









































































































































































































































































































































































































































Автор: Бабкин А.И. Белов С.И. Рутовский Н.Б. Соловьев Е.В.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) ракетные двигатели ракетостроение теория автоматического управления
Год: 1986




ДЛЯ ВУЗОВ
ОСНОВЫ ТЕОРИИ
АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
РАКЕТНЫМИ
ДВИГАТЕЛЬНЫМИ
УСТАНОВКАМИ
Издание второе,
переработанное и дополненное
Допущено Министерством высшего и среднего
специального образования СССР
в качестве учебника для студентов
авиационных специальностей вузов
МОСКВА
«МАШИНОСТРОЕНИЕ^
1986
ББК 39.62
0-75
УДК 629.78.064
А. И. Бабкин, С. И. Белов, Н. Б. Рутовский, Е. В. Соловьев
Рецензент д-р техн. наук А. А. Шевяков
Основы теории автоматического управления ракетными дви-
0-75 гательными установками/А. И. Бабкин, С. И. Белов, Н. Б.
Рутовский и др. —М.: Машиностроение, 1986.— 456 с.
(В пер.): 1 р. 30 к.
Л 3607000000-148 tAO оа ББК 39.62
° 038(01)-86 И8"86 6Т6
Издательство «Машиностроение», 1986 г.
ПРЕДИСЛОВИЕ
Со времени первого издания учебника прошло более
шести лет. За это время интенсивно развивались отечественное и
зарубежное ракетное двигателестроение, ракетная техника и
космонавтика, что и потребовало обновления разделов учебника и
внесения нового материала, отражающего современное состояние теории
управления ракетными двигательными установками и перспективы
ее развития. В связи с развитием и совершенствованием ракетных
двигательных установок возникла необходимость в более полном
и детальном изучении научно-технических основ автоматического
управления процессами в агрегатах двигательных установок (ДУ).
Высокая надежность, специфичность требований к автоматическим
устройствам делают необходимым их разработку непосредственно
в организациях, занимающихся созданием двигательных установок.
Поэтому инженеру в процессе работы приходится участвовать в
проектировании, расчетах, исследованиях агрегатов регулирования
и управления ДУ. В связи с этим инженер должен быть подготовлен
к работе с автоматизированными устройствами и установками еще
в период обучения в вузе. В учебные планы будущих специалистов
включены дисциплины, обеспечивающие такую подготовку.
Учебник предназначен для студентов авиационных
специальностей высших технических учебных заведений и будет полезен для
специалистов соответствующих отраслей. В нем изложены основные
понятия и определения теории автоматического управления,
приведены характеристики основных агрегатов и систем ракетных
двигательных установок. Описаны статические и динамические свойства
элементов и систем различного типа ракетных двигателей.
Рассмотрены системы автоматического управления, методы исследования
устойчивости и качества переходных процессов двигательных
установок ЛА.
Во втором издании книга сохранила прежние методологию
и направление, которые, как показал опыт, оправдали себя в методи-
1* 3
ческом отношении и в принципиальном подходе к изложению курса.
Во втором издании переработаны многие разделы учебника и
дополнены новыми глазами. При написании этого издания учтены отзывы,
замечания и пожелания преподавателей, студентов и работников
промышленности, учтен собственный опыт работы авторов.
Главы 1, 2 написаны Н. Б. Рутовским; гл. 3, 4, 5, 6— Е. В.
Соловьевым; гл. 7, 8, 9 — С. В. Беловым; гл. 10, 11, 12, 13, 14 —
А. И. Бабкиным.
В работе над рукописью книги и ее оформлением авторам
оказали помощь коллеги по работе. Всем им авторы выражают
искреннюю признательность. Авторы приносят благодарность А. Ф.
Волковой, Г. П. Акоповой за большую помощь в оформлении гл. 1, 2
учебника, автором которых и инициатором написания учебника
в целом был Н. Б. Рутовский.
Авторы выражают признательность проф. А. А. Шевякову и
проф. В. П. Шорину за ценные замечания при рецензировании книги,
способствовавшие ее улучшению.
ВВЕДЕНИЕ
Для современного состояния и перспектив развития
космической техники характерны многорежимные, регулируемые в
широком диапазоне изменения параметров, двигательные установки
(ДУ) многократного использования. В связи с этим особенно остро
встают вопросы изучения статических и динамических свойств
и характеристик ДУ на всех режимах работы, что является основой
создания надежных систем автоматического управления и
двигательных установок в целом.
Особенностью ракетных двигательных установок является
динамический характер основных параметров, их зависимость от
внешних условий и от характера работы других бортовых систем. При
исследовании таких систем необходимо тщательное изучение
характеристик отдельных элементов с последующим детальным
исследованием их взаимодействия, что позволяет оптимальным образом
определить регулируемые параметры, регулирующие воздействия
и наиболее эффективную систему автоматического управления.
Причиной возникновения неустойчивой работы многорежимных,
регулируемых ракетных двигательных установок являются сложные
внутренние связи между элементами, приводящие к возникновению
внутренних колебательных контуров, в каждом из которых
самостоятельно могут развиваться резонансные явления. Кроме этого,
на ДУ во время работы воздействует множество внешних
возмущений: продольные и поперечные ускорения, вибрации, изменение
режимов работы двигателей и др.
Ракетные двигательные установки относятся к такому типу
технических устройств, в которых имеются потенциальные
возможности проявления практически всех известных механизмов потери
устойчивости: наличие отрицательного сопротивления, замкнутого
контура воздействий, запаздываний в передаче воздействий, потери
статической устойчивости.
Учитывая указанные выше особенности двигательной установки
с ракетным двигателем, необходимо при ее проектировании уметь
анализировать ее динамические свойства, чтобы создавать отдельные
узлы ДУ с заданными динамическими характеристиками. Анализ
Динамических свойств двигательной установки и ее узлов может
быть успешно произведен только в случае, если достаточно полно
известны физические процессы, протекающие в отдельных ее
элементах.
Особо важное значение приобретает знание динамических свойств
Двигательной установки, когда она включается в систему
автоматического управления летательным аппаратом. Это важно также при
создании стендов для испытания двигательных установок или
отдельных узлов и агрегатов в условиях, близких к натурным.
ПЕРВАЯ ЧАСТЬ
ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ГЛАВА 1
ОСНОВНЫЕ ПОНЯТИЯ ТЕОРИИ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
1.1. ПРИНЦИПИАЛЬНЫЕ СХЕМЫ РАКЕТНЫХ
ДВИГАТЕЛЬНЫХ УСТАНОВОК
В настоящее время ракетный двигатель завоевал прочное
положение в двигательных установках околоземных летательных
аппаратов (ЛА), движущихся со скоростями, во много раз большими
скорости звука, и ЛА, осуществляющих полеты в космическом
пространстве.
Ракетная двигательная установка может быть различной
сложности в зависимости от ее назначения и от того, какие топлива и
рабочие тела используются в двигателе. Наиболее простую схему
имеет ДУ с однорежимным ракетным двигателем твердого
топлива (рис. 1.1). В таком двигателе все топливо 3 помещено в самой
камере сгорания 2, имеющей сопло / и запальное устройство 4.
Поэтому необходимость в какой-либо системе подачи топлива в
камеру полностью отпадает.
В двигательных установках, в которых используются гибридные
или однокомпонентные ракетные двигатели, схема установки
становится более сложной. На рис. 1.2 приведена принципиальная схема
ДУ с однокомпонентным жидкостным ракетным двигателем (ЖРД) />
где из бака 2 вытесняется компонент под действием сжатого газа,
заключенного в баллоне <3, а на рис. 1.3 — гибридным двигателем,
в котором один из компонентов (горючее Г) 4 помещен в камеру
сгорания 3 в твердом состоянии, а окислитель О подается из бака 2
под давлением сжатого газа, поступающего из баллона 1. Как в той,
так и в другой установке величина силы тяги определяется
секундным расходом жидкого компонента О, поступающего в камеру
сгорания.
На рис. 1.2 и 1.3 приведены схемы двигательных установок
с вытеснительной системой подачи компонентов топлива. На этих
установках кроме гидравлической системы должна быть еще и
пневматическая, содержащая газ — вытеснитель, газовый редуктор,
создающий в баке необходимое давление подачи, и пусковые
устройства: клапаны и мембраны.
Переход к двухкомпонентному ЖРД усложняет двигательную
установку наличием гидравлических систем для подачи отдельно
для каждого из компонентов топлива. На рис. 1.4 приведена
принципиальная схема двигательной установки с двухкомпонентным
Рис. 1.1
Рис. 1.2
Рис. 1.3
ЖРД и вытеснительной системой подачи. При насосной подаче
компонентов требуется создание наряду с гидравлическими
системами подачи окислителя и горючего и пневматической системой
наддува баков еще и системы обеспечения рабочим телом источника
механической энергии для привода насосов. На рис. 1.5 приведена
принципиальная схема двигательной установки с насосной системой
подачи и питанием газогенератора 4 турбины 3 от основных насосов /
и 2 с выбросом отработанного газа в окружающее пространство
через сопло 5-.
В современной двигательной установке с последовательным
включением камеры сгорания У, турбины 3 и газогенератора 2
схема еще больше усложняется (рис. 1,7), особенно в том случае,
когда желают отказаться от наддува баков окислителя 6 и
горючего 7 запасенным в баллоне сжатым газом. В этой ДУ наддув бака
горючего осуществляется газогенератором 5, а бака окислителя —
камерой смешения 4.
Во всех двигательных установках, использующих химическую
энергию топлива, из которого приготовляется рабочее тело,
количество тепла, подводимое к 1 кг рабочего тела, а значит и его
температура, зависят в основном от соотношения компонентов топлива
и их химической природы.
В двигательной установке, в которой используется ракетный
двигатель с ядерным реактором (ЯРД), имеющим твердую активную
Рис. 1.4
Рис. 1.5
зону, количество подводимой к рабочему телу (водороду) тепловой
энергии и количество проходящего через реактор рабочего тела
между собой не связаны. Это приводит к созданию в двигательной
установке еще одной системы, обеспечивающей связь между
секундным расходом рабочего тела, поступающего через реактор к соплу,
и нейтронной мощностью реактора NH. Соотношение этих величин
определяет температуру рабочего тела перед входом в сопло, а значит
и удельный импульс. Принципиальная схема такой двигательной
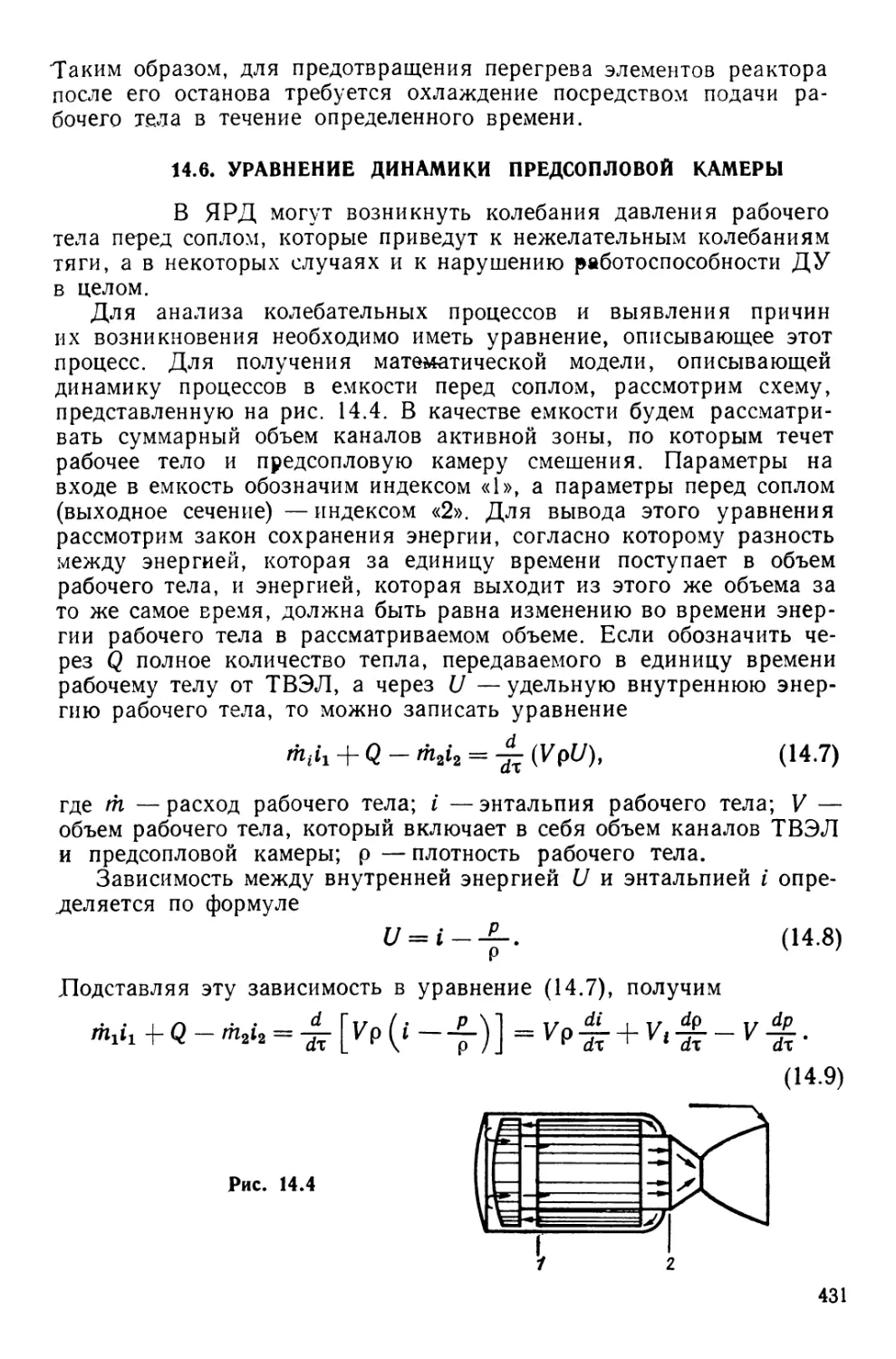
установки показана на рис. 1.6'.
В этой ДУ жидкий водород из бака / подается центробежным
насосом 2 двумя потоками а и b в газогенераторные
тепловыделяющие элементы (ТВЭЛ) 6 и далее в турбину с?, приводящую в
движение насос 2. После турбины газообразный водород поступает в
основную часть реактора, откуда, нагревшись, попадает в сопловую часть
камеры и далее, расширяясь, вытекает, создавая реактивную силу.
Правильное соотношение между секундным расходом рабочего тела
и количеством подводимой тепловой энергии на различных режимах
работы реактора обеспечивается регулирующим устройством (РУ),
которое связывает между собой давление в камере /?к, величину
нейтронной мощности реактора Nn, определяемую положением
регулирующих стержней 5, и количество рабочего тела, подаваемого
в реактор. Изменение мощности турбины 3 производится с помощью
перепускного клапана 4. Таким образом, подачей командного
воздействия (KB) на регулирующее устройство устанавливается тот или
иной требуемый режим.
8
Из приведенных примеров видно, что принцип построения ДУ
может быть совершенно различным в зависимости от условий и
программы полета, которая должна быть выполнена ЛА.
Кроме того, в ЛА, снабженных ДУ с ЖРД, топливные
магистрали, двигатель и упругий корпус аппарата образуют механико-
гидравлическую систему с мощным источником энергии. В такой
системе случайно возникшие отклонения давления топлива перед
насосами вызывают изменения расхода топлива в камеру сгорания
и тем самым являются причиной отклонения тяги от номинального
значения. Это вызывает колебания корпуса аппарата, который
представляет собой упругий цилиндр с отсеками, заполненными
жидкими компонентами. Незначительные изменения тяги вызывают
изменения длины корпуса, что приводит к увеличению колебаний
давления в магистралях. На рис. 1.8 приведена модель ракеты
и показаны продольные перемещения ее сечений относительно центра
масс (ЦМ), возникающее при низкой частоте колебаний. При
совпадении собственных частот продольных колебаний корпуса ЛА
с частотой колебаний тяги амплитуда колебаний корпуса резко
увеличивается, а так как при этом
возрастает влияние нелинейных
характеристик (свойств) основных
элементов двигателя, то нарастающие
колебания могут перейти в
стационарный автоколебательный процесс.
Рис. 1.6
Рис. 1.7
Ах (со,)
Рис. 1,8
Продольные автоколебания ЛА с ЖРД
могут возникать только при определенных
соотношениях между параметрами
колебательной системы «топливная магистраль —
двигатель — корпус». Для определения
условий, при которых случайно возникшие
колебания не будут переходить в
автоколебания, а будут затухать, проводится
тщательный анализ статических и динамических
характеристик всех звеньев, входящих в
ДУ, их взаимосвязь и определяются
характеристики всей ДУ. При необходимости
изменения характеристик ДУ в целом
изменяют характеристики некоторых звеньев,
при этом используют методы теории
автоматического управления (ТАУ) или в
состав ДУ вводят специальные устройства —
демпферы, устанавливаемые на топливных
магистралях, устраняющие колебания
жидкости.
В ДУ с ЖРД режимы работы по тяге и
соотношению компонентов должны или
поддерживаться на заданном уровне, или
изменяться в требуемом диапазоне. Для этого в
состав ДУ вводятся автоматические регуляторы и тогда система
«двигательная установка — регулятор» будет представлять систему
автоматического регулирования (САР).
1.2. ОСОБЕННОСТИ УПРАВЛЕНИЯ РАКЕТНЫХ
ДВИГАТЕЛЬНЫХ УСТАНОВОК
Двигательная установка с ракетным двигателем является
основной частью летательного аппарата, она обеспечивает его
перемещение в пространстве, которое необходимо для выполнения задачи
полета. Задачи могут быть различными. Так, например:
метеорологические ракеты должны переносить полезный груз
из точки старта в заданную точку атмосферы;
ракеты-носители должны выносить определенный по величине
груз на заданную околоземную орбиту;
искусственный спутник Земли (ИСЗ), во время полета
проводящий фотографирование облачного покрова, требует определенной
ориентации;
научные автоматические станции для изучения Луны и планет
Солнечной системы требуют коррекции во время движения по орбите
в космическом пространстве и при выполнении мягкой посадки;
пилотируемые космические корабли и межпланетные станции
требуют наличия системы, управляющей положением ЛА в
пространстве и обеспечивающей возможность перехода с одной орбиты
на другую, а также вход в плотные слои атмосферы в определенном
положении и посадку на земную поверхность.
10
Многообразие полетных задач ЛА требует разработки ДУ
различного типа и формирования специфических требований к ним:
ДУ для ЛА, маневрирующего в плотных слоях атмосферы,
должна быть всегда готова к запуску и изменять силу тяги в
достаточно широких пределах;
ДУ метеорологических ракет должны обеспечивать заданную
силу тяги для переноса грузов на большие расстояния;
ДУ ракет-носителей должны обеспечивать большие силы тяги
и иметь несколько ступеней для того, чтобы выводить спутники
и обитаемые корабли значительной массы на околоземную
орбиту.
Кроме того, все космические корабли и спутники должны быть
снабжены двигателями для коррекции орбиты, а также иметь
комплекты двигателей малой тяги, обеспечивающие стабилизацию
спутника или корабля относительно ЦМ.
В двигательных установках должна быть предусмотрена
возможность управления изменением силы тяги во время полета по
заданному закону. На беспилотных ЛА такое управление должно
производиться автоматически в зависимости от времени полета и
положения ЛА в пространстве или по командам, посылаемым со станции
слежения. Даже при наличии на ЛА экипажа необходимо
автоматическое устройство, управляющее двигательной установкой по
программе, вырабатываемой на борту, так как человек по своим
физическим возможностям во многих случаях не в состоянии воспринять
и оценить неожиданно сложившуюся обстановку, принять
необходимое решение и провести соответствующие операции.
Кроме операций по управлению двигательной установкой во
время ее работы на заданных режимах, существуют еще и операции,
которые проводятся в определенной последовательности при ее
запуске и выключении. Наконец, во многих случаях должны быть
предусмотрены операции по защите двигательной установки от
разрушения.
Совокупность всех операций по запуску, выключению,
поддержанию или изменению режима по требуемой программе называется
управлением, •
Когда задачи управления сужаются и сводятся только к
поддержанию заданного режима работы или к выполнению определенного
изменения показателя режима, то управление называют
регулированием.
Управление или регулирование может производиться как
непосредственно самим человеком, тогда этот процесс называется
ручным управлением у так и специальным автоматическим
устройством, тогда процесс называется автоматическим управлением.
В каждом из этих случаев предполагается наличие объекта,
в котором протекает процесс, требующий управления. Двигательная
установка, где протекают процессы, в результате которых возникает
сила тяги и поддерживается заданное соотношение компонентов
топлива, в теории автоматического регулирования носит название:
объект управления или объект регулирования.
и
Для того, чтобы осуществлять процесс управления, объект
должен быть снабжен управляющими или регулирующими
органами. Для ДУ с ЖРД такими регулирующими органами могут быть
дроссели, установленные на магистралях, подводящих компоненты
в смесительную головку камеры сгорания, или дроссели,
изменяющие расход компонентов, поступающих в газогенератор турбо-
насосного агрегата.
Система, состоящая из объекта управления и автоматического
управляющего устройства или из объекта регулирования и
автоматического регулятора, называется системой автоматического
управления (САУ) или системой автоматического регулирования (САР).
Системы автоматического регулирования называются
многомерными, если они должны обеспечивать поддержание на заданном
уровне нескольких регулируемых величин. В этом случае необходимо
наличие разных автоматических регуляторов. Примером такой
многомерной системы может быть современная двигательная
установка ЖРД с последовательным включением турбины, ТНА и кат
меры. Регулирующими устройствами являются: регулятор тяги
или давления в камере, регулятор соотношения компонентов,
поступающих в камеру сгорания, регулятор давления наддува в баках.
Для того чтобы ЛА мог выполнить поставленные задачи,
необходимо создать такую систему управления двигательной установкой,
которая обеспечивала бы на всех основных режимах наибольшую
эффективность ЛА. Чаще всего это сводится к требованию
минимальной суммарной затраты топлива за время выполнения задания,
получению на различных режимах работы наибольших из возможных
удельных импульсов, сохранению заданной величины тяги и
постоянного соотношения компонентов при воздействии различных
возмущающих факторов и т. д. Для того, чтобы выбрать наиболее
рациональную систему управления двигательной установкой,
следует рассмотреть возможные типы систем автоматического
управления и классифицировать их по различным принципам.
1.3. КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Широкое использование систем автоматического
управления в самых различных отраслях промышленности потребовало
классификации этих систем по различным признакам. Широко
распространен способ классификации САУ по их
функциональному назначению. Отсюда такие названия систем как,
например, система автоматического регулирования давления в
камере, частоты вращения, соотношения компонентов, температуры
газа и т. д.
Одним из принципов классификации САУ является разделение
их по виду носителя энергии, используемого в процессе управления.
В этом случае они называются механическими, гидравлическими,
электрическими, электрогидравлическими, пневматическими и т. д.
Такая классификация не дает представления о динамических свой-
12
ствах этих систем. Для теоретической разработки и практического
применения САУ разделяются на непрерывные и дискретные.
В системах непрерывного действия информация передается в виде
непрерывного сигнала, характерная величина которого изменяется
так же, как и измеряемая величина.
В дискретных системах информация передается в виде дискретных
величин, т. е. в виде отдельных сигналов, следующих друг за другом
через некоторые промежутки времени (квантование по времени),
или сигналов, квантованных по уровню, когда сигнал по величине
изменяется ступенчато при непрерывном изменении измеряемой
величины.
Если в дискретной системе квантование сигнала производится
только по времени, а величина сигнала изменяется плавно, то
система носит название импульсной.
К дискретным системам относятся релейные системы
автоматического управления. Примером дискретной системы автоматического
управления может служить система одновременного опорожнения
баков, схема которой и принцип работы приведены ниже (см.
рис. 1.21). Во всех остальных примерах приведены системы
непрерывного действия.
К особому классу дискретных систем относятся и так называемые
конечные автоматы. Конечный автомат — это система, которая под
воздействием внешних сигналов, вырабатываемых внутренними
связями, может принимать ряд дискретных состояний, смена которых
подчинена определенному закону или алгоритму. Таким конечным
автоматом становится двигательная установка в период запуска,
резкого перехода с одного режима работы на другой или
выключения. При этом по специальной команде она дискретно изменяет свое
состояние, переходя при запуске из состояния покоя на заданный
режим работы, который в дальнейшем может поддерживаться
постоянным или изменяться по определенному закону. В это время
ДУ будет уже системой непрерывного действия. Затем могут опять
последовать команды о дискретном переходе на режим пониженной
тяги или полного выключения. За время осуществления таких
дискретных переходов ДУ со Есей управляющей системой вновь будет
являться конечным автоматом.
Все реальные системы автоматического управления в общем
случае нелинейны. Это значит, что точно описать их свойства при
помощи линейных (алгебраических, дифференциальных, интегральных,
разностных и т. д.) уравнений невозможно. Если реальная система
в заданных конкретных условиях может быть с допустимыми
погрешностями описана линейными уравнениями, ее называют линейной
и тогда к ней применим принцип суперпозиции, т. е.
принцип одновременного независимого прохождения ряда сигналов через
эту систему. Это позволяет легко решить вопрос о реакции системы
на воздействие одновременно нескольких возмущений. Кроме того,
важно еще выявить стационарна или нестационарна данная система
во времени. Если линейная система стационарна во времени, то
коэффициенты описывающих ее линейных уравнений во времени
13
не изменяются. Если же параметры, определяющие свойства
системы, во времени изменяются, то система становится
нестационарной и решение уравнений с переменными коэффициентами требует
специальных методов.
Степень сложности системы управления двигательной установкой
ЛА зависит от его типа и предъявляемых к нему требований.
Поэтому система управления может изменяться по сложности и составу
используемых агрегатов в очень широких пределах. Так, например,
однорежимная двигательная установка с вытеснительной системой
подачи (см. рис. 1.4) оснащена одним автоматическим регулятором,
а именно: редуктором сжатого газа, поддерживающим давление
в газовых подушках баков постоянным. В то же время двигательная
установка, в которой используется в качестве источника энергии
ядерный реактор (см. рис. 1.6), требует применения бортовых
вычислительных машин.
В некоторых случаях управление двигательной установкой
производится по сигналам системы регулирования кажущейся скоростью
(РКС) ракеты. Системы РКС должны интегрировать ускорение во
времени для определения величины скорости движения ЛА в каждый
данный момент времени, а затем, сравнивая результаты
интегрирования с заданным значением скорости, вырабатывать управляющий
сигнал для корректировки режима работы ДУ, пропорциональный
рассогласованию этих скоростей. Еще более сложной будет система
управления двигательной установкой, если ЛА оснащен системой
самонаведения.
Из приведенных примеров ясно, что в каждом случае для
создания соответствующей системы управления, состоящей из объекта
управления и управляющего устройства, необходимо иметь сведения
о схеме двигательной установки, предполагаемых условиях ее
работы, технических требованиях, предъявляемых к ней, свойствах
используемых компонентов топлива и т. д. Эти сведения позволяют
создать регулирующее устройство, соответствующее по своим
свойствам объекту регулирования, с которым оно будет совместно
работать. Кроме того, дополнительная информация в систему
регулирования будет поступать во время ее работы, так как на объект
регулирования и регулирующее устройство будут воздействовать внешние
возмущения и командные воздействия. Эти возмущения САУ должна
воспринять и либо устранить влияние внешних возмущений на
изменение режима работы двигательной установки, либо по команде
перевести установку на новый режим работы.
Обращаясь к ранее приведенным примерам, нетрудно видеть,
что вся информация, используемая при создании и
функционировании САУ, может быть разделена на две части. Первая часть —
начальная или априорная информация, известная из
конструктивного оформления данной системы; она имеется в распоряжении до
начала выполнения системой задания. К ней относятся:
геометрические размеры основных элехментов (камеры сгорания, ТНА и
других агрегатов ДУ), схема соединения их между собой и сведения
об их свойствах; значения величин, определяющих номинальный
14
или расчетный режим работы, и пределы, в которых могут
изменяться рабочие режимы установки; сведения о свойствах
компонентов топлива; значения величин, определяющих начальное состояние
установки, и. т. д.
Если для работы САУ имеющейся начальной информации
достаточно и нет необходимости в процессе управления изменять
динамические характеристики отдельных звеньев системы, то такая
информация называется полной, а сама САУ в этом случае носит
название обыкновенной системы. Если же информация не является
полной и в процессе управления необходимо изменять динамические
характеристики отдельных звеньев или вырабатывать новую
программу работы, т. е. когда система должна настраиваться согласно
требованиям поступившей информации, САУ косит название
самонастраивающейся. Этот класс систем является более сложным и
находит все более широкое применение.
Вторая часть информации — рабочая информация — это
сведения, определяющие состояние регулируемого процесса и самого
объекта, поступающие и используемые в самом процессе управления.
Такими сведениями в ДУ могут быть отклонения текущих значений
отдельных величин (давления и температуры газов в газогенераторе
турбины, ускорений, действующих на установку, и т. д.) от заранее
заданных.
Обыкновенные системы автоматического регулирования требуют
наиболее полной начальной информации, так как не обладают
способностью приспосабливаться к изменяющимся условиям и
изменяющимся свойствам регулируемого процесса. Обыкновенные системы
являются наиболее широко внедренным и освоенным классом САУ.
Самонастраивающиеся системы требуют для обеспечения
процесса управления тем меньшего относительного объема начальной
информации, чем выше их способность изменять свои свойства в
зависимости от изменения внешних условий и свойств регулируемого
процесса.
В особый самостоятельный класс систем автоматического
управления выделяются так называемые игровые САУ. В некоторых
случаях сложные задачи атоматического управления многими
объектами • можно трактовать как задачи автоматического поиска
оптимального варианта управления в виде проведения некоторой
«игры», где действия участников могут быть либо чисто случайными
(поисковыми), либо частично подчиненными некоторым правилам —
алгоритмам.
Таким образом, все САУ можно разделить на три основных
класса:
а) обыкновенные, требующие наиболее полной начальной
информации; б) самонастраивающиеся, могущие изменять свои свойства
при изменении внешних условий и сеойств регулируемого объекта;
они требуют меньшего объема начальной информации; в) игровые,
использующие минимальную начальную информацию и Еырабаты-
вающие командные сигналы, опираясь лишь на поступающую
в процессе регулирования рабочую информацию.
15
Системы
адтоматичеспого управления
Рис. 1.9
На рис. 1.9 приведена схема классификации САУ. Как видно
из схемы, каждый из названных классов может быть разделен на
ряд подклассов.
Для того чтобы рассмотрение различных САУ было более
наглядным, примем, что двигательная установка выполнена по схеме,
представленной на рис. 1.10, где дана двигательная установка с двух-
компонентным ЖРД, насосной подачей компонентов и с автономным
питанием турбины рабочим телом.
Для управления двигательной установкой предусмотрено два
регулирующих органа. Один из них — это дроссель 1 перед головкой
газогенератора 2\ его проходная площадь /^p.rr может изменяться
при перемещении 2ДР.ГГ. Дроссель 1 позволяет изменять количество
рабочего тела, поступающего из полости 8 на турбину 4, в результате
чего будет изменяться суммарный расход компонентов, что
обеспечит соответствующие изменения давления рк в камере 7 и тяги
двигательной установки.
Для того чтобы сохранить соотношение компонентов или
изменить его в нужную сторону, в гидравлической системе компонента О
предусмотрен второй дроссель 5, установленный между насосом 3
и головкой камеры 6\ изменение его проходной площади /^p. 0 за
счет перемещения 2ДР.0 изменяет расход окислителя.
Изменения расходов окислителя и горючего вызывают
соответствующие изменения давлений: перед форсунками газогенератора
(ГГ) Рф.гг, в камере ГГ /?к.гг, перед турбиной рТ, за насосами
окислителя и горючего рн, 0 и /?н. г, перед дросселем 5 /?м. 0 з> за ним
Рм. 0 2' перед форсунками камеры рм.О2 и Рф.г- Давления перед
насосами р0, /?г, в баке рабочего тела турбины /?б. т и перед дроссе-
16
лем 1 Ркл.гг изменяются
незначительно при изменении давления /?ак
в аккумуляторе давления вытес-
нительной системы.
На двигательную установку —
объект регулирования (ОР) —
действуют различные внешние
возмущения (ВВ), изменяющие ее
режим работы. К таким
возмущениям относятся: полное
продольное ускорение, изменяющееся во
время полета; изменение
температуры компонентов топлива в баке
с изменением потока тепла,
поступающего через стенку бака;
изменение гидравлических
сопротивлений отдельных участков
системы Д/?ГЙДР; изменение давления
компонентов р0 и рг перед
насосами по мере выработки
компонентов топлива (снижения их
уровня в баках) и изменения давления
наддува баков и т. д.
На объект регулирования
должны также поступать
командные воздействия, по которым он
должен настраиваться на
заданный режим. Такие воздействия
могут поступать непосредственно от
управляющего двигательной
установкой человека или от
автоматического устройства. Эти командные воздействия должны привести
к тому, что оба дроссельных крана 1 и 5 установятся в положение,
при котором давление в камере рк и соотношение компонентов примут
заданные значения. Таким образом, объект регулирования будет
обладать двумя выходными величинами — давлением в камере рк
и соотношением компонентов km, а также двумя входными
величинами—проходными площадями дросселей FHP. гг и /^p.o-
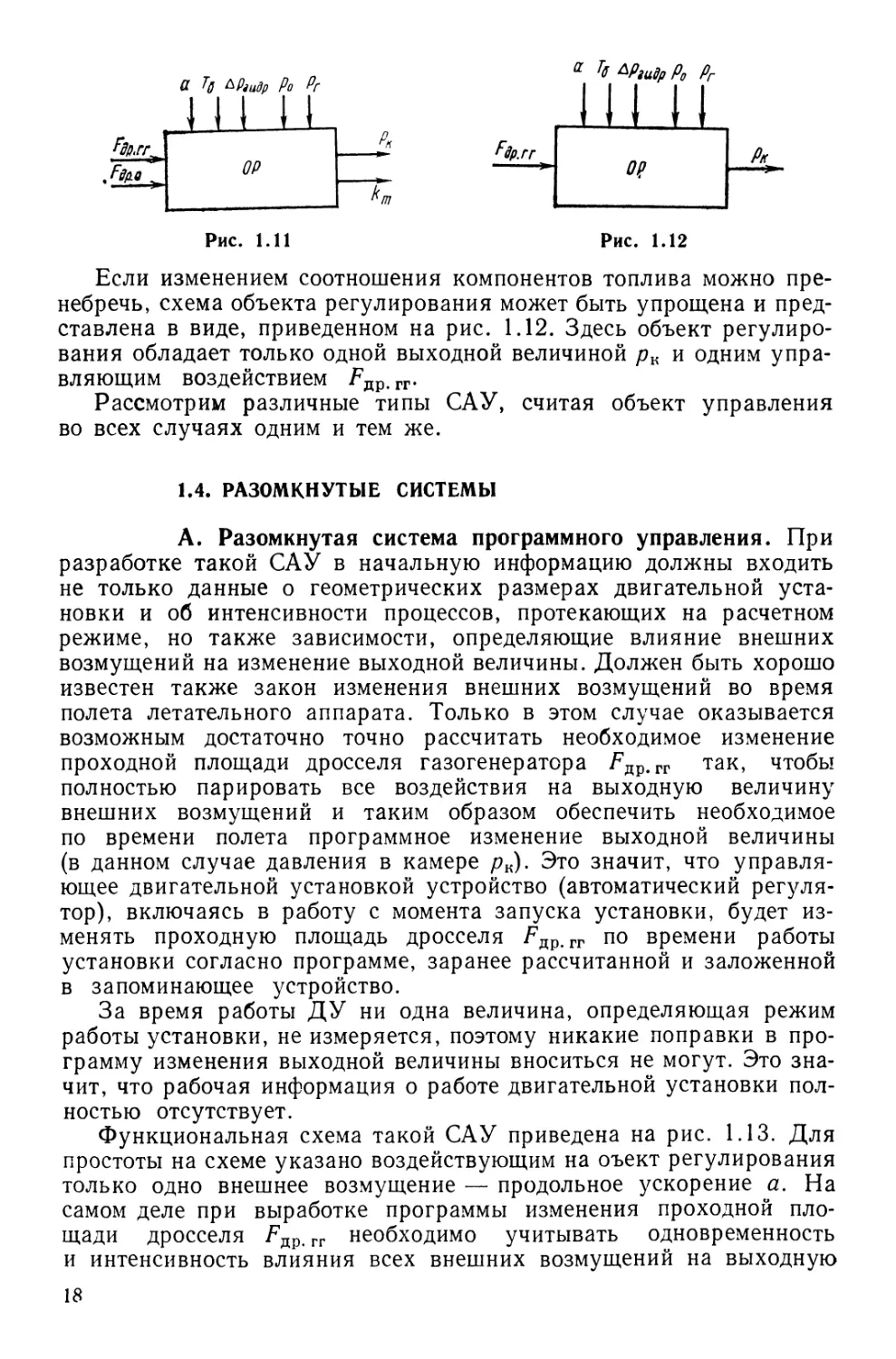
На рис. 1.11 приведена общая схема объекта регулирования.
Из нее видно, что в объекте регулирования имеем только две
выходные величины: давление в камере рк и соотношение
компонентов km.
На объект регулирования также воздействует ряд внешних
возмущений: а, Гб, А/?гидр, р0, рг. Входными величинами будут
также управляющие воздействия — проходные площади
дроссельных кранов ^др. гг и ^др. о- Все входные величины воздействуют на
объект регулирования только в направлении стрелок. Такое
однонаправленное прохождение сигналов иа&ываетея
Детектированием.
Рис. 1.10
2 А. И. Бабкин и др.
17
a ts
Рис. 1.11
Рис. 1.12
Если изменением соотношения компонентов топлива можно
пренебречь, схема объекта регулирования может быть упрощена и
представлена в виде, приведенном на рис. 1.12. Здесь объект
регулирования обладает только одной выходной величиной /?к и одним
управляющим воздействием /^р. гг.
Рассмотрим различные типы САУ, считая объект управления
во всех случаях одним и тем же.
1.4. РАЗОМКНУТЫЕ СИСТЕМЫ
А. Разомкнутая система программного управления. При
разработке такой САУ в начальную информацию должны входить
не только данные о геометрических размерах двигательной
установки и об интенсивности процессов, протекающих на расчетном
режиме, но также зависимости, определяющие влияние внешних
возмущений на изменение выходной величины. Должен быть хорошо
известен также закон изменения внешних возмущений во время
полета летательного аппарата. Только в этом случае оказывается
возможным достаточно точно рассчитать необходимое изменение
проходной площади дросселя газогенератора Fnv% гг так, чтобы
полностью парировать все воздействия на выходную величину
внешних возмущений и таким образом обеспечить необходимое
по времени полета программное изменение выходной величины
(в данном случае давления в камере /?к). Это значит, что
управляющее двигательной установкой устройство (автоматический
регулятор), включаясь в работу с момента запуска установки, будет
изменять проходную площадь дросселя Fm.TV по времени работы
установки согласно программе, заранее рассчитанной и заложенной
в запоминающее устройство.
За время работы ДУ ни одна величина, определяющая режим
работы установки, не измеряется, поэтому никакие поправки в
программу изменения выходной величины вноситься не могут. Это
значит, что рабочая информация о работе двигательной установки
полностью отсутствует.
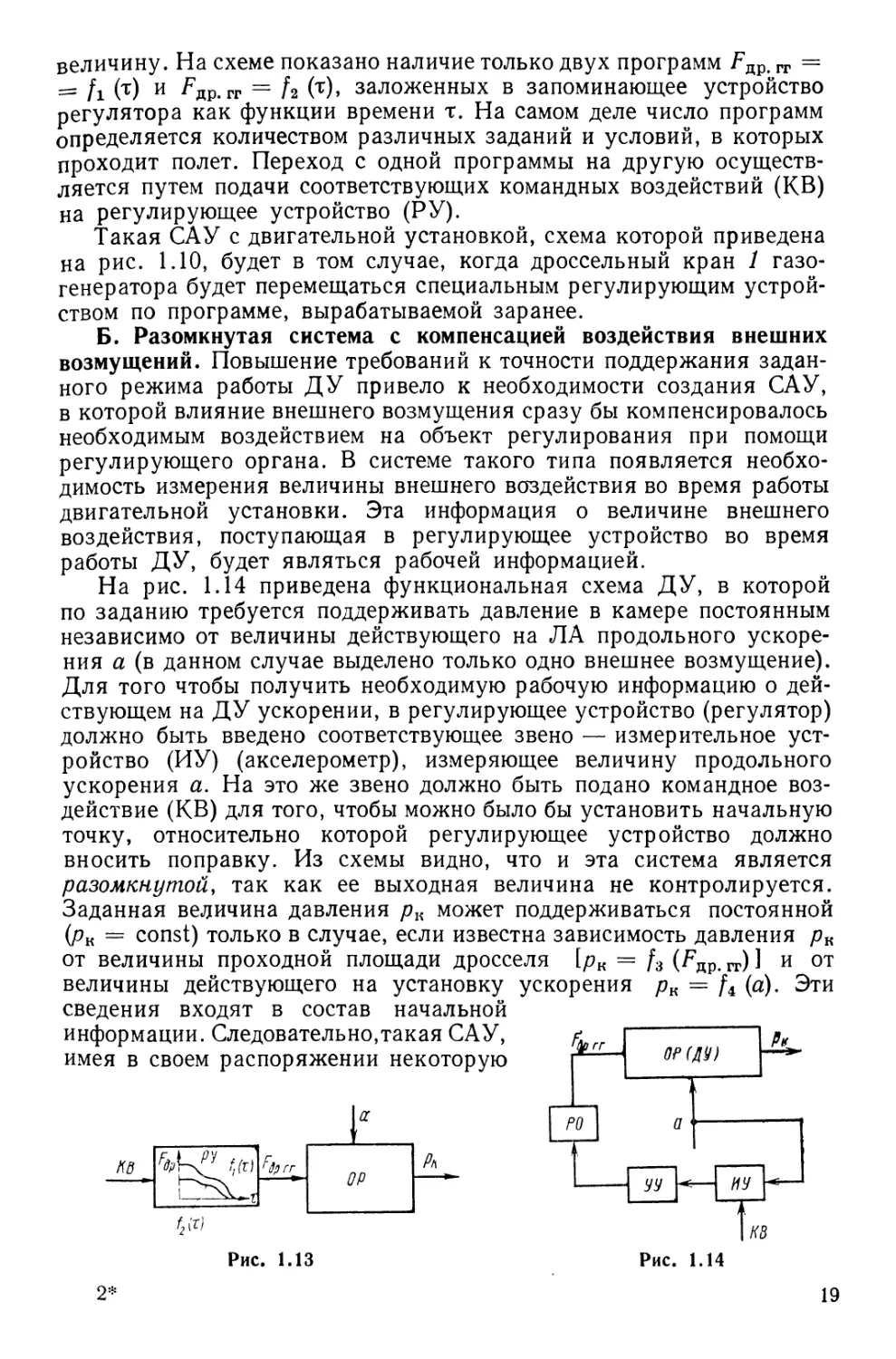
Функциональная схема такой САУ приведена на рис. 1.13. Для
простоты на схеме указано воздействующим на оъект регулирования
только одно внешнее возмущение — продольное ускорение а. На
самом деле при выработке программы изменения проходной
площади дросселя /^др. гг необходимо учитывать одновременность
и интенсивность влияния всех внешних возмущений на выходную
18
величину. На схеме показано наличие только двух программ F^Vt ^ =
== /i (т) и ^др. гг = /г (т)> заложенных в запоминающее устройство
регулятора как функции времени т. На самом деле число программ
определяется количеством различных заданий и условий, в которых
проходит полет. Переход с одной программы на другую
осуществляется путем подачи соответствующих командных воздействий (KB)
на регулирующее устройство (РУ).
Такая САУ с двигательной установкой, схема которой приведена
на рис. 1.10, будет в том случае, когда дроссельный кран /
газогенератора будет перемещаться специальным регулирующим
устройством по программе, вырабатываемой заранее.
Б. Разомкнутая система с компенсацией воздействия внешних
возмущений. Повышение требований к точности поддержания
заданного режима работы ДУ привело к необходимости создания САУ,
в которой влияние внешнего возмущения сразу бы компенсировалось
необходимым воздействием на объект регулирования при помощи
регулирующего органа. В системе такого типа появляется
необходимость измерения величины внешнего воздействия во время работы
двигательной установки. Эта информация о величине внешнего
воздействия, поступающая в регулирующее устройство во время
работы ДУ, будет являться рабочей информацией.
На рис. 1.14 приведена функциональная схема ДУ, в которой
по заданию требуется поддерживать давление в камере постоянным
независимо от величины действующего на ЛА продольного
ускорения а (в данном случае выделено только одно внешнее возмущение).
Для того чтобы получить необходимую рабочую информацию о
действующем на ДУ ускорении, в регулирующее устройство (регулятор)
должно быть введено соответствующее звено — измерительное
устройство (ИУ) (акселерометр), измеряющее величину продольного
ускорения а. На это же звено должно быть подано командное
воздействие (KB) для того, чтобы можно было бы установить начальную
точку, относительно которой регулирующее устройство должно
вносить поправку. Из схемы видно, что и эта система является
разомкнутой, так как ее выходная величина не контролируется.
Заданная величина давления рк может поддерживаться постоянной
(рк = const) только в случае, если известна зависимость давления рк
от величины проходной площади дросселя [рк = f3 (FWa „,) ] и от
величины действующего на установку ускорения рк = /4 (а). Эти
сведения входят в состав начальной
информации. Следовательно,такая САУ, f г
имея в своем распоряжении некоторую
Ч?гг
OP
0Р (ДУ)
РО
Рис. 1.13
УУ
Рис. 1.14
\К8
19
рабочую информацию о величине действующего внешнего
возмущения, сразу может выработать необходимое управляющее
воздействие через усилитель(УУ) на регулирующий орган (РО) и этим
полностью компенсировать влияние внешнего возмущения. Отсюда
и название этих систем—разомкнутые САУ, работающие по
принципу компенсации.
Положительным свойством такой системы является быстрота
реакции на возникшее внешнее возмущение, так как на объект
регулирования внешнее возмущение и управляющее воздействие
действуют почти одновременно.
Основным недостатком системы такого типа является
необходимость создания для каждого из внешних возмущений своей цепи
компенсации. Поэтому рационально создавать систему
регулирования, использующую принцип компенсации только для одного—
двух внешних воздействий, особенно сильно влияющих на объект
регулирования.
1.5. ЗАМКНУТЫЕ СИСТЕМЫ
Качественное рассмотрение свойств объекта
регулирования показало, что любое из внешних возмущений вызывает
отклонение выходной величины. Следовательно, возможно создание САУ,
в которых рабочей информацией будет являться изменение самой
выходной величины, и уже по величине этого изменения следует
определять величину управляющего воздействия. Функциональная
схема такой САУ приведена на рис. 1.15, откуда видно, что рабочая
информация об отклонении выходной величины поступает
непосредственно в регулятор. В измерительном устройстве регулятора
(ИУ) сравнивается текущее значение выходной величины рк с ее
заданным значением. При отклонении от заданного значения рк
регулятор начинает воздействовать на регулирующий орган объекта
регулирования Др. гг, в результате чего площадь /^p. гг будет
изменяться. Знак изменения FHP< гг должен быть таким, чтобы
возникшее отклонение выходной величины уменьшилось. В этом случае
выход объекта регулирования оказывается замкнутым через
регулятор с его входом. Таким образом, ос-
а Tf Ар&рРв Рг новной характерной чертой замкнутой
11111 САУ является наличие хотя бы одного
1 \ t 1 1. замкнутого контура прохождения
сигналов. Из этого ясно, что влияние
возмущения на выходную величину объекта
регулирования будет парироваться
относительно быстрее в системах,
работающих по принципу «компенсации», чем в
системах, работающих по «отклонению».
Но замкнутые САУ, работающие по «от-
НВ клонению», выходную величину
поддерживают более точно, чем системы, рабо-
Рис 1.15 тающие по принципу компенсации».
20
Др. г г
ВВ
Ш
ор
УУ
Рис. 1.16
Различают три основных ре- нв
жима работы замкнутых систем:
режим стабилизации,
программного регулирования и слежения.
Стабилизирующие замкнутые
САУ. Стабилизирующей САУ
замкнутая система называется в том
случае, когда в ее задачу входит
поддержание выходной величины
на заданном и постоянном во
времени уровне. Примером такой
САУ может служить двигательная Яро
установка ЛА, при полете
которого требуется поддержание
давления в камере рк постоянным. шкв
Замкнутые системы программ- I п0 Нт
ного регулирования. В тех
случаях, когда во время полета ЛА
режим работы необходимо
изменить во времени в некоторых пределах и по заранее заданному
закону, замкнутая САУ будет работать в режиме программного
регулирования. Программа изменения режима работы ДУ во времени
должна быть составлена с учетом динамических свойств как объекта
регулирования, так и регулятора.
Следящие замкнутые САУ. Во многих случаях выработать
заранее определенную программу работы ДУ невозможно и режимы
работы двигателя приходится выбирать исходя из сложившейся
ситуации использования ЛА в целом. В этих случаях необходимая
команда может вырабатываться на борту ЛА в специальном
расчетном устройстве или передаваться по системе телеуправления с земли.
Отсюда ясно, что САУ должна обеспечить изменение выходной
величины в некоторых пределах по любому задаваемому командным
воздействием закону. Это значит, что выходная величина должна
следить за подаваемой командой и с достаточной точностью повторять
все ее изменения.
При таком режиме работы системы регулирования объем рабочей
информации резко возрастает, так как она поступает не только
как информация о состоянии выходной величины, но и как
информация об изменении командного задания. Следует отметить,
что возможно построение комбинированных систем, в
которых воздействие наиболее сильных и регулярно действующих
внешних возмущений компенсируется созданием разомкнутой цепи,
а воздействие остальных возмущений парируется замкнутой
системой.
Часто приходится строить замкнутые системы многомерными.
На рис. 1.16 приведена функциональная схема двухмерной САУ.
Это двигательная установка с ЖРД, в которой один контур служит
для стабилизации давления в камере путем изменения проходной
площади дросселя Др. гг газогенератора, а второй контур стабили-
21
зирует соотношение компонентов изменением проходной площади
дросселя магистрали подачи окислителя Др. о, что приводит к
изменению расходов окислителя пг0 и горючего тг.
1.6. САМОНАСТРАИВАЮЩИЕСЯ СИСТЕМЫ
Самонастраивающиеся системы автоматического
управления в той или иной степени могут приспособливаться к
изменяющимся внешним условиям и учитывать поведение объекта
управления в этих условиях. Процесс управления в таких системах должен
сочетаться с периодической проверкой поведения объекта
управления при воздействии на него внешних условий. Такие периодические
проверки увеличивают количество рабочей информации, что и
восполняет недостаток начальной информации.
Ориентировочно класс самонастраивающихся систем можно
разделить на три основных подкласса.
А. Система экстремального управления. Экстремальные системы
управления применяются при условии, что выходная величина
объекта управления связана с входной экстремальной зависимостью
(или максимумом, или минимумом), которая определяет
оптимальный режим работы объекта управления. При этом положение
экстремума определяется непрерывным изменением внешних и внутренних
возмущений, влияние которых на объект не является однозначным.
В этом случае в задачу экстремальной САУ входит
автоматический поиск «плавающего» экстремума и последующего обеспечения
работы объекта управления в экстремальной точке.
Формирование экстремумов в ЖРД возможно по различным
параметрам: по удельному импульсу тяги или расходному комплексу
камеры в зависимости от соотношения компонентов топлива или
по минимуму суммарной массы расходуемого топлива в зависимости
от степени уширения сопла при значительном изменении давления
окружающей среды.
Рассмотрим принципильные основы построения таких систем.
Предположим, что ДУ по схеме рис. 1.10 должна работать всегда
при наибольшем значении расходного комплекса |3К = p^F^lth^.
Для этого на каждом режиме работы необходимо подбирать
изменением /^др.о такое соотношение компонентов km, при котором
комплекс рк был бы наибольшим. Как известно, связь между
величиной расходного комплекса |3К и соотношением компонентов km
или коэффициентом избытка окислителя ак зависит от большого
количества факторов и для каждой ДУ может быть экспериментально
определена. Обычно эта связь, выраженная графически, имеет вид,
представленный на рис. 1.17, где ясно видно наличие максимума.
Следует отметить, что выбранные значения (JK и km не могут
быть получены на работающей ДУ непосредственным измерением.
Для их определения необходимо создание специальной системы,
которая по измеренным давлению рк, секундному массовому расходу
окислителя т0 и по секундному массовому расходу горючего тГ
будет выдавать для каждого данного момента значения (5К и km.
22
Используя эти данные, можно
построить систему экстремального
регулирования на нескольких
принципах, одним из которых является
принцип шагового поиска с
запоминающим устройством.
Функциональная схема такой
системы экстремального управления
приведена на рис. 1.18. Устройство
шагового поиска (УШП), которое,
подавая соответствующие сигналы
на логическое управляющее
устройство (Л У У), обеспечивает
ступенчатое изменение Fn
валы заданной
(«шаги») и через определенные
промежутки времени. Ступенчатое из-
др.о через
интеркомандой величины
J
менение F
др. о
может быть как в
Рис. 1.17
сторону увеличения проходной площади дросселя ^др. 0, так и
в сторону ее уменьшения. Это зависит от сигнала, который
поступает на ЛУУ от вычислительного и запоминающего устройства
(ВЗУ).
Работа такой системы протекает следующим образом. После того
как шаговое устройство изменить проходную площадь клапана,
у ВЗУ попадают сигналы, пропорциональные рк и /?ш, которые им
и запоминаются. Затем устройство шагового программирования
(УШП) подает сигнал на следующее изменение проходной площади
и опять в ВЗУ поступают новые сигналы рк и km. В вычислительном
устройстве новые сигналы запоминаются, сравниваются со старыми
и вырабатываются разности, или приращения, Д|3К и Akm, после
чего старые сигналы в памяти уничтожаются. По знакам
полученных приращений Арк и Akm вырабатываются сигналы для
определения направления следующего изменения Fnp.o. На рис. 1.18
приведен график функции рк = / (km), на котором показаны два случая
работы системы — справа и слева от (JKmax. Если на данном рабочем
At
Акт
АЦК
Fdp.o
Слева
от /За nai
+
+
+
-
-
+
Спраба
от j3/f max
-4-
-
-
-
-
Рис. 1.18
23
режиме kml меньше km2 и рабочие точки находятся слева от
максимального значения рк и был дан сигнал на увеличение Fnv.o, то
в ВЗУ будет получено приращение Akml с положительным знаком.
Этому будет соответствовать и положительное приращение Дрк,
т. е. в этом случае следующий шаг надо делать опять в сторону
увеличения fHP. 0. Если же значение km2 > kml (справа от |3К шах),
то при положительном значении приращения Kkm2 будет получено
отрицательное значение Af}K. В этом случае необходимо следующий
шаг делать в обратном направлении, т. е. уменьшить FnVt 0. В
таблице, приведенной на рис. 1.18, указана связь между знаками
приращений Akm, ApK и изменением /^p. 0.
Таким образом, система, сравнивая вновь получаемые данные
с имеющимися в памяти, выдает каждый раз новую рабочую
информацию, причем в памяти ВЗУ сохраняется только тот минимум
информации, который необходим для определения направления
следующего шага. Проведя необходимое количество шагов, система
приведет объект управления (ОУ) к режиму, при котором |JK будет
находиться настолько близко от своего максимального значения,
что при каждом следующем шаге будет переходить эту точку и рк
начнет уменьшаться. С этого момента система будет поддерживать
объект регулирования в области рктах> так как каждый раз,
переходя через максимум, расчетное устройство будет давать сигнал
на изменение знака приращения /^p. 0- Очевидно, минимальной
шириной зоны по величине kKmax будет ширина, определяемая
двумя шагами изменения проходной площади клапана. Значение
же ширины шага зависит от кривизны функции (Зк = f (km) в
области f}Kmax> а также от чувствительности и точности работы
отдельных узлов вычислительных и запоминающих устройств. Для
построения систем экстремального регулирования кроме разобранного
здесь могут быть использованы и другие принципы [32].
Б. Системы с самонастраивающимися корректирующими
контурами. Системы управления этого типа позволяют обходиться еще
меньшим количеством начальной информации. Это связано с тем,
что при некоторых условиях под влиянием внешних возмущений
свойства объекта управления могут существенно изменяться и для
того, чтобы система сохранила работоспособность, необходимо
изменять динамические свойства регулирующего устройства.
Предположим, что ДУ может изменять тягу в широких пределах
и должна ее резко увеличить. Если же при этом давление наддува
в баках небольшое, а ускорение ЛА мало, то при резком увеличении
тяги, а значит, и резком увеличении частоты вращения рабочих
колес насосного агрегата, в магистралях подачи окислителя и
горючего к насосам может произойти разрыв потока жидкости и перед
насосами могут возникнуть паровые пробки. Такой эффект может
особенно резко проявиться, когда применяются низкокипящие
компоненты топлива. Очевидно, для предотвращения подобного
явления необходимо создать такую САУ, которая сама
корректировала бы свойства регулятора и при снижении давления перед
насосами уменьшала бы скорость перемещения регулирующего органа
24
(в ДУ это будет дроссель газогенератора). Функциональная схема
такой САУ приведена на рис. 1.19, где показана также необходимая
связь между величинами давлений р0 и рг перед насосами и скоростью
изменения проходной площади дросселя газогенератора d/^p. rvld%.
Из функциональной схемы видно, что эта система будет системой
с цепью настройки корректирующего устройства (КУ), изменяющего
скорость перемещения регулирующего органа соответственно
значениям р0 и рг.
В настоящее время создаются самонастраивающиеся САУ, в
которых проверяется реакция объекта управления на внешнее
возмущение (ВВ) заданной формы. Если обнаруживается, что свойства
объекта изменились, то КУ соответствующим образом изменяет
динамические свойства регулятора. Очень перспективной в этом
смысле является самонастраивающаяся САУ, в которой для
определения изменений динамических характеристик объекта
используется его электронная модель (ЭМ). Функциональная схема такой
САУ представлена на рис. 1.20. Принципиально такого типа
самонастраивающаяся САУ может выполнять задания при самых
различных изменениях условий, в которых находится объект управления,
и самых широких изменениях его динамических характеристик.
В. Самонастраивающиеся САУ с автоматическим поиском
оптимальных режимов работы. Такие САУ должны автоматически
обеспечивать поиск оптимальной программы работы САУ в каждый момент
времени в тех случаях, когда заранее программу составить
невозможно. Оценку оптимальности программы проводит также сама
система по критериям, которые выработаны для всего ЛА в целом.
Такая система автоматически, используя заложенные при ее
создании критерии оценки протекающих в объекте процессов, может
вырабатывать оптимальную программу своей работы. Примером
такой системы может служить система, обеспечивающая
одновременную выработку из баков обоих компонентов топлива при
наименьших гарантийных остатках. Прин- вв
ципиальная схема такой ДУ при- d * v
ведена на рис. 1.21. ill
Как видно из схемы, в баках f pi—I—*-
обоих компонентов установлены ^'
09 (ДУ)
KB
Рис. 1.20
25,
Рис. 1.21
датчики До и Д,, которые отмечают момент прохождения поверхности
жидкости через дискретный уровнемер. Датчики расставляются
по оси бака таким образом, чтобы в случае работы установки при
номинальном соотношении компонентов (km = kmH0M) сигналы
датчиков, подаваемые из обоих баков, проходили бы одновременно.
При этом соотношение компонентов будет поддерживаться по
объемным секундным расходам kv, а не по массовым секундным
расходам km. Эти коэффициенты связаны между собой отношением
плотй
ностей компонентов:
Рг
Рг
Следовательно, если плотность компонентов за время работы
установки не изменяется, коэффициенты kv и km при воздействии
возмущений будут изменяться одинаково. При заправке баки должны быть
залиты компонентами в количествах, соответствующих km H0M. Тогда
в самом простом случае (один режим работы и малое влияние
пускового периода), когда нет никаких возмущений, при работе установки
должно выполняться такое условие: разность относительных высот
уровней для обоих баков равна нулю, т. е. Яо — Нг = 0. Здесь Яо =
= 1 — Vot/VH. 0; йР = VWVH.r> где ^ — секундный расход,
м3/с; VH — начальный объем компонентов, заправленных в баки, м3;
т — текущее время работы ДУ, с.
Если же под влиянием воздействия различных внешних
возмущений объемный расход одного из компонентов V изменится, то
скорость изменения положения уровня в баке этого компонента также
изменится и разность Но — Яг Ф 0.
Это значит, что датчики положений уровня До и Дг,
расположенные в том баке, где уровень опускается быстрее, будут давать сигнал
26
о прохождении уровня несколько раньше, чем соответствующие
датчики другого бака. Разность во времени подачи сигналов Дт
будет пропорциональна разности относительных высот уровней,
т. е. Ат = А (Яо — Яр). Сигнал от датчика рассогласования уровней
(ДРУ) через усилитель (УУ) поступает в вычислительное устройства
(ВЗУ) (см. рис. 1.21, а), по команде которого осуществляется
перемещение регулирующего органа (РО) с использованием магнитного
усилителя (МУ).
График, иллюстрирующий работу системы автоматического
управления, приведен на рис. 1.21, б. На этом графике точка 1
соответствует моменту запуска установки с баками, заправленными
соответственно kVu0M. Предлагаемая программа работы системы на
графике изобразится прямой линией 1-~4У что соответствует случаю,
когда разность относительных высот уровней равна нулю. На самом
же деле воздействующие на объект управления внешние возмущения
приводят к тому, что объемные секундные расходы компонентов Vo
и Vr не остаются постоянными и относительные уровни Яо и йг
расходятся.
Пусть после прохождения первых датчиков уровня, который
соответствует моменту времени тх, оказалось, что уровень в баке
окислителя опускается медленнее и разность относительных высот
уровней соответствует точке 2. В этом случае, если не вмешиваться
в работу установки и считать, что V9 = const, к концу работы при
т = ткон разность относительных уровней будет соответствовать
точке 3. Это недопустимо, так как в этом случае в конечную точку
активного участка траектории полета ЛА будет поднят избыточный
груз, равный массе оставшегося в баке компонента, а значит,
уменьшится полезная нагрузка. Поэтому программу работы САУ
необходимо изменить, но так, чтобы только к концу работы установки
разность относительных высот уровней стала равной нулю. Поэтому
новая программа работы САУ изобразится на графике линией 2—4.
Из этого следует, что в момент времени т2 разность относительных
высот уровней в баках должна соответствовать точке б, тогда как
при старой программе эта разность соответствовала бы точке 5.
Для того' чтобы такое изменение в работе установки произошло,
необходимо изменить положение регулирующего органа (РО), т. е.
изменить на определенную величину проходную площадь дросселя
магистрали подачи окислителя Fnv, 0. При расчете новой программы
работы (линии 2—4) вычислительным устройством определяется
и необходимое изменение величины FAVm 0. В данном случае дроссель
должен дополнительно приоткрыться на величину, которая в
данной схеме задается в виде величины угла поворота золотника
дросселя Др с электромотором МУ. Правильность установки дросселя
в новом положении контролируется потенциометром обратной связи
(ДОС).
После проведения всех этих операций до прихода сигналов
от следующих датчиков уровня в памяти вычислительного устройства
остаются данные точки 2. В момент времени, соответствующий т2,
27
приходит сигнал от датчика
уровня в баке горючего Дг и через
некоторое время — от датчика
уровня в баке окислителя До. По
разности времени Ат прихода этих
сигналов оказывается, что
разность относительных высот
уровней соответствует точке 7. Разность
уровней уменьшается, но ее
уменьшение не соответствует требуемому,
так как новая программа (линия
2—7—8) показывает, что к концу
работы установки будет большой
избыток компонента в баке
горючего (отрезок 4—8). Это значит, что проходная площадь Fflp. 0 была
увеличена больше, чем нужно. Новая программа работы системы,
которую определит вычислительное устройство, должна проходить
по линии 7—4. Для этого проходная площадь FHp. 0 должна быть
соответствующим образом уменьшена. Если после выполнения САУ
всех команд, поступающих из вычислительного устройства, объект
управления будет работать в таком режиме, что к моменту ткон
разность относительных высот уровней в баках будет равна нулю,
то при поступлении новых сигналоз от датчиков уровня в момент
времени т3 разность во времени прихода сигналов Ат будет
соответствовать точке 10, разность уровней в которой определяется
отрезком 9—10. Эта точка лежит на рассчитанной программе (линии 7—4)
и поэтому никаких изменений в положение дросселя вносить не
следует.
Следовательно, такая САУ по данным, поступающим с рабочей
информацией, определяет программу, по которой работает вся
система. Если эта программа не обеспечивает заданных условий,
то САУ автоматически вырабатывает новую программу,
обеспечивающую оптимальный переход из данного состояния в заданное
конечное, и сама производит настройку режима работы объекта
регулирования под новую программу. Такого типа САУ носят
название самооптимизирующихся. Функциональная схема такой САУ
приведена на рис. 1.22. Отличительной особенностью этих систем
является наличие сложного счетнорешающего устройства с блоком
памяти ВЗУ значительного объема.
1.7. ИГРОВЫЕ САУ
Игровые САУ являются наиболее сложными техническими
системами. Их применение обусловлено необходимостью
управления объектами, поведение которых заранее непредсказуемо. К таким
объектам относятся большие технические комплексы (например,
крупные промышленные предприятия или целые отрасли
промышленности), содержащие в своей структуре множество входов и
выходов, соединенных между собой сложными внутренними связями.
28
Предварительное детерминированное описание таких комплексов
не представляется возможным, т. е. в этом случае имеет место полное
отсутствие начальной информации (или известен ее минимум). В этом
случае управление осуществляется за счет увеличения роли рабочей
информации (как в количественном, так и в качественном
выражении).
В редких специальных случаях игровая САУ содержит в своей
структуре наборы шаблонных решений, целесообразный подбор
которых решает в сложившейся ситуации успех управления
(например, игровые шахматные автоматы).
В общем случае автоматический поиск оптимальных режимов
работы в игровых САУ осуществляется в процессе динамического
программирования, происходящего в поэтапном решении задачи
выбора оптимального варианта.
На первом этапе управления действия управляющей машины
и объекта управления могут быть чисто случайными, а затем (по мере
распознавания «образа» объекта) могут подчиняться определенному
алгоритму.
Особенностью игровой САУ является формирование команд на
основе сопоставлений множества решений и выбора оптимальной
операции. Критерием сопоставления множеств является функция
выгоды, которая задается заранее и вырабатывается на основе
анализа операций или общей стратегией управления.
Из приведенного описания ясно, что игровые САУ для
успешного управления сложными объектами требуют значительного
времени и поэтому не могут в настоящий момент применяться для
управления быстродействующими ракетными двигательными
установками. Однако отдельные принципы построения игровых САУ
(например, перебор вариантов шаблонных решений) могут быть
применены в бортовых вычислительных машинах для диагностики
процесса функционирования как отдельных агрегатов ДУ, так и ее
контуров управления.
В рассмотренной выше классификации САУ основным признаком
отличия систем друг от друга является относительное количество
используемой начальной и рабочей информации. На рис. 1.9 все
рассмотренные системы автоматического управления расположены
по степени возрастания значения рабочей информации в их работе.
Если в первой, разомкнутой системе программного регулирования,
рабочая информация совершенно отсутствовала, то в последней она
играет решающую роль. Соотношение количеств рабочей и начальной
информации, необходимое для работы САУ, указано на рис. 1.9
в виде соответствующего графика.
Анализируя реальные САУ, в частности, системы управления
ракетными двигателями при широком изменении режимов их работы,
следует всегда помнить, что они имеют изменяющиеся во времени
параметры и являются, таким образом, системами нестационарными.
Но во многих случаях, когда изучают поведение систем в
сравнительно короткие периоды времени, можно полагать, что параметры
системы не изменяются во времени, и исследовать систему как линей-
29
ную и стационарную. Часто это дает возможность получить ответ
достаточно точный, близкий к действительности.
Материалы, изложенные в этой главе, показывают, что
удовлетворение тех или иных технических требований по обеспечению
заданных режимов работы САУ возможно только путем правильного
выбора структуры и характеристик регулирующего устройства,
а это невозможно без подробного знания статических и динамических
характеристик самого объекта управления.
Таким образом, построение любой САУ требует
предварительного изучения начальной информации об объекте управления
и регуляторе.
ВТОРАЯ ЧАСТЬ
РЕГУЛИРОВАНИЕ ЖИДКОСТНЫХ РАКЕТНЫХ
ДВИГАТЕЛЬНЫХ УСТАНОВОК
ГЛАВА 2
СТАТИКА ЖИДКОСТНЫХ
РАКЕТНЫХ ДВИГАТЕЛЕЙ
2.1. ОСНОВНЫЕ ПОНЯТИЯ О СТАТИЧЕСКИХ
ХАРАКТЕРИСТИКАХ
Для каждого конкретного ЛА может быть предложен ряд
ДУ различных схем. Для того чтобы выбрать из них наиболее
рациональную, необходимо провести подробный и глубокий анализ
ДУ по основным параметрам. Среди этих величин в анализе ЖРД
одно из основных мест занимают:
а) средний за время полета удельный импульс тяги ДУ
1=1 О
где п — количество конструктивных узлов, в которых возникает
сила тяги; k — количество мест в ДУ, через которые происходит
истечение как основного, так и вспомогательных рабочих тел; ткон —
продолжительность работы каждого из узлов;
б) масса конструкции ЛА /Иконстр;
в) возможная точность поддержания заданного режима по тяге
Др или по давлению в камере Д/?к и по соотношению компонентов
Akm и др.
Независимо от того, сколько вариантов двигательных установок
будет сравниваться, для каждой из них должны быть построены
статические характеристики.
Статической характеристикой системы регулирования, объекта
регулирования или отдельного звена называется зависимость, которая
характеризует связь между входной и выходной величинами на
определенном статическом, т. е. установившемся, стационарном режиме.
Это значит, что в заданных условиях на каждом установившемся
(или равновесном) режиме сама выходная величина и все
действующие сигналы не изменяются во времени или не выходят за пределы
установленных на них допусков.
Статическая характеристика может быть представлена в виде
алгебраического уравнения, определяющего функциональную связь
между выходной величиной, воздействующими внешними
возмущениями и командными воздействиями, или в виде графика, или целого
ряда графиков, выявляющих эту же связь. Полученная
экспериментально статическая характеристика может быть представлена
31
в виде графика, таблицы или уравнения, полученного путем
аппроксимации этой функции в заданном интервале. Аппроксимация
ведется обычными методами [19] и может быть произведена с
заданной точностью, но является достоверной только в пределах
выбранного интервала.
Статической характеристикой объекта регулирования, т. е.
двигательной установки, будет являться связь выходной величины
тяги Я, давления в камере рк или соотношения компонентов km
с входными величинами, т. е. управляющими и внешними
воздействиями.
Статическая характеристика такого сложного объекта
регулирования может быть построена только при наличии статических
характеристик отдельных узлов, составляющих этот объект, и схемы
их соединения между собой.
Построение статической характеристики ДУ начинается с выбора
режимов работы отдельных ее узлов (звеньев), обеспечивающих
работу установки на расчетном режиме.
Главным звеном ДУ является камера ЖРД, так как ее выходной
величиной является выходная величина всего объекта
регулирования — тяга Р или давление в камере рк. Поэтому в первую очередь
необходимо выбрать расчетный режим для камеры ЖРД. Расчетные
же режимы остальных звеньев должны быть выбраны так, чтобы
они обеспечивали работу камеры на выбранном расчетном режиме.
Обычно для камеры расчетным режимом является режим
максимальной тяги.
2.2. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ЭЛЕМЕНТОВ ДВИГАТЕЛЕЙ
А. Статическая характеристика камеры ЖРД. До того
как строить характеристики камеры ЖРД должны быть выбраны
ее основные размеры и величины, определяющие расчетный режим
ее работы. Исходя из этих данных и используя результаты
рассмотрения аналогичных схем, назначаются: величина давления газа
в камере сгорания /?к, соотношение компонентов km, суммарный
секундный расход компонентов ms, давление на срезе сопла ра.
В результате соответствующих расчетов получают величину
удельного импульса тяги /у.
Имея эти данные, определяющие расчетный режим камеры ЖРД,
и пользуясь известными из теории ЖРД зависимостями, можно
построить ее статические характеристики. Основной статической
характеристикой камеры ЖРД является связь выходной величины —
тяги Р — с входными величинами — расходами окислителя пг0
и горючего /пг при заданных соотношении компонентов km, геометрии
камеры и сопла и давлении окружающей среды на
соответствующей высоте /?н.
Эти характеристики носят название расходных или дроссельных.
Математическая связь между выходной и входной величинами
определяется так:
Р = rhjfiVa + PaFa - pHFa. (2.1)
32
Здесь ms — суммарный массовый расход компонентов, кг/с; wa —
скорость газов на срезе сопла, м/с; Fa — площадь выходного сечения
сопла, м2; ра — давление в выходном сечении сопла, Па; рн —
давление в окружающем камеру пространстве, Па. Обычно
расходная характеристика строится для случая
km = const, фк = const, фс = const,
где коэффициент срк = рк.э/Рк. т оценивает неполноту выделения
тепла в камере сгорания при эксперименте по отношению к
теоретическому (см. рис. 1.17); коэффициент фс определяет степень
совершенства рабочего процесса в сопле камеры сгорания.
Если перерасширение газовой струи невелико и отрыва ее от
стенок нет, то при постоянной геометрии сопла давление на срезе
сопла ра и давление в камере рк связаны между собой прямой
зависимостью: pjpa = pJpK- Здесь pi и Рк — давление на срезе сопла
и давление в камере сгорания на расчетном режиме.
Имея в виду все изложенное, величину силы тяги двигателя
можно определить по формуле
а суммарный расход компонентов — по формуле
так как суммарный секундный расход ras и давление в камере
сгорания рк связаны зависимостью
2
где FKp — площадь критического сечения, м2; Тк — температура
газов в камере ^сгорания, К; у X I —тг\) —величина,
зависящая от показателя адиабаты процесса расширения рабочего
R Т
— 2 \К(у+1)/(у-1) — теоРетическое значение рас-
* () ■ '
ff)
ходного комплекса, (Дж/кг)1/2; RK — газовая постоянная продуктов
сгорания в камере, Дж/(кг-К).
Теоретическое значение рк# т находится из термодинамического
расчета и должно быть поправлено на несовершенство процессов,
протекающих в камере сгорания. На рис. 1.17 приведены
теоретические и экспериментальные зависимости рк. т, рк. э и фк = Рк. э/Рк. т
от коэффициента избытка окислителя в камере сгорания сск.
Имея эту связь, можно определить суммарный расход
компонентов через критическое сечение
А. И. Бабкин и др, 33
При принятых допущениях и постоянном соотношении
компонентов (kK = const) для режимов, отличающихся от расчетного,
thz/mz = pjpi. (2.4)
Приведя формулу (2.1) к виду
и отнеся ее к такому же выражению, соответствующему расчетному
режиму, получим
Так как a>a, ра/рк, а значит, и pa/ms при заданной геометрии сопла
и принятых допущениях будут сохраняться постоянными, пока
скачок давления не войдет в сопло и не произойдет отрыв струи,
то можно записать
(2.6)
Отсюда
(2.7)
Эта зависимость позволяет получить величину тяги по заданным
суммарному расходу и высоте, имея исходными данными значения
тяги, суммарного расхода и высоты на расчетном режиме.
Формулу для пересчета удельного импульса тяги /у можно
легко получить в виде
7у=^ = —s- sr- (2>8)
Пользуясь полученными зависимостями, можно построить расходную
характеристику камеры ЖРД, которая позволит легко определять
необходимый расход компонентов при заданных значениях тяги
и высоты. При расчете расходных характеристик камер, работающих
при значительном атмосферном давлении, это относится особенно
к камерам двигателей, используемых в плотных слоях земной
атмосферы, необходимо внимательно следить за тем, чтобы отношение
давлений атмосферного рн и на срезе сопла ра не стало ниже
критического, при котором происходит отрыв струи газа от стенки
сопла, работающего в этом случае на режиме перерасширения. Это
отношение лежит в пределах 0,3 < ра1рн < 0,4. Если необходимо
рассчитать расходную'характеристику в этой области, то следует
пользоваться экспериментальными данными, полученными для сопла
данного вида.
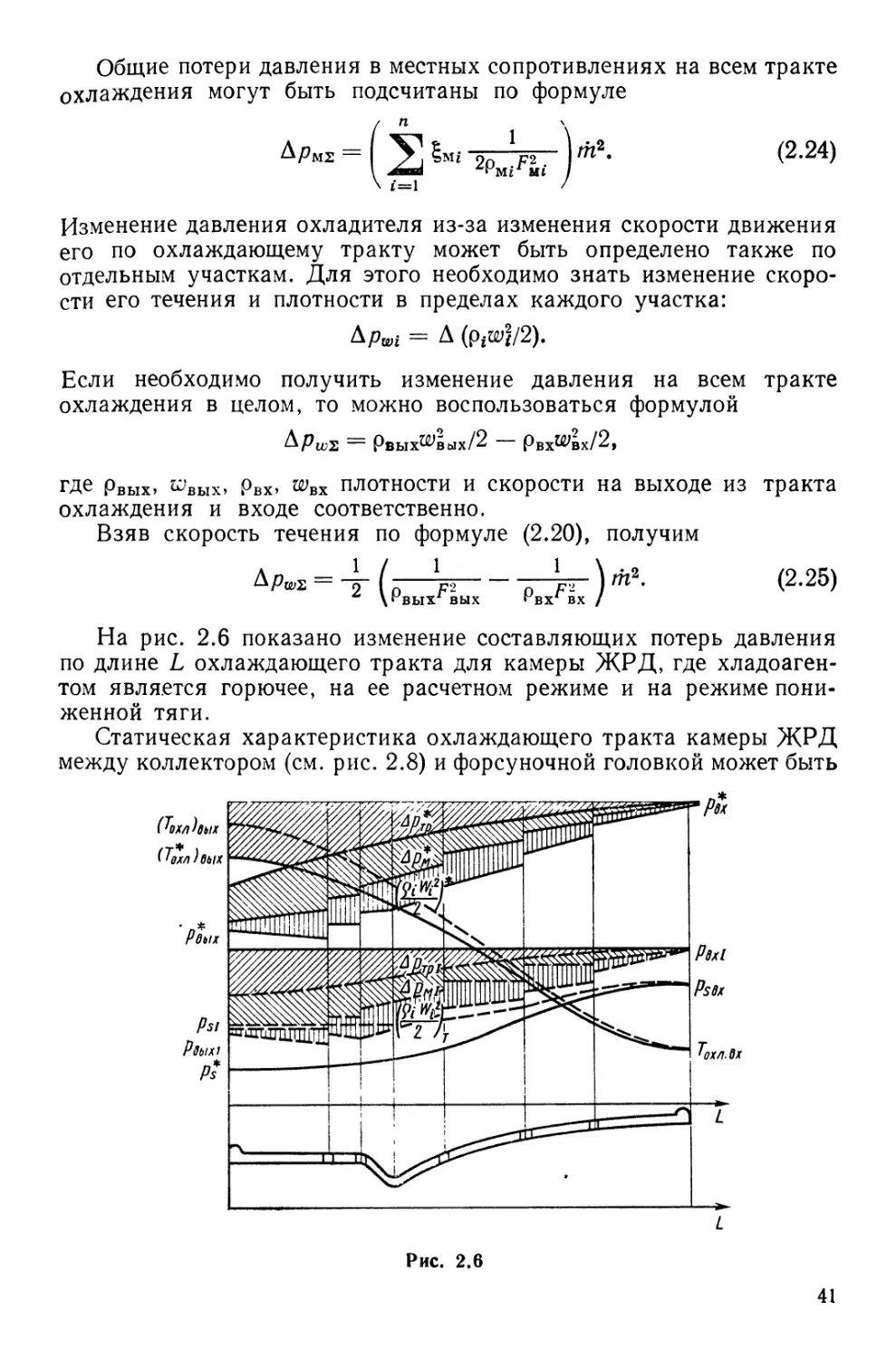
На рис. 2.1 представлена статическая характеристика камеры
ЖРД, работающей на жидких компонентах на земле и в пустоте.
34
Нужно иметь в виду, что точки статической характеристики,
полученные экспериментально, всегда имеют разброс из-за погрешностей
измерения. Поэтому реальная расходная характеристика
представляет собой не линию, а целую зону, ширина которой определяется
величиной разброса. Характеристики, снятые для разных
экземпляров однотипных камер, имеют еще больший разброс из-за различия
в геометрических размерах (хотя и в пределах допусков),
неидентичности газодинамических потерь в сопловом канале, различия в
процессах смесеобразования и горения и т. д.
Пользуясь статической характеристикой (расчетной или
полученной опытным путем), можно (по тяге или давлению в камере)
найти необходимый для обеспечения заданного режима суммарный
расход компонентов при выбранном их соотношении. Эти данные
необходимы для построения статической характеристики
следующего звена — смесительной головки камеры.
VI Б. Статическая характеристика смесительной головки
камеры ЖРД. Смесительная головка камеры состоит из полостей
горючего и окислителя. Каждый из компонентов поступает в камеру
через соответствующий комплект форсунок.
При построении статических характеристик смесительных
головок следует использовать прежде всего способность форсунок, как
струйных, так и центробежных, дозировать поступление компонентов
в камеру сгорания. Если форсунки рассматривать как местное
сопротивление, то связь между выходной величиной — расходом
жидкости через форсунки тф и входными величинами — /?ф и рк
определяется следующей зависимостью:
=1
(рф
(2.9)
где [д,ф — коэффициент расхода форсунки; ^ф — проходная площадь
выходного отверстия форсунки, м2; рж — плотность жидкости,
проходящей через форсунки, кг/м3; рф — давление жидкости перед
форсунками, Па; п — число установленных форсунок.
Входящий в это выражение коэффициент расхода (хф, равный
отношению действительного расхода жидкости к теоретически
возможному через то же самое выходное сечение, всегда меньше еди-
=const
ф
10
\Z
!
! \2аф
-
-
-5Q
Рис. 2.1.
2 4 6 в А
Рис. 2.2.
35
ницы. Для струйных форсунок при отношении ljd$ = 0,5 ... 1
(где /к — длина цилиндрической части канала форсунки, с1ф —
диаметр этого канала) коэффициент [хф = 0,6 ... 0,65, а при 2 < ljd$ <
< 5 коэффициент расхода увеличивается до |ыф = 0,75 ... 0,85.
На выбор величины [хф влияют свойства жидкости, ее температура
и давление газа в камере сгорания.
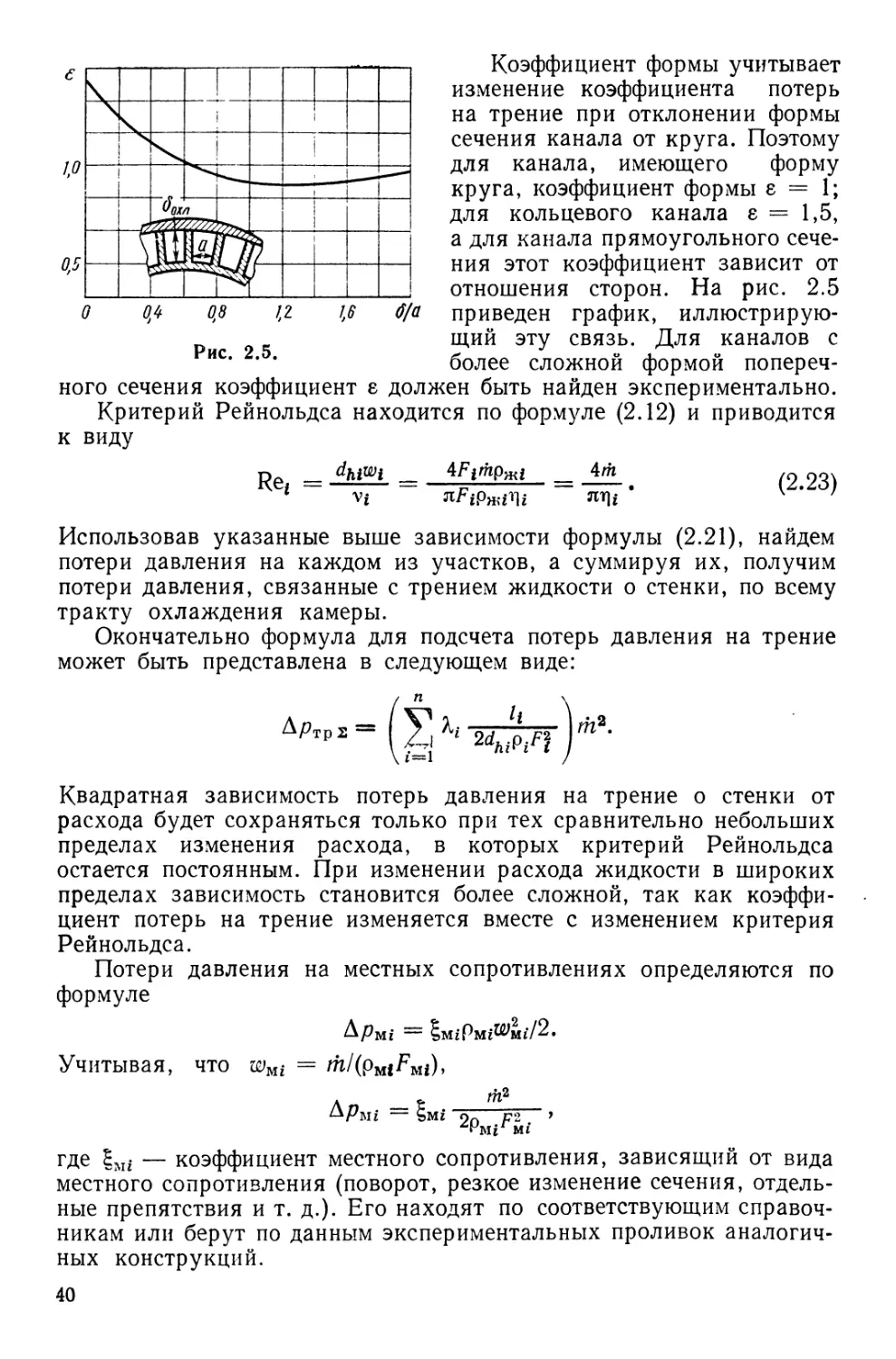
Коэффициент расхода центробежной форсунки \1ф связан с
геометрической характеристикой Л, если жидкость считать идеальной,
или с эквивалентной геометрической характеристикой Аэкв, если
учитывать вязкость (рис. 2.2):
л _ ^гс . д
" "2х ' экв ~ "2х
где R — радиус закрутки или расстояние от оси форсунки до осей
входных тангенциальных каналов; гс — радиус сопла; /*вх — радиус
входного канала; п — число входных каналов; К — коэффициент
трения жидкости о стенки.
Коэффициент трения жидкости можно определить по формуле
lg Л = [25,8/(lg Re)2'58] — 2. (2.11)
Критерий Рейнольдса определяется по условиям на входе в
камеру закручивания:
Re = wBXddKB/vm. (2.12)
Здесь ^вх — скорость жидкости на выходе из тангенциальных
каналов в полости форсунки; d3KB — эквивалентный диаметр, который
находится из условия ddKB = 2rBX >Лг; vm — коэффициент
кинематической вязкости жидкости. Так как wBX = тф/(^вхрш); FBX = nd'iKB/4;
vm = т]ж/рж, то критерий Рейнольдса удобно записать в следующем
виде:
Re = 4тф/(г)жя4кв), (2.13)
где т}ж — коэффициент динамической вязкости жидкости.
На практике связь хмежду расходом тф и перепадом давлений Д/?ф
для каждой форсунки определяется непосредственной проливкой
на специальном стенде. Собранные головки камер также
подвергаются проливке, что дает возможность получить действительную
статическую характеристику головки, которая может быть описана
следующей зависимостью:
ж (Рф — Рк)/ ^ф» (2-14)
где постоянная Лф с размерностью 1/м4 определяется по данным
проливки:
2ж. (2.15)
Полученная таким образом величина Лф действительна только
для тех пределов изменения перепадов давлений, в которых
производилась проливка.
36
Построение графика статической характеристики смесительной
головки камеры начинается с определения перепада давлений на
форсунках на расчетном режиме. Для этого режима известны
противодавление, равное давлению в камере /?к, и расход компонентов
на входе в камеру тк< 0 и гак. г. Поэтому выбор перепада давлений
сводится к назначению давления перед форсунками с учетом
условий, вытекающих из требований, предъявляемых к процессу
смесеобразования, глубине регулирования тяги, типам применяемых
форсунок и т. д. Обычно перепады давлений на форсунках
смесительных головок камер ЖРД выбираются (А—25). 105 Па. Для
однорежимных двигателей с вытеснительной подачей
придерживаются нижнего предела, а для двигателей с глубоким
регулированием тяги стараются использовать на режиме максимальной тяги
наиболее высокие значения Д/?ф.
Назначив величину перепада давлений на форсунках окислителя
и горючего для расчетного режима и приняв квадратичную
зависимость перепада давлений от расхода, можно построить статическую
характеристику каждой из частей смесительной головки камеры.
По данным расчетного режима находятся величины
коэффициентов для форсунок окислителя и горючего:
А = М/Уо-Рк) ;
«<f°\^ (2.16)
Зная Лф. 0 и Лф.г, можно получить выражение для статических
характеристик части смесительной головки, пропускающей
окислитель,
(2.17)
и части смесительной головки, пропускающей горючее,
тг = ■/рг(рф.г — Рк)/Аф.г. (2.18)
На рис. 2.3, а, б приведены поля статических характеристик
смесительной головки для случая, когда плотности окислителя
и горючего изменяются в широких пределах.
В. Статическая характеристика тракта охлаждения камеры.
Статическая характеристика охлаждающего тракта камеры даст связь
между гидравлическими потерями по тракту охлаждения и
расходами компонента, проходящего по этому тракту. Расчет такой
характеристики тесно связан с расчетом охлаждения камеры, и обычно
эти два расчета ведутся совместно. Для однорежимного двигателя
или двигателя, имеющего малые пределы регулирования тяги,
достаточно провести такой расчет для режима максимальной тяги.
Для двигателей же с широкими пределами регулирования тяги
необходимо такой расчет проводить для нескольких режимов работы.
Особенно следует проверять режим минимальной тяги. Это связано
с тем, что при минимальной тяге резко снижается секундный расход
компонентов, охлаждающих камеру, в то время как тепловые потоки
37
Рис. 2.3.
в охлаждающую среду изменяются сравнительно мало [27].
Последнее приводит к увеличению температуры охлаждающего
компонента и изменению числа Рейнольдса в широких пределах, а
следовательно, и к изменению условий течения охлаждающего
компонента в зазоре между камерой и рубашкой, из-за чего изменяются
и местные коэффициенты гидравлического сопротивления. На рис. 2.4
показано изменение удельных тепловых потоков q и температур Т
охлаждающей жидкости по длине камеры L на двух различных
режимах работы двигателя относительно их значений на расчетном
режиме, принятых равными единице. Имея такие данные и разбив
гидравлический тракт на отдельные участки, можно найти потерю
давления во всем тракте охлаждения с учетом изменения вязкости
и плотности компонента по температуре.
Потери давления при движении жидкости по охлаждающему
тракту камеры состоят из потерь на трение жидкости о стенки канала
и потерь, которые определяются местными сопротивлениями. Кроме
того, когда имеется резкое изменение скоростей течения охладителя,
должно быть учтено также и вызываемое этим изменение
статического давления.
Таким образом, на любом /-м
участке тракта охлаждения
измерение давления определяется
выражением
Арг = Д/?тр t + Apmi + А (р*о#/2).
В камерах современных
конструкций (паяные с гофром, с
фрезерованными каналами,
трубчатые) сопротивление
определяется в основном силами трения,
Рис. 2.4. местные же сопротивления неве-
38
лики, так как они возникают только в местах резких поворотов
(выход из коллектора и вход в коллектор), в местах переходов из
одного пояса охлаждения в другой с различным числом каналов и
в каналах, имеющих выштамповки.
При расчете величин гидравлических потерь на трение в тракте
охлаждения удобно принимать давление на участке таким же, какое
было принято при расчете охлаждения. Несмотря на сложную форму
отдельных участков (конус), расчет потерь для каждого из них ведут
как для участков, имеющих цилиндрическую форму, а параметры
протекающей жидкости и геометрические размеры принимают для
каждого участка осредненными. Зная потери АртрЬ суммируют
их и получают потери по всему охлаждающему тракту. Таким
образом:
Л/7ТР s = Jj Дртр*, (2.19)
где п — число отдельных участков.
Для любого 1-го участка величина потерь давления на трение
подсчитывается по следующей формуле:
Так как
Щ = fh/fatFi), (2.20)
где dhi — гидравлический диаметр данного участка охлаждающего
тракта, м; pt и wt — плотность и скорость движения жидкости на
данном участка, кг/м3 и м/с соответственно; Xt — коэффициент потерь
на трение.
Гидравлический диаметр для данного участка определяется
по формуле
dht=4Ft/U9 (2.22)
где Ft — площадь проходного сечения; П — смоченный периметр.
Коэффициент потерь на трение зависит от характера течения, формы
канала и шероховатости поверхности. Характер течения
определяется местным значением критерия Рейнольдса Re, а влияние
формы канала учитывается коэффициентом формы е.
Для ламинарных потоков (Re < 2320)
Я, = (64/Re) е,
для турбулентного течения (2320 < Re < 10Б)
%t = (0,3164/Re°'25)ef
а при Re > 10в зависимость от Re приобретает вид
Я, = (0,032 + 0,221/Re°'237) 8.
39
1.0
0,5
\
\
-
>
Л
бщ
L
ь
-
—■—
1,г 1,6 б/а
Рис. 2.5.
Коэффициент формы учитывает
изменение коэффициента потерь
на трение при отклонении формы
сечения канала от круга. Поэтому
для канала, имеющего форму
круга, коэффициент формы е = 1;
для кольцевого канала е = 1,5,
а для канала прямоугольного
сечения этот коэффициент зависит от
отношения сторон. На рис. 2.5
приведен график,
иллюстрирующий эту связь. Для каналов с
более сложной формой
поперечного сечения коэффициент е должен быть найден экспериментально.
Критерий Рейнольдса находится по формуле (2.12) и приводится
к виду
4m
с* ='
(2.23)
Использовав указанные выше зависимости формулы (2.21), найдем
потери давления на каждом из участков, а суммируя их, получим
потери давления, связанные с трением жидкости о стенки, по всему
тракту охлаждения камеры.
Окончательно формула для подсчета потерь давления на трение
может быть представлена в следующем виде:
Квадратная зависимость потерь давления на трение о стенки от
расхода будет сохраняться только при тех сравнительно небольших
пределах изменения расхода, в которых критерий Рейнольдса
остается постоянным. При изменении расхода жидкости в широких
пределах зависимость становится более сложной, так как
коэффициент потерь на трение изменяется вместе с изменением критерия
Рейнольдса.
Потери давления на местных сопротивлениях определяются по
формуле
Учитывая, что wMi = m/(pM|FMi),
где £Mf — коэффициент местного сопротивления, зависящий от вида
местного сопротивления (поворот, резкое изменение сечения,
отдельные препятствия и т. д.). Его находят по соответствующим
справочникам или берут по данным экспериментальных проливок
аналогичных конструкций.
40
Общие потери давления в местных сопротивлениях на всем тракте
охлаждения могут быть подсчитаны по формуле
(2.24)
1=1
Изменение давления охладителя из-за изменения скорости движения
его по охлаждающему тракту может быть определено также по
отдельным участкам. Для этого необходимо знать изменение
скорости его течения и плотности в пределах каждого участка:
Apwi = Д
Если необходимо получить изменение давления на всем тракте
охлаждения в целом, то можно воспользоваться формулой
kpw* = Рвых^1ых/2 — РвЖх/2,
где Рвых> ЦЫх» Рвх. ^вх плотности и скорости на выходе из тракта
охлаждения и входе соответственно.
Взяв скорость течения по формуле (2.20), получим
4
На рис. 2.6 показано изменение составляющих потерь давления
по длине L охлаждающего тракта для камеры ЖРД, где хладоаген-
том является горючее, на ее расчетном режиме и на режиме
пониженной тяги.
Статическая характеристика охлаждающего тракта камеры ЖРД
между коллектором (см. рис. 2.8) и форсуночной головкой может быть
ох л. Ох
Рис. 2.6
41
построена по выражению, полученному теоретически:
I — 1
I — 1
В тех случаях, когда изменения скорости потока настолько невелики,
что %i, lMi и pi можно считать постоянными, так как в этом случае
и ЛОхл = const для всех режимов работы, выражение может быть
упрощено и приведено к виду
Рм.П — Рф.г= 4
Рвх
где
вых
Поскольку на гидравлическое сопротивление охлаждающего
тракта влияет большое число различных факторов, не только
определяющих состояние охладителя, но и зависящих от конструкции,
материалов и технологии изготовления, то точность теоретического
расчета обычно довольно низка. Поэтому в большинстве случаев
пользуются статическими характеристиками, полученными
экспериментально при проливках или испытаниях аналогичных готовых
двигателей. В этих случаях полученную экспериментально
характеристику аппроксимируют с необходимой для практических
расчетов точностью.
На рис. 2.7 приведены
статическая характеристика
охлаждающего тракта одной из
существующих камер
(зависимость перепада давлений на
охлаждающем тракте Арохлх от
расхода компонента тг), по-
=РнгП~Р9.гП
77
Рис. 2.7
строенная по
экспериментальным точкам (кривая 3), и
аппроксимирующие эту
зависимость кривые 1 и 2. Кривая /
построена исходя из условия,
что постоянная величина Лохл1
находится из данных,
соответствующих точке расчетного ре-
42
жима. Эта кривая дает точное совпадение
кривых в точке расчетного режима,
соответствующей расходу ml, и наибольшее расхождение
на пониженном режиме, соответствующем
расходу тг1.
Кривая 2 построена исходя из условия, что
кривые, экспериментальная и
аппроксимирующая ее, должны давать одинаковое значение
потерь в середине интервала регулирования.
Поэтому для кривой 2 Лохл11 находится из
данных, соответствующих режиму, когда тг =
= тгП. В этом случае аппроксимирующая
кривая будет давать отклонения от
экспериментальной и на расчетном режиме при тг =
= т*, и на пониженном режиме при тг =
= тт1. Но эти отклонения будут достаточно
малыми, и аппроксимацию можно считать
удовлетворительной:
Рм.П
П = ДРохлиРохл
Рис. 2.8.
Г. Статические характеристики магистралей. Следующими
звеньями, непосредственно соединенными с камерой, являются магистрали
горючего и окислителя, которые включают ряд узлов: гладкие,
жесткие и гибкие трубопроводы, сильфонные устройства,
дроссельные шайбы, различные измерительные и регулирующие устройства
и т. д.
Рассмотрим часть объекта регулирования, в котором магистраль
горючего, соединяющая коллектор / с выходом насоса горючего 5
(рис. 2.8) включает в себя регулировочные шайбы 3, жесткие
трубопроводы и отсечные клапаны 4. Обычно часть этой магистрали,
прилегающая к коллектору, имеет разветвления 2. Статическая
характеристика такой магистрали должна дать представление об
изменении суммарного перепада давлений на ней в зависимости от
изменения' расхода горючего.
Общий перепад давлений А/?2 будет состоять из суммы перепадов
на отдельных участках:
Д/?2 = Рп. г — Рм. г 1 — (Рм. г 2 — Рм. г l) ~Ь (Рм. р 3 — Рм. р г) ~Г
+ (Рм. г 4 — Рм. г з) + (ри. г — Рм. 9 4)-
Для первого участка магистрали (разветвленная часть 2 до
коллектора 1) перепад может быть подсчитан по формуле
— Рм. г 2 Рм. г 1 —
d,F-;
(2.26)
43
Диаметры трубопроводов выбираются так, чтобы скорость
движения жидкости в них сотр = 10 ... 30 м/с.
Выражение (2.26) может быть упрощено и записано в виде
АЛ = Рм. г 2 - Рм. г 1 = ~^-, (2.27)
16
\ A\li A2/2 А3/3 /
где Ат =
В этом виде формулой удобно пользоваться при определении
перепадов на различных режимах работы двигателя. Коэффициент легко
определяется также по результатам экспериментальных проливок:
Лм1 = ApiPr/rhh (2.28)
Вторым участком является регулировочная шайба 5, внутренний
диаметр которой подбирается при контрольных проливках всей
гидравлической системы горючего или при контрольных запусках
таким образом, чтобы соотношение компонентов соответствовало
его номинальному значению, а перепад давлений на ней будет
Рм.гз — Рм.гг- Перепад давлений на этом участке подсчитывается
по формуле для сосредоточенного сопротивления
Ари = рм# г з — Рм. г 2 = "оГг—щ—7Г * (2.29)
^f*p. шгр. ш"г
гДе М-р. ш — коэффициент расхода регулировочной шайбы; FPt ш —
площадь проходного отверстия регулировочной шайбы.
Коэффициент расхода регулировочной шайбы зависит от формы
отверстия и выбирается либо по справочным данным, либо по
данным проведенных проливок. Обычно |ip.ш = 0,7 ... 0,8. Формулу
(2.29) удобно привести к виду
А рц = рм. г з — Рм. г 2 = А?. ш^р/Рг- (2.30)
„ 1
где
„П
' У
"р. ш р. ш
ИЛИ ИЗ ПрОЛИВОК
Ар.ш = Дрр.шрг/т?. (2.31)
Третьим участком является отсечной клапан 4. Поскольку во
время работы установки клапан неподвижен и перемещается только
при выключении, то его следует считать постоянным
сосредоточенным сопротивлением. В этом случае расчет его ведется по такой же
формуле, как и для регулировочной шайбы:
Арш = рм. г 4 — Рм. г з = -9ГГ2—^2—Г" > (2.32)
здесь [хкл. г и FKJI. г — коэффициент расхода и проходная площадь
отсечного клапана горючего соответственно.
44
Коэффициент расхода отсечного клапана зависит от его
конструкции и может быть получен экспериментальными проливками или по
специальным справочникам. Основной размер FKJI.r зависит от того,
какого порядка перепад может быть допущен на этом узле. Следует
иметь в виду, что с уменьшением перепада размеры и масса отсечного
клапана увеличиваются, а с увеличением растет затрата энергии
на привод насоса. В выполненных установках перепад на отсечных
клапанах изменяется в пределах (2 ... 5). 105 Па.
При наличии данных экспериментальных проливок удобно
пользоваться формулой
Арга = Рм. г4 - Рм. гз = АКЯи гт1/рг, (2.33)
где Лкл.г= l/VvL^.rFL.r).
Четвертым участком является трубопровод от отсечного клапана
до насоса, который может иметь как жесткие прямые, так и гибкие
участки — сильфоны. Кроме того, он может иметь повороты и
местные сопротивления. Поэтому его расчет необходимо также вести по
участкам, для каждого участка выбирая по справочным материалам
соответствующий коэффициент местного сопротивления %Mi. В
результате формула для расчета этого участка будет иметь следующий
вид:
= Рн. г - Рм. г4 = [ |] 5м£ -уА -^- • (2.34)
Если есть возможность проливки участка трубопровода в
собранном виде, то удобно представить связь между расходом жидкости
и перепадом давлений в таком виде:
Apiv = Рн. г - Рм. г 4 = Атт1/рГУ (2.35)
где Аш =
-
п
V
/ ! JmL
Рг Рг лишяё Fj
Из проливок величина Аш может быть определена следующим
образом:
Аш = A/?iVpr/m?. (2.36)
Окончательно разность давлений, необходимая для преодоления
сопротивления магистрали горючего, будет определяться как
Арм. г = Рн. г — Рм. г 1 = (Рм. г 2 — Рм. г i) + (Рм. г 3 — Рм. г г) +
+ (Рм. Г4 — Рм. гз) + (Рн. г — Рм. г*) = И mi + Ар, ш + ^кл. г -г Аш) ГП'г/рг$
После того как выбраны все конструктивные элементы магистрали
и их геометрические размеры, можно пользоваться более простой
зависимостью
АРм. г = Рн. г — Рм. г 1 = 7^ » ^м. v — ^mi ~Г Ар. ш -[- Акл. з -j- Лм4.
(2.37)
45
На рис. 2.9 приведен график статической характеристики
магистрали горючего с точками а и Ъ, соответствующими расчетному и
пониженному режимам.
Магистраль окислителя (рис. 2.10) от форсунок камеры сгорания /
до насоса 5 включает в себя также ряд агрегатов и трубопроводов.
Особенностью ее является то, что в ее состав помимо регулировочной
шайбы 2 и отсечного клапана 4 включен дроссель 3, позволяющий
изменять гидравлическую характеристику магистрали в широких
пределах.
Определять перепады давлений на отдельных участках
магистрали окислителя следует так же, как и для магистрали горючего.
Для всех участков, кроме дросселя 3, расчет можно вести по формуле
. ЛРм. о — (рм. о 1 — Рф. о) ~Г (Рм. о 2 ~ Рм. о l) + (рм. о 4 — Рм. оз)+ :
+ (Рн. о — Рм.о 4) =Им. о 1 (Л2/Ро)# (2.38)
гДе Ам. 0 1 — коэффициент, полученный по справочным или
экспериментальным данным.
Для дросселя статическая характеристика будет представлять
собой поле, так как изменяются его проходная площадь F^t 0
(от 0 до max) и коэффициент расхода ^др# 0.
Особенностью конструирования дросселей является то, что при
работе двигательной установки на расчетном режиме (обычно режим
максимального расхода компонентов) дроссель остается открытым
только на 70 ... 75 % своей
максимальной проходной площади. Это
необходимо для обеспечения
запасов по площади, используемых
при регулировании двигательной
установки. Обычно связь между
расходом компонентов, площадью
проходного сечения и перепадом
Из Ша
г1
— —. ^-* _~ — — -4
/
тгХ
Рис. 2.9
Рис. 2.10
46
давлений определяется следующей формулой:
1
Рм. о 3 — Рм. о2 =
Ро
(2.39)
На рис. 2.11 для одного из типов дросселей приведен график
изменения геометрической (проходной) площади дросселя Fnv =
= ^др.щДяйдр), коэффициента расхода \х и эффективной площади
^эф = Н^др по высоте его подъема гдр. Этот график является
статической характеристикой дросселя.
На рис. 2.12 приведена статическая характеристика дросселя
магистрали окислителя, на которой хорошо видна расчетная рабочая
точка. В этой точке дроссель открыт на 70 % и перепад давлений
на нем соответствует выбранному Д/?дР. 0. По этой характеристике
видно, что с уменьшением проходной площади дросселя Fnv,0 при
том же расходе компонента перепад давлений на дросселе будет
увеличиваться, что позволяет изменять характеристику всей
магистрали. Перепад давлений, расходуемый на преодоление
сопротивления магистрали окислителя при заданном расходе компонента, будет
выражаться следующей зависимостью:
Арм.о = Д/?м.о1 + Д/Ър. о = (Рм.о1 — Рф. о) + (Рм. о 2 — Pm.oi) +
+ (Рм. о 4 ~~ Рм. о з) + (Рн. о — Рм. 04) + (Рм. о 3 — Рм. о 2) = Рн. о — Рф. о =
Г- (2-40)
цр.о1 др.
Из формулы (2.40) следует, что характеристика всей магистрали
окислителя может изменяться в зависимости от величины проходной
площади дросселя. При
проектировании дросселя необходимо
выбирать так его размеры, чтобы в
процессе работы при наибольших
—*\ -^г 1^—
Рис. 2.11
0,75
Рис. 2.12
lmQ/m*0
47
перепадах в нем не могли возникать кавитационные режимы течения.
Для этого следует перепад давлений А/?др#0 на расчетном режиме
выбирать 8 ... 12 % от величины давления перед клапаном.
2.3. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ
ПОДАЧИ КОМПОНЕНТОВ ТОПЛИВА
В любой двигательной установке гидравлические системы
каждого из компонентов можно разделить на две части, одна из
которых является пассивной частью гидравлической системы. Для
обеспечения ее работы требуется подача компонентов (на ее вход)
под некоторым давлением, определяемым ее гидравлическим
сопротивлением и расходом. Это давление обеспечивается второй —
активной частью системы.
Статическая характеристика каждой из этих частей имеет
определенный вид, зависящий от свойств компонента и характеристик
агрегатов и деталей, ее составляющих.
Рассмотрим двигательную установку с вытеснительной системой
подачи (рис. 2.13). Часть системы, которая подает в камеру
окислитель (от Во до Л), и часть системы, которая подает в камеру
горючее (от В/гдо А), являются пассивными. Эти части требуют з а -
траты энергии на преодоление их сопротивлений.
Пневматическая часть системы (от С до Во и Вг) является
активной; она обеспечивает подачу компонентов в пассивную часть
системы под требуемым давлением с
помощью газового редуктора 5,
дросселирующего сжатый газ, запасенный в
аккумуляторе С с давлением /?ак.
На установившемся (расчетном)
режиме работы двигательной установки
статические характеристики этих частей
(так как эти части работают совместно)
должны пересекаться в точке,
соответствующей этому расчетному режиму.
На рис. 2.14 приведены статические
характеристики частей системы подачи
компонентов. На расчетном режиме
работы характеристики пересекаются
соответственно в точках М* и /Wq. При этом
обеспечиваются необходимые для
расчетного режима расходы компонентов в
камеру, соответствующие выбранному
расчетному соотношению компонентов k*m.
При переходе на новый режим работы
при расходах, соответствующих гаг1 и то1
и заданному km, необходимо, чтобы ста-
тические характеристики активных и пас-
сивных частей гидравлических систем
Рис. 2.13 пересекались в точках Мг1 или Мг2 и
48
р,Па >
/77/ тг,кг/с
Рис. 2.14
о, кг fa
соответственно AfOi или М01. Для того чтобы система стала
работать в точках МГ1 и Мо1, т. е. при неизменных характеристиках
пассивных частей АВГ и АВ0, необходимо снизить характеристики
активных частей ВГС и В0С. Это можно сделать, перерегулировав
редуктор подачи сжатого газа 3 на пониженное давление
[характеристики (SrC)i и (BoQil-
Если же перенастройка газового редуктора нежелательна из-за
наличия в баках большого количества газа высокого давления, а
необходимо заставить систему подачи работать в точках МГ2 и М02,
то следует изменить
характеристики частей АВГ и АВ0. На
рис. 2.14 это кривые (ЛЛГ)1 и
(AB0)i. Для того чтобы эти
кривые переместились вверх,
необходимо гидравлическое
сопротивление магистралей увеличить,
что можно осуществить, изменяя
соответствующим образом
проходные сечения дросселей 1 и 2 (см.
рис. 2.13). Из приведенного
примера можно сделать следующий
вывод: необходимый режим
работы двигательной установки
может быть получен путем
изменения статических характеристик
как ее пассивных (ABV и АВО)У
так и активных частей (ВГС и В0С).
На рис. 2.15 приведена схема
ДУ с насосной системой подачи
и питанием газогенератора тур-
бонасосного агрегата основными
компонентами. Пассивные части Рис 2.15
4 А. И. Бабкин и др.
49
т* то,кг/с
Рис. 2.16
т*птг;кг[с
системы питания для каждого компонента состоят из двух частей.
Для камеры ЖРД, как и раньше, они обозначены В0А и ВГА, а
для газогенератора, питающего ТНА, В0АТ и ВГАТ (см. рис. 2.16).
В части В0А предусмотрен дроссельный кран окислителя У, что
позволяет при необходимости изменять статическую характеристику
этой части и устанавливать необходимое соотношение компонентов
в камере km. Обе части системы, обеспечивающие питание
газогенератора 4, В0АТ и BtAT снабжены дроссельными кранами 5 и б, что
дает возможность, изменяя их характеристики, подбирать
необходимые по величине расходы компонентов в газогенератор т^. 0 и
/йгг.г, а значит, поддерживать и заданное значение соотношения
компонентов в газогенераторе kmrr.
Активными частями системы являются насосы 2 и 7 турбонасос-
ного агрегата, обеспечивающие увеличение давления между
точками системы А0В0 и АГВГ за счет механической энергии,
подводимой от турбины 3. Это давление обычно изменяется путем изменения
частоты вращения рабочих колес насосов.
