/





















































































































































































































































































































































































Автор: Куприянов А.И. Петренко П.Б. Сычев М.П.
Теги: электротехника радиолокация радиотехника разведка
ISBN: 978-5-7038-3325-4
Год: 2010



Текст
А.И. Куприянов
П.Б. Петренко
М.П. Сычев
Теоретические
основы
радиоэлектронной
разведки
Издательство МГТУ
им.Н.Э.Баумана
А.И. Куприянов,
П.Б. Петренко, М.П. Сычев
Теоретические
основы
радиоэлектронной
разведки
Допущено Учебно-методическим объединением
по образованию в области информационной безопасности
в качестве учебного пособия для студентов
высших учебных заведений, обучающихся по специальностям
«Информационная безопасность»
издашьствоЗ
Москва 2010
УДК 621.396.96(075.8)
ББК 32.95
К92
Рецензенты:
зав. кафедрой радиосистем передачи информации и радиоуправления
Московского авиационного института (государственного технического
университета), д-р техн, наук, проф. Р.Б. Мазепа',
ученый секретарь секции «Инженерные проблемы стабильности
и конверсии» Российской инженерной академии,
д-р техн, наук, проф. В.Л. Лукин',
директор НИИ радиоэлектронной техники МГТУ
им. Н.Э. Баумана, канд. техн, наук Г.П. Слукин
Куприянов А. И.
К92 Теоретические основы радиоэлектронной разведки : учеб,
пособие / А. И. Куприянов, П. Б. Петренко, М. П. Сычев. — М.:
Изд-во МГТУ им. Н.Э. Баумана, 2010. — 381, [1] с. : ил.
ISBN 978-5-7038-3325-4
Изложены основные технические принципы построения
средств радио-, радиотехнической и радиолокационной раз-
ведки, проанализированы методы проведения измерений, а
также потенциальные характеристики качества этих средств.
Для студентов старших курсов и аспирантов радиотехни-
ческих специальностей вузов.
УДК 621.396.96(075.8)
ББК 32.95
© Куприянов А.И., Петренко П.Б.,
Сычев М.П., 2010
ISBN 978-5-7038-3325-4 © Оформление. Издательство МГТУ
им. Н.Э. Баумана, 2010
ВВЕДЕНИЕ
В учебном пособии рассмотрены теоретические основы радио-
электронной разведки, а также основные классы радиоэлектронных
систем (РЭС), используемых средствами технической разведки для
извлечения информации в процессе и в результате анализа электро-
магнитных полей радиодиапазона. При этом принято традиционное
деление радиоэлектронной разведки на радиоразведку, радиотехни-
ческую разведку (РТР) и радиолокационную разведку (РЛР). По-
скольку задачи, решаемые радиоразведкой и РТР, обладают большим
сходством, они рассмотрены с единых позиций и точек зрения. В ча-
стности, это относится к методам поиска радиосигналов по частоте и
по направлению.
Средства радиоразведки перехватывают сигналы систем пере-
дачи информации (связи и передачи данных) и извлекают перено-
симую этими сигналами информацию. Средства РТР, обрабатывая
принятые излучения радиоэлектронных средств, определяют про-
странственно-временные параметры их сигналов. В РЛР для полу-
чения информации используется эффект рассеяния (отражения)
электромагнитных волн радиолокационными целями.
В пособии рассмотрены также методы радиоэлектронного про-
тиводействия техническим средствам радиоэлектронной разведки.
Особое место в пособии отводится методам измерения пара-
метров сигналов средствами радио- и радиотехнической разведки
(РРТР), а также причинам возникновения погрешностей измере-
ний. Специфика методов определения частоты средствами РРТР
обусловлена, с одной стороны, ограниченностью времени развед-
ки, а с другой стороны — широким диапазоном частот, в котором
ведется разведка. При изучении информационных возможностей
систем РРТР описаны фильтровые, дискриминаторные, корреля-
ционные (интерференционные) и цифровые методы измерения
частоты.
4
Введение
В пособии рассмотрено решение задач построения поисковой
аппаратуры, синтеза алгоритмов сканирования поискового про-
странства и процедур обнаружения полезных сигналов на фоне
помех. Также выполнен анализ характеристик качества обнаруже-
ния сигнала, в том числе в условиях неопределенности параметров
сложной помеховой обстановки.
При описании методов определения угловых координат объек-
тов разведки подробно рассмотрены пеленгаторы и радиосистемы
углового сопровождения. Все пеленгаторы являются радиотехни-
ческими измерителями угловых координат объектов, а радиосис-
темы углового сопровождения отождествляют направление при-
хода сигнала с направлением нормали к фронту волны, созданной
источником излучения. Показано, что различие методов пеленга-
ции и типов пеленгаторов сводится именно к техническим особен-
ностям построения ориентации этой нормали.
В пособии представлен большой раздел, относящийся к мето-
дам РЛР, которые базируются на теоретических основах радиоло-
кации и позволяют обеспечить обнаружение искусственных и при-
родных объектов, проведение их идентификации, определение
координат и параметров их движения.
Особое внимание к РЛР обусловлено объективными преиму-
ществами ее средств: их способностью функционировать незави-
симо от времени суток и погоды, обеспечивать большую даль-
ность действия, высокую точность и разрешающую способность
по дальности и угловым координатам.
Рассмотрены особенности ведения РЛР в условиях неопределен-
ности. Обычно результаты РЛР обусловливаются полнотой и досто-
верностью измерительной информации и зависят от времени радио-
локационного наблюдения, погрешностей измерений и обработки
информации. В этом случае под неопределенностью понимают си-
туацию, когда информация о возможных состояниях измерительной
системы и внешней среды полностью или частично отсутствует либо
когда в системе возможны непредсказуемые события. Вследствие
этого неопределенность сопряжена с риском получения недостовер-
ных оценок вычисляемых характеристик, риском планирования и, как
следствие, риском принятия ошибочного решения.
В пособии рассмотрены методы повышения точности радио-
локационных измерений на основе компенсации нестабильности
Введение
5
параметров измерительных каналов, обусловленных воздействи-
ем совокупности дестабилизирующих факторов, в том числе
дальномерного шума цели. Изложен метод повышения точности
измерений, основанный на использовании структурной избыточ-
ности в измерительной системе (которая создается с помощью
дополнительных измерительных каналов со вспомогательными
нелинейными либо нестационарными системами). Рассмотрен
модифицированный метод вспомогательных систем, применяе-
мых для идентификации параметров расширенного вектора со-
стояния измерительных каналов РЛС.
Для повышения достоверности решения задачи идентификации
параметров движения радиолокационных целей при аномальных
измерениях предложено использовать метод нелинейной фильтра-
ции и модели временных рядов, составленных из массива измерен-
ных значений амплитуд отраженных сигналов. Рассмотрен метод
параметрического оценивания функций распределения амплитуд
отраженных сигналов при ограниченном объеме измерений и отсут-
ствии априорной информации о виде теоретического распределе-
ния. Актуальность этой задачи обусловлена тем, что при ограни-
ченном объеме измерений применение методов, основанных на
группировке наблюдений, не позволяет достичь заданной точности
и достоверности оценок функций распределения.
В пособии представлен метод вычисления статистически ус-
тойчивых, обладающих высоким разрешением спектральных оце-
нок нестационарных реализаций сигналов. Метод заключается в
разделении исходной реализации на квазистационарные интерва-
лы, выборе оптимального перекрытия интервалов и последующем
усреднении частных периодограмм.
В пособии рассмотрены методы пассивной радиотеплолокации
(РТЛ), при которой обнаружение объектов происходит вследствие
приема их естественного радиотеплового излучения в диапазонах
радиоволн. При этом используется тот факт, что интенсивность ра-
диотеплового излучения зависит от температуры объекта, а прием
радиотепловых сигналов позволяет определять эти параметры на
основе анализа создаваемого объектом радиотеплового излучения.
Показано, что специфические особенности РТЛ позволяют при
любой погоде обнаруживать источники тепловой энергии и без
непосредственного контакта измерять распределения температуры
6
Введение
объектов с учетом того, что информационные возможности РТЛ
сочетаются с абсолютной скрытностью.
В заключительной главе рассмотрены методы противорадио-
локационной маскировки и снижения радиолокационной заметно-
сти. Показано, что применение радиопоглощающих материалов и
противорадиолокационных покрытий представляет собой мощный
резерв для снижения радиолокационной заметности за счет
уменьшения эффективной поверхности рассеяния. Вместе с тем
для изменения наблюдаемости объектов разведки можно исполь-
зовать методы и средства воздействия на среду распространения
сигнала. Арсенал методов и средств модификации среды распро-
странения сигналов постоянно пополняется как благодаря исполь-
зованию новых физических эффектов, так и в результате совер-
шенствования способов применения известных механизмов
рефракции, поглощения, отражения, рассеяния сигнала в среде.
Однако следует учитывать, что самое значительное снижение
радиолокационной заметности происходит тогда, когда упомяну-
тые методы применяются в комплексе, обеспечивая при этом
больший эффект, чем сумма возможных эффектов от применения
каждого конкретного метода отдельно.
Технический прогресс в области элементной базы радиоэлек-
тронных систем, совершенствование алгоритмического и про-
граммного обеспечения, процессов обработки информации, разви-
тие сетей передачи данных отразились на современном состоянии
средств РТР, которые постоянно и непрерывно развиваются и со-
вершенствуются. Повышается их точность и оперативность, рас-
ширяются их возможности. Указанные аспекты нашли отражение
в данном пособии.
Авторы выражают признательность рецензентам за полезные
замечания и многочисленные советы, которые были учтены при
работе над пособием.
СПИСОК СОКРАЩЕНИЙ
АКФ — AM — АРПСС — автокорреляционная функция амплитудная модуляция авторегрессионный процесс проинтегрированно- го скользящего среднего
АРСС — АРУ — АЦП — БМ — БПФ — ВС — ГОН — ДКС — ДКФ - ДН - ДНА - ДО - ДОР — ДОС - ДПЛА — ДПФ - ДРЛО — авторегрессионный процесс скользящего среднего автоматическая регулировка усиления аналого-цифровое преобразование балансная модуляция быстрое преобразование Фурье вспомогательная система генератор опорного напряжения дискретно-кодированные сигналы двумерная корреляционная функция диаграмма неопределенности диаграмма направленности антенны дипольный отражатель диаграмма обратного рассеяния диаграммообразующая схема дистанционно пилотируемый летательный аппарат дискретное преобразование Фурье комплекс дальнего радиолокационного обнару- жения
ЗГРЛС — ивк — исз — ИФД — КИМ — ЛА — лз — загоризонтная радиолокационная система импульсно-временной код искусственный спутник Земли импульсно-фазовый детектор кодово-импульсная модуляция летательный аппарат линия задержки
8
Список сокращений
лц — ложная цель
ЛЧМ-сигнал — линейно-частотно-модулированный сигнал
МВС — метод вспомогательных систем
ОБП — амплитудная модуляция с одной боковой полосой
ПГ — перестраиваемый генератор
РЛДН — комплекс радиолокационного дозора и наблюдения
РЛК — радиолокационный измерительный канал
РЛР — радиолокационная разведка
РЛС — радиолокационная система
РЛХ — радиолокационные характеристики
РРТР — радио- и радиотехническая разведка
РСН — равносигнальное направление
РТЛ — радиотеплолокация
РТР — радиотехническая разведка
РЭБ — радиоэлектронная борьба
РЭП — радиоэлектронное противодействие
РЭС — радиоэлектронные системы
СА — синтезированная апертура
сдц — селекция движущихся целей
СП — случайный процесс
спд — система передачи данных
УЛЗ — ультразвуковая линия задержки на поверхност- ных акустических волнах
УПЧ — усилитель промежуточной частоты
УЭ — управляющий элемент
ФАПЧ — фазовая автоподстройка частоты
ФАР — фазированная антенная решетка
ФКМ — фазокодовая модуляция
ФМ — фазовая модуляция
ФМС — фазометрические системы
ФН зс — функция неопределенности зондирующего сигнала
ФР — функция распределения
ФРМ — фазоразностная модуляция
ФЧХ — фазочастотная характеристика
чм — частотная модуляция
чпи — частота повторения импульсов
ЭМС — электромагнитная совместимость
ЭПР — эффективная площадь рассеяния
1. РАДИОРАЗВЕДКА
И РАДИОТЕХНИЧЕСКАЯ РАЗВЕДКА
1.1. Принципы работы технических средств
радиоэлектронной разведки
Принято считать, что радиоразведка добывает сведения о про-
тивнике путем поиска, обнаружения, пеленгования излучений его
радиосредств и перехвата сообщений, циркулирующих в радиока-
налах и сетях передачи данных [1]. Радиотехническая разведка
(РТР) получает сведения о пространственно-временных парамет-
рах сигналов радиоэлектронных систем (РЭС) противника и на
основании анализа этих параметров определяет тип и назначение
РЭС [1]. Поскольку задачи, решаемые радиоразведкой и РТР,
имеют больше сходства, чем различий, удобнее рассматривать фи-
зические и технические принципы построения и функционирова-
ния средств радио- и радиотехнической разведки (РРТР) с единых
позиций и точек зрения.
Деление радиоэлектронной разведки в радиодиапазоне на ра-
диоразведку и радиотехническую разведку не является единствен-
но возможным. По другим системам классификации различают
стратегическую, тактическую РРТР и РТР непосредственной
поддержки радиоэлектронной борьбы (РЭБ). Подробное обсужде-
ние этих и других классификационных признаков систем и средств
РРТР можно найти в [2-6], а также в других источниках, специ-
ально посвященных не созданию, а использованию технических
средств разведки. Классификация признаков методов и средств
РРТР показана на рис. 1.1.
С техническими проблемами, возникающими при создании и
использовании средств разведки, тесно связаны проблемы проек-
тирования и эксплуатации радиоэлектронных средств и систем
10
1. Радиоразведка и радиотехническая разведка
Радиоэлектронная
разведка
в радиодиапазоне
По назначению Обнаружение, определение параметров излучения
По месту Радиоразведка
РТР
Перехват сообщений
[Обнаружение,
1
базирования Наземная определение параметров излучения
Морская
Воздушная
Космическая
По оперативности
Стратегическая
Тактическая поддержка
радиоэлектронного противодействия
По источникам
информации
Системы (сети) связи и передачи данных
Радиолокационные системы
Системы АСУ
Рис. 1.1. Классификационные признаки методов и средств РРТР
контроля электромагнитной совместимости радиоэлектронных
средств, экологического мониторинга и исследования природных
ресурсов Земли, средств контроля за выполнением международ-
ных договоров.
1.1.1. Состав аппаратуры средств РРТР
При всем многообразии методов и средств РРТР можно, следуя
[7], привести типичную схему станции РРТР (рис. 1.2).
Антенно-фидерное устройство станции РРТР должно быть
широкополосным, чтобы работать во всем разведываемом диапа-
зоне частот, а также обеспечивать поиск по пространству и пелен-
гование разведываемого источника излучения с необходимой точ-
ностью. Кроме того, антенны станции РРТР должны иметь
минимальные боковые лепестки, чтобы исключить ложное опре-
деление направления на пеленгуемый источник. Поскольку удов-
1.1. Принципы работы технических средств радиоэлектронной разведки 11
летворить всем требованиям с помощью одной антенны просто
невозможно, обычно применяют несколько антенн, перекрываю-
щих весь разведываемый частотный диапазон.
Съем данных
Рис. 1.2. Структурная схема станции РРТР
Приемное устройство станции РРТР характеризуется разве-
дываемым диапазоном частот 8/: временем перестройки Т, которое
свидетельствует об оперативности разведки в диапазоне частот 8/;
чувствительностью; разрешающей способностью А/; способом по-
иска сигнала объекта разведки по несущей частоте и вероятностью
его обнаружения.
Наиболее важной технической характеристикой разведыва-
тельного приемника является полный диапазон частот, в котором
осуществляются поиск и обнаружение разведываемых сигналов.
Желательно, чтобы один разведывательный приемник перекрывал
по возможности более широкий диапазон частот.
Многообразие задач, решаемых с помощью средств РРТР, опре-
деляет многообразие типов используемых приемных устройств.
Так, некоторые системы непосредственной поддержки средств РЭБ
работают в таких условиях, когда от РРТР требуется только обна-
ружение работающих РЭС противника (например, для оповещения
экипажа самолета о радиолокационном облучении). При этом могут
использоваться одноканальные широкополосные приемники. Поло-
са пропускания таких приемников перекрывает весь частотный диа-
пазон, в котором могут работать РЭС объектов разведки. Для более
детальной разведки применяют устройства с узкополосными при-
емными каналами: сканирующие и многоканальные приемники.
12
1. Радиоразведка и радиотехническая разведка
Анализатор параметров принимаемого сигнала служит для об-
наружения и опознавания образа разведываемого РЭС. Анализатор
также демодулирует сигнал, определяет вид и индекс модуляции,
характеристики модулирующей функции. Анализаторы характери-
зуются количеством учитываемых при обработке параметров сиг-
нала и количеством обрабатываемых сигналов за единицу времени
(пропускной способностью).
Устройство измерения параметров служит для оценивания
параметров разведываемых сигналов. Различают временные, про-
странственные, поляризационные, спектральные и энергетические
параметры. Временные параметры сигналов — это частоты и дли-
тельности сигналов и их элементов, временные интервалы между
сигнальными импульсами; параметры модулирующей функции. Про-
странственные параметры сигнала — координаты точки излучения
(координаты объекта разведки) и характеристики направленности
излучения его антенн. Поляризационные параметры характеризуют
ориентацию вектора электрического поля излучения объекта развед-
ки. К спектральным параметрам сигналов относятся высокочастот-
ный спектр и спектр огибающей сигнала. Энергетические параметры
принимаемого сигнала — это мощность и спектральная плотность.
На основе оценок первичных параметров, определяемых с по-
мощью анализатора и измерителя, находят более сложные обоб-
щенные характеристики. Такими характеристиками могут быть
тип и назначение РЭС, тип и образец объекта, использующего
РЭС, и т. п.
1.1.2. Анализ сигнальной обстановки
1.1.2.1. Поиск информативных радиосигналов средствами РРТР
Среда распространения электромагнитных волн очень сильно
насыщена излучениями различной природы. Это искусственные
электромагнитные поля, специально или непреднамеренно созда-
ваемые техническими системами и устройствами, а также естест-
венные поля, обусловленные множественными природными при-
чинами. Радиоэлектронные системы и средства, сами являющиеся
объектами РРТР или входящие в состав технических комплексов,
против которых направлена деятельность РРТР, локализованы в
1.1. Принципы работы технических средств радиоэлектронной разведки 13
областях трехмерного геометрического пространства с координа-
тами R3, создают излучения в области частот Q и проводят сеансы
работы с излучением на временных интервалах длительностью Т.
Иначе говоря, информативные для средств РРТР излучения РЭС
занимают некоторые области в обобщенном геометрически час-
тотно-временном пространстве R5 = R3 х Q х Т. Поэтому приемни-
ки средств РРТР должны работать в сложной сигнальной обста-
новке, анализируя излучения в пространстве R5, обнаруживая в
этом пространстве сигналы разведываемых объектов и идентифи-
цируя эти излучения как информативные.
Анализ частотного подпространства Q для обнаружения излу-
чений объектов разведки обычно называют поиском по частоте, а
анализ геометрического подпространства R3 — поиском по про-
странству. Поскольку средствам разведки, как правило, доступно
определение только угловых координат источника излучения в
топоцентрической системе полярных координат, связанной со
средством РРТР (начало координат этой системы совпадает с точ-
кой расположения антенной системы средства разведки, точнее, с
положением фазового центра этой антенны), пространственный
поиск называют поиском по направлению прихода сигнала.
Для эффективной организации поиска объекта разведки в час-
тотно-временной области пространства средства РРТР должны
решать несколько связанных между собой, но не тождественных
задач. Во-первых, нужно построить поисковую аппаратуру, во-
вторых, выбрать алгоритм просмотра (сканирования) поискового
пространства, в-третьих, выработать и реализовать в виде некото-
рой формальной процедуры правило обнаружения сигнала от объ-
екта поиска на фоне мешающих сигналов (помех).
1.1.2.2. Поиск по частоте
Приемники средств РРТР, осуществляющие поиск в частотном
подпространстве, настраиваются по программе на все частоты в
диапазоне разведки (рис. 1.3) и проверяют наличие информативно-
го сигнала на каждой частоте настройки.
Чаще всего программа перестройки сводится к последовательно-
му просмотру всех частот разведываемого диапазона bf. Такой алго-
ритм сканирования частотного подпространства области интересов
14
1. Радиоразведка и радиотехническая разведка
Рис. 1.3. Схема сканирующего приемника
РРТР:
Увх,Лых,Лет — значения частоты входного, выход-
ного сигналов и сигнала гетеродина соответст-
венно
разведки называется панорамным последовательным частотным
анализом. Но возможны и другие алгоритмы работы. Например, пе-
рестройка с пропуском участков диапазона, в которых работают за-
ведомо неинформативные для разведки источники излучения (радио-
и телевещательные передатчики, источники мощных индустриаль-
ных помех и т. п.). Портативные сканирующие приемники способны
вести разведку в полосе частот от 100 кГц до 2 ГГц. Для приемников
РТР диапазон частот шире, так как он перекрывает все возможные
рабочие частоты РЭС, т. е. простирается от 100 кГц до 30 ГГц и выше
в диапазон миллиметровых волн.
Разрешающая способность приемника Л/ определяется полосой
пропускания усилителя промежуточной частоты (УПЧ) и может
изменяться в зависимости от сигнальной обстановки в разведы-
ваемом диапазоне, от требуемой точности указания частоты сиг-
нала объекта поиска, от ширины спектра разведываемого сигнала,
которая, в свою очередь, определяется видом и индексом модуля-
ции, от времени анализа Т. Связь между параметрами 5f, kfuT ил-
люстрируется диаграммой (рис. 1.4), при построении которой при-
1.1. Принципы работы технических средств радиоэлектронной разведки 15
Рис. 1.4. Связь между параметрами ty&fwT
при последовательном анализе
пято, что частотное сканирование разведываемого диапазона про-
df bf \f
исходит по линейному закону со скоростью — = — = .
dt Т Тя
Сигналы на рис. 1.4 представлены в виде своих диаграмм неопре-
деленности [2]. Диаграмма неопределенности — это проекции функ-
ции неопределенности сигнала на частотно-временную плоскость.
Протяженность диаграммы неопределенности вдоль оси абсцисс рав-
на длительности импульса сигнала, а вдоль оси ординат — ширине
его спектра. Как видно из рисунка, непрерывный сигнал наблюдается
приемником в течение интервала времени Т> Та. Импульсный сигнал
длительности тим может быть пропущен приемником, если период
повторения импульсов больше ТИ. Это случай быстрой перестройки
частоты. Разумеется, здесь прилагательное «быстрый» применитель-
но к частотному анализу определяет его скорость по сравнению с пе-
риодом (и длительностью) анализируемого сигнала.
Для панорамных приемников с быстрой перестройкой частоты
существует взаимосвязь между полосой пропускания резонансной
системы и скоростью перестройки. Увеличение скорости пере-
стройки ведет к ухудшению разрешающей способности и сниже-
нию чувствительности. Действительно, полоса пропускания А/ и
16
1. Радиоразведка и радиотехническая разведка
длительность т отклика приемника на сигнал связаны примерным
соотношением Д/ ~ (т)1. При скорости перестройки частоты
df/dt длительность отклика приемника будет примерно равна
. Следовательно,
(1.1)
а время анализа, т. е. перестройки по диапазону 5Д
Т = 5/|
\dt)
А/2’
(1-2)
Таким образом, каждой скорости перестройки соответствует
своя оптимальная полоса (разрешающая способность по частоте)
\f. Сокращая время поиска, можно проиграть в разрешающей спо-
собности, и, наоборот, увеличивая ДД одновременно приходится
увеличивать время разведки частотного диапазона bf.
Если скорость перестройки такова, что Тн < тим, мощность им-
пульса на выходе приемника будет меньше мощности входного
сигнала, т. е. приемник потеряет чувствительность. Потери чувст-
вительности можно оценить по следующей формуле [7]:
а «
1 + 0,2
"df 1
dt &f2
2 Л
(1-3)
где а — коэффициент потери чувствительности приемника по
сравнению с чувствительностью приемника, не перестраиваемого
по частоте (имеющего нулевую скорость перестройки), дБ.
Используемые для РРТР сканирующие панорамные приемники
перестраиваются со скоростью 20...30 частотных каналов в секун-
ду при полосе каждого канала ДА изменяющейся в пределах от
50...500 Гц до 50... 1000 кГц.
Противоречие между скоростью перестройки по частоте, кото-
рую для повышения оперативности разведки нужно выбирать как
можно большей, и разрешающей способностью ДА устраняется в
многоканальном приемнике РРТР (рис. 1.5).
1.1. Принципы работы технических средств радиоэлектронной разведки 17
Рис. 1.5. Схема многоканального приемника РРТР
Параллельные узкополосные фильтры (УПЧЬ УПЧЛ) на
выходе смесителя перекрывают своими полосами пропускания
весь диапазон частот (рис. 1.6).
Рис. 1.6. Настройки УПЧ в многоканаль-
ном приемнике РРТР:
^упч — коэффициент передачи фильтров
При такой схеме построения приемник позволяет раздельно
наблюдать (разрешать по частоте) сигналы РЭС, если разнос рабо-
чих частот этих РЭС не меньше А/. В разведываемом диапазоне
частот нужно разместить N параллельных фильтров:
w=^+l.
(1.4)
18
1. Радиоразведка и радиотехническая разведка
Время разведки не может быть меньше времени установления
переходных процессов в каждом фильтре. Для TV-канального при-
емника (см. рис. 1.5) это время составит
—, (1.5)
А/
где а = 2...3.
Сравнив (1.5) с (1.2), можно установить, что при одинаковой
разрешающей способности А/ время анализа многоканальным
приемником оказывается примерно в N раз меньше времени обзо-
ра полосы 5/ сканирующим одноканальным приемником. Платой
за такое увеличение оперативности разведки является пропорцио-
нальное (также в N раз) усложнение аппаратуры.
Рис. 1.7. Структурная схема матричного приемника РРТР
Возможны и применяются схемы, соединяющие преимущества
сканирующих и многоканальных приемников, — матричные при-
емники [7]. Структурная схема матричного приемника показана на
рис. 1.7.
1.1. Принципы работы технических средств радиоэлектронной разведки 19
Матричный приемник содержит набор элементарных ячеек,
состоящих из фильтров Фу, индикаторов Иу, гетеродинов Гу и сме-
сителей. Ячейки располагаются в т строках (z = 1, т) и п столбцах
(7 = 1,и). Фильтры первого столбца разбивают разведываемый
диапазон частот 8/на т равных полос Л/прГ
Л/пр1=-- (16)
т
Все сигналы с выходов этих фильтров гетеродинируются на
одну и ту же промежуточную частоту /Iipi. Таким образом, входной
диапазон частот 8/’ сворачивается в т раз более узкую полосу Л/npi-
Второй столбец трансформирует процесс из полосы A/^pi в полосу
A/np2^
Л/ПР2=— = К (1-7)
т т
и т. д.; в последнем и-м столбце сигнал наблюдается в полосе
фильтра Д/пр„:
А/Лр,=^. (18)
т
При таком построении приемник обеспечивает разрешение по
частоте Д/' = при использовании тп фильтров, тогда как чисто
J п
т
многоканальный приемник для такого же разрешения потребовал
бы тп> тп фильтров.
Для обнаружения сигнала и указания его частоты служат ин-
дикаторы Иу. Срабатывание индикатора означает обнаружение
сигнала в полосе около частоты настройки соответствующего
фильтра Фу.
Совершенствование элементной базы радиоэлектронной аппа-
ратуры, а также методов и алгоритмов обработки сигнала позволя-
ет в настоящее время решать многие задачи РРТР с помощью циф-
ровых приемников [8].
В цифровых приемниках сигналы в широкой полосе (в пре-
дельном случае — во всей полосе разведки 6/) с выхода УПЧ пре-
20
1. Радиоразведка и радиотехническая разведка
образуются в цифровую форму и дальше обрабатываются (фильт-
руются, обнаруживаются, демодулируются) с использованием ал-
горитмов, реализуемых специальными цифровыми сигнальными
процессорами. Преимущества цифровых методов обработки об-
щеизвестны. Это высокая точность и стабильность характеристик
аппаратуры, возможность запоминания, хранения и воспроизведе-
ния сигнала (что очень важно для систем непосредственной РТР
поддержки радиоэлектронного противодействия — РЭП). Недо-
статки цифровых методов (зависимость ширины частотного диа-
пазона разведки от быстродействия цифровых схем, дополнитель-
ные погрешности, обусловленные шумами вычислений, аналого-
цифровыми и цифроаналоговыми преобразованиями) компенси-
руются преимуществами цифровых приемников.
Аналого-цифровое преобразование, необходимое при переходе
к цифровой обработке, предусматривает дискретизацию сигнала
по времени и квантование его по уровню. Подвергающийся преоб-
разованию входной сигнал x(t) — это аддитивная смесь сигналов
разведываемых РЭС s(t) с сигналами неинформативных для
средств разведки излучений и с помехами (прежде всего собствен-
ных тепловых шумов приемника) n(t):
x(t) = s(f) + n(f). (1.9)
Используя известное представление процесса x(t) в виде оги-
бающей и фазы или через две квадратурные компоненты [9], мож-
но получить уравнение вида
x(t) = S(t) cos[co0/ - ф(0] = X (t) cos coo? + Y (0sin coo?, (1.10)
где S(T) и ф(7) — соответственно огибающая и фаза процесса x(t);
X(t) = S(t) cos O)0t и Y(t) = 5(/)sincooZ —квадратурные компонен-
ты, однозначно связанные с огибающей и фазой соотношениями
ад=#2(0+г2Ю; v(/) = arctg^. (1.11)
А (О
Из (1.10) и (1.11) следует, что процесс на выходе линейной
части разведывательного приемника однозначно определяется
двумя процессами: огибающей и фазой {S(t); ф(0} или квадра-
1.1. Принципы работы технических средств радиоэлектронной разведки 21
турными компонентами {X(t); И()}. Поэтому для преобразова-
ния процесса x(t) в цифровую форму, которое сохраняет всю
информацию о нем, достаточно сформировать цифровые выбор-
ки двух процессов: либо огибающей и фазы, либо квадратурных
компонент.
Для реализации многоканального приемника цифровая обра-
ботка сигнала позволяет применить процедуру вычисления дис-
кретного преобразования Фурье. Действительно, для вычисления
преобразования Фурье процесса S(t), наблюдаемого на интервале
времени Т е [-Т/2; Т/2],
772
5(со) = | х(0ехр(-уаЦ)Л, (1-12)
-Т/2
нужно разбить диапазон частот е [®min; ®max] на N интервалов
шириной 2лД/ = g>max^G)mm , таких, что Д/ > у, и в точках <о„ =
- - пДтгА п — 1, N, вычислить интеграл
Т/2
5(©„) = f s(t)exp(-jo>nt)dt =
-Т/2
Т/2 Т/2
= | s(t) cos(&nt)dt - j j x(t)sm(o)nt)dt, (1.13)
-Т/2 -T/2
где 5(а>и) — значение спектральной плотности амплитуд сигнала
на частотах со„.
Если сигнал представляет собой синусоиду с амплитудой ас и
частотой со е [®min; gw], то из (1.13) можно установить, что
5(®„) =
2ас
(co-coJT
. Г(а>-со„)7Л
sm -------?L—
I 2 )
(1.14)
т. е. величина 5(4) равна ас при со - 4 и убывает с увеличением
- о । । sin(Q7/2)
модуля расстройки £2 = |со - 4| как----. Нормированную к
/ 2
22
1. Радиоразведка и радиотехническая разведка
амплитуде а зависимость вычисляемой с помощью дискретного
преобразования Фурье спектральной плотности S((pn) от частоты
гармонического колебания <о
£((о-<о„) = smK(0~a)»)r]/2 (1 .15)
[(со-Ч)Г]/2
можно считать эквивалентом частотной характеристики некоторо-
го фильтра, настроенного на частоту со,,. Процедура вычисления
преобразования Фурье в N дискретных по частоте точках эквива-
лентна преобразованию сигнала в N параллельных фильтрах.
Кстати, считая полосой пропускания каждого фильтра частотный
интервал между ближайшими точками обращения в нуль величи-
2л
ны К(£1), из (1.15) можно определить AQ - — и соответственно
А/=1. (1.16)
Самая распространенная и эффективная вычислительная про-
цедура определения спектральной плотности в соответствии с
(1.13) — алгоритм быстрого преобразования Фурье (БПФ).
1.1.2.3. Поиск в пространстве (по направлению)
Для поиска по направлению прихода сигнала используют на-
правленные свойства антенных систем. Мощность сигнала, подво-
рие. 1.8. ДНА узко-
направленной антенны
димого от антенны к входу прием-
ника, зависит от ориентации направле-
ния максимума приема относительно
направления на источник радиоизлу-
чения. Типичная форма диаграммы
направленности антенны (ДНА) —
нормированная к единице зависимость
мощности принятого сигнала от на-
правления прихода сигнала — показа-
на на рис. 1.8.
Уровень принимаемого сигнала тем
больше, чем выше коэффициент усиле-
1.1. Принципы работы технических средств радиоэлектронной разведки 23
ния приемной антенны, который, в свою очередь, зависит от отно-
сительных размеров раскрыва антенны:
X2 ’
(1.17)
где 5эф =
ВЫХ
Пцад
— эффективная поверхность антенны (отношение
мощности выходного сигнала к плотности потока мощности через
раскрыв антенны); X — длина волны принимаемого сигнала.
Однако коэффициент усиления антенны связан с шириной
ДНА. Действительно, для направленных антенн, обладающих
сравнительно узкой диаграммой направленности, значение коэф-
фициента усиления в направлении максимума ДНА (оо; Ро) со-
ставляет
^max
— G(aopo) =
41 235
^aO,5^Po,5
(1.18)
где Aao,5 и Д0о,5 — параметры ширины ДНА в двух ортогональных
плоскостях (по азимуту а и по углу места Р).
Как следует из (1.17) и (1.18), увеличение надежности поиска
сигнала по направлению прихода за счет коэффициента усиления
антенны потребует сужения ДНА (уменьшения Дао,5 и ДРол). Но
при этом неизбежно возрастет время, необходимое для анализа
(сканирования направления прихода сигнала) геометрического
подпространства области интересов разведки.
Для ускорения поиска сигнала по направлению используют
многоканальные системы, аналогичные применяемым для ускоре-
ния поиска по частоте. В таких системах используют антенные
системы с многолучевыми ДНА.
Антенны с многолучевыми ДНА могут быть созданы на основе
многоэлементных конструкций (антенных решеток), объединяю-
щих определенным образом размещенные и соединенные одно-
элементные антенны. Свойства такой многоэлементной антенны
зависят не только от свойств образующих ее простых антенн, но и
от способа их размещения относительно друг друга, а также от
метода соединения. Сказанное иллюстрирует рис. 1.9, на котором
24
1. Радиоразведка и радиотехническая разведка
условно показана многоэлементная антенна, состоящая из к оди-
наковых антенн А у, Ак, имеющих диаграммы направленности
F(0) и размещенных на одинаковых расстояниях d друг от друга
вдоль прямой А]Ак. В цепь питания каждой антенны включен фа-
зовращатель, вносящий сдвиг zy, i -1, у. Подобные многоэлемент-
ные системы называют антенными решетками.
Рис. 1.9. Схема многоэлементной антенны —
линейной антенной решетки
В соответствии со схемой, показанной на рис. 1.9, от антенн
отводятся сигналы одинаковой мощности, но с различными фазо-
выми сдвигами, так что сигнал от первой антенны равен
wccos(<Bo^ + у), от второй — i/ccos(coo/ + 2у) и т. п. Сигнал, излучае-
мый из точки Р на большом расстоянии R от середины антенной
решетки (настолько большом R » kd, что параллакс базы много-
1.1. Принципы работы технических средств радиоэлектронной разведки 25
элементной антенны kd примерно равен нулю, а направление на
точку Р из каждой элементарной антенны примерно одинаково и
равно 0)
(П = £ 4 (/>W) cos(<oz+<г) =
Z-1
k
= Р(0)Ц(Р)
• k\ , э d a I
sin — у + 2л—cos0
Д ) ( k A Z1
—^cos coZH—у , (1.19)
k( _ d 2 )
— у + 2л—cos0
2l k )
2
где Л1(Р) — амплитуда колебания, получаемого из точки Р на вы-
ходе каждой элементарной антенны.
Как следует из (1.19), диаграмма направленности решетки,
нормированная к единице в максимуме множителем kAi(P), может
быть представлена в форме
FE(0,Y) = F(0)£(0,Y),
(1.20)
где Р(0) — ДНА каждого элемента решетки Ах, Ак; Р(0, у) —
множитель решетки,
^(е,у>=
sin
+ 2л—cos0
+ 2л—cos0
к
(1-21)
к
Таким образом, ДНА многоэлементной антенной решетки
Fz(0, у) определяется как типом используемых для решетки антенн
(множителем F(0)), так и их взаимным расположением, а также
фазовыми сдвигами входных напряжений антенн (множителем
решетки £(0, у)). Аналогичная (1.20) зависимость справедлива и
для плоской решетки, развернутой в двух направлениях, а не толь-
ко вдоль базовой линии:
(0, (р, у) = F(0, ф)Л(0, ф, у),
(1-22)
26
1. Радиоразведка и радиотехническая разведка
причем L(Q, ф, у) по-прежнему определяется взаимным располо-
жением элементарных антенн и значениями фазовых сдвигов у.
Используя такое свойство антенной решетки, можно получать за-
данные характеристики направленности сложной антенны. На-
пример, из совокупности малонаправленных антенн можно синте-
зировать остронаправленную антенну либо, используя разные
значения фазового сдвига у, можно изменять значения аргументов
(0о, фо), доставляющих максимум диаграмме направленности.
Иначе говоря, изменяя у, можно изменять ориентацию максимума
ДНА и тем самым осуществлять угловое сканирование для поиска
источника сигнала по направлению. Проводя обработку выходных
сигналов элементарных антенн при разных значениях у, можно
сформировать многолепестковую ДНА. Формирование такой диа-
граммы (рис. 1.10) осуществляют диаграммообразующая схема
(ДОС) и система управления (СУ).
Выходы ДОС на рис. 1.10 соединены с входами панорамных
приемников (ПП), осуществляющих поиск сигнала по частоте.
Управление формой ДНА в многоэлементных решетках по-
зволяет кроме поиска по направлению прихода полезного сиг-
нала осуществлять пространственную селекцию информатив-
ных для средств разведки сигналов на фоне помех.
Принцип пространственной селекции иллюстрируется схе-
мой, показанной на рис. 1.11.
Рис. 1.11. Схема про-
странственно-временной
обработки для компен-
сации помехи приемни-
ком РРТР
Рис. 1.10. Схема многолепе-
стковой антенной решетки
1.2. Обнаружение сигнала средствами РРТР
27
Антенная система состоит из двух элементов — основной Ао и
компенсационной Ак антенн. Диаграммы направленности антенн
соответственно Fo(0) и F(0). Сигнал с выхода компенсационной
антенны хк взвешивается множителем W и суммируется с сигналом
То основной антенны, образуя суммарный сигнал
xY=x(j + WxK. (1-23)
Эквивалентная суммарная диаграмма направленности пары
антенн Ао и Ак может быть определена как Fs(0) = Fo(0) + WFi(Q).
Для компенсации действия этой помехи можно подобрать весо-
вой множитель W так, чтобы обратить в нуль значение суммар-
ной ДНА в направлении 0П на источник помехи. Действительно,
из уравнения
Fs(0n) = Fo(0n)+FTFi(0n) = O,
где 0П — угловая координата источника помех, следует, что, выбрав
w = _Fo(Qa) (1.24)
можно полностью скомпенсировать действие пространственно
разнесенной помехи.
