/

































































































































































































































































































































































































































































































































































































Текст
М. Г. ЧИЛИКИН, А. С. САНДЛЕР
ОБЩИЙ КУРС
ЭЛЕКТРОПРИВОДА
ИЗДАНИЕ ШЕСТОЕ, ДОПОЛНЕННОЕ И ПЕРЕРАБОТАННОЙ
Допущено Министерством высшего и среднего специаль-
ного образования СССР в качестве учебника для студен-
тов электромеханических и электроэнергетических вузов
МОСКВА
ЭНЕРГОИЗДАТ
1981
ББК 31.291
4-61
УДК 62-83(075.8)
Рецензент: Кафедра электропривода и автоматизации
промышленных установок Лешинрадского
политехнического мнегитута
Чиликин М. Г., Сандлер А. С.
4-61 Общий курс электропривода: Учебник для ву-
зов.—6-еизд., доп. и перераб. — М.: Энергоиздат,
1981. — 576 с., ил.
В пер.: 1 р. 40 к.
Книга представляет собой учебник, составленный применительно
к программе курса «Электропривод» для электромеханических спе-
циальностей энергетических и электротехнических вузов. В ней изла-
гаются основы электропривода, а также вопросы управления автома-
тизированными электроприводами.
Пятое издание учебника вышло в 1971 г. Настоящее издание
обновлено в соответствии с последними достижениями науки и тех-
ники, а также новой учебной программой курса.
Кинга рассчитана ии студентов, специализирующихся в области
электрических машин, злектрячееких аппаратов, электротермических
установок и дрхгих специальностей шестой группы.
30307-431
Ч----- — 100-81 (Э). 2302030000
051(0f)-8l v '
ББК 31.291
6П2.1.081
ЧИЛИКИН МИХАИЛ ГРИГОРЬЕВИЧ,
САНДЛЕР АБРАМ СОЛОМОНОВИЧ
ОБЩИЙ КУРС ЭЛЕКТРОПРИВОДА
Редакторы П. Е. Саид л ср, Р. С. С а р б а т о в
Редактор издательства Л. А. Р е ш м н н а
Технический редактор А. С. Давыдова
Корректор И. А. В о л о д я с в а
ИБ № 1699 («Энергия»)
Сдано в набор 14.01.81. Подписано в печать 17.07 8]. Т-22057. Формат
НХЮЗ'/з?. Бумага типографская № 2. Гари, шрифта литературная.
Печать высокая. Усл. псч. л. 30,24. Уч.-изд. л. 33,38. Тираж 100 000 экз.
Заказ 1716. Цена 1 р. 40 к.
Энергоиздат, 113114, Москва, М-114, Шлюзовая паб., 10
Ордена Октябрьской Революции, ордена Трудового Красного Знамени
Ленинградское производственно-техническое объединение «Печатный
Двор» имени Л. М, Горького Союзполпграфнрома при Государствен-
ном комитете СССР по делам издательств, полиграфии и книжной
торговли. 197136, Ленинград. 11-136. Чкаловский пр., 15.
© Энергоиздат, 1981.
ПРЕДИСЛОВИЕ
Шестое издание учебника «Общий курс элек-
тропривода» выходит в свет, когда его авторов — профессо-
ров Михаила Григорьевича Чиликнна и Абрама Соломоно-
вича Сандлера уже нет в живых.
В основу настоящего издания положен учебник, соз-
данный М. Г. Чиликиным, выдержавший пять изданий
в СССР, неоднократно издававшийся за рубежом и полу-
чивший заслуженное признание технической обществен-
ности благодаря широте охвата проблем, ясному изложе-
нию сложных и разнообразных вопросов электрического
привода, удачному сочетанию теоретического и практиче-
ского материала.
В процессе подготовки шестого издания авторы под-
вергли содержание учебника существенной переработке.
Они стремились полно и глубоко отразить в книге совре-
менное состояние электропривода, подчеркнуть основные
тенденции его развития, показать новые технические идеи
и их реализацию. С этой целью была несколько изменена
структура учебника. Выделены главы «Механика электро-
привода», «Автоматическое регулирование скорости и мо-
мента», «Формирование переходных процессов», добавлен
ряд новых разделов. При изложении материала учтена
новая терминология по электроприводу в соответствии
с ГОСТ 6593-79.
Во вторую часть учебника «Системы автоматическою
управления электроприводами» введен раздел, посвященный
тиристорному управлению асинхронными и синхронными
двигателями. Рассмотрены дополнительно электрические
схемы управления некоторыми производственными меха-
низмами в разомкнутых системах. Дана новая глава, в ко-
торой уделено внимание типовым схемам замкнутого управ-
ления приводами постоянного и переменного тока, в том
числе с системами подчиненного регулирования. Новыми
схемами взамен устаревших дополнена глава «Следящий
привод и программное управление», в которую введен
3
параграф с краткими соображениями по адаптивному
управлению. Последняя глава дополнена материалами
по комплексной автоматизации электроприводов.
В книге изъяты разделы по автоматическому управле-
нию приводами с применением электромашинных усилите-
лей, а также исключены материалы, относящиеся к осно-
вам автоматического управления (вопросы о различных
критериях устойчивости, построение кривых переходных
процессов частотным методом и др.), освещаемые в соот-
ветствующем курсе. Исключены также некоторые мате-
риалы, отраженные в курсе «Вычислительная техника».
Новые разделы книги были написаны проф. А. С. Санд-
лером, н?,1 также выполнено редактирование остальной
части книги, написанной проф. М. Г. Чиликиным.
Приводясодержанпевсоответствиестребованиями быстро
прогрессирующей науки и практики, авторы стремились
оставить неизменным стиль учебника — ясное, как и в пре-
дыдущих изданиях, изложение материала, большое число
иллюстраций, практических приложений теории. Они стре-
мились помочь читателю разобраться в весьма непростых
вопросах, побудить его к творческому освоению материала.
Эту же цель ставил перед собой редактор книги канд.
техн, наук Р. С. Сарбатов, вложивший много труда в про-
цесс подготовки книги к изданию. Большой объем работы
выполнила по подготовке материалов рукописи книги
к изданию второй ее редактор инж. П. Е. Сандлер.
С именами авторов учебника профессоров Л4осковского
энергетического института М. Г. Чиликипа и А. С. Санд-
лера связан значительный период развития отечественной
науки об электроприводе, ими внесен существенный личный
вклад в создание ряда современных систем электропривода.
Огромный опыт, блестящая эрудиция и педагогический
талант авторов нашли отражение в книге, которая, несом-
ненно, принесет пользу всем, кто изучает современный
электрический привод.
Зав. кафедрой автоматизированного электропри-
вода МЭИ проф. Н. Ф. Ильинский
часть Основы
первая электропривода
ВВЕДЕНИЕ
Автоматизация и электрификация всех отрас-
лей народного хозяйства приводит к облегчению труда
рабочих, к уничтожению существенного различия между
трудом умственным и трудом физическим, к дальнейшему
повышению материального благосостояния советских лю-
дей.
Производственные механизмы, без которых нельзя в на-
стоящее время представить себе ни одной фабрики, ни одного
завода, равно как механизированного транспорта и пере-
дового сельского хозяйства, прошли длительный путь своего
развития, прежде чем приняли вид современных машин,
где гений и труд человека нашли свое материальное вопло-
щение.
Современное машинное устройство или, как его назы-
вают иначе, производственный агрегат состоит из большого
числа разнообразных деталей, отдельных машин и аппара-
тов, выполняющих различные функции. Все они в совокуп-
ности совершают работу, направленную на обеспечение
определенного производственного процесса. Необходимо
хорошо знать назначение отдельных элементов, составляю-
щих .машинное устройство, так как без этого невозможно
проектировать и создавать машину, а также невозможно
правильно обслуживать ее в эксплуатации.
«Всякое развитое машинное устройство состоит из трех
существенно различных частей: машины-двигателя, пере-
даточного механизма, наконец, машины-орудия или рабочей
машины» К
Назначение первых двух элементов: двигателя с его
системой управления и передаточного механизма, куда
могут входить валы, шкивы, ремни, шестерни и т. и.,
заключается в том, чтобы сообщить движение исполнитель-
ному механизму.
* К. Маркс. Капитал, т. 1. —М.: Политиздат 1973, с. 384.
5
Следовательно, первая и вторая части машинного
устройства служат для приведения в движение рабочей
машины. Поэтому их объединяют общим названием «при-
вод».
Примером простейшего привода является ручной при-
вод, который сохранился в некоторых случаях и до настоя-
щего времени. Его можно встретить, например, в быту,
в сельском хозяйстве и т. д. Однако в современных усло-
виях он не играет сколько-нибудь заметной роли.
Конный привод, являющийся развитием ручного при-
вода, где усилия человека заменены тяговой силой живот-
ных, в настоящее время также утратил свое значение.
На смену им пришел механический привод от ветря-
ного двигателя, от водяного колеса и турбины, паровой
машины, двигателя внутреннего сгорания и от электриче-
ского двигателя, который постепенно занял главенствую-
щее место. Первые механические приводы известны были
в глубокой древности со времени устройства водяных и
ветряных мельниц.
В настоящее время водяные и паровые турбины широко
применяются на электрических станциях, вырабатывающих
энергию для промышленности, сельского хозяйства, транс-
порта и бытовых нужд. Однако для приведения в движение
рабочих машин основным двигателем является электриче-
ский двигатель и, следовательно, основным типом привода
является электрический привод или сокращенно, элек-
тропривод, а на современном уровне техники авто-
матизированный электропривод.
ГЛАВА ПЕРВАЯ
ОСНОВНЫЕ СВЕДЕНИЯ.
ИСТОРИЯ РАЗВИТИЯ ЭЛЕКТРОПРИВОДА
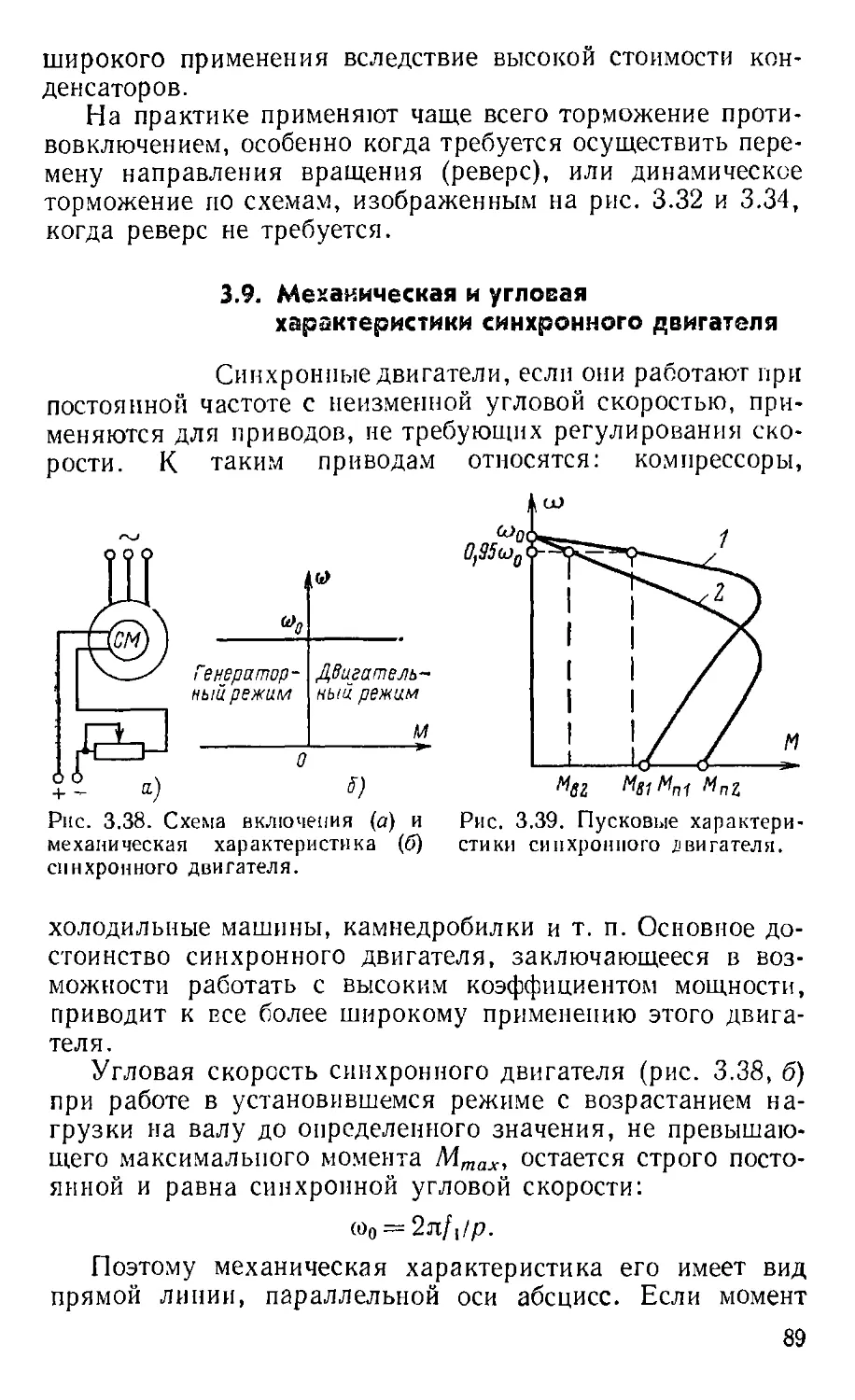
1.1. Типы электроприводов и движения ,
осуществляемые ими
Автоматизированным Элек-
тр о п р и водом называется электромеханическая си-
стема, состоящая из электродвигательного, преобразова-
тельного, передаточного и управляющего устройств, пред-
назначенных для приведения в движение исполнительных
органов рабочей машины и управления этим движением.
6
Нельзя представить себе ни одного современного про-
изводственного механизма, в любой области техники, кото-
рый не приводился бы в действие автоматизированным
электроприводом. В электроприводе основным элементом,
непосредственно преобразующим электрическую энергию
в механическую, является электрический двигатель, кото-
рый чаще всего управляется при помощи соответствующих
преобразовательных и управляющих устройств с целью
формирования статических и динамических характеристик
электропривода, отвечающих требованиям производствен-
ного механизма. Речь идет не только о сообщении машине
Рис. 1.1. Структурная схема автоматизированного электропривода.
вращательного или поступательного движения, но, глав-
ным образом, об обеспечении с помощью автоматизирован-
ного электропривода оптимального режима работы ма-
шин, при котором достигается наибольшая производитель-
ность при высокой точности.
Структурная схема автоматизированного электропривода
приведена па рис. 1.1. В ней можно выделить три основ-
ных элемента:
1) механическая часть привода МЧ, включающая рабо-
чий механизм РМ, передаточнсе устройство ПУ, пред-
назначенное для передачи механической энергии от элек-
тродвигательного устройства электропривода к исполни-
тельному органу рабочей машины и для изменения вида
и скорости движения и усилия (момента вращения);
2) электродвнгателыюе устройство ЭД, предназначен-
ное для преобразования электрической энергии в механи-
ческую или механической энергии в электрическую. На
схеме электродвигательпое устройство(или двигатель) пред-
ставлено двумя элементами: электромеханическим преобра-
7
зователем энергии ЭМП (на вход которого подаются элск-
трнческие сигналы в виде напряжения и тока), преобра-
зующим электрическую мощность в механическую мощ-
ность, и массой ротора двигателя РД, на которую воздей-
ствует момент М двигателя при угловой скорости ы;
3) система управления СУ, состоящая из силовой пре-
образовательной части П (преобразователя), управляющего
устройства У, задающего устройства ЗУ и датчиков обрат-
ных связей — электрических ДОСЭ и механических ДОСМ!
и Д0СМ2. Преобразователь П предназначен для питания
двигателя и создания управляющего воздействия на него.
Он преобразует род тока или напряжение, или частоту
либо изменяет иные показатели качества электрической
энергии, подводимой к двигателю. Устройство У, управ-
ляющее преобразователем П, получает командные сигналы
от задающего устройства ЗУ, а информацию о текущем
состоянии электропривода и технологического процесса —
от датчиков обратных связей. С помощью этих датчиков
ток, напряжение, мощность двигателя или другие его элек-
трические параметры, скорость, момент или усилие и поло-
жение (перемещение) исполнительного органа, преобразу-
ются в пропорциональные этим параметрам электрические
сигналы, которые и подаются в управляющее устрой-
ство У. В нем текущее состояние электропривода и техно-
логического процесса сравнивается с заданным и при нали-
чии рассогласования вырабатывается управляющий сиг-
нал, воздействующий через преобразователь П на электро-
привод в направлении устранения возникшего рассогласо-
вания с требуемой точностью и быстродействием.
Разнообразные электроприводы с учетом их историче-
ского развития и с точки зрения способов распределения
механической энергии можно разделить на три основных
типа: групповой электропривод; индивидуальный и взаи-
мосвязанный.
Групповой электропривод обеспечивает движе-
ние исполнительных органов нескольких рабочих машин
или нескольких исполнительных органов одной рабочей
машины. Передача механической энергии от одного двига-
теля к нескольким рабочим машинам и ее распределение
между ними производится с помощью одной или нескольких
трансмиссий. Такой групповой привод называют также
трансмиссионным (рис. 1.2).
Дальнейшее развитие электропривода было связано
с отказом от распределения механической энергии между
&
рабочими машинами, т. е. от трансмиссий, за счет уста-
новки на каждую рабочую машину своего электродвига-
теля ЭД (рис. 1.3). Однако при таком электроприводе
сохраняются системы распределения механической энер-
гии внутри машины, имевшие место и в трансмиссионном
приводе. Между отдельными рабочими органами одной
и той же машины остаются часто громоздкие механические
связи, усложняющие конструкцию самой машины. Этот
электропривод по сравнению с рассмотренным выше транс-
миссионным является более совершенным, по по существу
также может считаться групповым, если па рабочей машине
имеется несколько рабочих органов, приводимых в движе-
ние от одного двигателя.
Зле к три чемй 9 сеть
Рабочие машина
Электрическая сеть
Рис. 1.2. Структурная схема Рис. 1.3. Структурная схема
группового трансмиссионного группового электропривода,
электропривода.
Вследствие своего технического несовершенства транс-
миссионный электропривод в настоящее время почти не при-
меняется, он уступил место индивидуалыюму и взаимо-
связанному, хотя в ряде случаев еще находит применение
и групповой привод по схеме на рис. 1.3.
Индивидуальный привод по сравнению с транс-
миссионным и групповым обладает рядом преимуществ:
производственные помещения не загромождаются тяжелыми
трансмиссиями и передаточными устройствами; улучша-
ются условия работы и повышается производительность
труда вследствие облегчения управления отдельными меха-
низмами, уменьшения запыленности помещений, лучшего
освещения рабочих мест; снижается травматизм обслужи-
вающего персонала. Кроме того, индивидуальный электро-
привод отличается более высокими энергетическими пока-
зателями.
,9
В трансмиссионном приводе при выходе из строя или
при ремонте электродвигателя выбывает из работы группа
машин, тогда как в случае индивидуального привода или
группового по схеме на рис. 1.3 остановка одного электро-
двигателя вызывает остановку лишь одной рабочей ма-
шины.
При индивидуальном электроприводе за счет того, что
каждый рабочий орган машины приводится в движение
самостоятельным электродвигателем, рабочие органы ма-
шины оказываются уже не связанными друг с другом и
поэтому значительно упрощаются механические передачи.
В некоторых случаях в результате полного исключения
механических передач удается существенно повысить точ-
ность работы машины. Индивидуальный электропривод
Рис. 1.4. Индивидуальные электроприводы рабочих органов (шпинде-
лей) продольно-фрезерного станка.
позволяет обеспечить оптимальный режим работы машины,
при котором достигается максимальная производитель-
ность. Наконец, при использовании индивидуального элек-
тропривода создаются наиболее благоприятные условия
для автоматизации работы машин и технологических
процессов.
Индивидуальный электропривод широко применяется
в различных современных машинах, например в сложных
металлорежущих станках, в прокатных станах металлур-
гического производства, в подъемно-транспортных маши-
нах, экскаваторах, в робогах-мапипуляторах и т. п.
Примером использования индивидуального привода мо-
жет служить продольно-фрезерный станок (рис. 1.4),
имеющий отдельные электроприводы главных движений
(приводы трех шпиндельных бабок). На том же станке
(на рисунке не показаны) обычно еще установлены отдель-
ные приводы для перемещения стола с обрабатываемым
изделием, быстрого перемещения траверсы, закрепления
10
траверсы и приводы других механизмов, обслуживающих
необходимые режимы работы станка как для автоматиче-
ского цикла, так и для наладочных операций. Коорди-
нация работы отдельных рабочих органов и выполнение
ими соответствующих рабочих операций достигается не за
счет сложных механических передач, а с помощью элек-
трической системы управления.
В з а и м о с в я з а и н ы й электропривод содержит
два или несколько электрически или механически связан-
ных между собой электродвигательных устройства (или
электроприводов), при работе которых поддерживается
заданное соотношение или равенство скоростей или нагру-
зок или положение исполнительных органов рабочих ма-
шин. Необходимость в таком
приводе часто возникает по кон-
структивным или технологиче-
ским соображениям.
Примером взаимосвязанного
электропривода может служить
привод цепного конвейера. На
рис. 1.5 показана схема такого
привода, рабочим органом кото-
рого является цепь, приводимая
в движение двумя или несколь-
кими двигателями (Ml, М2),
Рис. 1.5. Схема взаимосвя-
занного привода конвейера,
расположенными вдоль цепи. Эти двигатели имеют вынуж-
денно одинаковую скорость.
Взаимосвязанный электропривод широко применяется
в различных современных машинах и агрегатах, например
в копировальных металлорежущих станках и станках с про-
граммным управлением, в бумагоделательных машинах,
ротационных машинах полиграфического производства,
в текстильных агрегатах, в прокатных станах металлурги-
ческого производства, в поточных технологических линиях
по производству шинного корда, синтетических пленок
и т. д.
Одной из разновидностей взаимосвязанного электропри-
вода является многодвигательный электропри-
вод — это электропривод, двигательные устройства которого
совместно работают на общий вал. Примером многодвига-
тельиого привода может служить привод платформы меха-
низма поворота мощного экскаватора. Здесь благодаря
применению миогодвигательного электропривода и специ-
альному электрическому соединению двигателей удается
11
осуществить равномерное распределение статических и
динамических нагрузок, возникающих при работе меха-
низма поворота.
Представляет интерес современный многодвигательпый
электропривод переменного тока, состоящий из четырех
Гис 1 & Иноп->"1В1:ГЗ’’Ч'
юй jiTjXieT переменного тока мса>
I ого "ого ирс-'ха.
или шести двигателей, приводящих в движение общую
шестерню мощного винтового пресса (рис. 1.6). Этот при-
вод работает с большим числом включений в час, что обес-
печивает высокую производительность пресса.
12
В том случае, когда во взаимосвязанном электропри-
воде возникает необходимость в поддержании постоянного
соотношения скоростей рабочих органов, не имеющих
механических связей, или когда осуществление механиче-
ских связей затруднено, используется специальная схема
электрической связи двух или нескольких электродвига-
телей, называемая схемой электр и ческогова-
л а.
Многообразие производственных процессов обусловли-
вает различные виды и характеры движения рабочих орга-
нов машины, а следовательно, и электроприводов.
По виду движения электроприводы могут обеспе-
чить: вращательное однонаправленное движение, враща-
тельное реверсивное и поступательное реверсивное дви-
жения.
Вращательное однонаправленное, а также реверсивное
движение осуществляется электродвигателями обычного
исполнения. Поступательное движение может быть полу-
чено путем использования электродвигателя вращатель-
ного движения обычного исполнения совместно с преобра-
зовательным механизмом (кулисным, винтовым, реечным
и т. и.) либо применения электродвигателя специального
исполнения для поступательного движения (так называе-
мые линейные электродвигатели, магнитогидродинамиче-
ские двигатели и др.).
По степени управляемости электропривод может быть:
/) нерегулируемый — для приведения в дей-
ствие исполнительного органа рабочей машины с одной
рабочей скоростью, параметры привода изменяются только
в результате возмущающих воздействий;
2) регулируемый — для сообщения изменяемой
или неизменяемой скорости исполнительному органу ма-
шины, параметры привода могут изменяться под воздей-
ствием управляющего устройства;
3) п р о г р а м м н о-у правляемый — управляе-
мый в соответствии с заданной программой;
4) следящий — автоматически отрабатывающий пе-
ремещение исполнительного органа рабочей машины с опре-
деленной точностью в соответствии с произвольно меняю-
щимся задающим сигналом;
5) адаптивный — автоматически избирающий
структуру или параметры системы управления при изме-
нении условий работы машины с целью выработки опти-
мального режима.
13
Можно классифицировать электроприводы и по роду
передаточного устройства. В этом смысле электропривод
бывает:
1) редукторный, в котором электродвигатель
передает вращательное движение передаточному устройству,
содержащему редуктор;
2) без р ед у кто р п ый, в котором осуществляется
передача движения от электродвигателя либо непосредст-
венно рабочему органу, либо через передаточное устройство,
не содержащее редуктор.
По уровню автоматизации можно различать:
/) неавтоматизированный электропривод,
в котором управление ручное; в настоящее время такой
привод встречается редко, преимущественно в установках
малой мощности бытовой и медицинской техники и т. п.;
2) автоматизированный электропривод, уп-
равляемый автоматическим регулированием параметров;
3) автоматический электропривод, в котором
управляющее воздействие вырабатывается автоматическим
устройством без участия оператора.
Два последних типа электропривода находят примене-
ние в подавляющем большинстве случаев.
Наконец, по роду тока применяются электроприводы
постоянного и переменного тока.
1.2. Краткий исторический обзор развития
электропривода
Развитие промышленных предприятий стало возмож-
ным лишь при переходе от ручного привода исполнительных механиз-
мов к механическим приводам. Еще в глубокой древности применялись
простейшие способы механизации работ с помощью водяных колес,
приводимых в движение силой падающей или текущей воды. Известны
водяные колеса, применявшиеся в Китае еще за 3000 лет до нашей эры.
С развитием капитализма в XVIII в. появились многочисленные
фабрики, где широко применялись водяные двигатели, а затем и паро-
ны- машины. Вплоть до конца прошлого столетия единственным типом
привода был чисто трансмиссионный, так как водяной двигатель или
паровая машина соединялись с помощью канатов и ремней с главней
трансмиссией, а все рабочие машины отдельного цеха или даже целой
фабрики приводились в движение от этой трансмиссии.
Переход к более совершенным типам привода — индивидуальному
и взаимосвязанному, которые полнее учитывают основные условия
работы различных производственных механизмов, стал возможен
лишь на базе широкой электрификации промышленности. Строи-
тельство электрических станций, передача электрической энергии
на большие расстояния и применение электропривода создали новую
эпоху в развитии промышленности,
14
Возможность создания электрического двигателя была обуслов-
лена успехами в области электромагнетизма. Вторая четверть XIX в.
характеризуется разработкой разнообразных физических приборов,
намядно демонстрирующих превращение электрической энергии в ме-
ханическую. Первый электродвигатель, с помощью которого осуще-
ствлен электропривод, был построен в 1834 —1838 гг. петербургским
академиком Б. С. Якоби, в 1838 г. на Неве были проведены испыта-
ния этого двигателя, установленного на небольшом катере, вмещав-
шем 12—14 чел.; это было первое судно, приводившееся в движение
электродвигателем. Однако отсутствие экономичных источников элек-
трической энергии не позволило внедрить электропривод в промыш-
ленность. Развитие электропривода совершалось в длительной борьбе
со старыми, отживающими способами распределения меха ин ческой
энергии, и прошло более полувека, прежде чем окончательно победило
передовое прогрессивное направление. До создания промышленного
типа электрического генератора (3. Грамм, 1870 г.) встречались лишь
отдельные случаи применения электропривода. Известно, например,
что в 50—60-х годах XIX в. некоторое распространение получил
электродвигатель французского электротехника Фромана, приво-
дивший в движение типографские и ткацкие станки. Прогрессив-
ную роль в развитии электропривода сыграло изобретение в 1860 г.
итальянским ученым А. Пачииотти электродвигателя с кольцевым
якорем.
И все же до конца прошлого столетия пар и вода оставались основ-
ной силой, приводившей в движение станки и механизмы в промыш-
ленности. Несмотря на успехи, достигнутые к 70-м годам XIX в. в об-
ласти конструирования электродвигателей постоянного тока, элек-
трическая энергия использовалась в основном лишь для освещения.
Существовавшая тогда система постоянного тока не давала удовлетво-
рительного решения задач передачи и распределения электроэнергии
и тормозила развитие электропривода.
Появление переменного однофазного тока сыграло существенную
рель в развитии электротехники вообще, однако попытки решения
проблемы централизованного производства и распределения электро-
энергии на переменном однофазном токе не привели к заметным сдви-
гам в области электропривода вследствие того, что электродвигатели
однофазного тока не имели пускового вращающего момента.
Открытие явления вращающегося магнитного поля в 80-х годах
прошлого века (Г. Феррарис и Н. Тесла) положило начало конструи-
рованию многофазных электродвигателей. Наиболее экономичной
среди многофазных систем оказалась система трехфазпого тока, основы
которой были разработаны в 1889—1891 г. русским инженером М. О.
Долнво-Добровольским. Система трехфазного тока явилась тем но-
вым техническим средством, с помощью которого разрешался весь
комплекс проблемы производства, передачи, распределения и потреб-
ления электроэнергии. Разработкой трехфазной системы были созданы
предпосылки для развития электрификации.
Создание М. О. Доливо-Добровольским в 1889 г. трехфазного
асинхронного двигателя ознаменовало новый этап в развитии электро-
привода н открыло широкую дорогу промышленному применению
электричества.
Несомненные экономические преимущества централизованного
производства электроэнергии и простота ее распределения привели
к тому, что электродвигатель, постепенно вытесняя другие виды дви-
гателей, занял первое место во всех отраслях промышленности. Мощ-
15
fioct'b электродвигателей по отношению к обшей мощности установ-
ленных двигателей составляла в 1890 г. 5 %, в 1927 г. 75 %, в настоя-
щее время около 100 %.
Рис. 1.7. Общий вид совремеьисчо цеха.
Применение электродвигателей оказало революциоипзирх ющее
влияние на устройство приводов п даже на конструкцию самих про-
изводственных механизмов. Прежде всего это сказалось в отказе от
трансмиссионного привода и пере-
ходе к индивидуальному и взаимо-
связанному электроприводам. Каж-
дый, кто бывал на современных
заводах, понимает, насколько раз-
личны условия работы в цехе, за-
громожденном большим числом
приводных ремней, и в свободном
светлом и чистом цехе, где нет
шумящих и затемняющих свет
трансмиссии (рис. 1 7)
Развитие электропривода всег-
да шло в направлении сближения
двигателя с производственным ме-
ханизмом и вытеснения промежу-
точных передач. Примером может
Рис. 1 8. Схема коробки скоростей
токарного станка при различных
типах приводных двигателей.
служить уменьшение числа пар переключаемых зубчатых колес в ко-
робке скоростей токарного станка (рис. 1.8). Для получения 12 ско-
ростей на шпинделе при нерегулируемом индивидуальном приводе
требуется 9 нар зубчатых колес (рис. 1.8, в). Применение дву хско-
16
ростпого асинхронного двигателя дает возможность уменьшить число
зубчатых колес до семи пар (рпс. 1.8, б), а при регулируемом двигателе
постоянного тока нх число снижается до четырех пар (рис. 1,8, в).
Рис. 1 9. Схема развития электропривода радиально-сверлильного
станка.
0 WO
На рис. 1.9 показана схема развития электропривода радиально-
сверлильного станка, где постепенное сближение приводного двига-
теля с производственным механизмом привело к значительному упро-
щению отдельных кинематических цепей рабочей машины, приводимых
различными двигателями (a, b, с, d).
17
Индивидуальные н взаимосвязанные электроприводы снабжаются
ино'-да обычными серийными двигателями, но часто в них применяются
специальные пристраиваемые фланцевые или встроенные двнгател, ,
чем достигается органическое слияние элементов всего электрифици-
рованного агрегата.
В индивидуальном электроприводе иногда достигается настолько
тесное слияние двигателя с исполнительным механизмом, что коп-
Рис. 1.11, Двигатель-ролик с наружным ротором.
структивио они представляют собой единое целое. На рис. I 10 пока-
зан электропривод шлифовального круга от асинхронного коротко-
замкнутого двигателя, так называемый электрошпи пдель.
Другим примером может служить двигатель-ролик (рис. 1.11),
применяемый в металлургической промышленности для перемещения
слитков металла. Неподвижная статорная обмотка двигателя здесь
располагается внутри, а сам ролик является ротором.
1.3. Развитие электропривода в СССР
В Советском Союзе развитие электропривода получило
широкий размах в годы пятилеток в связи с общей индустриализацией
страны.
Основоположники марксизма-ленинизма всегда придавали боль-
шое значение роли электрической энергии во всех отраслях народного
хозяйства. Всем известно гениальное определение В. И. Ленива
«Коммунизм — это есть Советская власть плюс электрификация всей
страны» г.
Под руководством Коммунистической партии ученые и инженеры
уже в первые годы советской власти создали государственный план
электрификации России — ГОЭЛРО, который был осуществлен с боль-
шим перевыполнением и в более короткие сроки, чем это было преду-
смотрено иланом. По плану ГОЭЛРО было намечено соорудить и ввести
в эксплуатацию в течение 10—15 лет 30 новых районных электро-
станций общей мощностью 1 млн. 500 тыс. кВт. За 15 лет — к 1935 г.
на районных электростанциях было фактически введено около
4,5 млн. кВт.
Созданный по указанию В. И. Лепина еще в 1921 г. Государст-
венный экспериментальный электротехнический институт, реорга-
низованный в 1929 г. во Всесоюзный электротехнический институт
(ВЭИ), оказал большое влияние на развитие отечественной электро-
техники, в том числе и на развитие электропривода.
1 В. И. Ленин. Поли. собр. соч., т. 42, изд. 5. —М.: Госполитиздат,
1963, с. 159.
18
Большую роль в развитии электропривода сыграла также начав-
шаяся подготовка инженерных кадров в этой области.
Еще в 1922 г. в Ленинградском электротехническом институте
имени Ульянова (Ленина) под руководством проф. С. А. Ринкевича
создается специальность «электрификации промышленности», которая
положила начало регулярному выпуску специалистов в области элек-
тропривода и электрификации промышленности.
В 1925 г. выходит в свет книга проф. С. Л. Ринкевича «Электри-
ческое распределение механической энергии», явившаяся первым
систематизированным трудом, в котором с большой полнотой рас-
сматривались основные вопросы теории и практики электропривода.
Дальнейшее развитие теории и практики электропривода нашло свое
отражение в труде проф. В. К. Попова «Применение электродвига-
телей в промышленности» (1932—1939 гг.), а также в трудах Р. Л. Аро-
нова, А. Т. Голована, Д. П. Морозова и др. Вопросы автоматиче-
ского управления электроприводами нашли освещение в трудах ака-
демиков М. П. Костенко, В. С. Кулебакинз, а также А. Г. Иосифь-
яна, В. К. Попова, Д. В. Васильева и др.
Уже в первые годы советской власти были созданы предпосылки
К широкому развитию научно-исследовательских работ, способствовав-
ших внедрению электропривода в различные отрасли отечественной
промышленности.
Размах электрификации страны иллюстрируется данными о про-
изводстве электрической энергии в СССР, приведенными в таблице.
Таблица
Показатель 1940 1950 1955 1960 1965 1970 1975 1980
Выработка электро- энергии, млрд. кВт • ч 48,6 91,2 170,2 292,3 506,7 740,9 1038,6 1295,0
Огромное увеличение производства электроэнергии вызвано широ-
ким размахом электрификации всех отраслей промышленности. В уголь-
ной, металлургической, химической, машиностроительной и других
отраслях промышленности коэффициент электрификации (т. е. отно-
шение установленной мощности электродвигателей к общей уста-
новленной мощности двигателей всех видов, выраженное в процентах)
приближается к 100 %.
Уже в 1960 г. коэффициент электрификации в важнейших отрас-
лях промышленности СССР составлял: в химической промышлен-
ности 97,7, в металлургической 66,9, в промышленности общего маши-
ностроения 98,5, в угольной 99,1 %. Электровооруженность промыш-
ленности СССР Достигла весьма значительных размеров.
В такой отрасли промышленности, как, например, металлургия,
в царской России преобладал паровой двигатель. В настоящее время
паровой привод в металлургии почти всюду вытеснен электроприво-
дом.
19
Претворение в жизнь плана индустриализации привело к созда-
нию в Советском Союзе мощной машиностроительной промышленности
и к выпуску огромного количества электрических машин, аппаратов
и других изделий электропромышленности.
Так, в черной металлургии уже в первой пятилетке было вве-
дено в строй 19 мощных прокатных станов, а во второй 60, из них
9 блюмингов, электропривод которых является одним из наиболее
сложных автоматизированных устройств. Завод «Электросила» в 1931 г.
выпустил первый советский электропривод блюминга с двигателем
7000 л. с. и с трехмашинным маховичным агрегатом, состоящим из
асинхронного двигателя мощностью 3680 кВт и двух генераторов
ио 3000 кВт. В 1931—1932 гг. разрабатывается отечественная система
комплексной автоматизации электроприводов загрузки доменных пе-
чей. Создается электрооборудование для врубовых машин уголыюй
промышленности, взаимосвязанный электропривод бумагоделательных
машин и т. и.
В 1936—1937 гг. были разработаны на принципе следящего при-
вода схемы автоматического управления нажимными винтами прокат-
ных станов.
Последующие годы (1940—1945 гг.) ознаменованы разработкой
новых принципов построения систем автоматического управления
электроприводами, основанных на применении замкнутых цепей с об-
ратными связями и использовании электромашипных, электронных
н в дальнейшем магнитных усилителей.
Широкое применение усилителей позволило осуществить непре-
рывное управление и обеспечить необходимое формирование переход-
ных процессов в электроприводах большого числа механизмов с плав-
ным и большим диапазоном электрического регулирования скорости.
Еще в довоенное время проводились работы, связанные с заме-
ной электромашиниого преобразовательного агрегата системы генера-
тор — двигатель статическим. Первая установка такого рода, в которой
двигатель постоянного тока для привода шахтного подъемника питался
от управляемого ртутного выпрямителя, была пущена в эксплуатацию
в 1940 г. Замена электромашиниого агрегата ртутным выпрямителем
заметно удешевила установку и привела к повышению КПД электро-
привода.
В послевоенные годы такие электроприводы нашли применение
на металлургических заводах для привода прокатных станов.
Сложные автоматизированные электроприводы, способствующие
повышению производительности и улучшению качества продукции,
были использованы в станах холодной прокатки, шахтных педтемных
машинах, текстильных поточных агрегатах, скоростных лифтах высот-
ных зданий, бумагоделательных машинах, экскаваторах, сложных
металлорежущих станках н др.
В годы пятилеток такие заводы, как ХЭМЗ, «Электросила», «Ди-
намо» и др. обеспечили быстрое развитие новых типов электроприводов.
При проектировании н реализации указанных электроприводом
большую работу провели коллективы таких организаций н заводок,
как ЦНИИТмаш, трест «Электропривод», ГПИ «Тяжпромэлектро-
проект», ЭНИМС, заводы им. Я. М. Свердлова, фрезерных станков
в г. Горьком, им. Серго Орджоникидзе и др.
Широкое развитие сельскохозяйственного машиностроения (трак-
торостроения, производства комбайнов), автомобилестроения, самоле-
тостроения и других видов массового производства потребовало зна-
чительного развития механизации и автоматизации трудоемких про-
20
цессов на базе повсеместного использования автоматизированного элек-
тропривода н современных систем управления им.
Заводом «Станкоконструкция» и ЭНИМС еще в первой пятилетке
была разработана и пущена в эксплуатацию автоматическая линия
станков для обработки блока цилиндров тракторного двигателя. Вве-
дение автоматической линии способствовало заметному росту произ-
води! ель пости труда за счет использования агрегатных станков, веду-
щих обработку изделий одновременно многими инструментами и с раз-
ных сторон, существенного сокращения вспомогательного времени
и автоматизации цикла обработки, совершаемого без участия опера-
тора.
Революционизирующее влияние на развитие автоматизированного
электропривода оказали разработка и производство полупроводиико-
г>'..1 х приборов — транзисторов, тиристоров, которые благодаря своим
преимуществам стали вытеснять ранее применявшиеся в электропри-
воде устройства с электронными лампами и ионными приборами. На-
ряду с системой генератор—двигатель (Г—Д), все шире используется
более быстродействующая система тиристорный преобразователь —
двигатель (ТП—Д).
В результате освоения пашей промышленностью мощных и на-
дежных силовых тиристоров удается создавать преобразовательные
устройства большой мощности. Тиристорные преобразователи отли-
чаются высоким КПД, практически безынерционны, требуют незна-
чительной мощности для управления н с нх помощью создаются си-
стемы электроприводои, обладающие плавным и широким диапазо-
ном регулирования скорости. Соответствующие схемные решения
обеспечивают формирование необходимых статических и динамических
характеристик.
Быстрое развитие в СССР и за рубежом полупроводниковой тех-
ники, существенное увеличение выпускаемых тиристоров обусловли-
вают резкое уменьшение их стоимости, поэтому наряду с широким
использованием тиристорных преобразователей для приводов постоян-
ного тока уже сейчас осваиваются автоматизированные электропри-
воды переменного тока, управляемые различного рода тиристорными
преобразователями.
Известно, что асинхронный двигатель с короткозамкнутым рото-
ром в несколько раз дешевле коллекторного двигателя постоянного
тока, имеет меньшие габариты, может быть выполнен на существенно
большие скорости при той же мощности, надежней п проще в эксплуа-
тации, так как является бесконтактным. Уже сейчас разработанные
принципы автоматического управления электроприводами переменною
тока с тиристорными преобразователями обеспечивают экономичное
плавное регулирование скорости в большом диапазоне, позволяя
получить значительно лучшие динамические характеристики этого
электропривода но сравнению с электроприводом постоянного тока.
Привод переменного тока, в котором используется асинхронный
двигатель с короткозамкнутым ротором с частотным управлением,
является весьма перспективным и в ближайшем будущем во многих
случаях сможет заменить систему ТП—Д постоянного тока.
Широким фронтом ведутся научно-исследовательские работы в об-
ласти электропривода во ВПИИэлектропрпвод и в других научно-
исследовательских, и проектных институтах, в высших учебных заве-
дениях страны — Московском энергетическом, Ленинградском и Харь-
ковском электротехнических институтах, Ленинградском политехни-
ческом и др.
21
Благодаря этому возникла возможность нового мощного разви-
тия теории и практики электропривода.
Природа социалистического хозяйства и его плановый характер
создают все условия для последовательного и целеустремленного
технического развития любой области техники. В этих условиях,
особенно в такой многогранной и всюду проникающей области тех-
ники, как электропривод, совершенно естественно возникает необ-
ходимость в общей теории, которая могла бы определенным образом
направлять и обобщать практическую деятельность. Поэтому не слу-
чайно, что именно в СССР вопросы общей теории и практики электро-
привода получили наибольшее развитие и работы советских ученых
в этой области являются наиболее значительными.
1.4. Значение электропривода в народном
хозяйстве и основные направления
его дальнейшего развития
Решения партии и правительства предусма-
тривают всемерное повышение эффективности обществен-
ного труда и улучшения качества продукции на базе уси-
ления его электровооруженности и автоматизации произ-
водства. Между электровооруженпостью труда и его про-
изводительностью существует прямая зависимость: за пос-
ледние десятилетия производительность общественного тру-
да в промышленности СССР повышается приблизительно
па столько процентов, на сколько повышается его электро-
вооружснность. В связи с этим большое значение для
промышленности СССР приобретают вопросы, связанные
с развитие?»! электропривода. Современный электропривод
определяет собой уровень силовой электровооруженности
труда и является благодаря своим преимуществам по
сравнению со всеми другими видами приводов основным
и главным средством автоматизации рабочих машин и
производственных процессов.
Если сравнить мускульную работу человека и работу
электрической машины, то получится разительный эффект.
В течение рабочего дня один человек может при помощи
мускульной энергии выработать около 1 кВт-ч. Отметим
кстати, что стоимость 1 кВт-ч энергии, полученной от
мощной гидроэлектростанции, составляет не более 1 коп.
В высоксэлектрифицпровапных отраслях промышленности
установленная мощность электродвигателей в среднем на
одного рабочего составляет 4—5 кВт, что при семичасо-
вом рабочем дне дает потребление в 28—35 кВт-ч. Это
означает, что рабочий управляет механизмами, работа
которых за смену эквивалентна работе 28—35 чел. Для
22
отдельных рабочих-новаторов производства, а также для
рабочих, управляющих сложными агрегатами, эти соотноше-
ния значительно выше.
Рост электрификации и автоматизации и создание на этой
базе более совершенных машин ведут к огромному повыше-
нию производительности труда. Поэтому при решении
вопроса о рациональном электроприводе было бы непра-
вильно исходить только из чисто энергетических сообра-
жений, т. е. оценивать привод только с точки зрения по-
требления энергии на единицу продукции. Конечно, борьба
за экономию электроэнергии требует уменьшения расхода
энергии и является дополнительным источником энергети-
ческих ресурсов в промышленности. Однако решающим
фактором в оценке электропривода является его влияние
на производительность рабочей машины и себестоимость
продукции. Себестоимость единицы продукции определя-
ется по формуле
= (ц Ч- б в а)/5,
где а — затраты на сырье; б — затраты на рабочую силу;
в — затраты на электроэнергию; г — накладные расходы;
Б — общее количество продукции, выработанное за время,
к которому отнесены составляющие числителя.
С увеличением продукции Б растут пропорционально
н затраты на сырье а, по затраты па рабочую силу б и
накладные расходы г возрастают значительно меньше,
а стоимость электроэнергии в играет относительно малую
роль, составляя всего лишь 3—8 % общей суммы числи-
теля.
Решающим является то, что правильно спроектирован-
ный электропривод увеличивает количество продукции Б,
т. е. приводит к увеличению знаменателя приведенного
выше выражения и определяет, таким образом, снижение
себестоимости продукции. Широкое внедрение рациональ-
ного электропривода коренным образом изменяет условия
производственной работы, повышая производительность,
улучшая качество продукции и облегчая труд рабочего.
В этом состоит существенное значение электропривода
для народного хозяйства Советского Союза.
Отечественная техника в короткие сроки создает образцы
электропривода более совершенные, а развитие советской
теории электропривода обеспечивает правильный путь
в решении основных проблем и вопросов.
23
Современный автоматизированный электропривод пред-
ставляет собой сложную электромеханическую систему,
которая управляет, например, мощными, в несколько
десятков тысяч киловатт, аэродинамическими трубами, где
осуществляется моделирование условий, аналогичных тем,
какие возникают в полете летательных аппаратов, или
реверсивными прокатными станами, в которых двигатели
постоянного тока мощностью каждый в 10 000 кВт более
1000 раз в течение 1 ч, т. е. примерно за каждые 3 с, ме-
няют свое направление вращения, обеспечивая автомати-
чески прокатку заготовки. Основные блоки системы управ-
ления прокатным станом реализуют: ввод данных, слеже-
ние за материалом, регистрацию измеряемых данных про-
цесса прокатки, автоматическую адаптацию и оптимальное
по времени регулирование процесса и другие функции.
В режиме адаптации используются УВМ.
Автоматизация управления станами горячей прокатки
с помощью УВМ позволяет выпускать продукцию высокою
качества. Кроме увеличения производительности труда
и улучшения качества продукции в результате применения
УВМ высвобождается большое число обслуживающего
персонала.
Автоматизированный электропривод развивает колос-
сальные мощности для сообщения значительной скорости,
высокой маневренности и большой надежности огромным
морским и океанским судам различного назначения. На-
конец, автоматизированный электропривод — это силовая
энергетическая основа мощных экскаваторов, магистраль-
ного электрического транспорта, уникальных металлоре-
жущих станков, огромных радиотелескопов и т. д., управ-
ляемых с помощью систем автоматики, обеспечивающих
оптимальные режимы работы.
Пределы использования по мощности современного элек-
тропривода весьма велики — от десятков тысяч киловатт
в единичном двигателе до долей ватта.
Для привода доменных воздуходувок применяются
двигатели переменного тока мощностью до 50 МВт. Такие
двигатели могут иметь частоту вращения до 3000 об/мин.
В измерительной, информационной технике, специаль-
ном приборостроении используются двигатели мощностью
в сотые доли ватта.
Диапазон изменения поминальных частот вращения
также имеет весьма широкие пределы. Так, известны без-
редукторные электроприводы, частота вращения которых
24
составляет единицы и десятки оборотов в минуту. С дру-
гой стороны, в специальных испытательных стендах, пре-
цизионных металлорежущих станках и в других объектах
в настоящее время применяются высоко- и сверхскоростные
(до 200 000 об/мин) бесконтактные электродвигатели пере-
менного тока, управляемые тиристорными преобразовате-
лями частоты.
Системы автоматического управления электроприводами
постоянного и переменного тока, в которых используются
все достижения полупроводниковой техники, а также
возможности электронной вычислительной техники, поз-
воляют существенно упростить конструкции производствен-
ных механизмов, повысить их точность и поднять произ-
водительность, т. е. способствовать техническому прогрессу.
Использование средств дискретной техники в системах
управления приводами постоянного тока расширяет диа-
пазон регулирования скорости до (10 000—15 000):! и
выше.
Широкая автоматизация механизмов на базе следящих
систем электроприводов, систем с цифровым программным
управлением и средств комплексной автоматизации —
обширная и весьма важная развивающаяся область авто-
матизированного электропривода. Иллюстрацией резуль-
тата такой автоматизации может служить быстрая и точ-
ная отработка команд по заранее предусмотренной про-
грамме па небольшом фрезерно-расточно-сверлильно-резь-
бонарезном станке с цифровым программным управлением.
Станок, представляющий собой по существу небольшой
обрабатывающий центр, предназначен для выполнения
с помощью шести шпинделей на револьверной головке
автоматического фрезерования, расточки, зенкования и
нарезания резьбы. Выбор операций и управление всеми
функциями осуществляется без вмешательства оператора
системой программного управления по трем координатам
с заданием программы на перфорированной ленте.
В машинах-автоматах будущего, в которых будут
широко использованы возможности автоматизированного
электропривода, должен развиваться принцип адаптации,
т. е. автоматического приспособления к изменению усло-
вий работы и выработки оптимального режима.
В условиях массового и крупносерийного производ-
ства, где применяются поточные линии, роль автоматизи-
рованного электропривода приобретает особое значение.
Такие автоматические линии включают большое число
2а
электроприводов, объединенных сложной системой управ-
ления, обеспечивающей интенсифицированный режим ра-
боты, логическую бесперебойную последовательность управ-
ления многочисленными механическими, гидравлическими
и электрическими устройствами.
Комплексная автоматизация других объектов, напри-
мер поточно-транспортных систем, доменного и прокат-
ного производства, бумагоделательных агрегатов и т. д.
на базе широкого применения автоматизированного элек-
тропривода с использованием УВМ, способствует повыше-
нию производительности труда, улучшению качества про-
дукции.
Развитие автоматического управления электроприво-
дами ведет к совершенствованию конструкций машин,
коренным изменениям технологического процесса, к даль-
нейшему техническому прогрессу в промышленности, сель-
ском хозяйстве, транспорте и т. п.
ГЛАВА ВТОРАЯ
МЕХАНИКА ЭЛЕКТРОПРИВОДА
2.1. Приведение моментов и сил
сопротивления, инерционных масс
и моментов инерции
Обычно двигатель приводит в действие
производственный механизм через систему передач, отдель-
ные элементы которой движутся с различными скоростями.
Примерная кинематическая схема электропривода с вра-
щательным движением исполнительного механизма пред-
ставлена па рис. 2.1.
Часто в рабочих механизмах один из элементов совер-
шает вращательное движение, другие — поступательное,
например в таких машинах, как подъемник (рис. 2.2),
кран, строгальный станок и т. п.
Механическая часть электропривода может представ-
лять собой сложную кинематическую цепь с большим
числом движущихся элементов. Каждый из элементов
реальной кинематической цепи обладает упругостью, т. е.
деформируется под нагрузкой, а в соединениях элементов
имеются воздушные зазоры. Если учитывать эти факторы,
то расчетная схема механической части привода будет
26
представлена многомассовой механической системой с упру-
гими связями и зазорами, расчет динамики которой состав-
ляет большие трудности и возможен только посредством
ЭВМ. Однако основные закономерности движения таких
систем определяются наибольшими массами и зазорами
и наименьшими жесткостями связей системы, что позво-
ляет свести расчетную схему механической части привода
либо к трехмассовой, либо к двухмассовой механической
системе с эквивалентными упругими связями и с суммар-
ным зазором (или без него), приведенным к угловой ско-
рости вала двигателя. Но и эти расчетные схемы исполь-
зуются в тех ответственных случаях, где пренебрежение
Механизм
Рис. 2.1. Кинематическая схема
связи двигателя с исполнитель-
ным механизмом.
Рис. 2.2. Кинематическая схема
привода подъемника.
упругостью и зазором приведет к большим ошибкам рас-
чета (точные следящие системы радиотелескопов и метал-
лорежущих станков; механизмы с гибкими связями, длин-
ными валами, канатами; резкие изменения состояния
системы и т. п.). Методика расчета электроприводов, меха-
ническая часть которых содержит упругие связи и зазоры,
рассмотрена в [421.
В большинстве практических случаев в инженерных
расчетах при решении задач, не требующих большой точ-
ности, и для механических звеньев, обладающих неболь-
шими зазорами и незначительной упругостью (большой
жесткостью), можно пренебречь зазорами и упругостью,
приняв механические связи абсолютно жесткими. При
этом допущении движение одного элемента дает полную
информацию о движении всех остальных элементов, по-
этому движение электропривода можно рассматривать
на каком-либо одном механическом элементе. Обычно
в качестве такого элемента принимают вал двигателя.
27
Расчетную схему механической части привода, следова-
тельно, можно свести к одному обобщенному жесткому
механическому звену, имеющему эквивалентную массу
с моментом инерции J, на которую воздействует электро-
магнитный момент двигателя М и суммарный приведенный
к валу двигателя момент сопротивления (статический мо-
мент) Л4С, включающий все механические потери в си-
стеме, в том числе механические потерн в двигателе.
Момент сопротивления механизма Л1с„, (рис. 2.1),
возникающий па валу рабочей машины, состоит из двух
слагаемых, соответствующих полезной работе и работе
трения.
Полезная работа, совершаемая производст-
венным механизмом, связана с выполнением соответствую-
щей технологической операции.
График полезной работы может
быть построен на основании ана-
литических расчетов или по экс-
периментальным данным. Такой
график, например, для станка,
Рис, 2.3. Циклический график работы
станка.
работающего по циклическому закону, представлен на
рис. 2.3. Заштрихованная область графика соответствует
полезной работе; незаштрихованная часть графика соот-
ветствует работе трения. При совершении полезной ра-
боты происходит деформация материала или изменяется
запас потенциальной энергии тел, например в подъем-
ных устройствах. В некоторых машинах совершение по-
лезной работы связано с незначительным превышением
момента по сравнению с моментом трения (например,
печатная машина, размольная шаровая мельница, кран,
передвигающийся по горизонтальным направляющим,
и т. и.).
Работа трения, совершаемая в производствен-
ном механизме, учитывается обычно КПД механических
связей привода. Работу трения можно иногда учесть,
пользуясь данными, полученными на основании опыта.
Например, при подъеме груза Gt на высоту h можно счи-
тать, что силы трения как бы увеличивают вес груза на
некоторое дополнительное значение Gt). Тогда работа подъ-
28
ема, Дж, записывается следующим образом:
Д =/i(G1-|-G0). (2.1)
В насосах потери могут учитываться некоторой фиктив-
ной дополнительной высотой подачи h0. Момент трения
всегда направлен против движущего момента привода.
Моменты сопротивления можно разделить па две кате-
гории, а именно: 1) реактивные моменты и
2) активные или потенциальные мо-
мент ы.
В первую категорию включаются моменты сопротивления
от сжатия, резания, моменты трения и т. и., препятствую-
щие движению привода и изменяющие свой знак при изме-
нении направления вращения.
Во вторую категорию входят моменты от силы тяжести,
а также от растяжения, сжатия и скручивания упругих
тел. Эти моменты могут быть названы потенциальными,
поскольку они связаны с изменением потенциальной энер-
гии отдельных элементов привода. Потенциальные моменты
могут тормозить движение привода или, наоборот, способ-
ствовать его движению. Следует отметить, что в отличие
от реактивного статического момента активный момент
сохраняет свой знак при изменении направления вращения
привода. Например, момент, создаваемый грузом подъем-
ного механизма, сохраняет свой знак как при подъеме
его, так и при опускании. Следовательно, в данном случае
активный статический момент при подъеме препятствует
движению, а при опускании способствует ему.
П риведение моментов сопротивления от одной оси вра-
щения к другой может быть произведено на основании
энергетического баланса системы. При этом потери мощ-
ности в промежуточных передачах учитываются введением
в расчеты соответствующего КПД — цп. Обозначим через
угловую скорость вала двигателя, а сом — угловую ско-
рость вала производственного механизма. На основании
равенства мощностей получим:
Мс,иСОи-^- = Мс<Од,
'III
откуда
где /Wf M — момент сопротивления производственного ме-
ханизма, Ы-м; Л1С — тот же момент сопротивления, при-
веденный к скорости вала двигателя, Н-м; i — ыл!м, —
передаточное число.
При наличии нескольких передач между двигателем
и механизмом (см. рис. 2.1) с передаточными числами
Jj, ы, ..., in и соответствующими КПД т]п1, rjll2, ..., мо-
мент сопротивления, приведенный к скорости вала двига-
теля, определяется формулой
Мс = Мс, м . . ----------•
<1!2 •••'/> ЦиЩпя- • -Лпл
Приведение сил сопротивления производится анало-
гично приведению моментов. Если скорость поступатель-
ного движения v, м/с, а угловая скорость вала двига-
теля сод, рад/с, то
Е,мц^- = Мссод, (2.4)
Чп
где ЕС1М — сила сопротивления производственного меха-
низма, Н.
Отсюда приведенный к скорости вала двигателя момент
сопротивления равен:
Мс = 77с.му/(одг]п. (2.5)
В случае приведения вращательного движения к посту-
пательному приведенное усилие
Есм == ЛКидЛпМ (2.6)
П риведение моментов инерции к одной оси вращения
основано иа том, что суммарный запас кинетической энер-
гии движущихся частей привода, отнесенный к одной оси,
остается неизменным. При наличии вращающихся частей,
обладающих моментами инерции Jл, JJ2, ..., Jn и угло-
выми скоростями <од, «j, со2, (см. рис. 2.1), можно
заменить их динамическое действие действием одного
момента инерции, приведенного например, к скорости вала
двигателя. В таком случае можно написать:
<o‘i 40; , <0; С.);,
J -2 = J*~2 + -2- + "2-J- + 2 ’ (27)
откуда результирующий или суммарный момент инерции,
приведенный к валу двигателя:
&)’+(5 7+• • +•'« • <2-8*
30
где J, — момент инерции ротора двигателя и других
элементов (муфты, шестерни и т. и.), установленных на
валу двигателя.
Иногда в каталогах для двигателей указывается зна-
чение махового момента GD2, кгс-м2. В этом
случае моменты инерции ротора двигателя, кг-м2, в си-
стеме СИ вычисляются по формуле
Jp = GZ>2/4, (2.9)
где D — диаметр инерции, м; G — сила тяжести (вес), кгс.
Это соотношение следует из формулы, определяющей
момент инерции тела массой т, кг,
J = тр2, (2.10)
где р — радиус инерции, м.
Если сила тяжести выражена в ньютонах, то масса
тела определяется из равенства
G = mg, (2.11)
где g = 9,81 м/с2 — ускорение свободного падения.
Момент инерции сплошного цилиндра относительно
продольной оси вычисляется по формуле
J = mR2/2, (2.12)
где R — радиус цилиндра, м.
Приведение масс, движущихся поста пательно, осуще-
ствляется также на основании равенства запаса кинети-
ческой энергии
Отсюда момент инерции, приведенный к валу двигателя,
J =/и (ц/<0д)2. (2.13)
Если механизм имеет вращающиеся и поступательно
движущиеся элементы, то суммарный приведенный к валу
двигателя момент инерции определяется на основании
(2.8) и (2.13)
— + 7777 4* • • • + J п + т ' I • • • (2.14)
Для приведения момента инерции к поступательному
движению нужно момент инерции заменить приведенной
массой, т. е.
т = /(ыд/о)2. (2.15)
31
2.2. Механические характеристики
производственных механизмов
и электрических двигателей.
Установившиеся режимы
При рассмотрении работы электродвига-
теля, приводящего в действие производственный меха-
низм, необходимо прежде всего выявить соответствие
механических характеристик двигателя характеристике
производственного механизма. Поэтому для правильною
проектирования и экономичной эксплуатации электро-
привода необходимо изучить эти характеристики.
Зависимость между приведенными к валу двигателя
скоростью и моментом сопротивления механизма ю —
— f (MJ называют механической характери-
стикой производственного механизма.
Различные производственные механизмы обладают раз-
личными механическими характеристиками. Однако можно
получить некоторые обобщающие выводы, если воспользо-
ваться следующей эмпирической формулой для механиче-
ской характеристики производственного механизма:
Л1С = Л40 + (Л<..11оч - Мо) (ю/ш„0 J-J (2.16)
где Мс — момент сопротивления производственного меха-
низма при скорости со; М() — момент сопротивления тре-
ния в движущихся частях механизма; МС1110., — момент
сопротивления при номинальной скорости <о,10„; х — пока-
затель степени, характеризующий изменение момента сопро-
тивления при изменении скорости.
Приведенная формула позволяет классифицировать ме-
ханические характеристики производственных механизмов
ориентировочно на следующие основные категории:
1. Не зависящая от скорости меха-
ническая характеристика (прямая 1 на рис.
2.4). При этом х = 0 и момент сопротивления Л4С не зави-
сит от скорости. Такой характеристикой обладают, напри-
мер, подъемные краны, лебедки, механизмы подач метал-
лорежущих станков, поршневые насосы при неизменной
высоте подачи, конвейеры с постоянной массой передвигае-
мого материала. Сюда же могут быть отнесены с известным
приближением все механизмы, у которых основным момен-
том сопротивления является момент трения, так как обычно
в пределах рабочих скоростей момент трения изменяется
мало.
32
2. Л и н е й н о-в взрастающая механиче-
ская характеристика (прямая 2 на рис. 2.4).
В этом случае х = 1 и момент сопротивления линейно за-
висит от скорости со, увеличиваясь с ее возрастанием (для
упрощения принято Мо = 0).
Такая характеристика получится, например, в приводе
генератора постоянного тока с независимым возбуждением,
если последний будет работать на постоянный внешний
резистор.
3. Н ел и н ей н о-в взрастающая (парабо-
лическая) механическая характеристи-
к а (кривая 3 на рис. 2.4). Этой характеристике соответст-
вует х = 2; момент сопротивления Л4С здесь зависит от
квадрата скорости. Механизмы, обла-
дающие такой характеристикой,назы-
вают иногда механизмами с вентиля-
торным моментом, поскольку у вен-
тиляторов момент сопротивления за-
висит от квадрата скорости. К меха-
Рис. 2.4. Механические характеристики про-
изводственных механизмов.
низмам, обладающим параболической механической харак-
теристикой, относятся также центробежные насосы, греб-
ные винты и т. п.
4. Нелинейно-спадающая механиче-
ская характеристика (кривая 4 на рис. 2.4).
При этом х — —1 и момент сопротивления Л4С изменяется
обратно пропорционально скорости, а мощность, потреб-
ляемая механизмом, остается постоянной. Такой харак-
теристикой обладают, например, некоторые токарные, рас-
точные, фрезерные и другие металлорежущие станки, мо-
талки в металлургической промышленности и т. п. Эти
характеристики не исчерпывают всех практически воз-
можных случаев, но дают представление о характеристиках
некоторых типичных производственных механизмов.
Механической характеристикой
электродвигателя называется зависи-
мость его угловой скорости от вра-
щающего момента, т. е. ы ~ f (Л4). Почти все
электродвигатели обладают тем свойством, что скорость
их является убывающей функцией момента двигателя.
2 Чиликин М. Г.. Сандлер А. С.
33
Это относится почти ко всем обычным электродвигателям,
применяемым в промышленности, т. е. к двигателям
постоянного тока независимого, последовательного и сме-
шанного возбуждения, а также к асинхронным бесколлек-
торным и коллекторным двигателям переменного тока.
Однако степень изменения скорости с изменением момента
у разных двигателей различна и характеризуется так
называемой жесткостью их механических характеристик.
Жесткость механической характе-
ристики электропривода — это отношение
разности электромагнитных моментов, развиваемых элек-
тродвигательным устройством, к соответствующей разности
угловых скоростей электропривода, т. е.
Р = (Л42 — Л'/1)/(<о2 — oil) = AAf/Aco. (2.17)
Обычно на рабочих участках механические характери-
стики двигателей имеют отрицательную жесткость Р < 0.
Линейные механические характеристики обладают постоян-
ной жесткостью. В случае нелинейных характеристик
их жесткость не постоянна и определяется в каждой точке
как производная момента по угловой скорости
$= ОМ/дм. (2.18)
Понятие жесткости может быть применено и к механи-
ческим характеристикам производственных механизмов.
Эти характеристики можно оценивать жесткостью
рс=дМс/д<о. (2.19)
Механические характеристики электродвигателей можно
разделить на четыре основные категории:
1. Абсолютно жесткая механическая
характеристика (0 = оо) — это характеристика,
при которой скорость с изменением момента остается
неизменной. Такой характеристикой обладают синхронные
двигатели (прямая 1 на рис. 2.5).
2. Жесткая механическая характер и-
с т и к а — это характеристика, при которой скорость
с изменением момента хотя и уменьшается, но в малой
степени. Жесткой механической характеристикой обладают
двигатели постоянного тока независимого возбуждения,
а также асинхронные двигатели в пределах рабочей части
механической характеристики (кривая 2 на рис. 2.5).
Для асинхронного двигателя жесткость в различных
точках механической характеристики различна (рис. 2.6).
34
Между максимальными (критическими) значениями момен-
тов в двигательном Л4КД и генераторном Л4К1Г режимах
характеристика асинхронного двигателя имеет сравнительно
большую жесткость.
3. Мягкая механическая характери-
стика — это характеристика, при которой с изменением
момента скорость значительно изменяется. Такой харак-
теристикой обладают двигатели постоянного тока после-
довательного возбуждения, особенно в зоне малых моментов
(кривая 3 на рис. 2.5). Для этих двигателей жесткость
не остается постоянной для всех точек характеристик.
Двигатели постоянного тока смешанного возбуждения
могут быть отнесены ко второй или третьей группе в зави-
Рис. 2.5. Механические харак-
теристики двигателей
Рис. 2.6. Механическая харак-
теристика асинхронного двига-
теля.
симосш от значения жесткости механической характери-
стики.
4. Абсолютно мягкая механическая
характеристика (£ = 0) — это характеристика,
при которой момент двигателя с изменением угловой ско-
рости остается неизменным. Такой характеристикой обла-
дают, например, двигатели постоянного тока независимого
возбуждения при питании их от источника тока или при
работе в замкнутых системах электропривода в режиме
стабилизации тока якоря (прямая 4 на рис. 2.5).
Работе электрического двигателя и производственного
механизма в установившемся режиме соответствует равно-
весие момента сопротивления механизма и вращающего
момента двигателя при определенной скорости, т. е. Л4=Л4С.
Изменение момента сопротивления на валу двигателя
приводит к тому, что скорость двигателя и момент, который
он развивает, могут автоматически изменяться и
2*
35
привод будет продолжать устойчиво работать при другой
скорости с новым значением момента.
Для восстановления равновесия между изменившимся
моментом сопротивления и моментом двигателя во всех
неэлектрических двигателях требуется участие специаль-
ных регуляторов, которые воздействуют на источник
энергии, увеличивая или соответственно уменьшая подачу
воды, топлива или пара. В электрических двигателях роль
автоматического регулятора может выполнять ЭДС двига-
теля. Эта особенность электродвигателей автоматически
поддерживать равновесие системы прн изменяющемся мо-
менте сопротивления является весьма ценным свойством,
так как во многих случаях момент может изменяться в той
или иной степени.
Изложенное иллюстрируется рис. 2.7, где приведены
механическая характеристика 3 двигателя постоянного
тока независимого возбуждения и две характеристики /
и 2 производственного механизма, например конвейера,
приводимого в движение этим двигателем *.
Характеристика / соответствует моменту сопротивле-
ния Мг при холостом ходе конвейера. Характеристика 2
получается при большом моменте сопротивления Л42 после
того, как на конвейер положены транспортируемые им
детали. Вначале при холостом ходе конвейера М —
двигатель работает со скоростью coj. С увеличением на-
грузки двигатель тормозится, скорость его снижается,
благодаря чему уменьшается ЭДС. При уменьшении ЭДС
возрастают ток в якорной цепи двигателя и момент, раз-
виваемый двигателем. Рост момента двигателя продол-
жается до тех пор, пока не наступит равновесие моментов
М = Л42 (точка <о2). Эта новая точка также является
общей для механической характеристики конвейера (2)
и механической характеристики электродвигателя (3).
Рассмотренные условия работы электропривода в уста-
новившемся режиме характеризуют статическую
устойчивость привода, когда изменение во вре-
мени скорости и момента происходит относительно медленно
в отличие от динамической устойчивости, имеющей место
при переходных режимах.
Под статической устойчивостью по-
нимается такое состояние установившегося режима ра-
1 Механические характеристики производственного механизма для
удобства изображаются в первом квадранте, хотя момент сопротивле-
ния имеет отрицательный знак.
36
боты привода, когда при случайно возникшем отклонении
скорости от установившегося значения привод возвратится
в точку установившегося режима. При неустойчи-
вом движении любое, даже самое малое, отклонение ско-
рости от установившегося значения приводит к изменению
состояния привода — он не возвращается в точку устано-
вившегося режима.
Привод статически устойчив, если в точке установив-
шегося режима выполняется условие
или
дМ/дса — dMjdd) < О
(2.20)
₽-₽с<0.
(2.21)
Условие (2.20) означает, что привод статически устой-
чив, если при положительном приращении угловой ско-
Рис. 2.7. Механические харак-
теристики двигателя постоян-
ного тока независимого возбуж-
дения и приводимого им меха-
низма.
Рис. 2.8. К определению стати-
ческой устойчивости привода
при постоянном моменте сопро-
тивления и вентиляторной на-
грузке.
рости момент двигателя окажется меньше статического
момента (момента сопротивления) и привод вследствие
этого затормозится до прежнего значения скорости. При
отрицательном приращении угловой скорости момент дви-
гателя окажется больше момента сопротивления и привод
вследствие этого разгонится до прежнего значения ско-
рости.
При постоянном моменте нагрузки (прямая / на рис. 2.4)
статическая устойчивость будет определяться только жест-
костью механической характеристики двигателя, так как
дМс/д<л = 0. Если она отрицательна, то работа в уста-
37
повившемся режиме устойчива дМ/д<л — дМ,/д<л =
= дМ/д<л < 0, как это имело место в рассмотренном слу-
чае (рис. 2.7).
Если же использовать асинхронный двигатель с ко-
роткозамкнутым ротором и нагрузить его постоянным
моментом (рис. 2.8), то в точке а дМ/ды — дМс/д<а —
——А/В — 0 < 0, т, е. устойчивый режим, а в точке б
дМ/да — дМс/да = А/С— 0 > 0, т. е. режим неустой-
чивый. При работе того же двигателя на механизм с вен-
тиляторной характеристикой (рис. 2.8) легко доказать,
что во всех точках работа будет устойчивой.
Обычно при проектировании электропривода механиче-
ская характеристика производственного механизма явля-
ется уже заданной. Поэтому для получения устойчивой
работы в установившемся режиме для определенных ско-
ростей н моментов сопротивления производственных меха-
низмов необходимо подбирать механическую характери-
стику электродвигателя соответствующей формы. Это мо-
жет быть достигнуто подбором электродвигателя соответ-
ствующего типа и изменением электрических параметров
его цепей. Иногда для получения требуемых механических
характеристик приходится применять специальные схемы
включения электрических машин и аппаратов.
2.3. Уравнение движения электропривода
Выше были рассмотрены условия работы
электропривода в установившемся режиме, когда момент,
развиваемый двигателем, равен моменту сопротивления
механизма и скорость привода является постоянной. Од-
нако во многих случаях привод ускоряется или замедля-
ется, и тогда возникает инерционная сила или инерцион-
ный момент, которые двигатель должен преодолевать,
находясь в переходном режиме. Таким образом, пере-
ходным режимом электропривода называют ре-
жим работы при переходе от .одного установившегося со-
стояния к другому, когда изменяются скорость, момент
и ток.
Причинами возникновения переходных режимов в элек-
троприводах является либо изменение нагрузки, связан-
ное с производственным процессом, либо воздействие на
электропривод при управлении им, т. е. пуск, торможе-
ние, изменение направления вращения и т. п. Переходные
режимы в электроприводах могут возникнуть также в ре-
38
зультате аварий или нарушения нормальных условий
электроснабжения (например, изменения напряжения или
частоты сети, несимметрия напряжения и т. п.).
Уравнение движения электропривода должно учитывать
все силы и моменты, действующие в Переходных режимах.
При поступательном движении движущая сила F всегда
уравновешивается силой сопротивления машины Fz и
„ „ dv
инерционной силой т-^-, возникающей при изменениях
скорости. Если масса тела т выражена в килограммах,
а скорость v — в метрах в секунду, то сила инерции, как
и другие силы, действующие в рабочей машине, измеря-
ются в ньютонах (кг-м-с 2).
В соответствии с изложенным уравнение равновесия
сил при поступательном движении записывается так:
= (2-22)
Аналогично уравнение равновесия моментов, Н-м, для
вращательного движения (уравнение движения привода)
имеет следующий вид:
= (2.23)
Уравнение (2.23) показывает, что развиваемый двига-
телем вращающий момент М уравновешивается моментом
сопротивления Мс на его валу и инерционным или дина-
мическим моментом J В (2.22) и (2.23) принято, что
масса тела т и соответственно момент инерции привода J
являются постоянными, что справедливо для значительного
числа производственных механизмов.
Из анализа (2.23) видно:
1) при Л4 > Л4С da/dt > 0, т. е. имеет место ускорение
привода;
2) при М < Л4С da/dt < 0, т. е. имеет место замедле-
ние привода (очевидно, что замедление привода может быть
и при отрицательном значении момента двигателя);
3) прн Л4 = Л4С daldt = 0; в данном случае привод
работает в установившемся режиме.
Вращающий момент, развиваемый двигателем при ра-
боте, принимается положительным, если он направлен
в сторону движения привода. Если он направлен в сторо-
ну обратную движению, то он считается отрицательным.
39
Отмегим, что знак минус перед М. указывает на тормозя-
щее действие момента сон.; отивления, что отвечает усилию
резания, потерям трепня, подъему груза, сжатию пру-
жины и т. п. при положительном знаке скорости.
При спуске груза, раскручивании или разжатии пру-
жины и т. п. перед Л4С ставится знак плюс, поскольку
в этих случаях момент сопротивления помогает вращению
привода.
Инерционный (динамический) момент (правая
часть уравнения моментов) проявляется только во время
переходных режимов, когда изменяется скорость привода.
При ускорении привода этот момент направлен против
движения, а при торможении он поддерживает движение.
Инерционный момент как по значению, так и по знаку
определяется алгебраической суммой моментов двигателя
и момента сопротивления.
При учете сказанного о знаках моментов формула (2.23)
соответствует работе двигателя в двигательном режиме
при реактивном моменте сопротивления (или при потен-
циальном тормозящем моменте сопротивления). В общем
виде уравнение движения привода может быть записано
следующим образом:
= (2.23а)
Выбор знаков перед значениями моментов в (2.23а)
зависит от режима работы двигателя и характера моментов
сопротивления.
2.4. Уравнение движения электропривода
при переменном моменте инерции,
зависящем от угла поворота вала
В некоторых устройствах, преобразующих вращатель-
ное движение в возвратно-поступательное при помощи кривошипнс-
шатунного механизма, скорость и ускорение поступательно движу-
щихся масс изменяются по значению и знаку за один оборот криво-
шипа. Соответственно запас кинетической энергии этих масс изменя-
ется от нуля до максимального значения. Момент инерции, приведен-
ный к валу кривошипа,
J к = mv2/a>^,
где ти2 — масса поступательно движущегося элемента системы, имею-
щая скорость v; <ок — угловая скорость вала кривошипа.
Используя геометрические соотношение в кривошипном механизме
(рис, 2.9), можно после некоторых преобразований получить выра-
40
жение
v = sin (a + P)/cosp. (2-42)
Подставив в формулу момента инерции значение v из (2.24), най-
дем.
JK=--tnr2 sin2 (a + P)/cos2 р. (2.25)
Так как угол Р можно выразить в функции угла а как
то приведенный момент инерции от поступательно движущейся массы
будет зависеть только от величины а, т. е. положения кривошипа.
Для определения суммарного момента инерции нужно к моменту инер-
ции, полученному по (2.25), прибавить момент инерции всех других
элементов электропривода, приведенный к валу кривошипа. Если
Рис. 2.9. Схема кривошипно-шатунного механизма.
между валом кривошипа и двигателем имеются промежуточные пере-
дачи, то приведение момента инерции от вала кривошипа к валу дви-
гателя производится по (2.8).
Пользуясь (2.5) и подставляя выражение для скорости из (2.24),
находим статический момент, приведенный к угловой скорости вала
двигателя:
Mc = Fcrsin(a + P)/r]icosP, (2.27)
где Ес — сила сопротивления поступательно-движущегося элемента;
i — передаточное число от вала двигателя к валу кривошипа.
При переменном моменте инерции, как это имеет место в криво-
шипных механизмах, уравнение движения электропривода получает
более сложный вид, так как JK = f (a).
Кинетическая энергия, запасенная на валу кривошипа и выра-
женная в величинах, приведенных к валу двигателя, равна:
А =
где J — приведенный к валу двигателя суммарный момент инерции,,
зависящий от угла <р поворота вала двигателя; со — угловая скорость
двигателя.
Динамическая мощность при этом равна:
Р -dA - 7fll d(0 1 0)2 dJ /9
-dT-Ja>~dt + 2 йф di- (2-28)
Так как co = dtf/ilt, to
41
Если учесть, что динамический момент Л/ДИц = ЕДИ11/ю, то урав-
нение движения для рассматриваемого случая примет вид:
= + (2.30)
dt 2 ay
Сравнивая уравнения (2.23) с (2.30), видим, что последнее носит
более общий характер (имеет дополнительное слагаемое в правой
части),
2.5. Время ускорения и замедления
привода. Определение
наивыгоднейшего передаточного
отношения
Время переходных режимов привода: пуска,
торможения, перехода от одной скорости к другой влияет
на производительность механизма. Определение времени
переходных процессов основано на интегрировании уравне-
ния движения привода (2.23). Разделяя переменные, полу-
чаем:
dt = J da/(M - Л4С). (2.31)
Время, необходимое для изменения скорости привода
ОТ Wj до со2>
Ьл = ( (2.32)
Для решения этого интеграла необходимо знать зави-
симости моментов двигателя и механизма от скорости.
В простейшем случае, приняв М = const, Мс = const
и J = const, получим:
Zt2 = J(co2-coi)/(M-/Hc). (2.33)
Этим уравнением можно воспользоваться, например,
для расчета времени пуска привода. Если значение момента
двигателя во время пуска обозначить через Л4П, как это
показано на рис. 2.10, то получим следующее выражение
для времени пуска от состояния покоя до конечной ско-
рости со,10м, соответствующей заданному моменту сопро-
тивления:
^, = До,,ом/(МП - Мс). (2.34)
Если требуется точно учесть время переходного про-
цесса и момент двигателя не может быть принят постоян-
ным, например при пуске двигателя с короткозамкнутым
42
ротором, необходимо пользоваться (2.32). При этом
следует иметь в виду, что момент инерции для большинства
приводов имеет постоянное значение, а момент двигателя
и момент сопротивления в переходных режимах обычно
не остаются постоянными.
Из (2.32) видно, что теоретически полное время пере-
ходного процесса равно бесконечности. Действительно,
поскольку переходный процесс заканчивается при наступле-
нии равенства моментов (М = Л4С), то величина, стоящая
под знаком интеграла, стремится к бесконечности. В прак-
считают, что процесс разбега
тических расчетах обычно
Рис. 2.10. Пусковой график при-
вода,
Рис. 2.11, График торможения
привода,
заканчивается при скорости, равной не со£, а приблизи-
тельно со = 0,95со2, тогда время разбега получит конечное
значение.
В тех случаях, когда динамический момент имеет отри-
цательное значение, привод замедляется. Как указывалось
выше, для такого случая уравнение моментов будет иметь
вид:
Очевидно, привод замедляется и в том случае, когда
двигатель развивает положительный момент по абсолют-
ному значению, меньший момента сопротивления.
Из последнего уравнения следует, что время торможения
(02
t? = J
(01
G),
J d(o f J d(D
-(М+Ж " J Л4+Ж
СО 2
(2.35)
43
Полагая в частном случае J = const, М = con^t и
М,. = const, получаем:
(2-36)
Пользуясь уравнением (2.36), можно рассчитать время
торможения (со2 = 0) для графика момента, показанного
на рис. 2.11.
Если момент двигателя и момент статический находятся
в сложной зависимости от скорости, уравнение движения
аналитически не решается. В этом случае приходится
пользоваться приближенными графическими или графо-
аналитическими методами решения.
В ряде практических случаев (например, в следящих
системах, приводах вспомогательных механизмов прокат-
ных станов, продольно-строгальных станках и т. п.) воз-
никает необходимость в получении минимального времени
разгона и торможения производственного механизма с целью
повышения его производительности. При заданных зна-
чениях моментов инерции ротора двигателя /д, произ-
водственного механизма Jc и момента сопротивленияЛ4С
уравнение движения привода относительно рабочего вала
механизма (пренебрегая потерями в передачах) может быть
записано так:
Ш-(Ис = (Л + ад-^, (2.37)
где k — коэффициент, учитывающий момент инерции пере-
дач.
Очевидно, минимум времени разгона имеет место при
наибольшем ускорении. Из (2.37)
daijdt = (iM — Л4с)/( Jc + kJ л12).
Пользуясь правилом определения максимума dcnjdt
и полагая Мс = const, а также М — const (средним за
период переходного режима), находим оптимальное (или
наивыгоднейшее) передаточное отношение i:
10„т = М./А4 + /(7м (2.38)
В том случае, когда момент сопротивления оказывается
значительно меньшим момента двигателя при пуске и
торможении,
/опт — JJkJ д.
(2.39)
44
2.6. Графическое и графо-аналитическое
решение уравнения движения привода
Если невозможно аналитически решить урав-
нение движения электропривода (2.23), то его решают,
например, так называемым методом пропорций или мето-
дом конечных приращений. Сущность этого метода заклю-
чается в замене бесконечно малых приращений скорости da»
и времени di малыми конечными приращениями Доз и ДС
При этом предполагается, что в уравнение движения элек-
тропривода подставляются средние значения момента дви-
гателя и момента сопротивления для каждого интервала
изменения скорости. Эти средние значения моментов обычно
находятся графическим путем на основании механических
характеристик двигателя и производственного механизма.
Рассмотрим применение метода пропорций
на примере привода вентилятора от асинхронного двига-
теля с короткозамкнутым ротором. Метод пропорций осно-
ван, как указывалось выше, на следующей записи урав-
нения движения электропривода:
M — MZ = J Ьы/Ы.
Считая, что в некотором интервале времени Д£ раз-
ность моментов М — Mz остается величиной постоянной,
получаем пропорцию
(М - Мс)/J = Дсо/ДЛ (2.40)
На рис. 2.12 показан ход графического построения
кривой скорости со = f (/), выполненного на основании
пропорции (2.40), и нахождения времени пуска двигателя,
Построение ведется следующим образом. В левом ква-
дранте строятся характеристики М = f (со) и Л4С — (со).
Графически находится их разность М — Mz — ф (со) —
кривая динамического момента, изображаемая в том же
квадранте. Последнюю кривую заменяют ступенчатой
с участками М — Mz = const. От числа участков зависят
точность построений и конечные результаты. Точность
тем выше, чем на большее число участков разбита кривая
М — Мс = ф (со).
Полученные на отдельных участках значения динами-
ческих моментов откладывают вверх на оси ординат. Так,
для первого участка получаем отрезок ОВ, для второго ОВХ
и т. д. Отмеченные на оси ординат точки В, Ви В2 и т. д.
соединяют прямыми с точкой А, находящейся от начала
45
координат на расстоянии, пропорциональном величине J.
Затем из начала координат проводят прямую ОС, парал-
лельную АВ. Последняя прямая характеризует искомую
функцию со = f (/) для первого участка моментов. Это
следует из подобия треугольников АОВ и ODC.
Действительно, ОВЮА = CDIOD, но ОВ = — Мс;
ОА — J', CD = Acoj, следовательно, отрезок OD согласно
уравнению (2.40) соответствует времени пуска на первом
участке, т. е. OD =
Проведя аналогичное построение для всех последующих
участков М — М., строим кривую скорости двигателя и
находим искомое время пуска привода.
Рис. 2.12. Применение метода пропорции для случая пуска привода
вентилятора от асинхронного двигателя с короткозамкнутым ротором.
При построении следует учитывать масштабы величин,
связанные между собой соотношением
mM!mj = mjrnt,
где т.н — масштаб момента; mj — масштаб момента инер-
ции J; та — масштаб скорости двигателя; mt — масштаб
времени.
Если задаться масштабами трех величин: момента,
скорости, времени, то из приведенного соотношения нахо-
дится масштаб четвертой величины — момента инерции J.
Подобный метод построения кривой скорости для опре-
деления времени пуска применим также для двигателей
постоянного тока, если механические характеристики не мо-
гут быть выражены аналитически. Этот метод расчета
46
может быть применен не только для пусковых, гго и для
тормозных режимов.
Кроме метода пропорции, для построения кривой угло-
вой скорости со = f (/) и определения времени пуска дви-
гателя используется метод площадей, сводящийся
к графо-аналитическому интегрированию уравнения дви-
жения. Задаются механическими характеристиками дви-
гателя и производственного механизма. Затем эти две
характеристики совмещаются и, как в предыдущем слу-
чае, определяется кривая динамического момента МДИ11 =«
~ М — Мс (рис. 2.13).
Кривая динамического момента делится на ряд участ-
ков, на каждом из которых момент предполагается постоян-
ным и равным среднему значению. Для каждого участка
будет справедливо следующее выражение:
Д* = /Дм/(М-Л4с). (2.41)
При равенстве значений Дсо на всех участках общее
время пуска определится по формуле
/ = 2 (Д/) =/До, ]/(Л4-Л1с), (2.42)
I I
где пг — число участков; Дсо = const — перепад угловой
скорости на каждом участке; Л4 — Мс — соответствующее
значение динамического момента (Л4Ь М2 ...) на каждом
из участков.
47
При расчете переходных режимов электроприводов
необходимо учитыьать харамерис и.ки не только произ-
водственных механизмов, но и различных типов электро-
двигателей. Особенности характеристик различных двига-
телей оказывают существенное влияние на протекание
переходных режимов.
Изучение переходных режимов в электроприводах свя-
зано с необходимостью установления зависимостей ско-
рости, тока, момента, а иногда и пути от времени при
пуске, торможении и реверсировании электродвигателей.
ГЛАВА ТРЕТЬЯ
МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ЭЛЕКТРОПРИВОДОВ
3.1. Механические характеристики
двигателя постоянного тока
независимого возбуждения
Обычная схема включения двигателя по-
стоянного тока независимого возбуждения представлена
на рис. 3.1. Якорь двигателя М и его обмотка возбуждения
ОВ обычно получают питание от разных, независимых
друг от друга источников (преобразователей) напряжения U
+
о
Рис. 3.1. Схема включения двига-
теля постоянного тока независи-
мого возбуждения.
и ил, что позволяет отдельно регулировать напряжение
на якоре двигателя и на обмотке возбуждения и выполнять
их на разное номинальное напряжение. Лишь при нали-
чии сети постоянного тока или при нерегулируемом пре-
образователе в якорной цепи обмотка возбуждения пита-
ется от того же источника напряжения, что и якорь дви-
гателя. Но и в этом случае ток возбуждения 1а не зависит
от тока I якоря двигателя.
48
Направления тока I и ЭДС вращения двигателя Е,
показанные на рис. 3.1, соответствуют двигательному
режиму работы, когда электрическая энергия потребляется
двигателем из сети (от источника напряжения U) и пре-
образуется в механическую энергию, мощность которой
равна Р = Мы. Зависимость же между М и со двигателя
определяется его механической характеристикой.
Аналитическое выражение механической характери-
стики двигателя может быть получено из уравнения равно-
весия напряжений, составленного для якорной цепи схемы
(рис. 3.1). При установившемся режиме работы двигателя
приложенное напряжение U, В, уравновешивается паде-
нием напряжения в якорной цепи IR и наведенной в якоре
ЭДС вращения Е, В, т. е.
U = IR + E; (3.1)
здесь Z — ток в якорной цепи двигателя, A; R — суммар-
ное сопротивление якорной цепи, Ом, включающее внеш-
нее сопротивление резистора Rp и внутреннее сопротивле-
ние якоря двигателя R„ (при наличии дополнительных
полюсов учитывается и их сопротивление);
Е = £Фсо,
(3-2)
где k — коэффициент, зависящий от конструктивных дан-
ных двигателя, k = pN /2ла (р — число пар полюсов
двигателя; N — число активных проводников обмотки
якоря; а — число пар параллельных ветвей обмотки якоря);
Ф и ы — соответственно магнитный поток, Вб, и угловая
скорость двигателя, рад/с.
Если в (3.1) вместо Е подставим ее значение Е из (3.2),
то получим уравнение для скорости двигателя
со = (6/-7/?)/&Ф. (3.3)
Уравнение (3.3) представляет собой зависимость ско-
рости двигателя от тока якоря. Такую зависимость со =
— f (/) называют электромеханической ха-
рактеристикой двигателя.
Для получения уравнения механической характеристики
необходимо найти зависимость скорости от момента дви-
гателя. Это легко сделать, если учесть, что момент, Н-м,
развиваемый двигателем, связан с током якоря и магнит-
49
ним потоком простой зависимостью, а именно Ч
Л1=АФ/ (3.4)
Подставив в (3.3) значение тока /, найденное из (3.4),
получим выражение для механической харак-
теристики:
со = UIk® - М R/k1 2®2, (3.5)
или
<л = Ь'г/с-MR/c2, (3.6)
где
с — k®. (3.7)
Коэффициент с принимается постоянным, не зависящим
от нагрузки, если у двигателя с независимым возбужде-
нием имеется компенсационная обмотка. Он может счи-
таться неизменным, если для обычных двигателей прене-
бречь реакцией якоря.
Механическая характеристика двигателя при неизмен-
ных параметрах U, Ф и R представляется прямой линией.
Ниже показано, что, изменяя тот или иной параметр меха-
нической характеристики, можно при определенном моменте
сопротивления на валу двигателя получать различные
скорости двигателя, т. е. регулировать скорость электро-
привода.
Здесь же рассмотрим влияние лишь одного параметра,
а именно сопротивления якорной цепи, поскольку это
необходимо для выяснения основных определений, связан-
ных с понятием о механической характеристике для раз-
личных режимов работы двигателя.
На рис. 3.2 представлены механические характери-
стики двигателя независимого возбуждения для различных
сопротивлений якорной цепи. Как видно из (3.5), при
М = 0 все характеристики проходят через одну точку,
лежащую на оси ординат. Угловая скорость в этой точке
имеет вполне определенное значение, не зависящее от со-
противления якорной цепи. Эта скорость носит название
1 Приведенным уравнением определяется электромагнитный мо-
мент двигателя. Момент па валу двигателя будет меньше электромагнит-
ного момента па значение, соответствующее потерям в стали и механи-
ческим потерям. Однако для практических расчетов можно пользо-
ваться уравнениями механических характеристик, где приводится
электромагнитный момент,
50
скорости идеального холостого хода ид
и определяется выражением
u0 = Ulk(b. (3.8)
При скорости идеального холостого хода, когда ток
в якорной цепи равен нулю, ЭДС якоря, направленная
навстречу приложенному напряжению, равна ему по абсо-
лютному значению. Если двигатель до приложения на-
грузки работал с угловой скоростью w0, то при появлении
на его валу момента сопротивления угловая скорость
будет снижаться. Следствием этого будет уменьшение ЭДС
вращения Е согласно (3.2) и увеличение тока якоря в соот-
ветствии с (3.1) и момента двигателя по (3.4). Угловая
Рис. 3.2. Естественная характери-
стика и семейство реостатных ме-
ханических характеристик двига-
теля постоянного тока независи-
мого возбуждения.
скорость будет снижаться до тех пор, пока момент двига-
теля не сравняется с моментом сопротивления. Разность
значений установившихся скоростей электропривода до
и после приложения заданной статической нагрузки назы-
вается статическим падением (перепадом)
скорости электропривода.
Второй член (3.6) характеризует собой статическое
падение угловой скорости (перепад) относительно угловой
скорости идеального холостого хода:
ДЫ = МДД2Ф2. (3.9)
Таким образом, уравнение для скорости двигателя
может быть записано так:
<b = w0 —Дсо. (3.10)
Верхняя характеристика из семейства, приведенного
на рис. 3.2, носит название естественной. Естествен-
51
ной характеристикой называется та-
кая характеристика двигателя, кото-
рая получается при отсутствии внеш-
них резисторов в якорной цепи и но-
минальных значениях напряжения и
магнитного потока двигателя. Жесткость
естественной характеристики зависит от внутреннего со-
противления якорной цепи двигателя /?я. Внутреннее
сопротивление якорной цени включает собственное сопро-
тивление якорной обмотки, сопротивление обмотки допол-
нительных полюсов, компенсационной обмотки и щеток.
Соответственно перепад скорости для естественной харак-
теристики
Дсо = /И/?я/й2Ф(1Ом.
По (3.9) определяется статическое падение скорости
для любой из характеристик двигателя независимого воз-
буждения, представленных на рис. 3.2. Например, при
дополнительно включенном реостате, имеющем сопротив-
ление AJp, статическое падение скорости определится из
соотношения
Дсо = М (Кя + /?р)/й2Ф2. (3.11)
Разделив (3.10) на со0, получим статическое падение
скорости в относительных единицах:
Дсо* = Дсо/ со0 = (соо — со)/со0-
Статическое падение скорости в относительных едини-
цах Дсо* аналогично скольжению асинхронного двигателя,
хотя скольжение для двигателей постоянного тока не имеет
того физического смысла, как у асинхронных двигате-
лей.
Если в якорную цепь двигателя включен дополнитель-
ный резистор (реостат), то механические характеристики,
получаемые при этом, называются искусственными
или реостатными. Эти характеристики пересекаются
все в одной точке соо. Реостатные характеристики так же ли-
нейны, как и естественная характеристика, но имеют зна-
чительно больший наклон к оси моментов, т. е. обладают
меньшей жесткостью. Чем больше введенное в цепь якоря
сопротивление резистора, тем круче идет характеристика,
тем меньше ее жесткость.
52
3.2. Построение механических
характеристик двигателя независимого
возбуждения
Для построения механической характеристики
двигателя независимого возбуждения, естественной или
реостатной, достаточно знать лишь две ее точки, поскольку
все механические характеристики теоретически представ-
ляют собой прямые линии (рис. 3.2). Эти две точки для
каждой характеристики могут быть любыми, однако постро-
ение естественной механической характеристики удобно
производить по точкам, одна из которых соответствует но-
минальному электромагнитному моменту двигателя и номи-
нальной скорости (Л1 = Л4„ом и со = со„ом), а другая — ско-
рости идеального холостого хода (М = 0 и со = соц). Но-
минальная скорость двигателя определяется по паспортным
данным. Номинальный электромагнитный момент вычисля-
ется по формуле
^ИОМ = ном*
Скорость идеального холостого хода для естественной
характеристики может быть получена из (3.8), если числи-
тель и знаменатель ее умножить на w,,0M и учесть, что
7-цом ^^НОМ^ИОМ ПОМ 711ОМ7?Я,
тогда
(Оо Uпомином/(^ПОМ 7НОМТ?Я). (3- 1 2)
Так как в каталогах внутреннее сопротивление якоря Ra
обычно не указывается, то его ориентировочно определяют,
принимая, что половина всех потерь в двигателе при номи-
нальной нагрузке связана с потерями в меди якоря. Поэ-
тому 0,5 (1 — ПпомКюм^иом- Отсюда
^„^0,5(1 —т1110ч)С7нок//1[0м. (3.13)
Пользуясь естественной механической характеристикой,
легко построить и реостатную характеристику при любом со-
противлении реостата /?р. Она также строится по двум
точкам: угловой скорости идеального холостого хода
со = соп (ггри М — 0) и угловой скорости, соответствующей
номинальному моменту при заданном сопротивлении ре-
зистора /?р, т. е. со = со,[ОМ1Р (при М = Л4110м). Угловая ско-
рость <о110М1Р определяется по формуле
Whom, р = СОо [ 1 — 7110м (А?я + 7?р)/77110м]. (3.14)
53
Механическая характеристика может быть построена
также по точке идеального холостого хода и точке, соответ-
ствующей режиму короткого замыкания \ где М = Л4К13,
а скорость w = 0. Угловую скорость w0 определяем по (3.12),
а момент Л4К13, пренебрегая реакцией якоря, — по формуле
•Мк.з =-Мцом/к.з^ном» (3.15)
где 1КЗ = U/R —ток короткого замыкания.
Сопротивление якорной цепи /? = /?„ + Rp может быть
различным в зависимости от сопротивления внешнего ре-
зистора. В соответствии с этим будут различными для раз-
ных реостатных характеристик и токи короткого замыкания
7к,з и моменты короткого замыкания Л4К,3.
Для естественной механической характеристики значе-
ние момента короткого замыкания Л4К13 является наиболь-
шим, так как при этом ток короткого замыкания ограничи-
вается лишь внутренним сопротивлением обмоток якоря дви-
гателя.
С учетом сказанного уравнение механической характе-
ристики представляется в следующем виде:
® = о>о(1 - М/Мк,3). (3.16)
Согласно (3.16) при М = 0 скорость а = <о0. Если
в (3.16) положить М = Л4К|3, то скорость <о = 0. Это будут
(при различных реостатных характеристиках) точки, лежа-
щие на оси абсцисс (рис. 3.2) и определяемые в конечном
счете сопротивлениями, ограничивающими ток и момент
короткого замыкания.
Так, если у нескольких двигателей механические харак-
теристики обладают одинаковой жесткостью, то указанные
характеристики, выраженные в относительных единицах,
будут для всех этих двигателей представлены одной и той
же прямой.
Уравнение характеристики двигателя независимого воз-
буждения в относительных единицах легко может быть по-
лучено из (3.3), если выразить его следующим образом:
w = w0(l — IR/U). (3.17)
Разделив затем левую и правую части (3.17) на w0,
получим:
<о* = I -IR/U-, (3.18)
1 Режимом короткого замыкания двигателя называется такой ре-
жим его работы, при котором угловая скорость двигателя, подклю-
ченного к источнику напряжения, равна нулю,
54
после преобразований
со* = 1—7*/?* (3.19)
или соответственно (при Ф = Ф,.ом = const)
со* = 1-М*Я*, (3.20)
где со* = со/со„; 7* = 7//11ом; Л-1, = М /Мво„ — соответ-
ственно угловая скорость, ток и момент двигателя в отно-
сительных единицах; /?* = R/R!lmi — сопротивление в от-
носительных единицах; Rll0tl = t/llOM/7IIOM — номинальное
сопротивление двигателя.
Номинальным сопротивлением двига-
теля постоянного тока называется такое сопротивление,
которое при неподвижном якоре и номинальном напряже-
нии ограничивает ток в якоре до номинального значения.
Рис. 3.3. Схема включения двига-
теля постоянного тока независи-
мого возбуждения при пуске.
В (3.19) и (3.20) второй член правой части представляет
собой перепад (статическое падение) угловой скорости, вы-
раженный в относительных единицах и равный:
Дсо* = 7*/?* = Л1*/?*. (3.21)
Последнее равенство позволяет при известных условиях
значительно упростить расчет механических характеристик.
Действительно, если рассматривать точки механических
характеристик, отвечающие номинальному моменту, то для
них
7* = 1 и ЛИ* = 1
и, следовательно, равенство (3.21) принимает вид:
Дсо* = /?*.
(3.22)
Это означает, что при номинальном моменте относи-
тельный перепад угловой скорости двигателя численно ра-
вен относительному сопротивлению якорной цепи двига-
теля.
55
Произведем теперь в качестве примера построение меха-
нических характеристик двигателя независимого возбужде-
ния, схема включения которого представлена на рис. 3.3.
Процесс пуска двигателя состоит в том, что вначале замыка-
ется выключатель К, затем через некоторые промежутки
времени по мере увеличения угловой скорости замыкаются
последовательно выключатели К1, К2 и КЗ. Когда же все
контакты замкнутся и пусковой резистор окажется пол-
ностью зашунтированным, двигатель начнет работать с оп-
ределенной угловой скоростью на естественной механиче-
ской характеристике.
Рис. 3.4. Механические характери-
стики двигателя постоянного тока
независимого возбуждения в отно-
сительных единицах.
Естественная характеристика в относительных единицах
легко может быть построена, если принять согласно (3.20)
и (3.22)
w*=too* = l и Д<в*=/?^ при Л4* — 1.
Координаты одной точки характеристики:
(о, = 1, М* = 0;
другой
W ном1 Д Wцом , К1 у. 1 .
Проведенная через эти две точки прямая и будет естест-
венной механической характеристикой. Указанное построе-
ние произведено на рис. 3.4. Там же даны построение ре-
остатных характеристик и графическое определение сопро-
тивлений.
Построение реостатных характеристик и расчет сопротив-
лений резисторов имеют значение при проектировании схем
автоматизированного пуска двигателя. Для построения ре-
56
остатних характеристик принято, что момент и ток двига-
теля при пуске изменяются в пределах от Л41# до Мг* и
от до /2*. Значение Л4и (/1#) при номинальном потоке
двигателя обычно принимается по условиям коммутации
равным 2—2,5. Что касается значения Мг* (/,*), то его нуж-
но принять по крайней мере на 10—20 % больше момента
сопротивления механизма.
В соответствии с характеристикой 1—2 двигатель увели-
чивает угловую скорость до значения, определяемого поло-
жением точки 2, затем должна быть зашунтирована первая
ступень резистора (замыкается выключатель К/ схемы на
рис. 3.3.). Угловая скорость двигателя из-за инерционно-
сти электропривода не может измениться сразу, а момент,
если пренебречь индуктивностью якоря, возрастает мгно-
венно до значения Л114., поэтому переход на новую характе-
ристику осуществляется по линии 2—3, параллельной оси
абсцисс.
Далее двигатель будет увеличивать угловую скорость
соответственно прямой 3—4 до точки 4, и когда замкнется
выключатель Л'2, произойдет переход на следующую ха-
рактеристику. После замыкания выключателя КЗ наступает
переход на естественную характеристику (6—7). Если при
пуске нагрузка на валу двигателя соответствует номиналь-
ному моменту, то двигатель по окончании пуска работает
на естественной характеристике со скоростью, соответствую-
щей wH0M*.
Согласно (3.22) вертикальные отрезки на линии, прове-
денной через точку М* = 1, соответствуют отдельным сту-
пеням сопротивления якорной цепи в относительных еди-
ницах (рис. 3.4). Ордината af в относительных единицах
равна номинальному сопротивлению, т. е. = 1 • Орди-
наты ае, ad, ас, ab равны соответственно относительным со-
противлениям отдельных ступеней якорной цепи двигателя.
Если из указанных относительных величин вычесть отно-
сительное внутреннее сопротивление двигателя, отмеченное
отрезком ab, то получатся относительные сопротивления
отдельных ступеней реостата (соответствующие ординатам
be, bd и be). Отдельные секции реостата Rl, R2 и R3 (рис. 3.3)
имеют относительные сопротивления и R3*, соот-
ветствующие отрезкам de, cd и be (рис. 3.4).
Для перехода от сопротивлений, выраженных в относи-
тельных единицах, к значениям сопротивлений в омах,
производится соответствующий пересчет по равенству Rt =
Ri % Rном*
57
3.3. Механические характеристики
двигателя постоянного тока
независимого возбуждения
в тормозных режимах
Выше была рассмотрена работа двигателя не-
зависимого возбуждения в двигательном режиме, чему со-
ответствовали механические характеристики, представлен-
ные на рис. 3.2 и расположенные в первом квадранте коор-
динатных осей. Однако этим не исчерпываются возможные
режимы работы электродви-
гателя и его механические
характеристики.
Весьма часто в современ-
ных электроприводах необхо-
димо быстро и точно остано-
вить механизм или изменить
направление его движения.
Быстрота и точность, с ка-
кой будут проделаны эти опе-
рации, во многих случаях
определяют производитель-
ность механизма, а иногда
и качество вырабатываемого
Рис. 3.5. Механические характери-
стики двигателя постоянного тока
независимого возбуждения при раз-
личных режимах работы.
продукта. Во время торможения или перемены направле-
ния движения (реверса) электродвигатель работает в тор-
мозном режиме на одной из механических характеристик,
соответствующих осуществляемому способу торможения.
Графическое изображение механических характеристик
двигателя независимого возбуждения для разных режимов
работы представлено на рис. 3.5. Здесь, кроме участка
характеристик, соответствующих двигательному режиму
(квадрант /), показаны участки характеристик в квад-
рантах II и IV, характеризующие три возможных способа
генераторного электрического торможения, а именно:
1) торможение с отдачей энергии в сеть (рекуперативное);
2) динамическое торможение;
3) торможение противовключением.
58
Каждый тормозной режим является генераторным, так
как энергия поступает в машину с вала, преобразуется
в электрическую и либо отдается в сеть, либо затрачивается
на нагрев элементов якорной цепи, обладающих активным
сопротивлением, и рассеивается в окружающую среду.
Рассмотрим подробнее особенности механических ха-
рактеристик при указанных способах торможения.
1. Торможение с отдачей энергии в сеть (генератор-
ный режим работы параллельно с сетью) осуществляется
в том случае, когда скорость двигателя оказывается выше
скорости идеального холостого хода и его ЭДС Е больше
приложенного напряжения U. Двигатель здесь работает
в режиме генератора параллельно с сетью, которой он от-
дает электрическую энергию; ток при этом изменяет свое
направление. Последнее очевидно из равенства
/ = (£-£)/£ = -(£-£)/£, (3.23)
следовательно, изменяет знак и момент двигателя, т. е. он
становится тормозным М = —кФ1. Если обозначить тор-
мозной момент через МТ = —М, то уравнение (3.5) при
со > w0 примет следующий вид:
о = U/кФ + Л1Т/?,£2Ф2. (3.24)
Первый член в правой части уравнения показывает, что
механическая характеристика двигателя независимого воз-
буждения в этом генераторном режиме при М. = 0 проходит
через точку, соответствующую угловой скорости идеального
холостого хода, как и в случае двигательного режима. На-
клон (жесткость) механической характеристики определя-
ется сомножителем второго члена уравнения Rlk2<&\ ко-
торый по абсолютному значению (при заданном сопротив-
лении R) остается неизменным. Следовательно, наклон ме-
ханической характеристики в рассматриваемом генератор-
ном режиме будет таким же, как и в двигательном. Поэ-
тому графически механические характеристики двигателя
в режиме торможения с отдачей энергии в сеть являются
продолжением характеристик двигательного режима в об-
ласть квадранта II (рис. 3.5). Этот способ торможения
возможен, например, в приводах транспортных и подъемных
механизмов при спуске груза и при некоторых способах ре-
гулирования скорости, когда двигатель, переходя к низ-
шим скоростям, проходит значения w > w0. Такое тормо-
жение является весьма экономичным, поскольку оно сопро-
вождается отдачей в сеть электрической энергии (за выче-
59
том потерь в двигателе), которую двигатель преобразует
из механической, поступающей к нему с вала. Но торможе-
ние этим способом может быть осуществлено в ограничен-
ных пределах, так как не во всех приводах возможно соб-
людение условия
w > Wo-
Необходимо отметить, что чем больше сопротивление
в якорной цепи двигателя, тем выше его угловая скорость
в генераторном режиме работы параллельно с сетью при том
же тормозном моменте (рис. 3.5).
2. Динамическое торможение происходит при отключе-
нии якоря двигателя от сети и замыкании его на резистор
(рис. 3.6), поэтому иногда его называют реостатным
торможением. Обмотка возбуж-
дения при этом должна оста-
ваться присоединенной к сети.
Режим динамического торможе-
ния также соответствует работе
машины в качестве генератора.
Однако этот режим отличается
+ 08 __ Рис. 3.6. Схема включения двигателя
о---- — q постоянного тока независимого возбуж-
Л дения при динамическом торможении.
от описанного выше торможения с отдачей энергии в сеть.
При динамическом торможении, так же как и в предыду-
щем случае, механическая энергия, поступающая с вала,
например, в виде кинетической энергии, запасенной в дви-
гателе и в движущихся элементах приводимого им меха-
низма, преобразуется в электрическую. Однако эта энер-
гия не отдается в сеть, а выделяется в виде теплоты
в сопротивлениях цепи якоря.
Вследствие того что ЭДС двигателя сохраняет при тор-
можении такой же знак, как и в двигательном режиме, а на-
пряжение извне к якорю не прикладывается, ток якоря
определяется но формуле
I = — E/R, (3.52)
где /? — сопротивление якорной цепи.
Тормозной момент при динамическом торможении, если
пренебречь реакцией якоря, может быть выражен равенством
— MT = k®l = — £2ФЗД. (3.26)
60
При Ф = const получим:
u = M,R/c2. (3 27)
При динамическом торможении механическая характери-
стика двигателя, как это видно из (3.27), представляет собой
прямую, проходящую через начало координат. Семейство
характеристик динамического торможения при различных
сопротивлениях R якорной цепи показано в квадранте II
на рис. 3.5. Как видно из этого рисунка, жесткость характе-
ристик уменьшается с увеличением сопротивления якорной
цепи.
Динамическое торможение широко используется для
останова привода при отключениях его от сети (особенно
при реактивном характере момента), при спуске грузов
в подъемных механизмах. Оно достаточно экономично, хотя
и уступает в этом отношении торможению с отдачей энергии
в сеть.
3. Торможение противовключением (генераторный ре-
жим работы последовательно с сетью) осуществляется в том
случае, когда обмотки двигателя включены для одного на-
правления вращения, а якорь двигателя под воздействием
внешнего момента или сил инерции вращается в противо-
положную сторону. Это может происходить, например,
в приводе подъемника, когда двигатель включен на подъем,
а момент, развиваемый грузом, заставляет привод вра-
щаться в сторону спуска груза. Такой же режим получается
и при переключении обмотки якоря (или обмотки возбужде-
ния) двигателя для быстрой остановки или для изменения
направления вращения на противоположное.
Графическое изображение механической характери-
стики для торможения противовключением, когда имеет ме-
сто, например, так называемый тормозной спуск груза, при-
ведено на рис. 3.7. Как видно из этого рисунка, а также из
рис. 3.5, механическая характеристика при торможении
противовключением является продолжением характери-
стики двигательного режима в область квадранта IV. Пос-
леднее выгекает из уравнения механической характери-
стики двигателя, если полагать момент большим момента
короткого замыкания и положительным по знаку.
При включении обмоток двигателя для подъема двига-
тель может быть пущен в ход лишь тогда, когда момент
сопротивления груза /И(] будет меньше момента
(рис. 3.7). В этом случае после включения двигателя в сеть
61
угловая скорость его увеличивается и достигает установив-
шегося значения (точка Л).
При этом ток в якоре, как обычно в двигательном ре-
жиме, определяется по формуле
/ = ([/- E)/R.
С увеличением момента груза угловая скорость двига-
теля уменьшается соответственно характеристике АВ, и
если момент груза будет равен /Ик 3, двигатель остановится.
В этом состоянии при со = О ЭДС двигателя равна нулю,
поэтому ток определяется равенством
I = IK,3 = U/R.
Когда момент сопротивления при дальнейшем увеличе-
нии груза превысит момент двигателя в неподвижном
Рис. 3.7. Механическая харак-
теристика двигателя постоян-
ного тока независимого возбуж-
дения при торможении противо-
включением в случае тормозного
спуска.
состоянии, последний начнет вращаться в противоположном
направлении и груз станет опускаться. При моменте, рав-
ном Мс2, будет достигнута установившаяся скорость спуска,
соответствующая точке С на приведенной характеристике.
Поскольку якорь теперь вращается в обратную сторону,
а направление магнитного потока не изменилось, ЭДС дви-
гателя изменит направление на обратное. Ток, определяемый
уравнением
I = (U + E)/R,
будет больше, чем в двигательном режиме, и соответственно
момент, развиваемый двигателем при торможении проти-
вовключением, тоже возрастет.
В таблице на рис. 3.8 стрелками показаны направления
напряжения, ЭДС и падения напряжения, а также даны соот-
ношения для токов якоря в случае двигательного режима,
короткого замыкания и торможения противовключением
62
при одном и том же значении сопротивления якорной цепи.
Для ограничения тока и момента при торможении проти-
вовключением приходится включать дополнительный рези-
стор.
Рассмотренное торможение противовключением при уста-
новившейся скорости используется, например, в подъемных
устройствах при спуске груза G (рис. 3.8). Как видно из
таблицы на рис. 3.8, при торможении противовключением
ЭДС двигателя направлена последовательно-согласно с на-
пряжением сети, т. е. двигатель работает в генераторном
режиме последовательно с сетью, получая механическую
Рис. 3.8. Иллюстрация возможных режимов работы двигателя при
подъеме и спуске груза.
энергию с вала и преобразуя ее в электрическую энергию.
Потребляется электрическая энергия и из сети. Вырабаты-
ваемая двигателем и потребляемая из сети энергия выделя-
ется в виде теплоты в сопротивлениях цепи якоря, поэтому
торможение противовключением не экономично, требует
больших затрат энергии.
Значительно чаще, чем за счет груза, торможение проти-
вовключением получают, изменяя полярность напряжения,
подводимого к якорю двигателя при его вращении. В этом
случае, так же как и в предыдущем (при спуске груза),
ЭДС направлена согласно с напряжением сети, а момент
двигателя направлен против вращения якоря. Как было
сказано выше, в режиме противовключения необходимо
включать дополнительный резистор в якорную цепь для
ограничения тока и момента. При этом механические харак-
теристики будут иметь большой наклон к оси абсцисс.
63
На рис, 3.9 представлены механические характеристики
при торможении противовключением. Здесь при изменении
полярности напряжения, подводимого к якорю, двигатель,
работавший до этого со скоростью, соответствующей точке
А квадранта /, переходит па работу по характеристике ВС
(индуктивностью якорной цепи пренебрегаем) в точку В
квадранта //. Сохранение неизменной скорости в первый
момент переключения двигателя обусловливается механиче-
ской инерцией электропривода. Под влиянием тормозного
момента скорость двигателя уменьшается соответственно
характеристике ВС до нулевого значения. При скорости,
равной нулю (точка С, рис. 3.9), двигатель в случае тормо-
жения для останова, а не реверса, должен быть отключен от
Рис. 3.9. Механические характери-
стики двигателя постоянного тока
независимого возбуждения при тор-
можении противовключением.
сети. Если такого отключения не произойдет, скорость дви-
гателя начнет увеличиваться в обратном направлении
(характеристика CD квадранта ///). Вместе с изменением
направления вращения изменяет направление ЭДС якоря,
которая снова в двигательном режиме направлена встречно
напряжению сети. Теперь привод вновь работает в двига-
тельном режиме с постоянной угловой скоростью, будучи
переведенным на естественную характеристику при проти-
воположном направлении вращения (точка F характери-
стики FE).
Если еще раз изменить полярность напряжения на
выводах якоря, то двигатель вновь перейдет в режим про-
тивовключения. Торможение и последующее увеличение
угловой скорости двигателя в обратном направлении про-
исходят по характеристике GK.L.
Изменение направления вращения двигателя может
быть осуществлено двояко. Чтобы получить режим проти-
вовключения, можно переключить либо обмотку якоря, либо
обмотку возбуждения. Однако переключение обмотки воз-
буждения практикуется реже, так как вследствие значи-
64
тельной ее индуктивности время торможения возрастает
по сравнению с временем торможения при переключении
обмотки якоря.
Электрическое торможение получило в настоящее время
широкое применение, особенно в часто пускаемых приводах.
Для обеспечения необходимого времени торможения и тре-
буемой точности остановки в практике чаще всего приме-
няется динамическое торможение или торможение проти-
вовключением. Для нереверсивных приводов чаще приме-
няют динамическое торможение, так как оно осуществля-
ется по более простой схеме. Для реверсивных приводов,
где торможение и пуск двигателя в обратном направлении
представляют собой единый процесс, целесообразно при-
менять торможение противовключением, которое дает вы-
игрыш во времени.
3.4. Механические характеристики
двигателя постоянного тока
последовательного возбуждения
Для электродвигателя последовательного
возбуждения, принципиальная схема включения которого
представлена на рис. 3.10, уравнение электромеханической
характеристики, так же как и для двигателя независимого
возбуждения, имеет вид:
со = (U — I R)/k<I~>,
где R — суммарное сопротивление якорной цепи, состоящее
из сопротивления обмотки якоря, обмотки возбуждения и
сопротивления внешнего резистора Ч
В отличие от двигателя независимого возбуждения
здесь магнитный поток Ф является функцией тока якоря I.
Эта зависимость, приведенная на рис. 3.11, носит название
кривой намагничивания. Так как нет точного аналитиче-
ского выражения для кривой намагничивания, то трудно
дать и точное аналитическое выражение для механической
характеристики двигателя последовательного возбужде-
ния.
Если для упрощения анализа предположить, пренебре-
гая насыщением магнитной системы, линейную зависимость
между потоком и током якоря, как это показано пунктиром
1 При наличии дополнительных полюсов учитывается и их сопро-
тивление.
3 Чиликин М. Г.. Сандлер А. С.
65
на рис. 3.11, т. е. считать Ф = а/, то момент двигателя
М = £Ф/ = а£/2. (3.28)
Подставив в равенство для угловой скорости двигателя
значение тока из (3.28), получим выражение для механиче-
ской характеристики:
U R А в
(О =------- —--------= - — D.
ak V M/ak ak У М
(3.29)
Отсюда следует, что при ненасыщенной магнитной
цепи двигателя механическая характеристика изображается
кривой (рис. 3.12), для которой ось ординат является
асимптотой. Особенностью механической характеристики
Рис. 3.10. Схема включения
двигателя постоянного тока
последовательного возбужде-
ния.
Рис. 3.11. Кривая намагничи-
вания двигателя постоянного
тока последовательного возбуж-
дения.
двигателя последовательного возбуждения является ее
большая крутизна в области малых значений момента.
Значительное увеличение угловой скорости при малых
нагрузках обусловливается соответствующим уменьшением
магнитного потока.
Уравнение (3.29) дает лишь общее представление о меха-
нической характеристике двигателя последовательного воз-
буждения. При расчетах этим уравнением пользоваться
нельзя, так как машин с ненасыщенной магнитной системой
обычно в современной практике не строят. Вследствие того,
что действительные механические характеристики сильно
отличаются от кривой, выраженной уравнением (3.29),
построение характеристик приходится вести графо-аналити-
ческими способами. Обычно построение искусственных
характеристик производится на основании данных катало-
гов, где приводятся естественные характеристики: п —
= / (/) и М = ф (/).
$6
Для серии двигателей определенного типа эти характе-
ристики могут быть даны в относительных единицах: сщ =
= f (I*) и /И.(: = ф (/*). Такие характеристики, называе-
мые универсальными, представлены на рис. 3.13.
Отметим, что в каталогах дается зависимость момента
па валу двигателя от тока. При построении механических
характеристик принимается зависимость угловой скорости
от электромагнитного момента. Это практически допустимо
Рис 3 12. Естественная механи-
ческая характеристика двига-
теля постоянного тока после-
довательного возбуждения.
Рис. 3.13. Зависимость момента и
угловой скорости от тока якоря
двигателя постоянного тока после*
довательиого возбуждения (в отно-
сительных единицах).
ввиду небольшой разницы между электромагнитным момен-
том и моментом на валу.
Для построения искусственных (реостатных) характери-
стик можно воспользоваться следующим методом.
Уравнение естественной характеристики
®е = (У-//?д)МФ,
где Ra = Ru + RB,
или
We М>\ и г
(3 30)
В случае включения в якорную цепь дополнительного
резистора Rv двигатель будет работать на реостатной ха-
рактеристике, для которой
3*
и /(R, + Rp)l
1--------и-----
(3.31)
67
При делении (3.31) на (3.30) получим:
a>/we = [//-/(Яд + ЯР)Ж -/Яд),
отсюда
или в относительных единицах
(3 33>
здесь Я* = (Яд -г Яр)/Я„оя — суммарное сопротивление
якорной цепи в относительных единицах;
Яд* Яд/Я„ои, (О* (о/(ОН0М, СОс* (О(/£ОП0М И / * ///цом*
Порядок построения реостатной характеристики сво-
дится к тому, что, задаваясь некоторыми произвольными
Рис. 3.15. Естественная и рео-
статные механические характе-
ристики двигателя постоянного
тока последовательного возбуж-
дения (в относительных едини-
цах).
Рис. 3.14. Естественная и рео-
статная электромехани ческие
характеристики двигателя по-
стоянного тока последователь-
ного возбуждения (в относи-
тельных единицах).
значениями тока /j*, по имеющейся естественной характе-
ристике находят ые|*. Затем по (3.33) при определенном
Я* = Я1<: (для которого строится реостатная характери-
стика) и том же /j* определяют искомое значение coj*.
Таким же образом для других значений /* определяют
искомые значения скорости <о2*, со3* и т. д. На рис. 3.14
показаны естественная характеристика двигателя последо-
вательного возбуждения Ял* и реостатная Я1*, построен-
ные по указанному методу.
68
Пользуясь кривой ci)t = / (/$) (см. рис. 3.13) и электро-
механическими характеристиками, легко построить кри-
вые со.* = f (Л4*), т. е. механические характеристики дви-
гателя.
На рис. 3.15 приведены естественная /?,,, и реостатные
механические характеристики двигателя после-
довательного возбуждения, построенные в относительных
единицах. С увеличением сопротивления скорость двига-
теля при том же моменте уменьшается и характеристика
смещается вниз. Жесткость характеристики уменьшается
с ростом дополнительного сопротивления в якорной цепи.
Рис. 3.16. Графическое построение ступеней пускового резистора дви-
гателей постоянного тока последовательного возбуждения.
Особенностью механических характеристик рассматривае-
мого двигателя является невозможность получения режима
идеального холостого хода.
При нагрузке ниже 15—20 % номинальной работа дви-
гателя практически недопустима из-за чрезмерного увели-
чения скорости якоря.
Расчет сопротивлений резисторов для пуска двигателей
последовательного возбуждения может быть произведен
следующим графо-аналитическим методом, не требующим
построения самих реостатных характеристик двигателя.
Воспользуемся естественной характеристикой двигателя
со — f (/) и, отметив на ней точки допустимых токов при пе-
реключении с одной ступени резистора на другую 1Г и /г
(рис. 3.16), проведем через эти точки пунктиром две парал-
лельные линии до пересечения с вертикалью Af в точках
f и е. Вертикаль Af расположена влево от начала координат
69
на расстоянии ОА, соответствующем внутреннему сопротив-
лению двигателя. Откладываем в том же масштабе отрезки
Оа = = U//г и Og = R2 — UИ,. Соединяя точки а и е,
а также g и f, получаем две прямые, характеризующие ли-
нейную зависимость между скоростью двигателя и сопро-
тивлением его якорной цепи при неизменном токе якоря.
Последнее вытекает из выражения
со = (U - IR)/kA> = A—BR.
Для определения числа пусковых ступеней и их сопро-
тивлений поступают следующим образом. Проводят верти-
каль через точку а до пересечения с gf в точке Ь. Затем через
точку b проводят линию, параллельную оси абсцисс, до
точки с на линии ае. Аналогично проводятся линии cd и de.
Построение считается удачным, если последняя горизонталь
проходит через точку е. Если этого не произойдет, то постро-
ение следует повторить, изменив наклон одной из прямых
ае или gf за счет выбора новых значений и /2 (чаще изме-
няют только /2).
На рис. 3.16 дано построение с числом ступеней рео-
стата, равным двум. Из построения ясно, что отрезок Ьс
соответствует сопротивлению первой ступени реостата,
a de — второй. В момент пуска (при со = 0) ток в якоре бу-
дет равен /х, а сопротивление всей якорной цепи Rr =
= и/1г. При разгоне двигателя до скорости o)j ток умень-
шается, а сопротивление якорной цепи не изменяется.
В точке b сопротивление то же, но ток равен /2. Затем при
(0 = 0)! происходит шунтирование первой ступени, общее
сопротивление якорной цепи становится соответствующим
отрезку ccL, а ток вновь достигает значения и т. д., пока
двигатель не начнет работать на естественной характери-
стике.
3.5. Механические характеристики
двигателя постоянного тока
последовательного возбуждения
в тормозных режимах
Для двигателя последовательного возбужде-
ния возможны два тормозных режима: торможение проти-
вовключением и динамическое торможение. Торможение
с отдачей энергии в сеть для этих двигателей осуществить
невозможно, так как их ЭДС не может быть больше прило-
женного напряжения сети.
70
При торможении противовключением в цепь
якоря двигателя вводится дополнительный резистор для
ограничения тока.
Механические характеристики для этого торможения
являются продолжением характеристик двигательного ре-
жима в область отрицательной угловой скорости. Это иллю-
стрируется характеристиками, которые проходят в квад-
рантах / и IV (рис. 3 17).