На рис. 2.16 приведены статические характеристики системы
подачи горючего и окислителя. При работе ДУ на расчетном режиме
с расходами через насосы т* = т*. г + /й?г. г и т% = т*. 0 +
+ т'гт.о характеристики пассивных частей (АВГАТ)* и (АВОАТ)*
и активных (Лг£г)* и (Лово)* пересекаются соответственно в
точках М* и Mi. При этом частота вращения рабочих колес насосов
соответствует со*. Рассматривая переход на новый режим работы,
соответствующий расходам компонентов mH. ri = m*. n + Щг.п
и ^н.о1 = ^к.о1 + ^гг. 0 1 ПРИ km = &т при ИСХОДНЫХ СТаТИЧе-
ских характеристиках частей (АВГАТ)* и (АВОАТ)*У видим, что они
смогут работать только в точках Мг1 и Moi. Центробежные же
50
насосы 2 и 7 (см. рис. 2.15) могут работать при со = со* и расходах
mri и moi только в режимах, определяемых точками МГ2 и М02
(см. рис. 2.16). Очевидно, в этом случае работа установки станет
невозможной, так как давления, необходимые для работы
магистралей (точки Мг1, Moi) не совпадают с давлениями,
обеспечивающими насосами в точках МГ2 и М02. Наиболее простым средством,
позволяющим совместить рабочие точки, является изменение
частоты вращения рабочих колес насосов.
По магистрали горючего это достигается при частоте вращения
насосов, соответствующей coj. По магистрали окислителя переход
на новый режим сложнее из-за неидентичности характеристик
насосов окислителя и горючего и поэтому выбор частоты вращения
рабочих колес насосов щ производится по характеристике магистрали
горючего. Характеристика (Л0В0)1 может не пройти через точку Моь
а пересекаться с характеристикой (ЛВОЛТ)*, например, в точке Моз.
Расход окислителя при этом станет больше заданного и равным m0lI,
а соотношение компонентов отклонится от расчетного значения.
Для того чтобы установить необходимый режим, следует изменить
характеристику части (АВ0АТ)* так, чтобы она прошла через точку
М%. Этот сдвиг характеристики можно получить только путем
увеличения сопротивления магистрали. В приведенной на рис. 2.15
схеме это можно сделать, уменьшая проходную площадь
дроссельных кранов / и 5. В этом случае статическая характеристика
части АВОАТ займет положение (AB0AT)i, что обеспечит получение
заданного режима работы камеры.
Таким образом, могут быть построены рабочие точки всех
промежуточных режимов, в каждой из которых, как уже было ранее
указано, должен сохраняться баланс расходов:
Величины расходов компонентов т0#к и тг. к, поступающих
в камеру, определяются заданной тягой и соотношением
компонентов по статической характеристике камеры. Величины же расходов
компонентов, поступающих в газогенератор, определяются по
балансу мощностей, насосов и турбины турбонасосного агрегата и
соотношению компонентов, принятому для газогенератора.
Из изложенного вытекает следующее. Во-первых, в тех
случаях, когда две части гидравлической системы питаются от одного
источника (на схеме рис. 2.15—это магистрали питания горючим
камеры и газогенератора от одного центробежного насоса),
необходимо в одной из частей иметь агрегат, позволяющий изменять
статическую характеристику этой магистрали (в данном случае — это
дроссель 6 магистрали горючего газогенератора).
Во-вторых, в том случае, когда магистрали питаются от двух
насосов, связанных между собой механически (в схеме рис. 2.15 —
это магистрали питания камеры горючим и окислителем),
необходимо для согласования их работы на различных режимах включать
в состав одной из них агрегат, позволяющий изменять ее статиче-
4* 51
скую характеристику (на схеме рис. 2.15 — это дроссель магистрали
окислителя 1).
Чтобы обеспечить работу двигательной установки на новом
режиме, соответствующем точкам МГ2 и М02> при со = со* (см.
рис. 2.16), необходимо увеличить гидравлическое сопротивление
магистралей окислителя и горючего, переводя их характеристики из
расчетного положения (АВОАТ)* и (ЛВГЛТ)* в положение (ЛВ0^т)и
и (АВгАч)ц соответственно. Но в этом случае необходимо
предусмотреть дроссель и в части АВГ системы питания горючим.
2.4. СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
ДВИГАТЕЛЬНОЙ УСТАНОВКИ
В настоящее время ЛА, снабженные двигательной
установкой с ЖРД, выполняют в полете различные задачи, каждая из
которых требует соответствующего изменения тяги или давления
в камере сгорания.
В табл. 2.1 указаны ориентировочные данные о пределах, в
которых должна изменяться тяга двигательной установки с ЖРД при
выполнении отдельных задач полета (принимая за единицу
номинальное значение тяги).
Для того чтобы изменить тягу или давление в камере сгорания,
необходимо знать связь между положением регулирующего органа
двигательной установки и величиной, определяющей режим ее
работы, т. е. величиной давления в камере или соотношением
компонентов. Такую связь и обеспечивает статическая характеристика.
Следовательно, статическая характеристика связывает выходную
величину объекта регулирования (давление в камере) с входной
величиной (положением регулирующего органа).
Статические характеристики ДУ могут быть построены и для
выявления других связей, например, связи изменения соотношения
компонентов с изменением положения дросселя магистрали
окислителя или изменения давления в камере с воздействием на объект
регулирования различных возмущений, как внешних, так и
внутренних. К внешним возмущениям можно отнести: отклонения
давлений компонентов на входе в насосы; отклонения плотности
компонентов от расчетной; отклонения давления окружающей среды
Таблица 2.1
Предельные изменения тяги (ориентировочно)
Задание
Запуск ракеты с экипажем с Земли
Переход с окололунной орбиты на траекторию
спуска
Вертикальная посадка на Луну
Встреча на орбите
Низколетающий аппарат
Характер
изменения
тяги
Ступенчатый
То же
Непрерывный
То же
»
Пределы
изменения
1 :2
1 : 6
1 : 10
1 : 100
1 : 20
52
о*
к
1,0
0.85
0,75 1
0,5 -
" / 1
1
I
1
i
I
1
!
0,15
0.5
Рис. 2.17
от расчетного его значения. К
внутренним возмущениям можно отнести:
отклонение гидравлических
характеристик трубопроводов, смесительных
головок, тракта охлаждения камеры;
отклонение характеристик насосов и
турбины от расчетных; отклонения в
процессах выделения тепла,
учитываемых изменением комплексов рк и рг1.
камеры и газогенератора соответственно.
Статические характеристики объекта
регулирования могут быть
представлены в виде уравнений, связывающих входную и выходную
величины, или в виде графиков, построенных по этим уравнениям
или полученных экспериментально. Можно также получить
уравнения статических характеристик, аппроксимируя опытные данные.
В тех случаях, когда по заданию необходимо изменение режима
работы двигателя в достаточно широких пределах, основной
является статическая характеристика, связывающая выходную
величину — давление в камере — с входной величиной — положением
регулирующего органа. Такая характеристика носит название
регулировочной.
Для ДУ, схема которой приведена на рис. 1.10, такая
характеристика должна связывать давление в камере сгорания с величиной
проходной площади дросселя газогенератора FR^ гг или его
положением 2др. гг. Примерный вид такой характеристики, построенной
в относительных координатах, приведен на рис. 2.17.
Для того чтобы построить эту характеристику, необходимо учесть
свойства всех звеньев, работающих в данной установке. Это можно
сделать, решая совместно уравнения статических характеристик или
пользуясь графоаналитическим методом, позволяющим наглядно
видеть изменения режимов работы каждого из звеньев. Такая
наглядность дает возможность вносить необходимые коррективы в
свойства используемых звеньев и находить соответствующие положения
регулирующих органов.
Покажем на примере построения статической характеристики
для ДУ, схема которой приведена на рис. 1.10, применение
графоаналитического метода.
Исходной является статическая (или дроссельная)
характеристика камеры сгорания, так как это главное звено объекта
регулирования.
На рис. 2.18, а приведена статическая характеристика камеры
сгорания. Исходной для ее расчета является точка расчетного
режима. По этой характеристике определяется необходимый
суммарный расход компонентов и далее по заданному соотношению
компонентов находятся расходы горючего пгГ и окислителя т0 для всех
необходимых режимов:
1 k
53
M7
м)
А
<
/77/7
Рно
10
10
0,8
0,6
Г
1
I 1
1,
1
!;
—i(~
Л
Рк !
-Рил **
Pm.qS
\ p«
1 .
m0 _
^5" /77r/ ^ fflr
Рис. 2.18
^ Лк Рк
54
Далее строятся статические характеристики обеих частей
смесительной головки камеры сгорания. В наиболее простом случае,
как было указано раньше, по параметрам расчетной точки находятся
коэффициенты сопротивления для головок горючего и окислителя:
= рг (Рф.г — Рк)М?2; Лф. о = ро (рф. о — рк)/гп
Эти коэффициенты могут быть нйдены и по результатам
экспериментальных проливок. Зная эти коэффициенты, можно построить
статические характеристики смесительных головок, пользуясь
следующими зависимостями:
ф.т4 . n
Рф.г — Рк = > Рф.о — Рк =
> Рф.о Рк •
На рис. 2.18, бив приведены статические характеристики
головок камеры сгорания, построенные в заданных пределах изменения
режима по расходу компонентов.
Следующим участком является рубашка охлаждения камеры
сгорания. На рис. 2.18, д показана статическая характеристика
охлаждающего тракта камеры сгорания.
На рис. 2.18, з приведена статическая характеристика
магистрали горючего, соединяющей коллектор рубашки охлаждения
с насосом горючего. Она построена по зависимости (2.37):
т2
ДРм.г == Рн.г — Рм.г1 = (^м1 ~Ь ^р,ш Н~ ^кл. г ~\~ Ami) "~JJ— ==
А
Зная давление в камере и потери давления на каждом участке
магистрали горючего, можно построить статическую характеристику
пассивной части этой магистрали, т. е. получить изменение величины
давления на ее входе со стороны насоса для обеспечения необходимых
расходов горючего на любом из заданных режимов работы
двигательной установки. Это давление определяется следующей суммой:
Рн.г = Рк + (Рф.г — Рк) — (Рм.п — Рф.г) + (Рн.г — Рм.п)-
Суммирование можно произвести графически или получить
аналитически, воспользовавшись соответствующими уравнениями.
На рис. 2.18, к приведена характеристика, полученная в
результате такого суммирования.
Для того, чтобы построить такую же характеристику для системы
подачи окислителя, следует использовать статические
характеристики отдельных участков этой системы. На рис. 2.18, б приведена
построенная по указанной ранее методике характеристика части
смесительной головки камеры сгорания. На рис. 2.18, г показана
статическая характеристика участка магистрали между головкой
и дросселем магистрали окислителя. Величина перепада давлений.
55
на этом участке может быть подсчитана исходя из следующей
зависимости:
п
Рм.о2 — Рф.о = 23 Ai(m20/p0).
t=\
Далее по схеме ДУ в этой магистрали установлен дроссель. При
построении его статической характеристики на расчетном режиме
работы ДУ выбирают потери давления на нем соответственно
указанным ранее рекомендациям, а проходную площадь /^р. 0
принимают постоянной.
На рис. 2.18, е приведены статическая характеристика
дроссельного крана, а также характеристика для случая, когда дроссель
будет полностью открыт Fnr),omax. Расчет потерь следует вести
по соотношению
Рм.оЗ Рм.о2— 9ij2 F*2 n *
^др.огдр.о^о
Затем следует построить характеристику участка магистрали между
регулирующим клапаном магистрали окислителя и насосом
окислителя. Потери давления на этом участке, как было указано ранее,
могут быть подсчитаны исходя из следующей зависимости:
п
Рм. о — Ры. оЗ = 23 Al (^о/Ро).
1=1
Статическая характеристика этого участка приведена на рис. 2.18, ж.
Зная изменение потерь давления на отдельных участках
магистрали и давление в камере сгорания на различных режимах работы,
можно получить статическую характеристику пассивной части
системы подачи окислителя как сумму
Рн. о = Рк + (Рф. о — Рк) + (Рм. о2 — Рф. о) +
+ (Рм. оз — Рм. о г) + (рн. о — Рм. оз)-
Результат этой операции приведен в виде графика на рис. 2.18, и.
После того, как построены статические характеристики
пассивных частей системы подачи компонентов в камеру сгорания, можно
приступить к построению характеристик активной части
(центробежных насосов) этих систем.
Точками, в которых должны пересекаться статические
характеристики этих частей, являются точки с координатами т*, р%. г
и т£, pi. 0.
Расчет насосов и построение их характеристик производится цо
известным в литературных источниках методикам [24].
Для насосов расчетными точками являются точки с
координатами т?, (рн.г — рг)* и то, (рн.о — Л>)*> гДе Рг и р0 — давления
на входе в насосы. Эти давления выбираются после проведения
подробного массового анализа ЛА в целом. Для ДУ они задаются
в технических условиях на проектирование.
56
Выбрав по наихудшим антикавитационным свойствам одного иг
компонентов угловую скорость ю* рабочих колес, можно
спроектировать насосы как для окислителя, так и для горючего, а значит,
и построить их статические характеристики, которые носят название
нормальных (или напорных). Напорные характеристики
центробежных насосов строятся обычно в координатах Я, ^, где Н — напор,
Дж/кг, V — подача насоса, м3/с.
При построении статической характеристики объекта
регулирования ДУ удобно эти характеристики представлять в координатах
Рну ™>™ где рп = (рн — р) — давление, создаваемое насосом, Па,
а тн — расход компонента через насос, кг/с. Для этого следует
значения Н и V умножить на плотность компонента р:
(Ри — р) = Нр; т = Vp.
Для удобства можно характеристики аппроксимировать
уравнениями более простого вида: для насоса горючего (для активной
части магистрали)
Ри. г — Рт = К. гСО2 — Вп. рС0ШР — DH. vthl
и аналогично для насоса окислителя
Ри. о — Ро^ АП. Осо2 — Вн. Ocom0 — DH. от%у
где коэффициенты Лн.г; Вн. г; Z)H. г; Л„. 0; Вн. 0; DH. о находятся
по точкам рассчитанной или полученной экспериментально
характеристики. Для того чтобы характеристики пассивной и активной
частей гидравлической системы совместились, необходимо отсчет
давлений вести от общего нуля. Поэтому необходимо характеристики
насосов строить по следующим уравнениям; для насоса горючего
(Рн. г)акт = Ан, г(о2 — ВЕ, гсотг — DH. гтг + рГ
и для насоса окислителя
(Рн. о)акт = АНи п0)2 — Вн. о<0Л0 — ^н. о^о + Ро-
Совмещенные характеристики пассивных и активных частей систем
подачи горючего и окислителя приведены на рис. 2.18, л и м. Таким
образом, полностью определены режимы работы всех узлов систем
подачи компонентов на расчетном режиме.
Если необходимо перейти на режим пониженной тяги, заданный
на характеристике камеры точкой /?к1, то по msr и по заданному
соотношению компонентов £mI находят расходы окислителя /йо1
и горючего тг1. Соответственно этим расходам на статических
характеристиках каждого из звеньев находят соответствующие
перепады давлений, необходимые для их работы. Тогда на графике
пассивной части гидравлической системы подачи горючего получают
согласно уравнению рИш г х = рк1 + (рф. r — pK)i + (/?м. г i —Рф.гЬ +
+ (Рн. г — Рм. ri)i новую точку статической характеристики этой
части, указанную в соответствующих координатах на рис. 2.18, к.
57"
Эта точка показывает, каким должно быть давление горючего
перед входом в магистраль, для того чтобы обеспечить необходимый
камере расход компонента на новом режиме работы.
Точно так же по расходу окислителя то1 находим перепады
давлений на отдельных участках системы подачи окислителя. При
этом считаем, что дроссель магистрали окислителя остается
неподвижным, т. е. ^др. о = ^др. о- Тогда на графике пассивной части
гидравлической системы подачи окислителя получим согласно
уравнению
Рн.о1 = Рк1 "Г (Рф. о — Pk)i + (Рм. 02 — Рф. o)l +
+ (Рм. о 3 — Рм. о 2)l + (Рн. о ~ Рм. о з)
новую точку статической характеристики этой части, указанную
в соответствующих координатах на рис. 2.18, и (точка М3). Эта
точка показывает, каким должно быть давление окислителя перед
входом в магистраль для того, чтобы камера работала на заданном
режиме и при заданном соотношении компонентов kml. Нанеся
полученные точки на графики (см. рис. 2.18, Л и Л1), увидим, что
при заданном расходе тг1 активная часть системы питания
горючим — насосы — могут работать при угловой скорости со* только
в точке М2 и обеспечивать соответственно давление /7Н. г11, а для
работы пассивной части системы на этом расходе необходимо
давление рн. ri- Для того чтобы обе части системы работали совместно,
необходимо обеспечить пересечение их статических характеристик
в одной общей точке при расходе компонента тг1. Это можно
сделать, либо опустив характеристику насоса горючего, изменив
частоту вращения его рабочего колеса, либо подняв характеристику
пассивной части, увеличив ее сопротивление, но в принятой схеме
такая возможность не предусмотрена.
Новая угловая скорость рабочего колеса с^ находится по
основному уравнению насоса при заданных значениях рн.п, Ръ Щ1
и известных коэффициентах Лн#г, Вн. г> ^н. г- Новая статическая
характеристика насоса показана на рис. 2.18, м, проходящей через
точку Mi, Это значит, что обе части системы, активная и пассивная,
работают совместно, обеспечивая заданный расход горючего в
камеру сгорания при заданном давлении в камере /?к1. Для системы
питания камеры окислителем совмещение характеристик активной
и пассивной частей на пониженном режиме осложняется тем, что
угловая скорость рабочего колеса насоса уже задана и равна coj,
так как насосы соединены общим валом. В этом случае точку, через
которую пройдет характеристика активной части системы питания
окислителем при расходе тоЪ можно найти из условия
Рн.о i = АВшОщ = B^otoithli — Dmli -\-p0.
Для обеспечения совместной работы обеих частей системы эта
величина давления должна соответствовать точке М3 характеристики
пассивной части системы. Но это будет выполняться только в том
случае, если нормальные характеристики насосов горючего и окис-
58
лителя будут подобны. Это значит, р!гр_ j
что характеристики, построенные в Ън-р)*
относительных координатах в
пределах заданного изменения
режимов, полностью совпадают так, как
это показано на рис. 2.19.
Если такого подобия
характеристика насосов не имеет, то точка
пересечения характеристики насоса
окислителя с координатой то1
может оказаться выше или ниже
точки М3. Предположим, что она
оказалась выше (в точке М4) и харак-
Насос
горючего
Рис. 2.19.
теристика насоса при угловой скорости щ проходит так, как
указано на рис. 2.18, л и пересекается с характеристикой магистрали
в точке Мъ. Это значит, что работая совместно, пассивная и
активная части системы будут обеспечивать расход окислителя больше
необходимого. Это приведет, в свою очередь, к увеличению
суммарного расхода компонентов и давления в камере /?к,
уменьшению расхода горючего и к изменению соотношения компонентов km.
В результате на ЛА будет перерасход окислителя, что сократит
время работы ДУ и увеличит остаток горючего в баке.
Исправить положение в данной ситуации можно, только изменив
характеристику пассивной части системы питания камеры
окислителем так, чтобы она проходила через точку Л44 (см. рис. 2.18, л).
Это можно сделать, только увеличив ее сопротивление путем
изменения проходной площади дросселя магистрали окислителя FAV.0.
Из рис. 2.18, л видно, на какую величину необходимо увеличить
сопротивление магистрали. Она определяется разностью давлений
между точками М3 и М4. Обозначим ее как Д/?др. 0; на такую же
величину должны быть увеличены и потери давления на дросселе
магистрали окислителя.
Действительно, так как расход должен остаться таким же, и
равным гао1, то можно записать
Идр. oi'др. о Y 2р0 (Рм. о 3 — Рм. о 2)l = И-др. о 1
. о I
р. о]-
х/2ро1(Л,.о8-Рм.о«)1 +
Отсюда эффективная площадь дросселя
• «л» " •>< ДР-о I == М'ДР-о^др. о I/ -у- ч , д •
М^ V (Рм. О 3 — Рм. О 2)1 "Г ДРдр. О
При малых изменениях коэффициента расхода формула может быть
упрощена, и тогда проходная площадь дросселя окислителя будет
(Рм. оз — Рм. 02)1
7 , F* 1/
др. о I — •'ДР. о у
(Рм. оз — Рм. о 2)1
(Рм. о з — Рм. о 2)1 + АРдр. о
На рис. 2.18, е показана статическая характеристика дросселя
для случая, когда он установлен в новое положение.
59
Проведя расчеты для ряда промежуточных режимов, можно
построить регулировочную характеристику, связывающую величину рю
определяющую заданный режим, и проходную площадь дросселя
магистрали окислителя.Эта характеристика приведена на рис. 2.18,#.
В выбранной схеме двигательной установки тяга изменяется
путем изменения напора насосов, что требует изменения частоты
вращения рабочих колес. Это достигается изменением мощности
турбины, приводящей их в движение. Таким образом, на каждом из
установленных режимов соблюдается следующий баланс мощностей:
WT = 2 NHi
где N7 — мощность турбины; 2 NH — суммарная мощность всех
насосов. В развернутом виде это будет выглядеть следующим
образом:
. г — Рг) i гпр (Рн. о — Ро)
j
i
j
" РгЛн.г РоЛн.о
Здесь £ад — располагаемая адиабатная работа турбины, Дж/кг,
шт — секундный расход рабочего тела через турбину, кг/с; г\т —
эффективный коэффициент полезного действия турбины.
Имея все данные правой части уравнения (2.41) из расчета
насосов и системы подачи горючего и окислителя, можно назначить
величины, определяющие конструкцию турбины и системы ее
питания рабочим телом.
В данном примере такой выбор легко сделать, так как в схеме
двигательной установки турбина имеет автономное питание рабочим
телом с вытеснительной системой подачи жидкого компонента в одно-
компонентный газогенератор. Если газогенератор турбины питается
от основных насосов, указания по составлению таких систем
уравнений и методы их аналитического или графического решений
приведены в специальной литературе [8, 27].
В рассматриваемом примере мощность турбины определяется
только суммарной мощностью, затрачиваемой на привод насосов,
обеспечивающих питание камеры. Поскольку количество
компонента, которое необходимо затратить на привод насосов, должно
быть минимальным, то работа, снимаемая с единицы массы рабочего
тела, должна быть максимальной.
LT = NT/riij = LaVh> (2.42)
где LT — удельная работа турбины.
Из (2.42) видно, что удельная работа турбины зависит от двух
величин — от адиабатной работы ££д и от к. п. д. турбины г)т.
Поскольку величина к. п. д. турбины ограничена и всегда меньше
единицы, то основной величиной, на которую можно воздействовать,
является адиабатная работа LlA.
Величины, определяющие адиабатную работу, связаны между
собой следующим выражением:
т * Хт г> пг
60
или Lin = —^~
~ &4%-i)/%T J >
где Хт — показатель адиабаты; RT — газовая постоянная рабочего
тела, поступающего в турбину; Т% — температура торможения
рабочего тела; рт1 и /?т2 — давления газа на входе и выходе из турбины;
б = рт1/рт2 — степень понижения давления в турбине. При
использовании двухкомпонентного газогенератора величины %т, RT и Тт
являются функцией соотношения компонентов в газогенераторе kmrr,
а температура газа перед турбиной выбирается по работоспособности
конструкции. При применении однокомпонентного газогенератора,
использующего реакцию разложения компонента, например
перекиси водорода или гидразина, величины %т, RT и Тт можно
принимать постоянными, а температура 71; определяется применяемыми
химическими веществами.
В рассматриваемом примере применен однокомпонентный
газогенератор, поэтому адиабатная работа будет определяться лишь
степенью понижения давления в турбине.
Так как величина противодавления /?т2 для автономной турбины
выбирается исходя из того, как будет использоваться газ,
выходящий из турбины (наддув бака, питание рулевых сопел, получение
реактивной силы), то во всех случаях это давление будет задано.
Поэтому единственной возможностью увеличить адиабатную работу
является повышение давления на входе в турбину.
Для предкамерной турбины давление на ее выходе определяется
давлением в камере сгорания и сопротивлением промежуточных
газоводов.
В объекте регулирования, стартующем с Земли, давление рт2
выбирается таким, что оно обеспечивает сверхкритический перепад
на выходном сопле. При этом давление внешней среды не влияет
на мощность турбины, а степень понижения давления на выходном
сопле будет определяться следующей зависимостью:
Л РТ2
где %т — показатель адиабаты газа, вытекающего из сопла.
Следовательно, основной величиной, которая определяет Ь*ая,
будет давление рт1. Выбор его связан с решением многих вопросов
как энергетического, так и конструктивного порядка. Во всяком
случае это давление должно быть выбрано так, чтобы решение общей
задачи, поставленной перед ЛА, было наилучшим.
Обычно при проектировании ДУ ставится задача получения ее
минимальной массы. При применении активной турбины малой пар-
циальности общая масса выбранной системы привода будет
выражаться следующей зависимостью:
Мт + М6Т + /Ис. пГ,
где УИтнл — масса самого турбонасосного агрегата (ТНА); Мт —
масса компонента Г, обеспечивающего работу турбины; Мьг —
61
масса бака, в котором находится компонент Т\ Мс,иТ — масса
системы, обеспечивающей подачу компонента Т в турбину и
состоящей из агрегатов, баллона, содержащего вытесняющий газ, и
самого газа.
На рис. 2.20 приведен ориентировочный график изменения
указанных составляющих и суммарной массы системы подачи
компонента, обеспечивающей работу турбины. Из графика видно, что
суммарная масса имеет минимум при некотором значении
давления /?т1, которое и принимается за расчетную величину.
Таким образом, выбрав давление /?т1, можно полностью
определить значение адиабатной работы, подводимой газом к
турбине.
Второй величиной, которую следует выбрать, является т]т.
Для турбин различных типов хорошо известна связь цт с
отношением и/саю где для данного случая с*аА = -/2/,ад.
Пользуясь рекомендациями, изложенными в работах по
проектированию турбин ЖРД [24], задаемся максимально допустимым
значением окружной скорости и (со задана насосами) и находим
величину т]т из графика т]т = / (и/сад), приведенного на рис. 2.21.
Поскольку в установках такого типа используются турбины с
малой парциальностью, то на рис. 2.21 нанесены рабочие точки на
кривой, соответствующей парциальности г = 0,26. Штрихпунктир-
ная линия — линия максимальных КПД. Рабочая точка
пониженного режима, с одной стороны, определяется частотой вращения
насосов ©!, а с другой — адиабатной работой, определяющей
скорость сад1. Но в системе, в которой газ протекает последовательно
через два участка, на каждом из которых сохраняется
сверхкритическое отношение давлений на всех режимах работы, при изменении
расхода газа отношение давлений остается без изменений. В
двигателе, который рассматривается в качестве примера, как раз такой
случай и имеет место. Первое сверхкритическое отношение давлений
устанавливается в сопловом
аппарате турбины, а второе — в сопле
на выходе из выхлопной трубы,
Для такого случая, когда один
Ofi
0,76
0,72
№
0,64
/
/
/
1
/
/
/
/
/
Л
I
1
-к
s
\
\e
V
\
\e=o,76
i
=0,5
\
\
=0,26
\
0,5
Рис. 2.21
62
и тот же газ протекает через эти два участка, можно записать
следующее соотношение:
п г л\ vJ.1
Tl ' N Д, "l X
\(Х+П/(Х-1)
Сократив одинаковые множители, получим
р. с
Prf2 ^Кр. Т ' l T2
Это значит, что степень понижения давления на турбине зависит
от отношения площадей критических сечений соплового аппарата
турбины и выходного сопла и от отношения температур газа, которые
он имеет перед сопловым аппаратом турбины Гт1 и при выходе
из нее Тт2.
В рассматриваемом случае изменяться может только температура
газа за турбиной в силу изменения г\т турбины. Но так как
отношение температур, изменяющееся в пределах 3 %, находится еще под
знаком радикала, то оно оказывает незначительное влияние на бт
и поэтому можно считать, что при изменении режима подведенная
с газом адиабатная работа Ь*гА будет сохранять свою величину.
Расход газа через турбину определяется из соотношения
тт НЛ^адТь). (2.43)
Пользуясь соотношением (2.43) и зная мощности, затрачиваемые на
приводы насосов, можно построить расходную характеристику
турбины. Она должна показать связь между необходимым массовым
расходом рабочего тела тт и давлением рт1, которое при этом
расходе будет устанавливаться перед турбиной. Эта связь при
сверхкритическом течении через сопловой аппарат может быть
определена из соотношения
р.п = ттсрггргг. T/FKp. T, (2.44)
где тт — массовый секундный расход рабочего тела через турбины;
Ргг. т — теоретический расходный комплекс газогенератора; сргг —
коэффициент неполноты выделения тепла в газогенераторе; FKV, т —
площадь критического сечения соплового аппарата турбины.
При применении двухкомпонентного газогенератора необходимо
учитывать и изменение произведения ФггРгг. т-
Расходная характеристика турбины приведена на рис. 2.22.
Имея такую характеристику, можно переходить к построению
статической характеристики гидравлической системы, обеспечивающей
питание турбины рабочим телом. Схема этой системы приведена на
рис. 2.23. В результате построения статической характеристики
этой части системы должны быть найдены: необходимое давление
подачи компонента Т и положения дросселя 1 газогенератора 2,
соответствующие каждому из режимов работы двигательной уста-
63
новки. Для построения такой характеристики необходимо знать
статические характеристики отдельных ее звеньев, первой из
которых является расходная характеристика турбины (рис. 2.24, а).
Как и при построении статических характеристик гидравлических
систем основных компонентов, здесь тоже можно характеристики
отдельных звеньев определять расчетом или использовать
характеристики, полученные экспериментально в виде графиков или
аппроксимирующих их уравнений.
В рассматриваемом примере двигательной установки с одноком-
понентным газогенератором рабочее тело турбины получается
разложением жидкого компонента на твердом катализаторе. Поскольку
количество катализатора, закладываемого в газогенератор, зависит
от многих величин, а именно: от количества компонента 71, которое
необходимо разложить, от удельной нагрузки катализатора
/ кг/с комп Т\ , т-г
s (—- ) и от полного ресурса катализатора /р. При этом
\ КГ КЗТ /
величина s для каждого катализатора может быть различной, но
всегда при увеличении s количество катализатора будет уменьшаться,
так как
где МКат — масса катализатора в пакете;
нента Т в баке.
Сопротивление пакета
катализатора при одном и том же его
количестве может быть различным в
зависимости от толщины слоя
гранул, их формы и конструктивного
оформления газогенератора. Поэтому
статическая характеристика,
связывающая потери давления на слое
катализатора с расходом через него
компонента, не поддается точному
расчету и всегда требует для
уточнения экспериментальных данных.
— масса компо-
/77 : ГПТ
Рис. 2.22
Рис. 2.23
64
0,3
0,21
\0№2 \0,06
0,09
0,06
тТ
mTi
Р -D
Гф1Г ИН.ГГ
0,06
0,04
0,5
0,3
0,2
"п
т/Г тТ
v tp.rr
0,05
rh
j
д)
Рис. 2.24
При этом надо иметь в виду, что компонент, проходя через слой
катализатора, изменяет свое агрегатное состояние и сопротивление
пакета может несколько изменяться во времени по мере
выработки катализатора.
Если нет надежных экспериментальных данных, построенных
в виде графических зависимостей, которые можно аппроксимировать
для получения аналитической зависимости, то в первом
приближении, при нешироких пределах изменения расходов, следует поль-
5 А. И. Бабкин и др. 65
зоваться следующей зависимостью:
/?кат.гг Р?\ = Ькат q == ^кат 7 1 ? \Т#
> Рнас Ркр
Эта формула может быть записана и в следующем виде:
Ркат. гг - Рт\ = Лкат (m%lpT)\
здесь
^кат = Ьк
ом2 ГГТп 1 /п \2" »
Z/Ki кат!1/Рнас Х/Ркр)
где £кат — приведенный коэффициент местного сопротивления
пакета катализатора; рт, о)г — плотность и скорость компонента Т
в газообразном состоянии; тт — массовый секундный расход
компонента Т\ Мкат — масса катализатора; /—длина пакета
катализатора; рнас — насыпная плотность катализатора; ркр — плотность
катализатора в кристаллическом состоянии.
На рис. 2.24, б приведена статическая характеристика пакета
катализатора, расположенного в камере газогенератора.
Если в ДУ применен двухкомпонентный генератор, то
статические характеристики питающих его магистралей будут определяться
так же, как это было сделано для камеры сгорания. В данном
примере расчет упрощается, так как существует только одна магистраль
компонента Т.
Следующим звеном этой гидравлической системы является
смесительная головка газогенератора. Методы построелия статической
характеристики головки газогенератора ничем не отличаются от
изложенных в подразд. 2.2, Б. Поэтому, если в головке гезогенера-
тора применены обычные струйные или центробежные форсунки,
статическая характеристика головки будет выражаться следующим
соотношением:
Рф.гг - Pi. гг - Лф.гг (тр/рг), (2.45)
откуда
Лф. гг = РТ (рф.гг — Рк.гг)/П1>Т2-
На рис. 2.24, в приведена статическая характеристика головки
газогенератора с нанесенными точками расчетного режима и режима
пониженной тяги. Перепад на форсунках газогенератора для
расчетного режима выбирается соответственно типу применяемых
форсунок и требуемой глубине регулирования режима работы ДУ.
Следующим звеном этой системы является дроссель
газогенератора. Чтобы построить его статическую характеристику,
необходимо знать, какова система подачи компонента в газогенератор
турбины. В данном примере принята вытеснительная система
подачи. Поэтому основной задачей является выбор давления в баке
66
компонента Т для работы на расчетном режиме р&. п- В дальней-
шем выбранное давление будет поддерживаться постоянным. Если
же выбран другой способ подачи компонентов, то необходимо знать
изменение давления подачи на режимах, отличающихся от
расчетного.
Необходимое давление в баке компонента Т определяется по
балансу давлений в пассивной части системы питания
газогенератора. В эту часть входят: турбина, газогенератор с насадкой
катализатора, смесительная головка газогенератора и дроссель
газогенератора. На рис. 2.24, г показан график построения статической
характеристики пассивной части системы питания по сумме потерь
на каждом из составляющих ее звеньев. Перепад давлений на
дросселе при работе установки на расчетном режиме, как уже
отмечалось раньше, выбирается порядка 10 % от давления в баке, причем
площадь открытия дросселя на этом режиме должна быть не более
70 ... 75% £дР. гппах- В результате суммирования потерь
получим точку а, соответствующую pi. гг.
Эта же точка должна являться и точкой статической
характеристики активной системы, состоящей из дросселя бака с
компонентом 7\ газового редуктора, пускового клапана и баллона с вы-
теснительным газом. При переходе на режимы пониженной тяги ДУ
(режим I) изменение давления подачи, требуемого для питания
пассивной части системы (при неподвижном дросселе) будет происходить
по характеристике аг—а. Давление же газа, подаваемого активной
частью системы подачи, из-за уменьшения гидравлических потерь,
но при постоянном давлении газа, за редуктором будет изменяться
по характеристике а—б. Как видно из рис. 2.24, г без изменения
статической характеристики пассивной части эта система работать
не может, так как точек пересечения характеристик ах—а и а—б
в левой части поля не существует. Для режима работы,
соответствующего расходу тп, необходимо потери давления на дросселе
газогенератора увеличить настолько, чтобы в сумме давление,
необходимое для работы пассивной части системы, стало бы равным
давлению, обеспечиваемому на этом режиме ее активной частью. При этом
статические характеристики а—б и бг—б пересекутся в общей точке б
и вся система питания турбины сможет нормально работать. Зная
необходимые изменения перепада на дросселе (область Л), можно
найти и соответствующие проходные площади или положение
дросселя газогенератора. На рис. 2.24, д приведена статическая
характеристика дросселя, где нанесены требуемые для каждого из режимов
перепады давлений на дросселе и соответствующие им проходные
площади дросселя.
Проходная площадь дросселя на каждом из режимов подсчиты-
вается по формуле
Р-др. ггК 2ру (Рб. гг — Рф. гг)
По полученным данным можно определить статическую
характеристику пассивной части гидравлической системы, обеспечи-
5* 67
вающей газогенератор турбины необходимым количеством
рабочего тела.
Действительно, при заданной мощности насосов давление перед
дросселем газогенератора определится следующим соотношением:
Рдр. гг = Рп + (Ркат. гг — Рт\) + (Рф. гг — Ркат. гг) + (/>др. гг — Рф. гг)-
С другой стороны, на каждом рабочем режиме такое же давление
должна обеспечивать активная часть этой системы. Это давление
может быть подсчитано при вертикальном подъеме следующим
образом:
(Рдр. гг)акт = Рб.гг + НтрТ (п + g) ~ Аы. гг (rhf/рт)-
Здесь /7б. и, — давление газа в баке с компонентом Г, Па; Нт —
высота уровня компонента Т над дросселем газогенератора, м;
Рг — плотность жидкого компонента Т; а — ускорение,
действующее по продольной оси ЛА; g — ускорение земного притяжения;
Ам. гг — коэффициент сопротивления магистрали от бака до
дросселя, м"4; тт — секундный массовый расход компонента 7\
После того как определены статические характеристики всех
звеньев ДУ, можно для любого заданного режима работы камеры
ЖРД, определяемого величиной рк, найти положение регулирующих
органов. Это значит, что можно получить статическую, или
регулировочную, характеристику всей ДУ. (см. рис. 2.17). На этой
характеристике могут быть нанесены и другие промежуточные величины,
интересующие конструктора или исследователя.
Все уравнения, описывающие статические характеристики
отдельных звеньев, сведены в табл. 2.2. Решая совместно систему
этих уравнений, можно решить различные задачи.
Можно определить зависимость основных выходных величин от
геометрических размеров отдельных элементов, физических свойств
компонентов топлива, влияния внешних условий. Для этого
необходимо изменить величину соответствующих коэффициентов в
уравнениях звеньев при неподвижных регулирующих органах. В
некоторых случаях необходимо, наоборот, определить, насколько нужно
изменить положение регулирующего органа, чтобы ликвидировать
влияние того или иного возмущения на работу ДУ. Можно
определить размер настроечных элементов при заданных выходных
величинах и положениях регулирующих органов; можно учесть влияние
производственных отклонений и допусков на разброс выходных
величин или подобрать размер регулировочных элементов для
ликвидации влияния производственных отклонений.
Наиболее важной задачей анализа статических характеристик
является получение исходных данных для расчета элементов систем
автоматического управления.
Применение для такого анализа графиков или номограмм
позволяет наглядно убедиться в связи отдельных звеньев между собой
и хорошо видеть перемещение рабочих точек по характеристикам.
Но такой способ обычно не обеспечивает требуемой точности, по-
68
Таблица 2.2
Уравнения статических характеристик объекта регулирования
Звено объекта
регулирования
Камера
Головка камеры
Рубашка охлаждения
Магистраль горючего
Магистраль окислителя
(без дросселя)
Дроссель магистрали
окислителя
Пассивная часть
магистрали горючего
Пассивная часть
магистрали окислителя
Активная часть
магистрали горючего
Активная часть
магистрали окислителя
Уравнение
рЩ'- к
Рф.г-''к = Лф.г('йг/Рг)
Рф.о-Рк = >|ф.о(*§/Ро)
Рм. г1-Рф.г="Лохл('й?/Рг)
Р». r-Pu. rt = А*н.г№/Рг)
(Рн. О — P.M. ОЗ) ~1~ (Рм. 02 "Г Рф. о) =
= Лм.ыК/Ро)
1 К
Рм. оу Рм. оа л 9 ,-,9 л
2^др.о^др.о Р°
(Рн. г)пас = Рк + (Рф. г — Рн) +
+ (Рм. п — Рф. г) f (Рн. г — Рм. п)
(Рн. о)пас = Рк "Г (Рф. о — Рк) + (Рм. 02 — Рф. о) ~Ь
+ (Рн. о — Рм. оз) + (Рм. оз — Рм. ог)
(Рн. г) акт = Ан. г<02 — Ян. г^^г —
-Z)H rm2r + pr
(Рн. о)акт = ^н. о^2 — £н. о«^о —
— Dh.o^o+Po
69
Продолжение табл. 2.2
Звено объекта
регулирования
Совместная работа
активной и пассивной частей
Совместная работа
турбины и насосов
Турбина
Газогенератор
Пакет катализатора
Головка газогенератора
Дроссель газогенератора
Пассивная часть системы
питания газогенератора
Активная часть системы
питания газогенератора
Уравнение
(Рн. г)пас — (Рн. г)акт
(Рн. о)пас = (Рн. о)акт
L* т п ™г ^Рн' г~ Рг) | ^° ^н- ° — Р°^
ад т т Рг^н. г РоЛн. о
J * ^Т d гр*
ад v 1 т т
Л"р 1
Г "т~' 1
/ D* \ "т
1 — ( —Т— 1
сад } ^ад' " 2 '
м / и \ . • ^т
<д' ^ 1<д)' m'' iaVb
Рт1 — ^^Т^рГгРгг/^'KD. Т
(^др. гг)пас I= Pti 4" (рк. гг — Pti) ~f"
+ (Рф. гг — Рк. гг) + (Рдр. гг — Рф. гг)
Рдр. гг = Рб. гг + НТРТ (а + 8)~ Апр. гг "^7
70
этому приходится решать эти уравнения аналитически, что, в свою
очередь, требует применения современной вычислительной техники,
так как большая часть уравнений нелинейна.
2.5. МЕТОД МАЛЫХ ОТКЛОНЕНИЙ В ТЕОРИИ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
В некоторых случаях, когда необходимо учесть влияние
на выходную величину малых возмущений, таких, например, как
неточности изготовления деталей, ошибки, допускаемые при
настройке двигателя, небольшие внешние возмущения, изменения
характеристик отдельных узлов в процессе работы и т. п., удобно
пользоваться системой линейных уравнений, описывающих
статические свойства объекта регулирования. Для этого нужно нелинейные
уравнения линеаризовать.
Наиболее простым и удобным способом линеаризации нелинейных
уравнений, описывающих процессы, протекающие в двигательной
установке, является способ разложения функции в ряд Тейлора,
ограничиваясь при этом только первыми членами ряда, в которые
входят малые приращения в степенях не выше первой. Разложение
в ряд Тейлора удобно тем, что в этом случае разложение функции
может быть произведено в области любого заранее выбранного
значения. В рассматриваемом случае это значит, что линеаризацию
уравнения можно произвести в области любого режима работы ДУ.
При этом всегда следует помнить, что величина малости отклонения
зависит от кривизны функции в данной точке, так как при
линеаризации происходит замена действительной функции ее касательной.
Поэтому практически малые отклонения лежат в пределах 5 ... 10 %
от значения линеаризуемой функции в данной точке. Кроме того,
линеаризации подлежат только функции, не имеющие разрывов,
производные которых непрерывны. Математически разложенные
в ряд Тейлора функции двух переменных записываются в следующем
виде:
1 /
2 V
*/(*, у) Ах2 , о */(*, у) ДгД , дЧ(х, у)
В этом выражении величины Ал: и Ау есть малые приращения
исследуемой функции; частные производные вычисляются по значениям
переменных, которые они имеют в точке, в области которой
производится линеаризация. При достаточно малых отклонениях от
заданного значения функции члены с отклонениями в степенях выше
первой могут быть отброшены без внесения значительной
погрешности. Поэтому линеаризированное уравнение справедливо в
пределах не более чем ±10 % от номинала, в области которого прово-
71
дилась линеаризация. Например, уравнение для активной части'ма-
гистрали горючего, куда входит центробежный насос с давлением
на входе
Риг = Лн.гог — 5„.гсотг — DH. тш\ + /?г,
после линеаризации будет выглядеть следующим образом:
(Здесь и далее индексом «*» отмечены величины, относящиеся к
режиму работы, в области которого производится линеаризация
функции).
Взяв частные производные, получим
рн.г = р£.г + А/?н.г = Рн. г+ 2Лн.гСо*А(о —Б„.гтгД(о —fiH#ro)*Amr —
— 2DH.rrh*Amr 4- Арг.
Имея в виду, что
Дсо = со — со*; Дтг = тг — ml и Дрг = рт — Р*,
получим
/?н.г = Рн.г + (2Лн.гсо* — Вн.гт{) (со — со*) —
- (Вн.гсо* + 2DH.rmr*) (тг - тг*) + (/?г - р?).
Раскрыв скобки и обозначив
2Лн.гсо* - Б„.гтг* = 0„.г; 5н.гсо* + 2Z)H.rm? = г|)„.г;
/?!.г — Эн.гСО* + г|)„.гШ? — рг* = Хн.г,
получим линейное уравнение вида
Рп. г = ^н. г + 0н. гС0 — 1|)н. г^г + ^г-
Для того чтобы построить статическую характеристику,
передающую достаточно точно свойства объекта регулирования в
широких пределах изменения режимов его работы, необходимо
линеаризацию статических характеристик отдельных звеньев проводить для
точек, отстоящих друг от друга не более чем на 10 ... 12 % от всего
интервала изменения функции, и чем кривизна линеаризуемой
функции больше, тем меньше должны быть эти интервалы. При этом
для каждой из точек будут получаться новые значения
коэффициентов уравнений. После того как будут линеаризованы уравнения
всех звеньев, составляющих объект регулирования, для каждой
из точек заданных режимов работы объекта решается своя система
линеаризованных уравнений. В результате этой работы получается
статическая характеристика всего объекта регулирования в целом.
Таких характеристик может быть построено такое количество,
какое необходимо для выявления интересующих конструктора связей
выходной величины с возможными возмущениями или командами.
72
Типодые харантеристини збеньев САУ
Таблица 23
Тип
звена
1
Z
J
4
5
6
Наименование
звена
Линейное
Идеальное
релейное
Релейное с зоной
нечувствитель-
ности
Линейное с
насыщением
Линейное
с насыщением
и зоной не-
чудствитель-
ности
Звено с гис-
терезисной
петлей (сухое
трение или
лннрт)
дид харанте-
ристини
Удых
/\
Увых
Удык
Удых
УвЬ)Х
Увых
2аj/
S
/
о %
А
b
/
4
/
b
*8Х
Особые
свойства
Линейная
-Релейная
Линейная с зоной
нечувствительности
Линейная с зоной
нечувствительности
С ограничением и
зоной
нечувствительности
С гистерезисной
петлей
и ограничением
73
При определении статических характеристик всей системы
регулирования в целом, состоящей из объекта регулирования и
регулирующего устройства, могут встретиться звенья, которые имеют
принципиально нелинеаризуемые характеристики. Типовые
характеристики таких звеньев приведены в табл. 2.3. При наличии таких
звеньев статическая характеристика системы автоматического
управления может иметь несколько значений выходной величины при
одном и том же значении входной. Это относится к системе, в
которой имеются звенья типа 6.
Однако, если в систему автоматического управления включены
звенья, имеющие зону нечувствительности, то, наоборот, при
изменении величины входного сигнала, выходной сигнал может
оставаться без изменений.
Проведя линеаризацию всех нелинейных уравнений, получим
систему, решая которую выявим необходимые связи между
различными величинами. Результаты расчетов сводятся обычно в таблицы
или представляются в виде графиков.
2.6. ВЛИЯНИЕ ВНЕШНИХ ВОЗМУЩЕНИЙ НА
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
Выходные величины ДУ на каждом из заданных режимов
работы должны лежать в пределах допусков, оговоренных в ТУ.
При этом следует иметь в виду, что при сборке установок из
большого количества узлов, размеры каждого из которых выполнены
в пределах допусков, выходные величины установок будут
получаться различными по величине и могут превысить предельнодопу-
скаемые значения. Кроме того, на отклонение выходных величин
могут влиять такие внешние условия, как температура компонента,
находящегося в баке, внешнее давление, ускорения, действующие
на ЛА во время полета, и т. д.
Как пример влияния внешнего возмущения на рис. 2.25 показаны
графики изменения давления на входе в насос при полете ЛА в поле
тяготения. Земли со скоростью V. Из рис. 2.25, а видно, что
давление на входе в насос рвх изменяется из-за действия продольного
Рис. 2.25
74
ускорения я, угла тангажа ср высоты уровня компонента в баке над
входом в насос Як. В зависимости от того, какое давление
необходимо иметь на входе в насос /?вх. Необх> выбирается
соответствующий наддув баков /?Г). За время полета величины #к, а и ф
изменяются. Поэтому выбирать давление /?б необходимо в расчете на
наиболее неблагоприятный случай, когда подпор жидкости будет
наименьшим.
Действительно, в любой момент времени
Рб — Рвх. необх Рст ~г Ргар»
где ръ — давление газа в баке; /?вх. неОбх — давление на входе в
насос, необходимое для его бескавитациойной работы; /?ст —
статический подпор жидкости из бака; ргар — гарантийный запас
давления.
Подпор жидкости из бака, переменный во времени т,
рст (т) = Я (т) р [а (т) + g sin ф (т)],
где g — ускорение силы тяжести на высоте.
Преобразовав эту формулу, получим
Рст (т) = Н (т) pg0 [±&- + JL sin ф (т)] = Я (т) pgonx,
где go — ускорение силы тяжести на уровне Земли; п (т) — осевая
перегрузка по траектории полета.
Результат расчета приведен на рис. 2.25, б.
Влияние всех, как внешних, так и внутренних, возмущений
может быть выявлено путем анализа статических характеристик
объекта регулирования. Для этого необходимо изменять
соответствующие коэффициенты и переменные величины в уравнениях,
описывающих статические характеристики, и находить
получающиеся при этом выходные величины. Обычно этот анализ проводят,
получая частные производные по каждому возмущающему фактору
отдельно. Для этого изменяют в уравнениях величины, связанные
только с одним из влияющих факторов, и находят отклонение
выходной величины только при его воздействии. Имея в результате
таблицу влияния каждого из возможных возмущений, можно,
пользуясь статистическими данными об одновременности воздействия
выбранных возмущений, определить суммарное отклонение выходной
величины ДУ.
Если такое суммарное отклонение укладывается в пределы
установленного допуска, то никаких специальных мероприятий по
настройке двигательной установки не требуется. Если же
отклонения выходной величины превышают допуск, то необходимо настроить
гидравлические системы.
i- При этом решается обратная задача, в которой, задаваясь
необходимыми значениями выходных величин, определяют размеры
настроечных шайб.
Когда совместное влияние возмущений, действующих на ЛА
в полете, велико или допуск на выходные величины достаточно
75
узок и обойтись только предварительной настройкой гидравлических
систем не удается, необходима установка автоматических устройств
(автоматических регуляторов), обеспечивающих поддержание
выходных величин в заданных пределах.
2.7. ВЫБОР РЕГУЛИРУЕМЫХ ВЕЛИЧИН
Когде необходимо применение автоматического
регулятора (вследствие значительных отклонений выходных величин или
при необходимости изменения режимов работы ДУ в широких
пределах), всегда нужно выбирать так называемую регулируемую
величину, т. е. величину, измеряя которую, автоматическое
устройство будет формировать сигнал, определяющий изменение
положения регулирующего органа.
На рис. 2.26 в качестве примера приведена схема камеры ЖРД,
с указанием возможных регулируемых величин.
Такой регулируемой величиной не всегда может быть выходная
величина. Так, если выходными величинами ДУ являются давление
в камере рк и соотношение компонентов km, то давление в камере
можно измерить достаточно просто, а соотношение компонентов
измеряется гораздо труднее. Поэтому во многих случаях
удовлетворяются тем, что следят за режимом работы двигателя только по
величине /?к, допуская небольшие отклонения в соотношении
компонентов. В этом случае выходная величина и регулируемая
величина совпадают, а регулирующее устройство будет поддерживать
только заданное значение давления в камере.
Если же желательно следить не только за величиной рк, но и
поддерживать на соответствующем уровне соотношение
компонентов km, регулируемыми величинами можно выбрать, например,
давления перед форсунками /7Ф#Г и /?ф. 0. Это особенно удобно,
если они одинаковы. Тогда при их постоянной величине будет
поддерживаться и заданное давление в камере, а равенство этих
давлений будет обеспечивать соответствующее значение km. В данном
случае регулируемые величины не являют-
ся выходными, поэтому, например, при из-
менении проходной площади одной из частей
смесительной головки, несмотря на поддер-
\Рф.г жание давлений перед форсунками
заданными, режим камеры двигателя будет нарушен.
Когда давления перед форсунками будут
различными, воздействие передается на
дроссель магистрали окислителя, который,
перемещаясь, уравнивает давления перед
форсунками, обеспечивая таким образом
поддержание заданного значения km. Но при
изменении суммарной площади одной из
частей смесительной головки, работа
системы поддержания соотношения компонентов
нарушится.
76
Рш-°
-Рк
Рис. 2.26
]лрш -const
95 —f-
i
60 90 100 110 ЧОр^РфАРщХ 90 95 100 105 110 рф;рш,%
Рис. 2.27 Рис. 2.28
Исключить эти недостатки возможно за счет усложнения системы
измерения. Для этого в каждую из магистралей включаются
специальные измерительные шайбы. Размер отверстий в шайбах
подбирается так, чтобы при заданном соотношении компонентов
перепады на них были бы одинаковы. Тогда при поддержании заданных
по величине перепадов на шайбах будет поддерживаться суммарный
расход компонентов, а равенство перепадов обеспечит постоянство
соотношения компонентов. Это приведет к поддержанию заданного
режима работы установки даже при тех нарушениях, которые были
раньше указаны. При этом регулируемые и выходные величины
совершенно различны. Отклонение регулируемых величин (га2 и km)
может произойти только вследствие изменения температуры
компонентов, поступающих из баков, так как оно приводит к изменению
их плотностей. Ниже приведена связь кт с р0 и рг
тогда
V
Po
а по условию Д/?ш. 0 = Д/?ш
тг j £
Следует иметь в виду, что закон изменения плотностей
компонентов не одинаков. Выбирая те или другие величины в качестве
регулируемых, всегда необходимо по статическим характеристикам
провести подробный анализ их связи с выходными величинами.
На графике рис. 2.27 показана такая связь, из которой видно,
что при изменении /?к на +10 % давление перед форсунками рф
изменяется на ±1 %, а перепады давлений на шайбах Дрш — на
±21 %. Из этого можно сделать вывод о том, что поддержание
давления в камере по перепадам на шайбах может быть осуществлено
либо с большой точностью, либо с использованием менее точной
измерительной аппаратуры.
На рис. 2.28 такая же статическая характеристика приведена
Для связи km с давлением перед форсунками рф и перепадами на
шайбах Дрш.
77
В некоторых случаях можно выбирать в качестве регулируемых
и другие величины, как, например, частоту вращения вала ТНА
или давление в газогенераторе, которые удобно использовать как
косвенные параметры регулирования. Выбор их зависит от схемы
ДУ, назначения и задач, выполняемых ЛА, на котором будет
использоваться ДУ.
Таким образом, подробное знание и глубокий анализ статических
характеристик дает возможность ответить на многие вопросы,
которые необходимо разрешить при проектировании двигательных
установок. Так, тяговые характеристики дают возможность
получить полное представление о связи между тягой, удельным
импульсом, расходом топлива и соотношением компонентов; регулировочные
характеристики позволяют получить связь между тягой, расходом
топлива, соотношением компонентов и положением регулирующих
органов при изменении режимов работы двигателя.
Статические характеристики позволяют учесть влияние на
выходные величины ДУ всех возможных, как внешних, так и
внутренних возмущений и получить исчерпывающие данные по подбору
размеров и положений настроечных элементов.
Только подробный анализ статических характеристик объекта
регулирования позволяет получить исходные данные для
проектирования системы автоматического управления.
ГЛАВА 3
ДИНАМИКА ДВИГАТЕЛЬНЫХ УСТАНОВОК
3.1. СТРУКТУРА СИСТЕМЫ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
В любую систему автоматического управления входят
объект управления и регулятор. Динамические характеристики
системы управления определяются взаимодействием объекта
управления с регулятором.
В процессе динамического взаимодействия объекта с
регулятором в каждом элементе системы от входа к выходу происходят
количественные и качественные изменения сигналов, свойственные
физической природе этих элементов. Динамические свойства объекта
регулирования определяют выбор типа регулятора и его
характеристик.
ДУ с ЖРД является динамическим комплексом. Составляющие
ее элементы: камера сгорания, ТНА, газогенератор, система топли-
воподачи сами по себе являются сложными динамическими звеньями.
Изучению динамических свойств ДУ предшествует изучение
динамических свойств ее отдельных составляющих элементов и
характера внутренних связей между ними.
Деление сложного комплекса на элементарные звенья в теории
регулирования обусловлено двумя обстоятельствами: во-первых,
78
способностью каждого элемента передавать /; /z хп
сигналы от входа к выходу и, во-вторых, 1 I I
ЗОено
определенной физической природой этих
сигналов: усиление, интегрирование,
инерция, дифференцирование, колебательность
и их комбинация, а также и более сложные
процессы, определяемые законами физики Рис зл
и гидромеханики.
Звеном системы автоматического регулирования называется
отдельно выделенный элемент системы, имеющий вход и выход, которые
связаны во времени определенным законом передачи сигнала и
обладают свойством однонаправленного воздействия. Динамическое звено
САУ изображено на рис. 3.1 с выходной у и входной х величинами.
В большинстве случаев наряду с основным входом на звено могут
воздействовать и другие входные сигналы, приложенный извне.
Это внешние и внутренние возмущения Xlt X2, ..., ХПУ а также
сигналы обратных связей между звеньями. В общем случае внешние и
внутренние воздействия могут быть приложены к динамическому
звену как через его основной вход (путем его деформации), так и
через другие дополнительные входные устройства, свойственные
динамическому звену.
Звено характеризуется как статическими, так и динамическими
свойствами. Статические характеристики звена определяют
зависимость выходной величины у от входной х [у = f (х)].
Статические характеристики отдельных звеньев представляются
в любом из возможных видов записи связи входных и выходных
величин, не содержащих время (чаще всего это алгебраические
уравнения).
Динамические характеристики звена связывают изменение
выходной величины во времени при определенном законе изменения
входной величины (чаще всего это дифференциальные уравнения).
Описание динамических характеристик звена требует применения
дифференциальных уравнений, а системы звеньев — системы
дифференциальных уравнений. В зависимости от целей изучения
степень подробности описания динамических характеристик звеньев
может быть различной.
Цель — изучение динамических свойств ДУ как объекта
регулирования, выявление характера изменения регулируемой величины
во времени при воздействии на ДУ сигналов со стороны регулятора
или внешних возмущений.
Принципиально внешние возмущения, действующие на ДУ,
являются по своему характеру вероятностными (стохастическим)
воздействиями. В зависимости от режимов управления действия со стороны
регуляторов носят либо стохастический, либо определенный
(детерминированный) характер. Упростим задачу исследования,
ограничиваясь рассмотрением только детерминированных воздействий.
Подавляющее большинство статических характеристик
элементов ДУ нелинейны, а параметры элементов с течением времени не
остаются постоянными и в общем случае не являются сосредоточен-
79
иыми величинами. Учет этих особенностей приводит к использованию
нелинейных дифференциальных уравнений в частных производных
с переменными коэффициентами. Трудности, вызываемые при их
анализе и решении требуют применения вычислительных машин,
что не на всех этапах проектирования ДУ является
целесообразным. Применение при анализе динамических свойств элементов ДУ
обыкновенных линейных дифференциальных уравнений с
постоянными коэффициентами накладывает ряд ограничивающих условий:
1) рассматриваются лишь такие элементы, характеристики
которых могут быть линеаризованы;
2) анализ динамических свойств проводится лишь в окрестностях
режима, где ошибка, связанная с линеаризацией, не превосходит
заранее заданной величины;
3) все параметры динамического элемента считаются
стационарными и сосредоточенными.
Теория, основанная на использовании этого математического
аппарата, называется линейной теорией автоматического
регулирования.
Линеаризация как динамических, так и статических
характеристик элементов ДУ производится путем разложения в ряд Тейлора
и использования только первых членов ряда. Это соответствует
замене исходной характеристики отрезком касательной к кривой,
проведенной в точке рассматриваемого режима.
Первое ограничивающее условие исключает из рассмотрения
звенья с существенно нелинейными характеристиками типа реле, как
не поддающиеся линеаризации путем проведения касательной в
каждой точке ее статической характеристики (см. разд. 5.5).
В дальнейшем будем называть линейными элементы и их
соединения, характеристики которых имеют непрерывную производную,
позволяющую в каждой точке характеристики провести
касательную. Точность расчетов, проводимых с помощью линейного метода,
будет определяться величиной отклонения, связанного с диапазоном
изменения рассматриваемых величин. Согласно второму условию
линейный динамический анализ позволяет судить о поведении
элементов или их соединений лишь в области малых отклонений
входных и выходных величин.
Третье условие исключает из рассмотрения процессы, в которых
свойства звеньев или их параметров переменны во времени (например,
переменность соотношения компонентов топлива в камере сгорания
и газогенераторах или рассредоточенность сопротивления в трактах
топливоподачи). Применение методов нелинейной теории с учетом
нестационарности и распределенности параметров к динамическим
процессам в ЖРД изложены в работах [11, 22, 33].
Рассмотрим динамические характеристики звена,
характеризуемые линейными дифференциальными уравнениями, и системы
звеньев, описываемые системой линейных дифференциальных уравнений.
Поскольку систему обыкновенных линейных дифференциальных
уравнений низких порядков может быть сведена к одному линейному
уравнению более высокого порядка, то нередко термин «звено»
80
объединяет комплекс звеньев вплоть до объекта регулирования или
регулятора в целом.
В общем случае для любого звена или системы регулирования
можно получить общее уравнение динамики следующего вида:
r+--•+*»-.-■£- + »,.*. (3.1)
где п, т — натуральные числа, определяющие наивысший порядок
производных при выходном сигнале у и входном х\ а}, Ь\ —
постоянные коэффициенты, отражающие параметры звена или системы
звеньев.
Показатель старшей производной п называют порядком
дифференциального уравнения динамики. Общие правила составления
уравнений динамики будут приведены в разд. 3.5.
3.2. ПЕРЕХОДНЫЕ, ПЕРЕДАТОЧНЫЕ ФУНКЦИИ
И ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ
Для упрощения математических операций и удобства
записи уравнений динамики в теории автоматического регулирования
переходят от обычной классической записи уравнений в
дифференциальной форме к записи уравнений в форме Лапласовых
изображений (к операторной форме). Действия дифференцирования и
интегрирования с уравнениями в операторной форме записи сводятся
к умножению и делению. Отыскание решений дифференциальных
уравнений не представляет в этом случае значительных трудностей
при переходе от изображений к оригиналам. Для наиболее часто
встречающихся функциональных зависимостей составлены таблицы
изображений и их оригиналов [19]. Запись уравнений динамики
в изображениях позволяет ввести понятия о передаточных
функциях и частотных характеристиках звена.
Пусть .уравнение вида (3.1) является уравнением динамики
звена, записанным в общем виде с выходной величиной у и входной х,
где а-, =-- const и а0 Ф 0; bt = const и b0 Ф 0 — коэффициенты,
отражающие параметры звена.
Начальные условия
при т:=0 уф), уф), уф), ...,V(0);
хф), хф), хф), ..., х (0).
Пользуясь свойством линейности преобразования Лапласа и
основной зависимостью прямого преобразования
со
F(s)=\ /(т)е-«<*с,
о
6 А И. Бабкин и др. 81
(F (s) — изображение; / (т) — оригинал), найдем исходное
уравнение (3.1) в форме изображения.
Примем изображение выходного сигнала у (т) в виде
обозначения Y (s), а изображение входного х (т) в виде X (s) и проинтегрируем
почленно уравнение (3.1):
+ а„|
+ 6«_1 j -^-е-^Л + bm j xe-^dx.
о о
Взяв каждый из интегралов по частям, после подстановки
пределов получим
aos"Y (s) -f ais"-1 Y(s)+...+ an_lSY (s) + anY (s) -
- во [s"-1 у (0) -f s"~2y (0) +...]- d [s«-2i/ (0) + s"-*y (0) +...]-
- ... - ап_1У (0) = bosmX (s) + bxs'"-1 X (s) + . .. +
+ ^m-isX (s) + 6mX (s) - b0 [s-"-1 x (0) + s"*-2 x (0) + ... 1 -
- Ьг Is—2x (0) + s»-3 i (0) +...]-...- bm_lX (0). (3.2)
Вынесем за скобки Y (s) и X (s), предварительно выделив
отдельные члены с начальными условиями:
(aosn + ais"-1 -г • • • + flnjs + an) Y (s) = (bos'" + blSm~l + ... -f-
+ bm_!S + fem) X (s) + a0 [s»-'у (0) -f s«-2y (0) + • • • ] -r
+ ax [s«-2y (0) + s^i, (0) +...]+ «„_!</ (0) -
- b0 [s"1-1 x (0) + sm-2 x (0) +...]-&! [sm-2x (0) + S"1-3 i (0) +
Запишем полученное равенство относительно изображения Y (s),
обозначив разность между суммой членов, содержащих начальные
условия, в виде #н. у (s) — оператора начальных условий:
6osm + bxsm~ + + b ^у
Первое слагаемое правой части выражения (3.3) не зависит от
начальных условий и определяется только уравнением динамики
звена, записанным в операторной форме (т. е. физической природой
преобразования сигнала звеном и видом входного сигнала). Второе
слагаемое определяется только начальными условиями собственного
движения и входного воздействия.
Положим /?н. у = 0, т. е. все начальные условия равными
нулевым значениям, и запишем уравнение (3.3) в форме отношения
Y(s) _ bosm + blSm-1 + ... + bm _ w . , п ..
w(s) {6A)
Отношение (3.4) определяется только внутренними свойствами
трансформации сигнала звеном и называется передаточной функцией.
Передаточной функцией звена называется отношение Лапласо-
вых изображений величины сигнала на выходе к величине сигнала на
входе при нулевых начальных условиях.
Последнее означает, что до момента приложения входного
воздействия звено рассматривается в невозмущенном состоянии, т. е.
в состоянии установившегося движения.
Из приведенных выше операций следует простой способ записи
уравнения динамики в виде изображений: необходимо заменить
в уравнении динамики символ операции дифференцирования didx
на s и, вынося за скобки изображения Y (s) и X (s), записать
уравнение в виде
Kt^tl^Xis) (3.5)
или в виде передаточной функции (3.4).
Для оценки динамических свойств звеньев и систем
автоматического регулирования применяют в основном два вида входных
сигналов: ступенчатую функцию (мгновенный скачок) и гармоническую
функцию, как наиболее часто встречающийся случай воздействия
возмущений при стабилизации режима и регулирования ДУ
(подробнее обоснование применения различных видов входных сигналов
см. в разд. 3.3). При воздействии на звено скачкообразным входным
сигналом (принятым за единицу измерения входной величины)
изменение во времени величины характеризуется переходной
функцией.
Переходной функцией звена (или системы автоматического
регулирования) называется изменение во времени выходной величины звена
при изменении входной, заданной в виде единичного ступенчатого
воздействия при нулевых начальных условиях.
Используя формулу прямого преобразования Лапласа, найдем
изображение единичной ступенчатой функции 1 (т)
= J
_e—sx
и подставим его в выражение (3.5):
83
или, используя выражение (3.4), запишем
Y(s)= -^L. (3.6)
Деление на s в изображениях равносильно
операции интегрирования в оригиналах. Итак,
для того чтобы найти переходную функцию
звена необходимо проинтегрировать диффе-
ренциальное уравнение динамики или найти
оригинал изображения выходной величины
У (s) ^~> У (т)- Обычно изображения записаны в таблицах
операционного исчисления в форме выражения (3.6), по которым легко
найти решение, переходя к оригиналам. Изменение во времени выходной
величины при скачкообразном изменении входной называется
переходным процессом. На практике обычно применяют не единичное
ступенчатое воздействие, а сигнал конечной величины. При этом
характер переходного процесса не изменяется, а лишь деформируется
масштаб его ординаты. При применении любого другого вида
входного сигнала определение «переходный процесс» дополняется видом
функции входного воздействия.
Произведем оценку реакции звена на гармонический входной
сигнал. При подаче на вход звена гармонического сигнала вида
х = Ах sin сот,
где Ах — амплитуда колебаний; (о — частота колебаний,
оценивается реакция звена на гармонические колебания.
При установившейся реакции звена (после окончания
переходного процесса) на выходе устанавливаются колебания с
измененной амплитудой Ау, сдвинутые по фазе на угол Э, что является
неотъемлемым свойством линейных систем:
у = Ау sin (сот + 0).
Для анализа реакции звена на гармонический сигнал проще
оперировать векторной формой записи гармонических колебаний,
используя тождество Эйлера:
eto)T = cos (0Т _j_ i sin 0)Т
Это соотношение представляет на комплексной плоскости
функцию косинуса проекцией единичного радиуса-вектора
(вращающегося против часовой стрелки) на действительную ось, а синуса —
на мнимую (рис. 3.2). Тогда можно записать
х = Axei(»x, у = Луе1'<сот+е),
где 6 = /2((о), Лу = Ы<о).
Составим соотношение
Обозначив отношение амплитуд АУ1АХ = М> получим у,х --=
= Ме'е = U -г iV. Это выражение представляет комплексную
84
функцию действительного переменного со. Эту функцию обозначают
W (/со) и называют частотной функцией звена:
W (ко) = М (со) е'в<®> = U (со) + iV (со), (3.7)
где М — модуль и Э — фаза комплексного числа, которые являются
функцией угловой частоты со.
Как всякое комплексное число, частотную функцию можно
представить на комплексной плоскости в координатах U, IV
(рис. 3.3). Если для каждого из значений частот в диапазоне 0 <
< со < оо определить М и 6 и построить кривую положения
концов этих векторов, то получим годограф частотной функции, который
характеризует установившуюся реакцию звена на гармонические
колебания и называется амплитудно-фазовой частотной
характеристикой. Для отыскания аналитического выражения частотной
функции воспользуемся уравнением динамики (3.1), подставив в него
х = АхеСых
и соответственно
dx _
d% ™ /
dT*
а у =
dmx
и соответственно
Jy_- а
d% v
d2y _ Л ,■
dT2 — *y{l
dny
(3.8)
(3.9)
IV
*~(0
г)
И
Рис. 3.3
85
После подстановки выражений (3.8) и (3.9) в уравнение (3.1)
получим
а0Ау (ш)"е140Vе -у- ахАу (too)n-1et"fi)Tet'0 +...-}- апАуеШх&° =
= ЬОАХ (i<o)m еШх + ЬгАх (ш)т-*еШт + • • • + ЬтАхеш\
Сокращая полученное выражение на общий множитель et40T,
составим отношение
b°(t(0)m + bl (t'(°)m~1 + '- • + bm-x(*Д>) + Ьт
JL = A]LeiQ = w (ш) =
x л* ао(т)п + а1(ш)п-1 ±... +ап_1(ш)
(3.10)
Сравнивая полученное выражение (3.10) с записью передаточной
функции в виде (3.4), определяем правило составления частотной
функции звена: частотная функция звена может быть получена из
выражения передаточной функции формальной заменой переменной
Лапласа s на значение /со.
Частотная функция звена может быть представлена отдельными
характеристиками. В соответствии с общим видом записи частотной
функции в форме (3.7) можно из него выделить следующие частотные
характеристики:
М (со) - | W (/со) |; 6 (со) = arctg V (<©)/£/(©);
U (со) = ReW (ко); V (со) = ImW (ко).
Функция М (со) называется амплитудной частотной
характеристикой, а 0 (со) — фазовой частотной характеристикой; функция
U (со) называется вещественной, а V (со) — мнимой частотной
характеристикой.
Для каждой частоты со — со^ частотная функция может быть
представлена вектором М (со*), имеющим отклонение от
положительного направления действительной оси на угол 6 (сог) по часовой
стрелке для отрицательных фазовых сдвигов и против часовой
стрелки — для положительных.
Годограф (геометрическое место концов векторов) этого вектора
при измерении частоты от 0 до оо обобщает все перечисленные выше
частотные характеристики (рис. 3.3, а) и, как было сказано выше,
называется амплитудно-фазовой частотной характеристикой.
Мнимая часть этой характеристики (пунктир на рис. 3.3, а) получается
при вариации частоты в диапазоне от —оо до 0 и не имеет физического
смысла, хотя в некоторых теоретических задачах представляет
определенный практический интерес.
Получению частотных характеристик М (со), Э (со), U (со) и
V (со) предшествует этап подготовительных операций.
Прежде всего необходимо это выражение представить в виде
W (/со) = U (со) + iV (со), для чего следует числитель и
знаменатель выражения (3.10) умножить на комплексное число, сопряженное
знаменателю:
W (/со) = (U4 -f iV4) (Ua - iV3)I(Ul + VI).
86
Далее, для определения модуля использовать его выражение в виде
М = у U2 (со) -р V2 (со), а для определения фазового сдвига
колебаний использовать его выражение 0 -~ arctg ^ I. Для
определения вещественной и мнимой частотных характеристик следует
построить зависимости U —fx (со) и V — /2 (со) как проекции
амплитудно-фазовой частотной характеристики на действительную и
мнимую оси.
Построенная по точкам амплитудная, фазовая, вещественная
и мнимая частотные характеристики представлены на рис. 3.3, б,
в, г и д. Переходный процесс и частотная характеристика могут быть
получены экспериментальным путем. Для этой цели на вход
исследуемого звена подается в первом случае скачкообразное воздействие,
а во втором — гармонический сигнал. При этом производится запись
во времени входной и выходной величин с помощью самописцев
или осциллографа. Запись по времени выходной величины при
скачкообразном воздействии представляет собой переходный процесс.
Для построения экспериментальной частотной характеристики
необходимо провести опыты с записью установившихся входных и
выходных колебаний при нескольких значениях частот в диапазоне
О < со < оо. Из записи входных и выходных колебаний определяются
отношения амплитуд и фазовый сдвиг для каждого из значений частот.
3.3. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ДИНАМИЧЕСКИХ СИСТЕМ
Для удобства проведения различных операций в каждом
конкретном случае пользуются различной формой записи уравнений
динамики звеньев системы автоматического регулирования. При
составлении дифференциальных уравнений динамики звеньев
целесообразно исходные уравнения записывать так, чтобы выходная
величина находилась в левой части уравнения. Составленное уравнение
динамики также сохраняет этот порядок и в общем случае принимает
вид (3.1) или в сокращенной форме записи:
(/г) (л—1) (т) т-\
Fly, у, ..., у, у] =/[*, х, ..., ху х], (3.11)
где F — полином n-й степени относительно входной величины у>
а / — полином /л-й степени относительно входной величины х.
На практике в подавляющем большинстве случаев п> т.
Уравнение статической характеристики звена в неявном виде
можно получить из выражения (3.11) при условии равенства нулю
всех производных. Исключая номинальный уровень из
линеаризованного уравнения динамики, переходят к рассмотрению только
отклонений. Тогда в общем случае линейное уравнение динамики
принимает вид
(п) (п—\) т т—\
F[Ay, Д</, ..., Дг/,Д*/] = /[Д*, Дх, ..., Дх,Д*]. (3.12)
Уравнение в форме (3.12) размерно, что создает неудобства в
определении физического смысла его обобщенных параметров. Поэтому
далее переходят к безразмерным отклонениям, относя абсолютные
87
отклонения к номинальному уровню (или базовым величинам),
относительно которых эти отклонения рассматриваются:
-^ = ДР; ^=Д*. (3.13)
s/ном *ном
Запись уравнения с безразмерными отклонениями позволяет
определить размерность всех постоянных коэффициентов и придать им
конкретный физический смысл.
Вернемся к полной форме записи уравнения динамики в виде
(3.11), но с безразмерными переменными, используя для этого
перехода обозначения (3.13):
dn~Ky dn~l~Ky
dm~Ek , , dm~xTx , . , Шк , , г /Q лл,
-^Г + Ь1 d%m-X +'••+- fcm-l -35- + ЬтА^, (3.14)
и проведем анализ размерности постоянных коэффициентов этого
уравнения.
Вследствие того, что левая и правая части уравнения (3.14)
безразмерны, безразмерным должен быть и каждый из составляющих
их членов. В таком случае и коэффициенты ап и Ьт являются
безразмерными величинами. Если поделить обе части уравнения на
коэффициент ап, то отношение Ьт1ап приобретает смысл
коэффициента усиления выходной величины по отношению
к входной. В самом деле, если положить все производные равными
нулю, т. е. предположить, что переходный процесс закончился, и
обозначить отношение Ьт1ап = /С, будем иметь точку статической
характеристики Ау = /СДх, которая показывает, что при внесении
отклонения величиной Ах выходная величина изменится на КАх.
Величина К принципиально может быть как целым, так и дробным
числом. Отношения bm_Jan и an_Yian должны иметь размерность
времени, так как оператор дифференцирования dldx имеет размерность
1/с. Эти отношения соответственно будем обозначать ап-\-&п =
= 7\ и Ьт_11ап — 7У Вторая производная tf-Vdx2 имеет размерность
1/с2, а соответственно размерность отношений ап_2/ап и bm_2la<n
будет с2. Для них вводят обозначения: ап_2!а{) — Т\ и bm_2/a0 = Т\\>
Учитывая, что dnldxn в 1/с", можно записать
(3.15)
dnAy L rpn—\ dn Ay . , rp dAy , T~ _ j>rn dAx
Коэффициенты TL в уравнении (3.15) называются постоянными
времени и характеризуют динамические свойства звена в переходном
процессе. Запись уравнения в виде (3.15) называется безразмерной
записью уравнения динамики в дифференциальной форме. Как
правило, такая форма записи применяется в процессе получения
(вывода) уравнений динамики. Дальнейшие операции с уравнением
в форме (3.15) довольно затруднительны ввиду ее громоздкости.
Поэтому с целью сокращения записи и удобства дальнейших
выкладок в теории автоматического регулирования широко применяют
символическую форму записи линейных дифференциальных уравнений
динамики, вводя обозначения:
А__ = р „ \...dr=±, (3.16)
в которых р называют символом дифференцирования (его не следует
отождествлять с переменной преобразования Лапласа s, которую
иногда обозначают также буквой р). С учетом выражений (3.16)
уравнение (3.15) запишется в виде
ТппрпТу + TnnZ\pn~l Ту +...+ ТхрЬу = Т^Хх + T%Z\pm-1 ЪГх +
Дальнейший путь упрощения записи уравнений динамики приводит
к следующему виду:
(Тппрп + TnnZ\pn"1 + ... + 7> + 1) Ту =
= (TZpm + nz\pm~l + ... + Ti + К) Ж?, (3.17)
в котором формально отрывают символ дифференцирования от
обозначения дифференцируемой функции. Или, идя дальше, приходят
к более компактному виду:
Q(p)~^ = N(p)A^i (3.18)
где Q (р) — символический полином при выходном сигнале (который
часто называют оператором звена), а N (р) — символический
полином при входном сигнале.
Уравнения в форме (3.17) и (3.18) следует рассматривать как
удобную форму записи уравнений динамики и в известном смысле как
подготовку к переходу в область лапласовых изображений,
позволяющему упростить операции совместного решения уравнений и
их интегрирования или перейти к записи уравнений в форме
передаточных функций. В -самом деле, на основании сформулированного
в разд. 3.1 способа перехода в область лапласовых изображений
требуется заменить в уравнениях символ операции дифференцирования
dldx на символ s. В уравнении (3.17) уже проведена такая замена,
но только на символический оператор р. Отсюда вытекает простое
правило: для перехода в область изображений по Лапласу достаточно
в символической форме записи уравнений динамики заменить символ
дифференцирования р на переменную Лапласа s. Согласно
сформулированному правилу переведем в область изображений уравнение
(3.17): _
(Tnnsn + Tnnz\sn-1 + ... -f- Tis + 1) AY (s) =
(s). (3.19)
89
Составив отношение ДК (s)/AX (s), получим запись уравнения
в форме передаточной функции
да: (s)
i-ij-i
... +7\s+l
или проще, используя формулу (3.18):
Q(s) '
(3.20)
(3.21)
В большинстве реальных случаев динамические звенья имеют на
входе несколько переменных величин, а передаточная функция
предусматривает оценку реакций от одного входного сигнала. Тогда
для восстановления картины реальных связей и большей наглядности
применяют запись уравнения динамики в структурной форме
(рис. 3.4). Внутри блока, изображающего динамическое звено,
записывают его передаточную функцию; на входе в блок изображают
суммирующий элемент (сумматор), динамические свойства которого
предполагают идеальными. В каждый элемент сумматора направляют
входной сигнал (Axt, Aa'2, ..., Да:,), а на выходе из него общую сумму
входных сигналов Дх2 направляют на вход блока. Если на вход
подаются отрицательные сигналы Дх3, то сектор сумматора,
соответствующий точке приложения отрицательного сигнала,
затушевывают. Естественно, что такое представление суммирующихся
сигналов возможно лишь при наличии одинакового входного элемента,
к которому приложены все входные воздействия. В случае, если
один или несколько сигналов приложены к другим входным
элементам звена, то перед этими сигналами рисуют свой блок,
характеризуемый такой передаточной функцией, которая соответствует свойствам
другого входного элемента (рис. 3.5), или изображают два
независимых входа. При этом передаточная функция от разных входных
сигналов будет разной. Кроме наглядности структурная форма записи
уравнений динамики звеньев практически подготавливает решение
динамических задач на аналоговых вычислительных машинах. В
структурной форме представления уравнений динамики заложено
некоторое несоответствие обозначений. Передаточная функция,
представляющая свойства звена, записана в области изображений, а
Рис. 3.4
Рис. 3.5
90
входные и выходные сигналы обыкновенно записывают в оригиналах.
В дальнейшем, в зависимости от решаемых задач, будут применяться
все рассмотренные формы записей уравнений динамики.
В связи с тем, что переходный процесс определяется не только
внутренними свойствами, но также видом входных сигналов, для
правильной постановки задачи исследования динамических свойств
звеньев необходимо применять наиболее характерный для каждого
случая вид входного воздействия. Выбор вида входного сигнала
принципиально затруднен, так как для реальной ситуации
невозможно предвидеть заранее его форму, потому что внешние
воздействия чаще всего носят случайный характер. Тогда выбирают из
типового ряда входных сигналов либо наиболее вероятный вид,
либо заведомо наиболее тяжелый для системы закон изменения
входной величины.
Рассмотрим наиболее часто применяющиеся в практике типовые
виды входных сигналов.
Наиболее распространенным видом типового входного сигнала
является так называемая единичная ступенчатая функция
(скачкообразный сигнал), показанная на рис. 3.6. Помимо того, что к
такому виду сводятся множество управляющих и возмущающих
сигналов, он одновременно является и наиболее тяжелым видом
входного воздействия. В ответной реакции на скачкообразный сигнал
система обнаруживает характеристики вынужденного движения.
По существу единичная ступенчатая функция не является
непрерывной и с математической точки зрения многие операции с ней
недопустимы (дифференцирование, интегрирование дифференциальных
уравнений, в правую часть которых входит эта функция). Поэтому
применение единичной ступенчатой функции требует обоснования.
Это обоснование осуществляется путем действия с непрерывными
функциями, аппроксимирующими ступенчатую функцию, и
последующим предельным переходом. Можно указать много способов
аппроксимации функций 1 (т) сходящимися последовательностями
непрерывных функций. Однако для решения многих практических
задач в применение к анализу динамических свойств в
пневматических и гидравлических элементах ДУ с ЖРД целесообразно
представлять единичную ступенчатую функцию как предел
последовательности экспоненциальной функции:
1 (т) = lim(1 - е~^)-
Предельный переход соответствует такой деформации экспоненты,
который показан на рис. 3.7. В соответствии с таким подходом для
единичной ступенчатой функции [1] должна быть следующая
аналитическая запись:
( 1 при т>0;
1 (т) = (3.23)
v ' {О при т <0. v ;
Запись (3.23) исключает функцию слева от точки 0 (вертикальная
пунктирная линия 1), что строго соответствует определению пере-
91
/ft)
Рис. 3.6
Рис. 3.7
ходного процесса, сформулированному в разд. 3.2 в части требования
нулевых начальных условий.
В подавляющем большинстве практических случаев в чистом
виде мгновенный скачок воспроизвести невозможно. По этой причине
сравнение расчетных и опытных данных чрезвычайно затруднительно.
Однако в большинстве случаев реальную форму входного сигнала
легко описать одной из экспонент 2, входящей в предельное
выражение (3.22). В таких случаях после опытной проверки реальной формы
воздействия последнее аппроксимируют одной из возможных
экспонент предельного выражения (3.22) и в последующих расчетах
уточняют динамические свойства исследуемых элементов в ответ на
входной сигнал, более близкий к реальной форме, чем мгновенный
скачок. Особенно такого уточнения требуют входные сигналы
подавлению и расходам, которые невозможно в опыте изменять скачком.
В предварительных теоретических расчетах при оценке
характеристик вынужденного движения всегда пользуются в чистом виде
скачкообразным воздействием. Это позволяет проводить сравнение
динамических свойств различных систем между собой, которые
обнаруживают при этом виде воздействия характер вынужденного
движения.
Вторым распространенным видом типового входного сигнала
является так называемая дельта-функция б (т), представляющая
математическую идеализацию импульса бесконечно малой
длительности, имеющего площадь, равную единице.
Одно из возможных определений понятия дельта-функции можно
сделать следующим образом. Рассмотрим какую-нибудь
аппроксимацию функции 1 (т), например, в виде (3.22). Продифференцируем
эту функцию во времени т и перейдем к пределу по Т:
х
б(т, T)=J±W =L'T; Пт6(т, Г) = б(т).
ах 1 г_^0
Этот предел и называется дельта-функцией. Запишем ее через предел
выбранной аппроксимации:
б(т) = lim
1 --Т-
(3.24)
Это выражение можно проиллюстрировать с помощью
деформации кривых /(т)=уе т , показанных на рис. 3.8 и построенных
92
при различных значениях Т. Все действия с функцией б (т) можно
обосновать путем действий с функцией б (т, Т) и последующим
переходом к пределу при Т ->0. В частности, так как б (т, Т) = ^т =
= i (т), то будем считать, что б (т) =
= 1 (т), хотя в обычном
понимании 1 (т) не дифференцируема. Так как
о
то примем это же свойство и для дельта-функции, т. е.
Кроме того, из определения и свойств принятой аппроксимации
б (т) вытекает, что б (т) = 0 при т < 0 и т>0и б (т) = оо при
т — 0 справа на бесконечно малом интервале времени от точки 0.
В соответствии с этими свойствами запишем аналитическое
выражение для б (т):
б(т)
0 при т<0 и при т>0;
оо при т = 0 справа;
J б (т) d% = 1.
(3.25)
Важность понятия дельта-функции в теории автоматического
регулирования заключается в том, что при ее помощи описываются
ударные входные сигналы; б (т) лучше других типовых сигналов
характеризует влияние случайных воздействий на систему
автоматического регулирования, которые являются лишь причиной
появления отклонения, а далее система освобождается от последствий
воздействия. Отклик системы на дельта-функцию характеризует
собственное движение звена или системы и называется импульсной
переходной функцией.
Реально дельта-функцию воспроизвести невозможно, однако
воздействия, близкие к дельта-функции, удается описать одной из
экспонент предельного выражения (3.24). i
Другими видами входных сигналов могут -*
быть: линейный закон изменения во времени
Ах (т) = Ахх (рис. 3.9), квадратичный за-
— — х2
кон изменения во времени Ах(т)=Ах-^-
(рис. 3.10), кубический и т. д. Последние
применяются чаще всего для исследования
следящих систем или для других
специальных целей. И, наконец, широко применяе- рИс. 3.8
93
Рис. 3.9
Рис. 3.10
мый на практике, входной сигнал в виде гармонического
воздействия (рис. 3.11):
_ Дл: (т) = ~АХ sin сот,
где Ах и со — относительная амплитуда и частота гармонических
колебаний. Применение такого вида входного сигнала обусловлено
тем, что почти каждый элемент ЖРД является потенциальным
источником гармонических колебаний (или близких к ним).
Последовательное соединение динамических звеньев в ЖРД обеспечивает
практически каждому агрегату входной сигнал в виде
гармонических колебаний. Целесообразным также является применение
гармонического сигнала не только к колебательным, но и к
периодическим звеньям и системам звеньев. Ответная реакция звена на
установившиеся гармонические колебания определяет его частотные
характеристики.
Принципиально анализ динамических свойств звена или системы
автоматического регулирования проводят либо во временной области,
либо в частотной. В первом случае анализируются переходные
процессы, во втором — частотные характеристики. Комплексная
оценка динамических звеньев и систем включает в себя как
временные, так и частотные характеристики.
Звенья систем автоматического регулирования принято
классифицировать по динамическим свойствам независимо от их
конструкции и физической природы. Динамические свойства звеньев
отображают дифференциальные уравнения динамики. В классификации
обычно рассматривают так называемые типовые динамические
звенья. Под типовым звеном понимают такое звено, динамические
свойства которого описываются дифференциальным уравнением не выше
второго порядка.
В табл. 3.1 приведены некоторые варианты левых и правых
частей уравнений динамики типовых звеньев; при этом
предполагается, что уравнение звена может
представлять собой любую комбинацию в
виде равенства левой и правой частей,
взятых из любых строк таблицы. Кроме
того, правая часть в общем случае
может быть функцией не только одной,
но и нескольких величин,
воздействующих на звено по разным законам.
Рис. з.п В табл. 3.1 уравнения динамики запи-
94
Классификация типовых звеньев
Таблица 3.1
о
с о.
1
2
3
4
5
6
7
8
9
10
11
Наименование звена
Идеальное
Инерционное
Неустойчивое
инерционное
Инерционное 2-го
порядка
Колебательное
(7\ < 2Г2)
Консервативное
Неустойчивое
лебательное
/т1 ., ОТ ^
\ * 1 ^~ ^ ■* 2/
Неустойчивое
инерционное 2-го
порядка
Тг > 2Г2
Неустойчивое
инерционное 2-го
порядка
(Ti и Т2
любые)
Интегрирующее
Левая часть
уравнения
ак
(Tts+ 1)AF
,(TlS — 1) AT
(r22s2+TlS+l)A?
(r^s2—riS+l)AF
„^
Правая часть
уравнения
A-AX
(Tis+ 1)/CAX
1 —
1 ' AY
/Ci AXj — /Co. с ^^о. с
Наименование звена
усилительное
дифференцирующее
с введением
производной
интегрирующее
с введением
производной и
интеграла
с введением
интеграла
с введением
двух
производных
с введением
двух
производных и
интеграла
суммирующее
с
включением
отрицательной
обратной
связи
С учетом
чистого
запаздывания
№ по
пор.
1
2
3
4
5
6
7
8
9
10
11
95
саны в области изображений; наименование левых и правых
частей отдельные; общее наименование звена складывается из двух
наименований, соответствующих левой и правой частям уравнений.
Например, если звено имеет уравнение динамики вида
то это звено называется инерционным с введением производной.
Если уравнение динамики звена имеет вид
то оно называется инерционным усилительным (хотя обычно термин
«усилительное» опускают). Звено, описываемое уравнением
Д? = TjsAX,
называется идеальным дифференцирующим. Часто термин «идеальное»
опускается и только подразумевается. Звено с уравнением динамики
вида
будет колебательным или инерционным второго порядка (в
зависимости от соотношения величин коэффициентов Т1 и Т2) с введением
двух производных.
Комплекс звеньев, динамика которых описывается линейными
дифференциальными уравнениями более высоких порядков, как
правило, представляет собой различные соединения типовых звеньев.
Порядок присвоения наименований комплексу звеньев,
представляемых как одно звено, остается прежним. Например, звену с
уравнением вида
(Tls3 + T22s2 + Txs + 1) ДГ = (Г is + 1) К АХ
присваивается наименование инерционного (апериодического или
колебательного) звена третьего порядка с введением производной.
Апериодический или колебательный переходный процесс такого звена
определяется соотношением всех его коэффициентов.
Для наименования комплекса звеньев высоких порядков кроме
характеристики колебательности или апериодичности движения
добавляется порядок уравнения динамики, а правым частям
присваиваются наименования в соответствии с числом производных
или интегралов, входящих в правую часть уравнения.
Все рекомендуемые названия, приведенные в классификационной
табл. 3.1, соответствуют реальным динамическим свойствам,
которыми обладают эти звенья при передаче ими сигналов от входа к
выходу в цепи системы автоматического регулирования.
Динамические характеристики наиболее часто встречающихся
на практике типовых звеньев приведены в табл. 3.2, где уравнения
динамики записаны в символической форме и в форме передаточных
функций.
96
Динамические обойстба типоОых зденьеб
Таблица 12
Дифференциальное уравнение
Переходная
функция
Переходный
процесс
Передаточная
(руннция
Частотные характеристики
Амплитудная
Фазодая
Амплитудно-
фазовая
1у
Лу =
АуЮ = ках
м
кдх
К
к\
00
iv
со
AyftjKAXiiB'T
УSx
T.S + 1
С
(Т,р-1)Ау=Ш
йу(1Н&х(1въ
м
tv
,(О=0
в\0 J/Tt
'I
м
TTS
iV
0)
(t)
Fy
M
Sx\
TXS
CO
(0
M
(TjS+1)K
K\
CO
Продолжение таблицы 3.2
(TI>ZTn)
ЛХ
у
(Tj>lTz)
Лу
AX
ш
У
e
0
-It
JPz
iV и (О~0
0J=oo
e~~
Iy
где _ 1TZ
7
(T,<ZTZ)
/ \m
Tz2s2+T,s+1
в
О
Z
-я
(O
Jfh
lv
п)
~1)КйХ
1UP
(АХ
¥\
M/f
VTi
1/h
OJ
Учет чистого
запаздывания
Выходной сигнал
отстает от
входного на время ^зйп
Ау
Ах
Не
LV
U)
3.4. ОПРЕДЕЛЕНИЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ
Запись уравнений динамики в форме передаточных
функций и построение по ним структурных схем систем автоматического
регулирования обладают той особенностью, которая позволяет проще
определить передаточные функции сложного соединения звеньев,
не прибегая к совместному решению громоздких систем уравнений.
Прежде чем перейти к общему правилу получения передаточных
функций сложных соединений звеньев, необходимо рассмотреть
правила получения передаточных функций типовых соединений
звеньев.
Первым таким соединением является параллельное соединение
звеньев.
Параллельным называют такое соединение звеньев, у которого
имеется общая входная величина, а выходная—представляет собой
сумму выходных величин всех звеньев, входящих в соединение (рис. 3.12).
Передаточная функция соединения в целом по определению будет
определяться отношением
но Yx (s) = Уг (s) + 72 (s) + ...,+ Yn (s).
Тогда
••• -t-
Yn(s)
(3.26)
В выражении (3.26) каждое из слагаемых представляет собой
передаточную функцию каждого из звеньев. Тогда его можно
записать в виде суммы передаточных функций:
W2 = Wt (s) + W2 (s) + ... + Wn (s) = t Wt (s). (3.27)
1=1
Второе типовое соединение является последовательным
соединением звеньев.
Последовательным называют такое соединение звеньев, у которого
каждая входная величина последующего звена является выходной
предыдущего (рис. 3.13).
Передаточная функция соединения в целом будет определяться
отношением
Yn(s)
X(s) >
W}(s)
Рис. 3.12
Wz(s)
Рис. 3.13
Wn(5)
99
или
„.2 (S)
= Wi (s) Г2 (s)... Wn_, (s) №„ (s) = П^ (s).
(3.28)
Передаточная функция последовательного соединения звеньев
определяется произведением передаточных функций, входящих в это
соединение.
Таким образом, как параллельное, так и последовательное
соединения звеньев могут быть заменены каждое одним звеном с
эквивалентной передаточной функцией, соответствующей выражениям
(3.27) и (3.28).
Третьим типовым соединением звеньев является
встречно-параллельное соединение звеньев, в котором два звена соединены так, что
выходная величина одного звена подается обратно на его вход через
другое звено (рис. 3.14). Часто такое соединение называют
соединением с обратной связью. Звено с передаточной функцией W^s)
называют звеном прямого канала, а звено с передаточной функцией
W2 (s) — звеном цепи обратной связи. В зависимости от знака
выходной величины звена обратной связи, соединение может быть как
с положительной, так и с отрицательной обратной связью.
Определим соотношение, связывающее выходную величину Y (s)
с входной величиной х (s) соединения в целом.
Изображение выходной величины
Y (s) = W, (s) Xz (s).
В случае отрицательной обратной связи
Xx(s) = X(s)-X0.e(s),
где X (s) — изображение возмущающего воздействия х (t). Так как
*о.с(«)= W2(S)Y(S),
то Xz(s) = X(s) — X0.c (s),
или
Y (s) = Wt (s) Xs (s) = W1 (s) X (s) - W1 (s) W2 (s) Y (s),
откуда Y(s)= l
идо
Рис. 3.14
Так как передаточная функция
определяется отношением
V 1ч\
1 \ь) TW /^\
X(s) ~ ^sWf
то передаточная функция
встречно-параллельного соединения звеньев с отри-
100
дательной обратной связью будет
определяться следующим
выражением:
l+W1(s)W2(s)
(3.29)
^484
W0(s)
Wp(s)
Аналогично определяется переда- Рис. 3.15
точная функция
встречно-параллельного соединения звеньев с положительной обратной связью:
_Ijj£L
— w1(s)W2(s)
(3.30)
С помощью выражений (3.27) ... (3.30), определяющих
эквивалентные замены типовых соединений звеньев, можно привести
структурные схемы линейных замкнутых цепей САР к одной
принципиальной схеме, показанной на рис. 3.15, где Wo (s) — передаточная
функция объекта регулирования; Wv (s) — передаточная функция
регулятора; Y(s) — регулируемая величина; X (s) — возмущающее
воздействие; Z (s) — командное воздействие; & (s) = Z (s) — Y (s) —
ошибка рассогласования между командным воздействием и
регулируемой величиной; х (s) — регулирующее воздействие.
В этой структурной схеме элемент сравнения условно вынесен
из регулятора в виде безынерционного сумматора. Поскольку
регулятор в замкнутых САР всегда включен в отрицательную
обратную связь, то на этот факт в обобщенной структурной схеме
указывает отрицательный сектор сумматора против входа регулируемой
величины Y (s) в условном элементе сравнения (что равносильно
отрицательному входу в объект регулирующего воздействия X (s)).
В таком соединении объекта и регулятора по каждому из
входных сигналов движение системы может характеризоваться
различными передаточными функциями. Рассмотрим выражения
передаточных функций замкнутой САР по каждому из входных каналов.
Передаточная функция САР относительно регулируемой
величины Y (s) по отношению к возмущающему воздействию X (s) в общем
виде будет характеризоваться следующим отношением
X(s) -
Передаточная функция САР относительно регулируемой
величины Y (s) по отношению к командному воздействию определяется
следующим отношением:
(S)
Z(s) - Wz(S}*
В системах слежения движение системы характеризуется
передаточной функцией САР сигнала ошибки г (s) (рассогласования команд-
101
ного сигнала и регулируемой величины) по отношению к командному
воздействию Z (s), которая определяется отношением:
Найдем соотношения, определяющие каждые из этих
передаточных функций через передаточные функции объекта и регулятора.
Изображение выходного сигнала от внешнего возмущения будет
Yx(s) = W0(s)x(s).1
Изображение выходного сигнала от регулирующего воздействия
будет
Yx (s) = Wo (s) x (s).
Поскольку эти сигналы проходят через объект одновременно,
суммируясь на входе, то Y (s) = Yx (s) + Yx (ь) или
У (s) = Wo (s) X (s) + Wo (s) x(s) =
= W0(s) lX(s) +x(s)l (3.31)
Изображение сигнала рассогласования будет
е (s) = Z (s) -Y(s). (3.32)
Тогда изображение регулирующего воздействия можно записать так:
X (S) = Wv (8) 8 (S) = Wv (S) [Z (S) -Y(S)}
и, подставляя полученное выражение в (3.31), получим
Y(s) = W0(s) \X(s) + Wv(s) IZ(s) - Y(s)}\.
Откуда имеем
[1 + W0 (s) Wp (s)] Y (s) = W0 (s) X (s) + B70 (s) Wp (s) Z (s)
итш УМ - ^o(^^) + ^o(s)^
ИЛИ Г (S) - _____
Для определения передаточной функции выходной величины САР
по отношению к возмущающему воздействию положим в (3.33)
Z (s) = 0 и, составляя отношение изображений выходного сигнала
к входному, получим
W М- F(s) - Wo(s) WU\
W W IW (334>
Для определения передаточной функции выходной величины
САР по отношению к командному воздействию положим в (3.33)
X (s) = 0 и, составляя отношение изображений выходного сигнала
к входному, получим
V!/ z W - -^Г ~" 1 + Wo (S) Wv (S) *
102
Для определения передаточной функции ошибки рассогласования
выходной величины САР с командным сигналом по отношению
к командному воздействию воспользуемся выражением (3.31),
полагая в последнем X (s) = 0. Откуда получим Y (s) = Wo (s) X (s).
С другой стороны, так как X (s) = Wv (s) г (s), то будем иметь
Y (s) = Wo (s) Wv (s) г (s). Используя полученное выражение
в (3.33), при условии X (s) = 0 получим
Wo (s) Wv (s) 8 (s) - l +
Откуда, составляя отношение изображений выходного сигнала к
входному, найдем
W ^ = -JW = (336)
Полученные выражения для характерных передаточных
функций замкнутых САР —(3.34), (3.35) и (3.36) можно обобщить в одно:
где №3ам (s) — передаточная функция замкнутой цепи САР от
любого входного до любого выходного сигнала; Wxy (s) —
передаточная функция участка цепи от места приложения воздействия х до
любой величины у; WVSL3 (s) — передаточная функция
разомкнутой САР.
Действительно, анализируя выражения (3.34), (3.35) и (3.36),
легко убедиться, что при использовании структурной схемы САР
(см. рис. 3.15), в числителе всегда стоит передаточная функция
участка цепи от входного воздействия до рассматриваемой
координаты. Для (3.36) тоже, так как передаточная функция
безынерционного элемента сравнения равна единице W9tC (s) = 1. В
знаменателе всюду стоит сумма 1 -j- Wo (s) Wp (5), в которой второе
слагаемое соответствует передаточной функции последовательного
соединения объекта с регулятором. Она автоматически получается при
размыкании САР по линии главной обратной связи, соединяющей
объект с регулятором (на рис. 3.15 линия размыкания показана
волнистой чертой). Пеле операции размыкания соединение объекта
с регулятором становится последовательным (рис. 3.16), для
которого выполняется равенство Wp3L3 (s) = Wo (s) Wv (s), при условии,
что W9u0(s) = I.
Итак, обобщенное правило для составления передаточной
функции замкнутой системы автоматического регулирования
формулируется следующим образом: для нахождения передаточной функции
замкнутой САР необходимо в ее числителе записать передаточную
функцию соединения звеньев от места приложения воздействия до
рассматриваемой координаты, а в знаменателе — единица плюс
передаточная функция соответствующей САР разомкнутой цепи.
103
Применение обобщенного
правила или выражений (3.34),
(3.35) или (3.36) заменяет
операцию «свертывания»
уравнений динамики элементов САР,
D облегчая получение конечного
гИС. о. 10
результата.
Аналогичным образом могут быть получены передаточные
функции для любых других соединений звеньев, не содержащих
перекрестных связей. Использование метода структурного решения для
контуров с перекрестными связями требует его предварительного
преобразования, основы которого, например, приведены в работе
3.5. УРАВНЕНИЕ ДИНАМИКИ ЭЛЕМЕНТОВ
ДВИГАТЕЛЬНОЙ УСТАНОВКИ
Динамические характеристики ДУ в целом дают
возможность оценить изменения основных регулируемых величин (тяги
и соотношения компонентов топлива) во времени при изменении
входных параметров.
В первую очередь при проектировании системы управления
интересуются динамической характеристикой прямого канала
управления — от точки приложения регулирующего воздействия на объект
до регулируемой величины. Например, для контура регулирования
тягой — от изменения площади дросселя газогенератора,
дозирующей компонент топлива для питания турбины, до изменения тяги
(см. рис. 1.10). Затем рассматриваются процессы изменения тяги от
влияния предполагаемых внешних и внутренних возмущающих
воздействий. При работе замкнутой системы автоматического
регулирования все изменения тяги с помощью косвенного параметра
регистрируются измерительным элементом регулятора и на
основании его сравнения с командным значением формируется сигнал,
переставляющий регулирующий орган в новое положение. В режиме
стабилизации регулируемой величины влияние возмущений парируется
регулятором с помощью перестановки регулирующего органа на
величину, достаточную для компенсации этого воздействия. Перевод
с режима на режим также осуществляется за счет перестановки
дросселя регулятора в новое положение.
Таким образом, основной динамической характеристикой ДУ
как объекта регулирования является динамическая характеристика
канала управления при подаче сигнала на его вход (дроссель
регулятора).
Задача решается с помощью применения метода теории линейных
дифференциальных уравнений с постоянными коэффициентами и
сводится к составлению уравнений динамики элементарных звеньев,
их приведению к одному уравнению (свертыванию) и последующему
интегрированию.
104
КС
-p*
Рис. 3.17 Рис. 3.18
При составлении уравнений динамики звеньев будем
придерживаться следующей последовательности операций.
1) выявление физического закона, определяющего поведение
звена в системе (составление уравнений статики);
2) определение переменных величин, входящих в уравнение;
3) определение выходной и входных величин (выходную
величину записывают в левой, а входные — в правой части
уравнения);
4) составление уравнения динамики (обыкновенного
дифференциального уравнения);
5) линеаризация уравнения динамики путем разложения в ряд
Тейлора и получение таким образОхМ линейного дифференциального
уравнения с постоянными коэффициентами;
6) составление уравнения в отклонениях, для чего необходимо
вычесть из уравнения динамики уравнение статики;
7) замена абсолютных отклонений относительными (переход
к безразмерным отклонениям);
8) приведение уравнения к одной из стандартных форм записи.
В качестве примера рассмотрим динамические характеристики
звеньев ДУ с автономной системой подачи рабочего тела для
питания турбины (см. рис. 1.10) по каналу управления тягой.
А. Камера сгорания ЖРД. Звено, с которого начинается
разбиение ДУ на элементарные динамические звенья, должно иметь
на выходе регулируемую величину. В рассматриваемом случае
таким звеном является камера сгорания. Так как прямое измерение
тяги в контуре регулирования невозможно, выберем косвенный
параметр — давление в камере сгорания. В этом случае модель камеры
сгорания как звена объекта регулирования будет иметь выходной
величиной' pKi а входной — суммарный расход топлива (т0 + тг),
поступающий в камеру (рис. 3.17). Одновременно такое
представление камеры сгорания (КС) будет являться моделью расчетной
схемы. Физическая модель камеры сгорания будет отличаться от
расчетной тем, что при тех же входных величинах на выходе
физической модели будет суммарный расход газа т2, реализующий тягу
(рис. 3.18).
Координатами состояния камеры сгорания как объекта
регулирования будут показатели рабочего процесса: х — показатель
адиабаты расширения газа; R — газовая постоянная продуктов
сгорания; Тк — температура продуктов сгорания в камере;
геометрический показатель VK — объем камеры сгорания.
Для составления уравнения динамики камеры сгорания
воспользуемся законом сохранения массы.
105
На установившемся режиме работы для камеры сгорания можно
составить баланс расходов по жидкой и газовым фазам:
rn0 -f тг — т2 = 0. (3.38)
В динамике при использовании метода малых отклонений тот
же баланс примет вид
(т0 -т- Дт0) + (/йг + А^г) - ("*z + A^s) = -$-> (3-39)
где тг — масса газа в камере сгорания, кг.
Правая часть баланса (3.39) отражает накопление (или
расходование) газа ввиду его свойства сжимаемости. Баланс (3.39) составлен
при условии сохранения во времени соотношения компонентов
топлива km = -?2- = const и без учета запаздывания воспламенения
компонентов топлива. Вычитая из баланса (3.39) баланс (3.38),
получим уравнение динамики камеры сгорания в отклонениях
Ат0 + Дтг - Дт2 = -^. (3.40)
Применяя уравнение состояния газа, заменим в правой части
баланса (3.40) dmT на dpK1 тогда получим
dntr =
r
Связь суммарного расхода с давлением в камере сгорания имеет
вид
х+1
х-1
После соответствующих подстановок получим
Полученное линейное уравнение динамики в отклонениях
приведем к безразмерной форме записи, вводя следующие обозначения:
— А/?к, т
Рк. ном wo
= Дтг
^г. ном
и полагая, ввиду малого диапазона отклонений, что Дрк
£ml 1^ _;_ 5к^к ном д^ = т0. ном
106
= т0. ном Д^Г0 + тг. ном Д^ГГ. (3.42)
Разделим уравнение (3.42) на комплекс ВкрКт ном, учитывая
что т2 = ВК/7К. ном, тогда
к ] д "*о. ном д ^ I
т2ном
тг. ном
mS еом
В последнехМ выражении коэффициент при производной имеет
размерность времени и называется постоянной времени камеры
сгорания:
/
(тг
где LnpHB — приведенная длина камеры ЖРД. Коэффициенты перед
входными сигналами правой части (3.43) являются так же
постоянными величинами и в теории автоматического регулирования
называются коэффициентами усиления. С учетом, что km=rhOt noJmrt H0M,
получим
о. ном km
rs Mr ном 1 is
Постоянным коэффициентам уравнения присваивают
порядковые номера.
Окончательно с учетом принятых обозначений получим
(3.44)
Это линейное дифференциальное неоднородное уравнение с двумя
независимыми переменными в правой части. Переходный процесс
камеры сгорания можно получить, пользуясь принципом
суперпозиции (независимости решений), проинтегрировав сначала
полученное уравнение по отношению к одному, а затем к другому
независимому переменному и сложив оба полученных решения:
А>к2 (т) = Д/?к. о (т) + А/?к. г (т).
Найдем Арк.э (т), полагая временно Д/?к.г(т) = 0.
Для этого случая исходное уравнение камеры сгорания будет
иметь вид
10
к = Кг ДЛ0. (3.45)
Полное решение линейного дифференциального уравнения
складывается из двух решений —общего и частного:
[Крк. о (Т)]полн = [АРк. о (Т)]общ + [А]5н. о (Т)]частн-
107
Общее решение имеет вид
где С — постоянная интегрирования, а X — корень
характеристического уравнения.
Частное решение получается из условия т->оо, при котором
^-->0: [Дрк(т)]частн = КгШ0. Тогда [Д/?к(т)]полн = Се*т + К^т^
Характеристическое уравнение, соответствующее
дифференциальному (3.45), будет
Т10К +1=0,
откуда А, = —\1Т10\ тогда
I Ар~к (т)]полн = Се + Кг Шо. (3.46)
Постоянная интегрирования находится из начальных условий
при т = 0
Подстановка этих условий с (3.46) дает тождество
0 = С + /CiAm0-
Откуда С = —/CiAm0- Полученное значение С подставляем в (3.46)
и окончательно находим
(3.47)
Графическое изображение найденного решения показано на
рис. 3.19. Оно характеризует изменение давления в камере сгорания
от скачкообразного изменения на входе расхода окислителя. Этот
переходный процесс условный и практически не реализуемый, так
как он не отвечает требованию km = то1тг = const, и может быть
получен только расчетом. Однако после сложения с аналогичным
процессом, полученным отдельно от воздействия по линии горючего,
он соответствует принятым условиям и становится реальным
Д/?К2 (*) = Д/?"к. о (Т) + Дрк. г М =
S^l] (3.48)
1
Графическое сложение решений показано на рис. 3.20.
Исследования полученного решения (3.47) представляют существенно
практический интерес.
108
Найдем выражение производной от полученного решения:
и при т = О
(3.49)
Такая операция соответствует проведению касательной к кривой
переходного процесса в начальной точке.
Из выражения (3.47) видно, что переходный процесс является
асимптотическим и стремится с течением времени к уровню KiArh0.
Одновременно из выражения (3.49) видно, что касательная,
проведенная в начале координат к кривой переходного процесса, отсекает
на асимптоте отрезок времени, равный Т10. Этот отрезок называют
подкасательной. Свойства исследуемой кривой таковы, что
проведенная в любой точке касательная отсекает на асимптоте всегда
одинаковый отрезок, равный Т10. Теоретически экспоненциальный
процесс продолжается бесконечно долго. Однако на практике под
временем переходного процесса понимается наименьший промежуток
времени, по истечении которого выполняется неравенство
К10 Ат0—Д/?к.
. о |дош
где | Д/?к. 0 |дОП — величина допускаемой ошибки.
В практике достаточному приближению часто соответствует
ошибка | Д/?к. о |д0П = 5 %. Тогда при этой величине ошибки
переходный процесс заканчивается за время ~ 37\О (см. рис. 3.19).
Таким образом, коэффициенты уравнения динамики камеры
сгорания (3.44) характеризуют как величину уровня нового режима,
который установится после изменения расходов (с помощью
коэффициентов усиления К\ и /С2)> так и длительность этого режима (с
помощью постоянной времени 7\). лР
Вид левой части уравнения (3.44)
характеризует инерционные
свойства камеры сгорания,
обусловленные сжимаемостью газа. Как
видно из рис. 3.19, инерционность
г,
Рис. 3.19
Рис. 3.20
109
процесса изменения давления газа в камере сгорания заключается
в том, что в ответ на скачкообразный входной сигнал выходной,
искажая форму входного, имеет максимальную скорость
изменения в начале процесса, а затем скорость его изменения монотонно
падает до нуля. Геометрический смысл постоянной времени Т19
как показателя инерционности, состоит в том, что 7\ — время, за
которое мог бы закончиться переходный процесс, если бы скорость
его изменения была равна начальной и сохранялась постоянной до
установления нового режима. Коэффициент усиления К показывает
уровень нового режима выходной величины по отношению к уровню
входного скачкообразного воздействия.
