/


















































































































































































































































Текст
И. А Сыромятников
РЕЖИМЫ
РАБОТЫ
асинхронных
и синхронных
двигателей
ЧЕТВЕРТОЕ ИЗДАНИЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
Под редакцией Л. Г. Мамиконянца
Москва Эиергоатомиздат 1984
ББК 31.26
С 95
УДК 621.313.323-b621.313.333
Рецензенты: работники кафедры «Электричес-
кие станции» МЭИ под руководством Б. И. Некле-
паева
Сыромятников И. А.
С 95 Режимы работы асинхронных и синхронных
двигателей/Под ред. Л. Г. Мамиконянца. — 4-е изд.,
переработ. н доп. — М.: Энергоатомиздат, 1984.—
240 с., нл.
В пер.: 1 р. 50 к. 15000 экз.
Рассмотрены основные свойства асинхронных и синхронных дви-
1ателей для решения практических вопросов, связанных с установив-
шимися и переходными режимами двигателей. Даны простые методы
определения основных параметров двигателей по результатам испыта-
ний и каталожным данным. Рассмотрены условия работы двигателей
во время пуска, выбега и самозапуска. Третье издание вышло в 1563 г.
Для инженеров, занимающихся проектированием и эксплуатацией
электроустановок на электростанциях и промышленных предприятиях.
2302050000-401 ББК 31.26
С0о1(01)-84 6'Е4 6П2.1.081
Б и Б Л И 7 Т Е К j
КРЕМЕНЧУГ .14 ФЙЛВлЛ
X 11 и
Рнв. К» _ ___
ИВАН АРКАДЬЕВИЧ СЫРОМЯТНИКОВ'
Режимы работы асинхронных
и синхронных двигателей
Редактор С. А. Мотыгина
Редактор издательства И. В. Антик
Художественный редактор В. А. Гозак-Хозак
Переплет художника Е. Н. Волкова
Технический редактор Н. Н. Хотулева
Корректор Л. С. Тимохова *
ИБ № 1026
Сдано в набор 24.11.83. Подписано в печать 14.03.84. Т-07484. Формат
70X1087,(1 Бумага типографская 2. Гарнитура литературная. Печать
высокая. Уел. печ. л. 21.0 Уел. кр.-отт. 21,18. Уч.-изд. л. 23,46. Тираж
15 000 экз. Заказ 649. Цена 1 р. 50 к.
Энергоатомиздат, 113114, Москва, М-114, Шлюзовая яаб., 10
Владимирская типография Союзполяграфпрома. при Государственном
комитете СССР по делам издательств, полиграфии и книжной торговли
ЫЮцОО, г. Владимир. Октябрьский проспект, д. 7
© Энергоатомиздат, 1984
Иван Аркадьевич Сыромятников
Один из известных энергетиков,
Иван Аркадьевич Сыромятников, ро-
дился 15 февраля 1904 г. в Москве.
С 1922 по 1926 г. учился на вечернем
рабочем факультете при Московском
университете, а затем — при Москов-
ском Высшем техническом училище
имени Н. Э= Баумана, В 1924 г.
И. А. Сыромятников вступил в ряды
КПСС. В 1930 г. окончил Московский
энергетический институт по специаль-
ности «Техника высоких напряжений»
и был оставлен аспирантом при ка-
федре высоких напряжений. До 1932 г.
работал сначала лаборантом, а поз-
же—заведующим лаборатории высо-
ких напряжений. Одновременно Иван
Аркадьевич помогал профессору
К. А. Кругу по подготовке третьего из-
дания книги «Основы электротехни-
ки», а также сотрудничал в лаборато-
рии по расчетам токов короткого за-
мыкания Всесоюзного электротехниче-
ского института (ВЭИ имени
В. И. Ленина).
С 1932 по 1936 г. Иван Аркадьевич
Сыромятников заведует лабораторией
электроцеха ОРГРЭС. Под его руко-
водством был выполнен ряд ориги-
нальных работ по вопросам эксплуата-
ции электрических станций. К этому
периоду относятся первые его исследо-
вания самозапуска двигателей собст-
венных нужд электростанций, полу-
чившего в дальнейшем широкое рас-
простанение.
С конца 1936 по 1940 г. Иван Ар-
кадьевич работает в Азэнерго сначала
руководителем группы, а позже —
главным инженером Центральной про-
изводственно-исследовательской лабо-
ратории энергосистемы. В эти годы
под его руководством впервые в Со-
ветском Союзе были проведены работы
по повышению устойчивости энергоси-
стемы путем массового внедрения ав-
томатического регулирования и фор-
сировки возбуждения синхронных ге-
нераторов и компенсаторов, широкого
применения быстродействующих за-
щит, обеспечения самозапуска элек-
тродвигателей не только в системах
собственных нужд электростанций, но
и у потребителей.
С августа 1940 г. по сентябрь
1957 г. Иван Аркадьевич Сыромятни-
ков работал вначале заместителем
начальника технического отдела Народ-
ного комиссариата электропромышлен-
ности и электрических станций, а поз-
же— заместителем начальника техни-
ческого управления и главным элек-
триком Министерства электростанций
СССР. С 1944 по 1949 г. он по совме-
стительству работал главным инжене-
ром и был научным руководителем
Центральной научно-исследоввтель-
ской электротехнический лаборатории
(ЦНИЭЛ) МЭС СССР, одним из орга-
низаторов которой он был. (Позднее
ЦНИЭЛ переросла во Всесоюзный ис-
следовальский институт электроэнер-
тики ВНИИЭ). Многие актуальные
для энергетических систем страны на-
учно-исследовательские работы были
выполнены ЦНИЭЛ по личной ини-
циативе Ивана Аркадьевича Сыро-
мятникова; и он принимал непосредст-
венное участие в разработке целого
ряда вопросов. Эти работы позволили
осуществить внедрение в практику
эксплуатации автоматического регули-
рования и форсировки возбуждения
синхронных машин, давших исключи-
тельный эффект в повышении надеж-
ности н устойчивости параллельной
работы электростанций; пофазного и
трехфазного автоматического повтор-
ного включения линий электропереда-
чи, автоматики ввода резерва, авто-
матической частотной разгрузки,
усовершенствованных быстродействую-
щих защит (в первую очередь широко-
го применения максимальных токовых
отсечек), самозапуска электродвигате-
лей собственных нужд, профнлактиче-
1’
3
ских испытаний электрического обору-
дования, новых методов сушки элек-
трических машин н трансформаторов.
Особую ценность представляли
проведенные Иваном Аркадьевичем
Сыромятниковым нсследоваиня спе-
циальных режимов работы синхронных
машвн (работа турбогенераторов при
потере возбуждения, при несимметрич-
ных нагрузках и др.) и смелые прак-
тические рекомендации по допустимо-
сти таких режимов в пределах опре-
деленных нагрузок.
Внедрение в практику эксплуата-
ции перечисленных мероприятий в
значительной мере повысило надеж-
ность н культуру эксплуатации элек-
трической части энергетических си-
стем страны.
С 1957 по 1961 г. Иван Аркадье-
вич Сыромятников работал главным
специалистом и членом Государствен-
ного научно-технического комитета
Совета Министров СССР, а с 1961 по
по 1964 г. — начальником отдела энер-
гетики и электротехники Государст-
венного комитета по координации на-
учно-исследовательских работ СССР.
В течение многих лет Иван Аркадь-
евич успешно вел педагогическую
работу по подготовке кадров электро-
энергетиков: с 1953 по 1965 г. — в ка-
честве заведующего кафедрой электри-
ческих станций ВЗЭИ, а с 1965 г. — за-
ведующего кафедрой электрических
станций МЭИ.
Из научных разработок И. А. Сы-
ромятникова особое значение имеют
нсследоваиня теоретических н практи-
ческих вопросов нормальных н специ-
альных режимов асинхронных н син-
хронных двигателей и синхронных
генераторов, сохранившие свою цен-
ность до настоящего времени, а так-
же создание новых методов определе-
ния параметров синхронных и асин-
хронных машин.
Научно-техническое творчество
Ивана Аркадьевича Сыромятникова
нашло отражение в. 200 опубликован-
ных работах, в том числе в 6 книгах,
9 изобретениях и технических усовер-
шенствованиях.
В 1944 г. Ивану Аркадьевичу бы-
ла присвоена ученая степень кандида-
та технических наук, а в 1952 г. — уче-
ная степень доктора технических на-
ук. За разработку и внедрение метода
пофазного ремонта ЛЭП И. А. Сыро-
мятников в 1948 г. вместе с группой
других авторов был удостоен Государ-
ственной премии.
Иван Аркадьевич Сыромятников
активно участвовал в работе Всесоюз-
ного научно-технического общества
энергетиков, был автором и членом
редколлегии журналов «Электричест-
во» н «Электрические станции».
За плодотворную научную и инже-
нерную деятельность Иван Аркадье-
вич был награжден орденами Трудо-
вого Красного Знамени, «Знак почета»,
Красной Звезды и медалями.
Иван Аркадьевич Сыромятников
был широко известен инженер ам-
электрикам, работающим в области
проектирования н эксплуатации элек-
тростанций н промышленных электро-
установок, в энергетических научно-
исследовательских н учебных институ-
тах. Напнсаиные нм книги, в особенно-
сти «Режимы работы синхронных
генераторов» и «Режимы работы асин-
хронных и синхронных электродвига-
телей», оказали большую практическую
помощь в формировании у специалис-
тов четких представлений о физичес-
кой стороне процессов в электрических
машинах, дали возможность выпол-
нять необходимые расчеты по методи-
кам, разработанным автором.
Ивана Аркадьевича отличали глу-
бокая и всесторонняя эрудиция, прос-
тота в обращении со всеми, кто с ним
сталкивался по любым техническим
вопросам, тесная связь с работниками
эксплуатации, личное обаяние. Инже-
нерная, научная и общественная дея-
тельность Ивана Аркадьевича явля-
ется примером творческого сочетания
теоретической работы с практикой,
направленной на решение наиболее
актуальных задач эксплуатации энер-
госистем и электрических установок в
промышленности, смелого внедрения
в жизнь достижений передовой науки
и техники.
ПРЕДИСЛОВИЕ К ЧЕТВЕРТОМУ ИЗДАНИЮ
В книге проф. И. А. Сыромятнико-
ва «Режимы работы асинхронных и
синхронных электродвигателей» обоб-
щены многолетние исследования н
опыт работы ее автора. Книга отлича-
ется характерной для И. А. Сыромят-
никова, длительно занимавшегося ак-
туальными вопросами эксплуатации
энергоснстем и электрооборудования
промышленных предприятий, практи-
ческой направленностью н ясным изло-
жением физической сущности рассмат-
риваемых процессов. Именно поэтому
она не потеряла своей ценности и ис-
пользуется широким кругом инжене-
ров-электриков, специалистов в обла-
сти проектирования, исследования н
особенно в области эксплуатации элек-
трических станций н электроустановок
промышленных предприятий. В насто-
ящее время она является библиогра-
фической редкостью.
В настоящем, четвертом издании
редакторы стремились максимально
сохранить авторский текст н стиль из-
ложения.
Изменению подверглись § 1.2, 1.3,
3.7, 4.3, 4.4, 5.4, 6.4, 6.6, 6.9, 6.10 и др.
В частности, несколько изменены из-
ложение вопросов теории синхронных
электродвигателей с целью приближе-
ния к стандартам МЭК, действующим
в настоящее время, и материал о си-
стемах возбуждения синхронных дви-
гателей, о выборе источников реактив-
ной мощности, тепловых процессах в
двигателях н особенностях нагрева
массивных роторов синхронных двига-
телей. В гл. 4 введен § 4.5, являющий-
ся последней опубликованной автором
работой о применении электродвигате-
лей для механизмов с ударной нагруз-
кой. Изменения внесены ив гл. 6
«Пуск и самозапуск двигателей» с це-
лью' уточнения условий самозапуска, а
также в Приложения.
Редакторы выражают глубокую
признательность за оказанную помощь
в процессе переработки рукописи ннж.
Я. Д. Карпель, кандидатам техн, наук
Ю. М. Голоднову, В. Б. Кулаковскому,
Ю. С. Железко, В. И. Долине, а также
проф. Б. Н. Неклепаеву и другим ра-
ботникам кафедры «Электрические
станнин» Московского энергетическо-
го института.
Л. Г. Мамиконяну
С. А. Мотыгина
ПРЕДИСЛОВИЕ АВТОРА
Асинхронные и синхронные двига-
тели широко применяются в электро-
приводе. Однако, несмотря на много-
летний опыт применения этих двигате-
лей, далеко не всегда и полностью ис-
пользуются все их возможности.
В практике еще встречается ряд не-
нужных ограничений в отношении ус-
ловий пуска и особенно самозапуска
двигателей, неоправданно усложняют-
ся схемы пуска, управления н защиты.
Причинами таких ограничений боль-
шей частью являются неправильные,
устаревшие представления о процес-
сах, происходящих в двигателях, и об
эксплуатационных характеристиках
двигателей как при номинальных зна-
чениях напряжения н частоты, так и
при отклонении от этих значений. Не-
обоснованные ограничения режимов
работы двигателей приводят к сниже-
нию надежности электропривода и
производительности приводимых меха-
низмов.
При проектировании электроуста-
новок до сих пор недостаточное вни-
мание уделяется техннко-экоиомнчес-
ким расчетам при выборе типа двига-
теля (асинхронный или синхронный)
и его номинального напряжения, опре-
делении нанвыгоднейшего режима ра-
боты синхронных двигателей и спосо-
ба компенсации реактивной мощности.
В отлнчие от предыдущих изданий
книга дополнена рассмотрением режи-
мов синхронных двигателем, примене-
ние которых в подавляющем большин-
стве случаев дает значительные тех-
ннко-экономнческие преимущества по
сравнению с асинхронными двигателя-
ми, особенно в связи с большими ус-
пехами, достигнутыми в области за-
К ТРЕТЬЕМУ ИЗДАНИЮ
мены машинного возбуждения более
совершенными системами, например с
применением полупроводниковых вы-
прямителей.
Весьма перспективны синхронные
двигатели без обмотки возбуждения
на роторе и без контактов в цепи воз-
буждения.
Книга предназначена главным об-
разом для работников эксплуатации,
а поэтому при изложении материала
автор стремился увязывать рассмат-
риваемые свойства двигателей с их
практическим применением и давать
методы расчета, пригодные для непо-
средственного использования в экс-
плуатации. Книга снабжена большим
количеством примеров.
Автор считает своим приятным дол-
гом выразить глубокую благодарность
канд. техн, наук А. А. Виноградову,
который провел весьма большую рабо-
ту по подготовке рукописи и чертежей
к печати и, что особенно следует отме-
тить, дал ряд ценных советов и внес
дополнения во многие разделы книги
(основные соотношения и диаграммы,
влияние частоты н напряжения на ре-
жимы синхронных двигателей, эконо-
мичное распределение реактивной
мощности, влияние напряжения на ус-
тойчивость узлов нагрузки, аналитиче-
ское определение времени разбега для
нормального асинхронного двигателя
прн постоянном моменте сопротивле-
ния и Др-), которые значительно улуч-
шили качество книги.
В книге использованы некоторые
материалы из работ канд. техн, наук
Л. С. Линдорфа, которому автор вы-
ражает искреннюю признательность.
Автор
6
Г 'Шва первая
ОСНОВНЫЕ СВОЙСТВА АСИНХРОННЫХ
И СИНХРОННЫХ ДВИГАТЕЛЕЙ
1.1. ПРИНЦИП РАБОТЫ, ОСНОВНЫЕ
ДИАГРАММЫ АСИНХРОННОГО
ДВИГАТЕЛЯ И ОСНОВНЫЕ РАСЧЕТНЫЕ
СООТНОШЕНИЯ
ряда вопросов, свя-
двигателей, поведе-
коротких замыканий
восстановлении
При решении
з энных с пуском
чием их во время
и самозапуском при
напряжения, выбором уставок релей-
ных защит и т. п., необходимо иметь
ясное представление об основных свой-
ствах асинхронных трехфазных двига-
телей.
Напомним кратко принцип работы
асинхронного трехфазного двигателя
и найдем основные расчетные соотно-
шения, характеризующие работу дви-
гателя.
При разомкнутой обмотке ротора
токи в этой обмотке отсутствуют. На-
пряжение трехфазной сети, приложен-
ное к выводам обмоткн статора и оп-
ределяющее вращающееся в простран-
стве магнитное поле с угловой скоро-
стью
сох = 2лД/р, (1.1)
уравновешивается ЭДС обмотки ста-
тора, созданной магнитным потоком
Ф,
Ех = 4,44
(1-2)
и падением напряжения от намагничи-
вающего тока (главным образом в ин-
дуктивном сопротивлении рассеяния
статора). При вращении ротора с уг-
ловой скоростью (02 посторонним дви-
гателем частота наведенной ЭДС ро-
тора пропорциональна разности угло-
вых скоростей:
у: _ р((0х—Юа)
2л
fl sfi.
(1.3)
а сама ЭДС ротора определяется ана-
логично выражению (1.2):
Ео 4,44 = 4,44 Ao63f1tt»2sQ ==
*061^1 *
или
(1-4)
Е. = —sE,
2 fe
где fi — частота тока в обмотках ста-
тора (частота сети); р — число пар
полюсов обмоткн статора; s = l-—
скольжение ротора; w2 — числа по-
следовательно соединенных витков на
фазу обмоток статора и ротора; £Обь
^об2'—обмоточные коэффициенты тех
же обмоток; ke^kc^wjk^wz — коэф-
фициент трансформации ЭДС при не-
подвижном роторе.
Из рассмотренного ясно, ч1го часто-
та ЭДС ротора будет изменяться от
нуля при <02=<йь т.е. синхронном вра-
щении ротора, до двойной частоты се-
ти при (£>2=2nfi/p и перемене чередо-
вания фаз статора илн вращения ро-
тора ПРОТИВ ПОЛЯ, ПРИВОДЯЩИХ к <oi =
=—2nf\lp.
При замыкании /п2~фазной обмоткн
ротора на внешние одинаковые в фа-
зах сопротивления под действием ин-
дуктированной в роторе ЭДС Е2 в фа-
зе ротора с общими сопротивлениями
г2 и х2 возникает ток*
= F+fx'• или 4 = —7£°- .(1.5)
г2 Г /-*2 1/212
создающий МДС ротора с амплитудой
F2 = 0,45 т.г1гиа^лг (1.6)
пптппч У е инДУКтивное сопротивление
? сп₽еделяетса индуктивностью рассеяния
£.2 н пропорционально скольжению s: е ия
Ж. = 2л/м SL,.
7
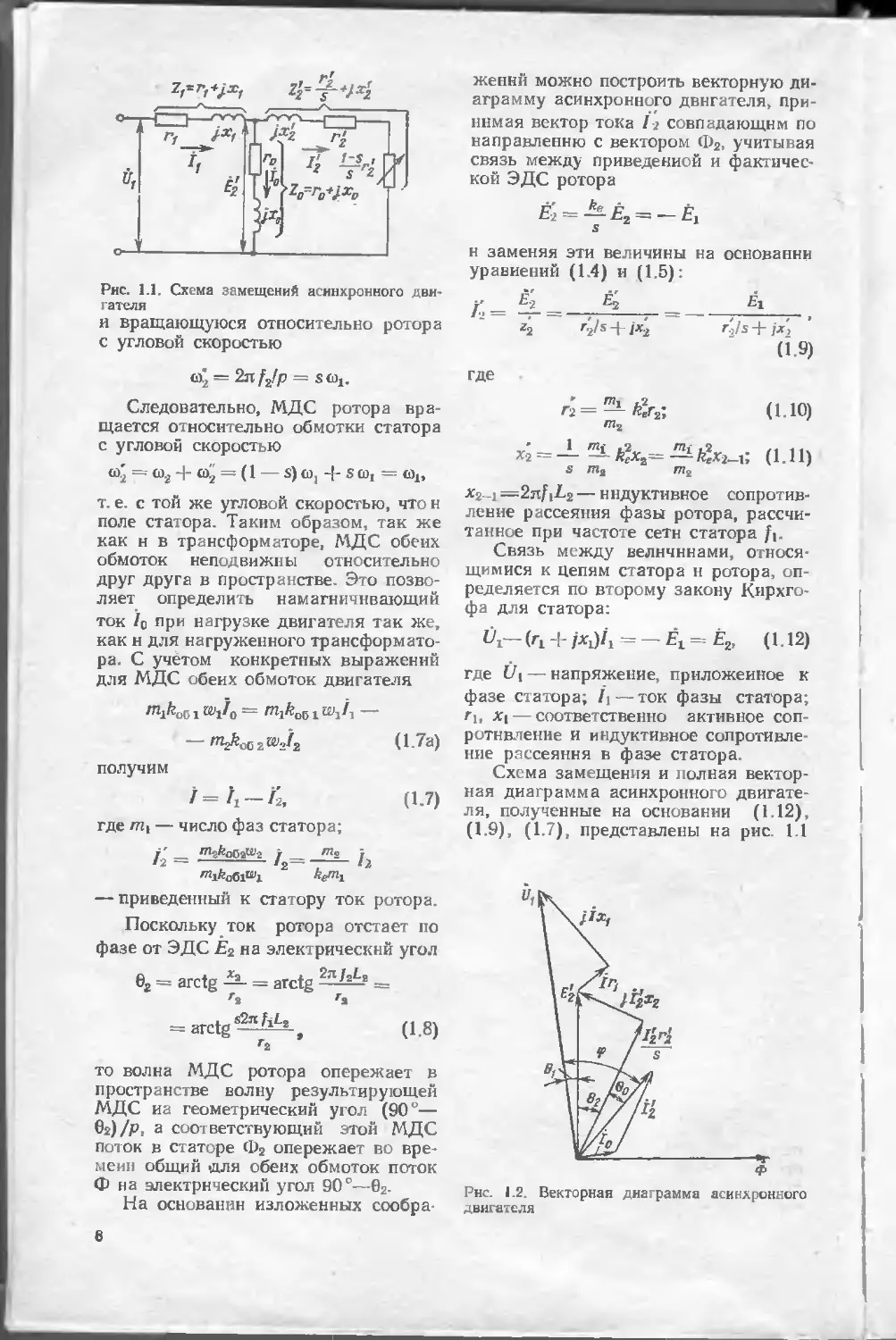
Рис. 1.1. Схема замещений асинхронного дви-
гателя
и вращающуюся относительно ротора
с угловой скоростью
©2 = ~ SCOj.
Следовательно, МДС ротора вра-
щается относительно обмотки статора
с угловой скоростью
со' == С02 Н- о" = (1 — S) <0] Ц- S COj = ©х,
т. е. с той же угловой скоростью, что н
поле статора. Таким образом, так же
как н в трансформаторе, МДС обеих
обмоток неподвижны относительно
друг друга в пространстве. Это позво-
ляет определить намагничивающий
ток /0 при нагрузке двигателя так же,
как н для нагруженного трансформато-
ра. С учётом конкретных выражений
для МДС обеих обмоток двигателя
mfas! sUiA —
— m£0(!swJ2 (1.7а)
получим
(1.7)
где rrii — число фаз статора;
j' __ j _
— приведенный к статору ток ротора.
Поскольку ток ротора отстает по
фазе от ЭДС Е2 на электрический угол
62 == arctg — = arctg 2л ==
ZS rs
arctg, (1.8)
г2
то волна МДС ротора опережает в
пространстве волну результирующей
МДС иа геометрический угол (90°—
62) /р, а соответствующий этой МДС
поток в статоре Ф2 опережает во вре-
мени общий для обеих обмоток поток
Ф на электрический угол 90°—62-
На основании изложенных сообра-
жений можно построить векторную ди-
аграмму асинхронного двигателя, при-
нимая вектор тока /? совпадающим по
направлению с вектором ф2, учитывая
связь между приведенной и фактичес-
кой ЭДС ротора
E^ = —Ё2 = —Ё,
S
н заменяя эти величины на основании
уравнений (1.4) и (1.5):
j'_ £2__ £2 _ £1
4 r.^s+jXi
(1.9)
где
r2’= (1.10)
«;=J-(in)
S Pfy
X2-1 —2nfaL2 — индуктивное сопротив-
ление рассеяния фазы ротора, рассчи-
танное при частоте сети статора fa.
Связь между величинами, относя-
щимися к цепям статора н ротора, оп-
ределяется по второму закону Кирхго-
фа для статора:
1\- (Г1 + ЛОЛ = - Ё, = Ё2, (1,12)
где U1 — напряжение, приложенное к
фазе статора; /1—ток фазы статора;
гь — соответственно активное соп-
ротивление и индуктивное сопротивле-
ние рассеяния в фазе статора.
Схема замещения и полная вектор-
ная диаграмма асинхронного двигате-
ля, полученные на основании (112),
(1.9), (1.7), представлены на рис. 1.1
ф
Рнс. 1.2. Векторная диаграмма асинхронного
двигателя
в
и 1.2. Намагничивающий ток может
быть выражен через ЭДС:
£р Го + JXv
что и отражено на схеме замещения.
Из рассмотрения схемы замещения
асинхронного двигателя следует, что
при неизменных значениях сопротив-
лений обмоток ствтора п, хь г0 и х0 и
ротора Гп, х'2 комплексное сопротивле-
ние двигателя со стороны выводов ста-
тора
Z =
— Г] + Mi +
i=2 + ~2~°
/, 1 g + zo
(1.13)
как по модулю, так и по фазе зависит
только от скольжения.
Активное сопротивление двигателя
равно действительной части комплекс-
ного сопротивления:
г — Re Z = Гу, -Н
(1.13а)
а индуктивное сопротивление — мни-
мой части:
х = Im Z == Xi 4-
. ч ,2
+ —^—Г7Г-----------ГЛ п 13б>
*о + г2 + 2|-^JL + xzx0 I
где
22 = (-Т) + Х2; 20 = "Кх? + rh.
Полное сопротивление равно:
г = И =
и фаза тока статора по отношению к
напряжению на его выводах
гр == arctg — ,
Анализ выражения (1.136)' показы-
вает, что при обычных соотношениях
между индуктивными н активными со-
противлениями отдельных цепей ин-
дуктивное сопротивление двигателя со
стороны выводов статора ^уменьшает-
ся с увеличением скольжения. Актив-
ное сопротивление в соответствии с
(1.13а) достигает максимального зна-
чения при скольжении sr, которое оп-
ределяется из условия dr/ds=0 и с
достаточной точностью легко может
быть найдено при tg<po=Xo/fo—°°
(намагничивающий ток принят чисто
индуктивным):
а следовательно,
х2
= гt 4- . .. (1 1 Зв)
2(%+х2)
Обычно sr в несколько раз меньше
номинального скольжения, а поэтому
практически при всех режимах работы
двигателя (s>sr) его активное сопро-
тивление уменьшается с ростом сколь-
жения, причем Гщах значительно боль-
ше активного сопротивления обмоток
статора и ротора.
Так, если х21^х1=Хо/ЗО н х^=5г '2 =5о, то
при r,(«iri+r.2 (для s=1.0)
302
''max —'1+2(30_р |)*2~ /3,5г1~ 36,75гв
и
а, = 1/5,31 =0,00646.
тогда как номинальное скольжение обычно не
менее 0,015.
Сопротивление двигателя при непо-
движном роторе (s = l) в основном
определяется активными сопротивле-
ниями и индуктивными сопротивлени-
ями рассеяния обмоток статора и рото-
ре, а при синхронной угловой скорости
(s=0) практически равно сопротивле-
нию ветви намагннчивання. При вра-
щении ротора против вращения маг-
нитного поля статора (s=2) сопро-
тивление двигателя несколько меньше,
чем при неподвижном роторе.
На основании (1.7), (1.9), (1.12) и
выражения для /0 или по схеме заме-
щения (рис. 1.1) найдем приведенный
ток ротора:
= _____С)1-п = £1
?;+?о ?g+?o) s’
ОН)
где сопротивление приведенному току
ротора
Zs = Zy CjZ2 Л/ Г| -J- /Xj • Су X
х(т + /**)’ (115)
?
Рис. 1.3. Сопротивление и кратность приведен-
ного тока ротора в заввсимости от s/sK
причем принято
По приведенному току ротора мож-
но определить вращающий момент
двигателя, степень загрузки обмоткн
ротора н реактивную мощность рассе-
яния двигателя при различных режи-
мах его работы.
Зависимость сопротивления zs от
скольжения
= ]/ (n + 's—) + U + сл)! (1.15а)
удобно прн ПОСТОЯННЫХ Г1, Г2. *1 их;
заменить его отношением к сопротив-
лению при неподвижном роторе (s=
z“ = V (r, + с1Г.>)2+ U + (1.156)
Пренебрегая активным сопротивле-
нием статора, получаем
где
На рис. 1.3 дана кривая изменения
отношения сойротивлений двигателя
ZJZ кв зависимости от отношения
s/sK при sK=0,l, построенная по фор-
муле (1.16), из которой следует, что
сопротивление двигатели, определяю-
щее приведенный ток ротора, резко
уменьшается при сравнительно не-
большом увеличении скольжения, а
прн скольжении, соответствующем
максимальному моменту (s=sK), со-
противление 2с всего лишь в 1,4 раза
превышает сопротивление двигателя
при неподвижном роторе.
Величина, обратная (1.16), равна
отношению приведенного тока ротора
к току 1при неподвижном роторе
(примерно равному начальному пус-
ковому току двигателя), причем, как
это следует из рис. 1.3, прн s—4sK ток
ротора всего на 2,5 % меньше началь-
ного пускового тока.
Из выражения для фазы тока
ротора (по отношению к напряжению
у.)
полученного на основании (1.15), сле-
дует, что при сравнительно небольшом
увеличении скольжения приведенный
ток ротора становится практвчески ин-
дуктивным. Для иллюстрации этого
положения и а рис. 1.4 даны кривые
изменения sin <р' и cos <р' в зависимос-
ти от скольжения. Кривые построены
для двигателя, имеющего ri=Cir.;,
Х|+С]Л;=10 С1Г2 н sKp = 0,l.
Из рассмотрения кривых рис. 1.4 так-
же следует, что сопротивление Z& а сле-
довательно, и приведенный ток ротора
за все время пуска остаются практиче-
ски индуктивными и только в самом
конце пуска начинает преобладать
активная составляющая. •
Кривые cos ср н sin <р (рнс. 1.4), по-
лученные по формулам (1.13а),
(1.136) при х?/х0—0,03 и л’о/гс —
при малых скольжениях существенно
Рис. 1.4. Зависимости costp', sin tp'. costp и
sin ф от скольжения
10
отличаются от зависимостей cos ср' и
sin <р' благодаря влиянию намагничи-
вающего тока и наличию максимума
активного сопротивления двигателя.
Кроме отмеченной выше простей-
шей и в то же время весьма важной
зависимости сопротивления двигателя
от скольжения следует учитывать, что
активное сопротивление и индуктивное
сопротивление рассеяния обмоток ста-
тора и приведенные сопротивления ро-
тора не являются постоянными вели-
чинами, а зависят от ряда факторов.
Прн изменении угловой скорости
двигателя частота тока в обмотках ро-
тора изменяется в пределах от часто-
ты тока статора (при неподвижном
роторе) до частоты, близкой к нулю
(прн работе на холостом ходу). Вслед-
ствие явления вытеснения тока актив-
ное и индуктивное сопротивления рас-
сеяния обмотки ротора изменяются.
Активное сопротивление ротора имеет
прн неподвижном роторе наибольшее
значение, а индуктивное сопротивле-
ние рассеяния ротора х-> — наимень-
шее. По мере увеличения угловой ско-
рости ротора уменьшается частота то-
ка в его обмотках н вследствие этого
уменьшается активное и увеличивает-
ся индуктивное сопротивления рассея-
ния обмотки ротора. Прн небольших
значениях скольжения активное сопро-
тивление обмотки ротора имеет наи-
меньшее значение, а индуктивное со-
противление рассеяния обмоткн рото-
ра — наибольшее.
Явление вытеснения тока обмоткн
ротора является полезным, так как за
счет увеличения активного сопротивле-
ния и увеличения пускового тока, свя-
занного с уменьшением индуктивного
сопротивления рассеяния обмотки ро-
тора, увеличивается начальный мо-
мент, развиваемый двигателем при
пуске.
Индуктивное сопротивление рассе-
яния обмоток статора и ротора зави-
сит от токов, проходящих по обмот-
кам, так как прн изменении тока из-
меняется поле потоков рассеяния и
частично главного магнитного потока
из-за изменения насыщения зубцового
слоя. При увеличении тока с ростом
скольжения индуктивные сопротивле-
ния рассеяния обмоток статора и ро-
тора уменьшаются.
Для примера на рис. 1.5 даиа кри-
вая изменения общего индуктивного
сопротивления рассеяния статора и
Рис. 1.5. Изменение реактивного сопротивле-
ния рассеяния нз-за насыщения в зависимости
от скольжения
ротора в зависимости от скольжения.
Из рассмотрения кривой следует, что
сопротивление весьма мало изменяет-
си при сравнительно большом измене-
нии скольжения от s=l до s~0,25 п
основное изменение сопротивления из-
за насыщения происходит при измене-
нии скольжения в пределах от s«?0,25
до s=0. Это обстоятельство облегча-
ет построение кривой момента с уче-
том изменения сопротивления благода-
ря насыщению.
Магнитный поток, а следовательно,
пропорциональная ему ЭДС прн изме-
нении скольжения ие остаются посто-
янными, а изменяются значительно.
Действительно, пользуясь схемой
замещения асинхронного двигатели
нли соотношениями (1.7), (1.9) н
(1.12), можно записать
и в соответствии с (1.13)
о.-М-Е(,+|+|).
“Е(', + Й-
откуда
^2 _ ^2
1/1 ~ 4-’
и отношение действующих значений
(U9)
Коэффициент Ci можно определить
приближенно по режимам короткого
11
замыкания (неподвижный ротор с за-
короченной обмоткой)1 н холостого хо-
да (з =0) при номинальном напряже-
нии на выводах статора, принимая со-
противление двигателя при s = l,0
zt 4 z-k 2zx« 2xj - t/i//K
и при s=0
zh л? Xq — U-JIq.
Подставляя в принятое выше выра-
жение для с, значения Xj и хо, нахо-
дим
q « 1 + /с/2/к.
Подставляя в выражение (1.19)
s=0 (после умножения числителя и
знаменателя подкоренного выражения
на s2), получаем по режиму холостого
хода
q = UJE-ix.
Для двигателей отношение напря-
жения на выводах к ЭДС при холос-
том ходе близко к единице: ci~1,02±
±1,05.
При заторможенном роторе (s=l)
для симметричной схемы замещения,
Т. е. Прн Г1=Г-2Н Xj=X2, получим
Из приведенных соотношений вид-
но, что при изменении скольжения от
0 до 1 ЭДС изменяется в пределах от
£к до Дк «0,51/1 (рис. 1.6).
Следует иметь в виду, что для
большинства двигателей (с глубоким
пазом, с двумя обмотками на роторе,
с двумя стержнями в пазу двигателя с
фазным ротором) отношение ЭДС прн
неподвижном роторе к напряжению
на выводах двигателя будет меньше
0,5, так как у этих двигателей реак-
тивное сопротивление рассеяния не-
подвижного ротора меньше, чем при
работе с небольшими значениями
скольжения. Для этих двигателей от-
ношение Е‘,к /U [ =0,254-0,4.
Поскольку при номинальной угло-
вой скорости скольжение близко к ну-
лю, можно с достаточной точностью
принимать, что, так же как н прн хо-
лостом ходе,
^2 ном 1
1 НОМ ci
1 Здесь к в дальнейшем псе параметры режима
короткого замыкапия имеют индекс «к* В катало-
гах тому же режиму соответствует индекс <п»
(пуск) (Прим, ред.)
Рис. 1.6. Зависимость ЭДС асинхронного дви-
гателя от скольжении
Рис. 1.7. Энергетическая диаграмма асинхрон-
ного двигателя
Учитывая последнее равенство, мо-
жно получить более простые расчет-
ные выражения для определения при-
веденных к статору величин Г.„ г', и
xz асинхронного двигателя с фазиым
ротором (/?i2=mi=3), используя
(1.4), (1.10) и (1.11):
Х-2 —
где С/гном номинальное фазное напря-
жение ротора прн неподвижном роторе
с разомкнутой обмоткой.
Приведенное активное сопротивле-
ние и индуктивное сопротивление рас-
сеяния обмотки ротора при нормаль-
ных скольжениях обычно примерно
равны соответствующим сопротивлени-
ям обмотки статора.
ДЛя анализа режимов асинхронно-
го двигателя большое значение имеет
энергетическая диаграмма, приведен-
ная на рис. 1.7.
На этой диаграмме Pi—подведен-
ная мощность из сети, а Р — полезная
мощность на валу, связанные между
собой через КПД ip
Pt = cos (p = РЛ1, (1.20)
12
и при номинальной нагрузке
^1НОМ = ЗЛ.БОМ ^АнОМ COS ФиОМ ~ ^"нОМ^*1 ЙОМ»
где Рном—номинальная полезная
мощность на валу, указываемая на
заводском щнтке.
Потребляемая из сети полная мощ-
ность при номинальной нагрузке мо-
жет быть определена по формуле
е ____чт и • ._ Рном
°1пом пометом — ~~ .
^НОМ COS фЕОм
Электромагнитная мощность, пере-
даваемая от статора к ротору, с уче-
том также схемы замещения по рис.
1.1
,2 ,
= (1.21)
р
где ДР1=ДР1м+ДР1с+ДР1д — потери
в меди н стали статора и добавочные
потерн, Вт; Ма — электромагнитный
момент двигателя, Н • м.
Мощность на валу
P2 = PR — ^P2^P1 — ^P1 — ^PZ =
= и2М = coi (1 — s) М, (1.22)
где ДР2=3/2 r2=sPa — потери в ро-
торе.
Учитывая последнее равенство, по-
лучаем нз (1.22)
P, = (l-s)P;=— кР21 (1.22а)
S
Полезная мощность на валу
Р = Р2 — ДРмех — Р1 — ДР1 —
-ДР2-ДРыех, (1.23)
где ДРмех — механические потери в
подшипниках и вентиляционные, зави-
сящие от угловой скорости ротора.
На основании (1.23) и (1.22а) мож-
но найтн потери в роторе, выраженные
через полезную мощность на валу н
скольжение:
др! = (-+й-м»)! (1.24)
1 —S
Поскольку с потерями ДРМе5 связа-
на определенная потеря вращающего
момента ДЛ4мех, то последнюю можно
рассматривать как составляющую об-
щего момента сопротивления на валу
двигателя.
1.2. ЭКСПЛУАТАЦИОННЫЕ
И КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ,
ОСНОВНЫЕ СООТНОШЕНИЯ
И ДИАГРАММЫ ДЛЯ СИНХРОННОГО
РЕЖИМА СИНХРОННОГО ДВИГАТЕЛЯ
Сихронные двигатели в силу ряда
техинко-экоиомических преимуществ
находят все более широкое примене-
ние для привода различных механиз-
мов.
В сочетании с регулируемыми гид-
равлическими и электрическими муф-
тами синхронные двигатели могут
применяться для механизмов, требую-
щих регулирования скоростн.
Главное преимущество синхронных
двигателей перед асинхронными за-
ключается в том, что путем изменения
тока возбуждения синхронных двига-
телей можно изменять реактивную
мощность. В зависимости от тока воз-
буждения реактивная мощность может
выдаваться в сеть (при перевозбужде-
нии) и потребляться из сети (при не-
довозбуждении).
Исключительно полезной является
возможность автоматического регули-
рования тока возбуждения синхронно-
го двигателя при отклоненнн режима
питающей сети или его нагрузки от
заданного. •
Автоматическое регулирование воз-
буждения (АРВ) является одним из
весьма эффективных способов повы-
шения устойчивости синхронных ма-
шин. Массовое внедрение АРВ на
синхронных генераторах энергосистем
Советского Союза оказало решающее
влияние на повышение надежности и
устойчивости параллельной работы
энергосистем. Применение АРВ на
синхронных двигателях при их доста-
точном удельном весе имеет большое
значение для устойчивости узлов на-
грузки и энергосистемы в целом н соз-
дает более благоприятные условия для
прямого пуска н самозапуска как асин-
хронных, так и синхронных двигате-
лей после кратковременного снижения
напряжения или перерыва питания.
По конструктивному выполнению
роторов с обмоткой возбуждения раз-
личаются следующие типы синхронных
двигателей:
двигатели с неявно выраженными
полюсами, так называемые турбодви-
гатели с массивными роторами и вы-
фрезованными в ннх пазами для ук-
ладки обмоток возбуждения; обычно
-13
это двухполюсные двигатели с часто-
той вращения 3000 об/мин;
двигатели с явно выраженными по-
люсами и обмотками возбуждения, со-
стоящими из катушек, насаженных на
полюсы; обычно они имеют частоту
вращения ниже 1500 об/мин.
Синхронные двигатели с явно вы-
раженными полюсами выполняются в
двух вариантах: с массивными и ших-
тованными полюсами. У двигателей с
массивными полюсами асинхронный
вращающий момент, необходимый при
пуске, создается, так же как и-у тур-
бодвигателей, главным образом за счет
токов, индуктируемых в теле полюсов
вращающимся магнитным полем ста-
тора; для увеличения асинхронного
момента полюсы металлически соеди-
няются перемычками. Для увеличения
асинхронного вращающего момента
двигателя с шихтованными полюсами
необходимы специальные пусковые об-
мотки, расположенные иа полюсах н
представляющие собой стержни, замк-
нутые по бокам полюсов медными
сегментами п кольцами.
Рассмотрим основные соотношения
и векторные диаграммы, определяю-
щие эксплуатационные свойства син-
хронных двигателей.
Основным отличием синхронного
двигателя от асинхронного является
наличие на его роторе либо обмотки
возбуждения (у подавляющего боль-
шинства двигателей), либо постоян-
ных магнитов (обычно только у двига-
телей малой мощности специального
назначения), создающих собственную,
независимую от токов статора в уста-
новившихся режимах МДС ГЕ, на-
правленную вдоль полюсов ротора
(продольная ось d машины).
Соответствующее этой МДС собст-
венное магнитное поле ротора враща-
ется вместе с последним и взаимодей-
ствует с магнитным полем, обуслов-
ленным приложенным к статору на-
пряжением сети V. Очевидно, что вза-
имодействие этих магнитных полей мо-
жет создать постоянный по знаку
электромагнитный момент только при
синхронной угловой скорости ротора:
= — о,, (1.25)
р
где fi — частота тока статора.
Соответственно упомянутый элек-
тромагнитный момент принято назы-
вать синхронным.
Рис. 1.8. Принципиальная схема контура ста-
тора синхронного двигателя и принятые ус-
ловные положительные направления парамет-
ров режима:
и — напряжение сети; i — ток контура статора; г —
активнее сопротивление контура статора; е—ЭДС
контура статора, определяемая его результирующим
потокосцеплением Ч*"; Pi. Q, — активная и ревктьв-
ная мощности, подведенные к двигателю от сета;
Ра —электромагнитная (активная) мощность, пере-
даваем ая от статора к ротору
У машин с явно выраженными по-
люсами существует еще одна состав-
ляющая синхронного момента, обус-
ловленная неравенством магнитной
проводимости ротора вдоль оси полю-
сов d н вдоль так называемой попереч-
ной оси q, расположенной между по-
люсами и сдвинутой по отношению к
первой на электрический угол 90е. Эту
составляющую синхронного момента
обычно называют моментом явиопо-
люсности.
Из физических соображений ясно,
что для создания как первой так н
второй составляющих синхронного мо-
мента необходимо наличие углового
сдвига в пространстве между магнит-
ным полем статора и продольной осью
полюсов (см. ниже).
Помимо указанных составляющих
синхронного момента прн частоте вра-
щения ротора, отличной от синхрон-
ной (например, в процессе пуска или
при выпадении из синхронизма), воз-
никает еще асинхронный момент, обу-
словленный взаимодействием магнит-
ного поля статора и токов, индуктиро-
ванных этим полем в замкнутых кон-
турах ротора (обмотке возбуждения,
пусковой обмотке, массивных элемен-
тах ротора). Очевидно, что синхрон-
ные составляющие момента в этом ре-
жиме будут знакопеременными.
На рис. 1.8 приведена принципи-
альная схема синхронного двигателя
по контуру статора с указанием при-
нятых в соответствии со стандартом
МЭК1 условными положительными на-
правлениями основных параметров,
характеризующих режим работы дви-
гателя.
1 МЭК. Публикация 34-10. 1975 г. (Прим ред.)
14
В этой схеме принято, что положи-
тельные направления токов и потоко-
сцеплении связаны между собой пра-
вовинтовой системой. Соответственно
ЭДС е, полное потокосцепление конту-
ра статора Чг и падение напряжения
ц„ уравновешивающее ЭДС е связаны
соотношением
е = — d4/dt = — щ. (1.26)
Уравнение напряжения всей цепи
статора записывается в следующем
виде:
и ~ Ui 4- ir = — е 4- ir = d W/dt — ir.
0.27)
Переходя к комплексным величи-
нам, соответственно получаем
E = — j2af1W-, (1.28)
и = Ut + ir = — Ё 4- ir. (1.29)
Прн пренебрежении активным со-
противлением, что обычно вполне до-
пустимо, получим
0 = — £ = 2лАТ. (1.30)
Таким образом, полное потокосцеп-
ление обмотки статора жестко связано
по модулю н фазе с приложенным на-
пряжением, отставая от него на элек-
трический угол 90°.
Рассмотрим вначале работу двига-
теля при отсутствии на его валу меха-
нической нагрузки, пренебрегая при
этом и механическими потерями. Не
будем учитывать также активного со-
противления цепи статора.
Очевидно, что прн этом в устано-
вившемся режиме от статора к ротору
не будет передаваться активной мощ-
ности, т. е. Ра н соответствующий
электромагнитный момент будут рав-
ны нулю. Это означает, что между
магнитными потоками и соответствен-
но между МДС статора и ротора не
будет углового сдвига, т. е. онн будут
направлены по продольной оси. Ин-
дуктированные этими полями ЭДС бу-
дут отставать от них на электрический
угол 90°, т. е. будут направлены по
поперечной оси машины.
Полное потокосцепление контура
статора Чг, пренебрегая насыщением,
можно представить как сумму потоко-
сцепления, созданного МДС ротора, и
потокосцепления, обусловленного соб-
ственной МДС от тока статора Д. Со-
ответственно и полная ЭДС цепи ста-
тора может быть представлена как
сумма ЭДС взаимной индукции Eqo =
=—jXadlв и ЭДС самоиндукции цепи
статора —jxj, где Iв — ток возбужде-
ния, Ха — синхронное реактивное со-
противление статора по продольной
оси, т. е. сопротивление самоиндукции
при расположении потока статора по
продольной оси машины, xaa — сопро-
тивление взаимной индукции между
обмотками статора и ротора по про-
дольной осн.
Тогда уравнение напряжения цепн
статора в .рассматриваемом режиме
можно записать в следующем виде:
(7 = -£ = -E,„ + jV. (1-31)
откуда
— i й + == i A f 1 4- ^5®-)
1 1 *d\ и г
(1.32)
Как указывалось выше, в рассмат-
риваемом решении все ЭДС синфазны
и расположены по поперечной осн ма-
шины; соответственно, как следует из
(1.31), по этой же оси, ио с другим
знаком будет расположен вектор U.
Тогда (1.32) можно записать в сле-
дующем виде:
/ = (1.зз)
Прн токе возбуждения, соответству-
ющем |Ё5о| = |й|. ток статора /=0;
этот режим называется холостым хо-
дом, прн этом, естественно, не только
активная, но и реактивная мощности
равны нулю. При меньших токах воз-
буждения (недовозбуждении) | Еде | <
< | t/j и ток статора отстает от напря-
жения сети U и а 90°, что соответствует
потреблению из сети реактивной мощ-
ности (Q>0 в соответствии с рис. 1.8).
При больших токах возбуждения (пе-
ревозбуждении) ток статора опережа-
ет напряжение сети и а тот же угол и
реактивная мощность отдается в сеть
(Q<0). В первом случае ток статора
подмагничивает, а прн перевозбужде-
нии размагничивает машину.
Сказанное иллюстрируется на рис.
1.9 векторными диаграммами синхрон-
ного неиагруженного двигателя, по-
строенными для расположения осей d
и q машины, рекомендованного в Пуб-
ликации МЭК 34-10.
15
Рис. 1-9. Векторные диаграммы незагруженного синхронного двигателя без учета потерь в ре-
жимах перевозбуждения (а) и недовозбуждения (б):
— МДС. создаваемая током обмотки возбуждения; — то же, во создаваемая токами статора; F —
результирующая МДС
В некоторых случаях, в частности
при учете насыщения (см. ниже), бы-
вает удобно выделить из полного по-
токосцепления обмотки статора его со-
ставляющую, обусловленную потоками
рассеяния, и соответственно иайти па-
дение напряжения в реактивном со-
противлении рассеяния и ЭДС статора
за этим сопротивлением £б , определен-
ную полным сопротивлением магнит-
ного потока воздушного зазора маши-
ны.
В этом случае уравнение напряже-
ния цепи статора синхронного двига-
теля в общем случае может быть за-
писано в следующем виде:
^ = (г + Л)/-£с. (1.34)
В общем случае при наличии на-
грузки на валу в установившемся ре-
жиме тормозящий механический мо-
мент на валу двигателя уравновешива-
ется электромагнитным моментом Ма,
направленным в сторону вращения
двигателя и соответствующим электро-
магнитной мощности Р&. Для создания
этого момента необходимо наличие уг-
лового сдвига между магнитными по-
лями статора и ротора или, что в ко-
нечном итоге то же, между осью ре-
зультирующего поля машины и осью
полюсов.
На рнс. 1.10 изображена векторная
диаграмма нагруженного синхронного
явнополюсного двигателя без учета
насыщении. Диаграмма построена для
случая работы двигателя в режиме
недовозбуждения.
В этом режиме ток статора отстает
от напряжения сети на угол <р и мощ-
ность, подведенная от сети,
Pt = 3UJcos<p = Р. 4- ЗРг. (1.35)
Рис. L10. Векторная диаграмма ненасыщенно-
го синхронного двигателя, работающего с на-
грузкой в режиме недовозбуждения:
Индексы d и q — обозначения проекций векторов
параметров режима (токов, напряжений и т. п.) на
роответствукицие оси, а также .чначения синхронных
реактивных сопротивлений статора по этим осям
Обычно активное сопротивление
мало и можно принять
Ра ~Р±—3 UI cos <р. (1.35а)
Заменяя проекцию / на направле-
ние U суммой проекций на то же на-
правление составляющей тока /, полу-
чаем
I cos ф = lq cos 6 4- Id sin 6. (1.36)
С другой стороны, из рис. 1.10 сле-
дует, что
и cos в = ldxd- (1,37)
U sin б = Iqxqt (1.38)
откуда
Id = (J 39)
16
f UsinS (]40)
Подчеркнем, что в приведенных вы-
ше формулах, начиная с (1,35), буква-
ми U, /, £ с соответствующими индек-
сами обозначены абсолютные значе-
ния величин без учета их знаков по
осям d и q.
Подставляя (1.36), (1.39) и (1.40)
в (1.35), после несложных преобразо-
ваний получаем
Pa = 3[-'5-Sin6-|-
L xd
£)sin26l- (1-41)
Здесь первое слагаемое определяет-
ся синхронным моментом, зависящим
от возбуждения, а второе — моментом
явнополюсности. Обозначим их соот-
ветственно Ре и Ри. Нетрудно видеть,
что максимальное значение первого
Ретах — имеет место при 6=90°, а
второго Ри max-ПрН 6=45°.
Соответствующие кривые электро-
магнитной мощности (угловые харак-
теристики) при постоянных, не завися-
щих от б значениях ЭДС Едс приведе-
ны иа рис. 1.11.
Потребляемая из сети активная
мощность равна сумме полезной мощ-
ности Р и потерь в двигателе:
+ ДЛм + ДР1д + ДР1с. (142)
«Внутренняя» мощность на валу
Рг = Ра-ДРв = Р + ДР„е1, (1.43)
где ДРВ — потери на возбуждение (от
возбудителя на том же валу). Соответ-
ствующая энергетическая диаграмма
синхронного двигателя приведена иа
рнс. 1.12. Подведенная активная мощ-
ность из сети Р{ и полезная мощность
на валу Р связаны между собой через
КПД двигателя так же, как и у асин-
хронного двигателя (1.20).
Так же как и у асинхронного дви-
гателя, на заводском щитке указыва-
ется не потребляемая нз сети активная
мощность, а полезная номинальная ак-
тивная мощность на валу.
Установившийся синхронный режим
при полезной нагрузке иа валу Рс воз-
можен лишь при соблюдении следую-
щего баланса мощностей:
(1.44)
т_\ I Ь Ч Ч? Й О т Е К А '
г (\ V3' ?• »'й
,1.11
Рис, 1.11. Угловые характеристики мощности
явнополюсного недовозбужденного (обозначе-
ния кривых а) и перевозбужденного (обозна-
чения кривых б) синхронных двигателей при
=0,9, Xq*=0,6, cos <ряои=0,9:
I — Р£; 2 — Ри‘. 3 — Здесь все мощности выраже-
ны в долях номинальной полной мощности дви-
гателя S1X1OM ’3(7НОМ ГыоМ
Рис. 1.12. Энергетическая диаграмма синхрон-
ного двигателя
которое позволяет определить графи-
ческим путем на рис. 1.11 угол бнагрв
установившемся синхронном режиме.
Индекс «с» здесь соответствует рас-
сматриваемому синхронному режиму.
При отсутствии нагрузки на валу
(Рс=0) угол б весьма мал, поскольку
определяется только потерями в рото-
ре и на валу. При увеличении нагруз-
ки на валу и постоянной ЭДС Ед0 угол
6 будет увеличиваться до значения
бтат, прн котором электромагнитная
МОЩНОСТЬ максимальна {Ра=Ртах} -
Если нагрузка станет больше Ртах, то
двигатель выйдет из синхронизма
вследствие нарушения баланса между
электромагнитной и механической
(тормозящей) мощностями. Мощность
Ртах тем больше по сравнению с
Ре тах==^ЕIXd, чем больше отноше-
нне сопротивлений
= а.
Г7
С ростом а уменьшается угол
при котором Ря=Ртах, а синхронизи-
рующая мощность PCi<H=dPa/d&=0.
Последнее условие на основании
(1.41) можно представить следующим
уравнением, позволяющим найти угол
Отах*
+ pcos6m„ — 0,5 = 0, (1.45)
решением которого будет
аВ6им = 0,50^+2'-г). (1.46)
где
р = Лс/2(а— 1); (1.47)
t pQn £WAiOM /1 401
в и ~ икоки ~ ku* *
Результаты расчетов бП1ах и Ртах/
/Ретах, выполненных на основании
(1-41) и (1-46) прн ke=1,0 и различ-
ных a=Xd/xQ, приведены в табл. 1.1.
Выпадение из синхронизма может
иметь место и при номинальной на-
грузке на валу вследствие снижения
напряжения в сети, например при ко-
ротких замыканиях в сети, н соответ-
ствующего уменьшения Ртах при по-
стоянной ЭДС Ego- При повышении
тока возбуждения и соответственно
ЭДС Е^о устойчивая работа двигателя
может быть сохранена.
Реактивная мощность, потребляе-
мая из сети синхронным двигателем,
может быть определена, исходя из об-
щего ее выражения:
Q = 3C//sin<p. (1.49)
Произведение /sin <р является про-
екцией вектора 1 на направление, пер-
пендикулярное вектору U. Нетрудно
видеть из рис. 1.10, что ее можно вы-
разить разностью проекций на это же
направление составляющих тока / по
осям d и q:
I sin <р — Iq sin 6 — ld cos 6. (1.50)
Подставляя (1.50) в (1.49), прене-
брегая потерями в статоре н учитывая
Рис. 1.13. Кривые зависимости реактивной
мощности синхронного двигателя от угла 6
при различных ЭДС двигатели и а=1,5:
7—кривые k.cosfi; 11— кривая —--- cos26: 111 —
2
кривые Г г—г — граница устойчивости
(1.39) и (1.40), после несложных пре-
образований получаем
q = 3[_^^-cos8 —
L
----------LVOS26 +
2 \ xd )
+-y-(—+—)1- (1S’>
2 xd х, Ji
Последнее выражение с учетом обо-
значений (1.47) и (1.48) может быть
представлено в следующем виде:
у-, 3U2 Г, х. . а—1 Qх а -|- 11
Q =--- cos о Н---cos 25---— .
*d L 2 2 |
(1.51а)
нлн в относительных величинах
Q* == =— ke cos б —
_^cos26 + H±l. (1.516)
Здесь
<2*=<2/$неМ.
где Shom-^SI/ном^пом — номинальная
полная мощность двигателя.
Соответствующие кривые реактив-
ной мощности приведены на рис. 1.13,
Если ЭДС Eqo меньше напряжения се-
ти, то синхронный двигатель будет
потреблять из сети реактивную мощ-
18
ность при любой нагрузке на валу.
При больших значениях тока возбуж-
дения и соответственно возросшей Еу0
двигатель будет отдавать в сеть реак-
тивную мощность при определенных
механических нагрузках, а прн боль-
ших нагрузках перейдет в режим по-
требления реактивной мощности. При
определенной нагрузке, соответствую-
щей данной ЭДС EqQ (угол 6i на рис.
1.13), двигатель будет работать с
cos <р=1,0. Связь между ЭДС Ед0~
=keU и б при cos <р=1,0) (Q=0) лег-
ко определяется из (151):
COS2 б! + —COS б± —
• (1-52)
Зависимость между ke и б получа-
ется наглядной при одинаковых значе-
ниях хл н xQ (а =1,0):
kel=-^-=~. (1.53а)
% COS Од.
Для данного случая
р 3ke U2 . «ч ke ku ^ном . с
Га —---sin о ==-----Sin о ~
xd *d
«^ОКЗЗ^пб,
где ОКЗ 1/xd* — отношение тока
статрра при установившемся трехфаз-
ном коротком замыкаини и токе воз-
буждения холостого хода к номиналь-
ному току статора.
По балансу мощностей (Рс = ра)
найдем
sin 6 =--------------
М«окз5„о„
cos 6 - - V 1 — sin2 6 =
(1.54)
ной осям ротора явнополюсного дви-
гателя приводит к усложнению расче-
тов режимов его работы. С целью уп-
рощения в большинстве практических
расчетов этой разницей пренебрегают
и принимают, что ЭДС Ед0 достаточно
точно определяется как ЭДС за про-
дольным индуктивным сопротивлением
Ха, что отражено на векторной диаг-
рамме (без учета насыщения и потерь
в статоре) рис. 1.14.
На этой диаграмме в соответствии
с отмеченными допущениями нет угло-
вого сдвига фаз между векторами тока
и магнитного потока реакции статора,
а следовательно, приняты совпадаю-
щими по фазе векторы результирую-
щей МДС F и магнитного потока Фе в
аоздушном зазоре машины.
Результирующая МДС определяет-
ся геометрической суммой МДС рото-
ра и статора. Вместо МДС можно рас-
сматривать соответствующие токи,
приведенные к одной из цепей (обмот-
ке возбуждения илн трехфазной об-
мотке статора).
Условием приведения токов являет-
ся равенство МДС, создаваемых дей-
ствительным током в соответствующей
обмотке (трехфазной, если речь идет
о токе статора) и приведенным током
прн условии его протекания в другой
обмотке.
Коэффициенты приведения могут
быть выражены либо соотношением
числа витков обмоток с учетом нх
структуры (числа фаз, схемы соедине-
ний, распределения в пространстве
н т. п.), цлн же с помощью соотяоше-
Т.-------------• (1.55)
Подставляя это значение cos (р в
(1.53а), получаем зависимость ЭДС
двигателя от нагрузки на валу и на-
пряжения на выводах статора U=
=kuUll0M, при которых обеспечивается
режим двигателя cos <р = 1,0 (при неиз-
менных значениях Xd=xg«l/OK3):
Учет разницы в проявлениях реак-
ции статора по продольной и попереч-
Рис. 1.14. Упрощенная векторная
диаграмма синхронного двигателя
Рис. 1.15. Характеристики холостого хода
(XXX) и короткого замыкания (ХКЗ) и век-
торная диаграмма синхронного двигателя с
при работе в режиме перевозбуждения
для определения тока возбуждения с учетом
изменения насыщения
иия токов в известных режимах и па-*
раметров машины. В практических рас-
четах режимов работы машин удобнее
последнее. Для этого обычно использу-
ются характеристики холостого хода и
установившегося трехфазного коротко-
го замыкания (рис. 1.15).
На рис. 1.15 отрезок АВ=1ЯОмХа
определяет падение напряжения в со-
противлении рассеяния статора (более
точно — в сопротивлении Потье). Токи
/х и До являются токами возбуждения
при номинальном напряжении статора,
определенными соответственно по
спрямленной н действительной харак-
теристикам холостого хода. Отрезок
ОС определяет ток возбуждения 7в.к,
соответствующий номинальному току
статора по характеристике короткого
замыкання и равный Д.хо/ОКЗ. Отре-
зок ОД определяет ток возбуждения,
необходимый для создания ЭДС, рав-
ной /номХа. Нетрудно видеть из подо-
бия треугольников ОАВ н OIB,XN, что
ОА^1Втс^=Ха /ном/ОНОм=х<у», так как
Оном/Люм — базисное сопротивление
цепи статора в системе относительных
единиц.
Из физических соображений оче-
видно, что отрезок АС определяет ток
возбуждения, эквивалентный МДС ре-
акции якоря при номинальном токе
статора. Тогда, учитывая все сказан-
ное выше, коэффициент приведения то-
ка статора к цепи возбуждения можно
записать в следующем виде:
tz = *пр — ~
I Лаем
I’e.XO / * ____
/всм 1ок3 с }
J-i{OC-OA) =
'ном
(1.57)
4 НОМ
где с=/г.хо//в.х — коэффициент, учи-
тывающий насыщение по характерис-
тике холостого хода при номинальном
напряжении; Хаао = (xd„—х ) /с —
реактивное сопротивление взаимной
индукции с учетом насыщения; —
относительное синхронное реактивное
сопротивление ненасыщенной машины.
Из (1-57) следует, что
. ПР “ 7 XadO* ~ О -58)
'в,хо 'йом
т. е. приведенный к цепи возбуждения
ток статора в долях тока холостого хо-
да равен действительному относитель-
ному току статора, умноженному на
относительное реактивное сопротивле-
ние ВЗаИМНОЙ ИНДУКЦИИ ХдйО*.
Величина, обратная Л/, является
коэффициентом приведения тока воз-
буждения к цепи статора, т. е.
4 Хдбо ' в,х
= T^=Jr^~- (1-59)
'1ном »вх лабо
Следовательно, приведенный к ста-
тору ток возбуждения в долях номи-
нального тока равен действительному
току возбуждения в долях холостого
хода, деленному на сопротивление
XadO*-
Коэффициент kv приведения к ста-
тору напряжения возбуждения легко
определить по условию равенства дей-
ствительной мощности возбуждения
Рв и приведенной к статору трехфаз-
ной МОЩНОСТИ Рв5
PB=p;=3t7B/B =
~ k, - k,
откуда
= — = Льь?»*. (1.60)
3
Приведенное к статору «эффектив-
ное» напряжение возбуждения
U = k.,U = и '
В и В о/ В»
07IHQM
нлн относительное (по отношению к
номинальному фазному напряжению
статора t/щом)
Р'н = Рв. к-^асй/^Аяом» (1.61)
где Рп,х=/в.х^в.х — мощность возбуж-
дения при холостом ходе.
20
Коэффициент приведения сопротив-
ления цепи возбуждения к цепи стато-
ра определяется по известному прави-
лу:
д, _ ~ k — ( Лз,х \а
Z /„//, L ' 3 Vihom/
(1.62)
Следовательно, приведенное к ста-
тору сопротивление обмотки возбуж-
дения в омах Гв=&гГв, или относи-
тельное
f _ ^1»ТОМ __ В,х *gdn)3 ]Q”3
б^ном S1HDM
(1.63)
если /в.х выражено в амперах, а
Sihom — в киловольт-амперах.
Связь между напряжением статора,
током статора и током возбуждения с
учетом насыщения может быть опреде-
лена с достаточной точностью с по-
мощью упрощенной (Xd=x0, г=0)
векторной диаграммы в характеристик
холостого хода и короткого замыкания,
изображенных на рис. 1.15 для режи-
ма работы двигателя в режиме пере-
возбуждения.
Построение диаграммы ведется в
следующем порядке. Откладываем по
вертикальной оси вверх вектор напря-
жения статора U (на рис. 1.15 он ра-
вен 17ном). Под углом <р к нему откла-
дываем вектор тока статора /. Пер-
пендикулярно вектору тока статора 7
из конца вектора 0 откладываем (вы-
читаем) вектор падения напряжения в
реактивном сопротивлении рассеяния
Потье jfxa и определяем вершину век-
тора— Es, равного по модулю и про-
тивоположного по знаку ЭДС статора
в воздушном зазоре. Для создания
этой ЭДС необходим ток ротора, рав-
ный ОК. Для определения составляю-
щей тока возбуждения, компенсирую-
щей реакцию якоря, откладываем пер-
пендикулярно — Е с вектор ОК', рав-
ный ОК, и вычитаем из него вектор
DK', параллельный току статора и
равный его длине в масштабе АС.
Полный ток возбуждения будет равен
OD—OD'.
При рассмотрении синхронной ма-
шины как источника реактивной мощ-
ности нетрудно видеть аналогию в ре-
жимах работы генератора и двигателя,
так как тот и другой при перевозбуж-
дении отдают в сеть реактивную мощ-
ность, а при недовозбуждении потреб-
ляют ее из сети Ч
1.3. КРАТКИЕ СВЕДЕНИЯ
О СИСТЕМАХ ВОЗБУЖДЕНИЯ
И ПРИНЦИПАХ РЕГУЛИРОВАНИЯ ТОКА
ВОЗБУЖДЕНИЯ СИНХРОННЫХ
ДВИГАТЕЛЕЙ
Основными требованиями к систе-
мам возбуждения синхронных двигате-
лей и компенсаторов, определенными
ГОСТ 183-74 и ГОСТ 21558-76, явля-
ются быстродействие, высокая форси-
ровочная способность, возможность
применения автоматических регулято-
ров возбуждения, быстрота развозбуж-
дения, простота и надежность. Выпол-
нение перечисленных требований дол-
жно быть увязано при выборе системы
возбуждения с мощностью и назначе-
нием синхронного двигателя и ие дол-
жно приводить к неоправданному удо-
рожанию агрегата.
Возбуждение синхронных двигате-
лей, выпускаемых отечественной про-
мышленностью, осуществляется от:
электромашинных возбудителей по-
стоянного тока (с индивидуальным
возбудителем для каждого синхронно-
го двигателя или групповым подклю-
чением к одному возбудителю обмоток
возбуждения нескольких синхронных
двигателей);
статических систем возбуждения,
использующих силовые полупроводни-
ковые приборы (диоды, тиристоры и
симисторы);
бесщеточных возбудителей (с син-
хронными или асинхронными возбуди-
телями и диодами или тиристорами, с
трехобмоточным динамическим транс-
форматором или каскадным асинхрон-
но-синхронным возбудителем). Мощ-
ность возбудителей колеблется в пре-
делах 0,5—3 % мощности синхронного
двигателя. Чем меньше мощность,
О КЗ и cos фном синхронного двигателя,
тем относительно выше мощность воз-
будителя.
Электромашинные возбудители по-
стоянного тока при частотах вращения
синхронных двигателей 600 об/мин и
выше, соединяются с валом двигателя
непосредственно, а при меньших час-
тотах вращения либо возбудители сое-
диняются с валом двигателя через кли-
1 Подробнее основные свойства синхронных дви-
гателей изложены в 1211- (Прим, ред.)
21
ноременную передачу, либо устанавли-
ваются отдельно стоящие возбудитель-
ные агрегаты. В последнем случае
мощность асинхронного двигателя,
вращающего возбудитель, выбирается
завышенной для предупреждения его
опрокидывания при снижении напря-
жения питающей сети до 0,5UnoM и
действии форсировки возбуждения.
Отношение мощности асинхронного
двигателя к мощности, отдаваемой воз-
будителем прн нормальном токе воз-
буждения, определяется из соотноше-
ния
^ном.а.дв ^Ф р
^НОМ Л В
где Рйом.а.дв — номинальная мощность
асинхронного двигателя, кВт; РВ1НОМ—
номинальная мощность возбудителя,
к Вт; т]в — КПД возбудителя; —
кратность форсировки, равная отноше-
нию потолочной величины напряжения
возбудителя к номинальному напряже-
нию возбудителя; Ьном — кратность
максимального момента двигателя.
Возможны два способа подключе-
ния обмотки возбуждения синхронного
Двигателя к якорю возбудителя. При
первом способе обмотка возбуждения
во время пуска замыкается на разряд-
ный резистор с отключением ее от
якоря возбудителя, а при достижении
подсинхронной частоты вращения пе-
реключается на якорь возбудителя.
Возбудитель к этому моменту обычно
должен быть возбужден до нормаль-
ного или потолочного значения пара-
метров возбуждения, и поэтому после
переключения сразу же начинается на-
растание тока возбуждения и происхо-
дит втягивание двигателя под действи-
ем синхронного момента в синхронизм.
При втором способе обмотка воз-
буждения двигателя глухо подключена
к возбудителю во всех режимах. Во
время пуска возбуждение двигателя
нарастает по мере увеличения его час-
тоты вращения, но в обмотке возбуж-
дения при пуске наводится переменный
ток с частотой скольжения, который
замыкается через обмотку якоря воз-
будителя.
Автоматическое регулирование воз-
буждения является эффективным сред-
ством повышения статической и дина-
мической перегружаемое™ синхрон-
ных двигателей, устойчивости их ра-
боты при заданных режимах загрузки,
а также поддержания номинального
напряжения в узле нагрузки в преде-
лах допустимого теплового режима
двигателей. Автоматические регулято-
ры возбуждения (АРВ) обязательно
дополняются устройством релейной
или параметрической форсировки воз-
буждения, действующей при кратко-
временных (до 1 мни) снижениях на-
пряжения.
При выборе схем АРВ еннхроииых
двигателей следует учесть следующие
рекомендации:
1. На предприятиях с равномерной
нагрузкой двигателей и незначитель-
ными колебаниями напряжения сети
устройства АРВ устанавливать нет не-
обходимости, достаточна установка
устройств форсировки возбуждения,
действующих при снижении напряже-
ния на (15—20 %) £/ном на всех дви-
гателях.
2. На предприятиях с ударной на-
грузкой на синхронных двигателях не-
обходимо устанавливать АРВ, регули-
рующие по активному току статора ток
возбуждения двигателей с целью
уменьшения колебаний напряжения в
узле нагрузки, и устройства форсиров-
ки возбуждения, действующие при
снижении напряжения до (15—20%)
£4юм- Это дает возможность значитель-
ного повышения перегрузочной способ-
ности двигателя, что в ряде случаев
позволяет уменьшить его номинальную
мощность.
3. Если синхронные двигатели ра-
ботают с резкопеременной нагрузкой
н АРВ пропорционального действия
оказываются неэффективными, воз-
можна установка АРВ сильного дейст-
вия, реагирующих на скорость измене-
ния напряжения, тока и других задан-
ных параметров.
Применение быстродействующего
АРВ, учитывающего нагрузку двигате-
ля и напряжение сети, дает возмож-
ность выбирать двигатель, исходя из
иагрева, а не из условия динамической
устойчивости, как это делается в боль-
шинстве случаев для приводов, напри-
мер, с резкопеременной нагрузкой.
Применение автоматического регу-
лирования возбуждения позволяет так-
же снизить требования к максимально-
му моменту и для синхронных двига-
телей с постоянной нагрузкой и тем
самым в ряде случаев снизить их стои-
мость за счет уменьшения воздушного
зазора в допустимых пределах. Расче-
ты показывают, что для синхронного
22
Рис. 1.16. Структурная схема системы возбуждения и АРВ синхронного двигателя с плавным
изменением нагрузки:
/7ИГ—универсальный подмагничивающий трансформатор; Т7\ и TTS — трансформаторы тока; TH — транс-
форматор напряжения; fij —силовой выпрямитель; ОВД-—обмотка возбуждения синхронного двигателя;
ОВВ — обмотка возбуждения возбудителя В; РР — регулировочный резистор; СД — синхронный двигатель
Рис. 1.17. Схема компаундирования с проме-
жуточным подмагничиваемым трансформато-
ром при глухоподключенном возбудителе
двигателя 4000 кВт, 1000 об/мин умень-
шение зазора с 14 до 4 мм приводит к
уменьшению ОКЗ от 1 до 0,432, умень-
шению перегрузочного момента от 1,95
до 1,46 и снижению массы медн обмот-
ки возбуждения с 538 до 278 кг. Одна-
ко при уменьшении воздушного зазора
увеличиваются добавочные потери
(для данного двигателя — с 11,3 до
64,1 кВт). Применение магнитных
клиньев дает возможность уменьшить
воздушный зазор почти в 2 раза с сох-
ранением КПД на прежнем уровне.
Экономия меди в обмотке возбужде-
ния при этом составляет 25—50 %
общей массы меди ротора или 15—
30 % общей м’ассы машины при том же
иагреве. Появляется возможность пол-
ной замены меди алюминием для об-
мотки возбуждения при тех же значе-
ниях КПД и температуры.
Структурная схема системы возбуждения
и АРВ синхронного двигателя с электрома-
шиниым возбудителем постоянного тока с
самовозбуждением с плавным изменением на-
грузки дана на рис. 1.16. Основная мощность
возбуждения возбудителя В обеспечивается
параллельной обмоткой самовозбуждения ОВВ.
Действующий из принципе управляемого ком-
паундирования АРВ обеспечивает дополни-
тельную мощность, необходимую для регули-
рования возбуждения во всех режимах двига-
теля.
В отдельных случаях применялась упро-
щенная схема компаундирования с промежу-
точным подмагничиваемым трансформатором
при- глухоподключенном возбудителе’(рис. 1.17)
|39, 47]. Подмагничивание промежуточного
трансформатора ПТ (обмотка с числом вит-
ков а;,) осуществляется долей тока /Р,в=/в.в—
—/к, причем /р.в при некотором значении тока
компаундирования /к=/к уменьшается с даль-
нейшим ростом /к. Следовательно, намагни-
чивающий ток /ц2 трансформатора ПТ ока-
зывается зависящим от тока компаундирова-
ния н прн/к=/к является наибольшим, а затем
уменьшается. Параметры устройства рас-
считываются таким образом, чтобы нормаль-
ная работа соответствовала значениям /«</*»
а режим форсирования возбуждения при за-
данном сниженном напряжении статора соот-
ветствовал /ц>/к.
Ток статора, приведенный ко вторичной
обмотке трансформатора тока ТТг можно при-
ближенно представить следующим образом:
4= К (С, /,)2+ K,+ Q2 . (1.651
23
Рис. 1.18. Системы возбуждения с полупроводниковыми диодами:
«г — смешанного возбуждения. б —с двухобмоточными трансформаторами; о —с трехобмоточным компаунди-
рующим трансформатором (ПО — последовательная обмотка; ОН — обмотке напряжения; Р — реакторы- ВО —
выходная обмотка); г—с магнитным усилителем МУ
где /ц]—намагничивающий ток ТТ, возраста-
ющий с увеличением /и; I — намагничиваю-
щий ток /7Г. Поскольку благодаря отмечен-
ной выше особенности в изменении сумма
/р2 ПРИ форсировании возбуждения
увеличивается с ростом Л< медленнее, чем /(li,
то характеристика /Ст=<р(/к), построенная со-
гласно (1.65), является более пологой, чем без
подмагничивания ПТ. Это позволяет получить
большой ток компаундирования при том же
токе статора, а следовательно, увеличить фор-
сировку возбуждения возбудителя и самого
синхронного двигателя в такой схеме по срав-
нению со схемой без подмагничивания /7Т.
Достоинством такой схемы ивляется также ее
простота, поскольку для подмагничивания ПТ
не требуется трансформатор напряжения.
Для синхронных двигателей с
электромашиниыми возбудителями
постоянного тока, работающих в ре-
жимах резкопеременных нагрузок, хо-
рошо себя зарекомендовала в эксплу-
атации схема АРВ с применением
электромаш инных усилителей [8]. Ре-
гулирование тока обмотки возбужде-
ния синхронного двигателя в этой схе-
ме осуществляется по активному току
статора и коэффициенту мощности.
Статические системы возбуждения
устанавливаются иа синхронных дви-
гателях с учетом их мощности и ха-
рактера нагрузки.
Система смешанного возбуждения
от выпрямленных тока и напряжения
статора (рис. 1.18, а) обычно приме-
няется на двигателях мощностью до
320 кВт и обеспечивает поддержание
коэффициента мощности и перегру-
зочную способность двигателей прн
34
изменении нагрузки до 3PHmt. Во из-
бежание повреждения диодов под дей-
ствием большого тока статора и зна-
чительного индуктированного напря-
жения в обмотке возбуждения в нача-
ле пуска двигателя специальными
контакторами закорачиваются транс-
форматоры тока, а выпрямитель В1
отключается от обмотки возбуждения
до тех пор, пока индуцированное на-
пряжение не снизится до приемлемого
значения, контролируемого реле мини-
мального напряжения. Поскольку ток
возбуждения определяется суммой вы-
прямленных напряжения и тока стато-
ра, данная схема обеспечивает естест-
венное компаундирование возбужде-
ния двигателя, зависящее от его на-
грузки.
При применении компаундирован-
ных синхронных двигателей без ма-
шинных возбудителей значительно рас-
ширяется область использования син-
хронных двигателей малой н средней
мощности, а в дальнейшем и больших
мощностей. При применении компаун-
дирования для синхронных двигате-
лей мощностью 30, 50 и 100 кВт умень-
шаются масса до 0,63; 0,66, 0,53 и
длина машин до 0,64; 0,7 и 0,67 от пол-
ных массы и длины машины соответст-
вующей мощности с машинными воз-
будителями.
В системе возбуждения с двумя
двухобмоточными трансформаторами
и одним выпрямителем (рис. 1.18,6)
трансформатор напряжения TH с ре-
Рис. 1.19. Принципиальная схема статической, системы возбуждения с тиристорами:
7 — нелнвейный резистор; 2— тиристорный преобразователь;3—питающий трансформатор; БУ — блок упрвв;
лення; РПТ— реле пускового тока; РИ— реле инвертирования
актором Р дает составляющую тока
возбуждении, пропорциональную на-
пряжению сети, и обеспечивает воз-
буждение двигателя при холостом
ходе. Трансформатор тока ТТ дает со-
ставляющую тока возбуждения, про-
порциональную току статора и обеспе-
чивает регулируемый ток возбуждения
двигателя при изменении нагрузки.
Система возбуждения с трехобмо-
точным компаундирующим трансфор-
матором и диодами (рис. 1.18, в) обес-
печивает хорошие динамические ха-
рактеристики синхронного двигателя,
но в конструкции трансформатора дол-
жны быть предусмотрены отпайки для
возможности изменения cos <р под на-
грузкой. Гибкость схемы повышается
при применении подмагничивающего
трансформатора или корректировка
напряжения.
Система возбуждения с магнитным
усилителем (рис. 18,г) по сравнению
с предыдущей системой легко позво-
ляет получить различные виды регули-
рования с помощью АРВ.
Более высокими технико-экономи-
ческими показателями обладают систе-
мы возбуждения с тиристорами (рис.
1.19). Тиристорные возбудители с сис-
темами управления и автоматического
регулирования тока возбуждения
(ТВУ) обеспечивают возбуждение
электродвигателя во всех нормальных
режимах работы, ручное илн автома-
тическое регулирование тока возбуж-
дения, подачу возбуждения прн пуске
электродвигателя в функции тока ста-
тора или времени, гашение поля при
отключении электродвигателя, форси-
ровку возбуждения кратностью не ме-
иее 1,4 при снижении напряжения пи-
тания на 20 % и не менее 1,75 прн но-
минальном напряжении питания дли-
тельностью до 50 с. Они позволяют
осуществлять прямой, автотрансфор-
маторный и реакторный пуски син-
хронного двигателя. Основным недо-
статком статических систем возбужде-
ния с тиристорами является за-
висимость тока возбуждения от
напряжения питающей сети.
При включении выключателя ВМ в
цепи статора синхронного двигателя
включается контактор К двигателя
вентилятора тиристорного преобразо-
вателя 2 и подается напряжение на
его питающий трансформатор 3.
Подача возбуждения в обмотку
ОВД происходит при достижении син-
хронным двигателем подсиихронной
угловой скорости и включения тирис-
торов преобразователя 2. Преобразо-
ватель питает блок управления БУ, на
который воздействует релейная схема.
При отпадении реле тока РПТ после
снижения пускового тока синхронного
двигателя ниже заданного значения
двигатель втягивается в синхронизм.
При отключении выключателя синхрон-
ного двигателя с выдержкой времени
включается реле инвертирования РИ
85
6) в“
Рис. 1.20. Принципиальные схемы бесщеточных систем возбуждения.
й —с синхронным возбудителем и диодами; б — с асинхронным возбудителем и диодами; о— с трехобмо-
точным динамическим трансформатором и диодами: 1 — токовая обмотка динамического трансформатора
(ДТ); 2—обмотка напряжения ДТ; 3 — трехфизная обмотка ротора ДТ; 4 — выпрямители; 5 —обмотка ста-
тора синхронного двигателя (СД»; б--обмотка возбужденияСД; 7 —регулятор; 8 —реактор с подмагничива-
нием
и тиристорный преобразователь 2 пе-
реводится в инверторный режим, обес-
печивающий интенсивное гашение
поля,
В зависимости от характера на-
грузки двигателя иа тиристорном воз-
будителе устанавливают различные
АРВ.
Разработанные системы возбужде-
ния с тиристорами, имеющими двусто-
роннюю проводимость (симисторами),
позволяют ограничить напряжение на
выводах обмотки возбуждения при
пуске и других переходных режимах
практически до амплитуды ЭДС вто-
ричной обмотки трансформатора или
напряжения сети, поэтому не требует-
ся защиты приборов от перенапряже-
ний, создать режим, эквивалентный
включению пускового сопротивления
для повышения вращающего момента
двигателя в процессе его пуска, осу-
ществить быстрое гашение поля при
нормальных и аварийных отключени-
ях синхронного двигателя переводом
преобразователя на работу с поляр-
ностью выпрямленного напряжения,
обратной предшествующему режиму
возбуждения. Недостатками данной
системы возбуждения являются при-
менение большего числа тиристоров
(при использовании встречно-парал-
лельной схемы) или бодее сложных
приборов и усложнения схемы управ-
ления преобразователем.
Следует отметить меньшую степень
устойчивости, которую обеспечивают
тиристорные возбудители по сравне-
нию с электромашинными возбудите-
лями при одной и той же заданной
кратности форсировки [8].
В последние годы начато производ-
ство синхронных двигателей с бесще-
точными системами возбуждения, ис-
ключившими щеточный аппарат и уп-
ростившими эксплуатацию, что осо-
бенно ценно при использоваини син-
хронных двигателей во взрывоопас-
ных н химически активных средах.
Система -бесщеточного возбужде-
ния с синхронным возбудителем и дио-
дами представлена на рис. 1.20, а.
Синхронный возбудитель представляет со-
бой обращенный синхронный генератор Вс. об-
мотка возбуждения которого ОВВ размещена
на полюсах неподвижной магнитной системы
(статора), а обмотка якоря — на вращающем-
ся роторе. Трехфазиая (или многофазная) об-
мотка якоря соединена с вращающимися вы-
прямителями, либо расположенными внутри
вала, либо закрепленными на дисках. В комп-
лект выпрямительного устройства /7ц входят
тиристоры, защитный резистор н кремниевые
стабилитроны.
Во время пуска двигателя положительная
волна переменного тока, протекающего по об-
мотке возбуждения, замыкается через враща-
ющийся выпрямитель. Напряжение на обмотке
возбуждения резко возрастает после перехода
тока через нуль, при этом пробиваются крем-
ниевые стабилитроны и включаются тиристоры,
вводящие защитный резистор в цепь тока ро-
тора. После протекания отрицательной полу-
волны тока ротора через резистор тиристоры
выключаются и далее процесс повторяется.
Питание на обмотку возбуждения возбудите-
ля подается при достижении подсинхроиной
частоты вращения от релейной схемы, работа-
26
квдей в функции /ст. После втягивания дви-
гателя в синхронизм выключаются тиристоры,
отключая резистор. Играя положительную роль
при пуске, защитный резистор приводит н не-
симметричной форме тока ротора и появлению
вследствие этого постоянной составляющей то-
ка возбуждения. В результате этого возника-
ют добавочный тормозной момент и некоторое
утяжеление пуска двигателя (длительность
разгона двигателя с описанной бесщеточной
системой возбуждения может оказаться на
25—35 % больше, чем прн других системах
возбуждения). К достоинствам такого возбу-
дителя относятся небольшая мощность управ-
ления и относительно большой воздушный за-
зор, что упрощает конструкцию агрегата.
В системе бесщеточного возбужде-
ния (рис. 1.20,6) асинхронный возбу-
дитель представляет собой асинхрон-
ную машину Ва, работающую в режи-
ме преобразователя частоты со сколь-
жением s>l. Конструктивно асин-
хронный возбудитель имеет фазный
ротор, на месте контактных колец или
на роторе синхронного двигателя рас-
положен выпрямитель Пв. Мощность
управления асинхронного возбудите-
ля, потребляемая от сети, меньше
мощности возбуждения двигателя.
Асинхронные возбудители более быст-
родействующие, чем синхронные, и
имеют меньшую зависимость габари-
тов от частоты вращения. Недостатка-
ми асинхронного возбудителя являются
значительная мощность управления и
малый воздушный зазор, что усложня-
ет их конструктивное исполнение.
Асинхронные возбудители целесо-
образны при частотах вращения 500
об/мин и менее 1,5 %, поскольку
при этом нх масса оказывается меньше
массы синхронного возбудителя. Для
синхронных двигателей с частотой вра-
щения 500—600 об/мин и выше реко-
мендованы бесщеточные системы воз-
буждения с синхронным возбудителем.
При замене диодов в описанных выше
системах возбуждения иа тиристоры
значительно улучшаются пусковые ха-
рактеристики бесщеточных систем воз-
буждения.
Наиболее сложным узлом бесще-
точной системы возбуждения с тири-
сторами является устройство переда-
чи сигнала на управляющий электрод
прибора, расположенного на роторе.
У систем возбуждения с синхронным
возбудителем для передачи управля-
ющих сигналов от системы регулиро-
вания и а управляемый электрод мо-
жет быть применена либо специаль-
ная управляющая машина (генератор
управления, одновременно являющий-
ся фазосмещающим устройством), ли-
бо вращающиеся конденсаторы, пере-
дающие импульсы повышенного на-
пряжения, либо импульсный трансфор-
матор, первичные обмотки которого
подключены к импульсному устройст-
ву, состоящему из генератора пилооб-
разного напряжения, индикатора сов-
падения фаз и усилителя-формирова-
теля. Последнее устройство является
наиболее надежным.
Система бесщеточного возбуждения
с асинхронным возбудителем н тири-
сторами проще, чем аналогичная си-
стема возбуждения с синхронным
возбудителем. Бесщеточные системы
возбуждения могут быть выполне-
ны также в виде каскадных асин-
хронных возбудителей, у которых сов-
мещены асинхронный преобразователь
частоты и обращенная синхронная ма-
шина, или в виде трехобмоточных ди-
намических трансформаторов. Послед-
няя система возбуждения применяется
на синхронных двигателях средней
мощности до 500 кВт с напряжением
обмотки статора 400 В и представляет
собой асинхронную машину с фазной
обмоткой на роторе, сочлененном с ва-
лом синхронного двигателя. Статор
имеет обмотки напряжения и тока, об-
мотка ротора соединена с выпрямите-
лем, который расположен либо на ро-
торе динамического трансформатора,
либо на роторе основного синхронного
двигателя (рис. 1.20, в). Во время хо-
лостого хода возбуждение двигателя
обеспечивается обмотками напряжения
на статоре возбудителя, под нагрузкой
начинает обтекаться током токовая
обмотка, при этом в обмотках ротора
наводится дополнительная ЭДС и эю
обеспечивает регулирование тока воз-
буждения прн изменении нагрузки.
Поддержание напряжения в узле на-
грузки может быть обеспечено путем
включения в обмотку напряжения ре-
актора с подмагничиванием н регуля-
тора.
Наиболее оптимальным режимом
работы трехобмоточного динамическо-
го трансформатора является режим
электромагнитного тормоза при s>l.
В настоящее время выпускается
серия синхронных двигателей СТД
мощностью до 5000 кВт с бесщеточны-
ми системами возбуждения, допускаю-
щими пуск только без нагрузкн, так
как не предусмотрен разрядный (пус-
ковой) реактор.
27
Глава вторая
ОПРЕДЕЛЕНИЕ АСИНХРОННОГО
ВРАЩАЮЩЕГО МОМЕНТА
ЭЛЕКТРОДВИГАТЕЛЕЙ
2.1. ОПРЕДЕЛЕНИЕ ВРАЩАЮЩЕГО
МОМЕНТА АСИНХРОННОГО
ЭЛЕКТРОДВИГАТЕЛЯ
С ОБЫЧНЫМ РОТОРОМ
Определение вращающего момента,
скольжения и токов асинхронных и
синхронных электродвигателей произ-
водится ниже аналитическим методом,
дающим достаточную для практичес-
ких расчетов точность. При этом ак-
тивные и индуктивные сопротивления
обмоток статора и ротора определяют-
ся либо на основании каталожных
данных, либо по данным испытаний.
Принятый метод значительно упроща-
ет и ускоряет определение сопротивле-
ний в схеме замещения двигателя, оп-
ределение зависимостей основных
параметров от напряжения, частоты,
нагрузки, построение кривых вращаю-
щего момента и токов двигателей, ана-
лиз переходных процессов в режимах
их пуска и самозапуска.
Электромагнитный момент враще-
ния, Н-м, определяется в соответствии
с равенством (1.21):
/Иа=-^=-^^А, (2.1)
<0j 2л/1 s
где Ра выражена в ваттах.
Принимая во внимание равенства
(1.14) и (1 15), из уравнения (2.1) по-
лучаем
Ра =--------, (2.2)
(ri+ci rJsY + (*i+ci
где принято приближенное значение
Ci ~ 1 -{-Xi/Xq.
Для двигателя с обычным ротором
можно не учитывать влияние вытесне-
ния тока в проводниках на сопротив-
ления г'их^. Пренебрегая также
влиянием насыщения по путям рассея-
ния на Xi и Хг, можно принять значе-
ния ru r'2, Xi и х‘2 постоянными, не за-
висящими от скольжения. Прн этом,
определяя первую производную
dP^/ds и приравнивая ее нулю, нахо-
дим критическое скольжение sKp, при
котором передаваемая ротору мощ-
ность будет иметь максимальное зна-
чение:
= - С,Гг---------- (2.3)
Максимальную мощность, переда-
ваемую ротору при критическом сколь-
жении, определим из формулы (2.2),
подставив s = sKp:
р ____________________________
* вшах -----------------------’
2с1Г1+У +
(2.4)
т. е. максимальные мощность и момент
не зависят от активного сопротивления
ротора.
Для практических расчетов удобно
представить вращающий момент в от-
носительных величинах, определив
предварительно отношение электро-
магнитных мощностей по уравнениям
(2.2) и (2.4):
Ра
Ратах
2с1 Г2 [ Г1 + г1 + (х1 + с1л;У ]
S [( '1 + С1 r2/s)2 + ( *1 + С1 *2)2]
(2.5)
Так как из уравнения (2.3)
У Г1+ {*1 + й х$ = ci r >/sKpj
Рашах
2С1г2(г1 + с1г2Акр)
(2.6)
Разделив числитель и знаменатель
(2.6) на ci г-2 /skp, получим
Обычно для удобства практических
расчетов пренебрегают активным со-
28
противлением обмотки статора, и тог-
да формула (2.7) принимает весьма
простой вид:
—= =-------?----. (2.8)
*атах mamax s । ^кр
5нр *
^Формула (2.8)’ по сравнению с точ-
ной (2.7) дает некоторую погрешность
при определении начального момента
(11 % при r|S=r'). Для двигателей с
повышенным критическим скольжени-
ем следует пользоваться формулой
Номинальный момент на валу.
Н-м,
ЛЛ ___ ^яом боевом (Вт]
2К1ном ~ ------------=
“йНОМ
= 9550РНОМ [кВт] (2
Яном
и номинальный электромагнитный мо-
мент
^а.иом = Л1ВОМ + в
__ Рамом __ Рном 4~ ДРмех.иом ggj
^Хном ®ihom (1 — shom)
поскольку из (1.22а) и (1.23) мощность,
передаваемая ротору от статора при
номинальных напряжении, частоте и
нагрузке на валу, равна:
Л.Яо» = Р-ом + ^мех,ном _ (2 i0)
1 SHOM
где sH0M — номинальное скольжение.
Отношение электромагнитных мо-
ментов
/Иа = __
^а,вом - ^ном + ЛМмех,ном
I + ЛЛ4|иех.ном/ Л4НОМ
Поскольку момент механических
потерь ДМмех весьма мал по сравне-
нию с вращающим моментом М, то со-
гласно последнему равенству можно
принить для любого скольжения
Ма#«Мж=Л4/Мном.
Таким образом, при определении
полезного момента М на валу двигате-
ля в относительных величинах можно,
пренебрегая механическими потерями,
принять кратность полезного момента
на валу М* равной кратности электро-
магнитного момента, выраженной че-
рез электромагнитные мощности:
М* Л М„ = р‘ =
f’a.HoM
^а.иом Ратах
Рис. 2.1. Вращающий момент асинхронного
двигателя в зависимости от скольжения при
разных значениях критического скольжения
или, учитывая (2.7),
М,=-------i-----С'Г—< , (2.11а)
SKP | s | 2/i SKp
s SKP Cl <2
а при подстановке упрощенного выра-
жения (2.8)
Л4, =-----------, (2.116)
Дир *
S SJKP
где кратность максимального момента
при любых напряжениях £/i== Лионом
н частоте fi=kffWM равна:
& А^тох „ Рдтах j gj
Л^ном kf Ра .пом
Критическое скольжение, при кото-
ром вращающий момент имеет макси-
мальное значение, для обычных двига-
телей имеет значение sKp =54-15 %.
При изменениях скольжения в преде-
лах 5—15 % можно пренебречь изме-
нением активного сопротивления и ин-
дуктивного сопротивления рассеяния
обмоткн ротора из-за вытеснения тока.
На рис. 2.1 приведены кривые мо-
ментов, построенные по уравнению
(2.8) при различных скольжениях и не
зависящих от скольженйя s активных
сопротивлениях и индуктивных сопро-
тивлениях рассеяния ротора и стато-
ра. Там же отмечен момент сопротив-
ления на валу двигателя.
Установившийся режим двигателя
имеет место при скольжении s=sy.
29
когда его вращающий момент равен
моменту сопротивления на валу, и
графически определяется местом пере-
сечения кривых М—fi(s) и Mc=fz(s)
при соблюдении условия
d(M — Mc)/ds^0. (2.13)
Кратность максимального момента
прн номинальных напряжении и ча-
стоте из формул (2.12) н (2.4)
к _____ (Ратая)ном
^ном — р —
г а,ном
=_____________^ном_______________
Ч ₽Ь.,юм [ Г1 V + ( *1 + С1 ^)2 1
(2.14а)
или, учитывая, (2.10)
^вом ~
~^1ном 0 shom) г
2£1(^ом+ДРме1)1 'Г Л''
(2.146)
где t/iHOM — номинальное линейное на-
пряжение; АРИех — механические поте-
ри при номинальной частоте враще-
ния.
Если напряжение, подведенное к
двигателю, отличается от номинально-
го, то кр’атность максимального мо-
мента при номинальной частоте в со-
ответствии с (2.12), (2.4) и (2.10)
равна:
_ Ратпах _
Р а,ном
=___________М4ф(1-»я»м)
= Ь,ЮЛ. (2.15)
Если принять полученное выше
приближенное значение
С1 = 1+ -^-»1 + ^-»1 + -^
Zq 2г0 2/в
и подставить в него средние значения
токов холостого хода и короткого за-
мыкания при номинальном напряже-
нии /о = 0,3 X /ном и /н = 5/ном, то полу-
чим:
. . 0,3 .
с, = 1 + — = 1 03,
1 2-5
т. е. значение коэффициента Ci обычно
близко к единице.
В действительности коэффициент
С] зависит от ряда факторов, и его
значение может несколько отличаться
от полученного вышеуказанным спосо-
бом* 1.
Однако, учитывая, что это значение
незначительно отличается от единицы,
в дальнейшем будем принимать коэф-
фициент Ci не зависящим от скольже-
ния для асинхронных двигателей всех
типов.
Из уравнений (2.14) следует, что
основной величиной, определяющей
кратность максимального момента, яв-
ляется индуктивное сопротивление
приведенному току ротора (xi+CiXg):
чем меньше это сопротивление, тем
больше кратность максимального мо-
мента. Чем меньше сопротивление
xi+ciXg тем больше пусковой ток у
двигателей с короткозамкнутым рото-
ром, а поэтому нельзя получить малый
пусковой ток и одновременно большую
кратность максимального момента
этих двигателей.
Для определения влияния частоты
и напряжения на кратность макси-
мального момента найдем согласно
(2.4) общее выражение максимальной
электромагнитной мощности при Ui =
—kuUiHow и замене Xi+cjX* на Л/(Х]-|~
H-Cix'), поскольку индуктивные со-
противления рассеяния пропорцио-
нальны частоте:
k2
Р — —“ х
‘атох — ,zx
kf
[fl
у, ____________ 1HOM ___________
2clfe+l/
или, заменяя rjkf на r\ в связи с ма-
лым влиянием этой величины,
Аг
Ратах^-Т-{Ратах)а^- (2.16)
kf
Подставляя (2.16) в (2.12), нахо-
дим
.2 .2
г> яг — = _г_ ,(2.17)
kf /’а,ном
1 Коэффициент ci можно представить следую-
щим образом:
откуда при 2zi>* к(благодаря вытеснению тока прн
неподвижном роторе) и *о«гоног|1 Получим С|>(1-4-
+/и/27в».
30
откуда следует, что максимальный мо-
мент прямо пропорционален квадрату
напряжения и примерно обратно про-
порционален квадрату частоты.
Если двигатель работает с нагруз-
кой, отличной от номинальной, т. е.
при моменте Л4С* =МС/Маом (Afc— мо-
мент сопротивления на валу двигате-
ля), то кратность максимального мо-
мента по отношению к этому значению
момента сопротивления будет равна:
I) — __ = 18)
Мс* М kf
с* J
Если пренебречь активным сопро-
тивлением обмотки статора, то из урав-
нения (2.3) следует, что критическое
скольжение будет изменяться обратно
пропорционально частоте, т. е.
s„p, « W"'°M = ^2-. (2.3а)
fl kf
Подставляя значения для кратно-
сти максимального момента (2.17) и
критического скольжения (2.3а) в
уравнение (2.116), получаем
2Ьиом 2
7И. =-------Д-, (2.19)
SKJP
kfs sKp
где sKp определено при номинальной
частоте.
Часто встречается схема, когда
двигатель работает блоком с транс-
форматором нлн питается через реак-
тор от шин практически бесконечной
мощности. В этом случае напряжение
иа выводах двигателя зависит от тока
статора, а поэтому прн расчетах токов
и вращающего момента необходимо
исходить из известного напряжения
системы бесконечной мощности Uc:
it =---------; (2.20)
/ -° ____йс
► ?»+?2 Zau + Zl + ^ ’
(2.21)
где
z + z,
й = 1+--вш -1 ; (2.22)
—О
2'вш=гвш+/Хвп1 — внешнее сопротив-
ление (трансформатора или реактора
вместе с соединяющими проводника-
ми) между выводами двигателя и ши-
нами с напряжением Uc.
Если принять
с; « с; га 1 + _ (2.22а)
х0
то приведенный ток ротора
/2 =
Uc
а следовательно, электромагнитная
мощность
(2.23)
где г12=лвш-|-г1; Х1х=Хвш+xt—соот-
ветственно полные активное и индук-
тивное сопротивления цепи статора.
Из формулы (2.23) следует, что с
увеличением внешнего сопротивления
между выводами двигателя и шинами
системы бесконечной мощности с
(7c=const электромагнитная мощ-
ность PR уменьшается (подробнее см.
§4.3).
Сравнивая равенства для Ci я
получаем
= *&fe_l) + ci, (9.226)
*1
т. е. практически близко к ci.
Максимум электромагнитной мощ-
ности в этом случае имеет место при
критическом скольжении
5нР = ~-2 -------, (2.24)
1 /ix+ ( *12 + ci *2) 2
а максимальная мощность при s = sKP
равна:
р _________________3^с
гатах . ,--------------- -
2г; [r.s+J/ ^х+с^+'л)21
(2 25)
На основании полученных соотно-
шений можно сделать вывод, что бла-
годаря внешним сопротивлениям кри-
тическое скольжение и максимальный
момент уменьшаются. При расчетах
31
проводимость холостого хода транс-
форматора можно не учитывать. Сни-
жение максимального момента и кри-
тического скольжения асинхронных
двигателей, вызванное увеличением
внешнего сопротивления сети; при оп-
ределенных условиях, создает пробле-
му устойчивости узлов нагрузки, со-
стоящих из обширного парка асин-
хронных двигателей (см. § 4.3).
Кратность начального пускового
момента (момента при коротком замы-
кании) по отношению к номинальному
моменту при номинальных напряже-
нии и частоте определяется из формул
(2.11а) или (2.116) при s = l:
или без учета г} получим
ИЛИ (при С1«1,0)
AU = -НдмЯвР . (2 266)
$кр
Выражая Л1к* непосредственно че-
рез отношение электромагнитных мощ-
ностей при s=l,0 н s=sH0M, по форму-
ле (1.21) при s = l ис учетом (2.10)
находим
= 3/г“'г(*~*mw) ~
^ном Рном 4" ЛРмех
~ З'кМ'-З-ом)
^ном + ДЛиех
где I-2к и I* — приведенный пусковой
ток ротора н пусковой ток статора при
неподвижном роторе.
Формулы (2.26а) и (2.26в) дают
более точный результат, чем прибли-
женная формула (2.266).
Начальный момент, развиваемый
двигателем при пуске, имеет макси-
мальное значение, когда критическое
скольжение равно единице (см. рис.
2.1)» Тогда нз формулы (2.3) для дви-
гателя с фазным ротором получим
где г'—приведенное сопротивление
резистора в цепи ротора.
Заменяя в соответствии с изложен-
ным в § 1.1
, п2
П + Г„ = (г, + Гр) , (2.28)
^2ном
а также принимая
Xi + аъя: я: , (2.29)
& 1Н0М
где й=Ги//1ном — кратность пускового
тока, получаем из (2.28) и (2.27) с
учетом (2.29)
, ^1НОМ С1 б'Зиом __ 3Cj £/|иом
Г2 — Гр ~----------------------------,
^1ном ^1И0М и
(2.30)
где SK=Зй/1ном С/ 1ном — полн ая мощ-
ность, потребляемая двигателем из се-
ти при неподвижном короткозамкну-
том роторе (пусковая мощность) и но-
минальном фазном напряжении стато-
ра С/1ВОМ-
Активное сопротивление обмоток
статора и ротора зависит от их темпе-
ратуры в. Эта зависимость для обмо-
ток, выполненных из меди, выражает-
ся формулой
— 235 + е2
Гег — Ге1 235 + е, ’
Заменяя 235 на 245, этой же зави-
симостью можно пользоваться и для
обмоток, выполненных из алюминия.
