/




















































































































































Текст
основы АВТОМАТИКИ
Л. В. НОЛЕСОВ
- УЧЕБНИКИ И УЧЕБНЫЕ ПОСОБИЯ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ТЕХНИКУМОВ
Л. В НОЛЕСОВ
ОСНОВЫ АВТОМАТИКИ
ИЗДАНИЕ ВТОРОЕ, ДОПОЛНЕННОЕ И ПЕРЕРАБОТАННОЕ
Допущено Главным управлением высшего и среднего сельскохозяйственного образования Министерства сельского хозяйства СССР в качестве учебника для средних сельскохозяйственных учебных заведений для специальностей 1509 «Электрификация сельского хозяйства» и 1518 «Механизация и электрификация животно-
водства»
ББК 40.7
К60
УДК 631.3—52(075.3)
Рецензент: доктор технических наук, профессор И. Ф. Бородин (МИИСП)
Колесов Л. В.
К 60 Основы автоматики.—2-е изд., доп. и перераб.— М.: Колос, 1984. — 288 с., ил.
Учебник написан в соответствии с программой одноименной дисциплины.
Освещаются элементы систем автоматики, измерительные устройства, усилители, их назначение и рассматриваются основы теории. По сравнению с первым изданием (вышло в 1978 г.) материал обновлен и дополнен с учетом современных достижений в науке и технике» а также требований новых ГОСТов.
Для учащихся по специальностям 1509 «Электрификация сельского хозяйства» и 1518 «Механизация и электрификация животноводства».
3802040100—196
--------------- 102
035(01)—
ББК 40.7
631.3
Лев Васильевич Колесов
ОСНОВЫ АВТОМАТИКИ
Заведующая редакцией А. И. Гераськина
Редактор И. А. Кузина
Художественный редактор А. И. Бершачевская
Технический редактор В. И. Смирнова
Корректор М. И. Б ы н е ё в
МБ № 3454
Сдано в набор 11.08.83. Подписано к печати 06.06.84. Т-10559. Формат 84X108732. Бумага тип. Кв 2. Гарнитура литературная. Печать высокая. Усл. печ. л. 15,12. Усл. кр.-отт. 15,44. Уч.-изд. л. 15,44. Изд. № 039. Тираж 30 000 экз. Заказ № 5067. Цепа 65 коп.
Ордена Трудового Красного Знамени издательство «Колос», 107807, ГСП, Москва, Б-53, ул. Садовая-Спасская, 18.
Областная типография управления издательств, полиграфии и книжной торговли Ивановского облисполкома, 153628, г. Иваново, ул. Типографская, 6.
© Издательство «Колос», 1978
© Издательство «Колос», 1984, с. изменениями
ВВЕДЕНИЕ
Основным направлением развития современного сельскохозяйственного производства является комплексная механизация, электрификация и автоматизация технологических процессов. Это направление нашло свое отражение в решениях XXVI съезда КПСС, Продовольственной программе СССР, одобренной майским (1982 г.) Пленумом ЦК КПСС и в последующих постановлениях, принятых Центральным Комитетом КПСС и Советом Министров СССР по дальнейшему развитию комплексной механизации, электрификации и автоматизации отраслей сельского хозяйства.
Так, в постановлении ЦК КПСС и Совета Министров СССР «О мерах по дальнейшему развитию электрификации сельского хозяйства» записано: «Осуществлять постепенный переход от автоматизации отдельных производственных процессов и операций к полной автоматизации цехов и сельскохозяйственных предприятий».
Автоматизация сельскохозяйственного производства повышает производительность и улучшает условия труда, устраняет различие между физическим и умственным трудом, увеличивает выпуск продукции, снижает ее себестоимость, позволяет полнее удовлетворять потребности человека.
Началом развития автоматики как науки считают 1765 г., когда талантливый русский механик И. И. Ползунов создал первую в мире замкнутую автоматическую систему для регулирования уровня воды в паровом котле. Применение автоматов в промышленности сыграло важную роль в развитии техники. Этот период можно назвать периодом формирования принципов автоматики: принцип регулирования по отклонению (Ползунова — Уатта), принцип регулирования по нагрузке (Понселе), метод регулирования по производной (братьев Сименсов). Именно в это время появляются первые теоретические исследования, посвященные изучению процессов регулирования машин. В 1868 г. была опубликована
3
работа Максвелла «О регуляторах», а в 1876 г.—работа И. А. Вышнеградского «О регуляторах прямого действия». Дальнейшее развитие автоматики шло как по пути создания автоматических устройств во всех отраслях техники, так и теоретических разработок основ автоматики. Большой вклад в развитие основ автоматики внесли русские и советские ученые: И. А. Вышнеградский, И. Н. Вознесенский, А. И. Ляпунов, Н. Е. Жуковский. А. В. Михайлов, В. В. Солодовников, Я- 3. Цыпкин и многие другие.
Говоря об автоматизации вообще, нельзя не остановиться на автоматизации сельскохозяйственного производства— одной из важнейших отраслей народного хозяйства. Богатый практический и теоретический опыт, накопленный при автоматизации промышленности, позволяет использовать его при автоматизации процессов в сельском хозяйстве. При этом необходимо помнить, что сельскохозяйственному производству присущи и свои специфические особенности, которые следует учитывать при автоматизации. К ним относятся: большое число помещений с агрессивными средами, с повышенной запыленностью, с широкими пределами изменения влажности и температуры; связь сельскохозяйственных машин и другой техники с биологическими объектами (животными и растениями), которые оказывают определенное влияние на работу установок, большое число мобильных машин как в растениеводстве, так и в животноводстве, подверженных сильной вибрации; рассредоточенность сельскохозяйственных машин и установок по площадям значительных размеров, а также удаленность от ремонтной базы.
Современный этап развития автоматизации характеризуется широким внедрением принципиально новых средств автоматики, выполненных на интегральных микросхемах, внедрением микропроцессоров и микро-ЭВМ. Достижения электроники, электротехники и механики воплощаются в роботах, создание и использование которых является одним из магистральных направлений технического прогресса.
Без автоматизации производственных процессов немыслимо дальнейшее развитие сельскохозяйственного производства.
4
ГЛАВА I
ОБЩИЕ СВЕДЕНИЯ ОБ ЭЛЕМЕНТАХ I И СИСТЕМАХ АВТОМАТИКИ
1.1. Основные понятия и определения
Автоматика, как и любая техническая наука, имеет свои понятия и определения, свою терминологию. Рассмотрим существующие основные понятия и определения в автоматике.
Любой технологический процесс характеризуется физическими величинами, называемыми показателями процесса. Для одних процессов показатели могут быть постоянными, для других допускается их изменение в заданных пределах по определенному закону.
Совокупность предписаний, ведущих к правильному выполнению технологического процесса в каком-либо устройстве, ряде устройств (системе), выполняющих один и тот же технологический процесс, называется алгоритмом (законом) функционирования устройства (системы).
Устройство или совокупность устройств, осуществляющих тот или иной технологический процесс и нуждающихся в специально организованных командах извне для выполнения алгоритма функционирования, называют управляемым объектом. Каждый управляемый объект должен иметь устройство, называемое у п-равляющим органом, при изменении положения или состояния которого показатели процесса будут изменяться Ъ заданных пределах или в заданном направлении. Так, управляющим органом в электрическом генераторе может служить обмотка возбуждения, в водонапорной башне — вентиль, управляющий подачей воды, в вентилируемом помещении — задвижка в вентиляционной трубе, в автомобиле — руль и т. д. Через управляющий орган в объект поступают воздействия, которое позволяют осуществлять заданный алгоритм функционирования.
5
Совокупность предписаний, определяющая характер воздействий извне на управляемый объект с целью выполнения им заданного алгоритма функционирования, называется алгоритмом управления.
Физические показатели объекта, которые преднамеренно изменяются или сохраняются неизменными в процессе управления, называются управляемыми (регулируемыми) величинами (координатами). Обычно управляемые величины в управляемом объекте характеризуют качественньГе показатели процесса. Поэтому управлять объектом —это значит создавать условия, при которых качественные показатели —• управляемые величины — изменялись бы по требуемому закону с определенной точностью независимо от действия на объект внешних условий.
Управлением называется преднамеренное воздействие на управляемый объект, обеспечивающее достижение определенных самим технологическим процессом целей. Управление, осуществляемое без непосредственного участия человека, называется автоматическим. Если управление осуществляется с участием человека, то оно называется ручным.
Автоматическим управляющим устройством называют техническое устройство, осуществляющее воздействие на управляемый объект в соответствии с заложенным в нем алгоритмом управления. Управляющее устройство воздействует на управляемый объект через орган управления.
Совокупность управляемого объекта и автоматического управляющего устройства, взаимодействующих между собой в соответствии с алгоритмом управления, называют автоматической системой управления (АСУ).
Из всех операций управления технологическим процессом, объединенных определением автоматической системы управления, наибольший интерес для практических целей представляют операции по поддержанию или изменению показателей процесса. Эти операции получили название регулирование. Техническое устройство, предназначенное для автоматического поддержания постоянного значения показателей процесса регулирования или изменения этих показателей по какому-либо требуемому закону, называют автоматическим регулятором. Сочетание объекта регулирования с автоматическим ре
6
гулятором принято называть автоматической системой регулирования.
В процессе работы автоматическая система в целом или ее отдельные части испытывают на себе воздействие различных факторов. Воздействием в автоматике называют взаимодействие между автоматической системой и внешней средой или одной ее части на другую, при котором в ней происходят изменения. Различают внутренние и внешние воздействия.
Внутренними воздействиями называют такие, которые передаются отводной части автоматической системы на другую, образуя последовательную цепь воздействий, обеспечивающих протекание технологического процесса с заданными показателями. Такие воздействия называют управляющими и обозначают, рассматривая их во времени как z(t).
Внешние воздействия, в свою очередь, можно разделить на два вида. К первому относят такие, которые необходимы для нормального протекания технологического процесса. Их подают на вход системы намеренно в соответствии с алгоритмом функционирования, обозначают через x(t) и называют задающими. Ко второму виду относятся те, которые поступают непосредственно на систему (объект) из внешней среды (под внешней средой понимается все то, что не входит в рассматриваемую автоматическую систему). Они носят незапланированный, зачастую случайный характер, обозначаются через F(t) и называются возмущающими воздействиями.
Под влиянием x(t) в автоматической системе происходят различные количественные и качественные изменения, в результате чего управляемые (регулируемые) величины, обозначаемые как y{t), приобретают заданные значения или прдучают требуемый характер изменения.
Значение управляемой величины, предусмотренное алгоритмом функционирования, называется предписанным, а измеренное (фактическое) — действительным.
Кроме того, в соответствии с принятой терминологией задающие воздействия x(t) называют входными, а управляемые величины y(t)—выходными (для системы в целом или отдельного элемента).
7
Возмущающие воздействия F(t) подразделяют на основные и второстепенные. К основным относят такие, которые оказывают наибольшее влияние на управляемые (регулируемые) величины у(t). Если влияние возмущающих воздействий на управляемые величины y(i) незначительно, то их считают второстепенными.
Автоматическая система обычно испытывает влияние и основных, и второстепенных возмущающих воздействий.
Таким образом, на основании рассмотренных понятий и принятых обозначений можно сделать вывод, что управлять объектом — это значит вырабатывать управляющее воздействие z(t) с таким расчетом, чтобы управляемая (регулируемая) величина y(t) изменялась по заданному закону и с требуемой точностью независимо от влияния на объект возмущающего воздействия F(t).
Для двигателя постоянного тока при неизменном номинальном токе возбуждения управляемой величиной будет угловая скорость, управляющим воздействием — напряжение на якоре, основным возмущающим воздействием— нагрузка на валу, а второстепенными — те возмущающие воздействия, которые приводят к незначительным отклонениям угловой скорости (в частности, изменения температуры окружающей среды, напряжения питания обмотки возбуждения, сопротивления щеточных контактов и т. п.).
Если в системе только одна управляемая величина, то систему называют одноконтурной; если же управляемых величин, характеризующих технологический процесс, несколько, причем изменение одной влияет на другие, то систему считают многоконтурной.
В дальнейшем будут рассмотрены только одноконтурные автоматические системы управления (регулирования).
1.2. Управление по разомкнутому и замкнутому циклам
Поддержание управляемой величины в определенных пределах или изменение ее по заданному закону в процессе работы системы может быть выполнено как по разомкнутому, так и по замкнутому циклам управления. Поясним эти понятия- на примере системы, изображенной на рисунке 1, которая состоит из последовательно
ff
Рис. 1. Схема управления по разомкнутому (в) и замкнутому (б) циклам:
3 — задатчик; У У — управляющее устройство; УО — управляющий орган; О — управляемый объект; x(t) — задающее воздействие; Zi(i) и z2(t) — внутренние управляющие воздействия; y(t) — управляемая величина; F(t) возмущающее воздействие.
соединенных управляемого объекта О, управляющего органа УО, управляющего устройства УУ и задатчика 3 — устройства, направляющего в систему задающее воздействие.
При управлении по разомкнутому циклу (рис. 1,а) воздействие x(t), поступающее на управляющее устройство от задатчика, не является функцией результата этого воздействия на объект — оно задается оператором. Определенному значению задающего воздействия x(t) будет соответствовать определенное текущее значение управляемой величины y(t), если возмущающее воздействие F(t) не изменяется во времени. В противном случае, когда возмущающее воздействие F(t) не остается постоянным, каждому новому значению возмущающего воздействия будут соответствовать различные значения управляемой величины y(t) при неизменном задающем воздействии %(/). По существу разомкнутая система представляет собой передаточную цепь, в которой задающее воздействие x(t) после определенной обработки управляющим устройством преобразуется во внутренние воздействия zt(t) и Zz(t) и передается управляемому объекту, но при этом обратного воздействия управляемого объекта на управляющее устройство нет.
По замкнутому циклу система работает (рис. 1,6), если соединить ее выход с управляющим устройством так, чтобы на него все время поступало два воздействия— с задатчика и с выхода управляемого объекта.
9
Таким образом, в данной системе существует воздействие не только управляющего устройства на объект, но и объекта на управляющее устройство.
На рисунке 2, а приведена схема управления угловой скоростью двигателя М постоянного тока. При перемещении движка реостата R меняется ток в обмотке возбуждения (ОВГ) генератора G, а значит и его ЭДС и напряжение, подводимое к двигателю. Тахогенератор BR, установленный на одном валу с двигателем М, развивает ЭДС, пропорциональную управляемой величине — угловой скорости со вала двигателя. Подключенный к щеткам тахогенератора вольтметр PV, шкала которого проградуирована в единицах угловой скорости, позволяет вести только визуальный контроль за управляемой величиной. Если характеристики машин стабильны, то каждому положению движка реостата будет соответствовать определенное значение управляемой величины — угловой скорости двигателя при постоянном значении возмущающего воздействия — нагрузки на его валу. В данной системе управляющее устройство (генератор) воздействует на управляемый объект (двигатель), но обратного воздействия нет: система работает по разомкнутому циклу.
Рис. 2. Принципиальная схема управления угловой скоростью двигателя постоянного тока по разомкнутому (а) и замкнутому (б) циклам
10
На рисунке 2,6 приведена схема управления угловой скоростью двигателя Ml постоянного тока, в которой выход системы посредством тахогенератора BR, реостата R1, усилителя У и двигателя М2 привода ползунка реостата R2 соединен с входом системы. Здесь ведется автоматический контроль угловой скорости двигателя.
Напряжение тахогенератора Птг, пропорциональное скорости вращения, все время сравнивается с постоянным значением напряжения Uo, и разность между ними в виде E=U0—1!тГ через усилитель У подается на двигатель М2. Любое изменение угловой скорости приведет к появлению сигнала на двигателе М2, который переместит ползунок реостата R2 в ту или другую сторону, в результате чего при уменьшении или увеличении угловой скорости двигателя Ml по какой-либо причине ток в обмотке возбуждения (ОВГ) генератора увеличивается или уменьшается, что приведет к соответствующему изменению напряжения генератора, а следовательно, и к возвращению управляемой величины к заданному значению.
Из рассмотренных примеров видно, что разомкнутая система, на которую влияют изменяющиеся возмущающие воздействия, не может самостоятельно, без вмешательства человека, стабилизировать режим своей работы. Замкнутая же система автоматически реагирует на любые изменения.
1.3. Принципы автоматического управления
При проектировании автоматических систем решают, как наиболее простым и технико-экономически обоснованным образом получить и передать необходимый объем информации. Несмотря на многообразие и различие технологических процессов и методов управления, а также средств автоматики, в управлении выделяют ряд общих принципов автоматического управления, которые определяют, как и на основе какой информации формировать управляющее воздействие в системе. Выбор того или иного принципа построения автоматической системы зависит от ее назначения, характера изменения задающего и возмущающего воздействий, возможности получения информации о параметрах системы, стабильности параметров управляемого объекта
U
г
Рис. 3. Схемы управления;
а — по отклонению; б — по возмущению; в — комбинированная; г — само* приспосабливающаяся; Р — регулятор; УО — управляющий орган; О —управляемый объект; АУУ— автоматическое управляющее устройство; УАО— устройство анализа состояния объекта; АВУ — автоматическое вычислительное устройство; У АВ — устройство анализа задающего воздействия; ИУ — испол н нтел ь ное ус тройство.
и элементов управляющего устройства и т. п. Рассмотрим основные принципы автоматического управления.
Принцип управления по отклонению основан на том, что управляющее воздействие в автоматической системе вырабатывается с учетом информации об отклонении управляемой величины от заданного значения. Чтобы реализовать этот принцип, в управляющем устройстве должно происходить сравнение действительного значения управляемой величины с заданным (предписанным), и в зависимости от результатов полученного сравнения формируется управляющее воздействие.
Принцип управления по отклонению иллюстрирует система управления угловой скоростью двигателя постоянного тока (рис. 2, б). Двигатель Ml, как управляемый объект, испытывает на себе влияние различных возмущающих воздействий (изменения нагрузки на валу, напряжения питающей сети, угловой скорости двигателя, приводящего во вращение якорь генератора G, температуры окружающей среды и др.). Возмущающие воздействия вызовут отклонение управляемой величины— угловой скорости двигателя Ml, но, как описано ранее, отклонение будет сведено к нулю или к заданным пределам. Это произойдет потому, что управляющее воздействие по его значению и знаку формируется с учетом не только задающего воздействия, но и управляемой величины, то есть система работает на основе принципа управления по отклонению.
В общем случае система, реализующая принцип управления по отклонению, может быть представлена схемой, изображенной на рисунке 3, а. Здесь отклонение управляемой величины от заданного значения вызывает изменение управляющего воздействия z2(0. стремящегося всегда уменьшить появившееся отклонение. Для получения разности e(t)=x(t)—y(t) в систему вводится элемент сравнения ЭС. Управляющий орган действует независимо от того, по какой причине произошло изменение управляемой величины. Поэтому такие системы нашли широкое применение.
Принцип управления по возмущению (принцип компенсации возмущения) основан на том, что управляющее воздействие в системе управления вырабатывается в зависимости от результатов измерения возмущающего воздействия, оказы-
13
Рис. 4. Схема управления напряжением генератора постоянного тока.
вающего влияние на объект. В общем виде схема системы, реализующей этот принцип, показана на рисунке 3,6.
В качестве примера рассмотрим работу генератора постоянного тока (рис. 4), обмотка возбуждения ОВ1 которого сое-
динена с независимым источником постоянного тока, а ОВ2 включена на сопротивление Rm, последовательно введенное в якорную цепь. Обмотки возбуждения соединены так, что их м. д. с. /71 и F2 скла-
дываются, то есть напряжение на клеммах генератора UT зависит от суммарной м. д. с. F=Ft + F2. При увеличении или уменьшении тока I (изменяется сопротивление нагрузки /?„), напряжение 0г остается на заданном уровне, поскольку м. д. с. F2, пропорциональная току нагрузки 1, создаваемая обмоткой возбуждения ОВ2, действует таким образом, что она компенсирует изменение м. д. с. Fi обмотки ОВ1 и поддерживает суммарную м. д. с. F, а следовательно, и напряжение Ur в заданных пределах. Так происходит компенсация падения напряжения при изменении тока нагрузки — основного возмущающего воздействия на генератор. В данном случае сопротивление /?ш выполняет роль устройства, измеряющего возмущающее воздействие—нагрузку, поэтому рассматриваемый принцип иногда называют принципом управления по нагрузке.
Сопоставляя схемы на рисунках 3, а и б, легко уяснить, что системы, использующие принцип отклонения, работают по замкнутому циклу управления, а использующие принцип возмущения — по разомкнутому.
Возмущающие воздействия вызываются разными причинами, и их может быть не одно, а несколько. Обычно во внимание принимают основное возмущающее воздействие, которое оказывает наибольшее влияние на работу системы. Компенсация всех возмущающих воздействий затруднительна, неосновными возмущающими воздействиями, как правило, пренебрегают. Это являет
14
ся существенным недостатком принципа управления по возмущению; суммарное влияние второстепенных возмущающих воздействий на управляемую величину может оказаться значительным.
Принцип комбинированного управления, сочетающий в себе достоинства принципов управления по отклонению и по возмущению, используется при построении систем высокой точности. На рисунке 3, в показана схема системы комбинированного управления. Действие неучтенных возмущений в комбинированных системах компенсируется или ослабляется управлением по отклонению.
^.Принцип адаптации (приспособления) находит применение в кибернетических системах управления. Чтобы понять отличительные особенности этого принципа, рассмотрим самоприспосабливающуюся автоматическую систему управления (рис. 3,г), в которую, кроме основной части, построенной согласно принципу управления по отклонению и содержащей управ- [ ляемый объект О и автоматическое управляющее устройство АУУ, введен ряд дополнительных устройств, настраивающих систему на наивыгоднейший режим работы..» Необходимость использования дополнительных устройств вызвана тем, что характеристики управляемого объекта изменяются в процессе работы в широких пределах, и поэтому без автоматической настройки невозможно достигнуть требуемых показателей качества процесса управления, ^дополнительным устройствам в рассматриваемой систёйе относятся следующие: устройство анализа состояния объекта УАО, позволяющее оценить характеристики управляемого объекта по измеряемым в процессе работы значениям управляемой величины y(t) и управляющего воздействия z(t)\ устройство анализа задающего воздействия У АВ, оценивающее значение и характер изменения задающего воздействия в процессе работы системы; автоматическое вычислительное устройство АВУ, которое на основании получаемой Информации отустройств УАО и У АВ вырабатывает воздействие для изменения характеристики АУУ; исполнительное устройство ИУ, настраивающее по сигналу АВУ автоматическое управляющее устройство основного контура на режим работы, соответствующий изменившимся условиям.
15
Автоматическая система, основанная на любом из рассмотренных принципов управления, состоит из двух основных частей: управляемой ) (управляемый объект) и управляющей j( автоматическое управляющее устройство). Для измерения управляемой величины управляющее устройство должно иметь измерительный элемент, а управляемый объект — содержать управляющий орган, возвращающий управляемую величину после ее отклонения к заданному значению. Если в системе управляющий орган получает воздействие непосредственно от измерительного элемента и приводится им в действие, то говорят о системе прямого управления (регулирования), а управляющее устройство называют регулятором прямого действия. Эти регуляторы применяют, когда сигнал измерительного элемента обладает достаточной мощностью для непосредственного управления управляющим органом. Однако такие случаи сравнительно редки, поскольку измерительный элемент стремятся сделать малогабаритным и малоинерциои-ным, а это обычно препятствует получению достаточных выходных мощностей. В большинстве случаев для управления управляющим органом сигнал измерительного элемента нуждается в усилении. Тогда говорят о регуляторе непрямого действия, а систему, в которой применен регулятор, работающий с усилителем, называют системой непрямого управления (регулирования). В подобных системах для перемещения управляющего органа используют вспомогательные механизмы, действующие от постороннего источника энергии или За счет энергии управляемого объекта.
1.4. Обратные связи
Характерной чертой автоматических систем, использующих принцип управления по отклонению, является наличие обратной связи. Обратные связи подразделяют на жесткие и гибкие, отрицательные и положительные, главные и местные.
Поясним само понятие и принцип действия обратной связи на примере системы управления угловой скоростью двигателя постоянного тока (рис. 2,6). Чтобы поддержать управляемую величину в заданных пределах, поступающее на объект управляющее воздействие (в нашем случае напряжение, подводимое к якорной
16 ...
цепи двигателя) формируется с учетом значения угловой скорости вращения. При помощи тахогенератора BR выход системы соединяется с ее входом. Такое соединение и называется обратной связью, то есть направление действия ее противоположно ходу управляющего воздействия, которое передается через элементы системы к управляемому объекту (в прямом направлении).
Таким образом, обратная связь — это связь, по которой информация о состоянии управляемого объекта (контролирующее воздействие, соответствующее действительному значению управляемой величины) передается с выхода системы на ее вход.
Если воздействие обратной связи, поступающее на вход системы, по знаку совпадает со знаком задающего воздействия, то ее называют положительной. В противном случае говорят об отрицательной обратной связи.
Когда передаваемое воздействие зависит только от выходной величины и не зависит от времени, связь считают жесткой. Практически жесткие обратные связи действуют как в установившемся, так и в переходном режиме. Обратная связь, оказывающая влияние на работу системы только в переходном режиме, называется гибкой. Такие связи реагируют на приращения воздействий, поступающих на их вход. Те из них, что реагируют на производные от воздействий, называют дифференцирующими, а на интегралы от воздействий — интегрирующими, гибкими обратными связями.
Если обратная связь соединяет выход системы с ее входом, то ее называют главной. Остальные обратные связи считают местными. Они служат для улучшения регулировочных свойств отдельных элементов или их группы, соединяя выход элементов или группы элементов с соответствующим входом. Их еще называют корректирующими. Местные связи, как и главная, могут быть гибкими или жесткими.
Следует отметить, что размыкание главной обратной связи превращает систему замкнутого цикла в разомкнутую; при размыкании же местной обратной связи замкнутая система будет продолжать работать по замкнутому циклу.
Рассмотренные обратные связи находят широкое применение в автоматических системах управления.
2 Заказ 5067
, 17
1.5. Элементы автоматических систем
Любая автоматическая система состоит из отдельных, связанных между собой элементов. Элементом автоматики называют часть системы, в которой происходят качественные или количественные преобразования физической величины, а также передача преобразованного воздействия от предыдущего элемента к последующему. Элементы, применяемые в системах автоматики, весьма разнообразны. В качестве основных используют датчики, элементы сравнения, усилители, исполнительные механизмы, корректирующие элементы и элементы настройки, а кроме того, командоаппараты, аппараты защиты, измерительные приборы.
Датчики измеряют управляемые (регулируемые) величины объектов управления и преобразовывают измеренные величины одной физической природы в другую (например, разность температур — в ЭДС, усилие — в электрическое сопротивление и т. п.). Различные типы датчиков будут подробно рассмотрены в главе II.
Элементы сравнения сопоставляют задающее воздействие x(t) и управляемую величину y(t). Получаемая на выходе разность e(t)=x(t)—y(t) передается по цепи воздействия либо непосредственно, либо через усилитель на исполнительный механизм. Элементы сравнения как самостоятельная часть системы не применяются, а являются составной частью других устройств.
Усилители в системах автоматики (магнитные, электронные, полупроводниковые и др.) обычно используются для усиления задающего воздействия x(t) или разности е(/), когда мощность этих сигналов недостаточна для нормальной работы регулятора.
Исполнительные механизмы предназначены для изменения управляемых величин или поддержания их в заданных пределах. Исполнительным механизмом может быть электрический двигатель, нагревательное устройство и др.
Элементы настройки (задающие элементы) представляют собой устройства, при помощи которых в систему автоматики подаются задающие воздействия x(t). В качестве этих элементов применяются потенциометры, сельсины, вращающие трансформаторы и т. д.
18
Корректирующие элементы предназначаются для улучшения регулировочных свойств системы в целом или отдельных ее частей.
Ком андоа ппа р а ты (кнопки, переключатели, конечные выключатели и т. п.) предназначены для подачи в систему различных воздействий и команд.
Элементы защиты (тепловые и токовые реле, плавкие предохранители, автоматы и др.)—для выполнения защитных функций при недопустимых режимах работы, а контрольно-измерительные приборы (амперметры, вольтметры, тахометры и т. д.) — для контроля и измерения различных величин.
Всем элементам автоматики независимо от их назначения присущи общие параметры: статическая и динамическая характеристики, передаточный коэффициент, погрешность, порог чувствительности.
Под статической характеристикой элемента понимают зависимость y=f(x), то есть зависимость между выходной у и входной х величинами в установившемся режиме, когда х и у неизменны во времени. По виду статической характеристики различают элементы с линейной и нелинейной характеристиками.
Под динамической характеристикой элемента понимают зависимость выходной величины у от входной величины х в переходном — динамическом — режиме, когда х и у меняются во времени.
На характер изменения динамической характеристики оказывает влияние инерционность элемента, из-за которой выходная величина изменяется в динамическом режиме с некоторым запаздыванием по отношению к изменению входной величины.
Передаточный коэффициент элемента представляет собой отношение выходной величины у к входной х — статический передаточный коэффициент
kc — ylx, или отношение приращения Д«/ к приращению Дх — динамический передаточный коэффициент
y/dx » Д/у/Дх,
где Ду=у2—j/i, Дх=х2—хь
Для линейной статической характеристики kc — k^ при всех значениях х и у. Единица измерения переда
2*
19
точного коэффициента равна отношению единиц измерения выходной и входной величин.
В практике пользуются относительным передаточным коэффициентом
6= {^ylyn)l^xlxn)= ^ухн1^хуа,
где хв и ув — номинальные значения входной и выходной величин.
Для датчиков передаточный коэффициент называют коэффициентом чувствительности, а для усилителей — коэффициентом усиления.
Погрешностью называется разность между текущим и номинальным заданным значениями выходной величины. Используют абсолютную и относительную погрешности, которые возникают из-за изменения внутренних свойств элемента (износ, старение) и внешних условий (изменение температуры и влажности окружающей среды, изменение питающего напряжения и т. п.).
Порог чувствительности—наименьшее изменение входной величины, способное вызвать появле- * ние изменения выходной величины. Вызывается он наличием в конструкциях элементов люфтов, трения, гистерезиса и т. п. Если X] и Х2 — значения порога чувствительности, то Дх= |%11 + |хг| — зона нечувствительности.
Необходимо отметить, что в отдельных элементах автоматики при постоянстве входной величины возникают самопроизвольные изменения выходной, которые в зависимости от назначения элемента называют по-разному: помехи, шумы, дрейф нуля, плавание коэффициента усиления и т. п.
1.6. Схемы автоматических систем
Для изучения принципа действия систем автоматики в целом, взаимодействия их различных элементов, поведения их в статических и динамических режимах системы представляют в виде схемы. Различают схемы трех основных типов: принципиальные, функциональные структурные и алгоритмические структурные.
Принципиальные схемы служат основанием для разработки конструктивных документов, например схем соединений (монтажных схем) и различных чертежей. Эти Схемы используют при изучении принципа
20
работы всей установки, при наладке, при управлении, контроле и ремонте систем автоматики.
На принципиальной схеме все элементы, входящие в системы, и связи между ними изображаются в виде условных графических обозначений в соответствии с действующими ГОСТами.
Различают совмещенные и разнесенные принципиальные схемы. На совмещенных схемах все элементы изображают в непосредственной близости друг от друга и соединяют их связями в виде линий, идущих от одного элемента к другому. Эти схемы при небольшом количестве элементов и связей наглядны и удобны для чтения. Когда же элементов много, обращаются к разнесенным схемам, на которых все элементы, входящие в одну цепь, располагаются последовательно, друг за другом, а отдельные цепи — параллельно в виде горизонтальных или вертикальных строк. Для удобства чтения принципиальных схем каждому элементу дают буквенное и цифровое обозначение. Буквенное обозначение представляет собой сокращенное название элементов, а цифровое показывает нумерацию элементов слева направо или сверху вниз.
Функциональные структурные схемы отражают определенные процессы, протекающие в отдельных функциональных частях системы или в ее цепях. Практически любой автоматической системе присущи процессы измерения, сравнения, преобразования, усиления, коррекции, исполнения. Каждый из названных процессов выполняется определенными частями системы, ко-
Рис. 5. Функциональная структурная схема АСУ.
21
торые обозначаются прямоугольниками, с указанием наименования элемента, в соответствии с выполняемыми функциями. Связи между функциональными элементами обозначаются линиями со стрелками, показывающими направление внутренних воздействий. На рисунке 5 приведена функциональная структурная схема АСУ с наиболее типичными для многих схем элементами.
В данной схеме датчик Д измеряет управляемую величину у объекта О. Задатчик 3 вырабатывает в сопоставимом масштабе аналогичную физическую величину уо, пропорциональную мгновенным значениям управляемой величины, которую требуется поддерживать в соответствии с алгоритмом функционирования. Элемент сравнения ЭС, сравнив у и у$, вырабатывает разность е=г/0—У, которая поступает в функциональный преобразователь ФП. Чтобы получить мощность, достаточную для приведения в действие управляющий орган, сигнал в усилителях У1 и У2 усиливается и поступает на исполнительный механизм, вырабатывающий управляющее воздействие z на объект. Если выходной величиной исполнительного механизма является механическое перемещение, его обычно называют сервомотором. Корректирующие элементы ДЭ1, КЭ2, ДЭЗ служатдля улучшения динамических свойств процесса управления. Способы включения их разнообразны.
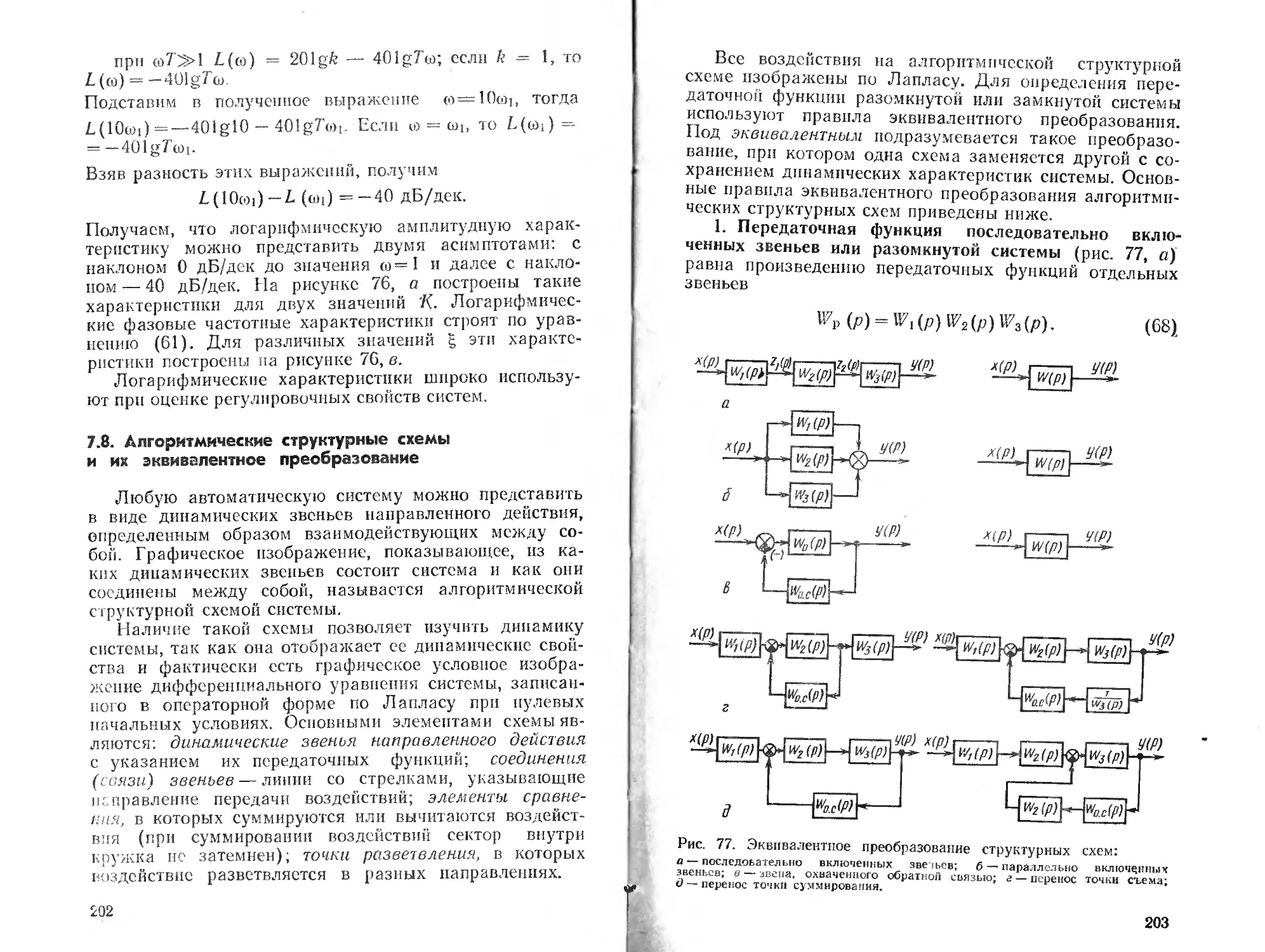
Алгоритмические структурные схемы показывают взаимосвязь отдельных частей системы и характеризуют их динамические свойства. На алгоритмической структурной схеме вся система автоматики, как и на функциональной, изображается в виде прямоугольников, каждый из которых представляет собой динамическое звено направленного действия. Поэтому алгоритмическая структурная схема отображает математическую модель процесса управления. Внутри звена (прямоугольника) указывается математическая зависимость между выходной и входной величинами данного звена, а связи между звеньями обозначают стрелками, указывающими направление и точки приложения воздействий. При этом какое-либо устройство реальной системы может быть представлено несколькими элементарными звеньями направленного действия и, наоборот, несколько устройств могут быть изображены как одно звено. Эти схемы будут рассмотрены ниже.
22
1.7. Классификация автоматических систем
Автоматические системы управления можно классифицировать по различным признакам: по назначению (системы управления станками, сушильными установками, установками микроклимата и т. п.); по характеру управляемых величин (системы управления напряжением, частотой, скоростью, температурой, освещением; и др.); по виду используемой для управления энергии (электрические, гидравлические, электронные, пневматические и др.) и т. д.
Ниже приведена классификация АСУ по наиболее характерным определяющим признакам. По характеру изменения управляемой величины (по характеру алгоритма функционирования) различают системы стабилизации, программные и следящие системы.
Системы стабилизации поддерживают требуемое значение управляемой величины с заданной точностью. Поскольку требуемое значение управляемой величины в системе стабилизации постоянно, то расхождение между ним и текущим значением в установившемся режиме (ошибка управления) не должно превышать допустимого значения. Если заданное значение управляемой величины y0(0=const текущее значение y(t), расхождение между ними в установившемся режиме Ду, допустимое значение этого расхождения ДУдоп, то с учетом того, что в системах стабилизации задающее воздействие x(t) постоянно, можно записать
x(/)=const, Ду=Уо(О~У(0^ДУдоп-
Любая система управления характеризуется зависимостью между управляемой величиной и внешним воздействием (нагрузкой) на объект управления. По виду таких зависимостей, называемых регулировочными характеристиками, различают системы стабилизации статического и астатического регулирования.
На рисунке 6, а показана система статического регулирования уровня воды в напорном баке. Поплавок 1 соединен непосредственно с управляющим органом — задвижкой 2. Поэтому любые изменения уровня воды в баке передаются через поплавок на задвижку. Если увеличивается расход q воды, то ее уровень в баке понизится, поплавок опустится и изменит положение задвижки таким образом, что увеличится пропускное сечение питающей трубы, а следовательно, и количество
23
Рис. 6. Схема (а) и регулировочная характеристика (б) статического регулирования.
воды, поступающее по трубе в бак. Это приведет к тому, что уровень воды начнет повышаться, поднимая поплавок и одновременно перемещая задвижку. Равновесие наступит, когда приток воды будет равен ее расходу. Чем больше нагрузка, то есть расход q, тем больше будет открыт управляющий орган — задвижка и, значит, тем ниже будет находиться состояние равновесия поплавка. Поэтому в данной схеме с возрастанием нагрузки значения управляемой величины у (t) (уровня воды) будут уменьшаться. Такое управление, когда установившееся после окончания переходного процесса значение управляемой величины при различных постоянных значениях нагрузки будет принимать различные постоянные значения, называется статическим регулированием.
Устройства, осуществляющие данный вид управления, называются статическими регуляторами. Характеристика статического регулирования показана на рисунке 6,6.
Статические регуляторы поддерживают не строго постоянное значение управляемой величины, а с некоторыми отклонениями от заданного, то есть с ошибкой, которая называется статической ошибкой. Под статической ошибкой Аг/ понимают наибольшее отклонение управляемой величины при изменении нагрузки от нуля до номинальной. *
Наряду со статической ошибкой широко используется понятие относительной статической ошибки (ста-тизм регулирования). Относительная статическая ошибка б определяется как отношение статической ошибки
24
к некоторому значению управляемой величины, например t/mm
6= (утел — Утт)/УгМп !
где «/max — максимальное значение управляемой величины, соответствующее нагрузке <7=0; z/min— минимальное значение управляемой величины, соответствующее номинальной нагрузке </Вом-
Перемещению рабочих органов регулятора противодействуют силы трения, для преодоления которых требуется некоторое минимальное значение воздействия. Если это воздействие меньше указанного минимального значения, подвижная система регулятора не может прийти в движение, так как противодействие сил трения больше движущей силы, вызванной возмущением. Таким образом, появляется некоторая зона отклонения управляемой величины от заданного значения, называемая зоной нечувствительности, в пределах которой регулятор не воздействует на процесс. Поэтому регулировочная характеристика любой системы будет представляться некоторой полосой (зоной) вдоль этой характеристики. С учетом нечувствительности регулировочная характеристика статического регулирования выразится уравнением.
у=Уь+ку±Н, где у0 — заданное (предписанное) значение управляемой величины; &у— статическая ошибка; Н— нечувствительность регулятора.
Статические регуляторы, хотя им присуща статическая ошибка, находят широкое применение, так как просты по устройству и обеспечивают устойчивую ра-
боту в переходных режимах.
На рисунке 7, а показана схема астатического регулирования воды в баке. Поплавок 1 через рычаг связан с ползунком реостата 2, при помощи которого двигатель постоянного тока 3 всякий раз, как только ползунок смещается вверх или вниз от среднего положения, начинает вращаться в ту или другую сторону и перемещает задвижку 4 (уп-
Рис. 7. Схема (а) и регулировочная характеристика (б) астатического регулирования.
,.,25
равляющий орган) до тех пор, пока не восстановится заданный уровень воды в баке, то есть пока напряжение, подведенное к якорной цепи двигателя, не станет равным нулю и не наступит установившийся режим (равновесное состояние). Этому режиму соответствует определенный заданный уровень t/0 воды в баке, который для всех равновесных состояний остается строго постоянной величиной с точностью до нечувствительности регулятора.
Графическое изображение регулировочной характеристики в функции расхода q воды будет соответствовать зависимости, показанной на рисунке 7,6. Следовательно, под астатическим регулированием понимают такое, когда в установившемся режиме при различных значениях постоянной нагрузки поддерживается постоянное значение управляемой величины, равное заданному.
Регулировочная характеристика для астатического регулирования без учета нечувствительности регулятора выражается уравнением
z/=z/o=const. (1)
При наличии нечувствительности, а она практически существует во всех регуляторах, уравнение (1) примет вид
у=у0±Н-
Устройства, осуществляющие данный вид регулирования, называются астатическими регуляторами. Такие регуляторы более точно поддерживают заданное значение управляемой величины, но, как правило, сложнее по устройству, чем статические, склонны к колебаниям в переходных режимах и в большинстве случаев не обладают требуемой устойчивостью брз вспомогательных устройств. Если сравнить системы статического и астатического регулирования, то нетрудно заметить, что в первом случае поплавок действует непосредственно на управляющий орган — задвижку, а во втором случае через промежуточный элемент — электродвигатель, ко- в торый в значительной мере усиливает сигнал, снимаемый с поплавка. Поэтому первая система будет прямого, а вторая — непрямого управления.
Программные системы предназначаются для изменения управляемой величины по определенному
с 26 . ,
предписанию — программе, которая составляется заранее на основании требований технологического процесса. Эти требования выражаются изменениями задающего воздействия по определенному закону в виде заранее известной функции времени. С учетом ранее принятых обозначений для программной системы
х(0=л^п(0. л«/(0=!/о(0-г/(0сг/доп(0»
где Nn(t)—заранее известная функция времени — программа, по которой должна изменяться управляемая величина.
Для получения определенной программы в таких системах предусмотрено специальное устройство — задатчик, изменяющий управляющее воздействие x(t) в заданном направлении. В качестве примера таких систем можно назвать системы программного управления работой металлорежущих станков, системы программного управления освещенностью в различных производственных сельскохозяйственных помещениях и т. п.
Следящие автоматические системы предназачаются для изменения управляемой величины по закону заранее неизвестной функции времени, определяемой задающим воздействием
x(t) = N(t), by(t) =yD(t) -y(t) ^yR0D(t), где —заранее неизвестная функция времени.
В таких системах применяется следующая терминология: вместо управление говорят слежение, окончание процесса — отработка, входная величина — ведущая величина, выходная величина — ведомая величина.
На рисунке 8, а показана схема следящей системы. Основным ее элементом является датчик рассогласования Д, который определяет расхождение (ошибку) между ведомой и ведущей величинами. Ведомая величина y(t) измеряется измерительно-преобразовательным элементом ИП и приводится к уровню ведущей величи-
Рис. 8. Схема (а) и диаграмма (б) изменения углового перемещения на входе и выходе следящей системы.
27
ны x(t). Установив значения рассогласования между ведущей величиной x(t), поступающей от ведущего элемента 3, и ведомой величиной y(t), датчик Д выдает сигнал регулятору Р, который вырабатывает управляющее воздействие z(t), направленное на ликвидацию рассогласования. На рисунке 8,6 приведена диаграмма изменения ведущей x(t) и ведомой y(t) величин следящей системы.
Примером следящей системы может служить система автоматического управления движением трактора при работе с почвообрабатывающим агрегатом в зависимости от изменения направления ранее проложенной борозды, за которой следит копир.
I По способу передачи и преобразования управляюще-
го воздействия, обеспечивающего нормальное протекание технологического процесса, автоматические системы управления делят на непрерывные и дискретные. Это связано с тем, что управляющее воздействие исполнительного механизма в зависимости от устройства регулятора может иметь непрерывный или прерывистый характер.
На рисунке 9,а представлена кривая отклонения Д«/ управляемой величины y(t) во времени от заданного значения у0. В нижней части рисунка показано, как должно меняться управляющее воздействие z(t): оно находится в линейной зависимости от сигнала управления и совпадает с ним по фазе. Регуляторы, вырабатывающие такое воздействие, называются регуляторами непрерывного действия, а само управление — непрерывным. Эти регуляторы работают только тогда, когда существует управляющее воздействие, то есть пока имеется различие между действительным и предписанным значениями управляемой величины.
Если в процессе работы автоматической системы управляющее воздействие при непрерывном сигнале управления прерывается в некоторые промежутки времени или подается в форме отдельных импульсов, то такое управление называют прерывистым (дискретным).
Рассмотрим два способа формирования прерывистого управляющего воздействия. На рисунке 9, б и в показаны графики прерывистого управляющего воздействия при непрерывном отклонении Дг/ управляемой величины. В случае (б) управляющее воздействие представлено отдельными импульсами одинаковой длительности Д/, следующими через равные промежутки времени — то есть формируется сигнал управления, квантованный по времени. При этом амплитуда импульсов z=f(t) пропорциональна значению сигнала управления в момент формирования управляющего воздействия. В случае (в) все импульсы имеют одинаковую амплитуду z = f(t) и следуют через равные интервалы времени»/] = t2~t, но имеют различную длительность Д/, то есть образуется сигнал управления квантованный по уровню (амплитуде). При этом длительность импульсов зависит от значения сигнала управления в момент формирования управляющего воздействия. Возможно совместное квантование сигнала по времени и по уров
29
ню. Управляющее воздействие от регулятора передается управляющему органу с соответствующими перерывами, поэтому управляющий орган меняет свое положение также с перерывами.
В практике широкое применение находят системы автоматического управления релейного типа с двухпозиционными и трехпозиционпыми регуляторами. Двух-лозиционный регулятор (рис. 9,г) имеет два устойчивых состояния: одно — когда отклонение управляемой величины перейдет установленный положительный предел -|-Ду, а другое — когда отклонение изменит знак и достигнет отрицательного предела —Ау. Управляющее воздействие в обеих позициях одинаково по абсолютной величине, но различно по знаку, причем это воздействие посредством регулятора заставляет управляющий орган перемещаться скачкообразно таким образом, чтобы абсолютная величина отклонения всегда уменьшалась. Если отклонение Ду достигнет допустимого положительного значения +Ду (точка 1), то сработает реле и на объект через регулятор и управляющий орган будет оказываться управляющее воздействие —z(t), которое равно и противоположно по знаку положительному значению управляющего воздействия 4-г(0. Отклонение управляемой величины по истечении некоторого времени будет уменьшаться. Достигнув точки 2, отклонение Ду станет равным допустимому отрицательному значению —Ду, реле сработает, и управляющее воздействие z(t) изменит свой знак на противоположный и т. д.
Трехпозиционный регулятор занимает одно из трех устойчивых положений (рис. 9, д). В диапазоне отклонения управляемой величины от +Ду до —Ду регулятор находится в так называемом нейтральном положении.
Релейные регуляторы просты по устройству, сравнительно недороги и находят широкое применение в тех объектах, где не требуется большая чувствительность к внешним воздействиям. По математическому описанию, то есть по виду дифференциальных уравнений, отражающих поведение системы в динамике, все автоматические системы делят на линейные и нелинейные. К линейным автоматическим системам относят те, поведение которых в динамике достаточно точно описывается линейными дифференциальными уравнениями. В
30
нелинейных системах переходный процесс описывается нелинейными дифференциальными уравнениями.
Кроме рассмотренных, определенное, хотя и довольно пока ограниченное применение находят самоприспосабливающиеся (самонастраивающиеся автоматические системы).
Ко всем производственным установкам предъявляются требования работы в оптимальном режиме с точки зрения расхода энергии, производительности и качества выполнения производственной операции. Чтобы в полной мере выполнить эти требования, необходимы специальные устройства, которые обеспечивали бы автоматическую настройку производственной установки на работу в оптимальном режиме. Их и называют самоприспосабливающимися нлн самонастраивающимися автоматическими системами управления. Такие системы автоматически настраивают производственную установку применительно к меняющимся условиям работы, то есть к изменяющимся характеристикам управляемого объекта в оптимальном режиме. Поэтому данные системы часто называют системами оптимального или экстремального управления. Использование этих систем позволяет увеличить производительность установки, улучшить качество выпускаемой продукции, уменьшить затраты труда, повысить культуру производства и т. д. Хотя такие системы значительно сложнее и дороже других, часто требуют коренной реконструкции производства, тем не менее в будущем следует ожидать их все более широкого применения в автоматизированных установках сельскохозяйственного назначения.
Приведенная классификация дает общее представление об автоматических системах. Из всего их многообразия в практике наибольшее распространение получили автоматические системы управления с отрицательной обратной связью, работающие по замкнутому циклу. Поэтому в дальнейшем материал будет излагаться применительно к этим системам.
1.8. Основные законы управления
Под законом управления в автоматике понимают математическую зависимость, по которой управляющее устройство (регулятор) воздействует на объект управления.
Существует много законов управления, которые используются в технике. Рассмотрим простейшие из них, в которых управляющее воздействие линейно зависит от отклонения, его интеграла и первой производной по времени. *
Для математического описания законов управления используем безразмерные относительные величины отклонений управляемой величины
<р=Д(//«/б
$1
И управляющего воздействия
Х=Д2/Хб, где уъ и zc — базовые значения (за базовое значение принимают любое известное значение, например номинальное).
Пропорциональный закон (/7) х=М>-
Регулятор, реализующий этот закон, называется пропорциональным, а управление, осуществляемое им, будет статическим (рис. 6). Коэффициент kp — переда-даточный коэффициент регулятора.
Интегральный закон (И)
Х=~7- $ <Pd/ О или dx
-~=М/Л
здесь Т — постоянная времени интегрирования, имеющая размерность времени. Регулятор, реализующий этот закон, называется интегральным или астатическим, с его помощью осуществляется астатическое регулирование (рис. 7).
Пропорциональн о-и нтегральный закон (ПИ)
t
X=^p(<p+-f S<PdO- (2)
О
Из уравнения (2) видно, что этот закон объединяет в себе пропорциональное регулирование с интегральной коррекцией, то есть регулятор ПИ осуществляет астатическое регулирование.
Пропорциональн о-и нтегральн о-д и ф ф е-ренциальный закон (ПИД)
(t \
J’,
где Тя и Тд — постоянные времени интегрирования и дифференцирования.
Регулятор, реализующей этот закон, также обеспечивает астатическое регулирование. Производная dq>/df вводится в закон управления для улучшения качества процесса управления.
32
Контрольные вопросы и задания. 1. Что такое алгоритм функционирования и алгоритм управления? 2. Поясните термин «управляемый объект». 3. Что понимают под внешним управляющим и задающим воздействиями? 4. Чем отличается автоматическая система управления от автоматической системы регулирования? 5. Каковы преимущества автоматической системы управления с замкнутым циклом воздействий в сравнении с автоматической системой управления с разомкнутым циклом воздействий? 6. Что такое обратная связь и какие виды обратных связей вы знаете? 7. Перечислите и охарактеризуйте основные элементы автоматических систем управления. 8. Расскажите о классификации автоматических систем управления. 9. Какими характерными признаками отличается статическое регулирование от астатического? 10. Что такое статическая ошибка? 11. Изложите принципы составления принципиальных и функциональных структурных схем автоматических систем управления. 12. Каковы основные функции, выполняемые элементами автоматических систем? 13. Что такое закон управления? 14. Назовите основные законы управления.
3 Заказ 5067
ГЛАВА II
ДАТЧИКИ СИСТЕМ АВТОМАТИКИ
2.1. Общие сведения
Для непрерывного контроля за режимом работы различных машин и агрегатов, протеканием технологических процессов необходимо иметь устройства, измеряющие значения величин, характеризующих эти процессы. В автоматике эти устройства называют датчиками.
Следует отметить, что термин «датчик» не имеет четкого толкования. В одних случаях за датчик принимают элемент, который выполняет функции измерения управляемых величин, в других — измерительный элемент и дополнительный преобразователь, включаемый с целью преобразования сигнала измерительного элемента в сигнал другой величины.
В дальнейшем под датчиком будем понимать устройство, измеряющее параметры процесса, режима работы машин и агрегатов и преобразующее измеренные физические величины в сигнал, удобный для дальнейшей обработки и передачи на расстояние или в цепь управляющего устройства.
В большинстве случаев на выходе датчика будет либо механическая величина (перемещение, сила), либо электрическая величина (напряжение, ток, электрическое сопротивление, емкость, индуктивность, сдвиг фаз и др.).
Наиболее легко измерению поддаются электрические величины, поэтому во многих случаях при измерении неэлектрических величин совместно с измерительным органом предусматривается специальное устройство — преобразователь, в котором неэлектрическая величина на его входе преобразуется в электрическую величину на его выходе. Любая величина независимо от ее физи
34
ческой природы может быть преобразована в электрическое напряжение или ток, поэтому при автоматизации производственных процессов наиболее широкое распространение получили электрические датчики — измерительные устройства с преобразованием неэлектрической величины в электрическую.