Суммарный переходный процесс изменения режима при
одновременном изменении расходов можно получить опытным путем. С этой
целью в опыте необходимо после выхода камеры сгорания на
установившийся режим синхронно с помощью параллельно включенного
отсечного клапана изменить скачком расходы на входе в камеру
сгорания так, чтобы на новом режиме сохранилось прежнее
значение km и регистрировать во времени изменение давления в камере
сгорания. Однако опытный результат по форме может иметь
существенное отличие от расчетного, так как эксперимент всегда
проводится в конкретной системе трубопроводов, а камера сгорания работает
вместе с форсуночной смесительной головкой. Естественно, что такой
опыт нужно проводить, исключая из системы питания
присоединенные емкости и длинные трубопроводы.
Реальный переходный процесс от расчетного также будет
отличаться на время чистого запаздывания моментов изменения расходов
и начала изменения давления в камере сгорания (КС). Это
обстоятельство обусловлено физической природой топлива, которое
обладает свойством запаздывания воспламенения.
При соизмеримых значениях постоянной времени камеры
сгорания с величиной запаздывания воспламенения топлива необходимо
для сохранения физической картины учитывать величину чистого
запаздывания (рис. 3.21). Для этого введем обозначения:
ho = Am0 (т — Тзап); Am; = (т — тзап), (3.50)
которые учитывают сдвиг начала переходного процесса на время
запаздывания относительно момента внесения возмущений. При
этом уравнение динамики камеры сгорания в символической форме
записи (полагая dldx — р) примет вид
(Тхр + 1) А^ = Кх М* + К2 АЛ?. (3.51)
Запись уравнения в форме (3.51) соответствует функциональной
схеме камеры сгорания, показанной на рис. 3.22.
Элементы запаздывания 1 и 2 в этой схеме несколько условны
и показывают, что при моделировании процесса изменения давления
в КС выходной сигнал запаздывает относительно входного на
заранее известную величину.
Для более строгого учета величины запаздывания в описании
переходного процесса запишем входное воздействие, учитывающее за-
110
йтй
Рис. 3.21
паздывание (3.50) в виде ряда по степеням малых приращений
(—тзап) на основании того, что эта величина мала по отношению к
текущему времени т:
Дга* = Am (т — тзап) =
(- Тзап) +
(л)
Перепишем этот ряд в символической форме:
Am (т) рп
\
Перейдем к записи полученного ряда в области изображений по
Лапласу:
Ш*= Ш(з) [l + -L (_ Тзап) + 4 (- тзап)2 + • •' + -J (- тзап
Ряд в квадратных скобках представляет собой разложение
функции e""ST3an; таким образом, окончательно
М* = Ш (s) e"st3an. (3.52)
Далее, подставляя (3.52) с присвоением индексов в уравнение
динамики камеры сгорания (3.51) (которое предварительно переведем
в область изображений по Лапласу, заменяя символ р на символ s),
получим
или (7\s + 1) ДР^ = е"5Тзап
или в форме передаточной функции:
(3.53)
(3.54)
111
\Amr
t-
Kc~st3an
Рис. 3.23
Рис. 3.24
Структурные схемы, соответствующие выражению (3.54),
приведены на рис. 3.23 и 3.24.
Полученные передаточная функция и структурные схемы
характеризуют инерционные свойства камеры сгорания с учетом
запаздывания воспламенения компонентов топлива.
Особенности нелинейных свойств КС приведены в работах [11,
22].
Б. Форсуночная смесительная головка. Для форсуночной
смесительной головки камеры сгорания физический закон связи расхода
и перепада давлений на форсунках и ее геометрией на
установившемся режиме записывается в виде
Дт0 =
Дтг =
(рф, о — pK)t\
^ф. г V~2pr (Рф. г ~Р«)г-
(3.55)
Переменными во времени величинами будут расход топлива т
и давления рф и рк. Остальные параметры (плотность компонентов р,
коэффициенты истечения \1ф площади проходных сечений Рф) за
рассматриваемый короткий промежуток времени изменяться не
могут.
Выходной величиной форсуночной головки будет расход топлива,
который поступает в газовую полость камеры сгорания и является
для нее входной величиной.
Запишем уравнение динамики форсуночной головки, задавая
переменным величинам отклонения:
т0 + Ат0 = 2 (Аф. 0Fф. о Т^2р0 [(рфт 0 + Д/7Ф. 0) — (рк
тг + Дтг = 2 Н. г^ф. гУ 2рг 1(рф. г + А^ф. г) - (рк +
(3.56)
Полученные уравнения предполагают головку полностью
залитой несжимаемой жидкостью, а стенки головки — абсолютно
жесткими. Поэтому уравнения динамики (3.56) не содержат
производных и являются алгебраическими.
112
Перейдем к уравнению в отклонениях и одновременно
линеаризуем уравнения (3.56) с помощью разложения в ряд Тейлора,
ограничиваясь только его первыми членами:
дпгп А
dthr A dthp A
°гф. г v СРк
Заменим в полученном выражении абсолютные отклонения
относительными:
= / РФ. о. ном дт0 \ д- / Рк. ном дгН0 \ д^-;
V ^о. ном дрф. о ) *' ° V я*о. ном Фк /
(3.57)
д^=/ Рф.г.ном
г \ /яг. ном
В правые части безразмерных уравнений динамики (3.57) перед
переменными величинами Ар входят константы.
Частные производные в этих константах являются тангенсами
углов касательных, проведенных в точках номинального режима
к статическим характеристикам связи расхода компонентов топлива
и давлений, т. е. являются характерными числами. Их легко
определить, дифференцируя уравнения статики (3.55) отдельно по каждому
переменному. Константы при входных величинах в уравнениях
динамики имеют смысл коэффициентов усиления, поэтому окончательно
для форсуночной головки получим
Дто = /С8 Д/?ф. о -
Форсуночная головка имеет два входных сигнала, причем один
из них, по давлению в камере сгорания, отрицательный. Это
означает, что при увеличении давления в КС расход через форсуночную
головку падает. Этот известный физический эффект в автоматике
получил (для соединения: камера сгорания — форсуночная головка)
название отрицательной обратной связи. Именно благодаря
отрицательной обратной связи форсуночной головки с камерой сгорания
возможно поддержание устойчивого процесса подачи топлива в КС
с одновременным выбросом продуктов сгорания через сопло.
Форсуночная головка обеспечивает подачу топливной смеси в
камеру сгорания, которая сгорая является источником энергии.
Сопловая часть камеры сгорания является «потребителем» этой энергии
(точнее — ее преобразователем). В системах источник энергии —
потребитель в зависимости от сочетания их характеристик может
осуществляться свойство самостабилизации (самовыравнивания)
совместных режимов работы при условии, что разность приращений
между подводом и отводом энергии или вещества, возникающая при
отклонениях от равновесного режима, устраняет эти отклонения.
8 А. Н. Бабкин и др. ИЗ
Рис. 3.25
На рис. 3.25 показаны
характеристики подвода топлива при
постоянном давлении перед
форсунками (кривая т0 + тТ) и отвода
продуктов сгорания через сопло
(прямая тс) в зависимости от
давления в камере сгорания.
Пересечение этих двух характеристик
образует точку совместного
равновесного режима работы
форсуночной головки и сопла с
координатами рк. ном и ^ном- При положительном отклонении давления в
камере сгорания между характеристиками подвода топлива и отвода
газов возникает отрицательная разность приращений расходов, а
при отрицательном отклонении давления — положительная (на
рис. 3.25 заштрихованы), которые возвращают систему в
равновесную точку. В этом свойстве проявляется физическая сущность
свойства самовыравнивания совместных режимов работы форсуночной
головки и сопла КС.
Как видно из рис. 3.25, необходимый знак разности приращений
между подводом топлива и отводом продуктов сгорания реализуется
за счет положительного наклона характеристики сопла (угол а)
и отрицательного наклона характеристики подачи топлива (угол ($).
Переходные процессы, соответствующие уравнениям динамики
(3.58), показаны на рис. 3.26 и 3.27. Они характеризуют свойство
идеального усилительного звена, в процессе передачи сигнала
которым не искажается форма входного воздействия, а изменяется лишь
его уровень.
Структурная схема форсуночной головки, соответствующая
уравнениям (3.58), показана на рис. 3.28. Отрицательная обратная связь
по А/?к на ней изображена секторами а сумматоров б входных
сигналов.
В. Трубопроводы и тракт охлаждения. Уравнение динамики
трубопроводов и охлаждающего тракта с учетом податливости стенок
и течения по ним реальной жидкости не описывается линейными
уравнениями типовых звеньев. Однако в поставленной задаче
исследования приближенного качественного анализа динамических свойств
Am
Am
n3(5)L
)ДРк
Рис. 3.26
Рис. 3.27
114
ДУ в целом при взаимодействии с
регулятором в диапазоне низких
частот (до 50 ГЦ) можно
ограничиться представлением гидравличе- ц
ских трактов как транспортных ма- фв
гистралей. При такой приближенной
динамической оценке жидкость в
трубопроводе представляется
свойствами жесткого тела, а все
параметры трактов течения жидкости —
сосредоточенными. jk
В этом случае уравнение статики р
для гидравлических магистралей
можно приближенно представлять, как для сосредоточенных
сопротивлений
Коэффициенты расхода магистралей \i, площади поперечного
сечения F и плотность компонента р будут константами.
Переменными величинами во времени, отвечающими принятым допущениям
будут в данном случае расходы т и давления р.
Выходной величиной рассматриваемых звеньев будет входная
величина в форсуночную головку камеры сгорания, т. е. /?ф. По
правилам составления уравнений динамики, приведенным выше,
необходимо записать ее в левой части, т. е.
__ / 1
Рф. о — Рн
Рф.г=(рп- ..2yL "*2
Постоянный комплекс величин в полученных выражениях
обозначим через Ам = 1/(2^м^мР). Тогда
Рф. о == Рн. о Дм. о^о*>
РФ.г = Рн.г-Лм.гт?. (3.59)
Уравнения (3.59) являются исходными уравнениями статики
магистралей как звена объекта регулирования; из них видно, что
магистрали имеют два входных сигнала, один из которых, со знаком
минус (по расходу) в контуре соединения с форсуночной головкой будет
введен как обратная связь.
Составим уравнения динамики магистралей, задаваясь
переменными отклоненияхми, с учетом инерции столба жидкости в трактах.
Последнее обстоятельство вызвано тем, что скорость движения
жидкости в трактах ЖРД достаточно велика и при скачкообразной
8* 115
перестановке регулирующих органов ее изменение происходит
в короткий промежуток времени. Итак,
I, + Арф)о = [(рн + Л/?н) — ^м (т + Ат)2]0 — ^ ^
(3.60)
(Рф + АРф)г = [(^н + А/^н) — ^м (^
JYV7
В уравнениях динамики (3.60) комплекс величин тм-^-
где тм — масса жидкости в магистрали, a W — скорость ее
движения, является силой инерции столба жидкости в тракте при
изменении скорости ее движения по времени, а комплекс -^ -з
гм ах
соответствующее изменение давления. В этом комплексе FM —
поперечная площадь сечения магистрали.
Определение массы столба жидкости через параметры тракта и
переход от изменения скорости к изменению расхода в этом комплексе
дает
тм dW _ plMFM I dm _ lM
F d F F d ~ F
dm
pFM di ~ FM dx ' ^OU1'
где /м — длина магистрали.
Подставляя равенство (3.61) в (3.60) и пренебрегая квадратом
отклонения расхода во вторых членах правой части (3.60), получим
линейное уравнение динамики гидравлических трактов
(РФ + Арф)о = [(Ри - Арн)о - (Амт* + 2Амт Аш)]0 -
(3.62)
(рф + Арф)г = [(ря - АРн)г - (Амт* + 2Амт Ат)]г - (J^-)
Перейдем к уравнению в отклонениях. Для этого из уравнений
динамики (3.62) вычтем уравнения статики (3.59):
Арф. 0 = (Ар„ - 2Лмт Дт)0 - (-^)о^
" (3-63)
В полученных уравнениях перейдем к безразмерной форме записи:
Рф.ном Уа Рф.ном /о \ F „ Рф.ном /о dx
(3.64)
д^
\ рф.ном г Рф.ном
116
Комплексы констант при двух первых членах правых частей
уравнений (3.64) безразмерны и имеют смысл коэффициентов усиления.
Комплексы постоянных величин в третьих членах правых частей
имеют размерность времени и соответствуют физическому смыслу
постоянных времени. Таким образом, можно записать
Т ^;
(3.65)
V г = ^9 А/?н. г — ^ А/П Г ^
. г
где Тм= -^—Шном для соответствующей магистрали.
**м Рф. ном
Перейдем в полученном выражении к символической форме записи
(вводя dldx = /?) и объединим члены, содержащие расходы:
Арфа 0 = К7 А/7Н - (Т2р + 1) /С8 Ат0;
(о.оо)
А/?ф. г = ^9 А/?н — (Т3р + 1) #]
где Га = -^- иГ3 = -^'
Полученные уравнения динамики в форме (3.66) соответствуют
свойствам идеального усилительного звена по отношению к
давлению на входе (что отражает свойства магистрали как транспортного
трубопровода) и звена с введением производной по отношению
к расходу (что отражает учет инерции массы столба жидкости в
магистрали), причем расход в контуре соединения с форсуночной
головкой будет входить как сигнал отрицательной обратной связи.
Таким образом, для каждой магистрали необходимо рассматривать
два переходных процесса. Первый показан на рис. 3.29 для
идеального усилительного звена. Второй процесс получается из решения
уравнений динамики (3.66) по отношению к входному сигналу Дт.
По отношению к тракту окислителя уравнение будет иметь вид
= — К*То—тг-^ Kg Ariio = — Tw
Анализируя переходный процесс от единичного скачкообразного
воздействия, запишем
. о = — TVol (т) Шо — К8 [1]
Но, как было показано выше, в разд. 3.3, производная от
скачкообразного воздействия есть дельта-функция i (т) = 6 (т). Таким
образом, в общем виде для любой магистрали можно записать
Д^ф = - Тм 8(т)Ш-К Am. (3.67)
Графическое изображение решения приведено на рис. 3.30.
Пунктирными линиями на рис. 3.30 показан теоретический переход-
117
\л
600)
Am
l-J/77
Рис. 3.29
Рис. 3.30
ной процесс, отвечающий полученному решению в соответствии
с принятой ранее в разд. 3.3 трактовкой дельта-функции [см. (3.25) ].
Ход теоретического процесса показан стрелками.
Для реальных гидравлических трактов такие процессы
невероятны. В гидравлических трактах всегда имеет место дессипация
энергии, не позволяющая реализовать подобные процессы. Поэтому
обратимся к одному из искусственных приемов, позволяющему
приблизить переходной процесс линейного анализа к реальным
процессам. Воспользуемся для этой цели предельным выражением для
дельта-функции (3.24) и ограничим предел ее аппроксимации такой
экспонентой, которая имеет постоянную времени Гм, а именно
т
f(%) = —- e Гм, и подставим эту функцию в выражение (3.67):
(3.68)
Графически полученный процесс показан на рис. 3.30 сплошной
линией. Этот процесс начинается с конечного заброса величиной Дт
от нового уровня К А^ (что соответствует подстановке в (3.68)
условия т = 0) и экспоненциально сходится к нему. Длительность
переходного процесса определяется величиной ЗТМ с ошибкой 5 %.
При таком представлении процессов в магистралях сразу же
возникает вопрос о динамическом согласовании магистралей подачи
окислителя и горючего из условия сохранения постоянного
соотношения компонентов топлива в переходных процессах. Естественно,
что эта задача может быть выполнена только при условии Тм. 0 =
= Тм.г. В этом случае по обеим линиям расходы будут изменяться
синхронно, что обеспечит во времени сохранение их соотношения.
Поскольку Тм = ф- /Пном определяется уровнем режима и
■г м Pp. ном
отношением lM/FM, то очевидно, что согласование постоянных
времени магистралей возможно только путем изменения IJF^ по
линии компонента, не участвующего в охлаждении камеры сгорания
и подбора длины и диаметра трубопроводов, отвечающих условию
7м. о — * м. г-
118
йто
Tzs
Структурная схема, соответствующая
уравнению динамики магистралей (3.66),
приведена на рис. 3.31. В ней наглядно
показан входной сигнал по расходам с
введением не только самого сигнала, но
и его производной.
Дальнейшее уточнение динамических
свойств трактов ЖРД может идти в
направлении учета реальной формы
сигналов (по рекомендациям разд. 3.3), учета
сжимаемости жидкости [11 ] и
податливости стенок трубопроводов.
Г. Насосный агрегат. Для оценки
динамических свойств турбонасосного
агрегата и воспроизведения картины общих
связей с этом агрегате предварительно
необходимо рассмотреть напорные характеристики насосов.
Поскольку основной входной величиной в магистрали в данной
задаче являлось давление /?н, то эта величина для увязки
структурной схемы ДУ должна быть выходной для насосов. Применим
аналитическую аппроксимацию напорных характеристик и запишем ее
выражение относительно давления за насосом в виде
то - DH. oml + ро\
TjS+!
Дтг\
Рис. 3.31
= А„. оп2 -
Рн. о =
Pyl. г = Ан. г/г2 — £„. гптг — DH. Tth2T
где р0 и рг — давления на входе в насосы.
Переменными величинами во времени в исходном уравнении
установившегося режима (3.69) являются давления /?, расходы т
и частота вращения роторов насосов п. Для составления уравнения
динамики необходимо переменным величинам задать отклонения.
Проводя эту операцию, примем, что насосы полностью залиты
идеальной несжимаемой жидкостью, каверны на входе в насосы
отсутствуют, корпусы насосов абсолютно жесткие. При этих
предположениях уравнения динамики напорной характеристики насосов
останутся алгебраическими и примут вид
ря + Д/?н = Ап. о (п -f А/г)2 - Ян. о (п + А/г) (/ft + Am)0 -
— DH. о (/ft + А^)о + (р + А/?)о;
/?н + А/7Н = АЯл г (/г + А/г)2 — Ян. Г (т + Дт)0 (/г + А/г) —
— DH. r (w + Дт)? -г (Р + дР)г-
После линеаризации по Тейлору и вычитания уравнений
установившегося режима получим
/с
(3.71)
119
Переход к безразмерной форме записи дает
Рн.пом
Рн.ном
ol \ Рн. ном /о Н0У
(3.72)
/ Пном дрн \ д^_ / iftH0M аРн \ дйг
Г V Рн. ном дл /р \ ра, ном dm /г г '
Рн.ном /г
где
= Ап/пном.
В уравнениях (3.72) константы перед переменными величинами
в правой части уравнений имеют смысл коэффициентов усиления.
Введем их в уравнения (3.72), присваивая порядковые номера:
Л/?н. о = Кц An - K12 Amo
АРн. г = Л:14^г — К1Ь~ШГ
(3.73)
Структурная схема уравнений (3.73) показывает (рис. 3.32),
что насос является усилительным звеном по отношению к входным
сигналам. При этом отрицательный знак при расходах компонентов
топлива как входной величины обусловлен падающей частью
напорной характеристики насоса (кривая 7, на рис. 3.33). Отрицательный
знак перед расходами определяется знаком частной производной,
входящей в коэффициенты усиления /Ci2 и /Ci5.
Потребителем энергии насосов является гидравлическая сеть
питания топливом и камера ЖРД, нагруженная давлением рк
(кривые 2, 3> 4 на рис. 3.33). При глубоком регулировании ЖРД (без
изменения частоты вращения насосов) точка совместной работы
насоса и гидравлической сети может переместиться с падающей части
характеристики насоса (точка а) на ее восходящую часть (точка б).
При этом, несмотря на изменение знака частной производной dpjdm
свойство самостабилизации (самовыравнивания) режима совместной
работы системы насос—гидравлическая сеть сохраняется. Это
происходит вследствие того, что при увеличении расхода от любых
равновесных точек совместной работы гидравлическая сеть превы-
шает располагаемый напор насоса,
ДРо а при уменьшении расхода от
равновесной точки наоборот — напор
Рис. 3.33
120
Рт
mr
Рис. 3.34
насоса превышает потребный напор
гидравлической сети. Таким образом,
разность приращений потребляемых и
располагаемых напоров во всех
случаях направлена на восстановление
равновесной точки работы системы
источник энергии — потребитель.
Д. Роторная часть турбонасосного
агрегата. Физическая и расчетная
модели роторной части турбонасосного
агрегата показаны на рис. 3.34.
Динамика ТНА в рассматриваемой
структуре связей, характеризуется угловой
скоростью ротора со (или частотой вращений п) и суммарным
моментом инерции дисков турбины, насосов и массы жидкости в их
проточных каналах. Очевидно, что для связи с напорной
характеристикой насосов линейная модель ТНА будет иметь выходной
величиной частоту вращения вала п. Остальные параметры
турбонасосного агрегата (все давления и расходы) будут входными
величинами. Из них основной, обуславливающей связь с
газогенератором, для рассматриваемой структуры будет давление перед
турбиной /?т.
Уравнение равновесного режима работы определяется законом
сохранения энергии
Л*т. ном = Af„. ном или Мт. ном — Мя. ном = 0, (3.74)
где М — крутящий момент.
В балансе моментов (3.74) переменными во времени могут быть
обе величины. Задаем им приращения п получаем уравнения
динамики в виде
ДМТ) -
АМН) = АМсопр =
Уравнение динамики (3.75) обнаруживает тот факт, что любое
изменение крутящих моментов, приложенных со стороны турбины
или потребителя, встречает момент внутреннего сопротивления МСОПр
со стороны ротора, обладающего конечным моментом инерции.
Преодоление этого внутреннего момента сопротивления связано'
с процессом изменения угловой скорости ТНА во времени.
Вычитая из уравнения динамики (3.75) уравнения статики (3.74),.
получим уравнение динамики ТНА в виде
^ (3.76)
Найдем изменение моментов через их определяющие величины. Для
момента турбины Мт = NT/n = т^Ь^^/п, или с учетом, что
тТ = ВтрТУ получим
(3.77)
121;
Здесь константами будут удельная адиабатная работа £ад в Дж/кг
и коэффициент пропорциональности между расходом и давлением
перед турбиной Вт в м/с; величины /?т1, %, п — переменные.
Задавая переменным величинам отклонения, после линеаризации и
исключения уравнения равновесного режима получим
дМт А , дМн А дМт
А
С учетом зависимости г)т от окружной скорости (или от частоты
вращения)
а и дМт А , дМт А . дМт дг\т А
АМТ = т Д/?т1 -j ■£-?- An -|—^-^—^— An =
амт А„
Обозначая я т = Д + -^—— • —^-, окончательно запишем
а/г а/г ат]т дп
Для момента насосов
М — iVH. о _j_ ^н. г _ ^о (Рн. о — Ро) i ^г (Рн, г — Рг) /g gQ\
Н л ' л /г(11н. оРо) ^~ «(Лн.гРг) ^ ' '
В последнем выражении переменными будут: расходы m в кг/с,
давления р в Н/м2 и частота вращения п в об/с. Остальные величины
во времени будут постоянными.
В этом случае уравнение динамики примет вид
н ' Н (п + Л/г) т|н. оРо ""
Дтг) [(рн + Арн) — (Р
а после проведения линеаризации и исключения из уравнения
динамики (3.81) уравнения статики (3.80) получим
Далее, подставляя (3.82) и (3.79) в (3.76) и переходя от угловой
скорости к частоте вращения, получим
-Ар-^ГА/г-ж-А/г-
122
ФнТ" АР"' г ~ ~дрГ АРг' ( }
Перенесем в левую часть равенства (3.83) все члены, содержащие
отклонения выходной величины А/г, и перейдем к безразмерной
форме записи
-г—
дМ.г -т— . дМи -г—г дМн
дМ.г -т— . дМи -г—г дМн т,
= PtIhom -qZ ^Pil — то. ном —faft— &то — Рн. о. ном*^7—^~ ^Рн. о I
+ Ро. ном -gj£- Аро—mr. ном -^- АтГ - рИш г. ном ^^ Арн, г +
В полученном выражении разделим левую и правую части на-
постоянный коэффициент при А/г:
2я/тна dAn i -TZ_ Рт. ном дМт -т—
^ W)
Рн. о. ном
Ро. ном dAfj
дРо
Рн. г. ном
'H A rf. _
т Г
Яном
Рг. ном дМи -д-jj-
дп дп
В уравнении (3.84) перед каждой переменной величиной стоят
постоянные коэффициенты. Перед первой производной коэффициент
имеет размерность времени; это постоянная времени ТНА. Как
123
видно из (3.84), постоянная времени ТНА определяется моментом
инерции роторной части и разностью частных производных моментов
отвода и подвода энергии по частоте вращения. Перед всеми
переменными величинами правой части константы безразмерны и имеют
смысл коэффициентов усиления. Присвоим всем коэффициентам
порядковые номера и будем окончательно иметь уравнение динамики
в символической форме записи
-1)~КК = К17~А~рт1 - К18~АЖ0 - /С19 А^н.о +
-f К2о А/?о — /С21 А^г — К22 А/?г. н -Ь К2з Apr- (3.85)
Из структуры уравнения (3.85) видно, что движение ТНА во
времени описывается свойствами инерционного усилительного звена
с включением отрицательных обратных связей. По каждому из
входных каналов воздействия вызывают экспоненциальный
переходный процесс (рис. 3.35), соответствующий решению
дифференциального уравнения (3.85) в виде:
(3.86)
An = К Алгвхи —
Пользуясь принципом суперпозиции, возможно получить
переходные процессы аналогичного вида по отношению к любому
входному сигналу. В соответствии со свойствами инерционного звена
постоянная времени роторной части ТНА определяется как время
раскрутки ТНА при скачкообразном изменении любого щ входных
сигналов до новой частоты вращения ротора при условии, что
скорость изменения раскрутки была бы равна начальной и оставалась
постоянной до установления нового режима, т. е. при условии, что
переходный процесс совпадает с касательной, проведенной к
экспоненте в начале процесса (см. рис. 3.35). Как правило, в ЖРД
постоянная времени ТНА всегда больше других постоянных времени
инерционных агрегатов ДУ и определяет инерционные свойства ДУ
как объекта регулирования в целом. В рассматриваемой постановке
задачи определяющей динамической характеристикой роторной
части ТНА в канале управления тягой является зависимость An = / (т)
при А/7Т1 = А/7Т1/ (т). Комплексный характер изменения всех
входных величин ТНА обнаруживается лишь при совместном реше-
ЛЧк
К
T+S+!
Рис. 3.35
Лриг Арг Amr
Рис. 3.36
124
''/У
3
дМн^ дМт
дп дп
tg/З м
Мм
W
дмп
IF
r-tgfi
дмт
4 дп
MtU/m"
Рис. 3.37
Рис. 3.38
нии уравнений динамики ДУ в целом, что будет рассмотрено
в разд. 3.6.
Структурная схема ТНА, отвечающая уравнению динамики
(3.85), показана на рис. 3.36.
Величины коэффициентов при отрицательных входных сигналах
(/Cis, /Ciet ЛГ21» ^22) в уравнении (3.85), которые реализуют обратные
связи в общей структуре ДУ, характеризуют степень
самостабилизации ТНА при работе на установившемся режиме. Естественно, что
эти коэффициенты определяются как выбором номинального уровня
режима, так и частными производными момента насоса по
рассматриваемым входным сигналам [см. выражение для коэффициентов
в уравнении (3.84) ].
Характерным отличием ТНА от всех звеньев, рассмотренных
ранее, является тот факт, что во все постоянные коэффициенты
входит комплекс
ф
д
/•
обеспечения
самостабилизации режима работы ТНА, т. е. для условий совместной
устойчивой работы турбины и насосов, непременно требуется выполнение
условия
дп
дМ1
дп
(3.87)
Этому условию соответствует такое сочетание моментных
характеристик турбины и насосов, которое показано на рис. 3.37. В
большинстве практических случаев это условие выполняется.
Если ^ н < d T > устойчивая совместная работа турбины
и насосов в равновесной точке невозможна. Сочетание моментных
характеристик для этого случая показано на рис. 3.38, из которого
видно, что при любом незначительном увеличении частоты вращения
ротора ТНА происходит его дальнейшая раскрутка со все
увеличивающимся разностным моментом, а при уменьшении частоты
вращения, наоборот, происходит торможение ротора. Такой ТНА без
специальных мероприятий по стабилизации режима в равновесной
точке работать не может.
125
Если
дМн
дМг
-, моментные характеристики насосов и
дп дп
турбины совпадают (рис. 3.39). Любая из точек такой
характеристики является возможной совместной точкой работы насосов и
турбины. Это граничный случай между устойчивым и неустойчивым
состоянием работы насосов и турбины в точке равновесного режима.
Этот случай практически не реализуемый, но представляющий
определенный интерес. Дело в том, что выполнение условий (3.87)
позволяет хорошо самостабилизировать режим работы двигателя, но
затрудняет перевод его с режима на режим. Граничный случай
отвечает наилучшим условиям быстрой смены режимов работы двигателя
в целом, так как ТНА практически своей инерционностью определяет
скорость перевода двигателя с режима на режим.
Таким образом, всегда имеет место противоречие между
свойством самостабилизации (устойчивостью сохранения режима в
равновесной точке работы) и управляемостью. Чем выше степень
самостабилизации режима, тем хуже управляемость, и наоборот. В связи
с этим следует рекомендовать применение ТНА с высокой степенью
самостабилизации режима для однорежимных двигателей и с низкой—
для многорежимных.
Е. Газогенератор. В рассматриваемом случае газогенератор для
питания турбины рабочим телом работает с использованием
саморазлагающегося однокомпонентного топлива и состоит из
форсуночной головки, пакета с катализатором и камеры разложения, куда
входит также сопловой аппарат турбины (см. рис. 1.10).
Для упрощения задачи сопротивления форсуночной головки
газогенератора и пакета катализатора объединены и рассматриваются
как единый элемент с сосредоточенным сопротивлением. Тогда
газогенератор будет представлен двумя элементарными звеньями: 8 —
камерой разложения и 2 — форсуночной головкой с пакетом
катализатора.
Рассмотрим сначала динамические свойства камеры разложения
с сопловым аппаратом турбины. Ее физическая и расчетная модели
показаны на рис. 3.40.
Равновесному режиму работы камеры соответствуют следующий
баланс расходов на входе и выходе газогенератора:
тгг == тт или тгг — тТ = 0,
(3.88)
Мн
щ
дп бп
гг
Рис. 3.39
Рис. 3.40
126
При отклонении от номинала любого из расходов с учетом
сжимаемости газа и конечного объема камеры имеем
(тгг + Дтгг) - (тТ + Дтт) = -^- , (3.89)
где тг — масса газа в камере разложения.
Баланс расходов (3.89) необходимо записать относительно
давления газа в камере, которое одновременно является давлением
перед сопловым аппаратом турбины рТ1 и служит выходной
величиной рассматриваемого звена. Для этого воспользуемся уравнением
состояния газа
тг = Г1£Т11 , откуда
dmr = -^- dpTl, (3.90)
и связью между отклонением расхода и отклонением давления в
активной газовой турбине
Д/пт = Вт Д/?Т1, (3.91)
/ х+1
где Бт = Fc:^-_ J/ х (^гтгг) Х"! ; здесь Фс.а — коэффициент
Фс. а V a i т ** '
потерь соплового аппарата; Fc.a —площадь соплового аппарата.
После подстановки равенств (3.90) и (3.91) в уравнение (3.89)
и вычитания уравнения (3.88), получим
Вт Д/?т1 = Дтгг.
RTr d%
После перехода к безразмерным отклонениям и делению
уравнения на коэффициент Втрпном получим
Комплекс постоянных величин при первой производной как
всегда имеет размерность времени и является постоянной времени
газогенератора. .Коэффициент в правой части уравнения равен
единице, так как в его числителе стоит номинальный расход на входе,
а в знаменателе — номинальный расход на выходе, которые
связаны между собой условием (3.88). Присваивая порядковый номер
постоянной времени, запишем (3.92) в символической форме
(Гвр+1)Др = Ж^. (3.93)
С учетом запаздывания процесса саморазложения окончательно
в области изображений по Лапласу получим *
(Tbs + 1) Ар, = е"5Тзап th. (3.94)
" Учет запаздывания саморазложения топлива аналогичен учету запаздывания
воспламенения компонентов топлива в камере сгорания и изложен в разд. 3.5, А.
127
Аил'
Постоянная времени газогенератора
будет определяться выражением
Рис. 3.41
x+i
которое сходно с аналогичным
выражением для камеры сгорания и
характеризует инерционные свойства
газогенератора при передаче сигнала
от входной величины — расхода
рабочего тела — до выходной — давления
перед турбиной.
Переходной процесс, соответствующий уравнению динамики
газогенератора как инерционного звена с запаздыванием, показан
на рис. 3.41, структурная схема, соответствующая уравнению
(3.94), — на рис. 3.42.
Форсуночная головка (с одной форсункой), объединенная с
пакетом катализатора и представленная как сосредоточенное
сопротивление, на установившемся режиме имеет следующую связь
определяющих величин:
= Цф. к^ф. кl/2pT (рф. гг - рт1).
(3.95)
Переменными величинами во времени будут давления и расходы.
Задавая им отклонения, запишем уравнение динамики в виде
Дтгг) = цф. к^ф. к /2рТ
г) - (рт1 + ДРт1)]. (3.96)
Уравнение динамики (3.96) составлено при следующих допущениях:
жидкость несжимаемая и полностью заполняет головку *; стенки
головки абсолютно жесткие. Поэтому уравнение динамики (3.96)
не содержит производных по времени и остается алгебраическим.
Переход к уравнению в отклонениях после вычитания из
уравнения (3.96) равенства (3.95) и предварительной линеаризацией дает
?~ дрт1 *Рт1* ^'У/>
Дтгг =
Переходя к безразмерным отклонениям, получим
Обозначая константы правой части как коэффициенты усиления
и присваивая им порядковые номера, окончательно получим
— #25 Л/?Т1- (3.99)
* Газовую емкость между форсункой и пакетом катализатора отнесем к объему
камеры разложения 17ГГ.
128
В этом выражении, как и для головки камеры сгорания,
коэффициент /<25 характеризует своей величиной степень самовыравнивания
процесса подачи расхода в камеру разложения с одновременным ее
опорожнением. Величина этого коэффициента определяется из (3.98)
как уровнем режима, так и тангенсом угла наклона касательной
к кривой (частной производной) связи расхода (при постоянном
давлении перед форсункой) с давлением в камере разложения в точке
номинального режима.
Структурная схема форсуночной головки с пакетом катализатора
показана на рис. 3.43.
Ж. Управляющий элемент. Управляющим элементом в канале
управления тягой служит дроссельный кран 5, установленный на
входе в газогенератор (см. рис. 2.15).
Уравнение статического режима течения жидкого компонента
через дроссельный кран записывается как для сосредоточенного
сопротивления и имеет вид
др
— Рф. гг)>
где рт — плотность жидкого компонента для питания турбины;
|Ыдр и jFhp — коэффициент расхода и площадь поперечного сечения
дроссельного крана; рб. т — давление в баке компонента для
питания турбины.
Выходной величиной управляющего элемента будет входная
величина в головку газогенератора, т. е. давление перед
форсуночной головкой рф. гг.
уравнение статического режима относительно этой
Запишем
величины
Рф. гг = Рб. т —
(3.100)
В этом выражении переменными во времени будут: расходы,
давления и площадь * проходного сечения дроссельного крана.
Задавая переменным величинам отклонения, запишем уравнение
динамики в виде
(3-101)
* Практически не Fap, а комплекс
ветствует определенное значение Цдр.
так как каждому значению
соотРис. 3.42
9 А. И. Бабкин и др.
Рис. 3.43
129
Последнее выражение получено при
условии, что полости крана заполнены
идеальной несжимаемой жидкостью, а
стенки его корпуса абсолютно жесткие.
Запишем уравнение динамики
управляющего элемента в приращениях,
вычитая для этого из уравнения (3.101)
уравнение (3.100) и предварительно
проведя линеаризацию уравнения динамики:
Д/7Ф. гг = Дрб. т - ^- Ашгг Ч- -Ц-Jg- Д^др. (3.102)
Переход к относительным отклонениям дает
Рф /ном ^°'т V рф.гг /ном дтгг
i М^ДР max Фф. г дц^
Рф.гг. ном Ф^др * ДР'
где А^/^др = —J* др относительная площадь открытия дрос-
И^дртах
сельного крана.
Обозначая все константы правой части уравнения как
коэффициенты усиления и присваивая им порядковые номера, получим
- #27 Атгг + #28 Дн^др- (3.103)
Основной входной величиной будет комплекс A|H^P, так как
стыковка ДУ с регулятором происходит именно по этому параметру.
Отклонение давления в баке является для управляющего элемента
ДУ возмущающим воздействием. В контуре газогенератор с
форсуночной головкой — управляющий элемент расход является
отрицательной обратной связью.
Поскольку уравнение динамики в форме (3.103) соответствует
свойствам идеального усилительного звена по отношению к каждому
из входов, то и переходные процессы воспроизводят на выходе
форму входного сигнала без искажения, деформируя лишь его
ординату.
Структурная схема управляющего элемента, отвечающая
уравнению (3.103), показана на рис. 3.44.
3.6. УРАВНЕНИЕ ДИНАМИКИ ДВИГАТЕЛЬНОЙ
УСТАНОВКИ
Для определения свойств ДУ как объекта регулирования
в целом необходимо найти ее уравнение динамики как элемента
системы управления.
При известных динамических свойствах отдельных элементов ДУ
задача сводится к совместному решению уравнений динамики всех
ее элементов. Поскольку анализ динамических свойств ДУ про-
130
водится в линейном приближении и считается, что все элементы ДУ
характеризуются линейными уравнениями динамики, то и
совместное их решение должно быть представлено линейным
дифференциальным уравнением.
Составим исходную систему линейных уравнений динамики,
характеризующую движение объекта регулирования на основе
уравнений, полученных в разд. 3.5, записывая последние в области
изображений по Лапласу.
1. Камера сгорания ЖРД
(TlS
2. Форсуночная головка
Д/й0 = К* АРф. о — #4 A/V> SjHt = Кь Дрф. г — Кв Д/?к-
3. Трубопроводы и тракт охлаждения
Арф. 0 = /Ст Арн. о - (T2s + 1) К* Шо;
АРф. г = К9 Дрн. г - (Tss + 1) /Сю Атг-
4. Напорная характеристика насосов
Арн. о = ^ii Ая — /<i2 Am0
0
Арн. г = КцШ К
5. Роторная часть ТНА
(T4s -f I) Ш = К а Крт - К18 &h0 ~ К19 Арн. о
— /C2i А/лт — /С22 А/?н. г + ^23 A/v
6. Камера газогенератора
7. Форсуночная головка газогенератора с пакетом катализатора
АЖГГ = /С24 Арф. гг — К2ь A/V
8. Управляющий элемент
Арф. гг = ^28 Дрб. т — К27 Атгг + /С2
Запись уравнений динамики в области изображений по Лапласу
позволяет совместно решать исходную систему как систему
алгебраических уравнений, что значительно упрощает эту операцию. Такой
подход к решению задачи в литературе получил название
свертывания системы дифференциальных уравнений. В результате операции
свертывания получается одно уравнение, составленное относительно
регулируемой величины с входными сигналами, соответствующими
управляющему и возмущающим воздействиями двигательной
установки. В рассматриваемом случае регулируемая величина
—давление в камере сгорания Арк. Основной входной величиной является
9* 131
регулирующее воздействие Л^др, а воз-
мущающими величинами, действующими
на ДУ, будут давления на входе в на-
сосы Д/?о и Д/?г, а также давление в баке
д компонента Т для питания турбины рабо-
^(5?) > чим телом Д/?бг- Такой постановке задачи
^■р ' соответствует предполагаемая структур-
I i ная схема ДУ, которая приведена на
лр0 1рг рис. 3.45. Два независимых входа отве-
Рис 3 45 чают в ней приложению входных
воздействий к различным входным элементам ДУ.
Получение уравнения динамики ДУ в целом и его решение в
рассматриваемом случае является довольно громоздкой операцией.
Поэтому в большинстве случаев на практике подобные задачи
решаются с помощью аналоговых вычислительных машин (АВМ).
В гл. 6 будут приведены примеры аналитического совместного
решения уравнений динамики для упрощенных случаев, а в данном
разделе ограничимся подготовкой системы исходных уравнений
к их решению с помощью АВМ. С этой целью прежде всего
необходимо провести вычисления всех коэффициентов уравнений,
входящих в исходную систему, затем составить по ним передаточные
функции и соответствующие им структурные схемы. В конечном
итоге по структурным схемам отдельных элементов составляется
структурная схема ДУ, которая дает представление о свойствах
каждого из ее элементов и восстанавливает полную картину
внутренних связей между ними. Структурная схема ДУ для
рассматриваемого случая дана на рис. 3.46.
При ее составлении использованы все структурные схемы
элементов ДУ, полученные в разд. 3.5. Все прямые связи по основным
входным и выходным величинам позволили соединить звенья в цепи.
Все обратные связи (со стрелками, направленными против
направления воздействия основного сигнала) позволили восстановить
картину внутренних связей между звеньями в составе ДУ. Как видно
из структурной схемы, все внутренние параметры элементов ДУ
оказались замкнутыми во внутреннем контуре (на рис. 3.46 внутри
границ очерченных штриховой линией). Выходная и входные
величины выходят за границы внутреннего контура. Кроме основной
входной величины Дц/^р на ДУ воздействуют извне давления на
входе в насосы А/?о и Д/?г и давление А/?бг в баке вспомогательного
компонента Т. Видно, что давления на входе в насосы и в баке
компонента Т приложены к разным точкам входа внутри ДУ. В целом
укрупненная модель ДУ как объекта регулирования может быть
представлена одним блоком, который изображен на рис. 3.46
пунктиром, и соответствует структурной схеме, показанной на рис. 3.45.
Подробная поэлементная структурная схема ДУ по каналу
управления тягой (см. рис. 3.46) совпадает с пневмогидравлической
схемой ДУ (см. рис. 1.10) только лишь схемой соединения прямых
каналов передачи сигналов.
132
133
Основным преимуществом подробной структурной схемы является
восстановление физической картины взаимодействия всех элементов
ДУ при передаче сигналов входа до выходной величины. Кроме
этого графическое изображение соединения звеньев предпочтительно
их формальной записи тем, что позволяет наглядно увидеть порядок
свертывания этих уравнений в одно уравнение динамики ДУ. Из
структурной схемы видно, что для этой цели необходимо в уравнение
камеры сгорания подставить уравнение форсуночной головки, затем
в полученный комплекс — уравнения магистралей, уравнения
напорных характеристик насосов и т. д. Кроме этого структурная
схема опытному разработчику позволяет качественно оценить
возможный вид переходных процессов по характеру соединения звеньев.
Для этого предварительно достаточно знать, что при
последовательном соединении звеньев общий порядок соединения равен сумме
порядков звеньев, входящих в это соединение. Во избежание лишних
затруднений не будем учитывать инерции жидкостей в магистралях
и упростим тем самым общую структурную схему ДУ; в этом случае
исчезнут передаточные функции в канале обратной связи по
расходам. Тогда легко видеть, что при приложении входного
воздействия^ со стороны управляющего элемента (либо по Ац-Рдр, либо
по Дрог) сигнал пройдет по цепи, состоящей из последовательного
соединения трех инерционных звеньев: газогенератора, ТНА и
камеры сгорания. На выходе такой упрощенной модели
формируется сигнал, во времени отвечающий одному из возможных видов
переходного процесса звена третьего порядка. Кроме того,
запаздывание в газогенераторе и камере сгорания сдвинет выходной сигнал
во времени относительно момента приложения входного. На рис. 3.47
показаны возможные переходные процессы для линейного звена
третьего порядка с запаздыванием.
При приложении входного воздействия по давлениям на входе
в насосы сигнал по направлению стрелок проходит лишь через два
последовательно соединенных инерционных звена: ТНА и камеру
сгорания. На выходе такой упрощенной модели формируется
сигнал, во времени отвечающий одному из переходных процессов звена
второго порядка с запаздыванием, свойственным процессам в камере
сгорания.
Рис. 3.47
Рис. 3.48
134
На рис. 3.48 показаны возможные виды переходных процессов
для линейного звена второго порядка.
Вопрос о возможной реализации апериодических или
колебательных процессов определяется соотношением времен чистого
запаздывания и постоянных времени звеньев исследуемого соединения
и решается конкретным расчетом переходных процессов на ЭВМ.
Предварительная качественная оценка ожидаемых результатов
вычислений с применением аналоговых машин позволяет проводить
контроль за правильностью составления программ и операций
моделирования.
При использовании ЭВМ не составляет большого труда
проведение вариаций коэффициентами уравнений элементарных звеньев
при решении задач синтеза необходимого вида переходных
процессов и их временных показателей, как например, поиск такого
сочетания коэффициентов, которое заранее обеспечивают
апериодические процессы с определенным уровнем отклонения выходной
величины и т. п. На основании такой постановки задачи могут быть
даны рекомендации по коррекции характеристик элементов ДУ,
изменение которых (например, характеристик магистралей или
насосов) не вызывает трудностей организации основных процессов, но
обеспечивает всей ДУ требуемые динамические качества.
ГЛАВА 4
регуляторы жидкостных
РАКЕТНЫХ ДВИГАТЕЛЕЙ
4.1. ПРИНЦИП ДЕЙСТВИЯ
Регуляторы ЖРД по своему составу и конструктивному
оформлению весьма разнообразны. Комплекс агрегатов,
обеспечивающих запуск ДУ и ее останов, имеет два конечных состояния —
«открыт» или «закрыт» — и относится к классу конечных автоматов.
Логика их взаимодействия представляет самостоятельный вопрос для
изучения.
В системе регулирования кажущейся скорости (РКС) полета
летательного аппарата, в системе обеспечения его конечной массы
путем одновременного опорожнения баков (СОБ), в системах
углового управления относительно центра масс ЛА двигательные
установки используются как активные исполнительные органы. Эти
системы выполняют целевые задачи управления полетом ЛА и
подлежат отдельному рассмотрению. В тех случаях, когда требуется
управление тягой и стабилизация соотношения компонентов топлива
в камере сгорания и газогенераторах ЖРД во внутренних контурах
ДУ, регулятор входит в ее состав и является неотъемлемым
элементом ЖРД. Внутридвигательные контуры управления тягой и
стабилизацией соотношения компонентов топлива используют
внутренние параметры управления (см. разд. 2.1) и являются в подавля-
135
Pper -^
Рис. 4.1
Рис. 4.2
ющем большинстве случаев пневмогидравлическими регуляторами
давления (или перепадов давлений) непрерывного действия.
На рис. 4.1 и 4.2 показаны возможные конструктивные схемы
регуляторов давления ЖРД. На рис. 4.1 показан регулятор
давления компонентов топлива, состоящий из сильфона У, жестко
скрепленного с ним дросселирующего клапана 2 с жиклером 3 на его
штоке, возвратной пружины крана 4 и корпуса 5.
Сильфон / является чувствительным элементом регулятора и
измеряет разность давлений командного рк. в и регулируемого /?рег,
которое через жиклер 3 и сверление в штоке регулирующего клапана
подводится к внешней стороне сильфона. Клапан 2 соединен с
днищем сильфона и при перемещении изменяет свое проходное сечение,
дросселируя компонент топлива, протекающий через его полость.
Во внутренней полости сильфона имеется пружина 4У
предварительной затяжки которой достаточно для герметизации клапана 2 при
отсутствии командного воздействия. Давление, подаваемое во
внутреннюю полость сильфона рк. в, преодолевая силу пружины,
открывает клапан. При увеличении регулируемого давления /?рег
ввиду изменения баланса сил, действующих на подвижные элементы
регулятора, клапан начнет прикрываться и установится в такое
положение, при котором восстанавливается равновесие подвижной
системы. Это приведет к уменьшению регулируемого давления ррег.
Аналогичный процесс происходит и при уменьшении /?рег.
Полностью восстановить прежнее значение давления такой регулятор
не может, так как равновесие сил обеспечивается при новом
положении клапана регулятора, которое отличается от старого усилием
затяжки пружины и сильфона. Такие простейшие регуляторы
называются регуляторами прямого действия и могут применяться в
контурах регулирования тяги и стабилизации соотношения компонентов
топлива в камере сгорания и газогенераторах ЖРД-
На рис. 4.2 показан регулятор контура управления тягой с
пневматическим усилителем. Он имеет чувствительный элемент в виде
тонкой стальной мембраны 10, зажатой между корпусом регулятора и
крышкой 9; золотниковый узел пневматического усилителя с
дросселирующим золотником 1 и возвратной пружиной 8\ пневматический
усилитель с поршнем 4, который перемещается в цилиндре корпуса
регулятора под действием возвратной пружины 7 либо под действием
командного давления рКя в, поступающего через золотник 1 и трубку 2
136
под поршень усилителя. Трубка 2 имеет на своем конце клапан
сброса воздуха 3 из-под поршня усилителя; клапан герметизируется
с помощью пружины. Поршень усилителя через шток 6 соединен
с дросселирующим клапаном регулятора 5.
Измеряемое давление /?изм действует на мембрану с внешней
стороны. С внутренней стороны на мембрану действует командное
давление /?к. в и усилие затяжки пружины золотника 8. При
равновесии сил с обеих сторон мембраны 10 золотник / перекрывает вход
воздуха в трубку 2. При равновесии сил, действующих на поршень
усилителя, клапан сброса воздуха 3 закрыт и поршень усилителя
с дросселирующим клапаном 5 неподвижен.
При изменении измеряемого давления (например, его
уменьшении), мембрана перемещается под действием сил командного
давления и золотник /, следующий за мембраной под действием пружины 5,
открывает доступ воздуха в трубку 2. Сжатый воздух, поступая
через трубку 2 под поршень, перемещает последний в сторону
сжатия пружины 7, открывая при этом дросселирующий клапан
регулятора 5. Одновременно с движением поршня перемещается в том
же направлении трубка 2, прикрывая при этом подачу воздуха
через золотник. При остановке всех подвижных частей поршень
и дросселирующий клапан будут находиться в новом положении.
Конец трубки 2, связанный с поршнем, тоже займет новое
положение. Золотник /, опирающийся на торец трубки, также будет
находиться в новом положении, а мембрана, опирающаяся на
золотник, займет новое равновесное состояние. При этом новом
равновесном положении мембраны и прежнем значении командного давления
регулируемое давление несколько изменится (на величину,
соответствующую усилию от прогиба мембраны).
При увеличении измеряемого давления мембрана перемещается
в сторону трубки 2\ при этом золотник закрывается и упирается
в трубку 2, которая, перемещаясь, сжимает пружину и открывает
клапан сброса воздуха 3. Воздух из-под поршня усилителя вытекает
через пружинную полость наружу, давление под поршнем усилителя
падает и последний под действием пружины 7 перемещается,
прикрывая дросселирующий клапан регулятора 5. Это вызывает
уменьшение регулируемого, а значит и измеряемого давления и
перемещение мембраны 10 с золотником У, который усилием пружины
стравливающего клапана с одной стороны и усилием мембраны 10
с другой прижат к трубке 2. При этом движении произойдет
уменьшение площади открытия стравливающего клапана. Закрытию
стравливающего клапана также способствует движение поршня.
Подвижные части регулятора остановятся в новом положении при
полном закрытии стравливающего клапана 3. Поскольку мембрана
следует за поршнем, то ее новое положение будет отличаться от
исходного, что приведет в конечном итоге к некоторому изменению
регулируемого давления.
Такие регуляторы могут применяться в контурах регулирования
тяги и стабилизации соотношения компонентов топлива. В
последнем случае командным давлением является давление второго ком-
137
Рк.в
Рис. 4.3
понента топлива, который и будет
являться рабочим телом усилителя.
Такой усилитель называется
гидравлическим.
Для поддержания постоянного
давления в замкнутой полости А
чувствительного элемента регулятора
тяги (см. рис. 4.1 и 4.2) по схеме
с последовательно соединенными
клапанами и подвижным седлом
стравливающего клапана
выполнен командный газовый редуктор
(рис. 4.3).
Редуцирующий клапан 1
редуктора открывается в соответствии с
усилием затяжки настроечной
пружины 3 и удерживается в
открытом положении штоком 6, который упирается в стравливающий
клапан 5 и перекрывает отверстие 4 в подвижной опоре 2. По мере
повышения командного давления рк, в в замкнутой полости А
регулятора (см. рис. 4.1) повышается давление внутри сильфонной
полости Б редуктора (см. рис. 4.3). Это приводит к такому
перемещению его подвижных частей, при котором редуцирующий клапан /
герметично садится на свое седло 7. Таким образом, в полости А
(см. рис. 4.1) регулятора создается определенное постоянное
давление рн.ъ- При уменьшении затяжки пружины 3 командного
редуктора (см. рис. 4.3) под действием рНщ в подвижные части редуктора
перемещаются так, что открывается отверстие 4 и газ из сильфонной
полости Б через пружинную полость В и отверстия в корпусе
стравливается наружу. При этом падает давление в сильфонной полости
редуктора, а следовательно, и в полости чувствительного элемента
регулятора. При работе редуктора в режиме стабилизации командного
давления оба клапана 1 и 5 закрыты. Другие схемы регуляторов
приведены в работах [11 и 33].
Особенностью гидравлических регуляторов, применяемых в ЖРД,
является высокая нагрузка на элементы его конструкции в связи
с высоким уровнем давлений в трактах питания топливом и
агрегатах современных ДУ. Перегрузки от ускорений ЛА также влияют
на работу регуляторов, поэтому рекомендуется оси подвижных
частей регуляторов располагать перпендикулярно продольной оси ЛА.
Связь регулятора с местом измерения параметров осуществляется
через соединительные трубки, заполненные жидкостью,
находящейся под высоким давлением. При перемещении подвижных
элементов регулятора жидкость в соединительной трубке перемещается.
При большой длине и малом диаметре трубки возникают
значительные нагрузки на измерительные элементы регуляторов от сил
инерции столба жидкости (см. подразд. 3.4, В). Поэтому регуляторы
рекомендуется располагать ближе к месту измерения, а
соединительные трубки выполнять с большим поперечным сечением; в связи
138
с этим преимущественное распространение получили регуляторы без
импульсных трубок (см. рис. 4.1).
При регулировании тяги по давлению в камере сгорания и
газогенераторов на измерительные элементы регуляторов действует
высокотемпературный химически активный газ, в связи с чем детали
регулятора приходится выполнять из жаропрочных и коррозионно-
стойких материалов.
При развитых высокочастотных колебаниях давления в камере
сгорания и газогенераторах в тупиковых полостях соединительных
трубок датчиков давления возможно проявление эффекта
дополнительного разогрева газа, который определяется резонансом
колебаний тупиковой полости датчика и колебаниями газа в камере
сгорания или газогенераторе.
Во время работы ЖРД на регуляторы действуют вибрационные
нагрузки. Они могут привести к разгерметизации стыков и
нарушению нормальной работы подвижных частей, поэтому регуляторы,
как правило, выполняются цельносварными. Стойкость к вибрации
подвижных частей можно увеличить введением их демпфирования,
однако это ведет к ухудшению быстродействия, являющегося
основной характеристикой систем регулирования ЖРД-
Перечисленные и другие трудности применения регуляторов
в ЖРД требуют тщательной отработки его конструкции и поиска
оптимальных решений на всех этапах разработки ЖРД.
Регуляторы классифицируются прежде всего по составу своих
элементов. Если регулятор не содержит усилителя, то он называется
регулятором прямого действия. Если в состав регулятора входит
усилитель, то регулятор классифицируется по типу применяемого
усилителя. Регуляторы также классифицируют по виду рабочего
тела, применяемого в усилителях, и по функциональному назна-
чению#
4.2. ЧУВСТВИТЕЛЬНЫЕ ЭЛЕМЕНТЫ
Чувствительный элемент (ЧЭ) является первым звеном
регулятора и предназначен для измерения входной величины. От
чувствительного элемента требуется определение не только знака
отклонения, но и его величины, поэтому ЧЭ часто называют
измерительным элементом или первичным преобразователем, так как
измерение регулируемой величины всегда сопровождается
изменением ее физической природы. Объединенный узел первичного
преобразователя с электрическим преобразователем часто называют
датчиком. Для наиболее распространенных в ЖРД входных
величин—давлений—измерительный элемент удачно компонуется с за-
датчиком командного давления. В этом случае такой объединенный
узел называется элементом сравнения.
К чувствительным элементам предъвляются жесткие требования.
Прежде всего они должны производить измерения с требуемой
точностью, т. е. должны обладать требуемой чувствительностью, под
которой понимают отношение -^- = К в размерной форме или
139
отношение ——: —— = К в безразмерной форме, где Ау и
Утах хтах
Ал: — отклонения выходной и входной величин, а утах и хтах —
предельно допустимые (или базовые) отклонения тех же величин.
Чувствительный элемент должен на выходе обеспечивать
достаточно большие усилия при минимальной инерционности;
уплотняющие элементы не должны создавать большого трения покоя;
характеристика связи выходной и входной величин по возможности
должна быть линейной; чувствительные элементы должны быть
надежны и стойки по отношению к внешним воздействиям.
Классификация чувствительных элементов обычно производится
по виду измеряехмой величины.
А. Элементы для измерения давления. Конструктивные типы
чувствительных элементов для измерения давления довольно
разнообразны (табл. 4.1). Однако для пневмогидравлических регуляторов
ЖРД наибольшее распространение получили сильфонные и
мембранные измерители давления.
Сильфонные элементы (см. табл. 4.1, № 2) прежде всего
применяются в регуляторах прямого действия. Они обеспечивают
необходимые перемещения и большие перестановочные усилия на
исполнительных органах, пропорциональные площади днища сильфона;
обладают высокой чувствительностью, которая определяется как
толщиной стенки, так и числом гофров сильфона; имеют линейную
статическую характеристику связи выходной величины —
перемещения с входной — давлением. Армированный сильфон хорошо
противостоит перегрузкам от сил давления. Наконец, сильфонный
элемент легко компонуется с задатчиком командного воздействия
в узел элемента сравнения.
Мембранные чувствительные элементы преимущественно
применяются в регуляторах с усилителями вследствие того, что имеют
малую величину перемещений. Необходимые перестановочные
усилия обеспечиваются выбором площади мембраны. Для увеличения
перемещений и чувствительности мембраны выполняют с кольцевыми
гофрами. Однако из условий стойкости к перегрузкам в регуляторах/
ЖРД преимущественно применяют гладкие мембраны, а опорные
поверхности профилируют по упругой линии мембраны с таким
расчетом, чтобы под действием перегрузочных давлений материал мембраны
не вытягивался в местах, близких к заделке. Применяют и обратный
прием, профилируя по толщине мембрану так, что при заданном
максимальном перемещении упругая линия мембраны принимала
заранее заданную форму, по которой выполняются ее ложементы.
При таких условиях мембранные элементы имеют нелинейную
статическую характеристику (см. табл. 4.1, № 1). Линейный участок
характеристики обеспечивается лишь величиной хода мембраны,
равной ее толщине. Давление действует на всю площадь мембраны,
но усилие перемещения определяет только центральная часть
мембраны, площадь которой называют эффективной площадью мембраны.
Принимается, что для гладких мембран эффективная площадь
составляет примерно 1/3 от всей площади мембраны. Для увеличения
140
Чудстдительные и сраднидающие элементы
для измерения дадления
ТайлщаМ
по
пор.
Наздание
Схема
СХ
Ураднение
динамики
Переходный
процесс
АФХ
Ризм
А11
Мембронный
Ризм
1рЛ±_
+1)Ау=ДХ
J
Ризм\\\
Силырон-
й
ный
I
Az
т
\
у
T,<ZTZ
Витая
манометрическая
трубка
д<р=у
У
T,<ZTZ
iV
Ризм
ш
трический
V
Ризм
У
АХ
К
Ay
5 Емностной
Ризм
Г
Р
О =
LV
AT *
ИндуктиЬ
ный
у
ный
iv
iZ7 t
J *
141
силы перемещения мембраны ее центральную часть обычно
выполняют жесткой. Рекомендуется, чтобы диаметр жесткого центра
мембраны не превышал 80 % от полного диаметра мембраны.
Мембранный чувствительный элемент легко компонуется в узел
элемента сравнения.
Витая манометрическая трубка как чувствительный элемент
давления может применяться в регуляторах, если необходимо иметь
выходной сигнал в виде углового поворота. Чаще всего эти трубки
применяются в реостатных датчиках давления.
Индуктивные, емкостные и пьезоэлектрические датчики давления
применяются в специальных регуляторах, требующих на выходе
электрический сигнал. Приемником давления этих датчиков является
мембрана, которая обеспечивает перемещения на величину, не
превосходящую ее толщины.
Статические (СХ) и динамические переходные и амплитудно-
фазовые (АФХ) характеристики датчиков приведены в сводной
(табл. 4.1).
Б. Элементы для измерений расходов. Расход является прямым
параметром регулирования при стабилизации соотношения
компонентов топлива. Определенные преимущества имеет выбор расхода
в качества косвенного параметра регулирования тяги. Однако
практически все чувствительные элементы расхода обладают большой
инерционностью и не имеют прямого выхода с усилием, достаточньш
для перестановки регулирующих органов.
Дроссельные профилированные расходомеры (трубки Вентури)
(табл. 4.2, № 1) выходным сигналом имеют перепад давлений,
который необходимо измерять дополнительными устройствами. Сам
чувствительный элемент вносит дополнительное сопротивление
в тракты топливоподачи. Статическая характеристика дроссельного
расходомера — нелинейная (параболическая). В динамике
дроссельный расходомер — ярко выраженное колебательное звено, а введение
демпфирования в измерительный тракт приводит к потере
быстродействия.
Ротаметрический расходомер, несмотря на прямой выход —
перемещение, чрезвычайно чувствителен к продольным и боковым
перегрузкам и различным шумовым помехам. Его применение
возможно лишь в условиях стендовых испытаний.
Турбинный электромагнитный расходомер, принцип действия
которого основан на замыкании магнитного поля многолопастным
поворотным якорем («вертушкой»), имеет выходной электрический
сигнал в виде частоты замыкания магнитного поля. Это наиболее
широко распространенный измеритель расхода при стендовых
испытаниях ЖРД.
Электромагнитный индукционный расходомер основан на эффекте
индукции. При пересечении магнитных силовых линий
электропроводящей жидкостью в ней индуцируется электродвижущая сила,
пропорциональная скорости движения жидкости. Несмотря на
высокие динамические качества электроиндукционный расходомер
имеет два существенных недостатка. Первый состоит в том, что
142
Чувствительные элементы дня измерения расхода
Таблица 4.2
№
по
пор.
Наздание
Схема
СХ
Уравнение
оинамини
Переходный
процесс
АФХ
Трубка
Вентури
РСРГУ
/77 =Х
Pi Pz
IV
к
^ ■>
Ротамет-
ри чески и
sу
йи
-/к
Ш
ж
IV
к
Турйинный
электромагнитный
\ДХ
IV
к
Электромагнитный
индукционный
w=x
У
удх
IV
к
Тепловой
о о
а -'
iV
К
143
электрический выходной сигнал измерителя слишком слаб и требует
громоздкой усилительной аппаратуры. Второй недостаток
заключается в самом принципе действия измерителя: выходной сигнал
реализуется лишь токопроводящими жидкостями. Таким свойством
обладают не все жидкие топлива, применяемые в ЖРД.
Тепловой расходомер (термоанемометр) является
высокочувствительным, но одновременно и инерционным измерителем. Высокая
чувствительность с одновременной компенсацией инерционных
свойств требует применения очень тонких проволочек (<2пр = 5 мкм),
что не обеспечивает необходимой прочности измерителя. Кроме того,
для него необходима специальная усилительная аппаратура с
большим коэффициентом усиления. Это приводит к понижению
стабильности работы измерительного устройства. Тепловой расходомер
применяется для измерения скорости движения газовых потоков.
Все рассмотренные чувствительные элементы требуют
специальных устройств сравнения измеренных величин с заданным уровнем
командного воздействия.
Статические и динамические характеристики чувствительных
элементов для измерения расходов приведены в табл. 4.2.
В. Элементы для измерения температуры. Непосредственное
измерение и регулирование температуры газа за турбиной вследствие
изменения соотношения компонентов топлива в газогенераторах
является одним из перспективных средстз контроля
работоспособности газогенераторов и ТНА для перспективных ЖРД.
Термопары — наиболее широко распространенный тип измерителя
температуры (табл. 4.3). Основным их недостатком является большая
инерционность и слабый выходной сигнал, однако слабый сигнал
одной термопары можно усиливать последовательным включением
Таблица 4.J
по
пор.
I
1
J
Чувствительные элементы
температуры
Название
Термопара
Термометр
сопротивления
Тепловое
реле
Схема
СХ
изм Л^
и=у
X
для измерения
Уравнение
динамики
(Т,р+1)Ау=Ш
•*-
Переходный
процесс
Лу
АХ t
1
,лу
/^[
'КДХ
[27 \
г
у=0 (при х<0
\ при х<+Ах
+Ау при х>+Дх
АФХ
IV,
и
144
нескольких термопар, а инерционность термопар можно
компенсировать введением дифференцирующих корректирующих звеньев
в цепи усиления сигнала.
Термометр сопротивления является достаточно точным
регистратором низких температур потоков газа или жидкости, особенно
с применением сетчатых сопротивлений, установленных поперек
потока.
Тепловые реле как ограничители могут использоваться для
управления температурой в пределах допускаемых отклонений. В них
применяются термоэлементы в виде биметаллических пластин.
Рассмотренные температурные датчики требуют для применения
их в регуляторах специальных сравнивающих и задающих устройств.
Статические и динамические характеристики чувствительных
элементов для измерения температур приведены в табл. 4.3.
4.3. УСИЛИТЕЛЬНЫЕ ЭЛЕМЕНТЫ
Применение усилительных элементов в регуляторах ЖРД
вызывается большими нагрузками на регулирующие органы, с одной
стороны, и большой требуемой величиной их перемещения, с другой.
Усилители компенсируют инерционные силы, вызываемые
подвижными массами исполнительных органов. Применение усилителей
позволяет улучшать статическую точность регуляторов и изменять
их динамические свойства в желаемом направлении.
Отмеченные обстоятельства обосновывают применение усилителей
сигналов в регуляторах ЖРД. Входным сигналом усилительного
элемента является выходной сигнал чувствительного элемента.
Усиленный по мощности и перемещению выходной сигнал усилителя
является входным для управляющего элемента регулятора, который
обеспечивает управление процессами в ДУ. Таким образом,
усилитель включается в последовательную цепь звеньев системы
автоматического регулирования и своими свойствами определяет свойства
системы управления ДУ.
Усилители разделяются по виду используемой энергии на:
гидравлические у пневматические и электрические. Целесообразно
использовать тот вид энергии (рабочего тела), который применяется
в ДУ.
К усилителям в системах автоматического управления
предъявляют следующие основные требования:
— обеспечение необходимой выходной мощности сигнала и
величины требуемых перемещений исполнительного органа;
— обеспечение необходимого быстродействия регулятора;
— линейность статической характеристики усилителя (по
возможности);
— незначительность влияния гистерезиса и минимум зоны
нечувствительности;
— динамические свойства усилителя не должны ухудшать свойстз
системы автоматического регулирования.
Ю А. И. Бабкин и др. 145
Рассмотрим различные типы усилителей, возможные к
применению в регуляторах ЖРД (табл. 4.4).
Интегрирующий (астатический) гидравлический усилитель с
поступательным движением поршня является простейшим и
управляется пропорциональным и одновременно отсечным золотниковым
устройством (табл. 4.4, № 1). Цилиндрические пояски золотника
усилителя имеют ширину, равную высоте прорезей окон
перепускных каналов гидроцилиндра, так что при нейтральном положении
золотника обе полости цилиндра перекрыты. При перемещении
золотника один канал сообщается с линией подачи рабочего тела,
а другой — с дренажом. Это вызывает движение поршня со скоростью,
пропорциональной высоте открытия окон. В обычном понимании
статическая характеристика как связь выходного и входного
перемещений для данного устройства усилителя смысла не имеет, так
как однозначного соответствия выходного перемещения входному
нет. Иногда взамен статической характеристики такого типа
гидроусилителя приводят динамическую, отражающую связь скорости
движения поршня с входным перемещением. Отсутствие связи
выходного перемещения с входным позволяет поршень гидроусилителя
устанавливать в любом положении при одном и том же положении
золотника. Такой усилитель называется астатическим. В динамике
связь выходного перемещения с входным характеризуется
свойствами идеального интегрирующего звена, в связи с чем его
называют интегрирующим усилителем. Особенности системы
автоматического регулирования с интегрирующим усилителем рассмотрены
в разд. 6.2.
Инерционный (статический) гидравлический усилитель отличается
от интегрирующего связью входного и выходного перемещений,
реализуемой с помощью жесткого рычага (в табл. 4.4, № 2). При
отклонении золотника от нейтрального положения усилием
чувствительного элемента, приложенным к концу короткого рычага,
поршень, перемещаясь, подтягивает за собой золотник и
останавливается в положении, пропорциональном величине входного
отклонения. Связь между входным и выходным отклонениями
характеризуется прямолинейной статической характеристикой усилителя.
Свойство однозначного'соответствия выходного сигнала усилителя
входному называется статизмом, а усилитель — статическим. В
динамике такой усилитель характеризуется свойствами инерционного
усилительного звена, в соответствие с которыми он получил свое
наименование. Особенности динамических свойств системы
автоматического регулирования с инерционным усилителем рассмотрены
в разд. 6.3.
Изодромный гидравлический усилитель обладает свойством
исчезающей обратной связи и имеет по отношению к инерционному
добавочный узел, называемый изодромом (табл. 4.4, № 3). Роль
изодрома сводится к тому, чтобы ликвидировать обратную связь
после остановки поршня гидроцилиндра усилителя. Происходит это
путем перемещения конца длинноплечего рычага, присоединенного
к штоку цилиндра изодрома, под действием его возвратной пру-
146
Усилители сигналов
Таблица 4.4-
по
пор
Название
усилителя
Схема
СХ
Уравнение
динамики
Переходный
процесс
А<РХ
Поршневой
гидравлический
тегрирующий )
ШТШ
а
=АХ
Ау
\6Х *
IV
(t)=oo
ПоршнвОой
гидравлический с
жесткой^ offpam--
ной связью
(инерционный)
-%* г
/Ъх
IV
К
,%ршневой
|
гидравлический с
гибкой
обратной СОЯЗЬН)
с и зо
бромный)
Поршневой
пневматический
Ъ>Ъ
jL
at
(Гг2р2+Г,р)Щ_=
/г,
i U
щ_
\\ш
iv
Злентро -
машинный
\AX
Электронный
x=u}
LV
со= со
Реверсивный
электрический с
контактным
управлением
Cd= у
Al= X
|
-Асо |?
{при x<+Ax
\
-Az
при
АО) При Х<~АХ
10*
147
жины. Скорость исчезновения обратной связи определяется
сопротивлением магистрали в обводном канале цилиндра изодрома при
перетекании через него вязкой жидкости, заполняющей цилиндр.
Перемещение длинного конца рычага обратной связи сопровождается
его поворотом вокруг точки крепления к золотнику, что возвращает
короткоплечий рычаг в исходное положение. Таким образом, в
статике усилитель отвечает свойствам астатического усилителя, а в
динамике — статического. Преимущества применения таких
усилителей заключается в объединении ими лучших свойств астатических
и статических усилителей. Получение необходимого усилия на
выходном штоке гидроусилителей обеспечивается выбором площади
поршня гидроцилиндра и давлением подачи рабочего тела, а
необходимая величина перемещения —выбором максимального хода.
Быстродействие требует малого размера поршня и больших проходных
сечений золотниковых окон.
Пневматический усилитель использует в качестве рабочего тела
сжатый газ. В табл. 4.4, № 4 показана схема проточного
пневматического усилителя с постоянным протоком газа из полости цилиндра
через жиклер. Возвратная пружина поршня усилителя, сжимаясь,
требует дополнительного давления для уравновешивания его
положения, поэтому золотниковое устройство должно в соответствии
с положением поршня обеспечивать различную степень открытия
проходного сечения. В связи с этим у такого усилителя
обнаруживаются свойства статизма. В динамике его характеристики отвечают
свойствам инерционного звена.
Для усиления слабых электрических сигналов в регуляторах
применяются как маломощные электронные усилители, так и
усилители большой мощности — электромашинные и электромагнитные
[17].
В том случае, когда электрический усилитель одновременно
является также и преобразователем сигнала, применяется
реверсивный электродвигатель с контактным управлением. Его
характеристики резко отличаются от обычных тем, что представляют собой
существенно нелинейные свойства таких усилителей. В пределах
люфта контактного управления двигатель не включается. Зона
люфта (зона нечувствительности) обуславливается величиной
допускаемого отклонения регулируемой величины. При отклонении
регулируемой величины из этой зоны включается одна из обмоток
возбуждения двигателя, вызывающая угловой поворот ротора
усилителя на величину, соответствующую компенсации вызванного
воздействия. Исполнительные органы, работающие с таким усилителем,
имеют входной величиной угловой поворот.
Статические и динамические характеристики усилителей
приведены в табл. 4.4.
4.4. ИСПОЛНИТЕЛЬНЫЕ ЭЛЕМЕНТЫ
Исполнительные органы регуляторов ЖРД выполняются
в виде дроссельных кранов, дозирующих расходы компонентов
топлива в камеру сгорания и газогенераторы, и являются конечными
148
элементами регуляторов, исполняющими заданные законы
управления.
Исполнительный орган объединяет объект регулирования —
например ДУ, и регулятор, обеспечивая взаимодействие этих
элементов в составе системы управления.
Требования к исполнительным органам определяются с одной
стороны, элементным составом регулятора (содержится в составе
регулятора усилитель или нет) и, с другой, — необходимой
величиной коэффициента усиления, который определяется профилем
подвижного элемента дросселирующего клапана.
Если регулятор выполнен без усилителя (по схеме регулятора
прямого действия), то масса подвижной части дросселирующего
элемента является определяющей в динамике такого регулятора и
совместно с упругим элементом сравнения реализует свойства типового
звена второго порядка. В этой связи для улучшения динамических
свойств регулятора его подвижная часть должна быть выполнена
с минимальной массой, а подвижная часть регулятора должна
предусматривать установку демпфирующих устройств. При выборе
типа исполнительного органа следует ориентироваться в регуляторе
прямого действия на такую конструкцию дросселирующего клапана,
которая имеет наименьшую присоединенную массу жидкости,
увлекаемую им при его перемещении. Как правило, этим требованиям
удовлетворяют конические или профилированные дроссели (табл. 4.5).
Если регулятор в своем составе содержит усилитель, то инерция
массовых сил подвижной части дросселя целиком компенсируется
усилителем и самостоятельно не проявляется в динамике регулятора.
Таким образом, в любом типе регулятора масса подвижной части
дросселирующего элемента либо учитывается в динамике элемента
сравнения, либо компенсируется свойствами усилителя, а
собственные динамические свойства исполнительного органа представляются
как для идеального безынерционного звена. Выходной величиной
исполнительного органа должна быть площадь поперечного сечения
дросселирующего клапана. Поскольку расход компонента топлива
определяется не только площадью проходного сечения, но и его
коэффициентом сопротивления, то целесообразней определять
выходную величину дроссельного крана в виде комплекса ц^др. При
оговоренных выше условиях уравнение динамики дросселирующего
элемента будет иметь вид
где Лц^др — отклонение комплекса jn/^p; Az — отклонение
перемещения подвижной части дросселирующего элемента, a d\iFl4Jdz —
коэффициент наклона статической характеристики связи \iF^ = f(z).
Вводя обозначения Ay/^p = AiiF^/iiF^m^ и Az = Az/zmax в
безразмерной форме записи получим
.1)
149
Исполнительные органы
Таблица 4.
по
пор.
^издание
Схема
Тарельчатый
Цилиндрический
пропорциональный
J1L
Цилиндричесний с
прямым ионичесним
Оырезом
Цилиндричесний с
обратным
ионическим Оырезом
U
~ \
Нонинеений
Профилированный
' дыпуилый
•tnax\
Лрорилороданный
Шнутыи
'шах
max 1
150
Продолжение mat/!. 45
Шародой
С большим
коэффициентом
усиления
ЧП
/гюдг
L|L
Шиберный
ZmgxZ
11
Подоротный
дроссель
'тих
ИоСоротнып
секционный
дроссель
L<p
151
Вводя обозначение Ки.0 = —^~—4^-—, окончательно будем
иметь
Как видно из выражения (4.1), коэффициент усиления
исполнительного органа в основном определяется частной производной связи
jxFHP = / (z), так как максимальное перемещение подвижной части
дросселирующего элемента zmax и максимальное значение
комплекса [г/^др. max определяется размерами проходного сечения
трубопровода, на котором установлен регулятор. В связи с этим,
коэффициент усиления исполнительного органа определяется видом его
статической характеристики, формирующей связь ц/^р = / (z).
В табл. 4.5 приведены возможные для исполнительных органов
регуляторов ЖРД профили подвижных элементов исполнительных
органов и их статические характеристики, определяющие для различных
отклонений различные коэффициенты усиления. Поскольку для
каждого из размеров дросселирующего элемента требуется опытное
определение коэффициента сопротивления, то в табл. 4.5 статические
характеристики приводятся только по геометрической связи /^p =
= / (*)•
Принципиально по виду статических характеристик
исполнительные органы можно разделить на линейные (пропорциональные) и
нелинейные.
Линейные исполнительные органы (табл. 4.5, № 1, 2, 9—12)
имеют постоянный коэффициент усиления, не зависящий от степени
открытия клапана. Величина коэффициента усиления определяется
наклоном статической характеристики, который при заданной
максимальной площади проходного сечения зависит от величины
максимального хода подвижной части регулятора.
Для реализации больших коэффициентов усиления конструкцию
подвижной части выполняют так, чтобы обеспечить полное
проходное сечение за возможно короткое перемещение (табл. 4.5, № 9).
Нелинейные исполнительные органы имеют нелинейную связь
площади и хода (табл. 4.5 № 3—8), которая обеспечивает большой
коэффициент усиления при малых степенях открытия
дросселирующего элемента и уменьшает его величину по мере увеличения
площади проходного сечения (табл. 4.5 № 3, 5, 7, 8), либо наоборот
(табл. 4.5 № 4, 6). Выбор вида статической характеристики
определяется величиной требуемого коэффициента усиления
исполнительного органа из условия обеспечения требуемой величины
статической ошибки системы регулирования на разных режимах ее
работы (см. разд. 6.1 и 6.3).
Принципиально к управляющим элементам регуляторов не
предъявляют требований к герметичности.
При необходимости совмещения дроссельного крана с запорным
устройством (обеспечивающего на режимах запуска и останова
двигателя дополнительную герметизацию подачи топлива)
предпочтительно применять для регуляторов прямого действия либо тарель-
152
чатые, либо шаровые дроссельные краны (см. табл. 4.5 № 1, 8),
а для регуляторов с усилителями — цилиндрические дроссельные
краны с уплотняющей конической фаской и цилиндрическим седлом
(см. табл. 4.5 № 2—4).
Конструктивно тарельчатые и цилиндрические дроссели
выполняются из материалов «металл по металлу» и способны выдержать
большое число циклов режимов герметизации, хотя при этом склонны
к незначительным утечкам топлива, особенно в условиях малых
противодавлений.
Шаровые дроссельные краны, выполненные из материалов
«фторопласт по металлу», наоборот — способны противостоять утечкам
топлива, но не способны выдерживать большое число циклов
герметизации.
Шиберные дроссельные краны не нашли применения в практике
использования в регуляторах ЖРД вследствие больших усилий
прижатия подвижных частей к их направляющим элементам
(вызываемых большим перепадом давлений), которые могут способствовать
их заклиниванию. Однако в принципиальных схемах регуляторов
ЖРД (см. разд. 6.1 ... 6.4) для более наглядного изображения
принципа действия регуляторов исполнительные органы изображены
в виде шиберного дроссельного крана.
При входном сигнале в виде углового поворота применяются
поворотные дроссельные краны (см. табл. 4.5 № 11, 12) с одно-
или многосекционными элементами (в зависимости от величины
расхода топлива). Профилирование проходного сечения и формы
подвижных частей дроссельных кранов могут реализовать любые
необходимые коэффициенты усиления таких исполнительных органов.
Принципиально, кроме указанных в табл. 4.5 типовых
исполнительных органов, могут быть спроектированы и любые другие
дроссельные устройства, отвечающие требуемым значениям
коэффициентов усиления, полученным из анализа взаимодействия ДУ как
объекта регулирования с конкретным типом регулятора.
ГЛАВА 5
ПЕРЕХОДНЫЕ ПРОЦЕССЫ И УСТОЙЧИВОСТЬ
СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
6.1. ОЦЕНКИ КАЧЕСТВА ПЕРЕХОДНЫХ ПРОЦЕССОВ
Современный подход к оценке качества системы
автоматического регулирования (САР) является комплексным и включает
в себя вопросы обеспечения требуемого вида переходных процессов,
непременного требования устойчивости, надежности, ограничения
расхода энергии, минимума стоимости изготовления и эксплуатации
и другие показатели. К настоящему времени нет такого
комплексного четко сложившегося критерия, однако отдельные его стороны
153
разработаны достаточно полно. К ним относятся прежде всего оценки
вида переходных процессов, а также способы обеспечения
устойчивости САР. Рассмотрим вопросы, связанные с оценкой
динамической и статической точности переходных процессов САР, оценки их
быстродействия и способы обеспечения устойчивости САР.
В теории автоматического регулирования качество процесса
функционирования САР оценивается по виду переходных процессов.
При этом, естественно, предполагается, что САР обладает свойством
устойчивости. В общем случае в сложных системах переходные
процессы достаточно разнообразны по своему характеру. В связи с этим
при анализе качества переходных процессов САР широко
применяются прямые и косвенные оценки качества, которые называют
критериями качества. Обычно это либо числовые характеристики,
либо их комплексы. Конкретные значения этих величин в каждом
случае могут быть разными, но, как правило, не превышающими
наперед заданных значений. При такой постановке вопроса считается,
что САР обладает требуемым динамическим качеством, если
критерии качества находятся в заданных пределах. Выбор и
назначение величин критериев качества САР сводятся в конечном итоге
к определению и реализации таких показателей переходного
процесса, которые не превышают предельных значений отклонений
параметров ДУ, гарантирующих их работоспособность.
Для обыкновенных замкнутых САР выбору свойств регулятора
предшествует тщательное изучение свойств объекта регулирования.
В гл. 3 были получены
структурная схема (рис. 5.1, а) уравне-
ния динамики ДУ и
соответствующие им переходные процессы по
отношению к различным входным
сигналам (рис. 5.2, а).
АраДргйр1г
Kits)
п) _
Wpel(S>
"АРк
*Pn
j,uk6
6)
Рис. 5.1
2
\
i.
т m уттгаяшш*1*^
В)
Рис. 5.2
154
Рис. 5.3
Рис. 5.4
При заранее известных динамических свойствах объекта в
идеализированной постановке задача разработки (синтеза) замкнутой САР
(рис. 5.1,6) сводится к выбору таких переходных процессов
регулятора (процессы 2 на рис. 5.2, б и в), которые полностью могли бы
компенсировать переходные процессы объекта (процессы /),
вызванные суммарным воздействием всех возмущений, а по отношению
к командному воздействию достраивали бы переходный процесс
замкнутой САР до идеального слежения за формой командного
сигнала (процессы 3). Но, как это было отмечено в разд. 3.5, в
практике одновременное воздействие на объект маловероятно, да и форма
входных сигналов носит случайный характер. Кроме того, реальные
динамические свойства регуляторов не позволяют решить задачу
в идеализированной постановке для достаточно сложных объектов.
Поэтому в реальной САР всегда имеет место переходный процесс,
реализуемый системой как при компенсации возмущающих
воздействий, так и при слежении за командным сигналом (рис. 5.3 и рис. 5.4).
Ординаты переходного процесса, отличающие реальный процесс
от идеального, составляют так называемую динамическую
переходную ошибку (см. рис. 5.3 и 5.4, области А). Ввиду многообразия
видов входных сигналов и форм переходных процессов оценка
качества управления по мгновенным значениям ошибки не используется,
но наиболее характерные из них (экстремальные и установившиеся
во времени) ординаты могут быть использованы в качестве так
называемых прямых оценок качества, т. е. полученных непосредственно
из кривых переходных процессов. На рис. 5.3 показаны возможные
критерии оценок переходных процессов в САР ЖРД для
апериодических переходныз^процессов^ Две экстремальные ординаты
переходного процесса Д/?к. заб и Д/?к. с. п характеризуют максимальный
заброс параметра (недорегулирование) и минимальную его величину
(перерегулирование). Эти величины ограничиваются из условий
обеспечения прочности конструкции оболочек камеры сгорания.
Разность уровней между новым и старым значениями
установившихся режимов фактически является статической ошибкой,
присущей рассматриваемой САР. Установившееся значение этой ошибки
характеризует отклонение от старого уровня—критерий "Д/?к. со.
155
Естественно, что величина статической ошибки САР должна лежать
в _пределах допускаемых отклонений от назначенного режима
±Д/?к. доп- Временные критерии качества переходного процесса
характеризуют его следующие особенности: трег — время
регулирования характеризует пребывание переходного процесса вне поля
допускаемых отклонений; тзап — время чистого запаздывания и
туст — время установления, которое характеризует
быстродействие САР. Последний временной параметр вводится из следующих
соображений. Время регулирования трег целиком определяется
назначением поля допускаемых отклонений. При жестком
ограничении забросов и спадов последние вообще могут лежать внутри поля
допусков, что является часто встречающейся ситуацией в ЖРД.
В этом случае время регулирования вырождается во время
установления режима, которое отсчитывается от начала подачи возмущающего
сигнала до момента первого пересечения с уровнем нового номинала,
обусловленного величиной статической ошибки. Время туст
оценивает «полезную» часть переходного процесса реальной САР.
Остальная часть переходного процесса, хотя и неизбежна, но является
«не полезной» с точки зрения того, что она несет в себе динамические
погрешности. Другими словами, — это время первого пересечения
со значением будущей статической ошибки. По значению туст можно
сравнить между собой быстродействие различных САР, имеющих
апериодические переходные процессы, независимо от назначения
уровней допускаемых отклонений.
Для колебательных переходных процессов (рис. 5.5) кроме
статической ошибки А/7К. с 0, максимальных забросов Д/?к.заб
и спадов Д/?к. с п кривой переходного процесса во временные критерии
дополнительно входят период Т или частота колебаний со, число
колебаний экстремальных точек переходного процесса и декремент
затухания колебаний (показатель степени экспонент, огибающих
колебания). Прямые оценки качества переходных процессов САР
принципиально могут быть сведены к комплексному показателю,
запрещающему пребывание переходного процесса вне определенной
области (см. рис. 5.3, область ограниченная наклонной штриховкой).
Кроме прямых оценок качества переходных процессов
применяются косвенные интегральные оценки, простейшей из которых
может служить показатель
Рис. 5.5
оо
/х = J y(x)d%, (5.1)
где у (т) — переходный
процесс САР (ординаты
динамической ошибки). Критерий 1г
представляет собой
алгебраическую сумму площадей под
кривой переходного процесса.
Очевидно, что чем меньше
156
оценка /lf тем быстрее затухает переходный процесс, тем
меньше его динамическая ошибка, т. е. тем выше качество системы.
Однако такая оценка справедлива только для монотонных
апериодических процессов, не имеющих перемены знака. Что же касается
колебательных процессов и апериодических с переменой знака (см.
рис. 5.3 и 5.5), то для них качество переходных процессов
характеризуется квадратичной интегральной оценкой
оо
/2= f y2(x)dx, (5.2)
-J/c
которая исключает влияние знака в алгебраической сумме
площадей. Естественно, что требования минимума оценки /2 также
соответствуют повышению качества переходного процесса. Однако
и квадратичная интегральная оценка не дает полной характеристики
колебательного процесса, так как не учитывает степени
колебательности процесса. Так, для двух колебательных процессов (рис. 5.6, а
и б) оценка /2 одинакова.
Для учета степени колебательности в интегральной оценке
необходимо наложить ограничение не только на величину отклонения,
но и на ее скорость изменения у (t). Такому условию удовлетворит
так называемая обобщенная квадратичная оценка:
1 х)]йх, (5.3)
О
где Т — постоянная времени некоторой «желаемой» экспоненты.
Особенность применения обобщенной оценки состоит в том, что
минимуму критерия /3 соответствует приближение переходного
процесса не к ступенчатой функции, а к экспоненте. Для этого
преобразуем /3 следующим образом:
/» = J [У2 (*) + T*y* (т)] dx = \[y (x) + Ту (т)]2 dx-2T\y (т) у (т) d% =
оо о
оо оо оо
= J [У (т) + 70 (т)]2 dx - Ту2 (х) | = } [г/ (т) + Ту (т)]2 dx + Т#2 (0).
0 0 0
(5.4)
Очевидно, что оценка /3 будет минимальной в том случае, когда
подынтегральная функция обращается в нуль, т. е. когда
Решение этого уравнения будет экспонента
у(%) = у(0)ег*'т. (5.5)
Таким образом, требование минимума /3 приводит к стремлению
реального процесса к «желаемой» экспоненте с минимально
возможной постоянной времени Т. Такое толкование оценки /3 применимо
только к характеристикам собственного движения, которое может
157
Л л
i/iA
Я A „
/ЯГ
Рис.
/^
5.6
Рис. 5.7
быть реализовано системой лишь в ответ на входной сигнал в виде
дельта-функции б (т). На рис. 5.7 пунктирной линией показана такая
экспонента, а сплошной линией — реальный процесс, отвечающий
условию минимизации оценки /3. В применении к ЖРД такая
постановка вопроса приводит к выбору из всех «желаемых» экспонент
к реальной экспоненте, которая отвечает объективным свойствам
динамических процессов в элементах ЖРД (при условии, что
регулятор является идеальным звеном). Это могут быть и экспоненты
собственного движения параметров камеры сгорания, ТНА,
газогенератора, элементов тракторов питания и других агрегатов,
которые в замкнутом контуре САР определяют временные процессы
объекта регулирования, ибо выбор меньших значений постоянных
времени «желаемой» экспоненты не возможен с точки зрения
обеспечения возможности реализации основных физических процессов
в агрегатах ДУ. Заметим, что для вынужденного движения анализ
оценки /3 согласно выражению (5.4) после подстановки в него и
в выражение (5.5) условия у (0) = 0 приводит к требованию нулевой
площади под кривой переходного процесса, т. е. приводит к задаче
идеального синтеза. Дальнейшее усовершенствование идеи
интегральной оценки переходных ошибок для САР высоких порядков
приводит к оценкам вида
(5.6)
= | W (г) + Т\у2 (т) + • •. + Т\п [уп (т)]2} d%
которые сводят переходные процессы в САР с минимальными
динамическими ошибками к кривым 2-, 5-, ... я-го порядка.
Интегральные оценки используются при синтезе регуляторов
для объектов с заранее известными динамическими свойствами.
Возможный минимум оценок обеспечивают вариацией параметров
регулятора.
Определение интегральных оценок не требует решения
уравнений динамики. Способы вычисления интегральных оценок
приведены в работах [17, 28].
Применение интегральных оценок при синтезе САР ракетных
ДУ позволяет решать сложные задачи проектирования оптимальных
регуляторов.
158
5.2. УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ СИСТЕМ РЕГУЛИРОВАНИЯ
Наряду с перечисленными в разд. 5.1 требованиями к
качеству переходных процессов непременным условием
работоспособности САР является обеспечение ее устойчивости.
Устойчивостью САР называется способность поддерживать
заданный режим работы с определенной точностью и восстанавливать
его после воздействия внешних или внутренних возмущений.
Устойчивость агрегатов двигательной установки и устойчивость системы
регулирования в разомкнутом состоянии еще не достаточны для
устойчивости замкнутого контура САР. Степень устойчивости
является одним из определяющих параметров качества САР, который
гарантирует выполнение возложенных на нее задач. Степень
устойчивости САР характеризуется видом и скоростью возвращения
переходного процесса к равновесному режиму работы системы после
парирования возмущений. Потеря устойчивости приводит к
усугублению отклонений, вызванных возмущением. При потере
устойчивости система теряет свою работоспособность и создает аварийную
ситуацию в ДУ. Устойчивость САР обеспечивается в процессе
проектирования системы.
Понятие устойчивости линейных САР основано на характере
переходного процесса и более точно формулируется следующим
образом. Устойчивой называется такая линейная САР, переходные
процессы в которой со временем затухают и остаются менее наперед
заданной допустимой величины при любых ограниченных по уровню
входных возмущениях. Это определение сводится к выполнению
условия
lim г/(т)<АуД0Ш (5.7)
Т->»оо
где у (т) = г/факт (т) — f/зад (т) — переходный процесс системы,
определяемый как разность между фактическим движением,
вызванным возмущением, и заданным законом движения САР (на рис. 5.8
заштрихованная разность ординат). Практический смысл
определения устойчивости приводит к требованию возвращения
возмущенного фактического движения системы */фаКт (т) к заданному закону
движения i/зад (t) с ликвидацией во времени динамической
переходной составляющей у (t), по крайней мере, до величины статической
ошибки или до уровня допускаемых „
отклонений. т
Из определения следует, что об
устойчивости систехмы можно судить
по решению уравнения динамики
замкнутой САР, общий вид
которого будет иметь форму (3.1).
Полное решение этого уравнения можно
записать в виде
= Уп (Т) + У7ст (Т). (5.8) Рис. 5.8
159
Общее решение однородного дифференциального уравнения
^ ^^ О (5.9)
определяет переходящую составляющую решения уп (т), а
установившаяся составляющая ууст (т) находится как частное решение
неоднородного дифференциального уравнения (3.1).
Для исследования устойчивости определяющей является
переходная составляющая решения, так как установившаяся составляющая
решения определяется в переходном процессе вынужденным
движением. Исключение уровня статической ошибки из определения
устойчивости будет соответствовать исключению из полного решения
(5.8) установившейся составляющей переходного процесса. В этом
случае определение устойчивости сводится к требованию
Нту„(т) = 0. (5.10)
Если переходный процесс с течением времени расходится, т. е.
если
lim */п (т) = оо, (5.11)
то система называется неустойчивой. Линейные системы, в которых
переходный процесс не расходится и не затухает, называются
находящимися на границе устойчивости.
Как известно, переходная составляющая решения соответствует
собственному движению системы после вывода ее из состояния
равновесия. Собственное движение характеризуется таким
переходным процессом, который вызывается возмущением, приложенным
на коротком отрезке времени, по существу являясь лишь причиной
отклонения системы от равновесного состояния. Собственное
движение динамической системы по своему описанию соответствует
решению однородного дифференциального уравнения (5.9). Таким
образом, исследование устойчивости линейных систем сводится к анализу
возможных видов решения однородного уравнения. Необходимость
получения общего решения однородного уравнения с вычислением
постоянных интегрирования также отпадает, вследствие того, что
пределы (5.10) и (5.11) определяются только лишь знаками степени
экспонент, входящими в структуру общего решения однородного
дифференциального уравнения. В свою очередь, знаки степени
экспонент (согласно общей теории обыкновенных дифференциальных
уравнений) определяются знаками действительных частей решений
характеристических уравнений, соответствующих
дифференциальным.
Обозначим через klt Я2, А,3, ..., Яп корни характеристического
уравнения
Qq№ + аг%п'1 4- • • • + ап-т)ь + ап = 0. (5.12)
160
Предположим, что ьсе корни являются действительными числами
%3 = ocj. В этом случае переходный процесс будет иметь вид
Уп(т)= %cfi*J\ (5.13)
где Съ С2, С3, ..., Сп —постоянные интегрирования (в общем случае
произвольные постоянные).
Рассмотрим устойчивость систем по полученному выше
определению для следующих вариантов:
1) если а < 0, то lim yn (т) = 0 — система устойчива.
Т->оо
2) если а > 0, то lim уп (т) = оо — система не устойчива.
Т->оо
3) если а = О, то lim уп (т) = const — система на границе
Т-»оо
устойчивости.
Если корни характеристического уравнения системы (5.12) —
комплексные числа Xj = aj ± /coj, то переходный процесс будет
иметь вид
Уп (х) = CfiaJ% cos (co/t + 6). (5.14)
Анализ тех же случаев приводит к следующим вариантам:
1) если а < О, то lim уп (т) = 0 — система устойчива.
Т-*оо
2) если а > 0, то lim уй (т) = оо — система не устойчива.
3) если а = 0, то lim уи (т) = const (сот +0) — система на гра-
Т->оо
нице устойчивости.
Из анализа рассмотренных вариантов можно сформулировать
необходимое и достаточное условие устойчивости линейных систем.
Для того, чтобы линейная САР была устойчивой, необходимо и
достаточно, чтобы вещественные части всех корней характеристического
уравнения системы (5.12) были отрицательными числами.
Поскольку устойчивость линейных систем целиком определяется
собственным движением системы, то можно сделать косвенный вывод
о том, что устойчивость не определяется видом правой части
уравнения динамики САР, т. е. не зависит от вида возмущающего или
командного воздействий.
П р и м е р. Найти условия устойчивой работы неустойчивого инерционного
объекта с идеальным регулятором. Уравнение динамики инерционного
неустойчивого объекта
Уравнение идеального регулятора при включении его в отрицательную
обратную связь к объекту
Уравнение динамики САР будет иметь вид
(ТобР — О У = — * оберег!/
или
(Тобр + /Соб^рег — 1) У = 0.
11 А. И. Бабкин и др. 161
Характеристическое уравнение, соответствующее дифференциальному, будет
Toth +- /Соб^рег —1=0,
откуда
Поскольку Toq > 0, то для обеспечения устойчивости необходимо 1—/обрег <
<0 или /(оберег >!• При выполнении этого условия САР будет устойчивой.
Графически необходимые и достаточные условия устойчивости
можно иллюстрировать местом распределения корней
характеристического уравнения по комплексной плоскости в виде корневого
годографа (кривые 1 и 2 на рис. 5.9), который характеризует не
только факт устойчивости, но также степень устойчивости и качество
переходных процессов.
Для устойчивости динамической системы все корни
характеристического уравнения должны быть расположены в левой
полуплоскости комплексной плоскости распределения корней
характеристического уравнения (на рис. 5.9, отштрихованная область).
О степени устойчивости судят по удалению ближайших корней
характеристического уравнения от мнимой оси, попадание корней
на которую характеризует границу устойчивости (рис. 5.10, а и б).
Наиболее простой оценкой степени устойчивости служит
расстояние от мнимой оси до ближайшего корня г\.
Степень устойчивости называет апериодической, если ближайший
к оси корень вещественный (рис. 5.11 и кривая 1 на рис. 5.9). В этом
случае в переходных процессах доминирует экспонента
быстрдта затухания которой характеризуется соотношением
тват~3-1_
переходный процесс заканчивается за время
Если ближайшими к мнимой оси будут комплексные корни
(рис. 5.12 и кривая 2 на рис. 5.9), то в общих чертах в переходном
процессе доминируют колебания
у (%) = Се~цкх cos (сот + 9),
(так как % = 1/7,
37)
Область
устой ч идо emu
Ш
неустойчивости
^(\ Граница
устойчидости
Рис. 5.9
т
i
т
i
ш ,
а)
: сГ
Рис.
5.10
(
i)
ос
)
162
ico
a
Рис. 5Л1
си)
ol
х—О—^
a
Рис. 5.12
Рис. 5.13
где показатель г|к — определяет скорость затухания колебательного
процесса.
При т]а = 0 система находится на апериодической границе
устойчивости (см. рис. 5.10, а).
При т]к = 0 система находится на колебательной границе
устойчивости (см. рис. 5.10, б).
Для двух динамических систем, имеющих одинаковое удаление
первого ближайшего корня от границы устойчивости, степень
устойчивости оценивается расстоянием I наиболее удаленного корня от
мнимой оси распределения корней (рис. 5.13). Однако при слишком
большом удалении корня характеристического уравнения от
границы устойчивости (к -> —оо) динамическая система может потерять
устойчивость (или существенно уменьшить степень устойчивости)
вследствие соизмеримости понятий ±<х>. Подобная ситуация
возникает при малых значениях коэффициента при старшей производной а0
(или при старшем порядке характеристического уравнения) по
отношению к последующему. В этом не трудно убедиться, анализируя
решение характеристического уравнения 2-го порядка (квадратного
уравнения), в котором делителем является коэффициент при 2-ой
(старшей) производной уравнения динамики. Поэтому
сокращение порядков дифференциального уравнения вследствие
несоизмеримости коэффициентов при старшей и последующей производной
для обоснованного принятия решения о сокращении порядка
уравнения требует предварительно произвести проверку исходного
уравнения на устойчивость.
Склонность динамической системы к колебаниям оценивается
величиной
т. е. отношением действительного коэффициента при мнимой части
корня к его вещественной части. Этот показатель оценивает степень
колебательности системы, который определяется частотой колебаний
и быстротой их затухания одновременно. Так, для двух
динамических систем, имеющих одинаковое удаление двух комплексных
корней от границы устойчивости (рис. 5.14, а) при одинаковых
длительностях затухания колебаний, имеется существенная разница
в частоте колебаний (рис. 5.14, б и в). Для двух динамических си-
11"
163
Рис. 5.14
стем, характеристические уравнения которых имеют одинаковые
мнимые части, но различные вещественные части (рис. 5.15, а),
существенно отличаются длительностью затухания колебаний
(рис. 5.15, б и в).
В рассмотренных случаях более высокая степень колебательности
соответствует большему углу у. При у = 180° динамическая система
выходит на колебательную границу устойчивости.
Таким образом, степень колебательности для систем, имеющих
ближайшие к границе распределения корней комплексные корни,
отождествляется со степенью устойчивости.
Следовательно, степень устойчивости характеризует вид (форму)
и скорость возвращения переходного процесса к равновесному
режиму работы.
Частным показателем устойчивости является запас устойчивости.
Запас устойчивости так же, как и степень устойчивости,
характеризует удаление ближайшего корня характеристического уравнения
от границы устойчивости. Но это удаление обеспечивается за счет
лишь одного параметра динамической системы, который при своей
вариации влияет на распределение корней. В частном случае запас
Рис. 5.15
164
устойчивости может быть определен по одному (или поочередно
по каждому) коэффициенту уравнения динамики системы. В
частотной области запас устойчивости определяют по амплитуде колебаний
или по фазовому сдвигу выходных колебаний по отношению
к входным.
Приведенные выше определения устойчивости, условия
устойчивости и оценка степени устойчивости были сделаны в
предположении, что движение динамической системы характеризуется
линейными дифференциальными уравнениями и что отклонения
переменных величин малы.
В практике обычно все системы нелинейные, однако можно
распространить результаты анализа устойчивости линеаризованных
систем на исходную нелинейную систему при следующих условиях,
сформулированных Ляпуновым.
1. Если линеаризованная система имеет все корни
(вещественные части) отрицательными, то и исходная нелинейная система при
рассмотрении малых отклонений будет иметь отрицательные корни
(т. е. исходная нелинейная система будет также устойчива в «малом»).
2. Если линеаризованная система неустойчива, то в «малом»
будет неустойчива и исходная нелинейная система.
3. Если линеаризованная система находится на границе
устойчивости, то для определения свойств исходной нелинейной системы
необходимо рассматривать более высокое приближение (т. е. учесть
в разложении ряда Тейлора члены более высокого порядка).
Третье условие Ляпунова говорит о том, что при попадании
корней характеристического уравнения линеаризованной системы
на границу устойчивости исходная нелинейная система будет
находиться вблизи границы и может быть как устойчивой, так и
неустойчивой.
Практически для обеспечения устойчивости при использовании
линейной оценки свойств динамической системы ни один корень
характеристического уравнения, соответствующего
дифференциальному, не должен находиться на мнимой оси.
5.3. КРИТЕРИИ УСТОЙЧИВОСТИ
Прямые методы оценки устойчивости, степени и запасов
устойчивости требуют решения характеристического уравнения и
отыскания всех его корней. При высоких порядках
дифференциального уравнения динамики системы (при п ^ 3) эта операция связана
с большими трудностями, поэтому существуют косвенные оценки,
позволяющие определять знаки вещественных частей корней
характеристического уравнения без их решения и тем самым оценить
устойчивость САР.
Признаки, позволяющие судить об устойчивости САР без
вычисления корней характеристического уравнения, называются
критериями устойчивости. Необходимым признаком устойчивости
является удовлетворение требованию положительности всех
коэффициентов уравнения динамики. Однако это требование оказывается
165
одновременно и достаточным лишь для систем не выше 2-го порядка,
в чем не трудно убедиться прямым нахождением корней уравнения.
Динамические системы с порядком уравнения динамики п ^ 3 для
обеспечения устойчивости требуют дополнительно к необходимым
признакам еще и выполнения особых достаточных условий.
Критерии устойчивости объединяют необходимые и достаточные
признаки устойчивости и основаны на применении алгебраических
или частотных методов.
А. Критерий устойчивости Михайлова. Критерий советского
ученого А. В. Михайлова основан на исследовании свойств
характеристического уравнения. Он позволяет судить об устойчивости как
замкнутой, так и разомкнутой САР без вычисления корней
характеристического уравнения.
Рассмотрим доказательство критерия устойчивости Михайлова.
Пусть уравнение динамики разомкнутой или замкнутой САР
имеет вид (3.1), а соответствующее ему характеристическое
уравнение (5.12). Рассмотрим левую часть уравнения (5.12) как
характеристический полином в следующем виде:
ao(X-Xt)(X-X2),. -(Л-Х,). • • (* - К) = f (Я),
где X—текущее значение корня характеристического уравнения;.
X] —корень характеристического уравнения (5.12) (/ = 1, 2 ... /г);
f (X) —левая часть характеристического уравнения (5.12).
Пусть Xj = <xj Hz /со и каждый корень можно представить точкой
на комплексной плоскости (рис. 5.16).
Рассмотрим свойства характеристического полинома / (X),
полагая текущее значение корня X = /со и варьируя со в диапазоне —оо <
<: со < +оо.
На комплексной плоскости каждый корень будет
характеризоваться вектором, проведенным из начала координат в точку,
характеризуемую координатами корня. Текущее чисто мнимое значение
корня соответствует положению вектора X на мнимой оси. Тогда
разностный вектор (X — Xj) будет замыкать векторный треугольник,
начинаясь в точке с координатами корня Xj и кончаясь на мнимой
оси. Варьирование модулем вектора X = /со от —оо до +оо приведет
к повороту разностного вектора X —Xj (с отрицательной
вещественной частью) на угол +я, а разностного вектора X — Xh (с
положительной вещественной частью) —на угол —л (рис. 5.17).
Операция подстановки значения X = /со в характеристический
полином дает
/ (/со) = а0 (/со —XJ (/со —Х2) ... (/со —Хп), (5.15)
а вариации со в диапазоне от —оо до +оо позволяют подсчитать
изменение углового поворота вектора кривой (5.15). При условии,
что характеристическое уравнение содержит всего п корней, из них
в правой полуплоскости (с положительными вещественными частями)
т корней, полное приращение аргумента вектора кривой (5.15)
согласно проведенному анализу будет
A arg/ (/со) = (п —т) п —тп = (п —2т) п. (5.16)
166
iwj
ГЛ-Лу)\
ш
Рис. 5.16
Рис. 5.17
Для устойчивости САР необходимо, чтобы все корни
характеристического полинома лежали в левой полуплоскости, т. е. чтобы
отсутствовали корни в правой полуплоскости. Это соответствует
требованию т = 0 в выражении (5.16).
Тогда для устойчивой САР изменение аргумента функции / (/со)
должно быть следующим:
A arg/(ico) = tin = 2mt/2 при — оо < со < + оо. (5.17)
Таким образом, если изменение со в диапазоне от —оо до +оо
вызывает суммарный угол поворота вектора кривой / (ш) на 2яя/2,
то система будет устойчивой.
Кривая / (ш) получила наименование кривой Михайлова. Ее
удобно получать непосредственной подстановкой X = ш в
характеристический полином (5.12):
/ (ш) = а0 (to)" + аг (to)»-1 H Ь ап-гш + ап. (5.18)
Геометрическое место концов векторов (годограф) этой кривой
на комплексной плоскости при изменении со от —оо до +оо
называется кривой Михайлова (рис. 5.18). В силу симметричности кривой
Михайлова можно ограничиться рассмотрением ее одной половины
и упростить условие устойчивости: если изменение со в диапазоне
от 0 до +оо вызывает приращение аргумента вектора кривой
Михайлова на п квадратов комплексной плоскости, то система будет
устойчивой, т. е.
Д arg/(ico) = п-~- при 0 < со < + оо. (5.19)
На рис. 5.19 приведены годографы кривой Михайлова для
устойчивых систем различных порядков.
Ниже приведены без доказательства основные свойства кривой
Михайлова / (ко) для устойчивых систем:
п
1) поскольку кривая f(to)= П (ш — Xj) и аргументы этих
векторов при изменении со от 0 до оо изменяются монотонно, то и
суммарный аргумент кривой / (/со) монотонная функция;
167
2) начало кривой / (ш) (при со = 0) всегда находится на
вещественной оси на расстоянии ап\
3) конец кривой / (ш) (при со = + оо) всегда уходит в
бесконечность с вертикальной или горизонтальной касательной (в
зависимости от четности я);
4) количество точек пересечения кривой / (/со) с осями координат
(т. е. точек и = 0 и v = 0) может быть в сумме не более п и точки
должны поочередно следовать друг за другом при пересечении
действительной и мнимой осей.
С учетом свойств кривой Михайлова более точно критерий
устойчивости сформулируется следующим образом, для устойчивости
САР, движение которой соответствует дифференциальному
уравнению n-го порядка, необходимо и достаточно, чтобы годограф
Михайлова при изменении со от 0 до +оо начинался со значения ап, имел
монотонное приращение аргумента и охватывал при этом в
положительном направлении (против часовой стрелки) п квадрантов
комплексной плоскости.
На рис. 5.20, а, б, в и г приведены примеры кривых Михайлова
для неустойчивых систем, не отвечающих основным свойствам,
характеризующим устойчивое движение.
Если система находится на апериодической границе устойчивости,
то свободный член характеристического полинома ап = 0 и кривая
Михайлова начинается из начала координат (рис. 5.21, а). При
колебательной границе устойчивости кривая Михайлова пересекает
начало координат в точке со Ф 0. В этом случае со имеет смысл
круговой частоты, величина которой в точке пересечения с началом
координат соответствует значению собственной частоты колебаний
системы на границе устойчивости (рис. 5.21. б). Степень устойчивости
по кривой Михайлова характеризуется максимальным удалением
от начала координат точки при со = 0 (рис. 5.22, а) и точки,
расположенной во втором квадранте комплексной плоскости
(рис. 5.22, б). Первый параметр (ап) характеризует удаление от
апериодической границы, второй —от колебательной. Критерий
Михайлова применим как к разомкнутым, так и к замкнутым системам
регулирования и благодаря своей универсальности нашел широкое
применение.
/7=2
Рис. 5.19
16S
—I/
w
OHJ U
a
Рис. 5.20
6)
Рис. 5.21
Б. Критерий устойчивости Рауса—Гурвица. Математиком
Раусом были сфэрмулированы условия устойчивости для линейных
систем в виде таблиц неравенств соотношений между коэффициентами
дифференциальных уравнений, дополняющих необходимые
условия устойчивости (требования однозначности всех коэффициентов).
Гурвиц опубликовал те же неравенства с учетом необходимых
условий устойчивости в виде системы определителей, приводящих
к матричному виду.
Рассмотрим без доказательств критерий устойчивости линейных
динамических систем в форме Гурвица.
Для характеристического уравнения (5.12) составляется матрица
(таблица), содержащая п строк и п столбцов:
а3 аъ
а0
0
a3
0
0
0
О О О ... а„_2
(5.20)
Правила составления таблицы следующие. По диагонали от
верхнего левого до правого нижнего углов записываются все
коэффициенты по порядку, начиная со второго
(flx), по возрастающим номерам. Каждый
столбец таблицы формируется так, чтобы
вверх от коэффициентов главной
диагонали располагались коэффициенты по
возрастающим индексам, а вниз — по
уменьшающимся. Свободные места в
столбцах после коэффициентов а0 и ап
заполняют нулями. Критерий устойчивости
сводится к тому, что при а0 > 0 должны
быть больше нуля все п диагональных
определителей Гурвица, получаемых из Рис. 5.22
169
U
квадратной матрицы n-oro порядка:
0;
Дз =
а
а
а±
а0
0
1 Я
о а
as
а2
3
2
«5
Яз
О;
Легко видеть, что An = #nAn-i и ПРИ ап > 0' Дп-i > 0, Дп > 0.
Таким образом, последний определитель вычисления не требует,
если удовлетворяется условие Ап^х > 0. Граница устойчивости
по критерию Гурвица определяется условием Дп = 0, которое
сводится к каждому из двух услоЕий ап = 0 и An_x = 0.
Апериодическая граница устойчивости соответствует условию ап = 0.
Колебательная граница устойчивости отвечает условию An_x = 0,
Из предпоследнего определителя получаются основные неравенства,
удовлетворение которых приводит к дополнительным необходимым
условиям уетойчивости (если остальные определители
положительны).
