/















































































































































































































































































































































































































































Автор: Петров А.З.
Теги: математика теория относительности общая теория относительности точные науки
Год: 1961
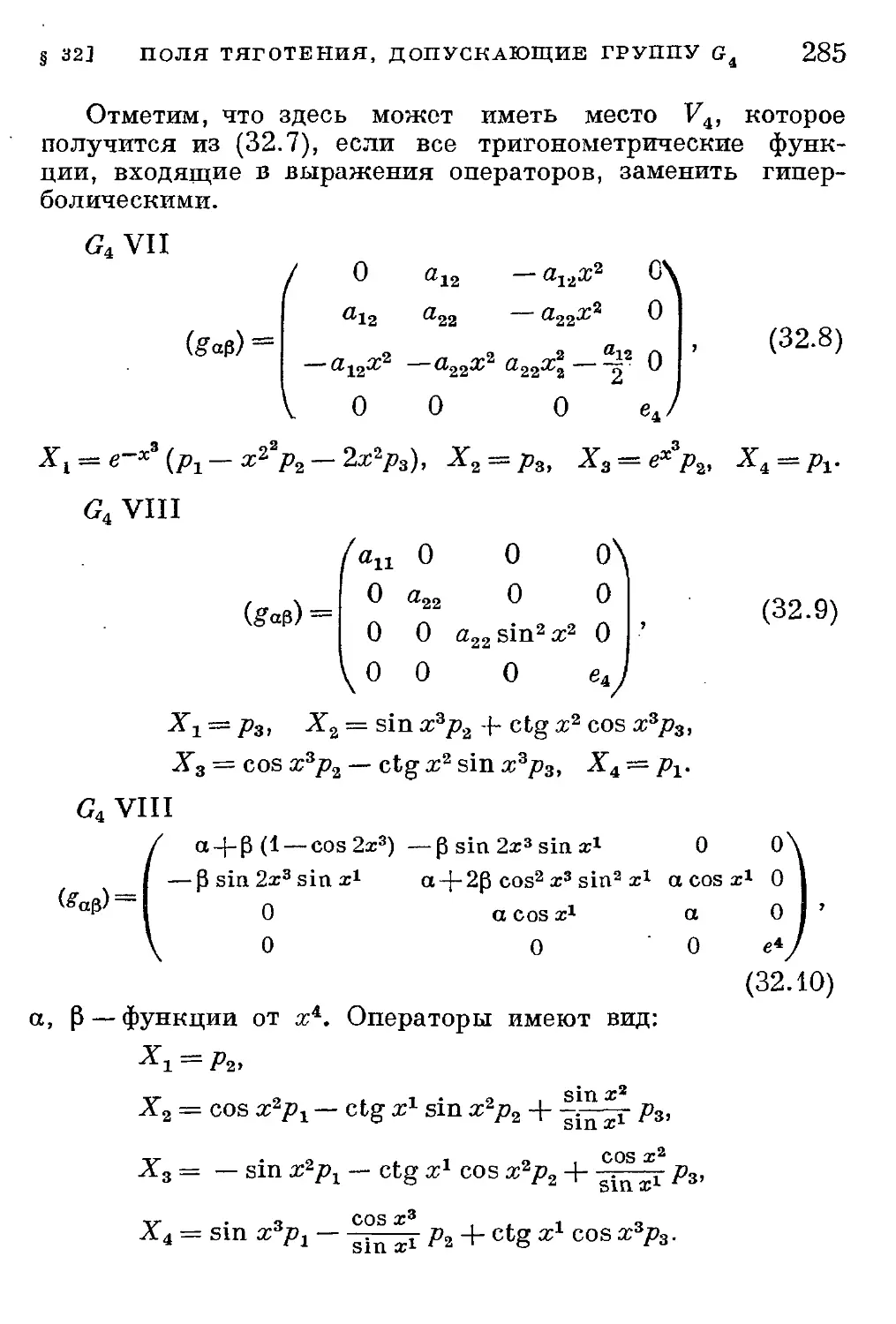
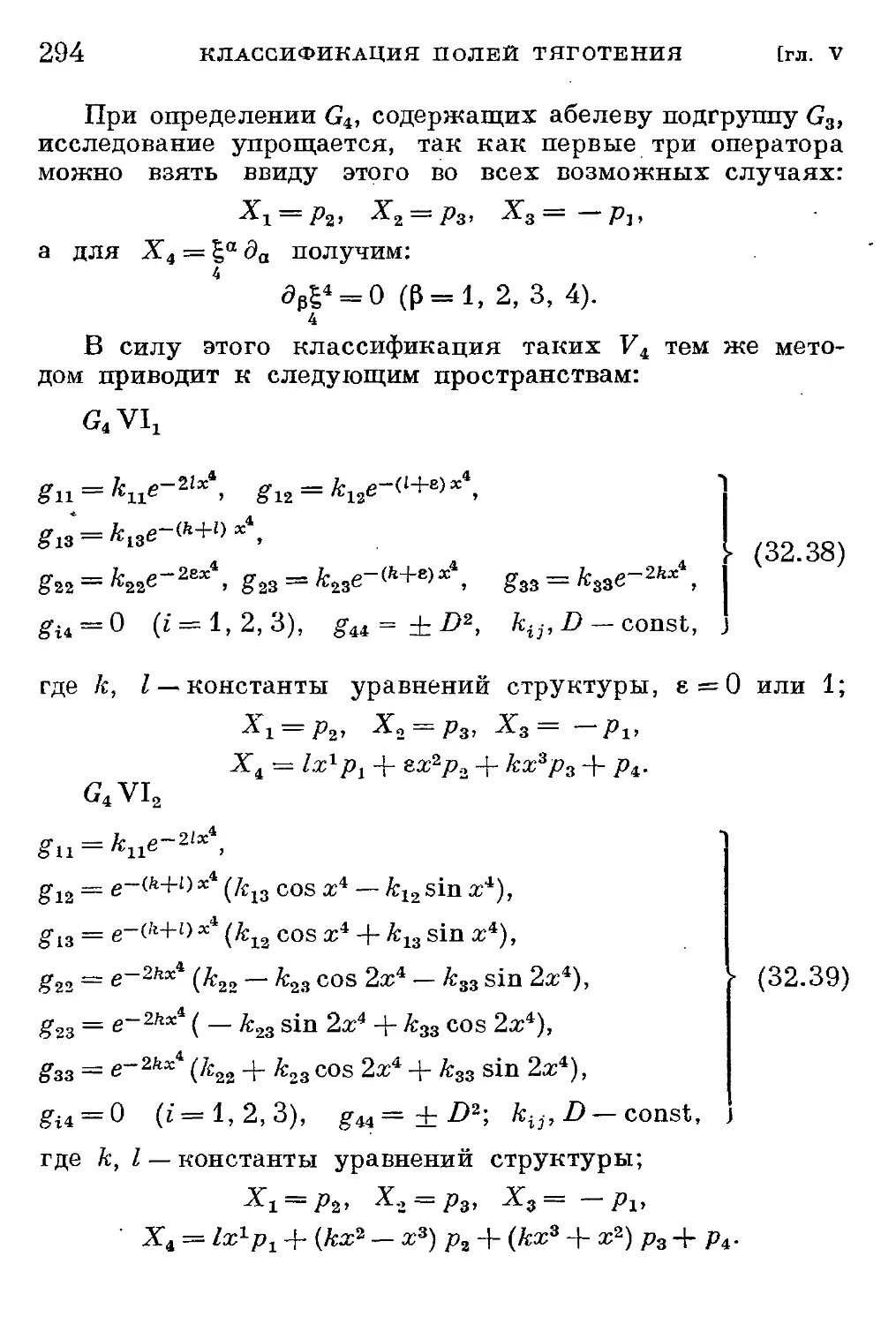
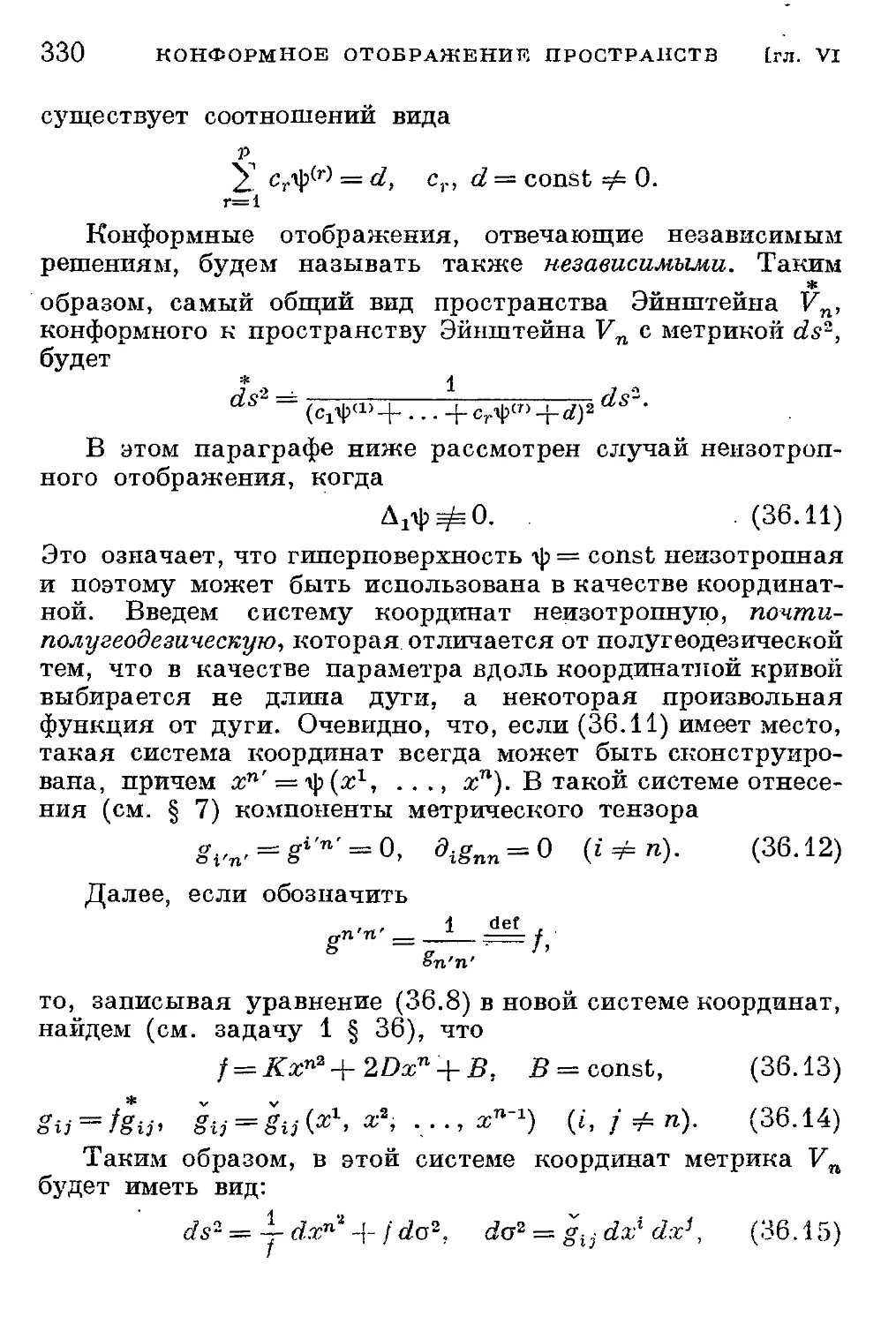
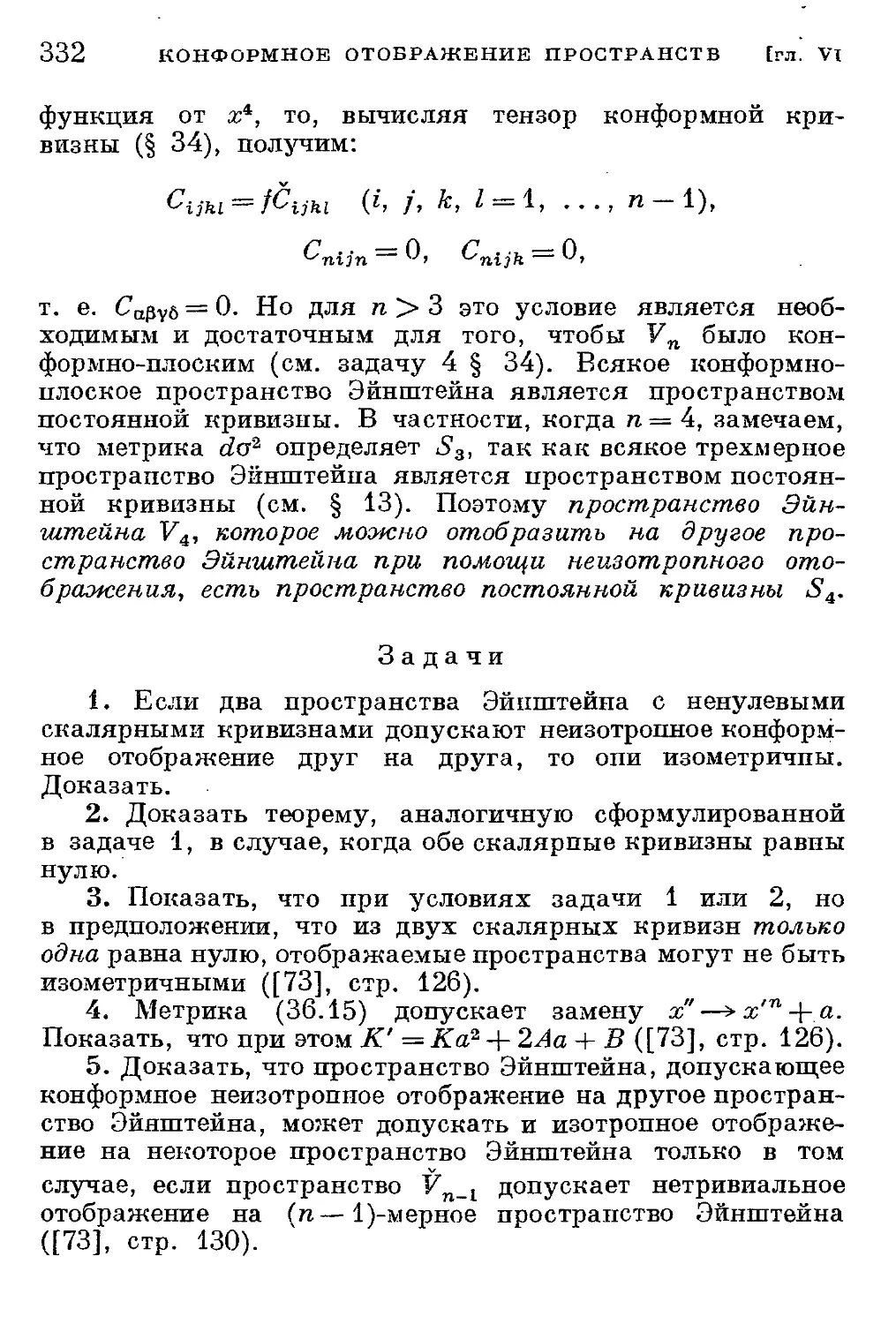
Текст
РОСТР АНСТВА
НШТЕЙНА
ГОСУДАРСТВЕННОЕ ИЗДАТЕЛЬСТВО
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1961
Петров Алексей Зиновьевич
Пространства Эйнштейна
Редактор Лапко А. Ф.
Техн. редактор Мурашова В. Я. Корректор Булатова К. В.
Сдано в набор 8/XII 1960 г. Подп. к печати 24/11 1961 г. Бумага 84 х 108V32.
Фаз. печ. л. 14,50. Услови. печ. л. 23,78. Уч.-изд. л. 22,76. Тираж 15000 экз.
Т- 03106. Цена книги 1р. 34 к. Заказ №719.
Государственное издательство физико-математической литературы.
Москва, В-71, Ленинский проспект, 15.
Московская типография № 5 Мосгорсовнархоаа
Москва, Трехпрудный пер., 9.
ОГЛАВЛЕНИЕ
Предисловие 5
Глава I. Основы тензорного анализа 7
§ 1. Римаяовы многообразия 7
§ 2. Алгебра тензоров 13
§ 3. Ковариантное дифференцирование 20
§ 4. Параллельное перенесение в пространстве Vn 25
§ 5. Тензор кривизны пространства Vп 31
§ 6. Геодезические линии 38
§ 7. Специальные системы координат в |/, 42
§ 8. Римаяова кривизна Vn. Пространства постоянной кри-
кривизны . 61
§ 9. TeopeAia о главных осях тензора 67
§ 10. Группы Ли в \'.п 75
Глава II. Пространства Эйнштейна 88
§ 11. Основания специальной теории относительности. Пре-
Преобразования Лоренца 88
§ 12. Уравнения поля релятивистской теории гравитации . . 95
| 13. Пространства Эйнштейна 98
§ 14. Некоторые решения уравнений поля тяготения .... 102
Глава III. Общая классификация полей тяготения . . 113
§ 15. Бивскторные пространства 113
| 16. Классификация пространств Эйнштейна 117
§ 17. Стационарные кривизны 120
| 18. Классификация пространств Эйнштейна в случае п = 4 122
§ 19. Канонический вид матриц (i?at>) для пространств Т^ и Т"; 130
| 20. Классификация полей тяготения общего вида 145
§ 21. О комплексном представлении тензоров пространства
Минковского 151
§ 22. Базис полной системы инвариантов второго порядка
пространства F4 157
Глава IV. Движения в свободном пространстве .... 165
§ 23. Классификация Т^ по группам движений 165
| 24. Неизоморфные структуры групп движений, допускае-
допускаемых свободными пространствами 175
§ 25. Пространства максимальной подвижности Тх, Т2, Т3 . . 188
§ 26. Пространства Tlt допускающие движения 206
§ 27. Пространства Тг и Тй, допускающие движения .... 229
§ 28. Сводка результатов. Обзор известных решений уравне-
уравнений поля 241
4 ОГЛАВЛЕНИЕ
Г л а в а V. Классификация полей тяготения общего вида
по группам движений . . . . ,. 246
§ 29. Поля тяготения, допускающие группу Gr (у ^ 2) . . . 248
§ 30. Поля тяготения, допускающие группу движений G3,
*
действующую на Vz или У2 • • 255
§ 31. Поля тяготения, допускающие группу движений Gs,
*
действующую на Vs или У3 . , 263
§ 32. Поля тяготения, допускающие просто-транзитивную
или нетранзитивную группу движений G4 281
§ 33. Поля тяготения, допускающие группу движений Оь . . 297
Глава VI. Конформное отображение пространств Эйнштейна 315
§ 34. Конформное отображение римановых пространств . . 315
§ 35. Конформное отображение римановых пространств на
пространства Эйнштейна / 318
| 36. Отображение пространств Эйнштейна па пространства
Эйнштейна. Неизотропный случай 327
§ 37. Отображение пространств Эйнштейна. Изотропный слу-
случай 333
Глава VII. Проблема Коши для уравнений поля Эйнштейна 340
§ 38. Уравнения поля Эйнштейна . 340
§ 39. Внешняя задача Коши 345
§ 40. Оценка произвола в задании потенциалов поля про-
пространств Эйнштейна 352
§ 41. Характеристические и бихарактеристыческие многооб-
многообразия 363
§ 42. Тензор энергии-импульса 366
§ 43. Закон сохранения тензора энергии-импульса 378
§ 44. Внутренняя задача Коши для потока масс 380
§ 45. Внутренняя задача Коши в случае идеальной жидкости 384
Глава VIII. Специальные типы полей тяготения .... 389
§ 43. Приводимые и конформно-приводимые пространства
Эйнштейна 389
| 47. Симметрические поля тяготения 399
| 48. Статические пространства Эйнштейна 402
§ 49. Центрально-симметрические поля тяготения 407
§ 50. Поля тяготения с осевой симметрией 413
§ 51. Гармонические поля тяготения 422
§ 52. Пространства, допускающие цилиндрические волны . . 429
§ 53. Пространства, связанные с граничными условиями . . 434
Библиография 440
Предметный указатель 460
Принятые обозначения 464
ПРЕДИСЛОВИЕ
Настоящая книга посвящена изучению пространств,
лежащих в основе общей теории относительности, и их
обобщений для любого числа измерений.
Учитывая, что в литературе по релятивистской теории
имеется ряд фундаментальных монографий, таких, напри-
например, как книга Л. Ландау и Е. Ляфшица «Теория поля»
и В. А. Фока «Теория пространства, времени и тяготения»,
автор, сознательно избегая повторений, ограничил себя
кругом вопросов, которые не освещаются в этих исследо-
исследованиях и которые должны представлять интерес как для
физиков, так и для математиков. Этим же объясняется
тот факт, что изложение дается с упором на математи-
математическую сторону вопроса, причем четырехмерным про-
пространствам с сигнатурой типа Лоренца уделяется особое
внимание.
В настоящее время имеется большая журнальная ли-
литература, в которой накопилось много новых результатов,
неизвестных математикам и физикам, не занимающимся
специально вопросами общей теории относительности.
Часть этих результатов получила освещение в книге, те
же вопросы, которые по тем или иным соображениям не
могли быть изложены, отмечены в ссылках на библиогра-
библиографию (которую автор стремился сделать по возможности пол-
полной) и в ряде задач (некоторые из них требуют простого
применения результатов, изложенных в книге, а другие
заключают в себе значительное расширение теории).
Оставаясь в рамках общей теории относительности,
автор не рассматривает в этой книге различные варианты
единой теории, сосредоточивая внимание читателя на проб-
проблемах, по-видимому, наиболее перспективных в настоящее
время; такими являются, например, применение групп Ли
к изучению полей гравитации, проблема Коши, методы
инвариантного изучения пространств Эйнштейна и тому
подобные.
6 ПРЕДИСЛОВИЕ
Современное развитие теории относительности, привед-
приведшее к изучению таких проблем, как гравитационная
радиация, поведение элементарных' частиц в гравитацион-
гравитационном поле, взаимодействие полей и т. д., необходимо тре-
требует тонких методов исследования. При написании настоя-
настоящей книги автор поставил перед собой цель — помочь чи-
читателям приблизиться к таким методам.
Автор с большой признательностью отмечает работу,
проделанную редактором книги А. Ф. Лапко, чьи советы
и замечания значительно повлияли на качество книги.
ГЛАВА I
ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА
Всякое пространство Эйнштейна представляет собой
специальный случай так называемых римановых много-
многообразий, и поэтому необходимо остановиться на опреде-
определении этого понятия.
§ 1. Римановы многообразия
Рассмотрим совокупность объектов, которые можно
поставить во взаимно однозначное соответствие со всеми
упорядоченными системами п действительных или ком-
комплексных чисел (х1, . . ., хп), удовлетворяющих системе
неравенств
\ха — а«|<еа, A.1)
где аа (а = 1, 2, . . ., п) —- постоянные, а еа — положитель-
положительные числа. Такую совокупность будем называть ограни-
ограниченной областью п-мерного пространства, а сами объек-
объекты — точками этой области. В зависимости от прило-
приложений и числа п эти точки могут интерпретироваться
различным образом (частоты спектра, события в простран-
пространственно-временном континууме, состояние динамической
системы, прямые и т. д.).
Всякое взаимно однозначное соответствие между точ-
точками и системами чисел (ж1, . .., хп) назовем системой
координат; числа ха назовем координатами той точки,
которой в этой координатной системе отвечает система
чисел ха.
Если в области заданы две системы координат {ха}
и {ха'\, то существует взаимно однозначное непрерывное
соответствие между этими двумя системами; оно может
быть записано уравнениями
ха = fa(x^' хп") ха' = ша' (х^ хп} A 2)
про которые будем говорить, что они определяют преоб-
8 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
разование координат. Можно также смотреть на A.2) как
на точечное преобразование, когда ха и ха' рассматри-
рассматриваются как координаты различных точек в одной системе
координат, однако в дальнейшем точечные преобразования,
в отличие от A.2), будем записывать, изменяя коренную
букву или отмечая ее знаком «*» при тех же индексах:
ха = ха (у1, . . ., уп), ха = ха(хх, . . ., хп). A.3)
Функцию f(x1,...,xn), допускающую непрерывные
частные производные порядка г, будем называть функ-
функцией класса С. Если / и ср в A.2) — класса СТ и якобианы
dfa
д(ра'
отличны от нуля для любого преобразова-
преобразования координат в области, то будем говорить, что задано
пространство класса СТ.
Если {ха} и {ха'} — две координатные системы в области
г дха
д-мерного пространства, то якобиан J = —jp- в этой
области не меняет знака; будем говорить, что эти коор-
координатные системы одинаково ориентированы, если знак /
положительный, и что они противоположно ориентиро-
ориентированы, если знак / отрицательный.
Теперь можно ввести понятие геометрического объекта,
в рамки которого укладывается почти весь применяемый
далее математический аппарат.
Рассмотрим в n-мерном пространстве некоторз^ю об-
область А, в которой определены две системы координат
{ха} и {ха'}. Пусть в А задана система N функций от ха
и, кроме того, задается правило (закон преобразования
объекта), указывающее, каким образом однозначно вы-
вычисляется другая система iV" функций от ха' только через
функции первой системы и производные достаточно высо-
высокого порядка от ха' по ха. Тогда будем говорить, что
задан геометрический объект, а первая и вторая системы N
функций являются его компонентами относительно коор-
координатных систем {ха} и {ха'\ соответственно. Например,
величины с одной-единственной компонентой ф(жа) и за-
законом преобразования
1] РИМАНОВЫ МНОГООБРАЗИЯ
где J =
, а к — некоторое число, являются объектами
дха'
и называются скалярными плотностями веса к; в част-
частности, когда /с = 0, получим объект, называемый скаляром,
для которого закон преобразования будет иметь вид:
¦ф (ха') = \Ь (ха).
Предположим теперь, что в области А n-морного веще-
вещественного пространства задан скаляр, который получится,
если в системе координат {ха} задать неопределенную,
в общем случае, квадратичную дифференциальную форму
d$2 = ga^dxadx^ A.4)
и потребовать, чтобы она не зависела от системы коор-
координат. Здесь, как и везде далее, по повторяющимся внизу
и вверху индексам производится суммирование (правило
Эйнштейна), a ga& = g~a (xa) — функции заданного класса С',
подчиненные условию
При помощи формы A.4) можно в области n-мерного про-
пространства определить метрику, после чего получаем ри-
маново многообразие; теория римановых многообразий на-
называется римановой геометрией, основы которой заложены
в классической работе Римана [1]. Эти многообразия
обозначаются далее символом Vn. Более тщательное опре-
определение Vn требует привлечения понятия покрытия
топологического пространства или других соображений
(П. К. Рашевский[188], стр. 346 — 366; Яно и Бохнер [257],
стр. 7 — 9; см. также § 38).
Смысл введения метрики при помощи формы A.4)
состоит в том, что ds интерпретируется как длина вектора
с компонентами dxa. В силу неопределенности формы A.4)
длина вектора может быть больше, меньше или равна
нулю, ив последнем случае вектор называется изотропным.
Если координаты ха заданы как функции веществен-
вещественного параметра t, то величина
s= • ~ ' ¦ dx<X
dt dt
dt A.6)
10 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
определит длину дуги между точками tx и ?2 кривой
ха __ ха (^ ПрН этом не исключается возможность того,
что длина будет равна нулю. Далее такие изотропные
кривые интерпретируются в пространственном многооб-
многообразии релятивистской теории тяготения как мировые
линии света.
Среди различных возможных объектов особенно важ-
важными являются тензорные поля, для определения кото-
которых нужно задать правило их вычисления при переходе
от системы координат {ха} к системе {ха'\. Чтобы полу-
получить представление об этом законе, рассмотрим вторую
из формул A.2) и, имея в виду замечание о классе фа,
загоппсм:
^ A.7)
Рассмотрим точно так же компоненту скалярного ноля
ty(x); по определению,
-ф (ха') = л|? (жа),
и следовательно, обозначая оператор через да, ПОЛу-
чим частные производные
В формулах A.7) и A.8) связь между старыми и новыми
компонентами объектов имеет линейный вид, однако
выступают две различные системы коэффициентов линей-
линейной зависимости. Соответственно этому будем различать
два сорта индексов: ковариантные индексы, отвечающие
A.8) (будем их всегда писать внизу), и контравариант-
ные, отвечающие A.7) (их помещаем всегда наверху).
Обобщая этот факт, будем далее рассматривать величины,
обладающие как ковариантными, так и контравариант-
ными индексами. Если число первых равно г, а вторых s,
то будем говорить о величинах валентности r-{- s. Теперь
можно дать следующее общее определение.
Тензорным полем веса N и валентности r-\-s назовем
геометрический объект, имеющий nT*s компонент
Т*1" '%....»,. (*) («1. • ¦ ¦ a,, Pi, . ¦ ¦, Р, = 1, • ¦ ¦, п),
§ ij РИМАНОВЫ МНОГООБРАЗИЯ 11
причем при переходе к другой системе координат новые
компоненты вычисляются по правилу ,
r<V--as _ r-vrYi---Ys ftr дха& дхь* fa6'1
A.9)
Это поле называют ковариантным валентности г и кон-
контравариантным валентности s. Если N Ф 0, поле назы-
называется относительным, при iV = O будем говорить просто
тензорное поле, иногда опуская указание веса.
Таким образом, скалярное поле или скаляр, опреде-
определенные выше, дают пример тензорного поля валентности
О + 0 и веса N = О. Скалярная плотность имеет валент-
валентность 0 + 0 и вес N.
Следующим примером тензорных полей будут вектор-
векторные поля: ковариантные
дх°
и контравариантные
имеющие оба вес, равный нулю. В частности, A.7) опре-
определяет контравариантное поле векторов, а A.8) —кова-
риантное, и притом градиентное.
Для римановых многообразий по определению ds' = da
и, следовательно,
gap dxa d-jfi = go,p/ dx
откуда в силу A.7) получим
дха
и в силу полного произвола в выборе вектора dxa'
т. е. g б определяет поле ковариантного тензора валент-
12 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [1Л. I
ности 2. Так как
то матрица —„- оудет транспонированной, обратной
матрицей относительно —gr ; здесь Ор — символ К роне-
кера, равный 1 при a = {5 и нулю при а =^ р.
Рассмотрим некоторую точку i5 риманова многообразия
и обозначим:
Тогда в Р компоненты контравариантиого вектора пре-
преобразуются по закону
определяющему группу линейных однородных преобразо-
преобразований — ценпгроаффинную группу, которой отвечает гео-
геометрия Клейна, обобщающая для п измерений обычную
аффинную геометрию. Следовательно, каждая точка Р
получает свое собственное локальное центроаффинное про-
пространство, которое обозначим символом Еп. Поля геоме-
геометрических объектов риманова многообразия, если отожде-
отождествить начало Еп с той точкой Vn, которой оно отвечает,
определяют в Еп объекты с постоянными компонентами.
Аксиоматике и изучению аффинных пространств посвящен
ряд статей и монографий (П. А. Широков [91], А. П. Нор-
ден [170], стр. 11-58, П. К. Рагдевский [188], 82—144).
Задачи
1. Показать, что если символы Кронекера принять
в качестве компонент смешанного тензора валентности
1+1 в некоторой координатной системе, то компоненты
этого тензора в другой системе также будут символами
Кронекера.
2. Если компоненты тензора в некоторой точке равны
нулю в системе {ж}, то в этой же точке они равны нулю
§ 2] АЛГЕБРА ТЯНЗОРОВ 13
и в любой системе {х')\ если компоненты тензора равны
нулю для одной системы, то они равны нулю и в любой
сястеме координат.
3. Для любого векториого доля иа (х) можно опреде-
определить такую систему координат [х'}, что
иа' = 0, un'=i (a < га). A-15)
§ 2. Алгебра тензоров
Будем говорить, что тензор при любом весе равен
нулю, если все его компоненты равны пулю хотя бы
в одной системе координат; в этом случае он равен нулю
в любой системе (задача 2, § 1). Алгебра тензоров вводит
операции, позволяющие данным тензорам ставить в соот-
соответствие новые тензоры.
Сложение и вычитание тензоров. Если сложить соот-
соответствующие компоненты двух тензоров одинакового веса,
с одинаковым числом г ковариантных и s контравариант-
ных индексов, то получаемая таким образом система ве-
величин определит тензор того же типа. Так, если
то
м% +щ: = jnj«'4> (mi +Щ).
Доказательство очевидным образом проводится при
любой валентности.
Внешнее произведение тензоров. Умножая каждую ком-
компоненту тензора веса N валептности к + т на каждую
компоненту другого тензора веса N' валентности г -\-s,
получим систему величин, которые будут компонентами
тензора веса N-\-N' и валентности p-{-q, где р = к-\- г,
q — m -\- s. Доказательство сводится к перемножению левых
и правых частей соотношений, определяющих закон пре-
преобразования для компонент этих двух тензоров.
Например, произведение скалярной плотности и кова-
риантного вектора определяет относительный ковариант-
ный вектор. Точно так же произведение ковариантного
и контравариантного векторов дает тензор валентности
1 + 1 и веса 0.
14 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА ?гл. L
Свертывание тензоров — операция, применимая к лю-
любому тензору валентности г-\~к, где г и к больше нуля,
и заключающаяся в том, что некоторый ковариантный
индекс полагают равным некоторому контра вариантному
и берется сумма по этому индексу суммирования. Это
приводит к компонентам тензора валентности (/•—1) +
+ (&— 1). Так как при доказательстве этого утверждения
вес тензора и значения /• и к не играют роли, то доста-
достаточно рассмотреть тензор
свертывая его по индексам а' и |3', получим:
т. е. Маау — My — тензор, если Ма$у — тензор.
Операция внутреннего умножения тензоров получается
как комбинация внешнего умножения и свертывания
и поэтому, как легко убедиться, приводит к тензору.
Пользуясь этими действиями, можно получить так на-
называемое правило частного для тензоров, часто применяе-
применяемое при исследовании тензорных уравнений. Оно заклю-
заключается в следующем: пусть в каждой системе координат
задана система rer+s чисел Ма ...а.р ...р, таких, что систе-
система чисел
при любом выборе s контравариантных векторов v опре-
определяет тензор валентности 7*-^0; тогда Ма ., а р ...р.
определяет тензор валентпости (г + s) + 0. Достаточно про-
провести доказательство для случая 5=1. Имеем:
Так как выбор v совершенно произволен, то
что и доказывает утверждение. Это правило, конечно,
обобщается на случай, когда числа М имеют контрава-
риантные индексы, а также на случай, когда v — кова-
S 2] АЛГЕБРА ТЕНЗОРОВ 15
риантные векторы; оно часто применяется и в некотором
смысле определяет действие, обратное операции умноже-
умножения тензоров.
Если компоненты некоторого тензора не меняются от
перестановки двух или нескольких индексов одинаковой
природы, то тензор называется симметрическим относи-
относительно этих индексов. Если же перестановка индексов
ведет только к изменению знака компоненты, то тензор
называется кососимметрическим по этим индексам. Ясно,
что симметрия и косая симметрия инвариантны при пре-
преобразовании координат. Эти два часто встречающиеся
свойства тензоров означают прежде всего, что тензор,
обладающий одним из этих свойств, определяется мень-
меньшим числом компонент, чем это было бы в общем случае.
Так, ковариантный тензор второй валентности в общем
случае имеет п% компонент; если же он симметрический,
п(п-\-\)
то его определяют ————- компонент, а в случае косой
п(п — 1)
симметрии —х——- компонент.
Симметрирование и альтернирование тензоров. Если
некоторый тепзор имеет несколько индексов одного и того
же рода, то из него можно образовать новый тензор, сим-
симметричный или кососимметричный по этим индексам или
по некоторым из этих индексов.
Пусть, например, дан тензор валентности т + 0:
Ва ...а • Взяв т\ компонент, которые получаются при
перестановке индексов аг . . . ат всеми возможными спосо-
способами, и сложив их, получим компоненту симметрического
тензора, которая обозначается так:
Эта операция симметрирования может применяться
только к индексам одного и того же рода.
Аналогично вводится операция альтернирования, при-
приводящая к кососимметрическому тензору; взяв те! ком-
компонент, как и ранее, образуем сумму, в которой каждую
компоненту берем со знаком плюс или минус, соответ-
- /" cti а, • • . ат \
ственно тому, будет ли подстановка I ) четная
V^fj Иг., • • • arm у
16 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
или нечетная. Это приводит к косоеимметрическому тен-
тензору, который обозначается символом
Деление на ml необязательно, но удобно. Если надо
показать, что знак симметрирования или альтернирования
не распространяется на какой-нибудь индекс, который
оказался внутри скобок ( ) или [ ], то этот индекс
будем выделять чертами | 1. Например,
^(а I Э I V) = у
Легко показать из определения, что операции симме-
симметрирования и альтернирования — операции тензорные.
Все операции, рассмотренные выше, никак не связаны
с метрическим тензором §•„, наличие которого характе-
характеризует римановы пространства; они имеют место в любом
локальном аффинном пространстве. Метризуя пространство
при помощи тензорного поля gap, мы тем самым привносим
ряд новых операций, характерных для римановых много-
многообразий.
Так как по определению g = \ g~ | ф .0, то, обозначая
через ga& = g&a алгебраическое дополнение элемента
gap = gpa в определителе \ ga^\, разделенное на g, получим,
что система чисел ga& в каждой точке пространства. Vn
удовлетворяет уравнениям
8а%у = Ьу- B-1)
Покажем, что ga& представляют собой компоненты
симметрического контравариантного тензора. Пусть
иа — компоненты произвольного вектора, Тогда
также определят вектор. Из B.1) следует:
так как ор — произвольный вектор, то, используя правило
частного, получаем требуемый результат.
S 2] АЛГЕБРА ТЕНЗОРОВ 17
Из B.1), свертывая по а и р1, получим:
fpCtpoc — yj /ел с\\
Ь бсф ' \&.?,)
Обозначая определитель j ga&j через g, получим:
I1
= 1, B.3)
откуда следует, что алгебраическое дополнение g°P в опре-
определителе g, деленное на g, равняется g .
Операция поднятия и опускания индексов. Используя
тензор ga~, каждому тензору можно сопоставить другой
тензор с тем же числом индексов, но другого вида. Так,
если Ва$у — компонента тензора, то ему можно сопоставить
тензоры с компонентами
Для каждого из этих тензоров процесс обратим,
например:
т. е. снова приходим к исходному тензору. Это позволяет
утверждать, что тензор gr B известной мере уничтожает
дуализм между ковариантными и контра вариантными
индексами. С этой точки зрения естественно говорить об
одном и том же тензоре, допускающем задание при по-
помощи компонент различного сорта. Удобно, подчеркивая
этот факт, сохранять коренную букву для всех возможных
компонент тензора.
Отметим, что для опускания и поднятия индексов
можно было бы использовать некоторый другой тензор,
например кососимметршгеский, и для некоторых вопросов
это является более эффективным ([170], стр. 310), но,
во всяком случае на протяжении всего исследования,
такой тензор не должен меняться.
Метрический тензор служит также для определения
нормы любого вектора:
2 А. 3. Иетрон
18. ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
Так как g — неопределенный тензор, то в каждой точке
пространства возникает конус изотропных направлений
gafixaxt = О,
который отделяет -j- -область (область вещественных век-
векторов с положительной, нормой) от области (область
вещественных векторов с отрицательной нормой). Норма
всякого изотропного вектора равна нулю. Векторы с нор-
нормой, равной + 1, называются единичными векторами.
Длиной вектора назовем положительный квадратный
корень из абсолютной величины нормы. Впрочем, в теории
относительности только для векторов из области гово-
говорят о длине, а для векторов из + -области принято гово-
говорить о длительности.
Пользуясь тензором, можно также определить угол
между двумя вещественными векторами иа и va, если
они оба лежат в ±-области. Он определяется формулой
cos(u,v) = -—^Uf . B.4)
По угол будет вещественным только в том случае, если
среди векторов
аиа + bva,
определяющих линейную оболочку векторов иа и va, нет
изотропных, так как тогда | cos (и, v) \ < 1. В противном
случае придем или к мнимым углам, или к выражению,
которое теряет смысл. Однако во всех этих случаях будем
называть векторы иа и vn ортогональными, если
иао° = 0. B.5)
Изотропные векторы и только они сами себе ортош
гоналъны.
Отметим, что из закона преобразования для метриче-
метрического тензора
следует:
g' = gJ\ B-6)
т. е. g — скалярная плотность веса 2.
2j АЛГЕБРА ТЕНЗОРОВ 19
Задачи
1. Если тензор симметричен по индексам ак и а{ и
'кососимметричен по индексам а; и ат, то он равен нулю.
2. Показать, что для любого тензора справедливы
соотношения
2
+ 3"
3. Если ф = Sa$uauP — скаляр при любых ка, то
p — тензор. Если <р = 0, то ^<ар) = 0.
4о Если тензор Aa$v удовлетворяет соотношению
(при любых иа) Aa$yiiauPuv — 0 и ^[ap]Y = 0, то Лару +
5. Если тензор ГарУэ удовлетворяет соотношению
p6 = О ПРИ любом выборе векторов иа и иа, то
+ Л'Раб + ^абуЭ + ^убаЭ = 0. B.7)
Если, кроме того, тензор Т удовлетворяет условиям
то он равен нулю.
6. Если Aia^y = 0, то
= О,
з ^vag)- B-8)
ЕСЛИ B(ag)Y = 0, ТО
3^Yap)' B-9)
7. Если для тепзора Гар имеет место равенство
относительно какой-либо одной системы координат, то
оно имеет место всегда. Если Тар Ф 0, то а=±6 ([77],
стр. 16).
20 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
8. Если для тензора Та$у хотя бы в одной системе
координат выполняется равенство
= О,
то оно имеет место всегда. Если.Тарг Ф 0. то а -j- b -\- с = О
или а — Ь — с.
9. Показать, что
10. Доказать, что
_ yOl _ _ Vah.
ft]
11. Ранг матрицы, составленной из компонент тензора
маир, равен 1, а для тензора ЩаР$) равен 2, если
"а Ф hva.
12. Доказать, что
§ 3. Ковариантное дифференцирование
Преимущества тензорного исчисления там, где они име-
имеют место, связаны прежде всего с возможностью записывать
тензорные уравнения в инвариантной форме, не завися-
зависящей от выбора системы координат. Приступая к постро-
построению тензорного анализа, необходимо прежде всего свя-
связать с дифференцированием тензоров операцию тензор-
тензорного характера. Будем предполагать в этом параграфе,
что класс функций соответствует порядку дифференци-
дифференцирования. Формула A.8) дает пример того, когда произ-
производные тензора валентности 0 + 0 и веса 0 определяют
тензор валентности 1 + 0 и веса 0. Этот факт является
исключительным. Так, например, частные производные
вектора не определяют тензора. Операция тензорного
характера, обобщающая обычное дифференцирование,
может быть введена неоднозначно.
Ковариантное дифференцирование, вводимое в этом
параграфе, тензорный характер которого впервые заме-
замечен Кристоффелем ([2], стр. 56), будет определено здесь
формально; его геометрический смысл выясняется в § 5.
3 3] КОВАРИАНТНОЕ ДИФФЕРЕНЦИРОВАНИЕ 21
Совокупности частных производных от компонент
метрического тензора dygap \ = {- ) взаимно однозначно
отвечает система функций
J C.1)
которые принято называть символами Кристоффеля
первого рода. В самом деле.
fct.PY + Гр.сеу = dygafr C-2)
т. е. соответствие взаимно однозначное. Метрический
тензор и символы Кристоффеля первого рода позволяют
ввести символы Кристоффеля второго рода:
Tty = gaara,^ C.3)
причем из определения следует:
ra,pv = Га,уЭ) Гру=Г"р. C.4)
Символы Кристоффеля первого и второго рода не явля-
являются тензорами, так как, например, для трехмерного
евклидова пространства относительно прямоугольной
декартовой системы координат они равны нулю, а в
цилиндрических координатах некоторые из них отличны
от нуля.
Символы Кристоффеля второго рода образуют объект;
символы Кристоффеля первого рода вместе с метриче-
метрическим тензором также образуют объект.
Рассмотрим закон преобразования метрического тензора
ga'fi'= Al.Algn. ¦ C.5)
Так как gax = gax(x), то drgaT = A^dQga% и
Прибавляя и отнимая выражения, получаемые из напи-
написанного соответственно при подстановках ( , ,У, J ,
Г а'Ъ'у
И Учитывая' что
22 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
щ
получим:
Га'.Э'Г = А1,А\,А%^ОЛХ + gaxAl^A*,, C.6)
что доказывает вторую часть теоремы. Свертывая C.6)
с ga'6' и имея в виду A.14), получим:
Т^у' = А%А1А^Т^х + А^д^А%„ C.7)
откуда следует первое утверждение.
Введем понятие ковариантнои производной вектора.
Частные производные от ковариантных компонент век-
вектора не определяют тензора, так как
но если взять разность этого равенства и
Т%У'К- = {Аах'да,Ахг
то получим, что величина
является тензором. Выражение в скобке, которое зависит
линейно от частной производной компоненты вектора ж
самой компоненты так, что коэффициенты этой линейной
зависимости определяются метрикой пространства Vn,
назовем ковариантнои производной вектора Ха и обозна-
обозначим:
"a.Y = ^Y"« — Га^лст. (^•")
Аналогичная операция для контравариантных ком-
компонент вектора приводит к определению ковариантнои
производной, и в этом случае
* Яа,у =? дуХ* + Г^уЛ*- C.9)
Из C.8) и C.9) естественным образом следует опреде-
определение ковариантнои производной тензора любой валент-
§ 3J КОБАРИАНТНОЕ ДИФФЕРЕНЦИРОВАНИЕ 23
ности р + <7, веса 0:
р
I таг. . .ао_ххаа+1. . .ар Гао _
<г
Таким образом, по сравнению с дифференцируемым тен-
тензором его ковариантная производная является тензором,
ковариантиая валентность которого на единицу больше.
Так как каждому невырожденному симметрическому тен-
тензору валентности 0 + 2 можно сопоставить дифферен-
дифференцирование, то в случае, если приходится рассматривать
более чем одно дифференцирование, необходимо отличать
их разными обозначениями, например, обозначая одно
дифференцирование запятой, а другое — точкой с запя-
запятой и т. д. Употребителен также знак V («набла»):
A,OiY == VyXa. Термин «ковариантная производная» введен
Риччи ([3], стр. 1 — 11), тогда как сама операция для
римановых пространств встречается уже у Кристоффеля [2].
Для ковариантных производных сумм, внешних про-
произведений, внутренних произведений действительны обыч-
обычные правила, если дифференцировать один раз. Так,
(К± Va),p=V3± va,P' (З.И)
C.12)
• C.13)
Доказательство этих формул следует очевидным обра-
образом из C.10). Для скаляра ковариантная производная
совпадает с частной производной:
ф,а = о»аф. C.14)
Формулы C.10) —C.14) легко1 распространить на отно-
относительные тензоры веса, не равного пулю, если потре-
потребовать, чтобы вес при ковариангпном дифференцировании
не менялся. Так, например, для скалярной плотности
веса к получим:
24 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА |лл. !
для тензора ELgY валентности 1 + 2 и веса о ковариант-
ная производная будет иметь вид:
Пру,б = С^Пру + ГабПру — ГрбП(тУ — ГустПра — ?>ПртГб, C.16)
где
Гб = Гба-
Так как, по определению, ковариантная производная
конструируется, если известны лишь компоненты объекта
Гру (х), называемые коэффициентами связности, безотно-
безотносительно к тому, связан этот объект с метрическим тен-
тензором или нет, то имеется возможность ввести кова-
риантыое дифференцирование для любого объекта вида
r<jY, что приводит к теории пространств аффинной связ-
связности, частным случаем которых являются многообра-
многообразия Fn(IH. Томас [92], А. П. Норден [170], П. К. Рашев-
екий [188]). При этом, естественно, нет необходимости
требовать, чтобы имела место симметрия объекта FpY
по нижним индексам, что приводит к пространствам
с кручением.
Будем далее говорить, что тензор ковариантно по-
постоянен,, если его ковариантная производная равна
нулю. Существование такого рода тензоров в Vn под-
подтверждается теоремой: тензоры ga$, ga&, 63 ковариантно
постоянны. Это утверждение следует из B.1), C.1), C.2),
C.3), C.4). Вследствие этого операции свертывания и
ковариантного дифференцирования коммутируют, напри-
например:
Ковариантное дифференцирование допускает введение
ротации вектора
дивергенции вектора или"тензора относительно ga$, опре-
определяемых соответственно выражениями
§ 4] ПАРАЛЛЕЛЬНОЕ ПЕРЕНЕСЕНИЕ 25
и скалярных операторов
/. Ф) = ЙГар/,аФ,р, [ C.18)
I
называемых дифференциальными параметрами Белътрами
первого и второго рода.
Задачи
1. Для того чтобы ковариантиый вектор ка был гра-
градиентом, необходимо и достаточно, чтобы первая ковари-
антная производная этого вектора была симметрична:
2. Если Ajy — ротация вектора, то \j,it + ^jh
4- Ки = dkhi + d%hh + tyki = 0 (Эйзенхарт [77], стр.
3. Показать, что 57Д1ф = 2^аРф>аф,ру и Х
4. Показать, что дивергенция тензора а°Р относи-
относительно gag, т. е. тензор ааР,р, имеет выражение аа&д =
= -tf^z dp (a«P ]/§¦) + apvrgY; если aaP — кососимметри-
ческий тензор, то второе слагаемое исчезает.
5. Показать, что Га=ГаСТ = да ln}/r g .
6. Показать, что если ХСаРЗ = 0, то ^а^,э —
= -1=6е(ЯаР|/у) + 4- Лат^0Т (Эйнштейн [36], стр. 769).
V g 1
§ 4. Параллельное перенесение в пространстве Vn
Будем говорить, что пространство Vп плоское, и обо-
обозначать' его символом Rn, если в нем можно определить
такую систему координат, относительно которой компо-
компоненты метрического тензора будут постоянными:
gap = const. Инвариантная характеристика плоских про-
пространств будет дана в следующем параграфе. Если, кро-
26 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
ме того, форма ds2 — gap dxa dx& определенно-положитель-
определенно-положительная, то такое Rn принято называть обыкновенным про-
пространством; примером обыкновенного пространства Rn
может служить трехмерное евклидово пространство.
Vп является обобщением Rn в том смысле, что возможность
для некоторой системы координат в области, не являю-
являющейся точкой приведения g(j к постоянным, не предпо-
предполагается.
Одним из основных понятий евклидовой геометрии
является понятие параллелизма. При построении геомет-
геометрии Vn естественно поставить вопрос о параллелизме
в таких многообразиях. Всякий параллелизм связан
с необходимостью сравнивать векторы в различных точ-
точках данной области пространства. Если эти точки соеди-
соединить некоторой кривой, то можно говорить о сравнении
векторов в различных точках кривой. Мы убедимся далее
в том, что понятие параллелизма в Vп нельзя отделить
от кривой, вдоль которой изучаются векторы, и ввиду
этого поставим вопрос о параллельном перенесении век-
векторов вдоль данной кривой в Vn.
Это понятие должно быть определено, и если не
наложить некоторых дополнительных требований, то
такое определение не будет однозначным. Чтобы приво-
приводимое пиже определение параллельного переноса векто-
векторов в Vn выглядело естественным, приведем некоторые
соображения, необязательные, впрочем, с формальной
точки зрения. Рассмотрим с этой целью параллелизм
в обыкновенном i?3 с тем, чтобы некоторые из свойств
взять за образец при определении параллелизма в Vn.
Если /?3 отнесено к криволинейным координатам, то
в каждой точке пространства существуют координатные
векторы /, а ковариантные координаты любого вектора
~ а
va = v-l, где v, I —безындексные обозначения векторов.
а а
Легко убедиться, что va является действительно компо-
компонентой вектора, проверив для этого закон преобразо-
преобразования этих величин и I при преобразовании координат.
а
Если некоторый вектор и переносится параллельно в i?3
вдоль кривой ха = xa(t), то-^- = 0. Тогда и компоненты
§ 4] ПАРАЛЛЕЛЬНОЕ ПЕРЕНЕСЕНИЕ 27
этого вектора равны нулю:
~- d I , a di v
аи -у а , ~ Т\ ~ а а 7* а
cf^ а dt^ a' dt di ° dt
dun „
?pfa
т. е. имеет место следующее свойство:
, ч dua . ^ж
(а) -, линейно зависит от иа и —т
а
Здесь I — система векторов, взаимных относительно Г,
а
определяемых условием
Взаимная система, как известно, всегда существует, если
векторы I независимы. Естественно потребовать, чтобы
а
свойство (а) сохранялось и в Vn. Повторяя рассуждение
для контравариантной компоненты, мы придем, очевидно,
к тому же результату.
Предполагая, что (а) имеет место при параллельном
перенесении в Vn вдоль кривой ха (t), получим:
Потребуем также, чтобы ак и в /?3> выполнялось свой-
свойство
(р) норма вектора при параллельном перенесении в
Vn сохраняется:
Тогда, пользуясь D.1), получим:
„ ,» dx* . С dua ft , „ du?
28 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл, I
где Аа . = gaoAfiy. Если это имеет место для любых век-
векторов иа любой кривой, то выражение в скобке, просим-
метрированное по а и 8, должно равняться нулю. Так
как это выражение уже симметрично по а, р\ то
дуёаЦ = А, 0Y -г -4Э, ay = gar My + gfrAly. D.2)
Потребуем, наконец, чтобы имело место
(Y) ^[рг] = A«, №v] = О-
Геометрический смысл требования (у) состоит в сле-
следующем. Рассмотрим некоторую точку пространства Vn
и две кривые, проходящие через нее; пусть касательные
векторы определяются векторами dxa и дха. Перенесем
вектор 6ха вдоль кривой, определяемой вектором dxa,
и наоборот. Тогда, если пренебречь бесконечно малыми
порядка более чем второго, то при первом перенесении
конец смещенного вектора будет находиться в точке
ха-\- dxa-\-bxa — AgydxP 6a;Y; а при втором перенесении
конец смещенного вектора придет в точку ха + дха + dxa —
— АрудхР dx**. Следовательно, «зазор» между этими точ-
точками выражается величиной ^ppY] dx$ dxv. Условие (у) сво-
сводится, таким образом, к требованию, чтобы в каждом дву-
двумерном направлении существовали бесконечно малые па-
параллелограммы (с точностью до бесконечно малых треть7
его порядка). Другое истолкование условия (у) дано
Картавом ([59], стр. 593-595, [83]). 168
При условии (у) из D.2) следует: Лру = Г^. Таким
образом, при условиях (а), ({$), (у) получаем, что при па-
параллельном перенесении вдоль данной кривой вектора и'1
. D.3)
Уравнения D.3) совпадают по форме с законом парал-
параллельного перенесения в i?3, но, в то время как в i?3
параллелизм инвариантен (по смыслу этого понятия),
для Vn инвариантность D.3) необходимо доказать, и та-
такое доказательство должно основываться на законе пре-
преобразования объекта Г|у.
S.4] ПАРАЛЛЕЛЬНОЕ ПЕРЕНЕСЕНИЕ 29
Так как иа' = А%'иа, то в силу D.3)
где в силу преобразования объекта Г$у (см. C.7)) выраже-
выражение в скобках можно выразить через Г^-у, и тогда будем
иметь:
что и доказывает инвариантность D.3) при преобразова-
преобразовании координат.
Если задана кривая xa = xa(t), где жа непрерывно
зависит от t, то Т}у = Т$у (ха (t)) и уравнения D.3) опре-
определят нормальную систему п линейных обыкновенных
уравнений с непрерывными в некотором интервале коэф-
коэффициентами; в силу теоремы существования и единствен-
единственности для каждой системы начальных условий
о
t = tQ, ыа=иа (а= 1, . . . , п),
долучим единственное решение системы.
Пусть через две точки А и В в Vn проходят две кри-
кривые, определяемые уравнениями ха = ха (t) и ха = ха (t)
с такой параметризацией, чтобы значению t0 на обеих
кривых отвечала точка А, а значению tx — точка В. Пред-
Предположим также, что А и В вместе с кривыми, их сое-
соединяющими, принадлежат такой области Vn, где условия
теоремы существования и единственности системы D.3)
выполняются. Тогда, задавая в А один и тот же век-
о
тор иа, получим две различные системы уравнений D.3),
отвечающие этим двум кривым, и в В в качестве парал-
о
дельно перенесенных аа будут отвечать два различных
вектора. Таким образом, параллельное перенесение по за-
закону D.3) совершается при заданном пути однозначно;
перенесение зависит от пути. Разумеется, эти утвержде-
утверждения носят локальный характер, так как имеют место
только в области, определяемой интервалом, в котором
справедлива теорема существования и единственности
системы D.3).
30 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
Умножая D.3) на dt, перенося все члены налево
и обозначая полученное i шраг „шие через 6«а, получим:
Ьиа = (дуиа 4- Грукв) ^v = и« ^жу = 0.
Выражение диа называют абсолютным дифференциалом
поля иа. Абсолютный дифференциал имеет смысл только
при определенном направлении, задаваемом дифферен-
дифференциалами dxa, и следовательно, поле иа переносится
параллельно вдоль кривой ха = ха (t), если абсолютный
дифференциал иа при бесконечно малом смещении вдоль
этой кривой равен нулю.
Обобщая этот факт для любого тензора и вводя абсо-
абсолютный дифференциал тензора
вдоль некоторой кривой, будем говорить, что тензор
переносится параллельно вдоль кривой ха = ха (t), если его
абсолютный дифференциал вдоль этой кривой равен нулю.
Параллельное перенесение тензоров непосредственно
связано с ковариантным дифференцированием: оно носит
название параллельного перенесения в смысле Леви-Чивита,
который ввел и обосновал это понятие ([39], стр. 173 — 205),
обобщенное в настоящее время в различных направ-
направлениях. Можно дать другие определения параллель-
параллельного перенесения в Vn, эквивалентные данному выше
(И. А. Схоз^тен и Д. Дж. Стройк [110], стр. 75 — 91,
П. К. Рашевский [188], стр. 429 — 450).
Задачи
1. В евклидовом пространстве даны сфера и касаю-
касающийся ее по малой окружности (/) круглый конус. По-
Показать, что всякая совокупность векторов, параллельных
вдоль (I) относительно сферы, будет также определять
векторы, параллельные вдоль (I) относительно конуса;
если конус разворнуь на плоскость, то эти векторы
перейдут в векторы, параллельные в евклидовом смысле.
2. Для того чтобы касательные к кривым ж2 = const
в пространстве F2 были параллельны вдоль некоторой
§ 5] ТЕНЗОР КРИВИЗНЫ 31
кривой (/), необходимо и достаточно, чтобы эта кривая (I)
была интегральной кривой уравнения T\adxa = 0.
3. При параллельном перенесении векторов иа, ... , иа
1 п
вдоль некоторой кривой линейные зависимости между
ними сохраняются.
§ 5. Тензор кривизны пространства Yn
Обычные частные производные к ковариантные про-
производные первого порядка подчинены одинаковым прави-
правилам, но ужо для производных второго порядка возникает
неустранимое различие. Это различие проще всего уста-
установить, решая основной вопрос, возникающий при иссле-
исследовании уравнений в ковариантных производных, — вопрос
об условиях интегрируемости. В то время как для обыч-
обычных частных производных имеет место переместитель-
переместительность порядка дифференцирования, для ковариантных
производпых это свойство не выполняется. Пусть задано
векторное поле иа (х). Ковариантная производная
"а,Э = д$иа — ГарМст- E.1)
Дифференцируя еще раз, получим, имея в виду E.1),
Так как риманова связность не имеет кручения (см.§3):
= 0, то альтернируя это уравнение по § и у, получим:
Слева находится тензор, иа — вектор, и следовательно,
согласно правилу частного для тензоров выражение в скоб-
скобках представляет собой также тензор валентности 1 + 3
и веса 0. Вводя обозначение
+ Го [уГр]Т) E.2)
получим, таким образом, равенство
ua, [PV] = " ^ a3YwOD E-3)
в котором и сказывается различие между частными и
ковариантными производными.
32 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
Тензор Raafiy называется тензором кривизны прост-
пространства Vn и играет основную роль для его характери-
характеристики.
Умножая E.3) на gaT и пользуясь тем, что метриче-
метрический тензор ковариантно постоянен, получаем:
1 а 1 1
S"^ и = y Я<зЧчиа = —-JRrafiyUc. E.4)
Вообще для тензора любой валентности получим:
Это соотношение получено Риччи и носит название тож-
тождества Риччи ([13], стр. 143). В том случае, когда вместо
обычных частных производных применяются ковариант-
ные, это тождество используется как условие интегри-
интегрируемости. Так как тензор кривизны целиком опреде-
определяется, если задан объект Г$у, то он может быть опре-
определен и в пространствах аффинной связности с круче-
кручением (§ 3), где также будет иметь место E.5). Смысл
этого тождества заключается в том, что в пространст-
пространствах Vn (пространствах аффинной связности) тензорное
поле с компонентами класса С"'(г>>2) не может быть
задано произвольно, так как при помощи E.5) оно свя-
связано с метрикой пространства (с коэффициентами связ-
связности).
В Vn тензор кривизны можно определить ковариант-
ньши компонентами
¦^аРуб ~ §ав^ Py6' E-6)
и в такой форме удобно исследовать его свойства.
Запишем ковариантные компоненты тензора кривизны
в явном виде. Так как
' выражаются через символы Кристоффеля пр
I oj ТЕНЗОР КРИВИЗНЫ 33
помощи C.2), то
Ya — Г-уб (Га. ар -j- Гffj аэ)
н; следовательно,
¦^аруб = ^Y^a, рв — ^бГа, pv + TpY Га. аб — ГрбГст, ау —
1
+ g°r (Га> абГт, pY - Га, ауГТ) рб). E.7)
Из этого выражения для ковариантной компоненты тен-
тензора кривизны непосредственно следуют тождества:
(a) J^aPvS = ~ -Яркув — — -"орлу ]
(Р) ^apY6 = ^Y6ap, E-8)
Назовем полным рядом тождеств для некоторого
тензора совокупность тождеств, определяющих все алге-
алгебраические условия для компонент этого тензора; следо-
следовательно, каждое тождество, которому удовлетворяют
компоненты тензора, может быть получено из полного
ряда. Можно показать (Томас [92], § 49), что для компо-
компонент тензора кривизны /?аруб полный ряд тождеств опре-
определяется тождествами (а) и (у); нетрудно непосредственно
убедиться, что ф) есть следствие (а) и (у).
Подсчитаем число независимых компонент тензора
кривизны. Среди компонент /?арар) имеющих только два
различных индекса, в силу (а) получим только С%, раз-
различных компонент, где Cfr — число сочетаний из п по 2.
Среди компонент с тремя различными индексами в силу
(а) и (у) получим оС\ различных компонент, и, наконец,
среди компонент с четырьмя различными индексами най-
найдется 2Сп независимых. Следовательно, общее число
независимых компонент будет определяться числом
В частности F9 отвечает N = i, для V3 число N = 6 п для
F4 число N = 20.
•1 А. 3. Петров
34 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
Ввиду зажности тензора кривизны пространства Vn,
определяемого метрическим тензором ga$, полезно выяс-
выяснить, какие тензоры могут возникнуть в результате свер-
свертывания этих двух тензоров. Первое свертывание, с точ-
точностью до знака, определяет только один тензор
ЯаР = Raaafi = даТ%$ — да& In У g =
= Г^Г?3 + Т^да In VI, E. Ю)
как это следует из E.2) и задачи 5 § 3; свертывание по
индексам кососимметрической пары дает, конечно, нуль.
Тензор /?ар (симметрический в силу E.10)) называется
тензором Риччи, который впервые ввел его, и играет
основную роль для пространств Эйнштейна вообще и для
теории относительности в частности.
Второе свертывание определяет скаляр
R = R\,
называемый скалярной кривизной пространства Vn.
Как первый пример приложения тензора кривизны
покажем, что имеет место теорема: для того чтобы про-
пространство было плоским, необходимо и достаточно, что-
чтобы тензор кривизны был равен нулю. Пусть имеем плоское
пространство, т. е. в некоторой системе координат компо-
компоненты метрического тепзора gag = const. Тогда Га> ^ =
= rpY = 0 и Rapy6 = 0 в этой системе координат, а следо-
следовательно, и в любой. Предположим, наоборот, что Ла|3уб=. 0
для некоторого Vn. Рассмотрим метрический тензор ga$
и покажем, что существует такое невырожденное преоб-
преобразование координат ха — ха (х&'), что в системе {ха>} ком-
компоненты ga'P' = const. Это эквивалентно требованию, чтобы
или в силу уравнений C.7), определяющих преобразова-
преобразование объекта Гр.у>
Га <а' л?> лУ 1 а л® Аа> п
рула Ар'А^ + д$>Ау,Аа = 0=
Свертывая это уравнение eij-, приведем его в силу A.14)
к эквивалентной форме:
dvA$= -T%,Al.A%., д«.х*=А%. E.И)
j 5j ТЕНЗОР КРИВИЗНЫ 35
Таким образом, вопрос свелся к совместности системы
уравнений E.11) при условиях
Al> = ga>W = COnSt E-12)
с неизвестными функциями А% и ха от независимых
переменных ха'. Теория интегрируемости (Гурса [53],
стр. 103) приводит к следующему результату. Если усло-
условия интегрируемости E.11) выполняются тождественно,
т. е. для всех значений А^> и ха, и если А% регулярны
в некоторой окрестности ха, (Аа'H, то существует одна
и только одна система решений, регулярных в этой
о
окрестности и принимающих значения (Ап'H при ха = ха.
Условия E-12) потребуются, при тождественном выпол-
выполнении условий интегрируемости, только для выбора началь-
начальных условий (Ла')о- Записывая условия интегрируемости
для второй группы уравнений E.11), получим:
но в силу первой группы уравнений E-11) (см. задачу 9 § 2)
Условия интегрируемости для первой группы уравнений
в силу уравнений E.11) будут иметь вид:
i г10 т^.
-f- 1 Ypl 0V
и в силу основной предпосылки также обращаются в тож-
тождества. Начальные условия E.11) потребуют задания
п + п2 произвольных постоянных, определяющих началь-
начальные значения хс- и А*§' при условии E.12). Это налагает
п (rt-M) „ -
—-^—- условии и следовательно, искомое преобразо-
л (л—1)
вание коорди!гат в данном случае содержит ¦ v —- про-
произвольных постоянных. Используя этот произвол, можно
а*
otf ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. i
соотношение ga'$' = const еще упростить, приведя на ве-
п
щественлом пути ds2 к виду 2 ^а dxai, где 1а = ± 1 и оп-
ределяют сигнатуру метрики плоского пространства.
Исследования в Vn приводят к необходимости рас-
рассматривать не только тензор кривизны, но и тензор,
определяемый ковариантной производной от тензора кри-
кривизны i?apv6, х- Является важным выяснить алгебраиче-
алгебраические тождества, связывающие компоненты этого тензора.
Выведем так называемые тождества Бианка, частично
отвечающие на этот вопрос.
Рассмотрим произвольное векторное поле иа и поле
иа, е- Применяя к ним тождество Риччи E.5), получим:
иа, [0Y] = ~2 R аруиа, E.13)
2 , 3 Ч~ Л $у6иа, а)- E.14)
Дифференцируя E.13) еще раз, придем к уравнениям
Ua, [0у] б = "(^ a(JY, бао "Г R aSvMtj, б)- E.15)
Альтернируя E.14) и E.15) по индексам fiyd, можно
опустить внутренние скобки (см. задачу 12 § 2), и сле-
следовательно, приравнивая левые части, получим:
R°a Гуви|о|, р] + Rai$y61ua, а — -R°a [Эу. б]и0 ~ -^ a №vw|ff|, б] = 0; •
первое и последнее слагаемые отличаются только знаком,
второе слагаемое равно нулю в силу E.8), и следова-
следовательно,
^ a [0v. б]"ст = О,
что в силу произвольности поля иа приводит к выводу:
R°a [pv, б] = ^ста [Py, d] = О
или, в развернутом виде (см. задачу 6 § 2),
-ffaaPY, в + Roayd, Р + -^0абр, y = ^* E..16)
Это соотношение называется тождеством Бианки ([14],
стр. 361).
S 5J ТЕНЗОР КРИВИЗНЫ 37
Дифференцируя тождества (а) и (у) из E.8), получим
также:
Э, -?. "Г' -"обру, л = U-
Можно доказать, что E.16) и E-17) определяют полный
ряд алгебраических тождеств для/?ар7б, я. (Томас [92], §49).
Из этих тождеств, свертывая, получим следствия
ЯааЭу.а-}-2Да[Э.У] = 0. E.18)
Лам-^,р = О. E.19)
В случае, если д = 4, E.19) представляет собой уравне-
уравнение закона сохранения импульса-энергии для релятиви-
релятивистских полей тяготения.
Тензор кривизны пространства играет исключительную
роль при построении теории римановых пространств
н в физических приложениях, где он допускает физиче-
физическую интерпретацию (см. [229], [253], [285], [293],
[297] [247]).
Задачи
1. В формулах E.8) из (а) и (у) получить (Р).
2. Показать, что если gap и ga$ — компоненты двух
симметрических невырожденных тензоров, а Гру и fpY —
символы Кристоффеля, отвечающие им, то QpY = FpY — Tfy —
тензор; тепзоры кривизны, отвечающие римановым связ-
*
ностям Г и Г, удовлетворяют соотношению
R рус = R pY6 + 2Q р [б, Yj + 2Q р [eQ |a|Yj,
где дифференцирование производится относительно мет-
метрики ga&.
3. Показать, что в V 3
-f ~2 (gadgfry —
4. Доказать, что пространство Vs определенной мет-
метрики, отнесенной к триортогональной системе координат.
38 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
имеет скалярную кривизну Л=0тогда и только тогда,
когда
з
где 2' означает суммирование по /' Ф i и i, /, k Ф
(Эйзенхарт [292]).
5. Показать, что, приняв Vrgu = xfix^xQ, ' ]/g^ =
= ж^аф^ У~^~г^х<ъхьъхс*, где а, 6, с — постоянные,
условиям задачи 4 можно удовлетворить, полагая:
1) а, = С1 = 0 (i = l, 2, 3), ^=1 при gix = x%, g22 = xl
i
2 2
2) а; = 0, с2 = b3, c3 =z bv Cj = fea, c{ = -j bi = у при
§ 6. Геодезические линии
Прямую в евклидовом пространстве можно определить
или 1) как кривую, касательные векторы к которой па-
параллельны, или 2) как кратчайший путь между^точками,
или 3) как линию нулевой кривизны.
В Vn можно определить кривые, обладающие соот-
соответственным образом обобщенными, но аналогичными
свойствами. Такие кривые называют геодезическими ли-
линиями Vn.
Геодезической линией в Vn назовем такую линию, ка-
касательный вектор которой переносится вдоль нее парал-
параллельно в смысле Леви-Чивита. Пусть xa(t), функции
класса С (г;>2). определяют уравнения геодезической:
dxa
ха = ха (t). Касательный к кривой вектор —-— при не-
прерывно дифференцируемом и обратимом преобразовании
параметра t = t (т) умножается на —z— :
dxa _ dxa dt
dx ~~ dl dx '
§ 6J ГЕОДЕЗИЧЕСКИЕ ЛИНИИ 39
т. е. в каждой точке определяется с точностью до чис-
численного множителя. Пусть вектор, переносимый парал-
параллельно вдоль геодезической, есть Ка, тогда
dt
Абсолютный дифференциал ЬКа вдоль геодезической равен
нулю, и следовательно,
dt \_ dt J dt
dxa
так как . Ф 0. Всегда можно ввести новый параметр т
- dxa
так, чтобы вектор —г— переносился параллельно вдоль
геодезической, т. е. чтобы правая часть этого равенства
обращалась в нуль, а левая имела тот жо вид. Пусть
т = т (t). Тогда F.1) запишется в виде:
dxa \ dx Г dH / dx \ dxa
= V
dx у dx J dt у dt2 I dt J dt
и, выбирая за х (t) интеграл уравнения
dx
¦ = v
dt
получим для канонического параметра т уравнение гео-
геодезической в виде:
4—0 F.2)
dx v '
или в развернутом виде:
d2xa , ро dx® dxy
. В. той области Vn, где для системы F.3) выполняются
условия теоремы существования и единственности, каж-
„ ¦¦'¦„¦¦' f dxa \ ¦ "
дои заданной точке и начальному значению —;— ). от-t.
вечает единственное решение системы и, следовательно,
через, каждую точку в данном направлении проходит одна
и только одна геодезическая. • .
40 основы тензорного анализа 1гл. i
Если метрика Vn неопределенная, то геодезические
могут быть как изотропными, так и неизотропными кри-
кривыми.
Вдоль любой геодезической с канонической параметри-
параметризацией
так как вдоль кривой F.2)
Другими словами, норма касательного вектора —^—
геодезической не меняется вдоль нее; в частности, геоде-
геодезическая , изотропная в точке, изотропна всюду. Очевидно,
что не всякая изотропная кривая будет геодезической.
В случае обыкновенного R3, когда кривые не могут
быть изотропными в декартовых координатах, вектор
dx
_-—- =}.!,« является вектором главной нормали кривой.
Если же в i?3 введены криволинейные координаты, то }ia
равняется левой части F.3), если там т выразить через
длину дуги 5. Как обобщение назовем
^l^~dr~dx~ (b-5)
с каноническилг параметром т вектором главной нормали
кривой в Vn; то, что \ха — вектор, следует из F.2). Тогда
естественно
назвать первой кривизной кривой пространства Vn и по-
поставить вопрос об определении в Vn кривых нулевой пер-
первой кривизны, когда
?0*^ = 0.
В случае определенной метрики пространства Vn
только геодезические имеют нулевую первую кривизну,
3 6J ГЕОДЕЗИЧЕСКИЕ ЛИНИИ 41
если метрика Vn неопределенна, то эти кривые будут
или геодезическими, или кривыми с изотропным вектором
главной нормали. Этот результат обобщает свойство 3)
для прямых в обыкновенном Vn.
Если в F.4) е Ф О, то геодезическая кривая неизо-
неизотропная и в качестве одного из возможных канонических
параметров можно взять длину дуги этой кривой, что
будет означать е = ±_ 1; другие канонические параметры
определяются затем с точностью до двух произвольных
параметров.
Неизотропную геодезическую можно определить также
как линию кратчайшего расстояния между двумя точками
А и В в Vn. Это приводит к следующей задаче вариа-
вариационного исчисления: требуется определить экстремаль,
на которой интеграл
М
A to
имеет стационарное значение. Обозначая подынтегральное
выражение через <р, имеем:
dt dt -f - dt -=-.
ц ф должна удовлетворять уравнениям Эйлера
(М. А. Лаврентьев и Л. А. Люстерник [95], стр. 30):
d f дд>
~dT\ , a
4 ох
Так как
то уравнение Эйлера запишется в виде:
Отсюда, свертывая с g°-v, получим:
'1 + Т1$ 4 ^v
42 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
Вводя канонический параметр т = s, придем к F.3). Реше-
Решение этой задачи, как видим, существенным образом зави-
зависит от предположения о неизотропности геодезической.
Этот результат обобщает свойство 2) прямых в евклидо-
евклидовом пространстве.
Так как понятие параллелизма имеет место и в про-
пространствах аффинной связности, то геодезические совер-
совершенно так же могут быть определены в этих многообра-
многообразиях ([170], стр. 148 — 149); это непосредственно видно
из уравнений F.3), зависящих только от коэффициентов
связности.
Задачи
1. Показать, что объект связности Т^у определяет те же
геодезические, что и объект Т^уу
2. Показать, что в пространстве Минковского, опре-
определяемом метрикой ds2 = — dxxZ — dx%2 — dx32 -f- dx%2, вся-
всякая изотропная кривая имеет вид:
х1 = \ q cos ф cos ty ds, х2 = \ q cos ф sin ip ds,
xz = \ q sin ф ds, ж4 = \ q ds,
tJ я)
где q, ф, г|) — функции от s. Когда эти кривые будут
геодезическими?
§ 7. Специальные системы координат в V^
Далее, при определении различных пространств Эйн-
Эйнштейна, возникает необходимость в специализации системы
координат. Б этом параграфе рассматриваются некоторые
из систем координат, которые могут быть введены в лю-
любом Vn. Такая возможность является следствием теоремы,
высказанной еще Риманом ([!]) и утверждающей, что
за счет преобразования коордшпат п компонент метри-
метрического тензора можно записать в виде наперед заданных
функций. Так как метрика ?п не вырожденная, так.; ;же
как и допускаемые преобразования, то выбор этих про-
произвольных фупкций не-должен приводить к вырождению
метрики. Рассматриваемые ниже системы координат
§ 7J СПЕЦИАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ 43
являются различными возможными реализациями этой
теоремы.
Координаты, геодезические в точке. Так как вообще
тензор кривизны в Vn отличен от нуля, то нельзя объект
римановой связности FpY за счет преобразования коорди-
координат в области обратить в нуль, но всегда можно специа-
специализировать систему координат так, чтобы в наперед за-
заданной точке Р этот объект обращался в нуль: (Гру)Р = 0.
Такая система координат называется геодезической
в точке Р.
Пусть Vn отнесено к системе координат ха и точка Р
о
определяется координатами ха. Введем новые координаты
посредством формул
где Ср' — постоянные, удовлетворяющие условию | Ср' | ф 0,
а в остальном произвольные; можно, в частности, поло-
положить Ср' = бр. Дифференцируя G.1) последовательно по ха
и вычисляя эти производные в точке Р, получим:
Для того чтобы (Гр'у)р = 0, при таком преобразовании
необходимо и достаточно, чтобы согласно C.7)
{А%Л1,АпгТ^ + А%'дуА%>)р - 0.
Свертывая с А^'аУ' и имея в виду, что
д Г дх
а'
дх1' J дх® дхх V дха J дху>
получим равносильное соотношение
которое обращается в тождество в силу G.2). Вместо G.1)
можно было бы взять многочлен любого порядка, в кото-
котором коэффициенты: членов с третьими, четвертыми и т. д.
44 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА 1гл. 1
степенями совершенно произвольны. Следовательно, гео-
геодезическую в Р систему можно ввести бесконечным числом
способов. Этот произвол можно использовать для дальней-
дальнейшей специализации координат.
Например, можно ввести систему координат, геодези-
геодезическую вдоль наперед заданной кривой (Ферми [60].
стр. 21 — 23). Из G.2) следует, что если рассматривать
пространство аффинной связности без кручения (см. § 3),
то все приведенное выше построение повторяется бук-
буквально. Для таких пространств можно также ввести
систему координат, геодезическую вдоль наперед заданной
кривой (Л. Эйзенхарт [80], стр. 64; П. К. Рашевский [188],
стр. 410). Смысл геодезических в точке координат состоит
в том, что в достаточно малой окрестности точки Р эти
координаты приближаются к аффинным координатам Rn,
так как формула параллельного переноса в Р в этих коор-
координатах будет иметь вид: dc,a = 0, т. е. координаты парал-
параллельно переносимого вектора в этой точке стационарны
и, следовательно, при смещении из точки Р они получают
приращения А|п — бесконечно малые высшего порядка.
Линейные преобразования таких координат оставляют их
геодезическими в данной точке, так как при таких пре-
преобразованиях объекты связности ведут себя, как тензоры
(см. C.7)).
Римановы и нормальные координаты. Отмеченная выше
возможность специализации координат, геодезических
в точке, может быть реализована в виде так называемых
римановых координат в Vn, введенных Риманом [1]. Отли-
Отличительным свойством этой системы координат является то,
что относительно них уравнения геодезических, проходя-
проходящих через начало координат, имеют такой же вид, какой
имеют уравнения прямых, проходящих через начало декар-
декартовой системы координат, в евклидовой геометрии.
Рассмотрим пространство Vn, отнесепное к произволь-
произвольной системе координат, фиксируем некоторую точку Р
в качестве начала координат и будем проводить через Р
геодезические по всем возможным направлениям. Уравне-
Уравнение каждой геодезической отнесем к каноническому пара-
параметру и, пользуясь тем, что любые два канонических
параметра связаны линейной зависимостью х — ах + Ь, вы-
Э 7j СПЕЦИАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ 45
берем параметр х так, чтобы на каждой геодезической
точке Р отвечало значение параметра т = 0, чем параметр
фиксируется с точностью до постоянного множителя.
Любая из геодезических, проходящих через Р, вполне
определяется заданием касательного к ней вектора
|а = -I —з— > = 0, а некоторая точка .4 на ней будет опре-
определена значением параметра т.
Разумеется, эти утверждения имеют место только в той
области около Р, где выполняются условия теоремы
существования и единственности системы дифференциаль-
дифференциальных уравнений, определяющих геодезическую, и только
в такой области можно говорить о построении римановых
координат. Если точка А имела координаты в исходной
системе координат ха(а= 1, . . ., п), то теперь этой же
точке можно сопоставить п чисел
^ = gar G.3)
— римановых координат точки А. Следовательно,
х* = х«(у\ ...,уа). G.4У
В исходной системе координат функции ха на геодези-
геодезической зависят от начальных условий и параметра т:
ха = ха (т, ха, |а), но, как известно из теории дифферен-
дифференциальных уравнений (В. В. Степанов [101], стр. 275),
,rtt будут здесь непрерывно дифференцируемыми функциями
всех своих аргументов такое же число раз, как и ком-
компоненты объекта FpY — римановой связности. Следова-
Следовательно, ха — непрерывно дифференцируемые функции уа.
Чтобы выяснить взаимно однозначное соответствие ха и уа
в некоторой области около начала, заметим, что в точке Р
V dx JP S V dy» 9x JP V.
следовательно,
и якобиан
р
Ф 0, т. е. он отличен от пуля в некоторой
46 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА 1гл. I
окрестности начала координат, и в этой окрестности со-
соответствие между ха н уа взаимно однозначное; геомет-
геометрически это будет означать, что в такой окрестности из
Р в А можно провести только одну геодезическую.
Когда исходная система координат будет заменена
некоторой другой, то отвечающие им римановы коорди-
координаты преобразуются одна в другую при помощи линей-
линейного однородного преобразования, так как при этом век-
векторы |а в соприкасающемся к Vп в точке Р плоском
пространстве преобразуется по такому закону.
Можно указать несколько необходимых и достаточных
критериев того, чтобы система координат в Vn была рима-
новой, различных по форме, но эквивалентных между со-
собой, например
а) уравнения геодезических имеют вид G.3), если счи-
считать ?а = const;
Р) компоненты объекта римаповой связности удовле-
удовлетворяют соотношению
Гэу2/У = О. G,5)
Необходимость а) следует из определения римановых
координат. Достаточность а) вытекает из того, что вдоль
геодезических -——= ga = const, т. о. и в Р
и ?° — касательный вектор в начале. Тогда эти координаты
римановы. Предположим, что а) имеет место, тогда G.3) при
постоянных |tt определяет интегральные кривые уравне-
уравнений F.3), что приводит к соотношениям
3yS S =0,
которые после умножения на т совпадают с G.5). Это
показывает необходимость Р). Наоборот, если G.5) имеют
место, то кривые уа = gat при §a = const удовлетворяют
уравнению F.3), и следовательно, являются геодези-
геодезическими с каноническим параметром t и проходят через
начало координат, т. е. имеет место а).
§ 7] СПЕЦИАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ 47
Если в качестве канонического параметра для неизо-
неизотропных геодезических взять длину дуги, а для изотроп-
изотропных какой-либо из канонических параметров, то-
О „
оарэ ъ °> V' • ' /
где s = ± 1 для неизотропных геодезических и 0 для изо-
0
тропных, a g. — метрический тензор в начале нормальной
системы координат. Умножая G.7) на s2, получим:
оплУ У — ' V • /
что выражает квадрат геодезического расстояния от на-
начала координат при любом е. Полагая здесь s = const,
получим при е Ф 0 уравнения концентрических геодези-
геодезических гиперсфер мнимого или действительного радиуса.
8 = 0 отвечает гиперконус, образованный изотропными
геодезическими. При г Ф 0 можно дать критерий рима-
новых координат, отличный от а) и р) ([188]), стр. 540).
Римановы координаты являются геодезическими отно-
относительно своего начала.
В самом деле, поделив G.5) на s'z и относя получен-
полученное уравнение к началу координат, получим:
Так как с,а — произвольный вектор, то Г(ру) = Г pv =0,
что и доказывает утверждение.
о
Компоненты метрического тензора gap в начало рима-
новой системы координат будут некоторыми постоянными,
о
удовлетворяющими условию | gap | ф 0, и следовательно,
всегда можно найти такое невырожденное вещественное
линейное однородное преобразование с постоянными коэф-
коэффициентами уа' = Ср г/Р, в результате которого фордза
о
gap dya dy& перейдет в форму
2 lady°\ G.9)
ОГ=1
где la = + 1 в соответствии с сигнатурой квадратичной
о
формы gap dya dy$. В результате такого преобразования
48 основы тензорного анализа 1гл. i
риманова система координат перейдет снова в риманову
систему координат с началом в той же точке, так как
это преобразование оставляет а) в силе. Таким образом,
специализированные римановы координаты называются
нормальными координатами с началом в данной точке.
Они были впервые введены Вебленом ([61], стр. 192—197),
применены в теории относительности и теории прост-
пространств Vn, а затем обобщены для пространств аффинной
связности рядом авторов ([66]; [67], стр. 551 — 560; [78],
стр. 44 — 62; [93], стр. 1-72).
Если предположить, что в некоторой окрестности
начала нормальной системы координат компоненты метри-
метрического тензора ga$ (у) суть аналитические функции, то
можно определить gap в виде разложения по степеням уа,
причем коэффициенты этого ряда определяются тензором
кривизны и его ковариантными производными, отнесен-
отнесенными к началу. Рассмотрим предварительно тензорное
поле Wa .. .а (ж), компоненты которого — аналитические
функции в окрестности начала нормальной системы коор-
координат. Тогда
ai • • ¦ a-p ~ ai • • • ар ~г
Можно выбрать такую систему координат, относи-
относительно которой коэффициенты этого ряда выражаются
о
через ковариантные производные W и компоненты тен-
тензора кривизны и его ковариантные производные, вычис-
вычисленные в начале координат. Определив такую систему,
мы покажем затем, что она нормальная.
Формула преобразования объекта связности и ее след-
следствия, полученные последовательным дифференцирова-
дифференцированием, дают серию соотношений:
pa' ду до лх pv I д /(V
чв' /tv I Т>а' а лУ -з лО лХ t-iV ]
-pCt'
о'1 я'ч'
ах
G 11)
7] СПЕЦИАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ 49
Рассмотрим преобразование координат, определяемое фор-
формулами
оэ
аГГ I —v г: i у ' • • • у "' G.12)
2 v
и выберем коэффициенты разложения G.12) следующим
образом:
П^^ G.13)
тогда в силу G.11)
hk = O, а(ЧГ^-О, ..., du3...vri;4) = 0. G.14)
Поставив себе задачей выражение коэффициентов ряда
G.10) до г-го порядка, можно в G.14) ограничиться напи-
написанными условиями. Теперь, в новой системе координат,
принимая во внимание G.14), имеем из выражения для
тензора кривизны E.2) и его следствий, получаемых
последовательным дифференцированием:
3
л 0 '
В, а), И75)
v
V,
так как введенная таким образом система координат гео-
геодезическая относительно начала, то, последовательно
дифференцируя ковариантным образом тензор Wa...a ,
выражая частные производные через ковариантные
и относя результат к началу, можно пренебречь теми сла-
о
гаемыми, которые содержат объект FpY- Если же в выраже-
выражении для некоторой производной появятся слагаемые,
содержащие d(Y.. .vf^e, то их заменим по формулам G.15).
4 А. 3. Петров
50
ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА
[гл. I
Подставляя эти выражения в G.10), получим для тензора W
разложение в виде:
-1r 2
...«
k—1
. .ap}
.ap, a
, G-16)
и коэффициенты этого разложения могут быть вычислены
как угодно далеко. Эта формула, интересная сама по себе,
может быть приложена к любому тензору, заданному
ковариантными компонентами.
Применяя ее, в частности, к метрическому тензору ga$
и принимая во внимание, что все его ковариантные про-
производные равны нулю, получим из G.16):
= gap —
л ( 0
±- | - 6J?a6PY,
q 0
R
ya6Q
G.17)
Покажем, что эта система координат нормальная. Ясно,
о
что ga$ можно считать равными бр/а, т. е. имеем форму
вида G.9), так как до введения этой системы можно пред-
предварительно произвести в Vn такое невырожденное линей-
линейное преобразование, которое в точке, предназначенной быть
о
началом нормальной системы, приведет ga$ к компонентам
метрического тензора, определяющего форму G.9). Свер-
Свертывая G.17) с ур, получим:
G-18)
§ 7] СПЕЦИАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ 51
так как во всех остальных слагаемых, как нетрудно
видеть, индекс J3 кососимметричен относительно хотя бы
одного индекса суммирования К, \а, v, ... Дифференцируя
G.18) по уУ, получим:
о
gya — gya,
отсюда получим два равенства, если свернуть с уа и ?/л
и учесть наличие G.18):
v?je = 0. G.19)
Взяв первое уравнение с минусом и прибавив к нему
два уравнения, получаемые из второго заменой индексов,
получим: Га, $уУ$Уу = 0, что приводит к условию Р), опре-
определяющему нормальную систему координат.
Формула G.17) принимает особенно простой вид для
того частного случая, когда ковариантная производная
тензора кривизны Ra$y&, \ = 0- Такие пространства Vn
называются симметрическими, и для них имеет место
теорема: для симметрического Vn в нормальной системе
координат
Y 2 (
-f\.-np2n+
i
. G-21)
4- 1, a = S
0, а=^р
о
гг /?apYe — компоненты тензора кривизны в начале нормаль-
нормальной системы координат.
Доказательство G.20) получается следующим образом.
Структура формулы следует непосредственно из G.17).
Численные коэффициенты при т также совпадают для
выписанных членов G.17). Теперь нетрудно проверить,
что полная индукция приводит к G.20) при условии G.21).
Нормальные координаты допускают физическое истол-
истолкование в общей теории относительности (ГТирани [258])
4*
52 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА {гл. I
и являются удобными во многих вопросах геометрии
и физики.
Полугеодезические координаты. Такие координаты
(их также иногда называют координатами Гаусса) являются
обобщением полугеодезических координат на поверхности
в трехмерном евклидовом пространстве. Они определяются
сетью однопараметрического семейства геодезических
и семейства ортогональных траекторий ([155], стр. 185).
В Vn эти координаты определяются семейством геодези-
геодезических и семейством гиперповерхностей, ортогональных
к этим геодезическим, но при неопределенной сигнатуре
dsz возможен случай изотропных геодезических линий,
что не имеет аналога в евклидовой геометрии.
Дадим предварительно определение поверхности в Vn\
т-мерной поверхностью в Vn назовем множество точек,
заданных уравнениями
ха — ха(и1) (а = 1, ..., n; i=l, . .., т),
где иг — независимые параметры, причем ранг матрицы
дха\ „.
равен т. Очевидно, что это условие инвариантно
ди1
относительно любых невырожденных преобразований коор-
координат ха в Vn. Условие о ранге предотвращает появление
особых точек на поверхности и вырождение поверхности
в геометрический образ меньшего числа измерений. Такое
определение m-поверхности по существу локально; это
определение «куска» поверхности. При т — 1 получим
кривую пространства Vn, при т = п — 1 — гиперповерх-
гиперповерхность пространства Vn. Задавая на m-поверхности функ-
функции и1 (t) некоторого класса С', будем говорить о кривой
соответствующего класса на этой т-поверхпости. Так
как тем самым получается кривая пространства Vn, то ее
касательный вектор
dxa __ дха du1
dt - duT-dT ¦
с, dxa
Ьудем говорить о пространственном векторе ~-ff~ и век-
векторе —з—, принадлежащем поверхности, связанных соот-
§ 7] СПЕЦИАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ 53
ношениями G.22). Будем исследовать только такие точки
dul
кривой, в которых —— не все одновременно равны нулю,
когда понятие касательного вектора становится неопре-
dxa
деленным. Тогда -у- также не все равны нулю в силу
условия о ранге для m-поверхности. Для произвольных
кривых па m-поверхяости при произвольной параметриза-
параметризации получим, что векторы |* = -?- произвольны. Тогда
векторы
? = ~11 G.23)
аи1
определят линейную оболочку т линейно независимых
дха а
векторов иа = —- (& = 1, . ... т). Векторы ? в совокуп-
ности определят касательное те-мерное пространство Ат
в данной точке к m-поверхности.
Называя координатной линией то-поверхности линию,
вдоль которой меняется только один из параметров и1,
получим, что т линейно независимых векторов иа являются
к
касательными векторами к координатным линиям
m-поверхности. Таким образом, в каждой точке m-поверх-
m-поверхности возникает свой локальный т-репер.
Рассмотрим дифференциал дуги при произвольном
бесконечно малом смещении кривой на m-поверхности:
дха
dxa = —-dul = uadul. Тогда квадрат элемента длины этой
ди1 1
кривой
ds2 = ga& dxa dx& = gtj dul duj, G.24)
где
дха дх$ * *
-^Г -JJ = gttP»e«P, gij = gji ('./ = L .-.,»»)
— скалярные произведения координатных векторов поверх-
поверхности—определяют дифференциальную квадратичную фор-
форму на да-поверхности.
54 основы тензорного анализа [гл. i
*
Если |gV;|?=O. то тга-поверхность метризоеапа и на
ней возникает ршданово пространство Vm, в этом случае
. *
поверхность называется неизотрсппой. Если те | gtj! = О,
то получаем изотропные т-поверхности, которые в тео-
теории относительности (п = 4, т = 3) получают важную физи-
физическую интерпретацию при изучении волновых процессов;
такие поверхности могут иметь место только для Vn
с неопределенной метрикой.
Вектор па пространства Vn назовем нормальным
к т-поверхностн, если он ортогонален ко всем т коор-
координатным векторам иа (к= 1, . . ., т; а = 1, . . ., п):
к
gapnau» = 0 (k=l, ..., т); G.25)
к
так как ранги матриц (gap) и (м0) равны соответственно
п и т, то ранг матрицы (gatfi?) равен т и система одно-
однородных, относительно неизвестных па, уравнений G.25)
имеет п — т линейно независимых решений: в каждой
точке Vn существует п — т независимых векторов, нор-
лшлъных к Vm.
Рассмотрим случай изотропных гиперповерхностей,
для характеристики которых основное зпаченио имеет
следующая теорема: нормаль к гиперповерхности изо-
трвпна тогда и только тогда, когда гиперповерхность
изотропна.
Из G.24) видно, что, как это следует из теории опре-
определителей (Ковалевский [21], стр. 77),
где А и оз — соответствующие определители т-то порядка
П 71
/ дха\ /дха\ ~ „ 1П ос\
двух матриц lga$—- и — т . С другой стороны, G.25)
V ди1 I \ 8uJ I
и уравнение тгрир = О, которое следует из G.25), показы-
' h
вают, что А и о пропорциональны ла и па, и следова-
n n
тельно, обозпатта,ч т!ерез кг, к* множители пропорциональ-
g 7J СПЕЦИАЛЬНЫЕ СИСТЕМЫ КОШ'ДИНЛТ 55
ности, отличные от нуля, получим:
g = kik2nana.
*
Если поверхность изотропна, то g — О и вектор нормали
изотропен; обратное утверждение также имеет место.
Введем теперь полугеодезическую систему координат,,
положив в основу такой конструкции пеизстроп-ную гипер-
гиперповерхность ф (ха) = 0, которой отвечает в каждой точке,
в некоторой области, иеязотропная нормаль:
Д1ф = §«Рф,аф,р = папа Ф 0.