Необходимо отметить, что одна из самых трудных и ответственных проблем при автоматизации любого производства и особенно сельскохозяйственного — это разработка соответствующих датчиков, способных отображать и контролировать автоматизируемые процессы. Очень часто требуется в одно и то же время измерять несколько управляемых величин (например, в животноводческих помещениях — влажность, температуру и газовый состав среды), поэтому нужны различные датчики.
Свойства, которыми должен обладать каждый датчик, чтобы соответствовать своему назначению в автоматической системе, разнообразны, поэтому можно выделить основные требования, предъявляемые к ним: однозначность зависимости между входной и выходной величинами, когда конкретному значению входной величины соответствует строго определенное значение выходной; линейная (там, где это возможно)—самая простая и наглядная зависимость между выходной и входной величинами; высокая чувствительность к измеряемой величине; достаточная мощность выходного сигнала, обеспечивающая по возможности дальнейшее управление элементами системы без усилителей; стабильность характеристик во времени, то есть в течение определенного периода эксплуатации; отсутствие влияния нагрузки выходной цепи на измеряемую электрическую величину и на технологический процесс в целом; малая инерционность, то есть минимальная задержка в передаче сигнала через датчик; наименьшее влияние посторонних факторов на характеристики датчика; устойчивость к воздействиям окружающей среды; надежная и долговечная работа; невысокая стоимость; технологичность изготовления; удобство эксплуатации; достаточная степень унификации отдельных частей. Датчики, используемые в современных системах автоматики, классифицируют по различным признакам: физической природе входных и выходных величин, принципу действия и конструктивному исполнению.
3*
35
В зависимости от физической природы входной величины датчики делятся на датчики электрических величин (тока, напряжения, мощности, частоты) и датчики неэлектрических величин (температуры, давления, скорости, уровня и т. п.). По виду энергии выходной величины датчики делятся на электрические и неэлектрические. Электрические датчики по принципу действия делятся на параметрические, в которых входные величины (обычно неэлектрические) преобразуются в выходные параметры электрических цепей (7? — сопротивления, L — индуктивные, С — емкостные и М — трансформаторные) игенераторные, в которых энергия входной величины преобразуется в энергию электрического выходного сигнала — ЭДС.
Неэлектрические датчики подразделяются на механические, пневматические и др.
По характеру изменения выходного сигнала во времени различают датчики непрерывного действия, которые выдают сигнал непрерывно, и дискретного действия, у которых значение выходного сигнала в определенные промежутки времени равно нулю.
Основными параметрами, характеризующими датчик, являются чувствительность и инерционность.
Чувствительность 5 датчика представляет собой отношение изменения Ду его выходной величины к изменению Дх входной
S = Ay/\x или S = dy/dx. (3)
Таким образом, чувствительность является первой производной функции, выражающей зависимость выходной величины от входной. В дальнейшем при изучении динамики автоматических систем управления отношение (3) для установившегося режима будем называть коэфф ициентом усиления датчика.
Инерционность датчика отражает некоторое запаздывание в измерении значения управляемой величины, которое может быть обусловлено массой деталей, тепловыми свойствами, индуктивностью, емкостью и другими параметрами самого датчика.
2.2. Датчики сопротивления
Б системах автоматики для измерения усилий, моментов сил, линейных и угловых перемещений и иных величин широкое применение находят датчики электри-
Рис. 10. Контактные датчики:
а — одностороннего действия; б — двухстороннего действия; в — многопредельный.
ческого (активного) сопротивления (контактные, реостатные, тензометрические и др.).
В контактных датчиках в результате различных воздействий происходит замыкание и размыкание контактов, включенных в какую-либо электрическую цепь. Контактные датчики бывают одностороннего действия (рис. 10,а) с одним неподвижным и одним подвижным контактами и двухстороннего (рис. 10,6) с одним подвижным и двумя неподвижными контактами, а также многопредельными, то есть с несколькими последовательно замыкающимися друг за другом контактами (рис. 10, в).
Несмотря на простоту, контактные датчики могут контролировать линейные размеры с высокой точностью. Все дело в самих контактах и в том, в какую цепь они включены. Чем меньше ток цепи, в которую введен контактный датчик, тем выше его точность. Весьма точные результаты можно получить, включая датчик в сеточную цепь электронной лампы, поскольку эта цепь потребляет очень небольшой ток.
Нечувствительность контактных датчиков определяется начальным зазором бо между контактами. Выходная величина датчика будет равна нулю до тех пор, пока подвижная часть контактов под действием измеряемой величины Р не преодолеет зазор 60.
Основной недостаток рассматриваемых датчиков — ограниченный срок службы контактов, которые подвергаются действию электрической дуги, обгорают, изменяют свои свойства и размеры.
Потенциометрические датчики за счет изменения своего электрического сопротивления преобразуют угловое или линейное перемещение измерительного орга-
37
Рис. И. Потенциометрические датчики:
а — с угловым перемещением контакта; б — с линейным перемещением контакта; в — с отводом от средней точки.
на в постоянный или переменный ток. Различают датчики с угловым (рис. 11, а) и линейным (рис. 11,6) перемещением подвижного контакта, соединенного с подвижной частью объекта, изменение положения которой измеряется. Для датчика каждого вида можно установить зависимость выходной величины от входной.
Если для датчика с угловым перемещением контакта обозначить сопротивление, приходящееся на единицу длины окружности при равномерной намотке как Ri, радиус датчика — как г, то зависимость сопротивления R на выходе между клемм-ами 0 и 2 от угла а поворота ползунка
/? = аг/?ь
Чувствительность такого датчика
S = d/?/da,
то есть она тем выше, чем больше радиус ползунка и чем больше сопротивление, приходящееся на единицу длины окружности (последнее зависит от удельного сопротивления материала и сечения наматываемой проволоки).
Для потенциометрического датчика с линейным перемещением контакта входной величиной является х— положение подвижного контакта, выходной — напряжение Uu при постоянном сопротивлении которое представляет собой сопротивление устройства, воспроизводящего изменение положения ползунка. Примени
38
тельно к схеме, изображенной на рисунке 11,6, можно написать следующую систему уравнений
I=I\+i2\ Ц : Iz~Rn Rr, R\ : Rq=x : /0;
Uo~i(Ro—Ri) + RRh', Rh—^Rh, (4)
где Uo— напряжение источника питания (стабилизированное;; Ro=Ri-^Rz— полное сопротивление потенциометра; Rl и R?— сопротивление частей, на которые ползунок делит полное сопротивление потенциометра; 10 — длина потенциометра; Л и /2 —токи в сопротивлениях Rt и Rz, 1 — ток от источника питания.
Решая систему уравнений (4) относительно выходной величины Ua, получим
U _и_31________1_.
ив~и° Rh
есчи Rn^Ro, что практически и бывает, то
7?1 х
ив^и0-^-=и(Г~.
Kt) 10
Значит, выходная величина UH пропорциональна величине х.
Чувствительность такого датчика S=dUH/dx=U0/l0.
Заметим, что если у потенциометрического датчика сделать отвод от середины обмотки (рис. 11,в), то такой датчик будет характеризовать не только значение, но и направление перемещения движка.
Для намотки датчиков применяют проволоку из константана, нихрома, манганина, никелина, реотана, фехраля и др. Толщину каркаса датчика рекомендуется принимать более 4d. При постоянном сечении каркаса намотки полное сопротивление R можно определить по формуле
R—lxnp/q, где/]—длина одного витка, м; п — число витков; р — удельное сопротивление провода, Ом-м2/м; q— поперечное сечение проволоки с изоляцией, м2.
Диаметр проволоки
где i = l/q— допустимая плотность тока (обычно ‘принимают 10 A/мм2); А/7— падение напряжения в обмотке потенциометра с сопротивлением R = U/I.
;э
Рис. 12. Угольные датчики:
а — простой; б — характеристики угольного датчика; в — дифференциальный.
К недостаткам потенциометрических датчиков можно отнести наличие скользящего контакта и то, что характеристика «выход» от «входа» не всегда получается линейной. Однако простота конструкции и возможность обойтись без усилителей зачастую компенсируют отмеченные недостатки.
Угольные датчики преобразуют действующее на них усилие в электрическое сопротивление или силу тока.; Входной величиной здесь будет измеряемое усилие, а выходаой — сопротивление датчика или силы тока в нем. ^Различают датчики этого типа в виде столбиков и так называемые тензолиты, состоящие из порошка угля, графита или сажи, смешанного с бакелитовым или другим изолирующим лаком. Простейший датчик в виде столбика, набранного из 10...15 угольных шайб/ диаметром 5... 10 мм и толщиной 1...2 мм, показан на рисунке 12, а. На концах столбика монтируются контактные диски 2 и упорные конструкции 3, через которые передается усилие Р на диски. Электрическое сопротивление такого столбика складывается из переходных контактных сопротивлений между угольными дисками и собственных сопротивлений дисков. При сжатии сопротивление столбика уменьшается. На рисунке 12,6 приведены кривые изменения силы тока I датчика в зависимости тия. Чтобы сопротивление столбика случайных встряхиваний и ударов, ' большое начальное давление.
сопротивления R и от усилия Р сжа-не изменялось от на него дают не-
40
Сопротивление датчика с некоторым приближением выражается зависимостью
R=Ro+(a/P}, (5)
где 7?о — постоянная величина, соответствующая сопротивлению при Р->оо, Ом; Р— усиление, приложенное к датчику, Н; а — постоянный коэффициент, Ом • Н.
Чувствительность датчика
I dtf
5= |-dF =°/р2-
Силу тока можно определить как
(6)
1
/?о+(а/Р)
По показаниям прибора, включенного в цепь датчика, судят об усилии, приложенном к датчику.
Т е н з о л и т ы, изготовляемые в виде стерженька диаметром около 1 мм с медными выводами, применяют для измерения различных упругих деформаций, которые возникают в рабочих деталях под действием внешних нагрузок и исчезают после их снятия. Наклеенный на полоску бумаги в том месте детали, где необходимо измерить деформацию, стерженек, растягиваясь или сжимаясь, воспринимает эту деформацию. При этом изменяется плотность контакта между частицами угля в бакелитовом лаке и общее сопротивление датчика. Чувствительность такого датчика определяется по формуле (6) и сравнительно невелика.
Для повышения чувствительности датчика применяют дифференциальное включение столбиков (рис. 12, в). На предварительно сжатые давлением Ро столбики (рабочая точка должна находиться на линейной части характеристики) действует входная величина — давление Р — таким образом, что сжатие одного столбика увеличивается, а другого — уменьшается. Столбики датчика совместно с сопротивлениями R3 и /?4 включают по схеме измерительного неуравновешенного моста; выходной .величиной (диагональ моста) является напряжение Un. Приняв Яз=/?4, напряжение на выходе моста можно определить по следующей формуле.
Ri—Ri
иа=и0
2(^+7?,)
s 41
Если сопротивление Rt и R2 посредством формулы (5) выразить через усилия Ро и Р, приложенные к датчику, то получим
R‘2~Rl
2аР
Ро-Рг ’
(7)
R2+R1 —
2а Ро
Р»-Р*
(8)
Подставив выражения (7) и (8) в (6), найдем,что
t/H=t7o(P/2P0).
Чувствительность дифференциального датчика
S = d(/ll/d₽=t70/2P0.
Основными недостатками угольных датчиков являются нелинейность характеристики R=f(P), нестабильность сопротивления, зависимость сопротивления от температуры, наличие явления, аналогичного гистерезису. При дифференциальном включении датчиков нелинейность в значительной степени устраняется.
^Тензометрические датчики, или так называемые тен-зосопротивления, предназначаются главным образом для измерения деформаций и механических напряжений, обусловленных этими деформациями. Они представляют собой тонкую (диаметром 0,02...0,04 мм) зигзагообразно уложенную и обклеенную с двух сторон тонкой папиросной бумагой 1 (рис. 13, а) проволоку 2, изготовленную из материала высокого удельного сопротивления. Тензосопротивление приклеивают прочным клеем к поверхности испытуемой детали так, чтобы направление ожидаемой деформации совпадало с длинной стороной петель проволоки^ Размеры тензодатчиков невелики: длина 2,5... 150 мм, ширина 3...60 мм. Со-
Рис. 13. Тензометрический датчик (а) и его характеристика (б).
противление тензодатчиков обычно 100... 200 Ом.
Деформации детали передаются на проволоку, в результате чего изменяются ее длина, диаметр и как след- ' ствие электрическое сопротивление R. Установлено, что относительное изменение со<-противления можно определить по формуле
42
где A///— относительная деформация; ST — чувствительность тензодатчика (так, для константана ST = 1,9... 2,1, для нихрома ST = 2).
Зная зависимость P=f(P), которая представляет собой тарировочную кривую, устанавливаемую опытным путем, определяют по ней усилие Р. Характеристика тензодатчиков (рис. 13,6) линейна, поэтому их чувствительность практически постоянна. Стабильность характеристики — важное преимущество тензометров по сравнению с угольными датчиками.
К недостаткам тензометрических датчиков можно отнести влияние температуры на сопротивление и сравнительно низкую чувствительность (намного меньшую, чем у угольных датчиков). Несмотря на это, тензометры находят широкое применение.
2.3. Индуктивные датчики
[Принцип действия датчиков основан на изменении г индуктивного сопротивления катушки при перемещении в ней ферромагнитного сердечника или при изменении, зазора в сердечнике с помещенной на нем катушкой/ Вследствие простоты и надежности конструкции, большой мощности на выходе и отсутствия подвижных контактов находят широкое применение при измерении давления, расхода различных жидкостей и газов, линейных и угловых перемещений/ Эти датчики работают от сети переменного тока на частотах от 50 Гц до нескольких килогерц. I,
Индуктивные дагтчики с подвижным якорем (с изменяющимся зазором) используют для измерения и контроля очень малых (до 2 мм) перемещений* Когда подвижный якорь 1 (рис. 14, а) под действием механического усилия Р меняет положение по отношению к неподвижному магнитопроводу 2, изменяется воздушный зазор 6, который является входной величиной датчика, что вызывает изменение индуктивного сопротивления катушки, а следовательно, и выходной величины — тока 1 (при заданном напряжении (7)4 поскольку
1= U/z,
где г=}</?2-|-(о)£)2 —полное сопротивление катушки датчика.
Ом.
43
Рис. 14. Индуктивные датчики и их характеристики:
а—с подвижным якорем; б — с перемещающимся сердечником; в — с изменяющейся площадью зазора; г — дифференциальный; д — характеристика датчиков (а, б, ej; е — характеристика дифференциального датчика.
Индуктивность катушки (Гн) можно определить по приближенной формуле
L = m>2fy./6,
где а» — число витков катушки; F — сечение магнитопровода, м2; ц — магнитная проницаемость, Гн/м.
Так как активное сопротивление /? катушки незначительно по сравнению с индуктивным (со£з>/?), то им допустимо пренебречь и считать, что
z=(o£ = &y2F(opi/6.
Тогда сила тока в катушке
l—U/z.
Чувствительность (А/м) датчика определяется как S=d//d6= U/w2F(im.
Индуктивные датчики с перемещающимся сердечником (рис. 14, б) способны измерять большие (до 50 мм) перемещения, а датчики с изменяющейся площадью зазора (рис. 14, в) —до 8 мм.
Характеристика индуктивного да/;ика
(рис. 14,д) линейна только на определенном участке; Линейность нарушается, когда активное сопротивление становится сравнимым с индуктивным. Индуктивные
44
I датчики выбирают так, чтобы в пределах зоны управ-^ ления характеристика была линейна.
Наибольшее распространение получили дифферен\ циальные индуктивные датчики (рис. 14,г), у которьц. входной величиной является смещение якоря относи-] тельно среднего положения, а выходной — напряженно! Uh. Для среднего положения якоря, когда входная ве-.’ личина равна нулю, 61 = б2 и t/u=0. При отклонении^ якоря от среднего положения происходит изменение! индуктивного сопротивления обеих катушек. Например}* если якорь переместится вправо, то зазор 62 уменьшит/! ся, а зазор 6j увеличится. Поэтому индуктивное сопротивление правой катушки станет больше, а левой --меньше. На выходе датчика появится напряжение U,J которое будет возрастать по мере увеличения отклонен f ния.^Характеристика (рис. 14,е) такого датчика пока-, зывает, что для двух одинаковых по величине, но раз-' личных по знаку отклонений значения UH отличаются только противоположными фазами.
У дифференциальных датчиков по сравнению с про- ' стыми выше чувствительность и значительно меньше погрешность от колебания напряжения питания.
К недостаткам всех индуктивных датчиков следует^ отнести сильную зависимость их работы от частоты на- . пряжения питания катушки и невозможность примене- ' ния на высоких частотах, поскольку при этом резко j увеличиваются потери на перемагничивание и индук- ; тивное сопротивление обмотки.
2.4. Трансформаторные датчики
Принцип действия датчиков основан на изменении взаимной индуктивности между двумя системами обмоток.
Взаимная индуктивность М может изменяться как от изменения полного магнитного сопротйвления zm цепи, так и от взаимного перемещения обмоток.
Трансформаторные датчики, применяемые для измерения угловых перемещений, имеют вторичную обмотку, выполненную в виде рамки, которая поворачивается в кольцевом якоре (рис. 15,с), и ее ЭДС может меняться в зависимости от угла <р, E2—f (<р).
Широко применяются трансформаторные датчики, выполненные в виде электрических машин, конструктив
45
но похожие на синхронные машины с первичной обмоткой, расположенной на статоре, а вторичной — на ро-। торе. Они подразделяются на вращающиеся трансформаторы (ВТ) и сельсины.
У ВТ на статоре и роторе, как правило, расположе-I но по две взаимно перпендикулярные обмотки. Рабо-' тают ВТ либо в режиме синусно-косинусного вращающегося трансформатора (СКВТ) (рис. 15,6), либо в режиме линейного вращающегося трансформатора (ЛВТ) (рис. 15, в). При включении обмотки возбужде-
Рис. 15. Трансформаторные датчики:
а — угловых перемещений; б — вращающийся трансформатор в сннусно-ко-синусном режиме: в — вращающийся трансформатор в линейном режиме; г — схема включения сельсинов в режиме дистанционной передачи угла; д — схема включения сельсинов в трансформаторном режиме; е •—статические характеристики.
46
ния wB статора в сеть и замыкании квадратурной обмотки аУкв на сопротивление /?1 (режим СКВТ) в обмотках ротора наведется ЭДС, величина которой при отсчете угла поворота <р от нейтрального положения против часовой стрелки пропорциональна синусу этого угла в обмотке шСИн, поэтому эту обмотку называют синусной, а в косинусной обмотке &укос ЭДС пропорциональна косинусу угла ф.
6/з=А^71созф,
где k=uf xb/wb = wkoq/wb — максимальный коэффициент трансформации В1
Сопротивление /?It R2 и R3 подбирают так, чтобы ток в обмотке юв был неизменным для любого ф.
В режиме ЛВТ выходное напряжение U2 преобразователя равно
sin®
1 -f-rcostp
Характеристики являются линейными в пределах изменения угла ф=±60°.
Погрешность возникает из-за неправильного подбора сопротивлений в схеме, отклонения’напряжения питания и частоты, изменения температуры датчика.
Сельсины обычно имеют однофазную первичную и трехфазную вторичную обмотки. Трехфазные обмотки расположены в пространстве под углом 120° одна относительно другой. Сельсины могут работать в дистанционном и трансформаторном режимах. В первом случае на передающей стороне устанавливается сельсин-датчик-ВС, на приемной стороне — сельсин-приемник BE (рис. 15, г). Первичные обмотки ОВ сельсинов питаются от одной и той же сети переменного тока, а трехфазные соединены между собой.
При согласованном положении обоих сельсинов Фд=Фп их роторы будут неподвижны, так как в одинаковых фазах ВС и BE будут индуктироваться равные, по величине ЭДС. Они уравновесят друг друга, так как обмотки синхронизации включены встречно.
При повороте ротора ВС на угол ф2>фп в обмотках синхронизации возникнут токи, обусловленные углом рассогласования 0 = ф2—фп- Взаимодействуя с магнитным полем ОВ, эти токи создадут вращающий синхро
47
лизирующий момент Мс, который повернет ротор BE на угол <рп-
Точность дистанционной передачи зависит от момента трения и нагрузки на валу. Выпускают сельсины с погрешностью Дер равной: ±0,75°; ±1,5°; ±2,5°.
Во втором случае к сети переменного тока подключается первичная обмотка сельсина-датчика ВС (рис. 15, д), а с однофазной обмотки сельсина-приемника BE, называемого сельсином-трансформатором, снимается сигнал в виде переменного напряжения
t/вых” &ct/msin0, где kc — коэффициент, учитывающий конструктивные и электрические параметры сельсина; Um—амплитуда напряжения питания; 0 — угол рассогласования; 0=<рд—<рп.
Зависимости синхронизирующего момента Мс и напряжения t/вых от угла рассогласования 0 изображены на рисунке 15, е.
| Трансформаторным датчикам присущи недостатки ' и достоинства индуктивных датчиков, кроме того, у них отсутствует гальваническая связь между цепями ( входа и выхода.
2.5. Емкостные датчики
Емкостный датчик представляет собой конденсатор, емкость которого зависит от площади пластин, расстояния между ними и диэлектрической проницаемости среды между обкладками. Различают три типа емкостных датчиков: с изменяемой пл'ощадью пластин, с изменяемым расстоянием между пластинами и с изменяемой, диэлектрической проницаемостью между пластинами. Все названные параметры емкостных датчиков являются входной величиной, а выходной величиной будет емкость. Наибольшее распространение получили датчики, выполненные в виде плоского или цилиндрического конденсатора. Различные примеры емкостных датчиков схематично изображены на рисунке 16.
Как известно, емкость (Ф) плоского датчика (рис. 16, а)
eoef
где е0— диэлектрическая проницаемость вакуума, Ф/м; е — диэлектрическая проницаемость среды, заключенной между пластинами
48
Рис. 16. Емкостные датчики:
а — плоский; б — с угловым перемещением; в — цилиндрический.
(электродами) конденсатора; F — площадь электродов конденсатора, м2; х — расстояние межу пластинами конденсатора, м.
В таком датчике входной величиной может быть е, F или х, а выходной величиной будет емкость. Если за входную величину принять х— расстояние между пластинами, то чувствительность (Ф/м) датчика
BoeF
dC
Емкость (Ф) датчика с угловым перемещением электродов (рис. 16,6)
„ BoeF / а \
С=—-~ 1---------) 5
а \ л 1
где d — расстояние между пластинами; F — полная площадь пластин (при а=0); а—угол поворота подвижных пластин.
Чувствительност!? (Ф/град) такого датчика
bobF nd
Емкость (Ф) цилиндрического датчика (рис. 16, в)
„ о (е-1)*+Л С = 2лео---л ’
"‘Т7
Чувствительность (Ф/м) цилиндрического датчика
dC dx
s=
s=
е—1
= 2лео---------
111
4 Заказ 5067
49
Датчики, работа которых основана на емкостном принципе, применяют для измерения различных параметров: влажности (почвы, зерна и др.), численного состава, расхода, давлений, толщины различных материалов и т. п. Все более широкое распространение получают емкостные датчики для измерения уровней различных веществ с цифровым отсчетом результатов, которые можно передавать на большие расстояния.
Емкостным датчикам присущ ряд недостатков: 1) мощность выходного сигнала невелика, поэтому необходимо применять усилители; 2) при промышленной частоте не удается получить значительную мощность датчиков, в связи с этим обычно они получают питание от источников повышенной частоты (10 кГц и более); 3) сильное влияние оказывают паразитные емкости (особенно емкости соединительных проводов относительно земли), что вынуждает использовать экранирующие элементы для проводов и датчика.
2.6. Фотоэлектрические датчики
Эти датчики получили широкое распространение в автоматических системах контроля и управления различными технологическими процессами. Принцип действия их основан на использовании фотоэлектрического эффекта. Датчики представляют собой фотоэлементы, реагирующие на изменение светового потока. Известно, что световая энергия, действуя на некоторые материалы, сообщает их электронам дополнительную энергию, достаточную для того, чтобы часть электронов оказалась свободной.
В зависимости от поведения высвобождающихся под действием светового потока электронов различают три типа фотоэлементов: с внешним фотоэффектом (вакуумные или газонаполненные), с запирающим слоем (вентильные) и с внутренним фотоэффектом (фотосопротивления).
Фотоэлементы с внешним фотоэффектом (рис. 17, а)’ представляют собой вакуумную или газонаполненную лампу, анод / которой выполнен в виде кольца или пластинки, а катод 2 образован светочувствительным слоем (цезий или сплав сурьмы с цезием), нанесенным на внутреннюю поверхность колбы.
Электрический ток возникает как поток электронов,
50
I
4*
выбитых под действием световой энергии с поверхности вещества (внешний фотоэффект).
К промышленным относятся фотоэлементы типа ЦГ — цезиевый, газонаполненный (аргон), СЦВ — сурь-мяно-цезиевый, вакуумный и ЦВ — цезиевый, вакуумный. Вольт-амперные характеристики таких фотоэлементов приведены на рисунке 17,6. По ним можно заключить, что фотоэлементы ЦВ и СЦВ имеют предел насыщения, когда при некоторой освещенности количество выбиваемых свободных электронов не увеличивается. У фотоэлементов типа ЦГ при возрастании напряжения фотопоток резко усиливается за счет ионизации газа, которым наполнена колба.
У фотоэлементов с внутренним фотоэффектом свободные электроны, изменяя под действием светового потока свое энергетическое состояние, остаются в веществе. Наиболее распространены селеновые и меднозакисные фотоэлементы.
На рисунке 17,в показаны устройство и схема включения селенового фотоэлемента. Элемент состоит из тонкой пленки золота 1, запирающего слоя 2, селенового слоя 3 и стальной подкладки 4. Запирающий слой на границе селена с золотом, обладая детекторными свойствами, не позволяет электронам, выбитым световым потоком, возвращаться обратно. Световой поток проходит через пленку золота и создает вентильный фотоэффект, при котором электроны из освещенного слоя переходят в неосвещенный, отделенный изоляционным запирающим слоем. Вследствие этого возникает разность потенциалов Еф и протекает ток /ф в нагрузочном сопротивлении RH. Чем больше /?н, тем менее линейна световая характеристика (рис. 17, г).
У фотосопротивлений (рис. 17, д) на стеклянную пластинку 1 нанесен тонкий слой селена или сернистых соединений металлов (таллия, висмута, кадмия, свинца). К пластинке прикрепляют электроды 2, контактирующие с полупроводниковым слоем. Размеры светочувствительной поверхности очень невелики и для выпускаемых отечественной промышленностью фотосопротивлений типа ФС-А1, ФС-А4, ФС-К1 и ФС-К2 составляют 4X7 мм. Выводные концы рассчитаны на включение в нормальную радиоламповую панель.
При подаче к электродам напряжения через полупроводник потечет ток, сила которого зависит от осве
52
щенности светочувствительной поверхности фотосопротивления. Чем больше световой поток Ф, падающий на поверхность фотосопротивления при постоянном напряжении питания U$, тем больше сила тока Нелинейность характеристики (рис. 17,е) объясняется тем,что начиная с определенного предела число свободных электронов с ростом освещенности не увеличивается. Чувствительность фотосопротивлений в сотни раз превышает чувствительность вакуумных фотоэлементов, что обеспечивает непосредственную работу на электромагнитное реле без усилителя. Кроме того, фотосопротивления не реагируют на полярность включения и могут работать в цепи переменного тока. Они обладают большой инерционностью и не способны следовать за быстрым изменением интенсивности светового потока.
Фотоэлементы и фотосопротивления просты по устройству, невелики по габаритам, высокочувствительны и достаточно надежны в работе. Находят широкое применение в системах автоматики сельскохозяйственного производства: для автоматического управления уличным освещением, как датчики освещенности в теплицах, для измерения температуры нагретых тел (фотоэлектрический пирометр), определения прозрачности жидкости или газов, подсчета изделий, проходящих по конвейеру, для оценки состояния поверхности объекта, для контроля пламени в топках и т. д.
Фотодатчики с электрическим током на выходе часто используются в составе фотоэлектрических реле, для чего их соединяют с контактными или бесконтактными электрическими реле. Особенно подходят для этой цели тиратроны, выполняющие функции одновременно и усилителя и реле. Фотоэлектрические реле очень удобны, а в ряде случаев и незаменимы как аппараты для автоматической сигнализации, браковки, сортировки, счета, защиты, управления и т. д. В целом же возможности фотоэлектрических реле в автоматике чрезвычайно велики.
Широкое применение в автоматике находят фотодиоды, фототриоды и фотоумножители. Принцип действия полупроводниковых фотодиодов и фототриодов основан на использовании свойств р — п — перехода в германиевом или кремниевом слое. Фотодиоды могут работать как с внешним источником питания (фотодиодный режим), так и без него (вентильный режим).
53
Многокаскадный фотоумножитель, предназначенный для усиления тока, использует явление вторичной эмиссии. В стеклянной колбе, кроме катода К и анода А, расположены эмиттеры 3t... Э5, к которым прикладывают напряжения . 1/5, возрастающие по мере приближения эмиттеров к аноду. Световой поток, падающий на катод К, выбивает из него электроны, которые под действием разности потенциалов между катодом и первым эмиттером и всеми парами соседних эмиттеров движутся со все возрастающими скоростями от эмиттера к эмиттеру и выбивают все большее количество вторичных электронов. Достигнув анода А, эти электроны поступают во внешнюю цепь в виде тока, ’превышающего ток катода в 107... Ю8 раз. Промышленность выпускает фотоумножители типа ФЭУ с числом каскадов усиления до 15 и наибольшим током на выходе до 0,2 мА (для фотоумножителей с жалюзийной системой ток достигает 25 мА).
2.7. Датчики температуры
Датчики для измерения температуры различных тел или сред используют в своей работе разнообразные свойства веществ или материалов, изменяющиеся в зависимости от температуры. Это может быть изменение линейных размеров или объема, коэффициента температурного сопротивления, термоэлектродвижущей силы, электропроводности и т. п.
Широкое применение в системах автоматики находят контактные термометры, биметаллические датчики, термометры сопротивления, полупроводниковые термосопротивления, термопары, позисторы.
Контактные термометры относятся к датчикам, ос-I нованным на принципе теплового расширения жидкос-j тей и газов.
Жидкостный (ртутный) датчик представляет собой стеклянную трубку, внутри которой размещена стеклянная ампула с капилляром, где находится ртуть. В ампулу (рис. 18, а) введены два контакта: один впаян снизу и соединен со столбиком ртути, а второй (подвижный) расположен сверху и может перемещаться в капилляре при помощи магнитной головки (на рисунке не показана). Поскольку высота столба ртути зависит от температуры измеряемой среды, то каждому
54
Рис. 18. Датчики температуры:
а, б, в, г и О — жидкостные; е, ж и з — манометрические.
положению подвижного контакта будет соответствовать определенное значение температуры срабатывания датчика. Таким образом, контактный термометр — датчик двухпозицпонного действия, входной величиной которого является температура, а выходной — высота столба жидкости в капилляре.|Пределы регулирования температуры от —30 до +100°С (и выше). В схемах автоматики такие термометры применяются с промежуточным реле, потому что разрывная мощность контактов не превышает 2 Вт при токе 0,2 AJ
Помимо рассмотренной конструкции, применяют тер- » мометры, где вариации столба жидкости используют для изменения сопротивления резистора, впаянного в капилляр (рис. 18,б), индуктивности катушки (рис. 18,в), емкости (рис. 18,г), интенсивности светового потока (рис. 18,6).
Манометрические датчики используют за- ' висимость давления, находящегося в замкнутой системе | газа или насыщенного пара низкокипящей жидкости, от
' <.*
55
температуры. Замкнутая система (рис. 18, е, ж, з) состоит из баллона 1, погружаемого в измеряемую среду, соединительного капилляра 2 и манометра 3, связанного через систему рычагов со стрелкой 4 измерительной шкалы 5. Изменение температуры в этих датчиках происходит за счет перемещения манометрических пружин (е), мембран (ж), сильфонов (з). При достижения предельных значений температуры стрелка вызывает срабатывание контактной системы 6, в результате чего возникает управляющий сигнал. (Датчики манометрического типа позволяют вести визуальный контроль температуры, причем шкала датчика может быть удалена на значительное расстояние от контролируемого объекта (длина капилляра до 40 м).|Жидкостные манометрические датчики заполняются ртутью, ацетоном, эфиром, спиртом и их соединениями, а газовые — азотом и инертными газами.
Погрешность измерения манометрических датчиков составляет 1...2,5%, а пределы измерения ограничиваются температурами качественного изменения физических свойств рабочего тела (например, температуры замерзания и кипения рабочей жидкости).) Недостатки : таких датчиков в том, что значительная инерционность и повышенная чувствительность к вибрации и толчкам могут вызвать срабатывание контактов. В схемах ав- тематики манометрические датчики применяют без промежуточных реле, поскольку мощность их контактов доступна для управления магнитными пускателями исполнительных механизмов.
В биметаллических датчиках измерительным органом служит спай двух полосок металлов с различными температурными коэффициентами расширения. При изменении температуры измерительный эффект деформируется (изгибается), причем степень деформации пропорциональна температуре. Спаянные пластинки изгибаются в сторону металла с меньшим температурным коэффициентом расширения.-На рисунке 19,а показан датчик, у которого деформация биметаллической пластинки 1 используется для освобождения пружины 2, которая обеспечивает резкое и четкое срабатывание контактов 3.
Для резкого срабатывания контактов в датчиках температуры типа ДТКМ (с пределами регулирования
56
Pijc. 19. Датчики температуры:
а биметаллический; б — термометр сопротивления; в — характеристика термистора; г — схема включения термистора; д — вольт-амперные характеристики термистора; е — схема включения термопары; ж— температурные характеристики позисторов при одном напряжении: / — позистора СТ6-1А;
2 — СТ6-1Б; 3 — СТ6-ЗБ.
от —30 до +50 °C и разрывной мощностью контактов 50 Вт) применяют постоянные магниты, которые притягивают пластинку сразу после того, как при определенной температуре она достигнет заданной степени деформации.
Диапазон рабочих температур биметаллических датчиков весьма велик: от —60 до +350 °C. Чувствительность их обычно составляет +1°С, но может быть и выше.
В термометрах сопротивления используют свойство металлических проводников изменять свое электрическое сопротивление при изменении температуры.
В практике используют платиновые термометры сопротивления типа ТСП с номинальным сопротивлением 10, 46 и 100 Ом для измерения температур от —200 до + 650 °C и медные типа ТСМ на номинальное сопротивление 53 и 100 Ом для измерения температур от —50 до +180°C.'В этих термометрах на рисунке 19,6 прово
57
лока 1, изготовленная из меди или платины, намотана /на изоляционный каркас 2 и закрыта кожухом 3. Выводы 5 закреплены в изоляционной колодке 4.
Зависимость сопротивления проволоки термометра от температуры окружающей среды описывается выражением
Re — Ro [ 1 + а (0 — ©о) ], где /?о — сопротивление, соответствующее начальной температуре ©о; R& — сопротивление проволоки, соответствующее измеряемой температуре 0; а — температурный коэффициент сопротивления (для меди а=0,00433, для платины а=0,00394 ... 0,0056 Ом/град).
Чувствительность (Ом/град) термометра сопротивления
S = iRe/№ = Rea.
Токовые нагрузки термометров сопротивления очень малы, с тем чтобы тепло, выделяемое током в проволоке термометра, было возможно меньшим по сравнению с получаемым. от среды, где измеряется температура. Поскольку интенсивность расхода тепла зависит от многих факторов (геометрических размеров и формы проводника и арматуры, к которой крепится проводник, состава, плотности, теплопроводности окружающей среды, скорости перемещения и т. п.), термометры сопротивления могут применяться и для измерения других величин— скорости, плотности и состава газовой или жидкой среды.
Полупроводниковые термосопротивления (ПТР) или термисторы, температурный коэффициент которых в 8... 10 раз больше, чем у металлов, получили широкое распространение в автоматических системах управления температурой. В зависимости от материала термисторы делятся на медномарганцевые (ММТ) и кобальто-мар-ганцевые (КМТ). Диапазон измеряемых и контролируемых ими температур составляет от —70 до +180°С. Конструктивно они представляют собой шарик, трубку или диск из этих полупроводниковых материалов с металлическими выводами.
Зависимость сопротивления термистора от температуры (рис. 19, в) описывается уравнением
в
Re=R~e~
где Rq — сопротивление при измеряемой температуре, Ом; '[ —температура, °К; /?оо и В — постоянные для данного термистора коэффициенты; е — основание натурального логарифма.
58
Значения коэффициентов Roo и В можно определить по следующим формулам
R Т1Т2 ,
23 7’2-T’i Rz'
и
R^Rte •
В качестве Ri обычно берется сопротивление термистора при температуре 7'1 = 293°К, которое называют номинальны м. Сопротивление R2 удобно измерять при температуре 7'2 = 373°К.
В этом случае формула для В приводится к виду
В=13651п-^-
Л2
Чувствительность (Ом/град) полупроводникового термистора
S = dRe/d0 = aRe-
Величину а называют температурным коэффициентом термистора
В
Значения сопротивления термистора и его коэффициента а весьма велики, что обеспечивает высокую точность измерения небольших отклонений температуры.
Характерной особенностью термисторов является возможность получения релейного эффекта в цепи (рис. 19,а), куда они включены. Если через термисторы пропускать ток, то по мере его увеличения напряжение Ue на термисторе R( растет сначала пропорционально току, а затем начинает падать из-за уменьшения сопротивления, вызванного нагревом термистора током. Дальнейшее повышение напряжения в цепи термистора, не ограниченной другим проводниковым сопротивлением, до значения Um сопровождается скачкообразным неограниченным увеличением тока и вызывает разрушение термистора (рис. 19,д). Чтобы ограничить ток, в цепь термистора включают сопротивление R с прямолинейной вольтамперной характеристикой. Общая вольтам-перная характеристика определяется как сумма характеристик Ue и U, и в цепи возникает релейный эффект; при напряжении Ucv (напряжение срабатыва
59
ния) ток скачкообразно возрастает до значения /ср, при снижении напряжения до UB (напряжение возврата) ток скачкообразно уменьшается до значения /в.
К недостаткам термисторов относится сравнительно низкая стабильность параметров. Выпускаемые промышленностью термисторы имеют разброс по сопротивлению до ±20 % от номинала, что затрудняет их взаимозаменяемость.
Позисторы обладают большим положительным температурным коэффициентом сопротивления, достигающим 80 % на ГС в узком диапазоне температур. Их изготавливают из титаната бария со специально подобранными примесями, придающими им свойства полупроводника, у которого сопротивление сильно зависит от температуры. Температурный коэффициент позисторов в 3.. .4 раза больше, чем у термистора. В температурных характеристиках позисторов (рис. 19, ж) наблюдается значительный варисторный эффект, заключающийся в уменьшении их сопротивления Дп с ростом приложенного напряжения. Выпускают позисторы следующих марок: СТ-5, СТ-6, СТ-7 до СТ-15 различных модификаций. Позисторы встраиваются в обмотки двигателей для измерения их температуры.
В термоэлектрических датчиках (термопары) исполь-I зуют термоэлектрический эффект. Если спаять два раз-' ных специально подобранных проводника и спаянный конец 1 (рис. 19, е) нагреть, то на свободных (холодных) концах проводников появится термо-ЭДС. Это происходит потому, что энергия свободных электронов в различных металлах увеличивается с ростом температуры неодинаково. Наличие перепада температур вдоль проводника приводит к тому, что энергии и скорости электронов на конце проводника с более высокой температурой будут больше и электроны начнут двигаться от горячего конца к холодному. Значение термо-ЭДС Е пропорционально разности температур нагретого 0Г и свободных концов 0Х и зависит от металла проволок Е=а(0г—0х). При измерении температуры свободным концам обеспечивают постоянную температуру, для чего их достаточно удаляют от спая или удлиняют путем подбора проводов 2, обладающих теми же термо-ЭДС и названных поэтому термоидентичными или компенсационными. На практике применяются термопары: хромель-копелевые (ХК) с пределами изме
60
рения температуры до 600 °C, хромель-алюмелевые (ХА) до 900 °C, медь-константановые (М) до 350.°C, железоконстантановые (Ж) до 600 °C и др.
2.8. Датчики уровня
Датчики уровня — это устройства для измерения уровней веществ относительно какой-либо отметки, принятой за начало отсчета. В автоматических системах управления находят применение мембранные, электродные, поплавковые и другие датчики уровня.
На рисунке 20, а показаны мембранные датчики, используемые как указатели предельного (верхнего и нижнего) уровня сыпучих тел в емкостях. В таких датчиках применяют микропереключатели, которые срабатывают при заданном усилии, соответствующем определенному уровню сыпучего материала над датчиком.
На рисунке 20, б изображен мембранный уровнемер, в котором на основе измерения давления, передаваемого
61
на мембрайу весом столба жидкости, контролируется ее уровень. Вес жидкости, пропорциональный ее уровню Н, вызывает определенный изгиб мембраны 7, механически связанный с угольным датчиком 2. Давление, соответствующее уровню материала, передается к угольному датчику, на выходе которого возникает электрический сигнал, измеряемый прибором П или используемый для управления.
Шкала прибора проградуирована в единицах уровня. Заметим, что измерение давления столба жидкости происходит в сосуде, сообщающемся с тем резервуаром, где контролируется уровень.
Электродные датчики позволяют измерять уровни жидкостей и некоторых сыпучих тел по соответствующему изменению активной или емкостной проводимости межэлектродного пространства датчика (рис. 20, в).
Электродные датчики просты, точны, недороги и де-\ лают возможным дистанционное измерение уровней в * различных емкостях.
В поплавковых датчиках изменения уровня жидкости, воспринимаемые поплавком 1 (рис. 20,а), передаются механической связью (трос 2, блоки 4, противовес 5) элементу, который обычно преобразует эти изменения в электрический сигнал при помощи потенциометрического 3 или индуктивного преобразователя. К выходу датчика подключен измерительный прибор 77, регистрирующий отклонения уровня. ^Сигнал с выхода может быть подан в автоматическую систему управления. Такие датчики позволяют контролировать уровень в широких пределах.) Их основным недостатком является наличие подвижных частей.1
Кроме рассмотренных датчиков, для измерения уровней жидкостей применяют различные уровнемеры — дифманометры, реагирующие на перепад давлений, созданных жидкостью в напорном бачке на постоянной высоте, и жидкостью, уровень которой измеряется.
Среди датчиков для измерения уровней сыпучих материалов можно назвать, например, крыльчатки, которые свободно вращаются в воздухе и останавливаются, замыкая свои контакты при соприкосновении с сыпучим материалом.
62
2.9. Датчики угловой скорости
Для измерения угловых скоростей широкое применение находят центробежные тахометры и тахометриче-1 ские преобразователи (тахогенераторы).
Схема простейшего центробежного тахометрического датчика показана на рисунке 21,а. Ось 3, на которой при помощи шарниров и четырех рычагов 2 закреплены два груза 1, воспринимает вращательное движение от объекта, чья угловая скорость ю измеряется. Пружина 4 надета на ось 3 в слегка сжатом состоянии, поэтому ползунки (нижний подвижный, верхний неподвижный), когда ось не вращается, удалены друг от друга на максимально возможное расстояние. При вращении оси с некоторой угловой скоростью со грузы 1 под действием центробежной силы симметрично расходятся, пружина сжимается и нижний ползунок поднимается до тех пор, пока сила пружины не уравновесит инерционные силы двух масс.
Центробежная сила 7'ц пропорциональна квадрату угловой скорости
где kj — постоянный коэффициент, зависящий от конструкции тахометра и массы грузов; г — расстояние от оси вращения до центра грузов.
Вращение оси через зубчатое колесо передается на счетный механизм 5, который регистрирует угловую скорость на шкале, проградуированной в единицах угловой скорости, или на специальное устройство 6, фик-
а
Рис. 21. Датчики скорости:
а — тахометрический центробежный; б — тахогенератор постоянного тока: в — тахогенератор переменного тока.
63
сирующее перемещение нижнего ползунка. Таким устройством может быть якорь индуктивного датчика, подвижный электрод емкостного датчика, подвижный ползунок потенциометрического датчика и т. п.
Чувствительность (Н-рад/с) датчика
S=d/-ц/d со=2Лт<ог.
Тахогенераторы могут быть постоянного тока (рис. 21,6) с постоянными магнитами или с обмоткой возбуждения переменного тока (рис. 21,в).
У тахогенератора постоянного тока с постоянными магнитами якорь 1 вращается в магнитном поле постоянного магнита 2. Выходная величина — напряжение U, снимаемое с коллектора машины, пропорционально (коэффициент т) входной величине — угловой скорости <о
и=т(и.
Чувствительность (Вс/рад) датчика
S = dt//dw=m.
В тахогенераторах постоянного тока обмотка возбуждения получает питание от независимого источника, поэтому магнитный поток остается неизменным, а выходное напряжение прямо пропорционально угловой скорости вала (при это.м переходными процессами в якоре пренебрегают).
Такие тахогенераторы имеют следующие недостатки: наличие щеток в коллекторе приводит к снижению надежности работы, температура влияет на сопротивление обмоток, а следовательно, на выходную величину и др.
Асинхронные тахогенераторы переменного тока не имеют подвижных контактов. На статоре размещено две обмотки (рис. 21,в), расположенные под углом 90°. Обмотка возбуждения 1 получает питание Ui от источника переменного тока, с обмотки 2 снимается выходное напряжение U2. Ротор 3 представляет собой алюминиевый стакан, вращающийся между статором и неподвижным цилиндрическим сердечником. Когда ротор не вращается, выходное напряжение U2 равно нулю, так как оси обмоток взаимно перпендикулярны. В роторе, вращающемся в магнитном поле обмотки возбуждения, индуктируется ток, который создает магнитный поток, пересекающий витки выходной обмотки 2, и наводит в ней переменную ЭДС,
64
пропорциональную (коэффициент т{) угловой скорости ротора
Таким образом, при постоянном значении напряжения, подводимого к обмотке возбуждения, выходное напряжение будет пропорционально угловой скорости тахогенератора.
Существуют и некоторые другие датчики измерения угловой скорости. Так, находят применение центробежные (гидравлические или пневматические) импеллеры. Для измерения частоты вращения используют цифровые автоматические тахометры с индикацией результата измерений на световом табло в десятичной системе. Такие тахометры (например, цифровой автоматический тахометр ЦАТ-ЗМ) включают в себя датчик частоты вращения и частотомер.
2.10. Датчики давления
Из всего разнообразия датчиков давления, отличающихся принципом действия и устройством, будут рассмотрены лишь некоторые, получившие наиболее широкое распространение в практике сельскохозяйственного производства.
В датчике с манометрической тонкостенной упругой трубкой / (рис. 22, а), изогнутой по дуге и имеющей овальное сечение, при изменении давления контролируемой среды меняется давление внутри трубки. Свободный конец трубки перемещается и через систему рычагов 2 приводит в движение указательную стрелку 3 относительно измерительной шкалы 4. Стрелка связана с контактной системой, включенной в электрическую цепь управления. Движение свободного конца трубки можно преобразовать в перемещение контакта потенциометрического датчика и т. п.
У сильфонных датчиков давления газов (рис. 22,6) и жидкостей (рис. 22, в) гофрированная трубка 1 соединена через рейку 2 с зубчатым колесом 3, которое связано с подвижной частью устройства, преобразующего перемещение рейки 2 под действием изменяющего давления Р в электрический сигнал. Напряжение ПВЬ1К на выходе потенциометрического преобразователя пропорционально (коэффициент k) измеряемому давлению
U КЪЛ — kP .
5 Заказ 5067
65
Под действием давления Р сильфон растягивается или сжимается и перемещает рейку, а вместе с ней, как показано на рисунке, и ползунок потенциометра 4.
Пьезоэлектрические датчики применяются для измерения давлений и особенно там, где процесс изменения давлений происходит быстро, например изменение давления газов в двигателях внутреннего сгорания, давления звуковых колебаний и т. п. Широко применяются пьезоэлектрические адаптеры (звукосниматели граммофонных пластинок), манометры, вибраторы (для измерения вибрации машин), акселерометры (измерители ускорений) и многие другие приборы. Принцип действия их основан на использовании прямого пьезоэлектрического эффекта, то есть появления электрических зарядов на гранях некоторых диэлектриков при их деформации. Наибольшее применение из материалов, обладающих пьезоэлектрическим эффектом, получили кварц, сегнетова соль, титанат бария и др.
Малые габариты, простота устройства, широкий частотный диапазон измеряемых величин — достоинства пьезоэлектрических датчиков; невысокая чувствительность и непригодность к измерению статических величин — недостатки.
2.11. Датчики расхода
Для измерения расхода жидкостей и газов применяются различные датчики. Наибольшее распространение получил метод измерения расхода по перепаду дав
66
ления в дроссельных устройствах, которыми могут служить диафрагмы, сопла, различные трубки.
В датчике с дросселем-диафрагмой 2 (рис. 23,я), помещенной в трубопровод 1, за счет того, что сечение отверстия диафрагмы намного меньше сечения трубопровода, создается перепад давлений. Этот перепад улавливается при помощи отводных трубок 3, в одну из которых вставлено омическое сопротивление R, которое с измерительным прибором П подключено к источнику тока и в процессе работы шунтируется жидкостью. Сила тока /п прибора пропорциональна (коэффициент а) перепаду давлений в трубопроводе
/п=а(Р1—Р2) — аДР.
Расход Q (м3/с) связан с перепадом давлений ДР следующим соотношением
Q = bSoy
где So — сечение отверстия диафрагмы, м2; у — плотность жидкости, кг/м3; Ь — коэффициент расхода (приводится в справочниках); g— ускорение свободного падения, м/с2.
Таким образом, по показанию прибора, шкала которого проградуирована в единицах измерения расхода, судят о количестве жидкости, проходящей по трубопроводу в единицу времени.
Датчики с вертикальной и спиральной вертушками находят широкое применение для измерения расхода воды, жидкого топлива, газа и других веществ.
В датчике с вертикальной вертушкой 1 (рис. 23,6), помещенной в корпус 2, жидкость, протекая через датчик, приводит во вращение вертуш-
Рис. 23. Датчики расхода:
а — с дросселем-диафрагмой; б — с вертикальной вертушкой; в « со спиральной вертушкой.
5*
67
ку, угловая скорость <о (рад/с) которой пропорциональна (коэффициент с) скорости потока
w = c(Q/S«),
где Q — расход жидкости, м3/с; 5Д — рабочее сечение датчика, м2.
Вертушка соединена со счетным механизмом прибора 3, измеряющего расход.
У датчика со спиральной вертушкой 2 (рис. 23,в), размещенной в трубопроводе 1, вращение вертушки передается на измерительный прибор 3, шкала которого програду ирована в единицах расхода. Угловая скорость о (рад/с) вертикальной вертушки пропорциональна расходу Q и обратно пропорциональна шагу лопасти Д/
<o = c(Q/S«A/)'.
Кроме рассмотренных датчиков расхода, находят применение объемные счетчики, работающие по принципу измерения числа отмеренных объемов жидкости, протекающей по трубопроводу: расходомеры постоянного перепада давлений, в которых перепады гидродинамических давлений восходящего потока уравновешиваются весом поршня или поплавка; расходомеры обтекания, у которых рабочий элемент (крыло, диск-шарик и т. п.) воспринимает динамическое давление обтекающего его потока и перемещается в зависимости от значения расхода; расходомеры щелевого типа, тепловые, чашечные анемометры и многие другие.
2.12. Датчики влажности
Существующие методы измерения влажности твердых и сыпучих тел, газов и других сред разделяют на прямые и косвенные. При прямых методах измерения влажности измеряемое вещество разделяют на сухое вещество и влагу, определяют их массы и находят влажность по формуле
где М — масса влаги вещества, Мо — масса сухого вещества.
В практике метод высушивания используют как эталонный, но реализовать его для измерения влажности в виде датчика автоматики практически сложно. По
68
этому используют косвенные методы измерения, здесь о влажности материала судят по какой-либо физической величине, связанной с его влажностью. Широкое распространение получили электрические методы, которые менее точны, чем прямые, но они наиболее просто и быстро позволяют осуществить измерение влажности и полученный сигнал использовать для целей контроля и управления.
К электрическим методам относят кондуктометрический, при котором о величине влажности судят по результатам измерения электрической проводимости измеряемого материала; диэлькометрический — здесь о влажности судят по значению диэлектрической проницаемости или тангенса угла диэлектрических потерь и гигрометрический, при котором о влажности среды судят по изменениям электрических или механических характеристик гигроскопического вещества, помещаемого в измеряемую среду.
По конструкции кондуктометрические и диэлькометрические датчики состоят из цилиндрического или плоского конденсатора, между электродами которого размещают материал, влажность которого подлежит измерению. Наибольшее распространение получили датчики с диэлькометрическим методом измерения влажности.
Гигрометрические датчики применяются для измерения влажности воздуха и газов. Воспринимающим элементом служит человеческий обезжиренный волос или пленка толщиной 5... 30 мк, изготовленная из оболочки кишок крупного рогатого скота. Волос удлиняется на 2...2,5 %, а животная пленка — на 4... 5 % при изменении относительной влажности воздуха от 0 до 100 %. Удлинение передается через рычажной механизм на стрелку прибора, которая отклоняется пропорционально влажности. Для измерения влажности газов и воздуха нашли применение полупроводниковые гигристоры. Они представляют собой тонкую пленку из полупроводникового материала, сопротивление которого резко падает при увеличении влажности. Большая инерционность, наличие гистерезиса и влияние температуры окружающей среды на точность измерения не позволяют гигристорам найти широкое применение.
69
Конструкция датчиков влажности, в основе которых лежит один из названных выше методов, очень разнообразна. Подробные сведения о конструкции датчиков, влажности и их характеристиках приводятся в специальной литературе.
2.13. Электронные и ионизационные датчики
Электронные датчики представляют собой электронные и ионные лампы, у которых можно менять взаимное расположение электродов: анода, катода и сетки. Перемещение одного из электродов приведет к изменению вольт-амперной характеристики лампы. Для практических целей применяют сдвоенные диоды с мостовой измерительной схемой (рис. 24). Подлежащее измерению перемещение осуществляют поворотным измерительным стержнем 1, закрепленным в мембране 2, который смещает сдвоенные аноды 3 относительно неподвижного катода 4. Такие датчики имеют высокую чувствительность по току. Значение анодного тока определяют по формуле
/a=fesHa%//2
где k — постоянный коэффициент, А=2,34-Ю-6; s— активная поверхность катода, см2; ил — анодное напряжение, В; I — расстояние между электродами, см.
Чувствительность датчика по току будет равна
S=d/a/d/=— 2ksU*^/l3
или с учетом тока 7а
S=21*11:
Электронные датчики, или, как их называют, механотроны, характеризуются малым внутренним сопротив-
Рис. 24. Схема электронного датчика со сдвоенным диодом.
лением и значительным током при невысоком анодном напряжении и чувствительности по току до 100 мА/мм.
Датчики . ионизирующего излучения применяются для измерения мощности радиоактивного излучения, загрязненности веществ радиоактивными
70
препаратами, для измерения числа и местонахождения специально «меченых» атомов, а также для измерения неэлектрических величин, функционально связанных с радиоактивным излучением, попадающим в приемник.
Обязательные элементы любого датчика ионизирующего излучения — источник и приемник излучен и я. Источниками излучений служат естественные и искусственные радиоактивные изотопы и рентгеновские зфубки. Используюдся различные виды ионизирую-‘ щих излучений (а-, 0- или у-излучение, нейтронное и рентгеновское излучение). Основные величины, характеризующие ионизирующие излучения, — активность источника, интенсивность и доза излучения, а- и 0-из-лучения представляют собой потоки радиоактивных частиц, у-излучение и рентгеновское — коротковолновое электромагнитное излучение, рассматриваемое часто по аналогии с а- и 0-частицами как поток у-квантов.