Например, если для уравнения третьего порядка, которое имеет
вид ,
аг%г + а2Х + а3 = 0,
условиями уетойчивоети будут требования:
= а±
0;
#1 #3
я0 я2
ах д3 0
а0 а2 О
О аг а3
= аур* — а0а3 > 0;
т. е.
Следовательно, при всех положительных коэффициентах особым
условием устойчивости будет неравенство, определенное из
требования А2 > 0:
аха2 > а0а3. (5.21)
Критерий Рауса — Гурвица обычно применяют для систем не
выше 5-го порядка, так как вычисление определителей высоких
порядков сложно и нецелесообразно.
В. Критерий устойчивости Найквиста. Все предыдущие
критерии требовали знания уравнений динамики САР. На практике
часто трудно получить достоверные дифференциальные уравнения,
170
Регулятор
рис# 5.23
•но относительно легко составить
макет или взять систему в гото-
вом виде, что позволяет провести
полунатурные или натурные ис-
пытания. Если испытания ведутся
частотным методом, то оценка
устойчивости может быть прове-
дена по опытным частотным
характеристикам с помощью частотного критерия.
Критерий устойчивости Найквиста основан на рассмотрении
амплитудно-фазовых частотных характеристик разомкнутой цепи
САР, по виду которых судят об устойчивости этой цепи в замкнутом
состоянии. Частотные характеристики разомкнутой цепи могут быть
получены как расчетным, так и экспериментальным способами.
Это обстоятельство выгодно отличает частотный критерий от ранее
изложенных.
Не касаясь строгого доказательства, получим частотный
критерий из чисто физических соображений. Для этого разомкнем цепь
системы автоматического регулирования по регулирующему
воздействию (рис. 5.23). Расчетным или опытным путем получим
амплитудно-фазовую частотную характеристику разомкнутой цепи от входа
в объект хВТ до выхода из регулятора хвых. Рассмотрим три
возможных варианта расположения частотных характеристик разомкнутой
цепи на комплексной плоскости частотной характеристики
(рис. 5.24).
В первом варианте (рис. 5.24, а) частотная характеристика
разомкнутой цепи проходит через точку с координатами U = —1,
V = 0. Это означает, что для частоты вынужденных колебаний,
соответствующей точке пересечения кривой с действительной осью,
модуль частотной характеристики М = —1, а фазовый сдвиг 6 =
= 180°. Модуль определяется отношением амплитуд, т. е. М ~
^/^вх- Значит, в рассматриваемом варианте амплитуды вход-
/""\
Рис. 5,24
171
ных и выходных колебаний равны и сдвинуты на угол 180°
относительно друг друга. Отрицательный знак модуля соответствует при
этом такому повороту выходных колебаний, что они в точности
совпадают по фазам с входными колебаниями. Если при таком
соотношении входных и выходных колебаний провести замыкание цепи, то
ничто не помешает колебаниям свободно существовать внутри
контура замкнутой САР. Такой случай соответствует колебательной
границе устойчивости.
Во втором варианте (рис. 5.24, б) частотная характеристика
разомкнутой цепи пересекает действительную ось, охватывая точку
U = —1, V = 0. Это соответствует условию Лвых > Лвх. Фазовые
соотношения для входных и выходных колебаний остаются как
и в варианте (рис. 5.24, а), так как фазовый сдвиг остается равным
180° и модуль имеет отрицательный знак. Если при таких
соотношениях параметров колебаний произвести замыкание цепи, то входные
колебания, проходя через объект и регулятор, увеличат свою
амплитуду. Возвращаясь на вход, при повторном прохождении контура,
колебания вновь возрастут по амплитуде и так — до полного
расхождения процесса. Такой случай соответствует неустойчивому
состоянию замкнутой САР.
В третьем варианте (рис. 5.24, в) частотная характеристика
разомкнутой цепи пересекает действительную ось, не охватывая
точку U = —1, V = 0. Так как при этом модуль меньше единицы,
то Лвых < Лвх. При этом условии и тех же фазовых соотношениях
колебаний после замыкания цепи каждый цикл прохождения
колебаний в замкнутом контуре вызовет ослабление амплитуды. При
таких соотношениях параметров входных и выходных колебаний они
со временем затухают, что соответствует устойчивому состоянию
замкнутой САР.
Итак, для того чтобы САР, устойчивая в разомкнутом состоянии,
была устойчивой в замкнутом состоянии, необходимо и достаточно,
чтобы годограф частотной характеристики ее разомкнутой цепи не
охватывал точку с координатами U = —1, V = 0. В таком виде
обычно формулируется частотный критерий устойчивости Найк-
виста.
Запас устойчивости по отношению к колебательной границе
оценивается удалением частотной характеристики от точки с
координатами U = —1, V = 0 (рис. 5.25). Характеристика запаса
устойчивости по модулю (или амплитуде) и по фазе различны. Запас по
модулю т определяется расстоянием от точки U = —1, V = О
до точки пересечения частотной характеристики с действительной
осью для частоты сот, соответствующей этому пересечению. Запас
по фазе ф для частоты сох, соответствующей пересечению частотной
характеристикой окружности единичного радиуса, определяется
углом ф = я —Эх, где 0Х —угол фазового сдвига модуля, равного
единице.
Критерий устойчивости Найквиста удобно применять для оценки
влияния чистого запаздывания на устойчивость. Фазовый угол,
соответствующий чистому запаздыванию, отрицателен и опреде-
172
iV
ЩШ)
Рис. 5.25
Рис. 5.26
ляется величиной 9зап ==: тзап^- Поэтому частотная характеристика
с учетом запаздывания отличается от обычной, без запаздывания
тем, что у нее для тех же частот увеличиваются фазовые углы в
отрицательном направлении (рис. 5.26). Это обстоятельство приводит
к такой деформации годографа, которая уменьшает запасы
устойчивости системы (кривая I). При значительных временах
запаздывания система может потерять устойчивость.
Некоторые особенности применения критерия Найквиста
появляются при исследовании устойчивости систем, находящихся
на границе устойчивости в разомкнутом состоянии.
Например, если система находится на апериодической границе
устойчивости и, следовательно, имеет один нулевой корень в начале
координат на плоскости распределения корней характеристического
уравнения, то ее годограф W (ш) разомкнутой цепи уходит в
бесконечность при со -> 0 (рис. 5.27, а). В этом случае для сохранения
формулировки критерия, справедливой для устойчивой разомкнутой
цепи, включают нулевой корень в левую полуплоскость, огибая его
справа окружностью бесконечно малого радиуса (рис. 5.27, б). На
плоскости частотной характеристики W (ш) этот обход отображается
кругом бесконечно большого радиуса, который проводится в
обратном направлении (по часовой стрелке), замыкая при этом мнимую
(см. рис. 5.27, а, кривая I) и действительную части годографа при
частоте со = 0. Начиная обход годографа со значения со = —оо
к со = 0 и далее до значения со = -f сх> (по направлению стрелок на
рис. 5.27, а) судят об
устойчивости замкнутой системы по охвату
или не охвату годографом
критической точки (U = —1,1/ = 0)
соответственно формулировке
критерия для устойчивых систем
в разомкнутом состоянии.
Аналогичные дополнения
амплитудно-фазовых характеристик
дугами бесконечно большого
радиуса необходимы при наличии
чисто мнимых корней в
характеристическом уравнении разомкну- Рис. 5.27
173
и)=0.
Рис. 5.28
той цепи, так как в этих случаях
годографы также имеют разрывы.
Частотный критерий применим также
к исследованию устойчивости замкнутых
систем, неустойчивых в разомкнутом
состоянии. Для такого случая,
рассматривая полный годограф
амплитудно-фазовой частотной характеристики
разомкнутой цепи (совместно с его мнимой частью),
требуется охват критической точки (U =
= 1, V = 0) т раз в положительном направлении (против часовой
стрелки), где т —число правых корней характеристического
уравнения неустойчивой разомкнутой цепи. На рис. 5.28 показан вид
годографа неустойчивой разомкнутой цепи, соответствующий
устойчивому состоянию системы после ее замыкания при условии т = 1.
5.4. ВЫДЕЛЕНИЕ ОБЛАСТЕЙ УСТОЙЧИВОСТИ
Инженерная практика ставит задачу о разработке такого
способа проектирования САР, который позволил бы заранее не
только обеспечить устойчивость системы, но и гарантировать
необходимые запасы устойчивости путем подбора параметров системы.
Принципиально такая задача возможна и сводится она к отысканию
таких сочетаний параметров системы САР, характеризуемых
константами уравнения динамики, которые обеспечивают только
отрицательные вещественные части корней характеристического
уравнения. Для определения таких соотношений необходимо рассмотреть
варианты, которые содержат в себе все возможные совокупности
констант, отвечающие различным сочетаниям левых и правых корней
характеристического уравнения (рис. 5.29). При такОхМ подходе
к задаче для отыскания области устойчивости оказалось необходимо
и отыскание всех областей неустойчивости. Таким образом, метод
выделения областей устойчивости предопределяет предварительный
анализ всех возможных областей неустойчивости.
Если число варьируемых параметров системы п, то задача
решается в я-мерном пространстве. Для большинства практических
задач достаточно вариации двух или одного параметра. Тогда задача
сводится к построению границ устойчивости на плоскости двух
связанных между собой или одного параметра с последующим
определением областей устойчивости.
Такой подход к выделению
областей устойчивости был обобщен
Ю. И. Неймарком и получил
название метода D-разбиения.
Метод предполагает
предварительный анализ всех возможных
областей сочетания левых и правых
корней характеристического
уравнения, предопределяющих область
174
Для ураднения n-so порядна
Правых
корней
Левых
корней
Область
п
0
п-1
1
п-г
г
Кг
...
• • •
Y////,
'/п'у
у///,
Ш
Рис. 5.29
устойчивости Do, не содержащую правых корней (на рис. 5.29
заштрихованная область).
А. Метод /^-разбиения по одному параметру. Пусть требуется
найти все возможные значения переменного параметра А
динамической системы, при которых она будет устойчива. Решение такой
задачи возможно при условии, что варьируемый параметр А будет
входить в коэффициенты дифференциального уравнения динамики
линейно. Тогда характеристическое уравнение, соответствующее
дифференциальному, будет иметь вид
1 ^ \-(ak + A) ln~k H \- ап = О
или (апХп + а№'1 Л г ahKn'k + ап) f А (Хп~1 - Xn~k) = О,
или Q(X) + A [R (X)] = 0. (5.22)
Это характеристическое уравнение решить нельзя, так как
параметр А неизвестен; но можно предположить, что имеется такое
значение Л, которое соответствует получению хотя бы одного
действительного или пары мнимых корней, лежащих на границе
устойчивости. Поэтому имеет смысл искать такое значение Л, которое
отвечает условию К = ш при изменении со в интервале от —оо до
+ оо. Тогда при подстановке в характеристическое уравнение (5.22)
условия X = ш получим
Q (ко) + A [R (ш) ] = 0
или А (ш) = - -Jgg. = U (о) + IV И. (5.23)
Построение кривой А (ко) на комплексной плоскости разбивает
последнюю на ряд областей, среди которых находится и
интересующая нас область, не содержащая правых корней Do (рис. 5.30, а).
По существу проведенная операция соответствует конформному
отображению комплексной плоскости распределения корней
характеристического уравнения на комплексную плоскость параметра А.
Кривая А (ко) отображает мнимую ось плоскости распределения
корней, т. е. границу устойчивости.
Для нахождения на плоскости А (/со) области устойчивости (левой
полуплоскости корней) проведем следующий анализ. Предположим,
что в правой полуплоскости находятся все п корней (т. е. все корни
положительные). Изменением варьируемого параметра А будем
добиваться получения хотя бы одного левого корня. Тогда произойдет
изменение в соотношениях левых и правых корней — правых станет
на один меньше. При этом потеря одного правого корня
сопровождается пересечением границы устойчивости справа налево из не-
заштрихованной области в заштрихованную (рис. 5.30, б). Наоборот,
если деформация параметра А сопровождается потерей одного
левого корня, то это соответствует пересечению границы
устойчивости со стороны заштрихованной области в незаштрихованную.
При изменении со от —оо до +оо штриховка мнимой оси
распределения корней наносится с левой стороны. Перенесем этот анализ на
175
n-1
n-1
OO / '
7
0
-^
103
—&-
n-1
a
n
0J= -oo
6)
Рис. 5.30
плоскость А (ко). Тогда кривая разбиения областей должна
содержать штриховку с левой стороны кривой, если начинать ее обход
со стороны со = —оо.
Далее предположим, что область параметра Л, не имеющая
штриховки, соответствует правой полуплоскости распределения корней
и содержит только правые корни, которых всего п. Пересекая
кривую из незаштрихованной области в заштрихованную, найдем
область с наибольшей потерей правых корней (на рис. 5.30, а —
область с числом правых корней п — 2). Эта область претендует на
область устойчивости. Если кривая разбиения построена для
уравнения такого порядка, который соответствует числу потерянных
правых корней, то это будет областью устойчивости Do. Для
проверки нужно взять любое значение параметра Л из этой области,
подставить его в характеристическое уравнение (5.22) и проверить
его на устойчивость с помощью любого другого критерия. После
определения области устойчивости находится диапазон возможных
вариаций параметра Л, который заключен в этой области в виде
отрезка действительной оси (на рис. 5,30, а — отрезок ОАг).
Б. Метод /^-разбиения по двум параметрам. Рассмотрим
характеристическое уравнение, в котором можно выделить два
независимых параметра системы, входящих линейно в его коэффициенты:
AQ (К) + BR (X) + N (I) = 0.
Подстановка в это уравнение значения К = ш предполагает
хотя бы один корень на границе устойчивости.
AQ (ко) + BR (/со) + N (ко) = 0. (5.24)
Выделив в (5.24) действительную и мнимую части, получим
UQ^co) + BRX (со) + N, (со)] + i IAQ2{(oj + BR2 (со) +
+ N2 (со) ] - 0. (5.25)
Применим к выражению (5.25) критерий устойчивости Михайлова
для колебательной границы устойчивости. Этот случай отвечает
условию прохождения кривой Михайлова через начало координат,
176
т. е, условию U = 0 и V = 0. Тогда будем иметь систему из двух
уравнений
£/ (со) = AQX (со) + B/?i (со) + N1 (со) = 0;
(5.26)
V (со) = Л<Э2 (со) + BR2 (со) + N2 (со) = 0.
Согласно правилу Крамера Л (со) = ДА/Д0 и В (со) = Дв/До
-^(со), /?х(со) в
Q2(CO), #2 (CD)
-ЛГ2(со), ^2 (со)
(5.27)
Qi(co), -
Q2(co), -
Система двух уравнений (5.26) связывает в параметрической
форме (через параметр со) переменные А и В. Если эти уравнения
совместны (т. е. если их совместное решение не приводит к
противоречивому результату) и линейно независимы (неравносильны), то
каждому значению со соответствует одна пара переменных Л, В.
Следовательно, на плоскости В = f (А) каждому значению частоты
соответствует одна точка, отвечающая таким значениям А и В,
которые определяют систему на границе устойчивости. При
непрерывном изменении со на плоскости В = f (А) вычерчивается
непрерывная кривая, которая определяет границы областей устойчивости
и неустойчивости системы.
Если при некотором значении со = со0 определители (5.27)
обращаются в нуль, т. е. До (соо) = 0, ДА (соо) = 0, Дв (со0) = 0,
тогда одно уравнение системы (5.26) становится следствием другого,
т. е. они становятся равносильными. В этом случае для значения соо
получается не точка, а прямая линия, которая называется особой.
Различают два вида особых прямых: концевые и промежуточные.
Концевые особые прямые проявляются при значениях со = 0
или при со = ±оо, что соответствует переходу корня из левой
полуплоскости в правую через значения нуль или бесконечность. Особая
прямая, соответствующая обращению корня в нуль, определяется
из условия равенства нулю свободного члена ап характеристического
уравнения (один нулевой корень в начале координат). Особая
прямая, соответствующая обращению корня в бесконечность,
получается при приравнивании нулю коэффициента при старшей
производной а0 (бесконечно большой корень в левой полуплоскости).
Чаще всего концевые особые прямые имеют место, когда А и В
входят в коэффициенты а0 и ап, т. е.
а0 = а01А + а02В и ап = ап1А + ап2В.
В таком случае эти равенства определяют уравнения концевых
особых прямых на плоскости В = / (А).
Условия реализации концевых особых прямых соответствуют
апериодической границе устойчивости динамических систем.
Промежуточные особые прямые появляются при значениях со0 Ф 0
12 А. И. Бабкин и др. 177
и соо Ф оо, т. е. при попадании пары комплексных корней
характеристического уравнения на границу устойчивости. Однако сама
кривая D-разбиения получена для точно такого же случая, который
предполагает прохождение кривой Михайлова через начало
координат при со Ф 0. Следовательно, появление промежуточной особой
кривой при тех же условиях отвечает вторичному пересечению
кривой Михайлова начала координат. Последнее возможно лишь
для динамических систем четвертого и более высоких порядков,
в которых возможно появление двух и более пар комплексных
корней.
Таким образом, условия реализации промежуточных особых
прямых соответствует колебательной границе устойчивости на
второй, третьей и т. д. собственных частотах динамических систем
четвертого и более высоких порядков.
Граница устойчивости метода D-разбиения по двум параметрам
состоит из кривой и особых прямых (если они пересекают кривую).
Область устойчивости определяется по правилам штриховки кривой
и особых прямых.
Правило штриховки кривой сводится к определению знака
определителя Ао, который часто называют определителем штриховки
и представляют в виде якобиана
dU dU
Д„,=
дЛ дВ
dV 0V
(5.28)
Если определитель До = Лш > 0, то штриховка при увеличении со
наносится с левой стороны кривой, если определитель Дш < 0, то
штриховка наносится справа (при этом параметр А откладывается
вдоль оси абсцисс, а В — по ординате).
Вследствие попеременной смены знаков определителя в особых
точках (о)0 = 0, соо = =Ь°о, а>0ф0 и со0^=±оо) кривая D-разбиения
по двум параметрам имеет по одну сторону двойную штриховку.
Концевые особые прямые штрихуются одинарной штриховкой
так, чтобы основная кривая и особая прямая сливались либо
гладкими, либо заштрихованными сторонами.
Промежуточные особые прямые штрихуются двойной
штриховкой так, чтобы вблизи точек их пересечения с основной кривой
штриховка была направлена навстречу друг другу.
Направление штриховки особых прямых меняется только в
особых точках, для которых Аш = 0.
Во всех случаях, при оговоренных выше правилах, штриховка
направлена внутрь устойчивой области.
Определение устойчивой области строится так же, как в
плоскости одного параметра с той лишь разницей, что при пересечении
линий с двойной штриховкой, два корня характеристического
уравнения изменяют знаки.
В качестве примера на рис. 5.31 показано распределение областей
устойчивости в плоскости двух параметров, расположение которых
178
определяется кривой и двумя
особыми прямыми. "Штриховка
кривой нанесена из условий:
при — оо< —со<о)о Аш<0;
при — соо<со<0 Аш>0;
при 0<о)<со0 Аш<0 и
при со0<со<+оо Аш>0,
а штриховка особых прямых —
в соответствии с изложенными
выше правилами.
Пример поиска устойчивой
области показывает (рис. 5.31),
что при п = 4 устойчивыми
являются области / и //.
Наибольший запас устойчивости
такой динамической системы по параметрам А и В соответствует
значениям А и 5, наиболее удаленным от заштрихованных границ
устойчивости.
В. Диаграмма устойчивости Вышнеградского. Рассмотрим в
качестве примера классическую задачу выделения областей
устойчивости на плоскости двух переменных параметров для динамических
систем третьего порядка, впервые решенную И. А. Вышнеградским.
Характеристическое уравнение для систем третьего порядка
имеет вид
а0Х3 -\- ajA,2 + а2Х + а3 = 0, (5.29)
в котором все коэффициенты — положительные числа. Разделим
уравнение (5.29) на коэффициент а3:
Рис. 5.31
а3
(5.30)
и введем новую переменную U = 7/^0/^3 ^- Тогда выражение (5.30)
можно переписать так:
U3 + AU2 + BU + 1 - 0, (5.31)
где А=-Т7^=- и 5 = ^Д=.
называются параметрами Вышнеградского. Построим D-разбиение
на плоскости параметров А и В. Для этого перепишем уравнение
(5.31) в виде
AU2 + BU + (U3 + 1) = 0
и, подставляя в него условие U = ко, получим
—Л(О2 + I'fiGO + (1 — Ш3) = 0
или (1 — Лео2) + i (Б© — со3) = 0.
12* 179
Разбивая последнее уравнение на два, соответствующих
колебательной границе устойчивости, по критерию устойчивости
Михайлова [U (со) = 0 и V (со) = 0] (см. рис. 5.21, б) имеем
U (со) *= Лео2 + О-В + 1 = 0; V (со) = 0-Л + Всо — со3 = 0.
Соответствующие им определители
-со2 О
О со
= -со3;
-ю2
0
Д л =
-1
(О3
— 1
СО3
-со*.
0
со
= — со;
Все определители обращаются в нуль только при соо = 0. Для
любого со Ф 0:
Л = ^, Я = оД т. е. В = ±.
Таким образом, кривая D-разбиения представляет собой равно-
бокую гиперболу (рис. 5.32), а особая прямая совпадает с осью А,
так как при со0 = 0 В — 0, а А — оо.
Для нанесения штриховки исследуем знаки определителя (5.28):
— со2 0
0 со
Ао = Аш =
= — со*
при вариации частот в диапазоне —оо < со < +оо.
Для отрицательных частот в диапазоне от со = —оо до со — О
определитель штриховки будет положительным, поэтому при
движении по полученной кривой сверху вниз (от —оо до 0) штриховка
наносится слева. Для положительных частот в диапазоне от со -= О
до со = +оо определитель штриховки будет отрицательным,
поэтому при движении по полученной кривой снизу вверх (от 0 до -г оо)
штриховка наносится справа. Таким образом, сверху полученной
кривой получится двойная штриховка, направленная в сторону
области устойчивости (область 1), а снизу, под кривой, — область
неустойчивости (область 2).
Особая прямая, совпадающая с осью параметра А, в
рассматриваемом случае не пересекает кривой разбиения и не накладывает
никакого ограничения на область
устойчивости. Поскольку
параметры Л и В в рассматриваемом
случае включают в себя все
коэффициенты уравнения динамики, то
расположение рабочей точки
относительно границы устойчивости харак-
„q теризуется не как запас, а как
степень устойчивости динамической
системы третьего порядка, которая
Рис. 5.32 может быть определена с помощью
'/////////'V,-
180
Рис. 5.33
семейства кривых равных степеней устойчивости, нанесенных на
поле диаграммы устойчивости Вышнеградского [28].
Исследование распределения корней характеристического
уравнения (5.31) позволило найти области с различными видами
переходных процессов на плоскости В = f (А) (рис. 5.33).
В области I три отрицательных вещественных корня
обеспечивают апериодические процессы.
В области II при различных сочетаниях пары комплексных
корней и одного действительного корня реализуются сходящиеся
колебательные процессы.
В области III один отрицательный вещественный корень и пара
комплексных корней с положительной вещественной частью
вызывают колебательные расходящиеся процессы.
В области IV три положительных вещественных корня вызывают
расходящиеся апериодические переходные процессы.
С помощью такой диаграммы (которую иногда называют
«улучшенной» диаграммой устойчивости Вышнеградского) можно
обеспечить желаемый вид переходного процесса САР и предвидеть его
деформацию при изменении параметров А и В.
Л1етод D-разбиения по двум параметрам широко используется
для оценки устойчивости с >КРД в области низкочастотных
колебаний и является наиболее общим методом исследования устойчивости
САР. Примеры использования этого метода для исследования
устойчивости ЖРД приведены в работах [11, 33j.
Рассмотренные выше методы анализа устойчивости САР с
помощью различных критериев применимы для систем регулирования
181
ЖРД при упрощенном линейном представлении динамических
свойств ДУ в узком диапазоне частот (примерно в диапазоне от О
до 50 Гц).
При более подробном анализе динамических свойств ДУ в
широком диапазоне частот из-за множества запаздываний и ряда
специфических свойств ЖРД уравнение динамики ЖРД становится
трансцендентным. В этом случае для исследования устойчивости нельзя
использовать алгебраический критерий Рауса — Гурвица, но
применимы критерии устойчивости Михайлова и Найквиста. Однако
степень их применимости также ограничивается узким диапазоном
частот и требует специальных подходов, которые выходят за рамки
рассматриваемых задач и для некоторых частных случаев изложены
в работе [111.
5.5. НЕЛИНЕЙНОСТИ ХАРАКТЕРИСТИК СИСТЕМ
При исследовании динамических свойств систем
регулирования нелинейности характеристик ее элементов учитывают в
следующих случаях:
1) когда качественная картина оценки динамических свойств
системы, полученных с помощью ее линейной модели, не
соответствует результатам опытных данных испытаний ее макетов или
выполненных опытных образцов;
2) если динамический анализ проводится для глубокого
изменения режимов работы системы, при котором отклонения от
равновесного уровня так велики, что линеаризация характеристик элементов
системы становится невозможной;
3) если в состав системы регулирования включены элементы,
характеристики которых не поддаются линеаризации.
Как правило, несовпадение опытных результатов с результатами
исследований линейных моделей возникает также при эксплуатации
сложных динамических систем, содержащих в своем составе большое
количество нелинейных элементов, неоднозначно проявляющих свои
свойства, большое число перекрестных и обратных связей,
определяющих сложную логику функционирования системы.
Для динамического анализа сложных динамических систем
нецелесообразно прИхменять прямые методы описания их свойств,
которые связаны с громоздкими вычислениями, удорожающими
стоимость разработок и затягивающими процесс проектирования. В
такой ситуации задача исследования свойств сложных больших
динамических систем на современном этапе сводится к разработке
математических моделей процесса динамического функционирования
элементов системы, алгоритмы которых построены на использовании
результатов испытаний макетов или опытных образцов этих
агрегатов. Математическая модель функционирования должна обладать
•гибкой структурой, которая позволяет имитировать изменение
параметров агрегатов в широком диапазоне, и методом перебора
различных сочетаний вариантов параметров позволяет, в конечном счете,
решить задачу обеспечения требуемого качества сложной
динамической системы в приемлемые сроки и с наименьшими материальными
затратами. Математические модели реализуются с помощью
цифровых или аналоговых вычислительных машин. В некоторых случаях
целесообразным является полунатурное моделирование, в котором
сложные агрегаты (например, двигатель) моделируются на
аналоговых машинах. В практике доводки и исследования свойств элементов
автоматики и систем регулирования ЖРД находят также применение
физические модели. Они построены на обосновании замены рабочих
тел агрегатов ДУ их аналогами — модельными жидкостями или
газами.
Вторая причина, не позволяющая использовать линейные методы
оценки динамических свойств систем регулирования, связана с
нестационарными процессами глубокого изменения режима работы
ДУ. К ним относятся запуск и останов ДУ, а также глубокое
изменение режима работы. Во всех этих случаях используется полная
система нелинейных уравнений, которая, как правило, решается
численным методом с помощью аналоговых или цифровых
вычислительных машин.
Наконец, третья причина, ограничивающая применение
линейного метода исследования систем управления, определяется
наличием в ней такого элемента, характеристики которого не поддаются
линеаризации обычным способом.
В начале гл. 3 было дано определение линейным элементам
систехмы регулирования как звеньям, характеристики которых имеют
непрерывную производную. Такие свойства позволяют проводить
линеаризацию характеристик в любой точке путем замены отрезка
исходной нелинейной характеристики отрезком касательной,
проведенной к кривой в любой точке соответствия входной и выходной
величин. Однако, как было показано в гл. 4, некоторые
измерительные и усилительные элементы имеют ограничения в виде упоров
или зоны насыщения, или скачкообразной связи выходной величины
с входной (реверсивный электромотор с контактным управлением,
см. табл. 4.4, № 7). В подвижных элементах регуляторов неизбежны
люфты в соединениях и влияние сил трения покоя и сухого трения.
Характеристики таких элементов не могут быть линеаризованы этим
способом, так как представляют собой кусочно-линейные
зависимости, в точках излома которых они не имеют общей касательной
(см. табл. 2.3, № 2 ... 6).
Элементы систем регулирования, обладающие такими
характеристиками, называют существенно нелинейными. Такие элементы,
входя в состав системы регулирования, вносят специфические
особенности в характер протекания переходных процессов и свойства
устойчивости САР.
Практически почти все реальные элементы системы
регулирования нелинейны. Рассмотренные выше результаты анализа
динамических свойств относились к линеаризованным элементам и их
соединениям, при этом основным условием исследования
динамических свойств было предположение о малой величине отклонений
относительно рассматриваемого уровня установившегося
динамического состояния этих элементов.
183
Постановка задачи исследования динамических свойств систем
-с существенно нелинейными элементами отличается тем, что система
описывается нелинейными дифференциальными уравнениями.
Если не рассматривать системы, параметры которой
соответствуют границе устойчивости, то в линейных системах возможны
лишь два типа движений после начального отклонения: затухающие,
либо расходящиеся (монотонно или не монотонно).
Если в системе регулирования имеется хотя бы один существенно
нелинейный элемент, то при потере устойчивости могут возникать
устойчивые колебания. Эти колебания возникают при отсутствии
внешних периодических воздействий и поддерживаются только в силу
внутренних свойств самой системы. Их частота и амплитуда
определяются параметрами элементов, составляющих систему. Такие
устойчивые колебательные режимы называются автоколебаниями.
Они возникают благодаря восполнению потерь на колебания извне
от неколебательного («гладкого») источника энергии. Таким внешним
источником энергии могут служить либо процессы в объекте
регулирования, либо усилительные устройства регуляторов.
Автоколебательные периодические режимы отличаются устойчивостью по
отношению к внешним воздействиям.
Исследование устойчивых периодических режимов позволяет
оценить не только параметры автоколебаний, но и условия их
существования, а также и все многообразие режимов исследуемой
нелинейной системы, существенно отличающейся от поведения
линейной САР.
Задачи исследования устойчивости нелинейной системы решаются
различными методами [4, 5]. Один из них —метод фазовых
траекторий является точным методом, позволяющим принципиально
решить поставленную проблему изучения общего характера
многообразия динамических свойств нелинейных систем регулирования.
Фазовые траектории линейных систем и типы особых точек.
Вначале с помощью метода фазовых траекторий исследуем свойства
устойчивости линейной системы второго порядка. Уравнение
динамики такой системы в общем случае после действия на нее
кратковременного возмущения имеет вид
flo-0- + fli-^-+fl.» = O, (5.32)
где а„, аг, а2 — постоянные коэффициенты.
Произведем в этом уравнении замену dyldx = у = ср и сведем
уравнение (5.32) к системе двух уравнений:
(5-33)
Поделив первое уравнение системы (5.33) на второе, найдем
^9 _ ах а2у -
134
В а)
Рис. 5.34
В полученном уравнении (5.34) исключено время. Решая эта
уравнение подстановкой z = у/ср, в координатах ср = / (у) получим
семейство логарифмических спиралей, сходящихся к началу
координат (рис. 5.34, б), которые называют фазовыми траекториями
системы, а плоскость, на которую они наносятся, — фазовой
плоскостью.
Движение системы (5.32) после действия на нее кратковременного
возмущения отображается на фазовой плоскости ер = f (у) с помощью
уравнения (5.34). Каждая точка фазовой траектории (которая
называется изображающей точкой) соответствует определенной точке
переходного процесса. Если имеется график переходного процесса
(на рис. 5.34, а он соответствует случаю двух комплексных корней,
расположенных в левой полуплоскости), то фазовую траекторию
можно построить, не прибегая к интегрированию уравнений. Для
этого достаточно снять с графика переходного процесса
соответствующие друг другу значения у и ф = dyldx = tg а, где а — угол
наклона касательной к кривой.
Участку О А переходного процесса, на котором у падает до нуля,
соответствует участок ОХА' фазовой траектории (см. рис. 5.34, б).
Далее участку А В переходного процесса, в котором dyldx падает до-
нуля, а у растет от нуля до максимального значения в отрицательной
области, соответствует участок А'В' фазовой траектории и так
далее — до полного затухания переходного процесса; при этом
фазовая траектория стягивается в начало координат. Аналогичным
образом можно построить фазовые траектории для любых других
переходных процессов, отличающихся друг от друга начальными
условиями (см. рис. 5.34, б; у'62) Фог)-
Таким образом, уравнения (5.33) определяют для различных
начальных условий семейство кривых, всюду плотно заполняющих
фазовую плоскость. Фазовая плоскость, заполненная всей
совокупностью фазовых траекторий, называется фазовым портретом
системы.
Фазовые траектории могут пересекаться друг с другом лишь
в ограниченном числе точек, а применительно к рассматриваемой
линейной системе — только в одной точке, в начале координат.
185
Рис. 5.35
Рис. 5.36
Действительно, дифференциальное уравнение фазовых
траекторий (5.34) получается делением первого уравнения системы (5.33)
на второе уравнение этой же системы:
(5.35)
dy аоц>
При любых значениях ф и у (кроме ф = у = 0) уравнение (5.35)
определяет единственное значение dy/dy. Таким образом, в любой
точке фазовой плоскости, кроме начала координат, к фазовой
траектории можно провести только одну касательную. На этом основании
применяется приближенный способ построения фазовых траекторий
методом изоклин. Умножив правую и левую части уравнения (5.34)
на ф и решая полученное выражение относительно ф, получим
Ф
—(■
а2/а0
dy/dy
■)>■
(5.36)
Уравнение изоклин можно получить из (5.36) положив dyldy = const.
Задавая значения dqidy в дипазоне от 0 до оо, из выражения (5.36)
видно, что геометрическим местом одинаковых касательных являются
прямые линии, проходящие через начало координат (рис. 5.35).
В частности, вертикальные касательные dy'dy — оо располагаются
на оси абсцисс, а горизонтальные касательные dtp/dy = 0 на прямой,
ориентированной относительно начала координат с отрицательным
наклоном. В начале координат касательная не имеет однозначного
определения dq>/dy — 0/0, т. е. начало координат является особой
точкой, в которой для рассматриваемого случая обеспечивается
равновесие системы (ф = 0 и у = 0). При устойчивой системе в эту
точку «вливаются» все фазовые траектории. Такая особая точка
называется устойчивым фокусом. Начертив достаточное количество
изоклин, можно провести по ним фазовую траекторию из любой точки
поля (см. рис. 5.35).
Из выражения (5.36) легко видеть, что в случае изменения любого
из постоянных коэффициентов уравнения (5.32), что соответствует
потере устойчивости системы, прямая с горизонтальными
касательными ориентируется с положительным коэффициентом наклона.
186
Рис. 5.37
Все другие изоклины [(кроме^ dyldy = оо) переориентируются
так, что фазовые траектории, начатые с любой точки поля,
расходятся от особой точки — начала координат (рис. 5.36). Перемена
знака одного из коэффициентов вызывает попадание пары
комплексных корней в правую полуплоскость и система теряет устойчивость.
Ее переходный процесс расходится, сопровождаясь увеличением
амплитуды колебаний (рис. 5.37, а), а фазовые траектории
«отталкиваются» от начала координат (рис. 5.37, б). Особая точка такого
типа называется неустойчивым фокусом.
Двум отрицательным вещественным корням характеристического
уравнения отвечают ^апериодические переходные процессы
(рис. 5.38, а). Переходному процессу с «забросом» (кривая У)
соответствует фазовая траектория (рис. 5.38, б), вливающаяся в начало
координат с переменой знака <р. Монотонному процессу (кривая 2)
на фазовой плоскости соответствует прямолинейная траектория,
при движении вдоль которой уменьшается как у, так и ср.
Процессу с перерегулированием (кривая 3) соответствует
фазовая траектория, вливающаяся в начало координат с переменой
знака у. Во всех случаях апериодические процессы, состоящие
из суммы двух экспонент, заканчиваются при т —► оо. Изображающие
точки попадают в начало координат также при т -> оо. Такая особая
точка на фазовой плоскости называется устойчивым узлом.
При попадании двух вещественных корней характеристического
уравнения на правую полуплоскость система теряет устойчивость
апериодически (рис. 5.39, а). Таким процессам соответствуют
фазовые траектории У, 2, 3, выходящие из начала координат и
удаляющиеся в бесконечность (рис. 5.39, б). Особая точка в этом случае —
начало координат — называется неустойчивым узлом.
При расположении корней характеристического уравнения по
обе стороны от начала координат переходные процессы в такой
динамической системе неустойчивы и в зависимости от начальных условий
движения имеют вид У, 2, 3, 4, 5, 6, показанный на рис. 5.40, а.
Отвечающие процессам У, 2, 3, 4 фазовые траектории (рис. 5.40, б)
не касаются особой точки 0. В нее входят и из нее выходят две
вырожденные фазовые траектории 5, 5, называемые сепаратрисами.
187
Они разделяют фазовый портрет на четыре области, в каждой из
которых фазовые траектории похожи на гиперболы. Как видно из
фазового портрета, для такой системы принципиально существуют
определенные начальные условия, начиная с которых реализуется
устойчивое движение (влияние левого корня). Эти начальные
условия соответствуют геометрическому месту точек, расположенных
на сепаратрисе, ориентированной на фазовом портрете с
отрицательным угловым коэффициентом наклона. Но как только это движение
закончится, в начале координат оно сразу может стать неустойчивым,
так как по второй сепаратрисе из начала координат система
расходится (пунктирные кривые на рис. 5.40, а). Особая точка такого
типа характеризует неустойчивое положение равновесия и
называется седлом.
В случае попадания пары комплексных корней на мнимую ось
плоскости распределения корней система находится на
колебательной границе устойчивости (консервативная система). Этому случаю
соответствуют незатухающие гармонические колебания (рис. 5.41, а),
фазовые траектории представляют собой семейство эллипсов,
вложенных один в другой (рис. 5.41, б). Особая точка — начало
координат фазовой плоскости — в этом случае называется центром.
Рис. 5.40
188
У i
Рис. 5.41
Принципиально такой периодический режим работы в линейной
системе возможен только в консервативных системах
[коэффициент ах при первой производной уравнения (5.32) равен нулю].
Практически такие колебания в реальных системах происходят при
слабом рассеивании энергии (без существенного демпфирования)
и для агрегатов управления являются опасными колебаниями,
способными вызвать их функциональный отказ. Из рассмотрения
характера фазовых траекторий для этого случая необходимо отхметить,
что любому периодическому колебательному процессу с постоянной
амплитудой и частотой на фазовой плоскости соответствует
замкнутая фазовая траектория. За один период колебаний, изображающая
точка проходит весь контур по часовой стрелке один раз.
Принципиально влияния внешних условий и условий
эксплуатации реальных динамических систем могут изменять топологическую
структуру фазовых портретов, а следовательно, и характер
движения, устойчивость, степень устойчивости и динамическое качество
систем. Так, например, при демпфировании колебаний
консервативной системы каждый эллипс переходит в спираль, а центр
вырождается в фокус. При дальнейшем увеличении демпфирования
колебаний витки спиралей разряжаются и в конечном итоге могут
выродиться в траектории апериодических систем. При этом фокус
перерождается в узел.
Изменение физического состояния динамической системы
однозначно сопровождается изменением коэффициентов уравнения
динамики. Значение коэффициентов уравнений динамики, в свою очередь,
определяется параметрами состояния системы. Если удалось
составить дифференциальное уравнение динамики системы, то тем самым
определяется связь между коэффициентами уравнений и реальными
параметрами этой динамической системы. Если поочередно
варьировать параметрами системы в диапазоне их значений от —оо
до +оо, то это непременно приведет к изменению количественных
и качественных соотношений на фазовом портрете. В определенных
дискретных точках значений этих параметров динамическая система
может быть апериодической или колебательной, может терять либо
приобретать свойство устойчивости. Это, в свою очередь, приведет
к качественному изменению топологической структуры фазового
портрета. Таким образом, при изменении какого-либо параметра
189
количественные характеристики фазового портрета изменяются
непрерывно, а качественная характеристика фазового портрета (его
топологическая структура) претерпевает резкие изменения при
дискретных значениях параметров, которые обуславливают переход
от апериодического движения к колебательному или переход корней
характеристического уравнения из одной полуплоскости в другую.
Эти дискретные значения параметров называют бифуркационными.
Бифуркационные точки разделяют ось числовых значений
каждого параметра динамической системы на участки, отвечающие
одинаковой структуре фазовой плоскости.
Бифуркационный анализ систем является наиболее общим
методом исследования их динамического состояния и не содержит
принципиальных ограничений подобно тем, которые ограничивают
применение метода D-разбиения (линейная связь варьируемых
параметров с коэффициентами уравнения).
Не составляет труда обобщение понятия бифуркации на
пространство параметров любого числа измерений подобно тому, как
обобщается понятие области устойчивости параметров для метода
выделения областей устойчивости.
Если число варьируемых параметров я, то в /г-мерном
пространстве этих параметров каждой точке соответствует определенная
структура фазового портрета. В частном случае, когда
рассматриваемая система может быть однозначно определена заданием двух
параметров, пространством параметров служит обычная плоскость,
а бифуркационные значения параметров определяют кривую в этой
плоскости.
Следовательно, метод фазовых траекторий является наиболее
общим — собирательным методом, наглядно отражающим все
многообразие свойств динамических систем. Рассмотренные в настоящем
разделе фазовые портреты и виды особых точек линейных систем
являются типичными для реальных нелинейных систем. Понятие
бифуркации целиком переносится на нелинейные системы и
бифуркационный анализ становится обобщенным методом исследования
структуры фазовых портретов.
Фазовые траектории нелинейных систем. Для нелинейных
систем регулирования второго порядка уравнение динамики будет
иметь вид
& £ (£) (6.37)
где а0, аъ а2 — постоянные коэффициенты; F — некоторая
нелинейная функция, которая в частных случаях может быть задана
аналитически, графически или системой неравенств (см. табл. 4.4, № 7).
Обозначая dyldx = у = ср вместо уравнения (5.37) получим си-
стему из двух уравнений
♦ -~2-,-3-1 + -ИЬЯ-! ,_, (5.38>
190
которая, в свою очередь, делением первого на второе сводится
к уравнению
d(p __ ад + а2у — F (у, ф)
dy аоф
(5.39)
Решение нелинейного уравнения (5.39) соответствует фазовым
траекториям исходной нелинейной системы (5.37). Уравнение (5.39)
аналогично по своей структуре уравнению фазовых траекторий
линейной системы (5.35) и отличается добавочным членом в
числителе, учитывающим нелинейную часть F (у, ф). Найти точное
аналитическое решение уравнения (5.39) можно лишь в немногих
случаях, когда F (у, ф) имеет достаточно простой вид.
В рассматриваемом случае для облегчения построения решений
графическим способом, французским математиком А. Пуанкаре
показано, что если нелинейная часть F (уу ф) в начале координат
фазовой плоскости обращается в нуль, по крайней мере как
бесконечно малая величина второго порядка, и выполняется условие
а0 ф 0 и ап Ф О, то нелинейная система (5.38) имеет особую точку
у = ф = о одного из рассмотренных выше типов в соответствии
с распределением корней характеристического уравнения линейной
части системы, за исключением чисто комплексного значения корней,
при которых возможен центр или фокус в зависимости от вида
функции F (у, ф). В каждом из возможных случаев фазовые траектории
нелинейной системы (5.38) вблизи окрестности особой точки
аналогичны соответствующим траекториям линейной системы.
Фазовые траектории нелинейных систем могут быть получены
интегрированием уравнения (5.39) различными способами в
зависимости от вида функции F (у, ф).
Наибольшее распространение получили машинные способы
решений нелинейных уравнений с помощью аналоговых или цифровых
вычислительных машин. Если F (у, ф) — кусочно-линейная
функция, то система (5.38) представляет собой ряд дифференциальных
уравнений, каждое из которых справедливо в определенной области
фазозой плоскости. Для такой области фазовые траектории
определяются как часть траекторий соответствующей линейной системы.
Полный фазовый портрет в таких случаях получается сшиванием
траекторий всего ряда областей, принадлежащих нелинейной
системе.
Для простейшего случая колебания маятника часового механизма
на рис. 5.42 показаны фазовые треактории колебательной системы
часового маятника, полученные сшиванием траекторий колебаний
маятника с вязким трением (траектории 1) с траекториями импульса
подвода энергии в равновесных точках колебаний (траектории 2).
Пунктирными линиями на этом рисунке показаны траектории
подвода энергии с запаздывающим импульсом.
Рассмотрим характерные особенности динамических свойств
нелинейных систем, анализируя типичные для них фазовые портреты
(рис. 5.43 ... 5.46). На рис. 5.43, б показана в качестве примера
нелинейная система, имеющая одну особую точку в начале координат
191
Рис. 5.42
(устойчивый фокус) и одну замкнутую
траекторию 7, охватывающую особую точку 0.
Фазовые траектории не могут пересекаться
на фазовой плоскости нигде, кроме как в
особой точке. Поэтому замкнутая фазовая
траектория разделяет области «притяжения»
траекторий к особой точке (область внутри
замкнутого контура — сплошная линия) и
область «отталкивания» от нее (область
снаружи замкнутого контура — пунктирная
линия). Развертки во времени колебательных
процессов, соответствующих такому
фазовому портрету, приведены на рис. 5.43, а.
Их характер протекания показывает, что в области начальных
отклонений, лежащих внутри замкнутого контура,
колебательные процессы затухают, т. е. система устойчива, а вне ее
колебательные процессы расходятся, т. е. система неустойчива. Таким
образом, замкнутый контур является границей, отделяющей
устойчивые колебательные процессы от неустойчивых колебаний. Такие
контуры называются неустойчивыми предельными циклами. Сам
предельный цикл соответствует колебаниям с постоянной
амплитудой уЦу но в рассматриваемом случае они сами по себе не
устойчивы и практически не существуют. Роль предельного [цикла при
этом сводится к отделению области устойчивости.
На рис. 5.44, б приведен другой пример фазового портрета
нелинейной системы, у которого также имеется особая точка 0 в начале
координат (неустойчивый фокус) и замкнутый контур 1,
охватывающий эту точку. Однако в этом случае он отделяет область
отталкивания фазовых траекторий, расположенную внутри замкнутого
контура (сплошная линия), от области притяжения к ней фазовых
траекторий, находящихся вне замкнутого контура (пунктирная
линия). Развертки во времени переходных процессов для этого
случая (рис. 5.44, а) показывают, что колебательные процессы в этой
системе, начинаясь внутри контура или вне его, как бы
«стягиваются» к колебаниям, соответствующим замкнутому контуру. Такой
замкнутый контур называется устойчивым предельным циклом. Ему
ч
Рис. 5.43
192
Рис. 5.44
соответствует устойчивый колебательный процесс с амплитудой уц
и частотой соц, определяемые параметрами самой системы. Такие
устойчивые периодические режимы называются автоколебаниями.
Фазовый портрет наглядно показывает, что автоколебания для
рассматриваемой системы являются единственно возможной формой
динамического состояния. Признаками того, что установившиеся
неколебания являются автоколебаниями, служат наличие источника
неколебательной энергии («гладкого» источника энергии),
необходимого для неизбежного возмещения потерь, и устойчивость колебаний
по отношению к внешним возмущениям.
Следует отметить существенное различие между
автоколебаниями и рассмотренными выше гармоническими колебаниями
консервативной системы, для которой фазовый портрет представляет
собой семейство замкнутых траекторий с особой точкой типа центр
(см. рис. 5.41, б). Такой фазовый портрет характеризует
колебательную границу устойчивости линейной системы. Фазовые траектории
такой системы, хотя и замкнутые, но не являются предельными,
так как к ним не сходятся никакие фазовые траектории ни изнутри,
ни снаружи. Фазовый портрет консервативной системы
характеризует возможность реализации колебаний с любой амплитудой.
Свойства консервативных систем объясняются отсутствием рассеивания
энергии, а значит, и отсутствием его пополнения.
Автоколебания являются колебаниями особого рода и возникают
в существенно неконсервативных системах. Амплитуда
автоколебаний поддерживается за счет равенства потерь энергии за
колебательный цикл благодаря притоку энергии от неколебательного
источника. Только при наличии нелинейного элемента возможен
указанный выше баланс энергии за колебательный цикл, и вычисление
условий существования автоколебаний сводится, по существу,
к определению условий реализации этого баланса. На рис. 5.44
показано для рассматриваемого случая соотношение характеристик
затраченной (—Е) и пополняемой (+Е) энергий в зависимости от
начальной амплитуды отклонений, откуда видно, что начальные
возмущения амплитуды, меньшей амплитуды колебаний устойчивого
предельного цикла, обеспечивают избыток пополнения энергии, а
при уровнях возмущений, больших амплитуды цикла, налицо недо-
13
А. И. Бабкин и др.
193
статок пополнения энергии. Баланс энергии наступает только при
установлении колебаний амплитуды цикла уц. Аналогичный график
на рис. 5.43 показывает невозможность реализации устойчивого
периодического режима для первого из рассмотренных выше примеров.
На рис. 5.45, б показаны для примера фазовый портрет системы,
имеющей как неустойчивый а, так и устойчивый б предельные циклы,
расположенные один в другом, и соответствующий ему график
баланса энергии. Видно, что устойчивые колебания возможны только
с амплитудой уц2у характеризующей наружный цикл, и не возможны
для амплитуды уц1 внутреннего цикла. В самом деле, внутренний
цикл а отделяет область устойчивости (сплошная линия) от
неустойчивой области (штрихпунктирная линия) и поэтому сам является
неустойчивым, а наружный цикл б стягивает к себе фазовые
траектории как снаружи (пунктирная линия), так и изнутри
(штрихпунктирная линия) и поэтому является устойчивым.
Развертки во времени переходных процессов, показанные на
рис. 5.45, а, подтверждают приведенный анализ возможных
динамических режимов.
ПГаким образом, исследование возможных динамических режимов
показало: в данном примере, затухающие колебательные процессы
находятся внутри области неустойчивого предельного цикла а;
расходящиеся неустойчивые колебания находятся вне этого цикла,
но внутри области устойчивого предельного цикла б, вне области
устойчивого цикла — сходящиеся колебательные процессы до
параметров цикла б. Или проще: все начальные условия движения вне
неустойчивого цикла приводят к автоколебаниям, а внутри его —
к затуханиям колебаний.
Принципиально возможны системы, у которых реализуются два
или несколько автоколебательных циклов; возможны их
комбинации с устойчивыми и неустойчивыми апериодическими границами
(рис. 5.46) и прочие сочетания, которые определяются структурой,
параметрами системы, видом и числом нелинейных элементов (в
сложных случаях фазовые траектории рассматриваются не на плоскости,
а в пространстве).
Однако общие свойства нелинейных систем отчетливо
обнаруживаются и на рассмотренных примерах — это свойство связи уровня
Рис. 5.45
194
Рис. 5.46
начального возмущения с
характеристикой устойчивости
движения системы. После рассмотрения
характерных фазовых портретов
нелинейных систем можно
сформулировать понятие
устойчивости «в малом», «в большом» и
«неограниченная устойчивость»
следующим образом.
Система устойчива «в малом»,
если точке ее равновесного
состояния соответствует в фазовом пространстве устойчивая особая точка,
в окрестностях которой в нее «вливаются» все фазовые траектории.
Если при этом уровень реальных и допускаемых отклонений
от заданного равновесного режима лежит целиком внутри области,
ограниченной неустойчивым предельным циклом, то система
устойчива и «в большом».
Если область устойчивости неограничена во всей фазовой
плоскости, то в этом случае система называется неограниченно
устойчивой.
Движение динамической системы, фазовый портрет которой
приведен на рис. 5.44, при любом сколь угодно малом отклонении с
течением времени будет приближаться к устойчивому предельному
циклу. При этом любая фазовая траектория, начинающаяся в
окрестностях особой точки, представляет собой расходящуюся спираль,
которой соответствует во времени возрастающие по амплитуде
колебания. Этот случай относится к так называемому «мягкому»
возбуждению автоколебаний.
Фазовый портрет динамической системы, приведенный на
рис. 5.45, наоборот, соответствует свойствам «жесткого»
возбуждения автоколебаний. В такой системе для реализации автоколебаний
с амплитудой уц2 начальные возмущения должны соответствовать
таким фазовым траекториям, которые начинаются из областей их
притяжения к устойчивому предельному циклу (см. рис. 5.45, б
кольцевая область между циклами а и б наружняя область вне
цикла б). При меньших уровнях начальных возмущений система
вновь вернется в исходное положение, так как она устойчива
«в малом».
Для системы, фазовый портрет которой показан на рис. 5.43,
жесткое возбуждение приведет к потере устойчивости.
На рис. 5.46 показан фазовый портрет нелинейной системы,
динамические свойства которой характеризуются двумя особыми
точками — фокусом и седлом. В малой окрестности фокуса все
фазовые траектории сходятся к началу координат, т. е. система
устойчива «в малом». При начальных условиях движения вне
автоколебательного цикла а фазовые траектории сходятся к циклу,
который может быть реализован только при стягивании к нему фазовых
траекторий снаружи. Такие автоколебательные циклы называются
полуустойчивыми. При начальных отклонениях, которые лежат
13* 195
вне сепаратрисы б, идущей от седла в него же, движение
динамической системы неустойчиво. Замкнутый участок сепаратрисы б
в этом случае играет роль устойчивости, отделяющей область
стягивания фазовых траекторий к автоколебательному циклу и их
отталкивания. В окрестностях седловой особой точки (кроме области
внутри замкнутого участка сепаратрисы б) все начальные условия
движения приводят к неустойчивости.
| Таким образом, по фазовому портрету динамической системы
можно, зная уровень допускаемых отклонений, определить
характеристику устойчивости движения.
Так, при условии, что все поле фазового портрета одновременно
является полем допускаемых отклонений (чисто теоретический
случай), можно для рассмотренных выше примеров определить
устойчивость следующим образом.
|В примере рис. 5.43, б система устойчива «в малом» и
неустойчива в «большом».
В примере рис. 5.44, б система неустойчива «в малом», но
устойчива «в большом».
В примере рис. 5.45, б система устойчива «в малом», ограниченно
неустойчива в «среднем» и устойчива «в большом».
В последнем примере ограниченную неустойчивость «в среднем»
и устойчивость «в большом» можно трактовать как устойчивость
относительно автоколебательного цикла.
В примере (рис. 5.46) система устойчива «в малом» устойчива
относительно автоколебательного цикла а (только при жестком
возбуждении), неустойчива «в большом» и неограниченно неустойчива
в окрестностях седловой точки (за исключением области внутри
замкнутого участка сепаратрисы б).
Все линейные системы, имеющие на фазовой плоскости особую
точку в виде устойчивого узла или фокуса, неограниченно
устойчивы.
Приведенный выше анализ типовых фазовых портретов
нелинейных систем показывает, что динамическое состояние нелинейных
систем резко отличается от линейных как возможностью появления
особых автоколебательных циклов, так и сложной комбинацией
устойчивых и неустойчивых областей. В зависимости от
топологической структуры фазового портрета возможно мягкое или жесткое
возбуждение автоколебаний. Жесткое возбуждение для нелинейных
систем также может привести к потере устойчивости.
Основным методом исследования топологической структуры
фазовых портретов нелинейных систем является бифуркационный
анализ параметров этих систем, принципы которого изложены в конце
предыдущего раздела. Как и для линейных систем, непрерывное
изменение одного (или нескольких параметров одновременно)
непременно приведет к деформации фазовых траекторий, а для ряда
их фиксированных значений — к резкому изменению топологической
структуры фазового портрета.
Например, для фазового портрета (см. рис. 5.43, б) при
увеличении демпфирования расходящихся колебаний фазовые траектории
196
будут уплотняться. В пределе их уплотнения образуется замкнутый
предельный цикл и портрет сформируется в виде структуры,
показанной на рис. 5.45, б. Замкнутая часть сепаратрисы б на фазовом
портрете рис. 5.46 может переродиться в неустойчивый цикл,
отторгнув при этом седловую точку, либо наоборот — полуустойчивый
цикл а свернется в особую точку, из которой возникнут
расходящиеся траектории; разряжаясь эти траектории могут разорвать
замкнутую часть сепаратрисы б, что вызовет исчезновение фокуса
и т. п. Более подробно типовые бифуркации нелинейных систем
второго порядка и многомерных динамических систем рассмотрены
в работе [5]. Принципиально важно, что бифуркационный анализ
нелинейных динамических систем позволяет прогнозировать
появление и исчезновение автоколебаний, предвидеть потерю или
восстановление устойчивости движения системы при изменении ее
параметров, что является основной задачей в исследовании
динамических свойств нелинейных систем.
С позиций бифуркационного анализа можно объяснить механизм
возникновения автоколебаний. При мягком возбуждении он состоит
в появлении неустойчивости равновесного состояния, приводящего
к нарастающим колебаниям, и в одновременном ограничении этого
нарастания. Как компромисс между возникшей неустойчивостью
и подавлением колебаний с большой амплитудой и возникает
устойчивый апериодический режим — автоколебания. Это не
единственный, но наиболее часто встречающийся механизм.
В некоторых случаях можно указать конкретные физические
причины образования автоколебательных режимов, которые, например,
приведены в работе [20].
Для теории автоматического регулирования изучение
автоколебаний является существенным, так как все автоматические
системы потенциально автоколебательные. Несмотря на то, что в
некоторых случаях высокочастотный автоколебательный режим с
малой амплитудой колебаний полезен с точки зрения повышения
статической точности системы (так как он устраняет например, силы
трения покоя в регуляторах,) в контурах управления ДУ с ЖРД
он является аномальным, нежелательным явлением. Спектр
собственных частот элементов ЖРД так широк, что практически любые
колебания с течением времени могут быть увеличены из-за
резонансных явлений до недопустимых пределов. С другой стороны, большое
число перекладок подвижных частей регуляторов смазываемых,
как правило, компонентом топлива, вызывает их натирание,
перегрев, заклинивание или даже их поломку, что приводит к
аварийной ситуации в контуре управления.
Замечания к применениюметода фазовых
траекторий. Приведенные выше примеры фазовых траекторий
рассмотрены для динамических систем второго порядка; при этом
фазовый портрет системы изображался на плоскости двух
переменных величин.
Состояние любой системы автоматического регулирования в
любой момент времени ее действия изображается точкой в фазовом
197
пространстве. Число измерений этого пространства соответствует
порядку дифференциального уравнения системы, поэтому
эффективность этого метода с увеличением порядка дифференциального
уравнения падает в связи с возрастающими трудностями изображений
траекторий и их анализа в многомерном пространстве.
На практике метод фазовых траекторий получил широкое
распространение преимущественно для систем второго и реже для
систем третьего порядка.
При исследовании динамических свойств нелинейных систем
в составе системы был рассмотрен один нелинейный элемент.
Принципиально метод фазовых траекторий позволяет учитывать
влияние на процесс управления многих нелинейных элементов,
находящихся в составе системы. При этом значительно возрастают
трудности технического порядка, а принципиальная сторона
вопроса не изменяется.
В настоящее время решение нелинейных уравнений динамических
систем считается полным, если определены фазовые портреты,
возможные в этой системе, и если в пространстве ее параметров
определены бифуркационные границы. Отличительной способностью
бифуркационного анализа является то, что в поле зрения попадают
все возможные решения при всех возможных значениях параметров.
Если результаты бифуркационного анализа совпадают с
экспериментальными данными, то это позволяет делать прогнозы
относительно возможного поведения динамической системы. Поэтому
бифуркационный анализ следует рассматривать не только как
описанный, но и как конструктивный метод исследования нелинейных
динамических систем.
Гармоническая линеаризация. Для исследования нелинейных
систем автоматического управления высокого порядка широкое
распространение получил приближенный метод гармонической
линеаризации или гармонического баланса. Этот метод основан на работах
Н. М. Крылова и Н. Н. Боголюбова и впервые в 1940 г. был
применен Л. С. Гольдфарбом для анализа систем автоматического
управления. Позже различные модификации метода гармонической
линеаризации использовались учеными различных стран. В СССР этот метод
получил дальнейшее развитие в работах Е. П. Попова и И. П. Паль-
това, Я. 3. Цыпкина, М. А. Айзермана и И. М. Смирновой и многих
Других.
Чаще всего метод гармонической линеаризации используется
при исследовании автоколебаний в нелинейных замкнутых системах
управления. При этом предполагается, что на входе нелинейного
звена действует гармонический синусоидальный сигнал. А на
выходе этого звена сигнал содержит спектр гармонических
составляющих с различными амплитудами и частотами. Предполагается
также, что сигнал, проходя через линейную часть системы,
фильтруется ею до такой степени, что всеми высшими гармониками, кроме
первой, можно пренебречь.
Основную идею метода гармонической линеаризации
проиллюстрируем на примере замкнутой системы автоматического управле-
198
Z(X)
1
У
ния, структурная схема которой нз лн
представлена на рис. 5.47. Система
состоит из последовательно вклю- /С?\ х>
ченных нелинейного безынерцион- ^р
ного звена (НЗ) и устойчивой или Т
нейтральной линейной части (ЛЧ). '
На основании этого
предположения имеем Рис' 5'47
х (т) = X sin сот.
При нулевом значении управляющего сигнала
х (*) = —У (*).
При выполнении гипотезы фильтра, когда сигнал z (т) проходя
через линейную часть Wn (too), фильтруется, на выходе линейной
части у (т) равен
у (т) « К sin (сот + ф).
Следовательно,
X sin сот = —К sin (сот + ф).
Это равенство выполняется при условии
X = Г; ф » я. (5.40)
Уравнения (5.40) представляют собой уравнения гармонического
баланса. Первое из них выражает баланс амплитуд, а второе —
баланс фаз гармонических колебаний. Следовательно, для того чтобы
в рассматриваемой системе существовали незатухающие
гармонические колебания, должны выполняться условия (5.40) при
соблюдении гипотезы фильтра.
Рассмотрим безынерционное нелинейное звено со статической
характеристикой z = / (х). При действии на его входе
гармонического сигнала оно может быть описано комплексным
коэффициентом усиления, зависящим от амплитуды входного сигнала. Иногда
эту характеристику называют описывающей функцией.
Если на входе нелинейного звена действует гармонический сигнал
х = X sin сот = Im Xe"»x9
то периодический сигнал z (т) на его выходе может быть
представлен в виде ряда Фурье. Приближенно этот сигнал представляется
своей первой гармоникой
z (т) « ZP sin сот + ZQ cos cot. (5.41)
При этом следует иметь в виду, что рассматриваются нелинейные
характеристики, для которых постоянная составляющая равна нулю.
Уравнение (5.41), записанное в комплексной форме, имеет
следующий вид:
z (т) ~ Im (ZP + iZQ) e^\ (5.42)
199
В этих выражениях коэффициенты ZP и ZQ определяются по
формулам:
2л
ZP = — [ z (X sin сот) sin сот d (ют);
ЭХ J
0 (5.43)
2л
ZQ = — | z (X sin сот) cos сот d (сот).
ЭХ J
о
Комплексным коэффициентом усиления нелинейного звена
называют отношение основных гармоник выходного и входного
сигналов, выраженных в комплексной форме:
= у—^ = нГ + 1-у-:=|Н7н|е н, (5.44)
Составляющие комплексного коэффициента усиления
Ph(X) = ^hQh(X) = A (5.45)
называются коэффициентами гармонической линеаризации.
Как видно из написанных выше выражений, коэффициент
усиления безынерционного нелинейного звена зависит от амплитуды
входного воздействия, а не от частоты, как в случае линейного
звена. Кроме того, можно показать, что в случае однозначной
нелинейности безынерционного звена мнимая составляющая
комплексного коэффициента усиления QH равна нулю.
Анализ симметричных автоколебаний в нелинейных системах
рассмотрим на примере системы, представленной на рис. 5.47 и
состоящей из нелинейного звена и линейной части. Условием
существования в системе автоколебаний является гармонический
баланс колебаний на входе нелинейного звена и на выходе звена
сравнения. Воспользовавшись полученным выше комплексным
коэффициентом усиления и амплитудно-фазовой частотной
характеристикой линейной части системь^ запишем уравнение гармонического
баланса в следующей форме:
W*(X) Wn(t(o) = -1. (5.46)
Это уравнение следует рассматривать как уравнение относительно
неизвестных частоты и амплитуды автоколебаний, которые
определяются на входе нелинейного звена.
Графический способ решения уравнения (5.46) был предложен
Л. С. Гольдфарбом. Для этого уравнение записывается в
следующей форме:
W* (/(°) = - -w^xy = ~ Гн (X'1) = VH (X), (5.47)
где VH (X) называется инверсным коэффициентом гармонической
линеаризации.
200
w
Рис. 5.48
Далее на плоскости комплексных
параметров строятся годографы частотной
характеристики линейной части системы
и инверсного коэффициента
гармонической линеаризации, взятого с обратным
знаком. В качестве примера на рис. 5.48
изображены указанные годографы. В
данном примере годографы частотной
характеристики линейной части системы и
инверсного коэффициента гармонической
линеаризации, взятого с минусом,
пересекаются в двух точках А и В. Частоты
и амплитуды, соответствующие этим
точкам сол, ХА и соБ, Хв, определяют
параметры искомых автоколебаний
системы. Не каждому из двух найденных решений будет соответствовать
устойчивый режим автоколебаний, т. е. режим, когда в
результате возможных возмущений автоколебания восстанавливаются.
Для суждения об устойчивости полученных автоколебаний
рассматривают колебания, близкие к гармоническим колебаниям
х (т) = Хеат sin (щт + ср)
с частотой соь близкой к частоте автоколебаний сол или сов.
Затухание или нарастание колебаний характеризуется знаком
коэффициента а. При положительном значении его (а > 0) колебания будут
нарастать, а при отрицательном (а < 0) — затухать.
Вблизи автоколебательного режима коэффициент передачи
линейной части является функцией (а + ш), т. е. Wn (а + ш) при
| а | < со. В автоколебательном режиме а = 0. Записывая
уравнение (5.47) в окрестности автоколебательного режима в комплексной
форме, будем иметь
У„ (X) = Рн (X) + iQK (X) = Wn (a + ш) = Рл (а, со) + ^л (а, со).
(5.48)
Из уравнения (5.48) видно, что а и со являются функциями
амплитуды колебаний X. Эта зависимость позволяет судить об
устойчивости или неустойчивости режима автоколебаний. Если
с ростом амплитуды значение коэффициента а возрастает и
становится положительным, то с течением времени возрастает амплитуда
Xtax и режим автоколебаний неустойчив. В случае, если с ростом
амплитуды X значения коэффициента а уменьшаются и становятся
отрицательными, то амплитуда XtaT с течением времени уменьшается
и режим автоколебаний будет устойчивым. Отсюда условия
устойчивости автоколебаний в точках А и В могут быть сформулированы
в следующем виде: -^- < 0 — режим автоколебаний устойчивый,
da
"3^- > 0 — режим автоколебаний неустойчивый.
201
Учитывая уравнения (5.48), эти условия устойчивости
автоколебаний можно представить в следующей форме. В начале
продифференцируем уравнения (5.48) и приравняем действительные и
мнимые части
dPH дРл da
dX да dX
dQn д<Зл да
dX да dX
, дРл
да)
да)
day
dX '
dX '
(5.49)
(5.50)
В соответствии с условиями Коши—Римана для аналитических
функций комплексного переменного имеем
дР дО дО дР
После подстановки уравнений (5.51) в (5.49) и (5.50), исключая -д~-
da
и разрешая их относительно -^-, получим:
д()л dPH дРл dQH
da _ day dX да) dX ,r rn\
dX ~~ I дР ^ г^^ ^ * (O.OZj
Учитывая, что знаменатель в уравнении (5.52) всегда положителен,
условие устойчивости автоколебательного режима можно записать
в следующей форме:
д()л dPH дРл dQu
да) dX db) dX
-<0. (5.53)
В качестве примера рассмотрим систему регулирования ЖРД
с турбонасоснои системой подачи открытой схемы. В качестве
регулируемого параметра в системе выбрано давление горючего после
насоса (перед двигателем). Регулирующим воздействием является
изменение расхода компонента (горючего) в газогенераторе путем
изменения проходного сечения F клапана регулятора. Статическая
характеристика клапана имеет вид симметричного насыщения
(рис. 5.49).
Исходная система дифференциальных уравнений рассматриваемой
схемы регулирования ДУ имеет следующий вид:
per JJ Г *-»'* — — i\per ^
н = /<THA ДР:Г;
= /СггАрдр; (5.54)
Д^др = й„ Дрн + ахт Артг -г aF AF;
AF = AF (Ah),
202
\-b
где 7"Рег> 7"тна» 7"гг — постоянные
времени регулятора, турбонасосного
агрегата, газогенератора; /Срег./Стна» ^гг—
коэффициенты усиления этих же
агрегатов; ан, агг, aF — коэффициенты
влияния соответствующих факторов на
Д/?др; ДА — перемещение клапана
регулятора; Арн — давление за насосом
горючего; Аргг — давление в
газогенераторе; Д/7др — давление перед
газогенератором (после регулятора); AF —
площадь проходного сечения клапана.
Первое уравнение системы
представляет собой уравнение регулятора,
второе — уравнение турбонасосного агрегата,
ние газогенератора, четвертое — зависимость
газогенератором от давления после насоса, от давления в
газогенераторе и величины проходного сечения клапана, пятое —
уравнение статической характеристики клапана регулятора, которая
представлена на рис. 5.49. Таким образом, в данном примере
рассматривается нелинейность типа симметричного насыщения.
Разрешая первые четыре уравнения системы (5.54) относительно
ДА, будем иметь
Рис. 5.49
третье — уравне-
давления перед
d* Ah
a2-
dAh
di
Ah = —Kn AF,
(5.55)
где
°
а, =
+ ^рег (ТУг + 7>HA (1 —
а =
2
v = /Cper^THA^rrQF
Чл 1 ~/Crrflrr(l +/СТНА) *
Используя рассмотренный выше метод гармонической
линеаризации, в соответствии с уравнениями (5.44) и (5.45) запишем
нелинейную зависимость AF (ДА) в виде
AF (Ah) = AhWm (Л),
(5.56)
\yQ ^ — амплитуда гармонических колебаний клапана регулятора;
и^н (А) — комплексный коэффициент усиления рассматриваемой
нелинейности, являющийся функцией амплитуды А.
203
/-a7 —--const
&2
Учитывая симметричность
рассматриваемой характеристики
насыщения, комплексный
коэффициент усиления WH (А) может
быть вычислен по формуле
я/2
Рис. 5.50
и в соответствии с [32] равен
W
, (А) = *§- (arcsin 4- + 1 V1 - IF
(5-57>
при А ^ &, где /С = tg a.
При Л < 6 характеристика клапана регулятора линейна и
система уравнений (5.54) становится линейной.
При А ^ Ъ в соответствии с (5.56) имеем
AF (АЛ) = Ж- (arcsin 4+4" Z1 ~ж) АЛ- (5'58>
С учетом полученных зависимостей и уравнения (5.55) имеем
Н = 0. (5.59)
Для определения параметров автоколебаний в соответствии
с (5.46) и (5.55) имеем
- — WB (А) Кл (1 _
1
( i) + . (fl2 _ aoO}2) ш 1.
Умножив знаменатель на комплексно сопряженное число, получим
w Мч /Сл [(1 - ait»2) ~ *д> (fl2 - До^>2)] _ i
Это уравнение эквивалентно двум уравнениям
со (а2 — Ьосо2) = 0.
Второе уравнение позволяет определить частоту автоколебаний
О);
V а0 ~ V
+ ^ТНА (^ — А"гг°гг) + ^рег (^ ~ Кгг^гг —
(5.62)
204
из которого видно, что частота автоколебаний зависит от параметров
линейной части системы.
Для определения амплитуды автоколебаний в соответствии
с уравнениями (5.57), (5.62) и первым уравнением системы (5.61)
имеем
Это уравнение позволяет найти величину амплитуды
автоколебаний. Для графического решения запишем его в виде
(5.64,
На рис. 5.50 показан графический способ решения уравнения
(5.64). Точка D пересечения зависимостей
= const
v -
Ал
определяет величину амплитуды автоколебаний Ла.
ГЛАВА 6
ТИПОВЫЕ СИСТЕМЫ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
6.1. СИСТЕМЫ С РЕГУЛЯТОРОМ ПРЯМОГО ДЕЙСТВИЯ
При большом разнообразии пневмогидравлических
систем ЖРД и вариантов конструктивных схем регуляторов
целесообразно рассмотреть замкнутые цепи САР с регуляторами,
выполненными по типовым принципиальным схемам.
Это объясняется тем, что любые конструктивные схемы
регуляторов классифицируются как не содержащие в своем составе
усилителя (регуляторы прямого действия) или содержащие усилитель
(регуляторы непрямого действия). В свою очередь, регуляторы,
содержащие усилитель, классифицируют по типу применяемого
усилителя, динамические свойства которого (как это будет
показано ниже) являются определяющими свойства регулятора и
системы регулирования в целом. Из рассмотренных в разд. 4.3
усилительных элементов отличительными типовыми свойствами в
динамике обладают следующие усилители с линейной статической
характеристикой: интегрирующие, инерционные и изодромные уси-
205
Рис. 6.1
лители. Ниже будут
рассмотрены статические и
динамические свойства одного и
того же объекта
регулирования с четырьмя типовыми
регуляторами: прямого
действия, с интегрирующим,
инерционным и изодромным
усилителями.
Одним из наиболее
распространенных типов
регуляторов является регулятор
прямого действия, не
содержащий в своем составе
усилительного устройства. Принципиальная схема такого
регулятора показана на рис. 6.1. Сильфонный сравнивающий элемент
регулятора трансформирует перепад давлений между командным
воздействием и регулируемой величиной в перемещение днища силь-
фона 5, которое жестко связано с исполнительным органом 4,
дозирующего подачу топлива в газогенератор 1.
Рассмотрим характеристики упрощенной модели замкнутой САР
ЖРД с регулятором прямого действия для контура регулирования
тяги по косвенному параметру Рт для линии питания турбины
рабочим телом.
В режиме стабилизации тяги командное воздействие
обеспечивается во времени постоянным давлением рКш в от командного
безрасходного редуктора. Возмущающие воздействия со стороны
объекта регулирования вносятся через изменение давления в баке
/?б. т. Объект регулирования включает в себя: газогенератор /
с форсуночной головкой 2, участок трубопровода 3 от головки до
исполнительного органа 4 и сам исполнительный орган 4
регулятора, дозирующий поступление топлива в газогенератор.
Исполнительный орган, по которому объект регулирования стыкуется с
регулятором, принадлежит как элемент САР одновременно объекту
и регулятору.
При регулировании тяги изменяется рк. в, что влечет за собой
изменение положения жесткого днища сильфона 5 и перемещение
исполнительного органа 4, обеспечивающего такое дозирование
подачи топлива, которое вызовет желаемое изменение режима.
В режиме стабилизации тяги возмущающие воздействия от
изменения давления в баке /?б. т парируются перемещением жесткого
днища сильфона, регистрирующего изменение давления в
газогенераторе /?т, при постоянном давлении командного воздуха и
перемещающего исполнительный орган в такое положение, которое
изменяет подачу топлива так, чтобы восстановить уровень
регулируемой величины в соответствии с уровнем командного сигнала.
Степень точности соответствия регулируемой величины
командному сигналу на установившихся режимах определяет статическую
точность САР и оценивается видом ее статической характеристики.
206
В рассматриваемом случае, например, для режима
стабилизации необходимо получить связь на установившихся режимах между
регулируемой величиной /?т и внешним воздействием /?б. т при
постоянном командном давлении рк, в. Для этого составим баланс
сил для установившихся положений подвижной системы
регулятора для различных уровней возмущений: рб1 > рб. ном и /?б2 <
<С Рб. ном- При увеличении давления в баке до значения рб1 после
успокоения системы дроссель исполнительного органа установится
в новое положение, компенсируя увеличение расхода топлива,
вызванное увеличением давления подачи. Поскольку задвижка
жестко связана с сильфоном, то он займет новое положение
zc.ном + Д^с- При этом баланс сил подвижной системы
записывается в следующем виде:
PtI^c — Сс (zc. ном "Г Л*с) = Рк. в^с. (6-1)
где рт1—давление в газогенераторе на новом установившемся
режиме после компенсации САР увеличения давления в баке; сс —
жесткость сильфона.
При давлении в баке, равном номинальному значению /?б. НОм»
дроссель исполнительного органа и сильфон установлены в
номинальном положении гс. ном- Этому положению соответствует
баланс сил
Рб. ном* с ^с^с. ном = Рк. в* с- №•")
Поскольку в режиме стабилизации давление командного
воздействия остается неизменным pR, в = const, то из сравнения балансов
сил (6.1) и (6.2) видно, что давление рт1 больше /?ном на величину
Ар = _ссрс_9 (63)
Аналогично легко показать, что воздействие, связанное с
уменьшением давления в баке до уровня рб2 вызовет на установившемся
режиме новый уровень /?г2, меньший на величину
Ар = J^- . (6.4)
Естественным при такой ситуации является требование
Ари< АРдоп- (6.5)
Таким образом, в рассматриваемой САР с регулятором прямого
действия каждому значению внешнего воздействия однозначно
соответствует определенное значение регулируемой величины.
График, связывающий между собой соответствующие точки
установившихся режимов регулируемой величины с уровнем внешних
воздействий, называется статической характеристикой САР и для
рассматриваемой системы показан на рис. 6.2. Там же для
сравнения показана статическая характеристика нерегулируемого объекта.
Видно, что при выполнении условия (6.5) САР позволяет компенси-
207
§ ровать более широкий диапазон откло-
Объепт //^ нений давлений по внешнему
воздействию, чем нерегулируемый объект.
Статические ошибки (6.3) и (6.4)
являются неотъемлемым свойством
рассматриваемой САР и
обуславливаются жесткой связью между входным и
выходным элементом регулятора.
САР, обладающие свойством
однозначного соответствия входных и
выходных величин, называются
статическими САР, а свойство, отожествляющее этот факт, — статизмом.
Рассмотрим динамические свойства системы. Для этой цели
необходимо составить уравнение динамики каждого элемента САР.
Для сильфонного элемента регулятора уравнение равновесного
состояния подвижных частей (полагая дроссель регулятора
разгруженным от перепада давления на нем) будет иметь вид (6.2). В
динамике переменными величинами во времени, входящими в этот
баланс, будут перемещение сильфона zc, давление в
газогенераторе рТ и давление командного воздействия /?к. в. Последняя
величина полагается переменной для исследования динамических свойств
САР в режиме управления. Задавая переменным величинам
отклонения и учитывая конечную массу подвижных частей и силы
сопротивления вязкого трения, получим
* Z0 , , dzc ^ JLA*\-
рсГ /Ут2 I /x\e 1 p Лег 1 L \ C« HUM I ^^ U/
= (Рт. ном + АРт) ^c - (Рк. в. ном + АРк. в) ^ct (6-6)
где mper — масса подвижных частей регулятора; кж% тр —
коэффициент сил, вызываемых жидкостным (вязким) трением в элементах
регулятора.
Уравнение (6.6) не содержит сил сопротивления, вызываемых
сухим трением, так как учет последних из-за перемены знака силы
не позволяет проводить анализ методом линейной теории.
Вычитая из уравнения динамики (6.6) уравнение статики (6.2),
получим уравнение в отклонениях
d2zc , , diQ , д р д р \п (&7\
//tripr —1—о— —Г" «V5.T» тп —: -у- С г L\cn — Г г» 1лРт ~"™ х п l\ Ut. n . I U. / I
Для перехода к безразмерной форме записи введем обозначение
для величины относительного хода подвижной системы
Агс = Дгс/гс тах, (6.8)
где zc max — максимально возможная величина перемещения днища
сильфона.
208
С учетом этого обозначения и обозначений гл. Здля
относительных давлений и полагая, что Azc^ dzc с переходом к безразмерной
форме в уравнении (6.7) получим
Azc , i d Azc
d2 Azc , i
Zc max^per ^2 Г ^с тах^ж. тр Jx ^~ ^c~c max &%с =
= Рт. ном^с ДРт — /?к. в. ном^с ДАс. в- (6.9)
После деления левой и правой частей уравнения на постоянный
КОЭффИЦИеНТ Сметах при Дгс ПОЛуЧИМ
/ярег d2 Azc , ^ж. тр <*Агс , 77 _
= PthomFc д^ Ph.,We 55
(6 Ш)
Постоянные коэффициенты при производных являются постоянными
времени, а константы при переменных величинах правой части
уравнения — коэффициентами усиления. Присваивая константам
обозначения принадлежности к регулятору и порядковые номера,
окончательно в символической форме записи получим
(Грег2р2 + ТрепР + l) Az0 = /Cperl А^т ~ /СРег2 Арк. в. (6.11)
Уравнение (6.11) отвечает свойствам колебательного или
апериодического звена второго порядка (в зависимости от
соотношения Грег1 и Грег2).
Для исполнительного органа регулятора (дросселя) уравнение
динамики будет отвечать свойствам идеального усилительного
звена и отражать связь перемещения с изменением площади
проходного сечения вследствие того, что массовые силы подвижного
элемента и присоединенные к нему силы вязкого трения уже учтены
в коэффициентах Грег1 и Грег2 уравнения (6.11).
Уравнение динамики исполнительного органа в отклонениях
в линеаризованном виде будет
где комплекс jx/^p содержит произведение коэффициента
сопротивления дросселя на площадь его поперечного сечения, а
d\iFRvldzc — коэффициент наклона зависимости в точке
номинального положения исполнительного органа (см. рис. 2.11).
Уравнение в безразмерных отклонениях получим, вводя
обозначение для относительной площади открытия дросселя
где i-i/^proax — максимальная площадь открытия дросселя,
соответствующая максимальному ходу подвижных частей регулятора.
14 Д. И. Бабкин и др. 209
С учетом этого обозначения
7др = „рС-та--..—Ж^" Д2С. (6.14)
Коэффициент правой части полученного выражения является по
смыслу коэффициентом усиления, так как он стоит при входном
воздействии. Частная производная, определяющая после выбора
геометрии дросселя величину коэффициента усиления, должна
быть отрицательной. Это обуславливает логику взаимодействия
работы регулятора с объектом, обязывающую для обеспечения режима
стабилизации при всяком увеличении давления в газогенераторе рт
уменьшить подачу топлива в газогенератор за счет введения в тракт
питания дополнительного сопротивления, т. е. путем уменьшения
площади проходного сечения |a/^p дросселя регулятора тяги.
Увеличение давления в газогенераторе соответствует в принятой схеме
на рис. 6.1 положительному отклонению сильфона. Поэтому для
стабилизирующего воздействия на объект необходимо иметь
отрицательное воздействие со стороны исполнительного органа, в
противном случае регулятор будет дестабилизирующим устройством.
Другими словами, регулятор в САР всегда должен быть подключен
к объекту через отрицательную обратную связь.
Вводя обозначение принадлежности к регулятору и присваивая
коэффициенту усиления порядковый номер, будем окончательно
иметь
= -/(рерзДгс. (6.15)
Объект регулирования рассматриваемой САР, состоящий из
газогенератора с форсуночной головкой, участком трубопровода и
дросселем регулятора, будет отвечать динамическим свойствам
инерционного звена (см. разд. 3.3 и 3.5):
(Г0С/7 + 1) Арт = Ко01 Аро + *об2 А^Др. (6.16)
Последнее уравнение не учитывает запаздывания процесса
саморазложения топлива в газогенераторе и инерцию массы жидкости
в трубопроводе.
Итак, система уравнений динамики САР представлена тремя
уравнениями динамики, поставляющих ее элементов (6.11), (6.15)
и (6.16). После их совместного решения («свертывания») будем иметь
одно уравнение динамики, характеризующее поведение САР в целом:
(Ь3 22 + 1) А/7Т =
1 .
210
где
1 САРЗ =
TqAP2 =
T2 т
об
(6.18)
Г Т
perlл об
(6.19)
АРкЛ
6)
Рис. 6.3
(6.20)
Уравнение динамики
рассматриваемой САР (6.17)
отвечает свойствам апериодической
или колебательной системы
третьего порядка с введением
двух производных в закон
регулирования по возмущающему
воздействию и просто
усилительной по отношению к командному воздействию.
В соответствии с решением уравнения (6.17) по отношению к
каждому входному сигналу САР будет иметь один из трех возможных
видов переходных процессов, показанных на рис. 6.3, а и б.
Конкретный вид переходного процесса зависит от соотношения
коэффициентов Гсар3, Гсар2 и 7сар] и коэффициентов усиления,
которые, в свою очередь, достаточно сложно определяются через
параметры объекта и регулятора. Поэтому физический анализ их
взаимного влияния прямыми методами затруднен, но может быть
решен с помощью аналоговых моделей. Анализ собственного
движения системы (уравнения динамики без правой части) может быть
проведен с помощью улучшенной диаграммы Вышнеградского (см
разд. 5.4 или [28]). Устойчивость САУ можно исследовать с
помощью любого способа, приведенного в разд. 5.3, 5.4, 5.5.
Что же касается статистической ошибки, то этот критерий
качества САР легко получается из уравнения (6.17) и определяется его
частным решением.
В самом деле, частное решение этого уравнения по отношению
к воздействию по давлению в баке находится из условия т->-оо,
которое предполагает отсутствие всех производных. В этом случае
(Д/7т)т->оо =
. , к к
1 "Г ЛобгАрепАрегз
■ Д/?б.
(6.21)
Комплекс постоянных коэффициентов в правой части
выражения (6.21) по существу является комплексным коэффициентом
усиления замкнутой САР по отношению к возмущающему воздействию,
который и определяет величину статической ошибки, а
следовательно и наклон статической характеристики САР (см. рис. 6.2).
14*
4 211
Для уменьшения статической ошибки необходимо уменьшать
комплексный коэффициент усиления (6.21). Естественно, что
коэффициенты усиления, характеризующие свойства объекта /СОбз и ^обг
практически изменять невозможно, так как они определяются
внутренними свойствами, присущими ЖРД. Что же касается
коэффициентов усиления регулятора, то это как раз тот путь, который
необходимо использовать для достижения поставленной цели. Для
уменьшения статической ошибки необходимо увеличивать
произведение коэффициентов KverlKper3 [см- формулу (6.21)].
Выражение для произведения этих коэффициентов легко
получить из уравнений (6.10) и (6.14).
is is Рт. ном^с zc max
дгс "
Отсюда легко видеть, что для увеличения коэффициентов /Cperi
и /СреГз можно:
а) увеличивать площадь жесткого днища сильфона /V,
б) уменьшать жесткость сильфона сс\
в) увеличивать наклон статической характеристики d\nFJdz^
исполнительного органа.
Увеличение площади сильфона ограничено массовыми и
габаритными соображениями; уменьшение жесткости сильфона
ограничено его прочностными характеристиками, а увеличение наклона
статической характеристики исполнительного органа определяется
профилем дросселя и служит эффективным средством влияния на
величину статической ошибки в рассматриваемой САР.
Величину ошибки воспроизведения командного сигнала легко
получить из частного решения уравнения (6.17) по отношению к
командному воздействию:
Комплекс коэффициентов усиления в выражении (6.22)
определяет точность воспроизведения двигателем командного
воздействия. Чем этот комплекс ближе к единице, тем меньше разница
в отклонениях командного воздействия и регулируемой величины.
Если удалось в процессе проектирования или на этапе
конструкторской доводки значительно увеличить комплекс /СреГ1^Срегз (Для
уменьшения статической ошибки), так, что выполняется условие
^обг^репЛ'регз » Ь то, пренебрегая в знаменателе комплекса
единицей, можно приближенно записать (6.22) в виде
откуда (ДртК^оо « Арк.в, так как /Срег2 ~ /СРеГь см. формулу (6.10),
ибо они отличаются друг от друга только давлением номинальных
величин рт. ном и рк. в. ном» которые между собой различаются на
незначительную величину cczc> ном^с 1СМ- формулу (6.2)].
212
Si
^ off, 2)
ToffS+1
Таким образом, двигатель в иссле-
дуемой САР (по косвенному параметру
регулирования рт) при принятых уело- ZjiFdp
виях воспроизводит уровень
командного воздействия с несущественной
статической ошибкой.
В заключении анализа свойств рас-
сматриваемой САР необходимо
отметить, что длительность переходного Рис 6 4
процесса по отношению к внешнему
воздействию намного короче, чем по отношению к командному
сигналу (что нашло свое отражение в рис. 6.3). Это объясняется
тем, что в закон регулирования по отношению к внешнему
воздействию введены две производные, а по отношению к командному
сигналу — ни одной. Введение в правую часть уравнения динамики
производных всегда укорачивает переходный процесс, так как
САР при этом реагирует не только на входной параметр, но и на
скорость его изменения, ускорение и т. д.
Структурная схема рассмотренной САР, построенная по переда1
точным функциям ее отдельных элементов, показана на рис. 6.4-
Увеличение времени переходного процесса по отношению к
командному воздействию, против внешнего возмущения можно
проиллюстрировать с помощью структурной схемы исходя из следующих
физических представлений. Прежде чем регулятор САР начнет
реагировать на изменение воздействия по рб, сигнал должен пройти
через инерционный объект. Затем следует измерение регулятором
нового значения /?т, его сравнение с командным значением и
ответная реакция исполнительного органа .и/^р, которая должна пройти
также через инерционный объект. На этом основной замкнутый
цикл работы САР кончается. Изменение командного воздействия
рк. в до начала реакции САР должно сначала пройти через
инерционный регулятор, а затем через инерционный объект. Только с этого
момента начнется изменение регулируемой величины и сравнение
результатов с новым значением командного воздействия. Затем
следует ответная реакция исполнительного органа, сигнал которого
вновь должен пройти через инерционный объект, чем и заканчивается
первый замкнутый цикл работы САР. Из приведенного описания
видно, что время изменения рт от командного воздействия до
полного завершения переходного процесса больше, чем время
переходного процесса, вызываемого в САР внешним воздействием. Поэтому
в замкнутых САР внешнее воздействие всегда парируется быстрее,
чем осуществляется перевод двигателя на новый режим работы
Рассмотренная система автоматического регулирования с
регулятором прямого действия является наиболее простой, надежной
и быстродействующей системой. Благодаря этим качествам она
получила наибольшее распространение в системах управления тягой
и стабилизации соотношения компонентов топлива в камере
сгорания и газогенераторах ЖРД.
21а
6.2. СИСТЕМЫ С ИНТЕГРИРУЮЩИМ РЕГУЛЯТОРОМ
Для ЖРД больших тяг в большерасходных и
высоконапорных магистралях применение регуляторов прямого действия
затруднено вследствие возрастания потребных перемещений и
перестановочных усилий исполнительного органа. В таких случаях
для разгрузки измерительного устройства применяют усилители,
которые обеспечивают необходимые перестановочные усилия и
требуемый диапазон перемещений исполнительного органа.
Простейшая схема регулятора с гидравлическим усилителем
показана на рис. 6.5. Усилитель имеет гидравлический цилиндр /,
поршень 2 которого соединен штоком 3 с дросселем 4
исполнительного органа. Цилиндрический золотниковый узел 8 имеет два
пояска 6, по ширине равных высоте окон 7 распределения жидкости
в цилиндр. Сильфонный узел 5 жестко связан с золотниками и
управляет его положением.
Статическая характеристика САР может быть определена из
следующих соображений. При отклонении внешнего возмущения
go стороны изменения давления в баке рб изменяется давление в
газогенераторе рт. Сильфонный узел 5, регистрируя это отклонение,
сдвигает золотник 8 и открывает в одну полость цилиндра подачу
рабочего тела, а другую сообщает со сливной магистралью.
Дроссель 4 изменяет свое положение, компенсируя изменением подачи
топлива в камеру влияние возмущения. В процессе восстановления
режима сильфонный узел подтягивает скалку золотника к старому
положению. Движение элементов регулятора прекращается в тот
момент, когда окна 7 перепускных каналов окажутся перекрытыми.
При одинаковых размерах высоты перепускных окон и ширины
поясков равновесное состояние системы возможно при одном положении
днища сильфона (когда окна полностью перекрыты), которому
соответствует одно значение
регулируемой величины /?т.
Дроссель исполнительного
органа при этом может
занимать любые положения, так
как он не имеет жесткой
обратной связи с сильфонным
узлом. При такой конст-
[ Рт.ном
1
1
1
1
1
1
f
1
1
1
1
1
Рис. 6.5
рог
Рис. 6.6
214
рукции регулятора рассматриваемая САР будет обеспечивать на
установившихся режимах одно и то же значение выходной
величины в широком диапазоне изменения возмущающего воздействия.
Статическая характеристика, соответствующая этому свойству
системы, показана на рис. 6.6. Видно, что система
регулирования не имеет статической ошибки. Системы автоматического
регулирования, не имеющие статической ошибки, называются
астатическими. Свойство астатизма обеспечивается отсутствием жесткой
связи между исполнительным органом регулятора и его
чувствительным элементом. Динамические свойства системы могут быть
получены из уравнений динамики элементов, составляющих САР.
Элемент сравнения системы аналогичен рассмотренному
в разд. 6.1. Однако, уравнение динамики (6.7), полученное из
характера его движения для данного случая, целесообразно упростить.
Инерционные силы дросселя и силы вязкого трения в его
уплотняющем узле целиком компенсируются усилителем.
Присоединенные массы золотника малы сами по себе (что является одним из
необходимых условий проектирования регулятора). Кроме того,
ввиду малой величины хода, ускорения и скорости перемещения
золотника невелики. Таким образом, для данной системы учет сил
инерции массы и сил вязкого трения в элементе сравнения не
является определяющим и для упрощения анализа САР в целом можно
пренебречь двумя первыми членами уравнения динамики (6.7).
Тогда получим
Агс = Дг30Л = #рег1 А/?т - #рег2 Д/7К. в, (6.23)
где /(реп и /СреГ2 определяются из выражения (6.10).
Гидроусилитель обеспечивает перестановку дросселя с
необходимым усилием соответственно выбранному давлению подачи
рабочего тела и площади поршня гидроцилиндра. Соотношение между
перемещением золотника 8 (входная величина) и перемещением
штока 3 поршня гидроцилиндра (выходная величина) во времени
определяется массовым расходом рабочего тела через золотник
при его отклонении на величину Дг30Л (см. рис. 6.5, вид по А)
^зол = Мзол' А^зол I 2рр. т (/7ПОД — /?цИЛ)> (6.24)
гДе Изол — коэффициент расхода перепускного окна; / — ширина
канала перепуска; рр. т — плотность рабочего тела; рпод —
давление подачи рабочего тела; ргпл — противодавление в цилиндре
гидроусилителя, и поступающим расходом того же рабочего тела
в гидроцилиндр
^цил = Pp. т^цил —££- > (6.25)
где Fm:i — площадь поршня гидроцилиндра, гу — ход штока поршня
усилителя.
215
При полном заполнении механизма рабочим телом оба расхода
равны: тзол = ^цил» или
[1гол1 Лг30Л "/2рр. Т (рпод — ртл) = рр. т/^цил —|^-. (6.26)
Записывая баланс расходов (6.26) относительно выходной
величины zy, получим
Pp. т^цил d*7 — \?
У 2рр. т(Рпод — Рцил) dX
Переход к безразмерным величинам дает
|Ызол2зол max* V 2Рр. т (Рпод — Рцил) "Т
где Агу = Дгу/гу тах и АгЗОл = АгаОл/2ЗОл max-
Комплекс постоянных величин, стоящий перед производной в
левой части уравнения динамики усилителя (6.27), имеет размерность
времени и представляет собой время полного перемещения поршня
(или заполнения цилиндра рабочим телом) при максимальном
открытии окон золотника. Это постоянная времени гидравлического
усилителя, для которой введем обозначение Ту. Окончательно запишем
уравнение динамики усилителя в символической форме:
Тур Дгу = Аг3ол или Дгу = -^- Дг30Л. (6.28)
Уравнение 6.28 отвечает свойствам идеального интегрирующего
звена. Уравнение динамики дросселя исполнительного органа
будет аналогично (6.15):
(6.29)
Объект регулирования также соответствует рассмотренному
выше уравнению (6.16):
(Тобр + 1) Тр = /Соб1 Д^ + /СОб2 АЦГдр. (6.30)
Динамические свойства системы регулирования в целом
характеризуются системой уравнений (6.23), (6.28), (6.29) и (6.30).
Совместное решение этой системы дает уравнение динамики САР в
следующем виде:
(ТуТобр2 + Тур -f ^Соб2/Срег1^Срегз)
= KoGlTyP Дрб "Г ^Co62^Cper2^pei3 ДРк. в- (6.31)
Уравнение динамики (6.31) соответствует свойствам
колебательной или апериодической системы второго порядка,
дифференцирующей по отношению к внешнему возмущению и усилительной по
отношению к командному воздействию.
Частные решения уравнения (6.31), полученные отдельно по
каждому из входов, позволяет определить статические ошибки системы.
216
Частное решение по отношению к внешнему возмущению рб
приводит к условию
что и следовало ожидать от САР с астатическими свойствами.
Частное решение по отношению к настройке Д/Гк. в будет иметь
вид
Рк. В
if т? jp
АобгЛрепАрегз
или (Арт)х-.ос ^ Арк.в, так как /CpeF2 « Kven (см. разд. 6.1).
Таким образом, после переходного процесса уровень давления
в газогенераторе почти точно соответствует заданному уровнк>
команды.
Возможные виды переходных процессов, отвечающие решению
уравнения (6.31), показаны на рис. 6.7, а и б. Колебательность или
апериодичность переходных процессов обеспечивается подбором
сотношения постоннх вре Т^ ТТ 7 Т
= ТуТ
об
сар1
р
= Т7
р
соотношения постоянных времени
путем вариации времени Т7.
Введение в закон управления по возмущению
дифференцирования укорачивает переходный процесс во времени. Однако
переходный процесс по возмущению рассматриваемой системы длительнее,
чем аналогичный процесс для САР с регулятором прямого действия,
в закон управления которого были введены две производные.
Устойчивость рассматриваемой системы целесообразнее всего
анализировать с помощью распределения корней характеристического
уравнения на комплексной плоскости, так как прямое вычисление
корней для системы второго порядка не представляет трудностей.
Несмотря на простоту конструкции регулятора и отсутствие
статической ошибки подобная система автоматического
регулирования не нашла практического применения. Причиной этому
является ее повышенная чувствительность к любым флуктуациям
возмущающих воздействий. При высоте скалки золотника, равной
высоте перепускного окна, малейшее изменение равновесного
состояния системы нарушается и она практически от шумовых воздействий
все время находится в состоянии переходного процесса. Уменьше-
Рис. 6.7
217
Лг
Рис. 6.8
Л77 ние чувствительности системы
можно получить путем
увеличения ширины поясков золотника.
Тогда в некотором диапазоне
перемещений золотника
перепускные окна остаются закрытыми и
система в соответствующем люфту
диапазоне отклонений
выключается. Такое ограничение
чувствительности одновременно
приводит к появлению зоны
нечувствительности регулируемой
величины в САР, приводящей к заранее планируемой ошибке.
Структурная схема системы, составленная на основании
уравнений динамики элементов САР, показана на рис. 6.8.
6.3. СИСТЕМЫ С РЕГУЛЯТОРОМ, ИМЕЮЩИМ
ИНЕРЦИОННЫЙ УСИЛИТЕЛЬ
Для уменьшения динамической переходной ошибки и
одновременного обеспечения приемлемой статической точности
в САР в регуляторах применяется усложненный вариант усилителя,
имеющего отрицательную жесткую обратную связь выходных и
входных перемещений (рис. 6.9).
В отличие от приведенного в разд. 6.2 описания простейшего
усилителя в рассматриваемом случае в его конструктивную схему
добавлен разноплечий рычаг 7, с помощью шарниров соединяющий
три точки перемещающихся элементов: сильфона /, штока
золотника 3 и штока 6 привода дросселя 9.
Статическая характеристика САР с таким усилителем может
быть определена следующим образом. При отклонении давления
в баке рб (например, при
его увеличении) возрастает
подача топлива в
газогенератор, что приводит к
увеличению давления рт. Силь-
фонный узел, регистрируя
это отклонение, перемещает
короткий конец рычага 7,
вращая его относительно
неподвижной точки 8
крепления к штоку дросселя
(линия а). Одновременно это
действие вызывает
перемещение золотника 4,
открывающего окна 5
перепускных каналов гидроцилиндра.
Шток 6 привода дросселя 9
начинает движение в сто-
218
Р С
Рис. 6.10
Рис. 6.11
рону закрытия дросселя, которое прекращается после
установления рычага в положение, соответствующее полному
закрытию перепускных каналов (линия б). При этом предполагается,
что рычаг вращается относительно точки крепления 2 к сильфон-
ному узлу, которая условно остается неподвижной. Однако
последнее предположение неверно, так как при движении дросселя в
сторону закрытия уменьшается подача топлива в газогенератор и
соответственно уменьшается давление /?т. Это приводит к подтягиванию
точки крепления рычага к исходному положению, которое, однако,
не может восстановиться, так как дроссель 9 должен занять новое
положение, а сильфонный узел с ним жестко связан рычагом.
Поэтому в конечном итоге подвижная система займет против исходного
новое положение (линия в), которое приведет на новом
установившемся режиме к дополнительной растяжке сильфона. Аналогичная
ситуация в системе с регулятором прямого действия (см. разд. 6.1)
привела к свойствам статизма. По тем же причинам данная система
будет обладать свойством однозначного соответствия входной и
выходной величин, т. е. свойством статизма. Статическая
характеристика, приведенная для данной системы на рис. 6.10,
подтверждает эти свойства.
Динамические свойства системы обнаруживаются из уравнений
динамики составляющих ее элементов.
Сильфонный элемент сравнения из тех же соображений, что и
для САР с интегрирующим усилителем (см. разд. 6.2), соответствует
в движении свойствам идеального усилительного звена:
Дгс = /Ci Арт — К2 А/?к. в.
(6.32)
В отличие от интегрирующего усилителя в рассматриваемой
схеме золотник воспринимает входной сигнал от элемента
сравнения через рычаг длиною а (рис. 6.11), второй конец которого
длиной Ь связывает его со штоком перемещения дросселя. В момент
отклонения жесткого днища сильфона на величину Агс точка М
рычага неподвижна. Вращаясь относительно этой точки, рычаг
перемещает золотник на величину Агзол- В следующий момент,
полагая неподвижной точку L, поршень гидроцилиндра, двигаясь под
действием сил давления жидкости, вращает рычаг относительно
этой точки, перемещает золотник в обратном направлении,
перекрывая перепускные каналы. Движение системы прекратится при пол-
219
ностью перекрытых каналах золотника, и шток гидроцилиндра
займет новое положение, соответствующее точке N. Для первого
движения из подобия треугольников KLM и АгзолМ можно найти
отклонение золотника
Для второго движения из подобия треугольников MNL и Az30JlL
учетом перемены направления движения золотника определим
В действительности оба движения происходят одновременно и
определяются их сложением:
Аг30Л s = Аг3ол1 ~т АгЗОЛ2 = а + ь Агс - °
или в безразмерной форме записи
~\у ^2с max дТ аг1 max
[a -j- о) гзол max (a + о) гзол max '
где комплексы постоянных величин при переменных в правой части
уравнения являются коэффициентами усиления. Присваивая им
индексы принадлежности и порядковые номера, окончательно
запишем
А^зол = ^з А7с - ^4 А7г (6.34)
Полученное уравнение динамики рычага жесткой связи
характеризует связь перемещений трех точек: сильфона, золотника и штока
исполнительного органа. Из равенства (6.34) видно, что
перемещение штока дросселя включается в сумму движений золотника как
отрицательная обратная связь, степень глубины которой
соответствует величине отношения короткого плеча рычага к сумме его
плеч [видно из выражения (6.33)]. Для выявления полного
характера движения усилителя в целом необходимо совместно решить
уравнение (6.34) и уравнение динамики гидроусилителя (6.28).
Тогда будем иметь систему двух уравнений
Аг3ол = /Сз Агс — /С4 Агу; TYp Дгу = Аг3ол- (6.35)
решая которую совместно, получим
7у=:^-Д?с. (6.36)
Это уравнение динамики усилителя с рычагом жесткой
отрицательной обратной связи. По структуре уравнения (6.36) видно, что оно
соответствует динамическим свойствам инерционного усилительного
звена с постоянной времени Гин = Ту1'/С4 и коэффициентом
усиления /Син = /С3/#4-
220
Из приведенного выше анализа видно, что включение к
интегрирующему звену жесткого рычага с отрицательной обратной связью,
соединяющего точку входа с точкой выхода, привело к изменению
динамических свойств усилителя: вместо интегрирующих свойств
без рычага с рычагом ему присущи инерционные свойства.
Уравнение динамики дросселя исполнительного органа
запишется в аналогичном виде как и в ранее рассмотренных системах:
, = - Къ Деу. (6.37)
Объект регулирования остается тем же, что и в предыдущих
примерах, и соответствует свойствам инерционного звена:
(7\>бР + 1) Д£ = #об1 ДРк. в + #об2 Д^др. (6.38)
Динамические свойства системы регулирования характеризуются
системой уравнений динамики составляющих ее элементов (6.32),
(6.35), (6.37) и (6.38). Совместное решение этих уравнений после их
свертывания дает уравнение динамики системы регулирования
в виде
= (Тур + К,) Kooi Apt + Ко02К2КзКъ Д^к. в. (6.39)
Уравнение динамики (6.39) соответствует свойствам колебательной
или апериодической системы второго порядка с введением
производной по отношению к внешнему воздействию и усилительной по
отношению к командному воздействию.
Частные решения уравнения (6.39), полученные отдельно для
каждого из выходных воздействий, характеризует статическую
точность системы. Частное решение по отношению к внешнему
возмущению рн дает величину статической ошибки, равную
Из выражения (6.40) видно, что в рассматриваемой системе
в отличие от разобранных выше имеется дополнительная
возможность влияния на величину статической ошибки путем изменения
соотношения плеч рычага обратной связи. Так как К3 ^ Ь, а /С4 с* а
(см. формулу 6.33), то уменьшая плечо а и увеличивая Ъ (что
соответствует уменьшению К± и увеличению К3) можно всегда обеспечить
статическую ошибку в поле допускаемых отклонений.
Частное решение уравнения (6.39) по отношению к командному
воздействию рк. в имеет вид
Комплекс коэффициентов при командном воздействии
характеризует точность воспроизведения команды. Если выбранное соот-
22 1
ношение рычага обратной связи обеспечивает малую статическую
ошибку так, что выполняется условие
то коэффициентом /С4 в выражении (6.41) можно пренебречь. Тогда
oo ^ к к к к 1±Рк. в
Л062А1ЛЗЛ5
или (Дрт)х-^оо ^ Арк. в, так как /Сх ~ /С2-
Таким образом, с точностью до пренебрежения влиянием /С4
в выражении (6.41) можно считать, что система регулирования после
переходного процесса примерно повторяет уровень командного
воздействия.
Колебательность или апериодичность переходных процессов
системы определяется соотношением постоянных времени Т1ар =
= (ГуГоб) и 7САр = (Ту + K*Toq). Из выражений постоянных
времени видно, что в системе появилась возможность воздействия на
вид переходного процесса путем подбора коэффициента К*, т. е.
подбором величины короткого плеча жесткой обратной связи.
Введение в закон управления по возмущению производной
в САР с регулятором, имеющим инерционный усилитель,
укорачивает переходный процесс во времени в такой же степени, как и для
системы с интегрирующим усилителем при одинаковых постоянных
времени усилителей Ту.
Переходный процесс по командному сигналу не содержит в
правой части уравнения производных, поэтому затухает медленнее.
Возможные виды переходных процессов системы показаны на
рис. 6.12, а и б.
Анализ устойчивости рассматриваемой системы целесообразно
проводить с помощью распределения корней характеристического
уравнения на комплексной плоскости, так как прямое вычисление
корней для системы второго порядка не представляет
принципиальных трудностей. Для исследования влияния существенных нелиней-
ностей характеристик САР на ее динамические свойства (например,
при учете в уравнении динамики знакопеременной силы сухого
трения) следует применять метод фазовых траекторий (см. разд. 5.5).
222
Структурная схема системы, составленная на основании
уравнений динамики элементов САР, приведена на рис. 6.13.
рассмотрим в качестве примера получение конечного результата
совместного решения уравнений динамики для САР с инерционным
усилителем, используя структурную схему системы и обобщенное
правило определения передаточных функций замкнутых САР (см.
разд. 3.4). Предварительно упростим структурную схему системы,
представив ее в таком виде, как она показана на рис. 6.14: где
Ц7Э (s) —эквивалентная передаточная функция структурной схемы
усилителя с жесткой обратной связью, показанной на рис. 6.15.
Вычисление эквивалентной передаточной функции по общему
правилу дает
Wa(s)=-
TyS
1 +
ту
Найдем передаточную функцию САР от внешнего воздействия
до выходной величины Ар. Пользуясь общим правилом для струк
турной схемы, показанной на рис. 6.14, будем иметь
To6s
Къ
К
01
To6s +
TyTo6s* + (Ту + К,Тоб)
Сравнение полученного результата с выражением (6.39)
показывает их полную идентичность (при условии Дрк. в = 0) с
отличием только по форме записи.
>
|~ч
/
. 7>*
rrfs+/
1
Рис. 6.13
223
Рис. 6.14
Рис. 6.15
Аналогичным образом определяется передаточная функция САР
с инерционным усилителем по отношению к командному воздействию:
(s)
•Коба
(Ty -h /C4To6) s + /C4
Сравнение полученного результата показывает сходимость
с уравнением динамики САР (6.39) при условии Д/?б = 0.
Единственное неудобство пользования методом структурного
решения состоит в том, что необходимо помнить порядковые номера
коэффициентов усиления объекта регулирования и регулятора,
которые изменяются в зависимости от прохождения сумматоров со
стороны различных входов. Для облегчения ориентации в
порядковых номерах коэффициентов усиления на рис. 6.14 против каждого
входа в сумматоры проставлены их номера. Подобным образом
можно получить совместное решение уравнений динамики любой САР,
используя ее структурную схему и методы структурного решения.
Рассмотренная система автоматического регулирования
благодаря изменению динамических свойств усилителя стабильна по
отношению к флуктуациям возмущающих воздействий. Введение
рычага жесткой обратной связи несмотря на появление статической
ошибки дает возможность простыми конструктивными средствами
изменять ее величину и активно влиять на характер переходного
процесса. Ввиду этих особенностей система регулирования с
инерционным усилителем нашла широкое применение.
6.4. СИСТЕМЫ С И30ДР0МНЫМ РЕГУЛЯТОРОМ
Поиски дальнейшего совершенствования динамических
и статических свойств САР в направлении обеспечения минимальной
переходной ошибки и повышения статической точности привели
к использованию в кинетической схеме регулятора усилителя
элемента с исчезающей во времени обратной связью между входом и
224
выходом усилителя регулятора (рис. 6.16). Элемент,
обеспечивающий эффект исчезновения обратной связи между входом и выходом
регулятора, представляет собой цилиндр / с поршнем 2 и обводным
каналом 3 с дроссельным краном 4 и возвратной пружиной 6.
Поршень цилиндра через шток соединен с длинным плечом рычага
обратной связи 5 и со свободным концом подпирающей его пружины 6.
Внутренняя полость цилиндра и обводной канал залиты вязкой
жидкостью. Цилиндр жестко закреплен на штоке 7 дросселя 8
исполнительного органа. Это устройство получило наименование изодром
(от греческого — равномерный бег).
Принцип действия изодрома основан на устранении во времени
жесткой обратной связи между сильфонным узлом (вход в
усилитель) и штоком гидроцилиндра (выход усилителя) после
переходного процесса. Однако во время перемещения подвижных частей
изодром жесткой связи не нарушает, так как вязкая жидкость не
успевает перетекать через обводной канал при значительном
сопротивлении дроссельного крана. При движении всех элементов
регулятора шток 7 через несжимаемую жидкость и поршень 2 изодрома
жестко соединен с длинным концом рычага 5. Таким образом,
характер взаимодействия подвижных частей регулятора при их
движении аналогичен их поведению в системе с инерционным
усилителем (см. разд. 6.3), движение всех элементов которой заканчивалось
наклонным положением б рычага жесткой обратной связи (см.
рис. 6.9). После остановки рычага, пружина 5 изодрома оказывается
сжатой, а рычаг — занимающим положение а (см. рис. 6.14). Под
действием пружины поршень 2 изодрома начинает перемещаться
вниз, преодолевая сопротивление вязкой жидкости в дроссельном
кране 4 о6еодного канала; при этом рычаг 5 поворачивается
относительно точки б соединения его с золотником. Такое движение
рычага обеспечивает подтягивание точки в крепления^ сильфонного
узла к номинальному поло-
сужению.
Положение'второго' конца
пружины изодрома (в месте
ее закрепления) подбирается
таким образом, чтобы рычаг
обратной связи 5 после
полного расслабления пружины
занял исходное
горизонтальное положение, а днище силь-
фона при этом подтянулось
до номинального уровня. При
аналогичной ситуации в си-
стемег~с интегрирующим
усилителем были реализованы
астатические свойства,
гарантирующие отсутствие
статических ошибок (см. разд. 6.2).
Поэтому система регулиро- Рис. 6.16
15 А. И. Бабкин и др. 225
Pj\
\
i
i
1 I
1
1
1 1
i
вания с усилителем, имеющим
исчезающую обратную связь, в статике
обладает астатическими свойствами,
а в динамике — свойствами системы с
инерционным усилителем, объединяя
таким образом лучшие свойства рас-
^ смотренных выше систем.
Р62 рб.ном % Р5.т Статическая характеристика
системы, показанная на рис. 6.17, под-
Рис. 6.17 тверждает отсутствие статической
ошибки.