Торможение противовключением возможно, если дви-
жущий момент нагрузки становится больше момента корот-
кого замыкания УИК>3 двигателя. Нагрузка двигателя при
Рис. 3 17. Механические харак-
теристики двигателя постоянно-
го тока последовательного воз-
буждения при различных режи-
мах работы.
Рис. 3 18. Механические харак-
теристики двигателя постоянно-
го тока последовательного воз-
буждения при торможении про-
тивовключением.
противовключении должна быть ограничена допустимым
током в якорной цепи.
Так же как и для двигателя параллельного возбужде-
ния, здесь возможно торможение противовключением при
изменении полярности напряжения, подводимого к якорю.
В этом случае следует, изменив направление тока якоря,
оставить без изменения направление тока в обмотке воз-
буждения.
Механические характеристики при перемене полярности
напряжения на якоре представлены на рис. 3.18 построен-
ными по тому же принципу, что и на рис. 3.9.
Динамическое торможение двигателя по-
следовательного возбуждения может быть осуществлено
двумя способами; с самовозбуждением и с независимым
возбуждением.
71
При торможении с самовозбуждением (рис. 3.19) якорь
и обмотка возбуждения двигателя отключаются от сети и
замыкаются на резистор.
Следует отметить, что при переводе машины из двигатель-
ного режима в режим динамического торможения с самовоз-
буждением необходимо во избежание размагничивания ма-
шины переключить обмотку возбуждения или якоря таким
образом, чтобы направление тока в обмотке возбуждения ие
изменялось. В этом случае машина самовозбуждаегся при
данном сопротивлении цепи якоря лишь при определенных
значениях скорости; возбудившись, она создает тормозной
момент. Практически тормозной момент возникает и при ско-
ростях, близких к нулю, вследствие наличия остаточного
/?Р
Рис. 3.19. Схема включения дви-
гателя постоянного тока после-
довательного возбуждения при
динамическом торможении с са-
мовозбуждением.
Рис. 3.20. Схема включения дви-
гателя постоянного тока после-
довательного возбуждения при
динамическом торможении с не-
зависимым возбуждением.
магнетизма, но при низких скоростях тормозной момент
весьма мал. Механические характеристики машины для
этого случая приведены в квадранте 11 на рис. 3.17.
При этом способе торможения может вначале происхо-
дить интенсивное самовозбуждение, которое приводит к зна-
чительному скачку тормозного момента. Последний при
сравнительно больших маховых массах механизма может
вызвать нежелательные удары в механизме. Поэтому чаще
применяется динамическое торможение с независимым воз-
буждением двигателя последовательного возбуждения по
схеме, представленной на рис. 3.20. Обмотка возбуждения
в этом случае подключается к сети через резистор, ограни-
чивающий ток до номинального значения. Поскольку дви-
гатель работает как генератор с независимым возбуждением,
его характеристики подобны характеристикам машины не-
зависимого возбуждения при динамическом торможении,
которые были приведены на рис. 3.15. Эти характеристики
72
линейны и все пересекаются в начале координат, обладая
большей жесткостью при меньших сопротивлениях.
Иногда для двигателей малой мощности отказываются
от включения последовательной обмотки по схеме рис. 3.20
и осуществляют поддержание потока при динамическом тор-
можении короткозамкнутыми медными кольцами на полю-
сах. Такие схемы с целью экономии аппаратов были выпол-
нены, например, для двигателей мощностью 0,52 кВт в си-
стеме управления загрузкой доменной печи.
3.6. Механические характеристики
двигателя постоянного тока
смешанного возбуждения
Двигатель смешанного возбуждения (рис. 3.21) имеет
две обмотки возбуждения: независимую ОВ2 и последовательную ОВ1,
поэтому его механические характеристики занимгют промежуточное
положение между соответствующими характеристиками двигателей
независимого и последовательного возбуждения. Механическая ха-
рактеристика рассматриваемого двигателя вследствие изменения маг-
нитного потока при изменении нагрузки не имеет аналитического
Рис. 3.21. Принципиальная схе-
ма включения двигателя посто-
янного тока смешанного воз-
буждения.
Рис. 3.22. Зависимость момен-
та М* и угловой скорости
от тока якоря для двига-
теля постоянного тока смешан-
ного возбуждения (в относитель-
ных единицах).
выражения, поэтому при расчетах обычно пользуются естественными
универсальными характеристиками момента и скорости от тока якоря,
которые даются в каталогах. Такие характеристики в относительных
единицах представлены на рис. 3.22.
В отличие от двигателя последовательного возбуждения двига-
тель смешанного возбуждения имеет конечное значение скорости иде-
ально холостого хода. Эта скорость определяется только магнитным
потоком, созданным МДС независимой обмотки, и равна:
«о = и1кФ0,
73
где Фо — магнитный поток, созданный током возбуждения независи-
мой обмотки.
Соотношения МДС независимой и последовательной обмоток раз-
личны для двигателей разных серий. Наиболее употребительным явля-
ется соотношение, которое при номинальном токе дает равенство МДС
обеих обмоток возбуждения. Скорость двигателя смешанного возбуж-
дения при малых нагрузках изменяется значительно, а затем при уве-
личении нагрузки медленно уменьшается почти по прямой, как у дви-
гателя независимого возбуждения. Происходит это вследствие того,
что при больших нагрузках насту-
пает насыщение машины, и хотя
МДС последовательной обмотки
возрастает, магнитный поток уже
почти не изменяется.
Для расчета реостатных ха-
рактеристик может быть применен
Рис. 3.23. Механические характе-
ристики двигателя постоянного
тока смешанного возбуждения для
различных режимов работы.
рассмотренный выше метод построения характеристик двигателя по-
следовательного возбуждения.
Двигатель смешанного возбуждения допускает три способа элек-
трического торможения: 1) с отдачей энергии в сеть, 2) динамическое
и 3) противовключением.
При торможении с отдачей энергии в сеть ток в якоре и в после-
довательной обмотке изменяет направление и может размагнитить
машину. Чтобы избежать размагничивающего действия, обычно при
переходе через угловую скорость со0 последовательную обмотку шун-
тируют, и поэтому механические характеристики в квадранте //
(рис. 3.23) имеют вид прямых. Такой же вид имеют и характеристики
динамического торможения вследствие того, что оно осуществляется
обычно при включении только независимой обмотки, когда магнитный
поток практически постоянен. Характеристики при торможении про-
тивовключением нелинейны вследствие влияния изменяющейся МДС
последовательной обмотки возбуждения при изменяющейся на-
грузке.
3.7. Механические характеристики
асинхронного двигателя
Асинхронные двигатели получили в промыш-
ленности весьма широкое применение благодаря ряду су-
щественных преимуществ по сравнению с другими типами
двигателей. Асинхронный двигатель прост и надежен
в эксплуатации, так как не имеет коллектора; асинхрон-
ные двигатели дешевле и значительно легче двига1елей по-
стоянного тока.
74
Для вывода уравнения механической характеристики
асинхронного двигателя можно воспользоваться упрощен-
ной схемой замещения, приведенной на рис. 3.24, где при-
няты следующие обозначения:
6/ф — первичное фазное напряжение; 1Х — фазный ток
статора; Г2 — приведенный ток ротора; Хх и Х2 — первич-
ное и вторичное приведенные реактивные сопротивления
рассеяния; /?0 и Хо — активное и реактивное сопротивле-
ния контура намагничивания; s = (соо — ®)/и0 — скольже-
ние двигателя; и0 = 2лпо/60 — синхронная угловая ско-
рость двигателя; соо = 2л/у/р; Rx и R2 — первичное и вто-
ричное приведенные активные сопротивления; Д — частота
сети; р — число пар полюсов.
Рис. 3.24. Упрощенная схема заме-
щения асинхронного двигателя.
В соответствии с приведенной схемой замещения можно
получить выражение для вторичного тока
(3.34)
K(/?iWs)1 2+(A\+a^’- ’
Момент асинхронного двигателя может быть определен
из выражения потерь M(ans = 3 (/г)2/?2, откуда
M = 3(/()2/?>oS. (3.35)
Подставляя значение тока Г2 в (3.35), получаем:
3UiR'
М = <Ool№ + /W -Н^+АД2]^’ (3'36)
Кривая момента М = f (s) имеет два максимума: один —
в генераторном режиме, другой — в двигательном *.
Приравнивая dM’ds = 0, определяем значение критиче-
ского скольжения s1(, при котором двигатель развивает
максимальный (критический) момент
sK = ± , R'2 (3.37)
/я?+(А\-1-АДг v '
1 При значительных сопротивлениях роторной цепи максимум
момента может оказаться в режиме торможения противовключением.
75
Подставляя значение sK в (3.36), находим выражение
для максимального момента
Л4К= ----------(3.38)
гсоо!/?! ± |//?( + (л1 + л;Н
Знак «+» в равенствах (3.37) и (3.38) относится к дви-
гательному режиму (или торможению противовключением),
знак «—» — к генераторному режиму работы параллельно
с сетью (при со > <ов).
Гели выражение (3.36) разделить на (3.38) и про-
извести соответствующие преобразования, то можно по-
Режим
ДЗига- торможеиая
тельный. лропщ,3о~
лучить:
М = 2A^(1+«s,J_ (3 39)
s/Sk + sK/s + 2asK
где Мк — максимальный
момент двигателя; sK —
критическое скольжение,
соответствующее макси-
мальному моменту; а —
= R1/R2.
Здесь следует подчерк-
нуть весьма важное для
практики обстоятельство —
Рис. 3.25. Механические характе- влияние изменения напря-
рнстики асинхронного двигателя. жения сети на механичес-
кие характеристики асин-
хронного двигателя. Как видно из (3.36), при данном
скольжении момент двигателя пропорционален квадрату
напряжения, поэтому двигатель этого типа чувствителен
к колебаниям напряжения сети.
Критическое скольжение и угловая скорость идеального
холостого хода не зависят от напряжения.
На рис. 3.25 приведена механическая характеристика
асинхронного двигателя. Ее характерные точки;
1) s = 0; М = 0, при этом скорость двигателя равна
синхронной;
2) s = sll0M; М = Л4110м, что соответствует номинальной
скорости и номинальному моменту;
3) s = sK; М = Мк,д — максимальный момент в двига-
тельном режиме;
,, , г. .. 2,'М„ (I +asK) s„
4) s = 1,0; M = ' г- 9 . —начальный пуско-
1 Т V Т ^а>
вой момент;
76
5) s = —sK; M = —A4K,r — максимальный момент в ге-
нераторном режиме работы параллельно с сетью.
При s > 1,0 двигатель работает в режиме торможения
противовключением, при s <; 0 имеет место генераторный
режим работы параллельно с сетью.
Необходимо подчеркнуть, что абсолютные значения sK
в двигательном и генераторном параллельно с сетью режи-
мах одинаковы.
Однако из (3.39) следует, что максимальные моменты
в двигательном и генераторном режимах различны. В гене-
раторном режиме работы параллельно с сетью максималь-
ный момент по абсолютному значению больше, что следует
из соотношения
где
Хк — ^х + Х'ъ-
Если в уравнении (3.39) пренебречь активным сопротив-
лением статора, то получится формула, более удобная для
расчетов:
здесь sK = zt/?.2/X„; Л4К = Зйф/2сооХк.
Подставив в выражение (3.40) вместо текущих значе-
ний М и s их номинальные значения и обозначив кратность
максимального момента Д4К/Д4НОМ через X, получим:
sK = sH0, (X ±1/^-1).
В последнем выражении перед корнем следует брать
знак «+».
Анализ формулы (3.40) показывает, что при s > sl(
(нерабочая часть характеристики) получится уравнение
гиперболы, если в этом случае пренебречь вторым членом
знаменателя в уравнении (3.40), т. е.
М = 2Л4К Sk ,
К S
или
где
М = A/s,
А = 2A4Ks<-
77
Эта часть характеристики практически соответствует
лишь пусковым и тормозным режимам.
При малых значениях скольжения (s < sK) для М =
f (s) получится уравнение прямой, если пренебречь пер-
вым членом в знаменателе (3.40):
или
здесь
М = 2Л4к4-,
SK
M = Bs\
В = 2MK/sK,
Эта линейная часть характеристики является ее рабочей
частью, на которой двигатель обычно работает в установив-
шемся режиме. На этой же части характеристики находятся
точки, соответствующие номинальным данным двигателя:
^НОМТ Д1ОМ> ^ном> ^иом*
Статическое падение (перепад) скорости в относитель-
ных единицах на естественной механической характеристике
асинхронного двигателя при номинальном моменте опреде-
ляется его номинальным скольжением.
Номинальное скольжение зависит от сопротивления
ротора. Наименьшим номинальным скольжением при оди-
наковой мощности и числе полюсов обладают обычно дви-
гатели с короткозамкнутым ротором нормального исполне-
ния. У этих двигателей в силу конструктивных особенно-
стей сопротивление ротора имеет относительно небольшое
значение, что ведет к уменьшению значений критического
скольжения s;t (3.37) и номинального скольжения $|10я.
По тем же причинам при увеличении мощности двигателя
уменьшается его номинальное скольжение и растет жест-
кость естественной характеристики. Последнее иллюстри-
руется кривой рис. 3.26, построенной по средним данным
для двигателей разной мощности.
Максимальный момент, как это видно из (3.38), не зави-
сит от активного сопротивления ротора /?2; критическое же
скольжение согласно (3.37) увеличивается по мере увели-
чения сопротивления ротора. Вследствие этого у двигателей
с фазным ротором при введении резисторов в цепь ротора
максимум кривой момента смещается в сторону больших
скольжений.
Значение сопротивления /?2, необходимое для построе-
ния естественной и реостатных характеристик двигателя
78
с фазным ротором, определяется из выражения
Ej ^ном^2к/Т//Л*^' Д1ОЧ»
где Е2к, /гном — линейное напряжение при неподвижном
роторе и номинальный ток ротора.
На рис. 3.27 приведено семейство реостатных характе-
ристик в двигательном режиме в координатных осях М.
и со для различных значений сопротивлений! роторной цепи.
С известным приближением реостатные характеристики в ра-
бочей их части могут быть приняты линейными. Это дает
возможность при расчете сопротивлений резисторов, вклю-
чаемых в роторную цепь асинхронного двигателя, поль-
зоваться методами, аналогичными методам, применяемым
Рис. 3 26. Кривая номиналь-
ного скольжения для асин-
хронных двигателей разной
мощности.
ш Естественная
О М,
Рис. 3.27. Естественная и рео-
статные механические характе-
ристики асинхронного двига-
теля с фазным ротором.
для расчета сопротивления цепи якоря двигателя постоян-
ного тока независимого возбуждения. Некоторая неточность
в определение сопротивления резистора вносится при этом
за счет того, что характеристика асинхронного двигателя на
участке графика от М. = 0 до максимального момента при
пуске считается линейной.
Более точным является метод, когда спрямление харак-
теристик производится на менынем участке. Кратность
максимального момента А, = 7ИК.Д/Л111ОМ должна быть у дви-
гателей нормального исполнения с фазным ротором не
ниже 1,8, а у двигателей с короткозамкнутым ротором не
ниже 1,7. Крановые двигатели отличаются более высокой
кратностью максимального момента Например, для дви-
гателей с короткозамкнутым ротором серии МТК А =
79
= 2,3 3,4. Двигатели с фазным ротором упомянутых
серий имеют приблизительно те же величины А.
Для двигателей с короткозамкнутым ротором сущест-
венное значение с точки зрения электропривода имеют крат-
ности начального пускового момента и начального пуско-
вого тока.
На рис. 3.28 представлены примерные естественные ха-
рактеристики двигателя с нормальным короткозамкнутым
ротором, имеющим круглые пазы. Эти характеристики по-
казывают, что двигатель с короткозамкнутым ротором,
потребляя из сети весьма большой ток, имеет сравнительно
Рис. 3.28. Характеристики со =
= f (М) и <о = А (/) для асин-
хронного двигателя с коротко-
замкнутым ротором с круглыми
пазами.
низкий начальный пусковой момент. Кратность началь-
ного пускового момента двигателей
Лп = МП/МНО>1 = 1 4-1,8,
а для крановых двигателей
Лп^1,7.
Кратность пускового тока
ki = 7П//Ном = 5 4- 7.
Отсутствие пропорциональности между моментом дви-
гателя и током статора во время пуска (рис. 3.28) объяс-
няется значительным снижением магнитного потока двига-
теля, а также уменьшением коэффициента мощности вторич-
ной цепи при пуске.
Момент асинхронного двигателя, как и любой электри-
ческой машины, пропорционален магнитному потоку Ф и
активной составляющей вторичного тока
/И =/г'фД cos ф.;, (3.41)
где /г'— конструктивная постоянная асинхронного двига-
теля; ф — угол сдвига между ЭДС и током ротора;
cos ф2 = . (3.42)
80
При увеличении скольжения растет ЭДС ротора Е2 —
== возрастает ток ротора Г> в соответствии с (3.34),
асимптотически стремясь к некоторому предельному зна-
чению, a cos ip2 с ростом s уменьшается (на рабочем участке
характеристики очень мало), асимптотически стремясь к ну-
лю при s -> оо. Поток двигателя также не остается неизмен-
ным, уменьшаясь при возрастании тока из-за падения на-
пряжения на сопротивлениях обмотки статора. Все это и
обусловливает отсутствие пропорциональности между то-
ком и моментом двигателя.
Для повышения начального пускового момента и сниже-
ния пускового тока применяются двигатели с короткозам-
кнутым ротором специальных конструкций. Роторы элек-
тродвигателей имеют две клетки, расположенные концен-
трически, или глубокие пазы с высокими и узкими стерж-
нями. Сопротивление ротора этих двигателей в пусковой
Рис 3 29. Механические характерис-
тики асинхронного двигателя с корот-
козамкнутым ротором с провалом при
малых угловых скоростях.
период значительно больше, чем при номинальной скорости,
вследствие поверхностного эффекта, обусловленного повы-
шенной частотой тока в роторе при больших скольжениях.
Поэтому при переходе к двигателям с глубоким пазом или
двойной обмоткой ротора существенно увеличивается крат-
ность пускового момента (увеличивается cos н поток)
и снижается кратность пускового тока. Правда, в этом слу-
чае несколько уменьшаются коэффициент мощности и КПД,
соответствующие номинальной нагрузке.
Необходимо отметить, что у двигателей с короткозамкну-
тым ротором пусковой момент практически не всегда явля-
ется наименьшим значением момента в области двигатель-
ного режима. Как видно из рис. 3.29, механическая харак-
теристика двигателя с короткозамкнутым ротором иногда
при малых угловых скоростях имеет провал, вызванный
влиянием высших гармоник зубцовых полей. Это обстоя-
81
тельство следует учитывать при пуске двигателя под на-
грузкой.
У двигателей с фазным ротором начальный пусковой мо-
мент увеличивается по мере возрастания до известных пре-
делов сопротивления резистора (рис. 3.27), а пусковой ток
при увеличении сопротивления уменьшается. Начальный
пусковой момент может быть доведен до максимального мо-
мента. С дальнейшим ростом сопротивления роторной цепи
увеличение cos ф2 уже пе компенсирует уменьшения тока
ротора и пусковой момент уменьшается.
3.8. Механические характеристики
асинхронного двигателя в тормозных
режимах
В § 3.7 были рассмотрены механические харак-
теристики асинхронной машины, работающей в двигатель-
ном режиме. Однако асинхронный двигатель может работать
и в тормозных режимах: при торможении с отдачей энергии
в сеть, при торможении противовключением и при динами-
ческом торможении.
1. Торможение с отдачей энергии в сеть (генераторный
режим работы параллельно
с сетью) возможно при скоро-
сти выше синхронной. Меха-
нические характеристики
асинхронного двигателя в
координатах М и со представ-
лены на рис. 3.30. В квад-
ранте / расположены участки
характеристик двигательного
Рис. 3.30. Механические характе-
ристики асинхронного двигателя
для различных режимов работы.
режима для трех различных сопротивлений роторной цепи.
По мере приближения скорости двигателя к скорости
идеального холостого хода, или синхронной скорости,
момент двигателя приближается к нулю.
При дальнейшем увеличении угловой скорости под вли-
янием внешнего момента, когда со > со0, двигатель рабо-
тает в режиме генератора параллельно с сетью, которой он
может отдавать электрическую энергию, потребляя при этом
реактивную мощность для возбуждения. Торможению с от-
82
дачей энергии в сеть отвечают участки характеристик, рас-
положенные в верхней части квадранта II. В этом режиме,
как видно из (3.38), максимальный момент имеет большее
значение, чем в двигательном. Режим торможения с отда-
чей энергии в сеть применяется практически для двигате-
лей с переключением полюсов, а также для приводов грузо-
подъемных машин (подъемники, экскаваторы и т. п.) и
в некоторых других случаях.
2. Торможение противовключением имеет значительно
большее применение на практике. Режим торможения про-
тивовключением может быть получен, так же как и для дви-
гателя постоянного тока, при движущем моменте нагрузки
М, > МП (рис. 3.30). Для ограничения тока и получения
соответствующего момента необходимо при использовании
двигателя с фазным ротором в его роторную цепь включить
дополнительный резистор. Установившемуся режиму при
торможении противовключением соответствует, например,
точка — coyCT, М. на характеристике /?р2 (рис. 3.30).
Механическая характеристика для Рр1 в режиме тормо-
жения противовключением и Л4С = const не обеспечивает
устойчивой работы. Торможение противовключением может
быть получено также путем переключения на ходу двух
фаз обмотки статора, что ведет к перемене направления вра-
щения магнитного поля (переход из точки А в точку В на
рис. 3.31). Ротор при этом вращается против направления
движения поля и постепенно замедляется. Когда угловая
скорость спадет до нуля (точка С на рис. 3.31), двигатель
нужно отключить от сети, иначе он может вновь перейти
в двигательный режим, причем ротор его будет вращаться
в направлении, обратном предыдущему (точка О).
3. Динамическое торможение асинхронного двигателя
осуществляется обычно включением обмотки статора па
сеть постоянного тока; обмотка ротора при этом замыка-
ется на внешние резисторы. Для перехода из двигательного
режима в режим динамического торможения контактор КД
(рис. 3.32) отключает статор от сети переменного тока,
а контактор К2 присоединяет обмотку статора к сети посто-
янного тока. Для ограничения тока и получения различных
тормозных характеристик в цепи ротора предусмотрены
внешние резисторы.
Проходя по обмотке статора, постоянный ток образует
неподвижное поле, основная волна которого дает синусо-
идальное распределение индукции. Во вращающемся роторе
возникает переменный ток, создающий свое поле, которое
83
также неподвижно относительно статора. В результате
взаимодействия суммарного магнитного потока с током
ротора возникает тормозной момент, который зависит от
МДС статора, сопротивления ротора и угловой скорости
двигателя. Механические характеристики для этого режима
приведены в нижней части квадранта // (см. рис. 3.30).
Они проходят через начало координат, так как при угло-
вой скорости, равной нулю, тормозной момент в этом режиме
также равен пулю. Максимальный момент пропорционален
квадрату приложенного к статору напряжения1 и возрастает
с ростом напряжения. Критическое скольжение зависит от
Рис. 3.31. Механические харак-
теристики асинхронного двига-
теля при переключении двух
фаз статора.
Рис. 3.32. Схема включения
асинхронного двигателя для
перехода на режим динамиче-
ского торможения.
сопротивления роторной цепи. Оно увеличивается пропор-
ционально росту сопротивления. Максимальный момент при
этом не изменяется. На рис. 3.30 характеристики динамиче-
ского торможения даны для трех различных сопротивлений
цепи ротора и одном и том же токе статора.
На рис. 3.33, а~е представлены различные схемы
включения обмоток статора при питании их от источника
постоянного тока. В схемах на рис. 3.33, д, е нагрузка гссх
фаз обмотки статора равномерна, однако схема переключе-
ния статора сложна. Более простыми, часто применяемыми
на практике являются схемы на рис. 3.33, а, б.
Питание обмоток статора асинхронных двигателей для
осуществления динамического торможения может произво-
1 Последнее справедливо при условии пренебрежения насыщением,
84
диться от сети переменного тока через полупроводниковый
выпрямитель В, как это показано на рис 3 34.
Анализ работы асинхронного двигателя в режиме дина-
мического торможения целесообразно произвести, считая,
что статор питается не постоянным, а эквивалентным трех-
фазным переменным током /э1;п. Эта замена предполагает
равенство МДС, созданных постоянным током и эквнва-
Рис. 3 33 Схемы включения обмоток статора асинхронного двигателя
при динамическом торможении.
лентпым переменным током. Амплитуда МДС, создаваемой
переменным током,
с 3 К 2 ,
F 2 экв^1>
где Wi — число последовательно соединенных витков фазы
статора.
Магнитодвижущая сила, создаваемая постоянным током,
пропорциональна постоянному току, числу витков фазы
статора и зависит от схемы соединения. Например, при сое-
динении статора в звезду и прохождении постоянного тока
только по двум фазам (рис. 3.33) МДС постоянного тока,
определяемая геометрической суммой МДС двух фаз,
равна:
ГП = УЗ/П^1.
Исходя из равенства F„ = F, определяют значение
эквивалентного переменного тока для рассматриваемого
85
случая:
экв
„L?/
Из
Определив эквивалентный ток, можно построить упро-
щенную векторную диаграмму токов для асинхронного дви-
гателя при динамическом торможении (рис. 3.35). На ди-
аграмме /ц. — ток намагничивания; /ц0 — наибольшее зна-
чение намагничивающего тока; /'2 — вторичный ток, приве-
денный к статору; /экв — первичный эквивалентный ток;
Е\, Ё'2 — соответственно первичная и вторичная приведен-
ная эдс.
Намагничивающий ток /^определяется геометрической
суммой эквивалентного тока /экв и вторичного приведенного
Рис. 3.34. Схема включения асин-
хронного двигателя при динами-
ческом торможении с питанием
статора через полупроводнико-
вый выпрямитель,
Рис. 3.35. Векторная диаграмма
для асинхронного двигателя в
режиме динамического тормо-
жения.
к статору тока ротора; с изменением скорости.ротора
изменяется вторичный ток. Конец вектора тока /экв при
уменьшении скорости ротора будет перемещаться по окруж-
ности вправо и при неподвижном роторе вектор /ЭК|1 совпа-
дет с так как вторичная ЭДС и соответственно вторичный
ток окажутся равными нулю. Поэтому при малых скоро-
стях ротора и сравнительно большом эквивалентном токе
двигатель в режиме динамического торможения оказывается
с сильно насыщенной магнитной системой. Наоборот, при
больших угловых скоростях и том же эквивалентном токе
магнитная система будет ненасыщенной. Примерная зави-
симость /и = / [$ (w)J приведена на рис. 3.36.
86
В связи с явлением насыщения магнитной системы не
остается постоянной и реактивность намагничивания Х|х
(рис. 3.36).
Из диаграммы (см. рис. 3.35)
Лкв— ii + 2/и/2 sin "фг + Au’>
£20s 1
VR? + (X(s)2 У yyyyyyji ’
(3.43)
(3.44)
где £'o — приведенная вторичная ЭДС при синхронной
угловой скорости со0 двигателя и намагничивающем токе /)х
(вторичная ЭДС может быть найдена по кривой намагничи-
вания двигателя); Хц, = ЕзоДц. — реактивность намагничи-
Рис. 3.36. Зависимость /ц и %ц 'от
скольжения s или угловой скоро-
сти со.
вания; s = ®/<о0 — скольжение при динамическом тормо-
жении.
Решая совместно (3.43) и (3.44), находим:
. (3.45)
Электромагнитный момент, развиваемый двигателем,
о г / 2 о q »2 v 2
О/о — ^/эквЛц —
м=• (3 46)
Если предположить в первом приближении машину не-
насыщенной, то в (3.46) Хн = const и М будет функцией $,
так как другие параметры принимаются постоянными,
поэтому,дифференцируя М nos и приравнивая производную
нулю, находим:
sk.t — RiRX^ -j- X'i), (3-47)
87
при котором момент имеет максимум:
Мк.Т
3/ЭКпХи
2% + Xj)
(3.48)
После несложных преобразований (3.46) принимает вид:
М =----.
S/Sk. т +sk t!s
(3.49)
Уравнение (3.49) по своей структуре аналогично уравне-
нию механической характеристики асинхронного двигателя
в двигательном режиме.
Отметим, что критическое скольжение в двигательном
режиме существенно больше критического скольжения в ре-
Рис. 3.37. Схема включения асинхрон-
ного двигателя при торможении с само-
возбуждением.
жиме динамического торможения при том же сопротивле-
нии цепи ротора, т. е.
вследствие того что Аф '> Хг.
Кроме того, в реальных условиях в связи с уменьше-
нием и ростом /экп критическое скольжение sK.r не ос-
тается постоянным для различных /ЭК11; следует учесть
также, что кривая М = f (s) при динамическом торможе-
нии может быть построена графо-аналитическим методом
с учетом насыщения, для чего должны быть заданы ток
/экв и зависимость Ег = f (/и).
Иногда применяют торможение с самовозбуждением,
подключая к статору конденсаторную батарею, например,
по схеме, приведенной на рис. 3.37. В этом случае машина
работает асинхронным генератором, получая намагничива-
ющий ток от конденсаторов С/, С2, СЗ. Возбуждаясь со
стороны статора, машина при определенной угловой скоро-
сти генерирует энергию, выделяемую в виде теплоты в ро-
торной цепи. Подобные схемы торможения не нашли еще
88
широкого применения вследствие высокой стоимости кон-
денсаторов.
На практике применяют чаще всего торможение проти-
вовключением, особенно когда требуется осуществить пере-
мену направления вращения (реверс), или динамическое
торможение по схемам, изображенным на рис. 3.32 и 3.34,
когда реверс не требуется.
3.9. Механическая и угловая
характеристики синхронного двигателя
Синхронные двигатели, если они работают при
постоянной частоте с неизменной угловой скоростью, при-
меняются для приводов, не требующих регулирования ско-
рости. К таким приводам относятся: компрессоры,
Рис. 3.39. Пусковые характери
стики синхронного двигателя.
Генератор- Двигатель-
ный режим ный режим
___________________М
0
V
Рис. 3.38. Схема включения (а) и
механическая характеристика (б)
синхронного двигателя.
холодильные машины, камнедробилки и т. п. Основное до-
стоинство синхронного двигателя, заключающееся в воз-
можности работать с высоким коэффициентом мощности,
приводит к все более широкому применению этого двига-
теля.
Угловая скорость синхронного двигателя (рис. 3.38, б)
при работе в установившемся режиме с возрастанием на-
грузки на валу до определенного значения, не превышаю-
щего максимального момента Мтах, остается строго посто-
янной и равна синхронной угловой скорости:
<о0 = 2л/|/р.
Поэтому механическая характеристика его имеет вид
прямой линии, параллельной оси абсцисс. Если момент
89
нагрузки превышает Мтах, то двигатель может выпасть из
синхронизма и показанная на рис. 3.38, б зависимость со
от М нарушится.
Современные синхронные двигатели имеют в роторе,
кроме нормальной рабочей обмотки, питаемой постоянным
током, еще п специальную пусковую короткозамкнутую
обмотку. С помощью этой обмотки двигатель пускается
в ход как асинхронный, и поэтому в пусковых режимах
он обладает асинхронной характеристикой. На рис. 3.39
представлены две пусковые характеристики синхронного
двигателя, одна из них 1 соответствует пуску с понижен-
ным начальным пусковым моментом Л4П1 и значительным
«входным» моментом Л4Р1, под которым понимается момент,
развиваемый при скорости, равной 0,95 со0. При этой ско-
рости возможно вхождение двигателя в синхронизм после
включения постоянного тока в обмотку возбуждения.
Если пусковая клетка имеет увеличенное активное со-
противление, то начальный пусковой момент Ми2 будет
больше, чем в предыдущем случае, а входной момент Л4„2
уменьшится (кривая 2 на рис. 3.39). Выбор одной из двух
указанных пусковых характеристик зависит от моментов
сопротивления, которым обладают производственные меха-
низмы.
При пульсации нагрузки на валу двигателя в установив-
шемся режиме значение мгновенной скорости колеблется
около среднего значения. Эти колебания происходят за счет
изменения угла между напряжением и ЭДС синхронной
машины. Колебания скорости имеют практическое значение
при работе синхронного двигателя на пульсирующую на-
грузку, например на поршневой компрессор. Для решения
вопроса об устойчивой работе двигателя в таких случаях
необходимо знать зависимость момента М. от угла G между
напряжением и ЭДС К Этсму углу G соответствует простран-
ственный угол сдвига между осью результирующего поля
машины и ссью полюсов (пространственный угол в р раз
меньше угла о).
Зависимость момента синхронной машины от угла G
носит название угловой характеристики.
Для нахождения уравнения угловой характе-
ристики обратимся к упрощенной векторной диаграмме
неявнополюсной машины, представленной на рис. 3.40.
1 Здесь и в дальнейшем электрический угол 0 выражается в гра-
дусах,
90
Если пренебречь потерями в активном сопротивлении ста-
тора, считая /?! = 0 (рис. 3.41), то подводимая к синхрон-
ному двигателю мощность, Вт, может быть принята равной
электромагнитной мощности:
P = 3/t/cos<p, (3.50)
где / и U — фазные ток и напряжение статора.
Рис. 3.40. Упрощенная вектор-
ная диаграмма синхронного
двигателя.
Рис. 3.41. Векторная диаграм-
ма синхронного двигателя при
Ri = 0.
Из векторной диаграммы (рис. 3.41) следует, что
U cos <р = Е cos (<р — 0).
Из рассмотрения вспомогательного треугольника АВС
видно, что
cos (гр — 9) = АВ/AC — U sin 0//Л\,
следовательно,
j j j-> т г sin О
U cos ср = EU -ртг.
1Л\
Теперь, подставив полученное выражение в (3.50), полу-
чим уравнение электромагнитной мощности, Вт,
Р = З£7к,3sin 9, (3.51)
где /к,3 — ток короткого замыкания,
4,3 = ^.
Отсюда электромагнитный момент
Л4 = -- = -Е/к 3sin9. (3.52)
С00 К>0
В случае явнополюспой машины появляется еще допол-
нительный реактивный момент. Однако для практических
91
расчетов им можно пренебречь и пользоваться формулой
(3.52).
При 6 = 90° момент имеет максимальное значение:
Мтал = ~EIKi3. (3.53)
Поэтому искомое уравнение угловой характеристики
принимает следующий вид:
М =Мтах sin 0.
(3.54)
С увеличением нагрузки угол 9 возрастает. Из (3.54)
видно, что вначале с увеличением угла 9 растет и развивае-
мый двигателем момент (рис. 3.42), что удовлетворяет требо-
ванию устойчивой работы двигателя. В правой части гра-
фика- при 9 > 90° условие устойчивой работы двигателя
теля.
Рис. 3.43. Принципиальная схе-
ма включения синхронного дви-
гателя при динамическом тормо-
жении.
нарушается, так как при увеличении нагрузки угол 9
продолжает возрастать, а момент, развиваемый двигателем,
уменьшается, вследствие чего двигатель выпадает из синхро-
низма. Левая часть характеристики является рабочей
частью, а правая, где угол 9 изменяется от 90 до 180°, пред-
ставляет собой неустойчивую часть характеристики.
Номинальному моменту двигателя Mti0„ практически
соответствует угол 9ИОМ = 30 н- 25°. При этом кратность
максимального момента к номинальному составляет:
А. — Мтах/Мпо.л — 2 -j- 2,5.
Однако в специальных случаях применяют синхронные
машины и с большей кратностью максимального момента,
достигающей 3,5—4.
92
Синхронный двигатель может работать и в режиме гене-
ратора параллельно с сетью при синхронной угловой ско-
рости, когда нагрузочный момент на его валу будет иметь
отрицательное значение, чему отвечает левая ветвь характе-
ристики на рис. 3.38. Для торможения такой режим практи-
ческого значения не имеет, так как при этом нельзя полу-
чить снижения скорости.
Обычно применяется динамическое торможение синхрон-
ных двигателей, при котором обмотки статора отключаются
от сети и замыкаются на резисторы (рис. 3.43). Механиче-
ские характеристики в этом случае подобны характеристи-
кам асинхронного двигателя при динамическом торможении.
Интенсивность торможения зависит от сопротивления ста-
торной цепи и от потока, создаваемого током роторной об-
мотки. Время торможения при питании цепей возбуждения
от собственного возбудителя, находящегося на валу син-
хронного двигателя, больше, чем при питании от независи-
мого источника постоянного тока. Объясняется это тем,
что при снижении угловой скорости возбудителя уменьша-
ется его ЭДС, а следовательно, уменьшаются ток возбужде-
ния двигателя и тормозной момент.
Торможение синхронных двигателей противовключе-
нием практически не применяется, так как оно сопровож-
дается большими толчками тока и ведет к усложнению управ-
ления ввиду необходимости отключения двигателя при под-
ходе к нулевой скорости.
ГЛАВА ЧЕТВЕРТАЯ
РЕГУЛИРОВАНИЕ УГЛОВОЙ СКОРОСТИ
ЭЛЕКТРОПРИВОДОВ
4.1. Основные показатели регулирования
угловой скорости электроприводов
В современной промышленности используется
большое количество производственных механизмов, рабо-
тающих с различной, изменяющейся скоростью. К этой мно-
гочисленной группе относятся металлообрабатывающие
станки, прокатные металлургические станы, подъемные
краны и транспортные устройства, а также различные ме-
ханизмы бумажной, угольной, текстильной и других отрас-
лей промышленности. Так, в металлорежущих станках
93
скорость электропривода должна регулироваться в зависи-
мости от рода обрабатываемого металла, качества резца,
размеров обрабатываемых изделий и других факторов.
В прокатных станах для каждого профиля прокатываемого
металла также имеются свои наиболее благоприятные ско-
рости, определяющие производительность стана и качество
продукции. Снижение скорости при прокатке ведет к умень-
шению производительности и увеличению расхода энергии
вследствие охлаждения металла, а чрезмерное увеличение
скорости ухудшает качество продукции и даже приводит
к появлению брака, так как при чрезмерных скоростях
металл не успевает заполнить углы калибров прокатных
валков.
В лифтах, подъемных и транспортных механизмах ско-
рость необходимо снижать по мере подхода к пункту оста-
новки, чтобы обеспечить плавное замедление и точную оста-
новку в нужном месте. Скорость, при которой должен рабо-
тать дымосос в котельной, определяется качеством топлива,
его влажностью, зольностью, условиями процесса горения
и требуемой производительностью котла. Во всех этих меха-
низмах, как и во многих других, для достижения высокой
производительности и требуемого качества работы необхо-
димо осуществлять регулирование скорости.
Регулированием скорости называется принудительное
изменение скорости электропривода в зависимости от тре-
бований технологического процесса. Понятие регулирования
скорости не следует смешивать с естественным изменением
скорости, возникающим в электроприводах в силу изме-
нения нагрузки на валу работающей машины. Регулиро-
вание скорости осуществляется дополнительным воздей-
ствием на приводной двигатель; оно может быть произ-
ведено человеком или специальным автоматическим устрой-
ством.
В настоящее время все большее применение находит
электрическое регулирование скорости, которое имеет ряд
преимуществ в отношении технических и экономических
показателей.
Основными показателями, характеризующими различ-
ные способы регулирования скорости электроприводов,
являются: 1) диапазон регулирования; 2) плавность;
3) экономичность; 4) стабильность скорости; 5) направле-
ние регулирования скорости (уменьшение или увеличение
ее относительно основной скорости); 6) допустимая нагрузка
при различных скоростях.
94
1. Диапазон регулирования угловой скорости определя-
ется отношением возможных установившихся скоростей!
максимальной а>тах к минимальной а>т1П
D = (O/nuv • <£>тт
при заданной точности регулирования (с заданным статиче-
ским падением скорости электропривода) для установленных
пределов изменения момента нагрузки и других возмуще-
ний.
Обычно диапазон регулирования выражается в числах
в виде отношения, например: 2 : 1, 4 : 1, 10:1,20:1 и т. д.
Современные системы автоматического регулирования элек-
троприводов с обратными связями позволяют существенно
расширить диапазон регулирования скорости.
Различные производственные машины требуют разных
диапазонов регулирования. Например, главные механизмы
металлорежущих станков в зависимости от их назначения
работают с диапазонами регулирования D = (4 : 1) 4-
-ь (100 : 1) и выше; для механизмов подач универсальных
станков требуется диапазон до 10 000 : 1 и выше. При изго-
товлении бумаги для газет бумагоделательная машина ра-
ботает с диапазоном регулирования D = 3 : 1, а при изго-
товлении высших сортов бумаги D = 20 : 1. Некоторые
прокатные металлургические станы имеют диапазон регули-
рования D — (20 : 1) н- (25 : 1).
2. Плавность регулирования характеризует скачок ско-
рости при переходе от данной скорости к ближайшей воз-
можной. Плавность тем выше, чем меньше этот скачок. Число
скоростей, получаемых в данном диапазоне, определяется
плавностью регулирования. Ее можно оценить коэффициен-
том плавности регулирования, который находится как
отношение двух соседних значений угловых скоростей при
регулировании
<Рпл =
где со, и со,-! — угловые скорости соответственно на Z-й и
(i — 1)-й ступенях регулирования.
При плавном регулировании српл -> 1, а число скоростей
г -> оо. В случае ступенчатого регулирования коэффи-
циент плавности регулирования может существенно отли-
чаться от единицы. Число скоростей, диапазон регулиро-
вания D и коэффициент плавности регулирования при та-
ком регулировании связаны между собой равенством
D = ф* -1
т ПЛ •
95
Плавность регулирования во многих случаях определяет
качество продукции. В практике электропривода наимень-
шей плавностью регулирования обладают двухскоростные
асинхронные двигатели с короткозамкнутым ротором (<р||Л =
= 2). Высокая плавность регулирования угловой скорости
достигается, например, в двигателе постоянного тока неза-
висимого возбуждения при регулировании изменен 1ем по-
тока или подводимого к якорю двигателя напряжения.
3 Экономичность регулирования характеризуется затра-
тами на сооружение и эксплуатацию электропривода.
Необходимо отметить, что экономически выгодным ока-
зывается такой регулируемый электропривод, который обес-
печивает большую производительность приводимого им
в действие механизма при высоком качестве технологиче-
ского процесса и сравнительно быстро окупается.
При оценке экономичности регулируемого электропри-
вода следует принимать во внимание надежность его в экс-
плуатации, а также учитывать дефицитность материалов и
оборудования, затрачиваемых на сооружение того или иного
привода. Существенное значение имеют потери энергии
в процессе регулирования. Потери мощности ДР, возникаю-
щие при регулировании скорости, определяют КПД при-
вода:
Т) = Р2/(Р2 + ДР),
где Р2 — мощность на валу двигателя.
При работе двигателя на разных угловых скоростях
следует подсчитывать так называемый средневзвешенный
КПД за регулировочный цикл, состоящий из т ступеней,
по выражению
т / т
где Р2<г и ДР9 — полезная мощность и потери на g-й ступени;
— время, в течение которого двигатель работает на
g-й ступени.
Из этого соотношения следует, что при известных усло-
виях работы электропривода КПД за цикл может оказаться
значительно выше КПД на какой-либо одной ступени ско-
рости. Если цикл не задан, то можно принять, что на всех
ступенях двигатель работает одинаковое время с одинако-
вой нагрузкой.
Потери энергии при регулировании скорости различны
для разных способов регулирования. Они сравнительно
96
велики в системах, где регулирование ведется в главных
цепях машин, и значительно ниже при регулировании в це-
пях возбуждения. Последнее становится понятным, если
вспомнить, что мощность цепи возбуждения, например,
машин постоянного тока составляет лишь 1—5 % мощности
главных цепей.
Важным экономическим показателем электропривода
является коэффициент мощности и потребление реактивной
энергии за рабочий цикл В случае двигателя переменного
тока сдвиг фаз между током и напряжением сети обусловли-
вается потреблением реактивной мощности, затрачивае-
мой на создание магнитного потока.
Зная потребляемые двигателем активную Ра и реактив-
ную Рр мощности, можно определить коэффициент мощно-
сти, с которым в данный момент работает двигатель:
cos ср = + Р2р,
и средневзвешенный cos <рр при работе на разных угловых
скоростях с разным временем и с различными нагрузками
в течение цикла регулирования:
т / т ____________
coscpp = 2ЛЛ / +
Номинальный коэффициент мощности для большинства
двигателей составляет cos <риом = 0,8 ч- 0,9 и зависит от
мощности двигателя. С ростом мощности и номинальной уг-
ловой скорости двигателя повышается номинальный коэф-
фициент мощности. Коэффициент мощности асинхронного
двигателя в сильной степени зависит от нагрузки; при хо-
лостом ходе коэффициент мощности мал вследствие значи-
тельной реактивной мощности, затрачиваемой на создание
потока, и малой активной мощности, связанной лишь с по-
стоянными потерями. По мере роста нагрузки примерно до
номинальной активная мощность растет быстрее реактивной
и cos <р возрастает до номинального значения.
Коэффициент мощности синхронного двигателя также за-
висит от нагрузки, однако он может быть изменен при регу-
лировании тока возбуждения. При меньшем токе возбужде-
ния синхронный двигатель является потребителем реактив-
ной мощности С увеличением тока возбуждения возрастает
cos <р. При дальнейшем увеличении тока возбуждения син-
хронный двигатель может работать в качестве генератора
реактивной мощности.
4 Чплнкии М Г , Сандлер А С. 97
Широкое использование управляемых полупроводнико-
вых преобразователей для регулирования угловой скоро-
сти двигателей постоянного и переменного тока приводит
к искажению формы первичного напряжения и тока и
к значительному возрастанию потребляемой из сети реактив-
ной мощности. Коэффициент мощности примерно равен:
cos ф cos а = <»ao/Wo,
где ыа0 — минимальная угловая скорость идеального холо-
стого хода, соответствующая наибольшему углу регулиро-
вания а; ы0 — то же при а = 0.
4. Стабильность угловой скорости характеризуется изме-
нением угловой скорости при заданном отклонении момента
нагрузки и зависит от жестко-
сти механической характеристи-
ки; она тем выше, чем больше
жесткость характеристики.
Если при регулировании
угловой скорости жесткость ха-
рактеристики изменяется, то и
Рис. 4.1. Иллюстрация изменения уг-
ловой скорости для механических ха-
рактеристик различной жесткости.
отклонение скороеiи от заданной тоже будет изменяться.
На рис. 4.1 приведены две характеристики двигателя посто-
янного тока параллельного возбуждения при регулирова-
нии угловой скорости введением резисторов в цепь якоря.
Если при этом момент сопротивления Л4С остается неиз-
менным, то двигатель, работавший ранее с угловой ско-
ростью <01, будет после введения дополнительного резистора
в цепь якоря работать с угловой скоростью ы2. Однако при
наличии изменений нагрузочного момента в некоторых
пределах (± ЛЛ4) угловая скорость двигателя не остается
постоянной, она изменяется относительно средних значе-
ний Ы1 или <в2. Отклонения угловой скорости Дсо, вызван-
ные изменениями нагрузки, будут тем больше, чем меньше
жесткость характеристики. Это обстоятельство во многих
случаях ограничивает диапазон регулирования скорости.
9. Направление регулирования скорости, т. е. уменьше-
ние или увеличение ее по отношению к основной скорости,
зависит от способов регулирования.
98
Основная угловая скорость, например, двигателя по-
стоянного тока независимого возбуждения соответствует
номинальным значениям напряжения и магнитного потока.
Эта скорость получается в том случае, когда в цепях двига-
теля нет никаких внешних резисторов, т. е. точка <оосн
находится на естественной механической характеристике.
Различают одиозопное регулирование вниз от основной
скорости, однозонное регулирование вверх от основной ско-
рости и двухзонное регулирование, когда имеется возмож-
ность получать характеристики выше и ниже естественной,
При регулировании с помощью резисторов в цепи якоря
двигателя постоянного тока или в цепи ротора асинхрон-
ного двигателя угловая скорость в двигательном режиме
при данной нагрузке по мере увеличения сопротивления
резисторов уменьшается. Это означает, что регулирование
изменением сопротивления резисторов может быть осуще-
ствлено только вниз по отношению к основной скорости.
Напротив, регулирование уменьшением магнитного по-
тока ведет в пределах нормальных нагрузок к увеличению
угловой скорости, т. е. в этом случае осуществляется
однозонное регулирование вверх от основной скорости.
6. Допустимая нагрузка двигателя, т. е. наибольшее
значение момента, который двигатель способен развивать
длительно при работе на регулировочных характеристиках,
определяется нагревом двигателя и для разных способов
регулирования будет различной.
Изменение нагрузочного момента в зависимости от ско-
рости у различных производственных механизмов различно.
Например, многие механизмы требуют регулирования при
постоянном моменте. К ним относятся: подъемные краны,
лебедки, некоторые прокатные станы и т. п. С другой сто-
роны, существуют механизмы, у которых регулирование
скорости производится с постоянной мощностью. В ка-
честве примеров подобного механизма можно привести
токарный станок, у которого в процессе обработки данной
детали желательно поддержание постоянства линейной
скорости (или скорости резания) и усилия резания. При
этих условиях произведение скорости резания на усилие
даст постоянство мощности. Поддержание постоянства
скорости резания достигается плавным регулированием
угловой скорости электропривода.
Принципиально путем выбора соответствующей мощ-
ности двигателя можно удовлетворить любому изменению
нагрузочного момента или мощности при регулировании
4* 99
скорости. Однако в таком случае регулирование угловой
скорости двигателя может оказаться неэкономичным, так
как двигатель на разных угловых скоростях будет исполь-
зован неодинаково и при работе на некоторых из них
будет недогружен.
Недогрузка двигателя ведет к ухудшению эксплуата-
ционных показателей привода, так как при этом умень-
шается КПД двигателя, а при переменном токе, кроме
того, уменьшается и коэффициент мощности. Желательно
поэтому применять такой способ регулирования, при кото-
ром двигатель был бы по возможности полностью загру-
жен при всех угловых скоростях.
Допустимая нагрузка двигателя ограничивается сте-
пенью его нагрева. Степень нагрева в свою очередь зави-
сит от потерь энергии в двигателе, а последние опре-
деляются главным образом током, потребляемым двига-
телем.
Таким образом, мы приходим к выводу, что условием
полного использования двигателя при работе на разных
регулировочных характеристиках является постоянство на-
грузочного тока. Если при работе на всех характеристиках
ток будет равен номинальному току двигателя, то это
и будет означать, что двигатель загружен полностью при
всех угловых скоростях. При этом предполагается, что
условия охлаждения двигателя остаются неизменными
как при больших, так и при малых угловых скоростях.
С учетом этого важного предположения допустимой нагруз-
кой двигателя можно считать такую, при которой ток дви-
гателя в его силовых цепях равен номинальному. Тогда
допустимый момент, например, двигателя постоянного
тока
/Идо„ = ЙФДюм.
Момент зависит от способа регулирования.
Рассмотрим в качестве примера двигатель постоянного
тока независимого возбуждения. Он может иметь две зоны
регулирования, как это показано на рис. 4.2. Зона / отве-
чает регулированию с постоянным моментом. Действитель-
но, если регулирование осуществляется изменением сопро-
тивления или напряжения главной цепи при неизменном
номинальном магнитном потоке двигателя, то при номи-
нальном токе якоря допустимый момент будет постоянным
Й4доп ^^иом^пом COnst М110м.
100
Мощность на валу двигателя в этой зоне изменяется
по линейному закону, так как она пропорциональна угло-
вой скорости
= Мео.
Зона // отвечает регулированию с постоянной мощ-
ностью, когда оно производится изменением магнитного
потока двигателя.
В этом случае при неизменном токе якоря, равном
номинальному, магнитный поток с увеличением угловой
скорости необходимо регулировать по закону гиперболы,
Рис. 4.2. Характеристики двух зон
регулирования двигателя постоян-
ного тока независимого возбужде-
ния.
что следует из (3.3). Если решить это уравнение относи-
тельно магнитного потока, то получим:
Ф = ОА.о, - Л.ОмО^® = ^/®-
Таким образом, становится ясной зависимость допусти-
мого момента от угловой скорости в зоне регулирования II,
а именно:
^^ДОП ^ФД1ОМ /® Л^пом® ноч/®•
Отсюда следует, что мощность в этой зоне регулирова-
ния остается постоянной, так как
^2доп = Л1й) = COnst — Л1пом®ном ^ном*
Допустимая нагрузка при регулировании угловой ско-
рости двигателей других типов определяется аналогич-
ными методами.
Следует, однако, иметь в виду, что для самовентилируе-
мых двигателей, снабженных собственным вентилятором
для охлаждения, снижению угловой скорости должно
соответствовать уменьшение допустимых потерь в двига-
теле. На малых угловых скоростях эти двигатели должны
работать при токах, меньших номинального, а следова-
101
телыю, п допустимый момент уменьшается по мере умень-
шения угловой скорости.
В приводах с вентиляторным моментом нагрузки дви-
гатель не может быть полностью загружен при низких
угловых скоростях. Особенностью регулирования таких
приводов является увеличение момента с возрастанием
угловой скорости. Поэтому здесь приходится выбирать
мощность двигателя по нагрузке при наибольшей угловой
скорости. При всех других меньших угловых скоростях
двигатель будет недогружен. Особенно больших габаритов
при вентиляторной нагрузке необходим двигатель в случае
регулирования током возбуждения. Это следует из того,
что такой двигатель должен будет развивать наибольший
момент при наименьшем магнитном потоке.
4.2. Регулирование угловой скорости
двигателя постоянного тока
независимого возбуждения
изменением магнитного потоке
Из уравнения
со = {U — /Р)/йФ
вытекает, что возможны три принципиально различны.'.'
способа регулирования угловой скорости двигателя:
1) изменением тока возбуждения (магнитного потока)
двигателя;
2) изменением сопротивления цепи якоря посредством
резисторов (реостатное);
3) изменением подводимого к якорю двигателя напри’
жени я.
Регулирование угловой скорости двигателя изменением
тока возбуждения является одним из наиболее простых
и экономичных способов. Мощность, потребляемая обмот-
кой возбуждения двигателя, составляет примерно 2—2,5 %
мощности двигателя, поэтому этот способ находит широ-
кое применение в современной практике электропривода.
Принципиальные схемы электропривода при регулиро-
вании тока возбуждения показаны на рис. 4.3, а, б. Ток
возбуждения регулируется или с помощью резистора
(рис 4.3, а) в случае двигателей малой мощности, или
посредством регулятора напряжения PH (рис. 4.3, б).
Регулирование скорости в этом случае осуществляется
вверх от основной, причем допустимый момент двигателя
102
изменяется по закону гиперболы, а допустимая мощность
остается неизменной. Так как допустимая нагрузка опре-
деляется током, равным номинальному, то мощность,
развиваемая двигателем, постоянна (Р = Р„пп = const)
независимо от магнитного потока (тока возбуждения).
Электромеханическим характеристикам со = f (/) при изме-
нении тока возбуждения соответствуют различные значе-
ния угловой скорости идеального холостого хода, опре-
деляемые по (3 8).
(Оц = U/кФ.
На рис. 4 4 по оси ординат отложено значение угловой
скорости идеального холостого хода <ь0 для естественной
характеристики, когда по-
ток Ф = Ф|1ом. Значения
угловых скоростей идеаль-
ного холостого хода при
ослабленном потоке соо и
со0' лежат, очевидно, выше
соо Все электромеханиче-
Рис 4 3 Принципиальные схе-
мы электропривода при регули-
ровании хгловой скорости изме-
нением магнитного потока с по-
мощью резистора (о) и регуля-
тора напряжения PH (б).
ские характеристики пересекаются с осью абсцисс в одной
точке. Последнее следует из того, что при со = 0 урав-
нение для любой электромеханической характеристики
имеет вид:
O = ((/_//^)/Mi,
откуда определяется ток в якоре двигателя
I = U/Rn = IK3.
Следовательно, при различных токах возбуждения и
при угловой скорости двигателя, равной нулю, ток в якор-
ной цепи равен току короткого замыкания двигателя.
Этим значением тока и определяется общая точка пере-
сечения электромеханических характеристик
Механические характеристики, показанные на рис 4 5,
имеют те же значения угловых скоростей идеального холо-
103
стого хода, что и для электромеханических характеристик.
Это следует из (3.5). Однако эти характеристики не пере-
секаются в одной точке на оси абсцисс, так как по мере
уменьшения потока уменьшается и момент короткого
замыкания, определяемый по формуле
MK.3 = kIK,3<D.
Регулирование является экономичным при постоянной
мощности; полному использованию двигателя соответствуют
точки, находящиеся на линии номинального тока /с = /110И
(см. рис. 4.4); этому соответствуют точки, лежащие на
гиперболической кривой момента сопротивления Мс, как
Рис. 4.4. Электромеханические
характеристики двигателя по-
стоянного тока независимого
возбуждения при регулирова-
нии угловой скорости током
возбуждения.
Рис. 4.5. Механические харак-
теристики двигателя постоян-
ного тока независимого возбуж-
дения при регулировании угло-
вой скорости током возбужде-
ния.
это показано пунктиром на рис. 4.5. При этом потери мощ-
ности в цепи якоря при работе на регулировочных харак-
теристиках будут такими же, как и на естественной харак-
теристике, а потери на возбуждение — меньше.
При работе на угловых скоростях, соответствующих
точкам, лежащим левее указанной кривой момента Л4С,
двигатель будет недогружен: напротив, работа на скоро-
стях правее этой кривой приведет к перегрузке двига-
теля.
Любопытно отметить, что при малых моментах нагрузки
угловая скорость с ослаблением поля растет, а при боль-
ших уменьшается.
При постоянном моменте сопротивления (Л4С = const)
и длительной нагрузке двигатель нужно выбирать так,
чтобы при наибольшей угловой скорости ток в цепи якоря
не превосходил номинального. При сниженных угловых
104
скоростях в этом случае приходится мириться с недогруз-
кой двигателя, так как ток в якоре становится меньше
номинального вследствие возрастания магнитного по-
тока.
Обычно регулируемые двигатели имеют диапазон регу-
лирования от 2:1 до 5:1, в ряде случаев до (8-ИО) : 1.
Диапазон регулирования ограничивается различными
факторами. Главным из них является ухудшение условий
коммутации с возрастанием угловой скорости, поскольку
реактивная ЭДС, вызывающая искрение на коллекторе,
пропорциональна току и угловой скорости, т. е. Ер = с/со.
Кроме того, при больших угловых скоростях требуется
повышать механическую прочность якоря. Нижний предел
угловой скорости ограничивается степенью насыщения
машины и нагревом обмотки возбуждения, т. е. номиналь-
ной угловой скоростью.
Плавность регулирования в пределах заданного диапа-
зона может быть получена весьма значительной и опреде-
ляется количеством ступеней регулировочного реостата
или же числом ступеней специальных устройств, регули-
рующих напряжение, подводимое к обмотке возбуждения.
Посредством этих же устройств или посредством ползун-
кового реостата (при малой мощности двигателя) можно
получить плавное регулирование.
Широко используется также импульсное параметриче-
ское регулирование тока возбуждения, при котором в цепь
обмотки возбуждения с определенной частотой и изменяе-
мой продолжительностью обычно посредством полупровод-
никового ключа (транзистора, тиристора) или реле (кон-
тактора) вводится добавочный резистор с постоянным
сопротивлением. Изменяя продолжительность включенного
состояния резистора (или ключа, шунтирующего резистор)
при заданной частоте включения, можно получить плавное
регулирование угловой скорости в диапазоне (2ч-3): 1
и более.
Стабильность угловой скорости при регулировании
определяется относительным перепадом угловой скорости
при изменении нагрузки и в данном случае при номиналь-
ном токе якоря как Дсоном/со0 = /110м/?я/^, поэтому неза-
висимо от тока возбуждения относительный перепад сохра-
няется одним и тем же для естественной и искусственной
характеристик, т. е. угловая скорость сравнительно ста-
бильна.
105
4.3. Реостатное и импульсное
параметрическое регулирование
угловой скорости двигателя
постоянного тока независимого
возбуждения
Регулирование угловой скорости изменением
сопротивления цепи якоря не требует особых пояснений.
В гл. 3 дано построение реостатных механических харак-
теристик применительно к пуску двигателя. Подобный
вид имеют характеристики и при регулировании угловой
скорости посредством реостатов в цепи якоря. В отличие
от пускового реостата регулировочный реостат должен
быть рассчитан в соответствии с режимом работы привода,
он оказывается включенным не только кратковременно
во время пуска, но и во время работы двигателя с заданной
угловой скоростью.
При этом способе регулирования изменяется жесткость
характеристики, а с ней и стабильность угловой скорости,
угловая скорость регулируется вниз от основной, причем
полное использование двигателя по току достигается при
регулировании с постоянным номинальным моментом, если
двигатель имеет независимую вентиляцию.
Действительно, если считать, что для любой угловой
скорости допустимым является номинальный ток, т. е.
Лоп = а поток двигателя остается номинальным,
то допустимый момент двигателя равен номинальному
= ^ФвомЛ.пом = А1|10и; по мере снижения угловой
скорости допустимая мощность двигателя уменьшается,
так как Ряоц — М„очю. Если допустить перепад угловой
скорости в 25 % при изменении момента нагрузки на ±25 %
номинального, то диапазон регулирования составит при-
мерно 2:1. Если допустить еще больший перепад угловой
скорости, можно несколько расширить диапазон регули-
рования. Однако следует иметь в виду, что при значитель-
ном перепаде угловой скорости с изменением нагрузки
наблюдается резкое снижение производительности меха-
низма, поэтому практически допустимый диапазон регу-
лирования не превышает (1,5 н- 2) : 1.
В большинстве случаев реостатное регулирование угло-
вой скорости производится с помощью контакторов, замы-
кающих отдельные ступени резисторов, т. е. скорость
привода изменяется дискретно, поэтому данный способ
ври контакторном управлении не обеспечивает плавного
106
регулирования. Применение жидкостного (при малой мощ-
ности двигателя) или ползункового реостата позволяет
достигнуть плавного регулирования. Другим способом
достижения плавного регулирования при введении рези-
сторов в цепь якоря является использование (при неболь-
шой мощности двигателя) импульсного параметрического
Рис. 4 6. Схема включения двигателя постоянного тока независимого
возбуждения при импульсном регулировании добавочного сопротивле-
ния (а), график регулирования угловой скорости при изменении скваж-
ности е замыкания контакта /( (б), механические характеристики при
импульсном регулировании сопротивления (в), схема тиристорного
ключа (г).
регулирования угловой скорости, применяемого также
в автоматизированном электроприводе для стабилизации
(поддержания) заданного значения угловой скорости при
изменении момента нагрузки или для предварительного
снижения скорости перед остановкой привода.
Схема включения двигателя постоянного тока незави-
симого возбуждения при импульсном регулировании доба-
вочного сопротивления в цепи якоря приведена на рис. 4.6,д.
Добавочный резистор /?до6, включаемый в цепь якоря,
либо полностью вводится в схему, либо замыкается нако-
107
ротко ключом К- Коммутация ключа К осуществляется
периодически. При замкнутом накоротко /?дов ток в цепи
якоря и угловая скорость двигателя возрастают, а при
введении Л\об в цепь, когда ключ К разомкнут, ток и угло-
вая скорость снижаются. Колебания тока и угловой ско-
рости происходят около некоторого среднего значения
(рис. 4.6, б). Среднее значение тока определяется моментом
нагрузки на валу двигателя, а среднее значение угловой
скорости зависит от соотношения длительностей замкнутого
и разомкнутого состояния ключа К и от момента нагрузки.
Амплитуды колебаний тока и угловой скорости зависят
при данных параметрах привода от частоты коммутации
ключа /(, которая должна быть достаточно высокой. Соот-
ношение длительностей замкнутого и t2 разомкнутого
состояний ключа К принято выражать в виде относительной
величины
В = -j- (2),
называемой скважностью управляющих импульсов. Оче-
видно, что с увеличением е при неизменной нагрузке
на валу двигателя угловая скорость его будет возрастать,
а при е = 1 двигатель будет работать на естественной
характеристике (ключ К постоянно замкнут). При е = О
двигатель будет работать на реостатной характеристике,
соответствующей постоянно включенному резистору /?доб
(ключ К разомкнут). При других значениях е эквивалент-
ное (усредненное) добавочное сопротивление в цепи якоря
определяется соотношением
^•доб.э = Ядоб (1 ®)»
и механические характеристики двигателя, показанные
на рис. 4.6, в, определяются формулой (для средних зна-
чений угловой скорости и момента)
U Л1ср г
ЫСр £ф £ф2 [/?я Н- Кцоб (1 e)L
т. е. характеристики имеют тот же вид и те же свойства,
что и при чисто реостатном регулировании угловой ско-
рости.
Для реализации импульсного способа регулирования
сопротивления (следовательно, и угловой скорости) при-
меняются бесконтактные ключи, выполненные на базе
транзисторов (при токах до 15—20 А) или тиристоров
(при токах до 100—150 А).
108
На рис. 4.6, г показана схема тиристорного ключа Роль
ключа выполняет тиристор VI, шунтирующий резистор Рдоб
при подаче на него управляющего импульса. Выключается
тиристор VI с помощью вспомогательного тиристора V2,
подключающего к тиристору VI коммутирующий конден-
сатор Ск, предварительно заряженный через тиристор V4
и резистор Рп от маломощного источника Un. Выключение
тиристора V2 происходит по окончании перезаряда кон-
денсатора Ск от напряжения цепи якоря (падение напря-
жения на Рдо6 при включенном тиристоре VI). При оче-
редном включении тиристора VI обратный колебательный
перезаряд конденсатора Ск осуществляется через VI,
диод V3 и реактор LK. Более подробные сведения об этом
способе регулирования можно найти в [19].
При регулировании угловой скорости введением рези-
сторов в цепь якоря двигателя постоянного тока потери
мощности в этой цепи изменяются пропорционально пере-
паду угловой скорости. Это видно из следующих энергети-
ческих соотношений:
для двигателя постоянного тока потребляемая мощ-
ность в цепи якоря определяется равенством
Р,= UI — EI-V PR.
Последнее уравнение может быть переписано так:
ЛФсоо/ = йФсо/ + ДР,
откуда
Л/МФоо/^
СОо
или
Д.Р = Р18, (4.1)
где
6 = (соо — ®)/®о-
Таким образом, потери мощности в этой цепи пропор-
циональны потребляемой мощности и перепаду угловой
скорости, выраженному в относительных единицах. Так,
если момент нагрузки постоянен (следовательно, постоянна
потребляемая мощность) и угловая скорость двигателя
уменьшается вдвое, то примерно половина мощности,
потребляемой из сети, будет рассеиваться в виде теплоты,
выделяемой в реостате, т. е. данные способы регулирования
(реостатный и импульсный параметрический) являются
неэкономичными. При импульсном регулировании сопро-
109
тивления энергетические показатели несколько хуже, чем
при ступенчатом его изменении. Это обусловлено наличием
в кривой тока якоря переменной составляющей, вызванной
коммутациями ключа, что приводит к увеличению потерь
энергии.
Средний КПД при Мс = const в предположении ра-
боты привода с одинаковой длительностью на каждой
ступени угловой скорости определяется по формуле
D -f-1 /л о\
ПсР=-2о-1]с> (4-2)
где D = (Ое/сОда,-,,; сос, со„(М — угловая скорость па есте-
ственной и регулировочной характеристиках; т]е — КПД
привода на естественной характеристике.
Некоторые особенности в отношении энергетических
показателей имеет регулирование угловой скорости при-
водов с вентиляторным моментом. Момент, развиваемый
двигателем при вентиляторной нагрузке, пропорционален
квадрату скорости, т. е. Л4 = Сео2 (потери в вентиляторе
не учитываются). Потребляемая двигателем мощность
— Л4сОд,
где Plll0M — мощность, потребляемая при номинальной
нагрузке; Рг„оч — номинальная мощность двигателя (мощ-
ность на валу); соо — угловая скорость идеального холо-
стого хода; сопом — номинальная угловая скорость.
Мощность на валу двигателя
Р2 = Мы,
или
^2 ^2|1ОМ (Ь)/СО।,оУ1 )3.
Потери мощности в цепи якоря двигателя 1
Д/32 = Л - рг = ? (соо - со). (4.4)
'••'ном \и,ном7
Взяв первую производную d (ДР2) /с/со и приравняв ее
2
нулю, найдем угловую скорость со = -д со«, при котороп
1 Здесь не учитываются потери в стали и механические потери.
по
потери в цепи якоря достигают максимума!
&Ргтах — 27 ?' (4-5)
Z' \WHOM/
Анализ формулы (4.4) показывает, что в случае венти-
ляторной нагрузки при и = 0 и со = соо потери-мощности
равны нулю, тогда как при неизменном моменте на валу
и со = 0 вся потребляемая мощность (Pt = UI) теряется
в цепи якоря.
Коэффициент полезного действия привода при реостат-
ном регулировании и вентиляторном моменте ориентиро-
вочно может быть определен по той же формуле, что и
КПД при Мс — const, т. е.
Л^со/соо. (4.6)
Соответственно и среднее значение КПД за цикл опре-
деляется по (4.2). Однако, несмотря на то что КПД при-
вода при Мс = const и Л4С = Сео2 одинаковы, регулиро-
вание угловой скорости введением резисторов в цепь
якоря для механизмов с вентиляторным моментом нагрузки
связано со значительно меньшими потерями мощности,
чем для механизмов с неизменным нагрузочным моментом.
Таблица 4 1
Угловая скорость, % Мощность вентилятора, % Потребляемая мощность двига- теля, % Потери в цени якоря, % КПД
100 100 105,2 5,2 0,95
90 72,9 85,3 12,4 0,855
80 51,2 67,4 16,2 0,76
70 34,3 51,6 17,3 0,665
60 21,6 37,9 16,3 0,57
50 12,5 26,3 13,8 0,475
40 6,4 16,8 10,4 0,38
30 2,7 9,5 6,8 0,285
20 0,8 4,2 3,4 0,19
10 0,1 1,05 0,95 0,095
0 0 0 0 0
Если, например, относительный перепад угловой ско-
рости при номинальной нагрузке Асоном = 0,05, то по-
тери мощности, отнесенные к номинальной мощности,
и КПД привода характеризуются цифрами, приведенными
в табл. 4.1.
111
По данным табл. 4.1 на рис. 4.7 построены зависи-
мости Рг Р, ДР.,* от oi^.
Несмотря на значительно меньшие потери мощности,
которые дает регулирование
угловой скорости измене-
нием сопротивления при
вентиляторном моменте,
нельзя, однако, признать
этот способ достаточно
экономичным, особенно
в тех случаях, когда вен-
тиляторы могут работать
длительно при угловых
Рис. 4.7. Кривые зависимости
Pi*, Р2* и ЛР2* от угловой
скорости (в относительных еди-
ницах).
скоростях, меньших номинальной, поэтому приходится
искать более экономичные способы регулирования угло-
вой скорости.
4.4. Регулирование угловой скорости
двигателя постоянного тока
независимого возбуждения изменением
подводимого к якорю напряжения
Регулирование угловой скорости осуществля-
ется вниз от основной, так как напряжение, прикладывае-
мое к якорю, в большинстве случаев может изменяться
только вниз от номинального (иногда, например, при регу-
лировании угловой скорости двигателя с постоянными
магнитами возможно регулирование как вниз, так и вверх
от основной скорости —двухзонное).
Допустимый момент без учета ухудшений условий
вентиляции со снижением угловой скорости остается по-
стоянным, так как допустимый ток якоря равен номиналь-
ному, а поток при независимом возбуждении остается
неизменным (номинальным).
Для различных значений напряжений угловая скорость
двигателя равна:
ы1 = (6'1-//?„)ЖР;
<Й2 ~ (И 2— /РЯ)/ЙФ.
112
Их отношение
«)1/оъ = (£Д - ~ IRJ- (4 7)
Отсюда следует: при изменении напряжения регули-
ровочные характеристики располагаются параллельно друг
другу, т. е. имеют одинаковую жесткость (как показано
на рис. 4.8), что определяет относительно высокую ста-
бильность угловой скорости. Диапазон регулирования
D = (UUOM- IRMUnun-lR^, (4 8)
где £7НОМ и итт — номинальное и минимальное напряже-
ния.
Из (4.8) следует, что относительный перепад угловой
скорости растет со снижением напряжения; это ограни-
чивает диапазон регулирования значением D = (8-ь 10) : 1
в системах привода без обратных связей (в замкнутых си-
стемах диапазон регулирования существенно больше и
может достигать значений 1000:1 и более).
Плавность регулирования определяется плавностью из-
менения напряжения питания и обычно характеризуется
значением коэффициента плавности <рпл -> 1.
Коэффициент полезного действия двигателя в данном
случае (без учета потерь на возбуждение) равен отноше-
нию фактической угловой скорости двигателя к угловой
скорости идеального холостого хода на заданной характе-
ристике. Потери мощности в якорной цепи при постоянном
моменте нагрузки остаются неизменными при регулирова-
нии угловой скорости и равными потерям при работе
на естественной характеристике. Но поскольку полезная
мощность по мере снижения угловой скорости умень-
шается, то и КПД двигателя падает. Вследствие малых
потерь мощности в цепи якоря этот способ регулирования
скорости является экономичным. Однако для полной оценки
экономичности необходимо учитывать потери мощности
еще в устройстве, посредством которого регулируется
напряжение на якоре двигателя, и затраты на это устрой-
ство
Так как напряжение питающей сети поддерживается
постоянным, то указанный способ регулирования возмо-
жен при использовании соответствующего преобразова-
теля с регулируемым напряжением постоянного тока
на его выходе, например, в системе генератор — двига-
тель (Г—Д) или управляемый выпрямитель — двигатель
(ув-д).
из
а) Система генератор — двигатель
Принципиальная схема включения двигателя
постоянного тока с независимым возбуждением по системе
Г—Д приведена па рис. 4.9. Здесь генератор G с постоян-
ной угловой скоростью приводится во вращение асинхрон-
ным или синхронным двигателем Ml; питание цепей воз-
буждения генератора G и исполнительного двигателя Л1 осу-
ществляется от независимого источника постоянного тока.
Рис. 4.8. Механические харак-
теристики двигателя постоян-
ного тока независимого возбуж-
дения при различных напряже-
ниях,
Рис. 4.9. Принципиальная схе-
ма включения двигателя посто-
янного тока независимого воз-
буждения по системе Г — Д.
Якорь двигателя М присоединяется к якорю генера-
тора G непосредственно. Электродвижущая сила генератора
определяется по формуле
Ег = ЛГФГ®Г,
где — коэффициент, зависящий от конструктивных дан-
ных генератора и определяемый по формуле
= ргЛ^г/2лог,
где рг — число пар полюсов; Nr — число активных про-
водников обмотки якоря; а. — число параллельных вет-
вей обмотки якоря. Следовательно, при постоянной угло-
вой скорости генератора <ог ЭДС его будет определяться
магнитным потоком, который легко регулируется током
возбуждения.
Пользуясь схемой замещения для рассматриваемого
случая (рис. 4.10,а), можно составить уравнение равно-
весия ЭДС
£г-£ = 7(/?г + /?д), (4.9)
114
или
- ЛФ(1) = /(/?,-! /?д), (4.10)
где Е и / — ЭДС двигателя и ток якорной цепи машин;
/<., — соотвектвепно сопротивление якоря генератора
и двигателя.
□(сюда угловая скорость двигателя
ы = £1/АФ-7(/?,+/?д)Ж)- (4-11)
Так как М. = /еФ/, то
(□ = £, //еФ - М (Rг + 7?д )/(£Ф)2. (4.12)
При неизменном потоке двигателя
ш = а0-ВМ, (4.13)
где В = (/?г -1- Ел) /А-Ф.
Механические характеристики двигателя при неизмен-
ном потоке двигателя и изменении потока генератора (без
учета реакции якоря) представляют собой семейство ли-
нейных характеристик, на-
клон которых остается посто-
янным и определяется общим
сопротивлением якорной це-
пи. Скорость идеального хо-
лостого хода определяется
по формуле
wo = Ег//еФ
и может приобретать любое
значение — от к>0 = EJkSb
Рис. 4.10. Схема замещения (а) н
характеристики (б) при двухзон-
ном регулировании угловой ско-
рости двигателя постоянного тока
независимого возбуждения, вклю-
ченного по системе Г — Д.
до —ь)0 = —£г//гФ; отрицательное значение ЭДС генера-
тора легко может быть получено при реверсировании тока
возбуждения изменением полярности напряжения на обмот-
ках возбуждения генератора.
Механические характеристики двигателя располагаются
в четырех квадрантах; основным достоинством этой системы
115
является плавность регулирования, которая осуществля-
ется воздействием на цепь возбуждения.
Система Г—Д может обеспечить двухзонное регулирова-
ние угловой скорости — до основной скорости изменением
ЭДС генератора при постоянном потоке двигателя, а выше
основной регулированием тока возбуждения двигателя
при постоянной, равной номинальному значению ЭДС
генератора. Характеристики, соответствующие первой зоне
регулирования, показаны на рис. 4.10, б сплошными
линиями, а второй зоне—штриховыми.
Верхний предел угловой скорости при регулировании
с постоянным потоком двигателя ограничивается номи-
нальным значением ЭДС генератора и тем перепадом ско-
рости, который обусловлен нагрузкой и сопротивлением
якорной цепи. Нижний предел регулирования определя-
ется заданным относительным перепадом угловой скорости
при заданном изменении нагрузки; этот относительный
перепад, называемый статизмом, определяется при мини-
мальной угловой скорости для случая изменения момента
нагрузки от нуля до Л1Н0М как
6 = Д(0иом/(0от;я> (4.14)
или
5 Дюм (Rr + Яд) ®о щах!ЕГ» НОм (4.15)
Отсюда допустимый диапазон регулирования
Вдоп = <Оо так! min = Е
г. номS//ном (Яг + Яд) = й/Лсо # ном» (4-16)
где Дсо*11ОМ — относительный перепад угловой скорости
при £'г,ном.
Если, например, для машин средней мощности отно-
сительный перепад принять равным Дсо#ном = 0,1, то при
допустимом статизме б = 0,2 допустимый диапазон регу-
лирования составит всего D = 2:1, если же задаться
еще меньшим статизмом б 0,1, то осуществлять регу-
лирование нельзя, так как D 1.
б) Регулирование угловой скорости двигателя
постоянного тока независимого возбуждения
изменением напряжения на якоре с помощью
управляемых тиристорных выпрямителей
К недостаткам системы Г—Д относятся:
1) необходимость в двукратном преобразовании энер-
гии (из электрической энергии переменного тока в меха-
ническую и из механической вновь в электрическую по-
116
стоянного тока регулируемого напряжения), что приводит
к значительному снижению КПД;
2) наличие двух машин в преобразовательном агрегате,
установленная мощность каждой, если пренебречь поте-
рями в машинах, равна установленной мощности регули-
руемого двигателя;
3) значительные габариты и масса установки, необхо-
димость в фундаменте для преобразовательного агрегата;
4) высокие капитальные и эксплуатационные рас-
ходы.
Развитие в последние годы силовой полупроводниковой
техники позволило создать статические преобразователи
(выпрямители), преобразующие переменное напряжение
в регулируемое постоянное напряжение.
Регулирование постоянного напряжения осуществляется
регулированием угла включения вентилей в проводящей
части периода переменного напряжения и имеет свои осо-
бенности.
Рассмотрим принцип регулирования напряжения на
примере включения тиристоров по однофазной нулевой
двухполупериодной схеме выпрямления, приведенной на
рис. 4.11, а. Допустим, что на управляющий электрод
тиристора VI подается от системы управления СУ отрица-
тельный импульс в момент времени tA (рис. 4.11 б). Угол а,
отсчитываемый от момента естественного включения вен-
тиля VI, вызовет на нагрузке скачок напряжения, которое
будет изменяться по кривой и2а. В момент t2 напряжение и2а
становится равным нулю и тиристор VI закрывается. На
интервале t2 — t3 оба тиристора закрыты и ток равен
нулю, а в момент t3 вступает в действие тиристор V2 и
остается открытым до момента /4 и т. д.
При активной нагрузке кривая выпрямленного тока
(рис. 4.11, в) повторяет кривую выпрямленного напряже-
ния.
Если изменяется угол а относительно начала синусоиды
напряжения на анодах тиристоров, то соответственно
меняется среднее значение выпрямленного напряжения.
Процессы в схеме с управляемым выпрямителем при
учете индуктивности рассеяния обмоток трансформатора
индуктивности обмотки якоря двигателя и противо-ЭДС
двигателя имеют свою особенность. В этом случае гра-
фики изменения во времени напряжения и тока преобра-
зователя имеют довольно сложный характер. Кривая вы-
прямленного напряжения состоит из положительных и отрп-
117
цательпых участков синусоид. Ток может быть как непре-
рывным, так и прерывистым.
Выпрямленное напряжение (и выпрямленный ток)
содержит постоянную Ud и переменную составляющие
(последняя содержит ряд гармоник). Наличие пульсаций
ига. и гь
Рис. 4.11. Регулирование напряжения при включении тиристоров по
однофазной нулевой (дву хполупериодной) схеме выпрямления.
а — схема выпрямления, б — диаграмма напряжений: в — диаграмма токов.
(переменной составляющей) выпрямленных напряжения
и тока ухудшает условия коммутации двигателей постоян-
ного тока и увеличивает потери в них, поэтому на выходе
выпрямителя часто устанавливается индуктивный фильтр,
представляющий собой реактор, включаемый последова-
тельно с якорем двигателя и обладающий большим реак-
тивным сопротивлением для переменной составляющей
выпрямленного тока, которая значительно уменьшается,
118
а падение напряжения от этой составляющей на активном
сопротивлении реактора незначительно. Другим средством
уменьшения пульсаций выпрямленного напряжения явля-
ется использование многофазных схем выпрямления.
Рис. 4.12. Регулирование напряжения при трехфазной пулевой схеме
включения тиристоров.
а — схема выпрямления; б — диаграмма напряжений; в — диаграмма токов
Рассмотрим форму напряжения и тока для трехфазной
нулевой схемы включения тиристоров, показанной на рис.
4.12, а, с учетом индуктивности рассеяния, приведенной
к вторичной обмотке трансформатора, и значительной ин-
дуктивности сглаживающего реактора Ld, при которой ток
можно считать идеально сглаженным.
119
Из-за индуктивности рассеяния вторичной обмотки
трансформатора переход тока от одного тиристора к дру-
гому происходит не мгновенно, а в течение времени, кото-
рое соответствует так называемому углу коммутации.
В интервале — t2 работает тиристор VI', в момент t2
начинается процесс коммутации тока с тиристора VI на V2,
в течение которого работают оба тиристора. За счет ЭДС
самоиндукции, наводимой в фазе и2„, ток ial спадает не сразу,
а из и2Ь вычитается часть напряжения, соответствующая
ЭДС самоиндукции, которая препятствует росту тока 1о2так,
что сумма токов ial и 1а2 в момент коммутации остается
равной выпрямленному току Id. К концу коммутации
(момент t3), обозначенной углом у, ток в тиристоре VI ста-
новится равным нулю, а в тиристоре V2 возрастает до зна-
чения 1а. В период коммутации выпрямленное напряже-
ние становится меньшим и равным ud — 1/2 (и2а + и2Ь);
оно изменяется так, как показано на рис. 4.12, б. К концу
коммутации напряжение скачком возрастает до фазного
напряжения и2Ь. Следовательно, выпрямленное напряже-
ние снижается из-за индуктивного падения напряжения,
которое показано заштрихованной площадкой на рис. 4.12,6.
Среднее значение выпрямленного напряжения определя-
ется соотношением (без учета падения напряжения на ти-
ристоре):
t/d = cos a-/d(^ + £T+ (4.17)
где иг/0 = ~уг2 U sin — среднее значение выпрямлен-
ного напряжения при холостом ходе выпрямителя и пол-
ностью открытых тиристорах; U—действующее значе-
ние переменного фазного напряжения; т — число фаз
выпрямителя; xr, Rt —соответственно приведенные к вто-
ричной обмотке индуктивное сопротивление рассеяния
обмоток фазы трансформатора и их активное сопротивление;
RL— активное сопротивление сглаживающего реактора.
Форма кривой тока приведена на рис. 4.12, в.
Уравнение электромеханической характеристики двига-
теля независимого возбуждения
со = (t/rfocosa — //?Э)/£Ф, (4.18)
а уравнение механической характеристики
ct) = Ul/0 cos а/кФ — Л4/?э/(йФ)а, (4.19)
где R3 = хгт!2л + /?т + RL + Дя.
120
Механические характеристики двигателя постоянного
тока независимого возбуждения, управляемого тиристор-
ным выпрямителем, напоминают характеристики в систе-
ме Г — Д (рис. 4.13), однако они отличаются рядом осо-
бенностей.
Характеристики имеют меныную жесткость за счет
большего падения напряжения в якорной цепи; при раз-
личных углах включения наклон их остается постоянным.
При конечных значениях индуктивности сглаживающего
реактора и малых нагрузках наступает режим прерывистых
токов, при котором имеет место резкий подъем характери-
стик. Чем больше угол включения тиристоров, тем больше
зона прерывистых токов.
Явление прерывистых токов обусловлено тем, чтос умень-
шением нагрузки снижается количество энергии, запасен-
Рис. 4.13. Механические характе-
ристики двигателя постоянного
тока независимого возбуждения,
питающегося от тиристорного
управляемого выпрямителя.
ной в индуктивности Ld, и наступает момент, когда созда-
ваемая ею ЭДС самоиндукции оказывается недостаточной
для поддержания тока при отрицательных напряжениях
на анодах тиристоров, что приводит к увеличению выпрям-
ленного напряжения Ud, а следовательно, к возрастанию
угловой скорости двигателя при холостом ходе.
В схемах, приведенных на рис. 4.12, а и 4.14, двига-
тель может работать в двигательном режиме и режиме
торможения противовключением (за счет активного мо-
мента, например, груза) при неизменном направлении
тока в якорной цепи. Когда возникает необходимость
реверсирования двигателя, можно изменять полярность
на выводах якоря при неизменном направлении тока воз-
буждения. На рис. 4.15 дана схема реверсирования с по-
мощью реверсора в якорной цепи, на рис. 4.16 — трех-
фазная мостовая реверсивная схема выпрямителя и на
рис. 4.17 — реверсивная трехфазная нулевая схема выпря-
мителя. Схема с реверсором (рис. 4.15) наиболее проста,
121
Рис. 4.14. Схема нереверсивного
электропривода постоянного то-
ка по системе УВ — Д при пита-
нии двигателя от трехфазного
мостового тиристорного выпря-
мителя.
Рис. 4.15. Схема реверсирова-
ния двигателя в системе
УВ — Д с помощью реверсора
в якорной цепи.
Рис. 4.17. Трехфазная нулевая
схема выпрямителя,
Рис. 4.16. Трехфазная мостовая
схема выпрямителя,
122
в пей отсутствуют уравншслы^ с ^с^лто^ы и сдгсе ’'М’ьше
тиристоров, чем в схеме рис 4 16, Но хотя переключение
реверсора может производиться при отсутствии тока в якор-
ной цепи, когда тиристоры закрыты, для мощных электро-
приводов аппаратура в силовой цепи оказывается гро-
моздкой
В схемах электропривода на рис. 4 15 — 4 17 двигател j
может работать в двигательном режиме и режимах тор-
можения противовключением и с отдачей энергии в сети
(рекуперативное торможение) В последнем режиме один
из комплектов тиристоров выпрямителя работает в режиме
инвертора (при больших углах включения), передавая
энергию от двигателя через трансформатор в сеть, а дру-
гой комплект тиристоров, находящийся в это время в вь
прямительном режиме, оказывается закрытым, так ка
ЭДС двигателя больше выпря пленного напряжения Во -
можиость работы двигателя в режиме рекуперативною
торможения и высокое быстродействие являются больши
достоинством выпрямителей, включенных по реверсивн
хеме
Возможно изменение направления вращения двигател т
в реверсивном приводе также за счет изменения папра>
(епия тока в цепи возбуждения двигателя постоянног >
гока независимого возбуждения, когда в цепи якоря исполг -
зуется нереверсивный управляемый выпрямитель Этт
схема проще остальных и дешевле (и даже позволяет пр>
определенном управлении осуществлять рекуперативно
торможение), ио уступает им по динамическим показателя
из-за сравнительно большой постоянной времени об.мотс .
возбуждения
Коэффициент полезного действия тиристорного выпря-
мителя определяется произведением КПД трансформатор 1
и вентилей Коэффициент полезного действия трансфор-
матора средней и большой мощности при номинальной
тагрузке примерно равен 0,95—0,98 Коэффициент полез-
ного действия тиристорного выпрямителя определяется
прямым падением напряжения на нем, которое для одного
тиристора составляет всего 1—1,2 В, поэтому общи й КПД
выпрямителя при номинальной нагрузке для мощности
50—100 кВт составляет 0,9—0,92 С увеличен! ем мощ-
юсти КПД выпрямителя оказывается еще ьы±е. Коэф-
фициент мощности тиристорного выпря».’ тела определя-
ется по формуле
сш ф,. =. еО' (" | »('/2),
123
откуда видно, что с увеличением угла включения тиристо-
ров резко падает коэффициент мощности, что является
существенным недостатком схем с тиристорным выпрями-
телем.
В системе УВ—Д так же, как и в системе Г—Д, воз-
можно регулирование угловой скорости двигателя вверх
от основной (при полностью открытых тиристорах) воз-
действием на поток двигателя и регулирование вниз —
изменением угла включения тиристоров при неизменном
магнитном потоке двигателя. В разомкнутой системе УВ—Д
диапазон регулирования невелик, примерно такой же, как
в системе Г-Д.
в] Регулирование угловой скорости двигателя
постоянного тока независимого возбуждения
изменением напряжения на якоре посредством
импульсных регуляторов напряжения
(широтно-импульсных преобразователей)
Регулирование напряжения на якоре дви-
гателя можно осуществить импульсным методом, когда
двигатель периодически подключается к источнику пита-
ния и отключается от него. В период отключения электро-
привод продолжает работать за счет запасенной кинетиче-
ской и электромагнитной энергии.
Схема включения двигателя постоянного тока незави-
симого возбуждения при импульсном регулировании на-
пряжения показана на рис. 4.18, а. Диод V, шунтирую-
щий якорь двигателя, создает цепь для протекания тока
якоря под действием ЭДС самоиндукции, возникающей
в индуктивности обмотки якоря в период разомкнутого
состояния ключа /(. Это создает условия для непрерывного
протекания тока якоря, что существенно уменьшает его
пульсации и устраняет коммутационные перенапряжения
на ключе К и обмотке якоря.
Из всех известных видов импульсного регулирования
для регулирования угловой скорости преимущественное
применение нашло широтно-импульсное регулирование на-
пряжения (ШИР), при котором период коммутации Тк
(частота) остается постоянным, а изменяется время
замкнутого состояния ключа К — скважность е =
(рис. 4.18, б).
Среднее значение напряжения на якоре при ШИР равно:
ср
где U — неизменное напряжение сети.
Ш
Диаграммы токов показаны на рис. 4.18, в — д. Урав-
нение механической характеристики двигателя для сред-
них значений угловой скорости и момента имеет вид:
wcp —— Мср7?я/^Ф2, (4.20)
откуда следует, что угловую скорость можно регулировать
в широких пределах, изменяя е, а жесткость механических
характеристик при регулировании угловой скорости по-
стоянна и равна жесткости естественной характеристики.
Это является достоинством данного способа регулирования
угловой скорости. Однако высокая жесткость свойственна
характеристикам лишь в области непрерывного тока якоря.
Если же в период выключенного состояния ключа К ток
якоря успевает снизиться до нуля и в кривой тока содер-
жится пауза, то имеет место режим прерывистых токов,
где жесткость механических характеристик (рис. 4.18, е)
резко падает. Основным средством сужения зоны преры-
вистых токов, уменьшения пульсаций тока якоря (момента)
и угловой скорости относительно среднего значения и, сле-
довательно, дополнительных потерь в обмотках якоря
является увеличение частоты коммутации ключа К- Обычно
частота коммутации составляет 800—1200 Гц. Увеличению
ее препятствует рост потерь в ключе (транзисторе, тири-
сторе) и его предельные динамические параметры.
Для реализации рассмотренного способа регулирования
напряжения могут быть использованы либо транзисторы,
работающие в режиме ключа, либо тиристоры.
Схема электропривода с тиристорным ключом приве-
дена на рис. 4.18, ж. Этот ключ работает так же, как и
в схеме на рис. 4.6, г, но в данном случае нет необходи-
мости в дополнительном источнике питания для предвари-
тельного заряда коммутирующего конденсатора Ck, кото-
рый предварительно заряжается от сети через коммути-
рующий тиристор V2 и якорь двигателя. При включении
тиристора VI происходит подача напряжения на якорь
двигателя, выключение тиристора V2 и колебательный пере-
заряд конденсатора Ск через реактор LK, тиристор VI
и диод V3.
При включении двигателя по схемам рис. 4.18, а, ж
он может работать только в двигательном режиме и режиме
динамического торможения (при активном характере мо-
мента), а реверс двигателя возможен только посредством
реверса тока возбуждения. Но существует много схем ШИР
напряжения (угловой скорости двигателя), позволяющих
125
двигателю работать во всех режимах (при питании от сети
постоянного тока или от аккумуляторов) и осуществлять
бесконтактное его реверсирование по цепи якоря. Неко-
Рис. 4.18. Схема включения двигателя постоянного тока независимого
возбуждения при импульсном регулировании напряжения на якоре
двигателя (и), диаграммы напряжения (б), токов (<;, г, д) и механиче-
ские характеристики (е) при ШИР и схема тиристорного ключа (ж)
торые из этих схем и более подробный анализ процессов
в них изложены в [19].
Электроприводы с ШИР напряжения на якоре двига-
теля вследствие их относительной простоты и высокого
126
быстродействия широко используются в различных отраслях
промышленности и техники, в транспортных установках
и т. д. Они особенно удобны при наличии сети постоянного
тока или в автономных установках при питании привода
от аккумуляторов. В случае сети переменного тока пита-
ние привода с таким управлением производится через
неуправляемый выпрямитель. При этом возникают боль-
шие трудности с организацией тормозных режимов и ре-
верса двигателя по цепи якоря, вследствие чего область
применения такого привода ограничивается установками
малой мощности.
4.5. Регулирование угловой скорости
двигателя постоянного тока
независимого возбуждения
при шунтировании якоря
Для получения сравнительно жестких меха-
нических характеристик при малых скоростях применяют
иногда шунтирование якоря резистором RIU при обязатель-
ном включении последовательного резистора /?„, как это
показано на рис. 4 19. Резисторы и Rn представляют
Рис. 4 19. Схема шунтирования
обмотки якоря двигателя постоян-
ного тока независимого возбужде»
НИЯ.
собой делитель напряжения. Правда, на работу этого
делителя в значительной степени влияет нагрузка двига-
теля, так как потребляемый из сети ток /п, а значит, и па-
дение напряжения на последовательном резисторе Rn
зависят от тока якоря /я двигателя. При таком включении
двигателя используются как бы одновременно два способа
регулирования угловой скорости двигателя — изменением
подводимого к якорю напряжения и реостатное, поэтому
и получаемые регулировочные характеристики двигателя
занимают промежуточное положение между характери-
стиками, свойственными указанным способам.
127
Уравнение механической характеристики двигателя
в схеме, представленной на рис. 4.19, может быть полу-
чено на основании следующих соотношений:
(/ = £+ (4.21)
U = IuRM + InRn-, (4-22)
/п = /я + /ш- (4-23)
Обозначения величин, входящих в соотношения (4.21) —
(4.23), приведены на рис. 4.19.
После соответствующих преобразований получим:
<4'24’
Обозначим через А отношение сопротивлений (коэффи-
циент деления напряжения сети делителем /?ш + R„ при
идеальном холостом ходе двигателя)
Rj(Rlu + Rn) — А.
Разделив левую и правую части равенства (4.24) на
коэффициент с и подставив, кроме того, величину А, полу-
чим уравнение электромеханической характеристики дви-
гателя при шунтировании якоря:
со = Лео» — 1Я (Ra -|- ARn)/c. (4-25)
Уравнение для механической характеристики двигателя
имеет вид:
со = Лсоо - М (R, + ARn)/c\ (4.26)
Из рассмотрения последнего уравнения видно, что меха-
нические характеристики двигателя в этом случае линейны.
Кроме того, угловая скорость идеального холостого хода
двигателя здесь будет меньше, чем при реостатном регули-
ровании угловой скорости. Действительно, для М = О
угловая скорость будет равна Лсо0, причем всегда
А = RujKRui 4* Rn) < 1 •
Снижение угловой скорости идеального холостого хода
объясняется тем, что при отсутствии тока в цепи якоря
приложенное к якорю напряжение не будет равно напря-
жению сети U, как это имеет место при реостатном регули-
ровании. В этом случае оно меньше напряжения сети на зна-
чение падения напряжения в последовательном сопротив-
128
леиии, так как в нем будет проходить ток и при отсутствии
тока в якоре.
На рис. 4.20 представлена механическая характеристика
двигателя при шунтировании якоря, проходящая через со(.
Там же приведены естественная и реостатная характери-
стики для обычной схемы включения. Из сопоставления
этих характеристик видны преимущества рассматриваемой
схемы. Действительно, получение пониженной угловой
скорости «с возможно и в обычной схеме путем перехода
от естественной характеристики к соответствующей реостат-
ной. Однако из сравнения реостатной характеристики
Естественная"
"^характеристика
Реостатная
характеристика
Рис. 4.21. Семейство механиче-
ских характеристик при неиз-
менном сопротивлении шунти-
рующего резистора и различных
сопротивлениях последователь-
ного резистора.
Рис. 4.20. Механическая харак-
теристика двигателя постоян-
ного тока независимого возбуж-
дения при шунтировании об-
мотки якоря.
с характеристикой при шунтировании якоря видно, что
последняя является значительно более жесткой и потому
обеспечивающей при возможных отклонениях момента на-
грузки более стабильное регулирование угловой скорости.
Жесткость механической характеристики и угловая
скорость идеального холостого хода зависят от соотноше-
ния сопротивлений последовательного и шунтирующего
резисторов. Если изменить сопротивления этих резисторов,
то можно получить другой наклон характеристики.
При неизменном шунтирующем сопротивлении рези-
стора /?ш1 или /?1и2 и различных значениях сопротивления
последовательного резистора /?„ получаются семейства
характеристик, имеющие соответственно общие точки А
и А' (рис. 4.21).
5 Чиликни М, Г., Сандлер А С. 129
Точка А пересечения характеристик соответствует ре-
жиму, при котором сопротивление последовательного ре-
зистора не будет влиять на ток якоря, т. е. когда через
последовательный резистор не будет проходить ток. Это
возможно лишь при вращении якоря с угловой скоростью,
большей угловой скорости идеального холостого хода,
а именно тогда, когда ЭДС якоря полностью уравновеши-
вает приложенное напряжение сети и внутреннее падение
напряжения в якоре, т. е. когда’
£ = и + /яЪ- (4.27)
В таком случае двигатель работает в режиме динамиче-
ского торможения на внешний резистор Поскольку
напряжение на якоре равно U, ток в якоре
Л = (4.28)
Подставив (4.28) в (4.27) и заменив Е и U пропорцио-
нальными им величинами <ол и со0, получим значение угло-
вой скорости в точке А:
к>д = (/?ш 4-/?п)//?ш. (4.29)
В предельных случаях при неизменном /?ш и перемен-
ных сопротивлениях резистора Rn получаются две харак-
теристики, показанные на рис. 4.21 утолщенными линиями.
Если Rn = 0, то напряжение, подводимое к якорю, не за-
висит от сопротивления шунтирующего резистора и оста-
ется неизменным при изменении тока якоря, поэтому зна-
чению Rn = 0 соответствует естественная характеристика
двигателя.
Если Rn = оо, то это означает, что двигатель не полу-
чает питания от сети и работает в режиме динамического
торможения на внешний резистор /?ш. Характеристика
при этом проходит через начало координат. Крутизна
ее зависит только от сопротивлений шунтирующего рези-
стора. Из сказанного ясно, что все остальные характери-
стики для любых конечных значений Rn при неизменном
сопротивлении резистора RUI образуют семейство харак-
теристик, лежащих в промежутке между двумя указанными.
При другом значении Rm = const и различных Rn полу-
чается второе подобное семейство характеристик, показан-
ное на рис. 4.21 штриховыми линиями. При этом все ха-
рактеристики будут также пересекаться в одной точке А',
лежащей на естественной характеристике и соответствую-
щей меньшему значению — Т?ш2.
130
ЛАожно построить и другое семейство характеристик
(рис. 4 22), соответствующих неизменному сопротивлению
последовательного резистора при различных сопротивле-
ниях шунтирующего резистора.
Это семейство характеристик будет иметь общую точку
5ц где сопротивление шунтирующего резистора ие будет
оказывать влияния на ток
якоря. Такое условие мо-
жет быть осуществлено
лишь при определенной
отрицательной угловой
скорости, когда
£ = -ДЛ. (4.30)
В этом случае ток не
проходит через шунтиру-
ющий резистор при любом
Рис. 4.22. Семейство механиче-
ских характеристик при неиз'
менном сопротивлении последо-
вательного резистора и различ-
ных сопротивлениях шунтирую-
щего резистора.
значении сопротивления последнего, так как разность
потенциалов между щетками якоря равна нулю. Двигатель
будет потреблять ток
h = U/Ra. (4.31)
Угловую скорость в точке Вг можно определить, под-
ставив значение тока /я в (4.30) и заменив Е и U значе-
ниями (О/л и (о0, т. е.
®В1 = (i>oRa/RnZ-
(4-32)
В предельных случаях при неизменном /?п2 и перемен-
ных сопротивлениях резистора R„, получаются две харак-
теристики, показанные на рис. 4.22 утолщенными линиями.
Если Ru, — 0, характеристика параллельна естественной
и двигатель работает в режиме динамического торможе-
ния. Характеристика при этом проходит через начало
координат. Если Rlu = 0, то это равносильно отключению
шунтирующего резистора и, следовательно, работе дви-
о* 131
гателя на реостатной характеристике с резистором /?|12.
Остальные характеристики для промежуточных значений
/?,„ пересекаются в этой же точке и лежат между указан-
ными двумя характеристиками.
При некотором другом значении /?п1 = const и для
различных получается новое семейство характеристик,
показанное на рис. 4.22 штриховыми линиями. Эти харак-
теристики пересекаются также в одной общей точке В2,
соответствующей увеличенному сопротивлению последо-
вательного резистора Rn — Rni.
Рассмотренный способ регулирования угловой скорости
двигателя постоянного тока независимого возбуждения
посредством подключения его якоря к сети через рези-
сторный делитель напряжения (шунтирование якоря) обла-
дает такими же основными показателями, что и реостатное
регулирование. Здесь повышенная жесткость механических
характеристик несколько исправляет некоторые недостатки
реостатного регулирования. Стабильность угловой ско-
рости при шунтировании якоря выше, и вследствие этого
больше диапазон регулирования — примерно (2ч-3) : 1 до
(5 ч- 6) I 1 при малом отклонении момента нагрузки.
При малой мощности двигателя использование пол-
зункового потенциометра позволяет получить плавное регу-
лирование. Однако потери энергии при шунтировании
якоря и одинаковых с реостатным способом диапазоне
регулирования и нагрузке больше. Поэтому схема с шун-
тированием якоря используется в приводах сравнительно
небольшой мощности. Обычно она применяется при пред-
варительном снижении скорости для более точной остановки
привода. Длительная работа при шунтированном якоре
неэкономична вследствие относительно больших потерь
энергии в резисторах.
4.6. Регулирование угловой скорости
двигателя постоянного тока
последовательного возбуждения
Для двигателя последовательного возбужде-
ния, как и для двигателя независимого возбуждения, воз-
можны три способа регулирования угловой скорости,
а именно: 1) регулирование посредством резисторов, вклю-
ченных в цепь якоря; 2) регулирование изменением тока
возбуждения; 3) регулирование изменением подводимого
напряжения.
132
Это вытекает из уравнения электромеханической харак-
теристики двигателя
и = (t/ -
Регулирование угловой скорости изменением сопротивле-
ния резисторов в цепи якоря. Введением резисторов после-
довательно с обмоткой якоря двигателя можно ступенчато
регулировать его угловую скорость вниз от основной.
Жесткость характеристик при этом уменьшается по мере
увеличения сопротивления резистора, т. е. стабильность
угловой скорости невысокая, уменьшается по мере уве-
личения диапазона регулирования и зависит от момента
сопротивления (см. рис. 3.75). Диапазон регулирования
угловой скорости не превышает (2 -е 2,5) : 1 и зависит
от нагрузки. Регулирование угловой скорости изменением
сопротивления последовательно включенного резистора по
условиям полного использования двигателя на всех угло-
вых скоростях должно производиться при постоянном
нагрузочном моменте, что соответствует работе двига-
теля с неизменным током якоря, равным номинальному.
Как и в предыдущем случае, не учитывается ухудшение
условий вентиляции при снижении угловой скорости.
Несмотря на большие потери в резисторах, этот способ
находит применение в крановых и тяговых установках,
поскольку он является одним из простейших для двига-
телей последовательного возбуждения, применяемых в ука-
занных приводах, а также потому, что работа этих уста-
новок происходит с перерывами.
Регулирование угловой скорости изменением тока воз-
буждения. Этот способ применяется в тех случаях,
когда требуется расширить пределы регулирования за
счет увеличения угловой скорости выше основной при
загрузке двигателя номинальным током. В этом случае
приходится осуществлять изменение тока возбуждения
при помощи шунтирования обмотки возбуждения двига-
теля.
Регулирование угловой скорости изменением подводимого
напряжения. Регулирование может быть осуществлено
с помощью отдельного генератора, тиристорного преобра-
зователя либо последовательно-параллельным включением
двигателей. При последовательно-параллельном включении
двух двигателей можно получить две ступени угловой
скорости благодаря изменению напряжения, подводимого
133
к каждому из двигателей Подобный способ регулирова-
ния осуществляется в том случае, если один производствен-
ный механизм приводится одновременно двумя двигателями
половинной мощности. Применение двух двигателей вместо
одного возможно по разным причинам, например: из-за
необходимости сократить время пуска и торможения путем
уменьшения суммарного момента инерции или по условиям
большей надежности работы, если ее можно вести при
пониженной мощности, т. е. с одним двигателем, или, на-
конец, по условиям удобства размещения двух двигателей
Рис. 4.23. Последовательность переключений при регулировании уг-
ловой скорости двух одинаковых двигателей постоянного тока после-
довательного возбуждения,
меньших габаритов вместо одного большого. Такой при-
вод находит применение, например, для мощных разли-
вочных кранов, в транспортных устройствах, трамваях,
в доменных подъемниках, мощных ножницах для разреза-
ния металла и для других механизмов. В подобных меха-
низмах два двигателя одинаковой мощности работают
на один общий вал (многодвигательный электропривод).
Применение последовательно-параллельного включения
дает экономические выгоды. При последовательном вклю-
чении на каждый из двигателей приходится половина
напряжения сети. Когда двигатели переключаются на
1 Такая схема применима и для нескольких двигателей, а также
для двигателей независимого или смешанного возбуждения,
134
параллельную работу, каждый из них оказывается включен-
ным на полное напряжение. Таким образом, получаются
две ступени регулирования без добавочной бесполезной
траты энергии. При снижении угловой скорости вдвое
роль резистора, в котором должно теряться напряжение,
играет второй двигатель, полезно использующий энергию.
Для получения промежуточных ступеней регулирования
в цепь якоря может быть введен добавочный резистор.
На рис. 4.23 приведены принципиальные схемы переклю-
чений, согласно которым получается пять ступеней регу-
лирования, из них две без потерь в резисторах. В целях
полного использования двигателей это регулирование может
производиться при постоянном нагрузочном моменте (без
учета ухудшения условий вентиляции).
Кроме указанных способов, находит применение и ком-
бинированный способ регулирования угловой скорости —•
сочетание регулирования изменением подводимого к якорю
напряжения и тока возбуждения с реостатным. Этот спо-
соб реализуется в схеме шунтирования обмотки якоря.
4.7. Регулирование угловой скорости
двигателя постоянного тока
последовательного возбуждения
шунтированием обмотки якоря
или обмотки возбуждения
Регулирование угловой скорости двигателя
вниз от основной может быть достигнуто шунтированием
его обмоток при обязательном наличии в цепи последова-
тельно включенного сопротивления в виде резистора или
обмотки возбуждения (рис. 4.24, а, б).
Снижение угловой скорости двигателя по схеме, при-
веденной на рис. 4.24, а, вызывается падением напряжения
на резисторе 7?п, в котором проходит ток 7П, являющийся
суммой тока якоря /я и тока в шунте /|П. Допустимой на-
грузкой двигателя в этой схеме является номинальный
момент. Однако при малых нагрузках характеристики
по-прежнему асимптотически приближаются к оси орди-
нат и, следовательно, имеют малую жесткость. Более
благоприятные характеристики получаются при включе-
нии двигателя по схеме на рис. 4.24, б. Снижение угловой
скорости обусловлено здесь вследствие малого сопротивле-
ния обмотки возбуждения в основном возрастанием потока
за счет увеличенного тока, проходящего по обмотке воз-
135
буждения. Ток возбуждения протекает по обмотке даже
при нулевом токе якоря. В этом случае характеристики
имеют конечные угловые скорости идеального холостого
хода и пересекают ось ординат. Угловая скорость идеаль-
ного холостого хода тем меньше, чем меньше сопротивле-
Рис. 4.24. Схемы шунтирования обмоток двигателя постоянного тока
последовательного возбуждения.
а — шунтирование двигателя; б — шунтирование обмотки якоря
ние шунтирующего резистора Вследствие этого угло-
вые скорости при малых значениях нагрузки лежат зна-
чительно ниже, чем для обычных реостатных характери-
стик, и жесткость характеристик увеличивается.
Наибольшее кратковременное снижение угловой ско-
рости здесь практически ограничивается насыщением дви-
гателя при увеличении тока возбуждения, что является
недостатком схемы. При длительной работе диапазон регу-
Рис. 4.25. Схема регулирования
угловой скорости двигателя посто-
янного тока последовательного
возбуждения шунтированием об-
мотки якоря.
лпрования ограничивается нагревом обмотки возбуждения,
поэтому длительная работа на регулировочных характе-
ристиках возможна только при малых статических момен-
тах, а при номинальном моменте нагрузки и продолжитель-
ном режиме работы использование этой схемы включения
двигателя недопустимо.
В схеме, приведенной на рис. 4.25, сочетаются особен-
ности двух предыдущих схем. Такая схема позволяет
осуществить регулирование угловой скорости одновре-
менно за счет снижения напряжения, подводимого к якорю
двигателя, изменения потока и реостатное. При заданном
136
токе якоря 7Я можно получать различные токи возбужде-
ния /п = /я + Ли, если изменять сопротивление рези-
стора /?ш. Угловая скорость двигателя регулируется обычно
ступенчато вниз от основной в достаточно широких пре-
делах, которые зависят от соотношения сопротивлений А’,,,
и R„, от насыщения машины и нагрева ее обмотки воз-
буждения. В данном случае обеспечивается значительнее
снижение угловой скорости и механические характери-
стики при этом обладают относительно большой жесткостью.
На рис. 4.26, а, б показаны механические характери-
стики, полученные при этой схеме включения двигателя.
Подобно тому, как это было для двигателя постоян-
ного тока независимого возбуждения, при Rn = const и
Rm — var получается се-
мейство характеристик,
пересекающихся в одной
точке, ограниченное двумя
крайними линиями, как это
показано на рис. 4.26, а.
В предельном случае, когда
RUJ — со, характеристика
Рис. 4.26. Семейство механиче-
ских характеристик двигателя
постоянного тока последователь-
ного возбуждения при шунтиро-
вании обмотки якоря по схеме
на рис. 4.25.
становится такой, как и для обычного включения в цепь
якоря последовательного резистора с сопротивлением
и жесткость ее уменьшается.
Если RUI — 0, то напряжение на якоре равно нулю
и характеристика представляет собой прямую, проходя-
щую через начало координат. Это условие соответствует
работе двигателя независимого возбуждения в режиме
динамического торможения без внешнего резистора.
Семейство характеристик для /?„, = const и Rn = var
приведено на рис. 4.26, б. При Rn = оо двигатель оказы-
вается отключенным от сети и не развивает момента. Если
/?„ =- 0, то характеристика отвечает схеме, приведенной
на рис. 4.24, б.
При переходе угловой скорости в область отрицатель-
ных моментов двигатель не отдает энергии в сеть, ио рабо-
137
тает генератором на шунтирующий резистор, так как
и в этой схеме ЭДС двигателя последовательного возбужде-
ния не может быть больше приложенного напряжения
сети. В этом режиме механическая характеристика машины
имеет максимум момента. Объясняется это тем, что воз-
растание ЭДС вызывает уменьшение тока в обмотке воз-
буждения. Вначале, когда машина насыщена, поток ее
мало изменяется, и момент с возрастанием угловой ско-
рости и тока якоря продолжает расти, но, начиная с неко-
торой угловой скорости, поток машины резко уменьша-
ется вследствие перехода из насыщенного состояния ма-
шины в ненасыщенное; это ведет к уменьшению момента,
который при дальнейшем росте угловой скорости стре-
мится к нулю. При номинальном моменте нагрузки и
продолжительном режиме работы использование этой схемы
включения двигателя также недопустимо.
Рис. 4.27. Схема шунтирования
якоря двигателя постоянного тока
последовательного возбуждения
с включением обмотки возбуждения
в цепь шунтирующего резистора
(параллельное соединение якоря и
обмотки возбуждения).
Регулирование шунтированием обмотки якоря двигателя
постоянного тока последовательного возбуждения, так же
как и в случае независимого возбуждения, является неэко-
номичным, поскольку потери в резисторах значительны.
И по остальным показателям оно близко к регулированию
шунтированием обмотки якоря двигателя постоянного
тока независимого возбуждения. Существенное различие
состоит в значении допустимого момента нагрузки.
По условиям полной загрузки двигателя по току при
длительной работе уменьшение угловой скорости в схе-
мах на рис. 4.24, а, б и 4.25 должно сопровождаться сни-
жением допустимого момента нагрузки таким образом,
чтобы ток возбуждения не превосходил номинального.
Поэтому эти схемы обычно используются для кратковре-
менного снижения угловой скорости. Схема на рис. 4.25
обеспечивает пределы регулирования до (2,5 ч- 3) : 1.
В крановых подъемных механизмах находит применение
еще одна схема шунтирования якоря двигателя постоян-
ного тока последовательного возбуждения, в которой
обмотка возбуждения включена в цепь шунтирующего
резистора (рис. 4.27). Не останавливаясь подробно на свой-
138
ствах характеристик двигателя, приведенных на рис.
4.28, а, б и проанализированных в [191, отметим только,
что получаемые в этой схеме характеристики целесообразно
использовать, например, для спуска грузов при малых
моментах в двигательном режиме и при больших и средних
моментах в генераторном режиме динамического тормо-
жения (в частности, при /?„ = со с самовозбуждением
без каких-либо переключений обмоток двигателя) и в гене-
раторном режиме параллельно с сетью при = 0. В пос-
леднем случае двигатель последовательного возбуждения
включен как двигатель с независимым возбуждением.
Механические характеристики имеют максимум момента,
но в режиме торможения противовключением, где с ростом
Рис. 4.28. Семейство механических характеристик двигателя при шун-
тировании якоря по схеме на рис, 4.27,
а — при изменении Яш; б — при изменении /?п.
тока якоря из-за усиливающегося падения напряжения
на резисторе /?п уменьшается ток возбуждения. По этой
же причине в двигательном режиме при низких угловых
скоростях жесткость механических характеристик отно-
сительно мала, что ограничивает диапазон регулирования.
В режиме динамического торможения с ростом тока якоря
падение напряжения на резисторе /?„ уменьшается (/„ =
— 7Ш — /„) и ток возбуждения увеличивается; при низ-
ких угловых скоростях жесткость механических харак-
теристик больше, чем при высоких, что значительно рас-
ширяет диапазон регулирования угловой скорости в этом
режиме, например при спуске груза (для реализации этого
режима для спуска груза нужно переключить одну из об-
моток двигателя так, чтобы угловые скорости идеального
холостого хода были отрицательными). В рассматриваемой
схеме не всегда удается полностью использовать двига-
тель, так как токи в якоре и обмотке возбуждения не сов-
139
падают друг с другом, в связи с чем при номинальном токе
в одной обмотке ток в другой может быть меньше, а зна-
чит, будет меньше допустимый момент двигателя.
Регулирование угловой скорости шунтированием обмотки
возбуждения осуществляется по схеме на рис. 4.29. Здесь
Рис. 4.29. Схема регулирования
угловой скорости двигателя посто-
янного тока последовательного
возбуждения шунтированием об-
мотки возбуждения.
регулирование угловой скорости производится изменением
магнитного потока двигателя, поскольку при заданном
токе якоря 7Я можно с помощью резистора 7?,и изменять
ток возбуждения 1В = 1Я — /ш. Регулирование осущест-
вляется вверх от основной угловой скорости вследствие
уменьшения магнитного потока. Оно является экономич-
I Шунтирование
( обмотки возбуждения
Естественная характеристика
Шунтирование якоря
| Реостатные характеристики
Рис. 4.30. Механические характеристики двигателя последователь-
ного возбуждения при различных способах регулирования его угловой
скорости.
пым, так как потери в резисторе будут примерно такими
же, что и при регулировании ослаблением потока двига-
теля независимого возбуждения. Объясняется это тем,
что сопротивление обмотки возбуждения относительно мало,
следовательно, и сопротивление шунтирующего резистора
должно быть также малым.
Пределы регулирования угловой скорости двигателя
здесь обычно не превышают 2:1 при условии постоянства
мощности нагрузки. Стабильность угловой скорости доста-
140
точно высокая (не хуже чем на естественной характери-
стике). Плавное регулирование здесь получить трудно
из-за большого тока обмотки возбуждения. Поэтому обычно
используется ступенчатое регулирование. Этот способ регу-
лирования угловой скорости находит применение в элек-
троприводах механизмов, требующих увеличения ско-
рости при малых нагрузках, например в безмаховиковых
ножницах блюминга, запускаемых для каждого пореза
металла.
На рис. 4.30 в верхней его части приведены механиче-
ские характеристики при шунтировании обмотки воз-
буждения. В нижней части даны характеристики, соот-
ветствующие шунтированию обмотки якоря. На этом же
рисунке утолщенной линией показаны естественная харак-
теристика двигателя и штриховой линией — характери-
стики при регулировании изменением сопротивления после-
довательного резистора, включенного в цепь якоря.
4.8. Регулирование угловой скорости
электроприводов переменного тока
Для плавного и глубокого регулирован!я
угловой скорости различных производственных механиз-
мов в настоящее время широко применяются разнообраз-
ные электроприводы с двигателями постоянного тока.
Однако наряду с использованием электроприводов посто-
янного тока в последние годы с развитием полупроводнико-
вой техники все большее внимание уделяется применению
различных систем регулируемых электроприводов пере-
менного тока с асинхронными двигателями с короткозамк-
нутым ротором или двигателями с фазным ротором. Для
установок сравнительно большой мощности в безредуктор-
ных тихоходных электроприводах экономически оправдан-
ным оказывается также регулируемый синхронный дви-
гатель.
Применение двигателей переменного тока обусловлено
их простотой, дешевизной, повышенной надежностью, суще-
ственно (в 2—3 раза) меньшими габаритами и массой по
сравнению с двигателями постоянного тока. Кроме того,
некоторые способы регулирования угловой скорости не тре-
буют специальных преобразовательных устройств.
Отмечая достоинства двигателей переменного тока,
нельзя не обратить внимания на то, что относительно про-
стые способы регулирования угловой скорости электро-
141
приводов переменного тока обладают и рядом недостатков,
к которым можно отнести в одном случае небольшую
плавность, в другом — невысокие энергетические показа-
тели и т. д. Более эффективные способы регулирования осу-
ществляются при помощи сравнительно сложных пре-
образовательных устройств и средств управления.
В последующих параграфах рассматриваются различ-
ные, получившие практическое применение способы регу-
лирования угловой скорости электроприводов перемен-
ного тока, анализируются их технико-экономические
показатели и определяется возможная область примене-
ния.
Наибольшее распространение получили следующие спо-
собы регулирования угловой скорости асинхронного дви-
гателя: 1) реостатное регулирование; 2) переключением
числа полюсов; 3) изменением частоты питающего напря-
жения; 4) каскадным включением асинхронного двигателя
с другими машинами или преобразователями. Для регули-
рования угловой скорости, кроме упомянутых, могут быть
использованы некоторые другие способы включения элек-
трических двигателей: импульсное регулирование, регу-
лирование изменением подводимого к статору напряжения,
регулирование с помощью электромагнитной муфты сколь-
жения и др.
4.9. Реостатное и импульсное
параметрическое регулирование
угловой скорости асинхронного
электропривода
Введение резисторов в цепь ротора (реостат-
ное регулирование) позволяет, как и для двигателей по-
стоянного тока, регулировать угловую скорость двигателя.
Плавность регулирования зависит от числа ступеней вклю-
чаемых резисторов. Регулирование осуществляется вниз
от основной угловой скорости.
Реостатные характеристики асинхронного двигателя,
как и в приводе постоянного тока, отличаются невысокой
жесткостью, уменьшающейся с ростом сопротивления рези-
сторов в роторной цепи. Если считать, что рабочая часть
механической характеристики двигателя линейна, то мо-
дуль жесткости реостатной характеристики
Рр = ^цом/^О^Ном, pi (4.33)
142
где s10M,p — скольжение на реостатной характеристике,
соответствующее номинальному моменту.
Если учесть, что диапазон регулирования
D ^inaxl^min (1 ^пом)/( 1 ^ном, р)»
ТО
0Р = DMaw/(D - 1 + s110„) 0)0. (4.34)
Формула (4.34) подтверждает сказанное — чем больше
диапазон регулирования, тем меньше жесткость характе-
ристик.
Любой способ регулирования скорости привода, в том
числе и реостатное регулирование, теоретически при неиз-
менном моменте нагрузки может обеспечить D = оо. Од-
нако практически в силу различных причин возникают
отклонения нагрузочного момента от расчетного; это откло-
нение момента АЛ4С вызывает изменение угловой ско-
рости Асо. Если отнести его к расчетной угловой скорости
на регулировочной характеристике сор, то относительное
отклонение угловой скорости, или точность регулирования,
можно записать:
А(о/©р = Дыр* = ДЛ4с,/(Рр* - 1), (4.35)
где АЛ1С;1. — относительное отклонение момента нагрузки от
Л4ИОМ; Рр* = — модуль жесткости реостатной
характеристики в относительных единицах (при базовых
единицах Мном и соо).
Подставляя значение Рр+ из (4.34) в (4.35), получаем:
Дсор* = ДЯ* [0/(1 - sH0M) — 1]. (4.36)
Отсюда можно найти допустимый диапазон при рео-
статном регулировании по заданному отклонению нагру-
зочного момента и допустимой точности регулирования
О = (1 — sI]0M) (АсОр^/АМ;.^-j-1)- (4 37)
Так как sll0M 1, то приближенно
D <=« AtOp^/A/VU -j- 1 • (4.38)
Из (4.38) видно, что, например, при равных относи-
тельных отклонениях угловой скорости и момента нагрузки
диапазон регулирования = 2 : 1. При еще меньшем
допустимом относительном отклонении угловой скорости
по отношению к возможному относительному отклонению
момента нагрузки диапазон регулирования окажется еще
143
меньшим. Следовательно, практически допустимый диа-
пазон при реостатном регулировании угловой скорости
не превышает (1,5 2) : 1. В условиях эксплуатации
напряжение питающей сети также может изменяться отно-
сительно номинального значения. Его снижение приведет
к уменьшению модуля жесткости характеристики и к еще
большему уменьшению диапазона регулирования.
При вентиляторной нагрузке может быть допущен
больший диапазон регулирования, примерно (Зч-5):1.
Реостатное регулирование скорости двигателей средней
и большой мощности может осуществляться плавно с по-
мощью, например, жидкостного реостата, включаемого
в роторную цепь. Этот способ из-за нестабильности сопро-
тивления электролита, громоздкости реостата и повышен-
ной инерционности регулирования не нашел широкого
применения.
Чаще всего используются дополнительные металлические
резисторы, ступени которых регулируются дискретно при
помощи контакторов, поэтому регулирование получается
ступенчатое. Плавность регулирования тем выше, чем
больше число ступеней регулировочного резистора.
Допустимая нагрузка длительно работающего двига-
теля при реостатном регулировании определяется неизмен-
ным моментом, равным номинальному, так как номиналь-
ному моменту соответствует номинальный ток двигателя.
В этом случае предполагается, что двигатель имеет неза-
висимую вентиляцию и охлаждается одинаково интенсивно
при любой угловой скорости.
Допустимый ток и соответственно допустимый момент
самовентилируемого двигателя должен быть снижен по
сравнению с номинальным тем в большей мере, чем ниже
его угловая скорость.
Допустимый момент асинхронных самовентилируемых
двигателей с фазным ротором уменьшается по мере сниже-
ния угловой скорости примерно до 0,4 соном в соответ-
ствии с равенством
Мдоп^МномКч/СОпом- (4.39)
Если момент нагрузки при регулировании угловой
скорости остается неизменным и равным номинальному,
то нужно завысить установленную мощность двигателя
(использовать двигатель с большей номинальной мощностью)
так, чтобы момент нагрузки не превысил допустимый
момент двигателя при минимальной угловой скорости.
144
При этом условии и для допустимого момента, определяе-
мого равенством (4.39), коэффициент завышения мощности
равен:
* (4.40)
Принимая ориентировочно /Идоп линейно-зависящим
от угловой скорости, получаем:
44доп/Л4цоч (РМо* + 1 — №,>*)/D, (4.41)
где Л10* = /Идоп0//И1|ОМ — относительный допустимый мо-
мент двигателя при неподвижном состоянии ротора дви-
гателя (для асинхронных самовентилируемых двигателей
с фазным ротором /Ио* 0,25).
Тогда
kp • ' О](рМ$* 4-1—/Ио*). (4.42)
Потери мощности при реостатном регулировании скла-
дываются из переменных потерь, включающих потери в меди
статора и ротора и во внешних резисторах роторной цепи,
и постоянных — не зависящих от нагрузки. К последним
относятся потери в стали статора и ротора, а также меха-
нические и добавочные, обусловленные полями рассеяния
и высшими гармониками АЩС статора и ротора.
Потери в стали статора в данном случае остаются по-
стоянными независимо от скольжения, так как напря-
жение, подводимое к статору, не изменяется.
Механические потери приблизительно пропорциональны
угловой скорости, с увеличением скольжения уменьша-
ются, при этом потери в стали ротора возрастают вслед-
ствие увеличения частоты тока ротора, поэтому можно
приближенно считать, что сумма постоянных потерь оста-
ется неизменной независимо от нагрузки и скорости при-
вода.
Сумма же переменных потерь мощности может быть
найдена по формуле
ДР2 + Д?! = AIcooS [1 + RM + /?;0б)]. (4.43)
Из (3.37) следует:
sk. h/sk, е = (^2 +/?доб)/^2> (4.44)
где sKi„, s,(>e — соответственно критическое скольжение,
отвечающее искусственной (реостатной) и естественной ха-
рактеристикам двигателя; R^Rz — внешнее дополнитель-
ное и собственное сопротивления фазы ротора.
145
При одном и том же моменте на естественной и искусст-
венной характеристиках справедливо соотношение:
5к.Н/5к,е = 5и/5е> (4.45)
здесь s„, $е — соответственно текущее значение скольжения
на искусственной и естественной характеристиках.