Выбор весового коэффициента в соответствии с (1.24) означа-
ет, что пара антенн (основной и компенсационной) образует ан-
тенную решетку с ДНА, имеющей провал в направлении на источ-
ник помехи.
Увеличивая число компенсационных антенн, можно сформи-
ровать ДНА с несколькими нулями. Так, при к вспомогательных
антеннах (или, иначе, при к + 1 элементной решетке) можно сфор-
мировать ДНА с к провалами и, следовательно, скомпенсировать
влияние излучателей к помех.
1.2. Обнаружение сигнала средствами РРТР
1.2.1. Оптимальный приемник РРТР для обнаружения сигнала
В результате поиска сигнала по частоте и по пространству
средством РРТР принимается решение о наличии сигнала в облас-
28
1. Радиоразведка и радиотехническая разведка
ти интересов разведки, т. е. обнаружение сигнала. Поскольку сиг-
нал всегда появляется в случайные для средств разведки моменты
времени и наблюдается на фоне случайных помех, сам факт обна-
ружения сигнала является случайным и может характеризоваться
только вероятностными показателями.
Кроме того, приемникам средств РРТР приходится работать в
уже упомянутых условиях сложной сигнальной обстановки, обу-
словливаемой наличием многих излучателей радиосигналов и ис-
точников побочных и непреднамеренных излучений, изменением
геометрических, частотных и временных параметров излучаемых
сигналов вследствие маневрирования излучателей в пространстве,
где функционируют средства РРТР (в среде интересов разведки).
С одной стороны, сама сложная сигнальная обстановка являет-
ся предметом анализа для средств РРТР: в ее создании участвуют
излучения РЭС объектов разведки. Но, с другой стороны, слож-
ность сигнальной обстановки затрудняет средствам РРТР обнару-
жение и определение параметров сигналов объектов разведки на
фоне неинформативных для разведки излучений.
Несмотря на всю сложность, для нормальной сигнальной об-
становки предполагается выполнение требований по электромаг-
нитной совместимости (ЭМС). Требования по ЭМС предусматри-
вают такую регламентацию работ РЭС, при которой они в
минимальной степени мешают друг другу. Это означает прежде
всего ортогональность сигналов всех РЭС, совместно работающих
в области интересов РРТР. На множестве всех в принципе доступ-
ных средству РРТР сигналов Si(t, R); /е[0; 7], ReR3, суперпозицию
которых R), где i-l, I, наблюдает приемник, условие op-
i
тогональности выполняется, если справедливо соотношение
►
О при i Ф j,
где/,/ = 1, 7; Qi — энергия сигнала Si(t, R); R — вектор простран-
ственных координат излучателя сигнала 5,.
Для выполнения соотношения нужно, чтобы сигналы R)
или не перекрывались по спектрам (излучались бы в разных час-
15,. 0,R>y(/,R)J/
1.2. Обнаружение сигнала средствами РРТР
29
тотных полосах), или существовали на разных временных интер-
валах, или излучались из непер екрывающихся областей простран-
ства. Возможно, что ортогональность сигналов обеспечивается и
другими способами, например приданием специальных свойств
структуре сложного сигнала, т. е. способом объединения простых
элементарных сигналов в сложный составной сигнал.
Разумеется, на практике условие ортогональности может быть
выполнено лишь приближенно. Но если ортогональность нару-
шается, шумы неортогональности, добавляясь к помехам естест-
венного происхождения, снижают качество приема сигналов. По-
этому характеристики качества работы средств РРТР в условиях
действия только ортогональных сигналов могут служить верхни-
ми, пессимистическими для систем защиты от технических раз-
ведок оценками эффективности. В реальных условиях, когда ра-
ботающие в среде интересов разведки РЭС неизбежно создают
взаимные помехи, качество работы технических средств разведки
может быть только хуже. Эти характеристики будут снижаться и
в условиях применения радиоэлектронного противодействия
средствам РРТР, когда для их подавления применяют специально
организованные помехи, скрывающие (маскирующие) сигналы.
Структура приемника, оптимального для обнаружения и распозна-
вания ортогональных сигналов (что и требуется от средства РРТР),
может быть синтезирована на основе следующих соображений.
Вся доступная разведывательному приемнику информация о
сигналах, присутствующих на его входе, заключена в апостериор-
ном распределении вероятностей на множестве возможных сигна-
лов. Поэтому по наблюдениям входной аддитивной смеси сигнала
с помехой (1.9) приемник должен реализовать следующие опера-
ции: 1) вычислить апостериорные вероятности всех возможных
сигналов; 2) выбрать максимальное из вычисленных значений сиг-
нала, вполне обоснованно предположив, что именно этому макси-
муму соответствует наблюдаемый сигнал; 3) сравнить выбранное
значение сигнала с некоторым пороговым уровнем для принятия
решения о том, что в формировании наблюдаемого колебания при-
нял участие сигнал, а не только шум.
Апостериорная вероятность P(sz|x) сигнала i -1, Z, вычис-
ленная по результатам наблюдения реализации смеси сигнала с
30
1. Радиоразведка и радиотехническая разведка
помехой x(t), равна произведению априорной вероятности P(st) и
функции правдоподобия Р(фг):
Р(ф) = кР(5,)Р(х|я,), (1.26)
где к — постоянный множитель, нормирующий Р(5;|х) к единице.
В соответствии с (1.26) апостериорная вероятность P(st\x) —
это условная вероятность того, что в наблюдаемой аддитивной
смеси сигналов с помехами присутствует конкретный сигнал л;.
Если есть основания предполагать, что априорные вероятности
всех возможных сигналов мало отличаются друг от друга, то
P(si) = const(s;) и максимум апостериорной вероятности Р(у,|х) сов-
падает с максимумом функции правдоподобия Р(ф/), показываю-
щей, какова вероятность реализации случайного входного колеба-
ния x(f), при условии, что в ее формировании принимал участие
сигнал Максимум функции правдоподобия указывает на то,
какой из возможных сигналов s^t) скорее всего (с наибольшей ве-
роятностью) присутствует в данной конкретной реализации x(t).
Совпадение экстремумов P(x\sl) и Лл|х) позволяет утверждать, что
приемник, принимающий решение по критерию максимума апо-
стериорной вероятности, эквивалентен приемнику максимально
правдоподобного сигнала. Разумеется, это утверждение верно
только в пределах справедливости сильного, но чаще всего выпол-
няемого на практике предположения об отсутствии (о незначи-
тельности) априорных сведений о сигналах, когда P(sl) = const(5;).
В типичных условиях работы РРТР, когда можно пренебречь
помехами, обусловленными неортогональностью, сигналы наблю-
даются на фоне нормального шума, стационарного на интервале
наблюдения Т и имеющего постоянную спектральную плотность
Мп во всей исследуемой полосе частот Af. Поэтому плотность ве-
роятности реализации x(t), t е [1; 7], совпадает с плотностью веро-
ятности реализации шума n(t) в (1.9):
/>(х|х,) = й/(„) = 1Г(х-5,). (1.27)
Все сведения о реализации шума n(t) длительностью Т со спек-
тром, сосредоточенным в полосе А/’ содержатся в соответствии с
теоремой Котельникова в выборке дискретных по времени отсче-
тов n^kAt). Объем выборки равен А/7 некоррелированных отсче-
1.2. Обнаружение сигнала средствами РРТР
31
тов. Поэтому плотность распределения вероятностей реализации
процесса x(t) можно рассматривать как совместную плотность
распределения Л/Т независимых нормально распределенных слу-
чайных величин Пк, имеющих такие математическое ожидание
Si(kAt) и дисперсию, как у шума n^t):
(1-28)
Множитель кх =— — в (1.28) не зависит ни от реали-
(7М\Г)
зации x(t), ни от сигнала Si(t). Это просто коэффициент, норми-
рующий плотность распределения W(x(t)-Si(t)) к единице, а сумма
в показателе экспоненты — дискретная форма для вычисления ин-
тегральной зависимости
(129)
о
Поэтому плотность распределения (1.28) иначе можно представить
соотношением
Иг(х-5,) = кхехр<
-^-|[х(0-^(0]2^
Q
(1.30)
Преобразуя подынтегральное выражение в (1.29), можно получить
W(x-st) = кх ехр
1 Т
———jx2(t)dt ехр -
X
z,Jvm о
(1.31)
32
1. Радиоразведка и радиотехническая разведка
—J
2N J
о
где не зависящий от Sj(t) множитель ехр
x2(t)dt
включен
в нормирующий коэффициент к', а
Т
О
(1-32)
является коэффициентом взаимной корреляции принятого колеба-
ния x(f) и сигнала Si(t).
Хотя энергия Q( (точнее, энергетическое отношение сиг-
нал/шум Qj(2Nm)) может в некоторых случаях зависеть от сиг-
нала $i(t), основная операция при определении апостериорной ве-
роятности принятого сигнала или функции его правдоподобия
сводится к вычислению значения в соответствии с (1.32).
Как следует из (1.31), функция правдоподобия монотонно не
убывает с ростом коэффициента показателя степени при экспо-
ненте. Формально соотношение (1.29) определяет коэффициент
взаимной корреляции принятого колебания x(t) и сигнала По-
этому выбор максимально правдоподобного сигнала эквивалентен
выбору сигнала, коэффициент корреляции которого с принятым
колебанием оказывается максимальным. Иначе говоря, оптималь-
ному приемнику достаточно вычислять не функцию правдоподо-
бия, а ее логарифм (1.32). Соответственно приемник, реализующий
операцию (1.32), именуется оптимальным корреляционным при-
емником.
Разумеется, для принятия решения о наличии сигнала в наблю-
даемом на входе приемника колебании x(t) нужно, чтобы лога-
рифм функции правдоподобия был не меньше некоторого огово-
ренного значения, т. е. превышал некоторое пороговое значение.
Поэтому приемник, оптимальный для обнаружения любого из I
ортогональных сигналов на фоне аддитивного нормального шума,
должен быть построен в соответствии со структурной схемой, по-
казанной на рис. 1.12.
Частный случай реализации схемы, приведенной на рис. 1.12, —
панорамный приемник для обнаружения сигнала с неизвестной час-
тотой (см. рис. 1.5), в котором роль корреляторов выполняют узкопо-
1.2. Обнаружение сигнала средствами РРТР
33
лосные фильтры (усилители промежуточной частоты). Очевидно, что
в панорамном приемнике информация о сигналах нужная для вы-
числений значений в соответствии с (1.32), содержится в парамет-
рах коэффициентов усиления усилителей промежуточной частоты.
Рис. 1.12. Схема приемника, оптимального для обнаружения ор-
тогональных сигналов на фоне шума
В каждом из параллельных каналов приемник, схема которого
показана на рис. 1.12, преобразует принятое колебание в соответ-
ствии со схемой, приведенной на рис. 1.13.
Рис. 1.13. Схема оптимального обнаружителя полностью из-
вестного сигнала
Опорный сигнал son(Z) для коррелятора, показанного на рис. 1.13,
учитывает всю доступную приемнику априорную информацию о па-
раметрах обнаруживаемого сигнала.
34
1. Радиоразведка и радиотехническая разведка
1.2.2. Показатели качества обнаружения
точно известного сигнала
Обнаруживая сигнал, средство РРТР может допускать погреш-
ности разного рода. Во-первых, это ложные тревоги — решения о
приеме сигнала при условии, что его нет на входе приемника. Они
случаются, когда значения £ на выходе коррелятора превышают
пороговый уровень обнаружения при 5 = 0. Во-вторых, пропуски
сигнала при том условии, что реализация входного колебания этот
сигнал содержит. Пропуски происходят тогда, когда вследствие
действия шума реализация £ оказывается ниже порога, несмотря
на наличие на входе коррелятора ненулевого сигнала 5^0. Услов-
ные вероятности погрешностей обнаружителя при указанных ус-
ловиях отсутствия и наличия сигнала составляют соответственно
оо
= (1-33)
h
h
^пР=.ИСФ*0)Л, (1.34)
—оо
где — плотность распределения величины £, на выходе
коррелятора и соответственно на входе компаратора, сравниваю-
щего значение £ с пороговым значением, т. е. формирующего ре-
шение по правилу
fl при 2, > h - s 0 (обнаружен сигнал);
Решение = <
[О при £, < й - 5 = 0 (обнаружено отсутствие сигнала),
(1.35)
а пороговый уровень h, с которым сравнивается значение £ на вы-
ходе коррелятора, определяется принятым и используемым крите-
рием обнаружения.
Очевидно, что полная вероятность возникновения погрешно-
сти оптимального обнаружителя
= Л* = О)РЙ > ф = 0) + Р(^ 0)Pg < h\ + 0), (1.36)
1.2. Обнаружение сигнала средствами РРТР
35
где PCs — 0) и P(s ф 0) — априорные вероятности отсутствия и на-
личия обнаруживаемого сигнала в реализации случайного входно-
го процесса x(f).
Если, как предполагалось, сигнал наблюдается на фоне нор-
мального шума с равномерным в полосе наблюдения спектром, то
в силу линейности преобразования (1.32) плотность распределения
величины 2, тоже будет нормальной. При этом очевидно, что пара-
метры распределения И^(х|5) равны
1
{^) = мj*(W)^
I ’ m Л
0 при 5 = 0,
Учитывая (1.23), (1.34) и (1.37), нетрудно установить, что ус-
ловные вероятности возникновения погрешностей обнаружения
полностью известного сигнала составляют
Р =1]1-ф
лт 21
где Q! Уш — энергетическое отношение на входе обнаружителя пол-
ностью известного сигнала; Ф[-] — интеграл вероятностей в форме
2 Г 2
Ф(г) = -=|е~х dx.
(1-39)
В популярных пакетах MathCAD и MatLab эта функция имену-
ется erf(x).
Энергетическое отношение QI — отношение энергии об-
наруживаемого сигнала к спектральной плотности шума — может
быть выражено через отношение мощностей:
36
1. Радиоразведка и радиотехническая разведка
где q = PJ Рш — отношение сигнал/шум по мощности; Д/ш — эк-
вивалентная шумовая полоса приемника; — произведение
ширины спектра процесса на входе обнаружителя и длительности
интервала интегрирования (база сигнала).
Условие полной известности сигнала означает, что время на-
копления в интеграторе обнаружителя может быть выбрано в точ-
ности равным его длительности Т, a &fm — ширине его спектра.
Поэтому для полностью известного сигнала параметр накопления
численно равен базе сигнала. Хотя полного тождества между па-
раметром накопления и базой обнаруживаемого сигнала нет, для
простых сигналов с базой В = 1 энергетическое отношение равно
отношению мощностей сигнала и шума.
Если априорные вероятности P(s = 0) и P(s ф 0) не известны, оп-
ределить вероятности возникновения погрешностей по формулам
(1.38) невозможно. Поэтому при создании и оптимизации структу-
ры обнаружителя пользуются критерием Неймана — Пирсона, в
соответствии с которым фиксируют вероятность ложной тревоги
Рл.т и минимизируют вероятность пропуска Р|1р. Такой подход по-
зволяет исключить из соотношений (1.38) зависимость от априор-
ных вероятностей наличия и отсутствия сигнала и рассматривать
соотношения (1.38) как параметрическую форму представления
диаграммы обмена между вероятностями Рп т и Рпр. Параметром се-
мейства диаграмм обмена, приведенных на рис. 1.14, служит отно-
шение сигнал/шум.
Рис. 1.14. Диаграммы обмена
для обнаружения известного
сигнала
1.2. Обнаружение сигнала средствами РРТР
37
Как видно на рис. 1.14, вероятности пропуска и ложной трево-
ги жестко связаны: допустив рост Рлт, можно уменьшить РПр, и
наоборот. Для заданного значения Рлт и выбранного отношения
q = РС/Рт по диаграммам, приведенным на рис. 1.14, можно опре-
делить условную вероятность пропуска сигнала.
1.2.3. Качество обнаружения при ограниченных
априорных сведениях о сигнале
Характеристики качества обнаружения, основанные на модели
полностью известного сигнала, представляют только теоретический
интерес. На практике априорная информация о сигнале всегда ограни-
ченна, поэтому невозможно сформировать и использовать в схеме кор-
реляционного приемника-обнаружителя (см. рис. 1.12) опорный сигнал
*уоп(0, В точности равный обнаруживаемому сигналу. Значения про-
странственно-временных параметров сигнала для приемника средства
РРТР случайны, максимум, что может быть о них известно, — это ап-
риорная плотность распределения их вероятностей.
При полной неопределенности относительно параметров сиг-
нала априорно распределение считают равномерным.
По результатам РЭС могут быть определены следующие пара-
метры сигналов.
Начальная фаза и амплитуда. Обычно считают, что фаза
сигнала равновероятна в пределах сегмента [0; 2л], а амплитуда
распределена на сегменте [0; Ас].
Несущая частота сигнала fo, которая может изменяться при
использовании для маскировки перестройки (скачков) по частоте
или вследствие взаимного движения источника сигнала и прием-
ника средства разведки. Несущую частоту можно считать неиз-
вестной для средства разведки и равновероятно распределенной в
некотором диапазоне
r bf.r &
fo 2 ’ ^° + 2
Ширина спектра сигнала А/. Многие современные радио-
электронные системы используют дискретные виды модуляции и
(или) кодированные последовательности для повышения скрытно-
сти сигналов. Несущие колебания сигналов таких систем модули-
руются дискретно-кодированными поднесущими колебаниями.
38
1. Радиоразведка и радиотехническая разведка
Неизвестность ширины спектра в этих условиях оказывается экви-
валентной неизвестности тактовых частот модулирующих колеба-
ний. Ничто не мешает считать, что априорные для средств развед-
ки плотности распределения тактовых частот Wpr(Fi) равномерны в
интервале [0; Fmax].
Структура модулирующих сигналов. Традиционно рассмат-
риваемые модели параметрической неопределенности сигнала
(полностью известный сигнал, сигнал с неизвестной фазой и
флуктуирующей амплитудой, с неизвестным временем прихода, с
неизвестной частотой) дают хорошее приближение при описании
работы обнаружителей в радиолокационных и радионавигационных
приемниках, в приемниках радиосистем передачи информации. На
основе этих моделей можно построить диаграммы обмена между
вероятностями возникновения погрешностей типа ложной тревоги и
пропуска при различных отношениях сигнал/шум в полосе обнару-
жителя. Но для средств радиоэлектронных разведок более характе-
рен предельный случай ограниченности априорных данных о под-
лежащем обнаружению сигнале — полное их отсутствие. В такой
ситуации средство разведки может выносить решение о наличии
сигнала только на основании анализа его мощности Рс. Если мощ-
ность принимаемого колебания больше мощности собственного
шума приемника, обнаружитель выносит решение о том, что на
входе имеется сигнал.
Оценка мощности входного процесса
1 Т
Р* = -jx2(t)dt (1.41)
? о
формируется устройством, выполненным по схеме, приведенной
на рис. 1.15.
Рис. 1.15. Схема автокорреляционного (энергетического) обнаружите-
ля априори неизвестного сигнала
1.2. Обнаружение сигнала средствами РРТР
39
Входное колебание фильтруется в полосе А/П1 и подается на
схему обнаружителя, подобного корреляционному обнаружителю
полностью известного сигнала. Схема, изображенная на рис. 1.15,
отличается от схемы корреляционного обнаружителя (см. рис.
1.13) тем, что в ней нет образца сигнала, поэтому в качестве опор-
ного сигнала коррелятора используется само принимаемое колеба-
ние x(t).
Всю информацию о входном процессе x(f) содержит выборка его
дискретных значений, следующих через интервал времени
А/ = 1 / А/ш. Поэтому объем выборки равен AfmT. В результате нако-
пления значений в интеграторе формируется величина £ такая, что
Л/п7 „2 А/ШТ 2
fc=l п А.=1 Рш
при отсутствии на входе сигнала,
когда s(t) = 0;
у (nk+sk)2 (nk +Sk)2 = 1 (nk+Sk}2
% a2 h Рш+Рс l + qh Рш
(1-42)
при наличии
сигнала, когда s(t) Ф 0,
где пк= n(t - k\t) nsk= s(t - kAt) — дискретные по времени отсчеты
входного шума и сигнала соответственно.
Плотность распределения нормированного процесса £, на вы-
ходе интегратора (и соответственно на входе решающего устрой-
ства) имеет вид %2 с числом степеней свободы В = &fmT:
Л/ШТ t _Х
х 2 е 2
W^x^fmT} = \
при х > 0;
(1-43)
о
при х < 0,
где Г(Д/ШТ) — гамма-функция,
Г(ц) = ]x^exdx. (1.44)
о
Если ц — неотрицательное число, Г(ц) = (ц - 1)!.
40
1. Радиоразведка и радиотехническая разведка
На рис. 1.16 показаны графики плотности распределения веро-
ятностей квадратов входного нормального процесса для парамет-
ров накопления Л/ШГ= 2; 10 и 20.
Рис. 1.16. Плотность распределения %2 с двумя, десятью
и двадцатью степенями свободы
Как видно, распределение величины, используемой для обна-
ружения сигнала приемником средства РРТР, существенно отли-
чается от нормального распределения для любых сколько-нибудь
реальных отношений входной полосы и полосы усредняющего
фильтра. Более детальный анализ показывает, что распределение
%2 сходится к нормальному при Д/щТ 30 (и, разумеется, более).
Соответственно рабочие характеристики обнаружителя средства
радиотехнической разведки следует рассчитывать с учетом того,
что распределение процесса на входе решающего устройства
подчиняется не нормальному закону, как в обнаружителе радио-
локатора, а закону %2.
Относительно величины В = необходимо принять следую-
щие соглашения. Поскольку ширина спектра процесса на входе
умножителя равна его отсчеты, следующие через интервал вре-
мени Д/ = 1/ Д/н, некоррелированы, а для нормального шума стати-
стически независимы. Тогда за время наблюдения этого процесса
1.2. Обнаружение сигнала средствами РРТР
41
(время интегрирования Т) будет накоплено В - \fmT независимых
отсчетов. Выборка объемом В этих отсчетов содержит всю инфор-
мацию о входном процессе. Поэтому, обрабатывая такую выборку,
обнаружитель может реализовать наилучшие рабочие характери-
стики. В этом смысле В — мера информационной емкости процесса,
с которым работает энергетический обнаружитель.
Если на входе приемника совместно с шумом присутствует
сигнал, то наилучшие условия для обнаружения сложатся тогда,
когда входная полоса обнаружителя точно совпадет со спектром
сигнала («накроет» спектр сигнала, имеющий ширину А/), а время
интегрирования после умножителя точно совпадет с интервалом
времени существования сигнала Т). Если условия совпадения по-
лос и времени не выполнены, часть энергии принимаемого сигнала
будет потеряна и характеристики обнаружения, естественно, будут
хуже. Но по содержательному смыслу произведение В — \JT— это
база обнаруживаемого сигнала.
Обычно в задачах синтеза и анализа алгоритмов обработки
сигнала база характеризует возможность его сворачивания (сжа-
тия) по времени и (или) по частоте при когерентной обработке.
В энергетическом приемнике когерентная обработка не преду-
сматривается. Сигнал рассматривается как чисто случайный про-
цесс, а обнаружение происходит при сравнении с порогом мощно-
сти (точнее, энергии) присутствующего на входе колебания. Таким
образом, знание базы и несущей частоты ограничивает объем ап-
риорных для средства разведки сведений о сигнале. Уменьшение
объема этих сведений (неточность знания частоты, ширины спек-
тра и длительности сигнала) может только ухудшить характери-
стики обнаружения. Дополнительные сведения о структуре сигна-
ла, которые в принципе могли бы улучшить характеристики
обнаружения, скорее всего разведке не доступны.
Характеристики приемника, учитывающего при работе боль-
ший объем априорной информации о структуре и параметрах сиг-
нала, будут лучше, чем у энергетического приемника, но только
для того сигнала, с которым он согласован. Поэтому такой прием-
ник не будет универсальным и не подойдет для использования в
средствах радиотехнической разведки. Возможная адаптация при-
емника к параметрам обнаруживаемого сигнала требует времени.
А потеря времени на адаптацию к неизвестным структуре и пара-
42
1. Радиоразведка и радиотехническая разведка
метрам сигнала снизит характеристики обнаружения. Полученные
при сделанных предположениях оценки качества энергетического
приемника могут служить верхними границами оценок характери-
стики обнаружения сигнала. Предположение о больших объемах
доступной разведке априорной информации о сигнале и, следова-
тельно, о лучших характеристиках обнаружения трудно обосно-
вать. Предположения о более низкой априорной осведомленности
могут привести к завышенным, чрезмерно оптимистическим оцен-
кам скрытности сигналов РЭС от обнаружения техническими
средствами разведки.
Используя приведенную выше модель %2 для распределения
вероятностей процесса на входе решающего устройства энергети-
ческого обнаружителя, можно получить его рабочие характери-
стики. Считается, что решение о наличии сигнала обнаружитель
принимает по критерию Неймана — Пирсона.
Порог обнаружения h определяется при заданном уровне веро-
ятности ложных тревог решением уравнения
оо h
Р„., =J»Tn,(x,A/r)<& = l-j»'„(x,A/r)<fc = l-Fnl(*,A/r), (1.45)
h о
откуда
A = F-1[(l-P,.t),A^], (1.46)
где Жш(х, AfT) — плотность, a FJJi, AfT) — интегральная функция
распределения вероятностей процесса на входе решающего уст-
ройства, соответствующие действию только шума на входе обна-
ружителя; Fml (х, kfT) — функция, обратная функции Fm(x, AfT).
При этом вероятность правильного решения о наличии сигнала
в полосе А/' на входе обнаружителя будет
оо h
р^. = J (х, У Т)dx -1 - J (х, У T)dx = 1 - (h, bf Т), (1.47)
h О
где И^с+ш(^ AfT) и Fc+ni(h, &fT) — соответственно плотность и ин-
тегральная функция условного распределения вероятностей про-
цесса на входе решающего устройства в случае присутствия на
входе обнаружителя сигнала вместе с шумом.
1.2. Обнаружение сигнала средствами РРТР
43
Диаграммы обмена между вероятностями Рл т и РПр= 1 - Рправ
для автокорреляционного (энергетического) обнаружителя, анало-
гичны диаграммам, представленным на рис. 1.14 для корреляци-
онного обнаружителя полностью известного сигнала, изображены
Поскольку считается, что обнаруживаемый сигнал не проявля-
ет когерентных свойств, в обнаружителе он проявляет себя так же,
как и шум. Поэтому рабочая характеристика обнаружителя опре-
деляется с использованием распределения %2 с Д/Г степенями сво-
боды, но при другом параметре масштаба:
/ z
= ---,А/Т (1.48)
U + ? )
И
/г h 1 / X
Г»'„ш(х;Д^)А=Г-——.4/T.t-
i ;1+? U+? )
h
7 ( h \
= f 1Гс+ш (z, Д/Т)^ = Fm -, Д/Т
Jo U + ? )
(1-49)
44
1. Радиоразведка и радиотехническая разведка
откуда
Р„р..=1-Ло|гй-.ЛЛ’|- (1-50)
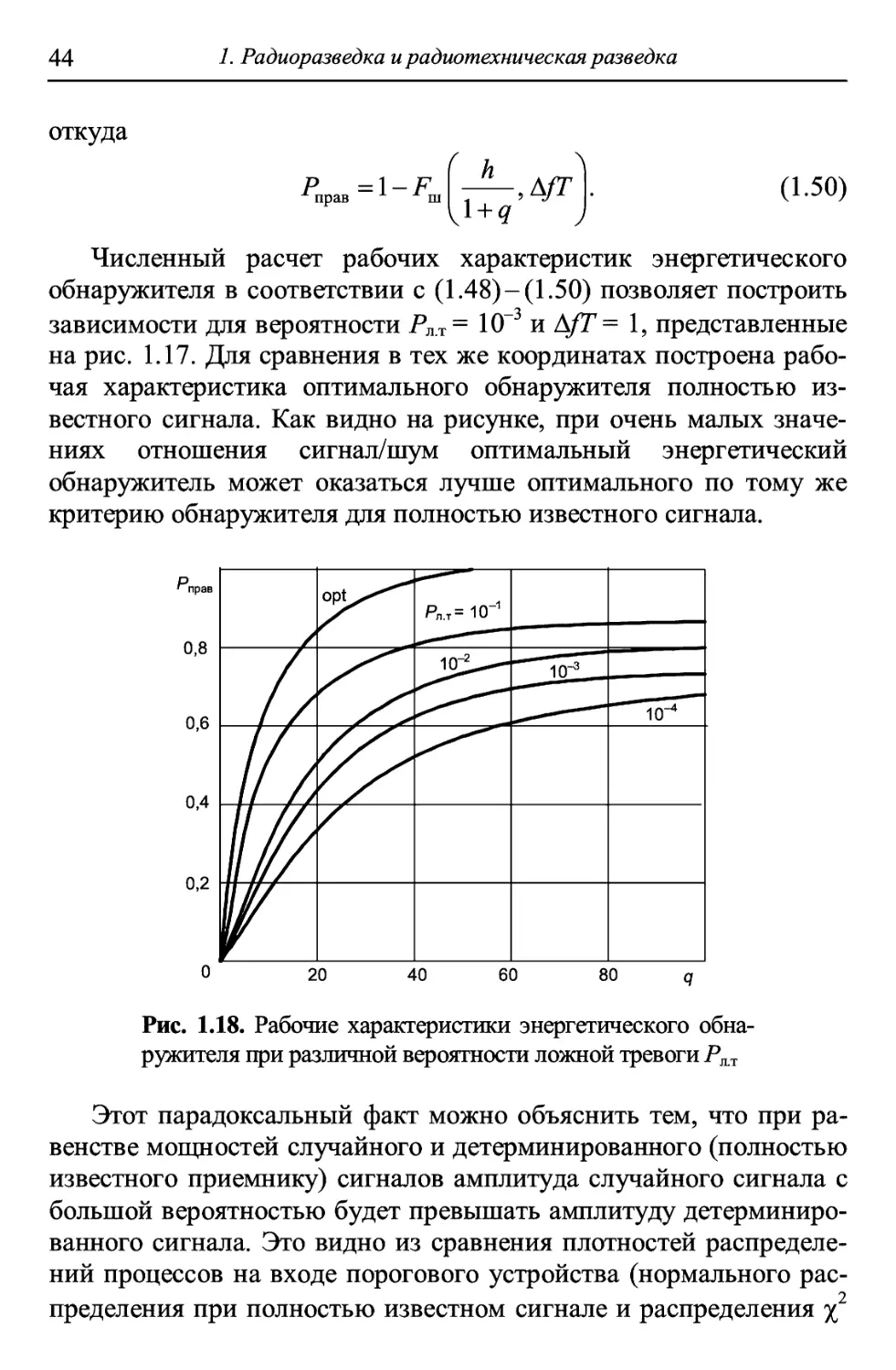
Численный расчет рабочих характеристик энергетического
обнаружителя в соответствии с (1.48)-(1.50) позволяет построить
зависимости для вероятности РПТ= Ю-3 и А/Т = 1, представленные
на рис. 1.17. Для сравнения в тех же координатах построена рабо-
чая характеристика оптимального обнаружителя полностью из-
вестного сигнала. Как видно на рисунке, при очень малых значе-
ниях отношения сигнал/шум оптимальный энергетический
обнаружитель может оказаться лучше оптимального по тому же
критерию обнаружителя для полностью известного сигнала.
Рис. 1.18. Рабочие характеристики энергетического обна-
ружителя при различной вероятности ложной тревоги Рл т
Этот парадоксальный факт можно объяснить тем, что при ра-
венстве мощностей случайного и детерминированного (полностью
известного приемнику) сигналов амплитуда случайного сигнала с
большой вероятностью будет превышать амплитуду детерминиро-
ванного сигнала. Это видно из сравнения плотностей распределе-
ний процессов на входе порогового устройства (нормального рас-
пределения при полностью известном сигнале и распределения %2
1.2. Обнаружение сигнала средствами РРТР
45
при энергетическом обнаружении). Кстати, тот же эффект наблю-
дается при сравнении рабочих характеристик обнаружителей пол-
ностью известного сигнала и сигнала со случайной амплитудой.
На рис. 1.18 показаны рабочие характеристики энергетическо-
го обнаружителя при разных уровнях вероятностей ложных тре-
вог: РПТ =10-1; 10 2; 1(Г3 и 10 4. Число степеней свободы (параметр
накопления В - AfT) всюду на рис. 1.18 принято равным В = 1.
Увеличение значения параметра накопления повышает крутизну
рабочих характеристик оптимального энергетического обнаружителя.
Этот эффект иллюстрируется семейством кривых на рис. 1.19.
Рис. 1.19. Зависимости рабочих характеристик
энергетического обнаружителя от числа степе-
ней свободы процесса на входе решающего
устройства при Рл т = КГ3
Иногда удобнее сравнивать качество работы обнаружителей
сигнала не по вероятностям возникновения погрешностей, а по
пороговым уровням мощностей сигналов, обнаруживаемых с за-
данными вероятностями. Для примера на рис. 1.20, а приведены
семейства зависимостей, характеризующие проигрыш в отноше-
46
1. Радиоразведка и радиотехническая разведка
нии сигнал/шум энергетического обнаружителя (см. рис. 1.15)
обнаружителю полностью известного сигнала (см. рис. 1.13).
На рис. 1.20, б показаны зависимости превышения К отношения
сигнал/шум q3H от вероятности правильного обнаружения для
энергетического обнаружителя над соответствующим отношением
для корреляционного обнаружителя полностью известного сигнала
qK при условии, что оба этих обнаружителя обеспечивают одина-
ковые вероятности возникновения погрешностей.
Рис. 1.20. Проигрыш энергетического обнару-
жителя оптимальному обнаружителю полно-
стью известного сигнала
Семейство кривых на рис. 1.20, а получено для значений пара-
метра накопления \fT — 1; 2 и 5. Как видно из рисунка, различие
оптимального и энергетического обнаружителей резко усугубляет-
ся с ростом требований к вероятности правильного обнаружения.
Параметром семейства кривых, показанных на рис. 1.20, б, служит
значение вероятности ложной тревоги, допустимое при работе об-
наружителя.
1.3. Измерение параметров сигналов
47
1.3. Измерение параметров сигналов
1.3.1. Измерение и запоминание частоты сигнала
средствами РРТР
Измерение и запоминание несущей частоты разведываемого
радиоэлектронного устройства являются одной из наиболее важ-
ных функций станции РРТР. Специфика методов определения и
запоминания несущей частоты средствами РРТР обусловлена, с
одной стороны, ограниченностью времени разведки, а с другой —
широким диапазоном частот, в котором ведется разведка.
Несущая частота — один из главных информативных для РРТР
параметров сигнала объекта разведки. Условно способы определе-
ния частоты можно подразделить на фильтровые, дискримина-
торные, корреляционные (интерференционные) и цифровые [3].
Определение частоты с помощью фильтров сводится к поиску
и указанию фильтра, настроенного на сигнал (т. е. фильтра, в по-
лосе которого обнаруживается сигнал). В панорамных приемни-
ках с последовательным анализом диапазона разведки на все час-
тоты диапазона последовательно настраивается один и тот же
фильтр. Таким образом, определение частоты сводится к опреде-
лению момента времени, в который частота настройки этого
фильтра совпадает с частотой сигнала. В многоканальных прием-
никах с параллельным спектральным анализом разведываемого
диапазона для определения частоты сигнала достаточно указать
номер фильтра, в полосе которого обнаружен сигнал. То же спра-
ведливо и при модифицированных способах многоканального
приема — для матричного приемника и приемника с цифровым
спектральным анализом.
Во всех случаях измерения с помощью фильтра максимальная
погрешность определения частоты 5/тах не превышает половины
ширины полосы пропускания фильтра, т. е. половины интервала
разрешения Af сигналов панорамным анализатором:
(1-51)
Для обычных аналоговых фильтров полоса пропускания связа-
на с добротностью Q. Так, для одиночного колебательного контура
48
1. Радиоразведка и радиотехническая разведка
А/'/ /о =1 /^9. Например, если нужно сохранить постоянной отно-
сительную погрешность измерения частоты / fc = const(/) в
широком диапазоне разведки, следует применять фильтры с пере-
менной полосой пропускания, т. е. фильтры с одинаковой для всех
частот добротностью, чего технически очень трудно достичь.
Рис. 1.21. Схема частотного дискриминатора РРТР
Частотные дискриминаторы преобразуют отклонения частоты
сигнала от некоторого известного значения в напряжение, пропор-
циональное модулю этого отклонения. Работа устройства дискри-
минаторного измерения частоты иллюстрируется структурной схе-
мой, показанной на рис. 1.21, а.
В соответствии с этой схемой принятый сигнал усиливается в
широкополосном усилителе и подается на пару фильтров Ф1 и Ф2,
несколько расстроенных от частоты 7^,. Разность значений огибаю-
щих сигналов на выходах фильтров 17Вых зависит от частоты, как
показано на графике (рис. 1.21, б). Таким образом, напряжение на
выходе дискриминатора оказывается пропорциональным (в преде-
лах линейности дискриминационной характеристики С,!ЫХ(/’)) часто-
те входного сигнала, а точнее, расстройке частот (fQ -fcp). Это на-
пряжение подается на индикатор приемника РРТР.
Приемники с частотными дискриминаторами способны опре-
делять частоту разведываемого сигнала в широком диапазоне и с
относительно высокой точностью (погрешность около 1 %) [3].
Корреляционные измерители несущей частоты строятся по
схеме, показанной на рис. 1.22.
Сигнал с выхода широкополосного усилителя подается на
умножитель вместе со своей копией, прошедшей линию задержки
(ЛЗ). Усредненное фильтром нижних частот напряжение на выхо-
1.3. Измерение параметров сигналов
49
де умножителя пропорционально значению автокорреляционной
функции входного процесса для аргумента т = т3.
Задержка входного разведываемого сигнала на т3 эквивалентна
сдвигу его фазы на <р = ®т3. Перемножение прямого и задержанного
Рис.1.22. Схема корреляционного измерителя частоты
(1-52)
сигналов дает (с точностью до быстропеременной составляющей, ус-
редняемой фильтром нижних частот) на выходе коррелятора сигнал
2
7
URbIX = К —COS OHL,
вых 2 'J
где к — коэффициент пропорциональности; а — амплитуда вход-
ного сигнала.
Как следует из (1.52), выходное напряжение коррелятора зави-
сит от частоты сигнала со, а также от его мощности а} / 2. Зависи-
мость от мощности компенсируется сигналом с выхода квадратич-
ного детектора, пропорциональным квадрату амплитуды сигнала.
Корреляционный измеритель обеспечивает однозначные изме-
рения частоты в пределах только одной октавы, т. е. диапазона,
для которого отношение верхней и нижней частот равно двум.
Цифровые способы измерения частоты обеспечивают высокую
точность и хорошо сопрягаются с вычислительными устройствами
для последующей обработки сигнала. Для измерения частоты при-
меняют схемы, реализующие различные модификации двух основ-
ных методов: цифрового частотомера и цифрового периодомера.
Работа цифрового частотомера иллюстрируется схемой, пока-
занной на рис. 1.23.
50
1. Радиоразведка и радиотехническая разведка
Рис. 1.23. Схема цифрового частотомера
Входной формирователь создает узкие импульсы в моменты
перехода сигналом через нулевой уровень снизу вверх (с положи-
тельной производной). Эти импульсы через схему совпадений, от-
крываемую стробом на время измерения Тизм, попадают на счет-
чик. Результаты подсчета числа импульсов за время Тизм выводятся
в качестве оценки частоты
(1-53)
F*=JL
Т
изм
где N — число импульсов в счетчике.
Погрешность дискретизации измерений по методу частотомера
соответствует погрешности в один счетный импульс, т. е. один
период входного сигнала за время измерения:
Sz= —
7 т
изм
(1-54)
Для уменьшения погрешности дискретизации цифрового изме-
рения частоты используют метод периодомера. Основная схема
измерения по этому методу приведена на рис. 1.24.
Периодомер подсчитывает число импульсов с частотой^ » fc
за время Гсч = пТс = n/fc. Поэтому показания счетчика-измерителя и
индикатора оказываются равными N = fC4TC4 = nfc4/fc, а частота сиг-
нала может быть оценена как
Y1
а-55)
Погрешность дискретизации в один счетный импульс zW = 1
(один период колебаний частоты /сч) соответствует погрешности
оценивания частоты:
1.3. Измерение параметров сигналов
51
(1.56)
Погрешность дискретизации тем меньше, чем больше fC4 по
сравнению с fc.
Аналогичные схемы применяются средствами РРТР для опре-
деления параметров импульсных сигналов РЛС и систем передачи
информации: длительностей импульсов и периодов (или частот) их
повторения.