Вопрос о динамических свойствах системы с исчезающей
обратной связью требует уточнения в связи с тем, что в ее состав
включен новый элемент. Для обнаружения этих свойств необходимо
изучение динамических характеристик каждого составляющего ее
элемента.
Для сильфонного элемента сравнения примем условия работы,
соответствующие упрощенному уравнению динамики:
Aic = tfi Др - Я2 Aft<. в • (6.42)
Рычаг жесткой обратной связи, в отличие от рассмотренного
случая в разд. 6.3 будет соединен не со штоком дросселя, а со штоком
поршня изодрома, перемещение которого обозначим через ги:
ЙГаол = KR - /С4ДГИ. (6.43)
Для получения уравнения динамики изодрома запишем баланс
действующих сил на его подвижные элементы после сжатия
пружины:
Р — Р
•* пруж — г ж. тр
или сиД*и = £ж .тр-%^, (6.44)
где си — жесткость пружины изодрома; Аги — затяжка пружины
изодрома; km, тр — коэффициент жидкостного (вязкого) трения
в дроссельном кране обводного канала; dz^^ldx —скорость поршня
изодрома в абсолютном движении.
В приведенном описании работы изодрома предполагалось для
простоты рассуждения, что он начинает свое движение после
остановки штока дросселя, что является в общем случае неверным, так
как усилие пружины возникает и начинает перемещать шток поршня
изодрома с момента начала перемещения штока дросселя. Тогда
уравнение (6.44) следует записать, раскладывая абсолютную
скорость движения поршня изодрома на ее составляющие:
или £ж.тр-^-Ь£иЛги=:/гж. тр-тй
226
Переходя в последнем выражении к безразмерным отклонениям,
получим
д— , ^ж. тр 2ymax dAzn ^ж. тр2ушах
, ^ж. тр 2ymax dAzn ^ж. тр2ушах dAzj /g ^.g\
^ *итах di ^и^итах di
или в символической форме
(7> + 1) Аги = КпТпР А^у, (6.46)
где Ти = &ж. тр/^и —постоянные времени изодрома; /Си =
= Zymax/2uшах —коэффициент усиления изодрома.
Уравнение динамики изодрома соответствует свойствам
инерционного дифференцирующего звена. Поскольку Кп > 1, то
дифференцирование преобладает над инерцией.
Уравнение динамики усилительного элемента будет
соответствовать свойствам интегрирующего звена (см. разд. 6.2):
L ^зол- (6.47)
Уравнение динамики исполнительного органа регулятора с
усилителем соответствует свойствам идеального усилительного звена
(см. разд. 6.1):
[== —КъАгу. (6.48)
Объект регулирования, как и в ранее рассмотренных случаях
определяется свойствами инерционного усилительного звена:
Динамические свойства системы регулирования в целом
описываются системой уравнений (6.42), (6.43), (6.46), (6.48), (6.49).
После их свертывания получим одно уравнение динамики САР
в следующем виде:
* об-« 2Р + \7 06^ 1 + ^ 2) P + \1 1 T" Ao6 2AlA3A5i и) Р +
+ Коб 2К\КъКъ\ Арт = Коб 1 \Т2р + Tip) Дрб +
+ /Соб 2^2^з/С5 (Тир + 1) Арк. в, (6.50)
где Т\ = ТУТИ; Тх = Ту + КаКиТи.
Вводя обозначения
Т/тп2 /т^З • ^Ti 'Ti I fni гтл £ •
об* 2= 1 CAPJ3) ^ об-« 1 "Г 1 2 = i CAP 2>
можно (6.50) записать более компактно
WCAP ЗР + Т'сАР 2р + ТсАР lP + Коб 2К\КъКъ) А/?т ==
= Коб 1 (Tip + Т,) р Арб + /Соб 2^2/Сз^5 (Тир + 1)Арк. в. (6.5?)
Уравнение динамики (6.51) соответствует свойствам
колебательной или апериодической системы третьего порядка с введением
15* 227
лр
a)
двух производных по отношению к возмущающему воздействию
и с введением одной производной по отношению к командному
воздействию. Частные решения уравнения динамики (6.51), полученные
для каждого из входных сигналов отдельно, дают возможность
оценить статическую точность системы.
Частное решение по отношению к возмущающему воздействию р$
приводит к условию Дрт# с. 0 = 0, так как в правой ч сти уравнения
(6.51) перед возмущающим воздействием Д/?б оператор
дифференцирования р является общим множителем.
Частное решение уравнения (6.51) по отношению к командному
воздействию имеет вид
___
или (Ар)х+0О ~ Д/?к. в, так как К\ ~ /Сг-
Таким образом, после переходного процесса уровень выходной
величины рт точно соответствует уровню командного воздействия Рк. в.
Колебательность или апериодичность переходных процессов
определяется в системе соотношением коэффициентов ГСАР 3, ТСАР 2
и 7"сар 1 и коэффициентами усиления элементов САР. Поскольку
последние в большей степени определяются временными
параметрами регулятора, то вариации их значений облегчают выбор вида
переходных процессов.
Рис. 6.19
228
Как и в САР с регулятором прямого действия, требуемое качество
рассматриваемой САР целесообразно анализировать с помощью
аналоговых моделей. Устойчивость САУ можно исследовать любым
из способов, изложенных в разд. 5.3, 5.4, 5.5.
По отношению к возмущающему воздействию в закон управления
введены две производные. Переходный процесс по этому воздействию
протекает достаточно быстро. Как видно из уравнения динамики
системы (6.51), постоянные времени при производных в правой части
определяются только параметрами регулятора, варьируя которыми
можно обеспечивать необходимое быстродействие системы.
САР с изодромом — единственная из рассматриваемых систем
имеющая производную в законе управления по отношению к
командному воздействию. Это обеспечивает такой САР наибольшее
быстродействие перевода ДУ с режима на режим. Как видно из
уравнения системы (6.51), высокое быстродействие по команде
обеспечивается свойствами изодрома. Возможные переходные
процессы системы показаны на рис. 6.18, а и б.
В конечном итоге система регулирования с усилителем, имеющим
исчезающую обратную связь, не только сочетает лучшие свойства
разобранных выше систем, но так же улучшает их.
Система подобного типа в применении к тепловым двигателям,
работающим с электрическими генераторами переменного тока,
дает наилучшие результаты по обеспечению постоянной частоты
вращения при переменной нагрузке, т. е. обеспечивают «равномерный
бег» машины (отсюда термин «изодром», укоренившийся в теории
автоматического регулирования). Единственным недостатком
рассмотренной системы, сдерживающим ее широкое применение в ЖРД,
является сложность и, как следствие, малая надежность.
Структурная схема системы, отвечающая динамическим
свойствам каждого из составляющих ее элементов и их взаимодействию
показана на рис. 6.19.
ТРЕТЬЯ ЧАСТЬ
РЕГУЛИРОВАНИЕ ТВЕРДОТОПЛИВНЫХ
РАКЕТНЫХ ДВИГАТЕЛЬНЫХ УСТАНОВОК
ГЛАВА 7 СВОЙСТВА РАКЕТНЫХ ДВИГАТЕЛЕЙ
ТВЕРДОГО ТОПЛИВА
Ракетные двигатели твердого топлива (РДТТ) созданы
раньше других видов ракетных двигателей, однако практический
интерес к этому виду двигателей по-прежнему достаточно высок.
Это объясняется рядом преимуществ РДТТ. К ним относятся:
простота конструкции двигателя и ракетной системы;
простота эксплуатации и малое время подготовки двигателя
к запуску;
постоянная готовность к запуску в сочетании с возможностью
длительного хранения двигателя;
высокая надежность и безотказность двигателя, обусловленные
главным образом простотой его конструкции.
Отмеченные преимущества предопределяют области применения
РДТТ. Они могут использоваться на ЛА различного назначения.
Большое значение имеют РДТТ как стартовые и разгонные
двигатели, а также как вспомогательные двигатели в системах
управления и питания ЛА.
Однако в некоторых типах летательных аппаратов РДТТ имеют
ограниченное применение (например, в космических ракетах) из-за
ряда недостатков, присущих ракетным двигателям твердого топлива.
К ним относятся:
более низкие энергетические характеристики современных
твердых топлив по сравнению с топливами, применяемыми в других
типах ракетных двигателей;
значительные трудности в создании систем управления вектором
тяги как по направлению, так и по величине;
зависимость выходных параметров двигателя (давления в камере,
тяги, времени работы) от начальной температуры заряда твердого
топлива и индивидуальных характеристик заряда^ и двигателя;
трудности создания двигателей многократного запуска.
Быстрейшее устранение этих недостатков во многом определяет
дальнейшее расширение областей применения РДТТ и их
способность конкурировать с другими типами ракетных двигателей. Во
многом это зависит и от создания надежных способов регулирования
основных параметров РДТТ, что особенно необходимо для успешного
использования двигателей твердого топлива в космических ракетах.
Работа РДТТ слагается из трех основных процессов: запуска
двигателя, работы его на основном режиме и останова двигателя.
230
основной режим ^
Рис# 7.i
Характерное изменение давления в
камере РДТТ во времени показано
на рис. 7.1. Эти процессы имеют важ-
ное значение в обеспечении
проектных параметров ДУ, однако с точки
зрения получения заданных
конечных параметров ракетной системы,
таких как конечная скорость полета
ракеты в конце активного участка
траектории или полный импульс ДУ
за цикл работы, наибольшее значе-
ние приобретает обеспечение расчет-
ного функционирования двигателя
на основном режиме и на режиме
останова. Поэтому рассмотрению этих двух процессов работы
двигателя и будет уделено основное внимание в дальнейшем.
Учитывая, что параметры и режимы работы РДТТ во многом
определяются свойствами твердого топлива и характеристиками
процессов его горения, целесообразно кратко рассмотреть их для
облегчения дальнейшего изложения и изучения вопросов, связанных
с созданием систем регулирования и управления РДТТ.
7.1. ХАРАКТЕРИСТИКИ ТВЕРДЫХ ТОПЛИВ
И ПРОЦЕССОВ ГОРЕНИЯ
В РДТТ применяются две группы топлив: двухосновные
(коллоидные баллиститные пороха) и смесевые.
Полагая твердое топливо однородным по составу, можно
представить схему процесса горения в следующем виде (рис. 7.2).
Источник воспламенения (воспламенитель) выделяет необходимое
количество тепла для возникновения процесса горения. Топливо с
поверхности разлагается и испаряется, размягчаясь и переходя через
жидкую фазу. Реакции в твердой фазе экзотермические, поэтому
температура продуктов разложения повышается. Однако толщина
прогретого слоя твердого топлива б, в котором идут реакции,
невелика, порядка 0,1 мм, что объясняется низкой теплопроводностью
твердого топлива. Основная масса твердого топлива сохраняет
постоянной свою начальную темпера-
- туру Тнач, и только в тонком
прогретом слое у поверхности горения
температура постоянно растет до
температуры поверхности горения Т8.
К поверхности горения примыкает
зона I, в которой происходят процессы
разложения топлива с переходом из
твердой фазы в жидкую и парогазовую.
Из-за выделения тепла при реакциях
разложения топлива температура в слое
I растет до величины 7\. За зоной I на-
Рис. 7.2
231
ходится зона II, в которой происходит подготовка продуктов
разложения топлива к горению. В этой зоне образуются активные
газообразные продукты. Процесс идет без выделения тепла, поэтому
7\ ~ const. Скорость газообразования зависит от свойств топлива,
от давления в камере и от температуры продуктов сгорания 7, т. е.
от количества тепла, поступающего в зону II от продуктов сгорания.
В зоне III происходит горение продуктов разложения твердого
топлива. Температура продуктов сгорания в зоне III достигает
температуры 71, величина которой определяется родом топлива.
Зона III представляет собой зону свечения, в то время как зоны т
и II являются несветящимися.
Разложение твердого топлива на поверхности и образование
газовой смеси является основной стадией процесса, которая определяет
скорость горения топлива и. На скорость разложения твердого
топлива большое влияние оказывает теплопередача от зоны
свечения к поверхности топлива, интенсивность которой растет
при увеличении давления и температуры продуктов сгорания
в камере.
Исследования показали, что общая толщина зон I и II зависит
от давления в камере. Рост давления сопровождается резким
уменьшением толщины этих зон и значительной интенсификацией
теплоотдачи от зоны III к поверхности горения, что способствует росту
скорости горения твердого топлива. При малых значениях давления
в камере скорость газообразования практически не зависит от
притока тепла из зоны свечения, так как толщина зон I и II становится
большой, а теплоприток к поверхности горения от зоны III весьма
малым. При некотором давлении горение топлива прекращается,
так как тепла, выделившегося в заряде в результате экзотермических
реакций разложения, оказывается недостаточно для поддержания
процесса горения. Давление, при котором прекращается устойчивое
горение твердого топлива, называется нижним пределом устойчивого
горения топлива pmln. Соответствующие значения минимального
давления в камере pmin для твердых топлив составляют 1 ...
2,5 МПа.
Скорость горения твердого топлива измеряется перемещение
поверхности горения по нормали к ней за единицу времени. На
величину скорости горения оказывают влияние давление в камере и
начальная температура топлива, так как от этих параметров зависит
скорость реакций и толщина зон I и II.
Теоретически получена зависимость для определения скорости
горения смесевых твердых топлив в виде
где а и Ь — константы, связанные с временем реакции в газовой
фазе и временем диффузии соответственно. Константы а и Ь
определяются экспериментально и зависят они от состава топлива и
размеров частиц окислителя.
232
В расчетах чаще пользуются эмпирическими зависимостями
для определения скорости горения топлив. Закон горения твердого
топлива обычно представляют в виде степенной зависимости
и = и'р\ (7.1)
где и' — величина, зависящая от начальной температуры топлива
и его состава; v — показатель степени, зависящий от свойств топлива
и в меньшей степени от р.
Зависимость (7.1) справедлива лишь при р > ртщ. Минимальное
давление различно для разных топлив и зависит от начальной
температуры топлива.
Величина и' определяется по эмпирической формуле
" = "*93 В — (Гнач-293) '
где urn — коэффициент скорости горения при нормальной
температуре, равной 293 К; В — физико-химическая константа, имеющая
характерное значение для данной марки топлива.
Формула (7.1) применима в интервале давлений от /?mln до 4 МПа.
С ростом давления в камере зависимость скорости горения от
давления становится линейной и описывается формулой
и = а + Ьр, (7.3)
где а и Ъ — константы, определяемые экспериментально.
Линейный закон может быть применен в широком интервале
давлений от 4 до 30 МПа. В интервале давлений от 4 до 10 МПа
с одинаковой точностью могут применяться законы горения (7.1)
и (7.3).
Показатель степени v различен для разных марок топлива и
изменяется в пределах от 0,1 до 0,8. Величина показателя v имеет
большое значение для процесса работы двигателя. При v = 0,6 ... 0,8
скорость горения в большой степени зависит от давления в камере.
При этом стабильность процесса горения может быть легко
нарушена при различных случайных возмущениях, влияющих на
давление. При v = 0,1 ... 0,3 влияние давления на скорость горения
топлива значительно меньше, что сопровождается большой
устойчивостью процесса горения. При v = 0 давление в камере вообще не
влияет на скорость горения твердого топлива. Двухосновные топлива
имеют высокие значения показателя v = 0,6 ... 0,8; для смесевых
топлив v = 0,2 ... 0,45.
Опыт отработки двигателей показывает, что на скорость горения
твердого топлива заметное влияние оказывает скорость движения
продуктов сгорания вдоль горящей поверхности заряда. На рис. 7.3
показано влияние скорости движения продуктов сгорания w на
скорость горения и смесевого топлива из перхлората аммония,
полиэфира и связующих веществ со средним размером частиц
окислителя 24 ... 30 мкм. Горение, при котором скорость движения
продуктов сгорания вдоль горящей поверхности твердого топлива сопро-
23 3
U,cm/c
2,0
0,8
/
У
/
/
/
/
/
/
х2Нм/с
/
/103
0
40 8,0 12,0 ЩОр,МПх
Рис. 7.3
вождается заметным увеличением
скорости горения твердого топлива,
называют эрозионным.
Для учета эффекта эрозионного
горения вводят коэффициент е,
представляющий собой отношение скорости
горения топлива при обтекании газо-
BbLM потоком иЭр к скорости горения
в неподвижной среде
е - иэр/и. (7.4)
С учетом соотношения (7.4) закон
скорости горения твердого топлива
(7.1) можно представить в виде и =
= u'pv&.
Для расчета коэффициента е можно
использовать формулу
В зависимости (7.5) коэффициент Аи учитывает свойства топлива
и давление в камере. В широком диапазоне давлений коэффициент А и
изменяется мало и поэтому для конкретного топлива может быть
принят постоянным; ориентировочно Аи = 0,003.
Параметр % в зависимости (7.5) представляет собой отношение
площади поверхности горения заряда S к площади поперечного
сечения канала заряда /^ан, по которому движутся продукты сгорания,
и называется критерием Победоносцева: % = S/FKaa. Значение
критерия Победоносцева, при котором начинает проявляться эрозионный
эффект, называется пороговым: %пор = 80 ... 120 в зависимости от
марки двухосновного твердого топлива.
Даже в двигателе с постоянной поверхностью горения
критерий х уменьшается с течением времени работы двигателя в силу
увеличения площади FK8B. Поэтому эрозионный эффект увеличения
скорости горения проявляется обычно лишь в начальный период
работы двигателя. Для устранения эрозионного горения топлив
необходимо при проектировании двигателя начальную площадь
поперечного сечения канала заряда определить из соотношения
(^кан)нач ^ 5/Хпор-
7.2. ДАВЛЕНИЕ В КАМЕРЕ, ТЯГА
И УДЕЛЬНЫЙ ИМПУЛЬС
При работе двигателя на установившемся режиме
секундное газовыделение при сгорании твердого топлива тГ равно
секундному расходу продуктов сгорания через сопло двигателя пгПяС>
т. е. тГ = гагьс.
Секундное газовыделение определяется по формуле
тг = upTS, (7.6)
где рт — плотность твердого топлива.
234
Секундный расход продуктов сгорания через сопло определяется
по формуле
В (п) срЛр/?
т . (7.7)
где В (ft) = >/7г ( . 2 ) П — постоянная расхода; ф2 —
коэффициент расхода сопла; FKp — площадь критического сечения сопла;
R — газовая постоянная продуктов сгорания; Т — температура
продуктов сгорания; п — показатель политропы расширения; р —■
давление в камере.
Уравнение (7.7) содержит две неизвестные величины р и Т.
В простейшем случае температуру продуктов сгорания топлива
в камере при отсутствии тепловых потерь принимают равной
изобарной равновесной температуре Гп. с продуктов сгорания топлива,
определяемой термодинамическим расчетом. Для учета тепловых
потерь на нагрев стенок двигателя и на возможную неполноту
химических реакций вводится коэффициент тепловых потерь % < 1.
В этом случае принимают
Т = %Тп.с. (7.8)
Это соотношение справедливо лишь при изменении давления в
небольших пределах, так как оно не учитывает изменений
температуры продуктов сгорания при их сжатии или расширении.
Рассматривая установившийся режим работы двигателя при
постоянной поверхности горения, можно из равенства тг = /пп. с
и соотношений (7.6), (7.7) и (7.8) получить формулу для определения
давления в камере в виде
Y
\
Формула (7.9) получена для степенного закона горения твердого
топлива вида (7.1).
При известных свойствах твердого топлива, заданном давлении
в камере и заданной поверхности горения по формуле (7.9)
определяют площадь критического сечения сопла /^р.
Сила тяги ракетного двигателя твердого топлива определяется
по общей формуле (2.1), подставляя в которую значения скорости
истечения и секундного расхода по формуле (7.7), получаем
Р = ф1ф2В («) FKpp Y^-x [ 1 - (f) (n-')/n] + Fa (pa - л),
где фх = 0,97 ... 0,99 — коэффициент скорости.
Формулу тяги для практических расчетов удобно представить
в виде
р = ф1ф2Ркр/7Ф (pjp) - FapH, (7.10)
где ®(Pa/P) = B(n)y^[l-(^} + ^^. (7.11)
235
Функция Ф (pjp) определяется однозначно в зависимости от
аргументов /г, pjp и фь ср2. Для расчетов Ф {pjp) можно
пользоваться таблицами, приведенными в работе [31]. Тяга двигателя
в пустоте Ри = Ф^г/^крФ (pjp)- Тяга двигателя может быть
выражена через тягу в пустоте по формуле:
В некоторых случаях тягу двигателя удобно представить в виде
Р = KPpFKpy где коэффициент тяги
КР = ф1ф1В (П)
±- (/з ~ ^/2) J
Здесь /.-/^[l-ltr'""]: <712>
2п Г/ ра \2/п I ра |
/з = (pjp) /2;
Фтр = 0,99 ... 0,995 — коэффициент, учитывающий потери на
трение, на скачки уплотнения и т. п.
Значение комплексов /lf /2 и /3 можно определить по таблицам,
приведенным в работе [31].
Отношение тяги двигателя к секундному расходу топлива
называют удельным импульсом тяги /уд = PlthUt c. С учетом соотношений
(7.7) и (7.12) формулу для расчета удельного импульса тяги можно
привести к виду
Под среднеинтегральным удельным импульсом тяги /уд понимают
отношение полного импульса тяги двигателя за время работы ткон
к массе израсходованного за это время топлива
ЬКО1
7 — <L
«V7T ~
Pd%
| гпП, с dx
о
При постоянной тяге и постоянном секундном расходе топлива
понятия удельного импульса тяги и среднеинтегрального импульса тяги
совпадают.
7.3. РАЗБРОС И ПРЕДЕЛЬНЫЕ ОТКЛОНЕНИЯ ПАРАМЕТРОВ
Решение основной задачи работы ЛА с РДТТ —
обеспечения требуемой точности выведения ЛА в заданную точку
космического пространства — невозможно без учета разбросов основных
236
параметров двигателя, а также без проведения соответствующих
мероприятий по ограничению разбросов. Разброс параметров
двигателя существенно сказывается и на конструктивном оформлении
двигателя. Так, разброс давления в камере влияет на толщину
стенок, которая должна рассчитываться на прочность из условий
максимального давления в камере; разброс секундного расхода
топлива влияет на величину гарантированного запаса топлива;
разброс тяговых характеристик двигателя существенно усложняет
работу системы управления ЛА в полете.
Прежде чем рассмотреть возможные пути устранения разброса
основных параметров двигателя, оценим их предельные отклонения.
Для этого из формул для определения давления в камере (7.9),
расхода продуктов сгорания через сопло (7.7) и тяги двигателя
(7.10) найдем выражения для вариаций этих параметров от их
номинальных значений, вызванных отклонениями характеристик заряда
и двигателя (параметров заряжания).
Проварьируем уравнение (7.9), полагая, что коэффициент в
законе скорости горения, комплекс RT, поверхность и плотность
заряда зависят от начальной температуры заряда. Ограничиваясь
малыми отклонениями параметров от их номинальных значений,
будем считать, что % и Т не зависят от давления. Тогда из уравнения
(7.9) получим
др_ __ 1 г&/_ 6S_ брт, бх,
р 1—v" L и' ^ S "*" Рт "*" 2Х ■*"
**\1 п. с Фг ^кр J
гттр п - 1 дп' I 1 ^(Х^п. с)
где ар - и, дт^ -j-
При выводе соотношения (7.13), полученного из уравнения (7.9)
логарифмированием при основании натурального логарифма с
последующим дифференцированием, принято, что В (п) — константа.
Из уравнения (7.7), пользуясь теми же приемами, можно
получить логарифмическую вариацию для расхода продуктов сгорания
через сопло в следующем виде:
• р 2RTn.
д(уЯТп.с) 6Т
— 9v/?T ЯТ Vi нач* Vf-*V
4Ai п. с 01 нач
Подставляя в формулу (7,14) выражение для вариации давления
(7.13), можно получить
п, о 1 Гб^ . 6S брт
' ^ 5 ^ рт
—.у UVf2 4- v и VAin- с) л-а 6Т (7 15)
v гр ~rv 9£>T TumUiHa4 ' V/-1*-7
- J a" I v a(x-Rrn, с)
~ и' дГа "Г"
дТмч ! SpT аГ„ач '
237
Из уравнения (7.10) можно найти логарифмическую вариацию
для тяги двигателя в виде
6P + pH6Fa 6ф1 бф2 . 6р . ^кр 6Ф (Palp) (7 16ч
P + PHFa ~ <Pi """ Фг ~*~ Р + FKp ~**ьФ(р/Р) ' V ' ;
Преобразуя вариацию (7.16), можно получить
FKp
6Ф(ра/р)1
PHFa
Выражение для логарифмической вариации 6Ф/Ф получено в
работе [31 ] в виде соотношения
6Ф 6
"ф"
где функция
t = (Pa/P)(AI-1)M (7.19)
либо находится по таблицам, приведенным в работе [31].
Подставляя значение Ьр/р по формуле (7.13) и значение 6Ф/Ф
по формуле (7.18) в соотношение (7.17), получаем формулу для
логарифмической вариации тяги двигателя
ЬР _ 1 + Ь \Ы 65^ _6рт_ , Ъ% &(RTn.c)
Р 1-v L и1 ^ S "^ рт "Т" 2х "Т" 2/?Гп. с "1"
где Ь = Ц2-\ &х(1—v)(l—/4); &, = v(l
(A) (7.21)
Если из формулы (7.20) почленно вычесть выражение для
логарифмической вариации расхода (7.15), то можно получить выражение
для логарифмической вариации удельной тяги в следующем виде:
б/уд Ь /Ы , 6S . бРт \ l + 6-v Гбх . б(^Гд.с) I ,
/уд 1-v\m' т S Т рт i1" 1-v [2x'r 2RTu.c J ""*"
. v-^2(l+6)/ Kp
ф1 -г !__v \ pKp -t- ф2
бф2\
b3(\
Как видно из формул (7.13), (7.15), (7.20) и (7.22),
логарифмические вариации основных параметров РДТТ зависят от
логарифмических вариаций параметров заряжания двигателя. Рассмотрим по-
238
следовательно величину и характер отклонений параметров
заряжания, переходя при этом к рассмотрению предельных отклонений
параметров заряжания, которые будем обозначать знаком А, а значения
номинальных параметров двигателя — знаком *.
Предельное отклонение коэффициента скорости горения
определяется по формуле
Аи' = Ацсл 1 + А"нсл 1 + Ацсл 2 + Ацнсл 2
и'* и'*
ИЛИ Ди' = Д^сл 1 + А^нсл 1 + АИсл 2 + Д"нсл 2, (7.23)
где" Д&СЛ1 — относительное случайное отклонение коэффициента
скорости горения, вызванное разбросом технологических режимов
и свойств исходного сырья в пределах одной партии зарядов,
определяется по результатам испытаний одной партии зарядов при
Тнач = const; обычно значение AwCJI1 = ± (0,01 ... 0,03); Аи'нсл1 —
относительное неслучайное отклонение коэффициента скорости
горения из-за изменения начальной температуры заряда; оно
определяется по формуле
Айнсл 1 = 4т (■#-) (Гнач - 293). (7.24)
и \ о* нач /
Из формулы (7.2) следует, что (ди'/дТя&ч)'* = и'*/В\ тогда
соотношение (7.24) приводится к виду
ТТТ' Т'нач 293 /у огч
^^нсл 1 = £ • (I .ZO)
В формуле (7.23) Д^слг — относительное случайное отклонение
коэффициента скорости горения из-за неточности измерения начальной
температуры заряда, определяемое по формуле
ДЙсл2= ДГнач/В, (7.26)
Д^нсл2— относительное неслучайное отклонение коэфф . иента
скорости горения, вызванное разбросами технологических режимов,
состава и свойств сырья при переходе от одной партии зарядов
к другой. Это отклонение указывается в паспорте на партию зарядов
и составляет обычно 0,02 ... 0,05.
Предельное относительное отклонение площади поверхности
горения заряда S определяется по формуле Д5 = ASCJI + Д5НСЛ,
где ASCJI — относительное случайное отклонение площади
поверхности горения заряда из-за ^отклонений линейных размеров в
пределах поля допуска, обычно Д5СЛ = ± (0,01 ... 0,02); Д5НСЛ —
относительное неслучайное отклонение площади поверхности горения
заряда от начальной температуры; оно определяется по формуле
Предельное относительное отклонение плотности твердого
топлива рт определяется по формуле Дрт = Дрт. сл + Др"т# нсл, где
239
Дрт. ел — относительное случайное отклонение плотности твердого
топлива, обусловленное отклонениями технологических режимов
его производства, обычно Арт. сл = ± (0,005 ... 0,01); Арт#нсл —
относительное неслучайное отклонение плотности твердого топлива,
обусловленное расширение заряда из-за изменения его начальной
температуры, определяется по формуле
Необходимо заметить, что отклонения А5НСл и Арт. Нсл являются
функцией одной и той же величины Гнач и имеют противоположные
по знаку значения. Поэтому целесообразно определить
относительные отклонения комплекса SpT при изменении начальной
температуры заряда:
Формулу (7.27) можно преобразовать, если ввести в рассмотрение
соотношение
тт = SpT/, (7.28)
где /пт — масса заряда твердого топлива; / — толщина горящего
свода.
Поскольку масса заряда не зависит от его начальной
температуры, то формулу (7.27) с учетом соотношения (7.28) можно
преобразовать так:
(де/дТн,ч)* (Тнач-293). (7.29)
В формуле (7.29) величина —- (де/дГнач)* представляет собой
коэффициент линейного расширения топлива а, поэтому
окончательно соотношение (7.27) можно записать в виде A (SpT) =
= а (7нач - 293).
Предельное отклонение коэффициента тепловых потерь % носит
случайный характер и определяется по статистическим данным.
Ориентировочно можно принимать в расчетах Д% = ± (0,002 ...
0,03).
Предельное относительное отклонение комплекса RTn,c
определяется по формуле
(ARTn. с) = (ДЯГП. с)сл! + (ДЯГП. с)сл.
. с)нсл ! + (А/?ГП, с)
с)нСЛ2»
где (А/?ГП.с)сл 1 — относительное случайное изменение комплекса
RTUtC, вызванное изменением состава и технологических режимов
изготовления заряда, в пределах одной партии зарядов;
(ARTn.c)cni = ± (0,005 ... 0,015); (А^ГП. с)н. сл i — относительное
240
неслучайное изменение комплекса RTn.c связанное с изменением
начальной температуры топлива, определяемое по формуле
)„сл 1 = jtf^r [-^M-] * (Тнач - 293). (7.30)
Для определения производной д (RTn.c)/dTHaL4 можно использовать
известное соотношение RTU с = R (— + THSL4 — 293), где Ни —
\ cv I
низшая теплотворная способность твердого топлива; cv —
теплоемкость продуктов сгорания твердого топлива при постоянном объеме.
Тогда
[d(RTn.c)/dTm] = R*. (7.31)
С учетом соотношения (7.31) формулу (7.30) можно привести к виду
Ш. с)нсл 1 = Гна_чГ293 , (7.32)
П. с)сл 2 — относительное случайное отклонение комплекса
RTmc из-за неточности измерения начальной температуры заряда,
определяемое по формуле
(Мтп. с)-л 2 = дги/П. с; (7.33)
П, с)НСл2 — относительное неслучайное отклонение комплекса
RTu.c> вызванное разбросом состава, свойств исходного сырья и
технологических режимов при переходе от одной партии зарядов
к другой. Это отклонение указывается в паспорте на партию зарядов
и обычно составляет величину порядка 0,01 ... 0,02.
Предельное отклонение коэффициента расхода сопла ср2 носит
случайный характер и зависит от точности изготовления входной
части сопла. Ориентировочно в расчетах его относительное значение
можно принимать Аср2 = ± (0,002 ... 0,004).
Предельное отклонение коэффициента скорости фх носит
случайный характер и зависит от точности изготовления закритической
части сопла, обычно Афх = ± (0,002 ... 0,004).
Предельные отклонения площади критического сечения сопла FKp
определяются его конструкцией. Принципиально можно
рассматривать два вида конструкций: сопло без программированного уноса
массы и сопло с программированным уносом массы. Для первого
варианта конструкции относительные предельные отклонения
площади критического сечения сопла определяют по формуле
AFKp = (Д^кр)сл 1 + (Д^кр)нсл 1 + (А^кр)сл 2»
где (А/7кр)сл1 — относительное случайное отклонение площади
критического сечения сопла в пределах допуска на изготовление,
определяемое по формуле
(АРкр)сл ! с* 2 Д^рА/кр,
16 А. И. Бабкин и др. 241
где AdKp — наибольшее отклонение диаметра критического сечения
сопла в пределах допуска на изготовление; (&FKp)HCJll—
относительное неслучайное отклонение площади критического сечения
сопла, обусловленное тепловым расширением соплового вкладыша;
оно определяется по формуле
кр)нсл 1 == I* "г авкл \Твкл 1 вкл. нач)] * —
кл \Гвкл *вкл. нач)»
(7.35)
здесь авкл — коэффициент линейного расширения материала
соплового вкладыша; Гвкл — текущая среднеобъемная температура
соплового вкладыша; Твкл. нач — начальная среднеобъемная температура
соплового вкладыша. В формуле (7.35) переменной по времени
работы двигателя является температура Гвкл, которая изменяется
от своего начального значения Твкл. Нач Д° ^вклтах за период
работы двигателя. Изменение температуры Твкл по времени работы
носит экспоненциальный характер и описывается уравнением
тзкл. нач
(7.36)
Обычно время тпр интенсивного изменения температуры вкладыша
(прогрева) от Гвкл.нач до 0,957вклтах составляет 8... 12 с, что
позволяет определить значение постоянной а в уравнении (7.36)
по известным значениям Твкл.нач и Твклтах:
а = — In 20 ( 1 — ^вкл- нач ). (7.37)
^пр \ * вкл max '
В соотношении (7.37) ТВШ1. Нач/^вклтах <^С 1, поэтому приближенно
а = 3/тпр.
После определения закона изменения среднеобъемной
температуры соплового вкладыша (рис. 7.4) можно найти изменение
(AFKp)Hc.ni B процессе работы двигателя, пользуясь формулой (7.35)
и определяя значения Твкл для каждого момента времени в интервале
0 < т < тпр по формуле (7.36). Относительное случайное отклонение
(А/7Кр)сл 2 площади критического сечения сопла, обусловленное
эрозией материала соплового вкладыша, определяется
экспериментально и зависит от свойств материала соплоеого вкладыша, а также
от параметров и состава
продуктов сгорания. Линейная скорость
эрозии сопла описывается
экспериментальной формулой по
данным испытания модели
V _ / Р \°'8 / <У м \°'2
VM \ Ры I \ ^кр / '
где vM, pM и dKp — соответственно
линейная скорость эрозии сопла,
давление и диаметр критического
сечения для модели.
71
'бкл max
'вкл нач
0
'■<■-
/С
^^-~—
тпр
i
/ Р НСЛ1
-с
Рис. 7.4
242
При эрозии сопла из-за неравномерности уноса материала может
возникнуть значительная шероховатость поверхности, что приводит
к потерям удельного импульса. Эти потери могут достигать 0,5 ...
1,0 % от номинального значения [9].
Для второго варианта конструкции критического сечения сопла
относительные предельные отклонения площади критического
сечения определяются по формуле
Д^кр = (Д^кр)нсл 2 + (А^кр)сл з» (7.38)
где (AFKp)HCn 2 — относительное неслучайное увеличение площади
критического сечения сопла из-за разгара соплового вкладыша,
определяется по формуле
т . 2
2 jVox \
(Д^кР)нсл 2 = \ 1 + -^ / - 1. (7.39)
В формула (7.39) скорость уноса массы у* зависит от свойств
материала, параметров газового потока и его состава. Для
конкретного материала вкладыша и заданного состава твердого топлива
зависимость скорости уноса массы от давления в камере носит
степенной характер:
V* = Сгрп. (7.40)
В формуле (7.40) Сх и п — экспериментальные константы. Если
ожидаемый диапазон изменения давлений не превышает (0,15 ...
0,20) р*9 то можно с достаточной точностью полагать у* = const.
В этом случае формулу (7.39) можно привести к виду
(7.41)
В формуле (7.38) (AFKp)CJl3— относительное случайное изменение
площади критического сечения сопла из-за нестабильности скорости
уноса массы. Для каждого конкретного двигателя скорость уноса
массы можно представить как v = и* + Av, где Av— разброс в
скорости уноса массы, имеющий случайный характер. Тогда
(т v 2
2 j Av dx \
1±-*-г. I "I- (7-42)
акр /
Если принять Av = const, то формулу (7.42) можно записать в виде
/t , 2 Дат \2 1 4 Avx ц
слз = 1 ± —*— — 1 ~ —*—- (7.
\ "Кр / аКр
Характерное увеличение площади критического сечения сопла
с уносом массы в процессе работы двигателя показано на рис. 7.5.
В расчетах принято и* = const и Av = const.
16* 243
Рис. 7.5
Предельное?отклонение
площади среза сопла Fa зависит
от допуска на изготовление
диаметра сопла на срезе и
изменений этой площади в процессе
работы двигателя в силу
теплового расширения. Если в
расчетах учитывают только
отклонения в пределах допуска на
изготовление размера &а, то
~AFa~2kdo/d*a. (7-44)
Ориентировочно в расчетах можно принимать AFa = ± (0,03 ...
0,04).
Предельные отклонения комплекса Ф (pjp) определяются
отклонениями Дфь Дф2, AFKp и Л^а и вычисляются по формуле
(Ра/Р) = АФ {Ра/Р)
(Ра/Р)н
где
ДФ (ра/р)сл = ± fl
+ ДФ2
+
ДФ (ра/р)г.сл = —
(7.45)
(7.46)
В формулах (7.45) и (7.46) значение /| определяется по формуле
(7.19) при ра = р% и р = р\
Отклонения начальной температуры топлива Тшч зависят от
условий работы по техническому заданию и от точности средств
определения этой температуры:
бГнач = (^нач — 293) ± АТнач,
где ТНач измеренное значение начальной температуры заряда
или предельное значение начальной температуры по техническому
заданию, например, 223 или 323 К; ДТ^ач — точность измерения
начальной температуры заряда; обычно ДТнач принимают равной
± (2 ... 5) К.
Формулы для логарифмических вариаций основных параметров
двигателя и значения предельных отклонений параметров
заряжания позволяют найти предельные отклонения основных
параметров двигателя (/?, тп, с, Р и /уд) от воздействия предельных
случайных и неслучайных отклонений параметров заряжания.
Согласно правилам теории вероятностей среднеквадратичное
отклонение суммы независимых случайных величин равно корню
квадратному из суммы квадратов среднеквадратичных отклонений
слагаемых. Для нормального распределения случайных величин
это правило распространяется и на предельные отклонения.
Принимая, что все случайные предельные отклонения параметров
заряжания подчиняются закону нормального распределения, можно за-
244
писать выражения для предельных случайных отклонений основных
параметров двигателя твердого топлива:
= ± у^г V №"сл
I *-*Л I у - п. с;сл i , у п. с/сл z ■
"Г 4 "I" 4 i- 4 -1-
(7.47)
с)сл = ± у^г ]/(Д17сл ,)2 + (ДЙ™ 2)2 + ASL + Ар?. сл +
/ v Ах У | Гу(Д^Гп. с)сл1 | Г v (ARTи. с)сл г Г ,
(v Аф2)2 + v2(ATKp)L 1 + v2(ATKp)L 2 = ± у^-/^; (7.48>
= ± у=| ]^(А^;Л О2 + (А^;л г)2 + А52 + Ар?, сл
+ ь\ (дткР)2л 2 + (&3AFa)2 = ±
(7.49)
А/Уд. сл = ± ^ ]ЛЬ2 (А«;л {)2 + (Ди« 2)2 + А52 + Ар?,
+ (1 + Ь - у). [Щ- + <^- ^ '- + iA~^4 ^2 ] +
[(Д^кр)^ 1 -Г (Д^кр)^ 2 + Дф1] +
(7.50)
Предельные отклонения основных параметров РДТТ,
вычисленные по формулам (7.47) ... (7.50), носят случайный характер и
проявляются в конкретном двигателе в той или иной мере только после
его запуска. Величину этих отклонений невозможно определить
до начала работы двигателя, а следовательно, и невозможно
устранить их действие путем настройки двигателя, например изменением
площади критического сечения сопла до запуска двигателя.
245
Суммарные предельные отклонения основных параметров
двигателя определяют по формулам:
(7.51)
(Тир \ -ш/"ТТ\т П
Jmin ~~ ^^кр)нслшах ~ У Ulj> (i .
_1_ (^^^п. с)нсл 2
Л 2 J
-J- [(ДЯГ„. с)нслг + (KRfu. с)нсл 2] - v (ШкР)нсл! + V~Dl}\ (7.53)
^п. с min = y^V ||А"нсл 1 + ДИнсл 2 +
. с)нсл 1 + (ДЛГп. с)нсл 2]}тт - v (AFKpW ~ /"^}; (7.54)
7
нсл 1
? , (AflTn. с)нсл 1 ,
НСл 2 Н ^ '
I (А/^Гп. с)нсл 2 и ПГЪ \ _[_ п/~гГ\
П 2 2 ' KP^HCtTIJmax ' ^ 3]
АР 1+6Яд7Г' -J-A77 , (А^Гп.с)нсл1 ,
п. с)нсл 2 t, /"/Тс5 \ т/"п~1' /7 t^ft\
о — ^2(Агкр)нслшах — у 1У8Г» (/.00)
^ Jmin J
\{& (Д" 1 + Ди^ г) + ~
1 /j д
/уд max = j—^ \{& (Д"нсл 1 + Ди^сл г) + g ~ tA^^n. с)нсл 1 +
О + &) - v] (Д?кр)нсл} + ^"Й;
/ max /
(7.57)
) + 1+2~V [(Д^п. с)
. с)ясл ,]} -[ba(l-b)-v] (ДТкр)„сл max - -/Щ • (7-58)
j mm ;
Пример 7.1. Определить предельные отклонения основных параметров РДТТ
за счет действия случайных и неслучайных отклонений параметров заряжания.
Исходные данные:
а) характеристики заряда:
и = 0,07р°.5^ см/с; В = 340; /?ГЙ. с = 860 000 Дж/кг; Гп. с = 2400 К;
n =s 1,25; S* = const в процессе работы двигателя от т = 0 до т = тк;
Тк_= 40 с; рт = 1,6 г/см3; Лйсл 1 = ±0,03; ^цнсл 2 = +0,04; "Арт. сл = ±0,006;
А5СЛ= ±0,008; (Д/?Гп.с)сл i = ±0,01; (А/?ГП. с)нсл 2 = —0,01; Ах = ±0,002;
246
б) характеристики камеры:
р* = 4,0 МПа; % = 0,98;
в) характеристики соплового блока:
dKp = 60 ± 0,03 мм; da= 170 ± 0,5 мм; фх = 0,99;
ф1р = 0,995; ф2= 0,98.
Материал соплового вкладыша — вольфрам с и* = 0;
Д?кр. сл 2 = 0; tK = 0,95Гп# с при тпр = 8 с; Афх = ±0,002; "Дф2 = ±0,02;
г) внешние условия работы:
ря = 0,05 МПа; /ном =—Ю.. .+30 °С; Д/нач = ±3 °С.
Порядок расчета. 1. Определяем по формуле (7.47) предельное
отклонение давления в камере за счет случайных отклонений параметров заряжания, для
чего предварительно находим А«сл 2, (^ЯТ\г.м)сл2 и (А^кр)сл1 соответственно по
формулам (7.26), (7.33) и (7.34). Тогда Дрсл = ±0,0707.
2. Определяем по формуле (7.48) предельное отклонение секундного расхода
газов за счет случайных отклонений параметров заряжания: (Дтп. с)сл = ±0,0697.
3. Определяем по формуле (7.49) предельное отклонение тяги двигателя за счет
случайных отклонений параметров заряжания, для чего предварительно находим:
по формулам (7.21) коэффициенты Ь, Ьъ b2, b3. Значения Ф (ра1р) и /4 определены
по формулам (7.11), (7.19) при п = 1,25. Тогда b = 0,0652; Ьг = 0,437; Ь2 = 0,5627;
бз^ОДХМ; /4 = 0,0697; Ф (ра/р) = 1,6924; AFa = ±0,003 по формуле (7.44).
Тогда АРСЛ = ±0,074.
4. Определяем по формулам (7.25) и (7.32) неслучайные предельные отклонения-
коэффициента в законе скорости горения и комплекса /?ГП. с. Получаем Д«нсл max =
= 0,0294; Л^нсл i min = 0,0883; (KRTn. с)нсл i max = 0,00417; (ARTn. с)Нсл i min =
= 0,0125.
5. Определяем по формулам (7.35), (7.36) и (7.37) изменение площади
критического сечения сопла за счет теплового расширения соплового вкладыша.
Результаты расчета сводим в табл. 7.1
Характер изменения площади критического сечения соплового вкладыша по
времени в период работы двигателя от 0 до тпр и соответствующие изменения
основных параметров двигателя показаны на рис. 7.6.
6. Определяем по формулам (7.51) ... (7.56) предельные отклонения основных
параметров двигателя. Результаты расчета сведены в табл. 7.2.
Пример 7.2. Определить предельные отклонения давления в камере РДТТ
с учетом разгара критического сечения сопла.
Рис. 7.6
247
т, с
'к. °С
ав- 10е, 1/град
(д^кр)нсл1
0,5
377
4,45
0,003
1,0
677
4,80
0,006
2,0
11 127
5,18
0,011
4,0
1655
6,22
0,020
Т
6,0
1884
6,72
0,025
а б л и
8,0
2002
7,26
0,029
ца 7.1
40
2127
7,26
0,031
Таблица 7.2
т, с
ДРтах
APmln
Аттах
Аттт
АРщах
АЯтт Г
Т, С
АРтах
Apmin
Дттах
Ammin
АРтах
A^min
0
0,224
—0,2857
+0,2197
—0,2707
0,2257
—0,2767
4,0
0,1814
—0,3283
0,1997
—0,2907
0,2057
—0,2967
0,5
0,2176
—0,2921
+0,2167
—0,2737
0,2227
—0,2797
6,0
0,1708
—0,3389
0,1947
—0,2957
0,2007
—0,3017
1,0
0,211
—0,2986
+0,2137
—0,2767
0,2197
—0,2827
8,0
0,1620
—0,3477
0,1907
—0,2997
0,1967
—0,3057
2,0
0,2006
—0,3091
+0,2087
—0,2817
0,2147
—0,2877
40
0,1580
—0,3517
0,1887
—0,3017
0,1947
—0,3077
248
Рис.
Исходные данные:
а) характеристики заряда,
камеры и внешние условия те же, что и
в примере 7.1, кроме тк = 10 с;
б) характеристики соплового блока
те же, что и в примере 7.1, кроме:
материал вкладыша — пластмасса со
скоростью уноса массы v* = 0,25 мм/с и
Ду= ±2%.
Порядок расчета. 1.
Определяем по формулам (7.34) и (7.43)
случайный разброс площади
критического сечения сопла за счет допуска
на изготовление и разброса в скоро-
сти разгара материала сопла Получаем (А^кр)сл = ±0,0043.
2. Определяем по формуле (7.47) предельное отклонение давления в камере
за счет случайных отклонений параметров. Получаем АрСл = ±0,072.
3. Определяем по формуле (7.41) изменение площади_ критического сечения
сопла по времени за счет разгара вкладыша. При т = 2 с (AFKp)HCjl2 = 0,034 и т. д.
Результаты расчета сводим в табл. 7.3.
4. Определяем по формуле Apv = — ■ __ (А/7Кр)нсл2 изменение давления
в камере сгорания при разгаре сопла. При т = 2 с Д/?о = —0,0723 и т. д.
Результаты расчета сводим в табл. 7.3.
Таблица 7.3
т, с
(А^кр)нсл 2
&Pv
0
0
0
2
0,034
—0,0723
4
0,070
—0,149
6
0,100
—0,213
8
0,135
—0,288
10
0,187
—0,396
5. Определяем по формулам (7.51) и (7.52) предельные отклонения давления
в камере. Результаты расчета показаны на рис. 7.7 и приведены ниже.
т, с
^тах
0
0,2222
—0,3172
2
0,0567
-0,3852
4
0,0842
—0,4552
6
0,0422
—0,4972
8
—0,0128
—0,5522
10
—0,0808
—0,6202
На рис. 7.7 для сравнения приведены данные по разбрссу давления в камере
при работе двигателя с сопловым вкладышем без разгара.
Если скорость разгара материала соплового вкладыша зависит от давления
в камере, то расчет необходимо вести с учетом зависимости (7.39), определяя в
каждом интервале времени скорость разгара Vf по давлению р$.
Все рассмотренные в настоящем разделе зависимости справедливы для РДТТ
с нерегулируемой площадью критического сечения. Уменьшение предельных
отклонений параметров двигателя возможно путем настройки двигателя до запуска
изменением площади критического сечения сопла или с помощью систем термостатиро-
249
вания зарядов твердого топлива, позволяющих привести начальную температуру
заряда к Гнач = Тнач обычно Тнач = 293 К. Во всех случаях подготовительные
операции дают возможность частично или полностью устранить лишь влияние
неслучайных отклонений параметров заряжания. Влияние случайных отклонений
параметров заряжания на разброс характеристик двигателя можно устранить лишь
применением системы автоматического регулирования параметров двигателя,
действующей в процессе его работы.
7.4. СПОСОБЫ УМЕНЬШЕНИЯ ПРЕДЕЛЬНЫХ
ОТКЛОНЕНИЙ ПАРАМЕТРОВ
Анализ факторов, влияющих на отклонения основных
параметров РДТТ от номинальных значений, и их количественная
оценка показали, что возможные разбросы давления в камере,
тяги и времени работы двигателя значительно превышают
допустимые отклонения, определяемые техническими требованиями к ДУ.
Наибольшее влияние на величину отклонений параметров
двигателя оказывают отклонения начальной температуры заряда и унос
массы критического сечения сопла, если в двигателе используется
сопло с программированным уносом массы.
Начальная температура заряда изменяется под влиянием
температуры окружающей среды. Однако процесс изменения
температуры заряда из-за влияния переменности внешних температурных
условий существенно зависит от толщины горячего свода,
теплопроводности твердого топлива и конструкции теплоизоляционных
покрытий в двигателе. Если принять, что температура окружающей
атмосферы изменяется в течение суток по гармоническому закону,
то, полагая, за начало отсчета точку с минимальной температурой
суток, соответствующую времени 0 ч, изменения среднесуточной
температуры можно описать зависимостью
* окр = ■* окр. ср \' окр max ' окр. ср) COS (ZJVZ/Z),^
где Т0Кр — текущая температура окружающей среды в момент
времени т; Гокр. ср — среднесуточная температура окружающей среды;
Токр max — максимальная температура окружающей среды при
т = 12 ч; г — период колебаний, равный 24 ч.
Закон изменения температуры заряда при этом можно описать
зависимостью
(■* нач)х = * окр. ср \' окр max ' окр. ср) # COS (2jTT/Z — ф),
где (Тнач)х — температура заряда в точке, расположенной от
поверхности горения на расстоянии х\ a — поправка на амплитуду
колебаний суточной температуры заряда, причем всегда a < 1 и
зависит от х\ ориентировочно a = 0,6 ... 0,7; ср — фазовый сдвиг,
зависящий от х\ ориентировочно ср = 15 ... 30°.
Эта зависимость показывает, что в зарядах твердого топлива
поле температур носит сложный характер, зависящий как от
изменения внешних условий, так и от геометрических размеров и тепло-
физических свойств заряда.
250
Суточные изменения температуры окружающей среды не способны
вызвать изменение начальной температуры заряда по всей толщине
свода, особенно у зарядов больших размеров. Они вызывают
изменение температуры только слоев топлива, лежащих близко к
поверхности заряда.
Сезонные изменения среднесуточной температуры протекают
медленно и поэтому могут быть учтены при определении начальной
температуры заряда. Однако в условиях эксплуатации ЛА
предсказать начальную среднеобъемную температуру заряда с высокой
точностью довольно сложно. Это объясняется как изменениями
температуры в течение одних суток, так и колебаниями среднесуточной
температуры в течение нескольких суток до запуска двигателя.
Возможные ошибки в определении Тнач могут достигать 3 ... 5 К,
а в некоторых случаях и более.
Наилучшим способом стабилизации начальной температуры
зарядов является их термостатирование перед запуском, которое
выполняется с помощью специальных термостатов, термочехлов,
обогреваемых контейнеров и т. п. Однако возможности этого способа
ограничиваются условиями эксплуатации двигателей и все
возрастающими габаритами крупных двигателей, из-за чего указанные
средства становятся чрезвычайно громоздкими.
В тех случаях, когда невозможно привести начальную
температуру заряда к нормальным условиям с помощью термостатирования,
стабилизации параметров (обычно давления в камере) достигают
предстартовой настройкой двигателя. Настройка двигателя на режим
работы с изменением давления в камере в допустимых пределах
заключается, как правило, в изменении площади критического
сечения. В практике известны два способа настройки двигателей на
требуемую площадь критического сечения: перемещением
профилированного центрального тела (рис. 7.8, а) и путем смены вкладышей
в критическом сечении (рис. 7.8, б).
Каждому из этих способов присущи свои преимущества и
недостатки. Так, настройка площади критического сечения с помощью
центрального тела / в отличие от способа настройки с помсшью
сменных вкладышей 2, обеспечивает плавное изменение FKp в
диапазоне регулирования и практически не требует никаких
дополнительных работ по монтажу двигателя. Однако применение центрального
тела усложняет конструкцию двигателя, ухудшает его
энергетические характеристики и снижает допустимую продолжительность его
работы или требует применения центральных тел с высокой тепло-
и эрозионной стойкостью. Обычно способ изменения площади крити-
Рис. 7.8
251
Рир mtiX
О
из из
ческого сечения сопла
перемещением центрального тела
используется в стартовых или
разгонных двигателях с ограниченным
временем работы.
Сменные сопла или вкладыши
в критическом сечении сопла нашли
широкое применение в РДТТ.
Каждому изготовленному
двигателю придается набор вкладышей
к соплу с указанием, в каком
диапазоне начальных температур
заряда должен применяться каждый из них. Площади критического
сечения таких вкладышей подбираются следующим образом. Прежде
всего выбирается допустимый предел изменения давления в
камере. Максимальное давление ртах обычно определяется прочностью
камеры, а нижний предел давления рт1п — допустимым изменением
тяги или нижним пределом устойчивого горения топлива. Расчет
проводится по формуле (7.9), приведенной к виду
гвз 193 зоо тнач к
Рис. 7.9
(7.59)
где
й' =
RTn
^293
f-k-
кр -*° (Я^п. с)
Для определения минимального размера площади критического
сечения coiLna_fKp mln в формулу (7.59) необходимо поставить
значения Mmuii (RTU. c)min и pmln, характерные для точки а на рис. 7.9.
При установке вкладыша с FKpmin на двигатель совокупность его
возможных режимов работы в допустимом интервале давлений
описывается линией /. Дальнейшее повышение начальной температуры
сверх значения, соответствующего точке б, приведет к
превышению р над /?тах, если двигатель по-прежнему будет иметь /^р =
= ^кр. mm- Для снижения давления в камере необходимо перейти
на работу с большим критическим сечением. Его размер вновь
определяется по формуле (7.59) при ub(RTn.c)b и pmln. Отличие
в начальных температурах заряда, соответствующих точкам бив,
составляет 3 ... 5 К. Оно необходимо для компенсации возможных
ошибок при определении Гнач. По параметрам точки 6 и по
формуле (7.59) определяется значение FKp2, при котором характеристика
двигателя соответствует линии 2 на рис. 7.9. Расчеты по указанной
методике ведут до тех пор, пока не будет перекрыт характеристиками
весь температурный диапазон от Гнач mm до TH8L4 max. Обычно
количество сменных вкладышей составляет 3 ... 4 шт.
Термостатирование и настройка двигателя по площади
критического сечения сопла позволяет учесть влияние неслучайных
отклонений "параметров заряжания на один из основных параметров
двигателя,' обычно на давление в камере. Однако в процессе работы
двигателя случайные отклонения параметров заряжания, а также
252
неточности при учете неслучайных отклонений параметров
заряжания могут привести к заметным отклонениям параметров двигателя.
Так, дисбаланс тяги маршевых РДТТ транспортного космического
корабля Шатлл [37] в поле достигал 284 кН через 117 с после
запуска, несмотря на строгий контроль качества РДТТ в процессе
изготовления и условий подготовки к полету. В менее ответственных
условиях подготовки РДТТ к запуску дисбаланс тяги двух мощных
РДТТ может достигать еще больших значений (400 и более кН).
Для стабилизации параметров двигателя необходимо применять
систему автоматического регулирования, работающую с момента
запуска двигателя и до его останова. Такая система автоматического
регулирования позволяет устранить, а точнее, свести к допустимой
неравномерности регулирования влияние отклонений всех
параметров заряжания на один из основных параметров двигателя (на
давление в камере или тягу).
7.5. РЕГУЛИРОВАНИЕ РАКЕТНЫХ ДВИГАТЕЛЕЙ
ТВЕРДОГО ТОПЛИВА
Разработка и создание систем автоматического
регулирования РДТТ ведется довольно давно. Возможные пути создания
систем автоматического регулирования РДТТ можно разделить на
системы регулирования по внутридвигательным параметрам и на
системы регулирования по параметрам ракетной системы.
Системы регулирования по внутридвигательным параметрам
автономны, т. е. не связаны с ракетной системой. Их программа
работы является исходной для баллистического расчета. Точное
выдерживание системой регулирования заданной программы
изменения параметра двигателя обуславливает точность движения ракеты
по траектории без учета возможных разбросов параметров ракеты.
Наиболее изученными из систем регулирования по
внутридвигательным параметрам являются системы стабилизации давления в камере.
Одна из возможных структурных схем такой системы показана на
рис. 7.10. Регулятор 5, настроенный на программное значение
давления р*9 сопоставляет действительное значение р с программными
передает величину рассогласования Ар в виде электрического сигнала
на усилитель /, где величина рассогласования усиливается и подается
на привод 2. Привод перемещает подвижную часть регулируемого
сопла 3, изменяя тем самым площадь критического сечения сопла
на величину AFKp- Изменение площади критического сечения сопла
приводит к устранению рассогласования давления в камере 4 с его
программным значением. Система
автоматического регулирования
функционирует в течение всего времени
работы РДТТ и устраняет влияние
всех возмущений / (случайных и
неслучайных), действующих на
давление в камере двигателя.
253
Рис. 7.11
Одна^из" возможных^
конструктивных схем системы
автоматического
регулирования давления в камере
показана на рис. 7.11. В
качестве рабочего тела для
привода 1 используется
жидкость с давлением рупр,
расход которой в полости
привода распределяется
золотником 2.
Наименее разработанным
узлом систем автоматического
регулирования такого типа
является сопло с переменной
площадью критического сечения (например, сопло с подвижным
центральным телом). Известные конструкторские проработки такого типа
не обладают высокой надежностью при работе в условиях поЕЫшен-
ных температур и газовой эрозии. Более рациональными следует
считать системы с гидро- и газодинамическим регулированием
площади критического сечения сопла, их основное преимущество
состоит в том, что они не имеют подвижных частей, расположенных
в высокотемпературном газовом потоке. Их принцип действия
основан на введении в дозвуковую часть сопла около его
критического сечения некоторых количеств газа или жидкости через ряд
отверстий или кольцевые щели. При этом происходит по^жатие
основного потока газов в критическом сечении, что эквиЕалентно
уменьшению его эффективной площади. Изменяя количсстео ееоди-
мой жидкости или газа, можно регулировать плсщадь критического
сечения сопла. Схема взаимодействия основного потока и веодимого
вторичного показана на рис. 7.12. Принципиально еоэможны две
схемы подвода вторичного потока к критическому сечению сопла:
подача жидкости или газа из специальных емкостей (рис. 7.13, а) и
отбор газов из камеры (рис. 7.13, б). В перЕом случае в качестве
рабочего тела целесообразнее использовать различные окислители
и горячие газы, полученные в специальных газогенераторах 1.
Температура газов определяется теплостойкостью регуляторов
расхода 2 и может достигать 2000 ... 2200 К и более.
Использование продуктов сгорания основного заряда твердого
топлива в качестве вторичного потока сопряжено с необходимостью
Рис. 7.12
а) 6)
Рис. 7.13
254
создания регулятора расхода 2, работающего при высоких
температурах, а также с разработкой мер по сепарации конденсированных
частиц в потоке, поступающем к регулятору, для обеспечения
стабильности его расходных характеристик. Решение этих задач
сопряжено с большими техническими трудностями.
Газодинамический способ регулирования площади критического
сечения сопла обладает удовлетворительными характеристиками
лишь в двигателях с зарядахми, имеющими высокую
чувствительность скорости горения к изменениям давления, т. е. для топлив
с v ^5 0,4 ... 0,5. При v < 0,4 запасы вторичного газа или жидкости
оказываются весьма высокими, что сильно снижает массовые и
энергетические показатели РДТТ. Недостатком систем с
газодинамическим регулированием площади критического сечения сопла является
также наличие нескольких клапанов перепуска горячего газа, а при
использовании специальных генераторов для создания
управляющего потока —и клапанов сброса избытка управляющего газа за борт.
Предварительные рекомендации и метод расчета сопел с
газодинамическим регулированием FKp рассмотрены в работе [6].
Поскольку в настоящее время наблюдается тенденция к созданию
топлива с малой чувствительностью скорости горения к давлению,
то возможности способа регулирования РДТТ изменением площади
критического сечения сопла становятся все более ограниченными.
Это привело к созданию других способов воздействия на скорость
газовыделения в камере РДТТ. К ним относятся:
изменение скорости горения твердого топлива введением
жидкостей в камеру;
изменение скорости горения твердого топлива генерацией
акустических колебаний газового объема в камере;
программное изменение поверхности горения твердого топлива;
комбинация указанных выше способов.
Экспериментальные исследования по влиянию жидкости, вво-
димэй в зону горения, на скорость газовыделения, проведенные нэ
модельных РДТТ, показали, что существуют реальные возможности
регулирования тяги космических силовых установок с помощью
инжекции в камеру РДТТ жидкого компонента: четырехокиси азота,
трифторида, смеси кислорода с фтором и жидкого фтора [26 ]. Жидкий
компонент должен самовоспламеняться при контакте с зарядом
твердого топлива. Установлено также, что изменение подачи жидкого
компонента позволяет регулировать тягу РДТТ в широких пределах.
Для устойчивого запуска РДТТ в вакууме необходимо
использовать более летучие жидкие компоненты, чем C1F3 (в частности, может
быть применен жидкий фтор [26]). Вместе с тем РДТТ,
использующие высокоактивные и токсичные жидкие компоненты, утрачивают
большинство преимуществ, свойственных твердотопливным
двигателям. Двигатель с регулированием тяги подачей по команде жидкого
окислителя следует сравнивать скорее с гибридным двигателем,
чем с РДТТ.
Конструктивное решение двигателей такого типа различно-
Возможна, например, и такая компоновочная схема: в заряд вмон.
255
тированы трубки из горючего материала (пластикаг или металла —
алюминия, циркония, титана), заполненные вязкой жидкостью.
При хранении РДТТ концы трубок закрыты заглушками. При
горении заряда с одного торца площадь поверхности горения
определяется глубиной «проскока» пламени вдоль трубок, которая зависит
от уровня жидкости в трубках. Можно регулировать газовыделение
изменением как расхода подаваемой жидкости, так и поверхности
горения твердого топлива.
Возможно [40] изменение модуля тяги РДТТ за счет подачи
в камеру окислителя (газообразного кислорода в смеси с аготом)
для дожигания продуктов сгорания твердого топлива и создания
вихревого движения продуктов сгорания в целях изменения
коэффициента расхода сопла. При тангенциальной подаче окислителя
в камеру достигается большее увеличение тяги РДТТ, чем при
подаче того же количества окислителя в осевом направлении. При
вихревом способе подачи окислителя увеличение тяги РДТТ в два
раза достигается при расходе окислителя, равном 25 % от расхода
продуктов сгорания. Ввод окислителя через отверстия при М =
= 1,0 производится в поток продуктов сгорания, имевший М =
= 0,08.
Другим способом воздействия на газовыделение в камере РДТТ
является возбуждение от специального источника звуковых
колебаний в газовом объеме камеры. Это приводит к увеличению скорости
горения твердого топлива. В диапазоне звуковых частот колебаний
скорость горения зависит от амплитуды колебаний, увеличиваясь
с ее ростом.
Рост скорости горения топлива при воздействии звуковыми
колебаниями объясняется турбулизацией зоны горения на поверхности
заряда, что сопровождается ростом теплоподвода от горячих газов
к поверхности заряда, а также стимулирует более интенсивное
перемешивание между собой элементарных объемов с избытком горючего
и окислителя.
Однако опыты, проведенные на РДТТ с генераторами звуковых
колебаний, показали, что рост скорости горения сопровождается
падением удельного импульса двигателя, достигающим в отдельных
случаях 5 % от номинального значения. Это существенный
недостаток, во многом определяющий перспективы данного способа
воздействия на скорость газовыделения РДТТ.
Программное изменение поверхности горения твердого топлива
может быть достигнуто применением лидирующих стержней,
обладающих скоростью горения, отличающейся от скорости горения
основного заряда.
Все рассмотренные выше способы создания регулируемого РДТТ
позволяют обеспечить работу двигателя в режиме стабилизации
или программного изменения давления в камере. Однако, решая
задачу стабилизации давления в камере путем изменения площади
критического сечения сопла, не удается обеспечить постоянство
тяговых характеристик такого двигателя, что является существенным
недостатком этого способа воздействия на параметры камеры. Ха-
256
Рис. 7.14
рактерное изменение тяговых
характеристик двигателя в
зависимости от начальной температуры
заряда твердого топлива показано на
рис. 7.14, где также показано
изменение площади критического
сечения сопла, необходимое для
поддержания постоянного давления в
камере. Устранить указанный
недостаток удается лишь воздействием
непосредственно на скорость горения
твердого топлива, например вводом
жидкости в камеру или
акустическими средствами. Однако эти
способы воздействия на скорость газовыделения в камере РДТТ
достаточно сложны и поэтому не нашли широкого применения. Разработка
и усовершенствование таких способов, а следовательно, и создание
систем автоматического регулирования РДТТ является актуальной
задачей, для того чтобы регулируемые РДТТ могли успешно
выдерживать конкуренцию с ЖРД-
В системах автоматического регулирования или управления по
командам от системы ЛА, последний является объектом
регулирования, а двигатель — как исполнительный элемент. В качестве
регулируемой величины в такой системе управления принимается
скорость полета ракеты, которая определяется продольным ускорением
ракеты. Для программного изменения скорости ракеты необходимо
изменение тяги двигателя в определенном интервале. Воздействие
на тягу РДТТ может оказываться либо с помощью одного из
способов изменения газовыделения в камере, рассмотренных выше, либо
непосредственно путем изменения тяги двигателя с помощью
газоотводных устройств, поворотных сопел и других устройств, принцип
действия которых основан на уменьшении тяги созданием
необратимых потерь удельного импульса.
Газоотводное устройство (рис. 7.15) представляет собой ряд
отверстий а, симметрично расположенных в горловине сопла 1. Их
площадь может изменяться путем поворота кольца 2 газоотводного
устройства. Прикрытие или открытие отверстий не сопровождается
изменением параметров газа в камере двигателя, так как изменяется
только количество газа, истекающего из сопла в осевом направлении.
В то же время симметричный отвод газа
из сопла через отверстия в радиальном
А-А
Рис. 7.15
17 д. И. Бабкин и др.
Рис. 7.16
257
направлении не создает тяги в продольном и поперечном
направлениях. Аналогичным образом изменяется тяга двигателя с
поворотными соплами (рис. 7.16), в котором симметричный поворот
сопел 1 на угол а уменьшает продольную тягу и не создает
поперечной составляющей тяги. Недостатком рассмотренных систем
является потеря суммарного импульса ДУ.
7.6. МНОГОРЕЖИМНЫЕ ДВИГАТЕЛИ ТВЕРДОГО ТОПЛИВА
При решении задач управления ЛА возникает
необходимость изменять тягу ДУ (рис. 7.17). В отдельных случаях
изменение тяги ДУ за время ее работы должно производиться 4 ... 5 раз
и более.
Уровень тяги ДУ на стартовом режиме Pi обычно таков, что
продольные перегрузки, действующие на ракету, достигают 25 ... 30 g.
Тяга ДУ на маршевом режиме Ри определяется работоспособностью
системы управления ракетой и выбирается таким образом, чтобы
продольные перегрузки, действующие на ракету, не превышали
3 ... 4g.
Конструктивное решение задачи создания ДУ с глубоким
изменением тяги (как правило, с глубоким дросселированием) возможно
путем создания либо многоступенчатых ДУ, либо однокамерного
двигателя с переменными тяговыми характеристиками. Первое почти
всегда требует лишь небольших работ по конструированию и
доводке двигателя, поскольку ДУ такого типа может представлять
собой сочетание уже отработанных в производстве двигателей.
Однако при создании таких ДУ необходимо учитывать, что при
продольном расположении отдельных двигателей относительное
удлинение ракеты получается весьма большим, тогда как периферийное
расположение ступеней двигателей приводит к росту миделя ракеты,
и, как следствие этого, к росту сил аэродинамического
сопротивления. Кроме того, создание многорежимной ДУ путем сочетания
различных двигателей приводит к ухудшению массовых
характеристик двигателя в целом и требует разработки быстродействующих
узлов разделения ступеней двигателя или ракеты.
Известно несколько способов создания многорежимной
однокамерной ДУ.
1. Изменение тяговых характеристик ДУ варьированием
степенью расширения потока в сверхзвуковой части сопла. Эта задача
может быть решена либо
применением дополнительных выдвижных
насадков (для форсирования тяги),
либо отделением сверхзвуковой
части сопла (для дросселирования
тяги); диапазон изменения тяги
двигателя в этом случае
ограничен и величина отношения Pi/Рц
Г находится в пределах от 0,85 до 1,4.
Известны конструктивные раз-
Рис. 7.17 работки по созданию раздвижных
258
Рт-
Рис. 7.18
сопел, позволяющих увеличивать степень расширения сопел и
удельный импульс двигателя. Так, в РДТТ верхней ступени [38] с
диаметром критического сечения сопла 108,5 мм достигнуто изменение
степени расширения с 44,3 (без насадка) до 159,5 (с насадком). При
этом длина сопла возросла с 0,93 м до 1,95 м, а удельный импульс
увеличился с 2850 до ЗОЮ Н/(кг/с). Масса раздвижного насадка
с системой приводов составила 40,6 кг. Угол конусности насадка
в выходном сечении равен 17,2°.
2. Изменение тяговых характеристик ДУ вариацией площади
критического сечения сопла камеры, что с конструктивной точки
зрения целесообразно применять в ДУ со ступенчатым уменьшением
тяги. Возможные схемы камер такого типа показаны на рис. 7.18.
Допустимая глубина дросселирования тяги двигателя, работающего
на одной марке топлива и с постоянной поверхностью горения
заряда, определяется из соотношения
Pi
( Pi \
\Рп I'
где рц — максимально допустимое давление в камере, определяемое
из условия ее прочности; рг — минимально допустимое давление
в камере, определяемое из условия устойчивости горения твердого
топлива.
Поскольку допустимые давления рг и рп ограничены, то
возможная глубина дросселирования тяги не может изменяться в
широких пределах. Возможное значение отношения pilpu зависит, кроме
того, от рода твердого топлива и находится в пределах от 1,3 до 3,0
для схемы двигателя с соплами стартового 1 и маршевого 2 режимов,
показанной на рис. 7.18, а. Применение дополнительных боковых
сопел 3 с заглушками 4 на камере двигателя (рис. 7.18, б),
расположенных под углом а к оси основного сопла, позволяет расширить
диапазон дросселирования тяги ДУ, который можно довести до
Р\1Рц = 10 ... 12 при а = 180°. Однако увеличение глубины
дросселирования тяги ДУ такого типа неизбежно связано со
значительным уменьшением ее удельного импульса и с возможностью
появления неуравновешенной боковой составляющей тяги из-за отклонения
тяги отдельных боковых сопел от расчетного значения.
3. Изменение тяговых характеристик ДУ варьированием
характеристиками заряда твердого топлива, таких как скорость и
поверхность горения твердого топлива. Если площадь критического сече-
17* 259
h+h
ния камеры сохраняет
постоянное значение, то
возможный диапазон
изменения тяги ДУ
можно определить из
соотношения
Pi
Рис. 7.19
(uvS-/RTBae)i
(uvS -/RTZDn'
(7.60)
Как следует из формулы (7.60), наиболее эффективны два пути
решения поставленной задачи. Во-первых, применением зарядов
твердого топлива с различными скоростями газозыделения и и,
во-вторых, применением зарядов из одной марки твердого топлива,
но с переменной поверхностью горения S. Первый способ
целесообразно использовать в двигателях лишь с простой формой
поверхности горения заряда, например, для заряда с торцевой поверхностью
горения, так как в таких зарядах со сложной конфигурацией
поверхности горения возникают большие трудности обеспечения их
надежного соединения друг с другом по поверхности горения. Второй
способ связан с меньшими трудностями при его реализации и
основные задачи при этом сводятся лишь к созданию заряда с
программным изменением поверхности горения. Это возможно при
использовании щелевого заряда или зарядов других типов (рис. 7.19).
На рис. 7.20 представлена конструкция РДТТ (пат. США
№ 4137286), обеспечивающего два режима работы: стартовый и
маршевый. Прочно скрепленный с корпусом 1 заряд состоит из
двух блоков: стартового 3 и маршевого 2. Топливо блока 3 имеет
высокую скорость горения, а топливо блока 2 —низкую. Типичные
характеристики РДТТ: масса стартового заряда 132 кг; время его
горения 5,5 с; масса маршевого заряда 142 кг, время его горения
Рис. 7.20
260
26,4 с. Для стартового режима максимальная тяга 95 кН, для
маршевого 4 кН; давления в камере сгорания соответственно 12,5 МПа и
1,38 МПа. Форма поверхности контакта двух блоков обеспечивает
надежное воспламенение маршевого блока. Температурный диапазон
эксплуатации РДТТ от —40 до +60 °С. Для компенсации
деформации заряда в осевом направлении при изменении температуры
окружающей среды служит слой эластичного материала на переднем и
заднем днищах корпуса камеры сгорания.
Увеличением поверхности горения можно форсировать РДТТ.
Известна (пат. Англия, № 1543044) схема РДТТ с зарядом
торцевого горения (рис. 7.21). Заряд 4 прочно скреплен с корпусом 1
и имеет центральный газовод 2, который заканчивается у сопла 6.
На режиме малой тяги горение заряда происходит по заднему торцу 5.
При необходимости форсирования РДТТ воспламеняют передний
торец 3 и тяга двигателя возрастает.
Применение способа изменения тяги ДУ за счет величины
поверхности горения заряда позволяет варьировать отношением Р\1Рц
в пределах от 1,0 до 4,0, но обладает рядом недостатков, главными
из которых являются: пониженный удельный импульс при работе
в режиме дросселирования, необходимость создания высокопрочной
камеры из условия ее надежной работы на режиме максимальной
тяги, возможность появления длительных переходных процессов
или забросов тяги при смене режимов работы.
4. Изменение тяговых характеристик ДУ путем одновременного
варьирования характеристиками заряда твердого топлива
(например, поверхностью горения) и изменения площади критического
сечения сопла. При этом целесообразно изменение параметров
выбирать таким, чтобы давление в камере на всех режимах работы ДУ
оставалось постоянным. Применение такого варианта многорежимной
ДУ с одной камерой позволяет получить максимально возможный
удельный импульс на всех режимах работы, не требует повышения
прочности камеры и дает возможность запрограммировать
практически любое изменение тяговых ДУ. Узким местом при создании ДУ
такого типа является разработка конструкции сопла с переменным
критическим сечением, обладающей высоким быстродействием,
необходимым для выполнения заданной программы смены режимов
работы с высокой точностью. Возможная конструктивная схема
сопла с переменным критическим сечением показана на рис. 7.22, а, б.
Аналогичная двухпозиционному соплу перенастройка площади
критического сечения может
быть выполнена и у сопла с
центральным телом (см. рис. 7.8, а).
4 5 6
ц
4
W//A
Рис.
7.21
Рис. 7.22
261
Во всех случаях сигнал на перенастройку площади критического
сечения сопла подается от датчика давлений в камере, который
фиксирует начало спада давления в камере при уменьшении
поверхности горения заряда. Недостатком двухпозиционного сопла по
сравнению с соплом с центральным телом является невозможность
плавного регулирования площади критического сечения на
стартовом и маршевом режимах.
7.7. СИСТЕМЫ ТОРМОЖЕНИЯ И ОТСЕЧКИ ТЯГИ
Системы торможения и отсечки тяги ДУ вводятся в
конструкцию для решения следующих задач:
— обеспечения заданной дальности полета ракеты независимо
от величины отклонения основных параметров РДТТ от
номинальных значений (в пределах допуска) и при изменении внешних
условий, влияющих на траекторию полета ракеты;
— обеспечения программного изменения дальности полета
ракеты;
— надежного разделения ступеней ракеты;
— создания ДУ многократного включения;
— аварийного выключения двигателя.
При проведении научно-исследовательских работ системы с
принудительным прекращением работы РДТТ используются для
изучения условий горения заряда твердого топлива и поведения элементов
конструкции камеры сгорания в процессе горения.
К системам торможения и отсечки тяги ДУ кроме общих
(надежность, минимальная масса, простота конструкции и т. п.)
предъявляется ряд дополнительных требований:
— минимальное время срабатывания системы, что позволяет
значительно уменьшить величину и разброс импульса последействия;
— отсутствие продольных и боковых импульсов тяги, которые
могут возникать из-за неодновременного срабатывания отдельных
узлов системы торможения, а также из-за специфических
особенностей способа торможения и отсечки тяги (например, расположение
сопел отсечки на заднем днище может привести к пику тяги);
— возможность выполнения торможения или отсечки тяги ДУ
в любой момент времени на активном участке траектории полета;
— независимость условий работы системы торможения и отсечки
тяги от внешних условий (давления окружающей среды, угла атаки
ракеты);
— отсутствие теплового воздействия системы торможения и
отсечки тяги на полезную нагрузку ракеты.
Все известные системы торможения и отсечки тяги ДУ можно
разделить на две группы:
— системы, не оказывающие влияния на внутрикамерные
процессы в РДТТ (торможение);
— системы, воздействующие на режим работы камеры (отсечка
тяги).
262
Рис. 7.23
К первой группе относятся системы
торможения с помощью раскрывающихся
аэродинамических щитков У (рис. 7.23) или с
применением газодинамических щитков, или со
специальными тормозными двигателями 1 (рис. 7.24),
а также системы, в которых изменение тяги
достигается путем отделения закритической части
сопла / (рис. 7.25) и системы с отделением
двигателей 1 (рис. 7.26), двигатели с поворотными
соплами и различные комбинации указанных
способов (например, одновременное
применение аэродинамических и газодинамических
щитков и т. п.).
Отличительной особенностью рассмотренных способов
торможения является то, что при срабатывании органов торможения
параметры в камере не изменяются и ДУ работает до полного выгорания
заряда.
Анализ способов торможения показывает, что они не отвечают
полностью предъявляемым требованиям. Так, система с
аэродинамическими щитками обладает большой массой, а ее эффективность
существенно зависит от внешних условий. Кроме того, система с
аэродинамическими щитками позволяет лишь уменьшить тягу, создание же
нулевой и обратной тяги невозможно. Применение газодинамических
щитков и отражателей позволяет обеспечить полное обнуление тяги
или получить обратную тягу, но требует высокой теплопрочности
элементов конструкции. Массовые характеристики таких систем
весьма низкие. Использование тормозных двигателей для создания
обратной тяги не имеет принципиальных трудностей, однако такие
системы имеют плохие массовые характеристики. В настоящее время
системы торможения ДУ без воздействия на внутрикамерные
процессы практического применения не имеют.
Во вторую группу систем входят различные способы увеличения
площади критического сечения камеры путем раскрытия
дополнительных отверстий: на сопловой крышке (рис. 7.27, а), на
цилиндрической части (рис. 7.27, б), на переднем днище (рис. 7.27, в).
Раскрытие дополнительных отверстий на камере сгорания
приводит к снижению давления в камере или полному его падению в силу
прекращения горения заряда твердого топлива. Рациональным
расположением дополнительных отверстий на камере можно обеспечить
быстрое обнуление или создание обратной тяги двигателя. Этот спо-
Рис. 7.24
Рис. 7.25
263
Рис. 7.26
соб отсечки тяги ДУ обычно называют отсечкой тяги раскрытием
камеры.
Отличительными особенностями способа отсечки тяги раскрытием
камеры являются: простота конструкции, быстродействие,
возможность создания нулевой и обратной тяги, хорошие массовые
характеристики. К недостаткам этого способа отсечки тяги следует отнести:
возможность возникновения вредных моментов из-за
неодновременного раскрытия дополнительных отверстий, разброса площадей
отверстий в пределах поля допуска, различного влияния набегающего
воздушного потока на работу сопел отсечки при наличии угла атаки
ракеты; конструктивные трудности при применении этого способа в
камерах со скрепленным зарядом и дополнительными отверстиями на
переднем днище камеры; невозможность многократного запуска
двигателя; низкие массовые характеристики на двигателях большой
тяги.
Ко второй группе систем отсечки тяги относятся способы
прекращения горения заряда твердого топлива впрыском жидкости или
твердых частиц в камеру (гашение зарядов). В конструктивной схеме
двигателя, показанной на рис. 7.28, по команде на отсечку тяги
в узле гашения 1 срабатывает пороховой заряд 2 и под высоким
давлением жидкость 3 (гаситель) через форсунки 4 вводится в свободный
объем камеры. Охлаждая таким образом продукты сгорания в
свободном объеме камеры и путем непосредственного ввода капель
жидкости в зону горения топлива, можно добиться гашения заряда. Этот
способ имеет большие преимущества в ДУ многократного действия,
так как при гашении заряда целостность камеры не нарушается и
поэтому возможно повторное воспламенение заряда. К недостаткам
способа отсечки тяги гашением заряда следует отнести
конструктивное усложнение двигателя, появление специальной жидкости на
борту ракеты, рост необходимого запаса жидкости при увеличении
размеров двигателя и количества повторных запусков.
Рис. 7.27
264
Рис. 7.29
Рис. 7.28
В зависимости от требований,
предъявляемых ракетной системой
к РДТТ, возможны следующие
программы изменения тяги после
срабатывания органов торможения:
— мгновенное уменьшение тяги на различную величину АР без
изменения давления в камере (рис. 7.29, /, 2, 3);
— плавное снижение тяги от Р* до 0 путем снижения давления
в камере;
— мгновенное изменение тяги на величину АР с последующим
плавным снижением тяги от величины Р* — АР до 0 (рис. 7.30, а, в)\
если Р* = АР, то тяга двигателя мгновенно обнуляется и остается
равной нулю в период спада давления в камере (рис. 7.30, б);
— ступенчатое уменьшение тяги с предварительным переходом
двигателя на режим устойчивости при давлении в камере ри >
> Pmin- Последующее уменьшение тяги выполняется по одной из
программ (рис. 7.31, а, б, в), рассмотренных выше (см. рис. 7.30).
Программа ступенчатого изменения тяги с реверсом тяги при втором
раскрытии сопел отсечки (рис. 7.31, кривая в) обеспечивает
минимальный импульс последействия.
Режим плавного снижения тяги от Р* до 0 практически может
быть реализован на двигателе с радиальным раскрытием камеры
(см. рис. 7.27) или на двигателе с гашением заряда твердого топлива
(см. рис. 7.28).
Двигатель с раскрытием камеры соплами отсечки,
расположенными на заднем днище (см. рис. 7.27, а) также обеспечивает плавный
спад тяги, однако при быстром открытии сопел отсечки возникает
0)
265
2,0
1,0
At,
*lomc A*tome At
Рис. 7.31
aP
Рис. 7.32
заброс тяги (рис. 7.32). Аналогичный заброс тяги возможен в
двигателях, выполненных по схеме, показанной на рис. 7.27, б.
Тормозные двигатели и устройства обеспечивают мгновенное
уменьшение тяги на величину АР без изменения режима работы
камеры. Время уменьшения тяги на величину АР определяется
скоростью срабатывания тормозного устройства. После срабатывания
тормозного устройства тяга двигателя остается постоянной и равной
Р* — АР. F
Двигатель с раскрытием камеры соплами отсечки,
расположенными на переднем днище (см. рис. 7.27, в) позволяет реализовать
программу мгновенного уменьшения тяги на АР с последующим
плавным ее изменением и программу ступенчатого уменьшения тяги при
применении последовательного раскрытия сопел отсечки.
Двигатели с раскрытием камеры имеют широкое применение,
поэтому рассмотрим подробнее вопрос влияния местоположения
сопел отсечки на камере на программу изменения тяги. Как следует
из предыдущего, возможны три случая расположения сопел отсечки
на камере (см. 7.27). Рассмотрим распределение давлений по
стенкам камеры (рис. 7.33) до раскрытия сопел отсечки на заднем днище
и сразу же после раскрытия их, когда волна разрежения еще не дошла
до переднего днища. Запишем уравнения тяги для обоих случаев,
полагая для простоты, что после раскрытия сопел отсечки камера не
имеет закритической части сопла, т. е. отсечка выполняется сбросом
докритической и закритической частей сопла. Задачу решают в
квазистационарной постановке, полагая, что давление в волне
разрежения снижается от р* до /?'.
Волна разряжения
\u\\m щ
in n i и
а)
Рис. 7.33
266
Уравнение тяги камеры до открытия сопел отсечки
р* = P*F*P + ДРдОКр + АРзакр - pHFi, (7.61)
где АРдокр — сила, возникающая от среднего давления,
действующего на площадь кольцевого элемента переднего днища FK — F£p,
по сравнению со средним давлением, действующим на докритическую
часть сопла той же площади, АРзаКр — сила, действующая на
внутреннюю поверхность закритической части сопла.
Иногда тягу записывают в виде Р* = /Cp/?*F£P — PhFI, где Кр —
коэффициент тяги внутреннего контура камеры и сопла, равный для
реальных РДТТ 1,6 ... 2,0. Тогда
ДРдокр + ДРзакр = (Кр ~ 1)р"«р. (7.62)
Уравнение тяги камеры без закритической части сопла после
открытия сопел отсечки (рис. 7.33, б) при наличии волны разрежения
запишем в виде
р = р* (F*p + iF0TC) + АР^окр - Pvl (FlP + i'Fotc), (7.63)
где F0TC — площадь критического сечения сопла отсечки; i —
количество сопел отсечки.
Составляющая тяги АРД0Кр приближенно может быть записана
в виде
= (FK - F£p - if™) (p* - С//)> (7.64)
где С — коэффициент, учитывающий изменение статического
давления при разгоне газа в предсопловом объеме камеры сгорания, С < 1.
Уравнение (7.64) будет определять тягу двигателя в течение
времени прохождения волны разрежения по камере тв, которое можно
определить по формуле тв = LJa, где LK — длина камеры; а —
скорость звука в неподвижном газе. Обычно тв — величина порядка
Ю-3 с.
После прохождения волны разряжения тягу камеры можно
определять по формуле (7.61), заменяя р* на //, a FKp на F*v + iF0TC.
Для оценки изменения тяги двигателя после открытия сопел
отсечки определяется разность тяг АР = Р — Р* с помощью
соотношений (7.61) и (7.63):
ДР = р*. iF0TC + (АРдокр - АРДокР) - Рн (iFотс + F*p - F*a) - АРзакР
или с учетом соотношений (7.62) и (7.64)
ДР = p*.iF0TC + (FK - F*KP - iF0TC)(p* -C-p')-
- (Kp - l)p*Ftp + рн (Fa - F*KP - iFme). (7.65)
Так как обычно имеют место соотношения FK ^ FJP + iF0TCt
iF0TC = (2 ... 4) F£p; F*JFip - 4 ... 12, то АР > 0. Третье
слагаемое правой части уравнения (7.65) всегда меньше первого слагаемого
и поэтому не влияет на знак АР. Из уравнения (7.65) видно, что
величина АР определяется суммарной площадью сопел отсечки и
интенсивностью волны разрежения, которая в свою очередь зависит от
суммарной площади сопел отсечки и скорости открытия этих сопел.
267
Из уравнения (7.65) видно, что АР > 0. Таким образом, при быстром
открытии сопел отсечки, расположенных на заднем днище камеры,
или при сбросе сопла возникает заброс тяги на величину ДР, который
действует в течение времени тв. Как только волна разрежения
достигает переднего днища, заброс тяги исчезает и тяга двигателя
начинает падать по мере спада давления в камере. На рис. 7.32 показано
изменение тяги двигателя при быстром раскрытии отверстий отсечки,
расположенных на заднем днище.
Заброс тяги возможен не только при расположении сопел отсечки
на заднем днище. Рассмотрим случай их радиального расположения.
После открытия радиальных отверстий от места, где расположены
сопла отсечки, к переднему и заднему днищам начинают двигаться
со скоростью звука волны разрежения. Известно, что форма фронта
волны разрежения зависит от конфигурации отверстий и их
расположения на корпусе камеры, однако в первом приближении можно
принять, что волны разрежения плоские и перпендикулярны оси
камеры. Если отверстия отсечки расположены ближе к заднему днищу,
то волна разрежения быстрее достигает заднего днища и возникнут
условия для появления заброса тяги на величину
AP = (p*-Cp')(FA-F*Kp).
Если отверстия отсечки расположены в средней части камеры, то
волны разрежения одновременно достигают переднего и заднего
днищ и поэтому АР = 0. Если сопла отсечки расположены ближе
к переднему днищу или на переднем днище (см. рис. 7.27, в), то
заброс тяги невозможен. В этом случае наблюдается быстрое
уменьшение тяги на величину АР.
При радиальном расположении отверстий отсечки величина
спада тяги определяется формулой АР = (// — С-р*) (FK — F£p).
Так как pf < С*р, то АР < 0.
При расположении сопел отсечки на переднем днище величина АР
определяется следующим образом.
Тяга двигателя после раскрытия сопел отсечки на переднем днище
запишется в виде
Р = А^закр - р"С (FK - F*p) + С-/7* (FK - iFOTC) - рн (Fa - iFmc).
(7.66)
Тяга двигателя до раскрытия сопел отсечки определяется по
формуле (7.61) с учетом, что АРД0Кр = (1 — С) р* (FK — FJP). Тогда,
вычитая из выражения (7.66) соотношение (7.61), получим
АР = -p*FK + С-р* (FK - IF™) + PhIFotc- ' (7.67)
Величиной, определяющей знак правой части уравнения (7.67)
является произведение p*FK, а так как р* > р и FK > FK — /F0TC,
то АР < 0.
При проектировании двигателей необходимо учитывать
возможности появления забросов тяги, так как они могут оказать
отрицательное влияние на работу систем управления и на расстыковку
ступеней ракеты. Если заброс тяги недопустим по условиям эксплуата-
268
ции двигателя, то узлы отсечки тяги необходимо располагать на
переднем днище камеры.
Программы изменения тяги РДТТ после открытия сопел отсечки
рассмотрены без учета упругих колебаний стенки камеры при
изменении растягивающих сил, действующих на корпус камеры. Эти
колебания могут оказать существенное влияние на характер
изменения тяги при отсечке, так как скорость распространения
возмущений в твердом теле значительно больше скорости распространения
возмущений в газе.
Рассмотрим камеру, отсечка тяги которой производится
отделением сопла или открытием отверстия на заднем днище площадью
iForci что аналогично открытию сопел отсечки, расположенных на
заднем днище. В анализе принимаем, что давление в камере остается
неизменным по крайней мере в течение одного периода колебаний
стенки камеры.
До отделения сопла растягивающая сила N* (рис. 7.34) в стенке
камеры определяется соотношением N* =* /?*FK — KpP*FkP.
После отделения сопла и открытия сопел отсечки растягивающая
сила N в стенке камеры определяется соотношением
N = p*FK - КотсР* (iF0TC + FJP).
Таким образом, изменение силы растяжения стенок камеры будет
равно
AN = n* -N = [Коте («Р + iFoxc) - KpF*kp) p\ (7.68)
Изменение силы растяжения стенок камеры равно изменению
тяги при отделении сопла, т. е. ДР = AN. Изменение
растягивающей силы получено в предположении, что давление у заднего днища
равно р*. Однако открытие сопел отсечки приведет к падению
давления у заднего днища, что вызовет еще большее изменение
растягивающих сил, определяемое по формуле (7.68).
Если стенки камеры представляют собой демпфер, то изменение
тяги двигателя на величину ДР будет происходить плавно (рис. 7.35,
кривая У); если стенки камеры не демпфированы, то процесс
изменения растягивающей силы в стенке камеры будет носить
колебательный характер (рис. 7.35, кривая 2). Обычно при построении кривой
изменения тяги по времени принимают, что корпус камеры обладает
высокими демпфирующими
свойствами и переходные процессы измене- Р
ния тяги на величину ДР завер-
'( • 1 Д
j 1 1 1
Ум,
ни
Ititl "
Рис. 7.34
Рис. 7.35
269
шаются за время порядка
10~3 с, а изменение тяги в
этом интервале времени
носит линейный характер (см.
рис. 7.30).
В РДТТ используются
узлы отсечки тяги взрывного
действия, время срабатыва-
Рис. 7.36 ния которых не превышает
0,002 ... 0,003 с.
На рис. 7.36, а, б, в показаны конструкции [18] узлов отсечки
тяги взрывного действия. Все узлы отличаются друг от друга лишь
конструктивным решением. Принцип их действия одинаков: по
команде на отсечку тяги подрывается детонатор 5, расположенный
около пирошнура /. Срабатывание пирошнура нарушает целостность
горловины 3 камеры по ослабленному сечению крышки 2.
Давлением газов в камере отбрасывается часть крышки и
теплоизоляция 4.
В узле отсечки тяги, показанном на рис. 7.36, б, стыковка
крышки 2 с горловиной 3 камеры выполнена с помощью сварки. Из
условий сборки кольцо 6 — разрезное и состоит из двух полуколец.
Фиксация полуколец на крышке обеспечивается шестью винтами 7.
Возможно конструктивное решение узла отсечки тяги„ показанное
на рис. 7.36, в, где полукольца заменены кольцом 8.
Для обеспечения одновременного выхода сопел отсечки тяги на
режим можно использовать конструкцию блока отсечки [18],
показанную на рис. 7.37. По команде на отсечку тяги разрушаются два
пироболта <3, освобождая полукольца 2 ~и опорный диск 1. Силой
давления газов поршень 7 перемещается в левое крайнее положение
и открывает доступ газов из камеры 6 в промежуточную камеру 5.
Истечение газов из сопел 4 начинается одновременно. Существенным
недостатком этой конструкции являются большая масса и
повышенное время срабатывания по сравнению с узлами отсечки,
рассмотренными ранее.
При расположении узла отсечки тяги на боковой поверхности
камеры можно применять конструкцию, показанную на рис. 7.38.
270
Рис. 7.37
Рис. 7.38
Для уменьшения ударных нагрузок при отсечке тяги в РДТТ
применяют раскрытие камер за счет отхода основного сопла от
камеры по специальным направляющим. Так, при испытаниях РДТТ
тягой 120 кН с давлением в камере 4,8 МПа отсечка тяги
выполнялась подрывом девяти разрывных болтов, крепящих кольцо с соплом
к корпусу камеры. После этого сопло по 27 направляющим болтам
длиной 300 мм отбрасывалось от камеры со скоростью 27 м/с. Через
образовавшийся кольцевой зазор камера опорожнялась за 0,015 с,
а горение заряда прекращалось [41]. Аналогичная система отсечки
тяги РДТТ испытана на верхних ступенях межконтинентальной
баллистической ракеты [39]. При срабатывании системы отсечки тяги
на камере открывались окна и продукты сгорания истекали почти
в радиальном направлении. Испытания проведены при скорости
перемещения соплового блока, равной 24 м/с. Полное время
срабатывания узла открытия камеры и спада давления в ней не превышало
0,17 с. Система отсечки тяги имела девять пироболтов диаметром 19 мм
и 27 направляющих болтов диаметром 12,7 мм. Система отсечки
обеспечивала допустимые моменты импульсов в плоскостях тангажа
и рыскания, вызванные действием системы отсечки, менее 1,6 кНсмс, а
в плоскости крена — менее 0,56 кНсмс. При срабатывании системы
отсечки тяги отсутствовали осколки, летящие вперед (в сторону
полезной нагрузки). Конструктивная схема (патент США, № 3999379)
системы отсечки тяги, аналогичная рассмотренной выше, показана
на рис. 7.39. Сопловой блок 3 крепится к камере 1 тремя пироболта-
ми 4 диаметром 12,7 мм. Для удержания соплового блока после
срабатывания пироболтов
используются шесть болтов 2
диаметром 6,75 мм и длиной 203 мм,
изготовленных из стали с
пределом текучести 1120 МПа. Тяга
двигателя составляла 5 кН при
давлении в камере 7 МПа.
Анализ систем торможения и
отсечки тяги ДУ показывает, что
практическое применение, кроме
различных способов увеличения
площади критического сечения Рис. 7.39
271
камеры, находит и отсечка тяги гашением зарядов. Внимание
исследователей к вопросу останова двигателя впрыском жидкости
или мелкодисперсного порошка в камеру объясняется
возможностью создания РДТТ с многократным включением. Результаты
исследований по гашению зарядов твердого топлива путем впрыска
жидкости в камеру позволяют предполагать существование двух
основных процессов гашения:
во-первых, мельчайшие частицы жидкости во взвешенном
состоянии испаряются и вызывают охлаждение, в результате которого
происходит быстрое понижение температуры газообразных
продуктов сгорания. Охлаждение сопровождается резким падением
давления, которое может привести к «мгновенному» прекращению
горения так же, как и при внезапном открытии сопел отсечки на камере;
во-вторых, впрыскиваемая жидкость попадает на поверхность
твердого топлива и гасит заряд, поглощая большое количество тепла
непосредственно из твердой фазы. В этом случае процесс гашения
путем впрыска жидкости можно рассматривать как процесс,
противоположный воспламенению.
Очевидно, эти два процесса действуют одновременно. Чтобы
оценить относительную роль этих двух процессов, необходимо
решить уравнения внутренней баллистики, описывающие изменения
давления и температуры газов в камере на нестационарном режиме.
Теоретические расчеты показывают, что одно только охлаждение
испарением обеспечивает скорость падения давления, достаточную
для гашения топлив с малым значением критерия затухания
а—ггг-\ < 100 с"1). Однако на практике удавалось впрыском
р' ctx j кр /
жидкости гасить заряды из топлива с добавками алюминия, имеющие
—=- -г- до 200 с"1. Это означает, что гашение таких зарядов
L P* dx J кр г
осуществляется как за счет охлаждения, так и за счет прекращения
горения на поверхности заряда вследствие непосредственного
контакта с впрыскиваемой жидкостью.
При выборе жидкости для использования в качестве гасителя
необходимо учитывать требования, обусловленные механизмом
гашения зарядов твердого топлива. Основные требования к гасителям
сводятся к следующему:
— гаситель должен обладать высокой разностью энтальпий до
и после впрыска в камеру;
— гаситель должен обладать возможно меньшим поверхностным
натяжением, чтобы обеспечить необходимую тонкость распыления
гасителя при впрыске;
— гаситель должен быть инертным или оказывать ингибирую-
щее действие на реакции горения продуктов разложения твердого
топлива;
— гаситель должен удовлетворять эксплуатационным
требованиям, предъявляемым к РДТТ.
С учетом указанных требований в качестве гасителей в настоящее
время используют воду или водные растворы солей щелочных ме-
272
Рис. 7.40
Рис. 7.41
таллов (NaCl, MgCl2) различной концентрации. В экспериментах по
гашению применялись бромистый метил, четыреххлористый углерод,
бромтрифторметан и бромхлорметан. Известны рекомендации по
использованию в качестве гасителей мелкодисперсных порошков
хлористого калия, бромистого натрия и галоидов щелочных металлов.
Конструктивно [43] узел гашения состоит из емкости для
гасителя и узла его подачи. Одно из возможных решений узла гашения на
экспериментальном двигателе показано на рис. 7.40. Узел гашения
срабатывает после одновременной подачи сигнала к детонаторам 1
и 8. Электродетонатор 8 подрывает взрывной заряд 6, который
разрушает крышки 5 и 7. Одновременно электродетонатор /
воспламеняет пороховой заряд 2, после чего давление в полости заряда 2
резко возрастает, разрушает проставку 3 и выбрасывает в камеру
гаситель 4.
На рис. 7.41 показана конструкция [43] узла гашения с твердым
гасителем. Отличительной особенностью этого узла гашения является
наличие одного электродетонатора 1 и проставки 4 с отверстиями.
Срабатывание узла гашения от одного детонатора обеспечивает
одновременность действия всех элементов узла. После подрыва
электродетонатора срабатывает воспламенитель 2 и пороховой заряд 3.
Газы через отверстия в проставке 4 поступают в полость с гасителем 5.
Одновременно пирошнур 7 подрывает заряд 5, что обеспечивает
разрушение крышки 6 и выброс в свободный объем камеры сгорания
гасителя. Газы, поступающие через отверстия в проставке 4 в полость
с гасителем 5, обеспечивают хорошее распыление гасителя.
ГЛАВА 8
ДИНАМИКА ТВЕРДОТОПЛИВНЫХ
ДВИГАТЕЛЬНЫХ УСТАНОВОК
Динамические процессы характерны для РДТТ в
условиях смены режимов работы двигателя, а также в условиях запуска
и останова двигателя. В основу настоящего рассмотрения
динамических процессов РДТТ положено воздействие на двигатель изменения
18
А. И. Бабкин и др.
273
площади критического сечения сопла как при малых отклонениях
регулирующего параметра, так и при его значительных изменениях.
В этой главе подробно рассмотрены динамические процессы,
протекающие в РДТТ при его останове, а также в условиях смены режимов
работы двигателя по командам от систем управления и
регулирования. Учитывая, что расчет переходных процессов изменения
давления в камере при запуске РДТТ подробно рассмотрен в работе [6],
этот вопрос в данной книге не анализируется.
8.1. РЕГУЛИРОВАНИЕ ДАВЛЕНИЯ В КАМЕРЕ
ИЗМЕНЕНИЕМ ПЛОЩАДИ КРИТИЧЕСКОГО СЕЧЕНИЯ
СОПЛА
С динамической точки зрения камера РДТТ представляет
собой емкость переменного объема с газоприходом тг от сгорающего
твердого топлива и расходом газа через сопло тш с. Следуя закону
сохранения массы, для камеры РДТТ можно записать уравнение
dmVt Jdx = mv — ти% с, (8.1)
где тк. с — масса газов в свободном объеме камеры VCB. Величины тг
и тп. с, входящие в формулу (8.1), определяются по зависимостям
(7.6) и (7.7), а величина гак# c вычисляется по формуле
Полагая, что за время переходного процесса в камере
параметры VCB, S и RT не изменяются, уравнение (8.1) с учетом
соотношений (7.6), (7.7) и (8.2) можно представить в виде
. (8.3)
rt d% ~ *"*"-" YW '
Дальнейшее решение уравнения (8.3) зависит от вида зависимости
скорости горения твердого топлива от давления в камере. В
простейшем случае, когда скорость горения линейно зависит от
давления и при малом изменении относительной площади критического
сечения (Д/^р < 0,1), уравнение (8.3) можно привести к
следующему виду, полагая при этом р = р* + Д/?,
(8.4)
где Тю = ^ г — постоянная времени камеры;
у Г В (п) ф^ 1
В (п) q>2F*
лр = р 1— = коэффициент усиления камеры;
/Я7Ч— 1L ^ -
у RT
274
Рис. 8.1
Рис. 8.2
bx — постоянная величина в линеаризованном законе горения
твердого топлива U = а + Ьхр.
Дифференциальное уравнение (8.4) можно использовать и при
степенном законе горения твердого топлива, предварительно
линеаризировав закон горения в окрестности номинального режима
работы двигателя по давлению в камере. При этом предполагаемое
отклонение давления в камере не должно превышать 10 % от
номинального значения.
Решив дифференциальное уравнение (8.4), можно найти
аналитическую зависимость для переходного процесса изменения давления
в камере при мгновенном изменении площади критического сечения
в виде соотношения Ар = Кр AF0 (l — е~х/тр) или р = 1 +
Ш рис. 8.1 показан характер изменения давления в камере при
мгновенном (т = 0) увеличении площади критического сечения сопла
на величину AF0 (кривая 2 соответствует работе двигателя на режиме
после запуска, кривая 1 — на режиме перед остановом двигателя).
Рост площади критического сечения сопла приводит к уменьшению
давления в камере, которое после завершения переходного процесса
достигает значения 1 + Кр AF0. Теоретически это значение
давления в камере достигается при т -*■ оо, однако уже при т = (3 ...5) Тр
'Ар = (0,95 ... 0,99) Кр AF0- Обычно время переходного процесса
принимается равным тпер = ЗТр. Рост значения постоянной времени
приводит к увеличению длительности переходного процесса. Для
современных РДТТ начальные значения Грнач составляют 0,002 ...
0,05 с. В процессе работы двигателя значение Тр возрастает по мере
увеличения свободного объема камеры из-за выгорания твердого
топлива (рис. 8.2).
Используя соотношение Ьх = и'чр*^~~1\ а также равенство
m* c = fh*9 можно выражения для постоянной времени и
коэффициента усиления камеры, входящие в формулу (8.4), привести к виду
Zcb „• (l-v). (ge5)
ТР RTpTu'S(\—v)
= —1/(1 — V).
18*
(8.6)
275
Из соотношений (8.5) и (8.6) следует,
что параметры Тр и Кр зависят от
показателя степени в законе
горения твердого топлива, увеличиваясь
по мере его роста. Это объясняет
малую эффективность регулирования
давления в камере путем изменения
площади критического сечения у
двигателей, работающих на смесевых
топливах. Значение коэффициента
усиления при переходе от топлив с
v = 0,8 к топливам с v = 0,2
снижается примерно в 4 раза. Рост
показателя степени в законе горения топлива приводит к
увеличению постоянной времени камеры, а следовательно, и к росту
времени переходных процессов.
В реальных регуляторах трудно обеспечить мгновенное
изменение площади критического сечения сопла на величину AF0. В
действительности это изменение будет носить апериодический или
колебательный характер. Для апериодического закона изменения
площади критического сечения вида
Рис. 8.3
(8.7)
где TF — постоянная времени сопла с переменной FKp, решение
уравнения (8.4) в действительном изображении получено в
следующем виде:
или
= l+KpAF0 1 + ■
Tf-T,
(8.8)
На рис. 8.3 для сравнения показано изменение давления в камере
РДТТ при мгновенном увеличении площади критического сечения
сопла (кривая 2) и для апериодического закона увеличения площади
(кривая 1). В расчетах принято TF = 0,03 с, Тр = 0,01 с.
Когда площадь критического сечения сопла изменяется по
колебательному закону, характеризуемому постоянными времени T1F
и T2F при T\f — 4Г2|г < 0, выражение для изменения площади
критического сечения во времени можно записать в виде
ДЛф =
l-e
■ т/г (cosсот + -=— sin сот
(8.9)
где
276
т = 2TlF/T1P; со =
- T\Fl{2TlF).
Решение уравнения (8.4) имеет вид
(8.10)
TlpTj tI (ТпТ
где Ф = arctg 2F p - arctg 2F l ' J
arcg J2
J IF1 p~ J 2F J p1 IF
Tp — T — со2ГрГ2 _ со (Г - 2Гр)
Тогда
X
V\FTp ~ Tif) + TpT2F<u2
[t-x/Ti> e"T/r , 11
X i/ A2 -\- B2 sin (сот -i- ф) 11.
t2 со v I
L 2F JJ
8.2. РЕГУЛИРОВАНИЕ ТЯГИ ИЗМЕНЕНИЕМ ПЛОЩАДИ
КРИТИЧЕСКОГО СЕЧЕНИЯ СОПЛА
Выражение для определения тяги двигателя удобно
записать через коэффициент тяги Кр в виде соотношения Р = /Cp/?FKp.
Поскольку ожидаемые изменения площади критического сечения
сопла невелики и находятся в пределах до 10 % от его номинального
значения, можно в дальнейшем считать, что коэффициент тяги изменяется
незначительно, и принять КР -- const. С учетом этого допущения
уравнение тяги в безразмерном и линеаризованном виде можно
записать следующим образом:
Д^" = AFKP + Ар + AFkP Ар. (8.11)
При мгновенном изменении площади критического сечения сопла
на величину AF0 уравнение (8.11) с учетом соотношения
можно записать в виде
АР = AF0 + (1 + AFo) (1 - е"т/7р) Кр AF0
или с точностью до малых величин первого порядка —
АР = AF0 + Кр AFo (1 - е"т/гр). (8.12)
Анализ соотношения (8.12) показывает, что мгновенное
увеличение площади критического сечения сопла сопровождается мгновенным
277
Рис. 8.4
ростом тяги двигателя, так что
АР = AF0, после чего наступает
режим плавного спада тяги из-
за уменьшения давления в камере.
Переходные процессы изменения
давления в камере и тяги РДТТ
при мгновенном увеличении
площади критического сечения сопла
показаны на рис. 8.4.
Для определения времени
действия заброса тяги т3 двигателя
необходимо решить уравнение
(8.12) в предположении АР = 0.
Тогда Afо + КР Щ (1 —е~х*/тр)= 0, откуда т3 = Tpln { *я^р .
Далее, учитывая выражение (8.6), можно получить окончательное
соотношение для определения т3 в виде
т3 = Tpln(lh). (8.13)
Из уравнения (8.13) видно, что время действия заброса тяги
двигателя зависит от постоянной времени камеры и свойств твердого
топлива через показатель степени в законе горения. Для камер с
одинаковыми постоянными времени значение т3 будет больше у камеры,
работающей на смесевом топливе. Характерные значения времени
действия заброса тяги составляют 0,05 ... 0,01 с и существенно
зависят от быстродействия механизма изменения площади
критического сечения сопла. Поскольку в реальной конструкции скорость
изменения площади критического сечения имеет конечное значение,
то теоретическое изменение тяги двигателя, приведенное на рис. 8.4,
практически недостижимо. Реальное изменение тяги камеры
сгорания с быстродействующим регулятором показано на рис. 8.4
пунктирной линией.
Из уравнения (8.12) видно, что коэффициент усиления РДТТ
/<д при регулировании тяги изменением площади критического
сечения сопла определяется соотношением
Кп = 1 + КР. (8.14)
Соотношение (8.14) можно записать в виде
Кд = —v/(l -v).
(8.15)
Анализ формулы (8.15) показывает, что коэффициент усиления /Сд
зависит только от рода твердого топлива. Эффективность
регулирования тяги двигателя изменением площади критического сечения
сопла снижается по мере уменьшения показателя в законе горения
твердого топлива. Уменьшение значения v от 0,8 до 0,2 снижает
коэффициент усиления тяги в 16 раз. Поэтому целесообразно регулировать
тягу РДТТ воздействием на площадь критического сечения сопла
лишь при использовании твердых топлив cv^ 0,4.
278
При изменении площади критического сечения сопла по
апериодическому закону (8.7) уравнение для расчета переходного процесса
по тяге РДТТ можно записать в виде
ДЯ = AFo (1 - t-x'Tp) + Kp AFo
(8.16)
Соотношение (8.16) получено подстановкой в формулу (8.12)
зависимостей (8.7) и (8.8).
Если площадь критического сечения сопла изменяется по
колебательному закону (8.9), уравнение для расчета переходного процесса
изменения тяги РДТТ можно записать в виде
АР = Af о [ 1 — е"т/7Р (cos сот + -у- sin сот) ] 4-
(т т
V IF1 p —
-i_^2 + fi2sin(coT + cp)
(8.17)
Формула (8.17) получена подстановкой в уравнение (8.12)
соотношений (8.9) и (8.10).
8.3. ПЕРЕХОДНЫЕ ПРОЦЕССЫ С УЧЕТОМ НЕЛИНЕЙНОСТИ
ЗАКОНА ГОРЕНИЯ ТВЕРДОГО ТОПЛИВА
Все рассмотренные выше уравнения переходных процессов
в РДТТ получены для линейного закона горения твердого топлива
и справедливы при малых отклонениях параметров двигателя от
номинальных значений. Однако при переходе с одного режима тяги на
другой в двухрежимном двигателе, параметры двигателя изменяются
в значительных пределах и поэтому возможность использования
полученных ранее уравнений переходных процессов требует
дополнительных обоснований.