Проведя через каждую точку гиперповерхности в направ-
направлении нормали геодезическую, которая также будет
неизотропной в силу F.4), определим новую систему коор-
координат следующим образом. Потребуем, чтобы уравнение
гиперповерхности имело вид ж1 = 0, геодезические были
бы координатными линиями ж1, причем х1 равио длине
дуги, отсчитываемой в заданном направленны от гипер-
гиперповерхности хх = 0, если нормаль имеет норму > 0,
и хх = is, если норма нормали < 0. Тогда, вычисляя
выражение линейного элемента для бесконечно малого
смещения вдоль геодезической линии ж1, получим ds2 =
= gl±dxl2 и, следовательно, gn = / = ^ 1 в зависимости
от знака нормы нормального вектора.
Полагая в уравнениях геодезических F.3) т = ж1 = 5
или is, получим: <91gia = 0, т. е. gla не зависит от ж1.
Но gia = 0 при ж1 = 0, следовательно, это имеет место
при любом ж1. Вследствие этого метрика в полугеодези-
полугеодезической системе координат запишется в виде:
ch-2 = / dxl2 + gvj dx{ dxj (i, / = 2, . . ., n) I = ± 1.
G.26)
Отсюда следует, что, полагая х1 = с, мы получим гипер-
гиперповерхности, опять-таки ортогональные к геодезическим
ж1; эти поверхности называются геодезически параллель-
параллельными гиперповерхности х1 = 0.
Полугеодезические координаты допускают физическую
интерпретацию в теории относительности (Ландау и Лиф-
шиц [156], стр. 301; Керес [259], стр. 12—25) и приме-
пятотся при различных иселгодолаииях. Эту спетому коор-
56 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
динат можно сконструировать даже в том случае, если
гиперповерхность вырождается в яг-поверхность, т < ?г— 1.
Тогда в каждой точке m-поверхности геодезические про-
проводятся в направлении п — т — 1 нормалей к лг-поверх-
ности и, следовательно, опять-таки будут зависеть от л — 1
параметров как и выше; откладывая на них отрезки
равной длины, получим гиперповерхности, геодезически
параллельные »г-поверхности. В частности, полагая т = О,
полугеодезическую систему координат можно построить,
отправляясь от точки; геодезически параллельными гипер-
гиперповерхностями здесь будут геодезические гиперсферы
с центром в данной точке; эта конструкция определит
полугеодезическую систему координат в области, заклю-
заключенной в некотором гиперконусе и не включающей дан-
данную точку.
Предположим теперь, что исходная гиперповерхность
f(xa) = O изотропная и, следовательно, нормали к ней
также изотропны. Тогда А1/=0 и, следовательно, гипер-
гиперповерхности / (ха) = const также будут изотропными, как
и их нормали. Рассмотрим систему дифференциальных
уравнений Дх (/, ф) = g0*/, аф, р = 0. Эта система имеет п — 1
независимых решений (Степанов [101], стр. 295), которые
обозначим ф1 (ха) (i = 2, . .., п). Введем новую систему
координат при помощи формул преобразования
х
г> =-
где г|з — некоторая функция, удовлетворяющая неравенству
D Ab Ш2 . . . , ф") л тп
—1 . . ^~ Ф О. В этой системе координат
D (х1 хп)
g2'n' = g3'n' = . . . = gn'n' = 0, g*'»' = ga^>,af3,
причем gl'n' Ф 0, Гтак как -ф функционально независимо
от / и ф& (к <Г п) и не может быть решением уравнения
Дг (/, -Цз) = 0. Всегда можно подобрать г|5(жа) так, чтобы
g4'«' = l. Отсюда следует, 4TogVi> = 0 (г = 1, . = ., и—1),
gi>n, = lt и метрика пространства может быть представ-
представлена в виде:
dsz = 2 dxl dxn + gij (xa) dxi dxj G.27)
(i, / = 2, .... n; a = l, ,. ., n).
§ 72 СПЕЦИАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ 57
Геометрическое истолкование этой системы также может
быть связано с геодезическими липиями: оно не является
таким простым, как для неизотропных гиперповерхностей.
Эту систему назовем изотропной полугеодезической систе-
системой координат, и она может быть введена только для Vn
с неопределенной метрикой.
Такого рода систвхма координат особенно удобна при
исследовании Vn, допускающих группу движений, дей-
действующую на изотропных трехмерных многообразиях
(см. гл. IV, V), и она допускает также физическую интер-
интерпретацию в общей теории относительности.
Гармонические координаты. Эта система координат
реализует теорему Римана при помощи координатных
условий
-7?=dr{V~=J'g*'»'da>)*a' = nxa'=O (<г=1, .... п),
У —g
G.28)
где ? — обобщенный оператор Даламбера. Таким обра-
образом, для определения гармонических коордипат ха необ-
необходимо в данной системе рассмотреть уравнение
и если п его независимых решений обозначить ф1, . .., <рп,
то искомое преобразование будет иметь вид:
ха' = qa(xa).
Выбор п функций фа можно еще уточнить некоторыми
условиями типа неравенств, и тогда система координат
определяется с точностью до линейных преобразований
Лоренца. Эта система координат, введенная в работах
Дондера [54] и Ланцоса [68], получила физическую интер-
интерпретацию и приложение в теории относительности, в рабо-
работах Фока и его сотрудников (см. В. А. Фок [111], [225],
Н. М. Петрова [164]). Дискуссия о физической значимости
этой системы координат, как системы привилегированной,
отражена в работах [189], [195], [201], [226], [253], [254],
[259], [306]. Примером гармонической системы может
служить декартова система в плоских пространствах. Ее
основное преимущество выражается в том, что уравнения
58 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
поля тяготения в этой системе отнесения принимают удоб-
удобную для исследования форму (см. гл. II).
Неголономные координаты. Рассмотрим некоторую си-
систему координат в Vn, например одну из введенных выше.
В любой точке пространства Vn определим координатные
гиперповерхности с уравнениями ха = const и координат-
координатные линии, как линии, вдоль которых все координаты ха,
кроме одной, постоянны. Рассмотрим координатную линию,
вдоль которой меняется ха, где а — фиксированный индекс.
Можно считать, что вдоль этой кривой ха является пара-
параметром, и поэтому касательный к координатной лпнин
вектор с контравариантными компонентами 1а (о = 1, ..., п)
а
(а — номер вектора) определится в виде:
.« eS. G.29)
а дх
Таким образом в каждой точке определяется п незави-
независимых координатных векторов 1°'. Для всякой системы п
а
независимых векторов можно поставить однозначно
а
систему независимых взаимных векторов 1а (а— номер,
а ( = 1, ..., га) — ковариантный индекс), и в данпом слу-
случае в силу G.29) взаимная система будет иметь вид:
и следовательно,
т. е. система взаимных к координатным векторов будет
системой градиентных векторов.
Наоборот, если мы выделим систему функционально
а
независимых скалярных полей ф, то им отвечают п
а
градиентных векторных полей ср, а, которые можно рас-
рассматривать как поля координатных векторов, заданные
своими ковариантными составляющими в новой системе
координат, которая определяется преобразованием координат
.-,¦«' =ф(хгт). G.30)
§ 7] СПЕЦИАЛЬНЫЕ СИСТЕМЫ КООРДИНАТ 59
Если поле иа не градиентное (<3[Y«a] Ф 0), но градиент-
градиентное с точностью до скалярного множителя: иа = со (.та) va,
где 3(Yya)=:0, то такому полю также отвечает возмож-
возможность быть выбранным, после деления на скаляр, в каче-
качестве координатного. Как известно ([110], стр. 74), для
существования такого поля необходимо и достаточно,
чтобы
tt[adpHY] = 0. G-31)
В том случае, когда координатными векторами
являются поля градиентных векторов, будем говорить, что
система координат голоиомнал. Все рассмотренные выше
системы координат являются головомными.
Однако очень часто представляется желательным ввести
в каждой точке пространства Vn в качестве координатных
а
векторы va, которые от точки к точке образуют вектор-
векторные поля с компонентами некоторого класса С, но
неградиентные: d^Vaj Ф 0. Эти векторы в каждой точке Vn
образуют неголономный репер из п независимых векто-
векторов и, следовательно, определяют систему координат, но,
однако, для области, не сводящейся к точке, исходя из
а
заданных полей va, нельзя определить преобразование
G.30). Такую систему координат назовем неголономной.
Примером введения неголономной системы отнесения
может служить следующая задача: исследуется симметри-
симметрический тензор /гар, собственные векторы которого взаимно
ортогональны; если эти векторы выбрать за координат-
координатные, то /гар принимает особенно простой вид, по система
координат от точки к точке будет иеголономяой. Здесь
мы имеем пример неголономной ортогональной системы
координат в Vn, тогда как голономной ортогональной
системы координат в Vn (при п > 3) вообще не суще-
существует.
Предположим, что дана некоторая голономдая система
координат {ха}. Рассмотрим величины
Q%y,^Al.Axy,dla%x}. G.32)
Тогда система координат, образованная векторными по-
а'
лями /т, будет оолонп.мной в том п только в том случае.
60 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
если все компоненты Q^y = 0. Легко убедиться, про-
проверяя закон преобразования для Q, что это — объект.
Его принято называть объектом неголономности (Схоу-
тен и Ван Данциг [87], стр. 646). Каждая неголономная
система координат определяется на базе некоторой голо-
номной системы. В то время как для геометрического
объекта, отличного от нуля, возможно обращение в нуль
в некоторой системе отнесения, для тензоров этого быть
не может, и ввиду этого при пользовании неголоыомными
координатами является основным следующий очевидный
факт: если тензор равен нулю относительно некоторого
неголономного репера, построенного в каждой точке
области Fn, то он равен нулю в любой системе коорди-
координат в этой области; обратное утверждение также имеет
место.
Задачи
1. Если в некоторой системе координат метрика про-
пространства Vn имеет вид
ds2 = I dx1* + griy (зР) dxl dx1
(I = ± 1; i, f = 2, . . ., n; a = 1, . . ., n),
то линии x1 — геодезические, ортогонально пересекающие
гиперповерхности х1 = с, которые геодезически парал-
параллельны ж1 = 0.
2. Как связаны между собой римановы координаты
с началом в точке Р и полугеодезические координаты
с геодезическими параллельными концентрическими ги-
гиперсферами с центром в той же точке?
3. Показать, что в нормальной системе координат
g = | gap I = ± 1 + 4" К*ЪУаУ* + ^Г Ra&,
+ Т! (I ^°P^ve + В ^Ах° + Т К, ар) УаУ^У6 +•¦¦
и, следовательно, если тензор Риччи i?ap = 0, то
т. е. в этом случае в окрестности начала нормальной
системы координат, с точностью до бесконечно малых
§ В] РИМАНОВА КРИВИЗНА 61
четвертого порядка,
4. Нормальная система координат с фиксированным
началом определяется с точностью до линейных преобра-
преобразований с постоянными коэффициентами, оставляющих
о
инвариантной форму ga$ dya dy$ (преобразования Лоренца
при п = 4 и сигнатуре типа 1- ).
5. Показать, что в F3 всегда можно ввести триорто-
гопальную систему координат, относительно которой
з
^2= 2 gaa(dx*J, где g*a = gaa{^,x\ Xs) (КоТТОН [10],
стр. 385-438).
6. Показать, что в Vn можно определить такую си-
систему координат, относительно которой g=±l в неко-
некоторой области, не сводящейся к точке. В этой системе
дивергенция вектора записывается так же, как и в век-
векторном анализе обыкновенного R3.
7. Для триортогональной системы в V3
1 1 1
R— У 1 R
8. Тензор кривизны всякого V3 (см. задачу 3 § 5)
ga
Где La$ — R< ?
9. Если i?ap = 0 в F4 и существует такое подпро-
подпространство F3, нормаль к которому неизотропна, и
= 0
на V3, то i?apYe = O в F4 [296].
§ 8. Римамова кривизна Fm. Пространства постоянной
кривизны
Простейпгее истолкование тензора кривизны в про-
пространстве Vn получается в случае обыкновенного V2 —
поверхности, погруженной в евклидово трехмерное про-
пространство.
E2 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
Если п = 2, то тензор кривизны имеет только одну
существенную компоненту, поэтому можно положить:
Внутренняя геометрия поверхности определяет V2 с опре-
определенно-положительной метрикой. Если задать эту по-
поверхность уравнением z — f(x,y), поместить начало про-
пространственных координат в касательной плоскости к этой
поверхности, полагая х = х1, у = х2, то
ds- = A + Рг) dx12 -j- 2pq dx1 dx2 -f A + q2) dx2°'
и Pq^ qo = O. Следовательно, символы Кристоффеля в
о
начале все равны нулю и Л1212 = rt — s2 — ш2. Отсюда сле-
следует, что К = —— гауссова кривизна поверхности, а ср1; <р2 —
первая и вторая формы поверхности ([155], стр. 148).
В случае п > 2 такого рода интерпретация возможна,
если ее связать с некоторым двумерным направлением
в Vn. Введем в Vn нормальную систему координат. Возь-
Возьмем в начале координат два вектора га и ia, образуем
1 2
линейную оболочку, натянутую на эти векторы, и про-
проведем в направлении каждого вектора этой двумерной
плоскости геодезические; их совокупность определит дву-
двумерную поверхность, геодезическую в начале координат.
Уравнение этой поверхности будет:
уа = иМа + иЧа, (8.1)
У 12 V '
где иа = кх, а т — канонический .параметр, который в слу-
а
чае неизотропной геодезической можно выбрать равным
дуге. Из (8.1) следует, что
dya = ia dua (a = 1, 2),
а
ds2 = gap,dya dyp = gabdua du , gab = ga^ai^> (8«2)
a 6
где, таким образом, gah — метрический тензор поверхно-
поверхности, геодезической в точке. Рассмотрим тот случай, ког-
когда двумерная поверхность пеизотропная (| gab\ Ф 0) и'
§ S] ¦ римлновл кривизна 63
следовательно, образует У2. Так как система координат
нормальная, т. е.
)
а Ь /0
то (Га?ЬсH = 0 и единственная существенная компонента
тензора кривизпы V2
* *
.* 1,22 ^2^ 3,12/0-
Символы Кристоффеля в пространстве Vz: ra,pyiafiiv = Га1Ьс,
a !) с
и поэтому тензор кривизны
12 12
и, как для всякого К,, равняется, с другой стороны,
* * * *
Kg = К (§и§22 — g\i) = К (gayg^6 — gaugfiy) iai&iyi6.
12 12
Таким образом,
к= {g a ат^ ll*iaiW » (8-3)
где ia,ia — любые два вектора, определяющие двумерную
1 2
плоскость.
Величину К называют римановой кривизной простран-
пространства Vn в двумерном направлении {iaia\; если F2 обыкно-
1 2
венное, то К будет гауссовой кривизной геодезической в
данной точке поверхности пространства Vn. Если дву-
двумерная поверхность изотропна, то знаменатель в (8.3)
обращается в нуль, и такое истолкование теряет смысл.
Однако и в этом случае (см. гл. III) можно, предпола-
предполагая, что К(ха)—непрерывная функция, дать истолко-
истолкование К.
Для обыкновенных Vn формула (8.3) всегда имеет
смысл.
К в (8.3) является однородной функцией нулевого
измерения от бивектора ?,"¦&, определяющего двумерную
[1 2]
g4
ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА
Lrn. I
плоскость, и меняется при изменении этого бивектора.
Vn называется пространством постоянной кривизны,
если К не зависит от выбора двумерной плоскости.
Обозначим:
к-
Из (8.3) получим:
gayga&
1212 =
при любом выборе векторов ia, ia. Это означает, что
1 2
За$у6 + Зу^аб + <$"абуР + *$\>ваР = 0.
Так как, кроме того, для тензора S имеют место свой-
свойства (a), (J3), (у) тензора кривизны, то Sa$y6 = 0 (см. за-
задачу 5 § 2) и необходимое и достаточное условие того,
чтобы Vn (n > 2) было пространством постоянной кри-
кривизны, имеет вид:
(8.4)
Это условие оказывается настолько жестким, что оно
определяет К как функцию точки, а не направления
бивектора, как это делалось только что: риманова кри-
кривизна пространства постоянной кривизны постоянна
(при п > 2) (Шур [4], стр. 563). В самом деле, из (8.4)
следует, что
=K,\ (gaygрб —
и, применяя тождество Бианки, свернутое по индексам
Р и у, получим:
Если п > 2, то, свертывая по индексам а и X, полу-
получаем (ге — 1) Ку б = 0, т. е. ¦ К = const. Если же п = 2, то
V\ только тогда будет пространством постоянной кривиз-
кривизны, когда К = const, условие же (8.4) всегда выпол-
выполняется з этом случае. Из (8.4) следует, что i?apv6 и К
обращаются в нуль одновременно, и поэтому всякое пло-
плоское пространство представляет собой пространство нуле-
§ 8] РИМАНОВА КРИВИЗНА 65
вой римановой кривизны. При К < 0 приходим к геомет-
геометрии, обобщающей геометрию Лобачевского— Бояи, а К > О
отвечает геометрии, аналогичной геометрии сферы. Про-
Пространства постоянной кривизны будем обозначать сим-
символом Sn при любой сигнатуре метрической формы.
Будем говорить, что два «-мерных римановых про-
пространства изометричны, если существует такое невы-
невырожденное вещественное преобразование, которое преобра-
преобразует метрику одного Vп в метрику другого. Для Sn имеет
место теорема: два Sn с равными римановыми кривизнами
и одинаковыми сигнатурами метрик изометричны. Всякое
Sn есть симметрическое Vn, следовательно, если
в таком Sn задать нормальпую систему координат, то
согласно G.20) его метрика полностью определяется зна-
значениями компонент тензора кривизны в начале коорди-
о
нат: i?apv6- Но из (8.4) следует, что для орторепера тензор
о
кривизны Ra$y& будет зависеть только от К и сигнатзфы
метрики. Следовательно, при совпадении сигнатур и кри-
кривизны К пространства Sn изометричны.
Отсюда как следствие получаем, что если нам удастся
найти хотя бы одну метрику, удовлетворяющую (8.4),
с произвольной сигнатурой и кривизной К, то это будет
общее выражение метрики любого $п в специальной системе
координат. Попытаемся определить такую метрику, предпо-
предположив, что она лишь скалярным множителем отличается
от метрики плоского пространства (конформно-плоские Vn):
/«=±1, п>2, (8.5)
и, таким образом, gaa — —т» gap = 0 (a Ф Р)- Вычисляя
компоненты тензора кривизны по формулам E.7) и запи-
записывая условия (8.4), получим систему уравнений
= 0, а {1ад^а + 1&дааа} = IJ& {К + 2 h (^aJ), a j= p.
Этой системе удовлетворяет
^ 4 *-Ь ° ' («.о)
5 А. 3. Петров
Ь'6 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА Ггл. I
так как сигнатура (8.5) при условии (8.6) произвольна
так же, как и кривизна К, то (8.5) при условии (8.6) —
метрика произвольного Sn. Из (8.5) следует, что всякое
Sn — конформно-плоское пространство Vn.
Задачи
1. Если Vn допускает векторное поле фа, удовлетво-
удовлетворяющее условию
фа, 0 =
и q Ф 0, то оно допускает такую систему координат,
в которой
gvq
5 3 X
где
gn dx* + ~ gvq {x\ ...,xn) dx*> dx",
5 3 X
а Q» &pq (P. 9 ?= 1)—произвольные функции своих аргу-
аргументов (Н. С. Синюков [274]).
2. Если пространство задачи 1 (яри п > 2) симмет-
симметрическое (i?apv6, а, = 0), то оно является пространством
постоянной кривизны.
3. Если риманово пространство Vn с символом Кри-
стоффсля Гг7 допускает точечное отобра жение на Vn
с символом Кристоффеля Гу, при котором геодезические
отобразятся в геодезические, то в общих по отображению
координатах
где г^ — градиент, "§vi = г|)г> у - ¦ф^у.
4. Если 7П (при га > 2 и % #= 0) допускает геодези-
геодезическое отображение на симметрические Vn, то оно яв-
является пространством постоянной кривизны (Н. С. Си-
Синюков [274]).
§ 9J ТЕОРЕМА О ГЛАВНЫХ ОСЯХ ТЕНЗОРА 67
§ 9. Теорема о главных осях тензора
Нам потребуется в дальнейшем решение вопроса
о приведении пары квадратичных форм с произвольными
сигнатурами к каноническому виду над полем веществен-
вещественных чисел в предположении, что одна из этих форм не
вырождается. В книгах по линейной алгебре этот во-
вопрос, как правило, обходится; авторы ограничиваются
изложением приведения к каноническому виду одной фор-
формы и пары форм в случае, если невырожденная форма
определенно-положительная, или же занимаются приведе-
приведением пар форм над полем комплексных чисел, когда во-
вопрос значительно упрощается. Общее решение поставлен-
поставленного вопроса дако впервые Диксоном ([27], 357 — 358).
Относительно этого решения можно заметить, что при-
применяемый им метод является довольно громоздким, а по-
получаемые в результате канонические формы не являются
простейшими: можно указать для них более симметричный
вид при любом п — числе измерений пространств. Так
как, кроме того, можно дать решение вопроса на чисто
геометрическом пути и для дальнейшего будут полезны
именно геометрические факты, то в этом параграфе бу-
будет дано решение этого вопроса (А. 3. Петров [165],
37-51).
Если в Rn с определенным метрическим тензором g{i
задан вещественный тензор oi;-, то теорема о главных
осях тензора утверждает ([110], 27), как известно, что
можно определить г взаимно ортогональных векторов
Xх (а =1, ...,г), которые будут главными осями тензо-
ог
г
pa atj, причем ai;- = 2 аХ^Х,,-, где а —инварианты и /• —
с= \ а а а а
ранг аХу Эта теорема является следствием теории эле-
элементарных делителей (И. Мут [9], 118—125; Ф. Р. Гант-
махер и М. Г. Крейп [126], 48 — 50), из которой следует
также, что главные оси определяются однозначно в том
и только в том случае, если отличные от нуля корни
характеристического уравнепия I a{j — ^ga | = 0 будут про-
простыми. Корню кратности р отвечает р-мериая плоскость,
в которой любые р взаимно ортогональных векторов опре-
определяют систему р главных осей тензора atj. Таким образом,
5*
68
ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
матрицы тензоров gij3 aij (j gis f Ф 0) одновременно при-
приводятся к диагональному виду.
При неопределенном gtj такая теорема не имеет места.
Причина этого кроется в том, что элементарные делите-
делители Х-матрицы А = (ai;- — Xgij) могут быть не простыми,
а корни соответствующего характеристического уравне-
уравнения — комплексными. Если задачу поставить над по-
полем комплексных чисел, то две пары тензоров fai3-, gtA
* #
и {а,ц, gij} эквивалентны тогда и только тогда, когда эле-
элементарные делители матриц одинаковы (М. Вохер [90],
274 — 275), и, основываясь на результатах Вейерштрасса
по теории элементарных делителей, канонические формы
g^ и ai;- всегда можно определить, и притом неоднознач-
неоднозначно. Если же ограничиваться вещественными составляю-
составляющими g^ и uij и коэффициентами допустимых линейных
преобразований, то эти пары матриц могут быть не экви-
эквивалентными, хотя бы они и имели одинаковые элемен-
элементарные делители. В дальнейшем нам понадобится приве-
приведение пары тензоров к каноническому виду именно на
вещественном пути.
Рассмотрим в Rn две формы: ср = g^x^x1 и ^ =
= a,ijXlxj с постоянными вещественными коэффициентами
и | g^ | Ф 0. Для определения собственных векторов ai;-
(главные оси ^i;), определяемых уравнениями
(dij — hga) V =0, необходимо исследовать корни уравне-
уравнения | aXj — 'kgn 1 = 0 е элементарные делители матрицы
{a-ii — kgij). Для неопределенного gtj корни могут быть
комплексными, а элементарные делители не простыми
(П. А. Широков [91], 43-54).
Если вещественное линейное преобразование А = g~xT =
= (Т}), где G = (gij) и T = (akj), то на основании теоремы
Гамильтона—Ке ли (П. А. Широков [91], 174—179;
Ф. Клейн [112], 378 — 387), пользуясь только веществен-
вещественными преобразованиями, можно ввести новые координаты
хг так, что каждая из форм <р и 1|з распадается на сумму
к к
к форм: Ф=2ф1> л13=^'Фг» ГДе *Pi и ^i содержат
*,
только переменные х' (/ = т\, . . ., Д), и если обозначить
§ 9] ТЕОРЕМА О ГЛАВНЫХ ОСЯХ ТЕНЗОРА 69
через Gs и Ts матрицы форм cps и ips соответственно, то
характеристическое уравнение линейного преобразования
j[s = Gs1 Ts будет иметь вид (к — Х)п* = 0.
S
Иными словами, можно выбрать новые координатные
векторы "К1 = CpV так, что
р я
nk/
* * *
где Gni, Tni, Ani — квадратные матрицы, имеющие га строк.
Таким образом,
«« = ?« = «) = О, (9.1)
если индексы i, / отвечают двум различным матрицам,
стоящим по главной диагонали, а координатные векторы
разбиваются на к взаимно ортогональных пучков. Преоб-
Преобразования векторов внутри пучка назовем внутренними.
Тогда при любом внутреннем преобразовании условия
(9.1) имеют место.
Рассмотрим случай вещественных корней. Пользуясь
только вещественными внутренними преобразованиями,
приведем матрицы Ani к жордановой форме (П. А. Ши-
Широков [91], 180-185):
А ,
; (9.2)
далее везде знак «*» опускаем.
70
ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА
[гл. I
Теперь можпо определить матрицы Gni и Tni. He умень-
уменьшая общности, можно предположить, что Ani находится
в левом верхнем углу матрицы А к содержит только две
подматрицы вида 5S/. Это означает, что характеристиче-
характеристическому уравнению (X.— >al)ni = 0 отвечают два инвариант-
инвариантных пучка числа измерений тх и тг, где тг + тг = щ,
тх
Для матрицы Ап получим:
{h = \, . . ., ht; i, j —
h h h Л—1
где A — 0 для h = 1,
h
Так как V = Г
(9.3)
то a{i —
метрию тензоров gi3- и
Следовательно,
и А = 1 в противном случае.
+ Agi, j-i- Используя сим-
получим Ag;-; {_j = Agi5 j_j.
ос.
a*
\
Yi
\
Yi
m2 У
В каждом элементарном пучке, отвечающем элементарной
ячейке Жордана, можно производить любые преобразова-
преобразования, оставляющие инвариантными соотношения (9.3).
Среди этих преобразований существуют такие неособен-
неособенные вещественные преобразования, которые позволяют
обратить в нуль коэффициенты аи р\ для г> 1 и уг
(i=l,...,m) (A. 3. Петров [165], 41-42). Так как
(а^) = (§,--.) (/';)> то @ля вещественных корней на веще-
вещественном пути матрицы форм ^3 13
и аг^х1х3 можпо
§ 9] ТЕОРЕМА О ГЛАВНЫХ ОСЯХ ТЕНЗОРА 71
привести к виду:
rni —
'Л /
Тт =
V.
(9.4)
где Еш{ = п, Ят.—корни характеристического полинома,
к — число инвариантных пучков, равное числу элементар-
элементарных делителей матрицы. Приведение к матрицам (9.4)
не нуждается в понятии элсмептарных делителей, но они
вполне определяются этими матрицами. Из (9.4) следует.
что простому элементарному делителю отвечает неизо-
неизотропное собственное направление ai.-!\ не простому — изо-
изотропное.
Переходим к случаю комплексных корней. Если корни
уравнения | ai;-—X,gi3-1 = 0 будут все или некоторые ком-
комплексными, то, применяя процесс, изложенный выше
(без приведения a, P к f 1), придем к матрицам (9.2)
с той разницей, что их элементы будут, вообще говоря,
комплексными числами. Но и в этом случае можно
выбрать такую вещественную систему отнесения, что
для gtj и a{j получим вещественные матрицы, которые
назовем каноническими.
• Так как аи и g-xi — вещественные числа, то каждому
комплексному корню будет отвечать комплексно-сопряжен-
комплексно-сопряженный. Если выделить систему комплексных векторов, опре-
определяющих жорданову форму матрицы (а}) и, о ледова-
72 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
тельно, удовлетворяющих условиям (9.3), то в сопря-
сопряженном пучке, соответствующем сопряженному корню,
найдется система векторов, комплексно-сопряженных
по отношению к данным, также удовлетворяющих (9.3)
и определяющих поэтому жорданову ячейку такого же
вида и числа измерений.
Иными словами, если р-кратному корню вида
а + Р« соответствует элементарный делитель вида
(к —а —фу (q<p), то имеется корень а —Рг, также
кратности р, которому отвечает элементарный делитель
(%,—- а + р?)в. Меняя нумерацию векторов, всегда можно
добиться того, чтобы две такие подматрицы стояли непо-
непосредственно одна за другой. Достаточно рассмотреть две
такие подматрицы Gs и Gs, которые можно считать нахо-
находящимися в верхнем углу (gi3). Их совокупность обозна-
обозначим через G2s и предположим, что G2s отвечает элемен-
элементарному делителю (X — а ± рг)8. Тогда
•"I. (9-5)
ч/с /
Пусть векторы, образующие инвариантный пучок, отве-
отвечающий матрице Gs, имеют вид:
11 ' S S S
Тогда матрице Gs соответствуют векторы
s+l I i is s
откуда следует, что К = 2 (р + iq), К = 2 (р — iq), где
р и q — некоторые вещественные числа, a gkj равняется
2(p-\-q), если K-\-/ — s-\- I, (p — iq), если К-{-j — 3s+ I,
или 0 в остальных случаях.
Принимая за координатные векторы 2s вещественных
векторов и), . .., и', v*, .. ., V*, перенумеруем их заново,
относя векторам и нечетные номера, а векторам v — чет-
четные. Тогда матрицы G2s и В%3 будут выражаться еле-
9]
ТЕОРЕМА О ГЛАВНЫХ ОСЯХ ТЕНЗОРА
73
дующим образом:
Р Я
q—p
Л
Р
.Я
ч
-р
' ар 10
— В а 0 1
а Р
-Р а
Теперь, пользуясь преобразованиями
X2 =
*
Ж4 = С2Х3
числа р и д можно обратить в 1, так что можно опре-
определить матрицу T2s = G2s-B2s в виде:
1 1
1-1
1 1
1 — 1
а -
а +
—а+
1
-1
а —р а+р 1 1
\а + р — а + Р 1 — 1- '
где аир имеют, вообще, различные значения для
каждого So
Таким образом, общее решение вопроса о приведении
нары форм на вещественном пути дает теорема: матрицы
74 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
вещественных симметрических тензоров gti и ац при
условии | gij | Ф О вещественным неособенным линейным
преобразованием координат можно привести к виду:
где Gi и Тг определяются формулами (9.4) для веществен-
вещественных корней и (9.6) — для каждой пары комплексно-сопря-
ОФсенных корней.
Здесь ?¦ —число инвариантных пучков тензора а^
и равно числу элементарных делителей Л-матрицы
(atj — hgij), если считать пару комплексно-сопряженных
делителей за один.
Числа li, Хг, а, р" в формулах (9.4) и (9.6) зависят,
вообще говоря, от номера пучка и могут, в частности,
быть одинаковыми для некоторых матриц Тг, когда два
или более соответствующих элементарных делителя имеют
одинаковые базисы.
В книгах по линейной алгебре ограничиваются изложе-
изложением случая, когда элементарные делители простые, т. е.
все ячейки Жордапа одномерные, или же делают приведе-
приведение над полем комплексных чисел, когда результат укла-
укладывается в рамки формул (9.4).
Задачи
1. Доказать, что матрица всякого ковариантно постоян-
постоянного смешанного тензора 5р может быть в некоторой голо-
номпой системе координат приведена к каноническому виду
Жордана; иными словами, существует такая голономиая
система координат, относительно которой все компоненты
•$$ будут постоянными (А. П. Широков [235]).
2. В каждой точке V4 бивектор fap и невырожденный тен-
30Р gap (\gafi I =? 0), пользуясь комплексными линейными
однородными преобразованиями координат, можно одновре-
одновременно привести к каноническому виду. Если ?" — ковариант-
ные составляющие координатных векторов, то в этом
10] группы ли 75
каноническом представлении
V ? ?
= Z. SaS
сг a cr
а бивектор vap с точностью до скалярного множителя
будет иметь одну из следующих форм приведения:
1[1 2] 2[3 4]
(бивектор будет изотропным тогда и только тогда, когда
К + Л. = 0);
1 2
II. -г;- Уар = « (SaSp ± 2aSp) + Ь (gagp ± ?а?|з) + С (gagp ± gagp)
1 [1 2] [3 4J [1 4] [2 3J [2 4] [3 1]
(бивектор будет изотропным тогда и только тогда, когда
а2 ¦+¦ Ь2 +¦ с2 = 0, и в этом случае он будет также одно-
однолистным);
III. -»¦ Уар = lalp ± i gagp
г И 4] [3 2]
(бивектор однолистный, изотропный);
" [1 4] ?2 3] [2 4] [3 1]
(неизотропный бивектор) (А. 3. Петров [171]).
§ 10. Группы Ли в Yn
Далее, при классификации пространств Vп, опреде-
определяемых полями тяготения, по группам движений, ими
допускаемым, необходимы сведения из теории непрерыв-
непрерывных групп преобразований (групп Ли). В этом пара-
параграфе даются основные определения и факты групп Ли
и некоторые теоремы, необходимые для дальнейшего.
Если через Хп обозначить n-мерное пространство,
отнесенное к координатам {ха) (а=1, ...,п), а через Gr
г-мерное пространство параметров {ah} (&= 1, ...,г), то
уравнения
*a = fa (Xit . . . s х«; а1, . . ., ar) s /«(х, а) A0,1)
76 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
при фиксированных значениях ак определяет преобразо-
# *
вание точки М (х) пространства .Хп в точку М (х). Здесь
предполагается, что /а — функции некоторого класса С5,
a ah — существенные параметры, т. е. они не могут быть
выражены через меньшее число независимых параметров;
для этого, как известно (Эйзенхарт [147], стр. 17), необ-
необходимо и достаточно, чтобы функции /а не удовлетворяли
никаким уравнениям вида
Gr становится группой, если существует г достаточное
число раз непрерывно дифференцируемых функций
фг (as, bl) (г, s, t—1, ....,r) таких, что
/«(/(ж, а) 6) = /° (х, Ф(а, Ъ), с),
и существует в Gr точка es (s= 1, . .., г), для которой
/«(ж, е) = яга,
при этом предполагается, что функции ф определены
в окрестности точки е3 и удовлетворяют следующим аксио-
аксиомам группы:
6), с),
2) Ф3(а, е) = е\
3) ф8(а, а-1)=ф'(о-1, a) = es.
Независимость этих трех аксиом исследовалась рядом
авторов с различных точек зрения (Диксон [22],
стр. 198 — 204; И. Г. Чеботарёв [120], стр. 46: Г. Вейль [148],
стр. 258; Л. С. Понтрягин [205], стр. 285).
При выполнении только аксиом 1) и 2) имеем так
называемую полугруппу. Аксиома 1) определяет ассоциа-
ассоциативный закон, аксиома 2) обеспечивает существование
единицы группы es, и аксиома 3) означает существование
для каждого элемента а группы обратного элемента.
Одномерной подгруппой Gj группы Gr назовем такую
кривую as = as(t) пространства параметров, проходящую
i ioj группы ли 77
через единицу группы es, для любых точек которой
Всякой точке этой кривой, бесконечно близкой к е3, в про-
пространстве Хп отвечает бесконечно малое преобразование
*
х —я -г Я, \х) ос, {№.?)
которому можно, таким образом, сопоставить оператор
A0.3)
Из A0.2) следует, что траектория одномерной под-
подгруппы в пространстве Хп, проходящая через данную
о
точку Р (ха), определяется как интегральная кривая
системы обыкновенных дифференциальных уравнений
*?- = Е*(х) (а=1, ...,п) A0.4)
о
с начальными данными ха@) = ха, as = es(a=l, ..., п;
5=1, ...,г). Каждой одномерной подгруппе группы Gr
можно взаимно однозначно сопоставить оператор с точ-
точностью до постоянного множителя. Среди всех операто-
операторов группы найдется ровно г линейно независимых опе-
операторов Хг, . . ., Хг (базис группы); любой оператор
группы является линейной комбинацией с постоянными
коэффициентами операторов базиса.
Для того чтобы г операторов группы определяли базис
группы, необходимо и достаточно, чтобы операторы
ъ J i °j i %
которые называются коммутаторами, были операто-
операторами Gr, если Xt, Xj — базисные операторы, как это сле-
следует из теории совместности систем дифференциальных
уравнений. Следовательно, коммутаторы должны иметь
вид:
где C\j — так называемые структурные константы
группы Gr; это составляет содержание так называемой
второй основной теоремы Ли ([147], стр. 67 — 69).
78 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
В частности, если все константы С3ц равны нулю, то все
коммутаторы равны нулю, а группа называется абелевой.
Совокупность преобразований группы Gr, оставляющих
о
неподвижной точку Р (ха), образует подгруппу Нт группы Gr,
называемую стационарной подгруппой ([147], стр. 81);
по опредзлению, для любого оператора Нт имеет место
равенство
|аЙ = 0. A0.7)
Если любые дво точки Хп могут быть переведены
друг в друга некоторым преобразованием группы Gr, то
она называется транзитивной. В противном случае
группа нетранзитивна и расслаивает Хп на совокупность
поверхностей транзитивности, на каждой из которых
группа транзитивна. Так, например, группа вращений
обыкновенного i?3 нетранзитивна, а группа переносов
транзитивна.
Среди транзитивных групп встречаются такие, для
которых можно найти семейство многообразий (содер-
(содержащих, все вместе, любую точку) такое, что при преоб-
преобразованиях этой группы одна точка одного многообразия
переходит в точку другого и все точки первого многооб-
многообразия переходят в некоторые точки второго. Так будет,
например, для транзитивной группы переносов трехмер-
трехмерного евклидова пространства. Такие транзитивные группы
называются импримитивными, а многообразия указанных
семейств — семействами импримитивности. В противном
случае группы примитивны. Так, группа движений евкли-
евклидовой плоскости очевидно примитивна.
Группа транзитивна в том и только в том случае,
если г>п и ранг матрицы (?а) равен п(а=1, . .., щ
S
s=i, ..., г) ([147], стр. 88). Если г = п, то группа назы-
называется просто-транзитивной, при г > п — кратно-тран-
кратно-транзитивной.
*
Две группы О,, и Gr, определяемые конечными урав-
уравнениями
(а) гс°=/в (ха, а9), ф) я« = /«(х°, а3)
(а = 1, . . .,п; s= 1, . . ., г),
5 ioj группы ли 79
называются подобными, если существует такая система г
независимых функций соа {а?), что можно указать невы-
невырожденное преобразование координат, переводящее ф) в (а),
если положить, что яа = соа(а3). Вопрос о подобии групп
решает следующая теорема, доказанная Ли (Ли и Энгель [5],
стр. 354): две г-параметрические группы одинаковой струк-
структуры от одного и того же числа переменных, для которых
*
общие ранги матриц (§а) и (§а) меньше г, подобны тогда
S S
и только тогда, когда эти ранги равны q; любая пара
соответствующих миноров порядка q имеет одинаковые
ранги, и если
1а = <1а (Р = ? + 1, .... п),
р *Л
то система уравнений
должна быть совместной и не приводить к соотношениям
между переменными какой-нибудь группы.
*
Если же матрицы (?а) и (?а) имеют ранги, равные г,
S S
то две нетранзитивные группы от одного числа перемен-
переменных будут подобны, если их структуры совпадают. Две
просто-транзитивные группы одинаковой структуры от
одного числа переменных подобны.
Всевозможные линейные комбинации коммутаторов
группы [линейная оболочка коммутаторов) отвечают под-
подгруппе Gr j которую назовем коммутантом группы Gr.
В свою очередь линейная оболочка коммутантов опреде-
определит коммутант Gr.CGr и т.д. Продолжая этот процесс,
получим:
При этом возникает альтернатива: 1) г > г1 > ?'2 > ...
... >/-ч=:0, и в этом случае группа называется разре-
разрешимой; 2) г > г1 > . . . > rk = rfe+1 = . . . > 0, и тогда
получим неразрешимую группу.
Далее потребуется рассмотрение непрерывных групп
преобразований в римановых пространствах Vn, и притом
80 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
специального вида — групп движений, которые оставляют
неизменной метрику Vn; в результате преобразований
группы движений составляющие метрического тензора
будут теми ;ке функциями от новых независимых пере-
переменных:
gap (х1, ..., х!г) dx* d*x$ = gap (а:1, . . ., хп) dxa dx$. A0.8)
Для того чтобы Gr была группой движения Vn, необ-
необходимо и достаточно, чтобы для каждого оператора группы
выполнялись так называемые уравнения Киллинга ([6],
стр. 167), для вывода которых удобно воспользоваться
понятием производной Ли. Пусть задан некоторый объект
Q(P) (валентность индексов в этом вопросе не играет роли,
и поэтому они обозначены одной буквой в скобках). Рас-
Рассмотрим некоторую точку Р {ха) в Vn и значение
объекта О.\$] (ха) в этой точке.
Увлечем теперь систему координат на vadt, т. е. пре-
преобразуем систему координат так, чтобы точка
ха + va dt
получила координаты ха. Тогда точка |° получит
координаты
После этого мы возвратимся к первоначальной системе
координат. Если первоначальное значение объекта в точке
ха было Q(jj), то значение в той же точке в результате
увлечения будет
Объект 6Q(p) называется, по предложению Ван Данцига,
дифференциалом Ли. Из определения следует, что диф-
дифференциал Ли не зависит от коэффициентов связности
пространства и в голономной системе координат в напра-
направлении векторного поля |а для ковариантных и контрава-
риаптных компонент вектора и будет иметь вид:
Ьиа = {1адаиа — иа да1а) dt, |
ioj группы ли 8i
Отбрасывая множитель dt, получим так называемые
производные Ли.
Дифференциал Ли для тензоров более высокой ва-
валентности вычисляется по тому же правилу для каж-
каждого индекса в отдельности, в зависимости от того,
будет ' ли этот индекс ковариантным или контрава-
риантным.
Уравнения Киллинга представляют собой выражение
необходимого и достаточного условия того, чтобы сдвиг
|аdt в Vn представлял собой движение, т. е. смещение Vn
в самом себе, при котором имеет место A0.8). Это озна-
означает, что увлеченное значение поля ga$ в точке
ха + g" d*
равняется там естественному значению поля тензора ga$(x)'>
другими словами, дифференциал Ли от ga$ при таком
сдвиге Ъ,а dt равен нулю.
Следовательно, для того чтобы вектор с,а определял
движение в Vn, необходимо и достаточно, чтобы в па-
правлении ?а
0, A0.10)
что в развернутом виде запигиется вследствие A0.9) так:
fi,a = O, A0.11)
в этом случае ?а называют вектором Киллинга.
По смыслу движения и понятия производной Ли
заключаем, что при движениях в Vn должна сохраняться
и риманова связность:
6Гру = 0, A0.12)
что означает
Ъ*К + ЪвЯоуа» = 0. A0.13)
Так как метрический тензор пространства полностью
определяется, если известны компоненты тензора кри-
кривизны и его ковариантных производных, то при движе-
движениях, определяемых оператором ?а, должны иметь место
6 А. 3. Петров
82 ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА [гл. I
также условия в направлении ?а:
= 0.
A0.14)
J
Эти уравнения представляют собой условия интегрируе-
интегрируемости уравнений Киллинга и дифференциальные след-
следствия из них, получаемые последовательным ковариант-
ным дифференцированием при использовании условий
A0.11) и A0.13). Они, конечно, могут быть получены
и непосредственно, как серия условий совместности урав-
уравнений A0.11) (см., например, [147], стр. 257 — 259).
Исследование уравнений A0.14) играет решающую
роль при определении порядка г группы Gr, допускае-
допускаемой Vn. Именпо как следствие общих теорем о совмест-
совместности системы дифференциальных уравнений получаем
([147], § 6):
Для того чтобы в Vn имела место группа движений
Gr, необходимо и достаточно, чтобы ранг матрицы
системы однородных алгебраических уравнений A0.14)
до номера к относительно неизвестных ga и йа, & при
условии A0.11) был равен
2 '•
а добавление новых уравнений из числа A0.14) с номером
к-{- 1 не меняло этого ранга.
Всякая классификация Vn по группам движения необ-
необходимо связывается со структурами исследуемых групп,
т. е., иными словами, со структурными константами для
некоторого канонического базиса группы. Зная структуру
группы, можно определить наиболее простую голономную
систему координат, связанную с этой структурой, и опе-
операторы группы относительно этой системы отнесения.
После этого определение Vn с данной группой сводится
ц интегрированию уравнений Киллинга с неизвестными
функциями
S 10}
Г РУППЫ ЛИ
83
В приложении к пространствам, определяемым полями
тяготения, нас будут интересовать только вещественные
группы' движений и вещественные структуры. Для г = 2, 3
классификация по вещественным неизоморфным структурам
дапа Бианки [44], для г = 4 (за исключением случая G4,
включающей- абелеву подгруппу G3) — Кручковичем ([203],
стр. 9; [260], стр. 209), исходившим из классификации неизо-
неизоморфных структур групп G4 в комплексной области, данной
Ли ([7], § 137). Эта классификация приводит к следую-
следующим возможным структурам:
I. [ХХХ2] = 0 — абелева G.,,
II. [XjX2] = Х1 — неабелева G., ¦
A0.15)
Разрешимые группы
I. [Х4Х,]=О (г, /=1, 2, 3) —абелева G3,
II. [Х^] = О, [Х2Х3] = Хг, [X3XJ = О,
V. [ХХХ2] = О, [Х2Х3] = Х2, [Х3ХХ] = - Х1г
хт-г гу у 1 а г v у I _ пХ ГХ Y 1 = X V МО 1fi^
(q Ф О и 1),
VII. [ХХХ2] = О, [Х2Х3] = - X, + ЯХ„,
[Х3ХХ] = —Х2 (^2 <[ 4).
Неразрешимые группы
VIII. [ХХХ2] = Хг, [Х2Х3] = Х3)
[Х3ХХ]=-2Х2,
LA.. [Л^з] — Л3, [Л2Л3] —Л-х, [vi.3AlJ — Л2*
Число пеизоморфных структур над полем комплексных
чисел будет меньше (типы VI и VII совпадают так же,
как VIII и IX).
84
ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА
1гл. J
/¦ = 4
Разрешимые G4, не содержащие
абелевой подгруппы G3
I. [ХХХ2] = О, [Х2Х3] = Xlt [Х^] = 0.
[Х1Х4] = сХ1> [Х2Х4] = Х2, [ХзХ4] = (с-1)Х3
(с — любое вещественное число),
II.[Z1Xa] = 0, [XaX,] = Xlf [X.XJ-0,
[a2X4] = A2, [a3a4] =
III. [XXX2] = 0, [XaX8] = Xlf
J = 0,
IV.[X1X2]=0, [Х2Х3] = Х2, [ХзХх] = 0,
[X1X4] = X1, [XaXJ = 0, [X3X4] = 0,
V. [XXX2] = 0, [X2X3] = X2! [X3XX] = - Xlt
[X1X4]=Xa, [X2X4]= -Xv [X,X4] = 0.
Разрешимые гру пп ы Gt с абелевой
подгруппой G3
VI. [Х4Х,] = 0, [XiXi] = CkiXh
(i, /=1, 2, 3; А= 1, 2, 3, 4).
Неразрешимые группы C4
VII. [Х1Ха] = Х1, [Х2^з]=-Х8, [Х3Х1]=-2Х2;
[XtX4] = 0 (i =1,2,3),
VIII. [ХХХ2] = Х„ [Х2Х3] = Х„ [X3XJ - Ха>
[Х,Х4] = 0 A = 1, 2, 3).
В комплексной области совпадают следующие струк-
структуры: I с III, IV с VIII.
Исследуем структуру VI, не рассмотренную в этой
классификации. Применим к операторам абелевой под-
§ ю] группы ли 85
группы <?з невырожденую вещественную линейную под-
подстановку
тогда [?,?,-] = Q (i, /=1, 2, 3), а
[YiYt] = 4 [ХД4] = 4С?Х, + С|Х4 - ClYs + CtXit
где Ci = AiC*As, a A) — обратное по отношению к А) пре-
образовапие. Таким образом,
\ \А\ФО.
Рассматривая С) как линейную функцию в трехмерном
аффинном пространстве, приходим к задаче приведения С
к каноническому виду невырожденным вещественным
преобразованием. Но для этого случая имеем четыре
и только четыре неизоморфных типа (П. А. Широков [91],
стр. 187, 201):
B) С
D)С = ! -
где A,j, а, Р — вещественные числа.
Для того чтобы С), определяемые этими матрицами,
и С\ являлись структурными константами, необходимо
и достаточно, чтобы они удовлетворяли условиям Якоби
([147], стр. 35):
if If if | (lU.io)
Подчиняя С) этим условиям, получим: если Gt содержит
абелеву подгруппу G3, то она имеет одну из следующих
86
ОСНОВЫ ТЕНЗОРНОГО АНАЛИЗА
[гл. Г
неизоморфных вещественных структур:
Vlr [ХД,.] = 0 (i, /= 1, 2, 3), [X1Xi]
[Х2Х4] = СХ2 + dXt, ¦ [Х3Х4] = еХ3 + /Х4,
г<9е существенны лишь случаи:
l)a = 6 = c = rf = e = / = 0, 2) а = с = е = /=0,
6 = й?=1, 3) а = с = е = 0, b = d=*f=l,
VI,.
.A0.19)
;Х,] = 0 (г, /=1,2, 3), [Х,Х
[А2Л4] = А;А2, [Л'3А4] = еЛ3,
VI3. [Х{Х;] = 0 (i, j = 1, 2, 3), [ХХХ4] = A:Xj + Х2,
[Х2Х4] = /сХ2 + Х3, [Z3X4] = еХ3,
VI4. [Х,Х,.] = 0 (г,/ = 1,2,3), [Х1Х
[Х2Х4] =-Xt-t kXv [ХД4]
Здесь 8 равно 0 или 1, а /с—некоторое вещественное число. Это
рассуждение очевидным образом обобщается для любого г.
Задачи
1. Доказать, что необходимое и достаточное условие
того, чтобы Vn допускало бесконечно малое движение,
состоит в том, чтобы существовала координатная система,
в которой все коэффициенты gap не содержат одной из
координат хУ; в этом случае координатные кривые хч пред-
представляют собой траектории движения ([147], стр. 252).
2. При движении Vn геодезические переходят в гео-
геодезические.
3. Если |а —векторы Киллинга, то csga (cs — const)
.S S
также вектор Киллинга.
4. ЕелиVnдопускает петранзитивную группу Gr движений
и некоторая неизотропная гиперповерхность Fn-1 является
гиперповерхностью транзитивности, то тем же свойством об-
обладают гиперповерхности, геодезически параллельные Vn_x.
5. Если неизотропные поверхности транзитивности
группы движений Gr имеют размерность п—1, то они
геодезически параллельны.
6. Движения, траектория которых являются геодези-
геодезическими, называются параллельным переносом или транс-
s toj группы ли 87
ляциями. Необходимое и достаточное условие того, чтобы
вектор Киллинга |а определял параллельный перенос,
S
записывается так: gaplaP = const; в этом случае все точки
S S
сдвигаются на равные расстояния. Доказать.
7. Векторы группы Gx движений образуют постоянные
углы с любой неизотропной геодезической. Доказать.
8. Бианки сформулировал теорему: траектории двух
групп G1 параллельных переносов пересекаются под посто-
постоянным углом ([44], стр. 167). Показать, что это утверж-
утверждение справедливо только тогда, когда наименьшая содер-
содержащая их группа транзитивна (П. А. Широков [105]).
9. Пространство Vn постоянной кривизны допускает Gr
«(и4-1) у, тт
с г = '—-. .всякое Vп с группой движения такого
порядка имеет постоянную кривизну.
10. V2 допускает параллельный перенос тогда и только
тогда, когда его кривизна равна нулю.
11. Однородное риманово пространство Vn (ds2 >• 0)
не допускает группы подобий более широкой, чем группа
движений, за исключением того случая, когда Vп евкли-
евклидово (Гу Чао-хао [307]).
12. Рассмотрим величины е^. . ,in = г{^и-- ¦ Ап, которые,
по определению, равны нулю, если содержат два или
большее число одинаковых индексов, и равны 1 или — 1,
в зависимости от того, получается последовательность
индексов iyi%. . . in из натурального ряда 1 2. . . п с помощью
четного или нечетного числа транспозиций. Показать:
1) любой определитель А = \а)\ (индекс i указывает номер
столбца, а / — номер строки; i, /= 1, . . ., п) может быть
записан в одном из двух видов а — eixi2.. .inailfi42- • -anl ~
— 8н42- ¦ -^а^а?,,. . . а?п; 2) величины ~l/geiiia.. лп определяют
компоненты ковариантного тензора {дискриминантный тен-
тензор), если g = | g-ap | — определитель, отвечающий метриче-
метрическому тензору; контравариантные компоненты этого тсн-
зора будут —т=-е{1-¦-in; 3) дискриминантный тензор кова-
V ё
риантно постоянен¦
ГЛАВА II
ПРОСТРАНСТВА ЭЙНШТЕЙНА
В этой главе будут рассмотрены основные факты, свя-
связанные со специальной и общей теорией относительности,
приводящие к четырехмерным пространствам Эйнштейна
и их обобщениям для любого числа измерений пространства.
§ 11. Основания специальной теории относительности.
Преобразования Лоренца
Оставаясь в рамках, определяемых характером этой
книги, основы специальной теории относительности дадим
здесь в кратком изложении, с упором на математическую
сторону вопроса.
Классическая механика, основы которой были зало-
заложены в работах Галилея и Ньютона, получившая всеоб-
всеобщее признание, с течением времени, по мере развития фи-
физики, перестала удовлетворительным образом объяснять
новые факты; прежде всего это относилось к теории света
и электромагнетизма.
Из двух теорий света, базирующихся на классической
механике, корпускулярной теории Ньютона и волновой —
Гюйгенса, зародившихся почти одновременно, в течение
почти целого столетия отдавалось предпочтение первой
из них.
Затем под давлением экспериментальных фактов (ди-
(дифракция света) большинство физиков стало склоняться
к волновой гипотезе, рассматривавшей свет как состояние
среды; носителем этого состояния было предложено при-
принять особую среду — эфир, наделенную многими необычай-
необычайными свойствами, остававшимися загадочными.
С другой стороны, теория электромагнитных явлений,
описываемая уравнениями Максвелла, подтверждаемая гро-
громадным экспериментальным материалом, не была инвари-
инвариантной с точки зрения классической механики. Для того
§ Н] ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА . 89
чтобы построить теорию^ отвечающую в большей мере, чем
классическая механика, действительному положению ве-
вещей, необходимо было исходить из экспериментально уста-
установленных фактов. Такими фактами, доведенными экспе-
экспериментальной проверкой почти до степени очевидности,
являются следующие два положения: 1) принципиальная
независимость любых явлений в движущейся системе от
поступательного движения системы в целом и 2) скорость
света не зависит от движения источника (и равняется
с 5« 300 000 KMJcen). Положение 1) более точно означает,
что существует со3 равномерно и прямолинейно движу-
движущихся друг относительно друга систем отсчета, в кото-
которых явления протекают одинаковым образом. Такие систе-
системы отсчета будем называть инерциалъными. Если ограни-
ограничиваться механическими явлениями, рассматриваемыми
в классической механике, то положение 1) совпадает
с принципом относительности Галилея. Положение 2)
можно теперь сформулировать так: скорость света в пу-
пустоте постоянна и равна с в любой инерциальной системе.
Конечно, для не инерциалъных систем отсчета предполо-
предположение 2) не имеет места.
В классической механике принцип относительности
Галилея выражается в том факте, что формулировка ее
законов не меняется при замене одной инерциальной
системы другой инерциальной. Эта замена координат для
того простейшего случая, когда координаты у и z не меня-
меняются, как известно, может быть записана формулами
х'=х — vt, y' = y, z' = z, A1.1)
причем, кроме того, требуется независимость промежутка
времени от системы отсчета
t' = t. A1.2)
Преобразования A1.1) и A1.2) называются галилеевыми.
Для выяснения существа вопроса достаточно рассмотреть
этот частный случай движения инерциальных систем друг
относительно друга. Если потребовать, чтобы принцип 1)
имел место и для электродинамики, то галилеевы пре-
преобразования приводят к противоречию.
Таким образом, возникает вопрос о том, как связаны
между Особой две инерциальные системы при соблюдении
90 ПРОСТРАНСТВА ЭЙНШТЕЙНА [гл. II
предположений 1) и 2). К этому же вопросу можно подой-
подойти, потребовав, чтобы уравнения Максвелла при искомых
преобразованиях одной инерциальной системы в другую
были инвариантными. Однако гипотез 1) и 2) еще недо-
недостаточно для однозначного решения вопроса, и требуются
некоторые дополнительные предположения для того, чтобы
получить эти преобразования, называемые преобразования-
преобразованиями Лоренца.
История вопроса такова. Впервые эти формулы были
получены Лармором ([12], стр. 167—177), пришедшим
к ним при решении вопроса о продольном сокращении тел
при движении и изменении масштаба времени. Эта работа
осталась незамеченной. Далее следуют две работы Лорен-
Ца ([15], Щ 64, 65; [19], стр. 809, 986), в первой из кото-
которых он хотя и предполагал еще существование эфира, но
сделал ряд ценных замечаний, а во второй получил иско-
искомые преобразования как преобразования, относительно
которых уравнения Максвелла инвариантны, если рассма-
рассматривать пространство без зарядов. Сокращение тел и здесь
понимается как причинно обусловленное явление. В по-
появившихся затем двух работах Пуанкаре ([23], стр. 1504;
[25], стр. 129) зополнены формальные пробелы, имевшиеся
в работах Лоренца. Названия «преобразования Лоренца» и
«группа Лоренца» фигурируют впервые именно в этих
работах Пуанкаре. Здесь впервые высказан принцип относи-
относительности в качестве всеобщего принципа. Предположение
о неизменности перпендикулярных относительно направле-
направления движения размеров тел выводится из гипотезы о том,
что искомая группа преобразований содержит в качестве
подгруппы обычную группу вращений. Пуанкаре сумел
построить инвариантную относительно данной группы
теорию электрона.
Одновременно с этим появились работы Эйнштейна,
содержащие по существу все существенные результаты,
полученные в указанных выше исследованиях (см. [24],
стр. 89), и глубокий подход к проблеме с новых точек
зрения. Он получил эти результаты из 1) и 2), исполь-
используя, впрочем, и другие предположения («однородность»
пространства и т. д.). В работах Эйнштейна специальная
теория относительности получила в известной мере завер-
завершенную форму. Гипотезы 1) и 2) вводятся как экспери-
5 11] ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА 91
ментально обоснованные, что в дальнейшем блестяще
оправдалось (С. И. Вавилов [84]).
Что же касается формальной аксиоматики, то этот
вопрос продолжает занимать внимание. Так, если поло-
положить в основу аксиомы (Игнатовский [29], стр. 972; [31],
стр. 779; Франк и Рут [32], стр. 825; Ми [33], стр. 750):
1) искомые преобразования образуют однопараметрическую
однородную линейную группу; 2) скорость системы отсче-
отсчета S относительно S' равна с обратным знаком скорости
i5" относительно S; 3) сокращения масштаба в 6" в смыс-
смысле S и масштаба S в смысле S' равны, то формулы пре-
преобразования получаются с точностью до знака и физи-
физического истолкования постоянных.
Каттанео [290] рассматривает систему аксиом, общую
для классической и релятивистской кинематики, пользуясь
которой, при пекоторых дополнительных требованиях, полу-
получает или преобразования Галилея, или преобразования
Лоренца. Вместо аксиом Каттанео можио выставить дру-
другие требования (В. А. Фок [225], стр. 31; А. Д. Алексан-
Александров [190], стр. 103; А. Д. Александров, В. В. Овчин-
Овчинников [191], стр. 95; Мапумото [227], стр. 55 — 58).
Постановка вопроса о строгом построении специальной
теории относительности, развиваемая в работах
А. Д. Александрова ([317], стр. 80 — 83), основывается
на следующих основных положениях: 1) пространство-
время есть многообразие всех событий, взятое лишь
с точки зрения его структуры, определенной системой
отношений предшествования, в отвлечении от всех иных
свойств; 2) пространство-время есть четырехмерное много-
многообразие; 3) пространство-время максимально однородно,
т. е. группа его преобразований, сохраняющих отношение
следования, максимальная из всех возможных; 4) как
само многообразие, которое представляет пространство-
время, так и преобразования, указанные в 3), являются
дифференцируемыми. Получим преобразования Лоренца
при следующих предположениях: пусть имеют место гипо-
гипотезы 1) и 2) и, кроме того, 3) преобразования должны быть
линейными, 4) — масштабы в плоскости, перпендикулярной
к направлению движения, не меняются, 5) показания двух
часов, находящихся в плоскости O'y'z', совпадают отно-
относительно системы S.
92 ПРОСТРАНСТВА ЭЙНШТЕЙНА [гл. II
Пусть система отсчета (состоящая из осей координат
с масштабом и часов) фиксирует место и время некото-
некоторого события набором чисел х1 = х, ж2 == у7 х3 = z и ж4 = t,
а система S соответственно четверкой чисел ж1', ж2', х3',
ж4'. Тогда, предполагая, что при xi = t = O системы S и S'
совпадают, в силу 3) искомое преобразование можно
записать в виде:
х*' = с?хР (а, р = 1, 2, 3, 4).
Пусть инерциальная система S' движется относитель-
относительно S с постоянной скоростью v так, что оси Ох, О'х'
совпадают. Тогда в силу 4)
ХА = X", X6 = Xs.
Из 5) следует, что ж1' и ж4' не должны зависеть от ж2
и ж3. Таким образом, преобразования должны иметь вид:
ж1' = аж1 + рж4, ж2' = ж2, ж3' = ж3, ж4' = уж' + 6ж4. A1.3)
Предположим, что при t = a;4 = 0, когда б1 и j5" совпадают,
из общего в этот момент начала излучается световой
сигнал, распространяющийся со скоростью с. В силу 2)
для такого сигнала за пекоторый промежуток времени t
в системе отсчета S будем иметь:
з
2г''-сУ' = 0, A1.4)
1
а применяя еще и гипотезу 2), получим:
з
2/-с?'2 = 0. A1.5)
1
Заменяя в A1.5) ха по формулам A1.3), мы должны по-
получить уравнения, эквивалентные A1.4), т. е. в данном
случае, может быть, с точностью до множителя. Но так
как ж2' = ж2, ж3' = ж3, то этот множитель должен быть
равен единице. Отсюда следует:
т. е,
а = ch(p,y p = cshq>, у==~т!3Ьф, 6 = ch«p.
S il] ПРЕОБРАЗОВАНИЯ ЛОРЕНЦА 93
Относительно S' описание движения начала координат
системы S получим, полагая х = 0, у = 0, z = 0. Это дает
х1' = cshq>t, х2' = х3' = О, ж4'=сЬф?,
и следовательно,
= — v = с th ф, thxp = .
Ввиду этого A1.3) записываются в виде:
л
_____ (Х1 TIT*) Ж2' = Т2
^
.хЗ-^^ Ж4'___^____^_^_а;г+Я.4^ A1.6)
Если встать на формальную точку зрения, подготовлен-
подготовленную введенными выше обозначениями, то можно говорить
о четырехмерном пространстве с координатами ха
(а= 1, .... 4), геометрия которого должна отвечать груп-
группе преобразований тина A1.6); отметим, что форма
^ -dx* —dxz —dx* +da* (x* = ct) A1.7)
инвариантна относительно этих преобразований. Если,
наоборот, среди A1.3) искать преобразования, оставляю-
оставляющие инвариантной (И.7), то придем к A1.6). Форма
A1.7) определяет метрику плоского пространства с сиг-
сигнатурой типа ( (-), которое называют простран-
пространством Минковского, указавшего на удобство такой интер-
интерпретации [261.
*
Пусть даны два плоских пространства Rn и Rn одного
и того же числа измерений и одинаковой сигнатуры; будем
говорить, что эти пространства изоморфны, если суще-
существует такое взаимно однозначное вещественное отображе-
отображение точек Rn на точки Rn, что: 1) если точкам А, В
* * *
пространства Rn отвечают точки А, В в пространстве Rn,
** *
то вектору АВ в Rn отвечает вектор АВ в Rn; 2) если
* *
вектору Ха в R отвечает вектор Ха в Rn, то вектору
94 ПРОСТРАНСТВА ЭЙНШТЕЙНА 1гл. II
аХа в Rn отвечает вектор аХа в Rn (a — число);
* * *
3) ga$uau& = gapu<Xu®, если иа отвечает иа.
Если изоморфные Rn и Rn совпадают, то будем гово-
говорить об автоморфизме или движении в плоском про-
пространстве. Если вместо 3) потребовать инвариантности
A1.7) при отображении, то получим, очевидно, автомор-
автоморфизм. Геометрия пространства Минковского есть гео-
геометрия группы лоренцевых автоморфизмов.
Преобразование A1.6) в силу равноправности коорди-
координат хх, х2, х3 допускает еще два аналога. Кроме того,
очевидно, что обычные вращения и переносы (при xi = ж4')
не меняют формы A1.7), как и сдвиг во времени
о
xk' = ж4 -f- xi. Следовательно, существует группа линейных
вещественных преобразований, являющаяся группой авто-
автоморфизмов пространства Минковского, зависящая от 10
произвольных параметров; она включает 3 лоренцевых
вращения, 3 пространственных вращения и 4 сдвига по
осям. Хорошо известно (см. задачу 9 § 10), что число неза-.
висимых параметров при .движениях, 10, является макси-
максимальным для любого F4. При этом мы отвлекаемся от зер-
зеркальных отображений вида ха' = — ха, которые также
оставляют A1.7) инвариаптной и увеличивают число раз-
различных преобразований ([188], стр. 208).
Сущность специальной теории относительности заклю-
заключается в установлении взаимосвязи пространства и вре-
времени, формальными выражениями которой будут как
формулы A1.6), так и введение четырехмерного про-
пространства Минковского.
Процесс движения некоторой материальной точки
можно описать, если для каждого момента времени задать
положение этой точки, т. е. задать
ж* = ж*(ж*) (i=l, 2, 3), A1.8)
что в пространстве Минковского определит кривую.
В частности, для равномерного и прямолинейного движе-
движения функции хх (ж4) будут линейными и, следовательно,
определят в четырехмерном пространстве прямые. Если
к тому нее точка движется со скоростью света с, то фор-
форма A1.7) будет тождественно обращаться в нуль и, еле-
S 12j УРАВНЕНИЯ ПОЛЯ 95
довательно, четырехмерной траекторией такой точки будет
изотропная прямая.
:>.Если представлять себе распространение света в пус-
пустом пространстве, как это делается в геометрической оп-
оптике, в виде движения частиц, то получим в простран-
пространстве Минковского опять-таки изотропные прямые. Свето-
Световой сигнал в данной точке распространяется по полуоб-
полуобразующим изотропного гиперконуса, имеющего вершиной
данную точку. Из A1.6) следует, что скорость матери-
материальной частицы не может превышать с и, следовательно,
в случае скорости < с четырехмерные траектории мате-
материальных частиц будут кривыми, касательные к которым
в каждой точке пространства направлены внутрь этого
конуса.
§ 12. Уравнения поля релятивистской теории
гравитации
Специальная теория относительности установила вза-
^имную связь между пространством и временем — этими
формами существования материи, но в ней не рассмат-
рассматривается зависимость геометрии пространства-времени от
распределения и движения материи; пространственно-вре-
пространственно-временной континуум предполагается однородным. Такая
зависимость, возможность которой предвидел еще Лоба-
Лобачевский (см. [199], стр. 10—18), устанавливается в ре-
релятивистской теории тяготения. В этой теории предпо-
предполагается, что только локально, когда можно пренебречь
нолем тяготения, имеет место геометрия специальной
теории относительности, а в области, где этого сделать
нельзя, метрика пространства-времени зависит от распре-
распределения и движения материи.
Общая теория относительности есть теория зависи-
зависимости пространства-времени от движения и распределе-
распределения материи в широком смысле этого слова.
В релятивистской теории тяготения геометрические
свойства пространственно-временного континуума не укла-
укладываются в рамки геометрии плоского пространства и
требуют для своего описания римановой геометрии. Если
метрика такого F4 определяется линейным элементом
A2.1)
96 ПРОСТРАНСТВА ЭЙНШТЕЙНА 1гл. 11
то компоненты метрического тензора gap (ж1, . . ., ж4) за-
зависят от распределения и движения материи.
Ввиду этого gap (х) называют иногда потенциалами
гравитационного поля.
Основная задача теории поля — определение поля
в зависимости от распределения и движения материи —
приводит к необходимости получения уравнений поля.
Они были получены Эйнштейном в 1915 г. (Эйнштейн
[35], стр. 778) в виде:
г> }_ р. __ у у /12 2^
К этим уравнениям Эйнштейн пришел после длитель-
длительных поисков, исследуя различные гипотезы. Так, напри-
например, еще в 1914 г. он исходил из предположения Z?ttp =
= ЪТар ([34], стр. 1030). Одновременно A915 г.) и неза-
независимо от Эйнштейна к уравнениям A2.2) пришел Гиль-
Гильберт ([41], стр. 395), получивший эти уравнения из вари-
вариационного принципа. Он, однако, вывел эти уравнения
не для произвольной материальной системы, а исходя из
теории материи Ми ([33], стр. 512). Этот метод получе-
получения основных уравнений поля был затем усовершенство-
усовершенствован Клейном ([40], стр. 469; [45], стр. 235), пользовав-
пользовавшимся такими вариациями координат, которые не исче-
исчезают на границе интегрирования (со времен Лагранжа
это часто делается в классической механике), при этом
многие соотношения приобретают более простой вид
(Паули [149], стр. 104—107, 285; Ландау и Лифшиц
[156], стр. 309 — 313; Фок [225], стр. 273, 278; Вейль [69],
стр. 205-206; Бель [299]).
Кроме уравнений A2.2), метрический тензор для поля
тяготения, отвечающего реальному распределению мате-
материи, необходимо должен удовлетворять условию, чтобы
в каждой точке области пространства-времени невырож-
невырожденными вещественными линейными преобразованиями
он приводился к виду:
¦ —1 0 0 0N
A2.3)
0
0
0
-1
0
0
0
— 1
0
0
0
1
S 12] УРАВНЕНИЯ ПОЛЯ 97
т. е. чтобы в каждой точке Р в касательном простран-
пространстве /?4 имела место геометрия Минковского. Левая
часть A2.2) целиком определяется геометрией простран-
пространства-времени; правая часть содержит постоянную Я и тен-
тензор энергии-импульса Та$, определяемый распределением
и движением материи. Таким образом, A2.2) означает,
что материя определяет геометрию пространства-времени
и, наоборот, движение этих масс определяется метриче-
метрическим тензором пространства, которое не будет плоским.
Условие A2.3) записывает физическое утверждение, со-
согласно которому в бесконечно малой области пространства
в течение бесконечно малого промежутка времени имеет
место геометрия специальной теории относительности.
Согласие выведенных из уравнений A2.2) следствий
с опытом (Т. А. Тихов [102], стр. 7; А. Ф. Богородский
[121], стр. 3; С. И. Вавилов [84]) в рамках доступной
точности и отсутствие фактов, противоречащих им, гово-
говорят о правильности этих уравнений для известных экспе-
экспериментов и наблюдений.
Основные предположения, из которых исходил Эйн-
Эйнштейн при получении уравнений поля A2.2), можно сфор-
сформулировать следующим образом: 1) При наличии грави-
гравитации геометрия пространства-времени — геометрия У4.
2) Распределение и движение энергии и импульса опи-
описываются симметрическим тензором Та$(хх, х2, ж3, ж4),
удовлетворяющим закону сохранения
ГаЭ,а =0. A2.4)
3) Уравнения поля должны иметь тензорный характер.
4) Они должны быть линейными относительно вторых
частных производных от потенциалов gap (x). 5) Тензор
энергии-импульса должен определяться геометрией про-
пространства F4. При соблюдении некоторых граничных
условий отсюда однозначно следуют уравнения A2.2).
Наоборот, при наличии гипотезы, что уравнения поля
тяготения имеют вид A2.2), получим как следствие все
эти предпосылки.
Получение A2.2) из вариационного принципа основано
на следующих гипотезах: 1) Уравнения поля тяготения
должны получаться как результат варьирования суммы
действий поля и материи. 2) Варьирование действия поля
1 А. 3. Петров
98 ПРОСТРАНСТВА ЭЙНШТЕЙНА 1!гл. 11
дс1лжно приводить к уравнениям, являющимся уравне-
уравнениями Эйлера — Лагранжа принципа Гамильтона; таким
образом, решается вариационная задача для интеграла,
распространенного по четырехмерному объему .4:
/ = С R Y~g dx1 dx2 dx3 dx\ Ы = 0,
A
где R — скалярная кривизна пространства F4. 3) Если
Q —некоторая функция от величин q, определяющих
систему и их производные по координатам и времени, то
действие выражается интегралом
S = \ Q f q, ^jdx1 dx2 dx3 dx*
и тензор энергии-импульса
q
при условии A2.4). Кроме того, необходимы некоторые
другие предположения о граничных условиях.
Гипотеза A2.2) эквивалентна серии таких гипотез,
и получение A2.2) из них имеет большое эвристическое
значение. Во всяком случае, в большинстве имеющихся
в настоящее время вариантов единой теории поля урав-
уравнения поля получаются из вариационного принципа.
Что же касается физической значимости A2.2), то она
может быть подтверждена только экспериментальным пу-
путем.
§ 13. Пространства Эйнштейна
Для свободного пространства там, где тензор энергии-
импульса Гар обращается в нуль (например, если мате-
материя представлена точечными массами, то вне точечных
масс), уравнения A2.2) будут иметь вид:
J?ae = 09 A3.1)
так как при таком предположении, свертывая по оф,
найдем, что скалярная кривизна пространства R — 0. Ре-
Решения уравнений поля A3.1) являются в известном
смысле аналогом решепий уравнения Лапласа в клас-
i 13 j ПРОСТРАНСТВА ЭЙНШТЕЙНА 99
сической теории поля: они определяют геометрию иро-
странства-времепи в областях, свободных от масс. Этим
пространствам посвящено большое количество исследова-
исследований. Наряду с уравнениями A3.1) можно рассматривать
уравнения поля
Яар=Х?аР, A3-2)
где к (при п > 2), как это следует непосредственно из
A3.2) и (8.19), будет постоянной величиной. Эти уравне-
уравнения можно рассматривать как уравнения поля A2.2) для
того случая, когда тензор энергии-импульса Та§ лишь
постоянпым множителем отличается от метрического тен-
тензора gap- Физической моделью такого поля может слу-
служить пространство, которое на всем своем протяжении
однородно, причем плотность материи постоянна во всем
пространстве ([156], стр. 345; [225], стр. 447). Для
«островного» распределения материи можно говорить о
«внутренней» и «внешней» задачах при интегрировании
уравнений поля, и в этом случае A3.1) определяет реше-
решения «внешней» задачи.
Независимо от теории тяготения пространства Vn,
удовлетворяющие уравнениям A3.2), встречаются во мно-
многих вопросах геометрии. В теории групп Ли возникает
риманова связность типа A3.2). Почти во всех имеющихся
в настоящее время вариантах единых теорий, как пра-
правило, возникают пространства Vn такого типа. Ввиду
этого римановы многообразия при условии A3.2), при лю-
любом п {размерность пространства) и любой сигнатуре
метрики назовем пространствами Эйнштейна и будем
обозначать символом Gn. В том случае, когда п = 4 и сиг-
сигнатура G4 имеет вид ( 1-), мы будем употреблять
символ Г, и, если, кроме того, и = 0, т. е. имеют место
A3.1), будем употреблять символ Т. Таким образом, поле
тяготения в свободном пространстве описывается геомет-
геометрией Т.
Вместо A3.2) пространство Gn можно определить ина-
иначе. Рассмотрим в Vn некоторую точку Р и совокупность
направлений, исходящих из Р, удовлетворяющих соотно-
соотношению
lOO ПРОСТРАНСТВА ЭЙНШТЕЙНА 1гл. !1
главные направления этого конуса второго порядка Риччи
предложил называть главными направлениями простран-
пространства Vn в данной точке. Если, кроме того, в прострап-
стве, касательном к Vn в данной точке, взять поверх-
поверхность второго порядка с центром в этой точке, уравне-
уравнение которой имеет вид:
то главные направления этой поверхности, называемой
иногда индикатрисой Эйнштейна, будут и главными на-
направлениями Риччи. Тогда уравнения A3.2) эквивалентны
требованию, чтобы эти направления были неопределенны,
т. е. в каждой точке индикатриса Эйнштейна должна
быть гиперсферой.
Иную характеристику Gn для случая определенно-по-
определенно-положительной метрики, интересную тем, что она полу-
получается, если приравнять нулю некоторый скаляр, дал
Томас ([107], стр. 331 — 340), который называет этот ска-
скаляр «квадратичной» кривизной пространства Vn. Он пока-
показал, что Vn с определенно-положительной метрикой
будет Gn' тогда и только тогда, когда выполняется
условие
nRa&Rafi-R* = 0. A3.3)
Требование определенности метрики здесь существенно
и возможность замены — условий A3.2) одним урав-
нением объясняется тем, что уравнение вида ]^ а? = 0 при
вещественных at эквивалентно системе at — 0 (i = 1, 2, ...).
Существуют также определения пространств Gn, осно-
основанные на понятии кривизны пространства Fn, взятые не
в двумерном направлении, а в ттг-мерном направлении
(Картан [98], стр. 199 — 200; Врона [150], стр. 234).
В случае п = 4 имеет место теорема: если для V4 имеет
место одно из условий:
j
то выполняется и другое.
§ 13J ПРОСТРАНСТВА ЭЙНШТЕЙНА 101
В условии Р) подразумевается двойное альтернирова-
альтернирование: одно по (zPy и Другое по %[iv. Для доказательства
в каждой точке пространства F4 введем, может быть
мнимый, неголономньш орторепер, для которого
Для каждого из этих ортореперов а) и Р) запишутся двумя
эквивалентными, с точностью до линейных комбинаций,
системами уравнений относительно компонент тензора кри-
кривизны, что и доказывает теорему.
Так как тензор кривизны всякого Vs полностью опре-
определяется через тензор Риччи и метрический тензор (см.
задачу 8 § 7):
= gay ?р6 — gabLfry + gg6 Lay — g$y La6, }
A3.5)
j
то, если к тому же имеет место A3.2), получим для
2?apY6 выражение C.4); таким образом, если F3 — про-
пространство Эйнштейна, то оно является пространством
постоянной кривизны.
Для любого п, свертывая (8.4), придем к A3.2),
и следовательно, всякое риманово пространство постоянной
кривизны есть пространство Эйнштейна. >
Отметим, что геометрия четырехмерного пространства-
времени общей теории относительности допускает инте-
интересную интерпретацию в неголономной геометрии Лагерра,
что позволяет подойти к исследованию этого многообра-
многообразия с новой точки зрения [216].
Задачи
1. Всякое V2 есть G2.
2. Gn, конформное плоскому пространству, есть Sn
(Схоутен и Стройк [55], стр. 214).
3. Проверить, что Vn с определенно-положительной
метрикой является Gn тогда и только тогда, когда имеет
место A3.3).
4. Для того чтобы в Vп все геодезические гиперсферы
были (гп_г, необходимо и достаточно, чтобы Vn было 3^
(П. А. Широков [72], стр. 53).
102 ПРОСТРАНСТВА ЭЙНШТЕЙНА 1.ГЛ. П
5. Назовем инвариант
квадратичной кривизной пространства Vn. Здесь gay&% —
= ?o[s^]y и иаР = |^° т]РЗ — однолистный бивектор. Если И
не зависит от выбора иа&, то Fn назовем пространством
постоянной квадратичной кривизны. Показать: 1) вели-
величина бивектора гг°Р, обнесенного параллельно вдоль гра-
границы неособенного элемента поверхности ы°Р Да, харак-
характеризуется инвариантом //, если ограничиться величи-
величинами, не превышающими четвертого порядка малости
(Дсг = О (б2)); 2) любое Sn есть пространство постоян-
постоянной квадратичной кривизны; 3) любое V3 постоянной
квадратичной кривизны есть S3; 4) любое У4 постоянной
квадратичной кривизны есть ?4 (А. 3. Петров [157],
стр. 211 — 214).
6. Пользуясь тождеством Риччи E.5), показать, что
постоянная к в A3.2) может быть выражена через любое
неизотропное векторное поле аа:
х = аа (а до — a*ax)lavav;
при к = 0 любое векторное поле с компонентами класса С2
удовлетворяет уравнению а\а — ахох — 0 (Нарликар [245],
стр. 1138).
§ 14. Некоторые решения уравнений
поля тяготения
*
Изучение полей тяготения Т (или Т) приводится к ис-
исследованию системы 10 дифференциальных уравнений
с частными производными второго порядка с 10 неизвест-
неизвестными функциями ga$(x) от четырех независимых пере-
переменных жа(а=1, 2, 3, А). Уравнения будут линейными
относительно старших производных, коэффициенты при
которых будут переменными. За счет специализации си-
системы координат (см. § 7) для любого Vn всегда можно п
компонент метрического тензора обратить в наперед задан-
§ !4J РЕШЕНИЯ УРАВНЕНИЙ ПОЛЯ ТЯГОТЕНИЯ ЮЗ
ные функции. Следовательно, систему уравнений поля
можно привести к 10 уравнениям от шести неизвестных
функций — случай переопределенной системы.
Ввиду сложности вопроса и физических требований
к теории тяготения, задача решалась при тех или ипых
дополнительных ограничениях, позволяющих получить
решение в замкнутом виде. Например, исследовались по-
постоянные гравитационные поля. Для постоянного поля
существует такая система отнесения, относительно кото-
которой все величины, в частности метрический тензор, не
зависят от временной координаты х4. Примером таких
полей могут служить так называемые статические поля,
для них в системе отсчета, относительно которой gap не
зависит от времени (х4), все тела неподвижны. Тогда,
г-чевидно, оба направления Бремени равноценны, т. е, все
составляющие метрического тензора gai = 0 (а Ф 4). Все
такого рода поля характеризуются тем, что в некоторой
системе координат д^а$— 0. Отсюда следует, что посто-
постоянные поля определяют геометрию, допускающую ту или
иную группу движений порядка г > 1, так как метрика
допускает оператор X = д%да.
По времени первыми были исследованы центрально-
симметрические поля тяготения, у которых выражение
линейного элемента o?s3 одинаково для всех точек, нахо-
находящихся на одинаковом расстоянии от центра.
Такое поле может создаваться центрально-симметри-
центрально-симметрическим распределением вещества, причем скорость движе-
движения материи в каждой точке направлена по радиусу (цент-
(центрально-симметрические пульсации). Рассматривались также
поля, обладающие осевой симметрией.
С момента появления в 1915 г. основной работы Эйн-
Эйнштейна было предложено много частных решений проб-
проблемы; некоторые из них обобщали или повторяли резуль-
результаты, полученные ранее. Последнее объясняется или не-
незнанием литературы, или же тем, что, хотя проблема
эквивалентности квадратичных дифференциальных форм
давно решена (Кристоффель [2], стр. 60), в конкретных
случаях она приводит иногда к громоздким вычислениям.
Рассмотрим в хронологическом порядке известные
в литературе многообразия Т и Т.
104 ПРОСТРАНСТВА ЭЙНШТЕЙНА 1гл. II
1. Пространство Т, найденное Шварцшильдом ([37],
стр. 195), исходившим из физических соображений:
gss = — xx sin%2, gti = 0 (i Ф /),
где с — произвольная постоянная. Квадратичная форма
в полярной системе координат допускает приведение
к ортогональному виду. Такое Т соответствует, как это
было строго доказано Гильбертом [41] и Биркхоффом
[66], наиболее общему центрально-симметрическому рас-
распределению масс.
Иными словами, при условии шаровой симметрии
членов метрики, не зависящих от времени, всегда, интег-
интегрируя A3.1), получим A4.1).
-2. Пространство Т, являющееся обобщением решения
Шварцшильда, предложенное Коттлером ([46], стр. 401 —
162). В полярной системе координат метрический тен-
тензор имеет следующие компоненты:
gii #11— 1-Г-^Х -Г^1> g-22 Я , I A4.2)
g33 = -xl* sin2x\ gij = 0 («>/), I
где а, с — произвольные постоянные. При a = 0 получим
решение A4.1), при с = 0 придем к пространству постоян-
постоянной кривизны 6'4. И A4.1) и A4.2) принадлежат к числу
тех F4, метрика которых в некоторой системе координат
имеет вид:
ds2 — ghl (x1) dxi —xl dx2 —хх sin2 ж2 dx3 -{- g44 (ж1) dxA",
и непосредственным подсчетом можно убедиться, что урав-
уравнения A3.2) для метрики такого вида приводят к A4.2).
3. Вейлю ([42], стр. 117; [56], стр. 112) и Леви-Чи-
вита ([47], стр. 177—183, 220 — 230) удалось найти ста-
статическое решение, обладающее только осевой симметрией,
но не сферической. Это решение, удовлетворяющее урав-
уравнениям поля A3.1), определяется следующими компо-
компонентами метрического тензора:
„. _ „-1 я- — pV- а — pv-ix а —О (i 4- i\
ЧИ ОП 622 — е ' 633 с ' 5U v \L ^L //;
A4.3)
S 14] РЕШЕНИЯ УРАВНЕНИЙ НОЛЯ ТЯГОТЕНИЯ 105
где функции jx и v зависят только от двух переменных:
х3 и q = \/ ж12 -f- я22 — и удовлетворяют системе уравне-
уравнений поля:
Непосредственно можно убедиться, что первые два из
этих уравнений представляют собой результат свертыва-
свертывания тождеств Бианки; задача решалась в предположе-
предположении, что ц и v должны обращаться в нуль на бесконеч-
бесконечности.
*
4. Пространство Т, полученное Бахом ([62], стр.. 119 —
134), который исходил из предположения, что метри-
метрический тензор определяется матрицей
'а со О 0N
о р О О
{gafi) = [ О О Y О
ч0 0 0 ду
где функции а, р, у, б, со зависят только от перемен-
переменных хв, ж4. Эти решения не являются точными, а, при
некоторых дополнительных условиях, ищутся по прибли-
приближению с ошибками наперед заданного порядка малости.
Бах получает, таким образом, три решения в виде поли-
полиномов от ж4 и х3. Это одна из первых попыток искать
приближенные решения уравнений поля, получившая
развитие в работах Эйнштейна, Инфельда и Фока.
5- Бринкман ([73], стр. 126) в работе о пространст-
пространствах, конформно-отображаемых на пространства Эйнштей-
Эйнштейна, доказал теорему: пространство Эйнштейна может быть
конформно отображено на другое пространство Эйнштейна
106 ПРОСТРАНСТВА ЭЙНШТЕЙНА Ггл. 17
при
аад$о Ф 0
тогда и только тогда, когда метрика допускает приведе-
приведение к виду:
ds* = fgafidxPdxl> + r1da?* (a, 0 = 1, ..., n-1), A4.4)
причем
где а и b — постоянные, gap не зависят от жп и метрика
ф = gap dxadx$ — метрика (п — 1)-мерного пространства
Эйнштейна. Таким образом, этот результат определяет
особый тип n-мерного пространства Эйнштейна. Заметим,
что если п = 4, то форма <р определит $3, так как каж-
каждое трехмерное пространство Эйнштейна является про-
пространством постоянной кривизны. Ввиду этого, полагая,
что Т имеет риманову форму, получим:
з
где
з
1
После этого нетрудно будет убедиться, что Т будет S±.
6. Казнер отыскивал пространства Т ([57], стр. 219),
исходя из предположения, что метрика допускает при-
приведение к ортогональному виду, а пространство допускает
погружение в плоское (п + /?)-мерное пространство и,
кроме того,
п
аь — ZL, /гах 1
г=1
где fi зависят от одной переменной или же от двух, но
являются многочленами. На этом пути им определены
метрики
ds == х '
§ 14] РЕШЕНИЯ УРАВНЕНИЙ ПОЛЯ ТЯГОТЕНИЯ 107
где постоянные at связаны соотношениями
-ai + a2 + a3 + a4=l, _(ai+l)a + a; + a; + a.; = 0
и
ds2 = I (xx, х2) + И (ж3, ж4),
где I и II — бинарные дифференциальные формы, т. е. про-
пространство приводимо.
7. Симметрические римановы многообразия с кова-
риантно постоянным тензором кривизны Ларуб, а. = 0- Иссле-
Исследование таких пространств приводит к изучению неприво-
неприводимых Vp (p < п), которые играют существенную роль при
изучении так называемых полупростых групп ([81],
стр. 133 — 141). Изучением таких пространств занимались:
П. А. Широков ([108], стр.! 9 — 27; [72], стр. 111; [204].
стр. 71-82), Э. Картан ([166], стр. 118—149), Б. А. Розен-
фельд ([169], [158]) и многие другие авторы. Среди таких
пространств естественным образом выделяются простран-
пространства Эйнштейна. Классификация и определение всех сим-
симметрических пространств Т будут даны в главе VIII.
8. Миттер ([86], стр. 110—114), пользуясь цилиндри-
цилиндрическими координатами z, r, б, t, изучал F4 при условии
A3.1) с метрикой
ds2 = — е* dz2 — е» dr2 — г2 dQ2 -f ev dt2,
где k, fx, v — некоторые функции от г. Это приводит
к отысканию статического решения с симметрией
около оси z. Исследованию аналогичных решений A3.1)
посвящена также работе [88]. Эти исследования приво-
приводят к результатам Вейля и Леви-Чивита.
9. Дельсарт [94] рассматривал пространство Т с ли-
линейным элементом вида
ds2 = cp2ds2 + /2 do2,
называя такие пространства «бинарными». Здесь
ds2 = h2 (и1, . .., uv), da2 = do2 (v1, . . ., vq),
f = f(u\ ...,u»), <p = <p@\ ..., Vе1), p + q = 4,
т. е. это неприводимые, вообще, пространства. Взяв в ка-
качестве точки отправления предположение, что простран-
108 ПРОСТРАНСТВА ЭЙНШТЕЙНА [гл. II
ство имеет ось симметрии и четырежды ортогональную
систему координат, он получает решение в виде
где §> — вейерштрассовы эллиптические функции от кри-
криволинейных координат. К этому же результату приходит
Юнг [143], который, кроме того, исследует вопрос
о том, когда дифференциальная форма Т4 допускает при-
приведение к виду:
ds* = {р (xh, t))* dt2 + gij {xk) dx1 dxj, dtP Ф0 (k = 1, 2, 3)
или
ds* = {e(xh, t)}*dt*+{p(xh, t)f gij{Jl)dxi dxj,
где предполагается, что форма gtj dxl dx' определенно-
отрицательная. Если для первого из этих элементов пред-
пололшть dtp = Q, то придем к решению Дельсарта.
Необходимые и достаточные условия возможности приве-
приведения линейного элемента к такому виду выражаются
автором в виде дифференциальных условий.
10. Шоу ([103], стр. 754 — 763) исследовал решение
A3.1) для статического и изотропного F4 в предполо-
предположении, что
ds* = и2 dt* + gij dx1 dxj (i, / = 1, 2, 3),
где и и g-i:) не зависят от t,
d
и gijdx%dxi — метрика трехмерного конформно-евклидова
пространства (условия «изотропности» пространства по
терминологии автора); если с = 0, то получается решение
Казнера, при с < 0 —решение Шварцшильда, а при с > 0
r[ + 2t + dx*t). A4.6)
11. Если Т — приводимое пространство, т. о. его мет-
метрика может быть представлена в виде двух или более
квадратичных форм, не имеющих общих переменных и
дифференциалов, то эти квадратичные формы, как легко
видеть, также определяют пространства Gq (q < 4). Ввиду
I 14] РЕШЕНИЯ УРАВНЕНИЙ ПОЛЯ ТЯГОТЕНИЯ 109
этого, оставляя в стороне тривиальный случай Sit полу-
получим только два типа:
ds* = - dxi2 - cos2 ^ dx22 - cos2 ~ dx32 + dxi2, A4.7)
если К = — > 0, где if — гауссова кривизна поверхностей
постоянной кривизны, на которые расслаивается У4, и
J<j2— drr2 гЪ2 — r/r22 rh2 ~ Лт& Л-rfrbz (\L 9\
a a s '
если гауссова кривизна К = г < 0.
12. Таксно показал ([127], стр. 125—136), что сим-
симметрично-сферические решения уравнений Ra$, Y == 0 при-
приводят к решению Швардшильда или Коттлера.
13. Имеет место также следующая теорема (А. 3. Пет-
Петров [146], стр. 8—12): метрика
п—1
определяет пространство Эйнштейна с сигнатурой
( • • • Ь) при следующем выборе функций g{: если
в A3.2) х > 0, то
2 2ai
A4.9)
если х < 0, то
^) ge=l; A4.10)
при х = 0 получим или Sn, или
*=-(*я)е*. *»=!, 2^=24=1. A4.11)
Если в решениях A4.9), A4.10) х = 0, то постоян-
постоянные at и pt также обращаются в нуль, а само Тп выро-
вырождается в плоское пространство. Как особое решение
при этом получается при х < 0 пространство Лобачев-
Лобачевского. Для этих Тп вопрос о группе движений решается
теоремой: если gt Ф gj, пространство допускает лишь
НО ПРОСТРАНСТВА ЭЙНШТЕЙНА [гл. П
тривиальную систему операторов |г = const, |'x = 0,
xj = pi (i < п); если же gt = gj, то для каждой такой
пары получаем оператор вращения.
14. Решения A4.11) в иной системе координат полу-
получены Нарликаром и Кармаркаром ([144], стр. 69) в виде:
vqdy* — vrdz2, v = l + kt, A4.12)
где к = const, a p, q, r — постоянные, связанные соотно-
соотношениями р + q + г = 2, pq + qr-\-rp = 0.
15. При изучении вопроса о погружении пространств
Эйнштейна в плоские пространства и пространства по-
постоянной кривизны (Фиалков [109], стр. 30 — 34) появ-
появляются приводимые пространства (см. гл. V).
16. Эйнштейн и Розен ([104], стр. 43 — 54). отыскивая
решение A3.1) для цилиндрических волн, пришли к эле-
элементу, допускающему ортогональную систему координат:
O(a^j3), A,B,C(x\x%
где А, В и С определяются системой дифференциальных урав-
1 л а 1 , /В\
пении, которая после замены a = In А, р =* -^ ml jt ) ,
у = " In (ВС) может быть записана в виде:
2д44*Р + 4 ГE4РJ + 3 (д4у)* + F^K - (д1У? -
2 (дпу - дыа) + [{д$? + (д.уJ -
-(д$)*-(д4у)*]= 0,
Р - д^Р + ^p5lY - 54р54у = 0,
+ 3 (^iYJ + (W -
- C4YJ + 2 (dxa 5lY - 54a дЛу)] = О,
dtf + dLy d4y - 2 (dxa d^y + 54a dxy) = 0;
этот результат, полученный из формальных соображений,
допускает физическое истолкование.
Гравитационные волны переносят энергию, плотность
которой становится источником гравитационного поля; это
§ 14] РЕШЕНИЯ УРАВНЕНИЙ ПОЛЯ ТЯГОТЕНИЯ ill
поле деформирует метрику, благодаря чему гравитацион-
гравитационные волны должны рассматриваться: в пространстве
своеобразной метрики. В. 1954 г. Розен рассматривал тот
случай, когда
случай, когда
где
= i|>(/>, 0» y = y(q. О
при независимых переменных q, Ф, z, t ([206], стр. 328).
К вопросу об определении волновых решений обращается
также Такено ([242], стр. 15 — 25), использовавший идею
Эйнштейна получения плоских волн, но отбросивший
предположение о слабости поля. В полученных при этом
решениях для неустранимых преобразованиями координат
волн выписанные решения не могут быть вещественными.
17. Изучая статические решения уравнений A3.1),
Букдал вводит понятие взаимных решений для данного
статического. Так, решение, взаимное решению Шварц-
шильда, имеет вид:
ds2 = — у2 (Y dza + г2 dt2 + г2 sin2 6 rfcp2) + p'1 dt*, A4.14)
где p — 1 — — . В данном случае можно убедиться
(см. гл. IV), что A4.14) лишь тризиальным образом от-
отличается от A4-1).