Принцип действия приемников излучения, преобразующих энергию ионизирующего излучения в электрическую Энергию основан на явлении ионизации газов при прохождении через них излучения или на люминесценций некоторых веществ под действием излучения. В качестве пр1^*риков используют: ионизационные камеры, пропорцион- ьные счетчики, газоразрядные счетчики (явление иониз<_лии) и сцинтилляционные счетчики (явление люминесценции).
2.14. Электрические задающие устройства
Задающие устройства по характеру выдаваемого сигнала можно разделить на два основных класса: аналоговые и цифровые. Аналоговые, в свою очередь, делятся на непрерывные и дискретные. Дискретность может быть как по времени, так и по значению вырабатываемого сигнала. Цифровые задающие устройства формируют сигналы дискретных уровней.
Кроме того, задающие устройства различают по виду энергии вырабатываемых сигналов, которые могут быть электрическими, пневматическими, гидравлическими, механическими (в виде перемещений или усилий).
Программу или заданную функциональную зависимость, которую должен реализовать регулятор, можно получить при помощи различных методов и средств.
71
В задающих устройствах непрерывного действия чаще используются кулачковые механизмы (жесткие и регулируемые), функциональные потенциометры, бумажная диаграмма, рычажные механизмы. В качестве носителя программы в задающих устройствах дискретного действия находят применение многоцепные переключатели, перфокарты, магнитные ленты, кинопленки и т. п. В качестве примеров рассмотрим ряд электрических носителей программ и функциональных зависимостей.
На рисунке 25,а...е показаны различные виды функциональных преобразователей, выполненные на потенциометрах. Ступенчатые потенциометры с плоскими каркасами (рис. 25,6) и посекционно шунтируемые потенциометры с отводами от намотки (рис. 25, е) при заданной высоте каркаса в первом случае и величине шунтирующего сопротивления во втором позволяют получить необходимую зависимость /?(х).
На рисунке 25, б показана функциональная зависимость между сопротивлением R и положением х ползунка ступенчатого потенциометра. Для получения функциональной зависимости, отличной от приведенной, необходимо изменять каркас, что является недостатком таких потенциометров.
В практике для реализации различных сложных функций, в том числе тригонометрических, широко применяют потенциометры с профильными каркасами. На рисунке 26, а изображены профильный потенциометр с поступательным перемещением подвижного контакта, воспроизводимая им функция y=f(x) при перемещении ползунка в заданном интервале точек 0...6 и схема соединения отдельных участков потенциометра, позволяющая получить заданную функцию.
При изготовлении таких потенциометров весь потенциометр делят на несколько частей и соединяют их так, чтобы точки нулевых значений функции соединялись между собой в одну общую нулевую точку; точки, соответствующие максимальному или минимальному значению функций, присоединяют к плюсу или минусу источника в зависимости от знака функции. Начальную и конечную точки потенциометра, если в них функция не равна нулю, присоединяют к полюсам источника питания через добавочные сопротивления, обеспечивающие ненулевые начальное и конечное значения. Если значения максимума и минимума неодинаковы, то для полу-
72
Рис. 25. Функциональные преобразователи:
а — профильный потенциометр с круглым каркасом; б — ступенчатый потенциометр; в — потенциометр с некруглым каркасом; г — потенциометр с переменным шагом намотки; д — секционный потенциометр; е — потенциометр с дополнительными резисторами.
Рис. 26. Воспроизведение функциональных зависимостей:
а — схема профильного потенциометра; б — схема соединения отдельных участков потенциометра; в — схема диодной линейки; г — вид нелинейной функции; д и е — перфорированные леиты.
чения меньшего значения присоединения выполняют через добавочное сопротивление. В соответствии с изложенными правилами и построена схема присоединения точек потенциометра к источнику тока (рис. 26,6). Заданный интервал 0...6 разделен на участки точками 1, 2...6. Точки 1, 3, 5 сведены в одну общую нулевую точку. Сопротивление Ro обеспечивает значение функции в точке 0, а сопротивление Re— значение функции в точке 6. Сопротивление Rt уменьшает значение //mtn по отношению к значению t/max за счет падения напряжения на нем.
Кроме различных потенциометров для воспроизведения сложных функций применяют диодные линейки. Принципиальная схема такой линейки показана на рисунке 26, в.
Когда значения напряжения входа [/вх малы, все диоды будут закрыты и напряжение на выходе
6^вых= б^вх.
Как только анодное напряжение £7а станет равным нулю, откроется диод VI и через сопротивление R\ и R пройдет ток
_ Ubx-Coj
!-~r+rT
Теперь напряжение на выходе
6^вых= /J (б^вх — At^BXl) + Пвыхр
Такое состояние в схеме будет продолжаться до тех пор, пока не откроется диод V2, то есть пока анодное напряжение U02 диода V2 не станет
U<a= б^вых— (^Л + 6^).
При этом напряжение выхода будет равно выходному напряжению на втором участке диодной линейки
6^вых=^/вых2 ‘
Процесс открытия диодов с увеличением входного напряжения UBX будет продолжаться, и в результате на выходе диодной линейки появится напряжение, которое изменяется по закону, графически изображенному на рисунке 2.6, г. Включая диодные линейки соответствующим образом, можно получить воспроизведение различных функций. Подробно этот вопрос освещен в специальной литературе.
74
Погрешность воспроизведения сложных функций для рассмотренных потенциометров со ступенчатыми каркасами и линейных потенциометров с шунтирующими резисторами достигает ±2 %, для диодных линеек ±1 и/о. Более точное воспроизведение дают функциональные преобразователи, выполненные на цифровых вычислительных устройствах. Поэтому применение рассмотренных преобразующих устройств возможно там, где нс требуется высокая точность работы автоматических систем регулирования. Находят применение и пневматические функциональные преобразователи, особенно в тех системах управления, которые работают в активных средах.
Носителем программы, как уже отмечалось, может быть перфорированная лента (рис. 26, д, е). В первом случае (рис. 26, д) длина отверстия основной перфорации отвечает длительности рабочего периода, определяемого временем освещения фотоэлемента, а расстояние между смежными отверстиями в продольном ряду— длительности нерабочей паузы. Во втором случае (рис. 26, е) все отверстия ленты основной перфорации имеют одинаковые размеры, а команды включения и выключения определяются расстоянием между отверстиями и надлежащей их группировкой. На ленте можно записать (зашифровать) любые команды, а следовательно, и получить управляющие сигналы, которые передаются затем в систему автоматического управления.
Наряду с перфорированными используются ленты с участками различной электропроводности, прозрачности или отражательной способности и др.
Контрольные вопросы и задания. 1. Какими основными параметрами характеризуются датчики автоматических систем? 2. В чем достоинства и недостатки контактных датчиков? 3. Какие датчики называют потенциометрическими? 4. Расскажите об устройстве и работе тензометрических датчиков. 5. Почему у индуктивного датчика характеристика «вход — выход» нелинейная? 6. Объясните принцип действия и назначения емкостных датчиков. 7. Каковы отличия термометров сопротивления от полупроводниковых термисторов? 8. Изложите принцип действия термопар и укажите область их применения. 9. Перечислите типы датчиков уровня. 10. Назовите типы тахогенераторов и укажите их достоинства и недостатки. 11. Расскажите об утройстве и работе фотоэлементов различных типов. 12. Объясните принцип действия пьезоэлектрических датчиков. 13. Назовите разновидности трансформаторных датчиков. 14. Каково назначение электрических задающих устройств?
75
Лабораторная работа №1
Испытание индуктивных датчиков и тензосопротивлений
Содержание работы. Изучить устройство, принцип действия и основные характеристики индуктивных датчиков и тензосопротивлений. Получить основные характеристики испытуемых датчиков.
Описание лабораторной установки. Лабораторная установка должна содержать стенд, на котором закреплены индуктивные датчики, устройство для испытания тензосопротивлений и электрические схемы для получения основных характеристик индуктивных датчиков и тензосопротивлений. С целью получения зависимостей выходных величин датчиков от приложенных усилий в схемы необходимо ввести приборы для измерения токов датчиков. Целесообразно, чтобы установка предусматривала возможность включения индуктивных датчиков по дифференциальной схеме (рис. 14, г).
Порядок выполнения работы. 1. Ознакомиться с датчиками, установленными на стенде, изучить электрическую схему соединений датчиков и измерительных приборов по руководству к лабораторной работе. 2. Собрать электрические схемы испытаний (для индуктивных датчиков можно рекомендовать схемы на рисунке 14, для тензодатчиков — схему на рисунке 27, а. 3. Изменяя положение подвижной части индуктивных датчиков, снимают зависимости l=f(6). 4 Изменяя вес груза Р от нуля до максимального и от максимального до нуля (рис. 27,6), снимают зависимости для тензосопротивлений Для повышения чувствительности тензо-
сопротивлений два тензодатчика R1 и R2 включают в измерительный мост, как показано на рисунке 27, а, и наклеивают на стальную пластину сверху и снизу (это увеличивает чувствительность в 2 раза, способствует температурной компенсации и исключает влияние измеряемых деформаций (например, поперечных). Результаты измерений вносят в протокол испытаний и по ним строят зависимости: для индуктивных датчиков /=Ц6), а для тензодатчиков /=/(<т), причем <т — напряжение изгиба, определяемое как отношение момента изгиба М к моменту сопротивления пластины Д' в месте наклейки датчиков (о=Л1/Лг); M=PL, N=bh'2l&, где b и h — ширина и высота пластины, L — расстояние от места приложения груза Р до центра тензодатчика.
Содержание отчета. Отчет должен содержать краткое описание принципа действия и назначения исследуемых датчиков, таблицы результатов проведенных опытов, расчетные формулы и расчеты, графики зависимостей выходных величин от входных, электрические схемы исследований, анализ полученных результатов, выводы по работе, таблицу с техническими данными измерительных приборов, заключение по работе.
Рис. 27. Схемы испытаний тензосопротивлений.
76
Лабораторная работа № 2
Испытание фотодатчиков.
Фотореле в схемах автоматического управления
Содержание работы. Изучить принцип действия и устройство фотоэлементов и фотосопротивлений. Снять вольт-амперные характеристики фотоэлементов с внешним (вакуумных и газонаполненных) и внутренним фотоэффектом и фотосопротивлений при различных значениях освещенности, пользуясь схемой, представленной на рисунке 28, а. Собрать схему фотореле (рис. 28, б) и испытать ее в работе (управление асинхронным двигателем). Значение катодного сопротивления R в цепи фотоэлемента задается преподавателем.
Описание лабораторной установки. Установка для снятия вольт-амперных характеристик должна содержать осветитель и фотоэлемент. Целесообразно, чтобы осветитель был выполнен в виде трубы 1 с вмонтированным в нее патроном 2 для лампы накаливания 3 и объективом 4, собирающим световой поток в параллельный пучок (рис. 28, в). Фотоэлемент необходимо поместить в светонепроницаемую камеру 6 и внутри нее укрепить панель 8 для фотоэлемента и фотосопротивления. На передней стенке камеры расположить окно 5 с диафрагмой 9. Чтобы уменьшить влияние постороннего света на фотокатод, диафрагму располагают в насадке, зачерненной изнутри. Схема для снятия вольт-амперных характеристик изображена на рисунке 28, а. Защитное сопротивление R принимают равным 1... 2 Мом. Отверстие диафраммы делают таким, чтобы освещался весь фотокатод. Измерения следует выполнять после того, как установлено определенное расстояние между осветителем и камерой, соответствующее максимальному фототоку при номинальном напряжении на лампе. Для удобства сборки схемы фотореле с электронным усилителем вводы всех элементов, в том числе и электронной лампы, снабжаются зажимами и монтируются на панели.
Порядок выполнения работы. 1. Снять вольт-амперные характеристики выбранных фотоэлементов и фотосопротивлений при различных освещенностях, устанавливаемых изменением отверстия диафрагмы. 2. Собрать схему управления асинхронным двигателем
Рис. 28. Схемы исследования фотореле:
а — снятия вольт-амперной характеристики фотоэлемента; б — управления асинхронным двигателем; е — определения чувствительности фотоэлемента.
. 77
от фотореле. Схема должна работать по принципу светового барьера, то есть при попадании света на фотоэлемент реле К получает питание (электронная лампа открыта), а при отсутствии света реле К теряет питание (лампа закрыта). 3. Установить определенное значение светового потока и испытать действие всей установки. Измерить силу токов срабатывания и отпускания реле К.
Содержание отчета применительно к исследуемым элементам по основным пунктам аналогично лабораторной работе № 1.
Лабораторная работа № 3
Испытание датчиков температуры
Содержание работы. Изучить устройство, принцип действия и основные характеристики датчиков температуры. Получить основные характеристики.
Описание лабораторной установки. Установка должна содержать стенд с набором датчиков температуры (полупроводниковые терморезисторы — ПТР, термометры сопротивления, термопары и т. д.), электрические приборы для получения основных характеристик и электрические схемы испытания датчиков.
Порядок выполнения работы. 1. Ознакомиться с устройством датчиков, установленных на стенде. Изучить электрические схемы включения датчиков и измерительных приборов по руководству к лабораторной работе. 2. Собрать электрические схемы. 3. Снять вольт-амперные характеристики датчиков, установленных на стенде. 4. Снять температурные характеристики, то есть зависимость сопротивления от температуры нагрева для чего датчик по-
мещают в термостат, температура в котором измеряется ртутным термометром. 5. Составить и собрать схему термореле (рис. 19, г) и определить его параметры: температуру срабатывания и возврата
Содержание отчета аналогично лабораторной работе № I.
ГЛАВА III
УСИЛИТЕЛЬНЫЕ И СТАБИЛИЗИРУЮЩИЕ ЭЛЕМЕНТЫ
3.1. Общие сведения
Выходные сигналы датчиков и других элементов, как правило, очень слабые и не могут использоваться непосредственно для приведения в действие элементов систем автоматики. Выходная мощность датчиков в большинстве случаев составляет сотые, тысячные доли ватта, тогда как мощность, необходимая для управляющего органа, может достигать десятков и даже сотен киловатт. Поэтому в современных автоматических системах управления широко применяют усилительные элементы (усилители), которые нередко наряду с основным назначением усиливать мощность сигнала выполняют и функцию его преобразования в вид, более удобный для работы системы.
Усилителем называется устройство, предназначенное для увеличения мощности сигнала за счет энергии дополнительного источника питания, при этоь| выходная' (усиленная) величина является функцией входного сигнала и имеет одинаковую с ним физическую природу.
Усилители различают по выходной мощности, виду подводимой вспомогательной * энергии, коэффициенту усиления, принципу действия, по форме характеристики, выражающей зависимость между выходной и входной величинами, и по ряду иных признаков.
Выходная мощность современных усилителей, используемых в системах автоматики, колеблется от долей ватта до десятков и более киловатт.
По виду вспомогательной энергии, подводимой к усилителям, их разделяют на электрические, электромеханические, магнитные, электронные, гидравлические, пневматические, комбинированные.
79
Коэффициент усиления усилителей достигает тысяч, сотен тысяч и даже более раз. В электрических усилителях различают усиление по мощности, напряжению и току. Так, коэффициент усиления по мощности для установившегося режима определяют по формуле
kp = ДР ВЫх/ЛР вх>
где ЛРвих. АРвх — изменения мощности выходного и входного сигналов.
Для усилителей напряжения и тока соответственно различают коэффициенты усиления по напряжению и току, которые в установившемся режиме определяются соотношениями
ky — Дt/вых/Д^вх i kj = Д/вЫх/Л^ВХ ,
где ЛРвыт, ДРвх, Д/вых, д/вх — изменения напряжений и токов выходного и входного сигналов.
Усилители работают в определенном режиме, который определяют соотношениями его входного Рвх и выходного Рвых сопротивлений и сопротивлений источников сигнала Рг и нагрузки Ри. Усилитель мощности работает в режиме согласованной нагрузки, при котором Рвх~Рг, Рп^Рвых выходной величиной является мощность (максимальная в условиях согласования).
Усилитель напряжения работает в режиме, практически близком к холостому ходу на выходе, при котором Рг<СРвх, Ри»Рвых входная и выходная величины — напряжение.
Усилитель тока работает в режиме, практически близком к короткому замыканию на выходе, при котором Рг»Рвх. РиСРвых входная и выходная величины— ток.
Коэффициент усиления по мощности в зависимости от принципа действия и конструкции усилителя может составлять от 1 до 107.
Усилению могут подвергаться не только электрические параметры, но и другие входные величины (перемещение, скорость, усиление, давление и т. п.).
Усилительный элемент совместно с резисторами, конденсаторами и другими элементами схемы называют усилительным каскадом. Если усиления сигнала одним каскадом недостаточно, применяют соединение нескольких каскадов, выполняющих роль предваритель-
80
Рис. 29. Статические характеристики усилителей: а—линейного; б. в, г, д и е — нелинейных.
него усиления и обеспечивающих работу мощного выходного каскада. Поэтому различают однокаскадные и многокаскадные усилители, при этом в многокаскадном усилителе первый каскад от входа называется входным, а последний — выходным.
По форме характеристики, отражающей зависимость между выходной и входной величинами, усилители разделяют на две большие группы: с линейными и нелинейными характеристиками. Обычно предпочтительнее, как наиболее простая, линейная характеристика.
К усилителям, применяемым в автоматических системах, предъявляют требования по ограничению зоны нечувствительности, запаздывающего действия усилителя и др.
Характеристики, выражающие зависимость между выходной у и входной х величинами усилителя в установившемся режиме, могут быть различны (рис. 29). Для характеристики (а) линейного усилителя показательно, что на всем интервале управления между величинами у и х существует прямо пропорциональная зависимость. Характеристики нелинейных усилителей изображены на рисунке 29, б... е. Характеристика (б) нелинейного усилителя с зоной нечувствительности от —Дх до +Дх; характеристика (в) нелинейного усилителя релейного типа: у него выходной
6 Заказ 5067 gj
сигнал у равен нулю до тех пор, пока х<Лх. При выходной сигнал релейного усилителя мгновенно достигает значения у<>, которое не изменяется, как бы не увеличивался сигнал х. Характеристика (г) нелинейного усилителя релейного типа с различными значениями токов срабатывания и возврата- реле (она близка по форме к петле гистерезиса ДХ1<Лх2). Характеристика (д) нелинейного усилителя с зоной нечувствительности и насыщением (подобную характеристику имеет, например, сервомотор с золотником, ход которого больше величины открытия окон, из-за чего золотник перекрывает их). Характеристика (е) нелинейного усилителя с зоной нечувствительности, насыщением и петлей гистерезиса (такова характеристика усилителей с зазорами в механизмах). В дальнейшем изложении будут рассмотрены усилители, которые получили наибольшее применение в автоматических системах управления технологическими процессами сельскохозяйственного производства.
<
3.2. Электронные усилители
Электронные усилители (ЭУ) широко применяются в системах автоматики для предварительного усиления сигналов, получаемых от датчиков. Предельная выходная мощность усилителей не превышает 100 Вт. В автоматических системах используют электронные усилители на лампах и полупроводниках, постоянного и переменного тока, однокаскадные и многокаскадные.
Схема простейшего однокаскадного электровакуумного усилителя постоянного тока показана на рисунке 30, а. Входной сигнал (напряжение (7ВХ) подается на ( сетку электронной лампы, в анодную цепь которой включено сопротивление (нагрузка) Ra — RB. Небольшие изменения входного напряжения вызывают значительные изменения анодного тока /а, а следовательно, выходного напряжения (7Вых, равного падению напряжения на нагрузочном сопротивлении RB. В этом и заключается усилительный эффект рассматриваемой схемы. Резистор R2 служит для ограничения сеточных токов. Резистор R1 введен как стабилизирующий по отношению к сопротивлению между сеткой и катодом лампы. Значит, входная мощность будет опре-
I
82 \
Рис. 30. Схемы усилителей:
электровакуумных постоянного тока (а)-, переменного (б) и полупроводниковых с общей базой (о); с общим коллектором (г); с общим эмиттером (О).у/
делиться сопротивлением резистора R1. Данная схема является нереверсивной.
В низкочастотном однокаскадном электровакуумном усилителе переменного тока с трансформаторным выходом (рис. 30,6) нагрузочное сопротивление Ru включено в анодную цепь через трансформатор, поэтому напряжение выхода содержит только переменную составляющую (дрейф нуля здесь не проявляется). Эта схема является реверсивной, то есть изменение фазы входного напряжения на 180° приводит к изменению фазы выходного напряжения. Такие усилители широко применяются в системах автоматического управления в отличие от высокочастотных, которые используют в радиотехнических приемно-передающих устройствах телемеханических систем.
Полупроводниковые усилители характеризуются незначительной мощностью потребления, достаточной надежностью, высоким быстродействием, сравнительно
6*
83
большим коэффициентом усиления, малыми размерами и поэтому вытесняют ламповые усилители из многих сфер применения. Они могут работать на постоянном и переменном токе. По способу включения полупроводниковых триодов эти усилители делятся на три основных вида: с общей базой, с общим коллектором и с общим эмиттером.
В усилителях с общей базой (рис.30,в) электрод базы — общий для входной и выходной цепей. Усилители, построенные по такому принципу, используются в качестве входного каскада по отношению к датчику с низким входным сопротивлением. Выходное напряжение находится в фазе с входным. Коэффициент усиления по току меньше единицы, а по напряжению много больше единицы.
Усилители с общим коллектором (рис. 30,г), где общим служит выход коллектора, применяют в качестве первого каскада усиления для согласованного включения с датчиками, имеющими высокоомный выход, а также в качестве выходного каскада при работе с низкоомной нагрузкой. Коэффициент их усиления по току 103, а по напряжению — меньше единицы.
Усилители с общим эмиттером (рис. 30, д), у которых общим для входной и выходной цепей является выход эмиттера, получили наибольшее практическое распространение, потому что они обеспечивают высокий коэффициент усиления по мощности и току (порядка 103) и обладают сравнительно большим входным сопротивлением. Выходное напряжение находится в противофазе относительно входного.
В практике применяют в основном многокаскадные усилители с емкостной или индуктивной трансформаторной связью.
3.3. Магнитные усилители
Схема простейшего однотактного магнитного усилителя (МУ) показана на рисунке 31, а. Магнитопровод усилителя выполнен из двух отдельных сердечников. На них накладываются рабочая обмотка с числом витков щ/2 на каждом сердечнике и обмотка управления (подмагничивания) с числом витков шу, охватывающая оба сердечника. Входной величиной МУ является
84
Рис. 31. Схемы и характеристики магнитного усилителя: а —- простейший магнитный усилитель; б — характеристика управления; в — магнитный усилитель с обмоткой смещения; г — характеристика управления; д— условное обозначение.
постоянный ток /у обмотки управления, а выходной — переменный ток 1 в.рабочей обмотке и нагрузочном резисторе RH.
Ток в рабочей обмотке
I=U/z=U/]/R^+(oyLy,
где U — напряжение переменного тока; R — активное сопротивле ние нагрузки и рабочих обмоток: <оС=ы(£.14-С2)—реактивное сопротивление рабочих обмоток.
Индуктивность (Гн) рабочих обмоток
Li = L2=w?-F^ll,
'85
где w— число витков рабочей обмотки одной или второй половины; I — длина средней линии сердечника, м; F — площадь сечения сердечника, м'2; ц — магнитная проницаемость сердечника, Гн/м.
Половины рабочей обмотки расположены на сердечниках так, что магнитные потоки, вызванные протеканием по ним переменного тока, будут в средних сердечниках направлены встречно и взаимно компенсировать друг друга, поэтому эти потоки никакого влияния на обмотку управления не оказывают.
Чем больше постоянный ток в обмотке управления, тем сильнее магнитный поток, создаваемый обмоткой управления, а следовательно, тем выше насыщение сердечника. При этом магнитная проницаемость сердечника уменьшается, что приводит к снижению индуктивности рабочих обмоток, падению их реактивного сопротивления и увеличению тока / нагрузки. Таким образом, незначительные изменения постоянного тока управления в подмагничивающей обмотке вызывают весьма существенные изменения переменного тока в рабочей обмотке. В этом и заключается эффект усиления МУ. Характеристика МУ — зависимость тока нагрузки / от подмагничивающего постоянного тока /у показана на рисунке 31,6. При отсутствии тока управления на выходе магнитного усилителя будет небольшой ток нагрузки. С усилением тока управления увеличивается ток нагрузки. Характеристика /=f(/y) в целом нелинейна; рабочей же ее частью является линейный участок Mi... М2.
Для увеличения коэффициентов усиления и получения характеристики усилителя с рабочей точкой М, соответствующей нулевому току управления, в МУ вводится дополнительная обмотка — обмотка смещения Кем, которая подключается к постороннему источнику постоянного тока (рис. 31, в). Ток смещения обеспечивает дополнительное подмагничивание. В обмотке управления в этом случае ток изменяется только в пределах —Д7у</у< + Д/у при работе усилителя на рабочем участке характеристики Mi...TW2 (рис. 31,г);
Магнитные усилители характеризуются коэффициентами усиления по току, напряжению и мощности
Аг = Д7н/Д7у; &и=Д(7н/ДПу ; kp=АРн/&Ру, где Л/н, Лб'п и ДРН — приращения тока, напряжения и мощности в рабочей обмотке магнйтногб усилителя при соответствующем из
86
менении тока Д/у, напряжения ДС/У и мощности ДРУ в цепи обмотки управления.
Коэффициент усиления зависит от конструктивных параметров магнитного усилителя, в частности, от объема меди обмотки управления, от материала сердечника магнитопровода (сталь, пермаллой). Для магнитных усилителей со стальным сердечником он в несколько раз меньше, чем для пермаллоевых. На коэффициент усиления влияет и частота тока нагрузки. Поскольку с увеличением частоты коэффициент усиления возрастает, МУ широко применяют в системах с повышенной частотой. Так, при частоте 50 Гц коэффициент усиления по мощности усилителя с сердечником из трансформаторной стали составляет 50..-.200, из пермаллоя—100... 1000, а при частоте 500 Гц соответственно 100... 800 и 200... 2000. Широко применяют магнитные усилители, которые работают в диапазоне частот 400... 3000 Гц.
На рисунке 31,с? показано условное изображение магнитного усилителя.
Магнитные усилители с обратной связью (особенно с положительной) получили наибольшее практическое применение. Такие МУ могут быть как с внешней (рис. 32,а), так и с внутренней (рис. 32,6) обратной связью (поле, создаваемое ею, совпадает по направлению с полем управляющего сигнала), которая увеличивает общий коэффициент усиления, а отрицательная (ее действие обратно положительной) — уменьшает, характеристика усилителя (рис. 32, в) становится несимметричной; участок ab соответствует положительной обратной связи, а ас — отрицательной. При внешней обратной связи поле создается дополнительной обмоткой а/0.с, а при внутренней — обмоткой переменного тока (в цепь обмоток включают диоды VI и V2, вследствие чего в обмотке переменного тока протекает пульсирующий ток, постоянная составляющая которого и создает поле обратной связи).
Коэффициент усиления по мощности МУ с обратной связью, сердечник которых выполнен из трансформаторной стали или из пермаллоя, при частоте 50 Гц достигает соответственно 1000 и 3000... 10 000, а на повышенных частотах намного больше.
Важным показателем, характеризующим интенсив-
87
Рис. 32. Схемы и характеристики магнитных усилителей с обратными связями:
а — с внешней; б — с внутренней; в — характеристика управления; г и д — в релейном режиме.
ность обратной связи, является коэффициент обратной связи
^о.с — f O.C^O.e/l
В схеме с внешней обратной связью можно обеспечить любое значение й0.с, так как можно задать ш0.с и менять 1о.с, изменяя сопротивление /?ш. В схемах с внутренней обратной связью feo.c^U.
При ko.c> 1 МУ обладает релейными свойствами и его можно использовать в качестве бесконтактного реле (рис. 32,г). Характеристика управления МУ I=f(ly) и характеристика его обратной связи — прямая ОА пересекаются на рисунке 32, г в точках 1, 2 и 3 при токе управления /у=0. Увеличение тока управления равно
88
сильно перемещению прямой ОА на графике параллельно самой себе вправо, соответственно уменьшение этого тока — перемещению влево. С ростом тока управления точка 1 (рис. 32, с?) перемешается в точку 4, а дальнейшее усиление /у приведет к тому, что рабочая точка скачком перейдет в точку 5 и ток в рабочей обмотке резко возрастет от 1=Ц до 1=1$. Такой режим работы МУ аналогичен режиму срабатывания электромагнитного контактного реле. Ток управления, соответствующий точке 4, называется током срабатывания. При снижении /у тока в рабочей обмотке будет уменьшаться и усилитель из точки 5 перейдет в точку 6. Дальнейшее ослабление 1У приведет к тому, что ток усилителя скачком упадет от /=/6 до 1—17. Этот режим усилителя можно сравнить с режимом отпускания электромагнитного контактного реле. Поэтому ток управления, соответствующий точке 7, называют током отпускания. Таким образом, МУ в данном случае работает как поляризованное реле. Для получения, характеристики магнитного усилителя, аналогичной характеристике нейтрального электромагнитного реле, необходимо включить обмотку смещения и пропустить по ней ток такой величины, чтобы характеристика обратной связи (прямая ОА) передвинулась влево и пересекла характеристику I=f(Iy) только в одной точке.
Двухтактные магнитные усилители обеспечивают большую крутизну характеристики отсутствие
тока в нагрузке при /у=0 и изменение фазы выходного напряжения на 180° при изменении полярности тока /у. Такие усилители представляют собой два соединенных определенным образом однотактных усилителя. Различают дифференциальную, мостовую и трансформаторную схемы включения двух однотактных магнитных усилителей.
В дифференциальной схеме (рис. 33, а) обмотки управления и смещения включены последовательно, а рабочие — параллельно. В обмотку смещения подается постоянный ток от стабилизированного источника питания. Обмотки управления создают постоянное магнитное поле. Поле одной из них совпадает по направлению с полем обмотки смещения, а поле другой направлено ему встречно. Когда ток управления равен нулю ток на выходе магнитного усилителя (сопротивление zH) отсутствует, потому что токи в рабочих обмотках равны и
сдвинуты по фазе на 180°. С появлением тока управления возникает магнитное поле, которое в одном сердечнике складывается с полем обмотки смещения, а в другом вычитается из него, поэтому ток на выходе первого усилителя больше, чем второго. Ток в нагрузочном сопротивлении равен геометрической сумме токов обоих усилителей
Это отражено и на характеристике усилителя (рис. 33,6). При изменении полярности тока управления фаза тока нагрузки изменяется на 180°. Недостаток дифференциальной схемы заключается в необходимости применения силового трансформатора Тр.
В мостовой схеме (рис. 33, е) четыре части рабочей обмотки составляют плечи моста, в одну диагональ которого включено сопротивление нагрузки, а во вторую — источник питания переменного напряжения. При
Рис. 33. Двухтактный магнитный усилитель:
а — дифференциальная схема; б — характеристики управления; в — мостовая схема; г — трансформаторная схема.
90
Iy=0 ток в нагрузке (сопротивление 2Н) отсутствует. Появление тока управления сопровождается возникновением магнитного поля, которое совпадает по знаку с полем смещения в одном сердечнике и направлено встречно во втором. Так как рабочие обмотки однотактного усилителя составляют противоположные плечи моста, то его равновесие нарушается и в нагрузке появляется ток. Перемена полярности тока управления вызывает изменение тока нагрузки на 180°. Напряжение на нагрузке составляет 0,5...0,6 напряжения источника питания.
Трансформаторная схема (рис. 33, г) объединяет два трансформатора насыщения, четыре секции первичных обмоток которых включены последовательно и присоединены к источнику переменного напряжения, а нагрузка подключена к соединенным встречно вторичным обмоткам. При 7у = 0 напряжение на нагрузке отсутствует. Появление тока управления изменяет взаимную индуктивность первичных и вторичных обмоток трансформаторов, и на нагрузке появляется напряжение, значение которого зависит от силы, а фаза — от полярности тока управления.
Существенным недостатком МУ является их инерционность в передаче сигнала от входа к выходу, характеризуемая постоянной времени усилителя T—kp/f, которая прямо пропорциональна его коэффициенту усиления ftp и обратно пропорциональна частоте f источника питания.
Магнитные усилители нашли широкое применение в автоматических системах управления, просты по устройству (нет вращающихся частей), надежны, долговечны, имеют высокий коэффициент усиления. Промышленность выпускает широкий ассортимент МУ, из которых наибольшее применение находят усилители серий ТУМ и У МП.
Магнитные усилители серии ТУМ имеют продольный магнитопровод из холоднокатаной ленточной трансформаторной стали толщиной 0,35 мм. Выполнены на выходную мощность 2,5... 50 Вт и рассчитаны для работы в схемах с внутренней обратной связью, с питанием от сети 50 и 60 Гц. Основной является схема с выходом па постоянном токе. Усилители имеют пару идентичных обмоток на переменном токе и несколько обмоток управления, которые можно использовать для суммирования
91
и сравнения сигналов, введения внешней обратной связи, осуществления смещения и т. д. Обмотки управления с наибольшим числом выходов имеют коэффициент усиления по мощности £р=740... 2420 и постоянную времени Г=0,22... 0,41 с. Общий коэффициент усиления по мощности всех Обмоток управления равен 3300... 10 000, а суммарная постоянная времени Т=1 с.
Магнитные усилители серии УЛ4/7 имеют П-образный магнитопровод из трансформаторной стали толщиной 0,5 мм и выполняются на мощность 0,07... 25 кВт. Выпускаются одно- и трехфазные для работы от сети с частотой 50 Гц и линейным напряжением для трехфазных 220, 380, 254 и 440 В, для однофазных 220 и 380 В. Они предназначены для работы в схемах с внутренней обратной связью с выходом на переменном и постоянном токе. Коэффициент усиления по мощности на переменном токе kp=480... 15200, на постоянном — 40... 12 650, постоянные времени от 0,08 до 0,38 с.
3.4. Гидравлические и пневматические усилители
Гидравлические и пневматические усилители применяют в автоматических системах для усиления сигналов по мощности. Принципиальные схемы таких усилителей практически не отличаются одна от другой. Если в гидравлических усилителях перемещение исполнительного органа происходит под действием жидкости, поступающей от специального насоса, то в пневматических рабочей средой является воздух, нагнетаемый специальным компрессором. В сельском хозяйстве гидравлические усилители используют чаще, чем пневматические (например, в гидравлическом оборудовании автомобилей, тракторов, комбайнов, при управлении навесными машинами и др.). Различают два класса гидравлических усилителей: дроссельные и струйные.
В дроссельных усилителях (рис. 34,а, б) давление Р2 рабочей жидкости изменяется в зависимости от перемещения дросселя Д или заслонки 3. Количество рабочей жидкости, проходящей через дроссель или сопло, дросселируемое управляемой заслонкой
Q = aF|/ 2£(р2_рз)1
92
где а — коэффициент расхода; F—проходное сечение дросселя или сопла, м2; g — ускорение свободного падения, м/с2; у — плотность жидкости, кг/м3; Р2 — давление в полости между дросселями, кг/м-с2; Р3 — давление за дросселем или соплом, кг/м-с2.
Таким образом, чем больше сечение F, тем больше Q, сечение же зависит от перемещения х регулирующего органа дросселя или заслонки. Коэффициент усиления дроссельного усиления по мощности достигает 106.
Конструктивно дроссельные усилители могут быть выполнены в виде задвижек или заслонок, сопл с заслонками, дроссельных игл и т. и. Широкое применение находят гидравлические усилители с золотниковыми устройствами (рис. 34, в), у которых в зависимости от положения х золотника давление Ра, а следовательно, и расход Q жидкости будут разными.
В струйных усилителях, схема одного из которых показана на рисунке 34, г, основным элементом является струйная трубка, состоящая из поворотной трубки 3, приемника 4 с двумя соплами, части 2, которая воспринимает действие измерительного элемента. Для компенсации влияния веса трубки на ее отклонение под действием чувствительного элемента на струйной трубке ус-
Рис. 34. Гидравлические усилители дроссельного типа:
a — с дросселем; б — с соплом-заслонкой; в— с цилиндрическим золотником; г — со струйной трубкой.
.93
тановлен противовес 1. Жидкость под давлением Р поступает по трубопроводу 5. Если струйную трубку смещать вправо, то давление в левом канале сопла будет падать, а в правом — возрастать и наоборот. Рабочей жидкостью служат чистое масло или специальные жидкости с малым температурным коэффициентом вязкости, подаваемые насосом под давлением. Отклонение конца струйной трубки не превышает 1... 2 мм. Коэффициент усиления по мощности таких усилителей составляет 103.
3.5. Функциональные элементы
В автоматике наряду с полупроводниковыми усилителями широко применяются и другие бесконтактные элементы: триггеры, мультивибраторы, нуль-индикаторы и т. п. Рассмотрим назначение и принцип действия этих элементов.
Триггер представляет собой электронную схему с релейными характеристиками, обладающими двумя устойчивыми состояниями. Два транзистора триггера (рис. 35, а) гальванически связаны так, что один открыт, а другой закрыт в любом состоянии (за исключением переходного процесса). Переход схемы из одного устойчивого состояния в другое происходит лавинообразно, это обусловливается наличием положительной обратной связи. В электроавтоматике триггер используют как устройство, обеспечивающее поочередное включение тока в нагрузочных сопротивлениях RK и RK'. В каждом устойчивом состоянии один транзистор (например, VI) проводит максимальный ток, а другой (например, V2) — минимальный. Резкому переключению схемы в противоположное устойчивое состояние способствует положительная обратная связь, проявляющаяся в том, что изменение коллекторного тока какого-либо транзистора вызывает содействующие изменения базового и коллекторного токов другого, если они находятся в активном состоянии. Активное состояние можно получить при помощи управляющего устройства (Ес, Rc), которое либо подает запирающие импульсы тока па вход открытого транзистора или отпирающие на вход закрытого (раздельный запуск триггера), либо воздействует одновременно на входные цепи обоих транзисторов (общий запуск). Каждый резистор Re и Re включен между
94
Рис. 35. Триггеры:
а — симметричный с автоматическим смещением; б — транзисторное реле с параллельной обратной связью по напряжению нагрузки; в — транзисторное реле с последовательной обратной связью по току нагрузки; г — мультивибратор.
коллектором одного и базой другого. Они обеспечивают протекание базовых токов, когда транзисторы открыты. Через резисторы RCM и RCM' подается напряжение смещения на базы транзисторов.
Рассмотренный симметричный триггер используют для низкочастотной коммутации тока в двух индуктивно не связанных обмотках электромагнитных механизмов. Для этого вместо резисторов RK и RK' включают обмотки и шунтируют диодами V3 и V4 для устранения перенапряжений на транзисторах.
Однако практические схемы транзисторных реле в отличие от симметричного триггера выполняют так, чтобы всякий раз управляющее напряжение или ток, проходя некоторые фиксированные уровни — пороги срабатывания и отпускания, имели один и тот же знак. В этом случае транзисторные реле занимают вполне определенные исходные состояния при отсутствии управляющего воздействия.
95
Наибольшее распространение в силу простоты схемных решений получили два варианта реле: с параллельной обратной связью по выходному напряжению (рис, 35, б) и с последовательной обратной связью по выходному току (рис. 35, в). В исходном состоянии схемы (б) транзистор VI насыщен от источника питания через резистор /?о.с обратной связи и нагрузочный резистор Ra. Транзистор V2 заперт падением напряжения на диоде V3, входящем в состав делителя V3—R2, через резистор /?н ток практически не проходит. Схема (в) имеет противоположное исходное состояние. Транзистор VI заперт напряжением обратной связи, а транзистор V2 насыщен от источника питания через резистор R1. Нагрузочный резистор RH соединен с источником питания.
При t/y>t/cp состояние каждой схемы скачкообразно изменяется на обратное. Так, в схеме (б) транзистор VI запирается источником напряжения управления. Транзистор V2 насыщается, и нагрузочный резистор Rn соединяется с источником питания. В схеме (в) транзистор VI открывается напряжением источника управления, а транзистор V2 закрывается, и ток в нагрузке Ra прекращается. В новом устойчивом положении схемы удерживаются до тех пор, пока t/y^t/отп, после чего скачкообразно возвращаются в исходное состояние.
Рассмотренные реле подобны по своим свойствам электромагнитным с соответственно размыкающим и замыкающим контактами. Транзисторные реле обладают значительным усилением по мощности, поэтому могут быть использованы для управления работой импульсных регуляторов. Кроме того, такое реле может служить как преобразователь непрерывного изменяющегося напряжения в импульсное.
Мультивибраторы представляют собой транзисторные устройства, формирующие управляющие сигналы определенной формы и длительности. Их применяют в автоматических системах и особенно в электрических вычислительных устройствах дискретного типа.
Одна из схем мультивибратора показана на рисунке 35,г. Транзисторы VI и V2 выполняют роль собранных по схеме с общим эмиттером ключей, которые поочередно замыкаются и размыкаются. Коллекторно-базовая часть каскадов осуществляется конденсаторами С1 и С2, а резисторы и Rs2 обеспечивают требуемый ток
96
базы открытого транзистора и создают цепь перезаряда соответствующего конденсатора связи.
Допустим, транзистор VI закрыт, a V2 открыт. Конденсатор С2, левой обкладкой подключенный к коллектору закрытого транзистора, а правой через участок база — эмиттер открытого транзистора — к земле, заряжается до напряжения, близкого к напряжению UK коллектора. Напряжение на разряжающемся конденсаторе С1, приложенное к базе запертого транзистора, достигает значения, при котором транзистор открывается. Это приводит к появлению коллекторного тока транзистора VI и возникновению положительного скачка напряжения на коллекторе, который через конденсатор С2 поступает на базу открытого транзистора V2. Ток его базы и коллектора уменьшается и вызывает отрицательный скачок напряжения на коллекторе, который через конденсатор С1 подается на базу транзистора VI. Транзистор V2 закрывается.
В результате под действием положительной обратной связи возникает лавинообразное опрокидывание мультивибратора в новое временно устойчивое положение. Процесс кратковремен, и можно считать, что за Ьремя опрокидывания напряжение на конденсаторах не изменяется. Через открытый транзистор VI заряженный конденсатор С2 оказывается подключенным к участку эмиттер — база транзистора V2. Поэтому в первый момент к базе приложено напряжение Uez=UK, поддерживающее запертое состояние транзистора. Конденсатор С2 разряжается через открытый транзистор VI, источник питания Ек и резистор /?бг с постоянной времени разряда Tp2^C2Rc>2, стремясь перезарядиться от напряжения (Jc~—UK до напряжения + Ь'И. Одновременно конденсатор С1 заряжается от источника UK через участок эмиттер — база открытого транзистора VI, резистор /?к2- Постоянная времени цепи заряда Т^~СИ^к2 выбирается такой, чтобы конденсатор С1 зарядился раньше, чем напряжение на одновременно разряжающемся кон-, денсаторе С2 достигнет нуля, тогда транзистор отпирается. Открытое состояние транзистора VI после окончания заряда конденсатора С1 обеспечивается протеканием тока базы через резистор /?д(.
Когда напряжение на разряжающемся конденсаторе С2 становится равным нулю, транзистор V2 открывается, что вызывает уменьшение коллекторного тока тран-
97
7 Заказ 5067
a
Рис. 36. Схема нуль-индикатора с двумя ниями (а) и его характеристика (б).
устойчивыми состоя-
зистора VI. Появляется положительная обратная связь, приводящая к лавинообразному опрокидыванию мультивибратора в положение, при котором VI закрыт, a V2 открыт. Временно устойчивое состояние поддерживается разрядом конденсатора С1 через открытый транзистор V2, источник питания, резистор /?кь В то же время конденсатор С2 заряжается от источника UK через участок эмиттер — база открытого транзистора V2 и резистор RKl, подготавливая схему к поддержанию очередного временно устойчивого положения: VI открыт, V2 закрыт. Это произойдет при перезарядке конденсатора С1, когда напряжение U§i=Uc\ станет равным нулю. Дальше процессы повторяются.
Нуль-ипдикатор представляет собой полупроводниковый усилитель с положительной обратной связью, работающий в режиме переключения и реагирующий на величину и знак разности двух сравниваемых электрических величин (токов или напряжений). Схемы полупроводниковых нуль-индикаторов могут быть разные, но принцип действия их одинаков. Выходная величина нуль-индикатора при его срабатывании или возврате, как и реле, изменяется скачкообразно. На рисунке 36, а изображена схема двухкаскадного нуль-индикатора с токовым выходом и двумя устойчивыми состояниями. Она включает два усилительных каскада, выполненных на транзисторах VI и V2 и охваченных положительной обратной связью /?0.с, что обеспечивает работу транзисторов в ключевом режиме. Электромеханическое реле
98
К, включенное на выходе, соответствует варианту с контактным выходом, при бесконтактном выходе включается резистор. На вход схемы подают сигнал рассогласования сравниваемых величин в виде малого тока или напряжения. Если входной сигнал /Вх=0, транзистор VI открыт, а транзистор V2 закрыт — первое устойчивое состояние, ток реле равен /0 (рис. 36, б). При /вхт^О имеющееся положительное направление (указано стрелкой) и по значению равное току срабатывания /ср приводит к закрытию триода VI, открытию триода V2 и срабатыванию реле К. Если входной ток уменьшится до величины тока возврата 1В, работа схемы происходит в обратном порядке, то есть схема скачкообразно переходит в первоначальное состояние.
Чтобы устранить пробой коллекторного перехода триода V2, при его закрытии включается цепочка V2— R4. Диод V4 открывается только в момент закрытия V2 и пропускает ток самоиндукции обмотки реле.
Цепь VI—R3 служит для компенсации изменения чувствительности схемы с изменением температуры. С ростом температуры падение напряжения на переходе эмиттер — база триода VI уменьшается, поэтому потенциал точки 1 возрастает. Наличие V3 увеличивает потенциал точки 2 с увеличением температуры за счет уменьшения падения напряжения на диоде V3.
Нуль-индикатор с тремя устойчивыми состояниями представляет собой соединение двух нуль-индикаторов, изображенных на рисунке 36, а.
3.6. Стабилизаторы
Стабилизатор — это элемент, который автоматически поддерживает постоянным какой-либо параметр. Например, в электрических цепях обычно возникает необходимость стабилизировать напряжение, ток, частоту. В системах автоматики чаще всего стабилизируют напряжение. Если изменения напряжения влияют на изменения параметров элементов автоматики, то напряжение стабилизируют с точностью 1...5%. Если заданное значение параметра, управляемого системой, устанавливается в виде некоторого напряжения, поступающего от задающего элемента, то напряжение стабилизируют с точностью 0,1...0,001 % и выше, так как любое изме-
7* S3
нение задающего напряжения скажется на точности работы автоматической системы.
Точность работы стабилизатора характеризуется коэффициентом стабилизации, показывающим, во сколько раз относительное изменение воздействующего фактора больше относительного изменения стабилизированного фактора. Так, для стабилизатора напряжения воздействующим фактором будет входное напряжение, а стабилизированным фактором — выходное напряжение. Тогда коэффициент стабилизации
Дб7вХ / Дб'выХ
Ку ------/--------•
б^вх / б^вых
Стабилизаторы по принципу действия делят на параметрические и компенсационные.
Параметрические стабилизаторы используют в своей работе элементы с нелинейными статическими характеристиками. Эти стабилизаторы могут действовать в цепях постоянного и переменного тока. К элементам с нелинейными характеристиками относятся активные нелинейные сопротивления: бареттбры, термисторы, стабиловольты, полупроводниковые /диоды-стабилизаторы, полупроводниковые термосоцротивления, обладающие отрицательным температурным коэффициентом, и реактивные нелинейное сопротивления: дроссели с насыщенными ферромагнитными сердечниками и конденсаторы с нелинейными диэлектриками (вариконды). В практике чаще других применяют дроссели в комбинации с линейными конденсаторами — феррорезона ясные стабилизаторы. Стабилизаторы, выполненные на реактивных линейных элементах, пригодны для стабилизации только переменного напряжения или тока. Как правило, у них выше КПД, но их работа зависит от частоты и, кроме того, они увеличивают реактивные токи.
По характеру вольт-амперных характеристик активные нелинейные сопротивления делятся на два типа: сопротивления, у которых вольт-амперная характеристика имеет участок, где ток I более или менее постоянен для определенных пределов изменения подводимого напряжения (рис. 37,о), и сопротивления, вольт-амперная характеристика которых имеет участок, где падение напряжения U можно считать постоянным для определенных пределов изменения тока (рис. 37,6).
100
, *
Рис. 37. Вольт-амперные характеристики нелинейных резисторов; а — с нелинейностью типа Ry, б — с нелинейностью типа R^ и схемы стабилизаторов: виг — параметрических; д — фсррорезонаксного; е — компенсационного.
т К сопротивлениям первого типа относятся лампы накаливания и бареттеры. С увеличением подводимого к лампам накаливания напряжения возрастает температура металлической нити и ток усиливается не пропорционально подаваемому напряжению, а значительно медленнее. (Б а реттер ы представляют собой стеклянный баллон, заполненный водородом, в котором расположена проволока из чистого железа. При включении такого сопротивления последовательно с сопротивлением нагрузки RH (рис. 37, в) с изменением входного напряжения в определенных пределах ток в цепи, а следовательно, и выходное напряжение UBWK=InRu будут изменяться незначительно.^Поскольку нелинейное сопротивление стабилизирует ток, а не напряжение, то при изменении сопротивления нагрузки выходное напряжение будет меняться. Если такие изменения нежелательны, то сопротивление нагрузки шунтируют постоянным сопротивлением /?ш (показано На схеме пунктиром). При этом, однако, необходимо применение более мощного нелинейного сопротивления.
rlK нелинейным сопротивлениям второго типа относят ^полупроводниковые терморезисторы и наиболее часто
131
применяемые стабиловольты и полупроводниковые диоды-стабилизаторы.
Стабиловольты являются лампами тлеющего разряда с холодными электродами больших размеров. (До определенного значения тока характер разряда стабиловольта, а следовательно, и падение напряжения на нем сохраняются, изменяется лишь участвующая в разряде площадь электродов. В этом и заключается стабилизирующее действие рассматриваемого элемента^ Дальнейшее увеличение тока приводит к образованию дугового разряда и выходу стабилизатора из строя. Характерно, что зажигание стабиловольта (образование тлеющего разряда) происходит при напряжении большем, чем необходимо для горения.
(Л олупроводниковые диоды-стабили* заторы — это германиевые или кремниевые диоды, к которым приложено обратное напряжение, несколько превышающее напряжение пробоя, которое в зависимости от конструкции различно (от сотых долей до единиц вольт, в то время как нижний предел для стаби-ловольтов порядка десятка вольт)^
Схема включения стабиловольтов и диодов-ста^ли-заторов показана на рисунке 37, г. Стабилизация выходного напряжения обеспечивается и при изменении входного напряжения (7Вх и при изменении сопротивления нагрузки /?„. Увеличение выходного напряжения по любой причине приводит к росту тока /с, а излишек выходного напряжения поглощается добавочным сопротивлением /?д, то есть Д(/вх=7?дА/с- Уровень стабилизации не превышает 0,1 %.
В феррорезонансном стабилизаторе (рис. 37, б) поддержание неизменного выходного напряжения осуществляется за счет того, что дроссель Lt работает в ненасыщенном режиме при постоянной индуктивности, а дроссель £2 — в насыщенном режиме. Поэтому повышение напряжения на дросселе £2 приводит к резкому усилению тока и как следствие — к увеличению падения напряжения на дросселе £]. Чтобы получить насыщение дросселя L2 при малых токах, потребляемых от сети, параллельно ему включается конденсатор С.
Компенсационные стабилизаторы могут быть выполнены на лампах и полупроводниках. На рисунке 37, е
102
изображена схема транзисторного стабилизатора. Она включает усилительный орган — триод VI и измерительный орган — диод V2. Резистор выполняет роль отрицательной обратной связи. При изменении входного напряжения С/вх триод VI препятствует отклонению выходного напряжения t/BbIx. Если £7ВХ увеличится, то возрастет ток через диод V2, а это приведет к увеличению напряжения на резисторе /?б и как следствие — к частичному закрытию триода VI и увеличению падения напряжения на нем. Это препятствует увеличению выходного напряжения стабилизатора. Значение выходного напряжения практически равно обратному напряжению на стабилизаторе V2.
Контрольные вопросы и задания. 1. Что называется усилительным элементом и каково его назначение? 2. Перечислите основные требования, предъявляемые к усилителям автоматических систем. 3. Усилители каких типов вы знаете? 4. Назовите достоинства и недостатки электронных усилителей. 5. Объясните принцип действия магнитного усилителя. 6. Каково влияние частоты переменного тока на работу магнитного усилителя? 7. В чем заключается действие обратных связей магнитных усилителей? 8. Расскажите о релейном режиме магнитного усилителя. 9. Расскажите о работе гидравлических и пневматических усилителей. 10. Каково назначение стабилизаторов? И. Перечислите основные типы стабилизаторов. 12. Какие» нелинейные элементы применяют в стабилизаторах? 13. Чем определяется точность стабилизации стабилизатора? 14. В чем основные отличия параметрических стабилизаторов от компенсационных?
Лабораторная работа № 4
Исследование магнитного усилителя
Содержание работы. Изучить устройство, принцип действия и свойства магнитного усилителя. Снять характеристики однотактного магнитного усилителя /=/(/у) без обмотки и с обмоткой смещения, без обмоток и с обмотками внутренней и внешней обратных связей. Перевести магнитный усилитель в релейный режим и снять его характеристику. Построить кривые и определить коэффициент усиления по току.
Описание лабораторной установки. Схема лабораторной установки для снятия характеристик аналогична приведенным на рисунке 32. Дополнительно в цепь каждой обмотки включают измерительные приборы.
Порядок выполнения работы. 1. Собрать схему лабораторной установки (рис. 31, в), и, не включая обмотку смещения, синь зависимость при изменении тока управления /у. 2. Вклю-
чить обмотку смещения и, задаваясь различными значениями тока смещения, снять ряд характеристик увеличивая ток уп-
равления /у от 0 до I—tyu- 3. Включить внешнюю обратную связь
* 103
при отключенной обмотке смещения (см. рис. 32, а) и снять характеристику l=f(Iy). 4. Включить внутреннюю связь (рис. 32,6) и снять ту же характеристику. 5. Выбрав число витков обмотки обратной связи магнитного усилителя таким, чтобы /ocWo.cS esfwi+wz)/, перевести его в релейный режим и снять релейную характеристику. 6. Для каждой характеристики получить коэффициент усиления по току и сравнить их значение.
Содержание отчета. Отчет должен содержать схемы испытаний, краткое описание принципа действия и устройства магнитного усилителя, таблицы с результатами опытов, построенные по ним характеристики, технические данные измерительных приборов и оборудования, заключение по работе.
ГЛАВА IV
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
4.1. Общие сведения
Исполнительными механизмами автоматических систем называют устройства, воздействующие непосредственно или через управляющий орган на объект управления. В исполнительный механизм входит двигатель и передаточное устройство. В зависимости от вида двигателя различают исполнительные механизмы: электрические, механические, гидравлические и пневматические. Наибольшее распространение в системах автоматики получили электрические и гидравлические исполнительные механизмы. Электрические исполнительные механизмы в зависимости от типа исполнительного двигателя делятся на электромагнитные и электродвига-тельные. К исполнительным элементам также относят электрические реле и шаговые искатели. Часто усилительные и исполнительные механизмы представляют собой единое устройство. Основными показателями, характеризующими регулировочные свойства исполнительных механизмов, является коэффициент усиления по мощности, усиление на выходе механизма, линейное или угловое перемещение, частота вращения и т. п. Так как исполнительные механизмы изменяют положение управляющего органа в соответствии с поступающими сигналами от датчика, измеряющего значения управляемой величины, поэтому к ним предъявляют определенные требования: мощность на выходе исполнительного механизма должна быть достаточной для перемещения управляющего органа с заданной скоростью при всех режимах; перемещение исполнительного механизма на выходе должно быть согласовано с соответствующим перемещением управляющего органа; выходная величина исполнительного механизма должна быть (по возможности) пропорциональной входному сигналу.