Рассмотрим решение основного динамического уравнения РДТТ
(8.1) при степенном законе горения твердого топлива (7.1),
по-прежнему полагая Усв = const, S = const и RT = const. Тогда
v Ип В (п) tyoFxtnP
Zctl _|L = pTSu'pv ZL- p (8.18)
Уравнение (8.18) представляет собой дифференциальное уравнение
Бернулли, которое путем преобразования искомой функции
приводится к линейному уравнению. Для этого разделим уравнение (8.18)
на pv, введем новую переменную z = pi~v и с учетом dz = (1 —
— v) p~v dp получим
279
или ^ + ^-B(n)^FKp(l-v)z = -^-PTSu'(l-v). (8.19)
Уравнение (8.19) можно записать в следующем виде:
™ 4- -f" (l _ V) v ;_ *p z - pTSu' = 0. (8.20)
di Уев V ; [ //?Г KT J V ;
Вводим новую переменную у= ^-Kp г — pTSu', откуда
*-dz. (8.21)
Тогда уравнение (8.20) с учетом соотношений (8.21) можно
представить в виде
dy (\-v)RTB(n)cp2FKp
— у = U. (o.zz)
Разделяя переменные в уравнении (8.22), получаем
у Усв
Интегрируя в пределах от т = 0 до т, получаем
(l-v) /^Г^ (п) Ф2РКр
Делая обратную замену переменных, находим уравнение
переходного процесса в виде соотношения
(l-v) Y2
т
(8.23)
(n)v2F
*l-v nl-v т
Если уравнение (8.23) решить для линейного закона горения
твердого топлива, то можно получить соотношение для расчета
изменения давления в камере в виде
\В (л) Ф2РКр
RT
7т
?~р = е усв . (8.24)
Р* — Рнач V ;
Сравнение решений уравнений (8.23) и (8.24) при одних и тех же
исходных данных показывает, что учет нелинейности закона горения
твердого топлива незначительно сказывается на характере
переходного процесса. Формулы (8.23) и (8.24) можно применять для
расчета переходного процесса по давлению, если на камеру оказываются
воздействия по поверхности горения твердого топлива, по площади
критического сечения сопла или по свойствам твердого топлива.
В уравнениях (8.23) и (8.24) рнач равно давлению в камере в момент
280
времени т = 0, т. е. до введения возмущения, например, по
изменению площади поверхности горения заряда. Давление р* —
конечное давление, которое должно установиться в камере после
завершения переходного процесса. Оно рассчитывается по формуле (7.9) при
5 = SHa4 + AS, где SHa4 — площадь поверхности горения заряда
до начала переходного процесса; AS — мгновенное изменение
площади поверхности горения заряда в момент времени т = 0.
Уравнения (8.23) и (8.24) справедливы для расчета переходных
процессов в камере РДТТ при условии, что температура и состав
продуктов сгорания, а также свободный объем камеры за время
переходного процесса не изменяются. Кроме того, при выводе указанных
уравнений принимается, что инерционность процессов в зоне
горения топлива мала, а возмущения, действующие на процессы в камере,
имеют конечное значение и вводятся мгновенно в момент времени
т = 0.
Не все из указанных допущений выполняются в полной мере,
однако учет переменности хотя бы одного из рассматриваемых
параметров приводит к значительному усложнению дифференциальных
уравнений, что затрудняет получение аналитических решений при
исследовании переходных процессов. В этих случаях целесообразно
прибегать к решениям задачи с помощью ЭВМ. Исходные уравнения
для решения на ЭВМ получаются довольно просто. Так, для учета
переменности свободного объема камеры уравнение сохранения
массы в камере (8.1) при линейном или степенном законах скорости
горения можно записать в виде системы уравнений
Р dVCB , Кеж. dp = р8и В(
RT dx ' RT dx ~ г?"" yrqj. r>
dVCB/dT = Su.
При линейном законе скорости горения система уравнений (8.25)
дополняется уравнением и = а + Ьгр, а при степенном законе
скорости горения — уравнением и = h'/?v.
8.4. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ ОТКРЫТИИ
СОПЕЛ ОТСЕЧКИ ТЯГИ
После открытия отверстий отсечки тяги принципиально
возможны три режима спада давления в камере: при мгновенном
гашении заряда; при плавном гашении заряда; при переходе двигателя
на режим пониженного давления в камере.
Возникновение того или иного режима спада давления в камере
зависит от площади отверстий отсечки, скорости открытия
отверстий, свободного объема камеры к моменту отсечки, состава твердого
топлива и геометрии заряда. Возникновение режима мгновенного
затухания заряда определяется критерием —*"j- > который
зависит от площади отверстий и свободного объема камеры к моменту
отсечки и характеризует собой скорость спада давлений в камере.
281
Критерий —j- -j- представляет собой отношение секундного
расхода газов через сопла отсечки к массе газов в свободном объеме
камеры и определяется по формуле
dp-] __В (п) ф2 отс^отсР* / Р*Усв _ В (п) ф2 отс^ртс VRf ^9fi.
где ф2Отс — коэффициент расхода отверстий отсечки; i —число
отверстий отсечки; FO1C — площадь критического сечения одного
отверстия отсечки; р* — давление в камере до открытия сопел отсечки.
Формулу (8.26) можно получить, если рассмотреть замкнутый
объем FCb, заполненный газом в количестве тк. с с давлением р*.
Для этого объема справедливо соотношение
/?*Ксв = m*.cRT. (8.27)
В дифференциальной форме уравнение (8.27) при условии, что
параметры 1/Св и RT не зависят от в/бремени, можно записать в виде
*£ ^ (8.28)
Преобразуем
1 dp
р* dx
dx
выражение
RT dmK.
P*Vcb dx
CB
(8
c
— i\i
.28)
или
dx
1
p*
dp
dx
/?zK, c dx
До раскрытия сопел отсечки камеру можно рассматривать как
замкнутый объем, так как газовыделение равно расходу газов через
сопло. И тогда, принимая, что в момент раскрытия сопел отсечки
1 dp I __ m0TC
dx
= m0TC, получаем
p* dx I mK.
где m0TC — секундный расход газов через сопла отсечки.
Если критерий удовлетворяет условию
1 dp
р* dx
dp_
dx
кр
>
(8.29)
то в камере происходит мгновенное гашение заряда. Критерий
затухания Г — -^ определяется экспериментально для каждой
марки топлива. Исследования гашения зарядов, изготовленных из бал-
листитных топлив, показали, что критерий затухания составляет
10 ... 15 с"1, а для смесевых топлив — 120 ... 180 с1.
Результаты опытов по гашению смесевого топлива на основе
перхлората аммония и сополимера бутадиена с добавками алюминия
(сополимер бутадиена 18,8 %, перхлорат аммония 72,0 %,
алюминий 9 %, окись магния 0,2 %) показали, что яркость пламени при
прохождении волны разрежения уменьшается, а затем вновь
восстанавливается (за время около 0,035 с), если не достигнуто значение
критерия затухания (рис. 8.5, кривая 1). Если выполняется условие
(8.29), то горение топлива прекращается за 0,0055 с (кривая 2).
282
%
1
\
1
1
J
/
/
г
г
О 0,010,02 0,03 0,04 0,05
Рис. 8.5
'1 dPL
р* dr'Kp\
180
160
НО
120
100
2,6 4,2 5,6 7,0 д,4Р*МПй
Рис. 8.6
Необходимо понимать, что при высоких давлениях окружающей
среды практически возможно повторное воспламенение заряда и его
аномальное догорание, однако время, необходимое для повторного
воспламенения заряда, значительно больше 0,035 с и составляет
величину порядка 1 ... 5 с. Опытами установлено, что критерий
затухания зависит от давления в камере (рис. 8.6), увеличиваясь по
мере его роста.
Механизм затухания с точки зрения теории горения баллиститных
топлив можно объяснить следующим образом: развитие
экзотермических реакций в парогазодымовой зоне в значительной степени
зависит от давления в камере. В конденсированной фазе (твердое
топливо) при экзотермических реакциях выделяется около 80 ... 90 %
тепла, необходимого для саморазложения топлива, а остальные
10 ... 20 % тепла, необходимого для разложения конденсированной
фазы, поступают из парогазодымовой зоны. В условиях
стационарного процесса горения устанавливается равенство между теплопри-
ходом в конденсированную фазу из парогазодымовой зоны,
выделением тепла при экзотермических реакциях и отводом тепла в массу
топлива. При падении давления в камере парогазодымовая зона
расширяется с уменьшением температуры зоны, что приводит к
уменьшению теплового потока в конденсированную фазу.
Конденсированная фаза стремится перестроиться в соответствии с новыми уело*
виями горения, но в силу инерционности ее тепловой баланс
нарушается. В некоторый момент в конденсированной фазе запас тепла
окажется меньше, чем необходимо для саморазложения, и
произойдет затухание. Если спад давления достаточно медленный, тогда
температура в конденсированной фазе будет соответствовать
изменению теплового потока из парогазодымовой зоны (т. е. за
изменением давления) и затухания не произойдет, а лишь уменьшится
скорость горения топлива.
Если условие (8.29) не выполняется, то возможны два режима
работы камеры: спад давления в камере при плавном гашении заряда
или переход двигателя на режим пониженного давления в камере.
Для установления, в каком именно режиме будет работать камера,
необходимо определить возможное давление в камере на стационар-
283
ном режиме при открытых отсечных отверстиях ротс по формуле
1
_ u'pTS /RT
Роте —
Если давление /?отс окажется меньше нижнего предела
устойчивого горения данной марки топлива /?mln, то двигатель будет работать
при режиме плавного гашения заряда. Если p0JC > /?min, то гашения
заряда не происходит и двигатель будет работать при давлении в
камере, равном /?Отс» до полного выгорания заряда. На практике в
режиме плавного гашения заряда при давлении в камере меньше рт{п
заряд не всегда гаснет полностью, а переходит на режим аномального
горения.
После открытия сопел отсечки в двигателе протекает процесс
распространения и многократного отражения волны разрежения, в
результате которого происходит изменение давления и температуры
в камере. Проведенные исследования показывают, что процесс
падения давления в РДТТ в период работы сопел отсечки с достаточной
точностью рассчитывается в квазистационарном приближении.
Изменение давления и температуры продуктов сгорания в камере
после открытия сопел отсечки в квазистационарной постановке
задачи определяется системой уравнений сохранения массы (8.30) и
энергии (8.31):
dmK. Jdx = mP - (mn. c + m0TC); (8.30)
d (mK# c£n. c)/dx = thrETt исх — (mn. c -f ^отс) Еп. с —
- RT (mn. c + m0TC) - dQ/dx, (8.31)
где Em c — полная внутренняя энергия 1 кг продуктов сгорания;
ЕТ. исх — полная энергия 1 кг исходного топлива; RT (mn. c +
+ ^отс) — потери энергии на работу расширения продуктов
сгорания, связанного с преодолением внешнего сопротивления; dQ/dx —
секундное изменение тепловых потерь в камере.
Уравнения (8.30) и (8.31) получены при следующих допущениях.
1. Температура газов постоянная по объему камеры.
2. Свойства продуктов сгорания постоянны и подчиняются
законам идеального газа.
3. Химические реакции протекают в тонком слое,
примыкающем к топливу.
4. Скорость горения твердого топлива на нестационарном режиме
определяется по законам, справедливым для стационарного режима
горения. Необходимо отметить, что опыты по определению скорости
горения при спаде давления в камере показали увеличение скорости
газовыделения по сравнению с газовыделением на стационарном
режиме. Скорость газовыделения тем больше, чем больше скорость
спада давления в камере. На рис. 8.7 показано относительное
увеличение скорости горения в зависимости от площади отверстий отсечки.
Видно, что нестационарная скорость газовыделения зависит от
скорости спада давления в камере. При отношении суммарной площади
284
0,7 1fi 2,1 Ц 3,5
Рис. 8.7
щмпа
критического сечения на режиме
отсечки к критической площади до
открытия сопел отсечки не более 3,5
скорость горения твердого топлива
увеличивается не более чем на 10 %.
Учитывая, что практически (FKp +
+ ^отс)/^кр < 3,5, можно считать
указанное выше допущение вполне
справедливым. Однако влияние изменения
давления в камере на скорость
горения твердого топлива изучено
недостаточно.
5. Критический режим истечения
через сопла отсечки устанавливается мгновенно.
6. Время спада давления в камере мало по сравнению с общим
временем работы двигателя, поэтому на режиме отсечки можно
считать Vcb = const и S = const.
7. dQIdx = 0.
Преобразуем систему уравнений (8.30) и (8.31), для чего умножим
уравнение (8.30) на Еп. с и раскроем в уравнении (8.31) производную
от произведения тк. с£п. с. Тогда
K. Jdx = тгЕт — (mn
m0
C)
n. c;
(8.32)
Wk. с dEn. c/dx + £п. с dmn. Jdx =
T. исх — (mn. c + m0TC) Eu. c — RT (mn# c + m0TC). (8.33)
Вычитая из уравнения (8.33) уравнение (8.32), получим соотношение
m
к. с
= тг (ЕТ. исх - Еп. с) - RT (тп. с + тотс). (8.34)
Полная внутренняя энергия 1 кг продуктов сгорания топлива
определяется по формуле
\ cv dT,
293
где £293 — удельная энергия образования продуктов сгорания
топлива из элементов в стандартных условиях при Т = 293 К; cv —
удельная теплоемкость продуктов сгорания топлива (изохорный
процесс).
Считая, что состав продуктов сгорания не изменяется, запишем
соотношение
dEn,Jdx = су (dT/dx). (8.35)
Полагая, что состав продуктов сгорания при температуре Ту
такой же, как и при изобарной температуре Тр, и используя
определение изохорной температуры сгорания Ту, можно записать
7V
= J CydT:
т
cv(Tv-T).
(8.36)
285
В формуле (8.36) дополнительно принято, что в интервале
температур Ту — Т теплоемкость cv или не зависит от температуры,
или заменена средним значением.
С учетом соотношений (8.35) и (8.36) уравнение энергии (8.34)
можно записать в виде
dT
m0TC).
тк. ccv -fa- = ^г (Ту — T)cv — RT (mn. c
Умножая уравнение (8.37) на R/cVt получаем
i^.^1 = SpTu'pvR(Tv -T)-(k-l) V~RTB (n) (ф2^р
где k — 1 = ■
(8.37)
(8.38)
Для определения давления и температуры газов в камере
сгорания необходимо интегрировать систему уравнений (8.38) и (8.39):
ф2OTctToTc)p'
Система уравнений (8.38) и (8.39) и ее решение применимы для
режима плавного гашения заряда до давлений в камере, при которых
происходит устойчивое горение топлива, т. е. при
1 dp
р* dx
1 dp
р* di
кр
и р>р
min*
Систему нелинейных дифференциальных уравнений (8.38) и (8.39)
можно решить приближенно, для чего запишем эти уравнения в виде
кр -v
F-n'pT
(8.40)
(8.41)
Уравнения (8.40) и (8.41) получены с учетом следующих
соотношений:
Т
•-*■'
ф2
(/г)
Раскрываем производную от дроби в левой части уравнения (8.41)
и получаем уравнение
-nl/2pT3/2.
(8.42)
286
AT
Подставив в уравнение (8.42) значение —^— из уравнения (8.40),
получаем уравнение
(8.43)
Разделим уравнение (8.43) на р и запишем его в виде уравнения
£^ = n(l-v)[^-pl-vf1/2], (8.44)
где i 1 = -7р— — -?р— •
Ту Тр
Анализ уравнения (8.44) показывает, что решение этого
уравнения будет давать заниженные значения давления в камере, если
принять, что процесс расширения в камере будет адиабатическим.
Таким образом, решение уравнения (8.44) дает заниженное значение
давления по отношению к действительному процессу изменения
давления в камере.
Решение уравнения (8.44) для этого случая можно записать
в виде pl~v = C3e-(1-V>^ + С2; при тх = 0 pl~v = 1, при т^ оо
Тогда С1=1-
Окончательно решение уравнения (8.44) для адиабатического
расширения можно записать в виде
.l-v =
Решение уравнения сохранения массы в предположении, что процесс
расширения продуктов сгорания в камере происходит при
изотермических условиях, можно преобразовать к виду
F* I F*
-1-у л пр , / 1 1 кр
Р —~р г М т—
Анализ уравнений (8.45) и (8.46) показывает, что выражение
(8.45) отличается от уравнения (8.46) сомножителем п в показателе
экспоненты. Очевидно, что действительный закон изменения в
камере при отсечке лежит в интервале между решениями уравнений
(8.45) и (8.46), поэтому определим разность этих решений и
исследуем выражение для разности решений на экстремум. Разность
решений будет равна
287
Очевидно, что при хх = 0 Ap{~v = 0, а т^оо Apl'v -> 0. Таким
образом, максимум A/?1-v лежит в интервале 0 < т2 <С °о. Взяв
первую производную по тх от Ap{~v и приравняв ее нулю, находим
значение т1экс, соответствующее экстремуму, в виде
Определив вторую производную по тА от Apl~v, можно показать, что
значение т1экс соответствует максимуму Apl~v. _Как следует из
выражений (8.47) и (8.48), максимальное значение Ар^ах зависит от
показателя политропы расширения п и от отношения площадей /V^kp-
Значение Apl^l определяется по формуле
Г ~Хпп -п\пп-\
[.->_.-■ J.
В табл. 8.1 приведены результаты расчетов Д/?тах при
изменении п и отношении F^/Fip; видно, что Л/?т7^ возрастает с ростом п
и увеличением отношения F^/Fip.
Таким образом, для практических случаев (п = 1,15 ... 1,25 и
Fz/Fxp < 3,0 ... 4,0) можно считать, что изменение давления в
камере после открытия сопел отсечки может определяться по формуле
(8.49), которая представляет собой полусумму решений (8.45) и
(8.46)
Ге-
+ е-««->ч}1'
(8.49)
Максимальная погрешность решения не превышает 3 ... 5 %.
Сравнение результатов расчетов и опытных данных показывает,
что несмотря на то, что решение системы уравнений (8.38) и (8.39)
получено приближенно, оно обладает достаточной точностью, чтобы
288
Таблица 8.1
п= 1,17
п= 1,5
1,25
0,011
0,0342
1,67
0,022
0,0683
2,5
0,033
0,1025
5,0
0,044
0,1368
10,0
0,0495
0,154
дать оценку характеру процессов в камере
после открытия сопел отсечки. Задаваясь
различными скоростями спада давления в
камере, можно найти изменение
температуры газов в свободном объеме камеры и
секундного газовыделения. На рис. 8.8
показано изменение относительной
температуры газов в камере в зависимости от
изменения давления при различной скорости
спада давления, определяемое отношением
Т/т*
7,0
с-=1,6
0,9
отс^отс
Для сравнения на
WJ
Адиабагпи-
[/ чеспое
расширение
0 ОЛ 0,4 о,б 0,6 1,0
Р/Р*
рис. 8.8 приводится изменение
температуры газов в условиях адиабатического Рис* 8-8
расширения.
Анализ расчетных данных показывает, цТо
падения давления в камере температура прОл П^и мал°й скорости
няется мало и процесс близок к изотермическс-КТ^ сг?Рания изме-
няется мало и процесс близок к изотермическо п Рия изме
ростях спада давления процессы близки к ади ^У* больших ско-
расширения, что соответствует условиям ра^°атическому процессу
ным затуханием заряда. Ты кам^ры с мгновен-
Изменение давления и температуры nponVK
при мгновенном гашении заряда. Уравнен сгорания в камере
(8.30) при отсутствии газовыделения запит сохранения массы
= - (ml , + /Lc) Шется в виДе <^к. с/Л =
или
d ( P\_ B(n)
аГ\Т) -т
Так как процесс расширения в камере прои
давление и температура газов в камере свя^, Аит по аАиаб^те, то
Л соотношением
(8.50)
сохранения массы можно
Т/Т* - )
Используя соотношение (8.50), уравнение
записать в виде
р* 2k a
1£в Р- - j, г
В (k) (т^р 4- *ф2 о^с) /ЯГ* <*т ^3: | = - -ТТ • (8.51)
\Р k ) p2k
Обозначая , # _ ч
B(k)(^FKp + iy2 OTCFOTC)
уравнение (8.51) можно записать в виде
k-\
a —dp ^L
тр -& = ~р2к
19 А. И. Бабкин и др.
289
После разделения переменных и интегрирования в пределах от р*
до р и от 0 до т — Ат1Отс зависимость для определения изменения
давления в камере можно записать в виде
2VC
- О В (k) (Ф/*р + *ф2 0TCF0TC) /RT
т - Atx отс =
(*— I) V (К) [№ип-\- Up9 nrrt птс) УНТ" LN Н I
(8.52)
На рис. 8.9 (кривая 1) показаны результаты расчета спада
давления и температуры продуктов сгорания на режиме мгновенного
гашения заряда, полученные по формулам (8.50) и (8.52) для двигателя
с /?* = 10.105 Па; RT = 8,5-105 Дж/кг; F*KP = 50 см2; VCB =
= 0,725 м3; k = 1,25; ф2 = 0,98; ф20Тс = 0,9; i = 4; FOTc = 37,0 см2.
Необходимо отметить, что F0TC выбрана условно без расчета по
критерию затухания для удобства сравнения с режимом спада давления
при плавном гашении заряда.
Формула (8.52) справедлива для критического режима истечения,
т. е. если давление в камере удовлетворяет условию
п
(8.53)
Если давление в камере не удовлетворяет условию (8.53), то
режим истечения газов из камеры докритический. В этом случае
суммарный расход газов через сопла можно записать в виде
ф2 отсчете) Р
2п
(n—\)RT
-^ • (8-54)
Для получения аналитической зависимости pip* = f (т) при
режиме докритического истечения в уравнение сохранения массы
необходимо подставить соотношение (8.54) и выполнить
преобразования с учетом зависимости (8.50). Решение получаемого
дифференциального уравнения возможно
лишь приближенными методами и
поэтому не приводится.
Кроме того, как следует из
уравнения (8.53), докритический режим
истечения наступает при низких
давлениях в камере. Так, при открытии
сопел отсечки на камере с /?*=40х
>:105Па ил = 1,20 в земных
условиях докритический режим истечения
устанавливается при pip* = 0,043, а
Рис. 8.9 при отсечке на высоте Н = 20 км
О 0,05 0,1 0,15 0,20Т-ьх,от,с
290
при pip* = 0,0024. Таким образом, даже при отсечке на земле
докритический режим истечения имеет второстепенное значение
и может не учитываться или рассчитываться приближенно по
формуле (8.52), полученной для критического истечения газов.
Изменение давления и температуры продуктов сгорания в камере
на режиме плавного гашения заряда. Изменение давления и
температуры продуктов сгорания в камере на режиме плавного гашения
заряда описывается системой уравнений (8.38) и (8.39). Однако
с достаточной точностью изменение давления в камере можно
определить по зависимостям, справедливым для изотермического
процесса, т. е. при Т = const.
Для нахождения аналитической зависимости р = / (т) уравнение
сохранения массы (8.39) записывается в виде
ш = sw'pv Щ (ф2/7*р +/ф2 отс/г°тс> Р- (8-55)
Разделяя переменные, уравнение (8.55) можно записать в виде
dx = -— ^ . (8.56)
£/— [Sprup* - В (п) fa* + «Ф2 0CTF0TC) p]
св
Так как горение заряда твердого топлива на нестационарном
режиме продолжается до давления в камере, равного нижнему
пределу устойчивого горения данного топлива pmh], то уравнение (8.56)
*
интегрируется в пределах от р = р* до р ^ рт\п:
Т-Атотс
ев
ЯГ [S9tuP- - В (n) (92F*p + 1Ъ 0TCF0TC) p] *
о p*
Правую часть уравнения (8.57) можно привести к виду
/g
Т-Атотс
ЯГ (1 - v) В (п) (ф2^р + «p20TCF0TC)
ч.
р
Г* с
J
р*
г
[ В(п)(<р2
В (п) (<p2F
Spu'
^р + 'Ф2отЛ>т
Spu'
кр ~г 'Фготс^отс
с)
)
1 " \
Dl-v
р
(8.58)
19* 291
Интегрируя уравнение (8.58), можно получить
" (1 - v) В (я) (fjF'p + <ф2 0TCF0TC)
Spt
X 111 ?; т-
е(«)(ф2/гкр + '"92 отсчете)
Выражение, стоящее под знаком логарифма, можно упростить,
разделив и умножив его на p*'~v = ~ ;
B(n)RT*(l- v) (Ф2^р + i<fe0TCF0TC)
X In —
кр
На рис. 8.9 (кривая 2) показаны результаты расчета спада
давления продуктов сгорания на режиме плавного гашения заряда,
полученные по формуле (8.59).
Уравнение (8.59) справедливо при р ^ /?mln, причем рт1п должно
удовлетворять условию
Pmin^PoTC- (8.60)
Если условие (8.60) не выполняется, то горение в двигателе не
прекращается, а двигатель переходит на режим пониженного давления
в камере, равного рОтс» и работает до полного выгорания заряда
твердого топлива.
Если условие (8.60) выполняется, то спад давления в камере
рассчитывается по формуле (8.59) до достижения давления р = рт1п.
Дальнейший спад давления в камере будет проходить в
адиабатических условиях, так как при р = рт1п заряд погаснет. Спад давления
при р < рт1п следует рассчитывать по формуле (8.61)
Г k—1
2VC
(k-l)B(k)(cp2F*Kp + i<p2oTCFOTC)yRT*L\ P
где Ат2Отс — время спада давления в камере от рт{п до р.
Как следует из формулы (8.59), скорость спада давления в
камере зависит от свободного объема камеры к моменту отсечки, рода
топлива и площади сопел отсечки.
На рис. 8.10, 8.11, 8.12 показаны кривые спада давления в
камере двигателей с различными параметрами у, VCB и — ——-—
Ф2^кр + *Ф2 отс^отс
при одинаковом начальном давлении в камере.
292
Рис. 8.10
Р*
0,9
US
0J
0,2
\\
\
\
\ .
\
ч
=0,6
0,1
Изменение спада давления и температуры продуктов сгорания
в камере при переходе двигателя на режим пониженного давления
после открытия сопел отсечки. Как и при плавном гашении заряда,
процессы в камере можно считать изотермическими, т. е. Т = const.
Расчет спада давления в камере производится по формуле (8.59),
которая аналогична формуле (8.23).
Отношение давления до отсечки к давлению в камере после
завершения переходного процесса находится по формуле
1-V
Роте
КР
и полностью определяется отношением площади сопел отсечки
к площади критического сечения сопла и соответствующими
коэффициентами расхода.
Как видно из формулы (8.59), теоретически время переходного
процесса т —>- оо при р ->/?Отс- Для практической оценки времени
перехода двигателя с давления /?* на давление ротс можно принять,
что переходный процесс окончен, если р = 1,05/?отс. Тогда
t(P2 OTC^OTC
/О ЛЛ\
(8.W)
Так, для двигателя, параметры которого использованы при
построении кривых на рис. 8.9, время переходного процесса т — т10ТС =
= 0,204 с при v = 0,5.
р > ■* JL
Р*
р*
0,д
0,6
0,2
\
I N
\
\
\
ч
\
Ч
>
у
X
ч
^;
0,6
0,2
0 0,05 0,1 0;W 0fZ
Рис. 8.11
к}
\ \
\
\
—
| /ип
'отс
0,4
О 0,05 0,1 0,15 0,2
Рис. 8.12
293
8.5. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ПРИ ОТСЕЧКЕ
ТЯГИ ВПРЫСКОМ ГАСИТЕЛЯ
Для процесса гашения зарядов твердого топлива при
впрыске гасителя можно записать требование к режиму спада
давления после ввода гасителя в камеру в виде соотношения (8.29). Так как
критерий затухания определяется при условии, что давление в
камере изменяется на величину 0,5/7*, то целесообразно записать
второе уравнение для характеристики режима спада давления в
камере для гашения в виде
■jr < 0,5 (8.63)
Совместное решение уравнений (8.29) и (8.63) дает возможность
определить продолжительность режима спада давления (Атс) от /?*
до 0,5/7* при условии «мгновенного» гашения заряда твердого
топлива по формуле
(8.64)
*Зт кр
Учитывая, что критерий затухания для смесевых топлив
изменяется от 120 до 180 с"1, можно принять продолжительность режима
спада давления равной 0,003 ... 0,004 с.
Так как время испарения капель гасителя мало и составляет
величину порядка 3-10"4 с (при скорости ввода гасителя более 50 м/с),
то можно считать, что время спада давления и время работы узла
гашения равны, т. е. Дтс ~ Ату. г, где Ату. г — время работы узла
гашения, необходимое для ввода гасителя в камеру.
Количество гасителя, которое необходимо ввести в камеру за
время Дтс, зависит от массы, температуры и состава продуктов
сгорания, находящихся в свободном объеме камеры, и определяется
из уравнения теплового баланса между продуктами сгорания в
свободном объеме камеры и гасителем
/як. с (In « - /п. с) = шгсу] (/*с - /г#:в), (8.65)
где ц — массовая доля испарившегося гасителя (при правильном
выборе скорости ввода гасителя в камеру т] = 1); /£.в — энтальпия
1 кг продуктов сгорания до ввода гасителя в камеру при
температуре /*; /п. с — энтальпия 1 кг продуктов сгорания после ввода
гасителя в камеру при температуре Т : /,*. с — /п е = суп (Т* —
— Т)\ су { — теплоемкость продуктов сгорания при постоянном
объеме; /?с — энтальпия 1 кг гасителя до ввода в камеру; /г. с —
энтальпия 1 кг паров гасителя при температуре Т\
/гс - /г*с - Г + (Т - Гкип) CVn 4- Сж (Гкип - Т*ж)9
Т — температура парогаза в камере после ввода гасителя при
давлении в камере, равном 0,5/7*; г — скрытая теплота парообразования
гасителя при давлении 0,75/7*; 7КИП — температура кипения
гасителя при давлении 0,75/7*; Т'ж — температура жидкого гасителя
294
до ввода в камеру; cVn — теплоемкость паров гасителя при
постоянном объеме; сж — теплоемкость жидкого гасителя.
Уравнение теплового баланса (8.65) записано с учетом следующих
допущений: газовыделение и газоотвод продуктов сгорания за время
Дтс малы по сравнению с массой газа в свободном объеме камеры и
в расчете не учитываются; газообразные продукты сгорания и
гаситель представляют собой однородную смесь; состав парогаза после
ввода гасителя одинаков во всех точках свободного объема камеры;
состав газа в камере постоянен при изменении температуры;
теплообмена газа со стенками камеры нет; свободный объем камеры не
изменяется за время гашения.
Уравнение (8.65) позволяет определить температуру парогаза Т
в зависимости от количества гасителя, введенного в камеру
сгорания. Поскольку /п. с и /гс зависят от 7\ то целесообразно расчет
вести, задаваясь рядом значений 7\ и определять соответствующее
значение тгс. Окончательный выбор запаса гасителя производится
по уравнению состояния парогаза при давлении в камере 0,5/?*,
записанному в виде
0,5р*1/св = До. тТ (тк. с + тгс), (8.66)
где Rn, г — газовая постоянная парогаза.
Для расчета по формуле (8.66) необходимо предварительно
определить зависимость газовой постоянной от количества гасителя,
введенного в камеру по формуле
Rn. г = grcRrc ~\- gn. с Дп. с» (8.67)
где grc — массовая доля гасителя в парогазе;
grc = пггс/(шгс + /як. с), (8.68)
gn. с — массовая доля продуктов сгорания в парогазе;
gn. с = /Пи. A™re + /Я„. с), (8.69)
Rrc — газовая постоянная паров гасителя; Rn, с — газовая
постоянная продуктов сгорания.
Учитывая, что газовая постоянная зависит от тгс, уравнение (8.66)
обычно решают рядом последовательных приближений. Для
определения исходного условия для расчета /?п. г по уравнению (8.67)
можно пользоваться соотношением Штс с~ 0,715.
тк. с
По уравнениям (8.65) ... (8.69) определяется необходимое
количество гасителя, время ввода гасителя в камеру и параметры
парогаза после ввода гасителя в камеру. Эти данные позволяют
рассчитать основные параметры узла гашения (давление подачи, количество
и размеры форсунок, геометрические размеры узла и т. п.), а также
являются исходными для построения кривой спада давления в
камере при отсечке тяги гашением заряда.
Начальный участок зависимости р = f (т) при спаде давления от
Р* до 0,5/?* можно аппроксимировать прямой линией, время спада
давления в этом интервале принимается равным Дтс и определяется
по формуле (8.64). Дальнейший спад давления от 0,5/?* до /?н рас-
295
считывается при условии
адиабатического истечения парогаза из
камеры по формуле (8.61).
Характерная зависимость р = / (т) при
отсечке камеры вводом гасителя
показана на рис. 8.13.
Пример 8.1. Определить параметры
узла гашения (запас гасителя, время
ввода и давление подачи гасителя) и
изменение давления в камере РДТТ при отсечке
тяги, при рн = 0.
Исходные данные:
а) характеристики камеры: р* =
= 5 МПа; FKp = 0,04 м2; свободный объем
камеры к моменту отсечки VCB = 0,4 м3;
1 dp
р* di
кр
б) характеристики топлива: RT* = 9-Ю6 Дж/кг; Г* = 2500 К;
= 150 с"1; время релаксации прогретого слоя тр = 0,004 с;
в) характеристики гасителя: вода при Т = 288 К.
Порядок расчета. 1. Определяем массу газов в свободном объеме
камеры к моменту гашения заряда по формуле
т„. с = P*VCB/(RT*)]mK. c - 2,22 кг.
2. Определяем связь между количеством (массой) гасителя пггс и
температурой Г смеси продуктов сгорания и паров воды (парогаза) в свободном объеме камеры
после срабатывания узла гашения, пользуясь формулой
Лгв4 V + (Т -
принимая в расчете л « ;
и сж = 4,44 кДж/(кг-град), получаем
cvu + сж (Гкип ~ ТК)) - «и. есу п с (Гп# с - Т).
1; г = 1800 кДж/кг; Гкин = 504 К; cVn = 3,26 кДж/(кг-град)
)
Г, К
/ПрС КГ
1073
0,985
873
1,22
673
1,64
523
2,08
3. Определяем по формуле (8.66) связь между массой гасителя и температурой
парогаза, задаваясь значениями тРС, полученными выше, и вычисляя по формуле
(8.67) газовую постоянную парогаза при различных значениях тгс. Тогда
тгс, кг
Г, К
0,985
792
1,22
728
1,64
635
2,08
561
4. Графически по координатам точки пересечения зависимостей тгс = / (Т)
в координатах Т — /пгс определяем значение тгс = 1,85 кг; /лгс/тк с = 0,833,
Т = 598 К.
5. Определяем время ввода гасителя в камеру по формуле (8.64). Атс = 0,0033 с.
Таким образом, Атс < тр.
6. Определяем давление ррс подачи гасителя по формуле ргс = рж№2/2 + Р* =
= 10 МПа при W = 100 м/с.
7. Определяем число струйных форсунок с диаметром сопла 4 мм, принимая
коэффициент расхода |Л = 0,7:
= 638 шт.
296
8. Определяем зависимость давления в камере от времени после впрыска
гасителя. Спад давления от р* до 0,5р* за время Дтс аппроксимируем прямой линией,
а дальнейший спад давления рассчитываем по формуле (8.61), принимая за исходные
следующие параметры парогаза: р = 2,5 МПа; &= 1,27, RT = 246 000 Дж/кг.
Результаты расчета приведены ниже:
р, МПа
т—Ат, с
т, с
2,5
0
0,0033
2
0,00635
0,00965
1,5
0,0159
0,0192
1
0,0289
0,0322
0.5
0,0544
0,0577
0,2
0,0895
0,0928
0,1
0,108
0,1113
0,05
0,52
0,5233
0
оо
оо
8.6. РАСЧЕТ ТЯГИ ВтНУСЛОВИЯХ ПЕРЕМЕННОГО
ДАВЛЕНИЯ В КАМЕРЕ
Изменения давления в камере, происходящие при запуске
или останове двигателя, а также при изменении режима работы
камеры, сопровождаются изменениями тяговых характеристик
двигателя. Это происходит не только за счет роста или падения давления
в камере, но и за счет нарушения режима течения газов в закрити-
ческой части сопла из-за отрыва потока от стенок сопла. Рассмотрим
основные положения по расчету тяги двигателя в условиях
переменного давления в камере на примере двигателя, работающего в режиме
отсечки после открытия дополнительных сопел, расположенных на
переднем днище камеры (рис. 8.14).
На двигатель (рис. 8.14, б) в режиме отсечки действуют три
составляющих тяги: тяга основного сопла Ро; тяга отверстий отсечки
ЯОтс; тяга газообразного насадка (люка), которая состоит из двух
составляющих: АР* (действующая вдоль оси люка) и АРУ
(действующая перпендикулярно оси люка). Если газоотводного
устройства нет (рис. 8.14, а)у то на двигатель действуют две составляющие
тяги Ро и Яотс.
Тяга основного сопла определяется по формуле
Ро =
^) - FipH,
здесь фх — коэффициент скорости:
^ 1 -f cos a
Ф1= о (
(8.70)
(8.71)
297
где фтр — коэффициент трения (фтр = 0,99 ... 0,995); а — угол
полураствора сопла; pi — давление на срезе сопла при давлении
в камере /?*; Ft — площадь среза основного сопла;
Принимая параметры ср1э ф2, п и R постоянными в режиме
отсечки тяги, можно считать, что тяга основного сопла изменяется
пропорционально изменению давления в камере. Необходимо
учитывать, что формула (8.70) применима в условиях безотрывного
течения газов в закритической части сопла и при сверхкритическом
перепаде давления.
Отрыв потока от стенок сопла сопровождается возникновением на
срезе сопла мостообразного скачка уплотнения, который при
дальнейшем уменьшении давления в камере проникает в сопло. Для расчета
тяги основного сопла при отрывном течении необходимо определить
условие возникновения отрыва потока от стенок сопла, найти
местоположение точки отрыва и параметры потока за скачком
уплотнения.
Условия возникновения отрыва потока можно найти по
формуле (8.72), которая позволяет определить давление до скачка
уплотнения (давление на срезе сопла в момент отрыва потока) в
зависимости от давления за скачком уплотнения (давление окружающей среды)
и числа М потока до скачка уплотнения (число Ма потока на срезе
сопла) [27].
^ = 0,73.Ма + 0,39, (8.72)
^ Ра отр
где ра отр — статическое давление невозмущенного потока на срезе
сопла в момент возникновения отрыва.
Давление в камере /?Отр> при котором на срезе основного сопла
возникает отрыв потока, можно определить по формуле:
= Ра ОТР (1 + ф Ml) ""' - |?g, (8.73)
где л (М) — газодинамическая функция.
Таким образом, тягу основного сопла в режиме отсечки можно
определять по формуле (8.70), если давление в камере удовлетворяет
условию: р s* /?отр.
Тяга основного сопла при отрывном течении газа зависит от
местоположения точки отрыва и параметров потока за скачком
уплотнения. Для определения положения точки отрыва обычно используют
тождество [27 ]
PJL = ?JL £l£l, (8.74)
Р Р2 Pi P V '
где р2 — статическое давление потока за скачком уплотнения;
рг — статическое давление невозмущенного потока в точке отрыва.
298
Для сопел с углами раствора 2а ^ 30° давление за скачком
уплотнения р2 равно давлению окружающей среды ри и местоположение
точки отрыва определяется тождеством
liL=*L£L9 (8.75)
р Pi P v ;
Отношение давлений Рн1р\ определяется по формуле (8.72),
где число Ма соответствует числу М невозмущенного потока в точке
отрыва Mj.
Отношение давлений — определяется по формуле (8.73),
которую для невозмущенного потока в точке отрыва можно записать в виде
. (8.76)
С учетом соотношений (8.72) и (8.76) тождество (8.75) можно
записать в виде
£н_ = 0,73]^ + 0,39
р п
1 п~Х
Из соотношения (8.77) для любого значения давления в камере
можно найти число Mi в точке отрыва и определить площадь сопла
в точке отрыва потока Fx по формуле
F 2 1 1
С уменьшением угла раствора сопла (2а < 30°) уменьшается
глубина проникновения скачка в сопло и возникает различие между
давлением за скачком уплотнения и давлением окружающей среды,
т. е. р2 < рн. Для сопел с 2а < 30° тождество (8.74) можно записать
в виде
Рн _ Рн 0.73М! + 0,39
— тг—
где pw/p2 = 1 + (0,192/sin a — 0,7) (1 + MlMa).
Определив по формуле (8.78) число Мг в точке отрыва, находим
Fi из соотношения (8.78). Распределение статического давления
на стенке сопла за точкой отрыва носит сложный характер. Для
приближенных расчетов можно принимать, что давление за скачком
уплотнения изменяется линейно от р2 до рн.
Тягу основного сопла со скачком уплотнения можно
рассчитывать по формуле
Ро =FpiF, (1. + /iM?) + fi^IL (f: - Fl) - pHFl (8.80)
299
30° р2 = Рн> то формула (8.80) упрощается
Так как для сопел с 2а
и имеет вид:
При приближении точки отрыва к критическому сечению сопла
число Мх в точке отрыва стремится к 1, а давление рг к р2, причем
давление р2 стремится к давлению ри. В критическом сечении сопла
устанавливается режим докритического истечения.
Давление в камере ^Д0Кр в момент возникновения докритического
истечения определяется по формуле
Рдокр
Тяга основного сопла на режиме докритического истечения (при
< Рдокр) определяется по формуле
2л
0 =
(8.81)
Тяга отверстий отсечки типа «очко» (рис. 8.15, а) и отверстий
с коническим насадком (рис. 8.15, б) определяется по формуле (8.70),
применяемой для расчета тяги основного сопла в режиме отсечки
при р^Ротр- Для этого необходимо в формуле (8.70) заменить
Flip на iFo™ Fa на /FaOTc (для сопел типа «очко» Fa необходимо
заменить на iF0TC, а коэффициенты фх и ф2 заменить соответственно
на Ф1 отс и Ф2отс)- Коэффициент скорости ф! отс определяется по
формуле (8.71) (для сопел типа «очко» F1 отс = 1,0). Коэффициент
расхода ф2 отс» представляющий собой коэффициент сужения струи
в критическом сечении, зависит от геометрических характеристик
дозвуковой части сопла, от угля входа в сопло р и от радиуса входа
/*вх> з также от равномерности распределения параметров газа
во входном сечении сопла. Обычно для основных сопел РДТТ ф2 =
= 0,97 ... 0,98. Конструктивно выполнить сопла отсечки с высокими
о)
д)
300
значениями ф2 Отс трудно, поэтому ср2 Отс обычно меньше ф2. Для
расчета ср2 Отс можно использовать зависимость
Фготс =
1
1+0,171ея '
где ех =
— -glor Для конического входа при 0 <: р <! 90°;
8ж = е Гкр для радиусного входа при 0 <: -^-<оо.
Расчет тяги отверстий отсечки типа «очко» по формуле (8.70)
проводится при спаде давления от р* до /?ДОкр- Для сопел с
коническим насадком этой формулой можно пользоваться при давлении
в камере от р* до /?Отр. отс (Ротр. отс — давление в камере, при котором
возникает отрыв потока от стенок конического насадка сопла
отсечки).
Тяга конического насадка при отрывном течении газа в закрити-
ческой части сопла определяется по методике, изложенной выше.
Обычно отрыв потока от стенок насадка сопел отсечки наступает
при /?0Тр. отс < /?отР> так как сопла отсечки имеют меньшую степень
расширения, чем основное сопло.
При давлении в камере р <С /?докр тяга сопел отсечки
определяется по формуле (8.81), где Fkp необходимо заменить на /FOTC»
а ф2 на ф2 отс-
Для уменьшения сил аэродинамического сопротивления ЛА
стремятся избежать элементов конструкции, выступающих за его
мидель, поэтому газоотводные насадки выполняют с косым срезом
(см. рис. 8.15, в, г, д).
На рис. 8.16, а показано распределение статических давлений
по внешнему и внутреннему контуру конического газоотводного
насадка с плавным входом. Распределение давлений по внутреннему
контуру насадка с косым срезом определяется соотношением,
справедливым для сверхзвукового сопла.
^ "отс
&?* йРу /Роте Л Pi
301
Тяга сопла отсечки с
коническим насадком без
а косого среза (см. рис.
8.16, а, сопло без контура
ABC) определяется по
формулам, полученным для
расчета тяги сопла отсечки
с коническим насадком при
^аотс = Fab* (Fab —
площадь конического насадка
в сечении I—I).
Составляющие тяги ДРХ и ДРУ,
снимаемые с косого среза
конического насадка,
возникают от действия
избыточного давления (/?б — рн) на
криволинейную боковую
поверхность контура ABC.
Для определения ДЯХ
и кру выделим на
криволинейной поверхности контура ABC (рис. 8.17) элемент площадью
г* , на которой действует давление /?б = / (х) (считаем, что
(я - Р) cos « =
- рн) г cos $d
Рис. 8.17
)
Составляющая тяги &РУ равна
= 2
О Эо
= 2j
В подынтегральное выражение входит переменная г, которую
можно записать как г = r0TC -f Дг = r0TC + ^ tg а. Тогда
(рб — рн) (готс+ х tg a) cos p dx dp.
Произведение (/?б — Рн) (Л)тс + ^ tg а) dx не зависит от угла
поэтому интегрируя по углу р, можно записать
* но
у = 2 J (/?б — /7Я) (/*отс + ^ tga)dA: | sin P =
О я
/
= 2 J (/7б - Ы (гото + х tg a) sin po dx. (8.82)
302
Значение sin j50 определяется из треугольника OEF (см. рис. 8.17):
cosp0 = -^ =
а sin В = ^ (г°тс + *tg а)2 ~ ^отс"~ х ctg v)2
Подставив значение sin р0 в соотношение (8.82), получаем
АРу = 2 J (рб-Ри)У 2r0TCx(tgа + ctg7) + х2 (tg2a - ctg27) dx.
о
Избыточное давление на внутреннюю поверхность контура косого
среза можно осреднить по формуле
Рб — Рн =
где рв — давление на внутреннюю поверхность в точке В; рс —
давление на внутреннюю поверхность в точке С. В результате
&РУ = 2рср j /2r0TC* (tg a + ctg у) + х* (tg« a - ctg^ у) их. (8.83)
О
Интегрируя соотношение (8.83), можно записать
АРУ =
где аг = tg2 a — ctg2 у <. О, так как в реальных условиях a < 20°,
а v < 60°; аг = 2r0TC (tg a + ctg 7).
Окончательно имеек
a - ctgV) + 2rOTC]+
4c(tg« + CtgV) Г „(tg — Ctg^l + r». Л!) (g84)
(tg a — ctg y) / ctg2 7 — tg2 a L ''отс ^ J J
Составляющая тяги ДРХ, действующая вдоль насадка,
определяется по формуле
О Эо
Полагая, что Рб — Рн = /?сР> и интегрируя по р, получаем
= 2/?ср tg a j (r0TC + x tg a) (я - p0) dx.
0
303
Составляющую тяги АРХ можно найти, полагая, что
равнодействующая сил давления АР перпендикулярна образующей
наибольшей длины ВС (см. рис. 8.17). Тогда
АРХ = АРу tg a.
Расчет тяги сопла отсечки с косым срезом при отрывном течении
газа в закритической части связан с определением положения точки
отрыва газового потока от стенок сопла. В настоящее время
поведение точки отрыва в соплах с косым срезом изучено недостаточно.
Для приближенного расчета положения точки отрыва и
составляющих тяги, снимаемых с косого среза сопла при отрывном течении,
можно использовать зависимости, полученные для определения
положения точки отрыва в соплах без косого среза.
Составляющие тяги АРХ и АРУ при расположении точки отрыва
в пределах отрезка ВС (см. рис. 8.17) можно определить по
формулам (8.84) и (8.85), интегрируя зависимость (8.84) в пределах от О
до /отр, где /отр — расстояние от точки В до точки отрыва на
образующей сопла.
Если точка отрыва совпадает с точкой В или располагается слева
от сечения I—I (см. рис. 8.16, а), то составляющие тяги АРХ и АРУ
равны 0, так как на внешнюю поверхность косого среза сопла
действует давление Рн (обычно сопло отсечки выполняют с а > 15°).
Тяга сопла отсечки Ротс при расположении точки отрыва в
симметричной части насадка (слева от сечения I—I) и при работе сопла
в дозвуковом режиме истечения газов определяется по формулам,
полученным для расчета тяги основного сопла в аналогичных
условиях работы.
Конструктивно не всегда удается выполнить закритическую
часть сопла отсечки в виде плавного расширяющегося насадка
(см. рис. 8.15, б, в). Очень часто закритическая часть сопла
выполняется с уступом (см. рис. 8.15, г, д) в месте соединения отверстия
отсечки с газоотводным насадком. На рис. 8.16, б, в показано
распределение давлений по внутреннему и наружному контуру
конического насадка с косым срезом и с уступом. Такое распределение
давлений характерно для большинства газоотводных устройств
узлов отсечки тяги. Газовый поток, пройдя критическое сечение
сопла отсечки тяги, подвергается внезапному расширению, образуя
застойные зоны между кольцевым днищем насадка, боковой
поверхностью насадка и внешней границей струи. С достаточной точностью
можно считать, что давление в застойной донной зоне постоянно
и равно рд.
В точках А и В внешняя граница газового потока достигает
стенок насадка. Положение точек пересечения внешней границы
потока со стенками насадка зависит от параметров газового потока
и геометрических размеров насадка. Особенностью насадков является
их малая длина. Вследствие этого внешняя граница газового потока
обычно проходит через точку Л, принадлежащую образующей на-
304
насадка наименьшей длины. На противоположной образующей
внешняя граница газового потока пересекается с внутренней
поверхностью насадка и газовый поток тормозится в системе косых
скачков уплотнения. Это приводит к росту статического давления на
стенке насадка. Дальнейшее движение газов по насадку
сопровождается понижением давления. Распределение давлений /?д и рб (р6 —
давление на боковую поверхность насадка) зависит от
геометрических размеров насадка (d07Ci du, /H).
Для расчетов по формулам (8.84) и (8.85) составляющих тяги
ДРЛ и ДЯУ, снимаемых с косого среза насадка, необходимо знать
среднее избыточное давление газового потока на стенки насадка.
В приближенных расчетах можно принимать, что
(о.00)
где рве — статическое давление газового потока на стенки насадка
в точке С при х = /.
На рис. 8.16, б показаны составляющие тяги сопла отсечки со
ступенчатым коническим насадком. Вдоль оси сопла отсечки
действует сила тяги
Р* отс = Роте + Д^д + APi + АЛс. (8.87)
где Яотс — сила тяги сопла отсечки типа «очко», определяется по
формуле (8.70) при F*a = iF0?cl ^кР = iF0TC; фх = 1,0; <р2 = ф2Отс;
ДЯд — составляющая тяги, снимаемая с кольцевого днища
ступенчатого насадка; определяется по формуле ДРД = (рп — рн) -2- х
X (dl — йоте) i\ Д/5! — составляющая тяги, снимаемая с боковой
поверхности конического насадка (без косого среза); определяется
по формуле
dx\
Pep — среднее избыточное давление на симметричную часть
конического насадка (от отверстия отсечки до сечения I—I); /?сР ~ рд;
АРХ — составляющая тяги, снимаемая с боковой поверхности
косого среза насадка; определяется по формуле (8.85) при условии,
что среднее избыточное давление на боковую поверхность находится
по формуле (8.86).
В поперечном направлении (по оси у) на насадок действует тяга
ДРУ, которая определяется по формуле (8.84) при г01С = гн-
В частном случае, газоотводный насадок может быть
цилиндрическим (см. рис. 8.15, г). Распределение статических давлений по
внутренней и наружной поверхности цилиндрического насадка
показано на рис. 8.16, в.
Продольная тяга Р^отс сопла отсечки с цилиндрическим
насадком вычисляется по формуле (8.87) с учетом того, что при a = О
составляющие тяги АРг и АРХ равны 0.
20 А. И. Бабкин и др. 305
Поперечная составляющая тяги АРУ, снимаемая с косого среза
цилиндрического насадка, определяется по формуле (8.88),
полученной путем упрощения соотношения (8.84) при а = 0:
APy = nr\pcv\gy. (8.88)
Расчет составляющей тяги сопла отсечки со ступенчатым
насадком при отрывном течении газа связан с определением положения
точки отрыва газового потока от стенок насадка. Поведение газового
потока при отрывном течении в ступенчатых насадках с косым срезом
носит сложный характер. Для приближенного расчета составляющих
тяги при отрывном течении газового потока в ступенчатом насадке
можно считать, что при /70Тр. отс > Р > Дцокр составляющие тяги
APlf АЯД, АРХ и АР у изменяются линейно от значения,
соответствующего началу отрыва, до 0.
Давление в камере сгорания ротр. 0Тс> при котором начинается
отрыв потока от стенок насадка, в первом приближении определяется
по параметрам газового потока в точке С.
Тяга сопла со ступенчатым насадком при дозвуковом режиме
истечения газов (р < /?Докр) определяется по формуле (8.81) при fjp =
= itотс; ф2 = Фготс-
Суммарная тяга двигателя Р2, действующая по оси двигателя
после открытия сопел отсечки, определяется по формуле
р2 = р0 - (Ротс + АРХ + АРУ + АЛ) cos б + АРу sin б. (8.89)
Формула (8.89) позволяет определить тягу двигателя в любой момент
процесса спада давления в камере.
Важной характеристикой двигателя, работающего в режиме
останова, является импульс последействия (/п.д)- Импульс
последействия определяется импульсом ДУ с момента подачи сигнала на
отсечку тяги до того момента, когда суммарная тяга двигателя
становится равной 0:
тотс
Л,.д= J Pzdx.
о
На рис. 8.18 показаны характерные программы изменения тяги
в режиме отсечки для двигателей с Pi < 0 (а) и Pi > 0 (б) при
расположении сопел отсечки на переднем днище камеры (Pi — тяга
двигателя с открытыми соплами отсечки при давлении в камере,
равном давлению до открытия сопел отсечки). Импульс последействия
зависит от характера и времени изменения Р2 от Pi до 0.
Время работы двигателя в режиме отсечки можно определить
по формуле
Т-отс == Атотс1 "1~ АТ0ТС2 |
где Дтотс 1 — время от подачи команды на отсечку тяги до момента
отделения заглушки узла отсечки от корпуса камеры; Ат0Тс i =
= (2 ... 4). 1 О*3 с; Дтотс 2 — время выхода заглушки из насадка
и установления расчетного режима течения газов через сопло
отсечки; ДтОтс2= (1 ... 3)-10"'3 с; Атотсз — время спада тяги двига-
306
ft ,'
* %
р
т
1
у
6)
Рис. 8.18
теля от Ps до 0; оно определяется по результатам расчета спада
давления и составляющих тяги камеры при отсечке.
В период времени Atotc i сопла отсечки закрыты и двигатель
создает тягу Р1. Составляющая импульса Д/п. д за время Дт0Тс i равна
Д/п. д1 = Р*о АТотсЬ
За время Дт0Тс2 тяга двигателя изменяется от Р*о до Р1. Закон
изменения тяги носит сложный характер и зависит от большого числа
случайных факторов. Для простоты обычно принимают линейный
закон изменения тяги от Р*о до Р%. Составляющая импульса
последействия Д/п. Д2за время Дт0Тс 2 равна:
0А при Pi=0;
при
Л/п. д2- 0,5 (Я5 - Р$ Дт0Тс2 при Я|>0.
Составляющая импульса последействия Д/П.дз 3^ время Дт0Тс з
определяется по формуле
"ОТС 8
Л/п.дЗ^ J
Для двигателей с Рх = 0 и Р2 < 0 Д/п. д з = 0.
Таким образом, импульс последействия для двигателей с
расположением сопел отсечки на переднем днище камеры определяется
ПО формуле /п.д = Д/П.д 1 + Д/п.д2 + Д/п.дз-
Пример 8.2. Определить геометрические размеры узла отсечки тяги; найти
изменение давления в камере и составляющих тяги двигателя после раскрытия сопел
отсечки; определить импульс последействия при отсечке тяги. Принципиальная
схема РДТТ показана на рис. 8.14, б.
Исходные данные:
а) параметры двигателя: давление в камере сгорания р* = 4 МПа; F*p =
= 0,05 м2;
20*
кр
= 8; угол полураствора сопла а = 15°; коэффициент расхода
307
сопла ф2 = 0,98; коэффициент тепловых потерь % = 0,96; начальный свободный
объем камеры сгорания VCB. Нач = 0,2 м3;
б) характеристики топлива: закон горения и = 2,86-10~3 0,53 м/с; RT* =
= 860 000 Дж/кг; показатель политропы расширения п = 1,25; плотность рт =
= 1600 кг/м3; нижний предел устойчивости горения pmln = 0,5 МПа; критерий
затухания ——-/— = 15с"1;
J \p* di
в) условия работы двигателя: давление окружающей среды в момент отсечки
т яги рИ = 0,02 МПа; время работы двигателя до отсечки тяги — тк = 60 с;
суммарная тяга после открытия сопел отсечки Рг = —(2 ... 3) кН.
Порядок расчета. 1. Определяем поверхность горения заряда
твердого топлива по формуле (7.9), полагая В (п) = 0,6581. Тогда 5 = 1,475 м2.
2. Определяем свободный объем камеры в момент раскрытия сопел отсечки
по формуле: VCB = VCB нач + м5тк = 0,726 м3.
3. Определяем коэффициент скорости основного сопла по формуле (8.71),
принимая фтр = 0,995. Тогда фх = 0,98.
4. Задаемся входным радиусом сопла отсечки rBX = 0,25rKD. OTC и определяем
коэффициент расхода ф2 отс по формуле: ф2 отс = 1/(1 +0,171ех), гдеел;=_е вх/ кр#
Тогда ех = 0,368, а <р* 0Тс = °>94-
5. В первом приближении определяем площадь отверстий отсечки тяги по
формуле
принимая 6 = 45° и Ф (p*amJP*) = 2 (-JLy7*""1*. Тогда iFmc = 0,01015 м2.
Конструктивно удобно принять i = 4, тогда F0TC — 0,00254 м2; d0TC = \f4F0TC/n =
= 0,0568 м = 0,057 м.
6. Назначаем геометрические размеры газоотводного насадка: dH= 1,5-^Отс==
= 0,0855 м; а = 0 (цилиндрический насадок); у = 45°; /н = 2,0 d0TC = 0,114 м.
7. Определяем суммарную тягу двигателя после открытия сопел отсечки:
а) находим тягу основного сопла Р* по формуле (8.70), тогда Р* = 31,7 кН;
б) находим тягу сопел отсечки Р*тс по формуле (8.70), тогда Р*тс = 47,8 кН;
в) находим тягу, снимаемую с кольцевого днища по формуле ДР* = (рд —
— рн) п (d^ — d~TC) i/4, принимая рд = 0,1р* = 0,4 МПа. Тогда АР* = 4,82 кН;
г) находим тягу АР*, снимаемую с косого среза цилиндрического насадка по
формуле (8.88), принимая р = 0,1р* = 0,4 МПа. Тогда АР* = 8,7 кН;
д) определяем суммарную тягу двигателя после открытия сопел отсечки Р£
по формуле (8.89) с учетом, что для цилиндрического люка АРг = 0 и АР^ = 0.
Тогда Р* = 0,7 кН.
Таким образом, заданное значение Р£ = —(2 ... 3) кН не обеспечивается
выбранными размерами отсечных отверстий и их необходимо увеличивать так, чтобы
получить Р*тс ^ 52 кН.
Во втором приближении принимаем d0TC = 0,06 м. Тогда da = 0,09 м, /я =
= 0,12 м; Р*тс = 53 кН; АР; = 5,73 кН; АР* = 9,65 кН; Р* = —2,7 кН.
Дальнейшие приближения делать нецелесообразно, поэтому считаем оконча -
тельными размерами сопел отсечки, принятые в расчете второго приближения.
8. Определяем по формуле (8.26) комплекс
—£- ~~т~ ~ 8,65 с х и прове-
р иТ
ряем условие (8.29). Условие (8.29) не выполняется, т. е. при отсечке не происходит
«мгновенного» гашения заряда.
9. Определяем по формуле poidp* = [ф2^кр/(ф2^кр + 1*ф2отсЛ>тс) J1/(1"v)
возможное давление в камере сгорания при открытых соплах отсечки и проверяем
условие /7min ;> Роте- Так как ротс = 0,35 МПа, то это условие выполняется, следо-
308
вательно, при открытии сопел отсечки в камере устанавливается режим «плавного»
гашения заряда.
10. Определяем по формуле (8.59) зависимость р = f (т) в интервале давлений
в камере р* > р ^ pmin- Результаты расчета приведены ниже:
р, МПа
т — Атотс ,, с
4
0
3,5
0,0161
3
0,0338
2,5
0,058
2,0
0,0867
1.5
0,132
1.0
0,202
0,5
0,453
И. Определяем по формуле (8.61) зависимость р = / (т) в интервале давлений
Pmin > Р ^ Р//> задаваясь рядом значений р. Результаты расчета приведены ниже:
р, МПа
0
.5
0
0,3
0,03
0,1
0,111
0,05
(
3,165
0,03
0,202
0,02
0,240
12. Определяем по формулам (8.72) и (8.73) давление в камере, при котором
начинается отрыв потока от стенок сопла. По таблицам газодинамических функций
для F*jF* = 8 и п = 1,25 находим М*а на срезе сопла; М* = 3,25. Тогда раотр =
= 7,74- 1(Г8 МПа; ротр = 0,515 МПа.
13. Определяем давление в камере, при котором начинается отрыв потока
от стенок цилиндрического газоотводного насадка. По таблицам газодинамических
функций для (dn/d0TC)2 = 2,25 и п= 1,25 находим Маотс на срезе газоотводного
насадка; Mfl*0TC = 2,2. Тогда Pfl0Tc.0Tp = 1,08-ИГ* МПа; Ротс. отр = 0,115 МПа.
14. Определяем по формуле ря/рДрКр = 12/(л + \)]п^п~1) давление в камере,
при котором начинается докритический режим истечения из сопел. pn0KD = 3,62 X
X Ю-2 МПа. Р
15. Определяем по формуле (8.70) тягу основного сопла при безотрывном
течении газов (4 > р > 0,515 МПа). Результаты сводим в таблицу.
16. Определяем тягу основного сопла при отрывном течении газового потока
в закритической части сопла (0,515 > р > 0,0362 МПа).
Для определения местоположения точки отрыва газового потока от стенок
сопла используем тождество (8.75). Для удобства расчета строим график рн1р ~
= / (М) и djd^ = f (М) при п = 1,25 (рис. 8.19).
Порядок построения. Задаемся рядом значений числа М и находим
отклонение рн1р по формуле (8.77); строим график рн/р= f (М) (см. рис. 8.19).
Отношение djd^ находим по формуле (8.78) для выбранных значений числа М
и строим график di/dKp = f (М) (см. рис. 8.19). (Для расчета зависимостей рн1р —
= / (М) и djd^ = f (M) удобно пользоваться
таблицами газодинамических функций). Так,
при р = 0,5 МПа рн/р = 0,04, что
соответствует М = 3,2 и отношению djd^ =2,8
(см. рис. 8.19). По полученному отношению
djd^ определяем площадь Fx сопла в точке
отрыва потока по формуле
Fi = Kp(*i/*kv? = °-0391 м2'
Тягу основного сопла при отрыве газового
потока от стенок сопла определяем по
формуле (8.70), полагая Fa ~ F± и определяем
комплекс Ф (pjp) по отношению FjFUp [31J.
Тогда Ро = 3,23 кН. Результаты расчетов
сводим в таблицу.
1,0 3,0
Рис. 8.19
М '
309
р, МПа
Ро, кН
Роте» кН
АРд, кН
АР^, кН
рг кН
р, МПа
Ро, кН
Роте кН
АРД, кН
АР^, кН
Р2, кН
4,0
37,1
53
5,37
9,65
—2,70
0,3
1,85
3,76
0,141
0,254
—0,73
3,5
27,65
46,37
4,65
8,40
—2,45
3,0
23,60
39,67
3,95
7,П
—2,20
0,10
0,5
1,10
—0,031
—0,175
—0,37
2,5
19,5
33,02
3,25
5,85
—2,00
0,05
0,201
0,435
—0,0067
—0,038
—0,13
1,5
11,4
19,72
1,83
3,30
— 1,50
0,0362
0,126
0,252
0
0
—0,052
1,0
7,32
13,07
1,13
2,03
—1,28
0,025
0,044
0,0955
0
0
—0,0235
0,515
3,38
6,62
0,444
0,80
— 1,05
0,02
0
0
0
0
0
17. Определяем по формуле (8.81) тягу основного сопла при дозвуковом
истечении газов (0,0362 > р > 0,02 МПа). Результаты расчетов сводим в таблицу.
18. Определяем по формуле (8.70) тягу сопла отсечки при сверхкритическом
истечении (4 > р > 0,0362 МПа). Результаты расчетов сводим в таблицу.
19. Определяем по формуле (8.81) тягу сопла отсечки при дозвуковом режиме
истечения (0,0362 > р >> 0,02 МПа). Результаты расчетов сводим в таблицу.
20. Определяем по формуле (см. п. 7 настоящего расчета) тягу, снимаемую
с кольцевого днища газоотводных насадков при безотрывном течении газов (4 >
> р > 0,115 МПа). Результаты расчетов сводим в таблицу.
21. При отрывном течении газов в насадке принимаем линейный закон
изменения АРд от —0,038 кН при р = 0,115 МПа до 0 при р = 0,0362 МПа и получаем
при р = 0,05 МПа АРД = —6,7 Н.
22. Определяем по формуле (8.88) тягу, снимаемую с косого среза
цилиндрического насадка при безотрывном течении газов (4>р>0,115 МПа). Результаты
расчетов сводим в таблицу,
23. При отрывном течении газов в насадке принимаем линейный закон
изменения АР» от —0,216 кН при р = 0,115 МПа до 0 при р = 0,0362 МПа, поэтому при
р = 0,05 МПа АРу =- -0,038 кН.
24. Определяем по формуле (8.89) Р^. Результаты расчетов сводим в таблицу.
310
р *
25. По формулам: Д/п. д, = ^Атотс , и Д/п 2 = 0.5/>0* -р~- Атотс 2 опре-
деляем составляющие импульса последействия, полагая ДтОТС1 = 0,003 с; АтотСо =--
= 0,0015 с. Тогда Д/П.Д1 = 95,1 Н-с; А/П.д2 = 22,6 Н-с; Д/п. дз = 0, так как
/>2<0.
26. Определяем суммарный импульс последействия по формуле: /п д =
= Д/п.д1+ ^п.дг. Тогда /п.д= 117,7 Н-с.
8.7. ПЕРЕДАТОЧНЫЕ ФУНКЦИИ СИСТЕМЫ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
В теории автоматического регулирования широко
используется аппарат передаточных функций. Составим передаточные
функции РДТТ для различных входных и выходных параметров. Если
в качестве входного параметра принимается изменение площади
критического сечения сопла, а в качестве выходного — изменение
давления в камере, то передаточная функция в соответствии с
уравнением (8.4) может быть записана в виде
*р<*> = т£т1" (8-90)
Таким образом, при Ксв = const, RT = const и при линейном
законе горения твердого топлива камеру РДТТ можно рассматривать
как апериодическое звено с характерным видом переходного процесса,
приведенного на рис. 8.1.
Если в качестве входного воздействия, кроме Д/^р»
рассматривается и поверхность горения твердого топлива, то уравнение (8.4)
при линейном законе горения твердого топлива преобразуется к виду
где
р£кр___ Sb]
rt Pt J
L Vrt
коэффициент усиления камеры сгорания, связанный с изменением
площади горения топлива.
Применяя принцип суперпозиций, получаем передаточные
функции двигателя в виде
WpW- TpS+l у
Таким образом, воздействие на двигатель твердого топлива
переменной площадью поверхности горения заряда приводит к изменению
давления в камере по апериодическому закону.
Если в качестве регулируемой величины принять тягу двигателя,
то передаточная функция двигателя может быть получена из урав-
311
нения (8.11), которое, пренебрегая членами'второго порядка малости,
можно записать в виде
APt= K?F*pAp -f KpP*AFkp. (8.92)
Далее, дифференцируя соотношение (8.92) по времени, получаем
dAP TJr i~i* dAp , „ + dAFvr\ /« qq\
dx
Заменяя
dAP
в формуле (8.93) выражением из уравнения (8.4),
dAFKl
окончательно получаем
„ dAP
где
Тогда передаточная функция может быть записана в виде
(8.94)
Передаточная функция (8.94) получена при тех же допущениях,
что и передаточная функция (8.90). Структура передаточной функции
(8.94) показывает, что при регулировании тяги РДТТ изменением
площади критического сечения сопла двигатель можно
рассматривать как звено, для которого характерна зависимость выходного
параметра не только от величины входного воздействия, но и от
скорости ввода входного воздействия в рассматриваемое звено. Вид
переходного процесса, характерный для реального звена такого типа,
показан пунктирной линией на рис. 8.4.
При переходе от линейного закона горения твердого топлива
к степенному структура передаточных функций (8.90), (8.91) и (8.94)
не изменяется, однако выражения для постоянных коэффициентов
приобретают другие значения.
Основной задачей работы ДУ является обеспечение программной
скорости полета ЛА по траектории. Эту задачу целесообразно решать
с помощью системы управления, воздействующей на тягу ДУ.
Одна из возможных структурных схем такой системы управления при
изменении тяги двигателя воздействием на площадь критического
сечения сопла показана на рис. 8.20. В состав структурной схемы,
кроме ЛА 5 и двигателя
тверлгкв
Ли
ли г
Кг
Рис. 8.20
дого топлива 4, входят:
регулируемое сопло 3 с приводом
2, усилитель 1 и гироинтегра-
тор 6. Для определения общей
передаточной функции
системы рассмотрим
последовательно передаточные функции
отдельных звеньев системы
управления.
312
Передаточная функция ЛА при воздействии на нее!(ах —про*
дольное ускорение) тягой двигателя в первом приближении может
быть записана как передаточная функция звена первого порядка
в виде
Передаточная функция (8.95) получена в предположении,^что^в
малые отрезки времени, характерные для переходных процессов при
управлении ЛА, его масса /пла, угол атаки а, угол тангажа 9
изменяются незначительно и могут рассматриваться как постоянные
величины.
Поведение РДТТ при изменении тяги за счет регулирования
площади критического сечения сопла описывается передаточной
функцией (8.94).
Регулируемое сопло можно рассматривать как безынерционное
звено с передаточной функцией
" •• UAFKnl =*р.е. (8-96)
Для управления площадью критического сечения сопла обычно
применяют гидроприводы, для которых характерна передаточная
функция следующего вида:
Работа магнитного усилителя может быть описана
передаточной функцией, характерной для апериодического звена, а именно: ]
W (Ч)
wy{s>~ L[AV] ~Tss+\ ' ^'^}
Гирогенератор можно рассматривать как безынерционное звено
с передаточной функцией
Wr(5) = tfr. (8.99)
По известным передаточным функциям отдельных звеньев и
характеру структурных связей звеньев можно записать передаточную
функцию Woe (s) ЛА как объекта регулирования в виде
Sr= w*-*(s) Wji"{s) Wr-n (s)- (8-100)
Соотношение (8.100) после подстановки выражений (8.94), (8.95)
и (8.99) и некоторых преобразований
можно записать в виде
w (с\ - К°6 + К
061 ;~ 4^ +
где
= Тр
Коб =
р р
Передаточную функцию регулятора,
в состав которого входят три последо-
Объект
Рщпятор ^
Рис. 8.21
L
к
313
вательно соединенных звена (усилитель, привод и регулируемое
сопло) можно записать в виде
= Wy(s)Wr,n(s)Wl>.c(s). (8.101)
Соотношение (8.101) можно преобразовать с учетом выражений
(8.96), (8.97) и (8.98) и привести к виду
w per W (Г5 + TS + 7^ + 1
где /Срег = КуКг. п/Ср. с; Tl = ТХТ2Т3; Т\ = {ТХТ2 + Т2П +
+ ТгТ3); Тй = Тг + Т2 + Т3.
После получения передаточных функций объекта и регулятора
структурную схему управления (см. рис. 8.20) можно заменить
схемой, приведенной на рис. 8.21. Далее, полагая заданными
характеристиками объекта, необходимо вариацией постоянных времени и
коэффициентов усиления регулятора оценить устойчивость системы
объект — регулятор и окончательно выбрать исходные данные для
проектирования регулятора.
ГЛАВА 9
УПРАВЛЕНИЕ ВЕКТОРОМ ТЯГИ
ПО НАПРАВЛЕНИЮ
9.1. СПОСОБЫ УПРАВЛЕНИЯ
Для управления полетом ЛА необходимо создавать
управляющие моменты относительно центра тяжести в трех плоскостях:
тангажа, рыскания и крена. Эту задачу можно решать с помощью
специальных систем управления или за счет изменения направления
действия вектора тяги основной ДУ. Второй способ нашел
наибольшее применение из-за относительной простоты, а также из-за
лучших массовых характеристик. Все известные способы изменения
направления вектора тяги ракетных двигателей можно разделить
на следующие группы:
— создание управляющего усилия за счет рассогласования тяг
камер в многокамерных двигателях или с помощью специальных
управляющих камер, работающих автономно или совместно с
основной камерой ракетного двигателя (поворотные двигатели);
— создание управляющего усилия за счет поворота на
определенный угол всего сверхзвукового газового потока (поворотные
камеры, поворотные сопла);
— создание управляющего усилия за счет локального
воздействия органа управления на сверхзвуковой газовый поток за срезом
сопла (дефлекторы, газовые рули, щитки и т. п.);
— создание управляющего усилия за счет искусственной
асимметрии сверхзвукового газового потока в закритическои части сопла
(вдув газа, впрыск жидкости, ввод твердых тел).
314
9.2. ТРЕБОВАНИЯ И ХАРАКТЕРИСТИКИ
СИСТЕМ УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ
Кроме общих требований (надежность, простота
конструкции, малая масса и т. п.) к системе управления вектором тяги
предъявляются дополнительные требования, вытекающие из условий
полета ракет и из условий совместной работы системы управления
полетом ракеты и органа управления вектором тяги по направлению.
К этим требованиям относятся:
— обеспечение необходимых управляющих усилий на активном
участке траектории полета;
— обеспечение наибольшей эффективности органа управления во
всем диапазоне его рабочих параметров;
— работа органа управления должна сопровождаться
наименьшими потерями тяги двигателя;
— для снижения массы ЛА целесообразно иметь возможно
меньший шарнирный момент, необходимый для изменения положения
органа управления;
— характеристики органа управления должны быть стабильны
по времени работы ДУ.
Величина и характер изменения по времени управляющих
усилий зависит от программы полета и от характера внешних
возмущений, действующих на ЛА в полете. Для космических ЛА
характерное изменение требуемых управляющих усилий показано на рис. 9.1.
Такое изменение управляющих усилий Ру по времени работы
ступени т объясняется характером внешних возмущений, действующих
на аппарат в полете. Сразу после отделения от стартового устройства
или после разделения ступеней на ЛА действует наибольшие
возмущения, для устранения которых необходимы достаточно большие
управляющие силы (моменты). По истечении 3 ... 10 с уровень
внешних возмущений снижается и поэтому снижаются требуемые
управляющие усилия. Величина управляющих усилий на маршевом режиме
составляет обычно 2 ... 5 % от тяги ракетного двигателя. На участке
полета непосредственно после старта или после разделения ступеней
уровень управляющих усилий может достигнуть 10 ... 15 % от тяги
ракетного двигателя. Величина требуемых управляющих усилий
от тяги каждой ступени ракеты снижается по мере перехода от
первой ступени к последующим. Эти значения управляющих усилий
необходимы для стабилизации
аппарата в плоскостях тангажа
и рыскания. Для стабилизации
по крену требуемые управляю-
щие усилия значительно меньше
и составляют примерно одну
десятую часть от управляющих
усилий в плоскости тангажа и
рыскания.
Для сравнения систем
управления вектором тяги используют Рис. 9.1
315
л
несколько параметров. Основной
характеристикой органа управления является
управляющая сила Ру. Величина
управляющей силы зависит от
конструктивных особенностей и величины угла
поворота органа управления. Обычно
Ру = Руб, где Ру — эффективность
органа управления при его повороте на
угол б.
$ Встречаются различные варианты
Рис 9 2 изменения управляющих усилий,
развиваемых органами управления, при
изменении угла их поворота, а именно: органы управления с
возрастающей эффективностью (рис. 9.2, линия У); органы управления
с постоянной эффективностью (рис. 9.2, линия 2); органы
управления с уменьшающейся эффективностью (рис. 9.2, линия 3).
Эффективность органа управления в каждой точке
характеристики Ру = f (б) определяется Ру = /' (6) = ДРУ/Д6, где ДРУ —
приращение управляющего усилия органа управления при
изменении его положения на малый угол Дб.
Для органов управления с переменной эффективностью
характерны зоны пониженной эффективности («мертвые» зоны), которые
ухудшают эксплуатационные свойства органов управления. При
выборе органов управления вектором тяги всегда необходимо
отдавать предпочтение органам управления с постоянной
эффективностью.
Величину максимального управляющего усилия Рутах,
развиваемого органом управления, оценивают значением относительного
управляющего усилия, ВЫЧИСЛЯеМОГО ПО формуле Рутах = Рутах/Рп>
где Рп — тяга двигателя в пустоте.
Возможность применения органа управления вектором тяги
ракетных двигателей во многом зависит от величины потерь тяги
двигателя из-за введения в конструкцию органов управления. Эти
потери слагаются из нулевых АРх0 и позиционных ДРхб потерь.
Нулевые потери тяги определяются по формуле: ДРх0 = Рх —
— Р*орг> где Рх — тяга двигателя по оси х без органов управления;
Рхорг — тяга двигателя по оси х с органами управления,
находящимися в нулевом положении, т. е. при 6 = 0. Позиционные потери
тяги определяются по формуле: ДРхб = Р*орг— Лев» где Рхъ—
тяга двигателя по оси х с органами управления, установленными
под углом б Ф 0. Во всех случаях при создании органов управления
вектором тяги необходимо стремиться к уменьшению потерь тяги
как нулевых, так и позиционных.
Потери тяги двигателя на органах управления обычно
характеризуют величиной относительных потерь тяги двигателя,
определяемых по формуле: ДРХ = АРХ/РХ1 где ДР* = ДРх0 + ЛР*6-
На рис. 9.3 в качестве примера приведены расчетные
характеристики органов управления РДТТ. Сравнение органов управления
316
0.06
от
>
— —
—-
^—
Ч2
3
\
О 0,02 0.05
Рис. 9.3
в координатах АРХ — /у/>х
показало, что наименьшие потери в тяге
двигателя характерны для поворотных
сопел (линии 4 и 5) и систем с вводом
фреона (линия 3) в закритическую
часть сопла, а наибольшие потери
характерны газовым рулям (линия /)
и дефлекторам (линия 2). Эти
расчетные данные подтверждаются
результатами экспериментальных
исследований [18] мощного РДТТ диаметром 4 м, на котором
сравнивались системы управления вектором тяги, в том числе поворотное
сопло, и системы с вводом жидкости в закритическую часть сопла.
Органы управления вектором тяги двигателей характеризуют
коэффициентом качества К7, определяемым по формуле Ку =
— "ymax/Л^х, где АРХ — потери осевой тяги, возникающие пои
получении Рутах. *
Важной характеристикой органов управления является
суммарный шарнирный момент, который необходимо развивать на оси
органа^управления, чтобы изменить его положение. Суммарный
шарнирный момент УИ2 определяется суммой моментов, действующих
на орган управления при его повороте, а именно
Мх=Мь + Мъ + Мъ + Мтр + Мас + М д + Мупл, (9.1)
здесь М6 — позиционный шарнирный момент, зависящий от
величины силы взаимодействия органа управления с газовым потоком и
от расстояния между центром давления силы взаимодействия и
центром вращения органа управления; Мб — шарнирный момент,
связанный с демпфированием газового потока и зависящий от угловой
скорости 6 движения органа управления и массы потока,
находящейся во взаимодействии с органами управления; его определяют
по формуле
= тг/2б,
(9.2)
где тг^~ массовый секундный расход газов через сопло; /—
характерный размер органа управления; Мб — инерционный шарнирный
момент, зависящий от углового ускорения 6 подвижных частей
и их момента инерции It относительно оси вращения:
м-6 = S /д
1=0
(9.3)
где п — число подвижных частей органа управления;
оМтр — момент трения в шарнирах и соединениях между
подвижной и неподвижной частью органа управления, который равен
мтр =
-fdjb,
(9.4)
317
где п — число шарниров; Рт — нагрузка на шарнир диаметром dm\
f — приведенный коэффициент трения; ат — угол поворота
шарнира;
Мае — момент асимметрии, зависящий от точности изготовления
газодинамического контура органа управления и силы
взаимодействия газового потока с органом управления; обычно его определяют
экспериментально;
Мд — момент дисбаланса, зависящий от массы ту подвижной
части органа управления, расстояния / между центром вращения
и центром тяжести органа управления и продольного ах и
поперечного ау ускорений, действующих на ракету при движении по
траектории; его определяют по формуле
Мд = myl (ax sin 8±a7 cos б), (9.5)
Мупл — момент сил упругого сопротивления гибких связей
(уплотнений, манжет, сильфонов и т. п.), зависящий от жесткости
упругих элементов, величины их деформации и расстояния между
линией действия упругой силы и осью вращения органа управления.
Обычно определяется экспериментально.
Величина суммарного шарнирного момента определяет
требуемую мощность привода и, как следствие, массовые характеристики,
параметры системы питания привода. Так, у ракеты, управляемой
поворотным двигателем массой 38 кг и тягой 32 кН, максимальный
шарнирный момент сервопривода равен 848 Нм, а номинальный —
415 Нм [18]. Сервопривод обеспечивает угол поворота двигателя
б = ±3° с угловой скоростью 0,5 рад/с и ускорением 5 рад/с2. Такая
система управления вектором тяги обладает следующими величинами
составляющих шарнирного момента (в долях единицы по отношению
к максимальному значению шарнирного момента):
позиционный момент при 6 = 3° 0,17
момент аэродинамических сил 0,11
инерционный момент 0,22
момент трения 0,19
момент асимметрии 0,15
момент дисбаланса 0,16
Для комплексной оценки влияния органов управления на
ракетную систему используют соотношение
где AL — потери дальности полета ракеты при установке органов
dL A Т
управления, —^- А/ — изменение дальности полета с изменением
суммарного импульса ракеты; дМ АМК и дМ АА4Т—уменьшение
дальности полета ракеты за счет увеличения соответственно массы
dL A
конструкции и массы топлива; -=— /\сх — уменьшение дальности
полета ракеты за счет увеличения лобового сопротивления ракеты,
обусловленного органами управления вектором тяги.
318
Сравнительная оценка органов управления вектором тяги,
основанная на использовании формулы (9.6), более правомерна при
проектных работах. Однако возможности этого метода ограничены
отсутствием достоверных данных, особенно при значениях
производных, входящих в это соотношение.
9 3 ПОВОРОТНЫЕ ДВИГАТЕЛИ
Для создания управляющего усилия в ракетных
двигателях часто используют специальные поворотные двигатели,
работающие автономно от основной двигательной установки. Такое
решение задачи удобно с точки зрения проектных и доводочных
работ, так как не требует специальных дополнительных исследований,
например, исследований по отработке режимов совместной работы
поворотных и тяговых двигателей. Однако применение поворотных
двигателей, как правило, увеличивает массу ЛА.
Известны различные компоновочные решения системы управления
вектором тяги, основанные на применении поворотных двигателей
(рис. 9.4). Так, ЛА с жидкостными ракетными двигателями 1
обычно имеют четыре поворотных двигателя 2, установленных в
шарнирной подвеске и обеспечивающих управление ракетой потрем
направлениям: тангажу, рысканию и крену. Поворотные двигатели I и III
управляют ракетой по углу рыскания, а двигатели II и IV — по
углу тангажа. Каждая пара двигателей или все двигатели
одновременно могут управлять ракетой по углу крена. Поворотные
двигатели обычно работают на тех же компонентах топлива, что и
основные двигатели. В тех случаях, когда для управления полетом
ракеты необходимы малые управляющие силы, в качестве поворотных
двигателей применяют двигатели малой тяги или специальные
газогенераторы, работающие, как правило, на гидразине и развивающие
тягу в несколько ньютонов и менее.
На ЛА с РДТТ в качестве поворотных двигателей применяют
газогенераторы на твердом топливе, как правило, с зарядом
торцевого горения. Применение таких газогенераторов обусловлено
простотой конструкции, малой стоимостью, высоким быстродействием.
Рис. 9.4
319
Температура продуктов сгорания твердого топлива в такого типа
газогенераторах обычно не превышает 1300...1500 СС, что позволяет
обеспечить надежную работу силового блока и тепловую защиту
стенок камеры газогенератора.
Поворотные двигатели ЛА РДТТ применяют для управления
по углам тгнгажа, рыскания и крена. Применяют также комбини
рованные схемы управления, когда управление по углам тангажа и
рыскания обеспечивает одна система (например, поворотное сопло
или система впрыска жидкости в закритическую часть сопла), а
управление по углу крена достигается за счет системы поворотных
двигателей с тягой в несколько ньютонов.
9.4. ПОВОРОТНЫЕ, КАМЕРЫ И СОПЛА
В тех случаях, когда компоновка ДУ позволяет создать
управляющий момент относительно центра тяжести ракеты за счет
поворота камеры в опорах (это особенно характерно для
двигательных установок с ЖРД и ЯРД) на угол б (рис. 9.5), расчетные
зависимости для определения управляющего усилия Ру, потерь в тяге АЯ*
и управляющего момента Му имеют вид
Ру = Р sin б ^ Р8; (9.7)
= Р(1 -cos 6); (9.8)
где Р — тяга двигателя; /ц. т — расстояние от центра вращения
камеры до центра тяжести ракеты.
Способ создания управляющих усилий за счет поворота камер
нашел широкое применение из-за конструктивной простоты, однако
необходимость создания подвижных опор для камер и подвижных
Рис. 9.5
320
соединений на топливных магистралях несколько снижают
достоинства этого способа управления вектором тяги двигателя.
Оптимальные углы поворота камер составляют 3 ... 5°.
Управляющее усилие и потери тяги двигателя для поворотных камер
определяются по формулам (9.7) и (9.8).
В РДТТ способ управления вектором тяги поворотом камер
неприменим из-за того, что центр тяжести ЛА практически всегда
располагается в пределах камеры. Для создания плеча между
линией действия вектора тяги и центром тяжести аппарата применяют
поворотные сопла (рис. 9.6). В поворотных соплах линия разделения
подвижной и неподвижной частей может размещаться в дозвуковой
(а) и на утопленной (б) части сопла. Выбор той или иной
конструктивной схемы поворотного сопла во многом зависит от условий
работы камеры 1 (давление и температура продуктов сгорания,
содержание конденсированной фазы) от компоновки ЛА, наличия надежных
узлов уплотнения 2, обладающих стабильными характеристиками.
Широкое применение поворотных сопел обусловлено малыми
потерями тяги как нулевыми, так и позиционными [обычно значения
близки к величинам, рассчитанным по формуле (9.8) ] линейной
зависимостью управляющей силы от угла поворота [см. формулу (9.7) ],
стабильностью основных характеристик в процессе работы
двигателя. К числу недостатков конструкций поворотных сопел следует
отнести трудности в создании надежных уплотнений между
подвижной и неподвижной частью сопла, а также высокий уровень
шарнирных моментов.
Поворотное сопло (см. рис. 9.6, а) состоит из неподвижной
части 1 и подвижной 3. Последняя соединяется с неподвижной частью
с помощью цапфы, через которую проходит ось вращения. В этом
случае для управления по углам тангажа, рыскания и крена
необходима система, состоящая из четырех сопел. Величина углов
поворота сопел для различных ЛА различна и составляет [18]: I
ступень — 7...8°, II ступень — 5 ... 6°, III ступень — 3 ... 4°. При
применении карданного подвеса одиночное сопло получает
возможность развивать управляющую силу в плоскостях тангажа
и рыскания, а управляющая сила в плоскости крена создается
дополнительными поворотными двигателями. Угол поворота сопла
в кардановом подвесе для I ступени обычно не превышает ±5°
в двух плоскостях.
На рис. 9.7 показана конструкция поворотного сопла, в которой
поверхность контакта подвижной 4 и неподвижной 1 частей выполнена
по сфере. Уплотнение достигается применением сальников 2 и
кольцевой диафрагмы 3 из силиконового каучука, армированной
нейлоном. Сальники выполняют из асбеста, фторопласта или вольфрама.
За сальниковым уплотнением располагают полость Л, иногда
заполняемую маслом, которая замыкается гибкой диафрагмой.
Надежность работы узла уплотнения во многом зависит от величины
зазора между подвижной и неподвижной частями сопла. Уменьшение
зазора может привести к росту шарнирного момента из-за шлаковки
зазора или затирания сочлененных поверхностей при температур-
21 А. И Бабкин и вр. 321
Рис. 9.7
Рис. 9.9
ных деформациях конструкции сопла. Зазор в уплотнении может
заполняться жаростойкой смазкой.
Иногда в качестве сальниковых уплотнений применяют
гидравлические подушки (рис. 9.8, патент Франции № 7932000). Упругим
элементом подушки является силиконовое масло /, заключенное в
непроницаемую оболочку 2. Оболочка выполнена из прорезиненной
ткани и армирована слоем 3 волокон из нейлона или других
материалов. Гидравлическая подушка устойчиво работает в сферическом
соединении сопла при углах поворота до 5°. Для исключения
проскальзывания при повороте сопла части 4 оболочки приклеены к
поверхностям сопла.
В последние годы получили применение сопла с упругим
уплотнением, конструкция которых отличается простотой,
технологичностью и низкой стоимостью. Ее недостатком является высокий
шарнирный момент, обусловленный жесткостью уплотнения. Для
снижения величины шарнирного момента применяют двойное упругое
уплотнение сопла (рис. 9.9), позволяющее значительно снизить
величину шарнирного момента. Узел уплотнения состоит из сервоуплот-
нения / с центром поворота 2 и главного уплотнения 4 с центром
поворота 3. Фактически сопло поворачивается относительно центра
Таблица 9.1
Характеристики поворотного сопла и рулевых приводов [18]
Параметр
Масса сопла, кг
Угол поворота сопла, градус
Усилие на штоке привода, кН
Ход штока, мм
Масса привода, кг
Мощность привода, кВт
Сопло с одиночным
уплотнением и
задним расположением
центра поворота
937
5,5
20
±116
73
7,1
Сопло с двойным
упругим
уплотнением
949
5,5
4,35
±17,7
15
0,44
322
поворота, расположенного между
центрами 2 и <?, что ведет к
снижению шарнирного момента и, как
следствие, к снижению мощности рулевых
приводов (табл. 9.1). Сопла с двойным
упругим уплотнением широко
используют для поворотных сопел с
утопленной частью (см. рис. 9.6, б).
Снижение шарнирного момента
для управления поворотными
соплами может достигаться применением
вращающихся сопел (рис. 9.10), в
которых неподвижная часть /
соединяется с подвижной частью 4 с помощью
игольчатого подшипника 5 и
уплотняется по линии разъема 2 кольцевыми сальникахми 3. Основной
недостаток вращающегося сопла — большая масса поворотного'узла.
Применяется редко.
Рис. 9.10
9.5. РАЗРЕЗНЫЕ УПРАВЛЯЮЩИЕ СОПЛА
В разрезных управляющих соплах (РУС) сила Ру
возникает вследствие перераспределения давления на внутреннем
контуре поворотной части сопла при его повороте на угол б (рис. 9.11).
Обычно линия разреза сверхзвуковой части сопла находится в зоне
потока с числомМ, равным 1,5 ... 2, поэтому при повороте раструба 3
на его внутренней поверхности возникает косой скачок уплотнения 1
максимальной интенсивности на входящей стороне сопла и
минимальной интенсивности 2 на противоположной стороне. Это приводит
к перераспределению давлений на внутренней поверхности
поворотной части сопла и возникновению боковой управляющей силы Ру,
величина которой зависит от угла поворота сопла. Одновременно
возникают позиционные потери АРхб и нулевые потери APx0 в тяге,
обусловленные соответственно перераспределением давлений на
внутренней поверхности РУС и наличием линии разъема сопла в его
сверхзвуковой части. Величина потерь тяги определяется по формуле
АР* = Р — Pxv, где Р — тяга,
развиваемая раструбом до его
отделения от сопла; PxV —
тяга, развиваемая раструбом при
Управляющая сила,
развиваемая РУС, оценивается [18] по
формуле
Рис. 9.11
здесь К — коэффициент
согласования, равный 1,24; Ру — эффектив-
323
/ 2 3 ___ 4 S 6
Рис. 9.12
ность РУС, определяемая по формуле
Рь -
ср
(Мср) — газодинамическая функция скоростного напора, опре-
п
деляемая по формуле: со (Мср) = ( 1 + —
■Мс
рк -
давление в камере, Па; Fp = £>ср/р — площадь поперечного сечения
раструба, м2; б — угол поворота раструба, радиан; Dcp —
внутренний диаметр раструба в середине поворотной части, м; /р — длина
раструба (см. рис. 9.11) от среза сопла до цилиндрической части
разъема, м; Мср — число М в среднем сечении раструба; п —
показатель политропы расширения.
Величина управляющей силы зависит не только от угла б, но
и от местоположения разреза сопла. Поэтому при проектировании
РУС необходимо задаться рядом значений /р и определить /р. опт,
при которой функция Ру = / (б) имеет максимальное значение в
рабочем диапазоне значений угла б.
Конструкция РУС в кардановом подвесе показана на рис. 9.12.
Корпус неподвижной части 1 соединен с раструбом 6, кардановым
подвесом 2 через рулевой привод 5. Уплотнение неподвижной части
сопла с раструба выполнено по сфере 3 с сальниками 4.
На рис. 9.13 показана конструкция РУС с сильфонным
металлическим уплотнением /.
Основными преимуществами разрезных управляющих сопел
являются линейная связь управляющей силы и угла поворота сопла,
малые потери в тяге двигателя, более высокая надежность уплотни-
тельных узлов, поскольку они работают в условиях малых
давлений и низких температур по сравнению с узлами уплотнения
поворотных сопел. Основной недостаток РУС — высокий шарнирный
момент.
9.6. ГАЗОВЫЕ РУЛИ
Различают несколько видов газовых рулей: внутриструй-
ный, внеструйный и кольцевой (дефлектор).
Внутриструйный газовый руль 3 (рис. 9.14) устанавливается
324
Рис. 9.14
Рис. 9.15
на срезе сопла / с помощью опор 2, Он имеет некоторые
преимущества. Во-первых, применение рулей позволяет получить
необходимое управляющее усилие и дает возможность управлять положением
ракеты в трех плоскостях даже при использовании двигателя с
одним соплом. Возможны две компоновочные схемы расположения
газовых рулей 1 на срезе сопла 2: четырехлопастная (рис. 9.15, а)
и трехлопастная (рис. 9.15, б), сравнение которых показало, что
переход к трехлопастной схеме, не усложняя систему управления
ракетой, позволяет уменьшить нулевые потери тяги двигателя,
уменьшить массу системы энергопитания за счет снижения числа
приводов, улучшить условия стыковки ракеты со стартовым
устройством и ступеней ракеты между собой. Для получения одинаковых
управляющих усилий в указанных схемах площадь боковой
поверхности руля в трехлопастной схеме должна быть больше на 13,4 %,
илиг при одинаковой площади боковой поверхности руля .необходимо
увеличивать угол поворота руля. Во-вторых, эффективность газовых
рулей при углах поворота, до 15 % практически постоянна и лишь
при дальнейшем увеличении угла поворота руля наблюдается
некоторое снижение эффективности (рис. 9.16). В-третьих, внутриструй-
ные газовые рули имеют небольшой шарнирный момент, основная
составляющая которого — позиционный шарнирный момент —
может уменьшаться за счет уменьшения расстояния между центром
давления и центром вращения руля.
Однако внутриструйным газовым рулям свойственны и
недостатки, главными из которых являются: высокий по сравнению
с другими видами органов управления уровень нулевых и
позиционных потерь тяги. Нулевые потери тяги могут достигать 1,5 ...
2,5 % от тяги двигателя. Уровень позиционных потерь также
достаточно высок; постоянное пребывание руля в сверхзвуковом газовом
потоке предъявляет высокие требования к материалу рулей по
тепловой и эрозионной стойкости. Особое значение эти вопросы
приобретают при использовании газовых рулей в РДТТ, продукты
сгорания которых содержат конденсированную фазу. Обычно для
обеспечения работоспособности по времени применяют рули с высокой
относительной толщиной, которая в РДТТ достигает 0,15 ... 0,2,
325
11
О 5 10 15 10 6,грод
Рис. 9.16
Мгнач
о
(
о
1
О 30 60 80 Х,с
Рис. 9.17
тогда как для ЖРД характерны значения относительной толщины
руля, не превышающие 0,1 ... 0,12; применение рулей с допустимой
эрозией их боковой поверхности приводит к изменению
характеристик руля в процессе работы, которое происходит за счет
уменьшения боковой поверхности руля и за счет притупления передней
кромки. Это изменение всегда сопровождаются ростом потерь тяги
двигателя, увеличением шарнирного момента и уменьшением управ-
ляющей силы в процессе работы двигателя. На рис. 9.17 показано
изменение шарнирного момента по времени работы двигателя твердого
топлива.
Расчет внутриструйных газовых рулей сводится к определению
их площади боковой поверхности по заданному управляющему
усилию, выбору формы поперечного сечения из условий работы,
а также к определению потерь в тяги двигателя и шарнирного момента
в зависимости от угла поворота руля, параметров невозмущеннога
газового потока (обычно параметры потока на срезе сопла) и
характера взаимодействия газового потока с газовым рулем.
На рис. 9.18 показана типичная картина обтекания тонкой
пластины сверхзвуковым газовым потоком. Газовый поток,
обтекающий пластину сверху (I), проходит через косой скачок уплотнения
и изменяет свое статическое давление от ра до /?ск. Газовый поток,
обтекающий пластину снизу (II), проходит через систему скачков
разрежения (течение Прандтля—Майера) и изменяет свое
статическое давление от ра до /?2. В этих условиях управляющее усилие
Р7 и потери в тяге АРХ определяются по формулам:
у = (Рек - р2) S cos 6;
(9.9)
где 5 — площадь проекции боковой поверхности руля на плоскость
его хорды.
При заданном значении управляющего усилия Ру и принятом
значении бтах (обычно бтах = 20 ... 25°) по формуле (9.9)
определяется площадь S. Давления рск и ръ являющиеся функциями
параметров набегающего газового потока и угла поворота газового потока,
определяются по известным формулам газовой динамики.
326
Косой скат уплотнения
I
,'av-vj
'•jjr ймиы слабых возмущений
- ромбический
Рис. 9.18
Рис. 9.19
При углах поворота газового руля до 15° удобно для расчета
параметров Р7 и АРХ пользоваться зависимостями:
праЩ
Р —
= ся
2
9аП
= С
у 2
ПРаЩ
S;
(9.10)
где Су — коэффициент подъемной силы профиля поперечного
сечения руля; сх — коэффициент лобового сопротивления поперечного
сечения руля; ра, Way pa и Ма—плотность, скорость, статическое
давление и число Маха газового потока на срезе сопла
соответственно.
Значения коэффициентов су и сх определяются для различных
профилей (рис. 9.19) поперечного сечения руля по формулам:
си = —===== I 1 * \: (9.11)
_
С* ~
-1 \
где X = h/l — относительная высота руля — отношение высоты
руля h к длине его хорды поперечного сечения /; k — коэффициент
формы поперечного сечения руля, для плоского и ромбического
профиля k = 1; для чешуйчатого профиля, образованного дугами
окружности, k = 4/3; для ромбовидного профиля k = 3/2; с = ~
относительная толщина руля; стр — коэффициент сопротивления,
учитывающий потери на трение при обтекании газовым потоком
боковых поверхностей руля, обычно стр = 0,005 ... 0,007. В
формулах (9.11) и (9.12) угол поворота газового руля — в радианах.
Множитель [1 ] учитывает уменьшение
коэффициентов су и сх за счет конечного размаха газового руля.
Полученные значения параметров Р7 и АЯЛ в зависимости
от угла поворота газового руля и выбранные конструктивные формы
газового руля позволяют определить по формуле (9.1) суммарный
327
шарнирный момент, который необходим для выбора мощности
привода и запасов энергии в системе питания привода.
Позиционный шарнирный момент
6 V + l /у.д,
где /у. д — расстояние от центра давления профиля руля до центра
вращения, положение которого выбирается конструктивно.
Положение центра давления зависит от формы профиля поперечного
сечения руля и условий его обтекания газовым потоком. Для
симметричных профилей в первом приближении можно считать, что центр
давления расположен на середине хорды.
Шарнирный момент, возникающий за счет сил демпфирования
газового потока при повороте руля, определяется по формуле (9.2)
в предположении, что угловая скорость поворота газового руля
обычно составляет 1 ... 10 с-1.
Инерционный шарнирный момент определяют по формуле (9.3),
полагая, что угловое ускорение руля обычно равно 1 ... 5 с~2.
Момент трения в шарнирах и подвижных соединениях
зависит, как известно, от коэффициента трения /, сил, действующих на
опору, и характерного размера опоры. Для шарнирной опоры
диаметром d момент трения определяется по формуле (9.4). При ат = б
2Х fd/2.
Момент асимметрии профиля газового руля определяется по
формуле Мас = у Р\ + API е, где е — отклонение центра
давления от его расчетного положения в пределах допуска, обычно
е < 0,3 ... 0,5 мм. Момент дисбаланса определяется по формуле
(9.5).
Высокий уровень нулевых и позиционных потерь тяги двигателя,
а также трудности создания конструкции газового руля,
обладающей повышенной тепло- и эрозионной стойкостью, ограничивают
области применения внутриструйных газовых рулей. Их применение
возможно на стартовых ступенях для кратковременного создания
управляющих усилий при малой скорости полета, а также при углах
поворота до б = ±22° [42].
Частично устранить недостатки внутриструйных газовых рулей
можно применением внеструйных газовых рулей, выдвижных
щитов и дефлекторов, отличительная особенность которых состоит
в том, что эти органы управления не находятся постоянно в газовом
потоке и вводятся в него по мере необходимости. На рис. 9.20 пока-
S)
Рис. 9.20
328
заны конструктивные схемы внеструиного газового руля (а),
выдвижного щитка (б) и дефлектора (в). Отличительной особенностью
таких органов управления является меньший уровень нулевых и
позиционных потерь тяги двигателя, а также повышенная тепло-
и эрозионная стойкость как за счет уменьшения времени
пребывания рабочих поверхностей органа управления в газовом потоке,
так и за счет одностороннего взаимодействия органа управления
с газовым потоком. Однако последнее обстоятельство приводит к тому,
что характеристики органов управления становятся зависимыми
от параметров состояния окружающей среды и параметров среды
в донной части ракеты, что снижает стабильность характеристик
органов управления этого типа. Кроме того, внеструйные газовые
рули, выдвижные щитки и дефлекторы имеют, как правило,
переменную эффективность в области малых углов отклонения органа
управления от нулевого положения, что требует применения
конструктивных мер для устранения этого недостатка.
По характеру взаимодействия со сверхзвуковым газовым потоком
внеструйные газовые рули, выдвижные щитки и дефлекторы весьма
схожи, а расчетная схема их обтекания газовым потоком
соответствует случаю внутреннего обтекания тупого угла сверхзвуковым
газовым потоком. В зависимости от величины угла поворота газового
потока возможны два различных характера взаимодействия потока
с рабочей поверхностью руля; 0 < б < бкр, возмущение, вносимое
поверхностью руля, приводит к возникновению косого скачка
уплотнения, отходящего от точки пересечения внешней линии тока с
поверхностью руля (рис. 9.21). Параметры потока за скачком
уплотнения в этом случае рассчитываются по формулам, справедливым
для внутреннего обтекания тупого плоского угла. Для большинства
случаев значение бкр близко к 18 ... 20°. При б ^ 6кр характер
взаимодействия потока с поверхностью руля изменяется, возмущения,
вносимые в газовый поток, увеличиваются настолько, что они
распространяются навстречу набегающему потоку по дозвуковой части
пограничного слоя, что, в свою очередь, приводит к возникновению
А-образной системы скачков уплотнения (рис. 9.22) с точкой отрыва
потока от стенки сопла. На стенки сопла в области отрыва газового
потока действует повышенное давление по сравнению с давлением
невозмущенного потока, что приводит к возникновению дополни-
Скачохуттюя
Скачок уплотнет
Ра У У\<Г
Рис. 9.22
329
тельной газодинамической силы, составляющими которой являются
силы Ру2 и ЛРу2 (см. рис. 9.22).
Давление на поверхности, введенной в газовый поток части
органа управления, и на поверхности сопла в зоне отрыва носят
сложный характер. Поэтому расчет основных характеристик дефлекторов
и триммеров проводят по полуэмпирическим зависимостям. Для
оценочных расчетов дефлекторов можно использовать следующие
соотношения [18]:
Ру = 6#2 [-|- (рск — Pa) — JL (Рн _ Ра) J cos б;
АРХ = 8R2 [-j- (pCK — Pa) — JL (Рн — Ра)] sin 6,
где R — радиус внутренней сферы дефлектора; ра — давление газа
на срезе сопла; рн — давление окружающей среды на внешней
поверхности дефлектора; /?ск — давление газа на входящей в поток
части дефлектора (за скачком уплотнения).
Конструкция дефлектора [18] в кардановом подвесе (рис. 9.23}
позволяет управлять ракетой в двух плоскостях (тангажа и
рыскания), для управления по крену необходима автономная система
управления. Дефлекторы находят применение на РДТТ различных типов,
например, используются на первой и второй ступенях ракеты «По-
ларис» (США).
Схема взаимодействия триммера со сверхзвуковым газовым
потоком показана на рис. 9.24. При вводе триммера 4 в поток газа
возникает зона отрыва 3, косой 1 и замыкающий (ударная волна) 2
скачки уплотнения, что приводит к перераспределению давлений
на внутренней поверхности сопла 5 и поверхности триммера,
введенной в сопло. Управляющую силу Ру можно определить по формуле
(9.10), полагая S = hi, где h и I — высота и длина части триммера,.
введенной в сопло.
Коэффициент су для
турбулентного течения в зоне отрыва
определяется [18] по формуле
204
Рис. 9.23
Рис. 9.24
330
где Re — число Рейнольдса невозмущенного газового потока на срезе
сопла; Re = —° Qpq ; №а — скорость потока на срезе сопла; da —
диаметр среза сопла; [ia — коэффициент динамической вязкости
газа; рОтр — угол отрыва, определяемый по формуле:
f Й + 1) (Jfj + £)"
tg (в., -
Й
+ 1)
•-Й-) *«-=
здесь 9СК — угол наклона скачка, определяемый по формуле:
где я — показатель изоэнтропы истечения.
На рис. 9.25 показано влияние глубины h ввода триммера в сопло
с радиусом среза г и длиной / на относительную величину
управляющей силы Ру/Рх, где Рх — тяга двигателя. Анализ результатов
показывает, что значение силы возрастает с ростом площади
триммера, погруженной в газовый поток. В то же время величина
управляющей силы зависит от геометрических размеров сопла, а именно
от отношения г/1.
Компоновочная схема триммеров на сопловом блоке РДТТ
показана на рис. 9.26. Уравнение по тангажу и рысканию осуществляется
поворотом соответствующих пар триммеров (по тангажу — пары /—
2 или 5—6; по рысканию — пары 3—4 или 7—5), а управление по
крену достигается путем установки плоскости триммеров под углом
1 ... 2° к плоскости среза сопла.
Триммеры используются для управления вектором тяги
мощных РДТТ, где требуются большие управляющие силы. Так,
триммер площадью 0,78 м2 отклоняет вектор тяги двигателя диаметром
4 м, с соплом, имеющим диаметр критического сечения 1,27 м,
диаметр среза 3,8 м и длину 4,5 м, на угол 2 ... 3° [18].
Конструкция триммеров должна обеспечивать их высокую тепло-
и эрозионную [стойкость. Поэтому триммеры облицовывают
тугоплавкими материалами (молибден, вольфрам и их сплавы),
сублимирующими покрытиями или выполняют в виде охлаждаемых
конструкций [18].
0,10
0.С8
0,06
0,01
о г ч б д ю п м ь,см
Рис. 9.25
Рис. 9.26
Г4 , .
г/4=0,017
^^"+**Т*>
\
331
9.7. СИСТЕМЫ С ВВОДОМ ЖИДКОСТЕЙ, ГАЗОВ
И ТВЕРДЫХ ТЕЛ В СВЕРХЗВУКОВУЮ ЧАСТЬ СОПЛА
Боковое управляющее усилие создается за счет ввода
в сверхзвуковую часть сопла газовой или жидкостной струи, а также
путем ввода твердых тел. В таких системах управляющее усилие
возникает из-за асимметрии газового потока в сверхкритической
части сопла. Эти системы обладают преимуществами, к числу
которых относятся: повышение надежности двигателя из-за отсутствия
подвижных соединений, работающих при высоких температурах,
а также из-за отсутствия подвижных сопрягаемых деталей,
работающих в вакууме; высокое быстродействие системы; сокращение
расходов на отработку систем, особенно при использовании
жидкостей для впрыска в сопло; простота конструкции системы. Однако
при использовании таких систем управления вектором тяги
ракетных двигателей нужно учитывать, что для их успешной работы
необходимо повышение прочности сверхкритической части сопла,
а в случае использования системы с вдувом газа или впрыском
жидкости в РДТТ — необходимость в дополнительной пневмо- или
гидросистемах. Использование для вдува в закритическую часть сопла
продуктов сгорания, получаемых в специальном газогенераторе,
или отбираемых из основной камеры, требует создания и отработки
клапанов, работающих при высоких тепловых нагрузках со стороны
газового потока.
Принцип создания управляющего усилия основан на
перераспределении статического давления по внутренней поверхности
сопла в результате взаимодействия основного сверхзвукового потока
со струей, подаваемой через отверстия на внутреннюю поверхность
сопла. Проникнув на некоторую глубину в основной поток, струя
разворачивается и постепенно смешивается с основным потоком.
Образованное таким образом препятствие вносит возмущение в
набегающий сверхзвуковой поток и перестраивает характер его
течения.
В процессе взаимодействия сверхзвукового потока с боковой
инжектируемой струей в сопле возникает сложное
пространственное течение. Физическая картина течения, отражающая наиболее
характерные особенности взаимодействия, показана на рис. 9.27.
Обтекание сверхзвуковым потоком струйного препятствия имеет
много общего с обтеканием твердых преград (уступ, цилиндр и т. п.).
Перед струей, как и перед твердой преградой, возникает слабо
искривленный скачок уплотнения /, близкий по форме к
коническому, с А,-образной системой скачков у поверхности сопла. За
скачком уплотнения повышается статическое давление в потоке и на
стенке сопла в зоне Л, ограниченной линией пересечения
поверхностей сопла и скачка.
Одной из особенностей обтекания преград сверхзвуковым потоком
является возникновение перед ними отрывного течения (зона 4).
Пограничный слой в связи с наличием в нем дозвуковой области
течения служит средством передачи возмущения от преграды вверх
332
Рис. 9.28
Рис. 9.27
по потоку. Появление поперечного и продольного градиентов
давления, вызывающих обратные токи в дозвуковой части пограничного
слоя, приводит к его утолщению и отрыву от стенки. Возникшая
таким образом пространственная область отрывного течения В
представляет собой конусообразное тело, обтекаемое сверхзвуковым
потоком. При этом переход от невозмущенного течения к отрывному
сопровождается возникновением отрывного скачка уплотнения 2.
Давление в зоне отрыва значительно превышает соответствующее
давление в невозмущенном потоке, а продольные размеры зоны
зависят главным образом от высоты препятствий, толщины и режима
течения пограничного слоя.
Обтекание сверхзвуковым потоком боковой струи практически
во всех случаях вызывает появление за струей, как за преградой,
донной области пониженного давления С (см. рис. 9.27). Эта область
имеет сравнительно малые размеры с наличием ярко выраженного
минимума давления непосредственно за струей, что приводит к
отрицательному эффекту этой области в создании общего бокового
усилия. Развернувшаяся в потоке струя охватывает донную область и
прилипает к стенке сопла. В месте прилипания возникает слабый
скачок уплотнения 5, вызывающий некоторое повышение давления.
Вдуваемая в сверхзвуковой поток струя проникает в него на
некоторую глубину, расширяется до давления потока и сносится им.
При этом происходит интенсивное перемещение потоков в зоне D,
сопровождающееся механическим, тепловым и химическим
взаимодействием. В зависимости от рода рабочих тел и способа подачи струи
в сопло, это взаимодействие в той или иной степени сказывается
на повышении давления в потоке и на поверхности сопла.
Типичное распределение давления в продольном сечении,
проходящем через оси сопла и отверстия для вдува струи, показано
на рис. 9.28.
Величину бокового усилия Ру можно представить суммой
реактивной силы струи Рт и индуцированной в результате перераспре-
333
деления давления по внутренней площади F
поверхности сопла силы Яв, возникающей от
взаимодействия двух потоков:
Реактивная сила струи определяется из
уравнения
Рис. 9.29
где rh1 — секундный массовый расход
вдуваемого газа или впрыскиваемой жидкости;
Wx — скорость вдуваемого газа на выходе
из отверстия; Fx — площадь среза отверстия;
/?! — давление газа на срезе отверстия; р — давление основного
потока в сечении инжекции.
Методы расчета Рв обычно основаны на упрощенной модели
течения и учитывают только два основных фактора взаимодействия:
отрыв пограничного слоя перед инжектируемой струей и
перераспределение давления за головным скачком уплотнения.
Возникающую в сопле силу Рв взаимодействия двух потоков можно
представить как результирующую силу давления на отдельные участки
сопла, соответствующие той или иной зоне течения. Вклад донной
зоны за струей С и зоны смещения потоков D в создание силы Рв
сравнительно мал, поэтому влиянием этих зон можно пренебречь.
Такое упрощение оправдывается еще и тем, что эти зоны создают
усилия разного знака и в какой-то степени взаимно компенсируются.