При определении вращающего мо-
мента для расчета времени пуска в
нормальных условиях активные сопро-
тивления обмоток должны быть вычис-
лены при температуре окружающей
среды.
При решении вопросов, связанных
с самозапуском или с пуском двигате-
лей в нагретом состоянии, активное
сопротивление обмоток должно приво-
диться к рабочей температуре.
Если при пуске двигателя с фазным
ротором пусковой ток ие превышает
номинального, то кратность начально-
го момента определяется по весьма
простой формуле, вытекающей из
(2.26в):
Мк*
„.3^(г,+гр)
Р ном
32
заменяя в которой /г» t/?noiw/(/2+rp)
(при Гр^Хк), получаем
№ ^аЩ'г + 'р) ~ 3l'Lc« (2 31)
(Г2 Гр)“ РНОМ fp РНОМ
Пример 1. Данные двигателя: 368 кВт;
740 об/мин; 3000 В; 86,6 A; cos ф=0,88. Ро-
тор 540 В, 410 А. Соединение обмоток стато-
ра и ротора -— звезда.
I) Определить сопротивление резистора,
при котором начальный момент двигателя ра-
вен максимальному.
Данные опыта короткого замыкания при
закороченной обмотке ротора: /к=72,8 А; Рн=
= 13,1 кВт при UK=712 В; г2=0,0118 Ом.
Ток короткого замыкания при номиналь-
ном напряжении
3000 ЛЛ .
= 72,8 ~712~= 306 А’
Пусковая мощность
1^з САноы /в- ю-*= ’Из-3000-306-ю-3 =
= 1590 кВ-А
Сопротивление резистора ио (2.30)
/ 540 \3
1590-103
— 0,0118 = 0.172 Ом.
2) Определить начальный момент, разви-
ваемый при пуске, если сопротивление пуско-
вого резистора гР=0,75 Ом.
По формуле (2.31) имеем
лл . 540а
К* Мном ~ 0,7б-368-108 ’ *
2.2. АСИНХРОННЫЙ ДВИГАТЕЛЬ
С ГЛУБОКИМИ ПАЗАМИ РОТОРА
Для двигателя с глубокими пазами
ротора активное сопротивление и ре-
активное сопротивление рассеяния ро-
тора могут быть выражены следующи-
ми уравнениями:
r2s = Г2Ь ^гГ2сО’ (2.32)
Z2s = Х2Ь + ^х Х2сО» (2.33)
где г2в и х 2в — активное и индуктив-
ное сопротивления частей обмотки ро-
тора, находящихся в воздухе; гесо и
х2с0 —активное и индуктивное сопро-
тивления при скольжении s—О части
обмоткн ротора, находящейся в стали
(при этом x-2co=2nfiL-2co ); kr и kx—
коэффициенты, учитывающие измене-
ние из-за вытеснения тока активного и
индуктивного сопротивлений части об-
мотки в стали при скольжении s по
сравнению с активным и индуктивным
сопротивлениями при скольжении з = 0.
Рис. 2.2. Зависимость коэффициента kT от
скольжения для разных значений приведенной
высоты стержня в пазу
Эти коэффициенты определяются
по следующим уравнениям:
. sh 2е 4" sin 2&
Rr = Е -----1-----;
ch 2е — cos 2е
(2.34)
3 sh2e—singe g
2е ch2e—cos2e
Здесь e — так называемая приве-
денная высота проводника ротора, оп-
ределяемая по формуле
е = 2пЛ I Аь'10~5 (2.36)
г ра
где h — высота проводника в пазу;
а — ширина паза, см; b — толщина
стержня, см; f2=sf1 — частота тока в
стержне; р — удельное сопротивление
материала стержня, мкОм-м.
В среднем можно принять а[Ъ =
—1,15 и для меди р=-^-мкОм-м,
тогда при fi=50 Гц
Ecu = 0,875/i Ks = ht p's;
где hi =0,875й — приведенная высота
стержня в пазу для з=1. Для алюми-
ния
eAi = 0,67/z]/s.
На рис. 2.2 и 2.3 даиы значения ко-
эффициентов kr н kx на основании
(2.34) и (2.35) в зависимости от сколь-
жения для разных значений приведен-
ной высоты стержня в пазу h}.
На рис. 2.4 дана зависимость kr от
kx. Как показал канд техн, наук
А. А. Виноградов, этой кривой можно
пользоваться для всех значений сколь-
жения от 5 = 0 до 5=2.
Если определить значение активно-
го приведенного сопротивления ротора
при двух значениях скольжения, на-
пример из опыта короткого замыкания
(з=1) и из опыта работы двигателя
3—649
33
Рис. 2.3. Зависимость коэффициента kx от
скольжения для разных значений приведенной
высоты стержня в пазу
Рис. 2.4. Зависимость kr от kx для всех значе-
ний скольжения
в стали. Для этого случая коэффици-
ент а равен 2,33 и
krl = 1,43-^- —0,43. (2.41)
Г20
Зная Ли, по кривым рис. 2.3 или
2.4 можно найти значение коэффици-
ента kxi ДЛЯ 5=1.
Приведенная высота стержня hi
при неизвестной высоте h может быть
определена по коэффициенту kr\ при
5=1,0 и семейству кривых рнс. 2.2,
поскольку каждому значению h\ соот-
ветствует вполне определенная кривая
kr=f{s) СО СВОИМ krl прн s = l,0.
Для определения индуктивного со-
противления рассеяния обмоткн стато-
ра и ротора при скольжениях, близ-
ких к нулю, предположим, что
Xj _ ri
*20 г20
^=а.
*2в
(2.42)
(2.43)
под нагрузкой для s~0, то из уравне-
ния (2.32) можно определить коэффи-
циент kr, зная отношение активных со-
противлений частей обмотки, проходя-
щих в стали и воздухе:
<2-37)
Для s = l r'.2s —а поэтому
krl = = 1-21 ~Г2в. _ (2.38)
Г2с0 аГ,2в
Для s«0 r'2s~r',Q, kTo=l, а поэтому
Г2с0 = ~ Г20 Г2в»
Из опыта короткого замыкания прн
неподвижном роторе, т. е. при s==l,
индуктивное сопротивление двигателя
без учета намагничивающего тока
ХК1 = Xl + К + ЛХ1 Хж) = Х1 +
+ *U,+°M- <2-44)
Индуктивное сопротивление рассе-
яния обмотки статора и ротора при
скольжении sa;0
= х1(Ц-О)^,.
(2.45)
откуда
<в = б»/(1 + а)- (2.39)
Решая совместно уравнения (2.42)
— (2.45), получаем
Подставляя (2.39) в равенство
(2.38), получаем выражение для опре-
деления krl:
(2 46)
(1 + a) r2i
ог20
(2.40)
При отсутствии данных о реальных
соотношениях частей обмотки, находя-
щихся в воздухе и в стали, для двига-
телей с глубоким пазом можно при-
нять в первом приближении, что 30 %
обмотки находится в воздухе и 70 %—•
а прн 0=2,33
(' + ЛХ=)
*К0 —
z -|- 0,3 -J- 0, / kxi
г20
(2.47)
Зависимость kx от kr для значений
3>ЛГ>1,3 из рис. 2.4 может быть до-
статочно точно выражена уравнением
kx = 1,35 — 0,285Лг. (2.48)
34
Для значений &<1,3 можно прини-
мать kx=l.
Подставляя значения kxi для 3>
>ftri>l,3 в формулу (2.47), получаем
неподвижном роторе и т. е.
по величинам
^ТКО----
Хи1 С1 ~rt/rzo)
/•,/4+1,25-0,2^
(2.49)
Из (2.32) н (2.33) для а=2,33 с
учетом (2.39), (2.37) и (2.43) получим
^ = ^(т7-а + ^-и)= 4(о.з+ о,7л);
(2.50)
= (0,3 + 0,7ftJ. (2.51)
Подстановка этих значений г2s и
xjs в уравнения (1.15), (2.2) н (2.3)
дает возможность полностью опреде-
лить зависимость тока ротора, крити-
ческого скольжения и электромагнит-
ной мощности двигателя от скольже-
ния ротора с глубоким пазом. Прн
этом в области скольжений вплоть до
критического можно принимать г'2 =
20 и поскольку коэффици-
енты kr и кх в этой области скольже-
ний мало отличаются от единицы
(рис. 2.2, 2.3).
Таким образом, действительно кри-
тическое скольжение и максимальный
вращающий момент следует опреде-
лять по выражениям
-1 - : (2.36)
V *1+ (*1+с1*2о)2
b = ^ном дном)
(^ном 4“ &Р мех)
х Is + V '1 + К + с14)2]- (2.14в)
используя равенство (2.19), а также
определяют точное значение кратно-
сти момента при промежуточном
скольжении, например при s=0,5:
Mo.s. =----— (2.52)
0,5 ’
2зкрй<5 +
SKpO,b
где bпом и Skpo,5 рассчитывают по
сопротивлениям Х20<5и Г20б аналогич-
но вышеизложенному.
Действительная кривая вращающе-
го момента при ее построении по вто-
рому способу для скольжений s>sKPp
проводится по точкам: 1) sKPo; &Номо;
2) 5=0,5; Л4* = Мо,5*. 3) 5 = 1,0;
/И. = +
2 / 2г, \
1 + —Ь
\ С1 '21 /
Так как параметры двигателя г 2 и
х' плавно изменяются с ростом сколь-
жения от rjo> х'2О до г2и х21 , то дей-
ствительная кривая вращающего мо-
мента прн s>sKPo располагается меж-
ду кривыми Л41* и ТИо*. постепенно пе-
реходя от кривой Л40* при s—Supo к
кривой Л41* при s = l,0 (рис. 2.5).
При скольжениях больше sKpo кри-
вая вращающего момента может быть
построена любым из двух способов:
1) для каждого скольжения s опреде-
ляют r-2S и №s по формулам (2.50),
(2.51), используя кривые рис. 2.2 и
2.4, а затем эти величины подставляют
в (2.2) и прн ft/= 1,0 определяют крат-
ность вращающего момента Л4* = Ра/
/1°а.ном; 2) строят кривую вращающе-
го момечта Mi«,> соответствующую со-
противлениям Г2=Г21 И K2 = Xsi ПрИ
Рис. 2.5. Кривые вращающего момента двига-
теля 875 кВт в зависимости от скольжения
3*
35
Пример 2. Для электродвигателя 875 кВт,
6 кВ, 100 A, cos 0,88, nfiOM=985 об/мин,
биоме—2,6 (из каталога) построить кривую
вращающего момента в зависимости от сколь-
жения.
Сопротивления двигателя дани: г21 ~
= 1,2 Ом; «=0,51 Ом*п; х K0=Xi+ciX2Q==
=7 Ом; Zki=6,3 Ом;
*ш ~ *1 + *21 = V6,3? —(0.51 + 1,2)2 =
= 6,05 Ом; Ci = 1,03.
Произведем построение двух кривых мо-
мента: одной, соответствующей параметрам
двигателя для скольжения s = I, и другой для
скольжения $~0. Примем ЛРЫ=0,01 Рвом.
Критическое скольжение для параметров,
соответствующих s=l,
1,03-1,2
s*pi ~ 6,05
= 0,206.
Кратность максимального момента для
параметров, соответствующих а=1, определя-
ем по (2.14г):
__________60002 (1 —0,015)________
*ном1- 2.1,03-875.102-1,01 (0,51 + 6,05)
= 2,96.
Критическое скольжение для параметров,
соответствующих скольжению s~0,
_________________6000а(1 — 0,015)____________
ногчо.5 - 2-1,03-875-1,01-108 (0,51 +6,45) “
= 2,85;
2-2,85
----------7----= 1.50.
0,14 0,5
0,5 + 0,14
Л4С
Для других скольжений построение не про-
изводилось и действительная кривая момента
проведена на рис. 2.5 между точками s=l и
х=0,5, а на участке от s<0,l взята кривая
момента, построенная для параметров, соот-
ветствующих скольжению s««0.
Пример 3. Для этого же двигателя по-
строить кривую момента при пуске через ре-
актор, имеющий хР=2.7 Ом.
Используя (2.24) и (2.25), для х=1 полу-
чим приближенно
, 6,05
2Д + 6 О5 = 0,142,
поскольку
(1,03—1)2,7+1,03-3,45
с' =-------------------------=1,05«С1
и
" 0,51 + 6,05
йном1 ~ 30 51+2д+6 05 —2,12.
Аналогично для в=0.5 (учитывая теперь
*kO.Sm бном о.б)
Л . 6.45
skpo.S- 2,70 + 6,45 ~0,1:
Обе кривые моментов, построенные по
формулам
2-2,96
“ ” 0,206 s
s +0,206
= +0,075
приведены на рис. 2.5.
Для построения действительной кривой
момента Л4. определим значение момента для
параметров, соответствующих скольжению 0,5.
Коэффициенты по (2.41) и (2.48)-
frrl = 1,43-1,2/0,51 - 0,43 = 2,93;
k„ = 1.35 — 0,285-2.93 = 0,52.
Значение kxi можно определить и по кри-
вой рис 2.4.
По кривой рис. 2.2 для Л»=ЛГ|=2,93 оп-
ределяем fero,5=2.03 и по кривой рис. 2.4
/?х09=0,78.
Принимая Xi=X2o=3,45 Ом, определяем
по (2.50) и (2.51)
г'о 5 = 0,51 (0,3 + 0,7-2,03) = 0,88 Ом;
= 3,45+ 1,03-3.45 (0,3 + 0,7-0,78) =
= 6,45 Ом;
. 1.03-0,88 Л
5КГГ1 - =---------= 0,14;
«Ро? 645
Для в=0
4Ро-0,075 2 ?7+ 7 = 0.054;
Ьиом0 = 2,6 0,5!+2,7 + 7
Кривую момента строим по точкам s=l
и в=0,5 В пределах скольжения от s=0.1 до
s=0 кривую момента строим по параметрам,
соответствующим скольжению s=0 (рис. 2.6,
кривая /).
Ряс. 2.6. Кривые вращающего момента двига-
теля 875 кВт в зависимости от скольжения
при пуске через реактор (1) и для прямого
пуска от сети (2)
36
-Пример 4- Построить кривую вращающе-
го момента двигателя с глубоким пазом
500 кВт, 6000 В, 59 А, 735 об/мин по данным
опыта короткого замыкания и нагрузочного
опыта.
Сопротивление обмотки статора постоян-
ному току при 18 СС составляет п=0,87 Ом.
Опыт короткого замыкания производился
примерно при той же температуре обмоток и
дал следующие результаты при питании трех-
фазным током: Рк=1,08 кВт; /к= 10,5 А при
14=227 В.
В одном из опытов было измерено сколь-
жение «1=0,0033 (0,33 %) при полезной на-
грузке на валу 97,5 кВт, что позволяет опре-
делить номинальное сиольженне
Рном 500
%ом ® S, = 0,33 =1,7%,
поскольку кривая вращающего момента при
Sbcm>s>0 достаточно близка к прямой линии.
По данным опыта короткого замыкания
определяем:
227
Ею. = ------=12,5 Ом;
1080
Т^г = 3 4-26Ом:
хв1=И12.5“ —3,26?= 12,1 Ом;
Га = 3,26 — 1,05-0,87 = 3,26 — 0,91 =
= 2,35 Ом
(коэффициент 1,05 приближенно учитывает
увеличение активного сопротивления по срав-
нению с сопротивлением постоянному току).
Построим кривую момента, соответствую-
щую параметрам двигателя, полученным из
опыта короткого замыкания, принимая коэф-
фициент С|=!,03. Прн этом активные сопро-
тивления не приводим к температуре, соответ-
ствующей рабочей температуре обмоток, пред-
полагая пуск двигателя при в=18°С.
Критическое скольжение по формуле (2.3)
1.03-2,35 л
£"Р1~ 12,1 “°'2’
Кратность максимального момента по
формуле (2.14г) при механических потерях
O.OIPhom и номинальном скольжении 5ВОы=0.02
. 6^-10° (1-0,02)
2-1,03-500-1,01 (0.91 + 12.1) 2‘ 7'
Кратность момента при номинальном на-
пряжении в зависимости от скольжения по
формуле (2.19) прн йо=Л/=1,0
/И1 2,67
------= /И. -------------------
^ном s 0,2
0,2 + s
«Номинальное скольжение» нз формулы
(2.19) при йвом--^вои| (А:а=Ау= 1,0)
°-2
Wn =----------~ = 0,039 == 3,9%
2,67 +у 2,67s *— I
Кривая вращающего момента для пара-
метров, рассчитанных по данным для s=® 1, да-
на на рис. 2.7 (кривая 1).
Рис. 2.7. Вращающий момент двигателя
500 кВт с глубоким пазом
Так как активное сопротивление ротора и
его сопротивление рассеяния зависят от сколь-
жения, построим кривую момента, соответст-
вующую параметрам двигателя при неболь-
шом значения скольжения.
Для определения приведенного активного
сопротивления ротора при скольжении s~0
воспользуемся приближенным выражением
• • %ом . , .
г2о==^21'-----(обоснование дано ниже),
%ОМ1
т.е.
4=2,35-1,7/3,9 = 1,' 2 Ом.
Коэффициенты kri й kxi по формулам
(2.41) и (2.48) равны
krl= 1,43.2,35/1,02 — 0,43 = 2,87;
frxj = 1,35 — 0,285-2,87 = 0,53
Индуктивное сопротивление рассеяния об-
моток статора и ротора при малых значениях
скольжения по формуле (2.47)
------------------ = и,6 ом.
+0.3 4-0,7.0,53
Из выражений (2.42) и (2.45) имеем
14,6
1 + 1,02/0,91
*кп
= 6,9 Ом;
4 = хк0— = 14.6 — 6,9 = 7,7 Ом
Так как нас интересует вращающий мо-
мент при небольших значениях скольжения,
т. е. в конце пуска, когда обмотки статора и
ротора будут находиться в нагретом состоя-
нии, то построение кривой вращающего мо-
мента произведем для средней температуры
обмоток, примерно равной 75 °C.
Определяем для этой температуры сопро-
тивления обмоток статора и ротора:
235 + 75
235 + 18
г£ = 0,91
= 1,
2 Ом;
4=1,02
235 + 75
235 + 18
= 1,24 Ом.
S7
По формуле (2.3а) без учета
5ко = 1,03-1,24/14,6 = 0,088.
По формуле (2.14н), пренебрегая гг по
сра вкению с (xi+С1Х20)
ФноМО =
______________6?- юзе 1—0,02)_____________
~ 2-1,03-500-1,01 (1 12 + 6,9 4- 1,03-7,7) “
= 2,2.
Кратность момента в зависимости от
скольжения по формуле (2.116)
s + 0,088
На рис. 2.7 построена кривая момента Мо»
б зависимости от скольжения для параметров,
соответствующих скольжению л=0 (кривая 3).
Для построения действительной кривой
момента при разных значениях скольжения
произведем расчет для s=0,5. По кривым
рис. 2.2 и 2.3 находим (для ftt?«ferl=2,87):
fero,5=2; &хо,5=0,76 и определяем
г'0Б= 1,02(0.3+ 0,7-2) = 1,74 Ом*
xKq _ = 6,9 + 1,03-7,7 (0,3 + 0,7-0,76) =
= 13,5 Ом;
________________62-103 (1 — 0,02)________
*НОМ£.,5 — 2-1,03-500-1,01 (1,12 + 13,5) “
== 2,32;
М 2-2,32
------- = /И* =--------л =1,14.
Мном 0,5 0,132
0,132+ 0,5
Для других скольжений построение не
производилось и действительная кривая 2 вра-
щающего момента (рис. 2.7) проведена между
точками для s=l и s=0,5, а на участке от s=
= 0,088 взята кривая вращающего момента,
построенная для параметров двигателя, соот-
ветствующих скольжению s=0.
2.3. АСИНХРОННЫЙ ДВИГАТЕЛЬ
С ДВУМЯ ОБМОТКАМИ НА РОТОРЕ
Для увеличения начального момен-
та применяют роторы с двумя обмот-
ками на роторе. Эти двигатели впер-
вые были предложены в 1893 г.
М. О. Доливо-Добровольским. Обе об-
мотки расположены концентрически.
Внутренняя обмотка имеет повышен-
ное значение индуктивного сопротив-
ления рассеяния и небольшое значение
активного сопротивления. Внешняя об-
мотка, наоборот, имеет небольшое ин-
дуктивное сопротивление рассеяния и
большое значение активного сопротив-
ления. Поэтому при пуске, когда час-
тота тока в роторе близка к частоте
сети, ток замыкается преимущественно
во внешней обмотке, имеющей боль-
шое активное сопротивление и малое
индуктивное сопротивление. При нор-
мальной работе частота тока в роторе
мала и поэтому ток замыкается глав-
ным образом по внутренней обмотке,
имеющей небольшое активное сопро-
тивление. Верхняя обмотка называет-
ся пусковой, а внутренняя — рабочей
обмоткой.
Соответствующий выбор активных
сопротивлений и индуктивных сопро-
тивлений рассеяния обеих обмоток да-
ет возможность получить хорошие пус-
ковые характеристики двигателя и не-
большое скольжение при нормальной
работе.
Упрощенная схема замещения дви-
гателя с двумя обмотками на роторе
(без учета цепи намагничивающего
тока) приведена на рис. 2.8. В этой
схеме л и хг— активное сопротивле-
ние н индуктивное сопротивление рас-
сеяния обмотки статора; г 21 н Х21 —
активное сопротивление и индуктивное
сопротивление рассеяния внутренней
(рабочей) обмотки; г22 и Х22 — актив-
ное сопротивление и индуктивное со-
противление внешней (пусковой) об-
мотки. При этом принимается, что
указанные выше сопротивления от-
дельных обмоток не зависят от сколь-
жения.
Результирующее сопротивление
обеих обмоток ротора
Za = y- + /B, (2.53)
где
д = г22 41 ( 41 + 4г) + ( 41 4г + 4г f
( Г21 + Г22)2 + (^21 + х»)~ S2
(2.54)
g ___ Г21 х22 4" г22 *21 “Ь *21 х22 (*21 + *22) s”
( *21 + г22)2 + (*21 + хшУ S2
(2.55)
Рис. 2.8. Упрощенная схема замещения для
двигателя с двумн обмотками на роторе
При работе с нагрузкой, т. е. при
я '22 '21 ( '21 + '22) '32 '?!
Л । ~ . . , .'— Г20»
(г21 + ^з)’ 'а+'аг
(2.56)
ВвХ =x-o (2 57)
( '21 + r2o)'
При неподвижном роторе, т. е. при
s=l,
__ '22 '21 ( '21 ~ь '22) '21 х22 4~ '22 Х21 _
( '21 + 'за)” + (х21 + * *22)”
= 4; (2.58)
& '21 х22 4~ г22 х,21 4~ Х21 х22 (х21 4~ x2g)
( '214" Ли)2 + (х21 + х2г)2
(2-59)
По каталожным данным можно оп-
ределить '’20» х2& Gk и х2к- Таким об-
разом, из четырех уравнений можно
найти активное н индуктивное сопро-
тивления обеих обмоток. При этом
следует иметь в виду, что нельзя при-
нимать индуктивное сопротивление
внешней (пусковой) обмотки равным
нулю. Покажем на примере, что это
приводит к большой погрешности.
Пример. Для двигателя 430 кВт, 3 кВ,
107 А, 585 об/мин определено А0=г2и=
=0,4 Ом; B0=X20=2,65 Ом; А ,=^«0.76 Ом
и Bi =*2к= 1Л 3 Ом.
В верхней строке табл. 2.1 даны значения
активных и индуктивных сопротивлений обеих
обмоток, вычисленные по уравнениям (2.56)—
(259) для случая х22=0.
Таблица 2.1
Сопротив- ления Г22 Х22 Г21 4
*22=0 2,68 0 0,47 3,7
х22^® 1,18 1,25 0,605 5,4
Если теперь для проверки подставить в
уравнение (2.58) определенные выше значе-
ния для г22. Г21 и х21» то ^<=г2к = 1»71 вместо
0,76 Ом. Отсюда следует, что принятое допу-
щение является неприемлемым.
Определив из уравнения для Ло
_< __ Г22 4
*21 3 .
ТЧй~ 4
и подставив это в уравнение для Во.
найдем значение
х- _ В0 '22 ~ 4 х( Г22 — Ао)
'22 ( '22 ~ 4)”
Заменив в уравнениях для Л и Bi
полученные выше значения г', и х'2г',
получим два уравнения для расчета
^22 И Х22‘.
д __ г22 Ао ( г22 — -^о)2 + г22 4 Х22 ( Г>2 ~
'22 ( '22 “ Л)2 + [4 '22 + *22 '22 Х
. ~ Ло)3 + 'kg [До '22 — 4 ( '22 — Лд)]2 -
Х ( '22 — 4 )” — А0 *22 ( '22 — 4) ]2
. 4 (г-,- 4)*+4» [Вс 'g-
'22 ( '22 4’)*” + | 4 '22 4" *22 Х
~ 4 *22 ( '22 ~~ 4) 1 '22 ~ Ар х22 Х
Х '22 ( '22 — 4)2 —
( '22 ~ 4) 4~ х22 '22 ( '22 — 4)" I
— 4 Х22 ( '22 — 4)1”
Эти два уравнения можно решить
путем последовательного приближе-
ния.
Такое решение было выполнено
для того же двигателя, и результаты
сведены в табл. 2.1.
Активные н индуктивные сопротив-
ления обеих клеток определены с по-
грешностью, которая составляет око-
ло 1 %.
Пример. Построим зависимость сопротив-
ления и вращающего момента от скольжения
для двигателя 430 кВт, данные которого при-
ведены в табл. 2.1. Для этого же двигателя
*1=2,68 Ом, Cj=l,03, Tj=0,4 Ом.
Сопротивление двигателя
2=0,4 4-/2,68 +
с 1,18-0,605-1,78+(0,605-1,252+1,18-5,4)
+ (I,78? + 0,65?s2)s +
. 0,605-1,25- + 1,182-5,4+ 5,4-1,25-6,65
+ / l,78? + 6,652s®
= 0,4 + -Ь-27 + 35-3^ +
(3,17+ 44,3s=)s
+ ,-(2,68+ 8-45+4^ у
т 3,17+ 44,3s? )
На рис. 2.9 даны кривые изменения ак-
тивного н реактивного сопротивлений ротора
и вращающего момента в зависимости от
скольжения.
На рис. 2.10 даны аналогичные кривые
для двигателя 380 кВт, 6 кВ, 47,5 А,
738 об/мнн, Ьесм=2, ЛГк=1-3 Л+jm. fK=
—5 О57вом-
39
Рис. 2.9. Вращающий момент, активное и ин-
дуктивное сопротивления ротора двигателя
430 кВт в зависимости от скольжения:
2 — /И1Й:3 — Мл
Рис. 2.10. Вращающий момент, активное и
индуктивное сопротивления ротора в зависи-
мости от скольжения двигателя 380 кВт:
f - 2 - М 3 — Л1,
Решая уравнения для Ai и получаем
с погрешностью в 1 % значения г^, -3,95 Ом,
*22=3,35 Ом, Г2! = 1,85 Ом и «2=21,2 Ом.
В заключение отметим некоторые
особенности в построении кривой вра-
щающего момента двигателя с фаз-
ным ротором.
Хотя двигатели с фазным ротором
в нормальных условиях пускаются с
введенным в цепь ротора сопротивле-
нием, все же для определения их по-
ведения во время самозапуска необхо-
димо иметь зависимость вращающего
момента от скольжения при замкну-
том роторе. Обычно обмотки роторов
имеют в пазу по два стержня. Иссле-
дования показали, что пря наличии
двух стержней в пазу можно приме-
нять тот же метод построения кряйой
момента, что* и для двигателя с глубо-
ким пазом, приведенный выше.
Активное приведенное сопротивле-
ние ротора и индуктивное сопротивле-
ние двигателя при скольжении s=l
определяются из опыта короткого за-
мыкания (см. ниже).
Активное сопротивление ротора прн
скольжении s=0 можно определить по
формуле из § 1.1
где г2о определяется простым измере-
нием на неподвижном роторе при от-
ключенном статоре.
Номинальный приведенный ток ро-
тора определяется по формуле
_ / С1 браном
*2НОМ r2llOM г/ »
‘-'1Н0М
где Леом — номинальный ток ротора;
бЛиом и £Аноы — фазные значения но-
минальных напряжений статора и ро-
тора.
При найденных сопротивлениях
гц , луп , Г20 производится расчет ве-
личин лк0, Xi и Яго и строится кривая
вращающего момента по указанному
выше способу.
При расчетах переходных и установивших-
ся режимов при пусках, самозапускзх, сбросе
и набросе нагрузки асинхронных двигателей
с вытеснением тока в роторе с пазами трапе-
цеидального, бутылочного, глубокой аз но го и
двухклеточиого профиля в последние годы ис-
пользуется предложенный канд. техн, иаук
В. Ф. Сивокооыленко и В. А. Павлюковым [61]
метод представления зависимостей сопротивле-
ний роторной обмотки r2(s)/s и «a(s) в виде
многоконтурной схемы замещения (рис. 2.11),
где нелинейные сопротивления роторной об-
мотки представлены в виде нескольких парал-
лельно включенных r/s, х-цепочек с постоян-
ными значениями этих сопротивлений.
Предложенный метод позволяет опреде-
лить параметры эквивалентных схем замеще-
ния по экспериментальным или расчетным за-
висимостям r2(s) и «•>($) пли комплексам пус-
ковых токов статора из решения переопреде-
ленной нелинейной системы алгебраических
уравнений методом прямого поиска из условия
обеспечения минимума суммы квадратов от-
клонений роторных проводимостей от исход-
ных характеристик. Оптимальное число ротор-
ных контуров ©предел иется по среднеквадра-
тичному отклонению от исходных данных (по-
дробнее см. [61]).
Рис. 2.11. Мкогокоитурная схема замещения
асинхронного двигателя с вытеснением тока в
рогоре
46
В приложении 1 приведены параметры эк-
вивалентных схем замещения некоторых элек-
тродвигателей, определенные по разработанной
методике авторами данного метода на ЭВМ,
там же иа рис. П.1 дано сравнение расчетных
зависимостей от скольжения пусковых харак-
теристик /.($) и A4*.(s) и роторных сопротив-
лений двигателя ДАЗО 1569-8/10, найденных
по каталожным данным и по эквивалентной
двухконтурной схеме замещения.
2.4. ОПРЕДЕЛЕНИЕ АСИНХРОННОГО
МОМЕНТА СИНХРОННОГО ДВИГАТЕЛЯ
С ПУСКОВОЙ ОБМОТКОЙ
В явнополюсных двигателях стерж-
ни пусковой обмотки закладываются в
полюсные башмаки н электрически со-
единяются между собой. Такая пуско-
вая обмотка называется неполной. Ес-
ли соединить электрически обмотки
всех полюсов по торцам перемычками,
то получается полная пусковая обмот-
ка. В подавляющем большинстве слу-
чаев синхронные двигатели выполня-
ются с полной пусковой обмоткой.
В отличие от асинхронного двига-
теля на роторе синхронного двигателя
имеется обмотка возбуждения. Кроме
того, ротор синхронного явнополюсно-
го двигателя в магнитном отношении
несимметричен. Сопротивление маг-
нитному потоку под полюсами значи-
тельно меньше, чем в межполюсном
пространстве.
Пуск синхронного двигателя услов-
но можно представить в виде двух
этапов. На первом этапе угловая ско-
рость двигателя доводится до подсин-
хронной угловой скорости за счет асин-
хронного момента. При этом, как н для
асинхронного двигателя, установивша-
яся угловая скорость или скольжение
установившегося асинхронного режима
определяются точкой пересечения кри-
вых зависимости от скольжения асин-
хронного момента двигателя и момен-
та сопротивления. На втором этапе
происходит втягивание двигателя в
синхронизм за счет момента, обуслов-
ленного возбуждением, или за счет ре-
активного момента, обусловленного
различием магнитных сопротивлений
по продольной и поперечной осям ро-
тора.
Разделение процесса пуска на ука-
занные два этапа в некоторой степени
условно, так как в ряде случаев про-
цесс вхождения в синхронизм начина-
ется еще прн скольжениях, которые
больше установившегося скольжения
асинхронного режима. Независимо от
этого результаты аналитических и экс-
периментальных исследований показы-
вают, что во всех случаях более бла-
гоприятные условия для втягивания
синхронного двигателя в синхронизм
создаются при меньшем значении
скольжения установившегося асинх-
ронного режима.
Таким образом, время пуска синх-
ронного двигателя н условия перед
вхождением в синхронизм практически
определяются характером зависимости
асинхронного вращающего момента от
скольжения.
Уточненное значение среднего
асинхронного момента синхронного
двигателя, если не учитывать активно-
го сопротивления в цепи статора, мо-
жет быть получено по формуле
Д/ __ Г / '____________________— V'
Л4В0М в* 2РИ0М Ц x-d xd J"
х STd /J_____________________1 \ std +
1 + (STd)2 \ K'd J1 + (этй)2
+ МХ+Ч.- (2-6°)
где Рном — номинальная активная
мощность на валу двигателя; SHOM —
номинальная полная мощность двига-
теля; Мной — номинальный момент
машины; xdt xd—относительные пере-
ходное и сверхпереходиое сопротивле-
ния по продольной оси; -относи-
тельное сверхпереходиое сопротивле-
ние по поперечной оси; т^, — посто-
янные времени переходного и
сверхпереходного процессов измене-
ния магнитных полей по продольной
оси ротора при замкнутой цепи стато-
ра, рад, причем тРад=тсй)о»3,14 тс;
— постоянная времени демпферного
контура (пусковой клетки) по попереч-
ной оси ротора при замкнутом стато-
ре, рад; ku = Uc/ua0K-t Uc — напряже-
ние сети, принимаемое не зависящим
от режима работы синхронного двига-
теля.
Для входящих в уравнение (2.60)
величин, выраженных в относительных
единицах, за базисные значения при-
няты номинальные значения тока /Ном,
напряжения £/ном и полной мощности
на выводах двигателя £ноы.
Постоянные времени при замкну-
том статоре и переходное сопротивле-
41
ние определяются на основании [15]
следующим образом:
+ (2.61)
= Тн (2,62)
\ Xq Xiq f xq
*в=тм(1~—): (2.64)
\ *д*В f
Tld = rld0fl--^-), (2.65)
y, = , (2.66)
*<, h'no+—К+Q
где
тв0 == xJr^. TTdO = Xld^r±d>
^IqD = Xlqfrlo (2.67)
— собственные постоянные времени
обмоток ротора; хъ, хщ, xiq и гв, ridt
rlQ — индуктивные и активные сопро-
тивления контура возбуждения и
демпферных контуров по продольной
и поперечной осям ротора, приведен-
ные к статору;
°Bid — 1 TV = —
— коэффициент рассеяния потоков ро-
тора по продольной оси при замкну-
том статоре;
о = 1/" 1 — 4а^т'»Т|< (2.69)
V (Тв + т^Г
Постоянные времени т’;()и т^0 , со-
ответствующие переходному и сверх-
переходному процессам изменения
магнитного поля по продольной оси
ротора при разомкнутом статоре, опре-
деляют по формулам (2.61) и (2.62)
путем замены постоянных времени от-
дельных целей и коэффициента рассея-
ния ротора на аналогичные величины
при разомкнутом статоре, принимая
хе~оо в формулах (2.64), (2.65) и
(2.68).
Если между точкой сети с напря-
жением Uc и выводами статора нахо-
дится внешнее сопротивление хвш, то
оно учитывается обычным образом в
сопротивлениях ха и хи (суммирова-
нием ха и х" самого двигателя с хВш)
и приближенно в переходном сопро-
тивлении X .Х^Хй-РЛ'вщ.
Постоянные времени также долж-
ны быть определены с учетом внешне-
го сопротивления.
Первая составляющая момента в
(2.60) обусловлена изменением обще-
го потока контуров ротора по пяо-
дольной осн:
Md- = Srdn k" ( 1_____— \ ST<1 _
2Р™М 4 J 1 + (st,,)2
Кратность максимального момента
этой составляющей при ku= 1
&' = J™™ /_1-----1_\ 70)
2Рном у Xj xd у
и критическое скольжение Sd=l/tZf.
Вторая составляющая момента
обусловлена изменением потоков рас-
сеяния контуров ротора
м' = (-L----—) х
2Рвом xj х' )
у
ч-(«Э2 _£+_l_
s £
с максимальным моментом (по отно-
шению к номинальному) при &м = 1
L (2.71)
2Р»°М x'd
при критическом скольжении 5^=1 /т^.
Третья составляющая момента
обусловлена токами в контуре ротора
по поперечной оси:
ч ^иом / 1____I \ sxq
м° 2Риом (*, / !+(sQ2
Рис. 2.12. Составляющие асинхронного момен-
та синхронного двигателя МС-322-8/10 в об-
ласти малых скольжений. Обмотка возбужде-
ния закорочена
Максимальный момент третьей сос-
тавляющей
Ц---------Ч (2-72)
XQ XQ /
» 1
при критическом скольжении = ~г.
Таким образом, средний асинхрон-
ный момент
Если критическое скольжение сос-
тавляющих моментов и М"» значи-
тельно больше, чем критическое сколь-
жение составляющей момента Л1'/о то
сумма при небольших значе-
ниях скольжения будет нарастать мед-
леннее с ростом s, чем успеет в тех же
пределах $ понизиться M’d t н кривая
суммарного момента
+М будет иметь провал при неболь-
ших значениях скольжения (рис. 2.12).
Изменение взаимного расположе-
ния отдельных составляющих асинх-
ронного момента с целью ликвидации
провала в кривой может
быть достигнуто соответствующим из-
менением параметров пусковой клет-
ки, а также введением гасительного
резистора в цепь обмотки возбужде-
ния на время пуска. Рассмотрим влия-
ние гасительного резистора с сопро-
тивлением гг=агъ на кривую асинх-
ронного момента, подставляя в приве-
денные выше формулы (2.61), (2.62) п
(2.66) значение постоянной времени
цепи возбуждения
(2 67а>
гв 1 гг 1 + а
вместо тн0.
Анализ полученных таким Образом
выражений показывает, что при уве-
личении гасительного резистора гг по-
стоянные времени переходного и
сверхпереходного процессов по про-
дольной оси уменьшаются, причем
первая значительно в большей степе-
ни, чем вторая. Соответственно умень-
шение т^и ха приводит к существен-
ному увеличению критического сколь-
жения sd н лишь к небольшому повы-
шению критического скольжения sd
[см. (2.70) и (2.71)]. Переходное ин-
дуктивное сопротивление x'd в соответ-
ствии с (2.66) несколько уменьшается
с увеличением гт, что приводит к по-
вышению максимального значения b'd
первой составляющей и понижению
максимума bd второй составляющей
асинхронного момента.
В результате указанных изменений
исчезает провал в кривой полного
асинхронного момента, но, как прави-
ло, увеличивается скольжение устано-
вившегося асинхронного режима бла-
годаря уменьшению наклона кривой
Ala*=f(s) в области малых скольже-
ний при введении сопротивления в
цепь возбуждения двигателя (рис.
2.13).
Рис. 2.13. Влияние изменения сопротивления
в цепи возбуждения синхронного двигателя
МС-322-8/10 на асиихройную характеристику
при малых скольжениях
43
В предельном случае при гг=оо.
а=оо (обмотка возбуждения разомк-
нута) по приведенным выше формулам
найдем:
Qco = l,0j тв.гО ~ 0» T/f =
ха = 0; sd = oo; Md. = 0; Sa = 1/tw;
— X(fld!'td<5 — ~ %d —
В данном случае асинхронный вра-
щающий момент создается только
демпферными контурами ротора и на
основании (2.60) определяется следу-
ющим образом:
и
Ь _____ ____ -^ном_________
vhom ~ ~7“
2^ном С1 (х1 С1 -*;?)
__ Shom
2Phom С1ХЦ
при критическом скольжении
Г. __ rid
-----------------
cirld
где
*o + cixlda
xad xad
xi=x о и *2 =Xfdcr сопротивления рас-
сеяния статора и демпферного конту-
ра.
Если известны реактивные сопро-
тивления в омах, то
X —1----------1, (2.736)
И
bt
. ___ Xv 1Ом] SnpM
'К —
U1
ном
С г/2
нем '•'ном
где Srf=l/Tid.
Наконец, принимая ротор симмет-
ричным в магнитном отношении {xq —
=Ха) и полагая одинаковыми пара-
метры пусковой клетки по обеим осям
ротора (xl£t=xi9; Tid—х,;) находим из
(2.736) уравнение асинхронного мо-
мента, по форме аналогичное полу-
ченному выше (см. § 2.1) для асин-
хронного двигателя с одной белнЧьей
клеткой на роторе:
2РнОМС1*К [Ом] SH0N
^НОМ
(2.76)
2^ном [Ом]
е. выражения ЬИом и sKp приведены
такому же виду, как и для аеннх-
где
^иом
Ма* = - 2Ь'^-“
skp , s
S SHp
(2.74)
•^нпм
НОМ
Sup —
Подставляя в равенство для Ьнон
значения xrf(e и ха=хс получа-
ем
7 — ci 4* ci-^ido) =
*d-*dco
4-CjX^
к
рониого двигателя.
Формулой (2.74) можно пользо-
ваться как приближенной прн боль-
ших скольжевиях (s>0,14-0,2) и лю-
бой схеме подсоединения обмотки воз-
буждения (с закороченной обмоткой
и замкнутой на разрядное сопротивле-
ние).
В случае пуска машины с обмоткой
возбуждения закороченной или ра-
зомкнутой значения &Ном и $кр могут
быть получены из опыта питания об-
мотки статора при заторможенном ро-
торе [10].
На первом этапе пуска (в области
больших скольжений) при обмотке
возбуждения, замкнутой на возбуди-
тель, имеют место некоторое уменьше-
ние момента, в том числе и начально-
го, и соответствующее увеличение
времени пуска. На втором этапе пуска
у ряда двигателей имеет место неко-
торый провал момента (рис. 2.13 п
2.14). Так, у двигателя ДС-140/39-8
провал момента до 0,5 имеет место 1
при скольжении 0,035 или 3,5 %.
44
Рис. 2.14. Изменение асинхронного момента
двигателя ДС-140/39-8 при s=0,14-0:
/ — по формуле (2-74) н 2 —по формуле (2.60) с
учетом (2 65)—(2.67) при замыкании обмотки ротора
на разрядный резистор; 3 — оо формиле (2 60) прн
закороченной обмотке ротора; А—опытные точки
Если момент сопротивления меха-
низма, связанного с этим двигателем,
при скольжении s=0,035 будет мень-
ше 0,5, то установившееся значение
скольжения при замкнутой обмотке
возбуждения будет значительно мень-
ше по сравнению со скольжением при
замыкании обмотки возбуждения на
гасительный резистор. При моменте
сопротивления больше 0,5 установив-
шееся значение скольжения прн замк-
нутой обмотке возбуждения будет
больше по сравнению со скольжением
при наличии гасительного резистора.
Однако было бы неправильным пред-
полагать, что синхронный двигатель
втянется в синхронизм только в том
случае, если момент сопротивления
будет меньше минимального значения
асинхронного момента прн небольших
значениях скольжения в случае про-
вала на кривой 7W*=f(s).
При относительно легких условиях
пуска (небольшая механическая посто-
янная агрегата) может быть обеспе-
чено втягивание в синхронизм и в тех
случаях, когда момент сопротивления
будет выше минимального значения
асинхронного момента.
Замыкание обмотки возбуждения
на гасительный резистор следует при-
менять только в тех случаях, когда
при замыкании обмотки возбуждения
на якорь возбудителя синхронный дви-
гатель не будет втягиваться в синхро-
низм.
Проведенное сопоставление различ-
ных методов определения асинхронно-
го момента синхронных двигателей
показало, что при обмотке возбужде-
ния, замкнутой на гасительный резис-
тор, с достаточной степенью точности
можно применять формулу (2.74) и в
области малых скольжений (рис. 2.14).
Применение этой формулы дает доста-
точную для практики точность при
определении значений времени пуска,
нагрева обмоток за время пуска, выбо-
ре реактора по термическому воздей-
ствию и т. п. Прн расчете принимает-
ся, что параметры двигателя не зави-
сят от скольжения.
Для схемы с обмоткой возбужде-
ния, замкнутой на якорь возбудителя,
определение асинхронного момента
при небольших значениях скольжения
должно в большинстве случаев произ-
водиться по формулам (2.60) или
(2.73а), которые дают возможность
определить провал в кривой момента
при скорости, близкой к синхронной.
2.5. ОПРЕДЕЛЕНИЕ АСИНХРОННОГО
МОМЕНТА СИНХРОННЫХ ДВИГАТЕЛЕЙ
С МАССИВНЫМ РОТОРОМ
И МАССИВНЫМИ ПОЛЮСАМИ
В настоящее время с массивным
ротором с неявно выраженными полю-
сами серийно изготовляются синхрон-
ные двигатели на 3000 об/мин на но-
минальную мощность до 12 500 кВт.
По индивидуальным заказам изготав-
ливаются и более мощные двигатели.
Эти двигатели по своей конструкций
практически не отличаются от турбо-
генераторов. Серийно выпускаются
синхронные явнополюсные двигатели
с массивными полюсами в двух испол-
нениях —- с перемычками демпферной
обмотки между полюсами и без ннх.
При применении перемычек улучшают-
ся пусковые характеристики.
Определение асинхронного момен-
та синхронных двигателей с массив-
ным ротором или полюсами является
сложной задачей, поскольку активное
и реактивное сопротивления такого
ротора имеют сложную зависимость
от частоты тока в роторе. Рассмотрим
явления, происходящие в массивном
роторе во время пуска.
В начальный момент пуска, когда
частота токов, индуктируемых в рото-
ре, равна частоте сети, этн токи про-
ходят в поверхностном слое относи-
тельно небольшой толщины. Активное
сопротивление ротора имеет прн этом
45
наибольшее значение, а реактивное
сопротивление рассеяния *— наимень-
шее. По мере увеличения угловой ско-
рости ротора во время пуска соответ-
ственно уменьшается частота токов в
роторе и увеличивается глубина про-
никновения тока в глубь массивного
ротора. При этом активное сопротив-
ление ротора уменьшается, а реактив-
ное сопротивление рассеяния ротора
увеличивается. В конце пуска при под-
синхронной угловой скорости активное
сопротивление ротора имеет наимень-
шее значение, а реактивное сопротив-
ление рассеяния ротора — наибольшее.
В результате двигатель с массивным
ротором имеет исключительно благо-
приятную характеристику асинхронно-
го момента даже по сравнению с
обычно применяемыми асинхронными
двигателями с глубокими пазами или
двумя обмотками на роторе.
Для иллюстрации на рнс. 2.15 даны
типовые кривые асинхронного момен-
та синхронного двигателя с массивным
ротором и асинхронного двигателя на
3000 об/мин. Из рассмотрения этих
кривых следует, что при прочих рав-
ных условиях время пуска двигателя
с массивным ротором будет значи-
тельно меньше, чем асинхронного дви-
гателя. Соответственно для самозапу-
ска лучшими будут условия у двига-
теля с массивным ротором. Это первое
основное преимущество синхронных
двигателей с массивным ротором. Вто-
рым важным достоинством синхрон-
ных двигателей с массивными ротора-
Рис 2.15. Характеристики вращающих момен-
тов синхронных,(/) и асинхронных (2) двига-
телей
мп является то, что они имеют жест-
кие характеристики асинхронного
момента при небольших значениях s
и, как следствие, более благоприятные
условия для втягивания в синхронизм.
Большая жесткость характеристик
асинхронного момента у машин с мас-
сивным ротором объясняется тем, что
активное сопротивление такого ротора
из-за большой глубины проникновения
токов в тело ротора имеет весьма ма-
лое значение.
На рис. 2.16 даны характеристики
асинхронного момента нескольких
синхронных двигателей при небольших
значениях скольжения, полученные
экспериментально.
Асинхронный момент в области от-
носительно больших скольжений (s=
=0,054-0,10) можно определить экс-
периментально по данным измерения
во время пуска. Для определения
асинхронного момента необходимо за-
мерить в зависимости от времени по-
требляемую из сети активную мощ-
ность Рп, ток /п, напряжение статора
Un и угловую скорость.
Потребляемую из сети активную
мощность можно определить путем
осцнллографирования гальванометром
мощности, а иногда, при достаточно
медленном пуске, — и по регистр нру-
Рис. 2.16. Характеристики асинхронного мо-
мента синхронных двигателей:
X—двигатель СТМ-6000-21000 кВт (обмотка воз-
буждений замкнута на гасительный резистор): X —
двигатель CTM-6DOO-2 6000 кВт (то же); /, 2— двига-
тель ЧК Д *1000 кВт. -1400 кВ - А: 3. 4 — двигатель
Шкода 2800 кВт, 3070 кВ-А; 5. 6 — двигатель
CTM-3500-2. 3500 кВт. 4500 кВ-А: 7. 8 — двигатель
CTM-1500-2. 1500 кВт, 1750 кВ-A; /, 3. 5. 7 — обмотка
возбуждения закорочена; 2, 4. б. 8 — обмотка воз-
буждения замкнута на гасительный резистор
46
ютим приборам или даже по стрелоч-
ным приборам с одновременной за-
писью (по сигналу) всех необходимых
величин.
В начале пуска при скольжении в
пределах от 1 до 0,9 нз-за значитель-
ных колебаний мощности, вызванных
наличием апериодических составляю-
щих тока, значения момента получа-
ются неточными. Если имеется необхо-
димость в более точном определении
момента в этой зоне скольжений, то
ротор двигателя следует затормозить
и произвести измерения при устано-
вившихся показаниях приборов. Во
время этого же опыта можно непо-
средственно измерить пусковой мо-
мент двигателя с помощью динамо-
метра, прикрепленного к конструкци-
ям здания н к тросу на валу двига-
теля.
Поскольку при пуске ЭДС значи-
тельно меньше напряжения на выво-
дах статора (см. § 1.1 н 2.4), то поте-
рями в стали при значительных сколь-
жениях можно пренебречь, а поэтому
электромагнитную мощность можно
принять равной разности между по-
требляемой из сети мощностью
и потерями в обмотке статора.
Асинхронный момент вращения
(относительный) определяется для
данного скольжения по формуле
р — др /2/7
M*=—2-------(277
Р kZ
ном “
Момепт при небольших значениях
скольжения наиболее точно определя-
ется из опытов установившихся асинх-
ронных режимов. Опыт асинхронного
режима производится следующим об-
разом: при данной мощности, потреб-
ляемой двигателем из сети, снимается
возбуждение и при установившемся
асинхронном режиме измеряются
мощность, ток и напряжение статора,
скольжение, ток и напряжение ротора
и возбудителя.
Опыт асинхронного режима произ-
водится при закороченной обмотке
возбуждения и замкнутой на гаси-
тельный резистор.
Из опыта синхронного режима оп-
ределяется момент по формуле
Рп —SAP
(2.776)
ном и
где SAP — сумма потерь в стали и об-
мотке статора’ двигателя, соответству-
ющих асинхронному режиму, имеюще-
му место при опыте.
Определение асинхронного момента
синхронного двигателя с массивным
ротором или с массивными полюсами
непосредственно по формуле (2.60)
или (2.73а) практически невозможно,
так как активное и реактивное сопро-
тивления зависят от скольжения и
насыщения.
В данном случае момент можно
определить приближенно, принимая за
основу выражение (2.74) и учитывая
изменение параметров, исходя из дан-
ных опытов пуска и гашения поля при
двух значениях сопротивления гаси-
тельного резистора.
Из данных опыта пуска определя-
ем приведенное активное сопротивле-
ние ротора при s — 1:
' == f f __ АРтпах,ноМ zg 7g\
где rK -— активное сопротивление ста-
тора и неподвижного ротора; Г] — ак-
тивное сопротивление статора;
^Ртах, ном — потери в обмотке статора
при номинальном токе; Pni — измерен-
ная при опыте активная мощность, по-
требляемая двигателем при s==l; /щ—
пусковой ток при s=l, измеренный
при опыте.
Реактивное сопротивление статора
и ротора
(2.79)
Реактивное сопротивление рассея-
ния статора
*! = *« — = (28°)
где а=0,64- 0,65 [62].
Так как несимметрия массивного
цилиндрического ротора, вызванная
наличием зубцов, относительно неве-
лика, то можно с достаточной сте-
пенью точности принять, что контуры
по продольной и поперечной осям оди-
наковы. Исходя из этого допущения,
определим среднее значение постоян-
ной времени ротора.
При разомкнутой обмотке ротора
= (2.81)
При обмотке возбуждения, замкнутой
на гасительный резистор гг, получим
47
Tldn *1 TRO r r T T](f0
Дф.Г ~
2
TBtl rB
— ин П------------------ (2.82)
Ис 2(<-B + rr) ’
Постоянные времени тщо и тэо мож-
но определить из опыта гашения поля
при двух значениях сопротивления в
цепи обмбтки возбуждения гг? и гГ2 по
найденным опытным путем постоян-
ным времени переходного процесса
гашения поля m и тГ2 (сверхпереход-
ный процесс не учитываем). На осно-
вании (2.61), принимая 1,0 при ра-
зомну том статоре, получаем
/т' \ L я-. . \ •
(2.83)
'Ido
Решая эти уравнения при замене
Gi = rri/rB и а2—Гг2/гКг получаем
= ТГ1 — (тг1 — тга) . (2.84)
*Г2 -ГГ1
_ ____ (тг1 Тга) (^в 4~ *ri) (гв Ч~ *гз)
•"ВО . .
ГВ v Г2-Гп)
Активное сопротивление ротора в
относительных единицах при 5=0 и за-
короченной обмотке возбуждения
(2.85)
г- =------=-------------1---- (2.86а)
2лЛср.к 2л/ОКЗтср.„’
и при обмотке возбуждения, замкнутой
на гасительный резистор,
Гжг^ 2п/тсрг ~ 2п/ОКЗтср.г ’ *2’866)
Зависимость приведенного активно-
го сопротивления ротора от скольже-
ния с достаточной степенью точности
может быть выражена формулой
4 = '-й + (4-'-У(<Г, (2.87)
а приведенное сопротивление рассея-
ния ротора при 5=1
где —приведенное активное сопро-
тивление ротора при s=0; г'2к —при-
веденное сопротивление ротора при
5 = 1.
Суммарное реактивное сопротивле-
ние рассеяния статора и ротора в за-
висимости от скольжения
*5 = *1 + X2KjVs = 4- аг-2к!(288)
где X] — реактивное сопротивление
рассеяния статора.
Входящая в (2.88) вторая состав-
ляющая сопротивления, определяемая
потоками рассеяния ротора, прн
уменьшении скольжения будет стре-
миться к бесконечности, в то время
как в действительности при s=0 опа
имеет некоторое конечное значение.
При уточнении этого вопроса следует
учитывать, что при небольших значе-
ниях скольжения момент практически
определяется активным сопротивлени-
ем ротора. Действительно, когда
sKp/s^>s/sKp, из формулы (2.74) при
Au=1,0 получим
Л4^«2д1И)Ы5/5Ир. (2.89)
Заменяя Ь1ЮмтА/х6 и 5ир=г^/хв,
где Л=5ном/2РЕОмС[, получаем
2As/ris. (2.90)
Произведенные поверочные расче-
ты показали, что реактивное сопротив-
ление рассеяния ротора можно с до-
статочной степенью точности считать
зависящим от скольжения в пределах
от 5 = 1 до 5=0,05, а от 5=0,05 до
5 = 0 Принимать *2s=X2(0.05) •
В этом случае xs=xl-j~4,47 аГчв
Для определения зависимости
асинхронного момента от скольжения
для нескольких значений последнего
(см. § 2.2) определяем критическое
скольжение
Skps^^s
и кратность максимального момента
U2
b ~_________ ном
2PEObI(ri + xs)
Асинхронный момент для каждого
данного значения скольжения, так же
как и для асинхронного двигателя с
глубоким пазом ротора (см. § 2.2), оп-
ределяется по формуле
, (2.91)
__S J SKPS
S«ps s
где Ьноыв и Sups зависят от принятого
в расчете скольжения.
Рассмотрим пример. Синхронный двига-
тель СТМ-1500-2, 1500 кВт, 1750 кВ-А, 6 кВ.
168 A, cos фвом=0,9; 1]нсм=0,9533. По данным
завода Xrf*=i»54 или хн=32 Ом. Д,Ртпх пом—
=21 кВт.
Из опытов пуска при напряжениях 4,3 кВ
было определено: прн закороченной обмотке
возбуждения Хк—3,25 Ом и гк=1,47 Ом; при
48
обмотке возбуждения, замкнутой на гаситель-
ный резистор 1,44 Ом, х«=3,25 Ом и г2н=
= 1,62 Ом.
Как следует из данных опытов, влияние
гасительного резистора относительно невелико.
Реактивное сопротивление осталось неизмен-
ным, а активное сопротивление изменилось
всего на 10 %.
Активное сопротивление обмотки статора
с учетом добавочных потерь
г1 = 2Ы03/3-168-=0,25 Ом,
Приведенное к статору активное сопро-
тивление ротора при закороченной обмотке
возбуждения
4с,х = 1,47 — 0,25 = 1,22 Ом
и при обмотке возбуждения, замкнутой на га-
сительный резистор 1,44 Ом,
4к.г= 1,62 — 0,25= 1,37 Ом.
Для определения постоянных времени кон-
туров ротора было проведено осциллографи-
рование гашения поля при двух значениях до-
бавочного резистора в цепи обмотки возбуж-
дения 0,2 и 1,44 Ом. На рис. 2.17 даио графи-
ческое определение постоянных времени гг2=
ческое определение постоянных времени Гц =
= 1,44 Ом.
Постоянные времени при сопротивлении
обмотки возбуждения, равном 0,144 Ом, по
формулам (2.84) и (2.85):
tide = 1,84 — (1.84— 1,01) °’И4+ 1-44 =
1,44 — 0,2
= 0,78 с;
'Ево ~
= (1,84— 1,01) (0,144 + 0,2) (0,144+1,44)
0,144(1,44 — 0,2) ~
= 2,53 с.
Определяем среднюю для двух осей рото-
ра постоянную времени прн обмотке возбуж-
Рис. 2.17. Опрецеление постоянных времени
магнитного потока:
/ — обмоткв возбуждения замкнута на гГ1 - 1.44 Ом;
2— обмотка возбуждения замкнута на гга»=0,2 Ом.
О — опытные точки
4—649
дения, замкнутой на резистор 1,44 Ом, при-
нимая Tigo^Tido:
0,78+1,01
top .г — ц — 0 ,89 с.
При закороченной обмотке возбуждения
0,78 + 2,53 + 0.78
тср.к— „ —2,05 с.
Активное сопротивление ротора при s=0
и обмотке возбуждения, замкнутой иа резис-
тор 1,44 Ом,
» 32
'Я”-- 2л/тсрг := 314.0,89 = °’"
и при закороченной обмотке возбуждения
j 32
г20к — г,.. п —0,05 Ом.
314-2,05
Реактивное сопротивление рассеяния рото-
ра при s=l и закороченной обмотке возбуж-
дения
х2к = а4к= 0,6-1,22 = 0,73 Ом,
а прн обмотке возбуждения, замкнутой иа га-
сительный резистор 1,44 Ом,
х2к.г = 6’6’ = i .62 Ом.
Изменение активного сопротивления и ре-
активного сопротивления рассеяния статора и
ротора в зависимости от скольжения при за-
короченной обмотке возбуждения:
r,s =0,05 +(1,22 — 0,05) УГ=
= 0,05+ 1,17 Vs
, = 3,25 — 0,73 + 0,73/Vs = 2,52 +
+ 0,73/Vs
4s 0,05+ 1,17 УГ
^RpS —
0,73
2.52+
V s
б2-10s
8„oMS --
2 1500
12
0,73
2,77 + —1—
0,05 + 1,17 FT
/л 6.73 \
4 2,52 + —— )
\ /s /
49
Для обмотки возбуждения, замкнутой на
гасительный резистор 1,44 Ом,
<5 = 0,11 + (1,37 — 0,11) УТ=
= 0»11 4- 1,2б/э;
0,82 0,82
rs = 3,25 — 0,82 4- — = 2,43 4-——
snps---
0,82
®HOMS
Рнс. 2.18. Кривые среднего асинхронного мо-
мента синхронного двигателя с цилиндриче-
ским ротором СТМ-1500-2, 1500 кВт, 168 А,
6000 В, 3000 об/мин для скольжений 1,0>
>s>0:
/ 0,82
Ч2-43+ /г)
0,11+ 1.26 ЦГ
По последней формуле определяется мо-
мент для скольжений ss>0,05. При меньших
значениях скольжения момент определяется по
формуле
0,114- 1,26]/s
На рис. 2.18 даны кривые асинхронного
момента для данного двигателя для скольже-
ний От s=l до s=0 и на рис. 2.19—для не-
больших значенйй скольжения. На последнем
рисунке даны также точки, полученные из
опытов установившегося асинхронного режи-
ма без возбуждения. Совпадение расчетных и
опытных данных получается достаточно хоро-
шим при скольжениях от s=l до s=0,5 и
при очень малых скольжениях. Расхождение
между этими данными в области скольжений
от 0,6 до 0,01 довольно значительно, что оп-
ределяется, по-виднмому, отмеченной выше
приближенностью метода расчета, а также
влиянием переходных процессов прн пуске,
обусловленных изменением угловой скорости.
Определение асинхронного момен-
та для синхронных двигателей с явно
1— обмотка возбуждения закорочена (расчет); 2 —
обмотка возбуждения замкнута на резистор (расче! ;
3 — из опыта прямого пуска при обмотке возбужде-
ния, замкнутой на резистор; *— обмотка возбужде-
ния замкнута на якорь возбудителя
Рис. 2.19. Кривые асинхронного момента дви-
гателя СТМ-1500-2 при малых скольжениях:
/ — обмотка возбуждения закорочена; 2 —обмотка
возбуждения замкнута на сопротнвлевие; X—точки
по результатам опытов установившегося асинхронного
режима
50
Рис. 2.20. Характеристики среднего асинхрон-
ного момента двигателя ДСП-116/4904,
6,3 кВ, 1150/1300 кВт, cos <рвои = 0,8/0,9,
1500 об/мин, с массивными полюсами (обмот-
ка ротора замкнута на гасительный резистор):
/ — при наличии соединительных колец; 2 — при сня-
тых кольцах
же, как и для синхронных двигателей
с массивным цилиндрическим рото-
ром.
Синхронные двигатели с массив-
ными полюсами выполняются как с
соединительными перемычками между
полюсами, так и без них. Характери-
стика асинхронного момента у первых
получается несколько лучше (рис.
2.20), но кратность пускового тока в
этом случае больше, чем у вторых *.
2.6. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ
АСИНХРОННЫХ И СИНХРОННЫХ
ДВИГАТЕЛЕЙ ПО КАТАЛОЖНЫМ
ДАННЫМ
Одними нз важнейших параметров,
характеризующих номинальный ре-
жим асинхронного двигателя, являют-
ся соответствующие номинальные зна-
чения приведенного тока ротора Г, иом
и намагничивающего тока /Оном- По-
скольку при переходе от идеального
холостого хода (скольжение s=0) к
номинальному режиму (s=sH0M) маг-
нитный поток практически ие изменя-
ется, ТО /оном МОЖНО принять рЭВНЫМ
току холостого хода /Ох, измеренному
прн работе двигателя без нагрузки на
валу. Определим значения 121ЯОМ и
/оном по каталожным данным номи-
нального тока статора /1ИоМ, кратности
максимального момента Ьвом и номи-
нального коэффициента мощности дви-
гателя COS (piioM.
1 Дополнительные сведения о характеристиках
асинхронного момента кеяюнополюсных синхронных
двигателей м методах их приближенного расчета чи-
татель может найти в 12Ц. (Прим, ред,)
На основании приведенных в гл. 1
основных соотношений и векторной
диаграммы асинхронного двигателя
ток статора может быть представлен
геометрической суммой намагничиваю-
щего тока и приведенного тока рото-
ра, а следовательно, при номинальном
режиме
Аном= V(А)ном8*п Фоном "Ь Аном *
”Xsta<₽K<»,)a + (/0HO»C0S Фоном + "
’+/ЛомС°5ФномГ (1 2 92а)
или без учета активных потерь в стали
(COS фоном = 9)
Arom= Аном sin Фном)~ "Ь
”+Са,ом Афоном)2: (292б>
а реактивная составляющая тока ста-
тора
Ар, НОМ Аном sin Фном
Аном* Аном ^Фном <2-93)
и активная составляющая
Ааном Аном C0S Фном AHOMC0S Фном'
(2.94)
Для выражения sincpB0MH cos(pBnM
через кратность максимального момен-
та воспользуемся равенством (1.17) с
учетом (2.3), пренебрегая активным
сопротивлением статора тх по сравне-
нию с qr'/s в (1.17) и г? по сравне-
нию с (X|+dx')2 в (2,3):
tgФ,',ом= Ь + С1^5,,°м « -S52K-, (2.95)
с. г2 snp
а также решим уравнение (2.19) при
номинальном режиме (/И* = 1,0) отно-
сительно Skp/Shom’-
=ЬИОМ + V^om-1. (2.96)
SHOM
что при подстановке в (2.94) дает ис-
комые выражения:
tgc,------------(2.97а)
"ком + V "«ом-1
(2.976)
£OS(p
ком
(2.97в)
Подставляя (2.97 в) в (2.95), нахо-
дим номинальный приведенный ток ро-
тора _________________
J’ \ / 2&НОМ______ у
2ком ~ 1/ /—--------
*вом*’ * ^н<да 1
X /ihomcos<₽Hom (2-98)
и, заменяя sin<p'OM согласно (2.976),
находим из (2.94) после подстановки
(2.98) номинальное значение намагни-
чивающего тока
/ Ainto__________сезоном \
0,11 VllOM ---—. I'
k бном+ИСм-1/
(2.99)
При Ьном>1,7 можно принять
/' ~ I. cos ф , (2 98а)
2ном 1ном тком> к /
поскольку погрешность по сравнению
с /зном» найденной согласно (2.98),
будет меиее 5 %.
В каталогах также обычно приво-
дятся кратности начального момента
Afjj д Г
“Tj--- — Мк* (при s=l,0) и пускового
'ином
тока А=/п/Лном=/ь-/Лном при номи-
нальном напряжении. По указанным
выше данным можно определить ак-
тивное н индуктивное сопротивления
обмоток статора и ротора.
По кратности начального пусково-
го тока находим полное сопротивление
двигателя при неподвижном роторе
(^=1,0)1
гш = ----, (2.100)
Wihom
где (Ужом — номинальное линейное на-
пряжение статора.
По кратности начального момента
Мк» определяем по (2.26в) приведен-
ное активное сопротивление ротора
при s=l:
г' _ (Рном 4~ АРмех) Mv* ~
-3 (! — SHOM) А2к
№ном &Рмет) IQ 1)
3(1 Siiom)^ /1нСМ
По кратности максимального мо-
мента Ьном определяем по (2.146) ин-
дуктивное сопротивление приведенно-
му току ротора при s=0, пренебрегая
fine сравнению с (Яч+^го)2-
X 4-С X га______;тм)------------
1+ 1 20 +
(2.102)
Заменяя критическое скольжение
согласно равенству (2.95), определя-
ем по (2.36) приведенное активное со-
противление ротора при s=0:
(2.103)
где (xi-^CiX ’0) заменяются по равен-
ству (2.102).
Если неизвестно активное сопро-
тивление статора, то с достаточной сте-
пенью точности можно принять1, что
г1=г2'0. В этом случае, решая (2.101)
и (2.102) относительно г go, получаем
,» _ ^1ном 0 Shdm)____________
2cj (РноМ 4~ 4Рмех) &ном X
J, _____________£1__________
SH0M ^НОМ 1 ®НОМ
(2 104)
Индуктивное сопротивление стато-
ра и ротора при s=l без учета намаг-
ничивающего тока
Х1 4- Х21 ~ I гк1 — (Г1 + Г21)2 (2-105)
Совместное решение уравнений
(2.101) и (2.104) позволяет опреде-
лить значения х1г x’2V учитывая
отношение xi/x2o, например согласно
(2.42).
Пример. Определить сопротивления дви-
гателя 875 кВт, 6 кВ, 100 A, cos фвпм=0,88,
985 об/мин; кратность пускового тока 5.5;
кратность начального момента 1,2; кратность
максимального момента 6ном=2,6.
Примем для этого двигателя Ct =1,03 и
механические потери равными 1 %, т. е,
ДТ'МВХ — 0,01Рпом-
Определяем:
активное приведенное сопротивление ро-
тора, соответствующее s=l, по (2.401):
, 875-1,01-10я-1,2
— —-------------------= 1,2 Ом;
21 3(1— 0,015)- 100г-5,5г
, Исключение составляют двигатели малой мощ-
ности с номинальным напряжением 220—380 В. у ко-
торых п мажет быть (1.6—1,В)г^.
52
активное приведенное сопротивление ро-
тора, соответствующее скольжению s~0, по
(2.103):
' _ «ЮР* О —0.015)
,2“ ~ 2-1,03-875- № 1,01 2,6 X
х[1 +___________'-У - 1 ^51Ом
L 0,015(2,6+1Лг,еа—i J
индуктивное сопротивление рассеяния
статора я ротора, соответствующее s«0, по
(2.102):
6000s (I —0,015) __
<1+с1ж2— 2-1.03-875-1,0! • 103-2,6 “ 151 “
= 7 Ом;
полное сопротивление, соответствующее
6000
гн1 = — = 6,3 Ом;
j/ 3-100-5,5
индуктивное сопротивление рассеяния, соот-
ветстзуюшее s =« 1,
«1 + 4] = 6132 —(0.5) + 1,2)2 = 6,05 Ом
По табличным данным можно опре-
делить отдельные потери двигателя,
зная КПД при иомииальной нагрузке
и сопротивление обмотки статора г}.
Принимаем добавочные потерн в
статоре равными ДРЯ=0,005 Рвом.
Потерн в обмотке статора и доба-
вочные потери
& Р1НОМ ~ Р1 М.НОМ 4- 0,005 Pvma —
= 3/?м„г1-10 0,005 Рет„
Механические потерн
ДРмех = 0,01Рном.
Потери в роторе
• — (РнпМ 4“ Л Родх) «цОМ
Д Р2 НОМ = -----------------
1--«ном
1 >01 РномДком
1 —’ «ном
Суммарные потери двигателя
VA D _____ Рцом(1 -Чном)
—,лл' ном-
Чном
Потери в стали статора
Д ^Ic.HOM — 2Д Рвом
ном
4- 0,005 + 0,01 рвом +
0.01РНОМ«Ном\
1 — «ном /
При определении потерь в роторе
следует иметь в виду, что номиналь-
ное скольжение, определенное по таб-
личным данным, может значительно
отличаться от действительного значе-
ния. Поэтому желательно определить
номинальное значение скольжения из
опыта. Для этой цели при нагрузке,
возможно более близкой к номиналь-
ной, определяют потребляемую двига-
телем мощность Р) и скольжение s.
Скольжение при номинальной на-
грузке достаточно точно может быть
определено по формуле1
с ~ с &а.ном «Рном
ном ~ S ра ~
В каталогах на синхронные двига-
тели кратность максимального момен-
та Ьном и критическое скольжение sKp
обычно не приводятся. С достаточной
степенью точности при номинальном
напряжении кратность Ьпон может
быть определена из выражения
(2.60), которое для симметричного ро-
тора будет иметь вид
(k, - -4-Y (2.106а)
2Р ном *:d4’xq/
где ki — 1/х"— кратность пускового
тока (по каталогу прн обмотке воз-
буждения, замкнутой на сопротивле-
ние).
Для машин с явно выраженными
полюсами хся»0,6 ха и
*„ОМ « —1 (2.1066)
Критическое скольжение
или
s«r=tH0M • (2.1076)
М„, Г
где Мп* — кратность начального пус-
кового момента, равная Мк*.
В каталогах величины кг и
приведены для случая замыкания об-
мотки возбуждения на разрядный ре-
зистор с сопротивлением, равным деся-
тикратному сопротивлению обмотки
возбуждения,
2.7. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ
АСИНХРОННОГО ДВИГАТЕЛЯ
ИЗ ОПЫТОВ КОРОТКОГО ЗАМЫКАНИЯ.
РАБОТЫ ПОД НАГРУЗКОЙ
И ХОЛОСТОГО ХОДА
Для определения параметров дви-
гателя по опытным данным необходи-
мо произвести следующие испытания:
1) измерение сопротивления посто-
янному току обмоток статора, а для
1 Обоснование приведено в § 3.2 [см. (3.27)1.
53
двигателей с фазным ротором — н для
ротора;
2) опыт короткого замыкания;
3) опыт работы двигателя под на-
грузкой.
Измерение сопротивления постоян-
ному току производится простым или
двойным мостом или с помощью
вольтметра и амперметра.
Опыт короткого замыкания произ-
водится прн неподвижном роторе. Для
двигателей с фазным ротором обмотка
ротора замыкается накоротко.
Опыт короткого замыкания можно
производить как при пониженном, так
н при номинальном напряжении. Там,
где есть возможность, предпочтитель-
нее проводить опыт короткого замыка-
ния при напряжении, близком к номи-
нальному, поскольку активное сопро-
тивление и индуктивное сопротивле-
ние рассеяния двигателей зависят от
тока.
Опыт короткого замыкания может
производиться как при питании обмот-
ки статора трехфазным током, так и
при питании двух фаз обмотки стато-
ра однофазным током. Проведение
опыта прн питании двух фаз обмотки
статора однофазным током значитель-
но проще, чем при питании трехфаз-
ным током (практически не требуется
торможение ротора, нужны один ам-
перметр, один вольтметр и один ватт-
метр). В то же время точность этого
способа вполне приемлема для практи-
ческих расчетов.
Прн проведении опыта короткого
замыкания следует концы вольтметра
и цепи напряжения ваттметра присое-
динять непосредственно к выводам
даигателя. При несоблюдении этого
правила возможны большие погрешно-
сти, так как в ряде случаев сопротив-
ление амперметра н токовой цепи ватт-
метра может быть соизмеримо с со-
противлением двигателя.
Прн питании однофазным током из-
мерения производятся для каждой
пары обмоток статора.
Прн питании обмотки статора трех-
фазным током измеряются линейный
ток статора /к, активная мощность Рк,
потребляемая из сети (по схеме двух
ваттметров), линейное напряжение UK-
По этим измеренным величинам оп-
ределяем:
активное сопротивление двигателя
PJ3& (2.108)
активное приведенное сопротивле-
ние ротора
Пи = Гш — П» (2. Ю9)
где и — активное сопротивление цепи
статора при переменном токе, которое
с достаточной степенью точности мо-
жно принимать равным 1,05 значения,
измеренного на постоянном токе;
полное сопротивление двигателя
zF1 = i/„1//3/„1; (2.110)
индуктивное сопротивление рассея-
ния
=1'' Zki — Гкь (2-111)
Необходимо учитывать, что по ра-
венствам (2.108) н (2.109) определя-
ются эквивалентные сопротивления,
совпадающие с действительными соп-
ротивлениями на фазу только при сое-
динении обмотки статора звездой.
Если обмотка статора соединена тре-
угольником, то фактические сопротив-
ления на фазу будут втрое больше по-
лученных таким расчетом.
При питании однофазным током
для каждой пары обмоток статора из-
меряются токи статора /щг, /кгз и /Кзь
активные мощности, потребляемые нз
сети Рк12, Рк2з н Ркз1 н напряжения
статора £/к>2, ^кгз, 1/кзь
По этим величинам определяются:
активное сопротивление двигателя
f«i = (fun “Ь Гюэ + ИкзхУЗ, (2.112а)
где
fms = и т. д.; (2.1126)
активное приведенное сопротивле-
ние ротора г2J определяется по (2.109);
полное сопротивление даигателя
гк1 = (2»12 "Ь ^К23 "Ь zral)/3. (2.113а)
где
zMZ = HK1272/I.1Z и т. д.; (2.1136)
индуктивное сопротивление рассея-
ния xKf определяется по (2.111).
Следует отметить, что при опреде-
лении приведенного активного сопро-
тивления ротора по результатам опы-
та короткого замыкания и формуле
(2.109) мы пренебрегали влиянием на-
магничивающего тока. Нетрудно убе-
диться по схеме замещения (см. рис.
1.1J, что при этом вычисленные значе-
ния приведенного актианого сопротив-
ления и суммы индуктивных сопротив-
лений рассеяния статора и ротора бу-
54
сопротивление при
1Х0 (Г2! + /*21) .
Г21 + /(*П + *21Г
дут несколько отличаться от действи-
тельных значений.
Из схемы замещения и равенства
(1.13) следует, что при s=I действи-
тельное полное
tgq’o=00 равно:
Zh1 = /1 4- /Xj 4-
(2.114)
соответствующее приведенное ак-
тивное сопротивление ротора
(2.115)
индуктивное сопротивление двига-
теля
Таким образом, расчетное значение
приведенного активного сопротивле-
ния ротора, полученное по (2.109),
всегда будет несколько меньше дейст-
вительного значения. Отметим также,
что часто применяемое на практике
расчетное значение реактивного сопро-
тивления короткого замыкания двига-
теля как суммы индуктивных сопротив-
лений рассеяния статора и ротора
Хк1расч= (^i-|-я21 )расч несколько боль-
ше действительного значения хКь оп-
ределяемого (2.116): Xki < (xi 4-xjJ *
• Неравенство легко доказать по знаку разности
между знаменателем и числителем коэффициента
при x'jB (2.116):
т. е. знаменатель больше числителя, а весь коэффи-
циент при меньше единицы
Например, для двигателя, имеющего в от-
носительных единицах Xi=x2l = 0,l, г = 0,2 и
хо=4, расчетное значение приведенного актив-
ного сопротивления ротора согласно (2.115)
будет
= 0,019 — 0.954,;
= 0,198 — 0,99 (л, +xj).
Для данного случая погрешность состав-
ляет 5 % ДЛЯ Г2,3 1 % ДЛЯ Хк1расч = Х1Ч-Х21 ==
=0,2 и 2 % для *21-
Активное сопротивление при не-
больших значениях скольжеиня можно
определить из опыта нагрузки следую-
щим образом. Из уравнения (2.19) для
режима при kn=kf=A,O, но с нагруз-
кой /Миотл^Рэ./Рп,тм==^с-»,
отличающейся от номинальной, полу-
чим
Решая уравнение (2.3 6) относи-
тельно Гао при подстановке (2.117),
получаем аналогично формуле (2.103)
(2,118)
Если 6ном/Мс*;>1,6, то
Заменяя ЬНОм по формуле (2.14 6),
получаем
, ^1ном(1 ~ shom)sX
Г20 — ~ ->
С7 (Р 4 Д р \ X
-1 ном ‘
Х 1/ rl + (xj + cix2o)2
---------7--------/ . (2 .11 9)
X Л1С. Jr, I
55
С достаточной степенью точности
можно заменить отношение
Kn + (*, + c^'xY
'i + V 'I + (*i + q-4)2
'i+'Sa '
Подставляя это значение в форму-
лу (2.119), получаем
Г 20^
^1ном(* hom)SXH1
сХ»(Р»ом+Д'>™х) ('-1+^1) '
(2.119а)
Для определения мощности Р&, пе-
редаваемой ротору, необходимо из из-
меренной при опыте потребляемой нз
сети активной мощности вычесть по-
тери в обмотке н а стали статора.
Если опыт производился при на-
грузке, близкой к номинальной, то ко-
эффициент загрузки Л4С* можно опре-
делить достаточно точно по отношению
мощности Рь потребляемой из се-
ти при опыте, к мощности РЫом^
Мс» « ном-
Кратность максимального момен-
та £>иом, соответствующую параметрам
двигателя при небольших значениях
скольжения, можно определить нз двух
нагрузочных опытов. Эти нагрузочные
опыты проводятся при двух значениях
кратности максимального момента по
отношению к моменту сопротивления:
один опыт прн 6С1=Ь ном^21 /Мс1* и вто-
рой При Ьс,2^=Ьном^
При М*=Л1с* и fys=l,0 по уравне-
нию (2.19) с учетом (2.18) можно по-
лучить два условия:
. ^>+4.
*® 2s2s„p ’
йы=^Р_^
2siSHp
(2.120)
При совместном решении (2.120)
наряду с равенством
h — h
- ”сг 5
— Ьс2
опреде чяется величина
s"j
"f^1
1 Sj \ S1 '
XPML,)
V/UA /
при известных из опытов скольжени-
ях Si и s2, а также значениях ЛГс«ь
Мег-. ^2 и Ui. Искомая кратность мак-
симального момента по отношению к
номинальному
L ___ РОМ __
U'{ ~
( sl\sl )
(2.121)
Для получения большей точности
следует производить опыт таким обра-
зом, чтобы отношение - а было
возможно больше н во всяком случае
не меньше 1,1.
Для определения загрузки двигате-
ля при первом н втором опытах и рас-
четах ОТНОШенИЯ Л11*/Л12* = Ра1/Ра2
следует из измеренной потребляемой
активной мощности вычесть потери в
статоре (потерн в обмотке и в стали).
Для получения достаточной степе-
ни точности один из опытов нужно про-
вести при небольшой нагрузке (0,3—
0,4 номинальной), а другой — при на-
грузке больше номинальной, причем
степень перегрузки должна быть тем
больше, чем больше кратность макси-
мального момента. Например, для дви-
гателя, имеющего Ьном—2 при номи-
нальном напряжении, опыты должны
быть проведены при Мс1*=0,5 и
Мс2* = 1,25.
Если кратность максимального мо-
мента больше 1,6,то значение]/ ^ом — 1
близко к Ьном и в соответствии с урав-
нением (2.85)
<• ~ Ьр1 и с — кро
ьиом I ~ о, и Лиом 0 ~
___Г2Г1
2&яомХц0
я
Принимая Ьнойц/^ном Яко/Хк], полу-
чаем
Г2Ч = Гл SHOM n/sB0M !, (2.122)
где Shomo и £>ном — номинальное сколь-
жение и кратность максимального мо-
мента, определенные по параметрам
двигателя, соответствующим скольже-
нию s—0 (shomo может быть определе-
но из опыта работы двигателя под на-
грузкой); Shomi и Ьном1 — номинальное
скольжение и кратность максимально-
го момента, определенные по парамет-
рам двигателя, соответствующим
скольжению s—1. Точность опреде-
ления активного приаедеиного сопро-
тивления ротора прн s^O по формуле
(2.122) вполне достаточна для практи-
ческих расчетоа.
Скольжение двигателя при работе
под нагрузкой можно определять при
помощи тахометра только в тех слу-
чаях, когда скольжение около 5 % нли
более. Прн значении скольжения не
больше 5 % измерение производится
стробоскопическим методом.
Для этого на конце вала наносится белая
радиальная черта. Конец вала освещается не-
оновой лампой, присоединенной к сети, от ко-
торой питается двигатель. Неоновая лампа
устанавливается так, чтобы она освещала чер-
ту обоими электродами.
Если в двигателе имеется р пар полюсов,
то на диске образуется звезда с количеством
лучей, равным 2р.
Так как отсчитывать количество полных
оборотов звезды затруднительно, то удобнее
считать количество прохождений всех лучей
а через верхнее вертикальное положение за
время в секундах.
Скольжение в процентах выразится сле-
дующим образом;
50а
s= р ’
при f=50 Гц
а
S — —.
t
Если освещать черту неоновой лампой,
повернутой одним электродом, то число лучей
сократится вдвое. В этом случае количество
прохождений лучей через нулевое положение
надо умножить иа 2.
Если из опыта холостого хода при
номинальных напряжении и частоте
определен намагничивающий ток
Днюй—Лх и известна из каталога или
определена расчетом кратность макси-
мального момента 61|ОМ, то номиналь-
ный приведенный ток ротора можно
определить достаточно точно нз урав-
нения для тока статора (2.926):
_ I / I / /|)НОМ * \fi
, I/ 1 I COS (рвом I —
'1ЛОМ г \ /1Нам /
_^KOMsin<p^ (2.123)
<1 ном
Заменяя cos ср ном и sin (рном по урав-
нениям (2.976) и (2.97в), получаем
^2 ном _
А ном
_ I f | /Л> ПОМ \2 6НОм’Г \ ^НОМ I
* Vihom/ 2^ном
__ А ном ______________1 _________
/1 ыом I/ 2й [ ь . -I л’р ZyV
Г пом^ ном 1 г ном J
(2.124а)
Для bjioM^l.6 можно определить
/зком^^ом упрощенно:
(2.1246)
что дает погрешность по сравнению с
(2.124а) не более 1%.
На рис. 2.21 даны кривые (/—3)
кратности приведенного тока ротора в
зависимости от кратности тока холос-
того хода для трех значений кратно-
сти максимального момента.
Приведенный ток ротора можно оп-
ределить нз опытов холостого хода и
номинальной нагрузки. Из уравнения
(2.926) находим:
1'2 ном COS (рком =
— I А ном ' (Аг ном :^П (рном +./о ном)
(2.125)
но
. • Рвом Q0 ROM _
<2 ном sin (ряом — * (2.126)
r 3 LiHOM
Phc. 2.21. Зависимость кратности приведенно-
го тока ротора асмихройного двигателя от
кратности тока холостого хода при различных
максимальных моментах:
1~Ь ном = а' 2 ~ Ьном = 2 ’ J “ 6ном -1-6
67
где Qhom — реактивная мощность, по-
требляемая из сети при номинальном
режиме; Q0HOM —реактивная мощность
намагничивания, потребляемая из сети
при холостом ходе и номинальных на-
пряжении и частоте.
Из этих двух уравнений можно оп-
ределить две искомые величины
и ф ном при известных /шом> Лжом>
Qhom и QoНОМ.
Пример. Прн номинальной нагрузке для
двигателя 7 кВт, 380 В измерено Pi —
=7,977 кВт; (Лиом—380 В; Лноы=14 А; ток
холостого хода /си см=4,5 А.
Определяем
cos «Рвом = 797?//^3 .14-380 =
= 0,865 и sin Фном = 0,5.
Потребляемая реактивная мощность при
номинальной нагрузке я холостом ходе
<2вом = ГТ-380-14-0,5 = 4600 вар;
<Зююн=/з'.380-4,5 = 2960 вар.
Из (2.125) и (2.126) определяем:
, , 4600 — 2980 о с д
^2ном s*n 'Рном f— * *
у 3-380
4ом cos<OM=pr 14s -(2,5 + 4.5)“ = 12,2 А,
откуда
tg Фмм = 2,5/12,2 = 0,205; cos <р'ом = 0й979;
sin ф'ом = 0,203;
АЯОМ = 2,5/0,203=12,4 А-
Глава третья
ОСНОВНЫЕ НАГРУЗОЧНЫЕ СВОЙСТВА
АСИНХРОННЫХ ДВИГАТЕЛЕЙ
3.1. ОБЩИЕ СООБРАЖЕНИЯ
Асинхронные двигатели в процессе
эксплуатации работают с нагрузками
на валу от холостого хода до номи-
нальной. Напряжение и частота сети
могут сохранять номинальные зна-
чения или длительно изменяться в за-
висимости от режима работы энергоси-
стемы. Под нагрузочными свойствами
асинхронного двигателя при отклоне-
ниях напряжения и частоты будем по-
нимать изменения основных парамет-
ров, характеризующих его установив-
шийся режим,—ЭДС магнитного пото-
ка, вращающего момента, скольжения
и частоты ротора, модуля и фазы то-
ка ротора, намагничивающего тока,
модуля и фазы тока статора.
Встречается необходимость исполь-
зования двигателя для работы в сети
с напряжением и частотой, отличаю-
щимися от его номинальных значений,
в случаях: а) применения двигателей,
рассчитанных на частоту 60 Гц, в сети
с частотой 50 Гц; б) работы двигате-
ля с нормальным соединением обмот-
ки статора в звезду, в сети другого
номинального напряжения — при сое-
динении обмотки статора в треуголь-
ник; в) переключения обмотки статора
на звезду вместо нормального сое-
динения треугольником для уменьше-
ния потерь активной мощности и по-
требления реактивной мощности неза-
груженных двигателей.
Рассмотрим сначала в общих чер-
тах явления, происходящие в двигате-
ле при отклонении от номинальных
значений нагрузки на валу (момента
сопротивления приводимого двигате-
лем механизма), напряжения и часто-
ты питающей сети.
По основным параметрам режима
определяются такие важные факторы,
как нагрев активных частей двигате-
ля, изменение потерь н КПД, потреб-
ление из сети активной и реактивной
мощностей, изменение начального вра-
щающего момента при неподвижном
роторе (для оценки возможности пус-
ка двигателя при отклонениях напря-
жения и частоты).
Определим общий характер изме-
нения перечисленных выше величин,
исходя нз основных соотношений, при-
веденных в гл. 1, 2 (§ 1.2, 2.1—-2.3),
принимая для упрощения момент со-
противления механизма не зависящим
от угловой скорости ротора.
Изменение нагрузки на валу двига-
теля при номинальных напряжении и
частоте питающей сети. Рассмотрим
влияние увеличения нагрузки на валу
на основные параметры установивше-
гося режима. Вследствие увеличения
нагрузки угловая скорость ротора не-
сколько снижается, а следовательно,
скольжение увеличивается (см. рис.
2.1) до такого значения, при котором
вращающий момент двигателя уравно-
вешивает повышенный момент сопро-
тивления. Поскольку при скольжениях
68
меньше критического сопротивление
статора составляет незначительную до-
лю общего сопротивления двигателя,
то ЭДС, магнитный поток н намагни-
чивающий ток практически не изменя-
ются при изменении нагрузки. Увели-
чение вращающего момента двигателя
сопровождается соответствующим уве-
личением тока ротора. С увеличением
скольжения возрастает фазный угол
приведенного тока ротора, что приво-
дит к увеличению реактивного тока
двигателя, практически равного сумме
индуктивного намагничивающего тока
и реактивной составляющей приведен-
ного тока ротора. В связи с ростом ак-
тивной и реактивной составляющих
тока статора последний также возрас-
тает при увеличении нагрузки на ва-
лу. Увеличение токов ротора и статора
обусловливает возрастание потерь в
меди обмоток.
У двигателей нормального исполне-
ния с короткозамкнутым и с фазным
роторами при нормальной работе с за-
короченным реостатом угловая ско-
рость ротора при изменении нагрузки
в пределах номинальной изменяется
незначительно и поэтому мощность на
валу увеличивается практически про-
порционально моменту сопротивле-
ния.
В связи с увеличением реактивного
тока двигателя при увеличении нагруз-
ки увеличивается реактивная мощ-
ность, потребляемая нз сети.
При уменьшении нагрузки на валу
скольжение, ток ротора и его фаза, а
также ток статора уменьшаются, что
приводит к снижению потребления
двигателем из сети активной н реак-
тивной мощностей.
При определении полезной мощно-
сти на валу двигателей с повышенным
скольжением, а также двигателей с
фазным ротором, работающих нор-
мально с регулировочным реостатом,
следует учитывать изменение угловой
скорости ротора.
Изменение напряжения при номи-
нальной частоте. Предположим, что на-
пряжение, подводимое к обмотке ста-
тора двигателя, работающего с посто-
янным моментом сопротивления,
уменьшилось. Вследствие уменьшения
напряжения уменьшаются ЭДС двига-
теля и магнитный поток.
Вращающий момент двигателя,
пропорциональный квадрату напряже-
ния, окажется при прежнем скольже-
нии меньше, чем момент сопротивле-
ния, и скольжение двигателя увеличит-
ся до такого значения, при котором
вновь наступит равенство между ука-
занными моментами.
Увеличение скольжения вызовет
возрастание тока ротора и увеличение
угла сдвига между приведенным током
ротора и напряжением сети.
При уменьшении напряжения на-
магничивающий ток уменьшается, а
ток статора, равный геометрической
сумме приведенного тока ротора н то-
ка холостого хода, в зависимости от
загрузки и соотношения между намаг-
ничивающим током /0 и током ротора
А' может увеличиться или умень-
шиться.
При увеличении напряжения уве-
личатся ЭДС и магнитный поток, а
скольжение и ток ротора уменьшатся.
Намагничивающий ток увеличится, а
ток статора может увеличиться или
уменьшиться в зависимости от загруз-
ки двигателя и указанного выше соот-
ношения между /0 и Г2.
Таким образом, понижение напря-
жения всегда вызывает увеличение то-
ка ротора, а увеличение напряже-
ния— уменьшение тока ротора.
Работа с напряжением, понижен-
ным более чем на 5 % номинального,
допустима согласно ГОСТ 183-74 толь-
ко при условии, что нагрузка двигате-
ля меньше номинальной. При несоб-
людении этого обстоятельства возмо-
жен перегрев обмотки ротора и, как
следствие, ее преждевременный износ.
Мощность, развиваемая двигателем,
останется практически без изменения,
так как угловая скорость ротора изме-
нится незначительно.
Изменение частоты при номиналь-
ном напряжении. Рассмотрим случай,
когда двигатель с постоянным момен-
том сопротивления на валу питается
при номинальном напряжении от сети
с частотой меньше номинальной.
Уменьшение частоты вызовет увеличе-
ние магнитного потока и увеличение
вращающего момента. Поскольку мо-
мент сопротивления остается постоян-
ным, скольжение уменьшится так, что-
бы сохранилось равновесие между вра-
щающим моментом двигателя при
пониженной частоте и моментом сопро-
тивления.
Вследствие увеличения потока
уменьшится ток ротора, а ток холосто-
59
го хода увеличится. Ток статора мо-
жет увеличиться или уменьшиться, так
же как для случая повышения напря-
жения.
Таким образом, понижение частоты
практически равнозначно увеличению
напряжения. Следовательно, если при
понижении частоты соответственно
уменьшить напряжение, то магнитный
поток, а следовательно, и токн холос-
того хода, ротора и статора останутся
такими же, как и прн нормальной ра-
боте. При этом будет иметь место не-
которое изменение потерь в стали, а
следовательно, н активной составляю-
щей тока холостого хода. Эти измене-
ния практически ие скажутся на токе
статора.
Однако существенным отличием от
рассмотренных выше двух режимов
будет значительное измеиенне угловой
скорости ротора, практически пропор-
циональной частоте статора. Напри-
мер, для двигателя, имеющего крат-
ность максимального момента £»НОы —
=2,0, критическое скольжение sKp —
=0,1 и работающего с постоянным мо-
ментом сопротивления, равным номи-
нальному, отклонение частоты от но-
минальной на 10 % приводит к измене-
нию угловой скорости ротора пример-
но на 9,8 %. При этом при снижении
напряжения на 10 % угловая скорость
ротора уменьшается всего на 1 %, а
прн повышении напряжения на 10 %
возрастает не более чем на 0,4%.
Следует отметить, что по условию
сохранения установившегося режима
(2.13) при скольжениях меньше кри-
тического снижение напряжения или
повышение частоты по сравнению с
номинальными значениями не должны
выходить за пределы, определяемые
равенством между максимальным мо-
ментом двигателя [см. (2.17)] н мо-
ментом сопротивления механизма
(Л1С*) sKp; при критическом скольже-
нии Sup/l
^ном
т. е.
(3 1)
где Л1с* в общем случае зависит от
угловой скорости ротора, а следова-
тельно, и от частоты сети. Нарушение
данного условия означает, что момент
сопротивления оказывается больше
вращающего момента двигателя, а это
приводит к торможению двигателя
вплоть до полной остановки ротора
(«опрокидывание» двигателя).
Во всех случаях, когда имеет мес-
то изменение угловой скорости ротора
двигателя, происходит изменение по-
лезной мощности на валу н произво-
дительности механизма. Полезная
мощность на валу изменяется пропор-
ционально произведению момента соп-
ротивления на угловую скорость. По-
этому для рассмотрения режима ра-
боты двигателей при любых значениях
нагрузки на валу, напряжения и час-
тоты питающей сети необходимо знать
характеристики моментов сопротивле-
ния механизмов (см. приложение 1).
3.2. ОПРЕДЕЛЕНИЕ ОСНОВНЫХ
ПАРАМЕТРОВ УСТАНОВИВШЕГОСЯ
РЕЖИМА ПРИ РАЗЛИЧНЫХ ЗНАЧЕНИЯХ
НАГРУЗКИ НА ВАЛУ, НАПРЯЖЕНИЯ
И ЧАСТОТЫ ПИТАЮЩЕЙ СЕТИ
Для определения параметров режи-
ма воспользуемся основными соотно-
шениями, приведенными в § 1.1 и 2.1.
Для практических расчетов удобно
выразить отдельные параметры через
момент сопротивления и а валу, крат-
ность максимального момента и соот-
ветствующие значения параметров при
номинальном режиме (Ам=Л/=Л4с* =
= 1,0), основные из которых были оп-
ределены в гл. 2.
Электродвижущая сила и магнит-
ный поток. Пренебрегая при малых
скольжениях (s-<sKp) потерей напря-
жения в активном и реактивном соп-
ротивлениях статора, получаем на ос-
новании (1.2)
л? £\— 4,44 &оИ Дном =
откуда
— F Ь.
— ^lnoMKf а 1
^нсм
= А
®ном
(3.2)
так как
= пом ~ пом-
Вращающий момент. Вращающий
момент асинхронного двигателя опре-
деляется критическим скольжением и
максимальным моментом (2.19).
Если пренебречь активным сопро-
тивлением обмоткн статора, то крити-
ческое скольжение на основании урав-
60
веиия (2.3а) будет изменяться обрат-
но пропорционально частоте.
Кратность максимального момен-
та Ь в соответствии с (2.17) изменя-
ется пропорционально квадрату нап-
ряжения и обратно пропорционально
квадрату частоты.
Отношение максимального момента
к моменту сопротивления на валу Ьс
определяется равенством (2.18), в ко-
тором Л4С*— постоянная величина, ес-
ли момент сопротивления ие зависит
от угловой скорости ротора, а прн вен-
тиляторном моменте сопротивления в
случае относительно небольшого ста-
тического противодавления, т. е. при
работе без противодавления, в первом
приближения можно принять иа осно-
вании приложения 2 [формула (П2.5)]
и, следовательно,
ь k2
h = (3.3)
где Мс,— момент сопротивления при
номинальной угловой скорости ротора
в случае работы двигателя с нормаль-
ной частотой.
Если пренебречь влиянием насыще-
ния на индуктивные сопротивления
рассеяния двигателя (см. § 1.1), то
критическое скольжение не будет за-
висеть от напряжения сети, а поэтому,
исходя нз (2.19), действительная кри-
вая вращающего момента двигателя
(при любом исполнении ротора) прн
любом напряжении и номинальной ча-
стоте может быть построена в резуль-
тате умножения на k‘u ординат кри-
вой момента, соответствующей номи-
нальным условиям.
При изменении частоты происходит
не только изменение ординат действи-
тельной кривой вращающего момента,
но и смещение ее максимума благода-
ря изменению критического скольже-
ния.
Скольжение и угловая скорость.
На основании (2.19) при установив-
шемся режиме (М*=МС*) и постоян-
ном моменте сопротивления скольже-
ние
SKp
s =-------=
М6с + 1/бс-9
и при вентиляторном моменте сопро-
тивления, изменяющемся по закону
> Ъ
М ~ М k- h ~ вом “
mc* — lvlf)*Kh иС — ^4 »
а поэтому
Отношение скольжения к номи-
нальному, определенному нз (2.95)
нли из (3.4) (при ku=kf — \,C), А1с»=
= 1,0),
(3.6)
Если значение Ьс^1>6, то с доста-
точной точностью (погрешность менее
10 % при Ьс=1,6) скольжение можно
определить упрощенно по формуле
___ 5кр ___
н, следовательно,
5В1Ж ku
(3.4а)
(3.6а)
если принять 5ном~5кр/2Ьним при
Ьном2> 1,6.
При работе с постоянным значени-
ем магнитного потока, т.е. прн соблю-
дении УСЛОВИЯ или
ku=kf, и постоянным моментом сопро-
тивления Ьс=Ьио1й/МС1, получим
т. е. скольжение двигателя при работе
с постоянными значениями магнитно-
го потока и момента сопротивления
будет изменяться обратно пропорцио-
нально частоте. При этом разность
между угловой скоростью магнитного
потока статора и угловой скоростью
ротора (угловая скорость скольже-
ния) останется неизменной.
Действительно, прн частоте f угло-
вая частота скольжения
2л/
w0;s = —-s,
6l
Рис. 3.1. Характеристика холостого хода асин-
хронного двигателя:
^оном — намагничивающий ток при номинальных
напряжении и частоте
или при замене 5=5Вом/^ и f—
=kffBou получим
.. _____ 2л/ноМ shom 6/ 2ji/homshom
w„f —-----------------—------------- =
*/р p
— <ooshom»
где Q0 — синхронная угловая скорость
при номинальной частоте сети.
Для определения изменения произ-
водительности механизма нужно знать
угловую скорость ротора.
В соответствии с определением
скольжения в гл. 1 и с учетом (3.4)
находим угловую скорость ротора:
<°2 = <01(1 — S) =
= k, и„ Г1-----------Skp 1 (3.8)
L + 1)J
или прн fec^l,6
w2~
A, «„fl----
' Ч 2kfbJ'
или
п2лА,л„/1— S"E’ j. (3.8а)
\ bc J
Намагничивающий ток. Значение
тока определяется с достаточной точ-
ностью по кривой намагничивания
(характеристике холостого хода), ко-
торая дает зависимость между током
и магнитным потоком (рис. 3.1).
Используя равенство /3.2), легко
иайти значение намагничивающего то-
ка /о при любых напряжении н часто-
те графическим путем.
Ток ротора и его фаза. Абсолютное
значение приведенного тока ротора на
основании (1.14) и (1.15) определяет-
ся следующим образом:
(3.9)
(без учета влияния изменения часто-
ты питающей сети на х‘2 и /•', ) и при
номинальных условиях
2ном
Пренебрегая влиянием активного
сопротивления статора прн малых
скольжениях, а также влиянием ина
критическое скольжение, находим с
учетом (2.3) отношение тока ротора к
его номинальному значению:
Заменяя в (3.11) из (2.95) и (3.4)
1 +("Sr) = 2Ь°°" ^но“ + Ь““ —
а также учитывая согласно (2.18), что
b' klu
находим
4 / ь +1/1?
----— — 1 / ]\Д ном 1 г ном
4ном Ьс + ]/ — 1
(3.12а)
и при подстановке значения кратности
момента Ьс
При вентиляторном моменте сопро-
тивления, изменяющемся по закону
Л1С* — Мо* k j , получим
—— Гм —?-°"+
2"°” В / ,
Г XT
62
Если разделить обе части уравне-
ния (3.126) науЛ Л1с*, то получим
72
(3.12в)
На рнс. 3.2 даны кривые
1/Л’е. \ % )
для разных значений Ьноы, построен-
ные по выражению (3.12в).
При применении формулы (3.12в)
нли кривых рис. 3.2 следует в общем
случае пользоваться соответствующей
зависимостью /Ис* от частоты f==
—kjfrjQM.
Пример 1. Асинхронный двигатель 368 кВт,
740 об/мин, 3000 В, 86,6 A, cos <р= 0,88. Ротор
540 В, 410 А. Для этого двигателя Ьиом=2.
Определим ток ротора прн снижении на-
пряжения до 0,9 номинального, т. е. до 2700 В,
при постоянном моменте иа валу, равном номи-
нальному (Afc.= l). и номинальной частоте,
т.е. fcj=l.
Находим *,Mc./Aj-l/0,9!-l,235. Крат-
кость тока ротора по рнс. 3.2
^2ном
или /2 = 410-1,14 = 467 А
О Дй•iO if2ft
Рис. 3.2. Кривые кратностей тока ротора
Определим теперь ток ротора при сни-
жении напряжения до 0,8 номинального, т. е.
до 2400 В. Момент на валу и частота те же.
В этом случае k = 1/0,8®= 1,56 и
кратность тока ротора /?//2Вом= 1,34, или h—
=410-1,34=550 А.