105
4.2. Электромагнитные механизмы
Широкое применение в системах автоматики находят электромагнитные исполнительные механизмы дискретного действия. Их используют для управления различного рода регулирующими и запорными клапанами, вентилями, золотниками и т. п. По виду движения исполнительного органа (шток, выходной вал) элементы подразделяют на прямоходовые электромагниты с прямолинейным движением и электромагнитные муфты с вращательным движением. В зависимости от типа, конструктивного исполнения и условий применения выходной величиной этих механизмов может быть: для элементов с прямолинейным движением рабочего органа — перемещение, скорость, усилие; для элементов с вращательным движением рабочего органа — угол поворота, частота вращения или развиваемый им вращающий момент.
Входной величиной (управляющим воздействием) электромагнитных исполнительных механизмов является электрический ток в намагничивающей обмотке, создающий магнитное поле и действующий через него на рабочий орган.
Прямоходовые электромагнитные механизмы, называемые соленоидными, используют в системах автоматики позиционного управления, так как управляющий орган (вентиль, клапан) может находиться только в двух конечных положениях, соответствующих двум положениям сердечника электромагнита: включен или выключен.
В настоящее время наибольшее распространение получили электромагнитные приводы серии Э-В, которые по принципу действия делятся на две группы: приводы ЭВ-1 и ЭВ-2 рассчитаны на длительный режим работы от сети постоянного тока напряжением ПО и 220 В или переменного тока напряжением 220 и 380 В, имеют ход штока 6 и 18 мм при тяговом усилии около 4 Н; привод ЭВ-3 рассчитан на кратковременный режим работы в 1 мин при усилии 100 Н. Он имеет два электромагнита: один тяговый, который служит для открывания рабочего органа, а другой, являясь приводом механической защелки, удерживает рабочий орган в открытом положении и обеспечивает его закрывание.
106
Рис. 38. Схемы конструкций электромагнитных муфт: а — сухого трения; б —вязкого трения; в — индукционная.
Обе катушки находятся под током только в момент переключения рабочего органа. При подаче питания на катушку главного электромагнита его якорь втягивается, рабочий орган открывается и удерживается в открытом положении защелкой, цепь катушки главного электромагнита разрывается с помощью конечного выключателя. Подачей напряжения на катушку электромагнита защелки рабочий орган освобождается и под действием собственного веса или возвратной пружины закроется, а конечный выключатель отключит электромагнит защелки. Недостаток электромагнитных клапанов и вентилей — возможность возникновения гидравлических ударов в трубопроводах с жидкостями при практически мгновенных переключениях.
Электромагнитные муфты служат связующим звеном между приводом и рабочим механизмом. В зависимости от вида связи их разделяют на фрикционные муфты сухого трения, муфты вязкого трения и различные индукционные муфты.
На рисунке 38 изображены конструктивные схемы электромагнитных муфт сухого (а), вязкого (б) трения и индукционная (в).
Муфта сухого трения состоит из двух полумуфт: ведущей 5 и ведомой 6, насаженных на валы 3 и 9. Обмотка 1 запитывается током через кольца 2 и щетки 4. Полумуфта 6 перемещается по шлицам 8 вдоль вала 9, который связан с валом рабочего механизма и отжимается от полумуфты 5 пружиной 7. Магнитное поле, преодолевая усилие пружины, притягивает ведомую полумуфту к ведущей. Силы трения между полумуфтами позволяют передать крутящий момент с ведущего вала на ведомый. Для увеличения передаваемого крутящего
107
момента муфты изготавливают многодисковыми. Выпускают муфты сухого трения типа ЭМ с номинальным моментом от 10 (ЭМ-12, 12 А) до 1000 Н-м (ЭМ-62, 62А) с наибольшей частотой вращения соответственно 3000 и 1500 об/мин и мощностью катушки возбуждения 11,5... 50 Вт.
Муфты вязкого трения — ферропорошковые или магнитоэмульсионные работают по принципу намагничивания магнитного порошка 1, образуя сцепляющий слой между ведомым 2 и ведущим 4 элементами муфты. С увеличением магнитного потока обмотки намагничивания 3 возрастает величина передаваемого крутящего момента. Эти муфты различают по конструктивному исполнению, расположению катушек (униполярные, многополюсные), их числу (однокатушечные, многокатушечные); по форме рабочей поверхности (дисковые, цилиндрические, барабанные, конусные); по числу рабочих зазоров (одно- и многозазорные); по виду токопроводов (с контактными кольцами и бесконтактные); по скорости срабатывания (малоинерционные и инерционные). Эти муфты не боятся перегрузок, как исполнительные элементы — быстродействующие с постоянной времени 0,005... 0,008 с и коэффициентом передачи, достигающим 3500.
Индукционная муфта скольжения состоит из двух основных частей: ведущего массивного якоря 3, жестко связанного с валом 2 приводного двигателя /, и ведомого индуктора 5, жестко соединенного с выходным валом 6 рабочего механизма 9. Обмотка возбуждения 4, расположенная между зубчатыми частями индуктора 3, питается током возбуждения через кольца 7 и щетки 8.
При работе ток, протекающий в индукторе, создает магнитный поток, который в связи с наличием в индукторе полюсов (зубцов и пазов) наводит в якоре ЭДС. ЭДС вызывает появление вихревых токов в якоре, которые, взаимодействуя с магнитным потоком полюсов, создают электромагнитный момент, увлекающий ведомую часть муфты в ту же сторону, что и ведущая. Частота вращения ведомого вала зависит от тока возбуждения и момента сопротивления на ведомом валу.
Принцип работы такой муфты аналогичен работе асинхронного электродвигателя, каждому току возбуждения соответствует своя механическая характеристика.
108
Для рабочих механизмов малой мощности выпускают муфты типа ПМС с номинальными моментами 1,7...30 Н-м, для бесступенчатого регулирования скорости в диапазоне 1 :8. Муфты серии ИМС с номинальными моментами 70... 1600 Н-м применяют для рабочих механизмов большой мощности.
4.3. Электродвигательные механизмы
Электродвнгательные исполнительные механизмы состоят из двигателя, редуктора и тормоза. Сигнал управления одновременно подается на двигатель и тормоз, при этом двигатель растормаживается и приводит в движение рабочий орган. При снятии сигнала двигатель выключается, а тормоз останавливает движение рабочего органа.
Простота схем, малое число элементов, участвующих в формировании управляющего воздействия, и высокие эксплуатационные свойства обеспечили широкое применение этих исполнительных элементов при создании систем автоматики.
Существует большое число электродвигательных исполнительных механизмов, которые классифицируют по различным признакам.
По виду движения исполнительного органа различают однооборотные — МЭО, многооборотные — МЭМ и прямоходные — МЭП. Исполнительные элементы МЭО применяют для рабочих органов с вращательным и поступательным движением; МЭМ применяют для трубопроводной арматуры с управляющими органами, имеющими большие площади проходного сечения; МЭП применяют для арматуры, где управляющие органы имеют малую и среднюю площадь проходного сечения затвора.
По скорости движения электродвигательные исполнительные механизмы делят на элементы с постоянной и' переменной скоростями передвижения рабочего органа.
Исполнительные элементы с постоянной скоростью движения рабочего орта-н а делятся на позиционные типа ДР и пропорциональные с резисторными или индукционными устройствами обратной связи типа МЭО, МЭМ, МЭП, МЭК, КДУ, ИМ и др. Их используют в сочетании с двухпо-
109
Рис. 39. Схемы управления электродвигательными исполнительными механизмами;
а — постоянной скорости перемещения рабочего органа; б — переменной скорости.
зиционными и трехпозиционными регуляторами, а также с пропорциональными (П) и пропорционально-интегральными (ПИ) регуляторами.
Исполнительные элементы с переменной скоростью движения управляющего органа используют в основном с интегральными (И), '(П), (ПИ) и пропорционально-интегрально-дифференциальными (ПИД) регуляторами.
По способу управления исполнительные механизмы делятся на контактные с релейно-контакторными блоками управления и бесконтактные с управляющими устройствами непрерывного действия на основе магнитных усилителей.
В качестве исполнительных двигателей используют однофазные, двухфазные и трехфазные короткозамкнутые асинхронные двигатели.
Из всего многообразия электродвигательных исполнительных механизмов в качестве примера рассмотрим исполнительный механизм постоянной скорости перемещения рабочего органа типа КДУ (рис. 39,а) и переменной скорости перемещения рабочего органа типа БИМ (рис. 39,6).
Исполнительный механизм типа КДУ включает трехфазный асинхронный короткозамкнутый двигатель М с редуктором, реверсивный магнитный пускатель с ключом управления QS, дистанционный указатель положения (ДУП) и резисторный или индуктивный
НО
указатель положения. Ключ управления обеспечивает требуемое направление вращения: КП — Вперед, КЗ — Назад. Резистор R (ДУП) с резистором /?ос образуют мостовую измерительную схему, в диагональ которой включен миллиамперметр РА, проградуированный в процентах от максимального угла поворота рабочего вала. Угол поворота ограничивается концевыми выключателями КВ2 и КВ4. Выключатели КВ1 и КВЗ служат для предупреждающей сигнализации. При приближении к крайнему положению размыкается КВ1, включается сигнальная лампа Л1. Дальнейшее движение исполнительного механизма приводит к размыканию КВ2, катушка КП обесточивается, и двигатель М отключается. Для противоположного движения ключ QS необходимо перевести в противоположное положение с использованием в цепи управления выключателей КВЗ и КВ4.
Мощность двигателя 250... 400 Вт, частота вращения 1500 об/мин, передаточное число редуктора 2000, перестановочный момент 250...1000 Н-м, время одного оборота 120 с, угол поворота 45...240°, сопротивление резисторного датчика обратной связи 34 Ом. Схема исполнительного элемента переменной скорости с бесконтактным управлением типа БИМ включает фазочувствительный усилитель ФЧУ, магнитные усилители МУ1, МУ2 и обратную связь Ro.c по частоте вращения исполнительного двухфазного асинхронного двигателя, использующую косвенный метод измерения частоты вращения двигателя с помощью положительной обратной связи по току от трансформатора тока ТА и отрицательной обратной связи по напряжению от трансформатора напряжения TV. Обмотки двигателя включены последовательно с рабочими обмотками усилителей МУ1 и МУ2. При Uвх=0 токи в обмотках управления МУ равны нулю, сопротивление рабочих обмоток МУ одинаковы и значительно превосходят по величине сопротивление обмоток двигателя. Напряжение на конденсаторе С равно нулю, поэтому двигатель неподвижен и на рабочий орган через редуктор не передается движение. Если [/вх=/=0, то в зависимости от его величины и фазы изменяются токи в выходных цепях ФЧУ и в обмотках управления МУ, а следовательно, и сопротивление рабочих обмоток МУ, При одной фазе работает усилитель МУ1, при изменении фазы на 180° запи
111
рается МУ1 и открывается МУ2. Частота вращения двигателя зависит от величины управляющего сигнала. Диапазон пропорциональной зависимости между частотой вращения двигателя и величиной управляющего сигнала С/вх определяется величиной обратной связи, го есть положением движка Ro.c. Конечные выключатели К.В1 и КВ2 останавливают двигатель при подходе управляющего органа УО в крайнее положение, разрывая цепь обмоток управления МУ. Мощность двухфазного двигателя исполнительного элемента 60 Вт, частота вращения 1500 об/мин, передаточное число редуктора 5400, номинальный перестановочный момент 25 Н-м, пусковой момент 80 Н-м; время одного оборота 120 с.
4.4. Реле
Релейные исполнительные элементы (реле) широко применяются в автоматических системах. Классифицируют реле по следующим признакам: параметру, от которого они приходят в действие, — токовые, напряжения, мощности, времени и др.; виду физических величин, на которые реле реагирует — электрические, механические, магнитные, тепловые, химические, акустические и т. д.; назначению — реле защиты, управления, автоматики, связи и т. п. В данном разделе будут рассмотрены только получившие наибольшее распространение контактные электрические реле, реагирующие на различные электрические параметры. В устройстве таких реле можно выделить три основных функциональных элемента: воспринимающий, промежуточный и исполнительный.
Воспринимающий элемент непосредственно реагирует на внешний контролируемый параметр и преобразует его в физическую величину, необходимую для дальнейшей работы реле (в контактных реле, как правило, в механическую силу). Следовательно, воспринимающий элемент является двигательным органом, который у электрических реле может быть выполнен на электромагнитном, индукционном, электродинамическом, магнитоэлектрическом, резонансном и других принципах.
Промежуточный элемент (у контактных реле— пружина), получив от воспринимающего элемен-
112
та преобразованный сигнал, сравнивает его с заданным и в случае отклонения от него формирует команду на срабатывание реле, то есть передает воздействие исполнительному элементу.
Исполнительный элемент (у контактных реле— контактная система), приняв команду от промежуточного, воздействует на управляемую цепь, изменяя ее параметры. При этом различают реле прямого действия, когда исполнительный элемент оказывает непосредственное влияние на контролируемую цепь, и реле косвенного действия, когда исполнительный элемент воздействует на контролируемую цепь через другие аппараты.
Основной характеристикой реле является статическая характеристика (характеристика управления), то есть зависимость выходной величины у от входной х. Эта характеристика для большинства реле имеет гистерезисную петлю.
Рис. 40. Виды статических характеристик релейных элементов: а и б— двукпозициоиного нейтрального реле; в — двукпозициоиного реле с двумя устойчивыми состояниями; гид- трехпозиционного реле.
8 Заказ 5067
14-3
Виды статических характеристик реле приведены на рисунке 40. Характеристики (рис. 40,щб) присущи двухпозиционным нейтральным реле, не реагирующим на знак входного сигнала. При изменении входного сигнала от 0 до х2 (рис. 40,о) реле не изменяет своего состояния. Выходной сигнал у скачкообразно изменяется от z/min до угаах по достижении входным сигналом значения х2 и остается неизменным, то есть у=«/max=const при дальнейшем увеличении х2. При уменьшении х2 от значения х>х2 до x=xi у не изменяется, ТО есть y = Z/max и по достижении входным сигналом значения Xi выходная величина скачкообразно изменится от t/max до ymln.
Устройства с характеристикой (рис. 40,6) отличаются от устройств с рассмотренной на рисунке 40,а инвертированием сигнала. Если входной сигнал х=0, то выходной сигнал у = г/тах, если х=х2, то 1/=0 или имеет минимальное значение y=£/min. На рисунке 40,в приведена характеристика двухпозиционных релейных устройств с двумя устойчивыми состояниями. При снятии входного сигнала х=0 реле останется в состоянии, находящемся до этого. Изменение знака входного сигнала меняет знак выходного сигнала.
Характеристики трехпозиционных релейных элементов изображены на рисунке 40,г,д. На рисунке 45,г с зоной нечувствительности и с неоднозначной зависимостью сигнала на выходе от входного, а на рисунке 40,6 с зоной нечувствительности.
К основным параметрам, характеризующим работу реле, также относятся следующие.
Параметр срабатывания — минимальное значение входного сигнала, при котором реле действует (срабатывает). Этот параметр характеризует чувствительность реле. Например, у токовых реле параметр срабатывания составляет от десятков микроампер до десятков ампер.
Параметр отпускания — максимальное значение входного сигнала, при котором реле возвращается в исходное положение.
Коэффициент возврата представляет собой отношение параметров отпускания и срабатывания.
У электрических реле он всегда меньше единицы (от 0,4 у электромагнитных до 0,99 у электронных)
114
Хоти kB=------<1.
Хер
Рабочий параметр — наибольшее значение входной величины, при котором реле длительно находится во включенном состоянии и работает нормально (воспринимающий элемент не перегревается).
Коэффициент запаса при срабатывании (он всегда больше единицы)—это отношение рабочего параметра к параметру срабатывания
хр
&3.ср =----> 1.
Лер
Коэффициент запаса при отпускании (возврате) (он всегда меньше единицы)—это отношение параметра отпускания к рабочему параметру
. -#отп
Кз.ОТП —-~< *•
Хр
Время срабатывания tcp — период от момента поступления сигнала на воспринимающий элемент до момента появления сигнала в управляемой цепи. В зависимости от значения этого параметра различают реле: безынерционные (/ср<0,001 с), быстродействующие (/ср<0,05 с), нормальные (/ср = 0,05.. .0,25 с), замедленного действия (/ср = 0,25... 1,0 с), выдержки времени (/ср>1.0 с).
Время отпускания /0Тп— период момента снятия сигнала, действующего на воспринимающий элемент до момента прекращения воздействия исполнительного элемента на управляющую цепь.
Срок службы — допустимое число срабатываний реле (для различных реле число срабатываний может составлять ог нескольких тысяч до нескольких десятков миллионов).
Электромагнитное реле — типичный и наиболее распространенный вид электрических реле. На рисунке 41,а в качестве примера показано устройство— реле клапанного типа. В электромагнитную систему реле входят скоба 1, сердечник 2, полюсный наконечник 3, якорь 4 и втягивающая катушка 5. Якорь и сердечник изготовлены из магнитомягкого материала. Когда по обмотке реле протекает ток, якорь притягивается к сердечнику, поворачивается относительно призмы 6 и действует на замыкание контактов 7. При
8*
115 -
исчезновении тока якорь и контакты возвращаются в исходное положение усилием пружины 8. Наконечник <9 сделан из немагнитного материала (латунь или медь), чтобы под влиянием остаточного магнитного потока якорь после отключения тока не оставался притянутым к сердечнику.
Электромагнитные реле могут быть постоянного и переменного тока промышленной и высокой частоты.
Реле постоянного тока делятся на нейтральные и поляризованные. У нейтральных реле вос-
Рис. 41. Схемы конструкций реле:
а — клапанного типа; б — поляризованного реле; в — переменного тока; г — диаграмма магнитных потоков.
116
принимающий орган одинаково реагирует на постоян ный ток независимо от его полярности, а у поляризованных полярность сигнала влияет на направление действующего на якорь усилия. Принцип действия поляризованных реле иллюстрируется рисунком 41,6. Если тока в рабочей обмотке w нет, то якорь I находится в нейтральном положении, потому что магнитные потоки <J>! и Ф2, создаваемые постоянными магнитами, равны и противоположны. Контактная группа 3 будет находиться в разомкнутом состоянии. При подаче в рабочую обмотку тока той или иной полярности возникает поток Ф3, который накладывается на потоки Ф( и Ф2 (с одним суммируется, а из другого вычитается). Равновесие нарушается, якорь 1 притягивается к магниту 4 или 5 и, поворачиваясь на оси 2, замыкает левую или правую пару контактов 3. Для создания потоков Ф( и Ф2 могут быть использованы электромагниты.
У электромагнитных реле переменного тока сердечник набирается из листовой трансформаторной стали с целью уменьшения потерь на вихревые токи. Для устранения вибрации контактов, вызываемой периодическим изменением значения и направления синусоидального тока, а следовательно, и усилия, создаваемого его магнитным полем, на торец электромагнита насаживается медный короткозамкнутый виток (рис. 41,в). Магнитный поток Ф делится на два составляющих потока Ф1 и Ф2. Поток Ф1 (рис. 41,г) наводит в короткозамкнутом витке ток, магнитный поток Фк которого суммируется с потоком Ф[ и вычитается из потока Ф2 (геометрически). В результате получаются потоки Ф1 и Ф2, сдвинутые один относительно другого на угол <р. Каждый из потоков создает тяговое усилие, а их результирующее усилие будет иметь тем меньше пульсаций, чем больше угол <р.
Реле с магнитоуправляемыми контактами, называемые также герконами (герметизированные контакты), представляют собой стеклянную ампулу 1 (рис. 42), из которой выкачан воздух — вакуумные герконы, или заполненную инертным газом (азотом, аргоном) —газонаполненные герконы. В ампулу впаяны тонкие упругие ферромагнитные пластинки (электроды 2), выполняющие одновременно роль контактов, упругих элементов и части магнитопровода. На
117
Рнс. 42. Реле с магнитоуправляемыми контактами.
пластины герконов наносят покрытия из хорошо проводящих материалов (серебра, золота, родия). Ток, протекающий по катушке 3, при подаче сигнала на вход реле, создает магнитный поток, замыкающийся внутри катушки по пластинкам, которые на
магничиваются и
приобретают проти-
воположную полярность. Между пластинками возникают силы притяжения, которые замыкаются, и на выходе появляется сигнал. При снятии входного сигнала пластины возвращаются в исходное положение. Промышленность выпускает ряд типов герконов (КЭМ-1, КЭМ-2, КЭМ-3, МК4, МКВ, МКП, МУК, МУП, МКО и др.) с размерами ампулы: длиной 20... 50 мм и диаметром несколько миллиметров. Намагничивающая сила колеблется от 25 А (для МКО) до 250 А (для МКП), время срабатывания 50...2500 мкс, коммутируемый ток до 1,0 Л и более при напряжении до 50...60 В, число срабатываний 106...109, сопротивление контактного перехода 0,05... 0,2 Ом.
Выпускаются различные типы реле с герконами: РЭС42— с одним контактом КЭМ-2; РЭС43 — с двумя контактами КЭМ-2; РЭС44 — с тремя контактами КЭМ-2 и др.
Реле времени представляют собой устройства, конструкция которых содержит специальный узел, обеспечивающий задержку появления (исчезновения) выходного сигнала после подачи (снятия) входного.
Выдержки времени до 5 с можно получать посредством несложных схемных решений, которые позволяют замедлить нарастание или спадание токов в обмотках электромагнитных реле постоянного тока; Для этого, как показано на рисунке 43, параллельно'обмот-ке реле можно включить резистор (а), полупроводниковый диод (б), конденсатор (в) или использовать ко
118
роткозамкнутый виток. Шунтирование обмотки реле резистором или диодом (рис. 43,а,б) позволяет после отключения ключа S поддерживать протекание тока по обмотке в прежнем направлении за счет ЭДС самоиндукции, возникающей в обмотке. Подбором емкости конденсатора С и сопротивления R можно в широких пределах менять продолжительность времени задержки срабатывания реле (рис. 43,в).
Для создания выдержки времени больших размеров широко применяют электромагнитные реле времени с электромагнитным, пневматическим и различными механическими замедлениями с помощью устройств, пристраиваемых к реле, электронные (полупроводниковые), моторные и др./
В реле времени постоянного тока с электромагнитной задержкой задержка в срабатывании или отпускании создается электромагнитным демпфированием, осуществляемым специальной короткозамкнутой обмоткой или гильзой из меди, латуни или алюминия, размещенной на магнитопроводе реле. Эти реле просты и надежны, выдержка времени составляет 0,15... 10 с и зависит от толщины немагнитной прокладки между якорем и сердечником и натяжения пружины. Недостатки реле — большие габариты и небольшой диапазон выдержек времени.
В электромагнитном реле времени с пневматической задержкой задержка создается пневматическим механизмом, пристроенным к приводному механизму электромагнитного типа. Реле типа РВП-72 имеет выдержку времени 0,2... 180 с. Оно рассчитано на переменное напряжение 127, 220 В и имеет разные наборы контактов: замыкающие, размыкающие с выдержкой
Рис. 43. Схемы увеличения выдержек времени и исследования реле.
времени при замыкании или размыкании, а также мгновенно срабатывающие контакты.
Для получения различных по величине регулируемых выдержек времени по нескольким выходным цепям, что позволяет применять их при программном управлении, широкое применение находят моторные реле времени. Привод в этих реле выполняется от синхронного электродвигателя, вращение от которого через редуктор и муфту сцепления с электромагнитным приводом передается на кулачковый валик, кулачки которого переключают выходные контакты через определенные заранее установленные промежутки времени. Величина выдержки времени регулируется изменением передаточного числа редуктора и положением кулачков. Выпускают различные типы моторных реле; так, для реле серии ВС-10 с синхронным двигателем пределы выдержек времени составляют 2...60 с для ВС-10-31; 15 с ...9 мин для ВС-1-34 и 1...24 ч для ВС-10-38. Число выходных цепей равно трем или шести.
Для программного управления периодическими технологическими процессами широкое применение находят командные электропневматические приборы (КЭП). Так, КЭП-12У может управлять 12 электрическими или пневматическими цепями. Реле выбирают в соответствии с техническими данными, электрическими режимами работы и условиями их эксплуатации. Тип реле зависит от рода тока, напряжения питания, величины коммутируемых токов и выходного напряжения, времени срабатывания и отпускания, числа контактов, габаритов и массы.
Особое внимание необходимо обращать на соответствие номинальных данных обмоток реле и контактов режимам их работы в различных системах автоматики.
Рабочие напряжения и токи в катушках реле должны соответствовать паспортным данным выбранного реле. Отклонение напряжения обмоток реле нежелательно. При выборе учитывают не только величину, ио и род коммутируемого тока, характер нагрузки, сопротивления контактов, количество и частоту переключений. Коммутация активных и активно-индуктивных нагрузок вызывает возникновение искрового разряда при размыкании цепи, при необходимости применяют искрогасительные контуры.
120
4,5. Шаговые искатели
Шаговые искатели являются электромагнитными импульсными переключателями, передвигающими контактные щетки при каждом импульсе с одного неподвижного контакта (ламели) на другой. Переключение может происходить в начале импульса — искатели прямого действия и после окончания импульса — искатели обратного действия.
В шаговом искателе прямого действия (рис. 44, с) ламели 1 располагают по дуге. Они занимают */3 или */г окружности, и поэтому каждая щетка 2 состоит из трех или двух лучей, сдвинутых на 120 или 180° относительно одна другой (в данном случае — из двух). Когда один луч щетки выходит из контактного ряда, другой входит в него, делая коммутацию непрерывной. Располагаясь по дуге окружности в несколько контактных рядов, ламели образуют контактное поле. Каждый контактный ряд имеет свою щетку, соединенную через скользящий контакт с выводом 7. Помимо рабочих ламелей, на каждый ряд предусмотрена одна нулевая ламель 0, соответствующая нулевому (исходному) положению щетки. В рассматриваемом искателе 1 контактное поле из четырех рядов и четырех щеток а,
Рис. 44. Шаговый искатель прямого действия с дву.хлучевыми щетками:
°— конструкция искателя; б — схема соединения ламелей.
121
б, в, г (рис. 44,6), которые состоят из двух параллельных пружин и охватывают ламели с двух сторон. При подаче импульса якорь 4 (рис. 44,а) притягивается к сердечнику электромагнита 3 и собачка 5 толкает зуб храпового колеса 6, жестко соединенного с ротором и со щетками. Ротор поворачивается и переводит щетки по ламелям в следующее контактное положение. После исчезновения импульса пружина 8 возвращает якорь в исходное положение.
В искателях обратного действия зубья храпового колеса направлены по-другому, а собачка ориентирована соответствующим образом. При подаче импульса якорь притягивается и собачка занимает исходное положение, а по его окончании собачка под действием пружины возвращается в исходное положение, поворачивая ротор со щетками.
Применяемые в практических схемах искатели ШИ-11, ШИ-17 (прямого действия) и ШИ-25,
ШИ-50 (обратного действия) имеют в каждом контакт-пом ряду соответственно по 11, 17, 25 и 50 рабочих ламелей. Допустимое значение тока, разрываемого контактами, составляет 0,2 А, потребляемая электромагнитная мощность 50... 70 Вт, время срабатывания 0,007...0,01 с, а отпускания — 0,04...0,007 с.
4.6. Электрические и гидравлические двигатели
Электрические двигатели распространены в автоматических системах, поскольку обеспечивают широкий диапазон регулирования, обладают значительным быстродействием, просты в обслуживании и т. п. Их мощность может составлять десятые доли ватта (как, на- ' пример, в электронных регулирующих приборах типа ЭПП, КСП) и достигать сотен киловатт. Чаще всего применяют электродвигатели постоянного тока с независимым возбуждением, представляющие наибольшие возможности для регулирования частоты вращения и электродвигатели переменного тока (обычно это двухфазные асинхронные с короткозамкнутым или тонкостенным полым ротором).
Свойства электродвигателей, их устройство и схемы включения изучаются в курсе электрических машин и поэтому здесь не рассматриваются.
122
Из гидравлических серводвигателей наибольшее применение в автоматических системах получили двигатели поршневого типа с золотниковым управлением. Их используют при автоматизации мобильных машин для управления навесными агрегатами и в системах автоматического вождения тракторов и комбайнов. Принципиальная схема такого двигателя показана на рисунке 45,а.
Давление рабочей жидкости создается и поддерживается насосом 1, а ограничивается перепускным клапаном 2. При нейтральном положении золотника 3 каналы, соединяющие его с силовым цилиндром 4, полностью перекрыты, а поршень 5 неподвижен. В результате входного воздействия х золотник 3 перемещается вверх или вниз и открывает отверстия. При этом одна полость силового цилиндра оказывается сообщенной с находящимся под давлением маслом, а другая — со сливным трубопроводом. Давление в первой полости возрастает, так как насос 1 работает, нагнетая масло из бака 6 в силовой цилиндр, и поршень 5 перемещается вверх или вниз в зависимости от направления входного воздействия х.
Скорость движения поршня Ayl&t зависит от количества масла, поступающего и вытекающего из цилиндра, что, в свою очередь, связано со степенью открытия отверстий. При постоянной нагрузке на шток поршня скорость движения выходного штока будет определяться величиной перемещения входного штока.
На статической характеристике гидравлического серводвигателя (рис. 45,6) можно выделить зону не-
Рис. 45, Схема гидравлического серводвигателя с золотниковым управлением (а) и его статическая характеристика (б).
123
чувствительности 2а, обусловленную тем, что ширина пояска золотника больше диаметра отверстия, и зону насыщения, которая соответствует полному открытию золотниковых отверстий, когда скорость движения поршня уже не может возрастать. Если перемещения золотника при работе не достигают значений полного открытия Хтах и зоной нечувствительности можно пренебречь, то статическую характеристику можно считать приблизительно линейной (пунктирная прямая).
Для получения больших выходных мощностей используют каскадное соединение серводвигателей, при котором поршень каждого предыдущего гидроцилиндра воздействует на золотник последующего. Таким образом, выходная мощность этих двигателей может составлять единицы, десятки, сотни киловатт и более. Гидравлические серводвигатели обладают значительным коэффициентом усиления (3-103... 3-105) и достаточно высоким быстродействием.
Контрольные вопросы и задания. 1. Что такое исполнительный элемент? 2. Какие электромагнитные исполнительные элементы применяют в системах автоматики? 3. Какие электромагнитные муфты применяют в системах автоматики! 4. Назовите электродвигатель-ные исполнительные элементы. 5. Что такое реле? 6. Охарактеризуйте типы и определяющие параметры реле. 7. Назовите основные элементы реле. 8. Как можно изменить выдержку времени реле? 9. Каковы назначение и принцип действия шагового искателя? 10. Как работает гидравлический серводвигатель поршневого типа?
Лабораторная работа № 5
Исследование электромагнитных реле
Содержание работы. Изучить устройство, принцип действия и технические характеристики электромагнитных реле. Ознакомиться со способами изменения выдержки времени различных реле. Измерить токи срабатывания и отпускания. Определить коэффициенты возврата и запаса при срабатывании и отпускании реле. Измерить сопротивления изоляции обмоток реле. Установить минимально и максимально возможные выдержки реле времени.
Описание лабораторной установки. Лабораторная установка должна иметь стенд с закрепленным на нем набором различных электромагнитных реле, электросекундомером, мегомметром, миллиамперметром, вольтметром.
Порядок выполнения работы. 1. Собрать схему, изображенную на рисунке 43. 2. Изменяя потенциометром П напряжение на обмотке реле, определить ток и напряжение его срабатывания в момент загорания лампы Л. 3. Уменьшая потенциометром П напряжение на реле, определить значения тока и напряжения его отпускания в момент погасания лампы Л. Измерения повторять не менее трех раз для каждого реле и по результатам вычислить сред
124
нее значение параметров. 4. Измерить при помощи мегомметра, действуя по инструкции, прилагаемой к нему, сопротивление изоляции обмотки реле. 5. Измерить выдержки времени посредством электросекундомера, включенного в схему совместно с реле так, чтобы выполнялось условие одновременного пуска секундомера после замыкания или размыкания контактов реле.
Содержание отчета. Отчет должен содержать схему испытаний реле, краткое описание лабораторной установки и принципа действия устройства реле и способов регулирования выдержек времени, результатов испытаний, значения вычисленных параметров, необходимые формулы, выводы по работе и технические характеристики реле и приборов.
ГЛАВА V
ЭЛЕМЕНТЫ ТЕОРИИ РЕЛЕЙНЫХ СИСТЕМ АВТОМАТИКИ
5.1. Основные понятия и определения
Среди многочисленных устройств автоматического управления релейные системы занимают видное место. Характерной их особенностью является скачкообразное изменение регулируемой (выходной) величины при изменении входной. Другими словами, любой элемент релейной системы может принимать только два состояния; «включен» или «выключен». Наиболее типичны и распространены релейные схемы, состоящие из контактных электромагнитных ‘элементов (реле).
По характеру работы релейные системы разделяют на однотактные и многотактные.
В однотактных системах состояние исполнительных элементов однозначно определяется состоянием приемных элементов в любой момент времени. Какая-либо четкая последовательность в их действиях не предусматривается, и поэтому отпадает надобность в промежуточных элементах. Иначе говоря, в однотактной системе определенной комбинации входных сигналов (аргументов) соответствует определенное значение выходной величины (функции). При описании схем таких систем не могут использоваться понятия «до», «после», «пока» и т. п., характеризующие последовательность ввода аргументов. Например, в однотактной схеме, изображенной на рисунке 46,а, действие исполнительного элемента X однозначно зависит от действия приемного элемента — замыкающего контакта а; промежуточных элементов здесь нет.
У многотактных систем в работе приемных и исполнительных элементов предусматривается определенная последовательность, для осуществления которой необходимо наличие промежуточных элементов. Следовательно, аргументам одной и той же комбинации, но по-
126
Рис. 46. Разновидности релейных схем:
а — однотактная; б — многотактная; в — типа П; г — типа Н.
данным в различные моменты времени, могут соответ-ствовать несколько функций. Так, в схеме на рисунке 46,6 действие исполнительного элемента X определяется не только действием приемного элемента — замыкающего контакта а, но и промежуточного элемента S.
Изображение схемы релейной системы, показывающее количество и состав структурных элементов, а также конфигурацию соединений между элементами, называют структурой релейной схемы. Часть релейной схемы, содержащую только контакты, называют контактной схемой.
Чаще всего структуру релейных схем изображают графически в виде символов элементов и их соединений. Каждому графически выполненному элементу схемы дается буквенное обозначение. Согласно ГОСТ 2.710—81, катушки контактов, магнитных пускателей, реле обозначаются буквой К. Если в схеме несколько элементов, то к буквенному обозначению прибавляется цифра, соответствующая порядковому номеру элемента на схеме. Можно применять двухбуквенное обозначение: так, катушки контактора, магнитного пускателя обозначаются КМ, реле времени КТ; реле напряжения KV, реле токовое КА и т. д. Контактам элементов даются те же обозначения, что и катушкам. Например, К4 — четвертое реле и все контакты этого реле будут иметь такое же обозначение.
По виду соединений различают схемы параллельно-последовательные (типа П) и с мостовыми соединениями (типа Н). В схемах типа П (рис. 46,в) контакты и катушки различных элементов
127
соединяют между собой последовательно, а отдельные цепи параллельно. В схемах типа Н (рис. 46,г) наличие мостовых элементов (элемент КЗ) приводит к одновременным последовательным и параллельным соединениям в различных цепях. У мостовых схем по сравнению со схемами типа П значительно меньше контактов. Кроме названных, применяют схемы с вентильными элементами и взаимно исключающими контактами и инверсные схемы, которые описаны в специальной литературе.
При изучении релейных систем автоматики решают в основном две задачи: первая сводится к анализу релейных схем, то есть к определению условий работы каждого реле и последовательности их действия, а вторая—к синтезу схем, то есть к нахождению структуры схемы по заданным условиям ее работы. Анализ и синтез позволяют получить электрическую схему системы с минимально возможным числом реле и контактов.
При изучении установившихся состояний отдельных элементов релейных систем автоматики без учета их поведения во времени широко пользуются специальным математическим аппаратом — так называемой алгеброй логики.
5.2. Аналитическая запись структуры и условий работы
Релейную схему можно представить не только по-средство« графических символов. Если, как это делается на практике, обозначить катушки элементов боль-
шими буквами латинского алфавита, замыкающие контакты — малыми буква-
Рис. 47. Способы изображения релейных схем:
а — с использованием графических символов; бив — с использованием буквенных символов.
ми и размыкающие кон-такты — малыми буквами с черточкой над ними (знак отрицания), то можно отказаться от графических символов и составлять схемы, используя только буквенные обозначения. Кроме того, обозначив последовательное соеди
128
нение между контактами знаком умножения (точка), а параллельное — знаком сложения (плюс), структуру релейных схем записывают в виде аналитических выражений, которые называются структурными формулами схем. Например, графически изображенная на рисунке 47,а релейная схема переведена на рисунке 47,6 в соответствии с принятыми правилами на буквенные символы.
Структурная формула для этой схемы будет выглядеть так
Fx =aff+cde + m. (9)
В правой части выражения (9) аналитически представлена контактная схема, а в левой части индекс X при функции F указывает, что контактная схема воздействует на катушку одного элемента X. Структурная формула, таким образом, отражает не только структуру самой контактной схемы, но и определяет условий работы элемента, в цепь которого она включена. Эти условия для элемента X в формуле (9) можно записать словами: элемент X сработает, если сработает элемент А и не сработает элемент В, или сработает элемент С и не сработает элемент Д и сработает элемент Е, или сработает элемент М.
В свою очередь, если условия работы какого-либо элемента У выражены словами, то по ним можно составить соответствующие структурную формулу и схему. Например, пусть какой-либо элемент У должен сработать: 1) при срабатывании элементов Л и В и несрабатывании элемента С или 2) при срабатывании элементов Д и Е и несрабатывании элемента М. Структурная формула, отвечающая данным условиям, примет вид
FY=abc+dem, и соответствующая схема будет выглядеть, как показано на рисунке 47, в.
5.3. Логические функции
Алгебра логики изучает различные логические зависимости между высказываниями и оперирует только двумя понятиями и значениями; истинно — «1», ложно — «О».
9 Заказ 5067
129
В алгебре логики выделяют три основные логические функции: 1) логическое умножение или конъюнкция (И); 2) логическое сложение, или дизъюнкция (ИЛИ); 3) логическое отрицание (НЕ). Рассмотрим сущность этих логических функций.
Логическое умножение—И. Эту операцию можно выполнять над двумя и более высказываниями. Структурная формула F=ab. Функция принимает значение! тогда и только тогда, когда аргумент а и аргумент Ь равны 1, то есть оба значения истинны. При любой другой комбинации значений а и b получим 0. Действительно, если п=0, Ь=1, то F=0-l = 0; если а=1, Ь = 0, то также 1-0=0. В электрической схеме элемент, реализующий логическую операцию И, по своему действию аналогичен цепи, состоящей из последовательно включенных контактов реле. Цепь тока образуется тогда, когда замкнуты все контакты.
Логическое сложение—ИЛИ. Данная операция представляет собой сложное высказывание, которое истинно при истинности хотя бы одного из составляющих его высказываний, и ложно, если все высказывания ложны. Составляющих высказываний может быть два и более. Структурная формула F=a + b. Функция принимает значение 0 тогда и только тогда, когда оба аргумента равны 0, а значение 1, когда или вход а, или вход Ь, или оба вместе имеют значение 1. В электрической схеме функции ИЛИ соответствует параллельное включение контактов.
Логическое отрицание — НЕ. Эта операция преобразует истинное высказывание в ложное и ложное в истинное. Структурная формула F=a. Выход всегда противоположен входу. В электрической цепи функцию логического отрицания может выполнять реле с размыкающими контактами (при подаче напряжения контакты реле размыкаются).
Кроме трех основных логических функций, применяются производные от них с более сложной логической связью. К ним относятся следующие функции:. ИЛИ—НЕ (стрелка Пирса), И—НЕ (штрих Шеффера), РАВНОЗНАЧНОСТЬ (эквивалентность), НЕРАВНОЗНАЧНОСТЬ (неэквивалентность), ИМПЛИКАЦИЯ, ЗАПРЕТ, ПАМЯТЬ, ЗАДЕРЖКА, ПОВТОРЕНИЕ и др.
130
Функция ИЛИ —НЕ (инверсия суммы) в структурном виде для двух аргументов записывается как = a + b. Она принимает значение I тогда и только тогда, когда оба аргумента равны 0, то есть функция истинна, лишь когда ложны оба входящие в нее высказывания. Стрелке Пирса аналогично в электрической цепи последовательное включение двух или более размыкающих контактов. Цепь будет замкнута, если ни на одно реле не подан сигнал.
Функция И — НЕ (инверсия произведения) в структурном виде записывается как F—ab. Функция принимает значение 0 тогда и только тогда, когда оба аргумента имеют значение 1, то есть функция ложна, лишь когда истинны оба входящие в нее высказывания. Электрический эквивалент штриха Шеффера — параллельное включение двух или более размыкающих контактов. Цепь будет разомкнута, если на оба реле подан сигнал.
Функция РАВНОЗНАЧНОСТЬ в структурном виде записывается как F=ab + ab. Функция принимает значение 1 тогда и только тогда, когда оба аргумента одновременно имеют одинаковые значения, и принимает значение 0, когда аргументы имеют разные значения, то есть сложное высказывание истинно, лишь когда оба высказывания истинны или ложны одновременно.
Функция НЕРАВНОЗНАЧНОСТЬ в структурном виде записывается как F=ab + ab. Функция принимает значение 1 тогда и только тогда, когда либо аргумент а, либо аргумент b равен 1, но не оба вместе, то есть сложное высказывание истинно, лишь когда одно из высказываний истинно, а другое ложно. Электрический аналог данной функции — схема, в которой на выходе появляется сигнал, если сигнал подан только на один из входов; при одновременном поступлении на входы двух сигналов на выходе схемы сигнала не будет.
Функция ИМПЛИКАЦИЯ в структурном виде записывается как F = a + b. Функция принимает значение О тогда и только тогда, когда аргумент а имеет значение 1, а аргумент b — значение 0, то есть сложное высказывание ложно, лишь когда первое высказывание истинно, а второе — ложно.
fl*
131
Функция ЗАПРЕТ в структурном виде записывается как F = ab. Функция принимает значение 0, если на вход Ъ подан сигнал 1, каким бы при этом ни был сигнал на входе а.
Функция ПОВТОРЕНИЕ в структурном виде записывается как F=--ka и означает, что функция принимает значение в k раз отличное от значения входного сигнала, совпадая с ним по знаку.
Функция ЗАДЕРЖКА в структурном виде записывается как F = a(t~—т) и означает, что функция принимает значение, совпадающее или отличное по знаку от входного сигнала а, через время т после его подачи.
В таблице 1 даны условные обозначения всех рассмотренных логических функций и приведены их релейные и полупроводниковые эквиваленты. Для автоматизации различных производственных процессов промышленность выпускает полупроводниковые элементы типа «Логика И», магнитные логические элементы ЭЛМ, элементы типа УСЭППА (универсальная система элементов промышленной пневмоавтоматики).
5.4. Основные законы алгебры логики и их следствия
При создании релейных автоматических систем аналитическая запись структуры и условий работы схемы позволяет найти ее оптимальный вариант. С этой целью делают аналитические равносильные преобразования и находят схемы, аналогичные по своему действию, но разные по структуре. В основе этих преобразований лежат методы преобразования, базирующиеся на математическом аппарате алгебры логики (ее еще называют булевой алгеброй — по фамилии английского математика прошлого века Буля).
В обычной математике оперируют числами или символами, которым могут быть приданы определенные численные значения и физический смысл. Однако те или иные события и явления можно оценивать путем логического их толкования, то есть перейти к «исчислению высказываний» — математической логике.
Часть математической логики, где оперируют двумя высказываниями — «истинно» или «ложно», «да» или «нет», «1» или «О», получила название алгебры логики (или двоичной булевой алгебры). По существу исчис-
132
Таблица 1
Логические Условные обозначения Релейный
функции Форма 1 Форма FL эквивалент
Конъюнкция И F-a-B а 7Г г £ a —ГЛ F в —L/ r > ' -<> Fl-J
Дизъюнкция 5^-
ПЛИ F--u^8 g 1 £ Cj П1 m в
Отрицание а Г r\ F аж
HF F=a ; B-
Стрелка Пирса ИЛИ-НЕ F=a*B а В Т F c ^-5 га
Штрих Шеффера И-НЕ_ F^a-B J Т a —ГХ2. e —1/ Яж' gж' , p /с -
Равнозначность F=a8+aB а । S F_ — J2 r F L
Неравнозначность F-aB^a.6 0| £ Z F — —! r\
Импликация F=a +В aw F_ c —£\_£ g — c ^£T|_ — в
Запрет F-a-B F по FH в • f Г
Повторение а т F_ 1 _XZ£Lp 1
Задержка F-ait-T) 3 3 £ — 1 JJj^r f’r u
ление высказываний представляет собой алгебру двух чисел, где любой аргумент и любая функция могут иметь одно из двух этих понятии или значений.
Поскольку в контактных релейных системах автоматики любой контакт схемы может принимать только два положения (в структурной формуле только два значения) — замкнутое или разомкнутое, то точно так же вся структурная формула может выражать или замкнутую, или разомкнутую цепь. При этом разомкнутому состоянию контактов соответствует значение ноль (0), а замкнутому — единица (1).
В булевой алгебре выделяют четыре пары законов, которые позволяют установить равносильность различных выражений, что дает возможность заменить одно выражение другим. А таЪ как каждому выражению соответствует своя определенная схема, то это означает и замену одной схемы другой. В качестве символа равносильности используется символ равенства из обычной алгебры ( = ).
Рассмотрим основные законы и вытекающие из них следствия, устанавливая их справедливость путем анализа схем, соответствующих правым и левым частям равносильных выражений.
1. Переместительные (коммутативные) законы: относительно сложения
и -р b с=b ~р с -Р о, относительно умножения abc=cba.
2. Сочетательные (ассоциативные) законы: относительно сложения
(а+Ь) +с=а+ (Ь + с), относительно умножения (ab)c-a(bc).
3. Распределительные (дистрибутивные) законы: сложение относительно умножения
ab + c= (а + с) (Ь + с), умножение относительно сложения (a + b)c=ac+bc.
134
4. Законы инверсии:
относительно сложения
a + b=ab, относительно умножения
(Ю)
ab=a + b. (11)
Черта над левыми частями равенств (10) и (11) означает, что берется отрицание от данного выражения (инверсия), а в правой части получаются выражения, которые имеют обратное значение по отношению к исходному.
Схемы, иллюстрирующие законы теории релейных схем, приведены на рисунке 48. Равносильность представленных схем не вызывает сомнений. В этом можно убедиться, рассмотрев различные комбинации срабатывания контактов; больше того, нетрудно видеть, что переместительные, сочетательные законы и распределительный закон умножения относительно сложения соответствуют аналогичным законам обычной алгебры.
Рис. 48. Схемы, иллюстрирующие законы теории релейных схем:
а — переместительный; б — сочетательный; в — распределительный; г — инверсный.
135
1-------- I-------------- ”
а
I
е _
и в » л
с
X ------ 4---------i-----------
Рис. 49. Прямая (а) и инверсная (б) схемы включения.
Исключение составляют законы инверсии и распределительный закон сложения относительно умножения, которые встречаются только в булевой алгебре.
Например, на рисунке 49,62 приведена схема с последовательным соединением контактов и
обмотки контактора. Структурная формула для этой схемы
F=abcX. (12)
Для получения инверсной (то есть обратной по действию) схемы нужно взять инверсию от выражения (12)
Fj = F=abcX—а 4- b + с+X.
Над символом обмотки реле знак инверсии не ставится, так как он не имеет смысла.
Структурная схема, соответствующая выражению (12), показана на рисунке 49,6. Сопоставляя, легко убедиться, что элемент Л' сработает в обеих схемах, если сработают элементы А, В, С; при этом контакты а, Ь, с в первой схеме замкнутся, а во второй — разомкнутся. Следовательно, по своему действию схемы равносильны, но их схемное решение различное. По аналогии для любой релейной схемы можно найти равносильную по действию схему, в которой все последовательно включенные контакты и обмотки контакторов (реле) будут заменены на параллельно включенные, а все параллельные цепи — на последовательные; все замыкающие контакты — на размыкающие, а размыкающие — на замыкающие.
Рассмотренные законы алгебры логики имеют ряд следствий, которые широко используются для преобразования структурных формул:
1) а + 0=а; 2) а + 1 = 1; 3) а + а=а; 4) а + а=1;
5) а-0=0; 6) а-1=а; 7) аа = а; 8) аа=0;
136
9) a+ab=a(\+b)=a- 10) a(a + b)=a-,
11) a+ab = a + b-, 12) a + ab = a + b. (13)
В справедливости этих равносильностей можно убедиться, начертив схемы, соответствующие левой и правой частям выражений, и сравнив их работу.
5.5. Минимизация релейных схем
Сущность минимизации состоит в том, чтобы, используя алгебру логики, найти для релейной системы автоматики оптимальный ее вариант с минимальным числом используемых элементов, наиболее простой и надежный в работе.
Среди различных способов минимизации схем наиболее распространенными для однотактных схем являются аналитический, графоаналитический, табличный (матричный) и другие способы.
При аналитической/способе для имеющейся релейной системы записывают логическую функцию и, применяя приведенные выше законы алгебры логики и их следствия, находят минимальную форму записи функции. На основе этой минимальной функции выполняют реализацию схемы.
Минимизацию релейной схемы этим способом можно пояснить конкретным примером. Пусть требуется минимизировать контактную схему, изображенную на рисунке 50, а. Следуя методике минимизации, запишем логическую функцию для данной схемы:
— — _________________
F=/H[(<?+fr)m4-c(d+mc)]-|-m[(c+e)m +• (а+ат)с].
Используя законы алгебры логики и равносильности, найдем минимальную форму записи. _
Вначале рассмотрим выражение c(d-j-rnc) с целью его упрощения
c(d+mc) =c(d-f-ml) =c(d-j-/n).
Т----------г ГТ
I---♦--1 Г*Т—f—L Ш
с 6 с с e a a 1 I
1—4 JL i_j 11 =
m d m m Li7 f
—U-i 1 _J JI
a b.
• Рис. 50. К пояснению интуитивного способа минимизации:
а —исходная схема; б — преобразованная схема.
137
Справедливость полученной записи подтверждается схемами, соответствующими левой и правой частям выражения. Тогда
+zn[(c+e)m+ (а 4-от)с].
Раскроем квадратные скобки с учетом следствий (7) и (8) из формулы (13):
F = т (с + b) + тс(d+т) + тс (а-^-ат) —mc+mb-\-
+ mcd+mca+mca^mc(l+d) +mb+mca-}-mca=
=tnc+mb+тса+тса—т (с+b) + тс (а+а) = =mc+mb+mc=^'c(m + m) +mb=c+mb. (14)
Формула (14) показывает, что исходной равносильна простая схема из трех элементов Ь, с, т, представленная на рисунке 50, б.
а в с аб ас 5с абс
0 — — —
с tint:
1 X Ж X Jc' обе
Z — - —
с (74. 'и и В"
3 X л- X @ Ж авс
4 X ЛС etc
5 -е--
-бе- see-
6 л ж if и ale
Z * л (afr) яс ate
При графоаналитическом способе для минимизации функции применяют так называемые минимизирующие карты — таблицы, содержащие комбинации состоянии ее элементов.
Например, для схемы с тремя приемными элементами А Д С можно написать 2?=8 различных произведений: abc, abc, abc, abc, abc. abc. abc, abc. Каждое такое произведение в исходной структурной формуле выражает отдельную параллельную цепь, называемую конституентой разложения единицы, потому что сумма всех 2" произведений выражает постоянно замкнутую цепь. В чем можно убедиться, вычертив соответствующую схему со всеми комбинациями состояний ее элементов.
На рисунке 51 представлена минимизирующая карта для схемы с тремя приемными элементами А, В, С. Число строк таблицы равно числу конститу-ентов В крайнем правом столбце таблицы записывают все конституенты, а в остальных столбцах — все комбинации состояний элементов по одному, по два, но три и т. д., если число элементов более трех.
Допустимая исходная структурная формула имеет такой вид
==abc+abc-j-abc-l-abc-)-abc 15)
Рис. 51. Минимизирующая Методика нахождения бо-карта, лее коротких произведений, со-
J38
ответствуюших исходной формуле, такова. Сначала в минимизирующей карте вычерчивают все строки, конституенты которых нс входят в исходную формулу (нулевая, вторая, пятая). Потом в каждом столбце вычеркивают все комбинации, которые встречаются в вычеркнутых строках. Затем находят те строки, где есть по одной невычеркнутой комбинации с минимальным числом символов (первая и четвертая). В первой — комбинация ас, а в четвертой ас. Их называют «существенными», и они обязательно входят в результирующее выражение. Из таблицы видно, что комбинацию ас получают при сложении конституента abc первой строки с кон-ституентом abc третьей строки, а комбинация ас — при сложении конституента abc четвертой строки с коиституентом abc шестой строки. Эти комбинации обведены прямоугольными рамками. В заключение находят строки, в которых нет комбинаций ас и ас, но есть несколько незачеркнутых комбинаций с минимальным числом символов. Это седьмая строка с комбинациями ab и Ьс. 1-1х называют «свободными». В результирующее выражение входит одна из них: либо ab. либо Ьс. Комбинацию ab можно получить при сложении конституента abc седьмой строки таблицы с конституентой abc третьей строки, а комбинацию Ьс в результате сложения конституента abc с коиституентом abc шестой строки. Комбинации ab и Ьс обведены кружками.
Следовательно, из минимизирующей карты видно, что исходную структурную формулу (15) можно представить двумя различными минимальными формулами с одинаковым числом структурных элементов
или
Fx=ac-j-ac+ab,
Fx=ac+ac-Fbc.
Эти структурные формулы выражают схемы, равносильные заданной.
Минимизация с помощью минимизирующих карт наглядна, но с увеличением числа приемных элементов схемы карта получается очень громоздкой. При числе приемных элементов более трех- применяют способ минимизации «координатных таблиц». С ним можно ознакомиться в специальной литературе.
В многотактных схемах условия срабатывания отдельных элементов составить невозможно, так как в работе приемных и исполнительных элементов предусматривается определенная последовательность действий во времени.
При анализе и синтезе многотактных схем пользуются таблицами включений и временными диаграммами взаимодействия. Таблица включений представляет таблицу, в которой последовательно записываются из-
139
Рис. 52. Схема для построения таблицы включений.
менения состояний всех элементов схемы. Включенное состояние элемента обозначают ( + ), отключенное— минус ( —). Изменение состояний элементов называют т а к-том работы схемы. Непрерывный ряд тактов, в течение которого элемент схемы находится во включенном состоянии, называют периодом включения этого элемента, в отключенном состоянии — периодом отключе-н и я.
Построение таблицы включений рассмотрим на примере (рис. 52) Допустим, требуется определить условия, при которых срабатывают элементы Х2, ХЗ, Х4, Х5 и последовательность действия элементов.
Запишем структурные формулы для всех исполнительных элементов схемы (S — промежуточный элемент, тумблер)
Fxi=abcd-, Fx2=x\ -x4+x2(xix2+ x4-x5);
Fi3 = xbx2; Fz*=*l-x2+ x5-x4+xl-X4-X2;
/+5=(х1-х2 +x5)(x3+x4). (1G)
Положение исполнительных элементов схемы определяется состоянием приемных элементов а, Ь, с. d и положением тумблера S.
Запишем начальные состояния элементов схемы, когда а=0: FjCl=0-l-l-l=0; ГХ2=1 -0+0(0-1+0-1) =0;
fX3=0-0=0; fx4 = 0-l + l-0+100=0;
Fxs= (0-0+0) (0+1) =0.