Тогда
^доб/^2 = 5и/5е — 1. (4.46)
С учетом (4.46)
АРа АР1 = МcoqS Л4соо -р/- se. (4.47)
Таким образом, при неизменном моменте нагрузки и ре-
остатном управлении потери мощности в роторной цепи
изменяются пропорционально скольжению, а потери в ста-
торе не зависят от скольжения и остаются неизменными
при данном моменте нагрузки.
Напомним, что основная мощность теряется в регулиро-
вочном резисторе. Если, например, скорость двигателя
снижена вдвое по сравнению с номинальной, то примерно
половина всей потребляемой из сети мощности теряется
в регулировочных резисторах.
Иначе оцениваются потери мощности в меди статора и
ротора при вентиляторной нагрузке. Для упрощения будем
считать, что вентиляторная характеристика выражается
квадратичной зависимостью момента нагрузки от угловой
скорости, а момент холостого хода вентилятора не учиты-
вается. Тогда
М = Миом
Кроме того,
= М
“0М (1 - sU0M)2
R2 + Rno6
(1 Зцом)2 5
(1 s)2 SH0M
r2.
(4.48)
(4.49)
Подставляя эти значения в (4.43), получаем:
ЛР, + АЛ = (^5 [ I + > (ЙВй-]. (4.50)
Первый член (4.50) определяет потери мощности в ро-
торной цепи от скольжения
АР2 = Миома)0 = Рном s, (4.51)
(* Ь11ОМ? (J shom) '
где Риом — номинальная мощность двигателя.
146
Из (4.51) следует, что при s = 0 и s = 1 потери мощности
в роторной цепи ДР2 = О
Анализ (4.51) показывает, что максимум потерь мощно-
сти в роторной цепи при вентиляторной нагрузке так же,
как и в случае привода постоянного тока, имеет место при
s = 1/3 и составляет:
V 5иом/
Например, при sH0M = 0,02 AP2maJC = 0,16PIlOM.
Потери мощности в меди статора при вентиляторной
нагрузке (без учета потерь от тока холостого хода) равны:
ЛР1 = MllOM<o0sllOM ,-,(1~5)7‘ , (4.53)
V shomJ '<2
ИЛИ
<4-54>
Из (4.54) следует, что при s, изменяющемся от 1 до Sjl0s,
D
APj изменяется от 0 до ДР2пом
На рис. 4.31 приведены кривые относительных потерь
мощности ДР1# = АР1/РН0М и АР2* = АР2/Р11ОМ при рео-
статном регулировании и вентиляторной нагрузке.
Суммарные потери мощности при регулировании угло-
вой скорости равны:
ЛР = ДР1 + ДР2 + ДРхП0СТ, (4.55)
где ДРе пост — постоянные потери.
Обычно привод работает на различных регулировочных
характеристиках неодинаковое время. В этом случае по-
тери энергии за регулировочный цикл следует определять
с учетом продолжительности работы на каждой характери-
стике, поэтому
ДАЦ = ДРДР2#2 .-|- ДРrtn = Xi (4.56)
1
где ДР1, ДР2, ...ДРл и /х, t2, .... t„ — соответственно суммар-
ные потери мощности и продолжительность работы при-
вода на первой, второй, ..., п-й регулировочных характери-
стиках.
Зная полезную мощность, развиваемую приводом на
каждой регулировочной характеристике, можно найти
147
КПД привода за регулировочный цикл
^P^i
'’Ip. ц= ~ п • (4 • 57)
I I
Коэффициент мощности при реостатном регулировании
с постоянным моментом нагрузки и неизменным магнит-
ным потоком остается постоянным.
Если на валу двигателя имеет место вентиляторная на-
грузка, то со снижением угловой скорости коэффициент
Рис. 4.31. Кривые относитель-
ных потерь мощности ДР2* и
ДР,* при реостатном регули-
ровании и вентиляторной на-
грузке.
Рис. 4.32. Зависимость коэффициен-
та мощности от скольжения асин-
хронного двигателя с реостатным
регулированием при различных на-
грузках (в относительных едини-
цах).
1 — при М. = const; 2 — при венти-
ляториой нагрузке.
мощности падает. При уменьшении угловой скорости вслед-
ствие снижения момента нагрузки и соответственно тока
ротора уменьшается потребляемая двигателем активная
мощность. Однако с уменьшением роторного тока неизмен-
ными остаются значения намагничивающего тока и соот-
ветственно потребляемой двигателем реактивной мощности,
и поэтому коэффициент мощности первичной цепи падает
с уменьшением угловой скорости.
На рис. 4.32 приведены в относительных единицах
(отнесенные к номинальному значению коэффициента мощ-
ности) примерные значения коэффициента мощности асин-
хронного привода с реостатным регулированием при раз-
личных нагрузках.
148
Следует отметить, что энергетические показатели регу-
лируемого электропривода за цикл зависят от режима ра-
боты. При продолжительном режиме они существенно
ниже, чем при повторно-кратковременном. В обоих случаях
они тем выше, чем меньше диапазон регулирования и чем
большую часть времени привод работает на повышенных ско-
ростях.
Недостатками реостатного регулирования скорости яв-
ляются: 1) необходимость дискретного изменения сопротив-
ления в роторной цепи с помощью силовых аппаратов, уп-
равляемых дистанционно или вручную, что дает ступенча-
тое регулирование скорости и исключает возможность ис-
пользования замкнутых систем автоматического управле-
ния; 2) невысокое быстродействие; 3) большие потери энер-
гии.
Реостатное регулирование благодаря своей простоте
находит практическое применение, например, в приводе
подъемно-транспортных устройств, вентиляторов и насосов
малой и средней мощности (до 100 кВт).
Плавное бесступенчатое регулирование угловой скорости
асинхронных двигателей при введении резисторов в цепь
статора или ротора можно получить (при небольшой мощно-
сти двигателя), использовав импульсное параметрическое
регулирование, применяемое в автоматизированном элект-
роприводе для стабилизации заданного значения угловой
скорости при изменении момента нагрузки или для пред-
варительного снижения скорости перед остановкой при-
вода.
Схема включения асинхронного двигателя с короткозам-
кнутым ротором при импульсном регулировании добавоч-
ного сопротивления (во всех трех фазах) в цепи статора при-
ведена на рис. 4.33, а. Механические характеристики дви-
гателя, включенного по этой схеме, для различных значе-
ний скважности е показаны на рис. 4.33, б.
При е = 1 двигатель будет работать на естественной ха-
рактеристике (ключи К. двусторонней проводимости — по-
лупроводниковые или контактные — постоянно замкнуты).
При 8 = 0 двигатель будет работать на реостатной характе-
ристике, соответствующей постоянно включенному рези-
стору (ключи К разомкнуты). Как следует из (3.37) и
(3.38), при увеличении активного сопротивления цепи ста-
тора уменьшаются максимальный момент и критическое
скольжение, модуль жесткости механической характери-
стики и стабильность угловой скорости уменьшаются.
149
Допустимый момент асинхронного двигателя с коротко-
замкнутым ротором при импульсном параметрическом ре-
гулировании со снижением угловой скорости резко падает
(как это показано штриховой линией на рис. 4.33, 6), так
как значительно возрастают потери в нем (потери в цепи
ротора равны АР = Mcoos), а выделяются они все внутри
машины. Для двигателя с независимой (принудительной)
вентиляцией по мере увеличения скольжения нужно так
уменьшать момент нагрузки, чтобы потери в двигателе не
превышали номинальных. Поэтому схема, показанная на
рис. 4 33, а, может быть использована в приводах малой
Рис. 4.33. Принципиальная схема импульсного параметрического уп-
равления асинхронным двигателем с короткозамкнутым ротором (а) и
механические характеристики (6).
мощности и в кратковременном режиме работы. По этой же
причине диапазон регулирования обычно не превышает
(1,15—1,2) : 1 при продолжительном режиме работы. В крат-
ковременном режиме работы регулирование угловой ско-
рости в более широких пределах может производиться лишь
при осуществлении замкнутых систем управления, в кото-
рых используются обратные связи для автоматического
поддержания угловой скорости двигателя на заданном
уровне.
Лучшее использование двигателя при импульсном пара-
метрическом регулировании угловой скорости асинхронного
двигателя достигается, когда применяется двигатель с фаз-
ным ротором. В этом случае дополнительные потери мощно-
сти, обусловленные регулированием угловой скорости,
в основном выделяются в добавочных резисторах вне ма-
150
шины, поэтому допустимый момент для двигателя с незави-
симой вентиляцией оказывается примерно равным номи-
нальному. Схема включения асинхронного двигателя с фаз-
ным ротором при импульсном параметрическом регулиро-
вании угловой скорости приведена на рис. 4.34, а. Дополни-
тельный резистор R включен через выпрямитель В в ротор-
ную цепь последовательно со сглаживающим реактором.
Резистор R периодически включается и выключается с по-
мощью ключа К (контактного или тиристорного, выпол-
ненного, например, по схеме рис. 4.6, г).
Рис. 4.34. Схема включения асинхронного двигателя с фазным рото-
ром с импульсным параметрическим регулированием угловой скоро-
сти (а), механические характеристики (б).
Когда ключ К замкнут (е = 1), двигатель работает на
характеристике, соответствующей R3 = 0 (рис. 4.34, б);
если ключ разомкнут (е = 0) и R9 = R, то двигатель рабо-
тает на реостатной характеристике. Рабочая зона при
импульсном параметрическом регулировании располага-
ется между двумя крайними характеристиками.
Энергетические показатели при импульсном регулиро-
вании сопротивления несколько хуже, чем при ступенча-
том его изменении. Это обусловлено пульсациями выпрям-
ленного тока (или действующего значения тока), увеличи-
вающими потери, наличием в цепи обмоток тиристоров, ко-
торые искажают форму тока двигателя, что приводит к по-
явлению моментов высших гармоник и дополнительным
потерям.
151
Импульсное управление асинхронным двигателем с фаз-
ным ротором в цепи выпрямленного тока простыми сред-
ствами обеспечивает плавное и в широких пределах (в зам-
кнутых системах) регулирование угловой скорости с высо-
ким быстродействием.
4.10. Регулирование угловой скорости
асинхронного электропривода
изменением напряжения
Если регулировать напряжение, подводимое
к трем фазам статора асинхронного двигателя, то можно,
отвлекаясь от влияния параметров регулирующего устрой-
ства на характеристики двигателя, изменять максимальный
момент, не изменяя критического скольжения. Устрой-
ством для регулирования напряжения может быть, напри-
мер, тиристорный регулятор; при этом в каждой фазе ста-
тора двигателя находятся два встречно-параллельно вклю-
ченных тиристора. Управляя углом включения тиристоров
(фазовое управление), можно плавно менять действующее
значение напряжения.
Максимальный момент при пониженном напряжении сни-
жается пропорционально квадрату напряжения:
Мк>и = Мк(адюм)г, (4.58)
где Л4К.И,МК — соответственно максимальные моменты, раз-
виваемые двигателем при сниженном и номинальном напря-
жениях; U„, иу,ом — соответственно пониженное и номи-
нальное напряжения.
Критическое скольжение, не зависящее от напряжения,
остается неизменным. Не изменяется также и синхронная
угловая скорость, которая зависит только от частоты питаю-
щего напряжения и числа пар полюсов двигателя.
Регулирование угловой скорости двигателя при этом
способе происходит за счет уменьшения модуля жесткости
механических характеристик и осуществляется вниз от
номинальной угловой скорости. Плавность регулирования
определяется плавностью изменения напряжения; при
применении тиристорного регулятора напряжения угло-
вая скорость регулируется бесступенчато.
Механические характеристики двигателя с короткозам-
кнутым ротором при регулировании напряжения па статоре
приведены на рис. 4.35. Из этих характеристик следует,
что пределы регулирования весьма ограничены даже при
152
использовании вентиляторной нагрузки, но они могут быть
существенно расширены в замкнутых системах электропри-
вода. В действительности вследствие уменьшения критиче-
ского скольжения из-за влияния параметров регулирую-
щего устройства пределы регулирования в разомкнутых си-
стемах еще уменьшаются.
Так как большие потери мощности скольжения в двига-
теле с короткозамкнутым ротором выделяются в самом ро-
торе, то допустимый момент резко уменьшается по мере
роста скольжения, поэтому такой неэкономичный способ
регулирования угловой скорости асинхронного двигателя
с короткозамкнутым ротором можно использовать только
при малой мощности двигателя и в кратковременном ре-
жиме работы.
Рис. 4.35. Механические характе-
ристики двигателя с короткозамк-
нутым ротором при регулировании
напряжения на статоре.
Лучшее использование двигателя и более благоприят-
ные характеристики могут быть получены, если применить
двигатель с фазным ротором, в роторную цепь его включить
дополнительный нерегулируемый резистор и регулировать
напряжение на статоре (рис. 4.36, а). Механические харак-
теристики для рассматриваемого способа приведены на
рис. 4.36, б. Преимущество этого способа по сравнению с ре-
остатным заключается в том, что управление двигателем
осуществляется плавно и исключается контактная аппара-
тура в роторной цепи.
Потери энергии в приводе получаются примерно такими
же или несколько больше, как и при реостатном регулиро-
вании; потери мощности скольжения в основном выносятся
из двигателя и выделяются в дополнительном резисторе,
что увеличивает допустимый момент. Этот способ может
быть использован при вентиляторной нагрузке для продол-
жительного режима, а при Мс = const для кратковремен-
ного режима работы. Очевидно, что регулирование измене-
153
наем напряжения может быть осуществлено только вниз от
основной угловой скорости.
Механические характеристики (рис. 4.36, б) по мере сни-
жения напряжения становятся мягкими и не обеспечивают
стабильности угловой скорости при возможном отклоне-
нии нагрузки. Кроме того, наличие постоянно включен-
ного резистора приводит к недоиспользованию двигателя
по скорости (угловая скорость всегда меньше номиналь-
ной) и по мощности. Повышение стабильности угловой ско-
рости и расширение диапазона регулирования до (5 4- 10) : 1
достигается в замкнутых системах.
Рис. 4.36. Схема включения двигателя с фазным ротором с нерегули-
руемым резистором в роторной цепи и регулированием напряжения
на статоре (а) и механические характеристики (б).
Для регулирования напряжения используются как ти-
ристорные регуляторы напряжения с фазовым управле-
нием, так и реакторы насыщения, автотрансформаторы и
импульсные, например тиристорные или контактные регу-
лирующие устройства.
Простейшая принципиальная схема включения асин-
хронного двигателя с короткозамкнутым ротором при им-
пульсном регулировании напряжения приведена на
рис. 4.37, а; механические характеристики двигателя, вклю-
ченного по этой схеме, для различных значений скважности
е включенного состояния ключей К — на рис. 4.38, а.
При е = 1 двигатель работает на естественной характери-
стике (ключи К постоянно замкнуты); при е = 0 двигатель
отключен от сети. Характеристики двигателя и его свойства
154
при эюм ciiocooc регулирования такие же, как и при не-
прерывном регулировании напряжения.
Энергетические показатели при импульсной регулирэ-
1 ании напряжения .хуже из-за больших пульсаций напряже-
ние. 4.3'7. Схемы включения дви-
гателя с короткозамкнутым рото-
ром с импульсным регулированием
напряжения.
ния и угловой скорости, а также из-за переходных электро-
магнитных процессов, вызванных включением и отключе-
нием обмоток статора двигателя. Частота коммутаций
здесь может быть небольшая, ограниченная целым числом
полупериодов для включенного состояния тиристорных
пли симисторных ключей К-
Рис. 4.Механические характеристики двигателей, управляемых по
схемам, изображенным на рис. 4.37,
Еще худшими энергетическими показателями обладает
электропривод с импульсным регулированием напряже-
ния и импульсным чередованием фаз, включенный по схеме
рис. 4.37, б; механические характеристики двигателя при
этой схеме включения приведены па рис. 4.38, б для различ-
ных значений скважности е включенного состояния ключей
КВ. На интервалах выключенного состояния ключей КВ
включены ключи /<//, изменяющие чередование фаз подве-
155
денного к двигателю напряжения. Поэтому при е = О, когда
постоянно включены ключи /<77, двигатель оказывается
в режиме торможения противовключением. Наложение
двигательного и тормозного режимов вызывает почти не-
прерывные электромагнитные переходные процессы, обу-
словливающие увеличение потерь мощности. Основное до-
стоинство этого способа импульсного регулирования —
повышенная жесткость механических характеристик в об-
ласти генераторного режима, что может быть полезным при
некоторых применениях этого способа.
Импульсное регулирование переменного напряжения
применяется редко, оно уступило место фазовому и другим
видам непрерывного регулирования.
4.11. Регулирование угловой скорости
асинхронного электропривода
переключением числа полюсов
Из выражения для угловой скорости асин-
хронного двигателя:
со = соо(1 — 5) =2л/1(1 — s)/p (4.59)
следует, что угловую скорость можно регулировать, изме-
няя число пар полюсов р, если задана частота питающей
сети Д и мало изменяется скольжение $. Так как число пар
полюсов может быть только целым числом, то регулирова-
ние угловой скорости оказывается ступенчатым. Такой
способ регулирования реализуется практически в двига-
телях с короткозамкнутым ротором, где переключение по-
люсов производится в обмотке статора, обмотка ротора при
этом автоматически приспосабливается к избранному числу
полюсов. Если использовать двигатель с фазным ротором,
то переключение числа полюсов на статоре потребует одно-
временного переключения числа полюсов и на роторе, что
усложнит конструкцию, поэтому для этого способа регули-
рования практически используются асинхронные двига-
тели с короткозамкнутым ротором, в которых чаще всего
переключение полюсов осуществляется изменением направ-
ления тока в отдельных половинах каждой фазной обмотки.
Принципиальные схемы присоединения полуобмоток для
изменения числа полюсов в обмотках с соотношением
2 : 1 приведены на рис. 4.39, а—в.
На рис. 4.40, а—д даны наиболее употребительные
схемы переключения обмоток статора. При переключении
153
с одного числа полюсов на
другое сохраняется то же
направление вращения дви-
гателя. В табл. 4.2 приве-
дены отношения магнитных
индукций для различных
соединений обмоток стато-
ра. Согласно рис. 4.40, а—д
одинарное число полюсов
обозначено I, а двойное
число полюсов — II.
Электромагнитный мо-
мент асинхронного двига<
теля:
М = т^ко6рФГ2 cos ip2.
(4.60)
Рис. 4.39. Принципиальные схе-
мы присоединения полуобмоток
для изменения числа полюсов в
обмотках с соотношением 2:1,
Рис. 4.40. Схемы переключения
обмоток статора.
а)
157
Таблица 4.2
№ рис, Двойное число полюсов (обозначение //, рис. 4.40) Одинарное число полюсов (обозначение /. рис, 4,40) Отно- шение «// В/
Соединение полуобмоток Соедине- ние фаз Соединение полуобмоток Соедине- ние фаз
4, 40, a Последователь- ное Y Параллельное Д 0,58
4. 40, б > Y или Д YY или Д 1,0
4. 40, в Последователь- ное или па- раллельное Y Последов атель- ное или па- раллельное Д 1,(6
4. 40, г Последователь- ное Д Параллельное YY 1,73
4. 40, д Последователь- ное или па- раллельное Y или Д Последователь- ное или па- раллельное Y или Д 2,0
Если принять для упрощения обмоточный коэффициент
^об' = Л>би и cos Ф21 = cos фги, то получим:
(4.61)
Так как рцФп = АВц; Р1Ф1 = ABi, где Л — конструк-
тивный коэффициент машины, то, полагая, что Шц/г'п^
получаем:
MnlMi=Bn/Bi. (4.62)
Следовательно, моменты, развиваемые двигателем с раз-
личными схемами соединения обмоток статора, отвечаю-
щими разным числам полюсов, относятся как соответствую-
щие магнитные индукции.
Отношение магнитных индукций можно оценить через
отношение ЭДС. Известно, что ЭДС можно рассчитать по
формуле
Е = лУ2 fwko6<b = n V2 fwko6AB/p, (4.63)
где Ф = ВА!р.
Тогда отношение ЭДС
“,II^o6lIfin/PlI
Ei ’ (4'Ь4)
или
Eu/Ej^wuBupi/wtBipn. (4.65)
158
Под w следует понимать число витков одной параллель-
ной ветви фазы. Если для неизменного напряжения сети
пренебречь падением напряжения в статоре, то при соеди-
нении обмоток статора в звезду Е = Uа в треуголь-
ник Е = U р
На основании (4.65) в графе Вц/В[ табл. 4.2 даны отно-
шения магнитных индукций при различных соединениях
обмоток статора.
В соответствии с этими данными на рис. 4.41 для схемы
на рис. 4.40, а приведены примерные механические харак-
теристики, которые могут быть использованы в приводах
с вентиляторным моментом
нагрузки.
Если применяется схема
переключения, отвечающая
рис. 4.40, б или в, то в этом
случае номинальные момен-
ты, развиваемые двигателем
Рис. 4.41. Примерные механичес-
кие характеристики для схемы на
рис. 4.40, а в приводах с вентиля-
торным моментом нагрузки.
при двойном и одинарном числах полюсов, примерно оди-
наковы, а его механические характеристики имеют вид,
показанный на рис. 4.42.
Переключение обмоток статора по схемам, изображен-
ным на рис. 4.40, а и 0, дает возможность получить момент,
вдвое больший при двойном числе полюсов по сравнению
с одинарным. Это означает, что с уменьшением номинальной
угловой скорости в 2 раза соответственно возрастает номи-
нальный момент (рис. 4.43).
Схемы переключения, показанные на рис. 4.40, а—д,
отвечают использованию одной обмотки на статоре, дающей
только две скорости, отношение которых равно 2. Такие
двигатели называются двухскоростными. Выпускаются также
серийные двигатели трех- и четырехскоростные сравни-
тельно небольшой мощности. Эти двигатели могут иметь
две независимые обмотки на статоре, каждая из которых
(или одна из них) выполняется полюсопереключаемой.
Использование двух полюсопереключаемых обмоток расши-
ряет диапазон регулирования скорости.
159
Минимальная синхронная частота вращения, с которой
выпускаются полюсопереключаемые двигатели широкого
назначения, равна 500 об/мин. Двигатели специального
назначения имеют меньшую частоту вращения. Максималь-
ная частота вращения составляет 3000 об/мин. Очевидно,
что при заданной мощности снижение нижнего предела ча-
стоты вращения приводит к увеличению габаритов двига-
теля и ухудшению его энергетических показателей.
Точность регулирования определяется статизмом на
данной характеристике и оценивается скольжением, которое
в среднем составляет: для многоскоростных двигателей
Рис. 4.42. Механические харак-
теристики для схем рис. 4.40, б
и в.
Рис. 4.43. Механические харак-
теристики для схем рнс. 4.40, г
и д.
малой мощности — 0,05, средней мощности — 0,03, т. е.
точность оказывается сравнительно высокой.
Практически диапазон регулирования не превышает
6 : 1 (3000 : 500 об/мин).
Направление регулирования при этом способе является
условным и зависит от того, при каком числе полюсов угло-
вая скорость для механизма принята номинальной (основ-
ной). Так, для вентиляторной нагрузки и характеристик на
рис. 4.41 регулирование осуществляется вниз от основной,
а при постоянстве мощности нагрузки и характеристиках
по рис. 4.43 — вверх от основной.
В соответствии с данными табл. 4.2 и приведенными
выше характеристиками на рис. 4.41—4.43 можно заклю-
чить, что полюсопереключаемые двигатели в зависимости
от схемы соединения обмоток статора можно выбрать прак-
тически для любой нагрузки (вентиляторной, с постоянным
160
моментом и мощностью), обеспечивая при этом достаточ-
ную перегрузочную способность (А = 1,8-4- 2,5).
Регулирование угловой скорости переключением полю-
сов является не плавным, а ступенчатым. Вместе с тем рас-
сматриваемый способ регулирования является весьма эко-
номичным и отличается механическими характеристиками,
обладающими большой жесткостью. Благодаря своим пре-
имуществам двигатели с переключением полюсов находят
применение там, где не требуется плавного регулирования
скорости, например в некоторых металлорежущих станках
в целях уменьшения количества механических передач.
Они применяются также для вентиляторов, насосов, эле-
ваторов, в цементной, нефтяной и других отраслях промыш-
ленности.
4.12. Частотное регулирование асинхронных
электроприводов
Принципиальная возможность регулирования
угловой скорости асинхронного двигателя изменением ча-
стоты питающего напряжения вытекает из формулы <о ~
’= 2л/х (1 — s)/p. При регулировании частоты также воз-
никает необходимость регулирования амплитуды напря-
жения источника, что следует из выражения Ег =
= /;Ф/Х. Если при неизменном напряжении изменять ча-
стоту, то поток будет изменяться обратно пропорционально
частоте. Так, при уменьшении частоты поток возрастет и
это приведет к насыщению стали машины и как следствие
к резкому увеличению тока и превышению температуры
двигателя; при увеличении частоты поток будет умень-
шаться и как следствие будет уменьшаться допустимый
момент.
Для наилучшего использования асинхронного двига-
теля при регулировании угловой скорости изменением ча-
стоты необходимо регулировать напряжение одновременно
в функции частоты и нагрузки, что реализуемо только
в замкнутых системах электропривода. В разомкнутых
системах напряжение регулируется лишь в функции ча-
стоты по некоторому закону, зависящему от вида нагрузки.
Частотное регулирование угловой скорости электропри-
водов переменного тока с двигателями с короткозамкнутым
ротором находит все большее применение в различных от-
раслях техники. Например, в установках текстильной
промышленности, где с помощью одного преобразователя
6 Чиликин М. Г., Сандлер А. С.
161
частоты, питающего группу асинхронных двигателей, на-
ходящихся в одинаковых условиях, плавно и одновременно
регулируются их угловые скорости. Примером другой уста-
новки с частотно-регулируемыми асинхронными двигате-
лями с короткозамкнутым ротором могут служить транс-
портные рольганги в металлургической промышленности,
некоторые конвейеры и др.
Частотное регулирование угловой скорости асинхрон-
ных двигателей широко применяется в индивидуальных
установках, когда требуется получение весьма высоких
угловых скоростей (для привода электрошпинделей в ме-
таллорежущих станках с частотой вращения до
20 000 об/мин).
Экономические выгоды частотного регулирования осо-
бенно существенны для приводов, работающих в повторно-
кратковременном режиме, где имеет место частое измене-
ние направления вращения с интенсивным торможением.
Для осуществления частотного регулирования угловой
скорости находят применение преобразователи, на выходе
которых по требуемому соотношению или независимо ме-
няется как частота, так и амплитуда напряжения. Преобра-
зователи частоты можно разделить на электромашинные и
вентильные. В свою очередь электромашинные преобразо-
ватели могут быть выполнены с промежуточным звеном
постоянного тока и непосредственной связью. В последних
используют коллекторную машину переменного тока, на
вход которой подают переменное напряжение с постоянной
частотой и амплитудой, а на выходе ее получают напряжение
с регулируемой частотой и амплитудой. Электромашинные
преобразователи с непосредственной связью практического
применения не получили.
Принципиальная схема электромашинного преобразо-
вателя с промежуточным звеном постоянного тока, в кото-
ром используется синхронный генератор, показана на
рис. 4.44. Преобразователь состоит из агрегата постоян-
ной скорости (Ml, G1), предназначенного для преобразова-
ния переменного тока сетевого напряжения и неизменной
частоты в регулируемое постоянное напряжение, которое
зависит от тока возбуждения генератора постоянного тока
G1. Двигатель постоянного тока М2 агрегата переменной
скорости получает питание от генератора G1. При измене-
нии напряжения на выводах генератора G1 плавно регули-
руется угловая скорость двигателя М2 и одновременно уг-
ловая скорость синхронного генератора G2. Изменение угло-
162
вой скорости генератора G2 при неизменном токе его воз-
буждения приводит к пропорциональному изменению
скорости, частоты и амплитуды напряжения генерато-
ра G2.
От синхронного генератора G2, являющегося источни-
ком напряжения с переменной частотой и амплитудой, пи-
тается одни или группа асинхронных двигателей с корот-
козамкнутым ротором М3 — М5. Меняя направление тока
возбуждения генератора постоянного тока G1, можно изме-
нять направление вращения асинхронных двигателей. При
неизменном токе возбуждения синхронного генератора G2
Рис. 4.44. Принципиальная схема электромашинкою преобразователя
частоты с промежуточным звеном постоянного тока с использованием
синхронного генератора.
и двигателя постоянного тока М2, меняя его угловую ско-
рость, можно автоматически регулировать выходное напря-
жение по закону U2/f2 = const. В данном случае, как будет
показано далее, со снижением частоты снижается перегру-
зочная способность асинхронных двигателей и поэтому
диапазон регулирования при постоянном моменте нагрузки
заметно уменьшается. Больший диапазон регулирования
с обеспечением необходимой перегрузочной способности (по
отношению к статическому моменту нагрузки) может быть
получен при вентиляторной нагрузке.
Угловая скорость двигателя постоянною тока М2 при
поминальной ЭДС генератора G1 может быть увеличена за
счет уменьшения тока возбуждения двигателя М2 с по-
мощью резистора R2, при этом частота и амплитуда напря-
6* 1G3
жения синхронного генератора G2 также возрастают, но
допустимый момент двигателя М2 уменьшается.
Независимо от частоты (угловой скорости) синхронного
генератора G2 амплитуда напряжения на его выходе
может регулироваться только вниз от номинального зна-
чения.
Если мощность, потребляемая асинхронными двигате-
лями от источника регулируемой частоты, равна Р„оч, то
при пренебрежении потерями в машинах общая установлен-
ная мощность преобразователя частоты составит:
Рп. ч = Рдп Н- Рал + Р?,\г + Pai ~ 4Р 1!Ом.
С учетом потерь энергии в машинах преобразователя
частоты его установленная мощность будет превышать че-
тырехкратное значение установленной мощности нагрузки,
что является недсстатком электромашинного преобразова-
теля частоты. Другим его недостатком является низкий
КПД, определяемый произведением КПД отдельных ма-
шин. Если, например, КПД каждой машины при полной
нагрузке принять равным 0,9, то номинальный КПД преоб-
разователя составит 0,94 = 0,66. С уменьшением нагрузки
и при регулировании угловой скорости двигателей М.3 —
М5 вниз от основной КПД становится еще меньше.
Регулирование частоты связано с преодолением значи-
тельной механической и электромагнитной инерционности,
которой обладает электромашинный преобразователь.
В схемах электромашинного преобразователя частоты
могут быть использованы в качестве основного преобразо-
вателя обычные асинхронные машины с фазным ротором
в режиме асинхронного преобразователя частоты. Одна
из таких схем с асинхронным преобразователем частоты
АПЧ приведена на рис. 4.45. Здесь статор АПЧ присоединен
к сети переменного тока через автотрансформатор А Т,
позволяющий независимо регулировать на входе (и выходе)
АПЧ амплитуду напряжения. Ротор АПЧ механически свя-
зан с якорем двигателя М2, угловая скорость которого
регулируется по системе Г—Д так же, как и в предыду-
щей схеме с синхронным генератором. Вторичная (ротор-
ная) цепь АПЧ служит источником напряжений регулируе-
мой частоты и амплитуды.
Частота на выходе АПЧ равна:
(4.66)
164
где Д,р = сор/2л; со — скорость двигателя Л42; Д —
частота напряжения питания статора, принятая равной
частоте питающей сети.
В (4.66) знак плюс относится к случаю, когда ротор
вращается против поля статора, а знак минус — согласно
с полем статора. Следовательно, при вращении ротора
против поля частота Д > Д, согласно с полем Д <; Д. При
неподвижном состоянии ротора АПЧ частота Д = Д.
Энергия, передаваемая АПЧ нагрузке, при вращении
против поля складывается из механической энергии, посту-
Рис. 4.45. Схема с асинхронным преобразователем частоты.
пающей с вала двигателя М2, и электрической энергии,
потребляемой АПЧ со стороны автотрансформатора АТ.
При вращении по полю электрическая энергия, поступаю-
щая в статор АПЧ, частично передается нагрузке, а часть —
двигателю М2, в этом случае работающему в генераторном
режиме. Эта часть энергии после преобразований возвра-
щается в сеть с помощью машины Ml.
Распределение активных мощностей, поступающих с вала
двигателя постоянного тока Рм и со стороны питающей
сети Р2, происходит (без учета потерь в АПЧ) пропорцио-
нально частотам статора и ротора, т. е.
Р2 = РгД/Д; (4.67)
PM = P^(fi-fi)/k, (4-68)
165
или
(4.69)
где — суммарная мощность, потребляемая на выходе
АПЧ.“
Если, например, принять частоту на выходе АПЧ
f2 = 100 Гц, а частоту питания = 50 Гц, то активная мощ-
ность Р2 составит только 50 % установленной мощности
нагрузки, а через двигатель М2 будет подводиться также
50 % Ps. Таким образом, при указанном соотношении ча-
стот установленная мощность машин системы Г—Д окажется
вдвое меньше, чем в случае электромашиниого преобразо-
вателя с синхронным генератором. Раздельное регулирова-
ние напряжения с помощью автотрансформатора АТ дает
возможность (ограничиваемую насыщением стали АПЧ)
устанавливать требуемое соотношение между Д2 и /»•
Если установленную мощность асинхронных двигателей
(нагрузки АПЧ) принять равной Р|10м, то, пренебрегая по-
терями в машинах преобразовательного агрегата, можно
найти установленную мощность преобразователя частоты
(при f2 = 100 Гц и = 50 Гц):
Р„. ч = Ли + Ра + Рмч + Р апч + Р ат =
— 0,5Р11ОМ + 0,5Р11ОМ Ц- 0,5Р11ОМ 4- Рноя -|- 0,5Р |10м = ЗРНОМ.
С возрастанием выходной частоты АПЧ установленная
мощность преобразовательного устройства увеличивается.
Электромашинные преобразователи частоты с АПЧ при-
меняются обычно для получения частот, превышающих
частоту питающей сети, когда необходимо регулировать
угловую скорость большого числа согласованно работаю-
щих асинхронных двигателей с короткозамкнутым ротором.
Схема вецтильно-электромашинного преобразователя ча-
стоты с синхронным генератором (вместо него может быть
использован и АПЧ) приведена на рис. 4.46. Здесь вращаю-
щийся преобразовательный агрегат постоянной скорости
заменен статическим управляемым преобразователем (вы-
прямителем) УП, собранным, например, на тиристорах.
От управляемого выпрямителя питается двигатель Ml
агрегата переменной скорости. В данном случае несколько
повышается КПД преобразователя частоты ПЧ, сокраща-
ются его габариты. Однако остаются такие недостатки,
как невысокая надежность, необходимость в использова-
нии, кроме УП двух машин (двигателя Ml и генератора G),
значительная инерционность привода, связанная с изме-
166
пением угловой скорости агрегата переменной скорости при
изменении выходной частоты
Указанные недостатки ограничивают применение элек-
тромашинных преобразователей и приводят к необходи-
мости создания статических преобразователей на основе
использования тиристоров или транзисторов.
По структуре схемы статических преобразователей ча-
стоты сходны с аналогичными схемами электромашинных
преобразователей и могут быть представлены двумя основ-
ными классами: 1) с непосредственной связью и 2) с проме-
жуточным звеном постоянного тока.
Рис. 4 46. Схема вентильно-электромашинпого преобразователя ча-
стоты с синхронным генератором.
Преобразователь с непосредственной связью предназна-
чен для преобразования высокой частоты в низкую и состоит
из 18 тиристоров, объединенных во встречно-параллельные
группы с раздельным управлением (рис. 4.47). В основе
преобразователя лежит трехфазная нулевая схема выпрям-
ления; каждая фаза преобразователя состоит из двух та-
ких встречно включенных выпрямителей. Группу из трех
вентилей, имеющих общий катод, называют положительной
или выпрямительной, а группу с общим анодом — отрица-
тельной или инверторной. Вентильные группы могут управ-
ляться раздельно либо совместно.
Во избежание короткого замыкания управляющие им-
пульсы при раздельном управлении должны подаваться на
тиристоры одной из вентильных групп в соответствии с на-
правлением тока в нагрузке. Для обеспечения раздельной
работы применяется специальное логическое устройство,
исключающее возможность прохождения тока в одной
группе в то время, когда ток проходит в другой группе.
167
В преобразователях с совместной работой вентильных
групп необходимо включение дополнительных реакторов,
ограничивающих уравнительный ток между вентилями
каждой группы, а углы управления положительной и отри-
цательной групп изменяются по определенному закону,
исключающему появление постоянной составляющей урав-
нительного тока. Преобразователи с совместным управле-
нием работой вентильных групп обладают большой установ-
ленной мощностью силовых элементов.
В течение одного полунериода выходного напряжения
преобразователя пропускают ток выпрямительные группы,
Рис. 4.47. Преобразователь частоты с непосредственной связью.
а в течение другого — инверторные. Выходное напряжение
состоит из отрезков волн напряжения питающей сети. На
рис. 4.48 показана кривая выходного напряжения при не-
изменном угле включения вентилей а = 0. Фазовая комму-
тация вентилей в одной группе, т. е. включение одного вен-
тиля и выключение другого, происходит подобно переклю-
чению в трехфазной пулевой схеме выпрямления без комму-
тирующих конденсаторов. Для получения выходного на-
пряжения, близкого по форме к синусоидальному, необ-
ходимо изменять угол включения вентилей таким образом,
чтобы среднее за полупериод питающей сети значение на-
пряжения изменялось в течение полупериода выходного
напряжения по синусоидальному закону. Регулирование
168
напряжения на выходе преооразователя достигается изме-
нением угла включения вентилей.
К достоинствам этого типа преобразователей можно
отнести: 1) однократное преобразование энергии и, следо-
вательно, высокий КПД (около 0,97—0,98); 2) возможность
независимого регулирования амплитуды напряжения на вы-
ходе от частоты; 3) свободный обмен реактивной и активной
энергией из сети к двигателю и обратно; 4) отсутствие ком-
мутирующих конденсаторов, так как коммутация тиристо-
ров производится естественным путем (напряжением сети.)
К недостаткам рассмотренного преобразователя частоты
относятся: 1) ограниченное регулирование выходной ча-
стоты (от 0 до 40 % частоты сети); 2) сравнительно большое
число силовых вентилей и сложная схема управления ими;
Рис. 4.48. Форма выходного напряжения трехфазного преобразова-
теля частоты с непосредственной связью.
3) невысокий коэффициент мощности — максимальное зна-
чение на входе преобразователя около 0,8).
Преобразователь частоты с непосредственной связью
можно использовать в случаях, когда частота питающей
сети много выше частоты нагрузки (например, если питаю-
щая сеть имеет частоту 400 Гц, а двигатель серийного
использования рассчитан на 50 Гц). Этот же преобразова-
тель может быть применен в случае использования тихоход-
ного безредукторного привода, когда возникает необходи-
мость в плавном регулировании угловой сксрссти (напри-
мер, в приводе шаровых мельниц, где номинальная угловая
скорость двигателя соответствует 12—15 Гц и регулируется
вниз; при этом частота питающей сети составляет 50 Гц).
Кроме того, данный тип преобразователя целесообразно
применить для регулирования угловой скорости асинхрон-
ного двигателя с фазным ротором, работающего в режиме
двойного питания, когда статор его присоединен к сети,
а ротор питается от той же сети через преобразователь
частоты.
169
Наибольшее применение для промышленных приводов
может иметь статический преобразователь частоты с проме-
жуточным звеном постоянного тока, структурная схема ко-
торого приведена на рис. 4.49. Преобразователь состоит из
двух силовых элементов — управляемого выпрямителя УВ
и инвертора И. На вход УВ подается нерегулируемое на-
пряжение переменного тока промышленной частоты; с вы-
хода УВ постоянное регулируемое напряжение подается
на инвертор И, который преобразует постоянное напряжение
в переменное регулируемой амплитуды и частоты. Кроме
Рис. 4.49. Структурная схема статического преобразователя частоты
с промежуточным звеном постоянного тока.
У В — управляемый выпрямитель; И — инвертор’. БУ В, БУИ — соответ-
ственно блок управления выпрямителем и инвертором; БЗС — блок задания
скорости.
двух силовых элементов, преобразователь содержит еще
систему управления, состоящую из блока управления вы-
прямителем БУ В и блока управления инвертором БУИ.
Выходная частота регулируется в широких пределах и опре-
деляется частотой коммутации тиристоров инвертора, кото-
рая задается блоком управления инвертором БУИ. В такой
схеме производится раздельное регулирование амплитуды
и частоты выходного напряжения, что позволяет осущест-
вить при помощи блока задания скорости БЗС требуемое
соотношение между действующим значением напряжения и
частотой на зажимах асинхронного двигателя.
Преобразователь с промежуточным звеном постоянного
тока позволяет регулировать частоту как вверх, так и вниз
от частоты питающей сети; он отличается высоким КПД
(около 0,96), значительным быстродействием, малыми габа-
170
ритами, сравнительно высокой надежностью и бесшумен
в работе
Примером принципиальной силовой схемы статического
преобразователя частоты с промежуточным звеном постоян-
ного тока, выполненного на тиристорах для привода неболь-
шой мощности (до 5 кВт), может служить схема, приведен-
ная на рис. 4.50 *.
Рис. 4 50. Схема статического преобразователя частоты с промежуточ-
ным звеном постоянного тока.
В качестве управляемого выпрямителя используются
два тиристора (V7 и V8) и два диода (V15 и V16), включен-
ные в так называемую полууправляемую мостовую схему
для получения двухполупериодного выпрямленного напря-
жения, среднее значение которого можно регулировать
обычным способом, воздействуя на угол включения тиристо-
ров V7 и V8.
Автономный инвертор напряжения (АИН) (рис. 4.50)
состоит из шести тиристоров (VI — V6), шести последова-
тельно включенных с ними диодов (V9 — V14) и шести дио-
дов, включенных по трехфазной мостовой схеме (V18 — V23)
и, наконец, шести колебательных контуров LC
* Схема разработана в проблемной лаборатории электромеханики
МЭИ,
171
Преобразование постоянного напряжения в трехфазное
переменное осуществляется коммутацией тиристоров VI —
V6, работающих в определенной последовательности. Время
открытого состояния каждого тиристора составляет 2/3
полупериода выходного напряжения (длительность откры-
того состояния тиристоров равна 120°); последователь-
ность включения тиристоров отвечает их нумерации по
схеме, т. е. сначала включается VI, через 60° включается
V2 и т. д. до V6. После V6 вновь VI и т. д. через каждую
периода выходного напряжения. В каждый момент времени
вне коммутации открыты одновременно два тиристора.
Включение тиристоров осуществляется подачей положи-
тельного импульса на управляющий электрод от БУИ.
Для выключения тиристоров необходимо ток, протекающий
через него, довести до нуля. Это достигается с помощью
коммутирующих контуров LC', например, при включении
V3 через ранее открытый VI происходит разряд конденса-
тора С и VI закрывается.
Выходное напряжение при чисто активной нагрузке
имеет ступенчатую форму (рис. 4.51), и длительность каж-
дой ступени соответствует периода выходного напряже-
ния.
При питании от преобразователя асинхронного двига-
теля форма выходного напряжения искажается и зависит
ст коэффициента мощности, который в свою очередь опреде-
ляется нагрузкой на валу двигателя.
Диоды V8 — V14 служат для отделения коммутирующих
конденсаторов от нагрузки, что дает возможность сущест-
венно снизить их емкость по сравнению с обычным парал-
лельным инвертором. Через мост V18—V23 реактивная
энергия двигателя возвращается конденсатору С1. Напряже-
ние на выходе инвертора регулируется изменением напря-
жения на его входе — управляемым выпрямителем, а часто-
та — изменением частоты подачи импульсов на тиристоры.
Достоинствами однофазной схемы выпрямления явля-
ется меньшее количество тиристоров по сравнению с трех-
фазнсй схемой выпрямления, а также более простое управ-
ление, что снижает стоимость преобразователя. Поэтому
при небольшой мощности привода и малом диапазоне регу-
лирования напряжения целесообразно использовать одно-
фазный выпрямитель, хотя пульсации выпрямленного на-
пряжения получаются довольно большими, что требует
применения сглаживающего реактора значительной индук-
тивности.
172
Для преобразователей большей мощности (от 20 кВт
и выше) с относительно большим диапазоном регулирования
выпрямленного напряжения (до 20 : 1) используются трех-
фазный полностью управляемый выпрямитель, обычно вы-
полняемый по мостовой схеме.
При больших диапазонах регулирования напряжения
целесообразно для средней мощности преобразователя (до
20 кВт) применять мостовую схему с трехфазным полу-
'управляемым выпрямителем, который содержит три тири-
стора и три диода. В данном случае схема оказывается
более простой по сравнению с полностью управляемым вы-
прямителем.
В тех случаях, когда инвертор питается от сети постоян-
ного тока или от неуправляемого выпрямителя, пш'ме-
Рис. 4.51. Форма выходного на-
пряжения при чисто активной
нагрузке.
Рис. 4.52. Схема ШИР напря-
жения.
няется широтно-импульсный регулятор (ШИР) напряже-
ния. Одна из возможных схем такого регулятора дана на
рис. 4.52. На схеме приняты обозначения: V2 — вспомога-
тельный тиристор; L1 — ограничивающий реактор; L2,
С — реактор и конденсатор коммутирующего контура. При
подаче импульса на VI напряжение источника питания
прикладывается к нагрузке. Для отключения нагрузки от
источника питания подается импульс на включение V2.
Среднее значение напряжения на выходе регулятора пропор-
ционально относительному времени (скважности) включе-
ния силового тиристора Vi, частота коммутация которого
должна быть высокой (около 800 Гц) для уменьшения габа-
ритов фильтрующих устройств, которые .необходимо уста-
навливать на выходе регулятора. Среднее напряжение на
нагрузке:
(/„,cP = £W = ^, (4.70)
где /вкл — время включенного состояния Vl\ f — частота
173
переключения тиристоров; е — скважность выходного на-
пряжения.
Системы с ШИР могут обеспечить большой диапазон ре-
гулирования выходного напряжения и позволяют умень-
шить габариты фильтрующих устройств. Питание инвер-
тора от неуправляемого выпрямителя через ШИР позволяет
получить высокий коэффициент мощности на входе преобра-
зователя частоты во всем диапазоне регулирования. Недо-
статками преобразователя частоты с ШИР на входе ин-
вертора являются необходимость установки силового тири-
стора, рассчитанного на всю мощность, потребляемую ин-
вертором, снижение КПД преобразователя из-за дополни-
тельного преобразования энергии (потери мощности в ШИР),
усложнение схемы преобразователя и снижение его надеж-
ности, поэтому ШИР на входе инвертора используется в ос-
новном только при наличии сети постоянного тока.
В случае применения в преобразователях частоты авто-
номных инверторов напряжения с фазной или индивидуаль-
ной коммутацией тиристоров или транзисторных инверто-
ров можно совместить в самом инверторе функции инверти-
рования и регулирования напряжения методом широтно-им-
пульсной модуляции (ШИМ). Такие тиристорные инверторы
и их системы управления существенно сложнее рассмотрен-
ных инверторов с межфазной коммутацией, а КПД их
ниже из-за повышенных потерь, связанных с высокой часто-
той коммутации тиристоров.
Несмотря на этот недостаток инверторы с индивиду-
альной и фазовой коммутацией тиристоров (и транзистор-
ные) используются в весьма перспективных преобразовате-
лях частоты с инверторами с ШИМ, применяемых в приво-
дах с глубоким регулированием скорости. Отличитель-
ной особенностью этих инверторов является не только
возможность регулирования в них как напряжения, так
п частоты от нуля до номинального значения, ио и полу-
чение формы выходного тока, близкой к синусоидальной.
Это позволяет в таких системах обеспечить весьма широкий
диапазон регулирования угловой скорости асинхронного
двигателя и уменьшить потери в нем от высших гармоник
напряжения. При использовании инверторов с ШИМ отпа-
дает необходимость в источнике регулируемого выпрям-
ленного напряжения, что упрощает силовую схему и позво-
ляет получить коэффициент мощности преобразователя,
близкий к единице. Рассмотрим принцип действия такого
инвертора (рис. 4.53, а). Нагрузка zH присоединяется к ис-
174
точнику питания с напряжением EI2 с помощью ключа К,
переключаемого с высокой частотой из положения 1 в поло-
жение 2 и наоборот. Если время Д^ нахождения ключа в по-
ложении 1 равно времени Д/2 нахождения ключа в положе-
нии 2, то среднее значение напряжения на нагрузке за пе-
риод несущей частоты равно нулю. Когда Д^ #= Д/2, то
(рис. 4.53, б) среднее значение напряжения на нагрузке
за период несущей частоты равно:
6г„.ср = £(д;1-д;2)/2т, (4.71)
где т = Д^ + Д/2 — период несущей частоты; Д^, Д/2 —
соответственно время нахождения ключа К в положениях
1 и 2.
Рис. 4.53. К пояснению принципа действия инвертора с ШИМ.
а — эквивалентная схема однофазного инвертора с синусоидальной ШИМ;
б — график напряжения и тока регулируемой частоты в нагрузке при по-
стоянной несущей частоте и неизменном выпрямленном напряжении на входе
инвертора.
Если при постоянной несущей частоте изменить соотно-
шения между Д/j и Д/2 по синусоидальному закону (Д^ —
— Д/2)/т = ц sin Qt, то среднее значение напряжения на на-
грузке за период несущей частоты также будет меняться по
синусоидальному закону (ы„у на рис. 4.53, б) с частотой мо-
дуляции:
£4,cP = (p£sin Q/)/2; (4.72)
здесь Й — круговая частота модуляции (выходная частота);
р — коэффициент глубины модуляции, показывающий, в ка-
ких пределах изменяется длительность интервалов Д/г1
и Д/2 в течение периода частоты модуляции.
При р = 1 Д/т и Д^2 изменяются от 0 до т и амплитуда
среднего значения напряжения на нагрузке равна £/2.
Таким образом, изменяя р и Q, можно осуществлять неза-
висимое регулирование амплитуды и частоты напряжения
175
на нагрузке при постоянной несущей частоте и неизмен-
ном выпрямленном напряжении (рис. 4.53, б).
Принципиальная схема однофазного инвертора, работа-
ющего в режиме синусоидальной ШИМ, приведена на
рис. 4.54. Здесь тиристоры VI и V2 коммутируются с по-
мощью конденсаторов С1 и С2 и реактора L так, что при
открывании тиристора V2 закрывается тиристор VI и на-
оборот. Так как тиристоры обладают односторонней прово-
димостью, то для пропускания обратного тока служат ди-
оды V3 и V4. При формировании положительной полуволны
тока проводит тиристор VI и ток нагрузки потребляется от
верхней половины источника питания. Когда открывается
тиристор V2 (закрывается тиристор VI) и ток нагрузки про-
текает в непроводяще.м направлении по отношению к тири-
стору V2, открывается тиристор V4 и ток возвращается
Рис. 4.54. Принципиальная схе-
ма однофазного инвертора, ра-
ботающего в режиме синусои-
дальной ШИМ.
в нижнюю половину источника питания. После изменения
полярности тока в нагрузке проводит тиристор V2, а во
время его закрытого состояния — диод V3. Когда открыт
тиристор V2, ток нагрузки потребляется из нижней поло-
вины источника питания, при открытом диоде V3 ток воз-
вращается в верхнюю половину.
Простейшая схема трехфазиого преобразователя частоты
с инвертором, работающим по принципу ШИМ, приведена
на рис. 4.55. Преобразователь состоит из мостового неуправ-
ляемого выпрямителя (V7 — VI2) и автономного инвертора
из шести тиристоров (VI — Кб) и шести обратных диодов
(VI'— V6'), предназначенных для передачи реактивной
мощности от двигателя М к конденсатору С. Конденсаторы
С1 — С6 и реакторы L1 — L3 осуществляют коммутацию
тиристоров. Частота на выходе преобразователя может
регулироваться ст 0 до 50 Гц и выше при практически сину-
соидальной форме тока в нагрузке. Выходное напряжение
также регулируется от нуля до максимального значения,
определяемого постоянным напряжением на входе инвер-
тора.
176
По сравнению с простейшей схемой на рис. 4 55, в кото-
рой из-за высокой частоты переключения тиристоров между
тирпсюрным мостом и мостом обратного тока устанавли-
вается постоянно циркулирующий уравнительный ток,
V10 V11 V1Z
i i А
V7 V8 VS
~ЯГцО-----
О-------г
-ЗД-ШШ
Рис 4 55 Простейшая схема трехфазного преобразователя частоты
с инвертором, работающим по поинципу ШИМ.
приводящий к снижению КПД и бесполезной загрузке вен-
тилей, лучшими показателями обладает инвертор с двухсту-
пенчатой коммутацией, схема которого приведена на
рис. 4.56.
Рис. 4 56, Схема инвертора с двухступенчатой коммутацией.
При регулировании напряжения на выходе инвертора
с поочередной коммутацией тиристоров (см. рис. 4 50)
коммутирующая способность инвертора снижается пропор-
ционально уменьшению напряжения на входе инвертора
(коммутирующая способность характеризуется максималь-
ным током нагрузки, который он способен коммутировать).
177
Коммутирующая особенность инверторов с ШИМ остается
постоянной, так как напряжение на его входе, а следова-
тельно, и напряжение на коммутирующих конденсаторах
остается неизменным.
Однако потери в инверторах с ШИМ вследствие высокой
частоты коммутации (несущая частота обычно в 8—10 раз
превышает максимальную выходную частоту) выше, чем
в инверторах с поочередной коммутацией. С другой стороны,
при питании двигателей напряжением ступенчатой формы,
которое имеет место в инверторах с поочередной коммута-
цией, КПД двигателя снижается из-за несинусоидальной
формы напряжения примерно на 1,5—2 %. В случае инвер-
тора с ШИМ потери в двигателе от высших гармоник меньше.
Суммарные потери в частотно-управляемом приводе с ин-
вертором с ШИМ оказываются несколько выше, чем в пре-
образователе с поочередной коммутацией.
Система управления инвертором с ШИМ сравнительно
сложнее системы управления АИН с поочередной коммута-
цией.
Инверторы с ШИМ могут найти широкое применение в си-
стемах электроснабжения, имеющих питающую сеть посто-
янного тока, где к тому же может быть использовано реку-
перативное торможение (например, троллейбус, трамвай
и др.).
Следует отметить, что при использовании преобразова-
телей частоты по схемам на рис. 4.46, 4.50, 4.55, 4.57 допу-
стимы только двигательный режим работы привода и дина-
мическое торможение. Торможение противовключением
в схемах с преобразователями частоты обычно не использу-
ется из-за больших токов. Для реализации рекуперативного
торможения необходимо усложнять схему выпрямителя,
выполняя его реверсивным.
В результате рассмотрения тиристорных преобразовате-
лей частоты можно наметить рекомендации по их примене-
нию. Выбор типа преобразователя зависит от типа привода
и режима его работы, а также от частоты и напряжения на
входе и выходе преобразователя. При частоте питающей
сети 50 Гц и выходной частоте до 25—12,5 Гц целесообразно
применять преобразователи с непосредственной связью
с устройствами на его входе, повышающими коэффициент
мощности.
При выходной частоте 50 Гц и ниже или выше могут
быть использованы преобразователи с автономным инвер-
тором, причем: 1) для индивидуальных и взаимосвязанных
178
нереверсивных приводов средней и малой мощности (от
200 кВт до долей киловатт) при диапазоне регулирования
частоты до 20 : 1 (для высокоскоростных приводов с номи-
нальной частотой от 100 до 2500 Гц) — преобразователь
с АИН; 2) для индивидуальных реверсивных и нереверсив-
ных приводов и особенно приводов, работающих в повтор-
но-кратковременном режиме, с диапазоном изменения ча-
стоты до 20 : 1 независимо от мощности преобразователя —
преобразователь с автономным инвертором тока (АИТ) *;
обо
К Зви,га.те.лю
Рис. 4.57. Принципиальная силовая схема преобразователя частоты
на транзисторах с промежуточным звеном постоянного тока.
3) для индивидуальных и взаимосвязанных приводов,
реверсивных и нереверсивных, с диапазоном регулирования
частоты свыше 20 : 1 независимо от мощности — преобра-
зователь с АИН с ШИМ (АИН—ШИЛ1), отличающийся,
как упоминалось, от преобразователей с АИН и АИТ высо-
ким коэффициентом мощности.
В последнее время в связи с разработкой более мощных
транзисторов, рассчитанных на напряжение до 1000 В и
на ток в несколько десятков и даже сотен ампер, стало воз-
можным производство транзисторных преобразователей ча-
стоты. На рис. 4.57 показана принципиальная силовая схема
преобразователя частоты на транзисторах с промежуточным
звеном постоянного тока и с ШИР. Напряжение от неуправ-
ляемого мостового выпрямителя регулируется ШИР, вы-
* Более подробно преобразователь с ЛИТ рассматривается в гл. 6.
179
полненным с помощью транзистора VI, затем через фильтр
LC подается на инвертор. Транзисторный преобразователь
частоты более экономичен и надежен, чем тиристорный,
из-за меньшего числа переключающих элементов. Эти пре-
образователи могут выполняться и с инверторами с ШИМ.
В этом случае количество элементов сокращается еще более
резко по сравнению с тиристорным АИН—ШИМ. При той
же схеме инвертора, что и на рис. 4.57, можно реализовать
ШИМ и убрать из схемы преобразователя ШИР и реактор L.
Транзисторные преобразователи частоты для регулируе-
мых электроприводов малой и средней мощности являются
более перспективными, чем тиристорные.
Для выявления свойств асинхронного двигателя при ча-
стотном управлении предполагаем, что преобразователь
Рис. 4.58. Схема замещения асинхронного двигателя при частотном
регулировании.
обладает неограниченной мощностью, выходное напряже-
ние которого симметрично и синусоидально. Такое представ-
ление преобразователя позволяет выявить предельные воз-
можности асинхронного двигателя и получить достаточно
простые закономерности.
Анализ характеристик асинхронного двигателя при ча-
стотном управлении можно произвести, использовав схему
замещения, приведенную на рис. 4.58. На схеме приняты
следующие обозначения:
1) относительная частота напряжения (тока) статора —
отношение частоты тока статора к ее номинальному зна-
чению:
а = /ДЛиом’
2) параметр абсолютного скольжения или относитель-
ная частота ротора:
Р = А со/<щном — f г//1ном»
180
где и1110„ — синхронная угловая скорость при номинальной
частоте /11ОК,
параметр р используется вместо скольжения s и связан
с ним отношением
s = Дсо/ац = Р/а;
здесь о»! — синхронная угловая скорость при частоте /£х;
3) относительное напряжение на статоре
У = Whom-
Момент, развиваемый двигателем,
/Иа = 3/2а/?2/Д(О = 3/2a/?2^Wili0MP. (4.73)
При подстановке в (4.73) выражения для тока Гга, най-
денного из расчета токов в схеме замещения двигателя
(рис. 4.58):
г (z, , , г, z , (4-74)
где гоя = /хоа; г1я = + /aw = /?2«/р + jxfa =
= а (/?г/р + /х?), после преобразований получим формулу
для момента двигателя:
дд 3LZному2________________7?йР___________________
' WI1IOM (&24~с2а2) ^+2RtR^ +(d*+eW) “
__ 3t/пом у2 . /Д 7^1
— W1H0M A (OCjP) ’ ( • 1
здесь & = (1 + т2); c = xot; d = /?i/x0; 6=1+1!,
где Tj и т2 — коэффициенты рассеяния соответственно для
статора и ротора, тг = Xj/хц и т2 = х2/х0; т — общий коэф-
фициент рассеяния,
Т = Tj + Т2 + ТХТ2.
Когда регулирование производится при напряжении,
зависящем только от частоты и не зависящем от нагрузки
Р, то абсолютное критическое скольжение равно:
Рк(а) = ±/?1/ (4-76)
а максимальный момент
Л4К (а) = -------------‘----------. (4.77)
2<o11IOM flja д:|/(7+-Л<2)(Д2 + е2а2)
181
Анализ выражения (4.77) показывает, что при сравни-
тельно больших частотах, когда значением Лу по сравнению
с *к = *! + х? можно пренебречь, максимальный момент
Двигателя при изменении частоты постоянен Л4ка =
= const, если напряжение изменяется пропорционально
частоте, т. е. у = а или U/f =- const.
При дальнейшем снижении частоты активное сопротив-
ление статора R1 становится соизмеримым со значением хл
и максимум момента двигателя снижается (рис. 4.59). Это
происходит как вследствие
уменьшения потока двига-
теля из-за увеличивающей-
ся доли падения напряже-
ния на Rt от общего при-
ложенного напряжения,
так и уменьшения абсолют-
ного критического сколь-
жения, определяемого фор-
мулой (4.76), что приводит
Рис. 4.59. Механические харак-
теристики асинхронного двига-
теля при частотном управлении
по закону U/f = const.
Даже при неизменном потоке к уменьшению момента вслед-
ствие уменьшения тока ротора в соответствии с выраже-
нием М = k<t>r2 cos ф2.
Для поддержания достаточной перегрузочной способно-
сти во всем диапазоне регулирования необходимо при ма-
лых частотах уменьшать напряжение в меньшей степени,
Чем снижается частота.
Приравняв единице отношение максимального момента
При номинальной частоте к максимальному моменту для лю-
бой частоты, получим закон регулирования напряжения,
Когда максимальный момент двигателя сохраняется:
у = I / Ria (&г + с2«2У(Л2 + е'2оД
V R, i /(&2 + c2)(ci2+e2) ‘ ( '
Однако управление по этому закону связано с увеличе-
нием потока двигателя в точке максимума момента при-
мерно обратно пропорционально ]Дрка, что приводит к на-
сыщению стали двигателя в случае большого диапазона ре-
агирования. Поэтому применение закона (4.78) ограничи-
182
вается диапазоном регулирования частоты вниз от номи-
нальной до (3 4- 7) : i.
Диапазон регулирования угловой скорости определя-
ется статизмом, который может быть допущен при малой
угловой скорости.
Если момент нагрузки принять равным Л4НОМ = const;
Рс = ₽,ом и управлять двигателем по закону (4.78), то ста-
1изм при малой угловой скорости по аналогии с приводом
постоянного тока можно определить:
6 = Aw/«13 = p,i0,Da,
гдс Рим — номинальное скольжение; Da ~ Л.:ом//1 — диа-
пазон регулирования частоты.
Например, задаваясь допустимым статизмом 6 = 0,1
и полагая для двигателей средней мощности puosl =
— 0,03 4- 0,05, получаем максимальный диапазон регулиро-
вания двигателя (с принудительной вентиляцией) равным
Dama^ (3 2) : 1.
Регулирование ниже основной скорости может произво-
диться с постоянным моментом нагрузки, если двигатель
имеет независимую вентиляцию. В тех случаях, когда
используется самовентилируемые двигатели, у которых
со снижением скорости уменьшается теплоотдача, допусти-
мая нагрузка должна быть снижена при длительной работе
на низких скоростях. При частотном регулировании ско-
рости и номинальном моменте потери уменьшаются за счет
снижения потерь в стали, что позволяет в меньшей мере сни-
жать его нагрузку, чем при других способах регулирова-
ния. О коэффициенте завышения мощности в связи с ухуд-
шением теплоотдачи при снижении скорости см. § 4.9.
При вентиляторной нагрузке в разомкнутой системе,
управляемой по закону Ulf = const, диапазон регулирова-
*Ч1Я может быть значительно расширен до Damax^ (20 4-
10) : 1 при <5 = 0,1. В этом случае может быть использо-
ван самовентилируемый двигатель без завышения его уста-
новленной мощности.
Обычно для вентиляторной нагрузки рекомендуется за-
кон управления у — а2 или UJp = const, получаемый нз
квадратичной зависимости момента нагрузки от угловой
скорости и квадратичной зависимости максимального мо-
мента идеализированного двигателя — 0) от напряже-
ния и частоты. Применимость этого более экономичного,
но более сложного для реализации закона ограничивается
183
из-за принятых идеализаций двигателя и нагрузки (в ко-
торой не учтена постоянная составляющая момента) диапа-
зоном регулирования до 2:1. При больших диапазонах
целесообразно использовать закон у = а.
Частотнее регулирование при изменении частоты и соот-
ветственно подводимого к статору напряжения может про-
изводиться не только ниже основной угловой скорости, но
и частично (в соответствии с допустимым превышением угло-
вой скорости над синхронной по условиям механической
прочности) выше основной.
Регулирование угловой скорости выше основной обычно
производится при постоянной мощности нагрузки. При ре-
гулировании угловой скорости вниз от основной потребу-
ется завышение установленной мощности двигателя с неза-
висимой вентиляцией пропорционально диапазону регули-
рования, что экономически нецелесообразно. Для нагрузки
с постоянной мощностью рекомендуется закон экономич-
ного регулирования у = ]/а, или = const, полу-
ченный аналогично случаю вентиляторной нагрузки. При-
менение этого закона при регулировании угловой скорости
вверх от основной требует завышения установленной мощ-
ности преобразователя частоты пропорционально Da, где
Da = fimaxlfimu- Поэтому обычно при диапазоне регулиро-
вания до 2 : 1 вверх от основной угловой скорости регули-
рование производят при неизменном номинальном напря-
жении, т. е. Uy = (71110м = const. В этом случае в первом
приближении поток двигателя и допустимый момент убы-
вают обратно пропорционально увеличению частоты, что
соответствует нагрузке, но перегрузочная способность дви-
гателя уменьшается обратно пропорционально VDa.
В замкнутых системах частотного управления могут быть
получены характеристики требуемого качества в диапазоне
регулирования 10 000 : 1 и более.
Частотное регулирование угловой скорости является эко-
номичным, так как управление двигателем производится
при малых скольжениях. Кроме того, в замкнутых системах
можно управлять двигателем, достигая минимума потерь
в нем или минимума потребляемого двигателем тока или
экстремума других энергетических показателей, так как
имеется возможность регулировать напряжение в функции
нагрузки. Частотное регулирование угловой скорости
обычно плавное, бесступенчатое. Но оно требует примене-
ния относительно сложного преобразователя.
184
Большим достоинством частотного регулирования яв-
ляется возможность реализации высоких регулировочных
свойств, не уступающих приводу постоянного тока, в элек-
троприводе с бесконтактным асинхронным двигателем с ко-
роткозамкнутым ротором — наиболее простым, надежным
и дешевым электрическим двигателем.
4.13. Асинхрониыч регулируемый
электропровод в каскадных системах
Каскадные электроприводы с асинхронными двига-
телями с фазным ротором в отличие от асинхронных электроприводов
с параметрическими и импульсными способами управления целесо-
образно применять в установках средней и большой мощности, рабо-
тающих в продолжительном режиме при относительно небольших
диапазонах регулирования К таким установкам относятся, например,
воздуходувки, центробежные насосы, шахтные вентиляторы, приводы
бумажных машин, шаровые мелыыцы и др.
Каскадные электроприводы позволяют полезно использовать энер-
гию скольжения, повышая при этом эффективность электропривода.
Они легко поддаются автоматизации и позволяют обеспечить оптималь-
ный режим работы производственного механизма.
Каскадные электроприводы в зависимости от того, как реализу-
ется энергия скольжения, разделяются на электрические и электро-
механические. В электрических каскадах энергия скольжения за вы-
четом потерь возвращается в питающую сеть. В электромеханических
энергия скольжения, преобразованная в механическую энергию, воз-
вращается па вал основного асинхронного двигателя.
По типу устройства, преобразующего энергию скольжения, раз-
личают электромашииные, вентильно-машинные и вентильные каскады.
Электромашинные каскады с асинхронными двигателями не поле-
чили широкого применения, так как предусматривали включение
в роторную цепь одноякорного преобразователя, отличающегося
повышенной инерционностью, неудовлетворительными условиями ком-
мутации и неустойчивой работой при малых скольжениях.
Бурное развитие силовой полупроводниковой техники и особенно
тиристоров, а также интегральных систем управления значительно
расширило область использования вентильных каскадных приводов,
повысив их надежность и КПД.
Наиболее простыми схемами вентильных и вентильно-машинных
каскадов являются схемы с промежуточным звеном постоянного тока.
Принципиальная схема вентильно-машинного электрического каскада
с промежуточным звеном постоянного тока приведена на рис. 4 60.
Здесь обмотка статора основного асинхронного двигателя Ml при-
соединена к сети переменного тока промышленной частоты, а роторная
обмотка соединена с выпрямительным мостом В. Энергия скольже-
ния, преобразуемая выпрямительным мостом, реализуется двигателем
постоянного тока М2. С помощью синхронного генератора G, нахо-
дящегося на одном валу с двигателем постоянного тока, энергия сколь-
жения за вычетом потерь возвращается в питающую сеть.
Регулирование угловой скорости двигателя Ml осуществляется
изменением добавочной ЭДС, создаваемой машиной М2 в цепи выпрям-
185
энного тока посредством воздействия на ток возбуждения этой ма-
шины при помощи R1.
При работе каскада в двигательном режиме выпрямленное напря-
жение ротора должно уравновешивать противо-ЭДС машины постоян-
ного тока, падение напряжения в активных сопротивлениях роторной
цепи, а также падение напряжения, обусловленное процессом комму-
тации вентилей.
Ток, протекающий в цепи выпрямленного напряжения, опреде-
ляется по формуле
Id—(ErfoS Едоб 2ДС/)//?э.
(4.79)
где Еп-0 — среднее значение ЭДС на выходе выпрямительного моста
при скольжении s= 1,
£rf0 = /2£21t^-sin^-; (4.80)
Rs—эквивалентное сопротивление роторной цепи; Е2К— линейное
напряжение на кольцах ротора /И/ при s— 1; Елод— добавочная
ЭДС, определяемая противо-ЭДС машины постоянного тока М2; —
падение напряжения на вентилях.
Рис. 4.60, Принципиальная
схема вентильно-машинного
электрического каскада с
промежуточным звеном по-
стоянного тока.
Если принять /а = 0, то можно, отвлекаясь от области прерыви-
стых токов, найти скольжение, отвечающее угловой скорости идеаль-
ного холостого хода:
-’о = (Едоб + 2Л(7)/£'г/о. (4-81)
или, для упрощения полагая = 0, получить;
Wji Щ) (1 Едоб/Е2к)> (4.82)
где соо — синхронная угловая скорость асинхронного двигателя Ml.
Таким образом, угловая скорость идеального холостого хода
каскада снижается по мере увеличения £дод.
Мощность скольжения, проходящая через роторную цепь, вос-
принимается, за исключением потерь, двигателем постоянного тока М2
и равна:
Mwfls = E(!Qsld—mx^sl (4.83)
здесь т — число фаз выпрямителя (для мостовой схемы т = 6); хд—
приведенное к цепи ротора индуктивное сопротивление фазы асин-
хронного двигателя,
186
Из (4.83) момент двигателя
После соответствующих преобразований получим:
Л4 =
2л
(S — So)
(4.84)
(4.85)
' ~ «о
где /?э= тхд«/2л+2/?д+/?я; йд—приведенное. к цепи ротора
активное сопротивление фаз асинхронного двигателя; сопро-
тивление якорной цепи двигателя постоянного тока М2.
Пренебрегая в (4.85) слагаемым тхл (s — s0) /2л по сравнению с кэ
(при значениях s, близких к s0), получаем:
M = £2do(s-s0)/WoR3. (4.86)
На рис. 4.61 приведены механические характеристики электриче-
ского каскада.
Полное использование асинхронного двигателя в электрическом
каскаде достигается в случае постоянства момента нагрузки (при
независимой вентиляции) на его
валу, поэтому вентильно-машин-
иый электрический каскад иног-
да называют каскадом постоян-
ного момента.
В рассматриваемом случае
установленная мощность выпря-
мительного моста и машины
Рис. 4.61. Механические харак-
теристики электрического кас-
када.
постоянного тока определяется наибольшим напряжением на кольцах
ротора, пропорциональным скольжению, и наибольшим током, зави-
сящим от момента нагрузки.
При постоянном моменте нагрузки наибольшему напряжению
в роторной цепи, обусловленному диапазоном регулирования, соот-
ветствует наименьшая угловая скорость асинхронного двигателя и
наибольший, равный номинальному, ток нагрузки (при независимой
вентиляции).
В случае вентиляторной нагрузки наибольшему току нагрузки
соответствует минимальное напряжение. Однако как при регулирова-
нии с постоянным моментом, так и при регулировании с вентилятор-
ным моментом установленные мощности преобразовательных агрега-
тов будут одинаковы.
Активная мощность синхронного генератора определяется мак-
симальной мощностью скольжения. Отсюда следует, что чем больше
диапазон регулирования угловой скорости, тем больше установлен-
ная мощность устройств в роторной цепи асинхронного двигателя,
преобразующих мощность скольжения. Поэтому практический диа-
пазон регулирования угловой скорости не превышает D = 2 : 1; при
этом суммарная установленная мощность вентильно-машинного элеи-
187
трического каскада составляет 250 % и разделяется так: 100 % —
основной асинхронный двигатель, 50 % —выпрямительный мост,
50 % —машина постоянного тока и 50 % —синхронный генератор.
С увеличением диапазона регулирования угловой скорости возрастает
установленная мощность каскада, достигая 400 %.
Регулирование угловой скорости может осуществляться только
вниз от основной, поэтому этот тип каскада относится к приводам,
обладающим однозоиным регулированием. Плавность регулирования
угловой скорости неограниченна, так как она определяется плав-
ностью изменения тока возбуждения машины постоянного тока. Регу-
лирование экономичное. Коэффициент полезного действия электро-
привода при номинальной нагрузке и максимальной угловой скорости
каскада составляет примерно 6,82—0,85 (уменьшаясь с уменьшением
нагрузки и угловой скорости). Коэффициент мощности собственно
каскада при указанных условиях
составляет 0,7—0,75. однако может
быть увеличен за счет перевозбуж-
дения синхронной машины агрегата
постоянной скорости.
Стабильность угловой скоро-
сти определяется жесткостью ме-
ханических характеристик и су-
щественно выше, чем при реостат-
ном и других видах иараметриче-
Рнс. 4.G2. Принципиальная схема
веитпльно-машинпогс электромеха-
нического каскада.
ского и импульсного регулирования, но хуже, чем при частотном
управлении.
Принципиальная схема вептильно-машппного электромеханиче-
ского каскада приведена на рис. 4.62. Как н в предыдущем случае,
к сети переменного тока присоединяется статор асинхронного двига-
теля Ml, ротор которого механически связан с двигателем постоян-
ного тока М2. Электрически якорь двигателя соединен через выпря-
мительный мост с обмоткой ротора; реализуемая двигателем постоян-
ного тока энергия скольжения за вычетом потерь возвращается па вал
привода.
Регулирование угловой скорости привода осуществляется, как
и в случае вептилыю-машинного электрического каскада, изменением
добавочной ЭДС, создаваемой двигателем постоянного тока, в цепи
выпрямленного напряжения.
Управляющим воздействием при регулировании угловой ско-
рости является изменение тока возбуждения двигателя постоянного
тока. С увеличением тока возбуждения снижается угловая скорость
двигателей. Очевидно, что в электромеханическом каскаде ЭДС ма-
шины постоянного тока зависит не только от тока возбуждения, по
и от угловой скорости асинхронного двигателя, поскольку обе машины
находятся на одном валу.
Электромагнитный момент, развиваемый каскадом, равен сумме
моментов асинхронного двигателя и машины постоянного тока:
Мкаск = ЯИ1 + Ж12 = /rf ЙФ / (4.87)
(Oq “
188
Уравнение равновесия ЭДС роторной цепи
= + (4.88)
Подставляя в (4.88) вместо Ел,„ = ^ФИйь)() (I — s), находим сколь-
жение асинхронного двигателя, соответствующее угловой скорости
идеального холостого хода каскада (полагая l(t = 0):
so = + 2 A^)/(£rfo“i_^®4i2wo)- (4.89)
С учетом (4.89) можно из (4.88) найти выражение для тока
s°) -Ь^®Л12шо)/^э' (4.90)
Подставляя из (4.90) значение тока в (4.87), после преобразова-
ний получаем:
(Е„-п /гФ и,оп)2 s — sn Г тх„ 1
и/2 0) -^[^-^(s-so)]. (4.9!)
По аналогии с (4.86) можно записать:
Мкаск =(£>0 + *Ф«пю")2 (4.91а)
Ы(| Кэ
Приведенное выражение для момента каскада справедливо при
токах, соответствующих так называемому первому режиму работы
схемы выпрямления.
Рис. 4.63. Примерные механиче-
ские характеристики вентильно-
машинного электромеханичес-
кого каскада.
Из (4.89) и (4.91) следует, что с увеличением магнитного потока
машп1ы постоянного тока момент каскада возрастает, при этом угло-
вая скорость его снижается. Примерные характеристики вентитьно-
машннного электромеханического каскада приведены на рис. 4.63.
Без учета потерь в машинах мощность, отдаваемая асинхронным
двигателем па вал, равна:
PMCx = Pi(l~s). (4-92)
где Pj — мощность, потребляемая из сети; s — скольжение асинхрон-
ного двигателя.
Мощность скольжения, реализуемая двигателем постоянного тока
н возвращаемая на вал каскада, равна'
Ps = PlS. (4.93)
Таким образом, суммарная мощность, развиваемая каскадом
независимо от скольжения (и от угловой скорости), будет поддержи-
ваться постоянной. Поэтому иногда вентильно-машинныи электро-
механическии каскад называют каскадом постоянной мощности. При
189
этом следует иметь в виду, что поддержание постоянства мощности,
а следовательно, возрастание момента каскада со снижением его угло-
вой скорости может быть обеспечено соответствующим выбором ма-
шин каскада и независимой нх вентиляцией.
Установленная мощность машины постоянного тока может быть
найдена из равенства
P1S = MM2m0(1-s), (4.94)
откуда
^>л12 = ^.1126)о = s) (4.95)
Уже при s = 0,5 Рл,л = Pmv c Poctom скольжения, т. e, с уве-
личением диапазона регулирования, мощность машины постоянного
тока существенно возрастает по сравнению с мощностью РЛ11, что
вытекает из (4.95), поэтому диапазон регулирования ограничен прак-
тически значением 2:1. Вентильно-машинный каскад позволяет полу-
чить плавное однозонное (вниз от основной) экономичное регулирова-
ние.
Коэффициент полезного действия каскада при регулировании
угловой скорости и полной нагрузке составляет примерно 0,82—0,85,
а коэффициент мощности асинхронного двигателя при номинальной
угловой скорости и полной нагрузке составляет примерно 0,75—0,8.
Стабильность угловой скорости примерно такая же, как и в случае
электрического каскада.
В настоящее время электромеханический агрегат посто-
янной скорости в электрическом каскаде заменяется инвер-
тором. Принципиальная схема такого каскада, называе-
мого асинхронно-вентильным (АВК), приведена на рис. 4.64.
Здесь асинхронный двигатель Л4 подключен со стороны
статора к сети переменного тока, роторная цепь его через
выпрямитель В, инвертор И и согласующий трансформа-
тор Т присоединяется к той же питающей сети. Для сгла-
живания выпрямленного тока и нормальной работы инвер-
тора включен реактор L. Принцип действия этого каскада
аналогичен действию вентильно-машинного каскада и со-
стоит в том, что в цепь выпрямленного тока ротора вво-
дится добавочная ЭДС, получаемая регулированием угла р
опережения включения тиристоров инвертора.
Ток в роторной цепи
la = - frfo,, cos 0 - £ (4.96)
где Еа0 — 1,35 Ег&', Еаок — ЭДС холостого хода инвертора
при [3 = 0, EdOl, = 2,34 Е2ф,т; Е.2ф т — ЭДС фазы трансфор-
матора; SA67 — суммарное падение напряжения в венти-
лях роторной и инверторной групп преобразователя; R3 —
эквивалентное сопротивление, приведенное к роторной
цепи;
— Зхд5/л ф- З.гт/л ф- 2/?д -|- RL ф- 27?т
190
xT, RT — соответственно индуктивное и активное сопротив-
ления фазы трансформатора, приведенные к цепи ротора;
Rl — активное сопротивление реактора.
Уравнение для момента асинхронного двигателя оказы-
вается аналогичным полученному для электрического вен-
тильно-машинного каскада (4.83). Ток ротора равен:
I<i = EM(s — & cos РН-Л.)//?э; (4.97)
здесь е = Ed0M/Edo\ !Ed0.
Из (4.97) при Id — 0, пренебрегая А<7, находим:
So = ЕМа cos P/Erf0. (4.98)
Используя (4.83), после преобразований получаем при-
ближенное выражение для момента
M^-^^-(s-s0), (4.99)
<Оо7?э
где /?э0 = Зхд50/л + Зхт/л + 2/?д -(- Rl + 2/?т.
Формула не учитывает высших гармоник тока, искаже-
ний механических характеристик в области прерывистых
Рис 4 64 Принципиальная схе-
ма асинхронно-вентильного кас-
када.
Рис 4 65 Примерные механи-
ческие характеристики асин-
хронно вентильного каскада
токов, а также различных режимов работы выпрямителя,
в которых внешняя характеристика выпрямителя резко
падает.
Примерные механические характеристики АВ К пока-
заны на рис. 4.65 (момент выражен в долях максимального
момента двигателя в естественной схеме включения). Из
191
них видно, что при некотором угле р перегрузочная способ-
ность АВК падает. Регулировочные свойства АВК при
уменьшении угловой скорости ограничены некоторым допу-
стимым по условиям устойчивой работы инвертора мини-
мальным угло.м р и током инвертирования.
Максимальная угловая скорость АВК при номинальном
моменте составляет примерно О,9ыо; минимальная угловая
скорость практически принимается равной О,5ы0. Даль-
нейшее снижение угловой скорости приводит к увеличе-
нию установленной мощности всех силовых элементов,
включенных в роторную
цепь, точно так же, как и
в электрическом вентиль-
но-машинном каскаде.
Регулирование угловой
скорости в АВК однозон-
ное (вниз от основной),
плавное бесступенчатое,
экономичнее. КПД асин-
хронно-вентильного кас-
Рис. 4.66. Примерная зависи-
мость коэффициента мощности
от скольжения для асинхронно-
вентильного каскада небольшой
мощности.
када достигает 0,82—0,9 при максимальной угловой скоро-
сти и те.м выше, чем больше его мощность. При снижении
угловой скорости КПД падает. Если КПД сравнительно
высок, то коэффициент мощности АВК оказывается низ-
ким, что обусловливается значительным суммарным потреб-
лением реактивной мощности двигателем и инвертором и
искажением тока инвертором. Коэффициент мощности
зависит не только от нагрузки, но и от угловой скорости
асинхронного двигателя. Примерная зависимость cos фк от
скольжения и момента М* = для АВК небольшой
мощности дана на рис. 4.66.
Стабильность угловой скорости АВК хуже, чем у вен-
тильно-машинного электрического каскада. Регулирование
осуществляется при независимой вентиляции с постоянным
(номинальным) моментом нагрузки.
Следует отметить, что в рассмотренных схемах каскадов
двигатель может работать в двигательном режиме при ско-
192
рости ниже синхронной, в режимах противовключения,
динамического торможения и генераторном параллельно
с сетью при скорости выше синхронной. При этом энергия
скольжения рекуперируется в сеть. Двигатель не может
работать в генераторном режиме при скорости ниже син-
хронной и двигательном режиме при сверхсинхронной ско-
рости, когда энергия должна поступать из сети в ротор,
что невозможно при нереверсивном неуправляемом выпря-
мителе в роторной цепи. Эти режимы могут быть реализо-
ваны в машине двойного питания.
4.14. Регулируемый асинхронный
электропривод в системе двойного
питания
Подсоединяя статор асинхронного двигателя
с фазным ротором к питающей сети переменного тока с не-
изменным напряжением и частотой, а в ротор его подавая
напряжение с изменяемой частотой и амплитудой, можно
Рис. 4.67. Схема включения (а) и замещения (б) МДП.
<Г)
плавно регулировать угловую скорость двигателя. Такой
двигатель принято называть машиной двойного питания
(МДП). Схемы включения и замещения МДП показаны на
рис. 4.67, а, б.
На основании схемы замещения система уравнений для
первичного и вторичного напряжений имеет вид:
= Л (.Ri + Mio) +
= /'a (R'Js + jx'l0) -|- // л,
7 Чиликин М. Г., Сандлер А. С. 193
(4.100)
где х]0 = Xi + х0; х'2о = Х2 + х0; 9 — угол сдвига между
напряжением и приведенным к цепи статора напряже-
нием и2.
Если пренебречь потерями в стали, то для электромаг-
нитного момента можно записать формулу
M = 3(/lU1-HRl)/<aa. (4.101)
Подставляя в (4.101) выражение для тока, полученное
из (4.100), и не учитывая составляющей намагничивающего
тока в первичном токе, после преобразований находим:
дд___ 3 f.,2 R'2 1 R2 1 .
+ UrU’i у [хк sin 9 — (/?a/s — /?i) cos 9]j, (4.102)
где га = (/?! + R2/s)2 + 4; хк = xY + х2.
Момент, развиваемый МДП, состоит из трех составляю-
щих: первая — синхронный момент при питании со стороны
статора напряжением и замкнутой накоротко вторичной
обмотке; вторая — при питании со стороны ротора напря-
жением U2 и замкнутой накоротко первичной цепи; третья—
синхронизирующий момент, обусловленный возбуждением
со стороны ротора и зависящий от напряжения и его фазы.
Выведенное соотношение для момента в установив-
шемся режиме дано в общем виде независимо от способа
управления машиной. Установившийся режим любой элек-
трической машины переменного тока определяется соотно-
шением
fl = fi + /в,р>
где fi, /2 и Д,,р —соответственно частоты напряжений, под-
водимых к обмоткам статора и ротора; /„,р = ыр/2л.
Указанное условие может быть выполнено, например,
при неизменной частоте питающей сети, либо когда /2 яв-
ляется независимой переменной, а Д.1Р —ее функция, либо
когда Д, р— независимая переменная, a — ее функция.
Первый случай — f2 — независимая переменная, аД,1Р —
ее функция:
/в,р = А-/2> или А,.р = ф(/г), (4.103)
т. е. угловая скорость ротора будет изменяться в том слу-
чае, если управление производится изменением частоты на-
пряжения, приюженного к обмоткам ротора, но эта частота
194
не изменяется при изменении нагрузки. Такой режим ра-
боты МДП называется синхронным. В частном случае,
когда f2 — 0, что означает питание роторной обмотки по-
стоянным током, машина работает в установившемся ре-
жиме с синхронной угловой скоростью как обычная синхрон-
ная машина.
Схема включения МДП, работающей в синхронном ре-
жиме, соответствует рис. 4.67, а. На рис. 4.67, а приняты
следующие обозначения: ПЧ — преобразователь частоты
с непосредственной связью; СУ — система управления
преобразователем. На вход преобразователя подают трех-
фазное напряжение с частотой Д, а на выходе получают
зрехфазное напряжение £72, амплитуду и частоту f2 которого
можно изменять в широких пределах. Для снижения угло-
вой скорости МДП необходимо увеличить частоту f2 и пово-
ротом вектора 02 в соответствующем направлении обеспе-
чить отрицательный электромагнитный момент, что приве-
дет к замедлению электропривода. Снижение угловой ско-
рости будет происходить до тех пор, пока не наступит уста-
новившийся режим, при котором возникнет равновесие
между моментом МДП и моментом нагрузки при заданном
значении частоты f2. Для увеличения угловой скорости при-
вода надо уменьшить частоту f2 и установить соответствую-
щие значения модуля и направление вектора С2, при этом
увеличится ток в роторной цепи МДП, возрастет электро-
магнитный момент, привод начнет ускоряться до угловой
скорости, при которой наступит установившийся режим.
За счет легко осуществляемого посредством преобразо-
вателя частоты изменения чередования фаз напряжения,
вводимого в цепь ротора, можно заставить машину работать
с угловой скоростью выше синхронной. Так как МДП в рас-
сматриваемом режиме работает как синхронная машина,
то угловая скорость ее не зависит от нагрузки, а развивае-
мый ею момент определится при заданных Ux и 02 углом
сдвига между ними. Если МДП работает при подсинхрон-
пой угловой скорости (/2 > 0) в двигательном режиме,
когда мощность, развиваемая машиной, отдается на вал
(рис 4.68, а), то она потребляет из сети мощность, равную
сумме:
Р1 = Рг + Р^ (4.104)
где Ps — мощность скольжения.
В роторе генерируется мощность скольжения Ps и через
преобразователь за вычетом потерь возвращается в сеть.
7* 195
Рис. 4.68. Направление потоков мощности в МДП в двигательном (а)
и генерагорпом (б) режимах и механические характеристики (в) при
подсинхронной угловой скорости и синхронном режиме.
А^
fz<o
Гг~О
О
Рис. 4.69, Направление потоков мощности в МДП в двигательном (а)
и генераторном (б) режимах и механические характеристики (в) при
сверхсинхронной угловой скорости и синхронном режиме,
196
Изменяя фазу вводимого в ротор напряжения, по не меняя
частоты, можно при соответствующей нагрузке заставить
работать МДП в генераторном режиме (рис. 4.68, б). В этом
случае при Д > f2 без учета потерь мощность, отдаваемая
в сеть, складывается из мощности, поступающей с вала и
со стороны ротора, т. е.
Pi^—P2-Ps- (4.105)
Механические характеристики МДП показаны для рас-
сматриваемой области угловых скоростей и режимов на
рис. 4.68, в.
Обмотки МДП могут быть так включены, что поля ста-
тора и ротора будут вращаться встречно (Д, <; 0); тогда угло-
вая скорость двигателя
соо ~ 2л (/] 4-/2)/Р- (4.106)
При сверхсинхронной угловой скорости МДП и работе
в двигательном режиме машина потребляет мощность и со
стороны статора и со стороны ротора, отдавая ее на вал
(рис. 4.69, а). Эта мощность равна:
P2 = Pr + Ps. (4.107)
В генераторном режиме мощность с вала передается
в сеть и статорной и роторной цепями (рис. 4.69, б), а соот-
ношение этих мощностей определяется равенством (4.107).
Механические характеристики МДП показаны для рас-
сматриваемой области угловых скоростей и режимов на
рис. 4.69, в.
Как видно из рис. 4.68, а, б и 4.69, а, б, для обеспече-
ния всех режимов работы МДП при угловых скоростях выше
и ниже синхронной преобразователь частоты должен обла-
дать двусторонней проводимостью и обеспечивать бескон-
тактное изменение чередования фаз. Для этого наиболее при-
годен преобразователь частоты с непосредственной связью.
В установившемся процессе и синхронном режиме ра-
боты МДП скольжение сохраняется неизменным, поэтому
ее устойчивость определяется характером изменения угла 6.
Второй случай — fBiP — независимая переменная, a f2 —
ее функция:
/2 = А-/в,Р. или /г = ф(А,.р). (4.108)
Здесь при изменении частоты ротора, например, вслед-
ствие изменения нагрузки должна соответственно изме-
няться частота напряжения, приложенного к обмоткам ро-
тора. Этому отвечает асинхронный режим работы МДП.
197
На рис. 4.70 дана структурная схема МДП для этого режима.
На одном валу с асинхронным двигателем М установлен
датчик частоты вращения ДЧВ, представляющий собой син-
хронный тахогенератор с возбуждением от постоянных маг-
нитов с числом полюсов, равным числу полюсов двига-
теля М. Датчик ДЧВ одновременно служит датчиком угло-
вого положения ротора. На входы блока формирования
напряжения частоты скольжения ФНЧС подаются сигналы
с частотой питающей сети и частотой вращения. На выходе
Рис. 4.70. Структурная схема
МДП для асинхронного режима
работы.
этого блока вырабатываются
синусоидальные сигналы, ча-
стота которых соответствует
(4.108). Напряжение с часто-
той сети подается на блок ФНЧС через фазовращающее
устройство ФВ и регулятор напряжения PH, благодаря
чему на выходе ФНЧС получают регулируемое по амплитуде
и фазе напряжение. Регулирование угловой скорости МДП
в этом режиме осуществляется воздействием на амплитуду
(посредством PH) и фазу (посредством ФВ) вводимого в ро-
торную цепь напряжения. Для получения механических
характеристик требуемого вида необходимо производить
одновременное изменение амплитуды и фазы роторного на-
пряжения по некоторому закону или посредством замкну-
тых систем регулирования; желательно также регулирова-
ние фазы роторного напряжения в функции нагрузки.
В асинхронном режиме работы МДП благодаря введе-
нию обратной связи по положению ротора, осуществляемой
ДЧВ, устойчивость работы МДП определяется характером
198
изменения скольжения; при этом, как показывают более
подробные исследования, МДП может устойчиво работать
с любым углом между ЭДС статора и напряжением сети
(кроме Ойл) как в двигательном, так и в генераторном ре-
жимах. Это одно из преимуществ асинхронного режима по
сравнению с синхронным.
Механические характеристики МДП для асинхронного
режима приведены на рис. 4.71, где ы* = со/со0|10м, —
= Л4/М„ом.
Диапазон регулирования угловой скорости МДП опре-
деляется предельной частотой на выходе преобразователя.
В обычном преобразователе частоты с непосредственной
связью и естественной коммутацией вентилей наибольшее
значение частоты на его выходе не превышает половины
частоты питающего напряжения, поэтому минимальная уг-
ловая скорость при регулировании МДП вниз от синхрон-
ной составит О,5о)0. Так как МДП допускает двухзонное ре-
гулирование, то верхний предел скорости может достигать
1,5со0, т. е. общий диапазон регулирования не превосходит
3:1. Регулирование во всем диапазоне плавное экономич-
ное, поскольку энергия скольжения за вычетом потерь
в цепи ротора и в преобразователе либо возвращается в сеть,
либо передается на вал (при сверхсинхронной скорости в ре-
жиме двигателя). При таком регулировании стабильность
скорости высокая.
Допустимая нагрузка МДП в установившемся продол-
жительном режиме определяется номинальными токами
в роторной и статорной цепях (постоянство момента Л4Д0П =
— Л4110м), если пренебречь ухудшением условий охлажде-
ния при регулировании угловой скорости вниз от синхрон-
ной. Регулирование вверх от синхронной обеспечивает не-
которое улучшение условий охлаждения, поэтому допу-
стимые токи в обмотках машины могут несколько превосхо-
дить номинальные значения.
Допустимую нагрузку нельзя оценивать только по
статорному току, проверка должна быть произведена и по
роторному току, так как область допустимых первичных то-
ков не совпадает с областью допустимых вторичных токов.
Следует заметить, что при значениях скольжения, превы-
шающих номинальные, для двигательного и генераторного
режимов имеют место ограничения по амплитуде и фазе вто-
ричного напряжения.
В МДП может осуществляться независимое регулирова-
ние вторичного напряжения и его фазы, поэтому возможно
199
поддерживать высокий коэффициент мощности. Этим вы-
годно отличается привод с МДП от вентильных каскадов.
Реактивная мощность первичной цепи
Q^niL^ Im [Л]. (4.109)
Если раскрыть уравнение (4.109), то можно увидеть,
что оно состоит из двух членов. Первый член со знаком
минус пропорционален квадрату первичного напряжения,
он представляет собой выражение отстающей реактивной
мощности обычной асинхронной машины, не возбуждае-
мой со стороны ротора; второй член со знаком плюс —
опережающая реактивная мощность, поставляемая со сто-
роны ротора и зависящая от вторичного напряжения и его
фазы, регулируя которую можно влиять на реактивную
мощность, потребляемую со стороны статора, а следова-
тельно, и на коэффициент мощности МДП. В частности,
возможна полная компенсация реактивной мощности пер-
вичной цепи (cos Ф1 = 1), когда машина возбуждается
только со стороны ротора. Очевидно, что этому условию
соответствует равенство первого и второго членов выраже-
ния (4.109). Однако не при любом значении вторичного
напряжения cos ф* = 1. Расчеты показывают, что в прак-
тически используемом диапазоне регулирования угловой
скорости при изменении момента нагрузки от номинального
в двигательном режиме до номинального в генераторном
МДП может работать с cos фг — 1. Если cos ф* — 1 при
номинальном моменте, то при меньших нагрузках cos фг
окажется опережающим.
Для определения результирующего коэффициента мощ-
ности (cos ф2) электропривода необходимо учесть коэффи-
циент мощности вторичной цепи.
При ограниченном диапазоне регулирования частоты
скольжения для создания одного и того же магнитного
потока со стороны ротора потребуется значительно мень-
шая реактивная мощность, чем при питании со стороны
статора, поэтому результирующий коэффициент мощности
МДП может быть получен более высокий, чем у обычного
асинхронного двигателя. С увеличением диапазона регу-
лирования угловой скорости cos фх понижается. Так как
роторная цепь МДП питается от преобразователя частоты,
то для оценки cos ф2 необходимо определить активную
и реактивную мощности на его входе.
В заключение необходимо отметить, что благодаря своим
преимуществам каскады с использованием МДП могут
200
найти более широкое применение в установках, мощностью
от нескольких десятков киловатт до нескольких мегаватт,
требующих плавного и экономичного регулирования угло-
вой скорости, а также для получения высокого быстро-
действия. При этом исполнение МДП в зависимости от усло-
вий окружающей среды возможно в контактном варианте
на базе обычного асинхронного двигателя с фазным рото-
ром и в бесконтактном варианте, например в виде двух
сидящих на одном валу обычных машин с фазным ротором,
роторные обмотки которых электрически соединены (без
контактных колец и щеток) так, чтобы их магнитные поля
вращались в противоположные стороны. В последнем слу-
чае статор первой машины присоединяется к питающей
сети с неизменным напряжением и частотой, а статор дру-
гой — к преобразователю частоты с непосредственной
связью.
Перспективной оказывается и специальная бесконтакт-
ная МДП, выполненная с двумя совмещенными обмотками
на общем статоре и со специальным короткозамкнутым
ротором. Регулируемый привод с МДП может быть исполь-
зован в установках с автономным питанием, где в качестве
генератора применяется синхронная машина. Применение
практически безынерционного преобразователя частоты
в роторной цепи МДП дает возможность реализовать все ее
положительные свойства в системе автоматического управ-
ления, обеспечивающей благоприятные статические ха-
рактеристики и высокие динамические качества электро-
привода.
4.15. Чгететнсе регулирование угловой
скорости синхронного электроприЕОда
Регулируемый синхронный электропривод с частот-
ным управлением в настоящее время находит применение в произ-
водстве искусственного волокна, в прядильном производстве, на мор-
ских судах и для некоторых специальных производств.
Использование полупроводниковых преобразователей частоты от-
крывает большие возможности в отношении формирования требуемых
статических и переходных процессов частотно-управляемых синхрон-
ных электроприводов. Этот привод обладает рядом свойств, не при-
сущих асинхронному электроприводу с частотным управлением в разомк-
нутых системах, а именно.
1) стабильность угловой скорости независимо от момента на-
грузки во всем диапазоне регулирования угловой скорости;
2) высокая точность синхронного движения управляемых машин
с контролем по углу вращающихся осей;
201
3) большие значения моментов па ползучих скоростях при регу
лированип напряжения и тока возбуждения.
В регулируемом синхронном электроприводе должны быть уста-
новлены закономерности, связанные с регулированием частоты пере-
менного тока и внутреннего угла сдвига. Важное значение имеет уста-
новление законов регулирования электрических параметров синхрон-
ного двигателя при выявлении запаса статической устойчивости.
Электромагнитный момент синхронного двигателя с явновыражен-
пыми полюсами
М=_3(ЛЕ_ . 3L2/J-------И sin 20. (4.110)
ыох</ ‘ 2(0,) xdJ '
Это выражение удобно представить, пренебрегая насыщением,
в виде
М = А^ sinS + В^уУ sin 26, (4.111)
где /в — ток возбуждения синхронного двигателя; А и В — постоян-
ные величины.
Основные режимы управления синхронным двигателем:
1. Регулирование синхронного двигателя при / = const; U = var;
/в = var, является наиболее характерным для нерегулируемого син-
хронного электропривода. Формула электромагнитного момента для
этого случая:
М = clU!B sin 9Н-с2С/2 sin 20; (1.112)
здесь су = A/f; с2 = B/f2.
Для характеристики электромеханических свойств здесь удобно
рассматривать регулирование синхронного двигателя отдельно при
/в= var; U = const_H /в = const; U = var. Моментно-угловые харак-
теристики при этом'соответственно представлены на рис. 4.72 и 4.73,
2. Режим частотного регулирования синхронного электропри-
вода при U/f = const; lg = var. Для этого случая характеристики
даны на рис. 4.74, а их аналитическая зависимость имеет вид:
M = clIB sinO-j-c2 sin 26, (4.113)
где с, = AU/f‘, с2 = В (U/f)2.
3. Режим частотного регулирования синхронного электропри-
вода при U = const; /в = const; / = var. Формула электромагнитного
момента:
41 = ~ sin0 + y|- sin 20; (4.114)
здесь с, = AUIB, с2 = BU2.
Из (4.154) видно, что при сниженных угловых скоростях (часто-
тах напряжения статора) синхронный двигатель обладает значитель-
ным максимальным моментом. Моментно-угловые характеристики для
случая изменения только частоты приведены на рис. 4.75. Увеличе-
ние максимального момента при снижении угловой скорости (частоты
статорного напряжения) синхронного двигателя, но при неизменном
напряжении связано с большим увеличением тока статора, которое
определяется уменьшением противо-ЭДС и реактивных сопротивлений
машины.
Закон регулирования напряжения и тока возбуждения неявно-
полюсного синхронного двигателя или приближенный закон регули-
202
Рис. 4.72. Моментно-угловые ха-
рактеристики синхронного дви-
гателя при /в= var; U = const.
/ — нормальное возбуждение; 2 —
повышенное возбуждение; 3 — по-
ниженное возбуждение; Mi — мо-
мент от поля возбуждения; М2 —
момент от явнополюсностн; М —
суммарный момент.
Рис. 4.73. Моментно-угловые ха-
рактеристики синхронного дви-
гателя при Ia— const; U = var.
I ~ U — С/Ном; 2 — U > Uli0M;
3 — U < Mt — момент от
поля возбуждения; М2 — момент
от явнополюсности; М — суммар-
ный момент.
Рис. 4.75. Моментно-угловые
характеристики синхронного
двигателя при U = const; /в =
= const; / = var,
Mi — момент от поля возбужде-
ния; М2 — момент от явнополюс-
ности; М — суммарный момент.
Рис. 4.74. Моментно-угловые ха-
рактеристики частотно-регули-
руемого синхронного электро-
привода при U/f == const; /в =
= var.
I _ нормальное возбуждение; 2 —
повышенное возбуждение; 3 — по-
ниженное возбуждение; Mt — мо-
мент от поля возбуждения; М2 —
момент от явнополюсности; М —
суммарный момент.
203
рования для крупных явнополюсных синхронных двигателей при изме-
нении угловой скорости (частоты) и момента нагрузки и заданном
запасе статической устойчивости найдем, воспользовавшись первой
составляющей (4.111) для электромагнитного момента.
При постоянстве угла нагрузки синхронного двигателя закон
регулирования напряжения и тока возбуждения находим следующим
образом:
1/sin С'цом — 4(/1ШИ/в. hom/Zhom'^iiom — AUI$/fMt
откуда
П/ц/Пном/и,
ПОМ — /^//иом^пом- (4.115;
При U/f = (7иом//„ом = const получим зависимость регулирова-
ния тока возбуждения синхронного двигателя от момента на валу:
пом — Л«/М|10М.
(4.116)
Из (4.116) следует, что при постоянном отношении U/f возбужде-
ние синхронного двигателя должно изменяться прямо пропорциональ-
но изменению момента на валу.
Для 1К = /В.;|ОМ = const из (4.115) следует, что U/f = </иом//||ом =
= const и регулирование производится при постоянном моменте.
В случае постоянной мощности регулирование осуществляется
изменением только частоты при неизменных возбуждении и напря-
жении.
По аналогии с двухзонным регулированием двигателей постоян-
ного тока независимого возбуждения можно осуществить двухзоиное
регулирование угловой скорости синхронных двигателей: при постоян-
ном моменте используется регулирование в зоне до номинальной угло-
вой скорости, а при постоянной мощности — в зоне регулирования
выше номинальной угловой скорости.
Таким же образом, как и для неявнополюсной машины, определя-
ется закон регулирования напряжения для синхронных двигателей
с явновыраженными полюсами при существенном влиянии реактивной
составляющей момента. Из (4.110) при условии постоянства угла 0
и тока возбуждения (/в = const), приняв в ограниченном диапазоне
регулирования угловой скорости Е «г U, получим:
Ыном /ном г /нном
т. е. закон регулирования имеет тот же вид, что и для асинхронного
двигателя при частотном управлении. Следовательно, и частотные
законы регулирования для различного вида нагрузок будут одина-
ковы для обоих типов машин: U/f = const при М = Л4НОМ = const;
U/Vf= const при Р = РНОм = const; U/f2, = const при вентилятор-
ной нагрузке.
Из (4.117), в частности, следует, что при некоторой фиксирован-
ной частоте f и при изменении момента нагрузки напряжение нужно
регулировать по закону
U/UIIOK = VM/M
НОМ» (4.118)
угол нагрузки при этом останется неизменным в диапазоне изменения
момента от холостого хода до номинального.
Для явнополюсного синхронного двигателя регулирование тока
возбуждения, как это следует из (4.111), приводит к изменению только
одной составляющей момента, поэтому закон регулирования тока
204
возбуждения существенно усложняется, в частности при Ulf = const
и 0 = const
^в/!в, ном — (Л4 — Ь) /(МНОм
где b — постоянная величина.
Предел статической устойчивости синхронного двигателя с пеяв-
новыражеиными полюсами наступает, когда угол 0 становится рав-
ным 90° при максимальном моменте
Mlm^=AUIvlf. (4.119)
Для реактивного синхронного двигателя этот предел наступает,
когда угол 0 становится равным 45° при максимальном моменте
M2llla: = B(U/l)\ (4.120)
Как видно из (4.119) и (4.120), при уменьшении частоты пере-
менного тока максимальные значения электромагнитных моментов
увеличиваются и, наоборот, с увеличением частоты уменьшаются.
Для синхронных двигателей с явновыраженными полюсами при
изменении частоты переменного тока неучет реактивного электромаг-
нитного момента (от явнополюсностн) приводит к значительным по-
грешностям в оценке механических свойств.
При низких частотах пренебрежение активным сопротивлением
статорной обмотки вносит значительные искажения в расчетное зна-
чение электромагнитного момента. Отрицательное влияние активного
сопротивления статора на характеристики синхронного двигателя
проявляется в меньшей степени и при относительно более низких
частотах, чем в случае асинхронного двигателя, и может быть в опре-
деленной мере скомпенсировано регулированием возбуждения.
Частотное регулирование, являясь практически единственным
способом регулирования угловой скорости синхронных двигателей,
характеризуется в основном такими же показателями, что и частот-
ное регулирование асинхронных двигателей с короткозамкнутым ро-
тором. Это регулирование плавное экономичное двухзонное; стабиль-
ность скорости высокая (идеально жесткие характеристики); допу-
стимая нагрузка при постоянном возбуждении — номинальный момент
(в случае независимой вентиляции); диапазон регулирования вверх
от основной угловой скорости ограничивается механической проч-
ностью ротора и подшипников; диапазон регулирования вниз с уче-
том идеальной жесткости характеристик может быть большим [до
(50 -j- 100) : 1 и белее] при обеспечении синусоидальности напряже-
ния, достаточного запаса устойчивости и сохранении значения мак-
симального момента.
Синхронный двигатель обладает очень важным для некоторых
применений свойством — при подаче в статорные обмотки постоян-
ного тока он создает тормозной момент при неподвижном роторе, обес-
печивая тем самым электрическую фиксацию ротора в заданном поло-
жении, что позволяет отказаться от применения механического тор-
моза.
Посредством явнополюсных или специальных тяговых синхрон-
ных двигателей может быть организовано дискретное движение ротора,
его поворот на заданный угол и удержание ротора в этом положе-
нии. Угловая скорость (средняя) при дискретном движении также регу-
лируется изменением частоты переключения обмоток статора двига-
205
теля (изменением частоты напряжения прямоугольной или ступенча-
той формы).
Некоторые трудности при использовании регулируемых синхрон-
ных двигателей вызывает их известный недостаток — склонность
к качаниям ротора.
4.16. Регулируемый привод переменного
тока с вентильным двигателем
Вентильным двигателем (ВД) называется устройство,
состоящее из электродвигателя переменного тока (по конструкции
аналогичного синхронному) и вентильного коммутатора (преобразова-
теля частоты), управляемого в функции положения ротора или маг-
нитного потока двигателя. На статоре его располагается обычно трех-
фазная обмотка (обмотка переменного тока), а ротор является воз-
будителем; возбуждение может быть выполнено либо от обмотки воз-
буждения, размещаемой на роторе и питаемой через кольца и щетки
от источника постоянного тока, либо с помощью постоянных магнитов,
расположенных в пазах ротора.
Существенным отличительным признаком ВД является наличие
вентильного коммутатора, который функционально заменяет щетки
и механически вращающийся коллектор машины постоянного тока.
Вентильный коммутатор присоединяется к выводам статора и выпол-
няет функции распределителя постоянного тока с преобразованием
его в переменный. Последовательность переключения тока статора
и связанная с этим очередность включения тиристоров вентильного
коммутатора определяется датчиком положения ротора.
Вентильные двигатели различаются по типу преобразователя
частоты, конструктивному исполнению машины и устройству системы
управления. Несмотря на многообразие сочетаний конструкций элек-
трических машин и принципов управления ВД имеют следующие
общие признаки, а именно: возможность регулирования угловой ско-
рости изменением подводимого к статору напряжения (вниз от номи-
нальной), тока возбуждения (при наличии обмотки возбуждения)
и угла опережения включения вентилей относительно фазных ЭДС
двигателя (вверх от номинальной).
Характеристики ВД аналогичны характеристикам двигателя по-
стоянного тока.
В ВД используются чаще всего два вида преобразователей частоты:
1) с промежуточным звеном постоянного тока и 2) с непосредственной
связью (НПЧ).
Если, например, синхронная угловая скорость двигателя соо =
~ 2nf/p для мпогополюсной машины при р — 6 составляет соо =
= 314 рад/с при частоте питающего напряжения 300 Гц, то следует
выбирать схему преобразователя с промежуточным звеном постоянного
тока.
Коммутация тока в вентилях инвертора может быть естественной
или искусственной.
Инверторы с естественной коммутацией — это преобразователь
постоянного тока в переменный, отдающий энергию нагрузке, кото-
рая уже содержит источник ЭДС той же частоты, что и выходное на-
пряжение преобразователя; при этом благодаря действию этой ЭДС
осуществляется коммутация вентилей; такая коммутация и называется
естественной.
206
Инвертор с искусственной коммутацией — это преобразователь
постоянного напряжения или тока в переменные с принудительной
(обычно конденсаторной) коммутацией тока в вентилях, отдающий
энергию нагрузке, характер которой жестко не лимитирован,
Рис. 4.76. Принципиальная схема вентильного двигателя с естествен-
ной коммутацией инвертора тока.
Принципиальная схема ВД с естественной коммутацией инвер«
тора тока приведена на рис. 4.76. Схема содержит управляемый вы-
прямитель УВ, сглаживающий реактор L, инвертор тока И, тиристор-
ный возбудитель ТВ двигателя М и системы управления выпрями-
телем СУ В и инвертором СУ И. Угловое положение ротора ВД кон-
тролируется косвенно — управление вентилями инвертора осущест-
вляется в функции фазы напряжения на выводах обмотки статора дви-
гателя [ <7 (<р)].
207
При естественной коммутации отпирающие импульсы на венти-
ли инвертора подаются с опережением на угол 0 относительно ЭДС
двигателя. Минимальный угол опережения р равен:
(3„.M = V+6, (4-121)
где у — угол коммутации тока, зависящий от параметров преобразо-
вателя и двигателя и от выпрямленного тока Ig\ 6 — угол выключе-
ния, определяемый временем восстановления запирающих свойств
тиристора.
В рассматриваемой схеме инвертор обычно работает с некоторым
постоянным углом Р, выбранным из условия надежной коммутации
наибольшего нагрузочного пли пускового тока.
Регулирование угловой скорости БД в этом случае производится
изменением выпрямленного напряжения посредством У В или тока
возбуждения посредством ТВ.
Естественная коммутация вентилей, позволяющая использовать
простой надежный инвертор, может быть осуществлена при сравни-
тельно большой ЭДС синхронного двигателя, т. е. при угловой ско-
рости его не ниже 10 % номинальной. Поэтому для пуска двигдтеля
в схеме с естественной коммутацией применяют следующие способы:
1) импульсный метод, использующий специальную систему управле-
ния выпрямителем; 2) переключение инвертора в режим искусствен-
ной коммутации; 3) асинхронный пуск синхронного двигателя, имею-
щего пусковую обмотку, от сети (включен /</, рис. 4.76) с последующим
переключением его на инвертор (Л/ отключается, К2 включается).
В первом случае запирание вентилей инвертора достигается сни-
жением до нуля его входного тока путем кратковременного запира-
ния выпрямителя или перевода его в инверторный режим. Прерыва-
ние выпрямленного тока приводит к уменьшению пускового момента
примерно на 15—20 % по сравнению с пусковым моментом при пита-
нии двигателя синусоидальным током. Во втором случае значительно
усложняется система управления ВД. При асинхронном пуске услож-
няется конструкция ВД, возрастают потери от высших гармоник из-за
наличия короткозамкнутой пусковой обмотки на роторе.
Таким образом, сравнительно простой способ естественной ком-
мутации не может быть реализован при пуске ВД, когда ЭДС его от-
сутствует или очень мала. В этом отношении схема ВД с искусственной
коммутацией предпочтительнее; фаза тока относительно ЭДС двига-
теля может быть установлена любой и ВД может работать не только
с опережающим током, но и с отстающим.
На рис. 4.77 представлен один из вариантов схем преобразова-
теля с промежуточным звеном постоянного тока с инвертором напря-
жения и искусственной коммутацией. Схема содержит: инверторный
мост на тиристорах VI — V6', коммутирующие тиристоры V7, V8,
обратный мост на диодах VI — V6', разрядные резисторы Rl, R2
и диоды V7’, V8', силовой фильтр Lt, С1 и устройства коммутации
(L2 — L5, С2, СЗ).
Искусственная коммутация осуществляется за счет энергии,
запасенной в конденсаторах С2 и СЗ от дополнительного источника
подзаряда U„. Инвертор имеет групповую коммутацию тиристоров.
Выключение тиристоров анодной группы осуществляется элементами
С2, L2, L4, V7, а тиристоров катодной группы — СЗ, L3, L5, V8. При
подаче отпирающего сигнала, например, на тиристор V7 конденса-
тор С2 разряжается по цепи С2 — Cl — R2 — V2' (V4’, V6') —
— VI (V3, И5) — L4 — V7 — С2, После спадания тока в этом кон-
208
туре до нуля тиристоры VJ (К?, V5) закрываются, но продолжается
колебательный подзаряд конденсатора С2 через реактор L2, обеспе-
чивая обратное напряжение на тиристоре VI (1ЛЗ, V5) в течение вре-
мени, необходимого для восстановления запирающих свойств тири-
сторов. После перезаряда конденсатора С2 и закрывания тиристора V7
(и в течение этого процесса) энергия, накопленная в реакторе L2,
частично гасится в резисторе R1. Во внекоммутационный интервал
конденсатор С2 вновь перезаряжается от источника подзаряда. Спа-
дающий во время коммутации ток нагрузки, протекающий через ком-
мутируемый тиристор VI, переводится на диод V2' обратного места.
+ -
Рис. 4.77. Принципиальная схема вентильного двигателя, содержа-
щая преобразователь с промежуточным звеном постоянного тока с ин-
вертором напряжения с искусственной коммутацией.
Управление инвертором производится в функции положения ро-
тора двигателя М, контролируемого посредством датчика положения
ротора ДПР, который воздействует на систему управления инверто-
ром СУИ. Регулирование угловой скорости двигателя в этой схеме
возможно всеми тремя способами: изменением выпрямленного напря-
жения, тока возбуждения и угла 0.
Рассмотренная схема преобразователя частоты не свободна от
недостатков и приведена только как пример инвертора с искусствен-
ной коммутацией. Возможно также и применение других схем инвер-
торов с искусственной коммутацией, например инвертора с отсекаю-
щими диодами без источника подзаряда.
209
Применение искусственной коммутации связано с более сложной
схемой преобразовательной части по сравнению с естественной ком-
мутацией в инверторе, как это видно из приведенных примеров инвер-
торов. Но в случае инвертора с естественной коммутацией, как отме-
чалось выше, возникает проблема пуска двигателя.
Наиболее просто пусковой режим обеспечивается при питании
двигателя от преобразователя частоты с непосредственной связью
(НПЧ). В НПЧ функции выпрямления и инвертирования выполняют
одни и те же вентили, что позволяет для коммутации тока в фазах ВД
использовать переход питающего напряжения через пуль.
Из краткого рассмотрения различных схем ВД следует, что во-
прос о применении целесообразной схемы преобразователя частоты
может быть решен только на основании технико-экономического сопо-
ставления.
Так как ВД обладает характеристиками машины постоянного
тока независимого возбуждения (можно получить у ВД и характери-
стики двигателя последовательного возбуждения, если обмотку воз-
буждения синхронного двигателя включить последовательно в цепь
выпрямленного тока на входе инвертора), то все способы регулиро-
вания его угловой скорости характеризуются такими же показате-
лями, что и соответствующие способы (изменением напряжения на якоре
и тока возбуждения) регулирования угловой скорости двигателя по-
стоянного тока независимого возбуждения. Но в случае преобразова-
теля частоты инверторного типа энергетические показатели регулиро-
вания у ВД будут хуже из-за двукратного преобразования энергии.
Несколько хуже оказывается стабильность скорости и как следствие
меньше диапазон регулирования вниз от основной угловой скорости,
так как механические характеристики ВД мягче, чем у двигателя по-
стоянного тока такой же мощности.
В случае питания инвертора от сети постоянного тока или от акку-
муляторов ВД называют бесколлекторной машиной постоянного тока.
То же название иногда распространяют и на ту часть ВД, которая вклю-
чает в себя инвертор с системой управления, синхронную машину
и датчик положения. Коэффициент полезного действия инвертора
обычно ниже, чем у коллекторно-щеточного узла машины постоянного
тока, но надежность инвертора и в целом ВД и его механическая про-
чность выше, чем обычной машины постоянного тока.
ГЛАВА ПЯТАЯ
ВЗАИМОСВЯЗАННЫЙ ЭЛЕКТРОПРИВОД
Иногда по конструктивным соображениям
или с целью уменьшения момента инерции электропривода,
а также из-за невозможности выполнения привода большой
мощности с одним двигателем прибегают к электроприво-
дам, состоящим из двух или нескольких машин, соединен-
ных между собой механическим или электрическим спо-
собом. Подобного рода взаимосвязанные электроприводы
встречаются в механизмах металлургической промышлен-
ности, кузнечно-прессовых машинах, подъемно-транспорт-
210
ных устройствах, в специальных установках большой
мощности ит п.
В качестве примера можно привести электропривод
аэродинамической трубы, осуществляемый от двух мощ-
ных двигателей постоянного тока, связанных общим валом
(многодвигательный электропривод). Другим примером спе-
циального исполнения электропривода может служить
привод крупного портального крана или шлюзового затвора,
где один механизм обслуживается двумя двигателями,
расположенными на значительном расстоянии. Эти дви-
гатели имеют электрическую связь для согласованной
работы (электрический вал).
Взаимосвязанный электропривод в установках большой
мощности позволяет уменьшить нагрузку каждого при-
вода и тем самым облегчить передачу к рабочему органу,
уменьшить суммарный момент инерции роторов двигате-
лей.
Важной задачей в подобных системах является необхо-
димость равномерного распределения нагрузок между от-
дельными электроприводами в статическом и динамиче-
ском режимах. Рассмотрим вопрос о распределении на-
грузок в наиболее простом случае, на примере двухдвига-
тельного электропривода.
5.1. Электропривод с механическим
соединением валов
При механическом соединении валов двух
двигателей в статическом режиме угловая скорость их
будет одинакова, а результирующий момент, развиваемый
электроприводом, равен:
Л4=М1 + М2=^1(соО1-со) + ^(соО2-со), (5.1)
W01 11)02
или
М = | pi | (coot — к») 4-1 р2 [ (coos — со), (5.2)
где | Pi |, | I, со01, со02 — модули жесткости механиче-
ских характеристик и соответственно угловые скорости
холостого хода каждого двигателя.
Из (5 2) находим уравнение механической характери-
стики двухдвигательного электропривода:
__coot1 Pi I + сора I Pa I_М /с
|₽1| + |₽а| 1Р1| + |РаГ ’
211
На рис. 5.1 тонкой линией показана механическая ха-
рактеристика двигателя постоянного тока независимого
возбуждения. Каждый из двух взаимосвязанных двига-
телей имеет такую характеристику [со = /(М12)]. Резуль-
тирующая характеристика привода со = f (Л4) показана
утолщенной линией /.
Так как соО1 = со02, а | | = | р2 |> то (5.3) примет
вид:
со = со0 —Л1/2| рх[, (5.4)
где соо = со01 = со02; pt = р2.
Как следует из (5.4), результирующая характеристика
привода проходит через точку со0, жесткость результирую-
щей характеристики равна сумме жесткостей отдельных
двигателей.
Рис. 5.1. Механические харак-
теристики двухдвигательного
привода постоянного тока.
Рис. 5.2. Механические1 харак-
теристики двухдвигательного
привода при вентиляторной на-
грузке.
На рис. 5.1 показано, что момент нагрузки М ~ Mz
равномерно распределяется между обоими двигателями
и они оказываются одинаково загруженными.
Взаимосвязанный привод может быть как нерегулируе-
мым, так и регулируемым. Например, если два двигателя
постоянного тока с независимым возбуждением включены
параллельно и требуется регулировать скорость привода,
то это можно осуществить изменением подводимого напря-
жения или другим известным способом. При пониженном
напряжении результирующая механическая характери-
стика привода 2 параллельна характеристике 1 (рис. 5.1).
При пониженной угловой скорости и одинаковых параме-
трах привода распределение нагрузки будет также равно-
мерным.
212
В случае регулирования угловой скорости при венти-
ляторном законе изменения нагрузки (рис. 5.2) и сниже-
нии угловой скорости до определенного значения рабо-
тают оба двигателя. Затем один из двигателей отключается
и нагрузка преодолевается только другим двигателем
Жесткость характеристики одного двигателя меньше жест-
кости результирующей характеристики.
Механические характеристики упомянутых двигателей!
могут иметь различную жесткость из-за различных сопро-
тивлений цепей якорей или вследствие неодинаковых токов
возбуждения; тогда при совместной работе двигателем
Рис. 5.3. Механические харак-
теристики двухдвигательного
привода при различных сопро-
тивлениях якорных цепей дви-
гателей постоянного тока неза-
висимого возбуждения.
Рис. 5.4. Механические харак-
теристики двухдвигательного
привода при различных токах
возбуждения двигателей посто-
янного тока независимого воз-
буждения.
распределение нагрузки между ними неодинаково. Харак-
теристики отдельных двигателей при различных сопро-
тивлениях цепей якорей и результирующая характеристика
даны на рис. 5.3.
В соответствии с (5.2) можно найти распределение
нагрузки М = Mz между двигателями:
МтНРИ (<оо-(о + Я/|₽|); 1
Л'Ь = I Ра I (юо — со + Мс/| Р |), J
ме I Р I = I pj 1+ I р2 |.
Механические характеристики двух двигателей постоян-
ного тока независимого возбуждения при различных токах
возбуждения показаны на рис. 5.4. Распределение нагрузки
между двигателями в данном случае
М] == | Pi | (cooi — соЛ4с/| р |); 1 (5 6)
Л12 — | Ра | (со02 — со Л4с/| р |). J
213
Из (5.6) следует, что двигатель, имеющий меньшую
скорость идеального холостого хода, может развивать
момент в генераторном режиме параллельно с сетью, хотя
привод работает в двигательном режиме, при этом оказы-
вается, что другой двигатель преодолевает не только мо-
мент сопротивления, но и тормозной момент двигателя,
работающего в генераторном режиме (рис. 5.4).
Совместная работа двигателей постоянного тока после-
довательного возбуждения обеспечивает более равномер-
ное распределение нагрузок, чем в случае двигателей
независимого возбуждения, даже при той же разнице
Рис. 5.5. Схема параллельного со-
единения двух двигателей постоян-
ного тока независимого возбужде-
ния при различных сопротивлениях
цепей якорей и разных угловых
скоростях идеального холостого
хода при совместной работе на
общий вал.
Рис. 5.6. Схема последователь-
ного включения двигателей при
совместной работе на общий
вал.
в сопротивлениях, так как характеристики этих двигателей
обладают меньшей жесткостью.
При одинаковых угловых скоростях идеального холо-
стого хода и параллельном соединении цепей якорей дви-
гателей постоянного тока независимого возбуждения, имею-
щих разные сопротивления, необходимо в цепь якоря
двигателя, имеющую меньшее сопротивление, включить
постоянный добавочный резистор (рис. 5.5). Аналогичным
способом, т. е. включением постоянных дополнительных
резисторов в цепь ротора, можно, например, добиться
достаточно равномерного распределения нагрузок между
асинхронными двигателями, имеющими неодинаковую жест-
кость механических характеристик в их рабочей части.
При различных угловых скоростях идеального холостого
хода двух двигателей независимого возбуждения можно
путем введения дополнительных резисторов в обмотки
214
возбуждения уменьшить неравномерное распределение на-
грузок (рис. 5.5).
Равномерное распределение нагрузок при неодинако-
вых сопротивлениях цепей якорей может быть также
осуществлено путем последовательного соединения двига-
телей (рис. 5.6), если напряжение сети окажется достаточ-
ным для получения необходимой угловой скорости.
Так как токи в цепи якорей обоих двигателей одина-
ковы, то при одинаковой угловой скорости напряжение
на выводах якоря одного двигателя
t/j = 0(0
а на выводах якоря другого двигателя
U 2, = с(о 1R^.
Следовательно, напряжение на якоре двигателя с боль-
шим сопротивлением будет выше, а с меньшим — ниже.
Рис. 5.7. Механические характе-
ристики двухдвигательного при-
вода при последовательном соеди-
нении якорных цепей двух дви-
гателей постоянного тока неза-
висимого возбуждения.
При этом можно себе представить, что характеристика аоа
переместится параллельно самой себе вверх, а аоб —
соответственно вниз (рис. 5.7). В точке в обе характери-
стики пересекутся при одном и том же моменте на каждом
двигателе.
В переходных процессах распределение нагрузок может
ухудшаться по той причине, что связь между двигателями
не является абсолютно жесткой, что создает благоприят-
ные условия для развития механических колебаний, обус-
ловленных действием возмущений со стороны электриче-
ской части привода и внутренними и внешними возмуще-
ниями. Колебания упругосвязанных масс всегда вызывают
дополнительные динамические нагрузки передач, которые
при неблагоприятных условиях могут достигать опасных
значений.
215
Исследования динамики многодвигательных электро-
механических систем показали, что рассмотренные особен-
ности двухдвигательного электропривода характерны и
для большего числа двигателей, причем с возрастанием
числа двигателей динамические процессы усложняются.
Поэтому для многодвигательных электроприводов при-
ходится отказываться от последовательного соединения
двигателей, переходя к другим схемам соединения сило-
вых цепей, обеспечивающим демпфирование любых воз-
никающих в системе колебаний.
Число возможных схем соединения двигателей увели-
чивается при возрастании числа двигателей многодвигатель-
ного электропривода.