Рис.1.24. Схема цифрового периодомера
Результаты измерения частоты нужно запоминать. В зависимо-
сти от задач, решаемых средством РРТР, различают способы крат-
ковременного и долговременного запоминания частоты.
Способы кратковременного запоминания позволяют сохра-
нять значение частоты обнаруженного сигнала на время, необхо-
димое для настройки передатчика помех, т. е. кратковременное
запоминание используется средствами разведки оперативной
поддержки РЭП. Одна из самых распространенных схем кратко-
временного запоминания частоты — схема управляемого рецир-
кулятора (рис. 1.25).
Из сигнала с выхода приемника ключом вырезается прямо-
угольный импульс длительностью т3. Этот импульс усиливается и
подается на выходной ключ и на ЛЗ. Задержанный на т3 импульс
снова подается на вход усилителя точно в момент окончания пре-
52
1. Радиоразведка и радиотехническая разведка
дыдущего импульса. До тех пор пока открыт выходной ключ, на
выходе устройства будет существовать последовательность вплот-
ную примыкающих друг к другу радиоимпульсов с частотой за-
полнения, равной частоте входного сигнала.
Рис. 1.25. Схема рециркулятора для запоминания частоты
Основным условием поддержания незатухающих колебаний
на выходе является баланс амплитуд: коэффициент усиления по
схеме рециркуляции, содержащей усилитель, ЛЗ, сумматор и от-
ветвитель сигнала в цепь обратной связи, должен быть точно ра-
вен единице.
При очевидной простоте построения схема рециркулятора для
запоминания частоты имеет существенный недостаток: выходной
сигнал не сохраняет когерентность входному. Эффект разрушения
когерентности обусловлен тем, что в моменты соединения примы-
кающих друг к другу выходных импульсов происходит разрыв фа-
зы несущего колебания.
Рис. 1.26. Схема запоминания частоты синхронизируемым генератором
Другой способ запоминания частоты предусматривает синхро-
низацию подстраиваемого генератора (рис. 1.26).
Сигнал с выхода приемника стробируется ключом и подается
на импульсно-фазовый детектор (ИФД). ИФД за время т3 форми-
1.3. Измерение параметров сигналов
53
рует напряжение, пропорциональное разности фаз входного сиг-
нала и колебания перестраиваемого генератора (ПГ) и запоминает
это напряжение после окончания строба. Выходной сигнал ИФД
подается на управляющий элемент (УЭ) и ПГ. Выходное колеба-
ние генератора подстраивается под частоту и фазу входного сиг-
нала. После окончания подачи входного сигнала параметры вы-
ходного колебания сохраняются на теоретически сколь угодно
длительное время. Однако практически время хранения ограничи-
вается стабильностью параметров ПГ.
При использовании многоканальных приемников, в том числе
и приемников с цифровым анализом спектра разведываемого сиг-
нала, запоминание частоты сводится к запоминанию номера
фильтра, в котором обнаруживается сигнал. Точно так же запоми-
нание результата цифрового измерения частоты — это запомина-
ние числа, формируемого счетчиком.
1.3.2. Пеленгация РЭС средствами РРТР
Пеленгаторы служат для определения угловых координат объ-
ектов разведки. Все пеленгаторы (радиотехнические измерители
угловых координат объектов, излучающих или отражающих ра-
диоволны) и радиосистемы углового сопровождения отождеств-
ляют направление прихода сигнала с направлением нормали к
фронту волны, созданной источником излучения.
Различие методов пеленгации и типов пеленгаторов сводится к
техническим особенностям построения ориентации этой нормали.
К пеленгаторам предъявляют высокие требования по быстродей-
ствию (возможность измерения пеленга по максимально короткой
реализации сигнала, в пределе — по одному импульсу), по точно-
сти пеленгации, по разрешающей способности.
Исторически самым первым был амплитудный способ радио-
пеленгации. Как следует из его названия, он основан на анализе
амплитудного распределения поля, создаваемого пеленгуемым
сигналом, на раскрыве приемной антенны: уровень сигнала мак-
симален в том случае, когда раскрыв антенны параллелен фронту
падающей волны.
Известны три разновидности амплитудного способа радиопе-
ленгации: по максимуму, по минимуму и на основе сравнения.
54
1. Радиоразведка и радиотехническая разведка
Способ максимума в принципе может применяться средствами
РРТР, работающими с остронаправленными антеннами. Диаграм-
ма направленности F(tp, 0) такой антенны показана на рис. 1.27,
где ера — угол ориентации максимума ДНА; фи и — угол между за-
данным направлением и направлением на источник излучения (ис-
тинный пеленг источника); ф — угол между направлением макси-
мума ДНА и направлением на источник излучения (измеренный
пеленг).
При пеленгации пространственное положение ДНА изменяется
и направление максимума совмещается с направлением на источ-
ник излучения. По угловому положению ДНА отсчитывают пе-
ленг. При использовании способа максимума ДНА обеспечивается
большая дальность пеленгации, поскольку средство РРТР работает
с большим уровнем сигнала. Но точность пеленгации невысока,
так как она определяется крутизной ДНА в окрестности максиму-
ма и составляет, как считается, несколько процентов от ширины
ДНА по уровню половинной мощности.
Способ минимума применяют, если можно сформировать ДНА
с ярко выраженным минимумом приема (рис. 1.28). Для пеленга-
ции ДНА поворачивается до положения, при котором уровень сиг-
нала на выходе приемника имеет минимальное значение.
Рис. 1.27. Вид ДНА при
пеленгации по способу
максимума
Рис. 1.28. Вид ДНА при
пеленгации по способу
минимума
1.3. Измерение параметров сигналов
55
Пеленгация по способу минимума обеспечивает более высо-
кую точность измерения, поскольку в окрестности минимума ДНА
имеет большую крутизну зависимости с^(ф)/дф. Однако даль-
ность действия пеленгаторов по способу минимума меньше, чем
пеленгаторов по способу максимума: уровень принимаемого сиг-
нала при этом ниже.
Как уже говорилось, угловые координаты определяют при ори-
ентации ДНА пеленгатора на объект разведки. Чаще всего (но не
всегда) угловое положение ДНА изменяется за счет механического
поворота антенной системы. Структурная схема амплитудного ра-
диопеленгатора, работающего по способу максимума или мини-
мума, представлена на рис. 1.29.
Рис. 1.29. Схема следящего пеленгатора РРТР
Сущность амплитудного способа
радиопеленгации на основе сравне-
ния иллюстрируется рис. 1.30. ДНА
такого пеленгатора имеет два оди-
наковых главных лепестка, соответ-
ственно Fi(tp) и F2((p), максимумы
которых развернуты в пространстве
на углы ±фо относительно некоторо-
го среднего направления ф = 0. При
Ф = 0 /ч(ф) = ^2(ф), поэтому направ-
ление ф = 0 называется равносиг-
нальным (РСН). Амплитуды сигна-
лов, принимаемых лепестками ДНА
такой антенны с некоторого направ-
Рис. 1.30. Вид ДНА
при равносигнальной
пеленгации
56
1. Радиоразведка и радиотехническая разведка
ления ф, составят соответственно значениям ДНА Е} = KiEFi(<pi) и
Ег = КгЕЕг((р). По физическому смыслу К\ и Кг — это коэффи-
циенты усиления принимаемого сигнала, имеющего амплитуду
Е. Представляя функции F|((p) и F2((p) в окрестности ф — 0 их
степенными рядами и удерживая два члена разложения, можно
получить
ф ;
^i(O)
4?ф
JF2(0)
—;—Ф •
«ф
E^KJF^K.E F1(0) +
E2=K2EF2(<p) = K2E F2(0) +
Но по условию F[(0) - F2(0), а производные ДНА в ок-
рестности РСН равны по модулю и имеют разный знак:
JF(0) dF(0) dF(<p) „
—1^- ------—-—— =F (0). Поэтому, решив (1.57) как
t/ф t/ф dtp <р=0
систему уравнений относительно пеленга ср, можно установить, что
KtFlW-K2FM
2(F1+F2)F'(0)
а если удается сохранить равенство коэффициентов усиления
К[ = Кг = К, то оказывается, что пеленг
^(ф)-^(ф) Ех-Е2
Ф 4F'(0) 4£F'(0)
(1-59)
линейно связан с разностью уровней сигналов, принимаемых ан-
теннами с ДНА F^p) и ^(ф). Измеряя эту разность, можно опре-
делять пеленг.
Разумеется, соотношение (1.59), устанавливающее линейную
связь пеленга с разностью (Fi - F2), справедливо только в некото-
рой небольшой окрестности ф = 0. Диапазон значений ф, в преде-
лах которого имеет место линейная связь разности амплитуд
(Fi - F2) с пеленгом, может составлять величину порядка фо- При-
мерный вид этой зависимости представлен на рис. 1.31.
1.3. Измерение параметров сигналов
57
Технически амплитудный пелен-
гатор, реализующий метод РСН для
измерения угловой координаты в
одной плоскости, может использо-
вать одну антенну, максимум ДНА
которой изменяет свое пространст-
венное положение (сканирует) в пре-
делах ±<р около РСН, или две антен-
ны с ДНА, развернутыми на ±ф отно-
сительно того же равносигнального
направления.
Пеленгатор со сканирующей ан-
Рис. 1.31. Дискриминаци-
онная характеристика ам-
плитудного пеленгатора
тенной осуществляет последовательное сравнение амплитуд сиг-
налов, принятых при разных ориентациях ДНА. Для определения
угловых координат источника излучения в двух направлениях ан-
тенна пеленгатора должна совершать эволюции в двух плоскостях.
Легче всего осуществлять эволюции за счет вращения ДНА вокруг
равносигнального направления, т. е. такого вращения, при котором
ось ДНА описывает коническую поверхность (рис. 1.32).
Рис. 1.32. Схема пеленгования при ко-
ническом сканировании ДНА
58
1. Радиоразведка и радиотехническая разведка
Амплитуда принятого сканирующей антенной сигнала Е(Т) бу-
дет меняться во времени:
E(t) = ^ot1 + fcecos(QCKf “ V)] = ^ot1 + k&x cos QCK^ + ksy sin QCK(I >
(1-60)
где E() — средняя амплитуда за период сканирования; к — крутиз-
на дискриминационной характеристики пеленгатора, в соответст-
вии с (1.59)
к =----; (1.61)
d(Ex-E2) 4KF'(G)
е — угловое рассогласование направления прихода падающей на
антенну волны и РСН; £1ск — угловая скорость вращения ДНА при
коническом сканировании; у — фаза огибающей принятого моду-
лированного по амплитуде сигнала; sx и &у — ортогональные про-
екции угловой погрешности е.
Как можно установить на основании (1.60), амплитуды двух
ортогональных составляющих огибающей принятого сканирую-
щей антенной сигнала
Е (f) - к& Eq cos£lCKZ;
Л V Z AU Viv у 1 /ч \
(1.62)
содержат информацию об угловых рассогласованиях направления
на излучающий объект и РСН. Выделяя эти амплитуды фазовыми
детекторами, можно измерить значения составляющих &х и еу угло-
вой погрешности. Если оси Ох и Оу на рис. 1.32 ориентированы в
горизонтальном и вертикальном направлениях соответственно, ор-
тогональные составляющие углового рассогласования е будут по-
грешностями пеленга по азимуту и по углу места соответственно.
Пеленгаторы, использующие последовательное сравнение ам-
плитуд сигнала, принимаемого одной сканирующей антенной в
разные моменты времени, обладают существенными недостатка-
ми. Прежде всего, они весьма чувствительны к таким колебаниям
уровня принимаемого сигнала, которые искажают информативную
для них огибающую сигнала. Поэтому в настоящее время в основ-
ном используют измерители угловых координат с одновременным
сравнением сигналов, принятых несколькими антеннами.
1.3. Измерение параметров сигналов
59
Поскольку такие системы не разворачивают во времени про-
цесс анализа ориентации фронта волны, падающей на раскрыв ан-
тенной системы, их называют также пеленгаторами с мгновенным
РСН, или иначе моноимпульсными пеленгаторами. Они способны
определять пеленг мгновенно, по одному принятому импульсу, а
не по огибающей, которую можно выявить, только приняв и обра-
ботав некоторую пачку импульсов. В моноимпульсных пеленгато-
рах применяется амплитудное, фазовое или смешанное амплитуд-
но-фазовое сравнение сигналов, принятых разными антеннами.
Усложнение пеленгатора с одновременным сравнением за счет
замены одной антенны системой из нескольких антенн и соответ-
ствующий переход к многоканальному приемному устройству —
это плата за улучшение точности пеленгации и устойчивости пе-
ленгации к помехам, в том числе и специально организованным.
Амплитудная обработка сигнала в моноимпульсных пеленга-
торах основывается на использовании уже упомянутых систем из
нескольких антенн (минимум двух для пеленгации в одной плос-
кости). Амплитуды сигналов, принятых двумя антеннами, оси диа-
грамм направленности которых развернуты на угол фо относитель-
но равносигнального направления ф - 0, описываются теми же
соотношениями (1.62), а функционирование моноимпульсного пе-
ленгатора с амплитудной обработкой иллюстрируется схемой, по-
казанной на рис. 1.33, а.
При одинаковых формах ДНА и точно равных коэффициентах
усиления приемников (Прм, см. рис. 1.33, а) отношение амплитуд,
вычисляемое схемой сравнения, составит
Е. _ W ~ ^0) + Г/(0)ф F'(0)
Е2 F2(q>) F2(0)-F2(0)<p F(0)V
Приближение в (1.63) оправдано постольку, поскольку F|(0) =
= f2(0) = F(0), f; (0) = F2' (0) = F(0) и 9 «1.
F(0)
Дискриминационная характеристика моноимпульсного пелен-
гатора с амплитудной обработкой изображена на рис. 1.33, б.
Для вычисления отношения амплитуд (1.63) УПЧ идентичных
приемников обоих каналов пеленгатора охватываются цепями ав-
60
1. Радиоразведка и радиотехническая разведка
Направление Ф»
Рис. 1.33. Схема моноимпульсного пеленгатора с ам-
плитудной обработкой сигнала
тематической регулировки усиления (АРУ), причем регулирующее
напряжение в приемнике первого канала выбирают из условия по-
стоянства амплитуды на выходе приемника второго канала Е2 —
- const. Это возможно в том случае, когда коэффициент усиления
УПЧ второго канала обратно пропорционален амплитуде сигнала
Q
на его входе, т. е. u^y = кК2 =--. Используя Идру для регули-
Е ,
вх 2
ровки усиления в УПЧ первого канала (кКл - «ару), можно полу-
чить на его выходе
(1.64)
^вх2
Сравнение амплитуд Е\ и Е2 упрощается, если в обоих кана-
лах (в обоих приемниках) использовать УПЧ с логарифмиче-
скими характеристиками, а схему сравнения выполнить как
устройство вычитания. Действительно, разность логарифмов
1.3. Измерение параметров сигналов
61
амплитуд эквивалентна монотонной функции их отношения —
логарифму. При этом дискриминационная характеристика
«(<p) = lg-^- = lgF1(<p)-lgF2((p) (1.65)
Е2
и проходит через нуль при F\ (ф) = /^(ф), т. е. при ориентации РСН
на направление прихода волны от источника излучения.
Суммарно-разностная обработка сигнала в моноимпульсных
пеленгаторах существенно снижает требования к идентичности
амплитудных и фазовых характеристик усиления в разных кана-
лах. Для получения суммарных и разностных сигналов выходы
антенн моноимпульсного пеленгатора подключают к волноводно-
му мосту (двойному волноводному тройнику) так, как показано на
рис. 1.34.
Направление
Рис. 1.34. Схема моноимпульсного пеленгатора с сум-
марно-разностной обработкой:
ФД — фазовый детектор
Если фронт волны, созданной источником излучения, образует
с базой антенной системы моноимпульсного пеленгатора угол ф, а
сигналы на входах антенн оказываются сдвинутыми по фазе отно-
сительно фазы сигнала в центре базы на величину
ф = ±Л —8Шф, (1.66)
Л,
где d — размер базы (расстояние между фазовыми центрами ан-
тенн); X — длина волны принимаемого сигнала, то разностный и
суммарный сигналы определяются следующими выражениями:
62
1. Радиоразведка и радиотехническая разведка
(t) = Ео cos(ot -у)-Eq cos(oZ + у) = Ео sin у sin ot;
uz (t) = Ео cos(oZ - ф) + Eq cos(co/ + у) = Eo cos у cos ot.
(1-67)
Амплитуды сигналов на выходе приемников разностного и
суммарного каналов будут пропорциональны ЕА ~ Eq sin ф и
Ey ~£0cos\|/ соответственно, а их отношение с учетом (1.67) и
(1.66) примет вид
_ зтф
Еъ cos ф
= tg л—sin ср .
< A, )
(1.68)
В пределах малых отклонений пеленга на источник излучения
от РСН, когда тангенс примерно равен своему аргументу, дискри-
минационная характеристика пеленгатора будет определяться со-
отношением
<р - arcsin
71-----
d Е%
(1.69)
Фазовый способ пеленгации основан на использовании зави-
симости разности фаз сигналов, принимаемых двумя одинаковыми
антеннами (Ai и А2 на рис. 1.35), которые разнесены в пространст-
ве на некоторое расстояние (базу протяженностью d). Если объект
разведки удален от центра базы пеленгатора на очень большое рас-
стояние R >> d, фронт излученной им волны около антенной сис-
темы пеленгатора можно считать плоским. Различие длин трасс
распространения сигнала от источника излучения до двух антенн
пеленгатора А] и А2 & = d зтф (см. рис. 1.35) приведет к тому, что
принятые этими антеннами сигналы 5i(Z) и s2(t) будут различаться
по фазам. Разность фаз сигналов на несущей частоте ®о при ис-
тинном пеленге ф определяется очевидным соотношением
* 1 а А ~ d . ,л
Дф - соо Дт = <о0 — = —— sin ф - 2л—sin ф, (1-70)
с с Л,
где Дт = Д/с — временная задержка прихода сигналов на разне-
сенные антенны; с — скорость света, 1 — длина волны излучения
объекта разведки (ОР).
1.3. Измерение параметров сигналов
63
Рис. 1.35. Схема фазового пеленгатора
Из (1.70) следует, что пеленг на источник излучения определя-
ется как
сДф
ф =arcsin----. (1-71)
Из (1.36) следует, что для определения пеленга на РЭС необхо-
димо измерить частоту соо и разность фаз Дф принимаемых сигна-
лов в разнесенных точках приема. Но частоту можно и не изме-
рять, если сделать пеленгатор следящим, способным поворачивать
базу, ориентируя ее параллельно фронту падающей волны. В слу-
чае, когда база касательна к фронту падающей волны (нормальна к
направлению прихода волны от источника излучения), $тфи =
= Дф - 0 независимо от частоты сигнала.
Функция arcsin(-) в правой части соотношения (1.71) неодно-
значна: нескольким значениям измененной разности фаз Дф могут
соответствовать разные пеленги на источник излучения. Для ис-
ключения неоднозначности отсчета пеленга используют антенную
систему с несколькими различными по базами.
Иногда от пеленгаторов не требуется вычисления угла ф —
достаточно измерения значения некоторой функции этого угла,
например направляющего косинуса, т. е. косинуса угла между ба-
64
1. Радиоразведка и радиотехническая разведка
зой пеленгатора и направлением на источник излучения. Этот угол
дополняет угол <р до 90°, и потому, как следует из (1.71),
cos(90°-<p) = ^. (1.72)
a>od
Метод использования базы для измерений пеленга получил
дальнейшее развитие при построении автоматических двухканаль-
ных пеленгаторов с вращающимися антеннами. В современных
системах РРТР такие пеленгаторы широко используются и назы-
ваются доплеровскими [10]. Пеленгаторы работают в диапазонах
коротких и ультракоротких волн. Основная упрощенная схема до-
плеровского пеленгатора приведена на рис. 1.36.
Рис. 1.36. Упрощенная схема доплеровского пеленгатора
На рис. 1.37 показана функциональная схема доплеровского
пеленгатора.
Две антенны, не направленные в горизонтальной плоскости
(например, вертикальные штыри А[ и А%), расположены симмет-
рично относительно оси и вращаются мотором М с угловой скоро-
стью О, описывая цилиндрическую поверхность радиусом R.
Если РЭС излучает сигнал s(t) на частоте соо, то сигналы во вра-
щающихся антеннах определяют по следующим формулам:
t ;
$i(t) =<2cos[®0? _(Pi(01-acos <°o 1-
c ,
, Vn(0 .
1+-^- z ,
c J
(1.73)
5,2(0 = acos[a)0Z + (p2(0] = a!cos ®0
1.3. Измерение параметров сигналов
65
где ф1(0, фг(О — фазы сигнала, изменяющиеся во времени в силу
взаимного движения антенны и источника излучения; Vr(0 — ра-
диальная скорость этого движения — проекция вектора линейной
скорости движения антенны на направление прихода сигнала,
гд(0 = vcosa(0 = Q7?cosa(Z) = Q7?cosa(Q?+ ф); (1-74)
а(?) — мгновенное значение угла между направлениями на источ-
ник излучения (пеленгом разведываемого РЭС фи) и вектором ли-
нейной скорости вращающейся антенны v.
Рис. 1.37. Функциональная схема доплеровского пеленгатора
В (1.74) учтено, что вторая антенна вращается в противополож-
ную сторону и сдвиг фаз сигнала в этой антенне имеет при том же
модуле другой знак. Приемники пеленгатора Прм1 и Прм2 перемно-
жают колебания с выходов двух симметричных антенн. Результат
перемножения с точностью до усредняемых в фильтрах осцилли-
рующих составляющих на частотах 2соо
а . _ Vo
S - sxs2 - — sin 2(о0 — t
2 V с
или с учетом (1.74)
ГТ d • 2 СО . / у-v X
S= —sin —+ cpj .
2 с
(1.75)
(1.76)
66
1. Радиоразведка и радиотехническая разведка
Это колебание с периодической угловой модуляцией. Спектр ко-
лебания содержит гармоники известной частоты Q вращения ан-
тенны:
ОО
= т 2L Лл+i
я=0
2—QR j sin(2n + 1)(Q/ + фи),
с J
(1.77)
где Jk(m) — функция Бесселя £-го порядка от аргумента
m=2^£lR=2n£l—.
с X
Применение фильтра низких частот после перемножителя (см.
рис. 1.36) позволяет выделить первую гармонику этого напряжения
S® = [ 2 QZ?| sin(2n +1 )(Qfl + <ри)
(1-78)
с
и, используя формируемые генератором опорного напряжения
(ГОН) колебания, синхронные и синфазные с вращением антенны,
вычислить оценку пеленга ф :
Ф =arctg— = arctg
5(1)sinQ/
£(1) cosQ?
(1-79)
Технически в доплеровских пеленгаторах используют не вра-
щение антенны, а кольцевую решетку неподвижных антенн,
расположенных по образующим цилиндра радиусом R и периоди-
чески подключаемых парами к входу приемника. Скорость комму-
тации антенн выбирают равной Q. Если в составе пеленгатора ис-
пользуется многоканальный приемник, то с его помощью можно
определять направления на различные РЭС, работающие на раз-
ных несущих частотах. Современные доплеровские пеленгаторы
работают в диапазоне частот 20 МГц ... 2 ГГц и при этом обеспе-
чивают точность пеленгации не хуже аф < 2° [10]. Точность пелен-
гации определяется как мощностью сигнала РЭС, так и базой пе-
ленгатора 2R (вернее, величиной 2R/X).
1.4. Точность определения сигнальных параметров средствами РРТР 67
1.4. Точность определения сигнальных параметров
средствами РРТР
1.4.1. Условия возникновения погрешности. Нормальные
и аномальные погрешности
Погрешности РЭС, работающих в условиях помеховых воздей-
ствий, удобно подразделить на два вида: малые {нормальные') и
большие {аномальные). Такое подразделение погрешностей имеет
смысл, поскольку каждый из видов удобнее оценивать качествен-
но разными характеристиками и показателями.
При рассмотрении малых погрешностей прежде всего интересу-
ются показателями, позволяющими оценивать погрешности. Измере-
ния с малыми погрешностями группируются около истинного значе-
ния измеряемого параметра, а отличие от истинного значения
обусловливается множеством случайных причин, ни одна из которых
не превалирует. Поэтому для малых погрешностей справедливы ус-
ловия центральной предельной теоремы, закон распределения их ве-
роятностей нормализуется. Плотность распределения оказывается
«узкой» (даже очень «узкой») по сравнению с протяженностью ин-
тервала априорной неопределенности измеряемого параметра. В пре-
делах малой ширины плотности распределения вероятностей появле-
ния погрешностей ее (плотность) всегда можно с хорошей точностью
аппроксимировать гауссовской кривой. Это оправдывает название
«нормальные» доя малых погрешностей измерений и, следовательно,
допускает использование таких характеристик, как средняя квадра-
тичная погрешность, максимальная погрешность и др.
При оценке аномальных погрешностей их значение чаще всего
не важно, ибо само появление аномальной погрешности означает
нарушение работы системы (сбой, отказ, промах). Очевидно, что
если такой сбой уже имел место, то неважно, какой была погреш-
ность, оказавшаяся его следствием. Аномальные погрешности наи-
более удобно и целесообразно характеризовать вероятностью появ-
ления. Проектируя измерительные системы, создают условия, при
которых эта вероятность должна оказаться малой величиной, а при
организации противодействия (или, в частности, маскировки, скры-
тия работы систем от средств разведки) необходимо потребовать
максимального значения вероятности возникновения аномальной
68
1. Радиоразведка и радиотехническая разведка
погрешности. Существенно, что максимизируется не значение (или
не только значение) погрешности, а ее вероятность.
Разумеется, в общем случае нельзя четко указать границу, от-
деляющую аномальные погрешности от нормальных. Эта граница
может быть определена только в конкретной системе, при кон-
кретном виде сигнала и для конкретных условий.
Для средства разведки информативен некоторый параметр
сигнала (возможно, векторный, т. е. набор скалярных парамет-
ров). Совершенно не обязательно, чтобы для РРТР были инфор-
мативны те же параметры, что и для приемника РЭС объекта
разведки. Измерение информативного параметра всегда сопро-
вождается погрешностями, обусловленными действием помех.
Погрешности, искажающие результаты измерений параметров,
зависят не только от уровня помех (точнее, от относительного
уровня отношения сигнал/помеха). В зависимости от того, каков
информативный для средства разведки параметр, какова функ-
циональная связь этого параметра с принимаемым сигналом, он
будет по-разному искажаться помехами. В связи с этим возникает
вопрос о точности измерений и о связи этой точности с формой и
способом модуляции сигнала. Математический аппарат, позво-
ляющий сравнивать различные радиосигналы по устойчивости их
параметров к искажениям помехами, основан на анализе сиг-
нальных и помеховых функций [11].
Пусть средством РРТР принимается сигнал .$’(Л,ХИ), причем
Хи — постоянный во времени (по крайней мере, на интервале вре-
мени измерения) информативный параметр. Задачей приема явля-
ется измерение значения этого параметра. Один путь для решения
задачи определения параметра сигнала состоит в том, чтобы сде-
лать приемное устройство в виде преобразователя сигнала, на вы-
ходе которого определяется оценка параметра X , функционально
связанная с Хи. Измерение сводится к сравнению X с эталонными
образцами X*, Xj, ...» X*, формирующими измерительную шкалу,
и к выбору одного-единственного образца, ближе всего подходя-
щего к X*. Этот образец и принимают за оценку параметра X*.
Возможен, однако, и иной метод приема, при котором не требу-
ется выделения X . Считая структуру сигнала полностью известной
1.4. Точность определения сигнальных параметров средствами РРТР 69
(за исключением значения параметра Хи), можно построить измери-
тельную шкалу из образцов сигнала s(t, X*) или частично преобра-
зованного сигнала sn(t, X*), а затем сравнить принятый сигнал
s(t, Хи) с этой шкалой. По результату сравнения следует выбрать об-
разец сигнала, совпадающий с принятым сигналом (точнее, наибо-
лее близкий к принятому сигналу из всех имеющихся образцов сиг-
нала). Очевидно, что этот способ измерения также обеспечивает
получение оценки X .
Если прием происходит без помех и искажений, а параметр Хи
может принимать значение лишь из дискретного множества, при-
нятый сигнал обязательно совпадает с одним из образцов. Если же
Хи изменяется непрерывно, точного совпадения может не быть, но
погрешность дискретности в принципе может быть сделана сколь
угодно малой, если соответственно увеличить число образцов
(уменьшить цену деления шкалы).
Действие помехи изменяет форму сигнала. Поэтому даже при
дискретном Хи принятый сигнал может не совпадать ни с одним из
образцов. В этом случае для выбора нужно задаться каким-либо
количественным критерием различия (или сходства) принятого
искаженного сигнала $«*(/, Хи) с образцом. Можно использовать
среднюю квадратичную меру близости сигнала и образца
оо
е: = (1.80)
выбирая в качестве истинного тот из образцов, для которого энер-
гия разности окажется минимальной.
Ясно, что при таком способе выбора возможность перепутать
значения сообщения будет тем меньше, чем сильнее образцы от-
личаются друг от друга. Поэтому наиболее употребительный кри-
терий оценки качества сигнала как источника информации об из-
меряемом параметре основан на определении нормированной
безразмерной величины s, называемой мерой различия:
s = (1.81)
-оо
70
1. Радиоразведка и радиотехническая разведка
где
00
а = J ?(ГД„)Л (1.82)
—оо
является энергией сигнала при некотором фиксированном значе-
нии Хо параметра X. Если сигнал ограничен во времени и s(t) = О
при ^[-Г/2;772], то пределы в интегралах (1.81) и (1.82) огра-
ничиваются интервалом существования сигнала.
Меру различия, определенную согласно (1.81), можно рассмат-
ривать как функцию X,- или разности АХ = Хи - Хг. Функция разли-
чия s(AX) неотрицательна, проходит через нуль при АХ = 0 (когда
Хи = Хг) и возрастает с увеличением модуля аргумента АХ, хотя этот
рост и не обязательно будет монотонным.
По виду функции различия е(АХ) можно судить об устойчиво-
сти исследуемого сигнала к помеховым искажениям параметра X.
Быстрое возрастание е(АХ) от нуля с увеличением АХ свидетельст-
вует о том, что даже малое изменение параметра в образце сигнала
приводит к резкому увеличению меры различия е. Следовательно,
это различие легко обнаружить и труднее замаскировать помехой.
Значит, сигналы с быстро нарастающей функцией различия е(АХ)
могут при модуляции параметра X сообщением обеспечить пере-
дачу информации с меньшими искажениями, но и разведка может
точно измерять этот параметр на фоне помех.
Соотношение (1.81) может быть преобразовано к виду
е(ДХ)=^-+^-2?(ДХ), (1.83)
где Q и Qi — энергии сигналов при значениях параметров Хи и Х„
которые определяются по выражениям, аналогичным (1.82);
1 00
<7(ДХ) = — (1-84)
—оо
Зависимость (1.84) в литературе называется сигнальной функцией [11].
Все информативные для средств разведки параметры сигналов
и соответственно все виды влияния изменений параметров сигнала
1.4. Точность определения сигнальных параметров средствами РРТР 71
на характер сигнальной функции можно подразделить на две груп-
пы. К первой группе {неэнергетической) относятся те параметры,
при вариациях которых не происходит изменения энергии сигнала.
Эта группа объединяет такие параметры и характеристики, как
частота, задержка, длительность импульса и т. п. Во вторую груп-
пу {энергетическую) входят такие параметры, с изменением кото-
рых меняется энергия сигнала. К ним относятся параметры и ха-
рактеристики амплитудной модуляции.
Для всех неэнергетических методов модуляции зависимость
(1.84) преобразуется к виду
е(ДХ) = 2[1-^(ДХ)] (1.85)
и качество определения значения информативного параметра пол-
ностью определяется видом сигнальной функции (/(ЛА). Как следует
из (1.84), сигнальная функция должна убывать с ростом аргумента
ДА,, и, чем круче будет спадать д(ДА) с увеличением |ДХ|, тем точнее
может измеряться параметр. Максимальное значение <?(0)=1.
Из (1.84) следует, что по своей структуре сигнальная функция ана-
логична автокорреляционной функции сигнала, а когда информа-
тивным параметром является временная задержка или длитель-
ность импульса, эти две функции совпадают.
Средняя квадратичная мера (1.81) и меры различия (или сход-
ства) двух сигналов, т. е. функции е(ДА,) и <?(ДХ), допускают весьма
наглядное геометрическое толкование. Действительно, каждому
сигналу s{t) можно поставить в соответствие вектор в /г-мсрном
пространстве, причем координатами или проекциями этого векто-
ра являются коэффициенты си разложения функции s{t) в ряд по
ортогональным функциям. Длина вектора в /7-мерном евклидовом
пространстве определяется по координатам его конца как
\п
г = ЛУ4, (1.86)
V л=1
но на основании теоремы Парсеваля для разложения в ортогональ-
ный ряд сигнала длительностью Т справедливо равенство
п Т/2
J = (1.87)
£=1 -Т/2
72
1. Радиоразведка и радиотехническая разведка
Иначе говоря, длина вектора, изображающего сигнал в пространст-
ве с евклидовой метрикой, равна корню квадратному из значения
энергии сигнала.
Если предположить, что изменился информативный параметр X
сигнала, то новый сигнал также можно представить в той же систе-
ме координат вектором, который отличается от первого своими
проекциями. Если мы имеем дело с неэнергетической модуляцией,
то при изменении X энергия сигнала не изменится, а следовательно,
сигнальный вектор повернется, не меняя своей длины. Иначе гово-
ря, при неэнергетической модуляции конец вектора сигнала всегда
лежит на поверхности и-мерной сферы радиусом г = . Если па-
раметр X меняется непрерывно, то конец вектора сигнала прочерчи-
вает на этой сфере некоторую непрерывную линию (линию сигна-
ла). При энергетической модуляции вектор сигнала изменяет свою
длину так, что линия сигналов не лежит на сфере постоянного ра-
диуса. Дискретному изменению X соответствует конечное множест-
во изолированных точек в том же «-мерном пространстве.
Для использованной векторной модели различие между двумя
любыми сигналами — s(t, X) с проекциями и s(t, X + АХ) с проек-
циями bk — определяется расстоянием d между концами соответ-
ствующих векторов. При евклидовой метрике сигнального про-
странства
п
(1-88)
it=l
Вектор d имеет проекции Ск = (Ц- Ьк и, следовательно, изобра-
жает сигнал s(t, X) - s(t, Х+АХ). Поэтому согласно той же теореме
Парсеваля
Т/2
d2= f [5(/,X)-5(Z,X + AX)]2^. (1.89)
-Г/2
Сравнив (1.89) с (1.81), можно отметить, что расстояние между
векторами сигналов в евклидовом пространстве пропорционально
мере различия s при среднем квадратичном критерии близости.
Если модуляция неэнергетическая, то
d2 = 2(Э[1 - #(АХ)], (1.90)
1.4. Точность определения сигнальных параметров средствами РРТР 73
где Q — энергия сигнала; д(АХ) — сигнальная функция, опреде-
ляемая по (1.84).
Быстрый спад функции ^(АХ) с увеличением АХ можно тракто-
вать как большой поворот сигнального вектора, в результате чего
вследствие изменения параметра X резко увеличивается расстоя-
ние d между сигналами s(t, X) и s(t, Х+АХ). Поэтому приращение
вектора сигнала в результате добавления к нему вектора помехи
приведет соответственно к меньшей погрешности в оценке пара-
метра X. Если функция <у(АХ) уменьшается немонотонно и имеет
выбросы, сравнимые с единицей, это означает, что линия сигналов
на и-мерной сфере извивается так, что ее отдельные точки на раз-
ных витках сближаются в сигнальном пространстве. Такая картина
указывает на опасность появления аномальных погрешностей при
действии даже сравнительно малой помехи.
Таким образом, векторное представление сигнала в евклидо-
вом пространстве показывает, что сигнальная функция (или функ-
ция различия), построенная на основе меры среднего квадрата
разности двух сигналов, может служить и мерой качества радио-
сигнала как переносчика сообщений, и показателем защищенности
сигнала от несанкционированного определения его параметра.
Анализ радиосигналов с помощью сигнальных функций триви-
ально обобщается на случай, когда в принимаемом сигнале неиз-
вестны несколько (т) параметров. В этом случае в сигнальном
пространстве при изменении сообщения образуется не линия, а
сигнальная поверхность, при этом образцы сигнала должны охва-
тывать все возможные сочетания разных значений неизвестных
параметров. Сигнальную функцию измеряют для каждого образца,
чтобы выбрать тот, для которого она будет наибольшей. Таким
образом, сигнальная функция будет многомерной величиной, за-
висящей от 2т аргументов, а число образцов
т
= <191)
г=1
где rii — число различаемых градаций z-ro параметра.
Используя многомерную сигнальную функцию, можно обоб-
щить исследование свойств радиосигнала и на те случаи, когда
какие-то из неизвестных параметров изменяются за время измере-
74
1. Радиоразведка и радиотехническая разведка
ния. Такие переменные параметры можно представить разложени-
ем в ряд по ортогональным функциям, а постоянные коэффициен-
ты ряда рассматривать как новые неизвестные параметры. Иначе
говоря, изменение параметра во времени можно учесть соответст-
вующим повышением размерности сигнальной функции.
Когда неизвестных параметров два (А, ц), сигнальная функция
будет, вообще говоря, зависеть от четырех переменных
(А,и, ци, А,,, цг), т. е.
1 00
^(Аи,ци,Аг,цг) = — (5(/Ди,ци)5(?Дг,цг)Л. (1.92)
QL
Часто используемый прием уменьшения числа переменных с
четырех до двух (ДА, = А,и - А,,; Дц = ци - ц,) не меняет сути, хотя и
позволяет преобразовать четырехмерную сигнальную функцию в
функцию двух переменных.
Естественно, что, если конкретный вид и уровень помех не за-
даны, нельзя дать и количественную оценку искажений сообще-
ния, в том числе и меры уровня аномальных погрешностей. Одна-
ко, сравнивая сигнальные функции двух различных радиосигналов
(при неэнергетической модуляции), можно сказать, какой из них
может обеспечить большую точность работы средств РРТР при
весьма общих предположениях о характере помех. При этом, ос-
новываясь на анализе только сигнальных функций, можно оценить
предельно возможную потенциальную точность измерений, ис-
ключив из рассмотрения способ демодуляции несущей.
Пусть прием сообщения осуществляется сравнением принятого
сигнала с образцами. Тогда определение 1 сводится к измерению
множества значений s' (1.80) для разных образцов и выбору среди
них наименьшего. При отсутствии помех (искажений) е' совпада-
ет с мерой различия (1.81). Если же искажения есть, то е' будет
отличаться от & на некоторую погрешность бе, которая приводит к
выбору другого образца сигнала, и, следовательно, параметр А, бу-
дет определяться с погрешностью.
Предположим, что образцов сигнала может быть сколь угодно
много и дискретность измерения (|Аг+1 - Хг|) весьма мала. Тогда
1.4, Точность определения сигнальных параметров средствами РРТР 75
функция е(ЛХ) определяет точность измерения параметра л, если
задана точность измерения меры различия е. Это утверждение ил-
люстрируется рис. 1.38, а, где вдоль кривой в(Ал) показан коридор
возможных погрешностей шириной ±8еот. Определяя 1 по мини-
мальному значению средство разведки будет работать с по-
грешностью, диапазон которой АХь. ,А12. Очевидно, что чем круче
нарастают обе ветви функции е(ДА), тем меньше будут интервалы
значений погрешностей |AXi - АХ2|.
Рис. 1.38. К определению погрешности измерения параметра X
Сигнальная функция #(АХ) при неэнергетическом параметре
связана с мерой различия простым соотношением (1.85). Поэтому
вместо измерения е' можно говорить об измерении q' с погрешно-
стью dq и определять точность оценки параметра А. по графику
сигнальной функции, как показано на рис. 1.38, б.
Сравнивая сигнальные функции, приведенные на рис. 1.39, а,
можно утверждать, что сигнал, которому соответствует сигнальная
функция 2, обеспечивает при одинаковых погрешностях измере-
ния АХ„, более высокую точность определения информативного
параметра, чем сигнал, которому соответствует функция 1.
Несколько сложнее обстоит дело при сравнении точностей оп-
ределения параметра для сигнальных функций 1 и 2, приведенных
на рис. 1.39, б. При высокой точности измерения, когда погрешно-
сти измерения параметра намного меньше значений АХ, и АХ2, сиг-
нал с функцией 2 позволяет проводить измерения точнее, чем сиг-
нал с функцией 1. При более грубых измерениях это уже не
76
1. Радиоразведка и радиотехническая разведка
О Дл
Рис. 1.39. К сравнению двух сигнальных функций
обязательно, и, если погрешности измерений, большие по модулю
значений ДА,] и ДА,2, встречаются достаточно часто, сигнал с функ-
цией 2 может оказаться предпочтительнее в смысле скрытности
параметров от средств разведки.