Определим ток ротора при снижении час-
тоты до 0,9 номинальной. Момент на валу по-
стоянный и равный номинальному; напряже-
ние номинальное.
Находим k2fMcJk2 =0,92=0,81 и из кри-
вых рнс. 3.2 /2//1ном=0,88, или /2=410-0,88=
=360 А.
Определим ток ротора, если момент на ва-
лу равен 0,7 номинального прн снижении на-
пряжения до 0,7 номинального при номиналь-
ной частоте:
1-0,7
---------=-----------= 1.4:
*2 0,7?
по рнс. 3.2 для этого значения
/гном ~V9,7
откуда
—- = 1,25 /о?7 = 1,05,
/зном
или /а = 410-1,05 = 430 А.
Найдем необходимое снижение на-
грузки для того, чтобы при снижении
напряжения ток ротора остался рав-
ным номинальному при номинальной
частоте.
Принимая в формуле (3.126) Г2 =
= Ghom “Ри ki = l получаем
(3.14)
При работе с номиналь-
ным моментом сопротивле-
ния и неизменным значени-
ем магнитного потока при
соблюдении равенства ku —
=kf ток ротора будет со-
храняться равным номи-
нальному току.
Для определения тока
статора н потребляемых
двигателем из сети актив-
ной н реактивной мощностей
необходимо знать изменение
фазы приведенного тока ро-
тора по отношению к на-
пряжению сети.
По равенству (1.17),
пренебрегая активным со-
противлением статора и
63
учитывая (2.3) и (2.3а) находим
tg<f' (3.15а)
и на основании (3.4)
tg<f' »-------------' — =
+ / »с-‘
а Г X -У» Л .(3.156) 2 1 — 1
По известным тригонометрическим
соотношениям находим из (3.156)
cosq>'=]/ tc + ^~-' <3-15г)
При работе с номинальным момен-
том сопротивления и неизменным зна-
чением магнитного потока угол сдвига
между напряжением сети н приведен-
ным током ротора равен номиналь-
ному.
Для определения активной мощно-
сти и реактивной мощности рассеяния,
потребляемых двигателем из сети,
найдем активную Г2л н реактивную Г2р
составляющие тока ротора. На основа-
нии (3.126), (3.15в) и (3.15г) получим
(3.17)
И при £>аом^ 1,6, 1 >6
Ар
Аном ^НОМ Af
(3.17а)
Ток статора и его фаза. Ток стато-
ра можно представить в виде геомет-
рической суммы активной н реактив-
ной составляющих:
Ля Л)cos Фо + f >cos Ф*»1
: . (з 18)
7lp = /„sin4>0 + /2sinq>,)
= j/(/csinq>„ + /;sin<p')-’ +
+ (/„ cos <р0 + /; cos <р')2, (3.19а)
или без учета активных потерь холо-
стого хода (sinq)0~I.O)
л = +z2sin ч> ')2 + (i; cos ч>')2.
(3.196)
где /г и ф' определяются согласно
(3.126) н (3.15), а намагничивающий
ток /о находится ио характеристике
холостого хода для данных значений
ku И kf.
Фаза тока статора
Ф = arctg =
Аа
. 4sin % + 4sin ф'
= arctg —£---------------
/0СОЯф0 + /2СОЗф
или при sin фо«1,0
(3.20а)
ф ~ arctg — ;-------;—
/2 cos qf
и коэффициент мощности
Ла _ /2СОЗ,)’
(3.206)
(3.20в)
costp =
Отметим, что при неподвижном роторе
приведенный ток ротора практически равен
току статора. Действительно, вследствие
уменьшения ЭДС прн неподвижном роторе ток
намагничивания будет невелик по сравнению
с током ротора. Например, если принять
/ижом — 0,3/поа>, f *=5/ ’Ном. ЭДС в момент пуска
0,35(/НОМ, cos ф'=0,25, cos <ро=Оэ / 2ИОМ=0,9/|НОМ,
то /о ~ 0,35, /овом—0,3 • 0,35 h пом и ток статора
с учетом намагничивания
4/Атом ~
=/(0,3-0,35-(-S-0.9-o,868)?+(S-0,90.2S)“''=
= 4,6,
64
а без учета намагничивающего тока
/к//ном = 5-0,9 = 4,5,
т е. меньше первого всего лишь на 2,2 %. Это
указывает на практическое совпадение значений
полного сопротивления двигателя при непо-
движном роторе, определенных без учета н с
учетом намагничивающего тока.
Влияние сопротивления цепи на-
магничивания на полное сопротивле-
ние двигателя практически сказыва-
ется только при сравнительно неболь-
ших скольжениях. Для иллюстрации
этого положения на рис. 3.3 даны кри-
вые полного сопротивления двигателя
(2) н сопротивления, найденного без
учета намагничивающего тока (7), по-
строенные для двигателя 180 кВт с
/оном/Лном=0,48. Поэтому прн всех
расчетах, связанных с пуском и само-
запуском двигателей, когда скольже-
ние больше критического, можно пре-
небрегать влиянием намагничиваю-
щего тока на полное сопротивление
двигателя.
Потери в стали. Удельные потери
в стали (Вт/кг), состоящие из потерь
на вихревые токн и на гистерезис, прн
синусоидальном изменении индукции
во времени могут быть выражены фор-
мулой
где индукция В выражена в теслах;
6г и бЕ,г — удельные потери, Вт/кг3 на
гистерезис и вихревые токи соответст-
венно при f=50 Гц и В = 1 Тл.
Для слаболегированной стали
толщиной 0,5 мм можно принять
6г=2,2 и ^=1,4 Вт/кг. Тогда при
номинальных значениях частоты
(fnDM = 50 Гц) и индукции (Вном) удель-
ные потери в стали равны:
^.ом=3,6В;ом. (3,22)
Разделив (3.21) на (3.22), получим:
3.6 й?
2.2+ 1.4Л/ ku
3,6
= (0,61 +0,39Лу)---,
так как
В ьи f
-------ян и
^ном---kj 50
(3.23)
На рис. 3.4 дана кривая 2 измене-
ния потерь в стали в зависимости от
частоты при номинальном напряже-
нии. Как следует из кривой, потерн при
снижении частоты увеличиваются, но
при этом изменяются мало. Например,
прн снижении частоты до 40 Гц поте-
ри в стали увеличиваются всего лишь
на 15 %.
Если магнитный поток остается не-
изменным (ku=kf), то при умень-
шении частоты потери уменьшаются
(кривая 1 на рис. 3.4).
Влияние изменения частоты иа на-
грев обмоток двигателя. При измене-
нии частоты соответственно изменя-
ется угловая скорость двигателя. Это
влияет на эффективность охлаждения
продуваемых двигателей. Передача
теплоты в окружающую среду проис-
ходит, во-первых, посредством тепло-
проводности и конвекции окружающе-
му воздуху н, во-вторых, за счет излу-
чения.
Рнс. 3.3. Зависимость значений полного со-
противления двигателя от скольжения без уче-
та н с учетом тока намагничивания
Рис. 3.4. Потерн в стали статора в Зависимо-
сти от частоты:
I — при J 2 — при Йи=1
5—649
66
Для продуваемых двигателей излу-
чение играет незначительную роль и
им можно пренебречь.
При небольших значениях превы-
шения температуры коэффициент теп-
лоотдачи посредством теплопроводно-
сти и конвекции можно считать практи-
чески не зависящим от температуры и
пропорциональным скорости воздуха в
степени 0,8. Так как скорость охлаж-
дающего воздуха примерно пропорци-
ональна первой степени угловой ско-
рости, то можно принять, что тепло-
отдача пропорциональна угловой ско-
рости в степени 0,8.
Потерн в обмотках можно принять
изменяющимися пропорционально
квадрату тока. Тогда при изменении
угловой скорости ток необходимо из-
менять пропорционально изменению
угловой скорости в степени 0,4, т. е.
_Z_ « = ил
Aiom \®1вом/ \ fnoM /
(3-24)
Учет влияния изменения частоты
необходим только в том случае, если
двигатель длительное время работает
при частоте, отличной от номинальной.
Активная и реактивная мощности,
потребляемые из сети. Активная мощ-
ность определяется согласно (1.20)
при подстановке значений активного
тока статора fia^Acosq) [см. (3.18)]
и активной составляющей тока рото-
ра [см. (3.16)]:
= /з ku (/„ cos <р„ +
+ |/~^„ом + ]Л-ои-1'| ,
(3.25)
откуда при номинальном режиме
Из^иом(/ОНОМ COS Фоном +
+/;во„ 1/ <3-26)
где (Дион — номинальное линейное
напряжение.
Потребляемая из сети активная
мощность более точно определяется
по нагрузке на валу и потерям в рото-
ре и статоре при заданных ku н kf~
Для приближенного определения
номинального скольжения по изме-
ренным в нагрузочном опыте мощнос-
ти Pi, скольжению s и известной мощ-
ности Риом возьмем отношение (3.25)'
и (3.26) при ku—Aj=l,O, пренебрегая
потерями в стали:
Р1/Р1ВОМ ~ Мс„,
что при подстановке в (3.6а) двет ис-
пользуемое в гл. 2 выражение
sBoM~sf7!1=s-5iV- (3-27)
4f Чном гi
Реактивная мощность двигателя
определяется реактивной мощностью
намагничивания Qo н реактивной мощ-
ностью рассеяния Qp.
Реактивная мощность намагничи-
вания^0 = УЗ 17,/„(sinфо» 1,0) прак-
тически не зависит от нагрузки дви-
гателя.
При номинальном режиме
0)НОМ ~ ^АиОМ АнОМ-
Отношенне реактивных мощностей
, (3.28а)
Фоном Анон
илн, принимая в первом приближении
OHottku/kft
п А?
—. (3.286)
Фоном kj
Поскольку в действительности на-
магничивающий ток прн повышении
напряжения сверх номинального или
снижении частоты увеличивается бо-
лее резко, реактивная мощность при
этом возрастает в большей степени,
чем пропорционально квадрату напря-
жения и обратно пропорционально
частоте.
Реактивная мощность рассеяния
= V3 Ux l2 sin <р = УЗ —
= У3 ku ^Апом Ар-
При замене здесь / 2р согласно
(3.17) получим
Qp = УЗ tAH0M /зном А/С), kf '
т2д^г^4-+-|/
[M^f V \м^) |
(3.29)
Прн номинальном режиме
Qp.HOM = Гз1/1ЯОМ АнОмХ
X---- 1 (3.30)
66
При критическом скольжении
h t> h ь'г
vov и = 1 И МСг = —пом “ ;
Мс.
Uieot/I /дном ^ном
но видно, если заменить в (3.29) —
(3-31)
./ ^7=
п ___ X ^<юм ^ном ~~
Ур.кр--------.----
kf V 2Ьноы
\г.ъоау
При ku = kf = 1
и
Л У <О J? »
"яом'ЧГ /1 / / f f А
Aac,fe} V \ ™СЛ /
~ 2йвом^дЛЯ *gA 1,6.
McJ?f
и Ьнои + ]' 61ом 1 ~
Ср.кр ~ 73^1И0М Аном ^НСМ C0S ФиОМ ~
~ Рейном. (З.ЗОб)
*7огда получим
<3р
И1НОМ IgKQM cos ФдвЕМ Me kf
Отношение реактивных мощностей
2*и0м*к
(3.29а)
Qp.BOM ~
26иом
= Л1с. fe/X
Qp.HOM
Рном
2^ном
(З.ЗОв)
-^2^ = —fe (fe + VV — 1 «
Qp.HOM ном \ BOM k HOM
~2ЙОМ—. (3.31a)
kf
При применении асинхронных дви-
гателей для приводов с ударной на-
грузкой в ряде случаев приходится
выбирать двигатель с большой крат-
ностью максимального момента, а это
приводит в соответствии с (3.31а) к
резкому возрастанию потребления ре-
активной мощности рассеяния при
увеличении скольжения при перегруз-
ке и соответственно к потере напряже-
ния иа выводах двигателя.
При помощи уравнения (3.31) мож-
но определить изменение потребления
реактивной мощности рассеяния дви-
гателя при изменении нагрузки, нап-
ряжения и частоты.
Из выражения (3.29) для реактив-
ной мощности, потребляемой двигате-
лем, следует, что прн уменьшении
кратности максимального момента
увеличивается 1 потребление реактив-
ной мощности. Это наиболее нагляд-
Применение упрощенных формул может
дать результат для реактивной мощности рас-
сеяния в самых неблагоприятных случаях
больше действительного на 6 %. Это будет
иметь место при замене
M^kf
когда отношение (3.29а) н (3.29) равно;
Г 1.6 + / 1,63—1
Для номинальной реактивной мощности
упрощенная формула дает прн Ьиом= 1,6 зна-
чение QP меньше на 6 %. Действительно, от-
ношение (З.ЗОв) и (3.30) прн 6иом=1э6 равно:
И2-1,б(1,6 + /1.6?-1) = о д43
2-1,6
Для отношения реактивной мощности рас-
сеяния к номинальной упрощенная формула
дает результат в самом неблсгоприятном слу-
чае больше действительного на 12 %. Это £>у-
Б*
67
дет иметь место при замене
Тогда отношение (3.29) н (3.30) при
Ьвом= 1,6 равно:
К *^(4».+К 4»-i)
Из (3.31) при 5ном >1,6 и йс>1,6
Фр.иом h'u
(3.316)
Для примера на рис. 3.5 даны кри-
вые номинальных значений sin(pHOM и
cos (рвом в зависимости от кратности
максимального момента для разных
значений кратности тока холостого
хода, построенные по формулам
sin Фпом _ Фоном + фр.иОМ___Л1НОМ
Кз U1H0M/1H0M Ьш® +
। ______________А?ном_____________
Лвом ^ном (&яом ’ V^HOM 1 )
(3.32)
cos (₽ном = 1Z1 — sin2(pH0M
прн замене /^„/Лном в (3.32) соглас-
но (2.124 а).
Из кривых следует, что влияние
кратности максимального момента на
реактивную мощность весьма велико.
Например, увеличение кратности мак-
симального момента от 1,6 до 3 вызы-
вает уменьшение потребления реак-
тивной мощности от 14 до 26 %.
Рис. 3.5. Зависимость номинальных значений
cos (рцоы и sin фноы от кратности максималь-
ного момента дая разных значений тока хо-
лостого хода
Нужно иметь в виду, что увеличе-
ние реактивной мощности вызывает
увеличение потерь активной мощности
и потерь энергии в двигателе и сети.
Таким образом, для улучшения
энергетических показателей асинхрон-
ный двигатель должен иметь возмож-
но меньшее значение кратности тока
холостого хода и возможно большее
значение кратности максимального
момента.
Из (3.29а) видно, что реактивная
мощность рассеяния изменяется при-
мерно пропорционально квадрату ко-
эффициента загрузки двигателя Л1С*
и кубу частоты и обратно пропорцио-
нально квадрату напряжения.
В случае работы с постоянным маг-
нитным ПОТОКОМ (&«=&f) из (3.316)
находим
= Mi.ku. (з.зз)
Фр.НОМ
Полная реактивная мощность, по-
требляемая из сети асинхронным дви-
гателем, равна сумме мощностей на-
магничивания и рассеяния:
Q ~ Фо Фр
или по отношению к номинальной ре-
активной мощности
Ф____Фоном фр I Qp.HOM Фр _____
Фном Фном Фоном Фном Фр,ном
= с-^ + (1-с)-5е-, (3.34)
Чином Чр.ном
где на основании (2.99) можно опре-
делить
_ Фоном _ 4>НОМ J
Фном Аном sin ФноМ
---------— 1 --------; (3.35а)
G’hom г I'^hom 1) ^ном
Фр,ном __ Фном — Фоном_____
Фном Фном
(Ь«ои + К4м - l) ‘S <РВС,„
(3.356)
причем feHCM и tg фном принимаются из
каталога илн tg фном определяется по
кривым рнс. 3.5 при известных ЬЯО1Л и
Л)ном//ihom-
Заменяя Фо/Фоном и ФР/фр,ном их
приближенными значениями (3.286) и
(3.316), находим из (3.34) приближен-
68
ное значение полной реактивной мощ-
ности:
(3.34а)
Чоиом «/ kf.
Начальный момент. Начальный мо-
мент при номинальных напряжении н
частоте находим из (2.1) при скольже-
нии з=1,0:
. __^Azk.hqm ^2ном Р
2л/иом
(3.36)
При частоте и напряжении, отлич-
ных от номинальных значений, прене-
брегая влиянием активных сопротив-
лений обмоток статора и ротора на на-
чальный приведенный ток ротора [см.
(3.9)], получаем
ЗАгк r2f Р
2п/
= ^Zk.hom r2f Р^ц / *« у (3 3/)
Отношена ’ начальных моментов на
основании (3.36) и (3.37)
= (3.38)
"к,ном U-kJ
где Гпном и Хи — сопротивления при
скольжении s=l,0 н номинальной час-
тоте; r'2J и Хк] — сопротивления при
скольжении з=1 н частоте f, причем
xKj отнесено к номинальной частоте, но
учтено вытеснение тока в проводни-
ках ротора при частоте /.
Таким образом, начальный момент
при принятом упрощении в определе-
нии начального тока ротора изменяет-
ся пропорционально квадрату напря-
жения и обратно пропорционально ку-
бу частоты.
Представляет интерес выяснить
влияние на начальный ток ротора ак-
тивного сопротивления ротора, кото-
рое у двигателей специального выпол-
нения может иметь значение, соизме-
римое с реактивным сопротивлением
(двигатели с глубоким пазом, особен-
но при малой мощности, когда требу-
ется большой начальный момент, а
также двигатели с фазным ротором и
пусковым реостатом).
Активным сопротивлением статора
по-прежнему пренебрегаем вследст-
вие его сравнительно небольшой вели-
чины.
Рис. 3.6. Отношение начальных моментов в за-
висимости от частоты при ku=k/ при различ-
ных значениях критического скольжении
Ток короткого замыкания из (3.9)
при частоте f н напряжении U\
/'к -----к“ , (3 39)
а при частоте /==/ном и напряжении
U I ===£Дном
4,™ = —^^-. (3.40)
Отношение токов
= ku л/ .? . (3.41)
Ata. ном Р' r2f +
или при введении критических сколь-
жений
SKpl Г:Ак» Sxpf ~ r4^XKf
Отношение начальных моментов
на основании (3.36) и (3.37) при под-
становке (3.42) равно:
MKf 0 + SKpl) / хк \а /3 43)
Мк.ном kf + £pf) r2
Если пуск двигателя происходит
при условии ku—kf, то из (3.43), пре-
небрегая разницей между г^и r2ft а
также между хк и xKf, находим
М«! .. M*+S»P1)
^+«кр1
(3.44)
На рнс. 3.6 даны кривые изменения
начального момента в зависимости от
частоты, построенные согласно (3.44).
69
При работе с относительно неболь-
шой частотой питающего напряжения
необходимо учитывать активное соп-
ротивление статора.
Проиллюстрируем иа различных
примерах влияние изменения напря-
жения и частоты на рабочие характе-
ристики двигателей.
Пример 2. Рассмотрим работу в сети с ча-
стотой 50 Гц двигателя, имеющего номиналь-
ную частоту вращения 1770 об/мин при но-
минальной частоте 60 Гп и работающего с
механизмом, создающим постоянный момент
сопротивления на валу. Примем в качестве
исходных данных при частоте 60 Гц и номи-
нальном напряжении кратность максимального
момента ЬВом=2,5, кратность пускового тока
k=5, ток холостого хода равным 30 % номи-
нального тока статора, кратность начального
момента М»= 1»2.
Приведенный ток ротора и коэффициент
мощности при номинальном режиме опреде-
лим следующим образом.
Фаза приведенного тока ротора прн но-
минальном режиме по формуле (3.156)
tg ф'оы ---------' = 0,208,
2,5+ у 2,5* 2 — 1
откуда
sin %ом = 0,2 и cos <р'ом = 0,976
Из уравнения (3.19) для тока статора
Л ном —
= 1'(° •3/1и<.м+».2Ь»™)'+(4ом0.9ГО)2
определяем номинальный приведенный ток ро-
тора
Лном = 0*®%1ном
и номинальный коэффициент мощности по
формуле (3.20в)
Потребляемая реактивная мощность при
номинальном режиме
Сном ~ sin Фном — 0,49SiHOm >
где Sjnow — полная номинальная мощность,
потребляемая двигателем из сети.
Наилучшим решением вопроса, связанно-
го с работой двигателя на 60 Гц в сети с час-
тотой 50 Гц, было бы уменьшение напряжения,
подводимого к двигателю, в отношении 50/60=
=0,835. При этом ток и cos <р двигателя оста-
лись бы неизменными, скольжение двигателя
увеличилось бы с 1,67 % до 5=1,67-60/50=
=2 %, а частота вращения скольжения оста-
лась бы равной 30 об/мин.
Рассмотрим работу двигателя с номиналь-
ным напряжением при /=50 Гц при номи-
нальном моменте сопротивления.
Кратность начального момента
1,2-60а/50а = 2,07.
Кратность пускового тока
~ 5-60/50 = 6.
Кратность максимального момента
z.s-eiF/so2 = з,б.
Ток холостого хода по кривой рис. 3.1 (для
60/50=1,2) равен 1,63 тока холостого хода
при номинальных частоте н напряжении, т. е.
— -0.3-1,63= 0,49.
'ОНОМ
Приведенный ток ротора по формуле
(3.12а) ________________
. .. -- / 2.5 + /2,5*-1
'2 ~ '2ном "В / ,------ =
|/ 3,6 + У 3,6? —1
= 0,825/'КО„ = 0,825-0,89/,^ = 0.7357,
Фаза приведенного тока ротора по форму-
ле (3.156)
tg ф' =--------— = 0,142;
3,6+-/з,6=— 1
sin ф' = 0,14 и cos <р' = 0,99.
Ток статора по формуле (3.19)
/ — Лж>м X
X V (0,49+0,735-0,14)=+(0,735-0,99)“ =
= 0,95/1ЯОМ-
Коэффициент мощности
cosф = 0,735-0,99/0,95=0,765 и sin ф=0,641.
Потребление реактивной мощности
—=0,95-0,641 =0,61
•S1HOM
вместо 0,49 при нормальной работе.
Удельные потери в стали по сравнению с
номинальными потерями
50 / 50 \2
4,4----F5.6 ----
Дре юр \юо/ /еоу | п
Л₽с,.юм , 60 / 60у ’
4,4---+5,о(-----
100 kiooj
Потери в обмотках статора и ротора
уменьшатся.
Пример 3. Определить ток статора и ко-
эффициент мощности при снижении напряже-
ния до 0,8 номинального при нагрузке 0,75
номинального момента для двигателя, имею-
щего кратность максимального момента ЬЕом=
=2 и кратность тока холостого хода при но-
минальном напряжении /o«om//ihdm=0,4.
По формуле (3.15) фаза приведенного то-
ка ротора прн номинальном режиме
tg Фиом~-----7= =0,27;
2 + V 2?— 1
»>" <РВои = 0'26 и cos <р'га = 0,965.
Из расчетного выражения для тока стато-
ра
/гном —
= 1<(0.«1НОМ+0.267;ВО!И)!+(7;ИМ.0,965)!
находим
^2ном — <>.82/^.
70
Номинальный коэффициент мощности
cos Фном = 0,8271НОМ-0,965//1НОМ = 0,79.
При работе с напряжением йв=0,8 и при
нагрузке Afc»=0,75 определяем:
кратность перегрузочного момента из урав-
нения (2.18)
Ъс = 2-0,82/0,75= 1,7;
кратность приведенного тока ротора по
формуле (3.12)
или £ =0,82-0,95/.„„„ = 0,78/, ;
z 1Н0М 1НОМ’
фазу приведенного тока ротора по форму-
ле (3.156)
tg <р£ =------= 0,325;
1,7 +У 1,7? — 1
sin ф' = 0,3! и cos <р' = 0,95-
По рис. 3.1 ток холостого хода при напря-
жении 0,8 номинального
/о = ,74-0,4/1ном = 0,3/ijjOMi
ток статора по формуле (3.19)
11 = Лиом V (0,3+0,78-0,31)!+0,78?-U,95? =
= 0,92/lfTOM.
Коэффициент мощности
cos ф = 0,78*0,96/0,92 = 0,81.
Таким образом, при нагрузке 0,75 номи-
нальной и напряжении 0,8 номинального токи
ротора и статора не превышают номинального
значения, а коэффициент мощности несколько
увеличивается.
3.3. ВЛИЯНИЕ НАГРУЗКИ
НА СКОЛЬЖЕНИЕ, ТОКИ
И РЕАКТИВНУЮ МОЩНОСТЬ
Рассмотрим более подробно влия-
ние нагрузки на основные параметры
установившегося режима, основываясь
на полученных выше общих соотноше-
ниях.
При изменении нагрузки и номи-
нальных значениях частоты и напря-
жения будут изменяться скольжение,
ток ротора и ток статора. Намагничи-
вающий ток практически не зависит
от изменения нагрузки.
Как было указано выше, для дви-
гателей с критическим скольжением,
составляющим 5—15 %, активное и
индуктивное сопротивления обмотки
ротора при изменении скольжения в
этих пределах можно с достаточной
степенью точности считать не завися-
щими от скольжения.
Из уравнения (3.4) при номиналь-
ных напряжении и частоте получим
приведенное в гл. 2 выражение (2.117).
При значении Ьном^1,6 номиналь-
ное скольжение с достаточной сте-
пенью точности определяется из
(3.4а):
®НОМ
Из этой формулы следует, что при
6ном^1,6 номинальное скольжение
практически не зависнт от индуктив-
ного сопротивления рассеяния обмоток
статора и ротора, а определяется ак-
тивным сопротивлением ротора. Дей-
ствительно, из (2.146) и (2.3) нахо-
дим
, ~ ~ С?(₽и», + .
*НОМ ~ ~ Z Г2-
24лом ^luoHI-SnoM)
(3.45)
Кривые кратности тока ротора при
изменении нагрузки для разных зна-
чений кратности максимального мо-
мента, полученные по рис. 3.2, даны
на рис. 3.7. Из рассмотрения этих
кривых следует, что при 6ВОМ^1,2 ток
ротора изменяется практически про-
порционально нагрузке.
Скольжение также практически из-
меняется пропорционально нагрузке
при Ьс —1,6. Это непосредственно сле-
дует из равенства (2.117):
Ток статора, равный геометричес-
кой сумме тока холостого хода и при-
веденного тока ротора, практически не
будет зависеть от кратности макси-
мального момента. Основное влияние
на него оказывает намагничивающий
ток.
На рис. 3.8 даны кривые тока ста-
тора в зависимости от нагрузки для
разных значений холостого хода. Ко-
эффициент мощности в значительной
степени зависит не только от нагруз-
ки и намагничивающего тока, но и от
кратности максимального момента
(см. рис. 3.5). Однако если принять
за единицу номинальный коэффициент
мощности, то отношение cos ф/cos (рн».?м
при различных нагрузках (рис. 3.9)
практически ие будет зависеть от
кратности максимального момента.
При известном номинальном коэф-
фициенте мощности по кривым рис.
3.8 и 3.9 можно определить соответст-
вующие изменения потребляемой даи-
71
Рис. 3.7. Кратности тока ротора в зависимости
от нагрузки при работе с номинальными значе-
ниями частоты и напряжения
Рис. 3.8. Кратности тока статора в зависи-
мости от нагрузки для разных значений то-
ка холостого хода при работе с номиналь-
ными значениями частоты и напряжения:
X—-двигатели 265 кВт, 3 кВ; ном=и*32'1 нем
Рис. 3.9. Зависимость cos ф/cos q?n0M от нагруз-
ки при различных значениях намагничиваю-
щего тока:
X-Двигатель с 4НОМ-0.3>5)1НОМ. &ном -2,5;
О-двигатель С /(| HQM -0.57/JHQM: bJi0M~3
гателем реактивной мощности, ис-
пользуя следующее равенство:
_^ = -А_х
Сном I1Н0М
3.4. РАБОТА ДВИГАТЕЛЯ
ПРИ ИЗМЕНЕНИИ НАПРЯЖЕНИЯ
3.4.1. Влияние изменения напряже-
ния при заданной частоте. Прежде
всего рассмотрим влияние напряжения
на основные параметры установивше-
гося режима при номинальной час-
тоте.
Намагничивающий ток будет изме-
няться в зависимости от напряжения
по характеристике холостого хода (см.
рис. 3.1).
Скольжение при постоянной на-
грузке при повышении напряжения
будет изменяться практически обрат-
но пропорционально квадрату напря-
жения. При уменьшении напряжения
скольжение будет изменяться в боль-
шей степени, поскольку при этом под-
коренное выражение в (3.4) будет
больше отличаться от Ь%. На рис.
3.10 даны кривые зависимости сколь-
жения от напряжения прн номиналь-
ных нагрузке и частоте.
Ток ротора при повышении напря-
жения изменяется обратно пропорцио-
нально напряжению. Действительно,
если в уравнении (3.126) при ПОВЫ-
^HQU 1 z*
шенном напряжении -----——>1,6,
72
ТО при ЬнО!и^1,6
4» >! *“ ’
а следовательно, прн fy—1,0
jr' Мс. ^2ном
*а
(3.46)
При уменьшении напряжения это
изменение будет происходить в боль-
шей степени [см. (3.126)]. Для иллюст-
рации на рис. 3.11 даны кривые изме-
нения токов ротора в зависимости от
напряжения при номинальных нагруз-
ке и частоте.
Отношение токов статора /1//]Ном
при изменении напряжения будет за-
висеть не только от намагничивающе-
го тока, но и от кратности максималь-
ного момента. Так, например, при
6ном=1,6 и напряжении 0,8 номиналь-
ного кратность тока статора при токе
холостого хода, равном 0,3 номиналь-
ного, составляет 1,43. Соответственно,
при £>ном=3 и тех же условиях крат-
ность тока статора будет равна 1,25.
При повышении напряжения'кратность
тока статора практически ие зависит
от Ьрок. В качестве иллюстрации на
рис. 3.12 даны кривые изменения тока
статора в зависимости от напряжения
для различных значений тока холосто-
го хода при номинальном моменте со-
противления для двигателя, имеюще-
го ЬцОМ~2.
Рис. 3.10. Изменение скольжения в зависимо-
сти от напряжения при номинальных частоте
и нагрузке
Рис. 3.11. Изменение тока ротора в'зависимо-
сти от напряжения прн работе двигателя с
номинальными частотой и нагрузкой
Рис. 3.12. Изменение тока статора двигателя
в зависимости от напряжения при работе с
номинальной частотой и номинальной нагруз-
кой при кратности максимального момента
Ьном = 2
На рис. 3.13 дана кривая / измене-
ния реактивной мощности намагничи-
вания Qo/Qobom в зависимости от нап-
ряжения, построенная по характерис-
тике холостого хода (см. рис. 3.1).
Реактивная мощность рассеяния с
увеличением напряжения изменяется
обратно пропорционально квадрату
напряжения [см. (3.29а)], а при сниже-
нии напряжения увеличивается в боль-
шей степени. На том же рис. 3.13 при-
ведены кривые изменения реактивной
мощности рассеяния Qp/Qp.hom и пол-
ной реактивной мощности Q/Qhdm для
двигателя с 6Ном=2,0, cos <pHOM=0,85
при работе с постоянным моментом
сопротивления, равным номинальному,
где для данного двигателя /оном//1яом^=
=0,3, c=Q0hom/Qkom^O,567,
Qpuom/Qhом —0,433 И Qp,hom/Qchom —
=0,763.
3.4.2. Определение закона измене-
ния напряжения при изменении часто-
ты. Весьма важным для практики
73
Таблица 3-1
Закон изменения напряжения Определяемые величины и ик общие выражения
II £ If А К " 1 Я W 5 SH0M Mc.kf II •4i р ф ф ном Ь! II =1 % . ^р.ном k2 и -5-=с_^_ + ^ном Qo ноМ 1Р.НОМ
ku=kf~ 1 k^k,VMc. ku=kf f|f г ме. 1 bf */ Мы Мс, 1 Клй" 1 1 к,Мс. к! М?. с)М“. kf Л1сл Ь/ [с+(1—c)Ate.]
вопросом является определение жела-
емого закона изменения напряжения
при изменении частоты с точки зрения
влияния изменения напряжения иа ос-
новные параметры режима работы
двигателя при заданной частоте f~
=kffn0Mt отличающейся от номиналь-
ной.
Рис. 3.13. Изменение относительных реактив-
ных мощностей двигателей при номинальной
частоте в зависимости от напряжения (кри-
вые 1, 3, 5} и при номинальном напряжении в
зависимости от частоты (кривые 2, 4, 6) в до-
лях соответствующих значений при номиналь-
ных частоте и напряжении;
/, 2 — реактивная мощность намагничивания; J, 4~
реактивная мощность рассеяния: 5, б— полная реак-
тивная мощность: А~А — граница устойчивой работы
двигателя при понижения напряжения. Б—Б — то же
прн повышении частоты
Сравним между собой следующие
способы изменения напряжения:
а) по условию сохранения постоян-
ной перегрузочной способности двига-
теля из (2.18), равной кратносги мак-
симального момента,
ku^kfVM^-
б) по условию сохранения постоян-
ного значения магнитного потока
ku = kf.
В табл. 3.1 даны приближенные
выражения основных параметров дви-
гателя для случая, когда Ьс^1,6.
Из рассмотрения данных, приве-
денных в таблице, следует, что при но-
минальном моменте сопротивления оба
закона изменения напряжения от час-
тоты приводят к одинаковым резуль-
татам. Но при моменте сопротивления,
меньшем номинального, более благо-
приятным является изменение напря-
жения пропорционально частоте (при
^том меньше скольжение и ток ротора,
чем при первом способе).
Сравнение полных реактивных
мощностей прн обоих законах измене-
ния напряжения показывает, что при
с>0,5 изменение напряжения по за-
кону ku=kj приводит к повышенному
потреблению реактивной мощности во
всем диапазоне нагрузок от = 0 до
Л4с» = 1,0 по сравнению с изменением
по закону ku = k, . Если с<
<0,5, то при 1 >Л4с*>Л4с1* потребля-
емая реактивная мощность несколько
меньше в случае изменения напря-
жения по___закону ku=kft чем при
ku=kf V Мс», а при Жс*<Л1с1* или
74
Мс*>1,0 меиыпне значения Q имеют
место во втором случае.
Целесообразно определить закон
изменения напряжения, при котором
потребляемая реактивная мощность
при данных значениях частоты и на-
грузки на валу минимальна. Для это-
го, воспользовавшись приближенным
выражением (3 34а), найдем произ-
водную по ku от Q/Qhom прн заданном
значении kf и приравняем ее нулю:
cki — м‘с.(1 — c)fe’ = 0,
откуда _____
kuXk,VM^
Рис. 3.14. Зависимость скольжения от частоты
при работе двигателя с номинальными напря-
жением и моментом
-----------,(3.47)
2^ном ?оном
поскольку
1 —с Ср.ноМ ^2ном
с Соном 2дном/оном
3.5. РАБОТА ДВИГАТЕЛЯ
ПРИ ИЗМЕНЕНИИ ЧАСТОТЫ
И НОМИНАЛЬНОМ НАПРЯЖЕНИИ
Прн изменении частоты и номи-
нальном напряжении индукция в ста-
ли будет изменяться обратно пропор-
ционально частоте и соответственно
(по характеристике холостого хода,
например, по рис. 3.1) будет изме-
няться намагничивающий ток.
Скольжение с понижением частоты
прн работе с постоянной нагрузкой
будет изменяться пропорционально из-
менению частоты, а при повышении
частоты скольжение будет изменяться
в большей степени. На рис. 3.14 даны
кривые зависимости скольжения от
частоты при работе с номинальным
моментом, построенные по формуле
(3.4) при ku = 1,0.
Ток ротора при уменьшении часто-
ты и при номинальных напряжении и
нагрузке будет изменяться пропорци-
онально частоте, а при увеличении
частоты это изменение будет проис-
ходить в большей степени. Для иллю-
страции на рис. 3.15 даны кривые
кратности тока ротора двигателя в за-
висимости от частоты при номиналь-
ных напряжении и моменте.
Ток статора при увеличении часто-
ты и номинальных напряжении и мо-
менте будет увеличиваться, причем
это увеличение, будет тем больше, чем
меньше ток холостого хода. При умеиь-
Рис. 3.15. Зависимость кратности тока ротора
от частоты при работе двигателя с номиналь-
ными напряжением и моментом
Рис. 3.16. Зависимость тока статора от частоты
при работе с номинальным моментом для дви-
гателя, имеющего ЬНОм=2
шении же частоты ток статора при
небольших значениях тока холостого
хода будет вначале уменьшаться, а
затем увеличиваться, а при больших
значениях тока холостого хода он бу-
дет все время увеличиваться благода-
ря резкому возрастанию намагничи-
вающего тока с уменьшением частоты.
75
Рис. 3.17. Зависимость тока статора от часто-
ты при работе с номинальным напряжением
и моментом вентиляторного типа для двига-
гателя, имеющего 6ИОИ=2
Для иллюстрации на рис. 3.16 даны
кривые изменения кратностей тока
статора в зависимости от частоты при
постоянном моменте, равном номи-
нальному, а на рис. 3.17—для момен-
та сопротивления вентиляторного ти-
па, изменяющегося пропорционально
квадрату частоты.
На рис. 3.13 была дана зависи-
мость реактивной мощности намагни-
чивания от частоты (кривая 2), пост-
роенная по характеристике холостого
хода (см. рис. 3.1). Там же приведены
кривые зависимости от частоты ре-
активной мощности рассеяния
Qp/Qp.hom (кривая 4) и полной реак-
тивной мощности Q/Qhom (кривая 6)
для двигателя, имеющего дИоМ = 2,0 и
cos <рном=0,85:
—2— = 0,567 -$2— + 0,433 .
Сном Соном Ср.ном
Минимум потребляемой реактив-
ной мощности, найденный по (3.34а),
имеет место примерно при
J----0,814,
' V 3-0,763
т. е. сниженной на 18$ % частоте, и
составляет
t_Q___\ _ 0.567
\ Оном /«»&» 0,814
+ 0,433 (0,814)3 = 0,931,
или «а 6,9 % меньше номинальной ре-
активной мощности.
36. ВКЛЮЧЕНИЕ ОБМОТОК СТАТОРА
ЗВЕЗДОЙ ВМЕСТО ТРЕУГОЛЬНИКА
И ПРИМЕНЕНИЕ ЭЛЕКТРОДВИГАТЕЛЕЙ,
ИЗГОТОВЛЕННЫХ ДЛЯ РАБОТЫ
С ЧАСТОТОЙ 50 Гц, ПРИ ЧАСТОТЕ 60 Гц
Переключение обмоток статора с
треугольника на звезду применяется
для повышения коэффициента мощно-
сти недогруженных асинхронных дви-
гателей. При этом фазное напряжение
обмотки статора уменьшается в т/З"
раз, вследствие чего уменьшаются ток
холостого хода и реактивная мощность
намагничивания. Но снижение напря-
жения при неизменной нагрузке на ва-
лу неизбежно сопровождается увели-
чением тока ротора и, кроме того, воз-
растанием угла сдвига между напря-
жением сети и приведенным током
ротора. По этим причинам реактивная
мощность рассеяния увеличивается.
Кроме того, вследствие возрастания
тока ротора увеличиваются потерн и
нагрев обмоток ротора. Ток статора,
слагающийся из приведенного тока
ротора и намагничивающего тока, при
соединении в звезду может быть мень-
ше или больше, чем при соединении в
треугольник, в зависимости от степе-
ни загрузки двигателя. Скольжение
при переключении обмоток увеличится
несколько больше чем в 3 раза, но
при этом угловая скорость, а следова-
тельно, производительность рабочих
механизмов уменьшаются незначи-
тельно.
Максимальный момент, развивае-
мый двигателем, уменьшается в 3 раза.
Соответственно в целях сохранения
устойчивой работы нагрузка должна
быть в 3 раза меньше номинальной.
Тогда скольжение будет равно номи-
нальному, а ток ротора уменьшится в
]/3 раз1.
’ Уменьшение /_2при пересоедитенми с А тга х
и снижении нагрузки в 3 раза подтверждается сле-
дующим:
Тогда, водставляя в (З.»2б). получаем
/з
(Прим, ред.)
76
Если двигатель работает при спо-
койной нагрузке, без толчков, то мож-
но допустить работу двигателя при со-
единении в звезду с моментом сопро-
тивления, найденным исходя из мини-
мальной перегрузочной способности
&С=1,3-1,4.
Наибольший возможный момент
сопротивления в этом случае опреде-
ляется допустимым током ротора, ко-
торый при всех режимах не должен
быть выше номинального. Необходи-
мое снижение относительного момен-
та сопротивления выразится формулой
(3.14) при подстановке ku = l/J/T:
(3.14а)
Наибольший возможный момент
сопротивления зависит от кратности
максимального момента; он равен 0,5
' _ л г у
при Ьном —1,6 и стремится кр/у ’
по мере увеличения 6Ном. Во всех слу-
чаях допустимый момент сопротивле-
ния меньше максимального момента,
равного при соединении звездой
Ьном/З, причем кратность Ъс макси-
мального момента по отношению к до-
пустимому моменту сопротивления
(перегрузочная способность двигате-
ля) увеличивается с ростом ЬНОм-
Однако перегрузочная способность
будет меньше, чем при нормальной ра-
боте. Например, при 6НОМ=1,6 пере-
грузочная способность явно недоста-
точна:
bc =
^НОМ 1,6 | Qy
/ИСф 3-0,5
Для определения эффективности
пересоединения обмоток статора в
звезду при недогрузке двигателя нуж-
но рассмотреть также изменение ре-
активной мощности и активных потерь.
Реактивная мощность намагничи-
вания при переключении обмоток ста-
тора в звезду уменьшится примерно в
3,5 раза, так как при напряжении,
меньшем в у7 3 раз, ток намагничива-
ния снизится примерно в 2 раза.
Реактивная мощность рассеяния,
как это следует из выражений (3.29),
при одной и той же нагрузке при пе-
реключении обмоток статора в звезду
увеличится обратно пропорционально
напряжению в степени, большей 2, т. е.
более чем в 3 раза.
При переключении обмоток стато-
ра в звезду потери в стали статора
уменьшатся примерно в 3 раза, а ак-
тивные потерн в роторе при той же
нагрузке на валу, как отмечалось вы-
ше, сильно возрастут вследствие уве-
личения тока ротора. Потери в обмот-
ке статора могут увеличиваться или
уменьшаться в зависимости от изме-
нения тока статора.
Рассмотрим на нескольких приме-
рах целесообразность пересоединения
обмоток статора в звезду при непол-
ной загрузке двигателя.
Пример 4. Двигатель 4,5 кВт, 380/220 В,
9,36/16,2 A, cos фном=0,86, пвоы = 1428 об/мин,
Ьном=2, 7оном//пом=0,27. Потери: механические
66 Вт, в стали статора 145 Вт, в обмотке ста-
тора, включая добавочные потери, 371 Вт, в
роторе 229 Вт. Кратность тока холостого хо-
да при питании от сети 220 В при соединении
в звезду составляет 0,128.
Из рис. 2.23 определяем Г2во//,ВОЫ=0,9.
Найдем потери и потребляемую реактивную
мощность при соединениях обмотки статора в
треугольник н в звезду.
Для нагрузки /Ис*=0,5 при соединении в
треугольник и питания от сети 220 В по фор
муле (2.18) находим кратность перегрузочного
момента:
V 2-4 (! |-у742 — |)
сскф' = , ,992.
Реактивная мощность
Ьс — •— 2/0,5 = 4.
По формуле (3.12) кратность тока ротора
2+^^ =0,485-
4+/ 4S — 1
По формуле (3.15)
<2„ов = VT-0,22-16,2 (0,9-0,485-0,126 +
-f-0,27) = 2 квар.
По формуле (3.18) ток статора
/f = 16,2-/ (0,9 -0,485-0,126 + 0,27)2 +”
"*+0,93.0,485?-0.9922 = 8,75 А.
По формуле (3.6) скольжение
77
8,752
Потери SAP = 66 4- 145 + 371 —:-------- 4-
16,2?
4-229.0,485? = 373 Вт;
2,25 4-0,373
cos <р =--- — — = 0,8.
/22 + (2,25 +0.373)2
При соединении в звезду при той же на-
грузке определяем:
2
--------=---------= 1,33:
Л1С* 0,5-3
Ь,
Рис. 3.18. Характеристика холостого хода
двигателя 310 кВт
'2иом
0,5-----L
1,334-/1,332— 1
= 0,92;
sin <р' --- — -
V 2-1,Эз(|,33+уЛ 1,33? —|)
= 0,413; cos ч>’ =0,911;
Q = ХГ3-L.22-9,36(0.9-0,92-0,413 +
4-0,128) = 1,67 квар;
/, = 9,36/^(0^9-0,92-0,413 4-0,128)3 4~
”*4-0,9?-0,92?-0,911? = 8,26 А;
2 4-/"22 — 1
5 = 4,8 ------- — = 8,1 %;
1,33 4-/ 1,33?— 1
145
SAP = 66 4- -у- 4-
. 8,262
“F371 —4- 229-0,922 = 598 Вт;
9,36?
2,25 4-0,598 Л „„
со? ф = --- — — 0,86
V 1,67й + (2,25 + 0.598)?
Таким образом, выигрыш в потреблении
реактивной мощности на 2—1,67=0,33 квар и
повышение коэффициента мощности с 0,8 до
0,86 вызывают увеличение активных потерь на
598—373230 Вт, или 0,23 кВт. На 1 нвар
это дает затрату активной мощности 0,695 кВт,
что совершенно недопустимо.
Прн загрузке двигателя 0,4 имеем
при соединении в треугольник Q=l,85 квар;
SAP=326 Вт; s=l,81 %; cos ф=0,74. Соответ-
ственно прн соединении в звезду Q = 1,17 квар;
SAP=399 Вт; s=5,95 %; cos ф=0,88. Таким
образом, имеем на 1 квар затрату 0,107 кВт
активных потерь. Это значительно меньше, чем
при загрузке 0,5, но все же более чем в 20
раз превосходит потери в конденсаторах.
Только при нагрузке 0,3 активные потери
становятся при соединении в звезду меньше,
чем прн соединении в треугольник. При этом
при соединении в треугольник Q=l,78 квар;
SAP=290 Вт; 5=1,35%; cosqi=0,656, а при
соединении в звезду Q=0,84 квар; 2ДР=
=289 Вт; s=4,26 %; соэф=0,89.
Пример 5. Сравнить работу двигателя
при соединении обмотки статора в треуголь-
ник и в звезду, исходя из условия сохранения
номинального значения тока ротора. Двига-
тель 310 кВт, 3000 В, 72,5 A, cos фНОм=0,89;
ротор 660 В, 288 А, 740 об/мин.
Соединение обмотки статора — треуголь-
ник; соединение обмотки ротора — звезда.
Потери этого двигателя при номинальной
нагрузке равны: механические: ДРыех=3 кВт;
в стали статора ДР1С,пом=6,7 кВт; в обмотке
статора с добавочными потерями ДРы.нвм=
=8,2 кВт; в обмотке ротора ДР2Ном=5,65 кВт.
Данные опыта короткого замыкании: Рк=
= 10,4 кВт; /1(=63 А при £Д=520 В. Опыт
короткого замыкания производился при тем-
пературе обмоток 35 °C.
Данные опыта холостого хода: ДР0=
= 10,6 кВт; /0=24 А; £70=3000 В. Кривая хо-
лостого хода дана нн рис. 3.18.
Сопротивление обмотки статора постоян-
ному току Г1=1,06 Ом при 35 °C и н=1,28 Ом
прн 90 °C.
Сопротивление обмотки ротора постоянно-
му току г2=0,0133 Ом при 35 °C и г2 =0,022 Ом
при 90 °C.
Для определения нагрузки, при которой
ток ротора был бы равен номинальному, не-
обходимо знать кратность максимального мо-
мента.
Из опыта короткого замыкания определя-
ем действительные сопротивления в фазе:
z«f =
У*
/ном//"3
/з~-520
63
= 14,3 Ом;
p«i
3 Ок/^З)2
10 400
63?
= 2,57 Ом;
ХК1 = V гк1 — ЛК1 = V14,3* — 2,57?=14 Ом:
Л21=гк1 — '‘1 = 2,57— 1,06= 1,51 Ом.
Кратность тока короткого замыкания
63 3000
72,5 520 ~ ’
q « 1 4-
21
к
= 14-
24
2-72,5-5
1,033.
78
Г2О _ r2
Приведенное сопротивление ротора, соот-
ветствующие скольжению s»0 при 35°C,
^1НОМ
С1 ^2ф,ном
„ _ / зооо у
= 0,0183 I----------— I
\1,033-660//з /
= 1,07 Ом;
прн 90 °C
а20= 1,07
235+90
-----!--= 1,28 Ом.
235 + 35
Принимая для обмотки ротора с=2,33 по
формулам (2.41), (2.48) и (2.49), получаем
*Н= 1.43-^--0,43 = 1,52;
*„ = 1,35 — 0,285-1,52 = 0,92;
14(1 + 1,06/1,07) .
х™=Тгё--------------------=,м °м
1,25-0,2.1,52
Принимая механические потери равными
I % номинальной мощности двигателя и но-
минальное скольжение равным 0,013, получаем
кратность максимального момента
^ном =
3-3000-(1 —0,013)
2-1,033-310 -1, JI (1,28+/ 1,28* 2 * *+ 14,42)
= 2,62.
Критическое скольжение при рабочей тем-
пературе обмоток
1,28
= 0,09.
sBp — f--------------
V 1,28?+ 14,45
Номинальное скольжение
0,09
SfiOM —
________ =0,0178,
2,62+/ 2,622— 1
или 1,78%.
Номинальный линейный приведенный ток
ротора
= 288
.• __ . с1^эном _______
2ном *2НОМ
^ХЯОМ
1,033-660
—---------= 65,5 А,
3000
или иначе
^а.ним Shom
20
310-1,01-0,0178
(1- 0,0178). 1,28 =66
Примем />ном =65,5 А.
Фаза приведенного тока ротора
=0,198;
*₽НОМ 1
2,62 + / 2,622
sin ФноМ - ° ’194; cos %оы = °»981 •
Номинальный коэффициент мощности
^2нбм cos Фном
COS фноМ---------------- =
J1HQM
65,5-0,981
= —-----------= 0,89.
72,5
Номинальная потребляемая реактивная
мощность
фЕОМ = )/з-72,5-3-0,457 = 173 квар.
Определим по формуле (3-14а) нагрузку
при лересоеднпении обмоток статора в звезду
при условии, чтобы ток ротора не превосхо-
дил номинального значения:
V 2-2,62(2,62+4^2,62=— 1) —3
А1с» — ___________ _____ —
(2,62 + V (2,62? — I)) /з
= 0,555
При нормальном соединении обмоток ста-
тора определяем:
кратность максимального момента
fcc = 2,62/0,555 = 4.72;
приведенный линейный ток ротора по фор-
муле (3.12а)
2,62+4^ 2,62=— I
4,72+4^ 4,72=— 1
= 36 А;
фазу приведенного тока ротора
tg ф' =----------* - - - — о, 107;
4,72 + 1/4,72=— 1
cos ф' = 0,994; sin ф' = 0,105;
линейный тон статора по формуле (3.19),
пренебрегая активной составляющей тока хо-
лостого хода,
+ = 4/ (24+36- 0.106)=+(36,0 - 0,994) =45 А;
коэффициент мощности
cos ф = 36-0,994/45 = 0,8; sin ф = 0,6;
потребление реактивной мощности
Q = /1-45-3-0,6 =141 квар;
скольжение по формуле (3-6)
Л „ 2,62+ /2,62s * * В— 1
s = 0,0178-----. ---- =
4,72+У 4,722— 1
= 0,0096=0,96%.
В действительности скольжение будет
меньше, так как температура обмотки ротора
при токе 0,55 номинального будет значительно
меньше нормальной.
Потери
ХАР = 3 + 6,7 + 8,2 (45/72,5)2 +
+ 5,65-0,65?= 14,5 КВт.
79
При пересоедииенин обмотки статора в
звезду определяем:
кратность максимального момента
2,62
3-0,555 ”1,Б7;
фазу приведенного тока ротора
tg ф' =-------- ----------= 0,36;
1,57+-/1,57»— 1
sinф' =0,339; cos фг = 0,941.
При пересоединении обмоток статора в
звезду лииейиый ток будет равен фазному
току.
Фазный ток холостого хода по криво ’
рис. 3.18 при напряжении 3000/^/^=1730 В
Рис. 3.]9. Кривые потребляемой реактивной
мощности и активных потерь двигателя 310 кВт
в зависимости от нагрузки при соединении об-
моток статора в треугольник и звезду
/,= П,4//з = 6,6 А.
Приведенный номинальный фазный ток
ротора
/;л=65,5/1/3 =37,5 А.
Фазный ток статора при Мс<~ 0,555
4 = (6.64-37,5-0,339)2 4- (37,5-0,941)2 =
= 40,5 А.
Коэффициент мощности
cns ф = 37,5-0.941/40,5 = 0,88; sin ф = 0,475.
Реактивная мощность
Q = Т^З -3-40,5-0.475 = 100 квар
Скольжение
Рис. 3.20. Кривые кратностей тока статора и
ротора двигателя 310 кВт в зависимости от
нагрузки при соединении обмоток статора в
треугольник и звезду
s= 0,0178
2,62+2,62а — I
1,57+1Л 1,57? — 1
= 0,0323 = 3,23%
Потери
6,7
2ДР = 3—^—4-8,2
40.5 \8
41,8 )
+
0 0323
4-5,65-0,555-Q Q|yg =18,5 кВт.
Такны образом, при переключении обмо-
ток статора в звезду активные потери увели-
чились на 4 кВт, а реактивная мощность
уменьшилась на 41 квар, т. е. &P/&Q—
=0,1 кВт/квар.
На рис. 3.19 даны кривые потребляемой
реактивной мощности и активных потерь и на
рис 3.20 — кривые кратности тока статора и
ротора и cos ф двигателя 310 кВт в зависи-
мости от нагрузки для соедииеиии обмоток
статора в треугольник и в звезду.
Из рассмотрения кривых следует, что при
нагрузках, меньших 0,44 номинальной, без-
условно, следует применять работу двигателя
при соединении обмоток статора в звезду, так
как активные потерн получаются меньше, чем
при соединении в треугольник.
Удельная затрата активной мощности иа
1 квар будет резко возрастать с увеличением
нагрузки двигателя.
Ниже даны удельные потери в зависимос-
ти от нагрузки:
Мс». . . . 0.44
кВт/квар . 0
Afc# .... 0,6
кВт/квар . 0,164
0,5 0,55
0,0346 0,0985
0,65 0,7
0,368 1,36
Из кривых, приведенных на рис. 3.20, сле-
дует, что прн соединении обмоток статора в
звезду предельная загрузка, соответствую-
щая номинальному току статора, не должна
превышать 0,58.
Так как обычно нагрузка контролируется
по току статора, то при Л4с»=0,58 ток ротора
будет превышать номинальный ток на 5 %.
При загрузке 0,58 затрата активной мощности
на 1 квар равна около 0,12 кВт. Такая затра-
та активной мощности слишком велика.
Из рис. 3.20 следует, что ток ротора при
соединении в звезду всегда будет больше, чем
ток при соединении в треугольник. Ток стато-
80
ра при соединении в звезду будет меньше то-
ка статора при соединении в треугольник
только в интервале нагрузки от 0 до 0.24, где
основное влияние оказывает намагничиваю-
щий ток.
Как было установлено выше, для
использования двигателей при часто-
те, отличной от номинальной, необхо-
димо соответственно изменять подво-
димое к двигателю напряжение. Рас-
смотрим условия применения двига-
телей, изготовленных для работы от
сетей с частотой 50 Гц при номиналь-
ных напряжен их 380 и 500 В, в сетях
с частотой 60 Гц.
Для двигателя 380 В нужно иметь
напряжение 380-60/50=455 В, для
двигателя 500 В —- соответственно
500-60/50= 600 В. Если двигатель
500 В пересоедииить в треугольник, то
в этом случае напряжение должно
быть 600/ИЗ" = 345 В.
Таким образом, если двигатель
50 Гц, 380 В применить в сети 60 Гц,
500 В, то напряжение и а ием будет
выше необходимого в 500/455=1,1 ра-
за. Соответственно у двигателя 500 В
в сети 60 Гц при напряжении 380 В
при соединении обмоток статора в тре-
угольник оно будет в 380/345=1,1 ра-
за больше требуемого. Такое повыше-
ние напряжения вполне допустимо и
необходимо для того, чтобы при рабо-
те с повышенной частотой начальный
пусковой момент не уменьшился. Де-
ло в том, что из (3.38) прн на-
чальный пусковой момент уменьшился
бы при ka=kf в отношении 60/50=1,2,
ио так как в нашем случае ku=kf\A,
то начальный момент практически бу-
дет таким же, как и при номинальных
условиях:
1,1«.50»_ 0)
мт kj 60" •
Применение двигателей 50 Гц на-
пряжением 500 В прн пересоедниении
их в треугольник и включении в сети
60 Гц с напряжением 380 В предпо-
чтительнее, чем применение двигате-
лей 50 Гц, 380 В в сети 60 Гц с напря-
жением 500 В. с точки зрения работы
изоляции обмоток^ которая в первом
случае будет находиться под напря-
жением, меньшим рабочего.
Для двигателей небольшой мощно-
сти повышение частоты вращения и а
20 % можно считать допустимым.
3.7. ОПРЕДЕЛЕНИЕ ПОТРЕБЛЯЕМОЙ
ИЗ СЕТИ АКТИВНОЙ МОЩНОСТИ
И КПД АСИНХРОННЫХ ДВИГАТЕЛЕЙ
ПРИ РАЗЛИЧНЫХ СПОСОБАХ
РЕГУЛИРОВАНИЯ
ПРОИЗВОДИТЕЛЬНОСТИ
МЕХАНИЗМОВ
Из приведенной на рис. 1.7 энер-
гетической диаграммы следует, что по-
требляемая из сети активная мощ-
ность равна:
₽! = /> + ДРмех 4- ДРХ + ДР2. (3.48)
Коэффициент полезного действия
двигателя
Т] = — =---------------------(3.49)
Pi Р + ДР, |-ДР24 ДРмех
можно представить в виде произведе-
ния трех КПД
Ч ' "Пет "Пр "Пмех»
где КПД статора
Т)ст = —=—gs ; (3.50)
Р, Р, Ра+ДР1 '
КПД ротора
,, _ Р» _ Pa-APa_Ps-Pas
1р~ р. к
= 1—5; (3.51)
механический КПД
__ Р __ Ра _
р2 -
= Pa(l-s)—АРмех (3 52)
₽а(1 -S)
Механические потери при синхрон-
ной угловой скорости выразим в долях
номинальной электромагнитной мощ-
ности и примем для упрощения, что
механические потери изменяются про-
порционально угловой скорости (такое
упрощение вполне допустимо, учиты-
вая, что механические потерн невели-
ки) :
Д^мех ~ сРа.ном^/(1—s)» (3.53)
где <2<С1, и тогда
Ра О s) — gPaiHoM kf (1 —s)
РаО-s)
__ Ре, — gPа.пом^/ г
Ра
Таким образом,
•n = s)(Pa °Ра .япм kf) __
(РаЧ-ДР1)Ра
__ (F S)(Pа gPа.яом kf) 55)
Ра -г APj
6—649
81
Вырази^ скольжение в этой фор-
муле прн £с^1,6 иа о^н^эении (3.4а) с
учетом связи между моментом и элект-
ромагнитной мощностью (2.17):
с — с 5ном ?а
й — ьном ., .. = Q »
лл k2, Р k~
нем ч а,ном и
и при наличии в цепи ротора сопротив-
ления регулировочного резистора R
8 = ——, 5номЖ* ~ Р----------~ »
«КР ря,ном kU
(3.56)
где отношение критических скольже--
ний при номинальной частоте сети
_sE = !k+R (3 57а)
%Р Г2
И
P = s„„„^, (3.576)
ьнр
причем г2 — сопротивление фазы ро-
тора в общем случае сопротивления
щеточного контакта.
Подставляя значение для скольже-
ния (3.56) в формулу (3.55), получаем
следующее выражение КПД через
электромагнитные мощности:
ра \ /
1 Р о 11 Ра — аРа,ном
k Р I \
______Ь.иом /______________
Pa + AJ’i
(3.58а)
и при номинальных напряжении и час-
тоте сети (ku=kf = 1,0)
(' Р р ) (Ра — оРа,и0!и)
~ _ д_____^а.ном/__________
Ра + ДЛ
Потери в статоре при номинальной
нагрузке зависят главным образом от
мощности двигателя. На рис. 3.21 да-
на средняя кривая относительных по-
терь в статоре при номинальной на-
грузке в зависимости от номинальной
мощности двигателей различных ти-
пов.
Изменение потерь в статоре в зави-
симости от нагрузки при номинальных
частоте и напряжении для двигателей
различных типов показано на рнс. 3.22.
По уравнению для КПД (3.586)
построена универсальная диаграмма
асинхронного двигателя, при помощи
которой можно быстро решать различ-
ные вопросы, связанные с определе-
нием КПД, потерь в регулировочном
Рис. 3.21. Потери в статоре в зависимости от
номинальной мощности двигателя
Рис. 3.22. Потери в статоре в зависимости от
нагрузки прв номинальных напряжении и ча-
стоте
резисторе н т. д. (см. приложение
рис. П.14).
Универсальная диаграмма построе-
на ДЛЯ Д-Р мех = 0,01Ра,иом И Р 1ном/
/Ра,Ном = 0,05.
Коэффициент полезного действия
при наличии в цепи ротора сопротив-
ления регулировочного резистора R
изменяется при изменении нагрузки по
кривым:
Р = » -р = const.
При номинальном моменте на валу
величина р равна номинальному сколь-
жению, соответствующему работе дви-
гателя с выведенным резистором:
Ро = Srom- 0.57b)
Таким образом, для расчета сопро-
тивления регулировочного резистора
необходимо знать скольжение илн час-
тоту вращения и соответствующее зна-
чение момента или мощности на валу.
Сопротивление резистора R, необ-
ходимого для обеспечения требуемого
82
р, находится из соотношений (3.57а) и
(3.376):
К = г2(—-------1Y (3.59)
\ SHOM /
Сопротивление регулировочного ре-
зистора можно определить при помо-
щи универсальной диаграммы.
Для экономичной работы ряда ме-
ханизмов большое значение имеет
возможность регулирован ня их произ-
водительности при эксплуатационных
нзменеииях режима работы.
На рис. П.6 показано, что для ме-
ханизмов с вентиляторной характери-
стикой момента сопротивления наибо-
лее экономично регулирование произ-
водительности путем изменения угло-
вой скорости.
Угловую скорость асинхронных и
синхронных двигателей можно регули-
ровать изменением синхронной угло-
вой скорости магнитного поля путем
изменения частоты приложенного к
обмотке статора напряжения, а также
числа полюсов обмоток машины. Пер-
вый из этих способов в последнее вре-
мя получает все более широкое приме-
нение.
Для асинхронных двигателей с
фазным ротором изменение угловой
скорости обычно осуществляется вве-
дением регулируемого резистора в
цепь ротора.
Положительно то, что прн введении
в цепь ротора резистора ие уменьша-
ется максимальный электромагнитный
момент асинхронного двигателя и, сле-
довательно, это ие влияет иа его пе-
регрузочную способность. Недостатком
является то, что в цепи ротора будут
иметь место дополнительные потери в
регулировочном резисторе.
Рис. 3.23. Механические характеристики асин-
хронного двигателя с фазным ротором при
разных значениях' регулировочного резистора
в цепи ротора
Рнс. 3.24. Кривые потребляемой двигателем
мощности в зависимости от расхода (Q) на-
соса при регулировании задвижкой n=consf и
изменении угловой скорости при помощи ре-
зистора в цеЪи ротора двигатели при различ-
ных напорах
На рис. 3.23 даны механические
характеристики асинхронного двигате-
ля с фазным ротором при различных
сопротивлениях регулировочного ре-
зистора R. При увеличении R сдвига-
ется характеристика вправо и увеличи-
вается скольжение в установившемся
режиме работы двигателя.
Коэффициент полезного действия
асинхронного двигателя с фазным ро-
тором уменьшается по мере снижения
угловой скорости за счет роста потерь
в регулировочном резисторе. Так, при
снижении угловой скорости в 2 раза
КПД также уменьшается примерно в
2 раза по сравнению с его значением
в нормальном режиме. Проще всего
его можно определить при помощи
универсальной диаграммы (см.
рис. П.14).
На рис. 3.24 даны кривые потреб-
ляемой двигателем мощности Р} в за-
висимости от расхода Q насоса при
регулировании угловой скорости рези-
стором в цепи ротора, построенные на
основании рис. П.6 и универсальной
диаграммы (рис. П.14). На этом же
рис. 3.24 для сравнения дана кривая
потребляемой двигателем мощности
при регулировании задвижкой при по-
стоянной угловой скорости. Из сопо-
ставления кривых для различных на-
поров 7/ст/Яном, равных 0,9; 0,75; 0,5;
0,25 и 0, с кривой /?=const следует,
что, несмотря иа значительные потери
в резисторе, регулирование этим спо-
собом все же значительно экономич-
нее, чем регулирование задвижкой.
6*
83
Таблица 3.2
№ ступени Ток ста- торе, А Напряже- ние стато- ра, В Потреб- ляемая мощ- ность. кВт Частота враще- ния. об/ мин s.% Р, -100 = Л- % 1ПОМ Р. кВт Ч
15 68,3 3045 310 736 1,85 93,5 287 0,926
14 64,1 3048 290 705 6,00 83,7 258 0,892
13 60,0 3069 268 684 8,55 80,7 231 0,864
12 54,4 3074 235 838 15,0 70,8 187 0,803
11 50,2 3080 214 608 19,0 64,5 162 0,756
10 46,0 3123 191 572 23,7 57,5 135 0 706
9 42,7 3099 170 542 27,8 51,2 113 0,666
8 41,2 3102 155 514 31,5 46,7 97.0 0,625
7 38,0 3109 140 490 34,7 42,2 83,5 0,596
6 36,7 3120 127 467 37,8 38,3 71,0 0,56
Рассмотрим иа конкретном приме-
ре определение КПД асинхронного
двигателя при регулировании резисто-
ром в цепи ротора.
Пример в. Двигатель дымососа имеет таб-
личные данные: 310 кВт, 3000 В, 72,5 А,
cos <рВом=0,89, 740 об/мии. Соединение — тре-
угольник. Ротор 660 В, 288 А.
Двигатель имеет регулировочный резистор
и работает с постоянно наложенными щет-
ками.
Сопротивление ступеней резистора Р вме-
сте с сопротивлением ротора rs при 35 °C:
№ ступени . 6 7 8 9 10
га+Р, Ом . 1,37 1,13 0,935 0,725 0,555
Ке ступени .11 12 13 14 15
га-Н?,Ом . 0,399 0,280 1,140 0,089 0,0256
Сопротивление ротора при 35 °C г3=
=0,0183 Ом.
Сопротивление одной фазы статора в на-
гретом состоянии и = 1,28 Ом.
Опыт холостого хода: Рю= 10,6 кВт; /о=
= 24 А; £/о=3000 В.
При неизменном положении задвижки ды-
мососа снята нагрузочная характеристика для
всех положений ступеней регулировочного ре-
зистора (табл. 3.2).
Определяем номинальную потребляемую
мощность
Ргнем — УЗ C/jhom Гном СОЗ <Рном 1Ю 3 —
= 1-^3 •72,5-3000.0 89.10-® = 334 кВт.
Добавочные потери АР|д=0,005РПои=0,005Х
X3I0=I,55 кВт.
Потери в обмотке статора при номиналь-
ном токе
Л₽Ь,.ком = 3/к»гГ 10-3+ Д₽1В =
/ 72,5 \2
= 3 [ - ] 1,28-10-»+1.55 = 8,2 кВт.
\ /з )
Номинальное скольжение двигателя, соот-
ветствующее 15-й ступени регулировочною
резистора и полной нагрузке,
. . 334
У1Е0М ____
%ОМ16 с15 —
где Sis и (Pi)[5 —скольжение и мощность, по-
требляемая из сети, при 15-й ступени регули-
ровочного резистора (из табл. 3.2).
Механические потери &РШ1~ 0,01 Раок=
=0,01-310-3 кВт»
Потери в стали статора
/2
^Ас.ном — ЛАо — Д^мех —Д|Р1м,ном ,, =
71НОМ
/ 24 \2
= 10,6 — 3 — 8,21 72 5 \ =6,7 кВт.
Номинальная мощность, передаваемая ро-
тору,
п ______ Лгом + АРмех
Р а,ном — ,
1 -ОДОМ
310 + 3
1—0,02
= 319 кВт.
Номинальная потребляемая мощность оп-
ределяется по формуле
Углом = Та,ном 4“ дТ\с.ном + ДР 1м,ком =
= 319 + 6,7 + 8,2 = 334 кВт,
что полностью совпадает с заводскими данны-
ми. Исключением является скольжение, кото-
рое по табличным данным равно:
750 — 740
«ном % ==---——— Ю0 = 1,33%.
Расхождение объясняется в данном слу-
чае тем, что двигатель работает с постоянно
наложенными щетками, а сопротивление ще-
точного контакта приводит к некоторому уве-
личению критического скольжения.
Потери в статоре при номинальном токе в
процентах номинальной мощности, переданной
ротору,
АРгном тпр 6,7+ 8,2
Ра,ном 319
100 = 4,73%.
Так как потери АР1ВОм, %, незначительно
отличаются от принятых А =5 % при построе-
нии диаграммы (см. рис. П.8), то поправкой,
учитывающей отклонение потерь в статоре
при номинальной нагрузке от 5 %, пренебре-
гаем.
84
Определяем для всех ступеней регулиро-
вочного резистора
Например, для 6-й ступени
1.37
р =-----— 1,33 = 100%.
1 0,0133
Для последующих ступеней значения р
равны:
№ ступени - 15 14 13 12 11
р,% - . . . 1,85 6,45 10,2 20,3 29
№ ступени 10 9 8 7 6
₽,%... - 40,3 43,7 68 82 100
Примечание. В приведенные выше формулы
для определения КПД (3.58а) и (3.586) значение р
должно подставляться не в процентах, а в относи-
тельных единицах.
Определим КПД двигателя при 6-й сту-
пени регулировочного резистора. Из опыта
для этой ступени имеем pt=38.3 % и «=37,8 %.
Соответствующая этим данным мощность иа
валу в процентах номинального значения
мощности, передаваемой ротору, может быть
найдена по формуле
Р8% = -Г-^— ЮО = —~ 100 =
"«.ном "а,ном
Р. — ДР,
= —ad---------(I “ $)100 =
' 1Л0М--й^1НОМ
Pl — &Р1J PjHOM
APihqm Рд.иом
P а,ном’ T’ihom
(1 — s) 100-
Здесь все величины, кроме потерь в ста-
торе ДРь были определены выше.
Потери в статоре найдем по формуле
АР1 = ДР1м.ном (“Г- ) 4“ АР1С.НОМ =
\ *£ном /
/36,7 V
==8-2('^у) +6,7 = 8,8 кВт.
Подставляя значения соответствующие
величин в формулу для р2 %, получаем
0.383 — 8,8/334
Ра % - J— о,0473-319/334( “°- 78)Х
У 100 = 23%.
Мощность на валу равна:
_ Рабатом 23,2-319
бг-=74кВТ-
и КПД на валу равен 56,3 %.
Полезная мощность на валу
Р — Р8 — ДРмет ~ 74 — 3 = 71 кВт
и КПД
Р 71
1) -----100 = -—~ 100 = 56%.
Рг 127
Аналогичным образом определяем КПД и
для других ступеней регулировочного резисто-
ра (табл, 3.2).
Для асинхронных двигателей с ко-
роткозамкнутым ротором, получивших
широкое распространение в системе
собственных нужд электростанций, и
для синхронных двигателей изменение
угловой скорости может быть обеспе-
чено применением гидромуфты или
изменением частоты питающей сети.
При регулировании угловой скорости
с помощью гидромуфты потребление
активной мощности двигателем при-
мерно такое же, как и при регулирова-
нии при помощи резистора в цепи ро-
тора. В этом случае потери будут
выделяться в гидромуфте, нагревая в
ней масло.
С развитием преобразовательной
техники получили применение статиче-
ские управляемые устройства для пре-
образования частоты, которые позво-
ляют в отдельных случаях заменить
двигатели постоянного тока асинхрон-
ными двигателями.
Рассмотрим, как будет изменяться
КПД асинхронного двигателя, работа-
ющего при переменной частоте.
Для получения наибольшего значе-
ния КПД напряжение, подводимое к
двигателю, следует изменять таким
образом, чтобы суммарные потери в
стали и меди имели при данной на-
грузке наименьшее значение.
Примем, что механические потери
изменяются пропорционально измене-
нию угловой скорости:
* %ом
Примем, что потери в стали соглас-
но (3.23)
k2
ЬР0 = ДРС1НОМ (0,61 + 0,39/у .
fy
Потери в обмотке*статора и рото-
ра, если пренебречь намагничивающим
током, прн моменте Л1С*
ЬР„.КМ
£
Поскольку
Р _ M(i>2 _ до ^/(1 — s)
Рном ^ном ю2ном 1 SHOM
= с/Ис*^(1 — $),
где
с = --------
1 --£цоы
85
-kf
и принимая скольжение s=sHnJMM 1
получаем при подстановке значений
ДРС, ДРЫ и ДРМех следующее выраже-
ние для КПД при мощности на валу
Р = сЛ1с*РномА/(1—s):
I -t- S&P/P } I
с^ном Мс*
ЬР^ (° .61 + 0.39А,) + М». *;ЛР„,„ОМ+
kt
_______~Ьс^мех, ном(^ц ’SHOM^c*^f)___
—5номМс‘А/
(3.60)
Определим напряжение при кото-
ром КПД имеет максимальное значе-
ние. Для этого возьмем первую произ-
водную от знаменателя по при за-
данном kf и после соответствующих
преобразований приравняем ее нулю:
ku ' 2sH0M Afc* kf ku —
Л1^,^дрмном o
~~ (0,614-0,39*,) ЛРС НОМ
Практически приемлемым является
следующее значение корня данного
уравнения:
л„ = _£г_=
Сытном
^с* kf 4“ ^(sном Mc* kf)z 4-
’ ДР Л12.
4- feJ-----^м.иом—С*------ (3.61а)
APc.HOM(0.6I4-0,39fe/)
Так как при этом вторая производ-
ная по ku положительна, то имеем ми-
нимальное значение знаменателя, а
следовательно, максимальное значе-
ние КПД. Поскольку sHOMMC4fe/ во
много раз меньше остальных слагае-
мых в (3.61а), то вполне достаточная
точность достигается при расчете ku
по следующей формуле:
4/ ь3 др Д42.
л/ ----------------------- (3 б1
“ У (0,614-0,39*/) ДРс.ном ’
В зависимости от сорта стали и
толщины листа в общем случае в зна-
менателе подкоренного выражения
могут быть н другие значения вместо
0,61 и 0,39.
Рассмотрим для примера измене-
ние КПД для двигателя с механизмом
вентиляторного типа, для которого
В этом случае КПД мо-
жет быть рассчитан по формуле (3.60)
при замене /Ис* на и будет
иметь максимальное значение при
4 / 7
____ Ui л / ^7_______АРМ НОМ Мр»_____
“ ' 1/1B0M 1 1 Д₽с.™м(0.61 + 0,39Ъ) •
(3.62)
Пример 7. Определим изменение КПД при
регулировании частотой и сравним с КПД
при регулировании резистором в цепи ротора
для рассмотренного выше двигателя мощно-
стью 310 кВт, 3000 В.
Для этого двигателя известны: механиче-
ские потери ДРЫех=3 кВт; потери в статоре
вместе с добавочными ДРм,вом=8,2 кВт; поте-
ри в стали статора Л Рс.ис№ 6,7 кВт; номи-
нальное скольжение 2 %. Напряжение будем
изменять пропорционально частоте, т. е. ku=kf.
Произведем подсчет для полезной нагруз-
ки на валу 71 кВт и 467 об/мип. Прн этой на-
грузке при работе с номинальной частотой
скольжение было бы равно:
714-3
«= 2-^r=°’45S”-
а частота вращения скольжения была бы рав-
на 3,5 об/мии. Так как при уменьшении часто-
ты и при сохранении постоянного значения
магнитного потока частота вращения сколь-
жения останется той же са.мой, то новая син-
хронная частота вращения равна:
467 4-3,5 = 470,7 об/мин,
что соответствует частоте
50-470,5/750 = 31,5 Гц,
и напряжение сответственно равно ЗОООХ
Х470,5/750= I860 В.
Так как двигатель работает при сохране-
нии постоянного значения магнитного потока,
то ток статора будет таким же, как и при
работе с номинальной частотой и регулирова-
нии частоты вращения резистором, а следова-
тельно, и потери в обмотке статора будут те-
ми же самыми:
36.73 4
Лрш-8,2-^j-=2 11 кВт.
Потери в стали по рис. 3.4 будут равны
ДРС = 6,7-0,53 = 3.55 кВт.
Скольжение увеличится обратно пропор-
ционально уменьшению частоты:
0,00465-50
S= 31.5
3,5
=-----— =0,00745.
470,5
Потери в роторе
(714-3)0,00745
Г'Рк~ 1—0,00745
= 0,55 кВт.
Механические потери будут меньше по
крайней мере пропорционально изменению час-
тоты.
31-5
ДРМех = 3—£5“ = ^8» кВт.
86
Суммарные потери
ZAP = 2,11 4- 3,55 + 0,55 4- 1,68 = 8,09 кВт:
КПД
4 = 71 +8,09 - °'9’
КПД при регулировании резистором в це-
пи ротора был равен 0,56.
Отметим, что выигрыш в значении КПД
бил бы еще больше, если бы ku изменялось,
исходя из приведенного выше условия мини-
мума потерь в двигателе (3.616).
При регулировании угловой скорости
асинхронного двигателя изменением напряже-
ния, подводимого к статору, снижаются мак-
симальный вращающий момент Мтах» и соот-
ветственно перегрузочная способность асин-
хронного двигателя.
Для того чтобы ток ротора не превосхо-
дил номинального значения, нагрузку двига-
теля при таком способе регулирования нужно
снижать. Если при этом сохраняется номи-
нальное значение тока ротора, то ток статора
будет несколько меньше номинального тока за
счет уменьшения намагничивающего тока.
Необходимое снижение нагрузки опреде-
ляется по формуле (3.14). Для примера при-
водим результаты подсчетов дли двигатели,
имеющего ЬВ1М—2:
ku............. 1 0,95 0,9 0,85 0,8
М„......... I 0,94 0,89 0,83 0,78
s/sH0M 1 1,05 1,12 1,17 1,27
ku . . . - 0,75
М<*............... 0,72
®/shom • * • • 1.36
0,7 0,65 0,6
0,67 0,61 0,56
1,47 1,6 1,8
Как видно, при регулировании угловой
скорости уменьшением напряжения нагрузку
двигателя необходимо снижать значительно.
Способ этот неэкономичен.
Угловая скорость двигателя нор-
мального исполнения при значитель-
ном снижении напряжения изменяется
весьма мало. Например, при номи-
нальном скольжении 2 % уменьшение
напряжения до 0,6 при нагрузке 0,56
номинального значения приводит к
уменьшению угловой скорости (увели-
чением скольжения в 1,8 раза) от 0,98
до 0,964. Таким образом, при регули-
ровании угловой скорости изменением
напряжения, подводимого к статору,
для более существенного изменения
угловой скорости необходимо иметь
двигатель с повышенным скольже-
нием.
В заключение остановимся на регу-
лировании угловой скорости асинхрон-
ного двигателя изменением числа по-
люсов его обмоток.
Для ряда рабочих механизмов при
изменении технологической загрузки
бывает достаточным ступенчатое регу-
лирование производительности, что
возможно осуществить установкой в
качестве их привода многоскоростных
асинхронных двигателей с коротко-
замкнутым ротором. У таких двигате-
лей на статоре располагают одну или
две обмоткн таким образом, чтобы
внешними переключениями иметь воз-
можность создать магнитное поле ста-
тора с разными числами полюсов и
получить, следовательно, разные угло-
вые скорости синхронного поля при
неизменной частоте в питающей сети.
Так, у двухскоростных асинхрон-
ных двигателей с отношением частот
вращения 2 : 1 одна обмотка и а стато-
ре и при ее переключении изменяется
направление тока в отдельных ветвях,
что позволяет в 2 раза уменьшить
угловую скорость механизма. Такие
двигатели в настоящее время приме-
няются в системах собственных нужд
мощных тепловых электростанций.
Глава четвертая
ОСНОВНЫЕ НАГРУЗОЧНЫЕ СВОЙСТВА
СИНХРОННЫХ ДВИГАТЕЛЕЙ
И СРАВНЕНИЕ ИХ С АСИНХРОННЫМИ
ДВИГАТЕЛЯМИ
Синхронные двигатели, так же как
и асинхронные (см. § 3.1), в реальных
условиях эксплуатации работают при
изменяющейся нагрузке иа валу, при
отличных от номинальных значениях
частоты и напряжения питающей сети,
а также при различных значениях
тока возбуждения. Под нагрузочными
свойствами синхронных двигателей,
рассматриваемых ниже в настоящей
главе, будем понимать зависимость от
изменений указанных величин значе-
ний основных параметров, характери-
зующих установившийся режим двига-
ет
телей (ЭДС, активная и реактивная
мощности, коэффициент мощности,
КПД и т. п.).
Кроме того, в настоящей главе
рассматриваются некоторые особенно-
сти влияния синхронных двигателей
иа характеристики узлов нагрузки, в
частности их устойчивость и распреде-
ление реактивных мощностей. В за-
ключительной части главы проводится
сопоставление основных рабочих
свойств синхронных и асинхронных
двигателей.
4.1. РЕЖИМЫ РАБОТЫ
СИНХРОННЫХ ДВИГАТЕЛЕЙ
ПРИ НОМИНАЛЬНЫХ НАПРЯЖЕНИИ
И ЧАСТОТЕ. ОПРЕДЕЛЕНИЕ ПОТЕРЬ
и кпд
При номинальных значениях часто-
ты и напряжения питающей сети и из-
меняющейся нагрузке на валу синх-
ронного двигателя соответствующим
регулированием тока возбуждения
можно устанавливать различные ре-
жимы работы при постоянных значе-
ниях тока возбуждения, коэффициента
мощности, реактивной мощности и др.
Для того чтобы решить вопрос об эко-
номичности того или иного режима,
необходимо знать потери в этом ре-
жиме.
Зависимости между током статора
и током возбуждения могут быть опре-
делены графически из диаграммы
Потье (см. рис. 1.15), а также анали-
тически из упрощенной векторной диа-
граммы (см. рис. 1.14).
По известному равенству для пол-
ной мощности статора
S = jApj + q2 = /3VI
находим ток статора при номинальном
напряжении и=иъоы:
} V pj+t? =
3 м
= V₽г cos2 <рвшч + a? sin2
ИЛИ
-Л— = /₽2 COS2 Фном + sin2 <Рком>
*НОЫ
(4.1)
где р=Р1/Р1ном и <x^Q/Qh0№ отно-
сительные нагрузки статора соответ-
ственно по* активной и реактивной
мощностям; созфном—-Pihom/Shom—но-
минальный коэффициент мощности
двигателя.
Из упрощенной векторной диаграм-
мы синхронной машины (см. рис. 1.14)
определяем кратность тока возбужде-
ния по отношению к номинальному:
________— k =
«в
7 В.НОМ
/ l+₽^cos24.n()M4-a2^sln2cp1,t>M +
)/ +2axrisin ф,„,м,
>+^ + 4sil,<fnoM
(4.2)
где сопротивление ха (в относитель-
ных единицах) соответствует насыще-
нию магнитной цепи при холостом хо-
де и номинальном напряжении ста-
тора.
В этой формуле знаменатель пред-
ставляет собой квадрат отношения
номинального тока возбуждения к то-
ку возбуждения при холостом ходе,
т. е.
^В.НОМ _ I ,
I в,х ^в,х
= V 1 + ^+2^sin<P»OM- (4-3)
При режиме с cos<p=l(Q=0) ток
возбуждения в долях номинального
I В.НОМ
1 + РЧ* COSS Фирм
1 + х=+
(4.4)
При некотором значении Ха форму-
ла (4.4) дает минимальное значение
ДЛЯ &в1-
Взяв первую производную dk&i/dxa
и приравняв ее нулю, получим
ха =
1 — Р? cos? фном 4-
(1—Р2 cos2 ФнрМ)24-4Р sin Фном со$а Фирм.
2р- sin фном cos- фцом
Например, для Р = 1 и cos<pHPM—0,8
ПОЛУЧИМ Xd=l,8 И При COS<Phom = 0,9
xd=l,41.
При этом режиме ток статора в
зависимости от активной мощности из-
меняется по закону прямой:
= ₽ cos q>HDM.
/ном
Прн номинальном токе возбужде-
ния /В=^в,ном(^в=1»0) реактивная
88
Таблица 4.1
мощность нз уравнения (4.2) при
А»=1,0
1п _ О' _
1 р.пом Спои
Значения при ОКЗ, равных
0,5 0,7
Способ
определе-
ния
xd s»n Фном
(4.5)
0,77 0,77 0,79 0,79
0,79 0,79 0,79 0,81
0,81
0,84
I
2
где /р.вом —реактивный ток статора
при номинальном режиме; 7Pi—то же
при номинальном токе возбуждения
и активной нагрузке pPiHOM.
Для двигателей с номинальным ко-
эффициентом мощности, равным еди-
нице, получаем бесконечность, так как
51Пфпом=0. Умножая в этом случае
обе части равенства (4.5) на tg <рном и
принимая затем cos (рНом==1,0, нахо-
дим отношение реактивной мощности
к номинальной активной мощности,
потребляемой из сети:
(46)
Т’щом
Ток статора при йв = 1,0
—-— = cos2 <[.„ом ч- (a' sin Ч>,„„)2.
Гном
(4.7)
0,8*
0
0,68 0,68 0,69 0,72
0,69 0,70 0,72 0,76
0,32 0,39 0,47 0,55
0,33 0,41 0,50 0,60
0,73
0,79
0,61
0,67
1
2
1
2
* С целью сохранения логического построения текста
автора во всех последующих расчетах наряду с ко-
эффициентом мощности синхронного двигателя
cos ч’ном_з0,9 сохрзнены расчеты для cos <р ном”О-8-
хотя в настоящее время двигатели с таким номиналь-
ным коэффициентом мощности отечественной про-
мышленностью не выпускаются. (Прим, ред.}
При режиме работы с cos ср =
= созфном, т. е. Pi/Q=tg<pHuM и а=р,
ток возбуждения из (4.2)
. _ / 1+₽M,+2P\,sin’’1™
«Вф — I / ---~—“-----—------,
р 1+ла+21й«пч’в<,м
ток статора из (4.1)
///Мм = ₽;
(4 8)
(4.9)
реактивная мощность
« = С/0юм-₽. (4.10)
При работе с постоянным значе-
нием реактивной мощности, например
при Q=Qhom(«=1,0), ток возбужде-
ния
. Г
«во — 'Ц /
I
* l + 2xdsin<pB1JM + i2
(4.Н)
Определим погрешности, получае-
мые по вышеприведенным формулам,
по сравнению с результатами, получае-
мыми из построения диаграммы Потье
(см. рис. 1.15).
В табл. 4.1 даны значения feBb оп-
ределенные графически по диаграмме
Потье (способ 1) и полученные по
формуле (4.4) (способ 2) для ₽=1,
а при cos фном=0 — для синхронного
компенсатора.
При графическом решении приняты
стандартная характеристика холосто-
го хода н реактивное сопротивление
Потье Лр=0,15.
Из сравнения данных, приведенных
в табл. 4.1, следует, что при значениях
ОКЗ от 0,5 до 1, т.е. наиболее часто
встречающихся в практике, погреш-
ность лежит в допустимых пределах.
Поэтому можно определять для этих
значений ОКЗ кратность тока возбуж-
дения при cos<p==l по формуле (4.4).
В табл. 4.2 даны значения а', опре-
деленные по диаграммам Потье и по
формуле (4.5) для cos(pHoM=0,8 при
I
xd =-----.
d ОКЗ
Таблица 4.2
Ток статора иа основании (4.1) при
Q/Qhom : 1,0 t
///««== t Р‘“^«о1» + 31п'-(р„о„. (4.12)
р Значения а' при ОКЗ, равных Способ определе- ния а.
0,5 0.7 1 1.Б 2
0,75 1,23 1.14 1,14 1.10 1,06 1
1,20 1,15 1,13 1,10 1,06 2
0,5 1,30 1,26 I 23 1,13 1.12 1
1,31 1,28 1,23 1,18 1,13 2
0 1,41 1,33 1,30 1,23 1,17 1
1,44 1,38 1,32 1,23 1,20 2
89
Рис. 4.2. Зависимость реактивной мощности, отдаваемой синхронным двигателем в сеть при
номинальном токе возбуждения, от активной нагрузки:
а — при cos Фцоы’1.0; б =- при cos <pHUM“0,9; е — при Cos ф1ШМ=> 0,8
Из рассмотрения данных, приведен-
ных в табл. 4.2, следует, что оба мето-
да дают практически один и тот же
результат.
На рис. 4Л даны кривые &Bi =
=/в1/4,ном в зависимости от ха при
различных значениях p=Pi/Pi ном ДЛЯ
значений коэффициента мощности,
равных 0,8; 0’9 и 1. Кривые построены
по формуле (4.4).
На рис. 4.2 даны кривые изменения
Q7Qном—ocf для значений cos срним,
равных 0,8; 0,9, и Q'/Pwom для
cos <рном= 1 в зависимости от р для
разных значений Хц.
Из кривых следует, что синхронные
двнгатели с большими значениями ха
имеют более благоприятные характе-
ристики по реактивной мощности, от-
даваемой в сеть при снижении актив-
90
Таблиц а 43
Определяемая величина Значения определяемых величин прн ОКЗ, равном
<1.5 0.7 1 1,5 2
х по диаграмме Потье 0,36 0,44 0.53 0,62 0,64
£ 0,37 0,46 0,50 0,67 0,73
|/1+^+2^5тфВ1Ш
& — *в.х <по диграмме Потье 6=1,0) 0,34 0,27 0,19 0,14 0,12
C0S2 ф <2 v НОМ 0,35 0,27 0,20 0,09
1 + + 2х j sin Ф 1 а 1 d 4 НОМ 0,13
ной мощности и номинальном токе
возбуждения. Однако при увеличении
Xd уменьшается кратность максималь-
ного момента при /в = /в,ном. При на-
личии автоматического регулирования
возбуждения снижение кратности мак-
симального момента в определенных
пределах допустимо.
Для установления наиболее выгод-
ного режима работы синхронного дви-
гателя целесообразно общие потери
активной мощности разделить на две
составляющие, зависящие соответст-
венно от активной и реактивной мощ-
ностей. Для этой цели можно исполь-
зовать приведенные выше выражения
токов статора и возбуждения через
составляющие, определяемые соответ-
ственно по активной и реактивной
мощностям.
В связи с изменением насыщения
при различных реактивных нагрузках
для определения тока возбуждения
целесообразно использовать нижесле-
дующее уточненное по сравнению с
аналитическим (4.2) выражение, осно-
ванное на использовании диаграммы
Потье и характеристики холостого
хода:
4 = + (/.«,., - ^1) . (4.13а)
а Уном
или
*, = *ю + (1-М—. (4136)
а Whom
где a'QH0M=Q'— реактивная мощ-
ность, отдаваемая в сеть при номи-
нальном токе возбуждения и активной
МОЩНОСТИ Р|=Р₽|НОМ.
Изменение реактивной мощности в
зависимости от тока возбуждения из
(4.136)
а = —2— t а' , (4/14)
Сном 1 -^В1
и тогда ток статора при изменяющем-
ся токе возбуждения
------= ]/ ₽?COS2 ч>аы,+
/ном V
+ [ a'(t°~*ln) Г sin2 <Рж,м (4.15)
I 1—1
Квадрат тока возбуждения
' ^а.ноМ / а
। (1 —/?в1)
ч - -------а.
а
Произведем сравнение коэффициен-
тов при р2, а2 и а в уравнениях (4.4),
(4.16а) и (4.2), принимая в уравнении
(4.16а) коэффициенты, найденные с
помощью диаграммы Потье, а в урав-
нении (4.2) — вычисленные по Xd=
= 1/0КЗ. При этом сравнение коэф-
фициентов прн р2 (табл. 4.3) приведе-
но для значений cos <рцОМ=0,8, а срав-
нение коэффициентов при а2 и а
(табл. 4.4)—для значений cos<pHoM,
равных 0,9; 0,85; 0,8, и cos ср=О для
синхронного компенсатора.
В таблицах при cos <pUOM=/=0 даны
соответствующие значения для Р=1,
а при cos <р1юМ=0 — для синхронного
компенсатора.
Из рассмотрения данных, приве-
денных в табл. 4.4, следует, что анали-
тический метод дает в ряде случаев
коэффициенты, существенно отличные
от значений, базирующихся на исполь-
зовании диаграммы Потье. Поэтому
рекомендуется определять коэффици-
еты при а- и а согласно формуле
(4.16а). Коэффициент при р вполне
допустимо определять аналитически,
принимая ха= 1 /ОКЗ.
91
Таблица 4.4
Значения определяемых величин при ОКЗ, равном
с К Определяемая величина 0.5 0.7 1 1.5 2
0,9 * '+*5 '-«Si 58!п'!Фиом + Ч51П<Р.юм 0,053 0,12 0,05 0.10 0,044 0,07 0,044 0,05 0,036 0.03
0,85 '+* (1 - W d+4sin4=MOM 0,076 0,16 0,075 0,13 0,068 0,10 0,06 0,06 0,053 0,05
0.8 ('-W 4»!п*ф„0М l+^ + 2xdsinTBOM 0,10 0,20 0,10 0,16 0,09 0,11 0,06 0,07 0,07 0.05
0 (1 *d 2 • 0,46 0,44 0,39 0,35 0,302 0.25 0,20 0,16 0,15 0,11
1 + xd
0,9 2^Bl (1 - —Лв1) 2хд sin q)HOM 1+*2 + Ч’!пФтм 0,35 0,26 0,35 0,29 0,34 0,30 0,33 0.29 0,31 0,26
0,85 (1 — йв1) %xd s*n Фном 1+*' + 2\,®1Пфвом 0,39 0.28 0,39 0,32 0,38 0,34 0,36 0,33 0,35 0,31
0,8 2йВ1 (1 —Ajbi) 2xd sin <рном 1+^+2х<1япфвом 0,43 0,32 0,43 0,36 0,42 0,37 0,40 0,36 0,39 0,32
0 2йВ1 (1 —- йвх) ^xd 0,43 0,44 0,47 0,48 0,50 0,50 0,49 0,48 0,47 U,44
Таким образом, вместо (4.16а)
можно принять следующее уравнение:
1+^ + 2^5Шфвом
+ / 1 -*rfУК2 + а.(4.16)
\ а( / п.(
Рассмотрим потери мощности в
синхронном двигателе.
92
При номинальном режиме актив-
ная мощность, потребляемая из сети,
^IHDM ~ Риом ^^ПОСТ “Ь +
+ ЛЛ.ЛОМ, (4.17)
где Ргюм — полезная мощность иа ва-
лу; ДРпост — постоянные потери (в ста-
ли и механические); ДРц^вом — потерн
в обмотке статора при номинальном
токе в ней /ном, включая добавочные
потери; ДРв.ном—потери иа возбуж-
дение при номинальном токе возбуж-
дения /в.вом.
Общие потери при номинальном ре-
жиме
удр — р _________р —
НОМ 1 1НОМ 1 ном
~ АРПОСТ + А-Р1М.ИОМ ^^В.НОМ- (4.18)
При нагрузке на валу Р, токе ста-
тора 1 и токе возбуждения 7В, отлич-
ных от номинальных значений, потреб-
ляемая из сети активная мощность
Рх = Р + дрпост + др1М ном /—-—j +
\ *ноы /
—-—у.
\ 'В.НОМ /
Общие потери при нагрузке Р
2ДР = РХ-Р = ДРПОСТ +
+ 1М.В0М (““—) + Л^в.иом (“Т"2 'l •
\ -«БОМ / \ 'В.НОМ /
(4.19)
Заменяя (//7НОм)2 и (7Е//В,ном)2=
—k£ выражениями (4.1) и (4.166),
получаем
ХДР = ЛР„О„ +-----_А±--------- +
Ч-^ + Ч^Ч’вом
| р,
1 +*3+2xdsin<pMOM
+ ДР1М ,ном ₽2COS24>no„ +
+ [*Prr.mMsin’<pB0M + ( 1 ~ У х
х ДР.,Я J а« + а,
(4.20)
или
2ДР = С + Dp2 + Ла2 + Ba, (4.20a)
где
С = ДРпост +
ДРв,ном__________.
1+4 + 2хйз1п<риом
(4-21)
D — ДР1М.НОМ COS2 Фном “Ь
х~, cos2 ф
+ ЛР.Н»,------7----; (4.22)
1+^+4sin’’.!OK
Л ~ А^ш.ном sin2 <РЯок Ч*
+(-4^-)!др--"°“; (423)
g —. %&РВ,НОМ kgl (1 feel) . (4 24}
a'
С — составляющая потерь, ие за-
висящая ог активной и реактивной
мощностей;
£)р2 = £)(Р1/Р)нбм)2 — составляю-
щая потерь, изменяющаяся пропорцио-
нально квадрату активной мощности;
Aa2=A(Q/Qном)_ ~ составляющая
потерь, изменяющаяся пропорциональ-
но квадрату реактивной мощности;
Ba~BQ/QltoM — составляющая по-
терь, изменяющаяся пропорционально
реактивной мощности
Для синхронных компенсаторов
0=0 и
с = ЛРпост + ^Л^.в»и; (4 25)
А = ЛР1Н но„ + ДРВЯВ„ (1 - *B (4.26)
В = 2ДРВ вом квл (1 - Ав1); (4.27)
/в,х — ток возбуждения при холостом
ходе.
Приведенными выше формулами
можно пользоваться и для синхронных
генераторов, принимая
Pi = Р
Р1Н0М Рном
где Р—активная мощность, отдавае-
мая генератором в сеть; РНОм— номи-
нальная активная мощность, отдавае-
мая в сеть.
Потери при различных режимах
работы синхронного двигателя. При
режиме с cos<p=l иа основании
(4.20а) при а=0 с учетом (4.21) и
(4.22) получим
2 ДР = ДРПОСТ + ДР1Мном Р2 cos2 <рьом +
4- ДР
“ в .ном
или, учитывая (4.4),
l+^ + 2xdsln4iI1(1M
(4.28)
ХДР = ДРПОСТ + ДР,
м.ном р2 COS2 <рном +
+ ^в.кОН^- (4-28а)
При режиме работы синхронных
двигателей с cos <р=1 имеет место сни-
жение потерь и нагрева обмоток стато-
ра и ротора по сравнению с номиналь-
ным режимом. Снижение температуры
обмоток дает дополнительное умень-
шение потерь. Если температура обмот-
ки возбуждения при номинальном ре-
жиме равна 95 °C, т. е. превышение
температуры составляет 55 °C (при
номинальной температуре окружаю-
щей среды 40°C), то при уменьшении
тока возбуждения при cos<p=l до
0,7 /в,мм получим температуру обмот-
ки ®=40+55-0,72 =66,9 °C.
Потери в обмотке возбуждения
уменьшатся н составят
-235 + 66>9 0 78 0 91 _0 49 = 0 448
235 + 95 ’ ’
нли 44,8 % потерь мощности при номи-
нальном токе возбуждения.
98
При неизменном токе возбуждения,
равном номинальному,
2ДР = ДРПОСТ + ДЛм.ш», (₽2 cos2 q>H0M +
+ a'2sin2<pn0M) + ДР,.ВО„. (429)
При неизменном cos <p=cos срном
(ct = p) из (4.19) с учетом (4.8)
2ЛР = ДРПОГ:1 +AP1Me„„₽2 +
+ ДРВИм l + p2^ + 2Px^in<|,"-!!“, (4.30)
нли с учетом (4.136)
2ДР = АРООСТ+ДР1М,Н0М ра ~Ь
+ АР,,ИМ. [*и + ]*, (4.30а)
причем обе формулы дают практичес-
ки одни и тот же численный результат.
При неизменной реактивной мощ-
ности (Q=Qhom; а=0,1) можно ис-
пользовать аналитический метод опре-
деления тока возбуждения, а поэтому
на основании (4.19), (4.1) и (4.2) на-
ходим
S ДР = ДРпост -|- ДР1М>ПОМ (р2 cos- <рном +
+ sin2<p„„,,) + ДРВ,Н0М X
х 1 sin ф„„ы - х2 cos2 Ф„ом (1 - ра)
1+х2 + 2х Лпф
(4.31)
При неизменной активной мощно-
сти, потребляемой из сети, и перемен-
ном возбуждении в соответствии с
(4.19) и (4.15) получим
2ДР = ДЄÄ + ДРИОТ {р2 cos2 ф„„„4
+ sin ф-.,..!2) + ДРв ноЛв.
(4
Коэффициент полезного действия
синхронных двигателей
п = --------
1 Р + SAP
Р
(4.33)
При номинальной нагрузке на ва-
лу и номинальном токе возбуждения
Чиом =--------—-----------• (4.34)
Рном + С + С + Л+В
Задача по определению полезной
мощности может быть решена сравни-
тельно просто следующим образом.
Задаемся активной мощностью, по-
требляемой из сети, Р) и для Q=0,t. е.
при созф = 1, определяем /В], в затем
находим реактивную мощность, отда-
ваемую в сеть при номинальном токе
возбуждения /В1НОм (Q=a,QHDM). Опре-
делив затем сумму потерь, находим по-
Таблица 4.5
Режим р 1 0.7S 0.Б 0.35 0,25
Рх, кВт 1048,7 786 524 367 262
SAP, кВт 41,0 34,0 29,0 26,9 26,0
Р, кВт 1008 752 495 340 236
cos ф—1,0 Ч. % 96,06 95,68 94,47 92,65 90,07
0,9 0,675 0,45 0,31 0,22
^в/^В.НОМ ^В,1 0,79 0,71 0,64 0,62 0,60
ХАР, кВт 48,7 45,1 42,4 41,4 40,9
Р, кВт 1000 741 482 326 221
^в—^в.нвм Ч. % 95,35 94,27 91,93 88,70 84,40
Ц 1 0,88 0,77 0,73 0,71
Q/ Сном— 1 1,26 1,44 1,51 1,56
SAP,кВт 48,7 38,3 31,8 29,2 27,2
Р, кВт 1000 748 492 338 235
COS ф—COS <Ркпм ч. % 95,35 95,13 93,94 92,04 89,65
1 0,75 0,5 0,35 0,25
«в 1 0,88 0,76 0,70 0,67
а 1 0,75 0,5 0,35 0,25
ХАР , кВт 48,7 41,5 36,6 34,5 33,6
Р. кВт 1000 745 487 333 228
ч> % 95,35 94,73 93,03 90,60 87,20
1. 1 0.80 0,62 0,54 0,49
1 0,93 0,89 0,87 0,86
94
Таблица 46
0=1; р1= 1048,7 кВт ^в/^в» НОМ'—'^В 2 ДР, кВт Р, кВт п. % а 1111 11 о,79 41.0 1008 96,06 0,9 0 0,8 41,2 1007,5 96,06 0,9 0,05 U,9 44,1 1004,6 95,79 0,925 0,53 1 48,7 1000 95,35 1,0 1,0
*» 0,71 0,8 0,9 1
2Д/>, иВт 34,0 36,1 39,6 44,8
р—U,75, Р, кВт — 752 749,9 748,4 741,2
Pi—768 кВт % — 95,68 95,42 94,97 94,32
I —- 0,67 0,69 0,76 0,86
а — 0 0,39 0,83 1,26
0,64 0,7 0,8 0,9 1
Р=0,5; ТАР, кВт 28,9 31,4 33,0 36,8 42,3
Р, кВт 495,1 492,6 491 487,2 481,7
/\=524 кВт п. % 94,49 94,08 93,70 92,07 91,90
I. 0,45 0,45 0,53 0,63 0,77
а 0 0,24 0,64 1,04 1,44
0,6 0,7 0,8 0,9 1
Р=0,25; ZAP, кВт 21,8 28,0 31,2 35,4 41 ,0
Р, кВт 240 234 230,8 226,6 221,6
Рг= 262 кВт ч. % 91,67 89.30 88,10 86,50 84,4с
I 0,22 0,28 0,41 0,55 0 71
а 0 0,39 0,78 1,15 1.56
лезную мощность и а валу по формуле
P^Pj—ХДЛ
Пример. Синхронный двигатель СДН
1000 кВт, 1170 кВ-А, 509 квар, 1000 об/мин,
cos фнам=0,9, 6 кВ, хц= 1, ДРпост=20,6 кВт,
APim,bdi*=15,6 кВт, Ря.иом=12,5 кВт,
=48,7 кВт, Р*ноы=1048,7 кВт, t>om=*= 95,35 %.