Допустим, в первом такте при замкнутом тумблере 5 включается приемный элемент а, тогда Гуг—1. Это приведет во втором такте к включению исполнительного элемента XI. Дальнейшее изменение значений структурных формул (16) воздействующих контактных цепей представлено в таблице 2. Там же указаны изменения состояний элементов схемы. Например, структурная формула для / Х2 принимает значение 1 в шестом такте, поэтому элемент Х2 должен включиться в седьмом такте и т. д.
140
Таблица
<М
' co •—f — ’—1 ~~1 о 1
r—< Г*м — о +
Т—J — — Т—< +
r~t т— И О о о т—« + 1 1
CJ о о о о *—' 1
z о »“* V—( с 1
C —ч * о <—< 1
СЛ г—4 о Т—И +
CO V-1 т—‘ — г—« Г““< +
r- т—’ г—* т—< »—< о + + +
CO о т—< о 1
Ю о о о о 1
Ч- о о »—« с
CO о о —« о +
OJ т—< о о о +
т—< о о о о +
о о о о о о 1 1 1 1 1
Такты работы схемы ,LO 1 * * + СЧ 1? сч >< СЧ я О) * к н 4- >н *+ сч 1? '+ со н -—' LO н 4~ сч н с сч >< со >< и ю
сз 'в С4 к и. X II го 1£ X и из н
1гЛи<10ф хпнсШяЛскэ ajiHShBiig • во1нэиэу€ гчиэхэ ЭИНВ01Э0Э
141
Временные диаграммы взаимодействия можно получить как экспериментально, так и расчетным путем по данным временных параметров (срабатывания и возврата) отдельных элементов из каталогов.
На рисунке 53 показаны релейная схема и временная диаграмма взаимодействия элементов. Число строк на диаграмме равно числу аппаратов, взаимодействие которых рассматривается. Для каждого элемента показывается своя ось времени, параллельная оси абсцисс. Отключенному состоянию элемента соответствует прямая линия на оси времени, включенному — прямая горизонтальная линия на некотором произвольном расстоянии выше оси времени. Срабатывание и отпускание элемента изображаются прямыми наклонными линиями, соответственно повышающей и понижающей. Время нахождения элемента под напряжением заштриховывается.
По диаграмме можно определить, что происходит в любой момент времени, для чего проводят перпендикуляр к оси времени и смотрят, с чем он пересекается. Можно определить, сколько времени необходимо для достижения определенного состояния электросхемы и какова последовательность взаимодействия элементов.
5.6. Логические устройства на интегральных микросхемах
Устройства микроэлектроники, состоящие из диодов, транзисторов, резисторов, конденсаторов, изготовлен
142
ных в едином технологическом процессе, электрически соединенных между собой по определенной схеме, смонтированных в общем пластмассовом или металли ческом корпусе, составляющие единую, нераздельную конструкцию, называются интегральными микросхемами (ИС). Одна интегральная микросхема эквивалентна электронной схеме, содержащей большое число (десятки, сотни и более) дискретных элементов (диодов, транзисторов и т. и.).
Достоинствами ЙС являются высокая надежность и быстродействие, малые габариты и масса, небольшая потребляемая мощность, усложнение реализуемых функций, большая нагрузочная способность. Выпускают полупроводниковые, пленочные и гибридные интегральные схемы.
Большое распространение получили серии микросхем транзисторно-транзисторной логики (ТТЛ) (К133, К155, К511 и др.), которые находят широкое применение при разработке дискретных систем автоматики. Серия микросхем К155 включает 14 типов схем ТТЛ. В микросхемы этой серии входят элементы, реализующие логические функции И — НЕ, И — ИЛИ — НЕ, триггеры, расширители входов. Основной элемент И — НЕ включает мно-гоэмиттерный транзистор (имеет несколько эмиттеров и одну общую базу), реализующий логическую функцию И, и сложный инвертор, реализующий логическую функцию НЕ. Число эмиттеров в транзисторе, а поэтому и число входов в элементе И — НЕ составляет 2... 8. На рисунке 54,а изображена схема логического элемента ТТЛ с многоэмиттерным транзистором на входе и с простым инвертором на выходе, а на рисунке 54,6 со сложным инвертором, состоящим из двухкаскадного усилителя V2, V3 и эмитгериого повторителя V4, что повышает нагрузочную способность и быстродействие схемы. При наличии на входах а.Ь.с, ...п транзистора VI положительных сигналов, что соответствует логическому сигналу 1, через коллекторный и эмиттерный переходы транзисторов VI и V2 протекает значительный ток, обеспечивающий открытие V2 и появление на его выходе сигнала 0. Если один из входных сигналов равен 0, то под действием смещения соответствующего (эмиттер — база) перехода в прямом направлении транзистор V2 запирается и на выходе будет сшнал 1. Работа схемы (рис. 54,6) аналогична рассмотренной, при запирании транзистора V2 и соответственно V3 откроется V4 высоким потенциалом, появившимся на коллекторе V2, и на выходе схемы появится сигнал 1.
Основные электрические параметры элементов серии К155: напряжение питания +5В. напряжение выходного chi нала 1—не менее 2,4 В, а 0 — не более 0,4 В, потребляемая мощность 10... 157 мВт, в зависимости от типа микросхемы.
Серия высокопомехоустойчивых логических интегральных микросхем К.511, представляет собой систему элементов ТТЛ и диодов Зенера. Основным логическим элементом является элемент И — НЕ (рис. 54,е). Вход элемента I,
143
Рис. 54. Схемы логических элементов на схемах.
интегральных микро-
выполненный на транзисторах VI... V4 р— п — р типа реализует логическую функцию И с одновременным усилением входных сигналов.
Часть микросхемы II представляет собой буферный усилитель на транзисторе V5, а часть микросхемы III—диод V9 (диод Зенера) с порогом напряжения 6В обеспечивает статическую помехоустойчивость. Диод 1'8 обеспечивает динамическую устойчивость за счет ускорения рассасывания неосновных носителей из области базы транзистора V5.
Выход микросхемы IV, включающий транзисторы V6, V7 и диод V10, образуя активную выходную цепь, представляет выходной инвертор. При единичном входном сигнале (с-1, ft-1, с-1, d-l) V7 открыт, выходной сигнал равен 0. Если на один из входов подать 0, то V7 закроется и на выходе будет 1. Серия К.511 имеет параметры: напряжение питания +15В, напряжение выходного сигнала 0 — не более 1,5В, а 1—не менее 13,5 В. Она включает 11 типов микросхем различного назначения: микросхемы, содержащие несколько элементов с различным числом входов — два, три, четыре; логическую схему для работы на сильнодействующую нагрузку (до 100 мА), микросхемы для преобразования высоких уровней напряжений в более низкие уровни; микросхемы для обратных преобразовании, триггеры, счетчики и т. п.
144
5.7. Построение релейных схем на бесконтактных элементах
Построение систем автоматизации с применением бесконтактных логических элементов можно вести путем перевода релейных схем на бесконтактные и путем непосредственной разработки бесконтактных схем на основании заданных условий технологического процесса.
Первый путь предполагает наличие релейно-контактного варианта схемы, проверенного и пригодного для практической работы. Если такого варианта нет, то вначале составляют релейно-контактную схему, а затем переводят ее на бесконтактные элементы. Этот путь целесообразен при построении несложных схем, особенно когда уже есть навыки создания таких схем.
По имеющейся релейно-контактной схеме составляют структурные формулы, причем в этой работе можно выделить два этапа.
На первом этапе выявляют входные элементы с контактами a, b, с, d,..., исполнительные и промежуточные элементы Z, У, X,..., Р с контактами z, у, к,
, р. Через входные элементы в функциональную часть схемы управления подают входные сигналы. Выходные сигналы поступают в исполнительные элементы непосредственно от выходных элементов или через промежуточные. Входные, промежуточные и выходные сигналы обозначают так же, как и контакты соответствующих элементов.
К входным относят сигналы о состоянии концевых и промежуточных выключателей, кнопок управления, датчиков, контролирующих процесс, и т. п. Если есть возможность, число входных сигналов сокращают, объединяя ряд простых сигналов в один эквивалентный или сложный сигнал. Так, при последовательном соединении нескольких контактов в блокировочной цени их сигналы можно заменить одним, значение которого равно конъюнкции элементарных сигналов. К выходным причисляют сигналы, управляющие работой исполнительных элементов контакторов, электромагнитов и т. п. При возможности выполняют группировку выходных и промежуточных сигналов.
На втором этапе ведут запись алгебраических выражений, соответствующих цепям выходных и про
10 Заказ 5367
145
межуточных переменных релейно-контактной схемы. Порядок составления алгебраических выражений заключается в следующем. Составляют структурные формулы для выходных сигналов и отдельно для промежуточных сигналов без обратных связей и с обратными связями. Выражают в структурных формулах выходных и промежуточных сигналов с обратными связями встречающиеся промежуточные сигналы без обратных связей через входные. Полученные уравнения, если это возможно, преобразуют, используя алгебраические равносильности. Группируют преобразованные структурные формулы по функциональным узлам. Составляют бесконтактную схему с учетом особенностей выбранного типа логических элементов.
Второй путь, который предусматривает составление структурной формулы на основе заданных условий технологического процесса, в принципе более правилен, так как позволяет находить самые целесообразные схемные решения с простейшими узлами и с наименьшим числом аппаратуры. Следует отметить, что логический элемент не является эквивалентом реле. У реле один вход (обмотка) и может быть несколько несвязанных выходов — цепей, замыкаемых контактами, в то время как у логического элемента зачастую несколько входов и несколько выходов. При изображении бесконтактных схем в отличие от контактных показывают только логические связи между отдельными элементами и опускают цепи их питания и другие соединения, не имеющие принципиального значения.
Применение указанных способов для построения бесконтактных схем рассмотрим на конкретных примерах.
Пример 1. Требуется преобразовать релейную контактную схему (рис. 55,а) в бесконтактную.
В соответствии с приведенной методикой выделим сигналы: входные — a, b, с, d; выходные — z; промежуточные — их нет.
Составим структурную формулу для контактов цепи включения исполнительного элемента
Fz=[(a+d)b+z]c.
Этой структурной формуле соответствует бесконтактная схема (рис. 55,6) из пяти логических элементов: двух элементов ИЛИ, соответствующих сложению, лвух элементов 11, соответствующих умножению, и одного элемента НЕ, соответствующего черточке над элементом с.
146
Рис. 55. Схемы к примеру 1 и 2: а и в — контактные; биг— бесконтактные.
Пример 2. Требуется составить схему на логических элементах, эквивалентную по своему действию контактному варианту (рис. 55,в). _
Выделим сигналы: входные — a, b, с, d, е; выходные — Z, А. У, N, М, Р; промежуточные — Р.
Составим структурные формулы для контактов цепей включения исполнительных элементов Z, X, У, N. М, Р
Fz=a(b-\-z)c у, Fx = apc\ Fy=ap^z\
Fn—x; Fxi—z+y, Fp—b(e+p).
По этим уравнениям составим структурную логическую схему (рис. 55,г) на элементах И, ИЛИ, НЕ. Для реализации первого уравнения необходим элемент И1, на вход которого поступает
10*
147
4 входных сигнала; а — непосредственно, b+z — через элемент ИЛИ1; с—через элемент НЕ1; у — через элемент НЕ2. Выходной сигнал с элемента И1 через усилитель У/ подается на исполнительный элемент Z. Подобным образом реализованы и остальные уравнения.
Контрольные вопросы и задания. 1. Объясните понятие равносильного преобразования схем. 2. Что такое структура релейной схемы? 3. В чем отличие однотактных схем от многотактных? 4. Расскажите о мостовых релейных схемах и изложите их особенности. 5. Назовите отличительные признаки инверсных схем. 6. Какие применяются способы перевода релейно-контактных схем в бесконтактные? 7. Назовите основные логические операции. 8. Каковы достоинства интегральных микросхем?
ГЛАВА VI
ОБЪЕКТЫ УПРАВЛЕНИЯ И РЕГУЛЯТОРЫ
6.1. Общие сведения
Любое производство, в том числе и сельскохозяйственное, характеризуется чрезвычайным многообразием объектов управления.
В качестве таких объектов могут рассматриваться как отдельные машины и установки, так и целые комплексы машин, различных устройств, оборудования и т. д.
К наиболее распространенным объектам сельскохозяйственного производства относятся тепловые устройства (теплогенераторы, водоподогреватели, калориферы, электропечи, котельные установки, обогреватели и т. п.), в которых обычно требуется управлять температурой, подачей воздуха, топлива или энергии; комплексы по производству, переработке и храпению продукции (животноводческие помещения, овощехранилища, теплицы и парники, зерносушильные пункты и т. д.), где необходимо управлять одновременно температурой, влажностью, газосодержанием; мобильные сельскохозяйственные агрегаты и машины (тракторы, комбайны, сеялки, плуги и др.), у которых необходимо управлять скоростью, траекторией движения, производительностью и иными показателями работы.
Свойства объектов оказывают существенное влияние па весь процесс управления и, поэтому при анализе работы автоматической системы их необходимо учитывать. К основным свойствам объектов управления относят статическую и динамическую характеристики, аккумулирующую способность, самовыравнивапис, запаздывание процесса в объекте, время разгона объекта.
6.2. Статическая и динамическая характеристики
Статическая характеристика объекта представляет собой зависимость управляемой величины у от задаю-
149
Рис. 56. Статические характеристики объектов.
щего воздействия х в установившемся режиме при постоянном внешнем возмущении F(/)=const.
Математически статическая характеристика выражается уравнением y=f(x).
Статические характеристики объектов чрезвычайно разнообразны по форме, но если они описываются уравнениями первой степени и графически изображаются прямой линией 1 (рис. 56),то говорят о линейных объектах, в противном случае (кривая 2) речь идет о нелинейных объектах. Ис
следования присущих многим объектам нелинейных статических характеристик не-
редко вызывают затруднения при анализе автоматических систем как в установившихся (статических), так и в переходных (динамических) режимах. Чтобы можно было анализировать работу системы, производят линеаризацию статических характеристик, понимая под этим замену нелинейной статической характеристики приближенной линейной. Замена может быть выполнена на отдельном участке кривой методом касательной к точке А или она полностью заменяется ли
нейной характеристикой 3 как для отдельных элементов, так и для системы в целом. При этом если кривая 2 представляет собой характеристику элемента автоматической системы, то точка А должна быть рабочей точкой этого элемента, около которой происходит изменение переменных х к у при работе системы. Очевидно, что в области достаточно малых отклонений от х0 и у0 реальная характеристика заменяется линейной (касательной). Ошибка при линеаризации будет тем меньше, чем меньше отклонение переменной х от л'о. Уравнение статической характеристики представляют не в абсолютных величинах х и у, а в отклонениях от номинальных %ц и уа значений, то есть Дх =
150
=хн— х0; Дг/=(/н — У о- Тогда уравнение запишется в таком виде
Ay = kAx,
где k = (d///dx)x=Xo=tg|3— передаточный коэффициент.
При необходимости статические характеристики можно представить в относительных значениях входной х» и выходной yi: величины, что облегчает сравнение между собой характеристик различных элементов и объектов
y* = kx„,
где х.=л/Хн, Д.=У/!/п-
Полная замена нелинейной характеристики линейной 3 приводит к определенной погрешности. Поэтому в каждом конкретном случае выясняют допустимость применения линеаризации, а также выбирают такой способ замены нелинейной характеристики прямой, чтобы не получить неправильных результатов или большой погрешности в расчетах.
Динамическая характеристика объекта представляет собой зависимость управляемой величины y(t) для любого момента времени от задающего воздействия x(t) в переходном режиме. Связь между этими параметрами выражается дифференциальными уравнениями. Наиболее полное и разностороннее представление о динамических свойствах объекта дают передаточные функции и частотные характеристики, которые будут подробно рассмотрены в главе VII.
6.3. Аккумулирующая способность
Любой технологический процесс в том или ином объекте управления связан с притоком, расходом, накоплением и преобразованием некоторой материальной среды или энергии. Многие объекты способны в процессе работы запасать рабочую среду внутри объекта. Например, в водонапорном баке создается запас воды, маховик вала двигателя внутреннего сгорания накапливает энергию вращающихся частей, в тепловых установках аккумулируется теплота и т. д.
Аккумулирующая способность, то есть способность объекта накапливать энергию и, во, оказывает существенное влияние на его
и вещест-рег^лиро-
151
сочные свойства. Аккумулирующую способность оценивают по емкости объекта, под которой понимают запас накопленной объектом энергии или вещества. Чем больше емкость объекта управления, тем медленнее при прочих равных условиях будет изменяться управляемая величина при возмущающих воздействиях, и, наоборот, чем меньше емкость объекта управления, тем он чувствительнее к возмущающим воздействиям.
Для оценки влияния емкости на изменение управляемой величины служит коэффициент емкости. Под коэффициентом емкости понимают то количество энергии или вещества, которое необходимо подвести к объекту или отвести от него, чтобы изменить управляемую величину на единицу измерения. В общем виде коэффициент емкости с представляет собой отношение емкости С к соответствующему значению управляемой величины у
с=С/у.
Так, при регулировании уровня воды в баке коэффициент емкости представляет собой то количество жидкости (м3), которое необходимо добавить или изъять, чтобы уровень изменился на 1 м; при регулировании температуры коэффициент емкости — это количество тепла (кДж), которое необходимо подать или отвести, чтобы температура изменилась на один градус.
Чем больше коэффициент емкости с, тем больше емкость объекта, тем медленнее изменяется управляемая величина и тем меньше чувствительность объекта к внешним воздействиям.
Чувствительность объекта к возмущениям представляет собой отношение скорости изменения управляемой величины dy/dt к изменению XF возмущающего воздействия
d(//d/ v=—ДГ”
Для каждого объекта различают емкости со стороны потребления, которая зависит от характеристик управляемой среды, и емкость СО стороны подачи, которая определяется характеристиками вещества или энергии, влияющими на управляемую величину и подвергающимися изменению управляющим органом. Так, для подогревателя емкость со стороны подачи пред
152
ставляет количество теплоты, которое содержится в теплоносителе, находящемся в подогревателе и в его сосуде, а вместимость со стороны потребления — количество теплоты в теплоносителе до точки замера управляемой величины после подогревателя и во всех металлических трубопроводах и других частях. Если отношение емкостей со стороны подачи и потребления незначительно, то управление процесса протекает легче, чем в случае, когда объекты имеют большую вместимость подачи и малую со стороны потребления.
Объекты управления, как показано на рисунке 57, могут быть безъемкостными (а), одноемкостными- (б) и многоемкостными (в). Объекты с очень малой вместимостью, например небольшие трубопроводы, относят к безъемкостным. Одноемкостными считают такие, у которых нарушение равновесия между подачей и потреблением вызывает одновременное и одинаковое изменение величины во всех ее точках. У двухъемкостных объектов процесс управления в значительной мере зависит от соотношения между емкостями на стороне потребления и подачи. Управление многоемкостными объектами затрудняется тем, что им присуще переходное запаздывание.
Рис. 57. Объекты с различными аккумулирующими свойствами: а — безъемкостный б — одноемкостный (Н соизмеримо с Д);
в — двухъемкостный (Яд соизмеримо с Дд; Н2 — с Дг); г—кривые запаздывания.
153
6.4. Самовыравнивание
В процессе работы в объекте возникает несоответствие между притоком и расходом рабочей среды (энергии), которое может быть ликвидировано двумя способами: без участия или под действием регулятора.
Если такое несоответствие стремится к нулю, а управляемая величина — к новому установившемуся значению без участия регулятора, то, значит, объект обладает самовыравниванием. Например, явление самовы-равнивания наблюдается в теплицах, когда температура воздуха внутри теплицы снижается из-за увеличения тепловых потерь через стены и крышу, но вместе с тем возрастает отдача тепла от почвы, обладающей большой аккумулирующей способностью. Наступает новое тепловое равновесие при пониженной температуре, и если она не выходит из заданных пределов, то действия регулятора не требуется.
Объекты без самовыравнивания характеризуются тем, что нарушенное в результате действия возмущения равновесие не восстанавливается. Такне объекты очень трудно поддаются управлению.
Самовыравнивание может быть положительным или отрицательным. В первом случае равновесие восстанавливается без участия регулятора, во втором возникшее нарушение стремится к нарастанию.
У разных объектов способность самовыравнивания различна, то есть при одних и тех же внешних воздействиях изменения управляемой величины могут оказаться неодинаковыми.
Количественно самовыравнивание объекта оценивается коэффициентом самовыравнивания, который равен отношению производной от приращения внешнего воздействия к производной от управляемой величины; таким образом
p = dAF/da
где AF= (Fj—F?)/Fn— приращение внешнего возды'гт вия в относительных единицах; с=у!уа — управляемая величина в относительных единицах; FH и уи— номинальные значения внешнею воздействия и управляемой величины.
Чем больше коэффициент р, тем легче осуществить процесс автоматического управления. Поскольку коэффициент самовыравнивания определяется как отношение внешнего воздействия к отклонению управляемой вели
154
чины, вызванному этим воздействием, это значит, чем больше коэффициент самовыравнивания, тем меньше отклонение управляемой величины при одинаковых внешних воздействиях и тем быстрее протекает процесс управления, а следовательно, тем он качественнее.
6.5. Запаздывание процесса
Большинству объектов в той или иной степени присуща инерционность, которая вызывает запаздывание во времени между изменениями управляющего воздействия, поступающего на объект, и соответствующими изменениями управляемой величины. Запаздывание свойственно не только объекту, но и другим элементам автоматических систем, в том числе и регулятору, и зависит от инерционности входящих в систему элементов. В зависимости от причин, обусловливающих запаздывание, различают переходное Тп и транспортное (передаточное) то запаздывание.
Переходное запаздывание появляется из-за сопротивления переходу вещества из одной емкости в другую или энергии из одного состояния в другое и всегда наблюдается в тех объектах, где имеются емкости, индуктивности, вращающиеся массы и т. и. Определяется оно как промежуток времени от момента возмущения до начала изменения управляемой величины в результате преодоления названных сопротивлений. Так, для подогревателя переходным запаздыванием будет время от момента изменения подачи теплоносителя до момента изменения температуры стенок подогревателя. Естественно, что переходное запаздывание отрицательно влияет на процесс управления.
Транспортное запаздывание присуще тем объектам, у которых между управляющим органом и выходом объекта имеются передаточные каналы (транспортеры, трубопроводы, теплопроводы и т. п.). Для прохождения такого канала требуется время, равное отношению длины канала к скорости движения вещества (энергии).
Процесс автоматического управления протекает более благоприятно при меньшем времени транспортного запаздывания. Заметим, что разным видам объектов присущи различные запаздывания.
Так, одноемкостные объекты обладают только передаточным запаздыванием, двухъемкостные и многоемко-
155
Рис. 58. Кривые разгона объектов:
а — графическое определение постоянной времени и времени регулирования: б — определение постоянных времени многоемкостных объектов; в — определение динамических свойств объекта.
стные — транспортным и переходным запаздыванием, а у безъемкостных запаздывания нет.
На рисунке 57, г графически изображено изменение управляемой величины у в объектах только с переходным (кривая 1) и переходным и транспортным (кривая 2) запаздываниями при изменении внешнего воздействия (нагрузки) на объект. Из приведенных кривых видно, что транспортное запаздывание оказывает существенное влияние на характер переходного процесса.
Запаздывание регулятора относится к переходному виду. Оно представляет собой время, необходимое для преодоления влияния зазоров, сил трения, индуктивностей, емкостей, задержек срабатывания реле, исполнительного механизма и т. п. Отрицательное действие запаздывания заключается в том, что перемещение управляющего органа не совпадает по времени с теми командными сигналами, которые формирует регулятор в процессе изменения управляемой величины. Особенно опасно влияние запаздывания, если объект не обладает свойствами самовыравнивания.
6.6. Время разгона и постоянная времени
Для сравнивания отдельных объектов по их свойствам в переходном режиме или, другими словами, для оценки динамических свойств объектов введено понятие полного времени разгона /р. Чтобы объяснить это понятие, проще всего рассмотреть кривую разгона, которая
156
иллюстрирует изменение управляемой величины объекта во времени. Такую кривую можно получить, если на вход объекта скачкообразно подать входную величину и записать изменения управляемой величины для различных моментов времени.
На рисунке 58, а изображена кривая разгона объекта, обладающего самовыравниванием. Здесь кривая у = —f(l) показывает изменение значения управляемой величины в процессе самовыравнивания при мгновенном изменении внешнего воздействия F(t). Время разгона определяет продолжительность переходного процесса от момента подачи внешнего воздействия до момента, при котором управляемая величина будет отличаться от установившегося значения не более чем на 1 % %), то есть составлять 99 % своего поминального значения. Для каждого объекта время разгона имеет свой физический смысл. Так, временем разгона объекта будет, например, время от подачи напряжения до достижения электродвигателем номинальной скорости вращения и равновесного состояния после его пуска или, скажем, время, необходимое, чтобы в нагревательном элементе установилась заданная температура после его подключения к сети и т. д.
Постоянная времени объекта — это время его разгона при отсутствии самовыравнивания. Значение постоянной времени Т объекта можно определить, если провести касательную к начальной точке кривой разгона. Отрезок, отсекаемый этой касательной на прямой, параллельной оси абсцисс, представляет постоянную времени Т.
Между временем /р разгона, постоянной времени Т, чувствительностью v и коэффициентом самовыравнивания р объекта существуют следующие зависимости
T=l/vp и /р=4,67’.
Чем больше постоянная времени Т, тем хуже объект поддается регулированию. На рисунке 58,б приведены кривые разгона объектов с различным числом емкостей. Значения постоянных времени различных объектов неодинаковы: для безъемкостного Т—0, для одноемкостного Т=Т\, двухъемкостного 7'=7’2, трехъемкостного Т— Т-. и т. д. (причем (Т} <7'2<7’3). Следовательно, чем больше емкость объекта, тем больше постоянная времени.
157
6.7. Определение основных свойств
Кривая разгона, характеризующая динамические свойства объекта, после соответствующей обработки и анализа позволяет определить (рис. 58) время запаздывания, коэффициент самовыравнивания, изменение управляемой величины, скорость этого изменения, постоянную времени объекта и время регулирования.
Время передаточного запаздывания т0 на кривой разгона представляется отрезком kl между моментами начала изменения внешнего воздействия F и начала изменения управляемой величины.
Время переходного запаздывания тп находят так: проводят линию аб, находят на кривой разгона точку О максимальной скорости изменения и проводят к ней касательную до пересечения с линией аб; отрезок 12 и характеризует переходное запаздывание.
Время полного запаздывания: т=то+тп.
Значение коэффициента самовыравнивания определяют как отношение воздействия F к вызванному им максимальному отклонению r/max управляемой величины: p = ^7j/max.
Зная значение коэффициента р самовыравнивания, находят коэффициент усиления объекта k0, который показывает, насколько изменится управляемая величина от изменения положения управляющего органа: /г0=1/р.
Чем больше коэффициент самовыравнивания, тем относительно меньше воздействие управляющего органа на скорость и значение изменения величины, то есть тем менее чувствителен объект к управляющим воздействиям и тем ниже коэффициент усиления.
Чтобы определить постоянную времени То объекта, проводят горизонтальную uq через новое установившееся значение управляемой величины, затем касательную до пересечения ее с линией uq в точке ж, потом через точку г вертикаль до точки м; отрезок мж в масштабе и соответствует постоянной времени объекта Тп, которая позволяет судить об общей продолжительности процесса самовыравнивания и характере изменения управляемой величины во времени. Так, для одноемкостного объекта по истечении времени с момента, когда заканчивается переходное запаздывание (объекты с запаздыванием), или с момента возникновения возмущения (объекты без запаздывания) управляемая величина дос
158
тигнет точки 0 и будет составлять 0,632 установившегося значения //тах- Через время 2Т0 //=0.865 //max, через ЗТ0 // = 0,956 //max, через 4Т0 // = 0,99 //max, то есть практически через 4,6 То процесс самовыравнивания закончится.
Скорость разгона е, или максимальную скорость изменения управляемой величины в процессе самовыравнивания определяют для одноемкостного объекта, проводя через точку I вертикаль до пересечения с касательной в точке л и линию, параллельную аб, через точку л; отрезок в и дает в масштабе скорость разгона.
Полученные данные, то есть значения т, р, То и е, позволяют судить о динамических свойствах объекта, на основании которых выбирают регулятор и определяют параметры настроечных элементов, обеспечивающих устойчивость и необходимые качественные показатели процесса управления. Параметры е и т чаще используют для оценки динамических свойств объекта без самовы-равннвания; параметры k0, То и т — для объекта с са-мовыравниванием. В общем же случае параметры k0, То и т пригодны для оценки объектов без самовыравнивания, и, наоборот, параметры е и т могут характеризовать объекты с самовыравниванием. У объектов без само-выравпивания коэффициент усиления &о=1, а время разгона /р—То. Для выбора настроечных параметров регулятора большую роль играет отношение х!Т0 или произведение ерт (т/Т=ерт).
Динамические свойства объекта очень часто определяют по частотно-фазовым или амплитудно-фазовым характеристикам, которые будут рассмотрены далее.
6.8. Автоматические регуляторы
Автоматическая система управления обеспечит заданный алгоритм функционирования, если регулятор выбран правильно и его параметры настроены на требуемый режим работы. Основная функция регулятора состоит в том, чтобы выявить отклонение управляемой величины от заданного значения, усилить это отклонение и преобразовать в перемещение исполнительного механизма или в управляющий сигнал управляющего органа объекта управления.
159
Промышленность выпускает регуляторы, которые можно классифицировать по следующим видам: управляемой величины, используемой энергии, конструктивному исполнению, принципу управления, алгоритму управления, управляющему воздействию на объект и закону управления. По виду управляемой величины различают регуляторы скорости, температуры, напряжения, освещенности, мощности, давления, уровня и др.
По виду используемой энергии различают регуляторы прямого (рис. 6, а) и непрямого (рис. 7, а) действия.
По конструктивному исполнению различают регуляторы приборные, аппаратные и агрегатные. Приборные регуляторы содержат измерительное устройство, которое одновременно выдает сигнал на измерительный прибор, регистрирующий значение контролируемой величины и сигнал управления. К ним относятся электронные потенциометры или автоматические мосты, измерительные логометры и т. п. В регуляторах аппаратного типа вырабатывается только управляющий сигнал. Основные узлы регуляторов — измерительный блок и электронное устройство, формирующее законы управления. Измерительный блок воспринимает сигналы от первичных приборов и задатчика, усиливает их и формирует унифицированный сигнал, подаваемый на вход электронного управляющего устройства. Электронное устройство включает электронный усилитель и устройство с релейным или аналоговым выходом при использовании отрицательных обратных связей.
Базовой конструкцией современных электронных устройств является регулирующий прибор Р-111, который используется в высокоточных регуляторах ВРТ и входит в состав электрической унифицированной системы приборов автоматического управления «Каскад» с некоторой модификацией под индексом Р-12. Для высокоточного управления тепловых процессов серийно выпускается регулятор ВРТ-2 с диапазоном управления температур 0... 1600°C и точностью управления ±0,5°C; в качестве измерительных и задающих элементов используют термопары ПР или ПП. Он состоит из измерительного блока (ИБ) типа 11-101 (102) и регулирующего прибора (РП) типа Р-111, выпускаемого в трех
160
модификациях. Аналоговый регулирующий прибор Р-111 включает модуль высокоомного усилителя, модуль источника питания, модуль станции управления, цепи функциональной обратной связи, входные и выходные цепи. В Р1Б компенсируется ЭДС термопары и усиливается сигнал разбаланса термопары и задатчика. Сигнал с выхода ИБ поступает на вход РП, который преобразует выходной сигнал в унифицированный сигнал постоянного тока 0... 5 mA и формирует закон управления (П, ПИ, ПД, ПИД). Сигнал с выхода РП воздействует на исполнительное устройство управления нагревом (тиристорные, магнитные и др.).
В регуляторах агрегатного типа преобразовательноусилительный блок сравнивает сигнал датчика и задатчика, формирует выходной сигнал. Сигналы этого блока унифицированы как на входе, так и на выходе. По такому принципу выполняют пневматические регуляторы.
По принципу управления регуляторы классифицируют в соответствии с принципами автоматического управления (1.3).
По алгоритму управления регуляторы классифицируют, так же как и автоматические системы (1.7), на статические, астатические, программные и следящие.
По управляющему воздействию на объект в соответствии с классификацией управляющих воздействий (рис. 13) различают регуляторы непрерывного, релейного и импульсного действия. По закону управления непрерывные регуляторы разделяют в соответствии с законами управления (1.8).
Интегральный регулятор реализует интегральный закон управления и характеризуется тем. что любому положению управляющего органа, то есть любой нагрузке, соответствует заданное значение управляемой величины. Если в автоматической системе с таким регулятором произойдет отклонение управляемой величины от заданного значения, управляющий орган будет перемещаться до тех пор, пока она не вернется к заданному значению. Подобные регуляторы могут быть с постоянной и переменной скоростью перемещения управляющего органа. Положительной особенностью является то, что управляющий орган может занимать любое положение в пределах своего хода при поддержании управляемой величины на заданном уровне. Основной недостаток этих регуляторов—замедленное действие. Ре
11 Заказ 5067 1 61
гулировочная характеристика автоматических систем с il-регулятором аналогична показанной на рисунке 7,6, поэтому такие регуляторы называют еще астатическими.
В пропорциональном регуляторе реализуется пропорциональный закон регулирования, в нем отклонение управляемой величины от заданного значения вызывает пропорциональное по значению и скорости перемещение управляющего органа. Эти регуляторы, называемые статическими, в своем действии они все время стремятся «догнать» отклонившуюся от заданного значения управляемую величину и остановить ее, то есть прекратить ее дальнейшее отклонение. Для такого регулятора диапазон управляемой величины, в пределах которого происходит перемещение управляющего органа из одного крайнего положения в другое, является пределом пропорциональности. Этот предел представляет собой величину, обратную чувствительности регулятора. Для получения заданного предела пропорциональности в П-регуляторах обязательно наличие жесткой обратной связи. Автоматические системы с П-регуляторамн имеют статическую характеристику, изображенную на рисунке 6, б. В их работе проявляется статическая ошибка регулирования.
Пропорционально-интегральный регулятор реализует закон управления ПИ и, как следует из его названия, совмещает в себе свойства интегрального и пропорционального регуляторов и поэтому действует без статической ошибки. Если в автоматической системе с ПИ-регулятором произойдет нарушение равновесия, то в работу вступят его статическая и астатическая составляющие. При этом статическая часть будет стремиться как бы догнать и остановить изменение управляемой величины при одновременно действующей астатической составляющей. По достижении управляемой величиной первоначального значения, пропорциональная составляющая прекратит свое влияние на управляющий орган, который займет положение, отличающееся от заданного на статическую ошибку. Действие астатической составляющей на управляющий орган будет продолжаться, и поэтому он займет такое положение, при котором статическая ошибка будет ликвидирована (равна нулю). В ПИ-регуляторах пропорциональную функцию выполняет жесткая обратная связь, а астатическую— гибкая обратная (изодромная) связь, которая
162
проявляется только в переходном режиме, а по его окончании исчезает.
У пропорционально-дифференциального и пропорционально-интегрально-дифференциального регуляторов, соответственно реализующих закон управления ПД и ПИД на перемещение управляющего органа дополнительно к пропорциональному или пропорционально-интегральному действию, оказывает влияние скорость изменения управляемой величины, которая представляет собой первую ее производную по времени. Поэтому такие регуляторы в своем названии имеют приставку «дифференциальный» (их иногда называют еще регуляторами по первой производной). Введение первой производной в закон управления вынуждает управляющий орган перемещаться с некоторым временным опережением, возрастающим по мере увеличения скорости изменения управляемой величины.
С уменьшением скорости изменения управляемой величины уменьшается и опережающее действие, а полностью оно прекращается, когда управляемая величина перестает изменяться.
Создание эффективно действующей автоматической системы управления требует выбора соответствующего регулятора и тщательной его настройки. Регулятор выбирают после того, как составлены требования к процессу управления, изучен объект и действующие на него внешние воздействия. В каждом конкретном случае стремятся выбрать самый простой по закону управления, наиболее дешевый и удобный в эксплуатации регулятор, который способен с учетом динамических свойств данного объекта обеспечить требуемое качество управления. Вместе с тем можно дать следующие, сугубо общие рекомендации по применению рассмотренных регуляторов.
Импульсные регуляторы подходят для объектов без большого запаздывания, обладающих средней емкостью при постоянной или мало и плавно меняющейся нагруз-т
ке, когда выполняется условие -->0,5 ... 1,0.
То ’
Двухпозиционные регуляторы можно рекомендовать для объектов без значительного запаздывания, имеющих большую емкость, при постоянной или мало меняющей-т
ся нагрузке, с учетом следующего условия: о<;-<0,2.
То
!!♦
1СЗ
Управление двух- и многоемкостными объектами может вестись двухпозиционными регуляторами только тогда, когда не требуется высокая точность поддержания управляемой величины.
П-регуляторы рекомендуют для объектов с небольшим запаздыванием и незначительными изменениями нагрузки. Обычно их применяют на одноемкостных, реже— на двухъемкостных объектах и надежно обеспечивают управление объектом с самовыравниванием, если
Мо> (4--^
и объекта без самовыравнивания, когда
т 1
1 >57 kp—тг, /о О
где — коэффициент усиления объекта; kv — коэффициент усиления регулятора; 6 — относительная статическая ошибка управления; То-—постоянная времени объекта.
И-регуляторы применимы в тех случаях, когда допускается большое время регулирования. Их нельзя использовать на объектах без самовыравнивания и с запаздыванием, так как процесс управления может быть неустойчивым. Если И-регулятор должен обеспечивать работу объекта при непрерывно изменяющемся внешнем воздействии, то для устойчивого действия такой системы необходимо, чтобы максимальная скорость управляющего воздействия была больше скорости изменения внешнего воздействия.
ПИ-регуляторы применяются практически при любых требованиях к значению ошибки и при сколь угодно широком диапазоне изменения внешнего воздействия, если допустимое время регулирования превышает 6т, то есть Zp>6t. Эти регуляторы получили наибольшее распространение.
ПД-регуляторы можно рекомендовать для объектов с большим временем запаздывания, незначительными изменениями воздействий и со средней емкостью.
ПИД-регуляторы пригодны для объектов с большими запаздываниями, значительными и резкими изменениями внешних воздействий и с любой емкостью, когда выполняется условие!->1
При использовании И-, ПИ- и ПИД-регуляторов в условиях неустановившихся внешних воздействий, кото
164
рые изменяются с постоянной скоростью, необходимо, чтобы максимальная скорость исполнительного механизма регулятора была больше скорости изменения внешнего воздействия, иначе отклонение управляемой величины будет накапливаться (поскольку компенсация внешнего воздействия происходит медленнее, чем его изменение) и может стать недопустимо большим.
Контрольные вопросы и задания. I. Что такое объект управления? 2. Расскажите об основных свойствах объектов управления. 3. Как можно определить основные свойства объектов управления? 4. Какие вы знаете регуляторы? 5. Изложите общие рекомендации по выбору регуляторов различных типов.
ГЛАВА VII
ОСНОВЫ ТЕОРИИ АВТОМАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ
7.1. Общие понятия о работе автоматических систем
Процесс автоматического управления характеризуется изменением управляемой величины у во времени, то есть функцией y(t).
Допустим, автоматический регулятор работает на поддержание постоянного значения управляемой величины уо. При отсутствии внешних воздействий, или в так называемом идеальном случае, функция #(/)== Уо- В действительности же в систему все время поступают внешние воздействия, которые приводят к тому, что график процесса управления y(t) отличается от идеального. На регулятор возлагается задача удерживать управляемую величину y(t) вблизи установленного значения у0.
Технологическим процессом определяются пределы, за которые не должны выходить некоторые отклонения фактического значения управляемой величины. Кривая процесса управления наглядно отражает, насколько хорошо данная автоматическая система справляется со своей задачей. Регулятор выбирают так, чтобы он удовлетворял технологическим требованиям данного объекта. От соотношения между параметрами регулятора и параметрами объекта в основном зависит близость кривой процесса управления y(t) к заданной у0.
Однако правильного выбора схемы регулятора в соответствии с общими принципами управления недостаточно. В системе могут быть не только потребители энергии, но и се источники. Без учета этого может получиться, что регулятор не будет стабилизировать (успокаивать) систему, а, наоборот, раскачивать ее за счет внешних воздействий. Кривая такого процесса начнет удаляться от заданного значения. Поэтому правильность выбора регулятора обычно подтверждают расчетными,
1С6
а если необходимо, экспериментальными данными с целью выяснения наилучших его параметров. Причем эти данные получают не только для статических (установившихся) режимов работы системы, но и для динамических (переходных) процессов.
При изучении динамических свойств системы все входящие в нее элементы рассматривают с точки зрения их динамических качеств. Такое представление элементов приводит к понятию динамического звена (или просто звена), к которому относят часть системы, описываемую тем или иным уравнением. Переходные процессы автоматических систем в целом или в отдельных ее звеньях описывают линейными или нелинейными дифференциальными уравнениями, причем общее уравнение системы составляют из уравнений отдельных звеньев.
Работу системы можно описать словесно—пояснить принцип действия конкретной системы и отдельных элементов, что необходимо при ее анализе и синтезе.
Однако количественной оценки качества работы системы словесное описание не дает. Поэтому для получения возможности оценивать и сравнивать различные по назначению и принципам действия системы применяют математическое описание как отдельных элементов, так и системы в целом, которое называют математической моделью. Заметим, что модели отражают наиболее существенные свойства оригинала. Малосущественные факторы, оказывающие незначительное влияние на какое-либо конкретное исследование, как правило, во внимание не принимают. Поэтому один и тот же объект в разных исследованиях можно представлять разными моделями.
В теории автоматического управления применяют три основных способа описания: поэлементный, а для системы в целом в управляемых переменных и в переменных состояния. При поэлементном описании на основании изучения физических свойств сигнала получают уравнения для отдельных входящих в систему конструктивных или функциональных элементов и для связей, объединяющих эти элементы в систему. В левые части уравнений включают физические выходные переменные элементов или их производные по времени, в правые части— физические входные переменные — воздействия на элементы. Отдельные переменные будут входными для
167
одного элемента и выходными для другого. Число переменных при таком описании может быть больше, чем число управляемых переменных, так как оно включает «промежуточные» переменные.
Такие описания позволяют исследовать влияние каждого элемента системы в отдельности и по ним судить о работе системы. Математическое описание всей системы получают, исключая все неинтересующие промежуточные переменные, и в уравнениях остаются только управляемые величины и их производные, записываемые в левой части уравнений, и возмущающие и управляющие воздействия на систему в правой части. Описание всей системы позволяет оценить работу в целом, не анализируя работу каждого элемента в отдельности.
В современных исследованиях наряду с двумя способами для оценки динамического состояния системы используют не только декартовы координаты, когда динамические свойства системы изображаются на плоскости, но все шире поведение системы в динамике изображают в пространстве, используя понятие переменных состояния и пространства состояния.
Переменными состояния системы в динамике принимают такие переменные, которые позволяют математически точно описать состояние системы в динамике.
7.2. Составление дифференциальных уравнений
Составление дифференциальных уравнений рассмотрим на примере составления уравнения генератора постоянного тока.
За управляемую величину для генератора примем напряжение на зажимах якоря, управляющим воздействием будет напряжение, подводимое к обмотке возбуждения. За нагрузку-возмущение примем ток якоря или же параметры (сопротивление, индуктивность) нагрузки.
Будем считать, что скорость генератора постоянная, температура обмоток неизменна, гистерезис отсутствует, реакция якоря скомпенсирована, индуктивность якоря и нагрузки малы и ими можно пренебречь. С учетом сказанного уравнение якорной цепи генератора запишется
е= U + iaRa, где е—ЭДС генератора; U — управляемое напряжение; Rn — сопротивление обмотки якоря; 1Я— ток нагрузки.
168
В отклонениях
Де — Д U 4* RnMp..
ЭДС генератора является нелинейной функцией тока возбуждения (рис. 59), поэтому произведем линеаризацию характеристики холостого хода генератора методом касательной. Приняв за рабочую точку А, где 1в=1Ео, получим
Д<?= (de/dz's) оД' в, где (de/diu)0==tgP.
Рис. 59. Характеристика холостого хода генератора.
Будем считать, что ЭДС пропорциональна магнитному потоку Ф обмотки возбуждения, тогда
е=сФ,
где с — постоянная, зависящая от конструкции генератора и скорости вращения.
В отклонениях
\е = с\Ф.
Цепь возбуждения
,, . _ d0
U = IeRb + w —— ,
dr
где —сопротивление обмотки возбуждения; Ф— ее магнитный поток; w — число витков.
В отклонениях
б(ДФ)
Ли = RB ДгР, + w-----—--
Qt
Получаем, что генератор постоянного тока описывается системой из четырех уравнений. После исключения промежуточных переменных ДФ, Д/в, Де и группировки членов получим одно дифференциальное уравнение в отклонениях, описывающее процессы в генераторе
w d(Au)
V d7~
Дн =
J69
D D
d (Ды) “d?~
(17)
Уравнение (17) очень громоздко, переменные в нем имеют размерности напряжения, тока. Пользоваться таким уравнением неудобно, поэтому применяют безразмерную форму записи, в которой все переменные величины, входящие в уравнение, кроме времени, безразмерные.
Для перехода к такой форме нужно разделить и умножить каждое слагаемое уравнения на постоянную величину, имеющую размерность той переменной, которая входит в это слагаемое. Такой величиной обычно считают номинальное установившееся значение переменной. В безразмерной форме уравнение (17) запишется
wUa du.
сЬ'яв
/ de \ ‘я* с '~~йГi ' ' dt, - °
(18)
где и.=и11]я-, ix.—inlla—безразмерные величины.
Уравнение (18) приводят к стандартной форме записи, когда коэффициент при низшей производной равен единице. Для получения стандартной формы разделим левую и правую части уравнения (18) на коэффициент
~-------1
de
dir.
Пн
при низшей производной
о
где
_ dw* . . d/я*
Tl ~dT + U* = ~ kln* ~ ’
W I
RrIh
(19)
Уравнение (19) позволяет определить характер процессов в генераторе и установить влияние всех параметров на его напряжение.
170
Наряду со стандартной формой записи применяют операторную. Опа ничем нс отличается от обычной, но более компактная.
Если обозначить физические величины, входящие в стандартное уравнение типа (19), то есть м*. tH* и т. и. через Xi, х2, х3... и ввести символы операторов дифференцирования
d d2 d3
~dT=P’ ~dP=^ -d^=P3: •
то дифференциальное уравнение элемента или системы вида
d^x dx df
+ + /W, (20)
в операторной форме запишется
(aip3+a2p2+alp + a0)x(t) = (blp + b0)f(l). (21)
Операторное уравнение (21) является дифференциальным уравнением, в нем буква р обозначает оператор дифференцирования, а переменные x(t) и f(t) являются реальными функциями времени.
7.3 Преобразование Лапласа
При исследовании и расчетах автоматических систем часто обращаются к математическому методу, который получил название преобразование Лапласа. Этот метод позволяет функцию x(t) одного переменного (обычно времени I) преобразовать в функцию х(р) другого переменного (как правило, р) посредством соотношения
со
Х(р) = J 0
где p=a-Pjb — произвольная комплексная величина; а и b — вещественные переменные.
Функция x(t) называется оригиналом, а х(р) — изображением. Сокращенно преобразование Лапласа записывается так
х(р)=А[х(/)].
Преобразование Лапласа дает возможность выполнить алгебранзацию дифференциальных уравнений, то есть операции дифференцирования и интегрирования за-
171
менить алгебраическими операциями умножения и деления. При этом первая производная от х будет иметь изображение рх(р), вторая — р2х(р), третья — р3х(р), производною n-го порядка выражают как произведение оператора р в n-ной степени на изображение х(р)
А
(t) dtn
= рпх(р).
Интеграл от х заменяют дробью, в числителе которой изображение х(р), а в знаменателе р
г *(Р)
Д[ х(/)d/] =--------•
Если применить преобразование Лапласа к дифференциальному уравнению (20), то при нулевых начальных условиях оно запишется так .
(a3p3+a2pz+aip+a0)x(p) = (bip+b0\f(p\. (22)
Такая форма записи дифференциального уравнения называется операционной. Под нулевыми начальными условиями понимают такие, когда выходные величины звеньев, из которых состоит система управления, в начальный момент имеют нулевые значения, если они описываются уравнениями первого порядка, дополнительно имеют нулевые значения первых производных, если они описываются уравнениями второго порядка, и т. д. Уравнения одного и того же элемента или системы, записанные в операторной (21) и операционной (22) форме внешне одинаковы, но они принципиально отличаются одно от другого. Уравнение (21) —дифференциальное, в нем р — оператор дифференцирования, a x(t) и /СО—реальные функции времени. Уравнение (22) алгебраическое, в нем р — независимая комплексная переменная, а х(р) и f(p)—изображения физических величин х(1) и f(t).
Операционную форму записи уравнений применяют в теории автоматического управления, так как она проста и удобна. При нулевых начальных условиях формальный переход от операторной к операционной форме осуществляется заменой переменных как функций времени t обозначениями этих переменных как функций комплексной переменной р.
172
Наряду с преобразованием Лапласа широко применяют преобразование Карсона — Лапласа
оо
х(р)=р £x(/)e-p'd/.
О
Для перехода от изображения переменной по Лапласу к ее изображению по Карсону — Лапласу необходимо умножить его на р. Оригинал по изображению находят с помощью таблиц оригиналов и их изображений или применяя обратное преобразование Лапласа. Для функций, часто встречающихся в задачах управления, таблицы дают в справочниках. В качестве примера приведем некоторые оригиналы и их изображения:
w р р
sino)/=-----; cosco/=--------; e~at=------•
p2+w Р2+ш2 p+a
Уравнение генератора в операционной форме после обозначения напряжения и* и тока нагрузки zH* соответственно через х и f и применения преобразования Карсона— Лапласа запишется
(Tip + \)x(p) = -(T2p+kl)f(p).
Дифференциальные уравнения автоматических систем составляются на основании уравнений отдельных звеньев (элементов) по отношению к управляемой величине путем последовательного исключения всех промежуточных переменных. В общем виде такое уравнение может быть записано следующим образом:
d'1# dw~*</ du
а°--77-bOj——-—F . . . +on-l—~+апУ —
dZn dzn-1 d/
dmx d"1-1* dx
— bo———F^i— -------+ ... +fe»i-i—~г+^1иХ, (23)
dZm d/™-1 dZ
где во, Oi, 02,.... и b0, b2,..— постоянные коэффициенты, в
которые сходят постоянные времени, передаточные коэффициенты и другие неизменные величины, стоящие при членах производных левой и правой частей дифференциального уравнения.
Операционное уравнение системы в общем виде с учетом уравнения (23) будет иметь вид
(nop" + aiP’1-1+ .. . +ап-1Р+ап)У(р) =
= (bcpr'\+bip^~l+ ... +bm-1p + bm)x(p) . (21)
173
7.4. Статические свойства
Статические свойства систем оценивают по статической характеристике. Статической характеристикой (рис. 56) системы или звена называют зависимость управляемой величины у от входной величины х. Если эта зависимость выражается линейной функцией (прямая 1), то система будет линейной и y—kx.
При нелинейной зависимости (кривая 2) систему считают нелинейной.
Передаточный коэффициент (Л) является основным параметром, характеризующим работу системы или звена в установившемся режиме. Значение передаточного коэффициента определяется из статической характеристики 1 как отношение приращений Дг/ и Дх выходной и входной величин: k=txylbx.
Звенья, входящие в систему, могут быть соединены последовательно или параллельно.
При последовательном соединении общий передаточный коэффициент k системы равен произведению передаточных коэффициентов k\, k2, ...,kn ее отдельных звеньев: k=ki-k2-k3,..., kn.
При параллельном соединении звеньев общий передаточный коэффициент равен сумме передаточных коэффициентов отдельных звеньев: k=ki+k2+k3-[-...-{-kn.
Для нелинейной системы передаточный коэффициент определяют так же, как и передаточный коэффициент нелинейного объекта (рис. 56).
Важным качественным показателем работы системы в статическом режиме является статическая ошибка.
Различают статическую ошибку для разомкнутой и замкнутой автоматических систем. Если в разомкнутой системе относительная статическая ошибка равна б, то в соответствующей замкнутой статической системе с передаточным коэффициентом k3 при том же внешнем воздействии статическая ошибка у уменьшится в раз, то есть
<5
Y= l'+V
Когда в систему входит звено, охваченное местной обратной связью, значение передаточного коэффициента k3 этого звена рассчитывают по уравнению
kj>
3 Izfc^p^O.C
174
где kp — передаточный коэффициент звена; ko.c — передаточный коэффициент местной обратной связи.
В формуле знак плюс (+) относится к отрицательной обратной связи, а знак минус (—) к ^положительной. Формула показывает, что при охвате звена отрицательной обратной связью передаточный коэффициент уменьшается (£3<Лр), а при положительной — увеличивается (&з>£р). Эффективность автоматической системы в установившемся режиме оценивается степенью точности — отношением статической ошибки Дхн неавтоматизированного объекта управления (без регулятора) к статической ошибке Дх автоматической системы Y=—- (рис. 60). Чем выше степень точности, тем Л Дх
эффективнее работает система.
Для астатической системы значение статической ошибки и коэффициент статизма равны нулю, а степень точности — бесконечности.
Статические характеристики отдельных звеньев и системы в целом можно снять экспериментально или рассчитать.
При экспериментальном определении статической характеристики входной величине звена или системы придают поочередно различные значения и каждый раз по истечении времени, необходимого для затухания переходного процесса, фиксируют значение выходной величины. Соединив полученный ряд точек плавной линией, строят статическую характеристику звена или системы (рис. 61, а). Если выходная величина у зависит не только от вход-
Рис. 61. Построение опытных статических характеристик: а — статическая характеристика звена; б — семейство статических характеристик.
Рис. 60. К определению степени точности статической системы в установившемся режиме: / и 2 — статические характеристики неавтоматизированного объекта управления и автоматической системы.
175
ной х, но и от некоторой величины /г, то получают семейство статических характеристик (рис. 61,6). По статическим характеристикам для каждого значения входной величины х можно найти соответствующее значение выходной величины у.
При аналитическом определении статической характеристики системы составляют уравнения, описывающие работу каждого элемента в установившемся режиме. Затем путем последовательных преобразований приходят к выражению, которое отражает зависимость регулируемой величины у от задающего воздействия х, то есть находят математическое выражение статической характеристики системы. Аналитический метод расчета позволяет получить зависимость любого параметра системы в виде аналитической функции других параметров; определить выражения статических характеристик, которые наглядно показывают влияние на процесс любого параметра системы; выявить общие закономерности данного процесса управления, не прибегая к подстановке в полученные уравнения конкретных значений параметров и исходных данных. Аналитический способ расчета статических характеристик применим только для линейных и линеаризованных систем.
При графоаналитическом способе, пригодном для анализа линейных и нелинейных систем, статические характеристики отдельных элементов представляют в виде графиков, которые строят на основании аналитических выражений, записанных для отдельных элементов. Затем в основном графически исключают промежуточные зависимые переменные. Характеристики элементов, охваченных обратными связями, также находят графическим построением.
7.5. Динамические свойства
Оценку динамических свойств автоматических систем, то есть поведения их в переходных режимах, выполняют различными методами. Для этой цели применяют дифференциальные уравнения, передаточные функции, временные и частотные характеристики.
Решение дифференциального уравнения, которым описывается система, представляет собой реакцию
176
* t
Рис. 62. Типовые внешние воздействия:
а — ступенчатое; б — гармоническое.