Заслуживает внимания многодвигательный электропри-
вод с индивидуальным питанием двигателей от отдельных
управляемых преобразователей, в котором осуществляется
индивидуальное управление током каждого двигателя и его
угловой скоростью во всех режимах. Однако при этом
увеличиваются габариты установки из-за дробления мощ-
ности преобразователя. Поэтому в тех случаях, когда
влиянием зазоров и погрешностей передач на динамиче-
ские нагрузки электромеханической системы можно пре-
небречь, рациональным является использование последо-
вательного соединения двигателей.
5.2. Асинхронный двухдвигательный
электропривод со сложением
механических характеристик
В некоторых производственных установках,
снабженных электроприводами переменного тока, возни-
кает необходимость стабильной работы при пониженных
скоростях. Например, в подъемных устройствах необ-
ходимо осуществлять достаточно точную остановку; с этой
целью важно перед полной остановкой производить тор-
можение с малой скорости.
Получение пониженной скорости возможно при совмест-
ной работе двух механически связанных асинхронных
двигателей, один из которых работает в двигательном
режиме, другой — в генераторном режиме торможения
противовключением (рис. 5.8, а).
Механические характеристики 1 и 2 этих машин и ре-
зультирующая 3 приведены на рис. 5.8, б. Наклон харак-
теристик 1 и 2 растет с увеличением сопротивления цепи
216
ротора. Уравнение результирующей механической ха-
рактеристики
м = 2Л4к1______________2М,<2 ,г -
s/ski + ski/-S (2 — s)/sK2-f- sli2/(2 — s) ’
где Л4К1, Л1к2 — максимальные моменты, развиваемые соот-
ветственно двигателями MJ и М2; при одинаковых дви-
гателях Л4К1 = Л4К»; sK1, sl(2 — критическое скольжение
Ml и М2.
Графическое суммирование двух указанных характе-
ристик дает результирующую характеристику привода 3,
обладающую в двигательном режиме достаточгюй жест-
костью при малых угловых скоростях.
Рис. 5.8. Принципиальная схема и механические характеристики двух-
двигательного асинхронного привода при работе одного из двигателей
в режиме торможения противовключением.
Однако с ростом жесткости результирующей характе-
ристики заметно снижается перегрузочная способность
агрегата в двигательном режиме, поэтому ограничивается
диапазон регулирования угловой скорости. Коэффициент
полезного действия такого привода низок; потери в элек-
троприводе равны сумме потерь в обоих двигателях, при-
чем один из них работает в режиме противовключения,
а другой — в двигательном режиме с повышенным сколь-
жением. Подбором сопротивлений в роторных цепях можно
перераспределить потери между двигателями и внешними
резисторами так, чтобы двигатели не перегружались. Если
используются самовентилируемые двигатели, то со сни-
жением угловой скорости на результирующей характери-
стике привода допустимый момент резко снижается по срав-
нению с номинальным. Коэффициент мощности, так же
как и при реостатном управлении, сравнительно высок.
Более жесткой в двигательном режиме при пониженной
угловой скорости является результирующая механическая
217
характеристика привода, показанного на рис. 5.9, а.
В приводе первая машина работает двигателем (кривая 1
на рис. 5.9, б), а вторая — в режиме динамического тор-
можения (кривая 2 на рис. 5.9, б). Режим динамического
торможения второй машины получается путем подключе-
ния обмотки статора к источнику постоянного тока.
Рис. 5.9. Принципиальная схема и механические характеристики двух-
двигателыюго асинхронного привода при работе одного из двигателей
в режиме динамического торможения.
Уравнение механической характеристики привода (кри
вая 3 па рис. 5.9, б) в данном случае имеет вид:
дл 2А1К1 ____________2Мк2т____________ /г о'
s/sK1 + sKl/s (l-s)/(l-sK2T) + (l-sK2T)/(l-s) ’
где Л/1к2т и sk2t — максимальный момент и критическое
скольжение двигателя М2, работающего в режиме дина-
мического торможения.
Рис. 5.10. Механические характе-
ристики двухдвигателыюго привода
при работе асинхронного двигателя
в двигательном режиме, а двига-
теля постоянного тока независимого
возбуждения в режиме динамиче-
ского торможения.
Таким образом, изменением сопротивления роторной
цепи двигателя М2, а также тока в цепи его статора можно
регулировать угловую скорость идеального холостого хода
результирующей характеристики при неизменной пере-
грузочной способности привода. Коэффициент полезного
действия привода при пониженной угловой скорости неве-
218
лик, поэтому работа привода на пониженной угловой ско-
рости должна быть ограничена во времени.
Приблизительно аналогичный результат может быть
получен, если асинхронный двигатель соединяется на од-
ном валу с вспомогательной машиной постоянного тока,
также работающей в режиме динамического торможения.
Уменьшая сопротивление цепи якоря машины постоянного
тока, можно получить более жесткие результирующие
характеристики (рис. 5.10).
5.3. Электропривод с электрическим валом
В ряде случаев между отдельными механиз-
мами одного и того же агрегата, требующими согласован-
ного движения и расположенными на значительном рас-
стоянии, трудно осуществить механическую связь из-за
необходимости увеличения диаметра и длины соединитель-
ных валов, возрастания числа опорных подшипников
и т. д. При передаче значительных вращающих моментов
и большой длине вала может возникнуть недопустимое
скручивание вала. Иногда конструктивно производствен-
ный механизм такой, что механическая передача движения
его рабочим органам становится практически невозможной.
Взамен громоздкой механической передачи может быть
использована электрическая передача для согласованного
вращения отдельных механизмов, которую называют для
простоты электрическим валом. Помимо упрощения кине-
матической схемы механизма электрический вал обычно
дает возможность увеличить его угловую скорость, так
как при этом снимаются ограничения, обусловленные
механическим резонансом, и, кроме того, упрощается
управление механизмом.
Электрический вал находит применение для привода
таких механизмов, как разводные мосты, затворы шлю-
зов, мостовые крапы, крупные токарные станки и т. п.
Система электрического вала наиболее проста, когда
синхронный двигатель через питающую сеть присоединя-
ется к синхронному генератору. Согласованное вращение
между синхронным генератором и синхронным двигателем
выполняется независимо от расстояния между ними. Два
или несколько синхронных двигателей, предназначенных
для привода одного механизма и получающих питание
от общей сети переменного тока, вращаются с равными
или жестко согласованными скоростями, не будучи меха-
219
ническп связанными. В обоих случаях имеет место осуще-
ствление электрического вала. Однако такая, хотя и про-
стая система электрического вала, не нашла практического
применения вследствие того, что в переходных режимах,
в частности при асинхронном пуске, возникают существен-
ные рассогласования в угловых скоростях и положении
валов отдельных двигателей, поэтому в системах электри-
ческого вала наибольшее распространение нашли асин-
хронные машины. Можно выделить три основные схемы:
1) с уравнительными машинами, или уравнительный элек-
трический вал; 2) с основными рабочими машинами и об-
щими резисторами — рабочий электрический вал; 3) с асин-
хронным преобразователем частоты — дистанционный элек-
трический вал.
Рис. 5.11. Принципиальная схема электрического вала с уравнитель-
ными асинхронными машинами.
Система электрического вала с уравнительными асин-
хронными машинами. Принципиальная схема электриче-
ского вала с уравнительными асинхронными машинами
приведена на рис. 5.11. Каждый элемент привода состоит
из основного (рабочего) двигателя Ml (М2) (двигатель
может быть любым в том числе и не электрическим), меха-
нически связанного с производственным механизмом ПМ1
(ПМ2), а также со вспомогательной уравнительной маши-
ной ВМ1 (В М2).
Уравнительные машины — это обычные асинхронные
двигатели с фазным ротором с одинаковыми числом фаз,
напряжением, обмотками и числом полюсов; статорные
обмотки их параллельно присоединяются к сети перемен-
ного тока, роторные соединяются между собой. В обеих
уравнительных машинах от сети наводятся одинаковые
магнитные поля с равными частотами, временным и про-
странственным расположением. При одинаковом относи-
тельном положении обмоток статора и ротора (и одинако-
вом скольжении) в обмотках ротора будут наводиться
220
равные по амплитуде ЭДС, совпадающие по фазе (0 — 0):
s= E"2ks = E2ks, где Ё2К — ЭДС ротора при его непод-
вижном состоянии (s — скольжение). Если встречно вклю-
чить роторные обмотки, то при 9=0 ток в них проте-
кать не будет; каждая из машин будет потреблять из сети
только ток намагничивания (рис. 5.12, а). Поворот ротора
одной из машин на определенный угол о вызовет под
влиянием разности ЭДС /\Г2 уравнительный ток /2 (рис.
5.12, б), который, взаимодействуя с магнитными полями
а)
Рис. 5.12. Векторные диаграммы электрического вала с уравнитель-
ными машинами.
статора одной и другой машин, создаст вращающие мо-
менты, стремящиеся повернуть ротор в исходное поло-
жение.
Уравнительный ток, а следовательно, и момент при
данном угле сдвига роторов зависит от угловой скорости
машин, уменьшаясь с ее возрастанием или уменьшением
скольжения; при скольжении s — 0 Д£2 = 0 л момент
равен 0. Для определения уравнительного тока и вращаю-
щих моментов, развиваемых машинами, воспользуемся
схемой замещения для роторных цепей, приведенной на
рис. 5.13.
Согласно схеме замещения
/2 == (£2ks - £2kS(?/0)/2z2, (5.9)
или
/2 = £2ks(1 — COS0 — jsin В)/2 (Д2 +jx2s). (5.10)
Активная составляющая тока /2 равна:
(5JI)
221
или
, г. S . „
1—cose--------sin в
J ____ J ____________SK_____
* 2a — * 2a, H, C 9
(5.12)
где /2я,и,с = E2ksR2/ I/?! + (x2s)2] — активная составляю-
щая тока ротора асинхронного двигателя в нормальной
(обычной) схеме включения; sKf=&R2/x2 — критическое
скольжение асинхронного двигателя при = 0 и = 0.
j^zs Rz ixzs
о-----------------------------о
Рис. 5.13. Схема замещения роторных цепей электрического вала с
уравнительными машинами.
Так как момент асинхронной машины пропорционален
активной составляющей тока ротора, то момент первой
вспомогательной (уравнительной) машины равен:
Л1„,м1 = — (l-cos6-/-sinsV (5.13)
* \ 5К /
Аналогия ю можно показать, что момент, развиваемый
второй уравнительной машиной:
А1В, м2 1 — cos 0 s~
sin 6
(5.14)
где М = 2Л4К/ (sK/s + s/sK) — момент асинхронной ма-
шины в нормальной схеме включения.
Уравнения (5.13) и (5.14) показывают, что моменты
уравнительных машин содержат две составляющие:
пропорциональную sin 0 — это синхронизирующий мо-
мент:
Mcl)1,1(2)=±4rsin0’ (5.15)
знак «—» относится к синхронизирующему моменту пер-
вой машины, «+» — ко второй;
асинхронная составляющая
M.chhi(2) = A1(1-cos0)/2. (5.16)
222
Синхронизирующий момент поддерживает согласован-
ное вращение, действуя на обе уравнительные машины
одинаково, но с противоположными знаками, поэтому
разность этих моментов определяет уравнивающее действие
системы. Таким образом, уравнительный или синхрони-
зирующий момент системы равен’
и Ms . „ 2МК s . .
(5.17)
Наибольшее значение синхронизирующего момента си-
стемы имеет место при В = 90° и равно:
9 М с2
(5.18)
Из (5.18) следует, что максимум синхронизирующего
момента зависит от скольжения уравнительных машин,
стремясь к предельному значению, равному 2Л4К (рис. 5.14).
Рис. 5.14, Зависимость синхро-
низирующего момента от сколь-
жения.
Рис. 5.15. Характеристика момен-
тов электрического вала с уравни-
тельными машинами в относитель-
ных единицах.
Очевидно, что при малых скольжениях, когда малы абсо-
лютные значения ЭДС роторов, малы и уравнительные
моменты. Поэтому практически с целью увеличения урав-
нительного момента машин необходимо вращать машины
против направления вращения поля статора; в этом слу-
чае скольжение будет выше 1.
Асинхронный момент действует в направлении враще-
ния вала, вызывая ускорение обоих его элементов.
Характеристика уравнительного момента электриче-
ского вала в относительных единицах Л4у* = Л4у/Л4к — f (0)
показана на рис. 5.15; там же приведены составляющие
и МаС11и#. Одна из уравнительных машин, как это
ридно из (5.14), развивает положительный момент, т. е.
223
работает в двигательном режиме, тогда как другая раз-
вивает отрицательный момент, работая в генераторном
режиме (5.13). Очевидно, что
I Мв. м21 > I Мв, mi !•
Синхронизирующий момент поддерживает согласованное
вращение за счет передачи вращающего момента от одной
машины к другой. При идеальных уравнительных машинах,
у которых сопротивление роторов равно 0, развивались бы
только синхронизирующие моменты. Практически же ма-
шины обладают активными сопротивлениями, в роторной
цени возникают потери и создаются асинхронные моменты.
На рис. 5.16, а, б приведены энергетические диаграммы
электрического вала при s = 0,5 без учета потерь и с уче-
том потерь.
Рис. 5.16. Энергетические диаграммы электрического вала с уравни-
тельными машинами при s= 0,5 без потерь (а) и с потерями (б).
В электрическом вале без учета потерь (рис. 5.16, о)
электромагнитная мощность передается через соединитель-
ные провода статоров; поступающая в ротор одной машины
электромагнитная мощность Р12 частично передается на
вал, другая часть в виде мощности скольжения Ps пере-
дается через контактные кольца от одной машины к дру-
гой. Мощность, потребляемая из сети, равна 0. Аналогич-
ное распределение мощности наблюдается в реальном
электрическом вале, отличающемся наличием потерь в ма-
шинах, которые покрываются потреблением энергии из
сети.
На диаграммах Рп и Р12 — мощности, потребляемые
статорами первой и второй машины; Mb.mi, Л1в,м2 — мо-
менты, развиваемые первой и второй уравнительными
машинами; ^Рц, AP12 — потери мощности в статорах;
Риех1, ^мехг —- механическая мощность каждой из машин.
224
Большая часть мощности циркулирует в цепи статоров
машин. Расхождение в значениях электромагнитных мо-
ментов машин (рис. 5.16, б) вызвано потерями в роторе.
Чем больше эти потери, тем больше разность моментов
машин.
При вращении роторов против поля (s> 1) подведен-
ная с вала к первой машине мощность j складывается
с мощностью, потребляемой со стороны статора, и пере-
дается через роторную цепь другой машине (рис. 5.17),
т. е. при s> 1 первая машина работает в тормозном ре-
жиме (режим торможения противовключением), потребляя
мощность из сети и с вала; вторая машина частично гене-
рирует энергию в сеть и, кроме того, развивает двигатель-
ный момент.
Рис. 5 17. Энергетиче-
ские диаграммы элек-
трического вала с урав-
нительными машинами
при вращении роторов
против поля.
При вращении машин против поля изменяются знаки
электромагнитной мощности и мощности скольжения; урав-
нительный поток мощности в роторной цепи значительно
больше, чем в случае вращения машин по полю, что объяс-
няется большими вторичными ЭДС, пропорциональными
скольжению, этим обусловлено большое значение уравни-
тельного момента, что является достоинством этого режима.
Направление механической мощности не изменяется с пе-
реходом от s <Д к s > 1.
Другим достоинством по сравнению с вращением по
полю является уменьшение угла рассогласования валов
при одном и том же расхождении в нагрузках отдельных
элементов системы.
Недостатком вращения машин против поля являются
повышенные потери в стали ротора из-за увеличенной
частоты тока ротора.
8 Чиликин М. Г, Сандлер А С.
225
Нормальная работа электрического вала требует соблю-
дения следующих условий:
1) сумма всех действующих в каждом элементе системы
моментов должна быть равна нулю, т. е.
МД1 (2) — МС1 (2) 4- Л1, Ml (2) = О,
(5.19)
где МХ1 (3) — момент, развиваемый рабочим двигателем;
Л4С1(г) —статический момент на валу рабочего двигателя;
Л4В, Mi (2) — уравнительный момент;
2) система должна быть статически устойчива, т. е. при
небольшом нарушении равновесия вращающие моменты
после устранения возмущающего воздействия должны вы-
звать замедление или ускорение привода, направленное
к установлению равновесия;
3) система должна б ять динамически устойчива, т. е.
отвечать известным критериям устойчивости, удовлетворять
необходимым требованиям качества переходного процесса:
обладать допустимыми максимумом амплитуды угла рас-
согласования и соответственно уравнительного момента и
временем переходного про-
цесса.
В рассмотренной систе-
ме электрического вала
уравнительные машины
могут развивать асинхрон-
ный момент только при
Рис. 5.18. Принципиальная схе-
ма рабочего электрического вала
с регулируемыми резисторами.
В ф 0 и различных нагрузках на валах отдельных эле-
ментов системы; основной ее особенностью является обра-
зование синхронизирующего момента, обеспечивающего
согласованное вращение.
Схема с основными рабочими машинами и общими
резисторами — рабочий электрический вал. Вместо двух
уравнительных машин возникла идея создания такой си-
стемы, в которой одна и та же машина выполняла бы за-
дачу приводного двигателя и синхронизирующего уст-
ройства. Такой является система электрического вала,
состоящая из двух (или нескольких) одинаковых асинхрон-
ных машин с фазными роторами, статорные цепи которых
226
подключены параллельно к питающей сети, а роторные
обмотки соединены встречно и параллельно этим соеди-
нениям включены во все три фазы регулируемые рези-
сторы (рис. 5.18). Иногда эту систему называют рабо-
чим электрическим валом потому, что в ней одна и та же
машина выполняет рабочую и синхронизирующую функ-
ции.
Влияние регулируемых добавочных резисторов весьма
существенно; при 7?доб = 0 электрический вал превраща-
ется в обычные, независимо работающие асинхронные
двигатели с короткозамкнутым ротором. Если /?до5 = сю,
электрические машины работают в режиме сельсинной
передачи угла.
Рис. 5.19. Упрощенная схема замещения рабочего электрического
вала.
Рассмотрим свойства этой системы, когда /?доб > О,
воспользовавшись упрощенной схемой замещения, приве-
денной на рис. 5.19. На основании схемы замещения состав-
ляем систему уравнений:
^2ks — (/*2$ + R? + Кдоб) + Лг#доб1 1 (5 20)
Л2я5(Уе = /22 (JX2S -f- R2 -f- /?доб) + 121^доб- J
После несложных преобразований получим уравнения
для токов в роторе первой и второй машин:
J ..... (* —е/й) £~2kS (1 О|\
21 2 (/x2s-р/?2) "г" 2 (/x2s/?а 4-2/?Д0б> ’ k '
j 7:2Ks (IEiks (1 e,,J) (ч 221
22 “ 2 (/x2s + R2 + 2/?дoG) 2 (jx2s+R2) * ' ’ ’
Пользуясь (5.21) и (5.22), определяем моменты машин
электрического вала аналогично тому, как это было сде-
8* 227
(5.23)
(5-24)
лано для системы с уравнительными машинами:
»л I 1— с*» 6 । 1 Ч-cos в \ ,
\s/sk + sk/s s/sk+sk/s/
I s/s' S/S" \
+ A4K sin 9 -t—At - ,
1 K ^s/s'+s;/s s/sK4-sK/s/’
U ЛЛ / 1— cos0 , 14-cosO \
,, . „ ! s/s' s/s \
“ Sin 6 ( Vs'+-</s " V\ + Vs/’
где si = sK (/?2 + 2/?до6)//?2.
Из (5.23) и (5.24) следует, что моменты, развиваемые
первой и второй машинами, представляются суммой двух
составляющих, где первая — асинхронная:
/ 1 — cos 0 . 1 4~ cos 0 \
\s/sk + sk/s ' */<+</*/’
а вторая — синхронизирующая составляющая:
МС1|Н1 (2) = ± Л4К ( . 5$к ,,--sin °- (5-26)
ИН1 к \s/s'ч-s^/s s/sK4-sK/s/
По сравнению с электрическим валом с уравнительными
машинами здесь прибавляется составляющая асинхрон-
ного момента, равная:
. , . и 14- cos 6
ДЛ4аСИИ - Мк •^>’+7'77•
(5.25)
Масив1 (2)
(5.27)
Анализ выражений (5.25) и (5.26) показывает, что при
0 = 0 обе машины развивают одинаковые моменты, рав-
ные:
дл ______
1(2) (0-0) s/s'-j-s^/s’
(5.28)
т. е. каждый из двигателей работает в асинхронном режиме
с добавочным сопротивлением в роторной цепи, равным 2/?дОб-
При этом синхронизирующий момент равен 0.
Если нагрузки на валах машин окажутся разными,
то уравнительный момент будет разгружать машину с боль-
шей нагрузкой и подгружать менее нагруженную машину.
При этом нагрузки на обеих машинах окажутся равными,
а угловые скорости одинаковыми, по появится угол рас-
согласования в положении роторов двигателей.
228
Условием установившегося режима работы является
равновесие приводных и нагрузочных моментов, при этом
ни одна из машин не испытывает ускорения или замед-
ления.
^Максимальный угол рассогласования для рабочего вала
составляет 90°. Это означает, что рабочий электрический
вал, так же как и электрический вал с уравнительными
Рнс. 5.20. Кривые зависимо-
стей моментов от скольже-
- ния рабочего электрического
вала при изменении сопро-
тивления резисторов /?Доб.
машинами, можно нагружать выше критического момента
машины электрического вала, работающей в генераторном
режиме, со статически устойчивой передачей уравнитель-
ных моментов. В этом случае нагрузочный момент не дол-
жен быть ниже определенного минимального значения.
Возможность использования рабочего электрического
вала видна из рис. 5.20, а, б, где для ряда значений х —
= Rd (Rz + 2/?до6) показаны кривые зависимости момен-
тов от скольжения. Все вращающиеся моменты отнесены,
к максимальному моменту А4К машин электрического вала.
229
Характеристики асинхронных моментов при симметрич-
ной нагрузке показаны иа рис. 5.20, а. Электрический
вал с уравнительными машинами в этом случае никакого
момента не развивает (х = 0). При х = 1 роторы непо-
средственно замкнуты накоротко (/?доб = 0) и машины
рабочего электрического вала работают как обычные ма-
шины с короткозамкнутым ротором с малой нагрузкой.
Соответствующим выбором сопротивления резисторов мож-
но устанавливать любые промежуточные значения момен-
тов, причем следует учитывать также и требуемые урав-
нительные моменты.
Характеристики передаваемых уравнительных моментов
показаны на рис. 5.20, б. Наибольшие уравнительные
моменты имеет уравнительный вал (при х = 0), а при
х = 1 никакие уравнительные моменты в рабочем элек-
трическом вале передаваться не могут. На рнс. 5.20, б
&Мтах — разность моментов нагрузок, передаваемых при
этом режиме работы:
AМr.ax = I М-2 — Ml |о-СО»-
В практически важном диапазоне скольжений (от
s= 0,1 приблизительно до s = 0,3) при уменьшении со-
противления резисторов /?доб уравнительный момент сна-
чала снижается лишь незначительно, хотя уже и созда-
ются значительные моменты. Эта особенность весьма бла-
гоприятствует обеспечению необходимых моментов на
рабочих механизмах.
Минимальный нагрузочный момент каждого двигателя
электрического вала приведен на рис. 5.20, в; для под-
держания статически устойчивой работы его значения
не должны быть ниже указанных.
Когда на обоих валах моменты инерции равны, условия
работы аналогичны электрическому валу с уравнительными
машинами. Статическая устойчивость в случае сильно
различающихся моментов инерции для уравнительных
моментов определяется исключительно нагрузкой машин
с малым моментом инерции. Этот привод может нагружаться
максимально вплоть до его критического момента. За этим
пределом статически устойчивая работа невозможна.
На рис. 5.21 даны предельные кривые 0 для различ-
ных значений х в зависимости от относительного сколь-
жения. Из них видно, что при малых скольжениях отри-
цательные углы рассогласования могут быть большими,
а положительные — только малыми.
230
Рабочий электрический вал может применяться лишь
при небольшой разнице статических моментов, прило-
женных к разным валам. Кроме того, из-за наличия по-
стоянно включенных резисторов КПД этого вала оказы-
вается низким и ухудшается использование машин.
Дистанционный электрический вал. Для обеспечения
согласованной работы вспомогательного привода с глав-
ным приводом приобрел особо важное значение дистанцион-
ный электрический вал. Например, для точного нарезания
резьбы в токарных станках часто требуется, чтобы скорость
Рис. 5.21. Предельные кривые О
для различных значений х в
зависимости от относительного
скольжения для рабочего элект-
рического вала.
Рис. 5.22. Принципиальная схе-
ма дистанционного электричес-
кого вала.
подачи резца (суппорта) находилась в постоянном соот-
ветствии с угловой скоростью главного привода, вращаю-
щего обрабатываемую деталь. Так как мощности главного
привода и привода суппорта сильно различаются, то вся
необходимая для перемещения суппорта мощность переда-
ется через дистанционный электрический вал.
На рис. 5.22 представлена схема дистанционного элек-
трического вала. Одна из машин Ml вала —датчик Д —
соединена с главным приводным двигателем ДГ, а дру-
гая М2 — приемник П1 — соединена с производственным
механизмом (Мс2). К одному датчику могут быть при-
соединены два приемника и больше с различными нагруз-
ками. Здесь в противоположность уравнительному валу
направление потока энергии неизменно. Датчик получает
231
необходимую мощность в основном от главного привода.
Приемник как двигатель вращает нагрузку Мс2. Датчик
работает в режиме асинхронного преобразователя частоты,
а приемник как машина двойного питания — в синхрон-
ном режиме.
По сравнению с уравнительным валом менее благопри-
ятной для дистанционного вала является работа в направ-
лении против вращающегося поля. Приемник под нагруз-
кой стремится снизить свою скорость. Вследствие этого
возникает угловой сдвиг в направлении вращения поля,
так как направление вращения вала противоположно
Рис. 5.23. Зависимость синхронизирующего (вращающего) момента ма-
шины-приемника от угла рассогласования для различных относитель-
ных скольжений в системе дистанционного электрического вала.
направлению вращения поля. Угол рассогласования прием-
ника при этом положительный, а максимальный синхро-
низирующий момент — относительно низкий (рис. 5.23).
На рис. 5.24, а, б показаны соотношение знаков и обра-
зование момента машины — приемника из синхронной
и асинхронной составляющих для обоих режимов работы.
Из рис. 5.23 и 5.24 следует, что работа в направлении вра-
щения поля является благоприятной (рис. 5.24, а), так
как вращающий момент приемника при отрицательных
углах 0 больше (см. рис. 5.23). Для машин большой мощ-
ности может быть рекомендована также и работа в направ-
лении против вращающегося поля (рис. 5.24, б).
Вращающий момент приемника дистанционного элек-
трического вала:
ДЛ Г с ”1
Мпр = 4- (1-COS0) ---sinfi , (5.29)
z L ьк J
где М = 2Л4К/ (sjs + s/sj; причем угол 0 должен в соот-
ветствии с направлением вращения относительно поля
232
выбираться либо положительным, либо отрицательным
(для 0 < s < 1 угол 0 < 0 и для s > 1 угол 0 > 0).
Устойчивая работа дистанционного электрического вала
обеспечивается в диапазоне моментов вплоть до максималь-
ного момента. Максимально допустимый угол рассогласо-
вания в статике определяется из условия
<Ш,1О м f s 1
-^- = -2"[sin0c--cos0(.|=O (5.30)
и равен:
0е = arctg | s/sK (5.31)
На рис. 5.25 показана зависимость 0С от относитель-
ного скольжения s/sK. Кривые 1 и 2 соответствуют работе
в направлении вращающегося поля и против.
Рис. 5.24. Соотношение знаков и образование момента приемника
из синхронной и асинхронной составляющих при работе в направле-
нии (а) и против (6) вращающегося поля.
Приемник не может отдавать вращающий момент боль-
ший, чем возникающий при 0С. Следовательно, максималь-
ная нагрузка на приемнике равна:
A'Lpmax -C-M 1(1 -COS 0J бс1. (5.32)
* L J
233
Можно вывести критерий для выбора машин электри-
ческого вала, если в (5.32) подставить максимально допу-
стимый угол рассогласования из (5.31):
I I > I 1 +(S/S,C)2
|(S/M[1 ±/i+(S/SK)2J
(5.33)
Отрицательный знак перед корнем справедлив для
положительного угла 0, т. е. для работы в направлении
против вращения поля, а положительный знак — при ра-
боте машин электрического вала в направлении вращения
поля.
Кривые на рис. 5.26, построенные по (5.33), наглядно
показывают благоприятные свойства дистанционного элек-
трического вала при работе в направлении вращения поля
(кривая /). Кривая 2 соответствует работе вала в направ-
Рис. 5.25. Зависимость угла ста-
тической устойчивости от отно-
сительного скольжения для ди-
станционного электрического
вала.
Недостатком рассмотренной системы является рассо-
гласование валов упомянутых приводов по углу (или по
пути), возрастающее с увеличением нагрузки. Это рассо-
гласование — органическое свойство обычной системы элек-
трического вала, так как момент, развиваемый приемни-
ком, возникает только в результате рассогласования и
пропорционален синусу угла рассогласования.
Из рис. 5.27 видно, что угол рассогласования 0Х (кри-
вая Г) возникает при статическом моменте Л1с; если момент
нагрузки меняется относительно заданного значения Л1 .
то соответственно изменяется и угол Oj, определяющий
погрешность системы. Уменьшение погрешности может
быть достигнуто за счет увеличения мощности машин
электрического вала. Так, кривая 2 на рис. 5.27 относится
к более мощной системе; при том же статическом моменте Л!с
погрешность обусловлена меньшим углом 62. Однако чрез-
мерное увеличение габаритов машин неприемлемо, поэтому
с целью повышения точности согласования по пути при-
меняются следящие системы, в которых используются
234
машины постоянного тока и сельсинные датчики угла
рассогласования валов. Эти системы отличаются некоторой
сложностью.
Следящая система на переменном токе, в основу кото-
рой положена рассмотренная выше схема дистанционного
электрического вала, приведена на рис. 5.28. Здесь валы
датчика Ml и приемника М2 соединены соответственно
с сельсинами С1 и С2, статорные цепи которых присоеди-
нены к источнику переменного тока, а роторные обмотки
Рис. 5.27, Зависимость мо-
мента от угла рассогласова-
ния для различных мощно-
стей электрического вала.
Рис. 5.26. Необходимое ми-
нимальное значение макси-
мального момента двигате-
лей дистанционного элект-
рического вала при работе
в направлении вращения по-
ля (7) и против вращения
поля (2).
включены встречно. Отличительной особенностью этой
системы электрического вала, в которой, как видно из
схемы, электрически соединены машины Ml и М2, явля-
ется применение машины-датчика Ml с поворотным ста-
тором. Поворот статора осуществляется при помощи испол-
нительного двигателя М3 малой мощности через редуктор Р
с большим передаточным отношением. Двигатель М3 пита-
ется от преобразовательного устройства ПУ, управляемого
промежуточным усилителем У.
Если после предварительной синхронизации до пуска
системы имеет место рассогласование в положении роторов
датчика Ml и приемника М2, например обусловленное
моментом трения, то при включенных статорных обмотках
235
сельсинов Cl и С2 вследствие рассогласования их роторов
(соответственно упомянутому рассогласованию роторов дат-
чика и приемника) на выходе сельсинов возникает ЭДС,
равная геометрической разности сдвинутых ЭДС С1 и С2.
На вход усилителя У будет подан сигнал, в результате
действия которого сработает исполнительный двигатель М3
и статор датчика М2 повернется на такой угол, при кото-
ром практически устраняется рассогласование в положе-
нии роторов машин Ml и М2 вследствие поворота вала
приемника Ml под действием возникшего синхронизирую-
щего момента. Статор датчика повернется на угол, соот-
ветствующий тому рассогласованию, которое имело место
до начала действия следящей системы.
Рис. 5.28. Следящая система на переменном токе на основе дистанцион-
ного электрического вала.
Затем, как обычно, производится пуск главного дви-
гателя и за ним согласованно следует синхронно-следящая
система электрического вала. В динамическом режиме,
так же как и в статике, действие системы направлено
к автоматическому устранению рассогласования в положе-
нии валов электрического привода за счет перенесения этого
рассогласования в положение статоров. Очевидно, что
такая система может обеспечить более высокую точность
отработки, чем обычная система электрического вала.
Установка роторов машин электрического вала в оди-
наковое угловое положение и осуществление предусмо-
тренных для согласованного вращения соединений между
обмотками машин и сетью производится с помощью син-
хронизации. Необходимо следить за тем, чтобы вращаю-
236
щиеся поля соединенных между собой машин имели оди-
наковое направление вращения.
Схема, которая надежно исключает погрешности при
синхронизации, изображена на рис. 5.29. Здесь весь про-
цесс синхронизации происходит в три ступени (К1, К2, К5).
На рис. 5.30 показано пространственное положение глав-
ного потока в машинах электрического вала на различных
ступенях включения схемы синхронизации.
Синхронизация в три ступени не всегда является обя-
зательной. В установках, к которым не предъявляются
Высокие требования и синхронизация требуется редко,
иногда считается допустимой случайная погрешность син-
хронизации, и синхронизацию можно производить в две
ступени (первая и третья или
вторая и третья по рис. 5.29
и 5.30).
Моменты трения и нагру-
зочные моменты действуют
навстречу соответствующим
направлениям вращательного
Рис. 5.29. Схема предварительной
трехступенчатой синхронизации ма-
шин электрического вала.
движения и оказывают поэтому демпфирующее воздействие
на возникающие уравнительные колебания. В отдельных
случаях, когда механическое демпфирование недостаточно,
для сокращения времени, протекающего между отдель-
ными ступенями синхронизации, в соединение роторов
включают резисторы с относительно большим демпфирую-
щим сопротивлением, которые при последнем переключении
на трехфазное присоединение машин вала к сети шунти-
руются и таким образом не могут влиять на работу вала.
Обычная выдержка времени между ступенями переклю-
чения при синхронизации составляет несколько секунд.
Иногда возникает необходимость пуска и синхрониза-
ции машины приемника дистанционного электрического
вала при уже вращающемся датчике. Наиболее надежная
возможность пуска машины-приемника дистанционного
электрического вала до угловой скорости, одинаковой
с угловой скоростью машины-датчика, и последующей
синхронизации приемника обеспечивается при возбужде-
237
пии машин вала постоянным током по схеме рис. 5.31,
При вращающемся главном двигателе ДГ и датчике Ml
Рис. 5.30. Пространственное положение главного потока в машинах
электрического вала на различных ступенях включения схемы синх-
ронизации на рис. 5.29.
замыкаются контакты /<7 и КГ. Машина М2 получает
питание со стороны ротора от машины-датчика Ml, рабо-
тающей как синхронный
генератор с возбуждением
постоянным током со сто-
роны статора. Две фазы
обмотки статора М2 замк-
нуты накоротко. Машина-
приемник М2 разгоняется
почти до угловой скорости
Рис. 5.31, Схема синхронизации
машины-прнемника дистанцион-
ного электрического вала при
возбуждении постоянным током
в случае вращающегося дат-
чика.
датчика как обычный асинхронный двигатель. После
переключения контактора К2 машина М2 получает воз-
буждение постоянным током и как синхронная машина
238
входит в синхронизм с машиной-датчиком Ml. После
этого воздействием па контактор КЗ на обе машины вала
подается трехфазиое питание и они переходят в режим
работы дистанционного электрического вала.
ГЛАВА ШЕСТАЯ
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
УГЛОВОЙ скорости и момента
ЭЛЕКТРОПРИВОДОВ
6.1. Общие положения
Ранее было показано, что в разомкнутых
системах регулирования вследствие значительного пере-
пада угловой скорости при изменении нагрузки на валу
двигателя не удается получить большого диапазона регу-
лирования угловой скорости и обеспечить высокую
точность регулирования. В разомкнутой системе при задан-
ном сигнале на входе (например, токе возбуждения дви-
гателя постоянного тока, питаемого от сети, или токе воз-
буждения генератора в системе Г—Д) выходная величина —
угловая скорость определяется параметрами двигателя
и нагрузкой на его валу, и ее изменение не компенсируется
при различных возмущениях, которые практически всегда
существуют. Параметры двигателя, а также и нагрузка,
обусловленная работой механизма, могут изменяться вслед-
ствие изменения сопротивления обмоток двигателя, ре-
жима работы механизма и т. д. Поэтому в таких системах
диапазон и точность регулирования угловой скорости
не высоки, В разомкнутой системе также нельзя получить
высокой точности поддержания момента, развиваемого при-
водом.
Для расширения диапазона регулирования и повышения
точности используются замкнутые системы регулирования.
Идея замкнутых систем регулирования сводится к тому,
что в системе автоматически компенсируется воздействие
возмущающих факторов и угловая скорость или момент
двигателя могут с большей точностью поддерживаться
на требуемом уровне. Последнее поясняется рис. 6.1.
Здесь тонкими линиями показаны механические характе-
ристики двигателя в разомкнутой системе преобразога-
239
тель—двигатель, например в системе Г—Д. При задан-
ной угловой скорости идеального холостого хода wn
поддержание угловой скорости иа требуемом уровне при
изменении нагрузки может быть достигнуто соответст-
венно моменту Mlt если увеличить ЭДС генератора от
значения £г3 до £г2 так, чтобы компенсировать падение
угловой скорости на значение Acoj и получить значение
угловой скорости, равное Wp Дальнейшее увеличение
нагрузки до М2 потребует увеличения ЭДС генератора
до значения £Г1 > £г2. При этом наблюдается большая
Рис. 6.1. Механические характеристики в разомкнутой системе Г — Д.
компенсация падения угловой скорости, равного Д<о2, для
получения угловой скорости со2; в случае большего мо-
мента нагрузки М3 ЭДС генератора еще увеличивается
и становится равной £г,ном > £г1, угловая скорость при-
вода при ЭТОМ (О3.
Таким образом, для получения характеристики с вы-
сокой жесткостью (утолщенная линия на рис. 6.1) и
расширения диапазона регулирования необходимо ав-
томатически с ростом нагрузки повышать ЭДС генера-
тора.
Рассмотрим системы автоматического управления двига-
телями постоянного тока независимого возбуждения. Си-
стема автоматического регулирования, в которой цепь
воздействий замыкается, характеризуется наличием обрат-
£40
ных связей; она имеет, по крайней мере, одну обратную
связь, соединяющую выход системы с ее входом. Кроме
того, могуг быть, так называемые внутренние обратные
связи, соединяющие выход и вход отдельных элементов
системы автоматического регулирования.
Обратные связи делятся на жесткие и гибкие. Жесткие
связи действуют как в переходном, так и в установившемся
режимах работы, гибкие — только в переходном режиме.
Различают положительные и отрицательные обратные связи.
При увеличении регулируемой величины положительная
связь еще больше ее увеличивает, а отрицательная, наобо-
рот, уменьшает. Обратные связи могут передавать сигналы,
пропорциональные значению или производной (иногда
интегралу) от значения напряжения, тока (или момента),
скорости, угла поворота и т. п. В этих случаях они назы-
ваются (жесткими или гибкими, положительными или
отрицательными) обратными связями соответственно по
напряжению, току, скорости, углу.
Для осуществления автоматического регулирования не-
обходимо измерить сигнал обратной связи, затем этот
результат в виде напряжения сравнить (произвести алге-
браическое суммирование) с заданным в виде напряжения
значением регулируемой величины и направить результат
сравнения регулируемому объекту. Обычно энергии изме-
рительного органа оказывается недостаточно для воздей-
ствия на регулирующий орган, поэтому возникает необ-
ходимость в применении усилительного устройства. Пере-
численные элементы (измерительный орган, усилитель и
регулирующий орган) входят в устройство регулятора,
осуществляющего процесс регулирования.
Таким образом, система автоматического регулирования
состоит из регулируемого объекта и регулятора, реаги-
рующего на изменение регулируемой величины.
Ограничение момента, развиваемого приводом, до тре-
буемого значения с определенной точностью может про-
изойти, например, при снижении ЭДС преобразователя,
питающего якорь двигателя постоянного тока независимого
возбуждения. Автоматически это выполняется при исполь-
зовании соответствующей обратной связи. В данном слу-
чае целесообразно применить отрицательную обратную
связь по току, которая вступает в действие при достиже-
нии током (или моментом при Ф — const) заданного зна-
чения.
241
6.2. Система автоматического
регулирования угловой скорости
с жесткой отрицательной обратной
связью по напряжению
Структурная схема системы автоматического
регулирования угловой скорости с жесткой отрицательной
обратной связью по напряжению на якоре двигателя по-
стоянного тока независимого возбуждения приведена па
рис,. 6.2, а.
Рис. 6.2. Структурная схема систе.уы автоматического регулирования
угловой скорости с жесткой отрицательной обратной связью по напря-
жению (а) и характеристики двигателя (б).
Система уравнений в установившемся режиме всех
элементов системы имеет вид:
^ВХ ^3 Еп ^у^п^вх’
1/д = Ua = Ea + IRa',
Ел — сю; М = cl.
(6.1)
где = (7y/f7,IX; k„ ~ EJUy—соответственно коэффи-
циенты усиления усилителя У и преобразователя /7;
Ел — соответственно ЭДС преобразователя П в двига-
242
теля М; Rn, RK— сопротивления преобразователя и дви-
гателя; а= Uq.zIUh — коэффициент усиления обратной
связи по напряжению.
После преобразований получим уравнение механиче-
ской характеристики в замкнутой системе:
или
Ш “с(1+а/г..Л„)
2?п + /?д(1+аМп)
М С2(1+ай^„)
(6.2)
kzU3 ftn + ^д (1 +а^с)
—-------------М -----------------
c(l+<zZ:c) c2(l+<zfec)
(6.3)
отно-
(6.3)
ХОЛ о-
где kykn.
Если считать, что коэффициенты ky и kn постоянные,
то (6.3) есть уравнение прямой. Первый член уравнения (6.3)
определяет угловую скорость идеального холостого хода,
пропорциональную задающему напряжению U3 (характе-
ристики 3 и 3' на рис. 6.2, б).
Анализ (6.3) показывает, что при коэффициенте усиле-
ния kz = kykn -> оо жесткость механической характери-
стики в рассматриваемой системе не превосходит жесткости
естественной характеристики двигателя (характеристика 1
на рис. 6.2, б), подключенного к сети с постоянным напря-
жением U„ = с(о0. Следовательно, в такой системе наи-
больший диапазон регулирования будет обусловливаться
падением напряжения в якорной цепи собственно двига-
теля; статизм в замкнутой системе регулирования при
нагрузке, равной Л41)ом, может быть определен как
шение перепада угловой скорости по уравнению
к текущему значению угловой скорости идеального
стого хода:
„ Л4| ОМ^Я . ^ном/?да
6 = ~ckJ7T ‘ cLT3 ’
где Rs — Rn + Ru-
Анализируя (6.4), можно установить следующее: 1) при
конечном значении коэффициента усиления 0 < kz <_ со
статизм системы будет возрастать по мере снижения зада-
ющего напряжения; 2) минимальный перепад скорости
(при /гс -» оо) обусловливается внутренним сопротивле-
нием цепи якоря собственно двигателя, т. е. предельная
жесткость характеристики, как отмечалось, определяется
жесткостью естественной характеристики, а относительная
жесткость падает по мере снижения задающего напряже-
ния. Поэтому такая система автоматического регулирова-
243
(6-4)
ния не может обеспечить большой диапазон регулирования
и не обладает высокой точностью поддержания скорости.
На рис. 6.2, б показаны: естественная характери-
стика 1 двигателя, к которой стремится характеристика
в замкнутой системе регулирования при kt-> со; характе-
ристика 2 в разомкнутой системе регулирования с учетом
общего сопротивления якорной цепи двигателя и преобра-
зователя и характеристики 3 и 3' в замкнутой системе
регулирования при конечном значении коэффициента уси-
ления системы.
В данной системе посредством обратной связи компенси-
руются падение напряжения на внутреннем сопротивле-
нии преобразователя и колебания напряжения сети, т. е.
стабилизируется выходное напряжение преобразователя.
Поэтому предельной жесткостью характеристики является
жесткость естественней характеристики двигателя.
6.3. Система автоматического
регулирования угловой скорости
с жесткой положительной обратной
связью по току якоря двигателя
В случае жесткой положительной обратной
связи по току якоря двигателя компенсация падения угло-
вой скорости, возникающего в результате увеличения
нагрузки, достигается автоматическим увеличением ЭДС
преобразователя. Структурная схема такой системы при-
ведена на рис. 6.3, а. Здесь сигнал на входе усилителя
определяется суммой напряжений:
= *4+ ₽/(£„ + £«), (6.5)
где р = RJ (/?„ + RJ.
В качестве шунтового резистора /?ш, с которого сни-
мается сигнал обратной связи, могут быть использованы
обмотки дополнительных полюсов, стабилизирующая и
компенсирующая обмотки.
Приняв систему уравнений, аналогичную (6.1), можно
после соответствующих преобразований получить уравне-
ние механической характеристики в замкнутой системе
регулирования:
(6-6)
244
Если считать, что коэффициенты усиления усилителя
и преобразователя постоянны, то характеристика двига-
теля (6.6) оказывается прямой линией. Первый член (6.6)
определяет угловую скорость идеального холостого хода,
пропорциональную задающему напряжению U3 (точки
идеального холостого хода на характеристиках 2 и 2'
на рис. 6.3, б).
Рис. 6.3. Структурная схема системы автоматического регулирования
угловой скорости с жесткой положительной обратной связью по току
якоря двигателя (а) и характеристики двигателя (б).
Для определения статизма разделим второй член пра-
вой части (6.6) на его первый член при М11ои; тогда полу-
чим:
g МиоЛ (I . (g
Анализ (6.7) показывает, что статизм в замкнутой си-
стеме может быть равен 0 при условии, что pfe. = 1 (харак-
теристика 3 на рис. 6.3, б); для значений pfe. > 1 харак-
теристика может быть восходящей (характеристика /),
245
при значениях pfec <z 1 характеристика имеет отрицатель-
ную жесткость (кривая 2).
Если коэффициенты усиления с ростом нагрузки падают,
то характеристики становятся нелинейными (кривые Г и 3'
иа рис. 6.3, б).
6.4. Система автоматического
регулирования угловой скорости
с жесткой отрицательной обратной
связью по угловой скорости
двигателя
Принцип действия жесткой обратной связи
по угловой скорости (рис. 6.4, а) заключается в следующем.
С ростом нагрузки на валу двигателя уменьшается его
угловая скорость и понижается сигнал с тахогенератора GT,
находящегося на одном валу с двигателем Л4; напряжение,
снимаемое с якоря тахогенератора, пропорционально угло-
вой скорости двигателя. Так как задающий сигнал оста-
ется при этом постоянным, то сигнал на входе усилителя У
при понижении угловой скорости возрастает, следователь-
но, возрастает ЭДС преобразователя П, что автоматически
приводит к компенсации падения угловой скорости при-
вода.
Составим для схемы на рис. 6.4, а систему уравнений;
^вх = ^з.с — р — ъ и • вх’
Ua = Ea-IRa', U^E. + IR.-, (6-8)
E:i = си; М—сГ,
здесь — задающее напряжение в системе с обрат-
ной связью по скорости; у = им/<л — коэффициент пере-
дачи обратной связи по скорости. Все остальные обозна-
чения такие же, как и для рассмотренных выше схем.
После соответствующих преобразований получим урав-
нение для механической характеристики в замкнутой
системе регулирования:
а) = ^^_Л4 (6.9)
1 +yk С2(1+уЙ)’ ' '
где k = &с/с — коэффициент передачи (усиления) всей
системы; = R„ + /?д.
При постоянном коэффициенте передачи k механиче-
ские характеристики двигателя линейны. Очевидно, что,
как и в предыдущих случаях, первый член правой части
246
уравнения (6.9) определяет угловую скорость идеального
холостого хода двигателя, а второй член — падение угло-
вой скорости, обусловленное изменением момента нагрузки.
В данной системе аналогично первому рассмотренному
случаю задающее напряжение в замкнутой системе выше,
Рис. 6.4. Структурная схема системы автоматического регулирования
угловой скорости с жесткой отрицательной обратной связью по угловой
скорости (а) и характеристики двигателя (б).
чем в разомкнутой. Статизм в этой системе регулирования
определится по формуле (при М — Л4Ц0М):
6 = MI10../?H/c2/et/3. (6.10)
Из (6.10) следует, что статизм может быть сколь угодно
малым с возрастанием коэффициента передачи всей си-
стемы. Поэтому в системе с отрицательной обратной связью
по скорости можно при большом коэффициенте передачи
получить значительный диапазон регулирования. На рис.
6.4, б приведены: предельная характеристика 1 при k -> оо,
характеристики 2, 2' при конечном значении коэффициента
передачи (усиления) системы и характеристика двигателя
в разомкнутой системе 3.
247
Применение комбинированных обратных связей рас-
ширяет возможности электрического привода в отношении
диапазона регулирования, например возможно сочетание
жестких отрицательной обратной связи по напряжению
с положительной по току или отрицательной обратной
связи по угловой скорости с положительной по току.
Подобного же вида обратные связи могут быть применены
в системах привода переменного тока.
В качестве преобразователя П в рассмотренных систе-
мах могут быть использованы различные устройства: асин-
хронный двигатель— генератор, управляемый выпрями-
тель, магнитный усилитель, широтно-импульсный пре-
образователь и т. п.
Следует отметить, что увеличение коэффициента усиле-
ния в рассмотренных системах ограничено их динамической
устойчивостью и чувствительностью к помехам. При боль-
ших коэффициентах усиления приходится вводить допол-
нительные корректирующие устройства или стабилизи-
рующие обратные связи (обычно гибкие отрицательные),
которые делают систему устойчивой и обеспечивают желае-
мое качество (время процесса, перерегулирование, колеба-
тельность процесса) переходных процессов в системе (изме-
нение задания по скорости, сброс — наброс нагрузки
и т. п.). Ограничение па коэффициент усиления системы
предопределяет и ограничение на диапазон регулирования.
Так, для системы с обратной связью по скорости, обладаю-
щей наплучшей стабильностью при всех возможных воз-
мущениях (изменение потока двигателя, нагрузки, тем-
пературы обмодок, напряжения сети и т. п.) среди рассмо-
тренных систем, наибольший диапазон регулирования
составляет около 2000:1.
6.5. Автоматическое регулирование
момента электропривода в системе
преобразователь — двигатель
Для автоматического регулирования момента
привода постоянного тока независимого возбуждения может
быть использована так называемая нелинейная жесткая
отрицательная обратная связь по току, или связь с отсеч-
кой. Упрощенная принципиальная схема, в которой наряду
с жесткой отрицательной обратной связью по угловой
скорости имеется еще жесткая отрицательная обратная
связь по току с отсечкой, показана на рис. 6.5. Отрицатель-
248
мая обратная связь по скорости действует на первом участке
характеристики двигателя (рис. 6.6), когда ток нагрузки
не достигает тока отсечки (/ /01С), и на втором — при
/ > Лис- Принцип действия обратной связи по скорости
был описан в § 6.4.
Отрицательная обратная связь по току с отсечкой на-
чинает действовать тогда, когда ток якоря двигателя пре-
вышает ток отсечки. Вступая в действие, эта обратная
связь позволяет системе обеспечивать с определенной
овм
Рис. 6.6. Механические харак-
теристики двигателя, работаю-
щего в системе с отрицатель-
ными обратными связями по
угловой скорости и по току
с отсечкой.
Рис. 6 5. Принципиальная схема
системы автоматического регулиро-
вания угловой скорости с жесткой
отрицательной обратной связью по
скорости и жесткой отрицательной
обратной связью по току с отсечкой.
точностью поддержание постоянства тока или момента
(при Ф = const).
На схеме рис. 6.5 преобразователь П (например, маг-
нитный или электромашинный усилитель или тиристор-
ный выпрямитель с промежуточным магнитным усилите-
лем) имеет две обмотки управления: одна ОУ1, сигнал
управления которой пропорционален разности задающего
сигнала U3, снимаемого с потенциометра П1, и сигнала
отрицательной обратной связи по скорости (70с, снимае-
мого с тахогенератора GT, и другая обмотка ОУ2, вклю-
ченная через диод V на разность опорного напряжения Uon,
снимаемого с потенциометра П2, и падения напряжения
249
на шунте /?„„ пропорционального току якоря двигателя Л1.
Разность этих напряжений при протекании тока / > /отс
создает МДС Fx, направленную встречно МДС Еу. При
токах, меньших тока отсечки, в обмотке 0У2 ток не про-
текает (из-за диода V и соответствующим образом подо-
бранного значения опорного напряжения) и система рабо-
тает только с обратной связью по скорости соответственно
характеристикам на участках (оо/, а'оГ или со'о/" (рис. 6.6),
отвечающим различным задающим напряжениям, снимае-
мым с потенциометра П1. По мере увеличения тока на-
грузки угловая скорость двигателя падает, уменьшается
напряжение обратной связи t/0.c, возрастает напряжение
на обмотке ОУ1, равное t/0.yl = U3 — иол, и возрастает
ЭДС преобразователя, частично компенсируя падение угло-
вой скорости. При токах, больших тока отсечки, появля-
ется напряжение на обмотке 0У2. Это напряжение вызы-
вает размагничивающий сигнал, и результирующая МДС
падает (/Д == Еу — FT), приводя к резкому падению ЭДС
преобразователя и угловой скорости двигателя. При не-
подвижном состоянии двигателя в его якорной цепи про-
текает ток стопорения /ст, а результирующая ЭДС пре-
образователя равна произведению стопорного тока па
сопротивление якорной цепи преобразователь — двига-
тель.
На втором участке характеристики (при / > /отс)
вместе с отрицательной обратной связью по скорости
действует отрицательная обратная связь по току. В этом
случае результирующий сигнал, выраженный через пара-
метры схемы управления, можно записать так:
= б'з. с~_ IRm — Upn _
2 Fo.yi °'yl Ri
= F3 —/?0, —/гт (/—/01С), - (6.И)
где /?0.у1 — полное сопротивление цепи обмотки- управле-
ния 0У1’, Ry — полное сопротивление цепи обмотки токовой
отсечки ОУ2; kx = RluwJRx\ /отс = U0JRm\ k0,x •=
= kX[w0,vlIR0,vi, F3= U3.zwo_ylIRo,yF, ®0.yi, wT — соот-
ветственно число витков обмоток управления 0У1 и ОУ2\
kx? — коэффициент передачи обратной связи по скорости
(тахогенератора).
Если в (6.8) вместо первого уравнения подставить (6.11),
а вместо второго выражения Е„ = ft,, (Е2) то полу-
чим уравнение электромеханической характеристики дви-
250
гателя на втором участке:
(<Ч)
“-------------r+CMAX------------------ ,6,2)
где kn (Fs) — коэффициент передачи (усиления) преобра-
зователя; kx — {/с.
Если заданы значения /отс и /ст, а также известны
параметры цепи управления обмоток, то можно найти ks.
Для режима стопорения (w = О, / = /ст):
ст = ^3 ^Т (^СТ /отс) >1 /С 1
Е — I R I ( )
*"П, СТ 1 СТ1 \я' )
Зная характеристику преобразователя Еа= f (F^) и
£п,ст. находим:
At = (F3-F2ct)/(/ct-/otc). (G.14)
Изменяя Uon, можно менять ток, при котором вступает
в действие отрицательная обратная связь по току, следова-
тельно, изменять предельный момент.
6.6. Автоматическое регулирование
скорости и момента в системе источник
тока — двигатель
Рассмотренные ранее способы автоматическо-
го регулирования скорости и момента двигателя постоян-
ного тока независимого возбуждения предполагают пита-
ние его от источника ЭДС, не зависящей от тока нагрузки.
Рассмотрим схемы автоматического регулирования момента
с питанием якорной цепи от источника тока, в котором
задан ток, не зависящий от ЭДС и сопротивления нагрузки
(допустим / = /иом). Обмотка возбуждения двигателя полу-
чает питание от источника регулируемого напряжения,
полярность которого можно изменять. Механические ха-
рактеристики такого привода представляют собой верти-
кальные прямые линии (рис. 6.7), т. е. являются абсолютно
мягкими (момент не зависит от угловой скорости), а их
положение (значение момента) определяется магнитным
потоком, так как М = k<bl = 6/номФ =
Применение обратных связей в схеме источник тока —
двигатель позволяет сформировать из вертикальных харак-
теристик любые характеристики. Таким примером явля-
251
ется схема, приведенная на рис. 6.8. Здесь якорь двига-
теля Л1 подключей к источнику тока ИТ, а обмотка воз-
буждения ОВМ присоединена к усилителю У с линейной
характеристикой, на входе которого две обмотки управле-
ния. Одна из них ОУ! получает питание от потенциометра
П1 и предназначена для создания сигнала, пропорциональ-
ного потоку Г,л — I ,ш„ (задание момента), другая ОУ2 —
обмотка отрицательной обратной связи по скорости с сиг-
налом Fo: = /о.сИ'о.о направленным встречно сигналу Fu.
Обмотка обратной связи 0У2
присоединена к тахогенера-
тору GT через потенциометр
П2 и выпрямитель V так, что
сигнал, пропорциональный
скорости, появляется на ней
тогда, когда | £,г | > U3.
Меняя с помощью потенцио-
Рис. 6.7. Механические характери-
стики привода по системе источник
тока — двига1ель.
метра П2 задающее напряжение U3, можно регулировать
уставку отсечки обратной связи по скорости, так как вен-
тили V пропускают ток /ос только в том случае, когда
напряжение ОТ превосходит U3.
Результирующий сигнал на входе усилителя У:
Fs=/?M-/?o.c=^M-^o,cW- (6.15)
Полагая, что магнитный поток линейно зависит от тока
возбуждения (Ф = kJB), получаем (при / = /ноа1):
М =fe/HOMfeB/B=fe/H0MfeBfeyfs = ЛР2, (6.16)
где ky — коэффициент усиления усилителя У.
Пока не действует обратная связь по скорости (система
разомкнута), двигатель развивает постоянный момент,
пропорциональный сигналу, зависящему только от F*
(рис. 6.7). С помощью потенциометра П1 (рис. 6.8) можно
изменять направление тока в обмотке управления ОУ1,
следовательно, изменять знак момента.
Если вступает в действие обратная связь по скорости
F0,c > 0, результирующий сигнал Л2 становится меньше,
а вместе с ним уменьшается и момент. Уравнение меха-
252
нической характеристики приобретает вид:
СО = M/kOi<_A, (6.17)
где ы0 = FJk0,c-, Aw = M/kocA.
На рис. 6.9 даны характеристики, соответствующие
различным уставкам задающего напряжения U3 (а>1 и со2)
и F„ (Mi и М2).
Механические характеристики могут быть расположены
в четырех квадрантах, если источник тока ИТ позволяет
рекуперировать энергию в сеть.
Рис. 6.8. Принципиальная схема системы источник тока — двигатель
с обратными связями.
Наиболее простое устройство, работающее в режиме
источника тока, — индуктивно-емкостный преобразователь
(ИЕП). Схема привода с таким преобразователем пока-
зана на рис. 6.10. Индуктивно-емкостный преобразователь
состоит из трех одинаковых реакторов с индуктивностью xl
и трех конденсаторов с емкостным сопротивлением Хс-
Точки А, В и С присоединены к питающей сети переменного
тока, а а, b и с к входу неуправляемого выпрямителя,
нагрузкой которого является двигатель постоянного тока
независимого возбуждения.
253
Принцип действия ИЕП основан па резонансе напряже-
ний в цепи LC, в которой ток нагрузки не зависит от со-
противления нагрузки, а зависит от линейного напряжения
питающей сети и реактивного сопротивления Хд — хс =
= хР,э (где хр,э— реактивное эквивалентное сопротивле-
ние)^. е. обладает свойством источника тока.
Рассмотренный неуправляемый преобразователь (ИЕП)
в силовой цепи относительно прост и надежен, так как
источник тока — двигатель с об-
ратной отрицательной связью
по угловой скорости с отсеч-
кой,
Рис. 6.10. Принципиальная схе-
ма электропривода с ИЕП.
не имеет вращающихся частей; он обладает хорошими
технико-экономическими показателями (высокие КПД и
cos ср). Диапазон регулирования (50—100):1 и зависит
от коэффициента усиления усилителя. Система обеспечивает
высокую стабильность и плавность регулирования угло-
вой скорости.
К недостаткам схемы следует отнести невозможность
получения рекуперативного торможения; торможение осу-
ществляется противовключением, для чего служит ограни-
чивающий резистор 7?т. Регулирование момента ограничено
254
значением (1 4- 1,2) Мпом в результате насыщения маг-
нитной системы. Система обладает невысоким быстродей-
ствием вследствие незначительной перегрузочной способ-
ности двигателя и в связи с тем, что управление переход-
ными процессами переносится в цепь возбуждения.
6.7. Автоматическое регулирование
угловой скорости асинхронных
электроприводов при помощи
тиристорных регуляторов напряжения
Несмотря на то что в разомкнутой системе асинхрон-
ный двигатель не может работать на неустойчивой части механиче-
ской характеристики, в замкнутой системе автоматического регули-
рования асинхронный привод может быть устойчивым, обеспечивая
плавное регулирование угловой скорости в сравнительно широком
диапазоне.
Структурная схема асинхронного электропривода с регулиро-
ванием угловой скорости при помощи тиристорного регулятора на-
пряжения приведена на рис. 6.11, а. Здесь регулирование напряжения
на статоре асинхронного двигателя производится тиристорным регуля-
тором напряжения ТРИ, угол а включения тиристоров которого изме-
няется системой управления СУ. На вход СУ подается сигнал от уси-
лителя У; этот сигнал зависит от разности задающего напряжения (/,
и напряжения отрицательной обратной связи по скорости, снимаемой
с выводов тахогенератора, U0,c — где у — коэффициент передачи
тахогенератора.
Механические характеристики в замкнутой системе регулирова-
ния располагаются в зоне между двумя характеристиками в разомкну-
той системе (рис. 6.11, б). Одна из этих характеристик соответствует
минимальному углу включения тиристоров ат/л. = <р (s), равному
фазовому углу нагрузки <р, который определяется по схеме замещения
двигателя как:
. (6.18)
K1^x‘’UW + (*0+^)2
где z'> = V R'Js)2 Jrx',-', х0— индуктивное сопротивление цепи на-
магничивания.
Другая характеристика соответствует наибольшему углу включе-
ния атах, примерно равному 135°. При таком угле момент, развивае-
мый двигателем, обычно меньше статического момента холостого хода
двигателя Л4Х,Х. Следовательно, при работе двигателя в замкнутой
системе по мере увеличения его нагрузки угол включения а должен
уменьшаться от некоторого максимального до минимального. Поэтому
система управления тиристорами должна вырабатывать при отсутствии
сигнала управления импульсы с углом включения а0 >ато,, а с воз-
растанием сигнала управления по мере увеличения нагрузки двига-
теля и уменьшения его угловой скорости угол а должен уменьшаться.
Такое действие системы управления отражает на рис, 6,11, а узел
255
сравнения на выходе СУ. В соответствии со структурной схемой можно
записать:
а = — kxky (U3 — уш). (6.19)
Используя это уравнение, можно рассчитать требуемые значения
коэффициента усиления усилителя У и задающего напряжения U3<
обеспечивающие необходимые значения угловой скорости и жесткости
Рис. 6,11. Структурная схема асинхронного электропривода с регу-
лированием скорости при помощи тиристорного регулятора напряже-
ния (а) и механические характеристики (б).
механической характеристики двигателя при работе его в замкнутой
системе регулирования. Задавшись крайними точками Wj и оа меха-
нической характеристики (рис. 6.11, б), можно составить систему
^тах = ^о — ^(из — у(1>2); (6.20)
amin = Ф (%) - “о — Му (U3 — ?Wi). (6.21)
где Si — скольжение, соответствующее угловой скорсоти й^, а <р (s,)
определяется по (6.18).
«у. треб- 4,1V((O2_Wi) • (6.22)
Из (6.20) и (6.21) следует:
256
j, _ „ «О (W2 — Wl) + - «2? (s,)
из, треб— T ~
(6.23)
-Ф (’j)
Механические характеристики двигателя в этой системе регули-
рования строятся обычно графо-аналитическим способом с исполь-
зованием универсальных кривых U\ — f (а, ср), графической зависи-
мости <р = A (s), определяемой (6.18), уравнения (6.19) и формулы
момента двигателя М = f, ((Д, s).
Диапазон регулирования составляет для рассматриваемой си-
стемы (15 -j- 20) : 1.
Напомним, что данный способ регулирования угловой скорости
является неэкономичным и может быть исиотьзован в основном при
кратковременном режиме работы.
6.8. Автоматическое регулирование
электроприводов переменного тока
с частотным управлением
Диапазон и точность регулирования в замкну-
тых системах частотного управления, в которых напряже-
ние, приложенное к двигателю, регулируется в функции
нагрузки, значительно выше, чем в разомкнутых системах,
где диапазон регулирования достигает не более 3:1 (см.
гл. 4).
Распространенной системой частотно-регулируемого
асинхронного привода является система со статическим
преобразователем частоты с автономным инвертором.
Многообразие автономных инверторов можно разделить
на два класса: инверторы напряжения и инверторы тока.
В случае автономных инверторов напряжения (АИН)
в качестве управляющих воздействий приняты частота
и напряжение на статоре двигателя, а в случае автоном-
ных инверторов тока (АИТ) может быть использован прин-
цип частотно-токового управления, при котором основ-
ными управляющими воздействиями являются потребляе-
мый статором ток и частота этого тока.
Существенным достоинством АИН является независи-
мость выходного напряжения от частоты и от момента
нагрузки. Выходное напряжение определяется лишь на-
пряжением питания инвертора. Это упрощает формирова-
ние необходимого закона частотного регулирования, осо-
бенно когда напряжение регулируется только в функции
частоты.
Однако если рассматривать систему в целом, т. е.
АИН — Д, то при глубоком диапазоне регулирования
9 Чиликин М, Г., Сандлер А. С. 257
угловой скорости привода и произвольно меняющемся
моменте нагрузки напряжение на двигателе должно регу-
лироваться в функции двух параметров — частоты и мо-
мента. Такое регулирование может быть осуществлено
в замкнутой системе управления. Практически реализация
системы регулирования напряжения в функции момента
нагрузки усложняется неоднозначностью закона регулиро-
вания при изменении частоты и трудностью получения
информации о моменте на валу двигателя.
Рис. 6.12. Структурная схема замкнутой системы автоматического ча-
стотного регулирования с АИН с жесткой отрицательной обратной
связью по угловой скорости в контуре стабилизации скорости.
Проанализируем основные особенности замкнутых си-
стем частотного регулирования асинхронных двигателей
с короткозамкнутым ротором, управляемых АИН.
В системах с жесткой отрицательной обратной связью
по угловой скорости (рис. 6.12) одновременно создается
воздействие на напряжение и частоту. Связь между регу-
ляторами частоты РЧ и напряжения УВ происходит с по-
мощью функционального преобразователя ФП, обеспечи-
вающего требуемое соотношение между напряжением и
частотой на статоре двигателя. На структурной схеме
пунктиром показан внутренний контур стабилизации на-
пряжения. Такая система обладает ограниченным диапа-
зоном регулирования до 7:1 при Л1С = const из-за умень-
шения перегрузочной способности двигателя при низких
частотах.
258
Стабилизация магнитного потока посредством жесткой
отрицательной обратной связи ио потоку двигателя Ф
(рис. 6.13) путем регулирования напряжения на двигателе
в функции частоты (с помощью ФП) и нагрузки обеспечи-
вает механические характеристики двигателя с высокой
перегрузочной способностью и жесткостью, соответствую-
щей естественной характеристике.
Рис. 6.13. Структурная схема замкнутой системы автоматического ча-
стотного регулирования с АИН с жесткой отрицательной обратной
связью по потоку в контуре стабилизации потока.
(6.24)
1 FW) __
> Кдф
В соответствии с рис. 6.13 магнитный поток опре-
деляется по формуле
ф _ knukn п
3V’
где kn(j Uy, ka c i/~л /
С1/1И0М V А (а, 3)
= 1/ClflHOM’ = ^О.с/Ф-
Преобразуя (6.24) с учетом принятых ранее [см. (4.75)]
обозначений, находим:
ф. *?(Р) _
Ci/iHOM /А (а, + (Р)
(6.25)
где k—kKu кЛфкф', В — + х'гР2-
Подставляя (6.25) в формулу момента Ма —
3c2f2 р'д
= ,..^/1,11о_м_ ф2 получаем выражение механической ха-
рактеристики двигателя в замкнутой системе с обратной
связью по потоку:
Л4 _ _______________________________ /с 2б\
о>11|ом [OmwW ( ’
9*
£59
Из выражения магнитного потока Ф = —^цом_ х
________ ___ С1/Л10М
х у полУчаемого из схемы замещения, и
из (6.25) найдем, что напряжение на двигателе в этой
системе регулируется согласно выражению
(6'27)
Напряжение, подводимое к двигателю, нужно менять
так, чтобы поток для всех частот и нагрузок оставался
неизменным и равным потоку при номинальном напряже-
нии и частоте и идеальном холостом ходе (Ф = Фо).
Начиная с некоторого большого коэффициента усиле-
ния (k 100) максимальный момент двигателя в рассма-
триваемой системе при любой частоте остается практически
постоянным и стремится к значению
) ДЦ^ЛюМ 1 3U||OM //? пп\
ка-> 2<0111омх: '
а критическое абсолютное скольжение
Рка->^/4- (6.29)
Из (6.28) и (6.29) видно, что предельные значения МК1Л
и рка не зависят от частоты и возрастают примерно в 2 раза
по сравнению с максимальным моментом и критическим
абсолютным скольжением на естественной характеристике.
Анализ замкнутой системы с обратной связью по потоку
показывает незначительное уменьшение токов по сравне-
нию с разомкнутой системой (при одинаковых моментах
нагрузки), но при этом уменьшается коэффициент мощ-
ности (примерно на 3—5 % по сравнению с номинальным
при а = 1 и р = 1).
Максимальный диапазон регулирования при А1 =
= М|(011 = const можно определить (при регулировании
вниз от номинальной угловой скорости) по формуле
Ватах 2 -и , (6.30)
РК, НОМ
где „ом — критическое абсолютное скольжение в есте-
ственной схеме включения двигателя.
Принимая в среднем Рк, |10м — 0,10 0,2, получаем
Damax = (20 10) : 1, поэтому если есть необходимость
в дальнейшем расширении диапазона регулирования, то
260
необходимо рассмотренную систему дополнить отрицатель-
ной обратной связью по скорости с воздействие?.! на ча-
стоту и задающее напряжение контура стабилизации
потока, как это показано пунктиром на рис. 6.13. Возможно
также использование обратной связи по скорости и в кон-
туре стабилизации потока.
В приводах, работающих с частыми переходными про-
цессами, и в случаях, когда требуется генераторное тор-
можение асинхронного двигателя с рекуперацией энергии
в сеть, целесообразно использование преобразователя ча-
стоты с АИТ. В этих случаях сказываются преимущества
АИТ, заключающиеся в возможности рекуперации энер-
гии в сеть при более простой силовой схеме. При исполь-
зовании АИН рекуперативное торможение асинхронного
двигателя возможно при дополнительном параллелытсч
подключении к управляемому выпрямителю инвертора,
ведомого сетью, так как при переводе двигателя в генера-
торный режим в звене постоянного тока меняется направ-
ление тока при неизменной полярности напряжения.
В системе с АИТ и работе двигателя в генераторном
режиме направление постоянного тока не меняется, а из-
меняется полярность напряжения в звене постоянного
тока. Следовательно, для рекуперации энергии в сеть
управляемый выпрямитель переводится в инверторный
режим.
По сравнению с АИН схема с АИТ отличается отсут-
ствием моста обратного (реактивного) тока, инвертора,
ведомого сетью, и конденсатора фильтра в звене постоян-
ного тока.
Используя схему замещения, приведенную на рис. 4.58,
находим связь между током /2 и /р
/' = / ________________
При этом электромагнитный момент двигателя:
З/'2 R\ 31 ~х2 R'
м wр' = «1Пом [(хо~~4)2+(^/Р)2Г Р" ’
а его магнитный поток:
Ф = /1Хо |/~-Л12 + (%2т^—•
с1/1ном Г Rz +(Хо + х')2Ра
(6.31)
(6.32)
(6.33)
Анализ (6.32) и (6.33) показывает, что при неизменном
токе статора механические характеристики двигателя об-
261
ладают постоянной перегрузочной способностью при всех
частотах как в двигательном, так и в генераторном режи-
мах, а момент его и магнитный поток однозначно связаны
с абсолютным скольжением и не зависят от частоты.
Однако при управлении с неизменным током статора
машина приобретает неблагоприятные свойства, заклю-
чающиеся в том, что с увеличением нагрузки (скольжения)
резко падает магнитный поток. Поэтому система должна
быть замкнута таким образом, чтобы с увеличением на-
грузки по определенному закону увеличивался и ток ста-
тора так, чтобы поток машины поддерживался постоянным.
Упрощенная схема системы частотно-токового управ-
ления асинхронным двигателем с АИТ представлена на
рис. 6.14. В ней задающий сигнал U3iZ определяет частоту
переключения тиристоров АИТ, а следовательно, частоту
тока статора, если не вошло в зону ограничения устройство
ограничения УО. После вычитания из напряжения изл
напряжения, пропорционального угловой скорости дви-
гателя Ua, образуется сигнал абсолютного скольжения (/р,
который является управляющим (после прохождения че-
рез ФП) для контура регулирования тока. В этот контур
входят управляемый выпрямитель УВ с системой управ-
ления СУВ, усилитель разностного сигнала У, сильная
обратная отрицательная связь по току 67,-, стабилизирую-
щая ток на уровне, определяемом сигналом задания, и
сигнал задания тока (7/з, получаемый на выходе функ-
ционального преобразователя ФП. В данной схеме Uj3 —
= k | Р |. Следовательно, при всех частотах ток двига-
теля пропорционален скольжению.
Подставляя в (6.32) и (6.33) зависимость тока статора
от скольжения (принимая ее линейной) — k$, получаем
выражения для момента:
М 3__________
Ы,1ОМ (*0 + Х^ Р2 -р /?22
(6.34)
и магнитного потока:
cJibom V /?'2 + (Хо + ^РРг
(6.35)
где — коэффициент пропорциональности между током
и абсолютным скольжением.
При малых р поток почти пропорционален абсолют-
ному скольжению. В области рабочих скольжений момент
пропорционален р, а нарастание потока уменьшается.
262
При резких изменениях заданного сигнала в системе
по рис. 6.14 или при перегрузках двигателя срабатывает
ОУ (ограничивая па заданном уровне и задание тока).
Система переходит в режим ограничения момента. Сигнал
задания частоты в этом режиме определяется текущим
Рис. 6.14. Упрощенная схема системы частотно-токового управления
асинхронным двигателем с АИТ.
значением угловой скорости и заданным ограничителем ОУ
абсолютным скольжением. Двигатель работает при любой
угловой скорости в этом режиме с постоянными значениями
тока и абсолютного скольжения, что и определяет, как
это следует из (6.32), постоянство момента, т. е. характе-
ристика двигателя становится абсолютно мягкой.
263
На рис. 6.15 приведены примерные механические ха-
рактеристики асинхронного двигателя с короткозамкнутым
ротором мощностью 45 кВт, управляемого АНТ в сис-
теме по рис. 6.14. Характеристики в двигательном и гепе-
о(/:’ач п
1500 1 К,НГц 31,3Гц ОЗ.ВГц м
1000- 1 1
_ • 11 1 1 1
500- 1— ' " 1 1
1 1 1 1 1—1 1
1_______________I_______I_______1—1----1----
-100 0 100 ООО 500Hm„‘t03 Нм
Рис. 6.15. Механи-
ческие характери-
стики асинхронного
двигателя с корот-
козамкнутым ро-
тором мощностью
45 кВт, управляе-
мого от АИТ ио
рис. 6,14.
раторном (рекуперативное торможение) режимах обла-
дают жесткостью не ниже, чем естественная характерис-
тика двигателя.
Система с АИТ позволяет регулировать угловую ско-
рость в диапазоне примерно до (20—30) : 1.
6.9. Автоматическое регулирование
каскадных электроприводов
Производственные механизмы, в которых возникает
необходимость в более высокой точности регулирования угловой ско-
рости в статических и динамических режимах,должны иметь электро-
привод с системой автоматического регулирования. .Для этого необ-
ходимо разомкнутую систему каскада дополнить соответствующими
обратными связями.
Например, АВК, если в нем возникают затруднения с установ-
кой тахогенератора, может быть выполнен с положительными обрат-
ными связями ио току и напряжению выпрямленной цепи. Когда на
асинхронном двигателе возможна установка тахогенератора, в качестве
обратных связей можно использовать положительную обратную связь
по току выпрямленной цепи и отрицательную обратную связь по ско-
рости.
Управление АВК при неизменном напряжении питающей цепи
осуществляется воздействием через усилитель на угол регулирова-
ния инвертора, т. е. на изменение его противо-ЭДС, что приводит
к изменению скорости привода. Для компенсации падения угловой
скорости, возникающего при увеличении нагрузки, нужно уменьшить
ЭДС инвертора (см. § 4.13). Это — особенность системы электропри-
вода с АВК, отличающая ее от всех ранее рассмотренных систем авто-
матического регулирования скорости, где для компенсации падения
угловой скорости нужно увеличивать ЭДС преобразователя. Другая
особенность обусловлена видом регулировочной характеристики инвер-
тора. Система управления инвертором выполнена таким образом, что
264
при отсутствии сигнала управления на ее входе ЭДС инвертора имеет
максимально допустимое по условиям его устойчивой работы значе-
ние. Это достигается, например, посредством подачи па вход системы
управления сигналом смещения {7СН. При увеличении сигнала управ-
ления он вычитается из сигнала смещения, результирующий сигнал
уменьшается, вследствие чего уменьшается ЭДС инвертора.
С учетом этих пояснений система уравнений для случая жестких
обратных связей (отрицательной по скорости и положительной но вы-
прямленному току) в системе АВК запишется так
— U +kaa(l—s) — k0
х см з. с ‘ о, с 0 ’ ' °, т а
Еи —Uyk ; E.as— Е, = 1 ,R ,
ан 2. и’ rfO dti tl a’
(6.36)
где (7S — суммарный сигнал управления; U — напряжение смеще-
ния; U3 с — задающий сигнал по скорости; kQ с, /гс,т — коэффициенты
обратной связи соответственно но скорости и току; ы0 (I — ь) — угло-
Рис. 6.16. Экспериментальные
статические электромеханичес-
кие характеристики АВК не-
большой мощности при работе
в системе автоматического регу-
лирования с жесткими обрат-
ными связями, отрицательной
по скорости и положительной
по выпрямленному току.
вая скорость привода; Аи — коэффициент усиления тиристорного пре-
образователя (инвертора); EdH— ЭДС инвертора; Ed0— ЭДС ротор-
ною выпрямителя при s=l; R3 — эквивалентное сопротивление
роторной цепи, приведенное к цепи выпрямленного тока.
Совместное решение системы уравнений (6.36) дает;
j E^qS ktl [£/см (/у&0. c<i)0 (1 s)] .
El =----------о-СГь7--------------• б’-3''
Если отвлечься от влияния прерывистых токов в зоне малых на-
грузок, можно найти скольжение холостого хода (при ld = 0)
^н(^см ССОр)
+ с(1>0
(6.38)
После преобразований (6.37) с учетом (6.38) получим;
(Eda-\-knk0 сСОо) (s —s0)
R$ ^н^о.т
(6.39)
Подставляя в формулу (4.8-1) значение Id из (6.39), находим:
(Е,:й + УОЛ)21~ ха (s - so) I (s - *о)
м=-----------------------J--. (6 40)
<1>о (^?э ^|Ло. т)2
Экспериментальные статические электромеханические характе-
ристики АВК небольшой мощности при работе в рассмотренной замкну-
той системе регулирования показаны на рис, 6,16,
265
ГЛАВА СЕДЬМАЯ
ПЕРЕХОДНЫЕ РЕЖИМЫ
В ЭЛЕКТРОПРИВОДАХ
7.1. Общие положения
Переходным или динамическим режимом элек-
тропривода называется режим работы при переходе из
одного установившегося состояния привода к другому,
происходящему во время пуска, торможения, реверсиро-
вания и резкого приложения нагрузки на валу. Эти
режимы характеризуются изменениями ЭДС, угловой ско-
рости, момента и тока.
Изучение переходных режимов электропривода имеет
большое практическое значение. Результаты их расчетов
позволяют правильно определить мощность электродви-
гателей и аппаратуры, рассчитать систему управления и
оценить влияние работы электропривода на производи-
тельность и качество работы производственных механиз-
мов.
В переходном режиме электропривода одновременно и
взаимосвязанно между собой действуют переходные меха-
нические, электромагнитные и тепловые процессы. При
быстро протекающих процессах изменение теплового со-
стояния электропривода в большинстве случаев не оказы-
вает существенного влияния на другие процессы, поэтому
в дальнейшем при изучении переходных режимов в электро-
приводах изменение теплового состояния двигателя не
учитывается. В этом случае имеют в виду протекание только
механических и электромагнитных переходных процессов,
в совокупности называемых электромеханическим пере-
ходным процессом.
Электромагнитные переходные процессы вызываются
электромагнитной инерцией обмоток электрических машин
и аппаратов. В некоторых случаях с влиянием электромаг-
нитных процессов можно не считаться, тогда переходные
процессы будут определяться только механическими про-
цессами, в которых учитывается только механическая
инерция движущихся масс электропривода.
При расчете переходных процессов необходимо построить
зависимости i = (/); М — f2 (/); <о = f3 (/), а в ряде
случаев зависимость пути от времени <р = (/).
£66
7.2. Пуск двигателя постоянного тока
независимого возбуждения до
основной угловой скорости и ударное
приложение нагрузки
Переходный процесс пуска двигателя посто-
янного тока независимого возбуждения до основной ско-
рости происходит в случае питания двигателя от сети
постоянного тока при замыкании в цепи якоря выключа-
теля К (рис. 7.1). В приведенной схеме постоянно включен
резистор, следовательно, общее сопротивление цепи якоря
R — Rs 4* Rp-
При исследовании процесса пуска полагаются неизмен-
ными: магнитный поток двигателя Ф, напряжение сети U
Рис. 7.1. Принципиальная схе-
ма п>ска двигателя постоянного
тока независимого возбуждения
в одну ступень.
Рис. 7.2. Пусковая механичес-
кая характеристика двигателя
посгоянного тока независимого
возбуждения.
и момент нагрузки Мс. Кроме того, индуктивность обмотки
якоря принимается L„ — 0.
Уравнения электрического и механического равновесия
системы при пуске:
U^ca + iR', (7.1)
= + (7.2)
Если из (7.2) определить значение тока якоря i и под-
ставить его в (7.1), а затем разделить его левую и правую
части на с, то после несложных преобразований получим:
U , JRdtit . MCR
— = (О 4* Т 777 4----,
с 1 с2 dt с2 ’
или
wo = со 4- Т'м 4- Лсос, (7 3/
267
где со0 = U/c — угловая скорость двигателя при идеаль-
ном холостом ходе; Д®с = M^RIc2 — перепад угловой
скорости при нагрузке моментом М. (рис. 7.2); Тм = JR/c2 =
= jw0/MK,3 — электромеханическая постоянная времени.
Электромеханической постоянной времени называется
время, в течение которого привод, обладающий моментом
инерции J, разгоняется без нагрузки из неподвижного
состояния до угловой скорости идеального холостого
хода <о0 при неизменном моменте, равном моменту короткого
замыкания Л4К,3. Необходимо отметить, что постоянная
времени зависит от С увеличением сопротивления
цепи якоря момент Л4К,3 уменьшается и соответственно
увеличивается постоянная времени. Электромеханическая
постоянная времени не зависит от нагрузки.
Уравнение (7.2) может быть записано иначе:
dw/dt + <п/Та = (ш — Д(ос)/Тм.
Решение этого уравнения дает:
® = о)й —Дй)с + Сг-//Г“, (7-4)
где С — постоянная интегрирования, определяемая по
начальным условиям переходного режима.
Для t = 0 начальное значение угловой скорости <о =
= <о1|ач, поэтому
С? (о)о Д<ос) сос.
Теперь легко получить уравнение для угловой скорости
двигателя при пуске в общем виде:
со = <Ос + (<ч,,ач — счс) (7.5)
где (о,- — установившаяся угловая скорость двигателя
при моменте нагрузки М. (рис. 7.2).
В частном случае, когда пуск двигателя совершается
под нагрузкой из неподвижного состояния (®11ап = 0),
<о = ®с(1 (7.6)
При пуске без нагрузки до установившейся угловой
скорости (О0
со = ®о (1 — ё~ (7.7)
Аналогичные формулы получаются, если вместо угло-
вой скорости использовать частоту вращения двигателя п,
об/мин, приводимую в каталогах.
268
На рис. 7.3 представлены кривые со = f (/) при пуске
двигателя постоянного тока независимого возбуждения
под нагрузкой (кривая /) и без нагрузки (кривая 2). Со-
гласно (7.6) и (7.7) процесс пуска теоретически заканчи-
вается за бесконечно большое время. Однако практически
можно считать процесс пуска закончившимся при t„ =
= (3-г-4)Т’м, так как угловая скорость в этом случае
отличается от установившегося значения не более чем на
5—2 %. Из (7.6) вытекает, что
— t/T
при /=со;<? “ = 0;
» / = 37'м; ва «1:0,05;
> Z = 4TM; е * 0,02;
со — <ос;
со «= 0,95<ос;
со «= 0,98<ос.
Таким образом, для t = 3 Тп угловая скорость привода
отличается от установившегося значения не более чем па
5 %, и можно считать, что
неустановившийся процесс
к этому времени практически
закончится.
Если бы пуск двигателя
совершался с неизменным мо-
ментом, равным Л1к.з, то уг-
Рнс. 7.3. Кривые со = / (Z) при
пуске двигателя постоянного тока
независимого возбуждения в одну
сту пень.
ловая скорость двигателя во времени изменялась бы по
прямой Оа при пуске двигателя без нагрузки и по Об —
при пуске под нагрузкой (рис. 7.3). Следовательно, если
провести через начало координат касательную к кривой 2
до пересечения с горизонталью, проходящей через точку ю.,,
то полученный отрезок сооа даст в определенном масштабе
значение t = Ты. Если же аналогичным путем провести
касательную к прямой /, то отрезок <осб также будет
равен Тм.
Зависимость тока в цепи якоря от времени при пуске
двигателя определяется из (7.2):
1 ~ с dt ,с>
где /с = MJc — ток нагрузки.
269
Определив из (7.4)
dt т.лс
и подставив значение производной в уравнение для тока,
получим:
f==_£^e-^M + /c. (7.8)
Для начальных условий при t — 0; i = постоянная
интегрирования
С-----—(! — I 1
— j V нач 4 ch
Подставив постоянную интегрирования С в (7.8), най-
дем:
' = /с + (/на,-/с)^'/Г“. (7.9)
Начальное значение тока в общем виде определяется
по формуле
/нач = (£/ —£)//?.
В частном случае, когда пуск совершается из неподвиж-
ного состояния двигателя, ЭДС его равна 0 и /нач = /К8 ==
= U/R.
Ток в якоре при этом выражается зависимостью
« = (/к.з-/с)е~'/Г« + /с. (7.10)
При пуске без нагрузки, когда /с = 0,
1 = /К13е’"г«. (7.11)
По (7.10) и (7.11) построены кривые i— f (i), приве-
денные на рис. 7.4.
Из рассмотрения (7.5), (7.6), а также (7.10) и (7.11)
можно заключить, что если механическая характеристика
двигателя линейна и момент нагрузки постоянен, то со =
= f (/) и i — fx (/) выражаются простыми экспоненциаль-
ными зависимостями.
При многоступенчатом резисторном пуске двигателя
постоянного тока независимого возбуждения и постоянном
напряжении сети задаются обычно определенными грани-
цами колебаний пускового тока или пускового момента.
В этом случае для нахождения времени пуска удобнее
пользоваться в качестве исходного не уравнением угловой
скорости, а уравнением тока (7.9).
270
Процесс пуска двигателя в несколько ступеней, изобра-
женный на рис. 7.5, характерен тем, что ток двигателя
во время пуска колеблется в пределах от до /2. В начале
пуска /пач = /1( далее по мере ускорения двигателя рас-
тет его ЭДС, вследствие чего начинает уменьшаться ток
в цепи якоря двигателя, а следовательно, и момент двига-
теля. Когда ток достигнет некоторого значения /2, выклю-
чается часть пускового резистора с таким расчетом, чтобы
ток двигателя снова достиг значения и т. д. Найдем
Рис. 7.5. Графики при реостат-
ном пуске двигателя постоян-
ного тока независимого воз-
буждения в несколько ступе-
ней.
Рис. 7.4. Кривые i — f (/) при
пуске двигателя постоянного
тока независимого возбуждения
в одну ступень.
/ — пуск под нагрузкой; 2 — пуск
вхолостую.
время tx, в течение которого ток двигателя изменяется от 1Х
до /2. Для этого воспользуемся уравнением (7.9), написав
его в следующем виде:
Л = Л+(/1-Л) е"'*/7А
(7.12)
где и /2 — границы изменения пускового тока (рис. 7.5);
tx — время разбега двигателя на рассматриваемой ступени
пускового резистора; ТкХ — электромеханическая пос-
тоянная времени для той же ступени.
Постоянная времени для каждой ступени резистора
соответствует суммарному сопротивлению цепи якоря.
Решая (7.12) относительно времени разбега, находим:
t —т 1 п ______
— •* мх 111 I I •
1ъ~~
(7.13)
271
Если значение тока нагрузки /с не изменяется, то под
знаком логарифма стоит постоянная величина и, следова-
тельно, можно написать:
tx = kTaX. (7.14)
По мере выведения резистора сопротивление цепи якоря
уменьшается, а следовательно, уменьшается и электроме-
ханическая постоянная времени, что приводит в свою
очередь к уменьшению времени разбега на каждой после-
дующей ступени, т. е. txl > txi > tx3 и т. д.
Приведенная на рис. 7.5 зависимость i — f (0 построе-
на на основании (7.9) с учетом сказанного выше, а кривая
углозол скорости двигателя ы = / (0 построена по (7.5).
Воемя переходного процесса на последней ступени (при
Г= Iz или ю = оц) получается равным бесконечности.
Рис. 7.6. Графики ю — f (() и i —
= / (О при пуске в одну ступень
под нагрузкой двигателя постоян-
ного тока независимого возбужде-
ния, построенные с учетом элект-
ромагнитной инерции якоря.
Практически для этой ступени надо принимать подобно
предыдущему
/Л. = (3-=-4)ГмЛ.
В тех случаях, когда время протекания электромагнит-
ных процессов соизмеримо со временем протекания механи-
ческих процессов, приходится учитывать и влияние элект-
ромагнитной инерции цепи якоря, которым мы до сих пор
пренебрегали. На рис. 7.6 показаны кривые пуска дви-
гателя при постоянном напряжении сети и учете индуктив-
ности якоря. Как видно из рис. 7.6, пуск двигателя состоит
из двух этапов.
Первый этап: якорь двигателя неподвижен, пока ток
в якоре не достигнет значения, необходимого для создания
момента трогания. На этом этапе увеличение тока двига-
теля зависит от скорости протекания электромагнитного
272
процесса, определяемого уравнением напряжений для цепи
якоря двиг’теля:
U^iR + L^-. (7.15)
Решение (7.15) при индуктивности якоря L„ = const
дает закон изменения тока в якоре при неподвижном якоре
i=-^(l -е-^э) = /к з(1_е-^а), (7 16)
где /к.3 = U/R—ток короткого замыкания двигателя;
T3=LJR—электромагнитная постоянная времени цепи
якоря; она имеет размерность времени и определяет ско-
рость протекания электромагнитных процессов.
Кривая тока, построенная по (7.16), изображена на
рис. 7.6 в пределах промежутка времени t3 сплошной кри-
вой, а за его пределами — штриховой. Время t3, которое
называют временем запаздывания, определяется из (7.16)
при подстановке тока i = /с. В этом случае
t3 = T3\nT-KtT. (7.17)
1 К з 1 с
Следует отметить, что в действительности время запаз-
дывания будет несколько больше времени, подсчитанного
по (7.17). Это дополнительное запаздывание пуска двига-
теля объясняется тормозящим влиянием вихревых токов,
возникающих в стали двигателя.
По истечении времени t3 якорь начнет вращаться. Угло-
вая скорость двигателя возрастает, и ЭДС, возникающая
в якоре, алияет на ток двигателя. Теперь уже оба процес-
са — электромагнитный и электромеханический прозе-
вают совместно, составляя единый процесс пуска двига-
теля. Расчет тока якоря и угловой скорости двигателя при
Ф const необходимо вести, исходя из следующих урав-
нений:
U^iR + L,^ +e = iR + Li,d^ + (7.18)
и
M = MC + Jd^-.
*- 1 dt
Разделив обе части последнего равенства на с, получим:
J dw
с ~dt '
(7-19)
273
Совместное решение уравнений (7.18) и (7.19) приводит
к линейному дифференциальному уравнению второго по-
рядка относительно «
^+^5+^=°’ <7-20)
где юс — установившее«я значение угловой скорости при
моменте нагрузки Мс.
Решение этого дифференциального уравнения имеет вид:
о)= + Веа^ + (7.21)
где ап а2 — корни характеристического уравнения а2 +
+ 1/7> + 1/7\Тм = 0, “1.2=-2^(1ч=1/1-47’э/Тм);Л,
В — постоянные интегрирования, определяющиеся на-
чальными условиями.
Соответственно для тока:
i = (Аа^* + Ва..^) + /с. (7.22)
При условии, что Тк > 4 7\, корни уравнения и аа
имеют действительные отрицательные значения, а выра-
жения для угловой скорости и тока с учетом постоянных
интегрирования имеют вид:
ю = 0)с 11 -f
”2
а.х — а.2
___ gl g0t2<
«1 —а2
^к.з
К1-47'в/7'м
(еа-'-^94-7с.
(7.23)
(7.24)
i
Кривые угловой скорости и тока, полученные по (7.23)
и (7.24), показаны на рис. 7.6. Угловая скорость асимпто-
тически стремится к й)с, а ток, достигнув максимума
Imax
__ ___ К,3
С^Т* э
(7.25)
уменьшается, асимптотически приближаясь к значению /с.
В процессе прямого пуска двигателя индуктивность якоря
ограничивает пик тока и увеличивает время пуска. Из (7.25)
следует, что максимум тока зависит от соотношения пос-
тоянных времени Т3 и Тм. Реальное соотношение этих
постоянных времени таково, что ограничение тока при
прямом пуске оказывается незначительным и пик тока
превосходит допустимое по условиям коммутации значение.
Поэтому прямой пуск (без добавочных резисторов) практиче-
274
ски недопустим для двигателей мощностью более 0,5—1 кВт.
Для ограничения тока при пуске вводится в цепь якоря
пусковой резистор. При этом Т3 уменьшается, а Тм увели-
чивается настолько, что оказывается Т3 Т„.
Если Та Ти, то можно приближенно принять:
1/Тм и а2^—1/Т9. (7.26)
Тогда при /с = 0 получим более простые выражения
для определения угловой скорости и тока, а именно:
w0(l —
I = _ е-//тэ) /к зе-ит№.
1 Ы-< 9
/ — / (Т IT )Г2/(ГМ~Гэ)^ /
•mav — э/ 2 м/ 2 к» з*
(7.27)
(7.28)
(7.29)
ю = <л>о (1
Как видно из (7.27) — (7.29), при Тв Тм (при боль-
шом сопротивлении добавочного резистора) индуктивность
якоря практически не сказывается на переходных процес-
сах.
Пик тока при прямом пуске можно попытаться умень-
шить введением в якорь реактора (индукционной катуш-
ки). Однако при этом процесс разбега приобретает неже-
лательный колебательный характер, если 47'9 > Т„.
При Ти<;4Т8 корни «j и а2 есть комплексные числа:
alj2 — — а±/Q,
гдеа=1/27\; й = 1.
Уравнение для определения угловой скорости в данном
случае:
= -yi_rM/-47.9^si»(^+^)]; (7.30)
здесь i|) = arctg VАТВ/Т№ — 1;
для тока:
i = We~a' sin (Q/) + /с. (7.31)
V4TB/Ta-\ '
Из (7.30) и (7.31) следует, что изменения угловой ско-
рости и тока имеют характер затухающих колебаний
(рис. 7.7). Из-за колебательного характера процесса су-
щественно увеличивается время пуска, возникает значи-
тельное перерегулирование угловой скорости (превышение
275
чад. установившимся значением) и снижается эффектив-
ность ограничения пика тока. Так, для граничного значе-
ния Т3 = Т„/-'1 при пуске вхолостую ImaX к, 0,73 /к,э, а
при Т3 = 1,25 7'м пик тока Inax 0,52 /Л3, что обычно
превышает допустимый по условиям коммутации ток. Поэ-
тому пуск с индукционной катушкой на практике не при-
меняют, а используют пусковые резисторы, при наличии
которых влияние индуктивности якоря иа процесс, как было
показано выше, несущественно.
При торможении или реверсировании влияние электро-
магнитных процессов оказывается также незначительным,
если в цепь якоря включается дополнительный резистор,
сопротивление которого должно быть больше, чем при
пуске.
Рис. 7.7. Кривые тока (а) и угло-
вой скорости (б) в функции вре-
мени при колебательном процессе
пуска двигателя постоянного тока
независимого возбуждения с доба-
вочной индуктивностью в якорной
цепи.
Влияние‘индуктивности якоря на переходный процесс
может существенно сказаться при работе двигателя на
естественной характеристике в случае резкого приложения
или снятия нагрузки как при питании двигателя от сети,
так и по системе преобразователь — двигатель. Наличке
индуктивности в якорной цепи в переходных режимах
нарушает связь между угловой скоростью и моментом,
определяемую статической механической характеристи-
кой.
В переходных режимах при ударном приложении на-
грузки возникает резкое динамическое падение угловой
скорости, что отрицательно сказывается па работе многих
электроприводов (в металлургии, машиностроении и т. п.).
Это динамическое падение угловой скорости должно быть
ограничено определенным небольшим значением (около
5—10 % значения установившейся угловой скорости) до
приложения нагрузки.
27$
Переходный процесс при ударном приложении нагруз-
ки в случае, когда 47’э > Ти, протекает так, как показано
на рис. 7.8, а—в. До приложения нагрузки двигатель посто-
янного тока независимого возбуждения работал на стати-
ческой характеристике 1 с угловой скоростью со = о)|1Я,,
при моменте нагрузки МС1 (рис. 7.8, в). При скачкообразном
Рис. 7.Ь. Графики изменения угловой скорости (а), момента (0) и пере-
ходного процесса (в) при ударном приложении нагрузки к валу дви-
гателя постоянного тока независимого возбуждения.
/ — статическая характеристика; 2 — фазовая траектория
изменении момента сопротивления до значения Мсг возни-
кает резкое замедление привода, в первый момент равное
(dw/d/)z_0 = (Л4ь1 — Л1с2)/ J = Аыс/7'м,
и угловая скорость быстро падает (рис. 7.8, а), вызывая
вследствие уменьшения ЭДС двигателя рост его тока и мо-
мента. Но индуктивность цепи якоря задерживает нараста-
ние тока и момента двигателя (рис. 7.8, б), поэтому, когда
углосая скорость достигнет значения wc, момент двигателя
не достигнет значения М<2, равновесия моментов не будет
и угловая скорость будет продолжать снижаться
(рис. 7.8, а, б). Лишь после того, как момент двигателя
277
сравняется со статическим моментом Мс2, уменьшение
угловой скорости прекратится. В этой точке угловая ско-
рость будет минимальной, а перепад Л«,,гаА. — максималь-
ным. Это значение перепада угловой скорости и называется
динамическим падением угловой скорости, которое обычно
больше статического Awc.
В точке равенства моментов двигателя и нагрузки угло-
вая скорость оказывается меньше, чем это соответствует
статической характеристике /, что влечет за собой! (из-за
малого значения ЭДС двигателя) дальнейший рост момента
до значения Мтах. Угловая скорость возрастает. Когда
она достигнет значения <ос, момент двигателя окажется
больше Мс3 и угловая скорость, продолжая расти, превы-
шает значение wL. Это превышение повлечет за собой умень-
шение момента и т. д. Протекающие таким образом коле-
бания затухают за счет электрических и механических
потерь в системе. После двух-трех колебаний момент и
угловая скорость достигнут установившихся значений Мга
и щ..
Отклонение момента и угловой скорости в переходном
процессе от значений, соответствующих статической харак-
теристике /, наглядно показывает фазовая траектория про-
цесса (кривая 2). Точки этой траектории получают из гра-
фиков рис. 7.8, а и б, перенося значения моментов и угло-
вой скорости для каждого момента времени в виде одной
точки на плоскость ю, М (на рис. 7.8 построение одной
точки показано стрелками).
Подобно рассмотренному будет протекать переходный
процесс и при резком снятии (сбросе) нагрузки. Колеба-
ниями сопровождаются и другие переходные процессы
(пуск, торможение, реверс) при отсутствии добавочных
резисторов в цепи якоря, когда 47'э > Тк, что часто имеет
место, например, в системе управляемый (тиристорный)
выпрямитель — двигатель.
7.3. Пуск двигателя постоянного тока
независимого возбуждения до углевой
скорости выше основной
Ранее был рассмотрен пуск двигателя до
основной угловой скорости; при этом предполагалось, что
в процессе пуска магнитный поток и напряжение сети ос-
тавались неизменными и равными номинальным. Если воз-
никает необходимость пустить двигатель до угловой ско-
278
роста выше основной, то обычно этот процесс совершается
в два этапа — первый заключается в разгоне двигателя до
основной угловой скорости с выведением его на естествен-
ную характеристику и второй. — в разгоне от основной уг-
Рис. 7.9. Принципиальная схема
разгона двигателя постоянного тока
независимого возбуждения до угло-
вой скорости выше основной.
ловой скорости до требуемой, которая достигается ослаб-
лением магнитного потока двигателя. Разгон двигателя до
угловой скорости выше основной может быть произведен
по схеме, приведенной на рис. 7.9, размыканием контактов
выключателя К, до этого находившихся в замкнутом со-
стоянии.
Рис. 7.10. Статические характеристики при ослаблении магнитного
потока двигателя постоянного тока независимого возбуждения.
а — механические; б — электромеханические.
Статические характеристики,соответствующие номиналь-
ному и ослабленному магнитному потоку двигателя, по-
казаны сплошными линиями на рис. 7.10. Если бы поток
двигателя изменялся мгновенно, то переход с одной харак-
теристики на другую происходил так, как показано штри-
ховыми стрелками.
В действительности за счет индуктивности обмотки
возбуждения магнитный поток изменяется во времени
(скорость этого изменения определяется электромагнитной
постоянной времени контура обмотки возбуждения), и
279
поэтому ток якоря и момент двигателя не достигают зна-
чений, соответствующих Л и ML, как показано на рис. 7.10,
а изменяются по траекториям, изображенным сплошными
линиями, отвечающим так называемым динамическим ме-
ханическим характеристикам. В данном случае вследствие
нелинейной зависимости угловой скорости двигателя от его
магнитного потока, а также магнитного потока от тока
возбуждения решение уравнений переходного режима це-
лесообразно производить графо-аналитическим методом.
В общем случае исходные уравнения для расчета угло-
вой скорости и тока двигателя при ослаблении его магнит-
ного потока можно представить в виде
1/ = /гФи+ »7?; (7.32)
k(i)i = Mc + Jd~. (7.33)
Здесь не учитывается индуктивность якоря ввиду ее
незначительности по сравнению с индуктивностью обмотки
возбуждения.
Заменив k в (7.32) через k = Й//Фиом«0, а в (7.33) —
через k = получим:
"-ф;ЬЛ“+«; <7-34’
(7.35)
Определив i из (7.35) и подставив его в (7.34), а также
разделив обе части полученного уравнения на 1/Ф11ОМ/Ф,
получим:
Ф _ / Ф \2 Ш ДШ d (W/Wp) „ .
Ф,>ом W.oJ + « dt '
где Ти— электромеханическая постоянная времени, отве-
чающая естественной характеристике, или
Ф^Ф^-И^ф^, (7.37)
где Ф.,. = Ф/Фцом — относительное значение магнитного
потока; ю* = ы/<оо — относительная угловая скорость дви-
гателя; Ао)Сф — относительный перепад угловой скорости
двигателя при нагрузке, равной Л4С, и номинальном маг-
нитном потоке; ю0 — угловая скорость идеального холосто-
го хода, соответствующая номинальному магнитному пото-
ку.
280
Для решения (7.37) следует найти зависимость =
= I (/). На небольшом интервале изменения потока
(рис. 7.11, а) можно принять зависимость между током
возбуждения и потоком линейной; тогда изменение потока
во времени определится по формуле
Ф*=ФкоиД1 + (7 38)
где Ф„ач*, Фко,* —начальное н конечное относительные
значения магнитного потока двигателя; Т9—электромаг-
нитная постоянная времени контура обмотки возбуждения
деигателя.
Кривую Ф* = / (0> приведенную на рис. 7.11, б, разби-
ваем па ряд отрезков с постоянными значениями потока на
Рис. 7.11. Кривые изменения магнитного потока.
а — в функции гока возбуждения; б — в функции времени.
каждом участке и с интервалом времени, соответствующим
выбранному интервалу времени Д/. Имея зависимость
Ф* = f (О, легко найти и Ф® = Д (/), после чего (7.37)
может быть разрешено в конечных приращениях. Расчет
кривой угловой скорости ведется с первого участка, для
которого известны начальная угловая скорость 0)na44i и
среднее значение потока Ф14!.
Приращение угловой скорости на первом участке можно
определить по формуле
— ф1*~ф1 ^иачк — Ди,
Тм/Д^ + Ф^/2
Начальная угловая скорость на втором участке равна:
®нач2* = Wua4i* -J- AtOi*»
(7.39)
281
Аналогично определяется приращение угловой скорости
на втором участке и т. д.
По рассчитанным приращениям строится кривая угло-
вой скорости двигателя при ослаблении магнитного потока
(рис. 7.12, а). Для определения
тока в цепи якоря двигателя
при разгоне его путем ослабле-
ния потока можно воспользо-
ваться формулой (7.32) и после
несложных преобразований при-
вести ее к виду
*7/к,з= 1 -Ф*ы*, (7-40)
где /к,з = U/R—ток корот-
кого замыкания.
Рис. 7.12. Кривые изменения и, =
— ! (/) (о) и i = Д (0 (б) при разгоне
двигателя постоянного тока независи-
мого возбуждения ослаблением его
магнитного потока.
Примерный вид кривой i = ф (/) при неизменном стати-
ческом моменте дан на рис. 7.12, б. Конечное значение тока
при этом
7с,кои = 7с,начФиач*/Фкон*- (7-41)
7.4. Динамическое торможение двигателя
постоянного тока независимого
возбуждения
Если обмотку якоря работающего двигателя
посредством переключателя К отключить от сети и замкнуть
на дополнительный резистор /Д (рис. 7.13), то двигатель
переходит в генераторный режим динамического торможе-
ния и снижает свою угловую скорость (рис. 7.14).
Обмотка возбуждения в процессе торможения остается
присоединенной к сети постоянного тока.
Основные уравнения, характеризующие процесс динами-
ческого торможения:
сто + iR = 0; (7.42)
ci = Jd£ + Mz,
где R = Ri + Ra.
282
Совместное решение этих уравнений относительно со
дает:
и = — ДСОс4-Се-'/7’“. (7.43)
Постоянная интегрирования С определяется из началь-
ных условий. При t — О
co = colhl4 = coc;
С = со11ач -f- Дсос,
где сонач = сос — угловая скорость двигателя в момент пе-
реключения с двигательного режима на динамическое тор-
Рис. 7.13. Принципиаль-
ная схема динамического
торможения двигателя по-
стоянного тока независи-
мого возбуждения.
Рис, 7.14, Механические характерис-
тики двигателя постоянного тока неза-
висимого возбуждения при переходе
из двигательного режима в режим
динамического торможения.
моженне; Дсос = Л4с7?/сг — абсолютное значение перепада
угловой скорости, определяемое по характеристике дина-
мического торможения при моменте нагрузки Л4С (рис. 7.14).
После подстановки значения С в (7.43) получим:
w = — Л«с + (юнач + Айс) '/г«. (7-44)
При динамическом торможении без нагрузки (Л4С — 0)
До)с = 0 и соцач = со0, тогда
со = соое- t,T«. (7.45)
На рис. 7.15, а показаны характеристики со = / (/)
при динамическом торможении в случае, когда торможение
производится под нагрузкой (кривая 1) и когда Л4С = О
(кривая 2).
283
При торможении под нагрузкой кривая w = f (t) асим-
птотически стремится к угловой скорости —Дсос, если
момент нагрузки активный, например, в случае опускаю-
щегося груза в приводе крановой установки. Если момент
нагрузки реактивный, то торможение электропривода за-
кончится при угловой скорости <о = О (точка Ь).
При торможении без нагрузки кривая и = f (/) асимп-
тотически приближается к 0, начальная угловая скорость
в этом случае ю„ач = ы0.
Рис. 7.15. Кривые со = f (!) (а) и i = Д (!) (б) при динамическом тор-
можении двигателя постоянного тока независимого возбуждения.
Для определения i = /д (0 можно воспользоваться фор-
мулой (7.8), если подставить в нее постоянную интегриро-
вания С, соответствующую данным начальным условиям
С — сТя(1 иоч + /с)/-/.
Тогда
1 = — (Л>ач+Л)е '/7'« + /с.
(7-46)
На рис. 7.15, б кривая 1 иллюстрирует изменение тока
в цепи якоря при динамическом торможении и наличии
активной нагрузки на валу двигателя, которой соответст-
вует ток /с. При реактивном моменте процесс закончится
в точке b при со = 0.
Кривая 2 иллюстрирует процесс динамического тормо-
жения при Лф = 0. Ток в цепи якоря для этого случая
определяется по формуле
(7.47)
284
Абсолютное значение тока в момент переключения из
двигательного режима в режим динамического торможения
/>.ач = с«нач/Аэ. (7.48)
Время торможения от начальной угловой скорости wl]a4
до текущей может быть получено из (7.44), если решить
его относительно tlt т. е.
= (7.49)
При торможении до полной остановки (оц = 0)
= (7.50)
Когда /с = 0; Awc = 0 и теоретически время /т = оо,
практически процесс торможения можно считать закоп-
ченным за время /т = ЗТМ. Постоянная времени определя-
ется аналогично тому, как это производилось в § 7.2. В дан-
ном случае учитывается суммарное сопротивление цепи
якоря двигателя при динамическом торможении.
Время торможения может быть также определено на
основании (7.46). Например, при торможении до полной
остановки, когда i = 0, время торможения
/т = Гм1пЛ|1,1,+ /с. (7.51)
' с
7.5. Торможение противовключением
и реверсирование двигателя
постоянного тока независимого
возбуждения
Торможение противовключением осуществля-
ется при изменении полярности напряжения на выводах
обмотки якоря, работающего двигателя и неизменном нап-
равлении тока в обмотке возбуждения. По схеме, приведен-
ной на рис. 7.16, указанное переключение выполняется
с помощью переключателя К, причем для ограничения тока,
потребляемого нз сети при торможении, в цепь якоря
вводится дополнительный резистор R1.
Рисунок 7.17 иллюстрирует переход из двигательного
режима в режим противовключения. В этом случае проис-
ходит торможение соответственно характеристике —Л41|ачОр
Если якорь двигателя при угловой скорости, равной или
близкой к 0, не отключить, то двигатель, развивая момент,
по абсолютному значению больший реактивного момента
285
сопротивления, разгонится в противоположном направле-
нии до установившейся угловой скорости —(оуст [характе-
ристика Oj (—(0уст)1. или под действием суммы моментов
двигателя и нагрузки он разгоняется до скорости —(оуст
при активном моменте сопротивления. Процесс электричес-
кого торможения противовключением с последующим раз-
гоном в обратном направлении и называется реверсирова-
нием.
Рис. 7.16. Принципиальная схе-
ма торможения противовключе-
нием и реверсирования двига-
теля постоянного тока незави-
симого возбуждения.
теристика двигателя постоян-
ного тока независимого возбуж-
дения при переходе из двига-
тельного режима в режим про-
тивовключения.
Уравнение электрического равновесия для цепи якоря
двигателя в период торможения противовключением
— U — ca-{-iR. (7.52)
Это уравнение отличается от аналогичного при пуске
(7.1) тем, что перед U стоит знак минус. Поэтому можно
воспользоваться общим уравнением для угловой скорости
(7.4), заменив в нем ~гсоо на —<оо, тогда при реверсировании
(о —— (оо — Д(ос4*Се— t/T*. (7.53)
Для t — 0 угловая скорость двигателя в момент переклю-
чения якоря (о = (о11ач = сос (рис. 7.17) и постоянная ин-
тегрирования С = сос + «0 4- Д(ос.
Зависимость со = f (t) при реверсировании определяется
выражением
(о == — (со# “Ь Awc) 4~ ((Оо 4~ Дсос 4~ сос) с м« (7.54)
286
Формула (7.54) получена в предположении постоянства
знака Awc с изменением направления вращения двигателя,
т. е. момент нагрузки принят активным. В этом случае
после реверсирования установившаяся угловая скорость
двигателя превысит соо на значение Аыс. Зависимость
io = f (t) при активном моменте нагрузки представлена
кривой / (рис. 7.18).
Для реверсирования без нагрузки (<ос = <и0 и Асос = 0)
со =—а>0 4* 2<иое
(7.55)
Данному случаю соответствует кривая 2 на рис. 7.18.
Если же реверсирование происходит с реактивным момен-
Рис. 7.18. Зависимость <о = / (!)
при реверсировании двигателя
постоянного тока независимого
возбуждения.
Рис. 7.19. Зависимость I = / (/)
при реверсировании двигателя
постоянного тока независимого
возбуждения.
том нагрузки, то кривая со = / (/) в точке пересечения
с осью абсцисс имеет излом и к установившейся угловой
скорости —<иуст приближается асимптотически, как по-
казано на рис. 7.18 (кривая 3). Расчет этой кривой произ-
водится на основании тех же исходных формул, но с учетом
того обстоятельства, что при изменении знака угловой
скорости момент нагрузки также изменит свой знак. Реак-
тивный момент всегда препятствует движению, поэтому
на участке торможения угловая скорость снижается под
действием суммы моментов двигателя и нагрузки, а на
участке разгона увеличение угловой скорости происходит
под действием разности этих моментов.
287
Ток в цепи якоря двигателя при реверсировании опре-
деляется, как и в § 7.4. В окончательном виде ток равен:
1-Л-(Л,ач + /с)е“^«, (7.56)
где /,,-ч = (U + c<j\)/R — абсолютное значение тока в на-
чальный момент переключения из двигательного режима
в режим торможения противовключением; R = /?я + RI—
общее сопротивление якорной цепи.
Формула (7.56), так же как и (7.54), справедлива для слу-
чая активного момента нагрузки (кривая / на рис. 7.19).
Эта формула также применима и для реактивного момента
с начала торможения до остановки двигателя. В точке
кривая i = f (/) при реактивном моменте нагрузки будет
иметь излом. К установившемуся значению тока —/с кри-
вая i = f (I) приближается асимптотически, как показано
на рис. 7.19 (кривая 3).
При реверсировании без нагрузки
/ = -/наче",/Г". (7.57)
Так как в этом случае <ос = «0, то
/нач = 2Ж = 2/к.э
и
i = — 2IK3e~t/T,t. (7.58)
Зависимость i = / (/) при Л4е = 0 иллюстрируется кри-
вой 2 на рис. 7.19.
7.6. Торможение двигателя постоянного
тока независимого возбуждения
от угловой скорости выше основной
до основной
Снижение угловой скорости двигателя по-
стоянного тока независимого возбуждения от выше основной
до основной путем усиления его магнитного потока проис-
ходит за счет возникающего торможения с отдачей энергии
в сеть (рекуперативного торможения). В этом случае, как
показано на рис. 7.20, я, б, угловая скорость будет изме-
няться ОТ Cdj до со2.
В силу механической инерции привода угловая скорость
его не может мгновенно измениться, н поэтому с ростом
магнитного потока возрастает ЭДС двигателя. Когда ЭДС
двигателя станет по абсолютному значению больше прило-
288
женного напряжения, ток якоря npnoopeiei отрицательно?
значение и энергия будет рекуперироваться в сеть. В на-
чальный момент торможения момент и соответственно ток
Рис 7 20. Статические характеристики при усилении магнитного по-
тока двигателя постоянного тока независимого возбуждения.
1 — О < Фц0Ч 2 — <1> — Фцом-
двигателя не достигают значений —Мт и —11. Объясняется
это тем, что благодаря электромагнитной инерции цепи
возбуждения магнитный поток двигателя сразу не дости-
гает своего установившегося значения.
Гяс 7 21. Кривая изменения
магнитного потока в функции
времени.
Рис. 7 22. Кривые со* = / (/) (а)
и i = / (/) (б) при торможении
усилением магнитного потока
двигателя постоянного тока не-
зависимого возбуждения.
Максимумы тока и момента при торможении оказываются
меньше (по модулю) значений соответственно Mt и 1,
На рис. 7.20, а, б, представлены характеристики для
сл' чая торможения с постоянным статическим моментом
4i iiihiui М Г, Сандюр Л С. 289
При этом установившееся значение тока в конце торможе-
ния /с2 меньше установившегося значения тока 1С1 до на-
чала торможения.
Если принять изменение магнитного потока во времени
Ф* = f (О п0 экспоненте (рис. 7.21) и заменить ее ступен-
чатым графиком с равными интервалами по времени Д/,
то, воспользовавшись методикой, изложенной § 7.3, мож-
но построить кривые изменения угловой скорости и тока
якоря при торможении (рис. 7.22).
7.7. Переходные режимы в приводах
с двигателями постоянного тока
последовательного возбуждения
В этом случае переходные процессы иссле-
дуются графо-аналитическими методами, так как магнитный
поток двигателя изменяется нелинейно в зависимости от
тока якоря. Для определения зависимостей со = f (t) и
i = /i (/) может быть использована изложенная выше мето-
Рис. 7.23. Зависимость о> = / (/)
и i ~ f (t) при ступенчатом пус-
ке двигателя постоянного тока
последовательного возбуждения.
Рис. 7.24. Принципиальная схе-
ма реверсирования двигателя
постоянного тока последова-
тельного возбуждения.
дика графо-аналитического решения уравнений переход-
ных процессов.
Примерный вид кривых угловой скорости и тока якоря
двигателя последовательного возбуждения при ступенчатом
пуске показан на рис. 7.23.
Принципиальная схема реверсирования двигателя пос-
тоянного тока последовательного возбуждения дана на
290
рис. 7.24. При переключении переключателя К из правого
положения в левое двигатель из установившегося режима
при со = ыс и I = /с переходит в режим противовключения.
Рис. 7.25. Характеристика со = /(/)
при реверсировании двигателя по-
стоянного тока последовательного
возбуждения.
На рис. 7.25 кривая 1 — естественная характеристика дви-
гателя, а кривая 2 — характеристика в режиме противо-
включения.
7.8. Переходные режимы в приводах
с асинхронными двигателями
трехфазного тока
При исследовании переходных режимов в при-
водах с асинхронными двигателями в первом приближении
пренебрегаем электромагнитными процессами, так как они
протекают значительно быстрее электромеханических про-
цессов.
Пуск асинхронного двигателя с короткозамкнутым ро-
тором небольшой и средней мощности обычно осуществля-
ется при полном напряжении (прямой пуск).
Иногда пуск двигателей с короткозамкнутым ротором
с целью ограничения тока или момента осуществляется при
напряжении, пониженном с помощью дополнительных ре-
зисторов или реакторов, включаемых в цепь статора, или
же посредством тиристорного регулятора напряжения.
Пуск двигателей с фазным ротором осуществляется по-
средством пускового резистора /?р, включаемого в цепь
ротора двигателя (рис. 7.26). Число пусковых ступеней
резистора и величина их сопротивлений определяются
условиями пуска электропривода.
Если для упрощения принять, что двигатель разго-
няется без нагрузки (Л4С = 0) в одну пусковую ступень
10* 291
или напрямую, и учесть, что момент, развиваемый двига-
телем,
то уравнение движения привода запишется тан:
2Л/к _ j da>
sK/s + s/sK— Л-
Из предыдущего известно, что со -- сои(1 — $)
довательно,
<До _ ds
~dt —
тогда
2Л1К ____ , ds
SjS -4- S/'Su Ш° dt ‘
После разделения переменных
или
d'=-Sr^- + r-ds’
\ S $к /
di = — b(s-“ + s-}ds,
2 \ s 1 sK /
(7.59)
и, сле-
(7 60)
где Т„ = Jco0/MK — электромеханическая постоянная вре-
мени.
Рис. 7.27. Кривые со/со0 = / при пуске
асинхронного двигателя для различных зна-
чений sK.
Рис. 7.26. Принципиальная схема щека
асинхронного двигателя.
Электромеханическая постоянная времени в данном
случае — это время, в течение которого привод с моментом
инерции J разгонится до синхронной угловой скорости w;
под действием момента, равного максимальному Мк.
292
Из (7.60) получаем время пуска двигателя
Sir*4
= У + (7-61)
£ J \ 5 5к /
SKO1I
При пуске двигателя из неподвижного состояния (sH ч =
= I)
/..о = т{Ц^ + 5“|пт)- (7'62)
Если принять, что s = 0, то = оо. Практически
можно считать пуск закончившимся тогда, когда значение
скольжения будет отличаться не больше чем на 0,05 его
установившегося значения. Тогда время пуска без нагрузки
. 7\ ! 1 — 0,05- , । 1 \
|,0 — Т \ 2.с< ^S|i п бЖГ
Пренебрегая в первом члене значением 0,052 (по сравне-
нию с I), получаем в относительных величинах
^по/^м — l/4sK-E 1,5sb. (7 63)
Следовательно, относительное время пуска зависит
от значения sK (рис. 7.27), которое пропорционально сопро-
тивлению цепи ротора.
Пользуясь (7.63), можно установить, что время пуска
имеет минимальное значение
(иТкил=1,22
при sK = 0,407 (рис. 7.28).
Минимальное время пуска при прочих равных усло-
виях определяется наибольшим эффективным значением
момента двигателя за период пуска. Это значение эффек-
тивного момента соответствует, очевидно, наибольшей пло-
щади (рис. 7.29), ограниченной кривой Л1 = f (s). Под
эффективным моментом понимается такой постоянный мо-
мент, при котором время пуска при прочих равных усло-
виях одинаково с временем пуска при фактическом моменте.
Время пуска без нагрузки (Мс = 0) может быть опре-
делено через значение эффективного момента по формуле
^п0“ «7и>о/Л4эф, п’
Отсюда значение эффективного момента при пуске
293
Если в эту формулу подставить значение tn0 из (7.63),
то после преобразований получим:
М9ф.п = MKsK/(0,25 + 1,5s,;).
(7-64)
По (7.64) (см. рис. 7.28) построена зависимость Л4эф =
= f (sK). Эффективный момент при пуске имеет максималь-
ное значение при sl( = 0,407 и равен 0,81 Л1|(. На рис. 7.29
кривая 2 отвечает этому случаю. Максимальное значение
эффективного момента Л4эф (см. рис. 7.28) соответствует
минимальному времени пуска двигателя.
'M/tnin
Рис. 7.28. Зависимости Л4Эфф и Рис. 7.29. Зависимости М1МА =
= f (s) при различных значе-
ниях sK.
! — sK < 0,407; 2 — sR = 0,407;
3-sK > 1.
Ступенчатый пуск двухскоростных и многоскоростных
двигателей производится вначале присоединением к сети
обмоток статора так, чтобы получить наибольшее число
полюсов. Затем, по достижении двигателем установившейся
угловой скорости, соответствующей этому числу полюсов,
его обмотки переключаются на меньшее число полюсов,
при этом двигатель вновь ускоряется, разгоняясь до боль-
шей угловой скорости.
На рис. 7.30 показаны механические характеристики
двухскоростного асинхронного двигателя. Вначале дви-
гатель соответственно характеристике, отвечающей числу
пар полюсов 2р, разгоняется до угловой скорости ojj при
моменте нагрузки Л4С, после чего происходит переключение
на число пар полюсов р, и с начальным моментом дви-
гатель начинает разгоняться до угловой скорости оз,.
Кривая изменения угловой скорости от времени может
быть построена по (7.62) для первой ступени в предположе-
£94
ни», что скольжение изменяется от 1 до 0,05, Тм = ТЫ1 =
= 7со01//Ил1, sK = sK1. Расчет кривой угловой скорости
для второй ступени производится по той же формуле,
однако начальным скольжением будет 0,5, а конечным
0,05; кроме того, Тм = Т„2 = /Мк2 и sK = sK2.
Полное время пуска равно сумме времен разгона на
первой и второй ступенях. Для рассмотренного случая
время ступенчатого пуска окажется меньшим, чем время
разгона в одну ступень до той же наибольшей угловой
скорости. Аналогично производится построение кривой
изменения угловой скорости во времени при другом числе
пар полюсов двигателя.
Рис. 7 30. Характеристики двух-
скоростного асинхронного двига-
теля прн двухступенчатом пуске,
Рис. 7.31. Принципиальная
схема реверсирования асин-
хронного двигателя.
Торможение противовключением и реверсирование асин-
хронного двигателя осуществляются переключением двух
фаз статора (рис. 7.31). Характеристики со = f (М), иллю-
стрирующие переход из двигательного режима в режим
противовключения, показаны на рис. 7.32.
Кривая 1 соответствует торможению, когда ротор замк-
нут накоротко, кривые 2 и 3 — условию, что в цепи ротора
включены резисторы с сопротивлением соответственно
Т?р2 < Rp3-
При Мс = 0 и с учетом того, что при противовключе-
нии s = (соо + со)/со0, уравнение движения привода примет
вид:
2Л4К _ , ds
sK/s4-s/sK ~ di'
После преобразований можно получить в общем виде
для времени торможения такое же выражение, как и (7.61).
295
Учитывая, что торможение происходит в пределах
скольжений от = 2 до sh0„ -- 1, получаем:
/,0= T„ (0,345sK + 0,75/sK). (7.65)
Аналогично случаю пуска время торможения противо-
включением имеет минимальное значение
= 1.027 при sK=l,47.
На рис. 7.32 характеристика 3 соответствует случаю,
когда sK = 1,47 и эффективное значение тормозного момента
имеет наибольшее значение. Аналогично предыдущему
Рис. 7.32. Характеристики асинхрон-
ного двигателя ы = f (М) при пере-
ключении из двигательного режима на
торможение противовключением.
Рис. 7.33. Принципиаль-
ная схема динамического
торможения асинхронного
двигателя.
может быть найдено эффективное значение момента при тор-
можении противовключением:
Мэф.т = MKsK/(0,75 + 0,345s,;). (7.66)
Если sK = 1,47, то эффективный момент имеет макси-
мальное значение при торможении МЭф,т>таж — 0,98 Мк.
Зная значение эффективного момента при пуске или при
торможении противовключением, можно в случае постоян-
ства момента сопротивления Мс определить время пуска
или торможения под нагрузкой:
/Г,(Т) = /со/(Мэф, п(т) ZjT Мс). (7-67)
В (7.67) знак минус относится к режиму пуска двига-
теля, знак плюс к режиму торможения. Время реверсиро-
вания можно рассматривать как сумму времен торможе-
ния противовключением и разбега в обратном направлении.