Определить потери, КПД, токи статора и
возбуждения, активную и реактивную мощно-
сти в зависимости от полезной мощности на
валу для режимов работы: cos<p=l, /и=
=/«,ном, COS ф=СОЭ срвоы И Q=Qhom-
В табл. 4.5 приведены данные по всем
рассматриваемым выше режимам.
На рис. 4.3 даны кривые т] в зависимости
от нагрузки для рассмотренных выше режи-
Рис. 4.3. Изменение КПД синхронного двига-
теля в зависимости от,активной нагрузки при
различных режимах
мов и на рис. 4.4 и 4.5 — кривые токов стато-
ра и ротора.
В табл. 4.6 приведены значения полезной
мощности на валу, КПД, тока статора и от-
на валу в различных режимах по реактивной
мощности
Рис. 4.5. Кривые зависимости тока возбужде-
ния синхронного двигателя от активной мощ-
ности на валу при различных режимах по ре-
активной мощности
95
Рис. 4.6. Изменение реактивной мощности и
тока статора синхронного двигателя в зависи-
мости от тока возбуждения при различных
активных нагрузках
даваемой в сеть реактивной мощности в за-
висимости от тока возбуждения при заданной
потребляемой из сети активной мощности.
На рис. 4.6 Даны кривые тока статора и
реактивной мощности в зависимости от тока
возбуждения.
4.2. ВЛИЯНИЕ ИЗМЕНЕНИЙ
НАПРЯЖЕНИЯ И ЧАСТОТЫ СЕТИ
НА РЕЖИМ СИНХРОННОГО
ДВИГАТЕЛЯ 1 * * * * *
Рассмотрим влияние изменений на-
пряжения п частоты на работу синх-
ронного двигателя в установившемся
синхронном режиме при заданных на-
грузке на валу (моменте сопротивле-
ния Мс) н токе возбуждения /в в ре-
жиме, соответствующем номинальным
значениям частоты и напряжения.
При отсутствии воздействий от ав-
томатического или ручного регулиро-
вания возбуждения и при питании об-
мотки ротора двигателя от машинного
возбудителя (генератора постоянного
тока) ток возбуждения двигателя не
зависит от напряжения сети, ио зави-
сит от частоты, поскольку при измене-
нии частоты изменяется частота вра-
щения двигателя и ЭДС Ев его возбу-
дителя. Как известно, у генератора
постоянного тока с параллельным воз-
буждением установившееся значение
ЭДС £в=сс€о2Ф может быть определе-
но графически точкой пересечения ха-
1 Составлено канд. техн, наук А. А. Виноградо-
вым к третьему изданию книги <1963 г.)- В настоя-
щей редвкции внесены лишь непринципиальные из-
менения н формальные поправки, связанные с уточ-
нением содержания, нумерации формул, обозначений
в соответствии с другими разделами книги. (Прим,
ред.)
рактеристики холостого хода £в =
~/(/в,в) при данной угловой скорости
to2=ft/cj0 с прямой £в=гв,в2^вв (без
учета падения напряжения в якоре).
При расположении этой точки в не-
насыщенной части характеристики хо-
лостого хода, чему соответствует ра-
бота с относительно большим сопро-
тивлением Гв.вя цепи обмотки возбуж-
дения возбудителя, изменения ЭДС £в
при изменении частоты будут сущест-
венно большими, чем при работе в на-
сыщенной области характеристики
холостого хода, т. е. при малых значе-
ниях и тем более при закорочен-
ном состоянии регулировочного резис-
тора возбудителя. В последней зоне, в
частности, при форсировке возбужде-
ния возбудителя в случае изменения
частоты сети f=kffBaM можно принять
приближенно EB^kfEBQ, где £во —
значение ЭДС возбудителя при номи-
нальной частоте f0=faOH.
Соответственно ток возбуждения
синхронного двигателя при форсиров-
ке
/,.Ф = « к, 7В>НОМ, (4.35)
гв
где £в,ф — ЭДС возбудителя при фор-
сировке; kB ф = —£в,фо -- = —7-,ф—-
ГВ Jfi.HOM /».яом
кратность форсировки тока возбужде-
ния двигателя в установившемся ре-
жиме при номинальной частоте; 7и,ф —
ток возбуждения двигателя при фор-
сировке.
При рабочем положении регулиро-
вочного резистора, определяющем
/во^/в.иом(^в^1,0), ток возбуждения
двигателя уменьшается более резко,
чем по соотношению (4.35), причем /в
можно определить по значению ЭДС
возбудителя, найденному графически
по характеристикам £B=f (7в,в) и £в =
—Jb.bs /в.в при данном значении сопро-
тивления регулировочного резистора
Гр.р и соответственно гВ1В2:=Л>,р+''в.в.
У синхронных двигателей с воз-
буждением от выпрямительной уста-
новки, питающейся от выводов стато-
ра, при отсутствии трансформаторов
тока, создающих дополнительную
ЭДС, пропорциональную току статора,
а также при отсутствии автоматиче-
ского регулирования возбуждения ток
в обмотке возбуждения двигателя при-
мерно пропорционален напряжению
сети и не зависит от частоты (без
96
учета падения напряжения на сопро-
тивлениях выпрямителя). Действитель-
но, среднее значение выпрямленного
напряжения при частоте и
любой схеме выпрямления можно оп-
ределить следующим образом
L,/. « -Г~‘ — f COs(2nfe,X
Г"‘т -г’®”
X t/BOMsin — = fe„ г/ердем. (4.36)
m
Здесь Л=1/А:;/иом — период перемен-
ного тока;
jy тт/ТЦдом
^ср.ном 1,111
fn
— среднее значение выпрямленного
напряжения при номинальном напря-
жении статора L/HOm (фазное — в схе-
мах с нулевой точкой и линейное —
при мостовых схемах); т — число
пульсаций кривой выпрямленного на-
пряжения за период переменного то-
ка, n-i — коэффициент трансформации
выпрямительного трансформатора;
kR~ отношение тока возбуждения к
номинальному при номинальных на-
пряжении и частоте питающей сети.
Ток возбуждения двигателя
!В ~ ku = ka /л вом. (4 37)
где 7ИС* определяется соответствующей
характеристикой механизма.
Результирующий магнитный поток
Фс в воздушном зазоре н потери вста-
ли статора синхронного двигателя при
изменении напряжения и частоты се-
ти определяются приближенно так же,
как и у асинхронного двигателя, т. е.
по (3.2) и (3.23).
Оценка влияния частоты на нагрев
обмоток синхронного двигателя может
быть произведена согласно (3.24), так
же как и для асинхронного двигателя.
Рассмотрим влияние напряжения н часто-
ты на другие параметры режима (ЭДС ста-
тора, намагничивающий ток, синхронный вра-
щающий момент, ток статора, реактивная
мощность), имеющие большое значение для
оценки статической устойчивости двигателя в
его характеристики как источника реактивной
мощности.
Электродвижущая сила статора и намаг-
ничивающий ток. При холостом ходе синхрон-
ной машины ЭДС статора равна и оп-
ределяется только током возбуждения. При
номинальной частоте вращения ротора в соот-
ветствии с материалом § 1.2 £,а может быть
найдена следующим образом (в относительных
единицах):
При наличии устройств автомати-
ческого регулирования возбуждения
(АРВ) зависимости тока /в от напря-
жения н частоты сложнее, чем пока-
занные выше в (4.35) и (4.36). Они
определяются прежде всего принятым
законом регулирования. Как правило,
различные типы АРВ синхронных дви-
гателей имеют в той или иной форме
органы, обеспечивающие увеличение
тока возбуждения прн снижении на-
пряжения на выводах статора.
Синхронная угловая скорость рото-
ра двигателя изменяется пропорцио-
нально частоте, т. е.
С02 = «1 = kf со0,
а поэтому полезная мощность на валу
Р = <о2Мс = kr Мс, (4.38а)
или в относительных единицах
<4-386)
“ном
' Еда xad
£90» — . . — f
‘-'ном Aad<« *в.х
______________________ xad ^’в
A'ado ^в.х
а при угловой скорости (i)2—ft/toa
. xad /в/
EK>t = к/ ---------------------------
xadn • в,Х
Здесь *ed и Xado определены
калькой частоте. Отношение сопротивлений
xOd/xai!0=fep характеризует степень насыще-
ния при холостом ходе и токе возбуждения /а
по сравнению с насыщением при токе /в,х, со-
ответствующем £‘о=^нем при номинальной
частоте вращения. Согласно (4.39) оио равно
отношению ординаты характеристики холосто-
го хода в относительных единицах при номи-
нальной частоте к абсциссе, равной току воз-
буждения в долях тока холостого хода, а по-
этому кривая х) или 6ц—ф(Ё«Л
легко строится по конкретной (для данного
синхронного двигателя) или стандартной ха-
рактеристике холостого хода. Величина ft t
уменьшается с ростом /и, причем для Д =
=/в.х ftp =1,0. По характеристике холостого
хода синхронной машины можно определить
связь между ЭДС Е^ от результирующего по-
тока Фо в воздушном зазоре при нагрузке
двигателя и «результирующим током возбуж-
дения» /п,ив8*=/в.реа//в,х, определяемым гео-
метрической суммой векторов собственно то-
ка возбуждения и реакции якоря, приведен-
ной к цепи возбуждения. Соответственно при
частоте сети согласно (4.40)
е> . xad ^и.рез
х л — -
xudo • в.х
(4.39)
(4.40)
при
номи-
имеем
(4 40а)
7-649
97
С другой стороны, по упрошенной вектор-
ной диаграмме (см. рис. 1.14) при любых на’
пряжении и частоте
^.“/(^^Ф + /,Л,хо)’+(^со=Ф)= ,=
= К*„ + 2Л„4;/ x„sln ф(4.41а)
В соответствии с равенствами (4.40а) и
(1.57) ток Zo6. =/в,Рев/х<1<1о/вд можно рассмат-
ривать как намагничивающий ток синхронной,
машины, определенной со стороны статора.
В именованных единицах этот ток
/м = '“,Р/ (4.42)
xado
В связи с большим значением намагни-
чивающего тока синхронной машины измене-
ние магнитного потока машины и соответст-
венно насыщения магнитной цепи при откло-
нениях напряжения я частоты от номинальных
величин влияет иа ток статора и реактив-
ную мощность более существенно, чем у асин-
хронного двигателя. Используя при оценке
изменения Zo6 приближенное равенство Е& as
^U=ku(JHou и принимая Ещ =Е б, получаем
из (4.40а)
(4 43)
Xad
откуда следует, что намагничивающий ток
увеличнваетси при уменьшении частоты и ku=
=const, причем не только в связи с уменьшени-
ем kj, ио также и из-за уменьшения хаа с
ростом насыщения, обусловленным увеличе-
нием магнитного потока [см. (3.2)}.
Уменьшение напряжения при номиналь-
ной частоте, наоборот, приводит к снижению
^00 и соответствующему повышению xa(j по
сравнению с номинальным режимом. Отсюда
следует, что определение тока статора и ре-
активной мощности в зависимости от напря-
жения и частоты при постоянных сопротивле-
ниях хеа и Xd=Xad+x о может привести к су-
щественным погрешностям по сравнению с
действительными значениями, найденными с
помощью диаграммы Потье или расчетно-гра-
фическим методом, при котором используется
предварительно построеннаи кривая йд =
=<p(Ee.) = <p(Es )
Заменяя в (4.41а)
UI sin <р
ku 1. sin ф = ----------------- sin фвоМ =
О'ном 'ном 5111 Фнам
с .
— _ SI п <РнОМ — И Sin *₽ном
Чном
1 Г/Pl COS Фирм
Лц 1А Аном
или
/; = Ц- (Р2 cos2 фном + aS sin® фиом). (4.44)
найдем выражение ЭДС Е через активную
и реактивную мощности статора:
£«.=V *;+2*)*<г“!'пФ.га,+
J (02 cos2 ф|1Ом + a? sin? <рвом).
(4 416)
Электродвижущая сила Еч0, обусловлен-
ная током возбуждения, может быть опреде-
лена аналогично ЭДС Е^ при замене сопро-
тивления рассеяния хс на синхронное индук-
тивное сопротивление по продольной оси Xd
(с учетом насыщения):
= 1 *« + 2*,^“51Пф„оМ +
(Р2 cos2 Фч™ + “'sin“ • I4’45)
Синхронный вращающий момент. Измене-
ние напряжения и частоты влияет иа электро-
магнитный момент двигателя, определяемый
формулой (1-41) или в относительных едини-
цах при t/i=ftuL/BoM н замене Xd иа kfXd, а
также xq иа
Л4ном Дном
5[п6+
Риом [ hjxd
/ 1 I \ 1
4-----(-----—------I sin 26 |, (4.46)
2fe* \ xq xd / J
где Eqf* определяется согласно (4.40).
При понижении напряжения можно пре-
небречь реактивной составляющей момента,
так как при номинальном напряжении она не
превышает 0,3—0,4 и уменьшается пропорцио-
нально квадрату напряжения. Тогда электро-
магнитный момент будет определяться только
первым слагаемым правой части (4.46). Его
максимальное значение можно записать в сле-
дующем виде:
•, ^воМ / Eqj* ku \ ___
ттпах*~ 9 —
Дном k]xd /
1/ /в,ном \ _.
Чном C0S Фном \ Zb .ном ZB X у
Глохнем* ^нас . » (4.47)
«/ 'в,ном
ГДе
^’рном ______4>,ном_____
/Итпаянсм* ~ " .
лДыоЫ X В.Х *1нОМ COS Фном
_____£?ном*_______
*<!ном Чисм C(-)s *Рном
(4.48)
— максимальный электромагнитный момент
при номинальной частоте, номинальном напря-
жении на выводах статора и номинальном то-
ке Возбуждения /в.вои; А*циом =Хо<1ном/Ха40,
xjbcm «Хцйиш + х о , £,ном — соответствен НС ко
эффицнеит насыщения, синхронное сопротив-
98
.пение и ЭДС, обусловленная возбуждением
прн номинальных условиях соответствующие
углу бтах (см. § 1.2); , Хц — коэффициент
насыщения и синхронное сопротивление по
продольной осн ротора, соответствующие ра-
боте двигателя прн неномииальных условиях
(ftU5^1,0; А/чМ.О; /bjWb.hom) с определенным
углом С;
, XdHDM
«нас — ,
Яцном
xadWM “Н хо
xad + хо
xad xado
xado xadehK
1 *o /*аДяом
H-xo/xfld
— полный коэффициент насыщения, определя-
емый по величинам, соответствующим рассмат-
риваемым режимам работы двигателя, исхо-
дя из характеристики холостого хода при ча-
стоте kffBaK и значениях ЭДС Eft (4.41а) или
(4.416) для установившегося режима, причем
Хай находится ПО сопротивлению Xudo:
xado* —
*tfHOM Хс______* ___ *с
с ~ ОКЗ с
Из выражения (4.48) следует, что макси-
мальный момент, а следовательно, и перегру-
зочная способность двигателя уменьшаются
при увеличении синхронного сопротивления,
так как кратность тока возбуждения при но-
минальной нагрузке к току возбуждения хо-
лостого хода возрастает непропорционально
увеличению х^. Так, при йцНОМ=1,0 н x<ihom=
=0,5 отношение 4 яомАМ110М/7влл:йном=2,72
при cos фном=0,8, а при х<1=2 равно 1,36.
В результате вместо (4.46) получим
k If
^а* ^тажноМ* "7~ &нас ~~Z s>n б. (4.49)
«7 'н.ном
Если не учитывать сопротивление рассея-
ния, особенно прн малых ОКЗ, то Авас^ЪО, и
тогда из (4.49) находим
^а* Мтпахвом* “7 Z S1B 6, (4.49а)
«/ 1 в.ном
или из (4.386)
1st
^тпахноМ# ZT sin 6 =
'♦’ном «в.ньм
= ^тах* sin 6 - (4.496)
Из (4.496) следует простое физическое
объяснение характера изменения максималь-
ного электромагнитного момента при любых
значениях напряжения, частоты и тока воз-
буждения: максимальный электромагнитный
момент пропорционален магнитному потоку в
воздушном зазоре и кратности тока возбужде-
ния синхронной машины (по отношению к но-
минальному току возбуждения).
Принимая приближенные зависимости то-
ка возбуждения от частоты и напряжения со-
гласно (4.35) и (4.37), нетрудно найти сле-
дующие приближенные значения максимально-
го электромагнитного момента при £вас = 1,0:
^шах* А^тпажноМв ^в,ф (4.50)
прн коллекторном возбудителе постоянного
тока на одном валу с двигателем н форсиров-
ке возбуждения;
Мтпах* ~ ^тахиом, “ (4.51)
<4
при системах с самовозбуждением.
Фактически благодаря увеличению насы-
щения, а также более резкой, чем по (4.35),
зависимости тока возбуждения от частоты
электромагнитный момент при машинном воз-
буждении не останется постоянным при сни-
жении частоты, а будет уменьшаться.
Учитывая снижение ЭДС генераторов
электростанций при уменьшении частоты и
принимая в худшем случае получаем,
что снижение максимального электромагнит-
ного момента синхронного двигателя пропор-
ционально частоте при всех вышеуказанных
системах возбуждения. Рассмотренные зависи-
мости электромагнитного момента от напря-
жения н частоты наглядно показывают поло-
жительную роль форсировки возбуждения не
только генераторов, но и синхронных двига-
телей.
Установившийся синхронный режим воз-
можен при равенстве электромагнитного мо-
мента двигателя полному моменту сопротив-
ления:
М р<д Р + 'Ц’ми + ДР.
СХ kt Ц, kf <1>„
или
М „ М<* _ Р + ДРмех+ДРе
с^* А1ноМ Рном
А/ РНОМ Л/ РНОМ
На основании (4.49) н (4.52) найдем при-
ближенную (без учета реактивного момента)
зависимость угла 6 от активной нагрузки дви-
гателя:
Pi*l ял t , 4/ . R
as Мтахиом* ku «нас . s,n О»
г ном * в.ном .
(4.53)
откуда видно, что с понижением напряжения
прн неизменном токе возбуждения угол 6 бу-
дет увеличиваться.
При некотором значении напряжения
электромагнитный момент станет меньше мо-
мента сопротивления и произойдет выпадение
двигателя из синхронизма.
Минимальное значение напряжения, при
котором максимальный электромагнитный мо-
мент прн номинальном токе возбуждения равен
моменту сопротивления, может быть определе-
но из (4.53) прн k/= 1,0, /в=/в.ном И ^нас = 1,0:
Р1 9
(ku)min ~ лл р —
/Птпахном* • ном
__________Р________
Мтахном* Реом
где Р — мощность иа валу; Мщахном. — значе-
ние максимального синхронного момента по
каталогу
Результаты испытаний показывают, что
эта формула дает хорошее совпадение с опы-
том. Так, для двигателя типа СМ-375/24-48
7*
99
800 кВт, cos <рвом=0,75 Метвхном*»2,4 прн на-
грузке на валу 850 кВт по формуле (ku)rnin =
= 0,443, а из опыта (А« ),„,„=0,40 Соответст-
венно при нагрузке, равной 0,54 номинальной,
но формуле (*u)miti=0,2 и из опыта
(ftu)m£n=0,I6.
Некоторое расхождение между расчетны-
ми и опытными значениями объясняется тем,
что в действительности &Вас>*1Х) благодаря
уменьшению насыщения магнитной цели дви-
гателя прн снижении напряжения.
Как уже отмечалось, увеличением тока
возбуждения можно повысить устойчивость
работы двигателя, так как максимальный мо-
мент двигателя изменяется пропорционально
току возбуждения.
Если подставить в приближенное выра-
жение (4.53) значение Мы,нам* согласно (4.48),
то получим 1
а ^ОномАы^НаС ^nf <.
-------- = р _--------------------1— sin О,
^IHOM *dH0W COS фном /в.НОМ
(4.54)
а при б=л/2, Авас=1Д а также /в;=/»>,ном на-
ходим
f. V ₽хйном COS фном кг
(Мт/ п = ---------- (4 - 55)
£ЧНОМ*
Ток статора и реактивная мощ
иость. Изменение напряжения и час-
тоты вызывает изменение активной и
реактивной составляющих тока стато-
ра. Как видно из (4.44), при заданной
нагрузке на валу активная составляю-
щая изменяется обратно пропорцио-
нально напряжению сети, реактив-
ная— по более сложному закону, так
как при изменении напряжения изме-
няется а. Для определения закона из-
менения реактивной составляющей то-
ка статора с учетом изменения насы-
щения воспользуемся равенствами
(4.40) и (4.45), из которых получим
(т’М' = (^r)T*“+2*/x"sin4’“-“+
\ 'В,НОМ ] \ Ku J р
к ХГ
+ (Р2 COS2 <роо„ + a2 Sin' <рним)
sin <p,ioM а + Ф^Фном а2
*/ Л;
*асоз2ч>|
₽2 * • (4 56)
1 Расчетное з ни чем не максимального момента по
формуле (4.48) является завышенным против факт»
ческого, получающегося прн учете потерь активной
мощности в статоре. Поэтому для установившегося
режима практически PilaffцОЫ’-^а^ причем Л1а*
определяется, правой частью равенства (4.48) по ве-
личине Мтих ном*’ЧТои₽1|ВОД,1Т к исключению КПД
Ч нз (4.53) и равенству (4 64}.
После решения (4.56) относитель-
но а найдем реактивную мощность в
долях номинальной реактивной мощ-
ности:
Xd sin Фном
(4.57)
где
^=-^-И *вк = -^с_.
•'в.ном ’в,ном
Уравнение (4.57) наглядно показы-
вает, что при понижении частоты и
неизменном токе возбуждения реак-
тивная мощность, выдаваемая в сеть,
уменьшается. Так как процесс сниже-
ния частоты в энергосистеме практиче-
ски всегда сопровождается понижени-
ем напряжения, то прн наличии авто-
матического регулятора возбуждения
ток возбуждения будет увеличиваться,
соответственно возрастет и реактивная
мощность, выдаваемая в сеть.
Для определения реактивной мощ-
ности прн отклонениях частоты и на-
пряжения с учетом изменения насы-
щения при заданном токе возбужде-
ния /е (при номинальных напряжении
и частоте) можно применить расчетно-
графический метод при следующем по-
рядке определения а: а) строится кри-
вая ku =xad/Xado=f(EG) по характе-
ристике холостого хода при номиналь-
ной частоте, которая одновременно
представляет собой зависимость Лц«=
=f(E у /kf) при частоте, отличной от
номинальной; б) при данных ku и kf по
значению E&f/kj при а=0, найденному
согласно (4.416), предварительно оп-
ределяются kn и Xd=kyx Xado+Xc, а за-
тем по формуле (4.57) при известных
km и Лв,х рассчитывается значение o&i;
в) по cci определяется [Еъ fkf) по фор-
муле (4.416) при заданной активной
нагрузке ₽ и по кривой находят фак-
тическое значение k^i ; г) при найден-
ном значении k Ц1 рассчитывается по
формуле (4.57) действительное значе-
ние реактивной мощности а; д) в слу-
чае сс^сц следует построить кривую
Ее,lkf—q>(ас-г) на основании (4.416)
для значений аст («реактивной мощ-
ности со стороны статора»), близких к
ctj, и по соответствующим и ха по-
строить кривую а=ф(а<,т) на основа-
нии расчетов по формуле (4.57).
Поскольку при установившемся ре-
жиме должно быть a = aCr, то дейст-
юо
Рис. 4.7. Номограмма для расчета
реактивной мощности при изме-
нениях напряжения и частоты с
учетом изменения насыщения син-
хронного двигателя с cos<pHoM=
=0,8; ОКЗ=1,0; х^О.15; с=
=1,2 при Р=-1,0 и feK= 1,0:
Н — точки номинального режима
вительное значение а най-
дется в точке пересечения
кривой а=ф(аст) с пря-
мой а=аст, проведенной под
углом 45° к оси аст (при
одвнаковых масштабах по
осям аст и а). Для облегче-
ния и наглядности решения
целесообразно использовать номограм-
му, подобную изображенной на рис.
4.7, где кривая ku построена по стан-
дартной характеристике холостого хо-
да, а кривые Ев /£/ = ф(аст) показаны
при xo=0,15 и cos <рном=0,8. Кривые
а=ф(аст) построены для двигателя с
ОКЗ = 1,0 при с=1,2.
При расчетах без учета изменения
насыщения обычно принимают ki;, ==
= 1,0 и постоянное значение ха=хаР.
В этом случае при а=р = 1,0 и fe« =
=Л/=1,0 из (4.56) найдем для номи-
иального режима «расчетное значе- кость
ние» тока холостого хода по отноше-
нию к номинальному току возбужде-
ния:
L р = — -
Е 1 + ^<!р5‘пЧ>«0„ + 4р
что совпадает с (4.3). Тогда расчет-
ное значение реактивной мощности
согласно (4.57)
1 М* га хо
I/ I -- — ФХ<’Р COS фном)2-—
t
*dp sin <рнсм
+ 4m si“’ х^)~
— (pXdp COS Фном)2—
xdp sin Фном
(4-58)
и при номинальных напряжении и час-
тоте, а также Лв=1 (/е=/в.ном) полу-
чнм а' согласно (4.5).
Нетрудно видеть, что при наруше-
нии устойчивости двигателя, учитывая
(4.50) и (4.54) при 6=л/2 и Ео&ж=
=zk дном имеем
Pxdcos<pBOM =
^)АНОМ Xd fyt *dBOM kU kBf
k К V"
b,x "циои' 4
^a,x
(4.59)
а поэтому из (4.57) реактивная мощ-
П,п1п =------7--------------
kf ха sm <рном
' у см8 Фирм (4 g(i)
J fe/sin<pn0M
т. е. вблизи нарушения синхронной ра-
боты двигатель забирает реактивную
мощность из сети, тем большую по аб-
солютному значению, чем ниже час-
тота.
Подставляя значение а по формуле
(4.57) в равенство (4.44), находим ре-
активную составляющую тока ста-
тора:
г ___ a sin фВрм ____
р ~ ~
| /7*4 у № CPS фному _
(4-61)
Возможность работы с отстающей
реактивной мощностью, т. е. в режиме
иедовозбуждения, является весьма
101
важной для регулирования напряже-
ния. При таком режиме ток статора не
должен превышать номинальный ток
при необходимом запасе устойчивости,
определяемом отношением максималь-
ного момента синхронного двигателя к
моменту на валу.
Заменяя в (4.59)
kBf
. — Рм
*в,х xd cos фном
и принимая условие устойчивости
РМ/Р = *заП> 1.0.
получаем минимальный допустимый
ток возбуждения при коэффициенте
запаса устойчивости £3ап:
feu У _ /в/ __ Pfeaan xdcos Фном
fee.x /в,х
и соответствующую реактивную мощ-
ность нз (4.57)
— ₽*d cos q>H0M Лзвп — 1
fe/
a — — ——------------:,
xd s*n Фиом
(4.62a)
или при номинальных напряжении и
частоте (£u=£f = l,0)
а 1 PXdCOS %гом ^'^зап.ном — 1
xd sin Фном
(4.626)
где ^звп.ном определен для £« = 1,0 и
£,= 1,0.
Коэффициент запаса зависит в зна-
чительной степени от характера на-
грузки и системы автоматического ре-
гулирования возбуждения. Если син-
хронный двигатель имеет только ре-
лейную форсировку возбуждения, дей-
ствующую при снижении напряжения
примерно до 0,85 номинального, то за-
пас устойчивости должен быть принят
с учетом уменьшения перегрузочной
способности двигателя из-за уменьше-
ния напряжения. При спокойной
нагрузке можно для этого случая при-
нять запас устойчивости £запном = 1,1/
/0,85 = 1,3.
Прн данном запасе устойчивости
реактивная мощность, потребляемая
синхронным двигателем из сети при
работе с недовозбуждением, в значи-
тельной степени зависит от величины
синхронного сопротивления ха.
По результатам расчетов согласно
формуле (4.626) при x<i=l/OK3 =
=const и £з£ш,ном=1,2 на рис. 4.8 no-
строены кривые Q/Qhom—|сс] в зави-
симости от ха при различных активных
нагрузках р для двигателя с
cos фном=0,9.
Предельная потребляемая двигате-
лем реактивная мощность должна
быть ограничена в длительном режиме
работы таким образом, чтобы ток ста-
тора ие превышал номинального зна-
чения, т. е. из (4.44) при /* = 1,0
, — Р2С052фноМ
'пред
sin фном
(величины «пред указаны на рис. 4.8).
Рассмотрим на конкретном приме-
ре изменение реактивной мощности и
тока статора синхронного двигателя с
машинным возбудителем при измене-
нии частоты и напряжения.
Пример. Определить зависимость реактив-
ной мощности и тока статора от частоты и на-
пряжения при активной нагрузке £=1,0 для
синхронного двигателя с cos (рВОм=0,8, ОКЗ =
= 1,0, принимая xff=0»15 н с—1,2, а следо-
вательно, Хагю= 0,875. Положение регулиро-
вочного резистора возбудителя соответствует
поминальному току возбуждения при номи-
нальной частоте вращения.
В результате построения диаграммы Потье
или расчетно-графическим методом получено
Л1
*pdHOM
+ *Лом
0,895
К1+2-0,933-0,6 + 0,933?
= -—-=0,518,
1,93
где Хсйвом и Хйном=Хайвом+х0 —соответствен-
но взаимное и полное синхронное индуктивное
сопротивление по продольной осн ротора при
номинальном режиме двигателя (свном. =
и kу—0,895).
Рис. 4.8. Кривые зависимости потребляемой
реактивной мощности от сопротивления ха
для синхронного двигателя о cos(pBnM=0,9 при
минимально допустимом токе возбуждения
102
Рассмотрим следующие условия: 1) изме-
нение частоты на 10 % (1,0>A!j>019) при но-
минальном напряжении (Л«=1,0); 2) измене-
ние напряжения пропорционально частоте,
т. е Аи=А/ в тех же пределах изменения ча-
стоты; 3) изменение напряжения в пределах
?,0>AtK^0,9 прн номинальной частоте.
Режим 1 (йц=1; A>/=var). Принимая
находим по формуле (4.57)
а = 1,67
kfXA
И по формуле (4.416)
А _
ki
J 1+0,0144*1 ;
~У +—ап-0,0081а-,
Режим2 (£«=£/):
«=1.67[|Л,72*;(^-)г-0,64-^];
Kj V kj kf k‘
Режим 3 (fy = l; fen=var). При feB = l
E = I’67[]A^(y-0.64-^j'.
^/^•^+0.^+°-^.
Ток статора во всех режимах по формуле
(4.44) при Р= 1.0
/, = -!— К 0,64 + 0,36а=
Ки
Результаты расчетов для характерных зна-
чений ku и kf. равных 0,9 н 0,95 (определение
а в этих случаях отражено на рис. 4.7), при-
ведены в табл. 4.7. Там же для сравнения да-
ны значения реактивной мощности и тока ста-
тора, полученные при постоянном xd=I/OK3=
= 1,0 и feu = I,0 (в этом случае feB1I= 1/1,79=
=0.56).
По результатам расчетов на рис. 4.9, а и б
построены кривые зависимости реактивной
мощности и тока статора от напряжения и
частоты при рассмотренных здесь режимах.
Штриховыми линиями отражено изменение со-
Рис. 4.9. Зависимость реактивной мощности
(о) и тона статора (б) синхронного двигате-
ля от частоты и напряжения:
! — Аи = 1,0 и fcy*=var; 2~ 3 — Ау=1,0 и
/?и =var; штриховые линии показывают изменение
<?/<2Н0М при x.d --I/O КЗ-const
ответствующнх величии, рассчитанных при
=1,0, №=1,0 и 1/Аи.х=1,79. В этом случае
а=1,67 | /3,2*р“ —0 64 —-у]-
Проведенные расчеты наглядно по-
казали весьма неблагоприятную зави-
симость реактивной мощности от час-
тоты при отсутствии АРВ: прн пони-
жении частоты на 5 % и номинальном
напряжении реактивная мощность, от-
даваемая двигателем в сеть, уменьша-
ется на 30 %, тогда как при понижении
напряжения на 5 % реактивная мощ-
ность немного больше номинальной.
Однако на основании результатов, по-
лученных в данном диапазоне измене-
ния частоты и напряжения, нельзя в
общем случае говорить о том, что по-
ведение синхронной машины при сни-
жении частоты и неизменном напряже-
нии соответствует ее поведению при
повышении напряжения и постоянной
частоте. Дело в том, что при меньших
напряжениях реактивная мощность
уменьшается, а следовательно, оба
Таблица 4.7
1 № п/п. 1 Режим »« xd ^HOM
Jtrf=var "rf-'-o x^=var ^=1.0
1 *„=1»о 0,95 I.o 0,88 0,92 0,7 0,75 0,904 0,918
kf—yiar 0,9 I о 0,85 0,894 0,35 0,484 0,827 0,85
2 ku=kf 0,9 0,9 0,924 0,959 0,57 0,517 0,965 0.953
0,95 0,95 0,91 0,945 0,78 0,755 0,973 0,967
3 fe/=l,0 I 0,9 0,95 0,981 1,08 0,98 1,14 1.1
*„ -var I 0,95 0,925 0,96 1,05 0,996 1,07 1,05
103
фактора (понижение частоты и напря-
жения) приводят к снижению реактив-
ной мощности, отдаваемой двигателем
в сеть. Как следует из табл. 4.7 и рис.
4.9, а, одновременно изменение часто-
ты и напряжения по закону ku=ki при-
водит к некоторому повышению реак-
тивной мощности. Однако такое одно-
временное изменение напряжения и
частоты нельзя признать желатель-
ным, поскольку это вызывает сниже-
ние максимального электромагнитного
момента [см. (4.48), (4.50) и (4.51)],
в следовательно, ухудшает условия
устойчивости двигателя.
Расхождение между значениями
реактивной мощности, найденными с
учетом и без учета изменения насыще-
ния (прн Xd=l/OK3), легко объясня-
ется тем, что в случае пониженной час-
тоты магнитная цепь синхронной ма-
шины в действительности является
более насыщенной, чем прн расчете по
хй=1/ОКЗ, а в случае пониженного
напряжения при номинальной частоте,
наоборот, магнитная цепь является ме-
иее насыщенной, чем это принимается
по расчету с хд=1/ОКЗ. С уменьшени-
ем ОКЗ разница между результатами
ио точному н приближенному расчет-
ному методам уменьшается.
Работа при приведенных в рассмот-
ренном примере относительно боль-
ших снижениях частоты обычно крат-
ковремениа и наблюдается лишь в те-
чение времени работы автоматов
частотной разгрузки. Поэтому рас-
смотрим более подробно режим син-
хронных двигателей при понижениях
напряжения сети. В частности, оценим
влияние напряжения, изменяющегося
в широких пределах, на реактивную
мощность, выдаваемую двигателем в
сеть при постоянном значении тока
возбуждения.
Сравнение результатов при номи-
нальном токе возбуждения, получен-
ных по формуле (4.58) при хй=0,8/
ОКЗ, с данными, полученными из
диаграммы Потье (рис. 4.10), показа-
ло, что при ОКЗ =0,5 и 1,0 результат
получается практически одинаковый
при снижении напряжения до feu=0,8;
при более глубоких снижениях напря-
жения формула (4.58) дает несколько
преуменьшенное значение. Так, если
при ОКЗ=1 и ^=0,6 по формуле
имеем сср=0,75, то с учетом изменения
насыщения а=0,8. При ОКЗ = 1,5, на-
против, погрешность несколько выше в
Рис. 4.10. Кривые зависимости реактивной
мощности от напряжении при номинальном
токе возбуждения (йв=1,0) и ₽= 1,0 для син-
хронного двигателя с cos фНсм=0,8:
------- —по формуле (4 58) при х—0,8/0 КЗ;
----— — ПО Диаграмме Потье
Рнс. 4.11. Изменение реактивной мощности в
зависимости от напряжения при кратности
тока возбуждения Л’в.ф=1,5 для синхронного
двигателя с созфИОи=0,8 прн р= 1,0;
—------По формуле (4.Б8);--------По диаграмме
Потье
области меньших снижений напряже-
ния.
При значениях тока возбуждения
больше номинального, если принять
Xd=l/OK3, и напряжениях меньше
0,8 f/ном погрешность лежит в допусти-
мых пределах. Для иллюстрации иа
рис. 4.11 и 4.12 даны зависимости
Q/QHoM=f(ku) при кратностях тока
форсировки возбуждения Лв,ф=1,5 и
£в.ф=2, построенные по формуле
(4.58) при Xd = l/OK3 и полученные из
диаграммы Потье. Погрешность уве-
личивается с увеличением ОКЗ, но при
напряжениях порядка 0,8—0,85 номи-
нального и ниже результаты расчетов
по формуле (4.58) получаются практи-
чески приемлемыми.
104
Из вышеизложенного следует, что
изменение реактивной мощности, вы-
даваемой синхронным двигателем в
сеть при снижении напряжения сети,
существенно зависит от ОКЗ и кратно-
сти тока возбуждения. Например, если
при ОКЗ = 1,5 и отсутствии форсиров-
ки возбуждения реактивная мощность
при снижении напряжения до 0,8 но-
минального увеличивается (рис. 4.10),
то при ОКЗ=0,5 реактивная мощность
при снижении напряжения сети все
время уменьшается. В последнем слу-
чае при снижении напряжения до 0,7
поминального отдаваемая в сеть реак-
тивная мощность уменьшается почти
вдвое, т. е. практически так же, как и
у статических конденсаторов. На это
свойство синхронных двигателей впер-
вые обратил внимание канд. техн, на-
ук Л. В. Литвак.
Таким образом, при отсутствии ав-
томатического регулирования возбуж-
дения синхронные двигатели с ОКЗ<1
имеют неблагоприятные характеристи-
ки по реактивной мощности. При на-
личии автоматического регулирования
возбуждения, реагирующего на вели-
чину напряжения, ток возбуждения
будет увеличиваться при снижении
напряжения. Если понижение напря-
жения имеет длительный характер, то
увеличение тока возбуждения выше
номинального недопустимо по услови-
ям нагрева. При кратковременных по-
нижениях напряжения, вызванных ко-
ротким замыканием или какой-либо
другой причиной, должна действовать
форсировка возбуждения двигателя,
обеспечивающая увеличение тока воз-
буждения до максимально возможно-
го (потолочного) значения.
При одной и той же кратности тока
при форсировке возбуждения по отно-
шению к номинальному току реактив-
Рис. 4.12. Изменение реактивном мощности в
зависимости от напряжения при кратности то-
ка возбуждения АПф=2,0 для синхронного
двигателя с costpHOM=0,8 при р —1,0
пая мощность увеличивается тем боль-
ше, чем больше ОКЗ. Для получения
той же кратности реактивной мощно-
сти в случае меньшего ОКЗ необходи-
мо увеличить кратность тока возбуж-
дения прн форсировке, что следует
учитывать при проектировании син-
хронного двигателя.
При повышении напряжения выше
номинального и постоянном значении
тока возбуждения будут уменьшаться
активная и реактивная составляющие
тока статора и полный ток статора, а
следовательно, и потери в обмотке ста-
тора. Потери в стали статора будут
увеличиваться. Так как потери в меди
статора превышают потери в стали, то
КПД синхронного двигателя при по-
вышении напряжения будет выше.
Для того чтобы избежать увеличе-
ния потерь в стали при работе с на-
пряжением выше номинального, целе-
сообразен режим работы с иедовоз-
буждением. В этом случае ЭДС стато-
ра Ес будет меньше напряжения на
выводах двигателя на потерю напря-
жения в реактивном сопротивлении
рассеяния обмоткн статора.
С достаточной для практики точ-
ностью эта ЭДС определяется форму-
лой
£ — Ь ___X ____
ки Л(
$Н0М Ьц
= k *p<?Sinq>"OM
&U Оном
Из уравнения (4.62а) следует, что
при напряжении Аи=1,1 при том же
запасе устойчивости потребляемая ре-
активная мощность может быть боль-
ше, чем прн работе с номинальным на-
пряжением. Прн р = 1 за счет умень-
шения активной составляющей тока
может быть допущено Q>QHom для
Xd^l.
При ku ~ 1,1, cos фНом = 0,9, хо = 0,8
и Q/QHOM=1 получим
C-f?'0i-436-= 1.065.
Согласно ГОСТ 183-74 двигатель
допускает продолжительную работу
при напряжении 0,95—1,1 номинально-
го без снижения мощности. При этом
возможное увеличение возбуждения
для обеспечения мощности двигателя
допускается:
при =1,05
Е, = 1.05 + °'—:°-4?6- 1,08;
1.05
105
при номинальном режиме работы
£бном-= 1 + 0,08-0,436 = 1,035.
Таким образом, работа с недовоз-
буждением при потреблении из сети
номинальной реактивной мощности
приведет к снижению потерь в стали
по сравнению с допустимым режимом
при =1,05*.
4.3. ВЛИЯНИЕ СИНХРОННЫХ
ДВИГАТЕЛЕЙ НА УСТОЙЧИВОСТЬ
УЗЛОВ НАГРУЗКИ
Узлом нагрузки называется скон-
центрированная в одной точке энерго-
системы группа потребителей электро-
энергии.
Устойчивость узлов нагрузки явля-
ется составляющей частью решения
проблемы устойчивости энергосистем и
зависит прежде всего от состава на-
грузки и ее параметров’.
Ниже рассматриваются основные
факторы, влияющие на устойчивость
узлов нагрузки, состоящих из асин-
хронных двигателей, асинхронных дви-
гателей и конденсаторов, асинхронных
и синхронных двигателей.
Последний случай позволит нам
выявить влияние синхронных двигате-
лей на статическую и динамическую
устойчивость узлов нагрузки в целом.
Простейшим случаем при анализе
устойчивости является питание узла
нагрузки от бесконечно мощной (по
сравнению с нагрузкой) электрической
системы, когда можно пренебречь
внешним сопротивлением. В этом слу-
чае условие устойчивости по реактив-
ной мощности («вторичный признак
устойчивости») легко определяется для
асинхронных двигателей согласно
(3.34) с подстановкой (3.28а) и (3.31)
при fef=l,0, а для синхронных двига-
телей можно использовать выражение
реактивной мощности (4.57) при kf=
= 1,0.
• Поведение синхронных двигателей при глубо-
ких понижениях напряжения и коротких замыканиях
рассмотрена в [2Ц. (Прим, ред.)
’ Влияние устойчивости узлов нагрузки на устой-
чивость энергетических систем, кроме того, зависит
от соотношения мощностей узла нагрузки и генери-
рующих источников, электрической удаленности узла
нагрузки от посяедннх. а также степени загрузки
всего парка двигателей и возможности одновремен-
ного ее регулирования условиями технологического
процесса- Исследованиям влияния на устойчивость
узлов нагрузки всех перечисленных факторов посвя-
щено много работ [М, 33—37. 40, 41j. (Прим, ред.}
Как известно, основным критерием
устойчивости электродвигателей при
постоянном моменте сопротивления на
валу (ие зависящем от напряжения)
является положительный знак произ-
водной электромагнитного момента по
скольжению (у асинхронных двигате-
лей) или по углу 6 (для синхронных
машин), и соответственно условиями
нарушения устойчивости являются
dPa/ds=Q или dPRldb—Ci. Для асин-
хронного двигателя dPa/ds—0 имеет
место при скольжении s=sKp, а у син-
хронного двигателя dPn/d&=^i при
6=90° (без учета реактивного момен-
та и при постоянной ЭДС Eq в процес-
се изменения 6). Так как при s=sKp/
/Ьном&ц =Л4С.» т. е. нарушение устойчи-
вости происходит при напряжении
то из (3.34) с учетом (3.286) и (3.31)
найдем реактивную мощность, потреб-
ляемую асинхронным двигателем на
границе устойчивости:
“ИЛ) ~
Whom /У
LPhom
х (*..,+
(4.64а)
(без учета изменения насыщения при
пониженном напряжении), или при
замене (1—с) согласно (3.356) полу-
чим
ссу ~ Л4С* (—----1-----------\
'^НОМ tg Фном /
(4.646)
откуда следует, что повышение крат-
ности максимального момента приво-
дит к уменьшению потребляемой ре-
активной мощности вблизи границ на-
рушения устойчивости.
Выражая в равенстве (4.57) при
fef=l,0 ряд величин через кратность
максимального момента синхройного
двигателя М-тахном* согласно (4.49),
найдем реактивную мощность, потреб-
ляемую синхронным двигателем на
границе устойчивости (принимая здесь
положительными значения «отстаю-
щей» реактивной мощности, потребля-
емой узлом нагрузки):
— = ( ^номХд Y х
Xd sin Фном \ *цном х'йном /
Ю6
f______б
1 kB м,
окз
2_____1 ~
'тохном* Чном J xd si*1 Фном
- L(-^~5------------Г «65)
sin фном Wa ^тазсном* Ином /
поскольку с достаточной точностью
можно принять
Ь у
гсцном лд
l.o.
dHOM
Полученные выражения реактивной
мощности, потребляемой двигателями
на границе устойчивости, весьма удоб-
ны при практических расчетах по ка-
таложным данным и приближенной
оценке устойчивости узла нагрузки,
питающегося через сопротивление.
Пример. Найти потребляемую на границе
устойчивости реактивную мощность при номи-
нальной нагрузке на валу асинхронного и син-
хронного двигателей (Л4с.я»р= 1,0), имеющих
cos фном=0,9; 6Иом=2; ОКЗ = 1,0; ч®с»’=6,92;
Мпохвом. « ОКЗ— ------ =
‘в,х Чном cos Фном
1-1,93
“ 0,9-0,92
регулирование возбуждения синхронного дви-
гателя отключено и Лв=1,0.
Для асинхронного двигателя по формуле
(3.35а) находим
2.3;
с = 1 — -------—------= 0,642
(2+Уз) 0,75
и согласно (4.646)
0,642 1
Оу » — ----------7 ~ 1.66,
2 0,75
или на 66 % выше номинальной реактивной
мощности при напряжении
£/=-““Г" =0,707L/HOM,
¥2
т. е. сниженном примерно на 30 % номиналь-
ного.
Для синхронного двигателя но формуле
(4.65)
—------------------= 0,226,
0,6 (2,3-0,92)?
т. е. всего 22 % номинальной реактивной
мощности, выдаваемой двигателем в сеть при
номинальном напряжении. Нарушение устой-
чивости синхронного двигателя происходит
прн напряжении из условия устойчивости
(4.59)
^В,Х COS фирм
Лв0КЗ
0,9-1
1-1,93-1
= 0,466,
т. с. при весьма глубоком снижении напряже-
ния (примерно на 53 %).
Приведенные- выше соотношения п
результаты расчета для двигателей со
средними типовыми параметрами на-
глядно показывают преимущества син-
хронных двигателей с точки зрения
как их устойчивости, так и их влияния
на электрическую систему при пони-
жениях напряжения.
Несмотря на различные в опреде-
лении потребляемых вблизи наруше-
ния устойчивости реактивных мощнос-
тей, асинхронные и синхронные двига-
тели характеризуются одинаковым
критерием устойчивости по реактивной
мощности:
(4.66)
Действительно, определяя для
асинхронного двигателя производную
от Q/Qhom по ku согласно (3.34), (3.31)
и (3.286)
-^-«2rt„-2(l— с)х
X (bHoM I Ьном — 1) X
^ном
&аоы ku ' --------------
х___________V
Г ^ном feu л / ( ^ном ku \ J 1
L мсл + k Мс, / J
и подставляя сюда bUQUk’JMCt,= 1, по-
лучаем
РЦ =_00.
\ dku /у
При отсутствии у синхронного дви-
гателя непрерывного регулирования
тока возбуждения, зависящего от U,
из (4.57) при £/=1,0, пренебрегая из-
менением насыщения, получаем, пола-
гая а<0,
что при подстановке сюда kBku ku/
/^B,x=₽^dcos фном приводит также к
условию
При наличии внешнего сопротив-
ления, как отмечалось в гл. 2, нельзя
рассматривать напряжение на шинах
нагрузки как произвольную величину.
107
Рис. 4.13. Схема питания и векторные диаграммы (а) и статические характеристики реактив-
ной мощности (б) узла нагрузки:
Кривые реактивной мощности со стороны системы построены 1 для ^ном*”1’^7®* =
—0,4; Е «1.146; 3 — понижения ЭДС Е^ ва 18 % при х _ —0.2; кривые реактивной мощности, потребля-
ном* • ып
емой нагрузкой. 0нвгр построены при Рс д№я д=0.3 и ОКЗ—1 4 при 12ном и С0<Рс,д “Со5<₽я.д ^*-’,8; ’ грм
1/ноМ н софсд = 1.0: cosq>a д—0.8 Возбуж’деВпе синхронных двигателей принято не зависящим от напряже-
ния и равным: *в—1,0 (кривая 4) и == fcBJ, (кривая 5) (кривые составлены А. А. Виноградовым)
поскольку при изменении скольжения
асинхронного двигателя или при изме-
нении угла б синхронного двигателя
изменяется падение напряжения на
внешнем сопротивлении, а следователь-
но, величина ku зависит от режима
двигателя. В данном случае в качест-
ве независимой от поведения нагрузки
величины можно принять ЭДС систе-
мы Е (рис. 4.13, а).
В соответствии со сказанным в
гл. 2 для одиночного асинхронного
двигателя, питающегося через индук-
тивное сопротивление хВш, кратность
максимального момента
причем Хвш* отнесено к результирую-
щей номинальной полной мощности
нагрузки (знак плюс при «отстающей»,
а знак минус при «опережающей» ре-
активной мощности в номинальном ре-
жиме).
Таким образом, условием наруше-
ния устойчивости в данном случае яв
ляется следующее:
Ь' = Мы илн =
/М1-^)
&ном
(4.70)
Ь'
_________Е~_________
2 (хдв + *В1п) Рном
и2
WHOM
Рном
X
£? h Е*
f Г / ~ ПОМ 1 Г /
1 гА'вш'*дв 1 “г-^вш'^пв
(4.67)
при критическом скольжении
Адв 1 + ^ВшМдВ
ЗкР_____
I + XBnj/Хдв
(4.68)
где Е*=Е/С7НОМ.
При поминальном режиме нагрузки
ЭДС системы определяется известным
выражением
£ио.м =14+ Sin %»м + •
(4.69)
Условие (4 70) позволяет опреде-
лить значение Е или хвш, отвечающее
условию нарушения устойчивости, ес-
ли одна из этих величин задана. По-
скольку согласно (4.70) значения Е* и
хвш Должны изменяться в одинаковом
направлении, то нетрудно заметить не-
обходимость в повышении ЭДС систе-
мы в случае увеличения сопротивления
электропередачи л'вш- Такое повышение
ЭДС может быть достигнуто регули-
рованием возбуждения генераторов
системы в случае резкого возрастания
хвш в аварийном режиме.
Пренебрегая намагничивающим то-
ком прн нарушении устойчивости, а
также пренебрегая активными сопро-
тивлениями цепи статора, находим из
(2.21) при s=sI{p и Uc^E
/х
______________Е_______________
V(Xjain т Адв): 4“ (*вш + хдв)3
108
—------£-------- (4.71)
я напряжение на выводах двигателя
V Хдв (1 4" *ВП1/ХДв)
Е V 1 -f-(l 4* ^вш/*ДВ)2
1^2 (I 4- Яви1/*дв)
что при подстановке ЭДС согласно
(4.70) дает для нарушения устойчиво-
сти
(^и)у —
X
Х VSd + L/x».)"1' 2
= - (4-73)
V Оном
Анализ величины Авш при любом
хВш>0 показывает, что всегда ABin>
>-1,0, а поэтому напряжение на выво-
дах двигателя, питающегося через
внешнее сопротивление, при наруше-
нии устойчивости оказывается всегда
выше, чем при питании от системы
бесконечной мощности [см. (4.63)].
Например, в случае Хвш—-^-Дв ПОЛуЧИМ
(Л„), = ~~ « 0,8 для b„oa = 2,0
V ^лоМ
против ku ~0,7 в приведенном выше
примере.
С увеличением внешнего сопротив-
ления значение Лвш увеличивается, что
означает дальнейшее повышение на-
пряжения на шинах нагрузки, при ко-
тором может произойти нарушение
устойчивости. Например, при значи-
тельном удалении промышленного уз-
ла нагрузки от системы (ku)? может
быть около 0,9, что близко к возмож-
ным эксплуатационным отклонениям
напряжения.
В случае сочетания асинхронных
двигателей и конденсаторов либо асин-
хронных и синхронных двигателей с
различными параметрами, сосредото-
ченных в узле нагрузки, удаленном от
системы, анализ устойчивости тем же
способом, что н для одиночного двига-
теля, оказывается затруднительным.
Наиболее наглядным способом оценки
устойчивости по реактивной мощности
в данном случае является метод сопо-
ставления суммарной статической ха-
рактеристики нагрузки QHarp=f(£/)»
построенной по характеристикам от-
дельных двигателей, а также для
конденсаторов QK=—где
cP
*с
с характеристикой «системной мощно-
сти» Qc=4'(^)t поступающей к узлу
нагрузки по сопротивлению хВш. Если
пренебречь поперечной составляющей
падения напряжения и активным со-
противлением электропередачи, то
E^U4-
U
откуда
Qc_—(4.74)
Устойчивый режим возможен
только в том случае, когда имеется
точка пересечения характеристик на-
грузки и системы, поскольку обяза-
тельно должно быть Онагр=Сс, причем
в этой точке обязательно выполнение
условия устойчивости узла нагрузки
•> о (4 75)
dku
(точка а иа рис. 4.13,6). Если в дру-
гой точке пересечения указанных ха-
рактеристик (точка 6)
^<0,
dku
то всякое небольшое изменение напря-
жения либо приводит к превышению
«системной мощности» над «нагрузоч-
ной», и тогда напряжение продолжает
увеличиваться до тех пор, пока не на-
ступит равновесие Ос = Онагр (в точке
а), либо, наоборот, благодаря дефици-
ту реактивной МОЩНОСТИ (Qc< Онагр)
начнется прогрессирующее снижение
напряжения, которое приводит к нару-
шению нормальной работы узла на-
грузки («лавина напряжения»). Нако-
нец, при понижении «системной» ха-
рактеристики по каким-либо причинам
до положения касательной к нагрузоч-
ной характеристике (в точке Ь на
рис. 4.13,6) узел нагрузки находится
на пределе устойчивости при соответ-
109
C,U 0.7 О,в 0.9 и/Оиом
Рис. 4.14. Статические характеристики узла
нагрузки прн моменте сопротивления Л}0* =
= 1.0:
А — асинхронные двнга-ели; 6 — асинхронные двига-
тели и конденсаторы; В — асинхронные двигатели и
синхронные двигатели без форсировки возбуждения;
Г — то же. что и В, ио с форсировкой возбуждения
^в^в.ном “*’6
0/0 ИОН
1,0
О,в
I О, в
£
ЦЧ -
0,2 ~
О
0,2
0,4
О,Б
Л*
1,8
2,0
Мг=о,в-
с=О,Б
0,7
0,в . ае
Асинхронные овигатели
Асинхронные двигатели
и конденсаторы
с =0,0
0,7
0,8 Л
Асинхронные и синхронные
двигатели без форсировки
возбуждения
с=О,Б
0,7
Of
То ясе, но с форсировкой
возбуждения 1д/1в,ном=1,5
U/Uhoh
0,7 О,В 0,9
Рис. 4.15. Статические характеристики узла
нагрузки при Л1с-=0,8. Обозначения Д, Б,
В и Г те же, что и на рис. 4.14
или, учитывая, что при номинальном
напряжении Фк.ном^Фдв, получаем
ствующем «критическом» напряжении
(^д)кр.
Рассмотрим статические характе-
ристики Q„=f(ku) для указанных вы-
ше случаев по соста нагрузки.
Изменение потребляемой асинхрон-
ным двигателем реактивной мощности
в соответствии с (3.34) при различной
реактивной мощности намагничивания
Фоном = сфпом и Ьеом = 2,0 для нагрузок
на валу Л1с- = 1,0 и AtCft = 0,8 отражено
на рис. 4.14, Л и 4.15, Л.
При установке конденсаторов, ком-
пенсирующих полностью реактивную
мощность, потребляемую асинхронны-
ми двигателями при номинальном на-
пряжении (COS фнагр ~ 1) > находим сле-
дующую зависимость реактивной мощ-
ности узла нагрузки от напряжения:
Фнагр ___ Фн.я ^2 ।
фдв Фдв
+ \<£ + (1 -С) —^-1 ,
L vp.HOM J Чдв
_<?ИВГР = [с ----1W-1-
Фдв . Фдв '
где Фном.дв — реактивная мощность,
потребляемая двигателем при номи-
нальном режиме; Фдв — реактивная
мощность, потребляемая двигателем
при номинальном напряжении (ku=
= 1,0) н нагрузке на валу Мс*=^1,0.
Изменение потребляемой двигате-
лем реактивной мощности при измене-
нии напряжения определяется соотно-
шением между реактивной мощностью
намагничивания и реактивной мощ-
ностью рассеяния и загрузкой двига-
теля.
Отношение с=Фопом/Фном изменяв
ется в пределах от 0,6 до 0,8.
но
На рис. 4.14. А даны зависимости
потребления реактивной мощности
асинхронным двигателем, имеющим
йном=2 и 7ИС* = 1, при снижении на-
пряжения для разных значений с, а
на рнс. 4.15,4-—соответственно при
ЗИС*=О,8.
Из рассмотрения этих кривых сле-
дует, что даже у полностью загружен-
ного двигателя при значениях с=0,74-
0,8 при понижении напряжения до
0,8 номинального происходит умень-
шение потребления из сети реактивной
мощности.
Совсем иное дело будет в случае
применения конденсаторов для повы-
шения коэффициента мощности. На
рис. 4.14, Б и 4.15, Б приведены кривые
изменения реактивной мощности в за-
висимости от напряжения для случая,
когда при номинальном напряжении
COS фнагр=1. Из рассмотрения этих
кривых следует, что даже при непол-
ной нагрузке двигателя потребляемая
узлом нагрузки из сети реактивная
мощность увеличивается. При отсутст-
вии в узле нагрузки синхронных ма-
шин такое увеличение потребления ре-
активной мощности приведет к допол-
нительному понижению напряжения
из-за увеличения потери напряжения в
элементах сети от источников питания
до узла нагрузки. Это снижение на-
пряжения вызовет в свою очередь до-
полнительное увеличение потребления
реактивной мощности узла нагрузки, и
этот процесс может принять лавино-
образный характер с полным наруше-
нием работы всего узла нагрузки.
Зависимости реактивной мощности,
потребляемой узлом нагрузки, от на-
пряжения в случае применения син-
хронных двигателей приведены на рис.
4.14 для Afc* = l и на рис. 4.15 для
Мс*=0,8. При номинальном напряже-
нии компенсация осуществляется до
COS фнагр = 1.
При построении кривых для 7ИС* =
==0,8 за единицу принята реактивная
мощность, потребляемая асинхронным
двигателем при номинальном напря-
жении.
Кривые рис. 4.14, В и 4.15, В по-
строены при отсутствии у синхронных
двигателей форсировки возбуждения,
а кривые рис. 4.14, Г и 4.15, Г — при
наличии форсировки до /в//в,ном=1,5.
При построении кривых рис. 4.14, Г и
4.15, Г условно принято, что форсиров-
ка возбуждения осуществляется, начи-
ная от номинального напряжения. Это
практически имеет место при наличии
АРВ или релейной форсировки, реаги-
рующих на первую производную на-
пряжения по времени. Обычная релей-
ная форсировка возбуждения осущест-
вляется при напряжениях меньше
номинального (порядка 0,85 номи-
нального). Из сравнения кривых, при-
веденных на этих рисунках, видно,
какое большое значение имеет форси-
ровка возбуждения синхронных двига-
телей. Но и при отсутствии форсиров-
ки возбуждения синхронные двигате-
ли имеют преимущество по сравнению
со статическими конденсаторами (см.
рис. 4.14,5 и В; рис. 4.15,5 и В).
Как следует из рассмотрения кри-
вых, приведенных на рис. 4.14 и 4.15,
весьма большое значение имеет отно-
шение
£ ~ Феноменом.
Наиболее тяжелые условия скла-
дываются в узлах нагрузки, состоящих
из парка асинхронных двигателей,
связанных единым технологическим
процессом, при компенсации потребля-
емой ими реактивной мощности только
статическими конденсаторами. Одно-
временная загрузка всех асинхронных
двигателей до номинальной нагрузки
вызывает возможность нарушения
устойчивости даже при колебаниях
напряжения сети в пределах, допусти-
мых по ПТЭ [33].
Если анализ или опыт эксплуата-
ции показывают, что в том или ином
конкретном узле нагрузки вероятно
нарушение работы потребителей из-за
лавинообразного снижения напряже-
ния, то необходимо принять меры по
снижению такой вероятности; это мо-
жет быть достигнуто путем проведе-
ния ряда мероприятий. В частности, в
таких узлах нагрузки необходимо
устанавливать наряду с асинхронными
двигателями синхронные, мощность
которых должна выбираться, исходя
из технико-экономических соображе-
ний, т. е. поддержания наивыгодней-
шего значения коэффициента мощно-
сти, регулирования напряжения н
предотвращения лавинообразного сни-
жения напряжения. Если по условиям
привода установка синхронных двига-
телей невозможна, следует применять
синхронные компенсаторы. Поскольку
’ Примеры расчетов устойчивости узлов нагруз-
ки см. в [37]. (Прим, ред.)
111
снижение напряжения имеет место
лишь кратковременно, следует широко
использовать перегрузочную способ-
ность синхронных машин, форсируя
их возбуждение в случае необходимо-
сти для потолочного значения. При
этом целесообразно в ряде случаев
применять устройство реагирующее на
скорость изменения напряжения
dUjdt.
4.4. ЭКОНОМИЧНОЕ РАСПРЕДЕЛЕНИЕ
РЕАКТИВНОМ НАГРУЗКИ
МЕЖДУ РАЗЛИЧНЫМИ
ЕЕ ИСТОЧНИКАМИ И РЕЖИМЫ РАБОТЫ
ИСТОЧНИКОВ реактивной
мощности
Для определения условия эконо-
мичного распределения реактивной на-
грузки между отдельными ее источни-
ками рассмотрим потерн активной
мощности, связанные с передачей ре-
активной мощности нагрузке (QHarp,
Рпагр) ОТ ДВУХ ИСТОЧНИКОВ Я] И Я2 ПО
соответствующим звеньям электропе-
редачи Л| и Л2 (линиям, трансформа
торам) согласно схеме рис. 4.16.
На основании вышеизложенного
потери ДР| и ДР2 в источниках И\ и
И? в общем случае можно предста-
вить в виде суммы пяти составляю-
щих:
АР1 = АРв1х APlfi 4- АР1р 4-
4-АР1С 4-АР1мех; (4.77)
АР2 == АР в2х 4~ АР2а + АР2Г +
4- АР2с + ДР2мех, (4.78)
где Рв,х — потери в обмотке возбужде-
ния электромашинного источника при
холостом ходе; ДРс4-АРмех=ДРпОСт—
постоянные потери, равные в случае
электромашинного источника сумме
потерь в стали и механических; АРа и
АРР — нагрузочные потери активной
мощности, пропорциональные квадра-
и
л, ед,
с;
Гндгр
8цпгр
Рис. 4.16. Схема питания нагрузки от двух
источников;
а — по двум линиям переда»?; о —по одной (общей)
линии передач
там токов цепей возбуждения и стато-
ра, обусловленных соответственно ак-
тивной и реактивной мощностями.
Потери в звеньях сети JIi и Л2,
обусловленные передачей мощностей
Pi, Qi, Р2 и Qs, можно представить в
виде суммы двух составляющих сле-
дующим образом:
Р’.*4-СГ
ДРл1=R‘=ДРл-+ДРл,р:
(4.79)
^Л2 = syi ^2 = ЛЛп28 "I" А^Л2р*
(4.80)
где Pi, Р2—суммарные активные со-
противления соответствующих звеньев
сети; АР ла , АРлР —составляющие
потерь, обусловленные соответственно
активной и реактивной мощностями.
На основании (4.77)—(4.80) об-
щие потери, зависящие от реактивной
мощности, с учетом постоянных по-
терь вместе с потерями иа возбужде-
ние при холостом ходе (для источни-
ков только реактивной мощности)
~ ^2р + А^Л2р + А^Л1р +
InOCT “I- АРАПИСТ- (4.81)
Экономичным является такое рас-
пределение общей реактивной нагруз-
ки Qnarp между отдельными ее источ-
никами, при котором суммарные поте-
ри АРр минимальны, что отвечает ус-
ловию
JAPp/aQj^O. (4.82)
Пренебрегая для упрощения выво-
дов потерями реактивной мощности в
сети (звеньях JIi и Л2), получаем
Q5 4-Qi~QnSrP, (4.83)
а следовательно (при Q2~Qs и =
dQ2=— dQ„ (4.84)
поскольку Qj5arp является заданной, не
зависящей от Qi и Q2 величиной.
Дифференцируя (4.81) по Qi с учетом
(4.84), находим согласно равенству
(4.82) следующее условие экономично-
го распределения реактивной мощно-
сти:
д(АР]р + ДРп1р) Д(АР2р + АРл2р)
dQ*
(4.85а)
или
Sis (4.856)
112
т, е. экономичное распределение об-
щей реактивной нагрузки между от-
дельными ее источниками имеет место
при равенстве относительных прирос-
тов [величин вида д(ДРр) n/dQn] ак-
тивных потерь, зависящих от реактив-
ной МОЩНОСТИ.
Отмеченное выше условие эконо-
мичного распределения реактивной на-
грузки справедливо при любом числе
п источников.
Доля каждого источника в покрытии на-
грузки будет Qk, так что
Снагр — Qi + Qi + • - • + Qk + • • •
-- 4- Qn = <&
Пусть потери в источнике и линии (транс-
форматоре), связывающей источник с нагруз-
кой, являются функцией вида
APpft = /(Qh)
(вид этой функции для конкретных случаев
приводится ниже).
Обозначим сумму потерь во всех эле-
ментах
®= S д₽р*-
k=l fe=I
Для определения условий, при которых
п
имеет экстремальное значение, соста-
k=i
вим функцию Лагранжа
Ч' = Ф+к 2 Qk.
где Л — неопределенный множитель.
Условие минимума
дТ
— ^0(А=1,2.........п),
oQk
дФ
0 = —+ 1
oQu
<У«&)
‘ =— * = const.
oQk dQh
Но последнее условие
df (Qk) д&Ррк
——------—-----— = const
dQk dQn
и есть условие равенства относительных при-
ростов.
Таким образом, можно сформули-
ровать общее положение: наивыгод-
иейшее распределение нагрузки при
любом числе источников наступает прн
равенстве относительных приростов
ghs const,
где — прирост, определенный для
всей цепы от источника до нагрузки.
На основании (4.85а) и (4.8561
полный относительный прирост цепи
питания равен сумме относительных
приростов источника питания и после-
довательно включенного звена элек-
тропередачи:
gs=gn + gn- <4-86)
Прн питании нагрузки от несколь-
ких источников по общей электропере-
даче Л (рис. 4.16,6) потери мощности
в последней не зависят от распределе-
ния реактивной нагрузки между ис-
точниками, а поэтому дДРл,Р/6(21 = 0
и условие (4.856) переходит в равен-
ство относительных приростов источ-
ников питания
gi = g2- (4.87)
Рассмотрим относительные прирос-
ты потерь, зависящих от реактивной
мощности, на основании определения
относительного прироста согласно
(4.85а) для различных источников и
электропередачи.
Для статических конденсаторов от-
носительный прирост равен:
Sc = Дрс = Ьс, (4.88)
поскольку
ДР = Дрс Q,.
Для электропередачи на основании
(4.79) и (4.85а) находим
_/(ДРп_р) 2<?л*п _
ёл «2л 1/^
= ал-~-. (4.89а)
'*Л,ном
где
2<?л.Ном *Л 2ДРл.ном s»n* Ф|1ОМ
аЛ ~~ [ ,2 “ 0
и Л ЧЛ.вом
.90)
р2 I гР
др г Л.ном ~ '«Л.пом р
ПГЛ.вом — 2
ил
— потери активной мощности в элек-
тропередаче при номинальной полной
передаваемой мощности
^Л.ном= |/"^Л.ном+ Ол.нои =
__ Оп.ном
sin <рном
Таким образом, зависимость отно-
сительного прироста электропередачи
от передаваемой реактивной мощности
графически -представляет собой пря-
8—649
113
мую линию, проведенную пол углом
4>л= arctg“,4
к оси <2л /Q Л,ном.
Зависимость относительного при-
роста от реактивной мощности для
синхронных машин определяется про-
изводной по Q от A + В и
выражается прямой линией
2AQ , В
Ои ' Фи
(4.91)
<?и
где Си — номинальная реактивная
мощность синхронной машины (источ-
ника Q).
Анализ выражений (4.23) и (4.24)
показал, что при изменении активной
нагрузки значения Л и В и зависи-
мость относительного прироста от ре-
активной мощности для синхронных
машин остаются практически одинако-
выми.
На рис. 4.17, 4.19 даны для приме-
ра прямые относительных приростов в
зависимости от Q/Qh для различного
типа синхронных машин, причем угол
наклона прямой
2Д
lb — arctg а = arctg--.
Из приведенных выше выражений
относительных приростов наиболее
общим является (4.91), полученное
для синхронных машин. Поэтому отно-
сительные приросты gis и s в ра-
венстве (4.856) также можно предста-
вить в общем виде:
= (4.92)
где О£=ои+ал, причем ал опреде-
ляется согласно (4.90).
При питании нагрузки от электри-
ческой системы большой мощности
можно пренебречь потерями в источ-
никах по сравнению с потерей мощно-
сти в электропередаче, а поэтому в
данном случае можно принять
Фп
(4.896)
**Л,ном
Для конденсаторов, непосредствен-
но подключенных к месту потребления
реактивной мощности,
Scz ~ =
поскольку ал э=0 и для самих конден-
саторов пс = 0.
Рис. 4.17. Прямые относительных приростов
активных потерь для некоторых синхронных
генераторов и компенсаторов
активных потерь для синхронных двигателей
типа ДС 380 В, с05фИОм=0,9, 1500 об/мин
Рис. 4.19. Прямые относительных приростов
синхронных двигателей типа СДН 6 кВ,
COS фном =0,9
Рассмотрим конкретные примеры
определения относительных приростов.
Пример 1, Синхронный двигатель 100 кВт;
cos фном—0 9- 121 кВ-А; 53 квар; 380 В;
АРст,ном=3,59 кВт; ДРВ.ПОМ=2,74 кВт; ОКЗ =
=0,75; Хл — 1,33. Определить значения А и В
и относительный прирост прн работе с нагруз-
ками 1,0; 0,75 и 0,5 номинальной.
Для случая, когда двигатель работает с
полной активной нагрузкой ((3=1), по форму-
лам (4.26), 4.27)
А = 0,82 кВт и В = 0,95 кВт;
114
<22 Q
APpi = 0,82-— + 0,95----;
Око» °«“м
2-t,82Q 0,95 Q
Sl =------ 4- — = 0,0305----------+J,018,
53Qhom 53 Qhom
Для нагрузки 0,75 номинальной определя-
ем (р=0,75):
, _ У 1+ 1,33°(1 — 0,75a-0.9j)+~‘
““•75- 1,33-0,436
5+2-1.33.0.436 -1 _
1,33-0,436 ' ’
75 = 1,32-33 = 70 квар;
/Bf _1/ 1+0,75^.1,33^0,9^ _Q
4,ном V 1+1,33^42-1,33-0,436 4
Ло 75 = 3,59-0,436? +
(1 —0,68)
Р0,76 = 2-2,74-0,68 t — =0,91 кВт;
0й Q
ДЛ.,75 = 0,84-^— + 0,91 —— ;
Сном <?ноМ
2-0.84Q 0,91
^“ЬЗ^Г4- 53 “
о
= 0,0317-^ + 0,017.
Сном
Для нагрузки 0,5 от номинальной (₽=
=0,5)
«0.5 =
К1 + 1.332 (1 —0,5?-0,93) +
1,33-0,436
Синхронный компенсатор
Пример 2.
75 МВ-А. Для этого компенсатора
„ 350 _
—=0,29.
^в.ном 1200
Постоянные яотери
ЛРПОСТ = 312 кВт
Потери в обмотке статора при номиналь-
ной нагрузке
АРст.ном ~ 532 кВт.
Потери на возбуждение прн номинальной
нагрузке
ДРвном- 180 кВт.
Определяем по формулам (4.25), (4.26) в
(4.27)
С = 312+ 180-0,29а = 325’
Л = 532 + 180 (1 — 0,29)? = 623;
В = 2-18.-0,29(1 — 0,29) = 74;
Q? Q
ДР = 325+ 623—+ 74—-------;
й» Q™“
2-623Q 74
ё~ 75 000QHOM + 75С00 “
С
= 0,0166+0,0001.
Сном
Реактивные нагрузки любого из
двух источников, соответствующие
экономичному распределению обшей
реактивной нагрузки, можно опреде-
лить в общем виде на основании
(4.856), (4.92) и (4.83);
Ы1Н0М ч/гном
= о,.. в”"?-а +ь
Q.BOM
+ Ь2 =
+2-1,33- ,436 - 1 _
1,33-0,436 ’
Ор 5 = 1,52-53 = 80,7 квар;
откуда
Q1 — & Онагр + Одоб» (4.93)
(22 = (1-С’)0яаи,-0до6, (4.94)
1+0,5?-1 ,ЗЗа-0,92
1 + 1,335 + 2-1,33-0,436 =0’587;
2,74(1—0,587)?
= 3,59.0,436? + —-----1-------------
1,52? ~
= 0,88 кВт;
0,587(1 — 0,587)
В01В = 2-2,74----= 0,88 кВт;
О1 Q
ЛРРо.б= ,88-^ + v,88—
С;ом QiICM
2-0,880 0,88 О
a s =-------" +’— = 0,033 —+0,0166.
*В'6 Сном 53 <?ном
Изменение потерь и относительного при-
роста в зависимости от реактивной мощности
для нагрузки 1; 0,75‘и 0,5 номинальной полу-
чается практически одинаковым.
8*
где
а
(4.95)
л а' {Ь2 — Ь^) <?2ном _
^поС ~
_____(bt — bi) Одном .
, Сгном
°2s + C1S л
vi’hom
(4.96)
Q1HOM, С?2ном — номинальные реактив-
ные мощности соответственно первого
и второго источников, причем здесь
предполагается b2>b[.
Распределение реактивной нагруз-
ки можно также найти графически со-
115
^24^25^26 ^12^13^^15^16 ^12^13^^24^1^23^16*^26 $1*^2
Ряс. 4.20. Распределение общей реактивной нагрузки между двумя источниками при условии
равенства относительных приростов активных потерь мощности
гласно рис. 4.20, причем при количе-
стве источников больше двух графи-
ческий метод определения нагрузок
является более простым и наглядным
по сравнению с аналитическим.
В соответствии с равенствами
(4.85а), (4.856) и (4.92) потери актив-
ной мощности можно выразить через
коэффициенты а и bt определяющие
относительные приросты обоих источ-
ников:
ДЛр + Д^Л1р = У^'«21 =
Й
— ais “57) Ь ЗД,;
^Ч11Н0М
+ ^^Л2Р = J Й2Е ^0? =
=_^L
2ЙВОМ 22
(4.97)
(4.98)
Подставляя (4.97) и (4.98)' в урав-
нение (4.81), получаем следующее вы-
ражение для общих потерь, завися-
щих от передаваемых реактивных мощ-
ностей:
др —. °ls I ”25^
2Q1hom 2Q2HOm
+ш + ед-ь2дрпост,
или с учетом (4.83), (4.95) и (4.96)
после соответствующих преобразова-
ний
ДРр =
°2S
Саном
°2£ (с Ояагр + 0доб) 0г ,
° ОгноМ
О2
+ “ГР +адвагр+2ДРп„„. (4.99)
При равенстве относительных при-
ростов, подставляя (4.93) в уравнение
(4.99) находим минимальное значение
потерь мощности:
(ДР \ — °2И° __21L ,bQ _1_
zg Уааом
+ 2ДРцост —
«25 0-«7^
+
4" [bg (1 (2 ) -{- (I bjl Снагр
a'(t’!!~f‘)8<?a"°M + 2ДРП0с1. (4.99а)
Минимум полный активных потерь
при работе обоих источников, найден-
ный в соответствии с условием (4.99а),
может оказаться больше, чем потери
при работе одного нз них. Например,
для синхронного компенсатора (или
генератора, используемого в качестве
компенсатора) пз расчета получилось,
что ои должен работать с малой на-
грузкой. Однако достигаемое при этом
снижение потерь активной мощности в
электрической системе в целом меньше
потерь активной мощности (в данном
случае в основном постоянных по-
терь) в самом синхронном компенса-
торе. Поэтому в данном случае вклю-
чение в сеть или оставление в работе
синхронного компенсатора допустимы
лишь в том случае, если другие источ-
ники реактивной мощности полностью
загружены и поэтому нельзя распре-
делить между ними всю реактивную
нагрузку.
Для определения реактивной на-
грузки Снагр.эк, при которой экономи-
чески целесообразно включить второй
источник, приравняем потери мощно-
сти при работе одного источника
(Д^Р1) = g‘^"“rp -Н ВДнагр + ДР,пне,
4-V1H0M
(4.
116
минимуму потерь (APp)mm. В резуль-
тате совместного решения уравнений
(4.99а) и (4.100) находим
О = &2~ п
ЧГнагр.эк с *<1вом
2Q1HOM Д^гпс-ст
в1х(1 — С')
(4.101а)
Заменяя согласно (4.95)
_ /1 °1ЕЯ^2ном
a\-s. О — а ) = —д’ п---’
°->S *4иом
^=«,e + Ci2^!-
а 41 ном
И принимая АРглост/Сгном^Арглост,
получаем более удобное для практи-
ческих расчетов выражение
Снагр.ан ___
Q1H0M
W /г fe+gisga.m/<4«J^2noCT
“is
(4.1016)
Если по расчету получится
Фнац),зк/Ф1ном>1,0, то при нагрузках
С1ном^0нагр>0 должен работать толь
ко один источник (имеющий bi<b2)t
а при Qnarp>QiHoM должны работать
оба источника, причем если Q[—=
=const, а у второго источника Q2—
= фнагр~ —Qibom, ТО При Qnarp,3K/QlnoM4C
>1,0 распределение общей реактив-
ной нагрузки не может соответство-
вать равенству относительных при-
ростов.
Если не учитывать постоянных по-
терь АРгпос», то
Фнягр.ян ~ ---bj ___
QtuoM С12
_ Фнагрицп ____
п Чвагртхп
чаном
является минимальным значением
реактивной мощности нагрузки, при
котором экономически целесообразно
включить второй источник реактив-
ной мощности.
На рис. 4.20 данное условие выпол-
няется при относительном приросте
источника И2> равном g3, а следова-
тельно, до нагрузки фнагр— Q13 должен
быть включен только источник Hi с
меньшей постоянной частью относи-
тельного прироста bi.
Однако в ряде случаев пренебре-
жение постоянными потерями может
привести к йрииципиально неправиль-
ным выводам о распределении реак-
тивных мощностей, что показано ни-
же на конкретном примере.
При рассмотрении синхронной ма-
шины, имеющей нс только реактивную
нагрузку, но и активную, выделение
части постоянных потерь, обусловлен-
ной только реактивной мощностью,
затруднительно. Поэтому для упроще-
ния в таких случаях постоянные поте-
ри не будем учитывать.
Пример 3. Определить наивыгоднейшее
распределение реактивной нагрузки между
синхронным компенсатором QiHow=75 МВ-А;
А(=623 кВт; Bt=74 кВт; АР1Пост=325 кВт;
АРиом/Рвом=0,0136 кВт/квар и турбогенера-
тором 100 МВт; Q2Bom=62 Мвар; Лг=115 кВт;
В2=76 кВт; ДРр.ном2/<?2ном=0,0031 кВт/квар;
АР2вост=810 кВт.
Компенсатор имеет удельные потери мощ-
ности при номинальной нагрузке, которые
больше в 4,4 раза, чем турбогенератор. Но
было бы совершенно неправильным иа этом
основании сделать вывод о том, что в первую
очередь следует использовать турбогенератор
как источник реактивной мощности.
Определяем относительные приросты обеих
машин:
_ 2-623 QK 74 _
8" 81 75 000 <5НС„„ + 75000
= 0,0166----+ 0,000987;
Qh^M.K
_ 2'1 |5^г 76
Ве" - 62 000QnoM.r + 62 ООО “*
<?г
= 0,00371 —— + 1 .001226.
Qjhomx
а) Турбогенератор несет активную на-
грузку (АРгпост ис учитываем). Из рассмотре-
ния относительных приростов следует, что до
определенной нагрузки
(0.001226 — 0,000987)
QmvVmin =- X
X 75 000 = 1080 квар
следует нагружать только компенсатор
Определим распределение реактивной мощ-
ности согласно (4.93) и (4.94) при QHob-P>
>1080 квар.-
_______1_______
, 0,0166 62
Н-----’--------
0,00371 75
= 0,213;
0,213(0,001226 — 0,000987)
<2доб — 0,00371 х
X 62 С00 = 850 квар;
Qk — 850 —0,213QGBrp;
Qr = 0,787Qnarp — 850.
Отсюда следует, что при общей нагрузке,
2-850
большей, чемфцагр = ‘ t _9.с 213= 2960 КК,р’
турбогенератор чолжеп нести большую, чем
компенсатор, реактивную нагрузку.
117
По уравнению (4.94) найдем обшуто ре-
активную нагрузку, при которой генератор
будет нагружен полностью:
62,85
Фнагр— Q ygy —79,8 Мвар.
В табл. 4.8 приведены значения реактив-
ной нагрузки компенсатора н генератора в
зависимости от общей реактивной нагрузки.
На рис. 4.21 дано соответствующее графиче-
ское построение.
Таблица 4.8
Quarp» квар
QK, квар
Qr, квар
ЛЛор/Ок
APr.p/Qr
65000
14 600
50 400
0,0233
0,00274
75 000
16 800
58 200
0,0194
0,00297
79800
17 800
62000
0,0195
0,0031
При общей нагрузке 79 800 квар генера-
тор оказывается загруженным полностью, а
компенсатор — только на 17 800 квар. При
больших нагрузках приходится нагружать
только компенсатор, так как турбогенератор
загружен на полную мощность.
В табл. 4.8 даны значения удельных по-
терь активной мощности ДРн,р/<2„ и APr1P/Qr-
Из рассмотрения данных, приведенных в таб-
лице, видно, что, если исходить нз удельных
потерь мощности, следовало бы вначале пол-
ностью загрузить реактивной мощностью ге-
нератор до его номинальной мощности, а за-
тем нагружать компенсатор.
Рассмотрим реактивную нагрузку
65 000 квар. Нагрузив полностью генератор,
получим общие потери, равные
~ 623-30002
АРобш = 0,0031 -62 000 + — ооо;
74-3000
— 4- 329 = 520 кВт.
75000
При распределении нагрузки по методу
относительных приростов получим
ДРоСи1 == 0.00274- 50 400 +
т. е. на 520—478=42 кВт меньше, несмотря
па то что удельные потери компенсатора в
9 раз больше, чем у генератора.
б) Турбогенератор включается как источ-
ник реактивной мощности с ДР2Пост=
=810/62 000=0,0131 (без учета потерь на воз-
буждение холостого хода).
По формуле (4.1016) находим прн
Qi но.ч/Q i ноы=62/75—0,827
Фнагр.ак__ 1 «08 ,
Qihom 75
К2(0,00371 (0,0166 0,827) 0,0131
+ 0,0166 ,3’
т. е. QHarp,eK= 1,3-75 = 97,5 Мвар.
Таким образом, при учете постоянных по-
терь турбогенератора включение последнего
целесообразно только при QaBrP=QiHoM=
=75 Мвар, когда компенсатор нагружен до
своей номинальной мощности. При нагрузках
137»QBarp2>75 Мвар разница Qnarp — 75 Мвар
целиком должна покрываться турбогенерато-
ром, тогда как предыдущий расчет (без уче-
та ДРгпост) привел к совершенно противопо-
ложным результатам.
Распределение реактивной нагруз-
ки между синхронной машиной (дви-
гателем, генератором, компенсатором)
и конденсаторами, непосредственно
включенными к месту потребления
реактивной мощности, следует рас-
сматривать для двух случаев:
a) &pc = i2>ftCM = b,;
б) лРс = ь1<:ьсы = ь2.
В первом случае СнаГр,эк определя-
ется ИЗ (4.1016) При ДР2пост = 0 (для
конденсаторов не учитываем постоян-
ные потери), а следовательно,
Qnarp,BK __________ Apt; — &CfW
Qc,m Сс.м
° ID 20 JO W 50 BO Qff О fO 20 JO W 50 Dr 0 fD 20 JO W JO 60 7DQK*QrjM8ap
Рис. 4.21. Зависимость относительного прироста синхронного компенсатора, генератора я оооих
источников от реактивной мощности
118
Рис. 4.22. Распределение реактивных нагрузок между синхронной машиной и конденсато-
рами:
fl —6см<Дрс; б — Ьсм>Дрс; г — реактивная нагрузка синхронней машины; 2— реактивная нагрузка кон-
денсаторов; сплошные линии соответствуют условию QBarp 3K/Q^m<1,0, пУнкти₽ные ^нагр эк/^с.м'>^'°
где QCim — номинальная реактивная
мощность синхронной машнны. Если
по расчету окажется 0нагр1вк/Фс,м<1,0,
ТО при Фнагр=Фнагр.эк следует включить
конденсаторы и общая реактивная на-
грузка должна распределяться в соот-
ветствии с равенством относительных
приростов. Поскольку для конденса-
торов а2=0, то из (4.95) находим а'=
=0 и согласно (4.93)
Q1 “ фдоб —
№с ~ &с.м) Qc
ас,м Qc ^с.м
ьс..,)Ое,н =gaffp№ (4.103)
ЛС,М
т, е. реактивная нагрузка снихрониой
машины должна сохраняться постоян-
ной, а разНИЦа Онагр Онагр,он Д0ЛЖИЗ
покрываться конденсаторами вплоть
до полной нагрузки Qc установленных
батарей (рис. 4.22, а).
При нагрузке больше, чем Qc-|-
„"VQwarP.BKj раЗНИЦа Онагр— (ОсЧ“
+ Онагр,эк) покрывается снова синхрон-
ной машиной вплоть до ее номиналь-
ной реактивной мощности QO1M при
максимуме общей реактивной нагруз-
ки Онагр max (участок III иа рис.
4.22, а).
ЕСЛИ 0Иагр.ак/0с,м>1Д ТО СНЯЧаЛЗ
синхронная машина нагружается до
своей номинальной мощности QC1M, а
ПрИ Qnarp>Qc,M раЗНИЦа Онагр—Ос,м
должна покрываться только конденса-
торами (штриховые линии на ^>ис.
4.22, а).
Во втором случае следует принять
ai=ac=0 н независимо от соотноше-
ния между bCfiA и Дрс, а также пос-
тоянных потерь синхронной машины
ПОЛУЧИМ СОГЛаСНО (4.1016) QHarp.3K =
= оо. Поэтому здесь в первую очередь
реактивная нагрузка в пределах Qc>
>ФнаГ₽>0 должна покрываться кон-
денсаторами, а при QHarP> Qc разни-
ца QHarp — Qc должна покрываться
синхронной машиной (рис. 4.22,6).
Распределение общей реактивной
нагрузки между линией передачи от
системы большой мощности (63>c«s0)
и местным источником реактивной
мощности определяется также соглас-
но (4.1016), (4.93) и (4.94), причем до
нагрузки
Фнагр.эк ~ Фл.еом
Ьм+рЛ2(Пн+Ол^-)дрм.пест
у____________\_______^Л.пом '_______
(4.104)
[ал определяется согласно (4.90), а
Ьм, сми ДР м,пост — коэффициенты
относительного прироста и постоянные
потери местного источника] следует
получать реактивную мощность толь-
ко ОТ системы, если Снагр.ак/Сл.ном <
<1,0, либо получать эту мощность
ДО ЗНачеНИЯ Q Л,ном при Снагр.ек/
/Q л.1юм>1,0. Режим работы электро-
передачи и местного источника иллю-
стрируем на рис. 4.23 (для Сл.ном >
>Спггр,эк). Когда общая нагрузка ста-
нет больше, чем QEarp,3K, распределе-
ние реактивных мощностей будет осу-
ществляться в соответствии с равенст-
вом относительных приростов и может
быть рассчитано по уравнениям (4.93),
(4.94).
Для удобства определения потерь
энергии, расчетных затрат и номи-
нальных мощностей преобразуем pa-
ne
венства (4.93) и (4.94), обозначив от-
ношение номинальной реактивной мощ-
ности источника с большей постоян-
ной частью относительного прироста
Ь2 к номинальной мощности источни-
ка с b\<b2 (для электропередачи
Ьл =0) через с:
c = Q2B0„/Qim„. (4.105)
Во время максимума нагрузки при-
мем
Q1HOM 4" ^2К0М = Снагршал
или с учетом (4.105)
1 ] с ^наГРтсх
Q1HOM
откуда
Л) ____ Фнагртах и Г) —
Ч1ЕОМ - , Г и Ч-2НОМ —
1 + С
= Т?—Смгипм- (4.Ю7)
14-с
Подставляя данные величины в
равенства (4.93) — (4.96), находим
Я “7 »
а22 + са12
/) __ №2 bj) сфиагртаз: .
Д°В (а2х + “и)(1+с)
q _ Д2Т ^нагр । fe]) cQuarp max .
°2Z + сс22 (а22 + м12) (1 + с)
или в долях от максимальной реактив-
ной нагрузки
Qj _ g2S О д_
л , '•с негр* г
Ч?нагр max °2е “г сс12
ч------fe~'’1)c-----; (4.108)
"(°2S + CM
Qi
— Фиагр* л
чнагртах
(6а bj) с
О*
Онагртах
_ са1Р Qparp. (Од — °1> с 109)
а22 4“ СС12 П (О22 4* СС12)
ГДе Онагр* = Снагр/Онагр max, а ЧИСЛО
„___ 1 1 г.__ Снагртах
п — 1 г с ~ —д указывает, ка-
<Лном
кую часть от общего максимума реак-
тивной нагрузки составляет номиналь-
ная мощность источника с меньшей
постоянной частью относительного при-
роста.
Уравнения ,(4.108), (4.109) позво-
ляют использовать типовые графики
Рис. 4.23. Распределение реактивной мощности
между линией передачи от системы неограни-
ченной мощности и местным источником
(синхронным компенсатором):
I — реактивная мощность, передаваемая по линии
<QjI с а л — 0,0394; (>Д“0); 2—реактивная нагрузка
местного источника (Одо с ищ =0.0166; 0,000987;
'“‘пост. -0<ЖИ>; участок / — QM -О; вл=
участок Н — распределение нагрузки при равенстве
относительных приростов; участок /Д —Qm=
= ^С,к,ном: Ол = ®нагр — ^с,к,ном: ^иагр max =
~ ^С.к.ном + Олином ~ ^Л.ном
реактивных мощностей узлов нагрузок
(в процентах QHarpmax) и ври данных
oix, а2х, и bi определить нагруз-
ку и режим работы обоих источников
реактивной мощности в зависимости
от отношения их номинальных мощно-
стей в соответствии с проведенным вы-
ше анализом режимов при наиболее
характерных случаях. В частности,
для случая питания нагрузки от систе-
мы источника реактивной мощности
получим при <2нагр> <2пагр1Эк
Л ном
Снагр max
ам
atA 4* сал
Фяагр* +
(14-с) (ам4-сал)
(4.110)
4.5. ПРИМЕНЕНИЕ СИНХРОННЫХ
И АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
ДЛЯ МЕХАНИЗМОВ С УДАРНОЙ
НАГРУЗКОЙ 1
Выше отмечалось, что одним из
преимуществ синхронных двигателей
по сравнению с асинхронными являет-
ся то, что они обладают большей пе-
регрузочной способностью. Весьма
важно, что перегрузочная способность
синхронных двигателей может быть
увеличена за счет автоматического ре-
гулирования тока возбуждения, в то
время как у асинхронных двигателей
такой возможности нет. Более того, в
, ’ Данный параграф включен в настоящее изда-
ние книги на основании одной нз последних работ
автора, опубликованной в журнале «Электричество»
1131. (Прим, ред.)
120
реальных условиях перегрузочная спо-
собность асинхронных двигателей прн
резких возрастаниях нагрузки умень-
шается нз-за понижения напряжения
в питающей сети..
Кратковременное использование пе-
регрузочной способности асинхронного
двигателя, например при ударной на-
грузке, возможно лишь за счет сниже-
ния частоты вращения. Изменение
скольжения можно уменьшить при по-
мощи маховика, но это удорожает ус-
тановку н усложняет ее эксплуатацию.
Частота вращения синхронных двига-
телей при ударной нагрузке остается
практически неизменной.
Синхронные двигатели успешно
применяются в механизмах с ударной
нагрузкой на некоторых металлурги-
ческих заводах. Мощность синхронных
двигателей превышает 20000 кВт.
Выше отмечалось, что важным пре-
имуществом синхронных двигателей
перед асинхронными является возмож-
ность использования нх как источника
реактивной мощности для поддержа-
ния необходимого уровня напряже-
ния в узле нагрузки или предприятия.
Если нагрузка резкопеременная, то
синхронный двигатель должен быть
снабжен автоматическим регулятором
возбуждения для обеспечения заданно-
го режима напряжения узла нагрузки
или предприятия и для форсировки
возбуждения с целью поддержания ус-
тойчивости работы двигателя.
Были случаи, когда синхронные
двигатели при ударной нагрузке из-за
неправильно выбранной системы авто-
матического регулирования возбужде-
ния (регулирование на постоянство ре-
активной мощности илн cos <р) выпа-
дали из синхронизма. Опыт показал,
что при наличии в таких случаях фор-
сировки возбуждения в функции на-
грузки привод работает надежно [65].
Ниже кратко охарактеризованы ос-
новные особенности работы синхрон-
ных и асинхронных приводов с ударной
нагрузкой, даны инженерный метод
выбора мощности электродвигателей
и требования к системе возбуждения.
Определение допустимой нагрузки
электродвигателей по нагреву. Рас-
смотрим режим работы асинхронного
н синхронного двигателей при периоди-
чески повторяющихся нагрузках. Для
упрощения рассмотрим идеализиро-
ванный цикл: работа с неизменной на-
грузкой Рр=const в течение времени
iP и пауза продолжительностью
когда нагрузка Рв—const меньше Рр.
Номинальная мощность двигателя
должна проверяться по нагреву обмо-
ток, который практически пропорцио-
нален квадрату тока. За один цикл
среднеквадратичные потерн в обмотке
статора двигателя будут равны:
Д^Хср.кв ~ Д^Гном COS2 Фном
х (Рп+^К+(£+$л _ (4Ш)
где ДР1Н0М — потери в обмотке статора
в номинальном режиме; cos фвом — но-
минальный коэффициент мощности;
рп = Д]п/Д1НОЫ ttPB[Pном! ^п=Qn/Р|ЦОМ!
рр == Р 1₽/Д1 ном л? Р^/Рном; Ур=Qp/^ihom;
Р> ном—Дном/т^пом — номи-
нальная активная мощность на выво-
дах двигателя; Pia и Pip — активные
мощности во время паузы и работы;
Qv н Qp — реактивные мощности дви-
гателя во время паузы и работы; РКОм
и т)ном — номинальные мощность на
валу и КПД.
Для синхронного двигателя путем
регулирования тока возбуждения мож-
но добиться режима, при котором
средняя за цикл реактивная мощность
равна нулю и мала в периоды паузы
и работы. Поэтому номинальная мощ-
ность асинхронного двигателя по усло-
вию нагрева, как правило, больше но-
минальной мощности синхронного
двигателя.
Принимая для синхронного двига-
теля в рассматриваемом режиме Q~
«0, получаем
ДЛер.™ =
(4.112)
При ДР1Ср.КВ ~
Р р= \f---------------(4.113)
г fp
При работе синхронного двигателя
с Q&0 кратности тока возбуждения
&в1р и йвщ по отношению к номиналь-
ному в периоды «работы» н «паузы»
соответственно могут быть определены
по формуле (4.4).
Среднеквадратичные потери (за
цикл) в обмотке возбуждения синхрон-
ного двигателя составляют:
к 2 л 1, <,2 л
Ар — ДР яв1п гп ‘ *в1р *р
S.cp.tiB у, »
(4.114)
121
или
А^в.ср.кв — А^в.ном
Т 4- cos2 <рном (р| /п + /р) (4 П5)
7(l+x=H-2xdSin4)EOM)
При Л^в.ср.кв = вом
j / 7 (xd + 2sin Фирм) Рг fn
* tp, XdCOS2(pHoM tp
(4.116)
Сравнив выражения (4.113) и
(4.116), можно заметить, что прн
соБ(рном=1 допустимая нагрузка будет
одна и та же по иагреву как обмотки
статора, так и ротора. При других зна-
чениях cos <рном допустимая нагрузка
всегда определяется нагревом обмот-
ки статора, так как
Xd + 2 sin фном
х^ cos2 <Рном
при всех значениях Xd.
В очень многих случаях можно
пренебречь нагрузкой в период паузы,
т. е. принять рп=О. Тогда допустимая
перегрузка по нагреву будет равна:
₽р=——V~~- (4-н7)
COS Фирм »
При cos <j>hqn =0,9 и /р/7'=0,1 до-
пустимая перегрузка рр=3,5; для
/р/Т=0,25 Р₽=2,2; при /₽/Г=0,5 ₽₽ =
= 1,6; прн /Р/Т=0,75 р₽=1,3.
Если реактивная мощность не рав-
на нулю, что характерно для асинхрон-
ных двигателей, то допустимая по на-
греву перегрузка будет меньше, чем
указано выше.
Чем меньше ₽р, тем меньшее значе-
ние будет иметь проблема обеспече-
ния устойчивой работы двигателя.
Однако следует считаться с возмож-
ностью появления для некоторых ти-
пов приводов относительно редко по-
вторяющихся перегрузок большой ве-
личины. В этих случаях возможно
«опрокидывание» асинхронных двига-
телей и глубокое снижение частоты
вращения вплоть до остановки, а при
использовании синхронных двигателей
за счет соответствующей быстродейст-
вующей форсировки возбуждения воз-
можно сохранение их устойчивой ра-
боты. Это, как отмечалось выше, весь-
ма существенное преимущество синх-
ронных двигателей.
Рассмотрим приближенно поведе-
ние двигателей при резких набросах
нагрузки.
Асинхронный двигатель. В период
действия перегрузки скольжение
асинхронного двигателя увеличивает-
ся. Если максимальный момент двига-
теля больше момента нагрузки, то
наибольшее скольжение двигателя не
превысит критического. В противном
случае при определенной длительности
перегрузки скольжение станет больше
критического. Такое увеличение сколь-
жения в определенных пределах впол-
не допустимо, если после прекраще-
ния перегрузки частота вращения дви-
гателя восстановится до нормального
значения.
Для уменьшения снижения частоты
вращения необходимы большая крат-
ность максимального момента и мень-
шее значение критического скольже-
ния. Это может быть достигнуто за
счет уменьшения реактивного сопро-
тивления рассеяния и активного со-
противления обмотки ротора.
Изменение частоты вращения (илн
скольжения) во времени может быть
найдено решением рассматриваемого
в гл. 6 уравнения динамики (6.4).
Не останавливаясь подробно на
расчете движения ротора двигателя
при набросе нагрузки, приведем при-
ближенную формулу для вычисления
времени, в течение которого скольже-
ние двигателя под действием статиче-
ской нагрузки увеличивается от нуля
до критического значения:
t = FtjS^/b^, (4.118)
где tj — так называемое «время уско-
рения» агрегата, характеризующее ме-
ханическую инерцию его вращающих-
ся масс и равное времени изменения
частоты вращения ротора от нуля до
синхронной (или наоборот) под дейст-
вием неизменного избыточного момен-
та, равного номинальному; F—посто-
янный коэффициент.
По произведенным расчетам для
случаев, когда
=ЬНОМ; 1,5 fejK>M н 2 дыом, значения F
соответственно равны 4,6; 1,0; 0,6.
Определив скольжение, можно вы-
числить активную и реактивную мощ-
ности асинхронного двигателя по фор-
мулам, приведенным в гл. 3.
122
Рис. 4.24. Зависимость &КомЛном от Ха синхрон-
ных двигателей при номинальной нагрузке для
COS (ряоы=0.9 и cos (р= 1
Из сказанного в гл. 3 следует, что
при увеличении кратности максималь-
ного момента Ьяом асинхронного дви-
гателя реактивная мощность рассея-
ния прн номинальном режиме умень-
шается примерно обратно пропорцио-
нально Ьном, но прн критическом
скольжении реактивная мощность воз-
растает пропорционально fen0M, т. е.
отношение реактивной мощности рас-
сеяния при критическом скольжении к
реактивной мощности рассеяния при
номинальном режиме и прочих рав-
ных условиях (ku и kf неизменны)
увеличивается примерно пропорцио-
нально квадрату кратности макси-
мального момента. Это может приво-
дить к значительным колебаниям на-
пряжения при переменной нагрузке.
Синхронный двигатель. В устано-
вившемся режиме максимальная элек-
тромагнитная мощность синхронного
двигателя, если пренебречь реактив-
ным моментом и насыщением, может
быть записана на основании (4.47) и
(4.49) в следующем виде:
Ртах _ kukB (4 119)
?ном Чном х& COS фном
В номинальном режиме ku=l и
kB=kB_ ном. Подставляя сюда выраже-
ние кратности тока возбуждения при
номинальной нагрузке согласно (4.3),
получаем
Ртах ном а _____
„ VHOM —
Гном
. (4.120)
Ином %d C°s Фном
Зависимость 6цОМТ) ном от Хд при но-
минальной нагрузке для cos фнОМ=0,9
и coscp = l приведена на рис. 4.24.
Завнснмость реактивной мощности,
выдаваемой в сеть синхронным двига-
телем, ст его активной нагрузки н то-
ка возбуждения определяется форму-
лой (4.57).
При ^,=^=1 и неучете насыще-
ния эта зависимость может быть запи-
сана в следующем виде:
Q .. К^-Ра^соз2фтм-1
Сном хд sin <рноМ
(4.121)
Зависимость Q/QHOM от ха при но-
минальном токе возбуждения и cos <р=
=0,9 изображена на рис. 4.25.
Реактивная мощность будет равна
нулю при
г / 1 4- ₽2 *5 cos2 в>
7^~=1/ ---------j. (4 122)
/в ном | l+I<l + 2j:dsinfE0M
Номинальной она будет в том слу-
чае, когда
^в.ном
(4.123)
С ростом активной нагрузки при
одном и том же значении гока возбу-
ждения реактивная мощность, отдава-
емая двигателем в сеть, уменьшается.