системы на входное воздействие (возмущение). Так как входные воздействия по своему характеру и величине могут быть разными, то и решение одного и того же уравнения будет различным. Чтобы можно было однозначно оценивать поведение системы в переходном режиме, входное воздействие должно быть простым, не затрудняющим решение уравнения и соответствовать самому тяжелому режиму работы системы из числа встречающихся при ее эксплуатации.
Таким входным воздействием является единичная ступенчатая функция (рис. 62, а). Единичная ступенчатая функция или типовое воздействие представляет собой
мгновенное (скачкообразное) включение или отключение входного сигнала. Она обозначается символом 1 (/) и записывается при включении
./М= I 0 при «О
' ' [1 при
при отключении
1 ПРИ *<0
1 | 0 при t^O.
Наряду с единичной ступенчатой функцией применяют единичную импульсную функцию, когда входной сигнал подается в виде импульса, подробнее с ней можно ознакомиться в специальной литературе.
Уравнение переходного процесса, то есть реакцию системы на типовое единичное воздействие, изображенное в графической форме, называют временной или разгонной характеристикой. Она представляет собой решение дифференциального уравнения движения системы или элемента для единичного входного воздействия при нулевых начальных условиях.
Динамические свойства систем можно также оценивать по передаточным функциям, которые получают
12 Заказ 5067
177
(25)
с опе-
(26)
из операционных уравнений. Передаточная функция элемента или системы представляет отношение Лапласова изображения соответствующей выходной величины к Лапласову изображению входной величины при нулевых начальных условиях, то есть при условии, что элемент или система находились в состоянии покоя при i<0. В соответствии с определением передаточная функция записывается
<(,>} л[х (I)]
В общем виде передаточная функция системы рационным уравнением (24) равна
у(р) Ьорт+Ь!р’"-'+ ... +bm-ip+bm
х(р) aapn-\-aipn-l+ ... +«n-iP4-0n
Заметим, что знаменатель выражения (26) является левой частью характеристического уравнения системы, причем по условию физической осуществимости системы всегда должно выполняться соотношение т^п. Наряду с передаточными функциями динамику систем оценивают по частотным характеристикам, которые отражают зависимость амплитуды и фазы от частоты синусоидальных колебаний при прохождении их через звено или систему. Для получения частотных характеристик на вход системы или звено подают типовое воздействие в виде периодически изменяющегося входного сигнала (рис. 62, б). На выходе появится сигнал той же частоты, но с другой амплитудой и фазой, которые зависят от частоты входного сигнала. Подавая на вход системы или звена гармонические воздействия постоянной амплитуды и разной частоты, на выходе установятся синусоидальные колебания с другой амплитудой и сдвинутые по фазе на угол ср, г/=712sin(со/ — <р). По полученным значениям х и у для различных частот со получают частотные характеристики: амплитудную, фазовую и амплитудно-фазовую.
Амплитудная частотная характеристика (АЧХ) есть зависимость отношения амплитуды А2((о,) колебаний гармонического воздействия на выходе к амплитуде A) (cot) колебаний на его входе от частоты колебаний со.
178
Л2 (сос)
Фазовая частотная характеристика (ФЧХ) отражает зависимость разности фаз между входными и выходными колебаниями от частоты колебаний
<Р (СО;) — фвх(сОг) фвых (<J)i) .
Задавая различные частоты входному гармоническому воздействию, получают в результате серию точек, по которым строят частотные характеристики А(со) = =f (со) И <p(co)=f(co).
Амплитудно-фазовую частотную характеристику (АФЧХ) строят по амплитудной и фазовой характеристикам. С этой целью на графике ФЧХ для определенной частоты со находят значение фазы ср (со), откладывают его в виде угла от горизонтальной оси (по часовой стрелке, если угол отрицательный, и против часовой стрелки, если угол положительный). На прямой, проведенной под этим углом, откладывают значения амплитуды К(ы), взятые с графика АЧХ при той же частоте, и получают точку характеристики для частоты со. Затем аналогичным образом находят точки для других частот, соединив которые получают кривую АФЧХ. Таков путь экспериментального определения частотных характеристик.
Если в выражение передаточной функции звена или разомкнутой системы подставить p—ju), то получим выражение АФЧХ или частотной функции, представленное на комплексной плоскости как геометрическая сумма вещественной Р(ы) и мнимой /Q(co )частей
1^(/со)=Р(со)+/Q(co)- (27)
Амплитудная частотная характеристика определяется как
К (со) = УР2 (со) + <Э2(со), (28)
а фазовая
Q (со)
<p(co)=arctg-^-y (29)
Подставляя в формулы (27)... (29) значения со от О до оо, строят амплитудную, фазовую и амплитудно-фазовую частотные характеристики отдельных звеньев и системы в целом.
12»
179
7.6. Типовые динамические звенья
При изучении автоматических систем наряду с классификацией элементов по функциональным признакам широко применяют классификацию элементов по их динамическим свойствам. Это позволяет все многообразие физических устройств, из которых состоят автоматические системы, представить сравнительно небольшим числом типовых динамических звеньев, понимая под динамическим звеном, или просто звеном, часть автоматической системы, которая имеет определенные динамические свойства. При этом необязательно, чтобы каждый элемент системы соответствовал только одному звену. Одному элементу с высоким порядком уравнения динамики может соответствовать несколько звеньев или, наоборот, одно звено — нескольким элементам с низким порядком уравнения динамики.
Типовые звенья подразделяют на усилительные, безынерционные, апериодические, дифференцирующие, 'интегрирующие, колебательные и запаздывающие. В основу такой классификации положена реакция звеньев — изменение выходной величины на строго заданное значение входной (типовое воздействие).
В усилительном безынерционном (пропорциональном) звене (рис. 63) выходная величина у в любой момент времени прямо пропорциональна входной величине х. Уравнение такого звена
1/=йх, (30)
где k — передаточный коэффициент звена.
Уравнение динамики этого звена совпадает с его статическим уравнением. Временная характеристика звена, получаемая подачей па его вход единичного воздействия х— 1 (/) (рис. 63, б), показана на рисунке 63, в.
Передаточная функция звена (рис. 63, а)
у(Р)
W(p)=-^=k. (31)
Частотная функция или АФЧХ безынерционного звена Ц7(/со)=& (рис. 63, е) представляет собой точку, расположенную от начала координат на расстоянии k по вещественной оси P(w). Из уравнения (30) видно, что
160
Рис. 63. Безынерционное звено:
а — условное изображение; б — входное воздействие;
6 — временная характеристика; г — амплитудная ха* рактеристика; д — фазовая характеристика: е — амплитудно-фазо-частотная характеристика.
У(Р>
х(Р)
f ft)
t
о 6
К(ы)_______
О г
JQ'u)
Wfja) Р^)
е
при входном сигнале х=АВх51пю£ выходной сигнал равен
i/ = /lUbTxSinO)/.
Следовательно, в безынерционном звене выходной и входной сигналы находятся в фазе (рис. 63, г)
<р(со) =0, (3'2)
а амплитуда выходного сигнала (рис. 63, д) в k раз отличается от амплитуды входного
Л'(“)=^- (33)
Из (32) и (33) видно, что частотные характеристики безынерционного звена не зависят от частоты. Примерами безынерционного звена могут служить электронные усилители постоянного тока, редукторы, различного рода рычаги без трения и зазоров, потенциометрические датчики и т. п.
Апериодическое звено может быть первого и второго порядка, причем в последнем случае его можно представить как последовательное соединение двух апериодических звеньев первого порядка. В апериодических звеньях первого порядка выходная величина при подаче на вход сигнала в виде единичной функции изменяется по экспоненциальному закону (апериодически), достигая нового установившегося значения. Часто такое звено называют инерционным, одноемкостным или статическим.
Апериодическое звено первого порядка описывается дифференциал ьным уравнением
T-^~-+y = kx, (34)
где k — коэффициент передачи; Т — постоянная времени,
181'
Передаточная функция k
АФЧХ апериодического звена k
U7 (/со) = •
' Т/ы+1
(351
(36).
Амплитудную и фазовую характеристики можно получить, решив уравнение (34). Однако их легче найти, не решая уравнения, а используя АФЧХ.
В выражении (36) выделим действительную и мнимую части, для чего знаменатель уравнения умножим па сопряженное число и после преобразований найдем вещественную
k
Р (ы) = (37).
и мнимую
kwT
Q(w) =----(38)
частотные характеристики.
Используя (37) и (38), определим амплитудную
К (ы) = V>2((0)+Q2((0)=------- (39)
fl+TAo2
и фазовую
0(<и)
<р(со) = arctg—-——= — arctgcoT. (40)
Из анализа уравнения (39) следует, что апериодическое звено обладает свойствами фильтра, то есть хорошо пропускает сигналы малой частоты и плохо — большой, поэтому /С(со) с ростом частоты убывает (рис. 64, в), убывает и амплитуда выходного сигнала.
Фазовая частотная характеристика (40) показывает, что выходные сигналы отстают по фазе от входных. Величина отставания находится в пределах 0°...—90°. Частота <ои=1/7’=—45° называется частотой излома. Постоянная времени Т характеризует меру инерционности звена. Переходный процесс заканчивается практически за время 7= (4... 5)Г. Чем меньше 7’, тем ближе апериодическое звено по своим динамическим свойствам к безынерционному.
182
Рис. 64. Апериодическое звено первого порядка:
а — условное обозначение; б— временная характеристика; в—амплитуд чая характеристика; г — фазовая характеристика; д — амплитудно-фазовая характеристика; е — пример звена.
На рисунке 64 показаны условное обозначение и характеристики апериодического звена 1-го порядка. К такому звену можно отнести обмотки возбуждения электрических машин, обмотки управления магнитных усилителей и ряд других устройств.
Апериодическое звено второго порядка описывается дифференциальным уравнением
, d2# djz
Г2~^+Г1—+^=^х. (41)
При Ti^2T2 потери энергии в звене очень велики и колебания в нем не возникают. Такое звено может быть представлено как два последовательно включенных апериодических звена первого порядка, описываемых уравнением (34).
Передаточная функция звена
k
’ T2^+TlP+i
(42)
183
Рис. 65. Апериодическое звено второго порядка: а — условное обозначение; б — временная характеристика; в—амплитудно-фазовая .характеристика.
Амплитудно-фазовая частотная характеристика k
W7(/со) = , т 2 „ • (43)
1—Т22ы2+Туы ' '
Амплитудная характеристика k
К (W) ------- (44);
У(1-со2Т22)2+ш2Г12
Фазовая характеристика (1)Г1
<Р (“) = - arctg-fZ^7V • (45)
Условное обозначение, временная и амплитудно-фазовая, частотная характеристики показаны на рисунке 65.
К апериодическому звену второго порядка относятся нагревательные установки, теплицы, сушильные агрегаты, животноводческие помещения и т. п.
У дифференцирующего звена выходная величина, пропорциональная производной по времени от входной величины, другими словами, выходная величина про- ' порциональна скорости изменения входной. Различают идеальное и реальное дифференцирующие звенья. ’
Уравнение идеального дифференцирующего звена dx
У = < (46)
184
Передаточная функция
W(p)=kp. (47)
Частотные характеристики: амплитудно-фазовая, амплитудная и фазовая
ITf/w) =kj(n ; A(oj)=A’gj; <р(<о)=-‘ (48)
Уравнение реального дифференцирующего звена йу dx
Т—T7+y = kT-~r~- (49)
Передаточная функция
kT р w^=J7+i' (50)
Частотные характеристики: амплитудно-фазовая, амплитудная и фазовая:
kT jto т ы
(/“) =,1/Г-т^г' ’ <f(«) = arctg7'co. (51)
Т/ю +1 У1+7Ао2
Условное обозначение, временная и частотные характеристики идеального звена показаны на рисунке 66. Такое звено можно представить в виде схемы (рис. 66, е) с выходным сопротивлением, равным нулю. При скачкообразном изменении входной величины на выходе звена образуется мгновенный выходной импульс, теоретически имеющий бесконечно большую амплитуду.
Временная и АФЧХ реального звена показаны на рисунке 66, ж, з. Такое звено можно представить в виде четырехполюсника, содержащего элементы R и С (рис. 66, и). Практически создать идеальное звено, удовлетворяющее уравнению (46), невозможно. Из уравнения (49) видно, что чем меньше Т и больше К, тем ближе реальное дифференцирующее звено к идеальному. Чем больше Т, тем ближе реальное дифференцирующее звено к усилительному, а при Т=оооно превращается в усилительное. Значение постоянной времени Т можно определить методом касательной или как Т—RC.
185
В интегрирующем звене выходная величина пропорциональна интегралу по времени от величины, подаваемой на вход. Оно описывается уравнением
t
(52)
Рис. 66. Дифференцирующее звено: а — условное обозначение идеального звена; б — временная характеристика идеального звена; в — амплитудная характеристика; г — фазовая характеристика; д — амплнтудно-фазовая
характеристика; е — пример идеального звена; ж — временная характеристика реального звена; з — амплитудно-фазовая характеристика; и — пример реального звена.
18G
Если продифференцировать левую и правую части выражения (52), то
-^-=М0- (53)
Из уравнения (53) видно, что скорость изменения выходной величины интегрирующего звена пропорциональна входной величине. Передаточный коэффициент k численно равен скорости изменения выходной величины при единичном значении входной величины. Если входная и выходная величины измеряются в одинаковых единицах, то единица измерения передаточного коэффициента с~*. В таких случаях применяют не передаточный коэффициент, а постоянную времени интегрирующего звена T=l/k. Тогда уравнение (53) примет вид
T-—-=X(t). (54)
С1Г
Передаточная функция
W)=“ (55)
Частотные характеристики: амплитудно-фазовая, амплитудная и фазовая
4>(ю) = -^- (56)
Условное обозначение, временная и частотные характеристики интегрирующего звена показаны на рисунке 67. Как видно из рисунка 67,6 и уравнения (53), при подаче на вход звена постоянного воздействия на его выходе получается величина, возрастающая линейно с течением времени. Характерным свойством этого звена является то, что оно способно «запоминать», то есть удерживать то значение выходной величины, которое оно имело в момент исчезновения входного воздействия. Примером такого звена может служить, если пренебречь электромагнитной и электромеханической постоянными времени, электродвигатель постоянного тока, идеализированный интегрирующий контур с емкостью (рис. 67, е). Амплитудная характеристика звена с ростом частоты w убывает, поэтому убывает и амплитуда выходной величины. Звено вносит отрицательный сдвиг фаз, равный 90°, не зависящий от частоты.
187
У
cj -JfiM д
Рис. 67. Интегрирующее звено:
а — условное обозначение; б — временная характеристика; в — амплитудная характеристика; г — фазовая характеристика; д — амплитудно-фазовая характеристика; е — пример звена.
Колебательным звеном считают такое, у которого при подаче единичного воздействия на вход выходная величина достигает установившегося значения, совершая гармонические колебания.
Дифференциальное уравнение такого звена d2y dy
T2~^+m~+y=kx’ <57>
где g—коэффициент затухания; Т — постоянная времени.
Примером колебательного звена служит электрическая цепь (рис. 68, е). При наличии на входе напряжения Пвх емкость С накапливает энергию электрического поля (потенциальная энергия), а индуктивность L — энергию электромагнитного поля (кинетическая энергия). Поэтому колебательное звено можно рассматривать как два последовательно соединенных элемента способных накапливать различные виды энергии, в одном потенциальную, в другом кинетичес
188
кую. При обмене энергиями, в канале, по которому происходит взаимный обмен, происходят безвозвратные потери (для электрической цепи в сопротивлении /?). Мерой этих потерь является коэффициент затухания g, чем больше g, тем больше потери энергии. Если 1>£>0, то переходный процесс будет колебательным затухающим, и чем больше £, тем быстрее затухнут колебания. Такое звено называют устойчивым. Постоянная времени колебательного звена определяется через его резонансную частоту соо, 7’=1/со0, и она в 2л раз меньше периода резонансных колебаний 7’о=2л/(оо=2я7’.
Передаточная функция звена
k
W(p) =----------
' ' TW+2T£p+\
Частотная характеристика k
(58)
IF (/со) --------------------
w ' Г2(/<о)2Т27Ъ<о+1
(59)
Рис. 68. Колебательное звено:
а — условное обозначение; б — временная характеристика; е — амплитудная характеристика; г — фазовая характеристика; д — амплитудно фазовая характеристика; е — пример звена.
189
Рис. 69. Неустойчивое колебательное звено:
а — условное обозначение; б — временная характеристика; в — амплитудно-фазовая характеристика.
Амплитудная характеристика
k
/<(<о) =------- ------------- (60)
|'(1-ы272)2 + 4ы2Г^
Фазовая характеристика
<p(w) = -arctg-Y=^2-
(61)
Условное обозначение и частотные характеристики звена при единичном воздействии х=1(/) показаны на рисунке 76.
Частотные характеристики колебательного звена зависят от коэффициента g. Если при колебаниях запас энергии в звене не уменьшается, а увеличивается, то амплитуда колебаний будет возрастать, такое звено называется неустойчивым.
Уравнение динамики неустойчивого колебательного звена
d2o йу
Т2——2Т^------+y=kx.
d/2 d/
(62)
На рисунке 69 изображены условное обозначение, временная и амплитудно-фазовая частотная характеристики неустойчивого звена.
Если с = 0, то такое звено называется гармоническим
190
колебательным (консервативным). Уравнение динамики такого звена
T2-w+y=kx- (б3)
Передаточная функция, частотная, амплитудная и фазовая характеристики консервативного звена имеют вид
Г (р) =-----— ; № (/со) =--------;
Т2^+\ V ’ Тг2(]ыу+\
k
= <р(ы)=0.
1 —/2о>
Графическое изображение этих характеристик представлено на рисунке 70. Характеристика 1Р(/со) при изменении со от 0 до оо начинается на положительной вещественной оси на расстоянии k от начала координат и уходит в бесконечность, а возвращается от —оо по оси отрицательных вещественных чисел.
Запаздывающее звено передает входное воздействие без искажений, но при этом задерживает его па некоторую постоянную величину, то есть выходная величина по отношению к входной запаздывает на постоянную величину т. Уже отмечалось, что такими свойствами обладают трубопроводы, длинные электрические линии без потерь, транспортеры и т. п. Запаздывающее звено описывается уравнением
(64)
//(/) = (1-т)х.
0) = ^ к Иы)
U--Q
Рис. 70. Консервативное звено:
а — условное обозначение; б — временная характеристика; в — амплитудно-фазовая характеристика.
191
г
Рис. 71. Запаздывающее звено:
а — условное обозначение; б — амплитудная характеристика; г — фазовая харак* теристика; д — амплитуднофазовая характеристика.
Передаточная функция, частотная, амплитудная и фазовая характеристики звена записываются так
W(p)=ke~vx\ W(ja) = ke~^x ; /((cd) =k\ cp(co) = — wt
Графическое изображение названных характеристик показано на рисунке 71.
АФЧХ представляет собой окружность единичного радиуса с центром в начале координат.
Амплитудные характеристики этих звеньев одинаковы, а фазовые различны. Это звено создает отрицательный сдвиг фаз, который линейно зависит от частоты вынужденных колебаний.
Пример 3. Составить операторное уравнение и найти передаточную функцию обмотки возбуждения машины постоянного тока, если входной величиной является напряжение 1/в, приложенное к этой обмотке, а выходной — ток возбуждения /в.
В статическом режиме уравнение обмотки возбуждения Uc—Rnle, а в динамическом в цепи появляется ЭДС самоиндукции
, <1А
£l = — Lu------»
di
192
и поэтому этот режим описывается дифференциальным уравнением
t/ в-J-Cl luRa.
Таким образом,
d/a С в=---------- •
dZ
Разделив левую и правую части дифференциального уравнения на RB, получим
1/в г , Lb d/D
Rb Re dZ
Если обозначить l/RB=k, Lb/Rb=Tb (Tb — постоянная времени цепи возбуждения), то
кив=1в~\~Тв ——— • dZ
Воспользуемся преобразованием Лапласа и получим операторное уравнение при нулевых начальных условиях
АЕв(р) =/в(Р) 4-Т вр1в(р) = (1 + Т вР)1в(Р). t
Передаточная функция обмотки возбуждения, согласно выражению (26)
/в(д) k W(p}=—±!_=-----------.
t/a(p) l-f-ГвР
Пример 4. Составить операторное уравнение и найти передаточную функцию для электрической схемы, изображенной на рисунке 66, и.
Запишем дифференциальные уравнения для отдельных участков цепи.
Напряжение, приложенное к схеме
Uвъ ~ /R+-/б/.
Выходное напряжение
t/вы « = //?.
Разделим оба уравнения на R 1 1 г 1 ------------------£/вх = / +---WdZ,------ t/ebiK = /.
R RC J R
1 1 C
Обозначив 11 ^t/ = T, получим Zrt/BX=/4-___ yd/,
MU = /.
Перейдем в уравнениях от переменной t к переменной р 1 /(/')
Art!BS(p) =/(/>)+—----1, ЙС/вЫХ(Д) «=/(»).
1 р.
13 Заказ 5%7
193
Решив совместно оба уравнения, найдем операторное уравнение
kUBx (р) —kUВЫХ (Р) Ч-kUaai.(P)
Тр или
t4x(p)=f 14------^Пвых(Р).
\ Тр /
Передаточная функция схемы
. П0Ых(/>) 1 Т-р
U (р) =----------=---------=----— •
б’вх(р) 1_ 1Ч-7>
Пример 5. Построить амплитудную, фазовую и амплитуднофазовую характеристики апериодического звена первого порядка. Примем передаточный коэффициент k=l, а постоянную времени Г=0,5 с. Заменяя р на /ш, в выражении (35) передаточной функции апериодического звена, найдем вещественную и мнимую части передаточной функции
k k(l—Tjco)
l+Tj(f> (l + T/ы) (1-Т/ш)
k kTw
------------i---------
1 + ы‘Р
p (W)=-------;
1+ы2П
Q(«)=-
/еЛ.»
l + o№
Подставив значения Р(ю) и Q(<o) в выражения (28) и (29), получим формулы для расчета искомых характеристик рассматриваемого звена
К (»>) =--------<р(ю)=—arctgwT.
j/rw+i
Рис. 72. Частотная характеристика апериодического звена первого порядка:
а — амплитудная; б — фазовая; в— амплитудно-фазовая.
194
Результаты вычислений представлены ниже, а по ним на рисунке 72 построены характеристики Л(ы) и ф(ш) и амплитудно-фазовая 117 (до J.
о) (',5 1,0 1,5 2,9 3,0 5,0 10,9
Ры) 0,9-1 0,8 0,61 0,3 0,31 0,14 0,04
Q.o>) —0,23 —0,4 —0,48 —0,5 —0,46 -0,34 —0,19
А'(ы) 0,98 0,89 0,8 0,7 0,56 0,37 0,21
<p(w) —11 -27 —37 —45° — —68 —79'
Подобным образом можно рассчитать и построить частотные характеристики для любого типового звена.
7.7. Логарифмические частотные характеристики
Метод логарифмических частотных характеристик представляет собой один из основных методов анализа и синтеза автоматических систем. Он применим к сложным системам и позволяет оценивать динамические свойства замкнутых систем по их частотным характеристикам в разомкнутом состоянии.
Различают амплитудную и фазовую логарифмические частотные характеристики.
Логарифмической амплитудной характеристикой £(сн) называется зависимость от частоты модуля частотной характеристики, изображенной в логарифмическом масштабе. Эту характеристику строят, переходя от выражения амплитудно-фазовой характеристики W(/со) к выражению
L(w)=201g|№(/w)|=20IgAz(co) . (65)
При построении логарифмических характеристик» пользуются акустическими единицами. Частоты по оси абсцисс откладывают в логарифмическом масштабе в октавах и декадах. Считают, что час-0)2
тоты сор и (01 отличаются на октаву, если —=2, п на де-0)1
С02
каду, если—=10. Величина L(co) измеряется в деци-
белах (1 децибел равен 0,1 бела). Бел — логарифмическая единица, соответствующая десятикратному увеличению мощности (1 Б равен увеличению мощно
13*
сти в 10 раз, 2 Б — в 100 раз, ЗБ— 1000 раз и т. д.)'. Так как характеристики К(ы) являются отношением не мощностей, а выходной и входной координат, то увеличение этого отношения в 10 раз соответствует увеличению отношения мощностей в 100 раз, то есть 2Б или 20 дБ. Поэтому в выражении (65) в правую часть введен множитель 20. Один децибел означает изменение амплитуды колебаний в }10 раз, его считают сравнительно небольшой величиной.
Логарифмическую амплитудную характеристику Z. (со) =201g/((w) строят в прямоугольной системе координат (рис. 73, а). По оси абсцисс откладывают угловую частоту в логарифмическом масштабе Igco, а по оси ординат — равномерно децибелы. Ось абсцисс проходит через нуль оси ординат, что соответствует Л’(со) = 1, так как lgl=0. Поскольку значение <о = 0 находится на оси абсцисс слева в бесконечности (]g0=-—со), ось ординат проводят так, чтобы она пе-
Рис. 73. Логарифмическая координатная система и логарифмические характеристики:
а — амплитудных характеристик; б — фазовых характеристик; в— амплитудная характеристика безынерционного звена; г — фазовая характеристика безынерционного звена; д — амплитудная и фазовая характеристики апериодического звена.
196
ресекала ось абсцисс в точке, справа от которой должна лежать исследуемая часть логарифмической амплитудной характеристики.
Логарифмической фазовой характеристикой гр (со) называется зависимость аргумента частотной характеристики от логарифма частоты. Эту характеристику <р(н>) также строят в прямоугольной системе координат, откладывая на оси абсцисс частоту в логарифмическом масштабе, а на оси ординат — фазу в градусах (рис. 73, б).
Рассмотрим логарифмические характеристики типовых звеньев, напомнив прежде некоторые соотношения: lgl=0 и соответственно 20Igl=0, IglO=I и 201gl0 —20 дБ; lg2=0,3 и 201g2 = 6 дБ.
Логарифмические характеристики безынерционного звена получают на основе выражения (31) передаточной функции. Поскольку модуль частотной характеристики K(w)=k, то
L(w)=201g/<(w)=201g^
Следовательно, логарифмическая амплитудная характеристика безынерционного звена представляет прямую линию, параллельную оси частот и удаленную от нее на 201g/e, дБ (рис. 73, в). Логарифмическая фазовая характеристика совпадает с осью частот (рис. 73, г), так как безынерционное звено не создает фазового сдвига.
Логарифмические характеристики апериодического звена первого порядка. Амплитудную характеристику получают, логарифмируя выражение (39)
£(и) =20l^-20lg]'7'W +1 i (66)
а фазовая характеристика будет описываться выра* женисм
(р(ю) = — arctgojT. (67)
Выражение (66) состоит из двух частей. Первая является постоянной, не зависящей от частоты величиной и представляет собой характеристику безынерционного звена. Вторая зависит от частоты, и поэтому ее значения нужно вычислить в функции частоты. Обычно же, чтобы избежать вычислений, пользуются асимптотическими логарифмическими характеристиками. С этой целью весь диапазон разделяют на два участка.
197
На участке с интервалом частот
==(Осп(сосп —1/Г — сопряженная частота, при которой пересекаются асимптотические логарифмические характеристики) второе слагаемое в подкоренном выражении всегда больше первого слагаемого или при wcn=l/7’ равно ему. Поэтому слагаемым <в27'2 можно пренебречь, значит
- 201 gVPco2 + 1 - 201 g'V 1 = 0.
Ошибка при таком допущении будет максимальной на сопряженной частоте и составит
- 201 glWcn +1 = - 201 gf2~ - 3 дБ.
Для участка с интервалом частот можно пренебречь единицей в подкоренном выражении, и тогда
- 201gVco27’2_|_ 1 _ 201 gw Г
Увеличив частоту в два раза — на октаву, будем иметь L (о) =—201g2w7'= — (201gw7’-|-201g2). Получается,
что второе слагаемое логарифмической характеристики увеличилось на 201 g2, то есть примерно на —6. Следовательно, наклон характеристики на этом участке составит —6 дБ/окт. Повышение частоты в 10 раз — на декаду увеличит второе слагаемое на 201g!0, так как £(о) =—201gl0o7’a~(201go7'—201g 10), то наклон характеристик будет 20дБ/дек. Оба значения —6 и —20дБ/дек дают один и тот же наклон.
Проведенный анализ показывает, что для построения асимптотической амплитудно-частотной характеристики необходимо определить значение сопряженной частоты wen и отложить его на оси частот. Для первого участка провести прямую 1 (рис. 73, д), параллельную оси частот и отстоящую от нее на 201 gk до сопряженной частоты. Для второго участка из точки С с координатами асп=1/Т и £(а>) — 201 gfe вычертить прямую 3 с наклоном —20дБ/дек. Чтобы построить точную характеристику 2, необходимо учесть ошибку, вызванную сделанными допущениями. На сопряженной частоте <осп=1/Т нужно ввести поправку, равную —3 дБ, а на частотах, отличающихся от сопряженной на 1 октаву, то есть 0,5 а>Сп и 20 ысп, поправка составит —201g|'l,25^—1 дБ.
198
Для построения точной логарифмической амплитудной характеристики применяют специальные, приводимые в справочной литературе шаблоны, которые совмещают с асимптотическими •характеристиками и проводят по ним точную характеристику.
Логарифмическую фазовую характеристику (рис. 73.5) строят, используя уравнение (67), по нескольким характерным точкам. Так, для сопряженной частоты
Ч (<Dcn) = —arctgcoenT = — arctgl = —45°.
Если частота приближается к нулю, то фазовая характеристика будет стремиться к прямой ср (со ) = О', если к бесконечности, то к прямой <р(со)—я/2. При более точном построении фазовой характеристики необходимо помнить, что она симметрична относительно сопряженной частоты. Поэтому, задаваясь двумя значениями фазового сдвига, можно получить четыре точки кривой. Так, фазовый сдвиг на частотах, отличающихся на 1 октаву от сопряженной, то есть 0,5cdch и 2<осп, отклоняется от фазового сдвига сопряженной частоты на 18,4°, а на частотах, отличающихся на 1 декаду от сопряженной, в диапазоне от 0° и —л/2— на 5,7°. Для построения логарифмических фазовых характеристик также используют специальные шаблоны.
Логарифмические характеристики дифференцирующего звена. Для идеального дифференцирующего звена с частотной функцией W(j(a) — Tju) логарифмическая амплитудная характеристика выражается так
А(со) = 201gK (со) =20lg7’ + 2Olgco и представляет собой прямую линию 1 (рис. 74,а), проходящую через точку, соответствующую на оси частот соСп=1/Т и имеющую наклон -|-20 дБ/дек. или -f-б дБ/окт. Логарифмическая фазовая характеристика <р(со) выражается прямой 3 (рис. 74,6), параллельной оси частот и отстоящей от нее на 4~л/2.
Для реального дифференцирующего з в е-н а с частотной функцией
логарифмическую амплитудную и фазовую характеристики можно найти, если сложить соответствующие ха-
199
Рис. 74. Логарифмические характеристики дифференцирующего звена:
а — амплитудные; б — фазовые.
рактеристики идеального дифференцирующего и апериодического звена первого порядка, так как из уравнения видно, что реальное дифференцирующее звено представляет собой последовательное их соединение. Выражение для амплитудной характеристики запишется как
L (со) = 201 g7+201g(o - 201 gf 1 + c+R
До сопряженной частоты сйСп=1/7’ характеристика идет вверх с началом +20 или 6 дБ/окт. Так как передаточный коэффициент звена равен Т, то на сопряженной частоте асимптотическая амплитудная характеристика проходит через нуль. Второй участок (рис. 74, а) характеристики 2 совпадает с осью частот, так как сумма слагаемых в правой части уравнения равна нулю.
Логарифмическая фазовая характеристика 4 (рис. 74, б) по форме совпадает с характеристикой инерционного звена, смещенного вверх на л/2.
Логарифмические характеристики интегрирующего звена (рис. 75), частотная функция которого
k
^(Ло)=—
описываются выражениями
А (со) =201g& — 201g(o и ф((о) = — л/2.
Логарифмическая амплитудная характеристика со-
стоит из двух частей. Первая является постоянной, не зависящей от частоты величи-
ной, вторая же, будучи переменной, имеет постоянный наклон к осп частот —20 или —6 дБ/окт. Чтобы построить характеристики интегрирующего звена, принимают в качестве опорной частоту ы=1, при которой вторая часть уравнения
L(u)
?(w)
Рис. 75 Логарифмические характеристики интегрирующего звена.
характеристики равна нулю: — 201gco = — 201gl=0. Тог ia Z.(to) = 201gfe.
200
Логарифмическая фазовая характеристика интегрирующего звена не зависит от частоты и представляет собой прямую линию, проходящую от оси абсцисс на расстоянии —л/2.
Логарифмическую амплитудную характеристику колебательного звена строят, основываясь на уравнении (60).
Если прологарифмировать уравнение (60), то получим выражение для построения логарифмической амплитудной характеристики
L (w) = 201 gk - 201 g]'71 - (о2Е2)2 + 4|2w2p.
По этой формуле на рисунке 76, б построены логарифмические амплитудные характеристики для различных значений g. В интервале 0,3^g^l,0 пользуются упрощенной логарифмической амплитудной характеристикой, которая получается следующим образом:
при coE-d L (®) = 201g&; если&=1, то L(to)=O;
201
при (о7'3>1 Л (со) = 20Igfe — 4(ilg7w; если /г = 1, то £(<о) = — 4Olg7'co.
Подставим в полученное выражение w— lOcoj, тогда L(10wi)=—401gl0 — 401g7'<oi. Если ю — сщ, то L(wi) = = —401g7'a>i.
Взяв разность этих выражений, получим
L(10coi)-L (g)i) =-40 дБ/дек.
Получаем, что логарифмическую амплитудную характеристику можно представить двумя асимптотами: с наклоном 0 дБ/дек до значения (о=1 и далее с наклоном— 40 дБ/дек. Е1а рисунке 76, а построены такие характеристики для двух значений К. Логарифмические фазовые частотные характеристики строят по уравнению (61). Для различных значений g эти характеристики построены на рисунке 76, в.
Логарифмические характеристики широко используют при оценке регулировочных свойств систем.
7.8. Алгоритмические структурные схемы и их эквивалентное преобразование
Любую автоматическую систему можно представить в виде динамических звеньев направленного действия, определенным образом взаимодействующих между собой. Графическое изображение, показывающее, из каких динамических звеньев состоит система и как они соединены между собой, называется алгоритмической структурной схемой системы.
Наличие такой схемы позволяет изучить динамику системы, так как она отображает ее динамические свойства и фактически есть графическое условное изображение дифференциального уравнения системы, записанного в операторной форме по Лапласу при нулевых начальных условиях. Основными элементами схемы являются: динамические звенья направленного действия с указанием их передаточных функций; соединения (связи) звеньев — линии со стрелками, указывающие направление передачи воздействий; элементы сравнения, в которых суммируются или вычитаются воздействия (при суммировании воздействий сектор внутри кружка не затемнен); точки разветвления, в которых воздействие разветвляется в разных направлениях.
202
Все воздействия на алгоритмической структурной схеме изображены по Лапласу. Для определения передаточной функции разомкнутой или замкнутой системы используют правила эквивалентного преобразования. Под эквивалентным подразумевается такое преобразование, при котором одна схема заменяется другой с сохранением динамических характеристик системы. Основные правила эквивалентного преобразования алгоритмических структурных схем приведены ниже.
1. Передаточная функция последовательно включенных звеньев или разомкнутой системы (рис. 77, а) равна произведению передаточных функций отдельных звеньев
Wp (/2) = IVj (р) UZ2(р) (р). (68)
Рис. 77. Эквивалентное преобразование структурных схем:
а — последовательно включенных звечьев; б — параллельно включенных звеньев; в — звена, охваченного обратной связью; г —перенос точки съема; д — перенос точки суммирования.
203
2. Передаточная функция параллельно включенных звеньев (рис. 77, б) равна сумме передаточных функций отдельных звеньев
W' (р) = (р) + 1Г2 (р) + IV 3 (р). (69)
3. Передаточная функция замкнутой системы с отрицательной обратной связью (рис. 77, в) определяется по формуле
IV о (р)
Гз(р)=-------—------•• (70)
1 + и7о(р)Г„.с(р)
При положительной обратной связи в выражении (70) в знаменателе будет знак минус (—).
4. При переносе точки съема или суммирования сигнала на большее число звеньев в цепь обратной связи необходимо добавить звено с передаточной функцией l/VV'a(р) (рис. 77,а).
5. При переносе точки съема (суммирования) на меньшее число звеньев в цепи обратной связи необходимо последовательно включить звено с исключаемой передаточной функцией (рис. 77, д).
Для оценки точности автоматической системы в установившемся режиме определяют передаточную функцию ошибки, устанавливающую связь между ошибкой и задающим воздействием (рис. 77, в).
^о(Р) =-^=-^7^=1 - =
1
1 + IV'p (р)
(71)
Сравнивая передаточные функции IV'p(p); и
U", (р), можно заметить, что между ними существуют определенные соотношения. Зная й^р(р), можно определить две другие функции.
Если за входную величину автоматической системы принять возмущающее воздействие с точкой приложения на входе объекта и счи-
Рис. 78. Сгр5ктурная схема рвтоматнчсс: :>й системы при действии возмущения.
тать, что другие воздействия отсутствуют, то реакция на выходе системы в этом случае является отклонением управляемой величины от требуемого значения и называется ошибкой влияния возмущения.
204
Передаточную функцию ошибки, устанавливающую связь между возмущением F(р) (рис. 78) и вызванной им ошибкой Дрг(р), определяют по уравнению
W7 / Д/Мр) ffZi W___ ,7Q,
'Ь(р) ?.0) \ + w2(p)W](P) ’ {72)
где 1Г|(р), 1Г2(р) — передаточные функции соответственно объекта и регулятора при условии, что возмущение приложено к входу объекта.
Если F (р) приложить к другой точке системы, то под (р) понимают часть системы между точкой приложения возмущения и выходом системы.
Знаменатель передаточной функции Wy(p) такой же, как и знаменатель других передаточных функций замкнутой! системы. Изменение точки приложения возмущения приводит к изменению передаточной функции числителя, который всегда представляет передаточную функцию соединения звеньев, заключенных между точкой приложения возмущения и выходом системы.
Контрольные вопросы и задания. 1. Что такое статическая характеристика автоматической системы управления? 2. Назовите виды статических характеристик. 3. Объясните, что такое передаточная функция. 4. Чем отличается операторное уравнение от операционного? 5. Перечислите типовые звенья и дайте их характеристику. 6. Что понимают под амплитудной н фазовой частотными характеристиками? 7. Назовите логарифмические частотные характеристики и укажите их достоинства и недостатки. 8. Каковы основные правила эквивалентного преобразования алгоритмических структурных схем?
ГЛАВА VIII
УСТОЙЧИВОСТЬ АВТОМАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ
8.1. Понятие об устойчивости
В любой автоматической системе управления под влиянием возмущающих воздействий возникает переходный процесс y(t), который зависит как от свойств самой системы, так и от вида воздействия. Поведение системы в переходном процессе можно представить двумя составляющими. Первая — свободное движение системы yc(t), то есть движение системы, выведенной из состояния равновесия и предоставленной самой себе, вторая — вынужденное движение системы yB(t), обусловленное внешним воздействием и свойствами системы
y(t) =ye(t) +yB(t). (73).
Устойчивость системы—одна из самых важных характеристик, отражающих поведение автоматической системы в переходном процессе. Под устойчивостью понимается свойство системы возвращаться к состоянию установившегося равновесия после устранения нарушившей его причины.
Неустойчивая система не возвращается в равновесное состояние, из которого она по той или иной причине вышла, а непрерывно удаляется от него или совершает около него некоторые колебания.
Простейшей иллюстрацией жить изображенная па рисунке
АМА а £ 6
Рис. 79. К определению устойчивых состояний системы шар— поверхность.
понятия устойчивости может слу-79 система шар — поверхность в различных сочетаниях. Система («)—наглядный пример неустойчивости: достаточно малейшего отклонения от начального положения шара, как он начнет двигаться вниз по поверхности и. уже не возвратится в исходное положение. Систему (б) можно отнести к устойчивой, поскольку шар, находящийся во впадине, при лю
206
бом отклонении обязательно вернется в первоначальное состояние. В рассмотренных примерах устойчивость и неустойчивость не зависит от начальных отклонений шара. Но есть и такие системы, которые устойчивы в «малом» и неустойчивы «в большом», поскольку их устойчивость связана со значением начального отклонения. Действительно, систему (в) можно считать устойчивой, только когда шар при начальном отклонении не выходит за край впадины: стоит ему миновать край впадины, как он уже не сможет вернуться в исходное положение и система будет неустойчивой.
Применительно к уравнению (73) суждение об устойчивости можно сформулировать так, что для устойчивости системы необходимо, чтобы свободная составляющая с ростом времени от начала переходного процесса стремилась к нулю: limyc(<)->0 при Л->оо. Следовательно, характер свободного движения системы определяет степень ее устойчивости.
При аналитическом исследовании динамических свойств системы управления необходимо в качестве математического описания составить дифференциальное уравнение и решить его. Однако решение дифференциальных уравнений даже для линейных систем сопряжено со значительными трудностями. Поэтому об устойчивости таких систем судят по определенным признакам, обходясь без непосредственного решения дифференциальных уравнений. Эти признаки, получившие название критериев устойчивости, позволяют, не прибегая к решению дифференциального уравнения системы, установить, устойчива ли она, а кроме того, выяснить характер влияния того или иного параметра и структуры системы па ее устойчивость.
8.2. Критерии устойчивости
Алгебраические критерии. К ним относится критерий Вышнеградского, который применим для систем третьего порядка, критерий Рауса и Гурвица.
В соответствии с критерием Вышнеградско-г о для устойчивости линейной системы с характеристическим уравнением
tZo/J3 + clPZ + fl2P + °3=:O (^)
необходимо выполнение двух условий:
1) все коэффициенты характеристического уравнения должны быть положительными — й0>0, fli>0, «2>0, а3>0;
207
2) произведение средних коэффициентов должно быть больше произведения крайних — а1а2>аоОз.
В коэффициенты характеристического уравнения входят лишь значения параметров системы, поэтому устойчивость системы определяют только по параметрам, нс рассматривая состояния системы.
Критерий Гурвица формирует условия устойчивости автоматических систем управления в виде определителей.
Для устойчивости системы с характеристическим уравнением первого порядка
aop+ai = O (75)
необходимо и достаточно, чтобы коэффициенты характеристического уравнения были положительными, то есть О()>0, f?i >0.
Для устойчивости системы с характеристическим уравнением второго порядка
aopz+alp + a2 = O (7G)
необходимо и достаточно, чтобы все коэффициенты характеристического уравнения были положительны, то есть оо>0, О]>0. Ог>0.
Для устойчивости системы третьего порядка с уравнением
йоР’+ °1Р2+о2рч-Оз = 0
необходимо и достаточно, чтобы были положительными все коэффициенты а0>0, О|>0, о2>0, о3>0, и определитель второго порядка
Д2= |01 °3 I а,3а2
Для устойчивости системы четвертого порядка с уравнением
= ata2- аса3>0.
оор4+О|/?3-|-й2/?2 + озр-Ьо1=0 (78)
необходимо и достаточно чтобы были положительными все коэффициенты «п>0, о,>9, «2>0, о:>-0, о4>0, и определители А2>0 и
а, о30
«о а2 аА
О о, а3
= «3 (Г',Й2 —OjOi) — «гЛ4>0.
208
В общем случае, если система имеет характеристическое уравнение n-й степени
aopn+alpn-i+ ... +an-tp+an = 0, (79)
то условия устойчивости по критерию Гурвица можно сформулировать следующим образом: система устойчива, если о0>0 и все диагональные определители таблицы коэффициентов положительны
«1 А3 а5 ООО
а0 «2 а4 0
0 °1 Аз • 0
* . -
п —* 0 • • Gn—З 0
0 • ° Дп—4 &п—2 (80)
Определитель Гурвица (80) составляют из коэффициентов характеристического уравнения следующим образом. По главной диагонали последовательно выписывают коэффициенты характеристического уравнения, начиная с й]. Столбцы таблицы, начиная с главной диагонали, заполняют вверх по возрастающим индексам, вниз — по убывающим. Все коэффициенты с индексами ниже нуля и выше степени уравнения п заменяют нулями.
Заметим, что если конечный определитель приравнять нулю при условии положительности всех предыдущих определителей, то полученное уравнение будет соответствовать границе устойчивости. Например, для системы третьего порядка (и = 3) граница устойчивости определится уравнением Д2 = ц1ц2 — СоОз = 0. Из полученного уравнения определяют допустимые пределы изменения параметров (о0,..., а3), при которых система устойчива.
Критерий Рауса применяется реже, чем критерий Гурвица, так как он сложнее.
С увеличением порядка характеристического уравнения увеличивается число выполняемых расчетов, поэтому их применяют для уравнений не выше пятого порядка.
Частотные критерии. Они относятся к графоаналитически'.! критериям определения устойчивости системы. К ним относят критерий Михайлова и Найквиста.
Критерий Михайлова основан па использовании характеристического уравнения системы. Для этого
14 Заказ 5и*э?
209
Рис. 80. Годографы Михайлова для устойчивой (о) и неустойчивой (б) систем.
в характеристическое уравнение системы подставляют p—jm и получают выражение годографа Михайлова
Г(/со)=«о(Ло)п + й1,(/со) 7г~1 Р ... +Gn-l/w+«n- (81J
Изменяя значение о от 0 до оо, вычисляют значение вектора D(/w) и строят его годограф в комплексной плоскости (заметим, что при ы = 0 D (0) = йп2>0). Полученный годограф позволяет судить об устойчивости системы. Согласно критерию Михайлова, для устойчивости системы п-го порядка годограф вектора характеристического уравнения D(jo) при повороте против часовой стрелки должен последовательно пройти п квадрантов, начиная из точки, лежащей на положительной полуоси, и нигде не обратиться в нуль. При несоблюдении одного из названных условий система неустойчива. На рисунке 80, а и б представлены годографы Михайлова для устойчивой и неустойчивой систем. При и—0 годограф превращается в точку на положительной части вещественной оси. Чтобы с помощью критерия Михайлова оценить влияние изменения параметров элементов системы на ее устойчивость, необходимо построить годограф Михайлова при данном значении параметра.
Критерий Найквиста позволяет судить об устойчивости замкнутой автоматической системы по амплитудно-фазовой характеристике разомкнутой системы. Для этого в уравнение передаточной функции разомкнутой системы подставляют р=/со и получают выражение
WC ) — — C)),lt~l+ • +Ь,л-уы + Ьт
U ' * eo(/w)n+Ci(jw)n-4- . . . +en-j/w+«n
210
и, поскольку а0,...,ап и Ьо,..., Ь,п — постоянные коэффициенты, то, придавая со значения от 0 до со и вычисляя каждый раз Н7с(/со;), строят годограф вектора VVz(/co) —амплитудно-фазовую характеристику системы. По ней и судят об устойчивости системы. Критерий Найквиста формулируется так: замкнутая система устойчива, если амплитудно-фазовая характеристика устойчивой разомкнутой системы не охватывает точку с координатами (—1; j 0) при изменении а от 0 до оо. На рисунке 81, а приведены амплитудно-фазовые характеристики 1 и 2 устойчивой и неустойчивой автоматических систем управлений.
Критерий Найквиста нашел широкое применение по следующим причинам: оценка устойчивости дается по передаточной функции разомкнутой системы, которая состоит из ряда сравнительно простых сомножителей, содержащих в качестве коэффициентов ее параметры, что дает возможность для сложных систем выбирать параметры устройств такими, чтобы системы были устойчивыми; критерий позволяет использовать экспериментальные частотные характеристики вместо дифференциальных уравнений сложных систем, когда составление этих уравнений весьма затруднительно; критерий связывает исследования устойчивости с последующим анализом качества автоматической системы управления.
Рассмотрим ряд примеров, поясняющих определение устойчивости на основании рассмотренных критериев.
Пример 6. Определить по критерию Гурвица устойчивость автоматической системы управления, характеристическое уравнение которой р34-1,5р2+4,5р-|-4=0.
Решение. В соответствии с условием устойчивости для систем третьего порядка (74) все коэффициенты уравнения (Оо=1; а,—
Рис. 81. Ам плиту дно фазовые характеристики.
14*
211
= 1,6; 02 = 4,5; о3 = 4) и определитель второго порядка Д2=1,5Х у4,5—1-4 = 2,75 положительны. Следовательно, система устойчива.
Пример 7. Построить годограф Михайлова и определить устойчивость автоматической системы по характеристическому уравнению 0,05р34-0,8р2+2р+10=0.
Решение. В соответствии с выражением (81) подставляют в уравнение p=jtf> и разделяют на вещественную и мнимую части
Р (со) =0з—що)2 = 10—0,8ю2,
С(ы) =агсо—a.jto3 = 2<о—0,05со3.
Задаваясь значением со от 0 до оо, получают значение />(со) и Q(<o) и по ним строят годограф. Так, для <оо=0, Р(со) = 10 и О(<о)= 0 находят первую точку (рис. 81,6).
Приравняв вещественную часть к нулю, находят значение <0|, при котором характеристика пересекает мнимую ось: Р(ы1)=0;
10—0,8 <oi2=O; <012()~8 =12,5; <01 = 3,55. Значение мнимой части при Ю1 = 3,55: <2(coi) =а2СО1 — o0coi*=2-3,55—0,05-3,553=6,5. Годограф пересекает вещественную ось между вторым и третьим квадрантами при W2, определяемой из уравнения Q(w2)=2<o2— 0,05ы22 = 0;
<|)22 = 40. Значение вещественной части при (Ог2 = 40; Р(<о2) = Ю—• -0,8-40=—22. При ю = оо Q(co00)=—оо; />(ыо0) =—оо.
Следовательно, результирующий угол поворота годографа при изменении <о от 0 до оо равен 3 л/2 — система устойчива, так как годограф начал движение от точки на положительной вещественной полуоси и прошел три квадранта (уравнение третьей степени), и нигде не обращаясь в нуль.
Пример 8. Определить по критерию Найквиста, устойчива ли замкнутая автоматическая система, если ее передаточная функция . k
в разомкнутом состоянии W(p)~----------------------- и значения
/’(Лр+О (ГгрЧ-1)
параметров £=100, Г1=0,1 с, Т2=0,2 с.
Решение. Подставив р=/ы в уравнение передаточной функции, получают выражение для частотной характеристики передаточной д.
функции W(/со) = — ---- --------— • Значение модуля и аргу-
/со (Tj/co+l) (Т^/со +1)
мента передаточной функции определяют соответственно но k
выражениям /г(со) =------------------------- и <р(ш) =_(л>2+
<o2y(W+l)(7-22co2+l)
-Tarclg Tico+arclg Т2ы). Подставив значения параметров в выражение модуля аргумента, находят, что
100
о)2У(1 4-0,01<й2) (1+0,04юг) я ср(со) =—(00°+arctg O,lu>+arctg 0,2ш).
212
Задаваясь значениями со от 0 до оо, вычисляют КМ и <р(о>). Результаты расчетов представляют в табличной форме
0 0,1 1 5 10 20 во
км ₽(<•>) ос -90 10 000 —92' 99 —107- 2,3 —161“ 0,3 —198 0,0045 —228’ 0 —270’
и по пей строят амплитудно-фазовую характеристику (рис. 81, в). Нетрудно убедиться, что характеристика разомкнутой системы не охватывает точку с координатами (—1; / 0), следовательно, замкнутая система будет устойчивой.
8.3. Исследование влияния параметров систем управления на их устойчивость
Рассмотренные критерии устойчивости дают возможность при конкретных заданных параметрах системы делать заключение об ее устойчивости. Чтобы исследовать влияние различных значений параметров системы на ее устойчивость, проводят синтез системы, исходя из условий устойчивости. Понимая под этим нахождение таких областей параметров (или коэффициентов), в которых при любом значении исследуемого параметра система будет устойчивой. Значение области устойчивости в пространстве параметров системы (особенно если эти параметры относятся к числу настраиваемых) имеет большое практическое значение, позволяя в процессе проектирования или наладки правильно выбрать параметры системы.
Наибольшее применение па практике получил метод Д-разбиения. При построении границы Д-разбиения. те есть границы областей устойчивости вначале выявляют, по каким параметрам необходимо построить Д-раз-биегше, то есть устанавливают факторы, которые способствуют неустойчивости системы.
Одним из важных факторов является увеличение коэффициента усиления системы с целью повышения точности управления. Увеличение коэффициента усиления системы увеличивает модуль АФЧХ, поэтому точка пересечения АФЧХ с вещественной осью перемещается влево и система из устойчивой может превратиться в неустойчивую (рис. 81, а).
Наметив параметры, по которым намечается Д-разбиение, записываю? характеристическое уравнение или передаточную фуик-
213
Рис. 82. К определению границ области устойчивости.
цию с этими параметрами в общем виде. Затем на основании выбранного критерия записывают условия нахождения системы на границе устойчивости. Для этого неравенства записывают в виде равенств. На основании равенств строят кривые или прямые в плоскости намеченных параметров. Полученные кривые штрихуют так, чтобы штриховка была направлена в ту сторону полуплоскости, точки которой удовлетворяют данному условию устойчивости.
На рисунке 82 построены области устойчивости в плоскости параметров Т и К для системы с характеристическим уравнением
0,0005/? 4- (0,57'4-0,00:) р2+
4-(0,54-T)p4-fe4-l=0.
В соответствии с критерием Вышнеградского и вышеизло
женной методикой запишем равенства:
0,57’4-0,001 =0; 0,54-7'=0; /<4-1=0; (0,57'4-0,001) (0,54-7’) =0,0005(/<4-1).
Граничным кривым исходя из записанных равенств соответствуют кривые на рисунке 82 соответственно 2, 1, 4 и 3, а условия устойчивости соответственно Т>—0,002; Т>—0,5; К>—1; (0,54-7)Х X(0,54-7')>0,0005(7(4-1). Областью устойчивости, как следует из (рис. 90), будет часть плоскости с координатными осями /\, Т, расположенная в первом квадрате между граничной прямой 4 и кривой 3.
8.4. Запас устойчивости
При математическом описании движения автоматической системы вводятся различные, допущения с целью линеаризации статических характеристик и улучшения возможности анализа. Поэтому теоретически устойчивая система может из-за неточностей, допущенных при составлении уравнений, оказаться практически неустойчивой или во время ее работы возникнут непредвиденные и недопустимые отклонения параметров от расчетных.
Следовательно, параметры системы должны быть такими, чтобы она была устойчивой не только при принятых дифференциальных уравнениях и характеристиках
214
элементов, но и при реальных зависимостях выходных величин от входных, то есть действительные значения параметров системы должны отличаться от предельных и обеспечивать некоторый запас устойчивости., Предельными называются значения параметров системы, ’ при которых она находится на границе устойчивости. Например, если годограф ЛАихайлова проходит через начало координат или амплитудно-фазовая характеристика разомкнутой системы управления через точку с координатами (—1; / 0), то считают, что система находится на границе устойчивости.
Запас устойчивости — это количественная оценка того, насколько значения параметров системы или ее характеристики отстоят от границы, опасной с точки зрения устойчивости. Различают запас устойчивости по амплитуде и фазе.
Запас устойчивости по амплитуде I показывает, насколько необходимо изменить модуль амплитуднофазовой характеристики разомкнутой системы при частоте среза «ср, чтобы замкнутая система оказалась па границе устойчивости. За частоту среза разомкнутой системы принимают такую, при которой выполняется равенство
A'(w)=|U7(/u)| = l.
Отсюда следует, что при частоте среза характеристика W(ju) пересекает окружность единичного радиуса с центром в начале координат (рис. 83). Если здесь час-
тоту, соответствующую пересечению характеристики 1Е(/со) с вещественной отрицательной полуосью, когда выполняется равенство cp(o)) = arctg W(ja)=—180°,
обозначить через <£>i, то запас устойчивости по амплиту-
де 1= [1 + U7(/со)] будет определяться расстоянием от точки этого пересечения до точки с координатами (—1; /0).