18. В разное время автором исследовались решения
A3.1) различной природы ([157], стр.? 87 — 94; [176],
стр. 179—186; [178], стр. 149 — 152; [181], стр. 27 — 32;
[182], стр. 35-47; [228]; [243]; [244]; [261]), которые
будут приведены ниже.
19. Верма и Рой ([246], стр. 129-137) указали сле-
следующее решение уравнений A3.2):
— .4 {dx* -f dy°- + dr2) + dt*, A4.15)
где
J= Fit)
c{ = const, -jz(F2) = g^ + a, a = — 4Clc
c\.
112 ПРОСТРАНСТВА ЭЙНШТЕЙНА [гл. П
До сих пор речь шла о решениях в замкнутом виде
уравнений поля в свободном пространстве или уравне-
уравнений A3.2). Если же рассматривать общие уравнения
поля, то, кроме неизвестных потенциалов ga$, необходимо
определить еще компоненты тензора энергии-импульса.
Система становится недоопределенной. Она, как уже
отмечалось, нелинейна относительно gap. Так как, с дру-
другой стороны, существует линейная теория Ньютона, ко-
которая с большой степенью точности описывает некоторые
гравитационные процессы (например, в небесной меха-
механике), то естественно предположить, во-первых, что такая
линейная теория должна получаться из теории Эйнштей-
Эйнштейна как первое, но хорошее приближение и, во-вторых,
что по крайней мере для тех задач, где ньютонова тео-
теория дает хорошие результаты в смысле совпадения
с экспериментальной проверкой, гравитационные поля
в своем нелинейном уточнении приводят к эффектам вто-
второго порядка. Эти соображения являются исходными для
метода «линеаризации» уравнений поля, который действи-
действительно позволяет получить ньютонову теорию тяготения
как приближение уравнений A2.2).
Этот метод развивался в работах Эйнштейна с со-
сотрудниками, с одной стороны [167], и Фоком [111] и Па-
папетру [238], с другой.
Мы не будем касаться этого круга вопросов, исследо-
исследованию которых посвящены, например, работы [225], [238].
ГЛАВА HI
ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
Приведенная в § 14 историческая справка приводит
к мысли о необходимости общей классификации про-
пространств Эйнштейна. Такая классификация должна иметь
инвариантный характер. В этой главе применяется метод
классификации полей тяготения, основанный на изучении
алгебраической структуры тензора кривизны и тензора
энергии-импульса.
§ 15. Бивекторные пространства
Классификацию пространств Эйнштейна свяжем с изу-
изучением алгебраической структуры тензора кривизны про-
пространства; так как компоненты тензора кривизны удовле-
удовлетворяют тождествам E.8):
О> A5.1)
определяющим полный ряд алгебраических тождеств для
Rafiyi), TO классификация должна основываться на A5.1).
Алгебраическое изучение тензора i?apv6 можно проводить
в данной точке пространства Vn; в этой точке нас будут
интересовать только тензоры специальной природы. Пока-
Покажем, что совокупность всех таких тензоров допускает
отображение па множество всех тепзоров некоторого дру-
другого пространства, и будем проводить исследование в этом
последнем пространстве.
Выделим все тензоры, которые удовлетворяют следую-
следующим двум условиям: 1) ковариантная и контра вариантная
валентности — четные; 2) ковариантные и контравариант-
ные индексы разбиваются на отдельные пары, для каждой
из которых тензор кососимметричен. Примером такого
рода тензоров могут служить бивекторы (кососимметриче-
ские тензоры второго порядка), заданные компонентами
Fap или Fap, или же тензор кривизны, если он определен
8 А. 3. Петров
114 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. Ш
компонентами /?аруб> или -^"^ув, или i?apv6. Будем далее
такие тензоры называть битензорами.
Множество всех такого рода тензорных полей в Vn
назовем бивекторным, а его представление в данной точ-
точке— локальным бивекторным множеством. Рассмотрим не-
некоторый тензор, принадлежащий локальному бивекторному
множеству, и примем каждую кососимметрическую пару
индексов ар за один собирательный индекс. При этом
из двух возможных пар ар и ра фиксируем одну, напри-
например ар*, а компоненты, несущие на себе Pa, отличающиеся
от соответствующей компоненты только знаком, не будем
принимать во внимание. Все собирательные индексы пере-
перенумеруем, и выбор такой нумерации произволен, но число
собирательных индексов будет равно N ==п Г~ ¦
Рассмотрим преобразование компоненты Пар некоторого
бивектора пространства Vn. Оно будет иметь вид:
Па'р' = Л°'
или в собирательных индексах
Па' = АааПа, A5.2)
где а = 1, . . ., N,
А%'-*А&А&. A5.3)
Таким образом, преобразование бивекторов в Fn имеет
вид преобразования векторов в Ем, но при этом допустимы
не любые линейные неособенные преобразования, а не-
некоторая подгруппа центроаффинной группы, определяемая
условиями A5.3); это является реализацией теоремы,
доказанпой Гуревичем ([172], стр. 463 — 469).
Совокупность бивекторов пространства Vn в данной
точке с контравариантными компонентами определит
в собирательных индексах совокупность векторов с контра-
контравариантными компонентами, каждый из которых имеет
N компонент. Отождествляя эти векторы с точками
iV-меряого многообразия, можно утверждать, что оно
будет аффинным многообразием En в том и только в том
случае, когда в нем имеет место геометрия Клейна
§ 15J БИВЕКТОРНЫЕ ПРОСТРАНСТВА 115
с группой:
\Аа\фО, А%>А\'= $, j
где Аа' имеют специфический вид, отвечающий A5.3),
и, следовательно, En, если оно имеется, будет специаль-
специального вида.
Первые два условия A5.4) следуют непосредственно
из A5.2). Третье условие следует из того, что опреде-
определитель
(В. Ф. Каган [64], стр. 410) и, с другой стороны, за счет
перестановки и линейной комбинации строк и столбцов С
его можно представить в виде:
т. е. | Ааа | ф 0, если | А® \ Ф 0. Четвертое из условий
A5-4) нетрудно проверить, исходя из первых двух. Таким
образом, A5.4) имеют место и En существует: всякое
локальное бивекторное множество Vп может быть ото-
бражено ни центроаффинное En (N — - "~ > J . Из опре-
определения этого отображения следует, что оно дает изомор-
изоморфизм относительно операций сложения, вычитания, умно-
умножения (без свертывания) тензоров. Операция умножения
со свертыванием должна быть исключена, так как она
может привести к тензорам, не допускающим такого ото-
отображения.
Следовательно, с каждой точкой Vn можно связать
локальное En с группой A5.4); такое En будем называть
бивекторным пространством. Тензор в Vn в данной точке,
с указанными выше свойствами, определит в En тензор
вдвое меньшей валентности.
Теперь можно метризоватъ бивекторное пространство.
Пусть в Vn существует поле тензора Та^У(, такого, что
тогда в каждом из пространств En, отвечающих той или
иной точке той области в Fm, где определено поле этого
8*
116 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ ?гл. Ш
тензора, можно ввести метрический тензор
* аЬ *¦ ^аЭуб>
если только | ТаЬ | Ф 0. В остальном выбор такого тензора
произволен, но представляется наиболее естественным
связать метрику, введенную в EN, с метрикой Vn. Ввиду
этого введем метрический тензор
Sab > ?а&у6 ^ Say§№ gadgfry' A5.5)
где gao — метрический тензор Vn, а собирательными индек-
индексами являются кососимметрические пары
ар* —^a,yb-^>b.
Тензор gab (a, 6 = 1, ..., N) симметрический и не-
невырожденный: | gab | Ф 0; чтобы убедиться в этом, доста-
достаточно в данной точке пространства Vп привести g „ к диа-
диагональному виду и вычислить gab по формуле A5.5). Если
g. — определенно-положительный или определенно-отри-
определенно-отрицательный тензор, то gab также будет определенным.
Для неопределенного g~ метрика gab может быть неопре-
неопределенной с некоторой сигнатурой, зависящей от сигнатуры
g „. Вместо знака —> в A5.5), обозначающего отображение,
можно было бы воспользоваться связывающими величинами:
где В — связывающие величины, представляющие кова-
риантный вектор в EN и контравариантпый бивектор
в Rn, отвечающий данной точке Vn.
Отметим, что матрица (gab) по отношению к (ga&) яв-
является так называемой производной матрицей. Именно,
если встать па ту точку зрения, что в аффинном про-
пространстве операция свертывания ga^a определяет линей-
линейную вектор-функцию, которая относит точке Va гипер-
гиперплоскость, полярно сопряженную относительно гипер-
гиперквадрики gRxaxb=l, то некоторый однолистный поли-
поливектор
vax ¦¦ ¦ ар _ уН ¦ ¦ ¦ {/гаР)
[1 рТ
§ 16 j КЛАССИФИКАЦИЯ ПРОСТРАНСТВ ЭЙНШТЕЙНА 117
после того как к каждому из векторов Vh, альтернирован-
альтернированным произведением которых он является, применим эту
вектор-функцию, преобразуется в поливектор
а/
где тензор
определяет производную форму. Для р — 2 этот тензор
совпадает с gab. После введения тензора gab в бивектор-
ное аффинное пространство Е^ становится метрическим
пространством Rpj.
§ 16. Классификация пространств Эйнштейна
Введенные в § 15 понятия позволяют исследовать алгеб-
алгебраическую структуру тензора кривизны любого риманова
пространства (А. 3. Петров [171], [207]). Отображая
тензор кривизны i?apva пространства Vn па бивекторное
метризованное пространство R^, получим, имея в виду
A5-1), в RN симметрический тензор Rab (а, 6 = 1, . . ., N),
которому можно сопоставить А,-матрицу
Приведя эту Я-матрицу к каноническому виду на веще-
вещественном пути (см. § 9), можно тем самым установить
классификацию Vn при заданном п. Тип пространства
будет определяться характеристикой ^-матрицы, и тип
пространства сохраняется в той области, где эта характе-
характеристика не меняется.
Пусть точке Р пространства Vn отвечает А,-матрица
A6.1) с системой элементарных делителей
(л. —
тогда этой Х-матрице отвечает характеристика
[{mv т2, . . .)(т[, т'г, ...) {т\, т\, ...)...], A6.2)
118 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. III
определяющая тип пространства в той области А, где
она не меняется. Инварианты Я4, базисы элементарных
делителей, будут в то же время корнями характеристиче-
характеристического уравнения
|Д«ь-А#«ь1«=О. A6.3)
Однако в области А возможно совпадение на некоторых
А:-мерных многообразиях базисов Я? (х) элементарных дели-
делителей. Эти многообразия к-поверхности будут записываться
уравнениями вида
Так, если взять гиперповерхность, определяемую урав-
уравнением
Ях (х) — Я2 (ж) = О,
и предположить, что она принадлежит области А, где
вообще Я1н^=Я2 и элементарные делители имеют вид
(Я — Х1)р, (Я — Я2)9, то характеристика в А будет иметь вид
[р, д, . . .], а на указанной гиперповерхности [(/?, q) . . .];
будем говорить, что такое совпадение не меняет типа Vn
в данной области. При определении типа Я-матрицы про-
пространства Vn тензор Rab ограничен условиями A5-1)
и только ими.
Предположим, что Vn является пространством Эйн-
Эйнштейна; тогда, кроме A5.1), необходимо еще учесть соот-
соотношения
Введем в данной точке пространства Vn ортогональный
неголономный репер |а (а, а=1, 2, 3, 4) такой, что
где еа определяется сигнатурой формы g~ dxadx$. Тогда
gaa=eaep, gab = 0 (a, 6=1, ..., N; афЪ), A6.6)
а тензор кривизны отобразится на симметрический тензор
Rab, которому в точке Р пространства Gn отвечает тензор
кривизны, ортогональные компоненты которого будут
§ i 6J КЛАССИФИКАЦИЯ ПРОСТРАНСТВ ЭЙНШТЕЙНА 119
связаны соотношениями
= 0»
= Xea, 2 еоДОаср = 0 (a =? 0
о
Записывая A6.7) в собирательных индексах, получим
полный ряд алгебраических условий, накладываемых на Rab
в Rn, после чего тип пространства будет определен
характеристикой ^-матрицы A6.3). Число возможных
типов Vn с возрастанием п быстро возрастает и зависит
от возможных сигнатур метрики, т. е. от выбора еа. Далее
будет дана подробная классификация для п = 4 — случай,
наиболее интересный в физических приложениях.
Проиллюстрируем введенные выше понятия на простом
примере пространств постоянной кривизны Sn. Если Vn
есть Sn, то
Яаруа = К (gayg^6 - ga6g?y) A6.8)
и, следовательно, ^-матрица будет иметь вид:
((K-X)gab).
Вводя в точке Р орторепер A6.5), приведем эту матрицу
к диагональному виду, и поэтому все элементарные дели-
делители будут простыми (в первой степени) с базисами,
равными К, и характеристикой [A, ..., 1)]. Наоборот,
если характеристика имеет такой вид, то (см. § 9)
gab = 2 еЛЛь, Rab = 2 еоЧсЛъ = КёаЪ (*• = Щ,
а а а а а а а а
т. е. имеет место A6.8) и (при п > 2) пространство имеет
постоянную риманову кривизну. Таким образом, Vn при
п > 2 будет Sn тогда и только тогда, когда характери-
характеристика "К-матрицы A6.1) имеет вид [A, . . ., 1)]. В частно-
частности, Vn — плоское пространство, если базисы элементарных
делителей равны нулю.
Задача
1. Если число элементарных делителей Я-матрицы
равно р, а ранг матрицы (Rab) равен г, то г>^~—- — р
[261].
120 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. Ш
§ 17. Стационарные кривизны
Базисы элементарных делителей Хг Я-матрицы для
любого Vn допускают простое геометрическое истолкование
([261], стр. 36-40),
Рассмотрим риманову кривизну пространства Vn в дву-
двумерном направлении, определяемом простым (однолистным)
бивектором y°P = FaFp:
[i 2]
к- afiy6
где gaSv6 имеет вид A5.5). Будем понимать инвариант К
в A7.1) в обобщенном смысле, именно предположим, что
требование простоты бивектора Va^ снимается. Инва-
Инвариант К, определяемый. A-7.1), при таком предположении
назовем бивекторной кривизной Vn в направлении данного
бивектора. Отображая на бивекторное пространство R^,
получим:
Поставим себе задачей определить критические значе-
значения К, если рассматривать этот инвариант как однород-
однородную функцию нулевого измерения от У™, что равносильно
нахождению тех векторов Va, для которых К принимает
критические значения. Условимся критические значения К
называть стационарными кривизнами пространства Va
в данной точке, а векторы Va, отвечающие критическим
значениям К, — стационарными векторами Rn (или
стационарными непростыми бивекторами в Vn в данной
точке). Если, в частности, некоторой стационарной кри-
кривизне отвечает вектор Va, определяющий в Vn простой
бивектор Fap, то эта стационарная кривизна совпадает
с римановой кривизной Vn в двумерном направлении Уар.
В зависимости от того, будем ли мы требовать простоты
бивектора или нет, получим две различные задачи. Если
понимать К в смысле Ридгана, то придем к задаче опре-
определения условно-стационарных направлений. Если же иметь
в виду бивекторную кривизну, то вопрос приводится
§ 17] СТАЦИОНАРНЫЕ КРИВИЗНЫ 121
к определению безусловно-стационарных Va, и в этом
случае необходимые и достаточные условия стационарно-
стационарности Va выражаются уравнениями
L = 0. A7.3)
dva
Таким образом, предполагается, что К — непрерывно диф-
дифференцируемая функция Vх. Необходимо иметь в виду,
что при неопределенной метрике пространства Vn возможно
появление изотропных стационарных направлений
gabVaVb = O. ¦ A7.4)
Мы исключим сначала этот случай из рассмотрения с тем,
чтобы вернуться к нему ниже. Выполняя в A7.3) диф-
дифференцирование для К, определенного выражением A7.2),
получим:
(Rab-Kgab)Vb = Q, A7.5)
т. е. приходим к уравнениям, определяющим собственные
направления тензора ЯаЬ в RN. Стационарные кривизны
при этом совпадают с характеристическими числами урав-
уравнения A6.3), т. е. 'к суть стационарные кривизны Vn.
Если п > 3, то стационарному направлению в Vn будет
отвечать, вообще, непростой бивектор.
Предположим теперь, что имеет место A7.4). Нас
иптсресуют только те направления Vх, для которых К
меняется непрерывно, и следовательно, если имеет место
A7.4), необходимо, чтобы
RabVaVb = 0 A7.6)
для изотропного стационарного Va.
Тогда, имея в виду непрерывную дифференцируемость К
по V, значение К для изотропного стационарного направ-
направления можно вычислить, исходя из соотношения
К (Va) = lim К (Va + dVa).
a
Обозначая
122 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. 111
получим:
'K(Va)= lim *(v
Так как этот предел не может зависеть от способа измене-
изменения dVc, то
т. е. снова приходим к A7.5): изотропный стационарный
бивектор также оцределяет направление Rab, а соответ-
соответствующая стационарная кривизна совпадает с базисом
непростого элементарного делителя (см. § 9). Таким обра-
образом, стационарные направления Vn совпадают с главными
направлениями Rab в R^, а. стационарные кривизны —
с базисами элементарных делителей, и следовательно, число
их < N = —2-х—-. При неопределенной метрике Vn стацио-
стационарные кривизны будут, вообще говоря, комплексными,
так же как и отвечающие им стационаряые бивекторы в Vn.
§ 18. Классификация пространств Эйнштейна
в случае п=4
Для четырехмерных пространств Эйнштейна над полем
вещественных чисел могут иметь место три принципиально
различных типа сигнатур (с точностью до умножения ds2
на -1):
(а) + + + + ,
(Р) +, A8.1)
(у) - - + + •
Рассмотрим каждую из этих трех возможностей. Если
имеет место случай (а) — определенно-положительной мет-
метрики, то можно в дайной точке ввести такой неголоном-
ный ортогональный репер, относительно которого gaa = l,
ga& = 0 и. следовательно,
?«=1. gab-0 (а, ЪФ).
§ 18 J КЛАССИФИКАЦИЯ ПРОСТРАНСТВ ЭЙНШТЕЙНА
123
Тогда (см. § 9) А,-матрица имеет только простые элемен-
элементарные делители с вещественными стационарными кри-
кривизнами; характеристика должна иметь вид [111, 11 1].
Таким образом, в случае сигнатуры ( -|—j—|—|-) суще-
существует один тип пространств Эйнштейна.
Переходим к рассмотрению (Р) — сигнатуры простран-
пространства Минковского. В этом случае в каждой точке про-
странства Т (или У), определяемого полем тяготения,
можно ввести вещественный неголономный орторепер,
относительно которого
A8.2)
1
0
0
0
0
-1
0
0
0
0
-1
0
0
0
0
1
Тогда относительно орторепера A8.2) в бивекторном про-
пространстве Нв получим в силу A5.5)
(gab) =
( -1
0
0
0
0
i 0
0
— 1
0
0
0
0
0
0
-1
0
0
0
0
0
0
1
0
0
0
0
0
0
1
0
0 \
0
0
0
0
1 ,
A8.3)
т- е- ёаъ определяет неопределенную метрику. Мы раз
и навсегда для п = 4 вводим следующую нумерацию
собирательных индексов в /?6:
14—>1, 24-^2, 34-^3, 23-» 4, 31-» 5, 12-»6. A8.4)
Покажем, что имеет место теорема: матрица (Rab) для
орторепера A8.2) будет симметрично-сдвоенной.
Так как для орторепера A8.2) контравариантные
компоненты метрического тензора совпадают с ковари-
антными, то. записывая уравнения поля Ra$ —
124 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТИНИЯ [гл. III
получаем две группы уравнений:
(I) УеДааЭо = 0 (а#Р),
а а
(II) У е Лааао = хеа, еа== ±\.
Полагая для уравнений (I) а, Р=1, 2, 3, 4 и записывая
в собирательных индексах A8.4), получим:
Я,2 + ^45 = ^13 + ^46 = -^
= Ru - i?34 = i?2e - R3a = 0. A8.5)
Система (II) в собирательных индексах запишется:
Rn + i?44 = ^22 + ^55 = ^33 + ^66 = ^,
^и+Я22 + Я33= -х. A8.6)
Кроме того, нужно учесть тождество R<x№y6) = 0, кото-
которым завершаются все ограничения, накладываемые на
тензор Rab\ это дает еще в собирательных индексах
Ru + R25 + R36 = 0. A8.7)
Поэтому, если ввести обозначения:
Rab~mab> Ra, Ь+3 = «аЬ» а» ^ < 3» A8.8)
то из A8.5) и A8.7) следует:
где М и iV —две симметрические квадратные матрицы
третьего порядка :
М-={таЬ), N = (nab), таЬ = тЬа, паЬ^пЬа A8.10)
(а, 6 = 1, 2, 3).
При этом имеют место соотношения
2>3S=-x, 2nss = 0; A8.11)
s=i . s=l
это доказывает теорему. Заметим, что к симметрично-
сдвоенным матрицам, при дополнительном, однако, усло-
условии их ортогональности, пришел Каган ([79], стр. 1 — 24)
при изучении группы лоренцевых преобразований. Изу-
i'is] классификация пространств Эйнштейна 125
¦гением такого рода матриц, при том же предположении
об ортогональности, занимались также Дубнов ([82],
стр. 33 — 54) и Лопшиц ([85], стр. 186 — 187).
Дифференцируя уравнения A3.2) к раз ковариантно
получим:
После этого, вводя, как и выше, собирательные индексы
в орторспере A8.2) (для кососимметрических пар, стоя-
стоящих до запятой), можно повторить все рассуждения
с той лишь разницей, что к нужно положить равной
нулю, а компоненты mab и nlb придется снабдить сло-
сложными указателями Хг, .. . , Яй. Следовательно, матрица
(Rab, jii...Xfe) &ля любой фиксированной комбинации индек-
индексов Хг, .. . , %k (\,,..., A,ft=l, 2, 3, 4) относительно
орторепера A8.2) будет симметрично-сдвоенной:
где
3 3
2 т — У и — О ИР. 141
'К-аа, Xi- ¦ .Xft— /Li "ел. Л.1. . .Xfe —w V lo> to-'
a= 1 a= 1
(a, 6=1,...,6; X,= l, 2, 3, 4; i=l, 2,...)-
Теперь можно доказать основную теорему, решающую
вопрос об общей классификации четырехмерных прост-
пространств Эйнштейна с сигнатурой ( {-) в смысле
алгебраической структуры тензора кривизны.
Теорема. Существует три и только три типа
пространств, определяемых полями тяготения (Ra$ =
= x#ap) с сигнатурой ( (- ).
Так как для A8.2) (gab) можно записать
126 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. Ill
где в —трехмерная единичная матрица, то Я-матрицу
можно записать в виде:
N
Воспользуемся так называемыми элементарными преобра-
преобразованиями, не меняющими элементарных делителей
и характеристики Я-матриц ([91], стр. 34). Прибавляя
к матрицам, принадлежащим к первому столбцу, матрицы
второго столбца, умноженные на i, получим:
N
— i(M-\-iN-\-X&)\ —М—Ы
Прибавляя к матрицам второй строки соответственные
матрицы первой строки, также умноженные на i, приведем
матрицу к виду:
( M+iN + Ks] N
— Xe J-
(
Ч. О |— M+iN
Умножая матрицы первого столбца на i/2 и прибавляя
к соответствующим матрицам второго столбца и затем
проделывая то же самое со строками, получим следу-
следующую матрицу, эквивалентную с точностью до элемен-
элементарных преобразований исходной Я-матрице:
/М-\-iN4-Xe | О
\ о Г^=^
Задача свелась к исследованию двух трехмерных Я-мат-
Я-матриц Q (Я) и Q (Я), соответствующие элементы которых
комплексно сопряжены. Отсюда следует, что и элемен-
элементарные делители этих матриц также комплексно сопря-
сопряжены, и, следовательно, их характеристики имеют
одинаковый вид. Таким образом, характеристика нашей
Я-матрицы распадается на две повторяющие друг друга
части.
Трехмерная матрица Q (Я) может иметь только один
из трех возможных типов характеристик: 1°. [111],
2°. [2 1], 3°. [3]; мы при этом оставляем в стороне слу-
случаи, когда некоторые из элементарных делителей имеют
; 18] КЛАССИФИКАЦИЯ ПРОСТРАНСТВ ЭЙНШТЕЙНА 127
одинаковый базис и, следовательно, некоторые из чисел,
стоящих в квадратных скобках, придется заключить
в круглые скобки (например, [A1I], [B1)] и т. д.),
так как это будут возможные частные случаи. Матрица
Q (X) имеет соответственно те же характеристики. Тогда
исходная Я-матрица может иметь только одну из следу-
следующих характеристик:
1°. [Ill, 111], 2°. [21, 21], 3°. [3, 3].
Черта над второй половиной характеристики означает,
что тут имеют место элементарные делители с базисами,
комплексно-сопряженными базисам элементарных дели-
делителей, отвечающих первой половине характеристики. Для
третьего типа черта отсутствует, так как в этом случае
элементарные делители всегда имеют вещественные
базисы, как это будет показано в следующем параграфе.
В следующей главе будут даны примеры пространств
каждого из этих трех типов, так что ни один из этих
типов не является пустым множеством. Это доказывает
теорему, полученную автором в 1949 г., с предваритель-
предварительной публикацией в 1950 г. [171], [176], [178]. В 1954 г.
автором был дан второй вариант доказательства, воспро-
воспроизведенный выше [207], и одновременпо третий — Норде-
ном [208], исходившим из исследуемых им бипланарных
пространств. В 1957 г. четвертый вариант доказатель-
доказательства (при х = 0) был дан Жеэньо ([262], стр. 723 — 724).
Физические применения этой теоремы даны Пирани [258]
и другими авторами [308], [321], [322], [324].
Будем везде далее пространства Т (когда Лвр = 0)
и Т (когда Ra$ = xgap) снабжать индексом, обозначающим
тип этого пространства: Ти ТгA=1, 2, 3).
Переходим к рассмотрению случая (у) — с сигнатурой
метрики типа ( 1—\-).
Для метрики с такой сигнатурой матрицу (ga$)
в точке можно задать в виде:
-1 0 0
~ о | (*> A8J5)
о о о
128
ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. Ш
и, следовательно,
(gab) =
— 1
0
0
0
0
0
0
_ \
0
0
0
0
0
0
1
0
0
0
0
0
0
-1
0
0
0
0
0
0
— 1
0
0
0
0
0
0
1
A8.16)
Заяисывая для метрики A8.15) относительного этого него-
лономного орторепера уравнения i?ap = xgap, получим для
матрицы (Rab), при обозначениях A8.8), выражение
A8.17)
/ ти
т21
т31
«11
«21
\ «31
т12
ТТЬ 22
«12
«22
«32
лг13
Отгз
«г3з
— «13
«23
«33
«11
«21
— «31
«11
т21
— "*3i
«12
«22
«32
та
т22
— т32
«13
«23
«33
-т13
— пг23
т33
где
причем
- отц - т22 + т33 - х, | A8.18)
«11 + «22 + «33 = °- I
Следовательно, А,-матрица, определяющая структуру про
странства, в силу A8.16) запишется:
С i + A
те21
т31
«и
«21
к «3,
т22-\-%
«г32
«12
«22
«ЗС
т13
«г23
™33-ь
«13
«23
«33
«11
«21
-«31
ти + *
т21
— т31
«12
«22
— «32
т12
тг24-^.
»«32
«13
«23
«33
— т13
— W23
т23 — X
\
A8.19)
§ 18] КЛАССИФИКАЦИЯ ПРОСТРАНСТВ ЭЙНШТЕЙНА 129
Проделаем над этой Х-матрицей последовательно следу-
следующие операции: 1) умножим первые три столбца на
число е и прибавим к соответствующим трем последним
столбцам, 2) умножим первые три строки на число е
и прибавим к трем последним соответствующим строкам,
3) прибавим три последние строки, умноженные на ~,
к трем соответствующим первым строкам, 4) прибавим
три первые столбца, умноженные на —^-, к трем послед-
последним, 5) разделим строки и столбцы на численные
множители, по величине отличные от нуля. Тогда,
если потребовать, чтобы
и рассматривать так называемые двойные числа a-\~eb
(В. А. Розенфельд [229], стр. 441-444), где а и /; -
вещественные числа, то
где
епп -\- ^ т12
Р (к) — I тп + е«21 от22 + ед22 + ^ ^2з ~" еп2з
V mz\ — (J-ns\ т$п — вп.л„ т?г3з — сп33 — А.,
причем
а Р(X) — двойственно-сопряженная матрица, т. о. получаю-
получающаяся от замены во всех элементах Р(х) е на —е.
Особенностью алгебры двойных чисел является то, что
в ней имеются элементы, отличные от нуля, «модуль»
которых zz — 0; они не имеют обратных элементов и
являются делителями нуля. Двойные числа впервые рас-
рассматривались Клиффордом ([65], стр. 203 — 221) и
систематически применялись в геометрии А. П. Котель-
никовым [8], [11].
Алгебра двойных чисел, за исключением A8.19), строит-
строится аналогично алгебре комплексных чисел. В частности,
'¦' Д. Л. Петро»
130 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ (.гл. III
если имеется рациональная функция f(zu z2,. . ., zn),
то f(z1,z2,..., zk)=J(z1, z2,..., zh). Следовательно,
элементарные делители (скалярные кривизны) Р (к) и
РСк) двойственно сопряжены, а их характеристики в силу
этого совпадают. Таким образом, имеет место теорема:
существует, в смысле структуры тензора кривизны, три
и только три типа пространств Эйнштейна с сигнату-
сигнатурой формы ( 1—[-), которые определяются характе-
характеристиками %-матрицы (Rab — kgab):
1°. [Ill, 111], 2°. [21, 21], 3°. [3, 3].
Для четырехмерных пространств Эйнштейна с сигна-
сигнатурами (— +) и ( Ь +) имеем аналогию
в смысле числа различных типов, но, в то время как
для сигнатуры Минковского Я-матрица отображается
с помощью A8.14) на трехмерное метрическое комплекс-
комплексное пространство, для второй сигнатуры имеем ото-
отображение на трехмерное метрическое пространство
двойных чисел.
Над полем комплексных чисел матрица A8.19) не
будет симметрично-сдвоенной.
§ 19. Канонический вид матриц (ИаЬ)
для пространств Ti и Тг
Так как число независимых компонент тензора кри-
Т7 га2 (и2 — 1) ,
визны пространства Vп равно ——j-—¦ , то для п = 4 полу-
получил! 20 существенных компонент. Десять уравнений
*
поля для пространств Тг снижают это число до 10.
Однако в нашем распоряжении остаются еще шесть про-
произвольных параметров, определяющих шесть степеней
свободы в выборе ортореперов. Геометрически эти пара-
параметры могут быть истолкованы как три пространственных
и три лоренцевых вращения, допустимых при выборе
орторепера. Таким образом, в ка-ждой точке простран-
*
ства Т тензор кривизны полностью определяется заданием
не более чем четырех параметров (не считая параметра х
*
для пространств Т). Зависимость компонент от этих
§ 19J КАНОНИЧЕСКИЙ ВИД МАТРИЦ 131
параметров нужно поставить в связь с типом простран-
ства. Будем исследовать пространства Tt, так как для 7\
результат получим, полагая х = 0.
1. Пространства Тх с характеристикой [111, 11 1J.
Так как в этом случае характеристика простого типа,
то тензор Rab(a, 6 = 1, ..., 6) в бивекторном простран-
пространстве имеет шесть неизотропных взаимно ортогональных
направлений (см. § 9). Эти направления R6 в данной
точке 7\ определяют бивекторы специфического строения.
Обозначим компоненты вещественного орторепера
*
в точке Тх через iff(ct, o*=l, 2, 3, 4), а простые бивекто-
а
ры gCTg\ определяющие двумерные плоскости, образуемые
[а Р]
координатными векторами этого неголономного орторе-
орторепера, будем обозначать ?ат. В R6 эти простые бивекторы
сф
определят шесть независимых вещественных неизотроп-
неизотропных взаимно ортогональных координатных векторов
?а = б?, и любой вектор Re (в частности, и собственные
векторы jRab) может быть разложен по векторам ga. По-
с
кажем, что в качество собственных векторов (они опре-
определяются однозначно только в том случае, если корни
уравнения | Rab — kg^ j = 0 различны) можно взять век-
векторы вида
vP = a(la ± ila) + ц(Г ± Ца) + v(ta± ila) (a = 1,... ,6).
14 2 5 3 6
A9.1)
В самом деле, условие того, что wa является собственным
вектором Rab, запишется так:
(Rab-bgab)wb = 0. A9.2)
Но эта система шести уравнений в силу симметричной
сдвоенности Х-матрицы сводится к трем уравнениям,
как это следует из A8.8) и A8.9):
+ v (ma3 ± inaS + ХЬп3) = 0 (а = 1, 2, 3).
9*
132 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ |.гл. JJI
Для того чтобы а, ц, v были ненулевыми решениями этой
системы, необходимо и достаточно, чтобы число % было
корнем одного из уравнений Q(k) = Q или <2(^) = 0, т. е.
корнем характеристического уравнения, что доказывает
утверждение.
Вектору Wa в данной точке 7\ будет соответствовать
бивектор полного ранга
= а Aа& ± t|aP) + И- (lafJ ± t|ap) + v (la$ ± j?aP). A9.3)
14 23 24 31 34 12
Нетрудно убедиться, что при любом ортогональном пре-
преобразовании WaP преобразуется в бивектор той же стру-
* * *
ктуры, а а, ц, v переходят соответственно в а, р,, v, так
что норма бивектора остается инвариантной:
а2 + ц2 4- v2 = а2 + J2 + v2.
Пусть корням Л- E- = 1, 2, 3) уравнения (Rab — kgab) = 0
S
отвечают собственные векторы PFa; тогда корням Л долж-
s s+3
ны отвечать собственные векторы с комплексно-сопряжен-
комплексно-сопряженными компонентами Wa.
Представим бивектор \?а& в виде комбинации двух
1
вещественных бивекторов
тогда
i 1
Полагая a = а -\- ib, ц — а -^ ib, v = a-\- ib, где аи 6 —
11 2 2 3 3 s s
вещественные числа (s=l, 2, 3), найдем:
FaP = a ?aP +- a g°P + a g«P — 6 |aP — 6 |«Э _ b ?aP,
1 114 224 3 34 1 23 2 31 3 12
7«Р = b gaP + b gaP -j- 6 gaP -f- a |aP + a g°P + a |aP.
1 114 2 24 3 34 1 23 2 31 3 12
Так как Wa — неизотропный вектор /?e (см. § 9), то
i
§ 19]
КАНОНИЧЕСКИЙ ВИД МАТРИЦ
133
всегда можно считать, что это единичный вектор;
gabWaWb = 1 (а, Ь=1,... , 6); отсюда следует, что
2
= о,
s=l s s
s=l s
A9.4)
Введем понятия степени параллелизма и степени орто-
ортогональности бивекторов и соответствующие обозначения.
Пусть даны два, вообще говоря непростых, бивектора
и поэтому (при п = 4) принадлежащих плоским пучкам
размерности <4. Если пучки, в которых лежат бивекто-
бивекторы, имеют к общих направлений, то будем говорить,
что степень параллелизма этих бивекторов равна — , где
s — размерность того из двух пучков, которая меньше.
Точно так же, если эти бивекторы лежат в плоских
пучках ер и eq (p^Cq) и если в ер существует s неза-
независимых направлений, ортогональных к е^ (т. е. ко всем
направлениям ei;), то будем говорить, что эти бивекторы
— ортогональны.
*
Покажем, во-первых, что бивекторы Va$ и Va& про-
i i
стые, т. е. лежат в двумерных плоских пучках. Для
того чтобы кососимметрическии тензор иа& (бивектор)
был простым, т. е. равнялся бы альтернированному
произведению двух векторов t)I>yP], необходимо и доста-
достаточно (для п — 4), чтобы выполнялось условие
и"и23 + u2iasl + u3iu12 = 0. A9.5)
Разла га я определитель
и1 и2 и3 и*
2 2
Ul U'
1 1
U1
2
2 2
7,3 „4
1 1
= 0
по минорам первых двух строк, получим A9.5). Наоборот,
134 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. III
если A9.5) имеет место, то всегда можно найти два
вектора т\а и va такие, что uaP = т^0^; для п — А это
проверяется непосредственно. Записывая A9.5)
и Va&, убедимся, что оно удовлетворяется в силу первого
+
из условий A9.4): каждый из бивекторов Va&' и FaP лежит
1 1
в двумерном плоском пучке.
Покажем, что эти бивекторы -у - параллельны. Они
не могут быть -^ - параллельными, так как тогда их ком-
компоненты были бы пропорциональными и в силу этого
обращались бы в нуль. Они не могут быть также и
-к--параллельными, так как тогда Wa& был бы простым
г 1
бивектором, но в этом случае условие A9.5) противоре-
противоречило бы A9.4). Следовательно, остается только возмож-
0
ность -г? -параллелизма.
2
Эти бивекторы у-ортогональны, т. е. любой вектор,
лежащий в плоскости Va$, ортогонален любому вектору,
1
*
лежащему в плоскости бивектора F™P. Для этого нсоб-
i
ходимо и достаточно, чтобы при любых аир имело
место равенство (см. задачу 6 § 19)
KapFP* = O.
i t
Легко убедиться, что это условие является следствиемA9.4).
Рассмотрим простой бивектор FaP. Его норма вслед-
ствие A9.4)
з
В плоскости этого вещественного бивектора всегда можно
выбрать два вещественных, ортогональных и неизотроп-
неизотропных вектора ца, уа. Тогда норма этого бивектора может
§ 19] КАНОНИЧЕСКИЙ ВИД МАТРИЦ 135
быть также выражена в виде 2цаг\аухух. Следовательно,
эти два вектора имеют нормы одного знака. Имея в виду
сигнатуру формы ( \-) и закон инерции при веще-
вещественных преобразованиях, можно утверждать, что нормы
этих двух векторов меньше нуля. Перенормировав эти
два вектора, их можно принять за векторы |а и |а орто-
2 3
репера.
* аЭ
Точно так же в плоскости V определим два орто-
1
тональных вектора, вещественных и неизотропных, но
* *
уже с нормами противоположного знака, так как gabVaVb <0;
1 1
эти векторы назовем |а и |а. В этой неголономной системе
1 4
отнесения
gap _|_ (ga0j \уа& _ gap __ jgap_
1 14 23 ' 4 14 23
Заметим, что орторепер {|а} выбрал лишь с точностью
до вращения в плоскости {||} и лоренцева вращения
2 3
в плоскости {^}. Так как Wa$ должен быть ортогональ-
14 2
ным к Wa& (см. § 9), то
2 24 31 " 34 12
Пользуясь указанным выше произволом, не меняющим
вида Wa& и, следовательно, Wa&, всегда можно обратить v2
1 2 ^
в нуль, а ц2 в 1 (см. задачу 1 в этом параграфе). Тогда,
учитывая еще и ортогональность Wa$ к двум первым
з
бивекторам (в /?6), получим:
g | ^
1 14 23 2 24 31 ' 3 34 12
и, вследствие комплексной сопряженности,
4 t 5 28
136 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. Ш
Теперь, записывая условия A9.2) для каждого из этих
бивекторов и учитывая, что ?а = dp (а, р — 1, . . ., 6), без
труда найдем, что
ты = oef m3t = nal = 0 (s, t ± ), nss = р„, (* = 1, 2, 3),
где а, и р\ — вещественные и мнимые части стационарных
кривизн Т1 (корней характеристического уравнения). Сле-
*
довательно, для пространств типа Т, матрица (Rab)
(a, b = 1, . .., 6) в некотором неголономном орторепере
имеет следующую каноническую форму:
'М N\ м (I' а°0 ^ N-№1 ^
i \ 0 б а3 /' \ О О I
A9.6)
где
з з
2«^-^ SP--0- A9-7)
В этом случае имеется четыре независимых параметра,
определяющих инвариантным образом структуру простран-
ства; это максимальное число, так как для Т, и Т3 оно
будет меньше. *
2. Пространства Т.2; характеристика Х-матрицы
[2 1,21]. Как было показано выше, за собственные век-
векторы и инвариантные пучки Я-матрицы можно взять соб-
собственные векторы и инвариантные пучки матриц Q (X)
и Q(X). Отсюда следует, что достаточно изучить, напри-
например, Я-матрицу Q (X), имеющую элементами комплексные
числа, и характеристику [2 1]. При такой характери-
характеристике тензор
трехмерного пространства (см. § 9) имеет одно собствен-
собственное неизотропное направление
= 0, A9.8)
5 I'Jl КАНОНИЧЕСКИЙ ВИД МАТРИЦ 137
одно ортогональное к W' изотропное собственное напра-
направление W1
2
(Pu-bgii)WJ=0 A9.9)
и, кроме того, существует изотропный вектор W', орто-
3
тональный к W3 и не ортогональный к W1, который вместе
1 2
с W] образует инвариантный пучок {W, W) тензора р-^,
2 2 'Л
что выражается соотношением
{Pa-bguW'-QWi, A9.10)
2 3 Л
где q — некоторый скаляр, отличный от нуля (иначе W
з
также определял бы собственное направление); его выбор
в остальном произволен. Произвол этот является след-
следствием того, что W1 и ¦ W'1, будучи изотропными, "могут
2 3
быт* умножены па любое число, отличное от нуля, без
изменения нормы.
Всякое собственное направление или пучок тензора pij
будут определять собственное направление и инвариант-
инвариантные пучки Rah в Нв; все эти векторы будут иметь струк-
структуры A9.3), как показано в начале этого параграфа.
Пусть корню А, отвечает простой элементарный дели-
1
тель (X — X) ^-матрицы и собственное направление, опре-
1
деляемое бивектором Wa$. Так как этот бивектор неизо-
1
тропный, то к нему применимы все рассуждения, прове-
денные выше для W в случае пространств 7',. Следова-
1
тельно, можно выбрать такой вещественный орторепер,
определяемый с точностью до вращения в двумерной
плоскости {11} и лоренцева вращения в [??}, относи-
2 3 1 1
тельно которого
! 1/. 2 Я
138 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. III
Тогда вследствие ортогональности W к W и W получим:
12 3
W<# = fxs (g«* + tgap) + vs (g«P + igapj (s = 2, 3).
s 24 31 34 12
Условия изотропности этих бивекторов приводят
к соотношениям
va = e2i\i2, v3 = е3г>3,
где е2 и е3 равны ± 1. Записывая также тот факт, что W
г
и W не ортогональны, получим еа = — е2. Следовательно,
з
можно, например, положить:
24
= а
fga|
24
31
31
34
5
ig«4
34
12
4
}
12
где а — произвольный скалярный множитель Ф 0. Запи-
Записывая условия, аналогичные A9.8), A9.9) и A9.10), но
уже для тепзора Rab в Re, получим:
A9.11)
Чтобы завершить нормировку изотропных векторов,
можно, например, положить а— 1, после чего канониче-
канонический орторепер будет определен без какой-либо степени
свободы. Так как ?аР —> Ъ,а = 5q, а тензор gab имеет вид
Р<2 0
A8.3), то, полагая в A9.11) а= 1, . . ., 6, получим систему
уравнений, из которой без труда определим все компо-
непты Rab. Они будут выражаться через вещественные
и мнимые части стационарных кривизн:
1 А 4 a
*
Таким образом, получаем, что для пространств Т2
канонический вид матрицы (Rab) может быть предста-
§ 19] КАНОНИЧЕСКИЙ ВИД МАТРИЦ
влен в виде:
139
О
М = ( 0 а3 + 1
,0 О
О
1
где
A9.12)
A9.13)
3. Пространства Т3; характеристика [3,3]. Для такой
характеристики тензор pij имеет одно собственное напра-
направление Wi и, кроме того, трехмерный инвариантный
пучок, определяемый векторами {W, W, W}; эти векторы
1 2 3
должны удовлетворять условиям (см. § 9)
(Рн -
= 0. (Ри -
= ogijWj,
2> 1
A9.14)
и не ортого-
где о" и х — произвольные числа, отличные от нуля,
и i, f — 1, 2, 3. При этом вектор W* неизотропный, a.Wl изо-
а з
тропный. Кроме того, W} ортогонален к W
1.5 2
нален к W1, a W1 ортогонален к Ws.
3 2 3 .
Так как Wa& — неизотропный бивектор, то, как и в двух
2
предшествующих случаях, выбирая соответствующим
образом репер с двумя степенями свободы, можно этот
бивектор записать в виде:
24
31
Тогда для бивекторов Wa$ и Wa?>, записывая указанные
1 3
выше условия ортогональности и изотропности, получим
140
ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ Ггл. lil
выражения
i
= Q
i
5 + ? ?, Q {
23 34 12 3 14 23 34 12
где q — любое число, отличное от нуля. Далее исследо-
исследование ведется по той же схеме, что и для предшеству-
* *
ющих типов пространств Тг и Т%. Записываем условия,
аналогичные A9.14), но уже в вещественном пространстве/?6,
фиксирующие тот факт, что Wa — собственный вектор Rab,
а векторы Wa и Wa вместе с Wa определяют инвариант-
2 3 1
ный пучок тензора Rab. Эти условия суть:
(Кь -
где а и т
== 0, (Rab - Xgab) W" = agab W\
A9.15)
ab4ab) g(xb
1 3
числа, отличные от нуля.
Так как бивектору W°P в данной точке Ts отвечает
0Т
п /?6 вектор Wa, а для координатного орторепера в Re
р
?°Р *--•¦ ?а = dp, то, записывая A9.15) при а, Ъ — 1, . . ., 6,
f\ p
получим систему, состоящую только из девяти незави-
независимых уравнений, которые, если Rab выразить через тц
и п1}, имеют вид:
in,о 4- im.i3 — гс23 = О,
тп +
42
'|3
n
«¦12
*22
'12
= — a.
гп22 = — К.
-f !Иц —
4- гЩг —
4- г^!3 —
«23 == —
«зз = г'^.
A9.16)
где А, == a 4- Ф — один из двух возможных комплексно-сопря-
комплексно-сопряженных корней уравнения | R,lh — Xgah | = 0, а числа а
КАНОНИЧЕСКИЙ ВИД МАТРИЦ
141
и т отличны от нуля, а в остальном произвольны. Этот
произвол возникает в силу произвольности числа о
и является следствием изотропности векторов Wa и Wa.
1 3
Для того чтобы определить орторепер однозначно, поло-
положим, например. а=±1.
Решая после этого систему A9.16) и имея в виду,
что
3=1
n6s — 0> получим:
= 2, C = 0, а = 4.,
а канонический вид матрицы (Rab) для пространств Т3
выражается соотношениями
М N "
(Л
1 -4
0
О —
> A9.17)
Ч 3/
Единственный всегда вещественный, корень уравнения
Rab — kgab j = 0 равен ^- , откуда и следует сделанное
в предыдущем параграфе замечание о вещественности
корней и базисов элементарных делителей для про-
пространств Т3.
Подытоживая результаты, получим, что имеет место
теорема: для каждого из трех возможных типов про-
*
странств Тг (г = 1, 2, 3) существует вещественный орто-
орторепер, относительно которого ортогональные составля-
составляющие тензора кривизны определяются каноническими
*
формами матриц (Rah), которые дляТг имеют вш?A9.6)
при условиях A9.7), для 7'2 имеют вид A9.12) при
142 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. III
*
условиях A9.13) и для Т3 — A9.17); орторепер во всех трех
случаях определяется однозначно.
Этот результат получен методом, который нигде
не опирается на предположение v. ф 0. Следовательно,
полагая к = 0, автоматически получим аналогичный
результат для пространств, определяемых уравнением
/?ар = 0. Таким образом, имеет место также теорема:
канонический вид матрицы {Rab), определяющей ортого-
ортогональные компоненты тензора кривизны для Ti, опреде-
определяемых полями тяготения в свободном пространстве,
будет
(М N
где для
для Т2
A9.19)
для Т3
/0 0 0\
iv= 0 0 -1 . A9.20)
\о -1 о/
Полученные здесь канонические формы определяют
конкретное содержание основной теоремы, доказанной
в § 18, и играют основную роль при инвариантной
характеристике пространств Эйнштейна в случае п = 4
и сигнатуры ( [-). Три указанных типа Тг допу-
допускают, очевидно, более детальную классификацию: слу-
случай кратных корней или случай вещественных и чисто
§ I9J КАНОНИЧЕСКИЙ ВИД МАТРИЦ. 143
мнимых корней и т. д. Это будет сделано далее по мере
надобности.
Относительно метода доказательства можно сделать
следующее замечание. На первый взгляд, поскольку
*
известна характеристика Тг, казалось бы возможным
сразу выписать канонический вид матриц (Rab), приме-
применяя общую теорему § 9. Однако этого сделать нельзя,
так как в качестве допустимых линейных преобразований
можно брать лишь те, которые определяются матрицами
где >1ц — коэффициенты некоторого вещественного орто-
ортогонального преобразования в данной точке Р простран-
пространства Tv Следовательно, можно пользоваться преобразо-
преобразованиями некоторой подгруппы всей группы ортогональ-
ортогональных вещественных преобразований шестимерного про-
пространства, оставляющих инвариантной метрику с сигна-
сигнатурой ( !- + +)•
Анализ известных примеров пространств Эйпштейна
(см. гл. IV) показывает, что подавляющее число их при-
принадлежит к типу 7\. Только в последнее время главным
образом при изучении Tit допускающих ту или иную
группу движений (гл. IV), были определены простран-
пространства Т2 и Т3. Необходимо отметить, что с этими про-
пространствами связаны интересные физические теории,
как, например, проблема гравитационной радиации и не-
некоторые другие (см. [177], [263], [265], [271], [291], [323],
[293], [294], [296], [297], [300], [321], [324], [342], [343],
[344], [353], [354], [362]).
Задачи
1. Доказать, что в случае Т% (Ra^ — 0) существует
такое векторное поле 1а, что
(Бель [291]).
2. Доказать, что для пространств Г3 (Ra$ = 0) суще-
существует векторпое поле 1а, удовлетворяющее условиям
= 0
144 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛКИ ТЯГОТЕНИЯ [гл. Ш
где еа$о%—дискриминантный тензор пространства; поле/01
определяет изотропные геодезические линии пространства
(Бель [299]).
3. Доказать, что для пространств Ts (i?ap = 0), кроме
поля 1а, определяемого в задаче 2, существуют еще век-
векторные поля ha, ка и га, образующие вместе с /а систему
независимых векторов и связанные условиями
1<Ча _ rara = laha = laka = haka ¦=¦ hara = kara = О,
haha = кака = — iara = — 1.
Эти поля удовлетворяют условиям:
4. Показать, что в случае 7'3 (i?ap = 0) для орторепера,
определяющего формулы A9.20), векторы Z, /г, /с, г имеют
компоненты
/«@,1,0,1), Л«A,0, 0, 0), *в@, 0, 1, 0),
/•«(о, -1, о, 1),
и, как следствие этого, получить выражение
= — 4 (/
5. При выполнении условий задач 3 и 4 дивергенция
изотропно-геодезического векторного поля /а равна нулю:
1% = 0.
0. Доказать, что простые бивекторы тогда и только
2
тогда — -ортогональны, когда
I 2
([91], стр. 391).
§ 20J КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ 145
. § 20. Классификация полей тяготения общего вида
Теорема о существовании трех типов пространств
Эйнштейна с сигнатурой (— — —-+) и канонические
формы компонент тензора кривизны для некоторого него-
лономного орторепера, определяемого в каждом из трех
возможных случаев однозначно, были получены в 1949 г.
Этот результат, нашедший физические приложения [258],
[263], [299], [265] главным образом при исследовании
свободных пространств, когда тензор энергии-импульса
Уа0 = 0, оставлял открытым вопрос о том, что можно
сказать в общем случае, когда Та$ Ф oga$. Рассмотрим
теперь этот общий случай [287]. Естественно предполо-
предположить, что такая классификация в общем случае должна,
во-первых, при Тац—> oga$ приводить к результатам §§ 18,
19 и, во-вторых, должна учитывать алгебраическую струк-
структуру не только тензора кривизны пространства, но и тен-
тензора энергии-импульса. Будем далее пространства, отве-
отвечающие полям тяготения общего вида, обозначать симво-
символом Т.
Рассмотрим геометрию пространства Г, определяемого
некоторым распределением и движением материи, с метри-
метрическим тензором gaf,{%), удовлетворяющим уравнениям
поля Эйнштейна
^Л2' B0.1)
где Я — постоянная и Та$ — тензор энергии-импульса мате-
материи. Свертывание формулы B0.1) устанавливает зависи-
зависимость между R и Т:
ХТ= —Л. ¦ B0.2)
Сконструируем четырехвалентный тензор
del ^
), B0.3)
который, как это следует из определения, обладает свой-
свойствами
•З'аЭуб^ —S$ay6 = —<Sap6y — SySap B0.4)
и
Saimi = 0, B0.5)
10 А. 3. Петров
146 ОВЩДЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. IIJ
совпадающими с известными свойствами тензора кривизны
пространства VQ. Свертывая B0.3) по индексам р1, 6,
получим:
Say — hTay Л~~2 Tgay = XTaY ^- gay. B0.6)
Определим теперь новый четырехвалентный тензор:
def
Ра$у6 = Ra&\6 — ^сфуб + а (So.'S g&& — ga6gpv) > ( 20.7)
который назовем тензором пространства-материи. Он
обладает следующими свойствами:
1) Из свойств B0.4) и B0.5), которым удовлетворяет
и тензор кривизны, следует:
Ра$у6 == — -Ррауб = — -PagS? = ^ба0 B0.8)
И
> О- B0.9)
2) Его свертывание по индексам Р, 6 приводит вслед-
вследствие B0.6) к соотношению
т. е. в силу уравнений поля B0.1)
B0.10)
3) Если задано распределение и движение материи,
т. е. тензор энергии-импульса Та$ и тензор пространства-
материи Раруб? то с точностью до задания скаляра а опре-
определяется кривизна пространства.
4) Задавая метрический тензор, скаляр а и тепзор Pa{iy6,
можно однозначно определить тензор энергии-импульса.
5) Если тензор энергии-импульса Та$ = 0 и сг = О, то
Ра&уб определяет кривизну свободного пространства-вре-
пространства-времени.
6) Тензор Рау удовлетворяет уравнениям, аналогичным
уравнениям поля тяготения для пространств Эйнштейна
(i?ap —xgttp), и в этом смысле является аналогом тензора
Риччи.
Тепзор пространства-материи B0.7) представляет своим
первым слагаемым кривизну пространства, а второе ела-
§ 20j КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ 147
гаемое отражает распределение и движение материи. Мы
свяжем классификацию полей тяготения с классифика-
классификацией алгебраической структуры тензора пространства-
материи.
Тот факт, что Ра$уб обладает свойствами B0.8), B0.9)
и B0.10), позволяет решить задачу, если воспользоваться
методом, применяемым при классификации пространств
Эйнштейна в §§ 18, 19. В самом деле, так как в §§ 18, 19
речь шла об алгебраической классификации, то вопрос
о дифференциальных свойствах тензора Ра$уб не играет
в данном вопросе никакой роли. Всеми же алгебраиче-
алгебраическими свойствами тензора кривизны тензор Ра$уь обла-
обладает так же, как его комитант Рау обладает свойствами
тензора Риччи /?ар. Следовательно результаты, получен-
полученные в этих параграфах, автоматически могут быть рас-
распространены на любой битензор, обладающий свойст-
свойствами B0.8), B0.9) и B0.10), и, в частности, на тензор Ра&уб-
Для этого достаточно в формулах A9.6), A9.7), A9.12),
A9.13), A9.17) заменить к через o) = i? + 3o\
Таким образом, пользуясь результатами, полученными
в §§ 18 и 19, получаем следующие теоремы, решающие
вопрос о классификации полей тяготения общего вида
в смысле алгебраической структуры тензора пространства-
материи [287].
Теорема 1. Для любого орторепера в точке про-
пространства Т, определяемого полем тяготения, матрица(РаЪ)
в бивекторном пространстве симметрично-сдвоенная:
B0.11)
M = (mti); N=(nti) (i. /=1, 2, 3),!
причем трехмерные матрицы М и N симметрические:
я»Гу] = лря = 0 B0.12)
и удовлетворяют условиям
|>и=-со, 5>н = 0. B0.13)
i=l i=i
Используя три лоренцевых и три пространственных
вращения, покажем далее, как и в § 19, что имеют место
еще следующие две теоремы.
10*
148 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. III
Теорема 2. Существует три и только три типа
полей тяготения общего вида в смысле алгебраической
структуры тензора пространства-материи. Эти типы
отвечают соответственно трем возможным типам
характеристик 'k-матрицы (Pab — hgab) в бивепторном про-
пространстве:
A) Т1 [1 1 1, ГТТ], B) Т2 [2 1, 21], C) Т3 [C, 3)].
Для полей тяготения Тх является характерным суще-
существование простых элементарных делителей и отвечаю-
отвечающих им шести неизотропных бивекторов W *—*Wa (две
S S
комплексно-сопряженные тройки), взаимно ортогональных
между собой и являющихся собственными вектора-
векторами РаЬ в i?0:
В случае полей типа Т2 имеем два непростых элемен-
элементарных делителя Я-матрицы (Раь~~^ёаь) с комплексно-
сопряженными элементарными делителями (Я — Я3J,
(А, — ^sJ, которым отвечают комплексно-сопряженные,
ортогональные между собой, изотропные (WaWa — 0)
S S
собственные векторы Wa, Wa и два неизотропных, ком-
1 4
плексно-сопряженных, ортогопальных между собой и к век-
векторам Wa, Wa вектора Wa, Wa, так что
14 2 5
PabWb^%Wa (*=1, 2, 4, 5)
s з s
И
*. = <*. ±'фв, ^=^ (i=l, 2).
s i i + 3
Наконец, в случае полей Т3 имеется только два непро-
непростых элементарных делителя (Я —ЯK, (Х — 'кK с одним
i i
и тем же вещественным базисом Xj = 5- . Этим дели-
О
телям отвечают два взаимно ортогональных изотропных
собственных вектора Wa, Wa.
1 k
§ 20J
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
149
Теорема 3. Для полей тяготения Тг матрица (РаЬ)
для некоторого неголо ножного орторепера, определяемого
однозначно, имеет вид:
М
N
Af = О а2 0
/Рх О О
N = О Ра О
\О О р3,
B0.14)
где
3
?'af=-co,
полей Т2:
О
¦ = |0 а2+1
,0 0
B0.15)
B0.16)
B0.17)
и для полей Т3:
Af =
1 —
1 ~ 3
о \
о
\
0 0-
(О
т/
7V=
B0.18)
Канонический вид для компонент тензора кривизны
пространств Эйнштейна A9.6), A9.7), A9.12), A9.13),
A9.17) получается соответственно из B0.14), B0.15),
B0.16), B0.17), B0.18), когда тензор энергии-импульса
Ta^ = ogap, и в этом смысле, эти компоненты можно рас-
рассматривать как некоторый предельный случай. В част-
частности, когда Тар = 0, a = 0, получим соответствующую
классификацию для полей тяготения свободного простран-
пространства, для чего в B0.14), B0.16), B0.18) достаточно поло-
положить со = 0.
150 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. III
Полученные здесь канонические формы определяют
конкретное содержание теоремы 2 и должны, по-види-
по-видимому, сыграть роль при инвариантной характеристике
полей тяготения реального мира.
Три указанных типа полей тяготения Т{ допускают,
очевидно, более детальную классификацию; можно, напри-
например, выделить случаи кратных или вещественных Я8,
можно также дополнить эту классификацию классифика-
классификацией (Тар — "kga^l и искать логическое пересечение двух
классификаций; такая классификация может быть осу-
осуществлена, если воспользоваться результатами § 9.
Относительно полученной выше классификации необ-
необходимо сделать следующее замечание.
Конструкция тензора пространства-материи Ра$уб
такова, что о — произвольный скаляр, очевидно, что его
выбор следует уточнять, исходя из физических сообра-
соображений, В частности, если выбрать
гт- 1 R
то в B0.14) нужно произвести замену ш—>0, и мы при-
придем к формам, аналогичным A9.18), A9.19), A9.20),
полученным для свободного пространства.
Так как для несвободных пространств (Тар Ф 0) основ-
основную роль играет тензор энергии-импульса, то кажется
естественным и необходимым классифицировать поля,
изучая тензор, включающий тензор кривизны простран-
пространства, и тензор, определяемый тензором Та$, каким
является тензор Ра$у(,.
Задачи
1. Определить тип пространства, которое получается
внутри несжимаемого жидкого шара, когда метрика
имеет вид:
ds* = - dx12 - dx& -dx&-
{x^dx^jx2dx2{x»dx8J ,
где a ¦= rn 1/ — , kn — значение h oa поверхности жара.
§ 21] О КОМПЛЕКСНОМ ПРЕДСТАВЛЕНИИ ТЕНЗОРОВ 151
7г2=1— —^—. Тензор энергии-импульса задается в виде:
2. Рассмотреть случай внешней проблемы при усло-
условиях предыдущей задачи.
§ 21. О комплексном представлении тензоров
пространства Минковского
Канонические формы для ортогональных компонент
тензора кривизны и тензора пространства-материи были
получены в §§ 19 и 20 при помощи отображения бивек-
торного пространства на трехмерное метрическое комплекс-
комплексное плоское многообразие. Такое отображение имеет само-
самостоятельный интерес, так как позволяет подойти к иссле-
исследованию более широкого круга вопросов.
На этом пути можно, например, ставить вопрос об
алгебраической классификации любых битензоров в бивек-
торном пространстве и пытаться подойти к решению
других проблем.
Такого рода вопросы рассматривались в работах [208]
и [316], в которых обследовались так называемые бипла-
нарные пространства, совпадающие по существу с бивек-
торными многообразиями, как это будет показано ниже.
Таким образом, в этих работах при несколько иной тер-
терминологии исследования проходят так же, как и выше;
получаемые при этом результаты даются в этом пара-
параграфе в кратком изложении.
Назовем векторное пространство В2п четного числа
измерений бипланарным, если в нем задан тензор е?,
определяющий так называемую абсолютную инволюцию,
удовлетворяющий условиям
еа8йЬ==-5а B1.1)
я характеристическому уравнению вида
в2 + 1 = 0, е« = 0
с корнями г, — I кратности п. Этот тензор позволяет
всякому тензору сопоставить сопряженный тензор, который
152 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. III
будем отличать от данного, надчеркивая его:
хь =
Всегда можно выбрать векторы аа так, чтобы они вместе
со своими сопряженными образовывали базис независи-
независимых векторов, который далее будем называть канони-
каноническим базисом. Введем в рассмотрение следующие ком-
комплексные комбинации:
которые, как легко видеть, удовлетворяют соотношениям
= -iAca,
Эти комплексные конструкции можно использовать в каче-
качестве связующих величин при отображении битензоров про-
пространства Вгп на комплексное пространство п измерений.
Именно для этой цели такого рода конструкция была приме-
применена в работе [261] (стр. 247), где в бивекторном простран-
пространстве i?6 вводится тензор раЪ — gab ± ie"b, совпадающий
в /?6 с Aab — gbcAc • Это отображение осуществляется по
схеме
Aa = A%ab, /P= -iAa.
Для того чтобы убедиться, что комплексное пространство,
на которое отображается В2п, будет иметь п измерений,
достаточно заметить, что линейная зависимость между
векторами в В2п:
т т
приводится после отображения к соотношению
то
Если а, а —векторы канонического базиса, то они неза-
й h
висимы, так же как и отвечающие им векторы А. Отсюда
к
§ 21] О КОМПЛЕКСНОМ ПРЕДСТАВЛЕНИИ ТЕНЗОРОВ 153
"следует, что всякие ге-j-l комплексных векторов А зави-
k
симы и, следовательно, отображение происходит на п-мер-
ное комплексное пространство, которое назовем Ап.
Пользуясь Дь, всякому тензору 1?аъ'... пространства В.2п
можно сопоставить тензор Та'ь!.. в Ап, где
Если же в этой формуле одну или несколько связующих
величин А'ь заменить через Дь, то тензору tic.'., будет
сопоставлена некоторая величина, которую можно рас-
рассматривать как связующую величину, принадлежащую
пространствам Ап и Ап, которые сопряжены друг другу.
Эти величины далее называются эрмипгианами в силу их
сходства с эрмитовыми формами в смысле закона пре-
преобразования.
Следовательно, каждому тензору из B.in можно сопо-
сопоставить тензор и набор эрмитианов из Ап. В частности,
для тензора второй валентности получим тензорный
образ в Ап
л
Aab=-2&Ca(acb— acb)
и эрмитов образ
где
Будем называть тензор прощензором, если его эрмитов
образ при отображспии равен нулю; для этого необходимо
и достаточно, чтобы
В случае же, если равен нулю тензорный образ, то будем
говорить о проэрмшпиане с необходимым и достаточным
условием
= a
ab-
Перейдем к пространству Минковского, сигпатура
которого ( -\—|—Ь — ) или ( 1- ) вполне характе-
154 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. III
ризуется также условием
gip gjp gkp Sip
giq gjq ghq glq
eijhl epqrs —
gir gjr ghr gir
gis gjs gks gis
(i, /=1, 2, 3, 4),
связывающим компоненты дискриминантного кососимметри-
ческого тензора е^к1 с единственной существенной ком-
понентоД ?1234 = "V\gI-
Установление в § 18 отображения любой бивекторной
величины пространства Минковского на битензоры локаль-
локального бивекторного пространства е6, как уже отмечалось
там, может быть записано при помощи связующих величин:
иа = riij-u1' (а = 1, ...,г; i, / = 1 п), r\fj = — ц%.
Так как это отображение однозначно, то
где
Метризованное бивекторное пространство /?6 получится
введением тензора (см. § 18)
a ki
gab = Ца Ць giiKU gijhl — §Ц[Ъ.д1уу
a ei;- отвечает битензор
Так как
то 8ь мояшо считать тензором абсолютной инволюции
в i?6. Теперь ясно, что такое В2п совпадает с введенным
выше бивекторным пространством, причем
т. е. метрический тензор является протензором. Тензор-
Тензорный образ gab, определяемый формулой
будем считать метрическим тензором пространства
которое, таким образом, становится комплексным /?3.
§ 21]
О КОМПЛЕКСНОМ ПРЕДСТАВЛЕНИИ ТЕНЗОРОВ
155
Для всякого битензора пространства Минковского aijkl
можно построить сопряженный и показать, что для них
имеет место тождество
B1.2)
B1.3)
a
pqij
где
«pi =
pqi>
a\ = 0.
Если а?-р = 0, то вследствие B1.2)
aijpq apqij>
каждое из этих условий характеризует битензоры, кото-
которые называются далее изотропными. Битензор, удовле-
удовлетворяющий условиям
apqij — aijpqi
наз ывается простым, а условия
aijkl = akli3i aijkl= ahlij
будут определять соответственно симметрический и косо-
кососимметрический битензоры.
При отображении на бивекторное пространство усло-
условия симметрии, косой симметрии, изотропности, простоты
и условия, характеризующие нротензор и проэрмитиан,
запишутся соответственно следующими равенствами:
аЪ
ааЬ — —
ааЬ^
Это позволяет установить связь между этими свойствами
при помощи следующей элегантной формулировки: если
битензор удовлетворяет условиям, указанным в двух
строках столбца таблицы
B1.4)
симметрический
простой
проормитиан
изотропный
протеизор
кососимметрический
простой
протензор
изотропный
проэрмитиан
156 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. III
то он удовлетворяет и третьему условию, указанному
в том же столбце.
¦ Рассматривая тензор кривизны риманова пространства
с локальной метрикой Минковского, видим, что он будет
симметрическим битензором. Если же, кроме того, Vi
является пространством Эйнштейна, то-его тензор Риччи
JRij = —Rkkgij, т. е. в силу B1.3) битензор Ri:jhl изотроп-
изотропный. Тогда из B1.4) при помощи указанного правила
приходим к выводу: для того чтобы V4, с метрикой
Минковского в точке, было пространством Эйнштейна,
необходимо и достаточно, чтобы его тензор кривизны
был протензором, т. е. отображался в двухвалентный
симметрический тензор комплексного i?3.
Отсюда вопрос о приведении тензора кривизны про-
пространства Эйнштейна к каноническому виду, кроме ука-
указанной в § 19, допускает следующую интерпретацию.
В комплексном /?з приводится к каноническому виду
пара симметрических тензоров Rab й Gab, являющихся
соответственно тензорными образами такого отображения
для тензора кривизны Ra$y& и тензора gaygpu — gatgfiv
Для i?3 при этом можно воспользоваться хорошо изве-
известной классификацией ([90], стр. 280), согласно которой
две формы
из которых первая неособенная, приводятся к одному из
трех видов:
2 2 * * + сх3*,
I.
И. '
III. 1
ф =
Ф =
-2xS
¦¦2х*
+ i
+ :
+ -
V2 +Х3\
r"' + ^,
х- -\- xd ,
ф = ах1 -f
Ф = 2аж1ж2
Ф = 2яжхж2
3* + 2ах1х3.
После этого необходимо совершить обратное отображение
из R3 в i?e, которое и приведем к каноническим формам
§ 19 с точностью, впрочем, до некоторых преобразований
Лоренца и трехмерных вращений, которые в i?6 индуци-
индуцируют некоторые линейные преобразования.
§ 22] . БАЗИС ПОЛНОЙ СИСТЕМЫ ИНВАРИАНТОВ 157
Задачи
1. Показать, что группа преобразований Ап, отвечаю-
отвечающая группе преобразований В2п, является общей аффин-
аффинной группой и-мерного комплексного пространства.
2. Показать, что вследствие B1.1) единичный тен-
тензор 6а является протензором, а в пространстве Ап ему
отвечает величина Д^, которая также является единичным
тензором Ап [316].
3. Показать, .пользуясь определением сопряженного
тензора, справедливость тождества B1.2).
§ 22. Базис но л ной системы инвариантов второго
порядка пространства F4
При исследовании полей тяготения общего вида
является интересным вопрос об инвариантной характе-
характеристике поля при помощи некоторой системы инвариан-
инвариантов, которые представляли бы собой рациональные функ-
функции компонент метрического тензора ga$ и его производ-
производных #у?аР,.... ^y ¦¦¦Ybg'ap, которые мы будем называть
инвариантами к-го порядка. В такой постановке проблема
до сих пор не получила решения. Первым этапом реше-
решения этой задачи является задача определения базиса пол-
полной системы инвариантов второго порядка; последние,
естественно, предполагают, что компоненты метрического
тензора и допускаемые преобразования принадлежат
к классу С% функций. Эта задача решена в совместной
работе Жеэньо и Дебеве ([250], стр. 114— 123) и неза-
независимо от них П. И. Петровым [270]. Методическое
улучшение, внесенное в работе [318], учитывается в при-
приводимом ниже изложении вопроса, где предполагается,
что сигнатура метрики имеет вид ( Ь )•
Рассмотрим некоторую точку пространства F4 и отве-
отвечающее ей бивекторноо пространство i?6 и сопоставим
тензорам gayg&6 — ga&gpy, Ка$у& и еаэув в пространстве i?6
тензоры gab, Rab и еаЪ: здесь eaPv6 — дискриминантный
тензор пространства F4. Этим величинам пространства Re
в свою очередь могут быть сопоставлены величины трех-
трехмерного комплексного пространства R3. Это отображение
может быть осуществлено двояким образом и особенно
158 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. Ш
просто получается, если воспользоваться тензором про-
пространства F4 ([261], стр. 247-250):
а[7 р]в ,
О О —*—
р
О О
которому в /?6, если взять его смешанные компоненты,
отвечают тензоры
def * _ def л
M = \{bl + ieca), M = ~(dca-ieca). B2.1)
Пользуясь тензором Да, всякому тензору ааЬ (а, Ъ = 1, . . ., 6)
сопоставим его тензорный образ
АаЪ = AcaA^cd = | Aca (асъ - ась) B2.2)
и эрмитов образ
Л-ь = Д^ДЯа = 1 Да (асЬ + асЬ). B2.3)
где
acb^edce[adl. B2.4)
Тензор Да является единичным тензором комплексного
пространства i?3. Напомним также, что (см. § 21) битен-
зор называется изотропным (или протензором), если он
удовлетворяет условию
Ясфуб — ау6а$ B2.5)
и его эрмитов образ А^ = 0. Битензор назовем простым,
если наряду с B2.4) выполняется условие АаЬ = 0. Про-
Произвольный битензор можно разложить на инвариантные
части, представив его в виде суммы
* о
«ap.vfl = aag,v6 + ааргУъ B2.6)
соответственно простого и изотропного битензоров. Здесь
каждое из слагаемых вполне характеризуется условиями
или
и
о о
B2.9)
§ 22] БАЗИС ПОЛНОЙ СИСТЕМЫ ИНВАРИАНТОВ 159
О 0 0
где асс = 0, вследствие чего aagaY = agY u
Aab = Maeb. B2.10)
Искомый базис должен состоять из инвариантов, каждый
из которых может быть получен в результате полного
свертывания некоторого тензора с метрическим и дискри-
минантным тензорами пространства F4. Рассмотрим сна-
сначала такие величины бивекторного пространства ааЬ и ЬаЪ,
которые являются симметрическими изотропными или
простыми тензорами. В R3 им соответственно будут отве-
отвечать тензоры АаЬ, ВаЪ или эрмитовы образы А-ь, В^.
Вследствие B2.8) будем иметь:
а, следовательно, битензор
СаЭ, уб = ааЭ, с%Ьувах,
если а и Ъ — изотропные битензоры, изображается в R3
тензором
СаЪ = АасВсь. B2.11)
Совершенно так же в случае, если а и Ъ — простые тен-
тензоры и, следовательно, изображаются эрмитианами в i?3,
получим, что тензорный образ Сар, уб в ^з будет
СаЬ = А-В%. B2.12)
Если воспользоваться формулой B2.9), то можно запи-
записать:
CaPlY6 = 2aff[a g№ Ъ™у6 = 2аа[а Ь^1у6. B2.13)
Но так как
то
Са$,у6 = Ьа1Ь[у1а§ш [ар], B2.14)
где символ [сф] означает, что окончательный результат
альтернируется по индексам а, р.
Если предположить, кроме того, что аар = Ъа$, то
ь = 2 (а[а|а| «а[у ёГб]Э] + aa[Y аб]э)- B2.15)
160 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. III
Рассмотрим теперь (см. задачу 1) эрмитиан
2 def _
AcE = sabc?~a-b-cAaaAbb, B2.16)
который получается в результате свертывания тривек-
def
тора 8аЬс = AaLbc пространства Н3 и комплексно-сопря-
комплексно-сопряженного ему тривектора e-g- с эрмитианом. На основании
2
задачи 1 и формулы B2.10) получим, что прообраз Ас-
в V4 будет иметь вид:
аар, ЪЪ = #°Э. va, ox g^, ^ ъ~х
или
««P.Hp^^aVaepiV B2.17)
Так как полученный битензор является прообразом эрми-
тиана, то он простой, и для его вычисления по формуле
B2.9) достаточно знать, чему равняется тензор:
Если заметить, что
y ~ &ffS gy» ~ &PY бб + &6Р б?), B2.18)
то нетрудно убедиться, что
и поэтому окончательно
Пользуясь формулой B2.19), можно теперь построить
систему инвариантов, определяющую искомый базис.
Рассмотрим тензор кривизны пространства и разложим
его на изотропную и простую части:
* о
ap,v6- B2.20)
§ 22J БАЗИС ПОЛНОЙ СИСТЕМЫ ИНВАРИАНТОВ 161
В бивекторном пространстве тензору кривизны отве-
отвечает симметрический тензор Rab, с помощью которого по
формулам B2.2) и B2.3) можно получить в комплексном
R3 тензорный образ ВаЬ и эрмитов образ Sa^. Метрический
тензор gab в RQ является изотропным, в R3 определяет
только тензорный образ Gab. Рассмотрим теперь величины
ВаЬ, S^, Gab и 8obc и образуем при помощи полного свер-
свертывания этих величин систему инвариантов:
2 2.
2 2,
B2.21)
2, 2 2, 2и 2
где
2 2 -
и поднятие индексов производилось о помощью тензора
Gab или комплексно-сопряженного ему тензора Ga^. В си-
системе инвариантов B2.21), как легко видеть, инварианты
iS, $3, S4 вещественны, так как при надчеркивании
индексов, осуществляющем переход к комплексно-сопря-
комплексно-сопряженным величинам, они переходят в себя; инвариант Ву
также веществен, как это будет видно дальше. Осталь-
Остальные инварианты комплексны, и следовательно, если рас-
рассмотреть еще и комплексно-сопряженные инварианты,
получим систему 14 инвариантов.
Для того чтобы доказать полноту системы B2.21),
необходимо показать независимость этих инвариантов.
Здесь необходимо сделать следующую оговорку: число
независимых инвариантов пространства У4 всегда можно
связать с базисами элементарных делителей Х-матрицы
(Rab — hgab) бивекторного пространства, которая уже не
будет вообще симметрично-сдвоенной. Легко видеть, что,
положив возможные характеристики А,-матрицы в основу
классификации У4, получим наряду со случаем [111, 111],
которому отвечает максимальное число независимых ин-
инвариантов, и характеристики, соответствующие непростым
элементарным делителям, например [21111] и т. д.,
которые нельзя рассматривать как частные случаи У4,
11 А. 3. Петров
162 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. Ш
отвечающих характеристике простого типа; мы имеем здесь
по существу различные типы пространств. Это рассужде-
рассуждение становится особенно прозрачным для случая про-
пространств Эйнштейна, когда имеют место три различных
типа пространств Тг(г—1, 2, 3). Ясно, однако, что F4
с характеристикой непростого типа имеет заведомо число
независимых инвариантов второго порядка меньше 14.
Поэтому далее вопрос о полноте будет рассматриваться
только для F4, допускающих максимальное число незави-
независимых инвариантов.
Величины B2.21) являются алгебраическими функ-
функциями 20 существенных компонент тензоров ВаЬ> ВаЬ, S^.
Для доказательства их независимости в случае макси-
максимального числа независимых параметров достаточно иссле-
исследовать матрицу Якоби этих функций в пространстве,
в котором координаты точки определяются значениями
компонент тензоров ВаЬ, ВаЬ, Sa^. Если найдется такая
точка, в которой определитель 14-го порядка будет отли-
отличен от нуля, то в окрестности такой точки всегда най-
найдется точка, в которой он также отличен от нуля. Сле-
Следовательно, независимость будет доказана, если подтвер-
подтвердится, что один из таких определителей 14-го порядка
в одной такой точке не равен нулю. Нетрудно построить
фактически такой определитель (см. задачу 2). Таким
образом, B2.21) составляет искомый базис.
Для того чтобы записать инварианты в пространстве F4,
воспользуемся следующими формулами, в справедливости
которых нетрудно убедиться (см. задачу 3):
2 0 0 0 Urv л-1
аа ту о п yb f,F}aT2 A J
O ?l Ii 4nit0
\ B2.22)
где «'—»—знак соответствия между величинами из R3
и величинами в точке пространства У4. Далее, инвари-
инварианту С„ в i?3 будут отвечать два инварианта в точке про-
пространства F4:
Ц + isahiC%. B2.23)
§ 22J БАЗИС ПОЛНОЙ СИСТЕМЫ ИНВАРИАНТОВ 163
Вещественная и мнимая части этого выражения разли-
различаются тем, что в первом случае свертывание произво-
производится с помощью метрического битензора, а во втором —
с помощью квадр ивектора. Применяя формулу B2.23)
к комбинации величин B2.22), получим базис системы
инвариантов в следующем виде:
Вг = Rc аГ, В2 — Ra ye,Ry ag, B3 = Ra y&R axR Tap, !
I
yR^R'a, (p)
где
„ defOOOO, 0 0 0.0
^ \a\% ya\R
В этой схеме отсутствует инвариант U^ = eaxXvRXvaT,
так как он равен нулю в силу тождества Риччи.
У инвариантов Т\ и Т\ имеются еще слагаемые вида
e^cxRaxa%R\R\ и e^ydRy6aaR\R\R\Rav, которые также,
вследствие того же тождества, обращаются в нуль.
Инварианты Тх и Т3 также упрощаются, так как они имеют
*
слагаемые, в которых содержится теизор i? g, выражаю-
выражающийся вследствие B2.7) через i?6p, где R— скалярная
кривизна, и следовательно, эти члены выразятся через ин-
инварианты низших степеней. Таким образом, искомый ба-
базис определяется 14-ю инвариантами (а.) ф) (у).
Задачи
1. Показать, что метрический трипгензор
def
gap, Y6, \v = glalygblxg-W
изображается в i?6 тривектором 1аЬс, а в J?3 — тривектором
/be-
/belt*
164 ОБЩАЯ КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЙЫИЯ 1гл. III
2. Доказать независимость системы B2.21), исследуя
определитель 14-го порядка, строки которого принимают
значения S2, S3,^, Bj, В%, В3, В.2, В3. Т1г 7^, Т3±_ТЪ T2,
Т3, а столбцы В12, В13, В23, /?12) fi13, R23, Sn, Вг2, Вп,
В22, В33, Sa, S2l, ^зз ПРИ Условии В12 = В13 = В23 = О
-([318], стр. 181).
3. Доказать формулы B2.22) я B2.23) ([318], стр. 181).
4. Показать, что в случае пространств Эйнштейна
простейший базис составляет система инвариантов В2,
В\, В3, В\. Сравнить с результатами § 19.
5. Показать, что для конформно-евклидовых пространств
базис определяется инвариантами Вг, S2, Ss, St. Если
имеем пространство постоянной кривизны, то базис сво-
сводится к одному постоянному инварианту, например R.
ГЛАВА. IV
ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ
В этой главе проводится классификация полей тяго-
тяготения в свободном пространстве, когда уравнения поля
имеют вид i?ag = 0 по группам движений. Теория групп
Ли позволяет подойти к инвариантному изучению этого
важного частного случая.
§ 23. Классификация Тг по группам движений
Рассмотрим некоторое гравитационное поле в свобод-
свободном пространстве, т. е. в такой области, где тензор энер-
энергии-импульса обращается в нуль. Геометрия такого поля
определяется компонентами метрического тензора ga^(x),
заданного относительно некоторой системы координат.
Но при этом ga? (x) описывают не только физические,
«чисто гравитационные» свойства пространства-времени,
по и отражают особенности выбора системы отнесения.
Различные попытки введения «инерциальпых» систем ко-
координат, в которых по замыслу авторов можно было бы
выделить эффект выбора системы координат ([225], стр. 441;
[259]), не получили пока общего признания.
Ввиду этого естественно изучение полей гравитации
связать с инвариантными свойствами метрики, определяе-
определяемой нолем, не зависящими от системы отнесения.
Пусть метрика пространства, определенная в некото-
некоторой системе координат, допускает группу Ли Gr непре-
непрерывных преобразований, сохраняющих метрику. Тогда
этот же факт бзщет иметь место для метрики, заданной
в любой другой системе отнесения. Преобразования этой
группы отображают пространство на себя. Такое отобра-
отображение пространства назовем автоморфизмом; преобразо-
преобразования, сохраняющие метрику, будут движениями в Vn.
В этом смысле каждому полю тяготения отвечает свой
166 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
автоморфизм. Очевидно, что 0 </•<;-^7^ - (<Ю при
п — 4), Gr, понимается как. группа, состоящая из едини-
единицы (тождественное преобразование); при максимальном г
получим пространство постоянной кривизны (простран-
(пространство Минковского в случае п = 4, сигнатуры (— — — +)
и пулевой скалярной кривизны).
Эта идея сопоставления полю геометрии заданного
автоморфизма высказывалась несколькими авторами,
и вопрос сводился к фактическому определению возмож-
возможных групп движения и отвечающих им метрик простран-
пространства-времени; очевидно, эти соображения относятся
не только к случаю свободного пространства, но и к по-
полям тяготения общего вида (см. гл. V). В этой главе ис-
исследуются F4 с сигнатурой (— — — -j-) и уравнениями
поля ЛаЭ = 0 ([261], гл.'II; [180]).
Наряду с изучением пространства-времени с точки
зрения допускаемых им групп движений, имеются иссле-
исследования, в которых рассматривается еопрос о конформ-
конформных бесконечно малых преобразованиях, допускаемых
этим многообразием [233], [236], или группах голоно-
мии [325], [328].
Пусть пространство 1\ (i — 1, 2, 3) допускает движе-
движение с оператором Х = ^ада. Для этого (см. § 10) необхо-
необходимо и достаточно, чтобы |а удовлетворял уравнениям
Киллинга:
«ga* = Sa,p + ip..=O. B3.1)
Для того чтобы Vn допускало группу Gr движений, не-
необходимо и достаточно, чтобы ранг матрицы системы
однородных алгебраических уравнений A0.14) до номера к,
относительно неизвестных ga и 'Е,а,$ при условии B3.1),
был равен ^~ — ?% а добазлоние уравнений A0.14) с но-
номером ft-f-1 не меняло бы его (§ 10).
При классификации Тг (i = 1, 2, 3) по группам движе-
движений прежде всего возникают два вопроса: 1) Пусть 1\
допускает группу движений Gr. Какие значения может
принимать г при заданном i? 2) Какова будет структура
группы при заданных г и г?
§ 23] КЛАССИФИКАЦИЯ Тг ПО ГРУППАМ ДВИЖЕНИЙ 167
Вопрос о верхней границе для г решается теоремой:
не существует пространств Tt (i = 1, 2, 3), отличных
от пространств постоянной кривизны, допускающих
группы движений GT с 7ш >- 7.
Vn не может иметь группой движений Gr с г > "t л~г )
(при п = 4 г<10). Если г =10, то получим пространство.
постоянной кривизны, которое в данном случае является
плоским пространством Минкозского; оно всегда будет
пространством Тг и получится из A9.18), если там поло-
положить ai = pi— 0. Этот тривиальный случай опускаем. Слу-
Случай г = 9 исключается на основании общей теоремы Фу-
бини ([16], стр. 270) о том, что Vn при п > 2 но допу-
екает полной группы движении порядка х —'- — 1.
Порядок полной группы г не может также равняться
восьми, как это показано Егоровым ([230], стр. 202)
для F4 с сигнатурой (— — — +).'Покажем, что для
Тг (?=1, 2, 3) порядок максимальной подвижности мо-
может быть снижен еще на единицу.
Для того чтобы имело место равенство г — 7, необхо-
необходимо, чтобы ранг матрицы системы
= 0 B3.2)
или, более подробно,
ах а
~1"-^ ¦yapeicr — 0) B3.3)
т. е. системы однородных алгебраических уравнений с не-
неизвестными ?а>р и ga при условии B3.1), был равен 3.
Здесь
о а ах а х ах
А ^ В 25[6-R v]oii + 2б[р7? а] ¦уб- B3.4)
Рассмотрим матрицу, составленную аз коэффициен-
коэффициентов Л и J5 в орторелере, для которого компоненты тен-
тензора кривизны определяются формулами A9.18), A9.19),
A9.20). В случае A9.18), отбрасывая одинаковые в силу
симметричной сдвоенности матриц (Еа.ъ) н (^ио,ь) строки,
168
ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ
[гл. IV
получим матрицу
s 0
0
о ps
0
0
0 a
0
P2-P3
0
4.08 —a а
0
о p
-Pi
0
0 a:
1 —«з
0
0
0
0
0
x-
0
0
' '
0
0
0
0
0
0
-P2 0
0
0
a± 0
0
0
°2-
0
p,-
0
0
a3 —с
0
0
Ра —
0
-a3 0
0
Рз 0
0
al —
4 0
0
Pi —
6x0
0
0
0
0
JF?14i4iO
a2/?i424'(I
-^1434,0
Rik2Z,a
Рг-^ 14 3.1.0
-^1412,0
^2424,a
•^2434,0
/?2431,о
-^2412,0
\
B3.5)
здесь первые шесть столбцов отвечают, значениям ох
в B3.4), равным 14, 24, . .., а последний столбец пред-
представляет четыре колонки, которые получаются при о = 1,
2, 3, 4. Любой определитель четвертого порядка, состав-
составленный из элементов матрицы, должен равняться нулю.
Рассматривая, например, определитель, составленный из 2,
3, 5, б строк и таких же столбцов, получим:
[(а, - а2J + (Рх - Р2J] [(а, - а3K + (рх - р,)*] = О
или, полагая as + z'Ps = Ks E=1, 2, 3), получим:
(Aj — J\.2) (лх — K2) (Ax — A3; (Aj^ — A3) = U.
Здесь Кs = as — ф8 и, следовательно,
В силу равноправности ^Гй, Kz, K3 нет необходимости
рассматривать другие определители; достаточно процик-
лировать по номерам 1, 2, 3 последнее уравнение. Таким
образом, получим:
(К3 - К.) (К, - К.2) - (К2 - К3) (К3 - Ж,) =
= (К1-К2)(К2-Кя) = 0,
откуда, если учесть еще условия ^ ^ ^
найдем, что A's = 0 (s==l, 2, 3), т, е. получим простран-
пространство Минковского.
§ 23] КЛАССИФИКАЦИЯ Тг ПО ГРУППАМ ДВИЖЕНИЙ
169
В случае Т2 из A9.19) получим матрицу
/00 0000 Д14и,<Л\
0 - 1 Р2 - рх 0 0 аа—с^+1 Д1424. а
О Р2-рг 1 0 ах-а2+1 0 i?l434,ff
0
0
0а2
2
0
0
0
2
ч о
0
0
— а
0
0
0
0
0
0
0
ах—а2Ч
L-l 0
0
0
0
0
0
0
0
-10
0 f
0
— 2
2
0
. 0
2
0
-1 f
>i-P.
0
0
0
0
0
0
0
)a — [
1
0
0
0
0
0
0
#1423, a
^1 #14 31,'ff
#1412, a
#2424, <T
#24 34, <J
#2431, a
-#2412, cr
-#3434, а
#3412, aJ
.B3.6)
Нетрудно убедиться, что, приравнивая определители чет-
четвертого порядка нулю, придем к противоречию.
Для Т3 из A9.20) следует матрица:
/^000002
(Т3)
0-1 0
0 0 1
0 0-2
0 0 0
0 О
О О
о о
о
1
2
О
О
О -1
-2 О
V О О
О О
-1 О
О О
0—1
о о
о
О 1
2 О
0. О
О О
-2 О
0
1
0 -2
0
0
0
0
0
1424, o^
0 #1424, а
0 #14 34, a
0 #1423, a
#14 31, о
#1412, 0
#24 24, а
#2434, а
#2431, <т
#2412, 0
#3434, а
#3412, а-
B3.7)
из рассмотрения которой непосредственно видно наличие
170 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВА [гл. IV
определителя шестого порядка, отличного от нуля, т. е.
г < 7. Теорема имеет место.
Выписанные выше матрицы B3.5), B3.6), B3.7) позво-
позволяют уточнить порядок полной группы для каждого
из трех типов Ti при помощи теоремы: если Т1 допускает
группу движений СТ с г >• 4, то оно допускает и группу
движений Glo и будет пространством специальной теории
относительности (пространство Минковского); для Тг
максимальной подвижности ?' = 6, а для Т3 7*<с4.
Введем для краткости индексы бивекторного простран-
пространства, записывая i?apv6,<j через Яаь,а (а, 6 = 1, ..., 6;
0=1, 2, 3, 4), и обозначим:
¦Rab.o + iRab+3,a = ПаЬ>сг (а, Ъ < 3). B3.8)
Тогда, тождества Бианки E.16), если учесть симметрич-
симметричную сдвоенность Rab,a, следующую из E.13), и соотноше-
соотношения B3.8) можно переписать в виде 12 тождеств:
П2а,1—П1а,2— гП3а,4=0, jV
Пза,2 — П2а.,3 — 1П1а,4 = 0, |
Кроме того, из E.13) следует:
П11,о+П22,о + Пзз,а = 0. B3.10)
Предположим, что 7\ допускает группу движений G5.
Тогда все определители шестого порядка, составленные
из элементов матрицы B3.5), должны равняться нулю.
Можно утверждать, что среди определителей четвертого
порядка, составленных из первых шести столбцов, най-
найдется по крайней мере один, отличный от нуля, так как
в противном случае Тх было бы плоским. Так как аг и $t
при различных значениях г = 1, 2, 3 равноправны между
собой, то, не нарушая общности, можно, например, пред-
предположить, что отличен от нуля определитель, составлен-
составленный из 2, 3, 5, 6 строк и столбцов, равный
[К - а3J + (Рх - Р3J] [К
Так как все остальные элементы этих строк и столбцов,
принадлежащие первым шести столбцам, равны нулю.
§ 23] КЛАССИФИКАЦИЯ Tt ПО ГРУППАМ ДВИЖЕНИЙ 171
то все миноры второго порядка матрицы, составленной
ИЗ ^4414,0, -^1423,0, -^2424,0, -*?2431,0, -^3434,G, -^3412,0
(ff=l, 2, 3, 4), и матрицы
Pa — Ps ct2 —a3
@=1,2,3,4) B3.11)
должны равняться нулю. Комбинируя попарно по пра-
правилу B3.8) строки этих матриц, приходим к выводу,
что любой минор второго порядка матрицы
-S3.0
(о = 1, 2, 3, 4) B3.12)
\
Кг —
равен нулю. Отсюда и из B3.10) следует, что Ylaac = 0
(а = 1, 2, 3) независимо от того, равняется или нет
К2 — К3 нулю. Рассмотрим величины Пгз^- Если К2 фК3,
то из B3.11) следует, что П2з,0 = О, а из тождеств Би-
анки B3.9) получим, что все Наь,а = 0, т. е. все кова-
риантпые производные компонент тензора кривизны равны
нулю: пространство — симметрическое.
Если же К.2=К3, то, записывая уравнения 6i?apY6 = 0
в орторепере, вводя обозначения
= — i F3,4 +
B3.13)
и комбинируя полученные 12 различных уравнений по
правилу B3.8), придем к системе уравнений
,, „ = 0,
12. а =
?аП23, 0 - (i5T2 - Ka) Wlt ГПзз, 0 = 0
(o=t, 2, 3, 4).
/B3.14)
172 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
Следовательно,
Предположим сначала, что допускаемая пространст-
пространством Тг группа Ga нетранзитивна. Тогда она расслаивает
пространство на гиперповерхности транзитивности. Если
бы эти поверхности были изотропные, то метрику та-
такого F4 можно было бы ([260], стр. 219) привести к виду:
ds2 = 2dx1 dx* + g32 (ж4) dx^ + 2g23 (ж4) dx* dx3 + g23 (ж4) dxz\
но, вычисляя для этой метрики Я-матрицу (Rab — A,g-ab),
легко убедиться, что она имеет непростые элементарные
делители и, следовательно, не может определять Тл.
Если же гиперповерхности ноизотропяыо, то, допуская G5,
оня должны допускать и группу Ge, так как для V3
группа GB не может быть полной. Тогда V4 допускает си-
систему геодезически параллельных гиперповерхностей тран-
транзитивности постоянной кривизны. Принимая их за коор-
дипатные и записывая уравнения поля, придем, как
легко убедиться, к плоскому пространству Минковского.
Если же группа G5 транзитивная, то среди векто-
векторов ga существуют четыре линейно независимых. Следова-
S
тельпо, в орторепере можно положить ?а = ё°, и тогда
s
из B3.14) опять следует, что 1123,0 = 0) и мы снова при-
придем к симметрическим пространствам 7\.
Исследуем условия интегрируемости для системы урав-
уравнений
= О, B3.15)
определяющей симметрические Vn. Дифференцируя B3.15)
ковариантно и альтернируя, получим:
-^аРтб, [я v] = Ra%v [aR 0] yb + f^aXv lyR 6] a? = 0.
Записывая ото равенство в ортореперо, будем иметь
«iP2 + «2Pt — «iPs — %Pi = 0, ага, — 0,0, - $$2 + ф?а = О
ш еще четыре уравнения, получаемые яз этих щшлиро-
3 23] КЛАССИФИКАЦИЯ Тг ПО ГРУППАМ ДВИЖЕНИЙ 173
ванием по номерам 1, 2, 3. Это означает, что
К, (К2 - А'3) = К2 (К3 - Кг) = К3 (К, -Х2) = 0; '
так как HKS = Q, то Ks — 0 E=1, 2, 3) и исследуемое Т±
плоское, т, е. доаускает группу движений Glo. Далее
будут фактически указаны пространства Т1 с группой G±,
и следовательно, для Г1 имеем лакуну (в смысле «прерыв-
«прерывности», «выпадания») в распределении порядков полных
групп Gr между г = 4 и г = 10, причем границы этой ла-
лакуны точные.