Прн определенном значении активной
мощности реактивная мощность умень-
шится до нуля и затем синхронный
двигатель начнет потреблять реактив-
ную энергию из сети.
Из формулы (4.121) нетрудно най-
ти активную нагрузку при номиналь-
ном токе возбуждения, при которой
123
реактивная мощность равна нулю Это
будет иметь место при
Р V ~ 1
Xj COS ФяоМ
__ yd ~1~ 2sjn Фирм) 124)
Xd cos Фяом
При номинальном токе возбужде-
ния по мере увеличения Ха значение р,
при котором реактивная мощность
равна нулю, снижается. Так, если при
cos<pHOM=0,9 для Xd=0,5 0=1,84, то
для Ха~1 0 = 1,52 и для %d=2 0=1,33.
Зависимость 0 от Xd при Q=0 и
номинальном токе возбуждения, соот-
ветствующем cos (рном—0,9, представ-
лена на рис. 4.26.
Для того чтобы компенсировать
уменьшение активной нагрузки, при
которой реактивная мощность будет
равна нулю при большем Xd, нужно
увеличивать ток возбуждения. Так, на-
пример, для того чтобы при №=2 уве-
личить 0 от 1,33 до 1,84, ток возбуж-
дения должен быть увеличен на 33 %.
Если Xd увеличится с 0,5 до 1, то для
сохранения прежнего значения 0 =
= 1,84 нужно ток возбуждения увели-
чить на 13 %.
Значение потребляемой из сети ре-
активной мощности синхронного дви-
гателя прн номинальном токе возбуж-
дения и 0=jPj//)j ном — TJhom^hom будет
равно:
—5— =-----------. (4.125)
Одом xd sln Фном
Таким образом, чем меньше Xd, тем
больше реактивной мощности двига-
тель будет потреблять из сети в режи-
мах, близких к предельным по макси-
муму момента. Например, если при
costpHOM=0,9 для №=0,5 Q/Qhom=4,6,
то для Xd=l Q/Qhom=2,3 и для №=2
Q/Qsom= 1,15.
При этом следует иметь в виду, что
кратность перегрузки будет различ-
ной. Так, для Ха, равного 0,5; 1 и 2,
кратность перегрузки 0=т]ном&пом бу-
дет соответственно равна 2,88; 1,88 н
1,44.
Если отнести кратность реактивной
мощности к кратности перегрузки, то
для хд=0,5 получим 4.6/2,88 = 1,6, для
№=1-2,66/1,88=1,21 и для Xd=
= 2-1,15/1,44 = 0,8.
При внезапных больших увеличени-
ях нагрузки на валу двигателя его ро-
тор будет перемещаться относительно
основного магнитного потока, созда-
ваемого токами статора (угол б будет
возрастать). Это движение ротора н
возрастание самих токов статора обу-
словят индуктирование в обмотке воз-
буждения и демпферных контурах
ротора свободных токов, затухающих
в последующем с постоянной времени
(сверхпереходными составляющи-
ми можно пренебречь). Благодаря
этим свободным токам мы можем по
крайней мере начальную часть данно-
го процесса в первом приближении
рассматривать как происходящую при
неизменных потокосцеплениях в кон-
турах ротора. Этому условию, как из-
вестно, соответствует принятие неиз-
менным значения ЭДС £' за переход-
ным реактивным сопротивлением x‘d.
Соответственно кратность максималь-
ной мощности jio отношению к номи-
нальной при пренебрежении реактив-
ным моментом будет определяться по
аналогии с (4.47) заменой в нем Eq на
Е^и ха на x'd, а именно:
Ь' = ?тах ~ ^ном _
Еном Еном х'а
Пн ОМ COS <рном x’d
Рнс. 4-26. Зависимость р от Хй при Q=0 и но-
минальном токе возбуждения, соответствую-
щем COS <₽воы— 0,9 *
Здесь x’d даны в относительных
единицах.
При номинальных значениях часто-
ты и напряжения kf=ku = l, тогда
= —-----------------(4.126а)
Х.'П COSG)
d *вом ’ном
Сравнивая с предельной кратно-
стью перегрузки в статическом режиме
124
по (4.120), получаем
^цом ___ Xtf,
^ноМ 1 /~. । о , > X,,
I 1 + 2*йыпЧ’шм + ^ о
(4.127)
При малых активных нагрузках в
период «пауз» и при работе в этот пе-
риод с малыми Q можно приближен-
но принять £,' = Dhom= 1,0-
Приняв X(i=l/OK3; cos <рном = 0,9;
£'=1,11; х* =0,25; ku— 1, получим
данные, приведенные в табл. 4.9.
Таблица 4.9
ОКЗ
Чном, *ном
^ном
^ном
0,5 0,7
i,44 1,6
1
1,9
3,1 2,75 2,36
1.5
2,4
1.87
2
2,9
1,55
Таким образом, динамическая пере-
гружаемость синхронного двигателя
существенно выше статической.
Весьма важно, что максимальная
электромагнитная мощность в начале
переходного процесса практически не
зависит от предыдущего значения то-
ка возбуждения. Однако по мере зату-
хания переходного процесса ток воз-
буждения при медленном изменении
момента начинает играть существен-
ную роль, поскольку максимальная
электромагнитная мощность в устано-
вившемся режиме пропорциональна
току возбуждения.
Когда скорость механических про-
цессов меньше электрических, опреде-
ление перегрузочной способности сле-
дует производить по формулам, полу-
ченным для установившегося режима.
Если продолжительность перегруз-
ки будет относительно велнка, то во
избежание выпадения двигателя из
синхронизма целесообразно в момент
перегрузки форсировать возбуждение.
Начало возникновения перегрузки
можно определять по увеличению ак-
тивной составляющей мощности.
Как было отмечено (см. табл. 4.9),
при резком изменении нагрузки дина-
мическая перегружаемость превосхо-
дит статический предел перегрузочной
способности. Однако допустимые по
условиям устойчивости перегрузки за-
висят от продолжительности действия
ударной нагрузки или от соотношения
длительности раузы н рабочего вре-
мени. Этот вопрос здесь не рассмат-
ривается. Соображения, изложенные в
настоящем параграфе, должны рас-
сматриваться лишь как первое, глав-
ным образом, качественное, прибли-
жение.
Пример 4. Сравнять эффективность при-
менения синхронного и асинхронного двига-
телей для привода с ударной нагрузкой, для
которого fn=i,5 с н Рп=280 кВт; /Р=0,5 с я
Рр= 1700 кВт.
1) Синхронный двигатель. Пренебрегая
предварительно нагрузкой во время паузы, по
формуле (4.117) определяем допустимую на-
грузку при cos tp—1 и рп=0:
₽‘’=ту1/Г-^=2-22-
Поэтому по условиям нагрева номиналь-
ная мощность двигателя должна быть
Рр 1700
/1™" = <==^Г = 755 кВ1-
Ближайшая номинальная мощность двига-
теля равна 800 кВт. Для этого двигателя
«280/800= 0,35.
Произведем проверку двигателя иа нагрев
по формуле (4.113):
, / 2 0,352-1,5 ~
₽в<|/ 0,95-0,5 0,5 — ,4’
Таким образом, выбранный двигатель
удовлетворяет требованиям по нагреву, гак
как §p«i700/800=2,i3.
Параметры двигателя: PHuM=800 кВт;
Лвоы=750 об/мин; 5наы==940 кВ-А; Свои —
= 410 квар; 1/вом=6 кВ; 1Вом=90,5 А;
cosq>BOM=0,9; ОКЗ—1,1; xd=0,25; 7}Вом=
=94.87%; &вом=2,08; АРСТ=6,95 кВт;
APwei=5,8i кВт; ДР|НОы=18,2 кВт; АРв.ноы=
= 12.4 кВт; SAPbom=43,4 кВт.
Определим угол бр по динамической ха-
рактеристик момента, приняв Е^=С/НОм и
при Р=1700 кВт. В этом случае
. 800
0,949-0,25.0.9 “ 3750 кВт;
sin бр = 1709/3750 = 0,48, или бр = 28° 40'.
Запас по устойчивости во время переход-
ного процесса равен 1/sin бр=2,08.
Определим кратность тока возбуждения в
установившемся режиме при ха=1 н cos ср =1
для периодов паузы и работы:
= =0.62;
^в.ном v 1 4* 14~ 2-0,436
_А^=-|/2±2-13,-0^=|.г8.
/в.иом г 1 4~ 1 2-0,436
В этом случае запас по устойчивости в
установившемся режиме будет равен 2.08Х
Х800-1,28/1700 = 1,039.
Из этих данных следует, что для обеспе-
чения данного режима необходимо, установив
ток возбуждения равным 62 % номинального,
в момент перегрузки вводить форсировку до
потолочного значения и снимать ее при окон-
чании перегрузки.
С учетом того, что 34 время перегрузки
(0,5 с) переходный ток, наведенный в обмотке
возбуждения, не успеет полностью затухнуть,
фактический запас устойчивости будет вы-
ше 1,25.
Кратность тока статора при Q=0 равна:
/п//ном= 0,35-0,9 = 0,316;
/р//ном=2.13-0 9= 1,92.
Суммы потерь и активная мощность соот-
ветственно составляют:
ЕД^ном = 6,95+ 5,81 + 18,2-0,316» 4-
12.4-0.622 = 19.4 кВт;
2£Рр = 6,95 4-5,81 + 18,2-1,92s +
4- 12Л-1.282 = 100 кВт;
Лном = 299 кВт; Р1р = 1800 кВт.
Потери в обмотках статора н ротора рав-
ны:
АРщ = 18,2-0,3162 = 1,82 кВт;
ДРВ(П = 12,4-0,622 = 4,8 кВт;
ДР1Р = 18,2-1,922 = 67 кВт;
дрв р= 12,4-1,282 = 20,4 кВт
Средине потери за цикл составляют:
1,82-1,5 + 67 0,5
дЛср —
= 18,1 кВт;
Д^2Ср —
4,8-1,5 + 20,4-0,5
--------—------------ =8,7 кВт.
2) Асинхронный двигатель. Для рассмот-
ренного выше режима, учитывая потребление
из сети реактивной мощности, выбираем дви-
гатель 1000 кВт; 1,215 кВ-А; 750 об/мин; 6 кВ;
117 A; cos <ркад{= 0,87; &псм=2,1; /оном 33,8 А;
ДРСТ=15 кВт; Д/мех=7,8 кВт; Д/,1ном= 18,2+
+5,25=23,45 кВт; ДР2ном=12,1 кВт; ЕДРЛОм=
= 58.35 кВт; т)ном=94,5 %; Дном=1,2 %; Pihom=
= 1058 кВт; Qobom=350 квар; Споы=596 квар.
Кратности перегрузочного момента и пе-
риоды паузы и работы будут соответственно
равны:
^яом/^ном 2,1-1000 п
К = 280 = 7’5;
8яом Рном 2,1 • ЮОО .
Рр ~ 1700 - ‘ '
Реактивная мощность рассеяния при но-
минальной нагрузке
Qp.hom = 596 — 350 = 246 квар.
Реактивная мощность при нагрузках, рав-
ных 280 и 1700 кВт:
Qn = 350 + 246-0,28
2,1 +1^2,12— 1
75 + У7.5? — !
= 368 квар;
Qp = 350 + 246-1,7
2.1 -ь 1е — 1
1,23 + V 1,23!—i
= 1300 квар.
Произведем проверку по условию нагрева
по формуле (4.1*11) при рв«= 280/1000=0,28;
?п=368/1058=0,35; р₽~ 1700/1000= 1.7 н-?₽ =
- 1300/1058=1,23:
(0,28 s + 0,35s) 1,5 4-
ДР.ГД.К.. с & Т (1,7В + 1,232) 0,5
гном 2
=0,95.
Таким образом, выбранный нами двига-
тель удовлетворяет требованиям по нагреву.
Критическое скольжение равно:
skp ®яом Сном “1“ 6ном I )
= 1,2(2,! + К2, Is — 1) =4,72%.
Скольжения при нагрузках 280 и 1700 кВт
составляют:
7,Б + Р/7,5« — 1
4,7
---------= 2,72%.
1,23+V 1,23е— 1
Потери в обмотке ротора ДР2 и электро-
магнитная мощность Рч равны:
280 + 7,8
ДР2П = ------1----- 0,0031 = 0,9 кВт;
2 1 — 0,0031
Ра,п — 289 кВт;
1700 + 7,8
ДР„О = —---- 0.0272 = 47,5 кВт;
“р 1 — 0,0272
Рар = 1755 кВт.
Потери в обмотке статора:
Рп « 280/1000 = 0,28; qD = 368/1058 = 0,35;
₽Р« 1700/1000 = 1,7; <7Р= 1300/1058= 1,23;
2ДР1П= 23,45-0,87s (0,282 + 0,352) =
= 3,5 кВт;
ЕДР1р = 23,45-0,87а (1,7? + 1,232) =
= 77,6 кВт.
Общие потери, активная н полная мощ-
ность составляют:
£ДР„ = 15+7,8 + 3,5 + 0,9 = 27,2 кВт;
ЕДРр = 15 + 7,8 +77,6 + 47,5 = 148 кВт;
Р1а = 307 кВт; Sn = V 307?+ 368? =
= 480 кВ А;
Р1р = 1850 кВт; Sp = V1850? + 1300е =
= 2260 кВ-А;
рп = 307/1058 = 0,29 и ₽р =
= 1850/1058= 1,75.
Поскольку эти значения мало отличаются
от вычисленных выше приближенных значе-
ний, поверочный расчет производить нет не-
обходимости.
В табл. 4.10 приведены основные расчет-
ные данные по обоим вариантам.
Из анализа этих данных следует, что ва-
риант с синхронным двигателем имеет ряд
преимуществ, к числу которых относится
меньшая номинальная мощность при значн-
126
Таблица 4.10
Тип двигателя •Рном, «Вт кВт р р=1700 кВт
v «п аг. «р хдрр
SP
Асинхронный 1003 307 368 27,2 185С 1300 148
480 2260
Синхронный 800 299 299 19,4 1800 1800 0 100
тельно меньших потерях активной мощности и
лучшем режиме реактивной мощности.
Пример Б. Проверка тех же двигателей в
режиме однократной перегрузки 3000 кВт в
течение 0,2 с при механической постоянной аг-
регата Tj=5 с.
Для асинхронного двигателя кратность
перегрузки составляет 3000/1000=3, или при-
мерно l,5feKOS!.
Время, в течение которого скольжение
становится равным критическому, составляет:
« = 5-0,0472/2,1 = 0.112 с,
т. е. оно почти в 2 раза меньше временя пере-
грузки. К концу перегрузки скольжение будет
больше критического и составит около 6 %.
Результаты определения реактивной мощ-
ности двигателя в зависимости от скольжения
приведены в табл. 4.11.
Таблица 4.11
Потери в роторе двигателя н электромаг-
нитный момент для s=Sj<p равны:
ДР2р =
(3000 -I 7,8)
1 —0,0472
0,0472 =
= 152 кВт; Ра>р = 3152 кВт.
Потери в обмотке статора составляют:
„ (3152 4- 15)г -4- 2450=
ДР1р = 23,45 -------=255 кВт.
Общие потери, мощность двигателя п
кратность тока статора к концу нагрузки бу-
дут равны:
SAP = 15 + 7,8 + 255 + 152 = 430 кВт;
Р1р = 3430 кВт; Sp = 4220 кВ А;
= 3,5.
Для синхронного двигателя
sinбр = 3000/3750 = 0,8, или бр = 53°.
Запас по устойчивости в переходном ре-
жиме составляет 1/0,8=1,25.
Проверим режим работы синхронного
двигателя с нагрузкой при cos <J>= 1:
Рр » 30D0/800 = 3,75;
Таблица 4.12
Тип двигателя р ком кВт Режим нагрузки Рр=3000 кВт
Р1р «р- квар ХДР, квар
SP
Асинхронный 1000 3430 4220 2450 430
Синхронный 800 3274 3274 0 274
^в.ном
1 +3,752-0,92
—— ----------- 2,07;
1 + 1+2-0,436
— - _ =0,59.
Льном - I + 1 +2-0,436
Запас по устойчивости в установившемся
режиме равен:
2,08-800-2,07/3000 = 1,15.
Кратность тока статора при перегрузке
составляет:
/р//ном« 3,75-0,9 = 3,38.
Общие потери и мощность двигателя
равны:
SAPp = 6,95 +5,81 + i8,2-2,38= +
+ 12,4-2,07? = 274 кВт;
Р1р = 3274 кВт; Sp = 3274 кВ • А.
В табл. 4.12 приведены основные расчет-
ные данные по обоим вариантам.
И в этом примере вариант с синхронным
двигателем имеет значительно лучшие пока-
затели.
4.6. СРАВНЕНИЕ АСИНХРОННЫХ
И СИНХРОННЫХ ДВИГАТЕЛЕЙ
И ВЫБОР ИСТОЧНИКОВ
РЕАКТИВНОЙ МОЩНОСТИ
Выбор между асинхронными и
синхронными двигателями должен
производиться на основе технико-эко-
номических расчетов.
Сравнительную стоимостную оцен-
ку вариантов следует производить по
расчетным затратам [26]
3 = C + £K/< = min, (4.128)
127
где /< и С — капитальные вложения и
себестоимость (годовые издержки
производства или эксплуатационные
расходы) для каждого варианта; Ев—
величина, обратная нормативному сро-
ку окупаемости Гн, называемая норма-
тивным коэффициентом эффективно-
сти.
Наивыгоднейший вариант имеет
минимальное значение расчетных за-
трат 3. Коэффициент эффективности
принимается равным рНом=0,12, что
соответствует нормативному сроку
окупаемости Гн—8,33 года. Таким об-
разом, экономичность того или иного
варианта зависит как от капитальных
вложений, так и от эксплуатационных
расходов. Это обстоятельство необхо-
димо учитывать при выборе номиналь-
ного коэффициента мощности синхрон-
ных двигателей. Уменьшение номи-
нального costp приводит к удорожа-
нию двигателя, но прн этом появляется
возможность получения от синхрон-
ного двигателя реактивной мощно-
сти. Вместе с тем последнее неизбеж-
но связано с появлением дополни-
тельных потерь в синхронном двига-
теле.
Представляет интерес рассмотреть,
во что обходится получение реактив-
ной мощности от синхронной машины
(генератора или двигателя) за счет
выполнения его с cos<p<l.
Удельная стоимость 1 квар реак-
тивной мощности у синхронного гене-
ратора или двигателя всегда значи-
тельно меньше удельной стоимости
1 кВ-А полной мощности, поскольку
при одной и той же активной мощно-
сти и изменении созфном полная мощ-
иость синхронной машины меньше
(обратно пропорционально cos <рНом
или пропорционально К 1 -Ь tgs <риим),
чем реактивная мощность (пропорцио-
нально tgcpHoj*). Например, полная
мощность синхронного двигателя (ге-
нератора) с cos<Phom=0,9 будет всего
на 11 % больше, чем у синхронного
двигателя (генератора), имеющего
cos<Phom=1, тогда как реактивная
мощность при cos<Phom = 0,9 составляет
0,48 активной мощности (рис. 4.27).
Удельная стоимость реактивной
мощности для синхронных двигателей
и генераторов, руб/квар,
Kq = К«~К , (4.129)
Сном
где Ли — стоимость синхронного дви-
гателя (генератора) с полной мощ-
ностью и номинальным коэффици-
ентом мощности меньше единицы; К —
стоимость синхронного двигателя (ге-
нератора) С СОЯфаом=1,0 при той же
номинальной мощности на валу и пол-
ной мощности; QBOM — номинальная
реактивная мощность.
Формула (4.129) может быть пре-
образована следующим образом:
QShOM — Рг^нОМ!
Сном
(4.130)
или для двигателей
D
sin <Рном
tJhqm
’Ihomi £
COSVbom).
(4.131)
Рие. 4.27. Изменение полной и реактивной
мощностей синхронного двигателя в зависимо-
сти от cos <р
где TjnoM, — КПД двигателя при
cos <рном = 1; D — удельная стоимость
1 кВ-А полной мощности двигателя
прн cos <рном< 1; — соответственно
для двигателя с cos <рНОм = 1-
Для синхронных генераторов
КСГ= . д (1 - cos<paoJ. (4.132)
sin фиом \ D /
Отношение D^/D всегда больше
единицы. Для различного типа двига-
телей это отношение колеблется в
пределах 1,02—1,09 при cos <рНом = 0,9.
Отношение стоимостей Dt/D мо-
жет быть заменено приближенно отно-
шением полных или удельных весов
[кг/(кВ А)].
12S
Из уравнений (4.131) н (4.132),
принимая £>j/Z>= I, получаем
ЛрИ COS фном^О.9
Kq. * Kq* = D (1 - 0,9)/0,436=0,231);
(4.133)
При COS фним=0,8
К<?г » к<зл = О (1 — 0,8)/0,6 = 0,330.
(4.134)
В действительности Kqv и /<<?д
меньше, так как удельная стоимость
двигателей (генераторов) уменьшает-
ся при увеличении полной номиналь-
ной мощности.
Стоимость конденсаторов значи-
тельно выше, чем удельная стоимость
Kqh. По капитальным вложениям в
источники реактивной мощности преи-
мущество синхронных двигателей бес-
спорно.
В Советском Союзе, как правило,
синхронные двигатели изготовляются
с номинальным коэффициентом мощ-
ности, равным 0,9. Йо это отнюдь не
означает, что во всех случаях в эксп-
луатации следует работать с таким
значением коэффициента мощности
илн с меньшим при неполной активной
нагрузке. Например, когда реактивная
мощность в месте установки синхрон-
ного двигателя может быть получена
более экономичным образом от других
источников (генераторы, компенсато-
ры, конденсаторы), целесообразным
является режим работы синхронного
двигателя с coscp=I. Этот режим яв-
ляется наиболее выгодным для самого
двигателя, так как при этом потери
будут иметь минимальное значение и
нагрев обмоток также будет меньше,
Чем При /в = /в.ном ИЛИ COS (p = COS фном-
Сравнение вариантов с синхронны-
ми и асинхронными двигателями про-
изводится исходя из условия обеспече-
ния заданного энергосистемой эконо-
мического значения реактивной мощ-
ности, потребляемой из ее сети. Это
значение в соответствии с действую-
щими нормативными документами по
компенсации реактивной мощности в
распределительных сетях [66] являет-
ся исходной информацией для решения
вопроса о выборе компенсирующих
устройств в сетях потребителей элек-
троэнергии. При этом сравниваются
следующие варианты:
I. Асинхронные двигатели с кон-
денсаторными батареями, мощность
которых определяется по формуле
« = (4.135)
где —расчетное значение реактив-
ной нагрузки потребителей при уста-
новке асинхронных двигателей; Q3 —
заданное энергосистемой экономиче-
ское значение потребляемой реактив-
ной мощности.
При этом, если Q JcQa, то конден-
саторные батареи могут не понадо-
биться.
И. Синхронные двигатели с кон-
денсаторными батареями, мощность
которых определяется по формуле
Q" = Q" — Qa~ti.K> (4.136)
где QJ1— расчетное значение реактив-
ной нагрузки при установке синхрон-
ных двигателей и работе нх прн
cos<p=l; Qcn — экономически целесо-
образная генерация реактивной мощ-
ности синхронными двигателями, оп-
ределяемая из условия минимальных
суммарных потерь мощности в двига-
теле и сети.
При этом для большинства син-
хронных двигателей с КПД более
95 % экономически целесообразным
оказывается использование макси-
мальной располагаемой реактивной
мощности.
Из этих вариантов выбирается ва-
риант с меньшей величиной затрат,
определяемых по (4.128).
Если величина, определяемая по
(4.136), оказывается отрицательной,
то это означает, что часть двигателей
может быть асинхронными. Эта часть
определяется нз условия сведения
(4.136) к нулю путем увеличения Q'’H
за счет добавления реактивной нагруз-
ки асинхронных двигателей и одно-
временного снижения Qc,n за счет
уменьшения числа синхронных.
649
Глава пятая
НАГРЕВ ЭЛЕКТРОДВИГАТЕЛЕЙ
Б.1. ОБЩИЕ СООБРАЖЕНИЯ
В этой главе основное внимание
уделено вопросам, касающимся нагре-
ва обмоток двигателей токами, превы-
шающими значения, допускаемые при
данной температуре охлаждающей
среды. Прн этом имеются в виду отно-
сительно кратковременные перегруз-
ки, имеющие место при пуске, самоза-
пуске, понижениях напряжения сети,
асинхронном режиме для синхронных
двигателей и др.
При определении допустимости той
или пион перегрузки по условиям на-
грева нужно исходить не из предельно
допустимых температур, а из сохране-
ния срока службы изоляции. Дело в
том, что часть времени двигатель рабо-
тает при температуре обмоток ниже
допускаемой нормами. В такие перио-
ды изоляция находится в более благо-
приятных условиях, и за счет «недоис-
пользования» ее в эти периоды могут
допускаться перегрузки в другие пе-
риоды при общем сохранении требуе-
мого срока службы изоляции двига-
теля.
Перегрузки различаются по дли-
тельности. Если за время действия пе-
регрузки температура обмоток ие до-
стигает установившейся, то перегруз-
ка называется кратковременной, в про-
тивном случае ее следует считать
длительной.
Как известно, относительно не-
большое повышение температуры изо-
ляции существенно сказывается на ее
сроке службы.
Распространенное мнение о том,
что тепловая защита является наилуч-
шей, так как она отключает двигатель
при повышении его температуры до
определенного предела, следует счи-
тать неправильным. Эта защита явля-
ется в большинстве случаев вредной,
так как она может отключать двига-
тель при вполне допустимых перегруз-
ках по условиям износа изоляции.
Двигатели, работающие с постоян-
ной нагрузкой и при небольшом числе
пусков, могут перегружаться по техно-
ЖЖШ
режимах в сети, при пуске под на-
грузкой, при обрыве одной фазы и при
поломке механизма или заклинивании
вала в подшипниках.
Перегрузки по технологическим
причинам имеют место при чрезмер-
ной загрузке механизма сырьем, при
неправильно установленном режиме,
например при работе дымососа на хо-
лодном воздухе с открытыми шибера-
ми. Эти перегрузки легко могут быть
устранены путем прекращения или
уменьшения подачи сырья в механизм,
закрытия шиберов и т. д.
Для того чтобы уменьшить дли-
тельность таких перегрузок, следует
иметь защиту, действующую иа сигнал
или обеспечивающую временное пре-
кращение подачи сырья в механизм.
После устранения перегрузки подача
сырья возобновляется вновь.
Кратковременные токовые пере-
грузки могут быть обусловлены пере-
ходными режимами в сети, например
при кратковременных понижениях на-
пряжения сети, при восстановлении
напряжения после отключения корот-
ких замыканий, при переключении
двигателей иа резервный источник пи-
тания. Перегрузки по этим причинам
редки и, как правило, не представляют
опасности для двигателей.
Опасной перегрузкой является руск
двигателя под нагрузкой в тех случа-
ях, когда двигатель не рассчитай иа
такой пуск. В этих случаях двигатель
не может развернуться и неизбежно
будет поврежден, если не будет своев-
ременно отключен от сети. Такая пе-
регрузка может иметь место также при
самозапуске таких двигателей в про-
цессе восстановления напряжения се-
ти после отключения короткого замы-
кания.
Токовые перегрузки двигателей,
вызванные обрывом одной фазы, име-
ют место главным образом у двигате-
лей низкого напряжения преимущест-
венно из-за перегорания предохрани-
телей иа одной фазе. При этом из-за
несимметрии токов возникает обратно-
синхроииое поле, снижающее резуль-
тирующий момент. Возрастание момен-
та до значения, равного моменту на-
ГЭДШи щкжкощгс за счет увеличения
тока. Если момент двигателя при об-
рыве фазы остается меньше, чем мо-
130
мент нагрузки, двигатель останавли-
вается (см. гл. 7).
Перегрузки по току статора и рото-
ра двигателя при указанных выше ре-
жимах колеблются в широких преде-
лах вплоть до пускового тока при не-
подвижном роторе.
Двигатели с частыми пусками, ра-
ботающие периодически с перегрузка-
ми, рассчитываются соответствующим
образом и для них режим работы с пе-
регрузкой является нормальным. В
этой книге такие режимы не рассмат-
риваются.
5.2. ПРОЦЕСС НАГРЕВАНИЯ
И ОХЛАЖДЕНИЯ ОБМОТОК
При решении вопросов, связанных
с перегрузками, необходимо знать тем-
пературу обмоток. При строгом анали-
зе процессов нагревания и охлаждения
обмотки электродвигателя должны
рассматриваться как сложное тело,
так как тепловые параметры металла
обмотки, изоляции и стали неодинако-
вы. Нагрев обмоток происходит не
только за счет потерь, выделяющихся
в самой обмотке, но и за счет потерь
в активной стали статора и нагрева,
вызываемого трением о воздух.
При учете всех указанных факто-
ров, особенно при переходных явлени-
ях, значительно усложняется анализ.
Одиако с достаточной для практиче-
ских целей точностью можно приме-
нять уравнения нагревания, выведен-
ные для однородного тела, нагрев ко-
торого происходит за счет выделяю-
щихся в нем потерь. Для упрощения
принимаем, что потери энергии в теле
и коэффициент теплоотдачи от поверх-
ности тела не зависят от его темпера-
туры, которая принимается одинаковой
дли всего тела и его поверхности.
При данных условиях имеем следу-
ющее дифференциальное уравнение
нагрева:
ДР dt = аРДО dt 4- cGdft, (5.1)
где ДР—потери мощности, выделяе-
мые в теле, Вт; коэффициент теплопе-
редачи а, Вт/(см2 °C), и удельную
теплоемкость с, Дж/кг, считаем не за-
висящими от температуры тела О и ее
превышения ДО' над температурой
окружающей среды Оо.
Здесь &Pdt=I2Rdt — энергия элек-
трических потерь, выделившаяся за
время dt, Дж; aPAOdf — отведенная за
9*
то же время наружу через поверхность
тела F, см2, тепловая энергия, Дж;
cGdO —тепловая энергия, Дж, идущая
на повышение температуры тела, име-
ющего массу G, кг.
В установившемся режиме dO=0 и
ДО = Д0у = ДР/аР = Оу — Оо, (5.2)
где Оу — температура тела при уста-
новившемся режиме, °C.
Разделяя переменные, получаем из
(5-1)
dt -----------dO =---------dO, (5. la)
АОУ — АО Оу — О
где с учетом (5.2)
с = — ==-cG-A^ (5.3)
— постоянная времени нагрева.
Решение уравнения (5.1а) имеет
вид
t — — с In (оу — О) С.
Определяя постоянную интегриро-
вания С по начальному состоянию
(при /=0, О=ОНач), получаем
t = „ In = t ]П А»У- ДДя.г ,
Оу — О АОу — АО
(5.4)
или
О = оу — (Оу — 0нач)Е-"т; (5.5а)
ДО = ДОу — (ДОу — ДОнач) е-'А (5.56)
На рис. 5.1 приведена графическая
иллюстрация (кривая 1) выражения
(5.56).
.Следует иметь в виду, что началь-
ное превышение температуры ДОиач
может иметь место по любым причи-
нам, в том числе за счет иагрева по-
терями ДРнач при установившемся
тепловом режиме. В таком случае
Онач=Рьач/ссР.
Рис. 5.1. Изменение превышения температуры
при нагреве однородного тела в зависимости
от времени
Таким образом,
ЛА ЛА Л Л А^нач
Дфу — Д^нач — ®у ®яяч—
(5-2а)
представляет собой дополнительное
превышение температуры тела двух
установившихся тепловых режимов за
счет выделения в теле потерь мощно*-
СТИ А Ру вместо ДРвач-
Полученные выражения, в частно-
сти (5.5а), (5.56) и (5.2а), справедли-
вы ие только для случаев перегрузок,
но и режимов снижения токов и соот-
ветственно потерь ДРУ п конечных пре-
вышений температур Д£)у.
Так, при исчезновении тока проис-
ходит постепенное охлаждение тела.
При этом ДРУ=О и Дбу=0. Подстав-
ляя последнее в (5.56), получаем урав-
нение охлаждения тела в следующем
виде:
ДО = Д0наче-"’. (5.6)
Как видно из (5.3), постоянная
времени нагрева (охлаждения) т зави-
сит от коэффициента теплоотдачи а,
который существенно зависит от усло-
вий охлаждения.
При охлаждении вращающегося
двигателя обмотка и сталь охлажда-
ются воздухом, имеющим значитель-
ную скорость, и поэтому теплоотдача
будет значительно более интенсивной,
чем при неподвижном роторе, когда
теплоотдача происходит главным об-
разом за счет естественной конвекции.
Поэтому, если охлаждение двигателя
происходит при неподвижном роторе,
коэффициент теплопередачи сс будет
меньше, а постоянная времени т боль-
ше, чем при вращающемся роторе. При
вращающемся двигателе нагрев и ох-
лаждение обмоток происходят прак-
тически с одинаковыми постоянными
времени.
Следует иметь в виду, что в дейст-
вительности благодаря тепловому со-
противлению изоляции и медленному
нагреву стали из-за ее большой массы
в начале переходного процесса нагрев
обмоток происходит изолированно от
нагрева стали. Поэтому при малых
длительностях перегрузки постоянная
времени нагрева т определяется тепло-
выми характеристиками собственно об-
мотки.
Постоянная времени не зависит от
мощности, выделяемой в теле, и опре-
деляехся отношением полной теплоем-
кости тела к его способности рассеи-
вать теплоту. Постоянная времени
представляет собой время, в течение
которого тело, имеющее удельную теп-
лоемкость с и массу G, нагревается до
превышения температуры Дфу от
Дв'нач^О при постоянном выделении в
нем мощности ДР и отсутствии рассея-
ния теплоты с его поверхности. Дейст-
вительно, ИЗ (5.1) При СС = О Н Д‘0нач==
=0 найдем
/ = — л-а
и прн Д'&^Д'О’у получим в соответствии
С (53)
Если нагрев начинается с момента,
когда температуры окружающей сре-
ды и тела одинаковы, т. е. при ДОЯач=
=0, то уравнение кривой нагрева при-
мет вид
Д & = Д<\ (1 — ©-"’). (5.5в)
На рис. 5.1 этому соответствует
кривая 2.
Взяв производную
Afly Р-//Т
tit т ’
получим для начального момента вре-
мени с учетом второго равенства (5.3)
I™-} =tga = ^_=^-, (5.7)
\ dt /t=x> t CG
т. e. наклон касательной, проведенной
к кривой нагрева в начале координат,
определяется мощностью, выделяемой
в теле, ДР и полной теплоемкостью
тела cG и не зависит от теплоотдачи.
Значение tga дает возможность
просто определить опытным путем се-
чение и массу обмотки двигателя. За-
меняя в уравнении (5.7)
ДР = /гр = Рр//д и G = ylq/WOO,
где I — длина обмотки, м, получаем
ЮООРр zc v .
tga= — —(5.7а)
сде-
откуда сеченые обмотки, мм2,
г 1 WOOp /к о\
У су tg а
где р — удельное сопротивление,
мкОм/м; I — ток в обмотке, A; v —
плотность, г/см3.
Так как по этому методу сечением
масса обмоткн определяются по каса-
132
тельной к кривой нагрева в начальной
части, то удельное сопротивление об-
мотки следует принимать для темпера-
туры, соответствующей началу измере-
ния и равной температуре окружаю-
щей среды.
Из (5.7) находим массу обмотки,
кг:
G = -, (5.9)
ctga 1 '
где /?0—сопротивление обмотки при
температуре окружающей среды, Ом.
Для определения tg а автором был
применен следующий простой способ.
Испытуемая обмотка включается в
мостовую схему (рис. 5.2), где R\—со-
противление испытуемой обмотки; /?2,
Rs, Rt—-сопротивления ветвей моста.
При небольшом токе устанавливаем
стрелку гальванометра в нулевое по-
ложение соответствующим подбором
сопротивления моста R3, при этом ток
должен быть таким, чтобы во время
компенсации моста обмотка ие нагре-
лась. Затем увеличиваем сопротивле-
ние R3 с тем, чтобы стрелка гальвано-
метра отклонилась от нулевого поло-
жения. Устанавливаем в обмотке ток
I н включаем секундомер. Во время
опыта ток должен оставаться практи-
чески неизменным. По мере нагрева-
ния обмотки сопротивление ее увели-
чивается и стрелка гальванометра бу-
дет приближаться к нулевому положе-
нию. Момент времени, когда стрелка
гальванометра будет проходить через
нулевое положение, отмечается по се-
кундомеру. Затем снова сопротивление
ветви моста R3 увеличивается и отме-
чается время прохождения стрелки че-
рез нулевое положение. Превышение
температуры обмотки определяется по
увеличению ее сопротивления, опреде-
ляемому каждый раз в момент про-
хождения стрелки гальванометра че-
рез нуль. Таким образом определяется
несколько точек с тем, чтобы мож-
Рис 5.2. Схема wotra для снятия кривой на-
грева
но было построить кривую сопротивле-
ния обмотки в зависимости от време-
ни. Для того чтобы можно было точ-
нее построить кривую изменения со-
противления в начальной ее части,
следует производить измерения 4ерез
относительно небольшие промежутки
времени — порядка 5—20 с.
Для удобства проведения опыта целесо-
образно подобрать сопротивления моста та-
ким образом, чтобы практически весь той про-
ходил по испытуемой обмотке, что будет иметь
место при Яз>Яь Изменение &RS регулируе-
мого сопротивления при изменении сопротив-
ления /?| на ARt благодаря повышению тем-
пературы обмотки на ДО- для удобства следу-
ет подбирать таким, чтобы оно выражалось
целыми числами (50, 100, 200 Ом и т д.). Оп-
ределение сопротивления перед нагревом об-
мотки легко производится по условию баланса
моста:
что дает для изменения сопротивлений
“в
а следовательно,
Д/?3 2U?f 3 ДЯ, 11
где 7?|—сопротивление обмотки при темпера-
туре Йиач.
Если принять изменение сопротивления ис-
пытуемой обмотки соответствующим измене-
нию ее температуры на 10 °C, то
и тогда
10
Д/?1= ---------
235 -[ • $нач
D (235-{-енач)Д7?3
«з =
10
Для того чтобы нагрев обмоткн ие проис-
ходил слишком медленно или слишком быстро,
необходимо иметь прн опыте плотность тока
около 10 А/мм2 Этой плотности тока соглас-
но (5.7а) соответствует tga—0,5. При этом
повышение температуры обмотки на 10 °C
происходит за время примерно 20 с. Если нет
никаких, хотя бы ориентировочных, данных о
сечении обмотки, то можно подобрать нуж-
ную плотность тока путем подбора тока, при
котором нагрев обмотки на 10 °C происходит
за время 15—30 с. Определив таким обра-
зом нужную плотность тока, следует дать об-
мотке охладиться до начальной температуры
и затем приступить к опыту.
Пример. Определить из опыта на нагрев
сечение и массу меди катушки. Температура
катушкн перед опытом равна температуре
окружающей среды йнзч=15оС, и ее сопро-
тивление при этой температуре Я| —1,49 Ом.
Таким образом, при изменении температуры
катушки иа 10 °C
ДЯХ= 1,49-10/250,
133
и ори ДЯз=100 Ом получим
/?3 = 100-250/10 = 2500 Ом.
R? принято равным 0,01 Ом. Мост балан-
сируется при токе I А и окружающей темпе-
ратуре 15 °C, при этом /?4= 16,8 Ом.
Предварительно путем подбора было уста-
новлено, что при токе 7 А получается доста-
точная скорость нарастания температуры.
Опыт производится следующим образом: со-
противление R3 увеличивается на 100 Ом, а
ток — до 7 А, стрелка гальванометра при этом
отклоняется от нулевого положения. Отмеча-
ется время, через которое стрелка гальвано-
метра переходит через нулевое положение,
6=26 с. Снимается для проверки еще не-
сколько точек, и по ним строится кривая Д/?з
в зависимости от времени (рис. 5.3). Проведя
к этой кривой касательную для времени i=0,
получаем с достаточным приближением
ГДЯз \ 300
l~— I • что соответствует tga=
/ Дй \ 3
= —— =“так как 10 Ом соответствует
\ AU 1
превышению температуры обмотки в началь-
ный момент на 1 °C.
Для медн у=8,9 г/см3 и с=390 Дж/(кгХ
Х°С) и, следовательно, по формуле (5 8)
, f 7-1000
о =7 I / --------------= 0.165 мм-,
4 V 3-56-8,9-390
где принято для 15 °C
р = 1/56 мкОм-м.
Измеренное сечение оказалось равным
0,785 мм2. Полученная точность вполне до-
статочна для практических целей.
Находим массу обмотки по формуле (5.9):
72-1,49-7
G =------------7 =0,44 кг
0,390-3-103
Действительные кривые нагрева об-
моток электрических машин, снятые
опытным путем, отличаются от экспо-
ненты. В начальной своей части кривая
нагрева определяется только потерями
в обмотке и ее теплоемкостью. По ме-
ре увеличения температуры обмоток
начинают сказываться теплоемкость
Рис. 5.3. Превышение температуры обмотки
е зависимости or времени
изоляции и стали, а также потери в
стали.
Если определить по опытной кри-
вой нагрева для 4гач=0 постоянную
времени нагрева как время, при кото-
ром превышение температуры обмоток
составляет 0,632 установившегося зна-
чения превышения температуры, то
эта постоянная времени будет больше
полученной по начальной части кри-
вой нагрева.
Поскольку при кратковременных
перегрузках нагрев обмоток определя-
ется постоянной времени, соответству-
ющей начальной части кривой нагрева,
нужно определять постоянную време-
ни по касательной, проведенной к кри-
вой нагрева в ее начальной части.
Постоянная времени нагрева об-
мотки может быть определена расче-
том из уравнения (5.7).
-f = йд,У_ А^ном cG (5 Ю)
ДР АРяом
где Д^аом — превышение температуры
обмотки над температурой окружаю-
щей среды, обусловленное потерями
Д/’ном, выделяющимися в самой обмот-
ке при номинальном токе в ней.
Потери в обмотке, обтекаемой пе-
ременным током, могут быть опреде-
лены по следующей формуле:
АО _ 72 О — ZH°M ,
учитывающий
сопротивления
за счет вытеснения тока.
Подставляя в (5.10) последнее вы-
ражение, а также формулу для массы
обмотки G, приведенное выше при вы-
воде формулы (5.7а), получим:
т =_____------ до"°”- (5 11)
ном ном
где kR — коэффициент,
увеличение активного
Подчеркнем, что входящая в эту
формулу величина ДОИОм должна опре-
деляться только той составляющей
полного перегрева обмотки в номи-
нальном режиме, которая определяет-
ся ее собственными потерями, т. е. без
учета тех составляющих, которые обу-
словлены притоком теплоты от других
его источников, в частности потерь в
стали, в других обмотках, вентиляци-
онных потерь (см. ниже).
В зависимости от исходного режи-
ма перед перегрузкой нагрев машины,
а следовательно, и р будут различны-
134
Рис. 5.4. Зависимость постоянной времени на-
грева от номинальной плотности тока
ми; соответственно и т, строго говоря,
зависит от начального нагрева ма-
шины.
Для перегрузок из исходного на-
гретого состояния машины с медными
обмотками можно принять: v=8,9 г/
см3; С=390 Дж/(кг-град); р=
= 1/43 мкОм-м при 100 °C.
Тогда из (5.11) получим
__ 390-8,9-43 AOtioM __ 150 Айном
“ 1000 . ,2
’'НОМ*/?
(5.11а)
Как видно из (5.11), постоянная
времени нагрева будет изменяться об-
ратно пропорционально квадрату но-
минальной плотности тока при том же
превышении температуры в номиналь-
ном режиме, что практически харак-
терно для двигателей различных типов,
габаритов и мощностей при одном и
том же классе изоляции обмоток.
На рис. 5.4 приведена кривая зави-
симости постоянной нагрева от номи-
нальной плотности тока, полученная
по формуле (5.11а) при ДОном=40°С.
Из сказанного следует, что номи-
нальная плотность тока определяется
главным образом условиями охлажде-
ния двигателя. Чем интенсивнее ох-
лаждение, тем выше может быть но-
минальная плотность тока обмоток
двигателя. Поэтому постоянная време-
ни нагрева обмоток продуваемых дви-
гателей, имеющих интенсивное охлаж-
дение, меньше постоянной времени за-
крытых обдуваемых двигателей,
имеющих меньшие значения коэффи-
циента теплоотдачи, чем у первых.
Зная плотность тока и потери в об-
мотке при номинальном значении то-
ка, можно определить массу обмотки.
Действительно, из приведенных выше
выражений для G и ДРном нетрудно
видеть, что
G т
откуда масса медной обмотки при р=
“1/45 мкОм м и y=8,9 г/см3
q — 0’4ДРном
b
ном
Ряд проведенных по этой формуле
расчетов показал, что погрешность по-
лучаемых с ее помощью результатов
не превышает 5 % по сравнению с дей-
ствительной массой обмоток.
5.3. ОПРЕДЕЛЕНИЕ ПРЕВЫШЕНИЯ
ТЕМПЕРАТУРЫ ОБМОТОК
ПРИ УСТАНОВИВШЕМСЯ РЕЖИМЕ
И КРАТКОВРЕМЕННЫХ ПЕРЕГРУЗКАХ
Превышение температуры обмотки
статора над температурой охлаждаю-
щего воздуха при установившемся ре-
жиме может быть представлено следу-
ющими составляющими.
Первая составляющая определяет-
ся трением охлаждающего воздуха.
Эта составляющая ДОвозд при постоян-
ной частоте вращения практически не
зависит от режима работы двигателя.
Вторая составляющая определяется
потерями в стали статора. Эту состав-
ляющую превышения температуры
можно принять пропорциональной
квадрату напряжения статора:
К Оном /
Третья составляющей определяется
потерями, выделяющимися в самой
обмотке статора. Эта составляющая
превышения температуры практиче-
ски пропорциональна квадрату тока
статора. Таким образом,
1 •
\ *ном /
Четвертая составляющая превыше-
ния температуры обмотки статора оп-
ределяется влиянием нагрева обмотки
ротора. Эта составляющая практиче-
ски пропорциональна квадрату тока
ротора:
В приведенных выше выражениях
Дбс.иом» ДОм.ном, ДАм.р.ном — составляю-
щие превышения температуры обмотки
статора, определяемые потерями соот-
ветственно в стали при номинальном
напряжении и в обмотках статора и
ротора при номинальных токах в этих
обмотках. Таким образом, превышение
135
температуры обмотки статора опреде-
ляется следующим уравнением:
деС1 = домзл + двс.ном М-)’ +
\ С'ноМ /
“Ь А^м.ном ) ~Ь Д^м.р.ном 'j •
(5.12)
Исследование асинхронных проду-
ваемых двигателей с радиальной и ак-
сиальной системами вентиляции, про-
веденное акад. М. П. Костенко, пока-
зало, что установившееся превышение
температуры обмоток двигателя зави-
сит главным образом от потерь в об-
мотках статора и ротора и потери в
стали на нагреве обмоток сказываются
очень мало.
Для асинхронных двигателей влия-
ние нагрева обмотки ротора значи-
тельно, так как воздушный зазор
мал.
Для синхронных двигателей с отно-
сительно большим воздушным зазором
влияние потерь обмотки ротора иа
превышение температуры обмотки ста-
тора невелико.
При кратковременных перегрузках
можно пренебречь теплоотдачей, если
время перегрузки /<Ст. При таком до-
пущении повышение температуры
(или, что то же самое, превышения
температуры) данной обмотки будет
определяться только изменением по-
терь в ней самой.
Предположим, что двигатель до пе-
регрузки работал с нагрузкой РНач при
потерях в обмотках Д/нач- При уста-
новившемся режиме превышение тем-
пературы обмотки, соответствующее
потерям ДРнач, равно Д-Онач. Вся теп-
лота, обусловленная потерями в об-
мотке ДРнач, отводится в окружающую
среду. В момент времени, когда дви-
гатель перегружается, ток в обмотке
увеличивается и в результате потери
мощности в обмотке возрастают до
значения ДР. Так как часть общего
количества теплоты, связанная с поте-
рями мощности ДРнач, выделяется в
окружающую среду, то дополнитель-
ное повышение температуры будет оп-
ределяться не всеми потерями мощно-
сти ДР, а разностью потерь ДР—
—ДРнач. Эта разность потерь мощно-
сти вызовет увеличение температуры
обмоток и соответственно превышений
их температур за время t иа
* - ®яач = Д (Д«) = Л* — Д®„„ =
= (5 13)
са
откуда превышение температуры обмо-
ток для времени I (от начала перегруз-
ки)
ДО = Д®„а, + • (5.14)
Примем потери в обмотках н обус-
ловленные ими превышения темпера-
туры обмоток пропорциональными
квадрату тока, т. е.
1-
Д Р = лр нач- =
нач ном 2
^ном
— ДР k2 *
— пом генач>
= ДРном^;
ДОМпа, = Д»Мда,-^ =
иом
где k — кратность тока в обмотке по
отношению к номинальному.
До перегрузки принят установив-
шийся тепловой режим. Из формулы
(5.13) с учетом (5.15) и (5.10) полу-
чим следующие выражения для опре-
деления увеличения превышения тем-
пературы обмоток статора над окру-
жающей средой, или, что то же, уве-
личения самих температур при
кратковременных перегрузках (без
учета теплоотдачи):
за время t
Д (ДО) = деи.,„ (ft* — А„ч) Y ; (5.16а)
за полное время перегрузки
Д (Д®)„ер = Д®м.»ом - О .
(5.17а)
При работе до перегрузки с номи-
нальным режимом £нач=1 и приведен-
ные формулы запишутся в следующем
виде:
Д (Д-0) = Дв„ „о™ — 1) —; (5-166)
т
Д(ДО)оер = Дв„.„о„(4!- 1)-^- . (5.176)
Из формул (5.16а), (5.166) и
(5.17а), (5.176) следует следующее
136
общее выражение:
Д (Д«) = О (Д0)юр -. (5.18)
‘пер
При пользовании этой формулой
следует помнить, что входящие в иее
величины Л (ДО) и Д(Д&)пер являются
взаимосвязанными формулой (5.176) и
поэтому произвольно может быть за-
дана лишь одна из этих величин.
При заданном значении допустимо-
го увеличения превышений температур
А (ДО) доп, или, что то же, увеличения
температур, можно из (5.17а) опреде-
лить допустимое время перегрузки:
f — Д (Д^)доп 1 __
‘доп — 1 .7 ,9
диы,иом Аг—А£ач
__ Т_______ Фдоп ~~ Фнач
Мм-"°“ (5.19а)
и при &нач=!
4 __ — Д (Д1^)поп I
‘доп — ь "гт — : —
ДО’м.ном & — I
= —— (5 196)
е -1 деы.„ом
Учитывая (5.13) и (5.18), находим
температуру обмотки статора при
кратковременной перегрузке после
предшествующего установившегося
номинального режима:
» = ®я„м + Л (Д»)пеР V- , (5.20)
гпер
где AfA’G’Jnep — увеличение превыше-
ния температуры за полное время пе-
регрузки /пер.
При учете теплоотдачи от обмотки
статора, ио без учета возможного при-
тока теплоты от увеличения при пере-
грузке тока ротора увеличение превы-
шения температуры обмотки статора
будет определяться экспоненциальным
законом типа (5.56), в котором уста-
новившееся превышение температуры,
определяемое потерями в самой об-
мотке, будет равно:
ДОМ .пер,уст — м,ном Л2. (5.15а)
Изменение приращения температу-
ры после несложных преобразований
(5.56) с учетом (5.15) и (5.15а) может
быть записано в следующем виде:
Д (ДФ)окр == Д^м.ном ^нач)
X (1-Ее-//т). (5 21)
Аналогично на основании (5.4) по-
лучим
t 1?_ь-
— =1п—--------------. (5.22)
т А0М
£2 ______S--
А'О'М .НОМ
Относительная погрешность при
пользовании упрошенной формулой
(5.16а) по сравнению с (5.21) будет
определяться формулой
g _ А (Афону Д (ДА) J QQ % _
Д (ДЗДовр
= 1~юо’/о.
i
Как видно из табл. 5.1, при /Пер/т£>
0,30 погрешность расчета без учета
теплоотдачи превышает 15 %. Факти-
ческая погрешность будет несколько
меньше из-за неучитываемого нами
при расчете по экспоненте дополни-
тельного подогрева обмотки статора
увеличенными потерями в роторе. На-
помним, что расчет без учета теплоот-
дачи дает завышенные по сравнению с
действительными значения дополни-
тельного нагрева обмоткн статора при
кратковременных перегрузках, т. е. яв-
ляется расчетом с «запасом», что для
большинства практических случаев
вполне приемлемо даже при относи-
тельно больших значениях отношения
/пер/т.
Заменим в (5.17а) и (5.19а) посто-
янную времени нагрева т его выраже-
нием (5.11а), где вместо Дтвом следует
подставить в нашем случае ДОмном.
Тогда после несложных преобразова-
ний получим
Д(Д®„.р) = Д»тр-дем, =
= - <*»а, - &,) („1
(5.23)
Таблица 5.1
^пер и 0,05 0,10 0,15 0,20 0,25 0,30 0,35 0,4 0,5 0,6
£, % 2,04 5.26 7,9 10,4 13,1 15,8 18,6 21,2 26,9 33,0
137
i __ 150 А (АД1) доп____
‘ДОП Q > f ~
&R ^ном ^нйч
__ 150 АОДоп А-&нач _
&R *^ком ^иач
_ 150 Ддоп — ~&иач 24)
ftRJHOM *кач
При исходном установившемся но-
минальном режиме Йнач=1 Д‘&нач=
=Д‘&НОМ И Онач=^ноМ1 тогда ПОЛуЧИМ
соответственно
A (Afl)nep = А^пер — Д&вом =
Ь Г2
— & _А — ном (hi______________ И/
— пер ином— I5Q \к Ц»пер>
(5 23а)
, _ 150 Д (Лй),,,.,, _
л™ *DJ2 »— 1
rR j bom
____ 150 А Д’доп — Айно^д
~ kt~'
= ISO tygon Фном /5 24а)
ь /2 *?_ ! * ’
КЛ ЦЕОМ
Пример 1. Определить дополнительное
превышение температуры обмотки за время
г=10 с прн перегрузке пятикратным током
fe=5 Плотность тока при нормальном режиме
/яом==5 А/м№.
Из уравнения (5.23а) определяем, прини-
мая приближенно Ак=1,
5а (5а — !)• 10
б'пер —Фном = jgg — 40 С.
Пример 2. Определить допустимое время
перегрузки током кратностью А=3 при до-
пустимом дополнительном превышении темпе-
ратуры, равном Д(А'б’)доп=Айдоп — А&нсм
Плотность тока прп номинальном режиме
/нм“4 А/мм2. Из уравнения (5.24а) при £в=1
определяем
150-30
‘лов - „(з,-!) -35 с-
В процессе асинхронного пуска син-
хронных двигателей с пусковой клет-
кой на роторе обычно основное количе-
ство теплоты выделяется в пусковой
клетке, а ие в обмотке возбуждения.
Испытания, проведенные Л. С.
Лиидорфом, показали, что при време-
ни пуска порядка 10—15 с нагрев пус-
ковой обмотки синхронного двигателя
можно определять приближенно без
учета отвода теплоты.
На основании (5.1) и (6.47г) при
сс^05 т. е. при асинхронном пуске без
нагрузки, для «повышения температу-
ры пусковой клетки за время пуска
/пх получим следующее выражение:
Д(Дв),= до,-двва, = в,-
=4- f лс<й =
cG
о
= — = TJ рНОм (5.25а)
cG 2cG
где G — масса пусковой обмотки, кг;
АР—потери мощности в пусковой об-
мотке, Вт; с — удельная теплоемкость
материалов пусковой обмотки; т/ —
«время ускорения агрегата».
При наличии нагрузки дополнитель-
ный нагрев пусковой обмотки может
быть с достаточной степенью точности
принят пропорциональным времени
пуска:
Д(Д®)™г = Д«„аг-Д*на,=
= ®яаг-«ва,«Д(Д»)х-^ =
*п.х
= т^рном/п (5.256)
2cG/n,x 1
Для меди и латуни с—390
Дж/(кг-°С) и, следовательно,
Д (Д0)иаг = наг — дОнач =
— А „___А — 1^ном 10-3
Сги х
(5.25в)
По этим формулам можно опреде-
лить дополнительный нагрев коротко-
замкнутых клеток асинхронных двига-
телей за время их пуска, если в этих
клетках ие сильно выражен эффект
вытеснения тока.
Подсчитанная по этим формулам
температура пусковой обмотки не дол-
жна превышать температур, устанав-
тиваемых в зависимости от материала,
из которого изготовлена обмотка, и
количество пусков.
5.4. ОСОБЕННОСТИ НАГРЕВА
МАССИВНЫХ РОТОРОВ
СИНХРОННЫХ ДВИГАТЕЛЕЙ
Рассмотрим особенности нагрева
массивного ротора синхронных двига-
телей при переходных режимах. Прн
асинхронном пуске синхронного двига-
теля ротор находится под воздействи-
ем вращающегося магнитного поля, в
результате чего в массивной бочке на-
водятся токи, проходящие вдоль оси
138
ротора. Эти токи замыкаются по тор-
цам через системы клиньев и бочку
ротора. Токи, наводимые в роторе, и
магнитный поток распространяются в
сравнительно тонком поверхностном
слое, толщина которого зависит от час-
тоты наводимых токов. Чем меньше
частота, тем больше глубина проник-
новения тока в глубь ротора. Часть
теплоты, обусловленной выделяющей-
ся в этом слое энергией, распростра-
няется в глубь ротора.
Если потери в поверхностном слое
при асинхронном пуске будут велики,
то может иметь место значительный
нагрев поверхностного слоя. Кроме то-
го, по торцам бочки ротора могут воз-
никнуть местные иагревы.
Следует учесть, что общее количе-
ство теплоты, выделяющейся в роторе
за время пуска, обычно сравнительно
невелико. Например, если подсчитать
общее количество теплоты, выделяю-
щейся в роторе турбогенератора мощ-
ностью 25 000 кВт при его асинхрон-
ном пуске вхолостую без турбины, и
принять, что потерн выделяются рав-
номерно по всему объему ротора, то
температура последнего повысится за
время пуска только на 6 °C. В дейст-
вительности же при достаточно боль-
шом напряжении, приложенном к об-
мотке статора, поверхность бочки ро-
тора за время пуска может недопусти-
мо нагреться. Поэтому для машин с
массивным ротором при выборе допу-
стимого напряжения на выводах об-
мотки статора при пуске следует иметь
в виду, что нельзя исходить только из
общего количества теплоты, выделяе-
мой в роторе.
Если для обычных асинхронных и
синхронных машин с пусковой обмот-
кой без сильно выраженного эффекта
вытеснения тока в контурах ротора
пуск при большем напряжении всегда
выгоднее, чем пуск при пониженном
напряжении, то у машин с массивным
ротором пуск при большем напряже-
нии может вызвать чрезмерный нагрев
поверхности ротора.
Аналитическое решение задачи по
определению нагрева массивного рото-
ра, имеющего выфрезованные зубцы,
систему металлических клиньев, об-
мотку возбуждения н переходные со-
противления по торцам ротора, чрез-
вычайно сложно. Поэтому рассмотрим
лишь в общих чертах нагрев сплошно-
го ротора.
Температура поверхности ротора
определяется потерями, приходящими-
ся на единицу поверхности ротора,
глубиной проникновения тока, физиче-
скими свойствами металла бочкн ро-
тора и временем, прошедшим с нача-
ла нагрева. Отводом теплоты с по-
верхности ротора охлаждающей сре-
дой за время пуска в первом
приближении можно пренебречь.
Расчет усложняется тем, что
удельные потери в стали бочки ротора
зависят от скольжения и тем самым от
времени.
С достаточной степенью точности
можно принять, что магнитный поток
остается постоянным на всей глубине
его проникновения в бочку ротора, а
токи, наводимые в поверхностном
слое, соответствующем глубине про-
никновения магнитного потока, ли-
нейно уменьшаются от максимального
значения на поверхности ротора до ну-
ля, а на глубине проникновения [10].
Глубина проникновения потока, м,
6„ = 2,481/.
I Но U
где р — удельное сопротивление рото-
ра, Ом-см; — абсолютная магнит-
ная проницаемость, Гн/м; f2 — часто-
та тока ротора, Гц.
Удельные потери, кВт/м5, т. е. по-
тери, приходящиеся на единицу по-
верхности ротора, равны:
Др=1,210-’/р/В„„Н^я,
где В„лх — максимальная индукция,
Тл; НтПХ—амплитудное значение на-
пряженности магнитного поля, А/м.
Магнитная проницаемость
М*Нпах'
Принимая для стали ротора р =
= 0,2-10~4 Ом-см, получаем
Др = 0,535 10-= Г (5.26)
b0 = 22,3/ГЙ/'. (5.27)
Для практических расчетов удобно
иметь зависимость глубины проникно-
вения потока не от индукции Втах нли
напряженности поля, а от удельных
потерь Др.
Задаваясь напряженностью поля,
определяем по кривой намагничивания
стали максимальную индукцию и со-
ответствующую магнитную проницае-
139
мость, а затем по формулам (5.26) и
(5.27) находим глубину проникновения
и удельные потери.
На рис. 5.5 построены кривые за-
висимости магнитной проницаемости
рп и глубины проникновения Ьо от
удельных потерь при различных часто-
тах.
На основании анализа распределе-
ния температуры по отдельным слоям
цилиндрического тела с гладкой по-
верхностью были произведены вычис-
ления распространения тепловой вол-
ны в роторе при неизменных значениях
частоты, потерь, глубины проникнове-
ния &о и при отсутствии теплоотдачи
в окружающую среду (все расчеты и
построения кривых выполнены канд.
техн, наук Б. Г. Оркиной).
При вычислениях принята ротор-
ная сталь (0,25—0,35 % О; 0,17—
0,37 % Si; 0,3—0,6 % Мп; 0,5—0,8 % Сг;
1,5—2,0 % Ni; 0,25—0,4 % Мо) с тепло-
проводностью Х=0,49 Вт/(°С-см), те-
плоемкостью с=500 Вт/(кг«°С), у—
— 7,85 г/см3.
Рис. 5 5. Зависимость относительной магнит-
ной проницаемости и глубины проникно-
вения Ьо магнитного потока от удельных по-
терь при различных частотах
Рис. 5.6. Превышение температуры поверхно-
сти ротора в зависимости от времени прохож-
дения тока при различных удельных потерях
На рис. 5.6 превышение температу-
ры поверхности ротора над температу-
рой окружающей среды построено в
функции времени прохождения неиз-
менного тока с /2=50 Гц. При этом
принято Д,0,нач=О, т.е. пуск нз «холод-
ного» состояния. Там же показана кри-
вая остывания поверхности после вы-
ключения тока. Температуры даны для
Др =2000, 1500 и 500 кВт/м2, для &0,
равных соответственно (во рис. 5.5),
1,5; 1,4 и 1,0 см. Мы видим, что при
Др=2000 кВт/м2 через 20 с с начала
нагрева превышение температуры по-
верхности достигает 475 °C.
При изменении потерь дальнейшее
изменение превышения температуры
поверхности во времени может быть
определено путем наложения на кри-
вую остывания (Др=0) кривой нагре-
ва, соответствующей новым потерям.
Например, если в момент £=20 с по-
тери изменяются с 2000 до 1500 кВт/м2,
то следует от точки О' отложить
отрезок O'A't соответствующий отрез-
ку ОА начальной части кривой нагре-
ва для Др=1500 кВт/м2. Результиру-
ющая кривая изменения превышения
температуры О'В' за точкой О' опре-
деляется как сумма ординат кривой
Др=;0, отсчитываемых от оси абсцисс,
н ординат кривой О'А', отсчитываемых
от оси ОГС'У параллельной оси абс-
цисс. Если Др после точки О' мало, то
может оказаться, что, несмотря на про-
должающееся выделение теплоты, тем-
пература иа поверхности будет пони-
жаться (кривая О'В' цля. Ар =
=500 кВт/м2).
При асинхронном пуске частота то-
ка увеличивается, а потери в роторе
уменьшаются. В первом приближении
можно пренебречь изменением р* и
принять, что частота вращения пропор-
циональна времени с начала пуска, а
потери в роторе изменяются пропор-
ционально скольжению s. Тогда глу-
бина проникновения
ь„ як
где Ьо(в=п — глубина проникновения
при неподвижном роторе, см.
Для указанной зависимости Др и
Ьо от скольжения определено измене-
ние температурного поля в роторе при
асинхронном пуске и найдено превы-
шение температуры наружной поверх-
ности в зависимости от времени для
МО
различных длительностей пуска (рис.
5.7) при начальной глубине проникно-
вения Ь0(а=:|}= 1,5 см. Как видно из
кривых, превышение температуры по-
верхности ротора нарастает сначала
быстро, затем по мере уменьшения
скольжения и потерь скорость нараста-
ния уменьшается и превышение темпе-
ратуры начинает спадать.
Превышение температуры на по-
верхности ротора достигает максиму-
ма через (0,65—0,7) /п, где tn—полная
длительность пуска.
На рис. 5.8 даны зависимости от
длительности пуска 1а максимальных
значений превышений температуры,
достигаемых в процессе пуска. Кривые
построены для различных значений
удельных потерь в начальный мо-
мент при неподвижном роторе, т.е. при
s=l.
Рис. 5.7. Изменение превышения температуры
наружной поверхности ротора при различных
длительностях ta асинхронного пуска в случае
изменения скольжения во времени по закону
прямой линии; &ole=j)=l,5 см; f>0--=34 °C;
Аро=2000 кВт/м2
Приведенные выше формулы и кри-
вые, как указывалось, даны для глад-
кого массивного ротора. В действи-
тельности ротор имеет выфрезоввииые
пазы, которые значительно изменяют
картину распределения магнитного
поля, токов и температур в толще ма-
териала. К сожалению, подробное ана-
литическое исследование изменения
указанных величин по времени и по
толще ротора с учетом зубцов чрезвы-
чайно сложно. Поэтому рассмотрим
упрощенный путь использования полу-
ченных выше кривых и формул для
практических расчетов нагрева зубча-
того ротора. При этом, как это часто
делается в технике, выберем такой ме-
тод, при котором расчет дает во вся-
ком случае не меньшие, чем действи-
тельно возможные, температуры.
Иными словами, расчет должен давать
некоторый запас.
Рассмотрим два предельных слу-
чая: первый, когда магнитный поток
проходит только по вершине зубцов, н
второй, когда магнитный поток, кроме
того, проникает до дна паза, проходя
по боковым стенкам пазов.
Если магнитный поток проходит
только по вершинам зубцов, то в этом
случае при одной и той же мощности,
выделяемой в роторе, удельные потери
будут больше, чем у гладкого ротора,
и, следовательно, глубина проникнове-
ния потока будет больше.
Для второго случая, когда магнит-
ный поток проходит по полной поверх-
ности зубца, активная поверхность ро-
тора значительно увеличится и соот-
ветственно уменьшаются удельные по-
терн и глубина проникновения потока.
В действительности имеет место
промежуточный случай, когда магннт-
Рнс. 5.8. Зависимости от дли-
тельности пуска максимальных
значений превышений темпера-
туры, достигаемых в процессе
пуска при различных удельных
потерях Аро в начальный мо-
мент при неподвижном роторе
(5=1)
141
ный поток проникает до дна паза, но
в нижней части он меньше, чем в верх-
ней.
Очевидно, если взять за основу
первый случай, т. е. предположить, что
все потерн образуются в верхней части
зубцов, и удельные потери подсчиты-
вать соответственно по поверхности го-
ловок зубцов, то получим расчет с «за-
пасом». Температуры, подсчитанные по
этому методу, получатся выше действи-
тельных. Наличие некоторого запаса,
вообще говоря, желательно, так как
при расчете мы не учитываем местных
повышений температуры на торцах ро-
тора, где токи протекают поперек
клиньев через контакт между клинь-
ями и сталью ротора.
5.5. НЕКОТОРЫЕ РЕЗУЛЬТАТЫ
ОПЫТНОГО ОПРЕДЕЛЕНИЯ
ТЕПЛОВЫХ ХАРАКТЕРИСТИК
ЭЛ ЕКТР О Д В И Г ATE.il Е И
В этом параграфе остановимся
лишь на некоторых результатах опыт-
ного определения тепловых характери-
стик электродвигателей—главным об-
разом, в нестационарных режимах.
Стандартные методы испытания на
нагрев в установившихся режимах
здесь не рассматриваются.
При опытном снятии кривых неус-
тановившегося нагрева элементов
электродвигателей основное затрудне-
ние заключается в правильном измере-
нии температуры обмоток.
Применение термометров сопротив-
ления или других типов термодетекто-
ров, устанавливаемых на изоляцию об-
мотки, при быстром изменении темпе-
ратуры меди испытуемой обмотки не
может дать правильного результата
главным образом из-за тепловой инер-
ции слоя изоляции, отделяющего тер-
модетекторы от меди обмоток *.
Более правильный результат мож-
но получить путем измерения средних
температур обмоток по изменению их
сопротивления. Особенно удобно при-
менять для нагрева обмоток постоян-
ный ток. В этом случае измерение тем-
пературы можно производить непре-
’ В последние годы разработаны и успешно
применяются для таких целей, особенно на крупных
машинах, методы, основанные на специальном осна-
щении машин термопарами, устанавливаемыми а
местах ожидаемых наибольших перегревов, в том
числе и непосредственно на медь обмоток. (Прим,
ред.)
142
рывио во время нагрева обмотки2. Со-
противление обмотки наиболее точно
определяется при помощи мостовых
схем, но может быть использован и ме-
тод амперметра — вольтметра. Так
как кривая нагрева должна опреде-
ляться для вращающегося двигателя,
то ротор испытуемого двигателя необ-
ходимо привести во вращение от дру-
гого двигателя и поддерживать номи-
нальную частоту вращения. Для соз-
дания потерь в стали необходим вра-
щающийся магнитный поток; он у
асинхронного двигателя с фазным ро-
тором, а также у синхронного двига-
теля может быть создан постоянным
током в обмотке ротора. Подвод по-
стоянного тока к обмотке статора и
схема соединения последней должны
быть такими, чтобы исключалось ин-
дуктирование переменной ЭДС в об-
мотке ротора, а также суммарной
ЭДС обмотки статора между зажима-
ми присоединения к ней внешнего ис-
точника постоянного тока. Это обеспе-
чивается соединением обмотки статора
в треугольник, разомкнутый в одном
месте для подвода постоянного тока.
Ниже приводятся данные тепловых
испытаний двигателя мощностью
190 кВт, напряжение статора 2000 В,
ток 68,6 А. Соединение обмоток стато-
ра и ротора (нормально)—звезда;
735 об/мин; ротор 350 А; 337 В.
При испытаниях обмотки статора
были соединены в разомкнутый тре-
угольник. Нагрев обмоток статора и
ротора производился от сварочного
машинного агрегата постоянного тока.
Температура обмоток определялась по
методу измерения сопротивления, для
чего была собрана мостовая схема.
Для определения влияния потерь в
роторе и в стали статора на нагрев об-
мотки статора к обмотке ротора был
подведен постоянный ток и ротор дви-
гателя приведен во вращение. При
этом две фазы обмотки ротора были
соединены параллельно. Возбуждение
ротора устанавливалось соответствую-
щим номинальному фазовому напря-
жению двигателя. Предварительно для
испытуемого двигателя были сняты ха-
рактеристики холостого хода и корот-
кого замыкания в генераторном режи-
! Существуют методы, в том числе и разрабо-
танные автором настоящей книги, позволяющие про-
изводить непрерывно измерение сопротивления обмо-
ток. обтекаемых переменным током, путем наложе-
ния на последние необходимого для измерений по-
стоянного тока. (Прим, рад.)
ме прн возбуждении ротора постоян-
ным током. Соответствующие характе-
ристики приведены на рис. 5.9.
Кривые изменения во времени пре-
вышения температуры обмотки стато-
ра над начальной температурой, рав-
ной температуре окружающей среды,
при токах в обмотке статора 68, 85 и
100 А прн номинальных потерях в ста-
ли статора и при токе в роторе 230 А
даны на рис. 5.10. Кривая охлаждения
была снята после отключения тока в
статоре 100 А при неизменной угловой
скорости двигателя. При анализе этих
кривых нагрева следует иметь в виду,
что ток ротора был меньше номиналь-
ного и поэтому кривые нагрева в той
части, где начинает сказываться тепло-
Рис. 5.9. Характеристики холостого хода и
короткого замыкания асинхронного двигателя
в режиме синхронного генератора
Рис. 5.10. Кривые нагрева и охлаждения об-
мотки статора при неизменном токе ротора и
номинальных потерях в стали
отдача, будут несколько отличаться от
действительных.
Кривые нагрева и охлаждения об-
моткн статора при неподвижном ро-
торе предварительно нагретого двига-
теля и при отсутствии тока в роторе
даны на рнс. 5.1L Там же приведена
кривая нагрева холодного двигателя
прн номинальном токе статора при
вращающемся роторе, но без потерь в
роторе и стали статора. Из сопостав-
ления приведенных кривых ясно отме-
ченное выше сильное влияние враще-
ния ротора и, следовательно, вентиля-
ции на характер изменения во време-
ни превышения температуры н, в ча-
стности, на постоянную времени на-
грева.
На рис. 5.12 даны кривые нагрева
обмотки статора для токов статора 68
и 112 А и охлаждения после отключе-
ния тока 112 А. Там же пунктиром на-
несены расчетные кривые, не учитыва-
ющие влияния потерь в стали статора
и роторе. Действительные кривые на-
грева н охлаждения несколько отлича-
ются от экспоненты.
Кривые нагрева обмоткн статора
от потерь в стали и потерь в роторе
при токах ротора 180 и 230 А прн вра-
щающемся роторе даны иа рис. 5.13.
Рнс. 5.12. Кривые нагрева и охлаждения об-
мотки статора при наличии тока 230 А в ро-
торе:
--------опыт; — — — расчет
Рис. 5.11. Кривые нагрева и охлаждения об-
мотки статора неподвижного и вращающегося
двигателя при отсутствии тока в роторе
Рис. 5.13. Кривые нагрева обмотки статора от
потерь б стали статора и потерь во вращаю-
щемся роторе
143
Рис. 5.14. Кривая нагрева стали статора в ре-
жиме холостого хода при питании статора от
сети переменного тока; нагрев медн; =18ч-
-19'С; Л,=26 А
Рис. 5.15. Изменение угла наклона касатель-
ной в начальной части кривом нагрева в за-
висимости от квадрата тока статора:
1—нагрев с холодного состояния; 2— то же с на-
гретого состояния: О — двигатель вращается; X —
двигатель неподвижен
Зависимость угла наклона каса-
тельной к кривой нагрева от квадра-
та тока статора приведена на рис. 5.15,
откуда видно, что опытные точки для
неподвижного и вращающегося рото-
ров хорошо ложатся иа одну прямую.
Это подтверждает приемлемость при-
нятого выше допущения о том, что на
начальную часть кривой нагрева не
влияют условия теплоотдачи, а следо-
вательно, не сказываются потери в ста-
ли и ее теплоемкость. Таким образом,
для определения угла наклона к кри-
вой нагрева вполне достаточно сиять
начальную часть кривой при непо-
движном роторе. Пересчет на другие
значения тока производится пропор-
ционально квадрату отношения токов.
Зная угол наклона касательной к
кривой нагрева, легко можно опреде-
лить сечение обмотки по формуле
(5.8).
В вашем случае температура обмоток в
начале опыта равна 15 °C и
р= 1/57 мкОм-м; tgcc = 7,5/60.
при 1= 102 А
Рис. 5.16, Кривые установившегося нагрева
обмотки статора в зависимости от квадрата
тока статора при разных токах в роторе
Кривая нагрева стали статора при
опыте холостого хода при питании пе-
ременным током приведена на рис.
5.14.
Сравнение кривых по рис. 5.13 и
5.14 показывает, что нагрев обмотки
статора от потерь в стали прн возбуж-
дении машины постоянным током со
стороны ротора и в реальных условиях
практически одинаков.
Полученные экспериментальные
кривые нагрева двигателя для разных
режимов дают возможность опреде-
лить по углу наклона касательной к
кривой нагрева сечение обмотки стато-
ра и постоянную нагрева.
, / 60
<7 = 0,535-102 1/ 7 5 ^ = 20,4 мм?.
Измеренное сечение равно 20,3 мм2.
Если нагрев начинается с момента,
когда температура тела не равна тем-
пературе окружающей среды [см.
(5.5а)], то определив производную
dft/dt для времени /=0, получим
(4) =tga1 = -?L—
Сравнивая с (5.7), видим, что угол
наклона касательной к кривой нагре-
ва в начальной части для предвари-
тельно нагретого двигателя получает-
ся меньше, чем для холодного.
На рис. 5.15 проведена прямая, по-
строенная по этой формуле. Опытные
точки хорошо ложатся на эту прямую,
что показывает правильность теорети-
ческих предположений.
В описанных испытаниях получено
общее влияние потерь в обмотке рото-
ра и в стали статора на нагрев обмот-
ки статора. Представляется интерес-
ным выделить влияние каждого из
этих факторов на нагрев обмотки ста-
тора.
Для определения изменения пре-
вышения температуры обмотки стато-
ра в зависимости от отдельных состав-
ляющих были найдены установившие-
144
ся превышения температуры для зна-
чений токов ротора 0; 180 и 230 А.
Результаты испытания даны на рис.
5.16 в зависимости от квадрата тока.
Перегрев от вентиляционных потерь
определяется отрезком, отсекаемым на
оси ординат продолжением прямой для
/р=0. В нашем случае AftBo3n=6°C.
Превышение температуры от тока
статора при номинальном токе 68,5 А
из рис. 5.16 для прямой /р=0 при
/ст =0.47-104 А? составляет After ном =
5=34—6 =28 °C.
Отрезок, отсекаемый на оси орди-
нат продолжением прямой для тока
ротора 230 А, представляет собой пре-
вышение температуры обмотки стато-
ра от потерь в стали Aftci, в обмотке
ротора Aftpi и вентиляционных ДОвоад-
В данном случае он равен 20 °C. Вы
читая из него Аб-возд, находим Aftci +
+Aftpi =20—6 — 14 °C.
Соответственно для тока ротора
180 А
Aftc2 + AftP2 = 9°C.
Принимая
= Д»(2(-^-)* = Дв(2Х
к 1070 )
где значения = и U2 взяты по
характеристике холостого хода двига-
теля (см. рнс. 5.11) для токов ротора
/pi =230 А и /Р2 —180 А соответственно.
Для превышений, обусловленных
токами ротора, как было принято вы-
ше, можем записать
= l,64Aftp2.
Решая полученные уравнения, находим
Aftpi = 12,0 еС; Aftcl = 2,0°C.
При номинальном токе ротора
(350 №
—) =27,6 «28 °C.
Таким образом, превышение тем-
пературы обмотки статора испытуемо-
го двигателя в зависимости от напря-
жения и токов статора и ротора из
(5.12)
Ю—649
Рис. 5.17. Зависимость средней температуры
стержня от времени при нагреве его током
5000 А с частотой 50 Гц:
Из опыта: 1 — стержень прижат к стали клиньями;
2 —то же При меньшем усилии подкливовки; 3—
стержень не прижат к стали: по расчету: 4— стер-
жень имеет идеальный контакт со сталью; 6 — без
учета теплоотдачи
С достаточной степенью точности
можно принять для асинхронных дви-
гателей
/ ~ /р
? НОМ fР.Н0М
и пренебречь влиянием изменения на-
пряжения на составляющую нагрева
обмотки статора от потери в стали.
Тогда для рассматриваемого двига ге-
ля получим
Д«„ = 8 + 5(—ЦЕ.
При номинальном токе статора
превышение температуры AftCT,H0M=
= 64 °C, чему соответствует номиналь-
ная рабочая температура обмотки око-
ло 100 °C, так как рассматриваемый
двигатель был спроектирован для но-
минальной температуры охлаждающей
среды, равной 35 °C. Постоянная вре-
мени нагрева обмотки статора, соот-
ветствующая исходному номинальному
режиму, может быть определена по
формуле (5.11а). В данном случае
4„м = -^|- = 3,37 А/мм».
Вместо Aft-ном в (5.11)’ мы должны
подставить ту составляющую иагрева
обмотки статора, которая определяет-
ся в ней. При номинальном токе, как
мы видели, она равна 28 °C. Тогда,
принимая &й = 1 из (5.11), получаем
т = 150 - 28/3 372 = 370 с.
Весьма интересные опыты, харак-
теризующие значение теплообмена для
Н5
нагрева неизолированных стержней,
были проведены на одном нз заводов.
Медный стержень, уложенный в паз,
нагревался током промышленной час-
тоты 5000 А при различной степени
прижатия к стали. Полученные из опы-
та кривые зависимости среднего пре-
вышения температуры стержня от вре-
мени даны на рис. 5.17 и наглядно по-
казывают влияние теплоотдачи. Там
же даиы кривые, полученные по рас-
чету, причем расчетная кривая 5 до-
статочно точно отражает прямолиней-
ную зависимость превышения темпе-
ратуры от времени при отсутствии
теплоотдачи от стержня и хорошо со-
гласуется с кривой 3 для случая от-
сутствия прижатия стержня к стали.
5.6. ВЛИЯНИЕ КРАТКОВРЕМЕННЫХ
ПЕРЕГРУЗОК НА СОКРАЩЕНИЕ СРОКА
СЛУЖБЫ ИЗОЛЯЦИИ ДВИГАТЕЛЕЙ
Дополнительный перегрев при
кратковременных перегрузках двига-
телей приводит к ускоренному износу
изоляции и сокращает срок ее службы.
Представляет большой интерес оп-
ределение уменьшения срока службы
изоляции за счет кратковременных
перегрузок.
Как известно, продолжительность
службы изоляции класса А выражает-
ся уравнением
В = СеГ™, (5.28)
где В и С имеют размерность времени
(годы, месяцы, дни, часы, секунды).
Примерно так же можно выражать
срок жизни нзолиции класса В.
По современным воззрениям вели-
чина b зависит от многих факторов
(состава изоляции, качества ее изго-
товления, степени старения и т. п.). В
наиболее тяжелом случае численные
значения могут достигать 0,0345 °C-’,
что соответствует сокращению срока
службы изоляции вдвое на каждые
20 °C. Обычно для изоляции класса В
принимают усреднение снижение сро-
ка службы вдвое на каждые 10 °C уве-
личения температур изоляции. Этому
соответствует &=0,069 °C-1.
Износ изоляции в единицу времени
при постоянной температуре Ф, °C,
ВС
Размерность этой величины — вре-
мя-1, и при изменяющейся в течение
времени t температуре О
t
J = (5.29)
й
Поскольку нас интересует относи-
тельное уменьшение срока службы
изоляции, то будем в дальнейшем ха-
рактеризовать износ ие величиной а
безразмерной величиной ^C—z.
Пренебрегая теплоотдачей при
кратковременных перегрузках, нахо-
дим износ за время нагрева током /=
=Миоы, подставляя в (5.29) значение
О'согласно (5.20):
^нагр
пер /-Д (А#)
о
4- Д (Д0)ПСТ) -г—
МР ^пер J dt
в*пер
'пер i
пер dt =
Е“<4«>„ер
&А (ДО)пер
= е |е“ (1 (5 30)
6Л(Л«)пер J-
Так как температура обмоток дви-
гателя после окончания перегрузки ие
может сразу уменьшиться до устано-
вившегося значения, то дополнитель-
ный износ изоляции происходит еще и
во время охлаждения. Будем считать,
что по окончании перегрузки режим
двигателя возвращается к исходному
номинальному.
При расчете принимается постоян-
ная времени при охлаждении такая
же, как и при нагревании, поскольку
предполагается, что двигатель после
перегрузки продолжает работать при
той же скорости, что и до перегрузки.
Незначительное или кратковременное
снижение скорости за время перегруз-
ки оказывает небольшое влияние на
постоянную времени нагрева.
В соответствии с уравнением (5.6)
температура при охлаждении после
снятия перегрузки изменяется по за-
кону
0 = «Яои + («пер-0..0„)^'Л =
= -9вом + Д(Д«)пеге-'/т. (5.31)
Поскольку за время £=3т от нача-
ла охлаждения температура практиче-
146
скн станет равной установившемуся
значению Фном, заменяем в целях упро-
щения интегрирования экспоненциаль-
ную зависимость ломаной линией, ко-
торая на участке от начала охлажде-
ния до времени т/2 имеет уравнение
9 = 4- Д (Д«)ОВР . (5.32)
а от времени т/2 до Зт представлена
зависимостью
« = «пом + Д (Д«)пер . (5.33)
5т
Износ изоляции за время охлажде-
ния
Зг т/2 . Г т—fl
dt = J eb -J X
о 0
Xdi +J e" [*™"+4 (Л’”11«'Тг]£й=г’—z";
T/2
z' = e 4^+ bL ^^dt=
0
те^Рном+ Д(Л??)пер1
~ S '* * * * * * * * x
те‘ Рпом+^^оер)
[1
М(Лв)„р J
= . Tg ”OM
6Д (A'&Juep
&A <A<%eP]
—e 2 ' :
E" (”hom+* <A«ras Ц j;- M «« Д x
t/2
x dt =— 25-1-------51 x
£>Д (Д'б)пер
хе^'^’перйT 5тДД*°"+ММД X
т/2 М (Лв)пер
x[e^<44_e^("Wr] =
ъ™№пал Ге»А<м>пер_ 11;
ьл (Л«)пвр L J
тей,?ном
ЬД (ДО) пер
гохл — г 1 z —
X
X [е"а(А,”™р + 4е 2 —5]. (5.34)
Следовательно, общий износ изо-
ляции за время одного цикла нагрева
и охлаждения обмотки двигателя ра-
вен:
те^НОМ
: = гкагР+гмл= м(ле)пер Х
X [4е,’а1“)п«' + е6Д(д’’>»еРХ
X (1 4-1ЩЕ.) — 5 — (5.35)
Заменяя Д(Д'0’)пер из уравнения
(5.17в), получаем
z _______та ном_____
&Д '&м,ном (А? -~ I) ?пер
X ^4е6Л,?м.ном <** — 1) /пер^2т-{-
М^м,номtfea ~*пер . . .
+ е 1 h-b-fnep-j —
— 5 —(5.36)
Из этого уравнения следует, что
при заданном времени перегрузки
^пер’ износ изоляции минимален при не-
котором значении постоянной нагре-
ва т.
Для иллюстрации влияния постоян-
ной времени нагрева и номинальных
нагревов обмоток на их износ при
кратковременных перегрузках произ-
ведем расчет по полученным форму-
лам для кратности перегрузки обмо-
ток статоров £ = 5, длительности пере-
грузки /тер=Ю с и двух вариантов ис-
ходных нагревов и превышений тем-
ператур:
а) 'й’ном — ЮО °C; Д-0-м,ном=35°С;
б) 0ком=12О°С; Д^м,ВОм-50еС.
Примем 6=0,069 °C1.
Тогда из (5.36) получим для этих
двух случаев соответственно
а) га = 1,71т2 |4е'ж-8'’ + (1 + —) X
X е5га.иг — 5 + -12-J; (5.37а)
б) гб = 4,76т2 рв™'’ + (1 + —) X
Xew<_(5 + J.jj. (5.376)
Соответствующие кривые построе-
ны на рис. 5.18.
Как видно из полученных кривых,
в обоих случаях при некотором значе-
нии т имеет место минимум износа
10*
иг
Рис. 5.18. Характеристики износа изоляции
обмотки статора ври перегрузке током 5/вом
в течение 10 с в зависимости от постоянной
времени нагрева при 6=0,069 С-1:
с —©ном-=100°с, Д©м ноМ =*35 “С: б —120 °C,
А^м.ном “ВО'С
изоляции при рассматриваемых пере-
грузках. С увеличением нагрева ма-
шин в исходном номинальном режиме
относительный износ существенно воз-
растает, что естественно, а минималья-
нсе его значение имеет место прн боль-
ших значениях т.
Сравним значения постоянной вре-
мени нагрева для обмотки статора и
изолированной обмотки ротора двига-
телей. Постоянная времени нагрева
обмоток двигателей при исходном на-
гретом состоянии может быть опреде-
лена по формуле (5.11а).
Для обмотки ротора при перегруз-
ках, не связанных с уменьшением ско-
рости более чем на 10—20%, гак же
как и для статора, в этой формуле
можно принять kR^l. При этих усло-
виях и одинаковых плотностях тока в
обмотках статора и ротора их посто-
янные времени нагрева будут практи-
чески одинаковыми.
Если же перегрузка связана со
значительным уменьшением угловой
скорости ротора, то коэффициент kR
для обмотки последнего может дохо-
дить до значения kR=3 (при номи-
нальной частоте, т. е. неподвижном ро-
торе).
При определении постоянной вре-
мени нагрева для изолированной об-
мотки ротора при перегрузке, связан-
ной с изменением угловой скорости
ротора от нуля до номинальной, мож-
но принять за расчетное значение ко-
эффициента kR величину (&н+1)/2.
Принимая s = l и &к=3, получаем
значение постоянной времени нагрева
для обмотки ротора
т = 150 ДО /2J2 .
р ном' ном
Таким образом, в данном случае
при одинаковых плотностях тока и
одинаковых значениях Д0м,ном посто-
янная времени для обмотки ротора бу-
дет в 2 раза меньше постоянной вре-
мени нагрева для обмотки статора.
Поэтому прн перегрузках, связан-
ных с глубокими изменениями угловой
скорости ротора, его обмотка, как пра-
вило, будет иметь большее превыше-
ние температуры, а тем самым и боль-
ший износ изоляции, чем обмотка ста-
тора. Такие перегрузки, в частности,
могут быть при пусках и самозапусках
двигателей.
Приращение температур обмоток
за время перегрузки может быть най-
дено по формуле (5.176).
Для рассмотренного выше случая
«б» при перегрузках в течение 10 с
были определены эти приращения в
зависимости от т и соответствующих
значений плотности тока, найденных
из (5.11а) прн £я=1- Результаты при-
ведены в табл. 5.2. Там же даны со-
ответствующие значения показателя
износа.
Как видно из таблицы, с ростом
номинальной плотности тока абсолют-
ные значения приращения температур
и износ существенно возрастают. При
обычно имеющих место значениях
/вом^б А/мм2 приращения темпера-
тур при таких перегрузках довольно
значительны. Отметим, однако, чтооии
не имеют существенного значения, ес-
ли перегрузки возникают на недогру-
женной машине.
Перейдем теперь к рассмотрению
вопроса о том, как скажутся периоди-
ческие перегрузки на сокращении про-
должительности срока службы изоля-
ции.
Таблица 5.2
/ном- А/мм2
А (ДФ)нер- СС
z-10—6
100
8,66
120
218
150
7,07
80
34,8
200 300
6.12 5,00
60 40
17,6 11,6
400
4.33
30
10,9
500
3,86
24
11,3
600
3,53
20
12,0
700
3.27
17
12,9
800
3,06
15
13.9
1000
2.74
12
16
148
Таблица 5.3
2,0 3,1
18,6 57,9
200
300 400 SOO 600 700 800 1000
5,4
54.1
6.7
82
10,7
108
12,8
140
15,3
169
17.9
199
22,8
256
Предположим, что перегрузка при
k—5 и t= 10 с происходит 1 раз в
день, тогда дополнительный износ в
течение года будет равен при т=150 с,
т. е. при /ном» 7,1 А/мм2,
Zj = 34,8-106-360 = 12528- 10е,
где 360— число дней работы двигателя
в году.
Износ изоляции за остальное время
года будет составлять при температу-
ре обмоток 120 °C
z2 = е-0,069-120-360-85 940 =
= 122 021-10е,
где 85 940—число секунд в сутки за
вычетом времени перегрузки /пер=Ю с
и времени охлаждения Зт=450 с.
Срок службы изоляции с учетом
перегрузки будет характеризоваться
значением
2f+za 12528 4- 122021
Износ изоляции за 1 год прн отсут-
ствии перегрузок при 0Ном = 120°С бу-
дет равен:
zHOM =£-0,069 120-360 -24 -3-3600 =
= 122 674- 10е.
Срок службы изоляции при отсутст-
вии перегрузок
Таким образом, срок службы изо-
ляции при ежедневных перегрузках
пятикратным током длительностью
10 с уменьшился на 8,8 %.
При большей т и соответственно
меньших плотностях тока сокращение
срока службы при тех же условиях
будет еще меньше. Представляет ин-
терес выяснить, какая доля из общего
износа при перегрузке падает на вре-
мя нагревания и иа время охлаждения.
Отношение износов изоляции пои ох-
лаждении и при нагревании зависит
от перегрузки и постоянной времени
при нагреве обмотки.
Из формул (5.30) и (5.34), заменив
Д-6 по уравнению (5.176), получим от-
ношение износа изоляции при охлаж-
дении к износу изоляции прн нагреве
= т
ьнагр ^пер
^ном^-^пер ^ном(У-1)/тер
4s 21 +е * —5
ЬД^М.НОМ ~ D /пер
В-------------------1
(5.38)
В табл. 5.3 даны значения отноше-
ния износа за время охлаждения и
нагрева при двух значениях перегруз-
ки £1 = 1,5, /1 = 120 с и £2 = 5, /2—10 с
при принятых выше значениях 5=0,069
и Д'О’м.ном=50 °C.
Из данных таблицы следует, что
при значениих постоянной времени от
300 с и выше даже при небольших и
относительно длительных перегрузках
износ происходит практически только
за время охлаждения.
При определении перегрузочных
характеристик обмоток двигателей
можно исходить из условия получения
одинакового дополнительного превы-
шения температуры или же из условия
получения одинакового износа.
Если принять, что при всех пере-
грузках мы допускаем одинаковое до-
полнительное превышение температу-
ры, то в этом случае время перегруз-
ки для двигателя, предварительно ра-
ботавшего с номинальной нагрузкой,
пренебрегая теплоотдачей и учитывая
только потери в меди, можем выра-
зить формулой (5.196), которая при
Д(Д&)доп=30°С, Дб-м.ном—50 °C и по-
стоянной времени т = 300 с принимает
следующий вид:
300-30
50 (Л? — 1)
^(5.39)
Если учесть теплоотдачу, то в этом
случае перегрузочная характеристика
149
Рис. 5.19. Иллюстрация определения допустимого времени перегрузки по условию одинакового
износа изоляции при различных перегрузках:
--------изменение кретности тока при перегрузках 1, S, Л;----— — — изменение дополнительного превы-
шения температуры во времени
^доп — in
для двигателя, работающего с номи-
нальной перегрузкой, может быть вы-
ражена формулой
---, (5.40)
Д2 А^М.доп
АФм.ном
полученной иа основании (5.22)’.
Для определения перегрузочной
характеристики из условия получения
одинакового износа изоляции для всех
перегрузок расчет можно проводить
следующнм образом.
Задаемся при некоторой наимень-
шей кратности ki временем перегрузки
fne₽=ti> определяем износ изоляции
за время нагрева и охлаждения, при-
мерно равное ^i-4-Зт. Затем для другой
кратности тока k2 методом последова-
тельного приближения определяем та-
кое время перегрузки t2, при котором
износ изоляции будет равен при-
чем £2 слагается из двух частей — из-
носа за время нагрева и охлаждения,
равного £з+3т, и износа при нормаль-
ной нагрузке и номинальной темпера-
туре за время Л—t2 (рис. 5.19).
Произведенные автором расчеты
показали, что перегрузочная характе-
ристика, построенная из условия оди-
накового износа, практически не отли-
чается от перегрузочной характеристи-
ки, построенной из условия одинакового
значения дополнительного превыше-
ния температуры. Поэтому при опре-
делении допустимого времени пере-
грузки можно ие производить громозд-
ких вычислений износа изоляции, а
пользоваться формулами (5.196) и
(5.39), дающими удовлетворительный
результат.
Глава шестая
ПУСК и САМОЗАПУСК ДВИГАТЕЛЕЙ
6.1. ОБЩИЕ СООБРАЖЕНИЯ
При установившемся режиме вра-
щающий момент двигателя равен мо-
менту сопротивления механизма, что и
обеспечивает постоянство угловой ско-
рости вала агрегата двигатель — ме-
ханизм. Если в силу каких-либо при-
чин это равновесие нарушается, то
угловая скорость агрегата изменяется.
Изменение угловой скорости про-
исходит под воздействием избыточного
момента Л1иа, равного разности между
врашающим моментом двигателя Л1
и моментом сопротивления механиз-
ма Л4С.
Если вращающий момент двигате-
ля больше момента сопротивления (по-
ложительный Миз), то угловая ско-
рость агрегата увеличивается, т. е, про-
исходит разгон двигателя до тех пор,
пока не наступит равновесие между
моментами двигателя и механизма при
большей угловой скорости.
Вопросы поведения двигателей при
пуске представляют весьма большой
интерес в связи с широким применени-
ем двигателей с короткозамкнутым ро-
150
тором для механизмов с тяжелыми
условиями пуска, а также при иссле-
довании асинхронного пуска синхрон-
ных двигателей и компенсаторов. Дви-
гатели, выбранные по условиям нор-
мальной работы, должны проверяться
по пусковому режиму.
При анализе процесса пуска дви-
гателей нужно найти зависимость уг-
ловой скорости или скольжения от
времени, по которой определяется за-
висимость пускового тока от времени,
позволяющая найти температуру об-
моток.
Если вращающий момент двигате-
ля окажется меньше момента сопро-
тивления (7Ииз отрицательный), на-
пример вследствие снижения напряже-
ния в питающей сети, то угловая ско-
рость агрегата будет уменьшаться, т. е.
будет происходить выбег. Выбег мо-
жет быть полным (до остановки меха-
низма), если в процессе торможения
избыточный момент все время отрица-
тельный, или частичным до некоторой
меньшей, чем в нормальном режиме,
угловой скорости, если в процессе тор-
можения избыточный момент станет
положительным, например при восста-
новлении напряжения.
Поскольку при изменении угловой
скорости изменяется сопротивление
двигателя (см. гл. 1, 2), то при тормо-
жении двигателя, не отключенного от
сети, или при разгоне по обмоткам, как
правило, проходят повышенные токи,
вызывающие дополнительный нагрев и
дополнительные механические усилия,
особенно в момент подключения к ис-
точнику питания.
Из-за опасения повреждении дви-
гателей повышенными токами при сни-
жении напряжения и переходных ре-
жимах до проведения исследования
процессов пуска и самозапуска произ-
водились массовые отключения двига-
телей от защиты минимального напря-
жения и максимальной токовой защи-
той. Проведенные исследования
позволили убедиться в том, что отклю-
чение двигателей во время короткого
замыкания и прн восстановлении на-
пряжения и сети, которое может выз-
вать расстройство технологического
процесса на предприятии, в большин-
стве случаев ничем не обосновано (в
связи с малой длительностью переход-
ных режимов при наличии совершен-
ных средств защиты и автоматики).
Важнейшим эксплуатационным пе-
реходным режимом, обеспечивающим
непрерывность технологического про-
цесса, является самозапуск двигате-
лей — такой режим, при котором дви-
гатели, снизившие свою угловую ско-
рость за время короткого замыкания в
сети или за время переключения на ре-
зервный источник питания, не отклю-
чаются защитой, а при восстановлении
напряжения достигают нормальной уг-
ловой скорости.
Таким образом, самозапуск сочета-
ет в себе два процесса; а) выбег дви-
гателей при сниженном напряжении
(как правило, частичный); б) разгон
до номинальной угловой скорости при
восстановлении напряжения до требу-
емой скорости.
Правильная оценка схем пуска,
возможности самозапуска и его обес-
печенности соответствующими устрой-
ствами защиты и автоматики основы-
вается иа анализе переходных режи-
мов пуска и выбега, проведенном
ниже.
Физические процессы при пуске и
самозапуске синхронных двигателей
протекают следующим образом. При
несинхронном вращении ротора в
пусковой обмотке и обмотке возбуж-
дения создаются ЭДС с частотой
скольжения sfi, индуктируемые вра-
щающимся магнитным полем статора.
Во избежание пробоя индуктирован-
ным напряжением изоляции разом-
кнутой обмотки возбуждения послед-
няя во время пуска обычно замкнута
либо и а возбудитель (в этом случае
практически является короткозамкну-
той), либо на гасительный резистор,
имеющий сопротниление, в несколько
раз превышающее собственное сопро-
тивление обмотки возбуждения. При
включении обмотки возбуждения на
возбудитель создается наиболее про-
стая и надежная схема цепи возбуж-
дения.1
Индуктированный в пусковой об-
мотке ток создает магнитное поле, ко-
торое при металлическом соединении
обмоток, расположенных во всех по-
люсах (полная обмотка), является
практически круговым и вращается с
угловой скоростью sco! относительно
ротора и, следовательно, неподвижно
относительно вращающегося с угловой
скоростью coi поля статора (аиалогмч-
1 Автор рассматривал схему с электромагнитным
возбуждением постоянного тока. (Прим, ред.)
151
но взаимному расположению магнит-
ных полей у асинхронного двигателя).
Полный магнитный поток ротора оп-
ределяется магнитными полями пуско-
вой обмотки и замкнутой обмотки воз-
буждения, причем с повышением мощ-
ности пусковой обмотки соответствен-
но увеличивается и создаваемая ею
доля общего магнитного потока рото-
ра, а ЭДС, напряжение и ток в цепи
возбуждения уменьшаются.
Рассмотрим влияние обмотки воз-
буждения на асинхронный момент
синхронного двигателя прежде всего,
когда обмотка возбуждения замкнута
иа возбудитель.
В замкнутой иа возбудитель об-
мотке возбуждения индуктируется пе-
ременный однофазный ток с частотой
скольжения sfi, который создает пуль-
сирующее магнитное поле. Это поле
можно условно заменить двумя поля-
ми, вращающимися относительно рото-
ра в разные стороны. Прямое поле,
вращающееся относительно ротора с
угловой скоростью Ч-so,, является
синхронно вращающимся по отноше-
нию к основному полю статора.
Обратное поле, вращающееся отно-
сительно ротора с угловой скоростью
—soij, по отношению к статору имеет
угловую скорость -рсо (1—2s). Это по-
ле наводит в статорной обмотке токи
частоты (1— 2s)fi, замыкающиеся че-
рез сеть, которые создают в машине
добавочное поле, вращающееся с угло-
вой скоростью (1—2s)<01. Амплитуда
результирующего гока статора, равно-
го сумме токов с основной частотой fi
и токов с частотой (1—2s) ft, пульсиру-
ет с частотой 2sft. Момент, обуслов-
ленный взаимодействием обратного
поля ротора и токов статора частоты
(1—2s)f(, при скольжениях s>0,5 яв-
ляется движущим, а при скольжении
s<0,5—тормозящим. При скольжении
s=0,5 этот момент равен нулю, по-
скольку обратное поле ротора оказы-
вается неподвижным относительно ста-
тора и не индуктирует в статоре ЭДС.
Тормозящий момент, связанный с
обратным полем ротора, резко возрас-
тает уже вблизи скольжения s=0,5,
что может привести к провалу в ре-
зультирующей кривой асинхронного
момента при угловой скорости, не-
сколько большей полусинхронной (од-
ноосный эффект).
У синхронных двигателей со специ-
альной пусковой обмоткой, а также у
152
синхронных двигателей с массивными
полюсами или с массивным ротором
момент, развиваемый обмоткой воз-
буждения, относительно мал, а поэто-
му одноосный эффект проявляется
столь незначительно, что им можно
пренебречь. Лишь у машин с шихто-
ванными полюсами, не имеющих пус-
ковой обмотки, одноосный эффект
становится заметным, и в ряде случаев
при асинхронном пуске таких машин
имеет место застревание вблизи полу-
синхронной скорости.