Запас устойчивости по фазе ф показывает, насколько необходимо увеличить фазу в разомкнутой системе при частоте среза, чтобы соответствующая ей замкнутая
Рис. 83. К определению запаса устойчивости.
система оказалась на границе устойчивости. Запас ус
245
тойчивости по фазе определяется углом ф между вектором IF(j(i)Cp) и отрицательной вещественной полуосью ф=[180—<р(<Ос1))]. Обычно при определении необходимого запаса устойчивости вокруг опасной точки вычерчивается определенная область, куда не должна заходить амплитудно-фазовая характеристика. Такие запретные области показаны на рисунке 84. В случае (а) система регулирования будет иметь необходимый запас устойчивости, если она при модуле характеристики А'(о>), отличающемся от единицы нс менее чем на заданную величину ±/, имеет фазу, отличающуюся от — 180е не менее чем на угол ±<р. В случае (б) система будет обладать необходимым запасом устойчивости, если ее амплитудно-фазовая характеристика не заходит в окружность, проведенную радиусом I из точки (—1; /0).
Применительно к алгебраическим критериям запас устойчивости системы будет выражаться тем условием, чтобы равенства (75) ...(79) были достаточно далеки от их нарушения. Применительно к годографу Михайлова £>(/ы) запас устойчивости обеспечивается, когда кривая D (/ы) не заходит в круг заданного радиуса с центром в начале координат (е).
8.5. Определение устойчивости по логарифмическим частотным характеристикам
Устойчивость автоматических систем управления и запас устойчивости по модулю и фазе можно определить и оценить не только посредством рассмотренных критериев, но и на основе графиков амплитудной и фазовой логарифмических частотных характеристик разомкнутой системы для соответствующей ей замкнутой
Рис. 84. Графическое изображение различных видов запасов устойчивости.
216
Рис. 85. К определению запаса устойчивости по фазе и амплитуде по логарифмическим частотным характеристикам.
системы. Если за частоту среза <Вср принять такую, при которой график логарифмической амплитудной характеристики пересекает ось частот, то есть L(co)—-= 201gA'(w) = 0, то можно записать следующие правила определения устойчивости.
1. Замкнутая система устойчива, когда угол на фазовой характеристике разомкнутой системы при со — 0)С|, по абсолютной величине меньше 180° (рис. 85). Запас устойчивости по фазе <р = = 180° —<рср. Регулирование считается хорошим, если <р^(30... 45°).
2. Замкнутая система устойчива, если значение ординаты Lv
логарифмической амплитудной характеристики имеет отрицательное значение, то есть £у(соу)<0, когда <р(<оу) = —180°. Запас устойчивости по амплитуде для замкнутой системы определяют по графику логарифмической амплитудной характеристики при ср(со?/) = —180°. Для этой цели измеряют ординату L(coy) = Lb которая и характеризует данный запас устойчивости. Управление считаеся хорошим, если Li^lO дБ.
Контрольные вопросы и задания. 1 Объясните понятие «устойчивость автоматической системы управления». 2. Что такое критерий устойчивости? 3. Какие критерии используют для оценки устойчивости систем? 4. Чем отличаются алгебраические критерии устойчивости от частотных? 5. Сформулируйте критерии устойчивости Гурвица, Михайлова, Найквиста. 6. Как определяется запас устойчивости по модулю и фазе?
Глава ix
КАЧЕСТВО ПЕРЕХОДНЫХ ПРОЦЕССОВ УПРАВЛЕНИЯ В АВТОМАТИЧЕСКИХ СИСТЕМАХ
9.1. Показатели качества
Автоматические системы управления должны быть нс только устойчивыми, но и обеспечивать качество процесса управления. Основные наиболее существенные требования к качеству управления, которые позволяют оценить работу почти всех систем управления, называют показателями процесса управления. Они характеризуют поведение системы в переходном ироцессс. На рисунке 86, а показана кривая переходного процесса системы при единичном возмущении, поданном на вход.
Показателями качества здесь будут время регулирования, перерегулирование, колебательность процесса, установившаяся ошибка, характер затухания переходного процесса, запас устойчивости. Рассмотрим каждый показатель в отдельности.
Время регулирования tv характеризует быстродействие системы и соответствует периоду, по истечении которого управляемая величина входит в зону нечувствительности регулятора.
Рис. 86. Основные виды .характеристик переходных процессов автоматических систем регулирования при типовом единичном воздействии.
219
Перерегулированием о называется максимальное отклонение z/max управляемой величины от заданного значения z/о и выраженной в процентах
i/inax—Уа . _Л,
<т=---------100%.
Уо
Перерегулирование появляется потому, что система к новому установившемуся состоянию подходит с определенной скоростью, определяемой тангенсом угла наклона касательной в точке А. Чем больше скорость, тем больше будет перерегулирование, и для его уменьшения необходимо снижать скорость нарастания управляемой величины. Но снижение скорости приведет к увеличению времени регулирования, что нежелательно. Поэтому перерегулирование считают оптимальным, если оно находится в пределах 20... 30 70-
Колебательность процесса характеризуется числом колебаний управляемой величины за время регулирования.
Количественно колебательность оценивается по л о-г а р и ф м и ч е с ко м у декременту затухания, который представляет собой натуральный логарифм отношения двух последующих амплитуд отклонений управляемой величины одного направления
Д'/l d = In ——• &У2
Чем больше логарифмический декремент затухания, тем быстрее происходит затухание переходного процесса.
Установившаяся ошибка показывает точность управление в установившемся режиме. Она, как было отмечено ранее, равняется разности между заданным значением управляемой величины и ее установившимся значением при номинальной нагрузке.
Характер затухания переходного процесса позволяет классифицировать переходные процессы в системах управления и выделить среди их многообразия четыре основных вида (рис. 86,6): колебательный процесс (кривая /)—ему присуще несколько значений перерегулирования; малоколебательный процесс (2)—процесс с одним перерегулированием; монотонный процесс (4), при котором скорость изменения управляемой величины
219
'бу/dt не изменяет знака в течение всего времени регулирования; апериодический процесс (3) — процесс, когда управляемая величина меньше ее установившегося значения с точностью до зоны нечувствительности регулятора при всех значениях t.
Запас устойчивости — физическая сущность и методы определения этого показателя качества управления рассмотрены в 8.5 предыдущей главы.
9.2. Методы построения
График временной или переходной функции, по которой определяют числовые значения показателей переходного процесса, можно получить экспериментально, при помощи моделирования и расчетным путем.
При экспериментальном методе определения кривой переходного процесса необходимо иметь автоматическую систему, то есть объект управления и регулятор. Регистрируя изменение управляемой величины во времени при единичном воздействии 1(0 на входе, получают кривую переходного процесса. Такой метод не всегда можно реализовать практически из-за отсутствия той или другой части системы или невозможности постановки эксперимента.
Метод моделирования применим при наличии дифференциальных уравнений, описывающих процесс управления, и аналоговых. (АВМ) или цифровых (ЦВМ) вычислительных машин.
АВМ удобны в применении и позволяют быстро и просто получить наглядное решение, проанализировать влияние параметров системы на качество процессов. ЦВМ наиболее целесообразно применять при исследовании системы с большими запаздываниями, сложными нелинейностями, сложными входными сигналами и при отыскании наилучших (оптимальных) параметров системы.
Подробнее вопросы моделирования можно изучить в специальной литературе.
К расчетным методам относят методы, основанные на решении дифференциальных уравнений, и ч а с т о т н ы й метод. Решение дифференциальных уравнений может быть выполнено классическим методом, что представляет значительные трудности и применяется редко, и операционным методом. Решение диф-
223
ференциалыюго уравнения операционным методом сводится к отысканию оригинала функции по известному ее изображению, то есть путем обратного преобразования Лапласа. Переходную функцию y(t) по ее изображению F(p) находят из уравнения
Изображение F (р) можно найти из уравнения передаточной функции W3(p) замкнутой системы
У(Р) = М3(р)х(р).
Если принять x(t) = 1 (/), то на выходе получим y(t). Так как изображение единичной ступенчатой функции равно —, то
Р
Тогда
\ 117з(р) F(P)=—г-
</(0=л-’
ff'a(P) 1
Р -1
Используя таблицы изображений, находят значение оригинала.
Частотный метод, основанный на свойствах амплитудно-фазовых и вещественных частотных характеристик, разработанный В. В. Солодовниковым, применяют при построении кривых переходного процесса чаще других. Главное его достоинство в том, что, пользуясь вещественной характеристикой, можно сравнительно простым способом построить приближенную кривую переходного процесса управления и по ней определить показатели процесса.
Процесс построения кривой переходного процесса по вещественной частотной характеристике может быть сведен к нескольким основным операциям, последовательность которых изложена ниже.
1. Рассчитывают и строят вещественную частотную характеристику Р(со), для чего в выражение передаточной функции замкнутой системы подставляют значения р=;ы, выделяют вещественную и мнимую части
U7 (/со) =Р (со) +]Q (со),
и, задаваясь значением со от 0 до со, находят для различных частот значения Р(ы), по которым и строят вещественную частотную характеристику.
221
2. Вещественную частотную характеристику заменяют линейно-кусочной таким образом, чтобы ломаная прямая достаточно хорошо воспроизводила кривую. Более точную разбивку делают на начальной части характеристики Р(со), которая соответствует основному участку кривой переходного процесса. Апрокспмпровать кривую необходимо только в зоне рабочих частот.
3. Полученную линейно-кусочную характеристику раскладывают на трапеции, одна сторона которых должна всегда располагаться на осн ординат. Чем больше число трапеций, тем, очевидно, полнее ломаная линия воспроизводит кривую Р(со), тем точнее построение кривой переходного процесса, ио и тем сложнее расчет. Если трапеции соответствуют площади, охватываемой кривой Р(ы) выше оси абсцисс, то их считают положительными, и, напротив, если они соответствуют площади, охватываемой кривой Р (со) ниже оси абсцисс, или площадям, дополненным к положительным трапециям при разбивке, их считают отрицательными.
4. Пользуясь таблицами интегральных функций Л (/о), Для каждой трапеции строят кривые переходных процессов и по ним находят результирующую кривую переходного процесса автоматической системы регулирования как алгебраическую сумму ординат у для частот coj всех трапеций.
Так, характеристика Р(со) па рисунке 87, а заменена четырьмя трапециями (рис. 87,6); трапеция 1 является положительной, а остальные — отрицательные, причем верхнее основание трапеции 2 равно нулю. Каждая из этих трапеций характеризуется следующими основными параметрами (рис. 87, в), по которым находят значение интегральных функций: Р — высота, wCp— частота среза, <оа — интервал равномерного пропускания частот, ?.=wd/wcp— коэффициент наклона.
Функция й(Г0) представляет собой кривую переходного процесса системы, вещественная частотная характеристика которой есть единичная трапеция с Рс=1 и <Вср=1с-’. Значения интегральных функций даются в справочных таблицах в зависимости от различных коэффициентов наклона (O^jZsOl). Для каждого X, (для каждой трапеции) при различных значениях времени t0 в таблице находят значение h(tD). Чтобы получить кривую //(/) переходного процесса, соответствующего неединичной трапеции, каждое значение функции /г (Zo) умножают на Pi, а время t0 делят на частоту среза юСр., то есть
Ординаты полученных кривых складывают с учетом их знаков И находят кривую y(t) переходного процесса (рис. 87, г). Пользуясь
222
Рис. 87. Построение кривой переходного процесса по вещественной частотной характеристике.
полученной кривой переходного процесса, определяют качественные показатели. Если они не отвечают заданным требованиям, принимают меры по их улучшению.
9.3. Косвенные оценки качества
Переходной процесс характеризуется рядом параметров, определение которых представляет собой сложную и громоздкую задачу. При решении практических задач не всегда требуется значение всех показателей качества. Поэтому, чтобы не строить кривую переходного процесса для исследования качества управления, применяют косвенные методы оценки переходного процесса. Косвенными оценками называют величины, характеризующие отдельные свойства переходного процесса, которые находят без его построения. Существует несколько косвенных оценок качества переходного процесса: оценка по частотным характеристикам, интегральные оценки,
223
корневые методы и т. д. Наибольшее распространение получила оценка по частотным характеристикам. На рисунке 88 изображены примерные амплитудная К(ь>) и фазовая ф(со) частотные характеристики замкнутой автоматической системы. В амплитудной характеристике можно выделить ряд характерных участков: на участке ab амплитуда выходного сигнала равна амплитуде входного, то есть К(ы) = 1; на участке Ьс в точке для резонансной частоты амплитуда имеет максимальное значение Атах, при дальнейшем увеличении частоты система вследствие своей инерционности не успевает реагировать на колебания больших частот и Л(с») резко падает — участок de. Выходной сигнал отстает по фазе от входного, поэтому фазовая характерис
тика отрицательна.
Л («max
Отношение —л7пГ /1 (0)
-=Л1 называют коэффициентом ко-
лебательности. Чем больше М, тем более колебательным является переходный процесс. Обычно Л1 — »=1,2... 1,5. Малым М соответствует большое время регулирования, система вяло реагирует на возмущения. При больших Л-1 увеличивается перерегулирование и система приближается к границе устойчивости.
Характерными частотами наряду с частотой итак для АЧХ являются <осз и соц. Частоту wC3 называют частотой среза замкнутой системы, и ее значение определяют на уровне Л'(ы) = 1, когда амплитуды входного
Вис. 88. Частотные характеристики автоматической системы; а — амплитудная и фазовся, б—логарифмические.
224
и выходного колебаний равны между собой. Частота соп называется полосой пропускания частот замкнутой Л(0)
системы и определяется как 0,707. Она влияет на точность и быстродействие системы, с ее увеличением быстродействие системы увеличивается. Чем больше <оп, тем больший спектр входного сигнала передается системой без искажений и тем выше точность работы системы.
Колебательность Л[ и полоса пропускания с>и замкнутой системы являются косвенными показателями качества переходного процесса, и по ним можно судить о работе системы.
Оценку качества управления можно выполнить и по логарифмическим частотным характеристикам. Для f этого введены типовые ЛЛЧХ разомкнутых систем, которые отличаются друг от друга наклонами отдельных участков. Количественная связь между показателями процесса управления и параметрами типовых ЛЛЧХ заранее определена и имеется в виде номограмм. По ним определяют как косвенные, так и прямые показатели.
С интегральными оценками и корневыми методами можно ознакомиться в специальной литературе.
9.4. Определение установившихся ошибок
Автоматическая система управления в процессе работы должна передавать и воспроизводить сигналы, поступающие на ее вход. Точность воспроизведения этих сигналов оценивается ошибками системы. Различают ошибки: по задающему воздействию
представляющую разность между входным воздействием x(t) и управляемой величиной 1/(0, и по возмущающему воздействию
c(O = -z/(O.
равную изменению управляемой величины под влиянием этого возмущения (задающее воздействие отсутствует).
15 Заказ 5067
225
Величина установившейся ©шибки вычисляется для значения времени t—oo, то есть
е (^)уст — lime (/).
f->oo
Существуют различные способы определения значения установившейся ошибки, наиболее просто она определяется при помощи передаточной функции ошибки (71), откуда
е(Р) = №о(р)х(р).
Для нахождения ошибки как функции времени делают обратные преобразования Лапласа и при t-^oo
е(о=а-«[е(р)].
Значение установившейся ошибки от задающего воздействия можно определить и не применяя обратного преобразования Лапласа по уравнению
в(/) уст — limpFo(p)x(p), в основе которого лежит теорема отрицательного исчисления о конечном значении функции. Так как передаточная функция ошибки (71) равна
IV’O (р) =------.
V ’ l+WP(p)
будем иметь
х(р)
Е(0уст = 11тр-рр^у •
р-*0
Для статической системы IV’(O) = &, а изображение по Лапласу единичного типового воздействия x(t)=x0 равно х(р) — — , поэтому установившаяся ошибка стати-
Р ческой системы будет
е(^)уст— (82)
где к — коэффициент передачи разомкнутой системы.
Из уравнения (82) следует, что статическая ошибка пропорциональна величине задающего воздействия и уменьшается с увеличением коэффициента передачи k разомкнутой системы.
Установившуюся ошибку от возмущающего воздей- s ствпя определяют по уравнению
Е(0 уст — limpIFF(p)F(p),
226
где WF (р)—передаточная функция по возмущению (72), равная
Тогда установившаяся ошибка от возмущения будет равна
Г, (р)
E(/)yCT=limp—(83)
Для статического объекта и статического регулятора соответственно имеем k0 и W(O)=kokv. При
г F«
скачкообразном возмущении F(t)—F0, тогда г (р) =—— и установившаяся ошибка
ko
е(0уст= (84)
где k=kokp — коэффициент передачи разомкнутой системы.
Из уравнения (84) следует, что различным значениям Fo соответствуют различные значения установившейся ошибки.
Контрольные вопросы и задания. 1. Назовите основные показатели качества переходных процессов и дайте их характеристику. 2. Какие методы построения переходных процессов применяются на практике? 3. Назовите косвенные оценки качества переходных процессов. 4. Что такое установившаяся ошибка? 5. Какими установившимися ошибками характеризуется система? 6. Методы определения установившихся ошибок.
15*
ГЛАВА X
КОРРЕКЦИЯ АВТОМАТИЧЕСКИХ СИСТЕМ
10.1. Понятие о коррекции
Показатели качества процесса регулирования должны удовлетворять предъявляемым к системе требованиям, то есть система должна быть устойчивой и иметь заданную точность. Для уменьшения ошибки в установившемся режиме, как уже отмечалось, необходимо увеличивать коэффициент усиления регулятора. Однако она все равно остается, так как увеличение коэффициента усиления всегда ограничено либо уменьшением запаса устойчивости и ухудшением переходного процесса, либо из-за физической неосуществимости большого коэффициента усиления в данной конструкции регулятора.
Увеличение коэффициента усиления может привести к тому, что система станет неустойчивой раньше, чем удастся получить требуемый коэффициент усиления.
На рисунке 88 изображены ЛАЧХ и ЛФЧХ системы с различными коэффициентами усиления и /г2. Если при малом значении k\ система имеет достаточный запас устойчивости по фазе од и амплитуде при ошибке, превышающей допустимое значение, то с увеличением коэффициента усиления до /г2 с целью уменьшения ошибки до требуемого значения система, как видно из рисунка, становится неустойчивой. Увеличение коэффициента усиления привело к увеличению частоты среза (0с2>Шсь к уменьшению запаса устойчивости по фазе до отрицательного значения «р2 из-за инерционности звеньев системы, создающей запаздывание в передаче колебаний по фазе.
Чтобы с увеличением коэффициента усиления сохранить устойчивость, то есть стабилизировать систему и обеспечить получение заданных показателей качества переходного процесса, необходимо осуществить коррекцию системы.
228
Одним из способов коррекции является введение в закон управления производной от сигнала ошибки.
В системе (рис. 89, а), состоящей из объекта управления ОУ, датчика Д, усилителя У и исполнительного механизма ИМ, включено дифференцирующее устройство ДУ с воздействием на выходе
dz
Z1 = fe,-dT' (85)
На выходе датчика сигнал равен
z=ky. (86)
Рис. 89. Введение производной в закон регулирования.
В усилитель поступает воздействие йу zA-Zi=k(y+kx)—^- (87)
После усилителя имеем
z2=k2(z + zi). (86)
Исполнительный элемент вырабатывает управляющее воздействие на объект
23 = ^2 (89)
или после подстановки значения г2 из (88) и его составляющих из (85) и (86) получим
/ ду \
2з = ^з^2^ ( У + Ь[-- / ' (96)
Включение дифференцирующего устройства в систему привело к тому, что управляющее воздействие на объект оказалось пропорциональным не только откло-dy нению управляемой величины у, но и производной -
от этого отклонения.
На рисунке 89, б изображено изменение отклонения управляемой величины у во времени (кривая /), а на dv
рисунке 89, в — изменение производной - с течением
229
времени (ее величина представляет собой тангенс угла наклона касательной в соответствующей точке кривой '/)-
При работе регулятора по закону z^ — k^i-y все время, пока i/>0, то есть на участке ОАВ, регулятор вырабатывает положительное управляющее воздействие z3, действующее на уменьшение положительного отклонения у. В точке В изменяется знак отклонения, и регулятор должен изменить свое действие в обратную сторону. Но из-за инерционности регулятора он будет продолжать работать на уменьшение управляемой величины и начнет действовать в обратную сторону позже, когда накопится определенное отрицательное отклонение у — внутри участка ВС. Это способствует раскачиванию системы и тем сильнее, чем больше коэффициент усиления регулятора.
При работе регулятора по закону (90) с увеличением отклонения у (участок ОА) производная dy/dt и отклонение имеют один знак, поэтому их сложение увеличивает управляющее воздействие регулятора z3 на объект, направленное на уменьшение отклонения у. Следовательно, наличие производной в законе управления формирует действие регулятора на участке возрастания отклонения управляемой величины. Поэтому максимальное отклонение в точке А будет меньше, чем для регулятора без производной.
При уменьшении отклонения у (участок АВ) производная имеет отрицательное значение, и в выражении (90) ее значение будет вычитаться из у, что приводит к уменьшению z3 в сравнении с воздействием без производной. Поэтому наличие производной в законе регулирования тормозит действие регулятора на участке уменьшения отклонения управляемой величины. Это предотвращает переход отклонения к отрицательному значению и в итоге к подавлению колебаний в системе и созданию переходного процесса, кривая 2 (рис. 89, б).
Управляющее воздействие z3 станет отрицательным не в точке В, а раньше, еще при положительном у. Введение производной компенсирует инерционное запаздывание в изменении действия регулятора в обратную сторону.
Итак, если в закон управления введена производная, то регулятор реагирует не только на значение управля
ло
емой величины в данный момент времени, но и на характер изменения отклонения в последующие моменты времени, то есть работает как бы с опережением, улучшая качество процесса управления за счет тенденции последующего развития процесса- Показатели качества системы можно улучшить путем изменения закона управления и с помощью других корректирующих устройств, выходной сигнал которых может быть некоторой функцией от входного сигнала: интегралу во времени, сумме производной и интеграла и т. д. Эти корректирующие устройства включаются либо параллельно, либо последовательно с элементами системы (рис. 5). Поэтому корректирующие устройства называют последовательными или параллельным и. На практике применяют и те и другие. При выборе схемы подключения корректирующих устройств нужно иметь в виду следующее.
Последовательное включение, аналогичное введению производных в основную цепь управления, увеличивает скорость воздействия на систему, но одновременно сопровождается усилением влияния высокочастотных внешних воздействий (при этом ускорение воздействия требует повышения мощности системы и ее прочности). Введение же интегралов в закон управления делает систему астатической и, следовательно, устраняет статическую ошибку, но в данном случае для стабилизации приходится усложнять схему системы.
Параллельное включение корректирующих устройств основным звеньям, то есть включение их в обратные связи, даст преимущества по сравнению с последовательным, так как делает систему менее чувствительной к внешним воздействиям и изменениям параметров основной цепи управления и не усиливает помех. Улучшение переходного процесса происходит потому, что при охвате можно изменить как коэффициент усиления звена, так и его постоянную времени и получить звено с нужными параметрами.
10.2. Коррекция с помощью последовательных корректирующих устройств
Коррекцию АСУ можно осуществить с помощью последовательных интегрирующих и дифференцирующих устройств, включаемых в цепь управления системы. Кор
231
рекция системы с помощью последовательных дифференцирующих фазоопережающих устройств наряду с увеличением коэффициента усиления системы позволяет увеличить частоту среза системы, то есть наряду с уменьшением ошибки системы в установившемся режиме имеется возможность уменьшить и время переходного процесса.
Так, последовательное включение дифференцирующего звена, которое на выходе дает производную от входной величины, может уменьшить влияние какой-либо постоянной времени. Например, если передаточная функция системы
(91)
IFj (р)
’ (1+Лр)(1+М
и требуется уменьшить влияние постоянной времени 7\, то последовательное введение в цепь управления дифференцирующего звена с передаточной функцией
7 Ч *2(1+Лр)
1Ыр) 1+ГзР
приведет к тому, что выражение (91) на основании формулы (68) при Т\=1\ будет иметь вид
!V,(p) = ^1(p)tt72(p) =
k,k2
(i+T2p)(l+T3p)
Из полученного уравнения видно, что включение дифференцирующего звена привело к полной компенсации нежелательной постоянной времени 7\ и, следовательно, к улучшению динамических свойств автоматической системы. Последовательное включение дифференцирующих фазоопережающих устройств приводит к ослаблению сигнала в области низких частот, оно тем интенсивнее, чем большее опережение должно обеспечить устройство. Компенсацию этого ослабления выполняют увеличением коэффициента усиления за счет других ее элементов. Высокие частоты пропускаются этим устройством без ослабления, если на дифференцируемый полезный сигнал накладываются высокочастотные помехи, то они будут полностью пропускаться. Поэтому с помощью дифференцирующих фазоопережающих устройств осуществляют коррекцию только в том случае, если на вход системы поступает управляющее воздействие без помех.
232
-IjO
=0
р(а)
г
Рис. 90. Схемы включения апериодических звеньев и их влияние на вид амплитудно-фазовой характеристики системы.
Последовательное включение типовых звеньев также изменяет характеристики отдельных звеньев и системы в целом. Амплитудно-фазовая частотная характеристика апериодического звена показана на рисунке 90, а. Если к нему последовательно подключить такое же апериодическое звено (рис. 90, б), то амплитудно-фазовая характеристка будет выглядеть, как на рисунке 90, в. Последовательное включение третьего звена (рис. 90, г) приводит к тому, что амплитудно-фазовая характеристика принимает вид, показанный на рисунке 90, д. Из рассмотренных примеров следует, что последовательное включение в цепь управления апериодического звена с передаточной функцией W (р) =k/(l-\-Tp) соответствует повороту вектора АФХ по часовой стрелке или отставанию по фазе на угол arctg(—(оТ). Другими словами, значение фазового угла амплитудно-фазовой характеристики растет с увеличением в системе числа апериодических звеньев, включенных последовательно.
Если в систему, характеристика 1 которой показана на рисунке 91, последовательно включить интегрирующее звено с характеристикой 2, то получим амплитуднофазовую характеристику 3.
233
Рис. 91. Влияние интегрирующего звена па АФХ системы.
уровень влияния помех,
Таким образом, включение привело к поворот)' всех векторов характеристики на угол —-90° по часовой стрелке с одновременным увеличением их на модуль интегрирующего звена klwT. Введение интегрирующего звена позволяет значительно повысить коэффициент усиления системы, не увеличивая ее частоты среза. Это позволяет уменьшить динамическую ошибку системы и снизить поступающих на вход системы
вместе с задающим воздействием. Недостатком такой коррекции является то, что переходный процесс ухудшается.
Из приведенных примеров следует, ,то включением различных звеньев в цепь управления системы можно повернуть АФХ на комплексной плоскости так, что она займет требуемое положение.
В заключение отмстим, что включение в цепь управления корректирующих звеньев (дифференцирующих и интегрирующих), которые вносят в закон управления составляющие, пропорциональные производным и интегралам выходной величины, позволяет значительно повысить устойчивость и быстродействие системы.
Однако нельзя полностью скомпенсировать влияние всех постоянных времени в системе и сделать се безынерционной. Если это сделать, то передаточная функция системы станет равной постоянному числу и система окажется мгновенно действующей.
В результате потребуется регулятор теоретически неограниченной мощности, а это выполнить невозможно. При переходных процессах в деталях системы будут возникать большие перенапряжения, что приведет к выходу их из строя.
10.3. Коррекция с помощью обратных связей
В практике наряду с последовательной коррекцией систем управления широко применяют корректирующие устройства, включаемые в местные обратные связи.
234
Рассмотрим влияние обратных связей на пара?иетры основного звена.
На рисунке 92, а изображено апериодическое звено, охваченное жесткой обратной связью. Эквивалентная передаточная функция этого звена в соответствии с правилами преобразования структурных схем (70)
w-(p) _ __________________*------------
Др) I “Ь (р) W'o.C (р) 1-р^рЧ-РРо-С
Перейдем от передаточной функции к дифференциальному уравнению. Вначале запишем операторное уравнение
У(Р) +Тру(р) + kkocy(p) t=kx(p), из которого, перейдя от изображения F(p) к оригиналу /(/), получим дифференциальное уравнение апериодического звена, охваченного жесткой обратной связью г/р
T-^-+y + kk0.cy=kx.
После преобразования этого уравнения получим Г dp Р
----- — Рр= х. 1+РРо.с------------d/-14-РРо.с
Из полученного уравнения видно, что структура звена не изменилась, а постоянная времени звена и коэффициент усиления уменьшились в (1 + kkQC) раз.
Для апериодического звена, охваченного гибкой обратной связью (рис. 92, б), запишем, опуская про-
Рис. 92. Схемы охвата типовых звеньев обратными связями: а и б — апериодического; в и г — интегрирующего.
235
межуточные преобразования, его дифференциальное уравнение
Т———1- kkocT\о.с—тт+У = kx. ас ос
В конечном виде
dy
(Г+^и.с^о.с)"^- \-y=kx ,
то есть характер звена сохраняется, а постоянная времени увеличивается на kkn.cToc.
Уравнение интегрирующего звена, охваченного жесткой обратной связью (рис. 92, в),
Ay Т Ay 1
Т'~7Г+ kk0.cy=kx или —---------------7Г+у = ~ь—Х’
At J kko.e At Йо.с
Следовательно, звено становится эквивалентным апериодическому, что существенно изменяет динамику сис-темы.
Коэффициент усиления и постоянная времени уменьшаются в kko.c раз.
Уравнение интегрирующего звена, охваченного гибкой обратной связью (рис. 92, г),
Ау ( Ау \ „ Ау
Т----= k \X — kQ.cTux--I ИЛИ (T+kkoe ^о.с )-----= kx
At \ At 1 At
Значит, полученное звено остается интегрирующим, но его постоянная времени увеличивается на kkn.cTn.c.
Подобным образом можно проанализировать охват обратными связями и других звеньев.
Контрольные вопросы и задания. 1. Для чего необходима коррекция? 2. Назовите способы улучшения качественных показателей процесса управления. 3. Как влияет последовательное включение корректирующих устройств на показатели системы? 4. Как влияет охват звеньев обратными связями на их параметры? 5. Каковы недостатки включения корректирующих устройств?
Лабораторная работа б
Определение постоянных времени различных элементов автоматических систем
Содержание работы. Овладеть методами и навыками определения постоянных времени различных элементов систем.
Описание лабораторной установки. Схемы лабораторных установок для снятия кривых разгона y(t) различных элементов при-
236
Рис. 93. Схема лабораторных установок для снятия кривых разгона:
а — электрического двигателя; б — гидроцилиндра; в — нагревательного элемента.
ведены на рисунке 93. Для снятия кривой разгона электродвигателя М в схеме используют тахогенератор BR и регистрирующий вольтметр PV (рис. 93, а). Напряжение подают, замыкая рубильник Р. Для исследования гидроцилиндра необходимо иметь потенциометрический П или индуктивный датчик, преобразующий перемещение поршня в напряжение (рис. 93, б). При снятии кривой разгона сначала включают двигатель масляного насоса, а затем полностью открывают золотник. Нагревательный элемент (рис. 93, в) исследуют при помощи термопары, выводы которой подключают к вольтметру PV с большим внутренним сопротивлением. Время нагрева отсчитывают по секундомеру, начиная с момента замыкания рубильника Р.
Порядок выполнения работы. 1. Снимают кривые разгона объектов. 2. По кривым разгона методом касательной определяют постоянные времени. 3. Рассчитывают зависимости у={(1) по формуле
У— 1/ус»(1—б т ) +Уиачв
где Уусг и уиэч — соответственно установившееся и начальное значения управляемой величины.
Содержание отчета. Отчет должен содержать принципиальные схемы и описание установок, таблицы с данными расчетов зависимости y=f{t), опытные и расчетные кривые y=f(t), построенные для каждого элемента на одном графике, паспортные данные основного оборудования и приборов, выводы по работе.
ГЛАВА XI
НЕЛИНЕЙНЫЕ АВТОМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ
11.1. Общие сведения
Автоматическую систему управления, в состав которой входит хотя бы один элемент с нелинейной статической характеристикой, называют нелинейной. Уже отмечалось, что системы, описываемые линейными дифференциальными уравнениями, на практике встречаются довольно редко. Нелинейности статических характеристик отдельных элементов могут обусловливаться различными причинами.
При исследовании рассматриваемых систем стремятся провести линеаризацию статических характеристик как отдельных элементов, так и систем в целом. Однако встречаются и такие системы, движение которых описать линейным или линеаризованными уравнениями не представляется возможным из-за наличия в них элементов со значительными нелинейностями. Поэтому применить изложенные ранее методы к анализу нелинейных систем, у которых динамические характеристики описываются нелинейными дифференциальными уравнениями, не удается, так как нет методов решения этих уравнений.
Виды статических характеристик некоторых распространенных в практике нелинейных элементов изображены на рисунках 29, 40. Нелинейные АСУ в зависимости от начальных условий могут быть устойчивыми, совершать незатухающие колебания или находиться в некотором критическом автоколебательном режиме. Нелинейная автоматическая система может быть устойчивой при малых отклонениях параметра управления и оказаться неустойчивой при больших отклонениях и в целом быть неустойчивой.
Математическую модель нелинейных систем составляют так же, как и для линейных. Составляют принци
238
пиальную, функциональную и алгоритмическую структурные схемы АСУ. Для каждого элемента находят статические и динамические характеристики с последующей их линеаризацией и выявлением возможного диапазона изменения управляемых параметров. Если нелинейность мало влияет на характер переходного процесса, ес линеаризуют, явно выраженные нелинейности сохраняют. Таким образом, получают алгоритмическую структурную схему с некоторой нелинейной передаточной функцией и нелинейными характеристиками звеньев.
Для анализа отдельных свойств автоматических нелинейных систем предложен ряд приближенных методов, из которых наибольшее распространение получили методы фазовой плоскости, припасовывания, гармонического баланса и математического моделирования. Самая важная задача при исследовании нелинейных систем — выявление условий, при которых создается режим автоколебаний, и оценка их параметров. Автоколебания в нелинейных системах возникают не как разультат внешних воздействий, а как проявление их особых динамических свойств. Рассмотрим отдельные методы анализа нелинейных систем.
1^.2. Метод фазовой плоскости
Состояние автоматической системы может быть охарактеризовано числами, которые допустимо рассматривать как координаты некоторой точки в пространстве: при этом любой точке этого пространства будет соответствовать одно определенное состояние системы. С течением времени параметры изменяются, точно так же изменяются координаты точки в пространстве. Таким образом, по движению точки можно судить о поведении автоматической системы управления. Точку, описывающую поведение системы, принято называть изображающей точкой, ее траекторию — фазовой траекторией, а пространство — фазовым пространством. Для исследования нелинейных автоматических систем второго порядка фазовое пространство сводится к фазовой плоскости.
Следовательно, фазовые траектории и фазовое пространство дают геометрическое представление о динамике процессов, происходящих в системе. Вместе с тем метод фазовой плоскости не позволяет судить о протека-
239
пии переходного процесса во времени и служит лишь его качественной характеристикой.
На фазовой плоскости по оси абсцисс откладывают, как правило, отклонение управляемой величины у от заданного значения, а на оси ординат — скорость ее изменения йу!й1 = у'. Поэтому состояние системы, описываемой уравнением второго порядка, будет в любой момент времени определяться значениями у и у' — положением изображающей точки. В переходном режиме значения у и у' меняются и изображающая точка занимает различные положения на фазовой плоскости, по-
Рис. 94. Колебательные переходные процессы и их изображение на фазовой плоскости:
а и б — незатухающий; в и г — затухающий; д и е — расходящийся.
240
этому по ее траектории можно судить о характере исследуемого переходного процесса.
Допустим, что отклонение управляемой величины от заданного значения представляет собой незатухающие синусоидальные гармонические колебания (рис. 94,а). Изобразим их на фазовой плоскости в координатах у и у'. Будем считать, что в момент времени t—О синусоидальные колебания t/ = X„,sin(oO имеют значение у0 и характеризуются точкой Л. На участке переходного процесса АВ отклонение параметра у увеличивается, а его скорость у' уменьшается. На фазовой плоскости (рис. 94, б) это соответствует участку МЛ.МВ фазовой траектории. В точке Мв у=Ат- у' = 0. На участке ВС отклонение у уменьшается, а его скорость у’ возрастаем, но имеет отрицательное значение. На фазовой плоскости это изображено фазовой траекторией МвМс. Подобным образом для точек D, Е, F переходного процесса на фазовой плоскости получены изображающие точки MD, МЕ, MF. По истечении периода переходный процесс автоматической системы в точке F будет иметь те же значения у и у', что и в точке А, поэтому фазовые траектории в изображающих точках MF и МА на фазовой плоскости будут совпадать. Следовательно, фазовая траектория представляет собой замкнутую кривую.
Уравнение для фазовой траектории при незатухающих гармонических синусоидальных колебаниях можно получить, если найти скорость изменения отклонения управляемой величины
dr/ d
у =-^- = -^-Лт51П(о/=(1)ЛтС05(оЛ (92)
Исключив из выражения (92) переменную t
у'= ыАт cos arcsin— = Лmcocos arccos 1 f i — — , Л>" | А’т
найдем искомое уравнение
<4т А то2
Нетрудно убедиться, что это уравнение эллипса с полуосями Л,„ и мЛ,,,. При разных значениях Л,„ на фазовой. плоскости получим семейство эллипсов, которые
16 Заказ 5067
211
Рис. 95. Переходные апериодические процессы и их изображения на фазовой плоскости:
« — затухающим; б — расходящийся.
не пересекаются и имеют общую точку, называемую центром (рис. 94, б).
Фазовая траектория затухающего гармонического колебательного процесса (рис. 94, в) представляет собой спиралевидную кривую (рис. 94, г), постепенно приближающуюся к началу координат фазовой плоскости, так как амплитуда отклонения регулируемой величины и скорость его изменения постепенно уменьшаются. Точка равновесия в начале координат называется устойчивым фокусом. Для гармонического колебательного расходящегося (неустойчивого) процесса (рис. 94, d) фазовая траектория изобразится в виде спиралевидной кривой (рис. 94, е), удаляющейся от начала координат, так как амплитуда отклонения управляемой величины и скорость его изменения постепенно увеличиваются. В этом случае точка равновесия — центр координат называется неустойчив ы м фокусом. У апериодического затухающего переходного процесса, изображенного на
242
рисунке 95, а (система устойчива), фазовые траектории стремятся к началу координат. Точка равновесия в этом случае называется устойчивым узлом. Для апериодического расходящегося процесса (рис. 95, б) фазовые траектории удаляются от начала координат фазовой плоскости. Точка равновесия теперь будет неустойчивым узлом.
Приведенные примеры подтверждают, что перемещение изображающей точки на фазовой плоскости по той или иной фазовой траектории дает возможность судить о характере исследуемого переходного процесса. При построении фазовых траекторий на фазовой плоскости у и у' можно пользоваться следующими, общими для всех переходных процессов, правилами: 1) фазовые траектории не пересекаются между собой (исключение составляют только особые точки); 2) если значение у положительно, то фазовая траектория находится в верхней половине фазовой плоскости и изображающая точка всегда движется слева направо, при отрицательном же значении у' фазовая траектория располагается в нижней половине фазовой плоскости и изображающая точка движется налево; 3) фазовые траектории при скорости изменения «/'=0 пересекают ось всегда под прямым углом.
11.3 Метод припасовывания
Сущность метода припасовывания (метода точечного преобразования) состоит в том, что нелинейную характеристику заменяют рядом линейных участков, для которых составляют линейные дифференциальные уравнения, приближенно описывающие поведение системы. Затем на основании условия непрерывности решения полученные результаты для каждого участка припасовывают в точках соединения. Существуют различные варианты этого метода, в том числе и метод точечного преобразования, предложенный А. А. Андроновым.
Переходный процесс разбивают па участки или этапы, в пределах которых процесс описывают линейными дифференциальными уравнениями. Поэтому всю фазовую плоскость разделяют на области со своими фазовыми траекториями, отвечающими уравнениям соответствующих этапов.
Рассмотрим фазовую плоскость, разделенную на че-
16*
243
Рис. 96. Картина фазовых траекторий к методу припасовывания (точечного преобразования).
тыре области (рис. 96). Каждая из этих областей очерчена границами: между областями IV и I границей служит положительная полуось у, между областями I и II — кривая AjBj, между областями II и III—полуось oylt между областями III и IV — кривая Л3В3. Будем считать, что начальные координаты изображающей точки определяются положением точки Мо, что соответствует на
чальным условиям у(0) = ОМ0=у0. Изображающая точка на первом этапе переходного процесса перемещается по некоторой фазовой траектории области 1 и попадает в точку М\ на границу /ЦВь Для области II принимается такая фазовая траектория, которая проходит через точку Му, тогда изображающая точка, двигаясь по этой траектории, на втором этапе переходного процесса приходит в точку М? на границе оух. Следуя по соответствующим фазовым траекториям на этапах III и IV, изображающая точка Л10 снова достигает полуоси оу в некоторой точке М* с координатой у0*.
Возможны три случая: ijo*<уо\ Уо*=Уо и Уо*>Уо-В первом случае переходный процесс будет затухающим, во втором имеет место предельный цикл, в третьем переходный процесс будет расходящимся. Для тех или иных значений у0 значения у0* будут различными, следовательно, существует определенная зависимость i/o*=f(f/o). Такая зависимость позволяет судить о том, каким будет переходный процесс.
Зависимость Уо* — 1(Уо) строят следующим образом. Задаются на фазовой плоскости рядом точек Л1о начального отклонения и, пользуясь семейством фазовых траекторий в каждой области, находят соответствующие им точки ЛД*. Приняв положение точек Мо и Мо* за координаты некоторой преобразующей точки, строят в данной системе координат искомую кривую, различные варианты которой показаны на рисунке 97. Так, отрезок ON0 (а) представляет собой наименьшее начальное
244
Рис. 97. Характеристики чечного преобразования.
к методу то-
отклонение, когда систему можно вывести из равновесия. Если через начало координат провести прямую Уо*~Уо, то получим биссектрису координатного угла. Возможно несколько случаев расположения кривой Уо*=[(Уо) по отношению к биссектрисе.
1. Кривая yo*=f(yo) не пересекает биссектрису и располагается справа от нее (рис. 97, а). Переходный процесс будет затухающим, в чем можно убедиться, заменив преобразование точки у0 в у0* на фазовой плоскости системы движением преобразующей точки Мо по отрезкам, как показано стрелками. Где бы ни взята начальная точка Мо, мы, двигаясь подобным образом, всегда придем к отрезку ON0. Если кривая f(yo) расположена слева от биссектрисы (рис. 97, б), то процесс будет расходящимся.
245
2. Кривая i/o*=f(yo) пересекает биссектрису в одной точке (рис. 97, в, г). В случае (в) система будет иметь устойчивый предельный цикл, автоколебания будут устойчивыми, так как при любом начальном отклонении y0<C(t или у0>С0 преобразующая точка Al0 движется к точке /( с координатами у0* = уо=С0. В случае (г) также предельный никл, но при t/o<cCo процесс устойчивый, так как изображающая точка движется к зоне равновесия, а при уо>С0—неустойчивый, поскольку изображающая точка удаляется в бесконечность.
3. Кривая y0*=f(y0) пересекает биссектрису в двух точках (рис. 97, д). Когда у0<^С, переходный процесс протекает устойчиво и система возвращается к положению равновесия. Когда же i/o>£i> изображающая точка движется к точке /<2 с координатами уо*—Уо~С2 и в системе возникают устойчивые автоколебания.
4. Кривая t/o*=f(t/o) касается биссектрисы в некоторой точке К (рис. 97, е). При уо<Сй изображающая точка движется к зоне равновесия, при у0>С0 — к точке К с координатами уо*—Уо=Си.
Таким образом, пользуясь методом припасовывания, можно провести анализ переходного процесса нелинейной автоматической системы.
11.4. Метод гармонического баланса
Метод гармонического баланса (частотно-амплитудный метод) исследования нелинейных систем любого порядка является приближенным, так как не учитывает влияние высших гармоник. Основан он на сравнении входного гармонического колебания и первой гармоники на выходе нелинейного элемента.
Автоматическую систему с одним нелинейным эле-
Рис. 98. Структурное представление нелинейной системы (а) и воздействие гармоническим сигналом на нелинейный элемент (б).
ментом представляют в виде нелинейного элемента НЭ и линейной части ЛЭ, куда объединяют все линейные элементы системы (рис. 98, а) Предполагают, что в такой нелинейной замкнутой системе, находящейся под воздействием гармонического возмущения, входная ве-
246
личина х нелинейного элемента будет изменяться гармонически, то есть x=Xmsin<i>Z. Такое предположение справедливо, если линейная часть системы не пропускает (отфильтровывает) все высшие (кроме первой), гармонические составляющие входного сигнала х. Это допущение позволяет определить условия устойчивости нелинейных систем и ввести понятие о передаточной функции нелинейного элемента, которая при гармоническом входном воздействии является функцией входной и выходной амплитуд и частот.
Наиболее распространен метод, когда передаточная функция считается зависящей только от амплитуды входных колебаний, то есть передаточной функцией нелинейного элемента НЭ называется отношение амплитуды первой гармоники его выходного сигнала к амплитуде входного гармонического сигнала НЭ. Если па вход нелинейного элемента в разомкнутой автоматической системе (рис. 98, б) подать гармоническое воздействие x=>4„1sincl)/, то на выходе НЭ установятся периодические колебания с той же частотой о
У=А0+ 22 (Asinncitf+ Л2СО5П(1)0- (93)
7/=1
Раскладывая выражение (93) в ряд Фурье и исключая высшие (кроме первой) гармоники, получим
у=А о+А । s i по)/+A 2cos<o6 (94)
Коэффициенты At и Аг разложения в ряд Фурье определяются выражениями
2л
Xj=— f (Xmsino)/)sinG)/cW; (95)
о 2л
Л2=— f (AnSinotfJcosco/dco/. (95)
n
Положив в уравнении /94) /„ = 0 и и подставив в него выражения (95) и (96), найдем
2л 1 г
у= [— у f (y^,„sin<p) sintpdcp] sinepЧ-o
2.1
Г J о 1
+ • — 5 f G4,nsincp)cos(fd(p j cosjp. (97)
Поэтому передаточная функция нелинейного элемента, согласно определению, представляет в общем виде комплексную величину вида
Wa.3(jAm)=^-+j~=b(Am) +jc(Am) (98)
и может быть обозначена как №н.э (Лт).
Выражение (98) показывает, что передаточная функция нелинейного элемента является функцией амплитуды Ат входного сигнала. Коэффициенты 6(Лт) и с(Дт) определяются как коэффициенты разложения Фурье
2л
Ь(А^)=-^д— S f0olsin<p)sin(pd(p;
1 2л
с(Лт)=—— \ f0msincp)cos<pd<p. лЛт о
Модуль передаточной функции (его еще называют комплексным коэффициентом усиления или амплитудной характеристикой нелинейного элемента)
Кпэ(Ат) =^Ь2(Ат)+с2(Ат), а аргумент с(Л,„)
<P=arctg—-з---
Условия возникновения автоколебаний в автоматической системе с нелинейным элементом
^л.э(/<о)^н.э(Лт) + 1=О. (99)
Обычно уравнение (99) решают графически, представляя его в виде
1
"Гл.э(/<0)-^8(Ли1-
Затем строят кривые —№л.э(/®) при разных значе-
1
ниях частоты ы и-------- при разных значениях амп-
» (Л т)
лптуды Ат входной синусоиды. Первую кривую строят как амплитудно-фазовую характеристику с учетом знака, а вторую — по точкам. На рисунке 99 изображены три случая взаимного расположения характеристик. Если
248
Рис. 99. Амплитудно-фазовые характеристики линейной части и обратные амплитудно-фазовые характеристики нелинейной части системы.
эти характеристики не пересекаются (а), то автоколебания в системе не возникают. Когда характеристики касаются одна другой (б), система находится на границе устойчивости (изменяя параметры нелинейного элемента, можно устранить касание характеристик). При пересечении характеристик в одной или нескольких точках (в) в системе возможны автоколебания. В каждой точке пересечения характеристик можно определить значение частоты ы и амплитуды Ат автоколебаний. Частоту находят по характеристике—№Лэ(/ю), а ампли-
1
туду — по хар^теристике . Чтобы выяснить,
устойчивы или неустойчивы автоколебания в системе,
пользуются следующим правилом: если точка годогра-
»'„.Э(А1П)
, соответствующая несколько
увеличенной
амплитуде (по сравнению с амплитудой в точке пересечения годографов), не охватывается годографом 1^л:э(/<о), то автоколебания устойчивы (и наоборот).
11.5. Метод математического моделирования
Метод моделирования, который может быть физическим и математическим, универсален и прост и поэтому широко применяется* для исследования систем автоматического управления.
Физическое моделирование предполагает, что процессы, происходящие в натуральном объекте, воспроизводятся в модели, имеющей меньшие размеры, но одинаковой по физической природе с оригиналом.
Математическое моделирование основано на анало
, 249
гии уравнений, которыми описываются натуральный объект и модель как в статике, так и в динамике. Такое моделирование реализуют на аналоговых или цифровых’ вычислительных машинах. Аналоговые машины проще в управлении, дешевле и в сочетании с осциллографом дают возможность воспроизводить и наблюдать на экране исследуемый процесс в виде кривых. Недостаток аналоговых машин — сравнительно большая погрешность (±5 % при исследовании линейных и ±20 % при исследовании нелинейных систем). Однако во многих практических случаях такая погрешность считается вполне допустимой. Цифровые вычислительные машины обеспечивают более высокую точность, по сложнее и дороже.
Аналоговые машины состоят из отдельных типовых блоков, каждый из которых выполняет определенные математические или логические операции: суммирование, умножение, деление, дифференцирование, интегрирование, воспроизведение различных нелинейностей, изменение знака и т. и. Блоки машины соединяют определенным образом в зависимости от степени и вида уравнения. На вход подают напряжение, пропорциональное возмущению, а с выхода снимают напряжение, в определенном масштабе соответствующее управляемому параметру системы. Промышленность выпускает целый ряд аналоговых вычислительных машин: МН-7, МН-7М, МН-ЮМ. МН-17М, МН-18, ЭМУ-10 и др. Основной элемент любой машины — решающий блок, в котором решается поставленная задача. Данные для решения вводятся в соответствии со структурной схемой системы с помощью коммутационного поля решающего блока. На поле выведены гнезда всех решающих элементов, выполняющих соответствующие математические операции, и гнезда проводников, соединяющих с этими элементами решающий блок. Структурная схема модели, соответствующая структурной схеме реальной АСУ, набирается па коммутационном поле. Решения в виде кривых переходного процесса наблюдают на экране осциллографа.
Для исследования АСУ в решающем блоке ЭВМ имеются элементы, выполняющие три основные математические операции масштабное преобразование, суммирование и интегрирование. Выполнение этих операций осуществляется при помощи
250
решающего операционного усилителя, постоянного тока с отрицательной обратной связью.
Существуют различные способы набора моделей автоматических систем, но в практике наиболее распространен способ набора по отдельным звеньям, соответствующим определенным звеньям структурной схемы исследуемой системы. Значение переменных величин Xi при этом определяется через машинную переменную Л\ и соответствующий масштабный коэффициент Шг
Xi=nitXi. (100)
Так как p = d/d(, то в машинных единицах p—mtP.
Составим схему набора апериодического звена на модели, передаточная функция которой имеет вид
W) =
k
1+Тр
Задаемся масштабом времени m и вводим машинные переменные, тогда с учетом формулы (100) получим
У k p—mtP-, —=-----------
X l+TfiP
Отсюда truTpY +Y = kX или
Величина У в модели будет представлять напряжение, поэтому взяв от нее посредством делителя часть, пропорциональную коэф-k
фпциенту 1 /niiT и просуммировав с напряжением ---—X, получим
напряжение, пропорциональное рУ. Подав это напряжение на вход усилителя, на выходе его получим величину У. Соединив выход усилителя с входной клеммой, принятой за величину У, воспроизведем искомую схему модели (рис. 100,а). Подобным образом могут быть получены схемы набора для других типовых звеньев.
Моделирование нелинейных АСУ выполняют на машинах, в которых, кроме операционных усилителей, имеются универсальные или специализированные блоки нелинейностей, представляющие собой набор диодно-резисторных ограничителей. В основе моделирования лежит замена заданной нелинейной функции отрезками прямых. Кроме них, имеются блоки перемножения.
251
Рис. 100. Схемы моделирования на ЭВМ:
а — зоны нечувствительчости; б — релейной характеристики с зоной нечувствительности.
Так, для нелинейности типа «зона нечувствительности» схема моделирования изображена на рисунке 100, б. Диоды VI и V2 закрыты напряжениями, снимаемыми с потенциометров, до тех пор пока входная величина Пвх меньше некоторого значения Uo. Когда сигнал t/BK превысит заданное значение, один из диодов в зависимости от знака сигнала откроется и на выходе схемы появится напряжение, пропорциональное входному.
Схема моделирования релейной характеристики с зоной нечувствительности (рис. 40, д) показана на рисунке 100, в. Если напряжение па входе меньше напряжения отпирания диодов VI и V2, входное сопротивление стремится к бесконечности и коэффициент усиления равен нулю. При возрастании входного сигнала откроется один из диодов, входное сопротивление становится значительно меньше сопротивления обратной связи. Напряжение на выходе резко возрастает и ограничивается диодами обратной связи V3 и V4.
Контрольные вопросы и задания. 1. Когда систему считают нелинейной? 2. Назовите основные методы исследования нелинейных систем. 3. Расскажите об основных свойствах фазовых траекторий. 4. При каких условиях переходный процесс нелинейной системы будет устойчивым? 5. В чем заключается сущность метода гармонического баланса? 6. Назовите условия возникновения устойчивых автоколебаний в нелинейной системе.
252
ГЛАВА XII
СИСТЕМЫ ТЕЛЕМЕХАНИКИ
12.1. Основные сведения
Телемеханика — это область науки и техники, занимающаяся изучением и построением устройств, получающих информацию об объекте, преобразующих ее в сигналы и передающих их в соответствующие команды управления на расстояние по линиям связи для измерения, сигнализации и управления. Слово «телемеханика» состоит из двух греческих слов: «теле» — далеко и «механика»— мастерство или наука о машинах.
Выполнение этих функций возлагается на специальные телемеханические устройства и системы. Телемеханические устройства применяют для управления сосредоточенными и рассредоточенными, стационарными и мобильными объектами и процессами. Телемеханизация имеет особое значение в условиях сельскохозяйственного производства, которое характеризуется рассредоточенностью объектов. В телемеханике различают системы телеизмерения (ТИ), системы телесигнализации (ТС), системы телеуправления (ТУ) и системы телерегулирования (ТР). Эти системы могут функционировать как раздельно, так и совместно; системы телеуправления и телесигнализации (ТУ — ТС), системы телеуправления, телесигнализации и телеизмерения (ТУ — ТС — ТИ).
Системы телеизмерения (ТИ) предназначены для передачи данных о непрерывно измеряемых величинах какого-либо технологического процесса. Например, требуется передать данные об уровне некоторой жидкости. Датчики уровня должны непрерывно следить за каждым отклонением уровня от заданного значения, а система телеизмерения передавать соответствующую информацию. Примерная блок-схема системы ТИ изображена на рисунке 101, а. Информация по линии связи с контролируемого пункта КП передастся на пункт управления ПУ
253
Рис. 101. Блок-схемы:
а — телеизмерения; б — телеуправления н телесигнализации; ЦО — цифровой отсчет; РП — регистрирующий прибор; СП — самопишущий прибор; Дг .. .А £“*— датчи* ки; ЛС — лампы сигнальные; Зв — звонок.