296
Динамическое торможение осуществляется чаще всего
при переключении на ходу обмотки статора от источника
переменного тока на источник постоянного тока (рис. 7.33).
Соответствующие характеристик!! динамического тормо-
жения получаются при введении резисторов /?т в цепь
ротора (рис. 7.34). Характеристика /?ч1 относится к слу-
чаю, когда сопротивление резисторов /?т = 0.
Для ограничения постоянного тока вводится дополни-
тельный резистор /?Д|Т.
Рис. 7.34. Характеристики асинхронного двигателя со — f (М) при
переключении из двигательного режима на динамическое торможение.
Если торможение производится без нагрузки, то урав-
нение движения запишется следующим образом:
2МК, т j do
sk,t/s + s/sk,t
(7.68)
После преобразований, принимая во внимание, что
s = со/соо, получаем время торможения
^,д = Т!ЛТ1П5 + -2Г- )£“”• <7-69>
* \ ZdK> т / | кон
Когда $|1ЭТ = 1,0, a shOn = 0,05, формулу (7.69) можно
представить в виде
= + (7.70)
где Тм = 7<о0/Л1к,т — электромеханическая постоянная вре-
мени при динамическом торможении.
Так как формула (7.70) аналогична (7.63) для времени
пуска асинхронного двигателя без нагрузки, то-значение
эффективного момента двигателя при динамическом тор-
можении может быть найдено по формуле, аналогичной
(7-64).
297
Очевидно, что минимальное время торможения, так же
как и при пуске, соответствует sK,T = 0,407.
Рекуперативное торможение асинхронного двигателя
возможно, если угловая скорость его оказывается выше
синхронной. Этот способ торможения может быть осущест-
влен при управлении, например, двух- или миогоскорост-
ными двигателями в случае переключения обмоток статора
работающего двигателя с меньшего числа полюсов на
большее. Построив механическую характеристику двига-
теля в генераторном режиме работы параллельно с сетью
и определив из нее максимальный момент и критическое
скольжение, подсчитав электромеханическую постоянную
времени для данного случая и задавшись пределами из-
менения скольжения, можно аналогично предыдущему по-
строить кривую зависимости
угловой скорости от времени
и определить время торможе-
ния.
Торможение двух- или
многоскоростного двигателя
может быть ступенчатым —
Рис, 7.35. Характеристики ступен-
чатого торможения двухскорост-
ного асинхронного двигателя.
вначале рекуперативным, а затем торможением противо-
включением (или динамическим торможением).
На рис. 7.35 показан процесс двухступенчатого тормо-
жения двухскоростного двигателя.
Если не учитывать время коммутации аппаратов управ-
ления, то можно считать, что время торможения при сту-
пенчатом торможении существенно меньше, чем при тор-
можении в одну ступень, за счет увеличения эффективного
тормозного момента.
В случае использования четырехскоростного двига-
теля можно осуществить рекуперативное торможение в три
ступени; на последней, четвертой ступени торможения
осуществляется противовключение при наибольшем числе
полюсов статорной обмотки. Плавное рекуперативное тор-
можение осуществляется при частотном управлении асин-
хронным двигателем в случае, если преобразователь час-
тоты обладает двусторонней проводимостью.
298
7.9. Электромагнитные переходные
процессы в приводах с асинхронными
двигателями
Для анализа переходных процессов в приводах с асин-
хронным двигателем до сих нор использовались его статические ха-
рактеристики, При этом предполагалось, что каждому значению угло-
вой скорости соответствуют строго определенные значения токов,
зависящие от параметров обмоток, частоты напряжения и его значе-
ния на выводах двигателя. Из этого предположения следует, что при
подключении двигателя к сети в его обмотках мгновенно возникают
токи, определяющие также мгновенное появление электромагнитного
момента, причем ток и момент могут быть рассчитаны по формулам,
соответствующим схеме замещения асинхронного двигателя. Такой
подход к анализу переходных режимов является упрощенным, по-
скольку он исключает из рассмотрения электромагнитные переходные
процессы.
Рис. 7 36. Статическая и дина-
мическая механические харак-
теристики асинхронного двига-
теля.
Рис. 7.37. Графики момента и
угловой скорости при пуске
асинхронного двигателя.
а — без учета электромагнитных
переходных процессов, б — с уче-
том электромагнитных процессов
Асинхронная машина представляет собой сложную систему маг-
нитно-связанных контуров (фазных обмоток), расположенных на ста-
торе и роторе, причем взаимоиндуктивность между отдельными кон-
турами при вращении ротора изменяется. При подключении к сети
переменного тока такой сложной цепи в ее контурах возникают пере-
ходные токи, которые могут существенно отличаться от их устаюзив-
шихся значений. Отметим, что каждая точка механической характе-
ристики асинхронного двигателя (кривая 1 на рис. 7 36) соответствует
установившимся для данной угловой скорости значениям токов в об-
мотках статора и ротора.
Если теперь, пользуясь статической механической характери-
стикой, построить, например, процесс пуска двигателя, то граф' ки
изменения угловой скорости н момента во времени будут иметь вид,
аналогичный приведенным на рис. 7 37, а. Однако эти графики не Оу-
дут соответствовать реальным изменениям переменных при переход-
ном процессе, так как для данной угловой скорости ротора переход-
ные токи отличаются от соответствующих устанознвшихся значений,
299
Следовательно, электромагнитный моо>епт двигателя в переходном про-
цессе также будет отличаться от своего установившегося значения,
определяемого по кривой 1 для соответствующей углевой скорости.
На рис. 7.37, б приведены примерные графики изменения момента
и угловой скорости при пуске двигателя с учетом электромагнитных
переходных процессов. Если по графикам рис. 7.37, б построить за-
висимость ш = f (М), то опа будет иметь вид кривой 2, изображен-
ной на рис. 7.36. Характеристика 2 па рис. 7.36 называется динами-
ческой механической характеристикой. Каждая точка последней соот-
ветствует определенному моменту времени переходного процесса. Так,
точка О динамической механической характеристики пуска двигателя
соответствует началу переходного процесса, точка А на рис. 7.36 — вре-
мени tA на рис. 7.37, б, а точка <о0 — окончанию переходного процесса
на рис. 7.37, б, причем это время теоретически равно бесконечности.
В отличие от статической механической характеристики динами-
ческая характеристика (фактически это фазовая траектория переход-
ного процесса) определяется не только параметрами обмоток двига-
теля, но и параметрами системы электропривода (момент инерции,
статический момент), а также видом переходного процесса (пуск, ре-
верс н т. п.). При изменении последних изменяется характер пере-
ходных токов, а следовательно, и переходных моментов, что влечет
за собой изменение динамической механической характеристики.
Следовательно, асинхронный двигатель при данных напряжении сети
и параметрах обмоток обладает одной статической н множеством дина-
мических механических характеристик (фазовых траекторий перехо-
дных процессов).
Рассматривая начальные участки графиков электромагнитного
момента, приведенных па рис. 7.37, а и б, отметим, что максимальное
значение переходного момента существенно, в несколько раз, превы-
шает пусковой момент. Это обьяспяется тем, что максимальные зна-
чения переходных токов могут значительно превысить амплитуду
пусковых токов двигателя. Поля, образуемые свободными токами,
могут либо усиливать, либо ослаблять основное поле, создаваемое
принужденными, т. е. установившимися, токами, вызывая соответ-
ствующее увеличение или уменьшение переходного электромагнитного
момента. Иногда значение момента может быть даже отрицательным
(рис. 7.37, б) на начальном участке переходного процесса. Как видно
из рнс. 7.37, б, изменение электромагнитного момента асинхронного
двигателя носит характер затухающих колебаний со значительными
амплитудами па начальном участке переходного процесса.
Детальное изучение электромагнитных переходных процессов
в асинхронном двигателе при пуске с полным напряжением показы-
вает, что колебания момента практически полностью затухают к мо-
менту достижения угловой скоростью значения, соответствующего
критическому скольжению на статической механической характери-
стике. Прп дальнейшем увеличении угловой скорости двигателя элек-
тромагнитные переходные процессы проявляются следующим образом.
При скольжении двигателя, меньшем критического, ток в обмотке
ротора машины, определяемый по статической характеристике (рис.
7.38), резко изменяется с изменением угловой скорости. Однако из-за
влияния индуктивности обмоток машины ток ротора не успевает из-
мениться так, как это следует из зависимости со = [ (/2) (рис. 7.38).
Очевидно, чем больше жесткость рабочего участка статической меха-
нической характеристики и чем меньше момент инерции ротора дви-
гателя, тем в большей степени изменение токов будет отставать от из-
300
мененпя угловой скорости Е р^зщьтгтс пл: ст п- "’’’х tparrop''B при
си в хро.) пой угловой скорости двигателя токи ротора могут щ ть
не равны 0, поэтому соответственно момент двигателя не равен 0, и
ротор разгоняется до угловой скорости, превышающей синхронную.
Далее, токи ротора уменьшаются, уменьшается момент, развиваем* 1 i
двигателем, а значит, уменьшается угловая скорость и т. д. Поэте ту
в конце переходного процесса пуска
момента двигателя имеют затухаю-
щий колебательный характер Чем
мягче рабочий участок статичес-
кой механической характеристики
и чем больше момент инерции ро-
тора, тем меньше амплитуда этих
колебаний и тем быстрее они зату-
хают. Практически колебания уг-
Рис. 7.38. Статическая характер)!
стика а = f (/2) асинхронного дви
гателя.
изменения угловой скорост ; и
ловой скорости и момента двигателя в конце переходного пронес з
пуска наблюдаются не всегда.
Итак, анализ электромагнитных переходных процессов на npi -
мере пуска двигателя показывает, что в начале переходного процесс.)
момент двигателя определяется переходными токами, обусловленными
в основном коммутационными операциями, а в конце переходного
процесса зависимость М (f) определяется соотношением механической
инерции ротора (момент инерции ротора) и электромагнитной инерции,
связанной с индуктивностями обмоток асинхронной машины.
Изучение электромагнитных переходных процессов в асинхрон-
ном двигателе имеет теоретическое и практическое значение, поскольку,
как показано выше, исключение из рассмотрения их влияния иска-
жает действительное представление о характере переходных процессоч
в асинхронном электроприводе. Исследования показывают, что мак-
симальные значения переходного момента могут существенно превь-
сить номинальный момент двигателя при пуске в 2—4 раза, при ре-
версировании в 8—15 раз, что след' ст . читывать при анализе свойств
1 стжретного электропривода.
ГЛАВА ВОСЬМАЯ
ФОРМИРОВАНИЕ ПЕРЕХОДНЫЕ
ПРОЦЕССОВ
3.1. Общие положение
Ранее было показано (см. гл. 7), как возни-
кающие переходные процессы протекают в электроприводе
при изменении управляющего воздействия скачком. В этом
случае рассматривались условия пуска, торможения, ре-
3J1
версирования, перехода от одной угловой скорости к дру-
гой при моментах двигателей постоянного и переменного
тока, зависящих от угловой скорости. Однако условия ра-
боты производственных механизмов требуют от электро-
привода обеспечения соответствующего формирования пе-
реходных режимов, направленного на достижение либо
максимального быстродействия, либо минимума потерь,
либо ограничения динамических нагрузок, возникающих
в элементах кинематических цепей, связывающих электро-
привод с рабочим органом машины, и т. д. Управление
переходными процессами электропривода может создать
максимальное быстродействие при соответствующих огра-
ничениях. Например, для двигателя постоянного тока
Рис. 8.1. Графики зависимости
угловой скорости, углового уско-
рения и производной углового
ускорения от времени, обеспечива-
ющие ограничение динамических
нагрузок привода.
одно из таких ограничений состоит в том, что ток в якоре
не должен по условиям коммутации превосходить 2—2,5-
кратного значения номинального. Другим ограничением,
например при отработке заданного перемещения, является
недопустимость превышения некоторого максимального зна-
чения угловой скорости, определяемого условиями коммута-
ции и механической прочностью якоря.
В большинстве случаев надо так формировать переход-
ные процессы, чтобы ограничивать угловое ускорение
привода, т. е. первую производную угловой скорости
dtoldt, и ограничивать вторую производную угловой ско-
рости р = <f2w/d/2 (рывок) или первую производную мо-
мента двигателя dMIdt = Jd2a>ldt2 при Mz ~ const. В ка-
честве примера можно сослаться на электропривод лифта,
где необходимо ограничить ускорение, превышение кото-
рого неблагоприятно сказывается на самочувствии пасса-
жиров н важно для снижения динамических усилий в ка-
802
натах и кабине лифта. Максимальные значения ускорений
и замедлений при движении кабины не должны превышать
1,5—2 м/с2, производная ускорения и замедления для ско-
ростных лифтов 3—10 м/с3.
Графики зависимости угловой скорости, углового ус-
корения (или пропорционального ему тока при Л4С = 0) и
производной углового ускорения от времени, обеспечиваю-
щие требуемое ограничение динамических нагрузок, при-
ведены на рис. 8.1.
Вкратце рассмотрим формирование переходных процес-
сов для двух практических случаев: 1) при линейном за-
коне нарастания управляющего воздействия на выходе
преобразователя; 2) при экспоненциальном возрастании
управляющего воздействия, характерном для системы Г—Д
и обусловленном инерционностью обмотки возбуждения
генератора.
8.2. Формирование переходных процессов
при линейном нарастании
управляющих воздействий
Линейный закон нарастания управляющего
воздействия достигается при использовании тиристорного
преобразователя, практически являющегося безынерцион-
ным, поэтому линейное изменение ЭДС на его выходе по-
лучают путем подачи на вход системы управления преоб-
разователем сигнала, изменяющегося во времени линейно.
Закон изменения ЭДС преобразователя, или, что то же
самое, угловой скорости идеального холостого хода со0
двигателя постоянного тока независимого возбуждения
представлен на рис. 8.2, б и определяется формулой
COq — 8П/, (8.1)
где еп — угловое ускорение электропривода при пуске,
характеризующее темп изменения «0.
Примем, что еп имеет такое достаточно малое значение,
которое позволяет пренебречь влиянием на переходный
процесс электромагнитной инерции (индуктивности якор-
ной цепи).
а) Пуск привода вхолостую
Примем механические характеристики ли-
нейными и параллельными друг другу при различных
фиксированных значениях ЭДС (рис. 8.2, а) и номинальном
303
магнитном потоке (Фном = const), т. о.
со = соо — М/Р, (8.2)
где р = (£ФноМ)2/Яя£ = ДМ/ | Дсо | — абсолютное значе-
ние жесткости механической характеристики.
Если принять, что статический момент Мс = 0, то
уравнение движения привода можно представить в виде
М = /^.
at
Используя (8.1), (8.2) и уравнение движения, получаем
дифференциальное уравнение переходного процесса:
7м^ + со = со0(0 = М. (8.3)
Кривая со (/), получаемая в результате решения (8.3),
имеет два участка, для каждого из которых расчет необ-
ходимо вести отдельно. Для первого участка (до /п0 на
рис. 8.2, б, в), принимая при t — 0 сонач = 0, получаем:
<о = еп^-епТм(1(8.4)
304
Это выражение графически показано на рис. 8.2, б.
Воспользовавшись уравнением движения (при Мс = 0),
получим показанное на рис. 8.2, в изменение момента во
времени:
М = Jetl(l-е“</гм). (8.5)
Момент при 15= ЗТК достигает практически своего мак-
симального (установившегося) значения, и соответственно
угловое ускорение остается постоянным, а угловая скорость
изменяется с таким же темпом, как и вызвавшая рассмат-
риваемый переходный процесс ЭДС преобразователя.
Максимальное значение момента, равное Mmax = Jen,
дает возможность оценить допустимое значение еп.
На рис. 8.2, а утолщенной линией показана зависимость
со = f (М) в переходном режиме (фазовая траектория про-
цесса), отражающая динамическую механическую харак-
теристику привода.
Второй этап пуска (при Т Ss /,10 на рис. 8.2, б, в) проис-
ходит тогда, когда ЭДС преобразователя и соответствую-
щая ей угловая скорость идеального холостого хода по
прошествии времени /п0 окажутся постоянными. Для этого
этапа пуска угловую скорость и момент двигателя удобно
рассчитывать, вводя новый отсчет времени с /„0 и обозначая
время через t' — t — /п0. Тогда на втором участке пуска
угловую скорость и момент можно записать следующим
образом:
co = wol —(cool —«нач)е"''/ги, (8.6)
где гонач = сол — соЛ1 (рис. 8.2, а, б);
М = = Mmaxe~ilT<*., (8.7)
т. е. переходный процесс в данном случае протекает так,
как это имеет место при линейной механической характе-
ристике двигателя и отсутствии момента нагрузки (Л1С = 0),
4то соответствует участку АсоО1 на рис. 8.2, а. На рис. 8.2, б
показан участок разгона привода от точки А1 до угловой
скорости to01, построенный в соответствии с (8.6), и, нако-
нец, на рис. 8.2, в дано изменение момента М (t) по урав-
нению (8.7) при разгоне привода.
6) Пуск привода с реактивным моментом нагрузки
Используя уравнение движения, линейность
механической характеристики двигателя и закона изме-
нения ЭДС преобразователя, получаем дифференциальное
305
уравнение переходного процесса пуска привода под на-
грузкой:
Тм$ + ® = е11/-ДШс = (ос(/), (8.8)
где Дсос = перепад угловой скорости на механической
характеристике двигателя, обусловленный моментом нагруз-
ки; сос (/) = e„t— Д<ос.
Если момент нагрузки является реактивным, то дви-
гатель остается неподвижным до тех пор, пока момент, раз-
виваемый им, не станет равным Мс. На этом этапе переход-
ного процесса, если двигатель подключен к преобразо-
вателю, ток и соответственно момент изменяются по прямой
Рис. 8.3. Механические характеристики (а) и графики переходных
процессов (б) при пуске под нагрузкой с реактивным моментом.
линии до значения Мс — e„ta | р |. С момента времени
t0 (е1Л = Awc)> называемого временем запаздывания, мо-
мент двигателя становится М > Л1с, и происходит пуск
электропривода по характеристике (по фазовой траектории),
показанной утолщенной линией на рис. 8.3, а.
Переходный процесс на втором участке начинается с t9
и продолжается до /П1 (рис. 8.3, б). Вводя новый отсчет
времени и обозначая его t' — t — t0, уравнение (8.7) запи-
сываем в виде
Т4“ + <О = М'. (8.9)
Полное решение этого уравнения с учетом того, что при
Г — 0 угловая скорость ш = 0, а постоянная интегриро-
306
вания С — Ткеп, имеет вид:
(1) = 8пГ-Тме„(1-е-/'/гм). (8.Ю)
Уравнение (8.10) описывает переходный процесс на
втором участке, причем первая составляющая представ-
ляет линейно-измепяющуюся угловую скорость в том же
темпе, что и соо (/). Вторая составляющая изменяется по
экспоненте, и через время, практически равное ЗТМ, угло-
вая скорость нарастает линейно, т. е.
ю = епГ — Тме„ = еп (Г — Тм). (8.11)
Момент двигателя
М=Мс + 7\еп|Н(1-е~Г/Ч (8-12)
В начале второго участка момент так же, как и угловая
скорость, изменяется по экспоненте. По истечении времени
f *=« ЗТ„ он практически достигает максимального значе-
ния и остается постоянным (рис. 8.3, б).
На третьем участке при t > /п1, где <о0 (/) = <оО1 и угло-
вая скорость электропривода достигает установившегося
значения wc = ы01 — Дсос, дифференциальное уравнение
переходного процесса принимает вид:
+ « = (8.13)
где t" = t — /п1.
Решение уравнения (8.13):
со = <ос — (сос — <онач) е~‘ /т«.
Момент двигателя
здесь <онач, Мтах равны соответственно значениям угловой
скорости и момента в конце второго этапа переходного
процесса.
Из рис. 8.2 и 8.3 следует, что характер переходных про-
цессов в основном зависит от темпа нарастания ЭДС пре-
образователя и не зависит от статического момента. От этого
темпа зависит динамический момент, создающий ускорение
привода.
При заданном значении динамического момента угловое
ускорение (темп нарастания ЭДС преобразователя) опре-
деляется моментом инерции привода:
Ьд = Л^ДИН, доп/^* (8.14)
307
в| Пуск правда с зитнаным моментом нагрузки
Переходный процесс пуска с активным момен-
том нагрузки определяется начальными условиями на пер-
вом этапе. Допустим, что ю11ач = 0, <о0 = М, перепад
угловой скорости, обусловленный активным моментом на-
грузки, не меняющим своего знака, составляет —Дсос, как
показано на рис. 8.4, а. Тогда по аналогии с предыдущим,
Рис. 8.4. Механические характеристики (а) и графики переходных про-
цессов (б) при пуске с активным моментом нагрузки.
подставив начальные условия, получим уравнение для
скорости привода:
со = еп/ - (Д<ос + еп7\) (1 - ё~ (8.15)
Производная скорости равна:
cfo До)с + епТм -цт
dt~Sn Тм е
при i = 0
dtis/dt = — Д<вс/Тм < 0.
Это означает, что момент нагрузки, будучи активным,
заставляет привод вращаться в обратную сторону.
При t > ЗТМ
со еп/ — Дсос - 8ПТ„,
ускорение das/dt = еп, ъ е. привод разгоняется.
Графики изменения скорости и момента во времени
показаны на рис. 8.4, б.
308
г) Торможение привода под нагрузкой
При наличии момента нагрузки торможение
начинается с угловой скорости юс, соответствующей мо-
менту (рис. 8.5, а). Для первого этапа торможения
(до ы0 = 0) можно записать уравнение
со = юс — e7i-|-eTTM(l — (8.16)
где —ет — угловое замедление привода при торможении
(темп спадания ЭДС преобразователя), в частном случае
I ет I = ея.
Рис. 8.5. Механичес-
кие характеристики (а)
и графики переходных
процессов (б, в) при
торможении с реактив-
ным и активным мо-
ментами нагрузки.
Момент двигателя
М = Мс-Тмеп|Р|(1-е-'/гм). (8.17)
На втором этапе, начиная со времени /т1, когда двига-
тель выходит на статическую характеристику с <о0 = 0
при условии, что момент нагрузки реактивный, угловая
скорость и момент изменяются по экспоненте соответственно
до значений <о — 0 и М = 0, так как реактивный момент
309
сопротивления не вызывает движения. Графики переход-
ных процессов показаны на рис. 8.5, б, в, а фазовая траек-
тория — на рис. '8.5, а.
Торможение с активным моментом нагрузки не отли-
чается вплоть до со = 0 от случая, рассмотренного выше,
когда момент нагрузки являлся реактивным. При активном
моменте нагрузки (как показано штриховой линией на
рис. 8.5) привод реверсируется начиная со времени Аг2 до
угловой скорости, равной —Дсос, за счет статического
момента, который не изменяет своего знака при изменении
направления вращения двигателя. Момент двигателя до-
стигает значения, равного моменту сопротивления.
д) Реверсирование привода под нагрузкой
Изменение направления вращения привода
должно осуществляться изменением знака ЭДС преобра-
зователя (или <о0) от положительного значения до отрица-
тельного; при этом, если считать момент нагрузки актив-
Рис. 8.6. Механические характеристики (а) и график переходного про*
цесса (б) при реверсировании с активной нагрузкой на валу.
ным, т. е. не меняющим своего знака при переходе через
нулевое значение угловой скорости, угловое ускорение
привода на всем этапе реверсирования остается постоянным,
как это видно из рис. 8.6, а, б. Переходный процесс на пер-
вом этапе до угловой скорости, близкой к установившейся,
не отличается от процесса при торможении с активным
моментом. На втором этапе, когда двигатель выходит на
статическую характеристику, переходный процесс имеет
310
экспоненциальный характер и угловая скорость возрастает
(по абсолютной величине) до установившегося значения
со = —С0с2.
Переходный процесс при реверсировании привода с ре-
активной нагрузкой на его валу протекает сложнее в связи
с тем, что при переходе угловой скорости через 0 реактив-
ный момент меняет скачком свой знак. Разгон привода
в противоположную сторону происходит при условии,
«то момент, развиваемый двигателем, по абсолютному
значению превосходит статический момент.
Рис. 8.7. Механические характеристики (а) и график переходного про-
цесса (б) при реверсировании с реактивной нагрузкой на валу.
Процесс торможения до угловой скорости, равной О
(первый этап реверса привода), протекает так же, как и
в случае реверса с активным моментом нагрузки, до точки
/р1 (рис. 8.7).
На втором этапе в случае, если при со = 0 | М | > | Л4С |,
начинается разгон в обратную сторону. Так как в первый
момент при t = /р1 динамический момент оказывается мень-
ше, чем он был в период торможения, то в точке перехода
через нулевое значение угловой скорости угловое ускорение
привода по абсолютному значению становится меньшим.
Поэтому для сохранения заданного углового ускорения 8Т
нужно увеличить динамический момент привода, т. е. на
втором этапе изменение угловой скорости со (/) связано
с возрастанием динамического момента (рис. 8.7). На треть-
ем этапе (точка t — tp2) в соответствии с линейной характе-
ристикой двигателя (—Мтах, —соо) угловая скорость и
момент привода изменяются по экспоненте.
311
8.3. Переходные процессы при
экспоненциальной зависимости
управляющего воздействия
а] Общие положения. Форсирование процесса
возбуждения
Экспоненциальная зависимость управляю-
щего воздействия характерна для системы Г—Д, в которой
закон изменения ЭДС генератора обусловлен индуктив-
ностью его обмотки возбуждения. Пуск, торможение и ре-
версирование, а также регулирование угловой скорости
двигателя в системе Г—Д производят обычно путем соот-
ветствующих переключений в цепи обмотки возбуждения
генератора, а иногда и двигателя. Так как обмотки воз-
буждения обладают сравнительно большой индуктивно-
стью, то их электромагнитные постоянные времени велики
и переходные процессы в цепях возбуждения машин про-
текают сравнительно медленно.
Для обмоток якорей электрических машин значение
электромагнитной постоянной лежит обычно в пределах
сотых и даже тысячных долей секунды, и поэтому в боль-
шинстве расчетов переходных режимов она может не учи-
тываться. Что касается обмоток возбуждения машин, то их
постоянная времени Т„ имеет уже существенное значение,
так как ее значение колеблется в пределах от десятых долей
секунды для машин малой мощности до нескольких се-
кунд в мощных электрических машинах. Ниже дается
представление о порядке электромагнитных постоянных
времени в зависимости от мощности машин постоянного
тока:
Мощность машины, кВт Постоянная времени обмотки
возбуждения Тв, с (ориентировочно)
1,5 0,2
15 0,6
75 0,8-0,9
3000 и выше 2 — 4
Рассмотрим некоторые способы ускорения процесса
возбуждения на примере системы Г—Д применительно
к мощным реверсивным станам, устанавливаемым для
прокатки металла на заводах металлургической промыш-
ленности. Выводы, полученные в результате этого расс-
мотрения, являются общими для подобных приводов посто-
янного тока.
312
По технологическим условиям в указанных прокатных
станах требуется производить 15—20 реверсов в минуту.
Как видно из приведенных данных, электромагнитная по-
стоянная времени обмотки возбуждения генератора Тв
достигает в некоторых случаях значений, лежащих в преде-
лах 2—4 с, и поэтому без специальных мер в подобной уста-
новке можно получить лишь три-четыре реверса в минуту.
На рис. 8.8 показана принципиальная схема Г—Д.
Прежде всего рассмотрим процесс нарастания тока в цепи
обмотки возбуждения генератора. После замыкания клю-
ча К и скачкообразного приложения напряжения к выво-
Рис. 8.8. Принципиальная схема соединения машин в системе генера-
тор — двигатель.
дам обмотки возбуждения ток в ней будет нарастать плавно
по экспоненциальному закону х:
1-в=/в.нои(1-г"'/Гв); (8-18)
здесь /В1НОм = (Ув.ном/^в — установившийся (номинальный)
ток в обмотке возбуждения генератора; Тв = LB/RB —
электромагнитная постоянная времени этой обмотки;
Rn и LB — соответственно номинальное напряжение
на выводах обмотки возбуждения, ее активное сопротивле-
ние и индуктивность.
Практически процесс возбуждения можно считать за-
кончившимся, когда iB = 0,95 /в 110м. В этом случае /095 =
= ЗТВ.
Таким образом, приходим к выводу, что скорость элект-
ромагнитного процесса возбуждения в указанной схеме
определяется постоянной времени обмотки возбуждения
генератора.
Для ускорения электромагнитного процесса применя-
ются способы, основанные на том, что на время пуска н об-
1 Здесь и в дальнейшем индуктивность цепи обмотки возбуждения
принимается постоянной,
313
моткам возбуждения генератора прикладывается повышен-
ное напряжение. Для ограничения установившегося тока
номинальным значением /в,110м приходится включать до-
полнительный резистор или прибегать к другим мерам
ограничения напряжения в установившемся режиме.
На рис. 8.9 представлена схема с постоянно включенным
дополнительным резистором /?доб. Сопротивление этого
резистора подбирается так, чтобы при повышенном напря-
жении U'b > ии>нок ток в обмотке возбуждения не превос-
ходил номинального значения, которое равно:
здесь
в’ном аддоб/Яр-нКв+Кдоб)1
(8.20)
UB — G.UBi ном,
где ос — коэффициентфорсировки, показывающий, во сколь-
ко раз приложенное извне напряжение выше номинального;
Рис. 8.9. Схема цепи возбуждения генератора с постоянно включен-
ным дополнительным резистором,
Rp — сопротивление разрядного резистора, принимаемое
практически равным (3—4) Ra.
Ток в обмотке возбуждения для рассматриваемой схемы
изменяется по закону
где
1—1 (1 —е~1/т'в\
*В * В, уСТ \1 С / ’
(8-21)
в в 1 + КрКдоб/(Кдоб + Кр) Кв
(8.22)
Анализ (8.22) показывает, что с увеличением Ra0^
уменьшается постоянная времени цепи возбуждения и,
следовательно, более интенсивно возрастает ток возбужде-
ния генератора. Очевидно, что с ростом 7?доб должно уве-
личиваться приложенное напряжение UB. Необходимо
отметить, как это вытекает из (8.21), что при I = 0, т. е.
314
в начальный момент процесса возбуждения, i„ = 0 и все
внешнее напряжение б'в прикладывается к выводам об-
мотки возбуждения. По мере роста тока возбуждения напря-
жение на обмотке возбуждения снижается, достигая уста-
новившегося значения. Таким образом, форсировка про-
Рис. 8.10. Кривые изменения
тока возбуждения генератора
при различных сопротивлениях
дополнительного резистора в
схеме на рис. 8.9,
цесса возбуждения генератора для рассматриваемой схемы
не остается постоянной.
Характер изменения тока возбуждения для этой схемы
приведен на рис. 8.10, где показаны кривые нарастания
тока iB при различных значениях напряжения U'B и соответ-
ственно разных сопротивлениях дополнительных резисто-
ров. Совершенно очевидно, что время переходного процесса
Рис. 8.11. Схема цепи возбуждения генератора с резистором, шунти-
руемым на время переходного процесса.
может быть сокращено до требуемого значения. Однако
с увеличением сопротивления дополнительного резистора
в цепи обмотки возбуждения возрастает и напряжение UB,
а следовательно, и потери в дополнительном резисторе.
Для форсирования процесса возбуждения в системе
Г—Д часто применяется схема с шунтированием резистора
на время переходного процесса (рис. 8.II).
В подобной схеме напряжение UB принимается в нес-
колько раз выше номинального, однако ток возбуждения
315
генератора по-прежнему не должен превосходить номиналь-
ного значения. Здесь, как и прежде, коэффициент форси-
ровки может быть определен из соотношения а = U^/UP,„04.
Отличие этой схемы от приведенной на рис. 8.9 заключается
в том, что при переходном процессе дополнительный ре-
зистор /?доб шунтируется и контакты КФ размыкаются
только в момент, когда ток достигает значения /В,1|ОМ. Повы-
шенное напряжение в переходных процессах полностью
приложено к обмотке возбуждения генератора, а ток ia
стремится к значению Гв = Ua/RB при той же постоянной
времени, что и в схеме рис. 8.8.
Рис, 8.12. Кривые изменения
тока = / (0 в схеме с шун-
тируемым резистором,
Рис. 8.13. Кривые изменения
напряжения на выводах обмот-
ки возбуждения генератора,
1 — в схеме нв рис 8.9; 2 — в схе-
ме на рнс. 8.11.
Уравнение для тока возбуждения в переходном режиме
имеет следующий вид:
/в = «/в,ном(1-е-/7Ч (8.23)
Решением этого уравнения относительно t определяется
время, в течение которого ток достигает номинального
значения:
/ = Тв1п^. (8.24)
Примерные кривые нарастания тока возбуждения при
различных коэффициентах форсировки приведены на
рис. 8.12. Целесообразно принимать значения коэффициен-
та форсировки ос = 3 4- 4, так как дальнейшее его увели-
чение мало сказывается на уменьшении времени нараста-
ния тока возбуждения.
Сравнивая приведенные выше способы ускорения пере-
ходных процессов, можно сделать вывод, что наиболее
316
эффективным является формирование напряжения с шун-
тируемым на время переходного процесса резистором.
Здесь при прочих равных условиях достигается наиболь-
шее ускорение процесса и, кроме того, нарастание тока
возбуждения идет почти по прямой линии, что благоприятно
сказывается на форме кривой тока в цепи якоря двигателя.
Напряжение, прикладываемое к выводам обмотки воз-
буждения генератора по схеме, приведенной на рис. 8.9,
уменьшается в процессе пуска (кривая 1 на рис. 8.13), а
по схеме, данной на рис. 8.11, остается неизменным, как
это показано на рис. 8.13 (кривая 2). Поэтому по схеме,
изображенной на рис. 8.11, обеспечиваются более форсиро-
ванное нарастание тока возбуждения и большее ускорение
переходного процесса при одном и том же напряжении U'B.
Следует еще раз подчеркнуть, что первопричиной уско-
рения переходных процессов во всех рассмотренных выше
схемах является увеличение подводимой мощности за счет
повышения на время пуска напряжения на выводах обмотки
возбуждения генератора. Ускорение процесса возбуждения
сокращает длительность переходных режимов двигателя.
6) Пуск электропривода в системе Г—Д
Если принять генератор ненасыщенным, то
его ЭДС при cor = const будет пропорциональна току воз-
буждения и в переходных режимах определится уравне-
нием
ег = а£ном(1-е“/УЧ (8-25)
где Ев0„ — номинальное значение ЭДС генератора при
С ^в.ном-
Для цепи якоря двигателя, в которой проходит ток i,
при пуске уравнение равновесия ЭДС
ег = аЕнои (1 - е~</Гв') = iRB + LB + ед, (8.26)
где /?я и £я — соответственно сопротивление и индуктив-
ность цепи якоря генератора и двигателя; ед — ЭДС дви-
гателя.
Значение £„ часто можно не учитывать, так как оно мало
по сравнению с индуктивностью обмотки возбуждения гене-
ратора LB, т. е. можно принять Д^=0.
Для получения зависимостей, определяющих изменение
угловой скорости, тока и момента при пуске двигателя,
317
необходимо уравнение (8.26) решать совместно с уравне-
нием движения привода:
Полагая при постоянном магнитном потоке двигателя
ел — ссо, а М = ci и решая совместно указанные уравне-
ния, получаем зависимость угловой скорости двигателя
от времени при пуске:
со = [?в (1 _ е~ _ ги (1 - tyT z/r«)] - Дсос, (8.27)
1 В 1 м
где соо — угловая скорость идеального холостого хода
двигателя; ос — коэффициент форсировки; Тъ — электро-
магнитная постоянная времени обмотки возбуждения гене-
ратора; Т„ — электромеханическая постоянная времени
электропривода; Дсос — перепад угловой скорости при мо-
менте сопротивления Л4С, равный
Дсос = соо — сос;
ф=(——\(7’в-гм)/гм> (8.28)
Использовав уравнение движения, разделив левую и
правую части его на с и взяв производную угловой скорости,
из (8.27) можно получить выражение для тока якоря дви-
гателя в функции времени:
i = ^4iL(e-z/rB-i|:e-//7’«) + Zc, (8.29)
1 в 1 м
где /к,з — ток короткого замыкания в цепи Г—Д, соответ-
ствующий номинальному значению ЭДС генератора; /с —
ток нагрузки при моменте сопротивления Мс.
Если пуск двигателя производится без нагрузки, т. е.
при Л4С = 0, то в этом случае /с = 0; Дсос = 0; ф = I;
тогда
со = [Тв (1 —е~tlT*)-Тм(I -е~'/Г«)]; (8.30)
(8.31)
* в * м
Если магнитный поток двигателя сохраняется неиз-
менным, то зависимости для момента, развиваемого дви-
гателем, оказываются такими же, как и для тока.
318
На рис. 8.14, а, б показаны кривые w = f (f) и i = (/)
при различных коэффициентах форсировки.
Приведенные выше равенства показывают, что проте-
кание переходных процессов в системе Г—Д зависит как
от электромеханической постоянной времени привода Т„,
так и от электромагнитной постоянной времени обмотки
возбуждения генератора Тв. В зависимости от мощности
привода эти постоянные имеют различные значения, ле-
жащие в широких пределах.
Как упоминалось, в приво-
дах мощностью в несколько
киловатт Тв = 0,1 ч- 0,3 с.
В мощных приводах ре-
версивных прокатных станов
Тв = 2 -;- 4 с, в то время как
Т.л = 0,3 0,05 с. В послед-
нем случае при определении
длительности переходных
процессов можно учитывать
лишь электромагнитную пос-
тоянную времени обмотки
возбуждения генератора, пре-
небрегая электромеханичес-
кой постоянной времени ввиду
Рис. 8.14. Кривые угловой скоро-
сти (а) и тока в цепи якоря (б)
при пуске двигателя в системе
Г-Д при схеме возбуждения
генератора на рис. 8.11.
ее относительной малости. Поэтому уравнение (8.30) примет
более простой вид:
со^асоо(1— е
(8.32)
При определении зависимости i — (t) практический
интерес представляет нахождение максимального тока
в цепи якоря для сравнения его с допустимым значением
по условиям коммутации на коллекторе двигателя.
Пользуясь уравнением (8.29), находим производную
di/dt и приравниваем ее 0, т. е.
| = т-а--тУ ‘/Та ~ т*е~ ‘/Т^ = °*
* В V В 1 М/
319
Отсюда можно определить время, по истечении которого
ток достигает максимума,., а именно:
(8.зз)
1 в 1 м 1 м
Подставив значение imax в (8.29) и произведя соответ-
ствующие преобразования, получим максимум тока в цепи
якоря при пуске двигателя
г ______« Д, з (afc)l) A(i>e) /7*м\ в^( в у zg 33а)
max л/л \ '/ ’ / I С* х * f
OCUJq V В/
Если пуск двигателя совершается без нагрузки (Л4С = 0,
Лсос = 0 и /с = 0),
/пта^ = а/к,з(7’м/ЛЛ/(Гв"Гм). (8.336)
в) Торможение и реверсирование привода
в системе Г—Д
Выше были показаны способы ускорения про-
цесса возбуждения и даны соотношения со = / (Z) и i =
= / (/) при пуске двигателя постоянного тока в системе
Г—Д. Не менее важными являются расчеты, связанные
с уменьшением времени переходных процессов при тормо-
жении и реверсировании в рассматриваемой системе.
/с
Рис. 8.15, Схема торможения двигателя в системе Г — Д.
Торможение двигателя М (рис. 8.15) производится чаще
всего отключением от сети обмотки возбуждения генератора
и замыканием ее на разрядный резистор Rp либо замыка-
нием ее на выводы якоря, причем таким образом, чтобы
изменялась полярность на обмотке возбуждения. При этом
двигатель работает в режиме генератора за счет запасенной
в нем и в механической части привода кинетической энер-
гии, а генератор — в двигательном режиме. Генератор G,
работая двигателем, отдает механическую энергию привод-
ному асинхронному (или синхронному) двигателю, связан-
ному с генератором общим валом. Наконец, асинхронный
320
(или синхронный) двигатель при резком снижении тока
возбуждения генератора переходит в генераторный режим,
отдавая энергию в сеть переменного тока. Интенсивность
спадания тока в обмотке возбуждения характеризует и темп
торможения двигателя. Зависимость спадания тока воз-
буждения генератора от времени при торможении может
быть установлена на основании уравнения
(Яв + /?Р) + Д>^ = о.
Решение этого уравнения относительно тока iB дает:
»в = /в.„оме-,/г», (8.34)
где Тв = LB/(RB + Rp) — электромагнитная постоянная
времени контура возбуждения.
По-прежнему полагая генератор ненасыщенным, полу-
чаем изменение ЭДС генератора при торможении:
= (8-35)
Из приведенных уравнений видно, что уменьшение по-
стоянной времени приводит к форсированию процесса тор-
можения. Последнее достигается увеличением сопротивле-
ния разрядного резистора. Однако следует иметь в виду,
что напряжение на выводах разрядного резистора, а зна-
чит, и на обмотке возбуждения подчиняется следующему
закону:
uB = UBRpe~t/T°/RB, (8.36)
а при t = О
ив = UBRP/RB.
Значительное увеличение сопротивления разрядного ре-
зистора, связанное с уменьшением постоянной времени,
может привести к недопустимым перенапряжениям на вы-
водах обмотки возбуждения в начале торможения, а также
к значительным броскам тока в цепи якоря. Поэтому со-
противление разрядного резистора практически не превы-
шает обычно трехкратного сопротивления обмотки возбу-
ждения.
Для нахождения аналитической зависимости угловой
скорости двигателя от времени при торможении решаем
совместно два уравнения:
^ном^ в = с® iRB>
11 Чиликин М, Г,, Сандлер Л, С. ",; > 321
После преобразований получим:
со = (Тве~‘!Тв - TMe~t/T^ - Дшс. (8.37)
Ток в цепи якорей машин определяем по формуле
* = сТт -т}к't/Tu -е~<8-38)
& V В 7 Ш
ИЛИ
i = lK.3rJ1f-(.e-l,T«-e-t/TB')+ Ц. (8.39)
* в 1 м
При Мс = О
t = (8.40)
1 в 1 и
Кривые м = /(/) и i = fi (/) при Л4С = 0 приведены
соответственно на рис. 8.16 и 8.17. Кривые 1 на обоих ри-
Рис. 8.16. Кривые угловой ско-
рости двигателя при торможе-
нии двигателя в системе Г —Д
по схеме на рис, 8,15.
Рис. 8-17. Кривые тока в цепи
якоря при торможении двигате-
ля в системе Г — Д по схеме
на рис, 8.15.
сунках относятся к приводам с большей постоянной вре-
мени Тв, кривые 2 — с меньшей.
Максимум тока при торможении находим из уравнений
(8.31) путем приравнивания 0 производной тока по вре-
мени
= - 4.з(ЛЛ’в)Гв/(Га-Гм) + Л- (8-41)
Если торможение производится без нагрузки (7С = 0),
то
Цтахо = - /к,3 (Л./7\)Гв/(Гв "Гм)- (8.42)
Реверсирование двигателя в рассматриваемой системе
осуществляется изменением полярности напряжения, при-
322
кладываемого к выводам обмотки возбуждения генератора,
что вызывает быстрое спадание тока возбуждения, а затем
нарастание его в обратном направлении.
форсирование возбуждения при реверсировании совер-
шается таким же образом, как и при пуске.
Зависимость тока возбуждения от времени определяется
из уравнения
-U'B = iBRB + LBd-£. (8.43)
После соответствующих преобразований получим:
»'в = -а/в[1-(1+^)е-//гв]. (8.44)
Электродвижущая сила генератора при ненасыщенной
машине
er=-a£B0B[l-(l+ (8.45)
Решая совместно уравнение равновесия ЭДС для цепи
якоря и уравнение движения привода относительно со,
получаем:
© = - («шо + Дсос) + (iT+B-T° </Тв ~ Ты<Г '/Тя)’ (8’46)
Если реверсирование происходит без нагрузки (Л1с = О
и Д(ос = 0), то
«,=-«>. +Ц^(Г,е-"г- - 7>-"Ч (8.47)
Примерные кривые изменения угловой скорости двига-
теля при реверсировании для различных коэффициентов
форсировки и Мс = 0 представлены на рис. 8.18.
Воспользовавшись уравнением (8.47) и подставив в него
и = —<о0, можно определить длительность реверса, т. е.
время, в течение которого угловая скорость ненагружеп-
ного двигателя изменится от + со0 до —со0-
Для мощных электроприводов значением Тк вследствие
малости его по сравнению с Тв можно пренебречь. В этом
случае время реверса определится по упрощенной формуле
/р^7\1п^. (8.48)
Формула (8.48) указывает на то, что продолжительность
реверсирования зависит от постоянной времени цепи воз-
буждения и коэффициента форсировки.
11*
323
Если воспользоваться выражением производной угло-
вой скорости по времени
Ло _ (1+а)й>0 (р-ит№ -ЦТ Л
dt ~ Те-Ты е 7
и подставить его в
уравнение для тока
J du> , ,
то после несложных преобразований получим:
При
. =(1 + <х)/кз7\(е-^м_е_//тв)+/с|
1 в < м
/с = 0
i
(1 + а) 1К.3ТК 1/тя _ -итву
Тв Т„
Кривые изменения тока i = (/) при /с = 0 и
ных значениях а представлены на рис. 8.19.
(8.49)
(8.50)
различ-
Рис. 8.18. Примерные кривые
угловой скорости при реверси-
ровании для различных коэф-
фициентов форсировки (а = 1;
2 и 3).
Рис. 8.19. Примерные кривые
тока двигателя прн реверсиро-
вании для различных коэффи-
циентов форсировки (а = 1; 2
и 3).
По известному правилу нахождения максимума опреде-
ляем время, в течение которого ток достигает максималь-
ного значения,
(8.51)
и максимум тока
Ismax — (1 +«) /к,з Гм) + 1с, (8.52)
324
или при /с = О
1ртах = -(!+«) /к.з (Л,/Л)мг" " (8.53)
В тех случаях, когда необходимо учитывать насыщение
генератора и индуктивность якорной цепи, приходится
прибегать к графо-аналитическим построениям или исполь-
зовать ЭВМ.
Как было показано, формирование переходных процес-
сов в системе управляемый преобразователь—двигатель
зависит от инерционности преобразователя. Если учесть
индуктивность якорной- цепи системы Г — Д, то оказы-
вается невозможным воспроизведение линейного закона на-
растания тока в якорной цепи двигателя и поэтому трудно
формировать темп нарастания момента.
Хотя формирование линейного нарастания ЭДС преоб-
разователя и обеспечивает высокую стабильность макси-
мального углового ускорения электроприводов при неиз-
менной динамической составляющей момента, и все же
в разомкнутой системе угловое ускорение зависит от на-
грузки, поэтому ограничивается эффективность формиро-
вания переходных процессов в разомкнутой системе, и
в случае, если предъявляются более жесткие к ним требо-
вания, необходимо создавать замкнутую систему.
Системы замкнутого регулирования скорости и момента
для приводов постоянного и переменного тока приводятся
в гл. 12.
ГЛАВА ДЕ ВЯТАЯ
РАСЧЕТ МОЩНОСТИ ЭЛЕКТРОПРИВОДОВ
9.1. Общие положения
Исходными данными для правильного расчета
мощности и выбора типа электропривода являются техно-
логические и конструктивные требования, которые возни-
кают в связи с эффективным использованием производст-
венных механизмов, а именно обеспечения высокой произ-
водительности, надежности и точности их работы. Так как
одним из главных элементов электропривода, определяю-
щим в значительной степени его технические и экономиче-
ские показатели, является электродвигатель, то в данной
главе прежде всего рассматриваются вопросы расчета мощ-
325
ности электродвигателей, работающих в различных ре-
жимах.
Применение двигателей недостаточной мощности может
вызвать нарушение в нормальной работе механизма, пони-
жение его производительности, аварию и выход из строя
двигателя. Использование же двигателя завышенной мощ-
ности приводит к неоправданному увеличению капиталь-
ных затрат, снижению электрических показателей электро-
привода, уменьшению КПД двигателя, а в установках
переменного тока, кроме того, ухудшению коэффициента
мощности, что в свою очередь влияет на непроизводитель-
ную загрузку преобразовательного устройства и распреде-
лительной сети. Кроме как по мощности, нужно еще пра-
вильно выбрать двигатель по исполнению, т. е. по степени
защиты (защищенный, закрытый, взрывозащищенный), по
способу охлаждения (самовентилируемый, с естественным
охлаждением, с независимой или принудительной венти-
ляцией) и по климатическому исполнению (для умеренного,
тропического, холодного климата и т. п.). Это можно сде-
лать, зная назначение электропривода и условия, в которых
ему придется работать. От правильного выбора двигателя
по исполнению существенным образом зависит надежность
его работы. В то же время необоснованный выбор, напри-
мер, закрытого двигателя вместо защищенного приводит
к увеличению капитальных затрат и утяжелению конструк-
ции. Выбор двигателя по способу охлаждения особенно
важен для регулируемых электроприводов, так как непра-
вильный выбор в этом случае может привести к значитель-
ному завышению установленной мощности двигателя, т. е.
к увеличению капитальных затрат, утяжелению конструк-
ции и к резкому снижению КПД и коэффициента мощности
(для переменного тока).
Если учитывать огромное число механизмов в народном
хозяйстве, значение правильного расчета мощности элект-
родвигателей и выбора их по исполнению очень велико.
Выбор мощности электродвигателя обусловливается ха-
рактером изменения статической нагрузки на его валу,
а также условиями протекания переходных процессов в эле-
ктроприводе.
В отношении характера изменения статического момента
производственные механизмы могут быть разделены на
следующие группы:
Первая группа. Механизмы, у которых стати-
ческий момент остается постоянным, не зависящим от ско-
326
рости. К этим механизмам относятся шахтный подъемник
с уравновешенным канатом, прокатный стан, механизмы
подъема мостового крана, лифт, механизмы, основная ра-
бота которых связана с преодолением сил трения, напри-
мер механизмы подач металлорежущих станков и т. п.:
Мс = const. (9.1)
Однако значение этого момента, оставаясь независимым
от скорости, может меняться в широких пределах.
Вторая группа. Механизмы, статический мо-
мент которых зависит от угловой скорости, например цент-
робежный вентилятор, центрифуга, дымосос, центробежный
насос и т. п.’.
Afc = M(> + A(I>2, (9.2)
где М(1 — момент холостого хода
Характеристика таких меха-
низмов представлена на рис.
9.1.
К этой же группе могут быть
отнесены тяговые транспортные
механизмы, главные приводы
металлорежущих станков и т. п.,
для которых характерным яв-
ляется постоянство мощности
нагрузки, т. е. Mat = const.
Третья группа. Ме-
ханизмы, у которых статиче-
ский момент зависит от пути.
Сюда относятся устройства с
кривошипными передачами, где
Рис. 9.1. Механическая ха-
рактеристика центробежных
механизмов (II группа меха-
низмов),
нагрузки изменяются в зависи-
мости от угла поворота кривошипа ф (рис. 9.2), — это
ножницы для разрезания металла, поворотные столы с
мальтийским крестом, прессы, поршневые компрессоры,
шахтные подъемники с неуравновешенным канатом и т. п.
Для этой группы механизмов справедливо при указании
области (задания функции) уравнение
Мс = Л1о + Л'1Л8!Пф,
(9.3)
здесь Л1о, Ма — соответственно момент холостого хода ме-
ханизма и максимальный момент.
Другим примером механизмов этой группы может слу-
жить механизм копания роторного экскаватора.
327
Четвертая группа. В эту группу входят ме-
ханизмы, у которых статический момент зависит от скоро-
сти и пути. Здесь примером может служить гребной винт
судовой установки. Для установившейся скорости движе-
ния судна момент сопротивления на валу двигателя греб-
ного винта пропорционален
квадрату угловой скорости
двигателя (кривая 1 на рис.
9.3). При задании команды на
реверсирование винта судно
продолжает вначале двигать-
ся в том же направлении, и
момент сопротивления, зави-
сящий от скорости движения
судна, оказывается не пропор-
циональным в этот период
квадрату угловой скорости
Рис. 9.2. Механическая харак-
теристика кривошипных меха-
низмов (111 группа механизмов).
винта. Результирующая статическая характеристика имеет
сложную форму и показана для разных установившихся
скоростей движения судна на рис. 9.3 (кривая 2—для мень-
шей скорости движения судна, 3 — для большей). В этом
случае момент на валу гребного винта зависит от скорости
движения судна, а поскольку судно тормозится, т. е. ско-
рость движения снижается,
то, следовательно, момент
зависит и от пути, прой-
денного судном и винтом
(эти пути разные), и от уг-
ловой скорости самого вин-
та. К этой группе относят-
ся также рулевые устрой-
ства.
Пятая группа.
Сюда можно отнести меха-
Рис. 9.3. Механические характе-
ристики гребного виита (IV груп-
па механизмов).
низмы, у которых статиче-
ский момент характеризуется случайным изменением во
времени. Это, например, камнедробилки, шаровые мель-
ницы в цементной промышленности и т. п.
Приведенные характеристики производственных меха-
низмов позволяют оценить, какую нагрузку будет нести
двигатель в установившемся режиме при различных угло-
вых скоростях, которые необходимо задавать механизму
с целью регулирования его производительности в соответст-
вии с изменяющимися технологическими условиями.
328
Однако нагрузка на валу электропривода изменяется
не только в связи с регулированием скорости механизма,
но и вследствие изменения режима работы механизма или
из-за зависимости момента нагрузки от пути, т. е. от вре-
мени. Например, в клети прокатного стана в течение одного
пропуска металла через валки момент прокатки, обуслов-
ленный объемом деформируемого металла и давлением,
практически остается постоянным. Однако момент прокатки
от пропуска к пропуску изменяется, и переменной оказы-
вается также длительность пропусков. Нагрузка в течение
времени прокатки одного слитка меняется, а затем полно'
стью повторяется при возоб-
новлении прокатки следую-
щего слитка.
Изменение момента на-
грузки и угловой скорости
во времени характерно для
весьма большого числа ме-
ханизмов, называемых меха-
низмами циклического дейст-
вия. Это изменение статиче-
ского момента и угловой ско-
рости от времени обычно пред-
ставляют в виде графиков.
Графическое изображение
зависимости статического мо-
Рис. 9.4. Примерная нагрузоч-
ная диаграмма (для двух про-
пусков) нереверсивной клети
прокатного стана.
мента механизма, приведенного к валу двигателя, от вре-
мени Мс — f (/) называют нагрузочной диаграммой меха-
низма.
Графическое изображение зависимости скорости испол-
нительного органа механизма (в виде угловой скорости,
приведенной к валу двигателя) от времени со = / (/) назы-
вают диаграммой скорости электропривода (или меха-
низма).
Примерная нагрузочная диаграмма нереверсивной клети
прокатного стана, построенная с целью упрощения для двух
пропусков металла через валки, приведена на рис. 9.4.
Число пропусков зависит от типа стана и может достигать
13—15 и более. Здесь характерным является чередование
резкого возрастания нагрузки с холостым ходом.
Примером, когда изменение статического момента ме-
ханизма во времени связано с зависимостью этого момента
от пути, может служить нагрузочная диаграмма поршне-
вого компрессора. Вид ее зависит от типа компрессора,
329
числа его цилиндров и угла сдвига их кривошипов. С не-
которым упрощением кривая статического момента М. (/)
для компрессора двойного действия может быть выражена
следующей формулой:
Л1С = Мо + Л4л j sin Qt |,
(9-4)
где Q = 2л//ц = ю/i — круговая частота вращения кри-
вошипа; /ц — время цикла; i — передаточное число от вала
двигателя к валу кривошипа.
Примерная нагрузочная диаграмма поршневого компрес-
сора двойного действия, на которой 7И0 — момент потерь
(холостого хода) механизма, приведена на рис. 9.5. Исполь-
зуя разложение в тригонометрический ряд, можно кривую
статического момента представить в виде
Мс = Л4с,ср + 0,43Л!д5т£27, (9.4а)
где Мс.ср = Мо + 0,64 Л4Л — постоянная составляющая
нагрузки (средний момент нагрузки); Q' = 2Й.
Формулой, аналогичной (9.4а), представляется момент
нагрузки (нагрузочная диаграмма) целого ряда механиз-
мов, в частности, уже
упоминавшегося механиз-
ма копания роторного экс-
каватора.
Циклически изменяется
также нагрузка главного
Рис. 9.5. Примерная нагрузочная Привода продольно-стро-
диаграмма поршневого компрессо- гального станка (механизм
ра двойного действия, возвратно-поступательного
движения стола с деталью).
При работе этого механизма статический момент на большей
части прямого хода соответствует неизменному моменту ре-
зания и на меньшей его части — моменту холостого хода.
Статический момент при обратном ходе также постоянен,
но равен моменту холостого хода. При этом скорости пря-
мого и обратного ходов стола различны.
Можно привести еще много аналогичных примеров, ил-
люстрирующих нагрузочные диаграммы других механиз-
мов, работающих в циклическом детерминированном ре-
жиме, т. е. обладающих свойством воспроизводимости при
повторении условий их возникновения. В этом числе суще-
ствуют, как уже указывалось, режимы, обусловленные слу-
чайной нагрузкой.
330
Под случайными понимаются такие режимы, при кото-
рых одна или несколько переменных, характеризующих
их, меняются заранее непредсказуемым образом, т. е. яв-
ляются случайными величинами. Например, для лифто-
вых установок не удается выделить участки нагрузочной
диаграммы, где графики Л!с (/) были бы идентичны. Дейст-
вительно, если лифтовая установка управляется командами,
поступающими от пассажиров, то нагрузочные диаграммы
работы лифта получаются в результате действия некоторой
случайной последовательности команд, поданных случай-
ным количеством пассажиров, случайно следующих в од-
ном направлении одновременно или в разных направле-
ниях разновременно. Для данного примера число включе-
ний в час двигателей лифта также является случайной
величиной.
Другим примером служит характер изменения усилия
в тяговых канатах экскаватора-драглайна в режиме напол-
нения ковша. Здесь случайный характер нагрузки вызван
наличием неоднородного грунта в каждом цикле копания,
различной реакцией машиниста при встрече ковша с пре-
пятствием. В данном случае время цикла практически по-
стоянно, а изменение нагрузки случайное.
Среди механизмов, для которых режим рсботы электро-
привода является случайным, могут быть названы еще мно-
гие другие: электроприводы следящих, экстремальных и
адаптивных систем, приводы врубовых машин, шаровые
мельницы, буровые машины и т. д.
В процессе проектирования систем электропривода раз-
личных механизмов возникает необходимость в учете фак-
торов, определяющих случайный режим работы двигателя.
Это связано с тем, что постоянно расширяются функции
электропривода, в системе которого возникают случайные
режимы, а также с необходимостью учитывать при проекти-
ровании электропривода недетерминированные составляю-
щие режимов, так как расчет на наибольшую нагрузку или
на наихудший режим, как правило, приводит к неоправдан-
ному завышению мощности элементов системы, ухудшению
их энергетических показателей и возрастанию капиталь-
ных затрат.
При работе двигателя в любом режиме, с той или иной
нагрузкой в нем возникают потери энергии, определяющие
нагревание двигателя, а следовательно, его мощность и габа-
риты. Поэтому прежде всего необходимо уделить внимание
нахождению потерь энергии в электроприводах с двигате-
331
лями постоянного и переменного тока как в установив-
шемся, так и в переходном режимах.
9.2. Потери энергии в электроприводах
постоянного и переменного тока
Потери в двигателе складываются из перемен-
ных, зависящих от нагрузки, и постоянных потерь, не за-
висящих от нагрузки.
Для электропривода постоянного тока суммарные по-
тери мощности равны:
ЬРх = ДРК + &PV = ДРВ + ЬР„ + ДРМИ + PR, (9.5)
где ДРК — постоянные потери, ДРК = ДРВ + ДР„ 4~
•4- ДРмех; &РК< ЬРст> &Ркы—соответственно потери на
возбуждение, потери в стали и механические; PR = &PV —
потери в силовой (якорной) цепи двигателя.
Аналогично для асинхронного двигателя
ДР2 = ДР„ + ДРмех + 3 (/?/?! + /.f Я0. (9.6)
Переменные потери Д/\ могут быть выражены также
через электромагнитный момент и относительную скорость
(или скольжение), а именно:
1) для двигателя постоянного тока независимого воз-
буждения
ДР1, = М((Оо-<о) = М(Оо-^- = /312 4г’ (97>
СОо Wo
где Pj2 — электромагнитная мощность; Д(о, w0 — соответ-
ственно перепад угловой скорости, обусловленный момен-
том М, и угловая скорость идеального холостого хода;
2) для асинхронного двигателя
ДРт = McoqS (1 Ri/R-t) — P12S (14* Ri/Rt)' (9.8)
Выше при рассмотрении различных способов регулиро-
вания угловой скорости электроприводов постоянного и
переменного тока приводились необходимые соотношения
для определения потерь в двигателях при установившемся
режиме.
Более подробно остановимся на определении потерь и
расходе энергии в переходных процессах. Здесь целесо-
образно находить не среднее значение потерь мощности,
а расход и потери энергии за время переходного процесса.
332
Потери энергии в двигателе за время переходного про-
цесса гп>п в общем случае равны:
1П, п (п. п
ДЛП,П= 5 bPs(i)dt= 5 (bPK + &Pv)(f)dt. (9.9)
о о
Так как по сравнению с переменными постоянные по-
тери в переходном процессе малы, то в дальнейшем они учи-
тываться не будут.
Для двигателя постоянного тока независимого возбуж-
дения потери при пуске равны:
ДЛП = $ М((о0-(о)Л. (9.10)
о
Если пуск совершается вхолостую (при Мс = 0), то из
уравнения движения следует: dt = J , тогда
(Оф
ДЛпо = $ J (со0 — со) d<£>,
о
или
ДЛп0 = /й>;/2. (9.11)
Следовательно, потери энергии при пуске двигателя
вхолостую определяются запасом кинетической энергии,
накопленной массами привода к концу пуска.
Полезная работа (затраченная на пуск привода), произ-
веденная двигателем за время пуска вхолостую, также
равна запасу кинетической энергии, накопленной массами
за этот период:
Л„о = /(о?/2. (9.12)
Расход электрической энергии из сети равен:
Дэл = ^. (9.13)
На рис. 9.6 приведены идеализированные графики угло-
вой скорости и развиваемой (полезной) и потребляемой из
сети мощности двигателя постоянного тока независимого
возбуждения. Суммарная потребляемая за время пуска
из сети энергия отображается прямоугольником Обве', по-
стоянные потери соответствуют площади абвг. Полезная
мощность двигателя растет по прямой Ог, принимая мак-
симальное значение к концу пуска, затем падает до 0, так
как Мс = 0; при этом не учитываются постоянные потери,
333
отмеченные отрезком де-вг. Энергия, потребляемая якорной
цепью двигателя, пропорциональна площади Оаге, площадь
треугольника Оаг — потерям в якорной цепи двигателя,
а Оге — полезной работе. График изменения угловой ско-
рости со (/) при постоянном моменте показан отрезком Ож.
При пуске двигателя под нагрузкой в предположении,
что Л4С = const, потери энергии
Д.4П = $ М (соо — со) dt — $ (Ме + Л4ДИ1[) (со0 — си) dt.
о о
Так как dt = J da/MiltH, то после преобразований
ДЛП = J (со0 — со) da + Л4С j (соо — со) dt,
6
или
ДД„ — J (со0сос — сос/2) + MQ
(9-14)
Первый член выражения (9.14) представляет собой по-
тери энергии в якорной цепи, обусловленные разгоном инер-
Рис. 9.6. Идеализированные
графики угловой скорости и раз-
виваемой и потребляемой из се-
ти'мощностей двигателя постоян-
ного тока независимого возбуж-
дения при пуске вхолостую.
ределению потерь при пуске
двигателя постоянного тока не-
зависимого возбуждения под
нагрузкой.
ционных масс привода (ДЛП1ДИН), а второй — потери, вы-
званные наличием момента нагрузки (ДЛП1С),
Формулу (9.14) можно записать так:
ДЛд = ДЛп,дин + ДДп,с. (9.15)
334
ДЛ(1.С = МС
Если wc мало отличается от <оп, то
Д^п. дин J ®о/2>
<0о^п —
Подсчет ДЛП1С можно произвести, воспользовавшись
следующим графиком (рис. 9.7), на котором дается зависи-
мость «о = f (/).
На рис. 9.7 заштрихованная площадь равна;
En = coo/fI —j со dt.
о
Следовательно,
ДЛП.С = МСЕП- (9.16)
Тогда потери в якорной цепи двигателя
ДЛп = J (<оо<ос — сОс/2) + McFtl. (9.17)
Потери энергии при торможении противовключением
вхолостую определяются по формуле
О (Do
ДА, по= —coo —co)dco= jj J (coo + со) dco,
о>о О
или
ДЛ1.п0 = 3/й>?/2. (9.18)
Таким образом, потери при торможении противовклю-
чением вхолостую равны тройному запасу кинетической
энергии, т. е. в 3 раза превышают по-
тери энергии при пуске вхолостую.
Графическая интерпретация измене-
ния механической и электрической
мощности при торможении противо-
включением с Л4С = О показана на рис.
9.8. Механическая мощность, посту-
пающая с вала, преобразуется в элект-
Рнс. 9.8. Графическая интерпретация изме-
нения механической и электрической мощно-
стей при торможении противовключением
вхолостую двигателя постоянного тока не-
зависимого возбуждения.
рическую и выделяется в якорной цепи двигателя, что опре-
деляет одну составляющую потерь, прямо пропорциональ-
335
ную площади треугольника баб. Так как напряжение сети
постоянно во время торможения, то вторая составляющая
потерь обусловлена потреблением электрической энергии
из сети и пропорциональна площади, ограниченной прямо-
угольником Обвг. Как видно, сумма этих составляющих и
определяет тройной запас кинетической энергии.
При торможении противовключением под нагрузкой
Мс = const) потери энергии можно определить по формуле
/т
п = ^(«ойс-гйс/2) —Л1С j (coo + w)dZ, (9.19)
о
или
/ 'т \
ДАГ. п = </(concoc + <Ос/2) — Mc I (0(Л + j cod/j. (9.20)
Аналогично предыдущему можно обозначить:
«т
coq/t “Ь со dt= Ет.
о
Окончательно
ДЛТ,„ = J (соосос + со?/2) — MJ\. (9.21)
Из (9.21) следует, что потери энергии при торможении
двигателя под нагрузкой меньше, чем вхолостую.
При динамическом торможении якорь двигателя отклю
чен от сети и замкнут на резистор, поэтому кинетическая
энергия, запасенная в массах электропривода, в процессе
торможения превращается в электрическую и выделяется
в виде теплоты в якорной цепи.
Потери энергии в якорной цепи двигателя при динами-
ческом торможении вхолостую
О (Оо
ДДТ. до = — $ «/со d<£> = J «/со dco,
ы0 О
или
ДАт.дП = «М/2. (9.22)
Если динамическое торможение производится под на-
грузкой (Мс = const), то потери энергии в якорной цепи
'т
ДДт.д = «/сй?/2-Мс J со dt. (9.23)
о
336
Второй член (9.23) легко подсчитать, как и ранее, если
известна зависимость со = f (/)•
Потери энергии в якорной цепи двигателя при реверси-
ровании без нагрузки
—- (00
ДЛрО= $ J (—соо —со)с/со =
(Оо
= J J(coo + co)dco = 4 (9.24)
— (Оо
Формула (9.24) подтверждает, что потери энергии при
реверсировании складываются из суммы потерь энергии при
торможении противовключением и пуске.
Для определения потерь энергии при реверсировании
под нагрузкой можно воспользоваться формулой
ДЛр = ДЛп + Д/1т,п. (9.25)
Следует подчеркнуть, что при управлении двигателем
независимого возбуждения от источника с постоянным
напряжением и Л4С = 0 на потери в переходном режиме
не влияет значение тока в якорной цепи, с которым пу-
скается или тормозится двигатель, а следовательно, и элект-
ромагнитный момент. Эти потери остаются неизменными
при любом числе ступеней пускового или тормозного рези-
стора, так же как и при безрезисторном управлении. От-
сюда следует, что и длительность переходного процесса не
оказывает влияния на потери энергии в переходных режи-
мах, если Л4С = 0, а постоянные потери не учитываются.
Иначе, чем в случае двигателя постоянного тока неза-
висимого возбуждения, определяются потери при переход-
ных процессах в двигателе постоянного тока последова-
тельного возбуждения, у которого магнитный поток за-
висит от тока якоря, т. е. имеет место нелинейная зави-
симость между током якоря и моментом. Здесь для опре-
деления потерь необходимо построить график зависимости
квадрата тока якоря в переходном процессе от времени и,
проводя численное интегрирование этой кривой, вычислить
потерн энергии. Так же определяются при переходных
режимах потери энергии в двигателе постоянного тока сме-
шанного возбуждения и для других типов двигателей в
случае существенного изменения магнитного потока или
статического момента в течение переходного процесса. Сле-
дует отметить, что при пуске и торможении противовключе-
337
нием двигателя постоянного тока последовательного воз-
буждения при неизменном напряжении потери энергии
в нем могут быть меньше, больше или равны соответствую-
щим потерям в двигателе постоянного тока независимого
возбуждения. Если среднее значение тока в переходном
режиме у двигателя последовательного возбуждения больше
номинального, то вследствие увеличенного магнитного по-
тока момент, развиваемый двигателем, окажется больше,
а время переходного процесса и потери энергии меньше,
чем у двигателя независимого возбуждения, при прочих
равных условиях (в частности, при одинаковых токах).'
Рис. 9.9. Схема пуска двухдвигательного привода постоянного тока
с двигателем независимого возбуждения изменением напряжения в две
ступени.
а — схема для первой ступени; б — для второй ступени.
Если же ток в среднем меньше номинального, то момент
двигателя последовательного возбуждения меньше, чем
у двигателя независимого возбуждения, а время и потери
энергии будут больше. Только при номинальном токе для
обоих типов двигателей время и потери энергии будут оди-
наковыми в переходных режимах.
Если при управлении переходными процессами напря-
жение, подводимое к двигателю, изменяется от меньшего
значения в начале процесса до большего в конце его, то
потери в якорной цепи становятся меньшими, чем при не-
изменном напряжении.
Рассмотрим простейший случай пуска изменением на-
пряжения в две ступени двухдвигательного привода по-
стоянного тока с двигателями независимого возбуждения,
каждый из которых рассчитан на номинальное напряжение.
Вначале (рис. 9.9, а) якорные цепи обоих двигателей вклю-
338
чены последовательно, и напряжение, приходящееся на
выводы якоря каждого из двигателей, равно половине н«-
минального — оба двигателя разгоняются до половинной
Рис. 9.10. Графики процесса разгона двухдвигательного привода по-
стоянного тока с двигателями независимого возбуждения в две ступени.
а — графики напряжения и угловой скорости, б — графики электрической
И механической мощностей
- угловой скорости. Очевидно (если считать для упрощения
'Мс = 0) потери энергии при пуске до угловой скорости,
равной соо/2, составят:
« ДЛпо/ = Js (соо/2)2/2 = «/scoe/8.
. а при последующем разгоне от угловой скорости соо/2 до соо,
осуществляемом переклю-
чением с последовательно-
го соединения двух дви-
гателей на параллельное
(рис. 9.9, б), потери энер-
гии равны:
Д^поп = J(wo — соо/2)2/2—
= J2 <-Щ/8.
Таким образом, суммар-
ные потери (пуск в двесту-
Рис. 9.11. Зависимости w0 (t) и
<о (0 при пуске вхолостую двига-
теля постоянного тока независимо-
го возбуждения путем линейного
изменения во времени подводимо-
го к якорю напряжения.
пени). ДЛп0/ — </2со5/4, т. е.
в 2 раза меньше, чем при
пуске в одну ступень (сра-
зу до соо). Графики, приве-
денные на рис. 9.10, а и б,
иллюстрируют в упрощенном виде процесс пуска двух-
двигательного привода в две ступени; площади заштри-
<339
хованных треугольников пропорциональны потерям энер-
гии.
В случае линейного во времени изменения напряжения,
подводимого к якорю двигателя постоянного тока независи-
мого возбуждения (линейно изменяется и задаваемая угло-
вая скорость идеального холостого хода), зависимости
соо (/) и со (t) при пуске вхолостую можно представить, как
это показано на рис. 9.11. Здесь на первом этапе пуска
при t Z110
со (/) = еп/ - 7>u (1 - е~ '/г«);
М = Лп(\-е-*/т«У,
на втором этапе при t > tn0
со (/') = соо110М + («п — (ОоиоМ)е-;,/Гм1 М = Мпе~t/T«, (9.26)
где еп — угловое ускорение;Тм — электромеханическая по-
стоянная времени привода; соп и Мп — соответственно угло-
вая скорость и момент при t = /п0; t' = t — ta0.
Потери энергии
ДДп0 = $ М (соо — со) dt.
о
Полагая tn0 !> Т№ и допуская для упрощения линейную
зависимость для со ((), получаем:
со (t) eat - Тие„.
Кроме того,
СО о СО — Тмеп, М ~ ^п’ ®п^пО ®0нои«
Тогда
«п
= J ЛпТм®п dtt
о
Или окончательно
ЛЛп0 = (9.27)
Из (9.27) следует, что когда Т„ /п0, потери энергии
при пуске с линейным изменением напряжения значительно
меньше (в 5—6 раз), чем в случае пуска с постоянным на-
пряжением.
Если пуск двигателя постоянного тока независимого
возбуждения производится в системе Г — Д путем включе-
340
ния обмоток возбуждения генератора на полное напряже-
ние и ЭДС генератора изменяется по экспоненциальному
закону, то потери в якорной цепи
С
ДЯП = $ ад.г+й.М (9.28)
О
Для пуска вхолостую с учетом, что
= (9.29)
после преобразования получим:
ДАог- д = Д/!п0^-г, (9.30)
где ДЛп0 = Уcoq/2; т — Т„/Т№ — отношение постоянной
времени обмотки возбуждения к электромеханической по-
стоянной времени привода.
Из (9.29) и (9.30) следует, что чем больше Тв по сравне-
нию с Тм, тем медленнее нарастает ЭДС генератора, за-
медляется пуск двигателя и уменьшаются потери энергии.
Форсирование процесса возбуждения приводит к возраста-
нию потерь энергии.
Можно показать, что при пуске под нагрузкой потери
в якорной цепи системы Г — Д равны:
Д^п. Г - Д = Д АоГ - Д + Pc (2Тм + Д<Ос^п/“о). (9.31)
где Рс, Дсос — соответственно мощность, потребляемая дви-
гателем, и перепад угловой скорости, обусловленный мо-
ментом нагрузки Мс при установившейся ЭДС генератора.
В процессе рекуперативного торможения вхолостую пу-
тем снятия напряжения с обмотки возбуждения генератора
потери в якорной цепи составят:
ДЛг0 = ДЛ110^7Г (9.32)
То же при /Ис = const:
Д Аг - д = Д Ао - Рс (2Т№ + Д сос А/соо)- (9.33)
Потери при торможении под нагрузкой при том же вре-
мени оказываются меньшими, чем вхолостую, из-за мень-
шего тока в якоре.
Пусковые потери в асинхронном двигателе, если пре-
небречь постоянной составляющей потерь ДРК и влиянием
341
тока холостого хода (т. е. считать Ц /2), можно опреде-
лить по формуле
4.
ДЛП = ^ З/а (/?i -|- Rn -|- /?2доб) dt. (9.34)
о
При Л4С = О
dt = — (Ло0/Л4) ds.
Выражая потери мощности в роторной цепи через мощ-
ность скольжения, т. е. З/о (R2 + /?2ЯОб) = Л4со0з, в ре-
зультате несложных преобразований получаем:
5нач
ДЛП = £ J&qS 14
SKOH
Ri
R-i /?2доб
(9.35)
или, учитывая, что sua4 = 1 и sK0H = О,
Д Aio
.R1 \
Ri 4“ ^2доб /
(9.36)
где <в0—синхронная угловая скорость двигателя; Rlt R'2,
/?2Доб — соответственно сопротивление фазы статора, при-
веденные к цепи статора сопротивление фазы ротора и со-
противление добавочного резистора в цепи ротора; для дви-
гателя с короткозамкнутым ротором /?2ДОб = О-
Из (9.36) следует, что потери при пуске состоят:
1) из потерь в роторной цепи: ДЛп02 = Усоо/2, опре-
деляемых запасом кинетической энергии, которую приобре-
тает привод к концу пуска;
2) из потерь в статорной цепи: ДЛп01 = — —,
2 R-14~ /?2доб
зависящих от активных сопротивлений статора и роторной
цепи; чем больше сопротивление роторной цепи, тем меньше
потери в статоре асинхронного двигателя. Уменьшение по-
терь в статоре с ростом вторичного сопротивления объяс-
няется уменьшением пускового тока.
Для двигателя с короткозамкнутым ротором /?2ДОб — О»
и составляющая потерь в статоре равна:
д д _ R1
^пп01 --2—
В двигателях общего назначения (единой серии) с ко-
роткозамкнутым ротором Rt R'2, т. е. в этом случае со-
ставляющая потерь энергии в статоре чйсленно равна запасу
кинетической энергии, т. е. потерям в роторе.
342
За счет применения двигателей со специальной конструк-
цией короткозамкнутого ротора, имеющего повышенное со-
противление, может быть достигнуто уменьшение потерь
в статоре. Это двигатели со сплошным стальным ротором и
двигатели с повышенным номинальным скольжением. Дви-
гатели, имеющие ротор с глубокими пазами или ротор
с двойной беличьей клеткой (двигатели типа Бушеро),
также обладают повышенным сопротивлением ротора, из-
меняющимся в функции скольжения, что приводит к умень-
шению переменных потерь в статоре. Потери в роторной
цепи при пуске вхолостую для всех типов двигателей опре-
деляются запасом кинетической энергии.
Потери энергии при пуске асинхронного двигателя под
нагрузкой (Мс = const) могут быть определены по формуле
А /1 л тп, Ср
Л/1„—Л110 ynn cp_^c->
(9.37)
где Мп>ср = (А. + fen) М1|0м/2 — средний пусковой момент
асинхронного двигателя; А = Л4К/Л4НОМ; kn = Мп/Мпом;
Мп — пусковой момент (момент короткого замыкания дви-
гателя).
Потери энергии в асинхронном двигателе при торможе-
нии противовключением могут быть найдены по (9.35) при
подстановке в нее пределов интегрирования sHaq = 2 и
5жон = 1» тогда
. Ri \'
2 \ Л-з + ^здоб /
ПО
(9.38)
Если торможение противовключением производится под
нагрузкой (Л4С = const), то потери равны:
МТ гп
ДЛ,п = Д^Т.пО Мт, ср+Мс ’ (9’39)
где МГ1Ср—средний момент, развиваемый асинхронным
двигателем при торможении противовключением.
Потери энергии в роторной цепи двигателя в период
динамического торможения вхолостую определяются запа-
сом кинетической энергии, который приобретет привод
.к началу торможения, т. е.
Аз4Т1 дин02 = 7<0ц/2«
Потери в статоре в этом случае
Дз4г, ДИН1 = 3/экв^?1М (9.40)
343
здесь 7ЭКВ — эквивалентный ток статора; tT — время ди-
намического торможения.
Наконец, если динамическое торможение происходит
под нагрузкой (Л4С = const), то потери в роторной цепи
ДДт,ди„2^ДЛт.д„„02 Л1т’д,,'7„ (9.41)
iVlT. ДИН. ср “Г
Потери в статоре для этого случая определяются по
(9.40) с учетом того, что время торможения будет меньше
при том же значении /ЗК!(.
У двух- или многоскоростных двигателей потери энер-
гии значительно выше, чем у односкоростного двигателя
такой же мощности, имеющего номинальную угловую ско-
рость, равную максимальной угловой скорости многоско-
ростного двигателя, обладающего значительно большими
габаритами и моментом инерции. Поэтому прямой пуск
многоскоростного двигателя на максимальную угловую
скорость нежелателен. Целесообразно для уменьшения пу-
сковых потерь энергии использовать ступенчатый пуск.
В случае двухскоростного двигателя пуск осуществляется
в две ступени. При включении обмотки статора при пуске
па первую ступень таким образом, что синхронная угловая
скорость будет равна половине верхней (<оо/2), потери
энергии составят (Л4С = 0):
дл„о/=-“Ц1+4У ' <9-42>
Пуск на вторую ступень от угловой скорости <в0/2 до со0
вызовет потери
ДЛ„о// = ^(1 + §). (9.43)
Суммарные пусковые потери составят:
д л „О = д а „о/ + д А „о// = ^ (1 + *0. (9.44)
Следовательно, при двухступенчатом пуске потери энер-
гии окажутся вдвое меньше, чем при пуске в одну ступень,
если отношение RxIRz сохранится неизменным с переклю-
чением числа полюсов. Ступенчатый пуск двухскоростного
двигателя аналогичен пуску двигателя постоянного тока
независимого возбуждения изменением подводимого к якорю
напряжения в две ступени.
При многоступенчатом пуске трех- или четырехскорост-
ного двигателя потери энергии еще в большей мере сни-
344
жаются. Например, если осуществить ступенчатый пуск
четырехскоростного двигателя, имеющего синхронные ча-
стоты вращения 500/1000/1500/3000 об/мин, то потери энер-
гии на первой, второй, третьей ступенях пуска составят
по 1/36 и на четвертой */4, а общие пусковые потери энергии
1/3 потерь при прямом пуске в одну ступень до 3000 об/мин.
Для двигателя с частотами вращения 500/750/1000/
1500 об/мин при четырехступенчатом пуске общие потерн
энергии составят 5/18 пусковых потерь в одну ступень до
1500 об/мин.
Торможение двух- или многоскоростных асинхронных
двигателей с целью.снижения потерь также может быть
ступенчатым.
Если двухскоростной двигатель имеет две синхронные
угловые скорости <о02 и со01, то торможение от со02 до со01
можно осуществить с рекуперацией энергии в сеть, а с со4
до О — противовключением или динамическим торможе-
нием. На первой ступени потери энергии при рекуператив-
ном торможении вхолостую можно определить по формуле
1 — т
ДДреКо = ^^' У sds^J-^k>ni2-^+\ (9.45)
о
где т = со02/о>01; k' = (R'2 + RJ/Ri-
Потери энергии на второй ступени (торможение противо-
включением)
2
ДЛт,по = ^У = (9.46)
I
Суммарные потери при ступенчатом торможении (в пред-
положении, что k' = k" — k)
л л , m2 —2;тг + 4 ,п
Д^тОступ Cok > (9-47)
здесь Со = Jcoq2.
Если осуществить торможение противовключением с мак-
симальной угловой скорости до остановки, то
2
ДЛТ, по = CQk у s ds = у CQk. (9.48)
1
Отношение потерь по (9.47) к потерям по (9.48)
ДЛ,ос1уп/ДДт,по = (9-49)
345
Например, если осуществляется ступенчатое торможе-
ние двухскоростного двигателя с т — 2, то потери энергии
составят 2/3 потерь при торможении противовключением
в одну ступень. С увеличением т уменьшаются потери
энергии в полюсопереключаемом двигателе при ступенча-
том торможении по сравнению с потерями при торможении
противовключением в одну ступень. Еще меньшими оказы-
ваются потери энергии в частотно-управляемом асинхрон-
ном электроприводе, которые могут быть ориентировочно
определены аналитически, если пренебречь электромагнит-
ными процессами. Примем, что электромеханический про-
цесс протекает с абсолютным скольжением, меньшим кри-
тического, т. е. Р <; рк.
При указанном ограничении потери можно найти из
следующей системы уравнений:
М = (р (р, а); |
<0 — СЩиом Р) ’
а = ф (/).
(9.50)
Уравнение движения в свою очередь можно выразить
так:
M = + (9.51)
Из (9.51) видно, что динамический момент представляется
двумя составляющими:
Мдииа = Ло1110Ч-^==/е; (9.52)
Мдии₽ = </со111Ом^, (9.53)
где е = didjdt.
Момент двигателя при управлении с Р < Рк можно
представить линейным уравнением
Л1=М> (9.54)
где Aip ^^ном^ном’
Учитывая из (9.50) третье уравнение и (9.54), получаем
выражение механической характеристики двигателя при
частотном управлении
М = /г₽а - /?₽со/со1110м (9.55)
346
и уравнение движения
М + /<о1ном^ = Мс + /^-, (9.56)
или
fepa(O = Mc + -^-« + J—. (9.57)
Ш1Н0М
Для линейного изменения частоты во времени, е =
= const, параметр абсолютного скольжения можно опре-
делить по формуле
A!c±Zs(1_e-//rM) + pce-//T»l> (9.58)
где 7*м = J со omsho м /М ном, |3С Л4с/^р.
Потери энергии при пуске
'п
ДЛ„ = $ (9.59)
о
Зная зависимость р = f (/), можно определить ДЛП;
при Мс = 0, принимая для упрощения, что 1П Тм, полу-
чаем: р = Je/fep;
А Д ^Ш1иОМ Л 1 ZQ сл\
ЛЛп0==—2—? + {9-60)
Таким образом, (9.60) совершенно аналогично (9.27),
что и следовало ожидать. Из (9.60) следует, что для Т„
<; £п0 потери при частотном пуске с Р < |3К значительно
меньше, чем в случае прямого включения асинхронного дви-
гателя с а — 1.
Так же могут быть найдены потери при частотном тор-
можении.
Необходимо отметить, что минимальные потери при ча-
стотном управлении могут быть достигнуты в результате
установления оптимального значения абсолютного сколь-
жения роп1. Его можно выбирать, исходя из режима мини-
мума потерь или режима минимума тока.
Значение ропт в режиме минимума тока выбирается так,
чтобы заданному току статора соответствовал максимум
электромагнитного момента, что обеспечивает необходимое
быстродействие, а следовательно, при выбранном токе и
минимум электрических потерь. Пользуясь механическими
характеристиками М = f (Р), построенными для фиксиро-
ванных значений токов статора, можно установить общую
закономерность независимо от типа и параметров асинх-
347
ронного двигателя, заключающуюся в том, что с ростом
тока статора увеличивается критическое скольжение
Линия оптимального скольжения проходит через точки
максимума моментов, каждый из которых отвечает своему
постоянному значению тока статора. Таким образом, срав-
нительно просто находится ропт.
Определение |3011Т в режиме минимума потерь связано со
значительно более сложными расчетами и практически не
всегда оправдано, так как потери энергии при частотном
пуске и торможении, полученные в режиме минимума по-
терь, всего иа несколько процентов отличаются от рассчи-
танных из условия минимума тока.
Приведенные выше соотношения для определения потерь
энергии в переходных режимах при различных способах
управления асинхронными двигателями не учитывают влия-
ния электромагнитных процессов и насыщения магнитной
цепи. Их влияние можно оценить в результате решения
дифференциальных уравнений асинхронного двигателя при
питании его как непосредственно от сети, так и от соответ-
ствующего преобразователя частоты. Эти уравнения, до-
полненные уравнениями для мощности потерь и потерь
энергии, сложные и нелинейные и аналитически не ре-
шаются. Их решение возможно с использованием средств
вычислительной техники.
9.3. Нагрев и охлаждение двигателя.
Классификация режимов работы
электроприводов
Потери энергии в двигателе вызывают нагрев
его отдельных частей. Допустимый нагрев двигателя опре-
деляется нагревостойкостью применяемых изоляционных
материалов. Чем больше нагревостойкость, тем при той же
мощности меньше размеры двигателя или при тех же раз-
мерах можно увеличить его мощность. Лучшему исполь-
зованию двигателя способствует также более совершенная
система его охлаждения.
Изоляционные материалы, применяемые в электриче-
ских машинах, делятся на следующие основные классы
нагревостойкости.
Изоляция класса А. К этому классу относятся
хлопчатобумажные ткани, пряжа, бумага, волокнистые ма-
териалы из целлюлозы и шелка, пропитанные или погру-
женные в жидкий диэлектрик. Допустимая предельная
348
температура 105 °C. В настоящее время электрические дви-
гатели с изоляцией класса А практически не изготовляют.
Такую изоляцию имеют двигатели постоянного тока се-
рии П мощностью до 2,2 кВт и асинхронные двигатели се-
рий А, АО до 6-го габарита включительно, АК-
Изоляция класса Е. Этот класс включает
синтетические эмали (для изоляции проводов) на основе
полиэфирных эпоксидных и подобных им смол, синтетиче-
ские органические пленки и т. п., синтетические материалы.
Допустимая предельная температура нагрева 120 °C. Эта
изоляция имеет небольшое применение в двигателях малой
мощности. В основном двигатели изготовляют с изоляцией
классов В и F.
Изоляция класса В. К этому классу отно-
сятся слюда, асбест, стеклянное волокно и другие неорга-
нические материалы со связывающими материалами орга-
нического происхождения. Допустимая предельная тем-
пература нагрева 130 °C. Эти материалы применяются
в двигателях серий 2П с высотой оси вращения до 120 мм
включительно; 4А с высотой оси вращения до 132 мм. При-
менялись в старых сериях П мощностью от 3,2 до 14 кВт
и в компенсированных двигателях мощностью 100—400 кВт;
АО свыше 6-го габарита; А2 и АК2 мощностью от 400 до
1250 кВт.
Изоляция класса F. Этот класс включает те
же материалы, что и для класса В, но сочетающиеся с син-
тетическими связующими и пропитывающими составами,
модифицированными кремнийорганическими соедине-
ниями. Допустимая предельная температура нагрева 155 °C.
Такую изоляцию имеют двигатели серий: 4А с высотой оси
вращения свыше 132 мм, 2П с высотой оси вращения свыше
225 мм; MTF, MTKF; старых серий П мощностью свыше
14 кВт.
Изоляция класса Н.К этому классу относятся
те же материалы, что и для класса В, но в сочетании с крем-
иийорганическими связующими и пропитывающими со-
ставами. Допустимая предельная температура 180 СС. Эта
изоляция применяется для двигателей с частыми пусками
и реверсами, а также при высокой температуре окружаю-
щей среды, например, для двигателей, предназначенных для
грузоподъемных машин, в том числе металлургических.
Такую изоляцию имеют двигатели серий МТН, МТКН, Д.
Изоляция класса С. Этот класс включает
слюду, керамические материалы, стекло, кварц, применяе-
349
мне с неорганическими связующими составами или без
связующих составов. Допустимая предельная температура
более 180 СС. Нагревостойкость этих материалов не исполь-
зуется полностью в современном электромашиностроении,
поэтому предельная температура нагрева для этого класса
не установлена.
Соблюдение установленных ограничений по допустимой
температуре нагрева обеспечивает срок службы изоляции
электрических машин для новых серий двигателей 15—
20 лет (например, двигатели серии 4А — 15 лет, серии Д —
20 лет). Превышение допустимых температур ведет к раз-
рушению изоляции обмоток и к сокращению срока эксплуа-
тации двигателя. Так, для изоляции класса А превышение
допустимой температуры нагрева на 8—10 °C сокращает
срок службы изоляции вдвое.
Предельные температуры обмоток двигателей с изоля-
цией различных классов достигаются при номинальной на-
грузке и температуре окружающей (охлаждающей) среды
40 °C и при высоте над уровнем моря до 1000 м. При тем-
пературе меньше 40 °C двигатель может быть нагружен не-
сколько выше номинальной нагрузки (для изоляции клас-
са А превышение номинальной нагрузки не допускается).
При большей температуре окружающей среды и высоте над
уровнем моря выше 1000 м нагрузка двигателя должна
быть снижена относительно номинального значения. Сте-
пень снижения (или увеличения) нагрузки зависит, кроме
температуры окружающей среды и высоты, еще от класса
изоляции, режима работы двигателя и соотношения по-
стоянных и переменных потерь. Ориентировочно для вы-
соты до 1000 м при повышении температуры среды до 45 СС
рекомендуемое снижение тока нагрузки составляет от 2
до 7 %, при температуре 50 °C — от 4 до 15 %, при 60 °C —
от 10 до 30 %. Увеличивать нагрузку сверх номинальной
при температуре среды ниже 40 °C (за исключением аварий-
ных случаев) не рекомендуется, так как разница между сред-
ней и максимальной температурой (наиболее нагретой части
обмотки) возрастает примерно пропорционально квадрату
коэффициента нагрузки, что может привести к появлению
опасных пиковых температур; кроме того, устанавливаемый
срок службы двигателя учитывает естественные колебания
температуры окружающей среды, что находит отражение
в отказе от нормирования допустимой температуры обмо-
ток двигателя.
Для двигателей нормируется недопустимая температура
350
обмотки и других частей машины, а допустимое превышение
температуры обмотки над температурой окружающей среды.
Условия нагрева отдельных частей машины различны.
Большему нагреву подвергаются части обмоток, располо-
женные во внутренних областях машины. Так же неоди-
наково и выделение теплоты в различных режимах ра-
боты, и поэтому направление тепловых потоков внутри ма-
шины непостоянно. При холостом ходе теплота передается
от более нагретой стали двигателя к его обмоткам, а в на-
груженном состоянии обмотки более нагреты, чем сталь, и
направление теплового потока обратное. Эти обстоятель-
ства весьма усложняют тепловые расчеты, и поэтому без
соответствующих упрощений сделать выбор мощности не-
возможно.
Исследование тепловых процессов в двигателях произ-
водится со следующими допущениями: 1) двигатель рас-
сматривается как однородное тело, обладающее бесконечно
большой теплопроводностью, с одинаковой температурой
во всех точках выделения теплоты и точках, соприкасаю-
щихся с охлаждающей средой; 2) теплоотдача во внешнюю
среду пропорциональна первой степени разности темпера-
тур двигателя и окружающей среды; 3) температура охла-
ждающей среды постоянна; 4) теплоемкость двигателя, мощ-
ность тепловых потерь и теплоотдача не зависят от темпе-
ратуры двигателя.
Уравнение теплового баланса двигателя при неизмен-
ной нагрузке имеет вид:
Qdt = Andt + CdT, (9.61)
где Q — количество теплоты (мощность потерь в двига-
теле), выделяемое двигателем в единицу времени, Дж/с;
А — теплоотдача двигателя — количество теплоты, отда-
ваемой двигателем в охлаждающую среду в единицу вре-
мени при разности температур в 1 °C, Дж/(с-°С); т — пре-
вышение температуры двигателя над температурой охла-
ждающей среды, °C, равно:
T = (9.62)
где Оос — соответственно температура двигателя и
охлаждающей среды, °C; С — теплоемкость двигателя —
количество теплоты, необходимое для повышения темпера-
туры двигателя на 1 °C, Дж/°С.
351
Разделив члены уравнения (9.61) на A dt, получим:
4 = T + (9.63)
или
т + Ги^ = ту, (9.64)
где Тн — постоянная времени нагрева двигателя — время,
в течение которого превышение температуры от т = 0 до-
стигло бы установившегося значения ту при Q = const и
отсутствии теплоотдачи в охлажденную среду, Т„ — О А.
Решение уравнения (9.64)
т = ту(1-е-^) + тое-//гк
(9 65)
где ту, т0 — соответственно конечное (установившееся) и
начальное значения превышения температуры двигателя
над температурой окружающей среды.
ту = (?/Д. (9 66)
Если т0 = 0, то (9.65) примет вид:
т = ту(1 — е-*/Гн). (9.67)
Согласно (9.65) и (9.67) на рис. 9.12 построены кривые 1
и 2 нагрева двигателя соответственно для т0> 0 и т0 = О
при одной и той же нагрузке
(Qi = const). Если двигатель
будет нагружен меньше (Q2<
< Qi), то этому случаю от-
вечает кривая 3 при усло-
вии, что т0 = 0.
На рис. 9.13 даны кривые,
отображающие процесс охла-
ждения двигателя. Здесь кри-
вая / соответствует уменьше-
нию нагрузки, а кривые 2 и
3— отключению двигателя от
Рис. 9.12. Кривые нагрева дви- сети.
гателя. В предположении, что про-
цесс нагрева двигателя про-
исходит без отдачи теплоты в охлаждающую среду, превы-
шение температуры его изменяется по линейному закону
(тонкие линии на рис. 9.12 и 9.13). Отсюда следует, что
постоянная времени нагрева (охлаждения) двигателя равна
отрезку, заключенному между перпендикуляром к оси абс-
352
цисс, проведенным через точку касания касательной к
экспоненциальной кривой т (/), и точкой пересечения этой
касательной с асимптотой (на рис. 9.12 и 9.13 это ось ор-
динат).
В реальных условиях вследствие теплоотдачи двигателя
за время Тн превышение температуры двигателя достигнет
значения т = 0,632 т„, что следует из (9.67), в котором
I = тн:
т = ту(1 — е*1) = 0,632ту. (9.68)
Действительная кривая нагрева несколько отличается
от экспоненты. В начале процесса нагрева повышение тем-
пературы двигателя идет бы-
стрее, чем по теоретической
кривой, и лишь начиная с
т = (0,5 -ь 0,6) Ту до т = Ту
действительная кривая при-
ближается к экспоненциаль-
ной Поэтому определение по-
стоянной времени нагрева на
начальном участке по методу
касательной может привести
к значительной ошибке.
У самовентилируемых дви-
гателей открытого исполне-
ния малой и средней мощно-
Рнс. 9.13. Кривые охлаждения
дви гателя.
сти постоянная времени соста-
вляет около 1 ч, у двигателей закрытого типа большой мощ-
ности — 3—4 ч. При отключении самовентилируемого дви-
гателя и его остановке постоянная времени охлаждения То
оказывается значительно больше, чем нагрева Т„. Это
объясняется тем, что при остановке самовентилируемого
двигателя уменьшается его теплоотдача. Коэффициент ухуд-
шения теплоотдачи при неподвижном якоре (роторе)
Ро — До/ Д,
(9.69)
где — теплоотдача соответственно при неподвижном
двигателе и номинальной угловой скорости.
Примерные значения коэффициента ро для двигателей
различного исполнения приведены ниже:
Исполнение двигателя........................................Ро
Закрытый с независимой вентиляцией...........................1
Закрытый без принудительного охлаждения.............. 095 — 0,98
Закрытый самовентилируемый...........................0,45 — 0,55
Самовентилируемый защищенный ........................0,25 — 0,35
12 Чнликнн М. Г., Сандлер А. С. 353
Как следует из (9.65) или (9.67), время нагрева двига-
теля до установившейся температуры равно бесконечности.
Практически нагрев двигателя можно считать законченным,
когда превышение температуры его достигнет значения
(0,95—0,98) Ту соответственно через время от начала на-
грева, равное (3—4) Тн.
Различные условия работы производственных механиз-
мов обусловливают различные режимы работы электро-
приводов, которые классифи-
цируются на восемь режимов
с условными обозначениями
от S1 до S81, что позволяет
более точно рассчитывать мощ-
ность двигателя.
Рис, 9.14. Зависимости мощно-
сти Р на валу двигателя, мощ-
ности потерь ДР и температуры
6 от времени в продолжитель-
ном номинальном режиме рабо-
ты (SI). f
1. Продолжительным но-
минальным режимом работы
(S1) электрической машины
называется режим работы ее
при неизменной нагрузке, про-
должающийся столько вре-
мени, что превышения темпе-
ратуры всех частей ее дости-
гают установившихся значе-
ний! (рис. 9.14, где Р, АР, 0 —
соответственно мощность па
валу двигателя, мощность
потерь и температура).
2. Кратковременным но-
минальным режимом работы
котором периоды неизменной
(S2) называется режим, при
номинальной нагрузки чередуются с периодами отключе-
пия машины; при этом периоды нагрузки не настолько
длительны, чтобы превышения температуры машины могли
достигнуть установившихся значений, а периоды остановки
настолько длительны, что все части ее охлаждаются до
температуры окружающей среды (рис. 9.15). В этом ре-
жиме рекомендуются продолжительности рабочего периода:
10, 30, 60 и 90 мин.
3. Повторно-кратковременным номинальным режимом
работы (S3) называется режим, при котором кратковре-
менные периоды неизменной номинальной нагрузки (рабо-
1 Эги же обозначения были введены во многие зарубежные стан-
дарты,
354
чие периоды) чередуются с периодами отключения машины
(паузами), причем как рабочие периоды, так и паузы не
Рис, 9.15, Зависимости Р, &Р и
0 от времени для кратковре-
менного режима (S2).
Рис. 9.16. Зависимости Р, Л.Р
и 0 ог времени для повторно-
кратковременного режима (S3),
настолько длительны, чтобы превышения температуры могли
достигнуть установившихся значений.
В этом режиме работы (рис. 9.16) продолжительность
цикла не превышает 10 мин, и режим характеризуется отно-
сительной продолжитель-
ностью включения, %,
ПВ = 15, 25, 40 и 60 %,
которая определяется по
формуле
ПВ = т4гг-1°0 = -г- юо,
*р"Г*о Гц
(9.70)
где tp — время работы;
t0 — время паузы; /ц —
время цикла.
Пусковые потери в этом
режиме практически не
Рис. 9.17. Зависимости Р, /\Р и 0
от времени для повторно-кратко-
временного режима с частыми пу-
сками (S4).
оказывают влияния на пре-
вышение температуры ча-
стей машины.
4. Повторно-краткое ре-
менным номинальным режи-
мом работы с частыми пусками (S4) называется режим, при
котором периоды пуска и кратковременной неизменной
12»
355
номинальной нагрузки чередуются с периодами отключе-
ния машины, причем как рабочие периоды, так и паузы не
настолько длительны, чтобы превышения температуры ча-
стей машины могли достигнуть установившихся значений.
В этом режиме пусковые потери оказывают существенное
влияние на превышение температуры частей машины. Здесь
остановка двигателя после его отключения осуществляется
путем выбега либо посредством механического торможения,
так что при отключении двигателя дополнительного нагрева
его обмоток не происходит (рис. 9.17). Данный режим ха-
рактеризуется относительной продолжительностью вклю-
чения, числом пусков в час и коэффициентом инерции при-
вода. Относительная продолжительность включения, %,
определяется по формуле
ПВ
<п-Нр
+^р + ^<1
• 100.
(9.71)
Нормируемые значения ПВ = 15, 25, 40 и 60 %. Нор-
мируемое число пусков в час — 30, 60, 120 и 240.
Коэффициент инерции — это отношение суммарного при-
веденного к валу двигателя момента инерции привода (сумма
момента инерции приводимо-
Рнс. 9.18. Зависимости Р, &Р и
© от времени для повторно-крат-
ковременного режима с частыми
пусками и электрическим тормо-
жением (S5).
дами отключения машины,
так и паузы не настолько
го механизма и момента инер-
ции якоря или ротора двига-
теля) к моменту инерции яко-
ря (ротора) двигателя:
FI = Js/Jp. (9.72)
Нормированные значения
коэффициента инерции: 1,2;
1,6; 2,5; 4; 6,3; 10.
5. Повторно-кратковре-
менным номинальным режи-
мом работы с частыми пуска-
ми и электрическим тормо-
жением (S5) называется ре-
жим, при котором периоды
пуска, кратковременной не-
изменной номинальной на-
грузки и электрического тор-
можения чередуются с перио-
причем как рабочие периоды,
длительны, чтобы превышения
температуры частей машины могли достигнуть установиь-
356
шихся значений (рис. 9.18). В этом режиме потери пуско-
вые и при электрическом торможении оказывают сущест-
венное влияние на превышение температуры частей маши-
ны. Этот режим характеризуется относительной продол-
жительностью включения, числом пусков в час и коэффи-
циентом инерции.
Относительная продолжительность включения, %.
^n + ^p + G
^п~Нр-Нт"Но
ПВ
• 100.
(9.73)
Рис. 9.19. Зависимости Р, ЬР И О
от времени для перемежающегося
режима (S6).
Нормированные значения ПВ, числа пусков в час и
коэффициентов инерции такие же, как и в режиме S4,
исключая значения FI =
= 6,3 и 10 и включая до-
полнительное значение
FI = 2.
6. Перемежающимся но-
минальным режимом рабо-
ты (S6) называется режим,
при котором кратковремен-
ные периоды неизменной
номинальной нагрузки (ра-
бочие периоды) чередуют-
ся с периодами холостого
хода, во время которых
двигатель не отключается,
причем как рабочие перио-
ды, так и периоды холосто-
го хода не настолько дли-
тельны, чтобы превышения
температуры частей машины могли достигнуть установив-
шихся значений (рис. 9.19). Продолжительность одного
цикла не должна превышать 10 мин.
Относительная продолжительность нагрузки, %,
ПН
^р+ tx-X
100,
(9.74)
где — время холостого хода.
Нормируемые значения ПН = 15, 25, 40 и 60 %.
7. Перемежающимся номинальным режимом работы с ча-
стыми реверсами (S7) называется режим, при котором пе-
риоды реверса чередуются с периодами неизменной номи-
357
пальной нагрузки, причем периоды последней не настолько
длительны, чтобы превышения температуры частей машины
могли достигнуть установившихся значений (рис. 9.20).
В этом режиме потери при реверсировании оказывают суще-
Рис. 9.20. Зависимости Р, &Р и 0
ственное влияние на пре-
вышение температуры ча-
стей машины, которая ра-
ботает без остановки, на-
ходясь постоянно под на-
пряжением. Данный режим
характеризуется числом ре-
версов в час (30, 60, 120 и
240) и коэффициентом инер-
ции (как для S5).
8. Перемежающимся но-
минальным режимом рабо-
ты с двумя или более угло-
выми скоростями (S8) на-
зывается режим, при ко-
тором периоды с одной на-
грузкой на одной угловой
от времени для перемежающегося скорости чередуются С пе-
режима с частыми реверсами (S7). риодами работы на другой
угловой скорости при со-
ответствующей этой угловой скорости нагрузке. Периоды
нагрузки на каждой из угловых скоростей не настолько
длительны, чтобы превыше-
ния температуры частей ма-
шины могли достигнуть уста-
новившихся значений (рис.
9.21). В этом режиме потери
при переходе с одной угло-
вой скорости на другую ока-
зывают существенное влия-
ние на превышения темпера-
туры частей машины.
Рис. 9.21. Зависимости Р, &Р, т и
о от времени для перемежающего-
ся режима с двумя и более скоро-
стями (S8).
Данный режим с двумя или более угловыми скоростями
характеризуется числом циклов в час, коэффициентом
инерции и относительной продолжительностью нагрузки, %,
358
на отдельных ступенях, определяемой по формулам:
ПН! = -t , < ,/П1!Р1 , . ~• 100; (9.75)
1П "Т Гр1 г ГТ1 “Г *р2 ~Г *Т2 ~Г fp3
пн^<,.+^-н..+<,.'|00; (976)
пн°=<.+1„+<Х,+1,.+1р.-1№ <977>
где fpl, /р2, /рз — время работы на каждой угловой скорости;
Gi> ^т2 — время электрического торможения; tn — время
пуска.
Нормированные значения числа циклов в час: 30, 60,
120, 240; коэффициента инерции: 1,2; 1,6; 2; 2,5; 4.
9.4. Нагрузочные диаграммы
электроприводов
Нагрузочная диаграмма электропривода ха-
рактеризует зависимость вращающего момента, тока или
мощности, развиваемой двигателем, от времени. Нагрузоч-
ные диаграммы используются для оценки перегрузочной
способности электропривода и сопоставления ее с допусти-
мой кратковременной нагрузкой для данного типа электро-
двигателя, а также для проверки мощности предварительно
выбранного двигателя по нагреву.
Нагрузочная диаграмма электропривода учитывает ста-
тические и динамические нагрузки, преодолеваемые элект-
роприводом в течение цикла работы механизма.
Статические нагрузки определяются на основании тех-
нологических данных, характеризующих работу того или
иного класса производственных механизмов, а динамиче-
ские нагрузки оцениваются инерционными моментами, ко-
торые развиваются электроприводом для обеспечения соот-
ветствующих угловых ускорений, обусловливающих за-
данную производительность механизмов.
Рассмотрим примеры построения нагрузочных диаграмм
электропривода некоторых типовых механизмов.
а| Нагрузочная диаграмма электропривода
шахтного подъемника С уравновешенным
канатом
Кинематическая схема шахтного подъемника
с уравновешенным канатом и шкивом трения представлена
на рис. 9.22, где 1 и 2 — клети, в которых поднимается
359
или спускается полезный груз G; Д7Т — шкив трения, не-
посредственно соединенный с приводным двигателем М,
и Шп — направляющие шкивы. Канат, закрепленный сво-
ими концами с клетями и охватывающий шкивы, приво-
дится в движение двигателем.
В соответствии с технологическими данными механиче-
ского оборудования и требуемой производительностью
шахты задается примерная диаграмма скорости (тахограмма)
Рис. 9.22. Кинематическая схема
шахтного ^подъемника с уравнове-
шенным канатом и шкивом трения.
одного цикла работы подъ-
емника v = f (0 (рис.
9.23, а), предусматриваю-
щая: время углового уско-
рения длительность
установившегося режима
/2, углового замедления t3
и время паузы между со-
седними подъемами /4. По-
следующие циклы работы
подъемника повторяются.
Графику скорости соответ-
ствует график углового ус-
корения и замедления(рис.
9.23, б), значения которых
постоянны по абсолютно-
му значению и имеют
разные знаки соответст-
венно на участках и /3. На участках пуска и торможения
динамические составляющие момента равны Л'1ДИН = J%
и показаны на рис. 9.23, в. Далее определяется статический
момент нагрузки, приведенный к валу двигателя: Мс =
= где Fc — расчетное усилие на окружности шкива
трения; R — радиус шкива трения; т] — КПД передачи.
Силы тяжести клетей и каната в ^расчет статического мо-
мента не входят, так как они уравновешены. Но масса
всех поступательно движущихся и вращающихся элементов
системы учитывается в связи с определением суммарного мо-
мента инерции привода. Сюда же входит и момент инерции
приводного двигателя, мощность и угловая скорость кото-
рого должны быть предварительно выбраны.
Ориентировочно мощность двигателя рассчитывается по
формуле
Р = kF,.Vy • 10'3/t),
(9.78)
360
(k = 1,2 4- 1,3), учитываю-
влияние динамических моментов; уу — установившаяся
где k — коэффициент запаса
щий
угловая скорость подъем-
ника, по значению которой
в соответствии с равенст-
вом vy — устанавли-
вается номинальная угло-
вая скорость двигателя.
Очевидно, что в рас-
сматриваемом случае мо-
мент Мс остается постоян-
ным. Зависимость М =
= f (/), представляющая
собой нагрузочную диаг-
рамму электропривода, мо-
жет быть получена в ре-
зультате суммирования
статического и динамиче-
ского моментов, т. е.
М (/)= Мс + Л4ДИ„ (/). Гра-
фик М = f (/) показан на
рис. 9.23, д. В зависимо-
сти от соотношения стати-
Рис. 9.23. К построению нагрузоч-
ной диаграммы электропривода
шахтного подъемника.
ческого и динамического
моментов на участке замед-
ления привода может воз-
никать либо положитель-
ный, либо отрицательный
момент. Данная нагрузоч-
а — диаграмма скорости электропри-
вода (тахограмма); б — график уско-
рения привода; в — график динамиче-
ского момента, г — нагрузочная диаг-
рамма подъемника (механизма), д —
нагрузочная диаграмма электропри-
вода
ная диаграмма иллюстрирует повторнократковременный
режим с частыми пусками (типа S4), при наличии от-
рицательных моментов на участке замедления нагрузочная
диаграмма будет близка к диаграмме режима S5.
б) Нагрузочная диаграмма главного привода
продольно-строгального станка
Главный привод продольно-строгального стан-
ка обычно выполняется с помощью двигателя постоянного
тока независимого возбуждения, управляемого преобразо-
вателем, и предназначается для сообщения столу с обраба-
тываемым изделием возвратно-поступательного перемеще-
ния.
Предварительный расчет мощности двигателя произво-
дят на основании технологических данных с учетом тре-
361
буемого диапазона н способа регулирования скорости, а
также с введением коэффициента запаса на динамические
режимы.
Цикл работы станка состоит из прямого хода, во время
которого ведется обработка изделия, и обратного холо-
стого хода. Скорость прямого хода обусловлена режимом
резания, а обратный ход совершается со скоростью в 2—
3 раза больше скорости прямого хода. Режим работы при-
вода сопровождается частыми реверсами с предельно допу-
стимыми по условиям коммутации на коллекторе токами,
,, , отвечающими наибольшему
Рис. 9.24. Примерные диаграмма
скорости и нагрузочная диаграмма
главного электропривода продоль-
но-строгального станка.
быстродействию привода.
Примерная, заданная
технологическим режимом,
тахограмма привода (диаг-
рамма скорости электро-
привода) (о (/) (рис. 9.24)
состоит из следующих уча-
стков. На начальном ин-
тервале прямого хода дви-
гатель разгоняется до не-
большой угловой скорости
ыЙХ, при которой режущий
инструмент врезается в об-
рабатываемое изделие, а
затем происходит разгон
привода при полной нагрузке до установившейся угло-
вой скорости прямого хода ыпр. Перед окончанием пря-
мого хода совершаются замедление под нагрузкой и выход
резца из изделия при ы8ЫХ wBX, после чего происходит
реверсирование привода с малой угловой скорости прямого
хода до угловой скорости обратного хода —ыобр. Обратный
ход стола осуществляется вхолостую, перед его окончанием
привод замедляется до небольшой угловой скорости —ывх,
затем реверсируется от—ыах до (оах. В последующем цикл
повторяется.
В переходных режимах двигатель кратковременно на-
гружается максимально допустимым ТОКОМ/п — /т = /рев^
«=« 2 -т- 2,5 /110м. В соответствии с рассмотренным режимом
на рис. 9.24 построена ориентировочная нагрузочная диа-
грамма привода i = f (i) для одного цикла, на основании
которой в последующем производится проверка по нагреву
предварительно выбранного двигателя.
В данном случае нет необходимости в проверке на допу-
362
стимую кратковременную перегрузку, ибо она была пред-
варительно регламентирована предельным током (по усло-
виям коммутации), который может поддерживаться в пере-
ходных режимах соответствующей системой автоматиче-
ского управления.
Рассмотренный режим работы электропривода можно от-
нести либо к перемежающемуся режиму работы с частыми
реверсами типа S7, либо режиму работы с двумя или более
угловыми скоростями типа S8, так как в данном случае
нагрузочная диаграмма содержит признаки обоих режимов,
но все же она ближе к S8.
некоторые прокатные станы,
Рис. 9.25. Двухступенчатый гра-
фик Мс = f (0, диаграмма скоро-
сти со = f (t) электропривода и его
нагрузочная диаграмма прн цик-
лическом ударном изменении ста-
тического момента,
приложении нагрузки, должна
в] Нагрузочная диаграмма маховикового
электропривода механизмов с рвзкопеременной
нагрузкой
Существует значительное число механизмов,
рабочий режим которых характеризуется резкопеременной
нагрузкой. К ним относятс
прессы, поршневые насосы
и компрессоры и т. п.
Простейший двухсту-
пенчатый график (нагру-
зочная диаграмма механиз-
ма) Л4С = f (0 при цикли-
ческом ударном изменении
статического момента при-
веден на рис. 9.25. На-
грузочная диаграмма элек-
тропривода будет отлича-
ться от нагрузочной диаг-
раммы механизма в этом
случае вследствие влия-
ния инерционных масс
привода. Чтобы увеличил-
ся момент двигателя при
уменьшиться его угловая скорость, но ее мгновенному из-
менению препятствуют инерционные массы, поэтому момент
двигателя будет отставать от момента нагрузки. Для оценки
влияния параметров электропривода на степень отклоне-
ния зависимости М (/) от Мс (/) рассмотрим работу элект-
ропривода с линейной механической характеристикой, при
этом не будем учитывать влияние электромагнитных пере-
ходных процессов. Для установившегося цикла работы
363
можно записать (обозначения даны на рис. 9.25):
Мнач2 = Мкон1 = (М иач1 - Мс1) + Мс1; (9.79)
М,,ч1 = Мкон2 = (Мнач2 - Мс2) + Мс2. (9.80)
Совместное решение (9.79) и (9.80) дает:
Мнач1 - Мс2 - е-утк. (9 81}
1—е 'и"м
Миач2 = Л1с1- УАе-Чт«. (9.82)
1-е а -
Анализ (9.81) и (9.82) показывает, что Мнач1 = Мт,„ и
Л11|1Ч2 = Мтах зависят от электромеханической постоянной
времени привода Т„, с ростом которой растет Мтщ и умень-
шается Мтах. На рис. 9.25 штриховой линией показана
кривая зависимости момента двигателя от времени при уве-
личенном Т„. С возрастанием Т.я осуществляется выравни-
вание нагрузки двигателя, достигаемое увеличением мо-
мента инерции привода, реализуемым, в частности, за счет
использования маховика. В этом случае привод принято
называть маховиковым.
Возрастающая скачком нагрузка частично преодоле-
вается за счет освобождающейся из-за снижения угловой
скорости кинетической энергии (на рис. 9.25 — заштрихо-
ванная область со знаком минус), которая была запасена
в инерционных массах привода (в частности, в маховике)
в период работы с малой нагрузкой, когда угловая скорость
возрастает (на рис. 9.25 — заштрихованная область со зна-
ком плюс). При перепаде угловой скорости от oij до
энергия инерционных масс, отдаваемая (запасаемая) на
вал привода, составит:
Д = (cot — а>1)/2. (9.83)
Из (9.83) и выражения для электромеханической по-
стоянной времени Т„ = J2W0/MKi3 следует, что одинако-
вую отдачу энергии от инерционных масс привода (одина-
ковое выравнивание нагрузки двигателя) можно получить
либо увеличением момента инерции привода Jz, либо соот-
ветствующим увеличением перепада угловой скорости, до-
стигаемым смягчением механической характеристики дви-
гателя (уменьшением Л1К13). На практике используются
оба способа вместе или отдельно для увеличения отдачи
энергии инерционными массами привода.
364
Выравнивание нагрузки двигателя позволяет уменьшить
переменные потери в нем, благодаря чему двигатель может
быть выбран с меньшей номинальной мощностью и мень-
шим перегрузочным моментом.
Вопрос выбора оптимальных значений момента инерции
маховика и мощности двигателя при рассматриваемой на-
грузочной диаграмме механизма или еще более сложной
Рис. 9.26. Нагрузочная диаграмма маховикового электропривода при
многоучастковом графике нагрузки.
диаграммы вида, показанного на рис. 9.26, является доста-
точно трудным и неоднозначным. Правильно выбранный
момент инерции и мощность двигателя должны обеспечи-
вать хорошее использование двигателя по мощности (по его
нагреву) и по перегрузке при умеренных размерах махо-
вика. В ряде случаев требуется выполнение еще третьего
условия о допустимой неравномерности хода
(tB,rax Ь)/Л/л)/Ь>ср (9.84)
где / — допустимая неравномерность хода; оср — средняя
угловая скорость.
Как показывает опыт проектирования подобных элект-
роприводов, первые два условия обычно удовлетворяются,
если двигатель выбран с номинальным моментом, близким
к среднему, а именно:
МН0.,М1,1-Ы,3)Мср, (9.85)
где Л4ср — средний момент нагрузки, определяемый по на-
грузочной диаграмме механизма; например, для диаграммы,
приведенной на рис. 9.26,
з
^ciG-rMczG+^сз^зЧ-Л4с0 У tzi
Л1ср =----------— ---. (9.86)
365
Расчет требуемого момента инерции маховика при вы-
бранном согласно (9.85) двигателе основывается на выпол-
нении условия о допустимой перегрузке двигателя и заклю-
чается в следующем. На нагрузочной диаграмме механизма
(рис. 9.26) выбираем предположительно наиболее тяжелый
участок работы (Мс3 = McmaJC), на котором момент двига-
теля может достигнуть наибольшего значения (в случае
примерно одинакового времени участков — это участок
с наибольшим статическим моментом). Если считать, что
наибольший момент двигателя будет равен допустимому по
перегрузке Мдоп = £дМНОм, то
АдМном = МствД1 + (9.87)
где для упрощения начальный момент двигателя на рас-
сматриваемом участке принят равным статическому мо-
менту холостого хода Мс0.
Из (9.87)
t =Т 1п ——сОТО,У —с0 — —О^иоч ]п ——ста* ^сО
^дМцом ^ном Г
(9.8S)
где кл — коэффициент перегрузки двигателя; Je — суммар-
ный приведенный момент инерции привода.
Решая (9.88) относительно 7е и учитывая, что Тм =
= Js дг2- = Js , получаем:
/WK.3 ^пом
os In Me "ox Mcl)
° ном Мстпл_йдЛ111ом
(9.89)
Момент инерции маховика
^мах — Jx~ -Ур’ (9.90)
где Jnp—момент инерции электропривода.
Для выбранного двигателя и рассчитанного момента
инерции маховика следует построить нагрузочную диаграм-
му электропривода М = f (/), примерный вид ее показан
на рис. 9.26, и диаграмму скорости электропривода. Кри-
терием правильности выбора момента инерции маховика п
построения диаграмм является равенство угловых скоро-
стей и моментов двигателя в начале и в конце цикла, а также
равенство суммы площадей, пропорциональных кинетиче-
ской энергии, запасенной в массах привода при холостом
366
ходе (на рис. 9.26 отмечена знаком плюс), сумме площадей,
пропорциональных израсходованной энергии при нагрузке
(отмечена знаком минус).
Используя полученную нагрузочную диаграмму элект-
ропривода, проверяем выбранный двигатель по допустимой
нагрузке и по нагреву, применяя методы, изложенные
в последующих параграфах.
Выровнять нагрузку двигателя и ограничить его момент
можно, как уже отмечалось, не только увеличением момента
инерции, но и увеличением перепада угловой скорости.
При наличии маховика, увеличивая перепад угловой ско-
рости, можно или увеличить выравнивание нагрузки или
при том же выравнивании уменьшить маховик. Увеличение
перепада угловой скорости при приложении нагрузки до-
стигается введением резисторов в роторную цепь асинх-
ронного двигателя с фазным ротором или в якорную цепь
двигателя постоянного тока или применением двигателя
с короткозамкнутым ротором и с повышенным скольже-
нием. Однако увеличение скольжения ведет к снижению
средней угловой скорости привода за цикл, что влечет за
собой снижение производительности механизма и увеличе-
ние мощности потерь. Сохранение производительности на
заданном уровне потребует уменьшения передаточного от-
ношения от двигателя к рабочему валу механизма, что
в конечном счете приведет к увеличению номинального
момента двигателя. Применение асинхронных двигателей
с короткозамкнуты?»! ротором и с повышенным скольжением
при увеличенном среднем моменте нагрузки требует зна-
чительного увеличения габаритов двигателя вследствие воз-
растания потерь скольжения. Включение дополнительных
резисторов в роторную цепь асинхронного двигателя с фаз-
ным ротором с целью увеличения скольжения вызывает
увеличение потерь в роторной цепи, но не сказывается на
габаритах двигателя, так как большая часть потерь энер-
гии выделяется в дополнительных резисторах. В силу этих
недостатков (большие потери и снижение производитель-
ности) перепад угловой скорости более чем на 20 % не до-
пускают. При этом использование инерционных масс элект-
ропривода с постоянно включенными резисторами оказы-
вается невысоким и не обеспечивает достаточное выравни-
ва -.ие нагрузки на двигателе.
Стремленье устранить отмеченные недостатки махови-
коього привода привело к созданию электроприводов с ре-
гуляторами нагрузки. В последних автоматически из'>е-
367
Рис. 9.27. Принципиальная схе-
ма регулятора нагрузки для
привода с асинхронным двига-
телем с фазным ротором, пост-
роенная на основе вентильно-
машинного электромеханиче-
ского каскада.
няется скольжение в зависимости от нагрузки на валу
двигателя, благодаря чему достигается значительно более
полное выравнивание нагрузки. Простейшим регулятором
такого рода является жидкостный регулятор нагрузки.
Вследствие его недостаточной чувствительности, нестабиль-
ности сопротивления, громоздкости, а также сравнительно
низкого КПД и быстродействия этот регулятор находит
весьма ограниченное применение.
Другой подобный тип регулятора нагрузки с резисто-
рами и контактным управлением обеспечивает большее быст-
родействие, однако при ча-
стом включении контакторов
снижается его надежность.
Кроме того, этот регулятор
также имеет низкий КПД.
Для механизмов, работаю-
щих с резкопеременным ста-
тическим моментом, могут
быть использованы асинхрон-
ный вентильно-машинный или
асинхронный вентильный кас-
кады, которые выполняют
роль более совершенного ре-
гулятора нагрузки.
Принципиальная схема од-
ного из таких регуляторов
нагрузки для привода с асин-
хронным двигателем с фаз-
ным ротором показана на рис.
9.27. Здесь двигатель Ml
включен в вентильно-машин-
ный электромеханический кас-
кад. По этой схеме осуществляется автоматическое регули-
рование угловой скорости электропривода с изменением
нагрузки на его валу. Вначале Ml совместно с маховиком J
и двигателем постоянного тока М2 пускается вхолостую
при подаче напряжения на статор Ml при включенном кон-
такторе К1 и выключенном К2. Затем устанавливается
близкий к 0 ток возбуждения М2, и производится отключе-
ние контактора К1 с последующим включением К2. Напря-
жение со вторичных обмоток трансформаторов тока ТТ
подается (после выпрямления) на усилитель У, управляю-
щий тиристорным преобразователем ТП, предназначен-
ным для питания обмотки возбуждения М2. Усилитель со-
368
держит также регулятор, обладающий настраиваемой зоной
нечувствительности (уставкой срабатывания).
При холостом ходе- привода напряжение, снимаемое
с ТТ, меньше напряжения уставки, тиристорный преобра-
зователь закрыт, и ток возбуждения М2 равен 0 — угло-
вая скорость привода наибольшая. Когда привод нагру-
жается, сигнал достигает напряжения уставки, открыва-
ется ТП, увеличивается ток возбуждения М2, и снижается
до требуемого значения угловая скорость привода. Якорь
машины М2 в некоторой мере выполняет роль дополни-
тельного маховика. Система по сравнению с жидкостными
и контакторными регуляторами обладает большим КПД и
относительно высоким быстродействием.
При использовании в качестве регулятора нагрузки вен-
тильного каскада достигается большее быстродействие и не
требуется установка дополнительной машины постоянного
тока.
Приведенные на рис. 9.25 и 9.26 нагрузочные диаграммы
электропривода при резкопеременной нагрузке не соответ-
ствуют ни одному из стандартных режимов работы электро-
приводов. Эти графики близки к нагрузочной диаграмме
перемежающегося режима S5, но при значительном вырав-
нивании нагрузки они будут близкими к диаграмме продол-
жительного режима S1.
Большинство реальных нагрузочных диаграмм электро-
приводов не соответствует диаграммам стандартных режи-
мов. Поэтому для выбора двигателя необходимо реальную
нагрузочную диаграмму преобразовать к одной из трех ос-
новных стандартных нагрузочных диаграмм, соответствую-
щих режимам работы SI, S2, S3. Преобразование это должно
быть эквивалентным, т. е. реальный режим и расчетный
эквивалентный должны соответствовать одинаковому сред-
нему или максимальному превышению температуры двига-
теля. Методы таких эквивалентных преобразований нагру-
зочных диаграмм (режимов работы) рассматриваются в по-
следующих параграфах.