6.2. ОСНОВНЫЕ ПОЛОЖЕНИЯ
ДИНАМИКИ. ОПРЕДЕЛЕНИЕ ВРЕМЕНИ
РАЗБЕГА И ВЫБЕГА В ПРОСТЕЙШИХ
СЛУЧАЯХ
Для определения зависимости уг-
ловой скорости агрегата а> от времени
t воспользуемся основным уравнением
движения
Мя3 = М — Мс = Jap dMt, (6.1)
где М — суммарный электромагнит-
ный момент двигателя, Н-м, в общем
случае (для синхронного двигателя)
равный сумме моментов асинхронного
режима без возбуждения и моментов,
обусловленных возбуждением; Мс —
момент сопротивления механизма, НХ
Хм; /щ, — приведенный момент инер-
ции агрегата, кг-м2*; <о — угловая
скорость ротора, рад/с.
Приведенный момент инерции ра-
вен сумме момента инерции двигателя
и приведенного к валу двигателя мо-
мента инерции механизма;
ГДе (Оном, мех И (Оном, дв ИОМИНЭЛЬНЫе
угловые скорости механизма и дви-
гателя.
На рис. 6.1 в качестве примера по-
казано определение избыточного мо-
мента для случая пуска асинхронного
двигателя.
Выразим угловую скорость через
скольжение:
ш бои .
(0# =-----=--------- - I— s,
Ю1НОМ 2л«1НОМ
где coiHOM и ятем — номинальные зна-
чения угловой скорости и частоты вра-
• Если в каталогах приведены значения махово-
го момента GD-, кге-м2. то соответствующий момент
инерции. кг-№. определяется по формул! / = <?/)г/4.
а если GD2 выражен в тс-м1, то J—GD2-1(Р/4. (Прим,
ред.)
стижения синхронной угловой скоро-
сти (si = l, s2—0):
Для выбега от синхронной угловой
скорости (si^O) до полной остановки
(^2=1) при постоянном избыточном
моменте Л4113*=—1 необходимо время
Рис. 6.1. Определение избыточного момента
для случая пуска асинхронного двигатели:
I — момент сопротивления; 2 — момент двигателя;
штриховкой показан избыточный момент
щеиия вала. Подставив это выраже-
ние в (6.1) и разделив последнее на
Миом, получим
из*
^иэ ____т ds
МИом dt
(6.2)
где ту — время ускорения агрегата, с,
равное времени изменения скольжения
(или, что то же, относительной угло-
вой скорости) на единицу под дейст-
вием неизменного избыточного момен-
та, равного номинальному:
X ~ J - J т1ном Ианом
J ар /Ином Пр Рном
(6.3)
“ном
Как видно нз (6.2), время ускоре-
ния (замедления) полностью характе-
ризует инерционные свойства агрегата
двигатель — механизм. Дело в том,
что момент инерции сам по себе ниче-
го не говорит об изменении угловой
скорости агрегата во время переход-
ных режимов (пуск, выбег, самоза-
пуск). Агрегат, имеющий весьма боль-
шой момент инерции, но работающий
с относительно небольшой угловой
скоростью, может обладать временем
ускорения, меньшим, чем агрегат с не-
большим моментом инерции, но рабо-
тающий с относительно большой угло-
вой скоростью.
Уравнение (6.2) позволяет опреде-
лить время t, соответствующее измене-
нию скольжения от Si до s2:
(6.4)
где f*=Tj—относительное время (в
долях времени ускорения агрегата)
Определим время разгона при из-
быточном моменте, равном номиналь-
ному (Мга* = 1), необходимое для до-
Таким образом, время ускорения
равно времени разбега от неподвиж-
ного состояния до синхронной угловой
скорости (или при выбеге от s=0 до
s=l,0) под действием постоянного из-
быточного момента, равного номиналь-
ному моменту двигателя.
Для определения времени разгона
и выбега в соответствии с формулой
(6.4) необходимо знать зависимости
вращающего момента двигателя Л4* и
момента сопротивления механизма
Л4С. от скольжения, причем кривая
ТИс*=f( s) должна соответствовать
конкретному типу двигателя, состоя-
нию цепи ротора (короткозамкнутая,
с дополнительным сопротивлением и
т. д.) и определенному напряжению в
условиях разбега или выбега.
В случае подключении двигателя к
сети через сопротивление последнее
необходимо вводить в расчет кратно-
сти максимального момента и критиче-
ского скольжения как для асинхрон-
ного [формулы (2.24), (2.25)], так и
для синхронного двигателя (учетом
внешнего сопротивления в параметрах
A'd.Xd, Xd, Trf, Td, т9и др.).
С целью упрощения анализа пере-
ходных режимов в дальнейшем
используем только статические харак-
теристики M*=f(s) (см. гл. 2), соот-
ветствующие установившемуся значе-
нию тока при данном значении сколь-
жения. В действительности прирезком
изменении напряжения на выво-
дах статора (при включении в сеть,
переключении на резервный источник
литания, понижении напряжения в
случае короткого замыкания в сети и
т. д.) а также в процессе изменения
угловой скорости (скольжения) возни-
кают дополнительные переходные сла-
гающие токов в цепях статора и рото-
ра, которые создают соответствующие
153
составляющие момента двигателя, из-
меняющиеся во времени. Однако вли-
яние этих дополнительных моментов
на время пуска или выбега обычно не-
велико, хотя и должно учитываться в
ряде случаев, в частности при опреде-
лении наибольших механических уси-
лий. Следует учитывать также допол-
нительное изменение синхронного мо-
мента синхронного двигателя или
компенсатора, обусловленное измене-
нием тока возбуждения в процессе
синхронизации (обычно при скольже-
ниях менее 0,2) прн асинхронном пуске
с подключенным возбудителем.
В случае относительно простого
математического выражения избыточ-
ного момента в функции скольжения
время разгона (выбега) можно опре-
делить аналитически.
Например, если вращающий момент двига-
теля представлен выражением (2.116) и мо-
мент сопротивления не зависит от угловой ско-
рости (AiCe=const), то избыточный момент
М _ 2AsKps — ( S2 + «кр)
—-------5----9------— ~
S +SK₽
________2frc$KPs
2*C%pS—(s“+4p)—1
и время разгона (выбега) по формуле (6.4)
(6.6)
где Ьс=&/Мс».
Заменяя в случае разгона
К>> “ 1-'«р)]
s! - Ч'рр5 + sSp = (s - ‘Лр)2 -
^“^рМ-1); г = и 0«>А
находим при s=z4-fccSKp и ds=dz интеграл
Для удобства вычислений произведем за-
мену
С2Р — г2 = (Ср — г) (Op + г) = (5ф — s)(s — s,).
и тогда
*1 = V [ (4- s) (S — Sp) + —:— In (Зф— S)—
2 L а1>
^с$кр . .
—-----s. In (s — Sj
2s 1, 7г—; [5ф>п <5Ф—s) — sy 111 (s — '1)11 =
Ир * °C ---1 s.
1
Чр
5ф1П^*^ + 5,1П^С±1.
5ф —Sj S2 Sy J
Определяя значение 7.i и подставляя его
в уравнение (6.6), находим время разбега от
угловой скорости (Dj = (1— Sj)Wq до угловой
скорости со2=(1—ss)w02>(li1:
£0,=5кр(Ьс + /',е-1);
Slip
где
(установившееся скольжение в момент окон-
чания разбега) и As=si—s2>0.
При разгоне без нагрузкп на валу (/Мс.=
=0) получим
Определяя согласно (6.7) полное время
пуска (si=l, S2=Sj), получаем /р=«>, что
означает асимптотическое приближение час-
тоты вращения к установившейся <ву= (1—
—Sy) W1HOM-
Дли практического расчета времени пуска
с достаточной точностью можно принять $2=
=sy+0,01, и тогда
lnS1~sy = ]П |b0 (1 _s ),
sa—«у
что при подстановке в (6.7) позволяет получить
расчетное выражение для полного времени
пуска:
5ф1П
5Ф~У~ °’01
®ф — 1
+ ., In 100 (I —S,)
(6-8)
154
В случае выбега (&с<1) получаем
где Og=(l—)$Кр и по-прежнему z—s—
—bcSvp, ds—dz, а поэтому интеграл в равен-
стве (6.6) приводится к следующему:
^Г!“р^т=т[1п<г2+^
s*“ficsKP Ь
22>cSkp г
4-------— arctg —
ав ав
Подставляя значение Кг в уравнение (6.6)
с учетом величин г и св, находим время вы-
бега ОТ угловой скорости €£>!=(!—Sl)(Oo до
УГЛОВОЙ скорости <02= (1—
т, Г
/в — ~ I *2------S1 4“ X
|n s2-4-V2 + s'kp 1 2Ьс (Ф2-<Р1А1
(6.9)
где
<ра — arctg <Pi = arctg - - •
Vt—ь* Vi—bi
Время полного выбега (от предшествую-
щего установившегося режима до полной
остановки) определяется в результате подста-
новки sa=l и st=sy в равенство (6.9).
В частном случае при отключении одиночного
двигателя от сети (напряжение при выбеге
равно нулю, т. е. k^—Q) имеем &с=0, «р2=
= arctg—, <й. — arctg и время выбега
$кр SKP
<b-k;(S2_St)(s Sy)’ (6l0)
откуда скольжение двигателя в любой момент
времени
s = Ate, Y“ + Sy (6 .11)
и угловая скорость (в относительных едини-
цах)
<0* = = 1 Sy —- /ИС(:
(6-12)
где начальная угловая скорость (до отключе-
ния двигателя wy*=l—sy.
В соответствии с равенством (6.12), так
же как и из (6.1), можно заключить, что кри-
вая выбега (зависимость угловой скорости аг-
регата от времени) отключенного от сети дви-
гателя с постоянным моментом сопротивле-
ния иа валу представляет собой прямую ли-
нию. Время полной остановки агрегата в со-
ответствии с (6.12) равно:
'°ст = т J= ' ' 'lJ’ (6•13а)
откуда следует, что при номинальном момен-
те сопротивления время остановки примерно
равно времени ускорения:
(?ост)д10ф=1 = (1 — sy) TJ (6.136)
Таким образом, по времени остановки аг-
регата при не зависящем от скорости моменте
сопротивления на валу можно эксперимен-
тально определить время ускорения:
Т/—-j____s ^ост- (6.14)
Рассмотрим конкретные примеры
аналитического определения времени
разгона и выбега.
Пример 1. Определить время разгона дви-
гателя, имеющего &Ном=3,0; sKp=0,2 при ij=
=5 с для двух случаев: а) пуск с нагрузкой
(/Hc.=0,5=const); б) пуск с номинальной на-
грузкой (/Ис.= 1,0).
а) При /Ис.=0,5 находим
Ьс=3/0,5=6,0; 5ф= 0,2 (б + Кб?—Т) 2,38;
0,2
sy =------- = 0,01675;
6 4- У 6? — 1
1 = 6/5,92= 1,015.
Определим время разбега из неподвижного
состояния до угловой скорости w = (l—
—^кр) W)BCK=0,8(i)tHOM, т. е.
sa = sKp =0,2 и s1 = 1,0.
. £ф— sa 2,38—0,2
In —-- = in ------
8ф —Si
1л?~^ = 1п
S2 — Sy
= 0,455;
2,38—1,0
1 — 0,01675
—-----------= 1,68.
0,2 — 0,01675
По формуле (6.7) находим
/р = ^[1-0,15 (2,38-0,455 4-0,01675-1,68) —
— (1 —0,2)1 = 10-0,33 = 3,3 с.
б) При /Ис.= 1,0 находим
— ^ном =3,0;
5ф = 0,2(з 4“ 1^32-— 1) = 0,2-5,82= 1,16;
Sy = 0,2/5,82 = 0,0344;
be
3___
2,82
1,062.
Для разбега от неподвижного состояния
до угловой скорости и=0,8 со том при
lnS2LZis=in
»ф—«1
1,16 — 0,2
1,16—1,0
= 1,79
s, — sv 1 — 0,0344 , Л
In ____? = In-------------= 1,76
s8 —Sy 0,2 — 0,0344
155
находим по формуле (6.7) необходимое время:
1р=5 [1,062 (1,16-1,79 + 0,0344-1,76)—0,8]=
= 7,4 с.
Полное время пуска от s=1.0 до s=sy4-
4-0,01=0,0444 по формуле (6.8)
/п « 5 [ 1,062 (1,16 In +0,0344 X
L о,1о
X In 100 0,9655) —(1 — 0,0444)j =5-1,6 = 8с.
Найдем полное время пуска при №.=0,5
и пониженном на 29,3 % напряжении, т. е.
при йи=0,707 и йц=0,5. В этом случае Ьс =
=3-0,5/0,5=3,0, s*=l,16, ку=0,0344 и по фор-
муле (6.8) определяем
5
/п=----- [1,062(1,16- 1,94 + 0,0344-4,56) —
0,5
— 0,956] = 10-1,6= 16 с.
Таким образом, прн пониженном пример-
но на 30 % напряжении время пуска с 50 %-ной
нагрузкой на валу вдвое превышает то вре-
мя пуска, которое требовалось для разбега
агрегата с поминальной нагрузкой при номи-
нальном напряжении.
Пример 2. Определить время полного
выбега (от предшествующей установившейся
угловой скорости до полной остановки), обус-
ловленного снижением напряжения в сети на
50 %, при номинальной нагрузке на валу
(№•=1,0) Для двигателя с ЬНом = 3,0; sKp—02
при Tj=5 с.
Находим при Ьс=3-0,5х/1=0,75 для
скольжения s3 = l,0 sj—SbcSKpS+s £р=1—2Х
Х0,75-0,2-1 +0,2в—0,74 и для скольжения =
=%-0,0344 sf—2b 4- ЗкР= (0,0344)г—2Х
Х0,75-0,2-0,03444-0,04=0,0309;
0.661 ’ ’
1/0.2-0,75 , ,,
Ф, = arete 0 66, — 1.44 рад;
Ф1 = arctg
0.0344/0,2 — 0,75
0,661
= —0,715
рад;
Фа — Ф1 = 1,44 + 0,715 = 2,15.
По формуле (6.9) определяем время вы-
бега:
Г * ( °,74
(„ = 5[0.966 + 0,75.0,2(1п—+
+ 2.27-2.15 )1 = 5-2,17 « 10,8 с.
т. е. оно примерно равно удвоенному времени
ускорения агрегата.
Рассмотренные примеры достаточ-
но хорошо иллюстрируют влияние раз-
личных факторов (момента сопротив-
ления, диапазона изменения скорос-
тей, напряжения сети) на время пере-
ходного режима.
При более сложных зависимостях
вращающего момента двигателя и мо-
мента сопротивления механизма от
скольжения определение времени раз-
гона и выбега проще всего произво-
дится графоаналитически (рис. 6.2).
Для этого строим кривые зависимости
от скольжения момента двигателя /
при заданном значении напряжения и
момента сопротивления 2, выражен-
ные в долях номинального момента
двигателя. Затем определяем кривую
3 избыточного момента как разность
между кривыми моментов двигателя
и сопротивления, аппроксимируя пер-
вую ступенчато с ординатами
Л4нз2--
Время разгона или выбега опреде-
ляется по формуле
t =_ т I + +... + 1
LMhbi* №j82» №iBn*J
(6.15)
являющейся приближенным выраже-
нием для (6.4).
При разгоне As отрицательны, а
Л4ИЗ* положительны. При выбеге As
положительны, а Л4Из* отрицательны.
Для большей точности расчета ин-
тервалы As следует выбирать меньши-
ми в области резкого изменения избы-
точного момента Л4И3.
Пример 3. Определить время пуска син-
хронного компенсатора 7500 кВ-А, 6,6 кВ,
660 А, 750 об/мин от разгонного двигателя
500 кВт, 6,0 кВ, 59 А. Кривая вращающего
момента двигателя дана на рис. 6.3.
Статический момент сопротивления в дан-
ном случае определяется потерями на вентиля-
цию и трение в подшипниках. При номиналь-
ной угловой скорости потерн вентиляционные
и в подшипниках компенсатора и двигателя
составляют около 50 кВт, т. е. 0,1 номинальной
мощности разгонного двигателя. Для упроще-
ния примем, что момент сопротивления не за-
о s) аз <• не о,7 if as аз аг о,з о
Рис. 6.2. Определение времени разбеш двига-
теля
156
Рис. 6.3. Кривые вращающего (/) и избыточ-
ного (2) моментов разгонного двигателя при
номинальном напряжении
Рис. 6.4. Осциллограмма пускового тока раз-
гонного двигателя
вискт от угловой скорости. На рис. 6.3 постро-
ены кривые вращающего и избыточного
моментов двигателя при номинальном напря-
жении. Время пуска определим графоаналити-
чески согласно (6.15):
_ Г0»1 0,1 Д- 0,1 - 0,1 Д-
- Ъ [0в9и + 0>g2 + 0>96 + 1,03 1,05 +
0,1 ( 0,01 0.1 0,1 0,11 _
+ 1,14 + 1,29 + 1,50 + 1,86 + 1,6J “
= 0,865 хт.
Время ускорения, отнесенное к мощности
двигателя,
ном — (А,к + *^дв + *^возс) “S
Г Дв.вом
78,52
= (2,375 + С,07» + 0,05) — =31 С,
500
где +.«-2,375— момент инерции компенсато-
ра, т-м2; /я«=0,075 — момент инерции двига-
теля, т-м2; /возб=0,05 — момент инерции воз-
будителя, т-м2;
2л «том 2л - 750
“1ВОМ ~ д. т
Время пуска
t = 0,865 • 31 =27 с.
На рис. 6.4 дана огибающая осцил-
лограмма пускового тока двигателя.
По осциллограмме полное время пуска
равно 25 с. Незначительное отклоне-
ние от расчетного значения может
быть объяснено отклонением напря-
жения от номинального и изменением
напряжения во время пуска двигателя,
влиянием насыщения и других факто-
ров, не учитываемых прн расчете.
Следует отметить, что применяю-
щийся иногда метод определения вре-
мени пуска по среднему избыточному
моменту, равному разности между
средними значениями асинхронного
момента двигателя н момента сопро-
тивления механизма, строго говоря,
является правильным лишь для случа-
ев, когда избыточный момент остается
неизменным во всем рассматриваемом
диапазоне изменения скольжения.
Этот метод может применяться на прак-
тике, когда отличия от этого условия
невелики; в частности, это имеет место
при пусках механизмов с вентилятор-
ным моментом сопротивления. Если
же фактическая зависимость избыточ-
ного момента существенно отлична от
постоянного значения, равного средне-
му, что характерно, напримерг для
случаев пуска асинхронными двигате-
лями механизмов с большим неизмен-
ным моментом сопротивления, то сле-
дует пользоваться описанным выше
способом, реализация которого воз-
можна, конечно, и с помощью вычис-
лительной техники.
6.3. ОДИНОЧНЫЙ И ГРУППОВОЙ ВЫБЕГ
АСИНХРОННЫХ И СИНХРОННЫХ
ДВИГАТЕЛЕЙ
Рассмотрим прежде всего простей-
ший случай выбега одиночного агрега-
та двигатель — механизм при отклю-
чении двигателя от сети и определе-
ние характеристик механизма по кри-
вым выбега, представляющим собой
зависимость угловой скорости агрега-
та от времени.
Получим кривые выбега для меха-
низмов с вентиляторным моментом со-
противления аналитическим путем.
Избыточный момент прн выбеге
равен моменту сопротивления меха-
низма, т. е. в данном случае
Миз* — — А4С# =— [Мс.вач. +
+ (1 — Мс,нач.)со2].
Подставив это выражение в фор-
мулу (6.4) и заменив в последней ds
157
на — dco, получим
©»
/. = (' =
J -Л4„
ы,
Os
____ ( ___________da_____________
J ^с.нач* 4" О — ^с.нач*)
«!
или
«S
t _ 1 Г da___________________
1 ЛЗс.нач* J у^с,нач* , «
"* Г~ м-------
* 1Нс.нач»
Принимая для случая выбега coi =
= <»1ном и W2“ (о и решая это уравиеиие,
получаем
^Л^с.нач* ~г U ЛГс.нач*)
х [arctg
l » Мс,иа.1»
— arctg т/ '~М^Ч. ш I (6 16)
* ^с,нач* J
На рис. 6.5 по последней формуле
построены кривые зависимости относи-
тельного времени выбега агрегата с
механизмом, имеющим вентиляторный
момент сопротивления, от относитель-
ной угловой скорости co* для разных
значений относительного начального
момента механизма Мс. пьч*. Из рас-
смотрения этих кривых следует весьма
важное обстоятельство: в своей на-
чальной части изменение угловой ско-
рости происходит одинаковым образом
независимо от характера момента со-
противления. Иными словами, выбег
совершенно различных агрегатов, но
имеющих одинаковые значения «вре-
мени ускорения» агрегата и работаю-
щих до отключения с номинальной на-
грузкой, будет происходить в своей
начальной части практически одина-
ково.
По кривой выбега можно судить о
характере момента сопротивления. Ес-
ли момент сопротивления не зависит
от угловой скорости, то характеристи-
ка выбега будет представлять собой
прямую линию. Если момент сопротив-
ления уменьшается при уменьшении
угловой скорости, то по мере уменьше-
ния угловой скорости выбег будет про-
исходить медленнее, т. е. угол между
касательной к кривой выбега и осью
ординат будет увеличиваться.
Время ускорения агрегата двига-
тель — механизм можно определить по
касательной к начальной части кривой
выбега (при и со=соу). Отрезок,
отсекаемый этой касательной на оси
абсцисс, будет равен:
или в соответствии с уравнением (6.2)
f =_ цу ТУ => ==
(^H3»)f=0 (^c#)fc=0
т. е. практически равен отношению
времени ускорения агрегата к момен-
ту сопротивления, с которым двига-
тель работал перед отключением (при
опытном определении Т/ можно при-
нять Л4с*«А/Р1ном).
Кривая выбега может быть снята
с помощью специальных датчиков уг-
ловой скорости и соответствующих ре-
гистрирующих устройств, а при их от-
сутствии при помощи ручного тахо-
Рнс. 6.5. Кривые выбега для агрегата с механизмом, имеющим вентиляторный момент сопротив-
ления
158
Рнс. 6.6. Кривые выбега механизмов собствен-
ных нужд:
1 — вентилятора котла; 2—дымососа котла; 3 —
мельничного вентилятора котла; 4 — питательного
электронасоса; 5 — циркуляционного насоса
метра н секундомера, что дает доста-
точную точность для необходимых
расчетов.
Техника снятия кривых выбега в послед-
нем случае следующая: выбирается шкала та-
хометра в зависимости от номинальной угло-
вой скорости двигателя и на стекле тахомет-
ра наклеивается белая бумага, вырезанная та-
ким образом, чтобы видны были деления шка-
лы и конец стрелки.
При работающем двигателе тахометр
соединяется фрикционно с концом вала, пос-
ле чего карандашом иа бумаге, наклеенной на
тахометр, делается отметка против конца его
стрелки, указывающей угловую скорость ра-
ботающего двигателя. Затем по команде дру-
гого лица, держащего наготове секундомер,
двигатель отключается и одновременно пуска-
ется секундомер. По командам, подаваемым
через каждые 1—2 с, работник, держащий та-
хометр, быстро делает отметки -карандашом
на бумаге против положения стрелки тахо-
метра.
При снятии кривых выбега агрегатов вен-
тиляторного типа отсчет по тахометру можно
делать в конечной части кривой выбега через
4—6 с, для насосного типа желательно полу-
чить первую точку через 1 с.
Если пределы тахометра ие позволяют
снять всю кривую за один прием, то кривая
снимается в два приема, в крайнем же случае
снимается возможная часть кривой по тахо-
метру и затем записывается по секундомеру
полное время выбега (до остановки двигате-
ля). По.цюлученным отметкам на шкале та-
хометра здесь же у двигателя строится на
миллиметровой бумаге кривая выбега данного
агрегата и в случае плохих результатов (кри-
вая с изломами н пр.) опыт сейчас же повто-
ряется н кривая строится вновь.
Во всех случаях перед снятием
кривой выбега нужно определить
мощность на валу двигателя путем
измерения мощности, потребляемой из
сети последним, или же по измерению
тока статора, если двигатель работает
примерно при номинальной нагрузке и
угловой скорости.
Характерные кривые выбега для
некоторых агрегатов собственных
нужд электростанций приведены на
рис. 6.6, 6.7, а иа рнс. 6.8, 6.9 — для
некоторых промышленных агрегатов.
В табл. 6.1 даются примерные зна-
чения времени ускорения для агрега-
тов собственных нужд по данным ис-
пытаний Союзтехэнерго н ВНИИЭ.
Таблица 6.1
Наименование агрегата Время ускоре- ния. с Примечание
Мельницы шаро- вые Резервные возбу- дители Дымососы, венти- ляторы, экс- гаустеры Центробежные насосы Питательные на- сосы Компрессоры 2—2,5 20—30 5—25 1,5—6,0 4,0—6,0 3,0—7,0 Могут быть до 16 с
Примечание,
рения имеют более
Рис. 6.8. Кривые выбега
компрессоров:
1 — горизонтальный комп-
рессор: 2 — вертикальный
компрессор
159
Рис. 6.9. Кривые выбега нефтяных качалок:
/ — групповой привод с двигателем Б9 кВт; 2 — груп-
повой привод с двигателем 7,3 кВт
стью момента сопротивления механиз-
ма от угловой скорости и степенью
загрузки двигателя.
Рассмотрим выбег группы асинх-
ронных двигателей при полном корот-
ком замыкании. Поскольку при этом
напряжение на выводах двигателей
равно нулю, выбег всех двигателей
происходит независимо друг от друга.
При коротком замыкании, как извест-
но, двигатель посылает к месту корот-
кого замыкания переходный ток (рис.
6.10). Поэтому выбег в этом случае
Рис. 6.10. Ток статора
асинхронного двигателя
при трехполюсном корот-
ком замыкании иа шинах
Рис. 6.11. Зависимость от времени ускорения
Tj конечных значений угловой скорости агре-
гата о» при коротком замыкании на выводах
обмоткн статора асинхронного двигателя
Рис. 6.12. Влияние дополнительного момента
при коротком замыкании иа выводах обмотки
статора на снижение относительной угловой
скорости о» агрегата с двигателем ВДС-213/
34-12 при различных значениях tj в
------ и — -----бен учета дополнительного момен-
та при вентиляторном и постоянном моментах сопро-
тивления; —-с учетом дополнительного момен-
та при постоянном моменте сопротивления
Из вышеизложенного ясно, что вы-
бег одного агрегата двигатель — меха-
низм полностью определяется «време-
нем хскорення» агрегатов, зависимо-
будет происходить принципиально ина-
че, чем при отключении одиночного
двигателя от сети.
Переходный ток создает тормозной
момент, н поэтому скорость двигателя
во время короткого замыкания будет
изменяться быстрее, чем при измене-
нии скорости при выбеге этого же дви-
гателя, отключенного от источника пи-
тания.
Для иллюстрации на рис. 6.11 (по
данным Э. М. Рихстейна) приведена
зависимость от времени ускорения от-
носительной угловой скорости агрега-
та, до которой эта скорость снижается
в результате дополнительного тормо-
жения за время короткого замыкания
иа выводах двигателя. Снижение до
этой угловой скорости происходит
весьма быстро. Из рассмотрения рис.
6.11 следует, что существенное измене-
ние угловой скорости в результате до-
полнительного торможения за время
короткого замыкания следует учиты-
вать лишь для двигателей, имеющих
сравнительно небольшие значения вре-
мени ускорения агрегата. Уже при
времени ускорения, разном 0,5 с, ко-
нечное дополнительное изменение уг-
ловой скорости агрегата составит все-
го лишь 7 %. Это мало скажется на
времени самозапуска.
Таким образом, для асинхронных
двигателей, имеющих время ускорения
агрегата более 0,5 с, можно не учиты-
вать дополнительное снижение угловой
скорости за счет переходных токов, ге-
нерируемых двигателем во время
короткого замыкания. Скольжение та-
го
ких двигателей к моменту отключения
короткого замыкания можно опреде-
лять по кривым выбега, снятым при
отключении двигателя от сети.
У синхронных двигателей дополни-
тельное торможение за время близких
коротких замыканий будет несколько
больше, чем у асинхронных, нз-за на-
личия тока возбуждения. Для иллюст-
рации на рис. 6.12 даны кривые выбе-
га двигателя типа ВДС-213/34-12 при
постоянном и вентиляторном момен-
тах сопротивления с учетом и без уче-
та составляющих тормозного момента,
обусловленных дополнительными по-
терями в статоре и роторе при корот-
ком замыкании на выводах обмотки
статора для разных значений времени
ускорения агрегата. Из рассмотрения
этих кривых следует, что дополни-
тельные тормозные моменты следует
учитывать при расчете выбега лишь
в тех случаях, когда значения времени
ускорения агрегата примерно равны
или меньше 1 с.
Когда происходит отключение ис-
точника питания и двигатели остаются
подключенными к общим шинам, вы-
бег их происходит по иному закону,
чем выбег отдельных двигателей. Дело
в том, что при отключении источника
питания магнитный поток двигателей
в течение некоторого времени поддер-
живается за счет токов, индуктируе-
мых в контурах ротора в момент от-
ключения. Поскольку двигатели про-
Рис. 6.13. Изменение напряжений, генерируе-
мых двигателями механизмов котлоагрегата,
после отключения каждого из них от сети:
1 — дымосос 430 кВт, 590 об/мин, А3—0 87, т-. -8,4 с;
2 — дутьевой вентилятор 380 кВт, S80 об/мин, ka~=
— 0,63, Х-. —3.3 с; 3— мельница 625 кВт, 735 об,мия,
&0 —0.65, Tj —1.9 с; 4 —эксгаустер 300 «Вт,
1480 об/мин. fe3—0.54, Ху —9.3 с; Б — питательный
электронасос 2000 кВт. 2975 об/мин, Яа—0,48, Ху •=
-5 с
Рис. 6.14. Напряжение, генерируемое двига-
телями собственных нужд после их отключе-
ния:
/—асинхронные двигатели; 2—асинхронные и синх-
ронные двигатели без форсировки возбуждения,- 3 —
асинхронный двигатель и синхронный двигатель с
форсировкой возбуждения
должают вращаться за счет запасенной
механической энергии, в обмотках дви-
гателей генерируется напряжение. Это
напряжение, уменьшающееся вследст-
вие затухания индуктируемых токов и
снижения угловой скорости двигате-
лей, обусловливает их взаимную связь
между собой.
На рис. 6.13 приведены по данным
Союзтехэнерго кривые напряжений,
генерируемых асинхронными двигате-
лями после их отключения от сети псд
нагрузкой. Следует указать, что имеет
место снижение не только напряжения
двигателя, но и его частоты. Поэтому
кривые, изображенные на рис. 6.13,
можно считать экспонентами лишь в
первом приближении. Из рассмотрения
кривых следует, что условная постоян-
ная времени затухания напряжения
(время, за которое напряжение умень-
шается до 0,368 начального значения)
колеблется от 0,46 до 2 с.
Влияние синхронных двигателей на
изменение напряжения во времени при
групповом выбеге после отключения
секции собственных нужд от сети по-
казано на рис. 6.14 (по данным испыта-
ний, проведенных Союзтехэнерго и
ВНИИЭ). Из рассмотрения кривых
следует, что синхронные двигатели,
особенно прн наличии форсировки
возбуждения, значительно увеличива-
ют генерируемое напряжение. Это на-
пряжение изменяется по отношению к
напряжению сети не только по ампли-
туде, но и по фазе, поскольку угловая
скорость двигателей уменьшается, а
следовательно, уменьшается и частота
этого напряжения. Когда напряжение
двигателей будет сдвинуто и а 180° по
11—646
161
Рис. 6.15. Разность напряже-
ний от сети Uc и двигателей
UR при их отключении от
сети:
а — асинхронные и синхронные
двигатели; б — асинхронные двига-
тели
Рис. 6.16. Групповой выбег и выбеги от-
дельных агрегатов;
/ — групповой выбег; 2 — выбег дутьевого венти-
лятора с т- —16.5 с; 3 —выбег дымососа • 1 =
=-20,2 С; 4 — выбег питательного насоса с ту =
=4,4 с; 5 — выбег циркуляционного васоса с
Ту -2.6 с
отношению к напряже-
нию сети, их разность ста-
нет максимальной. Если
бы напряжение двигате-
лей не затухало, то раз-
ность напряжений была
бы равна двойному на-
пряжению сети. Но так
как напряжение двигателей умень-
шается, то эта разность становится
меньше. Характер изменения этой раз-
ности показан для иллюстрации на
рис. 6.15 на основании осциллограмм,
полученных прн испытаниях, прове-
денных Союзтехэнерго и ВНИИЭ для
двигателей собственных нужд электро-
станции. f
0 0,10,20,30,4 0,5 0,0 0,7 0,0 0,9 1,0
Наличие ЭДС у двигателей приво-
дит к тому, что при групповом выбеге
между ними возникают уравнительные
токи, создающие в них вращающие
моменты. При этом в режиме генера-
тора оказываются те нз двигателей,
которые при индивидуальном выбеге
снижают свою угловую скорость в
меньшей степени, чем другие. Посколь-
ку по мере уменьшения скорости груп-
пы агрегатов уменьшается н частота
тока, генерируемого двигателями, их
вращающие моменты изменяются не
пропорционально квадрату общего ге-
нерируемого напряжения, а в меньшей
степени.
2
3
Г
0-1,0750^ U=1,55UH0M U=W7U„B„
1,5
1,5 2,0
2,5с
6)
Рис. 6.17. Схема испытаний и изменение напряжений и тока группы двигателей собственных
нужд при отключении выключателя трансформатора:
о — принципиальная схема (Д — вентиляторы и дымососы: В — насосы и мельницы)-, б — изменение разно-
стей напряжений сети и отключившихся секций (/). тика, протекающего через шиносоединительный выключа-
тель (2) и остаточного напряжения на секции (3)
162
Благодаря тому что на шинах име-
ется напряжение, в течение некоторого
времени выбег всех агрегатов проис-
ходит с одинаковой угловой скоростью
с одним и тем же временем замедле-
| ния, одинаковым для всех агрегатов.
Для иллюстрации на рнс. 6.16 дана
кривая / группового выбега агрегатов,
двигатели которых одновременно от-
ключены от источника питания. Из
рассмотрения кривой I видно, что до-
вольно продолжительное время выбег
всей группы отключенных агрегатов
происходит с одной н той же скоро-
стью изменения угловой скорости, хо-
тя при индивидуальном отключении
выбеги всех этих агрегатов происходи-
ли совершенно по-разному (см. кривые
2—5).
На рис. 6.17 приведены результаты
опыта совместного выбега группы ме-
ханизмов собственных нужд электро-
станции. При опыте двигатели тяго-
дутьевых устройств были подключены
к рабочей секции Л, а двигатели мель-
ниц и насосных агрегатов — к резерв-
ной секции Б собственных нужд. Рабо-
чая секция н резервная, подключенная
к резервной системе шин, были связа-
ны шиносоединительным выключате-
лем. Во время перерыва питания, как
это видно из осциллограммы рнс. 6.17,
через шиносоединительный выключа-
тель проходит уравнительный ток,
причем мощность, генерируемая дви-
гателями тяго-дутьевых агрегатов, по-
требляется двигателями насосов и
мельниц. Направление мощности через
шиносоединительный выключатель ука-
зывал прн опытах специальный осцил-
лографический гальванометр мощно-
сти, включенный в цепь шиносоедини-
тельного выключателя.
Как показали испытания, в системе
собственных нужд электростанций с
мощностью генераторов более 25 МВт
в единице постоянная времени затуха-
ния напряжения электрически связан-
ных на секции асинхронных двигателей
колеблется от 0,4 до 1,2 с, а угол меж-
ду напряжениями двигателей и сети
достигает 180° через 0,3—0,4 с. Раз-
ность напряжений сети и двигателей!
при этом равна примерно (1,5—1,7)
t/яом, а абсолютное значение затухаю-
щего генерируемого напряжения при
этом составляет (0,5—0,7) t/ном*.
По результатам исследования груп-
пового выбега можно принять, что вы-
бег с общим временем замедления аг-
регатов происходит до тех пор, пока
остаточное напряжение на секции (7ОСТ
выше 25 % номинального. При £/ост<
<0,25 t/HOM двигатели выбегают неза-
висимо друг от друга и их скольжение
при этом можно определить согласно
вышеизложенному (см. § 6.1).
Приближенный расчет скольжения
в процессе «синхронного» выбега
можно произвести, исходя из прямо-
линейной зависимости угловой скоро-
сти от времени, т. е. принять за основу
равенство (6.11), соответствующее в
данном случае выбегу прн неизменном
«эквивалентном» моменте сопротивле-
ния Мс,э* и эквивалентном времени
ускорения тэ:
= (6.17)
В качестве эквивалентного момен-
та сопротивления группы из N двига-
телей можно принять значение
Мс<Э
/^ном,&
N
"У | РНОМ£ kSl
t—1___________
N
У; Риом;
(6.18)
где k3i н PHoMi — коэффициент загруз-
ки до отключения секции и номиналь-
ная мощность любого (i-ro) двигателя
из группы.
Эквивалентное время ускорения
найдем по формуле
Выражая момент инерции каждого
агрегата через тл, PBGMl и co J, согласно
(6.3 б) найдем
N
--------- (6.19)
Т Рвоъц
Подставляя (6.18) и (6.19) в (6.17),
найдем изменение скольжения группы
* На скорость затухания остаточного напряже-
ния существенное влияние оказывает нагрузка энер-
гоблока и соответственно его двигателей. Так, при
снижении нагрузки блока 200 МВт с fea=l,0 До fe3 =
-=0.55 уменьшается скорость затухания Г'ост почти
вдвое. (Прим, ред.)
11
163
Рис. 6.18. Кривые выбега при разных значениях напряжения иа выводах двигателя при посто-
янном моменте сопротивления;
Рис. 6.19. Кривые выбега
вращающего момента и пус-
кового тока асинхронного
двигателя
двигателей спустя время tB после от-
ключения секции:
N
2 i РНОМ/
(617а)
f=l
и за время перерыва питания /Пер (ес-
ли к этому времени еще t/OCT^0,25
t/ном)
<6Л76>
iiowi
Из рис. 6.17, а видно, что при оди-
наковых агрегатах (Рном1 = Люм2= — =
= Люм/ и т//=т/) и их предваритель-
ных загрузках (k3l=k43=k33...=k3i)
изменение скольжения группы двига-
телей будет происходить так же, как
н прн индивидуальном выбеге отдель-
ного агрегата:
Для определения времени tB,rp, при
котором начинается выбег агрегатов
независимо друг от друга, необходимо
знать зависимость остаточного напря-
жения от времени, которая в общем
случае сложна и определяется пара-
метрами участвующих в выбеге асин-
хронных двигателей, наличием синх-
ронных двигателей, действием систем
регулирования возбуждения послед-
них (например, работой устройства
форсировки возбуждения после отклю-
чения от сети) и др. В отдельных слу-
чаях для практических расчетов мож-
но принять зависимость (JOCT=f(t)
прямолинейной в пределах от началь-
ного значения t/OCTo (непосредственно
в момент отключения от сети) до
t/OcT=0,25 t/ном, причем прямая может
быть проведена по двум точкам: t/0cro
и t/oCTt (для времени по дан-
ным испытаний для аналогичной в
Рвом}
смысле величины _2т р—~
Ji ном/
группы двигателей).
Если время перерыва питания /пер
больше, чем £В1гр при котором t/OCT =
=0,25 t/KOH> то скольжение любого
двигателя к моменту подачи напряже-
ния определяется суммой начального
скольжения sy, изменения скольжения
Д«гр за время /в,гр синхронного выбега
и изменения скольжения индивидуаль-
ного выбега за время (/пер—/в,гр), т. е.
~ ~ ®У “Ь -f- As(l (6. 1 /в)
(индекс «в» означает момент восста-
новления напряжения).
164
Если напряжение на выводах дви-
гателя исчезает не полностью, а вне-
запно уменьшается в результате ко-
роткого замыкания в сети, в двигате-
лях возникает переходный ток. Этот
переходный ток быстро затухает, и так
как скольжение двигателей за это вре-
мя не успевает заметно увеличиться,
то сопротивление двигателя практиче-
ски остается неизменным. В результа-
те ток, потребляемый двигателем из
сети после затухания переходного про-
цесса, в первый момент уменьшается.
Затем из-за уменьшения вращающего
момента угловая скорость двигателя
начнет снижаться, пока не будет до-
стигнуто равновесие или пока двига-
тель не остановится. Ток двигателя в
зависимости от величины сопротивле-
ния и напряжения может при этом
увеличиться или уменьшиться1.
Построение кривых выбега при на-
личии напряжения можем произвести
проще н нагляднее графическим спо-
собом, описанным выше (см. § 6.1),
принимая с достаточной точностью,
что в данном случае выбег происходит
так же, как и при одиночном дви-
гателе.
Для примера иа рис. 6.18, а, б да-
ны кривые выбега агрега-
та при постоянных моментах сопротив-
ления (Мс* = 1,0 н Л4с»=0,75), постро-
енные для двигателя с фазным ротором,
характеристики которого прн закоро-
ченной обмотке ротора приведены на
рис. 6.19.
Как видно из рис. 6.19, положи-
тельный избыточный момент при дан-
ном напряжении имеет место только в
определенной области скольжеиня
5пред>'8>8у, причем предельное зна-
чение скольжения «пред при постоян-
ном моменте сопротивления соответст-
вует равенству моментов двигателя и
механизма:
Таким образом, если во время по-
дачи напряжения tnep (считая от мо-
мента начала выбега при понижении
напряжения) двигатель имеет сколь-
жение больше, чем «пред, то последую-
щий разгон и успешный самозапуск
оказываются невозможными. Напри-
мер, при значении восстанавливающе-
1 Количественные вопросы группового выбега
двигателей при подпитке короткого замыкания изло-
жены Ю. М. Гол од новым в § 2.3 {22]. (Прим, ред.)
го напряжения, равном 80 % номи-
нального, ПО рис. 6.19 получим «пред =
= 0,25. При вентиляторном моменте
сопротивления самозапуск будет обес-
печен даже после остановки двигателя
при напряжении 0,65
6.4. НЕКОТОРЫЕ ОСОБЕННОСТИ
ПРОЦЕССА ПУСКА И ВХОЖДЕНИЯ
В СИНХРОНИЗМ СИНХРОННЫХ
ДВИГАТЕЛЕЙ И КОМПЕНСАТОРОВ
С ЭЛЕКТРОМАШИИНЫМИ
ВОЗБУДИТЕЛЯМИ ПОСТОЯННОГО ТОКА
Асинхронный пуск синхронного
двигателя происходит в общем случае
под влиянием полного электромагнит-
ного момента, равного сумме моментов
асинхронного режима (без возбужде-
ния) и моментов, обусловленных воз-
буждением (после его включения или
нарастания возбуждения, если пуск
осуществляется с постоянно подклю-
ченным возбудителем). Во всех прак-
тических случаях процесс пуска синх-
ронного двигателя можно разбить ус-
ловно на два этапа.
На первом этапе разгон происходит
до подсинхронной скорости (обычно
s = 0,05 и менее) в основном под дей-
ствием среднего асинхронного момен-
та (см. гл. 2). Второй этап представ-
ляет собой процесс вхождения в син-
хронизм под влиянием моментов, обус-
ловленных возбуждением.
При анализе первого этапа процес-
сов пуска обычно наибольший интерес
представляют следующие величины:
а) начальный толчок тока статора
(в момент подключения двигателя к
сети); б) длительность разгона до под-
синхронной скорости, принимаемой
обычно равной 0,95 номинальной;
в) изменение токов статора и ротора
в процессе разгона — для определения
нагрева обмоток. Знание этих величин
важно, в частности, для оценки воз-
можности прямого пуска (без допол-
нительных сопротивлений или авто-
трансформатора в цепи статора), а
также для выбора схемы и процедуры
включения обмотки возбуждения.
Значение начального толчка перио-
дической слагающей тока статора, не-
обходимое для оценки механических
усилий, действующих и а обмотки, и
снижения напряжения сети вблизи
двигателя с достаточной точностью
определяется сверхпереходным индук-
(65
‘Гивиым сопротивлением х” по про-
дольной оси:
-------= -^, (6.20)
Xd + •'„Ш
где Uc — напряжение сети в той точ-
ке, где оно может быть принято не за-
висящим от режима двигателя; хвш —
внешнее сопротивление цепи статора
(между точкой сети с напряжением
Uc и выводами статора включаемого
двигателя).
Соответствующее напряжение на
выводах статора 1/о в момент вклю-
чения
I] v" — __ Ucxd (С nil
/по ха---------— —~— .(b.zl)
xd “b xdZ
Длительность разгона синхронных
двигателей до подеинхронной скорости
определяется так же, как и для асин-
хронных двигателей, но преимущест-
венно графоаналитическим методом,
поскольку аналитическое решение,
приведенное выше (см. § 6.1), весьма
сложно, особенно для двигателей с
массивными полюсами.
Изменение токов статора н ротора
в процессе разгона зависит от сколь-
жения и соответствующего ему сопро-
тивления двигателя. Вращающееся
поле статора наводит в пусковой об-
мотке и в замкнутой обмотке возбуж-
дения ток с частотой скольжения. Пус-
ковая обмотка обычно практически
симметрична, и ее действие аналогично
действию короткозамкнутых роторов
асинхронных двигателей. Наибольший
ток, индуктированный в обмотке воз-
буждения, будет при схеме с глухопод-
ключенным возбудителем. Так как
ЭДС, наводимая в обмотке возбужде-
ния, изменяется пропорционально
скольжению, а сопротивление обмот-
ки возбуждения, если пренебречь ее
активным сопротивлением, также из-
меняется пропорционально скольже-
нию, то ток в этой обмотке в процессе
пуска практически не меняется; толь-
ко при малых скольжениях начинает
сказываться активное сопротивление и
ток уменьшается.
Как отмечалось выше (см. § 2.4),
магнитное поле, созданное изменяю-
щимся с частотой скольжения током
ротора, можно разложить на два маг-
нитных поля половинной амплитуды,
вращающихся относительно ротора в
противоположные стороны с угловой
скоростью s©i. В соответствие с этим
ток статора состоит из двух слагаю-
щих разных частот и определяется с
достаточной степенью точности следу-
ющим образом1 * *:
X cos (ifc + ю(, f) + ( —!--------------r ) X
X cos [ф2 + (1 — 2s) <х>0 fl [. (6.22)
Действующее значение этого тока
за период Т, соответствующий основ-
ной частоте сэо, с началом отсчета от
некоторого момента времени t' опреде-
ляется следующими формулами:
Г+Т/2
Г—Т/2
Uc I / ।_______b2fj(s, t')
гв V 1-1-6?
(6.23)
где сопротивление синхронного двига-
теля при асинхронном пуске, опреде-
ляющее изменяющееся во времени
действующее значение тока при дан-
ном скольжении s,
z(s, f) ----------— г‘ ----.
! _ 6s A (s. f) — bf2 (s, t")
' (6.24)
причем
z, = - (6 25)
И
& xsqT, xsd& .
xsq'2. “b xscfE
fl (s, tf) и t') — функции времени
t' при данном скольжении s:
г . _ sin 4sn cos 2 [ip2 (1 — 2s) t’} .
'll 1 ’ 2ir(l—2s)
/,(s. П =
sin 2ot {cos 2st') —
_ — 2scos (ipt 4- i') cos 4- (1 — 2s)
ЛЗ (1 —s)
1 Получено на основании анализа синхронной
машины при включении ее в сеть способом самосин-
хронизации (151.
166
Сопротивление по продольной осп
ротора
1 [ 1 + (5т«ю)2] р + ( ^о)"
(6.26а)
и для поперечной оси
—л<гх г i > / "
1 + (ST<70)
(6.266)
где т"0, т ° — постоянные времени по-
перечного демпферного контура соот-
ветственно при разомкнутой и замкну-
той цепи статора.
Расчет действующего значения то-
ка по формуле (6.23) является весьма
сложным, хотя она получена без учета
ряда факторов (непрерывного измене-
ния скольжения в процессе разгона,
изменения сопротивлений при измене-
нии тока и т. д.). Поэтому практичес-
ки лучше выполнять расчет тока ста-
тора по кривым сопротивления z, по-
лученным по результатам испытаний
ряда двигателей (рис. 6.20).
Как видно из кривых, сопротивле-
ние двигателя в основной части разго-
на (до s=0,2) изменяется сравнитель-
но мало, это определяет и небольшое
изменение тока в области скольжений
1,0>s>0,2. По мере приближения к
синхронной угловой скорости ротора
сопротивление z существенно увеличи-
вается н приближается к значению,
определенному по синхронным индук-
тивным сопротивлениям Xd н xq [это
следует также из (6.26) при s->0].
Прн отсутствии экспериментальной
кривой z—f(s) приближенный расчет
тока статора можно произвести по со-
противлению za согласно (6.25) (без
учета fi и f2).
Снятие межполюсных перемычек
на роторе приводит к увеличению
среднего сопротивления и тем самым к
снижению пускового тока. При этом
несколько уменьшается понижение на-
пряжения в сети при пуске, но дли-
тельность пуска двигателя увеличива-
ется. Например, по результатам
испытаний при снятии перемычек у син-
хронного компенсатора 7500 кВ-А уве-
личились средние значения его полно-
го, индуктивного и активного сопро-
тивлений при неподвижном роторе
примерно в 1,5 раза. Критическое
скольжение осталось практически без
изменения, а кратность максимального
асинхронного момента уменьшилась в
1,5 раза. Так как прн неполной обмот-
ке понижение напряжения в сети было
меньшим, продолжительность пуска
оказалась не в 1,5 раза, а только в 1,3
раза больше, чем прн полной обмотке.
Исследования пуска с различным чис-
лом стержней пусковой обмотки пока-
зали, что при полном удалении пуско-
вой обмотки, а также при двух стерж-
нях на каждом полюсе вместо семи
прн нормальном исполнении компенса-
тор достигал лишь полусинхронной уг-
ловой скорости. Это объяснялось одно-
осным влиянием обмотки возбуждения.
Прн включении в цепь возбуждения
гасительного резистора 1,26 н 4,26 Ом
лишь уменьшалось время разгона до
полусинхронной угловой скорости. При
четырех стержнях на каждом полюсе
компенсатор достигал синхронной уг-
ловой скорости и втягивался в синхро-
низм. Продолжительность пуска соста-
вила 3,7 с, а напряжение на шинах при
этом понизилось на 12 % вместо 20%
при пуске с полной пусковой обмоткой.
Соответственно пусковой ток умень-
шился в 1,6 раза. Для механического
укрепления стержней и обеспечения
лучшего контакта стержней с массой
полюсов онн зачеканивались по всей
длине паза.
Рис. 6.20. Зависимость сопротивления син-
хронных двигателей от скольжении (сопро-
тивление при s=l,0 принято за единицу):
/— двигатель СМ-180*18-8: 2— двигатель ЧКД 4000
кВт, 300 об/мин; 3 — двигатель СТМ-3500-2; 4— дви-
гатель МС-322-10/8; 5 — двигатель СТМ-1500-2; 6—дви-
гатель ДСК-116/49-4: 7 — двигатель ДСК-260,-34-36
167
Рис 6.21. Изменение токов статора и ротора
синхронного двигателя при его пуске
Электродвижущая сила статора
двигателя при пуске равна практичес-
ки напряжению на его выводах за вы-
четом потери напряжения в индуктив-
ном сопротивлении рассеяния обмотки
статора. Так как пусковой ток и на-
пряжение на выводах статора мало из-
меняются за основное время пуска, то
ЭДС остается практически неизмен-
ной. Лишь в конце пуска при относи-
тельно небольших значениях скольже-
ния пусковой ток резко уменьшается н
ЭДС соответственно возрастает, не-
значительно отличаясь от напряжения
сети.
При больших скольжениях ЭДС н
ток в обмотке возбуждения благодаря
экранирующему действию пусковой
обмотки относительно ‘невелики, т. е.
эффект вытеснения тока в пусковую
обмотку, имеющую меньшее, чем у об-
мотки возбуждения, индуктивное со-
противление рассеяния. При малых
значениях скольжения индуктивные
сопротивления обмоток уменьшаются
и распределение токов в них в боль-
шей степени начинает определяться
активными сопротивлениями. Послед-
нее меньше у обмотки возбуждения, и
поэтому индуктированный в ней ток в
конце пуска (при скольжении поряд-
ка 0,02) может несколько увеличить-
ся, после чего он резко уменьшается
(рис. 6.21).
Вблизи полусинхронной скорости
может иметь место некоторое пониже-
ние тока, и тем большее, чем слабее
демпферная система.
Амплитуда тока в цепи возбужде-
ния при прямом пуске от мощной се-
ти, как правило, не превышает 1,6 но-
минального тока возбуждения при
глухо подключенном возбудителе, а
при пуске с обмоткой возбуждения,
замкнутой на разрядный резистор с
сопротивлением, равным (7—10)гв на
20—40 % меньше. Такие небольшие
значения тока не могут вызвать замет-
ного нагрева обмотки во время пуска,
но их необходимо знать для выбора
разрядного резистора по термической
устойчивости.
Ток в пусковой обмотке и поверх-
ностных массивных контурах ротора,
если таковые есть, прн больших сколь-
жениях существенно превышает ток в
обмотке возбуждения, особенно при ее
включении На разрядный резистор. По-
этому необходимо проверять нагрев
обмотки статора н демпферной обмот-
ки ротора (в частности, поверхностно-
го слоя бочки ротора турбодвигате-
лей) при пуске.
Наименьшее напряжение на коль-
цах ротора будет при схеме пуска с
глухоподключеиным коллекторным
возбудителем, когда напряжение
обычно не превосходит 100 В.
При пуске с обмоткой возбуждения,
замкнутой на разрядный резистор, на-
пряжение на кольцах ротора равно
произведению тока, индуктированного
в обмотке возбуждения, на сопротив-
ление разрядного резистора. Обычно
это напряжение колеблется в пределах
400- 1000 В.
Напряжение на кольцах прн разом-
кнутой обмотке возбуждения и при
отсутствии пусковой обмотки и зна-
чительных массивных контуров при-
мерно равно произведению числа вит-
ков обмотки возбуждения на напря-
жение, приходящееся на виток обмот-
ки статора ew (ЭДС витка стато-
ра),^ е.
= ew а>в.
Для данного габарита машины
ЭДС витка более илн менее опреде-
ленная. Напряжение на виток умень-
шается с уменьшением номинальной
мощности двигателя, а так как двига-
тели на низкое напряжение изготовля-
ются на меньшие мощности, то у них
меньше и ЭДС витка. На при мер, для
синхронных двигателей типа СДН
6 кВ, 250 об/мин с числом полюсов
2 р^24 при уменьшении номинальной
мощности от 3200 до 320 кВт напряже-
ние на виток обмотки статора умень-
шается в 4,2 раза (табл. 6.2). Число
168
витков обметки возбуждения с умень-
шением номинальной мощности также
несколько уменьшается. Например,
для того же типа синхронных двигате-
лей при уменьшении номинальной
мощности от 3200 до 320 кВт число
витков уменьшилось в 1,6 раза. Поэто-
му напряжение и а кольцах (без учета
демпфирующего действия пусковой об-
мотки) при разомкнутой обмотке воз-
буждения при уменьшении номиналь-
ной мощности от 3200 до 320 кВт
уменьшается в 6,7 раза (см. послед-
нюю графу табл. 6.2).
Таблица 6.2
р ном1 кВт «-ст ew а'в еЛ
в отн. ед.
320 756 4.56 685 3130 1
400 630 5,5 685 3740 1,19
500 504 6,9 685 4700 1,50
630 420 8,25 685 5650 1,80
800 432 8 706 5670 1,80
1000 336 10,3 706 7250 2,32
1250 288 12,1 706 8550 2,72
1600 280 12,5 970 12 100 3,86
2000 220 15,8 970 14 700 4.7
2500 180 19,3 970 18 700 5,85
3200 180 19,3 1090 21 000 6,7
4000 144 24 830 20 000 6,38
Для одной и той же мощности, но
при большей угловой скорости произ-
ведение ewwB при разомкнутой обмот-
ке ротора уменьшается. Например,
для двигателя 1000 кВт, 1000 об/мин
elowB=5730 В вместо 7250 В при час-
тоте вращения 250 об/мин.
Для синхронных двигателей на
1500 об/мин произведение ewwB в за-
висимости от номинального напряже-
ния изменяется следующим образом:
для 100 кВт при 380 В ещ^в—1090 В,
а прн 3 кВ ешв —1260 В, т.е. измене-
ние незначительное. Соответственно
для 320 кВт имеем 3730 и 3660 В.
Действительное значение напряже-
ния на кольцах разомкнутой обмотки
возбуждения при пуске значительно
меньше ewws за счет потери напряже-
ния в сопротивлении рассеяния обмот-
ки статора и из-за демпфирующего
влияния пусковой обмотки.
На втором этапе процесса пуска на
несинхронно вращающийся ротор син-
хронного двигателя при наличии тока
возбуждения действуют следующие
моменты: средний асинхронный мо-
мент Л4а* (см. гл. 2); знакопеременные
составляющие асинхронного момента
ЛТа*. имеющие двойную частоту сколь-
жения, обусловленные электрической
несимметрией ротора; реактивный мо-
мент 2Ир*, обусловленный магнитной
неенмметрией, зависящий от двойного
угла б; момент Л1В*, зависящий от уг-
ла 6, обусловленный возбуждением;
тормозной момент Л4Т*, обусловленный
потерями в цепи статора от составля-
ющих тока, созданных возбуждением;
момент сопротивления механизма Л1С*.
Следует иметь в виду, что при бы-
стром нарастании угловой скорости
возникают дополнительные динамиче-
ские составляющие момента ЛГд», ко-
торые являются ускоряющими и об-
легчают втягивание двигателя в син-
хронизм.
Заменяя в уравнении (6.2) сколь-
жение s через производную угла 6
S - 1---------= I — ~
®1ном
= 1 —fl-------— ) = —!—— (6.27)
\ dt J W1HOM dt
и ускорение
-----— =-------— — , (6.28)
dt ®1ном dt?
получаем следующее дифференциаль-
ное уравнение движения ротора;
dt? ’
ИЛИ
МЁ. + Afp. + Ма, + 4- 7Ит. 4-
4- — —»(6.29)
а с «й2 ' 7
где М суммарный электромагнит-
ный момент, причем все моменты дол-
жны быть представлены соответству-
ющими функциями угла б.
Решение этого нелинейного уравне-
ния весьма сложно, а поэтому чаще
всего оно производится в численной
форме.
Наиболее просто уравнение (6.29)
решается методом последовательных
интервалов, если не учитывать знако-
переменного асинхронного, тормозного
и дополнительных моментов и предста-
вить средний асинхронный момент при
подсинхронной угловой скорости про-
порциональным скольжению, т.е.
Mat (6.30)
(00 dt
169
а также заменить AfB* и Л/р* их выра-
жениями
= Saa»_^tsin6;
Рном xd
= -----L^sinze
•Рвом 2 Xq х& )
и принять Afc*=const (при малом из-
менении скорости ротора это допусти-
мо). Электродвижущая сила Eq, обус-
ловленная возбуждением, после его
включения изменяется примерно по
закону
Ев®£уот(1-е-"<) (6.31)
в связи с плавным нарастанием тока
в цепи возбуждения. Одиако учет за-
висимости (6.31) осложняет решение
методом последовательных интервалов
даже при вышеуказанном исключении
ряда моментов, а поэтому для практи-
ческой приближенной оценки условий
вхождения в синхронизм принимают
Ед — EqyCT ~ kE^iiOM ~
= *> V 1 + 2Ad sin 4 <6-32)
(в относительных единицах), где &в =
=/в/в,вом — кратность тока возбужде-
ния в конце пуска.
При отсутствии возбуждения угло-
вая скорость двигателя под воздейст-
вием знакопеременных составляющих
момента колеблется около средней ве-
личины с двойной частотой скольже-
ния. Втягивание в синхронизм без воз-
буждения возможно только при усло-
вии, что Л4р1Пдх*>Л4с*, и при таком
скольжении, чтобы длительность воз-
действия ускоряющего реактивного мо-
мента была достаточной для увеличе-
ния угловой скорости до синхронной.
Так как обычно Мрп1ах*^0,3, то вхож-
дение в синхронизм при отсутствии
возбуждения возможно только при не-
большой нагрузке механизма в конце
пуска. Для механизмов, имеющих в
конце пуска момент сопротивления,
больший, чем реактивный момент, для
обеспечения втягивания в синхронизм
необходима подача возбуждения.
Момент Мв*, обусловленный воз-
буждением, является ускоряющим,
когда ось ротора отстает от оси поля
статора, и тормозным, когда она опе-
режает ось поля статора.
При работе возбужденного двигате-
ля со скольжением s в обмотке стато-
Рис. 6.22. Нагрузочные характеристики воз-
будителя типа ПН-290 при различных частотах
вращения пНсм, прямая / и.вгб,вЗ н зависи-
мость установившихся значений UB от часто-
ты вращения (-------)
ра наводятся ЭДС и токи с частотой
(l-s)fr
Эти токи создадут тормозящий мо-
мент
м„ = S"°M ' - (6.33)
РНОМ 1 S \ Xd J
где Гх —суммарное активное сопро-
тивление обмотки статора и сети.
Определим тормозной момент для син-
хронного двигателя, имеющего cos срИОм=0,9,
ха.= 1, при г2. =0,03, s=0,05, форсировка воз-
буждения 1,5в.ном, ilHOM=0,94. Определяем:
£2 = 1,5а(1 4- 1 4-2-0.436) = 6,45.
Преждевременное нарастание тока
возбуждения в процессе пуска неже-
лательно, так как при возникновении
рассмотренного тормозящего момента
увеличивается скольжение в конце
пуска и ухудшаются тем самым усло-
вия вхождения в синхронизм. Кроме
того, это вызывает большие колебания
тока статора и при относительно не-
большой мощности источника питания
недопустимые колебания напряжения.
Если в качестве возбудителей при-
меняются машины постоянного тока с
самовозбуждением, то следует иметь
в виду, что они возбуждаются начиная
только с определенной угловой скоро-
сти. Для примера иа рис. 6.22 приве-
дены нагрузочные характеристики воз-
будителя ПН-290 3,3 кВт при различ-
ных частотах вращения н дана прямая
/вХв,В2 ПРИ номинальном режиме его
работы (/в,в — ток возбуждения возбу-
дителя и гв,в s — сопротивление цепи
обмотки возбуждения, включая сопро-
тивление регулировочного резистора).
На этом же рисунке пунктиром нзо-
170
бражена кривая зависимости значе-
ний установившегося напряжения воз-
будителя Uв от частоты вращения. Из
рассмотрения этих характеристик сле-
дует, что возбуждение начинается
только при такой частоте вращения,
при которой угол наклона характери-
стики холостого хода в начальной ее
части больше угла наклона прямой
ZbXb.es . В данном случае нарастание
возбуждения начинается практически
только при частоте вращения, большей
0,6 номинальной.
Скорость нарастания напряжения
будет больше прн меиьших значениях
сопротивления в цепи возбуждения
возбудителя, в чем нетрудно убедиться
из характеристик, приведенных на рис.
6.22.
Опытные данные, полученные
Л. С. «Ниндорфом, по большому числу
возбудителей различных типов, приме-
няемых для синхронных двигателей
мощностью от 15 до 4500 кВт, подтвер-
ждают, что прн установке регулиро-
вочного резистора в положение, соот-
ветствующее номинальной нагрузке,
возбуждение начинает нарастать по
достижении частоты вращения около
0,6 номинальной.
Если учесть запаздывание, обус-
ловленное индуктивностью обмотки ро-
тора двигателя, то можно утверждать,
что нарастание тока возбуждения бу-
дет происходить практически только в
конце пуска.
Запаздывание нарастания тока воз-
буждения по отношению к напряжению
возбуждения проиллюстрировано кри-
выми, приведенными на рис. 6.23.
В случае необходимости можно
уменьшить скорость нарастания воз-
буждения увеличением сопротивления
в цепи возбуждения возбудителя, на-
пример установкой регулировочного
резистора в положение холостого хода.
При автоматизации процесса пуска до-
полнительный резистор в цепи возбуж-
дения возбудителя должен быть зако-
рочен в конце пуска или после втяги-
вания двигателя в синхронизм.
Соответственно, если нужно увели-
чить скорость нарастания возбужде-
ния, на время пуска необходимо умень-
шить сопротивление резистора в цепи
обмотки возбуждения. В этом случае
наиболее удобно применять устройство
для форсировки возбуждения.
Если возбуждение осуществляется
от отдельно стоящего агрегата возбуж-
дения, то нз-за относительно большой
постоянной времени обычно применяе-
мых для этой цели возбудителей впол-
не допустимо н в этом случае приме-
нение схемы с глухоподключенным
возбудителем при положении регулиро-
вочного резистора, соответствующем
номинальному возбуждению при син-
хронной частоте вращения. Пуск агре-
гата возбуждения при этом осуществ-
ляется одновременно с синхронным
двигателем от вспомогательных кон-
тактов его выключателя.
Рассмотрим теперь влияние иа воз-
будитель тока, индуктируемого во вре-
мя асинхронного пуска в обмотке воз-
буждения двигателя. Прн пуске с глу-
хоподключеиным возбудителем этот
ток замыкается через якорь возбудите-
ля. Обычно амплитуда этого тока не
превышает 1,6 номинального тока воз-
буждения, а поэтому не наблюдается
повышенного искрения на коллекторе,
если щетки установлены правильно.
В весьма небольшом числе случаев мо-
жет иметь место перемагничивание
возбудителя, имеющего относительно
небольшое остаточное возбуждение,
вызванное прохождением переменного
тока через обмотку возбуждения воз-
будителя при небольших значениях
скольжения.
Перемагничивание возбудителя са-
мо по себе не представляет какой-либо
опасности, только появляется необхо-
димость менять местами проводники у
Рис. 6.23. Кривые нарастания
напряжения UB и тока воз-
буждения /в при пусках дви-
гателя СТМ-1500-2 (/) н
ДСП-116-49/4 (II}:
tn— длительность пуска
171
Рис. 6.24- Изменение токов, напряжения сети и частоты вращения п прн прямом пуске дви-
гателя СТМ-1500-2 с отсоединенным насосом
подключенных магнитоэлектрических
приборов либо заменить эти приборы
на электромагнитные или на магнито-
электрические, но с двусторонней
шкалой. Явление перемагничивания
удается устранить во многих случаях
путем точной установки щеток на ней-
траль или применения компаундиро-
вания возбудителя.
В результате многочисленных экс-
периментов и многолетнего опыта экс-
плуатации установлено, что можно ре-
комендовать схему с глухоподключеи-
иым возбудителем для широкого при-
менения. При таком способе включе-
ния возбудителя существенно упроща-
ется схема пуска в целом и повышает-
ся надежность работы оборудования.
Принципиально иа процесс вхожде-
ния в синхронизм влияет относитель-
ное положение ротора и магнитного
потока статора при подаче возбужде-
ния. При этом наиболее благоприят-
ным положением будет такое, при ко-
тором наведенные в обмотке возбужде-
ния ЭДС или ток (при малых значе-
ниях скольжения ЭДС и ток практи-
чески совпадают по фазе) противопо-
ложны по направлению ЭДС или току
возбуждения в нормальном режиме
работы или соответственно противопо-
ложна полярность тока возбуждения.
Однако, как показали специальные
исследования, проведенные, в частности
Л. С. Лиидорфом, относительное поло-
жение ротора ие имеет большого прак-
тического значения. При наиболее бла-
гоприятном положении ротора по срав-
нению с наименее благоприятным раз-
ница в моментах ие превышает 0,15
номинального момента. Поэтому в
132
большинстве практических случаев
нет необходимости усложнять схемы
путем применения каких-либо уст-
ройств, обеспечивающих включение
возбуждения в наиболее благоприят-
ный момент.
Поскольку проверка вхождения в
синхронизм путем решения дифферен-
циального уравнения (6.29) требует
значительного труда и времени, иа
практике для приближенной оценки
успешности синхронизации обычно
применяют критерии, основанные на
определении критического скольжения
установившегося асинхронного режима
без возбуждения, при котором возмож-
но вхождение в снихроиизм. Одной из
широко применяемой форм этого кри-
терия является следующая:
s,,p = о.об 1/ Mm°x* -<«-*, (6.34)
Г j I в.ном
где /в,п—ток возбуждения в конце
пуска, при котором производится син-
хронизация; Мтах* — максимальный
электромагнитный момент с учетом
фактической форсировки возбуждения
и напряжения на выводах двигателя.
Если скольжение sy синхронного
двигателя, определенное точкой пере-
сечения кривых среднего асинхронного
момента и суммы момента сопротив-
ления и момента от потерь в цепи ста-
тора (6.33), равно или меньше s^p, то
втягивание в синхронизм обеспечено.
• При выводе этой формулы было принято, что
средний асинхронный момент уравновешивает момент
сопротивления на валу и момент. определяемый
(6.33). а знакопеременный момент, обусловленный
возбуждением, вызывает изменения скольжения с ам-
плитудой. превосходящей среднее установившееся
скольжение; включение возбуждения происходит прн
наиболее неблагоприятном значении угла б.
В действительности, как показали
исследования, при быстром изменении
скольжения во время втягивания в
синхронизм динамические характери-
стики асинхронного момента могут
быть заметно выше статических харак-
теристик, особенно у машин с больши-
ми постоянными времени. По этой при-
чие средний динамический асинхрон-
ный момент при нулевом значении
скольжения не равен нулю, вследст-
вие чего угловая скорость может быть
выше синхронной (рис. 6.24). Это яв-
ление облегчает вхождение двигателей
в синхронизм. На основании проведен-
ных опытов установлено, что синхрон-
ные двигатели во многих случаях ус-
пешно втягиваются в синхронизм при
скольжениях, больших критического,
определенного по формуле (6.34). Сле-
довательно, при Sy>»sKp необходимо
вводить корректировку полученного по
формуле (6.36) результата иа основа-
нии экспериментальных данных для
аналогичных установок или проводить
специальные расчеты. Например, для
синхронного двигателя МС-322/8-10,
1000 кВ-А, 940 кВт, costj)HOM=l,
Мтах* = 1,5, tj— 2,5 с, ток возбужде-
ния к моменту вхождения в синхро-
низм 0,86 номинального, напряжение
при пуске 0,9 номинального определя-
ем:
sKP = 0,06 у 0,86-0,9 = 0,041.
По результатам испытания двига-
тель входил в синхронизм прн сколь-
жении sy=0,052, соответствующем мо-
менту сопротивления Мс*=0,9.
Для другого двигателя — ДС-140/
39-8, 1300 кВ-А, 1220 кВт, cos <рНОм=
= 1, Afjna:«* = l,6, tj=2,5 с, нагрузка
при пуске Мс*=0,98, напряжение в
конце пуска 0,95 н ток возбуждения
прн синхронизации 0496
- 0,°6 у 0,95-0,96 = 0,46.
При опыте двигатель успешно син-
хронизировался и прн s=0,067 (прн
Л4с.*=0,98), т.е. больше, чем sKp.
В качестве другого примера рас-
смотрим синхронные двигатели с мас-
сивным ротором, которые имеют на-
столько жесткую характеристику сред-
него асинхронного момента (см. гл.
2), что проверка возможности втяги-
вания а синхронизм ие требуется. На-
пример, синхронный двигатель СТМ-
150Q-2, 1500 кВт, cos(pHoM=0,9 при мо-
менте сопротивления в конце пуска
Мс*—1,1 имел установившееся значе-
ние скольжения 0,01, тогда как по фор-
муле (6.34) допускается sKp=0,043
Для накопления данных о характе-
ристиках среднего асинхронного мо-
мента двигателей в области малых
скольжений, а также об условиях их
сиихронизациии и ресинхронизации це-
лесообразно проводить специальные
испытания. В частности, это может
быть проделано путем снятия возбуж-
дения с последующим его восстановле-
нием при различных нагрузках. Воз-
буждение подается после того, как
двигатель будет иметь установившееся
значение скольжения. Скольжение про-
ще всего может быть определено по
колебаниям стрелки амперметра в це-
пи возбуждения, %:
s = 2NB/t,
где —количество полных колебаний
тока возбуждения за некоторое вре-
мя t.
Учитывая, что ток статора при
асинхронном режиме с значительными
нагрузками обычно выше номинально-
го в 1,5—3 раза, следует сразу же по
достижении установившегося скольже-
ния производить отсчет по приборам
во избежание перегрева обмоток и мас-
сивных частей поверхности ротора.
Для измерения обычно требуегся вре-
мя около 10 с.
Во время опытов измеряются нап-
ряжение сети, токи статора и ротора,
потребляемая из сети активная мощ-
ность и скольжение. Измерение произ-
водится до и во время аснихрониого
режима н для проверки после втяги-
вания в синхронизм. Значения величин
лучше записать осциллографом, учи-
тывая относительно небольшое допус-
тимое время проведения эксперимента.
При этом весь опыт занимает несколь-
ко секунд.
При отсутствии ваттметра, счетчика
или осциллографического гальвано-
метра мощности активная мощность
может быть определена по показани-
ям вольтметра н амперметра в цепи
статора, прячем предварительно ток
возбуждения устанавливается таким,
чтобы ток статора имел минимальное
значение. Это будет соответствовать
cos<p=l. Учитывая, что скольжение
при асинхронном режиме невелико.
173
Рис. 6.25. Осциллограммы пуска синхронного двигателя СТМ-1500-2 с постоянно присоеди-
ненным к обмотке ротора отдельно стоящим возбудителем:
а — прямой пуск с насосом; б — реакторный пуск с отсоединенным насосом
можно принимать в большинстве слу-
чаев, что активная мощность при асин-
хронном режиме равна мощности пред-
шествующего синхронного режима.
Для определения условий синхрониза-
ции вначале опыт проводится при но-
минальном возбуждении, затем его по-
вторяют несколько раз при каждой на-
грузке, с тем чтобы получить наиболее
тяжелые условия по моменту включе-
ния возбуждения. Если двигатель не
входит в синхронизм при номинальном
возбуждении, опыт повторяется при
той же нагрузке с форсировкой воз-
буждения.
При опытах синхронизации с об-
моткой возбуждения, глухоподключен-
иой к возбудителю, из-за наличия про-
вала в кривой момента при небольших
значениях скольжения в некоторых
случаях двигатель не войдет в синхро-
низм даже при форсировке возбужде-
ния. В этом случае следует включить
обмотку возбуждения на добавочный
резистор и провести опыт вхождения в
синхронизм как без форсировки, так
и с форсировкой возбуждения.
Необходимо иметь в виду, что ус-
ловия вхождения в синхронизм в та-
ких опытах являются более тяжелыми,
чем при нормальном пуске, когда име-
ют место дополнительные составляю-
щие момента, обусловленные измене-
нием угловой скорости ротора. Кроме
того, при пуске механизмов с вентиля-
торным моментом сопротивления сле-
дует учитывать переходные процессы в
приводимом механизме, в результате
174
которых имеет место некоторое запаз-
дывание нарастания момента сопро-
тивления во времени. Поэтому при
синхронизации момент сопротивления
оказывается ниже, чем при установив-
шемся режиме с тем же скольжением.
По результатам испытаний, прове-
денных автором, установлено, что дви-
гатель, выведенный из синхронизма
путем уменьшения тока возбуждения
и не втягивающийся затем в синхро-
низм при наличии форсировки возбуж-
дения, успешно входил в синхронизм
после отключения и последующего
включения с небольшим перерывом,
требующимся для производства опера-
ции вручную.
На рнс. 6.25 приведены осцилло-
граммы пуска синхронного двигателя
с глухоприсоедииениым генератором
постоянного тока отдельно стоящего
агрегата возбуждения, который под-
ключался к сети одновременно с основ-
ным двигателем.
Из-за отсутствия проверенных дан-
ных ранее было принято, что глухое
подключение возбудителя допускается
при проектировании только в тех слу-
чаях, когда нагрузка в конце пуска
не превышает 0,4 номинальной. Вмес-
те с тем есть опыт применения такой
схемы пуска и при нагрузках выше 0,4
номинальной. Так, по данным ВНИИЭ
из 30 испытанных двигателей 10 %
имели нагрузку от 0,4 до 0,59;
23,4%—от 0,5 до 0,59; 13,3%—от
0,6 до 0,69; 6,7 % — от 0,7 до 0,79;
30 % — от 0,8 до 0,89; 3,3 % — от 0,9
до 0,99 и 13,3 % от 1 и выше. К сожа-
лению, при этом ие определялась пре-
дельная нагрузка, при которой син-
хронный двигатель надежно втягива-
ется в синхронизм. Пусковые характе-
ристики некоторых типов синхронных
двигателей I(s) и M(s) приведены в
приложениях 4 и 5.
6.5. ВЛИЯНИЕ РАЗЛИЧНЫХ ФАКТОРОВ
НА ДЛИТЕЛЬНОСТЬ ПУСКА
И НАГРЕВ ОБМОТОК ДВИГАТЕЛЯ
ПРИ ПУСКЕ
Асинхронный момент синхронного
и асинхронного двигателей пропорцио-
нален квадрату напряжения и пример-
но обратно пропорционален квадрату
частоты питающей сети. Зависимость
асинхронного момента синхронного
двигателя от скольжения можно упро-
щенно представить выражением (2.19),
полученным ранее для асинхронного
двигателя. У двигателей обоих типов
вращающийся момент при номиналь-
ной частоте сети и данном скольжении
пропорционален кратности максималь-
ного момента.
Максимальный момент определяет-
ся практически реактивным сопротив-
лением рассеяния обмотки статора и
ротора, т. е. кратностью пускового то-
ка при номинальном напряжении, ко-
торая является одним из основных па-
раметров двигателя. Уменьшение крат-
ности пускового тока связано с сопут-
ствующим уменьшением асинхронного
момента двигателя.
Рассмотрим влияние кратности
пускового тока k при номинальном на-
пряжении t/now , максимального мо-
мента 6Ком и напряжения иа выводах
статора на длительность разгона без
учета активных сопротивлений в цепи
статора, а также без учета влияния
внешнего сопротивления Хвш (между
источником питания и двигателем) иа
критическое скольжение двигателя.
При неизменных (не зависящих от
скольжения) индуктивном сопротивле-
нии рассеяния и активном сопротивле-
нии ротора момент, развиваемый дви-
гателем, пропорционален величине
а поэтому при прочих равных
условиях длительность разгона двига-
теля при пуске будет определяться
ТОЛЬКО бномАц.
Напряжение, подведенное к двига-
телю в случаях пуска и самозапуска,
зависит от отношения сопротивления
двигателя хд к внешнему сопротивле-
нию, т. е. от кратности пускового тока
двигателя, поскольку
Хд £7Н0М/Уз/г/ном> Ом
или в относительных единицах
— = —^2------, (6.35)
к1 ИОМ ^1Д,НОМ
где <91д,1]омГз/„ом ^ном
— номинальная полная мощность ста-
тора двигателя; S6 — У 3 t7H0M /б —
некоторая базисная мощность прн ба-
зисном напряжении f7o, равном номи-
нальному напряжению двигателя С7Ном-
Чем больше кратность пускового
тока, тем больше потери напряжения
в сопротивлении хвш, включенном меж-
ду источником питания и двигателем,
и меньше напряжение на двигателе.
175
Действительно, напряжение на дви-
гателе U при напряжении сети Uy
равно:
U = _и*.Ъ. , или fe = _Е_ =
t^HOM *Д + *вш
а при выражении сопротивлений в от-
носительных единицах с учетом (6.33)
k- = 7Г----------------------(636)
С'ноМ . , ЛУвШ Эгд.ном
** Sg
ь
nmt
^НОМ
кхвт 51Ддом'
Sg I
(6.37)
Поскольку кратность максимально-
го момента пропорциональна кратно-
сти пускового тока, то на основании
(6.37) при заданном сопротивлении
х'вш существует значение пускового то-
ка, при котором величина Ьном££ име'
ет максимальное значение. Принимая
для асинхронного двигателя 6Ном=
—Л/2, находим из (6.37)
jB = ^вои ~
-------------------------, (6.38)
2 (j । *вш Sjfl.noM &j8
откуда кратность пускового тока, со-
ответствующая максимальному значе-
нию В—Втах (прн dB/dk=0)t равна:
So
и тогда
I? —
Лопт — „
Э1Д.Н0М хвш
Анализ показал, что по мере уве-
личения Sw>H0MxBIn/S6 влияние кратно-
сти тока двигателей на величину В
становится все меньше и при значении
XbiuSia,homA$6>:0,1 нм можно прене-
бречь.
Принимая ориентировочно для син-
хронного двигателя
h Sxh.hom
ВОМ ~ 2 2PH0M
получаем из (6.37)
h t2 zz2
PHOM VHOM
if,
r& 1 >25 \ SIn^HOM
'Xd J P HOM
2 -L
(6.40)
откуда величина k, соответствующая
максимуму Ьномй^, равна:
А = +
ХВШ 51д>д0М xd
к^-ЭД'] =
---------. (6.41)
й о Л * >25xDni 51д,нОм\
8хвш^ном^+ XdSe )
Последние равенства показывают,
что у синхронных двигателей может
потребоваться большая кратность пус-
кового тока, соответствующая макси-
муму bKQKkl, причем этот максимум
оказывается меньше, чем у асинхрон-
ных двигателей при том же внешнем
сопротивлении.
На основании полученной зависи-
мости величины от кратности
пускового тока можно сделать вывод
о том, что стремление проектировщи-
ков к достижению наименьшей крат-
ности пускового тока ие всегда явля-
ется правильным.
Чем больше кратность максималь-
ного момента, тем меньше при прочих
равных условиях время разгона. В ус-
ловиях эксплуатации крайне жела-
тельно, чтобы время пуска при номи-
нальном и пониженном напряжениях
имело наименьшее значение. Кроме то-
го, нужно, чтобы при восстановлении
напряжения после отключения корот-
кого замыкания в сети двигатели бы-
стрее восстанавливали номинальную
угловую скорость.
Рассмотрим влияние кратности
максимального момента иа время раз-
гона для двигателя нормального типа
с критическим скольжением Skp==0,15,
приводящего в движение механизм с
относительным моментом сопротивле-
ния вентиляторного типа:
Мс, == 0,15 + 0,85(1 — s)\
IX
Из рассмотрения построенных для
данного случая кривых (рис. 6.26)
следует, что время разгона весьма
сильно зависит от кратности макси-
мальиого момента: например, при уве-
личении кратности максимального мо-
мента с 1,6 до 2,5 время пуска умень-
Рис. 6.26. Кривые времени разгона (в долях
времени ускорения) в зависимости от напря-
жения при различных кратностях максималь-
ного момента двигателя
Рис. 6.27. Кривые пускового тока в зависи-
мости от скольжения для двигателей с прос-
той беличьей клеткой на роторе
шается прн номинальном напряжении
в 2 раза, а при напряжении 0,7 номи-
нального— в 2,4 раза.
В процессе пуска двигатель потреб-
ляет повышенный ток. Зиая зависи-
мость тока от времени, нетрудно опре-
делить потери мощности и превышение
температуры обмоток двигателя.
Определим ориентировочно для ос-
новных типон асинхронных двигателей
эквивалентное значение тока за время
пуска tn
и кратность тока
(6.426)
Значение 1ак можно определить гра-
фоаналитически по кривой зависимо-
сти пускового тока i от времени t, по-
строенной на основании кривой пуско-
вого тока /=f(s) н кривой разгона
s=(p(f). В качестве примеров на рнс.
6.27, 6.28 даны кривые пускового тока
при номинальном напряжении и кри-
вые разгона при пуске асинхронных
двигателей с простой беличьей клет-
кой, имеющих &ном=2, $кр“0,1 и 0,15,
приводящих во вращение механизм с
вентиляторным моментом сопротивле-
ния, изменяющимся по вышеуказанно-
му закону.
Аналогичные кривые были построе-
ны для двигателей с глубоким пазом
и двойной обмоткой на роторе при по-
стоянном моменте сопротивления ме-
ханизма (рис. 6.29 и 6.30) при /?Ном~
и sKP«0,l.
В среднем для рассмотренных вы-
ше случаев можно принимать при ори-
ентировочных подсчетах
Цк — 0»93/к,
причем 1К — действующее значение пе-
риодической слагающей начального
Рис. 6.28. Кривые разго-
на и пускового тока в
зависимости от времени
для двигателя с беличь-
ей клеткой и механизма
с вентиляторным момен-
том сопротивления:
/. 1' — Пусковые токи; 2,
2‘ — эквивалентное значение
пусковых токов; 3, 3' —кри-
вые разгона
12—64В
177
Рис. 6.29. Кривые разгона и пускового тока в зависимости от времени для двигателя с глубо-
ким пазом ротора при постоянном моменте сопротивления механизма
Рис. 6.«j0. Кривые разгона и пускового тока в зависимости от времени для двигателя с двумя
обмотками на роторе при постоянном и вентиляторном (штриховые линии) моментах сопро-
тивления н
пускового тока (при неподвижном ро-
торе) .
Для некоторых видов механизмов с
тяжелыми условиями пуска выбор дви-
гателей производится нз условия по-
лучения начального момента необхо-
димой величины. Иногда из-за отсутст-
вия двигателей с требуемым началь-
ным моментом устанавливают двига-
тель с большей номинальной мощно-
стью.
Чтобы не- увеличивать в ряде слу-
чаев мощность электродвигателей по
условиям пуска, можно рекомендовать
примеиеине электромагнитных или
фрикционных муфт, создающих воз-
можность пуска электродвигателей
практически вхолостую (при отклю-
ченном муфтой механизме). После того
как двигатель достигнет нормальной
угловой скорости, дается возбуждение
на электромагнитную муфту или осу-
ществляется зацепление у фрикцион-
ной муфты и механизм приводится во
вращение.
Следует иметь в виду, что простым
увеличением мощности не всегда мож-
но добиться требуемого увеличения
начального момента при пуске; в не-
которых, правда, весьма редких случа-
ях начальный момент может даже
уменьшиться. Этот на первый взгляд
парадоксальный результат получается
вследствие потери напряжения в соп-
ротивлении, включенном между источ-
ником питания и двигателем.
Рассмотрим, при каких условиях
начальный момент двигателя большей
мощности будет равен начальному мо-
менту двигателя меньшей мощности.
Начальные моменты первого (мень-
шей мощности) и второго (большей
мощности) двигателей пропорциональ-
ны мощностям, выделяющимся прн
s=l в их роторах:
РВ«Ч1= 3/к| >21 = (rm Ги)2+(Хвш + Лв1)? ;
Рнач2 3/kj 7*22 ~~
178
= ______________________
(гвш т гнг)“ 4“ (лвш 4~ ^кз)2
где /К1 и /к2 — токи первого и второго
двигателей при пуске; r2x г22 — приве-
денные активные сопротивления рото-
ров первого и второго двигателей; гкь
Гк2, Хкъ лк2 — активные и реактивные
сопротивления первого и второго дви-
гателей; гвш и хвш — активное и реак-
тивное сопротивления между источни-
ком питания и двигателем; U\ — линей-
ное напряжение источника питания,
принимаемое неизменным.
Принимая, что активные и реактив-
ные сопротивления двигателей изме-
няются обратно пропорционально их
номинальным мощностям, получаем
Рцачв а [(^ВШ 4~ ГК1)2 4~ (*ВШ 4~ *К1)2]
(агвш 4- ГК1)- 4“ 4“ *И1)2
(6.43)
Где ОС = Рном2/Рвом1.
Отношение начальных моментов
равно единице при значении
1Л? , J,2 ' _1/ 4+^1 Zrf
г « Уа
(6.44)
Одним из способов увеличения на-
чального момента асинхронных двига-
телей является пуск с переключением
обмоток статора со звезды на тре-
угольник1. При этом предполагается,
что в случае соединения обмоток ста-
тора треугольником начальный мо-
мент увеличивается в 3 раза по срав-
нению с соединением звездой.
При переключении со звезды на
треугольник условно ct=3, и для этого
случая начальные моменты будут рав-
ны при
Zi<i
кг
(6.44а)
—
В практике работы автора имел
место случай, когда для опробования
двигатель 380/220 В, 92,6/160 А кон-
денсатного насоса был присоединен
временно к удаленной сборке 220 В ка-
белем небольшого сечеиня. При сое-
динении обмоток статора треугольни-
ком начальный момент был настолько
мал, что двигатель не мог развернуть-
’ Случаи использования такого пуска могут
встречаться в эксплуатации, хотя и редко. (Прим,
ред.)
ся. При соединении же обмоток статора
в звезду двигатель свободно достигал
номинальной угловой скорости.
Рассмотрим, какое влияние оказы-
вает напряжение на потери в обмот-
ках при пуске.
Потери энергии в трехфазной об-
мотке за элемент времени равны:
dW^ — ZPrdt.
Заменяя dt согласно (6.2), получаем
dW = — 3/z rxj ds/
и
J ^иа» J
Si s,
(6.45a)
Так как момент двигателя пропор-
ционален квадрату напряжения, а
ток — его первой степени:
Р = А&и и
где А и В — некоторые функции, опре-
деляющие зависимость тока и момента
от скольжения при номинальном на-
пряжении, то количество теплоты про-
порционально величине
W =— Згт, С ——. (6.456)
J
sl
Для случая пуска иа холостой ход,
т. е. при Л1с*=0,
W =— 3/tj J ds, (6.45в)
S,
или при замене для ротора
Л = /^; B = 3Iir2lsP^kl
получим
W=— 3г, т, [ /g ds =
J r2
S1
И При Si=l и S2 = 0
^ = Рном^/2- (6.45r)
Таким образом, потери электри-
ческой энергии в роторе за время пус-
ка при отсутствии механического мо-
мента на валу равны постоянной ве-
личине, равной запасенной ротором
кинетической энергии, и ие зависят от
12*
179
напряжения, конструктивного выпол-
нения и материала обмотки ротора.
При пуске под нагрузкой потери
энергии в роторе всегда будут больше,
чем при пуске вхолостую, и эти потери
будут тем больше, чем меньше напря-
жение. Действительно, прн понижении
напряжения знаменатель в подынтег-
ральном выражении (6.45 6) уменьша-
ется быстрее, чем квадрат напряжения,
а поэтому подынтегральное выражение
в целом увеличивается при понижении
напряжения.
Уменьшить потери энергии в роторе
можно при асинхронном частотном
пуске, который осуществляется при
плавном увеличении частоты по мере
разгона агрегата. Потери при частот-
ном пуске вхолостую могут быть най-
дены следующим образом:
t t
IF = J sP„ dt = J sM„., ю dt. (6.46)
It 0
Заменяя MK3—Jda!dt и принимая
скольжение s за время пуска неизмен-
ным (s=si) (такое допущение явля-
ется вполне приемлемым, учитывая,
что пуск происходит на устойчивой ча-
сти асинхронного момента), получаем
«о
W — J JS]<o da = J Si J co da =
о и
= -j-L = J *OM 1 . (6.47)
Таким образом, потери энергии в
двигателе при частотном пуске будут
значительно меньше потерь при пуске
с постоянной частотой питающего на-
пряжения.
Количественные соотношения, по-
лученные при испытании двигателя
вентилятора с номинальным напряже-
нием 2 кВ, приведены в табл. 6.3. Ука-
занный двигатель пускался при помо-
щи автотрансформатора с ответвлени-
ями. Кривые пусковых токов, снятые
Таблица 6.3
0,5
0,65
0,8
740
1020
1420
940
1280
1660
25,8 55
49,5 77,5
84,7 102
30
12
5
91
72
52
1 а б л и ц а 6.4
*« Пуск в холодном состоянии при "но«- Пуск в нагретом состоянии прв ЛНОМ1 равном
1.6 2 2.5 3 1.6 2 2.5 3
1 13 15 17 20 12 14 16 20
0,9 15 17 18 21 13 16 18 20
0,8 18 19 21 23 16 18 20 23
0,7 26 26 26 28 23 24 24 27
0,65 — 28 29 29 — 26 28 29
на первичной стороне автотрансформа-
тора, приведены на рис. 6.31.
Из данных, приведенных в таблице,
следует, что при повышении напряже-
ния от 0,5 до 0,8 номинального, т. е. в
1,6 раза, длительность пуска уменьша-
ется в 6 раз, а нагрев — в 1,75 раза.
На рис. 6.32 даны огибающие ос-
циллограмм пускового тока двигателя
питательного насоса 6 кВ, 236 кВт при
разных напряжениях. На рис. 6.33 да-
на зависимость времени пуска от на-
пряжения для двигателя, имеющего
Ь«ом=2 и sKp=0,15 и момент сопроти-
вления Л4с*=0,15+0,85 (1—s)z. Из со-
поставления обеих кривых следует, что
Рис. 6.31. Изменение тока двигателя при его
пуске через автотрансформатор:
/ — пуск при 0.8£УноМ; 2—пуск при 0,66fJHOM; 3 —
пуск при 0,5t/HOM
Рис. 6.32. Огибающие осциллограмм пускового
тока двигателя 236 кВт, 6 кВ при разных на-
пряжениях:
а — 6500 В; 6 — 6000 В; в — 6000 В[ в — 4000 В
180
расчетные данные хорошо совпадают с
опытными.
Определение температуры обмоток
при небольшой длительности пуска
можно производить без учета тепло-
отдачи, считая процесс нагрева адиа-
батическим, а следовательно, применяя
при расчете температуры формулы
(5.16).
В табл. 6.4 даны превышения тем-
пературы обмотки статора за время
пуска двигателя в холодном и нагретом
состояниях при времени замедления
агрегата, равном 5 с, и различных
кратностях максимального момента
Ьком, определенные по формуле (5.16)
с учетом кривых на рис. 6.26. При рас-
четах номинальная плотность тока об-
0,6 0,7 0,6 09 1,0 ки
мотки статора принята не зависящей
от дном и равной 5 А/мм2, а также при-
нято /эк=0,93 /к.
Из рассмотрения данных, приведен-
ных в табл. 6.4, следует, что нагрев об-
моток двигателя увеличивается с
уменьшением напряжения.
Таким образом, двигатели с боль-
шей кратностью максимального мо-
мента, а следовательно, и большей
кратностью пускового тока имеют
больший нагрев. По мере уменьшения
напряжения разница между нагревами
при различных k становится меньше.
В тех случаях, когда время пере-
грузки велико, например при затяжных
пусках, нельзя пренебрегать отводом
теплоты от обмотки. Это относится не
только к обмоткам роторов асинхрон-
ных двигателей с короткозамкнутым
ротором в пусковым обмоткам син-
хронных двигателей, но и к обмоткам
статора, имеющим изоляцию.
Поскольку энергии, выделяемая в
роторе при прямом пуске, будет мень-
ше, чем при пуске от пониженного на-
пряжения, то в случае небольшой дли-
тельности пуска нагрев обмоток полу-
чается также меньше, чем при пони-
женном напряжении. Однако когда
длительность пуска составляет не-
сколько десятков секунд, значительная
часть теплоты успевает рассеяться в
окружающую среду, и поэтому нагрев
за время пуска получится соответст-
венно меньше, чем нагрев, подсчитал-
Рис. 6.33. Влияние напряжения ни ллитель- НЫЙ’ ИСХ0ДЯ 113 адиабатического про-
кость пуска: цесса.
/ — опытная кривая: 2—расчетная кривая; ноМ— ДЛЯ ИЛЛЮСТрацИИ НЗ рИС. 6.34 ПрИ-
длнтельвость пуска при номинальном напряжении ВСДСНЫ Кривые ИЗМенеНИЯ Температуры
еннхпониого двигателя „
пусковой обмоткн при различных усло-
виях пуска синхронного двигателя 760
кВ-А, показывающие, что в случаях
прямого и реакторного пусков без на-
соса максимальный нагрев получился
больше при включении через реактор,
чем при прямом пуске, как это и дол-
жно быть при пуске под нагрузкой при
пониженном напряжении.
Нагрев пусковой обмотки можно
определять по формуле (5.25).
Расположение стержней пусковой
обмотки синхронного двигателя только
в полюсных башмаках приводит к ие-
Рис 6.34. Изменение угловой скорости <п и
температуры пусковой обмотки в при пусках
электродвигателя:
в] — прямой пуск без насоса: 62—прямой пуск с
насосом: в' — реакторный пуск без насоса; 0” — ре-
акторный пуск с насосом Значение индексов у кри-
вых частит вращения аналогично
равномерному распределению тока по
отдельным стержням. При этом ток в
крайних стержнях значительно превы-
шает ток в средних стержнях, причем
большее значение тока имеет место со
стороны полюса по ходу вращения.
181
Так, по данным испытаний [38] у
синхронного двигателя 800 кВт, 750
об/мин, 6 кВ с пусковой обмоткой из
11 стержней, выполненных из латуни,
ток в крайних стержнях в 1,5 раза пре-
вышал ток в средних стержнях н на-
грев их был соответственно в 2 раза
больше. При замене двух латунных
стержней с каждой стороны полюса на
медные нагрев крайних и средних стер-
жней получился практически одинако-
вым, хотя неравномерность распреде-
ления токов несколько увеличилась.
Для синхронных турбодвигателей с
массивной бочкой ротора необходимо
определять температуру поверхностно-
го слоя при пуске по удельным потерям
на единицу поверхности ротора соглас-
но методике, изложенной в гл. 5.
Практический расчет допустимости
асинхронного пуска по условиям на-
грева рекомендуется проводить в из-
ложенном ниже порядке.
Исходными величинами являются
напряжение сети, реактивные сопроти-
вления, включенные между пускаемой
машиной и мощной сетью, и парамет-
ры машины (реактивные и активные
сопротивления, механическая постоян-
ная времени).
По этим данным подсчитывается
пусковой ток, строятся кривые враща-
ющего момента двигателя и момента
сопротивления механизма в зависимо-
сти от скольжения и определяется дли-
тельность пуска.
По известному пусковому току Л- и
приведенному активному сопротивле-
нию ротора в неподвижном состоянии
Г2к подсчитываются потери в роторе в
момент пуска:
Определяются удельные потери:
Др = bP/F^,
где Гзуб — поверхность стали бочки ро-
тора по головкам зубцов, м2.
С достаточной для практики точно-
стью можно принять, что F3y6 состав-
ляет 60 % полной цилиндрической по-
верхности бочки ротора, включая н
клинья.
По кривым рнс. 5.8 определяется
максимальное превышение температу-
ры на поверхности ротора за время
пуска. Пуск следует считать допусти-
мым, если эта температура не будет
превышать 200 X.
Изложенный выше метод расчета
нагрева массивной бочки ротора в
предположении прямолинейного изме-
нения скорости за время пуска tn дает
определенный запас, поскольку в дей-
ствительности угловая скорость увели-
чивается более резко. Благодаря этому
более быстро будут уменьшаться поте-
ри, выделяющиеся в роторе, и увели-
чиваться глубина проникновения токов
в бочку ротора, а следовательно, на-
грев уменьшится по сравнению с на-
гревом, полученным из расчета.
Испытания по нагреву массивного
ротора подтвердили, что расчёт по уп-
рощенной методике, изложенной в
§ 5.4, определяет более высокие нагре-
вы по сравнению с действительным.
В тех случаях, когда температура
бочки ротора, определенная при усло-
вии прямолинейной зависимости ча-
стоты вращения от времени, получает-
ся выше допустимой, необходимо про-
вести уточненный расчет, используя
действительную характеристику изме-
нения частоты вращения во времени.
Результаты расчетов, проведенных
канд. техн, наук О. С. Ливановой, даны
на рис. 6.35 и 6.36. Там же даны пунк-
тиром для сопоставлеиия соответству-
ющие кривые, полученные при прямо-
линейном изменении частоты враще-
ния во время пуска. Во избежание
проведения трудоемких расчетов О. С.
Ливановой предложен метод определе-
ния температуры нагрева путем вве-
дения вместо действительного полного
времени пуска такой продолжительно-
сти пуска, прн которой температуры
нагрева, полученные по кривым, пост-
роенным для прямолинейного измене-
ния частоты вращения во времени, бу-
дут такими же, как прн реальном пус-
ке.
Для этого определяется температу-
ра 01 для . действительного времени
пуска /п по сплошной кривой рис. 6.35,
а затем по пунктирной кривой фиктив-
ное время пуска /п.ф, соответствующее
температуре 0[. Если нанести найден-
ные таким образом фиктивные време-
на пуска на кривые разгона двигателя
с насосом (рнс. 6.35), то видно, что они
соответствуют пересечению касатель-
ной к начальной части кривой разгона
с горизонтальной прямой <о=соНом- Это
объясняется тем, что температура по-
верхности ротора достигает максимума
не в конце пуска, а значительно рань-
ше [при (0,6—0,7) соном!, когда угловая
182
Чнач~^^ион ^иач^^^нач
1ч,^6,7с t1^p=9,0c tn^11,6c ip-12,2c
tg~7,6c tn4l,4c t„^t%5c *п=2$4с
MUJit 1,2 1,0 О,в 0,6 0,4 0,2 0 2 4 0 6 10 12 14 16 16 20 22 24 26 26 30 32
Длительность пуска, с
Рис. 6.35. Кривые разгона двигателя СТМ-6000-2 с иасосом ПЭ-570-300 при различных зна-
чениях начального напряжения
Рис. 6.36 Кривые превышения тем-
пературы поверхности ротора дви-
гателя СТМ-6О0О-2 с насосом
ПЭ-570-300 при различных напря-
жениях при пуске:
----— кривые рассчитаны при изме-
нении скольжения по кривой разгона:
------— —кривые рассчитаны при из-
менении скольжения по прямой; /—
Гнач^0^ноМ: АЛ,—1900 кВг/м1; 2-
^нач “°-6£/ноМ: OPt,~ 2740 кВт/м" 3 —
°нач “°-7t/HoM>‘ ЛРО=>3735 кВт/м2;
vH£J4-0.8L/аом; ДРс-4880 кВт/м2
скорость изменяется практически по
прямой.
Таким образом, можно пользовать-
ся кривыми нагрева рис. 5.8 дли пря-
молинейной зависимости угловой ско-
рости от времени, если брать фиктив-
ную продолжительность пуска, опреде-
ляемую по касательной в начальной
части кривой разгона.
Для механизмов с большими махо-
выми массами иногда приходится вы-
бирать номинальную мощность двига-
теля, исходя из условий пуска.
Для двигателей, пуск которых в го-
рячем состоянии, т. е. сразу после ос-
тановки, по технологическому процес-
су не требуется, время пуска может
определяться из условия допустимого
нагрева двигателя при пуске с холод-
ного состояния.
Дополнительное превышение тем-
пературы за время пуска с холодного
состояния для двигателей с редким
пуском может быть принято равным
200 °C.
Из уравнения (5.24) находим допу-
стимое время пуска, принимая &нач =
=0,’&=ДО:
, Ай-150
Так как /п=/*т/, то нз этой форму-
лы определяем предельное значение
времени замедления (ускорения):
Принимая номинальную плотность
тока /ном=5 А/мм2, кратность пуско-
вого тока й=5 и превышение темпера-
туры обмоток за время пуска 200 °C,
получаем
т/ = 48//,. (6.48а)
Для ответственных двигателей, са-
мозапуск или повторный пуск которых
должны быть обеспечены сразу же пос-
ле остановки, т. е. в горячем состоя-
нии, дополнительное превышение тем-
пературы может быть принято равным
183
135 °C, учитывая, что самозапуск про-
исходит относительно редко. В этом
случае нз уравнения (5.24а) находим
I = 150
и предельное значение времени замед-
ления (ускорения)
__jn____Ай-150
TJ ~'• ~
Принимая /110М —5 А/мм2, /?=5 и
Ай—135 °C, получаем
135-150 35
<г7 =г---------»------. (6.49)
Б?(53 — 1)/* /♦
Относительное время разгона /* мо-
жет быть определено по кривым раз-
гона (например, по рис. 6.28—6.30).
Если номинальная плотность тока от-
личается от 5 А/мм2, в уравнения
(6.50а) и (6.49) следует внести соот-
ветствующие поправки.
Пример. Выбрать двигатель по условиям
пуска для мельницы с моментом инерции J—
= 1012 кг-м8. Момент сопротивления — по-
стоянный. При нагрузке необходима мощность
порядка 250 кВт. При пуске без нагрузки мо-
мент сопротивления Мс,=0,4.
Определяем время ускорения (замедле-
ния), принимая мощность двигателя 250 кВт.