Что касается пространств Г2, то далее будет факти-
фактически определено Г2 с Ge. Так как Тг не допускает Gr
с г > 6, то пространство максимальной подвижности Т2
допускает G6. Пространства Т2 и Т3 не могут быть про-
пространствами постоянной кривизны.
Рассмотрим, наконец, пространства Т3. Если г > 4,
то любой определитель порядка п 9 — г + 1 = 11 — г -< 6,
составленный из элементов матрицы B3.7), должен рав-
равняться нулю. Но из B3.7) следует, что существует опре-
определитель шестого порядка, отличный от нуля. Следова-
Следовательно, для Т3 г <: 4. На этом доказательство теоремы
завершается.
Как следствие получаем, что для Т1 и Т3 следует рас-
рассмотреть лишь группы Gr с ?'<;4, а для Тг — с г ^6.
Для фактического определения групп движений нужно
предварительно выяснить, какие из неизоморфных между
собой структур допускает пространство Тх. Мы убедимся
далее, что только некоторые из приведенных в A0.16),
A0.17), A0.19) структур допускаются пространствами Г{.
При этом весьма существенным оказывается вопрос о ста-
стационарных подгруппах групп движений Тг, для решения
которого основную роль играет теорема [228]: если поле
тяготения Тг допускает группу движений со стационар-
стационарной подгруппой Нр, то: 1) р = 0, если КЛ, К2, К3 различ-
различны между собой; 2) р < 2, если К1=К2фК^', 3) /? = 6,
если К1 —К2 — К3; для Т2 имеем: 1) р = 0, если Кг и Кгф 0;
2) р <; 2, если Кх — &~2 = 0; для Г3 всегда р — 0.
Здесь JCS = а + г{5 определяется формулами A9.18),
A9.19).
174 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
Введем в пространстве Ti нормальную систему коорди-
координат (§ 6), фиксируя некоторую точх^у в качестве начала.
Тогда метрика представится з виде:
} B3.16)
Из определения движения следует, что при движе-
движениях коэффициенты этого ряда должны оставаться инва-
инвариантными. Инвариантность первого из этих коэффици-
коэффициентов показывает, что стационарная подгруппа является
в то же время подгруппой группы лоренцевых преобразо-
преобразований, оставляющих инвариантной форму — dx1 — dx2 —
- dx32 + da**.
Инвариантность второго коэффициента показывает,
что всякая Н 0 оставляет неизменными коэффици-
0
енты i?a (py)o • Отсюда, пользуясь E.8), получим, что ком-
компоненты этого тензора инвариантны при преобразованиях
Нр. Группа лоренцевых преобразований изоморфна группе
вращений комплексного трехмерного евклидова простран-
пространства (Л. С. Понтрягин [205], стр. 423). Для того чтобы
о
-RapvS оставались неизменными, необходимо, чтобы Лаь
оставались инвариантными относительно некоторого враще-
вращения комплексного R3- Здесь учитывается, что матрица (Яаь)
симметрично-сдвоенная. Таким образом, приходим к зада-
задаче: требуется определить ортогональные комплексные
преобразования, переводящие в себя две формы в R3:
.о
1
3 .а
Для 1\ из A9.18) следует, что -ф= у]К^г . Если
1
Ki (i = 1, 2, 3) различны между собой, то ясно, что не су-
существует ортогонального невырожденного преобразования,
отличного от тождественного, сохраняющего эти две формы.
Если Кj = К3 Ф К3, то существует такое преобразование,
зависящее от одного параметра; так как HKs = 0, то, пола-
полагая К1 = К2 = 'К> К3 = —2Х, X Ф 0, видим, что допустимо
вращение в плоскости {z1, z2}. Один комплексный пара-
параметр дает два вещественных и, следовательно, р < 2. В слу-
5 24] НЕИЗОМОРФНЫЕ СТРУКТУРЫ ГРУПП ДВИЖЕНИЙ 175
чае Кх—К^—К& получаем тривиальный случай пло-
плоского Тх.
Для Т2 из A9.19) имеем: $ = K1zL*+ (K2 + l)z** +
+ (К2 - 1) z*2 + 2iz1z*, где Кх + 2К2 = 0. Если Кх и К2 Ф 0,
то /fp сводится к тождественному преобразованию. При.^ =
= Kz = 0 получим однопараметрическое преобразование,
дающее в вещественной области v <. 2.
Для Г3 из A9.20) следует, что \р = 2z2 (z1 - izz),
и легко убедиться, что Нр всегда совпадает с единицей
группы.
§ 24. Неизоморфные структуры групп движений,
допускаемых свободными пространствами
Две группы изоморфны, если при некотором выборе
базисов этих групп их структуры одинаковы.
Переходя к вопросу об определении неизоморфных
структур грзшп движений, допускаемых свободными про-
пространствами, заметим, что определение структур непре-
непрерывных групп обычно сопряжено с большой вычислитель-
вычислительной работой, но для групп движений, допускаемых поля-
полями тяготения Тг, можно доказать теорему, значительно
упрощающую решение этого вопроса. Она заключается
в следующем утверждении: пространства Ti (?=1, 2, 3)
могут допускать только такие группы движений Gr,
которые являются подгруппами полной группы про-
пространств Тг максимальной подвижности с тем же номе-
номером i (г= 1, 2, 3).
Группа Gr состоит в общем слз^чае из стационарных
преобразований и некоторых сдвигов; она производит то-
точечное отображение пространства на себя: ха = / (ха). Каж-
Каждой точке пространства Ti можно сопоставить канониче-
канонический орторепер; это сопоставление однозначно в общем
случае, но может быть и неоднозначным, если некоторые
из стационарных кривизн удовлетворяют дополнительным
соотношениям (например, равны пулю). Во всяком случае
координатные векторы га орторепера будут некоторыми
S
функциями координат: ia = ia(x). Конструктивно эти фун-
S S
кции могут быть определены при помощи следующего
176 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ 1гл. IV
алгорифма. В бивекторном пространстве рассмотрим Л-мат-
рицу (Rab — hgab) (а, 6= 1, . . ., 6) и из системы уравне-
уравнений
(ЯаЬ - Чаъ) Wb = QgabWb B4.1)
а а а а—1
определим при помощи одних рациональных операций
векторы Wb (а, 6=1, . .., 6), которым в пространстве Ti
а
отвечают непростые вообще бивекторы Wy6 (x) (см. § 19).
ар
Эти бивекторы для канонического орторепера совершенно
определенным образом зависят от координатных векто-
векторов ia; отсюда при помощи опять-таки только рациональ-
s
ных операций определяются ia, как рациональные функ-
S
ции компонент тензора кривизны и метрического тензора.
Скаляры q в уравнениях B4.1) равны нулю или ±1,
а
в зависимости от номера а и типа пространства. Именно
(см. § 19) для Тх
Q = 0 (<x=l, ..., 6),
Для Т2
Q=Q=—1,
2 5
для
Отметим, что компоненты метрического тензора
?ве=?в0Л-р. ео=±1. B4.2)
а=1 <т а
и эта формула имеет место в любой системе координат.
Рассмотрим некоторое пространство Тг (i=l, 2, 3).
допускающее движение Glt определяемое вектором Кил-
линга ?;а(ж). Это означает, что производная Ли в направ-
направлении поля t,a от метрического тензора равна нулю:
= 0. Рассмотрим, кроме того, пространство Т[ с со-
ответствующим номером i максимальной подвижности
§ 24j НЕИЗОМОРФНЫЕ СТРУКТУРЫ ГРУПП ДВИЖЕНИЙ 177
и покажем, что оно в некоторой системе координат также
допускает вектор |а в качестве вектора Киллинга. Пусть
имеют место пространства Тл и Т[. Компоненты ia будут
S
искаться из уравнений B4.1) как для 1\, так и для Т[,
и в обоих случаях q = 0 (о— 1, .. ., 6), но для Т[ Rab =
а
= Я = О и потому орторепер определяется с большим про-
прост
изволом, который, в частности, позволяет в B4.2) выбрать
g<*P = const или наложить некоторые другие условия.
Орторепер для 7\ содержится среди совокупности орторе-
перов, отвечающих Т'х, и получается из нее при наложе-
наложении некоторых условий на ia(x), определенных для Т'г;
s
обозначая результат наложения этих условий символом га,
s
имеем: 6g°P(ia) = 0. Но если снять операцию, обозначенную
Is
значком «*», то ga$ при сохранении всех свойств ga®(ia)
s
получат некоторый дополнительный произвол и, следова-
следовательно, тем более будут иметь место уравнения dg"P = 0
для пространств Т[ максимальной подвижности, т. е. Т[
допускает движение Gx. Разумеется, наличие этих урав-
уравнений предопределяет некоторую специализацию системы
координат, так как конкретное задание вектора Киллинга
?а означает некоторые условия, накладываемые на систе-
S
му координат. Точно так же для пространств Т'2 макси-
максимальной подвижности имеем специальный выбор q, ука-
укает
занный выше, и условия Х — 0 (о*=1, ..., 6) (см. § 23),
а
отвечающие группе G6, и орторепер, отвечающий некото-
некоторому Т2, находится среди ортореперов, отвечающих T'z.
Далее все рассуждения повторяются буквально. Очевидно,
что рассуждения повторятся и для пространств Т3, что
доказывает справедливость утверждения, высказанного
вначале.
Таким образом, для определения неизоморфных струк-
структур групп движений, допускаемых Т{, достаточно опреде-
12 А. 3. Петров
178 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ Lrji. IV
лить все возможные подгруппы разных порядков, содер-
содержащиеся в полной группе движений пространств макси-
максимальной подвижности для i=l, 2, 3.
Пусть некоторое Ti допускает группу движений Gr,
причем ранг матрицы (|а), составленной из векторов Кил-
s
линга, равен г<4, следовательно, группа нетранзитивная
(см. § 10) и действует на r-мерных поверхностях транзи-
транзитивности.
Рассмотрим в некоторой точке Р одной из таких по-
поверхностей касательную r-мерную плоскость; любой ее
вектор можно представить как линейную оболочку г не-
независимых векторов Киллинга ?а. Для канонического
s
орторепера в точке Р метрический тензор /'-мерной
плоскости всегда можно представить в виде ([91], стр. 347):
k
2j Si
k=\ h
п
где J- - — система векторов, взаимных по отношению к век-
векторам ^г; ?,j полностью определяются в орторепере, если
s
*
известны компоненты t,t и, следовательно, определитель ] gi;
S
полностью определяется при задании ga. Рассмотрим те-
S
перь соответствующее Т[, максимальной подвижности. Оно
может быть получено, если па Т\, кроме векторов |а,
S
определяющих группу G>, воздействовать некоторыми до-
дополнительными векторами Киллинга, определяющими
полную группу Т1, оставляя при этом |a (s=l, ..., г)
8
неизменными. Следовательно, для Т[ подгруппа Gr будет
представлена теми же векторами, как и в Тг. Среди всех
ортореперов в точке Р, отвечающих Т[, как выяснено выше,
найдется и такой орторепер, какой имеет место для 7\
г
в точке Р. Следовательно, определитель | gi;- ( в Тi и Т[
будет один и тот же: если подгруппе Gr полной группы
пространства максимальной подвижности отвечают изо-
изотропные или неизотропные поверхности транзитивности,
§ 24] НЕИЗОМОРФНЫЕ СТРУКТУРЫ ГРУПП ДВИЖЕНИЙ
179
то этот же факт будет иметь место а для простран-
пространства Тг, допускающего группу Gr.
Как будет показано в следующем параграфе, простран-
пространство максимальной подвижности Т'х будет плоским прост-
пространством с десятичленной группой лоренцевых преобразо-
преобразований, включающей три лоренцевых и три обычных
вращения и четыре сдвига. Т'2 отвечает пространство
с метрикой в специальной системе координат
ds2 = — sh2 xk dx2* — sin2 xk dx32 + 2dx^ dx\ B4.3)
с транзитивной группой движений G6, операторами
B4.4)
— x2 cth x*p2 — x3 ctg xipi + p4
и структурой
[IA1 = O (& = 2, .... 6), ]
[X,X3] = [X2X5] = [X4X5] = [Х3ХЛ] = 0, I
[xai-x,, [x2xe] = x4, [x3xs] = xl; f (^-5)
[X3Xe] = X5,
= — X
2,
= Xz- J
Для пространств T'z необходимо определить предвари-
предварительно порядок группы в случае максимальной подвиж-
подвижности. Пусть в Т'3 действует группа GT движений, кото-
которая осуществляет автоморфизм этого пространства на себя.
Каждой точке Т'3 отвечает, согласно результатам § 19,
однозначно канонический орторепер, для которого матри-
матрица (Rab — kgab) (a, 6=1, ..., 6) определяется канониче-
каноническими формулами A9.20). Координатные векторы каждого
орторепера будут функциями координат точек Т'а: ia = ia (x).
з а
Из B4.1) следует, что орторепер не изменится, если
вместо Х-матриц (Rab — hg^) рассматривать матрицу
v(Rab — Xgab), где V —постоянная величина, может быть
комплексная.
Группа движений Т'3 не содержит стационарной под-
подгруппы, и следовательно, каждое движение в Т'а означает
12*
180 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
отображение некоторой точки этого многообразия в другую
точку, которой отвечает другой орторепер. Отображая все
эти ортореперы на один из них, взятый в точке Р, полу-
получим, что каждому движению отвечает некоторый поворот
орторепера в точке Р. Отображая теперь все такие орто-
ортореперы и отвечающие им битензоры на трехмерное комп-
комплексное метрическое плоское пространство, приходим
к выводу: группа движений T's изоморфна такой группе
линейных однородных преобразований трехмерной комп-
комплексной плоскости, при которой формы (см. § 23)
з
ф = 2 zi2, л|э = 2z2 (z1 — iz3)
переходят в себя с точностью до произвольного комплекс-
комплексного множителя v.
Легко непосредственно убедиться, что такое преобра-
преобразование содержит не больше одного произвольного комп-
комплексного коэффициента (именно коэффициента v), т. е.
двух произвольных вещественных.
Следовательно, пространство Т'3 не может допускать
группу движений более чем двучленную. Если бы эта
группа была абелевой, то преобразования, отвечающие
этим двум вещественным параметрам, коммутировали бы,
но v^iv, и следовательно, группа неабелева.
Пространства Тг в случае, если они допускают Gr
с г > 4, будут плоскими, и следовательно, необходимо
определить структуры следующих групп Gr: r== 1, 2, 3. 4
для Тх, г=1, ..., 6 для Т2, г = 1, 2 для Т3.
Определение неизвестных структур производится при
помощи следующего алгорифма. Пусть требуется найти
подгруппу Gr полной группы пространства Т[ максималь-
максимальной подвижности с базисом Xlt ..., Хг., где гх=10,
г3 = 6 и г3 = 2. Полагая, что операторы неизвестной под-
подгруппы имеют вид:
Yi = S C)Xk, С) = const,
учитывая структуру полной группы [Хг, Xj] — C%Xk и за-
записывая все возможные уравнения структуры A0.18),
S 24] НЕИЗОМОРФНЫЕ СТРУКТУРЫ ГРУПП ДВИЖЕНИЙ 181
A0.17), A0.19), непосредственно в каждом отдельном
случае определим, когда уравнения структуры совместны,
и тем самым найдем структурные константы. В каждой
полученной таким образом структуре возможны изменения
за счет замены базиса группы при помощи певырожден-
ных линейных преобразований. Для групп G5, когда ка-
канонические вещественные структуры не приведены в явном
виде, необходимо воспользоваться условиями Якоби A0.18).
Можно указать другой способ решения проблемы.
В следующей главе решается вопрос о классификации
пространств F4 с сигнатурой типа Минковского ( [-)
в каждой данной точке многообразия и приводятся, в спе-
специальной системе координат, метрики, отвечающие всем
возможным группам движений.
Чтобы отыскать Т{ (? = 1, 2, 3) с данным номером i
и некоторой группой заданной структуры, достаточно
взять соответствующее пространство V4, потребовать, что-
чтобы метрика удовлетворяла уравнениям поля (Ra$ = 0),
и затем вычислить в бивекторном пространстве А,-матрицу
(Rab — ^gab) (a< Ь—1, ..., 6), потребовать, чтобы харак-
характеристика ее была того же типа, который отвечает фикси-
фиксированному номеру L
Этот простой по идее метод имеет следующие недо-
недостатки: 1) он приводит к громоздким выкладкам уже на
первом этапе, когда записываются уравнения поля, и
2) условия, определяющие тип пространства, записываются
дифференциальными уравнениями второго порядка, как
и уравнения поля, но уже нелинейными относительно
старших производных. Эти затруднения становятся осо-
особенно ощутимыми в случае малой подвижности простран-
пространства (Gr при г=1, 2). Наложение таких условий неиз-
неизбежно, так как вообще (и особенно в случае г=1. 2)
пространства различного типа могут допускать группу
одной и той же структуры (см. § 52). Ввиду этого являет-
является более предпочтительным следующий, третий, метод
разыскания возможных структур Gr для данного прост-
пространства Tt (г = 1, 2, 3), при котором условия, определяю-
определяющие тип пространства, используются непосредственно при
нахождении структуры группы.
Этод метод сводится к следующему. Пусть Тг допу-
допускает группу Gr (г>2). Тогда вследствие A0.6) векторы
182 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ ?гл. IV
Киллинга должны удовлетворять уравнениям структуры
г<тЯ Sa рай ?а—. fs pa
S иоъ S иаъ — ^pqS
V q q p s
или, в силу того, что риманова связность (см. § 3) имеет
кручение, равное нулю: ГррУ] = 0>
papa papa rs pa /04 fi\
р q q p s
что дает инвариантную форму записи уравнениям струк-
структуры. Так как риманова метрика сохраняется при дви-
движениях, то должна сохраняться и риманова связность,
определяемая этой метрикой. Другими словами, производ-
производная Ли коэффициента связности должна обращаться
в нуль для любого вектора Киллинга, допускаемого
группой Gr:
6Г&, = |«>ЭУ + g^Vv = °- B4 • 7)
Дифференцируя B4.6) ковариантно и заменяя |а,ру ПРИ
помощи этой формулы, а также учитывая тождества Риччи
E.8), получим:
ia,0iP)a-|p,0ga,a+iagT^^ap = C^ia,p. B4.8)
р д Р Q P Q s
Дифференцируя B4.8) ковариантно и снова производя
ту же самую замену, получим еще одно соотношение:
Raaxy (Ifi," 1Х - gp,a 1Х) + flaptv 1Ла,в Iх - la,° Iх) +
q Р Р <1 V Q q p
B4. 9)
p q s
Формулы B4.6), B4.8), B4.9) имеют место в любой
голономной системе координат. В частности, относя прост-
пространство Тг к такой нормальной системе координат, для
которой в начале координат компоненты /?apys имеют ка-
канонический вид, получим для определения структурных
констант систему уравнений, в которой компоненты тен-
тензора кривизны можно заменить при помощи A9.18),
§ 24] НЕИЗОМОРФНЫЕ СТРУКТУРЫ ГРУПП ДВИЖЕНИЙ 183
A9.19), A9.20). После этого остается определить значе-
0 0
)
0 0
ния ?а, |а, р и CSPQ; для уравнений B4.9) необходимо, кро-
S S
о
ые того, или определить Ra$y6, я> или исключить эти ком-
0
поненты. Отметим, что если из B4.9) исключить Rapy6, x
при помощи уравнений B3.3), записанных для каждого
из векторов Киллинга, то придем к тождеству, т. е. вме-
вместо B4.9) можпо брать уравнения B3.3).
Кроме того, нужно учесть следующие соображения:
1) допустима любая комбинация с постоянными коэффи-
0
циентами для векторов |а; поэтому можно заранее г ком-
s
0
поиент §а привести к нулю или единице; 2) для любого
S
о о
вектора Киллинга невозможен случай, когда ?а=?и, р = 0
S S
одновременно, так как это означало бы, что ^а = 0 в лю-
s
бой системе координат ([147], стр. 80, 260); 3) если груп-
группа допускает стационарную подгруппу Нр, то р векторов
1а = 0 (*=1, ..., р).
а
Ввиду этого получаем следующий алгорифм: 1) поль-
пользуясь указанными замечаниями, заранее обращаем в 0 и 1
о о
некоторые из компонент \а или ga> ^; 2) решаем систему
S S
уравнений B4.6), B4.8); 3) дополняем, если это потре-
потребуется, систему B4.9), исключив предварительно Ва&\б, *.>
а также проверяем для полученных констант условия
Якоби A0.18).
Заметим, что важна не только структура группы, но
о
и ранг матрицы (|а) и другие геометрические свойства
S
операторов; в частности, решающим является вопрос о том,
будут или нет поверхности транзитивности изотропными,
оо
о чем можно составить суждение, изучая ?а и ?а> Р в на-
S S
чале координат. Поэтому определение начальных значений
184 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ 1гл. IV
о о
g« и |а- Р является не менее необходимым, чем нахожде-
S S
ние структурных констант.
Из непосредственного рассмотрения возможных веще-
вещественных неизоморфных структур групп G3, G4, G5 следует,
что каждая G5 допускает подгруппу G4 и каждая груп-
группа G4 допускает подгруппу G3, но среди G3 имеется груп-
группа вращений (неразрешимая G3 IX типа по классификации
A0.17)), не содержащая подгруппы G2, и других G3, обла-
обладающих таким свойством, не существует. Далее, при фак-
фактическом определении структур алгорифм применяется
сначала для групп G3. Затем остается исследовать только
такие Gn, которые содержат найденные неизоморфные ве-
вещественные структуры G3, и т. д.
Возможность применения такого алгорифма основы-
основывается на существовании канонических форм A9.18),
A9.19), A9.20) для трех типов полей тяготения Тг. Чтобы
избежать громоздких результатов и учитывая, что, как
указано выше, все возможные пространства Ti (i= I, 2, 3)
содержатся среди многообразий F4, указываемых в сле-
следующей главе, ограничимся рассмотрением наиболее ин-
интересных пространств 7\, приводящих непосредственно
к известным в литературе решениям или дающих прин-
принципиально новые решения уравнений поля; для Г2 и Т3
классификация будет полной.
Применяя указанный выше алгорифм, получим следу-
следующие возможные структуры.
Пространства Тх
Возможны как абелева, так и неабелева группы:
1. [Х1Х2] = 01 2. [ХХХ2] = Х,.
В зависимости от того, какова кратность стационарных
кривизп Ki (г=1, 2, 3), получаем следующие возможно-
возможности. Если К± = К2 — К3, то пространство плоское (см. § 19)
и допускает 10-членную группу движений. В случае
§ 24] НЕИЗОМОРФНЫЕ СТРУКТУРЫ ГРУПП ДВИЖЕНИЙ 185
Кх = К2 Ф Кг возможны следующие структуры:
= Ха, [ХгХ3] = еХг,
г\ = Х2, е = ± 1,
B4.10)
т. е. имеем типы VIII и IX неразрешимых групп по клас-
классификации A0.16). Кроме того, с точностью до нумерации
Iе = 0, ?а = 6?, а 1а = бг или б?.
1 2 3
Это позволяет определить метрический тензор двумер-
двумерной плоскости, являющейся линейной оболочкой системы
о о
ненулевых векторов {|а, ?а}, и выяснить, таким образом,
2 s
сигнатуру метрики поверхности транзитивности. Следова-
Следовательно, имеются одночленная стационарная подгруппа
к ввиду этого двумерные поверхности транзитивности,
про которые можно также утверждать, что они неизотроп-
неизотропные с метрикой сигнатуры ( ) или ( \-).
2. [ХХХ2] = 0,
= Х2, [Х2Х3] = - Xv B4.11)
_а схр=
т. е. разрешимая групиа типа VII с теми же условиями,
что и выше.
3. Абелева группа [ХгХ^ — 0 (i, /=1, 2, 3) с началь-
начальными значениями
0 0 0
|« = б", ga = б", ?a=6!
1 2 3
о Г А ар = 12, о
О, 2
{ а аВ= 14,
о | г >
3°'Р [о.
Следовательно, стационарная подгруппа совпадает
с единицей группы. Группа совпадает со своим центром.
Ранг матрицы (|а) равен порядку группы, вследствие чего
оР=13,
о.
B4.12)
186
ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
поверхности транзитивности трехмерные, неизотропные;
Klt K2, К3ФО. . B4.13)
4. Абелева группа с начальными значениями
1 2 3
т. е. имеют место неизотропные гиперповерхности тран-
транзитивности неопределенной метрики.
5. Группа со структурой типа VII
[ХХХ2] — 0,
2"
1-^-Х2 (КФО),
B4.15)
действующая на гиперповерхности транзитивности типа
()
1.
2.
3.
гХ^ = 0 B4.16)
t=l, 2, 3),
:=1, 2, 3),
= А2, [А2А3] =КХХу
[ХйХ4] = 0, [Х2^
где 8 = 0 или 1 и имеют место условия
°а ^а ° |2 «Р= 12,
4 4 ' \S^'
¦\7- 1 -Л X
B4.17)
B4.18)
4.
i, /=1, 2.3),
L3>
[Х2Х4] ~KX.Z,
и ранг матрицы (?а) равен 4, т. е. группа просто-тран-
S
зитивная.
§ 24] НЕИЗОМОРФНЫЕ СТРУКТУРЫ ГРУПП ДВИЖЕНИЙ 187
Пространства Тг
Для пространств Г2 структуры групп можно искать
первым из указанных выше способов, непосредственно
изучая все возможные подгруппы различных порядков
полной 6-членной группы. К тому же результату приво-
приводит довольно быстро и третий метод.
г = 2.
Возможны как абелевы, так и неабелевы группы дви-
движений:
1. [Х1Ха] = 0, 2. [Л:1Х8] = Х1.
/• = 3
1. Абелева группа, действующая на изотропной гипер-
гиперповерхности транзитивности,
[Х.Х^О (i, /=1, 2, 3). B4.19)
Так как у этой нетранзитивной группы ранг матрицы
совпадает с порядком группы, то в качестве операторов
можно взять любые операторы, удовлетворяющие струк-
структуре, чем группы определяются с точностью до подобия.
Операторы можно выбрать следующим образом: Xi = pi.
Стационарная подгруппа этой группы G3 совпадает с еди-
единицей группы.
2. Группа G3 типа II со структурой
[Х1Ха] = О, [Х.Х^^О, [Х2Х3] = ХЬ B4.20)
действующая на изотропной гиперповерхности. В качестве
оператора группы можно выбрать следующие:
*i = Pi, X2 = P2 + P3, Ха = х*рг-с1Ъх*Ръ. B4.21)
3. Группа G3 того же типа II, но уже действующая на
изотропных двумерных поверхностях транзитивности.
Операторы этой группы всегда можно задать в виде:
*р2. B4.22)
4. Группа G3 типа III со структурой
[ХгХ2] = 0, [Х1Х3] = Х1, [Х2Х3] = 0, B4.23)
188 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
действующая на неизотропной гиперповерхности V3 транзи-
транзитивности; операторы могут быть выбраны, например,
следующим образом:
12 2 B4.24)
Х3 = -i- (ж2 + ж3 ) />х — х2 cth aj*jo2 — л3 ctg ж4/?з -j- jo4. J
Этим исчерпываются возможные структуры G3, допу-
допускаемые пространством Г2 для г<3. Структур <34 и G5
приводить здесь не будем, так как их удобнее искать,
исходя из других соображений.
Для пространств Т3, как показано выше, возможна
лишь неабелева группа движений G2 1I;[X1X2] = X{.
Соображения, изложенные в этом параграфе, приводят
к необходимости исследования пространств максимальной
подвижности для каждого из трех возможных тииов про-
пространств Тг (г=1, 2, 3).
Для Тг решение вопроса очевидно, для Т2 оно услож-
усложняется, что же касается пространств Т3, то задача стано-
становится и технически и принципиально сложной; это объяс-
объясняется малой подвижностью в свободных пространствах
третьего типа. Именно поэтому до сих пор в литературе
не встречалось ни одного примера полей такого рода,
а приведенное в следующем параграфе решение опреде-
определяет свободные пространства нового типа.
§ 25. Пространства максимальной подвижности Т1Ч Т2, Т3
Вопрос о пространствах такого рода решает следую-
следующая теорема: пространствами максимальной подвижности
будут: 1) для Тх — пространство Минковского; 2) для
Т2 — пространство, допускающее 6-членную разрешимую
транзитивную группу с метрикой в специальной системе
координат
ds2 = 2 dx1 dx4 - sh2z* dx2" — sin2 ж4 dzs*;
3) для T3 — пространство, допускающее неабелеву группу
движений G-2 с метрикой в специальной системе координат
ds2 = e (a dx^" -[- dx2 ) + 2 dx3 dx^ Jr X dxi ,
где e= 4; 1, а а и X — функции, определяемые условиями
B5.49).
§ 25j ПРОСТРАНСТВА МАКСИМАЛЬНОЙ ПОДВИЖНОСТИ
189
Для доказательства этого утверждения рассмотрим
каждый из трех возможных типов пространств в отдель-
отдельности.
Пространство Тх
Вопрос, как отмечалось выше, является тривиальным,
так как среди многообразий Тх находится плоское про-
пространство Минковского и, наоборот, всякое Тг, допускаю-
допускающее группу движений Glo, будет при сигнатуре ( \-)
пространством-временем специальной теории относитель-
относительности.
Пространство Т2
Пусть Т2 допускает группу движений максимального
порядка G6. Из доказательства, приведенного в § 23, сле-
следует, что это возможно только в том случае, если Тг-~
симметрическое пространство и его стационарные кривиз-
кривизны Ks = as + ф8 = 0.
Введем в таком пространстве Т2 нормальную систему
координат, относительно которой метрический тензор
будет иметь вид G.20):
gap = gap + Y ZJ Bm+ 2) ! ma
171=1
Ш<
Jm-l
где
0 0
а ха — нормальные координаты, gap, /?apv6 — значения ком-
компонент этих тензоров в начале нормальной системы коор-
координат. Вычисляя эти коэффициенты для орторепера A9.19),
где положено сс3 = Р3 = 0, получим:
где
1
0
[ 0
— 1
0
0
1
0
0
0
0
0
-1
0
0
, (Pafi) =
0
0
1
0
0
0
0
0
-1
0
0
1
0
0
— 1
0
190 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
Полагая
fiaxxX = l/a, PaxxX = za
и используя для поднятия индексов тензор Минковского,
получим:
Следовательно,
о
gap = gap + Ауауа + BzaZ$,
где
m=i
ao
(
m=l
Отсюда, производя замену v—>iv, получим:
= g«3 + ^г [(v2 - sh2 v) г/„г/э + (v2 - sin^ v)zaz&], B5.1)
Можно определить невырожденные преобразования,
которые переводят метрику B5.1) в одну из следующих
метрик:
ds2 = - dxi2 — sh2 v dx2* — sin2 v dx^ + eta4', B5.2)
V = Ж1 — Ж4
или же
ds2 = 2с/жг dxi — sh2a;4 da;22 — sin2 ж4 Лг3'. B5.3)
Интегрируя для метрики B5.3) уравнения Киллинга,
найдем, что пространство допускает группу движений Ge
с операторами
B5.4)
Хв = т.(ж22 + ж32) рх - х* cth x*p2 - х3 ctgx*p3 + р4.
§ 25j ПРОСТРАНСТВА МАКСИМАЛЬНОЙ ПОДВИЖНОСТИ 191
Вычисляя коммутаторы этих операторов, получим
структуру
[1А] = 0 (А = 2, ...,6),
[X2XS] = [Х3Х4] = [Х2Х5] = [Х4Х5] = О,
[Х2Х6] =
[Х4Х6] = Х2, [ХаХ6] = — Х3.
B5.5)
Эта структура показывает, что Ge —разрешимая груп-
группа, а из B5.4) следует, что ранг матрицы равен четырем,
т. е. группа транзитивная.
Таким образом, для Тг утверждение имеет место.
Пространство Т3
В этом случае задача значительно усложняется.
Для исследования Т3 является полезной следующая
теорема, отмеченная впервые в работе Л. Беля [299]:
во всяком Т3 существует изотропное геодезическое вектор-
векторное поле 1а(х), удовлетворяющее условиям
= 0, B5.6)
. B5.7)
Здесь eapY6 — дискриминантный тензор пространства
([91], стр. 366; см. задачу 12 § 10).
Для доказательства существования такого поля и свойств
B5.6), B5.7) достаточно проверить их для того неголо-
номного орторепера, в котором имеют место канонические
матрицы A9.20). В этой системе отнесения la = v (S? + 6^)
и указанные свойства проверяются непосредственно;
последнее соотношение B5.7) требует применения тождеств
Бианки E.16) (см. задачи 2 и 4 § 19).
Имеет место также следующий факт. Если Т3 допу-
допускает группу движений Gr, то производная Ли вектора
1а в направле?ши любого вектора Киллинга Ъ,а E= 1, .. ., г)
S
удовлетворяет уравнениям
6Z« = G)Za. B5.8)
192 Движения в свободном пространстве [гл. iv-
Если учесть, что производная Ли от тензоров i?«pY6
и -Еа$уб равна нулю, то, дифференцируя B5.6) в смысле
Ли и относя результат к ортореперу A9.20), получим:
6/1 = 6Z3 = 6Z2 - 6 Z4 = 0,
S S S S
где знак «=» означает «равенство в специальной систе-
системе координат», и следовательно,
Но это тензорное уравнение будет справедливо уже и в лю-
любой системе координат, и поэтому B5.8) имеет место.
Так как Т3 может допускать в качестве максималь-
максимальной группы только неабелеву группу движений G2, то
структуру этой группы можно привести к виду
[X1Xt] = Xv
Так как группа нетранзитивная, то она действует вдоль
двумерных поверхностей транзитивности, и всегда можно
независимо от того, будут ли поверхности изотропными
или нет, выбрать систему координат так, что векторы
Киллинга, определяющие операторы группы, будут иметь
вид:
1а = б?, 1а = жхб« + 6«. B5.9)
1 2
После этого система координат будет определена
с точностью до преобразования:
х1' =
3, х3), \
- -^v-.-л } B5Л0)
х3' — ty(x2, х3), |
xk' = а;4 + 6 (ж2, ж3), J
где /, ф, г|), 0 — аналитические в некоторой области функ-
функции, удовлетворяющие условию невырожденности пре-
преобразования Фз'фз — Фз'Фз т^ 0 ( ЧЧ = "я\ ' ••• ) ив осталь-
остальном произвольные. Такие преобразования, не меняющие
вида данных операторов Xs, назовем допустимыми для Xs;
S 25J ПРОСТРАНСТВА МАКСИМАЛЬНОЙ ПОДВИЖНОСТИ 193
используя произвол в выборе /, ф, г|;, 6, можно
упростить некоторые из компонент метрического тензора.
Вопрос о сигнатуре метрики на поверхностях транзи-
транзитивности пока несуществен, и ввиду этого ж4 не отожде-
отождествляется, вообще говоря, с временной координатой.
Интегрируя уравнения Киллинга для векторов B5.9),
получим метрику искомого пространства в виде:
при а = 2, 3, 4,
= <*,., (я:*,
B5.11)
Определим изотропно-геодезическую конгруэнцию Р,
существование которой отмечено выше. Интегрируя урав-
уравнения B5.8) для векторов B5.9), получим:
где v == v (х1, ж2, а;8, ^4) ф 0, а А,г = Я? (ж2, ж3) (i = 1, 2, 3, 4).
Применяя допустимое преобразование B5.10), получим
в новой системе координат для компонент 1а следующие
выражения:
Отсюда следует, что возможность использования произ-
произвольных функций /, ф, я|з, б существенно зависит от того,
будут или нет Я2, Л3, А-4 тождественно равны нулю при
любом допустимом преобразовании. Покажем прежде все-
всего, что величина Я4 не равна нулю тождественно. Если бы
А4 = 0, то А,2 = А,3 = 0 и Za=a6f, т. е. конгруэнция 1а
с точностью до скалярного множителя совпадала бы с ве-
вектором Киллинга ga. В силу первого уравнения B5.7)
1
.получим, ковариантно дифференцируя,
= O. B5.13)
11
д. з. Петроп
11
194 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
Воспользуемся тем, что производная Ли от коэффициентов
римановой связности равна нулю:
6r^ = ga,Pv + r/?a/p = O. B5.14)
S S S
Ввиду этого последнее из уравнений B5.13) может быть
представлено в виде:
?а,р 1а,а = №ЛоаЧ = 0 B5.15)
i 1 11
в силу B5.6), если h,° заменить через 1°.
Для пеголономного орторепера, отвечающего форму-
формулам A9.20), la — v (&% + &%) (знак «=» означает равен-
равенство для неголономного орторепера), и поэтому, записывая
B5.13) и B5.15) для этого репера, получим ga> p= 0.
Но это уравнение имеет тензорный вид и будет справед-
справедливо и в любой системе координат, т. е. gap = |apY = O,
и из B5.14) следует, что ^Яауаа^О. Однако это урав-
уравнение для канонического орторепера приводит к противо-
противоречию, и следовательно, исходное предположение отпадает:
Х4 не может быть тождественно равна нулю.
Не уменьшая общности, будем предполагать далее,
что Х4 можно при желании считать отличной от нуля.
Покажем, что невозможно также и предположение
Я2 = А,{ = 0 при любом допустимом преобразовании. Пред-
Предполагая противное, из B5.9) и B5.12) получим, что
I2' = Z3' = 0, и следовательно, 1а выразятся линейно (с пе-
переменными коэффициентами) через ?а и ga; так как
1 2
Z4' ф 0, то коэффициент при Ъ? отличен от нуля и
2
Z« = o-(aia + ia), B5.16)
где а и а —некоторые функции от ха (а= 1, 2, 3, 4). Так
как конгруэнция 1а (х) определена с точностью до скаляр-
скалярного множителя, то выберем о— 1. В B5.12) Х,4 Ф 0 и вы-
выбор функции / ничем не ограничен, поэтому можно счи-
S 25] ПРОСТРАНСТВА МАКСИМАЛЬНОЙ ПОДВИЖНОСТИ 195
тать %х равной нулю и
__i to _ „ B5.17)
2 J
pa
1 2
Кроме того, имеем из первого уравнения B5.7):
Ма = 0, 1а1а, а = 0. B5.18)
Первое из этих уравнений означает, что g44 = 0, а второе
уравнение B5.18) приводится к виду:
B5.19)
т. е. вследствие B5. 11)
n = agu, ag2i = agSi = 0;
так как афО, то g2i = ^34 = 0 и, следовательно, а14 ^= 0,
иначе метрика была бы вырожденной; тогда из B5.11)
следует, что а^= —1, и поэтому
1<у1а> а = _. 1а. B5.20)
Запишем полученные соотношения для ыеголономного
канонического орторепера, где Za = v F2 + 64). Отметим,
что структурное уравнение неабелевой группы [ХХХ2] = ХХ
не изменится, если примепить подстановку Гх = Хг,
У2 = сХ1 + Х2, где с — произвольная постоянная. Поэтому,
о
если выбрать в данной точке пространства V4 c — a(xa),
то можно положить /a = aga и а===0. Таким образом,
2
имеем:
?« @, *, с, d), &« @, a, 0, a), a Ф 0, B5.21)
1 2
и из B5.17), B5.18), B5.20) следует:
«Ч + a^O, /2,а+^а=0, |
/а.2+/а,4=ог(_в§ + б?). ]
Так как
la,^a3la + U^, B5.23)
13*
.|9в ДЯ1ШКНИИ. В СВОБОДНОМ ПРОСТРАНСТВЕ (гл. [V
то B5.22) приводит к выводу: 223
ал—а,з — «,2-г«,4 — U, о — а Ф и, а я—т , ,
t _i_ -, t j_t s _*_ e B5.24)
S2, 4 — J-, 52, 3 S3, 4. SI, 2 ¦ Si, 4-
г г г г г I
Из B5.16) при о— — 1 получим:
1 1 ' ' ' 1 1 2
Заменяя здесь вторые производные векторов Киллинга
по формулам B5.14). получим:
1 1 1 1 2
Дифференцируя ковариантно B5.20), придем к соотноше-
соотношению
1GJ ! 1С 1 I / А /Ос: Ой\
*• *а,ар —г ь ,р^а,0 ~Г ^ч,р — "• у&о.СМ)
Из B5.16), в голономной системе координат, как легко
убедиться, следует, что latti стр = 0, поэтому, записывая
B5.26) для неголономного орторепера, получим:
Придавая a, p все возможные значения, получим си-
систему уравнений, из которых следует, что ga> p = 0,
2
а2(Ь — d) = 0, но последнее равенство находится в проти-
противоречии с B5.24). Следовательно, можно считать, что
Х2 и Хя не равны нулю тождественно при любом допу-
допустимом преобразовании.
Таким образом, в B5.12) можно использовать все
четыре неопределенные функции /, ср, ty, б. Так как 1а
но может, по доказанному, лежать в касательной плоско-
плоскости к поверхности транзитивности, то можно потребовать,
чтобы все компоненты 1а, кроме I" или Р, были отличны
от нуля. Отмстим, что одновременное обращение I2 и /3
в нуль возможно только для вырожденного преобразования.
Накладывая требования /*' = I2' = /'»' = 0, придем для
функций /, ф и 6 к системе дифференциальных уравне-
уравнений типа Копти, которая будет совместна в классе ана-
S 25] ПРОСТРАНСТВА МАКСИМАЛЬНОЙ ПОДВИЖНОСТИ 197
литических функций и в новой системе координат
la = vd%, B5.27)
где v — произвольная функция от ха.
После этого остаются допустимыми преобразования,
не меняющие B5.27), вида:
a^si'-L-e*4'/**2'), .х2 = ф(.х*'), *3 = *(з2'. зЗ'),|
i *' + 0 B') 'ф^О /
Так как конгруэнция Za изотропная, то а33 — 0. Интегри-
Интегрируя второе из уравнений B5.7), получим:
ai3 — Q^i (х2) е~х1« а2з = 6^3 (ж'2)> азз = 0> «34 = Q^4 (ж2)
и q — произвольная функция от х2 и ж3, отличная от
нуля, так как в противном случае метрика была бы вы-
вырожденной. Применяя преобразование B5.28), получим:
?2-3' =
B5.29)
Выбирая функции /, ф, гр, 6, можно упростить Ьг(х2),
но при этом возникают следующие три принципиально
различные возможности:
AN^0, B) Ьх = 0, ЬЛФО, C)^=^ = 0, B5-30)
каждую из которых необходимо рассмотреть отдельно.
Выберем в B5.27) функцию v = l, полагая тем самым,
что 1а — бз и, следовательно, la = gSa.
Тогда в любой допустимой системе координат B5.28)
и
Предположим, что имеет место случай A): Ъх Ф 0. Тогда
из B5-29) следует, что, не уменьшая общности рассуж-
рассуждения, можно предполагать Ьг, Ь2 и Ь4 отличными от нуля
в некоторой допустимой системе координат. При этом
198 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
предположении, полагая в B5-29) g2,y = g-3,4, = 0 за счет
выбора /, б и я|з, получим в новой системе координат:
^=1, Ь2 = Ьл = 0, q = 1 и из B5.31):
/a,l/ = 0. B5.32)
Это тензорное уравнение справедливо в любой системе
координат и, в частности, в любой допустимой системе
координат, где оно будет иметь вид:
d3g3a = 0. B5.33)
Найдем среди всех допустимых преобразований те, при
которых условия 6„ = 64 = 0 остаются инвариантными.
Из B5.29) следует, что такие преобразования получаются
из B5.28) при условии / = 0, в то время как ср(ж2'),
чр(х2',х3'), Q(x2') остаются произвольными функциями,
ограниченными лишь неравенством ц>'л!р,з- ^ 0. Совершая
такое преобразование по формулам B5.29), в которых
старые компоненты метрического тепзора g13 = e~x*, g23 —
= озз = #34 = 0. и учитывая, что условие B5.33) будет
иметь место и в новой системе координат, получим:
где б = 6 (х2'), г|з = ty(x2',xr). Следовательно, при а =
Но при произвольном выборе г[э это условие противоре-
противоречиво, и таким образом, случай A) отпадает.
Если предположить, что имеет место случай C):
bv = bA = 0, то в любой допустимой системе координат
этот факт был бы инвариантным; выбирая соответствую-
соответствующим образом i|K, (ж2', ж3'), можно g23 привести к единице.
Тогда условие B5.32) будет справедливо, и притом в лю-
любой системе координат. Следовательно, B5.33) будет
справедливо в любой допустимой системе координат; при
а=1, 3, 4 оно обратится в тождество, а при а = 2 по-
получим в новой по отношению к выбранной выше системе
коордийат: —^-(ф'^ 3,) = О. т. е. г|э 3,3, = 0 — условие, не
§ 25] ПРОСТРАНСТВА МАКСИМАЛЬНОЙ ПОДВИЖНОСТИ 199
выполняющееся при произвольном 1|э. Случай C) также
невозможен.
Следовательно, возможен только случай B): Ъ1 = О,
ЬдфО. Отсюда и из B5.29) следует, что, полагая 62q>'-f-
+ &46' = 0, в новой системе координат получим: gyZ,—
= §'3'==ёз'3' = 0' ?з-4- = Qbi^3'e~6- Здесь ^и Ч» — некото-
некоторые функции от х2-', х3', a bi-=bi{x2'). Выбирая функ-
функцию г|з, всегда можно обратить компоненту gb>li, в еди-
единицу. В этой системе координат B5.32) имеет место,
и следовательно, в любой допустимой системе справед-
справедливо равенство B5.3). Предполагая, что bx= b2 — О,
q&4=1, определим допустимые.преобразования, для кото-
которых эти условия сохраняются. Из B5.29) следует, что
это будет иметь место только в том случае, когда г|? 3, = 1
и -ф 3,3, = 0, вследствие чего противоречие, имеющее место
для двух предыдущих случаев, снимается. Если же не
требовать, чтобы g3.k, = l, то получим условие
которое означает, что при v = 1 множитель q связан
вполне определенным образом с координатой х3 = ty, что
не является противоречивым.
Будем далее предполагать, что указанное выше преоб-
преобразование совершено, но v ^ 1 и g13 = g»s — gs3 = 0> gzt, =
B' 3')
?( )
После этого среди преобразований B5.28) можно вы-
выделить такие, которые оставляют эти факты инвариант-
инвариантными. Из B5.29) нецосредственно следует, что эти пре-
преобразования будут иметь вид:
х1 = х*'+ f (х2') е**', а-2-ф(ж2'), )
B5.34)
аг3 == -ф (ж2', а;3'), х4 = ж4' + С, J
где С = const, cp'i|; g, Ф 0. Отметим, что после применения
такого преобразования новые компоненты метрического
тензора будут иметь вид B5.11), а функции аа/р' будут
200 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
выражаться через ааC формулами
= 0,
B5.35)
Компонента a3i не может равняться нулю, так как в про-
противном случае метрика вырождалась бы. Так как лр
ограничена лишь условием ф 3, Ф 0, а в остальном совер-
совершенно произвольная функция х'2', х3', то в B5.35) ком-
компоненту й2'/,' можно выбрать равной нулю. Кроме того,
аз<1 — Q^i (х'2')> ГД° Q> как это следует из B5.7), выражается
через скалярный множитель v Aа = v6g), выбор которого
ничем не ограничен, кроме неравенства v^=0: q = со (х2) v.
Ввиду этого при любом выборе 'ф и ¦ф 3, ¦#= 0 можно вы-
выбрать v так, чтобы а3'4- = 1. Отметим, что остальные
неизвестные компоненты аа>$> в B5.35) не зависят от v
и "ф, но еще остается произвол в выборе функций ф (х2')
(ф' ф 0), /, который можно будет в дальнейшем исполь-
использовать в. том случае, если некоторые из компонент аар
или их отношения не будут зависеть от х3.
Положим для краткости компоненты в новой системе
координат в безындексных обозначениях:
тогда искомая метрика будет выражаться матрицей
Зе—х4 0 бе~х^
B5.36)
1 ? я I == 8 == — 0€~^xi, О = CCV — Р2 ^> 0, С, V ф 0,
где штрихи при ха' опущены и а, р, у, 6 — неизвестные
функции от х2 и хэ.
§ 25J ПРОСТРАНСТВА МАКСИМАЛЬНОЙ ПОДВИЖНОСТИ
201
Неизвестные компоненты должны удовлетворять урав-
уравнениям B5.6) и уравнениям поля Rap = 0. Первая группа
уравнений B5.6) в силу B5.27) будет иметь вид:
ЯаЗрз = 0 (<х, р=1, 2, 3, 4); B5.37)
вторая группа запишется соотношениями
0
которые эквивалентны системе
= 0,
B5.38)
так как дискриминантныи тензор еа$у6 имеет компоненты,
отличные от нуля только при не равных друг другу
индексах. Контравариантные компоненты метрического
тензора определяются матрицей
„2.V* а„х1 ,,л„л-1
уе~
а
а
— у&ех~
а
v О
со = p2j
и поэтому в силу B5.37)
а
а
а
Р«
о
а
о
A)
а
о
1
о
B5.39)
Точно так же обращается в тождество второе уравнение»
B5.38), а третье приводится к системе уравнений
#i2 3Y = 0 (Y=l, 2, 3, 4). B5.40)
Кроме того, записывая уравнения ноля gaxHaaT$ — 0 для
метрики B5.39) и учитывая уравнения B5.37) и B5.40),
получим:
¦212 — -"j-iSl == ^1423 = ^2431 == ^2423 — 0j B5.41)
4, B5.42)
= 0. B5.43)
202 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
Уравнения B5.41) получаются из уравнений поля не не-
непосредственно, а как следствие B5.40) и тождества
Риччи:
¦ffl[234] = 0.
Прежде чем переходить к интегрированию полученной
системы уравнений, необходимо проверить, при каких
условиях исследуемое многообразие будет определять
пространство Т3.
Записывая матрицу (Ral) — ^gab) (а, 6 = 1, ..., 6)
в бивекторном пространстве для метрики B5.36) и ком-
компонент тензора кривизны, удовлетворяющих условиям
B5.37), B5.40), B5.42), нетрудно убедиться, применяя
элементарные преобразования (П. А." Широков [91],
стр. 34), что характеристика этой %-матрицы будет
[3° 3] в том и только в том случае, если по крайней
мере одна из компонент i?14i2 или Н24т не ровно- нулю.
Из B5.42) следует, что это возможно только в том слу-
случае, если компоненты Д1434. ^2434 не равны нулю одно-
одновременно.
Таким образом, приходим к задаче: требуется проин-
проинтегрировать переопределенную систему 18 уравнений
B5.37), B5.40), B5.41), B5.42), B5.43) с частными про-
производными второго порядка с пятью неизвестными функ-
функциями а, Р, у, 6, X, зависящими от двух аргументов
х2, х3; неизвестные функции, при наличии некоторых
соотношений между ними, могут быть упрощены за счет
произвольных функций согласно формулам B5.35).
Рассмотрим прежде всего уравнение /?3423 = 0. Для
метрики B5.36) оно запишется в виде:
б3(уРз-Руз) = 0. B5.44)
Предположим сначала, что б3 = ^-g б = 0. Тогда из B5.35)
следует, если учесть, что / и 0 — произвольные функции
от ж2, что т^аи = ^-3^x4 — 0, т. е. а3 = 0. Записывая при
этом предположении уравнение Д3131 = 0, получим, что
сф3 = 0. Так как а не может равняться нулю, как это
следует из B5.36), то рз = 0. Тогда и -^-за12 = 0, а из
B5.35) следует, что за счет выбора / всегда можно р"
§ 25] ПРОСТРАНСТВА МАКСИМАЛЬНОЙ ПОДВИЖНОСТИ 203
обратить в нуль. Кроме того, выбирая функцию 6, можно
в этом случае и б обратить в нуль. Если же в B5.44)
равен нулю второй множитель, то, записывая этот факт
при помощи формул B5.35), придем к уравнению
да12 да ^
дх3 дх3 у
в котором /, ф, 9 — произвольные функции (ф' Ф 0) от
переменной ж2. Следовательно, каждая скобка равна
нулю и, в частности, -х—( — j==0. Это означает, что за
счет выбора функции / можно обратить р в нуль. Но
тогда, записывая уравнение /?14.,3 = 0, придем к соотно-
соотношению
уа2б3 = 0.
Множитель у -И= 0, как это следует из B5.36); точно так
же и а2^0. Так как в противном случае ^-^ (апв~2й) — О
и так как 9 — произвольная функция от ж2, то а11 = 0,
что исключается опять-таки условием а > 0. Следова-
Следовательно, б3 = 0, и мы снова приходим к рассмотренному
выше случаю. Ввиду этого всегда можно р и б привести
к нулю, а метрику пространства искать в виде:
г-2*4 0 0 On
о
g = - ауе~2*\ a, y^O,
где a, у, Я — неизвестные функции от ж2, ж3. Кроме того,
из B5.35) следует, что остается еще произвол в выборе
функции ф (ж2') при условии ф' Ф 0.
Записывая уравнения B5.37), B5.40), B5.41) для
метрики B5.45), придем к следующей системе диффе-
204 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
ренциальных уравнений:
сс;> (Лз i~ 1) == U, Озз к— == U,
«-ее
- ( Y3 . «з > - ^ B5-46)
«28 —-1 -7Г — —
Все остальные уравнения, входящие в указанные системы,
обращаются в тождества.
Пятое уравнение этой системы приводит к альтерна-
альтернативе. Если предположить, что ^з Ф 0 и, следовательно,
X., = 0, то из первого уравнения следовало бы, что а3 = 0,
а из шестого, что а2 = 0. Вследствие этого последнее
уравнение системы B5.46) сводилось бы к соотношению
ау3 = 0, которое противоречиво, так как а ф 0. Следова-
Следовательно, уз = 0- Если в преобразовании B5.35) положить
/ = (), 0 = 0, ч|K=1, -ф2 = 0, то оно оставляет метрику
B5.45) неизменпой по своему виду, но компонента
а2'2' = уф'2> ГДС ф' ?= 0 и ф — произвольная функция от х2.
Ввиду этого всегда можно выбрать ф так, чтобы а^'21 =
— е—^ 1. Таким образом, в B5.45) и B5.46) можно
положить, не уменьшая общности, у = <?=±1, после
чего система B5.46) интегрируется элементарно и имеет
решения
а = е(с1 + с„х2 -г с3х3)-, X = а (х2) х*2 + Ь (х-) у = е = + 1,
B5.47)
где а и b — неизвестные функции от х- и имеют место
условия
«с3 = 0, с-ь = const (i=l, 2, 3). B5.48)
Как отмечалось выше, из двух компонент тензора
кривизны /?1434 и ^2^34 хотя бы одна должна отличаться
от нуля. Первая из них для метрики B5.45) при условии
B5.47) равна нулю тождественно, а вторая равняется
—2" ^23 и» следовательно, Х3 — аф0; это означает, вслед-
§ 25] ПРОСТРАНСТВА МАКСИМАЛЬНОЙ ПОДВИЖНОСТИ 205
ствие первого из условий B5.48), что с3 — 0 и а =
( 2J
Компонента R.z
.zil2. == 0, a RLil2 =
5 так как
бы одна из них должна быть отличной от нуля, то
0 0
а2
0, т. е. с2
0.
2
Уравнения B5.42) и B5.43) запишутся соответственно
+ 2) = 0. B5.49)
~
Заменяя X и а их выражениями и приравнивая нулю
коэффициенты при ж3, получим для X выражение
B5.50)
где ct — постоянные. Полагая
X1 = X1', X2 -— ± X2' — — , Ж3 = — X3' — С4, .?4 = — Ж7"''
постоянные с1 и с4 можно обратить в нуль, не меняя
структуры матрицы B5.45). Таким образом, получаем
искомые компоненты g~ в виде следующих функций:
а = exf, у = в, Я = Q хя + -1 a;2"^ln (joa;3*) — еж2" + 7, I B5.51)
е=±1, 1
где р и. q — произвольные постоянные, которые не ¦> огут
быть исключены при помощи допустимых преобразовагий.
Такое решение в другой системе координат было по-
получено впервые в работе [261] (стр. 201), и пока неиз-
неизвестно более короткого пути для решения проблемы.
Метрика пространства будет иметь вид:
ds2 = е(а сЫг + dz3*) + 2dx3 dr* -f K
B5.52)
где потенциалы а, X определяются формулами B5.51).
Следует отметить, что, интегрируя уравнения Кил-
линга при- любых р и q, для метрики B5.52) получим
как общий интеграл вектор Киллинга в виде:
g« = (с1 + С...Т1) 6« -г с„б«,
206 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
т. е. имеет место неабелева группа движений G2, дей-
действующая на неизотропных двумерных поверхностях
транзитивности, и пространство не допускает повышения
подвижности; группа максимальная — факт, доказанный
выше при помощи других соображений.
Задачи
1. Найти преобразования координат, переводящие мет-
метрику B5.1) в B5.2) и B5.3).
2. Определить, интегрируя уравнения Киллинга, опе-
операторы движения для метрик B5.1) и B5.2).
§ 26. Пространства Т15 допускающие движения
Переходя к фактическому определению пространств Тг,
допускающих ту или иную группу движений, необходимо
сделать следующее замечание.
Случаи, когда Т{ допускают только одночленную или
двучленную группы движений, не представляют затруд-
затруднений, так как наличие одночленной группы Gx просто
означает, что существует такая система координат, отно-
относительно которой все gap (х) не зависят от какой-либо
координаты ха (см. § 10, задачу 1) и в этой системе
координат параметрические кривые ха будут, траекториями
движения, после чего могут быть записаны уравнения
поля, отличающиеся от общих уравнений только этим
фактом.
В случае G2 не представляет затруднений выбрать
такую систему координат, где векторы Киллинга имеют
простой вид (см. задачу 1), проинтегрировать уравнения
Киллинга и автоматически выписать уравнения поля.
Ввиду этого мы будем в дальнейшем рассматривать
случай G3 с г>3. Далее тот факт, что пространство Тг
допускает группу движений Gr, будем обозначать симво-
символом Тг г.
Общая идея нахождения метрики пространств Tit до-
допускающих ту или иную группу движений Gr (с г>3),
сводится к следующему: для каждой из полученных в
§ 24 неизоморфных структур G3, учитывая ранг (?а) и изо-
26j ПРОСТРАНСТВА Ti, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 20?
тропность или неызотропность поверхности транзитивно-
транзитивности, подбирается голономная система координат, относи-
относительно которой векторы Киллинга имели бы по возмож-
возможности простой вид. Интегрируя после этого уравнения
Киллинга и уравнения поля Ra$ = 0, получим искомые
метрики возможных Тг с G3.
Так как всякая C4 допускает подгруппу G3, то все
Тг, 4 должны находиться среди Тг,з. Поэтому, наклады-
накладывая на Гг,з дополнительное требование, чтобы они допу-
допускали G4 допустимой структуры, найдем все 2\,4. Точно
так же дело обстоит с 7^,5. Что же касается Тг,$, то,
кроме полученного в § 25 Г26, других Tt с такой по-
подвижностью не существует, если не считать плоских
пространств.
Среди всех возможных преобразований координат вы-
выделим те, которые переводят компоненты векторов Кил-
Киллинга ?а (х) в те мое самые функции от новых перемеп-
S
ных, и будем называть их допустимыми для заданной
группы движений Gr, так же как это делалось в § 25.
Пространства Т1<3
1. Рассмотрим структуры B4.6), отвечающие обеим
возможным неразрешимым группам G3 в том случае,
когда они содержат стационарные подгруппы Gx и, ввиду
этого, двумерные поверхности транзитивности, неизотроп-
неизотропные с неопределенными и определенно-отрицательными
метриками.
Для всех представляющихся здесь случаев является
характерным следующее. Нужно рассмотреть неразре-
неразрешимую группу С?з, действующую транзитивно на двумер-
двумерных неизотропных поверхностях транзитивности. Следо-
Следовательно, каждая такая поверхность допускает группу
полной подвижности для пространства V2 (§ 10, задача 9)
и поэтому является поверхностью постоянной кривизны.
Необходимо определить систему операторов, индуциру-
индуцирующих на таком V2 группу G3 заданной структуры. При
этом необходимо иметь в виду следующее. Если ранг
матрицы (ga) равен порядку группы, то при одинаковых
s
структурах группы подобны, т. е. переводятся одна
208 ДВИЖЕНИИ В СВОБОДНОМ ПРОСТРАНСТВ!': [гл. IV
в другую некоторым преобразованием координат ([147],
стр. 96).
В рассматриваемом случае ранг этой матрицы меньше
порядка группы, и поэтому при одинаковой структуре
нужно выделить два случая в зависимости от знака кри-
кривизны поверхности К; К ф О, так как G3 для евклидо-
евклидовой или псевдоевклидовой плоскости содержит абелеву
подгруппу G2 и не может быть неразрешимой. Если
К Ф ± 1, то, определяя для такого пространства опера-
операторы из уравнений Киллинга, получим те же самые вы-
выражения, что и в случае if= ±-_ 1, но входящие в |а(ж)
переменные все будут делиться на У ± К. Так как от
такого множителя всегда можно избавиться, то доста-
достаточно рассмотреть случай К = + 1- Это утверждение
будет, однако, справедливо лишь в предположении,
что операторы поверхностей транзитивности не меняются
от поверхности к поверхности. Вообще, если F4 с не-
неопределенной метрикой допускает нетранзитивную группу
движений Gr и общий ранг q матрицы (?а) меньше г, то
.S
можно так перенумеровать |а, что
?« - ф'Д« (* = 1, . . ., q; к = q + 1, . . ., 7-),
к I
причем ранг (?а) равен q, a (ph — некоторые функции
от х. Пусть среди функций ф имеется р независимых.
Тогда может представиться два случая ([147], стр. 272):
1) если в координатной системе, для которой gv = 0, для
s
v = q + 1, . . ., п ранг матрицы Якоби функций ф по
х1, . . ., ос'1 равен р, то существуют координатные систе-
системы, в каждой из которых компоненты |а являются самое
большее функциями ж1, . . ., х'1; 2) ранг этого якобиана
меньше р, и тогда такого утверждения сделать, вообще
говоря, нельзя.
Достаточно показать отличие от нуля якобиана для
начала нормальной системы координат и в силу непре-
непрерывности распространить затем результат на некото-
некоторую область. Для рассматриваемого случая q = 2 и
§ 26J ПРОСТРАНСТВА Ti, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 209
2 3*
|а = ф|а + ф5а. Опуская индекс а, дифференцируя кова-
1 2 3
риантно и относя результат к началу, где имеют место
начальные условия B4.6), получим:
0 2 3
la, р = (ф,р §аH + (ф,Э ia)o-
1 ji О
2 3 3
Полагая здесь а, Р = 1, 2, 3, 4, получим: ф^ = q> 2 = <p,i = 0,
2
а ф2 = 1| т- е- исследуемый якобиан имеет вид:
0 1
10
Таким образом, можно утверждать, что существует
такая система координат, относительно которой поверх-
поверхности транзитивности будут иметь уравнения хг = const,
ж4 = const, причем ?а = ?а (ж1,ж2).
а а
Рассмотрим операторы на таких поверхностях (при
К— ±: 1), учитывая, что сигнатура метрики может быть
только или вида ( ), или ( \-); достаточно рассмот-
рассмотреть метрики, отнесенные к полугеодезическим коорди-
координатам:
1°. — dx& — cos2 ж2
2°. dxi2 —
3°. с/ж42-сп2ж4йж12, B6.1)
так как все другие возможности приводятся к этим трем
при помощи невырожденных вещественных преобразова-
преобразований. Этим метрикам отвечают операторы, определяемые
соответственно векторами Киллинга:
1) 1а = б?, la = sin ж3 6° 4- сой ж3 ctg ж2 6",
1 2 I B6.2)
go = cos ж3 6° — sin ж3 ctg ж2 dj', G3 типа IX.
з
1 2
?a = ch ж4 6? + sh ж4 tg ж1 б«; С3 типа VIII.
з
B6.3)
14 д. з. Петров
210 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ 1гл. tV
3)
i 2
« + sha;4tga;16o; G3 типа VIII.
з
Рассмотрим B6.2). Записывая уравнения Киллинга
?(a, p) = 0 для |а, получим, что g-ap не зависят от ж3,
а эти же уравнения для ?а и ?а приводят к выводу, что
2 з
gu = a. gM = p, g22 = Y> gss^Ysin2^2, #44 = 5, B6.5)
где a, P, y> ^ — некоторые функции от х1 и ж4, а все
остальные компоненты gag равны нулю.
Определим теперь общий вид допустимого преобразо-
преобразования для векторов Киллинга B6.2). Если оно имеет вид:
а**' = фа (ж1т ттт> xnyj
то, по определению,
5а' ^ sin ж3 ^2фа' + cos xs cfcg ж2 д3а>а' =
2
= sin ф3 б^' + cos ф3 ctg ф2
|а' =- cos ж3 <92фа' — sin ж3 ctg ж2 <93ф2' =
3
= cos ф3 б^' — sin ф3 ctg ф2 б^'.
Полагая здесь а= 1, 2, 3, 4, получим систему дифферен-
дифференциальных уравнений с частными производными первого
порядка с четырьмя неизвестными функциями. Общий
интеграл этой системы имеет следующий вид, опреде-
определяющий допустимое преобразование:
i' = }(x1, ж4),
ж4'=
* * * *
где к, s — целые числа, а / и 6 — произвольные функции
своих аргументов. Очевидно, что это преобразование невы-
невырожденное и допускает обращение, которое запишется
теми же формулами, если поменять местами ха и ха'
и опустить знак «*». Применяя такое преобразование, мы
§ 26J ПРОСТРАНСТВА Ti, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 211
не изменим Ъ,а и уравнений поверхностей транзитивности
s
х2 = const, х3 = const, а следовательно, и структуры
интегралов B6.5). Вычисляя g'a$, получим:
g'n = « ШJ + 2Р 3J 3,9 + б E1бJ,
g« = а (ЫJ + 2P а4/ а4е + б (d4eJ.
Пользуясь произволом в выборе функций / и 0, можно
потребовать, чтобы
что приводит к системе дифференциальных уравнений
где g^i зависит лишь от производных д4/ и <946. Пока-
Покажем, что здесь записана совместная система уравнений,
приводящая к вещественной системе координат. Для
справедливости последнего необходимо, чтобы правая
часть второго уравнения была больше нуля т. е. аб —
— Р2 < 0. Но для метрики B6.5)
g = \gafi I = («б - р*) y2 sin2 х* < 0,
и следовательно, аб—(З2 << 0. Определяя из второго урав-
уравнения дг0, подставляя в первое и опираясь на предполо-
предположение о голоморфности входящих сюда функций в неко-
некоторой области, придем к системе уравнений вида Коши —
Ковалевской (С. П. Фиников [160], § 1):
и следовательно, система совместна; выбирая в качестве /
и б интегралы этой системы, удовлетворим поставленным
выше требованиям, а метрику приведем к виду:
B6.6)
14*
i
(go») =
1
/a
fo ¦
0
0
У
0 у
0
0
0
sh2 ж2
0
0
0
0
1
a
212
ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
где а, у — некоторые функции от х1, х*. Система коорди-
координат 4-ортогональная.
Записывая уравнения поля i?ap = 0 для этой метрики,
найдем, что 6 из 10 уравнений поля удовлетворяются
тождественно, а остальные 4 имеют вид:
а
1
as
— Yii nv _ aiYi _ „ v _ о — О
B6.7)
где для краткости введено обозначение: 9;/ = /t (i= 1, 4).
Система эта совместна, так как далее будут указаны
с случае ТiA конкретные ее решения; на вопросе о про-
произволе в решениях этой системы мы здесь не будем
останавливаться, хотя эта задача в данном случае может
быть известными методами (С. П. Фиников [160],
стр. 19 — 23) решена до конца.
Так как для векторов Киллинга B6.3), B6.4) все
рассуждения повторяются буквально, то, не останавли-
останавливаясь на выкладках (см. задачу 2), укажем, что полу-
получаются соответственно еще два решения уравнений поля
Т1>3 со структурой VIII:
(gap) =
/а
0
0
\о
0
0
0
0
0
т
0
0 \
0 '
0
— а cos'a?
B6.8)
§ 26] ПРОСТРАНСТВА Ti, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 213
где а, р зависят от ж2 и ж3 и удовлетворяют системе
1/- а| аЛ^ра^ „/p.,, p22 р; Л _
а§
— ^ «зз — 2а
^ -2р = 0,
B6.9)
и
B6.10)
где а, р — функции от х1. х*, удовлетворяющие системе
уравнений поля
(?ар} =
/а
/о
°
0
р
о Р
0
0
0
ch2*2
0
0
0
0
1
а
Ри - «2Р44 - ¦?- «iPi + ««4^4 + 2a = 0.
B6.11)
Этими тремя решениями исчерпываются все возмож-
возможные Ти3 с неразрешимыми группами движений G3, когда
зти G3 действуют на двумерных поверхностях транзи-
транзитивности постоянной кривизны.
2. Рассмотрим структуру B4.7), которой отвечают опе-
операторы, действующие на псевдоевклидовых двумерных
поверхностях; Сз имеет одночленную стационарную под-
подгруппу. В качестве вектора Киллинга можно взять
+ 3*6?, B6.12)
214
ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ
[гл. IV
для которых система уравнений Киллинга запишется
в виде:
digap = d4gaSi = О,
gaa h ^Ч + Х^Ч) + gfia д* (*? + *16?) =. О-
Следовательно, ga^ не зависят от ж1 и ж4 и, кроме того,
Таким образом, компоненты метрического тензора имеют вид:
= —a,
где a, P, у. б —некоторые' функции от ж2 и х3, а все
остальные компоненты равны нулю. Общий вид допусти-
допустимого преобразования для этих операторов будет
х1 = х1', ж2 = ф(ж2', ж3'), ж3 = ij) (ж2', ж3'), ж4 = ж4',
и выбирая ср и г|) как интегралы совместной системы
удовлетворим на вещественном пути требованиям
г-'. = О,
в силу чего
#22 gs
, = 1,
B6.13)
О
о о
*О О О —а
где а, Р — функции от ж2, ж3, которые должны еще удов-
удовлетворять уравнениям поля
a
2Р
, $22 , 4Р1
а2 ао62 и Вч
азз~4а"~Ж^~2|Г'
а2а3 а2рз
а 2а 28"
= 0,
B6.14)
§ 26J ПРОСТРАНСТВА Ti, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 215
3. Пусть имеет место абелсва группа G3, отвечающая
условиям B4.8), когда стационарная подгруппа совпадает
с единицей группы и группа действует на неизотропных
гиперповерхностях транзитивности. Так как эти гипер-
гиперповерхности неизотропные, то они геодезически парал-
параллельны и можно выбрать такую систему координат,
в которой их уравнения будут: ж* = const, а следовательно,
gi4 = 0 (i = l, 2, 3), g44 = e4=±l.
Так как ранг матрицы (ga) совпадает с порядком
S
группы, то в качестве операторов группы можно выбрать
любые определяющие абелеву структуру, имеющие ранг 3
и не зависящие от ж4; этим группа определится с точ-
точностью до подобия. Возьмем следующие операторы:
ga — ao-^—if 2, 3; a = l, 2, 3, 4). Тогда уравнения Кил-
S
линга дают, что gap — функции только от хл.
Из начальных условий B4.8) следует, что для любого
орторепера
sijU=°> B6Л5)
т. е. выполняется условие того, что векторы ^а образуют
s
градиентные, с точностью до скалярного множителя,
поля. Очевидно, это будет иметь место и для любой го-
0
лономной системы координат. Вообще, векторы ?а орто-
s
репера и ?а в выбранной выше голономной системе коор-
s
динат не обязаны совпадать; они совпадают с точностью
до линейных комбинаций с постоянными коэффициентами.
Но для абелевой структуры, не меняя ее, всегда можно
добиться такого совпадения. Следовательно, можно при-
принять векторы ?а за координатные. Записывая B6.15),
S
придем к системе
ёи ё'т + gjh ёч = 0 (i, j, k=l, 2, 3),
где среди i, f, к имеются по крайней мере два неодинаковых.
216 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
Отсюда следует, что
следовательно, углы между ?а не зависят от выбора по-
s
всрхности х4 — const и эти векторы можно выбрать так,
что
Таким образом, пространство допускает 4-ортогональную
систему такую, что
gii , е4=±1, B6.16)
гДе Sn ~~ Функции только от ж4.
Запишем уравнения поля для этой метрики. Положим,
что gH — <х4 (ж4), тогда компоненты тензора кривизны
л а'*
4i4=-Ta*+4^ 0', 7=1, 2,3;/
а все остальные равны нулю. Следовательно, тензор Рич-
чи определится в виде:
3
i?44 = 2 Ai4i4. ^ij = 0 (i, 7, кф),
1
а уравнения поля будут иметь вид:
полагая аг — ete2Xi, ег — ± 1, придем к системе
Ti + t-2*; = 0 (i = l,2,3), 1т1+2^2 = 0. B6.17)
i . ii
Складывая уравнения первой группы для г —1, 2, 3,
получим:
§ 26J ПРОСТРАНСТВА Ti, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 217
Следовательно, обозначая V т3- = со, получим для опреде-
определения со уравнение
ш" + со'2 = О,
т. е. или
со = In (cja^ + Cjj), сг, с2 = const, B6.18)
или, как особое решение, оз = const.
В случае B6.18) из B6.17) следует:
B6.19)
особое решение приводит к плоскому пространству и по-
поэтому исключается из рассмотрения. Полагая 2$t = ки
получим:
где постоянные А,{ и Yi связаны соотношениями
3 Ч
2Yi = 0, 2^ = 2, 2Я^ = 0 (i^=/). B6.20)
4. Случай не равных между собой стационарных кри-
кривизн с абелевой структурой и условиями B4.9). Из на-
начальных условий следует, что стационарная подгруппа
совпадает с единицей группы, ранг матрицы (|а) равен
S
трем и группа действует на ыеизотропных гиперповерх-
гиперповерхностях транзитивности неопределенной метрики с сигна-
сигнатурой типа ( Ь )•
Принимая эти геодезически параллельные гиперповерх-
гиперповерхности за координатные с уравнением х1 = const, так что
gn = — 1, gu = 0 (i ф 1), в качестве оператора группы мож-
можно выбрать
g« = e|, g« = eS, 5е = б?.
i 2 3
Отсюда следует: ga$ = gap (x1), а метрика будет иметь вид:
^ = 0?i,) (», /=2, 3, 4), B6.21)
где gij — некоторые функции от х1.
Теперь, записывая уравнения поля для B6.21), най-
найдем, что три уравнения обращаются в тождества, а осталь-
218
ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
ные имеют вид:
B6.22)
/,
¦ = 2. 3, 4), i
т. е. получим систему обыкновенных уравнений.
5. Структура B4.10). Стационарная подгруппа совпа-
совпадает с единицей группы. Группа полного ранга действует
как просто транзитивная группа на неизотропных гипер-
гиперповерхностях транзитивности е метрикой типа ( f- ).
Нетрудно убедиться, что невырожденным линейным пре-
преобразованием структура B4.10) приводится к структуре G3
типа VII (при q = 1):
[Х,Х2] = 0, [ХгХ3] = Х2, [Х2Х3] = - Хг + Х2.
Так как поверхности транзитивности трехмерные, то их
можно выбрать за координатные, как и в предыдущем
случае, определяемые уравнениями х1 = const, а в каче-
качестве операторов группы выбрать
Х1=о3. X2 = pit Х3 = р% — xip3 + (ж3 + х*) р4.
Так как в этой полу геодезической системе координат
gn= — 1, gu = 0 (г = 2, 3, 4), то, интегрируя уравнения
Киллинга для этих операторов, получим метрику в виде:
gii=-l. gi* = 0 (i = 2, 3, 4), ¦
Ж2
A cos со,
-г ]/3 sin со).
B6.23)
gi4 = у e~*2 [2C -
«о =
v + ]/3sin v)],
В (cos v — У 3 sin v)],
v = ]/ 3.x2 -j- ijj,
§ 26J ПРОСТРАНСТВА Ti, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 219
где а22, А, В, С, ф, ty — некоторые функции от х1. Вы-
Вычисляя компоненты тензора Риччи и приравнивая послед-
последние нулю, получим систему уравнений поля, которой
должны удовлетворять эти неизвестные функции (см. за-
задачу 1 данного параграфа).
Пространства Тх, допускающие <34
Рассмотрим все Тг, приведенные выше и допускающие
группу движений G3, и среди них найдем те Тх, которые
допускают и <34.
1. Пусть имеет место метрика B4.8) с неразрешимой
группой G4 типа VIII. Существует единственная струк-
структура группы Gjl для пространств 7\, включающая эту G3
как подгруппу, именно B4.11). Следовательно, для опе-
операторов B6.3) нужно определить такой оператор Х4, что-
чтобы коммутаторы [ХгХ4] (?=1, 2, 3) обращались в нуль.
Это приводит к уравнениям
д&* = О,
4
A ch xi + В sh ж4 = О,
где
л г ср "ТГ (У с —— t Л / tO 1
4 4 4
и
4
Следовательно, Л = 5 = 0, т. е.
B5.24)
но |а не зависит от х1, и следовательно, g1 == 0, 54|а = О,
4 4 4
ИЛИ
5 — S V-C , •*¦ ) °2 ~Г 5 {X , X /Оз.
4 4 4
Пользуясь допустимым преобразованием
хх' = х1 + Ля, ж2' = ср (ж2, ж3), ж3'--= г|э(ж2, х3,), ж4' = .т4,
220 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
можно привести ?а к виду:
т- е. gap не зависит от х3. Теперь допустимое преобразо-
преобразование для всех четырех операторов имеет вид:
•Л/ " *Л/ 1 /Ъ J t у *Л/ - W/ I \Aj Г ш lAs — "— \1/ \ iA/ J * tJL/ ' tyC* *
и, пользуясь им, можно снова прийти к метрике B6.8),
но при условии д3а = дзР = 0, В силУ чего система урав-
уравнений поля B6.9) приводится к уравнениям
1 2 1 1
которые интегрируются в квадратурах; получаем следую-
следующую метрику:
= - {сгх2 + с2J dx1 - xl+js dx2 —
f (с,ж2 + c2J cos2 Xs- dxi%, B6.25)
где c{ — постоянные. Получено статическое решение с не-
неразрешимой G4.
Дальнейшее повышение подвижности для B6.25) при-
приведет к плоскому пространству.
Точно так же для метрик B6.8) и B6.10), буквально
повторяя рассуждение, придем к следующим простран-
пространствам:
sin3 х* dx* + cX.iZc*) dx^ B6-26)
2?
полагая з B6.26) c1= 1, c2 = 0, c3= —2a, получим реше-
решение Шварцшилъда, а при с1=1, с2= —2a — «взаимное»
решение Букдала (см. § 14), В этих трех решениях число
§ 26] ПРОСТРАНСТВА Ти ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 221
существенных параметров можно привести к единице за
счет линейных преобразований переноса и растяжения.
2. Точно так же для метрики B6.15) при наличии
структуры B4.13) как единственной, допускающей дан-
данную Gs своей подгруппой, придем к
* g* x*\ B6.28)
3. Пусть имеет место метрика B6.13) с разрешимой
структурой. Существует лишь одна структура GA, вклю-
включающая такую Gs, именно та, которая имеет три допол-
дополнительных коммутатора:
Применяя линейную подстановку, можно задачу привести
к следующей: требуется определять |а, если имеет место
4
структура:
1 2 3
Записывая три последних коммутатора, получим:
44 44
откуда
I» = е (хЧЧ + х*бЧ) + |2 (х\ Xs) 61 + |3 (х\ х3) б?.
4 4 4
Применяя допустимое преобразование
х*' = х1, ж2' = ф(ж2, х3), х3' = \р(х2, х3), xk'—
222 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
являющееся допустимым для трех первых операторов,
приведем ?а к виду:
4
Ввиду этого при условии голоморфности фигурирующих
здесь функций четвертый оператор можно привести к виду:
-4- еж^ + бгб!, e1==0 или 1.
Для первых трех операторов уравнения Киллинга, как
это было показано ранее, дают: gu^a, g22 = $, g23~Y.
g33 = б, g44 = — а, а все остальные компоненты равны
нулю. Для четвертого оператора получим:
Если 8Х = 0, то еа = 0. Но а ф 0, так как это приводило
бы к вырождению метрики и, следовательно, 8 = 0, но
тогда \а = 0 — факт, не имеющий смысла. Следовательно,
4
8j = 1 и д„а + 2еа = 0, а р, у, б — функции только от пере-
переменной х2. Если 8=1, то легко убедиться, что это при-
приводит к вырождению пространства. Поэтому, полагая
8 = 0, имеем, что а также функция только от х3.
Для всех четырех операторов имеется следующее до-
допустимое преобразование:
а;1' = ж1, х2' = ж2 + ф(ж3), ж3'= г|з (ж3), хк'=х\
и при его помощи можно обратить в нуль компоненту g'23
и удовлетворить равенству g^g2S=^- Теперь, полагая в
уравнениях B6.14) d2a = <92j5 = 0, получим систему
оставляя в стороне случай плоского пространства, получим
si 2Bj ПРОСТРАНСТВА Tlt ДОПУСКАЮЩИЕ ДВИЖЕНИЯ
223
отсюда следующую метрику:
/-(/сж3+1J О
О
О
О
\
О
О
О О \
О О
— (kxs +1) О
О (кх3 + 1) V
B6.29)
т. е. статическое решение.
4. Рассмотрим метрику B6.16) при условиях B6.10)
с абелевой группой G3. Так как в данном случае метрика
определена с точностью до постоянных, то можно непо-
непосредственно проинтегрировать уравнения Киллинга и оп-
определить вектор |а искомой группы G4. Если воспользо-
воспользоваться преобразованием
™4' _
(с1 очевидно Ф 0), то метрику B6.16) можно привести
к виду:
при условиях
B6.30)
B6.31)
Записывая для B6.30) уравнения Киллинга, найдем:
3 4 ] г4
224 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
Четвертая группа уравнений дает
1
Третья группа позволяет определить
ci(x1, x2, х*).
Первая группа запишется в виде
х*)~Ч da* + 04с*} = О
(по i не суммируется).
Если Xt = 2, то Я.у = lfe = 0 (/, A =?fc i; j ф к). Но тогда
пространство будет плоским. Если же Xt ф 2, то в силу
того, что ф и сг не зависят от а;4, получим:
^.ф = 0, - 6ie4 5;Ф ^ (x4)"Xi ^ж4 + дгс1 = 0.
Если хотя бы одна Хг = 0, то из B6.31) следует, что
непременно еще одна X равна 0, а третья равна 2, что
опять-таки приводит к плоскому пространству. Следова-
Следовательно, Хг ф 0 (г=1, 2, 3), и поэтому
ф = 0, дгс1 = О, cl(x}\ xh) (/, A=3ti; i\ /, A=l, 2, 3).
Так как ^4 = 0, то искомая группа нетранзитивная
и |1' = сг(ж3, a;fe). Записывая вторую группу уравнений,
получим:
ег (x*)%i д/ + е,- (а:*)^ 5t^ = 0 (t> /)
(по г, / не суммируется).
Если среди Хг нет ни одной пары одинаковь^г, то по-
получим решение с1 = const, которое определяет тривиаль-
тривиальные операторы Xt = pn существование которых было пред-
предположено, но группы С4 здесь не будет. Если А,, = Я2 = Х3,
это противоречит B6.31). Следовательно, нужно положить
%! — Х2, и тогда из B6.31) следует:
\ \ ч
Л1 — Л2 — "о" >
3 '
§ 26] ПРОСТРАНСТВА Ti, ДОПУСКАЮЩИЕ ДВР1ЖЕНИЯ 225
к с1 ^с1 (ж2), с2 = с2(ж1), с3 = const, причем с3 можно обра-
обратить в нуль за счет комбинации с оператором Х3, не из-
изменяя структуры, а с1 и с2 должны быть линейными
относительно своих аргументов, так как их производные,
совпадая со структурными копстантами, должны быть
постоянными. Легко видеть, что их можно привести
к виду:
c2 = sxl, eLk-\- e%s = 0.
Таким образом, четвертый оператор
2 + г
4
т. е. это — оператор евклидова или лоренцева вращения
в зависимости от сигнатуры формы gn dx1 + gi2 йхг .
Пространство одределяется метрикой
4 4_ _2
ds* = ег (х*K dxx* + ег (х4K dx* + е3 (х*) з dx32 + е4 dx*\
B6.32)
К этому типу принадлежат решения Казнера и Нар-
ликара и Кармаркара (см. § 14). Метрика B6.32) будет
давать статическое решение, если индекс 4 приписать
некоторому пространственному направлению, и не стати-
статическое, если xi отвечает времени. Метрика B6.32) всегда
отвечает структуре
[XtXy] = 0 (/, /=1,2, 3), [А\Х4] = б1Х2)
т. е. имеем случай VI2 ло классификации A0.19), когда G4
имеет абелеву подгруппу Ga.
5. Рассмотрим случай неравных стационарных кри-
кривизн, когда имеет место метрика B6.21) при условиях
B6.22). Эта метрика возможна только для абелевой
структуры и при таких начальных данных, которые
допускают единственную структуру группы G4, включа-
включающую абелеву группу G3 в качестве подгруппы. Структура
15 А. 3. Петров
226 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
такой группы G4 будет
[ВДЛ = О (г, А=1, 2,
B6.33)
причем группа просто-транзитивная, и так как
то с,4' Ф 0. С другой стороны, если взять пространства,
4
отвечающие структуре B4.10), то единственная для Ti струк-
структура группы G4, включающая эту ?3, будет снова B6.33)
(с точностью до нумерации). Таким образом, эти два
случая при повышении подвижности приводят к одному
и тому же классу пространств. Так как B4.10) сведено
выше к метрике B6.23), то достаточно рассмотреть те
пространства B6.23), которые допускают просто-транзи-
просто-транзитивную группу со структурой
[Х1Х2] = 0, [Х}Х 3] = X,, [Х.1Х3]=—Х1 — Х
[Х,Х4] = Х1г [Х2Х,] = Х2, [Х3Х4] = 0,
При этом первые три оператора можно взять те же, что
и для метрики B6.23). Ввиду этого три последних ком-
коммутатора B6.34) определяют h,a в виде:
4
4
4 4 4
х3 + е (^ cos ?-— 4- 9 sm
—
ft?. B6.35)
§ 26] ПРОСТРАНСТВА Ti, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ
227
Мы не будем здесь предполагать, что гиперповерхности
транзитивности, на которых действуют операторы Хх,
Х2, Х3, выбраны в' качестве координатных, и поэтому
можем воспользоваться допустимыми преобразованиями,
не меняющими этих трех операторов. Они будут иметь
вид:
х3' = х3 4- е2 [М cos v + N sin v],
А - -
х4' = ж4 — \ег \{М + N |/3) cos v + (N - M]/3)sinv],
где /, ф, М, N — произвольные функции своих аргумен-
аргументов, а
V =
2
Пользуясь этими преобразованиями, в новой системе ко-
координат h,a можно представить в виде:
4
!<* = 6?+я3бз + а;4б2; B6.36)
после этого остаются еще допустимыми преобразования
(с3 cos v + c4sm v),
4 е + 2
cos v + (с4 - с3 ]/3) sin v],
г = const (г=1, 2, 3, 4),
B6.37)
оставляющие неизменными все четыре оператора.
Интегрируя уравнения Киллинга для каждого из этих
четырех операторов, получим компоненты метрического
i5*
228
ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ
[гл. IV
тзязора
gis =
cosq,
-2e 2 c13(cosq + ]/3sinQ),
g22
— c2
— e
23
-—- _— р
#33 =
23
(cos
COS Ю,
3 sinco),
g34 = i-
g44 = у
2^1-^ (c33 + c34 cos v),
[c83 + Cs4 (cos v + ]/3 sin v)],
[2c33 - c34 (cos v - ]/3sin v)J,
14,
= С
24. V =
B6.38)
где cij = coast. Имея в своем распоряжении четыре про-
произвольных постоянных, фигурирующих в допустимом пре-
преобразовании B6.37), можно упростить эту метрику. Можно
выбрать с3 и с4 так, чтобы в новой системе координат
ci'3' — С2'3' ~0; полагая с2 = -?*|Г) обратим с4'4' в нуль,
V о
и, наконец, за счет постоянной сх можно упростить еще
один коэффициент сз'4'5 с34 Ф- 0, так как это приводило бы
к метрике не лоренцевой сигнатуры, и поэтому можно
подбором с2 обратить с34 в е = ± 1. После этого метрика
будет иметь вид:
(а
3
0
0
\
э
Y
0
0
е-2а1-зс2
1е-2з
+8 (COS V
0
0
F+8
+Кз
cos v)
6+
sin v)]
0
0
+Е (COS V+J/~3 Sin V)]
—e (cos v—V~3 sin v);
B6.39)
Записывая для этой метрики уравнения поля и интегри-
интегрируя их, можно уточнить значение входящих сюда посто-
§ 27J ПРОСТРАНСТВА Т2 И Т3> ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 229
янных. Мы не будем приводить здесь эти вычисления
(см. задачу 2 § 26). Отметим лишь, что искомая метрика
после некоторого преобразования координат (не принад-
принадлежащего к числу допустимых) может быть записана
в виде:
ds* = _ a(dxi2 + dx^) — 2р* dx1 dx* — dx22 - e~2^dxz\ B6.40)
где
a = evcos(]/3v), P = evsin (]/3v), v = kx2, к = const.
Это пространство является многообразием Tlt допуска-
допускающим просто-транзитивную группу движений G4; оно
характеризуется также тем, что имеет постоянные ста-
стационарные кривизны (постоянные базисы элементарных
делителей Х-матрицы (Rab — ^gab) (a> b = l, . . ., 6)).
Более того, можно показать (см. задачу 3 § 26), что
стационарные кривизны пропорциональны е3, где ss — три
корня уравнения деления окружности на три равные
части: sf = 1.
Так как Тх не может допускать группу движений Gr
с г > 4, если оно не пространство постоянной кривизны,
то дальнейшее повышение подвижности может привести
только к тривиальному случаю плоского пространства.
Задачи
!. Записать уравнения поля i?ap = 0 для метрики
B6.23).
2. Проделать то же самое для B6.39). Определить
преобразование координат, которое полученную таким
образом метрику переводит в метрику B6.40).
3. Для метрики B6.40) определить стационарные кри-
кривизны и показать, что они: 1) постоянны, 2) пропорци-
пропорциональны корням 83 (.s=l, 2, 3) уравнения деления окруж-
окружности на три равные части: 8s = 1.
§ 27. Пространства Т2 и Т3, допускающие движения
По тем же соображениям, что и для 7\, классифика-
классификацию пространств Т2 начнем с групп G3 (см. задачу 1
настоящего параграфа).
0
0
1
а
Р
0
Р
У
¦о
0
0
0
230 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
Пространства Гг,з
Как показано в § 24, существует три типа структур
групп движений G3, отвечающих многообразиям Т2, один
из которых приводит к двум различным возможностям.
Рассмотрим эти структуры.
1. Абелева группа со структурой B4.19) действует
на изотропных гиперповерхностях транзитивности. В этом
случае, как будет показано в § 31, могут возникнуть
три случая, отвечающие метрикам C1.27), C1.28), C1.29).
В случае C1.27), когда
О 0 0 1
1
B7.1)
t - Pl (i = 1, 2, 3),
записывая систему уравнений поля, получим, что девять
уравнений обращаются в тождества и остается лишь одно:
/?44 = 0. В развернутом виде оно запишется так:
Ya" - 2|ЗР" -+¦ ay" + ^ (Y2«'2 + а«у '2 + 2aYP'2 +
+ 2p2aY + 2p2p'2 - 4pYa'P' - 4сф? Y) = 0, B7.2)
где g = | g-aP | = P2 — ay < 0.
Таким образом, потенциалы поля зависят в этом слу-
случае от двух произвольных функций одного аргумента.
На ка ждой гиперповерхности транзитивности ж4 = const
Хг — особый оператор, а полная группа па гиперповерх-
гиперповерхности будет Сц+со, что соответствует, наличию особого
оператора, который можно умножить на произвольную
функцию. Нетрудно, однако, проверить (см. задачу 3 § 27),
что метрика B7.1) допускает и группу G5 с операторами
Хг ^Pi (i = 1, 2, 3), Х4 = x*Pl + ш'Р„
Х6*=х»Р1-+<?Р, (* = 2,3), B7.3)
где
ш2 = \ — , со3 = — \ , ст2 = — \ , а3 = \ ,
B7.4)
§ 27J ПРОСТРАНСТВА Т2 И Т3, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 231
но не допускает группу Ge, так как содержит произволь-
произвольные функции и не может быть пространством максималь-
максимальной подвижности для Г2. Таким образом, метрику B7.1)
следует отнести по групповой классификации к простран-
пространствам Т2, допускающим G5. Из B7.3) и B7.4) непосред-
непосредственно следует, что группа Gb действует на изотропных
гиперповерхностях транзитивности, а структура группы
будет
Что же касается метрик C1.28) и C1.29), то они не
могут определять пространств Т2 (задача 4 настоящего пара-
параграфа). Если для метрики B7.1) вычислить компоненты тен-
тензора кривизны и записать в собирательных индексах бивек-
торногопространства Х-матрицу (ЛаЬ — A,gab) (а, Ъ— 1,..., 6),
то, вычисляя элементарные делители этой матрицы, по-
получим ее характеристику в виде [2 1° 21]; таким образом
метрика B7.1) действительно определяет пространство Т2.
2. Группа G3 со структурой B4.20) типа II действует
на изотропных гиперповерхностях транзитивности и имеет
один особый оператор (см. B4.21)). В этом случае, как
будет показано в § 31, метрику можно представить в спе-
специальной системе координат матрицей C1.30):
(
0 р ^"о |' g = P2-«Y<0, a,Y?=0, B7.6)
где а, Р, у — некоторые функции от ж4, а операторы
группы С3 имеют вид:
ТГ "V" "V" 2 I п /07 Г7\
Вычисляя матрицу (g°?) и компоненты тензора кри-
кривизны, ПрИДем К ВЫВОДУ, ЧТО ТОЛЬКО ТрИ ИЗ НИХ /?2424>
^2434> ^3434 отличны от нуля, а система уравнений поля
дает единственное уравнение
- а/?з434 == О'
232
ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ
[гл.
тогда как все остальные обращаются тождественно в нуль.
Кроме того, вычисляя для метрики B7.6) Х-матрицу
(Rab — kg^b) (а, Ъ — 1, . . ., 6), получим, как и выше, ее
характеристику в виде [21° 21], т. е. имеем простран-
пространство Г2. Однако, непосредственно интегрируя уравнения
Киллинга для метрики B7.6), получим общее выражение
для неизвестного вектора Киллинга в виде:
с2)
(с3 + v)
где ci (i = 1, 2, 3) — постоянные, а и и о — функции только
переменной ж4, удовлетворяющие нормальной линейной
однородной системы двух уравнений
в'= —
—
B7.8)
Так как коэффициенты этой системы пепрерывны, то
в области непрерывности она совместна и допускает общее
решение
причем фундаментальная система и, и, v, v удовлетво-
12 12
ряет условию
и
1
и
2
V
1
V
2
^0
B7.9)
в указанной области. Таким образом, пространство допу-
допускает группу движений Gb с операторами
%i —Pi (*' = 1, 2), • X, = z2Pl + ps,
= их3рг +
H- vp3,
X5 =
где ы, и (i=l, 2) образуют систему двух независимых
? i
решений для линейной системы B7.8). Вычисляя для
тих операторов [все возможные коммутаторы, получим
§ 27] ПРОСТРАНСТВА Та И Г3, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 233
структуру
J = 0 (i = 2, 3, 4, 5), [Х2Х3] = Xl
[Х2Х,] = 0 (/ = 4,5),
3Xft] = 0 (к = 4, 5), [Х4Х5] = kXlt
B7.10)
где
= vu — vu.
12 2 1
Здесь &— постоянная, в чем можно убедиться и непосред-
непосредственно; если продифференцировать правую часть этого
равенства и заменить и' иу'(( = 1, 2) при помощи системы
г i
B7.8), которой она должна по своему смыслу удовле-
удовлетворять, то получим к' = 0. Кроме того, из B7.9) сле-
следует, что к -г= 0, и тогда за счет умножения, например,
оператора Х5 на -т- можно обратить к в единицу. Но в этом
случае нетрудно убедиться, что структура B7.10) изо-
изоморфна структуре B7.5), рассмотренной в случае Tz, з
с абелевой группой G3, действующей на изотропных гипер-
гиперповерхностях транзитивности; изменяя нумерацию опера-
/1 2 3 4 5 \
торов при помощи подстановки ( . о . Q _ I , можно одну
\ 1 Л 4 о о /
из этих структур привести к другой. А бе лева подгруппа Ga
группы G5 B7.10) имеет своим базисом операторы Хг,
Х2, Х4, и она действует, как это непосредственно следует
из B7.6) и вида операторов, на изотроппых гиперповерх-
гиперповерхностях транзитивности, т. е. метрика B7.6) может быть
приведена к метрике B7.1) при помощи невырожденного
преобразования, и этот случай не заслуживает специаль-
специального рассмотрения.