Режимы работы SI, S2, S3 являются основными потому,
что двигатели выпускаются только трех серий (по режиму
работы) — продолжительного режима работы, кратковре-
менного и повтор! о кратковременного. В зависимости от
того, из какой серии предполагается выбрать двигатель,
производится преобразование реальной нагрузочной диа-
граммы к соответствующей стандартной, для работы при
которой спроектирован и предназначен двигатель. Конечно,
369
двигатель нужно выбрать той серии, которая больше соот-
ветствует реальному режиму работы привода. Но иногда
в силу разных причин используется, например, двигатель
продолжительного режима работы при повторно-кратко-
временном режиме работы электропривода. В этом случае
нужно диаграмму повторно-кратковременного режима пре-
образовать к эквивалентной диаграмме продолжительного
режима работы.
9.5. Расчет мощности двигателя при
продолжительном режиме работы (SI j
а) Неизменная нагрузка
Существует значительное число механизмов,
работающих продолжительно с неизменной или мало ме-
няющейся нагрузкой без регулирования скорости. При-
мером таких механизмов могут служить насос, вентилятор
и т. п. Расчет мощности двигателя для подобных случаев
весьма прост, если известна мощность, потребляемая меха-
низмом.
Выбрав двигатель на указанную мощность, можно быть
уверенным, что он окажется полностью использованным по
допустимому превышению температуры. Если в каталоге
нет двигателя по мощности, полученной по расчету^ выби-
рается ближайший больший по мощности.
Так как в продолжительном режиме двигатель пускается
редко, то пусковые потери не могут заметно сказаться на
наГреве двигателя. Иногда, однако, приходится прове-
рять достаточность пускового момента, развиваемого дви-
гателем, учитывая, что некоторые механизмы имеют повы-
шенное сопротивление трения в Начале трогания с места.
Мощность, кВт, двигателя для насоса определяем по
формуле
Р = vV^g_.10-3t (9.9.!)
ЛнасЛпер
где V — подача насоса, м3/с; у — плотность перекачиваемой
жидкости, кг/м3; Я — расчетная высота подъема, м; г]иас —
КПД насоса (для поршневых 0,8—0,9; центробежных высо-
кого давления 0,5—0,8; низкого давления 0,3—0,6); т]пер —
КПД передачи от двигателя к насосу; g — ускорение силы
тяжести, g = 9,8 м/с2.
370
Мощность, кВт, двигателя для вентилятора
Р = —-----------10 3;
ЛаентПпер
(9.92)
здесь р — давление на выходе вентилятора, Па; рвент —
КПД вентилятора (от 0,3 до 0,8 — меныиие значения отно-
сятся к вентиляторам малой и средней мощности).
б) Переменная нагрузка (режим
перемежающийся S6 и подобные ему)
При продолжительной переменной нагрузке,
ступенчатый график которой в общем виде показан на
рис. 9.28, проверку предварительно выбранного двигателя
продолжительного режима работы следует производить по
нагреву путем определе-
ния наибольшего превы-
шения температуры Tma.v
за цикл и сравнить его
с допустимым превыше-
нием тдоп. При этом дол-
жно быть соблюдено ус-
ловие
Ijnax ^доп*
Рпс. 9.28. Ступенчатый график мощ-
ности на палу двигателя и потерь в
нем при продолжительной переменной
нагрузке.
Проверка мощности
двигателя, таким обра-
зом, связана с построе-
нием кривой нагрева,
что требует большой за-
траты времени. На практике пользуются хотя и менее точ-
ными, но более простыми методами проверки мощности
двигателя. Часто она производится по м е т о д у сред-
них потерь. Сущность метода заключается в том, что
превышение температуры двигателя при неизменной теп-
лоотдаче определяется средними потерями за цикл:
т
(9-93)
f=I
где ДР< — мощность потерь на i-м интервале; t, — продол-
жительность z-го интервала; т — число интервалов в цикле;
/ц — время цикла.
Найденные средние потери за цикл сопоставляются
с номинальными, и если ДРср ДРиои, т0 среднее превы-
371
шение температуры не больше допустимого значения, т. е.
тср ==S т110м = ТдОп.
Если средние потери за цикл ДРср > ДРНОМ, то двига-
тель будет перегреваться; наоборот, при условии, что
ДРср < ДРНОМ, двигатель недоиспользуется по нагреву.
В обоих случаях необходимо выбрать другой двигатель,
построить новую зависимость ДР = f (/) и вновь проверить
двигатель методом средних потерь.
Действительное максимальное превышение температуры
отличается от среднего, но при /ц << Гн и Чк > 4ТН, где q —
число циклов, это расхождение незначительно, и только при
соблюдении этих условий можно пользоваться методом сред-
них потерь.
В том случае, когда на протяжении цикла теплоотдача
двигателя на отдельных интервалах различна, например
в случае изменения угловой скорости самовентилируемого
двигателя, средние эквивалентные потери подсчитывают по
формуле
т т
АЛр,9 = 1;ДРЛ/2РЛ1 (9.93а)
f=I ;=1
где — коэффициент ухудшения теплоотдачи на i-м ин-
тервале, соответствующий значению угловой скорости на
этом интервале.
Приближенно зависимость коэффициента ухудшения теп-
лоотдачи от угловой скорости можно считать линейной:
Р = Ро + (1 — Р«) Ю/Юном»
где Ро — коэффициент ухудшения теплоотдачи при непод-
вижном якоре (роторе).
Порядок расчета мощности по методу средних потерь
1) По нагрузочной диаграмме механизма определяем
среднюю мощность на валу двигателя в случае постоянства
теплоотдачи и угловой скорости двигателя
т
(9.94)
।
в случае самовентилируемого двигателя при разных угло-
вых скоростях на интервалах
т
Лр.э—------------------• (9.94а)
i = l
372
Если двигатель с независимой вентиляцией, то в (9.94а)
принимаем 0, = 1. Затем Рср,8 умножаем на коэффициент
запаса k3 = 1,1 ч- 1,3, учитывающий отличие нагрузочной
диаграммы двигателя от диаграммы механизма; при нали-
чии заметных динамических нагрузок, связанных с изме-
нением угловой скорости, следует принимать большие зна-
чения k3.
2. На основании полученной расчетной мощности по ка-
талогу выбираем соответствующий двигатель.
3. Располагая кривыми КПД двигателя в функции на-
грузки при разных угловых скоростях, находим потери
мощности для каждого интервала нагрузочной диаграммы
и строим график ДР = f (t) (рис. 9.28).
4. По (9.93) или (9.93а) определяем средние потери за
цикл, которые и сопоставляем с номинальными:
ДРср ДРном = Рпом ( 1 Т]чом)/9ном»
где Рном, ti„om — соответственно номинальная мощность и
КПД двигателя.
В случае возникнове-
ния затруднений с опре-
делением КПД в зависимо-
сти от нагрузки, но при
наличии графика тока, по-
требляемого двигателем,
можно воспользоваться для
проверки выбранного дви-
гателя методом эквивалент-
ного тока. Эквивалентный
Рис. 9.29. График тока двигателя
i = / (/) при продолжительной пе-
ременной нагрузке.
ток — это ток постоянного
значения, который вызы-
вает в двигателе те же по-
терн, что и фактически про-
текающий в нем ток. На рис. 9.29 показан пример графи-
ка i = f (0 при продолжительной переменной нагрузке.
Если используется двигатель постоянного тока, то выде-
ляющаяся в нем средняя мощность потерь при загрузке его
эквивалентным током /8 равна:
bPcp = bPc + HR,
(9.95)
где ДРС =- К — мощность постоянных потерь; liR — пере-
менные потери, зависящие от нагрузки.
373
Средняя мощность потерь за цикл в соответствии с (9.93)
может быть рассчитана следующим образом:
др _ (АРА 4- АР2^2+ • •+ АРА)
ср h + 1г + • • • + tn
Заменяя потери мощности на каждом участке через соот-
ветствующие постоянную и переменную составляющие, по-
лучаем:
jz । пр_ (K+/f/?)G+(K-H&)/2+-+ . +{K + lnR)tn
K + tl+t2+...+ +tn
или
ГЛ 1 /2D _ (G4-^2-b---4~^n) [ P (jlt^ 4- /2/2 • +1ntn)
А-Г/эЛ G + G + - + 6, T /1 + /2_|-... + ^
Отсюда эквивалентный ток
г-,—2------------- -1/2
/э = 1/ = 1 ---- (9.96)
F Ч“Г<2“Г*‘- + ‘Л F 41
В общем случае при произвольной форме графика тока
Г
/,= 1/ 7- ( i2(t)dt. (9.97)
I/ 41 J
f О
При использовании самовентилируемого двигателя и из-
меняющейся угловой скорости на участках цикла в (9.96)
п
и (9.97) вместо /ц следует подставлять У, 0Л-
i=i
После нахождения эквивалентного тока сопоставляем
его с номинальным током двигателя: при /9 А /ном двига-
тель отвечает условиям полного использования по нагреву.
Следует, отметить, что метод эквивалентного тока пред-
полагает независимость (постоянство) потерь на возбужде-
ние, потерь в стали и механических потерь от нагрузки и
постоянство сопротивления главной цепи двигателя на всех
'Участках графика нагрузки.
Часто для проверки двигателя по нагреву и особенно при
предварительном его выборе приходится пользоваться гра-
фиками момента или мощности, развиваемых двигателем.
При неизменном магнитном потоке, когда момент двига-
теля М = cl, можно для проверки двигателя воспользо-
ваться методом эквивалентного момента. Для ступенчатого
374
графика эквивалентный момент определяем по формуле
г~------2--------—
Мэ = У '---(9.98)
При изменяющейся теплоотдаче вместо /ц в (9.98) под-
п
ставляем У] Эквивалентный момент сопоставляем с но-
»=i
минальным моментом двигателя, и если М3 Л4НОМ, то дви-
гатель полностью используется по нагреву.
Этот метод применим для двигателей постоянного тока
с независимым возбуждением, а также асинхронных и син-
хронных двигателей, работающих с номинальным магнит-
ным потоком. Кроме того, для применения и этого метода
должно выполняться условие неизменности постоянных
потерь и активных сопротивлений двигателя.
Когда нагрузочная диаграмма электропривода и меха-
низма задана графиком мощности, развиваемой двигателем,
выбор и проверка его по нагреву могут быть произведены
методом эквивалентной мощности, но лишь в том случае,
если между мощностью и током существует прямая пропор-
циональность, т. е. при ДРС = const, 7? = const, Ф =
= const, со = const — coHOM.
Эквивалентную мощность для ступенчатого графика оп-
ределяем по формуле
г—------г,------— 1 Л S
р3=у = г — с9-")
и сравниваем с номинальной мощностью двигателя, при
этом должно быть Рном.
Метод эквивалентной мощности может быть применен
для проверки по нагреву асинхронных и синхронных дви-
гателей, а также двигателей постоянного тока независи-
мого возбуждения, работающих с номинальным потоком и
постоянной или мало меняющейся угловой скоростью.
Методом эквивалентной мощности можно воспользо-
ваться и в случае переменной угловой скорости, если при-
вести мощность при угловой скорости со,- к эквивалентной
мощности при со = соном, используя соотношение P3i =
= Тогда формула эквивалентной мощности для
375
случая переменных угловрй скорости и теплоотдачи примет
вид:
Рэ = 1/ ---------(9.99а)
F 2 М
/=1
Следует отметить, что все рассмотренные методы про-
верки двигателя по нагреву при переменной нагрузке
представляют собой методы эквивалентного преобразования
нагрузочной диаграммы к стандартной диаграмме для ре-
жима S1, на который рассчитан двигатель продолжитель-
ного режима. Этими методами (при выполнении соответ-
ствующих ограничений) могут быть проверены двигатели
продолжительного режима, работающие в режимах S7,
S8 и подобных им и в режимах S3, S4, S5. Наиболее универ-
сальным и точным из всех рассмотренных методов является
метод средних или эквивалентных потерь.
Если методы средних потерь и эквивалентного тока при-
годны только для проверки по нагреву предварительно вы-
бранного двигателя, то методами эквивалентного момента
и мощности можно воспользоваться для предварительного
выбора двигателя по нагрузочной диаграмме механизма
(или по упрощенной нагрузочной диаграмме двигателя,
построенной без учета момента инерции двигателя), считая,
что момент (мощность) двигателя равен соответствующим
статическим значениям. Такой выбор является более точ-
ным, чем выбор по средней мощности. Предварительный
выбор производят по формулам
/Ы;)2 ti
376
9.6. Расчет мощности двигателя при
кратковременном режиме работы (S2)
График работы двигателя в кратковременном
режиме приведен на рис. 9.30. Исходя из определения
этого режима, можно ограничиться рассмотрением лишь
Рис. 9.30. График работы дви-
гателя в кратковременном ре-
жиме работы.
Рис. 9.31. Зависимость коэффи-
циентов тепловой Pi и механиче-
ской рм перегрузок от относи-
тельного времени работы.
одного периода работы двигателя для установления его пре-
вышения температуры, определяемого уравнением
т = ту(1-е //г»).
Если выбрать двигатель, рассчитанный для продолжи-
тельного режима мощностью Ркр, то, очевидно, при крат-
ковременном режиме превышение температуры не достиг-
нет установившегося значения ту к концу рабочего пери-
ода tp, как это видно из рис. 9.30 (кривая /). Поэтому в этом
случае двигатель недоиспользуется по нагреву.
При заданной нагрузке и времени рабочего периода
в тепловом отношении полностью будет использован дви-
гатель меньшей мощности; в этом случае превышение тем-
пературы ко времени tp будет равно тдоп (кривая 2
на рис. 9.30). При этом двигатель кратковременно будет
перегружаться, а установившаяся температура для него
окажется равной > ту = тдоп. Перегрузка может быть
значительной при малых t0.
377.
Соотношение между ту и ту может быть найдено из
выражения
ту = Ту (1 — е~/р/г“’ср), (9.100)
где Тн,ср — среднее значение постоянной времени нагрева
в начале и в конце процесса нагрева, Т1ЬСр = (ТН1Нач +
+ ^н,Кон)/2; ту = ДРНОМЛ4 и т' = ДРкрМ; ДРкр — по-
тери мощности в двигателе при нагрузке Ркр.
Отношение потерь при кратковременной нагрузке к но-
минальным называется коэффициентом термической пере-
грузки и может быть получено из (9.100):
рт = ДРкр/ДРнон = 1/(1 - e-V7- ср). (9.101)
Зависимость рт = f (tp/TiliZp) показана на рис. 9.31.
По коэффициенту термической перегрузки можно найти
коэффициент механической перегрузки, равный отношению
мощности Ркр к поминальной мощности Р1!ои при продол-
жительной нагрузке, т. е. р,л = Ркр/Р1;ом.
Действительно,
+ а + р^ /П1ПОЧ
Р< =------др-----4-др—--------(9-102)
к.ПОМП -и.НОМ ИТ*
отсюда
рм = V (1-Ьа) Рт-а» (9.103)
где а = ДРк,пом/Д^,иом — отношение постоянных потерь
к переменным при номинальной нагрузке.
Подставляя в (9.103) значение рт из (9.101), получаем:
ри = 1^(1 + о)/(1 — е~*р!Т«^р) — а. (9.104)
По (9.104) и заданному коэффициенту а может быть по-
строена зависимость коэффициента механической пере-
грузки рм от относительного времени работы tpITUiZp
(рис. 9.31, кривая рм).
Пренебрегая постоянными потерями (а = 0), выражение
(9.103) можно записать:
ри = Vpt = V 1/(1 -е-‘р/гн, ср). (9.105)
Если нагрузка в рабочий период меняется, то в расчет-
ные формулы вводится вместо Ркр эквивалентная мощность
за время /р.
378
Расчет мощности двигателей при кратковременной на-
грузке и применении двигателей, предназначенных для
продолжительного режима, производится из соображений
допустимых нагрева и перегрузки, при этом номинальные
мощности равны:
Р11ом.,кО = Ркр/Рт; (9.106)
Рноя max = Ркр/^д’ (9.107)
здесь кл — допустимая перегрузочная способность двига-
теля. Значения 1гя приведены ниже:
Т и и д в и г а т с л я Лд
Двигатели постоянного тока...............................2 — 2,5
Асинхронные двигатели с короткозамкнутым
ротором нормального исполнения.........................1,7 — 2,2
То же с фазным ротором.................................2,0 —2,5
Синхронные двигатели...................................2,0 — 2,5
При задании графика нагрузки в виде i = f (0 или
М = гр (0 в расчетные формулы вместо мощности Р11р вво-
дится соответствующее значение тока или момента.
Из анализа кривых на рис. 9.31 видно, что уже при
tJ7\ ср 0,35 и допустимой перегрузке по нагреву коэф-
фициент механической перегрузки становится равным 2,5,
что для двигателей постоянного тока оказывается предель-
ным. Асинхронные двигатели допускают меньшую пере-
грузку; кроме того, если учесть еще возможное понижение
напряжения питающей сети, то она будет еще меньше, поэ-
тому двигатели, предназначенные для продолжительного
режима и используемые в кратковременном режиме работы,
редко рассчитываются из условий допустимого нагрева,
так как в большинстве случаев они недоиспользуются в теп-
ловом отношении. Лучшее использование двигателей по
нагреву при небольших значениях tp/THyZp может быть
в случае применения двигателей специального исполнения,
отличающихся повышенной перегрузочной способностью;
асинхронные двигатели с короткозамкнутым ротором долж-
ны также иметь большой пусковой момент.
Двигатели, предназначенные для кратковременного ре-
жима работы, выпускаются заводами с нормированной дли-
тельностью работы в 10, 30, 60 и 90 мин. Следовательно, вы-
бранный по каталогу двигатель для этого режима может
быть загружен номинальной мощностью в течение указан-
ного времени, и он будет полностью использован по на-
греву.
379
Если же время работы двигателя отличается от ката-
ложного, то можно найти нагрузку Ркр, при которой двига-
тель будет полностью использован по нагреву из следую-
щих соображений.
Превышение температуры двигателя с номинальной на-
грузкой и нормированным временем /Р1Кат равно:
Тдоп = ~(9.108)
где Та — постоянная времени нагрева при кратковремен-
ном режиме работы.
В течение фактического времени tp с нагрузкой, отлич-
ной от номинальной, превышение температуры будет:
гдо.. = ^(1 (9.109)
здесь ДРкр — потери при кратковременной нагрузке, от-
личной от номинальной.
По аналогии с предыдущим коэффициент термической
перегрузки
ДРкр 1_е“'р-™т/2и а + (Ркр/Рном)2
Рт =------------/г ----------------.
ЛРцом 1— е Р н 1+а
откуда
~t Тт
I___________________________о *р. кат" н
(1+«)-- -rif----а-
\—е р' “
Если /р < /р,кат, двигатель должен быть также проверен
на допустимую перегрузку.
9.7. Расчет мощности двигателя при
повторно-кратковременном режиме
работы (S3)
Многоступенчатый график нагрузки, харак-
теризующий повторно-кратковременный режим работы, по-
казан на рис. 9.32. Такой или более сложный график (в част-
ности, графики для режимов S4, S5) можно привести к эк-
вивалентному одноступенчатому (т. е. к стандартному виду
для режима S3), если воспользоваться формулой
j /~ Pitpl + P-tp2 -1-Р'^рз + •• • + P~ntpn
9 V + ^р2 + tps + • • • + Ipn
380
В общем случае график нагрузки может включать
участки работы с расчетными угловыми скоростями, паузы,
участки пуска и торможения. Такой график также можно
привести к одноступенчатому с помощью формулы
т п
э=2 ПВэ= /р,э + ^,э ’ !00О//°’
1=1 <7=1
где т — число рабочих участков в цикле; п — число пауз
в цикле. Подобным же образом с использованием формул
эквивалентных величин
преобразуются к односту-
пенчатому графики тока и
момента.
Как отмечалось, для ре-
жима S3 (с одноступенча-
Рис 9 32. Многоступенчатый
график нагрузки, характеризую-
щий повторно-крат повременный
режим работы.
тым графиком) характерно чередование рабочих периодов
и пауз, причем длительности их таковы, что превышение
температуры двигателя не достигает установившегося зна-
чения как в рабочий период, так и в течение паузы
(рис. 9.33). Для достаточно удаленного от начала работы
привода цикла колебания превышения температуры уста-
навливаются равными ту = тдоп и т0. При равных постоян-
ных времени нагрева и охлаждения, что может иметь место
в случае независимой вентиляции двигателя, можно запи-
сать:
ту = Ту( 1 — е~‘р/гч) + 'гпе~‘р/Г"; (9.111)
То = туе-/о/гн. (9.112)
Подставляя знгчение т0 из (9.112) в (9 111), получаем:
Ту =Ту(1 — е-<р/г<>) Tyg~('p
381
Отсюда после несложных преобразований получим
коэффициент тепловой перегрузки двигателя при работе его
в продолжительном режиме с той же нагрузкой, что и в по-
вторно-кратковременном с ПВ = е:
_ ту _ 1— e~(<P+fo)/:rii _ 1
ту 1—е~{р/Т« 1_е_/р/гн
где е — относительная продолжительность включения, е =
= tp/(tp + /о).
I1OM графике цовторио-кратковремеиного режима работы.
Расчет мощности двигателей, предназначенных для про-
должительного режима работы, но используемых для по-
вторно-кратковременной нагрузки с одноступенчатым гра-
фиком, производится на основании следующих соображе-
ний. Полное количество теплоты, которое будет отдаваться
таким двигателем при номинальном превышении темпера-
туры за цикл, равно:
ДРном^р + Д^номМо = (ЛРк „ом + bPv ном) (/р + рй/о). (9.114)
В период паузы, когда двигатель отключен, в нем потери
отсутствуют, поэтому в рабочий период нагрузка его может
быть увеличена по отношению к номинальной в продолжи-
тельном режиме. Постоянные потери в рабочие периоды не
изменятся, а переменные потери возрастут до значения
Д/\> = ДР, ном (/пк/Iпр. ном) >
где /Пр,ном — ток при продолжительном номинальном ре-
жиме работы; /пк — ток при повторно-кратковременном
режиме.
382
Средние потери, выделяющиеся в двигателе за цикл,
равны:
ДРср =[ДРК, вом + ДР. ном УЧ /р. (9.115)
L Vпр,ном/ J
В квазиустановившемся процессе при повторно-кратко-
временном режиме, когда превышение температуры до-
стигнет тдоп, количество теплоты, выделяемое в двигателе,
и количество теплоты, рассеиваемое в окружающую среду,
равны, ...........
т. е. нужно приравнять (9.114) и (9.115):
(АРК, ном4~ АР .ном) (/р+Мо) = [АР к, ном+
4-Д^ном(Лк/Л1р,ном)2]<р,
(9.116)
или
откуда
(ДРк, пом + АР„ ном) [1 + ₽0 (1 /е - 1)] =
= Д^К, НОМ 4“ ДРтНОМ (^гк/^пр, ном) <
е
пр, пом
е + Ро(1+а)(1—е)
(9.117)
Полученный по (9.117) ток для продолжительного
режима сопоставляется с номинальным током выбранного
двигателя, и при условии, что /|1р>иом /,юм, двигатель про-
ходит по нагреву.
Если пренебречь постоянными потерями и считать, что
теплоотдача в неподвижном состоянии двигателя такая же,
как и для номинальной угловой скорости (р = 1), то
/Пр.Иом = /Пк/8. (9.118)
Аналогичные формулы для расчета мощности двигателя
получаются при задании графика нагрузки в виде Л4 =
= / (0 или Р = f (/).
В случае сложного многоучасткового графика нагрузки
для проверки двигателя, предназначенного для длитель-
ного режима работы, по'нагреву и для его предварительного
выбора обычно производят непосредственное преобразо-
вание заданного графика повторно-кратковременного ре-
жима к стандартному графику продолжительного режима,
используя методы и формулы средних потерь и эквивалент-
ных величин, как и в случае продолжительного режима
с переменной нагрузкой, нос учетом времени пауз в знаме-
нателях этих формул. При необходимости, когда режимы
близки к режимам S4, S5 — при большом числе включе-
ний, торможений или при больших инерционных массах
механизма, учитывают также и потери в переходных про-
383
цессах. Например, формула (9.93а) средних потерь при-
мет вид:
S + АЛП)П,
ДР =__________—-------------------
“'ср. э т п k
У Pi^oi + РоУ] ^ор+ У] ₽A,n 1
1=1 <7=1 /=1
где ДЛП1Пу — потери энергии в /-м переходном процессе,
продолжающемся в течение времени /п,п/ при среднем зна-
чении коэффициента ухудшения теплоотдачи р7; k — число
переходных процессов в цикле.
Для повторно-кратковременного режима работы целесо-
образно применять специальные двигатели, обладающие
значительной перегрузочной способностью и повышенным
пусковым моментом, что позволяет максимально использо-
вать их по нагреву. Такие двигатели выпускаются с норми-
руемой номинальной мощностью при определенной продол-
жительности включения и длительности цикла. При превы-
шении нормированной длительности цикла расчет мощности
двигателя ведется, как для продолжительного режима
(в каталогах на некоторые из этих двигателей указывается
номинальная мощность для продолжительного режима, но
некоторые из таких двигателей не могут работать в продол-
жительном режиме даже на холостом ходу, перегреваясь
из-за больших постоянных потерь).
Основным значением ПВ, на которое рассчитываются
двигатели, является ПВ — 25 % (е = 0,25) для старых се-
рий и 40 % (е = 0,4) для новых серий двигателей. В катало-
гах приводится номинальная мощность двигателя для раз-
личных значений ПВ.
Если расчетная продолжительность включения е и тре-
буемая (расчетная) мощность двигателя при одинаковом
графике нагрузки отвечают стандартным значениям, то вы-
бор мощности двигателя не составляет труда. Для отличаю-
щегося от стандартного ПВ двигатель в повторно-кратко-
временном режиме развивает другую мощность, которая
может быть найдена исходя из того, что потери при искомой
мощности, соответствующей е, должны быть равны поте-
рям при номинальной мощности, например при Р0125 и
е = 0,25, т. е.
(ЛРК + ЬР„0,2В) ta 0,25 = (дРк + ДР„0,25 /це, (9.119)
где ДРт0,25 — переменные потери в двигателе при Pq,k-
384
Из (9.119) имеем:
Ре. — Р <i,25 У (До.25 4” 1) 0,25/е — До 25, (9-120)
где а0,25 — коэффициент постоянных потерь при нагрузке
Р0 25» а0,25= ^Pk^Pvq,25-
При е > 0 25 Ре < Р0.25; при е < 0,25 Ре > Ро,25.
Без учета постоянных потерь формула (9.120) упростится
и примет вид:
Pg — Ро 25 У0,25/е .
(9.121)
Из (9.121) можно заключить, что пересчет мощности с от-
носительной продолжительностью включения е, получен-
ной из произвольного графика нагрузки (например, приве-
денного на рис. 9.32):
е — ^рДц — (^1 ~Мг 4~ ^з)/(^ 1 + h + + М, (9-122)
на стандартные значения может быть произведен по одному
из следующих соотношений:
Ре. !5 = Pg ; Р0.25 = Ре Vе/0,25 ;
Рол = ре р^е/ОЛ;
Ро.в = Ре Ке/0,6; Рг.о — РеУ^ > .
(9.123)
из этих значений выбирается то, где е наиболее близко
к стандартному значению ПВ. При большом различии
между е и стандартным ПВ следует пользоваться формулой
(9.120).
Расчет мощности для повторно-кратковременного ре-
жима с частыми пусками и электрическим торможением
(S5), когда пусковые и тормозные потери оказывают влия-
ние на нагрев двигателя, производится аналогично преды-
дущему, т. е. методом непосредственного учета потерь в дви-
гателе.
Если все потери выделяются в самом двигателе, как это
имеет место, например, в асинхронном двигателе с коротко-
замкнутым ротором при включении его в питающую сеть,
то наблюдается интенсивный перегрев двигателя, лимити-
рующий допустимое число включений. Расчет мощности
(проверка по нагреву) в этом случае сводится к определению
допустимой частоты включений и сравнению ее с требуемой
частотой включений.
13 Чиликин М. Г., Сандлер А. С. 385
9.8. Определение допустимой частоты
включений асинхронного двигателя
с короткозамкнутым ротором и пути
ее увеличения
В приводах значительного числа металлорежущих
станков, прессов, вспомогательных механизмов прокатных станов и
другого оборудования возникает необходимость по условиям техлологи-
ческого процесса в большой частоте включений двигателей, достигаю-
щей 600—800 и более в час.
Допустимым числом включений в час считают такое, при котором
среднее превышение температуры после большого числа рабочих циклов
в режиме S5 будет равно допустимому, и двигатель оказывается пол-
ностью использованным по нагреву. В этом случае, если двигатель
продолжительного режима работает с номинальной угловой скоростью
при допустимом превышении температуры, мощность потерь, выделяе-
мых в охлаждающую среду, равна ДРН0М, а в период паузы при том же
превышении температуры Ро ДРПом- В среднем за время переходных
процессов потери, выделяемые в охлаждающую среду, равны (1 +
-+- Ро) ДРН0М/2. Потерн энергии, выделяющиеся в двигателе за цикл,
состоят из потерь энергии за время переходных процессов ДДП + ДЛт
и потерь в установившемся режиме ДР ty. Последние могут меняться
в зависимости от нагрузки. Когда температура двигателя установилась,
потери энергии, выделяемые в двигателе за цикл, равны энергии, рас-
сеиваемой в охлаждающую среду, т. е.
Д А „ + ДР /у + ДДт = ДРнсм (In + <т) +
+ ДРном<у+Ро ион 6>> (9.124)
где t„, ty, /ти ta— соответственно время пуска, установившегося режима,
торможения и паузы.
Так как ta = 3600/й, то ty = 3600е/й — (1П + М и /0 =
= 3600 (1 — е)/Л, здесь h — число включений в час.
Подставляя в (9.124) значения ty и и решая его относительно h,
получаем:
,. __________(ДРном - ДР) е + ДРномРо (1 - е)______
доп ДЛ„ +ДДТ —(<П-НТ) (ДР + 0+₽о) ДРном/2 —ДРц0М)’
(9.125)
Для асинхронных двигателей с короткозамкнутым ротором третьим
членом знаменателя можно пренебречь по сравнению с суммой Д4и +
+ ДДТ1 так как он не превышает 2—4 % этой суммы; поэтому
йдоп «= 3600 (Д?|10М —~Е). (9,12б)
ал д -f- алт
Если в установившемся режиме двигатель работает с номинальной
нагрузкой (ДР = ДР1!ОМ), формула (9.126) упрощается и принимает
вид:
йдои 3600 . (9.127)
/1 д т
386
Анализ (9.125) показывает, что допустимое число включений в час
зависит от статической нагрузки, определяющей мощность потерь ДР,
относительной продолжительности включения е, коэффициента ухудше-
ния теплоотдачи р0 и от потерь энергии в переходных режимах. С умень-
шением ДР возрастает йдоп, Достигая наибольшего значения при холос-
том ходе. На допустимое число включений в час существенно влияют
потери энергии в переходных режимах. Так как они пропорциональны
моменту инерции привода, то с ростом уменьшается допустимая
частота включений.
Из (9.125) следует также, что при ДРНОм — ДР = Ро ДРНОм Д°’
пустимая частота включений ие зависит от е. Когда (ДРНОМ — &Р) >
> Ро ДР,|ОМ, с ростом е можно допустить большее число включений
в час. Наконец, если (ДРН0М — ДР) < Ро ДРНОМ, то с ростом е допусти-
мая частота включений уменьшается. В том случае, когда момент инер-
ции ротора двигателя составляет небольшую долю общего приведенного
момента инерции привода, с ростом номинальной мощности двигателя
допустимая частота включений увеличивается. Для номинальной на-
грузки с увеличением £ допустимая частота включений уменьшается.
Увеличение допустимой частоты включений достигается независи-
мой вентиляцией двигателя, действующей одинаково интенсивно в те-
чение всего цикла работы электропривода. Существенного увеличения
допустимой частоты включений можно добиться за счет уменьшения
потерь энергии в переходных процессах. В этом отношении наибольший
эффект дает частотное управление асинхронным двигателем с коротко-
замкнутым ротором по сравнению с другими способами управления.
Исследования показали, что практически потери энергии за время
переходного процесса достигают минимума при токах приблизительно
в 1,5—2 раза больше номинального и оптимальном абсолютном сколь-
жении. В большинстве случаев при частотном управлении именно эти
значения токов статора и обусловливают максимально допустимое число
включений асинхронного двигателя с короткозамкнутым ротором, ко-
торое оказывается в несколько раз большим, чем при прямом пуске
двигателя от сети с неизменной частотой и амплитудой напряжения и
торможением противовключением.
Так как повторно-кратковременный режим работы с частыми
пусками (S4) характеризуется так же, как и режим с частыми пусками
и электрическим торможением (S5), относительной продолжительностью
включения и числом пусков в час, то режим (S4) может рассматриваться
как частный случай режима (S5).
По аналогии с режимом S5 для двигателя, работающего в режиме
S4, может быть найдено допустимое число включений в час, а именно:
ь ____Qfifin (АРцом АР) е-НРо ДРНОМ (1 а)________
«доп Лии дЛп_Мдр + (1 + Ро) ДРном/2-ДРНОм]-
(9.128)
13*
Системы
ЧАСТЬ
вторая автоматического
управления
электроприводами
ВВЕДЕНИЕ
Управление электроприводами заключается
в осуществлении пуска, регулирования скорости, торможе-
ния, реверсирования, а также поддержания режима работы
привода в соответствии с требованиями технологического
процесса.
В простейших случаях пуск, регулирование скорости
и торможение производятся при помощи аппаратов ручного
управления. К ним относятся рубильники, пакетные вы-
ключатели, пусковые и регулировочные резисторы, кон-
троллеры. Применение этих аппаратов связано с дополни-
тельной затратой времени на управление и, следовательно,
снижает производительность механизма, особенно в тех слу-
чаях, когда его работа связана с частыми пусками или ре-
гулированием скорости. Кроме того, применение аппаратов
ручного управления исключает возможность дистанцион-
ного управления, что неприемлемо в ряде современных ав-
томатизированных установок. В мощных электроприводах
ручное управление затруднено или даже практически не-
возможно вследствие больших усилий, требующихся от
человека для совершения переключений аппаратов.
Стремление устранить указанные недостатки ручного
управления привело к созданию аппаратов полуавтомата
ческого и автоматического управления.
История развитая автоматизированного управления
электроприводами в промышленности СССР неразрывно
связана с общей индустриализацией страны, которая при-
вела к широкому применению высокопроизводительных ме-
ханизмов в самых различных областях народного хозяй-
ства и к необходимости автоматического управления этими
механизмами.
388
Автоматическое управление электроприводами явля-
ется одним из основных условий повышения производи-
тельности механизмов и производства продукции высо-
кого качества. В системе управления электроприводом
используются: релейно-контактные аппараты, где основ-
ными элементами являются различного рода реле, кон-
такторы, путевые выключатели и др.; усилители, преоб-
разовательные устройства и датчики — электромашинные,
электромагнитные, полупроводниковые (транзисторные,
тиристорные, интегральные) и т. п.; бесконтактные логи-
ческие элементы, различные элементы цифровой и анало-
говой вычислительной техники, микропроцессоры и мик-
ро-ЭВМ и т. п.
Выбор типа устройств для построения систем управления
и типа самих систем управления определяется требова-
ниями к электроприводу и тем функциям, которые он дол-
жен выполнять.
Современные регулируемые электроприводы для автома-
тических линий и механизмов обычно строятся на полупро-
водниковых устройствах (в приводах большой мощности
в силовой части привода используются наряду с тиристо-
рами и электромашинные преобразователи). На релейно-
контакторную аппаратуру в таких приводах обычно возла-
гаются функции включения питания (подсоединение к сети)
силовых блоков и блоков управления, защиты и ввода пер-
воначальных и конечных команд в систему управления
приводом. Но наряду с электроприводами, выполняющими
сложные функции, в ряде случаев содержащими микропро-
цессоры или программные устройства управления, сущест-
вует большое количество электроприводов, на которые
возлагаются относительно простые функции. Это обычно
нерегулируемые или регулируемые ступенчато в неболь-
шом диапазоне электроприводы с невысоким быстродей-
ствием. В задачу систем управления такими электроприво-
дами чаще всего входит организация пуска, торможения,
перехода с одной ступени скорости на другую, реверса и
осуществление этих операций в определенной последова-
тельности во времени или по командам от рабочей машины,
завершившей очередную технологическую операцию. При-
чем необязательно, чтобы система управления выполняла
все эти функции: набор функций зависит от требований
к приводу. Системы управления такими электроприводами
обычно строятся на релейно-контактной аппаратуре при от-
носительно небольшом числе срабатываний ее в час, а при
389
большом числе срабатываний — на бесконтактной аппара-
туре.
Перечисленные функции этих систем в большей своей
части являются логическими, определенная очередность их
выполнения, зависящая отсоединения этих аппаратов между
собой, представляет некоторую жесткую программу выпол-
нения операций. Такую логическую связь, но более слож-
ную, имеют системы управления электроприводами многих
современных рабочих машин, в частности металлорежущих
станков. Во многих случаях эта часть системы управления
выполняется на релейно-контактной аппаратуре, иногда на
бесконтактной или с использованием программируемых ко-
мандоконтроллеров, позволяющих изменять последователь-
ность выполнения операций.
Автоматическое управление электроприводами имеет
большое народнохозяйственное значение потому, что оно
дает возможность увеличить производительность труда,
облегчить условия труда рабочего, улучшить качество про-
дукции, уменьшить расход электроэнергии и повысить на-
дежность работы производственных механизмов.
Автоматизация упрощает обслуживание механизмов,
дает возможность осуществить дистанционное управление
электроприводами. Последнее особенно важно там, где
нельзя управлять двигателями в непосредственной близости
по условиям территориального расположения машин или
в связи с особенностями технологического процесса.
Различают системы управления разомкнутые и замкну-
тые. Разомкнутые системы отличаются той особенностью,
что изменение возмущающих воздействий (например, на-
грузки на валу двигателя) приводит к изменению ранее
заданного режима работы привода. В замкнутых системах,
или собственно автоматических системах, независимо от
состояния возмущающих воздействий можно поддерживать
заданный режим работы привода. В замкнутых системах
автоматического управления при пуске, торможении или
регулировании скорости привода может быть обеспечено
непрерывное изменение тока, момента, скорости, положе-
ния по требуемому закону. Замкнутые системы автомати-
ческого управления являются более сложными, но в то же
время и более совершенными, чем разомкнутые.
390
ГЛАВА ДЕСЯТАЯ
РАЗОМКНУТЫЕ СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
13.1. Изображение и обозначение
элементоз схем автоматического
управления
Для автоматического управления электропри-
водами применяются различные аппараты: контакторы,
автоматы, регуляторы, реле, кнопочные станции, путевые
выключатели, бесконтактные логические элементы, а также
разного рода вспомогательные электрические машины и
аппараты. Каждый из этих аппаратов состоит из ряда эле-
ментов: электромагнитной системы, создающей необходимое
тяговое усилие; главных и вспомогательных контактов
п т. п. С помощью проводов отдельные аппараты и их эле-
менты электрически соединяются в общую систему, при-
званную осуществлять заданные операции в определенной
последовательности.
Современные системы автоматического управления со-
держат десятки, а иногда даже сотни отдельных элементов,
вследствие чего возникают известные трудности ие только
в процессе проектирования схем, но и в чтении
схем. Поэтому начертание схем должно производиться
по определенной системе, облегчающей их чтение.
Прежде всего отметим деление цепей в схемах на две
категории: цепи главного тока и вспомогательные. К ц е-
л я м главного тока относятся силовые цепи дви-
гателей и генераторов. Для облегчения чтения схем цепи
главного тока можно вычерчивать утолщенными линиями.
Вспомогательные цепи включают в себя цепи
управления, где присоединяются катушки контакторов и
реле, контакты реле, вспомогательные контакты контакто-
ров и другие элементы аппаратов. Кроме того, к вспомога-
тельным цепям относятся цепи защиты, сигнализации и
цепи, связанные со специальными блокировками между
отдельными электроприводами. Цепи вспомогательные изо-
бражаются тонкими линиями.
В тех же целях облегчения чтения схем при выполне-
нии монтажных и ремонтных работ, а также при наладках
во время эксплуатации приводов используются два различ-
ных типа схем.
391
1. Принципиальная схема содержит изо-
бражение элементов всех аппаратов и машин. Расположе-
ние элементов на схеме дается так, как это удобно для чте-
ния схемы, а не по действительному пространственному их
расположению, т. е. отдельные токоведущие элементы аппа-
ратов и машин указываются в соответствии с их положе-
нием в электрической цепи вне зависимости от кинемати-
ческой или конструктивной связи этих элементов. Каждый
Рис. 10.1. Принципиальная схема управления асинхронным двигате-
лем с короткозамкнутым ротором.'
элемент в принципиальной схеме имеет свое условное гра-
фическое изображение. Кроме того, каждому аппарату
в схеме присваивается буквенное обозначение, указываю-
щее на функции данного аппарата и сохраняющееся одина-
ковым для всех его элементов. Так, на схеме, приведенной
на рис. 10.1, контакт линейного контактора обозначен бук-
вами КЛ. Такие же обозначения должны иметь и другие
элементы, например катушка этого контактора.
2. Схема соединений (монтажная) —
это схема, где изображается разводка силовых проводов и
проводов вспомогательных цепей с указанием их сечения,
марок и способов их прокладки.
392
В схемах соединений расположение отдельных аппара-
тов, измерительных приборов, а также элементов одного и
вызвав
с)
Шины
Ал. 50*4-
Рис. 10.2. Схема соединений панели управления асинхронным двига-
телем и общая схема.
того же аппарата дается обычно в соответствии с их действи-
тельным размещением. На рис. 10.2 приведена схема соеди-
нений (в случае так назы-
ваемого заднего монтажа)
панели управления двига-
телем по принципиальной
схеме, изображенной на
рис. 10.1. Правая часть
рисунка относится к об-
щей схеме, определяю-
щей составные части уста-
Рис. 10.3. Фасад панели управ-
ления асинхронным двигателем
(схема расположения).
600
новки и соединения их между собой, в данном случае сое-
динение панели с двигателем и кнопочной станцией.
393
На рис. 10.3 показан фасад этой панели управления.
Это изображение может быть отнесено к схеме рас-
положения, определяющей относительное располо-
жение составных частей установки и соединяющих их про-
водов, жгутов, кабелей и т. п. (провода здесь не показаны,
так как монтаж задний). Ясно, что схема соединений должна
составляться в соответствии с принципиальной схемой.
При проектировании и чтении схем замыкающие и раз-
мыкающие контакты электрических аппаратов изобража-
ются в положении, которое они занимают при снятии на-
пряжения с катушек этих аппаратов или отсутствии меха-
нического воздействия на контактную систему, например
при отсутствии тока в катушках реле и контакторов, при
отсутствии нажатия на кнопку, при нулевом положении ко-
мандоаппарата и т. д.
10.2. Принципы автоматического
управления пуском электродвигателей
в разомкнутых релейно-контактных
системах
Автоматизация пускового процесса значи-
тельно облегчает управление электродвигателями, устра-
няет возможные ошибки при пуске и ведет к повышению
производительности механизмов.
Наиболее просто осуществляется автоматизация для
асинхронного двигателя с короткозамкнутым ротором, по-
скольку управление пуском здесь сводится в подавляющем
большинстве случаев к прямому включению двигателя на
полное напряжение сети.
Что касается других двигателей, то здесь наиболее
часто приходится постепенно выключать пусковые рези-
сторы, регулирующие пусковой ток в допустимых преде-
лах. Для мощных синхронных и асинхронных двигателей
с короткозамкнутым ротором пуск иногда осуществляется
переключением обмотки статора с пониженного напряже-
ния на номинальное.
При проектировании схем управления для двигателей
постоянного тока и асинхронных двигателей с фазным рото-
ром исходят из заданных условий пуска.
На рис. 10.4 показана пусковая диаграмма двигателя
с тремя ступенями пускового резистора, построенная из
условий изменения тока в определенных заданных преде-
лах от ?! до /2. Пуск электродвигателя согласно этой диа-
394
грамме может быть произведен от руки или автоматически.
Если пуск осуществляется вручную, то резисторы пере-
ключаются с ориентировкой на показания амперметра в
цепи якоря.
Автоматическое управление позволяет более точно вы-
держать заданные условия пуска и освобождает человека
от выполнения утомительных операций.
Выясним прежде всего, в функции каких величин можно
осуществить автоматическое управление пуском двигателя.
Из рассмотрения диаграмм, показанных на рис. 10.4.
следует, что выключение ступеней резистора должно про-
исходить при определен-
ной угловой скорости дви-
гателя (<»!, ю2 и опре-
деленном токе /2 и через
определенные промежутки
времени (/ъ /2 и /3). Оче-
видно, что управление пу-
Рис. 10.4. Пусковая диаграмма
двигателя с тремя ступенями
пускового резистора.
ском может быть осуществлено в функции скорости, тока,
времени. Иногда управление двигателем совершается в
функции пути.
Диаграммы, приведенные на рис. 10.4, иллюстрируют
процесс пуска при ступенчатом управлении, осуществляе-
мом при помощи релейно-контактных аппаратов в разом-
кнутых системах управления.
10.3. Типовые узлы релейно-контактного
управления пуском двигателей
постоянного тока при питании от сети
а) Управление в функции угловой скорости |ЭДС)
Управление в функции угловой скорости тре-
бует контроля угловой скорости с последующим воздей-
ствием на соответствующий аппарат. Реле, непосредственно
работающие в функции угловой скорости, например центро-
бежные, в схемах управления пуском двигателей приме-
няются сравнительно редко. Объясняется это относительной
395
сложностью их конструкции и небольшой надежностью
в работе. Можно измерять угловую скорость электрическим
путем при помощи тахогенератора, соединенного с валом
двигателя. Однако необходимость иметь дополнительно та-
кой тахогенератор приводит также к усложнению схемы.
Поэтому угловая скорость двигателя часто фиксируется
косвенным путем — измерением других параметров, одно-
значно связанных с угловой скоростью. Для двигателей
постоянного тока таким параметром является ЭДС двига-
теля, а для синхронных и асинхронных двигателей с фаз-
ным ротором, кроме того, частота тока в роторе и значение
ЭДС ротора.
Рис. 10.5. Узел схемы автоматического пуска двигателя в функции
ЭДС вращения якоря двигателя.
Напряжение, зависящее от ЭДС, прикладывается к ка-
тушкам реле или контакторов, которые срабатывают при
определенном значении ЭДС и осуществляют переключе-
ние пусковых резисторов в требуемой последовательности.
На рис. 10.5 изображен узел схемы автоматического
пуска двигателя постоянного тока независимого возбужде-
ния в функции ЭДС.
Каждый из включенных в схему контакторов углового
ускорения (КУЦ КУ2, КУЗ) настроен на определенное зна-
чение напряжения втягивания. В начальный момент пуска
напряжение на катушках контакторов углового ускорения
равно лишь падению напряжения в цепи якоря, так как
е = 6<вФ = 0. По мере увеличения угловой скорости элек-
тродвигателя его ЭДС возрастает. При определенной угло-
396
вой скорости (Oj напряжение на катушке контактора КУ/
(рис. 10.5) достигает такого значения, при котором контак-
тор срабатывает и замыкает свой контакт. Таким образом,
первая ступень резисторов оказывается зашунтированной.
Контакторы КУ 2 и КУЗ при этом еще не работают, так как
они настроены на более высокие напряжения втягивания.
Как только угловая скорость двигателя достигает значе-
ния w2, срабатывает контактор КУ2, замыкая свой контакт,
и т. д. до тех пор, пока все ступени пусковых резисторов
не окажутся зашунтированными. После того как будет вы-
ведена последняя ступень резисторов, пуск двигателя за-
канчивается, и он работает на естественной характери-
стике.
Рис. 10.6. Узел видоиз-
мененной схемы автома-
тического пуска двигателя
в функции ЭДС враще-
ния.
К недостаткам рассмотренной схемы следует отнести
различное напряжение срабатывания, на которое должны
быть выбраны контакторы углового ускорения. Этот недо-
статок можно сгладить, если осуществить включение кон-
такторов по схеме, изображенной на рис. 10.6. В этой схеме
к обмотке якоря присоединены лишь одни концы катушек
контакторов, а другие концы их подключаются к разным
точкам пускового резистора. При таком присоединении
удается выровнять напряжение втягивания для всех трех
катушек. Контакторы по-прежнему должны срабатывать
при заданных угловых скоростях двигателя Wj, <о2 и со3.
Напряжения втягивания на разных катушках будут соот-
ветственно равны:
4" I (R« 4" Rz 4- Rs)>
Uкуi 4-1 (R>i 4- /?з);
U куз — с®з 4-1 R«‘
Эти напряжения мало отличаются друг от друга, т. е.
twi4-1 (Ra + Rt 4- Ra) tw-i 4- / (Ru 4~ Rs) <-ц>з4*
397
поэтому катушки контакторов могут быть выбраны па оди-
наковое напряжение втягивания. Равным образом после
пуска контакторы оказываются включенными на одинако-
вое напряжение сети. Следовательно, для всех ступеней
могут быть применены однотипные контакторы.
Однако в силу недостатков, заключающихся в возмож-
ном перегорании пусковых резисторов, в неточном срабаты-
вании контакторов при холодном и нагретом состояниях
катушек, а также вследствие того, что случайное увеличе-
ние напряжения сети во время пуска вызывает увеличе-
ние тока якоря, схемы пуска в функции ЭДС в современ-
ной практике для двигателей большой мощности не приме-
няются. Подобные схемы встречаются лишь в приводах не-
большой мощности, главным образом в металлообрабаты-
вающих станках.
Четкое и надежное включение контакторов без привари-
вания их главных контактов требует, чтобы напряжение сети
было существенно выше, чем напряжение втягивания кату-
шек контакторов. Поэтому обычно на место контакторов
ставятся промежуточные реле напряжения, действующие
в функции ЭДС и включающие контакторы, питаемые от
сети постоянного напряжения.
б) Управление в функции тока
Ток во время пуска двигателя колеблется в не-
которых заданных пределах, как это показано на рис. 10.4.
Начальный толчок тока определяется значениями требуе-
мого пускового момента и допустимого тока для данного
двигателя. По мере увеличения угловой скорости двигателя
его ток снижается. В момент снижения тока до определен-
ного значения часть пускового резистора шунтируется, что
приводит к новому увеличению тока до значения /х.
Ток переключения /2 выбирают, исходя из необходи-
мости обеспечить требуемое минимальное угловое ускоре-
ние при пуске двигателя с заданной нагрузкой, поэтому
ток переключения должен всегда быть выше тока, опреде-
ляемого моментом сопротивления.
Схема автоматического пуска, построенная на прин-
ципе управления в функции тока, должна предусматри-
вать одно или несколько реле, включаемых непосредственно
в цепь якоря двигателя. Количество реле зависит от числа
пусковых ступеней резисторов. Построение схем управле-
ния в функции тока понятно из рассмотрения рис. 10.7,
393
где показано применение токового реле углового ускоре-
ния РУ с размыкающим контактом. При включении линей-
ного контактора КЛ получает питание катушка токового
реле РУ и его размыкающий контакт в цепи контактора
углового ускорения КУ в начале пуска размыкается. Поэ-
тому пуск двигателя начинается с полностью введенным ре-
зистором в цепи якоря; контакт блокировочного реле РБ
не позволяет контактору КУ включиться сразу после вклю-
чения контактора КЛ, так как собственное время включе-
ния реле РБ выбирается большим или равным собствен-
ному времени включения реле РУ.
Рнс. 10.7, Узел схемы автома-
тического пуска двигателя в
функции тока.
Рис. 10.8. Кривые изменения
тока при пуске в функции вре-
мени с различными нагрузками
на валу двигателя.
Ток отпускания реле ускорения равен току переключе-
ния /2, что приводит к срабатыванию контактора КУ и
шунтированию пускового резистора. При втором броске
тока контактор КУ не отключается вследствие того, что кон-
такт реле РУ шунтирован теперь контактом КУ-
Достоинство рассмотренного принципа управления за-
ключается в том, что переключения производятся при
заданных значениях тока в цепи якоря и не зависят от коле-
баний напряжения сети.
Однако схемы, основанные на принципе управления
в функции тока, не свободны от недостатков. Так, если при
пуске двигателя нагрузочный момент на его валу по каким-
либо причинам окажется выше расчетного, то ток может дли-
тельное время превышать значение /2, при котором проис-
ходит отпускание якоря реле. Поэтому пусковой резистор
окажется невыключенным, что может привести к его пере-
горанию, так как он не рассчитан на длительную работу.
399
в] Управление в функции времени
Пусковые диаграммы w = f (/) и i = (/),
приведенные на рис. 10.4, показывают, что шунтирование
ступеней пускового резистора должно происходить через
определенные промежутки времени. Первая ступень рези-
стора должна быть выведена через время после начала
пуска, вторая — через время /2 и т. д. Этим и определяется
возможность создания схем управления, работающих в фун-
кции времени.
Для автоматизации пуска используются различные
реле времени, настраиваемые на соответствующие выдержки
времени. По принципу действия реле времени разделяются
па механические, электромагнитные, электронные, полу-
проводниковые, пневматические и т. д.
При управлении двигателями постоянного и переменного
тока часто используются электромагнитные реле, а в при-
водах с синхронными двигателями для переключения на-
пряжения во время пуска могут также применяться электро-
магнитные или полупроводниковые реле.
Необходимая выдержка времени каждого реле опреде-
ляется на основании пусковой диаграммы. Для определе-
ния выдержки времени реле нужно из времени пуска дви-
1ателя, полученного по расчету, вычесть собственное время
включения контакторов. Для контакторов постоянного тока
в зависимости от их величины собственное время лежит
в пределах 0,1 — 0,4 с, а для контакторов переменного тока
0,05 — 0,07 с.
Реле управляют контакторами углового ускорения по
истечении выдержки времени независимо от того, какой
ток проходит через двигатель и до какой скорости он разо-
гнался. Поэтому при переменной нагрузке приходится
устанавливать выдержки времени, соответствующие нор-
мальным условиям пуска при некоторой средней нагрузке.
Кривая 1 на рис. 10.8 дает зависимость тока при пуске
двигателя для случая, когда действительная нагрузка сов-
падает с расчетной.
Если пуск происходит с увеличенной нагрузкой при
неизменных сопротивлении резистора и выдержке времени
реле, двигатель не успевает разогнаться до расчетной угло-
вой скорости (см. рис. 10.4), а ток не снизится до зна-
чения /2. Поэтому бросок тока после шунтирования первой
ступени резистора окажется большим расчетного. То же
получится и на последующих пусковых ступенях резистора.
400
В результате этого зависимость тока i„ = f (/) в период
пуска получит вид, представленный кривой 2 на рис. 10.8.
В этом случае время пуска остается прежним, а средний
пусковой момент увеличивается.
Уменьшение нагрузки по сравнению с расчетной при-
водит к обратному, т. е. уменьшению среднего пускового
момента при неизменном времени пуска. Пусковая
диаграмма в этом случае представлена кривой 3 (рис. 10.8).
Достоинством схем управления, работающих в функ-
ции времени, является отсутствие опасности сколько-ни-
будь продолжительной работы двигателя с неполной угло-
вой скоростью, чего не удается избежать в схемах, исполь-
зующих принципы управления в функции угловой скорости
или тока. Опасность, возникающая при весьма резком воз-
растании нагрузки, устраняется наличием максимальной
защиты, с помощью которой двигатель отключается от сети.
Простота и надежность в работе, так же как и возможность
применения однотипных реле времени, привели к широкому
применению электроприводов, управляемых в функции
времени.
Для автоматизации пуска двигателей постоянного тока
в функции времени часто применяется электромаг-
нитное реле времени. Выдержка времени в некото-
рых типах реле достигается тем, что после снятия напряже-
ния магнитный поток в замыкаемой накоротко катушке спа-
дает постепенно, так как электромагнитная постоянная
времени катушки при закрытом якоре сравнительно ве-
лика, а ток в катушке реле изменяется согласно уравнению
i=Ine~f/T,
где 7ц — начальное значение тока; Т = L/R — электромаг-
нитная постоянная времени катушки реле; L, R — индук-
тивность и активное сопротивление катушки реле.
Такие реле могут иметь контакты, работающие с вы-
держкой времени лишь при отключении реле. Включение
реле происходит практически мгновенно, так как при отве-
денном якоре индуктивность катушки весьма незначительна
и нарастание тока в катушке происходит быстро.
Существуют также электромагнитные реле, обмотку ко-
торых после снятия напряжения не нужно замыкать нако-
ротко. Выдержка времени в подобных реле достигается за
счет применения медной гильзы, надеваемой на сердечник
реле. При отключении катушки реле медная гильза играет
роль замкнутого контура, в котором наводится ток, пре-
401
пя'1ствующии быстрому спаданию ма1 питого потока, вслед-
ствие чего якорь реле в течение определенного времени удер-
живается в притянутом положении.
В электромагнитных реле малых размеров можно полу-
чить выдержку времени до 1 с, больших габаритов — до
5—6 с. Конструкция электромагнитных реле времени яв-
ляется простой и надежной в работе, поэтому они широко
применяются в схемах управления электроприводами по-
стоянного тока.
Электромагнитные реле времени этого типа стали при-
меняться и в схемах управления приводами переменного
тока, где они включаются че-
рез вентильные устройства.
На рис. 10.9 показаны два
варианта включения электро-
магнитных реле времени. Пер-
вая ступень углового ускоре-
ния управляется здесь с по-
мощью реле РУ1, имеющего
гильзу, а вторая ступень—по-
средством электромагнитного
реле РУ2 без гильзы. Для
получения выдержки времени
Рис. 10.9. Узел схемы автоматиче-
ского пуска двигателя в функции
времени.
в последнем реле необходимо, как указывалось выше, за-
мыкать его катушку накоротко. Для этой цели катушка
реле РУ2 включена параллельно первой ступени пускового
резистора, шунтируемого контактом КУ1- После включе-
ния двигателя это реле мгновенно втягивается, так как
к нему прикладывается достаточное для срабатывания
напряжение, равное падению напряжения на первой сту-
пени резистора, вызванному пусковым током.
При пуске двигателя размыкающий вспомогательный
контакт КЛ, срабатывая, отключает реле РУ1, контакт
которого через некоторое время, обусловленное соответст-
вующей выдержкой времени, замыкается и подает напря-
жение на катушку контактора КУ1- Контакт /<У/ замы-
кается и шунтирует первую ступень резистора. Одновре-
менно замыкается накоротко катушка реле РУ2, вследствие
4G2
чего она теряет питание, и размыкающий контакт РУ2,
будучи ранее открытым, закроется с выдержкой времени.
После этого включается контактор углового ускорения
1(У2 и выводится вторая ступень резистора.
Для управления автоматизированными приводами в фун-
кции времени применяются также электронные и полупро-
водниковые реле.
1Э.4. Типовые узлы схем управления
торможением двигателей постоянного
тока при питании от сети
а] Управление в функции угловой скорости (ЭДС)
Часто для электрического торможения дви-
гателей, работающих в автоматизированных установках,
используются режимы динамического торможения и проти-
вовключения. Торможение с возвратом энергии в сеть при-
меняется реже, главным образом в установках с отдельным
генератором или тиристорным реверсивным выпрямителем,
вдвигателях независимого возбуждения при снижении угло-
вой скорости за счет усиления магнитного потока, а также
в многоскоростных асинхронных двигателях при измене-
нии числа полюсов, в приводах переменного тока с преобра-
зователями частоты, в машинах двойного питания и в неко-
торых каскадных приводах.
Динамическое торможение двигателей
может быть осуществлено по схемам, работающим в функ-
ции времени или в функции угловой скорости. Узел схемы,
осуществляющей управление торможением в функции угло-
вой скорости (ЭДС), приведен на рис. 10.10. При отключе-
нии линейного контактора КЛ замыкается его размыкаю-
щий вспомогательный контакт КЛ в цепи катушки реле РТ,
подключаемой к якорю двигателя. Реле РТ замыкает свой
контакт в цепи катушки контактора КТ, который своим кон-
тактом включает якорь двигателя на резистор R2, вслед-
ствие чего и происходит торможение двигателя. Процесс
динамического торможения в подобной схеме будет совер-
шаться до некоторой минимальной угловой скорости, при
которой реле РТ отключится. Торможение от минимальной
угловой скорости до полной остановки происходит под дей-
ствием статического момента.
Для создания наибольшего момента при торможении маг-
нитный поток двигателя должен быть полным. Интенсив-
403
ность торможения при неизменном токе возбуждения опре-
деляется током в цепи якоря, зависящим от сопротивления
резистора 7?2, включаемого на выводы обмотки якоря.
Расчет сопротивления резистора динамического тормо-
жения можно произвести, исходя из того, что ЭДС двига-
теля уравновешивается падением напряжения в цепи
якоря:
£ = /(7?я + Р2), (10.1)
где Е и / — начальные значения ЭДС и тока двигателя
при динамическом торможении.
овм
торможением двигателя в функции ЭДС вращения якоря двигателя.
Сопротивление резистора динамического торможения
R2 = E/I-Ra. (10.2)
Здесь при расчетах вместо Е нужно подставить макси-
мально возможное значение Етах, получаемое в начальный
момент торможения, вместо / —допустимый в начале тор-
можения ток /доп.
В таком случае формула (10.2) примет вид:
Ri — Етах/1 доп R«- (10.3)
Практически, если до начала торможения двигатель
работал с полным потоком, принимают Етах U, а /доп
№ 2/цом- В случае торможения двигателя независимого
возбуждения с ослабленным полем, так же как и для дви-
404
гателя последовательного возбуждения, необходимо учиты-
вать угловую скорость в начале торможения, влияющую как
на ЭДС, так и на допустимый ток. Если торможение осу-
ществляется при номинальном потоке, то величину Етах
можно определять по формуле 1
Eniat /-ном^тадг/^ном» (10.4)
где (отах — максимально возможная угловая скорость в на-
чале торможения; wH0M — номинальная угловая скорость
двигателя; Еком— ЭДС якоря при номинальной угловой
скорости двигателя и номинальном токе, т. е.
£|>ом = ^-/|юЛ- (10.5)
Ухудшение условий коммутации при повышенных угло-
вых скоростях ведет к снижению допустимого тока, поэ-
тому в формулу (10.3) вместо /яоп нужно подставлять его
значение, пересчитанное по формуле
Iдоп I доп ном^пом/^яюх, (10.6)
где /доп.пом —допустимый ток при номинальной угловой
скорости двигателя.
Так как момент двигателя при динамическом торможе-
нии прямо пропорционален угловойскорости,эффективность
торможения резко уменьшается по мере снижения угловой
скорости двигателя, поэтому процесс торможения затяги-
вается. Для уменьшения общего времени торможения иногда
применяют две и даже три ступени торможения, увеличи-
вая тормозной ток путем шунтирования ступеней тормоз-
ного резистора по мере уменьшения угловой скорости.
Торможение противовключением ши-
роко применяется для двигателей постоянного тока, осо-
бенно в случае реверсивных приводов, где вслед за торможе-
нием производится пуск двигателя в обратном направле-
нии.
При противовключении двигателя его ЭДС, как указы-
валось, действует согласно с напряжением сети, благодаря
чему ток в двигателе может сильно возрасти в соответствии
с уравнением
I = (U + E)/R.
Для ограничения тока при противовключении прихо-
дится вводить в силовую цепь, кроме пусковых резисторов,
1 Здесь для упрощения делается допущение, что ток возбуждения
сразу достигает номинального значения.
405
еще добавочный резистор. Этот добавочный резистор назы-
вают ступенью противовключения; кон-
тактор, шунтирующий эту ступень, называют контактором
противовключения, а реле, управляющее катушкой ука-
занного контактора, —реле противовключения.
Расчет ступени противовключения для двигателей неза-
висимого и последовательного возбуждения производится
на основании следующего равенства:
U + E = I(R„ + Ry+Rn), (10.7)
где /?я — сопротивление двигателя, включающее сопро-
тивления якоря, дополнительных полюсов и щеток (для
двигателя последовательного возбуждения учитывается
также сопротивление обмотки возбуждения).
Рис. 10.11. Принципиальная схема включения резисторов при тормо-
жении противовключением.
Обозначения других сопротивлений, входящих в послед-
нее уравнение, пояснено на рис. 10.11, где приведена прин-
ципиальная схема включения ступени противовключения.
Подставляя вместо / его допустимую величину /яоп,
а вместо Е — максимально возможную Етах, получаем
формулу для вычисления ступени сопротивления противо-
включения
Кп = -Ц^-(Яя + Яу). (Ю.8)
'доп
Для двигателей независимого возбуждения при Ф =
= const можно приближенно считать Етах = U. В других
случаях вычисление Етах и /доп производится по (10.4)
и (10.6).
Управление ступенью противовключения может осуще-
ствляться с помощью реле противовключе-
ния РП. Катушка реле включается параллельно обмотке
якоря двигателя и части резистора, как показано на
406
рис. 10.12. Реле РП предотвращает шунтирование ступени
сопротивления Ra при торможении до тех пор, пока угловая
скорость двигателя не окажется близкой к 0.
Произведем расчет точки присоединения
реле противовключения, для чего найдём зависимость
изменения напряжения на реле РП в функции угловой ско-
рости. Обозначим все сопро-
тивление силовой цепи А—D
(рис. 10.12) через R, а сопро-
тивление до точки присоеди-
нения реле С—D — через Rx.
Рнс. 10.12. Принципиальная
схема присоединения реле про-
тивовключения.
Рис. 10.13. Характеристики напря-
жения на реле противовключения
для разных точек присоединения
реле (двигатель постоянного тока
независимого возбуждения).
Напряжение на реле РП определится из соотношения
Upn = U — IRX', (10.9)
значение тока двигателя в общем случае
I = (U-E)IR = (U-k&®)IR. (10.10)
Совместное решение (10.9) и (10.10) дает искомую зави-
симость Upn = f (to):
Upn^U-tU-ktba)^-. (10.11)
Для двигателя постоянного тока независимого возбуж-
дения величины U, R и Ф постоянны; поэтому для данной
точки присоединения реле, когда Rx также постоянно,
зависимость Upn = f (to) линейна.
Семейство характеристик для различных точек присо-
единения реле, т. е. для разных Rx, представлено на
рис. 10.13. Все характеристики сходятся в одной точке,
отвечающей идеальному холостому ходу, так как при этой
407
угловой скорости ток в силовой цепи равен 0 и, следова-
тельно, падение напряжения в сопротивлении резистора
отсутствует. Это видно из (10.9).
Все характеристики для различных значений Rx лежат
между двумя крайними; справа проходит вертикально ха-
рактеристика, для которой Rx = 0 (точка присоединения D
на рис. 10.13), а слева — характеристика, соответствующая
Rx = R — R„ (точка присоединения В). Последняя отли-
чается от характеристики ЭДС якоря, показанной на
рис. 10.13 штриховой линией, лишь на падение напряжения
в обмотке якоря и щетках.
Присоединение реле в точке D привело бы к тому, что
на его катушке независимо от угловой скорости всегда было
бы полное напряжение сети. Включение реле в точке В
тоже неприемлемо. В этом случае напряжение на нем
будет изменяться по характеристике В (рис. 10.13), что при-
ведет к втягиванию реле при отрицательном напряжении и
высокой угловой скорости.
Для надежной работы реле желательно выбрать наибо-
лее пологую характеристику, однако такую, когда реле втя-
гивается при положительном напряжении, поэтому расчет
точки присоединения реле противовключения, т. е. опреде-
ление сопротивления Rx, производится из условия, что при
максимальной угловой скорости
Upn = U — IRX = 0,
откуда
RX = UU.
Но так как ток в начале торможения будет
1 = (U + Emax)/R,
то искомое значение сопротивления
RX = RU/(U + Emax). (10.12)
Для двигателя постоянного тока независимого возбуж-
дения Етах поэтому
Rx = 0,5R. (10.13)
Напряжение втягивания UBTtpn на катушке реле РП
из условий надежности работы при пуске принимают обычно
на 20 % ниже напряжения на реле при неподвижном якоре
двигателя, т. е.
UBX, рп =0,8Upn о,
(10.14)
408
где
Upn n = U — IRX = U— URX/R.
Следовательно,
U„ = 0,8U(\— Rx/R). (10.15)
Для двигателя постоянного тока независимого возбужде-
ния с учетом (10.13)
(/вт = 0,4(7. (10.16)
Для двигателей постоянного тока последовательного
возбуждения расчет точки присоединения реле противовклю-
чения ведется на основе универсальных характеристик,
которые можно построить для двигателей определенной
серии. Такие характеристики для различных значений
Rx/R приведены на рис. 10.14.
Рис. 10.14. Характеристики на-
пряжения на реле противовклю-
чения для двигателей постоян-
ного тока последовательного
возбуждения.
-120 -80 -W 0-0 80 %
Сопротивление Rx может быть найдено также по (10.12),
а значение Етах по (10.4).
Уставка напряжения втягивания реле противовключения
для двигателей последовательного возбуждения также при-
нимается на 20 % ниже напряжения на реле при неподвиж-
ном якоре двигателя. Определение напряжения втягивания
и в этом случае производится по (10.15).
6) Управление в функции времени
Динамическое торможение двигателя постоян-
ного тока может быть осуществлено в функции времени
(рис. 10.15). Допустим, что до начала торможения двига-
тель работает с установившейся угловой скоростью на есте-
ственной характеристике, йонтакторы КЛ и КУ включены.
В этом случае катушка контактора КТ не обтекается током,
409
так как ее цепь сказывается разомкнутой размыкающим
вспомогательным контактом контактора КЛ. При этом як.'рь
двигателя не замкнут на тормозной резистор R2. Так как
замыкающий вспомогательный контакт КЛ закрыт, имеет
питание катушка реле времени РВ, и замыкающий кон-
такт его в цепи катушки КТ замкнут (подготовка к работе
цепи управления динамическим торможением). При нажа-
тии кнопки КнС (стоп) теряет питание катушка контактора
КЛ, отключается якорь двигателя от сети, вспомогатель-
ным контактом КЛ разрывается цепь катушки реле РВ
(оно начинает отсчет времени), и одновременно через зам-
кнувшийся размыкающий вспомогательный контакт КЛ
Pre. 10.15. Узел схемы автоматического управления динамическим
торможением двигателя постоянного тока независимого возбужденья
в функции времени.
получает питание катушка контактора КТ, его силовой кон-
такт, включившись, присоединяет якорь двигателя к тор-
мозному резистору R2 — происходит динамическое тормо-
жение. По окончании выдержки времени реле РВ своим
замыкающим контактом отключает контактор КТ, чем и
заканчивается электрическое торможение двигателя.
Следует отметить, что торможение в функции времени
может быть использовано при реактивном статическом мо-
менте нагрузки, при этом уставка реле времени РВ должна
быть равна или несколько больше времени торможения.
Если же момент нагрузки оказывается активным, а уставка
реле РВ больше времени торможения, то двигатель начнет
реверсироваться еще до его отключения, что может быть
нежелательным. Поэтому при активной нагрузке по окон-
чании торможения и при отключении двигателя от сети его
вал должен быть заторможен механическим тормозом.
410
10.5. Типовые узлы схем автоматического
управления пуском и торможением
асинхронных двигателей при питании
от сети
Упрощенная принципиальная схема пуска асинхронного
двигателя с фазным ротором в функции времени представ-
лена на рис. 10.16. Здесь с помощью релейно-контактной
аппаратуры осуществляется пуск двигателя в две пусковые
ступени, при этом для большей надежности цепи управле-
ния подключены к сети постоянного тока.
Рис. 10.16. Упрощенная принципиальная схема пуска асинхронного
двигателя с фазным ротором в функции времени.
При подаче напряжения в цепи управления включаются
через размыкающие вспомогательные контакты КЛ и КУ1
цепи катушек реле РУ1 и РУ2, которые без выдержки вре-
мени отключают катушки контакторов КУ1 и КУ2. Затем
после нажатия кнопки КнП и включения контактора КЛ
статор двигателя подключается к сети, а роторная цепь его
замкнута на полностью включенные дополнительные рези-
сторы, и, как отмечалось, в начале пуска силовые контакты
контакторов КУ1 и КУ2 разомкнуты. Двигатель пускается
с полностью включенными резисторами, что должным обра-
зом ограничивает пусковой ток и обеспечивает необходимее
411
угловое ускорение привода. При включении КЛ его размы-
кающий вспомогательный контакт в цепи катушки реле вре-
мени РУ1 размыкается, и поэтому оно начинает отсчитывать
выдержку времени при пуске на первой пусковой ступени,
отсчитав выдержку, реле РУ1 своим контактом включает
катушку контактора КУ1 и шунтирует часть пускового ре-
зистора. Размыкающий вспомогательный контакт КУ1
Рис. 10.17. Схема торможения противовключением асинхронного дви-
гателя с короткозамкнутым ротором.
в цепи реле РУ2 разомкнется, и реле РУ2 начнет отсчиты-
вать выдержку времени, по окончании которой размыкаю-
щий контакт РУ2 закроется, подключив к источнику пита-
ния катушку КУ2, в результате чего зашунтируется вторая
ступень пускового резистора, и двигатель будет выведен
на естественную характеристику.
Схема торможения противовключением асинхронного
двигателя с короткозамкнутым ротором приведена на
рис. 10.17. Здесь управление торможением осуществляется
в функции угловой скорости с помощью индукционного реле
контроля угловой скорости РКС, связанного с валом асин-
хронного двигателя. При вращении двигателя «вперед»
контакты РКС 1—3 замкнуты, а при вращении «назад»
замкнуты контакты 1—2. Если двигатель работал в направ-
лении «вперед», когда был включен контактор КВ, то после
нажатия на кнопку КнС включается блокировочное реле
412
РБ и своим размыкающим контактом выключает контак-
тор КВ. Замыкающий контакт РБ включает контактор КН
через замкнутые контакты 1—3 реле РКС. Дальнейшее на-
'катие на кнопку КнС не требуется, так как блокировочное
реле РБ остается включенным через контакты РБ и КН.
Происходит торможение противовключением до тех пор,
пока угловая скорость двигателя не станет близкой к О
и контакты 1— 3 реле РКС не разомкнутся; двигатель авто-
матически отключается от сети (КН н РБ отключатся).
Если двигатель вращается в противоположную сторону,
когда включен контактор КН, то нажатием на кнопку КнС
через размыкающий контакт РБ отключается цепь катушки
контактора КН, а через замыкающий контакт РБ и замкну-
тые контакты /—2 реле РКС получит питание контактор
КВ, и начнется торможение противовключением аналогично
тому, как это было при прямом направлении вращения дви-
гателя.
Если требуется реверсирование двигателя, то необхо-
димо нажать на кнопку противоположного направления вра-
щения, не воздействуя на кнопку КнС. При этом двигатель
затормаживается в режиме противовключения (без участия
релеР/<С),а затем разгоняется в противоположную сторону.
На рис. 10.18 показана схема торможения противовклю-
чением асинхронного двигателя с фазным ротором, в кото-
рой реализуется управление в функции угловой скорости
(ЭДС ротора, которая пропорциональна скольжению). Реле
напряжения РП через выпрямитель В подключается к вы-
водам обмотки ротора. Реле настраивается с помощью рези-
стора /?р так, что при начале торможения (при s = 2) оно
срабатывает, а при угловой скорости, близкой к 0 (s = 1),
когда напряжение на его катушке резко снижается (почти
вдвое), реле отпускает свой якорь. При пуске в обратную
сторону реле РП не срабатывает, так как ЭДС ротора ста-
новится еще меньше, достигая нулевого значения при
s = 0.
Пуск двигателя совершается в одну ступень с дополни-
тельным резистором в роторе /?д. Ступень R„ служит для
ограничения тока при торможении. Нажатием кнопки
КнВ (или КнН) подается питание на катушку контактора
КВ (или КН), и статор двигателя присоединяется к сети,
включается блокировочное реле РБ. Затем замыкающим
контактом блокировочного реле РБ замыкается цепь ка-
тушки контактора КП, шунтирующего замыканием своих
контактов ступень Ra. С помощью механического маятни-
413
кового реле времени РВ, пристраиваемого к контактору
КП, осуществляется выдержка времени, необходимая для
пуска двигателя, после чего включается контактор КУ,
шунтирующий пусковую ступень /?д, и двигатель выво-
дится на естественную характеристику.
Если двигатель работал в направлении «вперед» и не-
обходимо его затормозить (реверсировать), то, нажимая
кнопку КнН, отключают контакторы КВ и КП, после чего
Рис. 10.18. Схема торможения противовключением асинхронного дви-
гателя с фазным ротором.
включается контактор КН, и двигатель переводится в ре-
жим торможения противовключением. При этом срабаты-
вает реле РП и своим размыкающим контактом разрывает
цепь катушки контактора КП, что обеспечивает на период
торможения введение всех дополнительных резисторов
в цепь ротора (/?д и Rn). Блокировочное реле РБ служит
для создания временного разрыва в цепи катушки контак-
тора КП. Оно отключается одновременно с контактором
КВ, а включается только после замыкания контактов кон-
тактора КН. Когда контакт РБ закроется, уже успеет сра-
ботать реле РП. По окончании процесса торможения контакт
РП закроется, и контактор КП шунтирует ступень проти-
вовключения. Затем происходит пуск в противоположном
направлении. Торможение противовключением происходит
аналогично при нажатии на кнопку КнВ. Если же нажать
414
па кнопку КнС, двигатель отключается от сети, и электри-
ческого торможения не происходит, двигатель останавли-
вается под действием статического момента на валу.
Схема динамического торможения асинхронного двига-
теля с короткозамкнутым ротором в функции времени пока-
зана на рис. 10.19. До начала торможения, когда двигатель
подключен к сети переменного тока, цепь питания катушки
реле времени РВ замкнута через замыкающие контакты кон-
тактора КЛ. Замыкающий контакт РВ закрыт, но катушка
Рис. 10.19. Схема динамического торможения асинхронного двигателя
с короткозамкнутым ротором в функции времени.
контактора КТ не получает питания благодаря раскрытому
размыкающему контакту КЛ. При отключении лилейного
контактора КЛ размыкаются цепь статора двигателя и
цепь катушки реле РВ. Размыкающий контакт КЛ, замы-
каясь, включает контактор динамического торможения
КТ. В этом случае через понижающий трансформатор Т,
выпрямительный полупроводниковый мост В и замкнутые
контакты КТ подается постоянный ток в обмотку статора
асинхронного двигателя, вследствие чего и осуществляется
динамическое торможение. Торможение двигателя будет
происходить до полной остановки. По окончании торможе-
ния отпадает якорь реле времени РВ п отключится контак-
тор КТ. Таким образом, торможение производится в функ-
415
ции времени, задаваемого выдержкой времени реле РВ,
которая определяется из условия
“иач
tpB^J j Мт + Мс ’
о
где Мг и Мс — соответственно момент динамического
торможения и статический момент, обусловленный нагруз-
кой на валу двигателя. Интенсивность торможения опреде-
ляется постоянным током, проходящим по обмоткам ста-
тора. Для ограничения тока статора допустимым значением
служит понизительный трансформатор Т.
10.6. Типовые узлы схем автоматического
управления синхронными
двигателями
Синхронные двигатели получили широкое при-
менение в промышленности в приводах средней и большой
мощности для механизмов, работающих с постоянной ско-
ростью. По сравнению с асинхронными приводами в этих
случаях синхронные обладают рядом преимуществ. Они
имеют высокий коэффициент мощности, работая при боль-
шой мощности с опережающим cos <р. Коэффициент полез-
ного действия мощных синхронных двигателей составляет
0,96—0,98. Больший воздушный зазор, чем у асинхронных
двигателей, даже при изнашивании подшипников почти не
изменяет свойств синхронных двигателей, тогда как нару-
шение воздушного зазора у асинхронных двигателей при-
водит к ухудшению их характеристик. Синхронные двига-
тели отличаются большой перегрузочной способностью,
линейно-зависящей от напряжения питающей сети; перегру-
зочная способность асинхронных двигателей пропорцио-
нальна квадрату напряжения.
Синхронные электроприводы в отношении требований
к пусковым режимам и условиям автоматического регулиро-
вания возбуждения можно разделить на три класса: 1) при-
воды с мало меняющейся нагрузкой; 2) пульсирующей на-
грузкой; 3) резкопеременной нагрузкой.
К типовым механизмам первого класса можно отнести
насосы, вентиляторы, компрессорные турбомашины и др.
Мощность этих приводов находится в пределах от несколь-
ких десятков до нескольких тысяч киловатт. Эти приводы
416
должны обеспечивать: пусковой момент k„ = Л4П/Л4НОЧ =
= 0,4 4- 0,6; входной момент k„ — = 0,8 -г- 1,2
и перегрузочную способность Л, = Мтах1Л4НОМ = 1,5 4- 2,0.
Второй класс приводов с пульсирующей нагрузкой (раз-
личного рода механизмы возвратно-поступательного движе-
ния, поршневые компрессоры и насосы) мощностью от
нескольких сотен до тысячи киловатт требует ka — 0,4 4- 1,0;
kB = 0,4 4- 0,6 и А. = 1,5 4- 2,5.
Для приводов третьего класса с резкопеременной на-
грузкой используются синхронные двигатели от несколь-
ких сотен до десятков тысяч киловатт (шаровые мельницы
горнорудных предприятий, буровые лебедки нефтяной про-
мышленности, непрерывные прокатные станы, скиповые
лебедки доменных печей и др.). Для механизмов этой
группы, пуск которых совершается вхолостую, характерно:
ka = 0,5 4- 1,0; kB — 0,4 4- 0,5; к = 2,5 ч- 3,5; при пуске
под нагрузкой kn = 1,2 4- 2,0; ka = 1 4- 1,5 и 1= 2,5-j-
3,5. Общим требованием для этого класса приводов яв-
ляется необходимость в автоматическом регулировании тока
возбуждения для повышения устойчивости и улучшения
энергетических показателей электропривода.
Современные синхронные двигатели имеют на роторе,
кроме обмотки возбуждения, питаемой постоянным током,
еще специальную пусковую короткозамкнутую обмотку,
с помощью которой пуск синхронного двигателя осущест-
вляется в схеме асинхронного пуска.
На рис. 3.39 показаны две пусковые статические харак-
теристики синхронного двигателя, одна из которых (кри-
вая /) отличается сравнительно малым пусковым моментом
Л4П1 и большим входным моментом Л4В1, отвечающим угловой
скорости, равной О,95со0, при которой подается ток в об-
мотку возбуждения и начинается процесс синхронизации,
и другая (кривая 2), имеющая большой начальный пусковой
момент Л4п2 и малый входной момент Л4в2.
Автоматическое управление синхронным приводом пре-
дусматривает процессы пуска, синхронизации, ресинхрони-
зации, торможения и автоматического регулирования тока
возбуждения.
В настоящее время синхронные двигатели пускаются
в ход при полном или пониженном напряжении. При вклю-
чении на полное напряжение статорная обмотка через вы-
ключатель присоединяется непосредственно к сети. Если
возникает необходимость ограничения пускового тока, то
применяется пуск при пониженном напряжении с помощью
14 Чиликни М. Г., Сандлер А. С. 417
включаемых в статорную цепь реакторов или автотрансфор-
матора.
В схеме, приведенной на рис. 10.20, статор в начале
пуска присоединяется через реактор Р — включен выклю-
чатель В1,а В2 — выключен. При пуске двигателя и дости-
жении им подсинхронной угловой скорости статор подклю-
чается на полное напряжение посредством включения
выключателя В2, который шунтирует реактор. Автоматиза-
ция пуска производится в функции времени.
Рис, 10,20. Схема реакторного
пуска синхронного двигателя
(статорная цепь),
Рис. 10.21. Схема автотрансфор-
маторного пуска синхронного
двигателя (статорная цепь).
На рис. 10.21 показана схема ограничения бросков
пускового тока при помощи включения автотрансформатора
в цепь статора синхронного двигателя. Последовательность
включения коммутационных устройств такова. Сначала
включаются выключатели ВЗ и В1, затем с выдержкой
времени отключается выключатель ВЗ и включается В2.
Пуск через автотрансформатор следует применять реже,
так как эта схема сложнее, дороже и менее надежна по срав-
нению с реакторным пуском. Однако схема с автотрансфор-
маторным пуском имеет преимущество, заключающееся
в том, что ток, потребляемый из сети, будет меньше, чем при
реакторном пуске, так как ток обратно пропорционален на-
пряжению, т. е.
Uli = U,jU„
418
тогда как при реакторном пуске
/д = /с.
При одном и том же пусковом токе, потребляемом из
сети, в обоих случаях в схеме с автотрансформатором будет
обеспечен больший пусковой моментдвигателя, которыйпро-
порционален первой степени снижения пускового тока.
Поэтому автотрансформаторный способ пуска можно ре-
комендовать в тех случаях, когда требуется повышенный
пусковой момент.
В случае пуска двигателя с помощью токоограничиваю-
щих устройств включение тока возбуждения может осу-
ществляться в зависимости от жесткости пусковой характе-
ристики в зоне подсинхронной скорости и значения момента
нагрузки либо до включения двигателя на полное напря-
жение — так называемый легкий пуск, либо при полном
напряжении — тяжелый пуск.
Легкий пуск производится при малых моментах на-
грузки, вхолостую и небольших моментах инерции при-
вода; он является более благоприятным в отношении брос-
ков тока при синхронизации.
Тяжелый пуск применяется при относительно большой
нагрузке на валу и значительных моментах инерции привода
там, где во время синхронизации может потребоваться боль-
шой входной момент (например, пуск мощных компрессор-
ных установок с маховиком, земснарядов и др.).
Постоянный ток подается в обмотку возбуждения от ге-
нератора постоянного тока с параллельным возбуждением
(возбудителя) или тиристорного преобразователя, исполь-
зуемого в качестве возбудителя. В быстроходных «приводах
возбудитель (генератор) устанавливается на валу синхрон-
ного двигателя, для тихоходных приводов применяется воз-
будитель, приводимый в действие от отдельного асинхрон-
ного двигателя с короткозамкнутым ротором.
В тех случаях, когда позволяют питающая сеть и дви-
гатель, применяют прямой пуск — подключение статорной
обмотки к сети при глухо подключенном (постоянно под-
ключенном) возбудителе (при Мс < 0,4 М1|0м) или с под-
ключением возбудителя при подсинхронной угловой ско-
рости, или с возбудителем, подключенным через разрядный
резистор, который шунтируется при подсинхронной угло-
вой скорости (при Мс > 0,4 Л4ИОМ).
Упрощенная принципиальная схема прямого пуска
синхронного двигателя низкого напряжения с глухопод-
14* 419
ключенным возбудителем, насаженным на вал синхронного
двигателя, показана на рис. 10.22. Пуск двигателя сво-
дится к включению линейного контактора КЛ. Возбужде-
ние возбудителя, как известно, может произойти при не-
которой критической угловой скорости, после чего повы-
шение тока возбуждения про-
исходит автоматически по ме-
ре роста угловой скорости.
В большинстве случаев кри-
тическая угловая скорость
составляет около 0,75 синх-
ронной. Поэтому сопротивле-
ние резистора R в цепи воз-
Рис. 10.22. Упрощенная принци-
пиальная схема прямого пуска
синхронного двигателя с глухопод-
ключенным возбудителем.
буждения возбудителя подбирается так, чтобы возбуждение
начиналось при угловой скорости, близкой к синхронной,
что приводит к значительному уменьшению толчков тока
Рис. 10.23. Схема управления пуском синхронного двигателя в функ-
ции тока статора при возбудителе, подключенном через разрядный ре-
зистор.
в статоре при синхронизации. Для форсирования возбуж-
дения двигателя при снижении напряжения сети исполь-
зуются реле минимального напряжения РФ и контактор
420
КФ, контакт которого шунтирует резистор R. При восста-
новлении напряжения сети контактор КФ отключается
размыкающим контактом реле РФ.
При более тяжелых условиях пуска управление пода-
чей возбуждения осуществляется в функции тока статора
(рис. 10.23), а разрядный резистор R1 подключается после-
довательно с обмоткой возбуждения двигателя и возбуди-
телем. Пуск производится нажатием кнопки КнГ1, вклю-
чается контактор КЛ, и статор двигателя присоединяется
к сети; одновременно токовое реле РПВ получает питание
от трансформатора тока ТТ и размыкает свой размыкаю-
щий контакт в цепи катушки контактора КВ, а замыкаю-
щим контактом включает реле РБ. Это реле замыкает свои
контакты и становится на самопитание. Назначение реле
РБ — предотвратить включение контактора КВ (за счет
времени срабатывания РБ) при подключении двигателя
к сети, пока реле РПВ еще не успело включиться. При асин-
хронном пуске около подсинхронной угловой скорости ток
статора резко уменьшается, и реле РПВ замыкает свой кон-
такт, включая катушку контактора КВ, контакты которого
шунтируют разрядный резистор и катушку реле РПВ.
Последнее необходимо, чтобы предотвратить срабатывание
реле РПВ от броска тока статора при вхождении двигателя
в синхронизм.
10.7. Применение бесконтактных аппаратов
и логических элементов в схемах
управления электроприводами
Выше были рассмотрены принципы автоматического
управления (пуск и торможение) электроприводами посредством ре-
лейно-контактных аппаратов (электромеханические и электромагнитные
реле времени, контакторы, кнопки управления и т. п.), в которых под-
вижные части подвержены износу, а долговечность зависит от нагрузки
и частоты включения.
Контактные аппараты нуждаются в систематическом уходе, регу-
лировке и недостаточно надежны в работе; чем больше число релейно-
контактных элементов в схеме управления, тем менее надежна такая
схема.
Для повышения надежности работы автоматически управляемых
электроприводов в ряде случаев находят применение бесконтактные
аппараты, которые, так же как и релейно-контактиые, представляют
собой аппараты дискретного действия. Поэтому построение систем
управления со статическими бесконтактными аппаратами подчиняется
тем же логическим законам, что и структура релейно-контактных систем.
Бесконтактные аппараты отличаются отсутствием контактов и
быстроизнашивающихся механических частей; большим сроком служ-
бы, не зависящим от нагрузки; нечувствительностью к влиянию окру-
421
жающей среды (пыль, влага, химически активные газы): высоким быст-
родействием; отсутствием необходимости в постоянном уходе и регу-
лировке; компактностью блоков с элементами. Бесконтактные логичес-
кие элементы изготовляются как модули, не подлежащие ремонту.
В настоящее время основной элементной базой для построения
отдельных логических модулей, матричной логики (сборки логических
и вспомогательных устройств, программируемых командоконтроллеров
и т. п.) являются интегральные полупроводниковые микросхемы, имею-
щие очень малые габариты и очень высокую надежность. Наметилась
тенденция к широкому использованию бесконтактных логических уст-
ройств взамен релейно-контактных даже в случае относительно простых
схем и при небольшом числе срабатываний, что связано с экономическим
преимуществом в области проектирования, производства и эксплуата-
ции логических схем управления для металлорежущих н других про-
мышленных механизмов.
Следует отметить, что бесконтактные логические элементы заменяют
собой только реле, выполняющие логические функции. Исполнительные
аппараты — сильноточные реле, контакторы, производящие коммута-
ции силовых цепей электропривода, обычно остаются контактными.
Лишь в редких случаях используются силовые бесконтактые аппара-
ты — транзисторные, тиристорные и симисторные ключи, — они пока
еще очень дороги. Бесконтактные логические устройства, являясь сла-
боточными элементами, применяются в сочетании с согласующими вход-
ными, выходными (усилительными) и исполнительными устройствами.
Для работы логических устройств требуются еще источники питания
низкого, сглаженного и хорошо стабилизированного постоянного напря-
жения.
Основные логические элементы и их релейные эквиваленты приве-
дены на рис. 10.24. Так как реле находятся лишь в двух положениях —
включено или выключено, что может соответствовать логическим поня-
тиям «да» или «нет», то удобно состояния входных и выходных цепей реле
описывать цифрами 1 и 0. Для контактных реле цифра 1 означает, что
цепь замкнута, цифра 0 — цепь разомкнута. Аналогично для бескон-
тактных логических элементов наличие напряжения на входе или на
выходе его принято обозначать 1, а его отсутствие — цифрой 0. Если
контактное реле имеет размыкающий контакт и при этом катушка обес-
точена, то входной сигнал равен 0, контакт реле замкнут — сигнал на
выходе равен 1. При подаче напряжения на катушку сигнал иа входе
равен 1, реле размыкает свой контакт—сигнал на выходе равен 0.
Реле в данном случае реализует логическую операцию НЕ (отрицание,
инверсия). Такой логический элемент обычно называется инвертором.
В случае наличия замыкающего контакта при подаче питания на
катушку реле оно выполняет логическую операцию «повторение», а
логический элемент называется повторителем.
Если катушка реле включается двумя последовательно включенны-
ми замыкающими контактами и имеет замыкающий контакт, то оно сра-
ботает (сигнал на выходе будет равен 1) только, когда оба контакта
в цепи катушкн будут замкнуты (на обоих входах по 1). Это соответст-
вует логической операции И (конъюнкция), выполняемой логическим
элементом И. В случае размыкающего контакта у реле оно выполняет
логическую операцию И — НЕ (штрих Шеффера).
При управлении катушкой реле посредством двух параллельно
включенных замыкающих контактов реле соответственно будет выпол-
нять в зависимости от вида его контакта логические операции ИЛИ
(дизъюнкция) и ИЛИ — НЕ (стрелка Пирса),
422
Обычно состояние на выходе логического элемента в зависимости
от состояния входов характеризуют таблицы истинности (рис. 10.24).
Количество входов у логических элементов может быть большим (до
восьми у интегральных микросхем).
Серии интегральных микросхем, помимо разнообразных логических
элементов, содержат еще элементы памяти — триггеры и ряд функцио-
нальных элементов. Серин бесконтактных управляющих элементов
включают еще элементы выдержки (задержки) времени, согласующие
входные и усилительные выходные элементы.
Логический злегент
И
rt) п о. а лица.
тункци.* Релейный, эквивалент истинности
Ц =х,хг
И-НЕ
X, ---
хг----
ИЛИ
Xi ---
а? 2
ИЛИ-НЕ
Рис. 10.24. Основные логические элементы.
Логические функции могут быть записаны в виде алгебраических
формул (рис. 10.24), над которыми по определенным правилам можно
производить преобразования. На этом основан один из способов проек-
тирования логических схем управления. Другим методом проектирова-
ния схем иа бесконтактных логических элементах является перевод
предварительно составленной релейно-контактной схемы в бесконтакт-
ный аналог путем замены сочетаний контакторов и катушек реле эк-
вивалентными логическими элементами (рис. 10.24). Второй путь проще,
если схема ие очень сложна. Первый — обеспечивает прямое решение
задачи посредством использования правил алгебры логики, дающих
рациональные схемные решения с наименьшим числом бесконтактных
аппаратов.
Рассмотрим в качестве примера простейшую схему включения и
отключения катушки контактора (электромагнитной муфты, тормоза и
т. п.), релейный вариант которой приведен иа рис. 10.25, а. При изоб-
ражении схем управления с бесконтактными логическими элементами
указывают только логические функции и связи между элементами.
423
В бесконтактной схеме иа рис. 10.25, б на входах 1п2 элемента ЛЭ 1
в исходном состоянии (до нажатия кнопки КнП) сигнал 0, поэтому на
вход 3 элемента ЛЭ2 поступает 1, а иа выходе 5 элемента ЛЭ2 — сигнал
0; напряжение на выходе усилителя У и на катушке контактора К
близко к 0. Нажатием кнопки КнП подается на вход 1 элемента ЛЭ]
сигнал 1, на входе 3 элемента ЛЭ2 соответственно устанавливается
сигнал 0, па выходе 5 — 1, этот сигнал поступает на вход усилителя У
и вход 2 элемента ЛЭ1, контактор К включается и остается включенным
и после отпускания кнопки КнП, так как на входе 2 элемента ЛЭ]
сохраняется сигнал 1, т. е. произошло запоминание команды «пуск»,
Рис. 10.25. Схема включения контактора.
а — релейно-контактный вариант; б — бесконтактный аналог на элементах
ИЛИ—НЕ.
При нажатии кнопки КнС подается 1 на вход 4 элемента ЛЭ2,
что приводит к появлению 0 на его выходе 5 и на входе 2 элемента ЛЭ1.
Контактор К отключается. Схема приходит в исходное состояние и пос-
ле отпускания кнопки КнС сохраняет его, так как на входы 1 и 2 эле-
мента ЛЭ] поступают сигналы 0.
Элементы ЛЭ] и ЛЭ2 (ИЛИ — НЕ), соединенные по схеме на
рис. 10.25, б, образуют типовой элемент «Память». Сигнал 1 на входе 1
этого составного элемента соответствует включению «Памяти», сигнал 1
на входе 4 — отключению ее. Функция «Памяти» чаще реализуется
посредством типового элемента триггера. Комплектованием соответ-
ствующих логических элементов может быть составлена практически
любая более или менее сложная схема бесконтактного управления
электроприводом.
ГЛАВА ОДИННАДЦАТАЯ
ТИПОВЫЕ СХЕМЫ РАЗОМКНУТЫХ СИСТЕМ
УПРАВЛЕНИЯ
11.1. Общие положения
Рассмотренные ранее типовые узлы схем ра-
зомкнутых систем управления приводами постоянного и
переменного тока дают возможность изучить типовые
схемы, отвечающие основным техническим требованиям,
предъявляемым к сравнительно простым объектам, когда
возможно дискретное управление ими.
424
Вначале рассмотрим некоторые типовые схемы, нашед-
шие практическое применение для пуска, реверсирования
и различных способов торможения односкоростного и двух-
скоростного асинхронных двигателей с короткозамкнутым
ротором. Потом — более сложные схемы управления асин-
хронным двигателем с короткозамкнутым ротором с тири-
сторным коммутатором напряжения, асинхронным двига-
телем с фазным ротором, а также синхронным двигателем.
Далее рассматриваются схемы управления двигателями по-
стоянного тока независимого и последовательного возбуж-
дения и типовые схемы релейно-контактного управления
электроприводами некоторых производственных механиз-
мов. В схемах приведены различные способы защиты двига-
телей от перегрузки и короткого замыкания, от резкого сни-
жения питающего напряжения и др.
11.2. Управление пуском, торможением и
реверсированием асинхронных
двигателей с короткозамкнутым
ротором
Для управления асинхронными двигателями
широко используются релейно-контактные аппараты. Пуск
асинхронных двигателей с короткозамкнутым ротором не-
большой мощности осуществляется обычно при помощи маг-
нитных пускателей. А1агнитный пускатель состоит из кон-
тактора переменного тока и встроенных в него двух тепло-
вых реле.
Простейшая схема управления асинхронным двигателем
с короткозамкнутым ротором посредством магнитного
пускателя показана на рис. 11.1. Схема предусматривает
питание силовых цепей и управления от источника одного
и того же напряжения. Однако в целях повышения надеж-
ности работы релейных и контактных аппаратов, большей
частью рассчитанных на низкое напряжение, а также в це-
лях повышения безопасности эксплуатации часто приме-
няются схемы, предусматривающие питание цепей управле-
ния от источника пониженного напряжения.
Если выключатель В включен, то для пуска двигателя
достаточно нажать кнопку КнП. При этом получает пита-
ние катушка контактора КЛ, замыкаются главные контакты
в силовой цепи, и статор двигателя присоединяется к сети.
Одновременно в цепи управления закрывается замыкаю-
щий вспомогательный контакт КЛ, блокирующий кнопку
425
КнП, после чего эту кнопку не нужно больше удерживать
в нажатом состоянии, так как цепь катушки контактора КЛ
остается замкнутой. Кнопка за счет действия пружины воз-
вращается в исходное положение.
Нажатием кнопки КнС двигатель отключается от сети.
При этом катушка контактора КЛ теряет питание и замы-
кающие контакты его размыкают цепь статора.
Рис. 11.1. Схема управления асинхронным двигателем с короткозамк-
нутым ротором посредством магнитного пускателя.
В схеме на рис. 11.1 предусмотрена защита двигателя
плавкими предохранителями от коротких замыканий и теп-
ловыми реле РТ от перегрузки. Кроме того, в этой схеме
осуществляется так называемая нулевая защита, которая
при исчезновении или значительном снижении напряже-
ния в сети отключает двигатель от сети. После восстанов-
ления нормального напряжения самопроизвольного пуска
двигателя не произойдет.
Более четкая защита от снижения или исчезновения на-
пряжения может быть выполнена при помощи реле мини-
мального напряжения, катушка которого присоединяется
кдвум фазам силовой цепи, а его замыкающий контакт вклю-
чен последовательно с катушкой контактора. В этих схемах
вместо устанавливаемых ранее на вводе рубильников с пре-
дохранителями применяют автоматы.
На рис. 11.2 показана схема управления асинхронным
двигателем с короткозамкнутым ротором с использованием
426
воздушного автоматического выключателя и контактора.
Преимущества автоматического выключателя заключаются
в том, что исключается возможность обрыва одной фазы от
срабатывания защиты при однофазном коротком замыка-
нии, как это имело место при установке предохранителей;
не требуется замены элементов, как в предохранителях
при сгорании их плавкой вставки.
Автоматические выключатели в зависимости от их типа
имеют либо электромагнитные расцепители мгновенного
Рис. 11.2. Схема управления асинхронным двигателем с короткозамк-
нутым ротором с использованием автоматического воздушного выклю-
чателя и контактора.
действия, либо тепловые, либо электромагнитные и тепло-
вые. В схемах управления электроприводами использу-
ются автоматы с электромагнитными расцепителями и рас-
цепителями электромагнитным и тепловым.
Электромагнитные расцепители имеют нерегулируемую
отсечку, равную 10-кратному номинальному току, и служат
для защиты от токов короткого замыкания. Тепловые рас-
цепители имеют обратнозависимую характеристику времени
от тока; например, расцепитель с номинальным током 50 А
срабатывает при 1,5-кратной нагрузке через 1 ч, а при
4-кратной — через 20 с. Такие тепловые расцепители не
могут защитить двигатель от перегрева при перегрузках
на 20—30 %, ио они могут в некоторой степени защитить
двигатель и питающие его провода от перегрева пусковым
током при застопоривании механизма. Поэтому при продол-
жительном режиме работы для осуществления надежной
427
защиты двигателей от длительных перегрузок в случае
автомата с тепловым расцепителем такого типа применяются
дополнительные тепловые реле, как и при использовании
автоматического выключателя, только с электромагнитным
расцепителем. Некоторые выключатели, например АП 50,
могут защитить двигатель и от токов короткого замыкания
и перегрузок. В этом случае надобность в тепловых реле
отпадает. Следует отметить, что тепловая защита одновре-
менно является и защитой двигателей от обрыва одной
фазы. Подобные схемы применяются для управления нере-
версивными электроприводами таких механизмов, как вен-
тиляторы, насосы, металлообрабатывающие станки и т. п.
В тех случаях, когда необходимо изменять направление
вращения, например при работе привода задвижек на тру-
бопроводах, привода рольгангов прокатных станов, меха-
низмов подачи станков и т. п., управление двигателями
может быть осуществлено при помощи реверсивного магнит-
ного пускателя (рис. 11.3).
Включение двигателя для одного направления враще-
ния производится нажатием кнопки КнПВ. Катушка кон-
тактора КВ получает питание, и замыкающие главные кон-
такты КВ присоединяют двигатель к сети.
Для включения двигателя на противоположное направ-
ление вращения необходимо нажать кнопку КнС, а затем
428
КнПН, что приводит к отключению контактора КВ и вклю-
чению контактора КН. При этом, как видно из схемы, две
фазы на статоре переключаются.
Во избежание короткого замыкания в цепи статора вслед-
ствие ошибочного одновременного нажатия на обе кнопки
Рис. 11.4. Схема управления реверсивным электроприводом с асинх-
ронным двигателем с короткозамкнутым ротором.
(КнПВ и КнПН) реверсивные магнитные пускатели снаб-
жены механической блокировкой, осуществляемой рычаж-
ной системой (на схеме не показана), препятствующей втя-
гиванию одного контактора, если включен другой. Для
большей надежности, кроме механической блокировки в схе-
ме (рис. 11.3), предусмотрена электрическая блокировка
с помощью размыкающих вспомогательных контактов КВ
и КН, что также исключает возможность одновременного
включения контакторов КВ и КН.
Совмещение электрической и механической блокировок
делает схему вполне надежной в эксплуатации.
Аналогичная схема управления реверсивным электропри-
водом с асинхронным двигателем с короткозамкнутым ро-
429
тором посредством командоконтроллера приведена на
рис. 11.4.
Управление двигателем производится командоконтрол-
лером КК, имеющим три положения. В этой схеме интерес
представляет действие защиты. Для двигателей, работаю-
щих в повторно-кратковременном режиме (например, в про-
катных цехах), тепловые реле не используют, но применяют
защиту от перегрева двигателей при стопорении и от пере-
грузки по току примерно на 100—200 %. Защита выпол-
няется так, как показано на рис. 11.4, с помощью электро-
магнитного максимального реле РМ и реле времени РВМ.
Реле РМ настраивается на надежное втягивание от пуско-
вого тока или от тока допустимой перегрузки и на отпада-
ние при снижении тока двигателя до тока нагрузки. Реле
РВМ обычно настраивается на 1,5—2 с. При каждом пу-
ске втягивается реле РМ и отключает катушку реле РВМ,
которое размыкает свой замыкающий контакт и отключает
катушку реле напряжения РН1 только в том случае, если
двигатель не идет в ход (или время перегрузки превышает
уставку реле РВМ) и контакты реле РМ не замыкаются.
Нескольких повторных включений двигателя может быть
достаточно для того, чтобы тронуть механизм с места, если,
например, стопорение произошло из-за того, что застыла
смазка. Стопорение механизмов получается также при за-
клинивании прокатываемых металлов.
Применение электромагнитных реле РМ и РВМ дает
преимущество по сравнению с тепловыми реле в том, что
двигатель отключается при стопорении всего через 1,5—2 с
и даже не успевает перегреться, тогда как в случае срабаты-
вания тепловых реле потребовалось бы несколько минут
для возможности повторного включения двигателя, что
в ряде случаев недопустимо. Кроме того, тепловая защита
от перегрузок двигателей, работающих в повтор но-кратко-
временном режиме, почти невозможна из-за различного
теплового режима (разные постоянные времени нагрева)
двигателя и теплового реле.
Представляют интерес в схеме нулевая защита и за-
щита от самозапуска, осуществляемая с помощью реле мини-
мального напряжения РН1 и РН2. Реле РН2, кроме того,
еще отключает схему управления, работающую на постоян-
ном токе, при срабатывании автоматического выключа-
теля В А.
Схема управления двухскоростным асинхронным двига-
телем с короткозамкнутым ротором приведена на рис. 11.5.
430
Привод может иметь две скорости: одна из них получается
при соединении обмоток статора в треугольник, что осу-
ществляется нажатием кнопки КнМ и включением контак-
тора КМ, другая — при соединении обмоток в двойную
звезду. Последнее выполняется нажатием кнопки КнБ и
включением контактора КБ. После предварительного сое-
динения обмоток статора производится пуск двигателя при
помощи контакторов КВ или КН в одном или другом на-
правлении. Включение контакторов КВ и КН осуществля-
ется соответственно нажатием кнопки КнПВ или КнПН.
Рис. 11.5. Схема управления двухскоростным асинхронным двигате-
лем с короткозамкнутым ротором.
Применение двухцепных кнопок позволяет осуществить
дополнительную электрическую блокировку, исключаю-
щую одновременное включение контакторов КВ и КН,
а также КМ и КБ.
В приведенной схеме управления предусмотрена возмож-
ность переключения с одной скорости на другую при враще-
нии двигателя в одном или другом направлении.
Для управления торможением асинхронных короткозам-
кнутых двигателей применяются различные схемы. Как
указывалось, в приводах с асинхронными двигателями при-
меняются динамическое торможение и торможение проти-
вовключением.
На рис. 11.6 показана принципиальная схема управле-
ния асинхронным двигателем с короткозамкнутым ротором
431
с использованием динамического торможения. При включе-
нии двигателя в сеть переменного тока возбуждается реле
времени РДТ, если от источника постоянного тока подано
напряжение. В этом случае замыкающий контакт реле РДТ
будет замкнут. Очевидно, контактор торможения КТ при
этом не включен, так как размыкающий вспомогательный
контакт контактора КЛ будет разомкнут. Выключение
двигателя осуществляется нажатием кнопки КнС', контак-
тор КЛ теряет питание, и его размыкающий контакт КЛ
закрывается, что приводит
к включению контактора
КТ, главные контакты ко-
торого присоединяют об-
мотку статора двигателя
на время динамического
торможения к сети посто-
янного тока.
Рис. 11.6. Схема управления
асинхронным двигателем с ко-
роткозамкнутым ротором с ис-
пользованием динамического
торможения.
При отключении контактора КЛ катушка реле динами-
ческого торможения РДТ теряет питание, однако замыкаю-
щий контакт РДТ, будучи ранее замкнутым, разомкнется
с выдержкой времени, которая несколько превышает дли-
тельность торможения двигателя. По истечении установлен-
ной выдержки времени статор двигателя автоматически
отключается от источника постоянного тока, и система
управления приходит в исходное положение.
Во избежание случайного одновременного включения
контакторов КЛ и КТ катушки этих контакторов взаимно
сблокированы размыкающими вспомогательными контак-
тами КЛ и КТ.
Для ограничения постоянного тока служит дополни-
тельный резистор /?т. Защита цепи постоянного тока от ко-
роткого замыкания осуществляется плавкими предохрани-
телями.
Более простая схема управления получается при тор-
можении противовключением (рис. 11.7). Для торможения
противовключением используется реле контроля скорости
432
РКС, механически связанное с валом двигателя; его замы-
кающий контакт при определенной угловой скорости дви-
гателя закрывается. При неподвижном роторе двигателя и
небольшой угловой скорости (около 10—15 % номиналь-
ной) контакт реле разомкнут.
Нажатием кнопки КнП включается контактор КЛ и
двигатель пускается в ход. Размыкающий вспомогатель-
ный контакт КЛ разрывает цепь питания катушки контак-
тора КТ, и поэтому, несмотря на то, что контакты реле
Рис. 11.7. Схема управления асинхронным двигателем с короткозамк-
нутым ротором с использованием торможения противовключением.
РКС при вращении ротора двигателя замкнуты, контактор
КТ не включается.
Отключение двигателя производится нажатием кнопки
КнС. При этом замыкается размыкающий вспомогательный
контакт КЛ. Так как контакт реле РКС замкнут, то контак-
тор КТ получит питание, и статор двигателя будет присоеди-
нен к сети. Из схемы видно, что при включении контактора
КТ две фазы переключаются и порядок чередования фаз
изменяется по сравнению с тем, когда был включен контак-
тор КЛ. При этом происходит торможение противовклю-
чением.
При угловой скорости, близкой к 0, реле РКС размы-
кает свой контакт, катушка контактора КТ теряет питание
и двигатель автоматически отключается от сети.
433
11.3. Тиристорное управление асинхронным
двигателем с короткозамкнутым
ротором
В типовой схеме разомкнутого управления
асинхронным двигателем с короткозамкнутым ротором в ка-
честве силовых элементов, включенных в статорную цепь
двигателя, используются тиристоры в сочетании с релейно-
контактными аппаратами в цепи управления. Тиристоры
по существу выполняют роль силовых коммутаторов и,
кроме того, легко позволяют осуществить необходимый
темп изменения напряжения на статоре двигателя путем
регулирования угла включения тиристоров.
При непрерывном изменении угла включения тиристо-
ров в процессе пуска так, чтобы приложенное напряжение
к статору изменялось от 0 до номинального значения, можно
ограничить токи и моменты двигателя.
Эффективное динамическое торможение имеет место
в схемах с демпфирующими контурами. Добавление одного
шунтирующего тиристора, замыкающего цепь тока между
двумя фазами, приводит к увеличению постоянной состав-
ляющей тока, что создает достаточный тормозной момент
в области высокой угловой скорости.
На рис. 11.8 приведена простая типовая схема комплект-
ного устройства, состоящего в силовой части из группы
включенных встречно-параллельно тиристоров VI — V4
в фазах А и С и одного короткозамыкающего тиристора
между фазами А и В — V5, для управления асинхронным
двигателем М. Схема включает блок управления тиристо-
рами БУ и релейно-контактный узел управления.
При нажатии кнопки КнП включаются реле РП1 и
РП2, на управляющие электроды тиристоров VI— V4 по-
даются импульсы, сдвинутые на 60° относительно питаю-
щего напряжения. К статору двигателя прикладывается
пониженное напряжение, в связи с чем снижается пусковой
ток и уменьшается пусковой момент. Двигатель начинает
разгоняться. Размыкающий контакт реле РП1 отключает
реле РПН с выдержкой времени, определяемой резистором
R7 и конденсатором С4. Размыкающими контактами реле
РПН шунтируются соответствующие резисторы в блоке
управления тиристорами БУ, и к статору прикладывается
полное напряжение сети.
При нажатии кнопки КнСтеряет питание релейная схема
управления, тиристоры VI—V4 отключаются, и напряже-
434
нне со статора двигателя снимается; включается за счет
энергии, запасенной конденсатором С5, на время тормо-
жения реле РКТ, которое своими контактами включает
тиристоры V2 и V5. Через фазы А и В обмотки статора дви-
гателя протекает ток однополупериодного выпрямления,
обеспечивающий эффективное динамическое торможение.
Этот ток регулируется резисторами R1 и R3.
Рис. 11.8. Схема тиристорного управления пуском и торможением
асинхронного двигателя с короткозамкнутым ротором.
В схеме предусмотрен шаговый режим, выполняемый на-
жатием кнопки КнШ; при этом включаются реле РШ1
и тиристоры V2 и V5. В этом случае по фазам А и В обмотки
статора двигателя протекает ток однополупериодного вы-
прямления. При отпускании кнопки КнШ выключаются
реле РШ1 и тиристоры V2 и V5, включаются на короткое
время за счет энергии, запасенной в конденсаторе С6,
реле РШ2 и тиристор V3, и ротор двигателя совершает шаг
(поворачивается на некоторый угол вследствие поворота
примерно на такой же угол результирующего вектора по-
тока статора). Размер шага не строго фиксирован и зависит
от напряжения сети, момента статической нагрузки, мо-
мента инерции привода и от среднего значения выпрям-
ленного тока.
435
Переход на шаговый режим работы двигателя возможен
только после осуществления динамического торможения и
остановки, так как реле РШ1 первоначально можно вклю-
чить только после замыкания размыкающих контактов
Р П1 и РКТ.
11.4. Управление асинхронными
двигателями с фазным ротором
На рис. 11.9 приведена схема управления асин-
хронным двигателем с фазным ротором, в цепь которого
введен пусковой резистор Управление двигателем осуще-
ствляется с помощью кнопок КнП и КнС. Пуск осущест-
вляется в функции времени с помощью электромагнитных
реле времени, включенных через вентиль V.
Рис. 11 9. Схема управления пуском асинхронного двигателя с фаз-
ным ротором в функции времени
Для защиты цепей двигателя от коротких замыканий
служат максимальные реле РМ1, РМ2 и РМЗ, от пере-
грузки — тепловые реле РТ, нагревательные элементы
которых включены через трансформаторы тока ТТ1 и ТТ2.
Цепи управления включены через автоматический выклю-
чатель, имеющий максимальную токовую защиту,
436
Подготовка схемы к пуску двигателя осуществляется
подачей напряжения переменного тока: включаются выклю-
чатели В и ВА. При этом после включения В А получит
питание реле РУ1 и замыкающие контакты его закроются —
подготавливается цепь включения РУ2 и /<«77; размыкаю-
щий контакт РУ1 разомкнется и выключит цепь катушек
контакторов ускорения КУ1, КУ2 и КУЗ.
Если нажать кнопку КнП, то через замкнувшийся кон-
такт РУ1 включится контактор КЛ, и будет подано напря-
жение на обмотку статора двигателя /И; в обмотку ротора
при этом включены все пусковые резисторы — начинается
пуск привода на первой реостатной характеристике. При
включении контактора КЛ один из его замыкающих вспомо-
гательных контактов шунтирует кнопку КнП, и отпадает
необходимость длительно удерживать ее в нажатом состоя-
нии, а другой замыкающий — подает питание на цепь кату-
шек реле ускорения РУ2 и РУЗ. Размыкающий вспомога-
тельный контакт КЛ отключит цепь реле РУР, так как оно
отпускает якорь с выдержкой времени при отключении ее
катушки, то РУ2 сразу не выключится и его размыкающий
контакт РУ2 будет открыт. Следует отметить, что размы-
кающий контакт РУ1 остается еще открытым; по истече-
нии выдержки времени реле РУ1 его замыкающий контакт
откроется, а размыкающий — закроется. В результате этих
переключений в схеме управления включится контактор
КУ1, и будет шунтирована первая пусковая ступень рези-
стора— двигатель с первой (реостатной) характеристики
перейдет на вторую, разгоняясь до большей угловой ско-
рости. Кроме того, выключится реле времени РУ2, и его
размыкающий контакт с выдержкой времени замкнет цепь
катушки контактора КУ2 — шунтируется вторая пусковая
ступень резистора — двигатель переходит на третью ре-
остатную характеристику. Наконец, после размыкания
с выдержкой времени замыкающего контакта РУ2 выклю-
чится реле РУЗ — с выдержкой времени, на которое
настроено реле РУЗ (соответственно времени пуска дви-
гателя на последней реостатной характеристике), замк-
нется его контакт РУЗ, и включится контактор КУЗ,
обмотка ротора М окажется замкнутой накоротко, и дви-
гатель начнет разгоняться в соответствии с его естествен-
ной характеристикой. Этим заканчивается ступенчатый
пуск асинхронного двигателя, контролируемый в функ-
ции времени электромагнитными реле времени РУ1, РУ2,
РУЗ.
437
Остановка двигателя производится нажатием кнопки
КнС. Рассмотренная схема может быть использована для
привода механизмов, не требующих изменения направле-
ния вращения, длительность торможения которых после
отключения двигателя не имеет существенного значения.
В тех случаях, когда требуется реверсирование асин-
хронного двигателя с фазным ротором и интенсивное прину-
дительное торможение его, может быть использовано вклю-
чение двигателя по схеме, приведенной на рис. 11.10.
Рис. 11.10. Схема управления реверсивным электроприводом с асин-
хронным двигателем с фазным ротором.
Пуск двигателя в одном и противоположном направле-
ниях осуществляется в функции времени. Торможение дви-
гателя при реверсировании осуществляется противовклю-
чением в функции ЭДС.
Подготовка двигателя к пуску заключается в подаче
напряжения переменного тока в силовую цепь включением
выключателя В и включением автомата ВА в цепи управле-
ния, подключающего аппараты управления к источнику
постоянного тока. При этом в исходном (нулевом) положе-
нии командоконтроллера КК получают питание реле на-
пряжения PH и реле ускорения РУ1 и РУ2— дополни-
тельно отключаются цепи контакторов ускорения /(У/
и КУ2.
438
Для пуска двигателя в одном направлении необходимо
повернуть рукоятку командоконтроллера в одно из поло-
жений, например Вперед. В этом случае будут включены
контакторы КЛ, КВ и реле РБ.
В неподвижном состоянии ротора двигателя напряжение
на реле РП недостаточно для его срабатывания, поэтому
его размыкающий контакт замкнут и контактор КП вклю-
чится. Пуск двигателя из неподвижного состояния ротора
произойдет при шунтированной ступени противовключе-
ния, когда к обмотке ротора подключены только пусковые
(две) ступени резистора. Двигатель разгоняется в соответ-
ствии с реостатной характеристикой, обусловленной пол-
ным пусковым сопротивлением резистора в течение времени,
определяемом выдержкой времени реле РУ1, которое в мо-
мент подачи напряжения на статор отключилось размыкаю-
щим контактом КЛ. Когда контакт реле РУ1 замкнется,
включится контактор КУ/ — шунтируется первая пуско-
вая ступень резистора, затем с выдержкой времени вклю-
чится КУ2, двигатель будет работать на естественной ха-
рактеристике.
Реверсирование двигателя производится путем перевода
командоконтроллера из положения Вперед в положение
Назад. Во время прохождения командоконтроллера через
нулевое положение система управления возвращается в ис-
ходное состояние. Переход на положение Назад сопровож-
дается включением контакторов КЛ и КН, которые изменяют
чередование фаз на статоре двигателя. При этом возникает
режим противовключения, так как ротор двигателя продол-
жает еще вращаться по инерции в прежнем направлении.
После включения контактора КН и реле РБ контактор
КП не включается, так как в начале торможения напряже-
ние на кольцах достаточно велико — РП срабатывает, и
его контакт размыкается. Поэтому при торможении в цепи
ротора будут включены и пусковой резистор, и ступень
противовключения.
При переводе рукоятки командоконтроллера в положе-
ние Назад реле противовключения РП только тогда зам-
кнет свой размыкающий контакт и обеспечит включение
контактора КП, а затем и контакторов ускорения, когда
напряжение в роторе спадет до значения, соответствующего
напряжению в начале пуска; это произойдет при угловой
скорости двигателя, близкой к 0. Затем последовательно
включаются аппараты управления, порядок работы которых
был изложен выше.
439
Реле блокировки РБ создает некоторую выдержку вре-
мени до включения контактора КП, необходимую для того,
чтобы реле РП в начале торможения успело открыть свой
размыкающий контакт. При отсутствии такой выдержки
времени контактор КП может включиться раньше срабаты-
вания реле РП, что приведет к возникновению тока аварий-
ного значения и отключению двигателя защитой.
Рис. 11.11. Схема управления, асинхронным двигателем с фазным ро-
тором в функции тока.
В данной схеме предусмотрена максимальная защита
двигателя (реле РМ1 — РМЗ), а также защита от чрезмер-
ного снижения напряжения, осуществляемая реле PH (при
этом предполагается, что цепи управления получают пита-
ние через выпрямитель, подсоединенный к силовой цепи
двигателя после выключателя В). Цепи управления защи-
щены автоматом с максимальной защитой.
Схема управления асинхронным двигателем с фазным
ротором в функции тока приведена на рис. 11.11. Напряже-
ние к статору двигателя подводится через линейные кон-
такты контактора КЛ.
В цепь ротора двигателя введены пусковые резисторы,
шунтируемые при пуске соответствующими контакторами
440
ускорения. Кроме того, в цепь ротора включены катушки
токовых реле ускорения.
Настройка реле ускорения РУ1, РУ2 и РУЗ должна быть
произведена таким образом, чтобы токи, при которых соот-
ветствующие реле отключаются, удовлетворяли следую-
щему неравенству:
/рд-1 > 1ру 2 > 1ру з-
Для пуска двигателя нажатием кнопки КнП включается
контактор КЛ, который блокирует пусковую кнопку и по-
дает питание на статор двигателя. Через блокировочный
контакт КЛ получает питание реле РБ, контакт которого
замыкается и присоединяет цепь катушек контакторов уско-
рения. Однако контакторы ускорения не включаются, так
как размыкающий контакт РУ1 будет открыт до тех пор,
пока пусковой ток в цепи ротора не спадет до значения,
соответствующего уставке отпускания реле РУБ После того
как контакт РУ1 закроется, сработает контактор ускоре-
ния КУ1 и зашунтирует своими силовыми контактами пер-
вую ступень резисторов в цепи ротора. Аналогично будут
работать реле ускорения РУ2 и РУЗ при меньших устав-
ках тока, и соответственно будут включаться контакторы
ускорения КУ2 и КУЗ, которые шунтируют вторую и третью
ступени резисторов в цепи ротора, после чего двигатель бу-
дет работать с полной угловой скоростью на естественной
характеристике.
В схеме управления предусмотрено шунтирование раз-
мыкающих контактов реле ускорения вспомогательными
контактами КУ1, КУ2 и КУЗ, что вызвано возможностью
вибраций контактов реле ускорения при значениях токов
в катушках реле, близких к токам уставки.
Реле блокировки РБ создает некоторую выдержку вре-
мени , необходимую для того, чтобы ток в цепи ротора достиг
значения, при котором реле ускорения РУ1, РУ2, РУЗ
открыли бы свои размыкающие контакты.
11.5. Управление синхронными двигателями
Синхронные двигатели получили широкое при-
менение в промышленности в большинстве случаев для при-
вода механизмов, работающих с постоянной скоростью.
Однако в настоящее время в связи с возможностью исполь-
зования преобразовательной техники разрабатываются у нас
и за рубежом регулируемые приводы с синхронными дви-
441
гателями. Типовые схемы управления регулируемыми при-
водами с синхронными двигателями и область их приме-
нения приводятся ниже.
К механизмам, которые приводятся синхронными дви-
гателями, работающими с постоянной скоростью, можно
отнести насосы, компрессоры, воздуходувки, двигатели
преобразовательных установок прокатных станов и т. п.
Широкое применение синхронных двигателей объясня-
ется их высокой перегрузочной способностью, меньшим
влиянием колебаний напряжения сети на максимальный
момент, а также возможностью использования их для улуч-
шения коэффициента мощности предприятия. Синхронные
двигатели для указанных выше механизмов изготавли-
ваются обычно на высокое напряжение, имеют большую
мощность, вследствие чего существенным является вопрос
о способе их пуска. В современных мощных электрических
системах синхронные двигатели часто включаются непо-
средственно на полное напряжение сети. В этом случае зна-
чительно упрощается схема управления и повышается
надежность работы электропривода.
Схема прямого пуска синхронного двигателя с глухопод-
ключенным возбудителем является простейшей и может
быть осуществлена в том случае, когда пусковые токи его
при подключении к сети не вызывают в ней падения напря-
жения сверх допустимого и момент статической нагрузки
Мс < 0,4Мном.
На рис. 11.12 показана упрощенная схема прямого пуска
синхронного высоковольтного двигателя с глухоподключен-
ным возбудителем, расположенным на одном валу с ним.
Для упрощения силовая часть схемы показана в однолиней-
ном изображении. Пуск синхронного двигателя произво-
дится одним командным импульсом, воздействующим на
масляный выключатель В1, который подключает статор
двигателя к питающей сети (схема включения катушек
масляного выключателя на рис. 11.12 не показана).
Если напряжение сети близко к номинальному, то при
пуске двигателя до угловой скорости, близкой к синхрон-
ной, напряжение на выводах возбудителя В окажется доста-
точным и ток, проходящий через обмотку возбуждения М,
обеспечит вхождение его в синхронизм. В схеме управления
предусмотрена форсировка возбуждения на случай сниже-
ния напряжения высоковольтной сети до 15—20 % по отно-
шению к номинальному. Форсировка может выполняться
двумя способами: 1) при помощи реле напряжения РФ,
442
присоединяемого к вторичной обмотке трансформатора
напряжения, используемого в схеме управления данного
двигателя (индивидуальная форсировка); 2) промежуточ-
ным реле РПФ, подключаемым к шинам групповой фор-
сировки на распределительном устройстве (групповая фор-
сировка).
При индивидуальной форсировке реле РФ размыкаю-
щими контактами (если напряжение сети снижено) включает
Рис. 11.12. Принципиальная схема пуска синхронного двигателя с глу-
хоподключенным возбудителем.
контактор КФ, шунтирующий своими контактами резистор
регулятора возбуждения РВ, чем и обеспечивается форси-
рованное возбуждение синхронного двигателя.
Недостатком индивидуальной форсировки является воз-
можность ложной форсировки в случае отключения автома-
том цепей, отходящих от трансформатора напряжения,
подключенного к распределительному устройству.
Более надежной является так называемая групповая
форсировка, при которой контактор КФ включается замы-
кающими контактами реле РПФ. Оно в свою очередь вклю-
чается при подаче питания на шины групповой форсировки,
когда напряжение высоковольтной сети снижается на
15—20 %. В этом случае благодаря непосредственному под-
443
ключению реле на выводы вторичной обмотки трансфор-
матора напряжения исключается возможность ложной
форсировки. Обычно на станции управления имеются оба
реле, и в зависимости от условий работы выбирается тот
или иной способ подключения РФ или РПФ, осуществляе-
мый перемычками / или 2, показанными на рис. 11.12 утол-
щенными линиями.