Исходя из этого, сила взаимодействия Рв определяется суммой двух
равнодействующих сил давления в зоне отрыва пограничного слоя В
и зоне повышенного давления А за головным скачком уплотнения.
Упрощенная схема взаимодействия потоков показана на рис. 9.29.
Определение Рв сводится к определению размеров рассматриваемых
зон взаимодействия и давлений в этих зонах.
При инжекции газа или жидкости в сверхзвуковой поток
происходит отрыв пограничного слоя с возникновением конического
скачка уплотнения /. Полагая, что угол отрыва ротр известен,
положение вершины О конического скачка может быть определено,
если будет найдена толщина h инжектируемого потока. Толщину h
определяют по следующим формулам работы [18]. При инжекции
газа
/2
№)•(£■)'№-)[«■-»■*■■] I
1/4
(9.13)
где Fo — площадь поперечного сечения сопла перед отрывом потока
(сечение 0); Fx — площадь выходного сечения отверстия инжекции;
р0 — давление основного потока перед отрывом; рг — давление ин-
334
жектируемого газа на выходе из отверстия инжекции; Мг — число
Маха потока на выходе из отверстия инжекции; п1 — показатель
изоэнтропы инжектируемого газа; ротр — среднее давление в зоне
отрыва.
Среднее давление в зоне отрыва определяется по формуле
/>отр = (Pi + 2ротР)/3, (9.14)
где Ротр — давление возмущенного потока в точке отрыва 0.
Длина зоны отрыва определяется по формуле
/отр = h [ctg ротр иг tg (a - e)J, (9.15)
где ротр — угол отрыва; а — угол наклона стенки сопла; 8 — угол
инжекции.
Угол отрыва определяется по формуле
<916>
где Мо — число Маха потока в сечении 0; рск — давление потока
за скачком уплотнения; п —показатель изоэнтропы основного
потока.
Давление за скачком уплотнения определяется по формуле
^ = ggl [l - 0,328 , +\^т (1 - *&■)], (9-17)
А —эмпирический коэффициент.
Для определения силы Рв, кроме параметров возмущенного
потока, нужно знать площадь поверхности сопла под скачком
уплотнения. Эта площадь F0Tp ограничена линией пересечения
конического скачка со стенками сопла. Выражение для площади AF0T?
можно записать [18] в виде
AFOTP = Л* [ctg ротр + tg (a + e)] tg eCK1 (9.18)
где 0Ск —угол наклона скачка уплотнения.
Угол наклона скачка можно определить по формуле
^.-^. (919)
Управляющая сила слагается из трех составляющих:
^у = (Ротр - А>) (lovph - Fo/2) cos a + (рск - Ро) (Л^отр - ^отР^) cos а +
+ (А - Ро) Fxcos e + m,Wx. (9.20)
Среднее давление за скачком уплотнения рассчитывается по
формуле
Рек = (Ротр+ 2рск)/3. (9.21)
Расчет управляющей силы удобно проводить в следующей
последовательности :
1. Определить местоположение отверстия инжекции газа,
полагая, что площадь сечения сопла в точке инжекции должна составлять
(0,75 ... 0,80) Fa, где Fa —площадь среза сопла.
335
2. Задаются рядом значений /отр, полагая /отр = 25, 50, 100,
200 мм и определяют давление /?отр по формуле (9.22), полагая А =
= 0,65:
Ротр _ 1 , пЩ 1 —Л
р0 ~ 1 "Т" 2 1+(п-1)АЩ/2 '
3. По известному давлению /?отр находят давление рск по
формуле (9.17).
Для приближенных расчетов отношение давлений рск/ро можно
определять по формуле [35]
PcJpo = 1 + 0,5М0.
4. Находят угол отрыва (Зотр по формуле (9.16).
5. По формулам (9.14) и (9.21) находят среднее давление в зоне
отрыва и среднее давление за скачком уплотнения соответственно.
Давление рх инжектируемого газа принимают равным рг > /?ск.
6. По формуле (9.19) находят 0СК.
7. Рассчитывают высоту h ипжекцнопного течения по формуле
(9.13), принимая значения Fx из конструктивных соображений,
обычно dx = 5 ... 15 мм. В качестве проверочного соотношения
согласно [35] можно принимать /отр = (4,2 ... 4,5) h.
Высоту проникновения h можно найти согласно [35] по формуле
где (1 + г|?2) рск —среднее давление на переднюю грань инжекти-
руемой струи; гр2 = 0,05 .., 1_\^^,л » Мх — число Маха в точке
вдува; ^хр — среднее давление на заднюю грань вторичной струи;
грх с^ 1,0; р —давление невозмущенного основного потока в сечении
инжекции.
8. Определяют площадь Д/^тр по формуле (9.18).
9. Находят величину управляющей силы Ру по формуле (9.20).
По результатам расчета строят графическую зависимость в
координатах тх1ттс, Ру/Р* и по необходимому значению максимума
управляющего усилия Яутах находят потребный максимальный
расход инжектируемого газа.
Для вторичной инжекции можно использовать различные
вещества: инертные газы (азот, аргон, гелий и др.), химически
активные газы (водород, кислород), газообразные продукты сгорания,
нейтральные жидкости (вода, углекислота и др.), диссоциирующие
жидкости (перекись водорода, аммиак, четырехокись азота и др.),
жидкости, реагирующие с основным потоком (для случая потока
с недостатком окислителя — кислород, перекись водорода,
четырехокись азота и др.), а также жидкие двухкомпонентные топлива.
Основным критерием для оценки эффективности системы
создания управляющего усилия служит величина удельного импульса
боковой силы /уд. б — Ру'Щ-
Так как при проектировании ЛА большое значение имеют
компоновочные характеристики газов и жидкостей, то важной
характеристикой является и их плотность. Сравнение компонентоз, применяе-
336
0,10
0,08
0,06
0,0Ь
0,01
j
1
/
I/
/
/
Г У
/7
У
у
,—'
ш
—-~
Q05 OJ0
Рис. 9.30
ОД т,/тле
мых для создания боковых усилий,
удобно вести, сопоставляя величину
комплекса /уд. бр; предпочтение
отдается компонентам с большим
значением этого комплекса.
Предварительная оценка
эффективности использования вещества для
создания бокового усилия может быть
проведена с помощью графика,
показанного на рис. 9.30. Зона I
характерна для систем с вдувом горячего
газа и впрыском двухкомпонентных
топлив. Зона II —для впрыска диссоциирующих и реагирующих
с основным потоком жидкостей, а зона III —для вдува холодных
газов и впрыска инертных жидкостей. Окончательный выбор
компонента для вторичной инжекции зависит и от других факторов
(условия хранения, токсичность и т. п.).
Экспериментальные данные [35] для инжекции газа с учетом
трехмерного течения газов в основном блоке приведены ниже.
Относительный расход
вторичного потока rh/mu, c
Ру/Р*
0,03
0,05
0,05
0,065
0,07
0,077
0,09
0,07
0,18
0,045
При инжекции четырехокиси азота [3 ] в закритическую часть
сопла получено РУАР* = 0,08 для щ/пг^о = 0,16.
При слишком большой интенсивности вдува возмущенная область
захватывает газовые слои вблизи противоположной стенки сопла,
давление на ней повышается и создается боковое усилие обратного
знака. Наибольшее значение боковой силы получается тогда, когда
возмущенная область 1 занимает приблизительно половину
проходного сечения сопла (рис. 9.31).
Системы управления вектором тяги инжекцией газов или
жидкостей в закритическую часть сопла находят широкое применение
в современных ракетных двигателях всех типов. В ЖРД применяют
системы, где в качестве вводимой в закритическую часть сопла
жидкости используют компоненты топлива (горючее, окислитель или
одновременно горючее и окислитель).
В РДТТ широко применяют системы с вводом горячего газа
в закритическую часть сопла. Наиболее эффективными являются
Рис. 9.31
337
22 д. И: Бабкин и др.
Рис. 9.32
Рис. 9.33
Рис. 9.34
Рис. 9.35
системы с вдувом горячих газов, отобранных из камеры РДТТ.
В этом случае устраняется необходимость применения
дополнительного рабочего тела и вспомогательной системы подачи.
Конструктивная схема камеры РДТТ с вдувом горячих газов в сопло РДТТ
показана на рис. 9.32. В этом случае целесообразно использовать
камеры 1 с утопленными соплами 4, поскольку это позволяет
приблизить место вдува газа (регулятор 3) к месту его отбора из
камеры, а следовательно, сократить длину газоходов 2. При
использовании систем вдува горячего газа в сопло возникают трудности,
связанные с созданием надежных регуляторов расхода газов и
газоходов.
Для некоторых типов РДТТ может оказаться наиболее выгодным
применение сравнительно холодных газов, вырабатываемых в
генераторах (рис. 9.33), либо применение систем с предварительным
охлаждением горячих газов (рис. 9.34). В газогенераторах (см.
рис. 9.33) удается снизить температуру вдуваемого газа до значений,
обеспечивающих надежную работу регулятора 5, выбором топлива
заряда 3, Газогенератор связан газодинамически с основной
камерой 1 через отверстие 2, а газоходом 4 с регулятором расхода
горячего газа. Конструкции некоторых регуляторов расхода горячего
газа приведены в книге [18].
В системах с предварительным охлаждением горячих газов (см.
рис. 9.34) на борту ракеты необходим запас охладителя. Горячие
газы из камеры 1 через заборник, установленный на сопловом днище 2У
попадают в фильтр 5, где очищаются от примесей конденсированной
фазы, и по газоходам 4 и 5 поступают к регулятору расхода 7. Для
понижения температуры горячих газов перед регулятором
предусмотрен эжектор 5, в котором происходит смешение газов с
охлаждающей жидкостью, размещенной в полости 6.
Система для инжекции жидкости в закритическую часть сопла
(рис. 9.35) состоит из баллона 1 со сжатым газом, емкости 2 с
инжектируемой жидкостью и регулятора расхода 3.
338
В РДТТ с соплом, работающим с перерасширением, при их
использовании на небольших высотах (до 6 км) возможно управление
вектором тяги за счет вдува воздуха из окружающей атмосферы
[36]. При открытии клапанов вдува, расположенных в зоне сопла,
где давление потока продуктов сгорания ниже, чем давление воздуха
в окружающей среде, поток воздуха поступает в сопло, вызывая
отрыв газового потока и создавая тем самым управляющее усилие.
Такие системы обладают высокой эффективностью по управляющей
силе, не требуют запасов жидкости или газа на борту, имеют
благоприятные условия работы клапанов вдува. Недостатки систем
состоят в снижении удельного импульса вследствие перерасширения
потока в сопле и в ограничении высоты полета.
22*
ЧЕТВЕРТАЯ ЧАСТЬ
РЕГУЛИРОВАНИЕ ЯДЕРНЫХ
РАКЕТНЫХ ДВИГАТЕЛЬНЫХ УСТАНОВОК
ГЛАВА Ю
ЯДЕРНЫЕ РАКЕТНЫЕ ДВИГАТЕЛИ
КАК ОБЪЕКТ РЕГУЛИРОВАНИЯ
10.1. ОСОБЕННОСТИ ЯДЕРНЫХ
РАКЕТНЫХ ДВИГАТЕЛЕЙ
Дальнейшее исследование и освоение космического
пространства предполагает применение ракетных систем с силовыми
установками, использующими ядерную энергию.
Основное отличие ядерных ракетных двигателей (ЯРД) от
ракетных двигателей других типов заключается в методе получения
энергии, необходимой для создания тяги. Если в ЖРД и РДТТ
выделение энергии происходит в результате сгорания топлива,
являющегося одновременно и источником энергии и рабочим телом,
истекающим из сопла, то в ЯРД рабочее тело и источник энергии
независимы. Рабочее тело ЯРД, истекающее из сопла, получает
энергию в результате деления ядер в процессе управляемых
ядерных реакций, происходящих внутри реактора — источника
энергии. Запас энергии в ядерных ракетных двигателях несоизмеримо
велик по сравнению с ЖРД и РДТТ, тогда как расход массы
ядерного топлива пренебрежимо мал.
Эти две отличительные особенности ЯРД — независимость
источника энергии и рабочего тела и почти неограниченный запас энергии
на борту — определяют существенное преимущество, которое дает
использование ядерной энергии в ракетных силовых устаногках.
Удельный импульс ракетного двигателя при адиабатном расширении
рабочего тела р. сопле определяется следующим уравнением:
Значения величин, кроме Гк и /VI, для ЯРД могут быть достигнуты
такими же, как для ЖРД и РДТТ. Температура же Тн вследствие
почти неограниченного запаса энергии может быть в ЯРД
значительно выше, чем в других типах ракетных установок, и
определяется схемой ДУ, типом реактора и температурной стойкостью
используемых материалов.
Величина молекулярной массы рабочего тела М в силу свойства
независимости рабочего тела и источника энергии ЯРД может быть
существенно меньше, чем в ЖРД и РДТТ. Так, при использовании
з качестве рабочего тела в ЯРД водорода М = 2 и при Тк = 2750 К
может быть достигнут /уд = 8800 м/с, а при Тк = 5250 К /уд ^
^ 14 000 м'с, в то же время для ЖРД, работающего на кислороде
с водородом, /уд с^ 4500 м/с. Кроме того, явление диссоциации
340
в ЯРД в отличие от ЖРД будет приводить к росту удельного
импульса, так как температура рабочего тела может быть обеспечена
на требуемом уровне благодаря почти неограниченному запасу
энергии источника.
Эти особенности ЯРД и определяют преимущества и
возможности их использования в качестве силовых установок для ракетных
систем.
Кроме удельного импульса важной характеристикой является
отношение тяги ДУ к массе двигателя. Здесь преимущество имеют
пока ЖРД. Так, если тяга ЯРД может быть такой же, как и для
ЖРД, то масса его будет больше из-за массы материала активной
зоны, замедлителя и отражателей.
Как объект регулирования ЯРД обладает существенными
особенностями по сравнению с ЖРД и РДТТ, связанными с запуском
и выключением ДУ.
Для обеспечения запуска ЯРД необходим предварительный
прогрев элементов ДУ и разгон с выходохм на номинальный режим,
в процессе которых диапазон изменения мощности реактора
изменяется на несколько порядков, а переходные процессы по
температуре должны быть монотонными и без перерегулирования.
При останове ЯРД, в случае его сохранения, необходимо
осуществлять в процессе выключения расхолаживание, в течение
которого рабочее тело прокачивается по трактам охлаждения.
При создании ЯРД возникают новые проблемы, связанные с
обеспечением эффективного и безопасного управления двигателем на
всех режимах его работы. К этим режимам относятся: режим
запуска ядерного реактора, включающий предварительный прогрев
элементов активной зоны реактора; запуск двигателя с выходом на
номинальный режим; работа на номинальном режиме; режимы
перехода с одного уровня тяги на другой; режим выключения двигателя
с расхолаживанием ядерного реактора для обеспечения
последующего запуска. При этом несмотря на существенное различие в этих
режимах работы система регулирования ДУ должна быть единой,
способной обеспечить управление всеми режимами работы. Энергия
ядерного реактора может использоваться как для непосредственного
создания тяги двигателя, так и для создания на борту ЛА источника
дополнительной энергии.
Теоретическое исследование процессов регулирования ЯРД
представляет собой задачу большой трудности. Это связано с
неравномерностью тепловыделения по объему активной зоны ядерного реактора,
с накоплением тепла в элементах ДУ со значительным подогревом
и сжимаемостью рабочего тела. В этих условиях большое значение
приобретает выбор рациональных математических моделей элементов
ядерной ракетной двигательной установки с выявлением и сценкой
существенных и несущественных связей внутри ЯРД. На выбор
математической модели и системы регулирования будет оказывать
существенное влияние схема ядерной ракетной двигательной
установки, особенности работы активной зоны реактора, тип
замедлителя, схема системы подачи рабочего тела и ряд других факторов.
341
Рис. 10.1
Рис. 10.2
Рис. 10.3
В качестве примера на рис. 10.1 представлена принципиальная
схема ЯРД.
Рабочее тело из бака 1 поступает к насосу 2 ТНА и далее по
трубопроводу 5 подается в зарубашечное пространство двигателя для
охлаждения сопла, стенок камеры, бокового и торцового
отражателей. Часть рабочего тела, нагретого при охлаждении торцового
отражателя 3, направляется в магистраль 6, ведущую к турбине 7
ТНА, а основная его часть — в активную зону 4 реактора. После
активной зоны нагретое до заданной температуры рабочее тело
истекает из сопла.
В зависимости от типа активной зоны реактора рассматривают
ЯРД с твердой активной зоной, с жидкой активной зоной, с
газообразной активной зоной. Схема ЯРД с твердой активной зоной
представлена на рис. 10.2. Применительно к этому типу ЯРД
соотношение (10.1) показывает, что для получения максимального удельного
импульса необходимо поддерживать максимальную температуру
тепловыделяющих элементов активной зоны реактора ЯРД на всех
режимах его работы. Наибольшую допустимую температуру имеют
карбиды металлов., однако добавка делящегося вещества в
значительной степени снижает их температуру плавления. Увеличения
температуры рабочего тела, а следовательно, и удельного импульса
можно добиться, используя твердое ядерное топливо в виде пыли,
вращающейся во внутренней полости реактора. Деление ядер в
пылеобразном топливе в этом случае поддерживается потоком нейтронов
из отражателя-замедлителя, расположенного вокруг полости
активной зоны. Преимущество подобной системы заключается в
уменьшении температурных напряжений в делящемся веществе.
Схема ЯРД с жидкой активной зоной представлена на рис. 10.3.
Использование делящегося вещества в жидкой фазе позволяет
342
повысить температуру рабочего тела и удельного
импульса по сравнению с ЯРД с твердой
активной зоной. Повышение удельного импульса
в схеме с жидкой активной зоной происходит не
только в результате повышения температуры
рабочего тела, но и в результате более
интенсивной диссоциации водорода, используемого
в качестве рабочего тела. В двигателях этого
типа значительно осложняется регулирование,
связанное с запуском и выключением
двигателя.
Схема ЯРД с газовой активной зоной
приведена на рис. 10.4. Принципиально
применение газовой активной зоны допускает
использование произвольно больших температур и
существенного повышения удельного импульса.
При создании газовых реакторов можно идти
двумя путями: в первом —делящееся вещество
и рабочее тело смешиваются, нагреваются
и после нагрева разделяются, во втором —
делящееся вещество и рабочее тело не смешиваются,
чить последующее их разделение.
10.2. СХЕМЫ ДВИГАТЕЛЬНЫХ УСТАНОВОК
В ядерных ракетных двигательных установках по
аналогии с ЖРДУ могут применяться как вытеснительная, или
баллонная, так и насосная системы подачи рабочего тела. Выбор системы
подачи зависит от назначения ДУ и тактико-технических
требований, предъявляемых к ней.
Принципиальная схема двигательной установки с вытеснитель-
ной системой подачи приведена на рис. 10.5. Под действием газа
высокого давления, находящегося в газовом аккумуляторе
давления У, рабочее тело из бака 3 подается в активную зону реактора 4
и, нагреваясь до заданной температуры, истекает из сопла 5.
Управление режимами работы ЯРД этой схемы осуществляется с помощью
редуктора давления 2, который, изменяя давление в баке 3,
изменяет расход рабочего тела. Для сохранения удельного импульса
двигателя на высоком уровне и для обеспечения нормальной
работоспособности элементов ЯРД одновременно с изменением расхода
рабочего тела необходимо изменить мощность ядерного реактора.
Рис. 10.
чтобы
Рис. 10.5
343-
Рис. 10.6
таким образом, чтобы
температура рабочего тела перед
соплом 5 сохранялась постоянной.
Для ЯРД с насосной
системой подачи в зависимости от
способа включения турбонасос-
ного агрегата в систему
питания ЯРД различают ДУ
замкнутого типа и с
промежуточным теплоносителем.
В ДУ замкнутого типа
(рис. 10.6) рабочее тело после
насоса / и тракта охлаждения
двигателя 4 проходит через
турбину ТНА 2, а затем поступает
в ТВЭЛ активной зоны 3. В этой
схеме турбина работает обычно
на докритическом перепаде.
В ДУ открытого типа
(рис. 10.7) небольшая часть
рабочего тела поступает в
турбину 2, а затем может быть
использована для создания
дополнительной тяги или в системе
управления 4 полетом. Большая
часть рабочего тела по этой
схеме поступает после насоса 1
непосредственно в ТВЭЛ
активной зоны 3. Турбина в этом случае работает на сверхкритическом
перепаде.
На рис. 10.8 представлена принципиальная схема ЯРД, в
которой для привода турбин 4 и 3 ТНА используется промежуточное
рабочее тело, подаваемое насосом / в ТВЭЛ 2 и далее — на турбины 3
и 4\ затем это рабочее тело проходит через теплообменник 5 и
поступает снова в насос У, образуя тем самым замкнутый контур.
Управление ЯРД с насосной подачей рабочего тела
осуществляется, как и ранее, изменением расхода и стабилизацией
температуры рабочего тела перед соплом двигателя. Кроме того, для
обеспечения безаварийного запуска двигателя необходимо в период
запуска осуществлять перепуск рабочего тела через насос 6 с
помощью клапана перепуска 7. Регулирование температуры рабочего
тела в замкнутом контуре турбопривода осуществляется с помощью
регулятора 8.
Кроме указанной классификации схем ЯРД по способу
включения турбонасосных агрегатов возможны классификации по составу
рабочего тела, по типу реактора и т. д.
Рассматривая особенности нейтронно-физических процессов,
можно отметить, что реакторы ЯРД могут работать как на быстрых,
так и па тепловых нейтронах. Если в дрнгателе используется реак-
344
Рис. 10.7
Нейтрон но -
физические
процессы
n;N
Тепловые
лроцессь'
Гидромеханические
процессы
Н> о
Рис. 10.8
Рис. 10.9
тор на тепловых нейтронах, то необходимо наличие замедлителя,-
в качестве которого могут быть использованы как твердые, так и
жидкие вещества. Использование твердого или жидкого
замедлителя существенно сказывается на схеме ДУ и ее конструкции.
Несмотря на разнообразие возможных схем ядерных ракетных
двигательных установок все основные процессы, происходящие
в них, можно разделить на следующие три группы:
нейтронно-физические процессы в реакторе;
тепловые процессы, т. е. процессы нагрева рабочего тела в ТВЭЛ,
охлаждение элементов двигателя;
гидромеханические процессы, т. е. движение жидкости и газа
по трубам и каналам ТВЭЛ, работа ТНА и агрегатов регулирования.
Взаимосвязь между этими процессами показана на рис. 10.9.
Результатом нейтронно-физических процессов — выходным
параметром звена в системе регулирования — является плотность
нейтронов п (число нейтронов в 1 см3 активной зоны) или
эквивалентная ей мощность реактора N. Входным параметром является
реактивность б/С.
Тепловые процессы определяются величинами мощности N и
расхода теплоносителя или рабочего тела т и характеризуются
температурой последних Т. Тепловые процессы посредством
температуры элементов активной зоны и рабочего тела влияют на
нейтронно-физические процессы в реакторе и на гидромеханические
процессы в системе питания и управления. Напор Я, создаваемый
турбонасосным агрегатом системы питания и характеризующий
плотность рабочего тела р, также влияет на характер нейтронно-
физических процессов.
Рассматривая приведенную на рис. 10.9 принципиальную схему
взаимосвязи процессов в ЯРД, можно отметить, что в качестве
регулируемых величин могут быть выбраны температура и давление
рабочего тела на входе в сопло, мощность реактора, расход
рабочего тела через сопло или частота вращения турбонасосного
агрегата. В качестве регулирующих воздействий могут выступать
изменение реактивности и перемещение регулирующего органа
различных клапанов и дросселей системы управления.
345.
10.3. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Включение в состав ракетной двигательной установки
ядерного реактора вызывает необходимость введения основных
понятий и определений, относящихся к управлению и регулированию
режимов работы ЯРД.
Ядерный реактор включает в себя активную зону, боковой и
торцевой отражатели, корпус реактора и систему управления.
В активной зоне реактора размещается ядерное топливо, которое
при облучении его нейтронами способно делиться. В процессе
деления выделяется значительное количество энергии; за одно деление
выделяется около 200 МэВ, при этом образуются новые свободные
нейтроны. В процессе работы реактора поддерживается цепная
реакция деления ядерного топлива, а высвобождающаяся энергия
отводится или теплоносителем, нагревающим рабочее тело, или
непосредственно рабочим телом. Реакция деления будет
самоподдерживающейся, если каждое ядро топлива, захватившее нейтрон и
испытавшее деление, даст, по крайней мере, один нейтрон, который
также вызывает деление. Остальные нейтроны деления поглощаются
в замедлителе, теплоносителе и конструкционных материалах, часть
нейтронов теряется в результате утечки из активной зоны.
Баланс нейтронов в реакторе характеризуется коэффициентом
размножения /С, который определяется как отношение числа
нейтронов данного поколения к числу нейтронов предшествующего
поколения. Различают коэффициент размножения для реактора
бесконечных размеров /Соо, из которого утечки нейтронов
отсутствуют, и эффективный коэффициент размножения КЭф для
реактора конечных размеров с учетом утечки нейтронов из активной
зоны. Оба эти значения связаны соотношением
где Р — вероятность избежать утечки нейтрона из активной зоны
в процессе замедления и теплового движения, которая
рассчитывается по формуле
р р р
г — 'тепл* быстр»
где Ятепл — вероятность избежать утечки для тепловых нейтронов;
^быстр — вероятность избежать утечки быстрых нейтронов в
процессе их замедления в реакторе конечных размеров без отражателя.
Величина РтеПл представляет собой отношение поглощенных
тепловых нейтронов к сумме утечки тепловых нейтронов и
поглощенных тепловых нейтронов и вычисляется по формуле
Величина Ябыстр в соответствии с теорией замедления Ферми
вычисляется по формуле
~быстр — е
Здесь L —длина диффузии нейтронов, являющаяся мерой среднего
расстояния, проходимого тепловым нейтроном от места своего
рождения до места поглощения; В2 —Лапласиан, являющийся мерой
346
кривизны распределения нейтронного потока в любой точке внутри
реактора; т — возраст нейтронов, большая величина которого
означает, что материал недостаточно эффективно замедляет быстрые
нейтроны.
На основании приведенных формул имеем
р = e-*2V(l + L?B2). (10.2)
Для реакторов малых размеров, которыми являются реакторы
ЯРД, величина В2 велика и^ как следует из последнего соотношения,
вероятность избежать утечек нейтронов мала, т. е. утечка нейтронов
для реактора небольшого размера велика.
Для поддержания реакции деления в активной зоне на
постоянном уровне необходимо, чтобы количество образующихся нейтронов
равнялось количеству нейтронов, теряемых в результате поглощения
и утечек; при этом /СЭф = 1 и реактор находится в стационарном
режиме. Если /СЭф > 1, то количество образующихся нейтронов
превышает число нейтронов, теряемых в силу поглощения и утечек,,
в результате чего плотность нейтронов п в реакторе непрерывно
возрастает. Если же /СЭф < 1, то число нейтронов поглощения и
утечки превышает число образующихся нейтронов и плотность
последних будет уменьшаться пока не установится на уровне,
соответствующем мощности источников нейтронов в активной зоне.
Самоподдерживающаяся реакция деления на стационарном
режиме работы соответствует критическому состоянию реактора, при
этом КВф = 1. Для поддержания критического состояния реактора
требуется определенное количество ядерного топлива,
соответствующее критической массе.
Условие критичности для реактора в соответствии с уравнением.
(10.2) принимает вид
Кэф = КооР 1 * £2£2 = 1 •
При работе реактора ЯРД в окрестности номинального режима-
эффективный коэффициент размножения изменяется в небольших
пределах и бывает близок к единице. Поэтому для характеристики
состояния реактора пользуются величиной
называемой избыточным коэффициентом размножения, или
избыточной реактивностью. Эта величина может быть положительной,
отрицательной и равной нулю. При А/С = 0 реактор находится
в критическом состоянии, при А/С >0 —в надкритическом и при-
Л/С < 0 — в подкритическом.
Для характеристики состояния конкретного ядерного реактора,,
кроме величин /СЭф и А/С, используют величину, называемую
реактивностью и обозначаемую б/С (см. рис. 10.9). Реактивность
определяется как отношение избыточного коэффициента размножения
к эффективному коэффициенту размножения:
с дг А/С /СэФ — 1
КэФ Яэф
34Г
Нулевая реактивность соответствует критическому состоянию
реактора, положительная —надкритическому и отрицательная —
подкритическому.
Из приведенных определений избыточного коэффициента
размножения и реактивности можно установить их физический смысл.
Если обозначить плотность нейтронов в одном поколении п1у а в
следующем— через время жизни поколения
то можно представить
и п2 пх + Лп л . \п
*вФ = — = —!£— =1+~ •
С другой стороны, /Сэф = 1 + А/С, откуда избыточный
коэффициент размножения будет равен
= —
и представляет собой относительное изменение плотности нейтронов
в новом поколении по отношению к плотности нейтронов
предыдущего поколения.
Физический смысл реактивности б/С вытекает из следующего
сгг А/С _ Дя
од — ——— — —-— .
АЭф «1
Отсюда следует, что реактивность —это относительное
изменение плотности нейтронов по отношению к плотности нейтронов
в новом поколении.
В процессе деления ядерного топлива нейтроны одного поколения
сменяются нейтронами последующего. Среднее время жизни
поколения нейтронов в реакторе / представляет собой промежуток
времени от момента образования нейтронов в акте деления до их
поглощения, т. е. до того как они снова вызовут деление или выйдут
из реакции, и рассчитывается в предположении точечной модели
реактора по формуле
(S)
где 1/2о = К —средний полный путь, который проходит нейтрон
от точки рождения до точки поглощения (длина поглощения).
Время от момента захвата нейтрона, вызвавшего деление ядра,
до появления мгновенных нейтронов деления составляет 10~14 ...
10~15 с. В тепловых реакторах нейтроны замедляются. В зависимости
от типа замедлителя время замедления равно примерно 10~4 ...
10~5 с. Замедлившиеся до тепловых энергий нейтроны
диффундируют в реакторе до момента поглощения. Время диффузии тепловых
нейтронов составляет примерно 10~3 ... 10~4 с. Таким образом, общее
время жизни одного поколения тепловых нейтронов определяется
в основном временем диффузии и для тепловых реакторов составляет
10"3 ... 10"4 с.
483
Номер
группы
1
2
3
4
5
6
Средняя
энергия,
Мэ-В
0,25
0,56
0,43
0,62
0,42
—
Период полураспада
ядерпредшествен-
ников, 7*1/2» с
55,72
22,72
6,22
2,30
0,61
0,23
"»Ри
54,28
23,04
5,60
2,13
0,618
0,257
h
•••и
55,00
20,57
5,0
2,13
0,615
0,277
Та
б л и ц а 10.1
Доля запаздывающих
нейтронов в общем
нейтронов деления,
236JJ
21-Ю-6
14-10"4
26- Ю-5
252-Ю-5
74- Ю-5
27- Ю-6
64-10"4
■••Ри
72-Ю-6
6626- Ю-6
444- Ю-6
685- Ю-6
18-Ю-5
93- Ю-6
21-10"4
числе
233U
224- Ю-6
776- Ю-6
654- Ю-6
725- Ю-6
134- Ю-6
84- Ю-6
26- Ю-4
В реакторах на быстрых нейтронах время диффузии от момента
рождения до поглощения нейтронов равно примерно 10~7 ... 10~8 с.
Эта величина и определяет время жизни одного поколения быстрых
нейтронов, так как время образования их в процессе деления
такое же, как и в реакторах на тепловых нейтронах, т. е. 10~14... 10~15 с.
При делении ядер топлива наряду с мгновенными образуются
запаздывающие нейтроны. Они образуются при радиоактивном
распаде некоторых осколков деления. Известно большое число осколков
деления —предшественников, излучающих запаздывающие
нейтроны. Лучше всего совпадают результаты теоретических расчетов
и экспериментальных исследований, когда все предшественники,
излучающие запаздывающие нейтроны, объединяются в шесть групп,
основные характеристики которых приведены в табл. 10.1 [14],
откуда видно, что суммарный выход запаздывающих нейтронов р
очень мал, однако их роль при переходных процессах чрезвычайно
велика.
Группы запаздывающих нейтронов характеризуются временем
полураспада или временем жизни предшественников и выходом
запаздывающих нейтронов на каждый акт деления или на каждый
образовавшийся при делении ядра нейтрон (доля запаздывающих
нейтронов).
Если ht — постоянная распада предшественников t-й группы,
то время жизни —величина, обратная постоянной времени:
Время жизни можно определить также, как время, в течение
которого количество ядер-излучателей запаздывающих нейтронов
уменьшается в е раз.
Период полураспада ядер излучателей равен
T1/2i-= 0,693/^ = In 2А;.
Долю запаздывающих нейтронов относительно полного выхода
мгновенных нейтронов для каждой группы обозначают |5Ь а общая
349
N
доля всех групп равна р = 2 рг-, где N — число групп запазды-
i
вающих нейтронов.
Запаздывающие нейтроны в общем балансе нейтронов составляют
незначительную долю и, следовательно, их вкладом в оценку
энергии деления можно пренебречь. Средняя энергия запаздывающих
нейтронов меньше средней энергии мгновенных нейтронов.
Следовательно, вероятность утечки и поглощения для запаздывающих
нейтронов в процессе замедления будет меньше, чем для мгновенных,
а эффективность их больше, чем мгновенных. С этой целью вводят
понятие эффективной доли запаздывающих нейтронов
где у —эффективность запаздывающих нейтронов и у>1,
В дальнейшем под величиной р будем понимать эффективную
долю запаздывающих нейтронов. При нестационарных процессах
изменения мощности реактора и плотности нейтронов в его активной
зоне роль запаздывающих нейтронов становится весьма
существенной. Если представить запаздывающие нейтроны всех групп одной
эквивалентной группой, доля которой в общем балансе с мгновенными
нейтронами составит р, то величины постоянной распада К и времени
жизни этой группы /зап будут определяться выражениями:
N
Р _ V Р* • / - *=! '' -
Т~ Zj^T' зап~ ~~Т~9
/ _JL
*8ап — ^ '
где %i и // — постоянная распада ядер-предшественников
запаздывающих нейтронов i-й группы и время жизни нейтронов этой группы.
Среднее время жизни эквивалентной группы запаздывающих
нейтронов в соответствии с табл. 10.1 235U будет равно 1вйП сх. 14 с.
С учетом времени жизни запаздывающих нейтронов среднее-
время жизни поколения всех нейтронов в реакторе может быть
определено суммой времен жизни запаздывающих и мгновенных
нейтронов с учетом их относительной доли
Второе слагаемое справа пренебрежимо мало по сравнению с
первым, поэтому время жизни одного поколения нейтронов в реакторе
практически определяется временем жизни только запаздывающих
нейтронов.
В связи с таким резким отличием времен жизни запаздывающих
и мгновенных нейтронов кинетика ядерного реактора будет
определяться преимущественно запаздывающими нейтронами.
Выше было показано, что в любой критической систехме должен
выполняться баланс нейтронов: образовавшиеся нейтроны =
поглощенные нейтроны + утекающие нейтроны.
350
Очевидно, что при всяком изменении соотношения между
количеством рожденных, поглощенных и ушедших из системы нейтронов,
условие баланса будет нарушаться. Это обстоятельство и
используется при проектировании систем регулирования мощности
ядерного реактора и ДУ в целом.
Увеличивая или уменьшая количество поглощенных нейтронов,
путем извлечения или введения поглощающих стержней в активную
зону реактора, будем нарушать условие баланса нейтронов и тем
самым осуществлять переход режима работы реактора с одного
уровня мощности на другой. Этого же можно добиться, если
изменять утечку нейтронов путем изменения положения отражающих
барабанов, что особенно целесообразно в реакторах небольших
размеров, когда утечки нейтронов относительно велики.
Для характеристики мощности реактора вводится понятие
плотности потока нейтронов. Плотность потока нейтронов Ф
определяется как произведение плотности нейтронов п на скорость их
движения v, т. е.
Ф = nv
и имеет размерность нейтр/(см2-с).
Плотность нейтронов представляет собой число нейтронов в
единице объема. А плотность потока нейтронов можно представить
как количество нейтронов, пересекающих площадку в 1 см2 в одну
секунду, или как суммарный путь, пройденный всеми нейтронами,
находящимися в 1 см3 за одну секунду.
Мощность ядерного реактора пропорциональна числу делений
ядер топлива активной зоны в единицу времени. Число делений
определим следующим образом. Каждый нейтрон единицы объема
активной зоны проходит за одну секунду путь, численно равный его
скорости у, а все нейтроны, число которых равно плотности
нейтронов п, пройдут суммарный путь nv. Разделив этот путь на длину
свободного пробега до деления Ху, получим полное число делений
в единице объема активной зоны за одну секунду. Это число равно
где 2/ —макроскопическое сечение деления.
Полное число делений ядер за одну секунду во всем объеме
активной зоны 1/а.з составит Ф2/V'a.a- Учитывая, что при одном делении
выделяется энергия Ef = 3,Ы0"и Дж (195 Мэ-В), получаем, что
тепловая мощность реактора может быть вычислена по формуле
где KN =
Из формулы видно, что тепловая мощность ядерного реактора
пропорциональна плотности нейтронов. Полученное выражение
позволяет по известной тепловой мощности оценить среднюю по
объему плотность потока нейтронов
351
Иногда бывает удобно выражать мощность ядерного реактора
через массу 235U в реакторе ти. Учитывая, что число ядер в
реакторе равно NV = /??и6,02- !023/235, будем иметь
NT = £УФ (mu6,02.1023/235) of.
Здесь было учтено, что 2/ = №>> гДе N — число ядер 235U в 1 см3;
Of —микроскопическое сечение реакции деления 235U.
Микроскопическое сечение деления 235U тепловыми нейтронами
а/ = 582 • 10~24 см2, Ef = 3,1 -10"11 Дж. Подставляя эти значения
в написанную выше формулу, получим
где значения ти даны в граммах.
Из полученных выражений следует, что в качестве регулируемых
параметров для контроля и управления мощностью реактора могут
быть выбраны плотность потока нейтронов или плотность нейтронов.
Использование в качестве регулируемого параметра тепловой
мощности, которая может быть оценена по расходу и подогреву рабочего
тела, нецелесообразно из-за большой тепловой инерции по сравнению
с процессами деления и выделяющейся при этом энергии.
Если известно время жизни нейтронов /, то мощность ядерного
реактора приближенно может быть оценена следующим образом.
Число нейтронов в активной зоне реактора равно пКа.3- И каждые
/ секунд при работе на стационарном режиме они делятся.
Следовательно, число делений в одну секунду будет пУЛф3/1. Отсюда
мощность реактора будет равна
N, = E7nV»-3 .
Особенностью ядерного реактора является то, что в нем нельзя
«сжечь» топливо полностью. Он может работать только тогда, когда
количество ядерного топлива соответствует критической массе.
Избыток его приводит к разгону реактора, а при недостатке реакция
деления прекращается. Для поддержания нормальной работы
необходимо либо непрерывно заменять выгоревшее топливо свежим,
либо работать при избытке ядерного топлива, но удерживать реактор
от разгона регулирующими органами, имея определенный запас по
реактивности, и изменять реактивность реактора введением или
выведением поглотителей, изменением плотности или количества
замедлителя, а также изменением свойств и конфигурации
отражателя. Для этого реактор снабжается соответствующей системой
управления и защиты (СУЗ).
Органы управления выполняют две функции: компенсируют
медленные изменения реактивности, если время работы ДУ
относительно велико, и регулируют переходные процессы.
Органы аварийной защиты предназначены для быстрого
выключения реактора при возникновении серьезных аварийных
ситуаций.
Наиболее распространенный способ регулирования подобных
реакторов — использование подвижных поглощающих стержней или
352
Материал
юв
Cd
Hf
Fe
Al
Назначение
Поглощающий
стержень
То же
»
Конструкционный материал
То же
Сечение
поглощения,
барн
3813
2450
1500
2,7
0,23
отражателя. В качестве мате- Таблица 10.2
риалов для поглощающих
стержней в реакторах на
тепловых нейтронах могут быть
использованы такие
материалы, как бор, кадмий, гафний,
обладающие большим
сечением поглощения нейтронов
в области тепловых энергий.
Значения сечений
поглощения тепловых нейтронов для
материалов, используемых
для поглощающих стержней, приведены в табл. 10.2 [14].
Регулирование отражателем наиболее эффективно в реакторах
небольших размеров, в которых утечки нейтронов велики. Это могут
быть реакторы на тепловых и на быстрых нейтронах с высоким
обогащением топлива. Конструктивно это выполняется в виде
подвижных блоков части отражателя, примыкающего к активной
зоне. Для изменения реактивности они могут извлекаться и
погружаться или выполняться в виде вращающихся барабанов, часть
периметра которых покрыта поглощающим материалом. Если
барабан поглощающей стороной повернут к активной зоне —
реактивность уменьшается, и наоборот.
В качестве органов регулирования могут быть использованы
«газовые» стержни, представляющие собой каналы, заполненные
газом, поглощающим нейтроны. Поглощающую способность можно
изменять путем изменения давления или концентрации
поглощающего газа в каналах.
ГЛАВА И
НЕИТРОННО-ФИЗИЧЕСКИЕ ПРОЦЕССЫ
В ЯДЕРНОМ РЕАКТОРЕ
11.1. ЭЛЕМЕНТАРНОЕ УРАВНЕНИЕ КИНЕТИКИ
И ПЕРИОД РЕАКТОРА
При рассмотрении ядерного ракетного двигателя как
объекта регулирования кроме вопросов динамики
гидрогазодинамических и механических процессов, протекающих в элементах
двигательной установки и изложенных в предыдущих частях,
возникают проблемы изучения динамики собственно реактора и динамики
теплообмена.
Рассмотрим упрощенную точечную модель реактора в одногруп-
повом приближении, когда предполагается, что все нейтроны в среде
рождаются и поглощаются в одной точке и имеют одинаковую
скорость. При этом из рассмотрения исключается пространственная
зависимость плотности нейтронов.
23 А. И. Бабкин и др.
353
Реактор, работающий на постоянном уровне мощности,
характеризуется постоянным значением плотности нейтронов п и
коэффициентом размножения К = 1. Если в момент времени т = 0 появится
избыточная реактивность А/С и коэффициент размножения /С = 1 +
+ А/С, то плотность нейтронов начнет изменяться. Если считать,
что все нейтроны являются мгновенными, а время жизни каждого
их поколения /, то можно определить скорость изменения плотности
нейтронов.
Если в начальный момент времени т = 0 плотность нейтронов
в реакторе равна л, то плотность нейтронов в следующем поколении
будет п (1 + А/С). Изменение плотности нейтронов, которое
произошло за время жизни /, равно п А/С. Следовательно, скорость
изменения плотности нейтронов, т. е. изменение за единицу времени,
будет равно
■ж--^. ("-о
Для определения плотности нейтронов в любой момент времени
при изменении коэффициента размножения /СЭф от 1 до (! + А/С)
необходимо проинтегрировать уравнение (11.1), учитывая
начальные условия:
т = 0; п (0) = я*.
Разделяя переменные в уравнении (11.1), имеем
dn Д/С
/
а т.
После интегрирования будем иметь
В соответствии с начальными условиями постоянная
интегрирования С равна
С = Inn*.
Отсюда после несложных преобразований будем иметь
т
При скачкообразном изменении коэффициента размножения
1 при т < О
1 +А/С при т>0
последнее уравнение имеет вид
или п(т)/п* = е 1
354
Из этой зависимости следует, что при появлении избыточной
реактивности Д/С плотность нейтронов начинает изменяться по
экспоненциальному закону.
При Д/С = 0 плотность нейтронов п = п* и не изменяется во
времени. В этом случае реактор находится точно в критическом
состоянии. При Д/С > 0 плотность нейтронов возрастает, а при
Д/С < 0 —убывает.
Важно отметить, что при определении критического состояния
реактора (Д/С = 0) не фигурирует абсолютное значение плотности
нейтронов. А это значит, что реактор может быть критическим при
любом значении плотности нейтронов, т. е. на любом уровне
мощности.
Очень важной характеристикой при рассмотрении кинетики
реактора является величина, называемая периодом реактора 7\ т. е.
время т = 7\ в течение которого плотность нейтронов изменяется
в е раз. На основании этого определения уравнение (11.2) для момента
времени (т + Т) имеет вид
п (т + Т) _ снг
и п(х+Т)^с= е' -сГ^Г.
е 1
Отсюда легко определяется, что период реактора равен
т = -!— ш 3)
Используя понятие периода реактора, уравнение (11.2) можно
записать в виде
^#- = е~К (11.4)
Из выражения (11.3) видно, что чем больше время жизни
нейтронов и чем меньше избыточная реактивность, тем больше период
реактора.
Для конкретного реактора время жизни одного поколения
нейтронов — величина практически постоянная и его период
определяется только значением избыточной реактивности,
характеризующей степень отклонения системы от критического состояния. При
этом, если Д/С уменьшается, то скорость переходного процесса
также уменьшается. В стационарном режиме избыточная
реактивность Д/С раЕна нулю, а период реактора, как следует из формулы
(11.3), равен бесконечности.
Если принять избыточную реактивность Д/С = 0,002 и время
жизни тепловых нейтронов / = 10~3 с, то период реактора
Т = //Д/С = 0,5 с,
23* 355
т. е. за 0,5 с плотность нейтронов возрастает в е раз, а через одну
секунду плотность нейтронов будет
п = п*е2 = 7,4п*,
через две секунды п = 54,6я* и т. д.
Если же А/С = 0,005, то Г = 0,2 с и за одну секунду плотность
нейтронов возрастает в 148,4 раза.
Из приведенного примера видно, что даже в реакторе, в котором
время жизни одного поколения нейтронов имеет максимально
возможное значение (/ = 10~3 с), даже при сравнительно небольшом
отклонении системы от критического состояния плотность нейтронов
возрастает катастрофически быстро. При таком лавинообразном
нарастании мощности исключительно трудно выполнить систему
регулирования, которая поддерживала бы плотность нейтронов на
заданном уровне.
В рассмотренном примере не учитывались запаздывающие
нейтроны, наличие которых оказывает существенное влияние на
кинетику реактора. При определенных условиях с учетом запаздывающих
нейтронов скорость изменения мощности реактора существенно
уменьшается.
Так, например, если учесть, что время жизни одного поколения
нейтронов с учетом запаздывающих составляет / ~ 0,083 с, то при
А/С = 0,002 период реактора будет составлять примерно 43 с и за
время т = 1 с плотность нейтронов изменится всего лишь на 2 %,
а за 10 с —в 1,25 раза.
11.2. КИНЕТИКА РЕАКТОРА С УЧЕТОМ
ЗАПАЗДЫВАЮЩИХ НЕЙТРОНОВ
Выражение (11.2), описывающее экспоненциальное
поведение плотности нейтронов, было получено в предположении
отсутствия пространственной зависимости плотности нейтронов и без
учета запаздывающих нейтронов.
Часто при изучении поведения реактора во времени уделяется
внимание определению изменения плотности нейтронов в активной
зоне при изменении реактивности с относительно большой скоростью,
когда все параметры реактора, отклоняющиеся от своих
установившихся значений, достигают новых установившихся значений за
сравнительно короткое время. Это особенно относится к реакторам
ядерных ракетных двигателей, так как возмущения состояния
реактора, обусловленные выгоранием делящихся изотопов и
поглотителей, проявляются за время существенно большее, несоизмеримое
даже с общим временем работы двигательной установки. В связи
с этим, говоря о кинетике реактора и соответствующем
математическом описании, можно исключить из рассмотрения возмущения,
обусловленные выгоранием ядерного топлива и поглощающих
материалов.
Учитывая наличие запаздывающих нейтронов, уравнение
кинетики будет выражать зависимость от времени средней плотности
356
нейтронов. Практически именно величину средней плотности
нейтронов дает информация, получаемая с приборов, используемых
для регулирования реактора. Для этого их размещают таким
образом, чтобы измерять среднюю плотность нейтронов и избегать
локальных возмущающих эффектов.
Учет запаздывающих нейтронов в уравнении кинетики приводит
к следующему балансу нейтронов.
Скорость изменения плотности нейтронов равна скорости
образования всех нейтронов при делении минус скорость потери
нейтронов, минус скорость образования предшественников запаздывающих
нейтронов, плюс скорость образования запаздывающих нейтронов
из этих предшественников, плюс интенсивность источника, если
он существует. Таким образом, для шести групп запаздывающих
нейтронов имеем
dn Я эф" п КП$
4=1
где Sn —интенсивность внешнего источника нейтронов; ct
—концентрация ядер предшественников запаздывающих нейтронов i-й
группы.
Скорость изменения плотности предшественников запаздывающих
нейтронов i-й группы равна скорости производства
предшественников запаздывающих нейтронов i-й группы минус скорость распада
предшественников запаздывающих нейтронов этой же группы.
Учитывая, что коэффициент размножения на запаздывающих нейтронах
для t-й группы равен Kfiiy будем иметь
При выводе этих уравнений предполагалось, что время жизни
запаздывающих нейтронов равно времени жизни соответствующих
предшественников.
Полученную систему уравнений можно записать в следующем
виде
dn *8ф(1-Р)-1
ЧГ = i п
dct Xc , Р*«эф*
-jj- = — Mci Н 1 (Ь= 1, 2 . . ., Ь).
Рассмотрим в отдельности параметры /СЭф, fr, /, входящие в эту
систему уравнений, с целью выявления возможности ее упрощения.
При эксплуатации реакторов ядерных ракетных двигателей
увеличение КЭф будет ограничиваться требованием недопущения
мгновенной критичности, т. е. во всех нормальных переходных
режимах должно выполняться условие К9ф < 1 + р.
Область подкритичности реактора обычно ограничивается
значениями КЭфу отличающимися на несколько сотых от единицы,
357
исключением является режим пуска. В уравнениях относительно ct
без заметной потери точности можно сказать, что /С8ф ^ 1.
Эффективные значения р, отличаются от соответствующих
табличных значений поправкой на ценность запаздывающих нейтронов,
которая в реакторах конкретных размеров несколько превышает
ценность нейтронов деления. Эффективные значения (3$ для разных
реакторов различны и зависят от размеров, состава активной зоны,
энергетического спектра нейтронов и т. д.
Время жизни нейтронов деления при реальных изменениях
состояния реактора ЯРД изменяется незначительно и в большинстве
случаев можно считать, что / = const.
Система уравнений (11.5) не содержит зависимости от
пространственных координат, поэтому ее иногда называют системой
уравнений кинетики точечного реактора. Однако она удовлетворительно
описывает поведение плотности нейтронов во времени и является
определяющей при проектировании систем контроля и управления
реактором и ДУ в целом.
Начальные условия для системы уравнений (11.5) могут быть
получены следующим образом. При работе на стационарном режиме
реактор находится в критическом состоянии и до момента т = О
при Sn = О коэффициент размножения /Сэф = 1;
ct = cj;
dn
dx
= 0;
dct
0
= 0.
Подставив эти значения в систему (11.5), будем иметь
б
В результате решения этой системы получаем
Подстановка этого равенства в первое уравнение дает тождество,
что подтверждает правильность определения начальных условий.
Используя введенное выше понятие реактивности б/С = -^—>
А эф
систему уравнений (11.5) можно записать в следующем виде:
dn /Сэф (6/С — р) , Y4 » с .
-яг = 1 п + L%iCi + Sn>
'-» (11.6)
Из этих уравнений видно, что коэффициент размножения /Сэф
входит в слагаемые правых частей в виде сомножителей. Учитывая,
что в процессе переходных процессов и при управлении реактором
358
значения КЭф мало отличаются от единицы, систему уравнений (11.6)
можно упростить и представить в виде
dn 6/(-р ,
2j
t=i
dCi _ Pi л ,, ,. i о fi, (1L7)
-jjt — —п — кгсь (i = l, Л ..., b).
Этой системой уравнений описывается изменение во времени
плотности нейтронов. Если учесть полученную ранее зависимость между
плотностью нейтронов и мощностью реактора в виде
N = KNn,
где Kn—коэффициент пропорциональности, и иметь в виду, что
f(N = const, то изменение во времени мощности реактора может
быть описано системой уравнений, аналогичной системе (11.7):
б
dN 6К —
4t
Лг , „
N + Kn 2j ii + Nn\
i=1 (11.8)
Для удобства решения полученных уравнений и оценки качества
переходных процессов целесообразно представить их в
относительных координатах. Для этого вводятся величины:
где п*> с\, N* —значения плотности нейтронов, концентрации
ядер предшественников запаздывающих нейтронов и мощности
реактора на номинальном режиме. Тогда уравнения (11.7) и (11.8) в
предположении отсутствия внешнего источника нейтронов, примут вид
б
Т — 4- п = К ЬКп 4- V К
Tci^L+el = n (i=h2, ...,6), (U-9)
rncx T * • If * • V Pi • T
где in=z—, дп = _> дс|==__^-, /«=
Аналогично
r«,^+F,-S «-1,2 6). "M0)
При выводе этих уравнений было учтено, что на номинальном режиме
справедливо равенство
359
Рис. 11.1
Если ввести обозначение оператора дифференцирования р = -^-,
то систему уравнений (11.9) можно будет представить в виде
(ПЛ1)
(пР+) п+%еМ
(Teip+l)dt = n (i=l, 2, ..., 6).
Аналогичный вид будет иметь и система (11.10).
Структурная схема кинетики ядерного реактора как объекта
регулирования, соответствующая системе уравнений (11.11),
показана на рис. 11 Л, откуда видно, что кинетика реактора описывается
совокупностью линейных звеньев и множительного звена (блока
перемножения).
В связи, с тем, что сигналы, поступающие на множительное
звено, зависимы, система становится нелинейной, несмотря на
линейность всех входящих в нее звеньев. Кроме того, из структурной
схемы видно, что концентрации ядер предшественников образуют
по отношению к плотности нейтронов обратную связь, которая
определяет динамические свойства ядерного реактора.
Исследование полученной нелинейной системы
дифференциальных уравнений является относительно сложной задачей. Иногда
при исследовании систем регулирования ЯРД для описания
кинетики реактора допустимо учитывать не все шесть групп
запаздывающих нейтронов в отдельности, а достаточно рассматривать
одну эквивалентную группу с усредненным временем жизни /ср
или, в крайнем случае, две или три —не более. Для оценочных
расчетов переходных процессов в реакторе в качестве /ер принимают
средневзвешенное значение по всем группам:
б 6
; /
360
Введение одной эквивалентной группы запаздывающих
нейтронов позволяет записать систему уравнений (11.11) в виде двух
уравнений вида
(Т + \)
(Тср+1)с =
(11.12)
где с =
1=1
Для получения более точных результатов расчета число
эффективных групп запаздывающих нейтронов и их параметры можно
определить из условия наименьшего отклонения переходных процессов,
полученных при учете этих групп и при учете шести групп
запаздывающих нейтронов. В работе [12] параметры двух эффективных
групп запаздывающих нейтронов Pf, pj, ^* и ^§ предлагается
определять из решения следующей системы уравнений:
6 б
6*4-6*= V 6- -Е- +-£L= V-&-
1=1 t'=l
Уменьшение числа групп запаздывающих нейтронов приводит
к понижению порядка системы дифференциальных уравнений
(11.11), что существенно упрощает исследование.
На рис. 11.2 показана структурная схема кинетики ядерного
реактора с одной эффективной группой запаздывающих нейтронов
в соответствии с системой уравнений (11.12). Как видно, схема
по сравнению с предыдущей упростилась, но по-прежнему осталась
нелинейной.
Если в качестве топлива в реакторе используется 235U, то
значения коэффициентов в системе уравнений (11.12) будут Тп --
= 0,0156 с; Кп = 156; Те = 13 с при I = 10"4 с и р = 0,0064.
Выведенные выше уравнения кинетики были получены для
упрощенной модели реактора без отражателя. Для большинства
задач регулирования ЯРД такое упрощение является допустимым
и решения получаются вполне удовлетворительными.
Когда отдельные зоны реактора имеют различные кинетические
характеристики, как, например, в системах на быстрых и тепловых
нейтронах, может быть предложен следующий приближенный подход.
При рассмотрении такого «двухзонного» реактора, т. е. активной
зоны, окруженной отражателем, для учета эффекта отражателя
вводят дополнительную группу запаздывающих нейтронов. Это
позволяет рассчитать кинетику
реактора с отражателем на
основе рассмотренной ранее
теории для реактора без
отражателя. Введем следующие
обозначения: /га, /а —плотность и
время жизни нейтронов в активной
зоне; пот, /от — плотность и Рис. 11.2
361
та
C(S)
. 1
Т s+1
1
время жизни нейтронов в отражателе; Ка — коэффициент
размножения в активной зоне или вероятность того, что нейтрон, исчезнувший
в активной зоне, даст нозые нейтроны деления в активной зоне;
Ка. от—вероятность того, что нейтрон, исчезнувший из активной
зоны, появится в отражателе; /Сот. а —вероятность того, что
нейтрон, исчезнувший из отражателя, появится в активной зоне.
С учетом этих обозначений уравнения кинетики можно записать
в следующем виде:
б
ип£ iTq [Ла \L — p./ — ij I "от*^от. a i ^ ^
d% In /от ' wJ
dtl0
--i^+—ir~' (1U3)
L_K.Ci (l-=i)2 6).
При выводе этих уравнений предполагается, что деление имеет
место только в активной зоне. Стационарное условие критичности
получается, если положить в системе уравнений все производные
по времени равными нулю. Тогда
7
. от
6
"17" 2j
l
°-~[Аа(1-Р)-~1]Н Г&
Из последнего соотношения имеем
Ла = * Ла. отЛот. а»
Отсюда следует, что коэффициент размножения активной зоны Ка
в этом случае на стационарном режиме для обеспечения критичности
реактора должен быть меньше единицы на величину произведения
Аа. отКот. а> что Дает возможность уменьшить несколько габариты
активной зоны.
11.3. ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ЯДЕРНОГО РЕАКТОРА
Решение уравнений кинетики ядерного реактора с учетом
всех шести групп запаздывающих нейтронов является довольно
громоздким и в настоящее время выполняется обычно на
вычислительных машинах. Для расчетов переходных процессов выше
предложена модель с учетом одной средневзвешенной группы
запаздывающих нейтронов и получена система уравнений (11.12),
описывающая процессы кинетики реактора в таком предположении.
Трудность решения этой системы уравнений заключается в ее
нелинейности. Однако использование стандартных типов возмущений
362
по б/С, например скачкообразного возмущения, позволяет
достаточно просто решить эту систему и тем самым выявить некоторые
характерные свойства реактора как объекта регулирования.
При скачкообразном изменении реактивности
0 при т<0,
const при и ^ 0 v }
система уравнений (11.12) становится линейной и ее решение легко
получается аналитически следующим образом.
Подставляя из второго уравнения системы
с =
ТсР+1
в первое уравнение и учитывая, что б/С = const, после несложных
преобразований получим дифференциальное однородное уравнение
с постоянными коэффициентами Еторого порядка, описывающее
динамические характеристики кинетики ядерного реактора как
объекта регулирования:
[ТпТсР* + (Г» + Тс - ТсКпЩ р - КпЬК) п = 0.
Если учесть, что для реакторов ракетных двигателей в большинстве
случаев Тс > Гп, то полученное уравнение принимает вид
[ТсТпР2 + Те(1-Кп6К)р-КпЬК]п = 0. (11.15)
Соответствующее этому уравнению характеристическое
уравнение будет
TeW + Тс (1 - КпЩ Z - КпЬК = 0.
Корни этого квадратного уравнения
_ \-КпдК
Z
В реакторах на тепловых нейтронах, как было показано выше,
Кп = 156, Тп = 0,0156 с; Те = 13 с и, если принять 6К = 0,003,
тогда
Следовательно,
1 . 2ТпКпЬК
^
1 Тс (1 - КпЬК)*
Тогда корни характеристического уравнения можно представить
в виде
_ \-КпЬК fi . /1
Z1.2- 2f;—|i±^i
отсюда 2l = т ,/"Г
гсг„(1-А:„аА:)
363
Учитывая, что ТпКп§К < Тс (1 —Кп&К)2 можно принять
значение второго корня
(1
Переходя к первоначальным обозначениям основных понятий
кинетики ядерного реактора, величины корней характеристического
уравнения гг и z2 можно записать в виде
" гг = Ш/ф —б/С),
22 = —ф — 6К)/1.
Определив значения корней zx и z2, решение уравнения (11.15),
а следовательно, и системы (11.12) можем записать в следующей
форме:
й(т) = Ле'^ + Яе*". (11.16)
Постоянные интегрирования А и В определяются из начальных
условий следующим образом. В начальный момент времени, при
т = +0, относительная плотность нейтронов п (+0) равна
единице, т. е.
й(+0) = й(—0) = 1 и л(+0) = л*.
Значение производной dn (+0)/dx определим из системы
уравнений (11.12) для момента времени т = +0, т. е. после внесения
скачкообразного воздействия (11.14).
Из второго уравнения этой системы имеем
т (+0) = п (+0),
dC (+0) Л
поскольку —* ' = 0.
Подставляя это значение С (+0) в первое уравнение системы, будем
иметь
Щт = const) 1 + 1.
Отсюда
dn(+0) _ Кп *к _ б/С _ 1
di ~ Тп 0Л — / "~ Т '
т. е. скорость изменения плотности нейтронов после внесения
ступенчатого воздействия по реактивности б/С приобретает значение
равное обратной величине периода реактора Т.
В соответствии с полученными начальными условиями и
уравнением (11.16) имеем следующую систему алгебраических уравнений
для определения коэффициентов А и В:
А + В = 1,
Отсюда значения коэффициентов А и В равны
364
в_ ькп—:
Подставляя сюда полученные выше значения корней zx и z2, получим
А = l l Ф&ЮВ
Р ~ 6К ик """ (Р — б/С)2
/ р —б/С
б/С Лб/С
„ _ / р — 6/С _ б/С (р — б/С) — /Яб/С
р6^ Аб/С ~ [(р —б/С)24-/Лб/С] •
Учитывая, что величина 1Х&К существенно меньше б'Л (р—б/С)
и (Р —б/С)2, можно записать приближенные равенства:
А _ в
* — р —б/с ' ^ — р-б/с *
Подставляя полученные значения А и В в выражения для
корней zx и z2 в уравнение (11.16), получим формулу для расчета
относительной плотности нейтронов в зависимости от времени:
Анализ полученного дифференциального уравнения и его
решения позволяют сделать следующие выводы о динамических
характеристиках ядерного реактора как объекта регулирования.
Из уравнения (11.15) видно, что установившийся режим работы
ядерного реактора характеризуется равенством
КпЬКп = 0.
Отсюда следует, что реактор имеет два установившихся режима,
соответствующие ЬК = 0 и п = 0. Режим б/С = 0 соответствует
критическому состоянию реактора с относительной плотностью
нейтронов п = 1. Режим ft = 0 соответствует «погашенному»
реактору нулевой мощности.
Устойчивость первого установившегося режима определяется
знаками корней характеристического уравнения и при
положительной реактивности (б/С > 0) один корень гх > 0, а другой — z2 < 0.
Это свидетельствует о неустойчивости режима реактора при
положительном возмущении реактивности. Мощность реактора
непрерывно и неограниченно возрастает.
Если б/С < 0, то гх < 0 и г2 < 0 и, как следует из уравнения
(11.17), мощность реактора в этом случае падает до нуля. Если б/С =
= 0, то 22 = 0, а г, < 0 и реактор с точки зрения динамики
представляет собой нейтральное звено.
При б/С > 0 и р — б/С > 0 плотность нейтронов в соответствии
с уравнением (11.17) определяется разностью двух членов, из
которых первый растет со временем, а второй — быстро падает.
Для иллюстрации подставим в это уравнение численные
значения величин: / = 10~4 с; ЬК = 0,003, К = 0,077 <т\ р = 0,0064.
Тогда
й(т) = 1,88е°'<>68* - 0,88е-34*
365
ч
щгу и при максимально возможном значении
/ = 10~3 с зависимость плотности
нейтронов от времени будет
Я (т) = 1,88е0'068* - 0,88е-3'4*
На рис. 11.3 представлено рассчитанное
по этому уравнению изменение плотности
нейтронов во времени. Кривая 1
соответствует изменению во времени первого члена
решения, а кривая 2 —второго. Из
решения и рисунка видно, что второй член очень быстро убывает и по
истечении небольшого времени им можно пренебречь и считать,
что плотность нейтронов практически определяется первым
членом решения. Тогда можно записать, что
1
Рис. 11.3
(11.18)
Для характеристики быстродействия реактора в соответствии
с этим уравнением определим величину периода реактора Т. По
определению периода реактора имеем
■ = е =
КдК
Отсюда
1 =
э —6/с
т _ р — б/с
Подставляя численные значения (3, б/С и X, получим Т = 14,7 с.
При этом следует помнить, что для тех же условий, но без учета
запаздывающих нейтронов, период будет равен 0,33 с, т. е.
запаздывающие нейтроны значительно замедляют переходный процесс.
При очень малых значениях реактивности, когда б/С < Р период
реактора будет обратно пропорционален реактивности:
Т = р/АЛ/С-
Отсюда видно, что в данном случае период реактора полностью
определяется свойствами запаздывающих нейтронов.
Период реактора является очень важной характеристикой
реактора. Он определяет собой скорость изменения плотности нейтронов
во времени. Чем больше период, тем меньше скорость изменения
плотности нейтронов, и наоборот, с уменьшением периода реактора
скорость изменения плотности нейтронов возрастает. При больших
значениях реактивности период реактора мал и скорость изменения
плотности нейтронов может оказаться настолько большой, что
управление реактором будет невозможно. Если б/( ^ р, то запаздывающие
нейтроны не оказывают практически влияния на переходный про-
366
цесс, реактор становится надкритическим по мгновенным нейтронам
с огромной скоростью изменения плотности нейтронов. Поэтому при
проектировании системы управления необходимо предусмотреть,
чтобы ни при каких ситуациях реактивность не превышала бы
суммарной доли запаздывающих нейтронов. Значение б/С — р приводит
реактор в состояние, которое называется мгновенной критичностью.
В начальный момент после внесения положительной
реактивности процесс нарастания мощности идет за счет только мгновенных
нейтронов. Количество запаздывающих нейтронов изменяется в этот
момент слабо, так как оно определяется предшествующим
состоянием реактора. Поэтому характерным для изменения плотности
нейтронов является быстрое возрастание в начальный момент, а затем
постепенный переход к скорости, соответствующей периоду
реактора, определенному выше, называемому иногда установившимся
периодом. Это особенно отчетливо заметно при малых
положительных значениях реактивности. Такой характер изменения плотности
нейтронов определяется тем, что мгновенные нейтроны реагируют на
скачкообразное изменение реактивности за очень короткий
промежуток времени. Однако при 8/С < р дальнейшее быстрое возрастание
плотности нейтронов прекращается, так как реактор только на
мгновенных нейтронах подкритичен, и последующее плавное изменение
плотности обусловлено действием запаздывающих нейтронов.
Из приближенной зависимости (11.18) следует, что период
реактора представляет собой отношение плотности нейтронов к скорости
их изменения, т. е.
»■-/(-£■)•
Действительно,
dn
dT (f
(P/p — 6/C)
ряб/с •
\ - 6/C)2 °
e 0—6K
P-6K
-T
Р-б/С
Л6/С
= т.
Таким образом, чтобы оценить период реактора в процессе его
работы, необходимо замерить плотность нейтронов и скорость их
измерения. В момент, когда величина Т становится очень малой,
возникает необходимость или выключения реактора или принять
меры для уменьшения скорости изменения нейтронов.
На рис. 11.4 показано изменение плотности нейтронов при
скачкообразном изменении реактивности для различных значений /С.
С увеличением реактивности возрастает первоначальный скачок
плотности нейтронов и последующее ее изменение идет быстрее. При
приближении б/С к р плотность нейтронов возрастает
катастрофически быстро и реактор становится практически неуправляемым.
При отрицательном изменении реактивности (б/С < 0)
запаздывающие нейтроны определяют изменение плотности нейтронов по
367
S
h
1
z
г
4" 0,005 t
1—
вк
\m
1005
0 l Ь S %c
Рис. 11.4
10
0,5
^W
4
1,0
Рис. 11.5
2,0 xtc
прошествии малого промежутка времени после внесения
возмущения по реактивности. Изменение плотности нейтронов при б/С <0
в~соответствии с решением (11.17) запишем в виде
p_
T
(11.19)
Подставив в это решение те же значения параметров, что и ранее,
8К = —0,003; (3 = 0,0064; X = 0,077; / = 10"3 с, получим
п (т) =
На рис. 11.5 это соотношение представлено графически. Кривые 1 и
2 показывают изменение первого и второго слагаемых правой части.
Как видно, второй член быстро убывает и спад нейтронного потока
определяется первым слагаемым.
Период реактора в этом случае будет
16/C
_
1 -
к\6К\
_ 4{)
ji(t)\
В случае положительной реактивности период был равен 14,7 с,
т. е. влияние запаздывающих нейтронов в случае отрицательной
реактивности проявляется в большей степени.
На рис. 11.6 для сравнения показан характер изменения
плотности нейтронов для случаев положительной и отрицательной
реактивности, из которого наглядно видно, что при положительной
реактивности уменьшение плотности нейтронов про-
исходит быстрее.
Скачкообразный характер уменьшени я
плотности нейтронов при б/С <0 в начальный
момент приводит к резкому спаду
тепловыделения в активной зоне. Это можно отнести к
положительному свойству реактора. Однако
последующий медленный спад
свидетельствует о том, что в реакторе еще длительное
время процесс деления может поддерживаться на
таком уровне, который требует специального
теплоотвода после выключения двигателя.
/4П
' dK=O,O.
h
-
-0,03
о
t,c
Рис. п.6
368
П.4. ЛИНЕАРИЗАЦИЯ УРАВНЕНИЙ КИНЕТИКИ РЕАКТОРА
В теории автоматического регулирования для
исследования динамики объектов регулирования и систем в целом широко
используется не исходная нелинейная система уравнений,
описывающая процессы в системе, а ее линеаризованная модель, которая при
отсутствии в системе элементов с типичными нелинейностями
удовлетворительно описывает ее динамические свойства. Особенно часто
линеаризованные системы используются при исследовании задач
устойчивости.
Наиболее часто переход от исходной нелинейной системы к
линеаризованной осуществляется разложением в ряд Тейлора слагаемых
исходных уравнений с удержанием только линейных членов
разложения. Применим этот метод к уравнениям динамики ядерного
реактора.
Динамика реактора как источника мощности в двухгрупповом
приближении описывается системой уравнений (11.12). При малых
отклонениях переменных от их значений на номинальном режиме
Ап — п— 1 и Ас = с — 1,
система уравнений (11.12) принимает вид
Пренебрегая малостью произведения Кп$К An по сравнению с А/г и
6^, уравнения преобразуются к виду
_~_? (11.20)
(Тср+ \)Ас = Ап.
Подставляя из второго уравнения значение Ас в первое, получим
Преобразуя, имеем
[ТпТсР + (Тп + Те)] р~А~п = Кп (Тср
(11.21)
An(s)
Учитывая, как и ранее, что Тс ^> Гп, и пренебрегая величиной Тп
по сравнению с 7С, уравнение (11.21)
принимает вид
Тс (Тпр +l)pAh = Kn (Тср + 1) б/С.
(11.22)
Отсюда видно, что ядерный
реактор, рассматриваемый в
двухгрупповом приближении, обладает
астатическими свойствами, т. е. при появле-
24 А. И. Бабкин и др. 369
AC(S)
Рис. 11.7
нии реактивности б/С плотность нейтронов An изменяется с
определенной скоростью, не переходя на установившийся режим.
Структурная схема реактора в двухгрупповом приближении
в соответствии с системой уравнений (11.20) представлена на рис. 11.7.
11.5. ПЕРЕДАТОЧНАЯ ФУНКЦИЯ И АМПЛИТУДНО-ФАЗОВАЯ
ЧАСТОТНАЯ ХАРАКТЕРИСТИКА РЕАКТОРА
Линеаризованное уравнение динамики ядерного реактора
(11.22), записанное в преобразованиях по Лапласу, при нулевых
начальных условиях будет иметь следующий вид:
Tc(Tns+l)sL[KR] = Kn(Tcs+l)L[8K], (11.23)
где s — комплексная величина, переменная преобразования Лапласа;
L [ ] — преобразование Лапласа функции, стоящей в скобках.
На основании уравнения (11.23) выражение для передаточной
функции ядерного реактора, представляющей собой отношение
преобразования Лапласа выходной величины к преобразованию
Лапласа входной величины, может быть записано в следующем виде:
iw /c\ L[An] _ Kn Tcs+1 n« 9..
Здесь в качестве входной величины принята реактивность б/С, а
выходной — изменение плотности нейтронов Дп. Отношение KJTC
является в уравнении (11.24) только масштабным фактором и зависит
от принятых единиц измерения параметров. Поэтому в качестве
передаточной функции реактора удобнее рассматривать
Тогда
Амплитудно-фазовая частотная характеристика реактора,
получаемая заменой s — /со в выражении (11.25) передаточной функции,
имеет вид
Гс/С0 + 1
Освобождаясь от мнимых величин в знаменателе путем умножения
на сопряженные величины, получим
w /,„ч _ (Тс - Тп) со2 - /со (ГпГссо2 + 1)
или ^(/со) = ^f^V - /I(nrg
370
Р(Ш)
(0=50
to-€J
Рис. 11.8
Рис. 11.9
Введя обозначения действительной и мнимой частей этого выражения
* с
ТпТс<0>+1
будем иметь
W (/со) = Р(<а)+ /Q (со).
(11.27)
Если учесть, что практически Тс > Тп, то выражение для
вещественной характеристики амплитудно-фазовой частотной
характеристики примет вид
Из полученных выше выражений видно, что при со ->• О
Q(0) = — оо, а при (о->оо Р(оо) = 0,
Q (oo) = -0.
На рис. 11.8 приведена амплитудно-фазовая частотная
характеристика ядерного реактора при Те = 13 с, Тп = 0,0156 с.
Из рис. 11.8 видно, что в характеристике можно выделить два
участка:
— низкочастотная часть характеристики, в которой ядерный
реактор ведет себя как астатическое звено, и
— часть характеристики, близкая к
полуокружности, с центром в точке Р (оо) ~
^ 6,5, в которой реактор ведет себя как
инерционное звено.
На рис. 11.9 и 11.10 представлены
амплитудная и фазовая частотные
характеристики соответственно. Особенностью
амплитудной частотной характеристики
является, как видно из рисунка, наличие
«плато» в определенном диапазоне частот Рис. ило
24* 371
входного воздействия, т. е. изменения реактивности 6/(. Фазовая
частотная характеристика также имеет существенные отличия от
аналогичных характеристик типичных звеньев. Эти отличия касаются
резкого вначале падения, а затем постепенного ее возрастания.
Формула для расчета амплитудной частотной характеристики
имеет следующий вид:
(со)
Из этого выражения видно, что при малых значениях частоты
входного воздействия (со < 0,1) амплитуда с возрастанием частоты
уменьшается обратно пропорционально со, т. е.
v ' G)
а при больших частотах (ГсТпсо2 > 1) амплитуда уменьшается по
закону
Тс 1
(СО) = -у— — .
Выше отмечалось, что Тп < Тс. Если в связи с этим пренебречь
постоянной времени ТПУ как весьма малой по сравнению с Гс, то
приближенное выражение для передаточной функции можно записать
в виде
(11.28)
Это значение передаточной функции реактора определяет характер
переходного процесса при малых изменениях б/(. Соответствующий
скачкообразному изменению реактивности переходный процесс будет
* с /
где
О при т<0;
б/С = const при т ^ 0.
На рис. 11.11 представлен график решения этого уравнения
(прямая 1) для значений параметров
Кп = 156; Тс = 13 с; 6/С = 0,001.
На этом же рисунке показан переходный процесс (кривая 2), рас-
— _,___,____, считанный с учетом постоянной величины Тп
Лп\ | | Г I по формуле
0.2
0,1
1/1 __
1
Рис. 11.11
(11.30)
и являющийся решением уравнения (11.21).
Из рис. 11.11 видно, что расхождения в
решениях имеют место только в начальный
момент времени и, как следует из полученных
372
решений, через т = 0,5 с уравнения (11.29) и (11.30) дают
практически одинаковые результаты.
Анализ уравнений динамики и переходных процессов показывает,
что ядерный реактор очень быстро реагирует на изменения
реактивности от нулевого уровня. Запаздывающие нейтроны позволяют
осуществлять переходные процессы с небольшой и допустимой
скоростью. При этом следует, однако, иметь в виду, что положительная
реактивность должна быть заметно меньше суммарной эффективной
доли запаздывающих нейтронов по отношению ко всем нейтронам
деления. В противном случае, если реактивность равна или больше
доли запаздывающих нейтронов, реактор становится критическим
или надкритическим только за счет мгновенных нейтронов, процесс
деления пойдет весьма быстро и реактор станет практически
неуправляемым. Исходя из этого формулируются основные требования
к системе регулирования реактора. В качестве примера
предположим, что скорость изменения плотности нейтронов пропорциональна
реактивности, т. е.
где коэффициент К\ аналогичен обратной величине эффективного
значения времени жизни нейтронов. Для регулирования такого
реактора необходимо иметь регулятор, скорость перемещения которого
пропорциональна плотности нейтронов и скорости их изменения, так
как пропорциональный регулятор не сможет обеспечить стабильной
работы системы регулирования. Таким образом, для управления
таким реактором нужен регулятор, работающий по закону
dbK l к плк dn
Совместное решение этих двух уравнений дает
а решенное относительно реактивности
d?6K , и- и- dbK \ к
+ KK + К
= 0.
Отсюда видно, что при анализе замкнутой системы регулирования
безразлично, относительно какого параметра записано уравнение.
Отсюда также видно, что если /С3 будет равен нулю, то не удасться
стабилизировать переходный процесс, который будет носить
колебательный характер. Желаемый характер переходного процесса
достигается выбором значений коэффициентов /С2 и УС3. Увеличение
коэффициента Ад делает процесс более затянутым и уменьшает вероятность
перерегулирования.
11.6. КИНЕТИКА РЕАКТОРА С ЦИРКУЛИРУЮЩИМ
ГОРЮЧИМ
Наличие контура циркуляции делящегося вещества в
реакторе приводит к появлению новых динамических свойств
реактора, обусловленных циркуляцией предшественников запаздываю-
373
СП
щих нейтронов. Характерной особенностью такого
реактора является зависимость нейтронно-кинети-
ческих процессов от гидродинамики горючего —
от времени пребывания ядерного горючего в
активной зоне. Динамические свойства реактора могут
быть при этом изменены путем изменения времени
пребывания (от свойств обычного стационарного
реактора, динамика которого в значительной
степени определяется запаздывающими нейтронами,
до свойств реактора, работающего на мгновенных
нейтронах) [15].
На рис. 11.12 показана схема движения
ядерного горючего в реакторе с циркуляцией горючего
по замкнутому контуру. Высоту активной зоны 1
обозначим Я, а длину внешнего тракта возврата
горючего (2,3) — L. Для приближенного рассмотрения, по существу
качественного, предполагаем параметры процессов на мгновенных
нейтронах сосредоточенными — осредненными по объему активной зоны.
Это приближение справедливо для случая, когда время жизни
мгновенных нейтронов на много меньше времени пребывания горючего
в активной зоне. Для предшественников запаздывающих нейтронов
предполагаем их распределенность по длине контура. В связи с этим
полная производная от концентрации предшественников
запаздывающих нейтронов будет равна
Рис. 11.12
дс
дс
дх '
где W — скорость движения ядерного горючего по контуру.
Для составления упрощенной системы уравнений кинетики
нейтронов в реакторе будем рассматривать одну эффективную группу
запаздывающих нейтронов. На основании сделанных допущений
имеем
■£-+*-а™-5-«-а*пРио<*<я,
4г + W -^- = — Яс при Я < дг < L.
(11.31)
В этих уравнениях за начало отсчета координаты х замкнутого
контура циркуляции горючего принят вход в активную зону. Второе
уравнение системы справедливо для участка активной зоны,
а третье —для внешней части контура, так как деление нейтронов
происходит только в объеме активной зоны.
Для выявления особенностей динамики рассматриваемого типа
реактора по сравнению с ранее рассмотренным вариантом поступим
следующим образом. Применим к системе уравнений (11.31) преобра-
374
зование Лапласа сначала по переменной
sn(s) = m=$-n(s) + Ic(s) -n{+ 0);
sc(s) = c(x, +0) + W^^=£-n(s)-Xc(x, s)
при 0<jc< H\ (11.32)
sc (s) + с (x + 0) + W dc(^ s) = — Xc(x9 s) при #< x<L;
здесь n (s) — изображение по Лапласу функции п (т); с (x, s) —
изображение по Лапласу функции с (я, т).
После приведения во втором и третьем уравнениях системы
подобных членов и деления всех членов на W, получим два
обыкновенных дифференциальных уравнения вида
_J_i^I = o при 0<*<tf;
Для интегрирования этих линейных уравнений воспользуемся
методом изменения произвольной постоянной. Тогда решения этих
уравнений запишутся в виде
при 0 < х <: Я;
с(х, \s) = е"^ Х[А2 - J с (x'w+ 0) е^ х d*} при Я<х<1.
В этих формулах следует брать одно из значений неопределенных
интегралов, так как прибавление к ним произвольных постоянных
изменяет только значения постоянных Л! и А2.
Постоянные интегрирования Ах и А2 определяются из условия
непрерывности решений — на границах активной зоны полученные
решения должны совпадать. Указанные условия записываются в виде
n(s) J&
e
где первое равенство представляет собой выполнение условия на
входе в активную зону, а второе — на выходе из нее. Поделив первое
равенство на второе, получим выражение для определения
коэффициента Ах в виде
д _ Р n(s) 1-е w
7
-1
375
Подставляя это значение А1 во второе уравнение, находим
выражение для расчета коэффициента А2
>■ Р п (s) 1 — е w
Л2 — — 7+Х s+^L •
е w — 1
Для того, чтобы сравнить особенности кинетики нейтронов
реактора с циркуляцией горючего и кинетики нейтронов реактора со
стационарным распределением горючего, рассмотренного ранее,
определим для реактора с циркуляцией горючего среднее значение
концентрации предшественников запаздывающих нейтронов по длине
активной зоны в соответствии с формулой
н
Подставляя в эту формулу значение концентрации предшественников
запаздывающих нейтронов с (х, s), определенное выше для части
контура 0 < х < Я, будем иметь
где сср (+0) — среднее значение концентрации предшественников
запаздывающих нейтронов в начальный момент времени после
внесения возмущения по реактивности.
После интегрирования этого выражения, получим
ccv(s)=- Аг C +"Г ТГ
LT
где тпр = -^г — время пребывания ядерного горючего в объеме
активной зоны.
Подставляя это среднее значение концентрации
предшественников запаздывающих нейтронов в первое уравнение системы (11.32),
получим следующее уравнение для скорости изменения плотности
нейтронов в активной зоне
sn (s) =
376
1 (5 + ^)ТпР
Р n(s) \
Это уравнение отличается от аналогичного для реактора со
стационарным распределением ядерного горючего на величину В,
равную
—
Анализ этого выражения показывает, что при W —>0, когда
тпр -> оо, добавочный член В -> 0 и уравнение скорости изменения
плотности нейтронов для реактора с циркуляцией горючего
совпадает с уравнением для ранее рассмотренного реактора.
Для случая, когда время пребывания горючего в активной зоне
существенно меньше времени жизни запаздывающих нейтронов,
можно считать, что запаздывающие нейтроны в пределах активной
зоны не участвуют в реакции деления, и тогда скорость изменения
плотности нейтронов будет равна
dn _ 6К —р „
"Зт""" I п'
Отсюда видно, что для поддержания стационарного режима
требуется дополнительное внесение реактивности 6К = Р,
обеспечивающей компенсацию отсутствия деления запаздывающими нейтронами.
Ранее было показано, что в реакторе со стационарным распределением
горючего для обеспечения установившегося режима необходимо
выполнить условия
б/С== 0, Xc* = -2-/i*,
т. е. необходима нулевая реактивность.
Таким образом, для поддержания реактора с циркуляцией
ядерного горючего на установившемся режиме необходима
положительная реактивность, изменяющаяся от нуля до максимального значения
б/С = р. При этом, чем больше время пребывания горючего в
активной зоне, тем меньшая положительная реактивность требуется для
поддержания реактора на стационарном режиме.
11.7. ТЕМПЕРАТУРНЫЙ ЭФФЕКТ И ЕГО ВЛИЯНИЕ
НА ДИНАМИЧЕСКИЕ СВОЙСТВА РЕАКТОРА
В процессе работы реактора неизбежны изменения
температуры элементов активной зоны, которые приводят к изменениям
ядерных свойств, связанных с энергетическим спектром нейтронов,
и к изменениям плотности и геометрических размеров активной
зоны, связанным с изменением средних пробегов нейтронов и
утечками их из реактора. Все это приводит к изменениям реактивности.
Изменение реактивности, обусловленное изменением температуры
377
>
a
N
N
50 290t°C
\
элементов активной зоны от значения 7\до
7*2, называется температурным эффектом:
8Кт = &К(Т2)- 6К(Т1) =
_ /Сэф (^г) —
Характер температурного эффекта, его
величина и знак зависят от состава и
компоновки активной зоны. На рис. 11.13
представлены возможные зависимости I, II, III,
IV температурного эффекта для различных
реакторов от средней температуры
теплоносителя [7].
Для устойчивой и безопасной работы реактора необходимо, чтобы
температурный эффект был отрицательным, так как увеличение
мощности реактора, вызывающее повышение температуры, приводит
к уменьшению реактивности и разгон реактора становится
невозможным.
Изменение реактивности, соответствующее изменению
температуры активной зоны на 1 К, называется температурным
коэффициентом реактивности
аТ =
Рис. 11.13
dT
В литературе иногда используют и другие определения
температурного коэффициента реактивности:
Поскольку реактивность б/С связана с коэффициентом размножения
/СЭф соотношением
то все указанные определения отличаются друг от друга
множителями
(1 - ЬК) и (1 - Щ2.
Так как обычно б/С < 1, то одно определение несущественно
отличается от другого.
Изменение реактивности из-за температурного эффекта при
изменении температуры активной зоны от Тх до Г2 и при температурном
коэффициенте реактивности ат будет равно
8Кт = J aTdT.
При постоянном значении ат это изменение составит
Скорость изменения реактивности йЬКт! dr при изменении
температуры со скоростью dT! dx будет
d8KT/dT = aT(dT/di).
378
В реакторе, работающем на больших уровнях мощности,
изменение температуры различных элементов активной зоны неоднородно,
особенно при быстром изменении мощности. Поэтому зависимость
реактивности от мощности, как самый быстродействующий фактор,
определяющий устойчивость работы реактора, играет
самостоятельное значение и называется мощностным эффектом реактивности,
а изменение реактивности, приходящееся на единицу мощности —
мощностным коэффициентом реактивности.
Выше при рассмотрении ядерного реактора как совокупности
нейтронно-физических процессов, тепловых и гидрогазодикамиче-
ских, указывалось, что тепловые процессы влияют на нейтронно-
физическое процессы. Это влияние как раз и оценивается
температурным эффектом реактивности, который с точки зрения динамики
реактора представляет собой обратную связь по температуре
элементов активной зоны реактора. И если эта обратная связь будет
отрицательной — то она будет стабилизировать режимы работы реактора
и способствовать его устойчивости. Если же обратная связь окажется
положительной — это будет дестабилизировать режимы работы
реактора и приведет к неустойчивости реактора.
Для исследования влияния температурного эффекта реактивности
на динамические свойства реактора представим коэффициент
реактивности б/С в виде суммы
здесь Ь Ку —реактивность, вносимая органами управления
реактором, а 8Кт — реактивность, обусловленная температурным эффектом,
которая может быть вычислена по формуле 6/Сг = а,тТ*АТ>
где ат — температурный коэффициент реактивности;
Т*—номинальное значение температуры тепловыделяющих элементов актив-
ду
ной зоны; AT = -^ относительное изменение температуры
элементов активной зоны.
Подставляя суммарную реактивность в систему уравнений
реактора (11.20), получим
(Тпр +l)AR = Kn ФК7 + *ТТ*АТ) + ДБ; (11.33)
{Тср-\-\)~Ас = An.
Эта система уравнений не замкнута, так как в нее входят три
неизвестные величины А/г, Ас, А7\ а уравнений два. Для замыкания
системы уравнений (11.33) ее необходимо дополнить уравнением,
связывающим изменение температуры тепловыделяющих элементов
с плотностью нейтронов в активной зоне. Это дополнительное
уравнение приближенно можно получить из энергетического баланса
между тепловыделяющими элементами и теплоносителем или
рабочим телом. Тепловые процессы в тепловыделяющем элементе, в
котором тепло выделяется в твердом материале и передается к
охлаждающему рабочему телу путем конвекции, могут быть описаны
системой уравнений с сосредоточенными параметрами.
379
Разность между энергией деления ядерного горючего и энергией,
воспринятой от тепловыделяющих элементов рабочим телом или
теплоносителем, расходуется на увеличение внутренней энергии
тепловыделяющих элементов, т. е. на увеличение их температуры.
Скорость изменения температуры тепловыделяющих элементов в
соответствии с законом сохранения энергии будет равна
здесь Т — среднеинтегральная температура тепловыделяющих
элементов; Тт — среднее значение температуры рабочего тела или
теплоносителя; m — масса тепловыделяющих элементов; с — удельная
теплоемкость материала тепловыделяющего элемента; N — мощность,
выделяемая в материалах тепловыделяющих элементов; а —
коэффициент теплоотдачи от тепловыделяющих элементов к рабочему телу
или теплоносителю; F — площадь теплоотдачи.
Мощность тепловыделения активной зоны реактора на тепловых
нейтронах N пропорциональна плотности нейтронов, т. е.
N = KNn.
Учитывая это соотношение, полученное выше уравнение для
скорости изменения температуры элементов активной зоны и
записанное в отклонениях, будет иметь вид
me 12L = KNAn - F (Г* - Т?) Да - a*F (AT - АТТ);
индексом «*» отмечены номинальные значения параметров. Выбирая
в качестве базовых значений переменных уравнения их номинальные
значения, получим уравнение для скорости изменения температуры
элементов активной зоны в относительном виде
= KNn*An -F(T* - Т1) а*Да - a*F (Т*ДГ -
где черта сверху означает относительное значение величины, т. е.
ДГ - -££- и т. д.
В безразмерном виде это уравнение можно записать в виде
ут-ДГ,. (П.34)
me dAT , -т-тр Kn*1* TZ * "TZ i * T7F
+ *T AnДа + ДГ
Количество тепла, переданное от тепловыделяющих элементов
рабочему телу, идет на повышение его энтальпии, т. е.
где ср — изобарная удельная теплоемкость рабочего тела; т —
расход рабочего тела; Т1 — температура рабочего тела на входе в
активную зону; Т2 — температура рабочего тела на выходе из активной
зоны.
380
Записанное в приращениях это уравнение будет иметь следующий
вид:
F (Т* - Г?) Да + а*/7 (AT - ДГТ) =
= ср (Т2* - П) Am + cpm* (ДГ2 - АТ{).
А после приведения к относительным величинам получим
a*F (Т* - Tf) Д^ + a*F (Т*ДГ - 7Т*Д7Т) = ср (П - Т{) пг*Ш +
+ срт* (Т(АТ2 - Т{ДГО- (11.35)
Коэффициент теплоотдачи а в полученных выше уравнениях
может быть приближенно определен по формуле [27]
)
Записанное в относительных приращениях это уравнение принимает
вид _
Да = 0,8Дт. (11.36)
Значение средней температуры рабочего тела или теплоносителя
Тт приближенно можно определить как среднее арифметическое
значение между температурой на входе в активную зону и на выходе
т _ тх + тъ
В приращениях и в относительном виде это соотношение имеет вид
~~ 1 ~ — (11.37)
Для совместного решения полученных уравнений поступаем
следующим образом. Уравнения (11.37) и (11.36) подставляем в
уравнение (11.35) и разрешаем его относительно ДГ2. Проделав несложные
преобразования, в результате получим
a*PT* Tf (cpm* — 0,5а*/7)
+ Г$(£уЛ*+0,5а^) АГ+ Г2*(<уп*+0,5a*F) ATl' (1L38)
Далее подставляем уравнения (11.36) и (11.38) в (11.34) и получаем
jnc1JET , д^т
U>
p ,5a*/7
X Ц
1 UjD Cpm*-f 0,5a*F
0,8a*F г/1 cp 18Г/' m*
~0'8
т*
" а*?
1 — 0)5 cpm* + 0,5a*F
381
xAth
Введя обозначения
Т т
Лтп
0,8a*F
v °'5
Am
т
'05
тс
a*/7 l
Т._Т{
Cprii* ■
1
0 5-
1
о
0
1
<
4-0,-
0,5
Т*
0,5
* српг*-\- 0,5а*/7 х^г
5
Cpjn* + 0,5а*/7
1
а*/7 '
JV cpm* + 0,5а*/7
0 5 а
5a*F
а*/7
cpm* — 0,5a*/7
cpm* 4- 0,5a*F
Cpm* + 0,5a*/7
*
r*
получим
TT -^- + AT = ^ТПЖ + /СтАЖ + /CiAf,. (11.39)
или (ГТр + 1) ДТ = /CTnM + КтШ + /СТ1АГ!. (11.40)
Это уравнение и является недостающим для замыкания системы
уравнений (11.33). Дополняя эту систему уравнением (11.40),
получим
(Тпр +1)М = Кп №7 + агТ*АТ) + Л?;
(Гс/7 + 1)АЗ=А^; (11.41)
(Гтр + 1) ДГ = КчгМ + /М
Структурная схема, соответствующая этой системе уравнений
представлена на рис. 11.14. Из схемы видно, что запаздывающие
нейтроны и тепловые процессы образуют обратные связи в системе
реактора, о чем говорилось ранее. Из рис. 11.14 видно, что входными
воздействиями для реактора являются реактивность органов управления
б/Су и расход рабочего тела Am, возмущающим воздействием является
изменение температуры рабочего тела Д7\ на входе в активную зону»
Для анализа динамики реактора с учетом тепловых процессов и
температурного эффекта реактивности систему уравнений (11.41)
необходимо решить как относительно плотности нейтронов Д/г, так и
относительно температуры элементов активной зоны ДГ с тем, чтобы
иметь информацию не только об энергетических характеристиках
реактора, но и о возможных забросах температуры
тепловыделяющих элементов в процессе переходных процессов.
382
ТпР + 1
1
ТсР + 1
AT
Рис. 11.14
Решение системы уравнений (11.41) относительно плотности
нейтронов An выполним следующим образом. Из второго уравнения
определяем значение Ас и подставляем его в первое уравнение. В
результате имеем
^ + атТ*АТ) + 7^L-.
*тТ*АТ)-
Приведя к общему знаменателю, получим
[ТпТср* + (Тп + Тс) рШ = Кп (ТсР + у
Учитывая, как и ранее, неравенство
Тп С TCJ
уравнение приводим к виду
Тс (Тпр + 1)рШ = Кп (Тср + 1) фКу + аг7*ДГ). (11.42)
Это уравнение определяет динамические свойства активной зоны
реактора (изменение плотности нейтронов во времени) при
изменении реактивности, вносимой органами управления, и при изменении
температуры элементов активной зоны, которое, в свою очередь,
определяется третьим уравнением системы (11.41). Подставляя
значение AT из этого уравнения в (11.42), получим
Тс (Тпр + 1)рШ = Кп (Тср + 1) ЬК7 + атТ*(ТсР + 1) X
Х
Приведя к общему знаменателю, будем иметь
+- Тс (Тп + Гт) р2 + Тс (1
) P -
1] 6/Су
(11.43)
383
Аналогично проводится решение системы уравнений (11.41)
относительно отклонения температуры тепловыделяющих элементов
Д7\ Для этого из уравнения (11.42) определяем величину An и
подставляем ее значение в третье уравнение системы (11.41):
Тс(ТпР+\)р
Приведя к общему знаменателю и объединив подобные члены,
получим
[ТсТпТтР* + Тс (Тп + 7Т) р2 + Тс (1 - *тТ*Ктп) Р -
- а<тТ*/CTn] AT - КчпКп (ТсР + 1) б/Су + /СЛГС (7> + 1) рШ +
(П.44)
Сравнивая между собой уравнения (11.43) и (11.44), видим, что
левые части этих уравнений, определяющие свободные движения
реактора как системы, одинаковы. Это говорит о том, что свободные
движения данной системы не зависят от выбора параметра ее
состояния. Отсюда также следует, что условия устойчивости определяются
знаками вещественных частей корней характеристического
уравнения
TcTnTTz* + Тс (Тп + Тт) z* + Тс (1 - атТ*К?п) +
+ (- *TT*K,n)z + (- ссгТ*7Стп) = 0. (11.45)
Условия устойчивости для этого уравнения известны и определяются
неравенствами:
ТсТпТт>0; Гс(Тв + Тт)>0;
Гс(1-аг7*/Стп)>0,
— атТ*Ктп>0,
П {Тп + Тт) (1 - атТ*Ктп) - ТсТпТт (- атТ*К?п) > 0.
Первое и второе неравенства выполняются всегда, поскольку все
постоянные времени Гс, Гп, Гт положительны, т. е. Гс > 0, Тп > 0,
Тт > 0. Третье, четвертое и пятое неравенства дают
Т
*к > аг<0, т. к.
Лтп
л:т„>о;
тс (Тп + гт)
Определяющим из этих уравнений является аг<0, поскольку
те (тп + тт) > тптт.
Итак, для устойчивости режимов работы реактора с учетом
теплового эффекта необходимо и достаточно, чтобы температурный коэф-
384
фициент реактивности ат был отрицательным. Так как с ростом
температуры элементов активной зоны будет уменьшаться
суммарная реактивность реактора, что приведет к стабилизации режима
работы и при внесении положительной реактивности б/Су плотность
нейтронов не будет расти беспредельно, а установится на каком-то
более высоком уровне. Этот уровень может быть определен по
уравнению (11.43). Действительно, при внесении органами управления
положительной реактивности б/Су. уст и при_ДЛ = Д7\ = 0
установившиеся значение плотности нейтронов Д/густ в соответствии
с уравнением (11.43) при т ->- оо будет равно
Д/густ = - ——i—. б/Су.уст.
Учитывая, что при этом выполняется условие устойчивости ат < О,
будем иметь
IS
Установившееся значение плотности нейтронов Д/густ при
изменении расхода рабочего тела на величину Дтуст и при б/Су = О
будет равно
Аналогично определяется изменение плотности нейтронов при из-
менении_гемпературы рабочего тела на входе в активную зону и при
6КУ = ~Ш = 0.
AtiyCT = г? Д71Уст-
1\ ХЛ
Из уравнения (11.44) можно определить установившееся
значение изменения температуры тепловыделяющих элементов активной
зоны ДГуст при изменении реактивности б/Су, изменении расхода
рабочего тела Am и при^ изменении температуры рабочего тела на
входе в активную зону Д7\. При установившемся изменении
реактивности 6/(у. уст, вносимой органами управления, и при Am = Д7\ =
= 0 изменение температуры элементов активной зоны 1±Т7С1!
состав
вит
= — а?,^* $/(у.уст.
При отрицательном температурном коэффициенте реактивности
olt < 0 будем иметь
Как видно из уравнения (11.44), установившееся значение
отклонения температуры ДТуст при установившихся значениях Д/йуст и
Д7\уст равно нулю. Изменение этих параметров вызывает
переходный процесс, который завершается условием ДГуст = 0.
25 А. И. Бабкин и др. 385
Zn;AT
/
(r
I-
An
^AT^cm
_. .. „
\ An gem
An; AT
/
dn
"yum
zn
AT
So
AT
■*■—
Рис. 11.15
Рис. 11.16
Рис. 11.17
На рис. 11.15, 11.16, 11.17 представлены графики,
иллюстрирующие характер переходных ^процессов Д/г (т) и AT (т) при ступенчатых
возмущениях 6/Су, Дт и Д7\. На рис. 11.15 представлены
зависимои Д71 (т) при скачкообразном изменении реактивности
сти An (т)
управления
О при т<0;
6^Cy. уст = const при т s* 0.
В первый момент после появления скачкообразного возмущения
по реактивности плотность нейтронов, а следовательно, и мощность
реактора интенсивно возрастают, что приводит к повышению
температуры активной зоны, так как теплоотвод практически остался
прежним. Повышение температуры активной зоны при
отрицательном температурном коэффициенте реактивности приводит к
снижению темпа роста плотности нейтронов и самой температуры. Через
некоторое время температура активной зоны и плотность нейтронов
достигают новых установившихся значений, которые определяются из
уравнений (11.43) и (11.44) приравниванием нулю всех производных.
На рис. 11.16 представлены графики подобных зависимостей при
ступенчатом изменении расхода рабочего тела
г 0 при т<0;
Дт (т) = | -т-г
Д/тгуст = const
при
Возрастание расхода рабочего тела нарушает баланс между
тепловыделением и теплосъемом, что приводит к уменьшению
температуры элементов активной зоны и через отрицательный
температурный коэффициент реактивности вызывает возрастание плотности
нейтронов, т. е. мощности реактора. После компенсации теплового
дисбаланса в результате изменения плотности нейтронов реактор
выходит на новый стационарный режим по мощности, соответствующий
режиму теплосъема, а температура активной зоны возвращается к
первоначальному уровню. Это означает, что статическая связь между
расходом рабочего тела Дт и температурой тепловыделяющих
элементов активной зоны AT отсутствует, т. е. реактор с отрицательным
температурным коэффициентом реактивности ат при изменении рас-
386
хода рабочего тела Am поддерживает среднюю температуру
элементов активной зоны на постоянном уровне за счет собственных
внутренних свойств. Аналогичным образом ведет себя реактор и при
скачкообразном изменении температуры рабочего тела на входе
в активную зону А7\. Зависимости An (т) и AT (т) для этого случая
представлены на рис. 11.17. Только в этом случае возрастание
температуры АТг соответствует уменьшению расхода рабочего тела Am,
а уменьшение АТг увеличению Am.
Таким образом, при наличии отрицательного температурного
эффекта реактор приобретает свойство саморегулирования, т. е.
после возмущений по реактивности, расходу и температуре рабочего
тела реактор без регулятора переходит на новый установившийся
режим.
Проведенный анализ позволяет, используя структурную схему
реактора, представленную на рис. 11.14, предложить возможную
схему управления ядерного ракетного двигателя. Для этого по
значениям расхода Am и температуры рабочего тела, Д7\ и температуре
элементов активной зоны AT, используя формулу (11.38),
определяют температуру рабочего тела на выходе из активной зоны АТ2.
Далее, по значениям температуры АТ2 и расхода Arh определяют
величину изменения тяги двигателя по формуле
АР =[Ш + 0,5 ДГ2,
поскольку тяга двигателя может быть приближенно определена по
зависимости
где К — коэффициент, учитывающий параметры рабочего тела и
степень расширения сопла. Из приведенных зависимостей видно, что
для поддержания удельного импульса двигателя на постоянном
уровне необходимо стабилизировать температуру рабочего тела, а
регулирование тяги осуществлять изменением расхода рабочего тела.
Для этого необходимо на магистрали подачи рабочего тела в
двигатель установить регулятор расхода, который будет изменять расход
в соответствии с заданной программой или стабилизировать его на
требуемом уровне. А управление реактивностью б/Су осуществлять
с помощью регулятора температуры рабочего тела на выходе из
активной зоны АТ2, воздействуя на органы управления реактором
и сохраняя реактивность на постоянном уровне. Информация о
температуре рабочего тела на выходе из активной зоны может быть
получена не только от специального измерителя температуры, но
и косвенно по соотношению
Уа~ 7?— УНТ) >
25* 387
1
j
Ac
Ст\£т
' • 1
Тлр+1
1
Гср+7
7
ТтР+1
An
1
которое следует из формулы
расхода газа через сопло
Рис. 11.18
с уравнением (11.38) по формулам:
Для использования указанного
соотношения на борту ЛА
нужно иметь решающее устройство.
В зависимости от типа и
характеристик реактора возможно
потребуется специальный
регулятор для управления реактором
по скорости изменения
плотности нейтронов или периоду
реактора. Принципиальная
структурная схема рассмотренного
способа регулирования
представлена на рис. 11.18, где
значения коэффициентов /Ст12, Ктг
/СТ2 вычисляются в соответствии
к _срт* — 0,5а* F Г?
Ат12~~ срт* + 0,5а*/г Т. >
а*/г ^* — т%) 0,8 — ср (Г^ ■— Г J) m*
/СТ2 =
Г* a*F
Принцип работы такой системы будет заключаться в следующем.
Для увеличения тяги двигателя подается сигнал управления на
регулятор расхода рабочего тела. В результате будет возрастать
расход рабочего тела, что должно привести к снижению температуры
рабочего тела на выходе из активной зоны (перед соплом двигателя).
В работу включится регулятор температуры, который увеличит
реактивность реактора б/Су на столько, чтобы сохранить температуру Г2
на прежнем уровне. Для уменьшения тяги двигателя будет
уменьшен расход рабочего тела и снижена реактивность б/Су на столько,
чтобы температура рабочего тела на выходе из активной зоны
сохранилась на прежнем уровне.
11.8. СПОСОБЫ УПРАВЛЕНИЯ МОЩНОСТЬЮ РЕАКТОРА
Из анализа системы уравнений, описывающей динамику
ядерного реактора, следует, что на уровень его мощности можно
влиять, изменяя реактивность б/С.
Реактивность б/С характеризует баланс нейтронов в результате
действия трех факторов: генерации, утечки и поглощения нейтронов.
Следовательно, для управления мощностью реактора можно
воздействовать на любой из трех фактороз.
388
Выбор метода управления существенно зависит от типа и
назначения реактора, а также от того, идет ли речь о быстром изменении
или же о компенсации медленных изменений реактивности.
Управление реактором путем воздействия на скорость генерации
нейтронов предусматривает устройство, изменяющее массу
делящегося вещества в активной зоне, что возможно, например, при
циркуляции делящегося вещества по замкнутому контуру или при
введении в активную зону или выведении из нее дополнительного
делящегося вещества в виде специальных блоков.
Значительно легче воздействовать на величину утечки нейтронов
из активной зоны, уменьшая или увеличивая эффективность
отражателя. И, наконец, можно изменять реактивность, регулируя число
поглощенных нейтронов. Для этого в активную зону реактора или
в отражатель вводят или удаляют из них материалы (твердые, жидкие
или газообразные) с высоким эффективным сечением захвата
нейтронов.
В настоящее время для реакторов на тепловых нейтронах в
большинстве случаев конструктивно более простым оказывается
управление с помощью твердых поглощающих элементов. По своему
назначению их можно разделить на компенсирующие, регулирующие и
аварийные. Функции компенсации и регулирования могут быть иногда
совмещены, а по аварийному сигналу могут вводиться в реактор
все элементы.
Назначение компенсирующих стержней состоит в компенсации
эффектов отравления и шлакования. Компенсирующие элементы
служат для компенсации сравнительно медленных, но больших по
абсолютной величине изменений реактивности.
Регулирующие органы предназначены для тонкого изменения
реактивности во время работы на режиме и в процессе пуска. В
отличие от компенсирующих стержней они работают в диапазоне
небольшого, но сравнительно быстрого изменения реактивности при
переходе с одного режима работы на другой или при небольших
случайных отклонениях реактивности. Аварийные элементы служат для
выключения реактора в аварийных ситуациях.
Одной из основных характеристик управляющих элементов
является их полная эффективность [7], под которой понимается
реактивность, которую элемент может скомпенсировать при введении
в активную зону и соответственно высвободить при удалении из
активной зоны. Эффективность регулирующего органа зависит от
его материала, размеров, конструкции и местоположения в активной
зоне.
При проектировании элементов системы регулирования
реакторов наряду с твердыми поглощающими элементами, особенно если
желают увеличить быстродействие системы, рассматривается
возможность использования жидких или газообразных поглотителей.
Использование этих поглотителей может обеспечить более
равномерное распределение их по объему активной зоны и получить более
равномерное распределение плотности нейтронов по сечению
реактора без усложнения системы приводов.
389
Для компенсации запаса реактивности реактора и
высвобождения его в процессе работы ДУ, как было указано выше, могут быть
использованы поглотители нейтронов, конструктивно выполненные,
например,^ виде регулирующих стержней. Эффективность работы
регулирующего стержня характеризуется величиной реактивности,
которую он Сможет скомпенсировать при введении его в активную
зону и соответственно высвободить при выводе из активной зоны.
Для реакторов ядерных ракетных двигателей, работающих
относительно небольшое время, когда можно пренебречь выгоранием, шла-
кованием^и отравлением ядерного топлива, эффективность
регулирующего стержня должна удовлетворять следующему условию:
| б/Сст | ^ А №) + | 6/Ст | + б/Срез,
где А (8Кт) — возможное увеличение реактивности в силу
температурного эффекта; |б/Сг] — запас реактивности на отрицательный
температурный эффект; о/Срез — резервный (аварийный) запас
реактивности.
Эффективность стержня зависит от занимаемого им положения
в активной зоне. Это учитывается дифференциальной
характеристикой регулирующего стержня, представляющей собой зависимость
эффективности стержня при перемещении его на 1 мм от положения
его в активной зоне:
т. е. изменение реактивности при перемещении стержня на 1 мм
в различных по высоте положениях.
\% Для оценки суммарной величины реактивности, которую
компенсирует стержень, находясь в данном месте активной зоны, пользуются
его интегральной характеристикой, определяемой по формуле:
б/С (г) = \{dbK\dz)dz.
Графики дифференциальной и интегральной характеристик
регулирующего стержня представлены на рис. 11.19 и 11.20. Кривые /
представляют характеристики для случая, когда эффективность
стержня небольшая и при погружении его в активную зону распре-
дк
0,1 0А 0,6
Рис. 11.19
/
/
' /
А
//
/
/Г
/
0,1 0,Ь 0,6
Рис. 11.20
0,8
390
деление плотности нейтронов по высоте практически не
деформируется. Дифференциальная характеристика стержня имеет в этом
случае симметричный вид. Кривые 2 являются характеристиками
для случая сильного поглотителя (несколько стержней), когда при
погружении его в активную зону нарушается распределение по
высоте плотности нейтронов. Максимум плотности нейтронов потока и
максимум дифференциальной характеристики стержня смещаются
при этом вниз.
Если для регулирования реактора используется несколько
стержней, то, как правило, суммарная эффективность их не будет равна
сумме эффективностей каждого стержня, измеренных отдельно. Это
явление называется интерференцией. Оно обусловлено влиянием
одного стержня, искажающего распределение плотности нейтронов,
на эффективность другого. Интерференция может быть нулевой,
положительной и отрицательной:
где k — коэффициент интерференции, который может быть больше
или меньше, или равен единице.
Система автоматического регулирования реактора должна
обеспечивать необходимую скорость изменения мощности реактора и
должна быть сконструирована таким образом, чтобы оказывать
минимальное искажающее влияние на распределение плотности
нейтронов.
В реакторе, имеющем несколько регулирующих стержней,
перемещение которых происходит группами, средняя удельная мощность
в области размещения их может быть относительно малой и
тепловыделение будет происходить в большей степени в области вне
стержней, что уменьшит общую мощность реактора. Для снижения этого
эффекта система регулирования должна быть спроектирована так,
чтобы объем активной зоны использовался эффективно с точки
зрения теплофизических характеристик.
Не следует стремиться получить наибольшую эффективность
стержней при наименьшем их количестве, так как при этом наряду
с улучшением экономических показателей возникает неоднородность
нейтронного потока и появляются местные перегревы, связанные
с неравномерностью энерговыделения.
Вокруг каждого регулирующего стержня имеется область
ослабленного потока нейтронов. За ней следует небольшой «всплеск»,
переходящий затем в распределение потока, которое было бы в отсутствии
регулирующего стержня. Это «выедание» потока и его всплеск
оказывают большое влияние на размещение других стержней системы
регулирования. Если стержень помещается в место, где имеется
выедание потока нейтронов из-за наличия другого стержня, то этот
стержень будет вносить меньший вклад в изменение реактивности, чем
он бы внес при отсутствии первого стержня. При этом говорят, что
один стержень «экранирует» другой; этот эффект приводит к
отрицательной интерференции. Если же стержень помещается в месте,
391
где имеется «всплеск» нейтронного потока, то он будет создавать
положительную интерференцию.
Кроме местоположения регулирующих стержней в активной
зоне первостепенное значение имеет выбор их материала. С этой
точки зрения основное требование, которое предъявляется к
регулирующим стержням, сводится к требованию их максимального сечения
поглощения, так как стержень должен быть «черным» для тепловых
нейтронов, оставаясь в то же время достаточно легким и компактным.
В качестве критерия того, может ли данный материал использоваться
для регулирующего стержня, служит величина 2а6, где 2а —
макроскопическое сечение поглощения материала; б — толщина стержня.
Для определения эффективности материала регулирующих
стержней используются несколько методов. Один из них состоит во
введении исследуемого стержня в реактор сходных параметров, для
которого регулирующие стержни были откалиброваны и условно
приняты за эталон. Сравнение эффективности его материала с известной
эффективностью эталонных регулирующих стержней позволяет
оценить эффективность исследуемого материала для стержней.
Калибровка вновь изготовленных регулирующих стержней может быть
произведена в результате измерения положительного периода,
возникающего при появлении положительной реактивности, вносимой
этим стержнем.