3. Пусть имеет место группа G3 того же типа II, но
уже действующая на изотропных двумерных поверхно-
поверхностях транзитивности; операторы группы можно задать,
например, в виде B4.22), т. е. среди них имеется один
особый оператор Х1г так как для пространства максималь-
максимальной подвижности оп также будет особым. В этом случае
*
(см. § 30, случай G3 II на V2) всегда можно выбрать
такую систему координат, относительно которой операторы
234 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
будут иметь вид (с точностью до нумерации):
X, = р X =п Xs = ж2р 4- xip , B7.11)
а метрика определяется матрицей
'О 0 0 ^
о —р о о
О 0 а О
0 0 0^
gats = gap (xs, х*), g = сф3 < 0, а, р < 0.
Но если для этой метрики записать уравнения поля, то
легко убедиться, что {3 не зависит от х3 и вследствие
этого функции аир будут подчинены только двум усло-
условиям:
а г\ ( О *-^Р-1 \ 1 ( ^4 ^4Н4 Л f\ /ОТ Л Q\
где fi^jrx- Отсюда следует, что потенциалы поля B7.1)
зависят от трех произвольных функций, две из которых
зависят от xz и одна от хй.
Нетрудно проверить (см. задачу 2 настоящего пара-
параграфа), что характеристика Х-матрицы имеет вид [21° 21],
ЗВ2
и следовательно, если выполняется условие р44 — '-— ф 0
при произвольных значениях функций а, р\ отсюда нельзя
получить пространства ТЛ или Т3, которым отвечают
характеристики другого типа.
Интегрируя уравнения Киллинга для метрики B7.12)
при условии, что на функции а и р не накладывается
никаких других условий, кроме B7.13), получим лишь
операторы B7.11), т. е. эта метрика, вообще говоря,
допускает только трехчленную группу движений.
4. Рассмотрим тот случай, когда имеет место группа Gz
типа III со структурой B4.23), действующей на неизо-
неизотропных гиперповерхностях транзитивности.
Как будет показано в § 32, в этом случае систему
координат всегда можно выбрать так, что метрика для
любого пространства У4 с такой группой движения будет
§ 27] ПРОСТРАНСТВА Т2 И Т3, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 235
определяться матрицей C2.7):
а22е2
«зз U I '
0 0 0 ej
а операторы группы будут иметь вид:
-\7~ "«7" —. V" „ | 2 Ti /07 4 ^л\
Отметим, что структура B4.23) остается неизменной
с точностью до линейной невырожденной подстановки
т. е. операторы Х1 и Х2 определяются для этой струк-
структуры с точностью до постоянных множителей. Как уже
отмечалось в § 24, для этой структуры возможна такая
система координат, для которой операторы будут опре-
определяться формулами B4.24). При этом в B4.24) опера-
оператор Х2 = р1; этот оператор допускается и пространством
максимальной подвижности в той же системе координат
(см. метрику B5.3) и операторы B5.4), с изменением
нумерации оператора 1 на 2), причем он отвечает изо-
изотропному полю вектора Киллинга; этот факт должен
иметь место и для исследуемого пространства. Следова-
Следовательно, оператор Х2 изотропный и вследствие B7.14)
и B7.15) а33 = 0. Кроме того, из B4.24) и B5.3) следует,
что операторы \Х1г Х2] образуют абелеву подгруппу, дей-
действующую на изотропных двумерных поверхностях тран-
транзитивности. Этот факт переносится и на метрику B7.14)
с оператором B7.15), так как Хх и Х2 определены для
данной структуры однозначно (с точностью до несуще-
несущественных постоянных множителей). Иными словами, опре-
определитель
а23 О
т. е. а2з = 0. Полагая аи = a, ai2 = j3, я13 = у> а22 = о>
236
ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
получим метрику в виде:
а $ех1 у 0s
$exl бе2*1 О О
у 0 0 0
О 0 0 ed
B7.16)
p2xl
•О, е4=±1,
g = - е4
где а, р, у. б —некоторые функции от xi. Если потре-
потребовать, чтобы допустимые преобразования для операто-
операторов B7.15) оставляли в то же время неизменной струк-
структуру B7.16), то они будут иметь вид
{ = const
и, следовательно, не содержат произвольных функций.
Интегрируя уравнения поля /?ар = 0 для метрики B7.16),
получим:
т. е. у и б—постоянные, a
где р, q, r, s — постоянные. Выбирая в преобразовании
B7.17) постоянные си с2 и с4 определенным образом,
можно б обратить в е4, a q и г превратить в нули.
Таким образом, метрика будет иметь вид:
'i?(iD2_2);
iexl
V
рх*е
У
О
О
О
Y 0\
О О
о о
О ej
B7.18)
где й4=1Ь1, а Р, s, У — произвольные постоянные.
Записывая для этой метрики Я-матрицу (i?a6 — kgab)
(а, Ъ = 1, . . ., 6) и вычисляя ее элементарные делители,
найдем, что характеристика этой матрицы будет иметь
§ 27] ПРОСТРАНСТВА Г а И Ts, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 237
вид [2 1° 2 1], если только р ф О или ± ]/2. Следова-
Следовательно, при этом условии метрика определяет простран-
пространство Т*. Однако, интегрируя для метрики B7.18) уравне-
уравнения Киллинга, получим вектор Киллинга ?а, зависящий
от шести независимых переменных, т. е. пространство
максимальной подвижности B5.3), но в иной системе
координат.
Пространства Т2, допускающие группы
движений G4 и G5
Для определения таких пространств достаточно сре-
среди 7\, допускающих Gs, выделить те, которые допускают
и Git так как всякая группа d содержит подгруппу G3.
Так как метрикам B7.1) и B7.6) отвечает группа движе-
движений Gs, то для определения пространств Т2, допускаю-
допускающих G4, остается выяснить, при каких значениях функ-
функций аир метрика B7.12) допускает четырехчленную
группу движений.
Если, кроме операторов группы G3 B7.11), простран-
пространство допускает еще оператор Х4, то согласно второй
основной теореме Ли (см. § 10, формула A0.18)), вычисляя
коммутаторы для Х4, получим:
[ХМ = АгХ, + BiX2+CiX3+DiXi (i = 1, 2, 3), B7.19)
где Ait Вi, Сг, Dt — структурные константы. Записывая
эти уравнения и исключая частные производные от ком-
компонент вектора Киллинга |а, отвечающего оператору Х4
4
(Х4 = ?,ада), получим уравнения
Если бы величина Q была отлична от нуля, то оператор Х4
действовал бы на тех же изотропных двумерных поверх-
поверхностях транзитивности, вдоль которых передвигаются
точки пространства Т2 под воздействием операторов
Хг (г =1,2,3); каждая такая поверхность являлась бы
изотропным многообразием V2, допускающим транзитив-
*
ную на V2 группу движений G4, но легко убедиться, что
238 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
это невозможно. Следовательно, Q = 0, и так как Di = const,
то все Dl равны нулю: Dt — 0. Ввиду этого, интегрируя
остальные уравнения B7.19), получим: Аг == В.л-\-С3,
Вг = Сх = 0, а вектор Киллинга будет иметь вид:
6? +
+ N (х», ж4) б3а + [С2ж*2 + (Ва - Ся) х* - В3] fij, B7.20)
где Л/ и iV — некоторые функции своих аргументов. Не-
Непосредственной проверкой можно убедиться, что условия
Якоби A0.18) для структурных постоянных Аг, Ви Сх
выполняются тождественно. Записывая для оператора |°
ч
B7.20) и метрики B7.12) уравнения Киллинга, получим:
Л2 = В2 + С3 = 0, М = М(х3) и
54(|4Р) = 0, aiV4 + pr=0t a3iV + |-a4 + 2aiV3 = 0. B7.21)
Кроме того, единственное уравнение поля B7.13) приво-
приводится к виду:
a? *
2а
Можно еще уточнить значения структурных постоян-
постоянных, если воспользоваться следующим соображением.
Из классификации возможных вещественных структур
групп Ли G4 A0.17) и A0.19) следует, в чем можно убе-
убедиться непосредственно проверкой, что подгруппу G3
тида II могут содержать только структуры типа I, II, III
или же типа VI. Так как структурные константы С\%>
С\я, С\з имеют канонический вид, то, не уменьшая
общности, можно считать, что найденная выше структура
должна и для 6% (/' = 1, 2, 3) иметь канонический вид.
Если бы имели место структуры I и II классификации
A0.17), то в обоих случаях постоянная С2 была бы рав-
равной нулю, т. е. в силу B7.21) р4 = 0- Н° в этом случае,
как уже отмечалось выше, характеристика А,-матрицы
§ 27] ПРОСТРАНСТВА Г2 И Т3, ДОПУСКАЮЩИЕ ДВИЖЕНИЯ 239
(Rab — ^-gab) (a, b — 1, . . ., 6) в бивекторном пространстве
не могла бы иметь вид [2 1° 2 1], что является необхо-
необходимым для пространств Т2. Если бы группа G4 имела
структуру одного из возможных типов VI, то многообразие
допускало бы абелеву группу движений G3. Но, как по-
показано выше, в этом случае Т2 допускало бы и группу
движений Gs, как полную группу движений, и поэтому
принадлежало бы к числу T2l 5.
Остается единственная возможность, когда структура G4
будет иметь тип III. В этом случае получим д = 0, Аг —
= А2 = А3 = В2 = С3 = 0, С2=1, ?3= — 1. В силу этого
из B7.20) и B7.21) следует:
к
{5 = — , к = const -{= 0,
N4a + М'В = 0, 7Va3 + j a4 -f 2aiV3 = 0, B7.23)
а B7.22) перейдет в уравнепие
«44 - # + ^- - 212?{!zilM = 0. B7.24)
44 2a ' (х42 + 1) (ж*2 + 1J V '
Метрика B7.12) и операторы B7.11) остаются неиз-
неизменными по форме при любом преобразовании вида
Пользуясь произволом в выборе функций / и яр, можно
за счет выбора / М (ж3) обратить в нуль; так как при
М = 0 из B7.23) следует, что N = N(x3), то, выбирая
соответствующим образом ij; (так, чтобы ijj8 =#= 0, что при-
приводило бы к вырожденному преобразованию), iV приведем
к единице. Вследствие этого из B7.23) получим уравне-
уравнение для а:
из которого следует, что а = а (х3 — arctg x4). Нетрудно
убедиться, что этот вывод вместе с уравнением поля B7.24)
приводит к выводу а = 0, что означало бы вырождение
метрики.
Таким образом, рассматриваемое пространство может
допускать лишь группу G4 типа VI и вследствие этого
допускает и группу Gs движений; пространства Т«
240 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
в распределении порядков полных групп движений имеют
лакуну: всякое Тг, допускающее группу G$, допускает
и группу G5.
Так как всякое пространство T2t 5 находится среди Г2>4,
то приходим к выводу: если Т2 допускает группу движе-
движений G5, не будучи пространством Т2 максимальной по-
подвижности, то оно определяется метрикой B7.1) со струк-
структурой B7.5) и операторами B7.3).
Пространства Т3, допускающие движения
Максимальная подвижность Ts, как показано в § 24,
определяется группой движений G2.
Является тривиальной задача определения Ts, допу-
допускающего группу Gt; она сводится к написанию системы
уравнений поля при условиях, что компоненты g „ (ж) не
зависят от одной переменной, и при условиях алгебраиче-
алгебраической структуры тензора кривизны (см. задачу 6 § 27).
Задачи
1. Записать уравнения поля для Т2, допускающих группы
движений G{ или G.2 обеих возможных структур (см. § 29).
2. Показать, что характеристика ^-матрицы (ЯаЬ — kgab)
(а, Ь=1, ..., 6) для метрики B7.2), B7.3) будет иметь
вид [2 1" 2 1].
3. Проверить, что метрика B7.4) допускает группу
движений G5 с операторами B7.6).
4. Показать, что метрики C1.28) и C1.29) не могут
определять пространств 1\.
5. Показать, что группы Сч типов IV, V, VII, VIII
не могут содержать подгруппы G3 типа II.
6. Записать уравнения поля и условия структуры для
пространств Т3, допускающих группу движений Gx.
7. Показать, что метрика
ds* = - е*2*4 (dx1* + dx^) - 2dx3 dxi +
определяет пространство Ts, допускающее одночленную
группу движений G± с оператором X = рг.
28J СВОДКА РЕЗУЛЬТАТОВ 241
§ 28. Сводка результатов. Обзор известных решений
уравнений поля
Естественно думать, что решения уравнений поля
¦(ЛаЗ — 0)> допускающие некоторую группу движений,
являются наиболее интересными с физической точки
зрения.
Во всяком случае все известные в литературе точные
решения обладают этим свойством.
Особенно интересными являются пространства с боль-
большой подвижностью, так как они отвечают наиболее простым
и физически важным моделям распределения и движения
материи. Можно думать, что они определяют геометрию
пространственно-временного континуума в свободном про-
пространстве в наиболее характерных случаях поведения
материи.
Так как всякие точечные преобразования, входящие
и заданную группу движений, определяют автоморфизм
и смысле отображения пространства-времени на себя,
п результате которого материя и геометрия гравитацион-
гравитационного поля будут описываться теми же формулами и урав-
уравнениями, что и до автоморфизма, то всякое описание
гравитационного поля задается с точностью до автомор-
автоморфизмов движения. В этом смысле геометрия любого гра-
гравитационного поля является геометрией автоморфизмов
движения пространства-времени. Каждому гравитацион-
гравитационному полю отвечает своя группа движений Gr, причем
О < г < 10. В случае г — 10 получим пространство постоян-
постоянной кривизны (при i?ap = 0 — пространство Минковского,
с точностью до выбора системы координат), а при т*=0
пространство допускает лишь тождественные преобразо-
кания ха — ха и группа автоморфизмов совпадает с едини-
единицей грзтппы.
Все известные в литературе решения можно характе-
характеризовать с этой точки зрения, но среди полученных в этой
главе пространств имеются и такие, о существовании
которых не было никаких предположений. К таким ре-
решениям относятся прежде всего пространства Т2 и Т3.
Но и среди пространств 7\ имеются неизвестные в лите-
литературе и обладающие рядом интересных свойств; стоит,
16 А. 3. Петров
242
ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ
(гл.
например, отметить пространства Tv допускающие просто-
транзитивную группу движений <34, с. неравными стацио-
стационарными комплексными кривизнами.
Классификацию полей тяготения в случае свободного
пространства удобно изобразить при помощп следующей
схемы.
\,тип
G?, 6g, Gg
в,
Оз
6г
о,
Ъ
лр-бо Минкойского Т,ю
шшш
¦ hi
TV
7>,о
шшшш
пр-8о максим, noffi Тг s
Т2.5
У///Ш*«У/Ж,
Т2,з
Т2,2
Т2,1
Т3
тгр-бомахсимподЗ. Г3>2
ъ
Здесь одинарная штриховка (лакуны) означает, что
такое Tt с группой указанного порядка автоматически
допускает и группу на единицу большего порядка (в слу-
случае 2\, следовательно, и группу Glo, которой отвечает
плоское пространство-время; для Г2 — группу G5). Двойная
штриховка означает, что не существует пространств такого
типа с группой движения указанного порядка. Других
лакун, кроме указанных на схеме, не существует. В каж-
каждой клетке указаны тип пространств и порядок возможной
полной группы. Из этой схемы непосредственно следует
отмеченный выше важный факт: пространства Т2 и Ts
не могут быть плоскими (тензор кривизны всегда отличен
от нуля).
Наиболее богатым по числу различных классов про-
пространств, допускающих движения, является первый тип
G\). Эти пространства имеют наиболее симметрическую
структуру тензора кривизны и являются характерными
для задач релятивистской космологии — области, где
5 28] СВОДКА РЕЗУЛЬТАТОВ 24.4
н основном до сих пор н применялась теория релятп-
ннстской гравитации. Может быть, именно этим объясняет-
объясняется тот факт, что почти все известные решения относятся
к классу пространств TJ>r (r = 2, 3, 4).
Приведем классификацию основных известных решений
уравнений поля
выяснив их тип и порядок допускаемой группы движе-
движений (см. § 14).
1. Решение Шварцшильда A4.1) для центрально-сим-
центрально-симметрического поля. Как показано в § 26, это есть реше-
irne, определяемое метрикой B6.26) при значениях постоян-
постоянных
<?!= 1, с2 = 0, cs= — 2а.
Следовательно, имеем здесь пространства TJti с неразре-
неразрешимой группой G* типа VIII. Наличие неразрешимой груп-
группы является естественным, если учесть, что это про-
пространство имеет двумерные неизотропные поверхности
транзитивности постоянной кривизны, для которых (з слу-
случае, когда кривизна отличпа от нуля) группа движений
исегда неразрешимая.
2. Решение Коттлера A4.2) является непосредственным
обобщением решения Шварцшильда на тот случай, когда
уравнепия поля имеют вид
Гут имеет место та же группа движений.
3. Решение Вейля и Леви-Чивита A4.3) статическое
с осевой симметрией. Так как решение зависит факти-
фактически только от двух церемонных х'л и q = j/х^ _|_ х-2.
то идсеют место два оператора, которые в некоторой си-
системе координат могут быть записаны в виде
Xt = ри Х2 = р2
п, следовательно, определяют абелеву группу G2, которая
действует на неизотропных поверхностях транзитивности.
Кроме того, так как это решение найдено при усло-
пип, что р, и v стремятся тс пулю на бесконечности,
то это пространство способно вырождаться в плоское.
16*
244 ДВИЖЕНИЯ В СВОБОДНОМ ПРОСТРАНСТВЕ [гл. IV
Но только пространство Tt может обладать таким свой-
свойством. Следовательно, имеем У1>2 с абелевой группой,
действующей транзитивно На неизотропных деул1врныз
поверхностях транзитивности.
4. Решение Бринкмана для п=4 определяет 7\ ю.
5. Решение Казнера определяет пространства Т\^
с разрешимой G4 типа VI4, имеющей абелеву подгруппу G3.
Группа нетранзитивная.
6. Решение Миттера является частным случаем реше-
решения Леви-Чивита и Вейля без повышения подвижности.
Таким образом, имеем здесь 7\2 с абелевой группой.
Решение Леви сводится к предыдущему.
7. Решение Дельсарта A4.5) представляет собой част-
частный интеграл системы уравнений поля Вейля и Леви-
Чивита. Подвижность не повышается. Характеристика
А,-матрицы имеет вид [A 1) 1, A 1) 1].
8. Решение A4.6) определяет Т1> 4 с неразрешимой
группой G4 типа VIII.
9. Всякое приводимое пространство A4.7) или A4.8),
когда ^аэ^х^ца и к Ф 0, имеет, очевидно, 6-членную
группу движений; если же х = 0, то приходим к пло-
плоскому пространству 7lil0.
10. Решение Нарликара и Кармаркара A4.12) приво-
приводится к решению Казнера.
11. Решение Эйнштейна и Розена допускает два оче-
очевидных оператора Kt = ръ и Х2 = р3, определяющих абелеву
группу G2. Если же записать уравнения Киллинга для
заданной метрики и потребовать, чтобы они допускали
решение, отличное от
|а = схб" + c26", с,, с2 = const,
то это возможно только при наложении на метрический
тензор некоторых дополнительных условий, не являю-
являющихся следствиями уравнений поля. Отметим, что решение
Эйнштейна и Розепа определяется при следующих допол-
дополнительных требованиях: 1) пространство допускает 4-орто-
гональную систему координат, 2) допускает абелеву группу
движений G2, действующую на неизотропных поверхностях,
3) gn— — gn, 4) сигнатура метрики ( 1- ). Более
подробное исследование этих пространств приведено в § 52.
S 28] СВОДКА РЕЗУЛЬТАТОВ 245
Очевидно, что любое решение может быть охаракте-
охарактеризовано в указанном смысле, и поэтому, резюмируя,
можно утверждать, что в свободном пространстве общая
классификация полей тяготения по структурам тензора
кривизны и классификация по группам движений при
наложении одной из них на другую приводят к инвариант-
инвариантной характеристике полей гравитации.
В случае полей тяготения при Тар ? 0 вопрос услож-
усложняется, но допускает решение, которое рассматривается
в следующей главе.
Г Л А В Л V
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
ОБЩЕГО ВИДА ПО ГРУППАМ ДВИЖЕНИЙ
В случае я = 4, когда уравнения поля гравитации
имеют вид:
классификация по группам движения, допускаемым про-
пространством, при произвольном тензоре энергии-импульса Уар
приводит к задаче классификации произвольных про-
пространств F4 при единственном ограничении
которое эквивалентно (с точностью до умножения мет-
метрики на — 1) утверждению: метрика пространства Г'п
в точке имеет сигнатуру типа ( 1-).
С физической точки зрения в развитие идеи, высказан-
высказанной в предыдущей главе, каждое поле гравитации общего
вида рассматривается здесь как такой физический фено-
феномен, который инвариантен относительно некоторой г-пара-
мстрической группы движений Gr ( 0 < г < " .7" == 10 ) ,
а геометрия пространства-времени рассматривается как
геометрия автоморфизмов, отвечающих данной группе Gr.
Задача классификации пространств F4 по группам
движений решалась различными авторами (см. § 29) при
тех или иных дополнительных предположениях. Общее
решение проблемы имеется в совместных работах
А. 3. Петрова, В. Р. Кайгородова, В. Н. Абдуллина [337],
[357], [358], которые содержат систематическое перечисле-
перечисление полученных ранее результатов, заполнение имеющихся
пробелов и решение проблемы для случая транзитивныл
si кратно-транзитивных групп.
КЛАССИФИКАЦИЯ ПОЛЕП ТЯГОТЕНИИ 24/
Такая классификация позволяет подойти к изучению
гравитационного поля с групповой и, следовательно, инва-
инвариантной точки зрения [321].
Систематической классификацией пространств F4 по
руппам двиячСний занимался Фубинн, в предположении
определенно-положительной метрики, в работе [18], где
отыскивались пространства F4 с группой G,. (?• = 1, 2, 3, 4),
и работе [20], где рассматривались Gr с ?\>5. Но в этой
последней работе содержалась неточность. Для установ-
установления допустимых структур групп движений Фубили дока-
доказал следующую теорему при не совсем, впрочем, точной
формулировке: всякая группа Gr (/• < 8) в V4 допускает
подгруппу Gr_v Однако, как показал И. П. Егоров [230],
эта формулировка требует уточнения. Фубини показывает
сначала, что теорема верна для >'<;7, а также и для
'—8, но в предположении, что G8 неизоморфна полной
проективной группе, и в этой части теорема верна. Если же
цля Gs не делать этой оговорки, то теорема не имеет
.места. Можно указать пространство F4 с группой Gs такого
вида, не допускающей подгруппы G7 [230]. Другая неточ-
неточность, допущенная Фубиии, заключается в том, что он
пользовался классификацией структур групп Gr над полем
комплексных чисел, полученной С. Лн в работе [7]; над
нолем вещественных чисел число структур увеличивается,
и поэтому часть пространств F4 с транзитивными груп-
группами выпадает; кроме того, в этом случае существует
нощественная группа G3, не содержащая подгруппу G2
(группа вращений).
Другим, оригинальным, методом отыскивал про-
пространства F4, допускающие кратпо-транзитивные группы
Gb,'Gc, G7 при определенно-положительной метрике, Врып-
чапу [200].
В случае неопределенной метрики появляется допол-
дополнительная возможность существования таких F4, у кото-
которых G. действует на изотропных поверхностях транзи-
транзитивности, метрика которых вырождена. Эту возможность
впервые отметил И. П. Егоров. Г. И. Кручкович пред-
предложил метод отыскания таких F4 и произвел классифи-
классификацию их для нетранзитивных Gr (?* = 3, 4) [260]. В этой
работе по недосмотру, замеченному А. 3. Петровым, выпало
е;колько классов пространств, кроме того, F4, допускаю-
248 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ Ггл. v
щие G2, а также транзитивные G4, не рассматривались.
Однако они очень важны для изучения полей тяготения.
Классификация основывается на рассмотрении кано-
канонических вещественных структур (§ 10).
Для выделения пространств F4, определяющих неко-
некоторое реальное поле тяготения, необходимо для каждого
из полученных классов пространств потребовать выпол-
выполнения условий 1^ае1<0. Исследование ведется в классе
аналитических функций.
§ 29. Поля тяготения, допускающие группу G
Будем всюду далее векторы Киллинга, определяющие
операторы XJ = l,a(x)daf, обозначать ?а, а производную
S S
-~- == да<р обозначать иногда для краткости фа.
Группа Go
Группа совпадает с единицей группы. Имеем про-
пространство F4, компоненты метрического тензора g~ (x)
которого нужно подчинить только условию j gaB | < 0.
Г руппа Gx
Возможны два случая: вектор Киллинга t,a изотроп-
изотропный или неизотропный.
Неизотропный ?"(§„?" ф 0). Тогда F4 допускает
такую систему координат, для которой Ъ,а = 6° и ga& =
~ё r(x2< х3' х4)' а координатные кривые с параметром /;'
являются траекториями движения.
Изотропный ?а(§а|а = 0). По сравнению с преды-
предыдущим случаем добавляется еще условие gn = 0,
Группа G2
Будем далее обозначать многообразия с вырожденной
*
метрикой символом Vm, опуская знак «*» в случае не-
невырожденности.
G2 I (абелева группа) на F2. Так как ранг (?a) (s= 1, 2:
а = 1, 2, 3, 4) пе может быть < 2, то всегда можно вы-
S 29] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ Gr (r<2) 249
брать такую систему координат, в которой векторы Кил-
линга имеют компоненты |3 = 0, ?4 = 0, а уравнения по-
S 3
верхностей транзитивности будут ж3 = const, ж* = const.
Пользуясь уравнениями структуры и самым общим пре-
преобразованием координат, оставляющим, как легко видеть,
;>ти факты инвариантными:
хх> — / (ж1, ж2, ж3, ж4), ж2' = ф (ж1, ж2, ж3, ж4),
ж3' = i|) (ж3, ж4), ж4' = 0 (ж3, ж4),
за счет выбора / и ср приведем векторы Киллинга к виду
Ь — "l > Ь — и2 '
1 2
После этого наиболее общее преобразование координат,,
сохраняющее все полученные выше факты, будет иметь вид:
Х1 = Х1' Jff(x3', Ж4'), Ж2 = Ж2'+ф(ж3', Ж4'),
х3 = <ф (ж3', ж4'), ж4 == б (ж3', ж4'),
где /, ф, я{з. О — произвольные функции своих аргументов,
подчиненные условию невырожденности преобразования:
г?з0* — tyi®s =f= 0- Уравнения Киллинга
для |а и |а приводят к выводу: ga^ — ga& (ж3, ж4). Исполь-
Используем произвол в выборе функций /, ф, ty, 6 для приве-
приведения метрики к одной из возможных канонических форм.
Выберем эти функции так, чтобы они удовлетворяли
системе уравнений
U = о (g13®s - g1*^), Щ = о (g*% - g**Mps),
где а = -^=-. «, = ± 1, w = g336^ - 2^34^з6з + g44^- и е4
выбирается так, чтобы в некоторой области пространства У4
а была вещественной. Здесь предполагается, что в gap
и ga$ переменные ха заменены через ха', а /, ф, ф, б — также
функции от жк'. При соблюдении этих условий и пред-
предположении об аналитичности gaB в некоторой области
250 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИИ 1гл. -\
получим систему дифференциальных уравнений типа
Коши — Ковалевской (С. П. Фиников [160]), совместную
о указанной области в классе аналитических функций.
Но эта система уравнений эквивалентна в новой системе
координат системе условий
giV = 0 (i =1,2,3), g4V = e4.
Следовательно, метрика в специальной голономной системе
координат будет иметь вид:
¦ B9. И
(i, /-1,2,3),
* *
C2 I (абелева группа) на F2. Так как F2 — изотропное
многообразие, то на нем метрика вырождается, т. о. если
отнести V2 к координатам х1, х2, то gxlg™ — g\% = 0. Если бы
ранг матрицы (gi3) (i, /= 1, 2) был равен нулю, то в неко-
некоторой системе координат gu = g12 = g22 = 0 и \ ga& I > 0
(а, р =1,2, 3, 4), но этот случай невозможен для реальных
нолей тяготения. Следовательно, ранг метрики на V2 равен
*
единице, и тогда на V2 существует единственное семейство
особых линии, изотропных и ортогональных ко всему Vг :
giji1 = 0 (г, /=1, 2). Если при этом G2 допускает опера-
оператор Х = |1<9|, то она допускает и оператор Y¦=a{x)!?'di.
где а — произвольный скаляр, т. е. получим два оператора
с общей траекторией, и наоборот, если в F2 имеются два
оператора с общей траекторией то эта траектория — осо
бая линия V2.
Ясно, что особые линии представляют собой систему
импримитивности Gz. Возможны два случая: а) среди
операторов G2 есть особый и Ь) нет особого оператора
a) t,a — особый вектор Киллннга. Так как ранг (?а) не
может б'ыть <2, то ([142], стр. 269) можно ввести такую
систему координат, для которой |3 = ?4 — 0 ('s=l. 2).
_•; I ПОЛЯ ТЯГОТКИЛЯ. ДОПУСКАЮЩИЕ ГРУППУ Or (r<2) 25 i
л уравнения V2 будут иметь вид жа = const, x* = const.
)ти свойства, инвариантны относительно преобразований
'•¦1'=/, ж2'= ф, x3'=ij;, а-4' = 6, где /, ф зависят от
г1, х2, ж3, х*, a ty и в от а,а, ж4, и ограничены только
условием невырожденности преобразования (^ф., — Дфх) х
> ('Фз^4 — Ч'^з) =# 0. Всегда можно выбрать /и ф так,
чтобы ga = 6° , после чего остается допустимым преобра-
преобразованием преобразование
х1' ~x1+f(x2, х3, ж4), х-2' = ^ (х-, х3, х4),
Ж3' = Т|5 (Ж3, Ж4), .X4' = 0 (Ж3, Ж4)
при условии ф2 A4'3^4 — ^^s) Ф 0, и это будет самый общий
вид такого рода преобразований. Так как |а — особый one-
Г
ратор, то в этой системе координат gn = g'12 = 0 и dff- = 0.
2
Из уравнений структуры [Хг, Х2] — 0 следует, что
§а=?°(ж2, ж3 ж4), и, применяя допустимое преобразование,
иолучим:
8 силу условия о ранге метрики пространства F, ?- =#= 0,
поэтому невырожденным преобразованием, выбирая ф„ и /.,,
собьемся того, чтобы ga =б?'. После этого допустил1ым
!1реобразованием будет .т1'—^1^/, ж2 =ж2-[-ф, ж3'= i(),
..¦4' = е; где /, ф, -i[), S — произвольные функции от ж3, ж4,
подчиненные условию ¦xjjgO.j — я|540з ^ 0- При таком преобразо-
преобразовании gi't-^gisty + giiPi' и так как ё'гз и ^и не могут
1ыть одновременно равны нулю, то можно, не нарушая
общности, принять, что gl4 Ф 0. Компонента g,2 инва-
инвариантна при таком преобразовании и не может равняться
нулю, так как в противном случае | g-1 > 0. Ввиду этого
\гожпо положить:
252 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ (гл. V
и =-
что приводит к совместной системе уравнений тияа Копти —
Ковалевской. Взяв в качестве /, ф, гр, 0 интегралы этои
системы, получим:
/О 0 gl30\
h) G2 «6 имеет особых операторов. Все рассуждения
повторяются почти буквально, но с тем ограничением,
что если хх — особые кривые, то не может быть вектора
Киллинга %а = 6°. Это приводит к двум возможностям
,B9.3)
= ±
B9./j;
G2 II (неабелева группа) на F2. Повторяя все рассуж-
рассуждения, относящиеся к случаю G.2 I на F2, с тем лишь
исключением, что уравнения структуры будут типа I f
получим:
B9.Гя
г* = ±
-f-
; 2<>i ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ От (г<2) 253
*
Ог II действует на F2. Здесь также выделяются два
случая:
а) G2 содержит особый оператор. Здесь применимы
нее рассуждения, проведенные в случае а) G21 на V2,
с незначительными отклонениями в силу других уравне-
уравнений структуры. Вследствие этого получим канонический
вид:
B9.6)
Ь) C2 не содержит особого оператора. Всегда можно
выбрать такую систему координат ([147], стр. 269), отно-
относительно которой F2 запишутся уравнениями xs = const,
х* = const, g3 = |4 = О. Выберем за координатные линии х1
S S
*
особые кривые на У2. Тогда gn = g12 = 0 и д-^2 = 0, как
0
0
__2
«13
0
0
«22
«23
0
-X2
е а13
«23
«33
0
0
0
0
е,
S
это следует из уравнений Киллинга; наиболее общее пре-
преобразование координат, сохраняющее все эти факты,
имеет вид:
х1' = /(з\ ж2, ж3, ж4), .г2' = Ф (ж2, ж3, -х4),
ж3' = il) (я3. ж4), ж*' = 9 (ж3, ж4)
при условии /хф2 (^304 — ^4^3/ # 0- Компонента g2 т^ 0, так
к&к случай особого оператора исключен. Поэтому, полагая
ii ~ ga /i> Ф2 — "gr ' придем к совместной системе типа
Коши — Ковалевской и приведем вектор Киллинга к сле-
следующему виду: ga' = б"'. После этого допустимые преоб-
преобразования примут вид:
Xх' = f (ж1, ж3, ж4), ж2' =¦- ж2 + ф (ж3, ж4),
Ж3' = 1|?(Ж3, Ж4), Ж4' = б (Ж3, Х%
254 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл
где fl (ip3e4 — "Ф4^з) Ф О- И3 уравнений структуры и дг%* — (
следует, что 6° = Л (.г1, .г8, х*) Ь? + (х* + В (хя, х*))&%, где-
2
Л =# 0, иначе имели бы случай особого оператора. Поэтом \
невырожденными допустимыми преобразованиями прине-
дом ?а' к виду б"' + ж2°° ¦ После этого допустимо еще
2
преобразование
х* = х1' + f (хя', .г1'), х* = х*',
x3 = ty (xz\ х4'), .с1 = 5(.т3', .г4')
При УСЛОВИИ %1K04 — tyi®S Ф 0.
Записывая уравнения Киплинга для этих операторов,
получим:
ffll = gl2=°. gl3=«l3. gl4 = «14.
где g p
Преобразуя допустимым образом, найдем, что
= ЯхзФл + я]4б4, и так как а]3, а14 не могут быть одновре-
одновременно нулями (| gaR | ^ 0), то компоненту а14 можно счи-
считать, не уменьшая [общности, отличной от нуля. Тогда
Потребуем, чтобы g^4, = go>4, =^3'4' — 0- Это приводит
к системе уравнений типа Коши: f4 — F, ф4 = ф, 64=ЧГ.
Если gx,t, = 0, то g , , Ф 0, и следовательно, можно раз-
разрешить эти три уравнения явно относительно /4, ф4, 04
Отметим, что если аыа^ — al3a2i = 0, то система сводится
к" fi = F, ф4 = Ф при произвольном 94 и приводит к тем же
{ 30] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G3 255
результатам. Следовательно, имеем канонический вид-
0 0 «13 0 \
0 e--xla.,n e'xla,3 0 \
г - -* | , B9. /
а„ е * a.2S a3, О у
0 0 0 о,/
«аЭ — аа0 (^3, a-4), A'j = р2, Х„ = //j + 2Г'-р2.
Этим исчерпываются все поля тяготения, допускающие
группу Ли движений G,.
$ 30. Поля тяготения, допускающие группу движений
6r;j, действующую на Т'-2 пли V-.
Если V'4 допускает группу движении G3 с матрицей
(cu) (s = 1, 2, 3; а = 1, 2, 3, 4) ранга 2, то эта нетрашитин-
ная группа действует на двумерных поверхностях тран-
транзитивности, которые могут быть неизотропными (V2) или же
изотропными (V2). Рассмотрим эти случаи по отдельности.
Gz действует на V2. Так как Gs — максимальная группа
на V.,, то каждое такое V, должно иметь постоянную кри-
шьшу К. При этом возможны случаи: 1) А' = 0, 2) К > 0
и 3) К < 0.
В первом случае (К — 0) каждое \'.z представляет собой
плоское двумерное пространство с сигнатурой (с точностью
до несущественного изменения всех знаков одновременно)
одного из двух видов: ( -j—\-) или ( + — ). В обоих слу-
случаях С3 допускает аболеву подгруппу С„. причем |а Ф <yh,a,
1 2
так как это означало бы, что на F2 действует особый
оператор, что исключено. Следовательно, искомые F4 со-
содержатся среди F4 типа B9.1). Но удобнее пойти другил!
путем, не опираясь на метрику B9.1).
Вообще, если Vn с неопределенной метрикой допускает
непрерывную группу движений Gr и ранг матрицы (?а)
s
меньше г, то можно так перенумеровать h,a, что можно
256 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ |,-л. V
будет записать:
где ранг матрицы (?а) равен q, а Ф^ — некоторые функ-
функции от х. Пусть среди ф^ имеется р независимых. Тогда
может представиться два случая ([147], стр. 272):
1) если в координатной системе, для которой
gv = 0 (v = q + 1, •..,«), ранг матрицы Якоби функций ф
по ж1, . .., xq равен р, то существуют координатные си-
системы, в каждой из которых ?а является самое большее
s
функциями от хг, .. ., xq;
2) ранг якобиана < р; тогда такого, как в случае 1),
утверждения сделать нельзя.
Рассмотрим случай К —0 Нетрудно убедиться, что
двум возможным сигнатурам здесь отвечают неизоморф-
неизоморфные вещественные структуры Gs: а) (-\—\- ) — G3 VII при
q = 0 и Ь) ( -1 ) — G3 VI при q = — 1. Предположим сна-
сначала, что имеет место предположение 1) относительно
якобиана и имеет место группа G3 VII. Тогда существует
в V4 такая система координат, относительно которой F3
будут записываться уравнениями
х3 = const, [х4 = const, ?3 = ^4^0 r(s = if 2,3) и ^(i1,!2).
Это означает, что искомые операторы можно определить,
интегрируя уравнения Киллинга в двумерном пространстве,
определяемом метрикой ds2 = ег dx1* -\-e2dx2Z. В силу этого
получим:
Эти операторы допускают преобразование х1=>х1', жа =
— х2', x3 = ty(x2', х*'), xi — b(x3', а;4'), сохраняющее их.
Интегрируя уравнения Киллинга для этих операторов
и используя функции \J) и 6, получим канонический вид
§ 30J ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G8 257
метрики:
/ац О
о о\
О а22 О О
О 0 а33 О
О О О е,
J
fli, = а.
22,
Аналогично в случае G3 VI получим:
'О g12 О О
gia О О О
О О
\
gss О
О О О е4 j
gafi =
), в4 = ±1,
C0.1)
C0.2)
Если же предположить, что якобиан удовлетворяет
условию 2), т. е. ранг < 2, то мы пришли бы к тому
случаю, когда два оператора имеют общую траекторию,
что исключено.
Если F2 имеют ненулевую кривизну (К ф 0), то они
не могут допускать G3, содержащую абелеву подгруп-
подгруппу G2, и следовательно, эти G3 могут быть только нераз-
неразрешимыми: Gz VIII или G3 IX.
Пусть якобиан имеет ранг, равный 2. Тогда, как
и в предыдущем случае, для отыскания операторов до-
достаточно рассмотреть метрику пространства F2, отнесен-
отнесенного к полугоодезической системе координат:
ех = ± 1, е2 = ± 1, о = а (х\ ж2).
Записывая условие того, что кривизна этого F2 постоянна
(но отлична от нуля), и интегрируя уравнения Кил-
линга, получим следующие случаи после очевидных
17 А. 3. Петров
258
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
(гл. V
упрощений операторов (за счет изменения метрики):
I. Gs IX е1 = е„ ClA;>0,
|« = cos х26<* + sin х2 tg х1б«,
|a = 6f, |а = sin х2б° — cos х2 tgx'6",
II.
VIII
III. G8 VIII
IV. G3 VIII
x _ (.}, г2Ла _l sh r2 tp гг6а ?а = Йа
2
Q — nil x O. —\- KjM JU bg X Ot,,
:)
ex = — e2, ^i/c < 0,
cos x-h\ — sin x2 Ы1.хгЬ%, |а = б^>
?а = sin х2б^ + cos %2 th х1б^,
:t
7 ^^» /\
a = ch x26f — sh x2 th
C0.3)
2- )
Как известно, две группы Gr и i/r называются гпо-
добными, если существует такая система /¦ независимых
функций q39(a) (s= 1, ...,/¦), что можно найти невыро-
невырожденное преобразование координат, при котором конечные
уравнения Gr переходят в конечные уравнения груп-
группы Нг, если положить a'3 = <ps (а). Нас интересуют
группы и их представления в V4 с точностью до подо-
подобия, для которого необходимо совпадение структур (при
некотором выборе базисов). Если ранги q матриц (?а)
в
меньше г, как это будет иметь место в рассматриваемом
случае, то это условие еще недостаточно для подобия
групп. Записывая для GT и Нт уравнения C0.1), можно
утверждать ([147], стр. 99), что Gr и Нт подобны
тогда и только тогда, когда ранги матриц (ga) для обеих
в
групп одинаковы; любая пара соответствующих миноров
порядка q имеет одинаковые ранги, и система уравне-
1, ... , г)
нии
вида ср?'(х1) = ф? (х1)^ = 1, . . . , q\ p=
совместна и не приводит к соотношениям между пере-
переменными какой-нибудь группы. Необходимо оценить на
S 30]
ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ С3
259
вещественном пути, какие из групп C0.3) типов II,
III, IV подобны. Уравнения C0.1) для каждой из этих
групп, если выразить ?а через h,a и t,a, приводят соот-
1 2 3
ветственно к следующим функциям (ph:
II. ф1 = —= 1 Ф2 =
III. фХ= - "
sin хг
IV. ф
1
th
sll
Ф2 = ctga;2,
ф2 = cth х2.
Записывая уравнения q>h' (.г1) = ф'1 (ж), например, для
групп II — III, придем к соотношениям tgxir = thx1',
= sha;2, tgaj2 = th ж2'. Но, исключая отсюда х2, при-
при2' 0
дем к выводу ж2' = 0, что даст соотношение между ха>.
Тот же результат получим для групп III — IV, по
группы II — IV на вещественном пути подобны. Следо-
Следовательно, достаточно рассмотреть отдельно лишь случаи
I, II, IV операторов C0.1). После этого так же, как
это делалось выше, используя уравнения Киллинга для
этих операторов и допустимые преобразования, получим
следующие канонические формы метрик:
G, VIII
и
0
0 0
— o^cos2:*;1 0 0
0
0
«зз 0
О ел
i — "ар — \х ' ж )i Л1 — сих p^-f- ьа.х Lgх р2,
. Х3 = shx2p1 -f ch ж2 tgx1p2, e4= ± 1;
«и 0
0
о
C0.4)
VIII
v
0
0
0
о о
о о
\
0
C0.5)
у
э(ж3! Ж4)? -X"! = COS Л2/?х — Sin Ж2 th Ж1/?2,
Х3 — sin ж2 jt?j -j- cos x2 th ж1 р2, е4 — ± 1;
17*
260
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
(.гл. V
G3 IX (gap) =
v
all
0
0
0
0
aucos x1
0
0
0
0
«33
0
0
0
0
e
C0.6)
J
«ap(^3, X4), X, = COSX2p1-{-sinX2tgX1
X2 = p.2. X3 — sin ж2 px — cos ж2 tg x1 p2, e4 =
1.
Эти метрики получены в предположении, что яко-
якобиан д , i^n имеет ранг р по меньше двух. Если же
предположить противное, то, например, в случае C0.6)
придем при р = 1 к соотношению |а = а|а + / (а, ж3, ж4) ?а,
3 1 2
где а — некоторая функция. Записывая уравнение стру-
структуры [ХЪХ3\ = Хх, получим а = 0 и /(ж3, ж4), что озна-
означает совпадение траекторий двух операторов на F2.
К такому выводу придем и при р = 0. Этот результат
повторяется для остальных двух типов пространств.
Таким образом, приведенные выше случаи исчерпывают
все F4, допускающие Gs, действующие на F2.
*
G3 действует на F2. В этом случае, как показал Кручко-
вич ([203], стр. 15), G3 будет или разрешимой группой
типов II, III, или неразрешимой группой типа VIII.
Пусть имеет место G3 II. Если бы имело место
условие 1) для якобиана, то F2 в некоторой системе
координат записывалось бы уравнениями ж3 = const,
ж4 = const, a ^a = (ж1, ж2). При этом можно выбрать такую
S *
систему координат на F.,, что Х1 = pv Х3 = р2, Xs = Х2рг.
Однако, записывая уравнения Киллипга для этих опе-
операторов, придем к вырожденной метрике F4. Следова-
Следовательно, ранг якобиана для функций ф, определяемых
уравнениями C0.6), меньше 2. Тогда можно выбрать
систему координат так, что
?а Ла ta Аа Sa
S — "ii S — о», g —
1 2 з
где
а — а(х1, х2, ж3, ж4).
§ 30J ' ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G3 261
Из уравнений структуры получим:
Cv ¦ iAs l v/ l tA^ у %А/ г» /v ¦ /V V "^v * *A/ I *
Для операторов Хх, Х2 допустимые преобразовэния будут
иметь вид:
-Г3' ih/'r3 i-4V r4' fl ('-г3 'r¦4^
Если заметить, что Я не может быть постоянной, что
вело бы к вырождению метрики, то за счет такого пре-
преобразования 5а можно привести к виду |а = ж26<* + ж4б".
з з
После этого остается еще допустимым преобразование
C0.7)
Уравнения Киллинга приводят к выводу:
г\ , А /V3 <у>4\
В 11 — gl2 — gl3 — 624 — g23 — u) gl4 "T" g22 — U' gag — gag \X , X j.
Используя теперь C0.7), найдем:
0.
g4'4' =
Заметим, что из условия
gu
0 следует g-33 M= 0,
Потребуем, чтобы g'3'4'==S'4'4'= ^> эт0 приводит к си-
системе Коши — Ковалевской для /4 и ijj4. Таким образом,
C0.8)
0
0
0
а,л
0
g-22
0
0
0
0
§zz
0
g]4 .
0
0
0
\ x*);
Пусть имеет место G3 III на Vs и условие 1) для
якобиана. Тогда ([203], стр. 15) операторы можно при-
привести к виду Х1=р1, Х2 — р2, Х3 = х1р1, а из уравнений
К " Q ( 1 2 3 )
у 1р1 2
Киллинга следует, что"
р
= 1, 2, 3, 4), т. о.
262 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ |гл. V
метрика пространства V4 вырождается. Если же пред-
предположить, что для якобиана условие 1) не выполняется,
то, так же как и выше, найдем Х1 — р1г Х2 = р2, Х3 —
= ххрг-\- xip%. Но уравнения Киллинга приводят к вы-
выводу:
gla = 0 (o=l, 2, 3, 4),
что невозможно. Следовательно, не может быть F4 с G3 III
на V2.
*
Рассмотрим случай Gs VIII па F2 и условие 1) для
якобиана. Тогда операторы можно привести к виду:
но и в этом случае | gap | = 0. Пусть условие 1) не имеет
места для якобиана, тогда ga = a?a + X(a, ж3, ж4)^°, где
3 1 2
а —некоторая функция. G3 VIII содержит подгруппу
* *
G2 II, действующую на F2 транзитивно. Но всякое F2,
допускающее неабелеву G2, ввиду равенства порядка
группы и ранга матрицы (?a) (s=l, 2) допускает в пе-
S
которой системе координат, относительно которой уравпе-
ние V% записывается в виде х3 = const, ж* = const,
операторы вида
X2 = pit s = 0, 1.
При этом, если взять е = 0, то такие G2 не могут быть
подгруппами G3 VIII, как в этом легко убедиться. Сле-
Следовательно,
Записывая для этих операторов уравнения структуры,
получим, что а = 0, К = 2еХ2, а из уравнений Киллинга
находим g2a = 0 (a = l, 2, 3, 4). Следовательно, не суще-
*
ствует полей тяготения, отвечающих F4 с G3 VIII на V2.
Приведенные выше классы пространств исчерпывают
все пространства Vt, допускающие G3 действующей на
V2 или- F2. Отметим, что эти классы пространств отве-
отвечают интересным, с физической точки зрения, полям
тяготения.
§31] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G3 263
§ 31. Поля тяготения, допускающие группу
движений бг3, действующую на Y3 или ~V3
Рассмотрим тот случай, когда G3 действует на гипер-
*
поверхностях транзитивности V3 или Vs как просто-тран-
просто-транзитивная группа.
Рапг матрицы (sa)s равен 3.
G3 действует на V3. Так как G3 действует на гипер-
гиперповерхностях транзитивности, то они геодезически парал-
параллельны ([147], стр. 254), и естественно ввести полу-
полугеодезическую систему координат, относительно кото-
которой эти гиперповерхности будут иметь уравнения
ж4 = const.
Такие У4 для определенной метрики исследовал Фубини.
В случае неопредолеипой метрики неизотропные V3 могут
нести на себе неопределенную метрику, и поэтому вычис-
вычисления, в основном совпадающие с выкладками Фубини,
необходимо проделать заново. Так как нетранзитивная G3
в данном случае осуществляется операторами, для кото-
которых ранг матрицы (?а) совпадает с порядком группы,
в
то ([147], стр. 269) в F4 существует координатная система,
в которой каждая компонента ?а векторов Киллинга
s
является самое большее фупкцией х1, х2, х3 и для кото-
которой гиперповерхности транзитивности имеют уравнения
ж4 = const. Поэтому достаточно для определения операто-
операторов рассмотреть операторы V3 с неопределенной метрикой,
допускающие просто-транзитивные группы G». Эта задача
решена в работе [203].
Пользуясь изложенными выше соображениями,
можно сократить выкладки. Рассмотрим разрешимые
G3 типов I, II, III, IV, V, VI, VII; введем полу гео-
геодезическую систему координат, относительно которой
уравнения гиперповерхностей V3 имеют вид ж4 = const,
так что ж4 будет длиной дуги неизотропных геодезических,
ортогональных к гиперповерхностям х* = const. В этой
системе координат компоненты метрического тензора:
gxi = g.2i = g3i = 0, gi4 = e4=± 1, в зависимости от нормы
вектора, касательного к геодезической хл. Для всех этих
264
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
[гл. V
типов структур операторы можно записать в виде:
C1.1)
причем значения постоянных а, Ь, с, d для каждой из
этих структур определяются следующим образом:
G3
I
II
III
IV
V
VI
VII
а
0
0
1
1
1
1
0
ь
0
0
0
0
0
0
1
с
0
1
0
1
0
0
^
d
0
0
0
1
1
дфО и 1
Я (?2 < 4)
C1.2)
Записывая уравнения Киллинга для операторов C1.1), по-
получим из уравнений для первых двух операторов, что ga^ —
= ga^(xx, ж4) и (для третьего оператора) систему уравнений
dlgl3 =
= Cg22 "Г (Я "I" rf)
= 2cg23+2dg33,
= #24 = Яз4 = О,
C1.3)
§ 31J ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G3 265
После этого канонический вид метрики находится из этой
системы для каждого типа структуры после замены их
соответствующими значениями из C1.2). Отметим, что
если для трех операторов C1.1), для любой из возможных
структур, определить самый общий вид преобразования,
оставляющего эти операторы неизменными, то это преобра-
преобразование будет зависеть от четырех произвольных функ-
функций от ж4. Если, кроме того, потребовать, чтобы сохра-
сохранялись условия g4i = 0 (?=1, 2, 3), g4i = e4, то допусти-
допустимое преобразование будет зависеть только от четырех
произвольных постоянных. Но интегралы "системы C1.3)
определяются в виде произвольных функций от х*, и сле-
следовательно, пользуясь допустимыми преобразованиями,
их упростить не удастся. Таким образом, для всех разре-
разрешимых G3 на V3 получим классификацию
*. / = !. 2, 3), е4=±1, C1.4)
причем (gn) для различных неизоморфных структур имеет
выражение:
G31 на V3
(ёи) = (ац),"и = ац(х*У> Xi = Pt(i= 1,2,3). C1.5)
G3 II на V3
«
11
(
«12 «22 а22хх + а23 \ C1.6)
а12хх + а1Л a22x1 + a2S а.1гхх* + 2а23х1 + а33/
Хя= -
C1.7)
= — pi
266
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. V
G3 IV на V3
«И
Хх = Р-2, Х2 = р3, Х3= —px+(x2 + x3) р.г-{-хър3.
G3 V на V3
/ап a,2exl a13erxl \
\ X1 9X1 9Х1 I
\а13ех а23е2Ж а33е2Х /
lG3 VI на V3
an Р п />"•*•
C1.10)
33е
VII на V3
x2p2+ qx;tp3(q ф 0 и 1).
пх
cos ^
+ 9«1з) sin Ц- j ,
оа;1
pa;1 .
^— +a13sm
g22 == e«xl [a22 + a23 cos pxl + a33 sinpx1],
^
g3 = у e^1 [<7a22 + (^a23 -\- pa33) cos рж1 +
g ^"
«зз ^) cos Z3*
C1.11)
= — Pi — ^2 + («73!» + Ж2) /V
s аи поля тяготения допускающие группу с3
267
Для неразрешимых неизоморфных вещественных струк-
структур G3 VIII и G3 IX, действующих на F3, необходимо
определить предварительно операторы в некоторой полу-
полугеодезической системе координат. Известно, что две
петранзитивные группы Gr и Нг от одного и того же
числа переменных с одинаковой сигнатурой, матрицы (|а)
которых имеют ранг г, подобны. Следовательно, доста-
достаточно 2;>ассмотреть некоторые операторы G3 с матрицей
полного рапга, отвечающие структурам VIII и IX; этим
группы будут определены с точностью до подобия. Настоя-
Настоящий вывод никак не связан с сигнатурой Vi. Выберем
операторы, отвечающие этим условиям, следующим образом:
G3 VIII
IX
sin a;2
Х2 = cos x2 pL — ctg x1 sin x1 p2 + -^^j
X3 — — sin x2 px — ctg x1 cos x2
eosa^
sin a;1
C1.12)
C1.13)
Интегрируя уравнения Киллинга для операторов C1.12),
получим:
G3 VIII на V3
а12),
= —апхг-\-а13,
+ 2 (а12 + 2а33) ж1" — 4а23х1 + а32],
— (а12 + 2a33)xL -f а2з],
п ™1 9/i -г-1 Л- /1
— ui.lJy ^адз-1' ~Г 3>
gi4 = 0 (i=l, 2, 3),
j?4.i = et = ± 1.
C1.14)
268
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
[гл. V
Аналогично, исходя из C1.13), получим:
G3 IX на F3
gtl = — а12 sin 2х3 — а22 cos 2х3 + -к- ап>
g12 = (а13 cos z3 — а23 sin ж3) cos x1 +
+ (а12 cos 2ж3 — а22 sin 2ж3) sin x1,
§13 — а13 COS %Z — а23 sin *3i
= «зз cos2 x1 +
2 (а23 cos x3 -f- а13 sin ж3) sin a;1 cos ж1 +
+ ( а12 sin 2ж3 + а22 cos 2x3 + — aix j sin2 x1,
= a33 cos x1 + («23 cos ж3 + a ^ S) ^ ±
C1.15)
g33 == аЗЗ,
g4i = 0 (?=1, 2, 3),
g44 = e4=: ± !•
Здесь, как и выше, а;;-—произвольные функции от ж4.
Исследуя самый общий вид преобразований, оставляю-
оставляющих неизменным вид операторов и сохраняющих полугео-
полугеодезическую систему координат, можно убедиться, что они
зависят только от произвольных постоянных; поэтому
дальнейшее упрощение C1.14) и C1.15) за счет такого
преобразования невозможно.
*
G3 действует на V3. Если Gs действует транзитивно
на изотропных поверхностях транзитивности V3, то в V4
всегда можно ввести изотропно-полугеодезическую систему
координат, для которой такие У3 записываются уравне-
уравнением се4 = const. Можно также на этих V3 уточнить выбор
координат так, чтобы параметрические кривые х1 совпали
с семейством особых линий У3, касательный вектор
к которым должен удовлетворять условиям
^•и4 = О(г, /=1, 2, 3),
и следовательно, в такой системе координат
= gl2-flS = 0.
gn
§ 31] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G3 269
т. е.
Как отмечено в работе ([260], стр. 200), формула C1.16)
инвариантна относительно преобразования
ж3 =ф3(.ха, .г3, ж4),
C1.17)
где фа — ироизвольные функции своих аргументов. Можно,
впрочем, показать, что это самый общий вид преобразо-
преобразования, обладающего подобным свойством; для этого доста-
достаточно взять систему дифференциальных уравнений, опи-
описывающих эти свойства, и проинтегрировать ее.
Так как пути движения, определенного любым опера-
оператором группы G3, по предположению лежат на V3, то
уравнения Киллинга для любого оператора ?а приводят
к выводу, что
д1^ = д113 = 0, ? = 0. C1.18)
Очевидно, что C1.18) также инвариантны для любого
преобразования C1.17). Идея метода отыскания G,., дей-
действующих на изотропных гиперповерхностях транзитив-
транзитивности, заключается в следующем. Так как каждая
группа G3, кроме G3 IX, допускает подгруппу G2 движе-
движений, то сначала отыскиваем канонический вид операто-
ров G2 с G3, действующих на V3, для изотропно-геодези-
изотропно-геодезической системы координат C1.16) и затем ищем из урав-
уравнений структуры и C1.18) оператор X3. После этого из
уравнений Киллинга определяется метрика F4. Для G3 IX
рассуждение выпадает из этой схемы.
270 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ 1гл. V
Как уже указывалось в § 29, семейство особых линий
на V3 образует систему импримитивности любой не транзи-
транзитивной группы движений, действующей на V3, и следова-
следовательно, если группа допускает особый оператор, совер-
совершающий сдвиг вдоль особой кривой, то он должен быть
оператором одномерного нормального делителя группы ([120],
стр. 26, 141). Вследствие этого его коммутант с любым
другим оператором группы отличается от особого опера-
оператора лишь на постоянный множитель, равный, может
быть, нулю. Поэтому является существенным особо выде-
выделить тс G2, которые содержат особый оператор. Оказы-
Оказывается, достаточно для определения всех G3 рассмотреть
случай абелевой G2 с особым оператором и без него
и неабелевой G2 без особого оператора.
Если абелева G2 допускает особый оператор, то ([260],
стр. 201) она действует на изотропных V2 и среди C1.16)
можно выбрать такую систему координат, относительно
которой операторы G2 будут иметь вид:
ХХ = Р1, Х3 = /?2, C1.19)
и система координат будет определена с точностью до
преобразования
Xх = х1-\-ср(х3, х4), х2 = ж2 + ф2 (се3, ),
( О1. d\) )
х3 =ф3(ж3, ж4), xi =ф4(ж4).
Это самый общий вид преобразования такого рода.
При рассмотрении абелевой G2, не имеющей особых
операторов, в работе [260] допущена неточность, которая
ведет к выпадению некоторых классов F4. Рассмотрим
этот случай.
Пусть аболева G2 не содержит особого оператора
и Xt = ^,lpi (t = l, 2, 3). Совершая преобразование C1.17),
получим в новой системе координат
§ 31J ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G3 271
|2 и |3 но могут одновременно равняться нулю, так как
1 1
в противном случае ?а был бы особым вектором Кил-
1
линга, что исключается постановкой вопроса. Функции фг
ограничены условием
ф» = Ф» = о и ф^ф'ф? - ф!ф23) ф о.
Будем искать ф2 и ф3 из условия срЩ + Фз^? = 1. Ч>%1 +
4-фзЕ? = 0- Коэффициенты ?J и ?, в силу C1.18) зависят
так же, как и ф2, и ф3 только от ж2, ж3, xi, и один из
коэффициентов |* и |* =?ь 0. Следовательно, система при-
приводится к виду системы Коши — Ковалевской и совместна.
Кроме того, очевидно, что интегралы со удовлетво-
удовлетворяют неравенству ф^ф! — ф1ф| Ф 0- Функцию ф1 (ж) опре-
определим уравнением ф|?г = 0 (г = 1, 2, 3), которое также
имеет решение, удовлетворяющее условию q>\ Ф 0. Таким
образом, Хх = jd2 в новой системе координат.
Нетрудно убедиться, что преобразованием, сохраняю-
сохраняющим вид Х1, будет
Ж1'= ф'(Ж1, Ж3, Ж4), Жа' = X1 + ф2 (Ж8, Ж4), \
\ C1.21)
хя =ф3(ж3, ж4), ж4 =ф1(ж4), J
где Ф^ФзФ^ Ф 0- Из уравнений структуры [Х}Х2] = 0
и C1.18) следует, что вектор Киллинга |а имеет вид:
2
1а = I1 (ж1, ж3, ж4) 6° + I2 (х3, ж4) 6° + |3 (ж3, ж4) 6«.
2 2 2 2
Применяя C1.21), получим в новой системе координат
51' = ф?1 + ф?3, ^' = g2 + (p^3; g3' »|3f g4' = 0>
2 2 222 22 22
Если |3 =И= 0, то функции ф1, ф2, ф3 выберем так, чтобы
2
они были интегралами совместной системы ф^1-j-фз!3 = 0,
2 2
g2 + фз?3 = 0, ф??3 = 1, и следовательно,
2 2 2
Х1вА, Х2 = /;3 C1.22)
— случай, полученный в [260]. Еслиже?3 = 0, то придем
2
272 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. V
к случаям, выпавшим из рассмотрения в [260]. При этом
условии
Sl' = a)lei ?2'_?2 ?3'_0 ?4' = 0
в — Т1= > в — Ь > з — w> э — Wm
2 2 2 2 2 2
Здесь S2 ?= 0, g1. =? 0, так как случай особого оператора
2 2
исключен. Пусть |2 = |2(ж3, ж4), тогда ф1 и ф3 определим
2 2
условиями ф^1 = 1, ф3 = ?2 (.г3, ж4), и следовательно,
2 2
ЛГ1 = /?2, X2 = /7X + ^V2- C1.23)
Если же ?2 = |2(ж4), то потребуем, чтобы ф||1=1, ф4 = ?2,
2 2 2 2
и тогда
Хх = />2, Х2 = Л + ^2- C1-24)
Предположение ?2 = const отпадает, так как тогда при
2
Ф^с1 = 1 мы получили бы систему операторов Хг = р2,
2
Х^—р1-\-ср2, эквивалентную системе Х1 = р%, Хг = plt
что давало бы особый оператор.
Наконец, если имеем неабелеву С2, не имеющую осо-
особого оператора, то система C1.16) может быть выбрана
так ([260], стр. 202), что
Х± = рг, X2 = Pl + x*p.2 C1.25)
или
Xi = P2, X2 = x*Pl + p3. C1.26)
Рассмотрим теперь V4 с G3, действующими на У3. Пусть
имеет место абелева G3: [ХьХ^ — 0 (г, / = 1, 2, 3),
и пусть она включает G2 с особым оператором. Любой
оператор группы является одномерным нормальным дели-
делителем группы, и систему C1.17) можно выбрать так,
чтобы для G2 {XXX2} операторы имели вид C1.19). Из
уравнений структуры для G3 I следует:
l* = ll(x*; хА-)Ь« + Щх3, ж4)б« + |3(ж3, ж4)б«.
3 3 3 3
После преобразования C1.20) мы получим:
33333 33 33
§ 31] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G3 273
Так как ?3 Ф 0 (иначе G3 действовала бы на V2), то за
з
счет выбора ф1, ф2 и ф3 можно привести невырожденным
преобразованием ?а' к б!*'. Таким образом, Xt = pi (i =1,2, 3),
о
a ga$ = g-ap (ж4). После этого общий вид допустимых пре-
преобразований будет
х1' = ж1 + ф1 (ж4), ж2' = х2 + ф2 (ж4),
Легко убедиться, что, пользуясь такими преобразова-
преобразованиями, можно подобрать фа так, чтобы g1.4'=l, g4i' = 0
(i — 2, 3, 4). Следовательно,
1) G3 I на V3
О 0 0 1
-Pi. г =1,2,3.
Предположим, что G2 не содержит особого оператора
и имеет место случай, когда операторы могут быть при-
приведены к виду C1.22). Из уравнений структуры Gs и C1.18)
следует, что тогда ^^^(х1, х4) б? -f ?2 (ж4) 6? + Is (х*) б?.
3 3 3 3
-Допустимое преобразование для ga и ga будет иметь вид:
1 2
Используя его, можно привести ga в новой системе коор-
з
динат к виду:
go' = б«' + X (ж4') б« + ж4'б32.
3
Здесь использован тот факт, что ?а Ф const, так как
з
в противном случае G3 допускала бы Gv действующую
*
на изотропной F2, т. е. допускала бы особый оператор.
18 А. 3. Петров
274 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. V
После этого, записывая уравнения Киллинга и исполь-
используя допустимые преобразования для всех трех операторов
группы, определим метрику в виде:
2) Сз I на V3
0
0
0
0
а 23
C1.28)
Xj_ = pt, X2 = ps, X3 = pt + op2 + х*р&, где о = ^ A, cte4.
Если же имеют место операторы C1.23), то из урав-
уравнений структуры и C1.18) следует, что ?3 = 0, т. е. мы
*
имеем G3 на Vz. В случае же операторов C1.24) получаем:
3) G3 I на *3
C1.29)
/о
0
- о
0
«22
- «23
«22*^
0
«23
«33
— а23хг
a^x
i22j
Хх = р2, Х2 = Рх~\-х P%i Х3 = р3.
*.
Конечный вид V4 с G3 I на V3 в [260] не рассматри-
рассматривался. Приведенная выше схема рассуждения повторяется
для каждой ^из возможных структур bG3. Этим методом
классификация G3 па V3 получена в работе [260], кроме
нескольких классов, выпавших из рассуждения, отвечаю-
отвечающих G.2 с операторами C1.23) и C1.24).
Таким образом, получаем следующую классификацию:
1) G3 II на У'з
0 0 1
-х3 0
§ 31] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G-, 275
2) G& И на V3
gll = gl2 = glS = 0, gl4 = «14. g22 — Я22.
-а22ж14 + а23хх* + а33ж12
23,
= 8 ( у
23
23
п33,
1 J + a.3i\
C1.31)
(e =
1) G3 III на V3
2)
C1.32)
C1.33)
» ; C1.34)
18*
276 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. V
4) G3 III на V3
о о
(ам — ацхЧх»
C1.35)
Этот класс V4 выпал из рассмотрения в работе [260].
Для групп движений типов IV, V, VI исследование можно
объединить, исходя из одной структуры
где соответственно
G3IV: e=l, g = l; ]
G3V: 8 = 0, g = l; | C1.36)
GSVI: 8 = 0, g^ 1. J
Пусть имеется особый оператор. В G3 IV это будет Xj,
в G3V также можно взять Х1У в G3 VI поело изменения
базиса всегда можно прийти к такому же выводу. Ввиду
этого тем же методом получим канонический вид метрики
для этих структур:
1) С» IV, V, VI на V3
0 0 е~х3
а23е-чх3 — ех3е~х3
L 0
-хз _ехзе-хз о 0
е, q определяются по формулам C1.36);
Если же предположить, что в группе нет особого
оператора, то получим:
§ 31] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G, 277
2) G3 IV, V, VI на V3
C1.38)
§33
5 22 — 2е »
| е-2*1 (а23 - а,.^1) IV (е = q = 1),
ia^e-^+Dx1 у, VI (e=0);
V, VI;
-в*1 V, VI;
C1.39)
Но, кроме указанных F4; для этих групп существуют
еще классы пространств, отвечающие операторам C1.23)
и C1.24), которые определяются тем же методом:
IV на F4
(g ap) =
о
о
о —
о
о.
а22е •
,2ха
о23е
ягдв30 О
з
+ азз а34
«34
О
C1.40)
Рг — Рз-
G3 V на F3
'О
О а.
0
o2jc3
~"^ tio()w t>
33
7 /7 т1 />2хЗ
734 а22х е
C1.41)
2 — р3.
278
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. V
G3 VI на V3
gll = gl2 = glS — #24 = #44 =
2—9
2-q
3,
= «
{ C1.42)
34
, 0;
= Pi
В случае группы G3 VII не существует особых опера-
операторов, так как нет нормальных делителей первого изме-
измерения и метрика, полученная в [260], будет иметь вид:
G3 VII на V3
#22 = е~ЯхХ [а1 + (<7а2 + Раз) COS pX1 +
+ (qa3 — pa2)sinpx1],
gza = е""чж1 [ "|- «1 + 2а2 cos /?хх + 2а3 sin px1 J ,
= e-v*1 [a1 + (qa2 — pa3) cos px1 +
fa:1
2
aa =
p q
-J- «5--f-a4
(
-
4;
C1.43)
= Pi
PS-
§ 31] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ Gg 279
Но возможен еще следующий класс F4:
Gs VII на Уз
_
ix1 + a.l3PR 2,
g33 — а2г
р __ е—pgarctgBx3—q)p Д __ Х3
<4> Р = ТгФ=»' ? = const;
C1.44)
- z3)] Pi
1) Pz-
В случае неразрешимых G3 VIII и IX, как легко
видеть, не может быть особых операторов. Для G3 VIII
имеем неабелеиу подгруппу G2 {Х-,, Х,,\, для которой
можно взять операторы в виде C1.25) и C1.26). Но
первое из этих предположений приводит к вырождению
метрики, и остается только второе, для которого из
уравнений структуры после некоторых упрощений полу-
получим:
^i = Рг> Xz = Рз + х.2р2,
Х3 = - е*'л + (ее2*3 4- х*3) р2 + 2х*р3, е = 0, ± 1.
В зависимости от того, какое значение примет е,
получаем три класса пространств:
280 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
1) G3 VIII на F3
[ГЛ. V
-г
= as cos 2^x — a4 sin 2.Г1; aa —
p3,
C1.45)
g3i = а^е2*1 — a&e~2xl; aa = аа{х% j
= Pv Xz = х*рг 4- л, Х> = —е*?^ 4- (е2^3 4- х*') р
2) G3 VIII на F3
= 1 —-^-ах 4-«2 ccs 4хг 4-я3 sin 4a;1 е~2ж3,
= [nz cos 4a;1 — а2 sin 4a;1] е~х ,
= —5" + а4cos 2Ж1 4- «5 sin 2a;1 e~x ,
= —к ах — а% cos ^ж1 — аз s^n ^^ >
C1.46)
3)
Х3 = - e*V, Н- (- е2*3 + ^22) Р* + 2х2Рз-
VIII на V3
gll = glZ = glS = Q> glA=l>
, = Dа1ж1 4- 4а2ж1 4- а3) е~-
= ( — ж12 4- 2а4жх 4- аь) е~х%\
gs3 =¦ «1. #34 = — ж1 4- а4", «а = аа{х*);
2, Х2 = ж2/?2 4- ря, Х3 = — e-3/?i + ^2
C1.47)
§ 32]
ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G.
281
Наконец, рассмотрим неразрешимую G3 IX, которая
также не может содержать особых операторов, и потому Хг
можно привести к виду Х± = р9. Так как G3 IX является
единственной G3, не содержащей подгруппы G2, то опера-
операторы Х2 и Xз приходится искать непосредственно из урав-
уравнений структуры, используя при этом допустимые преоб-
преобразования. После этого из уравнений Киллинга опреде-
определяется метрика, которую за счет допустимых преобразо-
преобразований ([260], стр. 209) можно привести к виду:
G3 IX на V3
C1.48)
g22 = (ax sin 2a;1 — a2 cos 2a;1 -f- a3) cos2a;3,
g23 = — {аг cos 2жх -f a2 sin 2a;1) cos a;3,
g24 = sin x3 -\- (a4 cos a;1 + «5 sin a;1) cos a;3,
gS3 = <z2 cos 2a;1 — at sin 2a:1 -J- a3,
= a4 sin a;
1 —
cos x
1;
ai = ai(x4);
X2 = sec x3 cos a;2 /»! — tg a;3 cos a;2jD2-fsin a;2 p3,
X3 = — sec a;3 sin x2px + tg a;1 sin a;2/?2 + cos x2p3.
Этим завершается классификация полей тяготения,
допускающих группу движений G3 (r <; 3).
Отметим, что для реального поля тяготения на все
полученные выше метрики необходимо наложить условие
|#ар|<0> обеспечивающее в данной точке возможность
приведения метрики к метрике Минковского.
§ 32. Поля тяготения, допускающие просто-транзитивную
или нетранзитивную группу движений G4
Если порядок полной группы Gr, действующей в V4,
равен г = 4 и ранг матрицы (?а) (s = 1, 2, 3, 4,) меньше 4,
S
*
то G4 имеет поверхностями транзитивности V3 или V3,
так как У2 и F2 пе могут допускать группы более высо-
высокого порядка, чем 3.
282 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. V
Далее везде тип структуры группы обозначается соот-
соответственно классификации, данной в § 10.
G, на V3
Если выбрать такую систему координат, относительно
которой гиперповерхность транзитивности V3 будет запи-
записываться уравнением х4 = const, то в этой системе отне-
отнесения для всех операторов группы будет иметь место
условие ?4 = 0 (s=l. 2, 3, 4). Разберем сначала случай,
S
когда имеет место группа G4 I со структурой
[ХМ = [Х2Ха] = 0, [ХХХ4] = cXlt [ХД4] = Х2,
где с — параметр группы. Эта группа содержит подгруппу
G3 II, действующую на V3, и следовательно (см. § 31)
искомое пространство находится среди пространств, опре-
определяемых метрикой C1.6) и операторами G3 вида
Хг = р2, Х2 = ра, Х3= -рг + х3рг.
Если искомый оператор Х4 = ?,apa, то из уравнений
4
структуры следует:
i + (
4 4
откуда для вектора Киллинга s" получаем выражение
•4
la = [(с _ 1) ж1 + а] б? + (сх2 - уж1 + Р) б? + (xs+y) 61, C2.2)
4
где а, Р, у — некоторые функции от ж4. Но если записать
уравнения Киллинга для |а и метрики C1.6) для ком-
4
понент g4i (г=1, 2, 3,), то получил! систему уравнений
gna'+^i(-^V + P') + ^3iY' = 0 (г = 1,2, 3).
Определитель этой системы отличен от нуля, и, следо-
§ 32J ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G4 283
вательно, а, р, у — постоянные. Допустимое преобразова-
преобразование, не меняющее операторов Xv X2, Х3 и метрики C1.6),
имеет вид:
х2'=
c2,
Применяя его к оператору C2.2), получим в новой си-
системе координат для параметров а, р, у выражения
* * *
ct = (l —c)cj+ct, Р= — с1с3 — сс2 + Yci + P. Y = C3 + Y>
и поэтому в зависимости от того, чему равен параметр
группы с, придем к двум возможным случаям: а) с -^1,
* *
когда можно за счет выбора ct положить а = у = 0;
Ь) с = 1, когда можно выбрать сг так, чтобы а Ф О,
* *
Р = у = 0, причем для каждого из этих двух случаев опе-
оператор Х4 можно представить соответственно в виде:
a) Х4 = (с — 1) хгрх + сх2р% + х3р3,
b) Xi = ap1 + x2p2 + x3p3.
Интегрируя уравнения Киллинга для метрики C1.6)
и оператора Х4 в случае Ь), придем к противоречию,
а предположение а) может иметь место только в случае
с = 0. Таким образом, получим метрику
GI ( 0)
r 0
0
«13
-°
-i;
0
a22
а.г2хл
0
P a
«13
CL22X1
- a22xiS
0
- xzp2,
0
0
4
\
C2.3)
Так как исследование для других структур групп G4
проводится тем же методом, то, повторяя аналогичные
рассуждения для других структур, получим следующие
пространства:
G4 II—не существует полей тяготения, допускающих
такую нетранзитивную группу движений G4.
284 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
G4 III (9 = 0)
(gafi) =
= а
и
о, iv
«п О
о
О а22 а22х1 О
О аггхг а22ж124-«ц О
.0 0 0 ej
1 / a2 4 2. ,1
аг1 0 0 0"
0 0 а23ех1 О
О а23ех1 О О
0 0 0 ел
[гл. V
C2.4)
C2.5)
VII
hi
0
0
0
0
2е
0
0
0
0
«22*
0
4-
О
(Sap) =
О
,2х» О
О
о
е3а22 sh2 ж2 О
= р9,
0 е4/
Хг = cos x3jd2 4- (cth xz sin ж3 — 1) p3,
X2 = sin xzp% 4- cth ж2 cos ж3 р3,
X3 = cos x3p2 ~ (cth ж2 sin ж3 -+-1) p3, X4 = px.
C2.6)
C2.7)
§ 32] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G4 285
Отметим, что здесь может иметь место V4, которое
получится из C2.7), если все тригонометрические функ-
функции, входящие в выражения операторов, заменить гипер-
гиперболическими.
G4VII
О
«12
О
O-io — >
«22 —''
О
„ Г2 п ~« -i2 О
0
0
е4/
4 VIII
/ап О 0 0\
О а,
22
О
о
О 0 a22sin2x2 О
\
О О
О
Хг — р3, Х2 = sin x3p2 -{- ctg ж2 cos x3jd3>
Х3 = cos x3p2 — ctg x2 sin ж3/?з, Х4 = /?1.
VIII
C2.8)
C2.9)
A — cos2x3) — р sin 2a:3 sin a;i О О
— Р sin 2a:3 sin x1 a + 2P eos2 a;3 sin2 a:1 a cos a:1 0
0
a cos Xs-
а,
0 0
i — функции от ж4. Операторы имеют вид:
а
О
C2.10)
sin a;-1
2 = cos xzpx — ctg xx sin x2p2 -]—.—-j- p3,
COS а:2
Х3 = - sin х2рг - ctg х1 cos ж2/з2 + -г—г ря,
sina;1
Х4 = sin xzp1
cos
sin
p2 + ctg x1 cos x3p3.
286 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. V
Что же касается разрешимых групп со структурами
G4 VIj (i — 1, 2, 3, 4), которые содержат абелевы подгруппы
G3, то тем же методом получим следующие возможные
пространства:
eidxi , C2.11)
где g-i3- = gtj (a;4), a операторы имеют вид:
xi = Pz> Х2 = Рз, Хз= — Pi, Х4 = ж2р2 — x3p3.
Для структуры G4 VI2 не существует полей тяготения,
допускающих группу движений с такой структурой.
GVI
о g12 о о \
8га ° ° I /оо -.оч
о о gl8 о I' C2Л2)
0 О О е4/
= — plt Xi = X2p3 — X3p1.
gap = gap(«4); -Х'1=Л» Хг = Рз, %s= — Pi, X^ = x2p3 —X3p2.
Рассмотрим тот случай, когда нетранзитивная группа
движений С4 действует на изотропном трехмерном многооб-
многообразии. Эти пространства были изучены в работе [260].
G4 на F3
Рассмотрим группу С4 типа I, которая содержит под-
подгруппу G3II. Ввиду этого систему координат можно
выбрать так, чтобы операторы G3 имели вид C1.25) или
другие возможные формы.
В случае C1.25) из уравнений структуры найдем:
Е1 = 2а;1 + А (х3, х*), I2 = ха, Is = с (xs, ж*),
4 4 4
8 32J ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ Gt 287
а применяя допустимое преобразование
dx*
приведем оператор Jf4 к виду:
= 0,
+ х2р.2 -\- ер3, е = 0 или 1.
Но из уравнений Киллинга следует, что е = 1. Поэтому
метрика после допустимых преобразований, сохраняющих
все четыре оператора, будет иметь вид:
*. C2.14)
- ds2 = а (ж4) е-2*3 B dx1 dx* + dx*) + р (ж4)
Точно так же в случае C1.26) получим:
ds2 =
- 2а (
- 2х3 dx2 dx*; C2.15)
X1 = jt»1, X2=p2, X3 = x2/?1 + /K, Х4 = а;2р-2-^3/>з- C2.16)
Исследование для других типов проводится аналогично
приведенному выше, и поэтому достаточно привести
сводку результатов.
G4II не может быть нетранзитивной группой движе-
движений с изотропными гиперповерхностями транзитивности.
ds2 = Ыхх dx* + а (х*) (dx* + dx*) — 2х3 dx2 dxa,
G4IV
ds2 = 2dxx dx* + 2а (х*) е-*1 dx2 dx3,
G4V
ds2 = 2dxx dx* + a (x*) e~*1 (dx* + dx32),
C2.17)
C2.18)
C2.19)
288
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТКНИЯ
[гл. V
G4VI
ds2 = 2dxx dx* + а (ж*) (е-2*3
e2 = ± 1; Xx = />я, X2
— e2 dxs*),
+ /?„
4 = Pi-
C2.20)
+ a (ж4) (е
-2*3 dx* -
e2
+ e2e~x3 dx2 dx\
Xa=-
C2.21)
G4VIII
ds2 = 2с?жг dx* 4- о. (ж4) (cos2 ж3 dx2 -\- <
4- 2е sin ж3 dx2 йж4,
8 = 0 или 1; Х^Р2, у
Х2 = е sec ж3 cos ж2 рх — tg ж3 cos ж2 рг + sin я2 Рз,
Х4 = рх, Х3 = — е sec ж3 sin ж2 рх 4-
4- tg ж3 sin х2 р2 4- cos ж2 р3. )
Рассмотрим теперь тот случай, когда Vt допускает
не транзитивную ?4, действующую на V3 и допускающую
абелеву подгруппу Gs. Все такие группы объединены
в структурах типа Gt \1г (г=1, 2, 3, 4). Рассматривая
каждый из этих типов тем же методом, получим только
следующие две возможности:
G4VI3
; 4- а (ж4) dx22 4- ]
i == /'г' -^з == Рз! ^4 == a;2/'i 4" юРг 4" ^з> ' -:
где со (ж4) = - V Y""" V ^\ _ С _U
C2-24)
dx* 4- а (ж4) (rfx2" 4- е dx*z), e=±l,
§ 32J ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G4 289
Структуры групп, отвечающих C2.23) и C2.24),
неизоморфны, и поэтому пространства, определяемые
этими метриками, существенно различны.
Просто-транзитивные группы движений G4
Две просто-трапзитивные группы одинаковой струк-
структуры от одного и того же числа переменных подобны
([147], стр. 97), поэтому, если пространство V4 допускает
в качестве группы движений просто-транзитивную группу G4,
то можно взять любые четыре оператора, удовлетворяю-
удовлетворяющие уравнениям структуры.
Ввиду этого является несущественным, будем ли мы
определять четвертый оператор, исходя из подгруппы G3
на V3 или из G3 на V3.
Мы будем придерживаться первого пути, считая, кроме
того, что в F4 задана полу геодезическая система коор-
координат (§ 7), относительно которой
ds2 = е4 dx4? + gij dxi dxj (i, i Ф 4), e4 = ± 1.
Так как, кроме того, для просто-транзитивной группы
?4 Ф 0, то из уравнений Киллинга следует, что 94|4 = 0.
4 4
Используя эти условия и операторы G3 на V3 (§31),
которая, как подгруппа, содержится в искомой G4, из
уравнений структуры A0.17) и A0.19) найдем четвертый
оператор; при этом некоторые из констапт интегрирова-
интегрирования можно привести к нулю или f 1 с помощью допу-
допустимых преобразований.
Рассмотрим группу ?41, которая содержит под-
подгруппу G3II.
Из уравнений структуры получим систему C2.1),
с тем различием, что а пробегает значения от 1 до 4:
g« = g«(x1, х2, ж3, ж4), d4g4 = 0, 1*ФО.
4 4 4 4
Интегрируя ее, найдем:
4
?2 = СХ2 _ С (х4) ХХ + В (Ж4),
4
+ С(ж4), Ъ?~ВфО, D — const.
4
C2.25)
19 А. 3. Петров
290 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. V
Записывая уравнения Киллинга, получим систему
уравнений
Oil *3 'О 1а ¦* ~ i О 1*5 "* ^ J
0 (J С' —I С? fi (~ 1 СР fit" — I } / О О О ?2 \
&12°4S + g22 ^S , ёы°& -W, C2.26)
4 44 & 4|
Определитель этой системы |g"i;| =/= 0 (г, / = 1, 2, 3), иначе
V3{xx, х2, ж3) было бы изотропным многообразием, поэтому
4& — U (г = 1, /, о),
4
т. е. А, В, С— постоянные.
Три оператора C3li и пространство F4, которое допу-
допускает эту группу движений, остаются инвариантными
при преобразованиях
х3' = х3 + у, ж4' = еж4 + 6, \ C2.27)
а, р, у, 6 — const, s= ± 1.
Применяя их, приведем четвертый оператор к виду:
Х4 = (с — 1) хгрх + сж2^2 + ж3р3 + Dpit C2.28)
если с^ 1, и к виду:
A, D — const, C2.29)
если с = 1.
Произведем преобразование х1' = х1, х'2' = х2, х3 = ж3,
х4 =-=у применительно к оператору C2.28). В этом слу-
случае константа D приводится к единице. Но это преобра-
преобразование паносит отпечаток на метрику исследуемого У4;
мы получаем:
g4,4, = ?>2g44 = e4D2 = ± D\ C2.30)
Остальные компопепты gap (a, p =?= 4) не изменяют своего
§ 32] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G4 291
вида; следовательно, метрика будет определяться матрицей
<341, сф!
Й12е-Bс-1)х4
*22°
+ft23«-(C+1)X °
*22xi2e-2cx4+
C2.31)
где D и A;fy — постоянные;
Xt = p2, X3 = p3, X3= —рг 4- ж3/?2,
X4 = (С — 1) ХХрг + СЖ2/?2 + Х3р3 + рд.
Для оператора C2.29) аналогичные рассуждения
приводят к метрике
g» = е-2ж* [ftM (ж1 - а
?зз = е-2х4 [fc22 (ж1 - а
gri4 = 0 (i= 1,2,3),
ktj, a, D — const;
у,
/с23], g32 = /с22е
+ 2к23 (х1 - ах*)
ps, X3= — Pi
x2p2 + x3p3 + p4.
C2.32)
Группы G4 II и G4 III также содержат подгруппу G3 II.
Повторяя рассуждения буквально, получим следующие
19*
292
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
[гл. V
пространства:
GII
gia = e~3*V (Лм + /СззЖ4) _|
?22 = k22e~ix\ g23 = iV
g33 = х1кае-^
gii = 0 (i = l, 2, 3), g44=±I>2;
- const;
C2.33)
- xl) Pz + Pi-
G4IH
lx = e~QX* [cj + c3 (# cos (ож4 + oo sin сож4) -J-
+ C3 (^ Sin ОЗЖ4 — CD COS (OX4)],
3 4
-»p Г
(о .Та 3„
— 2с2 cos сож4 — 2с3 sin сож4 ") , <" C2.34)
= ж^Сбб-2^4 ¦+- 2РЖ1 + e-e**[ci + С2 (? cos (ож4 —
— со sin сож4) + cs (q sin сож4 + со cos сож4)],
gii = o (* = 1,2,3), ^44=±^2;
Z), cv (v = lx, . . ., 6) — const, j
где со = 1/4 — <j2 , ?2 < 4, 9 — структурная константа, а
J
л.
32] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ Gt 293
Gt IV содержит подгруппу G3 III. Здесь, как и для G4 I,
• выделяются два случая:
1) G4 IV, а Ф О
gn = *u. gTi2 = Айв*1-»**, g13 = к1
fe = ^33e-2-4, gi4 = 0(i = 1,2,3),
Z>, a, A;i;;- — const;
X1 = jD3, X2 = p2, X3 = -
X/i = ap1 + x3p3 + pi.
2) G4IV
C2.35)
g12 =
g23 =
— "-3 б""-^
-33
i4 =
= 1,2,3),
C2.36)
const; j
4 /2 Ps Pi-
Однако, эти группы подобны, так как имеют одну
и ту же структуру.
Для G4V, исходя из подгруппы G3V, аналогично при-
придем к следующей метрике:
GV
о 11 11' О 12 V 12 ^-''-''^ ^ ~Т 14 OJ.XJ. JU lj
gi3 = е*1-"*4 (/с12 sin ж1 — kl3 cos ж4),
/Т ^-^— & &ЗС ^~ & CtОС ( /<• ^^ /% о ^ -V ^ ! i/* с1 т т^ у *v* ^* л
1
= 0 (i= 1,2,3), g44= ±
C2.37)
2,]/ci;-,Z?-const; j
— jdx + x2p2 + ж3р3,
+ р4, а = const.
294
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
[гл. V
При определении Gt, содержащих абелеву подгруппу G3,
исследование упрощается, так как первые три оператора
можно взять ввиду этого во всех возможных случаях:
= Рз<
— Рл >
а для Х4 — ?а да получим:
Зр?* = 0 (Р = 1,2, 3, 4).
4
В силу этого классификация таких F4 тем же мето-
методом приводит к следующим пространствам:
g22 = Лив-2", g23 = /c23e-№+8)-, g33 =
gi4 = 0 (i = 1,2,3), g44=±?>2, kijt D - const,
C2.38)
где /с, Z — константы уравнений структуры, 8 = 0 или 1;
Хг = р2, Х2 = р3, Х3= —р1г
G4VI2
Xi = 1.x1
g12 = e-(ft+')ж* (/с13 cos ж4 — /ci2 sin ж4),
gl3 = e-('i+0 =c* (A:la cos ж4 + A;13 sin x4),
g23 =
ёГзз =
gi4 =
где
е-2йх4 ( _ ^2з sin 2x4 + A:33 cos
e~2kx* (k22 + k23 cos 2ж4 + A:33 sin
0 (i = l,2,3), g44=±^2; kit,D — const,
, Z — константы уравнений структуры;
C2.39)
' Х4 - Z^Vi + (кх* - ж3) р2 + (кх* + ж2) р3 + Pt-
§' 32] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G4
G4 VI3 s = 0 или 1, к — любое вещественное
= (к22 - 2*33a:* + к33х*2) е~^\
g23 = (&23 - к33х*) e-*k*\ g33 =
gi4=0 (i =1,2,3), g^=±D\ kijtD- const; j
%1 = P2> Х2~РЗ! %3= — Pi
Для группы C4VI4 выделяются два случая:
1) C4VI4, /с Фг (8 = 0 или 1)
?¦„„ = — ii—- —
b2if v A — 8 (/c — eJ /c — e
=i
gss - А
gi4=0 (t = l, 2, 3), g-44= ± ?J, A:i;, /) — const; j
-^•1 — Pi>- %2= Рз> -Х'з — Pi'
X4 = (еж1 — ж3) pj + ка?рж + (А:ж3 + ж2) ря + p
296 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
2) G4 VI4) к = е = 0 или 1
gll = Лцб-28*4,
[гл. V
?22 = [ ^22 — 2/с23ж4 + (&33 — /с12) х*
#23 = [ K
Kb
— — к г*2 ^А- г*3! е~2ех*
о а13а' 2 11 I '
gi4 = 0 (i = l,2,3),
; /ci;-, ?>-const;
C2.42)
Х4 = (еж1 — ж3) рг + гх2р2 + (ех3 + ж2) р3 + jo4.
Накопец, рассматривая неразрешимые G4VII, VIII,
которые содержат соответственно неразрешимые G3 VIII, IX,
получим два возможных пространства:
G4VII
gll= Ь11
g13 = -
g33 = <2жз2 -
ls
, g22 =
+ P,
= 0(i = 1,2,3),
R =
12 + (b12 + 2b33) ж1
1 + ba,
C2.43)
§ 33J ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G5 297
где
li lc hi Jc ^4 Oq J* /v>4 I In f~i Ok* /yi4 \ In
1 — "-Hi U12 — п-хуЬ — ^jfc/t13X -f- /1-12» C^i3 — — вл-ц* ~Г "-13>
& V'^12 ~Г~ 33/ 4t?#Co3«t ~j~ *^22J
fc V^li "t" ^"-33/ x I" "-23'
= k^x4 — 2e/e13x4 + k33, кг-, D — const, e = ± 1;
Кз = -
^ е
=. р3,
G4VIII
gn — у ^n — &12 sin 2ж3 — /c22 cos 2x3,
gi3 = ^13 cos x3 — k23 sin x3,
gVi = cos ж1 (&13 cos x3 — k,lZ sin ж3) -j-
+ sin x1 (/c12 cos 2x3 — k2z sin 2x3),
-2 = Азз cos2 x1 + sin 2.Г1 (A;23 cos .т3 + ki3 sin a;3) +
к
+ sin2
„г sin2ж3 + A:22cos 2x3
g23 = A:33 cos xx + sin x1 (k.,3 cos ж3 -j- kl3 sin ж3),
^зз == "-33»
g-i4 = 0 (г = 1,2,3), g44 = + D2, ktj, D — const;
is ж2 /?! — ctg a^sin x2p
C2.44)
sin x2
Этим закапчивается классификация полей тяготения
общего вида, допускающих нетранзитивные и транзитив-
транзитивные четырехчленные группы движений.
§ 33. Поля тяготения, допускающие группу движений &5
По теореме Фубини, исправленной И. П. Егоровым
([230], стр. 187—189), всякая группа движений Gr
C<г<5) в V4 допускает подгруппу Gr_lt поэтому У4
с группой движений G5 содержится среди F4, допускаю-
допускающих G4 (§ 32).
298 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [ГЛ. V
Для дальнейшего исследования является полезным
рассмотреть следующие два случая:
1) G5 содержит в качестве подгруппы нетранзитивную
группу G4,
2) GB содержит в качестве подгруппы транзитивную
группу ?4.
Разберем эти две возможности отдельно.
Пусть имеет место случай 1), и предположим, что
пятый оператор Х5 = ?а да. Относительно этого оператора
5
могут иметь место три возможности: А) |4 = 0, В) |4 =
5 5
= X = const, С) ?4 = |4 (х). Рассмотрим каждое из этих
5 5
пре дпо л о жений.
Gb А. Если имеем ?4 = 0, то матрица (|а) (а = 1, 2, 3, 4;
и X
?=1, . . ., 5) имеет ранг 3, следовательно, группа Gb
нетранзитивная и действует на трехмерном многообразии
*
V3 или V3. В случае V3, группа G5, по теореме Фубини
([147], стр. 276), не будет полной группой движений на
этом V3, и оно допускает еще и шестой оператор; прихо-
приходим к пространствам Vit допускающим группу движений
*
G6. В случае, когда группа действует па V3 (изотропном),
указанная теорема неприменима; следовательно, имеются
возможности отыскания таких F4, которые допускают Gs
*
па У3, и группа является полной на этом многообразии.
G& В. Для |4 = X = const получаем, что матрица (ga)
5 i
имеет ранг 4, группа G5 транзитивная. В этом случае
приходим к альтернативе: или группа G5 содержит только
одну подгруппу GiiX^, X.2> Х3, Хл}, а в случае G3, дейст-
вующей на F2 или V2, также и группу G4{X1, X2, Х3, Х6},
которые являются нетрапзитивными, или пятый опера-
оператор Хь с тремя первыми операторами также дает G4, но
уже транзитивную (так как ?4 = Я Ф 0).
4
Вторая возможность приводит, очевидно, к случаю 2).
G5 С. Этот тип G5 может возникнуть при рассмотре-
рассмотрении нетранзитивной группы G4 в том случае, если |4 —
функция от координат х1, х2, х3, х*.
§ 33J ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G5 299
Исследуем случай 2), причем для оператора Х5=^ара
5
опять рассматриваем указанные три возможности.
G5 D. Имеем G4 транзитивную и ?* = 0; ранг матрицы
4
(?а) равен 4, группа G5 транзитивная. Покажем, что
i
в этом случае Gd обязательно содержит также и Gt нс-
транзитивную. Действительно, возьмем операторы XL, Х2,
Х3, Хь. Их коммутаторы необходимо должны выражаться
линейной комбинацией этих же операторов, так как все
они имеют компоненту ?4 = 0.
г
К этому же типу относятся и Gs В второго вида, так
как они тоже содержат и G4 транзитивную, и G4 нетран-
нетранзитивную. Легко видеть, что сочетание G4 транзитивной
и ?4 = X = const дает этот же тип G5, так как, взяв за пя-
5
тый оператор Y ь — Хь— XX4 = ^apa (из § 32, когда ?4 = 1),
4
получаем, что т]4 = 0, и имеем уже рассмотренный случай.