Аварийная остановка синхронного двигателя осущест-
вляется нажатием на кнопку КА в цепи отключающей ка-
тушки В1 или действием соответствующих реле защиты,
контакты которых присоединяются к вторичным обмоткам
трансформаторов тока. К обмоткам трансформаторов тока
Рис. 11.13. Принципиальная
схема подачи постоянного тока
в обмотку возбуждения синх-
ронного двигателя.
присоединяются реле токовой отсечки и реле защиты от
перегрузки, а также измерительные приборы. Реле защиты
от замыкания нд землю подключается к вторичной обмотке
другого трансформатора тока (цепи защиты на схеме не по-
казаны). При более тяжелых условиях пуска (А4С >
> 0,4А4НОМ) используется схема подачи постоянного тока
в обмотку возбуждения синхронного двигателя, когда по-
следний достигнет угловой скорости, близкой к синхрон-
ной.
Подачу постоянного тока в обмотку ротора можно осу-
ществить, например, по схеме, приведенной на рис. 11.13.
Из схемы видно, что когда контактор КМ отключен, обмотка
возбуждения двигателя через размыкающий контакт КМ
включена на разрядный резистор Rp и не получает питания
от источника постоянного тока.
Основным элементом схемы является реле РП (с успо-
коителем — медной гильзой), катушка которого присоеди-
няется через диод V к разрядному резистору и находится
под напряжением в период пуска синхронного двигателя
благодаря ЭДС скольжения, наводимой в обмотке возбуж-
дения (как в роторе асинхронного двигателя). При болыш х
частотах тока, проходящего по разрядному резистору,
444
поток в сердечнике реле поддерживается примерно постоян-
ным за счет успокоителя. С уменьшением скольжения поток
начинает уменьшаться, а интервалы между полуволнами
тока — увеличиваться, что приведет к отпусканию якоря
реле РП при скольжении s 0,05.
Работу схемы поясняет рис. 11.14, на котором показаны
кривые тока ipn в катушке реле и потока Фр л, а также
отмечен момент времени, при котором реле отпускает
якорь, подавая через размыкающий контакт питание на
катушку контактора КМ, после чего в обмотку ротора
поступает постоянный ток.
Момент
отписканиоя
яноря РП
Рис. 11.14. Кривые тока и потока реле РП, иллюстрирующие прин-
цип работы схемы на рис. 11.13.
Указанный способ включения постоянного тока при-
менялся в ранее выпускавшихся системах управления син-
хронными двигателями. Однако, как показал опыт, он ока-
зался недостаточно совершенным и не обеспечивал четкой
синхронизации из-за разброса выдержки времени реле РП.
Поэтому в настоящее время системы управления подачей
постоянного тока осуществляются в функции тока статора
двигателя при его пуске.
На рис. 11.15 показана схема прямого пуска высоко-
вольтного синхронного двигателя. При его подключении
к сети в начальный момент пуска (асинхронный пуск) в цепи
статора проходит ток, в несколько раз превышающий номи-
нальный, в результате чего сработает токовое реле РПТ,
присоединяемое через трансформатор тока, включаемый
в статор двигателя М. Контакт этого реле включает реле
времени РВ1, которое без выдержки времени присоединяет
реле времени РВ2. В цепи катушки КВ—В контактора КВ
размыкается контакт РВ1 и замыкается контакт РВ2,
что подготавливает цепь включения контактора КВ (с по-
мощью его включающей катушки КВ—В). По мере разгона
445
двигателя ток в статоре его спадает и при подсинхронной
угловой скорости (0,95—0,98 синхронной) значительно
уменьшается, реле РПТ при этом разомкнет свой замыкаю-
щий контакт в цепи РВ1. С выдержкой времени (около 0,9 с)
замкнется контакт реле РВ1 в цепи катушки КВ—В. Кон-
тактор КВ включается (становится на защелку) и подклю-
чает к обмотке возбуждения М постоянный ток (двигатель
входит в синхронизм). При включении КВ размыкается
цепь разрядного резистора Rp.
С отключением РВ1 по истечении времени около 4 с ра-
зомкнутся контакты РВ2, снимающие сигнал на включение
катушки КВ—В. Но контакты контактора КВ останутся
включенными благодаря действию защелки.
С целью облегчения вхождения М в синхронизм, если
напряжение питающей сети понижено, в схеме управления
предусмотрен узел форсирования возбуждения, действие
которого было описано выше. Остановка М производится
дистанционным отключением выключателя В1. При его
446
отключении теряет питание реле РП, которое своим раз-
мыкающим контактом включает отключающую катушку
КВ—о контактора КВ\ выключается цепь возбуждения М,
а его обмотка замыкается на разрядный резистор /?р.
Аварийная остановка синхронного двигателя осущест-
вляется таким же образом, как и в схеме на рис. 11.12.
Для ограничения пускового тока включение синхрон-
ного двигателя может производиться также через реактор
или автотрансформатор, как отмечалось выше.
11.6. Управление синхронными двигателями
с возбуждением от тиристорных
преобразователей
Преимуществом тиристорных преобразовате-
лей для возбуждения синхронных двигателей по сравнению
с электромашинными является их высокое быстродействие.
Постоянная времени электромашинных возбудителей со-
ставляет в зависимости от мощности от 0,1 до 0,5 с, тогда
как у тиристорных от 0,005 до 0,01 с. Многие электропри-
воды с синхронными двигателями, работающими с ударной
нагрузкой, требуют быстрого изменения, возбуждения
с целью повышения их динамической устойчивости. Высо-
кая инерционность электромашинных возбудителей не поз-
воляет осуществить своевременное формирование тока воз-
буждения как при ударных нагрузках, так и в случае
быстрого и значительного падения напряжения сети.
Тиристорный возбудитель обладает более высоким КПД,
но коэффициент мощности у него ниже, чем у электромашин-
ного. Однако сам синхронный двигатель может быть источ-
ником реактивной мощности, а мощность возбудителя не
превышает нескольких процентов мощности привода, поэ-
тому низкий коэффициент мощности тиристорного преобра-
зователя не сказывается на выборе типа возбудителя.
Тиристорный возбудитель, не имея вращающихся ча-
стей, является более надежным, чем машинный. Следует
отметить дополнительные преимущества тиристорного пре-
образователя: бесшумность, сокращение площади и отсут-
ствие фундамента, возможность использования в системах
автоматического регулирования (например, для поддержа-
ния постоянства cos <р или напряжения на шинах), малые
сигналы управления.
Тиристорные возбудители, выполняемые с различными
схемами соединений полупроводниковых приборов в зави-
447
симости от мощности синхронных приводов и синхронных
генераторов, находят все большее практическое приме-
нение.
Простейшая принципиальная схема с тиристорным
возбудителем для привода сравнительно малой мощности
приведена на рис. 11.16. В ней использован тиристорный
преобразователь ТП, выполненный по трехфазной нулевой
схеме выпрямления. Перед пуском двигателя необходимо
Рис. 11.16. Принципиальная схема синхронного электропривода с ти-
ристорным возбудителем
включить питание цепей управления с помощью автомати-
ческого выключателя В А и разъединителей В1 и В2, а также
трансформатор Т2, питающий тиристорный возбудитель.
Включением масляного выключателя В подается питание
на статор двигателя М и катушку контактора К, предназ-
наченного для включения вспомогательного асинхронного
двигателя, приводящего во вращение вентилятор для охлаж-
дения тиристоров (на схеме не показан, также не показаны
вспомогательные цепи сигнализации). Включаются реле
448
РПТ (пусковым током двигателя Л4), реле времени РВ1,
РВ2 и реле инверторного режима РИ.
Вначале осуществляется асинхронный пуск двигателя
М. Двигатель разгоняется до подсинхронной скорости, при
которой пусковой ток в статоре снижается и реле РПТ
размыкает свой замыкающий контакт в цепи катушки реле
времени РВ1, включающем с необходимой выдержкой вре-
мени реле РП1. Оно блокирует замыкающий вспомогатель-
ный контакт В в цепи катушки К, становится на самопита-
ние через замыкающий контакт РВ2, а также подаег
напряжение на блок управления тиристорного преобразо-
вателя БУТП, в результате чего открываются тиристоры
преобразователя и в обмотку возбуждения двигателя М
подается ток. Синхронный двигатель втягивается в син-
хронизм.
При отключении выключателя В теряют питание реле
времени РВ2 и реле РИ, которое своим размыкающим кон-
тактом воздействует на блок управления БУТИ, переводя
его в инверторный режим, обеспечивающий гашение поля
синхронного двигателя. После выдержки времени, осуще-
ствляемой реле РВ2, несколько большей времени гашения
поля, отключаются реле РП1 и контактор К, при этом от-
ключаются питание блока БУТП и двигатель вентилятора
охлаждения тиристоров, тем самым схема приводится в ис-
ходное состояние.
Блок управления БУТП содержит еще автоматический
регулятор возбуждения, предназначенный для регулирова-
ния тока возбуждения синхронного двигателя.
Обозначенный на схеме нелинейный резистор Др (вари-
стор) служит для защиты преобразователя от перенапря-
жений.
11.7 Управление двигателями постоянного
тока независимого возбуждения
На рис. 11.17 приведена схема управления дви-
гателем независимого возбуждения, предусматривающая
возможность пуска, регулирования угловой скорости и
динамического торможения двигателя. Управление произ-
водится с помощью командоконтроллера /СЛ, имеющего
исходное (нулевое) и три рабочих положения. Ускорение
двигателя осуществляется в функции времени, а торможе-
ние — в функции ЭДС.
В силовую цепь двигателя включены: выключатели Bi,
максимальные реле РМ1 и РМ2, пусковые и тормозные ре-
16 Чиликин М. Г., Саидлер А. С. 449
зисторы, контакты линейного контактора Л77, контакторов
ускорения ЛУД КУ2, КУЗ и торможения КДТ, а также
катушки реле управления РУ2, РУЗ, РП и РДТ.
Рис, 11.17, Схема управления двигателем постоянного тока независи-
мого возбуждения.
Обмотка возбуждения подключается к сети через выклю-
чатель В2, являющийся одновременно и выключателем цепи
450
управления. В цепь обмотки возбуждения включен рези-
стор /?, которым регулируется угловая скорость двигателя.
Кроме того, для контроля наличия тока возбуждения в цепь
обмотки возбуждения включена катушка реле РОП. Раз-
рядный резистор /?р подключен к обмотке возбуждения че-
рез диод V.
В защитную цепь включены контакт и катушка реле
напряжения PH, а также контакты максимального реле
РМ1, РМ2 и реле ослабления поля РОП. В исходном поло-
жении командоконтроллера реле PH включается и замыкает
свой контакт. При переключении командоконтроллера
в рабочее положение питание цепи управления контроли-
руется контактом PH. Этот контакт открывается или при
снижении напряжения до значения примерно 0,8t/IIOM,
или при обрыве цепи обмотки возбуждения, или при повы-
шении тока в силовой цепи двигателя свыше 200 %.
Перед пуском двигателя включаются автоматические
выключатели В1 и В2, тогда обмотка возбуждения двигателя
ОВМ. окажется присоединенной к сети через полное сопро-
тивление резистора R. Ток возбуждения при этом может
оказаться недостаточным для срабатывания реле РОП,
и поэтому его контакт в цепи катушки PH шунтируется за-
мыкающим контактом реле РУ 1, которое в исходном состоя-
нии командоконтроллера КК окажется под напряжением.
При переводе рукоятки командоконтроллера в крайнее ра-
бочее положение включается контактор КЛ. Кроме того,
через размыкающий контакт КДТ присоединяются к сети
«экономический» контактор КЭ и контактор усиления
магнитного потока КУП. На обмотку возбуждения ОВМ
будет подано полное напряжение, а в обмотку якоря дви-
гателя вводится полностью пусковой резистор — начинается
пуск двигателя с полным потоком. При этом включаются
реле ускорения РУ2, РУЗ и реле РОП. Через некоторое
время закроется размыкающий контакт реле РУ1 и срабо-
тает контактор КУ1, зашунтировав первую ступень рези-
стора и катушку реле РУ2. Замыкание катушки реле РУ2
накоротко приводит к закрыванию с выдержкой времени
контакта РУ2, включающего контактор КУ2, который шун-
тирует вторую ступень резистора.
Точно так же произойдет шунтирование третьей сту-
пени пускового резистора контактором КУЗ- В процессе
пуска до основной угловой скорости, пока контактор КУЗ
разомкнут, размыкающий контакт РКУ замкнут и контактор
КУП включен. При шунтировании последней пусковой
15* 451
ступени включается ЛУЗ, и контакты РКУ размыкаются.
Если при этом пусковой ток еще значителен, то КУП ока-
жется включенным через контакты ЛУЗ и РП. По мере
пуска двигателя ток якоря спадает, и реле РП отпускает
свои замыкающие контакты, КУП теряет питание, и в цепь
обмотки возбуждения вводится часть резистора R, опреде-
ляемая положением движка, которым задается требуемое
значение угловой скорости двигателя выше номинальной.
Дается импульс на ослабление поля двигателя, который
ускоряется до угловой скорости выше основной.
Хотя индуктивность обмотки возбуждения замедляет
спадание потока и таким образом смягчает толчки тока
в обмотке якоря, но она не уничтожает их полностью.
Ограничение толчков тока при ослаблении поля осущест-
вляется при помощи токового реле РП, которое замыкаю-
щим контактом включает или отключает контактор КУП,
управляя таким образом процессом ослабления поля в за-
висимости от тока в обмотке якоря.
Благодаря вибрационному режиму работы реле РП
и контактора КУП ток в обмотке якоря в течение переход-
ного процесса ослабления поля не выходит за пределы
допустимого значения.
Торможение двигателя осуществляется автоматически
перестановкой рукоятки командоконтроллера в нулевое
положение. В этом случае выключается контактор КЛ,
обмотка якоря отключается от сети. Контактор динамиче-
ского торможения КДТ включится через контакты реле
торможения РДТ. Вследствие этого обмотка якоря двига-
теля оказывается включенной на тормозной резистор, а дви-
гатель — в режиме динамического торможения. Следует
отметить, что динамическое торможение (пока включен
контактор КДТ) происходит при полном магнитном потоке
двигателя.
11.8. Управление двигателями постоянного
тока последовательного возбуждения
Схема управления двигателем последователь-
ного возбуждения (рис. 11.18) предусматривает автомати-
зацию процесса пуска и реверса двигателя. Автоматизация
пуска двигателя осуществляется с помощью электромаг-
нитных реле времени РУ1 и РУ2. Процесс реверса управ-
ляется двумя реле противовключения РПВ и РПН в функ-
ции ЭДС. Для пуска двигателя Вперед или Назад, а также
для его реверса служит командоконтроллер, имеющий
452
три положения: Вперед, Нулевое положение и Назад. Сило-
вые цепи и цепи управления двигателя подключаются
к сети постоянного тока выключателями В1 и В2.
Пуск двигателя в одном и другом направлениях произ-
водится поворотом рукоятки командоконтроллера. После-
довательность работы аппаратов при пуске двигателя
Рис. 11.18. Схема управления реверсивным двигателем постоянного
тока последовательного возбуждения с использованием торможения
проти вовключением.
в том или ином направлении одинакова; исключение состав-
ляют контакторы КВ1, КВ2 и реле РПВ, срабатывающие
при пуске Вперед, и КН1, КН2, РПН, срабатывающие при
пуске Назад.
В нулевом положении рукоятки командоконтроллера
его контакт ККО замкнут, и обмотка реле PH находится
поД напряжением, поэтому контакт PH шунтирует ККО.
В дальнейшем контакт ККО открывается, но катушка реле
PH и все цепи управления получают питание через закрыв-
шийся контакт PH. При понижении напряжения или сра-
батывании максимальной защиты контакт PH откроется,
и прекратится подача напряжения в цепи управления,
453
что приведет к остановке двигателя. В положении рукоятки
командоконтроллера Вперед или Назад замыкаются контакт
КЛ и одна из пар контактов реверсивных контакторов, ко-
торые подводят напряжение к обмотке якоря двигателя.
В начале пуска в цепь двигателя введены обе ступени
пускового резистора и ступень противовключения. Ка-
тушка одного из реле РПВ или РПН в зависимости оттого,
для какого направления вращения производится пуск, под-
ключается соответствующими блок-контактами КВ1 или
КН1 к сети, и реле закрывает свой контакт в цепи управ-
ления. Благодаря срабатыванию реле РПВ или РПН кон-
тактор противовключения КП, получив питание, сразу
закроет свой контакт и зашунтирует ступень противовклю-
чения, а также катушку реле ускорения РУ1, которая нахо-
дилась под напряжением. Реле РУ1 теряет питание и за-
крывает с выдержкой времени свой размыкающий контакт
в цепи катушки КУК Контактор ускорения КУ1, получив
питание, закроет замыкающий контакт КУ1 в силовой цепи
и зашунтирует первую ступень пускового резистора. Одно-
временно шунтируется и реле ускорения РУ2, которое
с выдержкой времени закроет свой контакт РУ2 и включит
контактор КУ2. Этот контактор зашунтирует вторую
ступень пускового резистора, и закончится, таким образом,
процесс пуска двигателя.
Реверсирование двигателя осуществляется переводом
рукоятки командоконтроллера из положения Вперед в по-
ложение Назад или в обратном направлении в зависимости
от того, какое положение занимал командоконтроллер до
переключения. При этом сначала будет осуществлено тор-
можение противовключением, а затем — пуск двигателя
в обратном направлении. Для того чтобы при торможении
двигателя не было чрезмерно больших бросков тока, тре-
буется ввести в цепь двигателя дополнительный резистор
противовключения. Это требование выполняется при ре-
версе с помощью реле РПВ и РПН, которые удерживают
свои контакты в цепи управления открытыми до остановки
двигателя.
Для того чтобы реле противовключения в начале тормо-
жения не срабатывало, напряжение на его катушке, как
указывалось выше, должно быть близким к 0, что дости-
гается соответствующим выбором точки присоединения реле
противовключения. При переводе рукоятки командокон-
троллера из положения Вперед в положение Назад контакт
РПН в цепи управления не закроется до тех пор, пока
454
напряжение на катушке реле не достигнет достаточного
значения, что произойдет при почти полной остановке дви-
гателя. Вслед за торможением двигателя сразу же начнется
пуск двигателя в обратном направлении, происходящий
аналогично тому, как было изложено выше.
11.9. Электрические схемы управления
электроприводами некоторых
производственных механизмов
Рассмотренные выше типовые разомкнутые системы
могут бкпь использованы для управления пуском, торможением и
регулированием скорости различных производственных механизмов.
Как правило, особенности технологического процесса вызывают до-
полнительные требования, предъявляемые к схемам управления. В каж-
дой области техники существует большое число разнообразных машин
и механизмов, имеющих отличительные особенности, которые должны
учитываться при проектировании автоматизированной системы управ-
ления. В качестве примеров ниже даются описания электропривода
и схемы управления тихоходного пассажирского лифта и агрегатного
станка.
а) Электропривод и схема автоматического
управления лифтом
Кабина лифта пятиэтажного здания приводится в дви-
жение от асинхронного двигателя с фазным ротором. Эта схема (рис. 11.19)
может быть легко видоизменена и применима для лифтов в зданиях
с большим числом этажей.
Этажные реле РЭ1—РЭ5 расположены стационарно на панели
управления лифтом. Количество этажных переключателей ПЭ]—ПЭ5
н соответственно этажных реле равно числу этажей. Аппаратура, рас-
положенная в кабине, включает: шесть кнопок, конечные выключатели
пола ВП1, ВП2, находящиеся в разомкнутом состоянии, если в кабине
находится пассажир, и в замкнутом состоянии (как показано на схеме),
когда пассажира нет в кабине; контакты пола ВП2, шунтирующие кон-
такты дверей кабины ВДК, когда пассажир вышел из кабины, а ее дверь
осталась открытой (в этом случае этот контакт ВДК разомкнут); кон-
такты конечного выключателя ВКК, контролирующего ослабление
натяжения каната или его обрыв, а также контакты выключателя
ловителя ВЛ, размыкающиеся при срабатывании механизма ловителя;
эти контактыдолжны быть замкнутыми. Размыкающие контакты ВП1,так
же как и контакты ВП2, дают возможность вызвать кабину, когда в ней
нет пассажиров. В кабине лифта имеется кнопка КнС2, предназначенная
для остановки лифта в любом его положении.
Перечисленные выше элементы оборудования, находящиеся в ка-
бине лифта, соединяются со всей остальной аппаратурой при помощи
гибкого кабеля ГК.
Статор двигателя присоединяется к сети замыканием выключателя
В1 через замкнутые в силовой цепи контакты аварийного выключателя
ВКА (ограничивающего ход кабины вверх и вниз), а также контактами
контакторов КВ и КН, определяющих направление движения кабины
вверх или вниз,
455
В роторную цепь двигателя включен дополнительный резистор,
который контакторами ускорения КУ1, КУ2 и КУЗ в функции времени
последовательно в период пуска шунтируется, и двигатель выводится
Рис, 11.19. Электропривод и схема автоматического управления лиф-
том.
на естественную характеристику. Пуск электропривода может произ-
водиться либо пассажиром из кабины лифта, либо пассажирами, на-
456
ходящнмися на площадке любого этажа, посредством вызывных кнопок.
Этажные переключатели ПЭ1—ПЭ5 соответственно установлены в шахте
лифта на каждом этаже, начиная с первого до последнего.
Следует отметить, что движение кабины исключается, если хоть
одна из дверей шахты окажется открытой, что контролируется конечными
выключателями, установленными на всех этажах (ВДШ1—ВДШ5) и
включенными в цепь управления.
Рассмотрим работу схемы при подъеме пассажира с первого этажа
на пятый. В этом случае этажный переключатель ПЭ1 в среднем поло-
жении, остальные этажные переключатели замкнуты в правом положе-
нии. При нахождении пассажира в кабине лифта первого этажа прежде
всего размыкаются контакты пола ВП1, благодаря чему разрывается
цепь вызывных кнопок первого — пятого этажей и исключается воз-
можность наружного управления лифтом. Далее закрываются двери
шахты первого этажа и замыкается контакт ВДШ1. Так как двери шахты
на всех остальных этажах должны быть закрыты, то контакты ВДШ1—
ВДШ5 замкнуты, затем закрываются двери кабины и при этом замы-
кается контакт ВДК. Нажатием на кнопку «Пятый этаж» включается
реле РЭ5 по замкнутой цепи через кнопку КнС1, замкнутые контакты
ВДШ1—ВДШ5, гибкий кабель, замыкающий контакт ВКК, контроли-
рующий натяжение канатов, замыкающие контакты ВЛ и ВДК, вторую
кнопку КнС2, находящуюся в кабине, гибкий кабель, катушку реле
РЭ5, гибкий кабель, нажатую кнопку «Пятый этаж» в кабине лифта,
гибкий кабель, размыкающий контакт КУЗ. Таким образом,
реле РЭ5 получит питание и своим замыкающим контактом РЭ5 через
повернутый в правое положение контакт этажного переключателя
ПЭ5 замкнет цепь катушки контактора КВ, включающего двигатель М
и одновременно растормаживающего электромагнитный тормоз ЭМТ.
После срабатывания КВ последний и этажные реле РЭ5 становятся
на самопитание (их катушки питаются через собственные замыкающие
контакты) через этажный переключатель ПЭ5. Кнопка пятого этажа
в кабине лифта может быть отпущена. Двигатель разгоняется в соответ-
ствии с выдержками времени, с которыми срабатывают последовательно
механические маятниковые реле времени РВ, РУ1, РУ2, замыкающие
цепи катушек контакторов КУ1, КУ2, КУЗ, выводящих ступени пус-
кового резистора в роторной цепи двигателя. Маятниковые реле време-
ни РВ (PH), РУ1, РУ2 пристроены соответственно к контакторам КВ
(КН), КУ1, КУ2.
При срабатывании контактора КУЗ его размыкающий вспомога-
тельный контакт отключает цепи всех кнопок как на этажах, так и
в кабине, н поэтому нажатие любой из кнопок не оказывает воздействия
на работу схемы управления лифтом до тех пор, пока кабина не придет
на заказанный этаж и не остановится.
Кабина лифта, проходя с первого этажа до четвертого, повернет
все контакты этажных переключателей (ПЭ1—ПЭ4) в левое положение.
Прн подходе к площадке пятого этажа упор, связанный с кабиной
лифта, повернет контакт переключателя ПЭ5 в среднее положение, в ре-
зультате чего контактор КВ и этажное реле РЭ5 потеряют питание,
двигатель отключится, и сработает тормоз, что приведет к быстрой ос-
тановке лифта.
Доехав до остановки на пятом этаже, пассажир может вначале
открыть дверь кабины, а затем дверь шахты, которую но выходе из лифта
необходимо закрыть (нажать открывшийся выключатель ВДШ5). После
закрывания двери шахты вся аппаратура приводится в исходное поло-
жение, за исключением этажных переключателей,
457
Если возникает необходимость осуществить движение пустой ка-
бины вниз, то это возможно произвести и при открытых дверях кабины
(это не опасно), так как дверной контакт ВДК. шунтирован контактами
пола ВП2. Например, если необходимо вернуть кабину с пятого этажа
на первый, то нажимается вызывная кнопка 1 наружного управления,
расположенная на первом этаже. При этом включаются этажное реле
РЭ1 и контактор КН, включающий двигатель на обратное направление
вращения. Пуск двигателя в обратном направлении происходит в функ-
ции времени, так же как это было при движении лифта вверх. Кабина,
опускаясь вниз, переставляет все этажные переключатели из левого
положения в правое, за исключением первого этажного переключателя
ПЭ1, который по достижении кабиной первого этажа переводится в сред-
нее положение. Катушка контактора КН теряет питание, двигатель
быстро останавливается благодаря тормозному моменту, который раз-
вивает тормоз при снятии напряжения со статора двигателя М.
Этажные переключатели первого и последнего этажа ПЭ1 н ПЭ5
одновременно выполняют роль конечных выключателей, однако для
большей надежности используется еще конечный выключатель ВКА,
включенный в силовой цепи. Если в одном из крайних положений по-
чему-либо не произойдет отключения привода и кабина лифта не оста-
новится, то при дальнейшем ее движении разомкнутся контакты ВКА,
отключатся главная цепь двигателя и тормоз ЭМТ. Включение конеч-
ного выключателя ВКА производится от руки после устранения по-
вреждения.
Тормоз, который оказывает дополнительное тормозное воздействие
после снятия напряжения с выводов двигателя, способствует обеспе-
чению необходимой точной остановки кабины на этаже.
На рис. 11.19 не показаны цепи сигнализации, которые указывают,
свободна или занята кабина, а также аварийной сигнализации.
Для скоростных и высокоскоростных пассажирских лифтов ис-
пользуется привод по системе Г-Д или УВ—Д, в котором ограничи-
ваются в переходных режимах ускорение н рывок, а также обеспечи-
вается пониженная скорость для точной остановки кабины. Эти функ-
ции выполняются в замкнутой системе управления при помощи соответ-
ствующих обратных связей.
6) Электропривод и схема автоматического
управления агрегатным станком
Агрегатные металлорежущие станки широко исполь-
зуются в условиях массового производства, таких как автомобиле- и
тракторостроение, сельскохозяйственное машиностроение, авиационная
промышленность и т. п.
На агрегатных станках обработка изделий часто производится од-
новременно большим количеством инструментов и в зависимости от
конфигурации обрабатываемого изделия может производиться с двух
или нескольких сторон. Поэтому агрегатные станки отличаются значи-
тельно более высокой производительностью по сравнению со станками
общего назначения. Наибольшее распространение агрегатные станки
получили для сверлильных, расточных и фрезерных работ.
Односторонний горизонтально-сверлильный агрегатный станок
показан на рнс. 11.20. На станке установлен асинхронный двигатель
с короткозамкнутым ротором 11, расположенный в правой части так
называемой силовой головки. Через шестерни 8 н 10 он вращает привод-
ной вал, далее через шестерни 3 и 4 движение передается шпинделям 2,
468
Рис. 11.20. Разрез одностороннего горизонтально-сверлильного агрегатного станка.
1 — обрабатываемое изделие; 2 — шпиндель; 3, 4 — шестерни; 5 — гидропанель; 6 — насос; 7—10 — шестерни; и — дви-
гатель; 12 — цилиндр.
несущим режущий инструмент. Количество шпинделей, размещенных
в коробке, может доходить до нескольких десятков. Подача силовой
головки с инструментами может производиться гидравлической систе-
мой, состоящей (как показано на рис. 11.20) из насоса 6, приводимого
в действие от тою же двигателя через шестерни 7 и 9. Масло от насоса
I оступает в распределительное
в переднюю или заднюю полость
Ш ВК!,ВК2
О—--------3
▼ вкз
~~1
______▼ вкз
1x4 £. ~|
______ ВК5 ▼
устройство 5, откуда оно передается
цилиндра 12. Таким образом, электри-
ческий двигатель, насос, рас-
пределительное устройство и
цилиндр образуют электро-
гидравлический привод пода-
чи, управление которым осу-
ществлется при помощи элек-
тромагнитов,
щи:; через золотниковую си-
стему на количество жидко-
сти, поступающей в ту или
иную полость цилиндра. Ко-
личество жидкости в едини-
цу времени определяет ско-
рость перемещения привода
подачи. Вначале осуществ-
ляйся быстрое перемещение
к обрабатываемому изделию
1, закрепленному на столе,
а затем переключением в гид-
росистеме уменьшается коли-
чество масла, подаваемого в
цилиндр, что обеспечивает
медленную рабочую подачу,
связанную с обработкой из-
делия. По окончании обра-
воздейстзую-
о
--- Быстрый подвой
---Рабочая подача
Рис. 11.21. Принципиальная
схема управления агрегатным
станком для глубокого свер-
ления с тремя вывод, ми ре-
жущих инструментов.
ботки изделия происходит переключение в гидросистеме, большее
количество масла поступает в заднюю полость цилиндра — головка
быстро возвращается в исходное положение.
Рассмотрим подробнее принципиальную схему управления агрегат-
ным станком для глубокого сверления с тремя выводами режущих ин-
струментов (рис. 11.21). В схеме используется управление в функции
пути. Назначение и месторасположение путевых выключателей таково:
ВК1 и ВК2 нажаты в исходном положении силовой головки (исходным
положением называется такое, при котором силовая головка с режущим
инструментом находится вне зоны обработки), ВКЗ — выключатель,
дающий команду в схему управления после окончания первого и второго
проходов режущих инструментов, ВК4 — блокировочный выключатель
между первым и вторым проходами, ВК5 — выключатель, фиксирующий
окончание обработки изделия; выключатель ВК5 на всем протяжении
обработки и до ее конца находится в нажатом состоянии,
460
После пуска двигателя (схема силовой части не показана) нажатием
кнопки КнП включаются промежуточное реле РП1 и элекромагнит ЭВ
(цепь катушки ЭВ в исходном положении замкнута, так как ВК1 нажат),
управляющий золотником гидросистемы, который дает импульс на
быстрое перемещение силовой головки вперед. Дальнейшее нажатие
на кнопку КнП не требуется, ибо она блокируется контактом РП1.
При движении силовой головки вперед освобождаются выключатели
ВК1 и ВК2, однако пушенная гидросистема продолжает нормально
работать, хотя цепь катушки электромагнита ЭВ окажется разомкну-
той. В связи с тем, что размыкающий контакт ВК2 замкнулся, подготав-
ливается цепь включения электромагнита ЭН для возврата силовой
головки в исходное положение. Как упоминалось, после быстрого дви-
жения силовой головки к обрабатываемому изделию производится пере-
ключение в гидросистеме на рабочую подачу.
По окончании первого прохода от упора, механически связанного
с силовой головкой, нажимается выключатель ВКЗ, включающий реле
РП2, которое своим замыкающим контактом включает цепь электро-
магнита ЭН. При этом переключается подача масла в гидросистеме и
совершается быстрое движение силовой головки назад. Кроме того,
другой замыкающий контакт РП2 блокирует выключатель ВКЗ, и реле
РП2 при возвращении головки назад (при разомкнутом контакте ВКЗ)
остается включенным. В исходном положении нажимается выключа-
тель ВК2, его размыкающий контакт отключает цепь электромагнита
ЭН, прекращается движением головки назад, а замыкающий контакт
ВК2 включает реле РПЗ, которое своим размыкающим контактом от-
ключает реле РП2, а посредством другого замыкающего контакта ста-
новится на самопитание. В этом же положении нажимается контакт
ВК1, вновь включается электромагнит ЭВ — головка быстро движется
вперед, совершая второй проход.
Так как реле РПЗ включено, то замыкание от упора выключателя
ВКЗ не приведет к замыканию цепи реле РП2, и поэтому силовая голов-
ка, совершая рабочую подачу, будет идти вперед. При дальнейшем
сверлении в процессе второго прохода тот же упор, который вначале
воздействовал на ВКЗ, нажимает на ВК4, размыкающий контакт кото-
рого отключает цепь катушки реле РПЗ, подготавливая включение
реле РП2 в конце второго прохода. Замыкающий контакт ВК4 вклю-
чает промежуточное реле РП4 (после отпускания РПЗ).
По окончании второго прохода другой упор опять нажимает ВКЗ',
при этом включается реле РП2, после чего совершается быстрый воз-
врат головки в исходное положение.
Как и в предыдущем проходе, в исходном положении размыкается
контакт ВК2, снова получает питание электромагнит ЭВ, и начинается
третий (последний) проход. Так как реле РПЗ и РП4 включены, то в
процессе третьего прохода воздействие упоров на ВК4 и дважды на ВКЗ
никаких изменений в системе управления ие произведет.
В конце обработки от упора нажимается рычаг, освобождающий
выключатель ВК5, при этом выключаются реле РП1—РП4 и включается
катушка электромагнита ЭН. Следовательно, совершается последний
в цикле быстрый отвод головки в исходное положение. При отводе го-
ловки от упора вновь нажимается конечный выключатель ВК5. В ис-
ходном положении окажутся нажатыми ВК1 и ВК2, ио движение го-
ловки вперед не произойдет, так как реле РП1 выключено. Для повтор-
ного пуска станка необходимо предварительно снять обработанную
деталь, установить и закрепить другую и вновь нажать кнопку КнП,
Цикл работы станка повторится,
461
Нажатием кнопки КнН в любом положении головки отключаются
все промежуточные реле и включается катушка электромагнита ЭН,
и осуществляется возврат головки в исходное положение.
ГЛАВА ДВЕНАДЦАТАЯ
ТИПОВЫЕ СИСТЕМЫ ЗАМКНУТОГО
УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
12.1. Общие положения
Современные системы замкнутого управления
электроприводами предназначены так же, как и рассмо-
тренные ранее более простые разомкнутые системы релейно-
контактного управления, для обеспечения автоматического
режима пуска, торможения, реверсирования, регулирова-
ния скорости, момента и т. д.
Однако эти системы позволяют сформировать указанные
режимы управления желаемым образом и связать их более
точно с требованиями технологического процесса, обуслов-
ленного работой производственных механизмов.
Большинство реальных систем автоматического управ-
ления имеют в своем составе нелинейные элементы, в кото-
рых выходные величины часто бывают связанными с вход-
ными нелинейными зависимостями. В практических расчетах
для упрощения задачи прибегают к линеаризации системы
с большей или меньшей точностью, заменяя нелинейные
элементы линейными. Если это не удается сделать, то для
сохранения точности расчетов используют ЭВМ.
В современных автоматизированных приводах общего
назначения электромашинные преобразователи разного ис-
полнения, применявшиеся ранее, не находят широкого при-
менения как в качестве генератора, так и в качестве возбу-
дителя и промежуточного усилителя.
На смену электромашинному преобразовательному агре-
гату системы Г—Д в приводы постоянного тока пришли
статические устройства в виде магнитных усилителей и
тиристорных выпрямителей. Только в мощных приводах
(свыше нескольких тысяч киловатт) оправдано применение
системы Г—Д, так как в этом случае использование синхрон-
ного двигателя в качестве приводного двигателя генератора
способствует повышению коэффициента мощности в питаю-
щей сети, а также не вызывает искажения кривой питающего
напряжения, возникающего в тиристорных приводах.
462
Для приводов малой мощности (до 10 кВт) в настоящее
время еще находит применение привод с магнитными уси-
лителями, отличающийся простотой, надежностью, длитель-
ным сроком службы и невысокой стоимостью. К недостаткам
этого привода относятся его инерционность, сравнительно
небольшой диапазон регулирования, большие габариты и
масса.
12.2. Принципы построения замкнутых
систем регулируемого
электропривода 1
Наибольшее применение получили два типа
построения замкнутых систем регулирования: 1) с одним
общим суммирующим усилителем (рис. 12.1, а); 2) с
п последовательными суммирующими усилителями
(рис. 12.1, б) — так называемые системы подчиненного ре-
гулирования с последовательной коррекцией.
Рис. 12.1. Структурные схемы замкнутых систем регулирования.
а — с общим суммирующим усилителем, б — с п последовательными сумми-
рующими усилителями — система подчиненного регулирования с последова-
тельной коррекцией
Системы, построенные по типу структурной схемы, при-
веденной на рис. 12.1, а, уже рассматривались в гл. 6,
в частности система с жесткой отрицательной обратной
связью по скорости ka и с отсечкой по току якоря (с жест-
кой отрицательной обратной связью по току якоря с отсеч-
J Написан канд, техн, наук Р, С, Сарбатовым,
463
кой — зоной нечувствительности). Отличительной особен-
ностью таких систем является наличие одного суммирую-
щего усилителя У, на вход (входы) которого подается
алгебраическая сумма сигнала задающего и всех обратных
связей жестких и гибких (суммирование может быть как
электрическое, так и магнитное). Выходной сигнал усили-
теля, таким образом, зависит сразу от нескольких перемен-
ных, что делает практически невозможным регулирование
какой-то одной переменной независимо от других.'
Для разделения действия обратных связей применяют
отсечки (блоки нелинейностей БН1, БН2). Но и в этом слу-
чае единственный (общий для всех обратных связей) задаю-
щий сигнал не определяет заданного значения выбранной
для регулирования переменной. Придание системе требуе-
мых динамических свойств при таком построении системы
обычно достигается применением сложных корректирующих
устройств, включаемых в цепь сигнала управления при
малой мощности управления (блок БК1 на рис. 12.1, а —
последовательная коррекция) или параллельно некоторым
блокам системы (параллельная коррекция — гибкая отри-
цательная обратная связь, блок БК2 — на рис. 12.1, а).
При этом нельзя осуществить независимую настройку
качества регулирования всех переменных. В целом получить
требуемое высокое или оптимальное качество регулирования
в таких системах крайне затруднительно, а в ряде случаев
и невозможно.
Но несмотря на указанные недостатки, системы, по-
строенные по типу структурной схемы, приведенной на
рис. 12.1, а, находили и еще находят широкое применение
либо из-за простоты реализации при использовании громозд-
ких электромашинных, силовых магнитных и электронно-
ламповых усилителей, либо в случаях, когда не предъяв-
ляются жесткие требования к качеству переходных процес-
сов и не требуется раздельное регулирование переменных,
либо когда относительно простыми средствами удается до-
стигнуть требуемого качества процессов.
С появлением малогабаритных и относительно дешевых
полупроводниковых, в частности интегральных операцион-
ных (или решающих), усилителей и тиристорных преобра-
зователей с малой мощностью управления открылась воз-
можность строить системы подчиненного регулирования
с последовательной коррекцией, в которых используется п
последовательных суммирующих усилителей (рис. 12.1, б).
На эти усилители возлагаются функции не только суммиро-
464
вания и усиления сигналов, но и выполнения некоторых
других математических операций над сигналами, поэтому
суммирующие усилители в этих системах называют регуля-
торами.
Наиболее часто используются два типа регуляторов:
пропорциональный (/7-регулятор), пропорционально-инте-
гральный (////-регулятор).
Напомним, что операционный усилитель — это усили-
тель с нечетным числом каскадов усиления и большим
коэффициентом усиления (6у > 1000), охваченный сильной
отрицательной обратной связью и практически не имеющий
дрейфа нуля. Л!атематические операции, выполняемые опе-
рационным усилителем, определяются видом сопротивле-
ний обратной связи и входной цепи.
Рис. 12.2. Схемы /7-регулятора (а) и*/7//-регулятора (&).
На рис. 12.2 приведены схемы /7- и П//-регуляторов.
Сигнал на выходе /7-регулятора (рис. 12.2, а) пропорциона-
лен входному, т. е.
^ВЫХ = ^WBX1 (12.1)
где k =
Сигнал на выходе ////-регулятора (рис. 12.2, б) пропор-
ционален входному сигналу и интегралу от входного сиг-
нала по времени, т. е.
1/вых = 7' V ^вх d/4” &«вх» (12.2)
или в операторной форме в виде передаточной функции
BZ(p)= u^'p)- = k 1 + ТоР = ^ТоР-=к + -^~, (12.3)
17вх (р) ТqP T(j-tp ТQiP
где То = /?0,сС; k = R0,c/Ri, Т01 = R& р — оператор.
Следует отметить, что сигнал на выходе ////-регулятора
перестанет изменяться во времени и будет сохранять неко-
торое постоянное значение, только когда входной сигнал
будет равен 0. Если на вход такого регулятора поступает
разность задающего сигнала и сигнала обратной связи, то
466
в установившемся статическом режиме эти сигналы равны,
что соответствует принципу астатического регулирования —
сигнал управления изменяется регулятором до тех пор, пока
не будет достигнуто равенство задающего сигнала и сиг-
нала обратной связи, т. е. пока не будет устранена ошибка
регулирования.
Система подчиненного регулирования (см. рис. 12.1,6)
состоит из ряда контуров, число которых равно числу регу-
лируемых переменных (или числу больших постоянных
времени системы, подлежащих компенсации), причем каж-
дый внутренний контур регулирования подчинен следую-
щему по порядку внешнему (по отношению к внутреннему)
контуру. Эта подчиненность выражается в том, что заданное
значение регулируемой переменной любого внутреннего
контура определяется выходным сигналом регулятора сле-
дующего по порядку контура. В результате все внутренние
контуры работают как подчиненные задаче регулирования
выходной координаты системы. Каждый контур строится
по принципу регулирования по отклонению (по ошибке)
и имеет свою обычно жесткую отрицательную обратную
связь по регулируемой переменной и свой регулятор (сум-
мирующий усилитель). Для каждого внешнего контура вну-
тренний контур (или несколько внутренних контуров)
входит в состав объекта регулирования.
Показанная на рис. 12.1, б типовая структура системы
привода постоянного тока с двигателем независимого воз-
буждения имеет два контура регулирования: первый (вну-
тренний) контур — контур регулирования тока якоря дви-
гателя, содержащий регулятор тока РТ, преобразователь П,
якорную цепь двигателя и жесткую отрицательную обрат-
ную связь по току якоря с коэффициентом передачи k{;
второй (контур внешний, которому подчинен первый кон-
тур) — контур регулирования угловой скорости двигателя,
содержащий регулятор скорости PC, первый контур, дви-
гатель М и жесткую отрицательную обратную связь по ско-
рости с коэффициентом передачи ka. Задающим сигналом
для второго контура является сигнал задания угловой ско-
рости U3)C, а для первого — сигнал с выхода регулятора
скорости U3'T
В системе подчиненного регулирования появляется
возможность раздельного регулирования переменных и раз-
дельной настройки контуров (начиная с первого, самого
внутреннего контура) и коррекции переходных процессов
в каждом контуре, что существенно упрощает как расчетную
466
работу, так и техническую реализацию коррекции и прак-
тическую (в наладке) настройку системы.
Настройку контура (расчет и выбор элементов последо-
вательных корректирующих цепей, т. е. выбор типа регуля-
тора и расчет его параметров) обычно производят так,
чтобы получить технически оптимальный переходный про-
цесс (настройка на технический оптимум) Технически
оптимальным переходным про-
цессом считается такой про-
цесс, при котором время tY
изменения регулируемой ве-
личины от 0 до установивше-
гося значения было бы мини-
мально возможным при пе-
ререгулировании АхиЬц, не
превышающем допустимого
значения, примерно 4—10%
(рис. 12.3). Такой переход-
ный процесс при скачке за-
дания является компромис-
сным между процессом более
Рис. 12.3. Технически оптималь-
ный переходный процесс.
быстрым, но с большим перерегулированием, и процессом
с меньшим перерегулированием, но более медленным.
Из теории автоматического регулирования известно,
что характер переходного процесса замкнутой системы опре-
деляется соотношением постоянных времени системы, и
оптимальному переходному процессу соответствует опти-
мальное соотношение постоянных времени. Математически
это выражается определенным (оптимальным) соотношением
коэффициентов характеристического уравнения системы.
Для системы, состоящей из п подчиненных контуров,
содержащих только безынерционные, инерционные и инте-
грирующие звенья (это ограничение не касается регуля-
торов), характеристические уравнения в зависимости от
порядка системы (числа контуров) должны иметь соотноше-
ния коэффициентов, указанные в табл. 12.1. При таких
характеристических уравнениях переходные процессы в си-
стеме по управляющему воздействию будут технически опти-
мальными.
В уравнениях табл. 12.1 принято: 1\ — наименьшая
постоянная времени первого (самого внутреннего) контура
системы. Указанные в табл. 12.1 значения времени регули-
рования /j и перерегулирования о, % (рис. 12.3), относятся
к случаю скачкообразного изменения входного (задающего)
467
сигнала. Таблица 12.1 может быть продолжена и для более
высоких порядков уравнений. При указанном в табл. 12.1
соотношении коэффициентов характеристических уравне-
ний характер переходного процесса определяется не всеми
членами уравнения, а вырожденным характеристическим
уравнением второго порядка. Особенность этих вырожден-
ных уравнений, приведенных в табл. 12.1, состоит в том,
что все они (для любого порядка полного уравнения) харак-
теризуются коэффициентом затухания, равным р 2/2 =
= 0,707, что обеспечивает требуемый технически оптималь-
ный характер переходного процесса.
Таблица 12.1
Поря- док урав- нения Полное характеристическое уравнение Вырожденное харак- теристическое уравнение Время регулиро- вания h Пере- регу- лиро- вание о. %
2 2T,p(TiP+ 1)4-1 2Т1Р (Т^+0+1 4,7 ?! 4,33
3 4Т1Р [2TiP(TlP+l)+ + 11 + 1 4Т]Р (27\р+1)+1 7,6 Г, 8
4 STlP {4r,Pi2T,P(TlP + + 1)+ 1)+ 1} + 1 8? iP (4/'1р+ 1) + 1 14,4 ?, 6,2
Заданная исходная система обычно не обладает опти-
мальным соотношением постоянных времени, поэтому, ис-
пользуя коррекцию, нужно изменять постоянные времени
системы, т. е. для настройки контура на технический опти-
мум нужно подобрать такой тип регулятора и с такими
параметрами, чтобы получить характеристические уравне-
ния системы, приведенные в табл. 12.1. Как видно из этой
таблицы, уравнения не содержат никаких других постоян-
ных времени, кроме 7\ и больших ее в 2я раз. Следовательно,
все другие постоянные времени нужно устранить (компен-
сировать) и заменить их нужными. Естественно, что физиче-
ски существующую инерционность можно устранить, только
изъяв из системы элемент, обладающий этой инерцион-
ностью, что невозможно. Но можно компенсировать влия-
ние больших инерционностей системы, используя форси-
ровку переходного процесса в данном элементе за счет уве-
личения напряжения (момента и т. п.) на время переход-
ного процесса подобно тому, как это делается для форси-
рования процесса возбуждения генератора (см. гл. 8).
Полная компенсация при этом невозможна, поэтому и
468
производят операцию замены большой постоянной времени
меньшей, но требуемого значения.
Рассмотрим, как производится расчет настройки регуля-
тора на примере контура регулирования тока якоря дви-
гателя постоянного тока независимого возбуждения
в системе тиристорный управляемый выпрямитель — дви-
гатель, воспользовавшись аппаратом передаточных функ-
ций. Расчет этого контура производится для случая непод-
вижного (заторможенного) якоря или при выключенном
возбуждении двигателя. Тогда структурная схема этого кон-
тура имеет вид, показанный на рис. 12.4, где приведены пе-
редаточные функции преобразователя (управляемого тири-
сторного выпрямителя) и якорной цепи двигателя.
Рис. 12.4. Структурная схема контура регулирования тока.
В контуре тока имеются две инерционности, характери-
зуемые постоянными времени: Т3 = L9/R9 — электромаг-
нитная постоянная времени якорной цепи; Тг — постоян-
ная времени, отражающая инерционность системы фазового
управления выпрямителем, запаздывание (дискретность)
выпрямителя и инерционности датчика тока и регулятора.
Эта постоянная времени называется некомпенсированной
или малой постоянной времени контура, так как обычно
7\ = 0,004 -г- 0,01 с < Т9. При этом Т9 называют боль-
шой постоянной времени, которую нужно компенсировать.
В соответствии со структурной схемой контура тока
(рис. 12.4) передаточная функция преобразователя и якор-
ной цепи двигателя равна:
где kn — коэффициент усиления преобразователя (управ-
ляемого выпрямителя).
Используем П//-регулятор с передаточной функцией
№Р.Лр) = (Т0-\-1)/Т01р.
469
Тогда передаточная функция разомкнутого контура тс ка
С целью компенсации большой постоянной времени кон-
тура примем То = 7\ (необходимую форсировку для этой
компенсации будет создавать регулятор, воздействуя на
преобразователь). Тогда
и передаточная функция замкнутого контура
№3,К(Р) =
Wj, (Р) _ 1/^
1+^р(р)^ 1\TnR4 TBiR, ,,
ТАГ‘,+ТЛ_’+'
(12.7)
т. е. замкнутый контур представляет собой систему второю
порядка.
Для того чтобы получить в этой системе оптимальный
переходный процесс, нужно, чтобы коэффициент затухания
был равен У2/2 = 0,707. Это условие будет выполнено, если
коэффициент при р в характеристическом уравнении си-
стемы [знаменатель (12.7) приравнен нулю] будет равен:
откуда
Tn = 2T1klk„/Ri. (12.8а)
В соответствии с обозначениями на рис. 12.2, б и форму-
лой (12.3) параметры ////-регулятора тока определяются
при принятых значениях То и Т01 из равенств
Т01=/?1С = 2Л^/!п//?э; (12.9)
T0 = RMC = T9. (12.10)
Передаточная функция регулятора тока примет вид:
При таком регуляторе тока передаточная функция зам-
кнутого контура
к (Р) = 27'ip'- + 27'1p+l 27\р (TiP-H)-|-l ’ (12•12)
470
Как видно из этой передаточной функции, получилось
характеристическое уравнение контура с оптимальным
соотношением коэффициентов (см. табл. 12.1), что и требо-
валось. Значит, переходный процесс в контуре тока при вы-
бранной настройке регулятора будет оптимальным при
скачке f/3,T (о = 4,39 %, = 4,7 7\). В результате про-
веденных операций получилась замена двух инерционных
звеньев (одно с большой постоянной времени) колебатель-
ным звеном (с коэффициентом затухания 0,707), близким
к инерционному звену с постоянной времени 27\, т. е. су-
щественно повысилось быстродействие контура при хоро-
шем качестве переходного процесса. Следует отметить, что
коэффициент при 7\ в характеристических уравнениях
табл. 12.1 не обязательно брать равным 2". Вместо 2 можно
брать число большее или меньшее. В первом случае процесс
будет протекать более медленно и с меньшим перерегулиро-
ванием или без него, во втором — более быстро, но с боль-
шим перерегулированием.
Полученную изложенным способом настройку контура
тока сохраняют и при вращающемся якоре, когда проявля-
ется влияние ЭДС вращения. При Тм > 2ТЭ и Тм 7\
(где Т„ — электромеханическая постоянная времени при-
вода) это влияние на переходный процесс в контуре тока
при изменении задания тока оказывается несущественным.
Аналогичным образом, как и в случае контура тока,
рассчитывается настройка (параметры регулятора) кон-
тура регулирования скорости. В этом контуре используется
либо /7-регулятор, либо ////-регулятор скорости.
/7-регулятор применяется при малом диапазоне регули-
рования угловой скорости. Коэффициент усиления регуля-
тора и его параметры (в соответствии с обозначениями на
рис. 12.1, б и 12.2, а) при настройке на технический опти-
мум по управляющему воздействию рассчитываются по
формуле
7 k,c R „
Г ____ М / -- О. С
р' с - 47\Rska Rt ’
(12.13)
где с = кФ.
При этом характеристическое уравнение контура полу-
чается третьего порядка, а переходный процесс с соответ-
ственно большим перерегулированием и временем (см.
табл. 12,1), чем в контуре тока.
Так как параметры регулятора выбираются из условия
обеспечения заданного качества переходного процесса, то
471
жесткость механических характеристик привода оказыва-
ется неконтролируемой и обычно невысокой. Отношение
статического падения угловой скорости в системе с /7-ре-
гулятором скорости Дйс,3 к статическому падению угловой
скорости при работе двигателя в разомкнутой системе
Да»С1Р = I^RJc равно
Дшс. 8/Д®с, р = 47'1/7'м. (12.14)
Из (12.14) следует, что при ТЯ<.^Т\ статический
перепад угловой скорости в системе подчиненного регулиро-
вания будет больше, чем в разомкнутой системе. Зависимость
статического перепада угловой скорости от электромехани-
ческой постоянной времени привода Тм объясняется зави-
симостью (12.13) коэффициента усиления /7-регулятора
скорости от этого параметра: чем больше Тк, тем больше
Ар.с, тем меньше статическое падение угловой скорости,
как и во всякой статической системе регулирования.
Действие системы подчиненного регулирования с /7-ре-
гулятором скорости (рис. 12.1, б) в установившемся режиме
сводится к следующему. При увеличении момента нагрузки
на валу снижается угловая скорость двигателя, увеличи-
вается сигнал с выхода регулятора скорости PC, т. е. возра-
стает задание тока 7/3тТ контуру тока, увеличивается ЭДС
преобразователя П (управляемого выпрямителя) и увели-
чивается ток якоря соответственно значению U3,т. Чем мень-
ше kp<c, тем больше должна быть ошибка по скорости (Дю =
= w3 — а») при одном и том же моменте нагрузки, т. е. при
одном и том же задании тока /7311.
Система с /7-регулятором скорости часто называется
однократно интегрирующей системой с обратной связью по
скорости.
При большом диапазоне регулирования и в случаях,
когда система с /7-регулятором не обеспечивает требуемого
статизма механических характеристик, применяют ПИ-уе-
гулятор скорости, при котором система становится астати-
ческой по угловой скорости, т. е. не имеет статической
ошибки регулирования. Она называется двукратно интегри-
рующей системой с обратной связью по скорости.
Коэффициент усиления ////-регулятора (пропорциональ-
ная часть) определяется формулой (12.13), постоянная вре-
мени То интегральной части принимается равной
T0 = ROl( С = 8ТЬ
(12.15)
472
т. е. передаточная функция /7//-регулятора имеет вид:
Т k.c 87\р+1
<12л6)
Однако при таком регуляторе (настройка на так назы-
ваемый симметричный оптимум) при скачке входного сиг-
нала перерегулирование по угловой скорости составит
43 %, хотя время регулирования 4 = Ь,2ТХ. Перерегули-
рование уменьшают до 6,2 %, что соответствует техниче-
скому оптимуму, установкой на входе регулятора инерцион-
ного звена (фильтра) с передаточной функцией
^и.з(р)=1/(8Лр+1). (12.17)
При этом время регулирования возрастает до /j =
== 14,4 7\. Характеристическое уравнение контура скорости
при /777-регуляторе получается четвертого порядка (см.
табл. 12.1).
Если на вход П- или /7/7-регулятора скорости подать
задающий сигнал t/3iC скачком, то угловая скорость уста-
новится за указанное время и с указанным перерегулирова-
нием, но при отсутствии каких-либо ограничений на зна-
чение тока якоря, ЭДС выпрямителя, на ускорение меха-
низма и т. п. Практически ток якоря при этом превзойдет
допустимое значение, поэтому должно быть предусмотрено
ограничение тока. В системе подчиненного регулирования
оно выполняется достаточно просто — для этого нужно
ограничить максимальный уровень сигнала задания тока
USyt, т. е. сигнала на выходе регулятора скорости. Ограни-
чение этого сигнала достигается установкой в цепь обрат-
ной связи усилителя стабилитронов V, как это показано
на рис. 12.5. Так же включаются стабилитроны в случае
/7-регулятора скорости. При такой схеме ограничения тока
и изменения (7ЗС скачком регулятор скорости сразу входит
в ограничение, т. е. устанавливается скачком UBtimax,
соответствующее допустимому току якоря, контур тока отра-
батывает это задание за время t — 4,77\ с перерегулирова-
нием 4,33 %, и привод разгоняется с постоянным значением
тока. Ускорение привода будет зависеть от момента инер-
ции и момента статической нагрузки. По достижении задан-
ной угловой скорости (при небольшом ее перерегулирова-
нии в случае ////-регулятора или при угловой скорости,
несколько меньшей заданной в случае /7-регулятора) за
счет сигнала обратной связи по скорости регулятор выйдет
473
из зоны ограничения и будет уменьшать U3,, до уровня,
определяемого нагрузкой.
При перегрузке или стопорении привода резкое сниже-
ние угловой скорости, т. е. сигнала отрицательной обратной
связи по скорости, также вводит регулятор скорости в зону
ограничения, и привод работает с постоянным допустимым
моментом. Изменяя уровень ограничения £/3л, можно изме-
нять значение этого момента.
Механические характеристики двигателя, получающи-
еся при его работе в системе подчиненного регулирования,
приведены на рис. 12.6.
Рис. 12.5. Принципиальная схема блока регуляторов двухконтурной
системы подчиненного регулирования угловой скорости двигателя по-
стоянного тока независимого возбуждения с ограничением тока якоря
посредством стабилитронов V.
Ограничение тока двигателя при пусках и торможениях
в системах подчиненного регулирования обычно достигается
не ограничением выходного сигнала регулятора скорости
(ограничение сохраняется как средство защиты), а приме-
нением задатчика интенсивности ЗИ (см. рис. 12.1, б),
посредством которого сигнал задания скорости изменяется
не скачком, а линейно во времени до требуемого уровня.
Ток якоря при этом устанавливается и спадает в конце
пуска или торможения по оптимальному закону, а угловая
скорость привода при Л4С = const изменяется по линейному
закону, следуя за сигналом задатчика интенсивности(по-
добные переходные процессы подробно рассмотрены в гл. 8).
Основным достоинством применения задатчика интенсивно-
сти является независимость значения ускорения привода
от статического момента.
474
При ударном приложении нагрузки переходный процесс
в однократно интегрирующей системе протекает за то же
время и с тем же перерегулированием, что и при управля-
ющем воздействии, а перепад угловой скорости устанавли-
вается в соответствии с равенством (12.14). В двукратно
интегрирующей системе возникает динамическое падение
угловой скорости, примерно равное статическому падению
угловой скорости в системе с /7-регулятором скорости, при-
чем это сопровождается 53 %-ным перерегулированием
тока якоря; время восстановления угловой скорости равно
Рис. 12.6. Механические характеристики двигателя постоянного тока
независимого возбуждения в системе подчиненного регулирования
с ограничением тока якоря (выходного сигнала регулятора скорости).
15,5Ti- Эти неблагоприятные свойства рассмотренных си-
стем подчиненного регулирования в известной мере ограни-
чивают область их применения. Разработаны схемы, поз-
воляющие уменьшить динамическое падение угловой скоро-
сти в астатической по скорости системе. Другой недостаток
систем подчиненного регулирования — это уменьшение бы-
стродействия системы примерно в раз по мере роста
числа последовательных контуров; пг — номер контура.
Поэтому используется число последовательных контуров
не более трех-четырех.
Системы, построенные по принципу подчиненного регу-
лирования, нашли широкое применение не только во всех
видах систем регулирования угловой скорости и положения
приводов постоянного тока (в том числе в системах регули-
475
рования угловой скорости ослаблением потока), но и во
всех системах приводов переменного тока (одна из таких
систем уже рассматривалась в гл. 6). Далее в этой главе
приводится много примеров систем электропривода, исполь-
зующих принцип подчиненного регулирования.
Способствуют широкому распространению систем под-
чиненного регулирования не только их достоинства, отме-
ченные выше, но и выпуск промышленностью унифициро-
ванных блочных систем регулирования УБСР-А и
УБСР-А И (на интегральных элементах), содержащих не-
обходимый для технической реализации систем подчинен-
ного регулирования набор готовых усилителей, датчиков,
источников питания, функциональных блоков, задатчиков
интенсивности и т. п.
Следует, однако, отметить, что постоянно возрастающие
требования к точности и быстродействию привода и более
широкие и универсальные для выполнения этих требова-
ний возможности, предоставляемые современной цифровой
вычислительной техникой и ее элементной базой по сравне-
нию с аналоговой, привели к разработкам и все большему
внедрению систем электропривода с цифровым управле-
нием, в частности с микропроцессорным, в которых все
измерения, передача информации, ее обработка и выработка
оптимальных управляющих воздействий на систему привода
и ее координаты производятся в цифровом виде. Подробное
рассмотрение этих систем выходит за рамки данного курса.
Некоторое представление о цифровом управлении дается
в гл. 13 при рассмотрении программного управления.
12.3. Схемы привода постоянного тока
с магнитными усилителями
Упрощенная принципиальная электрическая схема
привода с двигателем постоянного тока независимого возбуждения и
с магнитным усилителем (система Л4У—Д) приведена на рис. 12.7.
Силовой преобразователь состоит из неуправляемого полупроводниково-
го выпрямителя,собранного по трехфазной мостовой схеме, в каждое
плечо моста которого включено по силовой обмотке магнитного уси-
лителя (Ш — 6кД). Регулирование напряжения на выходе преобра-
зователя происходит за счет изменения магнитного состояния сердеч-
ников, на которых расположены силовые обмотки магнитного усили-
теля, т. е. за счет изменения индуктивности этих обмоток, магнитное
состояние сердечников зависит от токов, протекающих в обмотках уп-
равления и>2 и w3, и тока в силовых обмотках усилителя. Ток в силовых
обмотках подмагничивает сердечники. Действие тока в обмотках уп-
равления, охватывающих сердечники, зависит от его направления.
476
Такой преобразователь по существу является выпрямителем с ре-
гулируемым внутренним сопротивлением. Подма! ничивание сердеч-
ников вызывает уменьшение этого внутреннего сопротивления и уве-
личение напряжения на нагрузке при данном токе.
Обмотка управления ы2 включена на разность напряжений, одно
нз которых снимается с якоря двигателя, а другое определяется задаю-
щим напряжением, снимаемым с потенциометров RI, R2, и может быть
изменено в зависимости от требуемой угловой скорости привода. Таким
образом реализуется отрицательная обратная связь по напряжению
на якоре двигателя.
Рис. 12.7. Упрощенная принципиальная электрическая схема привода
с двигателем постоянного тока независимого возбуждения и магнитным
усилителем (система МУ — Д).
Через обмотку управления шЗ протекает ток, пропорциональный
току нагрузки; она получает сигнал через выпрямитель ВП от трансфор-
матора тока ТТ, включенного в силовой цепи. Магнитодвижущая сила
этой обмотки регулируется резистором R4. Посредством обмотки ииЗ
таким образом реализуется положительная обратная связь по току
нагрузки.
Применение указанных обратных связей обеспечивает диапазон
регулирования 10 : 1. Напряжение, подводимое к двигателю, автомати-
чески меняется с изменением угловой скорости привода, связанным
с изменением нагрузки; при снижении угловой скорости оно возрастает
и с увеличением падает.
Для расширения диапазона регулирования до 100 : 1 необходимо
увеличить коэффициент усиления системы и ввести обратную связь по
477
скорости. Упрощенная принципиальная электрическая схема для этого
случая приведена на рис. 12.8. Здесь цепь якоря двигателя М получает
питание от трехфазного выпрямительного моста ВП2, подключенного
к сети переменного тока через попарно параллельно включенные силовые
обмотки а>1 магнитных усилителей, каждая из которых соединена по-
следовательно с диодом (выпрямитель ВП1), т. е. по схеме с самопод-
магничиванпем. Обмотка управления w2, включенная на выход про-
межуточного полупроводникового (транзисторного), трехкаскадного
промежуточного нереверсивного усилителя ПУ, является одновремен-
но задающей обмоткой и обмоткой, посредством которой, а также уси-
лителя и тахогенератора GT реализуется обратная связь по скорости.
Обмоткой смещения служит обмотка шЗ, получающая питание от от-
дельного источника выпрямленного напряжения.
Рис. 12.8. Упрощенная принципиальная электрическая схема привода
по системе МУ — Д с обратной связью по скорости.
Для задания необходимой угловой скорости двигателя служат два
потенциометра R1 п R2 — первый для грубой настройки на всем диа-
пазоне, второй для точной настройки при низких угловых скоростях.
Задающее напряжение снимается с указанных потенциометров, сравни-
вается с напряжением тахогенератора; разность этих напряжений по-
дается па вход промежуточного усилителя и после усиления на обмотку
управления.
Для стабилизации системы и достижения требуемого качества
переходных процессов используется гибкая отрицательная обратная
связь по напряжению на якоре двигателя с помощью цепочки R5—С4,
выходной сигнал с которой подается па резистор R3, включенный на
вход промежуточного усилителя. Для защиты промежуточного усили-
теля от перенапряжений в процессе пуска па его вход включены диоды
VI и V2. Защита двигателя от чрезмерных токов осуществляется узлом
токоограничения, па вход которого подается сигнал с трансформатора
478
тока ТТ, включенного в силовую цепь магнитного усилителя. Если ток
превышает допустимое значение, то растет выпрямленное значение тока
на выходе моста ВПЗ, п отпираются стабилитроны V3 и W; возникаю-
щее при этом напряжение на резисторе R10 иризакрывает промежуточ-
ный усилитель ПУ, что приводит к уменьшению тока в обмотке и якоре
двигателя. Для установления допустимой уставки тока при пуске
служит резистор R9,
12.4. Системы управления двигателями
постоянного тока с тиристорными
выпрямителями
В замкнутых системах автоматического регу-
лирования, в которых двигатель питается от управляемого
преобразователя, введением обратных связей удается полу-
чить не только жесткие механические характеристики
в статике, но и возможно сформировать необходимое ка-
чество переходных режимов при пуске, торможении и
реверсировании.
Для управления двигателями постоянного тока сред-
ней и большой мощности чаще всего могут быть исполь-
зованы управляемые выпрямители, выполненные по трех-
фазной мостовой схеме. Удешевление и упрощение мосто-
вых схем достигается включением тиристоров в одну
половину моста, в другую — включаются диоды, что в срав-
нении с симметричными мостовыми схемами дает сокраще-
ние вдвое числа тиристоров, и во столько же раз умень-
шается число каналов управления. Недостатками этой
схемы являются снижение частоты пульсации выпрямлен-
ного напряжения тока и невозможность получения реку-
перативного торможения.
Нулевые схемы в тиристорных выпрямителях исполь-
зуются в приводах небольшой мощности с напряжением 115
и 230 В.
Трехфазная мостовая схема нашла наибольшее приме-
нение, так как она обладает лучшими энергетическими
показателями, лучшим использованием питающих транс-
форматоров; в некоторых случаях в зависимости от номи-
нального напряжения двигателя можно трансформатор
заменить токоограничивающими реакторами.
Упрощенная принципиальная электрическая схема ре-
версивного привода по системе тиристорный управляемый
выпрямитель — двигатель (УВ—Д) приведена на рис. 12.9.
Преобразователь включен по трехфазной нулевой схеме
и состоит из двух комплектов тиристоров VI, V3, V5 и
479
V2, V4, V6, силового трансформатора T, блоков управле-
ния тиристорами БУ1—БУ6, формирующих импульсы
управления, блока пилообразного напряжения БПН, транс-
форматора ТП, блока питания БП, от которого получают
напряжение транзисторный усилитель У и блоки управ-
ления БУ1—БУ6.
Рис. 12.9. Упрощенная принципиальная электрическая схема ревер
сивного привода по системе УВ — Д.
Для защиты тиристоров и двигателя от перегрузок
в каждой группе включен узел токоограничения БТ01 —
БТ02, состоящий из трех трансформаторов тока, первич-
ные обмотки которых включены в силовую цепь. Вторич-
ные обмотки трансформаторов тока включены на нагру-
зочные резисторы. Напряжение, пропорциональное току
нагрузки первичной цепи, снимается с этих резисторов,
выпрямляется и после сглаживания подается на усили-
тель У через стабилитрон. При условии увеличения тока
нагрузки против установленного значения усилитель У
закрывается, резко снижается напряжение на якоре дви-
480
гателя; ток в двигателе будет протекать до тех пор, пока
не сработает тепловая защита автомата.
Узел задания угловой скорости и управления пуском
и торможением выполнен с помощью потенциометра R1,
получающего питание от стабилизированного источника
питания через контакты реле. С помощью тахогенератора GT
реализуется отрицательная обратная связь по скорости
двигателя. Разность задающего напряжения и сигнала
обратной связи подается на вход усилителя У.
Изменение направления вращения двигателя осуще-
ствляется включением контактов КВ или КН. Плавное
регулирование угловой скорости привода вплоть до основ-
ной производится изменением угла включения тиристо-
ров VI — V6. Возможно повышение угловой скорости
ослаблением поля, когда включается реле РУ, обмотка
которого не показана. При включении реле РУ обратная
связь по скорости отключается. Для ограничения напря-
жения на якоре тахогенератора при угловых скоростях
выше основной в цепь его возбуждения вводится рези-
стор R3.
Последовательно с усилителем У включен блок коррек-
ции БК, предназначенный для ослабления или устранения
возникающих в переходных процессах колебаний. Блок
коррекции представляет собой простое интегродифферен-
цирующее звено (его схема приведена на рис. 12.9 в верх-
нем левом углу).
Благодаря высокому коэффициенту усиления удается
в такой схеме получить диапазон регулирования в преде-
лах 300 : 1 при высоких динамических показателях.
На рис. 12.10 представлена схема управления приводом
по системе УВ—Д с подчиненным регулированием и после-
довательной коррекцией. В ней якорь двигателя М полу-
чает питание от нереверсивного тиристорного выпрями-
теля, включенного по мостовой схеме. На одном валу с дви-
гателем установлен тахогенератор GT, осуществляющий
отрицательную обратную связь, сигнал которой пропор-
ционален угловой скорости двигателя (70 С = /?си. Задаю-
щий сигнал U3,z поступает от бесконтактного командо-
контроллера БКК через задатчик интенсивности ЗИ.
Рассматриваемая схема является двухконтурной. Кроме
внешнего контура регулирования скорости, в ней обра-
зован внутренний замкнутый контур регулирования тока,
потребляемого якорем двигателя. Сигнал отрицательной
обратной связи по току (70>т = /гт/я снимается с датчика
16 Чиликин М. Г., Сандлер А. С.
481
Рис. 12.10. Схема привода по системе тиристорный УВ — Д с подчиненным регулированием и последовательной
коррекцией,
тока ДТ и вводится на вход регулятора тока РТ. Этот
сигнал вычитается нз сигнала на выходе PC. Поэтому
выходной сигнал PC является задающим для регуля-
тора РТ. На выходе РТ формируется сигнал Uy, который
подается в систему фазового управления БУТ тиристор-
ного управляемого выпрямителя ТУВ.
Для ограничения тока якоря при пуске в цепи обрат-
ной связи регулятора скорости PC установлен стабили-
трон V7. Обычно в системах с подчиненным регулированием
применяется задатчик интенсивности ЗИ, включаемый
между командоаппаратом БКК и входом регулятора PC.
Принципиальная схема ЗИ показана на рис. 12.11.
На вход ЗИ подается входное напряжение t/BX, являю-
щееся напряжением пита-
ния коллектора транзисто-
ра V, включенного по схе-
ме с общей базой. Эмиттер-
ная цепь V питается от
стабилизированного напря-
жения 1/3. Ток эмиттера
определяет соответствую-
щее значение тока коллек-
тора, который в этой схе-
ме включения транзистора
практически не зависит от Рис. 12.11. Принципиальная схема
напряжения коллектора, задатчика интенсивности.
Процесс заряда и разряда
конденсатора С при включении напряжения UBX проис-
ходит с постоянным током заряда или разряда, поэтому
напряжение на конденсаторе, следовательно на выходе
задатчика интенсивности, изменяется во времени линейно
до значения (7|Ых = UK,. Знак выходного напряжения оп-
ределяется знаком входного. Ток коллектора транзистора
при этом сохраняет свое направление благодаря выпря-
мителю В.
Для реверсивных приводов с небольшим числом вклю-
чений (не более 300 включений в час) при относительно
небольшой мощности (до 250 кВт) может быть использо-
ван нереверсивный тиристорный выпрямитель с контакт-
ным реверсором. В этом случае вместо реверсивного пре-
образователя с двумя комплектами вентилей и более слож-
ной схемой управления используется относительно про-
стая схема с одним комплектом тиристоров. Краткое
описание такой упрощенной силовой схемы в разомкнутой
16*
483
системе дано в гл. 4. Использование контактного ревер-
сора предусматривает коммутацию силовых цепей двига-
теля при отсутствии тока. Бестоковая коммутация увели-
чивает срок службы реверсора при меньших его габаритах,
повышает надежность.
Типовая схема реверсивного электропривода с кон-
тактным реверсором и с двухзонным регулированием
угловой скорости показана на рис. 12.12. Нереверсивный
тиристорный выпрямитель подключается к сети перемен-
ного тока через автомат ВА, линейный контактор КЛ
н токоограничивающие реакторы Р.
Для перевода двигателя из двигательного режима ра-
боты в генераторный (из первого квадранта во второй)
необходимо переключить контакты реверсора, изменив
одновременно полярность ЭДС преобразователя, что до-
стигается переводом выпрямителя из выпрямительного
режима в инверторный. Переключение реверсора осуще-
ствляется автоматически логическим переключающим уст-
ройством ЛПУ в результате сравнения заданного и фак-
тического знака (направления) тока якоря. Заданный
знак определяется полярностью напряжения на промежу-
точном выходе регулятора скорости PC (выходной сигнал
регулятора скорости (73|Т является выпрямленным). Фак-
тический знак тока якоря определяется замкнутым состоя-
нием одного из вспомогательных контактов реверсора.
Если появляется необходимость переключения реверсора
(из-за несовпадения заданного и фактического знаков тока
якоря), то ЛПУ выдает сигнал ограничения на регулятор
скорости и блокирует регулятор тока, в результате чего
выпрямитель переводится в инверторный режим. Когда
ток в цепи якоря спадает до 0, происходит переключение
реверсора, и регуляторы PC и РТ деблокируются. Если
фактическая угловая скорость выше заданной (при тор-
можении в процессе реверса или остановки привода), то
поддерживается инверторный режим работы выпрямителя
и энергия от двигателя возвращается в сеть.
Регулирование угловой скорости выше основной произ-
водится при так называемом зависимом управлении полем,
когда это управление ведется путем стабилизации ЭДС
якоря посредством ослабления поля. На вход регулятора
тока возбуждения РТВ подаются заданное значение ЭДС
и отрицательная обратная связь по ЭДС. Сигнал этой связи
получается путем вычитания из сигнала, пропорциональ-
ного напряжению на якоре, сигнала, пропорционального
484
Рис. 12.12. Типовая схема реверсивного электропривода с контактным реверсором и с двухзонным регулирова-
нием угловой скорости,
падению напряжения на внутреннем сопротивлении якор-
ной цепи двигателя (исключая сопротивление выпрями-
теля). При угловой скорости до номинальной, когда ЭДС
якоря меньше номинальной, РТВ находится в режиме
ограничения, благодаря чему задается номинальный ток
возбуждения двигателя. При заданной значением изл
угловой скорости выше номинальной регулятор скорости
будет стремиться увеличить ЭДС двигателя выше номи-
нальной до тех пор, пока не будет достигнуто заданное
значение угловой скорости, что приведет к выходу из огра-
ничения на рабочую характеристику РТВ, который будет
уменьшать ток возбуждения, стремясь поддержать задан-
ное значение ЭДС якоря двигателя. В установившемся
режиме ЭДС равна заданной, а ток возбуждения соот-
ветствует заданному значению угловой скорости.
Выпрямитель в цепи возбуждения выполнен по одно-
фазной мостовой несимметричной схеме на двух тиристорах
и двух диодах.
Кроме рассмотренного способа реверсивного управле-
ния двигателем, возможны следующие:
1) изменением направления потока возбуждения дви-
гателя с неизменным по направлению током якоря;
2) изменением направления тока якоря двигателя при
использовании двух групп вентилей.
Первый из этих способов реверса прост и дешевле
других, но уступает им по динамическим показателям
из-за большой постоянной времени обмотки возбуждения
двигателя. Схема с двумя комплектами вентилей в ревер-
сивном преобразователе нашла широкое применение и
обеспечивает высокое быстродействие.
Применяются два способа управления вентильными
комплектами: совместное и раздельное. Кроме того, при
совместном управлении различают согласованное и несо-
гласованное.
При совместном согласованном управлении средние
значения ЭДС выпрямительного и инверторного комплек-
тов равны друг другу и противоположны по знаку, но
мгновенные значения не равны, вследствие чего в замкну-
тых контурах, образованных тиристорными комплектами
и источником питания, течет уравнительный ток, который
необходимо ограничить реакторами (уравнительный ток
ограничивают примерно до 10 % номинального тока).
В стучае совместного несогласованного управления
среднее значение ЭДС инверторного комплекта превы-
456
тает ЭДС выпрямительной группы. При минимальном
угле инвертирования уменьшается уравнительный ток,
и поэтому для его ограничения необходимо включение
реакторов в цепь уравнительного тока значительно мень-
шей индуктивности, чем в первом случае.
При раздельном управлении исключается необходи-
мость в уравнительных реакторах. Раздельное управление
Рис. 12.13. Типовая схема электропривода с реверсивным тиристор-
ным преобразователем с раздельным управлением комплектами тири-
сторов и двухзонным регулированием угловой скорости.
предполагает подачу управляющих импульсов па тот
комплект вентилей, который должен в данный момент
работать, с другого комплекта вентилей должны быть сняты
управляющие импульсы, что выполняется специальным
логическим устройством, определяющим момент равен-
ства 0 тока патрузки (вентилей) и блокирующим управ-
ляющие импульсы ранее работавшего комплекта вентилей.
После некоторой паузы (около 5—10 мс) разрешается
подача импульсов на вентили другой группы. При раз-
дельном управлении повышается КПД электропривода
из-за исключения уравнительных токов.
487
На рис. 12.13 показана типовая схема электропривода
с реверсивным тиристорным преобразователем с раздель-
ным управлением и двухзонным регулированием угловой
скорости. В схеме, построенной по принципу подчиненного
регулирования, используются задатчик интенсивности ЗИ,,
два ////-регулятора PC и РТ и логическое переключаю-
щее устройство ЛПУ, которое переключает выходы блока
БУТ1, подающие управляющие импульсы на разные ком-
плекты тиристоров VI — V6 и V7 — V12 выпрямителя.
Двухзонное регулирование угловой скорости производится
таким же образом, как и в схеме с реверсором (см.
рис. 12.12).
12.5. Система частотного управления
асинхронным двигателем
Одна из возможных схем автоматического управления
асинхронным двигателем с короткозамкнутым ротором, управляемым
с помощью тиристорного преобразователя частоты с автономным ин-
вертором тока, представлена на рис. 12.14. В ней силовая часть преоб-
разователя, описанная подробно в гл.6, сочетается с упрощенной схе-
мой блока регулирования, формирующего необходимую связь между
током и скольжением в статических и динамических режимах. Блок по-
строен по принципу подчиненного регулирования.
Входными сигналами блока регулирования являются: задающее
напряжение /73,с, определяющее частоту автономного инвертора тока
АИТ, напряжение отрицательной обратной связи по выпрямленному
току Ui, снимаемое сдатчика тока ДТ, и напряжение {/о отрицательной
обратной связи по угловой скорости асинхронного двигателя, снимае-
мое с датчика ДС.
Блок регулирования состоит из четырех операционных усилителей,
выполненных на интегральных микросхемах.
Регулирование выпрямленного тока (и следовательно, тока статора
двигателя) осуществляется с помощью регулятора тока РТ, воздей-
ствующего через систему управления выпрямителем СУ В на угол вклю-
чения тиристоров управляемого выпрямителя УВ. Регулятор тока РТ
собран на операционном усилителе по схеме П//-регулятора. На его
вход через резисторы R10 и R11 подаются сигналы отрицательной об-
ратной связи по току Ut и задающий сигнал U3,3, пропорциональный
модулю скольжения двигателя. Регулятор РТ обеспечивает в статичес-
ких режимах точное соответствие тока статора задающему сигналу U3,T
независимо от выходной частоты АИТ.
С помощью регулятора скольжения PC (работает подобно /7-регу-
лятору скорости в системе постоянного тока) производятся вычитание
из задающего напряжения U3,z сигнала /7И, пропорционального угло-
вой скорости ротора, н усиление разностного сигнала, т. е. вырабаты-
вается сигнал, пропорциональный скольжению двигателя.
Так как ток в звене выпрямленного напряжения не меняет своего
знака независимо от режима работы двигателя, а скольжение свой знак
изменяет, то знак задающего напряжения (73,т должен сохраняться
неизменным независимо от знака скольжения,
488
Операция выделения модуля напряжения I Uр 1 производится
с помощью диодов V14 и V15 и инвертора знака, собранного иа усили-
теле И.
На входе регулятора частоты РЧ производится суммирование
сигналов скольжения с выхода PC и угловой скорости с датчика ДС,
а напряжение Uf с выхода РЧ подается на систему управления авто-
номным инвертором СУИ, управляющую выходной частотой АИТ,
Таким образом, регуляторы тока РТ и частоты РЧ подчинены регуля-
тору скольжения PC. Но выходной сигнал PC не является задающим
сигналом для регулятора РЧ, в частности, потому, что на этот регуля-
тор вводится не отрицательная, а положительная обратная связь по
угловой скорости.
Рис. 12.14. Схема автоматического управления асинхронным двигате-
лем с короткозамкнутым ротором, управляемым тиристорным преобра-
зователем с автономным инвертором тока.
Стабилитрон V13 предназначен для ограничения скольжения
(если для подачи U3,z иа вход PC не используется задатчик интенсив-
ности), а следовательно, значения тока в переходных и аварийных
режимах.
Параметры регулятора частоты РЧ выбраны так, что с увеличением
нагрузки на валу двигателя на рабочем участке его механической харак-
теристики частота на выходе АИТ остается постоянной вследствие того,
что уменьшение сигнала угловой скорости компенсируется соответ-
ствующим увеличением сигнала скольжения. Пропорционально уве-
личению сигнала скольжения растет ток двигателя. Коэффициент про-
порциональности подобран таким, чтобы жесткость механической харак-
483
теристики была такой же, как у естественной характеристики двига-
теля. При дальнейшем увеличении момента ншрузки открывается ста-
билитрон V13, после чего скольжение, ток и момент двигателя остаются
постоянными, а частота на выходе АИТ и угловая скорость двигателя
снижаются, что соответствует вертикальному участку механической
характеристики.
Аналогично при подаче скачком задающего напряжения U3 с
открывается стабилитрон V13, и в первый момент напряжение =
= t/pmox, так как со = 0. С увеличением угловой скорости происходит
частотный пуск двигателя при постоянном скольжении и соответствую-
щих ему постоянных токе статора и моменте двигателя. По окончании
пуска напряжение поступающее со стороны датчика угловой ско-
рости, становится близким к задающему t/31C. Стабилитрон V13 закры-
вается, и угловая скорость привода устанавливается в соответствии
с задающим сигналом.
Темп пуска определяется заданными значениями максимального
скольжения, тока и момента, развиваемого двигателем, а также стати-
ческим моментом и не зависит от U3,z.
Торможение двигателя осуществляется отключением напряжения
Б’3 с. При этом торможение происходит с отдачей энергии в сеть. В этом
случае открывается стабилитрон V13, но уже при другом знаке сигнала
скольжения по сравнению с пуском, и на входе РЧ сигнал скольжения
теперь вычитается из сигнала угловой скорости, частота на выходе ЛИТ
уменьшается, и двигатель переходит в генераторный режим (скольже-
ние стало отрицательным).
По мере снижения угловой скорости снижается частота, происходит
частотное торможение, как и пуск, при неизменных значениях тока,
момента двигателя и скольжения.
При реверсировании двигателя (изменение полярности (73,с)
сначала осуществляется торможение до полной остановки с последую-
щим бесконтактным переключением чередования фаз па выходе АИТ,
осуществляемым посредством системы управления инвертором, после
чего двигатель разгоняется в обратною сторону.
Стабилитроны V16, установленные в цепи обратной связи регуля-
тора тока, ограничивают максимальный уровень сигнала управления
выпрямителем (Ja, т. е. максимальные значения ЭДС в выпрямительном
и инверторном режимах его работы.
12.6. Система управления асинхронно-
вентильным каскадом
На рис. 12.15 приведена построенная аналогично сис-
темам подчиненного регулирования приводов постоянного тока дв\ х-
коптурная система управления АВК, позволяющая оптимизировать его
статические и динамические режимы. Внешнему контуру регулирования
угловой скорости подчинен внутренний контур регулирования выпрям-
ленного тока. Задающим напряжением для регулятора РТ внутреннего
контура является выходное напряжение регулятора скорости PC.
В данном случае используется двукратно интегрирующая система под-
чиненного регулирования угловой скорости двигателя.
Схема содержит: задатчик интенсивности ЗИ, фильтр на входе
регулятора PC, состоящий из С1 и R1 и обеспечивающий настройку PC
на технический оптимум; ПИ-регуляторы PC и РТ, блоки ограниче-
ния БО, систему управления СИФУ, инвертор И,
490
Силовая часть схемы предполагает подключение статорной цепи
асинхронного двигателя Л1 к сети при помощи линейного выключателя
К 7 и присоединения роторной цепи к неуправляемому выпрямителю В,
собранному по трехфазной мостовой схеме. Выпрямитель В через реак-
тор L соединен с инвертором И. Обратная связь по скорости осущест-
вляется тахогенератором GT, жестко связанным с валом двигателя;
напряжение тахогенератора подается на регулятор PC. Сигнал, пропор-
циональный току в цепи выпрямленного напряжения, снимается с шуи-
та Ш и через датчик тока ДТ передается на регулятор РТ.
Так как АВК является не полностью управляемым электроприво-
дом (выпрямленный ток не может изменить своего направления), регуля-
торы PC и РТ должны иметь двустороннее несимметричное ограничение,
для чего служат диоды VI и V2, не допускающие появления на выходах
регуляторов напряжения другой полярности, чем полярность указан-
ных на рис. 12.15, и блоки ВО, ограничивающие максимальные уровни
сигналов на выходах регуляторов.
Торможение электропривода по схеме АВК можно осуществить,
подавая постоянный ток в обмотку статора М. В процессе возникшего
в этом случае динамического торможения мощность скольжения реку-
перируется в сеть через инвертор. Управление процессом торможения
можно перенести в цепь ротора, использовав воздействие в виде изме-
нения угла включения тиристоров инвертора. Автоматизация режима
торможения в большинстве случаев не требует дополнительных регули-
рующих устройств по сравнению с двигательным режимом.
12.7. Автоматическое управление
синхронными электроприводами
Если рассматривать синхронный двигатель в качестве
привода, нерегулируемого по угловой скорости, то задачи автомати-
ческого регулирования в зависимости от условий работы привода могут
быть сформулированы следующим образом.
491
Для приводов с мало или плавно изменяющейся нагрузкой следует
стремиться к поддержанию стабильности заданного тока возбуждения
и регулированию его по определенному закону (при переменной нагруз-
ке) для снижения потерь в двигателе или для поддержания реактивной
мощности и напряжения в узле нагрузки.
При кратковременной перегрузке и возможном снижении питаю-
щего напряжения следует повышать статическую устойчивость двига-
теля, увеличивая возбуждение. Это особенно необходимо при понижении
напряжения возбудителя.
В приводах, работающих с ударной нагрузкой, необходимо обес-
печить кратковременную форсировку возбуждения для повышения ди-
намической устойчивости.
Система автоматического регулирования возбуждения способствует
уменьшению качаний ротора относительно синхронной угловой скорости.
возникающих при ударной на-
грузке и приводящих к колеба-
ниям напряжения в питающей
сети и повышению потерь энер-
гии, а также неблагоприятно
сказывающихся на режиме ра-
боты приводимого механизма.
В приводах с пульсирую-
щей нагрузкой система автома-
тического регулирования воз-
буждения дает возможность ис-
Рис. 12.16. Структурная схема
системы регулирования возбуж-
дения синхронного двигателя с
тиристорным преобразователем
и общим суммирующим усили-
телем.
ключить синфазность в положении кривошипов нескольких механиз-
мов поршневых компрессоров, наличие которой может вызвать колеба-
ния в напряжении питающей сети.
Если режим работы спокойный, то к быстродействию системы регу-
лирования возбуждения не предъявляются высокие требования. Когда
приводы работают с резкопеременной нагрузкой, требования к системе
регулирования более жесткие, так как параметры привода быстро ме-
няют свои значения, поэтому привод должен отличаться высоким быст-
родействием, что обеспечивается использованием в системе регулирова-
ния сигнала по производной активной составляющей тока статора или
сигнала, пропорционального приращению внутреннего угла 0 синхрон-
ного двигателя, а также повышением кратности форсировки напряжения
возбуждения и снижением постоянных времени элементов системы воз-
буждения привода посредством использования вместо электромашинных
возбудителей тиристорных выпрямителей.
На рис. 12.16 приведена структурная схема системы регулирования
возбуждения с общим суммирующим усилителем РТВ. На вход регу-
лятора тока возбуждения РТВ подается задающий сигнал тока возбуж-
дения /вэ, сигнал гибкой положительной обратной связи по производ-
ной активного тока статора dljdt, поступающий отдатчика активного
тока ДАТ через дифференциальный преобразователь ДП, сигнал жест-
492
кой отрицательной обратной связи по Iр, поступающий! от датчика реак-
тивного тока статора ДРТ, и сигнал жесткой отрицательной обратной
связи по току возбуждения /„, снимаемый с датчика ДТВ. На входы
датчиков ДАТ и ДРТ поступают сигналы с датчика полного тока статора
двигателя ДПТ и с трансформатора напряжения TH.
Управляемый тиристорный выпрямитель ТУВ, предназначенный
для питания обмотки возбуждения, подключен к сети напряжением
380 В через согласующий трансформатор ГС; выпрямитель управля-
ется системой импульсно-фазового управления СФУ, которая получает
управляющий сигнал с выхода регулятора тока возбуждения РТВ. Регу-
лятор РТВ выполнен на основе суммирующего магнитного усилителя.
Рис. 12.17. Структурная схема автоматического регулирования воз-
буждения синхронного двигателя с подчиненным регулированием.
На рис. 12 17 приведена структурная схема автоматического регу-
лирования возбуждения, построенная по принципу подчиненного регу-
лирования. Схема разработана во ВНИИЭлектропривод.
Первый внутренний контур — это контур регулирования тока
возбуждения с регулятором РТВ. Сигнал задания для этого контура
состоит из двух составляющих: /в min — соответствует минимальному
значению тока возбуждения, создающему номинальную ЭДС двигателя
в режиме холостого хода; другая составляющая поступает от регуля-
тора задания тока возбуждения РЗТВ, входящего во второй контур
регулирования и предназначенного для изменения уставки тока воз-
буждения в соответствии с изменением условий работы и нагрузки при-
вода
Па входе РЗТВ складываются три сигнала; сигнал, пропорцио-
нальный квадрату активного тока и идущий от датчика актьвнго токт
ДАТ через квадратичный преобразователь ПК и усилитель форсировки
УФ', сигнал, поступающий по другому каналу от того ?ке датчика ДАТ
через дифференциальный преобразователь ДП, который образует на
493
выходе сигнал, пропорциональный производной dia'fdl; сигнал с выхода
регулятора реактивного тока РРТ.
Регулятор РРТ входит в третий контур регулирования, на входе
которого алгебраически суммируется сигнал задания реактивного тока
/р.з и сигнал жесткой отрицательной обратной связи по реактивному
току статора /р, поступающий с датчика ДРТ, и сигнал с выхода регу-
лятора напряжения PH.
Четвертый контур образуется с помощью регулятора PH, на вход
которого подаются сигнал задания U3 и сигнал обратной связи Uc,
выдаваемый датчиком напряжения ДН. На вход PH подключен сигнал
U3mi„ с выхода узла, обеспечивающего при снижении напряжения сети
до 0,8—0,85 номинального резкое форсирование возбуждения за счет
резкого увеличения сигнала U3min.
В отличие от традиционных систем подчиненного регулирования
с последовательной коррекцией, рассмотренных ранее, в системе на
рис.12.17 выходной сигнал регулятора каждого внешнего контура не
является задающим сигналом для подчиненного ему внутреннего кон-
тура. Внешние контуры выполняют роль корректирующих контуров,
изменяющих задающий сигнал внутреннего подчиненного им контура.
Кроме того, второй внутренний контур не имеет жесткой отрицательной
обратной связи. На вход его подаются две положительных связи,
одна — по производной активной составляющей тока, предназначенная
для повышения динамической устойчивости привода (для форсировки
возбуждения) при ударном приложении нагрузки и действующая только
в переходных процессах, связанных с изменением нагрузки; другая —
нелинейная квадратичная компаундирующая по активной составляю-
щей тока статора (положительная по нагрузке), предназначенная для
компенсации падения напряжения в сети оттока нагрузки. Это падение
напряжения пропорционально квадрату активной составляющей тока
статора, что и обусловливает квадратичную характеристику компаунди-
рующей обратной связи.
Третий контур регулирования поддерживает постоянство отдачи
двигателем реактивной мощности. Действие этих трех контуров обеспе-
чивает двигателю высокие энергетические показатели, статическую
и динамическую устойчивость при резкопеременной нагрузке.
При изменении напряжения сети вступает в действие четвертый кон-
тур — контур регулирования напряжения, изменяющий уставку реак-
тивной составляющей тока статора и, следовательно, ток возбуждения
двигателя. При снижении напряжения сети (в узле нагрузки) двигатель
перевозбуждается с целью поддержания напряжения на шинах и его
перегрузочной способности. Поддерживать напряжение на шинах при
его снижении (тем более с высокой точностью) может только очень
мощный двигатель, разгружая питающие линии от реактивного тока
за счет генерирования реактивной мощности. При значительном сниже-
нии напряжения, как уже указывалось, резко возрастает от действия
специального устройства сигнал U3min и форсирует возбуждение для
повышения статической и динамической устойчивости двигателя.
12.8. Управление приводами с вентильными
двигателями
Единственным способом регулирования угловой ско-
рости синхронного двигателя является частотное регулирование. Прак-
тически обычно оно реализуется в ВД (см. § 4.16); хотя иногда и при-
494
меняется обычное частотное управление синхронными двигателями,
в основном в разомкнутых системах.
Вентильный двигатель представляет собой единую систему, состоя-
щую из синхронного двигателя и преобразователя частоты с промежу-
точным звеном постоянного тока (выпрямитель — инвертор), вентили
инвертора которого коммутируются в функции положения ротора.
Инвертор, управляемый таким образом, фактически выполняет роль
коллектора обычной машины постоянного тока, а синхронный двига-
тель, работающий совместно с таким инвертором (коммутатором), при-
обретает свойства машины постоянного тока и называется бесколлек-
торной машиной постоянного тока (БМПТ) или ВД постоянного тока.
Для построения замкнутой системы управления ВД целесообразно
его представить в виде двух основных элементов — управляемого
выпрямителя и БМПТ. В этом случае могут быть использованы (и ис-
пользуются) для управления ВД рассмотренные ранее системы подчи-
ненного регулирования с последовательной коррекцией, содержащие
контур тока и контур скорости. Однако настройка регуляторов в случае
ВД должна учитывать зависимость параметров БМПТ от угла опереже-
ния (3 инвертора, угловой скорости и значительную реакцию якоря.
В качестве инвертора, особенно при наличии контура тока, целесообраз-
но использовать инвертор тока.
В ВД средней и большой мощности часто используют синхронные
двигатели обычной конструкции и естественную коммутацию вентилей
инвертора тока в функции напряжения статора двигателя. В этом слу-
чае устойчивая коммутация инвертора возможна в ограниченном диа-
пазоне регулирования угловой скорости (приблизительно до 0,1 ы11ом),
что усложняет процесс пуска двигателя н построение замкнутых систем
регулирования, которые должны отключаться на период асинхронного
пуска синхронного двигателя. Кроме того, в этих ВД сильное влияние
на характеристики и устойчивость ВД оказывает размагничивающая
реакция якоря. Поэтому систему регулирования угловой скорости и
тока якоря следует дополнять системой автоматического компаундного
(с положительной связью по току якоря) регулирования возбуждения
ВД. Вентильный двигатель на основе синхронных двигателей обычной
конструкции главным образом применяют в приводах с мало и медленно
изменяющейся продолжительной нагрузкой.
Для ВД следует создавать (и их создают) синхронные двигатели
специальных конструкций всего требуемого ряда мощностей и номи-
нальных угловых скоростей. Для возможности управления процессами
пуска, торможения и глубокого регулирования угловой скорости ВД
управление инвертором нужно производить посредством датчика поло-
жения ротора, устанавливаемого на валу ВД, и применять устройства
принудительной (искусственной) коммутации вентилей инвертора.
В некоторых случаях прн высоких угловых скоростях осуществляется
переход от искусственной коммутации на естественную, но Sto услож-
няет систему управления инвертором.
Из ВД постоянного тока специальных конструкций представляют
интерес бесконтактные (бесщеточные) синхронные двигатели.
Бесщеточный ВД с активным ротором конструктивно аналогичен
обычной синхронной машине, но магнитный поток его образуется с по-
мощью постоянных магнитов. Машина средней мощности до 30 кВт
с постоянными магнитами имеет меньшие габариты и массу, чем с об-
моткой возбуждения. Благодаря высокому КПД машин с постоянными
магнитами эют’омится электроэнергия, которая тратится в машинах,
снабженных обмотками возбуждения, на электрическое возбуждение.
495
Кроме того, требуется меньшее количество воздуха для охлаждения
машины, и вследствие этого они отличаются меньшим уровнем шума.
Следует отметить, что выпускаются также коллекторные двигатели
постоянного тока с постоянйыми магнитами.
Синхронные двигатели с постоянными магнитами выполняются
мощностью примерно до 30 кВт, с максимальной частотой вращения
до 3000 об/мин, миогополюсными (до 12 и более полюсов).
Рис. 12.18. Структурная схема автоматического управления ВД с по-
стоянными магнитами и принципиальная схема силовой части привода.
На рис. 12.18 приведены принципиальная схема силовой части
привода и структурная схема автоматического управления ВД с посто-
янными магнитами. Преобразователь частоты выполнен по той же схеме,
что и в случае частотно-токового управления асинхронным двигателем
с короткозамкнутым ротором (см. рис. 12.14). Управление автономным
инвертором тока АИТ осуществляется системой управления СУИ, син-
хронизируемой датчиком положения ротора ДПР, установленным на
валу двигателя М. Система управления приводом построена по прин-
ципу подчиненного регулирования с последовательной коррекцией и
содержит коит\ р тока с регулятором тока РТ и обратной связью по току,
снимаемой с датчика тока ДТ, и контур скорости с регулятором PC и
(196
обратной связью по скорости, снимаемой с тахогенератора GT. Струк-
тура системы такая же, как и для двигателя постоянного тока незави-
симого возбуждения. Регулятор тока воздействует на систему управ-
ления выпрямителем СУВ, изменяя ток (и напряжение) на входе ин-
вертора, т. е. на выводах якоря ВД постоянного тока. Диапазон регу-
лирования в этой системе до 100: 1.
Бесконтактные синхронные двигатели (ВД) мощностью более
30 кВт и примерно до 200 кВт при 3000 об/мин выполняются с обмоткой
возбуждения, специальным образом располагаемой на статоре. На ста-
торе же располагается и трехфазная якорная обмотка. Ротор представ-
ляет собой безобмоточный магнитопровод, напоминающий зубчатое
колесо, через выступы (зубцы) которого замыкается магнитный поток,
создаваемый обмоткой возбуждения и якорной обмоткой. Ротор враща-
ется синхронно с вращающимся полем статора, создаваемым трехфазной
обмоткой. Обмотка возбуждения постоянного тока способствует усиле-
нию поля и тем самым образованию крутящего момента, примерно про-
порционального току, протекающему в цепи выпрямленного напряже-
ния преобразователя частоты, на входе инвертора (на входе ВД постоян-
ного тока).
Как указывалось, большое влияние на характеристики ВД оказы-
вает размагничивающая реакция якоря, в связи с чем желательно уве-
личивать ток возбуждения с ростом нагрузки на валу двигателя. Наи-
более просто это можно сделать, применяя двигатель последовательного
возбуждения. В этом случае появляется еще возможность использовать
обмотку последовательного возбуждения двигателя и как сглаживаю-
щий реактор в цепи выпрямленного тока преобразователя частоты.
На рис. 12.19 приведены структурная схема автоматического уп-
равления бесконтактным ВД последовательного возбуждения и схема
силовой части привода. Здесь, как и в приводе по схеме на рис. 12.18,
управление тиристорами инвертора осуществляется отдатчика положе-
ния ротора ДПР, а тиристорами выпрямителя — по схеме подчинен-
ного регулирования. Обмотка возбуждения двигателя включена после-
довательно с якорем ВД постоянного тока (в цепь выпрямленного тока
преобразователя частоты) и выполняет дополнительную функцию сгла-
живающего реактора. При угловой скорости двигателя ниже 0,1 а>ц0М
коммутация тиристоров инвертора тока АИТ осуществляется посред-
ством устройства общей искусственной коммутации (типа короткозамы-
кателя), которое получает импульсы на включение от блока управле-
ния БУ, управляемого датчиком положения ротора. При более высоких
угловых скоростях срабатывает от сигнала с датчика скорости (тахоге-
нератора GT) блок блокировки ББ и блокирует блок БУ, запрещая
подачу импульсов управления на устройство коммутации УК. Проис-
ходит переход на естественную коммутацию тиристоров инвертора тока
АИТ, осуществляемую напряжением (ЭДС) машины М.
В отличие от случая питания коллекторного двигателя постоянного
тока последовательного возбуждения от сети постоянного тока, когда
двигатель не имеет конечного значения угловой скорости идеального
холостого хода и ие может работать в генераторном режиме параллельно
с сетью, в данной схеме за счет применения системы подчиненного ре-
гулирования, которая снижает напряжение на якоре и ток якоря по
мере уменьшения нагрузки, характеристики двигателя оказываются
такими же, как и у двигателя постоянного тока независимого возбужде-
ния: с конечным значением угловой скорости идеального холостого хода
и практически линейными. Кроме того, поскольку ток в цепи выпрямлен-
ного напряжения не меняет своего знака при переходе двигателя в гене-
497
раторнь'й режим (соответственно при переходе инвертора в выпрями-
тельный режим, а выпрямителя — в инверторный), то в данной схеме
оказывается возможной для Д|игателя последовательного возбуждения
работа в генераторном режиме параллельно с сетью (рекуперативное
торможение).
Рис. 12,19. Структурная схема автоматического управления бескон-
тактным ВД последовательного возбуждения и схема силовой части
привода.
‘ При реверсировании ВД сначала осуществляется торможение до
полной остановки с последующим бесконтактным переключением чере-
дования фаз на выходе инвертора воздействием датчика положения
ротора на схему управления инвертором, после чего ВД разгоняется
в обратную сторону.
Пока еще ВД из-за сложности и высокой стоимости преобразова-
теля и двигателя имеет ограниченное общепромышленное применение.
Перспективно его использование для мощных очень тихоходных при-
водов (например, привод шаровой мельницы) и для сверхмощных быст-
роходных приводов (нагнетатели),
498
12.9. Замкнутые системы управления
некоторыми производственными
механизмами
а) Автоматическое управление электроприводом
лебедок зондов доменной печи
Для слежения за уровнем шихты в доменной печи и
подачи сигналов в систему автоматического управления загрузкой, а
также световых сигналов применяются лебедки зондов, кинематическая
схема которой показана на рис. 12.20.
Момент двигателя 2 в режиме слежения оказывается меньше про-
тиводействующего момента зонда 3, и зонд лежит на поверхности 1
шихты. Двигатель находится в заторможенном состоянии и натягивает
трос 4. По мере понижения уровня шихты зонд, опускаясь, поворачи-
вает барабан лебедки 5, который связан с валом двигателя через редук-
тор 6, По углу поворота барабана определяется уровень шихты.
схема лебедки зондов доменной
печи.
Рис. 12.21. Требуемые механи-
ческие характеристики привода
лебедки зонда доменной печи.
Перед подачей шихты зонд поднимается, а после загрузки вновь
опускается на шихту. В верхнем положении зонда при отключении
двигателя накладывается механический тормоз 7.
Требуемые характеристики привода лебедки зонда приведены на
рис. 12.21. Момент двигателя при подъеме (точка Д на характеристике /)
уравновешивается суммой моментов от зонда Л13 и трения Л4Тр в меха-
низмах.
При опускании зонда момент двигателя меньше М3 на момент тре-
ния (точка В на характеристике 2), а угловая скорость при опускании
зонда не превышает значения шои.
В режиме слежения за уровнем шихты трос натягивается под дей-
ствием момента Л12. При работе на подъем момент двигателя ограничен
значением М1. Ограничение момента необходимо для снижения ударного
499
эис. 12.22. Принципиальная схема тиристорного выпрямителя н его
псгема управления,
500
растяжения троса, когда происходит переключение двигателя с харак-
теристики 2 на характеристику 1.
Вследствие постоянства динамического момента при пуске зонд
поднимается за минимальное время. При постоянной угловой скорости
<ооп опускания зонда уменьшается влияние электропривода на разброс
показаний уровня шихты, поверхность которой имеет крутизну естествен-
ного откоса. При разных скоростях опускания зонд скатывался бы на
разные расстояния к центру доменной печи, искажая показания уровня
шихты.
Характеристики, близкие к требуемым, могут быть получены от
двигателя постоянного тока, управляемого тиристорным выпрямителем,
В схеме (рис. 12.22) использованы тиристоры VI—V6, относительно
просто управляемые однополупериодными магнитными усилителями
МУ, с помощью которых можно регулировать угол включения тирис-
торов.
Схема управления одним тиристором показана на рис. 12.23.
Рис. 12.23. Схема управления тиристором с помощью однополупериод-
ного магнитного усилителя.
Наличие вентиля VT обеспечивает прохождение тока в цепи рабо-
чей обмоткн шр только в одном направлении. При ненасыщенном серде-
чнике индуктивное сопротивление рабочей обмотки во много раз превы-
шает сопротивление балластного резистора /?7, поэтому напряжение
на R7 очень мало. В момент насыщения сердечника МУ индуктивнее
сопротивление рабочей обмотки резко снижается, и основная часть
напряжения питания прикладывается к резистору R7. Это напряжение
подается на вход тиристора через ограничивающий резистор R1. Для
защиты от случайного возникновения на управляющем электроде отри-
цательного потенциала параллельно входу тиристора включается диод
VI'.
С помощью управляющей обмотки изменяется момент насыщения
сердечника и, таким образом, регулируется фаза сигнала управления,
подаваемого на тиристор, т. е. изменяется угол включения его.
В схеме управления приводом лебедки зонда, представленной на
рис. 12.24, в качестве источника питания двигателя используется уп-
равляемый выпрямитель (рис. 12.22), подключенный к сети через авто-
трансформатор Т1. Трехобмоточные трансформаторы Т2, ТЗ, Т4 (см.
рис. 12.22) обеспечивают необходимую начальную фазпровку сигналов
управления.
На схеме рис. 12.24 показаны обмотки управления магнитных уси-
лителей 03, ОС, ОНТ н ОТ, каждая из которых состоит из шести после-
довательно соединенных (как на рис. 12.22) обмоток: ОЗ — задающая
501
обмотка управления, полача сигнала на эту обмотку вызывает пуск
двигателя, ОС — обмотка смещения, ОНТ — обмотка управления
напряжением н током двигателя, используется только в режиме спуска
зонда ОТ — обмотка токовой отсечь и
Последовательное соединение обмоток управления магнитных
усилителей МУ1 — МУ6 (см рис. 12 22) исключает первую гармонику
в цепи управления.
С помощью указанных обмоток и стабилитронов V4 и V5 обеспечи-
ваются требуемые характеристики привода лебедки зонда
Открывающий сигнал на входе транзистора V3 при работе привода
на подъем отсутствует, и V3 не пропускает ток. Ключ К, если он приме-
нен для управления, в этом случае
разомкнут
От резистора R3, включенного
последовательно в цепь якоря дви-
гателя, подается питание на обмот-
ку ОТ. Если падение напряжения
превосходит напряжение пробоя
стабилитрона V5, то V2 открывает-
ся В противном случае ток через
обмотку ОТ практически не прохо-
дит, так как транзистор V2 при
этом имеет большое сопротивление.
Следовательно, обмотка ОТ вступа-
ет в действие в том случае, когда
ток обмотки якоря превышает за-
данное значение Магнитодвижущая
сила обмотки ОТ вычитается из
МДС обмотки 03.
Режим спу'ска достигается от-
пирающим автоматическим сигна-
лом на транзисторе V3 или при за-
мыкании ключа Л. В обмотке ОНТ
увеличивается ток, который снача-
ла снижает до 0 выходное напря-
жение управляемого выпрямителя,
а затем переводит его в инверторный
режим, когда двигатель изменит
направление вращения.
Как в режиме пуска, так и при
подъеме направление тока в обмот-
ке якоря двигателя не изменяется.
Вследствие того, что обмотка ОТ
создает сильную обратную отрица-
тельную связь по току двигателя,
получается очень мягкая характе-
Рис. 12 24. Схемы соединений
обмоток управления МУ.
ристика двигателя
Уменьшение отрицательной обратной связи по току, создаваемой
обмоткой ОНТ, при достижении установленной скорости спуска при-
водит к изменению наклона механической характеристики двигателя,
увеличению ее жесткости и ограничению скорости спуска Достигается
это шунтированием обмотки ОНТ транзистором VI, который открыва-
ется, как только отрицательное напряжение на резисторе R2 превысит
напряжение пробоя стабилитрона V4 При положительном напряжении
на обмотке якоря двигателя диод V6 отключает входную цепь триода У/.
502
На рнс. 12.25, а показано влияние различных параметров схемы на
механические характеристики привода при подъеме зонда, а на
рис. 12.25, б — при спуске.
Рис. 1'2.25. Влияние отдельных параметров схемы па механическою
характеристику привода при подъеме (и) и спуске (б).
Подбором значений сопротивлений резисторов можно получить
характеристики, близкие к требуемым.
6) Автоматическое управление электрическим
режимом сталеплавильной печи
Задачами управления электрическим режимом стале-
плавильной печи являются автоматическое регулирование и стабилиза-
ция мощности дуги. Для этой цели используют различные регуляторы.
Наиболее стабильным из них является дифференциальный, в котором
сохраняется постоянство отношения напряжения на дуге к ее току.
Современные бесконтактные регуляторы с тиристорами обладают
высоким быстродействием, значительно большим, чем в регуляторах
с электромаишиными усилителями.
Для дуговой печи рядом организаций разработан тиристорный
регулятор мощности типа АРДМ-Т-12, принципиальная схема которого
для одной фазы приведена на рис. 12.26. Здесь ог трансформатора тока
ТТЗ сигнал (через специальный прибор с интегрирующим устройством,
показывающим среднее значение тока), пропорциональный току дуги,
передается трансформатору ТЗ, имеющему три обмотки, одна из кото-
503
Рис, 12,26, Схема автоматического управления электрическим режимом дуговой сталеплавильной печи.
рых служит для подмагничивания и питается от источника выпрям-
ленного напряжения; ток намагничивания в ней регулируется бескон-
тактным сельсином БС, управляемым с помощью задатчика РЗ. Обмотка
подмагничивания может управляться вручную или от программного
устройства ПУ, подключаемого переключателем П.
По другому каналу сигнал, фиксирующий напряжение дуги, по-
ступает на трансформатор Т4 через устройство переклкчения напряже-
ния УПН, управляемое переключателем ступеней напряжения авто-
трансформатора Т1 и обеспечивающее одинаковое входное напряжение
на трансформаторе Т4 при различных вторичных напряжениях транс-
форматора Т2. Сигналы, пропорциональные току и напряжению дуги,
выпрямляются (В1 и В2), поступают иа схему сравнения, состоящую
из резисторов R1 н R2, на выходе которой образуется разность сигналов,
отличная от 0 при отклонении тока и напряжения от заданных значений.
Через фильтр, состоящий из реактора L и конденсатора С, сигнал
поступает в функциональное устройство ФУ, где из полученного сигнала
вычитается сигнал отрицательной обратной связи, подаваемый от тахо-
генератора СТ, сидящего на одном валу с двигателем М, предназначен-
ным для перемещения электродов. Результирующий сигнал через функ-
циональное устройство, обладающее соответствующим коэффициентом
усиления, попадает в блок регулирования БР, состоящий из промежу-
точного усилителя У и усилителя мощности УМ, реализующего токо-
ограничивающую связь ТО, действующую в функции ЭДС двигателя.
Сигнал этой связи поступает в усилитель мощности УМ с диагонали
тахометрического моста, образованного резисторами R3 и R4, обмоткой
якоря и обмоткой дополнительных полюсов ДП двигателя М. Другое
воздействие на усилитель мощности УМ и систему управления тирис-
торами ФСУ осуществляется включением логического устройства ТЛ,
дающего разрешение на включение анодной или катодной группы ти-
ристоров реверсивного выпрямителя с раздельным управлением. Сигна-
лы управления на выходе УМ воздействуют на фазосдвигающее устрой-
ство ФСУ, регулирующее фазу и формирующее импульсы управления
тиристорами, соединенными по реверсивной трехфазной нулевой схеме.
Двигатель М в соответствии с сигналом с выхода УМ включается с нуж-
ным направлением вращения и перемещает электроды печи до тех пор,
пока сигнал с выхода сравнивающего устройства на резисторах R1 и R2
не станет равным 0.
Рассмотренный регулятор мощности на тиристорах позволяет
значительно сократить число отключений из-за перегрузок печи, уве-
личить мощность при плавке и, следовательно, повысить производи-
тельность печи.
ГЛАВА ТРИНАДЦАТАЯ
СЛЕДЯЩИЙ привод, программное
УПРАВЛЕНИЕ
13.1. Общие положения, назначение
и классификация следящих приводов
Следящий привод представляет собой замкну-
тую автоматическую систему, при помощи которой испол-
нительный орган с определенной точностью отрабатывает
505
движение рабочего механизма в соответствии с произ-
вольно меняющимся сигналом, задаваемым управляющим
органом (датчиком). Так, на копировальном станке режу-
щий инструмент совершает обработку поверхности изде-
лия, соответствующей практически любой конфигурации
поверхности модели или шаблона, по которой перемеща-
ется копировальный палец измерительного устройства.
В прокатных станах автоматическое перемещение меха-
низма подачи валков осуществляется в соответствии с дви-
жением маломощного устройства, задающего программу
прокатки.
Область применения следящего привода продолжает
расширяться. В настоящее время он используется для
автоматического контроля за изменением различных физи-
ческих величин, для регулирования скорости паровых
и гидравлических турбин, в устройствах прокатных ста-
нов, в системах управления металлорежущими станками,
шагающими экскаваторами, манипуляторами т. п.
Источник
энергии
Рис. 13.1. Структурная схема
следящего привода.
Следящий привод применяется в установках мощностью
от нескольких ватт до нескольких десятков киловатт
и более.
В общем случае следящий привод состоит из датчика 1,
приемного (следящего) устройства 2, усилителя 3 и испол-
нительного двигателя 4 (рис. 13.1). Датчик и приемник
образуют устройство, которое обычно называют измери-
телем рассогласования. Элементы следящего привода свя-
заны между собой так, что изменение в положении датчика
воздействует через приемник и усилитель на приводной
двигатель, который отрабатывает заданное перемещение.
Следящий привод, как и устройства синхронной передачи,
работает только за счет возникающего угла рассогла-
сования между осями датчика и приводного двигателя
(механизма). Процесс работы следящего привода сводится
к непрерывному автоматическому устранению возникаю-
щего рассогласования.
Следящие приводы делятся по способу действия системы
управления на две группы:
506
1) следящие приводы с релейным пли прерывистым
управлением;
2) следящие приводы с непрерывным управлением.
Следящий привод с релейным управлением отличается
тем, что напряжение на исполнительный двигатель подается
только в том случае, когда угол рассогласования достигает
определенного значения. В процессе возрастания угла
рассогласования до этого значения двигатель неподвижен.
Угловые скорость и ускорение двигателя после его вклю-
чения не зависят от угла рассогласования, а определяются
параметрами самого электропривода (его вращающим мо-
ментом, моментом инерции привода и моментом сопротив-
ления).
В следящих приводах прерывистого действия исполь-
зуются обычно релейно-контактные аппараты или бескон-
тактные устройства с релейной характеристикой, поэтому
следящие приводы такого типа называют также релей-
ными.
Отличительной особенностью следящих приводов непре-
рывного действия является непрерывное управление испол-
нительным двигателем, зависящее от угла рассогласова-
ния.
В соответствии с требованиями, которые предъявляются
к следящим приводам в отношении точности отработки
угла в статическом и переходном режимах, устойчивости
работы, времени переходного процесса и т. п., следящие
приводы выполняются с различными обратными связями,
которые обеспечивают управление в функции угла рассо-
гласования и его производной, по углу рассогласования
и интегралу этого угла и т. п.
Так же как и в рассмотренных выше системах автомати-
ческого регулирования, в следящих приводах используются
различного рода усилители: электромашинные, магнитные,
полупроводниковые, гидравлические и др. В следящих
приводах может в должной последовательности сочетаться
работа, например электронного усилителя с электромашин-
ным, транзисторного с тиристорным и т. п.
Следящие приводы непрерывного управления, обеспечи-
вающие высокую точность отработки, оказываются более
сложными, чем следящие приводы релейного действия.
К основным техническим требованиям, которым должны
удовлетворять следящие приводы, относятся высокая точ-
ность отработки заданной величины и устойчивая работа
привода во всем диапазоне скоростей, возможно малое
507
время переходного процесса, а также простота и надеж-
ность в эксплуатации.
Угол рассогласования в переходных режимах не дол-
жен превосходить заданного, колебания системы, если
они возникнут, должны иметь затухающий характер.
13.2. Следящий привод релейного действия
Структурная схема следящего привода релей-
ного действия приведена на рис. 13.2, а.
Рис. 13.2. Структурная схема (а) и упрощенная принципиальная схема
следящего привода релейного действия малой мощности с двигателем
постоянного тока последовательного возбуждения (б).
Следящий привод состоит из задающего устройства ЗУ,
посредством которого задается угол поворота вала 0ВХ,
измерителя рассогласования углового положения валов ИР,
релейного элемента РЭ, характеристика которого имеет
зону нечувствительности, усилителя мощности УМ и
исполнительного двигателя М. Сигнал с выхода ИР, про-
порциональный разности углов поворота входного и выход-
ного валов следящего привода, поступает на вход релей-
ного элемента. Если сигнал превышает зону нечувстви-
тельности РЭ, то РЭ срабатывает и включает двигатель,
508
причем с таким направлением вращения, зависящим от
знака разности углов поворота валов привода, чтобы устра-
нить возникшее рассогласование валов. Как только рас-
согласование уменьшится настолько, что сигнал на вы-
ходе ИР станет меньше зоны нечувствительности РЭ,
двигатель отключается.
На рис. 13.2, б приведена упрощенная принципиальная
схема следящего привода релейного действия малой мощ-
ности с двигателем постоянного тока последовательного
возбуждения, имеющего две обмотки возбуждения. Дви-
гатель Л4, вращающий рабочий механизм РМ., подключается
к источнику питания посредством одного из транзисторов
VI, V2, которые при отсутствии сигналов управления
закрыты напряжением смещения t/CM через резисторы R1
и R2. Для снятия перенапряжений, возникающих при от-
ключении обладающих индуктивностью обмоток возбуж-
дения и обмоток якоря, последние шунтированы разряд-
ными диодами УЗ и V4. Если открыт транзистор VI, то
двигатель вращается в одну сторону; если открыт транзи-
стор V2, то в другую. Это происходит за счет изменения
направления потока возбуждения при неизменном направ-
лении тока якоря.
В релейных следящих системах применяются различ-
ной конструкции измерители рассогласования, в част-
ности электроконтактные релейного действия с механи-
ческим приводом от дифференциального редуктора, в ко-
тором производится механическое вычитание угловых
скоростей (и углов поворота) валов следящей системы. Од-
нако такие измерители рассогласования не пригодны при
значительном удалении задающего и исполнительного ва-
лов. В рассматриваемом следящем приводе использован
потенциометрический измеритель рассогласования, состоя-
щий из двух кольцевых потенциометров КП1 и КП2,
на которые подано постоянное напряжение. Движок од-
ного потенциометра КП1 связан с выходным валом задаю-
щего устройства ЗУ, в частном случае представляющего
собой редуктор с ручным приводом. Движок второго по-
тенциометра КП2 связан с выходным валом редуктора Р
(с тем же передаточным числом, что и у ЗУ), приводимого
в движение двигателем М. Сигнал, снимаемый с движков
потенциометров, подается на вход усилителя У. Если угло-
вое положение движков КП1 и КП 2 одинаково, то сиг-
нал, снимаемый с них, равен 0. При перемещении движка
задающего потенциометра КП1 вправо или влево от поло-
5Ж
жения равновесия на входе усилителя появится сигнал,
знак которого будет зависеть от направления перемещения
движка от положения равновесия, а значение сигнала
будет пропорционально углу поворота от положения рав-
новесия. Усиленный сигнал рассогласования валов по-
ступает в зависимости от знака сигнала на базу одного
из транзисторов V/, V2 (через диод V10, стабилитрон V5,
резистор R3, диод V7 — на транзистор VP, через диод V9,
стабилитрон V6, резистор R4, диод V8 — на транзистор V2).
Если сигнал превышает порог срабатывания стабилитро-
нов V5, V6, создающих зону нечувствительности, то один
из транзисторов открывается, подключая двигатель М
к источнику питания. Двигатель поворачивает вал меха-
низма РЛ4 и через редуктор Р движок потенциометра КП2
в ту же сторону, в какую был повернут движок потенцио-
метра КП1. Когда разность угловых положений движков
окажется такой, что напряжение с выхода усилителя У
станет меньше напряжения открывания стабилитронов V5,
V6, транзистор VI (V2) закроется, отключив двигатель
от источника питания. Таким образом, привод отработает
заданное перемещение с некоторой ошибкой, которая
зависит от коэффициента усиления усилителя У и порога
срабатывания стабилитронов (следует отметить, что в пол-
ной схеме привода сигнал с усилителя У поступает на про-
межуточные каскады усиления, один из которых обычно
имеет релейную характеристику — триггер — с заданной
зоной нечувствительности; в этом случае стабилитроны
из схемы исключаются). Если рабочий механизм содержит
редуктор, то его передаточное число должно быть учтено
в передаточных числах редуктора Р и ЗУ.
Существенное значение в работе следящего привода
имеют вопросы повышения точности отработки перемеще-
ния и устойчивости системы. Работа релейного следящего
привода может быть неустойчивой вследствие возникающих
колебаний около нулевого положения измерителя рассо-
гласования. Допустим, что после отработки определенного
угла 0 двигатель М отключается от источника питания.
Вследствие механической инерции привода двигатель оста-
новится не сразу, поэтому движок потенциометра КП2
перейдет положение, соответствующее равенству углов
поворота валов, настолько, что сигнал на выходе усили-
теля У превысит напряжение открывания стабилитронов
V5, У6‘ это приведет к включению двигателя в обратном
направлении. После этого двигатель сначала затормозится,
510
а затем начнет вращаться в противоположном направле-
нии, и указанное явление может повторяться.
Колебания исполнительного двигателя около нулевого
положения зависят от значения приведенного момента
инерции привода, характера и величины нагрузки, вре-
мени включения и отключения двигателя и ширины зоны
нечувствительности релейных элементов. Выбором доста-
точно большой зоны нечувствительности релейных элемен-
тов (увеличение напряжения открывания стабилитронов
V5, Кб) можно достигнуть быстрого затухания колебаний
при остановке привода. Однако такое решение вопроса
ведет к снижению точности работы следящего привода,
так как система не реагирует на угол рассогласования,
лежащий в пределах зоны нечувствительности.
Зону нечувствительности делают возможно меньшей,
соответствующей углу рассогласования 2—3°. Что же
касается повышения точности работы следящего привода,
обеспечения его устойчивости и демпфирования колеба-
ний, то для этого применяют различные возможно более
эффективные способы торможения двигателя, чтобы до-
биться остановки привода в пределах заданной зоны нечув-
ствительности. Одной из действенных мер по уменьшению
автоколебаний является введение на вход релейного эле-
мента или на вход усилителя У форсирующих сигналов,
пропорциональных первой и второй производным сигнала
ошибки (угла рассогласования); на схеме рис. 13.2 реали-
зация этих корректирующих связей не показана.
Примером следящего привода релейного действия может
служить электропривод подачи копировального станка
с электромагнитными муфтами. Здесь роль задающего
устройства выполняет шаблон или контур изделия, по
которому перемещается палец копировально-измеритель-
ного прибора. Этот прибор имеет контактное устройство,
управляющее соответствующими промежуточными реле,
которые в свою очередь включают электромагнитные муфты
подачи шпинделя. При включении необходимой электро-
магнитной муфты производится перемещение механизма
подачи станка, направленное к устранению возникшего
рассогласования между положениями пальца копироваль-
ного прибора и фрезы. Усилителями в такой системе слу-
жат промежуточные реле. Зона нечувствительности опре-
деляется расстоянием между контактами копировального
прибора. Исполнительными органами являются приводы
подач фрезы с нереверсивными двигателями, непрерывно
511
вращающимися с постоянной скоростью и реверсивными
электромагнитными муфтами.
Достоинством следящих приводов релейного действия,
как указывалось, является их сравнительная простота.
К недостаткам этих систем следует отнести сравнительно
невысокую точность отработки и наличие автоколебаний.
Более совершенной системой, обеспечивающей высокую
точность отработки задания, является система следящего
привода непрерывного управления.
13.3. Принцип работы следящего привода
непрерывного управления
Структурная схема следящего привода непре-
рывного управления приведена на рис. 13.3. Этот тип
привода состоит из датчика / и приемника 2, составляющих
Рис. 13.3. Структурная схема следящего привода непрерывного упра-
вления.
измеритель рассогласования, усилителя 3 и исполнитель-
ного двигателя 4, механически связанногос производствен-
ным механизмом РМ; исполнительный двигатель связан
с приемником через передачу 5. Здесь в качестве датчика
и приемника чаще всего используются сельсины, работаю-
щие в трансформаторном режиме х.
Усилителями могут быть электрические, магнитные,
механические, пневматические и гидравлические устройства.
1 Встречаются также системы, в которых вместо сельсинов исполь-
зуются устройства с делителями напряжения (потенциометрические
устройства) или с вращающимися трансформаторами и др.
512
Широкое применение получили электрические усили-
тели благодаря их относительной простоте, компактности
и возможности размещения аппаратов управления неза-
висимо от производственного механизма.