Другой способ калибровки регулирующего стержня
заключается во введении «отравителя», равномерно распределенного по
реактору. При этом для поддержания критичности регулирующий
стержень должен быть поднят на некоторую высоту. Величина этого
перемещения фиксируется, а количество введенного отравителя
известно, что позволяет оценить эффективность регулирующего
стержня.
Оценка эффективности регулирующего стержня может быть
проведена также по методу «сброса». Если стержень внезапно
сбрасывается в реактор, находящийся в критическом режиме, то
плотность нейтронов сначала быстро падает из-за резкого уменьшения
плотности мгновенных нейтронов, а затем этот спад замедляется
по мере распада предшественников запаздывающих нейтронов. Эта
характеристическая кривая может быть использована для
определения влияния стержней на реактивность реактора.
В реакторах небольших размеров в общем балансе нейтронов
велика роль отражателя. Поэтому в таких реакторах регулирование
отражателем оказывается достаточно эффективным. Кроме того,
эффективность поглощающего стержня в активной зоне небольшого
реактора достаточно велика, что приводит к большим
перераспределениям плотности нейтронов и энерговыделения. И с этой точки
зрения регулирование отражателем может оказаться более
предпочтительным.
Практически регулирование отражателем можно осуществить
различными способами. Можно отражатель выполнить в виде
подвижных блоков, извлечение которых частично или полностью
увеличивает утечки нейтронов, уменьшая реактивность реактора. В реакто-
392
pax на тепловых нейтронах можно также экранировать отражатель,
размещая на границе активной зоны с отражателем поглощающий
материал. В этом случае при наличии поглощающего экрана
отражатель утрачивает свои свойства и реактивность реактора уменьшается.
Конструктивно регулирование отражателем может быть выполнено
в виде поворотных барабанов, изготовленных из материала
замедлителя, с частью поверхности, покрытой поглощающим материалом.
Если барабан своей поглощающей поверхностью повернут внутрь
активной зоны, то материал отражателя барабана оказывается
экранированным от активной зоны и реактивность уменьшается. Если
поглощающей поверхностью барабан повернут наружу от активной
зоны, то отражатель выполняет свои функции и реактивность
возрастает.
ГЛАВА 12
ДИНАМИКА ПРОЦЕССОВ ТЕПЛООБМЕНА
12.1. ОСОБЕННОСТИ И ОСНОВНЫЕ УРАВНЕНИЯ
ПРОЦЕССОВ ТЕПЛОПЕРЕДАЧИ
Основное отличие ЯРД от жидкостно-ракетных и других,
использующих химические топлива, заключается в способе нагрева
рабочего тела. В ЖРД нагрев рабочего тела происходит в
результате химической реакции окислителя и горючего,
сопровождающейся выделением тепла; в ЯРД — в результате теплопередачи
от нагретых частей конструкции и специальных тепловыделяющих
элементов к рабочему телу.
Процессы тепловыделения и теплопередачи в активной зоне и
отражателе определяют поле температур в реакторе, распределение
и плотность замедлителя, теплоносителя и ядерного топлива. Они
также влияют заметным образом на линейные размеры активной
зоны и отражателя. Температуры рабочего тела перед турбиной и
перед реактивным соплом определяют работу всей ДУ. Поэтому
достаточно точное описание процессов тепловыделения и
теплопередачи в реакторе является одной из наиболее ответственных задач
при проектировании и исследовании нестационарных режимов ЯРД.
Важность этой задачи усугубляется тем, что характер переходных
процессов в установке ограничивается величиной отклонений от
установившихся значений именно теплофизических величин
реактора, таких как температура ядерного топлива, температура
оболочки ТВЭЛ.
Сложность математического описания теплообмена в реакторе
обусловлена:
пространственной распределенностью тепловыделения и
теплопередачи;
зависимостью коэффициентов уравнений, определяющих поле
температур в активной зоне, от пространственных координат.
393
Особенности различных конструктивных схем активной зоны
также оказывают значительное влияние на математическое описание
процессов теплопередачи. Однако при исследовании ЯРД как
объектов регулирования часто процессы тепловыделения и теплопередачи
описываются приближенно, а параметры процессов осредняются.
Большую роль в ядерных реакторах играет перенос тепла
посредством теплопроводности. Теплопроводностью осуществляется
перенос тепла в ТВЭЛ, замедлителе, защитной оболочке, корпусе
реактора. Если коэффициент теплопроводности материала в
рассматриваемом интервале изменения температур можно считать постоянным,
тогда уравнение теплопроводности, определяющее поле температур
в твердом теле, можно записать в виде
-g.-eVT + £., (12.1)
где а = К/(рс) — коэффициент температуропроводности, м2/с; у2 —
оператор Лапласа, 1/м2; qv — мощность тепловыделения, Дж/(м3с);
с — удельная теплоемкость, Дж/(кг К); р — плотность, кг/м3; к —
коэффициент теплопроводности, Вт/(м К).
За мощность тепловыделения qv принимается количество тепла,
выделяемого единицей объема за 1 с.
Для выделения конкретного решения из всего многообразия
возможных решений необходимо дифференциальное уравнение
теплопроводности дополнить начальными и граничными условиями,
начальное условие состоит в задании распределения температуры
в рассматриваемом элементе в начальный момент времени (т = 0):
Т(х,у, г, 0)=[/(*Г*/,^)> (12.2)
Если процесс теплопроводности стационарен, то задавать начальное
условие не требуется.
Граничные условия сводятся к заданию геометрической формы
рассматриваемого элемента и условий его теплового
взаимодействия с окружающими телами или средой. Так, например, если
тепловой поток с торцов тепловыделяющих элементов длиной Н
отсутствует, тогда
дх \х=о дх
На границе ТВЭЛ с теплоносителем граничные условия
заключаются в задании температуры теплоносителя и закона
теплообмена между ними:
- % (дТ/дг)^Яшх = а (Т£ - Тт;пл); (12.3)
- X (дТ/ду)у==Утах = а (Гст - Ттепл),
где a — коэффициент теплоотдачи, Вт/(м2 К); 7\>т — температура
стенки ТВЭЛ со стороны теплоносителя, К; Ттеил — температура
теплоносителя, К; х, у, z — координаты. В зависимости от характера
взаимодействия рассматриваемого элемента с окружающей средой
394
граничные условия могут быть заданы и другим образом, а именно
распределением температуры на границах элемента:
ТСт = h (*ст» Уст> Zct> Т) (12.4)
или распределением удельного теплового потока
?ст=/2(*ст> Уст. 2ст> Т). (12.5)
Для теплоносителя, омывающего ТВЭЛ, зправедливо
приближенное уравнение теплообмена в виде
cpF'
дх
стдТ™пл -
— ail (1 ст —
п),
(12.6)
где m — секундный массовый расход, кг/с; П — периметр канала
(теплосъема), м.
Это уравнение справедливо в предположении, что теплоноситель
несжимаем, что течение теплоносителя турбулентное с
эквивалентным тепловым сопротивлением, характеризуемым коэффициентом
теплоотдачи, и что можно пренебречь теплопроводностью в
теплоносителе.
Граничным условием для уравнения (12.6) будет задание
температуры теплоносителя на входе
а начальным — распределение температуры в начальный момент
(т = 0).
12.2. ДИНАМИКА РАСПРОСТРАНЕНИЯ ТЕПЛА ЧЕРЕЗ
ТОНКУЮ СТЕНКУ С ВЫСОКОЙ ТЕПЛОПРОВОДНОСТЬЮ
Передача тепла от более нагретого тела к менее
нагретому всегда обусловлена разностью температур, а изменения
тепловых потоков сопровождаются изменениями температурного поля.
Простейшим, а в технике и наиболее частым, является
распространение тепла через стенку. Этот случай характерен почти для
всех типов теплообменников, поэтому рассмотрим его подробнее.
Выведем динамические уравнения и необходимые передаточные
функции для тонкой стенки, выполненной из материала, который
является хорошим проводником тепла. В первом приближении
будем предполагать, что теплопроводность
материала стенки бесконечна (т. е. тепловым
сопротивлением стенки можно пренебречь),
и учтем только ее теплоемкость. Затем
покажем, каким образом можно учесть конечную
теплопроводность стенки, по крайней мере,
частично.
Рассмотрим стенку, показанную на
рис. 12.1. Предположим, что передача тепла
на обеих ее сторонах происходит путем
конвекции. Температура стенки Гст в
предположении бесконечной теплопроводности во всех Рис. 12.1
395
h
точках ее будет постоянной. В действительности теплопроводность
всюду конечна и Тст представляет собой среднюю температуру стенки.
Рассмотрим изменение во времени тепловых потоков q1 и q2 на
обеих поверхностях стенки при условии, что температуры
окружающих сред равны 7\ и Т2.
Составим уравнение теплового баланса для стенки. Разность
между тепловым потоком, поступающим к стенке, и тепловым
потоком, отходящим от стенки, приводит к изменению во времени
тепла, накопленного в стенке. Для единицы поверхности стенки
это уравнение баланса можно записать в виде
4i - 42 = Рс6 №Т/А), (12.7)
где р, с, 5 —[плотность, теплоемкость и толщина стенки.
Тепловые потоки дг и q2 определяются следующими
зависимостями:
<?i = «1 (7\ - Гст), (12.8)
<72 = <МГст— Tt), (12.9)
где аъ а2 — коэффициенты теплоотдачи путем конвекции с одной
и другой стороны стенки. Строго говоря, соотношения (12.8) и (12.9)
справедливы только для установившихся состояний. При
использовании этих соотношений для описания нестационарных процессов
пренебрегаем изменением количества тепла в промежуточном слое
вещества, прилегающем к стенке, и предполагаем, что переходные
процессы в этом слое происходят значительно быстрее, чем
изменения во времени температуры самой стенки, т. е. считаем процессы
квазистационарными.
Для выполнения дальнейших вычислений проведем
линеаризацию полученных уравнений. Уравнение (12.7) в приращениях будет
иметь следующий вид:
Поделив обе'части этого|[равенства на величину
получим линеаризованное уравнение теплового баланса в
относительных величинах:
^-Тъ^ЗЁрВ-Щ**., (12.10)
где Kqt = kqjq*\ Д^2 = ^Ч*\ дгст = kTjTtT\
* — означает номинальное значение величины.
Поступая аналогично с уравнениями (12.8) и (12.9), получим
Aft = аг (Л7\ - АГСТ),
Д?2 = а2 (ДТСТ — ДГ2)
396
и в относительных величинах
Aft Д~ "
1 — ' ст ' 1"~ ' ст
(12.11)
= А^?~У2 = r. l T. (7-SrAfcr - ПДТ2). (12.12)
7 ст — ' 2 ст л 2
Введем обозначения:
J^
У* дт — CTi^* AT
1 1 у ст *»
1 ст У ста1 к .
TS лтр
у ст 1 2 V
Теперь процессы распространения тепла через тонкую стенку с
высокой теплопроводностью можно описать следующей системой
уравнений:
Tq(dATCT/dT) =='E~q1- Цъ\
, (12.13)
Применив к этой системе уравнений преобразование Лапласа в
предположении нулевых начальных условий, получим следующую
систему алгебраических уравнений:
TqsATCT (s) = Д& (s) -AQ2 (s),
_ _ (s)f (12.14)
где A7CT (s^AQi (s), AQ2 (s), Qx (s), Q2 (s) — изображения по Лапласу
функций ДГСТ (т), Kqx (т), Д^2 (т), ^ (т) и ^2 (т).
Во втором уравнении системы (12.13) общее изменение теплового
потока A^i разделено на слагаемое <7ь обусловленное внешними
причинами (изменением температуры A7\), и слагаемое — Кх&ТС1У
которое соответствует обратному влиянию температуры стенки на
тепловой поток Д^. В третьем уравнении этой системы то же самое:
слагаемое q2 обусловлено внешними условиями, определяющими
изменение потока Д<?2 в силу изменения температуры ДГ2, и
слагаемое /(2ДГСТ, которое соответствует изменению потока Д<72 из-за
изменения температуры стенки. Системы уравнений (12.13) и (12.14)
397
содержат три уравнения и пять
неизвестных величин. Для решения такой
системы нужно задаться двумя
величинами. В качестве примера на
рис. 12.2 приведена структурная
схема, соответствующая системе
уравнений (12.14) и отражающая
динамические свойства процесса
распространения тепла через стенку. Из
этой структурной схемы или
непосредственно из системы уравнений
(12.14) могут быть определены все передаточные функции. Например,
зависимость относительного изменения температуры стенки от
внешних условий, т. е. от изменения температур Т1 и 7\> можно
представить в виде
Рис. 12.2
Эта зависимость получается подстановкой значений AQX (s) в AQ2 (s)
из второго и третьего уравнений системы (12.14) в первое, которое
затем решается относительно АГСТ (s).
Соответствующая передаточная функция как по отношению
к возмущению qx, так и по отношению к возмущению q2 одна и та же
и имеет вид
IV/ / \ *■
Тф + \
где W (s) = -^
•(s)
1 + К.) '
(s)
Qi(s)
С помощью этой передаточной функции изображения
функциональных зависимостей от времени температуры стенки и тепловых
потоков по обе стороны от нее можно представить в соответствии с
системой уравнений (12.14) в виде
(s) = W is) [Qx (s) — Q2(s)h
Щ (s) = [i _ Klw (s)] Q, (s) + KiW (s) Q2 (s);
AQ2 (s) = [1 — K2W (s)]~Q2 (s) + K2W (s)~Q1 (s).
Передаточные функции [1 — KiW (s)], KiW (s), [1 — /
K^W (s) соответственно равны
1 - KXW (s) = 1 -
(s)] и
Ts
TqS (Ki + Kt)
■s+l
Ts+l
где К =
K2
Кг
Т =
рсб
398
Аналогично
fC ivy /Q\ Aj. l —К
*lW [ }~ Tqs-\-K1 + K2 ~ Ts+\
Если ввести обозначения:
1 - /СЖ1Г (s) = Wlx (s); /^IF (s) = Wlt (s);
1 - /C2W (s) = №22 (s); *2Г (s) = Г21 (s),
то получим
]
= Wu №,. (s) + Vlt (s) Q2 (s);
= Г22 (s) Q, (s) + W2l
Полученная система зависимостей_позволяет рассчитать
переходные процессы Д<?1 (т), Д^г (т) и АГСТ (т) при различных входных
воздействиях. Так, при скачкообразном изменении температуры,
а следовательно, и теплового потока
«1 AT (0
получим
АГст.уст = W (0) Qt (0) =
0) = К =
= Г21 (0) Qt (0) = J
Изменение по времени зависимостей будет происходить в
соответствии с выше определенными передаточными функциями, по
экспоненте с указанными коэффициентами усиления и с постоянной
времени, равной Т. Характер этих зависимостей при а2 > ах
представлен на рис. 12.3, на котором показаны величины постоянной времени
и коэффициентов усиления.
На рис. 12.4 представлены аналогичные зависимости при
скачкообразном изменении температуры Т2 и при а2 > ах.
Выше был рассмотрен случай, когда распространение тепла по
обе стороны стенки происходило путем конвекции в предположении,
что тепловые потоки изменялись в силу изменения температуры
окружающей среды. Положение изменится несущественно, если
предположить, что изменение тепловых потоков будет происходить
при изменении коэффициента теплопередачи. При турбулентном
399
Рис. 12.3
Рис. 12.4
течении жидкости в трубе коэффициент теплоотдачи можно
представить в виде
т \0,8
Ы ' 02.15)
где а* — коэффициент теплоотдачи при номинальном массовом
расходе жидкости /й*. Подставляя это значение коэффициента
теплоотдачи в уравнение (12.9) и линеаризуя его, получим
Л?2 = 0,8а2* (TU - П
или в относительных величинах
а! (ДГСТ - А72),
2ст^2
Объединяя первый и последний члены уравнения, найдем
где
Д<72 — Чз~г К
! = 0,8Дт 4-<72;
Am =
Am
(12.16)
и получим таким образом уравнение, аналогичное третьему
уравнению системы (12.13). Но теперь величина q3 учитывает два внешних
воздействия — изменение расхода теплоносителя (коэффициента
теплоотдачи) и изменение его температуры Г2.
При изменении коэффициента теплоотдачи ах в результате
изменения расхода жидкости со стороны 7\ уравнение для определения
Д?! будет иметь аналогичный вид:
Д^ = q4 _ KxETcj, (12.17)
где <74 = О,8Д7й + qx.
Рассмотренный выше способ определения динамики передачи
тепла через тонкую стенку является приближенным, поскольку
предполагалось, что коэффициент теплопроводности бесконечен.
Поэтому необходимо определить условия, при которых справедливо
принятое выше предположение, и когда необходимо учитывать
конкретное значение коэффициента теплопроводности. Для этого
400
рассмотрим частный случай, когда коэффициент теплоотдачи со
стороны Тг намного меньше, чем со стороны Т2, т. е. когда ах < а2.
При этом предположении значения коэффициента К и постоянной
времени Т в выражениях для W (s), Wu (s), Wl2 (s), W22 (s) и W2i (s)
будут равны
В этом случае передаточные функции Wu и W12 будут W1± = 1,
W12 = 0. В соответствии с этим имеем
Отсюда
Aqx (т) = qx (т).
Это соответствует тому, что нет обратного влияния изменения
температуры стенки на величину теплового потока A^x (т). Для более
детального анализа рассмотрим случай, когда а2 -> оо. В этом
случае передаточные функции Wn (s), W12 (s), W2*\s) и W21 (s) равны
Wn (s) = 1, W12 (б) - 0, W22 (s) - 0, W21 (s) = 1. При этом
изображения по Лапласу тепловых потоков будут равны AQX (5) = Qx (5);
AQ2 (s) = Qj (s). ^^Соответственно будут выполняться равенства:
A<7i (т) = Яг (т); А^2 (т) = <7Х (т).
Из последнего равенства следует, что ступенчатое изменение
температуры (теплового потока) с левой стороны стенки вызывает
ступенчатое изменение теплового потока с другой стороны стенки.
Это говорит о том, что стенка не обладает тепловой инерцией и
физически это нереализуемо, так как увеличение теплового потока с
одной стороны стенки вызывает изменение градиента температуры
в стенке, а это приведет к накоплению энергии в стенке. Отсюда
следует, что при больших значениях коэффициента теплоотдачи а2
приведенные выше результаты необходимо уточнить. Точное решение
задачи о распространении через стенку достаточно сложно, поэтому
ниже приведем приближенное решение, которое практически во
многих случаях бывает достаточным.
Рассмотрим ступенчатое изменение теплового потока А^ = qx и
предположим, что при постоянном значении температуры Т2
изменение во времени теплового потока Ад2 близко к переходной
характеристике звена с одной емкостью. На
рис. 12.5 представлено изменение во
времени этих величин. Передаточная функция
между величинами AQ2 (s) и А^ (s) будет
иметь следующий вид:
(12.18)
где постоянную времени Т необходимо
определить с учетом конечной величины
26 д. и. Бабкин и др
Рис. 12.5
401
коэффициента теплопроводности стенки X. Для этого
воспользуемся следующим. Согласно уравнению сохранения энер-
гии <7i — Яг = —jr~> гДе U — тепловая энергия, накопленная в
dx
стенке и приходящаяся на единицу поверхности стенки, в Дж/м2.
Линеаризуя это уравнение, получим
Aft — ~Eq2 = -V-^r-- (12.19)
и иХ
С другой стороны, разность (A?i — А^2) позволяет определить
площадь F на_рис. 12.5 между ступенчатым изменением во времени ~Kq1 и
кривой Aq2. Эта площадь определяется следующим образом:
f ^
о о
(12.20)
Дифференциальное уравнение, соответствующее передаточной
функции (12.18), имеет следующий вид:
Т (dTq2/dT) + Д?2 = Aft,
отсюда A^i — А^2 = Т (dAq2/dx).
Интегрируя эту разность по времени в пределах от нуля до
бесконечности, получим
J (Aft - Aq2)dx = J TdAq2 =
о о
(00),
откуда F =TAq2 (00) = Т {Aq2lq%
(12.21)
Сравнивая выражения (12.20) и (12.21), получаем следующее
выражение для постоянной времени Т:
= ДЩоо)/Д<7я(оо).
(12.22)
Отсюда следует, что для определения постоянной времени Г, что
позволяет уточнить решение, необходимо вычислить полное
изменение энергии, накопленной в стенке. Это изменение энергии можно
определить в первом приближении по
следующей формуле:
AU(oo) = pcb А7<ет1(оо) + АГста(оо) ? (,2 щ
где АГСТ1 (оо) и АГСТ2 (с») — установившиеся
изменения температур поверхностей стенки
с различных сторон. Графически эта величина
может быть представлена площадью F между
кривыми распределения температур в стенке
Рис. 12.6 в начале и после установления переходного
402
процесса (рис. 12.6). С ^другой стороны, в соответствии с
законом Фурье изменение теплового потока Aq2 (оо) может быть
вычислено по формуле £•-[
Изменение температуры стенки АТст2 (оо) определяется по формуле
ЛГСТ2 (оо) = Aq2 (oo)/a2. (12.25)
Для совместного решения уравнений (12.25), (12.24), (12.23) и
(12.22) поступим следующим образом. Из уравнения (12.24)
определяем значение АТст1 (оо) и подставляем в него значение ЛТСТ2 (оо)
из уравнения (12.25)
АПт1 (°°) = х Aq*(оо) + A(?2 (oo)/a2-
Подставляем полученные значения АТСТ1 (оо) и ArCT2 (оо) в
уравнение (12.23)
-г- Aq2 (оо) + Aq2 (оо)/а2 + Aq2 (оо)/а8
AU (оо) = рсЬ
Используя это равенство в формуле (12.22), получим
Aqa{co) = pcb (-L + -A-), (12.26)
Т = рс6Д?2(оо) [ Л 2
т. е. Т =
Из этого соотношения видно, что влияние коэффициента
теплопроводности стенки X тем сильнее, чем больше значение коэффициента а2.
Например, для стальной стенки [р = 7850 кг/м3; с = 544 Дж/(кгК);
А, = 37,2 Дж/(мсК); 6 = 5 мм] при а2 = 930 Дж/(м2сК) находим ,
что Т ~ 24 с. При а2 = 1,16-104 Дж/(хМ2сК) получаем Т — 3,3 с.
12.3. ДИНАМИКА ТЕПЛООБМЕНА ЯДЕРНОГО ДВИГАТЕЛЯ
С ТВЕРДОЙ АКТИВНОЙ ЗОНОЙ И ГАЗОВЫМ
ТЕПЛОНОСИТЕЛЕМ
Рассмотрим схему рабочего канала реактора,
представленную на рис. 12.7 и состоящую из твердых ТВЭЛ, омываемых
теплоносителем. Изучая общие свойства тепловых процессов,
протекающих в элементах ЯРД, не рассматривая подробно
конструкции этих элементов, целесообразно рассмотреть распределение
параметров только вдоль оси активной зоны. В этом случае при
принятых ранее допущениях уравнения теплообмена от ТВЭЛ к газовому
26* 403
т
теплоносителю могут быть представлены
следующей системой уравнений:
дТс
(12.27)
тепл^тепл
(дТт
дТт
дх ^ W дт
= аП(Гст-Гтепл), (12.28)
где qH—поток тепла с единицы длины ТВЭЛ;
/ ст — температура теплоносителя и стенки
соответственно; а — коэффициент теплоотдачи от
ТВЭЛ к теплоносителю; П — периметр
теплообмена; F — поверхность единицы длины
теплообмена.
Уравнение (12.27) представляет собой уравнение
теплового баланса для ТВЭЛ, а уравнение (12.28)
— для теплоносителя. Если учесть, что в уравнении (12.28) при
больших скоростях течения теплоносителя справедливо неравенство
1 дТ ТепЛ // дТтаптт
Т6ых
Рис. 12.7
W дт
дх
тогда это уравнение может быть записано в виде
m дГтедл _
л"*т
'тепл"*тепл
(12.29)
Уравнения (12.27) и (12.29) могут быть совместно решены
аналитическими методами или приближенно методом численного
интегрирования.
В некоторых случаях для приближенного расчета системы
автоматического регулирования оказывается достаточным рассчитать
процесс теплообмена для сосредоточенных параметров. При этом
накопление тепла в уравнении (12.27) запишем для среднемассовой
температуры ТВЭЛ Гср, а в качестве определяющей температуры
в процессе передачи тепла от ТВЭЛ к теплоносителю примем
среднюю температуру теплоносителя между входным и выходным
сечениями
1 трп.тт —
Тогда уравнения теплообмена запишутся в виде
1/тепл"|'тепл
И
(12.30)
где Af — мощность реактора, Вт; Н — высота активной зоны
реактора, м; F = ПН.
404
После несложных преобразований перепишем систему (12.30)
в виде
I/" «, ~ U I Т * ВХ 1 * ВЫХ \ .
= i\Nn — at I / ср 2 / '
V Я ' 2/ вых == а СР » \ Я 2~/ вх*
(12.31)
Для проведения более точных расчетов активную зону
разбивают по высоте на ряд участков. Точность расчета будет тем выше,
чем меньше шаг разбиения. При этом следует, конечно, иметь в виду
ограничения, которые накладываются на величину допустимого
шага интегрирования условиями устойчивости счета. Кроме того,
при использовании этого метода и при решении системы
уравнений (12.31) необходимо следить за тем, чтобы выполнялось условие
Н
так как с увеличением температуры теплоносителя на входе в
активную зону реактора температура теплоносителя на выходе из
активной зоны может только возрастать. Этот факт может иметь место при
относительно большой высоте активной зоны Н. Чтобы указанная
величина не была отрицательной, н>жно разбить по высоте
активную зону на два-три участка и для каждого из них отдельно
составить полученную выше систему уравнений. Допустимая длина
участка активной зоны должна при этом определяться из условия
>"~2~" *
Избежать отмеченного факта удается, "рсреднив параметры в
предположении, что передача тепла определяется теплоперепадом
между ТВЭЛ и теплоносителем в'выходном сечении и что
производная изменения температуры в любом сечении одинакова и равна
■ °ых. В этом случае будет справедлива следующая система урав-
ох
нений:
ст
= N _
т т (12-32)
6ТеПЛШтепЛ Jj — ОСИ \1 ст. вых I ВХЛ
Эта система уравнений не имеет тех неприятных, с точки зрения
решений, особенностей, с которыми пришлось встретиться при
решении системы уравнений (12.31).
При анализе ЯРД как объекта регулирования, исключая режим
физического пуска реактора, можно использовать, как это обычно
делается в теории автоматического регулирования,
линеаризованные уравнения системы (12.30) или (12.31). Для этого запишем
405
уравнения системы (12.30) в отклонениях, считая переменными
величинами Тср, л, а, ттепл, Гвх, Гвых,
cm ,
d%
if л *-i с ( т1 вх i~ ■* вых \ a *->#
= Лд-АЛ — t yl cp ^ j Aa —
r /Т'вых — ^вх \ * л ^ i - *„* ^^bui— ATBX
6 теп л I Jj J ^"^тепл "+" ^-тепл^тепл Jj —
= П (Гср - Гвх+2Явых) * Да - a* П (Д7ср - АГвх+2АГвы^
После приведения подобных членов получим
cm~5T^ a*/7A7^cp = AjvA/i- Z7 (7^Cn х \ ых ) Аа
-|-a*FA BX+^
степлттепл , » M AT
^теплттепл д гр
7/ вх Я
+ п (гср - Гвх+/вых)Ла +
Запишем полученные уравнения в относительных величинах
=-^—А/г —
aT J ср
Fa* /^п Гвх + Твых \ * -t~ , _*с, 'вх т^
ср ' "* ср
2Г
ср
Н
th* Т* Т* \
л"*тепл* вх л г *гт bv x -г-=.
/ ^тепл (^вых ~ ^вх) ттепл П ЯПгу /т
77 7pi и,она мСр
\ " J вых ч
тепл П ЯПгу*
i и,она
X -^^—) АтТепл — а*п "гт2- АТ'ср.
вых / -1 вых
406
При записи этих уравнений было использовано соотношение
Да = 0,8АЖтепл.
Введя обозначения постоянной времени и коэффициентов усиления,
получим
+ #4ЛТВмх; (12.33)
cm
Г cm
т — —5^ постоянная времени тепловых процессов в
реакторе; Кг = T*N" F коэффициент усиления по плотности ней-
1 сра t
тронов;
о,8
/С2 = j^ коэффициент усилия по расходу тепло-
носителя; /С3 = 0,5 -~^ коэффициент усиления по температуре
г.
теплоносителя на входе в активную зону; /С4 = 0,5 -~^ коэф-
. ср
фициент усиления по температуре теплоносителя на выходе из
активной зоны;
1 ВХ Cj
вых
г*
1 вх
т*
*■ вых
•еп
0
,5о*п/(
/ [ ^тепл ттепл
1 "
степлттьптт
Я '
11 j -
0,5а*п)
— коэффициент усиления зависимости изменения температуры
теплоносителя на выходе из активной зоны от температуры на входе;
1У- степл ('вых
нт* / V н
ni вых / \
— 0,8 v Lp— / " ' °МА// / теплятепл -|-0,5а*П
— коэффициент усиления зависимости изменения температуры
теплоносителя на выходе из активной зоны от расхода теплоносителя;
К, = -^-а*П / /степл^тепл ц_ 0,5а*п) — коэффициент усиления за-
* вых I \ Н I
висимости изменения температуры теплоносителя на выходе из
активной зоны от средней температуры ТВЭЛ.
Указанные коэффициенты усиления представляют собой
отношение выходного параметра АГср или АТВЫХ от изменения того
или иного входного воздействия на установившихся режимах
работы.
407
6KL
г
йс
1
TnP + 1
7
ТсР+1
An
Рис. 12.8
Полученные уравнения (12.33). используя систему уравнений
динамики реактора с учетом температурного эффекта (11.33),
позволяют составить общую систему уравнений, характеризующую
динамические свойства реактора с твердой активной зоной и газовым
теплоносителем. Эта система имеет вид
(Тпр +1)Тп= Кп (б/Су
АГВЫХ = КЪАТВХ ~
= An;
(12.34)
Соответствующая этой системе уравнений структурная схема
реактора представлена на рис. 12.8, которая аналогична схеме,
представленной на рис. 11.14. Входными параметрами, как видно из
схемы, являются реактивность органов управления б/Су и расход
теплоносителя Аттепл. Возмущающим воздействием является
изменение температуры теплоносителя на входе в активную зону А7ВХ.
В качестве выходных_параметров рассматривают обычно изменение
плотности нейтронов А/г или мощность реактора AN = An и
температуру теплоносителя на выходе из активной зоны А7ВЫХ.
Параметр состояния реактора АГср, характеризующий среднюю
температуру ТВЭЛ, также представляет интерес при решении системы
(12.34), так как он в значительной степени определяет надежность
работы реактора.
408
ГЛАВ А 13
ОСОБЕННОСТИ ХАРАКТЕРИСТИК
СИСТЕМ ПИТАНИЯ
13.1. СИСТЕМЫ ПИТАНИЯ
Система питания ЯРД включает в себя бак рабочего тела,
турбонасосные агрегаты и элементы разветвленной
газогидравлической сети, состоящей из трубопроводов, каналов различной длины,,
конфигурации, сечений и агрегатов управления ДУ в виде клапанов
перепуска, регуляторов расхода и т. д.
Особенностью гидросистемы ЯРД является при этом то, что при
движении рабочего тела по каналам ТВЭЛ оно нагревается и далее
истекает через сопло. Степень нагрева рабочего тела в каналах
разветвленной сети может оказаться неодинаковой, что приведет
к перераспределению расходов и, как следствие, к перегреву
каналов, что недопустимо.
В зависимости от способа включения турбины в систему ДУ по
аналогии с ЖРД различают закрытые и открытые схемы ДУ.
В ДУ закрытой схемы рабочее тело после турбины поступает
в двигатель. Турбина в этом случае работает обычно на докритиче-
ском перепаде давлений.
В ДУ открытой схемы для работы турбины используется
небольшая часть общего рабочего тела, которая после турбины может
использоваться в системе управления ракетой, а основная часть
рабочего тела поступает в двигатель, минуя турбину. Для
получения требуемой мощности турбины в ней обычно обеспечивается
сверхкритический перепад давлений.
Работа ЯРД на различных режимах во многом определяется
взаимным протеканием характеристик турбонасосного агрегата,
гидросети и тепловой системы.
Для управления режимами работы ДУ в гидравлической сети
устанавливаются различные клапанные устройства.
Для математического описания ЯРД как объекта регулирования
необходимо располагать характеристиками ТНА, гидросети,
агрегатов управления и тепловой системы. Характеристики
турбонасосного агрегата рассмотрены в первой части. Динамические свойства
теплообмена рассмотрены в гл. 12. Рассмотрим характеристики
гидравлической сети.
13.2. ХАРАКТЕРИСТИКА ГАЗОГИДРАВЛИЧЕСКОЙ
СИСТЕМЫ
Особенности характеристик гидравлической части си-
стемы питания ЯРД обусловлены ее сложной схемой разветвления,
наличием нескольких турбонасосных агрегатов, линий перепуска
части рабочего тела с выхода насоса на его вход, наличием на
магистралях агрегатов управления ЯРД и клапанов перепуска. Эти
особенности не позволяют для расчета характеристик гидросистемы
409
Pl
(p, - Pl)
A
/77
/Я
Pl
ЯРД воспользоваться известными
решениями уравнений гидродинамики.
Расчет гидравлических характеристик
динамики системы питания ЯРД удобнее
производить, используя численные
методы с применением уравнений
конечных элементов [33]. При применении
метода конечных элементов для расчета
Рис 13#i нестационарных гидродинамических
процессов в системе питания ЯРД
удобно воспользоваться представлениями о простейших
гидродинамических элементах активного сопротивления R, массы L и емкости С,
являющихся первичными ячейками конечных элементов. Каждый из
этих элементов отражает одно определенное свойство сплошной
среды: вязкость, инерционность, сжимаемость.
Элемент активного гидравлического сопротивления R отражает
свойство вязкости среды и характеризует диссипативные потери
энергии .В простейшем случае этот элемент описывается уравнением:
(13Л)
где Pi и р2 — давления в начальном и конечном сечениях
выделенного элемента; R — коэффициент квадратичного гидравлического
сопротивления; т — расход жидкости через элемент.
На рис. 13.1 представлено условное обозначение этого элемента
в принципиальных и структурных схемах двигательных установок.
При исследовании динамических свойств системы питания ЯРД
обычно используют линеаризованные уравнения конечных
элементов. Линеаризация уравнения (13.1) дает
&Pl - Др2 = А (ft - р2) = 2#m*Am. (13.2)
В относительных величинах это уравнение принимает вид
р\Aft - р\Тр* = 2R {mf Ш = 2(р{- р2У Ш, (13.3)
где А/?! = -£-; А/72 = -^; ^
Р\ Р2
Элемент гидравлической или, как ее иногда называют,
акустической массы L характеризует инерционность жидкости. Уравнение
этого элемента для цилиндрического участка трубопровода может
быть получено из уравнения сохранения количества движения,
которое запишем в виде
dtnW = P dr,
где m — масса жидкости в элементе; W — скорость движения
жидкости на рассматриваемом участке трубопровода; Р — сила,
действующая на жидкость, заключенную в объеме элемента.
Величины, входящие в эту формулу, равны
m =
Р = (Pi- Рг)
410
где p — плотность жидкости; F —
площадь элемента трубопровода; ply р2 —
давления на входе и выходе из элемента.
Подставляя эти значения в
уравнение количества движения, получим
dpFlW = (Pl — р2) FdT.
Произведение pFW представляет собой
расход жидкости через сечение F.
Следовательно:
Pi
(p,-p*
Рис. 13.2
Idrh = (/?! — р2) Fdi.
Отсюда
dm
d%
l/F
где L = l/F.
В линеаризованном виде это уравнение принимает следующий
вид:
*g = Jj-(bPl-bp%). (13.5)
А в относительных величинах
. ^ dArh 1 / Л~т— 4-г— ч t< Л _с
m -гг = х(Pl А^ ~ ^? Дл). (13.6)
На рис. 13.2 представлено условное обозначение
рассматриваемого элемента в принципиальных и структурных схемах ДУ.
Элемент гидравлической емкости «С» характеризует свойство
сжимаемости среды. Применяя уравнение неразрывности, будем
иметь
*i-*. = -£- = V-£-. (13-7)
где fh1 и ш2 — расходы жидкости через входное сечение емкости и
выходное сечение соответственно; т — масса жидкости в объеме
емкости; р — плотность жидкости.
Для определения плотности жидкости воспользуемся понятием
модуля упругости среды £ж, который вычисляется по формуле
Е -
Отсюда
Подставляя dp в формулу (13.7), получим
т т Vp dp Г
т1~т = -Е^-1Г = С
где С -^А ■--= -^-; а — скорость звука.
411
ил
Рис. 13.3
Рис. 13.4
Итак,
dp riil — Щ
ИГ ~ С
После линеаризации это уравнение примет вид
dkp _ Arh1 — Ama
di ~ С
или в относительных величинах
(13.8)
(13.9)
(13.10)
На рис. 13.3 показаны условные обозначения рассматриваемого
элемента в принципиальных и структурных схемах ДУ. Если
рассматривается течение газа, то значение акустической емкости С
может быть вычислено по формуле
г ' V
Для учета упругости стенок емкости следует при расчете величины С
по формуле
С- V
вместо а подставлять эффективное значение аэф, которое
рассчитывается по формуле
а
где Е — модуль упругости материала трубы; d и 6 — диаметр трубы
и толщина ее стенки.
В общем случае каждый участок гидромагистрали обладает
всеми рассмотренными выше свойствами. Рассмотрим пример
составления уравнений динамики участка гидротракта, обладающего
указанными свойствами и состоящего из цепи типа L—R—С, как
представлено на рис. 13.4. Суммируя потери давления,
обусловленные наличием активного сопротивления R и акустической массы L,
ямеем
Р\
412
Рис. 13.5
Am,(S)
Уравнение, учитывающее наличие емкости С, имеет вид
В результате линеаризации эти уравнения принимают вид
а в относительных величинах составят следующую систему
уравнений:
Pi Ap2 = 2Rth2*Aml
Используя преобразования Лапласа, получим
~fci(s)-A*t(s)=-e- ~~
(13.11)
(13.12)
где Дрх (s), Д/?2 (s), Дтх (s), Дт2 (s) — преобразованные по Лапласу
функции Др7(х), Д^2 (т), Д/Й! (т) и Дт2(т); s — переменная
преобразования Лапласа.
Система (13.12) представляет собой два уравнения с четырьмя
неизвестными. Выберем в качестве входных параметры Арг и т2г
а в качестве выходных Д/?2 и Ат^ Тогда структурная схема,
соответствующая системе уравнений (13.12), примет вид, показанный
на рис. 13.5. Определим вначале зависимость Д/?2 (s)_ot указанных
входных воздействий. Для этого определим значение Атх из второго
уравнения системы (13.12) и подставим его в первое уравнение.
Итак,
Ащ (s) = Дт2 (s) -L- -£|f- sAp2 (s);
p'lApi (s) = p$ Др2 (s) = (Lth*s+2Rmtt) (Ш2 (s) 4- -0- CsAJt?2 (s)) .
41Э
Раскрывая скобки, получим
р\ АР (s) - p\Kp2 (s) = (Lrh*s + 2/?m"2) Mi2 (s) +
+ Lp;Cs*K~p2 (s) 4- 2Rm*Cp\sAp(s).
Записывая это выражение относительно выходной координаты
Д/?2 (s), будем иметь
2V + 2RCrh*pls -г /?*) Д^2 (s) -
- р(Крх (s) — (Lm*s - 2Rm**) Ш,2 (s).
И, разрешая относительно Др2 (s), получим
m* Is + 2ff m* r-T
Это уравнение определяет зависимость преобразования по Лапласу
давления на выходе из элемента Д/?2 (s) от изображений входных
воздействий Д/?х (s) и Дт2 (s). Переходя в этом уравнении от
изображений к функциям по времени, получим зависимость Ар (т). Для
этого можно воспользоваться таблицами обратных преобразований
.Лапласа. Введем следующие обозначения:
W (s) =
f 2RCm*s
\Ls + 2R
LCs2 + 2RCth*s + 1 *
Тогда
A^2(s) = -!£- Wp2pl(s) A]Ms) - ^ Wp2m2(s)Mi(s), (13.14)
где Wp2pi (s) — передаточная функция, характеризующая
динамику изменения Д/?2 (т) при воздействии Арх (т); Wp2m2 (s) — пере-
даточная функция, характеризующая динамику изменения Д/?2 (т)
при воздействии Дт2 (Т)-
Располагая этими передаточными функциями, достаточно легко
определяются соответствующие амплитудно-фазовые частотные
характеристики рассматриваемого элемента. Аналогичным образом
можно найти зависимости расхода Дтх от входных воздействий Д/?х и
Ат2. Для этого из второго уравнения системы (13.12) нужно опре"
414
делить выражение для Д/?2 и подставить в первое. Итак,
(s) - pi
4
p2cs
отв2)
= (Lth's + 27?отв2) ДЖ1 (s).
Приведем к общему знаменателю
p'CsApi (s) — ^* 'Arhi[(s) + m* АЖ2 (s) = (Lms + 2^m*2) CsAiti (s)..
Разрешив это равенство относительно Am^s), получим
(LCth's2 + 2th*2RCs + m*) AliJ (s) = m* Д/й2 (s) + ptCsApi (s),
или
Введя обозначения:
- 2RCth*s + 1 /
получим
A*i (s)|= WMlm2 (s) Ш2 (s) + ^ №mlpl (s) Д^ (s), ; (13.16)
где Wmlm2 (s) — передаточная функция, характеризующая
динамику изменения Ащ (т) при изменении Дт2 (т); WmiPi (^) — пере-
даточная функция, характеризующая динамику изменения Л*^ '~v
при изменении Др2 (т).
Из сравнения полученных передаточных функций имеем
т. е. динамика воздействия изменения давления р± на р2 и динамика
воздействия т2 на тх одинаковы.
При рассмотрении всего участка трубопровода гидромагистрали
его можно разбить на отдельные цепочки конечных элементов и
решать последовательно по участкам, согласуя граничные значения
параметров на стыке участков.
Рассмотрим теперь некоторые особенности течения газообразного
рабочего тела по каналам ТВЭЛ [29]. Особенности эти обусловлены
415
подогревом рабочего тела в процессе его движения по каналам
ТВЭЛ. Подогрев приводит к изменениям температуры рабочего
тела. Изменение давления и температуры вызывают, в свою очередь,
изменение плотности рабочего тела, что приводит к изменению
скорости его движения по длине тракта ТВЭЛ. Поэтому при
определении перепада давлений на ТВЭЛ необходимо учитывать энергию,
затрачиваемую на изменение кинетической энергии потока, так как
известно, что процесс подвода тепла вносит особый вид
сопротивления: при подогреве движущегося газа полное давление падает [271.
Рассмотрим, как и ранее, канал постоянного поперечного сечения.
Течение рабочего тела будем считать одномерным, полагая
параметры потока постоянными по сечению и изменяющимися только
по длине. Обозначим скорость, дазление, плотность ььтемпературу
рабочего тела на входе в каналы ТВЭЛ Wlt plt px и Тг, а на выходе
из каналов — W2, /?2, р2 и Г2 соответственно. Закон сохранения
количества движения для произвольного элемента потока рабочего
тела на участке канала длиной ах имеет следующий вид:
-dp = dpTp + pWdW, (13.17)
где dp — полное изменение давления на участке канала длиной dx\
dpTp — перепад давлений, обусловленный трением и другими
потерями (местные сопротивления), если таковые имеются; pW dW —
изменение количества движения потока на длине dx.
Перепад давлений, обусловленный трением о стенки ТВЭЛ,
можно определить через коэффициент сопротивления трения I
%P4f^ (13.18)
где d —диаметр канала ТВЭЛ.
Если канал не круглого сечения, то вместо величины диаметра
канала d используют эквивалентный диаметр d9, который
вычисляется как отношение учетверенной площади сечения канала к
его периметру.
Подставляя значение dpTp из (13.18), умноженное и поделенное
яа р, в уравнение (13.17), получим
(13.19)
Считая, что коэффициент сопротивления трения вдоль канала не
изменяется, и имея в виду, что
pW = const,
интегрирование равенства (13.19) от нуля до / дает
^-Wl). (13.20)
Для вычисления интеграла, входящего в это выражение,
необходимо знать функциональную зависимость плотности рабочего тела
по длине канала, которая отсутствует. Поэтому для анализа вос-
416
пользуемся средним по длине канала значением плотности р,
которое вычислим по формуле
Учтем далее, что
Pi И7! =
и в результате'получим
Первое слагаемое в квадратных скобках этого равенстза
характеризует величину потерь давления, обусловленную трением газа о
стенки, а второе слагаемое — потери давления на ускорение потока
рабочего тела.
Расчет перепада давлений при течении рабочего тела по каналам
ТВЭЛ (/?! —р2) в виду того, что заранее неизвестны величины
давления и плотности на выходе из ТВЭЛ р2 и р2, приходится
выполнять методом последовательных приближений.
Иногда бывает удобнее определять перепад давлений (рг —р2)
не через плотности р2 и рх, а через значения температур рабочего тела
на входе в ТВЭЛ 7\ и на выходе Т2, которые определяются в
результате теплофизического расчета. Для получения такой зависимости
умножим обе части равенства (13.19) на р и проинтегрируем
полученное выражение по длине канала ТВЭЛ. В результате получим
U.). (13.23)
При получении выражения второго слагаемого в правой части было
умножено и поделено на р второе слагаемое в уравнении (13.19).
Если предположИхМ, что рабочее тело является идеальным газом,
то можно получить
/ /
о
где 7ср = — J T dx — среднее по длине канала ТВЭЛ значение
о
температуры рабочего тела.
Для приближенной оценки можно принять за среднее значение
температуры ее среднее арифметическое значение
* ср —
27 А. И. Бабкин и др. 417
Интегрирование второго слагаемого можно выполнить по частям
О 0 0
1 1
-ro-ztfrin-g-,
где Т — некоторое постоянное значение температуры газа по длине
канала, Еынесенное из-под интеграла.
Считая приближенно, что Т = Тср, и подставляя полученное
выражение интеграла в уравнение (13.23), будем иметь
Если разделить обе части этого равенства на среднее арифметическое
значение давления /?ср = Pi + P* и обозначить рср = PcVf(RTcp)>
то после несложных преобразований можно получить
№ + *&■ + **]■ 03.24,
Обычно в ЯРД величина перепада давлений (рг —р2)
относительно мала по сравнению с величиной давления р2. В этом случае
можно записать
' Рг I Ръ Рср
Учитывая это соотношение, уравнение (13.24) можно записать в виде
п п —JEEZ. Г 1 г l I T2-Tx Pi — Ра 1 п*9К\
Pep L * "э * ср Pep J
Расчет по этому соотношению, как и ранее, следует проводить
методом последовательных приближений.
ГЛАВА 14
УПРАВЛЕНИЕ ЯДЕРНЫМИ РАКЕТНЫМИ
ДВИГАТЕЛЯМИ
14.1. ОСОБЕННОСТИ ПРОЦЕССОВ УПРАВЛЕНИЯ
Характерной особенностью управления ЯРД является
многоэтапность процессов его запуска, который включает в себя:
процессы предпусковой подготовки, куда входят вывод ракеты
на траекторию до начала непосредственного запуска реактора и
подготовка систем для физического пуска реактора;
418
IV „л.У VI т
Рис. 14.
процессы физического пуска
реактора, включающие в себя вывод
реактора из начального подкрити-
ческого состояния в критическое
и дальнейшее повышение мощности
до уровня 1 ... 2 % от
номинальной, с которого начинается прогрев
элементов системы;
процессы прогрева элементов
реакторов с выводом ДУ на
установившийся режим работы;
работу ДУ на установившемся режиме;
выключение ДУ с последующим охлаждением ее элементов.
Иногда выключение может сопровождаться предварительным
переходом на пониженный стационарный режим работы.
Циклограмма изменения основных параметров в процессе
запуска, работы на установившемся режиме и выключения показана
на рис. 14.1.
В процессе физического пуска (участок I) реактор выводится
из начального подкритического состояния в критическое и
мощность его повышается. Для выполнения физического пуска
необходимо обеспечить минимальный поток нейтронов с помощью
постороннего источника.
На участке II осуществляется прогрев элементов ДУ и
подготовка к запуску. По окончании процесса прогрева рабочее тело
подается в ДУ и начинается режим запуска (участок III) с выводом
на номинальный режим.
На режимах прогрева и запуска на изменение основных
параметров накладываются определенные ограничения. Так, например,
период реактора Т должен иметь определенное значение, не менее
допустимого. Это значение периода выбирается из условия
обеспечения минимального времени выхода на режим и из условия
безопасной работы реактора. Скорость изменения мощности реактора
dN/dx должна быть такой, чтобы система аварийной защиты при
необходимости смогла бы обеспечить выключение реактора.
Другим ограничением на этих режимах работы является
требование ограничения скорости изменения температуры ТВЭЛ во
времени и в пространстве. Это предотвращает возникновение опасных
напряжений в элементах ДУ.
Определенные ограничения накладываются и на величину
мощности реактора исходя из условий безопасности работы. При работе
на номинальном режиме (участок IV) необходимо обеспечить
требуемую точность поддержания основных параметров ДУ —
температуры рабочего тела 7\ давления.в предсопловой камере р и
расхода рабочего тела т, обеспечивающих номинальное значение тяги
и максимальный удельный импульс.
Перед выключением ДУ иногда переходят с номинального
режима на пониженный (участок V). Это делается с целью уменьшения
времени, необходимого для расхолаживания после выключения
27*
419
ДУ (участок VI), так как расхолаживание реактора определяется
уровнем его мощности перед выключением.
Одним из важнейших требований, которые предъявляются к
ЯРД, является требование обеспечения возможности повторных
запусков. Поэтому, кроме условия быстрого уменьшения тяги,
к режиму выключения и расхолаживания ставится требование
высокой надежности возможности повторного запуска. Для этого
необходимо в течение определенного времени охлаждать рабочим
телом или каким-либо другим охладителем элементы конструкции
реактора и двигателя, в которых происходит остаточное
тепловыделение.
При управлении ЯРД возникают следующие задачи оптимизации
процессов регулирования:
1) минимизация интегральной плотности нейтронов на режиме
пуска;
2) минимизация времени выхода реактора и ДУ на номинальный
режим с обеспечением накладываемых ограничений;
3) минимизация времени переходных процессов при переходе
с одного режима работы на другой;
4) минимизация времени и расхода рабочего тела при
расхолаживании реактора и выключении ДУ.
14.2. ФИЗИЧЕСКИЙ ПУСК РЕАКТОРА
Перед запуском ДУ реактор находится в подкритическом
состоянии и коэффициент размножения меньше единицы. Величина
введенной системой управления отрицательной реактивности
определяется запасом ее на компенсацию температурных эффектов, на
возможные возмущения реактивности, связанные с плотностным
эффектом по водороду, и на предосторожность бесконтрольного
пуска. Величина запаса по реактивности может составлять 5 ...
... 10 %.
Для облегчения физического пуска в активную зону вводят
источник нейтронов, который обеспечивает начальный уровень
мощности (10""9 ... 10~10) N*. Время установления равновесного
подкритического состояния можно оценить следующим образом.
Рассмотрим результат внесения одного из S нейтронов в подкри-
тический реактор. Каждый нейтрон создает в первом поколении К
нейтронов, которые, в свою очередь, во втором поколении дадут К2
нейтронов и т. д. В конце i-ro поколения число нейтронов М составит
М = 1 +К +К2 +-** + К'.
Учитывая, что в подкритическом реакторе К < 1, этот ряд сходится.
Сумма указанной прогрессии при i -»- оо равна
т ~ 1 - К ~ — ЬКф
Когда источник нейтронов «S» находится в реакторе, то число
нейтронов в активной зоне равно SM HeiiTV0H9 При условии равновесия
420
интенсивность нейтронного источника должна быть равна числу
нейтронов, деленному на время жизни /. Таким образом,
Отсюда
n=SMi = T±K=z^K,
где Д/С = К— 1.
Величину 1/(1 — К) называют коэффициентом размножения
реактора в подкритическом состоянии. Из этого определения видно,
что чем ближе коэффициент размножения К к единице, тем большее
значение имеет коэффициент размножения реактора в
подкритическом состоянии, т. е. тем больше плотность нейтронов в
установившемся подкритическом состоянии.
Выражение
„ Sl
получено в предположении, что число поколений размножения
нейтронов бесконечно. Это справедливо только в том случае, если
реактор длительное время находится в подкритическом состоянии.
Если же интересует плотность нейтронов или величина М сразу
после нескольких поколений размножения, тогда необходимо
использовать выражение
Время, в течение которого сменилось это i поколений равно
где / — время жизни нейтронов.
Следовательно,
М
Из этого выражения можно оценить скорость установления
равновесного подкритического состояния. Для этого определим время,
необходимое для того, чтобы величина М достигла 99 % своего
установившегося значения. При т = 0 число М = 1, а при то,99
число Мо,99 = 0,99 1 _„, следовательно,
1 1 jfT5"1"1
т0.99
или 0,99 = 1 — КК 1 .
421
Отсюда
/С/С*..,,// = 0,01.
Логарифмируя, получим
In /С + JEgf£- In /С = In 0,01.
Окончательно имеем
т0>99 _ In 0,01 1
Пусть для реактора, находящегося в глубоком подкритическом
состоянии, для которого К = 0,9, имеем
f -44,
а для реактора, близкого к критическому состоянию, для которого
К = 0,99, будем иметь
т. е. в 10 раз большее значение времени. Отсюда можно сделать
вывод, чем больше подкритичность реактора, тем больше скорость
изменения плотности нейтронов и тем быстрее достигается
состояние равновесия.
В процессе физического пуска мощность реактора возрастет на
несколько порядков. Это накладывает особые требования на
чувствительность датчиков нейтронного потока.
Общие требования к системе регулирования в процессе
физического пуска заключаются в следующем:
время пуска должно быть минимальным;
темп нарастания мощности должен быть ограничен и период
реактора должен быть больше или равен допустимому Т 5* Тдоп\
скорость изменения температуры элементов реактора должна
быть ограничена:
£1 < (*L\
di ^ \d% /доп #
Величина допустимой скорости изменения температуры (с1Т/йт)доп
лимитируется температурными напряжениями, возникающими при
неравномерном нагреве элементов. Кроме скорости изменения
температуры, в процессе физического пуска ограничивается и
неравномерность нагрева элементов по длине и радиусу реактора.
Процесс физического пуска может быть осуществлен при
программном изменении реактивности, с постоянным периодом и по
заданному изменению мощности.
Первые два способа взаимосвязаны через период и реактивность
реактора. Период реактора
422
В подкритическом состоянии
Дифференцируя это равенство по времени, имеем
&п_ _ SI dK
dx ~~ (1 — К)г dx #
Подставляя эти значения для п и для dn/dx в формулу для периода
реактора, имеем
1 ^dK/dx'
Отсюда видно, чем ближе значение коэффициента размножения
к единице, тем короче период, если не учитываются запаздывающие
нейтроны.
При приближении реактора к критическому состоянию время
выхода на установившийся режим увеличивается и требуется
учитывать присутствие запаздывающих нейтронов. Изменение
плотности нейтронов во времени в этом случае будет соответствовать
уравнению кинетики реактора с учетом запаздывающих нейтронов.
Процесс физического пуска реактора с помощью регулятора,
обеспечивающего постоянную скорость перемещения
регулирующего органа при линейной его эффективности по перемещению,
может быть описан следующей системой уравнений:
dC - Р П \Г-
6 К = б/Срег + 6#т,
8КТ = ат Л Г;
d6Kv
При обеспечении физического пуска реактора с постоянным
периодом изменение плотности нейтронов, а следовательно, и
мощности будет соответствовать закону
который можно осуществить регулятором, работающим по закону
dbK г* /rp /ti\
-^jr-= Ази зад — I )>
где Тзад, Т —заданное и замеренное значения периода реактора.
14.3. РЕЖИМЫ ПРОГРЕВА И ЗАПУСКА
ДВИГАТЕЛЬНОЙ УСТАНОВКИ
На режимах прогрева и запуска ДУ происходит
дальнейшее повышение мощности реактора, осуществляется подача
рабочего тела, раскручивается турбонасосный агрегат и продолжается
423
рост температуры элементов активной зоны и рабочего тела до
уровня, соответствующего номинальному режиму работы ДУ. На
режимах прогрева и запуска требуется обеспечить:
минимальное время прогрева и выхода на номинальный режим
в соответствии с требованиями технического задания;
минимальный расход рабочего тела за время выхода ДУ на
номинальный режим;
бессрывные и бескавитационные режимы работы насосов ТНА;
монотонное нарастание температуры реактора.
Минимальное время прогрева и выхода на номинальный режим
работы обеспечивается соответствующим ростом мощности реактора
при выбранном запасе реактивности.
Минимальный расход рабочего тела обусловлен требованиями
минимальных потерь удельного импульса ДУ.
Бессрывные и бескавитационные режимы работы насосов
обеспечиваются соответствующим выбором характеристик насосов и
ТНА в целом. В первом приближении можно считать, что границы
срывных режимов насоса совпадают с максимумом его напорной
характеристики. Представляя напорную характеристику насоса
в виде
Н = — am2 + amn-{-n2>
беря производную дШдт и приравнивая ее нулю, получим условие
бессрывной работы: т > 0,5/г. Это неравенство может быть
обеспечено перепуском части рабочего тела после насоса на его вход
с помощью специального клапана перепуска.
Бескавитационные режимы работы насосов обеспечиваются
выбором гарантированного давления в баке рабочего тела исходя из
кавитационной характеристики насоса как функции напора, расхода
и частоты вращения.
Монотонный характер нарастания температур в реакторе
обусловлен тем, что на номинальном режиме работы величины
температур выбираются близкими к максимально допустимым с точки
зрения прочности и надежности, что, в свою очередь, делает
нежелательным переходный процесс с перерегулированием.
14.4. НОМИНАЛЬНЫЙ РЕЖИМ РАБОТЫ
Выход ДУ на номинальный режим и работа ее на этом
установившемся режиме (IV участок циклограммы на рис. 14.1)
следует за прогревом реактора и запуском'двигателя, после того
как основные параметры системы достигли 70 ... 80 % от
номинальных величин. Основные требования, которые предъявляют
обычно к системе регулирования на этом этапе работы, сводятся
к следующему.
1. Высокая точность поддержания режима, превышающая по
некоторым параметрам точности, предъявляемые к ЖРД. Это
объясняется тем, что режимы работы ЯРД максимально форсированы и
допуски на регулирование получаются весьма малыми. Желание
424
повысить удельный импульс ДУ приводит к тому, что температура
ТВЭЛ на номинальном режиме ДУ выбирается близкой к предельно
возможной. Так, например, рабочая температура в американском
ЯРД «Нерва» превышает 2500 К, в то время как температура
плавления графита, из которого сделаны ТВЭЛ, около 3300 К.
2. Переходные процессы должны быть без забросов, с
минимальными отклонениями в процессе регулирования и с минимальным
временем установления режима.
3. Высокая, практически абсолютная, надежность диктуется
особенностями ЯРД и их высокой стоимостью.
От ЯРД требуются определенные величины тяги и удельного
импульса. При рассмотрении системы регулирования эти
параметры могут быть приняты как выходные, а за входные —
реактивность и величина открытия дроссельных клапанов и клапанов
перепуска. В связи с тем, что прямое измерение в полете тяги и
удельного импульса невозможно, необходимо обеспечить регулирование
по косвенным параметрам, которые могут быть выбраны исходя из
следующего.
Тяга ЯРД на номинальном расчетном режиме может быть
определена по формуле
Р = mW,
где т —массовый секундный расход рабочего тела через сопло;
W —скорость истечения рабочего тела из сопла.
Для реактивного сопла постоянной геометрии скорость
истечения рабочего тела пропорциональна корню квадратному из
температуры торможения его в предсопловой камере:
w = T
Расход рабочего тела через сопло вычисляется по формуле
Отсюда уравнение для определения тяги можно записать в
следующем виде:
Р = AwAmpK.
Таким образом, тяга двигателя пропорциональна давлению в
предсопловой камере, которое и может быть принято за косвенный
параметр регулирования тяги.
С другой стороны, удельный импульс можно определить по
формуле
Отсюда удельный импульс двигателя пропорционален корню
квадратному из температуры рабочего тела в предсопловой камере,
которая также может быть выбрана в качестве косвенного параметра
регулирования удельного импульса.
Кроме указанных параметров регулирования система
управления ЯРД включает в себя регулирование мощности реактора,
температуры перед турбиной, а иногда и частоты вращения турбо-
425
насосного агрегата. На рис. 14.2 представлена принципиальная
схема возможной системы регулирования ЯРД, которая
предусматривает регулирование давления в предсопловой камере (тяги),
температуры перед соплом (удельного импульса) и мощности
реактора (плотность нейтронов или нейтронного потока).
Давление в камере рк (тяга) регулируется регулятором / путем
изменения расхода рабочего тела, а стабилизация температуры
в предсопловой камере (удельного импульса) и мощности реактора
осуществляется регулятором 3 и блоком управления 2 путем
изменения реактивности реактора.
При регулировании мощности реактора, как указывалось выше,
ограничивается иногда скорость изменения реактивности. Темп
изменения мощности реактора определяется скоростью перемещения
регулирующего органа (стержня), которая может быть определена
из следующих соображений.
Пусть регулирующий стержень перемещается с такой скоростью,
которая обеспечивает скорость изменения реактивности, равную V.
Тогда за время т реактивность составит
б/С = Vx.
Ранее было отмечено, что при внесении положительной
реактивности в первый момент плотность нейтронов быстро, скачком,
изменяется на величину
А/г _ ЬК
ЦТ- р — в/с ш
При малых значениях реактивности по сравнению с величиной |3,
значение относительного изменения плотности нейтронов будет
А/г _ б/С
п* - р '
где п* —плотность нейтронов до внесения реактивности.
Если, например, допустимое отклонение плотности нейтронов
от его значения на номинальном режиме составляет 0,5 % и р =
= 0,0064, то тогда
Далее предположим, что выключатель регулирующего органа
(стержня) имеет минимальное время последействия (срабатывания)
0,01 с. Тогда за это время вследствие движения стержня реактивность
изменится на величину
0,01
где Гр о — постоянная времени перемещения регулирующего органа.
При Гр.о = 0,01 с
Для того чтобы обеспечить условие непревышения реактивности
6ЯОСТ = 3,2-Ю-5,
426
Рис. 14.2
Рис. 14.3
необходимо, чтобы скорость изменения реактивности не превышала
бы величины
V = 6tfOCTe.l00 = 0,875 X 10г*сгг.
Рассмотрим вопрос точности регулирования выбранных выше
косвенных параметров исходя из того, что относительная
погрешность регулирования тяги и удельного импульса не должна
превышать 1 %. Поскольку тяга двигателя пропорциональна давлению
в предсопловой камере, то погрешность регулирования этого
давления также не должна превышать 1 %.
Величина удельного импульса пропорциональна корню
квадратному из температуры в предсопловой камере, поэтому при
небольших отклонениях от номинального режима можно
соотношение между этими величинами записать в виде: /у. д = 0,57V Отсюда
следует, что погрешность регулирования температуры не должна
превышать 2 %.
Учитывая, что соотношение расхода рабочего тела, давления и
температуры в предсоплоЕОЙ камере можно записать в виде
где Лм — коэффициент,
то в линейном приближении и в относительных величинах получим
Д/fc = Д/?к — 0,5ДГк.
Отсюда видно, что в этом случае погрешность в регулировании
расхода рабочего тела не должна превышать 2 %.
При создании системы регулирования ядерного реактора может
представить интерес, особенно с точки зрения увеличения
быстродействия и уменьшения неравномерности распределения плотности
нейтронов, система регулирования с использованием газовых
поглотителей нейтронов.
Принципиальная схема подобной системы регулирования
реактора показана на рис. 14.3. Газовая турбина 5 вращает
компрессор 6, который обеспечивает циркуляцию поглощающего газа по
замкнутому контуру через активную зону реактора 5,
холодильник 8 и дроссель тонкой настройки 7. Управление дросселями гру-
427
бой 9 и тонкой 7 настройки осуществляется блоком управления 10,
на вход которого поступает сигнал с датчика нейтронного потока 4.
Аварийный останов реактора может быть осуществлен открытием
крана 2, в результате чего возрастает плотность поглощающего
нейтроны газа, поступающего из емкости 1. Через дроссель грубой
настройки 9 производится заправка и продувка системы.
Холодильник 8 необходим для охлаждения поглощающего газа в результате
нагрева в активной зоне. Запуск системы может быть произведен
путем предварительной раскрутки турбины 5 от бортового источника
с последующим переходом на питание турбины газами от
специальных газогенераторных ТВЭЛ или отбираемых из системы основных
ТВЭЛ. Изменение плотности поглощающего газа, осуществляемое
путем изменения проходных сечений дросселей 7 и 9 и частоты
вращения компрессора, приводит к изменению реактивности реактора,
а следовательно, и к изменению режима его работы. Скорость
введения положительной или отрицательной реактивности будет
пропорциональна скорости изменения плотности (расход)
поглощающего газа в газоводах активной зоны.
Для определения необходимого макроскопического сечения
поглощающего газа при заданном запасе реактивности воспользуемся
формулой для определения коэффициента теплового использования
нейтронов.
Коэффициент теплового использования нейтронов 0 представляет
собой отношение числа тепловых нейтронов, поглощенных в топливе,
к полному числу тепловых нейтронов, поглощенных во всей
активной зоне реактора. При дальнейших расчетах будем предполагать,
что остальные сомножители, определяющие коэффициент
размножения нейтронов, в пределах заданного запаса реактивности на
регулирование не изменяются. Тогда для реактора без учета системы
регулирования
где 2Т, 23> 2К — макроскопические сечения захвата нейтронов
топлива, замедлителя и элементов конструкции соответственно;
Фт, Ф3, Фк — нейтронные потоки в топливе, замедлителе и
элементах конструкции.
Для реактора с учетом системы регулирования выражение для
коэффициента теплового использования нейтронов будет иметь
аналогичный вид:
£Ф/14 О)
где 2р — макроскопическое сечение захвата нейтронов элементами
системы регулирования (поглощающего газа); Фр — нейтронный
поток в газоводах поглощающего газа.
На процессы регулирования задан запас реактивности б/С,
который связан с величинами 0 и 0Х следующим образом:
6/С = Цр1. (14.3)
428
Если предположить для упрощения расчетов, что нейтронные
потоки в элементах конструкции, в замедлителе и в элементах системы
регулирования реактора равны, т. е. что
Ф3 = Фк = ФР = Ф>
и что, кроме того, этот нейтронный поток составляет долю от потока
нейтронов в топливе,
Ф = хФт,
то тогда можно записать
е = ——
Отсюда можно определить, проделав небольшие преобразования,
величину х
Из выражения (14.3) имеем Gx = в (1 — 6//Q. После подстановки
этого значения 0х в уравнение (14.2), получим
Разрешив это выражение относительно величины 2Р, получим
у, 1—6(1 — 6/С)
Подставляя сюда вместо величины 2тее значение из уравнения (14.4),
получим
^ '^^
Проделав небольшие преобразования, окончательно будем иметь
Ьр- i__e 1 —6/С •
Отсюда видно, что макроскопическое сечение захвата
поглощающего газа при заданном запасе реактивности 6/( пропорционально
сумме макроскопических сечений захвата замедлителя и элементов
конструкции, деленной на величину (1 — 6).
После того как определена величина макроскопического сечения
захвата нейтронов поглощающего газа, легко определить плотность
этого газа в газоводах реактора:
здесь Мр — молекулярная масса поглощающего газа; Na — число
Авогадро; ар — микроскопическое сечение захвата нейтронов
поглощающего газа.
Если поглощающий газ состоит из нескольких элементов, то
за величину ар необходимо принимать микроскопическое сечение
захвата изотопа поглощающего элемента.
429
Парциальное давление после определения его плотности будет
равно
Таким образом, определены все основные параметры
поглощающего газа системы регулирования. Аналогичным образом могут
быть рассчитаны макроскопические сечения захвата нейтронов при
стержневом или барабанном регулировании.
14.5. РЕЖИМ ОСТАНОВА
С точки зрения останова ЯРД и расхолаживания его
элементов необходимо различать ДУ одноразового и многоразового
действия. Вопросы останова и расхолаживания становятся особенно
важными для ДУ многоразового действия.
Кроме того, следует отличать останов ДУ планируемый — при
нормальных условиях, и останов вынужденный, т. е. аварийное
выключение.
Тепловая мощность реактора складывается в основном из двух
составляющих:
энергии деления #д, высвободившейся при делении ядер топлива;
энергии, выделяющейся при радиоактивных превращениях
продуктов деления; обычно вторую составляющую называют остаточным
тепловыделением N0CT.
На величину первой составляющей можно повлиять изменением
положения органов управления реактора. На остальное
тепловыделение никакими внешними воздействиями повлиять нельзя. Это
тепловыделение зависит только от уровня мощности реактора перед
остановом и от продолжительности режима работы и остается
значительным в течение продолжительного времени после останова
реактора. Все трудности режима останова ЯРД связаны с
величиной этого остаточного тепловыделения. Таким образом, для
мощности реактора Np можно записать
На установившемся режиме работы реактора мощность остаточного
тепловыделения составляет обычно 5 ... 6 % от общей его мощности.
Поэтому перед остановом ЯРД целесообразно предварительно
перейти на пониженный режим работы, а затем уже остановить
реактор.
Точная зависимость величины N0CT (т) от уровня мощности
предварительного режима и от времени предварительной работы
достаточно громоздка и мало удобна для практического использования.
Если иметь в виду, что наибольший интерес представляют во многих
случаях первые секунды после останова реактора, то эта зависимость
может быть представлена в следующем виде [21 ]:
(х) / °>06 при т < 1 с,
0,1 [(т + 10)-°'2 - 0,03] при *> 1 с.
430
Таким образом, для предотвращения перегрева элементов реактора
после его останова требуется охлаждение посредством подачи
рабочего тела в течение определенного времени.
14.6. УРАВНЕНИЕ ДИНАМИКИ ПРЕДСОПЛОВОЙ КАМЕРЫ
В ЯРД могут возникнуть колебания давления рабочего
тела перед соплом, которые приведут к нежелательным колебаниям
тяги, а в некоторых случаях и к нарушению работоспособности ДУ
в целом.
Для анализа колебательных процессов и выявления причин
их возникновения необходимо иметь уравнение, описывающее этот
процесс. Для получения математической модели, описывающей
динамику процессов в емкости перед соплом, рассмотрим схему,
представленную на рис. 14.4. В качестве емкости будем
рассматривать суммарный объем каналов активной зоны, по которым течет
рабочее тело и предсопловую камеру смешения. Параметры на
входе в емкость обозначим индексом «1», а параметры перед соплом
(выходное сечение) —индексом «2». Для вывода этого уравнения
рассмотрим закон сохранения энергии, согласно которому разность
между энергией, которая за единицу времени поступает в объем
рабочего тела, и энергией, которая выходит из этого же объема за
то же самое Бремя, должна быть равна изменению во времени
энергии рабочего тела в рассматриваемом объеме. Если обозначить
через Q полное количество тепла, передаваемого в единицу времени
рабочему телу от ТВЭЛ, а через U — удельную внутреннюю
энергию рабочего тела, то можно записать уравнение
hth + Q- m2i2 = -r- (VpU),
di
(14.7)
где т —расход рабочего тела; i —энтальпия рабочего тела; V —
объем рабочего тела, который включает в себя объем каналов ТВЭЛ
и предсопловой камеры; р — плотность рабочего тела.
Зависимость между внутренней энергией U и энтальпией i
определяется по формуле
£/ = *--£-. (14.8)
Подставляя эту зависимость в уравнение (14.7), получим
(14.9)
Рис. 14.4
431
Для дальнейших преобразований воспользуемся законом
сохранения массы, который для рассматриваемого случая запишем в виде
Подставив значение правой части этого уравнения в уравнение (14.9),
получим
-*thh = Vp£ + i(thl-*4u-V% (14.11)
и запишем его в виде
*i0'i-0 + Q-*tA-0 = Vp-5--V^. (14.12)
В качестве первого приближения можно предположить, что
. = ^Цр, р = р29 h = const.
Тогда последнее уравнение примет вид
^ mai^ii=Fp-§--V^. (14.13)
Для исследования колебательных процессов запишем это уравнение
в отклонениях
Ащ ~\т* Ма + AQ - (^Цр1)* АЩ --jth* Ai2 =
Переходя к относительным величинам, получим
)*th*Alht-
^^^ (14.15)
При небольших отклонениях можно считать, что
А? = AT,
т. е. относительное изменение энтальпии равно относительному
изменению температуры. Используя это равенство и считая, что
для сверхзвукового сопла справедливо соотношение
— 0,5 АТ2,
перепишем уравнение (14.15) в виде
_ (±^У т Ш^ — тЦ Af~2 + Q* AQ —
432
Далее разрешим уравнение (14.16) относительно отклонения
давления перед соплом
+ [т'Ц - -L (t2 - lif th*]W2 + (Ц^)*тШ^-Q' AQ.
(14.17)
Введем обозначения:
У Pi ..... pVil _ „ .
Q*
2 2
И запишем уравнение (14.17) в виде
T1-aiAQ. (14.18)
Вместе с выполнением закона сохранения энергии для
выделенного объема рабочего тела выполняется и закон сохранения массы.
Соответствующее уравнение (14.10) в относительных отклонениях
имеет следующий вид:
^^ (14.19)
Имея в виду, что
Ат2 = Ар2 — 0,5 Д7^ Ар = AfT2 —
и обозначая
уравнение (14.19), решенное относительно величины Д/?2, имеет вид
тпр ^f- + Др2 = тпр ^1 + 0,5 ДГ2 + ДЖр (14.20)
Уравнения (14.20) и (14.18) можно совместно решить относительно
Ар2 и ДТ2. Предварительно запишем эти уравнения в
преобразованиях по Лапласу:
(alS - 1) Д^2(5) = (a2s + a3)ATl(s) + Mh(s) - а,Щ($); (14.21)
(Tnps + 1) Д/72 (s) = (tnps + 0,5) ДГ2 (s) + A/ftx (s).
Структурная схема, соответствующая этой системе уравнений,
представлена на рис. 14.5. Выходным параметром системы в данном
случае, как видно из рисунка, является величина Д/?2, а входными
воздействиями — Агпх и AQ, т. е. изменение давления перед соплом
28 А. И. Бабкин н др. 433
/
azs+ctj
ATz(s)
Рис. 14.5
um,(s)
обусловлено изменением расхода рабочего тела и изменением тепло-
подвода от ТВЭЛ к рабочему телу. Для получения этой зависимости
определим из второго уравнения системы (14.21) значение Д7\2 и
подставим его в первое
fas - 1) Д/?2 (s) = (a2s + а3)
TnpS +
а4
Разрешая это уравнение относительно Ар2 (s), получим
tap («2 - аг) s2 + (ая + ^пР (fls — 1) - 0,5ах) s + (а8 ~ 0,5)] ~Ар2 (s) =
= (^2s + fl8) A*i (s) + «4 (Tnps -r 0,5) AQ (s). (14.22)
Это уравнение характеризует динамические свойства
рассматриваемой емкости, включающей объем каналов ТВЭЛ и объем предсопло-
вой камеры смешения.
Решение системы уравнений (14.21) относительно ДГ2 имеет
следующий вид:
[тпр fa - fli) s2 + fa - тпр fa + 1) - 0,5a!) s - fa + 0,5)] AT2 (s) =
M^ (14.23)
= Ifa ~ тПр) s - 2] M^ (5) + a4 (rnps г 1) AQ (s).
Уравнения (14.22) и (14.23) позволяют установить условия
устойчивости, которые имеют вид
; а3-Ь0,5>0. (14.24)
Подставляя в эти условия значения коэффициентов а; через
номинальные значения параметров, получим
pi* > ph
т\
ир
0;
Анализ этих выражений показывает, что все они выполняются, и
рассматриваемая система, следовательно, устойчива.
434
Установившиеся относительные отклонения давления на выходе
из активной зоны Ар2уст и температуры АТ2уст могут быть
вычислены в соответствии с уравнениями (14.22) и (14.23) по формулам:
Р2 уст = fl3 + 0>5 АтУ" + ^МГ " AQyCT'
Д7\> усТ = - fl3 + 0>5 Д/Й1 Уст + ДС
Эти формулы получаются из указанных выше уравнений в
результате подстановки Z ■-— О, что во временной области соответствует
т->■ оо, т. е. установившемуся режиму.
Определение параметров номинальных режимов и их
устойчивости будут рассмотрены в следующем разделе.
14Л. УСТОЙЧИВОСТЬ РЕЖИМОВ РАБОТЫ РЕАКТОРА
Одной из характеристик ЯРД как объекта регулирования
является устойчивость стационарных режимов работы реактора и
ДУ в целом. Устойчивость рабочего режима ЯРД является
характеристикой, в значительной мере определяющей пригодность его
к эксплуатации. На ранней стадии проектирования должна быть
уверенность, что неизбежные возмущения стационарного режима
не приведут к опасным последствиям и что через некоторое время
после возмущения система вновь вернется к стационарному режиму.
Сточки зрения устойчивости к ЯРД предъявляются достаточно
жесткие требования. Во многих случаях бывает недостаточно установить
факт устойчивости стационарного режима; требуется еще установить
размеры допустимых начальных возмущений этого режима. В такой
ситуации линейная теория бессильна и приходится решать задачу
устойчивости в «большом», исследуя нелинейную математическую
модель ядерной ДУ [12]. Естественно, что эта задача намного
сложнее, чем анализ линейных моделей. Сложность задачи усугубляется
тем, что ЯРД является объектом с распределенными параметрами и
процессы в нем описываются нелинейными уравнениями в частных
производных или уравнениями с запаздывающим аргументом.
Задачи такого рода требуют применения широкого арсенала средств
теории устойчивости, которые еще не вошли в практику
конструкторов и инженеров, занимающихся проектированием и расчетом
ЯРД. В связи с этим представляется целесообразным рассмотрение
вначале вопросов устойчивости линеаризованной модели реакторов.
Проведенные выше исследования кинетики реактора показали,
что устойчивость стационарных режимов его работы может быть
обеспечена лишь при наличии отрицательного температурного
коэффициента реактивности. Было получено линеаризованное
уравнение кинетики реактора с учетом температурного эффекта и
определены условия устойчивой работы стационарных режимов. Прежде
чем перейти к детальному исследованию этого уравнения,
рассмотрим несколько простых примеров расчета устойчивости линейной
модели реакторов.
28* 435
Рассмотрим вначале модель реактора с постоянным отводом
тепла из активной зоны. Предполагая, что реактивность зависит
только от температуры, что запаздывающими нейтронами можно
пренебречь и что количество тепла, отводимое от реактора за
единицу времени, постоянно, получим следующую систему из двух
уравнений:
-§=-^Ц7-П«, тс-^ = п-п*. (14.25)
Предположение о постоянстве отводимого тепла может быть
оправдано в случае, когда отвод тепла из активной зоны осуществляется
через толстую стенку с большой тепловой инерцией. Характерное
время передачи тепла через такую стенку будет много больше
периода возможных колебаний мощности. Стационарный режим
работы рассматриваемого реактора будет определяться следующими
параметрами:
п (т) = я* = const;
Т (т) = Т* = const,
которые получаются из исходной системы уравнений
приравниванием нулю производных.
Линеаризуя исходную систему уравнений (14.25), будем иметь
_^Г*ДТ; тс*Щ- = ^Тп. (14.26)
Решив систему относительно An, получим
4#--г»=5>=0. (14.27)
Рассматриваемый реактор представляет собой консервативную
систему, в которой при появлении возмущения устанавливаются
гармонические колебания с частотой со. Характеристическое
уравнение, соответствующее уравнению (14.27), записывается в виде
22 + со2 - 0 (14.28)
и имеет два чисто мнимых корня:
z1>2 = ±/со.
Рассмотрим далее устойчивость стационарных режимов, работы
реактора, в котором теплоотвод будем считать пропорциональным
температуре активной зоны. Исходная система уравнений,
описывающая процессы в такого рода реакторе, с учетом принятых выше
допущений, может быть записана в виде:
|^ ^To). (14.29)
Здесь постоянные К и То имеют следующий смысл. Если теплоотвод
осуществляется посредством циркуляции ядерного горючего, то
К = тс,
436
где т — расход массы горючего; с — удельная теплоемкость
горючего; То — постоянная температура горючего на входе в активную
зону.
Если же тепло отводится путем охлаждения через поверхность,
то К — коэффициент теплопередачи от горючего с температурой Т
к охлаждающей среде с постоянной температурой То.
Состояния равновесия системы определяются как решения
уравнений (14.29), записанных для стационарного режима и имеющих
следующий вид:
л*(Т-Т*) = 0;
Эта система имеет два решения:
п* = О, 7* = Го; (14.30)
п* = К (Т* — То) > 0, Т = Т* > То. (14.31)
Первое решение характеризует состояние равновесия «погашенного»
реактора. Второе решение характеризует стационарный режим
работы реактора на некотором уровне мощности /г* > 0. Рассмотрим
устойчивость каждого из этих состояний равновесия.
Состояние равновесия «погашенного» реактора определим
следующим образом. Линеаризуя исходную систему уравнений (14.29)
в окрестности режима (14.30), получим
4^ ^Г-(Го-П An; пгс^- = Ап. (14.32)
Характеристическое уравнение этой системы имеет следующий вид:
[г-r^f- (То - Т)*] mcz = 0. (14.33)
Корни этого уравнения
Второй корень г2 > 0, так как Т* > То и, следовательно, состояние
равновесия «погашенного» реактора неустойчиво.
Состояние равновесия реактора на мощности п = п* в
соответствии с уравнениями (14.31) определяется аналогичным образом.
После линеаризации исходных уравнений системы (14.29) в
окрестности режима (14.31) получим
£ fLnAT; mcA£L = An-KAT. (14.34)
Эта система эквивалентна одному уравнению второго по рядка
характеристическое уравнение которого имеет вид
22--^-^ = °- (Н.36)
437
Коэффициенты этого уравнения положительны н согласно критерию
Гурвица состояние равновесия (14.31) устойчиво. В данном случае
не трудно вычислить и корни характеристического уравнения:
К
1 К I 1./1 К
~ 2 тс — у 4 (тс)*
1тс
Обычно подкоренное выражение отрицательно и, следовательно,
корни уравнения комплексные с отрицательной действительной
частью, что является условием устойчивости.
В заключение рассмотрим устойчивость реактора с одной
эквивалентной группой запаздывающих нейтронов, с одним
отрицательным температурным коэффициентом реактивности и в
предположении, что теплоотвод пропорционален температуре топлива. Исходная
система уравнений, описывающая рассматриваемую схему реактора,
может быть представлена в виде
dn
dx
= 6Ко -
dT
dx
= an — bT.
(14.37)
Эта система имеет два состояния равновесия. Первое —
соответствующее «погашенному» реактору, имеет нулевые значения
установившихся параметров
я* = 0, с* = О, Г* = 0. (14.38)
Второе — соответствующее стационарному режиму с параметрами:
г* _ д^о • „* _ b ЬКо . „* _ ft6 ^о /1,1огк\
1 ""1^"' П "Т-"57"э с -"Д^"^г • (14.39)
Линеаризация исходной системы уравнений в окрестности
первого состояния равновесия приводит к следующей системе:
d&n
dx
dx
= а&п -ЬАТ,
(14.40)
где An, Ac, AT — отклонения от нулевых значений плотности
нейтронов, концентрации ядер предшественников запаздывающих
нейтронов и температуры ядерного топлива.
Характеристическое уравнение, соответствующее этой
линеаризованной системе, имеет вид
-Z X
0
о
= 0.
(14.41)
438
Или, раскрывая определитель, получим
[г2 + 2 (^ - 6/Со~Р ) - -^-] = 0. (14.42)
Если «погашенный» реактор находится в подкритическом состоянии,
т. е. если б/С0 < 0, то все корни этого характеристического
уравнения действительные и отрицательные:
и, следовательно, состояние равновесия нулевой мощности реактора
устойчиво. Если реактор на нулевой мощности надкритический,
т. е. 8К0 > 0, тогда один из трех корней будет положительным и,
следовательно, состояние равновесия неустойчиво. Факт
неустойчивости системы в этом случае может быть решен и не определяя
знака корней, а воспользовавшись тем, что при б/С0 > 0 один из
коэффициентов характеристического уравнения имеет
отрицательный знак, что соответствует неустойчивости стационарного режима.
Если же реактор на нулевой мощности критический, т. е. б/С0 = 0,
то один из корней характеристического уравнения будет равен
нулю и в этом случае нельзя сделать вывод об устойчивости
исходной нелинейной системы.
Для исследования устойчивости второго равновесного режима
исходной нелинейной системы проведем ее линеаризацию в
окрестности этого режима и получим
(14.43)
_ « _ г- — п » _
Соответствующее характеристическое уравнение будет иметь вид
! = 0. (14.44)
Если 6К0 > 0, т. е. если реактор надкритичен на каком-либо
уровне мощности, то второе состояние равновесия устойчиво,
поскольку выполняется критерий устойчивости Гурвица
При 8Ло = 0, т. е. когда реактор критический, оба состояния
равновесия совпадают и вывод об устойчивости был сделан в этом случае
выше.
Случай ЬК0 < 0 не реализуем, поскольку второе установившееся
состояние теряет физический смысл.
439
14.8. ВЫБОР ПАРАМЕТРОВ РЕГУЛЯТОРА КОНТУРА
УПРАВЛЕНИЯ НЕЙТРОННО-ФИЗИЧЕСКИМИ
ПРОЦЕССАМИ В РЕАКТОРЕ
Рассмотрим кратко особенности выбора параметров
регулятора контура управления нейтронно-физическими процессами
в реакторе ЯРД.
Будем рассматривать динамику реактора в двухгрупповом
приближении, математическая модель которого описывается
уравнением (11.22). Только дополним это уравнение условием, что
реактивность б/С складывается из реактивности органов управления 8/Су
и реактивности возмущения б/Св. Реактивность управления б/Су
устанавливается регулятором плотности нейтронов или мощности
реактора. А реактивность возмущения б/Св включает в себя
температурные, плотностные эффекты, эффекты, связанные с
поступлением жидкого водорода в элементы активной зоны, и ряд других.
В связи с этим уравнение (11.22) запишем в виде
1)Ы< при б/С = б/Су + б/Св. (14.45)
В качестве регулятора плотности нейтронов или мощности
реактора ЯРД рассмотрим регулятор, содержащий статический и
астатический каналы управления. Уравнение такого регулятора
записывается в виде
где хх = Kni (Дя — Дяу);
хх и х2 — величины, характеризующие внутренние параметры
регулятора; Гр — постоянная времени регулятора; /Сп1, КП2 —
коэффициенты усиления регулятора.
Уравнение регулятора (14.45), записанное в операторной форме,
имеет вид
+ 1) б/Су = —хх—х2;
хх = Kni (Дя — Аагу); (14.47)
Передаточные функции реактора и регулятора в соответствии
с уравнениями (14.45) и (14.47) записываются в виде
W^2 Ге(Гпр+1)Р' W*W
где Wx (р) = Л,} — передаточная функция реактора; W2 (p) =
= -= = передаточная функция регулятора.
(Д/iy — Ля)
Используя полученные выражения передаточных функций
реактора и регулятора, можно составить структурную схеАму замкнутой
440
An
Нп Тср + /
Тс (Тлр+1)р
V'V
V nr
Рис.
д
14.6
с Л
ч
d
У
1
Tpp + l
системы регулирования, представленную на рис. 14.6. В
соответствии с этой схемой определим передаточную функцию замкнутой
системы регулирования
- StfeJ Гс(ГпР+
После приведения к общему знаменателю имеем
(А7гу-Ш)КП2 (4тР + ^)Кп(Тср~ 1) +
+ (УрР +1) Р^Сп (^сР ~^~ 1) ^^в = (УрР ~Г 1) р7*с (7^/7 -{"
Приведение подобных членов дает
с (Гр + Гп) р6 -\- 1 с (1 — AnAnl) P~ "
^ + 7\^ Р -1- Кп2Кп> Ля ==
-г /С» ITJcP* + (Гр + Ге) р -г
Это уравнение можно представить в виде
Д^ = ^пу (Р) Д^У "Г ^пб (Р) ЬКВ,
где
пТрР* + Тс (Тп + Гр) рз л. тс (1 + КпКп1) р» +
р + /Сп2/Сп
(14.48)
(14.49)
; (14.50)
. (14.51)
+ Гс
441
Передаточная функция Wny (p) характеризует динамические
свойства замкнутой системы «реактор—регулятор» при изменении
управляющего сигнала Дяу. В частности, из выражения (14.50)
видно, что установившееся значение относительного отклонения
плотности нейтронов ДяуС1 при установившемся изменении
управляющей величины Дпу. уст равно единице, т. е. система
регулирования полностью отрабатывает командный сигнал.
Передаточная функция WnSKB (p) характеризует динамические
свойства этой же системы при изменениях возмущающего
воздействия б/Св- Из выражения (14.51) видно, что в этом случае
установившееся значение изменения относительной величины плотности
нейтронов равно нулю, т. е.
Дпуст = 0 при б/Св = var и Дяу = 0.
Таким образом, регулятор плотности нейтронов, содержащий
статический и астатический каналы управления достаточно хорошо
отрабатывает сигналы командного воздействия и внешнего
возмущения на установившихся режимах, т. е. обеспечивает
удовлетворительную статическую точность. Для анализа динамических
свойств рассматриваемой системы рассмотрим характеристическое
уравнение замкнутой системы, которое в соответствии с
знаменателем передаточных функции Wny (/?) и Wnb (p) имеет вид
п = 0. (14.52)
Анализ устойчивости в данном случае удобно провести используя
метод D-разбиений. Для этого в уравнении (14.52) произведем
замену р = /со и получим
7УГП7>2 - Тс (Тп + Тр) /<а» - Тс (1 + KnKnl) (о2 +
421- + 7С) /<о -г- Кп2Кп - 0.
АП2 /
Отделяя вещественную и мнимую части, имеем
ГП7С7>* - Тс (1 4- КпКм) со2 + КтКп = 0;
Из второго равенства находим
712 ~~
Подставляя это значение /Сп2 в первое равенство, получим
/ сТп7 рсо4 — 7 с (1 + ЛпЛщ)со Н
442
Рис. 14.7
Разрешая это уравнение относительно /Сп1, имеем
тУ(1-тту)-т(т + т)
кп(ту+1)
Подставив это значение Кш в равенство для /Сп2, получим
(14.53)
Лп2 =
ту +1
(14.54)
Уравнения (14.53) и (14.54) представляют собой параметрическое
уравнение границы устойчивости системы в параметрах /Сп2, Кп\-
Задаваясь рядом значений со, по формулам (14.53) и (14.54)
определяются соответствующие граничные значения Кп\ и КП2-
На рис. 14.7 представлено качественное протекание указанной
границы устойчивости. Область I значений /Сп2 и Кп\ соответствует
области устойчивости.
Динамика рассматриваемой замкнутой системы описывается с
точки зрения устойчивости характеристическим уравнением (14.52)
четвертой степени. Используя критерий устойчивости Гурвица,
в данном случае можно определить и аналитические выражения
условий устойчивости, которые имеют следующий вид:
Tc(Tn]-Tv)>0, Гс(Ц-адп1)>0; адп
Кп2КП1>0 при Гс7\гГр>0,
и при выполнении неравенства
КпКп2 (-JjJ + Тс) [Т1 (Тп + Гс) (1 -г KnKnl) -
- TJnTvKnKn2 (-^7 -г Тс)] - Кп2КщТ2с (Тп + Гр)2>0.
Если воспользоваться критерием устойчивости Михайлова, то
можно определить и границу устойчивости, которая определяется
443
попаданием в начало координат точки кривой Михайлова. Это
соответствует условию:
Тс)
^ -f Te) ] - Кп2КщТ2с (Тп + Тр) = О,
когда имеют место пары чисто мнимых корней характеристического
уравнения при положительных его коэффициентах, либо
KnzKm = О»
когда имеется нулевой корень, либо
TJnTv = О,
когда имеет место бесконечный корень.
Последние два условия соответствуют тому, что регулятор имеет
только один из двух контуров управления: или только статический
(КП2 = 0)» или только астатический (Kni = 0)» или же регулятор
не обладает постоянной времени (Гр = 0).
СПИСОК ЛИТЕРАТУРЫ
1. Абрамович Г. Н. Прикладная газовая динамика. М.: Наука,
1976. 887 с.
2. Алемассв В. Е., Дрегалин А. Ф., Тишин А. П. Теория ракетных
двигателей. М.: Машиностроение, 1980. 553 с.
3. Баллистическая ракета на твердом топливе/А. М Синюков, Л. И. Волков,
А. И. Львов, А. М. Шишкевич/Под ред. А. М. Сикюкова. М.: Воениздат, 1972. 511 с.
4. Бесекерский В. А., Попов Е. П. Теория систем автоматического
регулирования. М.: Наука, 1972. 992 с.
5. Бутенин Н. В., Неймарк Ю. И., Фуфаев Н. А. Введение в теорию
нелинейных колебаний. М.: Наука, 1976. 384 с.
6. Виницкий А. М. Ракетные двигатели на твердом топливе. At.:
Машиностроение, 1973. 348 с.
7. Владимиров В. И. Практические задачи по эксплуатации ядерных
реакторов. М.: Атомиздат, 1972. 181 с.
8. Волков Е. Б., Головков Л. Г., Сырицын Т. А. Жидкостные ракетные
двигатели. At.: Воениздат, 1970. 540 с.
9. Волков Е. Б., Сырицын Т. А., Мазинг Г. Ю. Статика и динамика ракетных
двигательных установок. Т. 1. Статика. А1.: А1ашиностроение, 1978. 222 с.
10. Ганев И. X. Физика и расчет реактора. А1.: Энергоиздат, 1981. 368 с.
11. Гликман Б. Ф. Автоматическое регулирование жидкостных ракетных
двигателей. М.: А1ашиностроение, 1974. 396 с.
12. Горяченко В. Д. Методы теории устойчивости в динамике ядерных
реакторов. М.: Атомиздат, 1971. 264 с.
13. Григорьев А. И. Твердые ракетные топлива. М.: Химия, 1969. 116 с.
14. Дементьев Б. А. Кинетика и регулирование ядерных реакторов/Учебн,
пособие. At.: Атомиздат, 1973. 291 с.
15. Динамика и управление ядерным ракетным двигателем/Под ред. акад.
Б. Н. Петрова. М.: Атомиздат, 1974. 253 с.
16. Дюнзе М. Ф., Жмолохин В. Г. Ракетные двигатели твердого топлива для
космических систем. А1.: Машиностроение, 1982. 160 с.
17. Иващенко Н. Н. Автоматическое регулирование. At.: А1ашиностроение,
1973. 606 с.
18. Конструкция и отработка РДТТ/А. А1. Виницкий, В. Т. Волков, И. Г. Вол-
ковицкий, С. В. Холодилов/Под ред. А. М. Виницкого. М.: Машиностроение, 1980.
230 с.
19. Корн Г., Корн Т. Справочник по математике для научных работников и
инженеров. М.: Наука, 1973. 537 с.
20. Магнус К. Колебания (пер. с немец.). М.: А1ир, 1982. 303 с.
21. Митенков Ф. М., Моторов Б. И. Нестационарные режимы судовых
ядерных паропроизводящнх установок. Л.: Судостроение, 1970. 197 с.
22. Мошкин Е. К. Нестационарные режимы работы ЖРД. At.:
Машиностроение. 1970. 336 с.
23. Научно-технические основы управления ядерными реакторами/И. Я.
Емельянов, А. И. Ефанов, Л. В. Константинов. А1.: Энергоиздат, 1981. 360 с.
445
24. Овсянников Б. В., Боровский Б. И. Теория и расчет агрегатов питания
жидкостных ракетных двигателей/Учебник. Изд. второе. М.: Машиностроение, 1979.
344 с.
25. Основы автоматического управления ядерными космическими
энергетическими установками/Под ред. акад. Б. Н. Петрова. М.: Машиностроение, 1974. 379 с.
26. Основы теории автоматического управления ракетными двигательными
установками/А. И. Бабкин, С. В. Белов, Н. Б. Рутовский, Е. В. Соловьев/Учебник.
М.: Машиностроение, 1978. 328 с.
27. Основы теории и расчета жидкостных ракетных двигателей/Под ред. проф.
В. М. Кудрявцева. М.: Высшая школа, 1983. 703 с.
28. Основы теории автоматического регулирования/Под ред. д-ра техн. наук
проф. В. И. Крутова. М.: Машиностроение/1984. 367 с.
29. Петухов Б. С, Генин Л. Г., Ковалев С. А. Теплообмен в ядерных
энергетических установках. М.: Атомиздат, 1974. 407 с.
30. Ракетные двигатели/Под ред. проф. Т. М. Мелькумова. М.:
Машиностроение, 1968. 511 с.
31. Соркин Р. Е. Теория внутрикамерных процессов в ракетных системах на
твердом топливе. М.: Наука, 1983. 288 с.
32. Теория автоматического управления/Под ред. д-ра техн. наук проф.
А. В. Нетушила. М.: Высшая школа, 1983. 432 с.
33. Теория автоматического управления ракетными двигателями/Под ред.
проф. А. А. Шевякова. М.: Машиностроение, 1978. 288 с.
34. Чермак И., Петерка В., Заворка И. Динамика регулируемых систем в
теплоэнергетике и химии. М.: Мир, 1972. 623 с.
35. Шишков А. А., Румянцев Б. В. Газогенераторы ракетных систем. М.:
Машиностроение, 1981. 152 с.
36. Fitzgerald R. H., Kampe R. F. Boundary layer TVC for missile applications.
AIAA. Pap., 1983, n° 1153. 8 p.
37. Foster A. Jr., Sforzini R. H., Shackelford B. W. Jr. Thrust Imbalance of the
Space Shuttle Solid Rocket Motors. J. Spacecraft and Rockets, 1982, v. 19, n° 6.
p. 545—549.
38. I US nozzle and extendible exit cone development/R. J. Hall, О. Е. Morrow,
G. E. Growe, С A. LeFebvre, D. B. Edgett. AIAA Pap., 1980, n° 1297. 9 pp.
39. LeFebvre С A., Jankowski R. A. Betts demonstration program. AIAA pap.,
1980, nc 1276. 6 pp.
40. Natan В., Gany A., Wolff H. Thrust modulation of solid propellant rockets
by a fluidic vortex valve with secondary combustion. Acta astrounaut, 1982, v. 9,
n° 12. p. 703—711.
41. New System throttles Rockets. Ind. Res./Develop., 1980, v. 22, n° 2. p. 190—
191.
42. Schmucker R. H., Strecker R. A. Future tends in solid rocket technology
in Germany. AIAA Pap., 1980, n° 1220. 10 pp.
43. Taback H. J., Day E. E., Bravne T. P. Combustion Termination of Solid
Rockets Motors. J. Spacecraft and Rockets, 1965, v. 2, n° 3. p. 332—337.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Аварийная защита 352, 389
Автоколебания 193
Активная зона 341, 344
твердая 342
жидкая 342
газовая 342
Активное сопротивление 410
Акустическая масса 410
— емкость 412
Амплитудно-фазовая частотная характеристика 85, 97, 370
Астатизм 215
Б Баланс нейтронов 346, 350, 357, 388
— работы ТНА 60
Бифуркация 190, 197
В Возмущения внешние 17
— внутренние 17
Возраст нейтронов 347
Входной сигнал:
скачкообразный 92, 354, 363
в форме дельта-функции 93
гармонический 94
Входные величины 17, 382
Г Газовыделение в камере РДТТ 234
Газодинамическое регулирование сопла 234
Газоотводное устройство 257
Гаситель твердого топлива 272
Главное звено объекта регулирования 32
Д Давление в камере РДТТ 235
Дефлектор 328
Двигатели поворотные 319
Двигательная установка как объект регулирования:
уравнение динамики 104
структурная схема 133
Диаграмма Вышнеградского 181
Динамическая ошибка:
определение 155
оценка минимизации 157
разбиение (метод) 174
44 7
по одному параметру 175
по двум параметрам 176
Длина диффузии нейтронов 346
Ж Жесткая отрицательная обратная связь в усилителях 146, 219
— в уравнении динамики 220
3 Замкнутые САУ 20
Запаздывание всопламенения топлива:
учет в уравнениях динамики ПО
влияние на устойчивость 172
Запаздывающие нейтроны 349, 356
Запас устойчивости 172
Звено САР:
определение 79
классификация 95
динамические характеристики 97, 98, 362
И Идеальный переходный процесс 155
Изодром:
принцип действия 226
уравнение динамики 227
Импульс боковой силы 336
Инжекция газа, жидкости 334
Информация 14, 15
Источники энергии 340
К Камера поворотная 321
Кинетика реактора 353, 356
Классификация САУ 16
Командное воздействие 19
Конечные автоматы 13
Коэффициент усиления камеры РДТТ по давлению 274
— по тяге 278
Коэффициент теплового использования 428
Критерий качества переходных процессов:
прямые 155, 156
интегральные 157
Критерий затухания 158, 272, 294
— Победоносцева 234
Л Лаплас 370, 375, 397
Линеаризация уравнений 71, 369
Линейные элементы (звенья) 80
М Макроскопическое сечение 351, 392, 428
Мгновенные нейтроны 348
Микроскопическое сечение 352, 429
Мгновенная критичность 357
Многоконтурные САУ 21
Многорежимные РДТТ 258
Н Нейтроны 346, 354
Нейтронно-физическнй процесс 344
448
Нелинейные элементы 73, 183
Нулевые потери тяги 316
Объект регулирования 11, 341
Особая точка 184
— прямая 177
Отсечка тяги РДТТ 262
Отражатель 361
Передаточная функция 83, 99, 311, 370
Период реактора 353, 355
— полураспада 349
Переходная функция 83
Плотность потока нейтронов 345, 351
Поверхность горения заряда 234
Подкритическое состояние 348
Позиционные потери тяги РДТТ 316
Постоянная времени 107, 407
Постоянная времени камеры РДТТ 274
— распада 88, 349
Предельные отклонения давления в камере РДТТ 246.
поверхности горения заряда 239
плотности твердого топлива 240
площади критического сечения сопла 241
среза сопла 244
скорости горения твердого топлива 239
тяги РДТТ 246
удельного импульса тяги РДТТ 246
Рабочее тело 7, 340, 387
Расход газов через сопло РДТТ 235
Реактивность 345, 347
Регулировочная характеристика 77
Расходный комплекс 22
Реактор с циркулирующим горючим 373
Регулирование 11
Регулируемая величина 76, 345
Регулятор:
принципиальные схемы 206, 214, 218, 225
конструктивные схемы 136, 138
особенности применения 138
Рули газовые 324
Ряд Тейлора 71
САУ 12, 14, 16
Седло 188
Сепаратриса 187
Свободный объем камеры РДТТ 274
Системы линейные и нелинейные 13
Системы дискретные 13
— непрерывного действия 13
— работающие по принципу отклонения 20
Скорость горения твердого топлива 233
Сопло двухпозиционное 261
— с центральным телом 251
— поворотное 320
449
— раздвижное 258
— разрезное 323
— сменное 252
Сопловой вкладыш 251
Статизм 208
Статистическая ошибка 155, 212, 221
Т Температурный эффект 377
— коэффициент реактивности 378
Термостатирование 251
Тепловое звено САР 94, 95
Торможение РДТТ 262
Триммер 331
Тяга РДТТ 235
У Удельный импульс тяги 340
Узел устойчивый 187
— неустойчивый 187
Узел гашения 264
— отсечки тяги 270
Угол поворота органа управления 316
Управление 11, 12
Уравнение динамики 81
Устойчивость:
определение 159
условия 161
теоремы Ляпунова 165
степень 162
критерии Михайлова 166, 443
— Рауса—Гурвича 169, 438, 443
— Найквиста 170
Усилительные устройства регулятора 145
Фазовый портрет 185
Фазовые траектории 185
Фокус устойчивый 186
— неустойчивый 187
X Характеристическое уравнение 160, 363
Ц Центр 188
Циклограмма 419
Цикл устойчивый 192
— неустойчивый 192
— полуустойчивый 195
Ч Частотная функция 85, 370
Частотная характеристика 85, 371
Чувствительный элемент регулятора 139
Ш Шарнирный момент 317
Экспоненциальный переходный процесс 109
Энергия деления 340, 346
Эффективность органа управления 389
ОГЛАВЛЕНИЕ
Предисловие 3
Введение 5
первая ч асть
ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ 6
Глава 1. Основные понятия теории автоматического управления. ... 6
1.1. Принципиальные схемы ракетных двигательных установок 6
1.2. Особенности управления ракетных двигательных установок 10
1.3. Классификация систем автоматического управления ... 12
1.4. Разомкнутые системы 18
1.5. Замкнутые системы 20
1.6. Самонастраивающиеся системы 22
1.7. Игровые САУ 28
ВТОРАЯ Ч АСТЬ
РЕГУЛИРОВАНИЕ ЖИДКОСТНЫХ РАКЕТНЫХ ДВИГАТЕЛЬНЫХ
УСТАНОВОК 31
Глава 2. Статика жидкостных ракетных двигателей 31
2.1. Основные понятия о статических характеристиках . . 31
2.2. Статические характеристики элементов двигателей .... 32
2.3. Статические характеристики систем подачи компонентов
топлива 48
2.4. Статическая характеристика двигательной установки ... 52
2.5. Метод малых отклонений в теории автоматического
регулирования 71
2.6. Влияние внешних возмущений на статические
характеристики 74
2.7. Выбор регулируемых величин 76
Глава 3. Динамика двигательных установок 78
3.1. Структура системы автоматического регулирования . ... 78
3.2. Переходные, передаточные функции и частотные
характеристики 81
3.3. Математические модели динамических систем 87
3.4. Определение передаточных функций 99
3.5. Уравнение динамики элементов двигательной установки . . 104
3.6. Уравнение динамики двигательной установки 130
Глава 4. Регуляторы жидкостных ракетных двигателей 135
4.1. Принцип действия 135
4.2. Чувствительные элементы 139
4.3. Усилительные элементы 145
4.4. Исполнительные элементы 148
451
Глава 5. Переходные процессы и устойчивость систем автоматического
регулирования 153
5.1. Оценки качества переходных процессов 153
5.2. Устойчивость линейных систем регулирования 159
5.3. Критерии устойчивости 165
5.4. Выделение областей устойчивости 174
5.5. Нелинейности характеристик систем 182
Глава 6. Типовые системы автоматического регулирования 205
6.1. Системы с регулятором прямого действия 205
6.2. Системы с интегрирующим регулятором 214
6.3. Системы с регулятором, имеющим инерционный усилитель 218
6.4. Системы с изодромным регулятором 224
ТРЕТЬЯ ЧАСТЬ
РЕГУЛИРОВАНИЕ ТВЕРДОТОПЛИВНЫХ РАКЕТНЫХ
ДВИГАТЕЛЬНЫХ УСТАНОВОК 230
Глава 7. Свойства ракетных двигателей твердого топлива 230
7.1. Характеристики твердых топлив и процессов горения . . . 231
7.2. Давление в камере, тяга и удельный импульс 234
7.3. Разброс и предельные отклонения параметров 236
7.4. Способы уменьшения предельных отклонений параметров 250
7.5. Регулирование ракетных двигателей твердого топлива . . 253
7.6. Многорежимные двигатели твердого топлива 258
7.7. Системы торможения и отсечки тяги 262
Глава 8. Динамика твердотопливных двигательных установок 273
8.1. Регулирование давления в камере изменением площади
критического сечения сопла 274
8.2. Регулирование тяги изменением площади критического
сечения сопла 277
8.3. Переходные процессы с учетом нелинейности закона
горения твердого топлива 279
8.4. Переходные процессы при открытии сопел отсечки тяги . . 281
8.5. Переходные процессы при отсечке тяги впрыском гасителя 294
8.6. Расчет тяги в условиях переменного давления в камере 297
8.7. Передаточные функции системы автоматического
регулирования 311
Гл'ава 9. Управление вектором тяги по направлению 314
9.1. Способы управления 314
9.2. Требования и характеристики систем управления вектором
тяги 315
9.3. Поворотные двигатели 319
9.4. Поворотные камеры и сопла 320
9.5. Разрезные управляющие сопла 323
9.6. Газовые рули 324
9.7. Системы с вводом жидкостей, газов и твердых тел в
сверхзвуковую часть сопла 332
Ч Е ТВЕ РТА Я Ч АСТЬ
РЕГУЛИРОВАНИЕ ЯДЕРНЫХ РАКЕТНЫХ ДВИГАТЕЛЬНЫХ
УСТАНОВОК 340
Глава 10. Ядерные ракетные двигатели как объект регулирования . . . 340
10.1. Особенности ядерных ракетных двигателей 340
10.2. Схемы двигательных установок 343
10.3. Основные понятия и определения 346
Глава 11. Нейтронно-физические процессы в ядерном реакторе. . . . 353
11.1. Элементарное уравнение кинетики и период реактора. . 353
11.2. Кинетика реактора с учетом запаздывающих нейтронов 356
452
11.3. Динамические характеристики ядерного реактора. . . . 362
11.4. Линеаризация уравнений кинетики реактора 369
11.5. Передаточная функция и амплитудно-фазовая частотная
характеристика реактора 370
11.6. Кинетика реактора с циркулирующим горючим 373
11.7. Температурный эффект и его влияние на динамические
свойства реактора 377
11.8. Способы управления мощностью реактора 388
Глава 12. Динамика процессов теплообмена 393
12.1; Особенности и основные уравнения процессов
теплопередачи 393
12.2. Динамика распространения тепла через тонкую стенку
с высокой теплопроводностью 395
12.3. Динамика теплообмена ядерного двигателя с твердой
активной зоной и газовым теплоносителем 403
Глава 13. Особенности характеристик систем питания 409
13.1. Системы питания 409
13.2. Характеристика газогидравлической системы 409
Глава 14. Управление ядерными ракетными двигателями 418
14.1. Особенности процессов управления 418
14.2. Физический пуск реактора 420
14.3. Режимы прогрева и запуска двигательной установки . . 423
14.4. Номинальный режим работы 424
14.5. Режим останова 430
14.6. Уравнение динамики предсопловой камеры 431
14.7. Устойчивость режимов работы реактора 435
14.8. Выбор параметров регулятора контура управления ней-
тронно-физическими процессами в реакторе 440
Список литературы 445
Предметный указатель 447
УЧЕБНИК
Анатолий Иванович Бабкин,
Сергей Викторович Белов,
Николай Борисович Рутковский,
Евгений Васильевич Соловьев
ОСНОВЫ ТЕОРИИ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ РАКЕТНЫМИ
ДВИГАТЕЛЬНЫМИ УСТАНОВКАМИ
Редактор Л. Ф. Ермилова
Технический редактор
Н. В. Тимофеенко
Корректоры Н. Г. Богомолова
и Л. Я. Шабашова
ИБ № 4612
Сдано в набор 11.12.85. Подписано в печать
31.03.86. Т-09121. Формат 60X90Vle.
Бумага типографская № 1. Гарнитура
литературная. Печать высокая. Усл. печ. л. 28,5.
Усл. кр.-отт. 28,5. Уч.-изд. л. 30,53.
Тираж 2750 экз. Заказ 275. Цена 1 р. 30 к.
Ордена Трудового Красного Знамени
издательство «Машиностроение», 107076, Москва,
Стромынский пер., 4.
Ленинградская типография № 6 ордена
Трудового Красного Знамени
Ленинградского объединения «Техническая книга»
им. Евгении Соколовой Союзполиграфпрома
при Государственном комитете СССР по
делам издательств,1* полиграфии и книжной
торговли. 193144, г. Ленинград, ул. Мои-
сеенко, 10.
Отпечатано в Ленинградской типографии
№ 8 ордена Трудового Красного Знамени
Ленинградского объединения «Техническая
книга» им. Евгении Соколовой
Союзполиграфпрома при Государственном комитете
СССР по делам издательств, полиграфии
и книжной торговли. 190000, Ленинград,
Прачечный переулок, 6. Зак. 711.
УВАЖАЕМЫЕ ЧИТАТЕЛИ!
С целью получения информации о качестве наших изданий
просим вас в предлагаемой анкете подчеркнуть позиции,
соответствующие оценке этой книги.
1. В книге существует:
а) острая необходимость
б) значительная потребность
в) незначительная потребность
2. Эффективность книги с точки практического вклада
в отрасль:
а) весьма высокая
б) высокая
в) сомнительная
г) незначительная
3. Эффективность книги с точки зрения теоретического
вклада в отрасль:
а) весьма высокая
б) высокая
в) сомнительная
г) незначительная
4. Материал книги соответствует достижениям мировой
науки и техники в данной отрасли:
а) в полной мере
б) частично
в) слабо
5. Книга сохранит свою актуальность:
а) один—два года
б) в течение пяти лет
в) длительное время
6. Название книги соответствует содержанию:
а) в полной мере
б) частично
в) слабо
Дополнительные замечания:
Фамилия, имя, отчество
Образование
Специальность
Ученое звание
Место работы
Должность
Стаж работы по специальности
Просим отрезать страницу по линии отреза и в почтовом
конверте выслать в издательство «Машиностроение» по адресу
107076, Москва, Стромынский пер., 4
ОСНОВЫ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РДУ