Gs Е. Этот тип Gu выделяется при рассмотрении Gt тран-
транзитивной и |* = ^4(ж). Ввиду этого исследуем пространст-
5 5
ваУ4, допускающие группу движений G5 типов А, В, С, D, Е.
Пусть имеем группу G5 А. Как уже отмечалось выше,
имеет смысл рассматривать только случай С5 на V3. В ра-
работе ([260], стр. 215 — 220) показано, что имеется только
один класс У4, допускающий полную группу G5 на V3,
причем метрика такого F4 в специальной системе коор-
координат будет иметь вид:
= 2dxx dx4- + а22 dx2" + 2а23 dx* dx3 + a33 dx3\ C3.1)
аи = а„(х*); Хг = Рг (i=l, 2, 3),
где
Д = Д22 ^33 ^23"
Группа G5 В. По определению, такая группа содержит
в качестве подгруппы только GA{XX, X2, Х3, Х4} нетран-
300
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
[гл. V
зитивную, а если G3fXl7 X2, Х3] действует на V2, У2,
также и G4 (.Xlt X2, Х3, Х5) нетранзитивную, и для пя-
пятого оператора имеем соотношение ?* == А, = const. Для
О
определения V4, допускающих Gs В, можно исходить из ре-
результатов § 32. Условие того, что ?4 = const = 0, позволяет не-
5
посредственным интегрированием уравнений Киллинга для
указанных пространств определить группу Gs и искомое F4.
Начнем определение F4, допускающих Gb В, с G4, дей-
действующих на V3. Так как в пространстве V4 выбрана
полу геодезическая система координат, то из уравнений
Киллинга (для ?* = Я = const) имеем д4?г = 0 (г=1, 2, 3).
5 5
Далее в силу того же условия ?4 = const и условия, что
5
<Э4?г = 0 (а—1, 2, 3, 4) (§ 32), получаем, что коммутатор
а
[ХгХ5] должен быть линейной комбинацией первых че-
четырех операторов, т. е.
[ХгХь] = агХх + ЪгХ2 + CiX3 + dtXt. C3.2)
Давая в C3.2) i все возможные значения (г=1, 2, 3),
получим выражение для 92?а, д3Ъ,а и д^, а зная их, мож-
5 5 5
но проинтегрировать уравнения Киллинга для данного F4.
Применим эту схему рассуждений к случаю, когда
структура группы будет типа G4 I. Уравнения Киллинга
для этого пространства дают (см. § 32):
= 0,
5 5
с-^(д3\
5 5 5 5
2 5
4а22 + 2а
22
= 0.
C3.3)
§ 33J ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G5 301
Но из C3.2) для i = 1, 2, 3 имеем:
5
3
5
312
5
5
= о,
= - са
= - с8 -
= а3
C3.4)
Соотношения C3.3) и C3.4) приводят к выводу, что
d1 — dz = d3 = 0, т. е. операторы Хх, Х2, Х3, Х5 состав-
составляют группу и искомая G5 относится к типу G5 D, так
как она содержит G4 транзитивную и <74 нетрапзитивную.
Такие пространства будут рассмотрены ниже.
На том же пути аналогичный результат получается
и для всех других пространств § 32, за исключением тех
случаев, когда группа G3 {Хг, Хг, Х3) действует на V2
или F2; здесь выделяются две нетранзитивные подгруппы
G4 {Хг, Х2, Х3, Xi} и Gi{Xx, Хг Х3, Х5}, которые, по оп-
определению, отвечают случаю G5 В. Нахождение пятого
оператора проводится по указанной схеме. Имеем следую-
следующие V4, допускающие G5 В из § 32:
— 2екк,
-I° (И-D+P («
dx2- + е-*1
-\- k4i dx4?;
C3.5)
kip k, a, P — const; e = 0, ±1; а (к + 1) -f p A — к)фО; кф1;
= х3р2—ех1р3,
2k
[x" (a
302
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
[гл. V
2) ds* = Bekk12xl
3)
k12e
kxl
e~xl
X1 = /??, Z2 = p3, X3 =
P + x2P + X'P X
kn) d
d
= 0, ±1;
/c
44
j, к — const; 8 = 0, ± 1;
— exlp3,
k
i4
C3.6)
C3.7)
4)
5)
^ Bdxl
8=0, ± 1;
, C3.8)
C3.9)
const, co = ]/ — g2, q2 < 4, e = 0, ± 1;
X5 =
6) rfs2 = Bk12exi +
+ ^ cos2
= 0,±l; /Cij, q — const,
^ cos2 5^1 ^x32 J + A;44 rfx4'; C3.10)
?0
4= -
3 "\
§ 33] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G5 303
7) ds* = kaadx»* + an(xi)e-2*'Bdx1dx* + dx*), C3.11)
к33 = const; Х1 = р1, Х2 = р2, Х3 = х2р1 — х*р.,,
Х4 = 2х1р1 + х2р2 + р3, Х5 = С (х*) е2*3 ^ + D (ж4) /53 + Ра.
где функции С ж D подчинены условиям
2D = dt In а22, - 2а22С = /г33 dtD.
Для пространств C2.7) и C2.8) получим Х& = р4, но
тогда метрика искомых У4 будет иметь вид
ds* = ds*0 {хх, x^ + dsKx2, x3),
где dsl(xl, ж4) —плоская метрика /?2, a ds\(x2, х3) есть У2
постоянной кривизны.
В этом случае допускается еще и шестой оператор,
кроме Х5 — р^ действующий в i?2, т. е. получаем V4,
допускающие группу движений G6.
Случаи, когда исходная группа G4 действует па V3,
разобраны в работе [260], и они приводят к пространст-
пространствам с группой Ge.
Отметим также, что пространства, допускающие тран-
транзитивную Gb, найденные Г. И. Кручковичем («О движе-
движениях в римановых пространствах», Диссертация, гл. IV,
МГУ, 1957) и допускающие G4 I, II, III, у которых G3 II
действует на F,, есть частный случай простюанств C3.5)
(s = 0, а = Р), C3.7) (s = 0) и C3.9) (е = 0).
Перейдем к рассмотрению случая G6C. По второй тео-
теореме Ли имеем:
[ХгХ5] = %1Хк (i = 1, 2, 3, 4; к = 1, . . ., 5),>* — const. C3.12)
Рассмотрим сначала Vt, допускающие (?4 на V3. Прини-
Принимая во внимание то, что
g* = 0 (i = l,2,3,4),
г
из C3.12) имеем
g«das4 = ^4 (a=l, 2, 3). C3.13)
5
304 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. V
Кроме того, для полу геодезической системы координат
д4§4 — 0. Если рассматриваемая группа G4 имеет подгруппу
О
G3{Xlt Х2, Х3}, действующую на V3, т. е. j gy | Ф 0 (г, / =
= 1, 2, 3) и X.» = X.' = Х35 = 0, то из C3.13) для i = 1, 2, 3
и <94|* — 0 получаем, что |4 = const, т. е. приходим к рас-
О О
смотренному выше случаю G5B. Из этого можно сделать
вывод, что V4, допускающие группу G5C, возможны
только в том случае, когда подгруппа G3 группы G5 С
#
действует на F2, V2 или же когда по крайней мере одна из
постоянных ~к\, Х\, Xij отлична от нуля. Легко заметить,
что пространства C2.3), C2.4), C2.8), C2.9) не допу-
допускают группу G5C, так как из соотношений Якоби A0.18)
получаем X* = Х-* = XI = 0, а подгруппы G3 группы G5C
имеют ] gjг | Ф 0. Остальные пространства из § 32 могут
i
допускать G5 С. Для определения таких У4 мы применим
ту же схему, что и в случае G5 В, учитывая, кроме того,
еще и соотношения Якоби.
Так, например, для G.tV (§ 32, C2.5)) из соотношений
Якоби следует, что Ц = Ц = Ц = Ц = Я,* = Ц = 0, и из
C3.12) находим: 159
C3.14)
= const.
Легко видеть, что операторы {Xv X2, Х3, Х5} образуют
просто-транзитивную группу G4. Следовательно, сущест-
существует невырожденное преобразование координат, которое
приведет эту G4 к одному из видов G4, определенных
в § 32. При этом преобразовании координат группа
G4 {Xx, Х2, Х3, Х4\ останется или нетранзитивной, тогда
получаем случай G5D, или транзитивной, тогда имеем
случай G5E, который будет разобран ниже. Точно такой
же результат получим и для G4 IV, VI.
Для пространств '32.7) и других случаев, где под-
подгруппы G3 (-Х"г, Х2, Х3} действуют на F2 и У3, указанное
сведение к G5 D и G5 E не имеет места, но здесь можно
§ 33J ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ Gs 305
действовать по схеме, разобранной в начале для слу-
случая G5C.
Для пространств C2.7) и C2.8), как и для G5C, полу-
получаем G6, для других пространств получим следующие
возмо жности:
+ /с]2 ^-(fc+D x* pdx1 dx* + е-*1 Ac»1) + ки dx*\ C3.15)
&{J-, к, &2 — const, /с # ± 1;
2А;
2) rfS2- ^
+ Аив**1-^-1)** Bdx1 dx2 + е-^1 dx^) + /с44 rfa;42, C3.16)
kiit к, к2 — const, /г^±1; .^ = /12, Хг = pz,
X3 = ж3р2 - e*1 /?3, X4 = - ?—I /»! + ;—j ж2/?2 + ж3/?3,
Of US = AК-^2КщР \К — 1J —r j- ^n-^2 ЯЛ/2 Л -J- /tj
+ Лцв**1 B^жх ^.х2 + е-*1 dx3*) + /с44 dx^, C3.17)
ku, р, к, а, к2 — const, а = А: + р ^ 2~~¦¦ ¦ # О, А; =И= ± 1, 0;
Х"х = р2, Xa = р3, Х3 = ж3/J — ех /?з,
„ 2_ 2fc ж2 ^з
p(fe-l) 1
е 2 /?4.
20 A. 3. Петров
306 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ Чгл. V
В том. же пространстве лря А; = —1. содержится Vi7
допускающее С6С с метрикой
ds2 = ( - 2klzk2z* + ки) е2 *
+ е-*1 dx3*) + А44 rfa;4*, C3.18)-
kijt A-2 —const; Xx = p2,
Хя = x3p.2 — exlp3, X4 = рг +
X5 = e-*1 (Pi + p4)
Аналогично для других пространств имеем:
2) кмх** - 2к1г (р + 2) Йгаж* + А1г]
1 dx2 + Йжз2) + /с41 Йж42; C3.19)
, Х3 = х3рй — хгр3,
е(Р+2)хХ А + ePXV4, /> # - 2;
/viy, p —COnst.
2) ds2 = BаА1аж4 + кы) dx^ -^
+ /c12e-2xl Brfxx rf.c2 + ^з2) + /t-44 rfa;42; C3.20)
X: = p2, X3 = p3, X3 = хэр2 — ж^з,
^"a = Pi + 2ж2/?2 -f x3p3,
Xa = ( ax1-l-^—x*) p2 +e~2xlpi7 lc{j, a —const, /ci2 Ф 0.
3) ds2 = [(/? + q) pktix* + 2/c12 (p + q) K^ + Ац] dx1-* +
+ ft^ee*1 f 2dxx dx2 + ^ cos2 c^f- dx32 ^ + Л44 eta*2; C3.21)
V
3 ^
— XPz ^
§ 33] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ 0ъ 307
где kip к2, р, q — const, рф—q, ш = ]/4 — q2, q% < 4.
4) rfs2 = BA;l2aa;4 + &n) u?xa3 +
+ k12eixl С 2dxx dx2 + A Cos2 ^ йа;за ) + A44 rfa;4'; C3.22)
со
где /ei;-, а, /с2, ^ — const, q Ф 0, со = ~}/4 — д2.
5) ^2 = (-2А;12рж4 + ^11)^ж12 +
+ kizekxl Bdx1 dx2 + е-^1 dx*2) + k4i dx*2; C3.23)
Xx = /?,, X2 = ps, X3 = x3pz — exlp3,
X5 = ( - ^x* + №) p.2 + e^>4; fe{,., p, /c - const, Л Ф 0.
6) ds* = k33 dxa2 + a22 (x*) e~2xS {2dxx dxi + dx*2), A83 = const;
C3.24)
X& = ( аж1 + у ^ + A (x*) e2*3 j
2 , a, p, у, б-const,
*
Если же подгруппа G4 действует на V3, то, как это
показано в работе [260], группа G.G не допускается та-
такими пространствами.
Переходим к четвертому возможному типу.
20*
308 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [ел. V
Группа G5 D, по определению, содержит в качестве под-
подгрупп G4 {Xlt Х2, Х3, Х4} транзитивную и G4 {Xv Х2, Xs, Хь}
нетранзитивную. Обе эти группы имеют одну и ту
же подгруппу G3{XX, X2, Х3). Отсюда легко получить
алгорифм для нахождения F4, допускающих Gs D.
Берем Gi {Хх, Хг, Х3, Х4} транзитивную и присоеди-
присоединяем к ней четвертый оператор петранзитивной группы G4,
имеющей ту же подгруппу G3, что и исходная G4 тран-
транзитивная. Затем интегрируем уравнения Киллинга для
присоединенного оператора и исходного F4.
Рассмотрим при помощи этот алгорифма случай, когда
имеют место неразрешимые группы G4VII, VIII.
G4VII транзитивная группа содержит подгруппу
G3VIII {Хг, Х2, Х3] и имеет операторы:
Xt = е-3 (Pl - х*2р.2 - 2х^3), Х2 = р3, \
з ( (oo.Zo)
Хь = е р2, Xi = p1 + spi, г=±1. )
Из нетранзитивных G4 ту же подгруппу G3VIII имеет
только G4VII с операторами:
a) Х1 = е-х3(р1х*2р2 — 2х2р3), ХЛ = р8,
Х3 = ех3р2, Х4 = р! (действует на F3);
b) Xj_ = p2, Х2 = х2р2 + р3,
Х3 = (х^ + ге***) ръ + 2х*р3 — ех?рг, Х^ = рх (действует HaF3).
Следовательно, здесь нужно присоединить оператор
X = pv который с операторами C3.25) составляет группу.
Таким образом, имеем два пространства:
1) ds2 = 2к12 (dx1 dx* - х2 dx1 dx*)+k22 (dx2 — x2 dx3J —
— ^¦h^dz^ + k^dx*2, kti = const; C3.26)
Xx = е-3 (л- x22p2 - 2x*pa), X2 = ps,
X3 = ex3p2, X4 = px, X5 = pt.
2) ds2 = 2dx1 dx* + K2 (e-2*? dx* - s
-f 2ze-xZ dx2 dxi, k22 = const, e=±l; C3.27)
X3 = (z2'2 + ее2*3) /?2+ 2x2p3 - ех*рг, X4 = plt X6 = p4.
S 33J ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ С5 - 309
Аналогично, проводя это рассуждение для G4
I —VIII, получаем следующие пространства Vit допускаю-
допускающие Gb D:
1) ds2 = кпх4е-2ех* dxl2 +
+ /с12е-2«* {2dxx dx2 + dx**) + /c44 dx*s, C3.28)
ki:j = const, 8 = 0,1;
Xi = Pi (г=1, 2, 3), Z4= -xsp2 + xip3,
Xb — sz'sps + sx1p1 + (еж2 + ж1) р2 -f /?4.
2) rf52 = Ли (с/ж12 + sin2*1 dx*2) +
+ A33 (cos ж1 о?ж2 + dx3}2 + A;44 rfa;42, Ari3-= const; C3.29)
¦Xi = ft» X2 = cos z2ft — cfcg ж1 sin ж2ft + |^JiVz,
-^3==^2"^2' X^ —p3, X5
3) ds2 = 2^жх с/ж4 + k22 (cos%3 dx22 +
+ 2 sin ж3 dx2 dx*, k22 = const; C3.30)
Xx — p2, X2 = ?есж3 cos ж2 ft — tg-ж3 cos ж2 ft + sin ж2 р3,
Х3 = д2Х2К Хл = р1г Х5 = р?.
4) ds* = 2kvse-cx4 dx1 dx3 + k22e~2cxi (dx2 + x1 dxsJ +
^; c, ku — const; C3.31)
Хл— — жVi + x3p3, Is = c (x1p1 + ж2/?2) + pt.
5) Й53 = A:u e-2xi(dxl2 + dx?fl) + А2ке~4зс* (^ж2 + ж1 с/ж3J +
+ A44c?a;*2, А-ъ = const; C3.32)
З2 I2
6) tfs2 = ftu (йж12 + йжз2) + Ааа (^ж2 + я1 ^ж3J +
2, /ei3- = const; C3.33)
З2 I2
Х4 = — х3А + ТЖ ft + ^Va» ^з = Pi-
) КЛАССИОШКАЦИЯ ПОЛИП ТЯГОТЕНИЯ [гл. V
7) ds2 = кп dx1% + 2к23е~([+а) x*+xl dx* dx3 + k4i dxiZ,
C3.34)
/ci;-, а—const, а Ф 0;
Хг = р2, Х2 = р3, Х3= —р1-±-х2р2,
%4 = - Рх + х3р3! Х5 = (а + 1) р1 + А,-
8) -ds2 - Ап rf.xl2 + k22e~2axi+2xi (dx*2 + rfa;32) +
-Ь k^dx4?, a, /cj,-— const; C3.35)
^i = ^2^ ^ = Рз, %з =—/>i + ж2/?2 + хэр3,
9) ds- == 2с?жг rfx44-^e-rf+a3i:J(rfa;22 + i/ж32), Л:22 == const:
C3.36)
X1 — pz, X2 = jd3. -^3 = 2-Pi + x2Pi + х*Рз,
X4 = — ж3/>2 + х*р3, Х- = ajt?! + р€.
10) c?52 = гс/.г1 dx^ 4- /e23e-al+axl с/ж2 ^3, к23 = const;
C3.37)
¦^1 = /'г. ^2 — Рз> -Х"з = Pi + *3Рз.
^4 = Л + а;2Рв. ^5 = «Pi + Pi-
Pill) fl?52 = /t-ne-2b.x4 ^x* + 2/«23e~(k+E) xl rfa;2 (/ж3 + ki4, dx*\
C3.38)
/ci3-, A% b — const, 8—0, 1;
X, = Л (i = 1, 2, 3), A'4 = х*рг - z3/?3l
Z5 = bx1p1 -\- ex2p2 + fca,'3/i3 + pt.
12) rfs2 = kne~2h ** B^x йя;3 + u^3") +.
+ ki2e~2exi dz* + A44 rf^42, C3.39)
2k=b-\-e, e = 0, 1, ktj, k, b — const;
Х4 = р4(?=1, 2, 3), Х4=-х3^ + ^3!
13) ^2 = кпе~х* dx1' + k12e~2x4 {2dxl
-ffc44cte4*, A:{J-== const;] [C3.40)
А>^A = 1, 2, 3), X4= — з1/>8 + .г8/>2,
§ 33] ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ С5 311
14) ds2 = hlle-°-bxi dzl* + k22e-2hxi (dx** + dxa*)
i2
+ k4idxi2, kiit 6, A —const; C3.41)
Xi = Pdi=l, 2, 3), X4 = -х"А + г%
Z5 = firr1/?! -j- А; (ж2р2 4- жз^3) -f jt?4.
Переходим к рассмотрению последнего возможного
случая.
Если F4 допускает группу Са Е, то, по определению, Vt
допускает и просто-транзитивную группу Gi{X1, Х2> Х3, Х4];
поэтому искомые Vt находятся среди VA, указанных
в § 32. Пусть A'5 = |ajDa(a = 1, 2, 3, 4) —пятый опе-
6
ратор Gs E. По второй теореме Ли имеем:
[ХаХ5] = ЦХа (а = 1, . . ., 5; Р = 1, 2, 3, 4), Ц = const.
C3.42)
Пятый оператор можно определять по следующей
схеме:
1) записываем тождества Якоби: [[Х^к] Х5] +
+ [[ХкХ6]Хг] + [[Х5Хг]Хк] = 0 и, сравнивая коэффици-
коэффициенты при Xit определяем все возможные константы Яр;
2) по полученным уравнениям структуры, которые
линейными подстановками сводятся к наиболее простому
виду, определяем |а и интегрируем для данного F4 урав-
нения Киллинга; отсюда находил! вид операторов и иско-
искомой метрики. Так, например, для G4 V (§ 33) из соотно-
соотношений Якоби следует: Xf = А,* = %i = XI = \\ = А.* = 0.
Далее из C3.42) при г = 1, 2, 3, 4 для |4 получаем:
a2s* = 9sg4 = о, -^¦•«^ч-х;54, ад^ = х1 + щ'. (зз.43)
5 5 5 5 5 5
Дальнейшее рассмотрение разобьем на четыре случая:
1) я; = х; = о, 2) ц = о, х\фо,
3) ^ =^= о, xi ф о, 4) я; ^= о, к = о.
Если мы имеем случаи 1) и 2), то, используя соотно-
соотношения Якоби, получаем Х43 = Х1 — 0, т. е. g4 = const (так
5
как для полугеодезической системы коордипат 34|' = 0);
5
такие группы были рассмотрены выше.
312
КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ
[гл. V
Если мы имеем случаи 3) и 4), то получаем %1 — — аХ*.
Далее линейной подстановкой (имея в виду тождества Якоби)
*з — Х3, У4 = А4,
C3'44)
приводим структуру C3.42) к виду
[У^5] = [Y,Y5] = О, [У3У5] = KYa, [Y,Y5] = - aKY6.
Однако для пятого оператора, определенного отсюда,
и из уравнений Киллинга получаем вырожденные метрики.
Для других пространств (§ 32), рассуждая аналогично,
имеем следующие F4, допускающие G6 типа Е:
_ хл
кпе** dx1* + 2к13е 2 dx1 dxs +
xi(dx2 + x1dx3f + k33e-2xidxaZ + ki4dxi\ C3.45)
Xj — const, /c13 — ^22 = 0, /cu + 7«3fc22 = 0,
&1&11 + 4^s/ci3 = 0, ktk13 + 4/c3/c33 + 4k44 = 0;
Xx = pt, X2 = pa, X3= —p± + xzp2,
1 1
X4 = ~ — x1p1 + Y X*P* + х3Рз + Pi'
) 4) /?3 + 2х3р4.
2) ds2 = kneixidxl2 + 2А18в*4 «/ж1 с^ж3 + /с22е2*4 (^ж2 +
+ х1 dx3J + &33е-2*4 ^.г-3' + А:44 dxi%, C3.46)
,kvk3 — const, 4^^ + Ar3/f 13 + /c44 = 0, 4^:^ + /c3/c33 = 0,
^зз + ^1^22 = 0, k13 — k3k^2 — 0;
2 p
X4 = — 2хрг — ж
Xt = (x1' + k1e-'ixl)p1 - x4~xi
p3 -
§ 33J ПОЛЯ ТЯГОТЕНИЯ, ДОПУСКАЮЩИЕ ГРУППУ G5 313
3) ds* = Au dx^ + 2k13e~x* dx1 dx3 +
+ k22e~2axi+2xl dx** + kui dx*\ C3.47)
kipkx — const, a&xl +/ЬзА^з = 0, /cgA;^ — <?A;44 = a? -f 1 == 0,
X4 = aPl + xsp3 + Pi, X6 = e-e*1 (a^ + k3exip3 + рл).
4) ds2 = ku dx1* + 2/c12e-** c^a;1 йж2 + 2A;13 йж1 с?ж3 +
+ Л;зз dx32 + /c44 йж*2, C3.48)
kij — const, ktk±a -\- k3k33 = k-Jc^ + ^12 ~т к3к13 = Ar11A;12+
~Ь кгк1г = /c44 — k2k-i2 = 0, л;2 == i 1>
= e~xl {клрг + А;2еж4р2 + k3p3 + /?4).
5) c?s2=2A;12 dx1 dx2 + [&22— 2/с23ж4 + (А;зз — k12) ж42] йжз2 +
+ 2 [Л:23 + (Л12 — каз) ж4] йж2 </ж3 + кз5 dx32 + А:44 ^ж*2,
ktj, q, кг — const; C3.49)
*i = />i (i = 1,2,3), Х4 = ж^з-ж3/>1 + /?4>
X& = e^2 [(/Cl - &3Ж4) Pl + /c3p3 + p4];
k3kl2 — qkiti = qk3k33 — k33 + '^12 =
= AM — g (M^a + *s*2s) = 0, к12фк33,
6) rfs2 = /сисгж12 + 2A:l3 ( — ж^ж^ж2 + dx4x3) + k2
2, C3.50)
Этим завершается классификация многообразий F4,
допускающих в качестве своей полной группы группу
движений Gb. Для реального поля тяготения необходимо
для каждой из полученных метрик потребовать выполне-
выполнение УСЛОВИЯ ! gap | < 0.
314 КЛАССИФИКАЦИЯ ПОЛЕЙ ТЯГОТЕНИЯ [гл. V
Классификация F4, допускающих группы движений G6
и G7, может быть проведена тем же методом, а число
возникающих типов такого рода пространств V4 невелико.
Что же касается F4, допускающих группы движения Ga
в качестве полной группы, то они не могут в точке допу-
допускать сигнатуру метрики вида ( 1-) и, следова-
следовательно, не могут отвечать какому-либо реальному полю
тяготения.
Задачи
1. Пространство, определенное метрикой
ds* = 2dx1dx* + e-*1(dx** ± dx*2),
является субпроективным пространством. Только оно
допускает группу Ge на F3 ([260], стр. 219).
2. Пространство, определенное метрикой
ds2 = 2dx4x* + x** dx* + 2dx* dx3,
допускает транзитивную группу движений Ga. ЭтоУ4 —
симметрическое, эйнштейново (i?ap = 0)> двукратно-проек-
двукратно-проективное пространство, вполне гармоническое с двумя
абсолютно параллельными векторными полями. Оно не
может отвечать никакому реальному полю тяготения, так
как имеет в точке сигнатуру метрики вида ( 1—j-).
ГЛАВА VI
КОНФОРМНОЕ ОТОБРАЖЕНИЕ ПРОСТРАНСТВ
ЭЙНШТЕЙНА
§ 34. Конформное отображение римановых пространств
Если заданы два римановых пространства Vп с мстрп-
* *
ческим тензором gap(x) и Vn с тензором gap(z), причем
?*) = e2ffSap(*),. в = о{х), C4.1)
*
то будем говорить, что между Vn и Vn имеется конформ-
конформное соответствие и что эти два многообразия конформны;
соотношение C4.1) является необходимым и достаточным
условием конформности Vn и Vn. Геометрический смысл
этого определения заключается в том, что если имеет
¦36-
место C4.1), то в точках Vn и Vn, имеющих одинаковые
координаты, длины векторов с компонентами dxa разли-
различаются множителем, зависящим только от выбора точки,
а из формулы B.4) следует, что углы между двумя соот-
соответствующими направлениями в соответствующих точках
*
равны — отображение Vп на Vп конформное.
Пользуясь C4.1), легко установить зависимость между
контравариантными компонентами метрических тензоров,
коэффициентами римановых связностей, тензорами кри-
кривизны и т. д.
Непосредственно из определения ga& и формулы C4.1)
получаем:
Jap==e-2ag«p> C4.2)
H:j формул C.1) и C.2), определяющих символы Крис-
тоффеля первого и второго рода, к формул C4.1), C4.2)
316 КОНФОРМНОЕ ОТОБРАЖЕНИЕ ПРОСТРАНСТВ [гл. V]
следуют соотношения
2( O.p — gft в,а), C4.3)
о,х, C4.4)
где ста =—- = а>а ([77], стр. 112). Для того чтобы
О ОС
установить зависимость между тензорами кривизны про-
странств Vn и Vn, достаточно в формуле E.7) заменить
gap, Гсг,ар через g-ap, rff>ap, пользуясь выражениями C4.1),
C4.2) и C4.3), и выразить правую часть через о и Даруб-
Эти несложные выкладки приводят к выражению
е~2а Лару6 = i?apY6 + gabOfry + ё?>\аа-Ь — gayGfA —
— gp6<7aY "Г' Д^ (gab #P.Y ~ g'av gpfi). C4.5)
где для краткости введено обозначение
= a,ap — a,a a,p (aa = o,a),
a AiCr — первый оператор Бельтрами, определяемый фор-
формулой C.18). Отсюда, производя свертывание в C4.5)
по индексам а, б с тензором gab, определяемым C4.2),
получим соотношение, связывающее тензоры Риччи ото-
отображаемых пространств:
* def * *
#Pv = ga6Kafiy6 = Щу + (п - 2) aPY + [\(У + (п — 2) A ta] gPv,
C4.6)
где А2ст —второй оператор Бельтрами (см. C.18)). Про-
Производя еще одно свертывание, получим, наконец, формулу,
устанавливающую зависимость между скалярными кри-
*
визнами Vn и Vn:
Я = 5^i?pу = ft-2a [д + 2 (П — 1) А2а + (л — 1) (п - 2) Aid].
C4.7)
Наличие в правой части этого равенства целочислен-
целочисленных коэффициентов приводит к необходимости специаль-
специального рассмотрения случаев п = 1 и п == 2, но оба эти
предположения приводят к тривиальным выводам. Случай
§ 34J КОНФОРМНОЕ ОТОБРАЖЕНИЕ Vn 317
ге = 1, очевидно, не представляет интереса, а п = 2 также
исключается из рассмотрения, так как любые бинарные
квадратичные формы при любой сигнатуре приводятся
к виду Я (exdxx*-\- e3 dx2 ), ех,ег—±\, и, следовательно,
любые два F2 конформны друг другу ([147], стр. 477),
если их сигнатура одинакова. Конформное соответствие
устанавливается, конечно, на вещественном пути. Ввиду
этого будем предполагать, что п > 2.
Для изучения конформных римановых пространств
полезно ввести специальный тензор конформной кривизны,
введенной в рассмотрение Вейлем ([149], стр. 384 — 411).
Для определения этого тензора заметим, что в силу
C4.1) равенство C4.7) можно также записать в виде:
gap^=[JR+2(/i-l)Aaa + (ii-l)(ii-2)A1a]gap. C4.8)
Исключая из C4.6) и C4.8) второй оператор Бельтрами
Д2а, найдем:
1 *
/ ^ Aqg• C4.9)
2 (Д-/) (п-2) <^g«P - RS^) - У
Если, пользуясь C4.2), поднять в C4.5) один индекс,
то зависимость между смешанными компонентами тензо-
тензоров кривизны будет выражаться соотношением
C4Л°)
Введем теперь в рассмотрение геометрический объект
(flgg ^) C4.11)
который в силу своей конструкции является тензором;
назовем его тензором конформной кривизны. Нетрудно
убедиться, что (см. задачу 3 § 5) в любом Vs тензор кон-
конформной кривизны равен нулю.
Теперь из C4.10), если исключить тензор оа$ при
помощи C4.9), приходим к соотношению, характерному
318 КОНФОРМНОЕ ОТОБРАЖЕНИЕ ПРОСТРАНСТВ [гл. VI
для римановых многообразий, находящихся в конформ-
конформном соответствии:
Сат = Сацу6. C4.12)
Задачи
1. Показать, что если обозначить
#PyS Яру.6 -Rpe.v + 2(/г —1) (oP^'Y
то для ковариантной производной тензора конформной
кривизны имеют место соотношения
?°Р (V*.a) = ^ <ЛР ^бу] + ^« W^V])- C4.13)
2. Показать также, что
R° 0 C% i? C4.14)
3. Для того чтобы F3 можно было конформно отобра-
отобразить на 6) необходимо и достаточно, чтобы тензор
i?uPY = 0 -([58], стр. 80). C4.15)
4. Для того чтобы Vn (п > 3) было конформно Sn,
необходимо и достаточно, чтобы
Сат^0 ([58], стр. 80). C4.16)
5. Показать при п > 2, что наиболее общее конформ-
конформное отображение евклидова пространства на самого себя
может быть представлено как произведение инверсий
относительно гиперсферы, движений и преобразований
подобия ([14], стр. 375, 376).
§ 35. Конформное отображение римановых пространств
на пространства Эйнштейна
Вопрос о конформном отображении римановых про-
пространств на пространства Эйнштейна является естествен-
естественным обобщением вопроса о конформно-плоских римано-
римановых многообразиях.
§ 35] КОНФОРМНОЕ ОТОБРАЖЕНИЕ \'„ 319
Он был поставлен и в основном решен Бринкманом
[70], [71], [73] и рассматривался затем рядом других
авторов [113], [114], [129]-[133],^ [161], [174], [179].
Будем далее предполагать, что Vп является простран-
пространством Эйнштейна и п > 3. Следовательно,
*
Ra& = Jj- gafi, R = const. C5.1)
Предварительно перепишем соотношения C4.6) и C4.7)
в той форме, которая получится, если ввести в рассмо-
рассмотрение тензор
и скаляр
Тогда из C4.6) следует, что
*
и, следовательно,
e^R = R + 2(n-l)(o. C5.3')
Так как тензор Риччи пространства Эйнштейна удовле-
удовлетворяет условию C5.1), то из C5.3) получим соотношение
2 (n-
Чтобы получить искомые дифференциальные уравнения
в более удобной форме, обозначим второе слагаемое лепой
части C5.4) через тар так, что при этом тензор
х \_Г д R \
Тогда C5.4) вследствие C5.2) можно записать при помощи
уравнений
0 p. q I v<7 __ у. ^35 5)
где
320 КОНФОРМНОЕ ОТОБРАЖЕНИЕ ПРОСТРАНСТВ [гл. VI
Эту систему можно представить в более удобной форме,
если записать при помощи C5-5) и C5.6) производную
скаляра v в виде:
v,a= var,a + 0,etg. C5.7)
Если скаляры a и v будут удовлетворять уравнениям
C5.5) и C5.7), то и C5.6) будет удовлетворено такими о
*
и v при некотором постоянном JR. В C5.5) и C5.6) о,а,
по определению, градиентный вектор. Можно, однако,
вместо системы уравнений C5.5), C5.7) рассматривать
систему
О-«,р — О-аО-Э-Ь Vgap = Tap, C5.8)
va = vaa + сгэт&, C5.9)
где аа уже необязательно градиентное векторное поле,
а скаляр v произвольный. В самом деле, если из C5.8)
найдем вектор аа, то он, очевидно, должен удовлетво-
удовлетворять условию
<*а& — o-p,a = 0,
т. о. будет выполняться условие градиентности, и поэтому
можно будет положить оа = о,а-
После этого v и а будут удовлетворять C5.5) и C5.7).
Функция о определяется при заданных компонентах а,а
с точностью до несущественной постоянной. Для того
*
чтобы конформное отображение Vn на Vn было возможно,
необходимо, чтобы система уравнений C5.8), C5.9) была
совместна. Наложим условия интегрируемости на уравне-
уравнения C5-8) и для этого продифференцируем их еще раз
ковариантно, проальтернируем по индексам дифференци-
дифференцирования и применим тождества Риччи E.13). Тогда, ис-
используя C5.8) и C5.9), получим: .
Sa&y, C5.10)
где CoapY — тензор конформной кривизны, определяемый
формулой C4.11), который можно записать также в виде:
C5.11)
C5.12)
§ 35] КОНФОРМНОЕ ОТОБРАЖЕНИЕ Vn 321
Система будет совместна, с максимальным произволом
в решении, в том случае, если условие интегрируемости
C5.10) удовлетворяется тождественно нри любых оо. Но
это означало бы, что коэффициенты при oQ тождественно
равны нулю: Саруа = 0, и следовательно, Sa$y — 0, что
#
приводит к конформно-плоским Vn (см. задачи 3, 4 § 34).
Отбрасывая этот тривиальный случай, необходимо пред-
предположить, что C5.10) выполняется не тождественно и,
следовательно, кроме этих уравнений, необходимо рас-
рассматривать еще систему условий, которые получатся,
если C5.10) дифференцировать ковариантно. Этот процесс
последовательного дифференцирования получаемых усло-
условий совместности нужно продолжать до тех пор, пока он
или приведет к противоречию, или оборвется, так как
последующие условия обращаются в тождества в силу
предыдущих.
Как второй шаг в процессе нахождения полного ряда
условий совместности, продифференцируем ковариантно
условия совместности C5.10) и упростим полученные
выражения при помощи уравнений исходной системы C5.8),
C5.9). Тогда вторая серия условий совместности будет
иметь вид:
°° (^QapY.6 + gQ6Sa&y) — ^Сбар-у = ?сфу,6 — xQ&CQafiy C5.13)
Если заметить, что тар, Sa$y, Саруб не зависят от неиз-
неизвестных аа и v, то легко видеть, что при последующих
дифференцированиях C5.13), продолженных как угодно
далеко, и при использовании той же замены cai p и v,a
через их выражения из уравнений основной системы полу-
получим, что все последующие серии условий совместности
также будут иметь структуру
o<zAQ— vB = 2\ C5.14)
где AQ, В, Т — тензоры валентности q + 4, q + 3, q + 3
соответственно. Так, полагая q = 0, 1, получим или C5.10),
или C5.13). Нетрудно установить рекуррентные формулы,
позволяющие по q-м условиям совместности получать
(q -4- 1)-е. Их можно получить, если еще раз продиффе-
продифференцировать C5.14). Если искомую (q + 1)-ю серию снаб-
21 А. 3. Петров
322 КОНФОРМНОЕ ОТОБРАЖЕНИИ ПРОСТРАНСТВ [гл. VI
дить коэффициентами Ав, В, Т, то
Т = Т>3t — A tQ
* п
C5.15)
tprt
Таким образом, приходим к выводу: для того чтобы V.
*
конформно отображалось на пространство Эйнштейна Vn,
совокупность всех серий условий совместности C5.14)
должна образовывать систему уравнений, совместных
относительно аа и v.
В общем случае Vn не конформно к пространству
Эйнштейна; только что доказанная теорема дает необходи-
необходимые условия для существования конформного соответствия.
Для того чтобы получить систему необходимых и доста-
достаточных условий, обозначим q-ю серию условий совместно-
совместности C5.14) через Sg и рассмотрим всю систему условий
совместности
So, Slt ..., Sp, ... C5.16)
Если, начиная с некоторого номера, эта система стано-
становится несовместной относительно неизвестных о*а и v,
то соответствующие Уп не допускают конформного ото-
отображения на пространство Эйнштейна. Таким образом,
У„, допускающим такое отображение, отвечает тот случай,
когда, начиная с некоторого номера р, любое решение
для *S, ..., Sp будет также решением Sp+1. Покажем
предварительно, что имеет место утверждение: если система
C5.16) до номера р имеет только г линейно независимых
решений и все они удовлетворяют условиям Sp+1, то си-
система дифференциальных уравнений C5.8), C5.9) совместна
и ее решение содержит (г — 1) произвольных постоянных.
Предположим, что <та и v удовлетворяют уравнениям
Sq и Sq+1. Тогда, учитывая вид коэффициентов C5.15)
и тот факт, что дифференцирование Sq приводит к Sq+1
при помощи соотношения
Л° (а0> а — GQoa + vgQa — т9о) + В (v,a — vo-a — oQ%l) +
+ (aQAQ - vB — f) = 0,
§ 35] КОНФОРМНОЕ ОТОБРАЖЕНИЕ Vn \\%\
получим:
AQ (Oq, а — О-0О-а 4" VgQa — fQO) — В (V>a — V0a — CQX%) = 0.
C5.17)
Обозначая через S'q однородное уравнение, соответствую-
соответствующее Sq,
AQaQ — vB = 0;
видим, что
СГ0<х — a0(Ta 4" vgQa — TQa, V>a — VGa — GQXa
определяют решение Sq при любом a.
Предположим сначала, что существует единственное
решение системы C5.11), т. е. г=1. Если это решение
будет оа, v, то оно также должно удовлетворять -Sp^.
Тогда однородная система уравнений So, Slt ..., Sp
несовместна, а сделанный выпге вывод показывает, что
аа и v удовлетворяют C5.8) и C5.9), т. е. теорема имеет
место.
Пусть теперь г > 2, полная система линейно независи-
независимых решений однородной системы So, . .., Sv имеет вид
о"о; , v(Q) (q = 1, . .., г — 1). Пусть ста, v — любое частное
решение неоднородной системы C5.11). Тогда из C5.17)
следует:
-18)
v,p - vap - oK%l = X fx<oVo>. C5.19)
* *
Если в эти уравнения подставить вместо са, v выражения
ста 4- ^а\ v + ^(<3) и из полученных таким образом уравне-
уравнений вычесть соответственно C5.18) и C5.19), то придем
к уравнениям
i% f <> = 2 х^е)^а>, C5.20)
- = V 3dae)v(*>, C5.21)
a p
21*
324 КОНФОРМНОЕ ОТОБРАЖЕНИЕ ПРОСТРАНСТВ [гл. VI
где o"tQ=l, ..., г—1. Используя метод вариации, поло-
положим, что
Q Q
C5.22)
и поставим задачей определить функции b(Q) так, чтобы аа
и v*, определяемые таким образом, удовлетворяли уравне-
уравнениям C5.8) и C5.9). Подставляя C5.22) в C5.8) и C5.9),
придем к выводу, что искомые функции Ъ должны удо-
удовлетворять системе
b[$ + f*(aa) + 2 Ь(а)Х^ - b(Q)aa = 0, C5.23)
о
где аа берется из C5.22). Остается убедиться, что система
C5.23) вполне интегрируема. Доказательство этого факта
основывается на использовании уравнений C5.18) и C5.21)
(см. задачу 1 § 35). Этим завершается доказательство
теоремы. Таким образом, имеем следующий основной
результат [71]: для того чтобы Vп конформно отобража-
отображалось на пространство Эйнштейна Vп и такое отображе-
отображение осуществлялось с помощью о, v, зависящих от г г- 1
произвольного параметра, необходимо и достаточно, чтобы
существовало целое число р > 0, для которого система
C5.16) имела бы г линейно независимых решений и все
эти решения удовлетворяли бы -5'р+1 из серии условий
совместности.
Как уже отмечалось выше, при получении уравнений
C5.8), C5.9) скаляр о* определяется с точностью до про-
произвольной постоянной. За счет этого можно попытаться
*
уточнить выбор R скалярной кривизны пространства Эйн-
Эйнштейна. Когда г= 1, то, согласно доказанной выше теореме,
R придется взять такой, какой она получается. Если
же г>1, то, имея R Ф 0, полученное одним из возмож-
возможных способов отображения, и имея произвольные пара-
параметры, можно поставить вопрос о приведении R к наперед
заданному ненулевому значению. Можно также поставить
*
вопрос о возможности приведения R к нулю.
§ 35] КОНФОРМНОЕ ОТОБРАЖЕНИЕ Vn 325
Ответом на эти вопросы является утверждение: если
г > 1, то всегда, молено определить такое отображение,
при, котором R = 0; для определения отображения, при
котором R Ф 0, достаточно потребовать, чтобы выпол-
выполнялось условие
1 *
где |а, v и r\ , v — некоторые два региеная (может быть,
одинаковые) однородной системы So, Sx, ..., Sv.
* * * *(о) * Col * *
В самом деле, оа = о,a, v и о\а = а,а + a)?', v<o> = v +
удовлетворяют уравнениям C5.8), C5.9), так что а и
определяют конформпые отображения, которым отвечают
скалярные кривизны i? и i?(Q). Положим:
а<о) — а.
Теперь определяем Ь(о) в уравнениях вида C5.22) так,
чтобы сга и v удовлетворяли уравнениям C5.8), C5.9).
Если через JR обозначить соответствующую скалярную
кривизну, то нетрудно убедиться, что будет иметь место
соотношение
где
Отсюда непосредственно следует, что, выбирая подходящим
образом начальные значения Ъ , можно в качестве R вы-
выбрать наперед заданную величину, но только в том случае,
если
д (Ст(о), с«») # 0 (а, е = 1, ..., г-1),
Л = Л(е)^0 (е=1, 2, ..., г-1),
откуда следует справедливость доказываемого утверждения.
326 КОНФОРМНОЕ ОТОБРАЖЕНИЕ ПРОСТРАНСТВ 1гл. VI
В частном случае, когда п = 4, существенной является
следующая лемма: при п = 4 из уравнения
0 C5.24)
следует, что или
Сат^0, C5.25)
или
?afWTp = 0. C5.26)
Для доказательства можно применить следующее рас-
рассуждение, предложенное Схоутеном. Уравнение C5.24)
эквивалентно утверждению, что тензор Са$у& принадлежит
трехмерному пространству, ортогональному к вектору аа.
Предполагая, что этот вектор иеизотродный и, следова-
следовательно, C5.26) не имеет места, получим, что гиперповерх-
гиперповерхность, в которой определен тензор Са$у$, неизотропная
(см. § 7), т. е. она несет на себе риманову геометрию F3
с невырожденным метрическим тензором.
В V3 любой тензор Рцы, обладающий алгебраическими
свойствами тензора кривизны, всегда может быть пред-
представлен (см. задачу 3 § 8) в виде:
где Qij — симметрический тепзор. Если, кроме того, из-
известно, что gxlPijhi — 0. то тензор Pijtn = 0. В применении
к рассматриваемому случаю замечаем, что тензор конформ-
конформной кривизны обладает всеми перечисленными для PijkL
свойствами и, следовательно, Са$уе, = 0.
Поэтому при п = 4 существенным становится вопрос
о том, будет ли градиентное поле aa изотропным или нет.
В соответствии с этим можно различать два случая:
"def
а) Дха = gapo-,ao\p ф 0,
когда мы будем говорить, что отображение неизотропное,
и случай
отвечающий изотропному отображению.
§ 36J ОТОБРАЖЕНИЕ ПРОСТРАНСТВ ЭЙНШТЕЙНА 327
Если метрика Vn определенная и отображение осуще-
осуществляется при помощи вещественных функций, то случай C)
становится невозможным. При неопределенной метрике
оба эти случая возможпы и требуют специального рас-
рассмотрения.
Задачи
1. Показать, что система C5.23) вполне интегрируема.
2. Для того чтобы не конформно-плоское У4 можно
было конформно отобразить неизотропным образом на про-
пространство Эйнштейна, необходимо и достаточно, чтобы
уравнение So имело решение (необходимо единственное),
которое с некоторым скаляром v (также необходимо един-
единственным) удовлетворяло бы Sx и S2. Доказать. (Бринк-
ман [71], стр. 278.)
3. Не конформно-плоское F4, не являющееся простран-
пространством Эйнштейна, для которого (см. C5.10) и C5.12))
Sapy—O, не может быть отображено неизотропным образом
на пространство Эйнштейна. Доказать. ([71], стр. 278.)
§ 36. Отображение пространств Эйнштейна
на пространства Эйнштейна. Неизотропный случай
*
Если не только Vn, но и Vn является пространством
Эйнштейна, то
Rafi^^gap Я = Const. C6.1)
Простейшим случаем, когда возможно такое отображе-
отображение, является тот случай, когда
так как ясно, что C6.2) удовлетворяет уравнению Sq.
Геометрически это отображение означает просто изменение
масштабов вдоль параметрических кривых к поэтому будет
далее называться тривиальным.
Как уже показано в § 35, в случае нетривиального
отображения возможны также случаи, когда пространство
с ненулевой скалярной кривизной отображается на про-
пространство с пулевой кривизной, и наоборот. Обозначая
пространства с ненулевой скалярной кривизпой через G.
п
328 КОНФОРМНОЕ ОТОБРАЖЕНИЕ ПРОСТРАНСТВ [гл. VI
О
и с нулевой через Gn и применяя теоремы, доказанные
о
в § 35, без труда получим, что если Gn (Gn) можно ото-
0
бразить на Gn (Gn) существенно более чем одним способом,
о
то его можно отобразить нетривиально на Gn(Gn). Кроме
того, если Gn можно нетривиально отобразить на Gn, то его
о о
можно также отобразить на Gn. Наконец, если Gn допу-
о
екает нетривиальное отображение на Gn, то его можно
отобразить и на Gn, хотя при этом возможно исключение,
возникающее в том случае, когда для любых двух функ-
функций с, ст, определяющих два нетривиальных отображения,
имеет место соотношение
Произведем замену неизвестных функций, удобпую для
дальнейшего, полагая
а=_1пяЬ, vy~N-±KV, K^^g-Q. C6.3)
Так как
?аР=4А;ар, C6.4)
то, пользуясь тем, что
ф8<Ф> C6-5)
*
и заменяя в C6.4) все тензоры из Vn через тензоры про-
странства Vn и -фг придем к выводу, что Vn будет про-
пространством Эйнштейна тогда и только тогда, когда
« C6-6)
+ Ь1Ъ—К, C6.7)
где
Заметим, что N выражается через -Цз линейным образом.
Дифференцируя ковариантно C6.7), получим:
Щ,а =
§ 36] ОТОБРАЖЕНИЕ ПРОСТРАНСТВ ЭЙНШТЕЙНА 329
и, используя C6.6), найдем: N!a = Kty!a. Таким образом,
N = Kty + D, D = const.
Заменяя в C6.6), C6.7) N через г}з, придем к системе
уравнений
, C6-8)
K, C6.9)
где, впрочем, C6.9) является простым следствием C6.8),
так как из C6.8) следует:
,„ = 2g«t|),att>,TO - 2ATt*,a - 2Z>t,a = О,
так что при постоянном К C6.9) должно иметь место.
Данное в предыдущем параграфе определение изотроп-
изотропного отображения, если J3 выразить через гр, будет иметь
вид:
AiijjssO.
Из C6.9) следует, таким образом, что, для того чтобы
нетривиальное отображение было изотропным, необходимо
и достаточно, чтобы
K = K = D = O. C6.10)
Следовательно, изотропное отображение пространств
Эйнштейна друг на друга может быть осуществлено
только тогда, когда их скалярные кривизны равны нулю.
Если г])ш и г|з'2) — некоторые два решения системы
C6.8), которым соответственно отвечают постоянные К'1'
и Ki2\ то, полагая
где а, Ь, с — постоянные, найдем:
где
т. е. система C6.8) ведет себя, как линейная. В соответ-
соответствии с этим о последовательности решений г]/1', г]/2), ..., г|)'р)
будем говорить, что она является независимой, сели не
330 КОНФОРМНОЕ ОТОБРАЖЕНИИ ПРОСТРАНСТВ [гл. VI
существует соотношений вида
*\
^ сгл|э(г> = d, с,., d = const Ф 0.
r=i
Конформные отображения, отвечающие независимым
решениям, будем называть также независимыми. Таким
образом, самый общий вид пространства Эйнштейна Vn,
конформного к пространству Эйнштейна Vп с метрикой ds",
будет
л
,/,,2
В этом параграфе ниже рассмотрен случай неизотроп-
неизотропного отображения, когда
А^фО. . C6.11)
Это означает, что гиперповерхность ч]з = const неизотропная
и поэтому может быть использована в качестве координат-
координатной. Введем систему координат неизотропную, почти-
полугеодезическую, которая отличается от полугеодезической
тем, что в качестве параметра вдоль координатной кривой
выбирается не длина дуги, а некоторая произвольная
функция от дуги. Очевидно, что, если C6.11) имеет место,
такая система координат всегда может быть сконструиро-
сконструирована, причем хп' = 'ф(ж1, .. ., хп). В такой системе отнесе-
отнесения (см. § 7) компоненты метрического тензора
..,n, = gi'n' = 0, dignn = 0 Aфп). C6.12)
Далее, если обозначить
1 del ,
gn'n = -——/,•
ьп'п'
то, записывая уравнение C6.8) в новой системе координат,
найдем (см. задачу 1 § 36), что
f = Kxn2+2Dxn + B, B = const, C6.13)
gu = fgw ga = gii(^, **; ....,^n-1) {i,i*n). C6.14)
Таким образом, в этой системе координат метрика Vn
будет иметь вид:
gijdxi dxs, C6.15)
§ 36] ОТОБРАЖЕНИЕ ПРОСТРАНСТВ ЭЙНШТЕЙНА 331
где, следовательно, do2 определяет метрику неизотроп-
*
ного Уп-1.
Для того чтобы убедиться в том, что ds2, определяемое
соотношением C6.15), задает пространство Эйнштейна,
достаточно убедиться, что выполняются условия ¦
Raz = (n-l)Kgafy C6.16)
Вычисляя компоненты тензора Риччи для метрики C6.15),
получим:
где штрих «'» означает дифференцирование по хп. Поэтому
C6.16) будут иметь место только в том случае, когда
--2-//"-i(«-2)/'3j^., /" =
C6.17)
Зал1еняя здесь / при помощи C6.13), получим:
Rij = (n — 2)Kgij = 7^:igiJ, C6.18)
где
Следовательно, имеет место следующая теорема ([73],
стр. 125): пространство Эйнштейна мол-сет быть ото-
. бражеио конформно на другое пространство Эйнштейна
непзотропным образом е том и только в том случае,
когда в специальной системе координат его линейный эле-
элемент имеет вид C6.15), где f определяется формулой
C6.13); do2 определяет пространство Эйнштейна Уп_г
со скалярной кривизной C6.19).
Если п > 3 и Vn_t является пространством постоянной
кривизны, то Vn также будет пространством постоянной
кривизны. В самом деле, если Vn_, есть Sn , и / — некоторая
332 КОНФОРМНОЕ ОТОБРАЖЕНИЕ ПРОСТРАНСТВ [гл. VI
функция от ж*, то, вычисляя тензор конформной кри-
кривизны (§ 34), получим:
= /Сны (i, /, к, 1 = 1, .. ., п - 1),
— 0, Cjiijfe = О»
т. е. CapY6 = 0. Но для п > 3 это условие является необ-
необходимым и достаточным для того, чтобы Vn было кон-
конформно-плоским (см. задачу 4 § 34). Всякое конформно-
плоское пространство Эйнштейна является пространством
постоянной кривизны. В частности, когда п = 4, замечаем,
что метрика do2 определяет S3, так как всякое трехмерное
пространство Эйнштейна является пространством постоян-
постоянной кривизны (см. § 13). Поэтому пространство Эйн-
Эйнштейна V4, которое можно отобразить на другое про-
пространство Эйнштейна при помощи неизотропного ото-
отображения, есть пространство постоянной кривизны S4.
Задачи
1. Если два пространства Эйнштейна с ненулевыми
скалярными кривизнами допускают неизотропное конформ-
конформное отображение друг на друга, то опи изометричпы.
Доказать.
2. Доказать теорему, аналогичную сформулированной
в задаче 1, в случае, когда обе скалярные кривизны равны
нулю.
3. Показать, что при условиях задачи 1 или 2, но
в предположении, что из двух скалярных кривизн только
одна равна нулю, отображаемые пространства могут не быть
изометричными ([73], стр. 126).
4. Метрика C6.15) допускает замену х"—> х'п -\-а.
Показать, что при этом К' =Ка?-\-2Аа + В ([73], стр. 126).
5. Доказать, что пространство Эйнштейна, допускающее
конформное неизотропное отображение на другое простран-
пространство Эйнштейна, может допускать и изотропное отображе-
отображение на некоторое пространство Эйнштейна только в том
случае, если пространство Vn_l допускает нетривиальное
отображение на (п—1)-мерное пространство Эйнштейна
([73], стр. 130).
§ 37J
ОТОБРАЖЕНИЕ ПРОСТРАНСТВ ЭЙНШТЕЙНА
333
§ 37. Отображение пространств Эйнштейна.
Изотропный случай
Исследуем пространства Эйнштейна, которые допускают
изотропное конформное отображение на некоторое другое
пространство Эйнштейна. Как это следует из C6.8), C6.9),
C6.10), такое отображение возможно только в том случае,
когда функция ty удовлетворяет системе уравнений
¦Ч>,ар = О, C7.1)
Ai^ = 0. C7.2)
Уравнение C7.2) имеет тот геометрический смысл, что
поверхности ij> = const являются изотропными. Ввиду
этого, хотя уже нельзя, как в предыдущем параграфе,
ввести аналог неизотропной полугеодезической системы
координат и использовать для такой конструкции гипер-
гиперповерхности 1|э = const, но можно ввести изотропную полу-
полугеодезическую координатную систему (см. § 7). Выберем
ее так, чтобы
gi(n-i)==o (г = 1, . .., п-2), gnn = 0, g(«-i)n=l C7.3)
и, следовательно,
g4(n~l) = 0, g-(n—1) (n—1) = 0, g-n(n-l)=l.
Матрицы (gap) и (ga^) будут иметь соответственно вид:
iij
О . . .0
\ Щ . . .CD,,
где
\
0 (Or,
0 1
1 con /
\
-m1 . . . —mn~2
0 ... 0
°\
0
(t, / = 1, .... n-2),
Q 1
1 0 /
C7.4)
mi = gijmj, Q= — <ап + а>%. C7.5)
Метрика Vn в этой системе координат будет, таким обра-
образом, записываться в виде:
ds* = gtj dxx dxs + Bdxn~1 + 2co{ dxl + con dxn) dxn. C7.6)
334 КОНФОРМНОЕ ОТОБРАЖЕНИИ ПРОСТРАНСТВ [гл. VJ
Как показано в §7, такая координация возможна для
любого Vn с неопределенной метрикой; для изучаемого
изотропного отображения, как уже отмечалось в § 35,
¦ неопределенность метрики должна иметь место. Но в рас-
рассматриваемой задаче из C7.1) следует, что градиентный
вектор г|),а является к тому же и ковариантно постоян-
постоянным. Так как
Ф,«В = ^«э-Ф - Г2ря|>,а = 0, C7.7)
a t|) в новой системе координат играет роль хп', то это
уравнение дает:
= 0 (се, р = 1, ..., и), C7.8)
т. е. в новой координации gap являются функциями
ТОЛЬКО ОТ X1, . . . , ХП, ХП.
Необходимо проверить, когда и при каких условиях
пространство с метрикой C7.6) является пространством
Эйнштейна.
Рассмотрим пространство Vn_2, метрика . которого
определяется формой
dG^^giidxidxi . C7.9)
так, что метрика Vn может быть записана в виде:
ds2 = da2 + Bdxn-1 + 2ш| dxl + сап dxn) dxn, C7.10)
и условимся все величины, принадлежащие Уп_2, отхчечать
знаком «'». Тогда, если воспользоваться обозначениями
Gw = 0ngi;-, Gj = gihGhj, С1>=§гка, G = G\, C7.11)
Лу = ^ + 0L^-0),.,^ F) = gihGhj, C7.12)
Мь = дпщ, Ml = gikMk, М = дисои, C7.13)
то компоненты тензора Риччи будут иметь вид:
Ви = кн, . C7.14)
Rnn = \ (A2con + dnG + 4 ^П - 2М:,) , C7.16)
§ 37] ОТОБРАЖЕНИЕ ПРОСТРАНСТВ ЭЙНШТЕЙНА 335
a see остальные компоненты тождественно равны пулю;
здесь
del
A*<»n = g <»n, ik-
Так как /?(П_1)П=0, a g(n_ 1Ol=l, то является
очевидным, что искомое Vn может быть только про-
пространством Эйнштейна нулевой скалярной кривизны. Но
тогда из C7.14) следует, что и Fn_2 должно быть про-
пространством Эйнштейна нулевой скалярной кривизны.
Кроме того, из C7.15) и C7.16) получаем:
G,i-fi,k = O, C7.17)
Aian + dtfiA-^F*tFlk-2Mi,i = 0. C7.18)
Пусть Fn_2 задано и является пространством Эйнштейна
нулевой скалярной кривизны. Покажем, что в этом слу-
случае всегда можно определить о^ и а>п как функции от
х1, .. ., хп~2, хп, так что искомое Vn будет пространством
Эйнштейна. Обозначим в C7.17) все члены, пе зависящие
от соп, через Д, тогда C7.17) запишется в виде:
ghl(<*i,Ki-<*i,iu) = fu C7.19)
где
fi — Gi,h — Gti,
или, поднимая индекс вверх, запишем C7.19) в виде:
{gnghl{dl<oi-d^l)lh = f.
Так как в квадратной скобке стоит кососимметрический
тензор, то, пользуясь выражением для дивергенции такого
тензора (см. задачу 4 § .3), можно переписать это выраже-
выражение в виде:
dk[gilghl(d^i-di^)l= Vgf, C7.20)
где
Найдем необходимые и достаточные условия интегри-
интегрируемости уравнений C7.20). Дифференцируя C7.20) по хх
нековариантным образом и свертывая по индексам i и /,
получим:
l} = 0. C7.21)
336
КОНФОРМНОЕ ОТОБРАЖЕНИЕ ПРОСТРАНСТВ
[гл. VI
11окажем, что C7.21) является и достаточным условием
интегрируемости уравнений C7.20). Так как (см. -зада-
-задачу 3 § 3)
=g di (Vgf) = Л = <?',» - giJGtii = dnR,
, то
т. е. если C7.21) имеет место, то условия интегрируемости
C7.20) выполняются. Следовательно, можно определить щ
так, чтобы C7.20) удовлетворялись. Подставляя найден-
найденные значения к^ в C7.18), определим <вп. После этого Vn
будет пространством Эйнштейна. Если, в частности,
метрика имеет вид:
ds2 = gtj dxl dx1 + 2dxn'1 dxn (i, j — 1, . . ., n — 2),
то уравнения C7.17), C7.18) запишутся:
>i ijfe ' n i 2 ft i " \-/
Так как, кроме того, подсчитывая компоненты тензора
кривизны, можно убедиться, что среди них имеются
дующие, отличные от нуля;
lj + -j;
j ,
j J ,
C7.23)
то становится очевидным, что в общем случае, если даже
Fn_2 — плоское пространство, пространство Vn может
и не быть плоским (см. задачу 2 § 37).
Рассмотрим, в частности, случай гг = 4, представляю-
представляющий особый интерес. Так как было показано, что Vn_2
при рассматриваемом отображении обязано быть простран-
пространством Эйнштейна с нулевой скалярной кривизной, а вся-
§ 37 J ОТОБРАЖЕНИЕ ПРОСТРАНСТВ ЭЙНШТЕЙНА 337
кое F2, тензор Риччи которого Rap = 0, является плоским
пространством, то линейный элемент искомого Уп можно
привести к виду:
ds2 = glx dxl2 + 2g12 dx1 dx2 + g22 dx2" +
+ Bdx3 + 2a dx1 + 2b dx2 -f m dx*) dx*, C7.24)
где форма
do2 = gtj dx" dxj (i, / = 1, 2)
при любом значении переменной ж4 определяет плоское
пространство с метрикой одной из двух возможных сиг-
сигнатур: (Н—г) (~\ ); несущественное умножение метрики
на — 1 здесь не учитывается. Здесь а, Ъ, т — некоторые
функции от хх, х2, ж4. Задавая метрику da2 так, чтобы
при любых ж4 она определяла плоское пространство,
и интегрируя уравнения C7.17) и C8.18), получим общий
вид четырехмерных пространств Эйнштейна, допускающих
изотропное конформное отображение ла некоторое про-
пространство Эйнштейна.
Задачи
1. Показать, что преобразование координат вида
х1'^хг'{хг, . . ., хп~2, хп) (г=1, ...,п-2),
xn-i' = xn'1 + z(x1, х71'2, хп), хп'-=-хп
не меняет метрики C7.6). Пользуясь произволом функций
xv (г = 1, ..., п — 2), z, упростить метрику C7.6).
2. Показать, что метрика
ds2 = 2dxn-1 dxn + (ахп + bf gu dx1 dxj (i, f = 1, . . ., n — 2),
где a, b — постоянные и g-bi = gii (x1, . . ., xn~2)—опреде-
xn~2)—определяющее {n — 2)-мерное пространство Эйнштейна, допускает
изотропное конформное отображение на некоторое про-
пространство Эйнштейна Vn. Найти метрику Vn. Исследовать
частные случаи, которые возникают при а = 0 и 6 = 0
([71], стр. 136).
3. Когда метрика Vn
dsz = 2dxl dx* + 2dx% dx* + 2f(xx, x*) dx1 dx* -4-
+ 2g(x2, x
22 A. 3. Петров
338 КОНФОРМНОЕ ОТОБРАЖЕНИЕ ПРОСТРАНСТВ [гл. VI
определяет пространство Эйнштейна и допускает изотроп-
изотропное конформное отображение на другое пространство
* *
Эйнштейна F4? Определить метрику Vn.
4. Показать, что если F4, пространство Эйнштейна,
не являющееся пространством постоянной кривизны, до-
допускает конформное отображение, не зависящее от х4=лр, на
другое пространство Эйнштейна, то это отображение обя-
обязательно изотропное.
5. Когда У4 с метрикой
ds* = 2dxl dx* -j- 2dx3 dx* + 2/ (x1, xl) dxl dx*
удовлетворяет условиям задачи 4?
6. Vn, фигурирующее в задаче 5, может быть вложено
в пятимерное пространство Евклида как гиперповерх-
гиперповерхность [76].
7. Vn с метрикой, указанной в задаче 3, может быть
вложено как пятимерная поверхность в семимерное евкли-
евклидово пространство.
8. Показать, что Vn, определяемое метрикой
ds2 = 4 [dxl dx2 + dx3 dx*> + (ж1 dxx + x3 dx3J],
является пространством Эйнштейна и допускает погруже-
погружения в пятимерпое евклидово пространство с метрикой
ds* = dyi2 — dy** + dy*2 ~ dy*2 + dy*2
при помощи уравнений
у1 = хг 4 ж2, у2 = х1 — х2, y3 — x3jrXi,
у* = х3-х*, у5 = хг2+х*2
[76].
9. Показать, что метрика
определяет пространство Эйнштейна, которое может быть
§ 37J ОТОБРАЖЕНИЕ ПРОСТРАНСТВ ЭЙНШТЕЙНА 339
вложено в Sn+1. Вложение может быть осуществлено при
помощи формул
е zA- 4-е z
ер+2^ 1^ • • • ^ en + 2z — п 2 К '
где e=f I, a SnJtl определяется уравнением
i-
[76].
10. Рассмотреть частный случай задачи 9, когда
, 2 dx^ + dx2
S "~[i+-?-(^J2
([76], стр. 103-104).
22"
ГЛАВА VII
ПРОБЛЕМА КОШИ ДЛЯ УРАВНЕНИЙ ПОЛЯ
ЭЙНШТЕЙНА
В релятивистской механике, отвечающей общей теории
относительности и уравнениям поля Эйнштейна
возможна постановка различных задач, аналогичных
задачам классической механики [194], [209], [247],
[232], [266], [267], но в этом направлении сделаны только
первые шаги. Исключение составляет задача определения
интегралов поля но начальным данным (задача Копти),
для которой имеется четкая математическая постановка
и определенные результаты. По этой причине в настоящей
главе излагается проблема Коши для системы (а), нашед-
нашедшая наиболее полное решение в работах Лихнеровича
[231], [159], [247]. Необходимо отметить основной резуль-
результат для проблемы Коши в приложении к системам урав-
уравнений с частными производными, полученный И. П. Пет-
Петровским [106], [194]. Вопрос о корректности постановки
задачи Коши для уравнений (а) и дискуссия по этому
поводу отражены в работах [189], [226], [209], [247].
Решение задачи Коши, как правило [194], существен-
существенным образом зависит от класса функций, в которых
ищутся решения, и от условий, накладываемых на поверх-
поверхность, для которой ставится задача. Для системы (а),
таким образом, вопрос будет зависеть от условий, накла-
накладываемых на компоненты метрического тензора gap (,r)
и тензора энергии-импульса Гар (х) и их производные.
§ 38. Уравнения поля Эйнштейна
Придерживаясь терминологии, введенной в § 1, будем
говорить о функции ф, что она класса Сг, если допускает
непрерывные частные производные вплоть до порядка г;
§ 38] УРАВНЕНИЯ ПОЛЯ ЭЙНШТЕЙНА 341
обозначим бесконечно дифференцируемые функции и ана-
аналитические функции соответственно символами С°° и Са.
Введем также понятие функции класса С2 на куске
поверхности S. Рассмотрим для этого функцию ср, непре-
непрерывную в окрестности гиперповерхности $. Пусть система
координат в Vn выбрана так, что эта гиперповерхность
записывается уравнением х11 = 0. Предположим, что ф
удовлетворяет условиям:
1) она класса С2 в каждой из окрестностей, принад-
принадлежащих областям хп > 0 и хп < 0;
2) <9аф и <9арф равпомерно стремятся к определенным
пределам, когда хп—>0, не меняя знака, но в зависимо-
зависимости от того, будет ли при этом хп > 0 или хп < 0, эти
пределы будут различными.
Прерывность ф на S принято обозначать символом [ф].
Тогда, согласно классическим результатам Адамара ([17],
стр. 83 — 87), прерывности производных функции ф на S
будут иметь вид:
[5^1 = 0, [dnq>] = A, C8.1)
[di;.<p] = O, КпФ]=<М, [дппу] = В (i=l, ..., л_1),
C8.2)
где А ж В — некоторые функции, определяемые на S.
Если в Vn произведено преобразование координат
класса С2, то в новой системе отнесения получим функ-
функцию ф и гиперповерхность S, определяемую уравнением
f(x) — O, для которых: 1) ф имеет класс С2 для каждой
из окрестностей S, удовлетворяющих условиям / > 0 и/ < 0,
и 2) первые и вторые производные ф равпомерно стре-
стремятся к определенным пределам (при /= +0 и /= —0),
не совпадающим вообще между собой. Теперь, по опреде-
определению, функцию ф, определенную в некоторой области Vn,
назовем кусочно-гладкой класса С2, если в этой области
Ф имеет класс С2-, за исключением окрестностей конечного
числа поверхностей разрыва Sx, S2, . . ., Sk, для каждой
из которых имеют место условия 1) и 2).
Отметим, что эти условия аналогичны тем, которые
появляются в теории гидродинамических волн.
Уравнения поля (а) действуют в пространстве-време-
пространстве-времени V4, определяемом метрической формой
C8.3)
342 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
и здесь F4 определяется как дифференцируемое многообра-
многообразие. Для дальнейшего является существенным уточнение
понятия У4- Пусть дано некоторое га-мерное, топологи-
топологическое, связное ([205], стр. 96) пространство Vn, каждая
точка которого обладает окрестностью, гомеоморф ной евкли-
евклидовой сфере (см. § 1). Рассмотрим некоторую открытую
область D в Vn ([205], стр. 91) и совершим отражение
этой области D на евклидово re-мерное пространство Нп;
это определит локальную систему координат D, при
помощи которой каждой точке х из D сопоставляется
точка ? из Rn, определяемая п вещественными числами ха.
Дифференцируемое многообразие заданного класса Сг
определим как такое Vn, с которым можно связать мно-
множество А локальных систем координат, удовлетворяющих
условиям:
а) Области, отвечающие А, целиком покрывают Vn.
Р) Пусть Dx и D3 —две такие области; рассмотрим их
пересечение Dx f") D%. Тогда если xCZDif) ^2. то коор-
координаты точки х в одной локальной системе координат,
отвечающей Dlt суть функции класса С (с якобианом,
отличным от нуля) от координат этой точки в другой
локальной системе, отвечающей D2.
Аксиомы а) и Р) позволяют ввести такие понятия,
как эквивалентность покрытий области, рефлексивность
(эквивалентность самому себе), транзитивность и т. д.
Тщательное изложение этих вопросов содержится, напри-
например, в книге Л. С. Понтрягина [205].
В качестве пространственно-временного многообразия
V4, для которого исследуются уравнения поля (а), возь-
возьмем такое F4, которое будет дифференцируемым много-
многообразием, удовлетворяющим условиям а) и Р) и, кроме
того, условию
у) Требуем, чтобы на пересечении областей двух ло-
локальных систем координат вторые ироизводпые функций,
определяющих замену координат, были функциями кусоч-
кусочно-гладкими класса Сг.
В дальнейшем будет конкретно подразумеваться, что
на пересечении областей двух систем координат коорди-
координаты точки в одной из систем суть четырежды дифферен-
дифференцируемые функции (с ненулевым якобианом) координат
точек в другой системе; при этом первые и вторые про-
§ 38] УРАВНЕНИЯ ПОЛЯ ЭЙНШТЕЙНА 343
изводные непрерывны, а третьи и четвертые могут допу-
допускать разрывы типа Адамара.
Компоненты метрического тензора gap (х) и их произ-
производные dygap (x) будут предполагаться соответственно
класса С1 и класса С'2 кусочно-гладких.
Рассматривая некоторую гиперповерхность S в Vi;
проходящую через точку ха, можно построить касатель-
касательное к S в данной точке плоское пространство /?п_х. Если
направление некоторого вектора, принадлежащего /?n_i,
определяется вектором dx с компонентами dxa, то это
касательное плоское пространство можно определить урав-
уравнением vadxa — Q, где va — ковариантные составляющие
вектора нормали к Rn-X. В зависимости от того, какую
норму имеет этот вектор, будем касательной к S гипер-
гиперплоскости приписывать ту или иную ориентацию в про-
пространстве-времени, именно: если
Vfi > О,
то будем говорить, что гиперповерхность ориентирована
в пространстве (при сигнатуре метрики пространства
типа ( 1- )), и если
< О,
будем говорить об ориентации гиперповерхности во времени.
Эти понятия позволяют далее уточнить выбор гиперпо-
гиперповерхности S, на которой задаются начальные данные
Коши.
Уравнения поля (а) Эйнштейна, как уже отмечалось
в § 12, были получены последним в предположении, что
они должны, с одной стороны, обобщать уравнения Лап-
Лапласа—Пуассона, локально определяющие ньютоновский
потенциал, и, с другой стороны, удовлетворять закону
сохранения. Если обозначить левую часть (а) через Sa$,
то уравнения поля запишутся в виде:
«Sap = MV C8.4)
где тензор энергии-импульса Тар целиком определяется
распределением и движением материи, а Sa$ — метрикой
пространства-времени. Если Гар Ф 0, то будем далее гово-
говорить о внутренней задаче, ш в противном случае, когда
344 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
Та$ = 0 и речь идет о свободных областях пространства-
времени, не возмущенных энергетически, — о внешней за-
задаче. Не уточняя пока вопрос о строении Тар в зависи-
зависимости от природы поля, отметим лишь, что этот тензор,
по существу, обобщает правую часть уравнения Пуассона.
Что же касается тензора Эйнштейна ?ар, имеющего
чисто геометрическое происхождение, то он удовлетворяет
двум условиям:
1°- Sap — комитант (т. е. рациональная функция) от
gap, dygap и dy6ga$, причем от вторых производных зави-
зависит линейно.
2°. Он удовлетворяет закону сохранения
^аЭ,а = 0. C8.5)
Условия 1° и 2° являются гипотезами, которые, од-
однако, мотивируются физически. Так как, с другой сто-
стороны, уравнения (а) могут быть получены из вариацион-
вариационного принципа и тогда 1° и 2° будут следствиями, то тем
самым устанавливается согласованность этих условий
с вариационными принципами. Эйнштейн вывел уравне-
уравнения поля из условий 1° и 2°, опираясь при этом на ин-
интуицию. Строгий анализ этих условий, произведенный
Картаном ([63], стр. 141 — 203), привел его к теореме:
если Sap удовлетворяет 1° и 2°, то
| C8.6)
где Ra$ — тензор Риччи, В — скалярная кривизна прост-
пространства, a h, к— произвольные постоянные. Относя посто-
постоянную /г к правой части, можно прийти к уравнениям
поля
def' л
Sap = Яар - \ (R + к) gafi = кТа$. C8.7)
Так называемая космологическая константа к, к которой
обращался в свое время и Эйнштейн ([43], стр. 142),
приводящая к гипотезе о конечности вселенной в космо-
космологических проблемах, была исключена из физических
соображений, после чего C8.7) приведется к C8.4). От-
Отметим, что для многих вопросов присутствие постоянной
к не отражается на методе и результатах, которые полу-
получаются автоматической заменой R—>R-j-k.
S 39] ВНЕШНЯЯ ЗАДАЧА КОШИ 345
Если считать, что тензор Sa$ определяется формулой
C8.6), то закон сохранения C8.5) является непосредст-
непосредственным следствием тождества Бианки E.16). Свертывая
его по а, у, получим:
— ^аЭ, б + Rab, Э + Raa.6?, a = О,
откуда, производя еще одно свертывание по а, JJ, найдем:
Если к — постоянное число, то ввиду этого тождества
получим, что для Sap имеет место закон сохранения не-
независимо от того, будет ли Sa$ тензором Эйнштейна или
же имеет место формула C8.7).
§ 39. Внешняя задача Коши
Рассмотрим задачу Коши для такой области F4,
в которой тензором энергии-импульса Та$ можно прене-
пренебречь и, если исходить из C8.7), уравнения имеют вид:
i?ap = у (Я + к) gap = Kgafi, % = ~ (Я 4 к). C9.1)
Если в этом равенстве произвести свертывание по а и р,
то зависимость между постоянной А; и скалярной кривиз-
кривизной пространства определится в виде:
Д=—2А. C9.2)
В частности, для уравнения поля (а), когда космологи-
космологическая постоянная /с предполагается равной нулю, полу-
получим, что R — 0 и уравнения поля для свободного прост-
пространства будут иметь вид:
/?„р = 0. C9.3)
Решение задачи Коши для уравнений C9.1) или C9.3),
которые не отличаются существенно, представляя само-
самостоятельный интерес, в то же время будет полезно при
рассмотрении внутренней задачи Коши.
Пусть задана некоторая гиперповерхность S прост-
пространства-времени F4, определяемого компонентами метри-
метрического тензора gag (x), тогда задача Коши формулируется
следующим образом: требуется определить компоненты
346 ПРОБЛЕМА КОЖИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
тензора gap (х) так, чтобы на S они и их первые производ-
производные были данными функциями, если на S и вне S искомые
потенциалы gap удовлетворяют уравнениям поля C9.1)
или C9.3). Строго говоря, случай C9.1) более естественно
отнести к внутренней задаче, когда ХТа$= — -g-gbp, H0
в смысле метода решения задачи Коши условия к = О
или к Ф 0 не приводят к существенному различию.
Для задачи Коши прежде всего требуется определить
данные Коши. Для этого удобно ввести сначала в F4
такую специальную систему координат, где гиперповерх-
гиперповерхность S задается уравнением ж4 = 0, по крайней мере
локально. В этой системе координат g44 > 0. Назовем
для этой системы координат индексом производной потен-
потенциала gap (x) число, показывающее, сколько раз эта ком-
компонента дифференцируется по ж4. Тогда данные Коши
состоят из значений ga$ на S и первых частных производ-
производных от gap индекса 1, т. е. <94gap- Здесь предполагается,
что эти данные соответственно трижды и дважды диф-
дифференцируемы по крайней мере.
Для дальнейшего необходимо прежде всего выяснить,
привлекая для этой цели систему уравнений поля, во-
вопрос о поведении вторых производных от потенциалов на S.
Что касается вторых производных от ga^ индекса
<1(д4г?а|3, dijga& г, (=^> 2, 3), то они могут быть опре-
определены по данным Коши непосредственным дифференци-
дифференцированием и они непрерывны. Производные же индекса
2 E44gap) определяются системой уравнений поля и должны
быть определены из этой системы. Они вообще могут
претерпевать разрыв па S.
Так как на основании E.2)
~2 Ка ^Г^ + Г Г
то
2 C9.4)
здесь <оар — рациональная функция от символов Кристоф-
феля Гр\,, и следовательно, a>ap полностью определяются
данными Коши. Отсюда получаем, что если брать урав-
§ Зд1 ВНЕШНЯЯ ЗАДАЧА КОШИ 347
нения поля в виде C9.1), то, поскольку /?= —2к= const,
правую часть можно включить в <вар, и эта группа чле-
членов уравнения не перестает от этого определяться данными
Коши.
Рассматриваемую нами специальную систему коорди-
координат можно было бы, в частности, выбрать как полугео-
полугеодезическую, но мы не требуем этого, ограничивая ее вы-
выбор тем, что в ней гиперповерхность S ориентирована в
пространстве и записывается уравнением ж4 = 0. Ввиду
особой роли, которую играет индекс 4, для этой системы
координат запишем систему C9.4) в виде:
Яц = - у g44 d4igij + Qu = 0, ' C9.5)
4Ч а44 = о, C9.6)
где Qa$ составляется из озар и тех вторых производных,
которые могут быть определены дифференцированием на
гиперповерхности S данных Коши и, следовательно, также
определяются данными Коши. Так как гиперповерхность
ориептирована в пространстве, то g44 Ф 0 и из уравнений
C9.5) можно определить все производные вида d^g^. Что
же касается производных вида <944#4а (a=l, 2, 3, 4), то
они вообще в уравнениях C9.5) — C9.7) не встречаются,
так как все компоненты тензора кривизны вида -??44а4 = 0.
Тем не менее существенно показать, что прерывность про-
производных 544g4a (a = 1, 2, 3, 4), если она имеет место, не
может иметь физического смысла и потому является
несущественной. Это будет ясно, если удастся показать,
что при некотором преобразовании координат производные
дцёа не меняют своего значения, а di4g/.a можно приве-
привести к любому наперед заданному значению.
Рассмотрим в окрестности гиперповерхности S пре-
преобразование координат, обладающее тем свойством, что
на S оно сохраняет численное значение координат каждой
точки (напомним, что S записывается уравнением ж4 = 0):
348 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
где предполагается, что е^—>0, когда xi—>0. Ясно, что
(%)rbt C9.9)
и
'
C9.10)
C9.11)
Так как
дха' дхх>
то непосредственно получим:
d4gafi = A°a'Al'A\'dx,ga,x, + дААаа'A}'go'X' + <M|f Оа'т-,
C9.12)
и следовательно, вследствие C9.10) имеем, что данные
Коши на гиперповерхности S после такой замены коор-
координат определяются соотношениями
gafi = ga'(,', d4ga^ = di>ga^r. C9.13)
Если, кроме того, вычислить вторые производные, то при-
придем к выражению
544gap = Aaa'Al'AYATdx,v,ga,x, + д4йАаа'A}'ga>x< +
+ duAfAZgo-x' + «ap, C9.14)
где через ыар обозначена группа членов, содержащих
множителями первые производные от Лр, которые в силу
C9.10) на S обращаются в нуль. Следовательно, из
C9.14) имеем:
Таким образом, в то время как производные d44 gi3- не меня-
меняются, относительно вторых производных вида dMgiia можно
§ 39J ВНЕШНЯЯ ЗАДАЧА КОШИ 349
сказать, что в зависимости от выбора функций ф0, кото-
которые пока произвольны, их можно привести к наперед
заданным функциям ([231], § 14). Можно, в частности,
выбрать cpW так, чтобы d44ga4 были непрерывными на S.
Следовательно, с точностью до этой оговорки вторые
производные непрерывны на S. Если же, кроме того, пред-
предположить дифференцируемость данных Коши более высо-
высокого порядка, то, дифференцируя C9.10) последовательно
достаточное число раз, этот вывод можно распространить
на производные более высокого порядка.
Для решения задачи Коши необходимо еще рассмот-
рассмотреть группу уравнений C9.6) и C9.7).
Для простоты предположим далее, что к — О, хотя,
как мы видели, это несущественно и все выводы без тру-
труда распространяются и на случай к ф 0. Уравнения C9.6)
и C9.7) при этом предположении записываются в виде
Rka = 0 (a = 1, 2, 3, 4). Так как
S\ = gVRu + g"Rti, SU = R\ —i R =4 (g^Ru-gVRt,),
то эта система эквивалентна системе
54a = 0 (a= 1,2, 3,4), C9.15)
которая не содержит производных индекса 2 и, следова-
следовательно, определяет систему условий, накладываемых на
данные Коши.
Докажем, что система уравнений поля Эйнштейна
находится в инволюции, т. е. если потенциалы gap (ж)
удовлетворяют системе C9.5) и на гиперповерхности S
условиям C9.15) (или, что то же самое, C9.6) и C9.7)),
то они удовлетворяют C9.15) и в окрестности. S.
Пусть данные Коши удовлетворяют условиям
и потенциалы ga$(%), отвечающие этим данным Коши,
удовлетворяют уравнениям C9.5). В силу закона сохра-
сохранения C9.5)
или, выделяя индекс 4, можно записать:
•SV* + 21 «^p,i = 0- C9-16)
il
350 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
С другой стороны, имеем из C9.5):
— -J (§44j^<u ~г *
Отсюда следует, что систему C9.16) можно представить
в виде:
§^д^% = М * Vt-Уа4 + N%Ska, C9.17)
где М ж N будут класса С0.
Подытоживая, получим следующий вывод: для любого
решения C9.5) iS4p удовлетворяет системе четырех урав-
уравнений C9.17) с частными производными, линейных, одно-
однородных, разрешимых отпосителыю производных <94?4р.
Но такая система для нулевых данных Коши на S',
(«Sp)s = 0, имеет только нулевые решения; это доказывает
утверждение.
Следовательно, если данные Коши удовлетворяют C9.6)
и C9.7), то они удовлетворяют им и в окрестности S
и эти уравнения служат только для определения данных
Коши, в то время как первая группа уравнений поля
C9.5) служит для определения изменения потенциалов
во времени.
Следовательно, проблема Коши для уравнений поля
Эйнштейна приводится к двум задачам ([231], § 15):
1) Задача определения начальных условий, которая со-
состоит в отыскании данных Коши, удовлетворяющих на
гиперповерхности ? условиям ?4а = 0.
2) Задача интегрирования по времени ж4, которая со-
состоит в интегрировании уравнений Rtj = 0 (г, /=1, 2, 3)
(или уравнепий i?ij- = у (R + k)gtp если к ф 0) для дан-
данных Коши, удовлетворяющих условиям первой задачи.
Основную трудность представляет решение первой за-
задачи, которая зависит от характера гиперповерхности S
и которую только при некоторых частных предположе-
предположениях можно считать решенной в замкнутой форме. Вторая
задача в предположении, что первая задача решена, была
§ 39] ВНЕШНЯЯ ЗАДАЧА КОШИ 351
решена Фурье при сравнительно простых предположениях
о дифференцируемости [159], [247].
Если предположить, что решение ищется в классе
аналитических функций (т. е. все функции, появляющиеся
при решении второй задачи, аналитические и веществен-
вещественные), то, основываясь на теореме Когпи — Ковалевской
([160], § 1; [151], стр. 294) о системе уравнений с част-
частными производными, можно утверждать, что с точностью
до замены координат, сохраняющей координаты гипер-
гиперповерхности б" и данные Коши на S неизменными, вто-
вторая задача допускает единственное и вещественное реше-
решение в классе Са. Нужно отметить, что в релятивистской
теории поля аналитичность ga&(x) может иметь место
только для некоторых пространственно-временных обла-
областей и в общем случае, при наличии, например, тяготею-
тяготеющих масс неизбежно должны появиться прерывности по-
потенциалов. Именпо при прохождениии гиперповерхностей,
ориентированных во времени, отделяя движущуюся мате-
материю от областей, «заметаемых» ею во времени, нужно
неизбежно ожидать появления прерывностей, по крайней
мере вторых производных от gap (х). Учитывая это,
Лихнерович ([231], гл. I) при постановке задачи Коши
для внешней и внутренней задач исходил из постули-
постулированной им прерывности daxgap на S. Ему удалось опре-
определить данные Коши в замкнутом виде лишь в том слу-
случае, если гиперповерхность S минимальная, когда задача
значительно упрощается. Основное затруднение заклю-
заключается здесь в том, что требуется определить решения на
многообразиях, топология которых может быть сложной.
В случае, если гиперповерхность S ориентирована
всюду во времени (?44 <С 0), предыдущее рассуждение
можно провести с соответствующими изменениями, и за-
задача Коши опять-таки будет приводиться к двум задачам,
аналогичным указанным выше.
Полученные выше результаты существенным образом
опираются на возможность явным образом разрешить
систему уравнений поля C9.5) относительно производных
дцдц (it /=1» 2, 3), которая в данном случае вытекает
из условия g4i Ф 0.
Если гиперповерхность S выбрана так в локальной
системе координат, что это условие не имеет места, то
352 проблема кодга для уравк. поля Эйнштейна [гл.
мы придем к принципиально другим результатам, связан-
связанным с понятием характеристического многообразия,
как это следует из теории дифференциальных уравнений.
§ 40. Оценка произвола в задании потенциалов
поля пространств Эйнштейна
Требование аналитичности функций при решении за-
задачи Коши значительно упрощает вопрос и позволяет
воспользоваться классическими теоремами существования
и единственности. Хотя такое требование, на первый
взгляд, носит несколько формальный характер, тем не
менее оно заслуживает рассмотрения. Это объясняется
тем, что, например, для свободного пространства (см.
гл. II) все известные конкретные решения уравнений
поля в некоторых областях пространства-времени опре-
определяются потенциалами, принадлежащими классу Са.
Кроме того, с решением задачи Коши тесно связан во-
вопрос об определении произвола, с которым можно задать
потенциалы поля; если при этом удастся максимально
упростить систему координат, то для этой системы отне-
отнесения (в классе аналитических функций) определится, выра-
выражаясь условно, «физический» функциональный произвол,
с которым можно задать ноле. Такая качественная оценка
во всяком случае представляет интерес. При этом такая
оценка, произведенная для свободных пространств или
пространств Эйнштейна (^ар = ttgap), является полезной
и для изучения полей тяготения общего вида, когда тен-
тензор энергии-импульса Та$ ф agap.
Рассмотрим пространство Эйнштейна V4, для которого
и введем в нем полугеодезическую систему координат
(координаты Гаусса), в которой координатные линии х*
будут геодезическими (вдоль которых х* служит длиной
дуги), ортогонально пересекающими координатные гипер-
гиперповерхности х* = const. Таким образом, нормали к этим
гиперповерхностям времени подобны. Такую систему
координат можно, по крайней мере локально, ввести
в любом F4 с сигнатурой в точке вида ( +).
§ 40] ОЦЕНКА ПРОИЗВОЛА В ЗАДАНИИ ПОТЕНЦИАЛОВ 353
В этой системе координат метрика пространства будет
иметь вид:
ds2 = ds* + da*', D0.1)
где ds2 — определенно-отрицательная форма, причем
ds2 = gij(xl, ж2, х3, xi)dxidxj (г, /=1,2,3), D0.2)
и таким образом,
gi4 = 0, g44 = g«=l, D0.3)
а дискриминант тензора
g = |gaef = | = |^| (i\ / = 1,2,3; a, 0 = 1, 2, 3,4).
D0.4)
Следовательно, ds2 определяет пространство, являющееся
обобщением топологического произведения трехмерного
пространства V3 и одномерного, а на каждой гиперповерх-
гиперповерхности х* — const форма ds2 определяет, в силу условия об
определенности, многообразие, гомеоморфное трехмерному
евклидову пространству.
В такой системе координат гиперповерхности ж4 = const
геодезически параллельны, а второй тензор на z4 — const
будет выражаться формулами
Впрочем, удобнее взять этот тензор с обратным знаком,
положив
<о„=-*4У> D0.6)
после чего, пользуясь трехмерным тензором gli, где
(gii) = (gijU=c, D0.7)
естественно вводятся тензоры
ау = №% D0.8)
ш
coj=4'4i- D0.9)
23 А. 3. Петров
354 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
Пользуясь этими тензорами, введем трехмерный, инва-
инвариант
определяющий среднюю кривизну гиперповерхности, и ин-
инвариант
Т2 = со|а>*. D0.10)
Поставим вопрос о решении внешней задачи Коши
в этой системе координат и, как это делалось в преды-
предыдущем параграфе, запишем уравнения поля в виде двух
групп уравнений:
Ra = Kgii (г, / = 1, 2, 3), D0.11)
Rai = xgai (a=l, 2, 3, 4). D0.12)
Употребление термина «внешняя задача» тут формально
не совсем правильно, но предположение и — 0 ничего не
меняет в последующем рассуждении. Как показано в пре-
предыдущем параграфе, уравнения D0.11), D0.12) опреде-
определяют систему в инволюции, и задача Коши разбивается
па две задачи: 1) задачу определения данных Коши, со-
состоящую в том, чтобы найти наиболее общие данные
Коши, удовлетворяющие на xi = с уравнениям D0.12), и
2) задачу интегрирования по времени ж4, т. е. интегрирова-
интегрирования уравнений D0.11). В данном случае гиперповерхность
S не будет характеристическим многообразием.
Задача 1) может быть теперь сформулирована следую-
следующим образом: требуется определить функции g^ и со^-
от независимых переменных х1, х2, xz, удовлетворяющие
системе D0.12). Эту систему можно также представить
в виде двух групп уравнений, соответственно тому, будет
ли индекс а равен 4 или нет. Если а = 4, то, пользуясь
введенными выше обозначениями, получим уравнение
Н^ — Т2 — Л = к, D0.13)
где R — скалярная кривизна для трехмерного многообра-
тензором gi}-.
внения могут быть записаны в виде:
(«о1'-#?*')., = 0, D0.14)
зия, определяемого тензором gi}-.
Три других уравнения могут быть записаны в виде:
§ 40J ОЦЕНКА ПРОИЗВОЛА В ЗАДАНИИ ПОТЕНЦИАЛОВ 355
где символом «;» обозначено ковариантное дифференциро-
дифференцирование относительно метрики ds2.
Нас интересует максимальный произвол, с которым
определяются gi3- и a>i;- из этих четырех уравнений. Для
выяснения этого запишем эти уравнения подробно и по-
покажем, что они эквивалентны системе уравнений типа
Коши — Ковалевской относительно четырех неизвестных
функций.
Рассмотрим уравнение D0.13) и разрешим его отно-
относительно старшей производной одной из неизвестных функ-
функций по некоторому аргументу. Выберем в качестве аргу-
аргумента, например, х3. Т не содержит производных по
хх (г=1, 2, 3) от неизвестных функций, но R содержит,
а именно:
jpt - djpq) +
+ gLm (Г„.р А* - f „.p A.i) } • D0.15)
Вторая скобка содержит только первые производные от
* *
gtj, входящие в символы Кристоффеля Грдг — трехмерно-
трехмерного пространства Римана, а первая скобка содержит вто-
вторые производные. Нас будет интересовать вторая произ-
производная d33gtj. Непосредственно убеждаемся, что в правую
часть не входят производные вида d3sg3j(/=*l, 2, 3),
и поэтому остановимся, например, на производной d33g2i
и разрешим уравнение относительно нее. Коэффициент
при такой производной равен
* * *
р-232 _ „22р-
а 6 5
и поэтому уравнение D0.15) можно представить в виде:
(J232 -122|33) dssL = М, D0.16)
где
М = Н2-Т2 + х-К,
*, *
К означает разность между R и левой частью написанного
выше уравнения.
23*
356 ПРОБЛЕМА КОПШ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА 1гл. VII
Переходим к рассмотрению системы D0.14). Опустив
предварительно индекс i вниз, получим:
m>kf,- - Я h = д,<о\ - f &а>'р + Т3р]<о\ - dhH = 0.
Положим сначала индекс к равным единице и рассмо-
рассмотрим среднюю кривизну Н. После уничтожения подобных
членов придем it уравнению
д2а\ Ч- <?з«31 - дхф*л - дхш% - Г?У р + HXi = 0-
Точно так же, полагая к равным 2 и 3, получил; еще два
уравнения:
дха>\ + dsa>\ - д.,а>\ - д2со\ - Г$}<о'р + f i;top3 = 0,
^i»^ + 92»2з - ^зсо1! - азсо22 - Tfa'p + Hitop* = 0.
Таким образом, в эту систему входят только первые
*
частные производные от gtj и со1,-. Разрешим ее относи-
относительно производных по z3 от трех неизвестных функций coi;-.
Для этого необходимо сначала заменить ю13- через со1;-,
пользуясь тем, что
и*, = gki(okj.
Перепишем первое из этих уравнений в виде:
где
»q, dsf\ dsgpr, gpr,
Так как
то первое уравнение может быть записано в виде:
33- 2 д3{g3S(osl).
Совершенно так же второе и третье уравнения запишутся
§ 40] ОЦЕНКА ПРОИЗВОЛА В ЗАДАНИИ ПОТЕНЦИАЛОВ 357
при тех же обозначениях:
- J (J«'co2,) &
2
Так как в правой части последнего уравнения встречаются
производные, стоящие в левых частях двух первых урав-
уравнений, то эти производные можно заменить их выраже-
выражениями. При этом необходимо потребовать, чтобы коэф-
коэффициенты при этих производных были отличны от нуля.
Очевидно, не нарушая общности, всегда можно предпо-
предположить, что на гиперповерхности ж4 = 0 компоненты
* * * „ * *
„22 „33 „232 _ „22g-33
отличны от нуля. После этого получим следующую систему
уравнений, эквивалентную D0.12):
Р, - <оаа
- С013
«
23
-23W4S)J}
358 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
Если задать совершенно произвольным образом функ-
функции от х1, х2, Xs:
gl2' gl3> g-23>
то для остальных неизвестных функций
получим систему четырех уравнений, разрешенную отно-
относительно старших производных по х3 от этих неизвестных
функций и такую, что эти старшие производные не встре-
встречаются в правых частях, т. е. систему типа Коши — Кова-
Ковалевской. Предположение об аналитичности функций
позволяет применить, при определении произвола в реше-
решениях этой системы, теорему Коши — Ковалевской.