Момент инерпип двигателя ориентировочно
примем равным 37,5 кг-м2:
(1052 4-37,5) 77,Б2
Xj ~ 250 103 - 25 С"
По формуле (6.46а) относительное время
пуска должно быть ие выше /*=48/25 = 1,91,
а во время пуска — не более /п=1,91-25=48 с.
При пуске без нагрузки (ЛТС»=О,4) отно-
сительное время пуска во рис. 6.30 (кривая
/Ис*=0,4) /*=0,7. При пуске с полной нагруз-
кой (Л4С. = 1) из рис. 6.30 (кривая Л4С, = 1)
находим /*=1,4. Время пуска соответственно
получается равным 0,7-25= 17,5с н 1,4-25=
= 35 с.
Поскольку фактическое время пуска полу-
чилось меньше допустимого времени» равного
48 с, выбранную мощность двигателя следует
считать достаточной.
6.6. ОПРЕДЕЛЕНИЕ НАПРЯЖЕНИЯ
И ДОПУСТИМОЙ МОЩНОСТИ
ДВИГАТЕЛЕЙ В УСЛОВИЯХ ПУСКА
И САМОЗАПУСКА И ОПРЕДЕЛЕНИЕ
ПАРАМЕТРОВ ПУСКОВЫХ УСТРОЙСТВ
Определение напряжения в сети
при пуске н самозапуске двигателей
имеет решающее значение при выборе
схем пуска, определении допустимой
мощности двигателей по условию са-
мозапуска ч др. При этом следует
иметь в виду, что весьма важную роль
имеет длительность снижения напря-
жения. Более глубокое снижение на-
пряжения в месте включения цепи
двигателей и остальной нагрузки (на
общих шинах) при небольшой продол-
жительности в некоторых случаях ока-
зывается предпочтительнее, чем мень-
шее, но продолжительное понижение
напряжения не успевает сколько-ни-
будь значительно повлиять на нор-
мальную работу остальных потребите-
лей.
При решении вопроса о предельно
допустимой мощности двигателя по ус-
ловиям пуска или самозапуска следу-
ет исходить из допустимого снижения
напряжения у выводов двигателя и на
шинах, от которых питаются другие
приемники энергии. При этом напря-
жение на выводах пускаемого двигате-
ля должно быть достаточным, чтобы
обеспечить положительный избыточ-
ный момент в течение всего процесса
разгона, при допустимом нагреве об-
моток.
Чем больше напряжение на выво-
дах двигателя при пуске под нагруз-
кой, тем меньше время разгона и на-
грев его обмоток.
Допустимое снижение напряжения
на общих шинах при пуске или само-
запуске1 двигателя определяется с уче-
том характера нагрузки.
В тех случаях, когда снижение на-
пряжения получаетси больше допу-
стимого для некоторых потребителей,
следует питать их от отдельного транс-
форматора или ограничить пусковой
ток двигателя, включив его на время
пуска к общим шинам через реактор.
Пуск при помощи автотрансформа-
тора применяется крайне редко в свя-
зи со сложностью установки и боль-
шим количеством дополнительной ап-
паратуры. В реальных условиях, как
правило, оказывается достаточным на-
личие в питающей сети постоянно
включенных реакторов и трансформа-
торов.
Для определения напряжений в
различных точках сети можно принять
расчетную схему, изображенную на
рнс. 6.37, где прочая нагрузка пред-
1 Речь идет о снижении напряжения по условиям
разгона, а для синхронных двигателей — и вхожде-
ния в синхронизм. Эти требования в некоторых слу-
чаях могут входить в противоречие с требованиями
ограничения сверх переходного тока прн восстановле-
нии напряжения после кратковременного перерыва
питания. Вопросы расчетов тока включения двигате-
лей при самозапуске рассмотрены в гл. 3 [22].
(Прим, ред.)
184
Рис. 6.37. Расчетные схемы для определения
напряжения на шинах и выводах двигателя:
а — исходная схема при питании от источника с на-
пряжением Ut: 1—элементы системы бесконечной
мощности; 2 — трансформатор; 3 — реактор в цепи
питания включаемого двигателя; 4 — кабель; 5 —
включаемый двигатель: 6—прочая нагрузка на ши-
нах с напряжением U; б — схема замещения; в —
преобразованная схема замещения (активные сопро-
тивления всех элементов схемы не учтены)
ставлена постоянным (не зависящим
от напряжения U) сопротивлением
Знагр. При этом необходимо знать ос-
новные параметры элементов сети и
двигателя, сопротивление которого
должно быть принято соответствую-
щим определенному скольжению (s —
= 1,0 при пуске или s=sB в момент
включения в сеть при самозапуске).
Поскольку согласно (6.33) сопро-
тивление двигателя в относительных
единицах обратно пропорционально
кратности тока статора при номи-
нальном напряжении, то при расчетах
можно использовать приведенные вы-
ше кривые зависимости кратности то-
ка от скольжения (например, для син-
хронного двигателя по z/zn на рис.
6.20).
Если фактические кривые асин-
хронного вращающего момента и тока
статора в зависимости от скольжения
для конкретного двигателя отличаются
от приведенных выше, то все расчеты
следует проводить с учетом конкрет-
ных параметров данного двигателя.
При расчетах напряжения н опре-
делении допустимой мощности двига-
теля с короткозамкнутым ротором в
условиях пуска или самозапуска сле-
дует рассмотреть случай, когда двига-
тель включается через трансформатор
или реактор, присоединенные практи-
чески к источнику питания бесконеч-
ной мощности (по сравнению с мощ-
ностью самого двигателя), и когда
мощности источника питания и двига-
теля соизмеримы.
При питании от источника беско-
нечной мощности можно пренебречь
переходными процессами в генерато-
рах системы и определять напряжение
на включаемом двигателе при постоян-
ных значениях Xi и
Прн соизмеримых мощностях пус-
ковые токи будут размагничивать ис-
точник питания (синхронный генера-
тор), а поэтому нельзя пренебрегать
переходными процессами в генераторе,
приводящими к изменению во време-
ни напряжения Ui и сопротивления xs.
Питание от источника бесконечной
мощности. В соответствии со схемой
рис. 6.37, в напряжение на общих ши-
нах в момент включения двигателя
равно:
U = —
К(гп cos <₽ном)?+ивш + zn sin g>HoM)3
----------- - - - (6.50)
|/^cos2 + (sin
Значение z в (6.48) равно модулю
эквивалентного комплексного сопроти-
вления цепи двигателя и нагрузки
Z. Z „
у______в _нпгр .
-n Z JZ ”
_к 1 _нагр
2 7 Р^<гк^-Фнагр)
= в_------------------ , (6.51)
7 „/фнагр
гкв -ггнагрв
(6.52)
причем модуль полного сопротивления
нагрузки определяется ее полной мощ-
ностью SHarp при номинальном линей-
ном напряжении С7нагр,иом.*
________ ^нагр.ном
2вагр
•^нагр
а полное сопротивление цепи двигате-
ля, подключенного к шинам в общем
случае через трансформатор с коэф-
фициентом трансформации пт и актив-
ное (гдОб) и индуктивное (Хдоб) сопро-
тивления (элементы 3 и 4 на рис.
6.37, б), равны:
= Гд + Гдоб + / (хд -J- Хдоб) =
= Гк + = zK (cos <ри + / sin (pI5),
(6.53)
где
^ = п?'’д = п?гдс°8<рл =
Д.НСМ____
= ----COS <рд
ЛД°1Д,НОМ
185
*;=«х=п?м*п<рд=
^д.ном
^д^Гд.ном
sin <рд
— активное и индуктивное сопроти-
вления двигателя, приведенные к на-
пряжению С/д ном =nTt4,HOM со сторо-
ны обмотки трансформатора, включен-
ной к шинам.
По аналогии с выражением полного
сопротивления двигателя
1г
z = Д-ном
£д5'1д>ном
1Г
^д.ном
^д,ном
(6.54)
можно принять и для всей цепй
&%Д,НОМ Sr А
(6.55)
где
______Lii— — ^/Г3~^Ц.ном^к ==
^д,ном ^1Д,ВОМ ^т.ном
(6.56)
— кратность тока 7К в цепи двигателя,
подключенного через сопротивления
ГдОб и Хдоб, при номинальном напряже-
нии в начале цепи; SK= ]/ЗС7д.номЛк
условная (при номинальном напря-
жении двигателя) пусковая мощность
цепи двигателя; 5д,иом=/?д51ц1Ном — ус-
ловная пусковая мощность двигателя.
Подставляя в (6.53) значения
zH2rp и zK согласно (6.52) и (6.53), на-
ходим
if2
^D = {gnH - ом, (6.57)
^в.ном
где условная (при номинальном на-
пряжении нагрузки) пусковая мощ-
ность цепи двигателя и нагрузки рав-
на:
. Л (S«cos %+SHarpcos 4>„агр)2+.
Г +(S^inq>K+SMrpsin<I>Mrp)2'
(6.58)
______q [ ^нагр.нпм \ , / ^нагр.ном'
Лк~ dK( ,/ |-^Л»1д.ком1 ,
\ £7д,иом / \ ид.ном .
(6.59)
и на основании (6-55) и (6.53) имеем
k = —. ЛД : (6.60)
V(с COS фд)2 4- (bsin фд)2
Ate'sin ф
Sin <р„ - —— = =---------- =
Z" гя
_ Asin фд ; (6 6Ij
V (ncos фл)2 + (A sin фд)2
cos <рк = У1 — sin ,
где
__ j | ЛДоб j | глоб^д^нпм .
ном cos'll
' (6.62)
b = 1 ] — j _| ХД0б^Д;НОМ
< ^иом^Фд
Коэффициент мощности (6.50) це-
пи двигателя совместно с нагрузкой
определяется на основании (6.58):
costo -;
^’п.иом
(6.63)
sin (рп = I — COS2 (рп.
Напряжение на выводах двигателя
и напряжение на общих шинах в соот-
ветствии со схемой замещения рис.
6.37,6 взаимно определяются следую-
щим равенством:
(J = kU sK и
fljZp kpnT ^д,п
или по отношению к номинальному на-
пряжению двигателя
ku = --д— = ------. (6.64)
^л,пом Хд.д 1/диов
Приведенные выше расчетные вы-
ражения позволяют определить напря-
жение в любой точке сети по извест-
ным мощностям, коэффициентам мощ-
ности отдельных цепей и кратности
тока двигателей, не прибегая к предва-
рительным расчетам сопротивлений
двигателей и нагрузки в омах. Поэто-
му результирующее гп и внешнее хвш
сопротивления целесообразно выра-
зить в долях базисного сопротивления
ze = ^/S6
(при базисном напряжении L76, соот-
ветствующем месту включения рас-
сматриваемого элемента сети), т. е.
186
_ U‘ 1
__ Zn______Об___наг, и ом 1
гб ^'п.НОМ /7g £>п(б)*
(6.65)
где
S^,. = У (6.66а)
\ ^наг.ном /
— условная пусковая мощность в от-
носительных базисных единицах.
Сопротивления любого элемента
схемы в относительных базисных еди-
ницах определяются также согласно
(6.65), но при подстановке конкретно-
го значения относительной «пусковой
мощности»:
для реактора
Sp.n. = . (6.666)
ЛР% 'б ир.НОМ
для трансформатора
^=ioosT.„n„/^4 y. (6 66в)
“к%йб Х^т.ном/
для системы
= (6.66г)
\ Uc '
где SK — мощность короткого замыка-
ния на шинах высшего напряжения
трансформатора 2 (рис. 6.37, а) при
напряжении системы £/с.
Сопротивление лнннй в относитель-
ных единицах определяется согласно
первому равенству (6.65) при замене
в нем 2П на 2л=гУд1 (гуд — сопротивле-
ние на единицу длины, / — длина ли-
нии).
Следует несколько подробнее оста-
новиться на напряжении U,. Это на-
пряжение должно быть выше напря-
жения на шинах при нормальной ра-
боте двигателя и нагрузки для того,
чтобы покрыть потерю напряжения в
сопротивлении хвш, включенном между
источником питания и шипами. В про-
тивном случае напряжение на шинах,
к которым будут подключены прием-
ники энергии, будет меньше номиналь-
ного, что недопустимо. Очень часто это
весьма важное обстоятельство не учи-
тывается н расчет ошибочно произво-
дится по допустимой потере напряже-
ния в сопротивлении, включенном меж-
ду источником питания и двигателями
(трансформатор, реактор, линия), при
пусковом токе двигателей, найденном
прн их номинальном напряжении.
Принимая базисное напряжение
равным номинальному напряжению на
шинах, а также базисную мощность
равной мощности приемников энергии
при полной загрузке, найдем при £7* -~
= £//£7б=1,0 из (6.50) (при замене
£п(б)* на £н(б}* = 1,0 и sin фп на sin фном)
напряжение сети U\ в долях номи-
нального напряжения на шииах:
--Iх 0 Q’homF+^bid#^-05 Ч’ном)"’^'
«1 + s'n4>H0M- (6.67)
Определение напряжения в момент
включения двигателя при различных
величинах cos<pn можно произвести по
кривым, построенным в результате
расчетов по формуле (6.50). Для при-
мера на рис. 6.38 приведены кривые
напряжения на шинах в зависимости
от условной пусковой мощности (в до-
лях полной мощности двигателя и ос-
тальной нагрузки) при разных значе-
ниях сопротивления сети хвш и коэф-
фициенте мощности работавшей на-
грузки и пускаемого двигателя при
пуске cos фл=0,35. При построении
кривых иа рис. 6.38 напряжение сети
определялось по формуле (6.67).
Учет активных сопротивлений на-
грузки и цепи подключаемого двигате-
ля значительно усложняет расчет. По-
этому представляет практический ин-
терес выяснить, каково влияние ак-
тивных сопротивлений на напряжение
при пуске двигателя.
По результатам подсчетов по фор-
Рнс. 6.38. Относительное значение напряжения
на шинах в зависимости от условной пусковой
мощности (в долях полной номинальной на-
грузки) подключаемого двигателя и нагрузки
187
Рис. 6.39. Зависимость U!U\ от cos фп при
различных значениях пусковой мощности
(Sn/Su) и внешнего реактивного сопротивле-
ния сети (хвш)
Из (6.68а) и (6.68в) следует, что
с увеличением условной кратности k
(при уменьшении добавочных сопро-
тивлений в цепи двигателя) напряже-
ние на общих шинах снижается и до-
стигает наименьшего значения при
непосредственном включении двигате-
ля к шинам (k=kA), т. е. в случае пря-
мого пуска. С другой стороны, па ос-
новании (6.64) и (6.68а) с учетом
(6.68в)
. k и
ku = -b--------------:---
Д t/д.ВОМ
зависимости U/l)\ от coscpn, построен-
ные для различных значений пусковой
мощности и сопротивления хвш*. Из
рассмотрения этих кривых следует,
что влияние коэффициента мощности
в широком диапазоне сказывается не-
значительно на напряжении на шинах.
Когда двигатель питается по срав-
нительно длинной кабельной линии,
активное сопротивление которой пре-
вышает 0,3—-0,4 значения реактивно-
го сопротивления двигателя, следует
производить расчет с учетом активно-
го сопротивления. Такие случаи пре-
имущественно имеют место в уста-
новках низкого напряжения.
Прн cos<pn=0 из уравнения (6.50)
при гп=хп получим
Лд • (6Ю)
хвш 5д п-|- —- (1 4-Хвш*Снагр#)
к
или, учитывая (6.65),
и __ 1
(6.68а)
откуда
sm = —!—/-^.-11 (668б)
т. е. напряжение на выводах пускае-
мого двигателя достигает наибольше-
го значения в случае прямого пуска,
когда k=kR, и при любом ограничении
пускового тока; за счет включения до-
бавочных сопротивлений (/г<Лд) ве-
личина ku уменьшается, а следова-
тельно, снижается вращающий момент
двигателя, уменьшается избыточный
момент и увеличивается время разго-
на до номинальной угловой скорости.
Задаваясь допустимым снижением
напряжения при пуске, из (6.68) мож-
но определить допустимое значение
пусковой мощности, а следовательно,
и допустимую мощность включаемых
двигателей 5|Д>Ном, а также полезную
мощность на валу Рд,ном== Чд.номХ
X"-* IД.ном COS фд.ном-
Пренебрегая активной составляю-
щей пусковой мощности при расчетах
напряжений в различных точках сети
и принимая sin фк» 1,0, получаем на
основании (6.65) при t/e = i/narp>HOM
, ^д.ном / __ и
^1д.ном
причем согласно (6.66а) и (6.58) при
cos <рп=0 и sin срк~ 1,0 имеем
«б
+ Онагр#
где
•^д.п» 4“ Онагр#»
(6.68в)
) __ ^нагр sin Фнагр / Uft \2
-нагр*----------- — I -------------I J
Х^наг.ном /
Хвш*
(6.70)
откуда при известной условной кратно-
сти k тока в цепи двигателя и задан-
ном допустимом пониженном напря-
жении на общих шинах (7= URon най-
дем предельно допустимую полезную
мощность пускаемых двигателей:
jp | _ ^Тд.ИОМ COS Фд.НОМ у,
V д.ном/
k
•^Д.п* ---
£д ^гД1Нлм
[ ^д.ыом
WHarp,HcM.
2
(671)
168
Отсюда видно, что предельная но-
минальная мощность двигателя тем
меньше, чем больше условная крат-
ность тока в его цепи при заданном
допустимом пониженном напряжении
на шинах и чем больше реактивная
мощность остальной нагрузки, причем
/>д,ном.пред имеет наименьшее значение
при k=kRt т. е. при непосредственном
включении двигателя к общнм шинам
(прямой пуск).
Если фактическая мощность боль-
ше, чем Рд,ном,пред (при k=kp), то не-
обходимо уменьшить кратность тока
в цепи пускаемого двигателя до зна-
чения [согласно (6.60) при а = 0 и
sin <рд«1,0]
k = -5b- =-----5а—- , (6.72)
Ь '+*ло<Ал
эа счет введения добавочного сопро-
тивления ХдОб в цепь двигателя (на-
пример, включением реактора на вре-
мя пуска) или включения двигателя
через автотрансформатор с коэффици-
ентом трансформации пат- В послед-
нем случае номинальные напряжения
двигателя и остальной нагрузки оди-
наковы (67д.Ном=£/на.гр,н<1м), а поэтому
^д, яом =^ат^нагр,ном И ПрН (без
учета сопротивления пускового авто-
трансформатора, расчет которого воз-
можен лишь после предварительного
определения мощности автотрансфор-
матора) получим на основании (6.67)
с учетом (6.68г)
5Д,„.« -1 - М-
(6,73а)
откуда найдем требуемый коэффици-
ент трансформации
^ат
^д,п*_______
Хвги* Онагр*)
(6.736)
При включении двигателя через
реактор с сопротивлением хр имеем
^д.ном И ОбЫЧНО tAiarp,HOM =
= б/д.ном, а поэтому условная пусковая
мощность цепи двигателя (или группы
двигателей) из (6.70) с учетом (6.72)
и (6.65)
1
Н *р*
о ___
= — (-J7- ~ 1 ) - (6.74а)
Ашп« V ы J
откуда требуемое сопротивление реак-
тора прн заданном напряжении на ши-
нах t/доп равно:
__________АВШ*____________1
t/- § *
~Г. (14-*в1п*<2нагр*)
Ыдои
(6.746)
или в процентах при номинальных на-
пряжении б/р.ном и токе /р.ноы реакто-
ра с учетом (6.666)
х , = 100х,„ _ (6 74в)
^р.нсм
При пуске блока трансформатор—
двигатель условная кратность тока в
его цепи с учетом (6.65), (б.ббв) и
значения х'д при sinфд~ 1,0 равна:
k Лд =
1 4- Хг/х’д
=------------5а--------------, (6.75)
j I Ык% ^1Д,ИОМ / ^т.вом \2
100 5ТИ0м К^д.ним/
где С7т,ном — номинальное напряже-
ние той обмоткн трансформатора бло-
ка, где включен двигатель.
Подставляя полученное согласно
(6.75) значение k в уравнение (6.70),
можно рассчитать напряжение на ши-
нах нагрузки и в данном случае.
Таким образом, уравнения (6.69) и
(6.70) при отмеченных выше упроще-
ниях позволяют решить следующие
важные задачи:
а) определить напряжение на ши-
нах и выводах двигателей при извест-
ной пусковой мощности включаемых
двигателей;
б) найти предельно допустимую
мощность двигателей по условиям раз-
решаемого понижения напряжения на
общих шинах в момент включения
двигателей;
в) определить основные параметры
пусковых устройств в цепи двигателя
в случае необходимости их установки.
Как отмечалось выше, напряжение
на выводах двигателей должно быть
достаточным для их разгона до номи-
нальной угловой скорости, т. е. долж-
но быть выполнено условие
1,0 (6.76а)
во всем диапазоне скольжений от $ =
=sB (или s = l,0) до s=Shom- Полагая
вращающий момент двигателя для
любого скольжения равным =
= А4вноМЛ2 (^Ивном — Вращающий МО-
189
мент при номинальном напряжении,
соответствующий скольжению s) и
принимая, что для обеспечения разго-
на вращающий момент двигателя дол-
жен при включении в сеть превышать
момент сопротивления не менее чем
на 10 %, находим из (6.76а)
(6.766)
ku>
где — момент двигателя при
скольжении sBr соответствующем мо-
менту включения в сеть. При пуске
Sb = 1,0, а при самозапуске оно опре-
деляется по выбегу двигателя за вре-
мя от начала выбега до момента вос-
становления напряжения.
Минимально необходимое 'напря-
жение, определенное согласно (6.766),
должно уточняться по условиям нагре-
ва за время пуска.
Напряжение на выводах двигателя
легко определяется согласно (6.69).
Например, при прямом включении к
шинам k=kz, =ид,„о„ и
ku =--------, (6.77а)
1 + хвш» (5д,ном* + Фнагр*)
а при включении через реактор
(^Д1ном = ^-ном’ *<М
_________________^1/^д.ном_______________
ЯвшлЗд.еоНз-Н! Н_*р*^д,ном(1 +*Bnj* Онагр*)
(6.776)
поскольку в этом случае
= 1 4- Хр.,.
Из (6.776) можно определить зна-
чение сопротивления реактора, при
котором обеспечивается условие ус-
пешного разгона двигателя (6.766):
' -----— X
^Д,п* (1 + Явш* Онагр*)
Следовательно, если по расчету со-
гласно (6.746) получится значение хр*
больше предельного по формуле
(6.78), то ограничение пускового тока
реактором (по условию t/^t/доп) не-
возможно и следует применять авто-
трансформаторный пуск.
При отсутствии на шииах другой
нагрузки во всех приведенных выше
формулах принимается QHarp» = 0.
Действительный пусковой ток
включаемого двигателя по отношению
к номинальному току двигателя
= ^дДд.ИОМ — (6.79а)
а пусковой ток двигателя совместно с
нагрузкой в долях базисного
= SOT UIV6, (6.796)
Лз
или по отношению к номинальному
току трансформатора 2 (см. рис. 6.37)
k = .
^т.ном ^т.ном
-’•ОлУ- <6 79->
Допустимое число пусков двигате-
лей в сутки и число самозапусков
всей группы двигателей секции с точ-
ки зрения сохранения расчетной дли-
тельности срока службы питающих
трансформаторов регламентируется
ГОСТ 11677-75 в соответствии с
табл. 6.5.
Т а б л и ц а 6.5
Причина ТОЛЧКОВ нагрузки Повто- ряемость, не более Кратность
яри расщеп- ленной обмотке НН прн нерас- щепленной обмотке НН
для каждой части обмот- ки НН для обмотки НН о S «о о ?! «X 1 для обмотки вн
Пуск от- дельных двигателей Самозапуск всех двига- телей 2 раза в сутки 2 раза в год 5 5 3 5 4 5 4 5
В качестве пусковых реакторов использу-
ются сухие бетонные реакторы. При выборе
реактора по номинальному току следует ис-
ходить из того, что плотность номинального
тока обмотки реактора составляет примерно
2 А/мм2, а следовательно, номинальный ток
реактора в (6.74в)
^Р.НОМ ~
причем иа основании изложенного в гл. 5 и
§ 6.5 в условиях пусков, происходящих под-
ряд а раз прн продолжительности ta каждого,
(6 80>
190
или при а=3. Ай—10(1 °C и 7вк=0,9/1: получим
««/„KS/80, (6.80а)
где /к — пусковой ток, подсчитанный по xv»,
найденному согласно (6.746), с проверкой по
(6.78).
Питание от генератора соизмери-
мой мощности. При питании от генера-
тора, имеющего мощность, соизмери-
мую с мощностью включаемого двига-
теля, процесс изменения напряжения
во время пуска двигателя происходит
следующим образом: в первый момент
после включения двигателя напряже-
ние на шинах генератора сразу умень-
шается вследствие потери напряжения
в переходном реактивном сопротивле-
нии генератора (сверхпереходными
процессами в данном случае можно
пренебречь, так как их длительность
ничтожно мала по сравнению с време-
нем пуска двигателя).
В последующее время при отсутст-
вии на генераторе устройства автома-
тического регулирования возбуждения
напряжение иа шинах генератора нач-
нет уменьшаться вследствие затухания
свободных переходных токов ротора и
размагничивания генератора пусковы-
ми токами, которые являются практи-
чески реактивными до скольжения
около 0,1. Если время пуска больше
времени переходного процесса в гене-
раторе, то после окончания переходно-
го процесса на генераторе установится
некоторое значение напряжения, кото-
рое будет всегда ниже, чем начальное
значение напряжения в момент пуска
двигателя. На последнем этапе разго-
на двигателя пусковой ток резко
уменьшается и одновременно повыша-
ется коэффициент мощности. Все это
приводит к повышению напряжения
генератора.
При наличии автоматического ре-
гулирования возбуждения, когда име-
ет место увеличение тока возбуждения,
напряжение генератора при устано-
вившемся режиме может быть выше,
чем начальное значение напряжения
генератора в момент пуска двигателя,
а при определенном токе возбуждения
напряжение при установившемся ре-
жиме может быть равно номинальному
напряжению генератора.
Если пренебречь переходными про-
цессами возбудителя, то изменение на-
пряжения на генераторе от начального
значения £7нач до установившегося на-
пряжения U VCT будет происходить
практически по экспоненциальному
закону [10]
(6-81)
Постоянная времени переходного
процесса при включении двигателя со-
вместно с нагрузкой определяется по
формуле
где — постоянная времени пере-
ходного процесса при разомкнутой об-
мотке статора.
Определение начального значения
напряжения производится по переход-
ной ЭДС Е' в момент включения дви-
гателей:
= (6.83)
*d + *n
Установившееся напряжение может
быть определено аналитически или
графически.
Наиболее просто и быстро устано-
вившееся напряжение определяется по
кривым зависимости напряжения ге-
нератора (АДЛ-шом от условной ПуСКО-
вой мощности 5п/5г,нсм (Sn определя-
ется при номинальном напряжении ге-
нератора 1/г,Ном), построенным для
случая чисто реактивной нагрузки и
при разных относительных значениях
тока возбуждения генератора (рис.
6.40). Как показал проведенный авто-
ром анализ, влияние коэффициента
мощности иа напряжение при разных
значениях пусковой мощности сказы-
вается только при небольших нагруз-
ках и значениях cos <рп^0,8. В прак-
тических расчетах влиянием активной
нагрузки можно пренебречь.
Влияние ОКЗ также сравнительно
невелико, и поэтому с достаточной
степенью точности можно пользовать-
Рис. 6.40. Напряжение иа генераторе в зави-
симости от условной пусковой мощности при
установившемся режиме
191
ся кривыми рис. 6.40 для генераторов,
имеющих самые различные ОКЗ.
Если генератор не имеет другой на-
грузки кроме включаемого двигателя,
то в этом случае напряжение должно
выбираться только из условия возмож-
ности пуска двигателя при допустимом
нагреве его обмоток пусковыми тока-
ми.
Если принять, что начальная пере-
ходная ЭДС генератора равна его но-
минальному напряжению, превышаю-
щему номинальное напряжение
телей на 5 %, то из уравнения
ПОЛуЧИМ ПрИ ^1гнач= ^нач/6/д/ном
X — xd __
1 05 — ^ивач
Е/длом
^Г.ВОМ /
Принимая x'd=0,2 и &г1нач=0,55, по-
лучаем из (6.84)
х 0,55-0,2
п 1,05 — 0,55
Этому значению соответствует сле-
дующая общая допустимая мощность
на валах пускаемых двигателей:
п ______ ^Г,Н«тМ *)п,НОМ COS фд,иом __
Д,НОМ 0,22-1,05? kR ~
— 4 И ^’илМ ^Д.иоМ COS Фд,ном (g ggj
двига-
(6 83)
(6 84)
£д £1д,ном
= 0,22.
*д
Принимая в среднем кратность пус-
кового тока &д=5, произведение
т]д,номС05 срд/ном—0,85, получаем для
нашего случая
о 4,11 -0,855Г,НОМ л *7 0
* Д.КОМ----------~----------Ог.НОМ-
5
(6.85а)
Таким образом, при данных &и,нач,
хй и параметрах двигателя генератор
может обеспечить пуск двигателей
собственных нужд с общей полезной
мощностью и а валу, равной 70 % пол-
ной мощности генератора.
Определим теперь ток возбуждения,
необходимый для того, чтобы устано-
вившееся напряжение не было меньше
значения, выбранного по условиям ав-
тозапуска двигателей и равного 0,55
6^д,ном-
По рис. 6.40 для напряжения гене-
ратора
= 0,55/1.05 = 0,525
и условной относительной пусковой
мощности, равной 1/0,22 = 4,55, опре-
деляем, что ток возбуждения должен
быть равен 1,7 номинального тока воз-
буждения (/в =1,7 /в,ном).
Если генератор работает с нагруз-
кой, то в этом случае допустимое сни-
жение напряжения при пуске двига-
теля определяется не только из усло-
вия возможности пуска двигателя, но
и с учетом допустимого снижения на-
пряжения на других приемниках элек-
троэнергии, подключаемых к генера-
тору.
Необходимые при этом расчеты
для начального момента времени мож-
но выполнять в соответствии с форму-
лами для питания от источника беско-
нечно большой мощности, но при за-
мене U\ иа Е^.нач и хвш на хл -
Поскольку сопротивление двигате-
ля почти за все время пуска практи-
чески остается постоянным, то при
расчетах напряжений в сети можно
пренебречь изменением сопротивления
двигателя во время пуска и самоза-
пуска при скольжениях s^O.I.
Ниже приведены примеры опреде-
ления напряжения в сети, допустимой
мощности двигателя по условиям пус-
ка и самозапуска, а также примеры
выбора параметров пускового реакто-
ра.
Пример 1. Определить начальное напря-
жение на выводах двигателя 2000 кВт,
2350 кВ-А, 3 кВ, 450 А при его пуске от сети
через реактор. Кратность пускового тока дви-
гателя йд=5,5; cosфд,к= 0,25 (при пуске).
Данные реактора: /р,яом=600 А, хр=6 %.
Реактивное сопротивление сети до реактора,
отнесенное к базисной мощности 100 МВ-А и
напряжению 3 кВ, равно 70 %. Напряжение
на шинах при холостом ходе 3,1 кВ.
Принимая Uc= Uа. ком ₽3 кВ к Sn=
=2350 кВ-А=Х|Д,Яоы, находим условную пус-
ковую мощность:
5д-П= 2350 • 5.5 — 12 900 кВ-А
Сопротивление сети и реактора, приведен-
ное к базисной мощности,
2350 2,35
xp«4* *вш*— ® 'Vr= Н 70 ——- = 6,2%.
Уз- з- боо ио
Из (6.69) ПрИ Онагр* = 0 И Лд/А=1Ч-Лр<,«д,п.
находим напряжение на двигателе:
Ui
1 Ч- (-*-вш* ~Т* ЯрчЭ^Д.П*
3100
-------------=2310 В,
1+0,062-5,5
или
ku = 2310/2000 = 0,77.
Произведем расчет с учетом активного со-
противления двигателя. Определяем индук-
тивное сопротивление двигателя;
192
sin t£g _ 0,965
*Л*~ кл “ 5,5
Тогда из (6.62)
*=1
= 0.i76.
^= 1.256;
ЛД# 0,176
по формуле (6.60) прп а=1.0
5,5
k - ' —„ =4.45
V 0.25? + (],256-0,965)s
и согласно (6.61)
sin фк = l,256*4,45-0,176 = 0,981;
cos фн = 0,187.
Поскольку другой нагрузки нет, то
cos<pn—cos<pK и sin <pn=sin <рк, a l/zn,=^.
Напряжение на шинах (перед реактором)
по формуле (6.50) при хВш*=0,0165
_______________3100_____________
]/о, 187?+ (0,981 +4,45-0,0165)3
= 2890 В
н напряжение на выводах двигателя по фор-
муле (6.64)
t/n = 4,45-2890/5,5 = 2340 В,
fe„ = 2340/3000= 0,78,
т. е. практически то же самое, что и без учета
активного сопротивления (погрешность резуль-
тата при упрощенном расчете составляет
1,3%).
Пример 2. Определить напряжение иа вы-
водах асинхронного двигателя мощностью
875 кВт при пуске от трансформатора. Дру-
гой нагрузки на трансформаторе нег.
Данные двигателя: 875 кВт, 6 кВ, 100 А,
cos Фд,есм=0,88, кратность пускового тока 5,5,
cos фд =0,25. Начальный момент двигателя
Мк1 = 1,1. Трансформатор 1000 кВ-А, 35/6,3±
±5 % кВ, ии=6,5 %. Ответвления установлены
в среднем положении, т. е. номинальное на-
пряжение холостого хода трансформатора
равно 6,3 кВ прн напряжении иа первичной
стороне 35 кВ. Трансформатор пнтаетси от се-
ти практически бесконечной мощности.
Определяем условную пусковую мощность
при пуске двигателя, отнесенную к номиналь-
ному напряжению н номинальном мощности
трансформатора, т. е. принимаем
=6,3 кВ и So=ST>HoM= 1000 кВ-A:
3 t/д.ноМ 7д,нокЛд
•$т, ном
Напряжение на выводах двигателя по
формуле (6.68а)
1+^вш*^п* 1+0,055*6,3
ku = 4470/6000 = 0,746,
Кратность пускового тока для трансфор-
матора согласно (6.79л)
=6,3-4470/6300 = 4,47.
При расчете с учетом активного сопротив-
ления двигателя получим напряжение на вы-
водах двигателя 4520 В, или 0,753 номиналь-
ного, и кратность пускового тока 4,45, т. е.
без учета активного сопротивления погреш-
ность по напряжению меньше 1 %.
Пример 3, Определить напряжение прн
прямом пуске двигателя 875 кВт, 6 кВ,
Su,iiom== 1040 кВ-A от трансформатора
2400 кВ А, работающего с нагрузкой 1000 кВт
при cos фпагР=0,8 н напряжении 6,3 кВ. Дан-
ные двигателя приведены в предыдущем при-
мере.
Трансформатор: 2400 кВ-А, 35/6,3±5 %,
и1;=6,5 %. Номинальное напряжение прн хо-
лостом ходе 6,3 кВ.
Произведем расчет с учетом активного
сопротивления. Принимаем /7б = 6/т.иом=6,3 кВ
и Sb=2400 кВ-А.
Условная пусковая мощность подключае-
мого двигателя вместе с нагрузкой по форму-
ле (6.58) при k=ka, ^д,НОм=^д.”ом н замене
t/вагр.ном ИЗ t/т.вом
S„ = у '040 5,5 0,25^-^-у+ loooj+
’+[1040.5,5-0,9e(-5AV+J?™ 06|=_
L \ 6,0 / 0,8 J
= У 2570- +6850® = 7270 =3,03-2400,
T. e. Sn* = 3,03.
Сопротивление подключаемого двигателя
и нагрузки
гп, = 1/3,03 = 0,33,
и по формуле (6.63)
2570 „ „
cos фп =---------= 0,355:
° 2400-3,03 ’ ’
6850
sin фп =----------= 0,945-
441 3,03-2400
По уравнению (6.50)
________________6300______________
1^0,^553 + (0,0655-3,03+ 0,945)3
= 5250 В = t/д.
Кратность пускового тока двигателя сог-
ласно (6.79а)
=5,5-0,875 = 4,83
Приближенный расчет приводит к следу-
ющим результатам:
/ 6,3 \2
1040- 5,5 Hrz-j +750
= 2400 =
(/ =
7050
2400
= 2,94;
6300
1 +6,065-2,94
= 5270 В и ^ = 0,879.
F3—649
193
Пример 4. Выбрать пусковой реактор для
двигателя 4500 кВ-А, 260 А, 10 кВ, £д=7.
Двигатель получает питание от. трансформа-
тора 10 000 кВ-А, 35/10,5 кВ, Цц=8%. Допол-
нительная нагрузка составляет 3000 кВт при
cos (рнагр=0,8. Напряжение на двигателе при
пуске не должно быть ииже 0,4ПЛ.пОМг а на-
пряжение на шинах—не менее 0,85 UBoB. Со-
противлением системы можно пренебречь.
За базисную мощность принимаем Sc=
=4500 кВ-А.
Применим в качестве реактора нормаль-
ный бетоиный реактор на 10 кВ. Сечение ре-
актора определим, исходя из условия, чтобы
за время трех пусков подряд превышение
температуры обмотки реактора составило
де=юо°с:
730 ,/•—
q = gQ к 31 — 50,8 мм?,
где 7к-=0,4-7 260=730 А и ta 31 с при 14=
=0>4£7дтВом-
Определяем номинальный ток реактора:
7р,ном = 2-50,8 = 100 А.
Бетонные реакторы изготовляются только
на токи от 150 А. Если взять реактор с сопро-
тивлением Хр(В)*=8 %, то в этом случае со-
противление реактора, отнесенное к базисной
мощности, будет равно
8-260/150 = 13,9%.
Для этого реактора определим напряже-
ние иа шинах и на двигателе при пуске.
Условная пусковая мощность
________1_______ 3000-0,6 __
~ 0,143 + 0,139 + 0,8-4500 “ 4’05,
или
жп* = 1/4,05 = 0,247.
Напряжение на шинах при пуске
10,5-24,7
£/ = —, — = 9,02 кВ, или 90,2%,
4 + 24,7
и напряжение на двигателе
, 9,02-14,3
^=1473+13,9 =4-57кВ’
Таким образом, заданным условиям вы-
бранный реактор удовлетворяет.
Кратность тока двигателя при пуске кД11=
=7-0,457 =3,2, и ток двигателя 3,2-260=
=832 А.
Ток трансформатора с учетом нагрузки
согласно (6.79в)
/т» 260-0,902-4,05 = 950 А.
Пример 5, Определить изменение напря-
жения при пуске компенсатора 7,5 МВ-А,
6.6 кВ, 660 А, 750 об/мни, *^=0,17, tj=2 с
через реактор 150 А, 6 кВ, 8 % от трансфор-
матора 30 МВ-А, 110/6,6 кВ, кк=10%. На-
пряжение на шинах 110 кВ равно 109 кВ. От-
ветвления трансформатора установлены в по-
ложения 112,75 кВ. Сопротивление сети, отне-
сенное к мощности трансформатора, яс = 1 %.
Нагрузка иа шинах 6 кВ отсутствует.
Сопротивление реактора, отнесенное к мощ-
ности и номинальному напряжению трансфор-
матора,
3000-6
^=-0’08уз-юо-.б,И=1’28-
Сопротивление компенсатора в относитель-
ных единицах
хск = 0.17-30/7,5 = 0,68.
Напряжение сети до подключения ком-
пенсатора, приведенное к стороне низкого на-
пряжения трансформатора,
t/i= 109-6,6/112,75 = 6,38 кВ.
Напряжение при пуске на шниах подстан-
ции 6 кВ
_ 6,38(0,68+ 1,28) ,
0,68+ 1,28 + 0,1 +0,01 ’ КВ’
Напряжение на компенсаторе
6,1-0,68
с’к ~ 0,68 + 1,28
= 2,1 нВ.
С синхронным компенсатором был произ-
веден опыт короткого замыкания прн непо-
движном роторе и пониженном напряжении.
Опыт производился при питании статора
трехфазным током. По результатам расчетов
параметров асинхронного режима найдены
критическое скольжение
®кр ~ г2/*к = 0’33/0,97 = 0,34
и кратность максимального момента по отно-
шению к номинальному
, ^ном/с,»
йом~ 25л0М(г1 + хк) *
__________6600?_________
2-7500-103(0,05 + 0,97) =2,85-
На рис. 6.41 дана кривая момента в за-
висимости от скольжения, построенная по фор-
муле (2.19).
Время пуска при номинальном напряже-
нии иа компенсаторе без учета механических
потерь при времени ускорения
2,4.7502
т. = —-— ----= 2 с
J 91-7500
Рис. 6.41. Кривая асинхронного момента син-
хронного компенсатора в зависимости от
скольжения
194
Рис. 6.42. Огибающие ос-
циллограмм напряжения,
токов статора и ротора
при пуске синхронного
компенсатора мощностью
7500 кВ-А:
а — включение через реак-
тор; б — прямой пуск
значении напряжения время пуска по расчету
должно быть равно:
6,6й
'“=’-02^=9-4 с-
'“"~2'0’1Ы<Г+Т5б~+’^Г +
+—- ч-------+“— ч-------
2,35 2,54 2,74 2,84
+ 2.72 + 2,1 + 0,82 )— 1,02 С'
Так как пуск происходит прн напряжении,
меньшем номинального, — практически вхолос-
тую, то действительное время пуска изменя-
ется обратно пропорционально квадрату на-
пряжения, т. е.
В действительности же время пуска по
рнс. 6.42, а составляет 10,5—11 с. Расхождение
незначительное.
На рис. 6.42, б даны кривые, характеризу-
ющие прямой пуск того же компенсатора, прн
этом tc~2 с.
Пример 6. Определить предельно допусти-
мую мощность двигателя с номинальным на-
пряжением 6 кВ по условиям пуска прн пита-
нии от генератора 2500 кВт при токе возбуж-
дения /В=2/В, ном.
Параметры генератора: 3125 кВ-А, 6,3 кВ,
230 А, х j=0,2,
ха=1,68, Tjq—5 с. Другой нагрузки на гене-
раторе нет.
Напряжение, необходимое для пуска Дви-
гателя, составляет 0,7 номинального напряже-
ния генератора.
По рис. 6.40 для UrlUf .nw— 0,7 и 7в/7В1Вом=
=2,0 определяем пусковую мощность двигателя
Sn/Sr.HOM — 3,65.
Принимая кратность пускового тока дви-
гателя равной 5, произведение ^.homCos фл,асм=
=0,85 и номинальное напряжение 6 кВ, полу-
чаем номинальную мощность двигателя
3,65-3125-0,85-62
Рд.НОМ = -------- ё'о*----- = ^50 нВт.
U2
ном
*а,ном 7,
6,6й
= 1’02^Г = ,0’1с-
5-6,3?
Пусковой ток
. /ном ^с,к
*К и
Х{1 НОМ
660-2100
0,17-6600
— 1230 А.
Допустимое сечение реактора
1230
О = ---------- --------
80 80
(в действительности реактор имеет сечение ме-
ди порядка 70 мм2).
Интересно сравнить результаты расчета с
опытом. На рис. 6.42, а даны кривые напряже-
ния па рассмотренном выше компенсаторе,
кривые тока статора и тока ротора при пуске
через реактор с реактивностью 38 %, отнесен-
ной к мощности компенсатора.
Из рис. 6.42, а следует, что напряжение в
момент пуска составляло 2i80 В. При этом
Пример 7, Определить возможность пусз<а
асинхронного двигателя 875 кВт, 6 кВ от ге-
нератора 2500 кВт при условии, что генератор
имеет нагрузку 1000 кВт при Г/ИагР.ном=6,3 кВ
и cos фпагР=0,8. Данные генератора и двига-
теля приведены в предыдущем примере. Име-
ется автоматический регулятор возбуждения.
При определении условной пусковой мощ-
ности будем учитывать только реактивную
мощность нагрузки.
Максимальное значение тока возбуждения
при работе автоматического регулятора воз-
буждения /в=2/а.Вом- Учитывая наличие пред-
варительной нагрузки, примем, что относи-
тельное напряжение на общих шинах при пус-
ке двигателя должно быть не ниже 0,85.
Определяем пусковую мощность двигате-
ля н нагрузки:
5,5Гз.6.1оо(-^-У+^°А
_ \ 6,0 / 0,8
-2,24,
Ю*
195
или
Хп* = 1/2,24 = 0.0446.
Начальное значение ЭДС за переходным
реактивным сопротивлением
^<?нач. w 1 ° + xd* @нагр, ~
= 1 +0,2-0,6-1000/0,8-3125 = 1,05.
Начальное значение напряжения
6,3-1,05-0,446 „ _ . „
t/Ea4= - ' '----=0,725-6,3 = 4,56
0,2 + 0,446
кВ.
Установившееся зиачеиие напряжения иа
рис. 6.40 дли возбуждения 2/в,воч и условной
пусковой мощности 2,24 равно 0,97, нлн 6,ЗХ
X 0,97=6,1 кВ.
Изменение напряжения во времени
и = 6.1 —(6.1 — 4,S6)e'/1'62,
где постоянная времени
0.2 + 0,446
1,68+0,446
= 1,52 с.
Через /=1,52 с напряжение на шинах бу-
дет равно:
и = 6,1 — (6,1 —4,56)0,368 = 5,53 нВ,
или 5,53/6,3=0,88.
Пуск двигателя 875 кВт в данном случае
при наличии автоматического регулятора воз-
буждения вполне допустим.
6.7. ВЫБОР СХЕМЫ ПУСКА
АСИНХРОННЫХ И СИНХРОННЫХ
ДВИГАТЕЛЕЙ И СИНХРОННЫХ
КОМПЕНСАТОРОВ
Выбор простой и надежной схемы
пуска имеет большое значение для
эксплуатации двигателей и синхрон-
ных компенсаторов.
Наиболее распространенной в на-
стоящее время является простейшая и
вместе с тем наиболее надежная схе-
ма срямого пуска от полного напря-
жение сети; исключение составляют
двигатели с очень тяжелыми условия-
ми пуска или очень мощные двигатели
и компенсаторы, вызывающие при пус-
ке недопустимые снижения напряже-
ния в сети.
В случаях, когда прямой пуск не-
приемлем, напряжение, подводимое к
двигателю при пуске, снижается вклю-
чением в цепь статора реактора или,
в редких случаях, автотрансформато-
ра.
Конструкции всех асинхронных и
синхронных двигателей предусматри-
вают возможность асинхронного пус-
ка. С этой целью у синхронных двига-
телей с частотой вращения до 1500 об/
мин на роторе в явно выраженных по-
люсах расположена пусковая обмотка
в виде замкнутых стержней. Возмож-
ность асинхронного пуска турбодвига-
телей с частотой вращения 3000 об/мин
обеспечивается прежде всего токами в
бочке неявнополюсного ротора, а так-
же медиыми клиньями, заложенными
в пазы.
Выбор пускового реактора (рис.
6.43) для синхронного двигателя и
компенсатора принципиально не от-
личается от выбора реактора для асин-
хронного двигателя (см. § 6.6)’.
Для синхронных двигателей боль-
шой мощности в ряде случаев целесо-
образно применение питания от от-
дельных трансформаторов (блок-тран-
с форматоров) с мощностью блок-
трансформатора, в большинстве слу-
чаев соответствующей мощности уста-
новленного двигателя. В этом случае
за счет отказа от выключателя иа сто-
роне двигателя установка оказывается
весьма простой. Только при частых
тяжелых пусках может потребоваться
увеличение мощности трансформатора
по условию его нагрева (см. § 6.6).
Реакторный пуск и пуск при работе
по схеме блока двигатель—трансфор-
матор имеет неоспоримые преимущест-
ва перед пуском через автотрансфор-
матор. Например, напряжение на дви-
гателе или компенсаторе при пуске
через постоянно включенные реактор
и трансформатор по мере снижения
пускового тока плавно возрастает, и в
конце пуска это напряжение незначи-
тельно отличается от номинального.
Система
возбуждения.-
Рис. 6.43. Схема реакторного пуска синхрон-
ного двигателя нлн компенсатора
1 Определение необходимости тежопгранлчяваю-
1дих устройств и их выбор см. также в [21. гл. 3].
(Прим, ред.)
196
Рис. 6.44. Схемы пря-
мого пуска синхрон-
ных электродвигате-
лей с электромашин-
ными возбудителями
постоянного тока:
п — обмотка ротора глу-
хо подключена к якорю
возбудителя; б — вклю-
чена на разрядный рези-
стор: в — включена на
якорь возбудителя через
разрядный резистор
Поэтому при реакторном пуске шунти-
рование реактора происходит практи-
чески без толчка (см., например, рис.
6.25, б) в отличие от автотрансфор-
маторного пуска, где приходится при-
нимать специальные меры, усложня-
ющие схему пуска, для ограничения
толчка тока при переключении от пус-
кового напряжения на полное напря-
жение сети.
Требования некоторых трансформа-
торных заводов об ограничении пуско-
вого тока, приводящие к завышению
мощности блок-трансформатора, исхо-
дя из необходимости ограничения ди-
намических усилий на обмотке, следу-
ет считать неоправданными. Согласно
ГОСТ обмотка трансформатора дол-
жна выдерживать без повреждения то-
ки короткого замыкания на выводах
любой из его обмоток при номиналь-
ном напряжении на другой. Эти токи
заведомо существенно больше токов
при пуске двигателя, соизмеримого по
мощности с трансформатором. Дина-
мические усилия в трансформаторе,
пропорциональные квадрату тока, по-
лучаются соответственно значительно
меньшими гарантированных. Практи-
ка применения схемы блоков транс-
форматор—двигатель вполне себя оп-
равдала.
При применении электромашинной
системы возбуждения, как можно за-
ключить из рассматриваемых выше
процессов в этих системах при пуске
двигателя (компенсатора), предпочте-
ние следует отдавать схемам глухого
подключения возбудителя к ротору
двигателя (компенсатора), если это
допустимо по условиям пуска [32].
Сопротивление в цепи возбуждения
возбудителя при этом должно быть
подобрано таким образом, чтобы при
номинальной угловой скорости напря-
жение на двигателе (компенсаторе),
отключенном от сети, было равно на-
пряжению сети или несколько боль-
ше1. Пуск двигателя (компенсатора)
происходит следующим образом:
включается главный выключатель,
двигатель (компенсатор) разворачи-
вается, возбуждается н втягивается в
синхронизм плавно, без толчков и без
вмешательства персонала или каких-
либо элементов автоматики, дающих
команду на возбуждение машины.
Эта схема применима для двигате-
лей и компенсаторов, как имеющих
возбудитель на одном валу, так и пи-
тающихся от отдельно стоящего дви-
гатель-генератор а. В последнем случае
пуск агрегата возбуждения должен
осуществляться одновременно с пус-
ком двигателя или компенсатора за-
мыканием блок-коитактов выключате-
ля основного двигателя.
При прямом включении в сеть об-
мотки статора и гл ухоподключенном
возбудителе схема пуска синхронной
машины (рис. 6,44. а) также проста,
как и схема пуска асинхронного двига-
теля с короткозамкнутым ротором.
Проведенные испытания и накоп-
ленный опыт эксплуатации вместе с
тем показывают, что область примене-
ния схемы пуска синхронных двигате-
лей с постоянно подключенным возбу-
дителем ограничивается практически
двигателями относительно небольшой
мощности, — как правило, не свыше
2000 кВт. Схема непригодна для дви-
гателей, запускающихся с нагрузкой
выше 0,4—0,6 номинальной мощности,
из-за провала в кривой асинхронного
момента в области малых скольжений
1 Здесь имеется в виду электромашянный возбу-
дитель без автоматического регулирования. В общем
случае указанное положение относится к устанке
регулирующего органа системы возбуждения (Прни.
ред.)
197
(см. гл. 2) и малоэффективна для дви-
гателей, у которых контактор возбуж-
дения оказывается необходимым для
гашения поля или осуществления схе-
мы ресинхронизации. Например, про-
веденные исследования [42] показа-
ли неприемлимость данной схемы на
синхронных двигателях СДМ-20-49-
60, 2000 кВт, применяемых для приво-
да шаровых углеразмольных мельниц
Ш-50 и Ш-50А на энергоблоках 300
МВт мощных тепловых электростан-
ций. Кривая вращающего момента
при пуске этих мельниц имеет резко
выраженный пульсирующий характер,
в результате чего на вал воздействует
знакопеременная нагрузка. При вклю-
чении двигателя с глухоподключен-
ным к ротору возбудителем кривая
вращающего момента имеет особо не-
благоприятный характер, поэтому ус-
пешный пуск таких агрегатов оказал-
ся возможным только по схеме с вклю-
чением обмотки ротора на якорь воз-
будителя через разрядный резистор
Rpasp = (5-5-10) ЯРот (рис. 6.44, в).
Вновь проектируемые синхронные
двигатели желательно рассчитывать
таким образом, чтобы обеспечивалось
расширение области применения пуска
с глухоподключенным возбудителем
при полной нагрузке в конце пуска;
это должно обеспечиваться выбранной
пусковой обмоткой, влияние которой
на общую стоимость двигателя обычно
невелико.
В ряде случаев на действующих
предприятиях, имевших синхронные
двигатели со схемой реакторного или
автотрансформаторного пуска, оказа-
лось целесообразным и возможным пе-
рейти к схеме прямого пуска.
При прямом пуске механические
усилия в лобовых частях обмотки ста-
тора асинхронных и синхронных дви-
гателей и компенсаторов возрастают,
но, как правило, за счет падения на-
пряжения в сети оказываются меньше
тех усилий, которые получаются при
близких коротких замыканиях.
Большинство электродвигателей
допустимо переводить на прямой пуск
без дополнительного усиления крепле-
ний лобовых частей обмоток. Однако
в отдельных случаях (большие крат-
ности пускового тока при малых сни-
жениях напряжения сети, слабое за-
крепление лобовых частей обмоток
статора) такое усиление может потре-
боваться. С этой целью можно реко-
мендовать установку дополнительных
дистанционных распорок и взаимную
перевязку соседних лобовых частей в
местах ранее установленных и допол-
нительных распорок.
Из практики эксплуатации извест-
ны многочисленные случаи примене-
ния прямого пуска для асинхронных
двигателей с фазным ротором, переде-
ланных на короткозамкнутые или пус-
каемые без реостата в цепи ротора, а
также для двигателей, ранее пускав-
шихся от автотрансформатора или че-
рез реактор. Опыт подтвердил целесо-
образность перевода этих двигателей
на прямой пуск.
Пуск без нагрузки двухскоростных
электродвигателей следует всегда про-
изводить на меньшей угловой скоро-
сти. Если необходима работа иа боль-
шей угловой скорости, то следует пос-
ле пуска двигателя на меньшей угло-
вой скорости переключить вращающий-
ся двигатель на большую угловую
скорость. При таком пуске суммарные
потери за время пуска будут иметь
минимальное значение.
6.8. САМОЗАПУСК
АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Проведенный выше анализ влия-
ния различных факторов на режимы
работы двигателей при разгоне и вы-
беге, а также полученные расчетные
выражения для определения напря-
жения в сети и предельно допустимой
мощности пускаемых двигателей поз-
воляют более подробно рассмотреть
процесс их самозапуска после крат-
ковременного перерыва питания или
глубокого снижения напряжения и оп-
ределить условия, обеспечивающие
при этом восстановление нормальной
работы механизмов.
Для определения восстанавливаю-
щегося напряжения на группе двига-
телей через время t=tmv после нача-
ла выбега, вызванного отключением от
источника питания или возникнове-
нием отключаемого защитой коротко-
го замыкания в сети, необходимо най-
ти эквивалентное сопротивление груп-
пы в этот момент времени.
Поскольку основное изменение со-
противлений асинхронных двигателей
происходит при небольших скольже-
ниях (обычно в пределах до s=0,14-
-4-0,15), а их выбег при одинаковых
относительных загрузках и значениях
198
Tj независимо от типа механизма в на-
чальной части происходит практичес-
ки одинаково (см. рис. 6.5), то и изме-
нения сопротивлений двигателей отли-
чаются друг от друга практически не-
существенно. Разница в изменении
сопротивлений и условной кратности
тока двигателя делается заметной
только при повышенном времени вы-
бега (рис. 6.45).
Кривые, приведенные на рис 6 45,
подтверждают, естественно, вывод о
том, что быстрое отключение коротких
замыканий илн восстановление пита-
ния после отключения источника обес-
печивают меньшее значение условной
кратности тока, а следовательно, бо-
лее высокие значения восстанавливаю-
щегося напряжения и избыточного мо-
мента двигателя. При этом повышает-
ся возможность обеспечения самоза-
пуска всех подключенных двигателей,
поскольку при уменьшении ka согласно
(6.69) повышается предельно допусти-
мая мощность двигателей. Замедлен-
ное отключение коротких замыканий
нли восстановление питания после от-
ключения источника приводят к сни-
жению восстанавливающегося напря-
жения, что при увеличенном скольже-
нии затягивает время самозапуска и в
ряде случаев может заставить отклю-
чить часть двигателей, чтобы обеспе-
чить разгон остальных.
Для определения неотключаемой
мощности по условию самозапуска не-
обходимо иметь данные об изменении
момента сопротивления механизма,
вращающего момента двигателей н их
сопротивления (или условной кратно-
сти тока kp) в зависимости от сколь-
жения, а также необходимо знать вре-
мя ускорения т/ каждого агрегата.
Рис. 6.45. Кривые изменения сопротивления
(1) и кратности тока двигателя (2) в зависи-
мости от времени при выбеге для механизмов
с постоянным и с вентиляторным моментом
сопротивления прн Tj=5 с и полной началь-
ной загрузке. Параметры двигателя: zKi==0,2;
0,196; Skp^O,!; Г1=Г2»
Расчеты по определению длитель-
ности процесса самозапуска и обеспе-
чения успешного самозапуска двига-
телей производятся в следующем по-
рядке:
а) Зная продолжительность корот-
кого замыкания в сети и напряжение
на двигателях во время короткого за-
мыкания либо продолжительность пе-
рерыва питания йкр при отключении
секции с группой двигателей, по кри-
вым выбега (группового или одиноч-
ного) находим скольжение s=sB и со-
противление двигателей (или значение
ka) к моменту отключения короткого
замыкания или повторного включе-
ния секции. По сопротивлению дви-
гателей определяем общее эквивалент-
ное сопротивление всех двигателей.
б) Зная напряжение и сопротивле-
ние источника питания, определяем
восстанавливающееся напряжение на
двигателях в момент отключения ко-
роткого замыкания или повторного
включения отключившейся секции. Ес-
ли вращающий момент двигателя при
этом напряжении больше, чем момент
сопротивления у приводимого им ме-
ханизма при скольжении s=sB, то са-
мозапуск данного двигателя возмо-
жен. Если же вращающий момент дви-
гателя меньше, чем момент сопротив-
ления приводимого им механизма при
s=sB, то самозапуск не обеспечен и
двигатель будет снижать свою часто-
ту вращения.
в) Если в результате расчета уста-
новлено, что восстанавливающееся на-
пряжение недостаточно для обеспече-
ния самозапуска всех двигателей, то
следует провести расчет при отключе-
нии неответственных двигателей, что-
бы проверить возможность разгона от-
ветственных механизмов. При этом,
несмотря на соответствующее повыше-
ние восстанавливающегося напряже-
ния, оно может оказаться недостаточ-
ным для одновременного разгона всех
включенных двигателей. В таком слу-
чае следует рассмотреть возможность
каскадного самозапуска. Каскадный
самозапуск характеризуется последо-
вательным разгоном механизмов по
мере повышения напряжения на шинах
за счет увеличения сопротивления тех
двигателей, которые уже достигли нор-
мальной частоты вращения при мень-
ших напряжениях.
г) По избыточным моментам при со-
ответствующем напряжении на шинах
199
и значениям времен ускорения отдель-
ных агрегатов определяется их время
разгона до нормальной скорости (в со-
ответствии с данными, изложенными в
§ 6.2—6.4).
д) Рассчитывается дополнительное
превышение температуры за время са-
мозапуска по действительному току
двигателя и сравнивается с допусти-
мым превышением температуры при
кратковременных перегрузках (соглас-
но расчетам, приведенным в гл. 5).
Определение допустимой мощности
неотключаемых двигателей при само-
запуске имеет особенно большое зна-
чение для собственных нужд электри-
ческих станций. Подавляющее боль-
шинство ответственных потребителей
собственных нужд представляет собой
насосы, вентиляторы и дымососы, мо-
мент сопротивления которых можно
принять изменяющимся по закону
~ Мс/Мс,вои = 0,15 + 0,85 (1 — s)a,
за исключением питательных насосов,
у которых показатель степени во вто-
ром члене выше 2.
На рис. 6.46 даны кривые вращаю-
щего момента двигателей различных
типов (в долях номинального момента
сопротивления механизма), построен-
ные при кратности перегрузочного мо-
ь А2
мента 6 = —"ом-“ =1,0, и кривая мо-
мента сопротивления вентиляторного
типа.
Из сопоставления кривых следует,
что для обеспечения самозапуска при
любых скольжениях достаточно иметь
6=0,9. Тогда для двигателя, имеющего
&ном=2-^2,5, при загрузке £3=0,8
*“ = /2^ = 0’60*°-53-
Для обеспечения самозапуска
асинхронных двигателей все синхрон-
ные машины Должны быть оборудова-
ны устройством автоматического регу-
лирования возбуждения. Эти устрой-
ства должны при понижении напряже-
ния увеличивать ток возбуждения до
потолочного значения.
Рассмотрим несколько примеров по
расчету самозапуска при питании дви-
гателей от системы неограниченной
мощности.
Пример 1. Восемь асинхронных двигате-
лей по 180 кВт. 6000 В, 23 А, 750 об/мин пи-
таются через реактор 200 А, 6 кВ, 6 %. Вре-
мя ускорения агрегата tj=5 с.
Номинальное напряжение перед реакто-
ром 6,3 кВ. Двигатели приводят в движение
механизмы с постоянным моментом сопротив-
ления и работают с полной нагрузкой. Кривые
выбега при разных значениях напряжения да-
ны на рис. 6.18, кривые вращающего момента
и кратности тока — на рис. 6.19.
а) Определим возможность самозапуска
после отключения короткого замыкания через
0,7 и 2,1 с. Напряжение при коротком замы-
кании равно нулю.
Расчет для времени 0,7 с. По кри-
вой выбега рис. 6.18 для времени 0.7 с, или
tu=0,7/5=0,14, двигатели будут иметь сколь-
жение около 0,15. При этом скольжении
кратность тока по рис. 6.19 равна 3,35.
Сопротивление всех двигателей, отнесен-
ное к номинальному току реактора при t/6=
=6 кВ,
хд = 200/3,35-8,23 = 0,325.
Напряжение иа двигателях при самозапус-
ке согласно § 6.6
ид =
илн
*д+*р
6,300-0,325
0,325 + 0.06
= 5330 В,
5330
6000
= 0,89.
и д, ном
Из рис. 6.19 следует, что при напряжении
0,89 номинального и скольжении 0,15 самоза-
пуск возможен, так как вращающий момент
двигателя превышает момент сопротивления
примерно на 57 %.
Для времени 2 с По кривой выбега
рис. 6.18 скольжение через 2 с, или *и=2/5=
=0,4, равно около 0,43. Кратность тока по рис.
6.19 Лд=4, а сопротивление всех двигателей
200
4-8-23
= 0,27.
Напряжение при самозапуске
U 6300-0,27
д —0,27 + 0,06
= 5150 В,
или
U„ 5150
ки = V, = =0,86.
б^д.ном 6000
При напряжении 0,86 и скольжении 0,43
момент из рис. 6.19 будет меньше момента со-
Рис. 6.46. Кривые вращающего момента для
различных типов двигателей (1—3) при
'=6ИОМА“/А3=1 и момента сопротивления вен-
тиляторного типа (4) в зависимости от сколь-
жения
200
противления и двигатели остановятся. Для
обеспечения самозалуска необходимо отклю-
чить часть двигателей.
Если принять, что вращающий момент
двигателей в момент отключения короткого
замыкания должен быть на 10 % больше мо-
мента сопротивления, то по рис. 6.19 напря-
жение должно быть 0,93, илн 5600 Б. Для то-
го чтобы получить это значение напряжения,
сопротивление двигателей должно быть равно:
хрУд___
Ui(l-Ua/UJ
0,06-5600
I 5600 X
6300 1 —-)
6300 /
= 0,46
Р;НОМ
и число оставшихся двигателей
^р.ном 2Q0 4 7
Льном 4-23-0,46
Таким образом, при времени короткого
замыкания 2 с могут развернуться только че-
тыре двигателя, т. е. 50 % всей нагрузки.
Продолжительность разгона от скольже-
ния s=0,43 до нормальной угловой скорости,
найденная по кривой избыточного момента
при йц=0,945 (при N=4)t равна tv— 1,4-5=
=7 с.
б) Определим теперь возможность само-
запуска после снижения напряжения до
3000 Б на двигателях в течение 3 с и после-
дующего восстановления напряжения до но-
минального перед реактором.
Из рнс. 6.18,а определяем скольжение,
которое будет иметь двигатель к моменту вос-
становления напряжения для tu=3/5=0,6 и
t/до. =0,5; 5=0,33. Для этого значения сколь-
жения кратность тока йд=3,8.
Сопротивление всех двигателей в относи-
тельных единицах
200
3,8-8,23
= 0,286.
Напряжение иа двигателях при самоза-
пуске
6300-0,286
д“ 0,286 + 0,06 ~ 5200 Б'
или
£/д 5200
-----=--= —-------= 0,87.
^д.ном 6000
Из рис. 6.19 следует, что при s=0,33 и
fct=0,87 вращающий момент двигателя прак-
тически равен моменту сопротивления. Поэто-
му нужно отключить часть двигателей. Если
принять, что вращающий момент должен быть
на 10 % больше момента сопротивления, вос-
станавливающееся напряжение должно быть
равно 5340 В (см. рис. 6.19).
Для этого значения напряжения сопротив-
ление двигателей должно быть равно:
0,06-5340
------= 0,338
5400 \
6300 1 — -------)
6300 /
и число оставшихся двигателей
Л’ «200/3,8-23-0,338 = 6,8.
Рис. 6.47. Изменение момента и пускового то-
ка в зависимости от скольжения
Следовательно, шесть двигателей могут
быть сохранены н работе, т. е. 75 % всей на-
грузки.
Из данных примеров следует, насколько
важно быстрое отключение короткого замы-
кания.
Продолжительность разгона от скольже-
ния 5=0,33 до нормальной угловой скорости
при
0,38
*“ = 1 °S08 + 0,08 = °'905 ("рН N = 6>
составляет /₽=0,8-5=4 с.
Пример 2. К трансформатору 7500 кБ-А,
«к—10%, 10,5/3,3 кВ, 412/1310 А подключены
восемь асинхронных двигателей с двойной бе-
личьей клеткой, 985 об/мии, 750 кВт, 3 кВ,
173 А, кратность начального пускового тока
6,2, номинальное скольжение 1,5 %.
Двигатели приводят в движение механиз-
мы с постоянным моментом сопротивления,
равным номинальному моменту двигателя.
Бремя ускорения агрегата 4 с. Определить
мощность иеотключаемых двигателей по усло-
вию самозапуска в зависимости от времени
короткого замыкания. Кривые вращающего
момента н пускового тока двигателя при
нормальном напряжении даны на рис. 6.47.
а) Время короткого замыкания /=0,25 с.
Скольжение согласно § 6.2
s = 1.0-0,25/4 4- 0,015 = 0,077.
Кратность тока 3,7.
Условная пусковая мощность
„ 8 Ез* 173*3,7*3 / 3,3 V
S“=--------------------(—) =4'27:
ИЛН
Хд=$б/$и = 1/4,27 = 0,235.
Остаточное напряжение на двигателях
t/n 3,3 0,235
---------=------------------- = 0,775.
^д,ном 3 0,1 0,235
Момент при скольжении 8=0,077 при на-
пряжении 0,775 номинального
Л4е = 2,17-0.775®= 1,3,
где 2,17 — момент двигателя при номинальном
напряжении и скольжении 5=0,077.
Все двигатели могут развернуться
201
б) Время короткого замыкания £=0,7 с.
Скольжение к моменту отключения корот-
кого замыкания
s = 1.0-0,7/44-0,015 = 0,19.
Кратность тока 5,1.
Условная пусковая мощность
So
—^=4,27-5.1/3,7 = 5,9
или Хд = Sg/Sn = 0,17.
Остаточное напряжение на двигателях
UR 3.3 0,17
------5-= —-----------------= 0,693.
^д.ном 3 0,14-0,17
Момент при напряжении 0,693 номиналь-
ного и скольжении s=0,19
Л4, = 2,11-0,693?= 1,02.
Так как вращающий момент двигателя
получился почти равным моменту сопротивле-
ния, необходимо отключить часть двигателей.
Для определения числа двигателей, которые
могут быть оставлены в работе, будем исходить
из условия, чтобы при данном скольжении
момент двигателя превышал на 10 % момент
сопротивления. Из этого условия можно оп-
ределить напряжение на двигателях и сопро-
тивление двигателей, отнесенное к мощности
трансформатора.
Из уравнений
= Уд _ 3,3 1
t/д НОМ 3 1 4" Хвш
1
= 14-O,isn# ;
_____1 пУзт-з-кд-з.з»
х.. ~ 7500-3»
определяем
/З-173-3,3-0,1*д*ы
76 А _ 3М
кдки \ 3,3 /
В нашем случае
*«= |/Г’^7Г = °-725; *л = 5,1.
следовательно, .
3-0,725 \ „
3,3 '
Таким образом, один двигатель должен
быть отключен.
Время разгона до нормальной частоты
вращения составит примерно 2.8 с.
в) Время короткого замыкания 1,4 с.
Скольжение
s= 1-1,4/4 + 0,015 = 0.36.
При этом скольжения момент при номи-
нальном напряжении равен 1,88 н кратность
тока 5,75,
Для того чтобы момент при этом сколь-
жении был равен 1,1, требуется напряжение
на двигателях
ku= К1,1/1,88 = 0 77.
Число оставшихся двигателей
76 / 3-0,77\ _
N- ——--------f 1 —---— I = 5,15.
5,75-0,77 \ 3,3 )
Следовательно, нужно отключить три
двигателя.
Еслн двигатели будут полностью останов-
лены, то в этом случае напряжение должно
быть равно:
76 / 3-0,86\
— 6,2-0.86 (1— 3.3 J-3,151
т. е. пять двигателей должны быть отключены.
Пример 3. К трансформатору 7500 кВ-А,
Ю %, 10,5/3,3 кВ, 412/110 А подключены во-
семь асинхронных двигателей 985 об/мни,
750 кВт, 3 кВ, 173 А, кратность пускового то-
ка 4,15, отношение начального момента к но-
минальному равно 1,0, максимального к но-
минальному равно 2,1. Двигатели приводят в
движение вентиляторы. Начальный момент
вентилятора равен 0,1 номинального момента
двигателя. Коэффициент загрузки равен 0,85.
Время ускорения агрегата tj=6 с. Определить
возможность пуска этих двигателей после от-
ключения короткого замыкания продолжитель-
ностью 2 с.
На рнс, 6.48 даны кривые вращающего мо-
мента двигателя и момента сопротивления ме-
ханизма.
По универсальным кривым выбега (см.
рнс. 6.5) определяем скольжение, которое бу-
дет иметь двигатель в момент отключения ко-
роткого замыкания длительностью /«=2 с.
Так как двигатель работал до момента
короткого замыкания с нагрузкой 0,85 номи-
нальной, а кривые рнс. 6.5 построены для вы-
бега при полной нагрузке, то относительное
время в нашем случае будет:
2-0,85
6
0,284.
Рис. 6.48. Кривые вращающего момента дви-
гателя при разных напряжениях сети и мо-
мента сопротивления в зависимости от сколь-
жения
202
Из рнс. 6.5 для tu=0,284 определяем сколь-
жение, равное 0,25, и кратность пускового то-
ка с учетом формул (1.14), (1.16):
Условная пусковая мощность подключен-
ных двигателей, отнесенная к мощности
трансформатора,
„ 8 Г^З-173-3-4 / 3,3
°* - 7500 ( 3 ) = 4'7’
Для сопротивления трансформатора ик==
= 10 % и пусковой мощности SB*=4,7 опреде-
ляем напряжение:
3 3
С/д=1+0Л-4,7 =0-68'3-3 = 2-25 кВ,
или
^д/^щном = 2,25/3 = 0,75.
Для этого напряжения на рис. 6.48 по-
строена одна из кривых момента двигателя и
графически найдено время разгона fp=3,5 с.
Определим для этого же примера возмож-
ность самозапуска для случая, когда двигате-
ли полностью затормозились. В этом случае
условная пусковая мощность в относительных
единицах
Sn# —
8Гз-173-3-4,15 / 3,3 (2
------™---------(.—) =4’9-
Напряжение иа двигателях прн пуске
3,3
14-0,1-4,9
^д =
»2,2 кВ
или 6/д/£/д ном = 2,2/3 = 0,74.
Для этого значения напряжения определе-
но время разгона /п~17 с.
В действительности время пуска будет не-
сколько меньше, так как сопротивление дви-
гателей не будет оставаться постоянным.
Действительная кратность тока двигателей
knu = 4,15-0,74 = 3,06.
Принимая номинальную плотность тока
/цом=5 А/мм2 и пренебрегая изменением тока
за время пуска, из формулы (5.17) получаем
дополнительный нагрев обмотки статора за
время разгона:
52
ДО = О1 — йыоМ = —- (3,06? — 1) 17 = 28 °C.
Из данного примера следует, что даже при
полной остановке двигателей и их суммарной
мощности, почти равной мощности питающего
трансформатора, самозапуск является вполне
допустимым. Это объясняется главным обра-
зом тем, что механизмы имеют момент сопро-
тивления вентиляторного типа.
Пример 4. Три группы двигателей (6ВОм==
=2,5; SKp=0,15; k=5) мощностью каждая
2250 кВ-А питаются от сети через сопротивле-
ние Хвш=0,165, отнесенное к мощности транс-
форматора 7500 кВ-А. Момент сопротивления—
вентиляторный: Л1с*=0,15+0,85(1—з)2. Вре-
мя ускорения для первой группы Тл=2с, для
второй tjB=5 с, для третьей группы Tjg—10 с.
Рис. 6.49. Кривые изменения скольжения и пу-
скового тока при самозапуске электродвига-
телей
Рис. 6.50. Кривые вращающего момента (7)
двигателя и момента сопротивления (2) в за-
висимости от скольжения
Определить нзмснение скольжения, напря-
жения я пусковых токов в зависимости от
времени при самозапуске после отключения
короткого замыкания длительностью 3 с.
По кривым рис. 6.5 определяем измене-
ние скольжения прн выбеге во время коротко-
го замыкания для каждой группы двигателей.
Например, для первой группы относительное
время выбега /й-=2/3=1,5.
По кривым рис. 6.5 определяем для этого
значения tv скольжение s=0,69. Кривые из-
менения скольжения от времени даны на рис.
6.49.
К моменту отключения короткого замыка-
ния определяем кратность пускового тока
двигателей по рис 6.27:
для первой группы ^=0,69, kt =5-0,98=4,9;
для второй группы S2 = 0,42 fea=5-0,93 =
=4,65;
для третьей группы ss=0,27; Аа=5-0,89=
= 4,45.
Условная пусковая мощность всех двига-
телей
_ 2250 (4,9 4-4,65-}-4,45)
™---------------=4-2-
По расчету напряжение при самозапуске в
момент отключения короткого замыкания 6vjeT
Av-0,67.
203
Величина Ькоыкц =0,672-2,Б—1,12. На рис.
6.50 дана кривая вращающего момента в за*
внснмости от скольжения, построенная для
6ufe„=l,12. На том же рис. 6.50 дана кривая
момента сопротивления. Для первой группы,
двигателей $1=0,69 и ipl=4,4 с. Для второй
aiynn« 32=0,42 н время разбега /р2=5,7 с.
ля третьей группы ss=0,27 н время разбега
грз=6,3 с.
На рис. 6.49 даны кривые токов двигате-
лей за время самозапуска. Времена запуска
для всех трех групп двигателей, имеющих
различные значения времени ускорения, прак-
тически отличаются весьма незначительно. Это
объясняется тем, что агрегаты, имеющие
меньшие значения Tj, хотя и быстрее тормо-
зятся, ио зато и быстрее разворачиваются.
Пунктирная кривая представляет ток транс-
форматора.
6.9. НЕКОТОРЫЕ ОСОБЕННОСТИ
самозапуска и ресинхронизации
СИНХРОННЫХ ДВИГАТЕЛЕЙ
Принципиальное отличие самоэа-
пуска синхронных двигателей от само-
запуска асинхронных двигателей за-
ключается в наличии у первых возбуж-
дения.
Для двигателя, выпавшего из син-
хронизма н снизившего угловую ско-
рость за время короткого замыкания в
сети или перерыва питания, ток воз-
буждения к моменту отключения ко-
роткого замыкания при отсутствии
форсировки возбуждения всегда не-
сколько меньше тока предшествующего
режима.
При сравнительно продолжитель-
ных коротких замыканиях с глубоким
понижением напряжения угловая ско-
рость двигателя, имеющего возбуди-
тель на собственном валу, может сни-
зиться настолько значительно, что ток
возбуждения будет практически равен
нулю. В этом случае после восстанов-
ления напряжения самозапуск будет
происходить так же, как при асин-
хронном пуске с глухоподключеиным
возбудителем.
В тех случаях, когда синхронный
двигатель во время короткого замы-
кания или перерыва питания выпадет
из синхронизма, в зависимости от
скольжения наличие тока возбужде-
ния может как способствовать, так и
препятствовать в некоторых случаях
втягиванию в синхронизм.
В связи с этим необходимо остано-
виться на вопросе о целесообразности
применения форсировки возбуждения
во время коротких замыканий. Если
бы все короткие замыкания сопровож-
дались снижением напряжения на вы-
водах синхронных двигателей практи-
чески до нуля и прн этом отключа-
лись бы с выдержкой времени поряд-
ка нескольких секунд, то применение
форсировки возбуждения было бы яв-
но нецелесообразно, так как двигате-
ли все равно бы выпадали из синхро-
низма. Но в условиях эксплуатации
при многих коротких замыканиях на-
пряжение не снижается столь значи-
тельно, а поэтому применение форси-
ровки возбуждения может быть весьма
эффективным. Она позволяет сохра-
нить во многих случаях в синхронизме
синхронные двигатели и обеспечить
более быстрое восстановление напря-
жения после отключения короткого
замыкания, обеспечивая самозапуск
работающих параллельно асинхрон-
ных двигателей при восстановлении
напряжения на секции.
Для иллюстрации на рис. 6.51 при-
ведены результаты обработки двух ос-
циллограмм восстановления напряже-
ния в узле нагрузок. Синхронный дви-
гатель 1610 кВ-А, 3 кВ с отдельно
стоящим возбудителем был присоеди-
нен к трансформатору 4200 кВ-А в од-
ном случае и 5600 кВ-А — в другом.
При действии АВР с выдержкой вре-
мени 3,9 с в одном случае и 3,6 с в
другом подключалась нагрузка, рав-
ная соответственно 0,98 номинальной
мощности трансформатора при транс-
форматоре 5600 кВ-А и 1,18 при
4200 кВ-А. В одном случае использо-
вался свой агрегат возбуждения с
асинхронным двигателем 37 кВт,
Рис. 6.51. Восстановление напряжения на сек-
ции с синхронным двигателем 1610 кВ-А, име-
ющим два разных отдельно стоящих электро-
машинных возбудителя, при набросе нагруз-
ки, вызванном действием АВР (fnep~
«3,54-4,0 с):
--------при возбуждении от агрегата с приводным
двигателем мощностью &0 кВт;-------— при воз-
буждении от агрегата с приводным двигателем мощ-
ностью 37 кВт
204
1440 об/мин и генератором 33 кВт,
1460 об/мин с «потолком» возбужде-
ния 1,5 номинального тока возбужде-
ния двигателя н в другом — резервный
агрегат возбуждения с асинхронным
двигателем 80 кВт, 975 об/мин и с ге-
нератором 120 кВт, 975 об/мин с под-
возбудителем 3 кВт. Во втором случае
«потолок» возбуждения составил 2,4
номинального тока возбуждения дви-
гателя. Агрегаты возбуждения пита-
лись от того же трансформатора. Аг-
рёгат возбуждения с асинхронным дви-
гателем 37 кВт при понижении напря-
жения, вызванном иабросом нагрузки,
резко снизил свою угловую скорость,
и, несмотря на форсировку возбужде-
ния, ток возбуждения снизился. Поэто-
му напряжение в узле нагрузок в те-
чение 3 с держалось на уровне 2 кВ,
или 0,65 номинального, и только за
счет уменьшения тока самозапуска,
потребляемого другими двигателями
нагрузки по мере их разворота, напря-
жение начало быстро повышаться.
Агрегат возбуждения с более мощным
асинхронным двигателем 80 кВт обес-
печил достаточную форсировку воз-
буждения, и напряжение на шинах
сразу начало увеличиваться, что спо-
собствовало более быстрому оконча-
нию самозапуска всех двигателей.
Иногда высказывается мнение, что
форсировка возбуждения синхронных
двигателей неэффективна, так как за
время снижения напряжения сети при
коротких замыканиях форсировка не
«успеет» существенным образом повы-
сить ток возбуждения из-за сравни-
тельно медленного его нарастания во
времени.
В действительности в момент ко-
роткого замыкания ток в обмотке воз-
буждения сразу увеличивается, так как
в этой обмотке наводится переходный
ток, который затем затухает с постоян-
ной времени xj , которая при близких
коротких замыканиях значительно
меньше, чем т,^а (при разомкнутой об-
мотке статора). С той же постоянной
времени x'd увеличивается составляю-
щая тока возбуждения, обусловленная
форсировкой. Полный ток возбужде-
ния есть сумма переходного тока, на-
веденного в обмотке возбуждения при
коротком замыкании, и тока, даваемо-
го возбудителем, и поэтому изменение
полного тока при наличии форсировки
происходит более благоприятно, чем
это было бы при отсутствии форсиров-
ки. Для иллюстрации в табл. 6.6 при-
ведены значения тока возбуждения
синхронного двигателя 10300 кВ-А,
имеющего та — 1,06 с, без форсировки
возбуждения и с форсировкой возбуж-
дения.
Таблица 6.6
о 0.5 1,0 1,6 2,0 3.0
Ток возбужде- ния без фор- сировки 1,88 1,58 1,34 1,2 1,07
То же с форси- ровкой 1,94 1,91 1,6 1,58 1,58
К сказанному следует добавить,
что эффективность форсировки нельзя
оценивать только по ее действию в
период перерыва электроснабжения
или снижения напряжения сети при
коротких замыканиях; гораздо сущест-
веннее последующий период восста-
новления напряжения.
Следует при этом иметь в виду, что
форсировка возбуждения эффективна,
если остаточное напряжение при ко-
ротком замыкании больше (0,4—
0,5) С/ном и время отключения коротко-
го замыкаиня мало (в зависимости от
параметров системы возбуждения —
не более 0,2—0,5 с). При £7Ост<0,4
t/ном и большем времени короткого за-
мыкания форсировка возбуждения на
синхронных двигателях может приво-
дить к дополнительному торможению
двигателя за счет возрастания генера-
торного тормозящего момента, обус-
ловленного активными сопротивления-
ми в цепи статора, в том числе и
сопротивлением параллельно включен-
ной другой нагрузки. Это может отри-
цательно влиять на условия сохране-
ния синхронизма н особенно ресинхро-
низации. В таких случаях может
сказаться целесообразным снятие на
некоторое время возбуждения у двига-
телей, выпавших из синхронизма; воз-
буждение восстанавливается (в том
числе и с форсировкой) по достиже-
нии двигателями подсиихронной ско-
рости1.
1 Подробный математический анализ изменения
скорости и угла синхронного двигателя яри кратко-
временной потере питания, изменения токов в обмот-
ках и электромагнитных моментов вращения, возни-
кающих в синхронных двигателях прн самозапуске.
н условий допустимости несинхронного включения
синхронных двигателей изложен в [21, гл. 4].
(Прим, ред.)
206
Испытания, проведенные канд.
техн, наук Л. С. Линдорфом на многих
синхронных двигателях, показали, что
при продолжительности короткого за-
мыкания не более 0,5 с в большинстве
случаев двигатели либо не успевают
выпасть из синхронизма, либо если и
выпадают, то после восстановления
напряжения успешно втягиваются в
синхронизм.
Как указывалось выше, большое
значение для успешного втягивания в
синхронизм выпавшего из синхрониз-
ма синхронного двигателя имеет вос-
станавливающееся напряжение. Если
после отключения короткого замыка-
ния или восстановления кратковре-
менно нарушенного питания напряже-
ние будет значительно ниже номиналь-
ного, двигатель может не втянуться в
синхронизм.
Для иллюстрации на рис. 6.52 по-
казано поведение синхронного двига-
теля 3100 кВ-А, 6 кВ прн внезапном
понижении напряжения до 0,4 при ко-
ротком замыкании в сети. Форсировка
возбуждения отсутствует. К моменту
отключения короткого замыкания
(около 0,55 с) двигатель выпадает из
синхронизма, но после восстановле-
ния напряжения до 0,95 быстро втяги-
вается в синхронизм.
Тот же двигатель прн значении
восстанавливающегося напряжения
около 0,45 номинального к моменту от-
ключения короткого замыкания выпал
из синхронизма и после восстановле-
ния напряжения в синхронизм не во-
шел. Для обеспечения вхождения в
синхронизм потребовалось снижение
нагрузки двигателя.
Рис. 6.52. Изменение токов возбуждения и
статора синхронного двигателя СМ-180/12-8,
3100 кВ-А, 6 кВ при коротком замыкании за
реактором 6 кВ, 300 А, 3,5 %
Следует различать три случая
вхождения двигателей в синхронизм в
процессе ресинхронизации:
а) вхождение в синхронизм обес-
печивается без принятия каких-либо
специальных мер, за исключением фор-
сировки возбуждения, действующей
при понижении напряжения;
б) вхождение в синхронизм обес-
печивается только после предваритель-
ного снятия возбуждения и введения
в цепь обмотки возбуждения резис-
тора;
в) вхождение в синхронизм обеспе-
чивается только при снижении на-
грузки.
Опыт и расчет [21] показывают, что
успешная ресинхронизация синхрон-
ных двигателей с электромашинными
возбудителями на валу без снятия
возбуждения возможна, если нагрузки
двигателя не превышают '(0,6—0,7)
Риск, а напряжение на выводах двига-
теля составляет (0,8—0,9) £/ном- При
этом схемой ресинхронизации должна
быть исключена возможность действия
форсировки возбуждения при сколь-
жениях, превышающих критическую
величину.
Если ресинхронизация без снятия
возбуждения невозможна или же да-
же кратковременный асинхронный
ход возбужденного синхронного дви-
гателя нежелателен по условиям воз-
действия на сеть и иа присоединение
к ней других потребителей, то следу-
ет ориентироваться на указанный вы-
ше вариант «б» ресинхронизации. При
этом для двигателей, нормальный
пуск которых происходит с введением
резистора в цепь обмотки возбужде-
ния, ресинхронизация осуществляется
переключением на пусковую схему.
Если же нормально пуск осуществля-
ется с глухоподключенным возбуди-
телем, необходимо для ресинхрониза-
ции иметь резистор, сопротивление
которого выбирается порядка 2—3-
кратного по отношению к сопротивле-
нию обмотки возбуждения, чтобы
обеспечить наименьшее скольжение
перед синхронизацией. Для того что-
бы обеспечить разгон двигателя до
подсинхронной угловой скорости под
действием асинхронного момента, по-
дача возбуждения должна произво-
диться с выдержкой времени пример-
но 2—3 с.
Схема ресинхронизации должна
предусматривать форсировку возбуж-
206
дения возбудителя одновременно с
вводом в цепь возбуждения двигателя
резистора, с тем чтобы к моменту по-
дачи возбуждения напряжение было
достаточным. Форсировка возбужде-
ния выводится после отключения ре-
зистора через 1—2 с, если к этому
времени напряжение восстановилось
до нормального.
Если вхождение двигателей в син-
хронизм не обеспечивается при на-
грузке выше определенного значения
даже при введении в цепь обмотки
возбуждения резистора н последующей
форсировки возбуждения, необходимо
применять автоматическое снижение
нагрузки. Импульс на снижение на-
грузки может быть получен от уст-
ройств, описанных выше. В отдельных
случаях можно использовать для этой
цели реле понижения напряжения с
уставкой (0,4—0,5) UWfA по напряже-
нию и 0,5 с по времени.
На рис. 6.53 приведена осцилло-
грамма автоматической ресинхрони-
зации синхронного двигателя мощно-
стью 3100 кВ-А, 6 кВ, используемого,
для привода генератора постоянного
тока. Снижение нагрузки осуществля-
лось путем введения добавочного ре-
зистора в цепь возбуждения генерато-
ра постоянного тока с последующим
его шунтированием с выдержкой вре-
мени. Двигатель втянулся в синхро-
низм, несмотря на понижение напря-
жения после отключения короткого за-
мыкания.
В компрессорных установках реле,
реагирующее и а асинхронный ход, мо-
жет действовать иа включение клапа-
на байпаса, оборудованного электро-
приводом. В насосных установках в
случае необходимости может быть дан
импульс на закрытие задвижки, при
этом одновременно должно снимать-
ся возбуждение, так как в существу-
ющих установках время, требуемое
для прикрытия задвижки, слишком
велико — обычно не ниже 1 мин.
Для осуществления такой схемы
необходима предварительная оценка
нагрева обмоток за время пуска рабо-
ты двигателя в асинхронном режиме.
Кроме того, следует предусматривать
более быстрое закрытие задвижки.
Если схема ресинхронизации полу-
чается слишком сложной, а по усло-
виям технологического процесса воз-
можен кратковременный останов ме-
ханизма, то следует применять схемы
автоматического повторного пуска.
При этом механизмы останавливаются
и пуск их осуществляется по нормаль-
ной схеме после восстановления нап-
ряжения в сети.
В большинстве случаев нет необ-
ходимости в усложнении схем автома-
тики для обеспечения ресинхрониза-
ции введением элементов, обеспечива-
207
Рис. 6.54. Осциллограмма процесса ресинхронизации двигателя ДСК-260/24-36, 630 кВт при пол-
ной нагрузке и после перерыва питания длительностью 1,3 смегодом циклической форсиров-
ки и гашенвя при s=13 % (данные Н. И. Соколова и др. [45])
ющих подачу возбуждения при наибо-
лее благоприятном по условию
вхождения в синхронизм угловом по-
ложении ротора.
Только в отдельных случаях, когда
ресинхронизация затруднена (напри-
мер, на тихоходных двигателях, а осо-
бенно на двигателях для поршневых
компрессоров), а по условиям техно-
логического процесса она необходима,
следует применять специальные сред-
ства и устройства для ее обеспечения.
Так, одним из способов ресинхрони-
зации тихоходных синхронных двига-
телей является применение цикличес-
ких форсировок возбуждения одного
знака, сопровождающихся периода-
ми гашения поля. Циклические форси-
ровки возбуждения при оптимальных
углах включения позволяют ресинхро-
низировать синхронный двигатель при
начальных скольжениях более 10 %
(при потолочных значениях возбужде-
ния не более 1—1,5, кратных возбуж-
дению номинального режима). Необ-
ходимыми условиями применения это-
го способа являются высокая скорость
нарастания и спада напряжения воз-
буждения и осуществление управле-
ния возбуждением в зависимости от
положения ротора относительно век-
тора напряжения на зажимах синхрон-
ного двигателя. Процесс ресинхрони-
зации двигателя методом циклических
форсировок приведен на рис. 6.54.
Учитывая все сказанное выше, за-
щиту от асннхрониого режима син-
хронных двигателей, устанавливаемую
на них согласно ПЭУ, следует исполь-
зовать прежде всего для воздействия
на устройства ресинхронизации, вклю-
чая, при необходимости, разгрузку ме-
ханизма, или на отключение электро-
двигателя с повторным его пуском.
Эта защита должна действовать на
отключение двигателя только в случае
невозможности обеспечения ресинхро-
низации или прн отсутствии ее необ-
ходимости по условиям технологичес-
кого процесса.
Не останавливаясь подробно на
различных вариантах схем автомати-
ки для обеспечения ресинхронизации
синхронных двигателей, отметим не-
которые из возможных путей их вы-
полнения1.
Импульс для действия устройства
ресинхронизации наиболее просто
можно получить от реле, реагирующе-
го на увеличение тока статора, появ-
ление колебаний тока статора или пе-
ременной составляющей с частотой
скольжения в токе возбуждения.
Для того чтобы исключить ложную
1 Белее подробно см. [21]. (Прим, ред.)
208
работу устройства ресинхронизации
при установке токового реле в цепи
статора, необходимо иметь выдержку
времени (порядка нескольких секунд),
достаточную для отстройки от воз-
можных кратковременных перегрузок.
Реле, применяемые для этой цели,
должны иметь малый коэффициент
возврата и достаточную инерцию для
того, чтобы оно не срабатывало мно-
гократно при колебаниях тока стато-
ра в асинхронном режиме работы.
Устройство,. реагирующее на появ-
ление переменного тока в цепи воз-
буждения двигателя, позволяет умень-
шить выдержку времени для отстрой-
ки от токов, возникающих в обмотке
возбуждения прн коротких замыкани-
ях в сети или в процессе втягивания в
синхронизм. Достаточно иметь вы-
держку времени примерно 0,5 с илн
предусмотреть действие устройства
ресинхронизации по числу колебаний
тока (примерно трех). На время пус-
ка устройство ресинхронизации долж-
но автоматически выводиться нз ра-
боты.
Для измерения переменной состав-
ляющей тока в обмотке возбуждения
применяются трансформаторы тока.
Номинальный ток последнего должен
быть не меньше тока возбуждения
при форсировке, если магнитопровод
трансформатора не имеет воздушного
зазора, если же такой зазор есть, то
номинальный ток по условиям нагре-
ва должен быть не ниже номинально-
го тока возбуждения.
Переменная составляющая тока в
обмотке возбуждения обычно бывает
примерно 0,15—0,3 номинального тока
возбуждения. Трансформируемый ток
во вторичной обмотке трансформато-
ра тока зависит от 'тока возбуждения
и частоты наведенного тока. Эта за-
висимость может, быть существенно
уменьшена, если трансформатор тока
выполнить с магнитопроводом, имею-
щим воздушный зазор.
Во многих случаях, как показал
опыт эксплуатации некоторых пред-
приятий, для предотвращения выпаде-
ния синхронных двигателей из синхро-
низма и для их ресинхронизации мо-
гут применяться реле мощности с
воздействием и а форсировку возбужде-
ния и устройство ресинхронизации;
целесообразно также компаундирова-
ние возбуждения возбудителей. При
этом своевременное увеличение воз-
буждения обеспечивается по измене-
нию угла между током и напряжени-
ем или с увеличением тока статора,
когда напряжение еще недостаточно
низко для обеспечения действия фор-
сировки возбуждения.
6.10. ОБЕСПЕЧЕНИЕ САМОЗАПУСКА
И РЕЗУЛЬТАТЫ ИСПЫТАНИИ
Весьма большой ущерб народному
хозяйству приносят массовые отклю-
чения ответственных двигателей при
понижениях напряжений, вызванных
короткими замыканиями в сети, а так-
же при переключении с одного источ-
ника питания на другой в случае не-
правильной работы защиты минималь-
ного напряжения лнбо при неоправ-
данной работе максимальной защиты
при повышенных токах в процессе са-
мозапуска.
Попытка совместить защиту эле-
ментов сети от коротких замыканий и
защиту от перегрузки приводила к то-
му, что эта защита имела совершенно
неудовлетворительные характеристи-
ки; ток срабатывания выбирался близ-
ким к номинальному, и защита имела
выдержку времени. Вследствие этого
короткие замыкания в присоединении,
питающем двигатели, отключались с
выдержкой времени, что вредно отра-
жалось на других потребителях, пи-
тающихся от шин той же подстанции,
и в то же время эта защита отключа-
ла двигатели при вполне допустимых
перегрузках, вызванных, например,
кратковременным понижением напря-
жения при удаленных коротких замы-
каниях в сети.
Поэтому целесообразно защиты от
коротких замыканий и перегрузок вы-
полнять раздельно: первая должна
иметь большую уставку по току и дей-
ствовать мгновенно или с очень ма-
лой выдержкой времени, вторая —
меньшую уставку по току, но большую
выдержку времени.
При внедрении самозапуска асин-
хронных и синхронных машин в от-
дельных, к счастью, редких случаях
может потребоваться проведеиие до-
полнительных расчетов на прочность
механических конструкций как само-
го привода, так и связанных с ним ме-
ханизмов.
Некоторые технологические агре-
гаты могут не допускать самозапуска
по особенностям технологических па-
14—649
239
раметров либо по условиям безопас-
ности обслуживающего персонала1.
Например, иногда опасным считается
самозапуск центробежных насосов при
пуске их с открытой задвижкой из-за
возникновения гидравлических ударов.
Для предотвращения гидроударов
при самозапуске центробежных насо-
сов с открытой задвижкой можно ре-
комендовать применение соответству-
ющих конструкций трубопроводов [22].
При самозапуске практически не
возникает повышенного износа изоля-
ции обмоток двигателей из-за их на-
грева, так как случаи самозапуска
для каждого двигателя достаточно
редки.
Следует остановиться на вопросе о
допустимости самозапуска для син-
хронных двигателей и компенсаторов.
Существующее широко распрост-
раненное мнение о недопустимости по-
дачи напряжения на возбужденную
синхронную машину после перерыва
питания в большинстве случаев нельзя
считать обоснованным. Для доказа-
тельства необходимости отключения
синхронных машин при отключении
источника питания иногда приводят
два довода: а) подпитка места корот-
кого замыкания, снижение тем самым
эффективности АП В и АВР и б) раз-
рушение обмоток синхронной машины
динамическими усилиями от переход-
ных токов при возможном несинхрон-
ном включении возбужденной маши-
ны на напряжение сети.
Опыт эксплуатации показывает, что
открытая дуга, возникшая на воздуш-
ной линии электропередачи, гаснет
при отключении основного источника
питания и синхронные двигатели и
компенсаторы, находящиеся за срав-
нительно большим сопротивлением от
места короткого замыкания, не могут
заметно поддерживать дугу. Таким
образом, этот довод не может служить
основанием для отказа от применения
самозапуска синхронных машин.
При решении вопроса о действи-
тельной опасности несинхронного
включения необходимо учесть, что
есть весьма существенная разница
между несинхронным включением на-
пряжения на одну синхронную маши-
ну и на группу машин. В первом слу-
чае мощность сети, от которой пита-
ется одна машина, может быть весь-
1 Эти положения рассмотрены Ю. M. Голодно-
иым в [22]. (Прим, ред.)
210
ма велика по сравнению с мощностью
этой одной машины, и поэтому ток и
момент при несинхронном включении
в неблагоприятный момент при рас-
хождении угла между ЭДС синхрон-
ной машины и напряжением сети в
пределах 120—140 ° действительно мо-
гут быть больше, чем при коротком
замыкании на выводах возбужденной
синхронной машины. Иное положение
при восстановлении напряжения после
перерыва на группе машин, что ха-
рактерно для узлов нагрузки. В этом
случае сопротивлением элементов се-
ти (генераторов, трансформаторов, ли-
нии, реакторов) пренебрегать нельзя и
переходный ток при несинхронном
включении будет меньше, чем при не-
синхронном включении одной машины.
При наличии асинхронных двигате-
лей, включенных параллельно синхрон-
ным двигателям, снижается также пе-
реходный ток в момент подачи напря-
В качестве примера в табл. 6.7
приведены полученные канд. техи. на-
ук Л. С. Линдорфом результаты отно-
шений максимального электромагнит-
ного момента к моменту прн трехфаз-
ном коротком замыкании на выводах
и тока при несинхронном включении
синхронных двигателей к пусковому
току (при номинальном напряжении)
в зависимости от номинальной мощно-
сти питающего трансформатора.
При решении вопросач о возможно-
сти оставления в работе синхронных
машин после отключения источника
питания н повторного включения пита-
ния следует иметь в виду, что анало-
гичное явление будет иметь место
после отключения короткого замыка-
ния с выдержкой времени. За время
короткого замыкания синхронный дви-
гатель может выйти из синхронизма и
после отключения короткого замыка-
ния, когда на выводах двигателя вос-
становится напряжение сети, будет
иметь место по существу несинхрон-
ное включение. Такие случаи бывают
неоднократно в практике эксплуата-
ции, и они проходят, как правило, без
каких-либо вредных последствий.
Оценим время, в течение которого
разность фаз между ЭДС синхронно-
го двигателя и напряжения сети изме-
нится на 180 ° при перерыве питания
благодаря отключению источника пи-
тания или трехфазному короткому за-
мыканию между двигателем и основ-
ной сетью. Примем для упрощения,
что момент сопротивления на валу дви-
гателя Мс„ остается неизменным, кро-
ме того, пренебрежем дополнительны-
ми тормозными электромагнитными
моментами, возникающими при ко-
ротких замыканиях. При этих допуще-
ниях изменение приращения угла Дб
в градусах во времени, выраженном в
секундах, будет определяться следую-
щим образом:
Дб = 6 — 6„ = SOOOAtc.^ (6
где — начальный угол.
Выражения для подсчета измене-
ния угла б во времени в случаях, ког-
да необходим учет изменения момента
сопротивления на валу двигателя от
угловой скорости, рассмотрены в [22].
При Дб = 180° из (6.86) получим
/ = 0,141
Это время во многих случаях мо-
жет быть соизмеримо с временем от-
ключения короткого замыкании в се-
ти. Так, при
т/ ~ 2 с и Ale, = 1 получим t = 0,2 с.
Как отмечалось выше, при 6 —
= 120-^-240° восстановление питания в
принципе может вызвать в двигателе
токи и электромагнитный момент,
большие, чем при внезапном коротком
замыкании на выводах обмотки ста-
тора. Однако опыт эксплуатации сви-
детельствует, что случаи повреждения
синхронных двигателей при восста-
новлении напряжения очень малове-
роятны. Это объясняется, с одной сто-
роны, наличием достаточно больших
запасов прочности и, с другой сторо-
ны, малой вероятностью сочетания в
сетях таких неблагоприятных усло-
вий, при которых токи и моменты в
синхронных двигателях имели бы опас-
ные значения.
Следует отметить как неблагопри-
ятное обстоятельство то, что напряже-
ние, генерируемое двигателями после
и*
их отключения, препятствует работе
АВР, если последнее действует от за-
щиты минимального напряжения.
В этом случае при уставке реле мини-
мального напряжения 0,4 С/Но« время
действия АВР увеличивается на 1—
2 с. Поскольку АВР имеет еще вы-
держку времени около 2,2 с для от-
стройки от действия максимальных за-
щит, то общее время действия АВР
составляет 3,2—4,2 с. Такое увеличе-
ние времени действия АВР приводит
к сильному увеличению времени само-
запуска, уменьшению восстанавлива-
ющегося напряжения, которое будет
на двигателях при самозапуске, и в
ряде случаев — к ограничению мощ-
ности неотключаемых двигателей. На-
пример, по данным испытаний Союз-
техэнерго на одной из электростанций
время самозапуска увеличилось с 1,2
до 32 с при увеличении времени дейст-
вия АВР с 0,44 до 3,8 с. Восстанавли-
вающееся напряжение на двигателях
при самозапуске соответственно умень-
шилось с 0,68 до 0,54 номинального.
Нужно стремиться осуществлять
действие АВР с минимально возмож-
ным временем, которое может быть
получено прн применении существую-
щей аппаратуры.
Многолетний опыт эксплуатации
показывает, что работа АВР с време-
нем 0,3—0,4 с не приводит к каким-
либо неприятностям, хотя часть таких
включений происходит в момент, ког-
да разность напряжений сети и дви-
гателей равна максимально возмож-
ному значению.
Начальный ток асинхронных и син-
хронных двигателей при АВР в мо-
мент включения может превышать
пусковой ток в 1,5—1,6 раза н более.