Для многих способов модуляции сигнальная функция имеет
вид, показанный на рис. 1.40 (сплошная линия). Здесь на медленно
меняющуюся зависимость «/(ДА.) накладываются колебания высо-
кой частоты. Исследуя такие сигналы, в первую очередь нужно
оценить точность измерения, которую может реализовать средство
разведки. Если эта точность настолько высока, что погрешности
составляют доли периода быстрых колебаний сигнальной функ-
ции, то рассматривать следует только начальный участок в преде-
лах ДА,]...ДА,2.
В большинстве случаев погрешности значительно превышают
указанные пределы. При этом вполне допустимо пренебречь ма-
лыми колебаниями и рассматривать сглаженную кривую, показан-
ную на рис. 1.40 штриховой линией.
Другой характерный случай соответствует большим колебани-
ям сигнальной функции (рис. 1.41). При точных измерениях здесь,
как и в предыдущем случае, можно рассматривать только началь-
ный участок кривой ^(ДА). Если же возможные погрешности пре-
вышают период колебаний осциллирующего множителя сигналь-
ной функции, что соответствует погрешностям определения
сигнальной функции, большим 8#i, то на оси ДА, выделяется ряд
областей, в пределах которых может лежать погрешность пара-
метра ДА,.
1.4. Точность определения сигнальных параметров средствами РРТР 77
ДХ,2 0
Рис. 1.41. Сигнальная функция
с большими колебаниями
Рис. 1.40. Сигнальная функ-
ция с малыми колебаниями
Первая такая область находится в окрестности АЛ, = 0, вторая
и третья — около соседних боковых максимумов функции #(АЛ.)
и т. и. Иначе говоря, параметр Л, определяется неоднозначно. Ко-
гда приемник разведки располагает априорными сведениями, ог-
раничивающими область возможных значений Л,, их можно ис-
пользовать для исключения неоднозначности. Тогда точность
измерения определяется шириной первой области погрешностей.
Сравнивать сигнальные функции разных сигналов при этом сле-
дует по двум показателям: по точности измерения и по требова-
ниям к априорным сведениям, необходимым для исключения не-
однозначности. Полезной характеристикой при этом является
информативность, которая определяется логарифмом отношения
допустимой априорной погрешности к получающейся после из-
мерения апостериорной погрешности. Информативность будет
тем выше, чем дальше отстоят боковые (побочные) максимумы
сигнальной функции от основного максимума.
Возможно, однако, что априорных сведений нет или их точ-
ность недостаточна для исключения неоднозначности. При этом
точность определяется крайними областями погрешностей и, сле-
довательно, при анализе полную кривую <?(АЛ,) можно заменить ее
огибающей 0АЛ,), показанной на рис. 1.41 штриховой линией.
Существует и другой подход к анализу такой неоднозначной
сигнальной функции. Допустим, что погрешности измерения АЛ, по
большей части малы, но существует и некоторая вероятность появ-
ления аномальных погрешностей. Тогда можно считать, что точ-
78
1. Радиоразведка и радиотехническая разведка
ность оценки параметра X определяется начальным участком сиг-
нальной функции, но могут иметь место и аномальные погрешно-
сти. Вероятность отсутствия аномальных погрешностей характери-
зует надежность измерения, а для систем противодействия
техническим разведкам — уровень защищенности скрываемых па-
раметров от РРТР. При таком подходе сигнальные функции следует
сравнивать по двум характеристикам: точности и надежности. Чем
выше уровень боковых максимумов в сигнальной функции, тем
выше надежность маскировки параметра от несанкционированного
определения параметров средствами технической разведки.
В некоторых случаях информативный параметр X может при-
нимать только ряд дискретных фиксированных значений. Тогда
задача измерения сводится к определению номера значения X для
принятого (обнаруженного) радиосигнала. Подобный случай ха-
рактерен, например, для перехвата сигналов цифровых систем пе-
редачи информации. Сигнальная функция такого сигнала также
будет дискретной. Погрешность измерения сигнальной функции
может привести к тому, что вместо истинного значения параметра
Х; будет принято другое фиксированное значение Ху. Качество из-
мерения при этом удобно характеризовать вероятностью появле-
ния погрешностей, а сигнал будет тем лучше, чем больше отлича-
ются от единицы значения сигнальной функции.
При анализе двумерной сигнальной функции необходимо раз-
личать следующие случаи.
1. Оба неизвестных параметра информативны и подлежат
маскировке от определения средством разведки (например, не-
сущая частота и длительность радиоимпульса). Двумерной сиг-
нальной функции <?( ДХ, Др) соответствует некоторая поверхность,
причем в силу нормировки к энергии сигнала в начале координат
q(0, 0) = 1. Чем выше крутизна этой поверхности при отклонении
в любом направлении от начала координат, тем более точные
оценки параметров можно получить при заданной погрешности
измерения bq (при заданном отношении сигнал/шум). Наличие у
поверхности <?(ДХ, Др) нескольких максимумов может быть при-
чиной неоднозначного определения параметров, т. е. аномальных
погрешностей измерений. Для хорошей маскировки значений па-
раметров желательно, чтобы побочные локальные максимумы
1.4. Точность определения сигнальных параметров средствами РРТР 79
сигнальной функции были соизмеримы по уровню с главным
максимумом q(0,0) = 1, но отстояли бы от него как можно даль-
ше. При этом аномальная погрешность измерений будет иметь
большее значение и появляться с высокой вероятностью.
2. Только один параметр X является информативным, а второй
неизвестный параметр р не дает полезной информации для раз-
ведки, т. е. является для нее паразитным случайным параметром
сигнала. Несмотря на то, что измерять ц не требуется, образцы
сигнала должны также варьироваться и по ц, хотя количество и
размер градаций по каждому параметру могут сильно различать-
ся. Пусть, например, полезным параметром является частота сиг-
нала, а паразитным — задержка импульса. Если образцы сигнала
будут различаться между собой только по частоте /, то вполне
возможно, что ни один из них не даст хорошего сходства с при-
нятым сигналом вследствие различия по задержке (образец сиг-
нала с истинным значением частоты может вообще не совпасть с
принятым сигналом по времени, что обусловит нулевое значение
измеренной оценки сигнальной функции). Значит, в случае, когда
один из двух параметров паразитный, сигнальную функцию сле-
дует также рассматривать как функцию двух переменных. Одна-
ко требования к виду сигнальной функции теперь будут другими.
Малая крутизна поверхности ^(Ал, Др) необходима только вдоль
оси частот. По оси времени (задержки) поверхность должна быть
как можно более крутой, это позволит уменьшить чувствитель-
ность средства разведки к изменениям информативного парамет-
ра и зависимость точности несанкционированных измерений от
значения паразитного параметра.
Все приведенные рассуждения убеждают прежде всего в том,
что граница между нормальными и аномальными погрешностями
условна и может быть определена только для сигналов конкрет-
ного вида и в конкретных условиях приема и обработки: ано-
мальные погрешности, обусловленные действием только нор-
мального стационарного шума приемных устройств, будут
существенно отличаться от аномальных погрешностей, обуслов-
ленных помехами вследствие нарушения ЭМС или активным
противодействием (дезинформации средств разведки) с исполь-
зованием имитирующих сигналоподобных помех. Тем не менее
80
1. Радиоразведка и радиотехническая разведка
ниже исследуются условия возникновения аномальных погреш-
ностей, диапазон значений которых превышает ширину некото-
рой окрестности около главного экстремума функции разли-
чия е(ДХ). Область малых погрешностей обычно располагается
симметрично вокруг нуля на оси ДА (или около Аи на оси X).
На рис. 1.42 соответствующие граничные точки обозначены как
AHi и АН2. Эти точки лежат внутри области априорной неопреде-
ленности, границы которой обозначены как Аа) и А,^.
Если полагать, что средство РРТР работает в нормальной сиг-
нальной обстановке в отсутствие преднамеренных помех, то при-
чиной возникновения погрешностей является действие только ад-
дитивного шума приемных устройств. Тогда, учитывая, что оценка
параметра определяется наименьшим значением измеренной
функции различия, можно сформулировать достаточное условие
наличия аномальных погрешностей:
6'(Л)<£'(Ч) «.е[Хн1Дк2]. (1.93)
С учетом соотношения (1.80) условие (1.93) можно представить в
виде
un(f)dt >е(А) + еп(А) + — un(t)dt,
(1-94)
1.4. Точность определения сигнальных параметров средствами РРТР 81
откуда искомое достаточное условие наличия аномальных по-
грешностей
s'(A) + sn(X)>0 VXS[XH1;XH2], (1.95)
т. е. это условие должно выполняться для всех А, лежащих в об-
ласти
При неэнергетическом параметре 1 функция ограничена усло-
вием е(А) < 4 и связана с сигнальной функцией q(k) соотношени-
ем е(А,) = 2[1 - ^(А,)]. Поскольку погрешность sn(X) может иметь
разный знак, (1.95) заменяют более сильным неравенством
£(Х) < |еп(Х)|,
(1-96)
или, используя связь е(Х) с сигнальной функцией qQC), неравенством
2
2[1-<7(Х)]<
f [^Аи)-^Л)]«п(ОЛ
(1.97)
В частном случае, когда в области аномальных погрешностей
сигнальная функция не имеет значительных выбросов, можно при-
нять q(X) = 0. Тогда из (1.97) получается условие, обеспечивающее
максимальное значение обобщенной помеховой функции вида
1 ™
8„ = — J
(1-98)
где S(t, А,) — детерминированная функция, равная в данном случае
2|Х/, Аи) - s(t, А,)]. Поэтому условие наличия аномальных погреш-
ностей выглядит как
£птах>2. (1.99)
Таким образом, аномальные погрешности измерения парамет-
ра (параметров) сигнала возникают тогда, когда боковые выбросы
оценки сигнальной функции по измеряемому параметру превы-
шают уровень главного выброса. В случае приема сигнала с не-
энергетическим параметром на фоне нормального стационарного
белого шума вероятность такой ситуации можно оценить на осно-
вании соотношения
82
1. Радиоразведка и радиотехническая разведка
(1.100)
где Стщ = Рш = —Е---мощность шума, прикладываемого к каждо-
му оцениваемому значению сигнальной функции; п — число неза-
висимых каналов, равное числу градаций дискретных значений ин-
формационного параметра л и соответственно объему выборки
отсчетов, по которому однозначно и точно восстанавливается сиг-
нальная функция; qk — относительный уровень k-ro значения сиг-
нальной функции (относительно уровня главного выброса q\ = 1) —
математическое ожидание значения сигнальной функции, которое
получается в процессе оценивания информативного параметра на
фоне шума.
Из структуры выражения (1.100) видно, что оно задает вероят-
ность такого события, которое образует полную группу с событи-
ем отсутствия превышения любым из п - 1 боковых выбросов сиг-
нальной функции случайного значения, сформированного в
настроенном канале, где q = 1.
Выражение (1.99) получено в предположении, что все значения
оценки сигнальной функции qk, к = 1,п, статистически независи-
мы. Если нет достаточных оснований для того, чтобы принять это
условие, полученная на основании (1.100) оценка оказывается за-
вышенной, и ее можно принять в качестве верхней границы веро-
ятности возникновения аномальной погрешности.
Для оценки нижней границы можно поступить следующим об-
разом.
Дело в том, что далеко не все сомножители, входящие в произ-
ведение интегралов в (1.100), одинаково значимы. Этот вклад тем
значительнее, чем больше математическое ожидание соответст-
вующего значения оценки сигнальной функции. А наибольший
вклад в оценку вероятности возникновения аномальной погрешно-
сти вносит самый большой выброс сигнальной функции: именно
1.4. Точность определения сигнальных параметров средствами РРТР 83
для него характерна наибольшая вероятность возникновения ано-
мальной погрешности. Поэтому нижнюю границу вероятности
возникновения аномальной погрешности можно оценить на основе
двумерной совместной плотности распределения оценки сигналь-
ной функции в окрестности главного и наибольшего из боковых
выбросов (в окрестности главного и наибольшего из локальных
максимумов).
Соотношение для такой оценки, полученное на основе тех же
рассуждений, которые ранее привели к (1.100), можно представить
в виде
МЛн) =
(*-02
2<4
(X~Q)2
2<4
(1101)
где qk — уровень наибольшего из боковых выбросов сигнальной
функции, а коэффициент 2 перед интегралом учитывает тот факт,
что боковые выбросы сигнальной функции всегда имеют пару
(<?(А,) — четная функция).
Интеграл в(1.101)не выражается через элементарные функции.
В результате численного интегрирования (1.101) для конкретного
случая оценивания несущей частоты радиоимпульса можно полу-
чить нижние, осторожные с точки зрения обеспечения радиозащи-
ты, оценки вероятностей возникновения аномальных погрешностей
измерения несущей частоты радиоимпульса при разной форме его
огибающей. Зависимости этой вероятности от отношения сиг-
нал/шум приведены на рис. 1.43. Для импульса с прямоугольной
огибающей, у которого относительный уровень второго, наиболь-
шего, бокового лепестка сигнальной функции
_ |sin(3Tt/2)|
?2пряи Зтг/2 ’ ’
(1.102)
соответствует кривая Fi (см. рис. 1.43).
84
1. Радиоразведка и радиотехническая разведка
Рис. 1.43. Нижняя граница вероятно-
сти появления аномальной погреш-
ности измерения несущей частоты
радиоимпульса с прямоугольной (F\),
треугольной (F2) и с гауссовой (F3)
огибающими
Для радиоимпульса с симметричной треугольной огибающей
^2 треуг Sm(37l/2)>| = 0,04 (1.103)
У2треуг I Зя/2 J 17
вероятности появления аномальных погрешностей, естественно,
будут меньше.
При трапецеидальной огибающей радиоимпульса будет обес-
печиваться вероятность аномалий измерения частоты между гра-
ничными значениями (1.102) и (1.103), поскольку
$2 прям — $2 трапец — $2 треуг* (1.104)
Импульс с гауссовской огибающей (такую модель радиоим-
пульса часто используют в радиолокации, описывая ею огибаю-
щую радиоимпульса на выходе многокаскадного УПЧ) не будет
иметь боковых выбросов сигнальной функции. Но он имеет до-
вольно медленный спад ^(<о). Поэтому для него характерна зави-
симость F3 вероятности появления аномальных погрешностей от
отношения сигнал/шум (см. рис. 1.43).
1.4.2. Аномальные погрешности при измерении задержки
и частоты радиосигнала
Определение времени задержки и частоты радиосигнала — рас-
пространенная и типичная задача для средств РРТР. Хотя физичес-
ки измерение задержки радиосигнала для средств разведки чаще
1.4. Точность определения сигнальных параметров средствами РРТР 85
всего является измерением некоторого иного временного интервала,
а именно длительности или периода следования импульсов, прин-
ципиального для анализа условий возникновения аномальных по-
грешностей различия здесь нет — просто начало измеряемого вре-
менного интервала исчисляется не от произвольного момента.
Ниже рассмотрение проводится на основе анализа одномерных
сигнальных функций некоторых характерных радиосигналов.
Обобщение на случай произвольной размерности тривиально.
Представляет интерес рассмотрение погрешностей определения
задержки и частоты сигнала, имеющего форму пачки радиоимпуль-
сов. Не нарушая общности при существенном упрощении модели
сигнала, радиоимпульсы в пачке считают прямоугольными (точнее,
имеющими прямоугольную огибающую) и когерентными. Анали-
тическая модель такого сигнала может быть представлена в виде
e(t) = (71П(?,тИм)8тсо?, (1.105)
где П(?,Тим) — последовательность прямоугольных импульсов с еди-
ничной амплитудой, длительностью импульса Тим и периодом повто-
рения ТП. Полная длительность сигнала Tc=NTn (N— число излучен-
ных импульсов). Сигнал будет задержан на время т, которое в данном
случае представляет собой информативный параметр. Принятый сиг-
нал сравнивается с образцом сигнала, в который также введена за-
держка на время т,-. Сигнальную функцию, определяющую потенци-
альную точность измерения задержки и возможность происхождения
аномальных погрешностей, можно представить в виде
1 Тс
<1(^) = — f Ц2П(* - T,xHM)sin(coZ - - T/,T[1M)sm(co/ - сотг)Л,
» о
(1.106)
„ тт2 А
где Q= ; Ат = т - т,-.
Отбрасывая в (1.106) составляющую, осциллирующую с часто-
той 2со, можно получить
Тс
= с°вюАт j П(/ - т, тим)П(/ - т,-, тим)Л. (1.107)
™ ^им о
86
1. Радиоразведка и радиотехническая разведка
Интеграл, входящий в (1.106), разбивается на сумму интегра-
лов, причем каждое слагаемое соответствует интегрированию в
пределах одного периода Тп. До тех пор пока сдвиг Ат меньше пе-
риода, таких интегралов будет N. При сдвиге в пределах от Тп до
2ГП интегралов будет N-1 и т. д.
Естественно также, что каждый интеграл отличен от нуля, ко-
гда импульсы двух перемножаемых последовательностей пере-
крываются. С учетом сказанного, выражение для сигнальной
функции (1.107) можно представить в виде
cos
#(Ат) = <
n (
©Ат^ 1-
'=1 \
т
v им 7
при iTn - тим < Ат <Тп + тим;
(1.108)
0 при остальных Ат.
График функции (1.108) приведен на рис. 1.44.
Рис. 1.44. Вид сигнальной по задержке (совпадающей с авто-
корреляционной) функции пачки прямоугольных импульсов
Из анализа сигнальной (автокорреляционной) функции следует
ряд важных выводов о качестве рассматриваемого сигнала при его
использовании для измерения задержки. Допустим, что средство
1.4. Точность определения сигнальных параметров средствами РРТР 87
разведки может измерять q с такой точностью, что погрешность \q
значительно меньше 2тг/(сотим), которая, в свою очередь, меньше
UN. Тогда исследуемый радиосигнал обеспечит однозначное из-
мерение задержки с погрешностями, составляющими доли перио-
да заполняющей импульс частоты <о. Чем выше эта частота, тем
точнее оценка задержки, но и тем выше требования к точности из-
мерения q, при которых этот вывод справедлив. На практике такой
режим работы можно использовать, если сотим не очень велико.
Однако в большинстве случаев сотим » 1 и точность следует
оценивать по огибающей сигнальной функции. Очевидно, что точ-
ность тем выше, чем короче импульс. Разумеется, сравнение сле-
дует проводить при постоянной полной энергии сигнала Qo, по-
этому для укороченных импульсов сравнение корректно при
соответствующем увеличении импульсной мощности / 2 или
числе N импульсов в пачке.
Измерение по огибающей импульса также неоднозначно (при-
водит к аномальным погрешностям), если погрешность оценки сиг-
нальной функции превышает 1/N. Такой случай обычно имеет место
при N » 1. Наконец, как видно из рис. 1.44, измерение задержки
может проводиться по огибающей пачки импульсов, при этом оно
всегда будет однозначным (без аномальных погрешностей), но ма-
лоточным.
Отождествление измеряемой задержки с аргументом ближай-
шего бокового выброса сигнальной функции, имеющего уровень
1 - 2я/(сотим), не всегда можно считать аномальной погрешно-
стью: это погрешность на период частоты несущего колебания. Но
при очень низких частотах и такая погрешность может иметь
большое значение. Совершенно строго и безусловно аномальной
будет погрешность, превышающая Т„ (и кратная этому значению).
Такие погрешности соответствуют аргументам максимумов оги-
бающей сигнальной (автокорреляционной) функции пачки. По-
грешности возникают с такой вероятностью, с которой относи-
тельное значение помехового выброса превысит уровень 1/N.
Необходимо исследовать, какими свойствами обладает пачка
когерентных радиоимпульсов, если по ней измеряется частота
(точнее, смещение частоты относительно некоторого опорного
88
1. Радиоразведка и радиотехническая разведка
с . с
2 ’ 2
значения, например, относительно середины диапазона априорной
для разведки неопределенности значения несущей сигнала). Пре-
жде всего следует отметить, что вид сигнальной функции #(А<о)
зависит от выбора начала отсчета времени. Для сигнала, заданно-
го, например, в интервале [0; Гс], сигнальная функция будет не та-
кой, как для сигнала в интервале t е
Это обстоятельство можно пояснить следующим образом. Ко-
гда в сигнале считается неизвестным только один параметр — час-
тота, образцы сигнала могут различаться только по этому пара-
метру. Это означает, что в какой-то момент времени ?о все образцы
(и принимаемый сигнал) должны точно совпадать. По мере удале-
ния от момента времени to расхождение будет увеличиваться тем
сильнее, чем больше разность соответствующих частот. Инте-
гральное различие между сигналом и образцом, которое и опреде-
ляет сигнальную функцию, будет зависеть от момента времени t0
относительно начала наблюдения сигнала. Ясно, что если to совпа-
дает с началом сигнала, то общее расхождение за время То будет
большим, чем когда to взят в его середине.
Для примера представим сигнал в виде
e(t) = L^sinco/ при ti<t<t2. (1.109)
Считается, что to = 0, поскольку именно при t = 0 сигнал е(?) не за-
висит от о и, следовательно, в этот момент времени все образцы
точно совпадают. Но тогда, естественно, t/(Aco) будет зависеть не
только от разности (t\ - ti), но и от значения Л.
В некоторых случаях, когда определены физические условия
задачи, можно однозначно задать момент начала действия сигнала
t\. Так, если речь идет об определении частоты колебаний на вы-
ходе УПЧ, момент начала действия сигнала нужно совместить с
началом отсчета времени и считать, что сигнал расположен в ин-
тервале [0; Гс]. В других случаях определенно задать момент нача-
ла действия сигнала нельзя. Это связано с идеализированной по-
становкой задачи об измерении частоты при точно известной фазе.
На практике чаще всего бывает так, что если неизвестна частота,
то неизвестна и фаза, а измерять нужно два параметра, рассматри-
вая двумерную сигнальную функцию. Тем не менее идеализиро-
1.4. Точность определения сигнальных параметров средствами РРТР 89
ванная постановка задачи также представляет интерес, например
тогда, когда речь идет о сравнении сигналов в одинаковых услови-
ях. Кроме того, произвольный выбор начала отсчета в пределах
длительности сигнала не очень сильно влияет на вид сигнальной
функции.
Полагая, что приемник средства РРТР осуществляет оптималь-
ную обработку при измерении частоты принимаемого сигнала и
что фазы сигнала и его образцов, используемых при такой обра-
ботке, совпадают в момент начала сигнала, сигнальную функцию
для пачки радиоимпульсов с когерентным заполнением следует
записать в виде
Т
2(Дсо) =-М (712П(Л тим) sin[(co + £1)?]П(?, тим) sin[(co + Ц )Ж (1 • 110)
(/о о
где Дсо = Q-Qz; Q, Q; — смещение частоты в принятом сигнале и
в образце сигнала соответственно.
Представим интеграл в соотношении (1.110) в виде суммы
интегралов, каждый из которых вычисляется в пределах, соот-
ветствующих одному импульсу из последовательности П(/,тим).
Пренебрегая малыми членами (с аргументами сотим), можно по-
лучить
•„ Аютим
1 о ( Дсот А
?(Д<0) = — . 2 ZCOS п^Тп------------> (1111)
N А«>тиМ к 2 )
2
а вычислив в (1.111) сумму, окончательно можно записать
. Дсот™. . Мотим
sin-----им sin-----™
^(Дсо) = —-—---------—2— cos
2 2
ЛД®Ьш +2У 2дюГД (1.Н2)
2 2 ПГ
где NTn — длительность пачки импульсов.
Зависимость сигнальной функции пачки импульсов по частоте
для N = 1 превращается в формулу
90
1. Радиоразведка и радиотехническая разведка
. Д(отим
sm----—
^(Д®)= ——2—
А(отим
2
которая уже рассматривалась выше в связи с анализом аномаль-
ных погрешностей определения частоты одиночного прямоуголь-
ного импульса (1.102). Эта зависимость изображена на рис. 1.45.
(1113)
Рис. 1.45. Сигнальная
функция для оценки
точности определения
частоты радиоимпульса
Вероятность появления аномальной погрешности в первом
приближении совпадает с вероятностью совместного действия
двух таких помеховых выбросов, которые опустят основной лепе-
сток сигнальной функции и поднимут боковой лепесток до уровня,
превышающего уровень главного лепестка. Такая функция спадает
от единицы при До - 0, до нуля при Дсо = л/тим. Поэтому чем
длиннее импульс, тем быстрее спадает сигнальная функция и, сле-
довательно, тем точнее определяется смещение частоты. Но веро-
ятность аномальной погрешности от длительности импульса не
зависит, если, разумеется, при разной длительности сравнивать
импульсы с одинаковой энергией.
Для N - 2, т. е. для пачки из двух импульсов, разнесенных на
время Тп, как на рис. 1.46, сигнальная функция принимает вид
. Дот„„
Qin---
/а ч 2 До>Т ДоТ + Дот
q2 (Дсо) = — cos —^-2- cos----------—. (1.114)
2
1.4. Точность определения сигнальных параметров средствами РРТР 91
Вид сигнальной функции ^2(Аю) пары импульсов, показанной
на рис. 1.46, изображен на рис. 1.47. Полную длительность сигнала
можно считать равной Т = ТП + тим. Если сопоставить функции
1 (Лео) и <72(А(о) при равной полной длительности сигнала и равной
энергии, то можно получить сравнительные характеристики этих
сигналов в режиме измерения смещения частоты. Первый сигнал
Рис. 1.46. Пара импульсов при N= 2
представляет собой прямоугольный импульс длиной Т и амплиту-
дой U(энергия Q-U^T/2). Второй сигнал (см. рис. 1.46) состоит
из двух более коротких импульсов. Каждый импульс занимает
время, равное одной десятой полной длительности сигнала, но с
большей амплитудой. Таким образом, во втором сигнале заданная
энергия как бы сосредоточена по краям временного интервала Т.
Рис. 1.47. Сигнальная функция для оценки точности оп-
ределения частоты пары когерентных радиоимпульсов
92
1. Радиоразведка и радиотехническая разведка
На рис. 1.47 для сравнения штриховой линией показана сиг-
нальная функция для одиночного радиоимпульса. Как видно, ве-
роятность появления аномальных погрешностей при определении
частоты сигнала по паре импульсов примерно такая же, как и при
наблюдении одиночного импульса с той же энергией сигнала, но
наиболее вероятное значение аномальной погрешности иное. Кро-
ме того, на рисунке видно, что и при одинаковой энергетике точ-
ность определения частоты при наблюдении пары импульсов (кру-
тизна сигнальной функции в точке истинного значения частоты
А® = 0) оказывается выше, чем для одиночного импульса.
Рис. 1.48. Сигнальная функция ^1О(Асо) при N= 10
Сигнальная функция для пачки, состоящей из десяти импуль-
сов, изображена на рис. 1.48.
Для крайнего случая, когда и» 1иГ„ >> 1, из (1.112) следует, что
. 7УАсоТп
/а 2 (#-1)АсоГп Z1 11_ч
- NA($Tn C0S 2 (1-П5)
2
Исследование выражения (1.115) показывает, что функция
<7оо(Асо) спадает до нуля при А® = 71 , но в точках А® = (к =
= 1, 2, ...) опять возрастает до значений, близких к единице. След о-
1.4. Точность определения сигнальных параметров средствами РРТР 93
вательно, точность оценки будет тем большей, чем больше полная
длительность сигнала Тс = NTn, но вероятность возникновения ано-
мальной погрешности существенно выше. Очевидно, что если бы
сигнал излучался непрерывно в течение времени Тс (сохраняя ту же
полную энергию), то достигалась бы почти такая же точность изме-
рения, но вероятность возникновения аномальных погрешностей
была бы меньше. Этот вывод отражает тот известный факт, что им-
пульсный режим невыгоден для измерения смещения частоты.
Важное практическое значение имеет оценка точности совме-
стного определения временных характеристик и несущей частоты
широкополосных сигналов (сигналов с базой В - \fT » 1). Как
уже отмечалось, при измерении временной задержки сигнальная и
автокорреляционная функции полностью совпадают, и требование
быстрого спада сигнальной функции в данном случае эквивалент-
но требованию расширения спектра сигнала. Поэтому, чем шире
спектр излучаемого сигнала, тем точнее с его помощью можно из-
мерить характеристику момента времени (прихода, задержки, на-
чала и конца сигнала и (или) его элемента). Расширить спектр сиг-
нала можно разными путями, например укорачиванием импульсов
в сигнале. Но более перспективный путь — формирование широ-
кополосного непрерывного сигнала за счет применения специаль-
ной фазовой или частотной модуляции.
В качестве примера можно рассмотреть непрерывный сигнал,
который получится при модуляции несущего колебания по фазе
(ФМ) импульсно-временными кодами (ИВК). Сокращенно такой
сигнал называется ИВК-ФМ. При прямоугольной форме импуль-
сов фаза несущего колебания может принимать только два значе-
ния. Чаще всего эти два дискретных значения отличаются на л.
Тогда аналитическую модель радиосигнала можно представить
в виде
е(0 = CWOsinctf, (1.116)
где IT(Z) — последовательность ИВК, каждый из которых состоит
из М положительных и отрицательных импульсов, в зависимости от
значения символа соответствующего кода П'(?) = ±1. На рис. 1.49
для примера изображена функция П'(0, полученная из семисим-
вольной последовательности Баркера {1110010}.
94
1. Радиоразведка и радиотехническая разведка
Рис. 1.49. Структура псевдошумового кода, получен-
ного на основе последовательности Баркера {1110010}
Радиосигнал, модулированный последовательностью П'(/), на-
блюдается средством разведки в течение времени Тс. Длительность
одного периода ИВК модулирующей функции равна Тп, длитель-
ность одного символа последовательности ГГ(/) — Г,1М. За время Тс
совершается N периодов ИВК, т. е.
Тс= NTa=NMx„M. (1.117)
При измерении задержки сигнальная функция радиосигнала,
модулированного последовательностью П'(/) в соответствии с
(1.116), будет равна
1 ?с
#(Дт) =— [ ^2n\/-T)sin[(o(Z-T)]n\/-Tjsin[co(Z-Tz)]Gfr, (1.118)
бо о
где Qo = U%TИ;&х = х-т,-.
После тривиальных преобразований в пренебрежении интегра-
лом за большое время Тс от аддитивной составляющей, осцилли-
рующей с двойной несущей частотой сигнала, из (1.118) получаем
<?(Дт) = COS(oAt j n'(Z - т)П'(Г - тг)Л = £>(Дт)cos оДт. (1.119)
о
Сигнальная функция <?(Дт) в данном случае представляет собой
высокочастотное колебание частоты со, умноженное на сравнитель-
но медленно меняющуюся функцию (?(Дт), которая зависит только
от вида используемого ИВК. Для приведенного на рис. 1.49 примера
1.4. Точность определения сигнальных параметров средствами РРТР 95
псевдошумового кода Баркера при М = 7 достаточно вычислить ин-
теграл (1.119) в дискретных точках Ат = 0, тим, 2тим, ..., ^и«, по-
скольку в промежуточных точках соответствующая функция 0(Ат)
получается путем соединения отрезками прямых линий.
Все псевдошумовые коды, предназначенные для измерения
временной задержки, синхронизации или гаммирования, обладают
общим свойством: их сигнальная функция резко уменьшается при
сдвиге на один символ и остается малой величиной до тех пор, по-
ка сдвиг не станет кратным длительности периода псевдошумово-
го кода Та. При этом
Q(kTa) = l~ при1<£<# (1.120)
так же, как в случае периодической последовательности импуль-
сов. Все это позволяет сконструировать для сигнала с расширени-
ем спектра последовательностью кода Баркера форму сигнальной
функции, показанную на рис. 1.50.
В промежуточных точках (Ат = гтим * кТ„) автокорреляционная
функция кода Баркера может иметь только отрицательные значе-
ния, причем при N —> оо эти значения приближаются к -ИМ. На
графике функции £?(Ат) (см. рис. 1.50) при n = l,N=3 видно, что
точность определения временного интервала по сигналу псевдо-
шумовой ФМ зависит от длительности импульса тим, а вероятность
Рис. 1.50. Огибающая автокорреляцион-
ной функции пачки из N кодов Баркера
96
1. Радиоразведка и радиотехническая разведка
аномальной погрешности — от длительности одного псевдошумо-
вого кода Тп. Поэтому становится понятным стремление при выбо-
ре сигналов в процессе проектирования систем найти такие коды,
которые имели бы большие значения М = Та/ тим (высокую ин-
формативность), сохраняя при этом и высокую надежность, т. е.
стойкость к аномальным погрешностям (малые промежуточные
выбросы сигнальной функции при т„м < т < Тп - тим). Для рассмат-
риваемого кода значение максимального промежуточного выброса
равно ИМ. Таким же свойством обладают и другие коды Баркера.
Для навязывания аномальных погрешностей средству разведки
нужно стимулировать в точности обратную ситуацию.
В отличие от сигнала в виде пачки импульсов при сигнале
ИВК-ФМ (с увеличенной базой) повышение точности измерения
не требует обязательного увеличения мощности сигнала.
Особенность широкополосного сигнала с увеличенной базой
состоит в том, что, как нетрудно показать, этот сигнал имеет хо-
рошие характеристики и для измерения частотного смещения.
Сигнальная функция #(Д<о) при тех же условиях, что и для пачки
импульсов (1.110), имеет вид
1 Тс
^(Аю) = — J (72П'(Л тим) sin[(o) + О)/]П'(Л тим) sin[(co + Q; )?]Л,
^0 о
(1.121)
где Дсо = Q = Ц.
Поскольку П'(0 = 1, из (1.121) следует, что
= . (1.122)
Д®ТС
Таким образом, сигнал ИВК-ФМ с расширением базы за счет
балансной модуляции несущего колебания псевдошумовой после-
довательностью при измерении смещения частоты обладает таки-
ми же потенциальными характеристиками, как и реализация не-
прерывного гармонического колебания (радиоимпульса) при той
же длительности. Риск возникновения аномальных погрешностей
измерения такой же, как при измерении несущей радиоимпульса.
1.5. Перехват сообщений средствами радиоразведки
97
1.5. Перехват сообщений средствами радиоразведки
1.5.1. Перехват аналоговых сообщений
Качество и даже возможность выделения аналогового речевого
сообщения приемником средства радиоразведки определяется от-
ношением сигнал/шум в полосе канала, оканчивающегося слухо-
вым аппаратом оператора средства радиоразведки. Критерием ка-
чества приема при этом считается вероятность правильного
распознавания слова оператором, которая нелинейно зависит от
отношения сигнал/шум. Экспериментальная зависимость вероят-
ности правильного узнавания слова W от отношения сигнал/шум q
в акустическом канале приведена на рис. 1.51 [12].
Рис. 1.51. Экспериментальная кривая разборчивости речи
Считается (это экспериментальный факт), что для удовлетво-
рительной разборчивости речи необходимо обеспечить W - 0,2.
Как видно на рис. 1.51, этому условию отвечает отношение сиг-
нал/шум на уровне q - 0,026. В дальнейшем для определения по-
рогового сигнала для средства радиоразведки используются обе
величины: пороговая вероятность для разборчивости W— 0,2 и по-
роговое отношение сигнал/шум q - 0,026.
В радиоканале утечки информации (перехвата) действует сиг-
нал s(f), модулированный сообщением x(t). Принято, что сообще-
ние (модулирующая функция) нормировано к единице: |х(/)| < 1.
98
1. Радиоразведка и радиотехническая разведка
Спектр сообщения сосредоточен в полосе ./’vg(0; ^тах]- Это сооб-
щение модулирует несущее колебание частоты fa. Ширина спектра
модулированного сигнала 5[х(?)] не уже полосы сообщения. Обо-
значим среднюю мощность сигнала на входе приемника средства
радиоразведки Рс, а мощность шума — Рт. Тогда отношение сиг-
нал/шум, приведенное ко входу приемника, равно q=PjPm . Кро-
ме того, положим, что шум имеет равномерную спектральную
плотность =РС/ff в полосе А/» занятой спектром сигнала.
Будем считать, что сигнал s(f) модулирован сообщением по
амплитуде либо по аргументу (по фазе или по частоте).
При обычной амплитудной модуляции (AM)
s(t) - a[l + /nAMx(Z)]cos27r/'0Z (1.123)
ширина спектра сигнала в 2 раза больше ширины спектра модули-
рующей функции:
(1.124)
При балансной модуляции (БМ)
5,(?) = ax(0cos(27T^)0, (1.125)
а ширина спектра такая же, как и при обычной AM:
Д/бм = Д/ам ~2/\пах. (1.126)
При AM с одной боковой полосой (ОБП) спектр сообщения
переносится из полосы (0; Fmax] в полосу (f0; fo+Fmsa] или
(/о; /о - Лпах], поэтому ширина спектра модулированного сигнала
принимается равной ширине спектра сообщения:
¥овп=Л„„- (1-127)
При ФМ сигнал представляется в виде
s(f) = acos[27r/'0f + wOMx(z)], (1.128)
а ширина спектра определяется как шириной спектра модулирую-
щей функции, так и индексом ФМ /пфм-
1.5. Перехват сообщений средствами радиоразведки
99
При частотной модуляции (ЧМ)
s(f) = a cos
2n/o/ + 27t/Jx(e)d0 ,
о
(1.129)
где fA — девиация частоты.
Индекс модуляции при ЧМ тчм - falF^, а ширина спектра
А/чм = 2(/д + Fmax) 2(/nw + l)Fmax, (1.130)
т. е. при тчм< 1 Д/чм= А/дм, а при Отчм » 1 А/чм= 2/д » 2Fmax.
Считается также, что приемник для выделения сообщения x(t)
реализован оптимальным алгоритмом демодуляции сигнала s(f).
Алгоритм является оптимальным в том смысле, что любой техни-
чески реализуемый, а тем более реальный приемник не может
обеспечить лучшего воспроизведения сообщения.
Полученные оценки качества воспроизведения сообщения
оказываются максимально допустимыми для средств разведки, а
в реальных условиях указанные характеристики могут ухуд-
шаться.
Все модификации способа амплитудной модуляции (обычная
AM, БМ и ОБП) относятся к классу линейных: сигнал s(t) линейно
связан с сообщением x(t).
Полная мощность АМ-сигнала
рс=|Р2(0Л (1.131)
1 о
распределена между зависящими от сообщения (информационны-
ми) компонентами и спектральной составляющей на частоте не-
сущего колебания. При AM из (1.123) и (1.124) следует, что
2
Рс = — (1 + т2АМ) = Р() + Рощ*м, (1.132)
где Ро — мощность на несущей частоте, равная мощности немоду-
лированного колебания (сигнала при x(f) = 0); Р^т^ — суммар-
100
1. Радиоразведка и радиотехническая разведка
ная мощность в боковых полосах (именно эта мощность перено-
сится на выход демодулятора АМ-колебания).
При БМ
2
^=у = ^о (1-133)
и вся мощность сигнала сосредоточена в боковых полосах спектра.
Это отражает очевидный факт: при БМ мощность на несущей час-
тоте равна нулю (если только модулирующая функция, как при
передаче речи, не содержит постоянной составляющей).
При передаче с ОБП вся мощность сигнала приходится на ин-
формационные спектральные составляющие, как и при БМ. Но
ширина спектра сигнала при ОБП в 2 раза уже, чем при простой
AM и при БМ, т. е. ширина спектра сигнала равна (примерно) ши-
рине спектра сообщения. Поскольку спектр шума в полосе прием-
ника равномерный, при фиксированной мощности передатчика
отношение сигнал/шум на выходе демодулятора сигнала с ОБП
будет в 2 раза больше, чем при БМ, и в 2 /т\м раз больше, чем
при обычной AM. Но если нормируется не мощность передатчика,
а отношение сигнал/шум на входе приемника, то следует считать,
что отношения сигнал/шум на выходе демодулятора при БМ и при
ОБП будут одинаковы.
Линейность связи x(t) и s(t) принципиально допускает линей-
ность оператора демодуляции. Именно так строят оптимальные
демодуляторы сигналов с AM, БМ и ОБП. Поскольку при линей-
ных преобразованиях не происходит подавления сигнала шумом, в
результате оптимальной демодуляции (в принципе) не изменяется
отношение сигнал/шум. Следовательно, учитывая (1.132) и (1.133),
можно построить обменную диаграмму между отношением сиг-
нал/шум на входе приемника средства радиоразведки и коэффици-
ентом глубины AM при фиксированном отношении сигнал/шум на
выходе демодулятора ^вых. Эта диаграмма изображена на рис. 1.52
(нижняя кривая).
Разумеется, линейный демодулятор — это идеализированная
модель устройства выделения сообщения из АМ-, БМ- или ОБП-
колебания. На практике модулятор всегда отличается от идеально-
го и обеспечивает на выходе меньшее отношение сигнал/шум.