Разумеется, эти выводы имеют место с точностью до
перенумерации индексов. Следовательно, эти четыре функ-
функции определены с произволом
(а13(хг, х2), <о23 (ж1, ж3), <о22(ж\ ж2),
ёю{х\ х*), д?22 = }(х\ х*) D0.17)
о
для х3 = х3, где зти функции произвольные, аналитические
в области точки хг = хг и в этой точке принимающие
вместе со своими производными заданные значения. Этим
определяется произвол в определении данных Коши при
решении задачи 1).
Перейдем теперь к решению задачи 2). Она, как ука-
указывалось выше, заключается в интегрировании уравнений
поля для начальных данных Коши. Система D0.11) запи-
записывается в виде:
dvgu^Fu (i, /=1,2,3),
где Fti полностью определяется данными Коши. Это —
система шести уравнений от шести неизвестных функций g{j
типа Коши — Ковалевской, и следовательно, в качестве
аналитических функций она допускает единственное реше-
решение с произволом
gij = gij(^1> X2, Ж3),
§ 40] ОЦЕНКА ПРОИЗВОЛА В ЗАДАНИИ ПОТЕНЦИАЛОВ 359
для х* — 0. Здесь, однако, эти функции не вполне произ-
произвольны, а такие, которые на гиперповерхности х* = 0
удовлетворяют D0.12), т. е. являются данными Коши,
определенными при решении задачи 1).
Теперь можно записать искомые потенциалы в полу-
полугеодезической системе координат, выделив явным образом
произвольные функции, от которых они зависят (пара-
(параметрическая часть), и определенные компоненты {глав-
{главная часть).
Рассмотрим разложение потенциала поля gij (x) в сте-
степенной ряд:
2
D0.18)
где коэффициенты Су, ft1ft2ft3ft4 определяются соответствую-
о
гцими производными gi3-, вычисленными в точке ха = ха:
t a
сц, ft^^rwW I A 9k2 Л Л °ij о •
V дх1 дх2 дх3 Эх4 /*°==са
Для того чтобы выделить параметрическую часть
в этом разложении, нужно удалить из этого разложения
все члены с теми производными, которые стояли в левых
частях системы D0.11), D0.12), и члены с любыми произ-
производными от этих производных (так называемые главные
производные системы уравнений поля).
Рассмотрим, например, потенциал g^i30)- В левые части
D0.11) и D0.12) входят следующие главные производные
этой неизвестной функции: d33g22, д3а>.12 = d3ig22, d44g\,2.
Для первой из этих двух производных в разложении
нужно вычеркнуть члены, делящиеся на (х3 — ж3J.
После такого вычеркивания останется параметрическая,
относительно такой производной, часть разложения. Она
должна состоять: 1) из членов, которые не делятся на
о
(ж3 —ж3), и поэтому эта группа получится, если в D0.18)
о
положить х3 = х3; следовательно, это будет произвольная
360 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
О
функция от ж1, х2, х4; 2) из членов, содержащих (х3—х3)
в первой степени; эта группа получится, если разложе-
разложение D0.18) продифференцировать по х3 и затем положить
о
ж3 = ж3. Это снова определит некоторую функцию от х1,
х2, х*. Таким образом, для главной производной d3g22
параметрическая часть имеет вид:
А [хх, хй, ж4) 4 (ж3 — х3) В (ж1, ж2, ж4). D0.19)
Вторая главная производная дмц22 показывает, что нужно
вычеркнуть в разложении D0.18) члены, делящиеся на
оо
произведение (ж3 —ж3) (ж4 — ж4). Это будут те члены разло-
разложения, которые: 1) не делятся на (ж3 — ж3), т. е. А (ж1, ж2, ж4),
о о
и 2) члены, содержащие (ж3 — ж3), но не содержащие ж4 — х4;
они получаются, если D0.19) продифференцировать по ж3
и положить затем х* = х4. Это приводит к функции от
переменных ж1, ж2, и потому разложение для g22 будет
иметь вид:
А (хх, ж2, ж*) + (ж3 — ж3) В (хх, ж2). D0.20)
Наконец, для третьей главной производной du4g22 нужно
вычеркнуть в D0.20) члены, делящиеся на (ж4 — ж4J. После
о
этого останутся члены, которые: 1) не делятся на ж4 —ж4;
о
они найдутся, если в D0.20) х4 = х4, т. е. имеют вид:
А (хх, ж2) +- (ж3 - ж3) В (ж1, ж2),
о о
и 2) члены, содержащие ж4 — ж4, но не содержащие (ж4 — ж4J;
они найдутся, если разложение продифференцировать по ж4
о
и затем положить ж4 = ж4. Это дает некоторую функцию
от ж1, ж2. Следовательно, параметрическая часть будет
иметь вид:
о о
А(х1, ж2) + (ж3 — ж3) 5(ж1, ж2) + (ж4 —ж4)С(ж1, ж2).
.Это полностью определяет произвол в задании
§ 40J ОЦЕНКА ПРОИЗВОЛА В ЗАДАНИИ ПОТЕНЦИАЛОВ 361
кроме того, в разложение этого потенциала войдет еще
главная часть, не содержащая произвола, которая, вообще
говоря, будет зависеть от всех четырех независимых пере-
переменных ха (а = 1, 2, 3, 4). Ясно, что А, В, С предста-
представляют собой данные Коши на ж4 = const: g22 (ж1, ж2),
d (х1> х*)> Ш22(х1> я2)- Таким образом,
= ^(x1, ж2) + (ж3 -ж3) В (ж1, х*) +
(ж4 - ж°4) С
х3,
где ^22 ~ главная часть потенциала, целиком определяю-
определяющаяся при помощи уравнений поля, если определены
данные Коши.
Повторяя эти рассуждения для каждого из потенциа-
потенциалов и несколько изменяя обозначения произвольных
функций, получим для потенциалов следующие выра-
выражения:
4 - ?4) Фи (х1, х\ х3) + ч]>и,
о
* — Х*) <Pl2 ixl> х*> х3) + "Фх2.
, х3) + (о;4 - ж4) ф13 (ж1, ж2) + Ц>18>
о
2) +(ж4-ж4)ф22(ж1, ж2)+
giz = А
з
= /
аз
о
" — ^4) Фгз
о .
— я4) Фзз (
D0.21)
g-зз = /зз (з1, ^2> ^3) + (
^i4 = 0 A-1,2,3),
где функции tyij определяют главные части потенциалов,
вполне определяемые параметрическими частями и урав-
уравнениями поля. Функции fxi, (pij, 6fj определяют искомый
произвол в общем решении для полу геодезической системы
координат.
Нужно учесть, что выбор поверхности S, для которой
решается задача Коши, является произвольным, что дает
одну произвольную функцию ж4 = Ф(ж1, ж2, ж3).
362 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
Нас интересует произвол в построении самого простран-
пространства, безотносительно к выбору начальной гиперповерх-
гиперповерхности. Поэтому произвол уменьшается на одну функцию,
и в окончательном подсчете произвольных функций нужно
учесть этот факт. Тогда остается все же некоторый про-
произвол в выборе системы координат. Именно система коор-
координат во всем пространстве определена, но остается еще
возможность, не меняя выбранную в F4 систему гипер-
гиперповерхности xi = const, производить преобразования вида
xir = х1' (хх, ж2, х3) (г = 1, 2, 3)
на гиперповерхностях ж4 = const. Пользуясь такими пре-
преобразованиями на гиперповерхности Коши ж4 = 0, три
из потенциалов glj(x1, ж2, х3) можно обратить в наперед
заданные функции, согласно известной теореме Римана.
Для этого на ж4 = 0 можно специализировать некоторым
образом систему координат: можно, например, в V3 ввести
полугеодезическую систему или наложить иные требова-
требования; последнее автоматически снижает полученный вы-
выше произвол на три функции от трех аргументов
каждая.
После этого остается еще произвол в выборе коорди-
координат на хх = const, который с точностью до перенумерации
можно записать в виде:
xs' = xs' (х1, ж2) (в' = 1, 2),
за счет которого можно уменьшить произвол в задании
потенциалов на ж4 = 0 на две функции от двух пере-
переменных.
Таким образом, произвол, с которым в полугеодезиче-
полугеодезической системе координат можно определить потенциалы
поля, определяется в четыре функции от трех аргу-
аргументов и три функции от двух аргументов (данные
Коши).
Этот произвол в такой максимально упрощенной полу-
полугеодезической системе координат, так сказать, отражает
тот неустранимый остаток, который в общем случае выра-
выражает чисто гравитационный эффект, и в этом смысле его
можно условно назвать физическим произволом.
§ 41] ХАРАКТЕРИСТИЧЕСКИЕ И БИХАРАК. МНОГООБРАЗИЯ 363
Задачи
1. Получить формулы D0.21) для всех потенциалов
так же, как это было сделано для g22 (x).
2. Показать, что произвол для пространств Тхяе меньше,
чем для пространств 7*2 и Т3, и, следовательно, опреде-
определяется в четыре функции от трех аргументов и три функ-
функции от двух аргументов.
3. Показать, что «физический» произвол для про-
пространств. Т2 в полугеодезической системе координат опреде-
определяется в две функции от трех аргументов и семь функций
от двух аргументов ([261], стр. 237).
4. Показать, что для Т3 «физический» произвол будет
равен девяти функциям от двух независимых перемен-
переменных ([261], стр. 237).
§ 41. Характеристические и бихарактеристические
многообразия
В каждой точке пространства F4 (см. § 2), в силу
неопределенности метрики, существует конус изотропных
направлений
который отделяет область вещественных векторов с поло-
положительной нормой от области вещественных векторов
с отрицательной нормой. Каждый вектор, лежащий на
этом конусе, будет изотропным. Если гиперповерхность S
такова, что в каждой из своих точек она касается изо-
изотропного конуса, отвечающего этой точке, то касательная
плоскость в этой точке к S будет изотропной, а метрика —
вырожденной (§7), и следовательно, нормаль к гипер-
гиперповерхности будет изотропной. Если уравнение S имеет
вид /(ха) = 0, то
&lf=gafif,af,t = O. D1.1)
Уравнение D1.1) определяет изотропную гиперповерх-
гиперповерхность пространства F4, которую будем обозначать, как
и ранее, V3 и назовем характеристическим многообразием
относительно уравнений поля. В специальной системе
364 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА 1гл. VII
координат, когда S задается уравнением я4 = 0, уравне-
уравнение D1.1) принимает вид:
Это условие приводит к тому, что из уравнений C9.5)
не определяется явно d4igij, что, как известно (И. Г. Пет-
Петровский [106], гл. I), может привести к тому, что dugi:j
будут прерывными на S, а число решений уравнений
поля при одних и тех же данных Коши может быть
бесконечным: изотропные конусы будут характеристи-
характеристическими для уравнений поля Эйнштейна. Изотропные
гиперповерхности V3, касательные к изотропным конусам,
будут характеристическими многообразиями уравнений
поля. Если интерпретировать этот факт в терминах гео-
*
метрической оптики, то изотропную нормаль к Vs можно
понимать как волновой вектор, касательный к световому
лучу, / — как эйконал, а уравнение D1.1)— как уравнение
эйконала (П. Ландау и Е. Лифшиц [156], стр. 283).
Покажем, что характеристические многообразия F3
можно получить, если заданы некоторые кривые Со,
называемые бихарактеристиками уравнений поля, и 1-пара-
метрическое семейство гиперплоскостей, определенных
в каждой точке бихарактеристики.
Рассмотрим билинейную форму
и неоднородное уравнение с частными производными
2H(afi, daf) = C,
где С —произвольная постоянная. Этому уравнению отве-
отвечает система обыкновенных уравнений
dx1
дН
dx%
дН
dx*
ОН
дУз
dx*
дН
ду*
dyi
дН
дх1-
dy.2
дЫ
дН '
dt
2Н
§ Ш ХАРАКТЕРИСТИЧЕСКИЕ И БИХАРАК. МНОГООБРАЗИЯ 365
относительно переменных ха, уа, допускающих первый
интеграл
2Я(^, уа) = С,
когда С = const. Вводя вспомогательный параметр и,
можно переменные ха, уа задать как функции этого пара-
параметра при помощи канонических систем
du дуа ' ди ~ дха '
в которых правые части выражаются, если задана функ-
ция Гамильтона Н (ха, уа). Обозначая -^— = ха, первую
группу уравнений D1.2) можно записать в виде:
D1.3)
и, следовательно, наоборот:
Это приводит к выводу, что ха и D1.2) определяют
экстремали функции Лагранжа
так как, переходя от переменных (ха, х&) к перемён-
пым (ха, уа), которые связаны между собой при помощи
соотношений D1.3), придем к классическому соотноше-
соотношению между L и Н:
д'ха
Решения этого уравнения являются экс гремалями, удовле-
удовлетворяющими первому интегралу
2L = C, С = const. D1.4)
Это означает, что полученные экстремали будут экстре-
экстремалями и для
если имеют место D1.3). Но это означает, что кривые ха
определяют геодезические линии пространства V4 (§ 6)e
366 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. Vu
Если, в частности, С = О, то система уравнений эйко-
эйконала D1.1) допускает первый интеграл /= const и много-
многообразия V3 могут быть найдены при помощи геодезиче-
геодезических нулевой длины, т. е. изотропных геодезических,
если брать изотропные гиперплоскости, касательные
к изотропному конусу, вдоль касательной к изотропной
кривой.
Можно заранее утверждать, что бихарактеристики —
изотропные кривые, так как из теории уравнений с. част-
частными производными известно, что, если дано множество
*
многообразий V3, касающихся элементарного конуса в Хп,
вдоль образующей g, касательная к кривой Cw связанной
с V3 в Хп, есть g. Но не всякая изотропная кривая
является геодезической. Предыдущее рассуждение при-
приводит к выводу, что бихарактеристика уравнений Эйн-
Эйнштейна являются изотропными геодезическими.
Отсюда на основе аналогии с теорией Адамара рас-
распространения волн были построены некоторые теории
о природе гравитационных волн, основанные на предста-
представлении фронта волны как поверхности прерывности вто-
вторых производных потенциалов поля ga$ (х) ([231], § 16;
[258]; [288]; [289]).
Прежде чем перейти к постановке внутренней задачи
Коши, необходимо остановиться на изучении тензора
энергии-импульса, от физических свойств которого суще-
существенно должны зависеть метрика пространства F4 и харак-
характер потенциалов поля ga$ (x).
§ 42. Тензор энергии-импульса
Рассмотрим в некотором Vn точку Р и совокупность
направлений, исходящих из Р, удовлетворяющих соотно-
соотношению
где i?ap —тензор Риччи. Мы получим, таким образом,
конус второго порядка (конус Риччи), инвариантно свя-
связанный с точкой Р. Риччи предложил назвать главные
направления этого конуса главными направлениями про-
пространства Vu в данной точке. Если, кроме того, в пло-
§ 42] ТЕНЗОР ЭНЕРГИИ-ИМПУЛЬСА 367
ском пространстве, касательном к Vn в данной точке (§ 1),
взять поверхность второго порядка с центром в этой
точке, уравнение которой имеет вид (для случая, когда
Т )
то главные направления этой поверхности, называемой
иногда индикатрисой Эйнштейна, будут и главными
направлениями Риччи, если они изотропны. Тогда система
уравнений поля в случае свободного пространства или
в случае, когда Т"ар = oga$, определяется требованием,
чтобы эти направления были неопределенными, т. е. в каж-
каждой точке индикатриса Эйнштейна должна быть гипер-
гиперсферой.
Можно дать другие определения пространств Эйн-
Эйнштейна, основанные на других понятиях ([107]; [98],
стр. 199-200; [261], стр. 4; [150]).
Таким образом, главные направления пространства F4
удовлетворяют условиям
i?ap№ = gaP^ = 0, D2.1)
и тогда из уравнений поля (а) следует, что главные
направления будут сопряженными также относительно
тензора энергии-импульса Та$:
Если мы найдем собственный вектор тензора Та$:
и он окажется изотропным или же имеет собственное
число %, равное нулю, то такой вектор в обоих случаях
будет и главным вектором пространства У4 и отвечает
уравнениям поля (с дополнительным требованием изотроп-
изотропности во втором случае). Следовательно, определение
главных направлений пространства V4 связано с опреде-
определением собственных векторов Та$, которые должны удовле-
удовлетворять уравнениям
^aPHp = 0, D2.2)
а собственнные числа, отвечающие ?&, будут в то же
время базисами элементарных делителей Я-матрицы
368 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. ЛГИ
(Тар — kgafi) (§ 9) и одновременно корнями характеристи-
характеристического уравнения
О. D2.3)
Если известны Та$ и ga$, то всегда можно определить
собственные числа и собственные векторы (с некоторым
произволом в случае кратных корней D2.3)). Наоборот, если
известны собственные числа X, собственные векторы |а тен-
с а
зора Гар и элементарные делители rk-Mampuubi{Ta$ — 'kg0$),
то можно выразить gap и Гар в любой системе (голояом-
ной или неголономнои) координат через X и ?а. Подчерк-
а а
нем, что в отличие от задач классической механики, где
один из тензоров Гар или gap был определенным и поэтому
^.-матрица (Гар — Xgap) была всегда простого типа, в V4,
определяющем пространство-время, ga$, по существу,
неопределенный и поэтому на первый план при общем
изучении выдвигается вопрос об элементарных делите-
делителях А,-матрицы
(Гор —А,?оэ), D2.4)
о ее характеристике (§ 9); при этом собственные числа
могут быть, вообще говоря, комплексными, собственные
векторы, все или некоторые, —изотропными, а элементар-
элементарные делители — не простыми.
Такая классификация всех возможных стрзгктур тен-
тензора энергии-импульса очевидным образом получается из
результатов § 9 и исчерпывается следующими случаями
характеристик:
I. [1111], [A1I1], [A1) A1)],
[A11I], [(ИИ)],
II. [211], [B1I], [2A1)], [B11)],
III. [3 1], [C 1)],
IV. [4]. J
D2.5)
Здесь круглыми скобками отмечены те частные случаи,
которые возникают, если некоторые базисы элементарных
делителей одинаковы; так, характеристике [B 1) 1] отве-
отвечают элементарные делители ^-матрицы D2.4) вида
I 42] ТЕНЗОР ЭНЕРГИИ-ИМПУЛЬСА 369
(X— XJ, (Х—.Х), (Х — Х) и т. д. Так как существенным
1 i 2
является решение вопроса на вещественном пути, то при
наличии комплексных X и, следовательно, комплексных h,a
о а
собственных векторов такую классификацию необходимо
было дать, пользуясь только вещественными преобразова-
преобразованиями.
Вводя в каждой точке пространства F4 неголономный
вещественный орторепер, определяющий метрику Минков-
ского, или некоторый квазиорторепер, можно для каждой
из характеристик D2.5) записать в этом локальном орто-
репере канонический вид тензора Та$. Этот результат
записывается формулами (9.4) в случае вещественных
собственных чисел Тар и (9.6) для комплексных Я или
а
в общем случае формулами (9.7). После этого не пред-
представляет затруднений показать, что метрический тензор
gap (x) и тензор Тар (х) можно выразить через собственные
векторы и собственные числа:
g-ap=2gaP, T^JlTap, D2.6)
R=i h k=i k
где г — число элементарных делителей, а gap и Та$ имеют
структуру, отвечающую некоторому данному элементар-
элементарному делителю. Конкретные формулы приведены в [165]
(стр. 47 — 51). Формулы D2.6). полученные в силу кано-
канонического вида матриц (9.7) в неголономном орторепере,
имеют место, конечно, в любой системе координат. Этим
решается общая формальная задача изучения тензора
энергии-импульса. Что же касается физической интерпре-
интерпретации различных типов D2.5), то она получена только
для некоторых специальных случаев характеристик D2.5)
Я-матрицы D2.4), которые приведены далее.
Тензор энергии-импульса «чистой материи» или, как
иногда называют, тензор энергии-импульса потока масс
([188], стр. 304) отвечает тому случаю, когда тензор
энергии-импульса Та$ имеет единственный собственный
вектор с ненулевым собственным числом, ориентированным
во времени, и интерпретируется физически как касатель-
касательный вектор та к четырехмерной траектории потока масс;
24 А. 3. Петров
370 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
его собственное число Я4 = Мо (ха), где Мо (х) — плот-
плотность покоя. Все остальные собственные числа А,{ = 0
(г=1, 2, 3). Вектор ха можно дополнить в этом случае
до орторепера неоднозначно при помощи трех векторов
?<* (?=1, 2, 3). Таким образом, имеем:
i
4
ga$= S talalp, e* = — e1 = — e2 = — e3=l, ?а=та D2.7)
cr= \ a a 4
И
р. D2.8)
При этом, как известно ([188], стр. 305), в орторепере
компоненты Та^ имеют следующий физический смысл:
Г44 определяют плотность энергии в потоке; Г41 (г = 1, 2, 3) —
плотность проекций импульса на оси Ox, Oy, Oz, умно-
умноженную на с или деленную на с, плотность потока
энергии в направлении i-й оси; Тг; (г, / = 1, 2, 3) — плот-
плотность потока импульса на i-ю ось в направлении j-й оси.
По схеме D2.5) мы имеем здесь случай характеристики
о
простого типа 1, когда она имеет вид [1 A 1 1)], где «0»
над круглой скобкой означает, что три базиса элементар-
элементарных делителей (собственные числа) равны нулю.
Тензор энергии-импульса макроскопических тел, кото-
который, например, имеет место для «идеальной жидкости».
Так как поток импульса через элемент da поверхности
тела является силой, действующей на do, то Гар do$ пред-
представляет собой a-ю компоненту силы. Так как для твер-
твердых тел максимальные возможные разности давлений
в разных направлениях исчезающие малы по сравнению
с давлениями, существенными в теории относительности,
то с большим приближением можно считать, что картина
будет аналогична той, которая имеет место для «идеаль-
«идеальной жидкости». Введем в данном элементе объема собст-
собственную систему отсчета. В такой системе давление, кото-
которое оказывает данный участок тела, перпендикулярно
к площадке, на которую оно производится одинаково во
всех направлениях (закон Паскаля). Следовательно,
§ 42] ТЕНЗОР ЭНЕРГИИ-ИМПУЛЬСА 371
иными словами,
Tii = Pga (i, /=1, 2, 3).
Компоненты Ti4 определяют плотность импульса, они
равны нулю, а компоненты Г44 определяют плотность
е
энергии е тела; следовательно, -^ определит плотность
массы тела, т. е. массу единицы «собственного» объема.
Следовательно, в собственной системе отсчета для эле-
элемента объема
(р О О О
О р О О
oo^o
0 0 0 е
Пусть скорость макроскопического движения элемента
объема будет иа. Для собственной системы отсчета, где
объем покоится, и{ = 0(?=1, 2, 3), и4=1. Следовательно,
для матрицы D2.9) имеет место соотношение, справедли-
справедливое, в силу тензорного характера, уже не только в собст-
собственной системе, а в любой системе координат:
D2.10)
Из D2.9) следует, что элементарные делители А,-матрицы
D2.4) будут все первой степени, т. е. имеет место, опять-
таки по схеме D2.5), тип I с характеристикой [A 1 1I].
Полагая давление р = 0, получим тензор энергии-импуль-
энергии-импульса D2.8), где е = \iQ. Тензоры D2.8) и D2.10) широко
применяются в различных вопросах релятивистской гидро-
гидродинамики ([210] - [212]).
Тензор энергии-импульса электромагнитного поля.
В специальной теории относительности показывается, что
тензор энергии-импульса электромагнитного поля может
быть сконструирован из кососимметрического тензора
Fap— — F$a, называемого тензором электромагнитного
поля ([173], стр. 191-202; [156], §32; [272]; [273], [304];
[218]; [237]). Именно, при помощи Fa^ тензор энергии-
импульса электромагнитного поля выражается в виде:
D2.
24*
372 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
откуда следует, что «след» тензора энергии-импульса
электромагнитного поля равен нулю:
Taa = g^Ta^O. D2.12)
Для того чтобы оценить тензор Та$ D2.11) в смысле его
алгебраической структуры, можно, например, поступить
следующим образом. В локальном неголономном орторе-
пере, как известно из специальной теории относитель-
относительности, компоненты Fu определяют составляющие электри-
электрического поля относительно этого репера, a Ftj (i, / = 1, 2, 3) —
составляющие магнитного поля. Именно если вектор элек-
электрического поля имеет пространственные компоненты
{аг, а2, а3}, а вектор магнитного поля {$v P2, р3}, то
р\ = F23 = F**, j
P2 = ^3i = ^31! D2.13)
з M\ p3 = F12 = F*\ J
где поднятие и опускание индексов осуществляются при
помощи метрического тензора Минковского в данном орто-
репере. Поэтому из D2.11) и D2.13) непосредственно
имеем:
v — а* — в* — а7а9 —в,в„ - а,а
v — а| — Р| — а2а3
D2.14)
где
Полная группа лоренцевых вращений состоит из трех
пространственных вращений и трех лоренцевых. Если
фиксировать вектор е и тем самым ортогональную к нему
4
неизотропную гиперплоскость, то на этой гиперплоскости
за счет трех чисто пространственных вращений можно
так специализировать систему координат (на гиперпло-
§ 42J
ТЕНЗОР ЭНЕРГИИ-ИМПУЛЬСА
373
скости с определенно-отрицательной метрикой), чтобы
выполнялись некоторые три условия. Например, как в этом
легко непосредственно убедиться, на вещественном пути
совместны требования в новой системе координат:
а; = р; = « + р&' = 0. D2.16)
Так как вообще имеем тождество для любого орторепера
(Gla2 + рхр2J + («^ - ахр2)з = (а? + PJ) (а| + ft), D2.17)
то, полагая
получим из D2.14), D2.16) и D2.17) в новой системе
координат (штрихи опускаем):
2
О
О
О
О
О
О
О
2
О
О
О
. D2.18)
Отсюда следует, что корни характеристического уравне-
уравнения D2.3) будут А,! = Ха = - Х8 = - Л,4 = Л. = у («2 - &2)-
Следовательно, тензор энергии-импульса электромаг-
электромагнитного поля имеет четыре вещественных собственных
числа, попарно равных и попарно противоположных по
знаку (Синг [96]; Рузе [99], стр. 302 — 322). Но можно,
определяя при помощи матрицы D2.18) элементарные
делители Х-матрицы {Та$ — hga$) (§ 9), непосредственно
показать несколько больше.
Можно различать два случая: 1) Я, Ф 0 и 2) X = 0.
В первом случае, ввиду наличия простых элементарных
делителей и равенств, по абсолютной величине собствен-
собственных чисел Гцр, пользуясь формулой (9.4), получим еле-
374 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
дующие канонические
/
/
(gap) — J
\
\
/
(Toe) =
\
формы
< — 1
0 -
ч 0
0 -
^ 0
для
0
-1
0 -
0
0
-h
0 -
0
матриц (gap) и (Гар):
0
0
_1
0
0
0
-я,
0
0<
0
0
°|
о •
¦ 1/
V
\
¦
и следовательно, здесь имеет место характеристика про-
простого типа [A1) A1)]. Из этих матриц можно непосред-
непосредственно выразить Тар и ga$ через собственные векторы
и собственные числа Тар до формулам
0 0 0 О 00 0
которые справедливы, впрочем, только для характеристик
простого типа, как в данном случае.
Следовательно, получим:
iai 2°2 3°3 4 4*
ga&=llealab, D2.19)
0 00
где единичные ортогональные векторы |а и |а оба про-
2 3
странственные, выбранные в площадке {?, |} с точностью
2 3
до вращения, а векторы |а и |° единичные, ортогональ-
I 4
ные, определяемые в площадке (|, §} с точностью до лорен-
1 4
цева вращения, так что | пространственный, а 5 временной.
1 4
В случае 2), который называют особым случаем,
X =—^— = 0 и, следовательно, 6 = еа, в= ± 1. Вычисляя
в этом предположении для тензора Та$, определенного
матрицей D2.18) и (gap)j взятыми в форме Минковского,
элементарные делители Х.-матрицы (Та$—^gap) (см. § 9),
§ 42]
ТЕНЗОР ЭНЕРГИИ-ИМПУЛЬСА
375
убедимся, что тут имеет место характеристика непростого
типа [B11)]. Для такой характеристики характерен один
изотропный собственный вектор тензора 7"ар, а канони-
канонический вид Та$ и gap принимает особенно простой вид,
если вместо орторепера ввести квазиорторепер, для кото-
которого этот изотропный вектор использован в качестве
координатного. Общий вид канонических матриц для такой
характеристики для этого квазиорторепера по фор-
формуле (9.11) будет
(gap) =
0 0 0\
о
о
о
2
О 0 X
3
X 1
з .
о
Но в данном случае, когда Х = Х — Х~О, ех = е2= — 1,
1 2 3
получим:
'0 0 0 0N
0 0 0 0
0 о 0 0
откуда следует:
4 4
D2.20)
D2.21)
где вектор еа изотропный, как это непосредственно видно
4
из D2.20) при рассмотрении матрицы (gap). Разумеется,
формула D2.21) имеет место уже в любой системе коор-
координат.
В силу изотропности вектора еа его можно умножать
4
на любое число, не изменяя его нормы, и поэтому в D2.21)
справа можно при желании вставить множителем квадрат
любого скаляра. Не представляет труда от квазирепера
D2.20) перейти к ортореперу при помощи подстановки типа
376 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
Особый случай электромагнитного поля дает первый при-
пример тензора энергии-импульса с характеристикой по схе-
схеме D2.5) непростого типа.
Кроме этих тензоров, рассматривают также тензор
энергии-импульса для поля, образованного наложением
двух или нескольких полей. Например, тензор энергии-
импульса, отвечающий идеальной жидкости и электро-
электромагнитному полю ([173], стр. 18), будет иметь вид:
Тар = (р + е) иаи& - pgafi + \ {FGXFOX) gap - FaaF%, D2.22)
где иа есть и-скорость движения частиц — неизотропный
вектор.
Отметим также тензор энергии-импульса диссипатив-
ных процессов, появляющийся тогда, когда требуется
установить релятивистские уравнения гидродинамики
с учетом вязкости и теплопроводности ([193], стр. 606).
Искомый тензор энергии-импульса получится, если
к правой части D2.10) прибавить некоторый тензор тар,
и для вектора плотности вещества hi также придется
найти некоторую дополнительную компоненту va. Следо-
Следовательно,
У<хр = (Р + б) иа
ha = hua -f ve.
' } D2.23)
Скорость иа определяется так. чтобы в собственной системе
отсчета каждого данного элемента жидкости его импульс
был равен нулю, а его энергия выражалась бы через
другие термодинамические величины теми же функциями,
как и при отсутствии диссипативных процессов. В собст-
собственной системе отсчета т44 = t4i = 0 и и{ = 0, а следова-
следовательно,
ха^ = 0, D2.24)
соотношение справедливое, в силу своего тензорного харак-
характера, уже и в любой системе координат. Так как в соб-
собственной системе компонента /г4 4-вектора потока частиц
должна совпадать с плотностью числа частиц Л, то
уаЛа = 0, D2.25)
§ 42J ТЕНЗОР ЭНЕРГИИ-ИМПУЛЬСА 377
Уравнения движения жидкости должны следовать из
уравнений
даТа = О, daha — O, D2.26)
из которых следует соотношение
иад},Та = — Тда (аиа) + ц dava -J- ua dGx%,
w — ха
где fx = —y релятивистский химический потенциал
вещества. Используя D2.24), получим:
а ( оиа —~ va )= — v™да ( ^ 1 —-Та даиа.
Левая часть этого уравнения представляет собой 4-дивер-
генцию потока энтропии и поэтому справа будем иметь
величину, характеризующую возрастание энтропии в резуль-
результате диссипативных процессов. Следовательно, вектор
плотности потока эптропии равен
„а rrija f vd /АО 97}
Тензор tap и вектор va должны выражаться линейно
через градиенты скорости и термодинамических величин
так, чтобы соблюдалось требование: правая часть D2.19)
положительна. Это требование вместе с D2.24) и D2.25)
позволяет определить тар и va однозначно в виде:
/ ди„ диа ди„ диа N
Отсюда, переходя к инвариантной форме, можно написать:
т«Э = ц [(ga0 — uaua) и% 4 (gpa — "pwff) и"а] —
-(S—|л)(ввир-^р)и?а. D2.28)
Здесь У) и g — коэффициенты вязкости,
378 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
Возможны и другие комбинации полей. Отметим, что
все приведенные тензоры Гар, кроме D2.28), относятся
к простейшему виду характеристик типа схемы D2.5).
Исследование тензора Та$, определяющего распределе-
распределение и движение и свойства материи, имеет основное зна-
значение и приводит к ряду интересных физических выводов
(см., например, [273]).
§ 43. Закон сохранения тензора энергии-импульса
Если уравнения поля записать в виде:
Scfi^XTat D3.1)
и учесть, что тензор Эйнштейна Sa^ удовлетворяет тожде-
тождеству *Sap, a = 0, % = const, то тензор Гар удовлетворяет
закону сохранения
Т\а = 0. D3.2)
Посмотрим, какие физические следствия можно получить
из D3.2) для некоторого заданного тензора Тар. Рассмот-
Рассмотрим прежде всего тензор Tap, определяемый формулами
D2.8) и D2.10) соответственно для потока масс и идеаль-
идеальной жидкости. Чтобы сблизить эти два случая, запишем
тензор энергии-импульса в виде:
Та$ = ruau$ — 6ap, D3.3)
где иа — единичный вектор скорости, ориентированный во
времени, г — скалярная плотность и 0ар — некоторый от-
относительный симметрический тензор. Таким образом,
ga&uaut=i D3.4)
и
ц«,эиа = 0. D3.5)
Если обозначить
9вЭ,а = шр, D3.6)
то закон сохранения D3.2) запишется в виде:
(гиа иэХа
§ 43J ЗАКОН СОХРАНЕНИЯ ТЕНЗОРА ЭНЕРГИИ-ИМПУЛЬСА 379
т. е. скаляр г и вектор иа, кроме D3.4) и D3.5), удов-
удовлетворяют еще соотношению
э, а = гар; D3.7)
свертывая с иР это соотношение и используя D3.4)
и D3.5), придем к выводу, что
(гиа),а = гааиа. D3.8)
Так как г Ф 0, то отсюда получим:
г*а"Э, а = (gap — иащ) аа. D3.9)
Теперь уравнения D3.8) и D3.9) получают следующее
предварительное истолкование. Во-вервых, отметим, что
левая часть D3.8) напоминает хорошо известное выраже-
выражение, входящее в уравнепие непрерывности. Кроме того,
dx
если иа = -т— , то уравнения D3.9) можно истолковать
как систему дифференциальных уравнений, определяющих
линии тока, если считать заданным вектор оа.
Закон сохранения для тензора потока масс. В этом
случае из D3.8) следует:
и уравнения D3.8) и D3.9) соответственно запишутся:
(Но »«).« = О, D3.10)
вввэ>в = 0. D3.11)
Условие D3.10) будет уравнением непрерывности изучае-
изучаемой среды, выражающим тот факт, что дивергенция век-
вектора, выражающего произведение плотности покоя среды
на единичный вектор скорости, равна нулю, а уравнения
D3.11) просто записывают тот факт, что линии тока
являются неизотропными геодезическими линиями F4.
Если положить
>• = /? +8, 0аC /?? О(рЬ%)
то придем к тензору энергии-импульса D2.10). Предпо-
Предположим, кроме того, что при помощи некоторых сообра-
соображений, например термодинамического характера, удалось
установить уравнение состояния, связывающее собственную
380 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
плотность и давление
. в = ф(/>).
Тогда, как можно видеть,
v
dp
РО
и можно было бы показать, что в этом случае линии тока
являются также неизотропными .геодезическими, но уже
не пространства Vit а некоторого другого римапова про-
пространства V4, конформного к данному, метрика которого
где в данном случае
р
' dp
со = е
РО
Аналогичное утверждение будет иметь место вообще в том
случае, если о$ — градиентное поле ([231], § 17).
Мы не будем здесь рассматривать закон сохранения
для тензора энергии-импульса электромагнитного поля,
так как это далее не понадобится (см. [231], гл. И, раз-
раздел II).
При исследовании внутренней задачи Коши, сущест-
существенным образом зависящей от физического смысла и струк-
структуры тензора энергии-импульса, мы ограничимся рас-
рассмотрением тензора энергии-импульса в случае потока
масс D3.8) и идеальной жидкости D3.10).
§ 44. Внутренняя задача Коша для потока масс
Рассмотрим внутреннюю задачу Коши для случая,
отвечающего тензору энергии-импульса D2.18).
Если на гиперповерхности S задано гравитационное
поле при помощи данных Коши, введенных в § 40, то
требуется определить это поле вне S, если оно удовле-
удовлетворяет уравнению
«р, ¦ D4.1)
$ 44] ВНУТРЕННЯЯ ЗАДАЧА КОШИ ДЛЯ ПОТОКА МАСС 381
где Q > 0, а вектор иа единичный. Мы предположим также,
что S не касается изотропного конуса. Если локально
система координат выбрана так, что S записывается урав-
нием х* = О, то g44 Ф 0. Аналогично тому, как это дела-
делалось в случае решения внешней задачи, можно в данном
случае (g44 Ф 0) систему D4.1) заменить двумя системами
уравнений. Первая система состоит из шести уравнений:
(|) (i, / = 1, 2, 3), D4.2)
вторая:
Sl = XQn°ua, D4.3)
причем еще должны выполняться условия
g<"uaux=l D4.4)
и
5>0. . D4.5)
В силу закона сохранения всякая система решений
{gap* ua, or этих уравнений удовлетворяет и уравнениям
вида D3.10) D3.11), которые в данном случае можно за-
записать в виде:
ааггр>а^ц494цэ + ?э = 0, D4.6)
' (Qu*),a = u*d4Q + Qdtu* + F = 0, D4.7)
где Wq зависит от иа, дь иа и данных Коши на «5", a F
определена как функция от иа, дфа, q, 3jQ и опять-таки
от данных Коши. Потребуем, чтобы ga$ и d4ga& были
соответственно два и три раза непрерывно дифференци-
дифференцируемы иа S. Имея в своем распоряжении данные Коши,
однозначно на S определим компоненты <S'4a. Кроме того,
теперь можно определить на S g и иа. Для этого восполь-
воспользуемся соотношением
Правая часть по смыслу больше нуля, т. е. S*a можно
рассматривать как времениподобный вектор. Обозначая
его норму
382 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
найдем:
Вследствие этого, используя вторую группу уравнений
поля D4.3), получим:
„ 1 С4 „4 1 O44 «.^ ^
ай"а' О" ' 5CQ — ^sz -
Учитывая, что имеет место D4.5)
Q>0,
получим, что и
?44 > 0. D4.8)
Так как знак Q является неопределенным, то для того,
чтобы определить с помощью данных Коши иа однозначно,
необходимо знак О, фиксировать определенным образом.
Теперь, учитывая результат, полученный при решении
внешней задачи, можно утверждать, что первая группа
уравнений поля D4.2) определяет на гиперповерхности S
значения производных d44g4;-. Кроме того, из D4.8) сле-
следует, что и* ф 0, и следовательно, из уравнений D4.6)
и D4.7) на гиперповерхности S можно определить д4гга
и <94q.
Таким образом, если выполняются все предположения,
упомянутые выше, то на гиперповерхности S величины иа, Q,
dug и, д4гга, d4Q непрерывны и имеют вполне определенное
значение.
Легко видеть, что если, в частности, данные Коши
локально дифференцируемы большее число раз, то тот же
вывод может быть отнесен к более высоким производным
системы функций {ga$, ua, о}: для этого достаточно про-
продифференцировать по xi D4.2), D4.6), D4.7).
Чтобы завершить исследование, рассмотрим систему
функций |gap, ма, q), удовлетворяющую на гиперповерх-
гиперповерхности S условиям D4.3) D4.5). Выясним, что можно
сказать о пей в окрестности S. Из D4.6) и D4.7) следует:
Записывая эту систему уравнений для решений D4.2),
получим:
§ 44J ВНУТРЕННЯЯ ЗАДАЧА КОШИ ДЛЯ ПОТОКА МАСС 383
и, применяя рассуждение, приведенное для случая внеш-
внешней задачи, к уравнениям C9.17), получим, что D4.3)
выполняется в окрестности S, если оно имеет место на S.
Получаем систему в инволюции.
Этим решается задача определения данных Коши,
и дело приводится к задаче интегрирования «во времена»
системы уравнений D4.2), D4.6), D4.7), для которой
имеется указанный в § 39 метод, при довольно слабых
требованиях относительно класса функций.
В частности, в классе функций Са, пользуясь класси-
классической теоремой существования Коши — Ковалевской,
будем иметь единственное принадлежащее классу Са ре-
решение с точностью до такой замены координат (см. § 39),
которая сохраняет гиперповерхность точечно и данные
Коши в предположении, что они удовлетворяют условиям
ё^ф0, Q* = g<*S*aS\>Qt S">0.
Если для внутренней задачи Коши поставить вопрос
о характеристическом многообразии, то по сравнению
с внешней задачей получим еще многообразия, которые
во внешнем случае не имеют места. Именно для внутрен-
внутренней задачи Коши возможны два типа гиперповерхностей S,
на которых возможна прерывность данных Коши: 1) гипер-
гиперповерхность S касается элементарного конуса — случай,
уже рассмотренный для внешней задачи, когда
приводящий к изотропной гиперповерхности S; 2) много-
многообразия V3, отвечающие условию
что приводит к выводу
и, следовательно,
S*a = 0.
Отсюда следует, что гиперповерхность S образована ли-
линиями тока. Этот случай является новым по сравнению
с внешней задачей.
Если предполагать, что плотность q конечна, то слу-
случай S4i = 0 сводится к предыдущим и не представляет
ничего нового.
384 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА [гл. VII
§ 45. Внутренняя задача Коши в случае идеальной
жидкости
Решение внутренней задачи Коши в случае идеаль-
идеальной жидкости приводит к рассуждениям, повторяющим
в основном те, которые были приведены в предыдущем
параграфе, но при этом возникает обстоятельство, инте-
интересное с физической точки зрения.
Пусть тензор энергии-импульса определен в виде:
Та& = (Р + 8) паЩ
где в случае идеальной жидкости е может определяться
как некоторая функция <р (р) от давления. Этому тензору,
как и выше, сопоставим две группы уравнений поля:
D5.2)
-p6ia], D5.3)
причем имеют место условия
g<"uaux=i, D5.4)
определяющие иа как единичный времениподобный век-
вектор. Закон сохранения энергии-импульса и уравнения
непрерывности аналогично тому, как это делалось в пре-
предыдущем параграфе, можно записать в виде следующих
уравнений:
^ D5.5)
и
[(р+-г)иа],а — и*дар = 0. D5.6)
Если предположить, что значение р на гиперповерх-
гиперповерхности S дано, то из D5. 3) получим:
Х(р + г) иа и4 = S*a + Хрда,
и вследствие единичности иа D5.4) приходим к выводу:
[X (р 4- е) и*}* = g*» (S\ + ХрдЦ) (SV + W)-
Обозначая определенно-положительную правую часть,
которая вообще должна быть функцией от р, через Q2,
g 45J ЗАДАЧА КОШИ В СЛУЧАЕ ИДЕАЛЬНОЙ ЖИДКОСТИ 385
очевидным образом получим:
Если е = ф(/?), то третье уравнение D5.7) является
конечным уравнением для р, позволяющим определить
возможные значения р.' Из других уравнений D5.7) после
этого будут определены иа, 8, и затем, используя D5.2),
найдем dtigtj.
Остается определить д4е и дцр, исходя из уравнений
состояния. Если в уравнении D5.5) индекс р поднять
вверх и положить [3 = 4, то полученное таким образом
уравнепие, а также уравнение D5.6) можно записать
в виде:
(р + 8) и* <94u* - (g" - и*2) д4р = А\
где А* и В задаются вполне определенным образом на
гиперповерхности S. Рассматривая эти уравнения как
алгебраическую систему относительно неизвестных dtfi
и <94и4, приходим к выводу, что их одновременное опре-
определение возможно только в том случае, когда
что обеспечит отличный от нуля определитель, составлен-
составленный из коэффициентов левой части. Следовательно, д4р
и д^и* можно определить однозначно только при условии
?44_A_ф')Ы42^0. D5.8)
Если это условие выполняется, то будут определены на
гиперповерхности S величины д4р, <94гг4 и из остальных
уравнений D5.6) величины д4иг. После этого, очевидно,
все рассуждения, приведенные в предыдущем параграфе,
повторяются почти буквально. Но условие D5.8) приво-
приводит к новой возможности особых многообразий.
В отличие от предыдущего параграфа, получим три
случая возможных многообразий, на которых может воз-
возникнуть прерывность поля:
25 А. 3. Петров
-ПРОБЛЕМА КОШИДЛН УСАЬП. ПОЛЯ ЭЙНШТЕЙНА Irji. Vll
*
1) характеристические изотропные многообразия Vs,
отвечающие условию gu = 0;
2) многообразия, касательные к «линиям тока» или
образованные «линиями тока» F3;
3) многообразия V3, для которых
^44_A_ф')Ц42==0.
Эти многообразия удовлетворяют уравнению
[gcx _ иаих A _ ф')] daf dxf = 0.
На этих многообразиях возможна прерывность градиента
давления, что представляет собой в известном смысле
релятивистское обобщение фронта волны классической
гидродинамики. В том случае, если эти волновые фронты
ориентировать во времени, они допускают наглядную
интерпретацию к релятивистской физике ([231], § 19).
Пусть имеет место такое предположение, тогда
ко вследствие D5.7)
Дг/=(В°За/)*A-ф'),
и следовательно,
Ф'>1. D5.9)
Используя этот факт, определим «скорость распростра-
распространения» таких гидродинамических волн. Возьмем два из
таких многообразий V% и V3, определяемых соответствеп-
но уравнениями
и предположим, что б —бесконечно малая величина. Про-
Проведем через некоторую точку V°3 линию тока и определим
на Уз точку, в которой эта линия тока пересечет это
многообразие, ограничиваясь при этом вычислениями с
точностью до бесконечно малых высшего порядка.
Искомая точка на Vs может быть определена з виде
хи + 'Пма> гДе скаляр г) определяется из соотношения
v,u*daj = b. D5.10)
45J ЗАДАЧА КОШИ В СЛУЧАЕ ИДЕАЛЬНОЙ ЖИДКОСТИ 387
Рассмотрим точку xadVl и единичный вектор нормали
па к V\ {папа = — 1). Тогда ковариантная составляющая
вектора п будет иметь вид:
Траектория ортогональна к Fs° и пересекает Уз в точке,
которая с точностью до бесконечно малых высшего порядка
может быть записана в виде ха + цпа, где г] определяется
условием
цпада1=Е. D5.11)
Следовательно,
D5.12)
Рассмотрим зектор wa = r\ua — цпа. Он, очевидно, ле-
лежит в касательной плоскости к поверхности волны. В са-
самом деле,
и вследствие этого
tana — (т]иа — цпа) па = 0.
Вычисляя норму вектора ta, получим:
tata = т]2 — rf — 2пциапа = ц2 -f rj2 > О,
т. е. вектор ориентирован «во времени».
Таким образом, вектор циа определяется как сумма
двух векторов, один из которых ортогонален к поверх-
поверхности волны и ориентирован в пространстве, а другой
касается этой поверхности и ориентирован во времени.
«Скорость распространения» волны v определяется как
предел отношения длин этих векторов и поэтому будет
иметь вид:
v = lim —-— .
fl—»i) ia(n I
2b*
388 ПРОБЛЕМА КОШИ ДЛЯ УРАВН. ПОЛЯ ЭЙНШТЕЙНА 1гл. VII
Отсюда следует:
Таким образом, скорость распространения волн
1
причем имеет место условие D5.9). Этот результат, имею-
имеющий место в классической механике, обобщает величину
скорости распространения волны. Кроме того, из D5.9)
следует, что v < с, так как скорость света принимается
здесь за единицу. Этот результат находится в хорошем
согласии с релятивистской физикой.
Решение внутренней задачи Коши для других распре-
распределений и движений материи, определяемых тензором
энергии-импульса более сложного вида, в основном может
быть получено на пути, изложенном выше, но, по суще-
существу вопроса, оно будет зависеть от формы Гар, так же
как и возникающие при этом особенные гиперповерхности.
Такое рассмотрение для электромагнитного поля и поля,
полученного наложением полей электромагнитного и «чи-
«чистой материи», можно найти, например, в [231].
Случай диссипативных процессов и вопросы отыскания
решения по аппроксимациям, а также постановка задачи
Копти для так называемых единых теорий поля, которые
здесь не рассматриваются, можно найти, например, в [267],
[268], [196], [213].
ГЛАВА VIII
СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ
В этой главе рассматриваются пространства Vit отве-
отвечающие полям тяготения специального вида, определяе-
определяемым некоторыми условиями геометрического или физиче-
физического характера.
§ 46. Приводимые и конформно-приводимые
пространства Эйнштейна
Риманово пространство Vn называется приводимым,
если в некоторой голономной системе координат его мет-
метрика может быть представлена в виде:
^2 = J]q>fe, D6.1)
где ф^ — квадратичная форма, зависящая только от пере-
переменных zak~1+i, ... , zak, а г > 1.
Мы, имея в виду теорию относительности, ограничимся
здесь рассмотрением случая п = 4, предполагая, кроме
того, что форма D6.1) в каждой точке рассматриваемой
области имеет сигнатуру типа ( \-). Тогда D6.1)
может быть только одного из двух возможных типов:
A) ds2 = фх (х1) + ф2 {х\ х3, ж4),
B) ds2 = (pl(x1, х2) + ц>2(х3, х4).
В случае метрики A) форму всегда можно привести
к виду ф1 = е1с?х1 (е1=;Ь1), и следовательно, метрика A)
допускает неизотропный вектор Киллинга ?а = S?; форму ф9
1
в пространстве V3 переменных х2, х3, ж* всегда можно
привести к ортогональному виду [10], и поэтому
4
е, dxi2 + 2 ehH\ dxh*,
fe2
390 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИИ 1гл. VI11
Если эта метрика определяет пространство Эйнштейна
(Rap = Kga^), то из уравнений поля получим, что и = 0
и ф2 определяет трехмерное пространство Эйнштейна
с нулевым тензором Риччи: i?i; = 0 (г, /=2, 3, 4); сле-
следовательно, ф2 определяет метрику плоского пространства
(см. § 13) и рассматриваемое F4 — плоское многообразие.
В силу условия о сигнатуре метрику A) можно привести
к форме метрики Минковского.
Если же имеет место метрика B), то легко видеть,
что, опуская тривиальный случай плоского пространства,
придем только к метрикам A4.7) и A4.8), рассмотрен-
рассмотренным в § 14. Таким образом, метрика всякого приводимого
пространства Эйнштейна при п = 4 и сигнатуре вида
(— [_) в специальной cucmeAte координат будет или
метрикой Минковского, или A4.7), или A4.8).
Будем называть Vп конформно-приводимым, если его
метрика в некоторой системе координат имеет вид:
г
d*9 = aa2<ph, D6.2)
где (pfe определяется, как и в D6.1), а <х = а(ж1, х2,х3, ж4) —
некоторый произвольный скаляр. Рассмотрим тот случай,
когда ф2 и ф2 — бинарные формы:
^8=а8[ф,(х1, х*) + у2(х3, ж4)] D6.3)
и метрика удовлетворяет уравнениям поля свободного
пространства: Ra$ = 0.
Полагая, что индексы р, 9 = 1, 2; а, 6=3, 4 и а, |3 =
= 1, 2, 3, 4, рассмотрим преобразование координат
в результате такого преобразования компоненты метри-
метрического тензора
и следовательно, не меняя структуры метрики D6.3),
можно каждую из форм ф, и ф2 привести к диагональ.
46J
ПРИВОДИМЫЕ ПРОСТРАНСТВА ЭИЫШТЕШ-1А
391
ному виду
V
- а2Р2 О О
О -а2 О
О 0 — а2-
0 0 0
0\
0
о
а2
О, D6.4)
где а (ж1, х2, х3, х*), $(хг, ж4), у(х3, ж*) и знаки вы-
выбраны в согласии с условием о сигнатуре метрики.
Непосредственным вычислением можно убедиться, что
П х 7?
424 — Т^г" л2331>
"l434 —
434 П2" "Зл2>
423 — 5Т •'Ч
а компоненты i?apYs> У которых все четыре индекса раз-
различны, тождественно равны нулю вследствие диагональ-
диагонального вида метрики. Из этих соотношений следует, что
уравнения поля эквивалентны системе уравнений
D А * ТО | * Т> i * D Л (АР. К\
* «-арау — ^5 ,,. ¦* lctp<zp ¦* '¦a'yctY ~1 ~т ' *-aoao — ^ v.^*u* *-*/
°Cр* Ъуу o^fi
(a, p, у, дф).
Полагая компоненты i?l414 = ^, Я2424 = 1?, из второй
группы уравнений D6.5) найдем:
414 "¦> "'2424 —
"
3434
— "^ Y ( "R2"
¦" J
323 —
D6.6)
Поэтому, записывая Х-матрицу (Rab — kgab) (a, b =
= 1, ... , 6), получим, во-первых, что она простого типа
w, во-вторых, что базисы элементарных делителей будут
a
4R2 >
392 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ [гл. VIII
Следовательно, имеет место теорема: всякое конформно-
приводимое поле тяготения D6.3) определяет простран-
пространство Тх с вещественными стационарными кривизнами
и характеристикой Х-матрицы типа [1 1 1, 1 1 1]. Обрат-
Обратное утверждение но имеет места.
Первая группа уравнений D6.5) состоит из шести
уравнений, среди которых четыре имеют вид:
О (*=1, 2; i = 3, 4),
где at == дга. Отсюда следует:
сг1 = ф(а;1, x2) + ty(x3,x4),
после чего остальные уравнения системы D6.5) могут
быть записаны в виде:
;1, ж3), г|?3 = v (х3) у (xs, х4), D6.7)
-0, D6.9)
2Ф
1
-:!tfi- + ^-D> + 4') = 0, D6.10)
где <u, v, ф, л|) — неизвестные функции. Для интегрирования
этой системы воспользуемся тем, что неизвестные функции,
входящие в псе, зависят от разделяющихся переменных.
о о
Полагая в D6.9) Xs = х3 и ж4 = ;г4 и вводя обозначения:
о
46V ПРИВОДИМЫЕ ПРОСТРАНСТВА ЭЙНШТЕЙНА 393
получим:
= 0. D6.11)
~ _ о _
Точно так же, полагая х3 = х3, ж4 = ж4, где хафха,
получим:
0, D6.12)
где с4 имеют тот же смысл, что и сг, но, вообще, могут
и не совпадать с ними. Из D6.11) и D6.12) следует:
B;-с1)-^-+ся-г;+(с,-ся)ф=о... D6.13)
Это приводит к следующим предположениям: 1) сг = сх при
любых х3, ж4 и 2) сх Ф сг. В случае условия 1) имеем по
определению г|э = const. Если бы при этом с3 Ф с3 при лю-
любых х3, х4, то из D6.13) следовало бы, что и ф было
бы постоянной, т. с. а = const, что давало бы приводимые
пространства. Отбрасывая этот рассмотренный выше слу-
случай, необходимо предположить, что с3 — с3 при любых
значениях переменных Xs, х*, т. е. Y44 = —C3Y- Кроме
того, из D6.13) следует в этом случае, что с.^ — с, и,
следовательно, если учесть смысл постоянных сг, с1с3 = с2.
Таким образом, предположение 1) приводит к тривиальному
случаю приводимых пространств Эйнштейна, или к соот-
соотношениям
г13 = с1» Y44 — —с3у, с2 = сас3, Cj, c3 — постоянные. D6.14)
Подставляя эти выражения в D6.10) и используя при этом
D6.11), D6.14) и первое из соотношений D6.7), найдем:
ф* + а)« + ^?(ф + С1)»==0, D6.15)
и следовательно,
ся<0. ' D6.16)
394 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ 1гл. VIII
В случае 2) получим:
$ k(p + c, $ф const, D6.17)
где к и с — некоторые постоянные.
Следовательно, возникают альтернативы:
A) ^ — сг, Y44
с -
С2 —
ft
B) -Eg5-= &ф + с, rjj =5^ const, &, с — постоянные.
Точно так же, фиксируя значения переменных ж1, х2,
получим две возможности:
(!') Ф = с, Ра2=-с8р,
у * * * *
B') -iii- = /сгр + с, ф # const, &, с — постоянные.
Искомые решения уравнений поля отвечают возможным
комбинациям A), B) и (Г), B').
Если отбросить тривиальный случай, когда ф = const,
¦ф = const, отвечающий приводимым пространствам, то по-
получим только три возможных предположения:
(а) ^=/сф + С) Ум = к^ + с,
* *
где к, к, с, с — некоторые постоянные и ф и т|з не могут
быть постоянными;
и, наконец,
В, * * *
(Y) -д—=Ас + С= — С3, ф = С,
Р i 1
1 ¦/ q>i0i"\ , , Ф2Р2 P22 * * * *
"рТ I ТП " S~ i Т^ Т22 П о о ф — С2' С2 — С1С3-
§ 48J ПРИВОДИМЫЕ ПРОСТРАНСТВА ЭЙИШТЕЙНА 395
Для каждого из этих случаев необходимо потребовать,
чтобы выполнялись уравнения D6.7), D6.8), D6.9), D6.10).
Выполнение этих условий будет в то • же время и доста-
достаточным для того, чтобы пространство было конформно-
приводимым.
Рассмотрим сначала случай (а). Дифференцируя пер-
первое из уравнений D6.7) по переменной ас1, получим:
фц = <в'Р + юр1, D8.18)
в силу чего первое уравнение D6.8) будет иметь вид:
Ф22 = у(ф2Р2 + О- D6.19)
Тогда уравнение D6.11) приводит к выводу, что
Ф2.2 = 4~Ф2 + /нр + <?, D6.20)
где
Предположим сначала, что (аг) ф2 Ф 0, с тем, чтобы
далее особо рассмотреть случай, когда (а2) ф2 = 0. В этом
предположении уравнение D6.20) допускает понижение
порядка и приводится к виду:
4>l = ~4>3 + p<p2 + 2qcp + r(xi). D6.22)
Дифференцируя D6.2) по х1 и заменяя фх его значением,
дифференцируя выражение для ф! дважды по х2, срав-
сравнивая правые части и сокращая на J3 =?¦ 0, получим соот-
соотношение
со (с — р) = 0.
Отсюда, используя полученные выше уравнения, легко
получить, что если ?0 = 0, то
г), ф2 = р(ж2). D6.23)
Если же с = р, то
ф1=-|" Ф3 + сф2 Ч-2тф — ш2 (ж2) + ^,
где Я, = const.
396
СПЕЦИАЛЬНЫЙ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ 1гл. VII1
Если же имеет место случай (сс2), то, как легко видеть,
со = const.
Очевидно, что эти рассуждения и выводы повторяются
двойственным образом для функций у (х3, ж4) и г|5 (х3, ж4).
Запишем полученные результаты в виде следующей схемы.
1.
2.
3.
<р2ф0
со = О, ф
Фгг Рг
*
ЩФО,
к
Ф22—лГФ
ф!=-ф3
— со2 (ж2)
ф2-0
со = const
р.
(а,
i =
„
24-
4-
4-Я
>i=
ф
20),
0,
б
Р,
=Ф24--
(«,
*
2тф —
22),
4
5.
6.
Y
+ e^ + t,
*
*
*
.=¦?¦•+
v:=-0, i)>3 = 0,
к, е, t, h—const.
*
#
к
*
+rwi|)-)-v2 (x
^3=v (*3)ч
1P4=O, 115 =
v = const.
• *
3) 4~M"»
{ (ж3, ж*).
= vY(K3),
Искомые решения получатся как все возможные ком-
комбинации случаев левого и правого столбцов, если, кроме
того, записать для них уравнения поля. При этом реше-
решения ищутся в веществепной области, что исключает неко-
некоторые из комбинаций.
§ 46J ПРИВОДИМЫЕ ПРОСТРАНСТВА ЭЙНШТЕЙНА 397
Проделывая эти вычисления, нетрудно убедиться, что
если исключить тривиальный случай ср = const, ij) = const,
приводящий к приводимым пространствам, то получим
следующие принципиально различные случаи1):
!• Фз = у Ф3 + СФ2 + ^Ф — со2 + т, @ = 0) (ж1),
, v = v(x3),
II. ср^
г|з == ]/оJ + v2 ж4 + jx, v = v(a;3), \a = \i{xz),
у = v ж + / К®2 + v2, / = / (.х3), со = const.
у co2+v2
III. ф = с, $ = {) ()
tyl = А (с + я])K + к2 (с 4- я|)J + v2, v = v(z3),
Y = *4^V ^^J +/) , / = /(ж3), с, /с, Л — const.
IV. ф = с, p = BcosA;a;2+Z)smA;x2, В=В{хг), D = D(x1),
1Й = Л (с + -фK - А;2 (с + -фJ + v2, v = v (ж3), с, ft, Л — const,
V. ф = с, В + , {), ()
+ 'у2> v = v(a;8), ^4, с —const,
VI. ф^ = Л(с + фK+А;2(с+фJ-(о2, Л, А, с-const, оа = (о(ж1),
*) Вычисления проводились А. М. Анчиковым.
398 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИИ 1га. V111
VII. ф* = Л(с + фK — &2(e-fcpJ — о2, Л, &, с—const, о> = (о(а;1),
\|з = с, y = В cos &ж4 + Dsin
VIII. ф| = Л(е + фK— а»2, с, Л —const, <в = о)(ж'-),
Здесь, таким образом, ф, г|з, Р, у определяются из
уравнений, которые вообще не допускают квадратур
в элементарных функциях. Легко, например, видеть, что
в случае пространств вида I при некоторых частных
предположениях о коэффициентах А;, с, д функции ф и г|)
будут удовлетворять дифференциальным уравнениям, опре-
определяющим периодические функции q(x2), q (ж4) — функции
Вейерштрасса. В частности, отсюда можно получить из-
известное решение Дельсарта (см. § 14). Можно, впрочем,
пользуясь произвольной сигнатурой, некоторые из этих
решений объединить.
Кроме конформно-приводимых пространств Эйнштейна
указанного вида, можно исследовать при п == 4 приводи-
приводимые дифференциальные формы вида
ds2 = a [eL dx12 + tp (ж2, х3, ж4)],
которые здесь не рассматриваются (см. задачу 2).
Задачи
1. Доказать, что Vn приводимо тогда и только тогда,
когда оно допускает поле постоянного, симметрического,
идемпотентного тензора га$:
tafi,v = O, /[вЗ]==0, г2*ар = *аЗ (П- А- ШирОКОВ [108]).
2. Записать дифференциальные уравнения, определяю-
определяющие g^ в случае, когда пространство Эйнштейна имеет
метрику вида
dxlgx') (i, /=2, 3, 4), gii(xb*i*),
а = а(жг, х2, ж3, ж4).
¦'•7J ОИМЛШ'ГРИЧЕОКИИ ПОЛЯ ТЯГОТЕНИЯ 399
§ 47. Симметрические поля тяготения
Рассмотрим некоторое пространство 7\ и отвечающее
ему поле. Будем называть поле и соответствующее ему
пространство симметрическими, еслл тензор кривизны 7\
ковариантно постоянен:
= 0- D7.1)
Найдем необходимые условия интегрируемости этих урав-
уравнений, для чего продифференцируем их еще раз ковари-
антно и проальтернируем по индексам дифференцирования.
Тогда, применяя тождество Риччи E.5), получим:
W = 0- D7.2)
Так как эти уравнения содержат только компоненты тен-
тензора кривизны, то для того, чтобы их исследовать, удобно
записать их в каноническом него лоно мном орторепере,
относительно которого компоненты Ra$y& имеют канони-
канонический вид A9.6), A9.12), A9.17), а метрический тензор
определяется формулой A1.7). Рассмотрим каждый из
трех возможных типов полей тяготения.
Пусть имеет место пространство Тг Тогда, заменяя
в D7.2) компоненты тензора кривизны их значениями
согласно A9.6), получим:
«1 («2 - «з) - Pi (Р8 - Рз) = Pi К - аз) + а1 (Р« - Ре) = О
и еще три пары уравнений, получаемых из этих цикли-
рованием по индексам 1, 2, 3. Если умножить второе из
этих уравнений на i и прибавить к первому, а затем про-
проделать то же самое с остальными двумя парами и вос-
воспользоваться стационарными кривизнами (см. § 17) ks —
= ag + z"Ps, то придем к эквивалентной системе уравнений
&! (А8 - k3) = k2 (ks — А,) = к3 (кг — Аа) = 0. D7.3)
Кроме того, из A9.7) следует соотношение
S*s = *- D7.4)
Система уравнений D7.3) и D7.4) допускает, с точностью
400 СПЕЦИАЛЬНЫЕ ТЕПЫ ПОЛЕЙ ТЯГОТЕНИЯ [гл. VIII
до перенумерации, лишь следующие альтернативы при
¦л Ф0:
(а) кг = /с2 = к3 = y , (Р) kj,—k2 = 0, к3 = х.
В случае (а) имеем, очевидно, пространство постоянной
кривизны, а (Р) определяет приводимое, как мы сейчас
покажем, пространство.
Для того чтобы пространство Vn было приводимым,
необходимо и достаточно, чтобы оно допускало существо-
существование поля постоянного, симметрического, идемпотентного
тензора Сар (задача 1 § 46):
A) <?ap>Y = 0, B) С[аРЗ = 0, C) СааСар = Са&.
Покажем, что для пространств, получаемых в случае ф),
существует такой тензор, для которого все эти три усло-
условия выполняются. Достаточно показать это для неголо-
номной ортогональной системы отнесения. Для того чтобы
система дифференциальных уравнений A) была совместна,
необходимо и достаточно, чтобы выполнялись условия
инте грируемости
= 0. D7.5)
Все дальнейшие дифференциальные следствия, получаемые
дифференцированием этих соотношений, тождественно
удовлетворяются в силу A) и симметричности простран-
пространства. Условия D7.5) в орторепере A9.6) запишутся так:
при этом условия B) входят в определение Са&, а C) —
условие идемпотентности Са$ — в том же орторепере при*
водит к выводу
Поэтому, задавая Са$ для канонического орторепера в виде:
1-Х 0\
Ч о J-
удовлетворим всем трем требованиям, достаточным для
приводимости пространства. Так как, кроме того, Сар —
§ 47j СИММЕТРИЧЕСКИЕ ПОЛЯ ТЯГОТЕНИЯ 401
тензор второго ранга, то метрическая форма распедается
на две бинарные формы [108]. Легко видеть, что каждая
из этих форм определяет двумерное пространство постоян-
постоянной кривизны, первая — с определенно-отрицательной мет-
метрикой, вторая — с неопределенной. Следовательно, в под-
подходящим образом выбранной системе координат будет
иметь место утверждение ([261], стр. 242; [287], [320]):
симметрическое пространство 7\ в специальной системе
координат будет иметь или метрику
ds2 = -dxi2 — cos2(У~%хх) dx22 - dxS2 -f cos2 ( l/хж3) dx4",
x>0, D7.6)
или
ds^ = —dxi% - ch2 (/^xx1) dx^ — dx3" + ch2 ( ]/"^ж3) dxk%,
x<0, D7.7)
или же будет пространством постоянной кривизны; при
% = 0 получим плоское пространство Минковского.
Рассмотрим пространство Т2, когда компоненты тензо-
тензора кривизны определяются формулами A9.12) при усло-
условиях A9.13). Полагая в уравнениях D7.2) A, = l, [i = 4,
получим соотношения ах = {^ = 0 и, следовательно, как
это следует из A9.13), а2 — -у, jl2 = 0. Если же теперь
в D7.2) фиксировать индексы, пользуясь подстановкой
\ 9й 14 1? ' ' то ПОЛУЧИМ: а2 — О» к = 0. Таким образом,
пространство типа Уа можзт быть симметрическим,
только если % = 0, когда Т2 определяет геометрию поля
свободного пространства. Но, как показано в § 23, суще-
существует единственное симметрическое Т2, метрика которого
удовлетворяет уравнениям /?ар = 0. это пространство мак-
максимальной подвижности Т2 с метрикой B3.3) и шестичлен-
пой транзитивной разрешимой группой движения.
Если же имеет место пространство Т3, то, полагая
в уравнениях D7.2), что компоненты тензора кривизны
определяются по формулам A9.17), прядем, как нетрудно
убедиться, к противоречию при любом «.
Таким образом, вопрос о симметрических полях тяго-
тяготения Тг (i= 1, 2, 3) решает следующая теорема: сим-
26 А. 3. Петров
402 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ (.гл. VI1J
метрическое пространство Тх будет или пространством
постоянной кривизны, или одним из приводимых про-
пространств D7.6), D7.7); при к = 0 симметрическоеТ\6ydem
всегда плоским. Симметрическое Т2 всегда имеет х = 0
и в специальной системе координат, определяется метри-
метрикой B3.3). Пространства Т3 не могут быть симметри-
симметрическими ([261], стр. 243).
Здесь, в отличие от обозначений главы III, не произ-
*
водится разделения яа пространства Тг и Tt.
Вводя в рассмотрение нормальную систему координат
(§ 7), получим:
о ,| о | о
— -^ Raofix, kXaXxXk + О (б4).
Рассмотрим точку Р пространства У4, бесконечно близкую
к началу координат, и компоненты gap (P) с точностью
до определенного порядка малости. Нулевое приближение
определяет плоскую метрику, т. е. совершенно не отра-
отражает действия гравитационного поля. Приближение пер-
первого порядка не меняет картины. Приближение второго
порядка всегди скажется, если имеет место некоторое
распределение и движение материи; оно характеризуется
отклонением в орторепере компонент тензора кривизны
от нуля, и это первый показатель существования поля.
Следующее приближение порядка три определяет, грубо
говоря, быстроту изменения тензора кривизны, и для сим-
симметрических пространств он обращается в нуль, так что
остаются лишь поправки более высокого порядка малости.
Можно условно говорить, что в этом случае тензор кри-
кривизны слабо меняется. Отсюда следует, в частности, что
для пространств Т2 «слабое изменение» тензора кривизны
возможно только в случае максимальной однородности
пространства, а для пространств Т3 никогда не имеет
места. Симметрическим Vn посвящен целый ряд исследо-
исследований (см. § 14).
§ 48, Статические пространства Эйнштейна
Как известно, такие пространства отвечают полям
тяготения, которые допускают систему координат, относи-
относительно которой компоненты метрического тензора не зази-
48] СТАТИЧЕСКИЕ ПРОСТРАНСТВА ЭЙНШТЕЙНА 403
сят от времени ж4 и, кроме того, оба направления времени
равноценны, что приводит к выводу, что в этой системе
координат gai = 0 (а Ф 4). Можно не требовать, чтобы xi
отвечало временной координате, тогда получим некоторое
обобщение статических пространств. Формально такие
«обобщенные статические» пространства можно определить
требованиями: 1) пространство допускает группу движе-
движений Gx и 2) в той системе координат, где вектор Кил лип-
га имеет вид ?а = 6у, пространство допускает еще зеркаль-
зеркальное отображение ж4' = — ж4, xv = xl (i—1, 2, 3).
В такой специальной системе координат метрический
тензор будет иметь вид:
gll gl2 gl3 0
о о о g
и следовательно,
ds2 - do* +¦
где da2 — квадратичная форма переменных хг (г=1, 2, 3).
Будем далее предполагать, что F4 является статическим
пространством и git > 0, а do2 — определенно-отрицатель-
определенно-отрицательная форма. Как показал Коттон ([10], стр. 357), любое Vs
допускает голономную ортогональную систему координат.
Следовательно, da2 всегда может быть представлена
в виде суммы квадратов, умножепной на минус единицу,
при помощи некоторого неособенного преобразования.
xi = f(x1', ж2', Xs') A=1,2,3), ж4 = ж4', \df\фO.
Так как, кроме того, при таком преобразовании
дха
дх
'sl> 2>
то, таким образом, всякое апатическое пространство F4
допускает ^.-ортогональную систему координат, относи-
2С>*
404
СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ [гл. VIII
телько которой метрика иудет определяться в виде:
/~ii-
0
0 0 \
\
0 О
О -Я2
2
О О —IP О
D8.2)
о
О IP
где коэффициенты Ляме Яа — некоторые функции от пе-
переменных хг (г = 1. 2, 3). Подсчитывая для D8.2) компо-
компоненты тензора кривизны, получим:
[
4 4
г, 53- In Я + Я,- 5t In Я],
i 4 У
+ НН
г У
да
j
'TJiHk HkH}\
;'
H
/,
D8,3)
где г, /='i, 2, 3 и ^j означает, что /г Ф i.
к
Поставим вопрос об исследовании типа статического
пространства в том случае, когда оно является простран-
пространством Эйнштейна с уравнениями поля Ra$ = 0. Записывая
уравнения поля, найдем, что три из зтих уравнений дают
тождества, а остальные семь могут быть записаны в виде:
/ ft
+ H*H°Rjkjh = 0,
i 4
D8.4)
jk + H*Rihi
ihih
§ 48) СТАТИЧЕСКИЕ ПРОСТРАНСТВА ЭЙНШТЕЙНА 405
где i, /', к ¦=¦ 1, 2, 3 и не равны между собой. Для иссле-
исследования типа пространства запишем в этой системе коор-
координат А,-матрицу
A = (Rab-Kgab) (a, 6 = 1, ..., 6)
в собирательных индексах бивекторного пространства.
Пользуясь D8.3), получим:
(Р 0
Но Q
где
pJ\R * * Л2424 + А, {ННу i?2434
\ 1424 24 R
4434 -*34 3 4
Я '
/ D \ / Lff-f\2 ?? P?
I iti^Ofl о '" ' /v \ ?J л X I _t *¦ -? ^5 3 1 iiiioin
331 13 "
-rl2312 i'8112 1 2
Если воспользоваться уравнениями D8.4), то легко, поль-
пользуясь элементарными преобразованиями матрицы Р, убе-
убедиться, что
н, следовательно,
. (Р '
"" •"'Sab) ^ \ Q р
Ввиду этого достаточно исследовать элементарные дели-
делители одной кз зтих двух матриц Р и Q. Рассмотрим,
например, Q. Разделив первую строку на НН, вторую
2 з
на НН, а третью да НН и выполнив такую же
13 12
операцию над столбцами, получим матрицу, эквивалент-
эквивалентную, в сыысле элементарных делителей, матрице Q, но
406 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ (.гл. V j J «
уже
где
имеющую
(А
вид:
т) (М, N
wv > нннв
i j к 1
— символы Кронекера. Следовательно, имеем две
симметрические матрицы: А и единичную трехмерную
матрицу Е. Как известно, в этом случае Я-матрица {А — ХЕ)
имеет характеристику простого типа с вещественными
базисами элементарных делителей. Таким образом, имеет
место теорема: всякое статическое пространство Эйнштейна
с сигнатурой ( [-) и х = 0 является простран-
пространством первого типа Тг с вещественными стационарными
кривизнами.
Отметим, что хотя уравнения поля и не интегрируются
в конечном виде, но не представляет принципиальных
затруднений выяснить произвол, от которого зависит общее
решение для статического случая. Обобщением статиче-
статических пространств в указанном выше смысле и для п >• 4
занимался Букдал и некоторые другие авторы [215], [248].
Задачи
1. Показать, что если метрика статического V4, удо-
удовлетворяющая уравнениям Иа^^=0, имеет вид:
= gih (xl) dxl dxh + gaa {*') dx"* (а Ф h }', A),
где а — фиксированный индекс, по которому не произво-
производится суммирование, то и «взаимная» ей метрика
также определяет статическое решение этих уравнений [215].
2. Применить полученный в задаче 1 результат к ре-
решению Шварцшильда и к плоскому пространству Мин-
ковского,
3. Показать, что для статического решения общих
уравнений поля (Rag Ф и^ар) можно построить взаимное
§ 49] ЦЕНТРАЛЬНО-СИММЕТРИЧЕСКИЕ ПОЛЯ ТЯГОТЕНИЯ 407
ему статическое решение; полные энергии таких полей
будут равны по величине и противоположны по знаку
[248].
4. Исследовать Я-матрицу и тип четырехмерного псе-
псевдостатического пространства Эйнштейна, когда ,г.4 не вре-
временная координата.
§ 49. Центрально-симметрические иоля тяготения
Вообще естественно думать, что когда имеется не-
несколько масс, то они должны двигаться и поэтому поле
будет не статическим. Тем не менее для многих вопросов
является важным рассмотрение статических полей тяго-
тяготения. В частности, принципиальный интерес представляет
рассмотрение статических центрально-симметрических
полей гравитации.
Центрально-симметрическое поле может создаваться
любым центрально-симметрическим распределением мате-
материи. При этом, если речь идет о веществе, то не только
распределение вещества, но и его движение должно быть
центрально-симметрическим.
Центральная симметрия поля, т. е. тот факт, что
метрика пространства-времени должна быть одинакова
во всех точках, находящихся на одинаковом расстоянии
от центра симметрии, может быть всего удобнее определе-
определена в терминах теории групп движений (§§ 10, 24).
Предварим такое определение следующим геометрическим
рассуждением (см. [188], стр. 610 — 617). Будем искать
статические центрально-симметрические поля, которые
определены условиями: 1) ж4 отвечает времени, 2) опреде-
определенно-отрицательная форма ф = g'ij dxl dxj (i, /=1, 2, 3)
инвариантна относительно всевозможных ортогональ-
ортогональных преобразований независимых переменных х1, х2, Xs,
Можно для наглядности рассматривать гиперповерх-
гиперповерхности х4 = const как серию плоских пространств с прямо-
прямоугольными координатами хг, но, конечно, метрика такого
плоского пространства не совпадает с метрикой гипер-
гиперповерхности.
408 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЗИ ТЯГОТЕНИЯ Ггл. VIII
Введем в рассмотрение координаты ха, обобщающие
полярные координаты в плоском пространстве, полагая
х1 = г = Vx1* + х2" + ж3', х2 = ^ — 6, х* = ц,
где б — широта и ср — долгота. При этом полагаем, что
х1 = х1 sin х2 cos xs, x2 = ж1 sin x2 sin ж3,
ж3 = х1 cos ж2, ж^ = ж4.
Искомой группой движений, определяющей статиче-
статическое центрально-симметрическое поле, будет группа G4,
причем один оператор этой группы очевиден: ?а = б";
4
искомые компоненты изучаемого тензора не должны зави-
зависеть от времени. Кроме того, G4 должна содержать под-
подгруппу, изоморфную группе ортогональных вращений,
оставляющих инвариантными сферы с центром в начале
координат в евклидовом пространстве, отнесепном к де-
декартовым координатам. Как это хорошо известно, такая
группа G3 является неразрешимой, не содержащей дву-
двучленных подгрупп, т. е. типа IX.
Следовательно, и искомая группа в четырехмерном
пространстве должна быть неразрешимой. Над полем ком-
комплексных чисел неразрешимые структуры VIII и IX
неразличимы. Но при вещественных подстановках, как
в данном случае, нам потребуется именно неразрешимая G3
типа IX. Далее, очевидно, что эта группа должна дей-
действовать на многообразиях двух измерений, определяемых
широтами и долготами, т. е. ранг матрицы векторов
Киллинга (?а) (s=i, 2, 3; а—1, 2,3, 4) должен рав-
8
няться двум: поверхности транзитивности группы G3 — дву-
двумерные. Такую группу в данной системе координат всегда
можно задать операторами (§ 24):
Хл = cosj:3/?2 — sin x3 ctg хгр3,
Х2 = sin xzp2 -j- cos x3 ctg x2p3,
D9.1)
§ 49] ЦЕНТРАЛЬНО-СИММЕТРИЧЕСКИЕ ПОЛЯ ТЯГОТЕНИЯ 409
Кроме того, как условие статичности, искомое про-
пространство должно еще допускать оператор
Х4 = р4. D9.2)
Искомую метрику получим, интегрируя уравнения
Киллинга для заданных операторов D9.1) и D9.2). При
этом необходимо учесть, что допустимы еще все такие
преобразования координат, которые оставляют эти опера-
операторы инвариантными. Легко определить самый общий вид
таких допустимых преобразований. Для этого достаточно
записать дифференциальные уравнения, фиксирующие тот
факт, что операторы не меняют сбой вид при искомом
преобразовании, и определить общее решение такой системы.
Оно будет иметь вид:
j' ~х / -j\ 27 | 2 _! Tf ->з' 3 ' 1* 47 ^ 4_t fi*V 1\
D9.3)
где / и 6 — произвольные функции переменной х1, a s
и к — целые числа к /'=-=0, что следует из предположе-
предположения о невырожденности преобразования. Следовательно,
преобразование, обратное D9.3), будет
хх = / (х1'), х- = ±ж2' -f 6-я. х3 — жу' + кл, I
D9.4)
v.4 _ ,,.4 i A /vl Ч !
•As X ~р" \j I ¦*/ у. j
Записывая уравнения Киллинга
рСТ/9 О' о J- О' (9п?а '- Cf f) Ра Г)
Ь усгба8 1 йасг 5 г g4r7 уаь — и
для операторов при s — 3, 4, получим:
а при s=l, 2 после очевидных преобразований получив
две группы уравнений:
дгёа» ~ §Sa Ctg X2 6^ — g3fi Ctg X2&1 = 0, D9.5)
^ ?) = 0. D9.6)
Полагая в D9.6) а, р = 1, 2, 3, 4, получим:
^22 sin2x2, D9.7)
410 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ [гл. VIII
а уравнения D9.5) запишутся в виде системы
d2gu = 0, д.?ы = 0, d2g22 = 0,
^ = 0, 6»g 0 '
Отсюда следует, что gxi, gl4k, g22, g41 зависят только от ж1 и
gzz = i22
Пользуясь допустимыми преобразованиями D9.4), в новой
системе координат получим, кроме соотношений D9.7)
и D9.8), еще выражения
gl'4' = gUf Ч- ?448', g2'2' = g32 (Ж1).
Если потребовать, чтобы в новой системе координат выпол-
выполнялись условия
gi'4<=0, ^22 (а;1) = — х1*.
то придем к совместной на вещественном пути системе
уравнений.
Следовательно, выбирая в качестве / и 6 интегралы
этой системы, получим искомую метрику в виде:
= - еа dxx% — (dx? + sin2^2 dx^) + eP dx*\ D9.9)
где учтено условие сигнатуры метрики и а, р — некото-
некоторые функции от ж1.
После этого, вычислив компоненты тензора Рыччи,
можно записать уравнения поля в виде:
L
а;12
,} D9.10)
!
Остальные компоненты тензора энергии-импульса тожде-
тождественно обращаются в нуль.
В случае свободного пространства, когда Tj}=0, эта
система легко интегрируется и после простых преобра-
49] ЦЕНТРАЛЬНО-СИММЕТРИЧЕСКИЕ ПОЛЯ ТЯГОТЕНИЯ 411
зований приводит к выводу, что Р= -а и
*
¦ с *
е~а=1-]—j, с = const,
— известное решение Шваршпильда.
Когда х1 стремится к бесконечности, то, как легко
видеть, метрика стремится к метрике плоского простран-
пространства. Если потребовать, чтобы на больших расстояниях,
где поле слабо, имел место закон тяготения Ньютона,
*
то постоянная с выразится через полную массу тела,
создающего поле. Как известно, в случае слабого поля
([156], § 86)
ga — 14- -^г >
где потенциал ф равен своему ньютоновскому выражению
([156], § 95)
km km
ф —= -f>
где т — полная масса тела. Отсюда следует:
* 2кт
Такой элемент длины определяет гравитационное поле
в пустоте, создаваемое любым центрально-симметрическим
распределением масс, как покоящихся, так и с центрально-
симметрической пульсацией.
Эта метрика, важная при решении многих задач, может
быть получена многими различными способами ([156], §96;
[188], §§ 129 — 130; [225], § 57). Она имеет основное зна-
значение при расчетах движения перигелия Меркурия, искри-
искривления световых лучей и т. д. Впервые эта задача (ме-
(методом последовательных приближений) была решена Эйн-
Эйнштейном в 1915 г. [35]. Затем Щварцшильд [37] и неза-
независимо от него Дросте [38] впервые дали строгое реше-
решение для поля материальной точки. Значительно упростил
решение этой задачи Вейль, который [42] пользовался
вариационным принципом и употреблял декартовы коор-
координаты.
412 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ . [гл. VIII
Задачн
1. Показать, что метрика
ds'2 = — dx1 — dx2 —¦ dx3 —
г* ( sy**- /7'у>1 .?., v'2 /-/'у»2 I --y-3 //o^^\2 _j (K rjт-^
определяет центрально-симметрическое статическое рас-
распределение материи. Проинтегрировать уравнения в сво-
свободном пространстве и показать, что
2т Q . 2т л/ ,2 Гг~ р
2. Получить из D9.10) решение Шварцшильда.
3. Показать, что метрика
= - dx* - dx* - da* -
где
a = r0 |/ ;p-, Ло — значение h на поверхности шара
/г2 = 1 __га j может быть интерпретирована как мет-
метрика поля внутри несжимаемого жидкого шара. Тензор
энергии-импульса задан здесь в виде:
где \х0 — плотность массы покоя, р — давлении (Шиарц-
шильд [37], Вейль [69]).
4. Вычислить чисто «пространственный» (т. е. на ги-
гиперповерхности ж4 = const) тензор Риччк и тензор кри-
кривизны для метрики D9.9).
о. Показать, что функция действия в центрально-сим-
центрально-симметрическом поле имеет вид:
«у
S = - Eot + il/ф + ^ е" 2 |/ ^ e-v _ m-2cz _ MJ ,
где Ео — постоянная энергия, М — момент импульса,
. 2ктх , „
ev = 1- гт , т3- — масса тела, создающего поле, гп1—масса
н 50] ПОЛЯ ТЯГОТЕНИЯ С ОСЕВОЙ СИММЕТРИЕЙ 413
пробкой частицы и
м
-s
(Л. Ландау и Е. Лифшиц [156], § 97).
§ 50. Поля тяготения с осевой симметрией
Исследованию гравитационных полей с осевой сим-
симметрией, начатому в работах Вейля [42], [56] и Леви-
Чивита [47], [50], посвягцоно большое количество работ.
При этом само определение таких полей тяготения пре-
претерпело изменения и неодинаково понимается различными
авторами.
Исследованию полей тяготепия такого рода и анализу
понятия осевой симметрии посвящены, например, работы
Леви[89], Стоккума [100], Мардера [269] и других авторов.
По-видимому, наиболее общее ояределекие полей с осе-
осевой симметрией, инвариантное по существу, можно сфор-
сформулировать следующим образом: а) это постоянные ноля,
т. е. в специальной системе координат ga$ не зависит
от ж4; это означает, что метрика допускает оператор
Киллинга одночленной группы движений, причем норма
вектора Киллинга
gatitaf > 0;
р) метрика пространства, отвечающая такому полю,
допускает еще один оператор, также неизотропиый, но
с нормой
^ < 0,
причем эти два оператора определяют группу движений
О, — абелеву:
[Х.гХ2] = 0. E0.1)
Накладывая на пространство, определенное условиями
а), Р), некоторые дополнительные условия, можно построить
все рассматривавшиеся в литературе поля с осевой сим-
симметрией .
414 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ [гл. VII]
Выбирая систему координат так, чтобы векторы .Кил-
линга имели наиболее простой вид, можно определить
одпу из возможных форм метрики; такой выбор, есте-
естественно, не может быть однозначным.
Группа Gt такова, что ранг матрицы || |а jj (s— 1, 2;
s
а = 1, 2, 3, 4) равен двум: пути двух одночленных групп
не могут совпадать. В F4 всегда можно ввести такую
систему координат, относительно которой вектор Киллинга,
определяющий первый оператор, будет иметь вид:
причем любое преобразование
х1' = у\ ж4' = ж4 + ф4 (i = l,2,3)f E0.2)
где фа = фа(ж1, ж2, Xs), не меняет вида этого вектора.
Из уравнений структуры E0.1) следует:
|а = ?а(ж\ х2, х3).
2 2
Пользуясь допустимыми преобразованиями E0.2), можно
уточнить выбор системы координат так, что вектор |а
1
не изменится, а вектор |а будет иметь некоторый более
2
простой вид. В частности, так как группа абелева, можно
было бы Ь,а привести к виду ?а = б|, пользуясь известпой
2 2
теоремой ([147], стр. 63). Но, имея в виду получение
далее, в частности, решения Вейля и Леви-Чивита, выбе-
выберем иную систему координат. Пусть кривая xz является
линией, относительно которой имеет место осевая симмет-
симметрия и, следовательно, ga$ должны вообще зависеть от х3.
Рассматривая в некоторый момент времени (ar1 = t = const)
бесконечно малую область Fa, получим в ней симметрию
около касательной / к кривой х3. Искомый оператор
группы должен определять вращение около / и поэтому
будет иметь вид:
E0.3)
5 50] ПОЛЯ ТЯГОТЕНИЯ С ОСЕВОЙ СИММЕТРИЕЙ 415
Покажем теперь, минуя эти рассуждения, что к такому
виду для 1а можно прийти, исходя из допустимых пре-
2
образований E0.2). Вектор ?а в повой системе координат
2
будет иметь вид:
Г = Ф,?, ?4' = Ф^' + ё4 (/=1,2,3).
2 2 2 2 2
Если потребовать, чтобы
?' = ?*, ?2'=-фЬ g3' = 0, ё*' = 0, E0.4)
2 2 2 2
то получим систему четырех дифференциальных уравне-
уравнений с четырьмя неизвестными функциями <ра (а = 1, 2, 3, 4).
Так как |* пе может определять тех же траекторий, что
2
и Ъ,а, то по крайней мере одна из компонент |*(г = 1.2,3)
1 2
не равняется тождественно пулю в некоторой области А.
Ввиду этого можно систему E0.4) представить так:
ф« = /^(ф«, фо, х), кфв.
Предполагая, кроме того, что правые части этой системы —
аналитические функции своих аргументов в А, приходим,
таким образом, к системе уравнений типа Коши—Ковалев-
Коши—Ковалевской, совместной в А.
Таким образом, всегда можно в А ввести такую систему
координат, что
|« = Ы, 1а = хЧа — хЧЬ E0.5)
12 J
После этого еще остаются, как легко убедиться, до-
допустимыми преобразования
х1' = / cos arctg — + m j , ж2' = / sin j arctg -^ + ф ,
xs' = q>3, ж*' = ф4, E0.6)
где /, ф, ф3, ф4 — произвольные функции от х3 и
q =|/ х1 -\- хг . Интегрируя уравнения Киллинга для век-
вектора ?а, найдем, что ga$ — ga^{^, x2, Xs), а записывая эти
416 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ [гл. VIII
уравнения для вектора ?а. придем к системе уравнений
Xl 9%gs.% = Ж2 #lg4* — Я1 Зг?44 = О,
ж2 (9^23 - хх d2g.23 + g13 = О,
= ж2 дг§п — ж15agu - 2gla = ж2 9^„ - xl d,g22 4- 2gi2 =
Отсюда следует, что компоненты g33, g3i, g44 являются
некоторыми функциями от х3 и q = ]/' .г3-2 + ж22, а
A — A(q, ж3), <р = агс1д-^- + В(в, ж3),
gr,4 = Ccosu>, §24 = С sin о),
= С (е, .х3), со = arctg-^- + D (q, ж3),
8гг =
где .4, i?, С, D, X, v — некоторые функции от а^3
и q = |/ ж1 + х'л'. Теперь. использ}гя произвол в- вы-
выборе функций /, ф, ф3, ф4 допустимого преобразова-
преобразования E0.6), можно уточнить выбор системы координат
так, чтобы
gl'3' = g2'3' ==g3'4' = 0,
где ?i, — значение, которое принимает первый множитель
в gi'p g новой системе коордипат. Этим исчерпываются
все допустимые преобразования, и окончательно метрика
§ 50] ПОЛЯ ТЯГОТЕНИЯ С ОСЕВОЙ СИММЕТРИЕЙ 417
будет иметь вид (если учесть еще условие на сигнатуру):
<*-*Ll-2>- )E0.7)
g3i = #32 — §34 = 0, g33 — — <#- й, g4i = е*, j
где %, \i, v — функции только двух переменных,
q = у х%г -)- х-2 и х3. Накладывая на эти функции некото-
некоторые дополнительные требования, получим те или иные
решения с осевой симметрией. Выбор в качестве независи-
независимых переменных q та. х3 допускает очевидное физическое
толкование.
'"" Мы рассмотрим более подробно решение Вейля и Леви-
Чивита, которое получится из E0.7), если там положить
X = v и потребовать, кроме того, чтобы решение было
статическим, а не только постоянным. Как известно,
решение называется статическим, если, во-первых, в не-
некоторой системе координат все компоненты метрического
тензора не зависят от ж4 =2 и, во-вторых, если метрика
не меняется при изменении направления течения времени;
другими словами, метрика остается инвариантной при пре-
преобразованиях дискретной группы (зеркальное отображение
в данном случае)
х4- —> — ж*.
В этом случае в указанной выше системе координат все
компоненты git = 0. Таким образом, получим:
E0.8)
gl3 = #23 = g34 = glA = #24 = 0,
g3S == — eV **¦> g~44 = e(Xi
где
9 =
a \i и v — функции переменных q и Xs. Тогда тензор
Эйнштейна
1
27 а. 3. Петров
418 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ [гл. VIII
будет определяться компонентами
GSi ¦= 0, Gip = О,
GsP ~~ Ч, ~~~ е да:3 + 3
г 1
~ \ 2q
Q '
4 L 4. ^Q У V^
|
?44=e2u-V j_
, 1 / d2v , 92v Л
E0.9)
Пользуясь этими выражениями и вводя компоненты тен-
тензора энергии-импульса, можно записать общие уравнения
поля. В случае, когда рассматривается поле в свободном
пространстве, система уравнений поля, как легко убедиться,
приводится к уравнениям
(О4
def
E0.10)
Два из этих уравнений представляют собой свернутые тож-
тождества Бианки. Кроме того, непосредственно проверяется, что
и
о2 дсоз du<
-5 3 = 0 "^~5 ©1 •
E0.11)
E0.12)
§ 50] ПОЛЯ ТЯГОТЕНИЯ С ОСЕЕОЙ ^СИММЕТРИЕЙ 419
Как и обычно при анализе решений уравнений поля, яв-
является существенным то, какие условия накладываются
на потенциалы поля на бесконечности. Выбор условий на
бесконечности в общем случае не является столь очевид-
очевидным, как это иногда предполагается (см. § 53). Мы про-
проведем, следуя Вейлю и Леви-Чивита, дальнейшее исследова-
исследование решений системы уравнений поля E0.10), предпола-
предполагая, что функции (i и v должны обращаться в нуль на
бесконечности.
Из уравнений E0.8) видно, что компоненты gvq имеют
на оси ж3 особенность типа неопределенности, если только
не имеет места дополнительное условие, что lim v = 0.
Q -> О
Первое уравнение системы E0.10) является линейным,
однородным относительно неизвестной функции \х; для
функций, обладающих осевой симметрией, оно является
уравнением Лапласа в цилиндрических координатах. Реше-
Решения уравнения Лапласа (если отбросить тривиальный слу-
случай) удовлетворяют граничным условиям на бесконечности
только в том случае, если они имеют особенность в ка-
какой-либо точке, находящейся на конечном расстоянии от
начала координат. Геометрические места вне оси х3, на
которых возникают особенности, всегда будут окружностя-
окружностями, но на самой оси х3 могут возникнуть особенности в точ-
точках в том случае, если они будут обусловливаться наличием
выражений вида 2[Q2 + (a;;3 — aiJ] 2 или некоторых про-
производных по Xs от такого выражения; тут, таким образом,
получим полюсы.
Нужно, конечно, еще потребовать, чтобы эти решения
удовлетворяли уравнениям ш2 = со3 = 0 для неизвестной
функции v. Дело заключается в том, что если уравнение
cOj = 0 удовлетворяется в некоторой односвязной области
двумерного прострапства в переменных q и x3(q^>0), to
в силу E0.12) уравнения (О2 = со3 = 0 имеют решения, но
при наличии особенностей пространство (q, х3) уже не бу-
будет односвязным. Ввиду этого необходимо рассмотреть
возможные особенности ([152], стр. 277 — 280).