В системах, где применяются электрические усилители,
исполнительными двигателями являются обычно электро-
датчика / в однофазной
Рис. 13.4. Схема соединении
сельсинов в трансформатор-
ном режиме.
двигатели постоянного или переменного тока.
Принцип работы следящего привода заключается в сле-
дующем. При повороте ротора
обмотке сельсина-приемника 2
наводится ЭДС, которая воздей-
ствует на усилительное устрой-
ство 3. Усилительное устройст-
во обеспечивает при этом вклю-
чение двигателя и работу его
с определенной скоростью. Дви-
гатель 4 приводит в действие
производственный механизм РМ
и одновременно через передачу
5 — ротор сельсина-приемника
2. При повороте ротора сельси-
на 2 на заданный угол устра-
няется рассогласование в поло-
жениях роторов датчика и приемника и прекращается
работа исполнительного двигателя 4.
В рассматриваемых схемах однофазная обмотка сель-
сина-приемника присоединена не к сети переменного тока,
как это производится в случае обычной схемы синхронной
передачи, а на вход усилителя.
Схема соединения сельсинов приведена на рис. 13.4.
Однофазная обмотка сельсина-датчика присоединена к сети
переменного тока, а его обмотка ротора соединена с обмот-
кой ротора сельсина-приемника. Переменный ток, питаю-
щий однофазную обмотку датчика, создает пульсирующий
поток, который наводит в обмотках фаз ротора ЭДС, сов-
падающие по фазе, но отличающиеся по амплитуде. Токи,
проходящие в обмотках ротора сельсина-приемника, соз-
дают пульсирующий поток, который наводит ЭДС в одно-
фазной обмотке приемника. Частота этой ЭДС равна ча-
стоте сети. Следовательно, сельсин-приемник работает
трансформатором, первичной обмоткой которого является
его трехфазная обмотка ротора, а вторичной — однофазная
обмотка статора.
Найдем зависимость действующего значения ЭДС одно-
17 Чиликни М. Г., Саидлер А, С.
фазной обмотки приемника от угла рассогласования рото-
ров сельсинов'
0 = 01 — 02,
где 0t—угол поворота ротора датчика относительно на-
чального положения, при котором ось первой фазы ротор-
ной обмотки совпадает с осью обмотки статора (рис. 13.4);
02 — угол поворота ротора приемника относительно на-
чального положения.
Полагая, что действующее значение ЭДС каждой об-
мотки ротора датчика изменяется синусоидально в зави-
симости от угла поворота 015 получаем:
Ei = Ern cos 0р
Д, = cos (©! — 120°);
Е.л = Ет cos (01-24О°), .
(13-1)
где Elt Ег и Е3 — действующие значения ЭДС, наведенные
соответственно в первой, второй и третьей фазах ротора;
Ет—действующее значение ЭДС, наведенной в любой
из обмоток ротора при совпадении ее оси с осью однофаз-
ной обмотки.
Если пренебрегать реакцией цепи ротора датчика на
его первичную цепь и учитывать только активные и реак-
тивные сопротивления обмоток ротора, то действующие
значения токов в его обмотках равны:
I^EJZZ-, 12 = Ег/2г-, [3 = E3/2Z, (13.2)
где Z — полное сопротивление фазы обмотки ротора (оба
сельсина обладают одинаковыми параметрами).
Токи /1( /а и /3 создают результирующий поток в при-
емнике, который наводит ЭДС в однофазной обмотке.
Электродвижущая сила Ес равна сумме отдельных
ЭДС, наведенных в однофазной обмотке, если результи-
рующий магнитный поток рассматривать как геометри-
ческую сумму трех потоков, создаваемых отдельными
обмотками ротора приемника. Следовательно,
Ez — Ei + Ei + Ез,
(13.3)
где
Е{ = kl^os 02;
Е'з = kl2 cos (02 — 120°);
Ез = kl3 cos (02 — 24 0°);
(13.4)
5Н-
здесь k — коэффициент пропорциональности между током
и ЭДС.
Подставляя значения £(, £?, и £3 из (13.4) в (13.3) и
используя (13.1) н (13.2), получаем после соответствующих
преобразований:
£c = 4fe^Lc°s(01-92), (13.5)
или
£c = (7mcos0, (13.6)
где Um~- Ak
Из (13.6) следует, что амплитуда или действующее
значение ЭДС, наведенной в однофазной обмотке прием-
ника, зависит от угла рассогласования и достигает мак-
симального значения при 0 — 0.
Обычно в практических условиях стремятся, чтобы
при 0 = О £с также была равна 0. Это легко достигается
тем, что в исходном положении системы создают установ-
кой статоров сельсинов угол рассогласования 0О — 90°;
тогда (13.6) можно записать в виде
£,.=•£„, sin 9. (13.7)
Выражение (13.7) является основным при анализе
работы сельсинов в трансформаторном режиме; при малых
углах можно приближенно считать, что £с U,nft. В дан-
ном случае согласованное положение (синфазность) при-
нято условно, так как от истинного положения сипфаз-
ности роторы сельсинов рассогласованы на постоянный
угол 90°. Из (13.7) следует, что при повороте ротора дат-
чика влево или вправо от согласованного положения изме-
няется знак £с, т. е. при переходе через согласованное
положение фаза £с смещается на 180°. Следовательно,
измеритель рассогласования не только измеряет угол
рассогласования, но и определяет направление, в котором
произошло рассогласование.
Напряжение на выводах однофазной обмотки приемника
представляет собой синусоиду с частотой, равной частоте
напряжения возбуждения датчика. Амплитуда и фаза
этой синусоиды определяются зависимостью (13.7).
В следящих системах в качестве исполнительных могут
быть использованы двигатели постоянного или перемен-
ного тока. Обычно для приводов небольшой мощности
применяются двигатели постоянного тока, управляемые
17*
515
от полупроводниковых или электромашинных усилителен,
при больших мощностях — по системе Г — Д или по си-
стеме ТП —Д (УВ—Д). Для маломощных следящих при-
водов часто применяются двухфазные двигатели перемен-
ного тока с короткозамкнутым ротором, а также синхрон-
ные двигатели с постоянными магнитами.
13.4. Схемы следящих приводов с непре-
рывным управлением
Особенности той или иной системы следящего привода
выявляются при анализе ее статических и динамических характери-
стик. Под статическими характеристиками следящего привода понимают
зависимость момента, тока и других параметров в схеме от угла рас-
согласования в установившемся режиме, когда отработка угла привод-
ным двигателем происходит при его неизменной угловой скорости.
Однако одни статические характеристики не полностью характеризуют
работу привода. Необходимо, кроме статических, знать также и дина-
мические свойства системы, определяющие качество переходного про-
цесса, угол рассогласования в переходном режиме, время переходного
режима и т. п. Эти свойства системы анализируются на основании урав-
нений переходного режима системы.
Рассмотрим принцип действия и особенности работы некоторых
схем следящих приводов.
Схема следящего привода с ЭМУ поперечного поля и исполнительным
двигателем постоянного тока независимого возбуждения
Применение электрических машин постоянного тока обеспечивает
возможность создания высокоточных следящих систем в диапазоне
мощностей от 100 Вт до десятков киловатт при использовании доста-
точно простых усилительных и корректирующих устройств. Такие
приводы допускают значительные (в 2—3 раза) кратковременные пере-
грузки по моменту исполнительного двигателя и увеличение угловой
скорости двигателя до 150 % номинальной. При использовании в ка-
честве приводного двигателя для ЭМУ асинхронного двигателя сле-
дящий привод создает для сети симметричную нагрузку и не вносит
искажений в форму кривой питающего напряжения. При резком крат-
ковременном увеличении момента нагрузки на валу исполнительного
двигателя пиковая мощность, потребляемая следящим приводом из
сети, меньше мощности, соответствующей увеличенному моменту; это
происходит за счет кинетической энергии, отдаваемой инерционными
массами привода при снижении их скорости.
При уменьшении угловой скорости исполнительного двигателя
имеет место торможение с рекуперацией энергии в сеть. Переход из
режима двигателя в режим генератора обеспечивается естественными
характеристиками электрических машин и происходит без резких из-
менений электромагнитного момента двигателя, что имеет большое зна-
чение для плавности и точности работы следящего привода.
Как видно из схемы иа рис. 13.5, двигатель М через редуктор Р
приводит в действие объект регулирования РМ и сельсин-приемник СП.
Управление исполнительным двигателем осуществляется от ЭМУ по-
516
перечного поля. Обмотки управления ЭМУ ОУ—I и ОУ—// питаются
от электронного или полупроводникового усилителя У, выходной
каскад которого У2 выполнен на постоянном токе. Эти обмотки управ-
ления имеют среднюю точку и включены по дифференциальной схеме;
результирующий магнитный поток ЭМУ определяется разностью
МДС обмоток ОУ—/ и ОУ—II, т. е. разностью токов, проходящих
в этих обмотках.
Управляющее напряжение следящего привода, пропорциональное
разности угловых положений 0 задающего вала и а исполнительного
вала, т. е. ошибке слежения, вырабатывается при помощи двух сель-
синов СД и СП, работающих в трансформаторном режиме; сельсин-
датчик СД кинематически связан с задающим валом следящего
Рис. 13.5. Схема следящего привода с ЭМУ.
привода.Это напряжение поступает на вход предварительного фазочувст*
внтельного усилителя У1, где оно усиливается, выпрямляется фазо-
чувствительным выпрямителем и через корректирующий контур (ре-
зисторы Rl, R2, конденсатор С1) и выходной каскад усилителя У2
поступает на обмотки управления ЭМУ. При разности токов в обмот-
ках управления ОУ—/ и ОУ—II возникает напряжение на выходе
ЭМУ, в результате чего приводится во вращение исполнительный дви-
гатель М. Двигатель М через редуктор Р перемещает объект регули-
рования РМ и вращает ротор сельсина-приемника СП до тех пор, пока
напряжение ошибки не станет равным 0, т. е. до тех пор, пока угол а
не станет почти равным углу 0. Следящий привод будет уменьшать
угол рассогласования между задающим валом 0 и исполнительным
валом а вне зависимости от того, вызвано ли это рассогласование управ-
ляющим воздействием или изменением момента нагрузки на валу
объекта.
Для обеспечения устойчивой работы следящего привода и прида-
ния ему' требуемых динамических свойств используется последователь-
ное дифференцирующее звено Rl, Cl, R2 в цепи сигнала ошибки, а
также дифференцирующее звено С2, R3, от которого поступает на вы-
ходной каскад У2 электронного усилителя напряжение гибкой отри-
цательной обратной связи, пропорциональное изменению тока якоря М
(сигнал, пропорциональный току, снимается с резистора R4),
517
Наряду с отмеченными выше положительными свойствами следя-
щего привода с ЭМУ необходимо отметить и его основные недостатки.
К ним относятся наличие сложного преобразовательного агрегата
(ЭМУ — приводной двигатель), установленная мощность которого бо-
лее чем в 2 раза превосходит мощность исполнительного двигателя;
значительные массы и габариты силовой части привода, сравнительно
низкий КПД (0,5—0,6); высокий уровень шума за счет вращающихся
частей преобразовательного агрегата; сравнительно невысокое быстро-
действие; малая жесткость механической характеристики приводного
двигателя, вследствие чего значительна статическая ошибка (ошибка,
пропорциональная статическому моменту).
Повышение жесткости механических характеристик двигателя до-
стигается введением жестких обратных связей, например по току и
напряжению.
Схема следящего привода с двигателями постоянного тока с силовым
транзисторным усилителем
Основным достоинством следящего привода с исполнительным дви-
гателем постоянного тока и силовым транзисторным усилителем по
сравнению с системой ЭМУ — Д является большое быстродействие
электропривода, что позволяет придать приводу требуемые динамиче-
ские свойства. Кроме того, уменьшаются масса и габариты привода,
повышается КПД, снижается уровень шума, повышается надежность.
Рис. 13.6. Схема следящего привода с силовым транзисторным усили-
телем.
ФЧВ — фазочувствительиый выпрямитель; ТУ — транзисторный усилитель.
Формирование сигналов рассогласования и корректирующих сиг-
налов в следящих электроприводах постоянного тока с силовыми тран-
зисторными усилителями иллюстрирует рис. 13.6.
Измерительная схема для получения сигнала рассогласования (за-
данного сигнала управления) построена с использованием двух синусно-
косинусных вращающихся трансформаторов СК.ВТ. Один из них —
датчик Д — связан с задающей осью, другой СК.ВТ — приемник П —
связан с исполнительной осью. Точность измерения угла рассогласо-
вания в таких следящих электроприводах достигает 1—3',
Как видно из рис. 13.6, СК.ВТ в отличие от сельсина имеет на
статоре две взаимно перпендикулярно расположенных в пространстве
обмотки и такие же обмотки на роторе. Схема соединения обмоток дат-
чика и приемника ясна из рисунка. При повороте ротора датчика отно-
сительно его обмотки возбуждения в обмотках ротора наводится пере-
518
менная ЭДС, амплитуда которой пропорциональна cos Р в одной об-
мотке и sin Р — в другой. Отсюда и название СКВТ. В остальном
принцип измерения угла рассогласования такой же, как и в случае
сельсинов. Синусно-косинусный трансформатор обладает большей точ-
ностью, чем сельсины, по имеет меньшую мощность сигнала. В настоя-
щее время разработаны следящие приводы с транзисторными усили-
телями мощностью до нескольких киловатт.
Схема следящего привода с управляемым тиристорным выпрямителем
и двигателем постоянного тока независимого возбуждения
Схема следящего привода с двигателями постоянного тока незави-
симого возбуждения с управляемым тиристорным выпрямителем УТВ
приведена на рнс. 13.7. Здесь управляющее напряжение t/g вырабаты-
вается измерителем рассогласования, состоящим нз СКВТ-Д (датчика).
Рис. 13.7. Схема следящего электропривода с реверсивным тиристор-
ным преобразователем.
связанного с задающей осью, и СК.ВТ-П (приемника), связанного
с исполнительной осью. Напряжение, пропорциональное углу рассо-
гласования 6, поступает на вход предварительного фазочувствнтельного
усилителя ПУ (предназначенного для преобразования и усиления сиг-
нала ошибки), в котором суммируется с сигналом обратных связен.
Преобразованный н усиленный сигнал ошибки поступает в блок БФУ
формирования импульсов, отпирающих тиристоры УТВ и изменяющих
их фазы относительно фазы напряжения питающей сети в функции
сигнала рассогласования. Исполнительный двигатель М, присоединен-
ный к УТВ, перемещает через редуктор объект регулирования РМ и
одновременно датчик обратной связи по положению — СКВТ—П. На-
пряжение тахогенератора GT, жестко связанного с исполнительным дви-
гателем М, используется в качестве корректирующей обратной связи
619
по скорости (после дифференцирования цепочкой /(?), а также для фор-
мирования статической характеристики ПУ. В качестве корректирую-
щей обратной связи по току используется после дифференцирования
цепочкой К/ падение напряжения на резисторе 7?с, включенном в цепь
якоря М.
Реакторы L1 — L4 в УТВ служат для ограничения уравнительного
тока и уменьшения пульсаций тока якоря.
Следящий привод с УТВ обладает высоким быстродействием, малой
массой и габаритами, высоким коэффициентом усиления по мощности,
мгновенной готовностью к работе и высокими энергетическими показа-
телями. Он может быть использован при создании высокоточных сле-
дящих приводов сравнительно большой мощности до 100 кВт и выше.
Схема следящего привода переменного тока с двухфазным асинхронным
двигателем
Достоинствами следящего привода переменного тока являются
большой срок службы и высокая надежность работы благодаря отсут-
ствию в двигателе коллектора.
Двухфазные исполнительные асинхронные двигатели обычно с по-
лым короткозамкнутым ротором широко используются в следящих
системах. Особенностью их является большое критическое скольжение
(?к = 2 4- 4). Обмотки их питаются сдвинутыми на 90° напряжениями.
Регулирование момента и угловой скорости осуществляется нли изме-
нением действующего значения напряжения на управляющей обмотке
(или на обеих обмотках), или изменением сдвига фаз напряжений, или
комбинированными способами (изменение фазы и напряжения). Суще-
ственным недостатком этих двигателей являются повышенные тепло-
вые потери в роторе двигателя, что исключает возможность создания
таких приводов мощностью более 1—2 кВт.
Схема следящего привода с двухфазным асинхронным двигателем
приведена на рнс. 13.8. Двухфазный асинхронный двигатель имеет
обмотку управления ОУ и обмотку возбуждения ОВ. Питание обмотки
управления осуществляется от фазы А трехфазной сети переменного
тока через силовые тиристоры VI — V4. Обмотка возбуждения двига-
теля включается на линейное напряжение (фазы В, С) через силовые
тиристоры V5, V6. Управление двигателем происходит следующим
образом.
При отсутствии ошибки в работе следящего привода напряжения Ux
и U2 выходного каскада У2 усилителя У равны 0. Блок БУТ не выра-
батывает импульсов, управляющих тиристорами VI — V6, и напря-
жения на управляющей обмотке ОУ и на обмотке возбуждения ОВ
двигателя равны 0.
При наличии ошибки появляется напряжение Ut или U2 в зави-
симости от фазы сигнала ошибки. При возникновении напряжения Ut
с выхода БУТ на тиристоры VI, V2 подаются импульсы, которые управ-
ляют углом включения этих тиристоров. При этом в один полупернод
питающего напряжения открывается тиристор VI, а в другой полу-
период — тиристор V2, и на обмотке управления ОУ создается управ-
ляющее напряжение переменного тока. При изменении фазы ошибки
на выходе усилителя появляется напряжение (72. При этом соответ-
ственно в один полупернод питающего напряжения открывается тири-
стор V3, а в другой полупериод — тиристор V4, и на обмотке управле-
ния ОУ создается управляющее напряжение переменного тока другой
520
фазы (сдвиг на 180°). Значение управляющего напряжения пропорцио-
нально напряжению UL (U2).
Силовые тиристоры V5, V6 в цепи обмотки возбуждения ОВ дви-
гателя подают соответствующее напряжение на нее при наличии на-
пряжения Ui (U2). Изменение угла включения тиристоров V5, V6
определяется значением напряжения Ui (U2). В один полупериод пи-
тающего напряжения открывается тиристор V5, в другой — Кб, и на
сбмотке возбуждения ОВ двигателя создается переменное напряжение
регулируемой величины.
Рис. 13.8. Схема следящего электропривода переменного тока с двух-
фазным асинхронным двигателем.
Таким образом, при наличии ошибки слежения появляется напря-
жение i/j (U2) усилителя, создается напряжение с соответствующими
фазой и значениями на обмотке управления ОУ двигателя и возникает
напряжение соответствующего значения на обмотке возбуждения ОВ
двигателя. Двигатель М начинает вращаться. При изменении фазы
ошибки изменяется на 180° фаза управляющего напряжения на обмотке
управления и изменяется направление вращения двигателя.
Конденсаторы С2 — С5 и резисторы R3, R4 служат для сглажи-
вания пульсаций напряжения в обмотках двигателя.
Тиристоры VI — V6, попарно включенные встречно-параллельно,
выполняют функции тиристорных регуляторов переменного напряже-
ния с фазовым управлением. В схеме возможен режим, когда тиристоры
V5, V6 работают при появлении напряжения Ut (U2) с постоянным
углом включения (в частности, с нулевым), выполняя роль тиристор-
ного бесконтактного выключателя переменного напряжения, который
отключает обмотку возбуждения ОВ двигателя при стоянке привода
для уменьшения нагрева двигателя.
521
13.5. Программное управление электропри*
водами
В последние годы получают применение в раз-
личных областях техники системы автоматического управ-
ления, действующие по заранее заданной программе.
Программа может быть задана различными способами.
Например, в копировальных станках программа задается
в виде заранее изготовленных шаблонов или моделей,
весьма разнообразных и имеющих в некоторых случаях
очень сложную поверхность (рис. 13.9, а—и). При помощи
соответствующих следящих приводов подач в процессе
Рис. 13 9. Примеры деталей с фасонными поверхностями.
обработки на таких станках удается с определенной точ-
ностью придать заготовке такие формы и размеры, какими
обладает модель или шаблон. В этих и аналогичных устрой-
ствах приходится затрачивать много времени на настройку
станка. В условиях индивидуального и мелкосерийного
производства это время оказывается существенным. Так,
если речь идет о механической обработке деталей, то для
того, чтобы просверлить несколько отверстий в двух-
трех деталях, необходимо предварительно разметить место-
положение этих отверстий от руки, а затем уже по этой
разметке просверлить отверстия То же самое приходится
выполнять, если необходимо прорубить отверстия, напри-
мер, в панели для крепления электрических аппаратов.
Если необходимо обработать два-три кулачка, то при-
ходится разметить шаблон от руки, почти полностью
522
ручным способом его обработать, а затем на копироваль-
ном станке обрабатывать требуемые кулачки. Таких при-
меров можно было бы привести много. Но из приведенных
примеров уже ясно, что для автоматизации машинострои-
тельного производства в условиях мелких серий необходимы
новые средства автоматики, позволяющие исключить зна-
чительную долю ручных работ, выполняемых в техно-
логическом процессе, начиная от чертежа до готовой де-
тали.
Появление современных средств электроавтоматики и
вычислительной техники позволило разработать новые
принципы построения автоматических систем управления
производственными механизмами. В этих системах под-
готовленные соответствующим образом числовые данные
чертежа непосредственно вводятся в машину, минуя вспо-
могательные ручные работы, и обеспечивают автоматиче-
скую обработку детали. Такие системы автоматического
управления называются системами числового программного
управления (ЧПУ).
Наиболее эффективно использование оборудования
с ЧПУ в мелкосерийном и единичном производстве при
точной обработке сложных по конфигурации изделий.
В зависимости от типа оборудования с ЧПУ и производи-
мой на нем операции производительность его по сравнению
с обычным оборудованием может увеличиваться до 500—
600 %. Значительный экономический эффект достигается
в этом случае за счет существенного сокращения вспомо-
гательного времени, которое в обычных условиях состав-
ляет 60—80 % общей затраты времени на обработку изде-
лия, а в системе с ЧПУ оно составляет 20—30 %.
Высокие показатели оборудования с ЧПУ получаются
при правильном планировании и высокой организации
производства. При этом возникает также необходимость
в работниках высокой квалификации, знающих ЭВМ.
Применение ЭВМ позволяет автоматизировать программи-
рование режима обработки.
Существуют две группы систем ЧПУ, определяемые
технологическими условиями работы управляемых машин.
В первой из них необходимо обеспечить положение изде-
лия относительно инструмента в определенные дискретные
моменты времени. При этом характер траектории пере-
мещения из одного положения в другое не имеет значения
(сверлильные станки, дыропробивные прессы и т. п.).
Системы ЧПУ этой группы называются системами п о-
523
акционирования или системами управ-
ления положением.
Вторая группа машин требует непрерывного управле-
ния движением обрабатываемой детали относительно ин-
струмента (фрезерные станки для обработки штампов
Рис. 13.10. Многооперационный станок.
и пресс-форм, газорезальные машины и т. п.). Системы ЧПУ
этой группы называются системами контурного
управления или непрерывного управ-
ления.
С развитием цифрового управления все больше сти-
раются грани между указанными способами цифрового
524
управления. Это связано с широким применением много-
операционных станков, на которых производят обработку
различного вида (сверление, расточку, фрезерование и т. п.).
На рис. 13.10 приведена фотография такого многооперацион-
ного станка. Для управления станками используются так
называемые универсальные системы ЧПУ, позволяющие
осуществить как позиционирование, так и контурное управ-
ление. Эти системы обычно характеризуются тем, что от
программы наряду с геометрической информацией задается
большое число технологических и вспомогательных команд
автоматизировать цикл обработки детали на станке.
Рассмотрим прохождение цифровых данных (информа-
ции) от чертежа до технологической машины. Машино-
строительный чертеж в связи с использованием ЧПУ
претерпевает некоторые изменения по сравнению с тра-
диционным. В частности, расстановка размеров произ-
водится с. учетом удобств последующего программирова-
ния, и иногда даже значительно уменьшается детализация
его, поскольку чертеж не попадает непосредственно на ра-
бочее место. Пример карты с координатами приведен
на рис. 13.11. По этому чертежу технолог намечает путь
и режим перемещения обрабатываемой детали относительно
инструмента. Если речь идет о выполнении технологических
операций на машинах с ЧПУ положением, то в нсполь-
525
зовании ЭВМ для последующего расчета траектории дви-
жения инструмента относительно детали нет необходимости;
технолог непосредственно задает все данные для подготовки
программы, которая затем непосредственно вводится в си-
стему управления станком.
Ввод программы осуществляется часто на перфориро-
ванной ленте или перфорированной карте. На перфориро-
ванных лентах используется запись в коде, легко прочи-
тываемом обслуживающим персоналом. Таким кодом обычно
Рис. 13.12. Примеры записи числа в десятичном коде (а) и в двоичио-
десятичном (б).
При десятичном коде каждой цифре десятичного раз-
ряда соответствует определенное положение отверстия
на ленте, так что для каждого разряда требуется 10 мест.
В двоично-десятичном коде каждый десятичный разряд
образуется комбинацией четырех цифр, возможное соче-
тание которых обеспечивает все числа от 0 до 9, таким
образом, в этом коде требуется четыре места на ленте
для каждого разряда. Наиболее часто применяется код
8 4 2 1. Следует отметить, что читаемость цифр в этом коде
после некоторого времени работы с ним такая же, как
и в чисто десятичном коде. На рис. 13.12, а и б в качестве
примера приведена запись числа 12 506 в обоих кодах.
Цифровые коды применяются обычно в тех случаях,
когда от программы вводится сравнительно небольшой
объем информации. При большом объеме вводимой информа-
ции наиболее часто используются алфавитно-цифровые
коды и адресный способ кодирования, при котором цифро-
вой информации предпосылается буквенный адрес. Код
буквенного адреса определяет те ячейки памяти, куда
посылается следующая за адресом цифровая информация.
Такой способ записи программы позволяет существенно
4SB
сократить длину программоносителя за счет того, что
в программе не записываются адреса с нулевым значением
цифровой информации и команды, которые не изменяются
по сравнению с ранее введенной информацией.
13.6. Применение ЭВМ для программного
управления металлообрабатывающими
станками
При использовании ЭВМ в случае програм-
мирования обработки сложных траекторий движения из
нее выдается перфорированная лента, которая, как ука-
зывалось выше, идет либо непосредственно в прочитываю-
щее устройство системы управления станком, либо на
устройство для декодирования и записи на магнитную
ленту. В обоих случаях должно выполняться декодирова-
ние, т. е. перевод чисел, «непонятных» для исполнительных
элементов системы, в физические параметры, «понятные»
для этих элементов. В качестве таких параметров исполь-
зуются частота и число импульсов, фаза управляющего
сигнала относительно опорного сигнала и напряжение.
Как правило, стремятся систему управления непосред-
ственно технологической машины сделать возможно проще,
и поэтому декодирующее устройство отделяют от нее,
вводя программу на магнитной ленте. На ленте программа
записана в расшифрованном виде.
Рассмотрим принцип работы декодирующего устройства
на примере перевода кодированной программы в импульс-
ную форму. Траектория движения инструмента относи-
тельно детали (рис. 13.13) аппроксимируется участками
прямых, длина которых определяется допустимым отклоне-
нием от геометрической кривой. На перфорированной
ленте записаны числа, соответствующие перемещению по
осям координат в единицах цены импульсов датчиков
обратной связи. Для того чтобы инструмент двигался
по заданному отрезку прямой, необходимо, чтобы за время
прохождения пути Ах вдоль одной оси по второй был прой-
ден путь \у. Для этого на магнитной ленте вдоль дорожки
сигнала управления перемещением по оси х записыва-
ются Лг/б импульсов, а вдоль оси у — &у/Ь импульсов,
где б — перемещение на один импульс. Скорость пере-
мещения задается частотой следования импульсов
От задающего генератора / (рис. 13.14) импульсы через
блок регулирования скорости 2 (частоты следования импуль-
527
сов) подаются на кодированный десятичный делитель 3—6,
причем с каждым выходом этого делителя связаны соот-
ветствующие цепи реле памяти. Последние в зависимости
от чисел, введенных с ленты, подготавливаются так, что
по делителю через эти цепи будут проходить импульсы,
количество которых, снимаемое с каждого десятичного
разряда делителя, за время наполнения всех разрядов
счетчика равно fe-lO"*1; здесь п — номер десятичного
разряда, если считать от конца; k — число кода.
Рис. 13.13. Аппроксимация тра.
ектории движения инструмента,
I — Фреза; 2 — траектория движе-
ния центра фрезы; 3 — контур из-
делия.
Рис. 13.14. Схема устройства
для записи на магнитную ленту.
Для обеспечения непрерывности выхода импульсов
предусмотрены два устройства промежуточной памяти 7,
8 и 7а, 8а\ таким образом, при работе одного устройства
памяти второе подготавливается. Переключение с одного
устройства памяти на другое выполняется выходным сиг-
налом с последнего разряда делителя, который переключает
триггер 9, а последний подготавливает ту или иную схему
совпадений и тем самым соединяет соответствующие
цепи выходных сигналов. Импульсы, выходящие через
цепи памяти после усиления (10, 11), подаются на записы-
628
вающую головку 12 для записи импульсов на магнитной
ленте 13.
Декодирующее устройство может быть использовано и
для непосредственного управления станком от перфори-
рованной ленты 14. В этом случае импульсы с выхода
декодирующего устройства подаются на вход импульсной
следящей системы. Если же речь идет о программирова-
нии работы машины с ЧПУ второй группы при отработке
сложных пространственных траекторий, то выполнение
всей массы вычислительной работы передается быстродей-
ствующей ЭВМ. В нее заранее введены необходимые под-
программы вычисления всех основных геометрических
образцов, встречающихся в машиностроении (прямая, ок-
ружность, эллипс, цилиндр, конус, шар, гиперболоид
вращения и т. п.). Программист в дальнейшем задает по-
рядок сочетания этих геометрических образцов, их пара-
метры и требуемые технологические условия: размеры
инструмента, режимы работы, точность вычисления и т. п.
Каждая из подпрограмм имеет свое наименование, которое
программистом выписывается, так что программа при-
нимает вид, аналогичный тексту телеграммы. Затем состав-
ленная программа передается из перфорационного устрой-
ства, где подготавливается лента, для управления работой
ЭВМ либо непосредственно для управления работой тех-
нологической машины.
В первом случае ЭВМ выдает перфорированную ленту,
которая идет либо непосредственно в технологическую
машину, либо на устройство для переписи с перфорирован-
ной ленты на магнитную, и уже последняя подается на
управляемую технологическую машину.
Ввод программы осуществляется чаще всего на пер-
форированной ленте. Иногда предусматривается возмож-
ность ручного набора перемещений непосредственно на
технологической машине с помощью переключателей.
На перфорированных лентах используется запись в коде,
который принимается десятичным или чаще всего бук-
венно-цифровым с записью чисел в двоично-десятичном
коде.
Наряду с рассмотренным декодирующим устройством,
которое осуществляет линейную интерполяцию, широкое
применение нашли линейно-круговые интерполяторы, поз-
воляющие существенно сократить объем вводимой инфор-
мации при обработке деталей, контур которых составлен
из дуг окружностей и отрезков прямых.
529
Для построения систем ЧПУ различного назначения
в современной практике наиболее часто применяется агре-
гатный принцип, позволяющий строить различные системы,
используя для этого ограниченную номенклатуру агрегат-
ных узлов.
На рис. 13.15 приведена структурная схема позиционной
системы, построенной по такому принципу. Информация х,,
считываемая с перфоленты через устройство ввода УВ,
где она контролируется, преобразуется в необходимый код
Рис. 13.15. Функциональная схема позиционной системы числового
управления.
и вводится в регистр памяти Rn. В регистре памяти поло-
жения /?п,п хранится код положения исполнительного
органа станка относительно заданного нуля отсчета
Сигнал, поступающий от датчика обратной связи ДОС,
соединенного с исполнительным органом станка, преобра-
зуется с помощью ПК в код системы. Преобразователь
кода ПК опрашивается примерно 500 раз в секунду и
посылает в арифметическое устройство А У код, определяю-
щий приращение перемещения за период между двумя
последовательными опросами (преобразователя ПК) — Ах.
При перемещении исполнительного органа к содержимому
регистра Rn,„, равному х,_г, прибавляется приращение Дх,
и эта сумма заводится в регистр /?11П. Затем новое содер-
жание регистра, равное xt j + Дх, выбирается из содер-
жимого регистра памяти Ra (х,), и результат сравнивается
с постоянными Сь С2. Если указанная разность достигает
значений постоянных С.,, выдается соответствующая
команда на снижение скорости. При х, — (xi.l + Ах) = О
выдается команда на остановку исполнительного органа
станка.
Работа системы управляется устройством УУ, которое
осуществляет управление в соответствии с описанным выше
алгоритмом.
В рассмотренной системе могут быть применены разные
датчики (импульсные, фазовые, кодовые) и привод испол-
нительного органа различного типа. При этом будут соот-
ветственно изменены устройства, связывающие вычисли-
тельную часть системы с датчиком обратной связи и при-
водом подачи.
Применение в системе центрального вычислительгого
устройства обеспечивает различного вида коррекции про-
граммы, вводимые вручную с панели управления и необ-
ходимые для компенсации влияния ряда факторов, кото-
рые не могут быть учтены при подготовке программы и
могут быть введены по результатам обработки первой
детали, без изменения самой программы.
Аналогичным образом могут быть построены и другие
системы, например контурная система или универсальная
система. При этом такие узлы, как устройство ввода, ариф-
метическое устройство, устройство связи с датчиком обрат-
кой связи, устройства управления приводом, устройства
формирования технологических и вспомогательных команд
и ряд других могут использоваться без каких-либо изме-
нений. Изменяться будут только число регистров памяти Rn
и устройство управления УУ, которое должно выполняться
в соответствии с заданным алгоритмом работы, видом при-
нятой интерполяции и т. п.
Несмотря на ряд существенных преимуществ, связанных
с широкими технологическими возможностями и гиб-
костью управления станками, системы с управлением от
перфоленты являются весьма сложными устройствами
с большим объемом электронного оборудования, по-
этому в ряде случаев используются системы ЧПУ движе-
нием с вводом программы на магнитной ленте.
Программа обычно задается в виде командных импуль-
сов, каждый из которых несет информацию об элементар-
ном перемещении, или изменении фазы импульсов отно-
сительно опорной. Структура системы воспроизведения
определяется видом задания программы и типом датчика
531
обратной связи. При этом устройство, управляющее стан^
ком, существенно упрощается.
Замкнутые системы ЧПУ с применением датчиков
путевого контроля (датчиков обратной связи) исполь-
Рис. 13 1ь. Общий вид фрезерного станка с программным управлением,
зуются для автоматизации тяжелых станков (с переме-
щениями исполнительных органов свыше 1 м), а также
станков повышенной точности малых и средних размеров.
Замкнутая система ЧПУ рассматривается на примере
трехкоординатпого фрезерного станка модели 6441П
(рис. 13.16), предназначенного в основном для обработки
объемных штампов сложной формы, а также фасонных
изделий из стали.
Привод стола, а также приводы шпиндельной бабки
в горизонтальном и вертикальных направлениях осуще-
ствляются двигателями постоянного тока, управляемыми
преобразователем. Скорость и перемещение исполнитель-
ных органов станка определяются подводимым к якорю
двигателя напряжением и знаком этого напряжения, си-
стема выполнена с помощью соответствующих обратных
Рис. 13.17. Схема индуктивного фазоимпульспого датчика.
связей, обеспечивающих необходимый диапазон регули-
рования скорости, а также высокое быстродействие при-
вода подачи с допустимым перерегулированием.
Станок оснащен датчиками путевого контроля и систе-
мами числового управления, осуществляющими непрерыв-
ный контроль за соответствием заданной и фактической
величин перемещения исполнительного механизма.
Перемещения исполнительных органов контролируются
индуктивными фазоимпульсными датчиками. Программа ра-
боты станка вводится на магнитной ленте способом, ана-
логичным описанному выше. Принципиальная схема дат-
чика представлена на рис. 13.17. Магнитная система дат-
чика состоит из шкалы 1 и винта 2, который приводится
во вращение с помощью синхронного двигателя 3. На шкале
533
нанесены зубцы с шагом h, с точно таким же шагом выпол-
нена нарезка резьбы на винте. При вращении его с постоян-
ной угловой скоростью со вершины зубцов винта будут
перемещаться вдоль шкалы с линейной скоростью ю/г/2л.
При этом будут изменяться магнитное сопротивление за-
зора в зоне шкала — винт. Это приведет при наличии
соответствующего подмагничивания к изменению магнит-
ного потока в сердечнике, благодаря чему во вторичной
обмотке будет наведена ЭДС е = t/Ф/dt, которая изме-
няется по периодическому закону с частотой f0CH, соответ-
ствующей угловой скорости ю.
При перемещении исполнительного механизма жестко
связанный с ним винт смещается относительно шкалы,
что приводит к изменению частоты следования сигналов
на вторичной обмотке, f = /осн ± АД На одном валу
с винтом установлен тактирующий датчик 4 (индуктивный
или фотодатчик), вырабатывающий постоянную опорную
частоту /опорн, которая больше /ос„ в k раз. Отношение k
выбирается исходя из минимального перемещения, кото-
рое необходимо задавать в систему числового управления
(дискретность ввода информации). Кроме того, значение &/2
(число импульсов) или h/2 (мм) соответствует максимально
допустимому рассогласованию, при котором еще не про-
исходит потери информации. Это значение выбирается
в основном исходя из динамических параметров системы
привода подач.
Для исключения влияния радиального биения винта
на точность измерения фазы сигнала датчика винт выпол-
няется многозаходным (в реальной системе число заходов
т — 10), что позволяет электрически отделить основную
частоту /ос11 от складываемой с ней частоты, связанной
с радиальным биением системы.
Структурная схема фазоимпульсной системы с исполь-
зованием в качестве датчика путевого контроля фазо-
импульсного датчика представлена на рис. 13.18.
Импульсы программы п (s) по одному из каналов в зави-
симости от заданного направления перемещения испол-
нительного механизма станка поступают на вход схемы
синхронизации 3. Назначение ее состоит в том, чтобы
синхронизировать командные импульсы с импульсами N
от тактирующего датчика 2 /пмакс). После этого
импульсы п (s) поступают на вход схемы преобразования,
состоящей из блока сложения и вычитания 4 и делителя 5.
В блоке 4 осуществляется сложение или вычитание (в за-
534
висимости от заданного направления перемещения) импуль-
сов п (s) с импульсами N тактирующего датчика, благодаря
чему на вход делителя 5 поступает последовательность Л'Дд/г
импульсов. Объем делителя выбирается равным соотно-
шению /опори//оси = поэтому ПрИ ОТСУТСТВИИ КОМЗНД-
ных импульсов и неподвижном исполнительном механизме
рассогласование по фазе между импульсами от винтового
датчика и импульсами с выхода делителя отсутствует.
Рис. 13.18. Структурная схема фазоимпульсной системы.
/ _ фазоимпульсный винтовой датчик: 2 — тактирующий датчик: 3 — схема
синхронизации; 4 — блок сложения (вычитания); 5 — делитель; 6 — триггер
(фазовый преобразователь); 7 — усилитель мощности; 8 — исполнительный
двигатель: 9 — исполнительный механизм; 10 — синхронный двигатель дат-
чика; // — блок автоматического задания скорости.
Приход импульсов программы вызывает смещение фазы
импульсов с выхода делителя относительно фазы сигналов
винтового датчика, которое с помощью фазового преобра-
зователя — триггера преобразуется в напряжение, управ-
ляющее скоростью привода подач.
Перемещение исполнительного механизма и связанного
с ним жестко винтового датчика приводит к смещению
фазы последнего на то же значение.
13.7. Программное управление с примене-
нием шаговых двигателей
Для цифрового программного управления станками ма-
лых размеров (с перемещением стола до 1 м) средней точности нашли
применение «дискретные» приводы с шаговыми двигателями (ШД),
у которых поворот ротора при подаче управляющего импульса дозиро-
ван. В этом случае используются разомкнутые системы, в которых им-
535
пульсы программы подаются непосредственно на исполнительные дви-
гатели без проверки их исполнения (без датчика обратной связи).
Принцип действия существующих ШД основан на дискретном
изменении состояний электромагнитного поля в рабочем зазоре машины
за счет импульсного возбуждения обмоток. Импульсное возбуждение
обмоток обеспечивается электронным коммутатором, который преоб-
разует одноканальную последовательность управляющих импульсов
малой мощности в многофазную систему напряжений, приложенных
к обмоткам (фазам) ШД.
Наиболее полно требованиям программного управления с точки
зрения быстродействия, устойчивости движения и степени его дискрет-
ности в сочетании с надежной системой коммутации отвечают много-
фазные (т Эг 3) ШД, обмотки которых возбуждаются поочередно или
группами однополярными импульсами напряжения прямоугольной
формы. В конструктивном отношении эти двигатели являются модифи-
цированными синхронными машинами: с постоянными магнитами на
роторе, индукторными или реактивными. Ступенчатому характеру из-
менения напряжений на фазах соответствует дискретное вращение
электромагнитного поля в рабочем зазоре двигателя, вследствие чего
движение ротора состоит из последовательных элементарных поворотов
или шагов, совершаемых по апериодическому или колебательному
закону.
Число различных электрических состояний двигателя называют
числом тактов его коммутации. Шаг, определяемый числом п тактов
коммутации и числом р пар полюсов ШД, равен:
а = 360°/рл.
Шаговый двигатель совместно с электронным коммутатором пре-
образует последовательность управляющих импульсов в угол поворота
и угловую скорость исполнительной оси. Суммарный угол поворота
пропорционален числу импульсов, а угловая скорость — частоте.
Амплитуда и форма импульсов могут изменяться в определенных пре-
делах, не нарушая нормальной работы системы и ее точности. При
отсутствии сигнала иа входе электронного коммутатора переключение
обмоток прекращается, поле в рабочем зазоре оказывается неподвижным.
Привод фиксирует, т. е. «запоминает» конечные координаты любых
перемещений с точностью до долей одного шага. В отличие от синхрон-
ных двигателей ШД рассчитаны на вхождение в синхронизм из состоя-
ния покоя и на принудительное электрическое торможение. Благодаря
этому они обеспечивают в рабочем диапазоне частот внезапные пуск,
остановку и реверс без потери информации, т. е. без пропуска шагов.
Посредством логического преобразования маломощных входных им-
пульсов можно в широких пределах изменять шаг двигателя, получать
стартстопные движения без колебаний вала в конце шага или, напротив,
почти полностью устранять дискретность движения, реализуя синх-
ронное вращение вала.
Шаг двигателя может быть выбран произвольно малым по условиям
требуемой точности, поэтому шаговый привод воспроизводит все виды
механического движения, доступные непрерывным системам привода.
Перечисленные особенности позволяют определить дискретный при-
вод с ШД как синхронно-импульсный следящий привод, сочетающий
в себе возможности глубокого частотного регулирования угловой ско-
рости (до 0) с возможностями числового задания пути.
На выходе ШД может устанавливаться усилитель, обычно пред-
ставляющий собою автономную следящую систему. В этом случае ШД
536
выполняет функцию преобразования импульсного сигнала в угловое
или линейное перемещение задающего органа этой системы. Им может
быть поворотный трансформатор, сельсин, золотник гидроусилителя
н т. п. При ограниченной мощности ШД работают непосредственно на
приводной механизм. Ниже будут даны примеры применения ШД
в станках с программным управлением как с непосредственным при-
водом, так и с приводом через гидроусилитель.
Промышленностью серийно выпускается широкая номенклатура
ШД. Магнитоэлектрические четырехфазные двигатели серий ШДА и
ШД имеют шаг 22,5 и 18°. Индукторные четырехфазные двигатели се-
рии ШДР обеспечивают шаг от 15 до 3°. Кроме того, выпускаются
силовые ШД для металлургического машиностроения серии ШДА
с номинальным моментом до 35 Н-м и ШД-5, ШД-4, ШД-6А, ШД-4Б,
входящие в состав комплектных устройств дискретного привода для
станков с программным управлением.
Рис. 13.19. Поперечный разрез
конструкции четырехфазного
шагового двигателя.
Рис. 13.20. Схема соединения
обмоток шагового двигателя.
На рис. 13.19 показан поперечный разрез конструкции четырех-
фазного индукторного ШД серии ШД-4. В корпусе 1 запрессован ших-
тованный пакет статора 2, имеющий восемь полюсных выступов с гре-
бенчатыми зубцовыми зонами. Зубчатый ротор 3 также набран из
листов электротехнической стали. Число зубцов ротора Zp определяет
собою число р пар полюсов двигателя и его шаг (при заданной схеме
переключения обмоток). Зубцы иа полюсных выступах статора наре-
заны с тем же шагом, что и на роторе, при этом смежные гребенчатые
зубцовые зоны статора взаимно смещены относительно зубцов ротора
на '/4 зубцового деления. Катушки 4 диаметрально противоположных
полюсных выступов статора объединены последовательным включением
в одну обмотку управления (фазу). Фазы статора соединены в четырех-
лучевую звезду с выведенной общей точкой, как показано на рис. 13.20.
Общий провод обмотки присоединяется к «минусу» источника постоян-
ного тока, а на начала фаз через усилители мощности, работающие
в ключевом режиме и управляемые электронным коммутатором, в кру-
говой последовательности поочередно или попарно подается положи-
тельный потенциал. Таким образом, питание фазных обмоток произво-
дится однополярными импульсами напряжения. При протекании тока
537
п одной или двух смежных фазах ротор ШД стремится занять положе-
ние, при котором его зчбцы соосны с зубцами возбужденных гребенча-
тых зон статора. Поскольку зубцовые зоны статора смещены на */4 зуб-
цового деления относительно зубцов ротора, то перенос возбуждения
на смежную пару диаметрально противоположных полюсных выступов
статора прн переключении обмоток вызывает поворот ротора на таг,
равный */« зубцового деления. Механический угол поворота при этом
равен:
а = 3607«2р.
Разомкнутую систему ЧПУ с шаговым приводом можно рассмотреть
на примере трехкоордиватного консольно-фрезерною станка модели
Рис. 13.21. Общий вид консольно-фрезерного станка с числовым про-
граммным управлением.
6Н13ПР. Общин вид этого станка представлен на рис. 13.21, а на
рис. 13 22 показан участок станков 6Н13ПР с ЧПУ. Станок предназна-
чен для обработки плоских или пространственных изделии сложного
профиля типа штампов, пресс-форм, кулачков и т. п, Пространственная
обработка достигается сочетанием движения стола станка с обрабаты-
ваемой деталью в горизонтальной плоскости (в продольном и попереч-
ном направлениях) и вертикальною перемещения фрезерной головки
с инструментом. Привод стола и головки выполнен на ШД, работающих
через гидравлические усилители момента. Для исключения влияния
538
зазоров в передачах на точность обработки изделий в приводах всех
подзч применены рециркуляционные шариковые винтовые пары с вы-
соким КПД, а кинематические цепи сделаны предельно короткими.
Двигатель, обеспечивает дозированный (1,5°) поворот вала на каждый
посту пивший импульс управления, благодаря этому система управле-
ния выполняется без датчиков обратной связи, что существенно упро-
щает все устройство.
Рис. 13.22. Общий вид участка станков с ЧПУ,
Структурная схема системы управления станком приведена на
рис. 13 23 Программа работы стайка записывается на магнитной ленте
на шести дорожках Две дорожки предусмотрены по каждой координате
для задания команд на перемещение по координате соответственно
в прямом и обратном направлениях. Ввод программы осуществляется
в унитарном коде в виде последовательности импульсов
Считанные с магнитной лепты импульсы программы после форми-
рования в усилителях считывания / поступают на входы трехканаль-
ных шеститактных электронных коммутаторов Электронный коммута-
тор каждой из координат х, и, г состоит из распределителя импульсов
но трем каналам (фазам ШД) // и выходного усилителя мощности III,
539
который обеспечивает коммутацию обмоток ШД IV в круговой после-
довательности 1 —1,2—2—2,3—3—3,1. Двигатели воздействуют на зо-
лотники гидроусилителей ГУ, которые в свою очередь изменяют поло-
жения рабочих органов VI.
Рис. 13 23. Структурная схема системы управления станком с шаго-
выми двигателями.
13.8. Программное управление приводом
нажимного устройства реверсивного
прокатного стана
На реверсивных станах горячей прокатки (блюмингах,
слябингах) слиток прокатывается до заданных конечных размеров
заготовки (блюмса, сляба) за несколько пропусков. После каждого
пропуска изменяют раствор между валками и направление прокатки.
Изменение раствора валков производят при помощи нажимного устрой-
ства путем перемещения верхнего валка по определенной программе
(программе обжатий). Последняя зависит от исходных размеров слитка,
требуемых конечных размеров заготовки, марки стали и температуры
металла.
При ручном управлении нажимным устройством высокая точность
прокатки получается, как правило, за счет снижения производитель-
ности стана. Это объясняется тем, что оператору стана не удается за
одно включение нажимного устройства установить требуемый раствор
между валками; ему приходится делать несколько дополнительных вклю-
чений, па которые, естественно, затрачивается время. Даже лучшие
операторы делают до 40 % таких дополнительных включений.
Управление нажимным устройством требует от оператора большого
физического и нервного напряжения. Так, на высокопроизводительных
станах оператору приходится делать 1000 и более включений нажим-
ного устройства в час. Естественно, что выдержать такой высокий темп
работы в течение всей смены, не допустив при этом ошибки, практически
невозможно. А между тем резул1татом такой ошибки бывает снижение
производи|елыюсти, а иногда и авария — поломка дорогостоящих про-
540
катных валков. Таким образом, целесообразность автоматизации про-
цесса управления нажимным устройством очевидна.
На рис. 13.24 показана в общем виде структурная схема програм-
мной системы автоматического управления нажимным устройством.
Раствор между валками измеряется в этой системе датчиком полой е-
ния верхнего валка ДП, который через редуктор механически или по-
средством «электрического вала» связан с нажимным устройством НУ.
Программа обжатий хранится в программио-задающем устройстве
ПЗУ и выдается оттуда по сигналу устройства счета пропусков УСП.
Рис. 13.24. Структурная схема программной системы автоматического
управления нажимным устройством.
Сигналы от датчика ДП и программно-задающего устройства ПЗУ
поступают в управляющее вычислительное устройство УВУ, где они
сравниваются между собой и преобразуются в соответствии с заданным
законом управления (алгоритмом) в управляющее воздействие. По-
следнее выдается в схему управления СУ привода нажимного устрой-
ства по системе Г — Д.
Система автоматического управления нажимным устройством
должна обеспечивать установку раствора валков с заданной точностью
за минимальное время. Для этого необходимо выполнить два условия:
первое — обеспечить пуск и торможение привода с постоянными и
максимально допустимыми ускорением и замедлением и второе — обеспе-
чить установку верхнего валка в заданное положение без перерегу-
лирования.
Первое условие выполняется обычно при помощи предусмотренных
в схеме управления приводом нелинейных обратных связей (отсечек)
по току и напряжению двигателя.
Второе условие обеспечивается тем, что перевод двигателя нажим-
ного устройства в режим торможения производится в строго опреде-
ленный момент времени. Для определения этого момента времени пред-
положим, что привод тормозится с постоянным и максимально допусти-
мым ускорением а. Тогда скорость двигателя со будет уменьшаться по
541
закону
(О (l)|j2 q ”“ Qtf
где (Оцач — начальная скорость торможения.
В конце торможения ы = 0, поэтому /т = со1ИЧ/а. Соответственно
путь торможения привода равен:
Ф^ = >* (“„ач —Л = “иаЧ^ —0/т/2«
О
откуда
4>1 = “нач/2а-
Таким образом, при постоянном замедлении путь торможения
привода пропорционален квадрату его скорости в момент начала тор-
можения. Отсюда следует, что начинать торможение привода нужно
в момент, когда рассогласование между действительным и заданным
положением верхнего валка равно пути торможения. В рассматривае-
мой системе это достигается при помощи квадратичной обратной связи
по скорости привода нажимного устройства, осуществляемой датчиком
скорости ДС совместно с функциональным преобразователем ФП,
имеющим квадратичную характеристику, и при помощи управляющего
вычислительного устройства, реализующего следующий закон упра-
вления:
"И Umax
О
Umax
при
при
при
S — S3 си2;
— cw2 < S — 5зад < сы2;
S-S3s£-cw2,
где U — регулирующее воздействие, подаваемое в схему управления
привода нажимного устройства; S и S3 — соответственно действитель-
ный и заданный растворы валков;с— коэффициент пропорциональности.
Для повышения точности управления и во избежание колебаний
вблизи заданного значения раствора валков привод нажимного устрой-
ства переводится в линейный режим управления:
U = k(S — S3) при |S — S3|^A,
где A — относительно малая величина; k — коэффициент пропорцио-
нальности.
Программные системы автоматического управления нажимным
устройством делятся на два основных класса: аналоговые и цифровые.
Последние в настоящее время получают все большее применение, так
как обеспечивают более высокую точность и надежность работы, в них
проще осуществляются хранение и выбор программы обжатий, легче
осуществляется связь с электронной вычислительной машиной, упра-
вляющей станом.
Одним из основных элементов цифровой системы автоматического
управления иажимным устройством является датчик положения верх-
него валка, который представляет собой преобразователь углового по-
ложения вала в цифровой код. Существуют различные типы таких дат-
чиков: контактные, индуктивные, фотоэлектрические и др. Ниже рас-
сматривается фотоэлектрический вариант, наиболее часто применяе-
мый па практике. На рис. 13.25 схематически показано устройство
фотоэлектрического датчика.
542
Основным элементом этого датчика является стеклянный диск СД,
вал которого соединяется с валом нажимного устройства. Диск раз-
делен на несколько колец, количество которых соответствует количеству
двоичных разрядов числа и определяет точность датчика. В данном
случае число разрядов равно 4. На практике применяют 10 разрядов
и больше.
В свою очередь каждое кольцо разделено на ряд прозрачных и не-
прозрачных частей. Внутреннее кольцо, соответствующее старшему
разряду числа, разделено на две части, из которых одна прозрачная,
а вторая непрозрачная, Следующее кольцо разделено на четыре части
и г, Д.
Рис. 13.25. Фотоэлектрический преобразователь угла поворота в циф-
ровой код.
С одной стороны стеклянного диска СД расположены осветители ОС,
дающие узкий параллельный пучок света; с другой стороны, против
них — фотодиоды ФД. Количество фотодиодов и осветителей равно
числу колец диска. Напряжения, снимаемые с фотодиодов, поступают
на входы усилителей РУ с релейной характеристикой. Если фотодиод
засвечен, то иа выходе соответствующего усилителя имеется полисе
напряжение, что соответствует в цифровом коде +1; если не засве-
чен — то 0.
Таким образом, каждому углу поворота диска СД соответствует
определенная комбинация уровней напряжений на выходах усилите-
лей РУ, т. е. код числа.
Другим существенным элементом цифровой системы автоматиче-
ского управления нажимным устройством является программно-задаю-
шее устройство. Существует несколько типов таких устройств.
Первое и наиболее простое из них — это устройство, в котором
набор программы производится при помощи различного рода переклю-
чателей. Переход с одной программы на другую занимает в этом случае
довольно много времени. Поэтому такие устройства могут быть успешно
применены только на тех станах, где число программ обжатий невелико
и где они редко меняются.
В тех случаях, когда иа стане прокатывается разнообразный сор-
тамент продукции и имеет место частая сменяемость программ обжа-
тий, применяют устройства с перфокартами, на которых программа
обжатия записана в двоичном коде при помощи отверстий. Считывание
программы с перфокарты осуществляется в этом случае контактным или
54Э
фотоэлектрическим способом. Однако и эти устройства имеют свои не-
достатки. Основным из них является то. что записанная на перфо-
карте программа является «жесткой» и не учитывает необходимости ее
изменения в зависимости от температуры слитка.
В связи с этим в последние годы получают все большее применение
лрограммно-задающие устройства, выполненные по типу памяти, при-
меняемой в цифровых ЭВМ. Запись программы обжатий в такие устрой-
ства производится следующими двумя способами.
Первый способ состоит в том, что оператор стана прокатывает
один-два слитка новой партии при ручном управлении. При этом про-
грамма обжатий автоматически записывается в программно-задающее
устройство. Прокатка последующих слитков осуществляется по этой
записанной программе. Если температура слитков отличается от за-
данной, то оператор стана корректирует программу обжатий, прокатав
для этого слиток вручную.
Второй способ заключается в том, что перед прокаткой каждого
слитка программа обжатия рассчитывается на цифровой ЭВМ на осно-
вании начальных размеров слитка, марки стали, температуры металла
и конечных размеров заготовки и вводится перед прокаткой каждого
слитка в программно-задающее устройство. В процессе прокатки слитка
машина получает информацию о давлении па валки, о нагрузке на глав-
ный привод и др. и корректирует на основании этой информации про-
грамму обжатий.
13.9. Адаптивное управление производст-
венными механизмами
Программное управление производственными
механизмами предполагает детерминированное задание ре-
жимов обработки изделий с целью получения необходимо^
производительности и точности обработки соответственно
информации, получаемой из данных чертежа, и с учетом
параметров инструмента и состояния оборудования. Од-
нако при составлении программы, например, для металло-
режущего станка невозможно точнЗ*учесть погрешности
обусловленные системой станок — приспособление — ин-
струмент— деталь (СПИД) и ее упругими свойствами,
изменением твердости заготовки, износом инструмента,
изменением параметров привода подачи, наконец при-
ближенностью данных по режимам обработки и'рядом дру-
гих случайных или трудно учитываемых факторов. Ука-
занные трудности особенно усложняются при составлении
программы для обработки деталей сложной конфигура-
ции.
Снижение упругих деформаций за счет уменьшения
скорости при чистовой обработке сокращает производи-
тельность станка. При ручном управлении в процессе обра-
ботки рабочий может учесть факторы, влияющие на точ-
ность обработки изделия за счет упругих деформаций или
за счет затупления режущих инструментов, или каких-
либо других случайных факторов. В станках, работающих
по заранее заданной программе, из-за невозможности учета
упомянутых обстоятельств составленная программа не всег-
да может обеспечить необходимый режим обработки и
качество изделий. Однако в станках, оборудованных си-
стемой ЧПУ, с широко регулируемым главным приводом
и приводом подачи возможно использовать так называемый
принцип адаптивного управления.
Адаптивные системы автоматически осуществляют вы-
бор оптимального режима обработки, поддерживают его
и обеспечивают необходимую коррекцию геометрических
размеров изделий.
Оптимальным режимом обработки считается тот, кото-
рый получается при минимуме удельных приведенных
затрат. Может быть также использован другой критерий,
например максимальной производительности. В общем
случае оптимум указанных критериев не совпадает. Мак-
симальная производительность достигается при соответ-
ствующем съеме металла с учетом стойкости режущего
инструмента.
Минимальная себестоимость и максимальный экономи-
ческий эффект определяются с учетом использования обо-
рудования, числа выпускаемых изделий, их значения
"й экономике предприятия и т. д. Адаптивная система
должна обеспечивать минимальные затраты на съем еди-
ницы объема металла, осуществляя непрерывный поиск
по оптимальному нахождению величин, определяющих
высокое качество обработки, с целью получения соответ-
ствующей производительности.
Необходимая точность обработки и высокая произво-
дительность обеспечиваются введением соответствующих
ограничений регулируемых параметров.
В адаптивной системе управления металлорежущими
станками должны учитываться следующие силовые огра-
ничения: усилие резания и мощность или усилие резания
и стойкость режущего инструмента, мощность при предель-
ной подаче, предельная подача и оптимальная стойкость
инструмента.
Переход от одного закона оптимизации к другому
’ в адаптивных системах должен происходить автоматически.
Рассмотрим некоторые особенности адаптивного управ-
ления на примере шлифовальных станков. При длитель-
18 Чиликин М. Г., Сандлер А. С.
ной эксплуатации станка в пределах заданной стойкости
одного шлифовального круга или иногда в пределах цикла
обработки одной детали свойства процесса шлифования
не остаются постоянными. Это непостоянство вызывается
изменением износа круга по мере изменения его диаметра
при заданном усилии резания, изменением жесткости упру-
гой системы станка, изменением текущего припуска в про-
цессе обработки и т. д. Оптимизация технологического
процесса может быть достигнута в адаптивной системе
управления. Например, при неизменной угловой скорости
шлифовального круга в процессе обработки с уменьшением
его размеров изменяется скорость резания. Это вызывает
возрастание скорости износа шлифовального круга, уве-
личение усилия резания и соответственно упругих дефор-
маций. Для наиболее полного использования станка,
увеличения его производительности нужно сохранить на-
грузку на шлифовальный круг постоянной и максимально
допустимой по условиям качества обработки. Для этого
необходимо, чтобы скорость съема металла при обработке
изделия изменялась не только в функции припуска, но
и в зависимости от диаметра шлифовального круга. Наи-
большее значение отжатия упругой системы возникает
при минимальном диаметре шлифовального круга.
Анализ зависимостей усилий и мощности резания,
скорости износа круга, скорости поперечной подачи и
упругой деформации при шлифовании от диаметра шли-
фовального круга показывает, что при регулировании
подачи, линейно-уменьшающейся по мере уменьшения диа-
метра шлифовального круга, процесс шлифования проис-
ходит стабильнее и упругие деформации поддерживаются
на допустимом уровне. При таком условии съема припуска
обрабатываемой детали при изменении диаметра шлифо-
вального круга значительно повышается производитель-
ность станка. При этом скорость резания должна поддер-
живаться постоянной на максимально допустимом уровне.
Оптимизация процессов шлифования и использование
экономических критериев целесообразно при черновой
обработке деталей, т. е. на первом участке цикла, когда
снимается примерно 70—80 % припуска.
Рассмотрим в качестве примера некоторую структурную
схему адаптивного управления поперечной подачи внутри-
шлифовальных станков (рис. 13.26). В этой схеме реали-
зуется связь между предельно допустимым усилием подачи
и текущим значением припуска при изменяющемся диа-
546
метре шлифовального круга, т. е. алгоритм управления
Fv — f (s, 6), где Fy — усилие поперечной подачи; s —
текущее значение припуска; 6 — относительное изменение
диаметра шлифовального круга.
В качестве выходной величины принято усилие по-
дачи Fy, которое воспринимается соответствующим дат-
чиком ДРУ, встраиваемым в неподвижную опору станка;
другим источником сигнала, фиксирующим текущее зна-
чение припуска s, является индуктивный датчик ДП.
На станке выполняется контроль текущего значения диа-
метра шлифовального круга датчиком ДДШК. Выходные
сигналы указанных выше датчиков подаются на програм-
мирующее устройство ПУ, на выходе которого возникает
сигнал напряжения Ua = f (s, 6).
Рис. 13.26. Структурная схема адаптивной системы автоматического
управления внутришлифовального станка.
Обратная отрицательная связь осуществляется по уси-
лию Fy. Сигнал рассогласования через усилитель УО
подается на управляемый тиристорный преобразователь ТП,
от которого питается двигатель механизма поперечной
подачи МП. Этот двигатель приводит в движение меха-
низм подачи МПП, связанный с шлифовальным кругом,
при этом развивается оптимальное усилие шлифования
с последующей его стабилизацией и стабилизацией упру-
гих деформаций системы СПИД.
Датчиком измерения диаметра шлифовального круга
может служить бесконтактный сельсин, соединенный через
реечную передачу и редуктор с салазками шлифовальной
бабки. Выходное напряжение сельсина, пропорциональное
диаметру шлифовального круга, выпрямляется и подается
в устройство адаптации.
В рассмотренной системе автоматического управления
производится отработка требуемого алгоритма управления
16* 547
поперечной подачей шлифовального круга, и по сравнению
со станками, имеющими обычные (не адаптивные) системы
управления, достигается повышение производительности
примерно на 30 % с соблюдением той же точности обра-
ботки деталей.
ГЛАВА ЧЕТЫРНАДЦАТАЯ
КОМПЛЕКСНАЯ АВТОМАТИЗАЦИЯ ЭЛЕК-
ТРОПРИВОДОВ
14.1. Общие положения
Рассмотренные выше системы автоматизированного
электропривода, как отмечалось, представляют собой электромеханиче-
скою систему, состоящую из ряда устройств, предназначенных для
приведения в движение исполнительных органов рабочих машин и уп-
равления этим движением. В большинстве случаев в этих устройствах
автоматизация управления ограничивается связями в пределах системы
электропривода данного производственного механизма.
Для сокращения времени на вспомогательные операции и повыше-
ния тем самым производительности труда часто приходится отдельные
производственные машины с помощью средств автоматизации объеди-
нять п соответствующие комплексы.
В отличие от одиночной автоматизации, где управляемый электро-
привод не имеет электрических связей с другими приводами, в схемах
комплексной автоматизации в простейших случаях при помощи раз-
личных блокировок осуществляется электрическая связь между инди-
видуальными электроприводами, обеспечивающая определенную по-
следовательность операций. В более сложных системах применяются
различные электрические устройства, приборы и аппараты, в том числе
ЭВМ, с помощью которых автоматически избираются оптимальные
режимы работы производственных механизмов.
Комплексная автоматизация производственных механизмов нахо-
дит себе применение в самых разнообразных отраслях промышленности.
Существуют, например, автоматизированные хлебозаводы, где рука
человека совершенно не прикасается к продуктам и работа произво-
дится автоматически с помощью различных механизмов. Примерами
комплексной автоматизации являются также системы управления
бумагоделательных агрегатов, металлургических прокатных станов
и др., где требуется управление сложными технологическими процес-
сами. В машиностроительной промышленности для крупносерийного
и массового производства получают все большее применение автомати-
ческие линии станков (рис. 14.1 и 14.2), значительно увеличивающие
производительность цехов. В настоящее время автоматические линии
можно встретить на многих металлообрабатывающих заводах.
Экспериментальный научно-исследовательский институт металло-
режущих станков (ЭНИМС) совместно с работниками опытного завода
«Ст анкоконструкция»сконструировал и построил первый в нашей стране
автоматический завод для изготовления автомобильных поршней, Не
548
только основные, но и подсобные операции, начиная с загрузки сырья
в электропечь и кончая упаковкой готовой продукции, выполняются
на этом заводе автоматически.
Производительность труда на подобных заводах многократно воз-
растает по сравнению с обычными ныне действующими заводами, а роль
рабочего совершенно изменяется. Рабочий автоматического завода
становится командиром целой группы машин, таким образом, создаются
новые предпосылки для стирания существенных различий между умст-
венным и физическим трудом.
Приведенные примеры показывают, что развитие техники автома-
тического управления ведет к коренным изменениям техполопш произ-
водственных процессов, к такому совершенствованию организации
трута, в котором уже видны черты техники коммунистическою общества.
Рис. 14.1. Автоматическая линия станков для обработки блоков трак-
торного двигателя.
Именно этим объясняется то особое внимание к вопросам комплекс-
ной механизации и автоматизации производственных процессов, кото-
рое уделяют им партия и правительство.
Автоматизация приводит к созданию новых конструкций машин,
к повой компоновке их в высокопроизводительные автоматические аг-
регаты. Все это создает предпосылки для полной п широкой автомати-
зации в недалеком будущем различных технологических процессов,
отдельных цехов и даже целых предприятий.
При осуществлении схем комплексной автоматизации электропри-
водов применяются различные средства автоматизации. Во многих
случаях удается решить вопрос с помощью релейно-копгактпых или
иных простейших аппаратов, как, например, телефонных реле, шаговых
54 J
Рнс. 14,2. Автоматическая линия станков для обработки блоков двигателя грузового автомобиля,
искателей и других компактных устройств сигнализации и связи. По-
добные решения мы находим в схемах комплексной автоматизации ме-
таллообрабатывающих станочных линий, различных поточио-траиспорт-
ных систем и в других комплексных устройствах.
В ряде случаев приходится прибегать к специальным датчикам,
контактным или бесконтактным (с применением фотореле, индукцион-
ных, емкостных н других датчиков), как это наблюдается в некоторых
устройствах автоматизации прокатных станов.
Однако во многих случаях приходится применять иные принципы
автоматического управления механизмами и производственными про-
цессами, требующие быстрой обработки поступающей обширной инфор-
мации. Повышение требовании к точности и быстроте протекания про-
цессов в этих случаях приводит к тому, что человек оказывается не
в состоянии следить за машинами и процессами и управлять ими. Здесь
на помощь приходят УВМ, перерабатывающие информацию и осущест-
вляющие сложные функции управления. Применение УВМ в ближай-
шем будущем позволит значительно интенсифицировать различные
производства, например доменное, мартеновское, химическое и др,
14.2. Автоматические станочные линии
Затрата вспомогательного времени при обработке дета-
лей сложной конфигурации с большим числом операций достигает при
работе на металлообрабатывающих станках общего назначения или спе-
циальных агрегатных станках относительно больших значений (до 40—
60 % общего времени обработки). Установка детали, ее зажим и от-
жатие, операции по пуску и остановке станка, снятие обработанной
детали и транспортировка ее на другой станок снижают в целом произ-
водительность оборудования.
Создание автоматически?; линий станков, в которых обработка дета-
лей производится многими инструментами, позволяет значительно по-
высить эффективность оборудования за счет сокращения в среднем
вдвое вспомогательного времени, повышения производительности труда
в 2—10 раз по сравнению с обработкой изделий на универсальных стан-
ках. В этом случае уменьшается число рабочих в несколько раз (до 10
и более) и сокращается в 1,5—2 раза произво ственная площадь.
Станки, из которых комплектуется линия, представляют собой по-
луавтоматы, располагаемые по одной линии и автоматически между
собой связанные транспортными и зажимными устройствами. Здесь без
участия рабочего производятся транспортировка обрабатываемых де-
талей с одной рабочей позиции, где она была ранее обработана, на сле-
дующую, их фиксация и зажим, автоматический быстрый подвод режу-
щих инструментов к месту обработки, затем обработка детален н после
окончания ее быстрый отвод режущих инструментов в исходное поло-
жение.
Задача рабочего состоит в том, что он должен установить на загру-
зочной позиции новую деталь, предназначенную для обработки, а также
на разгрузочной позиции, в конце линии, снять обработанную деталь.
По способу осуществления транспортных, задающих и управляю-
щих устройств различают автоматические линии с жесткими и гибкими
транспортными связями. Жесткие транспортные связи используются
на линиях для обработки корпусных деталей, а гибкие транспортные
связи чаще всего для обработки тел вращения (колец шарико- и ролико-
подшипников, клапанов поршневых двигателей, болтов и т, д,).
551
Схематическое изображение линии с жесткими транспортными сли-
зями показано на рис. 14.2. Здесь транспортер пронизывает всю линию,
состоящую обычно из агрегатных станков, расположенных по обе
стороны’обрабатываемых деталей. Перемещение всех деталей, находя-
щихся в обработке, осуществляется одним транспортером с точно уста-
новленным тактом, т. е. шагом и временем между шагами. Транспортер
совершает шаговое поступательное движение либо возвратно-поступа-
тельное движение. Длина шага определяет расстояние между пози-
циями, которое должно быть строго одинаковым.
Транспортер Вперед
Назад V/
Отжатие
Р&сфиксащия
Фиксация ж
Зажим
Подвод силовых головок и обработка. шш
Возврат силовых головок 1
Рис. 14.3. Циклограмма работы механизмов автоматической линии
станков.
Часто требования технологического процесса приводят к необхо-
димости включения в линию большого количества станков, управле-
ние которыми сильно усложняется, поэтому в таких случаях автома-
тические линии разделяются на отдельные участки. Каждый из участ-
ков имеет свой транспортер, свои фиксирующие и зажимные устрой-
ства. Количество участков определяется технологическим процессом,
например, границей двух участков может быть переход от обработки
одной плоскости детали к другой.
Между отдельными станками линии, транспортирующими и за-
жимными устройствами осуществляются определенные блокировки,
обусловленные технологическим процессом. Наиболее гибкой связью
является электрическая, обладающая компактностью, возможностью
ее расположения в любом месте благодаря дистанционному управлению,
легкостью замены аппаратов и др. В связи с большим количеством ап-
паратов и сложностью системы управления обеспечение высокой надеж-
ности работы линий является первостепенным требованием.
Необходимая связь между отдельными механизмами линии и соот-
ветствующие им основные блокировки осуществляются чаще всего конт-
ролем исполнения команд в функции пути, что является наиболее надеж-
ным. Вспомогательные команды могут контролироваться в функции
времени и усилия.
На рис. 14.3 показана циклограмма работы отдельных механизм! в
линии в автоматическом режиме. По циклограмме можно проследить
определенную очередность их действия, обусловленную технологиче-
552
ским процессом. Исходное состояние линии характеризуется нахожде-
нием всех механизмов на исходных позициях и отжатым расфиксиро-
ванным состоянием деталей.
Вначале дается сигнал на включение привода транспортера вперед,
который осуществляет перемещение деталей на последующие позиции,
при этом новая деталь перемещается с загрузочной на первую рабочую
позицию, а полностью обработанная деталь (на данном участке липин)
выдается с последней позиции на разгрузочную. После перемещения всех
деталей происходят их фиксация (введение в обрабатываемые детали
фиксирующих шпилек, строго устанавливающих детали на рабочих
позициях) и зажим. По окончании этих операций дается сигнал па
движение транспортера назад вхолостую и на быстрое перемещение
силовых головок с режущим инструментом к обрабатываемым деталям
с последующим автоматическим переключением движения каждой го-
ловки на рабочую подачу, после чего начинается процесс обработки.
По окончании обработки каждая головка независимо от остальных
быстро отводится в исходное положение. После возврата всех силовых
головок в исходное положение производятся расфиксация и отжатие
всех деталей, и цикл работы линии повторяется.
Если устанавливается автоматический режим работы линии, то
рассмотренный цикл непрерывно повторяется, следуя одни за другим,
до тех пор, пока не будет дана команда на остановку линии нажатием
кнопки Предварительный стоп. Нажатие на эту кнопку может быть
произведено в любой момент работы линии, при этом система управле-
ния автоматически должна довести работу линии до положения отжима
деталей. Возможен также и полуавтоматический режим работы линии,
когда она, например, осваивается и рабочий еще не успевает за рит-
мом, заданным автоматическим режимом. В этом случае совершается
только один цикл, и для осуществления последующего необходимо каж-
дый раз нажимать кнопку Пуск.
В системе управления должны быть предусмотрены следующие
блокировки, обусловленные технологическим процессом:
1. Пуск транспортера и перемещение обрабатываемых деталей
возможны, если все силовые головки линии находятся в исходном по-
ложении, все детали отжаты и фиксирующие шпильки выведены.
2. Зажим деталей производится в том случае, когда закончилось
перемещение с позиции на позицию и все головки находятся в ис-
ходном положении.
3. Перемещение головок вперед осуществляется при полном вве-
дении в детали фиксирующих шпилек и зажиме деталей, контролируе-
мом в функции усилия.
4. Отжатие деталей производится тогда, когда все головки выпол-
нили свои рабочие операции и пришли в исходное положение.
Транспортер приводится в действие от индивидуального электро-
или гидропривода. При перемещении деталей важно, чтобы скорость
перемещения плавно возрастала до своего максимума, а в конце пере-
мещения плавно снижалась до 0. Последнее необходимо для обеспече-
ния точной остановки.
Транспортер с гидроприводом обеспечивает точную установку де-
тали на рабочей позиции, что достигается применением режима работы
гидропривода на жесткий упор. После зажима деталей транспортер
возвращается в исходное положение.
При использовании нереверсивного асинхронного двигателя с ко-
роткозамкнутым ротором в электроприводе транспортера последнему
сообщается возвратно-поступательное движение при помощи кулис-
653
кого механизма. Электропривод транспортера проще и дешевле гидро-
привода, ио обладает меньшей точностью. Кроме того, перемещение
транспортера назад этот привод осуществляет во время фиксации и
зажима деталей, что может привести к их смещению на рабочих пози-
циях. Поэтому он применяется только в линиях с малым количеством
позиций и малым шагом.
Управление каждой силовой головкой производится конечными
выключателями.
Зажим и отжатие деталей также контролируются своими конеч-
ными выключателями, расположенными на каждой позиции. Если за-
жим гидравлический, то окончание зажима обычно фиксируется по-
средством реле давления.
К достоинствам линий с жесткой транспортной связью можно от-
нести сравнительно короткое время прохождения обрабатываемою
изделия с позиции на позицию; недостатком же является то, что при
неисправности любого из устройств прекращается работа всей линии,
14.3. Узел схемы управления автоматиче-
ской линией станков
Для уяснения действия основных блокировочных свя-
зей в схемах управления участком автоматической линии с жесткой
транспортной связью рассмотрим упрощенную схему управления тран-
спортером с электрическим приводом и кулисным механизмом (рис. 14 4).
Кулисный механизм используется здесь для реверсирования транс-
портера и обеспечения соответствующего графика скорости н ускорения
транспортируемых деталей с одной позиции на другую. В соответст-
вии со схемой, изображенной па рнс. 14.4, двигатель транспортерам
включается контактором К-
Назначение конечных выключателей следующее:
ВК1 — конечный выключатель, фиксирующий исходное положе-
ние силовых головок; для упрощения схемы он условно показывает
контакты конечных выключателей всех силовых головок. В исходном
положении головок его контакты оказываются в нажатом состояния;
ВКТ1 — конечный выключатель, находящийся в нажатом состоя-
нии в исходном положении транспортера (перед началом его движения
вперед);
ВКТ2— конечный выключатель, фиксирующий окончание хода
транспортера вперед;
ВКО — конечный выключатель, условно показывающий все вы-
ключатели, контролирующие отжатие всех обрабатываемых деталей.
Когда детали отжаты, контакты этого выключателя находятся в нажа-
том состоянии;
ВК2 — выключатель, контролирующий конец обработки деталей
на всех станках (условно показан только один выключатель, в дейст-
вительности их столько, сколько силовых головок на линии);
ВКЗ — конечный выключатель, условно показывающий все вы-
ключатели, нажатые при правильном положении деталей;
РД — реле давления, контролирующее окончание зажатия дета-
лен, когда его контакт закрывается.
В представленной схеме с помощью переключателя В избирается
автоматический или полуавтоматический режим работы линии.
Для обеспечения автоматического режима работы контакты В
должны находиться в таком состоянии, как это показано на схеме
554
т. е. контакт, показанный в верхней части схемы, разомкнут, а внизу —
замкнут.
После нажатия иа кнопку Кн. предвар. пуск включается промежу-
точное реле РП1, и если все силовые головки будут в исходном поло-
жении, что контролируется замыканием ВК1, и все обрабатываемые
детали отжаты (выключатель ВКО замкнут), то срабатывает контактор К
через замкнутые контакты РПС (кнопка Кн. разреш. пуска линии была
нажата), РП1, ВКО, ВК.1, РПЗ, и двигатель М присоединяется к сети.
Рис. 14.4, Схема управления транспортером автоматической линии
стан ков.
При движении транспортера вперед контакт выключателя ВКТ1
освобождается, его размыкающий контакт замкнется, подготовив пи-
тание катушки контактора К, когда включится реле РПЗ.
По окончании хода транспортера вперед замкнется контакт вы-
ключателя ВКТ2, и включится реле РПЗ, замыкающие контакты ко-
торого шунтируют ВКТ2 и включают электромагнит зажима Эм.З,
если детали заняли правильное положение (зафиксированы) и закрылся
замыкающий контакт ВКЗ. Двигатель продолжает работать, вращаясь
в том же направлении, а транспортер благодаря действию кулисного
555
механизма начнет перемещаться назад. По возвращении в исходное
положение транспортер остановится, так как разомкнется контакт8КТ 1.
а размыкающие контакты РПЗ разомкнуты. После окончания зажима
обрабатываемых изделий начнется движение силовых головок из ис-
ходных положений (BKI и ВКО разомкнутся), так как после замыка-
ния контакта реле давления РД включится реле РП5 п получит пита-
ние электромагнит Э:лВ хода силовых головок вперед.
По окончании процесса обработки изделий от упоров, находя-
щихся на силовых головках, нажимается выключатель ВК2, и замы-
кается цепь катушки реле РП4 (размыкающий контакт РПЗ замкнут,
так как катушка реле РПЗ потеряла питание одновременно с катушкой
контактора К в момент нажатия ВКТГ).
После возвращения головок в исходное положение включаетея
контакт ВК1, получает питание электромагнит отжима ЭмО и ироис-
ходит отжатие всех изделий. Вновь включается контакт ВКО, катушка
контактора К автоматически получает питание (без воздействия на
кнопку Кн. предо. пуск) через контакты РПС, РП4, В, ВК1 и ВКО,
и цикл работы автоматически повторится.
Полуавтоматический режим можно получить, если предварительно
переключатель В повернуть в другое положение, при котором разомк-
нутый на схеме контакт замкнется, а замкнутый — разомкнется. После
этого нажимается кнопка Кн. предв. пуск, включаются реле РП! и
РП2, и транспортер, как и в предыдущем случае, пускается в ход.
В конце хода транспортера вперед включится реле РПЗ, что приведет
к отключению реле- РП2. Схема управления двигателем транспортера
работает так же, как и в автоматическом режиме, с тем, однако, отли-
чием, что по возвращении транспортера в исходное положение и окон-
чании одного цикла работа линии не возобновится до тех пор, пока
оператор не нажмет на кнопку Кн. предв. пуск. Нажать эту кнопку
он может н во время цикла после возвращения транспортера в исход-
h. е положение; в этом случае команду запомнит реле РП2, и следующий
цикл автоматически повторится.
Для рабочей остановки линии после возвращения транспортера
в исходное положение нажимается кнопка Кн. предв. стоп, включается
реле РПС, размыкая свой размыкающий контакт и запрещая тем самым
пуск линии после ее остановки по окончании цикла. Пуск линии воз-
можен только после нажатия кнопки Кн. разреш. пуска линии.
В качестве основного двигателя в автоматических линиях станков
используется асинхронный двигатель с короткозамкнутым ротором
в сочетании с гидравлическими устройствами.
Для цепей управления применяются различные реле, контакторы,
путевые выключатели, командоаппараты. Их число возрастает по мере
усложнения обработки деталей и с увеличением числа станков в линии.
Это снижает надежность линий, повышение которой является одной
из главных задач. Именно поэтому внимание конструкторов современ-
ных линий станков сосредоточивается на возможном сокращении коли-
чества применяемых аппаратов управления, а также использовании
компактных слаботочных аппаратов, бесконтактных узлов управления,
в частности программируемых командоконтроллеров.
В отличие от автоматических линий с жесткими транспортными свя-
зями существуют автоматические линии с гибкими транспортными свя-
зями, в которых в качестве транспортных устройств используются
различные наклонные лотки, вибрационные, цепные, рольганговые тран-
спортеры и пр. Причем все эти транспортные устройства часто выпол-
няют роль межоперационпых накопителей—бункеров,
556
В таких линиях работа каждого станка и транспортных устройств
не зависит от положения или состояния соседнего станка. Это позволяет
управлять станками автономно и производить автоматическое управ-
ление ими только в зависимости от наличия деталей на загрузочной
позиции. Автономное управление каждым станком упрощает его об-
служивание, повышает надежность и производительность линии в це-
лом и уменьшает количество электрических блокировок между агре-
гатами .
Схема небольшой линии, состоящей из трех станков с гибкой тран-
спортной связью, показана на рис. 14.5. В ней должны быть соблюдены
следующие взаимосвязи:
1) станок 3 должен останавливаться при заполнении бункера 2
и неработающем транспортере 6 или прн неработающем устройстве
J для подачи обрабатываемых изделий;
Рис. 14.5. Схема автоматической линии станков с гибкой транспортной
связью.
I — бункер и элеватор для подъема обрабатываемых изделий; 2,8 — бункера-
накопители; 3—5 — станки; 6,7 — транспортные устройства.
2) при неработающем стайке 4 транспортер 6 должен останавли-
ваться при заполнении бункера 2;
3) станок 4 должен останавливаться при отсутствии обрабатывае-
мых деталей в бункере 2.
На участке между станками 4 и 5, связанными транспортером 7
и бункером 8, должны выполняться следующие взаимосвязи:
1) станок 5 должен останавливаться при отсутствии деталей в бун-
кере S;
2) при неработающем станке 5 транспортер 7 работает до полного
заполнения бункера 8, затем автоматически отключается;
3) бункер 8 заполняется при неработающем станке 5, работающем
станке 4 и транспортере 7;
4) бункер 8 опорожняется при работающем станке 5 и неработаю-
щих станке 4 и транспортере 7;
5) станок 4 останавливается при наполненном бункере 8 и нера-
ботающем транспортере 7.
14.4. Комплексная автоматизация поточно-
транспортных систем
В целях осуществления комплексной автоматизапии
некоторых производственных цехов применяется метод диспетчерского
управления механизмами на расстоянии, который заключается в цент-
557
рализации управления и реализуется: для небольших поточно-тран-
спортных систем (ПТС) из 5—20 механизмов с помощью обычной силь-
ноточной аппаратуры управления; для больших поточно-транспортных
систем из 50—1000 механизмов — маломощными средствами автоматики,
техники сигнализации и связи.
Управление электроприводами достигается здесь с помощью стан-
дартных телефонных реле, ключей, кнопок и шаговых искателей. Теле-
механические устройства и схемы применяются уже в ряде случаев для
управления электроприводами сложных ПТС агломерационных н обо-
гатительных фабрик, элеваторов, цементных заводов и т. л. Их исполь-
зование возможно также для централизованного управления механиз-
мами химических цехов, электростанций, предприятий конвейерного
производства железобетонных изделий, а также для управления объек-
тами прокатного производства.
Основным средством автоматизации, применяемым в ПТС, являются
блокировки, осуществляющие между электроприводами взаимную
связь, соответствующую технологическому процес-
су. Блокировки обеспечивают определенный поря-
док пуска и остановки отдельных двигателей.
Кроме того, иа всю установку имеется централизо-
ванное управление, общее для всех механизмов
данной ПТС.
При комплексной автоматизации избирание
рабочего участка, включение и отключение его
механизмов осуществляются указанным централи-
зованным устройством. Процесс пуска или оста-
новки механизмов состоит из трех основных опе-
раций: подготовительной, избирания и исполни-
тельной.
Рис. 14,6. Схема технологического участка ПТС,
Первая из этих операций необходима для подготовки к действию
цепей управления. Операцией избирания выбирается участок и подго-
тавливаются к включению цепи механизмов, избранных для работы.
И, наконец, исполнительная операция осуществляет пуск или оста-
новку участка.
На рис. 14.6 приведена схема технологического участка ПТС,
который состоит из следующих элементов: 1, 5 — бункера; 2,3 — кон-
вейеры; 4 — питатель. Сплошной линией показана последовательность
прохождения материалов на участке, а штриховой линией — последо-
вательность пуска механизмов. Блокировочные связи между отдель-
ными электроприводами выполняются в режимах автоматического и
местного управления. В случае наладочного режима (ручного управле-
ния) блокировки не обязательны.
Для пуска участка достаточно включить электродвигатель меха-
низма, расположенного последним по потоку материала; это приведет
к автоматическому включению всех предшествующих механизмов этого
участка. Блокировочные связи электроприводов обеспечивают необхо-
димую последовательность пуска механизмов, соответствующую тех-
нологическому потоку материала. Делается это во избежание завала
транспортируемым материалом отдельных механизмов. В этих же це-
658
лях блокировки приводят К отключению двигателей всех предшествую-
щих по потоку механизмов при остановке любого механизма.
Схема управления участком ПТС, а также соответствующие ей
схемы включения электроприводов показаны соответственно иа рис. 14.7
Рис. 14.7. Узел схемы управления участком ПТС,
и 14.8. Схема на рис. 14.7 предусматривает различные режимы работы,
которые избираются переключателем КУ. В положении А обеспе’И-
вается централизованное автоматическое включение. Креме того, воз-
можно местное управление — сблокированное М и ручное Р,
559
Рис. 14 8, Схема управления электроприводами у'метка ПТС.
В нулевом положении КУ все механизмы участка выключены.
Нажатием кнопки КнПУ при предварительной установке КУ в поло-
жение А включается реле времени РВ, а затем промежуточное сигналь-
ное реле РПС. Контакты этого реле включают сигнальные звонки Зе/,
Зв2, предупреждающие о предстоящем пуске участка. Затем с выдерж-
кой времени замыкается контакт РВ и включается реле включения
участка РВУ, которое в свою очередь включает промежуточное пуско-
вое реле РПП.
Контакт этого реле включает через замкнутый контакт РВУ ка-
тушку линейного контактора КЛ1 (рис. 14.8); при этом пускается пер-
вый двигатель участка. Вспомогательный контакт КЛ1 замыкает пень
промежуточного реле РП1, которое своим контактом через замкнутый
контакт РВУ включает цепь управления для пуска второго двига-
теля.
Пуск последующих двигателей осуществляется аналогично. Вклю-
чением последнего двигателя заканчивается пуск механизмов участка.
При этом отключаются все реле системы управления, кроме РПП
(рис. 14,7), в связи с включением промежуточного реле РПп (рис. 14.8).
Одновременно прекращается звуковая сигнализация.
Для отключения двигателей участка необходимо нажать кнопку
КнСУ', РПП теряет питание, отключается первый двигатель, затем
поочередно и все остальные (рис. 14.7 и 14.8). Последний двигатель
отключается за счет отключения контактора КЛ (п — 1) предпоследнего
двигателя (не показанного на схеме).
Для выполнения режима местного сблокированного управления
переключатель КУ предварительно устанавливается в положение М
(рис. 14.7 и 14.8). Нажатием кнопки КнП1 включается первый двига-
тель. Арестный пуск второго и последующих двигателей возможен
только при работающем предыдущем. Независимое местное управление
каждым двигателем возможно при переводе КУ в положение Р. В этом
случае реле местного управления РМУ включает свои контакты в це-
пях управления всех двигателей.
Аварийная остановка любого из двигателей при положении А
переключателя КУ приведет к отключению всех последующих двига-
телей, в том числе и последнего. В этом случае отключится РПп, и
окажется замкнутой цепь аварийной сигнализации ЗвЗ. Для снятия
звуковой аварийной сигнализации необходимо нажать на кнопку КнОЗ,
при этом срабатывает реле звуковой сигнализации и отключает зво-
нок ЗвЗ.
Схема предусматривает также световую сигнализацию, контроли-
рующую работу всех двигателей участка. Нажатием кнопки КнОС
можно снять световую сигнализацию, а при необходимости проверки
работающих двигателей можно восстановить ее воздействием на кнопку
КнВС (рис. 14.7).
Схемы с использованием сильноточной аппаратуры применимы
для участков ПТС с ограниченным числом механизмов. В системах
управления с большим числом механизмов целесообразно использовать
слаботочную аппаратуру, а также бесконтактные аппараты для повы-
шения надежности работы этих систем, создания более компактных
блоков управления к сигнализации, а также сокращения площади,
занимаемой ими.
561
14.5. Комплексная автоматизация домен-
ной печи
В черной металлургии СССР свыше 90 % всего чугуна
выплавляется в крупных высокопроизводительных доменных печах,
оснащенных рядом устройств автоматического контроля и регулиро-
вания.
Одним из наиболее автоматизированных участков доменной печи
является система загрузки шихтовых материалов (агломерата, руды,
известняка, кокса). На подавляющем большинстве доменных печей
автоматически регулируются также температура, влажность, расход
и состав дутья (соотношение природного газа, воздуха и кислорода),
Рис. 14.9. Структурная схема системы комплексной автоматизации до-
менной печи.
давление газа под колошником. На некоторых печах автоматизированы
набор и взвешивание шихтовых материалов и работают автоматические
регуляторы распределения дутья по фурмам.
Наряду с автоматическими регуляторами доменная печь оснащена
также множеством контрольно-измерительных приборов, позволяющих
обслуживающему персоналу своевременно обнаружить нарушения ре-
жима (хода) печи и принять соответствующие меры к его восстановле-
нию.
Дальнейшим этапом развития автоматизации доменного процесса
является комплексная автоматизация доменной печи с применением
УВМ.
На рнс. 14.9 показана система комплексного автоматического
управления доменной печью. Эта система имеет иерархическую, т. е.
состоящую из нескольких уровней управления, структуру. К первому
уровню относятся контрольно-измерительные приборы и автоматиче-
ские регуляторы. Второй уровень — это локальные управляющие вы-
числительные машины УВМ1 — УВМ4, выполняющие следующие функ-
ции (соответственно): шихтовку доменной плавки; распределение ших-
товых материалов до сечению колошника печи; обеспечение равномер-
562
пого и непрерывного схода шихтовых материалов от колошника к горну
печи и управление тепловым режимом работы печи. Перечисленные
функции хотя и являются составными частями общего процесса упра-
вления доменной плавкой, тем не менее в известной степени незави-
симы одна от другой. Поэтому они могут быть реализованы при помощи
отдельных УВМ, объединенных в общую систему управления,
Ко второму уровню управления относится также машина центра-
лизованного контроля МЦК. Эта машина принимает в аналоговой форме
сигналы от датчиков контрольно-измерительных приборов, преобразует
эти сигналы из аналоговой формы в цифровую, выполняет над ними
операции масштабирования, линеаризации, сглаживания и т. п. и
выдает их на цифровые индикаторы, печатающие устройства, на пер-
фораторы и в УВМ.
И, наконец, к третьему, самому высокому уровню относится цент-
ральная управляющая вычислительная машина УВМ5, координирую-
щая работу локальных УВМ и оптимизирующая процесс управления
доменной печью.
Выделение машины централизованного контроля, локальных и цент-
ральной УВМ в самостоятельные конструктивные узлы в известной
степени условно, поскольку одна современная ЭВМ может выполнять
одновременно все функции названных машин.
Автоматическое управление шихтовкой доменной плавки при по-
мощи УВМ1 имеет своей целью получение заданного состава чугуна и
требуемого состояния шлака путем более точной дозировки компонен-
тов шихты с учетом их химического состава и физических свойств.
Машина УВМ1 рассчитывает программу шихтовки на основании инфор-
мации о составе шихтовых материалов и продуктов плавки (чугуна,
шлака). При расчете учитываются также влажность кокса и вынос ко-
лошниковой пыли. В соответствии с рассчитанной программой ших-
товки УВМ1 выдает управляющие воздействия в системы взвешива-
ния и дозирования шихтовых материалов, которые транспортируются
затем к скипам н загружаются в печь по программе, заданной системой
загрузки.
Автоматическое управление распределением шихтовых материалов
по сечению колошника доменной печи при помощи УВМ2 преследует
своей целью более равномерное распределение газового потока по се-
чению колошника, что в свою очередь способствует повышению произ-
водительности печи и сокращению расхода топлива. Машина УВМ2
получает информацию о температуре и составе газа по сечению колош-
ника и в газоотводах, а также информацию о расходе и составе дутья
через каждую фурму доменной печи и выдает на основании этой инфор-
мации управляющие воздействия в системы программного управления
вращающимся распределителем шихты и автоматического командо-
контроллера подач.
Автоматическое управление сходом шихтовых материалов при
помоши УВМЗ обеспечивает ровный ход доменной печи при ее макси-
мальной производительности. На основании информации о скорости
схода шихтовых материалов и перепаде давления по высоте доменной
печи УВМЗ непрерывно устанавливает расход дутья таким образом,
чтобы производительность печи была максимальной.
Автоматическое управление тепловым состоянием доменной печи
при помощи УВМ4 производится на основании информации о темпе-
ратуре и составе колошникового газа, о температуре в шахте и в фур-
менной зоне печи, о перепаде давления по высоте печи и о температуре
и составе чугуна и шлака на выпусках. Машина УВМ4 изменяет соот-
563
ношение между рудой и коксом и задания (уставки) автоматическим
регуляторам температуры влажности и состава дутья.
Локальные УВМ объединяются в единую автоматическую систему
при помощи УВМ5, которая осуществляет координацию их работы и
оптимизацию процесса управления. В качестве критерия оптималь-
ности могут быть приняты производительность печн, расход кокса,
себестоимость чугуна и др.
14.6. Автоматическое управление распреде-
лением газового потока по сечению
доменной печи
Ровная и производительная работа доменной печи с низ-
ким расходом кокса определяется в значительной мере степенью исполь-
зования тепловой и химической энергии газа. Одним из средств для
обеспечения наиболее полного использования энергии газа является
равномерное распределение его по сечению колошника доменной печи.
Последнее может быть достигнуто соответствующим распределением
шихтовых материалов по окружности колошника. В рассмотренной
выше системе комплексной автоматизации доменной печи этим рас-
пределением управляет УВМ2 (рис. 14.9).
О распределении газового потока по окружности колошника можно
судить по температуре газа над уровнем засыпки. Чем выше темпера-
тура газа, тем большее количество его проходит через контролируемый
участок, и, наоборот, при снижении температуры поток газа умень-
шается. Повышение температуры газа относительно среднего по окруж-
ности значения свидетельствует об увеличении газопроницаемости
столба шихтовых материалов в контролируемом участке (об образова-
нии в нем каналов) и требует, как правило, дополнительной загрузки
на этот участок рудных материалов. Наоборот, понижение температуры
газа характеризует уменьшение в контролируемом участке газопрони-
цаемости (образование в нем уплотнений) и требует дополнительной
загрузки на этот участок коксовых материалов.
При нарушении равномерности распределения газового потока по
окружности колошника изменяютсятакжетемпература и содержаниеСО2
в газоотводах. Повышение температуры газа в газоотводе и одновре-
менное уменьшение в нем содержания СОа свидетельствуют о повыше-
нии газопроницаемости шихты в соответствующем квадранте печи.
И, наоборот, при уменьшении газопроницаемости шихты в каком-либо
квадранте температура газа в соответствующем газоотводе уменьшается,
а содержание в нем СО2 увеличивается.
Нарушение равномерности распределения газового потока по ок-
ружности колошника отражается также на распределении дутья по
фурмам (в том случае, конечно, если это распределение не регулируется
автоматически). Так, при повышении газопроницаемости шихты в ка-
ком-либо секторе печи расход дутья через фурму, расположенную в этом
секторе, увеличивается, а при снижении—уменьшается.
Таким образом, измеряя температуру газа над уровнем засыпки,
температуру и содержание СО2 в газоотводах и расход дутья по фурмам
и изменяя соответствующим образом распределение шихтовых мате-
риалов посредством вращающегося распределителя шихты (ВРШ),
можно регулировать распределение газового потока по окружности
колошника.
564
Рассмотрим один из вариантов управления этим распределением
газового потока посредством УВМ, воздействующей на ВРШ. Опреде-
ление нарушения распределения газового потока по окружности ко-
лошника производится УВМ в два этапа.
На первом этапе измеряются температура и содержание СО2 в ка-
ждом из четырех газоотводов печи. Результаты измерений сравни-
ваются со средним по газоотводам значением и на основании получен-
ных разностей выявляются квадранты печи с нарушенной газопрони-
цаемостью.
На втором этапе измеряются температура газовнад уровнем засыпки
и расход дутья по фурмам. Результаты измерений сравниваются со
средними по окружности печи значениями температуры газа и расхода
дутья по фурмам. Полученные разности используются для уточнения
сектора печи с нарушенной газопроницаемостью в пределах выявлен-
ного на первом этапе квадранта печи. Сектор считается надежно уста-
новленным, если характеры нарушений газопроницаемости в нем и
в квадранте печи не противоречат друг другу.
Рис. 14.10. Структурная схема системы управления распределением
газового потока по окружности колошника.
В зависимости от выявленной картины газораспределения по ок-
ружности колошника машина задает ВРШ одну из следующих четырех
программ работы:
1. При равномерной газопроницаемости шихты по окружности
печи загрузка шихтовых материалов производится в порядке нормаль-
ной последовательности; при этом ВРШ поворачивается каждый раз
на угол, равный 20°.
2. При появлении сектора только с повышенной газопроницаемо-
стью в него подаются руда и кокс.
3. При появлении сектора только с пониженной газопроницаемо-
стью этот сектор при загрузке пропускается.
4. При одновременном появлении секторов с повышенной и с по-
ниженной газопроницаемостью в первый подается руда, а во второй —
кокс.
Структурная схема системы управления распределением газового
потока по окружности колошника показана на рис. 14.10. Рассмотрим
работу системы па первом этапе. В качестве первичных датчиков тем-
пературы и содержания СО2 в газоотводах используются четыре тер-
5,65
моэлектрических термометра и четыре газоанализатора. Выходные сиг-
налы этих датчиков поступают в электронные потенциометры. В по-
следних имеются вторичные реостатные датчики. Снимаемые с этих
датчиков напряжения подаются в УВЛ1.
В блоках С аналого-цифровой УВМ, выполненных в виде сумма-
тора на резисторах, данные о температуре и содержании СО2 усред-
няются по газоотводам. Затем на входах чувствительных элементов ЧЭ,
имеющих релейную характеристику с зоной нечувствительности, про-
изводится сравнение данных о температуре и содержании СО2 в каждом
из четырех газоотводов с полученными ранее средними значениями.
Если разность превосходит зону нечувствительности, то на выходе
чувствительного элемента появляется сигнал +1 в том случае, когда
температура (или содержание СО2) превышает среднее значение, и —1
при значении этого параметра ниже среднего.
Доменная печь является очень сложным объектом управления.
Она подвержена сильному влиянию случайных возмущений. Поэтому
отклонение температуры в газоотводе от среднего значения принимается
за достоверное только в том случае, если оно подтверждается противо-
положным по знаку отклонением содержания СО2 и повторяется за-
данное число раз. Выполнение этих двух условий обеспечивается соот-
ветственно при помощи матрицы Ml, представляющей собой совокуп-
ность логических элементов И и накопителей Н, в качестве которых
используются реверсивные цифровые счетчики (рис. 14.10). После
каждого опроса датчиков (измерения) в накопители добавляются -4-1.
0 или —1.
Если после n-го измерения выполняется одно из двух условий
п п
У] xik~m2k*
i=i i=i
где X; — текущий параметр, поступающий на вход накопителя и при-
нимающий значения + 1; 0; —1; mlt т2 — целые положительные уставки
накопителя; k — номер накопителя, то характер отклонения темпера-
туры в газоотводе, а следовательно, и характер нарушения газопрони-
цаемости в квадранте печи считаются установленными и фиксируются
в запоминающем устройстве ЗУ1 (рис. 14.10).
Если по истечении максимально возможного в цикле числа измере-
ний N выполняется условие
N
то нарушения газопроницаемости шихты по окружности печи отсут-
ствуют, что также фиксируется в запоминающем устройстве ЗУ1.
Рассмотрим теперь работу системы на втором этапе. Информация
иа этом этапе поступает в УВМ от 18 термоэлектрических термометров,
расположенных над уровнем засыпки, и от 18 датчиков (трубок ВГИ)
расхода дутья по фурмам, причем термоэлектрические термометры рас-
положены на одних образующих с фурмами. Так же как и на первом
этапе, данные о температуре газа по окружности колошника и о расходе
дутья по фурмам усредняются в блоках С и сравниваются со средними
значениями на входах чувствительных элементов ЧЭ. При этом все
датчики температуры и датчики расхода дутья через коммутаторы,
выполненные на шаговых искателях (на рис. 14.10 не показаны), под-
ключаются к двум чувствительным элементам. Подключение датчиков
566
начинается по сигналу от накопителей Н, т. е. в момент, когда уста-
навливается характер нарушения газопроницаемости шихты по квад-
рантам печи.
Сигналы (+1; 0; —1) с выходов чувствительных элементов анали-
зируются при помощи матрицы М2, представляющей собой совокуп-
ность логических элементов ИЛИ. Нарушение газопроницаемости
шихты в секторе печи считается установленным, если хотя бы один из
датчиков (температуры газа или расхода дутья) покажет отклонение от
среднею значения. Поскольку на первом этапе нарушение равномер-
ности газопроницаемости шихты по квадрантам печи было установлено
достаточно надежно, то на втором этапе считается возможным устано-
вить нарушение газопроницаемости в секторе печи только на основании
одноразового измерения. Этим объясняется отсутствие накопителей
после матрицы М2.
После установления в секторе печи характера нарушения газопро-
ницаемости шихты при помощи матрицы М3, представляющей собой
совокупность логических элементов И, проверяется совпадение харак-
тера этого нарушения с характером нарушения в квадранте печи, вы-
явленным на первом этапе. Присналичии совпадения в запоминающем
устройстве ЗУ2 фиксируется номер сектора печи и выдается команда
на изменение программы работы ВРШ. В противном случае программа
работы ВРШ остается без изменения.
Применение рассмотренной системы управления, все блоки кото-
рой, представленные на схеме рис. 14.10, входят в состав УВМ, позво-
ляет снизить расход кокса на 0,9 % и увеличить производительность
печи на 1,1 %.
Массовое применение интегральных схем со средней и большой
степенью интеграции снизит стоимость, повысит надежность и расширит
возможности использования систем автоматического управления электро-
приводами, позволит шире применить системы цифрового управления.
Перспективным направлением в комплексных автоматизированных си-
стемах является применение микропроцессоров с программируемой па-
мятью, контролем и связью электропривода с технологическими про-
цессами, что дает возможность создать адаптивные самооптимизпрую-
щиеся структуры управления,
СПИСОК ЛИТЕРАТУРЫ
1. Андреев В. П., Сабинин Ю. А. Основы электропри-
вода. — М. — Л.: Госэнергоиздат, 1963. — 722 с.
2. Аракелян А. К., Афанасьев А. А., Чиликни М. Г. Вентильный
электропривод с синхронным двигателем и зависимым инвертором. —
М.: Энергия, 1977. — 224 с.
3. Башарин А. В., Голубев Ф. Н., Келлерман В. Г. Примеры рас-
четов автоматизированного электропривода. — Л.: Энергия, 1972.___
440 с.
4. Ботвинник М, М., Шакарян Ю. Г. Управляемая машина пере-
менного тока. — М.: Наука, 1969. — 140 с.
5 Булгаков А. А. Частотное управление асинхронными электро-
двигателями. — М.: Наука, 1966. — 300 с.
6. Бутаев Ф. И., Эттингер Е. Л. Вентильный электропривод._
М. — Л.: Госэнергоиздат, 1951. — 248 с.
7. Вершинин П. П., Хашпер Л. Я- Применение синхронных эле-
ктроприводов в металлургии. — М.: Металлургия, 1974. — 272 с.
8. Гейлер Л. Б. Основы электропривода. — Минск: Высшейшая
школа, 1972. — 608 с.
9. Глебов И. А., Логинов С. И. Система возбуждения и регули-
рования синхронных двигателей. —Л.: Энергия, 1972. — 113 с.
10. Голован А. Т. Основы электропривода. М. — Л.: Госэнерго-
издат, 1959. — 344 с.
11. Жемеров Г, Г. Тиристорные преобразователи частоты с непо-
средственной связью. — М.: Энергия, 1977. — 280 с.
12. Зимин Е. Н-, Чувашов И. И. Автоматизированный электро-
привод и электрооборудование промышленных механизмов. Ч. I. —
М.: Стройиздат, 1977.— 431 с.
13. Каганов И. Л. Электронные и ионные преобразователи. Ч. III.—
М. —Л.: Госэнергоиздат, 1956. — 528 с.
14. Ключев В. И. Ограничение динамических нагрузок электро-
привода. — М.: Энергия, 1971. — 320 с.
15. Копылов И. П. Электромеханические преобразователи энер-
гии. — М.: Энергия, 1973. — 400 с.
16. Михеев Ю. Е., Сосонкин В. Л. Системы автоматического упра-
вления станками. — М.: Машиностроение, 1978. — 264 с.
17. Михелькевнч В. Н. Автоматическое управление шлифова-
нием. — М.: Машиностроение, 1975. — 304 с.
18. Онищенко Г. Б. Асинхронный вентильный каскад. — М.:
Энергия, 1967. — 153 с.
19. Основы автоматизированного электропривода / М. Г. Чиликин,
М, М. Соколов, В. М. Терехов, А. В. Шинянскин. — М.: Энергия,
1974, — 567 с.
20. Петелин Д. П. Автоматическое управление синхронными элект-
роприводами. — М.: Энергия, 1968. — 193 с.
568
21. Иванов-Смоленский А. В. Электрические машины. — М ’ Энер-
гия, 1980. — 928 с.
22. Петров Г. Н. Электрические машины. Ч, I — ЛА.: Энергия,
1974. — 240 с.; ч. II, 1963. — 416 с.; ч. III, 1968. — 224 с.
23. Асинхронный электропривод с тиристорными коммутаторами /
Л. П. Петров, В. А. Ладензон, ЛА. П. Обуховский, Р. Г. Подзолов. —
ЛА.: Энергия, 1970. — 128 с.
24. Преображенский В. И. Полупроводниковые выпрямители. —
М.: Энергия, 1976. — 120 с.
25. Ратмиров В. А. Основы программного управления станками. —
ЛА.: Машиностроение, 1978. — 240 с.
26. Розман Я. Б- Электропривод с магнитно-тиристорными пре-
образователями для станков. — М.: Машиностроение, 1976. — 184 с.
27. Сандлер А. С. Электропривод и автоматизация металлорежу-
щих станков. —М.: Высшая школа, 1972. — 440 с.
28. Сандлер А. С., Гусяцкий Ю. М. Тиристорные инверторы с ши-
ротно-импульсной модуляцией.—ЛА.: Энергия, 1968. — 96 с.
29. Саидлер А. С., Сарбатов Р. С. Автоматическое частотное упра-
вление асинхронными двигателями. — М.: Энергия, 1974. — 328 с.
30. Преобразователи частоты на тиристорах для управления высо-
коскоростными двигателями / А. С. Сандлер, Г, К. Аввакумова,
А. В. Кудрявцев, А. А. Никольский. — М.: Энергия, 1970. — 81 с.
31. Сандлер А. С., Тарасенко Л. М, Динамика каскадных асинхрон-
ных электроприводов. — М.: Энергия, 1977. — 200 с.
32. Сиротин А. А. Автоматическое управление электропривода-
ми. — М.: Энергия, 1969. — 560 с.
33. Следящие приводы / Под ред. Б. К- Чемоданова. — М.: Энер-
гия, 1976, кн. I — 480 с., кн. II — 384 с.
34. Соколов М. М. Автоматизированный электропривод общепро-
мышленных механизмов. —М.: Энергия, 1976. — 488 с.
35. Теория автоматического управления / Под ред. А. В. Нету-
шила. — ЛА.: Высшая школа, 1968, ч. I. — 424 с., 1972, ч. II. — 430 с.
36. Тиристорный электропривод постоянного тока / Я. Ю. Соло-
духо, Р. Э. Белявский и др. — М.: Энергия, 1971. — 104 с.
37. Тиристорные электроприводы с реверсорами / Я. Ю. Солодухо
и др. — М.: Энергия, 1977. — 112 с.
38. Унгру Ф., Иордан Г. Системы согласованного вращения элект-
родвигателей. — М.: Энергия, 1971. — 198 с.
39. Управление вентильными электроприводами постоянного тока /
Е. Д. Лебедев, В. Е. Неймарк, М. Я. Пистрак, О. В. Слежановский. —
М.: Энергия, 1970. — 197 с.
40. Филиппов Б. А., Ильинский Н. Ф. Основы электропривода. —
М.: Изд. МЭИ, 1977. — 204 с.
41. Чиликин М. Г. Общий курс электропривода. —5-е изд. —ЛА.:
Энергия, 1971. — 432 с.
42. Чиликин М. Г., Ключев В. И., Саидлер А. С. Теория автомати-
зированного электропривода. — ЛА.: Энергия, 1979. — 616 с.
43. Шубеико В. А., Браславский И. Я- Тиристорный асинхронный
электропривод с фазовым управлением. — М.: Энергия, 1972. — 130 с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Астатическое регулирование 466
Б
Балластный резистор 501
Быстродействие электропривода 255,
302
В
Воздействие возмущающее 390
Время запаздывания 273, 306
— переходного процесса 42, 315
— пуска 42, 295
— реверсирования 2Э6
— регулирования 147
— цикла 330, 355, 359
Д
Диаграмма нагрузочная 329, 359
— скорости 329
Диапазон регулирования 95
Ж
Жесткость механической характе-
ристики 34
3
Задатчик интенсивности 474, 483
Закон оптимизации 545
— частотного регулирования 182
Звено колебательное 471
— механическое приведенное 28
— УПР> гое 27
И
Источник тока 251
— ЭДС 251
К
Каскад асинхронный вентильный
191, 265
— войти лыю-машинный 185
— электрический 185
— электромеханический 188
Контур колебательный 171
Коррекция последовательная 464
Коэффициент глубины модуляции
/75
— жесткости 133
— мощности 97, 192, 200
— перегрузки механической 377
--- термической 378
— плавности при регулировании 95,
164
— полезного действия 96, 113, 203
— усиления 405, 170, 471
— ухудшения теплоотдачи 353
— форсировки 314, 323
М
Метод графо-аналитический 45, 280
— средних потерь 371
— эквивалентного момента 375
--- тока 373
— эквивалентной мощности 375
Модуль жесткости 142, 211
Момент активный 29
— динамический 39, 47, 346
— допустимой нагрузки 138
— инерции 30, 40, 43
— короткого замыкания 54
— критическим 75, 152
— максимальный 75
— пусковой 90
— реактивный 29, 205
— сопротивления 20, 32
— трения 32
— электромагнитный 67, 204
Мощность динамическая 41
— потерь 373
— реактивная 200
— скольжения 153
Н
Нагрузка пульсирующая 415
— резко-переменная 3G3, 415
О
Ослабление поля 484
П
Падение угловой скорости динами-
ческое 475
------ статическое 56, 472
Перегрузочная способность 161
Передаточное отношение 42
Перерегулирование 467
Постоянная времени иагрева 353
--- электромагнитная цепи воз-
буждения 28|, 314
--- электромеханическая 268, 292
--- якоря 273
Потери механические 332
— мощности переменные /45, 332
---постоянные 147, 332
---эквивалентные 376
Превышение температуры 351, 371
Пульсация напряжения 118
— тока 118
Пуск 42, 210, 267
570
р
Реверсирование 121, 285, 310, 321
Реверсор 121, 484
Регулирование угловой скорости
автоматическое 242
— — — двухзониое 199, 204, 484
— — — импульсное 106, 142, 149, 154
— — — непрерывное 156
—-----параметрическое 106, 142,
149
— — — подчиненное 463
— — — реостатное 106, 142
— — — частотное 161, 205, 494
Регулятор напряжения импульс-
ный 124
— — тиристорный 117, 152, 255
— — широтно-импульсный 173
— пропорционально-интегральный
465
— пропорциональный 465
— скольжения 488
— скорости 466
— тока 466
— частоты 489
Режим генераторный 59, 87, 197, 216
— двигательный 197, 216
— номинальный кратковременный
150, 354
— — перемежающийся 357
---повторно-кратковременный 149,
162. 179, 354
---продолжительный 149, >85, 199,
354
С
Связь обратная по напряжению 2^2
-------- положению 198
------ скорости 246
------ току 244
---------с отсечкой 249
Система регулирования замкнутая
258, 463
Скважность управляющего импуль-
са 149, 154
Скольжение абсолютное 75
— критическое 75
— оптимальное 347
Скорость угловая идеального холо-
стого хода 51
— — синхронная 193
Стабильность угловой скорости 98,
149
Статизм 160, 183, 243
Статор поворотный 235
Т
Температура двигателя 351
— охлаждающей среды 351
Теплоемкость двигателя 351
Теплоотдача 183, 351
Ток короткого замыкания 54
— намагничивания 86
Торможение динамическое 60, 71, 83,
218» 282, 403
— противовключением 61, 71, 83, 405
— рекуперативное 59, 82, 178, 288, 346
Точность остановки 216
— регулирования 160
У
Управляемые вычислительные ма-
шины УВМ 24
Уравнение движения электропри-
вода 32, 40, 295, 297
Устойчивость электропривода 202.
226, 230. 492
Ф
Формирование переходных процес-
сов 301
Форсирование переходных про-
цессов 312, 463
X
Характеристика двигателя венти-
ляторная 146
— — динамическая 300
— — естественная 51
— — искусственная 52
— — механическая 49
— — реостатная 52
— — угловая 90
— — частотная 182
--- электоомеханическая 49, 133
Ч
Частота включений допустимая 386
Ш
Шунтирование якоря 127, 135
э
Экономичность регулирования 95
Электрическая фиксация 20!
Электрический вал 219
Электропривод адаптивный 13, 544
— взаимосвязанный 11, 179
— групповой 8
— индивидуальный 9, 179
—многодвигательный 11
— программно-управляемый 13, 522
— следящий 13. 505
ОГЛАВЛЕНИЕ
Предисловие............................................... 3
ЧАСТЬ ПЕРВАЯ
ОСНОВЫ ЭЛЕКТРОПРИВОДА
Введение..................................................... 5
Глава первая. Основные сведения. История развития
электропривода .......................................... 6
1.1. Типы электроприводов и движения, осуществляемые ими 6
1.2. Краткий исторический обзор развития электропривода 14
1.3. Развитие электропривода в СССР...................... 18
1.4. Значение электропривода в народном хозяйстве и основ-
ные направления его дальнейшего развития.................. 22
Глава вторая. Механика электропривода........................ 2о
2.1. Приведение моментов и сил сопротивления, инерционных
масс и моментов инерции................................... 26
2.2. Механические характеристики производственных ме-
ханизмов и электрических двигателей. Установившиеся
режимы................................................ 3'2
2.3. Уравнение движения электропривода ............... 33
2.4. Уравнение движения электропривода при переменном
моменте инерции, зависящем от угла поворота вала . . 43
2 5. Время ускорения и замедления привода. Определение
паивыгоднеишего передаточного отношения............... 42
2.6. Графическое и графо-аналитическое решение уравнения
движения привода...................................... 45
Глава третья. Механические характеристики электропри-
водов ................................................ 48
3.1. Механические характеристики двигателя постоянного
тока независимого возбуждения............................ 48
3.2. Построение механических характеристик двигателя не-
зависимого возбуждения................................... 53
3.3. Механические характеристики двигателя постоянного
тока независимого возбуждения в тормозных режимах 58
3 4. Механические характеристики двигателя постоянного
тока последовательного возбуждения....................... 6э
3 5. Механические характеристики двигателя постоянного
тока последовательного возбуждения в тормозных ре-
жимах ................................................ 70
3.6. Механические характеристики двигателя постоянного
тока смешанного возбуждения........................... 7 1
«7S
3,7. Механические характеристики асинхронного двигателя 74
3.8. Механические характеристики асинхронного двигателя
в тормозных режимах.................................. 82
3.9. Механическая и угловая характеристики синхронного
двигателя................................................ 89
Глава четвертая. Регулирование угловой скорости эле-
ктроприводов ............................................ 93
4.1. Основные показатели регулирования угловой скорости
электроприводов ......................................... 93
4.2. Регулирование угловой скорости двигателя постоянного
тока независимого возбуждения изменением магнитного
потока.................................................. 1С2
4.3. Реостатное и импульсное параметрическое регулирова-
ние угловой скорости двигателя постоянного тока не-
зависимого возбуждения.................................. 106
4.4. Регулирование угловой скорости двигателя постоян-
ного тока независимого возбуждения изменением под-
водимого к якорю напряжения ............................ 112
4.5. Регулирование угловой скорости двигателя постоянного
тока независимого возбуждения при шунтировании
якоря................................................... 127
4.6 Регулирование угловой скорости двигателя постоянного
тока последовательного возбуждения...................... 132
4.7. Регулирование угловой скорости двигателя постоянного
тока последовательного возбуждения шунтированием об-
мотки якоря или обмотки возбуждения..................... 135
4.8. Регулирование угловой скорости электроприводов пе-
ременного тока ........................................ 141
4.9. Реостатное и импульсное параметрическое регулирова-
ние угловой скорости асинхронного электропривода . . . 142
4 10. Регулирование угловой скорости асинхронного электро-
привода изменением напряжения ........................... 152
4.11. Регулирование угловой скорости асинхронного элект-
ропривода переключением числа полюсов.................... 156
4.12. Частотное регулирование асинхронных электроприводов 161
4.13. Асинхронный регулируемый электропривод в каскад-
ных системах ............................................ 185
4.14. Регулируемый асинхронный электропривод в системе
двойного питания ........................................ 193
4.15. Частотное регулирование угловой скорости синхронного
электропривода .......................................... 201
4.16. Регулируемый привод переменного тока с вентильным
двигателем............................................... 206
Глава пятая. Взаимосвязанный электропривод.................. 210
5.1. Электропривод с механическим соединением валов . . 211
5.2. Асинхронный двухдвигательный электропривод со сло-
жением механических характеристик....................... 216
5.3. Электропривод с электрическим валом............... 219
Глава шестая. Автоматическое регулирование угловой
скорости и момента электроприводов ..................... 239
6.1. Общие положения.................................... 239
573
6.2. Система автоматического регулирования угловой скоро-
сти с жесткой отрицательной обратной связью по на-
пряжению .......................................... 242
6.3. Система автоматического регулирования угловой скоро-
сти с жесткой положительной обратной связью по току
якоря двигателя........................................ 244
6.4. Система автоматического регулирования угловой ско-
рости с жесткой отрицательной обратной связью по угло-
вой скорости двигателя ................................ 246
6.5. Автоматическое регулирование момента электропривода
в системе преобразователь—двигатель ................... 248
6.6. Автоматическое регулирование скорости и момента в си-
стеме источник тока—двигатель.......................... 251
6.7. Автоматическое регулирование угловой скорости асин-
хронных электроприводов при помощи тиристорных ре-
гуляторов напряжения................................... 255
6.8. Автоматическое регулирование электроприводов пере-
менного тока с частотным управлением................... 257
6.9. Автоматическое регулирование каскадных электропри-
водов ................................................. 264
Глава седьмая. Переходные режимы в электроприводах 266
7.1. Общие положения................................... 266
7.2. Пуск двигателя постоянного тока независимого возбу-
ждения до основной угловой скорости и ударное прило-
жение нагрузки......................................... 267
7.3. Пуск двигателя постоянного тока независимого возбуж-
дения до угловой скорости выше основной................ 278
7.4. Динамическое торможение двигателя постоянного тока
независимого возбуждения............................... 282
7.5. Торможение противовключением и реверсирование дви-
гателя постоянного тока независимого возбуждения . . . 285
7.6. Торможение двигателя постоянного тока независимого
возбуждения от угловой скорости выше основной до
основной............................................... 288
7.7. Переходные режимы в приводах с двигателями постоян-
ного тока последовательного возбуждения................ 290
7.8. Переходные режимы в приводах с асинхронными дви-
гателями трехфазного тока.............................. 291
7.9. Электромагнитные переходные процессы в приводах
с асинхронными двигателями............................. 299
Глава восьмая. Формирование переходных процессов . . , 301
8.1. Общие положения................................... 301
8.2. Формирование переходных процессов при линейном на-
растании управляющих воздействий....................... 303
8.3. Переходные процессы при экспоненциальной зависимо-
сти управляющего воздействия........................... 312
Глава девятая. Расчет мощности электроприводов . . . 325
9.1. Общие положения................................... 325
9.2. Потери энергии в электроприводах постоянного и пере-
менного тока........................................... 332
9.3. Нагрев и охлаждение двигателя. Классификация режи-
мов работы электроприводов............................. 343
574
9.4. Нагрузочные диаграммы электроприводов........... 359
9.5. Расчет мощности двигателя при продолжительном ре-
жиме работы (S1)..................................... 370
9.6. Расчет мощности двигателя при кратковременном ре-
жиме работы (S2)..................................... 377
9,7. Расчет мощности двигателя при повторно-кратковре-
менном режиме работы (S3)............................ 380
9.8. Определение допустимой частоты включений асинхрон-
ного двигателя с короткозамкнутым ротором и пути ее
увеличения........................................... 386
ЧАСТЬ ВТОРАЯ
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ЭЛЕКТРОПРИВОДАМИ
Введение................................................. 388
Глава десятая. Разомкнутые системы автоматического
управления .......................................... 391
10.1. Изображение и обозначение элементов схем автомати-
ческого управления................................... 391
10 2. Принципы автоматического управления пуском эле-
ктродвигателей в разомкнутых релейно-контактных си-
стемах .............................................. 394
10.3. Типовые узлы релейно-контактного управления пуском
двигателей постоянного тока при питании от сети 395
10.4. Типовые узлы схем управления торможением двига-
телей постоянного тока при питании от сети........... 403
10.5. Типовые узлы схем автоматического управления пуском
и торможением асинхронных двигателей при питании
от сети ............................................. 411
10.6. Типовые узлы схем автоматического управления синх-
ронными двигателями.................................. 416
10.7. Применение бесконтактных аппаратов и логических
элементов в схемах управления электроприводами . . . 421
Глава одиннадцатая. Типовые схемы разомкнутых си-
стем управления .................................. 424
11.1. Общие положения................................ 424
11.2. Управление пуском, торможением и реверсированием
асинхронных двигателей с короткозамкнутым ротором 425
11 3. Тиристорное управление асинхронным двигателем с ко-
роткозамкнутым ротором ......................... 434
11.4. Управление асинхронными двигателями с фазным ро-
тором ............................................... 436
11.5. Управление синхронными двигателями............. 441
11.6. Управление синхронными двигателями с возбуждением
от тиристорных преобразователей ..................... 447
11.7, Управление двигателями постоянного тока независи-
мого возбуждения..................................... 449
11.8. Управление двигателями постоянного тока последо-
вательного возбуждения............................... 452
11.9. Электрические схемы управления электроприводами
некоторых производственных механизмов................ 455
575
Глава двенадцатая. Типовые системы замкнутого уп->
равления электроприводами .......................... 462
12.1. Общие положения.................................462
12.2. Принципы построения замкнутых систем регулируе-
мого электропривода ................................ 463
12.3. Схемы привода постоянного тока с магнитными усили-
телями ..............................................476
12.4. Системы управления двигателями постоянного тока
с тиристорными выпрямителями.........................479
12.5. Система частотного управления асинхронным двига-
телем ...............................................488
12.6. Система управления асинхронно-вентильным каскадом 490
12.7. Автоматическое управление синхронными электропри-
водами ..............................................491
12.8. Управление приводами с вентильными двигателями 494
12.9. Замкнутые системы управления некоторыми производ-
ственными механизмами................................499
Глава тринадцатая. Следящий привод. Программное
управление...........................................505
13.1. Общие положения, назначение и классификация сле-
дящих приводов.......................................505
13.2. Следящий привод релейного действия..............508
13.3. Принцип работы следящего привода непрерывного уп-
равления ............................................512
13.4. Схемы следящих приводов с непрерывным управлением 516
13.5. Программное управление электроприводами.522
13.6. Применение ЭВМ для программного управления ме-
таллообрабатывающими станками........................527
13.7. Программное управление с применением шаговых дви-
гателей .............................................535
13.8. Программное управление приводом нажимного уст-
ройства реверсивного прокатного стана .............. 540
13.9. Адаптивное управление производственными механиз-
мами ................................................544
Глава четырнадцатая. Комплексная автоматизация
электроприводов......................................548
14.1. Общие положения.................................548
14.2. Автоматические станочные линии..................551
14 3. Узел схемы управления автоматической линией стан-
ков .............................................554
14.4. Комплексная автоматизация поточно-транспортных си-
стем ............................................557
14.5. Комплексная автоматизация доменной печи.......562
14.Gr Автоматическое управление распределением газового
потока по сечению доменной печи.............562
Список литературы.........................................568
Предметный указатель ......................570
.
> 4 ж Ъ •*w А
М.Г.Чиликцн
А.С.Сандлер
ОБЩИЙ КУРС
ЭЛЕКТРОПРИВОДА
.-----------------Т-
Для студентов вузов