1.5. Перехват сообщений средствами радиоразведки
101
Рис. 1.52. Область пороговых АМ-сигна-
лов для приемников средств радиоразведки
Обычный амплитудный детектор обеспечивает выходное от-
ношение сигнал/шум [13]
При больших значениях входного отношения сигнал/шум
(^вх » 1) соотношение (1.134) линеаризуется, а при малых значе-
ниях (</iiX < 1) детектор превращается в квадратичный. Действи-
тельно, при слабых сигналах, когда qBX< 1, из (1.134) следует, что
^вых~ q2Bx. В противоположной ситуации, когда qBX » 1, формула
(1.134) преобразуется к виду qBiBX=qBX/2, т. е. отношение сиг-
нал/шум становится в 2 раза меньше, чем на выходе линейного (и
синхронного) детектора. Это свойство обусловливает известный
эффект подавления слабого сигнала шумом на нелинейности ам-
плитудного детектора. Диаграмма обмена между qBX и Шам для са-
мого крайнего тяжелого случая демодуляции с помощью квадра-
тичного детектора показана на рис. 1.52 (верхняя кривая).
Две кривые на рис. 1.52 для идеального линейного демодуля-
тора и для квадратичного детектора, подавляющего сигналы на
своей нелинейности, снизу и сверху ограничивают область, в ко-
торой могут располагаться диаграммы обмена для реальных, ис-
пользуемых на практике демодуляторов. Эта диаграмма в коорди-
натах (qBX; /идм) представлена на рис. 1.52 для определенного выше
порогового отношения сигнал/шум qBblx - 0,026. Модуляциям ОБП
и БМ соответствует точка т - 1, qBX- 0,026.
102
1. Радиоразведка и радиотехническая разведка
По диаграмме на рис. 1.52 для известного значения коэффици-
ента глубины модуляции т определяют пороговое отношение сиг-
нал/шум на входе (в полосе приемника средства радиоразведки),
при котором обеспечивается выходное отношение сигнал/шум не
ниже минимального для достижения разборчивости речи.
Нижняя кривая на рис. 1.52 получена в предположении о ли-
нейности демодулятора, работающего без подавления, т. е. не уве-
личивающего уровень выходного шума по сравнению с входным.
Это утверждение является довольно сильной идеализацией по сле-
дующим причинам.
1. Линейный демодулятор — это синхронный детектор, исполь-
зующий умножение входного принятого сигнала, наблюдаемого в
аддитивной смеси с шумом, на опорное колебание, когерентное со-
ставляющей на несущей частоте. Для формирования такого коге-
рентного колебания необходим следящий фильтр, обычно реали-
зуемый по схеме фазовой автоподстройки частоты (ФАПЧ). Но
система ФАПЧ не может иметь бесконечно узкую полосу. Следова-
тельно, сформированное фильтром опорное колебание непременно
будет содержать шумовую составляющую мощностью
(1.135)
где А/ш — эквивалентная шумовая полоса системы ФАПЧ.
Этот шум статистически независим от выходного шума демо-
дулятора и, следовательно, складывается с ним по мощности,
уменьшая тем самым выходное отношение сигнал/шум:
Р ( Р У ( txf
<7вых=---------^швх 1------— Чшвх 1-^- .(1.136)
*с + ^ш.оп \ 'max /
2. Сам синхронный детектор технически невозможно выпол-
нить в виде идеального умножителя. Обычно умножитель двух
колебаний u\(f) и иг(0 работает в соответствии с правилом
«I (t )и2 (f) = 0,25 {[(i/j (t) + u2 (012 _ t(wi (0 _ и2 (О]2}, (1.137)
т. е. по схеме, показанной на рис. 1.53. В частности, подобные
технические решения применяют при использовании в качестве
фазовых детекторов балансных умножителей, фазовых детекто-
1.5. Перехват сообщений средствами радиоразведки
103
Рис. 1.53. Схема аналогового умножителя
ров, интегральных умножителей на основе дифференциальных
каскадов.
Если схемы возведения в квадрат неидентичны, то после вы-
ходного вычитающего устройства не будет полной компенсации
случайных (шумовых) составляющих, образованных биениями
сигнала с шумом на нелинейностях квадраторов. Этот эффект про-
является тем сильнее, чем меньше отношение сигнал/шум на вхо-
де. Если считать, что обычная инструментальная точность возве-
дения в квадрат составляет около 5 % (это характерный уровень
приведенной погрешности хорошего квадратичного вольтметра),
то разность погрешностей двух независимых квадраторов будет в
л/2 раз больше, т. е. примерно 7 %. На эти 7 % увеличится мощ-
ность флуктуационной составляющей шума на выходе умножите-
ля (синхронного детектора). Соответственно на эти же 7 % умень-
шится выходное отношение сигнал/шум.
3. В спектре БМ-сигнала отсутствует составляющая на несу-
щей частоте. Поэтому для демодуляции такого колебания необхо-
димо применять специальные схемы восстановления несущей. Та-
кие схемы используют нелинейные преобразования входного
процесса. Но нелинейные преобразования всегда сопровождаются
подавлением сигнала шумом.
4. Демодулятор сигнала с ОБП — это смеситель, перенося-
щий спектр входного колебания из окрестности частоты несуще-
го колебания /0 в полосу сообщения (0; Fmax]. Для реализации
такого переноса обычно в спектре сигнала с ОБП оставляют
несущую частоту, пропорционально уменьшая тем самым мощ-
ность составляющих сигнала. Кроме того, при демодуляции ко-
лебаний с ОБП возможно подавление слабого сигнала шумом на
нелинейностях смесителя. Но эти эффекты поддаются учету
104
1. Радиоразведка и радиотехническая разведка
только для конкретных схем демодуляторов и структур модули-
рованного сигнала.
5. Если вместо синхронного детектора, оптимального для вы-
деления сигнала с линейной модуляцией из шума, использовать
амплитудный детектор, демодуляция принципиально будет сопро-
вождаться подавлением слабых сигналов, для которых qBX < 1.
Именно поэтому амплитудный детектор при слабых сигналах
хорошо описывается математической моделью квадратичного пре-
образования входного колебания (1.134). В процессе такого преоб-
разования образуются дополнительные флуктуационные состав-
ляющие, мощность которых добавляется к мощности шума и
уменьшает выходное отношение сигнал/шум.
Соотношение (1.134) получено в предположении, что на квад-
ратичный детектор вместе с узкополосным нормальным шумом
действует немодулированный синусоидальный сигнал. Но это со-
отношение можно полностью и точно распространить на случай
детектирования прямоугольных радиоимпульсов. Наличие АМ-
сигнала, если рассматривать его как медленные изменения ампли-
туды входного сигнала, не оказывает существенного влияния на
изменение выходного отношения сигнал/шум. Иначе говоря, и в
этом случае соотношение (1.134) можно рассматривать как оце-
ночное для отношения сигнал/шум на выходе амплитудного де-
тектора, используемого для демодуляции колебания с линейной
модуляцией. Разумеется, для таких оценок в (1.134) следует учи-
тывать мощность только сигнальных, зависящих от сообщения,
составляющих спектра сигнала. С учетом сказанного, а также того,
что суммарная мощность информационных составляющих в соот-
ветствии с (1.132) равна /^/ЛдМ , соотношение (1.134) можно преоб-
разовать так:
2 4
?вх”*
Увых , _ 2 •
1 + 2^BXW
(1.138)
При линейных видах модуляции выходное отношение сиг-
нал/шум никогда не бывает больше входного. Принципиально
иное положение складывается при нелинейной модуляции.
При малых индексах ЧМ (отчм < 1) ширина спектра сигнала не
превышает двойной ширины спектра сообщения (узкополосная ЧМ)
1.5. Перехват сообщений средствами радиоразведки
105
и отношение сигнал/шум при демодуляции не увеличивается. Мощ-
ности информационных составляющих в спектре ЧМ-сигнала такие
же, как и при AM. Поэтому при анализе пороговых свойств узкопо-
лосных ЧМ-сигналов (тчм < 1) можно пользоваться теми же соот-
ношениями и диаграммами (см. рис. 1.52), что и для AM.
При ЧМ с большим индексом (отчм> 1) демодулятор «собирает»
энергию сигнала из входной полосы А/® 2(fa + FlT)2x) — 2/а(тчм + 1) и
сосредоточивает ее в полосе сообщения (0; Fmax], тогда как прило-
женный к сообщению шум формируется выходными флуктуация-
ми в полосе сообщения. Таким образом происходит обмен вход-
ной полосы сигнала на выходное отношение сигнал/шум.
Принципиально увеличение отношения сигнал/шум имеет порядок
отношения полос
'"чм^-тг-. (1.139)
г max
Но обмен полосы на отношение сигнал/шум происходит только
при больших уровнях входного сигнала. При уменьшении входно-
го отношения сигнал/шум возникает пороговый эффект — резкое
нелинейное уменьшение сигнала на выходе. Степень уменьшения
выходного отношения сигнал/шум зависит и от уровня сигнала, и
от индекса модуляции.
На качественном уровне этот эффект можно пояснить следую-
щим образом. Конец вектора сигнала с линейной модуляцией s(z)
под управлением сообщения перемещается по прямолинейной
траектории между 8„иП и smax, как показано на векторной диаграмме
модулированного колебания (рис. 1.54).
Рис. 1.54. Векторная модель АМ-колебания
106
1. Радиоразведка и радиотехническая разведка
(1.140)
Очевидно, что
I §max ®min I
Поэтому информационная производная
= ^Ам<1
и приращение сообщения dx(f) не больше вызываемого им прираще-
ния сигнала
|<fc(0| < dx(t), (1.142)
а это значит, что если к сигналу прикладывается шум, искажаю-
щий его на некоторую величину &, то демодулированное сообще-
ние х будет искажаться на < & не больше, чем на &.
В случае нелинейной (фазовой или частотной) модуляции мо-
дуль s(t) вектора сигнала остается постоянным. Под воздействием
модулирующего сообщения x(t) изменяется аргумент вектора сиг-
нала. Условие постоянства модуля означает, что конец вектора s(Z)
в процессе модуляции должен скользить по поверхности постоян-
ного радиуса — по поверхности гиперсферы радиуса |s(f)| в про-
странстве сигналов. Разным точкам поверхности сферы соответст-
вуют разные сигналы. Но не все сигналы формируются в процессе
модуляции. Поскольку РЭС передает непрерывное аналоговое со-
общение x(t) (при передаче речи), близким значениям сообщения
x(f) соответствуют мало отличающиеся значения сигнала s(t). Тра-
ектория конца вектора s(/) — непрерывная кривая на поверхности
гиперсферы. Для иллюстрации на рис. 1.55 показаны такая гипер-
Рис. 1.55. Векторная модель
ЧМ-сигнала
1.5. Перехват сообщений средствами радиоразведки
107
сфера и линия модулированных сигналов на ее поверхности в
трехмерном пространстве.
В отличие от линейной модуляции протяженность линии сиг-
налов при ЧМ или ФМ может быть сделана сколь угодно большой
без увеличения мощности (или энергии) сигналов. Однако при
этом витки линии нужно укладывать на поверхности гиперсферы
все плотнее и плотнее, и расстояние Д/г между соседними витками
(шаг «намотки») будет все меньше и меньше. Эта особенность
приводит к существенному различию показателей помехоустойчи-
вости нелинейных видов модуляции по сравнению с линейными.
Для иллюстрации можно рассмотреть небольшой участок по-
верхности гиперсферы, на котором расположены три соседних
витка линии сигнала с номерами (г - 1), г и (z + 1) (рис. 1.56).
Рис. 1.56. Образование помех и погрешностей при ЧМ
В некоторый момент времени t\ конец вектора сигнала s нахо-
дился на линии сигнала в точке А\. При изменении передаваемого
непрерывного сообщения на величину Дх (|Дх « 11) сигнал изме-
нится на некоторую величину Дух, а конец вектора сигнала пере-
местится по линии сигналов из точки А\ в точку А2. Связь между
Дх и Дух устанавливается из отношения
Лзх _ s(t + ДО - s(t) ds(t)
Дх x(t + Д/) - х(0 dx(t)
(1.143)
Представив (1.143) в форме
108
1. Радиоразведка и радиотехническая разведка
& _ ds(f) ( dx(f) А 1 _ s'(f)
s dt \ dt ) x'(t) ’
можно получить оценку коэффициента К,:
. 4fcmax|s(Q|
Fmaxmax|x(r)
(1.144)
(1-145)
где Д/с — ширина спектра модулированного сигнала; Fmax — верх-
няя граничная частота спектра сообщения.
Приняв во внимание, что шах|х(?)| = 1, а для ЧМ (или ФМ)
max |s(/)| = а, можно получить следующее выражение для Ks:
Ks~a&p. (1.146)
Значение Ks показывает, во сколько раз приращение сигнала Ду
больше соответствующего ему приращения сообщения Дг, поэтому
Ks называют коэффициентом растяжения сигнала. Чем больше
этот коэффициент, тем протяженнее линия сигналов. Из выражения
(1.146) следует, что при ЧМ или ФМ можно увеличить длину линии
сигналов за счет увеличения индекса модуляции Дер, не изменяя при
этом мощность (или энергию) сигнала.
Если кроме сигнала на входе приемника действует также адди-
тивная флуктуационная помеха, то она будет «сбивать» конец век-
тора с линии сигналов. Пока помеха мала, результирующий вектор
s(/) + Де с большой вероятностью попадает в окрестность точки А ь
находящейся на рассматриваемом витке линии сигналов.
Влияние малой помехи можно оценить величиной дополни-
тельного (паразитного) смещения Де точки А\ по линии сигналов.
Полное смещение, определяемое как сообщением, так и помехой,
окажется равным
Ду8+Дуп
= ДуД1 + е).
(1.147)
Ду
Случайную величину в = —- можно рассматривать как погреш-
ность, вызванную помехой.
1.5. Перехват сообщений средствами радиоразведки
109
Чтобы влияние помехи было незначительным (малая помеха),
нужно обеспечить выполнение условия |е| 1. Поскольку величина
£ случайна, это условие носит вероятностный характер и должно вы-
полняться с вероятностью, близкой к единице. Выполнить указанное
условие можно за счет увеличения мощности сигнала на входе при-
емника или индекса модуляции, или при одновременном увеличении
мощности сигнала и его индекса модуляции.
Следует подчеркнуть, что стремление ослабить влияние помехи
только за счет увеличения индекса модуляции (т. е. за счет неэнер-
гетического параметра) может привести к обратному результату и
вместо уменьшения погрешности произойдет ее резкое возрастание.
Этот эффект обусловлен тем, что при увеличении индекса модуля-
ции расстояние между соседними витками линии сигнала уменьша-
ется, а вероятность попадания конца вектора сигнала s в окрест-
ность одного из соседних витков возрастает. «Перескоки» вектора у
из окрестности своего витка в окрестность иного витка связаны с
появлением аномальных погрешностей, значения которых во много
раз превосходят значения малых погрешностей, характерных для
малой (слабой) помехи.
Эффект, связанный с появлением аномальных погрешностей,
называется пороговым. Количественно пороговый эффект можно
характеризовать величиной допустимой вероятности появления
аномальных погрешностей. До тех пор пока вероятность «переско-
ков» не превышает допустимого значения, считается, что имеет
место малая помеха и оптимальный прием осуществляется в над-
пороговой области. Это означает, что значение отношения сиг-
нал/шум на входе превышает пороговое значение.
Для объяснения применяемого способа формализации условий,
приводящих к аномальным погрешностям при угловой модуляции
(ФМ или ЧМ), можно рассмотреть следующую модель.
Принимаемое колебание, содержащее модулированный сигнал
s(t) в аддитивной смеси с шумом n(f), можно представить вектором
на комплексной плоскости (рис. 1.57).
Вектор сигнала s(/) имеет постоянный модуль и переменную
фазу фс(0’ зависящую от времени и модулирующего сообщения:
t
<рс(<) = 2яЛ + 27г/Дх(т)Л. (1.148)
о
по
1. Радиоразведка и радиотехническая разведка
Рис.1.57. Траектория движения
вектора сигнала в сумме со сла-
бым и сильным шумами
Шум п(/) векторно суммируется с сигналом, и суммарный век-
тор, изменяясь по модулю, вращается вокруг начала координат с
переменной средней скоростью
т(() = ^£Ю=2я/ + 2п/дХ0- (1-149)
at
Кроме того, фаза суммарного вектора флуктуирует. На диаграмме
рис. 1.57 флуктуации фазы учтены случайной добавкой фш к мгно-
венной фазе сигнала.
Для дальнейшего рассмотрения важно описание именно шумовой
компоненты вектора принятого колебания s(t) + п(/). Поэтому удоб-
нее рассматривать вектор этого колебания на плоскости, вращаю-
щейся вокруг начала координат со скоростью Inf +
Если отношение сигнал/шум велико (q »1; слабый шум на
рис. 1.57), модуль вектора шума п(/) с очень большой вероятно-
стью будет меньше модуля вектора сигнала s(z), суммарный вектор
принимаемого колебания при флуктуациях не обходит начало ко-
ординат. Случайная добавка к информационному параметру —
1
фазе <рш при ФМ или частоте /ш =--— при ЧМ — флуктуиру-
2л dt
ет около нулевого среднего значения, поскольку фаза шума равно-
вероятна на симметричном интервале [-л; л].
Если отношение сигнал/шум мало (q < 1) и модуль вектора
шума соизмерим с амплитудой сигнала или больше нее, траекто-
рия конца суммарного вектора будет выглядеть примерно так, как
1.5. Перехват сообщений средствами радиоразведки
111
показано на рис. 1.57 для сильного шума: время от времени она
будет охватывать начало координат.
Каждому такому обходу соответствует приращение («пере-
скок») полной фазы принимаемого колебания на 2л. «Перескоку»
фазы соответствует скачкообразное изменение частоты. Такие
«перескоки» дают аномальные выбросы на выходе демодулятора
ЧМ-сигнала. Эти аномальные выбросы всегда перекрывают мгно-
венные значения выходного сигнала и искажают его до неузнавае-
мости. В акустическом канале перескоки прослушиваются как
щелчки. Если перескоки (аномальные погрешности) случаются
часто, щелчки сливаются в сплошной треск, на фоне которого опе-
ратор средства РРТР не может выделить сообщение. Вероятность
таких импульсов можно принять в качестве оценки вероятности
возникновения аномальной погрешности приема сигнала и соот-
ветственно вероятности W, характеризующей разборчивость речи.
Для оценки вероятности аномальной погрешности можно посту-
пить следующим образом. Вектор шума п(/) можно представить
как сумму двух ортогональных проекций: на направление вектора
сигнала — синфазная компонента псин(0 и на ортогональное этому
вектору направление — квадратурная компонента ns(t):
п(/) = пСин(Ос08(2д/оО + ib(Osm(27t/or). (1.150)
Компоненты nv(/) и ЦиДО описывают нормальные случайные
процессы. Спектры колебаний п5(0 и псин(/) сосредоточены в поло-
се [0; .Fmax+/'J, равной половине ширины спектра сигнала s(t), по-
скольку шум п(/) формируется в результате фильтрации белого
шума в полосе спектра ЧМ-сигнала.
Поскольку нормальные компоненты вектора шума пси„(/) и ns(/)
ортогональны, они некоррелированны. Кроме того, они обладают
нулевыми средними значениями и равными дисперсиями:
мН”*2 F =2 +)• " 1511
Вероятность того, что вектор входного колебания s(z) + п(/)
совершит полный оборот вокруг точки |s(f) + п(/)| по направле-
нию против хода часовой стрелки за малое время А?, совпадает с
112
1. Радиоразведка и радиотехническая разведка
вероятностью того, что совместно произойдут сразу несколько
событий:
- квадратурная компонента вектора шума примет значение в
малой окрестности нуля:
(1.152)
- синфазная компонента вектора шума примет отрицательное
значение, по модулю большее амплитуды сигнала:
(1.153)
- квадратурная компонента вектора шума должна уменьшиться:
^<0. (1-154)
Вероятность таких совпадений — совместная элементарная ве-
роятность
(1.155)
Процесс dns(t)/dt получается из входного нормального колебания
линейным преобразованием. Поэтому он тоже нормальный, как и п(/).
Протяженность интервала А не больше, чем возможное прираще-
ние процесса s(/) + n(z) за время его корреляции А? =---, т. е.
f + F
3 д max
д = <4(0 Дг = А(0 1
dt dt fz+F^'
(1.156)
Это значит, что у производной нулевое среднее, а дисперсия
f +F
Уд шах
а? =2 J /2W =
о
(1.157)
3
Кроме того, с учетом (1.155) - (1.157) получаем
1.5. Перехват сообщений средствами радиоразведки
113
ехр(-/) dt =
жН(Я<(1-158)
где
2 2< _ 2^/д2
п 3 3 ’
Л = ns —.
(1.159)
(1.160)
(1-161)
Вероятность того, что вектор входного колебания совершает
полный оборот вокруг нуля против хода часовой стрелки хотя бы
один раз за время, равное интервалу корреляции сообщения x(t),
т. е. за время т = 1/Д при fa > Fmax и при т > 1 или за время
т = 1 / Fmax при /’, < Fmax и при т < 1, составляет
при Мам >1;
придам <1.
(1.162)
С учетом того, что вероятности обхода нуля по ходу и против
хода часовой стрелки равны, можно утверждать, что полная веро-
ятность аномального выброса в 2 раза больше Р.
114
1. Радиоразведка и радиотехническая разведка
Полагая граничное значение вероятности появления аномаль-
ной погрешности при приеме каждого слога, равным W = 0,2, из
(1.158) и (1.162) можно найти пороговое отношение сигнал/шум в
полосе приемника с угловой модуляцией, при котором уже не
обеспечивается разборчивость речи. Диаграмма обмена между ин-
дексом ЧМ и входным отношением сигнал/шум приемника сред-
Рис. 1.58. Характеристики реального и оптималь-
ного ЧМ-демодуляторов
ства радиоразведки, обеспечивающего на выходе в акустическом
канале отношение сигнал/шум q = 0,026 и разборчивость W = 0,2,
приведена на рис. 1.58.
Оценка вероятности появления аномальной погрешности при
угловой модуляции в соответствии с (1.162) является несколько
заниженной, пессимистической. Во всех реальных демодуляторах
возможно (хотя и маловероятно) наличие более одного выброса за
период частоты Fmax. Кроме того, полученная оценка характеризу-
ет аномальные искажения в обычном приемнике с амплитудным
ограничителем на входе частотного детектора. Но такая схема де-
модуляции ЧМ далека от оптимальной при сравнительно сильных
шумах. Анализ показывает, что демодулятор, оптимальный в
смысле максимального правдоподобия, должен строиться на осно-
ве следящей схемы автоподстройки частоты, например на основе
системы ФАПЧ (рис. 1.59). В этой схеме частота управляемого ге-
нератора подстраивается под частоту принимаемого ЧМ-сигнала.
1.5. Перехват сообщений средствами радиоразведки
115
Сигнал управления такой настройкой и есть оценка x*(f) модули-
рующей функции принятого сигнала s(x(f)).
При использовании следящего приема ЧМ также приходится
считаться с пороговым эффектом. Но механизм проявления этого
эффекта иной. При работе следящая система ФАПЧ подстраивает
местный гетеродин под мгновенную частоту входного процесса.
Рис. 1.59. Схема ЧМ-демодулятора на основе ФАПЧ
Для этого гетеродин должен иметь перестройку в полосе ±f:i около
номинального значения несущей частоты fo. Полоса А/уд — Ifя —
это полоса удержания системы ФАПЧ.
Для обеспечения слежения за частотой входного сигнала в по-
лосе удержания на управляемый гетеродин должна подаваться ко-
пия принимаемого сообщения. Эта копия формируется на выходе
системы ФАПЧ. Формирование выходной копии без значительной
динамической погрешности возможно, если система ФАПЧ не ис-
казит спектра принимаемого сообщения, т. е. будет иметь полосу,
не меньшую Fmaii. Примерно такой же будет и эквивалентная шу-
мовая полоса системы ФАПЧ.
Аномальная работа системы ФАПЧ — это срыв синхронизма,
т. е. нарушение установившегося процесса слежения за частотой.
Теория переходных процессов в такой существенно нелинейной
системе, какой является ФАПЧ, достаточно разработана и позво-
ляет оценивать характеристики срыва синхронизма при заданных
параметрах самой системы и входного воздействия. Однако для
рассматриваемой задачи оценки достоверности приема достаточно
использовать общеизвестный вывод о том, что устойчивой, без
срывов работа системы ФАПЧ будет в том случае, если отношение
сигнал/шум в полосе этой системы составляет
^вх=5...1О. (1.163)
116
1. Радиоразведка и радиотехническая разведка
Принимая в качестве порогового значения минимальное значе-
ние <7фапч = 5 и учитывая, что спектральная плотность шума на
входе системы ФАПЧ (в полосе УПЧ приемника) составляет
А =----,
2(A+Fmax)
(1.164)
можно получить
<7фапч—#вх2(игчм+ !)•
(1.165)
На основании (1.165) можно записать соотношение для построе-
ния диаграммы обмена входного отношения сигнал/шум на индекс
ЧМ для оптимального демодулятора, использующего систему
ФАПЧ:
2,5
^чм
(1.166)
В соответствии с (1.166) построена диаграмма (см. рис. 1.58),
на которой совмещены зависимости порогового отношения сиг-
нал/шум для реального частотного детектора с ограничителем на
входе и для оптимального ЧМ-демодулятора. Графики, изобра-
женные на рис. 1.58, иллюстрируют парадоксальный эффект: при
q < 1 реальный частотный демодулятор оказывается лучше опти-
мального. Но этот парадокс разрешается очень просто: пороговое
отношение сигнал/шум на входе реального детектора получено
на основе анализа только аномальных погрешностей. При q > 1 и
тчм > 1 качество работы дискриминатора определяют вовсе не
аномальные погрешности, а выходные шумы, мощность которых
примерно в т раз меньше мощности шумов на входе.
По-видимому, в качестве приближенной оценки порогового от-
ношения сигнал/шум следует использовать зависимость ^(тчм) для
реального демодулятора. В качестве хорошей аппроксимирующей
функции, описывающей пороговые свойства реального демодуля-
тора при сильных шумах и оптимального демодулятора при слабых
шумах, можно использовать выражение
QBX(m) =
1,65
тчм +0,16
(1.167)
1.5. Перехват сообщений средствами радиоразведки
117
Фазовая модуляция обычно не применяется для передачи не-
прерывных сообщений. Это утверждение, однако, требует некото-
рых комментариев.
1. Напряжение на выходе частотного детектора всегда пропор-
ционально частоте входного сигнала. Поэтому шум с равномер-
ным в полосе УПЧ спектром превращается частотным детектором
в случайное колебание с параболической зависимостью спек-
тральной плотности от частоты. В таких условиях, чтобы избежать
существенных шумовых искажений высокочастотных составляю-
щих сообщения, их «подчеркивают» на передающей стороне, т. е.
пропускают модулирующую функцию через дифференцирующий
фильтр. Но модуляция частоты производной сообщения — это мо-
дуляция сигнала по фазе.
2. Технически, чтобы получить большую девиацию частоты
стабильного по средней частоте несущего колебания, используют
фазовый модулятор на низкой частоте задающего генератора и
увеличивают частоту полученного ФМ-колебания до номинала
несущей частоты, пропорционально увеличивая размах фазовых
отклонений до больших индексов (/«фм » 2л).
3. Ширина спектра ФМ-сигнала пропорциональна ширине
спектра модулирующего сообщения, тогда как при ЧМ с большим
индексом ширина спектра сигнала определяется прежде всего и в
основном девиацией частоты и от Fmax почти не зависит. Поэтому
на практике при передаче непрерывных сообщений предпочитают
использовать ЧМ.
Учитывая сказанное, можно считать, что полученные оценки
пороговых сигналов при ЧМ достаточно полно характеризуют все
практически применимые виды угловой модуляции. Можно по-
строить диаграмму для определения порогового отношения сиг-
нал/шум при ФМ непрерывным сообщением. Легче всего полу-
чить такую зависимость, используя связь между индексами
модуляции и шириной спектра сигнала при ЧМ и ФМ.
Пусть два сигнала — ЧМ с индексом /иЧм и ФМ с индексом
А<Рфм — образуются в результате модуляции несущего колебания
одним и тем же сообщением x(z) е [-1; +1].
Ширина спектра при ЧМ определяется соотношением
Д/чм= 2(/;+ Fmax) = 2(шчм+ l)Fmax. (1.168)
118
1. Радиоразведка и радиотехническая разведка
При ФМ исследования и расчеты показывают, что ширина
спектра с достаточной точностью может быть оценена как
Д/фм = 2Fmax( 1 + Дффм). (1.169)
Приравнивая (1.168) и (1.169), можно получить
(?Ичм+ l)Fmax = (1 + Лффм)^тах, (1.170)
откуда следует, что у эквивалентных по ширине спектра сигналов
с разными видами угловой модуляции
^1чм~ДфФм (1.171)
и для оценки порогового сигнала при ФМ можно пользоваться той
же диаграммой (см. рис. 1.58).
1.5.2. Перехват сигналов систем
с кодово-импульсной модуляцией
Абонентами систем передачи данных (СПД) являются автома-
тические устройства и приборы — разного рода дистанционные
измерители, регистраторы и сигнализаторы. В частности, к классу
СПД относятся радиотелеметрические системы, по которым пере-
даются сообщения о состоянии объектов, не доступных для непо-
средственного наблюдения (например, узлы и агрегаты на борту
самолета, ракеты или автоматического космического аппарата).
Радиоразведка строит свою приемную аппаратуру и организует
ее работу так, чтобы максимизировать эффективность функциони-
рования, а средства радиопротиводействия минимизируют эффек-
тивность средств радиоперехвата. Разумеется, конкретные количе-
ственные показатели эффективности могут быть разными для
различных сигналов и систем в разных тактических ситуациях.
Однако показатели эффективности всегда должны учитывать точ-
ность воспроизведения перехваченных сообщений.
Передача данных предусматривает две операции преобразова-
ния исходного сообщения в сигнал: кодирование и модуляцию. На
приемной стороне над сигналом выполняются две обратные опе-
рации: декодирование и демодуляция.
Кодирование предусматривает преобразование сообщений из
той формы, в которой они создаются источником информации (на-
1.5. Перехват сообщений средствами радиоразведки
119
туральное кодирование или кодирование источника), устранение
естественной избыточности сообщений (эффективное кодирова-
ние) и введение специальной искусственной избыточности для
снижения вреда, причиняемого помехами (помехоустойчивое ко-
дирование). В СПД сообщения представляют собой упорядочен-
ные последовательности элементов х,-, 1 = 1,М. Множество всех
используемых элементов принято называть алфавитом, а мощ-
ность этого множителя М— объемом алфавита.
При передаче данных элементы сообщения однозначно ото-
бражаются в элементарные сигналы х; —> s(t, х,'). Очевидно, что это
преобразование должно быть однозначным (как и обратное) и что
полный набор разных сигналов, используемых при модуляции,
равен размеру алфавита. Крайний случай — двоичное (или бинар-
ное) кодирование (М =2). Для двух элементарных сообщений
обычно используют (как правило, но вовсе не обязательно) логи-
ческие имена «О» и «1». При двоичном кодировании все элементы
Xi исходного сообщения нумеруются, а номера представляются
числами в двоичной системе. Минимальное количество т знаков
числа, которое требуется для представления любого из М-ичных
элементов сообщения, называется позиционностью или разрядно-
стью двоичного кода. Очевидно, что
2т>М. (1.172)
Для представления элементов двоичного кода требуется мини-
мальное количество элементарных сигналов — всего два: х0
-> s(t, Хо) и X] -> s(t, X]). Некоторые виды таких сигналов изображе-
ны на рис. 1.60.
Первичной модуляцией в современных системах передачи дан-
ных является кодово-импульсная модуляция (КИМ) — рис. 1.60, а.
Последовательная передача сообщений и служебных символов, ис-
пользуемых для обнаружения и исправления погрешностей за счет
применения помехоустойчивого кодирования, для синхронизации,
обозначения границ блоков информации и для других подобных
целей, образует единый двоичный поток.
Длительность импульсов КИМ равна тим, а последовательность
этих импульсов случайная, поскольку случайно передаваемое со-
общение. Спектр сигнала КИМ при совершенно случайной после-
120
1. Радиоразведка и радиотехническая разведка
довательности импульсов сплошной, повторяющий по форме
спектр одиночного импульса. В частности, спектр сигнала КИМ с
прямоугольной огибающей импульсов (см. рис. 1.60, а) представ-
лен на рис. 1.61, а. Если импульсы не прямоугольные, а более
гладкие, боковые лепестки спектра будут ниже и большая часть
энергии сигнала сосредоточится в главном лепестке.
В СПД могут применяться несколько видов модуляции: ДМ,
ЧМ, ФМ, фазоразностная (ФРМ) и многопозиционная амплитуд-
но-фазовая. Все остальные виды модуляции — не более чем ва-
риации этих основных видов.
Рис. 1.60. Сигналы СПД при различных видах
дискретной модуляции:
а — сигнал КИМ; б — сигнал КИМ-АМ; в — сигнал
КИМ-ЧМ; г — сигнал КИМ-ФМ; д — сигнал КИМ-ФРМ
1.5. Перехват сообщений средствами радиоразведки
121
Рис. 1.61. Спектры сигналов цифровых СПД:
а — спектр сигнала КИМ; б — спектр сигнала КИМ-АМ;
в — спектр сигнала КИМ-ЧМ
Амплитудной модуляции соответствует передача с пассивной
паузой: символу «О» соответствует нулевой уровень сигнала
5(/,x,) = acos(27r/00, s(r,xo) = O, Ге[0;тим]. (1.173)
При частотной модуляции (КИМ-ЧМ) логическим значениям О
и 1 информационного символа соответствуют разные частоты фи-
зического сигнала при неизменной его амплитуде:
5(Z,x0)=acos(27i/00, 5'(r,x1) = acos(2n/;0, /€[0;^]. (1.174)
Как видно из выражения (1.174), сигнал КИМ-ЧМ — это сумма
двух сигналов КИМ-АМ на частотахЭнергетический спектр
КИМ-ЧМ по форме совпадает со спектрами двух одиночных ви-
деоимпульсов, разнесенных по частоте на |/0-/J| > 2/тим, а ши-
рина энергетического спектра А/' > 4/ тим.
При ФМ начальные фазы сигнала изменяются на ± 0 от симво-
ла к символу:
122
1. Радиоразведка и радиотехническая разведка
s(t,xx) = acos(2izf0t + 0), s(t,x0) = acos(2nf0t-Qi), te[0;тД(1.175)
Максимальное значение девиации фазы 20 = 180°, и ему отве-
чает максимальное различие сигналов, соответствующих разным
символам s(t, Xi) = -s(t, Хо).
Для иллюстрации свойств элементарных сигналов удобно ис-
пользовать их графическую интерпретацию в виде векторов в сиг-
нальном пространстве. Например, сигналы КИМ-АМ (1.173),
КИМ-ЧМ (1.174) и КИМ-ФМ при 20 = 90°, для которых справед-
ливо условие ортогональности
ти
J Si(t)Sj(t)dt =
о
Е при i = j;
0 при z Ф j,
(1.176)
где £— энергия элементарного сигнала; i,j е 0; 1, представляются
векторами, показанными на рис. 1.62, а и б соответственно. Про-
тивоположные сигналы s(t, Х|) = —s(t, хо) отображаются векторами,
показанными на рис. 1.62, в. Дополнение пары противоположных
сигналов парой ортогональных к ним сигналов дает систему четы-
рех биортогональных сигналов (рис. 1.62, г). Примерами системы
биортогональных сигналов могут служить четыре сигнала
s(t, х0) = a cos(otf + 0);
s(t, Xj) - a cos(otf + it / 2);
s(t,x2) - -s(t,Xo) - -acos(&t + я);
s(t, x3) = —s(t, x,) = a cos(&t + Зя / 2),
или
s(t,xQ) = acos(aot + л/4);
5(?,Xj) -acos(&t + Зя/4);
s(t, x2) = a cos(otf - я / 4);
s(t, x3) = a cos(co/ - Зя / 4),
как на рис. 1.62, д.
Наглядное графическое изображение ортогональных сигналов
возможно только при М < 3. Но эти случаи не исчерпывают всех
систем сигналов, для которых может выполняться условие (1.176)
1.5. Перехват сообщений средствами радиоразведки
123
Рис. 1.62. Геометрические конфигурации систем элементар-
ных сигналов:
а, б — ортогональные; в — противоположные; г — ортогональные;
д — биортогональные; е — симплексные
при произвольном M; i, j е М. Примерами таких систем могут
служить наборы радиоимпульсов разных частот (5(r,xz) = acosco,7,
О < t < ти ) или наборы таких функций, которые перекрываются во
времени и имеют перекрывающиеся частотные спектры, но в силу
внутренних свойств удовлетворяют условию (1.176).
Существенно важным для качества приема сигналов СПД яв-
ляется то, насколько легко эти сигналы отличаются друг от друга.
Разные сигналы различаются тем лучше, чем больше расстояние
между концами их векторов в сигнальном пространстве. Для евк-
лидовой метрики сигнального пространства это расстояние
по 2 I-------------
dt +Ej -2Pij^EiEj ’ (1179)
V о
где Ej и Ej — энергии сигналов s(t, x;) и s(t, xj) соответственно, a
124
1. Радиоразведка и радиотехническая разведка
| ти
= [ s(t, х )s(t, x.)dt (1.180)
E,Ej Jo
является коэффициентом взаимной корреляции сигналов s(t, хг)
И s(t, Xj).
Для ортогональных сигналов рг/ = 0, а для противоположных
Ру = -1. Максимальное расстояние dy соответствует симплексным
сигналам. Векторы симплексных сигналов sCHM(f, х;) имеют одина-
ковые модули и коэффициент взаимной корреляции р,у = -ИМ.
Для М - 2 симплексные сигналы совпадают с противоположными
сигналами. Система (ансамбль) симплексных сигналов при М - 3
иллюстрируется векторами, показанными на рис. 1.62, е. Если
М » 2, симплексные сигналы почти не отличаются от ортого-
нальных сигналов.
В практике СПД большое распространение получила относи-
тельная (или фазоразностная) модуляция (ФРМ), при которой ис-
пользуются два противоположных сигнала 5(/,*i) = -s(t,x^, но фа-
за сигнала отсчитывается не от абсолютного значения фазы
несущего колебания, а от фазы предыдущего символа:
асоз(2л/00, 0<£<ти;
a cos(2tc/0?— ти), ти<Г<2ти,
'acos(2rc/00, 0<?<ти;
-асо8(2л/(/-ти), ти<г<2ти.
(1-181)
Энергетический спектр сигнала КИМ-ФРМ по форме совпадает со
спектром одиночного видеоимпульса и имеет ширину А/ > 2 / ти.
Если предположить, что средство радиоразведки, перехваты-
вающее сигналы СПД, действует наилучшим для себя образом,
т. е. не вносит искажений в сигнал, то на входе его приемника бу-
дет колебание
у(0=5(Г,х,) + и(0,
(1.182)
где s(t, х,) — один из возможных сигналов, входящих в известный
для средства радиоразведки ансамбль; n(t) — помеха. Задача при-
емника — наилучшим образом, с минимальной вероятностью воз-
1.5. Перехват сообщений средствами радиоразведки
125
никновения погрешности, распознать, какой конкретно сигнал из
М возможных был принят на фоне помехи.
Наилучшим решением приемника средства радиоразведки о
сигнале будет то, которое максимизирует апостериорную плот-
ность вероятностей, связанную согласно теореме Байеса с априор-
ной вероятностью сигнала P(st) и функцией правдоподобия Р(у|5г),
показывающей, насколько вероятна реализация колебания y(t) при
условии, что эта реализация создана сигналом 5;:
РЦ)Р(Ж)
Р(^ | у)
(1.183)
При равновероятных сигналах, когда Р(у) - const(5,), максимум
апостериорной вероятности достигается при самом правдоподоб-
ном сигнале, который максимизирует 7э(р|л’;).
Если представить колебание y(t) вектором в том же сигнальном
пространстве, где заданы сигналы ^(/,х;), i -1,М, то можно утвер-
ждать, что приемник максимального правдоподобия должен выби-
рать в качестве оценки принятого сигнала тот, который оказывается
ближе всех к вектору у(/). Расстояние между y(t) и s(Z,x;) — это мо-
дуль вектора помехи п(/).