Во избежание срабатывания при этом
токовых отсечек двигателей требуется
либо загрубление их уставок, либо до-
полнительная задержка срабатывания
отсечек на 2—3 периода. Можно так-
же осуществлять АВР с блокировкой
встречного напряжения отключившей-
ся секции шин. Такую блокировку в
схеме АВР целесообразно иметь прн
кратности 7сз//пУск>1,2 [23]. Простые
схемы контроля встречного напряже-
ния, проверенные в эксплуатации чои-
ведены в [46]1.
1 Отдельные случаи, когда условия противовклю-
чения могут оказаться недопустимыми по условиям
воздействия па обмоткн статоров синхронных двига-
телей, рассмотрены в [22]. (Прим, ред.)
21!
Рнс. 6.55. Кривые зависимости времени само-
запуска механизмов собственных нужд мощ-
ных энергоблоков от длительности перерыва
питания (данные И. Г. Вайнера, Л. С. Лии-
дорфа, Е. И. Несвижского):
1 — ПЭН; S — АД* I; 3 — АД-3;-------привод ПЭН
СТ синхронного двигателя;-----— привод ПЭН от
асинхронного двигателя
Рис. 6.57. Кривые зависимости времени само-
запуска от мощности двигателя питательного
электронасоса (данные и обозначения те же,
что и на рис. 6.55)
Самозапуск синхронных двигате-
лей успешно применяется в нефтяной
и химической промышленности.
На тепловых электростанциях син-
хронные двигатели иногда использу-
ются для привода питательных элек-
тронасосов, углеразмольных мельниц,
поршневых компрессоров, в отдельных
случаях — для привода сетевых насо-
сов теплофикационной воды.
Применение для привода питатель-
ных электронасосов синхронных дви-
гателей мощностью до 12 500 кВт
вместо асинхронных двигателей той
же мощности обеспечивает повышение
экономичности и эксплуатационной на-
дежности установок.
Групповой самозапуск электродви-
гателей собственных иужд с синхрон-
ными двигателями питательных элек-
тронасосов проходит успешно. Эффек-
тивность применения синхронных
электродвигателей по сравнению с
асинхронными в данном случае дает
тем большие преимущества [48], чем
больше длительность перерыва пита-
ния /П1П (рис. 6.55), внешнее сопротив-
ление между шинами собственных
нужд и источником питания 2Вш (рис.
6.56) и кратность мощности двигате-
ля питательного электронасоса 5ПЭн
по отношению к мощности питающего
трансформатора 5ТР (рис. 6.57).
Участие в самозапуске синхронных
двигателей углеразмольных мельннц и
поршневых компрессоров, как показа-
ли опыт эксплуатации и испытания
[51], является нежелательным.
Правильный путь обеспечения са-
мозапуска двигателей заключается в
том, что по всей энергосистеме, вклю-
чая и электроустановки промышлен-
ных предприятий, проводится ряд ме-
роприятий, в результате которых необ-
ходимость применения специальной
автоматики в сетях напряжением вы-
ше 1000 В для обеспечения самозапус-
ка отпадает. Такая автоматика может
быть применена лишь как исключение,
а не как правило. Так, самозапуск
двигателей собственных нужд электро-
станций обеспечивается в результате
рациональной настройки имеющихся
защит, а не путем усложнения защиты
или автоматики.
При решении вопроса о том, каки-
ми средствами можно обеспечить само-
запуск двигателей, следует весьма
тщательно рассмотреть все возмож-
ные способы и выбрать наиболее на-
212
дежный и экономичный, не требующий
больших капитальных затрат и не ус-
ложняющий эксплуатацию.
Для обеспечения самозапуска дви-
гателей необходимо правильно вы-
брать мощность неотключаемых двига-
телей ответственных механизмов, исхо-
дя из условия возможности их самоза-
пуска, т. е. необходимо обеспечить при
самозапуске такое восстанавливающе-
еся напряжение, чтобы двигатели смог-
ли развернуться до нормальной скоро-
сти при допустимом дополнительном
нагреве их обмоток (см. § 6.7).
Самозапуск ответственных механиз-
мов обеспечивается в основном двумя
мероприятиями, а именно правильной
настройкой максимальной зашиты как
самих двигателей, так и всех элемен-
тов сети и отключением при необходи-
мости защитой минимального напря-
жения неответственных двигателей для
облегчения самозапуска ответственных
двигателей.
Повышение мощности неотключае-
мых двигателей, которые могут быть
оставлены в работе по условию само-
запуска, обеспечивается также быстро-
действующим отключением коротких
замыканий в сети и применением и а
синхронных машинах автоматического
регулирования возбуждения. Автома-
тическое регулирование возбуждения
синхронных машин выполняется таким
образом, чтобы при снижениях напря-
жения ток возбуждения увеличивался
до своего максимального (потолочно-
го) значения. Исключения могут сос-
тавить лишь отмеченные выше случаи
возможности возникновения больших
тормозных моментов у синхронных
двигателей, обусловленных возраста-
нием потерь в цепях их статоров
(включая другую параллельную на-
грузку) при увеличении возбуждения.
Автоматическое регулирование воз-
буждения, как правило, обеспечивает
быстрое восстановление напряжения
после отключения коротких замыка-
ний и тем самым дает возможность
увеличить мощность неотключаемых
двигателей по условию самозапуска.
Защита минимального напряжения,
устанавливаемая на двигателях неот-
ветственных механизмов, должна
иметь выдержку времени около 0,5 с
для того, чтобы избежать излишних
отключений при работе быстродейст-
вующих защит в сети.
Если не удается обеспечить само-
запуск электродвигателей всех ответ-
ственных механизмов, то часть их при-
ходится отключать и затем после окон-
чания самозапуска основных агрегатов
включать эти двигатели все сразу или
поочередно при помощи АП В.
Следует считать целесообразным
автоматическое повторное включение
двигателей не только ответственных,
ио и неответственных механизмов,
особенно при отсутствии дежурного
персонала. Обратное включение дви-
гателей неответственных механизмов
можно производить через определен-
ное время, выбранное таким образом,
чтобы оно было больше времени само-
запуска двигателей ответственных ме-
ханизмов. Недостатком этого способа
является то, что это время должно
быть выбрано, исходя из наиболее тя-
желого случая самозапуска. Произво-
дить обратное включение можно по на-
пряжению (после восстановления на-
пряжения до 0,9—0,95 номинального).
При наличии нескольких групп
двигателей, которые по условию само-
запуска должны включаться пооче-
редно, можно осуществить соответст-
вующую автоматику.
Для поочередного самозапуска глу-
бинно-насосных установок, например,
была использована схема с токовыми
реле, в которой обратное включение
очередного двигателя производится при
спадании тока в цепи развернувшегося
двигателя. Преимущество этой схемы
состоит в том, что время самозапуска
всех электродвигателей получается ми-
нимальным. Промежуток времени
между включением магистралей зави-
сит от длительности спадания тока при
самозапуске.
В мощных узлах синхронной на-
грузки (насосные машинного ороше-
ния, компрессорные газо- и нефтепро-
водов, химические заводы) мощностью
100 тыс. кВт и более при единичной
мощности двигателей до 12 тыс. кВт и
более время, в течение которого под-
держивается напряжение после отклю-
чения линий связи с энергосистемой,
достигает 5—10 с. С целью уменьшения
длительности протекания токов при
коротких замыканиях в сети, а также
времени АП В и повышения его эффек-
тивности требуется быстрое отключе-
ние двигателей защитой, реагирующей
на скорость снижения частоты [43].
Укрупнение единичной мощности
турбогенераторов и котлов и примене-
213
иие схемы блока котел — турбина —
генератор привели к увеличению
мощности трансформаторов собствен-
ных нужд электростанций. Для сохра-
нения в допустимых пределах тока
короткого замыкания эти трансформа-
торы выбираются с повышенным на-
пряжением короткого замыкания, до-
ходящим до 14 %. Мощность транс-
форматоров выбирается, как правило,
по максимальной нагрузке питаемой
секции без запаса, однако, как пока-
зал опыт, это не является препятстви-
ем к внедрению самозапуска.
Многочисленные испытания, про-
веденные Союзтехэнерго, и опыт экс-
плуатации показали, что использова-
ние режимов самозапуска электродви-
гателей при кратковременных наруше-
ниях электроснабжения собственных
нужд современных тепловых электро-
станций, как правило, обеспечивает
сохранение устойчивой работы техно-
логического оборудования и способст-
вует предотвращению отключения ге-
нерирующих мощностей и нагрузки. По-
этому действующими «Нормами техно-
логического проектирования тепловых
электрических станций» предусмотрен
самозапуск двигателей ответственных
механизмов, для чего на всех секциях
собственных нужд установлены устрой-
ства АВР, подающие напряжение на
обесточенную секцию собственных
нужд от резервного источника пита-
ния.
Кратковременное нарушение элект-
роснабжения секции собственных иужд
может произойти из-за автоматическо-
го или ошибочного отключения основ-
ного оборудования энергоблока илн ра-
бочего источника питания, отключения
энергоблока при повреждении основно-
го оборудования, работы АВР при
глубоком и продолжительном сниже-
нии напряжения на шинах собственных
иужд от действия защиты минималь-
ного напряжения.
Основными расчетными условиями,
при которых должен быть обеспечен
самозапуск двигателей, в соответствии
с [22, 29] являются:
сумма номинальных токов двигате-
лей, участвующих в самозапуске, не
должна превышать полутора кратного
номинального тока пускорезервного
трансформатора
длительность перерыва питания
секции шин, откуда питаются двигате-
ли, определяемая суммарным време-
нем действия защиты, автоматики и
коммутационной аппаратуры, должна
быть не более 2,5 с;
двигатели несут нагрузку, близкую
к номинальной, и нагреты до устано-
вившейся температуры;
снижение угловой скорости меха-
низмов определяется для индивиду-
ального и для группового выбегов дви-
гателей;
предельное время самозапуска
двигателей ответственных механизмов
собственных нужд по условиям сохра-
нения технологического процесса сос-
тавляет для блочных станций высокого
давления 20 с, электростанций высо-
кого давления с поперечными связями
в тепловой части 25 с, станций средне-
го давления 35 с;
мощность резервного трансформато-
ра собственных нужд блочных элект-
ростанций должна обеспечивать под-
хват рабочей секции собственных нужд
одного блока н одновременный пуск
или аварийный останов второго блока;
мощность резервного трансформа-
тора собственных нужд станций с по-
перечными связями в тепловой части
должна быть в 1,5 раза больше мощ-
ности наиболее крупного рабочего
трансформатора собственных нужд
или реактора, через который питается
секция.
С целью сокращения продолжи-
тельности перерыва питания собствен-
ных нужд ступень селективности мак-
симальных токовых защит всех элемен-
тов схема уменьшается до 0,3 с, исклю-
чаются лишние ступени выдержек
времени защит (например, на рабочем
трансформаторе собственных нужд
или реактированной питающей секцию
шин собственных нужд линии выдерж-
ка времени на отключение выключа-
телей с питающей и приемной сторон
устанавливается одинаковой, защита
устанавливается только с питающей
стороны), вводятся меры по ускорению
пуска АВР. К таким мерам относятся
пуск схемы АВР от вспомогательного
контакта отключившегося выключате-
ля рабочего ввода питания секции шин
собственных нужд с приемной сторо-
ны (при отключении выключателя с
питающей стороны или отключения
выключателя блока с одновременным
срабатыванием стопорного клапана
турбины выключатель с приемной или
низкой стороны немедленно автомати-
чески отключается), защита мииималь-
214
ного напряжения секции шин собствен-
ных нужд с уставкой по напряжению
около 0,25 t/ном, воздействующая на
схему АВР, которая должна иметь та-
кую же выдержку времени, как и у
максимальной защиты ввода рабочего
питания секции, и другие меры, указан-
ные в [29]. С этой же целью одновре-
менно с отключением выключателя пи-
тания собственных нужд соответству-
ющей секции автоматически отключа-
ются синхронные электродвигатели
шаровых мельниц, а на синхронных
электродвигателях ответственных ме-
ханизмов осуществляются мероприя-
тия по их ресинхронизации.
Продолжительность самозапуска
ограничивается нагревом электродви-
гателей н необходимостью сохранения
технологического режима работы обо-
рудования при изменении угловой ско-
рости ответственных механизмов.
Для электростанций с поперечны-
ми связями по пару продолжитель-
ность самозапуска ограничивается
только нагревом электродвигателей и
поэтому предельное время самозапус-
ка разрешено в пределах 25—35 с.
Для электростанций с блочными
схемами в тепловой части в процессе
самозапуска опасны отклонения от
нормируемых значений таких пара-
метров, как уменьшение расхода воды
котлоагрегата, снижение уровня воды
в барабане котла, снижение давления
на всасывающей и напорной сторонах
питательных насосов, уменьшение
расхода циркуляционной воды в кон-
денсаторах турбин, падение давлений
жидкости в системе смазкн н регули-
рования турбины, падение давлений
масла в системах смазки генератора
и агрегата питательного насоса, сни-
жение производительности питателей
пыли, снижение разрежения в топке
котлоагрегата, повышение давления в
обратной магистрали сетевой воды
теплофикационного блока.
Как видно из вышеперечисленных
расчетных условий, продолжительность
самозапуска блочных электростанций,
ограниченная надежностью техноло-
гического процесса, составляет всего
20 с.
Предотвращение отключения обо-
рудования и сохранение неизменной
нагрузки турбоагрегата после успеш-
ного самозапуска возможны только
при правильном выборе уставок тех-
нологических защит и их согласовании
с действием электрических защит.
Расчетная и экспериментальная
проверки условий обеспечения режи-
мов самозапуска производятся при
всех возможных в эксплуатации ситу-
ациях и перерывах питания схем соб-
ственных нужд.
Минимально допустимое начальное
напряжение на шинах собственных
нужд при самозапуске электродвига-
телей после перерывов питания дли-
тельностью от 1 до 2,5 с принимается
равным:
для электростанций среднего давле-
ния
U нач = 0,55t/ном.дв j
для электростанций высокого дав-
ления неблочного и блочного типов
^нач = 0,6С7ном,дв.
Если на электростанциях в качест-
ве привода питательных электронасо-
сов установлены асинхронные двига-
тели АТД-4000 и АТД-5000, имеющие
начальный пусковой момент меньше
80 % номинального, предельное значе-
ние начального напряжения, если вре-
мя перерыва питания этих электродви-
гателей более 0,7 с, принимается
равным:
^нач = 0>65£/Ном,дв.
Как показали исследования, прове-
денные В. И. Долиной (ВНИИЭЭ),
при расчетах времени разворота и воз-
можности самозапуска двигателей
следует учитывать, что у некоторых
механизмов кривые изменения момен-
тов сопротивления в завнснмости от
сопротивления при пуске и выбеге
имеют существенно различную форму.
Поэтому в расчетах процессов пусков
и самозапуска должны применяться
характеристики моментов сопротивле-
ния механизмов, определенные из
опытов пуска и снятые современными
методами. Неу чет этого обстоятельст-
ва может привести к большим ошиб-
кам.
Методика расчета самозапуска от
ненагруженного и нагруженного ре-
зервных источников питания приведе-
на в приложении 3. Общий характер
процессов при самозапуске дан на
рис. 6.58 и 6.59.
В настоящее время для исследова-
ния пусковых режимов двигателей я
режимов их самозапуска применяются
215
Рис. 6.58. Изменение основных параметров блока при самозапуске механизмов собственных
нужд блока 300 МВт в зависимости от перерыва питания:
/ — давление питательной воды на выдаче ПЭН; 2—частота вращения ПЭН; 3— расход питательной воды
одной нитки Q. т/ч; 4 — давление масла и системе смазки ПЭН; 5 — напряжение секции собственных нужд;
6 —ток статора ПЭН АТД-8000 (данные А. Т. Лебедева п А М. Уфимцева!
Рнс. 6.59. Принципиальная схема (п) и кривые изменения токов и напряжений (б) сетей, пи-
тающих собственные нужды блока 300 МВт в процессе самозапуска (данные В. И. Долины):
/ — ток секции /Б; 3 — напряжение на секции 2А; 3 — напряжение на секции /А. полученное расчетом ла
5БМ; 4 —ток секции /Б. полученный расчетом на ЭВМ-. 5 — напряжение на секции М; б—напряжение на
секции /Б, полученное расчетом на ЭВМ; 7 — напряжение на секции /Б; 8 — напряжение на шинах посто-
янного тока; 9 — ток секции /Z; 10 — ток секции Z4. полученный расчетом на ЭВМ; // — ток аккумуля-
торной батареи: 12 —’ток секции 2А
методы математического моделирова-
ния с использованием аналоговых вы-
числительных машин (АВМ). Эти ме-
тоды позволяют получить динамичес-
кие пусковые характеристики электро-
привода в нормальных и аварийных
режимах, сократить объем проводи-
мых на действующем оборудовании
испытаний, разрабатывать мероприя-
тия по повышению надежности собст-
венных нужд мощных энергетических
блоков [58].
Глава седьмая
НЕСИММЕТРИЧНЫЕ РЕЖИМЫ РАБОТЫ
ДВИГАТЕЛЕЙ И КОМПЕНСАТОРОВ
7.1. ОБРЫВ ОДНОЙ ФАЗЫ СЕТИ
ПРИ ИЗОЛИРОВАННОЙ НЕЙТРАЛИ
ОБМОТКИ СТАТОРА
АСИНХРОННОГО ДВИГАТЕЛЯ,
СОЕДИНЕННОГО ЗВЕЗДОЙ
Анализ явлений, происходящих в
двигателях при несимметричных режи-
мах, наиболее просто производится
при помощи метода симметричных со-
ставляющих.
Индексами 1, 2 и 0 в скобках в
дальнейшем обозначены сопротивле-
ния, а также составляющие токов и
напряжений прямой, обратной и нуле-
вой последовательностей.
Индексами 1, 2 и 0 без скобок обо-
значены соответственно, как и раньше,
сопротивления статора, ротора (со
штрихом вверху — для приведенных к
статору величин) и ветви намагничи-
вающего тока.
Общая схема замещения при обры-
ве одной фазы трехфазной цепи (А) и
соответствующая полная схема заме-
щения двигателя при обрыве одной
фазы цепи статора (Б) даны на рис.
7.1, где 17(П — фазное напряжение ис-
точника, равное напряжению фазы А.
Поскольку при данном виде по-
вреждения токи нулевой последова-
// а)
sc.
Рис. 7.1. Схемы замещения асинхронного дви-
гателя прн обрыве одной фазы обмотки ста-
тора
тельности отсутствуют, а ток статора
в фазе А
*1А = 4(1) + 4(2) = О, ТО Л(1) =— /1(2).
(7.1)
причем из схемы замещения (рис.
7.1.6)
/щ> =----------------------— (7.2)
2Z J -оЬо) 5 5(2)
^0^5(1) £о+5«»
Симметричные составляющие при-
веденного тока ротора
х
7з(1> ;
£о + “ги>
I i -°
Го Г2(2>
(7.3а)
(7.36)
Таким образом, только при непо-
движном роторе (s —1), когда
=^2(2) ’ приведенные токи ротора пря-
мой и обратной последовательностей
равны между собой по абсолютным
значениям.
Токи в фазах В и С обмотки ста-
тора складываются из токов прямой и
обратной последовательностей:
/в = а2 7(1) + ^Лг);
где
/0 = c7(d 4-а2/(2)»
(индекс I — для токов статора здесь
и в дальнейшем опущен), или, учиты-
вая (7.1),
/в=(О’- й) А» = (--у- i +
+ -^— /_^3) ^<1) =—’А’>-
4? = (а — а2) /(и = j/3/(1).
Таким образом, /д=—1С, что и
должно быть при отсутствии тока в
нейтрали и обрыве одной фазы.
217
Ток статора при неподвижном ро-
торе в соответствии с (7.2)
/„ = |Лз/(1> = —EZo»—
7 7’
?о+?2(»
V3t7„,
2ZK
Таким образом, ток двигателя при
s = l и обрыве одной фазы цепи ста-
тора составляет V3/2 = 0,866 пуско-
вого тока двигателя при нормальных
условиях.
При холостом ходе (s«0) имеем
7о =
УЗ^(|>
7 1 2<2> ,
So + 2 + 1*2(2)
(7.5)
тогда как при отсутствии обрыва фазы
[Оаом ~~
"(1)
?х + ?о •
Таким образом, практически ток
холостого хода при обрыве_ одной фа-
зы статора примерно в / 3 раз боль-
ше, чем ток холостого хода при нор-
мальной работе. .Кроме того, при ра-
зомкнутой обмотке ротора ток холос-
того хода при обрыве фазы статора
примерно в 2 раза меньше, чем при
работе с замкнутой обмоткой ротора.
Это следует из схемы замещения (рис.
7.1,6) при 7j(1, =/3(2;=0:
Vau.
= 2 (?1 + S,) ^.6)
В схеме обратной последовательно-
сти при 0^s<l можно пренебречь
током в ветви намагничивания, так как
(7-7)
При малых скольжениях (менее
0,1—0,15) можно, как правило, прене-
бречь также сопротивлением г*(2)/
1(2—s) по сравнению с Xj(2> и тогда
/;(2> =______________________________
to+
(7.8)
(7.4)
и согласно (7.3а)
г
'2(1) = -----------------------— Г
. , ( 2Z,+4.2)\
2^1 + ?2(2) + ?2(1)| 1 4 у Г
\ -0 /
(7.9)
или
= ------------ . '. (7.9а)
2А + ?2(2) + ^2(1)
где
J _ 1 I 25 4" —2(2} _ , 1 , 2х1 4- *2(2)
— I ~1 “—------~ 1 П ,
откуда следует, что c\^>Ci (см. гл. 3).
Электромагнитная мощность и
вращающий момент двигателя при об-
рыве одной фазы цепи статора опреде-
ляются суммой составляющих прямой
и обратной последовательностей:
Р = Р +р = з( /г*'> r;|1) 4-
a fl(l) ’ ' (в)2 ° I s
+ '™Г™ Y (7.11)
2 —-s /
М = — [%" г'гт----------\ (7 12)
b’(i) \ s 2—-s /
поскольку момент, обусловленный по-
лем прямой последовательности,
м(1.=^ =-^12^11- (7.13а)
1 ’ “(I) ««(1)
и момент, обусловленный полем обрат-
ной последовательности, вращающим-
ся в противоположную сторону по от-
ношению к полю прямой последова-
тельности со скоростью (1)2——cd i отно-
сительно статора,
"(2)
Вg(g)
*2
02 2(2) *2(2)
(2 — 5.) О,
(7,136)
При неподвижном роторе приведен-
ные токи ротора прямой и обратной
последовательностей равны между со-
бой, поэтому вращающий момент дви-
218
гателя при скольжении s—1 равен
нулю и, следовательно, пуск двигате-
ля невозможен. Для того чтобы дви-
гатель развернулся, ему необходим
хотя бы кратковременный толчок. Ес-
ли под воздействием этого толчка дви-
гатель приобретает такую скорость,
при которой его вращающий момент
больше момента сопротивления на ва-
лу, то он может развернуться.
Если обрыв одной фазы цепи ста-
тора произойдет во время работы, то
двигатель будет вращаться, когда раз-
виваемый им максимальный момент
будет больше момента сопротивления.
При небольших скольжениях (до
3=0,14-0,15), пренебрегая величиной
r2i2)/(2—s), находим из (7.9)
~ (7.14)
+(2г1+^(2>+^«211)Г
Принимая q^l и пренебрегая ак-
тивным сопротивлением статора, полу-
чаем при ^2(21 Л Л 2(1)
(7.Иа)
У
где ХкХХх+х'цц.
Как следует из выражения для то-
ка прямой последовательности, обрыв
одной фазы обмотки статора практи-
чески приводит к увеличению реактив-
ного сопротивления примерно в 2 раза,
а следовательно, и к соответствующе-
му уменьшению критического сколь-
жения и максимального момента.
Кратность максимального момента
и критическое скольжение на основа-
нии (7.12) и (7.14) могут быть выра-
жены следующими уравнениями (без
учета активного сопротивления стато-
ра и момента обратной последователь-
ности) :
_ ________3*7(1 )НОМ_______
2С1 Т’ном (2*1 + С1 *2(1) + *2(2))
V/2 .
(*)Н0М ^НОМ . /у 1 £-\
4Р ном *к 2
С1 Г2(1) SKp
2хк 2
Из приведенных выше уравнений
следует, что кратность максимального
момента и критическое скольжение
двигателя при обрыве одной фазы це-
пи статора примерно в 2 раза меньше,
чем соответствующие значения при
нормальном режиме.
При больших скольжениях можно
принять, что
Л(1) « ^2(2) ,
и тогда из (7.12) с учетом (7.9а) име-
ем
+ (2*1 + «1 Ъ(1) + *2(2))2
(7.17)
Как следует из (7.15), для сохране-
ния работы двигателя при обрыве фа-
зы статора и номинальной нагрузке на
валу необходимо, чтобы кратность
максимального момента 6ЯОМ при нор-
мальных условиях была больше двух.
При больших значениях скольже-
ния нельзя пренебрегать активным со-
противлением пепи ротора в схеме об-
ратной последовательности и следует
применять формулу (7.17).
Пренебрегая в ней активным соп-
ротивлением статора и принимая
Г2(1)=Г2(2)= Г(2) И Ц1)=Ц|)ном, ПОЛу-
чаем
(7.18)
Заменяя
3^(1)ном д „ г2 >,________________
~ °ном и 5кр»
ноыхн *к
219
-----Ьком(1 — SI----- р Д9)
SkP | s(2 —S)
s(2 —s) "Г sKP
получав
м
Мцом
Рассмотрим, как изменится приве-
денный ток ротора при обрыве фазы.
Приведенный ток ротора при нормаль-
ной работе с номинальной нагрузкой
(см. гл. 3)
Учитывая, что максимальный мо-
мент при данном режиме примерно
вдвое меньше, а сопротивление при-
веденному току прямой последователь-
ности ротора примерно вдвое больше,
чем при симметричном режиме, можно
для установившегося режима в дан-
ном случае принять соответствующие
расчетные выражения из гл. 3, заме-
нив в них Ьном на Ьном/2 и xv на 2хк.
Так, вместо (7.14а) можно записать
или, учитывая (7.12) для первой со-
ставляющей момента в другой форме
4^(1) ___ _____бном __ дх
""ОМ , “
5кр s
(при установившемся режиме), полу-
чаем
(7.20)
и прн номинальной нагрузке на валу
(Мс. = 1,0)
f ___ ' ^7(1)ном
/2(0----------- . ~ =
2x4/
_ ______________^ГНОМ_____________
хк 2^иом Оном + 4 )
(7.20а)
Обратная составляющая приведен-
ного тока ротора будет несколько боль-
ше за счет намагничивающего тока в
схеме прямой последовательности; она
численно равна составляющим пря-
мой и обратной последовательностей
тока статора (см. ниже). При более
или менее значительных нагрузках
(40—50 % и более) можно намагничи-
вающим током пренебречь. Тогда со-
ставляющие прямой и обратной после-
довательностей приведенного тока ро-
тора и тока статора будут численно
равны между собой.
При последнем допущении токи в
фазах В и С будут численно в / 3 раз
больше токов прямой и обратной со-
ставляющих.
Приведенный ток ротора при обры-
ве одной фазы обмотки статора и ра-
боте с номинальной нагрузкой (без
учета Г1)
или
Отношение (7.21) к /гном Равио:
= Из KtP0„+ К 4и~1
Кратность тока ротора при обрыве
одной фазы статора по отношению к
току ротора при номинальном режиме
в зависимости от кратности максималь-
ного момента дана в табл. 7.1.
Таблица 7.1
Как видно из табл. 7.1, только при
больших значениях кратности макси-
мального момента, когда величины
« 2V, И Йном + - 4 » Чом-
220
отношение токов
12//-’ном «1/3.
Если двигатель работает при на-
грузке иа валу, равной Л1с*<1,0, то
(7.23)
Для примера в табл. 7.2 даиа
кратность тока ротора при обрыве од-
ной фазы статора в зависимости от
момента сопротивления на валу при
Ьн=2.
Таблица 7.2
Л1с. 1 0,9 0,8 0,7 0,6
——— 2,36 1,77 1,49 1,26 1,05
^2ном
Продолжение табл. 7.2
А 0,57 0,5 0,4 0,3 0,2
^2иом 1 0,86 0,68 0,5 0,34
Из табл. 7.2 следует, что при на-
грузке 0,57 и. выше возникает пере-
грузка по току.
Реактивная составляющая приве-
денного тока ротора при обрыве од-
ной фазы обмотки статора по сравне-
нию с нормальной работой возрастет.
Действительно, при нормальной ра-
боте (см. гл. 3)
а при обрыве одной фазы обмотки ста-
тора
tg ч>;»-------------
(7.24)
Например, у двигателя, имеющего
кратность максимального момента
6ИПМ=2 и работающего с номинальной
нагрузкой,
tg =-----------1 ---= 0,268,
2 т V 2» - 1
фном = 15 .
Прн обрыве одной фазы обмотки
статора
tg <₽' =-----1 = 1, = 45°-
1+ V 12 — 1
Так как скольжение при нормаль-
ной работе
ним .-------1
^ноы ~Ь и b*n0M — 1
то при обрыве одной фазы обмотки
статора н номинальной нагрузке на
валу
На основании (7.25) получим
(7.26)
Значения s/sHoM в зависимости от
кратности максимального момента да-
ны в табл. 7,3.
Таблица 7.3
i*H0M 2 2,5 3 4 5 10
S 1,86 1,2 1,И 1,05 1,04 1,01
Shom
Из данных, приведенных в табтн-
це, следует, что при больших кратно-
стях максимального момента скольже-
ние практически не изменяется.
221
При Afc*<1.0 получим
S ___ ^ПОМ У^ном 1_________ _
2(а- +1/7wQ
\2МС* \2MCJ )
с_ ^НОМ ' У^^ЯОМ " * (у 27J
&НОМ ~1 / / &ном \2 _Д
Me* V \ Мсл J
Из сказанного следует, что только
при нагрузках, близких к номиналь-
ной, скольжение увеличивается значи-
тельно. Например, для Ьтюм—2 при
Л1СЛ = 1 скольжение увеличивается в
1,86 раза, а при нагрузке Л1СЛ=0,5 оно
увеличивается всего лишь в 1,05 раза
но сравнению с нормальным режимом.
Рассмотрим, как будет изменяться
напряжение на выводах двигателя при
обрыве фазы цепи, статора в зависи-
мости от скольжения.
Пренебрегая активным сопротив-
лением обмотки статора и намагничи-
вающими токами в схемах прямой и
обратной последовательностей, опре-
делим симметричные составляющие
напряжений прямой и обратной после-
довательностей на выводах двигателя:
Ц1)Дв = 7(1) ^(1) =
~Г12- + i tl + *2<1>)
х —;--------’-----------------------=
— +уг7 +' V2*! + *2<i> + хт)
=1?(1)Х
1 + i~(*1 + 4(1))
X _______-________;
sr2(2) S „ , , »
•+- -Г- + /— (2*1+*2(1)+*2(2))
(2 —s)r2(1> г2(1)
(7.28)
(7(2)дв = Цо)дв = 7(2jZ(2) =— 771 X .
^77 + г(*1 + *2( J
-Т^+ТТ7 + (Ч + 4(1> + 4(2>)
=—Ц)) х
• + »Л-1(*1+*г(2))
X ----------—-----------------------
(2—s>ra ,, 2—s . , .
>+ ; И/ — (2*j.+*2(l)+*2(2))
sr2(2) r2(2)
Фазные напряжения иа двигателе:
77.Ддв ~ 7/(1 >Дв + Т/(2)дв + Uo№f
&вдв ~ о2^(1)дв +а^(2»дв+ йодь = a2
Йсдв “ Я^Л1)ДВ + n2f7(2)flB+^(0)flB = flT/ц).
При s=l
Ц1)дв = Ad 2(1) =— £7(2)дв =— 7(2) Z(2) —
= 77(1>/2.
При з=0
(7(1)дв = 7(i) Z(i) = t/(ij;
Т/(2)дв = 7(2) Z(2) = 0.
Таким образом, при изменении
скольжения от нуля до единицы нап-
ряжение прямой последовательности
изменяется от полного фазного напря-
жения сети до половины этого напря-
жения, а для обратной и нулевой по-
следовательностей — соответственно
от нуля до половины фазового напря-
жения сети. Следовательно, при холос-
том ходе напряжение иа выводах дви-
гателя будет практически симметрич-
но. Потенциал нейтрали двигателя бу-
дет равен нулю. Некоторая несиммет-
рия и смещение нейтрали возникают
за счет падения напряжения от тока
холостого хода. По мере загрузки дви-
гателя вследствие возрастания потока
обратной последовательности напря-
жение и а двигателе становится все бо-
лее несимметричным, а потенциал
нейтрали двигателя — отличным от
нуля.
Строго говоря, благодаря наличию
токов намагничивания при s=0 нап-
ряжение прямой последовательности
несколько меньше фазного напряже-
ния, а напряжения обратной и нулевой
последовательностей — несколько боль-
ше нуля, но это отличие незначи-
тельно.
При неподвижном двигателе, т. е.
при s=l, в фазе А не будет индукти-
роваться ЭДС. Напряжение этой фа-
зы будет равно напряжению нейтрали,
равному в данном случае — С7<1 )/2_
222
Линейные напряжения на выводах
двигателя в этом случае определяют-
ся так:
#ДВдв = Оадв “ ^Вдв =---~
л2 fl i * 3 r't V НСДВ .
— а 0(1) = j — <7(1, -—,
Uвеяв ~ ^/вдв — ^сдв “ caC/(i) —
— аОц) ~— j УЗ U(i) = &всдв',
^сАдв = ОСт — U ддв — аиц) +
, Лп ЛУ3^(1) ^ВСдв
+ —=;—г~=—5~-
(7.30)
Таким образом, при неподвижном
двигателе вольтметр, включенный иа
выводах двигателя между оборванной
фазой и одной из включенных фаз, по-
кажет половину линейного напряже-
ния.
7.2. ОБРЫВ ОДНОГО
ИЗ ЛИНЕЙЛЫХ ПРОВОДОВ
ПРИ СОЕДИНЕНИИ ОБМОТКИ СТАТОРА
ТРЕУГОЛЬНИКОМ
При соединении обмоткн статора
треугольником определение токов в
линейных проводах при обрыве одной
фазы в сети производится так же, как
и, для случая соединения обмотки ста-
тора звездой. При этом по обычному
правилу треугольник для токов пря-
мой и обратной последовательностей
заменяется эквивалентной звездой.
Совершенно ясно, что линейные токи
будут изменяться одинаковым обра-
зом независимо от схемы соединения
обмоток статора, и поэтому нельзя
при работе двигателя с обрывом одной
фазы определить схему соединения
обмоток статора асинхронного двига-
теля.
Распределение токов по фазам об-
мотки статора при соединении ее тре-
угольником будет иным, чем при сое-
динении звездой. Если принять токи в
линейных проводах
Ал = 0; /в = /в =—1С
и соответственно токи прямой и обрат-
ной последовательностей
/^(1) = /_!«;
Уз
J ИЗ ‘в . ‘в
I \ ? В 1в
=--~ —-/—тг:
1 3 2р'з
/ =—/ в
1А(2) ! ——;
Уз
I : 1В
‘ вау = ——— + / —— ;
2 Уз 2 Уз
г __ из 1в ,
/С(2)----Т-—+ /-------
2 Уз 2У 3
то симметричные составляющие токов
в фазах обмоткн статора соответствен-
но равны:
в
7 — в
о
7 —в •
—-Г -3-»
1сли> — 1—в = Лад;
6 гУз
/аВ(2> =s— — j >В_ .
6 гУз ’
/ - 1 >в
‘всю = + — •
/сЛ(2) =—^-+7-^.
6 2И 3
Токи в фазах при этом равны:
1ав — 1ав<д> + 7ив(2> =— 7в/3;
1вс = 1вс(1) + Ibci& =+ 27/73;
?СА — /сЛ(1)+ 705(2} 1в/3.
При отсутствии обрыва одного ли-
нейного провода токи в фазах обмотки
статора меньше линейного тока в УЗ
раз. Таким образом, при обрыве од-
ного линейного провода ток в одной
нз фаз обмотки статора, соединенной
треугольником, получается больше в
2/У^Г= 1,15 раза, а в двух других —
меньше в 1/УЗ- = 0,57 раза по отно-
шению к линейному току при обрыве
одного линейного провода.
Отношение потерь активной мощ-
ности в обмотке статора при обрыве
одного линейного провода к потерям
при нормальной работе получается
одним и тем же независимо от схемы
соединения обмоток, так как линейные
токи получаются одинаковыми при об-
223
рыве одного из линейных проводов не-
зависимо от схемы соединения обмо-
ток.
Действительно, при соединении об-
моток звездой
~ 2
З^г, 3 '
а при соединении треугольником
—а + —
9 7 9 2
3/1
3
7.3. ОБРЫВ ФАЗ ПРИ СОЕДИНЕНИИ
НУЛЕВЫХ ТОЧЕК ИСТОЧНИКА
ПИТАНИЯ И ОБМОТКИ СТАТОРА
ДВИГАТЕЛЯ
Рассмотрим случай обрыва одной
фазы цепи статора, когда нулевые
точки обмоток статора соединены с ну-
левой точкой источника пита и ня.
На рис. 7.2 дана расчетная схема
для случая, когда можно пренебречь
сопротивлением сети. Из рис. 7.2 сле-
дует, что токи прямой, обратной и ну-
левой последовательностей
йа>___________
7 ?<’!> ?<01
£('> + » .7
5<2> -Г „(<1>
?<5>+?<о>
-. '(!> g«l>
/ (О? — । 7
±(2)' ±(0)
(7.31)
(7.32)
(7.33)
Токи в фазах двигателя
* л ~ Ли + /<а> + Ло> = 0;
7в = 7(1) а + /<2) а + 7(0,;
1С ~ 7(2) я + 7(2) С1 а + 7(0)-
Рис. 7 2. Схема замещения асинхронного дви-
гателя с заземленной нулевой точкой статора
при обрыве одной фазы
Из этих уравнений следует, что ток
обратной последовательности не равен
току прямой последовательности, как
это имеет место при обрыве одной фазы
цепи статора с изолированной нейтра-
лью. Таким образом, при заземлении
нулевой точки условия получаются бо-
лее благоприятными.
Пренебрегая активными сопроти-
влениями обмотки статора и активным
сопротивлением нулевой последова-
тельности, а также намагничивающим
током двигателя и принимая г 2(2) =
= Г2(1)= Г(2> Н Х2(2) ~ Х2(1) = Х(2)’ 0ПРе"
деляем суммарное сопротивление дви-
гателя:
?(i> “ ^к’
7 = Г(2> 4- IX -
-<2> 2-s
При принятых нами допущениях
из (7.31) суммарное сопротивление
двигателя равно:
Z , g<»g«> ri ,
-(1> * Z + Z — с +/хн +
ZC2} ~(0) f
, +«ал|+*>]
При малых скольжениях можно
пренебречь членами, содержащими 2—
—s. Тогда сопротивление двигателя
будет равно:
Критическое скольжение и крат-
ность максимального момента при ра-
боте двигателя в сети с заземлением
нулевых точек двигателя и источника
питания при обрыве одной фазы цепи
статора меньше, чем при работе в нор-
мальном режиме:
е -е
кр к 1+2Л ’
НОМ ~ НОМ j
При £ = 1
= и Ь»ом ^«оЛ5-
224
При k —1,5
<P = V-6 и Ьиои=*1™/1.6-
При k=2
%=%/>.66 И ^“^оЛ66
Из этого следует, что коэффициент
k незначительно сказывается на кри-
тическом скольжении и кратности
максимального момента. В среднем
можно принять fe=l,5 (см. ниже).
Скольжение при обрыве одной фа-
зы цепи статора
$ _____________SkP____________
|6 [_*»«_ ]/’
[ 1,6Ж„ Г \1,бМт) J
Для двигателя, имеющего sKp =
= 0,1 и 6НОМ=2,
_______________0,0625______
S~ д my»,, '
мс, V \Mr. j
В табл. 7.4 даны значения скольже-
ния при различных нагрузках.
Таблица 7.4
Мс. S, % 1 3.12 0,9 2,7 0.8 2,26 0.75 2,1 0,7 1,9
s/ShoM 1,16 1,01 0,845 0,785 0,71
Приведенные токи ротора нрямой н
обратной последовательностей
г _______________^(D_____________
'2(1)““ ’
I с 1 / Z°HOM Оном
+/(тХ)’-' J
j _ 72(1)^(0> 4(1)*
2(2>~ ?(2>+£(0) ~~ 1+й ’
При А=1,5
^2(2) = ®»®А?(1)в
Так как обмотка ротора симметрич-
на, то при ^ращении ее в магнитном
поле статора в ней ие может возник-
нуть ток нулевой последовательности,
а поэтому приведенный ток ротора в
комплексной форме
h~ Л(1) а + Л(2> а ~ /2») (а — 0,6л) =
= /;(П(—0,2 —j. 1,39)
и по абсолютному значению равен:
Ток в нулевом проводе
при fe=l,5
3/(0) == — 1,2/2(1).
Так как /(2)1=7^1,4, то 3/о = О,86/?,
т. е. ток, проходящий через нулевую
точку обмотки статора, немного мень-
ше тока в фазе двигателя.
Кратность приведенного тока рото-
ра по отношению к номинальному то-
ку
/г ___
Азном
1 / ftgQM 1 Г/ feHQM \8___ .
У 1,6МСФ “‘к М,6МС.)
При нагрузке Л4С*=0,71 ток ротора
будет равен номинальному току.
В табл. 7.5 даны значения кратно-
сти тока ротора в зависимости от на-
грузки для двигателя, имеющего ЬНОм =
=2.
Таблица 7.5
Л1с* /зуавом 1 1,5 0,9 1,31 0,8 1,14 0,71 1 0,6 0,83
При 5=1 индуктивное сопротивле-
ние двигателя будет равно:
Г 2±2ft .
к 1-Ьй ’
15—649
прй £=1,5
х'к = 1,6хк.
Пусковой ток двигателя
Г =14/' = = 0 875/'
2к । g 1»°'° 2к,ном-
При глухозаземленной нейтрали
двигателя возможна работа даже при
обрыве двух фаз. В этом случае при
обрыве фаз В и С имеем
7в=5/с==о
и
, _ ] _, ______________.
*U) — *(2)— /(0) — 7 г 7 . у ,
£<и 1 £(2> । £<о>
ЗЦ(Р
~ Л1) Лв) + ' (о) “ 7 J-Z J-2
—(1Э ‘ —<2> ‘ —(о)
Принимая Zo=ri+j-5,5хк, получа-
ем электромагнитную мощность
('.+4t+£)'+<««'
Из этого уравнения следует, что,
пренебрегая г, и г2(2»/(2—s) при ма-
лых s критическое скольжение
% = '«.ЛЧ
и максимальная электромагнитная
мощность
₽' «ЗЦ/2-ЗЛх^
а.тах и ’ н
Таким образом, критическое сколь-
жение и максимальный момент полу-
чаются в 3,5 раза меньшими по срав-
нению с нормальной работой двигате-
ля.
Ток холостого хода увеличится при-
мерно в 2,5 раза по сравнению с номи-
нальным режимом (для случая, когда
ток холостого хода при нормальном
режиме равен 30 % номинального то-
ка, £=1,5 и хк=20 %).
Начальный пусковой момент
М = Д1О) + Д1(Й ------
*л •
или
(2 г
72(1) Г2 72(2) Г2
S 2 — S
При s=l
0>1\ 2 ]
= з^<1> ъ 0 72
(0J ’ ’
Заменяя /£к(1) = ном, получаем
1,6
м = Чк.«°м <2 0,72 ___ 8
(01-1,62 Ь.НОМ »
7.4. ВКЛЮЧЕНИЕ СИНХРОННОГО
КОМПЕНСАТОРА ЧЕРЕЗ РЕАКТОРЫ
В ДВУХ ФАЗАХ
Рассмотрим пуск синхронного ком-
пенсатора при включении реактора
только на две фазы. Необходимость в
таком пуске может возникнуть при по-
вреждении одной фазы реактора. Та-
кой случай был, например, с масляным
реактором компенсатора 30000 кВ-А.
У реактора была повреждена одна фа-
за. По предложению автора был осу-
ществлен пуск при зашунтированной
одной фазе реактора. В последующем
такой пуск применялся и на других
компенсаторах при повреждениях од-
ной фазы реактора. Пусковой ток при
пуске по этой схеме увеличивается.
Наибольший ток будет в той фазе, где
иет реактора.
Схемы замещения для этого случая
приведены на рис. 7.3, где для упро-
щения мы пренебрегли активными со-
противлениями и условно объединили
симметричные сопротивления фаз сети
и компенсатора, обозначив их хс,к-
В результате преобразований по-
лучим, что пусковой ток в фазе А с
закороченным реактором можно опре-
делить по формуле
/кл = /«» + /«а = /к(„ (1 + 5^^)=
=---------------(1 + ———).
Ху (2sfe)4-Xp) \ Зх(2) 4-2хр/
(7.34)
где U(iy — фазное напряжение той фа-
зы, в которой нет реактора, в нашем
Рис. 7.3. Трехфазная схема (с) и схема за-
мещения для токов прямой, обратной и нуле-
вой последовательностей (б) при одной зашун-
тированной фазе пускового реактора синхрон-
ного компенсатора
226
случае U{^=UA\ и x^— сопроти-
вления прямой и обратной последова-
тельностей компенсатора, включая со-
противление сети; хр — сопротивление
реактора.
Принимая для неподвижного ком-
пенсатора Х1=х2=хс,ки Хр=рхс.к* по-
лучаем для начального значения этого
тока
зил(1+Р)
/кЛ——7,---------- . f/.OO)
хсК(3+4р+Р3)
Здесь Хс.к является сопротивлени-
ем компенсатора, включая сеть при
s=l, которое примерно равно полу-
сумме сверхпереходных сопротивлений
по осям du q.
Пусковой ток при наличии реакто-
ра во всех трех фазах
*с.к(Н"Р)
Взяв отношение, получим
= 3(1 + Р)» (7 36)
Гк.ном 3+4Р+Р"
При р=2
/к 3-9 27
/к, ном 34-84-4 15
Для определения начального пус-
кового момента определим токи пря-
мой и обратной последовательностей:
UA UA&+2p)
Xi+ *P<2**+*A х".к(3+4р+р2);
Зха4~2яр
Z . т Хр ____ I Р
*К(2) — /кс!) —-—----— <к(1) .
Зхи-|-2хр 34-2р
Кратность начального тока прямой
последовательности при пуске с двумя
фазами реактора к пусковому току при
наличии трех фаз
Ai(i) _ (14-р)(34~2р)
Л*,ном 34-4р4-р?
(7.37)
Кратность начального тока обрат-
ной последовательности при пуске с
двумя фазами реактора к пусковому
току при наличии трех фаз
/н(г) __ Р (14~Р) /у
^н.ном 3-}-4р4-р?
Для р=2
К.П) __ _21 __ | 4.
At,ном
Zkc2)/Zk,hom = 6/15 = 0,4.
Кратность начального пускового
момента при пуске с двумя фазами ре-
актора
МК _ А<(2) ft ggi
Чиом '
к,ном 'к, ном
При р=2
Мном/Мк.ном = 1,42 —0,4® ~ 1,84.
Токи в двух других фазах
= Zk(D d? 4- ZK(2)C =
=zK(1) (^+/2 у
\ Зх2-|-2хр /
ZkC = ZK(1)£J 4- Zk(2) tz2 =
= 7ка>(я+-^Н.
\ 3x24-2x₽ /
(7.40)
По абсолютному значению оии оди-
наковы:
, , V 1+р+о.ззр»
/кВ = *кС — *кА----—-----------
>4-Р
При р—2
1кВ = Zkc = 0,69/кд.
Заменяя 1ка~ 1,8 7и,ном, получаем
1кв = 1кс~ 0,69- 1,8ZK HOM = 1,24Zk.bom.
Таким образом, благодаря увели-
чению тока во всех фазах при пуске с
реакторами в двух фазах начальный
пусковой момент получается больше,
чем при нормальном пуске с реактора-
ми в трех фазах.
15*
ПРИЛОЖЕНИЯ
ПРИЛОЖЕНИЕ I
Таблица П.1. Параметры эквивалентных двухконтурных схем замещения некоторых
асинхронных двигателей с вытеснением тока в роторе [46]
Тнп двигателя Номи- нальная МОЩНОСТЬ, кВт Форма паза ротора Параметры многоконтурной схемы замещения, относительные значения
г. X. Хо 'и
ДАЗО 1910-12 1700 Бутылочная 0,00458 0.122 2,24 0,179 0.0112 0.174 0,148
ДАЗО 1669-8/10 (рис. 800 0,01 0.0966 3.17 0.12 0.0092 0.235 0,257
ДА 30-1569-8/10 400 » 0,0093 0.0836 2,54 0.128 0,098 0.232 0.195
АЗ 1252-4 630 * 0,0103 0,0865 2,22 0,168 0,0109 0.177 0.115
АТД-8000 8000 Специальный профиль 0,0133 0,114 3.7 0.102 0,0145 0.0973 0,0709
ВА 1241-4 500 Бутылочная 0.0133 0.0587 4.54 0,217 0,013 0.239 0,120
АТД-500 500 Трапецеидальная 0,0083 0.0974 4.24 0,163 0,0081 0.169 0.0908
ДВДА 215/39-12/16 1000 Дну хклеточнз я 0.008 0.0953 2,85 0,131 0,011 0.184 0,265
ДВДА 215/39-12/16 500 > 0,0185 0.104 2.94 0,1295 0.02 0.246 0.552
АСЗ-1764-8 1600 Круглая 0.0033 0.0333 1.678 0,0587 0,0077 0,0387 0,0162
Рис. П.1. Кривые зависимости от скольжения пускового тока Гп(«), вращающего момента
Ma(s) и роторных сопротивлений rz(s), Xj(s) асинхронного двигателя ДАЗО 1569-8/10:
--------расчет по каталожным данным;----------—расчет по эквивалентной двухконтурной схеме замеще-
ния 1471
ПРИЛОЖЕНИЕ 2
МОМЕНТЫ СОПРОТИВЛЕНИЯ
РАЗЛИЧНЫХ МЕХАНИЗМОВ
Момент сопротивления механизма обыч-
но характеризуется своим начальным значе-
нием, соответствующим нулевой угловой ско-
рости при трогания с места, и характером за-
висимости последующих его значений от угло-
вой скорости ротора.
В общем виде для большинства вращаю-
щихся механизмов зависиморть момента от
угловой скорости ротора и сопротивления мо-
жно выразить формулой
Мс — /Ис внч -- (Л4с иом — Л^с.нач) [ | »
\ ®ном /
(П2.1)
где Мс.нач — начальный момент сопротивления
вращающегося механизма (без учета момента
треиия покоя); Мс.ном'—номинальный момент
сопротивления механизма; р — показатель сте-
пени; юном — номинальная угловая скорость,
при которой момент сопротивления равен но-
минальному, принимаемая в дальнейшем рав-
ной синхронной угловой скорости ротора Юо-
При наличии редуктора моменты сопро-
тивления механизма /Ис.нач и /Ис.ком должны
быть приведены к угловой скорости вала ро-
тора электродвигателя.
Разделив обе части уравнения (П2.1) на
Л/с.вом, учитывая, что u=ti>j(l—s)=A/u0(l—
—s), и заменив
и S)
------ е= О « -------------
®Н0М
= kf (1 - S),
получим выражение дли момента сопротивле-
ния в относительных единицах
Мд Мс,нач / Мс<нач \
^с.ном ^с.ном \ -^с.ном /
(П2.2)
228
иля
^с» “ Л1С naq* (1 ^с.ннч*) [&/ (I —s)l₽
(П2.3)
Если значения номинальных моментов
механизма и двигателя ие совпадают, т. е.
/Ис,вом=аМиои, то по отношению к номиналь-
ному моменту двигателя получим
Л4Г
= Мс# = аЛ4с,нач* 4~ с (I *— А1с<нач#)Х
^ном
Х[Л/(1— *)Г • (П2.4)
При р~0 момент сопротивления ие зави-
сит от угловой скорости ротора.
Прн р=2 момент сопротивления механиз-
ма вентиляторного типа изменяется пропор-
ционально квадрату угловой скорости.
На рис. П.2 даны кривые моментов в за-
висимости от скольжения для случая р=2,
£/=1,0 (сплошные кривые) и Л1с,Вач.=0,15;
0,3; 0,5; 0,75; 1.
Там же показаны характеристики момен-
та сопротивления с Л4с,пач*=0 и Мс.яач»=0,5
при сяижеиин частоты сети на 10 % (kf—0,9),
показывающие уменьшение их крутизны и мо-
мента при угловой скорости, равной ©»./ == kfO0
(пунктирные линии).
Для того чтобы сдвинуть механизм с мес-
та, нужно преодолеть момент трения покоя в
подшипниках (начальный статический момент
Л4с.вач), который превышает момент трения,
существующий после того, как агрегат сдви-
нулся с места. Этот начальный момент сопро-
тивления при трогании агрегата необходимо
знать для правильного выбора двигателя, осо-
бенно в тех случаях, когда для привода вы-
бирается двигатель с короткозамкнутым ро-
тором.
Начальный момент двигателя должен быть
выше начального статического момента сопро-
тивления агрегата, иначе двигатель ие сможет
тронуться с места.
Наиболее просто начальный статический
момеит сопротивления определяется динамо-
метром или при помощи рычага с грузом, при-
строенного к шкиву механизма.
Начальные статические моменты по дан-
ным измерений составляют: для вентиляторов,
дымососов и центробежных иасосов — от 0,05
до 0,36 номинального, при среднем из 22 изме-
рений— 0,14 номинального, при этом только
в одном случае момент был равен 0,36 и в
двух случаях — 0,22; для поршневых компрес-
соров— от 0,13 до 0,36, при среднем из шести
Рис. П.2. Момент сопротивления вентилятор-
ного типа при р=2 в зависимости от сколь-
жения
измерений — 0,25, только в одном случае мо-
мент был равен 0,36; для турбокомпрессора —
0,13; для дробилки угля — 0,21; для шахтной
мельницы — от 0,39 до 0,8 в зависимости от по-
ложения бил; для центрифуги—0,22; для ша-
ровой мельницы — от 0,4 до 0.75; для синхрон-
ного компенсатора 15 000 кВ-А —0,04 и для
гидрогенератора 72 МВт — 0,14.
Для механизмов со сравнительно большим
начальным моментом и двигателями с фазным
ротором начальный статический момент мож-
но определить следующим образом. Двигатель
включают при полностью введенном реостате и.
постепенно выводя реостат, замеряют мощность
Pi, кВт, потребляемую двигателем в момент,
когда двигатель стронулся с места.
Тогда начальный момент в долях от но-
минального
^нач Pg ~ Pj ~ РхЪгюМ
МвоМ РИНОМ Р1НОМ Рном
где Д]ИОм — 3 £/ном /ном cos фпомф Ю-3
— потребляемая из сети мощность при номи-
нальной нагрузке.
Для трогания с места тижелых механиз-
мов можно применять кран
Тягодутьевые механизмы собственных
нужд электростанций (дымососы, вентиляторы
и др.) в большинстве случаев имеют вентиля-
торный момент сопротивления Момент
центробежных иасосов в зависимости от ста-
тического давления (высоты подачи или про-
тиводавления) изменяется пропорционально
угловой скорости ротора во второй или более
высокой степени.
В промышленности применяются механиз-
мы с самыми различными характеристиками.
Постоянный момент сопротивления имеют
транспортеры, шнеки, компрессоры, углераз-
мольиые мельницы и другие механизмы.
Для дымососов и вентиляторов начальный
момеит сопротивления при вращающемся ме-
ханизме может быть принят равным Мс.нвч=
=0,15, а следовательно, момент сопротивления
будет изменяться по закону
^ = 0,15 + 0,85^(1—s)s. (П2.5)
Характеристики моментов сопротивления,
создаваемых центробежными насосами, широ-
ко применяемыми в установках собственных
нужд электростанций и в промышленности,
существенно зависят от статического проти-
водавления Нот на выходе иасоса.
На рнс. П.З построен ряд кривых Мс»=
=1£(со*) для НСт/Нном=0; 0,5; 0,75; 0,9, отку-
да видно, что только для случая НСт=0 имеем
примерно квадратичную зависимость М от уг-
ловой скорости.
Подача насосов, работающих с противо-
давлением» уже не пропорциональна угловой
скорости в первой степени и в зависимости от
статического сопротивления может изменяться
очень резко.
Данное обстоятельство указывает иа то.
что насосы, преодолевающие относительно
большое статическое сопротивление, напри-
мер питательные насосы, весьма чувствитель-
ны к изменению угловой скорости и, следова-
тельно, к изменению частоты сети.
Параллельная работа таких насосов в
случае присоединения двигателей к разным
источникам питания неустойчива по причинам.
229
Рис. П.З. Кривые момента сопротивлении в за-
висимости от угловой скорости для разных
значений статического напора
Рис. П.4. Кривые моментов сопротивления
мельницы ШБМ-370/850 и вращающего момен-
та двигателя СДМЗ-20-49-60:
I — вращающий момент двигателя; 2 — момент со-
противления мельницы при пуске; 3 — избыточный
момент двигатели; 4 —момент сопротивления мель-
ницы при выбеге
приведенным выше (колебания частоты и на-
пряжения).
Если иапор, развиваемый насосом, будет
меньше статического напора, что может иметь
место при снижении частоты сети, направление
потока воды изменится и при наличии обрат-
ного клапана последний закроется. В зтом
случае насос будет преодолевать сопротивле-
ние воды, не совершая полезной работы. При
таком режиме мощность насоса составляет
30—40 % номинальной мощности.
Прн отключении двигателя от сети или
при значительном’ понижении напряжения в
случае отказа обратного клапана возможно
вращение насоса в обратную сторону с весь-
ма значительной угловой скоростью. В подоб-
ных случаях момент двигателя при самозапус-
ке может оказаться недостаточным, а если
двигатель ие будет отключен от сети, он мо-
жет быть поврежден.
У большинства механизмов собственных
нужд электрических станций кривые моментов
сопротивления, снятые при пуске и выбеге,
практически одинаковы. С совершенствовани-
ем методов измерении угловой скорости рото-
ра двигателей стало возможным уточнить ха-
рактер изменения моментов сопротивления
различных механизмов при динамических про-
цессах пуска и выбега. Наибольшие различия
значений Л1С* при пуске и Bbioeie выявлены у
агрегатов углеразмольных мельниц.
Для экспериментального определения вра-
щающего момента двигателя и момента сопро-
тивления механизма в зависимости от сколь-
жения (угловой скорости) при разгоне и
торможении производятся три опыта: пуск
двигатели, расцепленного с механизмом, пуск
и выбег агрегата с нагрузкой.
При пуске двигателя без механизма опре-
деляется зависимость вращающего момента
двигателя от скольжения. Пуск двигателя с
нагруженным механизмом и выбег агрегата,
работавшего с нагрузкой, позволяют опреде-
лить зависимость избыточного вращающего мо-
мента прн пуске и момента сопротивления иа
выбеге от скольжения. Момент сопротивления
механизма при пуске определяется как раз-
ность между вращающим моментом двигатели
и избыточным моментом для данного сколь-
жения.
В процессе пусков н выбегов осциллогра-
фнруются время» угловая скорость двигателя,
потребляемая из сети мощность и линейное на-
пряжение. Вращающий момент двшателя и
моменты сопротивления механизмов в зависи-
мости от скольжения в процессе пусков н вы-
бегов могут быть записаны с помощью специ-
альных датчиков илн получены графическим
дифференцированием кривых угловой скорости.
Пример экспериментальных зависимостей
вращающих моментов двигателей н моментов
сопротивления механизмов для шаровой мель-
ницы приведен на рис. П.4.
Из приведенных кривых видно, что мо-
менты сопроотивлеиия мельниц при пуске и
выбеге не только зависят от скольжения, но
и имеют совершенно различную форму при
пуске и выбеге. Это следует учитывать при
расчете возможности самозапуска мельницы
после перерыва питания.
ПРИЛОЖЕНИЕ 3
МЕТОДИКА И ПРИМЕР РАСЧЕТА
САМОЗАПУСКА ДВИГАТЕЛЕЙ
СОБСТВЕННЫХ НУЖД
ЭЛЕКТРИЧЕСКИХ СТАНЦИЙ
В СООТВЕТСТВИИ
С ЭКСПЛУАТАЦИОННЫМ
ЦИРКУЛЯРОМ Э-6/73
Расчет начального напряжения на шинах
при самозапуске для случая самозапуска от
иенагруженного резервного источника пита-
нии производится по формуле, оти. ед.
£/иач. =-------~. (П3.1)
^ном.дв
где £/с« = 1,0—1,1—относительное напряжение
источника с учетом положения переключателя
ответвлений; —суммарное сопротивление
цепи питания (системы, линии, реактора или
трансформатора с учетом положения РПН),
Ом; ki — коэффициент, учитывающий умень-
шение кратности пускового тока электродви-
гателей прн самозапуске по сравнению с его
значением для заторможенных двигателей. По
данным Союзтехэнерго и ВНИИЭ для расче-
230
Рис. П.5. Зависимость коэффициента умень-
шения кратности пускового тока электродви-
гателей при самозапуске от времени перерыва
питании
тов можно принимать зависимость Ki от вре-
мени перерыва питании, показанную иа рис. П.5:
— суммарный пусковой
ток заторможенных электродвигателей. А.
В случае самозапуска электродвигателей
от предварительно нагруженного резервного
источника питания расчет производится при
следующих допущениях:
ток самозапускающихся двигателей при-
нимается чисто индуктивным;
ток предварительной нагрузки резервного
источника из-за понижения напряжения на нем
при подключении секции с затормозившимися
двигателями увеличивается в среднем на 50—
55 %;
средний коэффициент мощности предвари-
тельной нагрузки резервного источника в про-
цессе самозапуска двигателей остается неиз-
менным и равен cos фввгр=0|7-^-0,8.
Из рис. П.6 получаем
1/” 2 l/3*xE^p
Риач. = |/ ----------7}--------- Х
^ноМ.дв
(П3.2)
\ О'ном.дв /
Здесь /р — результирующий ток резервно-
го источника питания, А:
/р = /сз V 1 +2asincpHr + aa , (ПЗ.3)
где /сз— ток самозапускающихся двигате-
лей, А:
/сз = С/нач^ /пЗ (П3.4)
в=М«//сз — отношение увеличенного тока
предварительной нагрузки к току подключив-
шейся секции CH (fe= 1,5-: 1,55); <рр —угол
сдвига между напряжением Uc и током
1 4- sin <рпг a
sin фр =
у 1 4- 2 sin <рпг a 4-
Начальное напряжение из (П3.4)
жеимя для а может быть записано в
шем виде:
,___________k/цг
’-'нач# — . .
a^i /пуск
и выра-
следую-
(П3.6)
Коэффнциент а определяется по уравне-
нию
2А В
а2 — (£/с* — A sin =0, (П3.7)
где
^НОМ.ДВ
в Л?;
\ /пуск /
C=l/|_-24sin<pHrl/M+A2.
Пример I. Определить начальное напря-
жение при самозапуске электродвигателей
6 кВ собственных служб блочного агрегата
мощностью 200 МВт после перерыва питания,
равного 2 с. В самозапуске участвуют элек-
тродвигатели питательного насоса (ПЭН), ды-
мососов (ДС), дутьевого вентилятора (ДВ).
резервного возбудителя (РВ)0 вентилятора
горячего дутья (ВГД), конденсатного насоса
(КН).
Данные электродвигателей приведены в
табл. П.2.
Таблица П.2
Параметр электродви- гвтеля Значение параметра электродвига- теля с приводом
ПЭН дс ДВ РВ ВГД КН
^НОМ’ДВ 450 204 99 156 32 29,4
7,0 5,5 10,3 10,5 4,6 5,8
Параметры резервного трансформатора:
5иом= 15 750 кВ• A; Uk=10,3 %; /иом,тр= 1445 А;
6/вом,тр=6300 В; напряжение трансформатора
с учетом положения переключателя ответвле-
ний при отсутствии нагрузки 1/О“6200 В
(Uc= 1,033 прн иНом,д0=6ООО В). Сопротив-
ление шии Хш=0,04 Ом. Сопротивление систе-
мы не учитывается.
Рнс. П.6. Векторная диаграмма для опреде-
ления £/Вач при самозапуске электродвигате-
лей от предварительно нагруженного источни-
ка питания
231
Таблипа П.З. Средняя загрузка двигателей собственных иужд блоков 300 МВт
Наименование механизма Средняя Нагрузка Наименование механизма Средняя загрузка
Питательные электронасосы Конденсатные электронасосы Бустерные насосы Сливные насосы Циркуляционные электрона- сосы Дымососы 0,8—0,85 0,76—0,95 0,53—0,75 0,61—0,63 0,85 0,59—0,83 Дутьевые вентиляторы Вентиляторы горячего дутья Молотковая мельница Мельничные вентиляторы Шаровая мельница Багерные насосы 0,55—0,8 0,78—0,87 0,7 0,65 0,56 0,5
Расчет выполняется для следующих ус-
ловий:
а) самозапуск электродвигателей произ-
водится от ненагружеиного трансформатора;
б) самозапуск производится с учетом
предварительной нагрузки резервного транс-
форматора, равной 0,5/Н(,м,тр-
Индуктивное сопротивление цепи питания
*2 = Sr + хш = 0,264-0,04 = 0,3 Ом;
___ ик ^ном.тр
*тр — ~ — —
10 ¥ 3 / ном.тр
ю.з : бзоо \
— 100 ( 1,73-1445 ) = °-26Ом-
Суммарный пусковой ток электродвига-
телей в заторможенном состоянии (при едком
электродвигателе ПЭН)
^/цуск ” У Люм.двг — 450-7 4- 204-5,5+
/=1
+ 99-10,3 + 156-10,5 + 32-4,6 +
+ 29,4-5,8 = 7247 А.
Начальное напряжение иа шниах собствен-
ных нужд при самозапуске от ненагружеино-
го трансформатора после перерыва питания,
равного 2 с,
1.033
(Укач_ =------------------;---— = 0,685,
1.73-0,3-0,81-7247
‘ 6000
(Согласно рис. П.5 для перерыва питания,
равного 2 с, fcf = 0,81).
Полученное значение £/Нач. больше мини-
мально допустимого начального напряжения,
равного 0,6(/иом, следовательно, самозапуск
электродвигателей обеспечивается.
Начальное напряжение иа шинах собст-
венных нужд при самозапуске от предвари-
тельно нагруженного резервного Трансформа-
тора (7яг=720 А; Л=1,55; cos<pHr=0,8)
1,73-0,3-1,55-720
А =---------——-----------= 0,0967;
6000
/ 1,55-720 \3
fl=(-0T6i.-7247 ) -°.™^ = 0,0268;
С = 1,0332-2-0,0967-0,6-1,033 +
+ 0,09672 = 0,9564;
1,33 - 0,0967-0.6
сс2 — 2-0,0967-------------------
0,9564
0,0268
------~ = 0.
0,9564
Отсюда а=0,292. Тогда по формуле (П3.6)
определим
1,55-720 „ „„
€/вач* — --------“7--------= 0,653.
0,292-0,81-7247
Поскольку £/нач. >0,6£/Ном, самозапуск
электродвигателя обеспечивается.
Пример 2. Определить допустимую дли-
тельность перерыва литания по условиям са-
мозапуска электродвигателей двух питательных
насосов от иеиагруженного резервного транс-
форматора, параметры которого приведены в
примере 1. £/вом,рв определяется при 1/Ивч.=0,6
по коэффициенту ki из соотношения (П3.1):
—4——1)6000
0,6 }
!— -----------= 0,8.
1,73-0,3-10 397 '
где /„=7247+450-7=10 397 А.
Из рис. П.З следует, что в рассматривае-
мом случае допускается перерыв питания в
схеме СН не более 1,9 с.
В табл. П.З дана средняя загрувкя двига-
телей собственных нужд блоков 300 МВт.
ПРИЛОЖЕНИЕ 4
Пусковые характеристики синхронных двигателей I[In(s) — верхняя строка, М./М» («)—-нижняя
строка
Серия двигателя Скольжение
1.0 0.8 0.6 0,-5 0.4 0,2 0.1 0.05 0,025
СТМ, стмп 1,о 1,0 0,95 0,98 0,86 0,92 0,82 0,87 0,78 0,82 0,65 0,65 0,53 0,5 0,4 0,3 0,25 0,15
ВДС-325 1,0 I.... 0,98 1.17 0,96 1,6 0,94 1,87 0.92 2,23 0,83 3,19 0,67 3,4 0,53 2,8 0,4 1,27
ДСМ, демп 1,0 1,0 0,98 1,13 0,93 1,33 0,88 1,466 0,81 1,58 0.63 1,53 0,44 1,2 0,33 0,8 0,22 0,4
ДСП-116/49-4 1,0 1.0 0,96 1,03 0,91 1,Н 0,88 1.14 0,81 1,18 0,67 1,14 0,55 1.0 0,43 0,81 0,34 0,51
ДСП-140/74-4 1,0 1.0 0,97 1,15 1,93 1,29 0,87 1,35 0,82 1,42 0,64 1,45 0,48 1,31 0,36 1.13 0,27 0,63
ДСКЗ-260 1,0 1.0 0,99 1,31 0,98 1,75 0,97 2,19 0,96 2,66 0,87 4.0 0,69 4.5 0,48 3,44 0,29 1,88
ВСДН(ДВ)-16-ЗЫ0 1.0 1,0 0,99 1,31 0,98 1,75 0,97 2,19 0,96 2,66 0,87 4.0 0,69 4,5 0,48 3,44 0,29 1,88
СДК(П)-14-26-10 1,0 1,о 0,99 1,19 0,97 1,63 0,95 1,72 и,9 1,94 0,75 2,14 0,5 1,65 0,4 0,94 0,2 0,4
СДК(П)-14-31 -10 1,0 1,0 0.99 1,15 0,97 1,48 0,96 1,65 0,91 1.9 0,73 2,1 0,56 1,65 0,42 0,9 0,24 0.4
СДК(П)-14-44-10 СДК(П)-14-36 10 1,0 1,0 0,99 1,23 0,97 1,56 0,95 1,69 0,9 2 0,75 2,3 0,5 2 0,4 1,1 0.2 0,5
СДК(П)-14-56-10 1,0 1,0 0,99 1,25 0,98 1,57 0,95 1,69 0,91 2,0 0,77 2,31 0,42 2 0,37 1,1 0,23 0,5
СДК(П)-15-39-12, СДК(П)-15-49-12 1.0 1.0 0,98 1,2 0,97 1,5 0,95 0,65 0,91 1,89 0,73 2,17 0,523 1,83 0,32 1,01 0,18 0,66
СДК(П)-14-31-12 1,0 1,0 1,0 1,18 0,99 1.44 0,94 1,76 0,92 2,03 0,75 2,65 0,54 2,24 0,33 1,24 0,25 0,76
СДК(П)-14-36-12 1,0 1,0 1,0 1,19 1,0 1,38 0,95 1,75 0,93 2.06 0,77 2,69 0,56 2,22 0,36 1,25 0,23 0,72
СДК(П)-14-44-12 1,0 1,0 1.0 1.2 1,0 1,53 0,97 1,73 0,95 2 0,79 2,67 0,52 2,37 0,38 1,43 0,33 0,87
СДК(П)-15-34-12 1,0 1,0 0,97 1,21 0,96 1,46 0,92 1,52 0,87 1.7 0,68 1,85 0,49 1,46 0,32 1.0 0,22 0,67
СДК(П)-15-39-12 1,0 1,0 0,98 1,12 0,95 1,47 0,9 1,59 0,83 1,76 0.7 1,88 0,5 1,53 0,3 1.12 0,2 0,6
СДК(П)-15-49-12 1.0 1,0 0,95 1,19 0,91 1,39 0,88 1.5 0,84 1,69 0.7 1,89 0,51 1,56 0,32 0,94 0,23 0,69
СДК(П)-16-41-12 1,0 1,0 0,98 1,24 0,95 1,44 0,9 1,56 0,86 1.74 0,71 1,91 0,5 1,56 0,38 1,47 0,24 0,74
СДК(П)-16-64-12 1,0 1,0 0,96 1,15 0,95 1,36 0,9 1.5 0,86 1,67 0,71 1,79 0.5 1,68 0,38 1,27 0,24 0,73
СДК(П)-16-51-12 1.0 1.0 0,96 1,15 0,95 1.36 0.9 1.5 0,85 1,67 0.7 1,79 0,55 1,58 0.4 1.27 0,2 0,73
233
Продолжение прилоэк. 4
Скольжение
Серия двигателя ™ 1 0,8 0,6 0.S | 0,4 | 0,2 | 0.1 | 0,05 0,025
СДК(П)-17-49-12, СДК(П)-17-76-12 1.0 1.0 0,96 1,19 0,93 1,38 0,89 1.5 0,83 1,62 0,65 1,57 0,52 1,36 0,3 1,0 0,22 0.67
СДК(П)-17-59-12 1,0 1,0 0,98 1,18 0,95 1,3 0,9 1,5 0,84 1.6 0,7 1,57 0,54 1,35 0,36 1,05 0,27 0,65
СДК(П)-15-34-16, СДК(П)-15-41-16 1,0 1,0 1.0 1,21 0,98 1,57 0,95 1,79 п,93 2,04 0,75 2,68 0,53 2,29 0,35 1,46 0,23 1.0
СДК(П)-16-34-16, СДК(П)-16-41-16 1,0 1,0 1,0 1,25 0,98 1,5 0,95 1,7 0,93 2 0,76 2,61 0,57 2,3 0,38 1,5 0,29 1,14
СДК(П)-16-51-16 1,0 1,0 1,0 1,25 0,98 1,5 0,95 1,7 0,93 2 0,77 2,61 0,57 2,3 0,34 1.5 0,25 1.14
СДК(П)-17-41-16 1,0 1,0 0,98 1,2 0,93 1,43 0,91 1,6 0,87 1,7 0,71 1,7 0,53 1,45 0,4 1,05 0,27 0,68
СДК(П)-17-49-16 1,0 1,0 1,0 1.19 0,93 1,4 0,89 1,5 0,85 1,67 0,7 1,67 0,5 1,39 0,4 1,06 0,3 0,72
СДК(П)-17-59-16 1,0 1,0 1,0 1,15 0,95 1,35 0,9 1,5 0,86 1,6 0,71 1,5 0,57 1,1 0,45 1.0 0,33 0,65
СДК(П)-18-49-16, СДК(П)-18-91-16 1,0 1,0 1,0 1.21 0,96 1,52 0,93 1,66 0,91 1,86 0,8 2,2 0,64 2,07 0,51 1,66 0,36 1.1
СДК(П)-18-76-16 1,0 1,0 1,0 1,19 0,96 1,5 0,92 1,66 0,9 1,84 0,78 2,16 0,64 2,03 0,48 1,78 0,36 1,5
СДК(П)-17-46-20 1,0 1,0 1,0 1,25 0,96 1,5 0,96 1,70 0,93 2 0,81 2,46 0,61 2,29 0,44 1,46 0,26 1,11
СДК(П)-18-39-20 1,0 1.0 1,0 1,21 0,98 1,46 0,95 1,88 0,9 1,86 0,8 2,04 0,63 1,79 0,45 1,5 0,3 1,29
СДК(П)-18-49-20 1,0 1,0 0,96 1,19 0,96 1,44 0,93 1,63 0,91 1,81 0,76 1,97 0,6 1,56 0,47 1,5 0,36 1,0
СДК(П)-18-61 -20 1,0 1,0 1,0 1,17 0,96 1,46 0,92 1,6 0,89 1,74 0,77 1,86 0,61 1,71 0.48 1,43 0,4 1.14
СДК(П)-19-54-20 1,0 1,0 1.0 1,25 0,96 1,5 0,93 1,67 0,9 1,96 0,78 2 0,65 1,92 0,5 1,79 0,4 1,29
СДК(П)-19-69-20 1,0 1,0 1,0 1,22 0,96 1,48 0,93 1,59 0,91 1,81 0,8 1,93 0,65 1,81 0,57 1,56 0,46 1.И
СДК(П)-18-49-24, СДК(П)-18-61 -24 1,0 1,0 1,0 1,18 0,98 1,5 0,94 1,71 0,92 1,91 0,76 2,35 0,53 2,11 0,33 1,32 0,18 1,18
СДК(П)-19-46-25 1,0 1,0 1,0 1,14 0,97 1,48 0,95 1.76 0,92 2 0,82 2,67 0,64 2,67 0.54 2,14 0,33 1,52
СДК(П)-19-54-24 1,0 1,0 1,0 1,21 0,96 1,54 0,95 1,71 0,93 2 0,81 2,54 0,67 2,5 0,55 2,1 0,38 1,54
СДК(П)-19-69-24 1,0 1,0 1,0 1,15 0,97 1,46 0,95 1,62 0,92 1,85 0,82 2 0,64 1,85 0,54 1,58 0,33 1,27
СДК(П)-19-84-24 1,0 1,0 1,0 0,14 0,98 1,4 0,95 1,61 0,93 1,82 0,81 1,96 0,67 1,82 0,55 1,61 0,38 1,14
234
ПРИЛОЖЕНИЕ 5
Пусковые характеристики синхронных двигателей серин СТД/n//HOM=/n(s)— верхняя строка,
Л1п//Ицси=Л1п*(х) — нижняя строка
Тип двигателя Скольжение
1 0,8 0,6 0.5 0,4 0,2 0,1 0.0Б 0,02
СТД-630-2 5,66 2,03 5,39 2,06 5,04 2,06 4,80 2,08 4,52 2,07 3,60 1,91 2,73 1,59 2,00 1,19 1,38 0,745
СТД-800-2 5,58 2,01 5,32 2,05 4,96 2,07 4,78 2,06 4,44 2,06 3,54 1,90 2,67 1,59 1,94 1,18 1,31 0,75
СТД-1000-2 6,70 2,41 6,37 2,46 5,93 2,49 5,55 2,49 5,30 2,48 4,22 2,30 3,18 1,93 2,28 1,45 1,49 0,889
СТД-1250-2 6,48 2,07 6,22 2,14 5,85 2,20 5,61 2,23 5,31 2,24 4,34 2,17 3,37 1,91 2,48 1,50 1,65 0,954
СТД-1600-2 6,79 2,16 6,51 2,24 6,12 2,32 5,87 2,35 5,55 2,36 4,53 2,29 3,51 2,02 2,57 1,60 1,67 1,01
СТД-2000-2 6,91 2,23 6,62 2,32 6,21 2,40 5,94 2,43 5,61 2,44 4,55 2,35 3,51 2,07 2,55 1,63 1,63 1,02
СТД-2500-2 6,16 1,75 5,94 1,84 5,64 1,93 5,43 1,97 5,17 2,00 4,31 1,97 3,43 1,82 2,50 1,50 1,74 0,997
СТД-3200-2 6,63 1,85 6,40 1,95 6,07 2,07 5,85 2,12 5.56 2,16 4,63 2,17 3,68 1,99 2,77 1,65 1,82 1,09
СТД-4000-2 6,69 1,92 6,45 2,03 6,11 2,14 5,88 2,20 5,58 2,24 4,60 2,23 3,52 2,02 2,71 1.56 1,75 1,06
СТД-5000-2 7,22 2,07 6.96 2,20 6,59 2,35 6,33 2,41 6,00 2,47 4,90 2,45 3,83 2,20 2,83 1,80 1,79 1,16
СТД-6300-2 6,28 1,62 6,09 1,73 5,81 1,86 5,69 1,93 5,36 1,99 4,50 2,05 3,61 1,92 2,75 1,65 1,78 1,13
СТД-8000-2 6,93 1,76 6,72 1,89 6,42 2,05 6,20 2,13 5,92 2,21 4,95 2,29 3,95 2,14 3,01 1,83 1,93 1,26
СТД-10000-2 8,10 2,06 7,86 2,24 7,50 2,44 7,24 2,55 6,90 2,65 5,71 2,75 4,51 2,53 3,39 2,14 2,14 1,48
СТД-12500-2 8,86 2,24 8,60 2,43 8,21 2,67 7,93 2,80 7,56 2,92 6,24 3,04 4,89 2,79 3,67 2.35 2,30 1,50
Примечание. Для получения зависимостей /(s) и необходимо значения, приведенные выше, умно-
жить соответственно на кратности пускового тока /п и пускового момента М п*, взятые из каталогов.
ПРИЛОЖЕНИЕ 6
Расчетные индуктивные сопротивления н постоянные времени синхронных двигателей серии СТД
Тип даигателя ^ном. в 4 % 4% % Xt. % xt. % Tc!0-c 4 е Vе Vе
СТД-630-2 6000 10 000 14,68 14,25 22,73 21,91 181,0 175,0 17,91 17,39 5,70 5,48 2,51 2,51 0,314 0,314 0,0392 0,0393 0,0347 0,0308
СТД-800-2 6000 10 000 14,25 14,53 22,79 23,30 188,0 192.0 17,39 17,73 5,90 6,03 2,52 2,62 0,318 0,318 0,0397 0,0398 0,0373 0,0314
СТД-1000-2 6000 10 000 13,31 12,76 22,20 21,10 193,0 133,8 16,20 15,57 6,16 5,83 2,81 2,81 0,322 0,323 0,0403 0,0403 0,0395 0,0317
СТД-1250-2 6000 10 000 13,76 13,73 28.00 20,72 163,0 163,0 15,80 16,75 4.62 4,58 2,86 2,88 0,367 0,366 0,0460 0,0458 0,0552 0,0404
235
Продолжение прилож, 6
Тип двигателя ^НОМ' Е 4 % «d-% % Xq, % с Vе
СТД-1600-2 6000 12,85 22,00 165,0 15,70 4.71 3,05 0,371 0,0454 0,0588
10 000 13,39 21,10 171,6 16,34 4,93 3,06 0,375 0,0470 0,0404
СТД-2000-2 6000 13,44 22,13 186,7 16,40 5,42 3,20 0,379 0,0475 0,0523
10 000 13,28 21,97 186,5 16,20 5,36 3,20 0,377 0,0471 0,0426
СТД-2500-2 6000 14,24 22,20 154,5 17,40 4,07 3,66 0,527 0,0659 0,0740
10 000 15,05 23,63 163,6 18,36 4,32 3,66 0,529 0,0662 0,0565
СТД-3200-2 6000 14,04 23,13 169,0 17,13 4,49 3,89 0,533 0,0660 0,0782
10000 14,39 23,48 169,3 17,56 4,58 3,89 0,539 0,0674 0,0544
СТД-4000-2 6000 14,80 25,57 192,1 18,05 5,10 4,02 0,535 0,0669 0,0596
10 000 14,29 24,58 185,1 17,43 4,88 4,02 0,534 0,0667 0,0560
СТД-5000-2 6000 13,70 24,90 196,4 16,70 5,32 4,29 0,544 0,0680 0,0697
10 000 13,61 24,81 196,3 16,60 5,30 4.29 0,542 0,0667 0,0598
СТД-6300-2 6000 15,31 26,8 214,8 18,70 7,31 5,76 0,720 0,0900 0,0935
10 000 15,54 26,77 218,5 18,96 6,70 5,80 0,709 0,0886 0,0845
СТД-8000-2 6000 14,32 25,70 219,0 17,47 6,72 6,06 0,711 0,0888 0,1070
10 000 14,47 25,84 219,2 17,65 6,76 6,06 0,714 0,0893 0,0777
СТД-10000-2 8000 12,57 23,26 206,0 15,30 6,45 6,46 0,729 0,0911 0,0948
10 000 12,91 24,40 219,4 15,75 6,82 6,60 0,722 0,0902 0,0840
СТД-12500-2 6000 12,00 23,53 218,4 14,63 6,805 6,72 0,724 0,0905 0,1060
10 000 12,09 23,60 218,5 14,75 6,83 6,72 0,727 0.0908 ПРИЛО) 0,0773 КЕНИЕ 7
Расчетные индуктивные сопротивления и постоянные времени некоторых других типов
синхронных двигателей
Тип двигателя р пом> кВт ^НОН’ В 4 « 4% xd' % V % С 4е V с Vе
СТМ-12000-2 12 000 6000, 10 000 11,7 - 18 188 188 0,096 0.4 0.766 0.29
СТМ-ЗБ00-2 J500 6000 11 18 172 172 0,065 — 0,512 0,09
3500 10 000 12 — 18 174 174 0.066 — 0,529 0,09
СТМ-1500-2 1500 6000 12 - 18 159 159 0,048 - 0,382 0,09
СД-12-46-6 400 6000 - - 154,7 82.1 0.00946 0.616 -
ДСП-116/49-4 1300 6000 23 24 30 170 85 0,0034 - 0,45 -
ДСП-213/59-16 2000 6000 19 - 32 82 БО 0,071 - 0,63
ДСП-140/74-4 2000 6000 12,5 13,4 17.5 129 70 0,043 — 0,43 0,092
3000 6000 18 20,1 28 200 — — —
СМ-165/8Б-6 3800 6000 16 17 25 130 70 о.ооб - 0,7 0,08
МС-322-8/6 1000 6000 15,2 17,4 24,4 96 59 0,00932 0,0132 0,56 0,092
СДСЗ-17-41-16 1200 6000 14,2 | 15,3 24,2 78, Б 1 49 0,0056 0,00728 0,35 | 0,0495
236
Продолжение прилож 7
Тип двигателя р HUM- кВт В 4* 4% X(L‘ % V» Vе 4 е V с V с
СДЗ-13-34-6А 450 6000 13,3 14,3 19,3 144 83 0.014 0,27 0.026
ДСЗ-1608-Ь 800 6000 16,9 18,3 24,4 13У 83 0.0054 0.35 0,042
ДСЗ-19У16-12 6550 6000 1Б 30,8 117 68.7 0,00771 - 0.878 0.1
СД-12-46-8 320 6000 16.4 17,6 23,5 161 104,6 0,00708 - 0,257 0,0356
СДУ-18-54-It 3200 6000’ 14 16 21 102 54 0.011 U,017 0.344 0,058
СПИСОК ЛИТЕРАТУРЫ
1. Алексеев Е. А. Конструкции электриче-
ских машин. М.—Л.: Госэнергоиздат, 1949,
392 с.
2. Костенко М. П. Электрические машины.
Специальная часть. М.: Госэнергоиздат, 1949.
712 с.
3. Важное А. И. Электрические машины.
Л.: Энергия, 1969. — 768 с.
4. Веников В. А. Переходные электромеха-
нические процессы в электрических системах.
М.: Энергия, 1964. 378 с.
5. Жданов П. С. Устойчивость электриче-
ских систем. М.: Энергия, 1979. 455 с.
6. Казовский Е. Я. Переходные процессы в
электрических машинах переменного тока. М.:
Изд-во АН СССР. 1952. 624 с.
7. Конкордиа Ч. Синхронные машины.
Переходные и установившиеся режимы. М.:
Госэнергоиздат, 1959. 266 с.
8. Глебов И. А., Логинов С. И. Системы
возбуждения и регулирования синхронных дви-
гателей. Л.: Энергия, 1972. ИЗ с.
9. Рюденберг Р. Переходные процессы в
электроэнергетических системах. М.: Изд-во
иностр, лит., 1955. 714 с.
10. Сыромятников И. А. Режимы работы
синхронных генераторов. М,: Госэнергоиздат,
1952. 199 с.
11. Сыромятников И. А. Режимы работы
асинхронных и синхронных электродвигателей.
М_: Госэнергоиздат, 1953. 528 с.
12. Сыромятников И. А. Технико-экономи-
ческие преимущества синхронных двигателей.—
В кн.: Синхронные двигатели. М.: Госэнерго-
издат, 1959, с. 13—41.
13. Сыромятников И. А. Сравнение эффек-
тивности применения асинхронных и синхрон-
ных электродвигателей для механизмов с удар-
ной нагрузкой. — Электричество, 1964, № 3,
с. 44—50.
14 Сыромятников И. А. Об устойчивости
электрических систем. — Электричество, 1957.
№ 1, с. 38-41.
15. Мамиконянц Л. Г. Токи и моменты вра-
щения, возникающие в синхронной машине прн
включении ее способом самосинхронизации. —
Тр. ЦНИЭЛ, вып. IV, 1956, с. 9-87.
16. Мамиконянц Л.» Г. О переходных про-
цессах в синхронных машинах с успокоитель-
ными конторами на роторе. — Электричество,
1954, № 7, с. 10—15
17. Лнндорф Л. С. О повышении надеж-
ности работы электроустановок промышленных
предприятий. — Электричество, 1955, № 9.
с. 25—32.
18 Линдорф Л. С. К вопросу об АВР при
наличии синхронных двигателей. — Промыш-
ленная энергетика, 1958, № 10, с. 38—39.
19. Линдорф Л. С. Особенности пуска и
самозапуска синхронных двигателей. — В кн.:
Синхронные двигатели. М.: Госэнергоиздат,
1959, с. 90—127.
20. Долина В. И., Линдорф Л. Q, Яков-
лев В. М. Опыт прямого пуска и самозапуска
синхронных двигателей. — В кн.: Синхронные
двигатели. М.: Госэнергоиздат, 1959, с. 156—
167.
21. Слодарж М. И. Режимы работы, ре-
лейная защита и автоматика синхронных элек-
тродвигателей. М,: Энергия, 1977. 215 с.
22. Голодное Ю. JVI-, Хоренян А. X. Са-
мозапуск электродвигателей. М.: Энергия,
1974. 144 с.
23. Слодарж М. И. Токи при самозапуске
асинхронных двигателей. — Электрические
станции, 1971, № 4, с. 40—42.
24. Миллер Г. Р. Вопросы самозапуска
синхронных двигателей. — Промышленная
энергетика, 1957, № 12, с. 19—23.
25. Улицкий М. С. Самозапуск двигателей
собственных нужд после АВР. МОНТОЭП.
Релейная защита, автоматика и телемеханика.
М_: Госэнергоиздат, 1957.
26. Типовая методика определения эконо-
мической эффективности капитальных вложе-
ний. М.: Экономика, 1969
27. Грейсух М. В. Выбор способа пуска
синхронных двигателей с короткозамкнутым
ротором и синхронных электродвигателей.—
Электричество, 1959, № 9, с. 19—23.
28. Голодной Ю. М. Ток включении при
самозапуске синхронных двигателей. — Про-
мышленная энергетика, 1970, № 8, с. 35—38.
29. О самозапуске электродвигателей соб-
ственных нужд тепловых электростанций. Ми-
нистерство энергетики и электрификации СССР.
Главное техническое управление по эксплуа-
тации энергосистем. Эксплуатационный цир-
куляр № Э-6/73.
30. ОЙрех Я- А., Сивокобыленко В. Ф.
Режим самозалуска асинхронных электродви-
гателей. М.- Энергия, 1974, 96 с.
237
31. Юхов В. В. Автоматизация регулиро-
вания возбуждения мощных синхронных дви-
гателей. — Электричество, 1966, № И,
с. 25—29.
32. Мотыгина С. А. Требования к синхрон-
ным двигателям и их схемам управления и
защиты. — Электричество, 1954, № 8, с. 78—80.
33. Мотыгина С. А. Влияние способов
компенсации реактивной мощности иа стати-
ческую устойчивость нагрузки. — Электриче-
ство, 1959, № 11. с. 27—31.
34. Мотыгина С. А. Режимы работы энер-
гетических систем и статические характерис-
тики нагрузки. — Электрические станции, 1960,
№ 2, с. 56—59.
35. Соколов Н. И. Устойчивость работы
асинхронных двигателей при значительных
внешних сопротивлениях и параллельных ста-
тических конденсаторах. — Электрические
станции, 1961, № 6, с. 43—46.
36. Веников В. А. Влияние улучшения ко-
эффициента мощности нагрузки на ее устой-
чивость. — Электричество, I960, № 6, с. 6—9.
37. Виноградов А. А. Устойчивость нагру-
зок.—В кн.: Грейсух М. В., Лазарев С. С.
Расчеты по электроснабжению промышленных
предприятий. М.: Энергия, 1977, с. 236—250.
38. Нейман 3. Б. Мощные синхронные
электродвигатели с массивными полюсами на
роторе. — Электричество, 1957, № 6, с. 32—34.
39. Юхов В. В. Компаундирование син-
хронных двигателей при глухом подключении
возбудители.— Электричество, 1959, № 3,
с. 82—85.
40. Гуревич Ю. Е. Влияние конденсаторов
на устойчивость асинхронных двигателей. —
Электричество, 1975, Хе 4, с. 75—77.
41. Калентионок Е. В., ФаЙбисович В. А.
Нарушение устойчивости в узле нагрузки с не-
идентичными параметрами двигателей. —
Электричество, 1975, № 12, с. 58, 59.
42. Киселев Ю. А., Б-лавацкий 3. М., Руд-
ковский М. А. Режимы пуска синхронных элек-
тродвигателей шаровых мельниц. — Электриче-
ские станции, 1975, № 10, с. 43—46.
43. Почепня С. И., Туркот А. М. Отклю-
чение синхронных двигателей по скорости сни-
жения частоты. — Электрические станции, 1971,
№ 4, с. 37—39.
44. Соколов Н. И., Сумцов И. А., Креме-
нецкий А. М. Ресинхронизация синхронных
двигателей многократной форсировкой воз-
буждения. — Электричество, 1975, № 5,
с. 43—48.
45. Слодарж М. И., Фридман А. Ю= Схе-
мы автоматического включения резервного пи-
тании при наличии высоковольтных синхрон-
ных и асинхронных электродвигателей. — Элек-
трические станции, 1975, № 4, с. 53—56.
46. Сивокобыленко В. Ф-, Павлюков В. А.
Расчет самозапуска электродвигателей с ис-
пользованием многоконтурпых схем замеще-
ния.— Электрические станции, 1976, № 3,
с. 51—53.
47. Юхов В. В. Расчет устройств компаун-
дирования синхронных двигателей. — Электри-
чество, 1961, №2, с. 40—45.
48. Вайнер И. Г., Лиидорф Л. Q, Несвиж-
ский Е. И. Самозапуск механизмов с. н. бло-
ков при приводе питательных насосов от син-
хронных электродвигателей. — Электрические
станции, 1974, № 8, с. 33—36.
49. Штейн Ю, Н., Ойрех Я- А., Метлен-
ко Г. П. Анализ надежности работы энерго-
блоков 200 МВт при самозапуске электродви-
гателей с. и. — Электрические станции, 1973,
№ 12, с. 31—34.
50. Долина В. И. Определение моментов
сопротивления шаровых барабанных мельниц
при пусках и выбегах. — Электрические стан-
ции, 1972, № 12, с. 32, 33.
51. Долина В. И. Переключение агрегатов
собственных нужд пылеугольного блока мощ-
ностью 300 МВт с рабочего источника питания
на резервный. — Электрические станции, 1975,
№ 5, с. 14—16.
52. Уфимцев А. М., Лебедев А. Т. Само-
запуск электродвигателей собственных иужд с
агрегатами мощностью 165 МВт. — Электриче-
ские станции, 1968, № 8, с. 55—59.
53. Лебедев А. Т„ Уфимцев А. М. Иссле-
дование режимов самозапуска электродвига-
телей собственных иужд блока мощностью
300 МВт. — Электрические станции, 1969, № 11,
с. 36—45.
54. Мамикоиянц Л. Г. Специальные во-
просы электрических станций (конспект лек-
ций), МЭИ, 1954, с. 147.
55. Долина В. И. Экспериментальное опре-
деление вращающих моментов двигателей и
моментов сопротивления механизмов средней
и большой мощности в эксплуатационных ус-
ловиях,— Тр. ВНИИЭ, № 42, 1973, с. 103—116.
56. Ермолин Н. П.„ Жерихин И. П. На-
дежность электрических машин. Л.; Энергия,
1976, с. 248.
57. Сивокобыленко В. Ф., Ойрех Я- А.
Использование аналоговых вычислительных
машин для исследования режимов пуска и са-
мозапуска электродвигателей собственных
нужд блочных электростанций. — В ки.: На-
ладочные и экспериментальные работы
ОРГРЭС. Вып. XXXV. м.: Энергия, 1968,
с. 266-272.
58. Сивокобыленко В. Ф. Режимы работы
синхронных двигателей при кратковременных
перерывах питания в схеме собственных
нужд. — В ки.: Наладочные и эксперименталь-
ные работы ОРГРЭС. Вып. XXXV. М.: Энер-
гия, 1968, с. 272—277.
59. Гришин В. И. Изменение остаточного
напряжения на шинах с. и. электростанции
при исчезновении питания. — Электрические
станции, 1968, № 11, с. 47—49.
60. Сивокобыленко В. Ф., Павлюков В. А.
Параметры и их схемы замещения асинхрон-
ных двигателей с вытеснением тока в рото-
ре.— Электрические станции. 1976, № 2,
с. 51—54.
61. Нейман Л. Р. Поверхностный эффект
в ферромагнитных телах. Госэнергоиздат, 1949.
62. Плесков В. И. Применение ионных
приводов реверсивных прокатных станов и син-
хронных двигателей станов с ударной нагруз-
кой. Горьковский политехнический институт
им. Жданова, 1963.
63. Гендельман Б. Р. Безм аховые агрега-
ты приводов реверсивных прокатных станов. —
Тр. НИР! электропромышленности, 1959, т. 5.
64. Плесков В. И. и Магазиннмк Г. Г.
О применении синхронного привода для про-
катных станов. — Электричество, 1960, № 10,
с. 31—34.
65. Указания по компенсации реактивной
мощности в распределительных сетях. М„-
Эиергия, 1974. 254 с,
66. Долина В. И., Аббасова Э. М. Об оп-
ределении моментов сопротивления средне-
ходной мельницы МРС-240.— Электрические
станции, 1981, № 3, с. 19—22.
238
ОГЛАВЛЕНИЕ
Иван Аркадьевич Сыромятников . . 3
Предисловие к четвертому изданию 5
Предисловие автора к третьему изданию 6
Глава первая. Основные свойства
асинхронных и синхронных двигателей 7
1.1. Принцип работы, основные диа-
граммы асинхронного двигатели
и основные расчетные соотно-
шения .........................» 7
1.2. Эксплуатационные и конструк-
тивные особенности, основные
соотношения и диаграммы для
синхронного режима синхрон-
ного двигателя .... 13
1.3. Краткие сведения о системах
возбуждении и принципах регу-
лирования тока возбуждения
синхронных двигателей . . 21
Глава вторая. Определение асин-
хронного вращающего момента элек-
тродвигателей ......................28
2.1. Определение вращающего мо-
мента асинхронного электродви-
гателя с обычным ротором . 28
2.2. Асинхронный двигатель с глу-
бокими пазами ротора ... 33
2.3. Асинхронный двигатель с двумя
обмотками на роторе ... 38
2.4. Определение асинхронного мо-
мента синхронного двигателя с
пусковой обмоткой ... 41
2.5. Определение асинхронного мо-
мента синхронных двигателей с
массивным ротором н массив-
ными полюсами .... 45
2.6. Определение параметров асин-
хронных н синхронных двигате-
лей по каталожным данным . 51
2.7. Определение параметров асин-
хронного двигателя из опытов
короткого замыкания, работы
под нагрузкой и холостого хода 53
Глава третья. Основные нагрузоч-
ные свойства асинхронных двига-
телей . ..............................58
3.1. Общие соображения ... 58
3,2. Определение основных парамет-
ров установившегося режима
при различных значениях на-
грузки на валу, напряжения и
частоты питающей сети . . 60
3.3. Влияние нагрузки на скольже-
ние, токи и реактивную мощ-
ность ........................71
3.4. Работа двигатели при измене-
нии напряжении .... 72
3.5. Работа двигатели при измене-
нии частоты и номинальном на-
пряжении .......................... 75
3.6. Включение обмоток статора
звездой вместо треугольника и
применение электродвигателей,
изготовленных для работы с ча-
стотой 50 Гц, при частоте
60 Гц............................76
3.7. Определение потребляемой из
сети активной мощности и
КПД асинхронных двигателей
при различных способах регу-
лировании производительности
механизмов ...... 81
Глава четвертая. Основные нагру-
зочные свойства синхронных двига-
телей и сравнение их с асинхронны-
ми двигателями ..... 87
4.1. Режимы работы синхронных
двигателей при номинальных
напряжении и частоте. Опреде-
ление потерь н КПД ... 88
4.2. Влияние изменений напряжения
н частоты сети на режим син-
хронного двигателя ... 96
4.3. Влияние синхронных двигате-
лей на устойчивость узлов на-
грузки ........................106
4.4. Экономичное распределение ре-
активной нагрузки между раз-
личными ее источниками и ре-
жимы работы источников реак-
тивной мощности . . . . 112
4.5. Применение синхронных и
асинхронных электродвигателей
для механизмов с удариой на-
грузкой ..........................120
4.6. Сравнение асиихроиных и син-
хронных двигателей и выбор
источников реактивной мощно-
сти ..............................127
Глава пята и. Нагрев электродвига-
телей ..............130
5.1. Общие соображения ... 130
5.2. Процесс нагревании и охлаж-
дении обмоток . . . . . 131
».3. Определение превышении тем-
пературы обмоток при устано-
виншемси режиме и кратковре-
менных перегрузках ... 136
5.4. Особенности нагрева массивных
роторов синхронных двигателей 138
5.5. Некоторые результаты опытно-
го определения тепловых ха-
рактернсч лк электродвигателей 142
239
5.6. Влияние кратковременных пере-
грузок на сокращение срока
службы изоляции двигателей . 146
Глава шестая. Пуск и самозапуск
двигателей.................... 1^0
6.1. Общие соображения . . . 150
6.2. Основные положения динами-
ки. Определение времени раз-
бега и выбега в простейших
случаях ..................... 152
6.3. Одиночный и групповой вы-
бег асинхронных и синхронных
двигателей........................157
6.4. Некоторые особенности про-
цесса пуска и вхождения в
синхронизм синхронных дви-
гателей н компенсаторов с
электромашинными возбудите-
лями постоянного тока . . 165
6.5. Влияние различных факторов
на длительность пуска и на-
грев обмоток двигателя при
пуске.............................175
6.6. Определение напряжения и до-
пустимой мощностн двигателей
в условиях пуска и самозапус-
ка и определение параметров
пусковых устройств . . . 184
6.7. Выбор схемы пуска асинхрон-
ных и синхронных двигателей
и синхронных компенсаторов 196
6.8. Самозапуск асинхронных дви-
гателей ..........................198
6.9. Некоторые особенности самоза-
пуска и ресинхронизации син-
хронных двигателей . . . 204
6.10. Обеспечение самозапуска и ре-
зультаты испытаний. . . . 209
Глава седьмая. Несимметричные
режимы работы двигателей и ком-
пенсаторов /.......................217
7.1. Обрыв одной фазы сети при
изолированной нейтрали обмот-
ки статора асинхронного двига-
теля. соединенного звездой - 217
7.2. Обрыв одного из линейных про-
водов при соединении обмотки
статора треугольником . . 223
7.3. Обрыв фаз при соединении ну-
левых точек источника питания
и обмотки статора двигателя . 224
7.4. Включение синхронного ком-
пенсатора через реакторы в
двух фазах ...... 226
Приложения......................
Приложение I. Параметры эквивалент-
ных двухконтурных схем замещения
некоторых асинхронных двигателей
с вытеснением тока в р.оторе . . 228
Приложение 2. Моменты сопротивления
различных механизмов .... 228
Приложение 3 Методика и пример рас-
чета самозапуска двигателей собст-
венных нужд электрических станций
в соответствии с эксплуатационным
циркуляром Э-6/73 ............. 230
Приложение 4. Пусковые характеристи-
ки синхронных двигателей . . 233
Приложение 5. Пусковые характеристи-
ки синхронных двигателей серии СТД 235
Приложение 6. Расчетные индуктивные
сопротивления и постоянные време-
ни синхронных двигателей серии СТД 235
Приложение 7. Расчетные индуктивные
сопротивления и постоянные време-
ни некоторых других типов синхрон-
ных двигателей ..... 236
Список литературы.................... 237