Если имеет место особенность впе оси ж3, то, выбирая
решение jx уравнения <ax = 0 с произвольной окружностью
особых точек, получим, что иптеграл по замкнутому кон-
27*
420 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ (гл. VIII
туру, окружающему такую особенность в плоскости Q, х3:
dv , , dv , Л
^-dQ + ^dx3 =
не будет, вообще говоря, обращаться в нудь. Но если этот
интеграл не исчезает, то неизвестная функция v не будет
определяться однозначно вне геометрического места, на
котором возникает особенность; следовательно, как необхо-
необходимое условие существования решения нужно потребовать
обращения этого интеграла в нуль.
Если же имеет место особенность на оси хя и так как
вне точки, где имеет место особенность, ^-^ равна нулю
на оси Xs, то, предполагая, что v обращается в нуль в не-
некоторой точке на оси х3, необходимо получим, что v рав-
равняется нулю на всей оси х3 до особой точки.
В особой точке должен обращаться в нуль интеграл
от дифференциала
взятый по малой полуокружности около особенности
от одной точки пересечения этой полуокружности с осью
х3 до другой.
Рассмотрим, например, типичную особенность, возни-
возникающую на оси х3, если
Так как
<Н±_ _Q_ d\i __ х3 ._!/" 2 1 з2
5q г3 9z3 г2 у v '
то дифференциал E0.14) будет иметь вид:
dv= t^^^±-dQ + ^dx3 . E0.15)
§ 50] ПОЛЯ ТЯГОТЕНИЯ С ОСЕВОЙ СИММЕТРИЕЙ 421
Для вычисления интеграла от dv по малой полуокруж-
полуокружности введем угол ср, полагая
x3 = r sincp, dx3 = qd<p, r = const.
Тогда из E0.15) получим:
dv = a- cos ф sin ф dq>, r = const,
и, производя интегрирование, в пределах f — -у , -^- J ,
получим:
я
Я 2 ¦ ,г
ф=2 1С" 1 -
_ я=у-2 \ cos ф sin ф б/ф = v-2 [sin2 ф]2 =0. E0.16)
ф—2 ^ _я
2
Решение ц совместимо с условиями регулярности для v.
Особый интерес представляет рассмотрение того случая,
когда имеют место сразу две особенности. Воспользуемся
тем, что в одной особой точке решение с особенностью
в другой точке можно разложить в степенной ряд по q2
и ж3 и предположить, что вблизи от начала координат
решение \i имеет вид:
И = -7+ 2 a<n>nQ х3 . E0.17)
m, n
В этом разложении нас будут интересовать только те
коэффициенты ато п, которые существенно войдут при вы-
вычислении интеграла по полуокружности. Если полуокруж-
полуокружность не охватывает никакой другой особой точки, кроме
г = 0, то интеграл не должен зависеть от г. Ввиду этого
несущественны все те коэффициенты атп, которые делают
#*
интеграл зависящим от ?\ Далее, регулярная часть \i сама
по себе не может приводить к неисчезающему интегралу,
и следовательно, нужпо рассматривать только «перекрест-
**
ныс» произведения сингулярной и регулярной частей \i.
**
Производные сингулярной части \х при заданном ф убы-
убывают, как г'2. Они умножаются на q, па дифференциалы
координат, возрастающие, как 7'1, и на производные от ре-
422. СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ 1гл. VIIJ
**
гулярной части jx. Ввиду этого представляют интерес толь-
только те члены разложения, которые зависят от ср, но не от г.
Таким членом будет только q°x3. Поэтому можно взятб
Вычисляя искомый дифференциал, получим:
dv= —Q^i( — )*-ч (ox3) do + о -д—f — ) д—= (for
tfa?J V ^ У c/a?d ' 00 V ?• у с/а?3
и только выписанные члены могут привести к неисчезаю-
щим значениям интеграла. Но теперь имеем:
dv = —5- Q (ж3 dq — q dx3) = — ab cos ф ^ф = — ab d (sin ф),
и в пределах ( — -^ , — ) интеграл отличен от нуля.
Следовательно, в окрестности одной из особых точек про-
производная по х3 от регулярной части fx должна обращаться
в нуль. Другими словами, возможность одновременного
существования нескольких особых точек, на оси х3 исклю-
исключается. Это фактически означает, что уравнения поля
исключают движения точечных масс, не совместимые с урав-
уравнениями движения ([152], гл. XV).
Задачи
1. Показать, что если решение с осевой симметрией
допускает абелеву группу G3 движений, то линейный эле-
элемент можно представить в виде:
ds2 = е2а dt2 — r2e~2a dq>2 — ^23—2а (dr2 -f- dz2),
где a = clnr-j-D, p = c2ln?-+8, D, с, s — постоянные
([269], стр. 8-9).
§ 51 о Гармонические поля тяготения
Если в обыкновенном евклидовом пространстве Rn че-
через ха обозначить декартовы координаты, то расстояние
некоторой точки до начала координат
s = Y7rfib&. E1.1)
§ 51] ГАРМОНИЧЕСКИЕ ПОЛЯ ТЯГОТЕНИЯ 423
Отсюда, дифференцируя, получим:
E1.2)
И
(sp),aa = p(n + p-2)sp-*. E1.3)
Следовательно, s,aa является функцией только от s
и s2~n (n Ф 2) есть решение уравнения Лапласа
v,aa = 0. E1.4)
Для произвольного Vп, вообще говоря, нельзя указать
такого рода решений. Ввиду этого выделяется специаль-
специальный класс пространств Vn, допускающих существование
гармонических функций, зависящих только от расстояния.
Такие Vn принято называть гармоническими (или вполне
гармоническими). Различают также Vn, гармонические
в данной точке ха, для которых расстояние от некоторой
о
точки до ха удовлетворяет уравнению
s,aa = f(s). E1.5)
Рассмотрение гармонических пространств в теории
гравитации имеет принципиальный интерес, который объ-
объясняется следующим. Классическая теория тяготения и
электростатика строится на законах Ньютона и Кулона,
в основе которых лежит возможность использования гар-
гармонических функций, зависящих только от расстояния.
Для произвольного Vn априорное утверждение о существо-
существовании такого рода функций, без дополнительных требова-
требований к метрике, не имеет смысла. Исследование этого во-
вопроса приводит к выводу, что только Vn довольно частного
вида будут гармоническими.
Исследование такого рода пространств Уп начато
в работах П. А. Широкова [72], [75], [108], который,
в частности, рассматривая проблемы теории потенциала
в Уп, показал, что: 1) для того чтобы в Vn существовала
гармоническая функция, зависящая только от расстояния,
от любой его точки, необходимо и достаточно, чтобы каж-
424 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ [гл. VIII
да я гиперсфера этого пространства имела среднюю посто-
постоянную кривизну, и 2) Vn, в которых каждая гиперсфера
имеет постоянную среднюю кривизну, являются простран-
пространством Эйнштейна (Ва? = Kgai)- Здесь гиперсфера пони-
понимается как гиперповерхность, все точки которой равно-
равноудалены от данной точки — центра гиперсферы; таким
образом, речь идет об аналогах окружности на поверх-
поверхности в смысле Бианки в Vn — геометрический образ,
имеющий смысл в любом Vn.
Таким образом, для п = 3 такие функции существуют
только в пространствах постоянной кривизны. Для п > 3
вопрос существенным образом зависит от сигнатуры мет-
метрики Vn. Понятие пространств Vn, гармонических в точ-
точке, введено Рузе и Гобсоном [123]. Аффинное обобщение
этого понятия рассматривалось в работах [185], [186].
Основные результаты для гармонических Vn и гармони-
гармонических в данной точке Vn и о связях между этими двумя
видами гармоничности получены в работах Лихнеровича
[139], [197], Уолкера [128], [141], [142], [145] и других
авторов [217], [178], [198].
Мы рассмотрим далее подробно, имея в виду физиче-
физические приложения, только случай четырехмерного про-
пространства с сигнатурой метрики ( 1- ).
Рассмотрим некоторую точку Vn и введем для этой
точки локально геодезическую систему координат. Если
обозначить
dxk2 ¦ ¦ ¦ dxkP ikih* ¦ ¦ ¦ V
то (§ 7)
• E1.6)
Предположим теперь, что Vn допускает гармоническую
функцию, зависящую только от расстояния, и, следова-
следовательно, оно должно быть многообразием Эйнштейна. Про-
Производя в E1.6) свертывание по индексам г, / и учитывая,
что /?ар = Kgafi, получим:
/ r> rtdb , 15 , -j-,a ,
\tiH qp)j0 = — у i 1а{к, lpq)H-
§ 51] ГАРМОНИЧЕСКИЕ ПОЛЯ ТЯГОТЕНИЯ 425
Исследуем значение правой части этого равенства, исходя
из условий доставленной задачи. Прежде всего отметим
(см. задачу 1 § 51), что средняя кривизна любой гипер-
гиперсферы Бианки должна быть постоянна и будет в данной
системе координат
п _ + ____ fe н ___ f
а искомая функция ф (s) должна иметь вид [72]:
ф=_а \ e~№dsds + C2. E1.9)
Из E1.8) и E1.9) следует:
и следовательно, дискриминант метрического тензора
является некоторой функцией от s: g =_ | ga$ j — g (s). Ввиду
этого
= ^ да In g(s)
будет зависеть только от расстояния s от начала коор-
координат. После этого, дифференцируя четыре раза тожде-
тождество
сравним члены с одинаковыми степенями s, имея в виду
что xa — 1as, где ga —единичный вектор, определяющий
направление геодезической, выходящей из начала коор-
координат. Так как
Гсга = Га = 9а (s) sa> sa = ~ц >
ТО
15
~~ 2" 'Га (h,lpq))o = {^SV4gpg)}0
и, следовательно,
E1.10)
426 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ [гл. VIII
уже в любой точке той области Vn, где соблюдаются ус-
условия, позволяющие ввести геодезическую систему коор-
координат. Это условие впервые отмечено П. А. Широковым
[72]. Пользуясь свертыванием, найдем:
Х = и2. E1.11)
Положим теперь, что п = 4, и, чтобы не заниматься пока
рассмотрением различных случаев возможных сигнатур,
введем в данной точке Vn ортогональный репер (мнимый
в случае сигнатуры типа ( (- )), относительно ко-
которого
?аа=1, gaP = 0 (а ф C), . E1.12)
и рассмотрим бивекторное пространство (см. § 15), отве-
отвечающее этому ортореперу, в котором, как и ранее,
#af3v6—>^ab> gaygf$5 — gabg&y —> gab (a> Ь—1,...,6).
Тогда
?а«=1> gab-О (пфЬ)
II
(М N'
где М = (mi3), N == (rai?) — симметрические трехмерные
матрицы, обладающие, кроме того, тем свойством, что их
следы
з з
i 1
причем бивекторные индексы, как и ранее, определены
нумерацией: 14 — 1, 24-2, 34-3, 23 — 4,31-5, 12-6.
Запишем подробно условия E1.10) в бивекторном прост-
пространстве. При этом существенно рассмотреть следующую
комбинацию индексов к, I, p, q:
1. к, I, р, q Ф,
2. к—1 ф рФ q,
3. к = 1 Ф р = а,
4. к = 1 = рф q,
О * tb — i ^= р — (.[,
соответственно чему получим пять типои соотпошепип
§ Ы] ГАРМОНИЧЕСКИЕ ПОЛЯ ТЯГОТЕНИЯ 427
между mtj и ntj:
?гаа) + ^yy (паа ~ лрр) = 0.
4- тар (^ Шуу к j = пауЩу -+
2 (maam№ — га|э
(ro?v.+ m|y) + (
= nog (noa — /грр
2
где а, р, у п0 смыслу обозначений могут принимать
только значения 1, 2, 3 и всегда a, f>, у не равны между
собой.
Не представляет труда, исследуя эту алгебраическую
систему при всех возможных случаях, убедиться, что
E1.13)
(a, P = l, 2, 3) (аф Р), е= ± 1. J
Таким образом, Я-матрица (i?ab — kgab) (a, b = 1, . . ., 6)
бивекторного пространства будет
' N
где
М=(/яар-А,баЭ), iV-(e^map-^6apJj. E1.15)
Все исследование до сих пор велось без учета сигнатуры
метрики пространства Уй над полем комплексных чисел.
Потребуем, чтобы изучаемое поле гравитации было реаль-
реальным и, следовательно, в каждой точке F4 метрику можно
привести на вещественном пути к метрике Минковского:
Six — 622 — бзз — — © 44 — — -1; б«Э — и vu ~г~ ")' vol> iu;
Переход от E1.12) к E1.18) можно осуществить при по-
помощи невырожденного преобразования, определяемого
428 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ Ггл. VI11
матрицей
Но при таком преобразовании, как легко видеть, все
составляющие вида па$ будут чисто мнимыми, а состав-
составляющие тар — вещественными. Это приводит к противо-
противоречию, если не предположить, что тиар = О, таа = ^-
О
(а Ф р"; а, р" = 1, 2, 3). Отсюда следует, что гармоническо-
гармоническому пространству F4 с сигнатурой метрики ( V-)
отвечает в бивекторном пространстве Я-матрица простого
типа с одинаковыми элементарными делителями и харак-
характеристикой А,-матрицы [A11, 11 1)]. Так как в этом случае
Rab^J-gab (а> Ь= 1, . ...6),
ТО
т. е. такое V4 будет пространством постоянной кривизны
S^. Иначе этот же результат вытекает из теоремы, со-
согласно которой всякое Vn является конформно-евклидовым
многообразием, если для каждого орторепера в таком Vn
о
i?apv6==0 (a, Р, у. &фО) ([77], § 37). Всякое конформно-
плоское пространство Эйнштейна является простран-
пространством Sn. Таким образом, реальное поле тяготения общей
теории относительности может допускать существование
гармонической функции, зависящей только от расстояния,
в том лишь случае, если это поле определяет геометрию
пространства постоянной кривизны.
Если ставить вопрос о развитии теории тяготения или
электростатики на основе законов типа Ньютона и Куло-
Кулона, то это возможно только для пространств постоянной
кривизны, а для геометрий, определяемых в общей теории
относительности, в общем случае необходимо положить в
основу другие законы.
§ 52] ПРОСТРАНСТВА С ЦИЛИНДРИЧЕСКИМИ ВОЛНАМИ 429
Задачи
1. Доказать формулы E1.8), E1.9) (П. А. Широков [72]).
2. Показать, что гармоническое Vn будет пространст-
пространством Sn, если п = 2, 3.
3. Гармоническое конформно-плоское Vn есть Sn,
4. Гармоническое Vn есть Sn, если индекс метрики
равен 1 или п— 1 (т. е. п —/?—1 или п— 1; здесь /> —
число полюсов при квадратах дифференциалов для кано-
канонического вида метрики в данной точке пространства
ds2 = 2eirfa:*\ e; = ± 1) [142].
5. Показать, что пространство, определяемое метрикой
ds2 = с {х2 dx1 — хх dx2J-\-2dxx dx* + 2dx2 dx4-, с = const Ф О,
гармоническое. Показать также, что это пространство
Эйнштейна (i?op = 0) с сигнатурой метрики индекса 2.
6. Каждое вполне гармоническое Vn_x в Sn есть Sn x
([217], стр. 388).
7. Показать, что вполне гармоническое F4 с определен-
определенным метрическим тензором есть симметрическое Vt [142].
8. Показать, что F4 с метрикой
ds2 = ty (x, у) dx2-\-2(p {x, y)dx dy-l-Q(x, у) dy2 + 2dx dz-\~2dy dt
вполне гармоническое.
§ 52. Пространства, допускающие цилиндрические волны
Рассмотрим в этом параграфе решение уравнений по-
поля в свободном пространстве, предложенное Эйнштейном
и Розеном, к которому они пришли, разыскивая строгое
решение для цилиндрических волн. Постановка этой за-
задачи была вызвана тем, что в то время как для линеа-
линеаризированных уравнений поля, когда решение берется по
приближению, можно говорить о плоских гравитационных
волнах, для нелинеаризированяых уравнений этого не
будет. Хотя задача сведена только к системе уравнений
поля упрощенного типа, для которых Эйнштейну и Розе-
ну не удалось указать решений, тем не менее их рас-
рассмотрение представляет интерес, так как на осповапии
результатов, полученных в гл. IV, можно указать целые
классы конкретных решений для задачи такого рода.
430
СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ 1гл.. Vil I
При этом является важной инвариантная характери-
характеристика этих пространств, именно тип пространства и груп-
группа движений.
Исходя из формальных соображений, Эйнштейн и Розен
пришли к рассмотрению прострапств с метрическим тен-
тензором
— А 0 0 СИ
О-В 0 0.
I BC ВС>0, E2,1)
0
0
о
о
-с о
О As
где А, В, С — функции только от переменных х1, х*.
Этот факт по аналогии с теорией электромагнитных волн
и послужил основой формальной конструкции метрики.
Применяя затем подстановку
) l
Эйнштейн и Розен [104] пришли к пяти независимым
уравнениям поля.
Проведем исследование, не пользуясь этой заменой.
Вычисляя компоненты тензора кривизны по формулам
E.7) для метрики E2.1), получим непосредственно
В
-1 (А -А ^л.^
?
2424
— 2 V/J44 2В 2А J '
О-
Л,
11 2С
ГУ _ 1 / Л °4
¦Г13434 — ~2~ V 44 2С
B\
2А J
JO _ 1 f _
¦«2412 — y^
3431
¦ ' 25 ' 2Л У '
^ТС^14""^ *2.4 * г) '
E2.2)
§ 52]
ПРОСТРАНСТВА С ЦИЛИНДРИЧЕСКИМИ ВОЛНАМИ
431
а все остальные компоненты равны нулю. Здесь индексы,
стоящие около А, В, С, означают частное дифференциро-
дифференцирование по соответствующим аргументам:
Записывая уравнения поля для свободного простран-
пространства i?ap==O, получим, что пять из них обращаются в
тождества, а остальные пять будут иметь вид:
1
А
5~-**1212 ~П~ -131— ">
Q 823 —
1 ш я
~д ^434 -ri3i3i; g~ ^гзаз — и> /
-д- -^1414 + -g" -^2424 + ~^~ ^3434 = 0>
E2.3)
1 R L/J — И
о "*ч-2412 /"• 343Х
Заменяя в E2.3) компоненты тензора кривизны по фор-
формулам E2.2), придем к пяти уравнениям поля, определя-
определяющим потенциалы А, В, С, эквивалентные уравнениям,
полученным Эйнштейном и Розеном.
Что касается группы движений, допускаемой метри-
метрикой E2.1) при условиях E2.3), то имеем два очевидных
оператора: Х=д%да, Y=&%da, определяющих абелеву
группу G%. Если же записать уравнения Киллипга для
метрики E2.1) и потребовать, чтобы они допускали ре-
решения, отличные от
ge=C716« + C26«, Cv Сл- const,
то, как легко проверить, это возможно только при нало-
наложении на метрический тензор некоторых дополнительных
условий, не вытекающих из E2.3). Следовательно, Эйн-
Эйнштейн и Розен искали решения при такой постановке
вопроса, которая эквивалентна следующим требованиям:
1) метрика искомого пространства удовлетворяет уравне-
уравнениям поля тяготения свободного пространства i?ag = О,
2) искомое пространство допускает 4-ортогона льну ю систему
432 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ [гл. VIII
координат, 3) оно допускает также абелеву группу
движений G2, действующую на неизотропяых двумер-
двумерных поверхностях транзитивности определенной метрики,
4) в указапной системе координат gu = — g^, 5) сигна-
сигнатура метрики имеет вид ( \- ).
Для определения типа пространства исследуем ^-мат-
^-матрицу в бивекторном пространстве. Эта матрица будет
иметь вид:
/Й1411+А.А2 0 0 0 0 0 v
О i?242i4"^AJ5 0 0 0 ^24
0 0 Кз434+АДС 0 Й3431 0
0 О О R232S—\ВС 0 О
О 0 #3431 О Й3131—>ЛС О
\0 J^2412 0 0 0 -Ri2l2—%АВ 1
Отсюда следует, что после перестановки строк и столбцов
эта матрица может быть записана так:
'Мх 0 0 0
О М2 О О
О 0 Мя О
ооо м;,
где Мг и М2 определяют одномерные блоки матрицы
(
которым отвечают два простых элементарных делителя
Я-матрицы. Ввиду этого характеристика А,-матрицы мо-
может быть только одного из двух следующих типов:
[111, 111] и [12, 12]. Следовательно, исследуемое прост-
пространство может быть только или пространством типа Тг,
или типа Т2- Следующие два блока имеют вид:
_ /^2424
\ -^
MlRziZi 4* kBC -??3431
\ -431
S 523 ПРОСТРАНСТВА С ЦИЛИНДРИЧЕСКИМИ ВОЛНАМИ 433
Из последнего уравнения системы E2.3) следует, что
компоненты i?24ia и ^s-isi равны или не равны нулю од-
одновременно. Если, например,
то оба блока определяют одновременно простые элементар-
элементарные делители, что приводит к пространствам типа 7Y
Если же
то получим одновременно два непростых элементарных
делителя вида ("к — "кJ, (Я. — А,J, что приводит к простран-
пространствам Т2. Более того, в этом последнем случае можно
утверждать, что
~А* ВС
и что два квадратных уравнения
E2.5)
определяют четыре корня, разбивающиеся па две пары
корней, комплексно-сопряженных между собой. Условия
E2.4) и E2.5) определяют всякое возможное прострапст-
ео типа Т.2, удовлетворяющее условиям Эйнштейна—Розе-
на.. Имея в виду классификацию пространств Тг по груп-
группам движений (см. § 27), можно указать сколько угодно
интегралов системы уравнений поля Эйпштейна—Розена.
В частности, таким интегралом будет пространство мак-
максимальной подвижности Т2 с группой G6 движений, опре-
определяемое метрикой
ds2 — — dxx — sh'J v dx2" — sin2 v dxs2 -j- dx*2, v = xx — x4,
а также все те классы пространств, которые удовлетво-
удовлетворяют условиям E2.4) и E2.5) и допускают более низкую
группу движений.
28 а. 3. Петров
434 • СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ' [гл. VIII
Задачи
1. Показать, что решение уравнений поля Розена (§ 14)
представляет собой частный случаи решения Эйнштейна—
Розена при
где г|), y — некоторые функции от х1 и ж4 с абелевой
группой движения G2.
2. Исследовать тип пространства задачи 1.
§ 53. Пространства, связанные с граничными
условиями
Вопрос о предельных условиях при интегрировании
уравнений поля тяготения в релятивистской теории играет
такую же роль, как и в классической теории. Для ньюто-
ньютоновской теории гравитации, основанной на принципе даль-
дальнодействия, характерна следующая картина. Пусть на
некоторую точку воздействуют массы, причем эта точка
может быть внутри этих масс или вне их [внутренняя
или внешняя задачи). Тогда действие этих масс на точку
описывается потенциалом ф, т. е. такой функцией, про-
производные которой ф^, ф^, ц>'г, взятые с обратным знаком,
определяют компоненты силы, действующей на точку.
Так как результат действия зависит от плотности мате-
материи, то вводится еще плотность д(х,у,г). В теории
Ньютона этот потенциал определяется уравнением Пуас-
Пуассона Дф = 4яо или же, если рассматривается внешняя
задача, уравнением Лапласа Дф = 0.
Общее выражение однозначной н один раз непрерывно
дифференцируемой функции, удовлетворяющей уравнению
Пуассона, имеет вид:
о
О 0
где ф удовлетворяет уравнению Лапласа (Д ф = 0) во всем
бесконечном пространстве. Важно отметить, что для
теории Ньютона важное значение имеет условие на бесконеч-
бесконечности, которое состоит в том, что ф на бесконечности
считается заданной функцией. В классической механике
S 53] ПРОСТРАНСТВА, СВЯЗАННЫЕ С ГРАНИЧ. УСЛОВИЯМИ 435
о
это проявляется в то.м, что ф принимается за потенциаль-
потенциальную функцию масс, которые целиком лежат на бесконеч-
бесконечности. Например, в качестве ф — coast принимают потен-
потенциальную функцию однородного шарового слоя бесконечно
большого радиуса.
В релятивистской теории тяготения, если понимать ее
в широком смысле, дело обстоит в сущности аналогичным
образом. Роль потенциала ср здесь играют компоненты
метрического тензора—потенциалы ?'ав(%)', аналогом плот-
плотности q является тензор энергии-импульса Гар 0е). Соответ-
Соответственно этому вместо уравнения Пуассона имеем общие урав-
уравнения поля
а для областей, где исчезает тензор Та$, получим как аналог
уравнения Лапласа систему
В этом смысле можно говорить, что ga$ (x), удовлетворяющие
этим последним уравнениям, являются обобщениями гар-
гармонических функций.
Разумеется, эта несколько формальная аналогия не
претендует на доказательную силу, но она, несомненно,
полезна для уяснения существа вопроса. Так же, как и
в классическом случае, в теории гравитации предельные
условия должны играть важную роль. Они должны про-
проявиться при интегрировании уравнений поля [225].
Исторически проблема граничных условий связана
прежде всего с вопросами космологии, и именно поэтому она
формулировалась как задача о граничных условиях на
бесконечности. К этому вопросу неоднократно возвращался
Эйнштейн ([97], стр. 315 — 331), который при формулировке
граничных условий видел лишь следующие три возмож-
возможности: 1) в пространственной бесконечности при надлемса-
щем выборе системы координат метрика стремится
к метрике плоского пространства Минковского, 2) не суще-
существует граничных условий, которые могли бы претендо-
претендовать на всеобщую справедливость; каждая задача должна
иметь индивидуальное решение этого вопроса, 3) общие
28*
436 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ [гл. VIII
уравнения поля должны быть изменены путем введения
добавочного (космологического) члена так^ чтобы простран-
пространство стало замкнутым, чем снимается вопрос о гранич-
граничных условиях; вселенная замыкается в себе и является
везде однородной.
По поводу этих трех возможностей Эйнштейн в указан-
указанной работе делает следующие замечания.
Гипотеза 1) не всегда согласуется с понятием относи-
относительности инерции и плохо согласуется с некоторыми
статистическими соображениями; предположение 2) факти-
фактически не соответствует какому-либо решению вопроса,
а означает отказ от его решения; в случае же 3) получается
такое обобщепис уравнений поля, которое не подтвер-
подтверждается нашими действительными знаниями о тяготении.
В дальнейшем этот вопрос хотя и обсуждался, но не
получил определенного решения. Как нам кажется, поль-
пользуясь классификацией по алгебраической структуре тен-
тензора кривизны (см. глазу III), можно попытаться сформу-
сформулировать достаточно определенное и инвариантное реше-
решение этого вопроса.
Прежде всего, можно утверждать, что гипотеза 1), тесно
связанная с планетарными задачами, которые обычно рас-
рассматриваются как задачи статические, в общем случае не
имеет места Рассмотрим, например, некоторое поле типа 7\3.
Физически в некоторых случаях его можно истолковать
как поле, создаваемое материей и гравитационными волна-
волнами. Согласно гипотезе 1) пространство, определяемое та-
таким полем, в предельном случае должно стремиться к пло-
плоскому пространству-времени. Для этого необходимо и до-
достаточно, чтобы компоненты тензора кривизны такого
риманова пространства стремились к нулю для некоторых
значений аргумента. Но, например, для любого из про-
пространств Т.,, допускающих некоторую группу движений,
легко убедиться, что это невозможно ни при каких значе-
значениях аргументов, если исключить вырождение метрики.
Так, для пространства максимальной подвижности Т%
с метрикой
ds2 = —dx^ — s\?{xx — x^dx2' - sina(a;1 — я*) Ac3* + dx42
среди . компонент тензора кривизны имеется равная
r1 — .х4), и стремление ее к нулю означало бы, что g=
§ 53] ПРОСТРАНСТВА, СВЯЗАННЫЕ С ГРЛ1ШЧ. УСЛОВИЯМИ 437
стремится к нулю. Тем более это рассуждение относится
к пространствам типа Т3.
Можно было бы пойти по путп исключения пространств
типа Т2 или Т.л из рассмотрения, но такое решение вопро-
вопроса едва ли может претендовать на научность, если оно
не будет подтверждено более вескими аргументами. Ввиду
этого гипотеза 1) явно не может быть универсальной.
Для того чтобы подойти к иному решению вопроса,
заметим, что является нежелательным при формулировке
граничных условий связывать их с некоторой системой
координат. Такие условия нужно сформулировать инвари-
инвариантным образом с четким физическим содержанием. Далее,
понимая под граничными условиями для ga$(z) характери-
характеристику этих потенциалов в тех областях, где Та$(х) —> О,
необходимо предположить, что данное поле в областях,
где имеют место граничные условия, должно сколь угод-
угодно мало отличаться от поля, отвечающего метрическому
тензору, компоненты которого являются решением урав-
уравнений поля для свободного пространства
Кроме того, тип пространства не должен меняться: вся-
всякое изменение типа с физической точки зрения можно
объяснить только наложением нового поля, что исключает-
исключается существом поставленной задачи.
Так как, наконец, гипотеза 1) хорошо согласуется
с экспериментом и наблюдениями для пространств первого
типа (к этому типу относятся все экспериментально про-
проверенные решения), то для этих пространств (Тг) ее сле-
следует признать правильной и в этом смысле она может
послужить образцом для формулировки граничных усло-
условий для пространств Т2 и Т3.
Для пространств Тг искривление, выражающееся в от-
отклонении компонент тензора кривизны от нуля, обуслов-
обусловливается, например, наличием гравитационных масс.
По мере удаления от этих масс (например, на гиперсфере
бесконечно большого радиуса, для метрики Шварцшиль-
да, в полярной системе координат) их гравитационное
действие ослабевает, «искривленность» пространства сгла-
сглаживается, оно становится более однородным и стремится
к пространству максимальной подвижности Т\ с группой
438 СПЕЦИАЛЬНЫЕ ТИПЫ ПОЛЕЙ ТЯГОТЕНИЯ [гл. VIII
движений Glo, т, е. к плоскому пространству. Это и состав-
составляет существо гипотезы 1). Группа Ли движений имеет
то простое физическое истолкование, что при преобразо-
преобразованиях группы gap(x) переходят в те сисе самые функции
от новых переменных и, следовательно, поле гравитации
не меняется. Поэтому подход к граничным условиям
с точки зрения групп движения является наиболее естест-
естественным.
Если предполагать, что пространства Т2 и Т.Л обя-
обязаны своим происхождением наличию движущейся грави-
тирующей материи и, может быть, гравитационным волнам,
распространяющимся в пустоте со скоростью света, то, на-
например, можно было бы думать, что при удалении от масс
гравитационное действие этих масс ослабевает, но остает-
остается еще вторая причина искривления пространства, кото-
которая не позволяет, так сказать, «приблизиться» данному
пространству к плоскому многообразию. Необходимо от-
отметить, что нет необходимости; говорить о бесконечности,
так как в принципе можно представить себе, что для не-
некоторого физического феномена имеет место своя геометрия,
создаваемая «тяготением», которое не сходно с тяготением
между планетами, истолковывается в более широком
смысле и которое имеет место только в области, где все-
всеми иными полями, не относящимися к данному феномену,
можно пренебречь. Эта идея высказывалась еще Лобачев-
Лобачевским в его знаменитом «Вступлении» к книге «Новые
начала геометрии».
Кажется наиболее естественным для пространств 1\
и Т3 по аналогии с пространствами Тл предположить, что
в областях, где должны иметь место граничные условия,
эти пространства приближаются к пространствам макси-
максимальной подвижности данного типа. Таким образом, можно
сформулировать следующий принцип наложения граничных
условий: пусть имеется поле тяготения Ti (?= 1, 2, 3), тогда
для областей, где Та$ (х) —> 0, компоненты метрического
тензора ga& (x) данного поля тяготения сколь угодно мало
отличаются от соответствующих компонент метрического
тензора пространства, определяемого условиями: а) оно
является пространством того же типа Ti7 что я данное,
и Р) допускает максимально возможную для дапного типа
группу движений.
§ 53] ПРОСТРАНСТВА, СВЯЗАННЫЕ С ГРАНИН. УСЛОВИЯМИ 439
Такая формулировка не зависит от системы отнесения
и является инвариантно-групповой по существу. Таким
образом, здесь речь идет не об отказе сформулировать
граничные условия, имеющие всеобщий характер, что
оттолкнуло Эйнштейна от гипотезы 2), а о том, что сущест-
существует три и только три типа полей тяготения и для каждого
типа существуют свои граничные условия. Следовательно,
можно говорить о трех типах граничных условий.
Если задано некоторое 7\, то всегда можно определить
его тип и тем самым выяснить, какие граничные условия
отвечают этому полю тяготения. Используя результаты
§ 25, получим следующую схему:
Т1 —^ плоское пространство 7\ с груп-
группой G1Q,
Т2 —> пространство Г2 с транзитивной раз-
разрешимой группой Ge вида B5.3),
Т3 —> пространство Т3 с неабелевой груп-
группой G2 вида B5.52).
Является очевидным, что попытка поставить при решении
некоторой задачи для пространств некоторого заданного
типа граничные условия другого типа приведет к проти-
противоречию, так как вырождение метрики и изменение типа
здесь физически но будут мотивированы.
Можно думать, что сформулированный выше принцип
наложения граничных условий должен сыграть роль при
изучении пространств Т.г и Т3, исследованию которых
посвящен ряд работ (см. [258], [299]).
Возможен в принципе и иной подход к вопросу о гра-
граничных условиях для Т% и Т3, когда пространственно-вре-
пространственно-временной континуум типа 7\ (i = 2, 3) мыслится как замкну-
замкнутый в себе и тем самым вопрос о граничных условиях
отпадает. Этот вопрос может быть решен только на пути физи-
физического осмысливания такого рода многообразий и в конеч-
конечном счете экспериментом.
БИБЛИОГРАФИЯ
1868
1. Riemann В., Ober die Hypothesen, welche der Geometrie
zu Grunde liegen, Nachrichten von der k. Gesellschaft von Wissen-
schaften, Gottingen, 13, 133—152 (см. русский перевод: сб.
«Об основаниях геометрии», М., Гостехиздат, 1956, 309—341).
1869
2. Christoffel Е. В., Ober die Transformation der homoge-
nen Differentialausdriicke zweiten Grades, Journ. reine imd
angew. Math. (Crelle) 70, 46—70.
1886
3. R icci G., Sui parametri gli invarianti delle forme differenzi-
ale, Ann. Math._ 11, 14.
4. S с h u г F., Ober die Zusammenhang der Raume konstanten
Kriimmengs massen mit den projektiven Raumen, Math. Ann. 27.
1888
5. L i e S. und E n g e 1 F., Theorie der Transformationsgruppen,
S. 1, 2, Teubner, Leipzig, Reprinted in 1930.
1892
6. Killing W., Ober die Grundlagen der Geometrie, Journ.
reine und angew. Math. (Crelle) 109.
1893
7. Lie S. und E n g e 1 F., Theorie der Transformationsgruppen,
Bd, 3, Leipzig.
1895
8. Котельников А. П., Винтовое счисление и некоторые
приложения его к геометрии и механике, Казань.
1899
9. М u t h P., Theorie und Anwendung der Elementarteiler,
Leipzig,
БИБЛИОГРАФИЯ 441
10. С о t t о n E., Sur les varietes a trois dimensions, Ann Fac
Sci. Toulouse B), 1, These, Paris.
11. Котельников А. П., Проективная теория векторов,
Казань.
1900
12. L а г m о г Y. J., Aether and Matter, Cambridge.
1901
13. R i с с i G., L e v i-C i v i t а Т., Methodes du calcul diffe-
rentiel absolu et leurs applications, Math. Ann. 54.
1902
14. Bianchi L., Lezioni di geometria differenziale, vol. 1,
Spoerri, Pisa.
1903
15. Lorentz H. А., Обзорная статья в «Enzyklopadie der
Mathemat. Wissensch.», V. 14.
16. Fubini G., Sulla teoria degli spacii che ammetono un grup-
po conformo, Atti Accad. Sci. Torino 38.
17. Hadamard J., Lecons sur la propagations des ondes,
Hermann.
18. Fubini G., Sugli spacii che ammetono un gruppo continuo
di movimenti, Ann. di Math. 3, 8.
1904
19. L о г е n t z H. A., Electromagnetic Phenomena in a System
Moving with any "Velocity Smaller than of Light, Amst. Proc,
№ 6; № 12.
20. Fubini G., Sugli spacii a quattro dimensioni she ammetono
un gruppo continuo di movimenti, Ann. Math. 3, 9.
1905
21. Kowalewski G., Einfuhrung in die Determinantentheorie,
Leipzig.
22. D i с k s о n L. E., Definitions of a Group and a Field of Inde-
Independent Postulates, Trans. Amer. Math. Soc. 6.
23. Poincare H., Compt. Rend. Acad. Sci. (Paris) 140.
24. Einstein A., Zur Elektrodynamik bewegter Korper, Ann.
Physik 17.
1906
25. Poincare H., Sur la dynamique de 1'electron, Rend. Circolo
mat. Palermo 21.
442 БИБЛИОГРАФИЯ
1907
26. М inkowski H., Das Relativitatsprinzip, Доклад Матем.
об-ву в Готтиыгене, см. сб. «Принцип относительности»,
М.—Л., ОНТИ, 1935.
1909
27. Dickson L. E., Equivalence of Paires of Bilinear or Quadratic
Formes in the Rational Transformations, Trans. Amer. Math.
Soc. 10, № 3.
28. F u b i n i G., Sulle rappresentazioni die concervano le iper-
sfere, Arm. Math. 16.
1910
29. Ignatowsky W., Physik Zs., № 11.
1911
30. Frank Ph., Rothe H., Ann. Physik 34.
31. Ignatowsky W., Physik Zs., №12.
1912
32. Frank Ph., Rothe H., Physik Zs,, № 13.
33. M i e G., Grundlagen einer Theorie der Materie, Ann. Physik,
№ 37, 39.
1914
34. Einstein A., Die formale Grundlage der allgemeinen Relati-
vitiitstheorie, Berl. Berichte.
1915
35. Einstein A., Zur allgemeinen Relativitatstheorie, Berl.
Berichte.
1916
36. E insteinA., Die Grundlagen der allgemeinen Relativitats^
theorie, Ann. Physik 49.
37. Schwarzschild K., Ober das Gravitationsfeld eines
Massenpunktes nach der Einstcinschen Theorie, Sitzungsber.
Akad. Wiss. Berl.
38. Droste Y., Amsterdam. Versl. 25, 163.
1917
39. Lev i-C i v i t а Т., Nozione di parallelismo in ma varieta
qualunque e conseguente specificazione geometrica della curvatura
Riemanniana, Rend, di Palermo 42.
40. Klein F., Zu Hilbert erster Note tiber die Grundlagen der
Physik, Gott. Naehr., math.-pys. Klasse.
БИБЛИОГРАФИЯ 443
41. Н i 1 Ь о г t D., Grundlagen tier Pb.ysik, 2 Mitteihmg, Gott.
Nachr.
42. Weyl H., Bemerkung iiber die axialsymmetrischen Losungen
der Einsteinschen Gravitationsgleichungen, Ann. Physik 54
(см. также 59 A919)).
43. Einstein A., Sitzungsber. der Preussische Akad. Wiss.
1918
44. Bianchi L., Lezioni sulla teoria dei gruppi continui finiti
di transforinazioni sperri, Pisa.
45. Klein F., Ober die Differentialgesetze yon Impuls und Ener-
gie in der Einsteinschen Gravitationstheorie, Gott. Nachr.
46. К о t t 1 e r F., Ober die physikalischen Grundlagen der Ein-
steinscben Gravitationstheorie, Ann. Physik, ser. 4, 56.
47. Lev i-C i v i t а Т., ds2 Einsteiniani in campi Newtoniani,
Atti Accad. Naz. dei Lincei 27, fasc. 7—8, Roma.
48. S с h о u t e n J. A., Die direkte Analysis zur neueren Relati-
vitatstheorie, Ver. kon. Akad. Amsterdam 12, № 6.
49. Weyl H., Reine Infinitesimalgeometrie, Math. Zeitschr. 2.
1919
50. Lev i-C i v i t а Т., ds2 Einsteiniani in campi Newtoniani,
Atti Accad. Naz. Lincei 28.
51. Weyl H., Bemerkung iiber die axialsymmetrischen Losungen
der Einstoinschcn Gravitationsgleichungen, Ann. Physik 59.
1920
52. E i s e n h a r t L. P., Condition that a Tensor be the Curl of
a Vector, Bull. Amer. Math. Soc. 28.
1921
53. Goursat E., Lecons sur l'integration des equatons aux deri-
vees partielles du I-er ordre, Paris.
54. De Bonder Th., La graviiique einsteinienne, Paris.
55. Schouten J. A., S t r u i k D. J., On Some Properties of
General Manifolds Relating to Einstein's Theory of Gravita-
Gravitation, Amor. Journ Math. 43,
56. Bach P., Weyl H., Math. Ann. 13.
57. К a s n e r E., Geometrical Theorems on Einstein's Cosmolbgi-
cal Equations, Amer. Journ. Math. 43.
58. Schouten J.A., Ober die konforme Abbildung л-dimensio-
nalen Mannigfaltigkeiten mit quadratischer Masszbestimmung auf
eine Mannigfaltigkeit mit Euklidischer Masszbestimmung, Math.
Zeitschr. 11.
1922
59. С a r t a n E., Sur une generalisation de la notion decourbure de
Riemann et les espaces a torsion, Compt. Rend. Acad. Sci.
(Paris) 174.
444 БИБЛИОГРАФИЯ
60. Fermi E., Sopra i fenomeni che avvengono in vicinanza di
una linea oraria, Rend. Accad. Sci. Lincei (Roma) 31.
61. Voblen O., Normal Coordinates for the Geometry of Paths,
Proc. Nat. Acad. Sci. USA 8.
62. Bach P., Neue Losungen Einsteinschon Gravitationsglei-
chungen, Math. Zeitschr. 13.
63. Cartaa E., Journ. Math, pures et appl. 1.
64. Каган Б. Ф., Основания теории определителей, Одесса.
65. Клиффорд В. К., Предварительный очерк бикватершш-
пов, Приложение к его книге «Здравый смысл точных наук»,
Петроград.
1923
66. Birkchoff G. D., Relativity and Modern Physics, Horvard
Univ. Press, Cambridge, Mass.
67. V e b 1 e n O., Thomas T. Y., The Geometry of Paths,
Trans. Amer. Math. Soc. 25.
68. L a n с z о s K., Physik Zs. 23, 537.
69. Weyl H., Raum-Zeit-Materie, Springer, Berlin.
70. Brinkman H. W., On Riemann Spaces Conformal to
Einstein's Spaces, Proc. Nat. Acad. Sci. USA 9.
1924
71. Brinkman H. W., Riemann Spaces Conformal to Einstein's
Spaces, Math. Ann. 91.
1925
72. Широков П. А., Об отличительных свойствах сфер в про-
пространствах постоянной кривизны, Изв. Казанск. физ-матем.
об-ва, сер. 2, 25.
73. Brinkman H. W., Einstein Spaces which Mapped Confor-
mally on Each Other, Math. Ann. 94.
74. Широков П. А., Постоянные поля векторов и тензоров
2-го порядка в римановых пространствах, Изв. Казанск. физ.-
матем. об-ва, сер. 2, 25.
75. Широков П. А., О функциях, удовлетворяющих уравне-
уравнению Лапласа в римаповых трехмерных пространствах и зависи-
зависимых только от расстояния, Уч. зап. Казанск. ун-та 85, кн. 1.
76. К a s n e r E., An Algebraic Solution of the Einstein Equations,
Trans. Amer. Math. Soc. 27.
1926
77. E i s e n h a r t L. P., Riemannian Geometry, Princeton Univ.
Press; русский перевод: Эйзенхарт Л. П., Риманова
геометрия, М., ИЛ, 1948.
78. Н Га v a t у V., Application des paramctres locaux, Ann. Soc.
Pol on. 5.
БИБЛИОГРАФИЯ 445
79. К а г а а В. Ф., О некоторых системах чисел, к которым при-
приводят лорепцевы преобразования, части 1, 2, изд. Ин-та матем.
и мех. при МГУ, Москва.
1927
80. Eisenhart L. P., Non Riemannian Geometry, Amer. Coll.
Publ. S.
81. С a r t a n E., La theorie desgroupeset la geometrie, Доклад на
заседании Швейцарск. матем. об-ва в Берне .7 мая 1927 г.;
L'enseignementmathematique; русский перевод: Серия моногра-
монографий и исследований по неевклидовой геометрии, № 1, Казань,
1939 г.
82. Дубнов Я. С, О симметрично-сдвоенных ортогональных
матрицах, изд. Ин-та матем. и мех. при МГУ, Москва.
1928
83. Gar tan E., Geometie les espaces riemanniens, Paris.
84. Вавилов С. И., Экспериментальные основания теории
относительности, ГИЗ.
85. Л о п ш и ц А. М., Векторное решение задачи о симметрично-
сдвоенных матрицах, Труды Всеросс. съезда математиков.
1931
86. М it ter О. К., On a Solution oi' Einstein's Gravitational
Equations (?Jlv=0, Symmetrical about an Axis, Tohoku Math.
Journ. 34.
1032
87. Schouten J. A., van Dantzig G. F., Generalle Feld-
theorie, Zs. Physik 78.
88. Lewis Т., Proc. Royal Soc. 136.
89. Lewis Т., Some Special Solutions of the Equations of Axially
Symmetric Gravitational Fields, Proc. Royal Soc, series A, 81.
1933
90. Б о x e p M., Взедение в высшую алгебру, М.—Л., ГТТИ.
1934
91. Широков П. А., Тензорное исчисление, ч. 1, М.—Л.,
ГТТИ.
92. Т h о m a s T. Y., The Differential Invariants of Generalized
Spaces, Cambr. Univ. Press 25 i S.
93. Hlavaty V., Les courbes de la variete generale a n dimen-
dimensions, Mem. Sci. mathera., fasc. 63,-Paris.
9-5. Delsarte M., Sur les ds- d'Einstein a sj^metrie axiale, Paris.
446 БИБЛИОГРАФИЯ
1935
95. Лаврептьев М. А., Л ю стерни к_Л. А., Основы
вариационного исчисления, т. 1, ч. 2, М.—Л., ОЫТИ.
96. S у n g e J. L., Univ. of Toronto Studies, Appl. Math. Series.
97. Эйнштейн А., Вопросы космологии и общая теория отно-
относительности, Сб. работ классиков релятивизма «Принцип
относительности».
1936
98. К а р т а н Э., Геометтэия риыановых пространств, М.—Л.,
ОНТИ.
99. Ruse H. S., Proc. London Math. Soc. 41.
100. Van Stockurn W. J., The Gravitational Field of a Distri-
Distribution of Particles Rotating about an Axis of Symmetry, Proc.
Royal Soc. Edinburgh 107, part II.
1937
101. Степанов В. В., Курс дифференциальных уравпений,
М.-Л., ОНТИ.
102. Т и х о в Т. А., Об отклонении световых лучей в поле тяготе-
тяготения звезд, ДАН i6, № 4.
103. С h о у Р. V., Isotropic Static Solutions of the Field Equations
in Einstein's Theory of the Gravitation, Amer. Journ. Math. 59.
104. Einstein A., Rosen N., On Gravitational Waves,
Journ. Franklin Inst. 223.
105. Широков П. А., К вопросу о трансляциях в римановых
пространствах, Изв. Казанск. физ.-матем. об-ва, сер. 3, 9.
106. Петровский И. Г., О проблеме Коши для системы урав-
уравнений с частпыми производными, Матем. сб. 2 D4) : 5.
1938
107. Thomas Т. Y., New Theorems on Riemann Einstein Spaces,
Матем. сб. З D5) : 2.
108. Широков П. А., Симметрические конформно-евклидовы
пространства, Изв. Казанск. физ.-матем. об-ва, сер. 3, 11.
109. F i a I k о w A., Einstein Spaces on a Space of Constant Curva-
tura, Proc. Nat. Acad. Sci. USA 24.
1939
ПО. С x о у т е п И. А. и С т р ой к Д. Дж., Введение в новые
методы дифференциальной геометрии, т. 1, М.—Л., Гостехиздат.
111. Фок В. А., О движении конечных масс в общей теории отно-
относительности, ШЭТФ 9, № 4.
112. Клейн Ф., Высшая геометрия, М.—Л., Гостехиздат.
113. Ы a a n t j e s Y., W г о n a W., Ober konformeuklidische
und Einsteinsche Raumo Gerader Dimensionen, Proc. kon. Ned.
Akad. Amsterdam 42.
БИБЛИОГРАФИЯ 447
114. F i a 1 к о w A., Totally Geodesic Einstein Spaces, Bull A.mer
Math. Soc. 45.
115. КартанЭ., Теория групп и геометрия, Казань, стр. 113—141.
116. Н 6 hi H. und Papapetrou A., Ober die Selbstenergie
und das Gravitationsfeld einer elektrischen Punktladung, Zs.
Physik 112, 65—88.
117. H о h 1 H. und Papapetrou A., Ober die innere Bewe-
gung des Elektrons, I, Zs. Physik 112, 512—541.
118. Papapetrou A. und И 6 h 1 H., Ober die innere Bewe-
gung des Elektrons, II, Zs. Physik 114, 478—495.
119. Pap apetrou A., Drehimpuls- und Schwerpunktsatz in
der relativistischen Mechanik, Praktika de l'Academie d'Athenes
14, 54—547.
1940
120. Чеботарёв И. Г., Теория групп Ли, М.—Л., Гостехиздат.
121. Во г о р о д с к и й А. Ф., К вопросу о природе красного сме-
смещения в спектрах внегалактических туманностей, Циркуляр
ГАО № 29.
122. Богородский А. Ф., Задача Кеплера в общей теории
относительности, Циркуляр ГАО № 30, Пулково.
123. Gopson E. Т., Ruse M. S., Harmonic Riemannian Spaces,
Proc. Roy. Soc. Edinburgh 60, 117 — 133.
124. Hohl H., Papapetrou A., Ober die innere Bewegursg
dos Elektrons, III, Zs. Physik 116, 153—184.
125. Papapetrou A., Drehimpuls- und Schwerpunktsatz in
der Diracschen Thoorie des Elektrons, Praktika de l'Academie
d'Athenes 15, 404—417.
1941
126. Г а н т м a x e p Ф. P. и К p e и н М. Г., Осцилляционпые
матрицы и малые колебания механических систем, М.—Л., Гос-
Гостехиздат.
1942
127. Т а к е п о Н., Equations characterising Various Riemann Spaces
treated in Cosmologies, Journ. Sci. Hiroshima Univ., series A, 12.
128. Walker A. G., Note on a Distance Invariant and the Calcu-
Calculation of Ruse's Invariant, Proc. Edinburgh Math. Soc. B), 7.
129. Fialkow A., Correction to «Totally Geodesic Einstein
Spaces», Bull. Amer. Math. Soc. 48.
130. Sasaki S., On a Relation between a Riemannian Space which
is Conformal with Einstein Spaces and Mormal Conformally
Connected Spaces whoso Groups of Holonomy Fix a Point or
a Hypersphere, Tensor 5, 66—72.
1943
131. Y a n о К., Conformal and Concircular Geometries in Einstein
Spaces, Proc. Imp. Acad. Tokyo 19, 444—453.
132. Wong Y. Ch., Some Einstein Spaces with Conformally Se-
Separable Fundamental Tensors, Trans. Amer. Math. Soc. 53.
448 БИБЛИОГРАФИЯ
133. Yang Chow Wong, Family of Totally Umbilical Hyper-
surfaces in a Einstein Space, Ann. Math. 44.
134. Papapetrou A., Les corpuscules a structure multipolaire
en relativite restreinte, Praktika do I'Academie d'Athenes 18,
40—50.
135. Papapetrou A., La structure interieure des corpuscules
a constitution mono-bipolaire, Praktika de I'Academie d'Athe-
d'Athenes 18, 50—62.
136. Papapetrou A., Ondes gravifiques du corpuscule mono-
bipolaire, Praktika de l'Academie d'Athenes 18, 313—317.
137. Papapetrou A., La loi des moments dans un systeme quel-
conque de coordonnees, Praktika de I'Academie d'Athenes
18, 317—323.
1944
138. К у р о ш А. Г., Теория групп, М.—Л., Гостехиздат.
139. Lichnerowicz A., Sur les espaces riemanniens comple-
tement harmoniques, Bull. Soc. Math. France 72.
140. Papapetrou A., La theorie de la gravitation dans la rela-
relativite restreinte, Praktika de l'Academie d'Athenes 19, 224—23fi.
1945
141. Walker A. G., A Particular Harmonic Riemannian Space,
Journ. London Math. Soc. 20.
142. Walker A. G., On Completely Harmonic Spaces, Journ.
London Math. Soc. 20.
1946
143. Y ang Chow Wong, Some Theorems on Einstein 4-Space,
Duke Math. Journ. 13, № 4.
144. N a r 1 i к a r V. V., К a r m a r к а г К. К., On a Curious So-
Solution of Relativistic Field Equations, Currient Sci. 15.
145. Walker A. G., Symmetric Harmonic Spaces, Journ. London
Math. Soc. 40.
146. Петров А. З., Один тип пространств Эйнштейна, Труды
Казанск. авиационного ин-та 7.
1947
147. Эйзенхарт Л. П., Непрерывные группы преобразований,
М., ИЛ.
148. В е й л ь Г., Классические группы, их инварианты и пред-
представления, М., ИЛ.
149. Паули В., Теория относительности, М.—Л., Гостехиздат.
150. W г о n a W., Sur les conditions necessaires et suffisantes pour
qu'un espace soit Einsteinien ou conforme-euclidien (см.
статью «Польское матем. общество» в УМН 2, вып. 1 A7)).
151. Рашевский П. К., Геометрическая теория уравнений
с частными производными, М.—Л., Гостехиздат.
152. Бергман П. Т., Введение в теорию относительности, М., ИЛ.
БИБЛИОГРАФИЯ 449
153. Каган В. Ф., Основы теории поверхностей, ч. J, М.—Л.,
Гостехиздат.
154. Papapetrou A.,A Static Solution of the Equations Gravi-
Gravitational Field for an Arbitrary Charge-Distribution Proc Roval
Irish Academy 51, A, 191—204.
1948
155. H о р д е н А. П., Дифференциальная геометрия, М., Учпедгиз.
156. Ландау Л. иЛифшиц Е., Теория поля, М.—Л., Гос-
Гостехиздат.
157. Петров А. 3., О кривизне римаяовых пространств ДАН
61, № 2.
158. Розенфельд Б. А., Дифференциальная геометрия
образов симметрии, ДАН 59, № 6.
159. Mme Foures et Lichnerowicz A., Sur un theoreme
global de reduction des ds2 stationaires d'Einstein, Compt.
Rend. Acad. Sci. (Paris) 226.
160. Фиников С. П., Метод внешних форм Картана, М.—Л.,
Гостехиздат.
161. W г о n a W., Conditions necessaires et suffisantes qui deter-
minent les espaces Einsteiniens, conformement euclidiens et de
courbure constante, Ann. Soc. Polon. Math. 20.
162. Papapetrou A., Einstein's Theory of Gravitation and
Flat Space, Proc. Royal Irish Academy 52, A, 11—23.
163. Papapetrou A., The Question of Non-Singular Solutions
in the Generalized Theory of Gravitation, Phys. Rev. 73, 1105—
1108.
1949
164. П е т р о в а И. М., Об уравнении движения и тензоре материи
для системы конечных масс в общей теории относительности,
ЖЭТФ 19, вып. 11.
165. Петров А. 3., К теореме о главных осях тензора, Изв.
Казанск. физ.-матем. об-ва, сер. 3, 14.
166. К а р т а н Э., Геометрия групп Ли и симметрические про-
пространства, М., ИЛ.
167. Einstein A., Infeld L., On the Motion of Particles
in General Relativity Theory, Canad. Journ. Math. 1.
168. Егоров И. П., К усилению теоремы Фубини о порядке
групп движений рпмаповых пространств, ДАН 66, № 5.
1950
169. Розенфельд Б. А. и Абрамов А. А., Пространства
айфинной связности и симметрические пространства, УМН 5,
вып. 2 C6).
170. Н о р д е н А. П., Пространства аффинной связности, М.—Л.,
Гостехиздат.
171. Петров А. 3., Об одновременном приведении тензора и би-
бивектора к каноническому виду, Уч. зап. Казанск. ун-та 110,
кн. 3.
29 а. 3. Петров
450 ' . библиография ¦
172. Г у р е в и ч Г. В., О некоторых линейных преобразованиях
симметрических тензоров и поливекторов, Матем. сб. 26, № 3.
173. Lichnerowicz A., Elementes du calcul tenseuriel, Paris.
174. Rainich G. Y., Mathematics of Relativity, New York.
175. Kniper N. H., Einstein Spaces and Connections, I, II,
Kon. Ned. Acad. Amsterdam Proc. 53.
1951
176. Петров А. З., О пространствах, определяющих поля тяго-
тяготения, ДАН 81, № 2.
177. Papapetrou A., Equations of Motion in General Relati-
Relativity, Proc. Phys. Sci., series A, 14, 64.
178. Петров А. З., О существовании в поле тяготения гармони-
гармонической функции, зависящей только от расстояния, Уч. зап.
Казанск. ун-та 111, кн. 8.
179. Kniper N. II., Sur les proprietes conformes de espaces
d'Einstein, Coll. Geometrie Differentielle, London.
180. T a u b A. H., Empty Space-Times Admitting a Three Pa-
Parameter Group of Motions, Ann. Math. 53, № 3, 472—490.
1952
181. Петров А. 3., Регулярные пространства Эйнштейна, допу-
допускающие транзитивную группу движений, Уч. зап. Казанск.
ун-та 112, кн. 10.
182. Петров А. 3., Поля тяготения с комплексными стационар-
стационарными кривизнами, Уч. зап. Казанск. ун-та 112, кн. 10.
183. Петров А. 3.,0 полях тяготения, Юбилейный сб. «125 лет
неевклидовой геометрии Лобачевского», М.—Л., Гостехиздат,,
184. Широков А. П., К вопросу об Л-пространствах, Юбилей-
Юбилейный сб. «125 лет неевклидовой геометрии Лобачевского»,
М.—Л., Гостехиздат.
185. Ruse H. S., Simply Harmonic Affine Spaces of Symmetric
Connection, Publ. Math. Debradu.
186. Patterson E. M., Simply Harmonic Riemann Extensions,
Journ. London Math. Soc. 27.
187. Соколов А. А., Замечания к квантовой теории гравита-
гравитационного поля, Вестник МГУ № 9, 9—19. "
1953
188. Рашевский П. К., Риманова геометрия и тензорный ана-
анализ, М.—Л., Гостехиздат.
189. Франкль Ф. И., Некоторые принципиальные замечания
к общей теории относительности, УФН 8, вып. 3.
190. Александров А. Д.,О сущности теории относительности,
Вестник ЛГУ, сер. матем., физ. и хим., № 8.
191. Александров А. Д. и Овчинников В. В., За-
Замечания к основам теории относительности, Вестник ЛГУ, сер.
матем., физ. и хим., №11.
БИБЛИОГРАФИЯ 451
192. Александров Л. Д., По поводу"некоторых взглядов на
теорию относительности, Вопросы философии, Л° 5.
193. JI а н д а у Л. Д.нЛифшицЕ.М., Механика сплошных тел.
194! Петровский И. Г., Лекции об уравнениях с частными
производными., М.—Л., Гостехиздат.
195. Ф р а н к л ь Ф. И., О гравитационных волнах и о движении
газов в сильных переменных гравитационных полях, Труды
физ.-матем. факультета Киргизского ун-та, вып. 2.
196. Lichnerowicz A., Etude des equations du champ de la
theorie unitaire d'Einstein, Rend. Sem. Mat. e fis. Milano
A953—1954), 14—133.
197. Lichnerowicz A., Equations de Laplace et espaces har-
moniques, Premier colloque sur les equations aux derivees parti-
elles, Louvain, 17 — 19.
198. Willmore' T. Y., Mean Value Theorems in Harmonic
Riemannian Spaces, Joura. London Math. Soc. 25.
199. Делоне Б. Н., Краткое изложение доказательства непро-
непротиворечивости планиметрии Лобачевского, М., Изд. АН СССР.
200. Vranceanu G., A supra grupurilal de miscare ale unii
spatii Riemann cupartu dimensiomi, Sludii si cercetarri mat. 4,
№ 1—2.
1954
201. Фок В. А., О работе Ф. И. Франкля «Некоторые принципиаль-
принципиальные замечания к общей теории относительности», У ФН 9, вып. 4.
202. И н ф е л ь д Л., Несколько замечаний о теории относитель-
относительности, Вопросы философии, № 5.
203. К р у ч к о в и ч Г. И., Классификация трехмерных римано-
римановых пространств по группам движений, УМН 9, вып. 1 E9).
204. Широков П. А., Симметрические пространства 1-го клас-
класса, Уч. зап. Казанск. ун-та 114, кн. 8.
205. Понтрягип Л. С, Непрерывные группы, 2-е изд., М.,
Гостехиздат.
206. Rosen N., Bull. Res. Council. Israel 3.
207. Петров А. 3., Классификация пространств, определяемых
полями тяготения, Уч. зап. Казанск. ун-та 114, кн. 8.
208. Норден А. П., О комплексном представлении тензоров
бипланарного пространства, Уч. зап. Казанск. ун-та 114, кн. 8.
209. Халатников И. М., Некоторые вопросы релятивистской
теории Эйнштейна, ЖЭТФ 27, вып. 5.
210. Pounder Y. R., On Relativically Rigid Surfaces of Revolu-
Revolution, Comm. Dublin Inst. Adv. Stud., series A, № 11.
211 T a u b A. H., General Relativitic Variational Principles for
Perfect Fluids, Phys. Rev. 94, № 6, 146—470.
212 Salzman G., Taub A. H., Born-Type Rigid Motion
' in Relativity, Phys. Rev. 95, № 6, 1659—1669.
213 Pham Man Quan, Compt. Rend. Acad. Sci. (Paris) 238,
№ 3, 324—325.
214. С 1 a u s e r E., Sui fronti d'ondi nella teoria unifoia Em-
steiniana, Rend. Inst. Lombardo Sci. e Lettere, Cl. Sci. mat.
e natur. 87, № 3, 473—492.
29*
452 БИБЛИОГРАФИЯ
215. В и с h d a h 1 Н. A., Reciprocal Static Solutions of the Equati-
Equations 0^=0, Quart. Journ. Math. 5, № 18.
216. Takasu Т., Equations of Motion a Free Particle in the
Author's General Relativity as a Nonholonomic Laguerre
Geometry Realized in the Moving Three Dimensional Cartesian
Space, Proc. Japan Acad. 30, № 9.
217. Schouten J. A., Ricci-Calculus, Berlin.
218. T а к e n о Н., On Solutions of Electromagnetic Equations in
Non-Static Spherically Symmetric Space-Times, Tensor 4, № 1.
219. С и н io к о в Н. С., О геодезическом отображении римановых
пространств на симметрические римановы пространства, ДАН
98, № 1.
220. Papapotrou A., Eine Theorie des Gravitationsfeldes mit
einer Feldfunktion, Zs. Physik 139, 518—532.
221. Papapetrou A., Eine neue Theorie des Gravitationsfeldes,
I, Math. Nachr. 12, № 3_4.
222. Papapetrou A., Eine neue Theorie des Gravitationsfeldes,
II, Math. Nachr. 12, Ss 3—4.
223. Papapetrou A., Urich W., Zur Kohlerschen Formu-
lierung der Gravitationstheorie, Ann. Physik 14, 220—232.
1955
224. P а ш е в с к и й П. К., Теория спиноров, УМН 10, вып. 2.
225. Фок В. А., Теория пространства, времени и тяготения, М.,
Гостехиздат.
226. Ф р а н к л ь Ф. И., О корректности постановки задачи Ко-
Копта и о свойствах гармонических коордипат в общей теории отно-
относительности, Труды физ.-матем. факультета Киргизского ун-та,
вып. 3.
227. Matsumoto Т., Sur la deduction axiomatique desformules
de Transformation de Lorentz, Mem. Coll. Sci. Univ. Kyoto,
A, 29, № 1.
228. Петров А. З., О пространствах максимальной подвижности,
определяемых полями тяготения, ДАН 105, № 5.
229. Розенфельд Б. А., Неевклидовы геометрии, М., Гостех-
Гостехиздат.
230. Егоров И. П., О движениях в пространствах аффинной
связности, Докторская диссертация, МГУ.
231. Lichnerowicz A., Theories relativistes de la gravitation
et de I'electromagnetisme, Masson &. Cie, Paris.
232. Storchi E., Su una nuova interpretazione del principii
dell'acione potenziale, Bull. Unione Mat. Ital. 10, № 2.
233. T a k e n о IL, On Conformal Transformations in the Space-
Time of Relativistic Cosmology, Tensor 4, № 3.
234. К г о n G., A Physical Interpretation of the Riemann-Christof-
fel Curvature Tensor, Tensor 4, № 3.
235. Широков А. П., Об одном свойстве ковариантно постоян-
постоянных аффиноров, ДАН 102, № 3.
236. Т a k e n о Н., On Groups of Conformal Transformations in
Spherically Symmetric Space-Times, Tensor 5, № 1.
БИБЛИОГРАФИЯ 453
237. I к е d a M., On Static Solutions of "Einstein's Generalized
Theory of Gravitation, II, Progr. Theor. Phys. 13, N° 3.
238. Мейстер Г. И. и Папапетру А., О роли коорди-
координатного условия в выводе уравнений движения общей тео-
теории относительности, Бюлл. Польск. Акад. наук, отд. III
3, № 3.
239. Егоров И. П., Максимальные подвижные римановы про-
пространства F4 непостоянной кривизны, ДАН 103, № 1.
240. PapapetrouA.,Urich W., Das Pol-Dipol-Teilschen in
der Gravitationsfeld und elektromagnetischen Feld, Zeitschr.
Naturforschung 10 A, 109—117.
241. В о с h n e r S., Stationary Space-Time in General Relativity,
Math. Ann. 41, 485—490.
1956
242. T a k e n о Н,, On the Theory of Gravitational Waves, Tensor
6, № 1.
243. Петров А. З., Классификация пространств, определяемых
полями тяготения, по группам движений, УМН 11, вып. 4 G0).
244. Петров А. 3., Движения в полях тяготения, Труды III Все-
Всесоюзного матем. съезда, т. II.
245. Narlikar V. V., Results of Gravitational Significance in
Riemannian Geometry, Nature 177, № 4520.
246. V e r m a D. N., Roy S. R., Special Metric Forms and their
Gravitational Significance, Bull. Calcutta Math, Soc. 48,
№ 3.
247. Mme Foure s-B tuhat Y., Sur I'integration des equations
de la relativite generale, Journ. Rat. Mech. und Anal. 5, № 6.
248. Buchdahl H. A., Reciprocal Static Solutions of the
Equations of the Gravitational Field, Austral. Journ.
Phys. 9, № 1.
249. Y u s t K., Strenge Kugelsymmetrische Losungen Ein-
steinschen Feld Gleichungen, Zs. Physik 34, № 2, 235—240.
250. Ceheniau J., Derbever R., Les invariants de courbure
de I'espace de Riemann a quatre dimensions, Bull. Acad. Roy.
Belgique 42, № 2.
251. P i r a n i F. A. E., On the Physical Significance of the Riemann
Tensor, Acta Physica Polonica 25, fasc. 8.
252. Траутман А., Уравнения Киллинга и законы сохранения,
Бюлл. Польск. АН, отд. III, 4, № 10, 671—874.
253. Франкль Ф. И., О корректности постановки задачи Ко-
Копта и о свойстве гармонических координат в общей теории отно-
относительности, УМН 11, вып. 3.
254. Фок В. А., Замечание к работе Ф. И. Фраикля «О коррект-
корректности постановки задачи Копта и о свойство гармонических
координат в общей теории относительности», УМН 11, вып. 3.
255. Mikhail F. Y., Solutions of Einstein's Field Equations for
Empty Space, A'in Shams Bull. № 1, 125—135.
256. С и н ю к о в II. С., Нормальные геодезические отображения
римановых пространств, "ДАН 111. № 4, 766—767.
454 БИБЛИОГРАФИЯ
1957
257. Я н о К. и Б о х н е р С, Кривизна и числа Бетти, М., ИЛ.
258. Р irani F. A. E., Invariant Formulation of Gravitational
Radiation Theory, Phys. Bev. 105, № 3, 1089—1099.
259. К е р е с Х., О понятии инерциальной системы в общей теории
относительности, сб. «Исследования по теоретической физике»,
Тарту.
280. Кручкович Г. И., О движениях в римановых простран-
пространствах, Матем. сб. 41 (83) : 2.
261. Петров А. 3., Пространства, определяемые полями тяго-
тепия, Докторская диссертация, МГУ.
262. Geheniau J., Une classification de espaces Einsteiniens,
Compt. Rend. Acad. Sci. (Paris) 244, № 6.
263. Joseph V., Physical Properties of some Empty Space-Times,
Proc. Cambr. Phys. Soc. 53, 836.
264. К е р е с Х., Некоторые вопросы общей теории относительно-
относительности, сб. «Исследования по теоретической физике», Тарту.
265. Conference on the Role of Gravitation in Physics, Carolina.
266. Pham Man Q u a n, Inductions electromagnetiques dans un
milieu anisotrope relativiste, Comrt. Rend. Acad. Sci. (Paris)
245, № 21.
267. Pham Man Quan, Inductions electromagnetiques en re-
lativite generale et principe de Format, Acch. Art. Mech. and
Anal. 1, 54—86.
268. Айтмурзаев Т., Метод решения уравнений неустановив-
неустановившегося течения газа с учетом диссипативных процессов в общей
теории относительности, ДАН 113, № 4.
269. Marder L., On the Existence of Cylindrical Gravitational
Waves, London King's College, Тезисы докторской диссертации,
pre-print; см. также: Ргос. London Math. Soc, A, 244 A958).
270. Петров П. И., Инварианты второго порядка кватернарной
дифференциальной квадратичной формы, ДАН ИЗ, № 6.
271. Papapetrou A., Uber periodische nichtsingulare Losungen in
der allgemeinen Relativitatsthcorie, Ann. Physik 6F, 20, № 7—8.
272. T a k e n о Н., On Plane Wave Solutions of Field Equations in
General Relativity, Tensor 7, № 2, 97—102.
273. Bondi H., Negative Mass.in General Relativity, Rev. Modern
Phys. 20, № 3.
274. С и н ю к о в Н. С, Эквидистантные римановы пространства,
Научн. Ежегодн. Одесск. ун-та.
275. Papapetrou A., Eino neue Formulierung in der Relativi-
tatstheorie, Schriften d. Forsch. Inst. f. Mathematik b. d. Deu-
tschen Akaderuie d. Wissenschaften zu Berlin, № 1, 210—221.
276. Papapetrou A., Le probleme du mouvement dans la
relativite gen era le et dans la theorie du champ unifie d'Einstein,
Ann. Inst. Henri Poincare 15, 173—203.
277. Treder H., Stromladungsdefinition und elektrische Kraft in
der Feldtheorie, Ann. Physik 19, 369—380.
278. Mei.ster H. I., Die Bewegungsgleichungen in der Theorie
des Gravitationsfeldes mit einer Feldfunktion, Zs. Physik 147.
БИБЛИОГРАФИЯ ' 455
279. Taiib A. H., Singular Hypersurfaces in General Relativity,
Illinois Journ. Math. 1, № 3, 370—388.
280. Taub A. H., Approximate Solutions of the Einstein Equations
for I sen tropic Motions of Plane Symmetric Distributions of
Perfect Fluids, Phys. Rev. 107, № 3, 884—900.
281. Bond! H., Plane Gravitational Waves in General Relativity,
Nature 179, 1072—1073.
282. Y a n о К., Nagano Т., Einstein Spaces Admitting a One-
parameter Group of Conformal Transformations, Ann. Math.
69, № 2, 451—461.
283. Pira ni F. A. E., Tetrad Formulation of General Relativity
Theory, Bull, de 1'Acad. Polon. Sci!, Cl. Ill, 5, № 2, 143—146.
284. Trautman A., On the Conservation Theorems and Coordi-
Coordinate Systems in General Relativity, Bull, de l'Acad. Polon. Sci,
Cl. HI, 5, № 7, 721—727.
285. Trautman A., Discontinuities of Field Derivatives and
Radiation in Covariant Theories, Bull. Acad. Polon. Sci., Cl. Ill,
5, № 3, 273—274.
1958
286. Петров П. И., Поправка к статье «Инварианты второго
порядка кватерпарной дифференциальной квадратичной фор-
формы», ДАН 119, № 5.
287. Петров А. 3., Классификация полей тяготения общего
вида, Изв. вузов, Матем., № 6 G).
288. Trautman A., Sur la propagation des discontinuies du ten-
seur de Riemann, Compt. Rend. Acad. Sci. (Paris) 246.
289. Trautman A., Lectures on the General Relativity, pre-
preprint, King's College, London.
290. Cattaneo C., Sui postulate comuni della cinematica
classica e della cinematica relativistica, Atti Accad. Naz. Lin-
cei Rend, Cl. sci. fis., mat. e natur. 24, № 5, 526—532.
291. Bel L., Sur la radiation gravitationelle, Compt. Rend. Acad.
Sci. (Paris) 247, № 18, 1044—1046.
292. Eisenhart L. P., Spaces for which the Ricci Scalar R is
Equal to Zero, Proc. Nat. Acad. Sci. USA 44, JV° 7, 195—648.
293. T r e d e r H., Stoszwellen des Gravitationsfelds, Ann. Physik,
7F, 2, № 5—6.
294. Papapetrou A., Ober periodische gravitations- und elektro-
magnetische Felder in der allgememen Relativitatstheorie, Ann.
Physik, 7F, 1, № 4—5. _
295. Papapetrou A., Ober zeitabhangige Losungen der Feld-
gleichungen der allgememen Relativitatstheorie, Ann. Physik,
7F, 2, № 3—4.
296. O'Raifearteigh L., Synge J. L., A Property of the
Empty Space-Time, Proc. Royal Soc, series A, 246, 299—300.
297. Israel W., Discontinuities in the Spherically Symmetric
Gravitational Fields and Shells of Radiation, Proc. Royal Soc,
series A, 248, 404—414.
298. Synge J. L., Whittaker's Contributions to tho Theory of
Relativity, Proc. Math. Soc. 11, part I, June.
456 библиография
299. Bel L., Etude algebrique d'un certain type de tenseurs de
courbure. Lecas3 dePetrov, Compt. Rend. AcacL Sci. (Paris) 247,
№ 27, 2096—2099.
300. Trautman A. i Tulczyjew W., Gravitacja i nie-
zmelnniczosc, Postepy Fizyki 9, 1.
301. Tra utman A., Radiation and Boundary Conditions in the
Theory of Gravitation, Bull. Acad. Polon. Sci. 6, № 6.
302. Trautman A., Boundary Conditions at Infinity for Physi-
Physical Theories, Bull. Acad. Polon. Sci. 6, № 6.
303." Trautman A., Sur la propagation des discontinuites du
t. tenseur de Riemann, Compt. Rend. Acad. Sci. (Paris) 246,
' 1500—1502.
304. T а к e n о Н., On Plane Wave Solutions of the Field Equations
in General Relativity, II, Tensor 8, № 1.
305. Joseph V., On Apparent Luminosity in General Ralativity,
Month. Nat. Roy. Astr. Soc. 118, № 6.
306. T о д о р о в И. Т., Об одной теореме единственности для вол-
волнового уравнения (к дискуссии В. А. Фок — Ф. И. Франкль),
УМН 13, выи. 2.
307. Г у Ч а о-х а о, О некоторых типах однородных римановых
пространств, ДАН 122, № 2.
308. Kundt W., Methoden zur Charakterisierung von Losungen der
Einsteinschen Gravitations feldgleichungen, Dissertation zur
Erlangung des Doktorgrades (pre-print), Universitat Hamburg.
309. Bel L., Definition d'une densite d'energie et d'un etat de
radiation totale generalisee, Compt. Rend. Acad. Sci. (Paris)
246, 3015—3018.
310. Hlavaty V., The Structure of our Space, Aeronautical Engi-
Engineering, Review, April.
311. Geiszlerund D., T r e d e r H., Ober ebene Wellen in
der allgemeinen Relativitatstheorie, Tensor 8, 165—168.
312. Pham Tan Huang, La methode des singularites pour les
equations du mouvement en relativite generale et en theorie du
champ unifie, Ann. Schola norm, super. Pisa, Sci. fis. e mat.
12, № 4, 425—477.
313. Mme Foure s-B r u h a t Y., La relativite generale, Sernm.
mec. analyt. et mec. celeste, M. Janet. Fac. Sci., Paris 1957—
1958. I. Annee, Paris.
314. Брумберг В. А., Уравнения движения и координатные
условия в релятивистской задаче N тел., Астр. журн. 35,
№ 6, 839—903.
315. Пугачев Я. И., Дифференциальные тождества и разреши-
разрешимость уравнений Эйлера — Лагранжа, Труды Краснодарск.
ин-та тицев. пром., вып. 20, 55—57.
1959
316. Норден А. П.,О комплексном представлении тензоров про-
пространства Лоренца, Изв. вузов, Матем., № 1 (8).
317. Александров А. Д., Философское содержание и зна-
значение теории относительности, Вопросы философии, № i.
БИБЛИОГРАФИЯ 457
318. Норден А. П., Вишневский В. В., О комплексном
представлении инвариантов четырехмерного риманова про-
пространства, Изв. вузов, Матем., № 2 (9).
319. Takasu Т., Em Seitenstiick der Relativitatstheorie als eine
erweiterte Laguerresche Geometrie, Proc. Japan Acad. 35, № 2.
320. Петров А. З., О симметрических полях тяготения, Изв.
вузов, Матем., № 2 (9).
321. Вавилов Б. Т., О слабых полях гравитации, Изв. вузов,
Физика, № 2.
322. Sachs К. К., A Coyariant Integral Conservation Law in
Vacuum Gravitational Fields of Тире III (pre-print), Hamburg
University.
323. Bel L., Introduction d'un tenseur du quatrieme ordre, Compt.
. Rend. Acad. Sci. (Paris) 248, 1297 — 1300.
324.'В el L., Quelques remarques sur la classification de Petrov.
Etude du cas 2, Compt. Rend. Acad. Sci. (Paris) 248,
2561—2563.
325. И 1 a v a t у V., The Holonomy Group, I. The Curvature Ten-
Tensor, Journ. Math, and Mech. 8, 2—59, 285—308.
326. Hlavaty V., The Holonomy Group, II. The Lie Group
Induced by a Tensor, Journ. Math, and Mech. 8, 597—622.
327. Hlavaty V., The Holonomy Croup, III. Covariant Constant
Quadratic Tensors, Journ. Math, and Mech. (in print).
328. Hlavaty V., The Holonomy Group, IV. The General with
Symmetric Connection, Journ. Math. and. Mech. (in print).
329. Takasu Т., Adjusted Relativity Theory: Applications of
Extended Euclidian Geometry, Extended Equiform Geometry
and Extended Laguerre Geometry of Physics, Journ. Yokohama
University, series D (Math.).
330. Geiszler D., Papapetrou A. und T r e d e r H.,
Die Gravitationstrahlung eines Zeitweilig nichtstationaren
Systems, Ann. Physik 2, 344—350.
331. Papapetrou A. und T r e d e r H., Das Sprungproblem
erster Ordnung in der allgemeinen Relativitatstheorie, Math.
Nachr. 20, 53—66.
332. T а и b A. H., Small Motions of Spherically Symmetric Distri-
Distribution of Matter, Illinois University (pre-print).
333. Arnowitt R., Quantum Theory of Gravitation: General
Formulation and Linearized Theory, Phys. Rev. 113, № 2,
745—750.
334. Arnowitt R., D e s e r S., and Misner C. W., Dy-
Dynamical Structure and Definition of the Energy in General Rela-
Relativity (pre-print), Depart, of Physics Syracusa University.
335. Bergman P. G., Summary of the «Colloque international
de Rayaumont» (pre-print), Syracusa University.
336. Newman D. J., Kilmister С W., A new Expression
for Einstein's Law of Gravitation, Proc. Cambr. Philos. Soc. 55,
№ 1, 139—141.
337. Петров А. З., КайгородозВ. Р., Абдул-
л и и В, Н., Классификация полей тяготения общего вида по
группам движений. I, Изв. вузов, Матем., № 6, 118—130.
458 БИБЛИОГРАФИЯ
338. Петрова Н. М.,0 законах сохранения для системы враща-
вращающихся тел в общей теории относительности, Тематический
сб. «Исследования процессов переноса. Вопросы теории отно-
относительности», Алма-Ата, Казахск. ун-т, 192—208.
339. Айтикеева 3. А. и Петрова Н. М., О системе
сферически симметрических тел в общей теории относителыго-
сти, Тематический сб. «Исследования процессов переноса.
Вопросы теории относительности», Алма-Ата, Казахск. ун-т,
209—228.
340. Мурзагалиев Г., Тензоры момента импульса (кине-
(кинетического момента) и моменты силы в релятивистской меха-
механике, Тематический сб. «Исследования процессов переноса.
Вопросы теории относительности», Алма-Ата, Казахск. ун-т,
229—236.
341. Мицкевич Н. В., Вакуумный нелинейный эффект в те-
теории гравитации, ЖЭТФ 36, вып. 4, 1207—1214.
342. Debever R., Tenseur de super-energie, tenseur de Rie-
mann: Cas singuliers, Compt. Rend. Acad. Sci. (Paris) 249,
1744—1746.
343. Debever R., Sur le tenseur de super-energie, Compt. Rend.
Acad. Sci. (Paris) 249, 1324—1326.
344. Takeno H.,A Note on the Theory of the Gravitational Wa-
Waves, Tensor 9, № 2, 73—75.
345. Arnowitt R., Deser S., Misner C. W., Energy
and the Criteria for Radiation in General Relativity (pre-print).
346. S у n g e T. L., A Theory of Elasticity in General Relativity,
Math. Zeitschr. 72, 82—87.
347. Miss Durga Roy, Resistance on a Circular Cylindre Due to
any Number of Vortices Lying in Two Rows, Journ. Appl. Math,
and Phys. 10, 5, 502—508.
348. Mast СВ., Strathdce J., On the Relativistic Inter-
Interpretation of Astronomical Observations, Proc. Roy. Soc, A,
252, 476—487.
349. Иосифьян А. Г., Вопросы единой теории электромаг-
электромагнитного и гравитационыо-инерциального полей, Изд. АН
Арм. ССР, Ереван.
350. Takeno H., On Geometric Properties of some Plane Wave
Solutions in General Relativity, I, Tensor (new series) 9, № 2.
79—93.
351. Takeno H., On Geometric Properties of some Plane
Wave Solutions in General Relativity, II, Tensor 9, № 3,
168—174.
352. Ikoda M., Miyachi Y., Coordinate Systems in General
Relativity and Geometrical Representation for Physical Quanti-
Quantities, Progr. Theor. Phys., № 9, 45—68.
353. Bondi H., Pirani F. A. E., Robinson I., Gravita-
Gravitational Waves in General Relativity, III, Exact Plane Waves,
Proc. Roy. Soc, A, 251, 519—553.
354. Pirani F. A. E., Gravitational Waves in General Relativity,
IV". The Gravitational Field of a Fast-Moving Particle, Proc.
Roy. Soc, A, 252, 96—101.
БИБЛИОГРАФИЯ 459
355. Brill D.R., On the Positive Definite Mass of the Bondi-We-
Bondi-Weber-Wheeler Time-Symmetric Gravitational Waves, Ann. Phys
7, № 4, 466—483.
356. A r а к i H., On Weak Time-Symmetric Gravitational Waves
Ann. Physik 7, 456—465.
1960
357. Петров A. 3., Кайгородов В. Р., А б д у л-
л и н В. Н., Классификация полей тяготения общего вида
по группам движений, II, Изв. вузов, Матем., № 1.
358. Петров А. 3., Кайгородов В. Р., А б д у л-
л и н В. П., Классификация полей тяготения общего вида по
группам движений, III, Изв. вузов, Матем., № 4.
359. Т a k en о Н., On the Theory of Gravitational Waves in Ge-
General Relativity (pre-print, to be published in Tensor 10).
360. Arnowitt R., Deser S. and Misner C. W., In-
Interior Schwarzschild Solutions and Interpretation of Source
Terms (pre-print), Depart, of Physics, Brouders University,
Waltham, Massachysetts.
361. К e r r R. P., On the Quasi-Static Approximation in General
Relativity, Nuovo cimento 10, 16.
362. Penrose R., A Spinor Approach to General Relativity
King's College, University of Lond.
предметный указатель
Автоморфизм 165
Аксиомы группы 78
Альтернирование тензоров 15
Базис группы 77
— канонический 152
Базисы элементарных делителей 74,
118, 367
Бивектор 63, 113
— однолистный 102, 120, 131
— простой 120, 131
— стационарный 120
Битензор 114
— изотропный 155, 158
— кососимметрический 155
— простой 155, 158
— симметрический 155
Валентность тензора 10
Вектор волновой 364
— главной нормали кривой 40
— единичный 18
— изотропный 9
— Киллинга 81, 176
— нормальный к т-поверхности 54
— особый 271
— потока частиц 376
—, принадлежащий поверхности 53
— пространственный 52
— собственный 68
тензора энергии-импульса 367
— стационарный 120
Векторы взаимные 27
Величина связывающая 116
Вес тензорного поля 9
Вычитание тензоров 13
Геодезическая изотропная 40
— пеизотропная 41
Геометрия Клейна 12
— Минковского 97
— пространства-времени 97
— риманова 9
Гиперповерхности, геодезически па-
параллельные 55
Гиперповерхность 52
—, ориентированная в пространстве
343
Гиперсфера геодезическая 47
Гиперсферы, геодезически парал-
параллельные 47
Гомеоморфизм 342
Гравитация 96
Группа абелева 78, i 80
— голономная 166
Группа движений 80
— иыпримитивная 78
— кратно-транзитивная 78
— Ли 75
— лоренцевых автоморфизмов 94
— неразрешимая 79
— нетранзитивная 78
— полу простая 107
— преобразований центроаффин-
ная 12
— примитивная 78
— просто-транзитивная 78
— разрешимая 79
— транзитивная 78
Группы изоморфные 175
— подобные 79, 258
Данные Коши 346
Движение бесконечно малое 77
Движения 165
Делитель нуля 129
¦— элементарный 117
непростой 68
простой 68
Дивергенция вектора 24
— тензора 24
Дифференциал абсолютный 30
— Ли 80
Дифференцирование ковариантное 20
Длина вектора 18
Длительность 18
Единица группы 78
Задача гравитационного поля внеш-
внешняя 99
— внутренняя 99
— интегрирования по времени 350
— Коши 340
внешняя 344 345
внутренняя 343
для идеальной жидкости 384
потока масс 380
— определения начальных дан-
данных Коши 346
условий 350
Закон группы ассопиативпый 76
— преобразования объекта 8
— сохранения 344
тензора энергии-импульса 97,
378
изоморфизм 115
Инварианты й-го порядка 157
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
461
Инволюция абсолютпая 151
Яндекс ковариантный 10
— контравариантный 10
— производный потенциала 346
— собирательный 114
Индикатриса Эйнштейна 100, 367
Канонический зид матриц 130
Классификация полей тяготения 145
— пространств Эйнштейна 117
Комитант 344
Коммутант группы 79
Коммутатор групп 77
Компоненты геометрического объек-
объекта 8
— тензора кривизны ортогональ-
ортогональные 118
Константа космологическая 344
Константы группы структурные 77
Конус изотропных направлений 18
— Риччи 366
Координаты гармонические 57
— Гаусса 52
—, геодезические в точке 43
— голоиомные 59
— допустимые 197
— изотропные полугеодезические
57
— инерциальные 89
— локальные 342
— неголономные 58
— нормальные 48, 174
— полугеодезические 52, 55
— почти-полугеодезические 330
— римановы 44
— точки 7
Коэффициент вязкости 377
Коэффициенты связности 24
Кривая изотропная 10
— па т-поверхности 52
— пространства 51
Кривизна бивекторная 120
— кривой первая 40
— поверхности гауссова 62
— пространства в двумерном на-
направлении риманова 63
квадратичная 100, 102
скалярная 34
— средняя 354
— стационарная 120
Кручение пространства 24
Лакуна 173
Линеаризация уравнений поля 112
Линии тока 379
Линия геодезическая 38
— координатная 53
—- света мировая 10
Я-матрица 117
Матрица двойственно-сопряжен-
двойственно-сопряженная 129
— каноническая 71
— производная 116
— симметрично-сдвоенная 123
Метризация пг-пОЕерхности 54
Метрика определеняо-полоиштель-
ная 122
— пространства 9
Минус-область 18
Мировая линия 10
Многообразие аффинное 114
— бихарактеристическое 363
— дифференцируемое 342
— риманово 9
симметрическое 107
— характеристическое 352, 363
Многообразия конформные 315
Множество локальное бивектовное
114
гп-поверхность 52
m-репер локальный 53
Направление безусловно-стационар-
безусловно-стационарное 121
— изотропное 18
стационарное 121
— условно-стационарное 120
Направления индикатрисы Эйнштей-
Эйнштейна главные 100
— пространства главные 100, 366
— Риччи главные 100
— сопряженные 367
Норма вектора 17
Область вещественных векторов с
отрицательной нормой 13
положительной нормой 18
— n-мерного пространства огра-
ограниченная 7
Оболочка векторов линейная 53
— коммутаторов линейная 79
Образ тензорный 153, 158
— эрмитов 153, 158
Обратный элемент группы 76
Объект геометрический 8
— неголономности 60
Оператор группы 77
— Даламбера обобщенный 57
— скалярный 25
Операция альтернирования 15
— опускания индекса 17
— поднятия индекса 17
— симметрирования 15
Опускание индекса 17
Ориентация гиперповерхности во
времени 343
Ортогональность векторов 18
Орторепер канонический 136, 141
Оси тензора главные 67
Основания специальной теории отно-
относительности 88
Отображение конформное 315
— пространств изотропное 326, 329
неизотропное 326, 330
Эйнштейна 327
конформное 315
— римановых пространств кон-
конформное 315
— тривиальное 327
Отображения конформные независи-
независимые 330
462
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Параллелизм 26
— Леви-Чивита 30
Параллельное перенесение в смысле
Леви-Чивита 30
вектора вдоль кривой 26
тензора вдоль кривой 30
Параметр канонический 39
Параметры Бельтрами дифферен-
дифференциальные второго рода 25
первого рода 25
— существенные 76
Перенос параллельный 86
Плотность веса k скалярная 9
— покоя 370
— энергии в потоке 370
Плюс-область 18
Поверхности, геодезически парал-
параллельные 55
Поверхности транзитивности 78
Поверхность, геодезическая в начале
координат 62
— изотропная 54
— неизотропная 54
— т-мерная 52
Подгруппа одномерная 76
— стационарная 78
Поднятие индекса 17
Поле бивекторное 114
— векторное 11
ковариантное 11
контравариантное 11
— гравитационное постоянное 103
— градиентное 11
— скалярное 11
— тензорное 10
относительное 11
— тяготения гармоническое 422
с осевой симметрией 103, 413
— цилиндрическими волнами
НО, 429
симметрическое 399
статическое 103
центрально-симметрическое
103, 407
Поливектор однолистный 116
Полугруппа 76
Последовательность решений неза-
независимая 329
Потенциал гравитационного поля 96
— Ньютона 343
Правило частного 14
— Эйнштейна 9
Преобразование координат 8
— тождественное 166
— точечное 8
Преобразования галилеевы 89
— координат допустимые 192, 207
— Лоренца 61, 90
— элементарные 126
Прерывность функций и их про-
производных 341
Принцип наложения граничных'
условий 438
— относительности Галилея 89
Произведепие тензоров внешнее 13
внутреннее 14
Производная вектора ковариант-
ная 22
Производная Ли 81
— тензора ковариантная 23
Производные главные 359
Произвол физический 362
Пространства изометричпые рима-
новы 65
— изоморфные 93
— максимальной подвижности 188
— Ti, r 206
Пространство аффинное 12
— аффинной связности 24
— бивекторное 115
метризованное 115
— бинарное 107
— бипланарное 151
— вполие гармоническое 423
— гармоническое 423
—, гармоническое в данной точке
423
— двойных чисел 130
— изотропное Уп 255
— касательпое 53
— класса Сг 8
— конформно-плоское 65, 321
— конформно-приводимое 390
— локальное 12
— максимальной подвижности 167
170, 173
— Мииковского 42, 93, 123
— на куске поверхности 341
— неизотропное Vn 255
— неприводимое 107
— несвободное 150
— обыкновенное 26
— плоское 25
касательное 343
— постоянной квадратичной кри-
кривизны 102
кривизны 64
— риманово приводимое 109, 389
— с кручением 24
цилиндрическими волнами
429
— свободное 145, 345
—, связанное с граничными усло-
условиями 434
— симметрическое 51, 104, 107, 171,
399
— субпроективное 314
— центроаффинное 12
— Эйнштейна 99
статическое 402
Протензор 153, 158
Проэрмитиан 153
Пульсация центрально-симметри-
центрально-симметрическая 103
Пучки взаимно ортогональные 69
— инвариантные 136, 137, 139, 140
Равенство нулю тензора 13
Репер неголономный 59
Решение Букдала 220
— статическое 220
— уравнений поля Баха 105
Бринкмана 105, 24 4
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
463
Решение уравнений поля Букдала
Вейля и Леви-Чивита 104, 243
Верма и Роя 112
Дельсарта 107, 244
Казнера 106, 244
Коттлера 104, 243
Миттера 107, 24 4
'¦ НарликараиКармаркара 110
Петрова 109, 111, 188—205,
209—241
Такено 109
Шварцшильда 104
Шоу 108, 244
Эйнштейна и Розепа 110,
244, 429
— Шварцшильда 220, 243
Решения уравнений поля вза-
взаимные 111
Ротация вектора 24
Ряд тождеств для тензора кривизны
полный 33
Кар.убД полный 37
Свертывание тензоров 14
Семейства импримитивности 78
Сигнатура метрики 122
Символ Кронекера 12
Символы Криетоффеля второго рода
21
первого рода 21
Симметрирование тензоров 15
Система векторов взаимная 27
— координат 7
в Vn специальная 42
геодезическая вдоль кривой 44
голономная 59
изотропная полу геодезическая
57
неголономная 59
•— отсчета инерциальиая 89
— уравнений поля 349
педоопределепная 112
переопределенная 102
Системы координат, одинаково ори-
ориентированные 8
, противоположно ориентиро-
ориентированные 8
Скаляр 9, 11
Сложение тензоров 13
Соответствие конформное 315
Степень ортогональности бивектора
133
— параллелизма бивектора 133
Структуры групп движений неизо-
неизоморфные 175
— неизоморфные 173
Тензор абсолютной инволюции 151
— альтернированный 15
— веса N 10
— дискриминантный 87, 154
— диссипативных процессов 376
— идеальной жидкости 376
— ковариантно постоянный 24
Тензор конформной кривизны 317
— кососимметрический 15
— кривизны 32
— макроскопических тел 370
— метрический 16
— относительный 11
— потока масс 369
— пространства-материи 146
— Риччи 34
— симметрированный 15
— симметрический 15
— сопряженный 151
— чистой материн 369
— Эйнштейна 344
— электромагнитного поля 371, 376
— энергии-импульса 98, 366
Теорема Ли вторая основная 77
— о главных осях тензора 67
Теория относительности общая 95
Тождество Бианки 36
— Риччи 32
Точка области 7
Трансляция 86
Тривектор 160
— метрический 163
Увеличение значения поля 80
— системы координат 80
Угол между векторами 18
Уравнение закона сохранения им-
импульса-энергии 37
— Эйконала 364
Уравнения Киллинга 80
—¦ непрерывности 379
— поля релятивистской теории
гравитации 95
— структуры 182
—Эйлера 41
— Эйнштейна 340, 343
Условие изотропности пространства
108
Условия интегрируемости уравне-
уравнений Киллинга 81
— на бесконечности 434
Форма поверхности вторая 62
первая 62
— производная 117
Функции аналитические 341
—бесконечно дифференцируемые 341
Функция Вейерштрасса 108
— класса Ст 8, 340
на куске поверхности 341
— кусочно-гладкая класса С7" 341,
342
Характеристика д,-матрицы 117
Число двойное 129
Эйконал 364
Эрмитиан 153
Эффект гравитационный 362
ПРИНЯТЫЕ ОБОЗНАЧЕНИЯ
Ат 53
А* 153
16
С1 341
Сг 340
С°° 341
EN 114
^п 12
154
154
63
146
Bn25
32
T 99
Г 99
98
206
Г, 24
а,
V« 23
б« 154
бе 12
4 151
8а Ьс 160
К, у 22
Ка,у 22
[ф] 341
а 57
-*- 194