В большинстве случаев помеху можно считать нормальным
стационарным шумом
1
Р(п)-—^=ехр -
оу2л (
п
2с2
(1.184)
При аддитивной шумовой помехе ближе всех к вектору y(f)
должен подходить (с наибольшей вероятностью) тот сигнал, кото-
рый максимально с ним коррелирован. Иначе говоря, приемник
будет выбирать в качестве оценки сигнала ту оценку, которая мак-
симизирует коэффициент взаимной корреляции
ти
d =max f y(r)5(r,x;)Jt
1 о
(1.185)
Такой приемник называется оптимальным корреляционным
приемником. Алгоритм его работы иллюстрируется структурной
схемой, показанной на рис. 1.63.
126
1. Радиоразведка и радиотехническая разведка
Рис. 1.63. Структурная схема оптимального корре-
ляционного приемника
Вероятность возникновения погрешности распознавания сим-
вола совпадает с вероятностью того, что значение на выходе
коррелятора превысит половину расстояния между концами век-
торов соседних сигналов в сигнальном пространстве. Поскольку
шум, отклоняющий принятое колебание от положения истинного
сигнала, нормальный, эта вероятность
2
P^=P\d,y>^-\= J Х»Х» = -У<^Л = |[1-Ф(а)],(1-186)
I 2о.м, У2< 2
<7.. ГЁ
где а - /—(1-р..) 5 Ру— коэффициент корреляции сиг-
налов ансамбля (1.180),
0 для ортогональных сигналов;
-1 для противоположных сигналов;
(1.187)
Ру
1
----для симплексных сигналов;
М
cos 0 для сигналов КИМ-ФМ с индексом ФМ 0;
1.5. Перехват сообщений средствами радиоразведки
127
Е — энергия элементарного сигнала, одинаковая для всех сигналов
ансамбля, или средняя энергия для сигнала КИМ-АМ; No — спек-
тральная плотность шумовой помехи — для сигналов одинаковой
мощности и приемников, согласованных по полосе пропускания со
спектром сигнала
А = (1.188)
N0Pm
q — отношение мощностей сигнала Рс и шума Рш на входе приемника;
В — база сигнала (произведение длительности элементарного сигнала
и ширины его спектра); Ф(а) — интеграл вероятностей в форме,
Ф(а) = ^[е’х2</х (1.189)
чМ
Эта функция табулирована и, кроме того, под именем erf(a) вклю-
чена в перечень стандартных функций математических пакетов
MathCAD и MathLab.
Определенные в соответствии с (1.186) вероятности возникно-
вения погрешностей для разных сигналов в зависимости от отно-
шения сигнал/шум представлены на рис. 1.64.
Рис. 1.64. Вероятности возникновения погрешно-
стей приема элементарных сигналов СПД
128
1. Радиоразведка и радиотехническая разведка
Структурная схема приемника сигналов с ФРМ показана на
рис. 1.65. Фаза каждого следующего элементарного сигнала опре-
деляется относительно фазы задержанного на тим предыдущего.
Рис. 1.65. Структурная схема приемника сигналов с ФРМ
Сущность решающего правила при приеме сигналов с ФРМ
состоит в проверке того, сохранилась или изменилась начальная
фаза сигнала при переходе от одного элементарного сигнала к дру-
гому, смежному с ним. Разумеется, наличие в приемнике сигналов
ФРМ канала с задержкой существенно расширяет шумовую поло-
су системы и увеличивает вероятность возникновения погрешно-
стей. Зависимости вероятности возникновения погрешностей, ана-
логичные показанным на рис. 1.64, приведены на рис. 1.66.
погр
Рис. 1.66. Вероятность возникновения погрешнос-
тей при КИМ-ФРМ при разных базах сигнала
1.5. Перехват сообщений средствами радиоразведки
129
Полученные соотношения позволяют оценить потенциально
достижимую вероятность возникновения погрешностей при пере-
хвате сигналов СПД. Любая реальная система может работать
только хуже. Поэтому оценки являются верхними, пессимистиче-
скими для характеристики эффективности радиомаскировки СПД
от радиоразведки. Задав вероятность возникновения погрешностей
средства разведки при перехвате сигналов (эта вероятность опре-
деляется требуемым уровнем защиты), можно найти пороговое
значение отношения сигнал/шум в радиоканале перехвата инфор-
мации. Если по условиям функционирования СПД и средства раз-
ведки отношение сигнал/шум в канале утечки информации оказы-
вается больше определенного таким образом порогового уровня,
необходимо применять специальные методы и средства для защи-
ты передаваемых данных. Самая распространенная защита инфор-
мации в этих условиях — криптографическая, предусматривающая
шифрование сообщений.
2. РАДИОЛОКАЦИОННАЯ РАЗВЕДКА
2.1. Технические основы РЛР
2.1.1. Задачи и организация РЛР
Радиолокация — мощное средство, расширяющее возможно-
сти человека по обнаружению различных искусственных и при-
родных объектов, их идентификации (соотнесение с определен-
ным классом объектов), определению координат и параметров
движения. Для решения этих и некоторых других задач в радиоло-
кации используется созданное и специальным образом организо-
ванное электромагнитное поле радиодиапазона.
Ближайшим аналогом и конкурентом радиолокационных раз-
ведывательных средств при выполнении функций технических
средств разведки является оптическая и оптоэлектронная техника.
Но преимущество радиолокационных средств по сравнению с оп-
тическими и инфракрасными средствами состоит в том, что они
могут работать независимо от времени суток и погоды (в темноте,
сквозь облака, дождь и снег), обладают большей дальностью, вы-
сокой точностью и разрешающей способностью [14-16].
Появление и развитие радиолокации — важный аспект научно-
технической революции XX в. Военная техника, в которой были
реализованы принципы и возможности радиолокации, появилась
перед самым началом Второй мировой войны. С этого времени
начался быстрый и непрерывный прогресс радиолокационных сис-
тем и средств в различных областях, требующих применения дис-
танционных методов извлечения информации. Заметное место
среди этих областей занимают области, традиционно относящиеся
к сфере технической разведки. Ко времени зарождения радиолока-
ции относится и появление термина «радар», образованного как
аббревиатура английского выражения “Radio Detection and Rang-
2.1. Технические основы РЛР
131
ing”. В самом названии указаны возможности таких средств — об-
наруживать и измерять расстояние до цели с использованием ра-
диоволн.
С обнаружением и определением дальности неявно связаны и
другие функции радиолокационных средств. Это функции сопро-
вождения движущихся целей по координатам, определения приро-
ды (типа, класса, назначения) цели. Очевидно, что эти функции
очень ценны для технической разведки. Внедрение методов и
средств радиолокации в область технической разведки способст-
вовало развитию специфического направления радиоэлектронной
разведки — радиолокационной разведки (РЛР).
РЛР — активная разновидность радиоэлектронной разведки,
обеспечивающая извлечение информации в результате анализа
параметров электромагнитного поля, взаимодействующего с объ-
ектами разведки (радиолокационными целями) и окружающей их
средой.
РЛР принято подразделять на видовую и параметрическую.
Видовая РЛР обеспечивает добывание информации, содержащейся
в радиолокационных изображениях различных объектов местно-
сти. Параметрическая РЛР связана с извлечением информации,
которая содержится в пространственных, скоростных, отражатель-
ных и излучательных характеристиках искусственных (космиче-
ских, воздушных, наземных и морских) и естественных объектов.
РЛР предназначена для обнаружения, определения коорди-
нат и параметров движения наземных, воздушных и космиче-
ских объектов; радиолокационной съемки территории с целью
картографирования местности; определения метеоусловий в за-
данных районах.
Для ведения РЛР применяют в основном пять типов радиоло-
кационных средств.
1. Наземные загоризонтные РЛС, предназначенные для обна-
ружения низколетящих целей, кораблей в акваториях океанов и
всплывающих подводных лодок, запусков баллистических ракет.
Большая протяженность зон действия этих средств обеспечивается
за счет специфических условий распространения радиоволн дека-
метровых диапазонов.
2. Бортовые самолетные РЛС воздушного дозора и дальнего
радиолокационного обнаружения самолетов, крылатых ракет и
132
2. Радиолокационная разведка
других атмосферных летательных аппаратов. Использование
летно-подъемных средств обеспечивает большую дальность ра-
диовидимости, а совершенство конструкции и алгоритмического
обеспечения в сочетании с многорежимностью — высокую ин-
формативность и надежность работы, в том числе и в условиях
радиолокационного конфликта, когда противник оказывает сопро-
тивление ведению РЛР (применяет средства радиоэлектронного
противодействия).
3. Бортовые РЛС бокового обзора, носителями которых могут
служить самолеты и космические аппараты. Использование дви-
жения носителей позволяет применять виртуальные антенны, раз-
меры которых значительно увеличены по сравнению с физически-
ми размерами бортовых антенных систем. Такой синтез антенн
позволяет резко повышать возможности разрешения, идентифика-
ции и точности измерения параметров движения объектов РЛР.
Удается получать очень подробные радиолокационные карты ме-
стности по трассе полета носителя средства РЛР.
4. К средствам РЛР часто относят системы пассивной радиоло-
кации, не излучающие зондирующих сигналов, а извлекающие
информацию из сигналов электромагнитных излучений, создавае-
мых самими объектами разведки. При этом возможны ситуации,
когда пассивные РЛС принимают сигналы передатчиков, установ-
ленных на радиолокационных целях, либо естественное электро-
магнитное излучение объектов, имеющих температурный контраст
с окружающей средой, либо излучение плазмообразований, сопро-
вождающих работу ракетных двигателей и разрядов, возникающих
при движении летательных аппаратов (ЛА) в атмосфере.
5. Относительно новые, весьма информативные и потому пер-
спективные средства подповерхностной радиолокации. Дело в
том, что радиолокационные средства при некоторых условиях
позволяют наблюдать (обнаруживать, идентифицировать) не
только объекты в свободном пространстве, но и такие, которые
скрыты под покровами, не прозрачными для волн других диапа-
зонов. Эти свойства весьма ценны для технической разведки. Ис-
пользуя методы подповерхностной радиолокации, бортовые и
наземные средства РЛР, получают возможность картографиро-
вать подземные коммуникации и сооружения, обнаруживать за-
маскированные объекты.
2.1. Технические основы РЛР
133
Средства РЛР могут устанавливаться на разных платформах.
Существуют РЛР космического, воздушного, морского и наземно-
го базирования. Каждое из перечисленных средств РЛР неодно-
родно.
Технический прогресс в области элементной базы РЭС, совер-
шенствование вычислительных подсистем, алгоритмического и
программного обеспечения процессов обработки информации,
развитие сетей передачи данных отразились на современном со-
стоянии средств РЛР. Средства РЛР постоянно и непрерывно раз-
виваются и совершенствуются, повышаются их точность и опера-
тивность, расширяются возможности радиолокации.
Информационный конфликт, в котором участвуют средства
технической разведки, имеет диалектическую природу. Развитие
и совершенствование технических средств разведки (в том числе и
РЛР) инициируют совершенствование средств радиоэлектронной
защиты и радиопротиводействия. Поэтому изолированное рас-
смотрение средств РЛР в отрыве от анализа особенностей их
функционирования в агрессивной внешней среде, свойства кото-
рой во многом определяются системами радиоэлектронного про-
тиводействия, оказывается неполным. Однако подробное и акку-
ратное рассмотрение методов функционирования средств РЛР в
условиях радиоэлектронного противодействия выходит за рамки
данного пособия.
Радиолокационная разведка — весьма информативный вид ра-
диоэлектронной разведки [3]. Видовая РЛР добывает информацию
об изображениях местности и объектов на ней. Параметрическая
РЛР служит для получения информации о характеристиках объек-
тов разведки, способных отражать (рассеивать) энергию электро-
магнитных волн и обладающих радиоконтрастом с окружающей
средой: о структуре и параметрах отраженного объектом радио-
сигнала, пространственных координатах и параметрах движения
этого объекта. Определяя параметры движения объектов разведки
(радиолокационных целей), средства РЛР позволяют судить об
их тактико-технических характеристиках. Средства, аналогичные
используемым в РЛР, также применяют для картографирования
земной, водной и ледовой поверхностей, для экологического мо-
ниторинга, исследования природных ресурсов Земли. Типовая
обобщенная структурная схема средства РЛР показана на рис. 2.1.
134
2. Радиолокационная разведка
Рис. 2.1. Структурная схема средства РЛР
Антенна служит для излучения и приема радиоволн. Радиопе-
редающее устройство (передатчик РПД) генерирует высокочас-
тотные колебания с заданными модулятором (Мод) параметрами
амплитудной или угловой (частотной или фазовой) модуляции.
Модулирующую функцию зондирующего сигнала формирует за-
дающий генератор (ЗГ).
Радиоприемное устройство (РПМ) совместно с демодулятором
(Демод) и системой обработки информации обеспечивает усиле-
ние принятого сигнала и его преобразование на более низкую час-
тоту, а также фильтрацию полезных сигналов на фоне естествен-
ных шумов и искусственно созданных (преднамеренных) помех.
Объекты РЛР как физические тела являются неоднородностя-
ми среды распространения электромагнитного поля, созданного
антенной радиолокатора, — они имеют иные значения проводимо-
сти и диэлектрической и магнитной проницаемости. При облуче-
нии такие неоднородности создают вторичное поле рассеянных
электромагнитных волн. Некоторая часть энергии этого поля из-
лучается в направлении на антенну РЛС, т. е. отражается объектом
РЛР. По традиции такие отражающие объекты называют радиоло-
кационными целями. Целями для РЛР могут служить корабли, ат-
мосферные и космические летательные аппараты, подвижные и
стационарные объекты на поверхности Земли. Для современных
радиолокаторов все это точечные цели, имеющие малые размеры.
2.1. Технические основы РЛР
135
Но РЛР имеет дело и с существенно протяженными целями, когда
картографирует земную поверхность для получения радиолокаци-
онных изображений местности с расположенными на ней объек-
тами или зондирует атмосферу для изучения условий распростра-
нения радиоволн.
Взаимодействие электромагнитного поля зондирующего сиг-
нала с радиолокационной целью приводит к тому, что параметры
отраженного сигнала изменяются. Эти изменения и содержат
полезную радиолокационную информацию. Для выделения радио-
локационной информации принятый антенной РЛС отраженный
сигнал демодулируется и сравнивается с переданным. Такое срав-
нение для определения информативных параметров и выделения
радиолокационной информации осуществляется в процессе обра-
ботки отраженных целями сигналов. При этом условно различают
первичную обработку, задача которой сводится к обнаружению
сигнала и определению значений его информативных параметров,
и вторичную обработку, в результате чего на основании данных
первичной обработки идентифицируются радиолокационные цели
и определяются траектории их движения.
Разумеется, радиолокационная информация должна отобра-
жаться и регистрироваться для дальнейшего использования.
На практике структура средств РЛР может значительно отли-
чаться от изображенной на рис. 2.1. Так, РЛС может включать
системы автоматического сопровождения целей, изменяющих
свои пространственные координаты и скорость в процессе дви-
жения. Кроме того, РЛС могут по-разному разворачиваться в
пространстве. Все элементы системы, изображенной на рис. 2.1,
располагаются в одной точке пространства, на одной позиции.
Это однопозиционная, или моностатическая, система. Но могут
использоваться средства РЛР, у которых передающие и прием-
ные подсистемы разворачиваются на разных позициях. Это би-
статическая РЛС. Благодаря пространственному разнесению эле-
ментов такие системы способны обеспечивать большую инфор-
мативность и помехоустойчивость, однако технически они слож-
нее однопозиционных. Несколько моно- и бистатических РЛС
для совместного решения общих задач объединяют в многопози-
ционные РЛС. При разнесении РЛС в пространстве на каждой
позиции может размещаться или только приемная аппаратура
136
2. Радиолокационная разведка
(пассивные многопозиционные РЛС), или приемная и передаю-
щая аппаратура (пассивно-активные РЛС), или моностатические
РЛС (активные многопозиционные РЛС).
2.1.2. Принципы формирования и извлечения
радиолокационной информации
Радиолокационная информация — это совокупность сведений
о целях (их наличии, числе, классе, координатах, скоростях дви-
жения и т. д.), полученных с помощью РЛС. Информация о целях
заключена в параметрах принимаемых радиолокационных сигна-
лов. Параметры сигналов, содержащие полезную информацию,
называют информативными. Обычно к информативным парамет-
рам относятся момент времени приема сигнала, его частота,
направление прихода (ориентация вектора плотности потока мощ-
ности радиоволны, падающей на приемную антенну). Кроме ин-
формативных радиолокационные сигналы содержат параметры, не
несущие полезной информации. Это сопутствующие параметры.
Обычно амплитуда (или мощность) принимаемого сигнала ма-
ла, а сам сигнал случаен и его прием происходит на фоне случай-
ных помех. Малая мощность сигнала объясняется рассеянием сиг-
нала на большом расстоянии до радиолокационной цели и
поглощением энергии сигнала при его распространении. Интен-
сивность сигнала существенно уменьшается при отражении от
целей небольшого размера. Случайный характер сигнала — след-
ствие случайных изменений амплитуды сигнала при распростра-
нении; его флуктуаций при отражении от цели; случайного пере-
мещения одних элементов, излучающих или отражающих
радиоволны, относительно других элементов; многолучевого рас-
пространения радиоволн и иных подобных факторов. В результате
принимаемый сигнал по характеру и интенсивности становится
подобным шумам и помехам в приемном тракте. Поэтому первой
задачей средства РЛР является обнаружение полезного радиосиг-
нала — вынесение решения о его присутствии в колебании, посту-
пающем на вход приемного тракта.
Статистическую задачу обнаружения сигнала решает радио-
приемное устройство, качество работы которого характеризуют
вероятностью правильного обнаружения Рправ, т. е. условной веро-
2.1. Технические основы РЛР
137
ятностью обнаружения полезного сигнала во входной реализации
при условии, что он в ней действительно присутствует, и вероят-
ностью ложной тревоги Рлт (условной вероятностью вынесения
решения о приеме сигнала при условии, что на входе приемника
присутствует помеха, а сам сигнал отсутствует). Обнаружитель
тем лучше, чем больше Рправ и меньше Ря т.
Среди всех параметров принимаемого сигнала для радиолокато-
ра больше всего априори неизвестных. Поэтому при обнаружении
средство РЛР вынуждено осуществлять поиск характерного пара-
метра радиосигнала, отличающего его от сопутствующих шумов и
помех. Обычно сигнал ищут по его информативному параметру.
При этом приходится либо поочередно, последовательно во време-
ни, просматривать все значения этого параметра, либо одновремен-
но наблюдать все эти значения. Устройства поиска, основанные на
первом методе (устройства последовательного поиска), более про-
сты в реализации, но требуют затрат времени на анализ всех воз-
можных значений параметра. Устройства, основанные на втором
методе (устройства параллельного поиска), способны обнаруживать
сигнал за существенно меньшее время, однако они, как правило,
отличаются большей аппаратурной сложностью.
Для извлечения радиолокационной информации используют
еще ряд физических эффектов.
2.1.2.1. Прямолинейность и постоянство
скорости распространения электромагнитного поля
Используя этот эффект, РЛС реализуют возможность измерения
дальности. Если суммарное время распространения запросного сиг-
нала от РЛС до цели и обратно равно т, то дальность до цели составит
R=^, (2.1)
где с — скорость распространения электромагнитного поля (ско-
рость света).
В вакууме скорость света с = ЗЮ8 м/с. Однако реальная среда
распространения радиолокационного сигнала не является одно-
родной и обладает коэффициентом преломления п ф 1 (п = 1 харак-
терно для вакуума). В такой среде скорость распространения ра-
138
2. Радиолокационная разведка
диоволн v = с/п. Кроме того, наличие неоднородностей среды при-
водит к тому, что коэффициент преломления изменяется вдоль
трассы распространения радиоволн. Поэтому не только скорость
распространения радиолокационного сигнала отличается от скоро-
сти света с, но и трасса распространения радиоволн не совпадает с
кратчайшим расстоянием между точками излучения, переотраже-
ния и приема колебаний. Регулярную составляющую коэффициен-
та преломления радиоволн вдоль трассы распространения можно
уточнить на основе построения модели атмосферы. Неучтенные
отличия Д/? = /?1 приведут к случайным погрешностям опреде-
ления запаздывания отраженного радиосигнала и, как следствие, к
погрешностям измерения дальности.
2.1.2.2. Отражательная способность радиолокационных целей
и физическая природа рассеяния электромагнитных волн
Отражательная способность целей в радиолокацион-
ном диапазоне определяется их электромагнитными харак-
теристиками: диэлектрической (e = s' + у (4лаее/со)) и магнитной
( ц = ц' + у(4лзец/<о)) проницаемостями, а также потерями энергии
при рассеянии электромагнитных волн [22]. Здесь в', ц' — относи-
тельные электрическая и магнитная проницаемости среды соот-
ветственно; аеЕ, аец — электрическая и магнитная удельные прово-
димости вещества на частоте со соответственно.
Проводимость аеЕ определяется потерями, обусловленными то-
ками проводимости и поляризацией диэлектрика, а проводимость
аец — магнитной вязкостью вещества (магнитного гистерезиса).
Коэффициент затухания электромагнитного поля в среде а = k Im п,
где к = 2л/‘к — волновое число для поля в вакууме; к' =
= 2л/А/ -к^&п — волновое число для электромагнитного поля в
среде; п - ер - J\ g| | ц| • е 1 — комплексный показатель прелом-
ления; Де = arctg(4K2eE/(®£')), Дц = arctg(4K аеДюц')) — углы элек-
трических и магнитных потерь соответственно [17].
При облучении цели часть энергии электромагнитной волны по-
глощается, а часть рассеивается. Если объект абсолютно проводя-
2.1. Технические основы РЛР
139
щий, то он рассеивает всю энергию падающих электромагнитных
волн. При рассеивании на абсолютно черном теле возникает «тене-
вое» рассеянное поле. При решении задач РЛР — обнаружения и
распознавания радиолокационных целей — представляет интерес
главным образом электромагнитное поле, рассеянное в направлении
приемника РЛС.
Характеристики рассеянного поля существенно зависят от па-
раметров зондирующего сигнала и от соотношений размеров тела
и длины волны падающего излучения. В связи с этим всегда рас-
сматривают три характерных случая электромагнитного рассея-
ния: низкочастотное рассеяние (когда размеры тела значительно
меньше длины волны излучения), резонансное рассеяние (или рэ-
леевское, которое соответствует условию соизмеримости размеров
тела и длины волны) и высокочастотное рассеяние (когда разме-
ры тела больше длины волны). При изучении рассеяния электро-
магнитных волн из параметров сигнала определяющим является
ширина спектра зондирующего сигнала.
Параметры рассеянного электромагнитного поля определяются
по заданным характеристикам излученного поля, а также по элек-
тродинамическим и геометрическим параметрам цели (прямая
задача дифракции). Если требуется найти параметры, характери-
зующие рассеивающие свойства цели (в том числе ее пространст-
венные характеристики и геометрический облик) по заданным па-
раметрам падающего и рассеянного полей, то решают так
называемую обратную задачу дифракции.
Для случая узкополосного сигнала обычно рассматривают ста-
ционарный вариант дифракции, который характеризуется тем, что
форма отраженного сигнала по отношению к зондирующему сиг-
налу не меняется.
В случае применения широкополосных и особенно сверхширо-
кополосных сигналов имеет место нестационарный вариант
дифракции, когда структура отраженного сигнала значительно от-
личается от структуры зондирующего сигнала. Амплитуда и фаза
рассеянного поля в значительной степени определяются ракурсом
цели и параметрами окружающей среды. Так, основным эффектом
искажения формы коротких импульсов в атмосфере Земли являет-
ся их уширение и затухание. На дальности до 5 км искажения
пикосекундных импульсов (длительностью до 0,1 нс) являются
140
2. Радиолокационная разведка
настолько сильными, что извлечение радиолокационной информа-
ции о целях из отраженных сигналов является практически невоз-
можным [18]. Причина этого ограничения заключается в умень-
шении дальности применения сверхширокополосных импульсов в
атмосфере и связана, в частности, с наличием резонансной линии
поглощения у паров воды на частоте 22,2 ГГц.
Отметим важные физические особенности рассеяния электро-
магнитных волн на телах, имеющих проводящую поверхность.
В низкочастотной области поле вторичного излучения можно
рассчитывать по распределению тока на облучаемой поверхности.
При этом в рамках метода физической оптики полагают, что тене-
вая область не вносит вклад в формирование дифракционного по-
ля. Для элемента плоской или выпуклой поверхности [15] напря-
женность вторичного магнитного поля в точке приема
</Н = (2.2)
2лг
где Is =2^п, Нц]е — плотность тока на освещенной по-
верхности; Нц — напряженность магнитного поля падающей вол-
ны в месте расположения цели; 1 — длина волны зондирующего
сигнала; Дг — разность значений расстояния от РЛС до плоскости,
перпендикулярной плоскому фронту падающей волны, и расстоя-
ния г от РЛС до произвольной точки на поверхности цели; го —
единичный вектор нормали к поверхности цели.
При выводе (2.2) учтены граничные условия Леонтовича, в со-
ответствии с которыми нормальные составляющие магнитного
поля падающей и отраженной волн взаимно компенсируются, а
тангенциальные — суммируются. Следует учитывать, что точ-
ность граничных условий Леонтовича тем выше, чем больше по
модулю постоянная распространения среды |у| = (Од/ёц . После ин-
тегрирования по всем источникам тока на освещенной поверхно-
сти можно получить эффективную площадь рассеяния (ЭПР) вто-
ричного излучения плоской или выпуклой поверхности [15]:
(2.3)
2.1. Технические основы РЛР
141
где dS' — проекция единичной площадки освещенной поверхности
на плоскость, перпендикулярную фронту падающей волны,
dS' = dS cos (го, п).
Каждый независимый участок освещенной поверхности в со-
ответствии с принципом Гюйгенса — Кирхгофа может рассматри-
ваться как независимый источник вторичных волн (отраженного
поля). Результирующее поле формируется с учетом амплитуд и
фаз отдельных источников как результат суперпозиции отражен-
ных волн и имеет резко выраженный интерференционный харак-
тер (это проявляется в изрезанности диаграммы вторичного рас-
сеяния) вследствие несовпадения фазовых соотношений волн,
отраженных от элементов поверхности. Толщина поверхностного
слоя, в котором сосредоточено вторичное магнитное поле, умень-
шается с увеличением частоты, проводимости и магнитной прони-
цаемости материала поверхности. По мере удаления от поверхно-
сти плотность тока убывает согласно тому же закону, что и
амплитуда напряженности поля.
Высокочастотной области присущи следующие особенности:
зеркальное отражение; «ползущие» волны, обусловленные рассея-
нием в области тени; «бегущие» волны, возникающие при наклон-
ном падении ЭМВ. Результирующее поле является суперпозицией
указанных составляющих.
Следует отметить, что наблюдается плавный переход из осве-
щенной области в область тени. Однако иногда в задачах электро-
динамики выделяют область полутени. Дифракционные явления,
связанные с рассеянием в области полутени, рассмотрены в рабо-
тах академика В.А. Фока, которым установлен принцип локально-
сти тока вблизи границы раздела «свет — тень».
Вклад зеркальной составляющей в суммарное поле обычно
оценивают на основе применения методов физической и геомет-
рической оптики. Согласно этим методам отраженное поле носит
локальный характер, так как при его формировании основной
вклад вносит первая зона Френеля, а вторичные излучения от ос-
тальных зон взаимно компенсируются. Поэтому характер поверх-
ности за пределами первой зоны Френеля для указанных методов
не имеет существенного значения.
Если необходимо учесть рассеянное поле, связанное с участ-
ками излома поверхности, то следует использовать методы физи-
142
2. Радиолокационная разведка
ческой теории дифракции Уфимцева [19] или методы геометриче-
ской теории дифракции Келлера [20, 21].
Метод краевых волн базируется на допущении, что ток, возни-
кающий на поверхности «освещенного» объекта, в высокочастотном
диапазоне содержит две составляющие: ток на освещенной части и
ток, обусловленный неоднородностями в виде ребер или острых кро-
мок поверхности. Вторая составляющая тока служит причиной воз-
никновения краевых волн, вносящих значительный вклад в дифрак-
ционную картину при всех ракурсах наблюдения цели.
В рэлеевской (резонансной) области, начиная с а / X > 0,1 (а —
характерный размер тела), наблюдаются осцилляции в отраженном
сигнале, которые носят резонансный характер. Особенно наглядно
это можно продемонстрировать на известном примере рассеяния
на шаре. Зависимость ЭПР шара от отношения его радиуса к длине
волны представлена на рис. 2.2 [22]. Первый максимум ЭПР на
графике соответствует случаю, когда отражение шара эквивалент-
но отражению от полуволнового вибратора (тш/л-0,5) и отра-
женная волна формируется только первой зоной Френеля. Первый
минимум соответствует условию па / X « 0,9.
Рис. 2.2. Зависимость ЭПР вторичного излучения
металлического шара от отношения его радиуса к
длине волны R/X
2.1. Технические основы РЛР
143
Увеличение значения отношения а /А приводит к уменьшению
ЭПР, поскольку в формировании рассеянного поля начинает уча-
ствовать вторая зона Френеля. С появлением участков, соответст-
вующих третьей зоне Френеля, ЭПР снова увеличивается. Очевид-
но, что максимальное значение ЭПР соответствует случаю, когда
отраженное поле формируется в результате сложения сигналов от
нечетного числа зон Френеля. По мере увеличения значения отно-
шения а/Х размах колебаний ЭПР уменьшается, а при а /А, >1,6
ЭПР будет равна площади поперечного сечения шара.
Аппроксимацию функции рассеяния шара можно получить с
помощью разложения по рядам Ми. При этом нормированное зна-
чение ЭПР может быть представлено в виде функции параметра z
(z/ 2л = а / А.) следующим образом [23]:
00
£(-1)"(2и + 1).
7И=1
(2.4)
где JOT+V2(2), 77^1/2(z) — сферические функции Бесселя и Хан-
келя соответственно.
Структура отраженного поля в значительной степени опреде-
ляется типом поверхности объекта. Гладкость поверхности ска-
зывается в различных частотных диапазонах по-разному. При
невыполнении условия h < X /(16 sin у) (у — угол отражения элек-
тромагнитной волны от поверхности тела при прямолинейном
распространении) рассеивающую поверхность следует считать
шероховатой, в результате чего рассеяние приобретает диффуз-
ный характер. Например, для диффузно-отражающего шара ЭПР
в 2,7 раза больше, чем для идеально проводящей сферы.
2.1.2.3. Эффект Доплера
Этот эффект используют для определения радиальной скоро-
сти движения целей. Частота f радиолокационного сигнала в не-
144
2. Радиолокационная разведка
подвижной системе координат и /' в движущейся системе коорди-
нат связаны соотношением, получаемым при использовании пре-
образования Лоренца:
l-vr/с
71-V /с2
(2.5)
dR
где vr =-----радиальная компонента вектора скорости v движе-
dt
ния радиолокационной цели относительно РЛС.
Аналогичное (2.5) соотношение для связи частот отраженного
целью и принятого неподвижной РЛС сигналов имеет вид
У1-у2/с2
1 + vr / с
(2.6)
Из (2.5) и (2.6) непосредственно следует соотношение для свя-
зи частот излученного РЛС зондирующего сигнала и сигнала, при-
нятого на той же позиции после отражения от цели:
f=ff^ = f^-2vr/c + 0\vr/c)),
l + vj С v 7
(2.7)
где f и fa — соответственно частоты принятого и зондирующего
сигналов; о2( ) — величины второго порядка малости относительно
отношения |vr /с| < vic « 1 для любых реальных макроскопиче-
ских объектов.
Из (2.7) следует, что доплеровский сдвиг частот
Гд=/-/0=-2/0уг/с = -2уг/Х
(2-8)
позволяет измерить радиальную скорость движения цели относи-
тельно РЛС средства разведки. При определении радиальной ско-
рости будут возникать систематическая погрешность в результате
пренебрежения релятивистским эффектом и погрешности в ре-
зультате отклонения значения скорости света в реальной неодно-
родной среде распространения радиолокационного сигнала от зна-
чения скорости света в вакууме.
2.1. Технические основы РЛР
145
2.1.2.4. Эффект направленного излучения
и приема радиоволн антенными системами
Этот эффект позволяет определять угловые координаты целей,
отражающих радиолокационные сигналы.
Перечисленные выше физические эффекты и информативные
параметры радиолокационного сигнала, на которые влияют эти
эффекты, позволяют определять геометрические координаты ра-
диолокационных целей. Чаще всего пространственные координаты
определяют в сферической топоцентрической системе координат,
начало которой совмещают с фазовым центром антенны РЛС, как
показано на рис. 2.3. Этими координатами являются: наклонная
дальность R, радиальная скорость vr, азимут а — угол, образован-
ный горизонтальной проекцией наклонной дальности и направле-
нием на Север (направлением местного меридиана) и угол места р,
который образует направление наклонной дальности с горизон-
тальной плоскостью.
Иногда вместо азимута и угла места РЛС определяет две дру-
гие угловые координаты, а именно направляющие углы 0Х и 0У, об-
разованные направлением наклонной дальности с соответствую-
щими координатными осями, или направляющие косинусы cos0r и
cos0v. В пределах изменения направляющих углов (0 > 0 > л) на-
правляющие косинусы являются их монотонными и однозначны-
ми функциями.
Рис. 2.3. Сферическая топоцентрическая сис-
тема координат для определения пространст-
венных координат объектов РЛР
146
2. Радиолокационная разведка
2.1.3. Классификация и сравнительный анализ
методов расчета ЭПР
Традиционно решение электродинамических задач подразде-
ляют на четыре этапа:
1) получение математических соотношений на основе решения
уравнений Максвелла в интегрально-дифференциальной форме;
2) введение определенных ограничений на поведение полей и
источников, которые проявляются в допустимом упрощении мо-
дели. Цель этого этапа — введение формального математического
описания дифракционной задачи;
3) преобразование формального математического описания к
виду, удобному для проведения численных расчетов, т. е. создание
алгоритма, реализующего численные методы вычисления;
4) получение искомых оценок, исследование их достоверности
и адекватности, а также оптимизация алгоритма для обеспечения
вычислительной эффективности.
Строгое решение задачи рассеяния поля плоской волны суще-
ствует для ограниченного числа случаев: для идеально проводя-
щей плоскости, кругового цилиндра, эллиптического цилиндра,
сферы и вытянутого сфероида. Это обусловлено тем, что волновое
уравнение
V2\|/ + £2у - 0, где к - (Од/ёц, (2.9)
полученное из уравнений Максвелла с учетом граничных условий,
может быть решено методом разделения переменных. Функция у
в (2.9) является суперпозицией сферических волн, излучаемых
элементарными источниками, распределенными на поверхности
проводящего тела. В результате этого сложная математическая
задача упрощается за счет уменьшения количества переменных и
ограничений для них.
Трудности при применении классических методов возникают
даже при решении задачи рассеяния на сфероиде и большой сфере.
Причина ограничений классических методов связана с проблема-
ми решения дифференциальных уравнений, а также с тем, что ре-
шения часто имеют вид расходящихся рядов или плохо обуслов-
ленных систем алгебраических уравнений.
2.1. Технические основы РЛР
147
К строгим методам решения дифракционных задач относятся
следующие основные методы:
- классический метод разделения переменных (собственных
функций [24]);
- метод поверхностных токов (интегрального уравнения [25]);
- метод парных интегральных уравнений (преобразования Фу-
рье [26]);
- метод Винера — Хопфа (интегральных преобразований [27]);
- вариационный метод [25] (в некоторой литературе его отно-
сят к строгим методам только частично).
Существует, кроме того, ряд методов, которые можно рассмат-
ривать как модификацию перечисленных строгих методов.
Метод поверхностных токов предполагает определение тока на
поверхности объекта как результат одновременного действия па-
дающей волны и вторичного поля. При этом дифракционное поле
является суперпозицией сферических волн, излучаемых каждым эле-
ментом поверхности тела. В отличие от этого метода при использо-
вании метода парных интегралов работают со спектром Фурье
поверхностного тока, а решение интегрального уравнения рассматри-
вают в дальней зоне. В методе разделения переменных исходные
дифференциальные уравнения Максвелла представляют в виде ска-
лярных дифференциальных уравнений электрического и магнитного
полей в ортогональных криволинейных (часто сферических) коорди-
натах. Основываясь на гармонической зависимости параметров элек-
тромагнитного поля от времени и вводя вспомогательные скалярные
функции, удается разделить переменные (составляющие поля), т. е.
привести уравнение к такому виду, где каждое из них содержит толь-
ко одну составляющую поля и одну координату.
Классическим примером строгого решения задачи дифракции
является задача дифракции плоской электромагнитной волны на
бесконечном проводящем круговом цилиндре радиусом а.
Если плоская волна распространяется в направлении, перпен-
дикулярном оси z (перпендикулярно образующей цилиндра), а
значения параметров s, ц, g для цилиндра и окружающей среды
различны, то строгое решение дифференциальных уравнений сво-
дится к решению уравнений Максвелла при граничных условиях
для составляющих электромагнитного поля на поверхности ци-
линдра и в бесконечности.
148
2. Радиолокационная разведка
В результате решения электродинамической задачи в цилинд-
рической системе координат (р, ср, z) получены проекции векторов
Ёг и Я рассеянного поля [28]:
=-E„t иг
т=1 Нт \&а)
Н, = -—E&W
zwp т=1 dp
В соответствии с этим закон распределения тока, возбужденного
на поверхности цилиндра ( р = а ), имеет вид
Z
cos<p-e7bcos<₽
J_ у (/r dH^k&ci>
H^\kd) dp
eJm<$
(2.Ю)
На рис. 2.4 показана диаграмма рассеяния ЭМВ на проводящем
цилиндре при различных соотношениях его радиуса а и длины
волны X.
Рис. 2.4. Нормированная диаграмма рассеяния
ЭМВ при дифракции плоской волны на проводя-
щем цилиндре при различных значениях параметра
2 ла / %:
1 — 7,94; 2 — 4,0; 3 — 0,20
2.1. Технические основы РЛР
149
Современные математические методы и алгоритмы расчета по-
лей рассеяния на объектах сложной конфигурации можно условно
подразделить на две группы. Первую группу составляют методы,
основанные на теории Делано [29], и развитые в работе Е.А. Шта-
гера [30] модели локальных рассеивателей. Суть этих методов со-
стоит в том, что предварительно модели целей сложной формы под-
разделяют на локальные отражающие элементы и далее на основе
применения принципа суперпозиции вычисляют характеристики
рассеяния целей и координаты фазового центра рассеяния.
Методы второй группы предполагают преобразование моде-
ли сложной цели к фацетной форме, т. е. состоящей из совокуп-
ности плоских ячеек с известной функцией рассеяния [31].
Недостатки второй группы методов связаны с грубой аппрокси-
мацией поверхности объекта, со сложностью ввода информации
о модели и с наличием погрешностей фацетного представления
теневых областей.
В ходе математического моделирования при решении задач
дифракции электромагнитных волн применяют различные мето-
ды расчета, различающиеся используемыми моделями взаимо-
действия электромагнитного поля с элементами поверхности
проводящих тел. Метод геометрической оптики дает высокочас-
тотное приближение для падающего и отраженного полей, но
только в направлении зеркального отражения, определяемом за-
коном отражения. Метод краевых волн позволяет уточнить при-
ближение физической оптики и учесть дифракционные явления
вблизи резких изломов поверхности рассеивающего тела. Как и
метод физической оптики, метод краевых волн применим в пер-
вую очередь к идеально проводящим выпуклым телам, например
к диску, прямоугольной пластине, конечному цилиндру. Приме-
нение данного математического аппарата позволило учесть по-
мимо поверхностных волн влияние неравномерной части тока
вблизи точек, лежащих на ребрах, и краевых волн, возникающих
на ребрах.
Известно, что геометрическая теория дифракции представляет
собой развитие и обобщение метода геометрической оптики, она
базируется на следующих основных физических допущениях [27]:
- распространение энергии электромагнитных волн происхо-
дит вдоль лучей;
150
2. Радиолокационная разведка
- длина волны электромагнитного поля мала по сравнению с
характерными размерами рассеивающего тела, радиусами кривиз-
ны его поверхности;
- кроме падающих, отраженных и преломленных лучей суще-
ствуют также дифрагированные лучи;
- лучи падают на гладкие участки поверхности рассеивающего
тела не только нормально; отражение и преломление происходит
по правилам геометрической оптики, дифрагированные лучи при
этом не возникают;
- лучи, падающие на гладкие участки поверхности касатель-
но и под любым углом на ребра, а также на вершины тел, по-
рождают пучки дифрагированных лучей, причем амплитуда
поля, соответствующего любому дифрагированному лучу, в
точке падения пропорциональна амплитуде падающего поля;
изменение амплитуды и фазы поля рассчитывают по законам
геометрической оптики;
- структура пучков дифрагированных лучей и коэффициенты
пропорциональности для них в точках дифракции различны для
лучей, падающих касательно на гладкие участки поверхности, на
ребра и на вершины;
- для луча, падающего касательно на гладкий участок поверх-
ности, пучок дифрагированных лучей имеет форму расходящегося
веера;
- для луча, падающего на ребро, пучок дифрагированных лу-
чей имеет форму воронки с вершиной в точке дифракции и с осью
вдоль касательной к ребру.