(диспетчерский пункт). Если переданные величины адресуются диспетчеру, то на ПУ они поступают на стрелочные приборы или светящееся табло, по которым ведется контроль за процессом. Кроме этого, полученная информация может направляться на регистрирующие приборы, где фиксируется в виде документов — пленок, бумажных лент и т. п. При необходимости информация может поступать в управляющую вычислительную машину (УВМ), которая обрабатывает ее и выдает необходимые команды для улучшения режимов технологического процесса.
1 Системы телесигнализации (ТС) передают различные данные о ходе технологического процесса и разного рода дискретных величинах, которые также вводятся в вычислительную машину (иногда непосредственно в автоматический регулятор) или сигнализируют диспетчеру о состоянии технологических процессов. 11ри необходимости используют световую или звуковую сигнализацию, которая обращает внимание диспетчера на изменения в состоянии объекта или на аварийную ситуацию.
* Системы телеуправления (ТУ) передают информацию в виде команд, которые посылает диспетчер с ПУ или УВМ, на изменение режимов работы регуляторов, на отключение или включение исполнительных механиз
254
мов и т. п. Объекты управления 01, 02, 03 находятся вне поля зрения диспетчера, поэтому требуется специальная сигнализация, извещающая об исполнении поданных команд.
Системы телеуправления и телесигнализации (ТУ — ТС) относятся к комбинированным, в которых команды на управление объектом (ТУ) подаются с диспетчерского пункта ПУ, а с контролируемого пункта КП поступает сигнализация (ТС) об исполнении команд, действующих на включение или отключение механизмов и устройств, изменение режима работы объекта и т. п. Блок-схема такой системы изображена на рисунке 101,6.
Системы телеуправления, телесигнализации и телеизмерения (ТУ — ТС — ТИ) предназначены для управления отдельными агрегатами или целым комплексом машин. Обычно в таких системах диспетчер дает команды на выполнение различных операций, а по данным ТУ и ТС проверяет их исполнение.
Телемеханическую информацию передают по различным линиям связи: проводным, электропередачи, радио, а также по высокочастотным. В зависимости от функций, выполняемых телемеханической системой, информация идет либо с ПУ на КП — система ТУ, либо с КП на ПУ — система ТИ и ТС, либо с КП на ПУ и с ПУ на КП — система ТУ — ТС. Поэтому каждый из этих пунктов может быть источником или приемником сообщения. Чтобы эффективно эксплуатировать линию связи, сообщения передают от одного диспетчера к многим приемникам — система ТУ или от многих источников к одному приемнику — система ТС, то есть используют линию связи многократно посредством каналов связи. Канал связи — это совокупность технических средств, обеспечивающих передачу сообщений по линии связи от источника к приемнику. Число каналов связи на линии может быть различным._^д^__
12.2. Сообщение и информация
Управление производственным процессом осуществляется на основании тех сообщений, которые возникают в ходе процесса и передаются от одного звена автоматической системы к другому. Под сообщением понимают все то, что передается о ходе производственного процесса, а под информацией только ту часть сообщения, кото-
255
ГК
Переносчик Сигнал
Сигнал
1И
Переносчик Сигнал
Информация
Помехи
Сигнал с „ ~ помехами Сообщение
ПИ
I I — Сообщение
Сообщение с помехами
а
б
и Ь пи
Рис. 102. Схема телемеханической информации: а — без помех; б — с помехами.
рая представляет новизну и о которой раньше не сообщалось. Например, оператор периодически получает о производственном процессе все сведения: наименование, номер процесса, данные о его качественных показателях и т. п. Из всех этих сведений информацией будут только те, которые относятся к изменению качественных показателей, что крайне необходимо для управления процессом, а все остальные, периодически повторяющиеся данные относятся к сообшенивэ.
Сообщения передаются посредством сигналов. В качестве переносчиков информации в телемеханике используются электромагнитные колебания. Если на переносчик воздействовать, то есть нанести на него сообщение или информацию, то получим сигнал. Следовательно, сигнал — это переносчик с нанесенным на нем сообщением или информацией. Так как сообщений о производственных процессах поступает много, то и сигналов должно быть много, но, поскольку переносчик один, сигналы должны отличаться один от другого и соответствовать передаваемым сообщениям. Передаваемые сообщения о различных показателях производственного процесса по своему характеру делятся на непрерывные и дискретные. В первом случае сигналы, передающие сведения о непрерывном процессе, являются непрерывными. Во втором случае, когда необходимо передать только определенное конкретное значение показателей процесса (например, минимальное и максимальное значения параметров), сообщения будут дискретными.
256
С учетом изложенного для получения диспетчером пли машиной новых сведении должна быть организована следующая информационная цепь: происходит событие, сообщение с информацией превращается в сигнал, сигнал накладывается на переносчик^ поступает в линию связи и передается к получателю; здесь сигнал снова преобразуется в сообщение и информацию.
Схематично информационная цепь показана на рисунке 102. Информация 1И (рис. 102, а), поступающая от датчиков, воздействует на переносчик, создаваемый генератором колебаний ГК, и образует сигнал, который передается по линии связи. На приемной стороне избавляются от переносчика, и информация в чистом виде поступает к получателю информации ПИ. На рисунке 102,6 изображена схема телемеханической информации с помехами, которые частично или полностью искажают передаваемые сообщения. Эти искажения отфильтровываются, и к получателю ПИ поступает информация без помех.
Для того чтобы передать информации с возможно меньшей ошибкой по каналу связи, в котором действуют
помехи, применяют соответствующие методы кодирования. В качестве переносчиков информации в телемеханике используют электромагнитные колебания в виде колебаний переменного тока или импульсов. Переменный ток характеризуется амплитудой, частотой и фазой Изменения этих параметров при наложении информации осуществляются методом модуляции. Модуляция — это изменение параметров переносчика под воздействием сообщения. При непрерывной модуляции переносчиком служат высокочастотные колебания. Существуют три основных типа непре-
17 Заказ 5067
Рис. 103. Непрерывные модулированные колебания:
а — передаваемый сигнал (модулирующий); б—колебания переносчика; в — амплитудная модуляция; г — частотная модуляция.
257
рывных модуляций: амплитудная (AM), частотная (ЧМ), получившие наибольшее применение, фазовая (ФМ) и их комбинации.
На рисунке 103 представлены непрерывные модуляции: передаваемое сообщение (а) и высокочастотный переносчик (б). При воздействии сообщения на переносчик образуется новое колебание, в котором изменяется амплитуда (AM), а частота остается стабильной (в) или амплитуда остается постоянной (г), а изменяется частота (ЧМ). Сравнивая AM и ЧМ, можно отметить, что AM требует значительно меньшей полосы частот и технически проще реализуется; вместе с тем помехоустойчивость ЧМ значительно выше, поэтому AM находит ограниченное применение. В телемеханике используется главным образом ЧМ или двойная модуляция AM—ЧМ.
12.3. Передача и прием сигналов
Передача сигналов не представляет особых трудностей, если сигнал следует по одной линии связи, то есть если для передачи сигнала одному приемнику выделяется пара проводов, а для передачи Л' сигналов N приемникам предусматривается N пар проводов. Все значительно усложняется, если передавать /V сигналов по одной паре проводов, так как сигналы, следующие по одной липни связи, не должны терять своих отличительных особенностей, чтобы их можно было отделить на приемной стороне от других сигналов и направить по своему адресу. Решить эту задачу простым кодированием сигналов, присваивая каждому сообщению определенную кодовую комбинацию, невозможно, поскольку в системах телемеханики информация передается как от одного источника информации ко многим приемникам (команды ТУ, направляемые на КП), так и от многих источников к одному приемнику (сигналы телеизмерения, отправляемые на ПУ с КП). Подобная информация может поступать на КП одновременно с разных мест, поэтому коды должны быть такими, чтобы сигналы не смешивались при приеме. Решается данная система специальным кодированием, которое включает в себя элементы разделения сигналов.
Разделение сигналов — это обеспечение передачи и приема многих сигналов, следующих по одной линии связи или в одной полосе частот, когда сигналы
258
сохраняют свои индивидуальные свопства и не искажают один другого. Различают два способа разделения сигналов: временной, при котором сигналы передаются последовательно во времени, и частотный, в котором сигналы могут передаваться одновременно — либо последовательно, либо параллельно. Применяют и комбинации этих способов.
На рисунке 104, а изображена простейшая схема временного способа разделения сигналов, реализованная на шаговых искателях, и на рисунке 104,6 — импульсные диаграммы, иллюстрирующие этот способ.ЛШаговые искатели включены так, что их щетки 1Ц вращаются синхронно, делая одинаковое число оборотов в единицу времени, и синфазно, то есть одновременно замыкая одинаковые ламели на ПУ и КП. При вращении (механизм вращения на рисунке не показан) щетки поочередно замыкают ламели 1,2,3,...,п искателя, к которым
Постоянный подаВаемый В линию сВязи
Рис. 104. Временной способ разделения сигналов: а — схема разделения сигналов при помощи шаговых искателей; б— импульсные диаграммы; е— синхронизирующий импульс.
I_I ющии иыпульс |___|
259
на ПУ через ключи 51,..., Sn подсоединена одна клемма батареи Б. Другая клемма батареи присоединена на КП через линию связи к обмоткам реле Л1,..., Кп- Вторым проводом линии соединяются щетки. В момент замыкания цепи, когда щетки находятся под ламелями и ключи 51,..., 5» включены, цепи реле К\,...,Кп замкнуты, а когда щетки располагаются между ламелями, эти цепи разомкнуты. Получающиеся импульсы постоянного тока показаны на рисунке 104,6. В данном случае распределитель является одновременно и генератором импульсов. Полному обороту щеток соответствует один цикл, за время которого передаются все сигналы. Если щетки продолжают вращаться, тб за первым циклом следует второй, третий и т. д. Каждый импульс несет то пли иное сообщение, так как распределитель поочередно подключает линию связи к источникам информации ключом 51,..., 5,i- Такие устройства называют циклическими или непрерывно действующими. Очередность передачи сигналов может'быть разной: так, в первом цикле передается, например, сигнал 2, во втором — сигнал 1 и т. п. Рассмотренная передача действует надежней, если распределители работают синхронно и сии-фазно.
Обычно для синхронизации распределителей выделяется один специальный сигнал, так называемый синхронизирующий импульс, обеспечивающий синхронную работу ведущего распределителя на ПУ с ведомым на КП. Этот импульс имеет отличительный признак (у импульса на рисунке 104, в отрицательная полярность), поэтому число передаваемых сигналов за один цикл уменьшается на один.
При частотном способе разделения сигналов (рис. 105) на передающей стороне ПУ расположены генераторы Г1, Г2, ГЗ, ..., Гп, которые формируют синусоидальные колебания частотой fi, [г, fs, , fn- В случае использования одночастотного кода каждому сообщению ЛЛ, Л/2, Л/3.Пп соответствует определенная частота
ft, /2, fa, •., fn. Чтобы сообщение поступило к определенному объекту, на приемной стороне устанавливают частотные избиратели, которые выбирают необходимый сигнал. В состав частотных избирателей входят фильтры Ф и специальные выходные исполнительные элементы (ВИЭ), работающие в релейном режиме, то есть они срабатывают после того, как сигнал достигнет некото-
260
Рис. 105. Схема частотного способа разделения сигналов.
рого заданного значения. Поэтому частотные избиратели называют частотным реле. Таким образом, на приемной стороне каждый поступивший сигнал выделяется вначале фильтром, построенным на данную частоту, затем выпрямляется диодами VI,..., Vn, и уже постоянный ток воздействует на реле К1,...,КП, которые вводятся в цепь ключами Sl,...,Sn- Порядок следования сигналов может быть любым. Так, одновременное замыкание всех ключей, когда все реле сразу получают сигналы, дает параллельную посылку сигналов. Если же в посылке предусмотрена определенная очередность, то есть реле К\,...,Кп включаются один за другим, то говорят о последовательной передаче сигналов.
12.4. Способы кодирования
Кодом называют структуру, составленную ьз комбинации дискретных посылок, однозначно соответствующих набору сообщений. Каждую такую комбинацию записывают в виде последовательности условных сигналов, обозначающих два или несколько состояний дискретного сигнала. Процесс формирования по определенному закону сигналов, каждый из которых соответствует определенному сообщению, называется кодированием.
Любой код содержит определенный набор символов, который называют буквами алфавита. Место
2G1
Рис- 106. Передача кодовых комбинаций: а — буквами; б — частотами.
г
расположения каждой буквы называют элементом комбинирования, а сами буквы — признаками элементов. Весь набор букв образует алфавит кода, называемый основанием кода. Кодовая комбинация, составленная из определенного числа п букв, называется словом, имеющим длину п.
Если число признаков (букв алфавита) К=2, то такие коды называют двоичными (бинарными), при >3— небинарными (троичными, четвертичными и т. п.). Элементы кода можно передавать последовательно во времени (коды с временным разделением сигналов) или одновременно. Одновременную передачу выполняют по нескольким проводам или применяют частотные признаки для разделения элементарных сигналов. <-
Рассмотрим последовательную передачу кодов. Допустим, есть пять элементов комбинирования: А Б, В, Г и Д (л=5), каждый из них обладает признаками а и б (К=2), то есть существует пятиэлементный двоичный код. Число возможных комбинаций Л1=25 = 32. На рисунке 106, о показана последовательная передача комбинации буквами с некоторыми интервалами между ними для отличия одной комбинации от другой. Вместо букв можно передавать импульсы с различными признаками, например частотными, то есть букве а будет соответствовать частота fi и букве б — f2. Тогда те же комбинации примут вид, представленный (частотами) и изображенный на рисунке 106,6.
При параллельной передаче кодов во времени каждому элементу комбинирования присваивается своя частота: А—f,; Б—f2; В — f3; Г — ft,; Д— fb. Отличительными признаками будут не частоты, а, например, амплитуды или длительность импульса. Для амплитудных признаков их число будет два: «да» — есть импульс, «нет» — нет импульса
Число кодовых комбинаций, которые могут быть образованы, зависит от числа букв алфавита, длины кодовой комбинации и ограничений, накладываемых при построении кода. Если длина всех кодовых
262
комбинаций одинакова, то такие коды называют комплектными (равномерными) и наоборот. В телемеханике обычно используют только комплектные коды. Если информация передается по каналу связи, то каждой цифре или букве соответствует элементарный сигнал (импульс), наделенный определенными признаками: наличие пли отсутствие импульса, его амплитуда, продолжительность, полярность, частота заполнения п ее фаза.
В телемеханике для различных целей используются различные коды, в основе которых лежат соответствующие системы счисления: десятичная, пятеричная, двоичная и т. п. Широкое распространение получили двоичные коды, в основе которых лежит двоичная система счисления. Каждый элемент комбинирования двоичного кода обладает двумя признаками.
Обычно один признак записывается в виде единицы, а другой — в виде нуля, а их передача осуществляется при помощи самых разнообразных импульсных признаков. В телемеханике и..в вычислительной технике двоичный код широко применяют потому, что большинство элементов и устройств обладает релейными характеристиками и может принимать одно из двух устойчивых состояний. Более подробно с кодами можно ознакомиться в специальной литературе.
12.5. Телеуправление и телесигнализация
Отличительная особенность систем телеуправления — это использование одной линии связи для передачи сообщений от одного источника (диспетчера) ко многим приемникам, а систем телесигнализации — от многих источников к одному (диспетчеру).
На рисунке 107 изображена блок-схема системы ТУ—ТС. Распределители на ПУ и КП переключаются от импульсных генераторов и работают синхронно и синфазно, что обеспечивается посылкой синхронизирующего импульса с одного из распределителей (обычно ведущего). 1Ведущий распределитель вводится в действие при помощи автозапуска АЗ в начале работы системы. Состояние объектов 01 и 02 контролируется датчиками сигнализации ДС. Согласование распределителей выполняется блоком синхронизирующего импульса БСИ, импульс которого поступает на распределитель КП, синхронизируя работу распределителей. Блок памяти БП обеспечивает в схеме И точное совпадение импульсов распределителей на КП и ПУ. Индикаторы, установлен-
263
Рис. 107. Блок-схема системы ТУ—ТС с временным разделением сигналов.
ные на ПУ, работают, как правило, тю методу «темного щита», когда о состоянии объекта судят не по индикаторным лампочкам Л1 и J12, а по положению ключей К1 и К2, которые всегда разомкнуты, когда объект отключен. Поэтому между новым состоянием объекта и положением ключа возникает несоответствие, что приводит к загоранию лампочки и действию звукового сигнала. В этом случае диспетчер переводит ключ в положение «включено», лампочка гаснет, звонок перестает работать.
В телемеханике для уменьшения возможности неправильных действий принят двухступенчатый процесс управления. Первая ступень — диспетчер выбирает объект управления, то есть находит его адрес, вторая — посылает команду Включить или Отключить. Такой способ позволяет уменьшить вероятность неправильной посылки команды и дает диспетчеру возможность исправить допущенную ошибку^Дополнительно в системах предусматривается защита, сигнализирующая о возникших ошибках или запрещающая дальнейшие действия.
Число объектов, а следовательно, и элементов на пульте управления ПУ может быть значительно больше, чем изображено на рисунке 107. Все это требует от диспетчера усиленного внимания. В качестве примера проследим, какими должны быть действия диспетчера при включении объекта 02. Первая операция — диспетчер выбирает ключ, которым нужно включить требуемый объект, затем замыкает ключ К2. Это приводит к состоянию несоответствия, отчего загорается сигнальная лампа Л2. Сигнал от распределителя через линейный блок ЛБ и блок запирания БЗ поступает в линию связи и далее на контролируемый пункт КП. Здесь сигнал проходит через блок запирания БЗ, блок выделения команд ВК, блок памяти БП, схемы совпадения И и включает выходной исполнительный элемент ВИЭ, от которого должно сработать реле объекта РО. Включение объекта произойдет только после того, как диспетчер нажмет кнопку
264
Включить (Вкл). Возникшая при этом команда пройдет тем же путем, что и сигнал выбора объекта, и, включив ВИЭ характера операции, выдаст разрешение на срабатывание реле объекта, которое включит объект 02. Одновременно начинает действовать датчик сигнализации ДС2, свидетельствующий о том, что объект включен, наступает состояние соответствия, и сигнальная лампа гаснет. Если сигнализация поступает с какого-либо объекта, когда посылается команда управления с ПУ, то команда отменяется независимо от того, с какого объекта сигнализация передается. Преимущество сигналов перед командами в том, что поступившая сигнализация может изменить ситуацию и необходимость в команде отпадает.
12.6. Телеизмерение
Телеизмерение (телеметрия) находит широкое применение для измерения на расстоянии как электрических, так и неэлектрических величин. Сущность этого способа состоит в том, что измеряемая величина сначала преобразуется в эквивалентный ей сигнал, который затем передается по линии связи и в определенном пункте измеряется. Параметры сигнала выбирают такими, чтобы искажения при передаче были минимальными. Например, в схематично изображенной на рисунке 108, а системе телеизмерения измеряемая величина х (температура воздуха в помещении) непрерывно или дискретно преобразуется датчиком / в электрическую величину z (ток, напряжение, сопротивление, емкость, индуктив-,..ность и т. п.). В передатчике 2 величина z превращается в сигнал Ci, который поступает в линию связи. На приемном пункте 3 происходит обратное преобразование принятого сигнала Сг (за счет помех в линии связи он может отличаться от сигнала С)) в измеряемую физическую величину, которая в виде сигнала у фиксируется измерительным или регистрирующим прибором П. Число блоков, входящих в систему, может быть отличным от того, что показано на рисунке.
Различают системы телеизмерения трех основных классов: системы интенсивности (небалансные, балансные и потенциометрические), импульсные системы (частотно-, время- и кодо-импульсные) и частотные системы переменного тока.
В системах интенсивности измеряемая величина преобразуется специальным устройством, включенным непосредственно в линию, в напряжение или ток. Поскольку передача ведется постоянным гоком, влияние изменений индуктивности и емкости линии связи не
265
Рис. 108. Схемы систем телеизмерения: а—токовой небалансной; б— псбалансной с потенциометрическим преобразователем; в — токовой балансной; г — потенциометрической системы напряжения; £ —частотно-импульсной.
сказывается на показаниях приемного прибора, подключенного к линии. Погрешность телеизмерения из-за изменения параметров линии связи составляет 1...2%. Дальность передачи для воздушных линий связи не превышает 10 км, для кабельных достигает 25 км.
Токовая небалансная система по своему схемному решению и принципу действия соответствует изображенной на рисунке 108, о.
Небалансная система с потенциометрическим преобразователем изображена на рисунке 108.6. Для уменьшения влияния изменения сопротивления линии связи на погрешность в начале линии включено большое балластное сопротивление /?б. Управляемая величина измеряется датчиком (на схеме не показан), и сигнал передается на ползунок преобразователя, напряжение с которого передается по линии связи на выходной прибор П.
266
Напряжение U источника должно быть стабилизировано, поскольку ему пропорционален ток в линии связи.
Токовая балансная система представлена на рисунке 108, в. В основу действия таких систем положен принцип компенсации погрешностей, обусловленных внешними воздействиями, при помощи воздействии обратного знака. Поэтому ток в линии не зависит от изменений ее сопротивления и напряжения источников питания. В системе непрерывно сравниваются два параметра: создаваемый током в линии связи и создаваемый измеряемой величиной. Для этой цели используют преобразователь с отрицательной обратной связью по току выхода. Если измеряемая величина х увеличится по какой-либо причине, то первичный преобразователь ПП усилит воздействие на противодействующий элемент ПЭ и одновременно включит регулятор тока РТ, что приведет к росту тока в линии, а тот, в свою очередь, увеличит влияние противодействующего элемента ПЭ в противоположную сторону, стремясь тем самым уравновесить влияние ПП. Когда эти воздействия сравняются, ток в линии будет соответствовать новому значению измеряемой величины х. Если возрастет сопротивление линии связи, то ток в линии станет меньше, воздействие ПЭ также уменьшится и первичный преобразователь дополнительно повлияет на регулятор тока РТ, который увеличит ток в линии до исходного значения (прибор П будет показывать прежнее значение измеряемой величины).
В потенциометрической системе (рис. 108, г) подаваемое в линию связи напряжение Ux, в которое преобразована измеряемая величина преобразователем ПР, компенсируется напряжением, снимаемым с автоматического потенциометра АП. Компенсация происходит на приемной стороне, поэтому ток в линии связи становится равным нулю, о чем можно судить по прибору П. При изменении измеряемой величины движок АП передвигается, пока не исчезнет ток в цепи прибора.
В импульсных системах значение измеряемой величины передается посредством импульсных сигналов, в которых изменения амплитуд, происходящие из-за колебаний параметров линий связи, не влияют на результаты телеизмерения. В силу того, что переносчиком сигнала является серия импульсов с нанесенной на них инфор-
267
мацпей об измеряемой величине, измерения можно передавать на значительные расстояния, поэтому импульсные системы иногда называют системами дальнего действия. Дальность передачи зависит от уровня сигнала и чувствительности приемника.
В частот но-импульсных системах измеряемая величина пропорциональна частоте импульсов. Существуют различные способы превращения измеряемой величины в частоту импульсов. Например, измеряемая величина сначала преобразуется в скорость вращения диска и уже скорость — в частоту (такими преобразователями являются всевозможные электрические счетчики) или сначала в постоянный ток (напряжение), а потом посредством различных генераторов или мультивибраторов-— в частоту импульсов. В показанной на рисунке 108, д схеме измеряемая величина с датчика постоянного тока / подается на преобразователь 2 постоянного тока в переменный, который усиливается усилителем 3, а затем снова превращается выпрямителем 4 в постоянный. Полученный ток, пройдя преобразователь 5, поступает в виде импульсов по линии связи к приемнику 7, где осуществляется обратное преобразование импульсов в постоянный ток, средняя составляющая которого меняется в зависимости от числа импульсов, проходящих за определенный интервал времени, прибором 8. Для увеличения точности преобразования вводится отрицательная обратная связь 6.
У время-импульсных систем в зависимости от значений измеряемой величины передаваемые импульсы изменяют либо свою длительность, либо свое местоположение. В первом случае системы называют широтными, а во втором— фазо-импульсными.
Код о-импульсные системы разбивают измеряемую величину на ряд уровней и каждый передают своими импульсами, определенная комбинация которых образует код.
В частотных системах переменного тока измеряемая величина изменяет (моделирует) частоту переменного тока, передаваемого по линии связи. Такие системы способны действовать на большие расстояния, так как час-тотно-модулированные колебания обладают высокой помехоустойчивостью и изменение параметров линии связи почти не создает погрешностей.
268
12.7. Преобразователи и приемники измеряемых величин
Преобразователи — важный элемент систем телеизмерения. Из разнообразных по устройству и принципам действия преобразователей рассмотрим только некоторые.
Бесконтактный фотоэлектрический преобразователь (рис. 109, а ) превращает измеряемую величину в частоту импульсов. Зубцы диска Д, который вращается с частотой, пропорциональной измеряемой величине, прерывает луч света, падающий на фотоэлемент ФЭ от осветительной лампы ОЛ. Посредством формирователя длительности импульсов ФДИ получают импульсы одинаковой длительности и передают их в линию связи. Если число зубцов диска т, а угловая скорость вращения w, то частота следования импульсов
Бесконтактный преобразователь напряжения в частоту импульсов (рис. 109,6) представляет собой схему магнитополупроводникового управляемого генератора с магнитной положительной обратной связью (генератор Роэра). Если на вход подается постоянное напряжение f7BX, которое снимается с датчика измеряемой величины, то вследствие неидентич-ности параметров транзисторов ток коллектора у одного из них, например VI, будет больше, чем у другого. Это приведет к тому, что напряжение, индуктируемое в обмотках lEt и tt"2 трансформатора, будет направлено так, что на базу транзистора VI подается минус, а на базу V2—плюс подводимого напряжения. В результате произойдет дальнейшее открытие транзистора VI и увеличение тока, протекающего по обмотке 1Е2. Одновременно положительное напряжение, наводимое в обмотке $4, полностью закроет транзистор V2. Сердечник трансформатора, выполненный из материала с прямоугольной петлей гистерезиса, быстрее перемагничивается из-за увеличения тока через обмотку 1Е2, и транзистор VI полностью открывается. При помощи такой положительной обратной связи сердечник полностью перемагнитится, и при выходе в область насыщения на горизонтальной (верхней) ветви петли гистерезиса, где изменение индукции равно нулю, транзистор VI начнет закрываться, так как на Wi отрицательная ЭДС будет равна нулю, а V2 — открываться за счет наведенного отрицательного
269
JTTLTL
Рис. 109. Схемы преобразователей измеряемых величин:
а — бесконтакиюго фотоэлектрического; б — генератора Роэра; в — меха-иического; г — бесконтактного; д — емкостного; е — индуктивного.
напряжения на обмотке 1К4. В результате по обмотке Ws пойдет ток и сердечник станет перемагничиваться в другую сторону через обмотки 1К3 и 1Г4. По достижении нижней горизонтальной ветви кривой намагничивания сердечник начнет перемагничиваться в обратном направлении, и процесс будет повторяться. На выходе мультивибратора получаются прямоугольные импульсы, частота которых зависит от подводимого к схеме напряжения.
Преобразователи измеряемых величин в длительность импульса могут быть механическими, у которых преобразуется угол поворота первичных измерительных приборов, и электрическими.
У механического преобразователя (рис. 109, в) к выводам контактов первичного измерительного прибора 77/7 подводится напряжение питания. Контакт 1 подви
270
жен, так как он прикреплен к стрелке прибора, а контакт .2— неподвижен и расположен в начале шкалы. Двигатель Д с постоянной частотой вращает щеточный контакт 3. При замыкании теткой контакта 2 в линию посылается первый импульс, при замыкании контакта 1 — второй, отстоящий от первого в зависимости от положения стрелки, то есть от значения измеряемой величины. Расстояние между импульсами превращается в модулированные по длительности импульсы.
В электрическом преобразователе (рис. 109,г) для получения импульсов различной длительности используется время заряда конденсатора С, которое зависит от значения измеряемой величины, фиксируемой реостатным датчиком R2. Напряжение питания на схему подается в виде определенных ипульсов путем периодического замыкания и размыкания ключа К. При замыкании ключа К поступает импульс напряжения длительностью Т и конденсатор С начинает заряжаться. Через диод V ток не идет, так как Ua>Uo- Напряжение на конденсаторе С достигнуть изменения ЭДС Е не сможет, потому что после наступления равенства Ua = U(j через резистор R1, диод V и резистор R2 пойдет ток. При размыкании ключа К ток по истечении определенного времени через конденсатор прекратится. С резистора Ru снимается импульс напряжения длительностью
T—RC In
R,
Поскольку сопротивление R2 меняется в зависимости от изменения измеряемой величины, то неодинаково и время заряда конденсатора, а на выходе схемы получаются разные по длительности импульсы.
В преобразователях измеряемой величины в частоту переменного тока (рис. 109, д и е) измерение передаваемой величины может осуществляться емкостным (<Э) или индуктивным (е) датчиком. В первом случае при изменении’ измеряемой величины поворачивается ротор конденсатора С переменной емкости, включенного в схему генератора, что вызывает изменение частоты генератора ГЧ переменного тока (частотная модуляция). Во втором случае изменение частоты генератора ГЧ происходит за счет изменения индуктивности L, которая зависит от изменения передаваемой величины.
271
Рис. ПО. Схема транзисторно-конденсаторного частотомера
Приемные устройства систем* тел емеханикн весьма разнообразны. Ниже рассмотрены некоторые приемные устройства описанных ранее систем телеизмерения.
Транзистор и о-к о н д е н с а т о р н ы й частотомер частотно-импульсных систем, в основу которого положена схема триггера, изображен на рисунке 110. Приходящие по линии связи импульсы воздействуют на базу триода V2 триггера и открывают его, что вызывает закрытие триода V3. Конденсатор С заряжается через конденсатор Спр, диод V5 и резистор R3 до тех пор, пока не будет пробит стабилитрон СТ. Это повлечет за собой включение триода VI и выключение триода V2. При этом триод V3 откроется и конденсатор С начнет через него и диод V6 разряжаться. Приход очередного импульса вызовет повторение описанного процесса. Прибор П фиксирует постоянную составляющую импульсов, которая создается выпрямителем из диодов V4 и V5 и пропорциональна частоте следования входных импульсов.
Приемные устройства время-импульс-пых систем делятся на электромеханические и электрические. В первых, представляющих собой различного рода механические устройства, осуществляется измерение длительности импульса, во вторых происходит преобразование длительности импульса в средний ток или измерение отношения длительности импульса к периоду. Длительность импульса преобразуется в средний ток устройствами, аналогичными тем, что применяются в частотно-импульсных системах (рис. 108,д). Приемные
272
устройства частотных систем переменного тока выполняются либо в виде конденсаторных частотомеров, подобных изображенному на рисунке НО, либо в виде частотных детекторов, в которых изменение частоты сигнала преобразуется в соответствующее изменение его амплитуды.
12.8. Линии связи
Линия связи соединяет передающую и приемную части телемеханической системы. Для передачи сигналов используют’проводные линии связи (воздушные и кабельные) и лиМии электропередач (низковольтные и высоковольтные).
Кроме проводных линий связи прямого назначения, для целей телемеханики используют телефонные линии. На рисунке 111,о изображена такая линия с использованием ее для двухсторонней телесвязи между пунктами П1 и П2. Например, чтобы передать команду из П1 в 772, замыкают ключ S1. Импульс тока от батареи Б через обмотки реле 2К и разделяющие трансформаторы Тр1 и Тр2 поступает на реле /К и включает его. Суммарный поток дифференциального реле 2К равен нулю, так как в его обмотках токи равны и направлены встречно, и поэтому оно нс включается. Реле 7/( срабатывает, поскольку токи в нем протекают согласно, и подает команду на объект. Помех в телефонных аппаратах не возникает, так
Линия
Рис 111. Схемы телемеханических каналов:
а — по липни телефонной связи; б — по высоковольтной линии.
18 Заказ 5067
273
как токи в дифференциальных обмотках трансформаторов направлены в разные стороны. Подобным образом передают команды и из пункта П2 в П1. Частота телекоманд в таких линиях связи 2400...8500 Гц, а телефонные разговоры передают на частотах от 300 до 2400 и свыше 8500 Гц.
В энергосистемах для передачи телемеханических сигналов используют линии электроснабжения. Передача сигналов ведется па частотах в диапазоне от 30 до 500 кГц. На рисунке 111,6 изображена схема телемеханического канала, образованного на высоковольтной линии. Посты телемеханики 1ПТ и 2ПТ отделены от высоковольтной линии. Посты телемеханики 1ПТ и 2ПТ отделены от высоковольтной линии конденсаторами связи КС, которые создают большое сопротивление для передаваемого по линии переменного тока промышленной частоты и малое сопротивление для высокочастотных сигналов телемеханики. Чтобы канал был настроен на передающую частоту, в схему включен фильтр присоединения ФП, который вместе с конденсаторами КС образует полосовой фильтр, пропускающий сигнал определенной частоты. Растеканию токов высокой частоты в сторону от телемеханического канала препятствуют высокочастотные заградители ВЧЗ, задерживающие телемеханические сигналы и пропускающие промышленный ток. Рассматриваемый телемеханический канал выполнен по схеме фаза — земля; возможно образование канала по схеме фаза — фаза, но при этом число аппаратуры удваивается.
Все большее значение в условиях сельскохозяйственного производства приобретает радиосвязь на волнах от 3 см до 10 м (30... 10000 мГц), обеспечивающая передачу сигналов на расстояния до 50...70 км.
ГЛАВА Xlil
НАДЕЖНОСТЬ ЭЛЕМЕНТОВ И АВТОМАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ
13.1. Общие сведения
С ростом автоматизации производственных процессов средства автоматики и телемеханики делаются все более сложными. Усложнение систем и средств автоматики приводит к тому, что они становятся менее надежными. Отклонение параметров элементов от номинальных и допустимых и особенно неисправность хотя бы одного элемента не только нарушают нормальную работу системы, но и нередко приводят к выводу ее из строя. Причины, вызывающие разброс параметров, подразделяют на технологические и эксплуатационные.
К технологическим причинам относятся различного рода допуски: на свойства материала, из которого изготовляется элемент; на размеры деталей элементов; на сборку элементов их деталей и т. п. Чтобы уменьшить влияние указанных причин, в конструкциях элементов может быть предусмотрено регулировочное приспособление (переменное сопротивление, емкость и т. и.), которое позволяет изменять параметры и компенсировать отклонения. Отметим, что такая регулировка может обеспечить сокращение допусков на параметры только при определенных внешних условиях.
К причинам эксплуатационного характера причисляют влияние окружающей среды, состояние энергоисточника, качество обслуживания, старение, износ.
Известно, что в сельскохозяйственном производстве различные- установки нередко работают на открытом воздухе и в условиях, когда меняются основные показатели окружающей среды (температура, плотность воздуха, влажность и т. п.). Все это приводит прежде всего к изменению параметров отдельных деталей (например, удельного сопротивления проводников, вязкости рабочей жидкости и т. д.), а также элемента в целом.
18*
275
Существенное влияние на параметры элемента ока-зывает и состояние энергоисточника. Так, увеличение напряжения в системе приводит к уменьшению времени срабатывания реле или магнитного пускателя, а повышение давления жидкости вызовет ускорение перемещения поршня гидроусилителя.
Старение и износ деталей — естественные явления, развитие которых происходит сравнительно медленно и сопровождается отклонениями параметров элементов. Установлено, что наиболее интенсивны эти процессы в начальный период эксплуатации, поэтому ответственные детали (например, электронные лампы) подвергают до выпуска с завода предварительному искусственному старению. На каждый элемент устанавливается гарантийный срок службы, по истечении, которого интенсивность старения возрастает и он подлежит замене вне зависимости от его фактического состояния.
13.2. Основные понятия и определения
Надежность технических устройств, в том числе и автоматических систем, связана по крайней мере с двумя сторонами процесса их эксплуатации: с безотказностью в работе в течение определенного промежутка времени и способностью к восстановлению — ремонтопригодностью при полном или частичном выходе из строя. Рассмотрим основные понятия и определения надежности.
Под надежностью системы, изделия или элемента понимают свойство, обусловленное безотказностью, долговечностью и ремонтопригодностью и обеспечивающее нормальное выполнение всех заданных функций при сохранении своих эксплуатационных показателей в требуемых пределах в течение заданного промежутка времени.
Безотказность — свойство системы (изделия, элемента) непрерывно сохранять свою работоспособность в определенных режимах и условиях эксплуатации в течение некоторого интервала времени.
Долговечность — свойство системы (изделия, элемента) длительно, с возможными перерывами па ремонт, сохранять работоспособность в определенных режимах и условиях эксплуатации до разрушения или другого предельного состояния.
Ремонтопригодность — свойство системы (из
276
делия, элемента), показывающее, насколько данный объект приспособлен к восстановлению исправности и к поддержанию технического состояния путем предупреждения, обнаружения и устранения отказов.
Исправность — состояние системы (изделия, элемента), при котором в данный момент времени соблюдается соответствие всем требованиям, установленным как в отношении основных параметров, характеризующих нормальное выполнение заданных функций, так и в отношении второстепенных параметров (например, удобство эксплуатации, внешний вид и т. д.).
Отказ — это событие, заключающееся в полной или частичной утрате системой (изделием, элементом) работоспособности, то есть в утрате состояния соответствия всем требованиям, установленным в отношении основных параметров. Различают внезапные отказы, возникающие в результате скачкообразного изменения одного или нескольких основных параметров, и постепенные отказы, причиной которых является постепенное изменение значений одного или нескольких параметров системы (изделия, элемента) вследствие износа, старения и т. п.
По степени разрушения параметров системы различают отказы полные, до устранения которых система или элемент не могут использоваться по их прямому назначению, и частичные, до устранения которых остается возможность хотя бы частичного использования системы.
Основные численные показатели, характеризующие надежность, безотказность, долговечность и эффективность,— вероятность безотказной работы, интенсивность отказов, наработка на отказ (среднее время безотказной работы), срок службы, технический ресурс, среднее время восстановления.
Вероятность безотказной работы — вероятность того, что при определенных режимах и условиях в пределах установленной (заданной) продолжительности работы системы отказ не возникает.
Интенсивность отказов — это вероятность отказа не-восстанавливаемой системы в единицу времени после данного момента времени при условии, что до этого момента отказ не возникал.
Наработка как величина принята для измерения продолжительности или объема работы системы в определенных условиях.
87?
Наработка на отказ — это наработка восстанавливаемой системы между двумя последовательно возникшими отказами.
Срок службы — календарная продолжительность эксплуатации системы до разрушения или другого предельного состояния.
Технический ресурс — сумма интервалов времени безотказной работы системы за период эксплуатации до разрушения или другого предельного состояния.
Среднее время восстановления — время вынужденного нерегламентированного простоя.
Рассмотренные основные понятия надежности определяют, исходя из теории вероятностей, математической статистики и т. п Для практических целей наиболее важными параметрами надежности, являются: наработка на отказ Тср, интенсивность или частота v(/) отказов, вероятность безотказной работы P(t) в течение заданного времени.
Наработку на отказ используют для сравнительной оценки надежности отдельных установок, систем, изделий и определяют на основании статистических данных как
лт
2 б
тг.
где ti—время безотказной работы между f-мп выходами из строя; N — число выходов из строя.
Интенсивность отказов — это отношение числа отказавших изделий n(t) в единицу времени к среднему числу N(/) исправно работающих изделий в данный отрезок времени А/
я (О
где N(t)=---—----, .У,_! и .V,-—число исправно работающих
изделий соответственно в начале и в конце интервала времени Д/.
Графически интенсивность отказов элементов во времени выражается графиком, представленным на рисунке 112. Здесь можно выделить три периода: первый—характеризуется повышенной опасностью отказов и дает возможность выявить производственные дефекты и ошибки; второй — /2 отличается сравни-
278
тельно малым, практически постоянным и соответствующим нормальной работе числом отказов; третий — /3 характеризуется увеличением опасности отказов, обусловленных закономерным износом и старением элементов.
Частота отказов определяется по формуле
Рис. 112. Кривая опасности отказов.
«(/)
где No — число однотипйих изделий, находящихся под наблюдением.
Вероятность безотказной работы характеризуется отношением числа испр'авно работающих деталей к общему числу деталей No, „находящихся под наблюдением
п 2 nt
где п, — число деталей, вышедших из строя, в интервале времени Д/ь
Среднее время восстановления равно
1 тп = — 22 tsi,
где Р: — время восстановления i-го изделия, включающее время поиска отказа, демонтажа, ремонта, монтажа и проверки; т — число отказов каждого i-ro изделия до требуемой наработки.
С течением времени опасность отказов возрастает и вероятность исправной работы падает. Если считать, что К(0 =const, то уменьшение надежности происходит по экспоненциальному закону
P(t)=e ТСР = e~w, где ТСр — среднее время исправной работы системы или элемента, или средняя наработка на отказ.
Расчет надежности системы в целом выполняют по уравнению
где Pe(t)—вероятность безотказной работы системы; Р\(1), Pi(t), ..., Pn(t)—вероятность безотказной работы отдельных элементов.
279
Так как
Р,(/)=е-м; P2(/)=e-M>...jpn(/)=e-x„t;
Следовательно,
Pc(t) = е~&‘4 '•+ • ^п')1 = е~
13.3. Пути повышения надежности элементен и систем автоматики
Повышение надежности — важная народнохозяйственная задача.
При проектировании элементов и систем повышение их надежности достигается схемными и конструктивными способами. Схемные способы основаны на совершенствовании и упрощении схем, на создании схем с ограниченными последствиями и схем с резервированием.
Упрощение схем — сам_ый распространенный метод увеличения надежности с одновременным уменьшением габаритов и массы проектируемого устройства. Схемы проектируют так, чтобы замена любого элемента однотипным не отражалась на ее работе. Схемы с ограниченными последствиями отказов применяют в ответственных устройствах автоматики. Выход из строя любого элемента не приводит к аварии.
Резервирование предполагает замену выходящего из строя элемента резервным. Резервные элементы подключаются постоянно или вводятся автоматически после выхода из строя основных.
Различают общее, автономное, раздельное и внутри-элементное резервирование. При общем резервируется вся схема, за исключением входных и выходных устройств. При автономном имеется несколько независимых систем автоматики, выполняющих одну и ту же задачу.
При раздельном резервируются отдельные узлы автоматики. Внутриэлементное резервирование предполагает резервирование внутренних связей элемента.
Конструированием также можно повысить надежность систем и элементов автоматики, для чего применяют детали с большим запасом по электрическим и механическим параметрам.
Контрольные вопросы. 1. Что понимают под надежностью средств автоматизации? 2. Какие причины приводят к изменению параметров элементов? 3. Изложите основные понятия, определения и качественные показатели надежности? 4. Назовите способы повышения надежности.
230
ГЛАВА XIV
ТЕХНИКО-ЭКОНОМИЧЕСКАЯ ЭФФЕКТИВНОСТЬ АВТОМАТИЗАЦИИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ПРОИЗВОДСТВА
14.1. Общие сведения
Автоматизация — одно из магистральных направлений технического прогресса в сельскохозяйственном производстве. Внедрение средств автоматизации способствует: повышению производительности машин, агрегатов, поточных линий и увеличению числа часов их использования; повышению производительности труда и значительному облегчению труда; удешевлению Продукции и улучшению ее качества; сокращению расхода топлива и энергии, повышению надежности работы энергетического оборудования. При автоматизации производственных процессов возникают различные варианты ее практической реализации. Из всех возможных выбирают наиболее эффективный, простой, надежный и обеспечивающий более высокий рост производительности труда.
За базовый вариант сравнения принимают тот, в котором применена самая совершенная механизация производства.
Автоматизацию, если говорить вообще, можно считать эффективной, когда с ее внедрением повышается производительность всего производства, сокращаются прямые и капитальные затраты, удешевляется продукция и улучшается ее качество, облегчается труд человека, повышается культура труда.
14.2. Основные показатели эффективности автоматизации
Для оценки экономической эффективности применяются различные показатели, наиболее важные из которых: производительность труда, годовые эксплуатационные издержки, срок окупаемости капитальных затрат,
281
нормативный коэффициент экономической эффективности
Повышение производительности труда является одним из основных показателей экономической эффективности, который определяется либо количеством произведенной в единицу времени продукции, либо количеством времени, затраченного на единицу продукции. Повышение производительности труда за счет средств автоматизации оценивают по уменьшению затрат труда
Ри-Ра
АР=---------100%
Р в
и по годовой экономии труда
5T=(/’„-Pa)Qa,
где Рц—затраты труда на единицу продукции или вид работы при неавтоматизированном способе производства; Ра—то же, при автоматизированном способе производства; t?n—производство продукции за год при автоматизированном способе производства.
Годовые эксплуатационные издержки производства определяются как сумма амортизационных отчислений Иа, отчислений на текущий ремонт Ят, годовых затрат на зарплату обслуживающему персоналу Ио, на электроэнергию Яэ и горюче-смазочные материалы Иг
И — И а + Ит4- Ио 4- Иэ+Иг.
Амортизационные отчисления и отчисления на текущий ремонт определяются по следующим выражениям:
Ил = тлК\ И^ — т-гК, где nia— коэффициент амортизационных отчислений; m-t — коэффициент отчислений на текущий ремонт; К — первоначальные капитальные затраты.
Затраты на зарплату обслуживающему персоналу
Ио— 22 ДотЦог-
г==1
где 1=1,...,п— число обслуживающего персонала; £>0>—-число часов работы t-го обслуживающего персонала в году; ..Ло;—оплата ва час 1-го обслуживающего персонала с учетом отчислений в соцстрах и надбавок к зарплате.
Затраты на электроэнергию
т
Из— У yjH-jj,
2S2
где j — вид системы, потребляющей электроэнергию; Дзз — число часов работы системы в году; kHf — коэффициент использования установленной мощности системы, Pyj — установленная мощность системы, кВт; Ц.,з — стоимость 1 (кВт-ч)/руб.
Затраты на горюче-смазочные материалы определяют как произведение количества израсходованных материалов на их прейскурантную стоимость с учетом транспортных расходов.
Срок окупаемости капитальных затрат на автоматизацию определяется как
Эа-Эа'
где Ла и Кн — капитальные затраты на автоматизированное и неавтоматизированное производство (Ли Ла); За п Эа — эксплуатационные расходы автоматизированного и неавтоматизированного производства (Эн>Эа).
Чем меньше срок -окупаемости, тем эффективнее автоматизация. Расчетный срок окупаемости сравнивают с нормативным сроком окупаемости, который для сельскохозяйственной техники принят равным пяти годам.
Нормативный коэффициент экономической эффективности дополнительных капитальных вложений представляет собой обратную нормативному сроку окупаемости величину. Для сельского хозяйства он установлен равным 0,2.
Применение средств автоматизации повышает технологичность производства за счет сокращения числа и времени простоев, применения более прогрессивных способов производства, типизации и унификации технологических операций.
Эффективность автоматизации можно определить по так называемым приведенным, или расчетным, затратам, которые находят по следующему уравнению:
3=ЕК+И, где Е=1/То„—нормативный коэффициент экономической эффективности.
Если при выборе варианта автоматизации может оказаться, что капитальные вложения К2 и готовые эксплуатационные издержки производства И2 выше, чем для предшествующего варианта, то есть Л'2>Л1 и И-2>Н\, то эффективность нового варианта следует определять исходя из следующего неравенства:
ЕКх + И,>ЕК2 + И,-Д,
283
где Д — дополнительный доход за счет 'увеличения производительности, улучшения качества продукции, уменьшения затрат за счет различных потерь и т. п.
Определим в качестве примера экономическую эффективность автоматизации водокачки с суточным расходом воды 200 м3. Применение средств автоматизации увеличило капитальные затраты с 590 до 700 руб., при этом годовые эксплуатационные расходы уменьшились с 2850 до 1800 руб., а затраты соответственно с 1200 до 150 ч.
В соответствии с принятыми обозначениями имеем
Л',,-590 руб., Эи=2850 руб., Ри=1200 ч;
Да = 700 руб., За = 1800 руб., Ра=150 ч.
Вычислим срок окупаемости дополнительных капитальных вложений на автоматизацию
Ка-Ли
Эн-
700-590
2850-1800
= 0,1047 года.
Нормативный срок окупаемости оборудования составляет 5 лет, поэтому автоматизация оказывается весьма эффективной.
Снижение затрат труда
„ Ри-Р.
ЬР=-------
100 РИ
1200-150
1200
100=88 %.
% =
Дополнительно определим себестоимость 1 м3 воды для неавтоматизированной
Э„ 2850-100
Сы=-----=------------=4 коп/м3
365 365-200
и для автоматизированной водокачки
Эа 1800-100
С„ =----=-------------а2 кол/м3.
а 365 365-200
Таким образом, по всем показателям автоматизация водокачки имеет высокую эффективность.
Контрольные вопросы и задания. 1. Какие цели преследует автоматизация производственных процессов? 2. Каковы основные показатели оценки технико-экономической эффективности автоматизации?
УКАЗАТЕЛЬ ЛИТЕРАТУРЫ
1. Материалы XXVT съезда КПСС. — М.: Политиздат, 1981.
2. Продовольственная программа СССР на период до 1990 года.— М.: Политиздат, 1982.
3 Материалы июньского (1983 г.) Пленума ЦК КПСС. — Н.: Политиздат, 1983.
4. Беседы по автоматике. Под редакцией П. И. Чинаева. — Киев: Техника, 1973.
5. М. А Бабиков, А. В. Носи некий. Элементы и устройства автоматики. — М.: Высшая, школа, 1975.
6. П. Ф. Б о р о д и н, Н. И. К и р и л и н. Основы автоматики и автоматизации производственных процессов. — М.: Колос, 1977.
7. И. Ф. Бородин. Технические средства автоматики — М.: Колос, 1982.
8. Л. И. Коновалов, Д. П. Петелин Элементы и системы электроавтоматики. — М.: Высшая школа, 1980.
9. Техническая кибернетика. Устройства и элементы систем автоматического регулирования и управления, книга I. Измерительные устройства, преобразующие элементы и устройства. Под редакцией В. В. Солодовникова. — М.: Машиностроение, 1973.
10. Электрические измерения неэлектрических величин. Под редакцией П. В. Новицкого. — Л.: Энергия, 1975.
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ.........................................9 3
ГЛАВА 1. Общие сведения об элементах и системах автоматики .......................................... .
1.1. Основные понятия и определения.......... .
1.2. Управление по разомкнутому и замкнутому циклам
1.3. Принципы автоматического управления .
1.4. Обратные связи...................................
1.5. Элементы автоматических систем ..................
1.6. Схемы автоматических систем......................
1.7. Классификация автоматических систем
1.8. Основные законы управления ......
5
8 И 16 18 20 23 31
ГЛАВА II. Датчики систем автоматики........................ 34
2.1. Обшие сведения.............................
2.2. Датчики сопротивления ............................
2.3. Индуктивные датчики ......................... .
«—2.4. Трансформаторные датчики..........................
2.5. Емкостные датчики...............................
2.6. Фотоэлектрические датчики . . . .
2.7. Датчики температуры.............................
2.8. Датчики уровня..................................
2.9. Датчики угловой скорости........................
2.10. Датчики давления...............................
2.11. Датчики расхода................................
2.12. Датчики влажности .............................
2.13. Электронные и ионизационные датчики ...........
2.14. Электрические задающие устройства..............
Лабораторная работа 1. Испытание индуктивных датчиков и тензосопротивлений......................... . . .
Лабораторная работа 2. Испытание фотодатчиков. Фотореле в схемах автоматического управления .................
Лабораторная работа 3. Испытание датчиков температуры
34 36 4*3
45
48 о ц» 54 7>Г~ 63 65 66 68
70 71
76
77 78
ГЛАВА III. Усилительные и стабилизирующие элементы . . 79
3.1. Общие сведения.................................
3.2. Электронные усилители............................ 82
3.3. Магнитные усилители.............................. 8!
3.4. Гидравлические и пневматические усилители .... 92
3.5. Функциональные элементы . . ........ 94
3.6. Стабилизаторы.................................... 99
Лабораторная работа 4. Исследование магнитного усилителя .................................................103
286
ГЛАВА IV. Исполнительные механизмы........................103
4.1. Общие сведения....................................
4.2. Электромагнитные механизмы........................
4.3. Электродвигательные механизмы.....................
4.4. Реле..............................................
4.5. Шаговые искатели..................................
4.6. Электрические и гидравлические двигатели..........
Лабораторная работа 5. Исследование электромагнитных реле ..................................................
105
106
1(9
112
121
122
124
ГЛАВА V. Элементы теории релейных систем автоматики . 126
5.1 Основные понятия и определения.................... 126
5.2. Аналитическая запись структуры и условий работы 128
5.3. Логические функции............................... 129
5.4. Основные законы алгебры логики и их следствия . . 132
5.5. Минимизация релейных схем........................ 137
5.6. Логические устройства на интегральных микросхемах 142
5.7. Построение релейных схем на бесконтактных элементах ....................................................145
ГЛАВА VI. Объекты управления и регуляторы ...... 149
6.1. Общие сведения............................. 149
6.2. Статическая и динамическая характеристики .... 149
6.3. Аккумулирующая способность........................ 151
6.4. Самовыравнивание...........................154
6.5. Запаздывание процесса...................... 155
6.6. Время разгона и постоянная времени......... 156
6.7. Определение основных свойств............... 158
6.8. Автоматические регуляторы......................... 159
ГЛАВА VII. Основы теории автоматических систем управления .......................................................166
7.1. Общие понятия о работе автоматических систем . . 166
7.2. Составление дифференциальных уравнений .... 168
7.3. Преобразование Лапласа..................... 171
7.4. Статические свойства....................... 174
7.5. Динамические свойства...................... 176
7.6. Типовые динамические звенья................ 180
7.7. Логарифмические частотные характеристики .... 195
7.8. Алгоритмические структурные схемы и их эквивалентное преобразование ................................... 202
ГЛАВА VIII. Устойчивость автоматических систем управления 206
8.1. Понятие об устойчивости............................206
8.2. Критерии устойчивости..............................207
8.3. Исследование влияния параметров систем управления на их устойчивость ................................... 213
8.4. Запас устойчивости.................................214
8.5. Определение устойчивости по логарифмическим частотным характеристикам..................................216
ГЛАВА IX. Качество переходных процессов управления в автоматических системах..................................... 218
287
9.1. Показатели качества...............................218
9.2. Методы построения..................................220
9.3. Косвенные оценки качества.........................223
9.4. Определение установившихся ошибок........225
ГЛАВА X. Коррекция автоматических систем . .....228
10.1. Понятие о коррекции...............................223
10.2. Коррекция с помощью последовательных корректирующих устройств........................................231
10.3. Коррекция с помощью обратных связей...............231
Лабораторная работа 6. Определение постоянных времени различных элементов автоматических систем...............2j>
ГЛАВА XI. Нелинейные автоматические системы управления 2 >8
11.1. Общие сведения...................................ill
11.2. Метод фазовой плоскости..........................2")
11.3. Метод припасовывания.............................211
11.4. Метод гармонического баланса.....................216
11.5. Метод математического моделирования..............249
ГЛАВА XII. Системы телемеханики............................25;
12.1. Основные сведения.................................2'3
12.2. Сообщение и информация..........................2-.-5
12.3. Передача и прием сигналов.........................258
12.4. Способы кодирования...............................261
12.5. Телеуправление и телесигнализация.................263
12.6. Телеизмерение.....................................255
12.7. Преобразователи и приемники измеряемых величин 259
12.8. Линии связи . . ...................... . 273
ГЛАВА XIII. Надежность элементов и автоматических систем управления.................................................27. ч
13.1. Общие сведения....................................27 >
13.2. Основные понятия и определения..................276
13.3. Пути повышения надежности элементов и систем автоматики........................................280
ГЛАВА. XIV. Технико-экономическая эффективность автоматизации сельскохозяйственного производства . 231
14.1. Общие сведения................................28
14.2. Основные показатели эффективности автоматизации 281
Указатель литературы ......................................23