В отличие от указанных физических принципов метод краевых
волн основан на представлении поверхностных токов в виде двух
частей: равномерной, определяемой по правилам физической оп-
тики, и неравномерной, возникающей вследствие влияния изломов
поверхности. Неравномерная часть тока имеет характер краевой
волны с многократным отражением, распространяющейся в на-
правлении от ребра излома и затухающей по мере удаления от не-
го. Вблизи какой-либо точки, лежащей на ребре излома, ее прини-
мают равной току на поверхности бесконечного клина, ребро
которого касательно к ребру излома. Полагают, что краевая волна,
возникающая на ребре, может достигать других ребер тела и отра-
жаться от них, порождая вторичную дифракцию.
2.1. Технические основы РЛР
151
2.1.4. Оценка влияния атмосферы на распространение сигналов
при широкополосном радиолокационном зондировании объектов
Свойства и состояние атмосферы Земли заметно влияют на
прохождение электромагнитных волн и служат причиной возник-
новения погрешностей радиолокационных измерений при прове-
дении РЛР. Неоднородность атмосферы нарушает прямолиней-
ность распространения радиоволн и постоянство их скорости.
Поскольку показатель преломления атмосферы зависит от вы-
соты, изменяется направление распространения электромагнитной
волны в атмосфере, что приводит к погрешностям измерения угла
места, скорости и дальности. В этой ситуации применим принцип
Ферма, в соответствии с которым радиолуч в неоднородной среде
имеет такую траекторию, при которой время распространения по
заданному пути минимально.
При прохождении широкополосного сигнала через тропосферу
его форма сохраняется практически неизменной, так как скорость
распространения сигнала не зависит от частоты, что обусловливает
распространение гармоник спектра сигнала с одинаковой скоростью.
Иначе обстоит дело с ионосферой: ее дисперсионные свойства
являются причиной изменения фазовых соотношений между гар-
моническими составляющими широкополосного сигнала. Именно
это приводит к искажению формы сигнала в ионосфере.
Фазовые сдвиги вдоль пути распространения волн выражаются
следующим соотношением [14]:
ПЛ
dl,
(2.П)
где /„л — плазменная частота, определяемая концентрацией элек-
тронов в ионосфере; /— частота зондирующего сигнала.
Функция времени ср(7) представляет собой фазочастотную ха-
рактеристику (ФЧХ) диспергирующей среды. В ионосфере показа-
тель преломления «(./) зависит от частоты и концентрации элек-
тронов N3:
«(/) = 71-80.8Л,//2.
(2.12)
152
2. Радиолокационная разведка
Под действием ультрафиолетового излучения разреженный газ
в атмосфере ионизируется. Концентрация электронов достигает
максимума на высоте 300...400 км, она является функцией высоты
или угла р наклона трассы распространения ЭМВ относительно
Земли.
Зависимость распределения концентрации электронов от высо-
ты может быть аппроксимирована следующим соотношением [32]:
(А) = 7Мпах у- ехР
(2.13)
Для наклонных трасс распространения сигнала зависимость
концентрации элементов от высоты и угла 0 наклона трассы [33]
может быть представлена в виде
Л?3(Л,₽) = 1,7
+й2 +7?/zsinP -Л, -7?3
хехр
где 7?з — радиус Земли; hi — нижняя граница ионосферы; hM— высо-
та слоя ионосферы с максимальной концентрацией электронов.
Соответствующие графики показаны на рис. 2.5.
Поскольку в ионосфере показатель преломления меньше еди-
ницы, фазовая скорость может быть больше скорости света в ва-
кууме [14]:
(2'15)
V VoLL J V L 2
При этом групповая скорость v p = с(1 - xLd L), где L — длина пу-
ти распространения ЭМВ, а изменение времени распространения
гармонического сигнала, обусловленное дисперсионными свойст-
1 г 7 40 г
вами среды, =------1 f^dl = —-1 N3dl [14]. Зависимости време-
2с/о L Cfo L
2.1. Технические основы РЛР
153
Рис. 2.5. Аппроксимация концентрации электронов в ионо-
сфере по высоте для различных трасс распространения волн:
1 — вертикальная трасса; 2-4 — наклонные трассы под углами 60,
45, 30° соответственно
ни п от угла наклона трассы распространения волн показаны на
рис. 2.6. В частности, для вертикальной трассы протяженностью
400 км, на которой значение интегральной концентрации электро-
нов составляет 3,682-1017, изменение времени запаздывания сигна-
ла, обусловленное дисперсионными свойствами среды, равно
4,95-10’8 с.
Дисперсионные свойства среды распространения являются
также причиной искажения огибающей широкополосных сигна-
лов. В качестве примера можно рассмотреть прямоугольный сиг-
нал, огибающая которого после прохождения атмосферы может
быть представлена следующим соотношением [14]:
где С(и) и S(u) — интегралы Френеля, С(и) =
и
Jcos
о
и
S(u) = J sin
о
ИХ'
dx.
2
154
2. Радиолокационная разведка
Рис. 2.6. Зависимости времени распростра-
нения сигнала в атмосфере от протяженнос-
ти трассы распространения:
1 — вертикальная трасса; 2 — наклонная трасса
под углом 60°
На рис. 2.7 показан график, характеризующий изменение оги-
бающей сигнала прямоугольной формы с несущей частотой 1 ГГц
после прохождения ионосферы.
Рис. 2.7. Искажения огибающей сигнала
прямоугольной формы после прохождения
ионосферы (несущая частота 1 ГГц)
2.1. Технические основы РЛР
155
Без значительных искажений будет проходить атмосферу сиг-
нал, ширина полосы которого [15] определяется соотношением
7^
. Допустимыми искажениями считаются
^^инт
те, при которых измерение группового запаздывания
162^ А/
А(,р _------—— не превышает длительности сжатого импульса.
cfo
На рис. 2.8 изображены графики зависимости допустимой ши-
рины спектра сигналов, распространяющихся в ионосфере без
больших фазовых искажений, от протяженности трассы распро-
странения. Из графика видно, что с уменьшением дальности обна-
ружения можно увеличивать ширину спектра зондирующего сиг-
нала. Например, при протяженности трассы 1000 км допустимая
ширина спектра равна 84,2 МГц, а для трассы длиной 400 км соот-
ветствующее значение возрастает до 117,4 МГц. Для наклонной
трассы (угол наклона 0 = 60°) при высоте 400 км допустимая ши-
рина спектра возрастает на 8,6 МГц по сравнению с шириной
спектра для вертикальной трассы.
Рис. 2.8. Графики зависимости ширины спек-
тра сигналов, распространяющихся в атмосфе-
ре без больших фазовых искажений, от протя-
женности трассы:
1 — вертикальная трасса; 2, 3 — наклонные трассы
под углами 60 и 45° соответственно
156
2. Радиолокационная разведка
В связи с тем что в процессе распространения сигнала в ионосфе-
ре изменяются фазовая структура сигнала и его огибающая, указан-
ные искажения приводят к ухудшению характеристик обнаружения,
разрешающей способности и точности определения координат.
Погрешность измерения дальности при переходе от верти-
кальной трассы к наклонной, обусловленной разностью времен-
ной задержки сигнала вследствие дисперсионных свойств ионо-
сферы, изменяется незначительно. Например, для вертикальной
трассы распространения сигнала протяженностью 1000 км и на-
клонной трассы (угол наклона 60°) указанная погрешность не
превышает 1,28 м. Если не вводить поправку на реальные пара-
метры трассы распространения при использовании методов из-
мерения по доплеровской частоте, то можно ожидать появления
погрешности измерения скорости цели.
Из возможных видов искажений наиболее существенны фазо-
частотные искажения, вызываемые нелинейностью ФЧХ среды,
которые приводят к непостоянству времени группового запазды-
вания отдельных частот [15]:
(217)
л df с cf^
Если зондирующий сигнал не был модулирован по частоте, то
вследствие изменения группового времени запаздывания от часто-
ты принятый сигнал на выходе системы обработки становится час-
тотно-модулированным. Этим объясняется причина возникнове-
ния погрешности измерения координат и ухудшения разрешающей
способности по дальности и по скорости. Для анализа точности
измерения координат объектов, разрешающей способности по
дальности и по скорости может быть использована диаграмма не-
определенности сигнала (смешанная корреляционная функция по
времени и по частоте) и ее сечения по частоте.
В частности, для гауссовского импульса с линейной частотной
модуляцией модуль автокорреляционной функции (АКФ) опреде-
ляется следующим соотношением:
К (т, А®) = ехр(-0,5у 2т2) ехр
(26т-Д(о)2
8у
(2.18)
2.1. Технические основы РЛР
157
Сечение АКФ плоскостью на уровне 0,5 от максимального значе-
1 ь
ния показано на рис. 2.9 [34], где а = —arctg---т--------угол
2 0,25-(у + Ь )
наклона эллипса; Пю( - —-— — полоса частот импульса; а =
Wcp
1 Ь т Г. г о / 4
= — arctg------л---z----угол наклона эллипса; + b /у —
2 0,25-(у4 +62) V
коэффициент сжатия импульса по длительности; b = Асом/2тим —
коэффициент, характеризующий скорость изменения частоты;
Лсом - 2nAfm — девиация частоты; у - Vir / ти — коэффициент, ха-
рактеризующий скорость изменения огибающей; ти — длительность
импульса на уровне 0,46.
Рис. 2.9. Сечение поверхности АГ(т,Дю) горизонтальной плоскостью
на уровне 0,5 от максимального значения
Диаметры эллипса, совпадающие с осями т и Лю, определяют
разрешающую способность по времени (по дальности) и по часто-
те (скорости) при раздельном разрешении этих параметров.
158
2. Радиолокационная разведка
Численную оценку нижней границы снижения разреша-
ющей способности по дальности можно определить в виде
A7?n,in = / 2, где — минимальное значение разности дли-
тельностей зондирующего и принятого сигналов при учете
дисперсионных свойств ионосферы. В качестве тп11п можно при-
нять разность длительностей переднего фронта сигналов:
Тф . На рис. 2.10, 2.11 показаны графики уменьшения
л/ЛЛ2^)
потенциальной разрешающей способности по дальности в зави-
симости от протяженности трассы распространения ЭМВ и не-
сущей частоты сигнала соответственно.
Рис. 2.10. Зависимости разрешающей способ-
ности по дальности от протяженности трассы
распространения ЭМВ в ионосфере:
1 — вертикальная трасса; 2, 3 — наклонные трассы
под углами 60 и 45° соответственно
Более строго влияние дисперсионных искажений на снижение
разрешающей способности можно оценить по степени рассогласо-
вания параметров принятых сигналов после прохождения уст-
ройств, предназначенных для оптимальной фильтрации, рассчи-
танных на неискаженный сигнал. Компенсация дисперсионных
искажений должна проводиться при обработке отраженных сигна-
лов на основе реализации диспергирующих фильтров, компенси-
рующих изменение фазы.
2.1. Технические основы РЛР
159
Рис. 2.11. Зависимости разрешающей способности по
дальности от несущей частоты сигнала:
1 — трасса протяженностью 100...200 км; 2 — трасса протя-
женностью 100.. .700 км
2.1.5. Показатели качества работы средств РЛР
К основным показателям, по которым судят об эффективности
средства РЛР, обычно относят следующие.
Точность характеризуют значением погрешности, сопровож-
дающей работу средства РЛР. Как и для средств РРТР, точность
по-разному характеризуют для малых (нормальных) и для боль-
ших (аномальных) погрешностей.
Особую роль для описания малых погрешностей играет нор-
мальный закон распределения вероятностей. Практически любая
симметричная и «узкая» по сравнению с интервалом априорных
значений функция плотности распределения вероятностей возник-
новения погрешностей может быть с хорошей точностью аппрок-
симирована квадратичной экспонентой — гауссовской кривой.
А поскольку для практики важны только точные системы, форми-
рующие выходные оценки с малыми флуктуациями, условие «узо-
сти» плотности распределения вероятностей возникновения по-
грешностей радиолокационных измерителей в реальных условиях
всегда выполняются. Но если форма закона распределения W(&)
160
2. Радиолокационная разведка
малых погрешностей задана таким образом, то достаточной харак-
теристикой точности будут являться два параметра этого закона:
математическое ожидание М{&} = M{k - X } (смещение оценки X
относительно истинного значения оцениваемой величины X) и
дисперсия О; = A/{A(X-X*)2}. Характер поведения оценки (ре-
зультата работы РЛР) во времени характеризуется АКФ р; (т) =
= ^M{z(t)z(t-T)-M1{z}} или функционально связанным с АКФ
энергетическим спектром СЕ(со).
Конкретные значения аномальных, грубых погрешностей не
важны для характеристики точности. Эти погрешности оцени-
вают по вероятности их появления P{|g| » Зст;}. Такие грубые
погрешности (промахи) могут происходить при наличии неод-
нозначности в измерениях радиолокационных параметров, при
сбоях в аппаратуре, а также при воздействии специально орга-
низованных помех. Для оценки погрешностей обнаружения и
распознавания радиолокационных целей используют вероятно-
стные характеристики.
Рабочая область, или зона действия, — это область геомет-
рического пространства R3, в пределах которой средство РЛР
обеспечивает требуемую точность. Размер рабочей области опре-
деляет максимальное удаление 7?тах объекта разведки от разведы-
вательной РЛС. На значение RmAy. влияют несколько факторов. Во-
первых, на пути 27?пмх от РЛС до цели и обратно, а также при от-
ражении от цели рассеивается энергия радиолокационного сигна-
ла. Но для обеспечения точности РЛР принятый сигнал должен
иметь мощность не ниже некоторого порогового значения Р„ор.
Максимальная дальность, которой соответствует уровень РПор на
входе приемника средства РЛР, определяется по основному урав-
нению радиолокации [16]:
D I -^ИЗЛ^^^эф I
= 4-----э-- П = 4-----Л,
V471) pnop V^)2Pnop
(2.19)
где Ризл — мощность излучаемого зондирующего сигнала; G —
коэффициент усиления передающей антенны;
2.1. Технические основы РЛР
161
^=^изл<? (2.20)
— эффективное значение мощности зондирующего сигнала, излу-
чаемого РЛС по направлению главного лепестка диаграммы на-
правленности передающей антенны; S — эффективная площадь
приемной антенны, если передача и прием ведутся на одну и ту же
антенну,
S = (2.21)
4л
X — длина волны радиолокационного сигнала; с->ф — эффективная
площадь рассеяния цели; ц — коэффициент, учитывающий потери
в антенно-фидерном тракте.
Эффективная площадь приемной антенны — это коэффициент
пропорциональности между плотностью потока мощности |П| -
= |ЕхН| рассеянного целью электромагнитного поля и мощностью,
подводимой антенно-фидерным трактом ко входу приемника. Для
больших антенн значение S приближается к геометрической пло-
щади раскрыва, нормального к вектору Умова — Пойнтинга П.
Однако и у антенн с исчезающе малой геометрической площадью
(например, когда антенной служит кусок проволоки) площадь S
конечна. Так, при произвольной ориентации полуволнового вибра-
тора из проволоки или тонкой ленты относительно вектора Е на-
пряженности электрического поля
5 = 0,1V. (2.22)
Коэффициент Пэф имеет размерность площади и представляет
собой коэффициент пропорциональности между плотностью пото-
ка мощности радиолокационного сигнала, облучающего цель, и
мощностью сигнала, переизлученного целью (отраженного в на-
правлении на РЛС).
Соотношение (2.19) получено для условий прямолинейного
распространения радиоволны на трассе между РЛС и радиолока-
ционной целью. Но каковы бы ни были мощность излучения и
другие переменные в правой части уравнения (2.19), радиус рабо-
чей области средства РЛР, работающего в обычных радиолокаци-
онных диапазонах в околоземном пространстве, все равно не мо-
162
2. Радиолокационная разведка
жет превысить дальность прямой видимости. С учетом рефракции
в атмосфере эта дальность (км) составляет
где Ярде и 77рлц — соответственно высота антенны РЛС и высота
радиолокационной цели (м) над сферической земной поверхно-
стью со средним радиусом 7?3 s 6400 км.
Формула (2.23) справедлива вплоть до высот орбит искусст-
венного спутника Земли, предназначенного для целей РЛР.
Для увеличения значения 7?отах, как требует соотношение
(2.23), антенну средства РЛР поднимают над поверхностью Земли,
размещая РЛР на борту самолета (это системы дальнего радиоло-
кационного обнаружения) или ИСЗ.
Другой способ увеличения дальности основывается на исполь-
зовании декаметровых волн, трасса распространения которых уве-
личивается за счет отражений от земной поверхности и от ионо-
сферы. Этот принцип использует ЗГ РЛС.
Поскольку при решении разных задач (обнаружения, распозна-
вания, измерения параметров движения) требуемая точность дос-
тигается при разных Р110р, максимальная дальность у одного и того
же средства РЛР тоже может быть разной.
Помехоустойчивость и помехозащищенность характеризуют
способность РЛР обеспечивать требуемую точность в условиях
действия помех естественного происхождения (помехоустойчи-
вость) и специально организованных противоборствующей сторо-
ной, с которой средство РЛР состоит в информационном конфлик-
те (помехозащищенность).
При анализе и проектировании средств РЛР различают реаль-
ную и потенциальную помехоустойчивость. Потенциальные — это
наивысшие, предельно достижимые характеристики помехоустой-
чивости и помехозащищенности, которые всегда выше реальных и
соответствуют наилучшим способам обработки при приеме радио-
локационного сигнала. Сравнение потенциальной и реальной по-
мехоустойчивости позволяет выявить резерв для совершенствова-
ния средств РЛР.
2.1. Технические основы РЛР
163
Скрытность характеризует доступность информации о пара-
метрах (пространственно-временных и более сложных, обобщен-
ных) сигналов для средств РТР противника в информационном
конфликте при условии, что РЛР обеспечивает требуемую точность.
Разрешающая способность средств РЛР — это способность к
раздельному наблюдению (обнаружению, измерению параметров
и т. п.) сигналов от разных объектов разведки при обеспечении
требуемой точности. Разрешающая способность характеризуется
минимальным рассогласованием АХ = Х( - Х2 значений параметров
сигналов, отраженных раздельно наблюдаемыми радиолокацион-
ными целями. Значение разрешающей способности АХ определяет
размер элемента разрешения в рабочей области средства РЛР по
параметру X. Число элементов разрешения в рабочей области сред-
ства РЛР зависит от размера этой области, свойств зондирующего
сигнала, характеристик и свойств антенной системы. Для улучше-
ния разрешающей способности по дальности расширяют спектр
зондирующего сигнала, а по радиальной скорости — увеличивают
длительность сигнала Тс. Таким образом, для совместного умень-
шения размеров элемента разрешения и по дальности, и по скоро-
сти требуется увеличить базу сигнала В = &fcTc.
Разрешающую способность по угловым координатам увеличи-
вают за счет уменьшения ширины ДНА средства РЛР: чем меньше
ширина ДНА, тем меньше размер элемента разрешения по угловым
координатам. В частности, для увеличения разрешающей способно-
сти по угловым координатам используют движение носителя сред-
ства РЛР. Радиолокаторы, установленные на борту самолета или
ИСЗ, синтезируют апертуру антенны за время движения по дуге
траектории L. При этом размер синтезированной апертуры, опреде-
ляющий размер элемента разрешения, оказывается гораздо больше
физического размера антенной апертуры.
Пропускная способность — это максимальное количество ра-
диолокационной информации, которое может быть извлечено
средством РЛР в единицу времени при выполнении требований по
точности формируемых разведывательных данных. В соответст-
вии с этим определением пропускная способность может изме-
ряться числом целей (обнаруженных, распознанных, принятых на
сопровождение) в секунду.
164
2. Радиолокационная разведка
Кроме перечисленных показателей, средства РЛР могут харак-
теризоваться надежностью, эксплуатационной эффективностью,
экономическими и оперативно-тактическими параметрами.
2.1.6. Зондирующие сигналы средств РЛР
Разработанная к настоящему времени теория радиолокации рас-
полагает мощным аппаратом анализа и синтеза радиолокационных
сигналов, а также методами наилучшего (оптимального) построения
подсистем их приема и обработки. В частности, согласно теории на
выходе оптимального приемника должно формироваться колебание,
совпадающее по форме с корреляционной функцией зондирующего
сигнала. Поэтому перечисленные выше основные качественные ха-
рактеристики РЛС, такие как возможность разрешения сигнала,
точность оценивания его параметров, связаны с формой двумерной
корреляционной функции (ДКФ) зондирующего сигнала по частоте
□ и по времени т.
При исследованиях корреляционной функции оперируют с
комплексной формой представления сигналов (с аналитическими
сигналами).
Реальному сигналу
s(t Д) = S(t, X)[cosco/ + <р(/ Д)], (2.24)
где S(t, X) и ф(/, X) — огибающая сигнала и его фаза, учитывающая
модуляцию сигнала и зависимость его от вектора параметров X,
соответствует аналитический сигнал
5(?Д) = 5(?Д) 4-й±(^Д) = 5(?Д)ехр[гср(^Д)]ехр[гсо^], (2.25)
где л’Д/Д) — сигнал, сопряженный с 5(?Д) в смысле преобразо-
вания Гильберта:
5хДк) = -1[^^2б/Т; (2.26)
Я J t-T
5(?Д)ехр[г’ф(^Д)] — комплексная огибающая сигнала, которая
для обычных узкополосных сигналов изменяется с течением вре-
мени существенно медленнее, чем несущее колебание coscot
2.1. Технические основы РЛР
165
Двумерная корреляционная функция радиолокационного сиг-
нала [2] определяется соотношением
7 • *
Я(т,О) = j t/(Ot/(/-T)exp(-zQO^» (2.27)
где U (t) — огибающая, комплексно сопряженная с U (t).
На выходе оптимального приемника формируются сигналы,
описываемые модулем корреляционного интеграла (2.27). Поэтому
ДКФ является обобщением корреляционного интеграла на случай
рассогласования принимаемого и опорного сигналов по времени
на интервал т и по частоте на величину расстройки Q. При этом т
можно физически интерпретировать как несовпадение задержек
принимаемого и опорного сигналов, a Q — как расстройку согла-
сованного фильтра относительно несущей частоты принимаемого
сигнала, что физически обусловлена эффектом Доплера при работе
с движущимися объектами. Поэтому ДКФ при различных фикси-
рованных значениях т определяют зависимость искажений спектра
выходного сигнала от задержки принимаемого сигнала относи-
тельно опорного, а при фиксированных значениях Q устанавлива-
ют зависимость искажений огибающей выходного сигнала от рас-
стройки по частоте. ДКФ радиолокационного сигнала четная
(1?(-t,-Q) = 7?(t,Q) ) и имеет глобальный экстремум в точке (т = О,
Q - 0), причем максимальное значение
00
|Д(0,0)|= j |{/(0|2Л = 2е, (2.28)
где Q — энергия сигнала.
Модуль нормированного значения ДКФ
X(t,Q) = L_^ (2.29)
называется функцией неопределенности и широко используется
для анализа свойств зондирующего сигнала средств РЛР.
166
2. Радиолокационная разведка
Функцию неопределенности зондирующего сигнала (ФН ЗС)
можно представить поверхностью в трехмерной координатной
системе. Объем, ограниченный поверхностью функции неопреде-
ленности, называют телом неопределенности. На рис. 2.12 в каче-
стве примера представлен вид тела неопределенности зондирую-
Рис. 2.12. Тело неопределенности прямо-
угольного радиоимпульса
щего сигнала, имеющего форму прямоугольного радиоимпульса
длительностью тим:
Х(т,£2) =
8т(^(тим-|т|)/2)
От /2
им/
(2.30)
Объем тела неопределенности
ОО ОО
V = — [ [ x2(t,QWQ = 1
2л ДД
(2.31)
постоянен, т. е. если уменьшается длительность сигнала ти (и соот-
ветственно тело неопределенности сжимается вдоль оси т), сигнал
X(tQ) пропорционально расширяется вдоль оси Q.
Рельеф ФН ЗС позволяет судить о свойствах сигнала при его
оптимальной обработке. Например, острота основного максимума
свидетельствует о точности измерения дальности и скорости или о
разрешающей способности при наблюдении близко расположен-
ных целей. Наличие дополнительных максимумов рельефа ФН ЗС
2.1. Технические основы РЛР
167
указывает на неоднозначность измерения или маскировку слабого
отраженного сигнала боковыми лепестками функции неопреде-
ленности сильного сигнала. Наконец, постоянство объема ФН ЗС
при фиксированном максимуме в начале координат свидетельст-
вует о том, что любое изменение вида зондирующего сигнала мо-
жет только деформировать тело ФН ЗС, не меняя его объема, по-
ложения и значения максимума.
Несмотря на большую наглядность трехмерных поверхностей
ФН ЗС, использовать их изображения при синтезе и анализе зон-
дирующих сигналов неудобно. Поэтому на практике рассматрива-
ют сечения тел неопределенности плоскостью, параллельной
плоскости т0£1, на некотором заданном уровне, например у(т, Q) =
- 0,5. Геометрические фигуры в таких сечениях называются диа-
граммами неопределенности [2]. Центр этих диаграмм всегда
находится в начале координат, они обладают центральной симмет-
рией и инвариантны к изменению параметров сигнала (при изме-
нениях формы зондирующего сигнала их площадь не меняется).
Для примера на рис. 2.13 изображены диаграммы неопределенно-
сти прямоугольного импульса (а) и пачки таких импульсов, при-
нимаемых радиолокатором при обзоре пространства и непродол-
жительном радиолокационном контакте с целью (б).
Рис. 2.13. Диаграммы неопределенности типичных радиолокационных
сигналов
ФН ЗС можно использовать при анализе схем обработки ра-
диолокационных сигналов с различной задержкой. Для этого с
началом координат на плоскости т(Ю следует совместить диа-
грамму неопределенности сигнала, для которого момент приема
равен нулю. Это излученный зондирующий сигнал. Тогда эллип-
168
2. Радиолокационная разведка
сы диаграммы неопределенности отраженного сигнала будут
смещены по оси т в положительную сторону на время распро-
странения сигнала до цели и обратно, а по оси Q — на величину
доплеровского сдвига частоты принятого сигнала. При повто-
ряющихся сигналах, когда диаграммы направленности подобны
диаграмме, изображенной на рис. 2.13, б, однозначное измерение
времени запаздывания возможно только в пределах периода
повторения импульсов, т. е. при выполнении условия т < Тп,
а доплеровского сдвига частоты — при |£1Д| < л/Тп. Объединяя
эти условия, можно установить ограничения на выбор частоты
повторения импульсов зондирующего сигнала Fn:
(2.32)
т
max
Диаграммы неопределенности показывают контуры тел неоп-
ределенности при пересечении ДКФ на уровне 0,5. Таким образом,
для разрешения целей (на основе анализа сигналов, отраженных
радиолокационными целями) нужно, чтобы диаграммы неопреде-
ленности не пересекались. Только в этом случае можно раздельно
наблюдать сигналы от разных целей. Поэтому для хорошего раз-
решения по дальности нужно уменьшать длительность отклика
приемника РЛС на принятый сигнал от цели, а для хорошего раз-
решения по скорости — уменьшать ширину спектра этого отклика,
т. е. сужать диаграмму неопределенности вдоль оси Q (рис. 2.14).
Но поскольку 5Q 5тим = const, одновременно повышать 5Q и 5т при
использовании простых сигналов не удается.
Значения дальности R и радиальной скорости vr находят по по-
ложению максимума функции неопределенности зондирующего
сигнала по оси т или по оси Q соответственно. Точность фиксации
положения максимума ФН ЗС зависит от остроты пика Ат по оси т.
Для простых сигналов Ат пропорциональна длительности импуль-
са зондирующего сигнала тим, поэтому для повышения точности
следует эту длительность уменьшать. В то же время точность фик-
сации положения максимума функции неопределенности сигнала
Qmax по оси Q зависит от протяженности AQ пика по этой оси. Так
как ДО ~ 1/тим, точность измерения радиальной скорости возраста-
2.1. Технические основы РЛР
169
ет при увеличении значения тим. Деформируя тело неопределенно-
сти простого сигнала, можно сделать пик функции %(т) или %(Q)
более острым и тем самым повысить точность измерения R или vr
соответственно.
Рис. 2.14. Диаграммы неопределенности
сигналов, отраженных несколькими целями
Таким образом, теория радиолокационных сигналов устанав-
ливает, что при простых зондирующих сигналах, у которых база
5О5ти (произведение длительности сигнала и ширины его спектра)
близка к единице, вследствие постоянства объема функции неоп-
ределенности запросного сигнала или площади диаграммы неоп-
ределенности невозможно повышать разрешающую способность и
точность одновременно по т и по Q. Для преодоления этого недос-
татка необходимо переходить к так называемым сложным сигна-
лам, у которых база сигнала 8£18тим » 1.
Применение сложных сигналов позволяет разрешить противо-
речия и обеспечить выполнение требований по достижению боль-
шой дальности обнаружения и высокой разрешающей способно-
сти. Дальность обнаружения повышается при использовании
зондирующих сигналов большой энергии Q. Увеличение энергии
Q возможно за счет увеличения либо мощности, либо длительно-
сти сигнала. Мощность в РЛС ограничена возможностями генера-
тора радиочастоты, электрической прочностью фидерных линий,
соединяющих этот генератор с антенной, требованиями электро-
магнитной совместимости с другими радиоэлектронными систе-
170
2. Радиолокационная разведка
мами, требованиями скрытности работы. Поэтому проще увеличи-
вать энергию зондирующего сигнала за счет его длительности. Но
сигналы большой длительности не позволяют разрешать цели по
дальности. Для устранения этого недостатка в качестве зонди-
рующих применяют импульсные сигналы с большой базой В -
= 5/5тим » 1. Увеличивают базу за счет применения внутриим-
пульсной модуляции зондирующего сигнала.
Принцип создания и использования сигналов с внутриим-
пульсной модуляцией можно проиллюстрировать следующим об-
разом. Протяженный во времени импульс зондирующего радиоло-
кационного сигнала тим составляется из п примыкающих друг к
другу более коротких импульсов (рис. 2.15).
Рис. 2.15. Вид сложного сигнала
На приемной стороне эти импульсы когерентно складываются,
образуя импульс в п раз большей амплитуды и соответственно в н2
большей мощности. Шумы, сопровождающие прием радиолокацион-
ного сигнала, складываются некогерентно, увеличивая мощность
шумового выброса только в п раз. Поэтому результирующее отноше-
ние сигнал/шум при такой обработке увеличивается в п/п = п раз.
Поскольку длительность каждого элемента S; примерно в п раз
меньше длительности импульса тнм, ширина спектра сложного сиг-
нала, определяемая длительностью самого короткого элемента, со-
ставит примерно п/тим, а база сложного сигнала В -ттп/ =п.
Таким образом, база сложного сигнала тем больше, чем больше
элементов составляют этот сигнал. Преобразование протяженного
импульса в п раз более короткий импульс при соответствующем
увеличении энергетического отношения сигнал/шум называется
сжатием сложного сигнала. Чтобы сжатие было возможным, парци-
2.1. Технические основы РЛР
171
альные сигналы 5г, z е 1, п должны отличаться друг от друга. В на-
стоящее время в радиолокационных системах наиболее широко
используются два вида сложных сигналов: с модуляцией несущей
частоты импульса по линейному закону (линейно-частотно-модули-
рованные — ЛЧМ-сигналы) и сигналы с дискретным изменением
фазы несущего колебания по закону кодовой последовательности
(ФКМ-сигналы).
Если в пределах длительности импульса ти модулировать не-
сущую частоту по линейному закону с большой девиацией часто-
ты то база сигнала составит В = тимД/с = 2тимА/д » 1, а форма
огибающей спектральной плотности зондирующего сигнала будет
приближаться к прямоугольной ($(/) = const). В соответствии с
(2.28) и (2.29) функция неопределенности такого сигнала в сече-
нии Q = О будет равна
%(т,0)= f 5(/)ехр(йл/т)# = 5шу»теХр(Дя/1,т). (2.33)
Л 4
Поскольку отклик оптимального приемника повторяет форму
функции неопределенности радиолокационного сигнала, из (2.33)
ясно, что ЛЧМ-импульс этого отклика (рис. 2.16) имеет огибаю-
sin л/'t
шую вида------—.
Длительность выходного импульса на уровне 0,637 равна
тсж =1/ fn. Таким образом, оптимальная обработка обеспечивает
сжатие ЛЧМ-импульса в Ксж = т^ /тсж = тим/д раз.
В общем случае, а не только при Q = 0, функция неопределен-
ности сигнала с внутриимпульсной линейной частотной модуля-
цией имеет вид, показанный на рис. 2.17. Для сжатия ЛЧМ-
импульсов можно использовать устройства с прямоугольной
амплитудно-частотной и квадратичной фазочастотной характери-
стиками, в частности дисперсионные ЛЗ. У дисперсионной ЛЗ
скорость изменения времени группового запаздывания от частоты
противоположна по знаку скорости изменения частоты ЛЧМ-
сигнала во времени.
172
2. Радиолокационная разведка
Наиболее распространены дисперсионные ультразвуковые ли-
нии задержки (УЛЗ) на поверхностных акустических волнах, пред-
ставляющие собой тонкие пластины пьезоэлектрических материа-
лов (синтетического пьезокварца, ниобата лития, германата
висмута и др.), на которые нанесены преобразователи электриче-
ского сигнала в акустические колебания. Преобразователи пред-
ставляют собой металлические решетчатые электроды с перемен-
ным шагом решетки. К числу основных параметров ЛЗ относятся
рабочая частота fo, полоса пропускания Д/' и время задержки т3,
значения которых зависят от материала ЛЗ.
Рис. 2.16. Осциллограмма формирования
и сжатия ЛЧМ-импульса:
а — огибающая импульса; б — закон внутри-
импульсной модуляции; в — ЛЧМ-импульс;
г — импульс, сжатый в результате оптимальной
обработки
2.1. Технические основы РЛР
173
Рис. 2.17. Функция неопределенности ЛЧМ-сигнала
Увеличить базу (и соответственно коэффициент сжатия) слож-
ного сигнала можно за счет одновременного увеличения длитель-
ности и ширины спектра сигнала.
Чаще всего в качестве сложных сигналов с большой базой ис-
пользуются дискретно-кодированные сигналы (ДКС). В принципе
дискретное кодирование сигналов можно выполнять, изменяя в
соответствии с кодирующей последовательностью фазу, частоту
или амплитуду несущего колебания радиолокационного сигнала.
Наиболее распространными являются сигналы с модуляцией фазы
(ФКМ-сигналы):
S(t) = ехр{/[art + лГЦ(/)]}, 0</<нтл, (2.34)
k=i
где ГЦ(7) — модулирующая кодовая последовательность, прини-
мающая значения (0, 1).
Цифровая техника позволяет формировать кодовые последова-
тельности П;(/) с большой точностью, что в сочетании с высокой
стабильностью несущей частоты повышает точность формирова-
ния зондирующего сигнала РЛС и обработку принятого сигнала.
Для фазовой манипуляции сигнала используют различные
кодовые последовательности П^Ц), прежде всего линейные рекур-
рентные кодовые последовательности на основе М-послсдоватсль-
ностей, кодов Баркера и др.
Для генерирования линейных последовательностей использу-
ют регистры сдвига (триггеры Т1, ..., Т4) с линейными обратными
связями (рис. 2.18).
174
2. Радиолокационная разведка
Рис. 2.18. Схема генератора Л/-последова-
тельности для М = 24 - 1
Последовательность символов {П^}, вырабатываемая регист-
ром сдвига, удовлетворяет рекуррентному правилу
Щ = С]Щ_1 + с2Пк_2 +... + стПк_т = /(Щ_1,..., Пл_то), (2.35)
где символы ГЦ так же, как и коэффициенты q, принимают значе-
ния 0 или 1, а операции сложения и умножения выполняются по
модулю 2.
Число т называется памятью последовательности. Соотно-
шение (2.35) задает рекуррентное правило, согласно которому
устройство, вырабатывающее линейную двоичную последова-
тельность, должно в каждом такте времени запоминать т по-
следних символов П*_ь П^ 2, ..., Па ,„ последовательности {П*},
умножать их на весовые коэффициенты cb c-i, ..., ст, задаваемые
правилом кодирования, и суммировать результаты умножения по
модулю 2.
Такие последовательности обладают рядом замечательных
свойств. Хотя они формируются регулярными алгоритмами и (или)
детерминированными схемами, но удовлетворяют тестам проверки
на случайность. Автокорреляционные характеристики таких после-
довательностей полностью определяют форму функции неопреде-
ленности зондирующего радиолокационного сигнала. На рис. 2.19
показан вид функции неопределенности ФКМ-сигнала, у которого
фаза зондирующего импульса модулируется последовательностью
Баркера с М - 13. Такие последовательности позволяют формиро-
вать зондирующий радиолокационный сигнал, функция неопреде-
ленности которого имеет минимальный уровень боковых выбросов,
не превышающий значения 1/М от уровня главного выброса. Но
2.1. Технические основы РЛР
175
баркеровские последовательности известны только для М< 13. Дру-
гие последовательности, формируемые регистром сдвига с линей-
ными обратными связями, могут иметь длину М- 2т - \, где т —
число триггеров регистра — генератора последовательности, или,
что то же самое, память последовательности.
Рис. 2.19. Функция неопределенности ФКМ-
сигнала, сформированного на основе последо-
вательности Баркера сМ= 13
На основе ^-последовательностей могут быть синтезированы
сложные и шумоподобные сигналы, в частности сигналы Голда,
которые обеспечивают достижение требуемых свойств функции
неопределенности, а также высокую скрытность и помехозащи-
щенность при использовании этих сигналов в системах передачи
информации.
Кроме бинарных кодовых последовательностей, известны так
называемые многофазные коды, когда скачок фазы А<р < л. Наибо-
лее распространены многофазные коды Френка, Хаффмена, после-
довательности полных кодовых колец и некоторые другие.
176
2. Радиолокационная разведка
2.2. РЛР в сложной
радиолокационной обстановке
2.2.1. Особенности ведения радиолокационной
параметрической разведки в условиях неопределенности
Результаты радиолокационной параметрической разведки оп-
ределяются полнотой и достоверностью измерительной информа-
ции и зависят от времени радиолокационного наблюдения, по-
грешностей измерений и обработки информации.
Методический аппарат, предназначенный для обработки ин-
формации по данным радиоизмерений, должен быть эффективен в
том числе и в условиях ограниченного объема измерительной ин-
формации, характеризующейся неполнотой, неоднозначностью и
неопределенностью.
Обычно под неопределенностью понимают [32] ситуацию, ко-
гда информация о возможных состояниях системы и внешней сре-
ды полностью или частично отсутствует или когда в системе воз-
можны те или иные непредсказуемые события. Вследствие этого
неопределенность сопряжена с риском получения недостоверных
оценок вычисляемых характеристик, с риском планирования и, как
следствие, принятия ошибочного решения.
С проявлением неопределенности сталкиваются, например,
при исследовании процесса отражения радиоволн от объектов
сложной формы, когда используются модели локальных (коге-
рентных) источников, для которых суммирование полей осущест-
вляется в условиях неточно известных фазовых соотношений меж-
ду ними [30].
В качестве основных причин возникновения ситуации неопре-
деленности с учетом данных работы [35] можно выделить сле-
дующие:
- низкую точность информации, возникающую ввиду недопус-
тимо больших погрешностей измерительных средств, возможного
снижения их надежности и отказов средств сбора и обработки ин-
формации;
- неполноту информации, обусловленую ограниченным време-
нем наблюдения целей и потерь при отбраковке аномальных изме-
рений;
2.2. РЛР в сложной радиолокационной обстановке
177
- ненадежность исходных данных, используемых для обнару-
жения объектов и измерения параметров их движения;
- неточность задания исходных данных при построении моде-
лей элементов радиоканала, используемых для вычисления оценок
радиолокационных характеристик и их погрешностей;
- использование детерминированных моделей, не учитываю-
щих накопленный статистический материал о вероятностных рас-
пределениях отраженных сигналов для исследуемых величин;
- использование неадекватных моделей вследствие ограничен-
ного объема исходных данных или использования неэффективного
математического аппарата, а также необоснованных допущений
(стационарности, эргодичности, однородности и т. д.) и исходных
данных при работе с моделями физических процессов;
- нечеткости правил в системах экспертного типа, которые мо-
гут быть применены для решения радиолокационных задач в не-
формализованных (либо плохо формализованных) областях.
По классификации А. Ньюэлла [36], к неформализуемым за-
дачам относятся те, которые обладают следующими особенно-
стями:
- алгоритмическое решение неизвестно либо не может быть
найдено из-за ограничений, например материальных и временных
ресурсов;
- алгоритм решения задачи не может быть представлен в чис-
ленной форме и требует символьного представления;
- цели и задачи не могут быть выражены в терминах точно оп-
ределенной целевой функции.
Вследствие указанных особенностей неформализуемые задачи
всегда характеризуются неполнотой, неоднозначностью и проти-
воречивостью данных и правил.
Вклад неточных начальных данных в общее число источников
неопределенностей, по оценке авторов работы [35]: при анализе
сложных технических систем составляет 82...84 %, неточных мо-
делей — 14... 15 %, неточных и неадекватных методов — 2.. .3 %.
Неопределенность можно классифицировать [36] по степени'.
полная определенность, вероятностная, лингвистическая, интер-
вальная и полная неопределенность; по характеру, параметриче-
ская, структурная и ситуационная; по использованию полученной
информации: устранимая и неустранимая неопределенность.
178
2. Радиолокационная разведка
Задачи обработки измерительной информации, в которых функ-
ции распределения (ФР) вероятностей для оцениваемых характери-
стик и дополнительные ограничения заданы на всем множестве их
изменения, являются задачами с полной априорной определенно-
стью. Если характеристики наблюдаемых процессов известны с
точностью до конечного числа параметров, то такие задачи относят-
ся к классу задач с параметрической априорной неопределенностью.
В задачах с непараметрической априорной неопределенностью
(обнаружение сигналов на фоне помех) семейство функций прав-
доподобия выборки является непараметрическим [37] в том смыс-
ле, что этому семейству нельзя поставить в однозначное соответ-
ствие некоторую конечномерную область евклидова пространства.
Непараметрическим является, например, семейство функций прав-
доподобия нормально коррелированных помех с известной корре-
ляционной функцией. Обычно к непараметрическим алгоритмам
относят алгоритмы обработки, инвариантные по отношению к од-
ной из непараметрических гипотез. Задачей непараметрической
статистики является также построение оценок неизвестных функ-
ций правдоподобия по наблюдаемой выборке.
В работе [37] приведена классификация задач синтеза инфор-
мационных систем и выделены следующие основные методы пре-
одоления априорной неопределенности: методы непараметриче-
ской статистики; асимптотические методы; методы адаптации,
использующие обучающие выборки; методы параметрической ста-
тистики, основанные на принципах инвариантности, подобия и
минимакса. Несмотря на многообразие методов, можно полагать,
что развитие теории и методов преодоления априорной неопреде-
ленности далеко до полного завершения.
Для устранения априорной неопределенности в задачах, связан-
ных с оценкой радиолокационных характеристик целей, достаточно
эффективными являются структурная и параметрическая идентифи-
кация систем. Эти методы в большинстве случаев позволяют ликви-
дировать неточность и неоднозначность моделей элементов радио-
канала. Здесь под идентификацией целей понимается разделение
реализаций отраженных сигналов на классы, соответствующие оп-
ределенным объектам и отождествление конкретных значений ам-
плитуд отраженных сигналов с конкретным типом объекта. Такое
толкование соответствует общепринятому понятию идентификации
2.2. РЛР в сложной радиолокационной обстановке
179
[38] в широком смысле, которая заключается в получении или уточ-
нении по экспериментальным данным модели системы, а именно в
построении оптимальной в некотором смысле модели системы по
результатам наблюдения над выходными и входными переменными
системы. При этом задача идентификации сводится:
- к выбору структуры системы и определению класса адекват-
ных математических моделей;
- к оценке параметров стационарности и линейности соответ-
ствующих операторов;
- к определению соотношений, характеризующих влияние вход-
ных воздействий на выбор информативных переменных.
В узком смысле задача идентификации заключается в оценке
параметров и состояния системы по результатам наблюдений.
К априорной неопределенности при радиолокационных изме-
рениях приводит снижение объема получаемой информации
вследствие срыва радиолокационного сопровождения целей, по-
грешностей обнаружения и распознавания. В этом случае большое
значение имеет идентификация траекторий, особенно в условиях
сложной радиолокационной обстановки и действия помех.
Ошибочные решения при идентификации траекторий могут
быть следствием неразрешения целей по дальности и по угловым
координатам из-за ограниченных информационных возможностей
РЛС и действия помех различного рода. В этом случае для повы-
шения достоверности идентификации параметров траекторий ис-
пользуют разнородную измерительную информацию, получаемую
с помощью всех имеющихся измерительных средств.
Для оценивания траекторных и радиолокационных характери-
стик объектов используют методы фильтрации и сглаживания из-
мерительной информации, методы отбраковки и восстановления
аномальных измерений, а также робастные алгоритмы, обеспечи-
вающие инвариантность по отношению к погрешностям определе-
ния параметров моделей и погрешностям измерений.
При выборе алгоритмов решения перечисленных задач необ-
ходимо учитывать возможную их некорректность (по Ж. Адамару
или А.И. Тихонову [39]), когда небольшие изменения в исходных
данных могут привести к большим изменениям оцениваемых па-
раметров. В этом случае целесообразно использовать эффектив-
ный метод регуляризации [39, 40].
180
2. Радиолокационная разведка
Для преодоления априорной неопределенности в радиолока-
ции используют вероятностное описание функционирования из-
мерительной системы и объекта локации, что обусловлено слу-
чайной природой воздействия дестабилизирующих факторов на
элементы радиоканала и взаимодействия радиолокационной цели
с внешней средой при формировании отраженного сигнала.
Функции распределения наиболее полно отражают изучаемые
статистические закономерности. Обычно выборочную функцию
распределений случайной величины вычисляют с использовани-
ем классической непараметрической процедуры, основанной на
группировке наблюдений [41]. Кроме того, для решения задачи
выравнивания статистических распределений можно применять
метод моментов и методы, основанные на кривых Пирсона или
Бородачева [42].
При использовании параметрических методов для выравнива-
ния статистических распределений сложно выбрать адекватные
модели теоретических распределений, которые нужно применять
для аппроксимации встречающихся на практике функций (часто
бимодальных), и устранить неопределенность исходных данных,
используемых при построении гистограммы по эксперименталь-
ным данным.
2.2.2. Повышение точности радиолокационных измерений
на основе параметрической идентификации
измерительных каналов
На точность проведения измерений в ходе радиолокационной
разведки значительно влияют мультипликативные и аддитивные
помехи, связанные с дальномерным и угломерным шумами цели, а
также погрешности, обусловленные дестабилизацией параметров
измерительного тракта при измерениях и флуктуациях энергетиче-
ских характеристик радиолинии.
Компенсация указанных погрешностей представляет собой до-
статочно сложную задачу, возможность решения которой зависит от
априорной информации об измеряемых параметрах и погрешностях
измерений. Технические способы реализации известных процедур
уменьшения систематических погрешностей недостаточно прорабо-
таны и в известных измерителях не применяются [44].
2.2. РЛР в сложной радиолокационной обстановке
181
Рассмотрим метод повышения точности измерения радиолока-
ционных харктеристик целей на основе идентификации измери-
тельных каналов в ходе проведения измерений. Под идентифика-
цией здесь понимается определение параметров частотной
характеристики измерительного канала (либо передаточной функ-
ции) по наблюдаемым значениям зондирующих и отраженных
сигналов.
Реализация метода предлагает последовательное решение трех
задач:
1) идентификация параметров приемопередающего тракта
РЛС;
2) уточнение времени запаздывания сигнала при его распро-
странении в радиолинии «РЛС — цель»;
3) определение оператора рассеяния цели (либо ее частотной
характеристики).
При решении первой и второй задач должна быть выявлена за-
висимость точности измерения времени запаздывания сигнала от
структуры радиоканала, которая однозначно определяет ФЧХ
тракта и процесс преобразования сигнала. Характеристики изме-
рительного тракта зависят от инерционных свойств входящих в
него элементов и воздействий дестабилизирующих факторов в хо-
де измерений.
Для идентификации параметров измерительного тракта РЛС
необходима информация о параметрах широкополосных зонди-
рующих сигналов, в том числе в процессе проведения радиолока-
ционных измерений. Получение такой информации сопряжено с
большими техническими трудностями.
При отсутствии информации о зондирующем сигнале указан-
ную выше задачу идентификации параметров можно решить с
использованием пространственной (структурной) либо времен-
ной избыточности в измерительной системе. Пространственная
избыточность проявляется в наличии дополнительных измери-
тельных каналов. Это позволяет подойти к анализу и синтезу ра-
диолокационной измерительной системы с позиций теории инва-
риантности [45], в соответствии с которой для идентификации
систем с ненаблюдаемым входным сигналом необходимо, чтобы
между точкой его приложения и точкой, относительно которой
достигается инвариантность, существовали, по крайней мере, два
182
2. Радиолокационная разведка
канала передачи возмущающего воздействия (принцип двухка-
нальности Петрова).
С учетом указанных ограничений можно применять метод
вспомогательных систем (МВС) [46], являющийся модификацией
тестовых методов при неизвестном входном сигнале. При таком
методе предполагают, что измерительная система обладает струк-
турной избыточностью в виде дополнительных измерительных
каналов со вспомогательными линейными нестационарными либо
нелинейными системами, причем параметры этих вспомогатель-
ных систем известны с высокой точностью.
Рассмотрим в качестве примера применения МВС задачу иден-
тификации параметров линейного стационарного измерительного
устройства, преобразование сигнала в котором описывается обык-
новенным дифференциальным уравнением заданного порядка п:
+... + y(t) =x(0, (2.36)
где x(t), y(t) — неизвестный входной и наблюдаемый выходной
сигналы измерительного устройства соответственно, причем
Хо><0 =о,
где i - 0, (п -1) , aj (J = 1,п) — идентифицируемые параметры из-
мерительного устройства.
В операторной форме уравнение (2.36) можно записать в виде
y(t)=Ax(t). (2.37)
Для оценки ограниченного и непрерывного оператора А доста-
точно идентифицировать его обратный дифференциальный опера-
тор А~1:
=(апрп+.. . + агр +1),
где р = d/dt.
Пусть в дополнительном измерительном канале вспомогатель-
ная система (ВС) осуществляет однозначное преобразование над
входным сигналом в соответствии с известным оператором В. На-
2.2. РЛР в сложной радиолокационной обстановке
183
блюдаемый сигнал z(t) связан с входным сигналом x(t) соотноше-
нием
z(/) = ABx(f) при z(0)(,) = 0, i - 0, (п -1). (2.38)
Для оценки параметров линейного стационарного оператора А
необходимо и достаточно выбрать оператор вспомогательной сис-
темы на основе условия некоммутативности операторов: АВ — ВАф
ф 0, которому удовлетворяют операторы нелинейных и нестацио-
нарных систем [47]. Совместное решение уравнений (2.37) и (2.38)
позволяет исключить неизвестный входной сигнал х(/) и получить
следующее операторное уравнение идентификации:
BA~xy(f) = A~xz{f). (2.39)
Необходимо отметить, что для нелинейной ВС оператор В
является интегральным с ядром h(t, т) ф 0. В соответствии с
этим уравнение (2.39) можно представить в дифференциальной
форме:
Т п п
\h(t,x) dx = ^iajz(j}(t) + z(t). (2.40)
0 7=1 У=1
Таким образом, существует однозначное решение задачи иден-
тификации параметров измерительных устройств по наблюдаемым
выходным сигналам основного и дополнительного измерительных
каналов.
Однако непосредственному применению МВС для оценки па-
раметров радиоканала (или его элементов) препятствуют следую-
щие причины:
- вспомогательные системы являются элементами передатчика
РЛС и подвержены воздействию дестабилизирующих факторов, их
параметры при функционировании измерительных устройств не
могут быть известны точно, а постоянный контроль за ними за-
труднен;
- уравнения идентификации (2.39) и (2.40) составлены для
безынерционной динамической системы и не содержат парамет-
ров, определяющих задержку сигнала в измерительном тракте, по-
184
2. Радиолокационная разведка
этому параметры передаточной функции будут содержать большие
методические погрешности;
- для оценки параметров вектора состояния измерительных ка-
налов необходимо идентифицировать большое число параметров.
Увеличение числа оцениваемых параметров может привести к пло-
хой обусловленности системы уравнений идентификации и явиться
причиной больших методических погрешностей. Для этих условий
задача обеспечения устойчивости решений МВС исследована авто-
рами работы [48];
- структура алгоритма идентификации для радиолокационной
задачи зависит от вида зондирующего сигнала и не может быть
применена без существенных доработок.
Указанные причины обусловливают необходимость модифи-
кации МВС применительно к задаче повышения точности радио-
локационных измерений.
Иными словами, модификация состоит в разработке алгорит-
мов идентификации, предназначенных для оценки расширенного
вектора состояния измерительного устройства, включающего ис-
комый вектор параметра движения цели q, и совокупность пара-
метров dy (J = l,h, передаточных функций измерительных
каналов, и в вычислении вектора поправок информационного па-
раметра Aq, к его измеренному значению q,. При этом вектор
Aqr =||A^(?j),...,А^(/й)|| представлен набором своих дискретных
значений с шагом по времени Af = tj -tj_x , совпадающим с интер-
валом дискретизации значений вектора q,.
Рассмотрим задачу идентификации параметров двухканальной
РЛС, упрощенная структурная схема которой изображена на
рис. 2.20. В ее состав входят: генератор высокой частоты (ГВЧ); два
генератора низкой частоты (ГНЧ1 и ГНЧ2); два модулятора (Ml и
М2); антенный переключатель (АП); приемник (ПРМ); устройство
регистрации (УР) и устройство коррекции дальности (УКД).
Цепочка ГВЧ, ГНЧ1, Ml формирует зондирующий ВЧ-сигнал
Si(t) первого измерительного канала с прямоугольной огибающей.
Кроме того, выходные сигналы ГНЧ1 подаются в приемник в ка-
честве опорных. Блоки ГНЧ2 и М2 предназначены для формиро-
вания зондирующего сигнала Si(t) дополнительного измерительно-
2.2. РЛР в сложной радиолокационной обстановке
185
го канала. В терминологии МВС данные устройства (ГНЧ2 и М2) в
совокупности можно рассматривать как вспомогательную систему
(ВС), осуществляющую над сигналом Si(t) известное нелинейное
преобразование u(t) (например, амплитудную модуляцию).
Г енератор сигнала
Рис. 2.20. Упрощенная структурная схема двухканальной РЛС
Поочередно сигналы si(f) и S2(t) излучаются в направлении ра-
диолокационной цели. Из принятых сигналов 5^(0 и ^211р(/) в при-
емнике наземной системы выделяются напряжения огибающих
ВЧ-сигналов для определения дальности до цели.
Структурную схему (см. рис. 2.20) приведем к виду (рис. 2.21),
который отображает преобразование сигнала в радиолокационном
канале (РЛК), где ЛЗ — эквивалентная линия задержки, обеспечи-
вающая задержку сигналов Si(t) и sitt) на время, равное задержке
сигнала в РЛК с передаточной функцией W(D,p); ГС — генератор
сигнала.
Выходные сигналы 5^(0 и S2nP(0 могут быть использованы для
измерения дальности до цели и определения нестабильности задерж-
ки сигнала в тракте в целях коррекции измеряемой дальности.
Поскольку приемный тракт является линейным по отношению
к информационным параметрам принятых сигналов, можно спра-
ведливо полагать, что процесс преобразования сигнала в тракте
описывается линейным дифференциальным уравнением.
186
2. Радиолокационная разведка
Рис. 2.21. Эквивалентная упрощенная структурная схема двухканальной РЛС
Для решения этих задач составим уравнение идентификации
вектора состояния измерительного канала 9 = (А,Дт), включающе-
го в себя параметры (у -1, п) оператора G преобразования сиг-
нала в тракте и задержку Дт сигнала в нем вследствие нестабиль-
ности указанных параметров. Уравнение (2.40) можно записать в
алгебраической форме:
п
u(t) lLajy(J)^+y^
(2.41)
с тем лишь различием, что роль u(t) будет играть функция
u{t - т) = u(t - т0 - Дт) = U Т°\-Дт)*, (2.42)
£=0
где u(t) — закон амплитудной модуляции сигнала во вспомога-
тельной системе; y(t), z(t) — наблюдаемые на интервале [0, 7]
ответные сигналы основного и вспомогательного каналов соответ-
ственно; т — задержка сигнала, пропорциональная истинному зна-
чению дальности до цели; то — априорно известное приближенное
значение задержки сигнала, заданное с реализуемой точностью.
Поясним целесообразность использования u(t') в виде (2.42).
В случае активной локации сигналы 5,(0 и s'2(t) на входе ретранс-
лятора, удаленного от наземной РЛС на расстояние R = тс / 2, бу-
дут задержаны на время т/2 относительно зондирующих сигналов
51 (t) = 5] (t - т / 2), s'2 (t) = S2(t-T/ 2).
2.2. РЛР в сложной радиолокационной обстановке
187
После ретрансляции сигналы лД?) и s'2(t) трансформируются в
сигналы y(t) и z(t), которые с задержкой т/2 принимаются РЛС.
Формирование принимаемых сигналов у\(Р) и zi(t) можно рассматри-
вать как последовательное выполнение операций задержки зонди-
рующих сигналов на время т: s”(t) = s1(t-T), s2(t) = sx(t- x)u(t - т).
Для нахождения оценок элементов вектора 0 = ||а1,...,аи,Дт||т
преобразуем линейное дифференциальное уравнение (2.41) к сис-
теме алгебраических уравнений, для чего в соответствии с дан-
ными работы [49] умножим скалярно левую и правую части на
(п +1) раз дифференцируемые линейно независимые модулирую-
щие функции <р,(0, для которых фр)(Т) = фр)(О) = О (j = 0,n) на
интервале [0, 7]:
т
п
т
п
,ф;) + (г,фг). (2.43)
k=0
k=0
С учетом краевых условий для функции ф; (^) воспользуемся из-
вестным свойством скалярного произведения (у(,)(О,ф,-(О) =
= (-1)7(у(/),ф/(?)). Тогда уравнение идентификации примет окон-
чательный вид
т \гк
= Д-£(-1)‘— В,к. (2.44)
к=0
tj\q Ацк, Ру, Bik, Di — элементы матриц скалярных произведений,
Ajk = J ЯО £ Cftf
0 P=°
Bik = (у, <PiUW); Py = (z, ф,(у));
Di = (z, фг-); uw (t - t0 ),
j = l,n, i = l,n + l.
188
2. Радиолокационная разведка
Если при разложении в ряд Тейлора (2.42) ограничиться двумя
первыми членами, то (2.44) значительно упростится:
и (7 г п\ . А
Zaj (-1)7 (ь[Ф1/} + ф2р Ат]) - О’ ф!У) ) = (Ф/) - (Ь [фъ + Ф2);Дт])>
7=1 1 ’
где
Ф],(г) = а(г-го)ф,(О; (2.45)
dt
Соотношения (2.41), (2.45) позволяют идентифицировать па-
раметры измерительного устройства с пространственным либо с
временным разделением каналов. Уравнение (2.45) получено в
предположении, что каналы имеют одинаковую структуру и их
операторы совпадают.
При проведении высокоточных измерений радиальной дально-
сти до объектов широко используют фазовые методы, реализуемые
в фазометрических системах (ФМС). Обычно в ФМС применяются
сигналы с несколькими поднесущими частотами, формируемые
частотной модуляцией несущей. При этом каждая из поднесущих
частот используется для формирования шкалы дальности, а сопос-
тавление измерений на различных шкалах позволяет получить
значение дальности до объекта. Кроме того, обычно полагают, что
среда, в которой проводятся измерения, является однородно дис-
пергирующей, поэтому разность фаз Дер между излученной и при-
нятой k-й поднесущей частотами может быть определена по соот-
ношению, приведенному в работе [50]:
. Дсо г . . 1 „
Дф = (О0т-----cos сом (Г - т) - cos &м t , (2.46)
/ух 1_ к Л _I
где Д® — девиация частоты; — k-я масштабная частота мо-
дулирующего сигнала; соо — несущая частота; т — время запаз-
дывания сигнала при ее распространении.
При использовании (2.46) полагаем, что на измерительный ка-
нал ФМС воздействует аддитивная шумовая помеха, не приводя-
2.2. РЛР в сложной радиолокационной обстановке
189
щая к смещению оценки т. На результаты измерений могут также
влиять мультипликативные помехи, вызывающие изменение т за
счет дестабилизации параметров приемно-передающего тракта
ФМС, изменения энергетических характеристик радиолинии. То-
гда адекватность принятой модели помеховой обстановке и усло-
виям функционирования МС может нарушаться, что приведет к
снижению точности измерений.
Для повышения точности измерений ФМС при действии муль-
типликативных медленно изменяющихся во времени помех до-
полним решение задачи по оценке т на основании (2.46) задачей
идентификации параметров приемно-передающего тракта, кото-
рые подвергаются дестабилизации. При этом ограничимся рас-
смотрением линейной части ФМС, процесс преобразования сигна-
ла в которой определяется дифференциальным уравнением
+a,.,Zi("-1>(t) +... + zk(t) = (2.47)
где x* k (t) — закон изменения поднесущей частоты в k-м измери-
тельном канале; т — заданный порядок модели измерительного
канала; zk(t) — наблюдаемая реализация принимаемого сигнала
k-й поднесущей.
Кроме того, будем полагать, что в процессе модуляции мас-
штабными частотами выполняется условие стыковки шкал, а чис-
ло масштабных частот обеспечивает разрешение противоречия
между точностью и однозначностью отсчета. В этом случае анали-
тическое выражение для ЧМ зондирующего сигнала /с-го измери-
тельного канала может быть записано как
* / X •
xk (t) — U cos сооГ + —-sin co w t
I
и преобразовано к виду
х*к (t) = и cos (мк sin ) cos - и sin (Mk sin z) sin <n0Z, (2.48)
где Mк =---------индекс частотной модуляции.
190
2. Радиолокационная разведка
Соотношение (2.48) можно записать иначе:
xk (f) = 4 (t) cos G)ot - A2 (f) cos w0 (t - T / 4), (2.49)
где Ax(t) = ucQs{Mksvx&Mkt^, A2(t) = и sin^Mk sin— оги-
бающие ВЧ-сигнала с периодом Т = 2л/соо. Таким образом, ЧМ-
сигнал можно рассматривать как результат преобразования гармо-
нического сигнала с частотой (Во вспомогательной системой, схема
которой изображена на рис. 2.22.
Рис. 2.22. Структурная схема синтеза ЧМ-сигнала:
ИС — идентифицируемая система; ВС1, ВС2 — вспомогательные системы
Системы ВС1, ВС2 формируют огибающие 4(0, 4г (О соот-
ветственно, а ЛЗ осуществляет задержку сигнала x(t) на четверть
периода огибающей.
Структурная избыточность многочастотной РЛС позволяет по
наблюдаемым реализациям ответных ВЧ-сигналов z^t), z2{t),
z3 (t), соответствующих трем модуляционным частотам, составить
систему уравнений для идентификации параметров (J = 1,п)
каналов и задержки Дт сигнала в радиоканале за счет воздействия
дестабилизирующих факторов:
2.2. РЛР в сложной радиолокационной обстановке
191
A (?) = Дj-т)-Anx(t-х-Т/4);
Л’Ч (0 = 4i “ т) “ A22x(t -х-Т/ 4); (2.50)
Л-1£3(?) = A3x(t)x(t — т) — Л32х0 - т-Г/4).
После исключения из (2.50) (?-т) и (t-x-T/4) получим сле-
дующее операторное уравнение идентификации:
4 (?) А~\ (?) + f2 (t)A~lz2 (?) + /3 (t)A-% (?) = 0, (2.51)
где /](?)=44J 42 (?)-Л (0=4^42(0-42(0;
41(0 41(0 41(0
A (Г)
/з (0 = 4г(0 --Г7Т 41 (0; 41 (0 = « соз[МЛ sin сом (? - т0 - Дт)];
41(0
4г (0 = и sin[Mk sin oMk (t-x0- At)] , k = 1,3.
Решение уравнения (2.51) можно найти только приближенно,
так как функции Ак2 (?) и 41 (0 выражаются через функции Бессе-
ля с аргументом Дт.
Рассмотрим ФМС с тремя поднесущими частотами. Предпо-
ложим, что известны разности между значениями масштабных
модулирующих частот ДЦ = соМ] - соМ2, ДО2 = соМз - юМ2 и де-
виации частот Дс^ = Д<п2 =... = Да)р = Да». Для такой ФМС в соот-
ветствии с (2.47) можно рассмотреть систему уравнений [51]
А~хzA(t) -xx(t-х);
A~xz2 (?) = и2 (? - t)Xj(? - т) - Uj (? - х - я/ 2)Xj (? - х - л / 2); (2.52)
Л-1г3(?) = u3(t - т)*^?) - u2(t - х - л/2)хД? - х - л/2),
где z, (?),..., z3(?) — наблюдаемые ответные сигналы на промежу-
точной частоте на выходе измерительных каналов; u}(t) = cos(AQ1Z);
х2(?) = Дсосо8сом2(?) = Дсосоз(юМ1 + ДО])?; мД?) —закон измене-
ния первой модулирующей частоты; х = т0 + Дт ; Дт — искомая
192
2. Радиолокационная разведка
поправка на время задержки сигнала в радиоканале за счет воздей-
ствия дестабилизирующих факторов.
Запишем систему (2.52) в дифференциальной форме, исключив
из нее функции хД?-х) и Xj(?-x-tt/2):
и,\ t — x — -
I 2
7Г 1 W
- Lv37)w+z3<o -
и2
Za7Z27)^) + Z2W -
2;|_у=1
-V(t) Xa.zp^D + ^t) = 0, (2.53)
где V (t) = u2(t- t)uj (t - x - л 12) - ux (t - x)w2 (t - x - л/ 2).
Для определения вектора А = (а1,а2,...,ат,^т) применим метод
Лоэба [49], для чего перейдем к системе алгебраических уравнений
=1л(«г№,, (2.54)
7=1 «=1 п=1
где
р = (23,ф</’) -(z2>®f/’) -(z„®!/’).
(z3,®“) -feoy’) -fe,®',!’)’
_ -(z3’®lj) (Z2’®l<) (Z1’®1|)
^ni ~ * — 5
—(.z3’®2i) (Z2’®2i) (Zl’^2i)
причем элементы блочных матриц Pnij и 5И/, расположенные в
строках в соответствии с ростом номера п -1,6, являются скаляр-
ными произведениями вида
(г3,ф{/)) = |г3ф{/)^;
о
Ф1; (t) - sin [(Д^! - AQ2)] срг. (г)Д<о;
Ф2г. (0 = cos [(AQi - ДО2)] ф;. (ОДю;
2.2. РЛР в сложной радиолокационной обстановке
193
4>b(0 = cos
7Г
ДЦ(Г-т0)--
C>2/.(f) = sin
ф,(ОЛ®;
<Db(0 = cos
<D2/(7) = sm
Я
ДО20-т0)--
<рг(0д®>
/ \ 7Г
ДО2 (f ~ —
ф,(ОЛ®;
фг(7) — непрерывная т раз дифференцируемая на интервале [О, Г]
принятых сигналов zk(t) математическая модулирующая функция,
удовлетворяющая краевым условиям фрэ = фр)(Г) = О. Аналитиче-
ские выражения для /Л(а2) — довольно громоздкие степенные по-
линомы аргумента а2 = tg(AQ2AT/'2) и поэтому не приводятся.
Поправку Дт можно определить по найденному значению а2
и априорно известным значениям ДО,, ДО2,т0.
Для импульсной РЛС два канала, а для фазометрической РЛС
три канала позволяют получать необходимую избыточную инфор-
мацию, достаточную для оценки по модифицированному МВС
параметров РЛК и задержки сигнала в них. В этом смысле двухка-
нальная импульсная РЛС и трехканальная фазометрическая РЛС
являются минимально избыточными системами.
Отличительными особенностями модифицированного МВС яв-
ляются:
-инвариантность измерительных каналов к изменению пара-
метров вспомогательных систем;
- возможность вычисления задержки сигнала в тракте РЛС;
-возможность повышения точности измерения амплитуд от-
раженных сигналов и дальности до цели по результатам измерений
на основе идентификации параметров измерительных каналов и их
частотных характеристик. Необходимо отметить, что представ-
ленные алгоритмы идентификации могут быть реализованы без
изменения структуры сигналов и схемных решений ФМС, а только
за счет совершенствования математического обеспечения. Кроме
194
2. Радиолокационная разведка
того, с помощью модифицированного метода вспомогательных
систем можно совместно с оценкой дальности до объекта оценить
радиолокационные характеристики цели. В этом случае должны
быть выполнены следующие операции.
1. Идентификация параметров измерительных каналов Ах, Дт,
и их частотных характеристик в режиме калибровки изме-
рительных каналов РЛС.
2. Идентификация параметров измерительных каналов А , Дт
и их частотных характеристик K( j&) в режиме измерения.
3. Вычисление оценки частотной характеристики цели
гущ) = =Г(ш)ел<»); Хш) = Г2(и>).
В результате математического моделирования показано, что ис-
пользование данного алгоритма позволяет повысить точность изме-
рения амплитуд отраженных сигналов на 15...20 %. В ходе вычис-
лений суммарная методическая погрешность не превышает 4 %.
2.2.3. Идентификация радиолокационных целей
по результатам измерений в условиях неопределенности
2.2.3.1. Применение методов нелинейной фильтрации
для идентификации целей на фоне помех
В условиях априорной неопределенности в радиолокационной
обстановке идентификация целей осложняется тем, что объект мо-
ниторинга наблюдается на фоне пространственно-протяженных
помех или мешающих отражающих поверхностей.
Кроме того, вследствие ограничений по времени наблюдения
радиолокационный мониторинг может проводиться при отсутст-
вии достаточного объема измерительной информации. Уверенно-
му обнаружению полезных сигналов препятствует то, что ампли-
туды сигналов целей и маскирующих помех могут быть
соизмеримы между собой (значение отношения сигнал/шум не бо-
лее единицы). Это не позволяет разрешить сигналы доминирую-
щих отражателей в составе сложной цели.
2.2. РЛР в сложной радиолокационной обстановке
195
Воздействие мешающих отражателей проявляется в погрешно-
стях оптимальной фильтрации полезного сигнала приемником
РЛС. В этом случае применение традиционных методов линейной
фильтрации не обеспечивает получение желаемого результата, ес-
ли принятый сигнал сопровождается мультипликативным шумом
или представляет собой свертку с сигналом помех.
Для решения этой задачи применимы методы нелинейной (го-
момофной) фильтрации [52, 53]. На первом этапе спектр отражен-
ного сигнала S(t) подвергается нелинейному преобразованию, в
результате которого произведение спектральных составляющих
преобразуется к сумме соответствующих кепстров. Кепстром
мощности называется обратное дискретное преобразование Фурье
(ДПФ) логарифма квадрата модуля ДПФ [52]:
С(х(*П) = F[ln(F(x(W)))2 ], (2.55)
где F~x — оператор обратного ДПФ.
Применение кепстра имеет смысл только при работе с дис-
кретными данными. Кепстр мощности позволяет выделить полез-
ный сигнал из свертки сигнала и шума x(kT) = s(kT) * n(kT). Эту
операцию можно выполнить в три этапа [54], последовательно ис-
пользуя формулы
s2x (иДсо) = s2 (n^o)R2 (п&со);
1п5|(иДю) = 1п52(нДю) + 1п1?2(иДсо); (2.56)
С(х(кТ)) = F~' [1п52(пД®)] = C(s(kT)) + C(n(kT)),
где Д® = 2л /(NT), N—число используемых коэффициентов ДПФ.
Следует отметить, что на этапе вычисления суммы (второе
уравнение системы (2.56)) первое слагаемое является медленно
меняющейся функцией, а второе — быстро меняющейся, осцилли-
рующей функцией, по этой причине кепстр полезного сигнала
C(s(kT)) и кепстр помехи С(п(кТ)) будут занимать на оси време-
ни различные положения. Известно, что наибольшую сложность
при вычислении комплексного кепстра вызывает возможная неод-
нозначность, обусловленная логарифмированием, особенно если
полезный сигнал представляет собой последовательность импуль-
196
2. Радиолокационная разведка
сов, сформированных при высоком пространственном разрешении
«блестящих точек» на поверхности объекта.
Таким образом, применение кепстра мощности позволяет ре-
шить задачу идентификации полезного сигнала на фоне мешающе-
го отражения (помехового сигнала) и уточнить временные соот-
ношения импульсов в сложном сигнале.
Основной недостаток применения кепстра мощности состоит в
том, что из-за потери информации о фазовых соотношениях не пред-
ставляется возможным восстановить временную функцию полезного
сигнала путем применения обратного ДПФ.
Указанная процедура будет эффективна только в том случае,
если спектры разделяемых сигналов занимают не перекрывающие-
ся полосы частот. Полученную аддитивную сумму кепстров мож-
но обрабатывать методами классической фильтрации, которая в
пространстве кепстров выполняется как умножение на корректи-
рующую функцию фильтра.
Если полезный сигнал сосредоточен вблизи начала координат
(впереди сигнала помехи), то мешающий сигнал можно подавить,
выделяя начальный участок общего кепстра. В комплексном кеп-
стре в отличие от кепстра мощности сохранена информация о фазе
отдельных составляющих сигнала, поэтому его можно использо-
вать не только для обнаружения полезных сигналов и измерения
расстояний между ними, но и для восстановления зондирующего
сигнала.
В этом случае зондирующий сигнал может быть получен с по-
мощью комплексного кепстра s(kT) = F~x [exp[F(C(.s(AT)))]J. Ком-
плексным кепстром называется обратное ДПФ от логарифма ДПФ
исходного сигнала [52, 53]:
C(x(kT)) = F~x [ln(F(x(£T)))] =
= F-1 (1п(я(иАю) + InЯ(иАю))) = C(s(kT)) + C(n(kT)). (2.57)
Основной трудностью достоверного определения комплексно-
го кепстра является вычисление комплексного логарифма. Это свя-
зано с получением фазового спектра в виде непрерывной функции
arg(.s\ (нАсо)). Методика решения данной задачи подробно рас-
2.2. РЛР в сложной радиолокационной обстановке
197
смотрена в работах [52, 54] и сводится к развертыванию фазы и
устранению ее линейной составляющей.
Один из методов [52] развертывания фазы состоит в добавле-
нии к фазовой последовательности ф(/?Асо) = Arg[.s'v(/7Aco)] коррек-
тирующей последовательности С(нДсо):
С[(и-1)Доо]-2л при ф(нДсо) - ф((п - 1)Доо) > л;
С(иДсо) = С [(и -1) Дсо] + 2 л при ф(иДсо) - ф((н - 1)Дсо) < л;
С(0) = 0.
Развертывание фазы не применяют для класса минимально-
избыточных сигналов, т. е. последовательностей, Z-преобразование
которых не имеет нулей и полюсов вне единичной окружности. На-
личие линейной фазовой составляющей может привести к появлению
погрешности идентификации полезного сигнала на фоне помех.
Для фильтрации кепстра полезного сигнала можно использовать
режекторные фильтры. При отсутствии необходимой априорной
информации для оценки кепстра полезного сигнала целесообразно
использовать методику неопределенной инверсной свертки [53],
эффективную для устранения влияния на полезный сигнал иска-
жающего сигнала с заранее не известными характеристиками.
Применимость гомоморфной фильтрации для дискретной
свертки двух временных последовательностей n(kT) и s(kT):
х(кТ) = £ п(кГ)*в(кТ-т)
(2.58)
обусловлена тем, что сигналы x(f), n(f) и s(f) и их спектры
5 (у со) и 7?(усо) удовлетворяют следующим условиям.
1. S (jсо) и R(j&) являются аналитическими функциями, не
имеющими особенностей на единичном круге z = eJ0>, и непре-
рывными функциями со.
2. Дискретные функции x(t), n(t) и s(t) являются действи-
тельными функциями, удовлетворяющими условиям Дирихле и
представляющими собой минимально-фазовые последовательно-
сти (х(кТ) = 0, если к < 0).
198
2. Радиолокационная разведка
При этом класс гомоморфных фильтров реализуем в том смысле,
что выходной сигнал зависит только от предшествующего значения
входного сигнала, если линейный фильтр является реализуемым.
Следует отметить, что фильтрацию кепстра полезного сигнала
можно провести с использованием согласованного фильтра, кото-
рый в кепстральной области эквивалентен взвешиванию (или
сглаживанию) кепстра с помощью окна, позволяющего выделить
участок кепстра, соответствующий полезному сигналу. Это объяс-
няется тем, что логарифм спектра сигнала с ростом частоты изме-
няется медленнее, чем логарифм спектра шума, и соответствую-
щие кепстры могут быть разделены на оси времени.
Функцию окна для сглаживания кепстра можно получить сле-
дующим образом.
В качестве модели полезного сигнала можно принять ансамбль
из L среднестатистических зондирующих сигналов. При этом шаг
дискретизации амплитуды Т выбирают из условия однозначного
восстановления формы огибающей сигнала (с использованием
теоремы Котельникова: Т <l/(2Fmax), где Fm.a —максимальная
частота спектра сигнала). Для увеличения частотного разрешения
при вычислении спектра сигнала может быть использована про-
цедура дополнения массива амплитудных значений N нулями.
Спектральную функцию сигнала 5((х(кТУ) находят с исполь-
зованием ДПФ:
7V-1
5,. (х(А7)) = NT^ х(п) exp(-j2nkn/ N). (2.59)
«=0
Далее вычисляют средний кепстр сигнала
1 L-1
С,(х(кТ)) = -£С, (х(кТ)), (2.60)
i=0
где кепстр С{(х(кТ)) для каждого г-го сигнала определяется со-
гласно (2.56).
Для нахождения границ функций окна определяют нормиро-
ванный кепстр Сф (t), протяженность которого совпадает с протя-
женностью окна для сглаживания кепстра, соответствующего сме-
си сигнала с шумом:
2.2. РЛР в сложной радиолокационной обстановке
199
С?сТап>Г (2-61)
тах[Сг(х(АТ))]
Для уверенной идентификации объекта необходимо повторить
процедуру фильтрации нескольких смежных по времени фрагмен-
тов сигнала для постоянного ракурса наблюдения. Для этого также
можно применять корреляционную обработку принятых сигналов.
2.2.3.2. Идентификация радиолокационных целей
по динамическим радиолокационным характеристикам
на основе использования моделей временных рядов
Применение параметрических моделей динамических радио-
локационных характеристик позволяет повысить достоверность
идентификации объектов по результатам измерений.
Для аппроксимации динамических радиолокационных характе-
ристик, являющихся нестационарными реализациями, целесообраз-
но использовать параметрические модели временных рядов, состав-
ленные из отсчетов амплитуд отраженных сигналов, которые
адекватно описывают достаточно большой класс случайных про-
цессов, в том числе процессов со стационарными приращениями.
В общем случае параметрические модели временных рядов ти-
па авторегрессии проинтегрированного скользящего среднего [55]
имеют вид
ИЛИ
®(By?dzt = ®(B)zt, (2.62)
где G)t=Vdzt; zt=@(B)at; Ф(В)^1-Ф1В-Ф2В2 -...-ФрВр —
оператор авторегрессии; 0(5) = 1 - 0,5 - ®2В2 -... - ®рВр — опе-
ратор скользящего среднего; = zt - = (1 - B)zt — разност-
ный оператор; at — оператор белого шума с дисперсией а2 и нуле-
вым средним.
Полагаем, что белый шум является стационарным временным
рядом, для которого спектральная плотность постоянна: /(Х) =
= о^/(2л) при X е [—тс, л].
200
2. Радиолокационная разведка
Обобщенный авторегрессионный процесс проинтегрированно-
го скользящего среднего (АРПСС) можно синтезировать на основе
белого шума с помощью трех последовательных операций фильт-
рации. Это схематично показано на рис. 2.23.
Модель (2.62), в отличие от модели авторегрессии скользяще-
го среднего (АРСС), включает нестационарный оператор Ф(В)
авторегрессии порядка (р + d) такой, что d корней уравнения
Ф(В) = 0 равны единице, а остальные р корней лежат вне еди-
ничного круга [55].
Процесс {ZJ, описываемый уравнением (2.62), можно полу-
чить d-кратным суммированием (или интегрированием) процесса
который соответствует модели АРСС (р, d, q).
Будем полагать, что в общем случае для этой модели оператор ав-
торегрессии Ф(В) имеет порядокр, а оператор скользящего среднего
0(B) — порядок q, это определяет модель АРПСС (р, d, q).
Рис. 2.23. Структурная схема обобщенного АРПСС
Эффективность работы со стохастическими моделями времен-
ных рядов достигается трехступенчатой итерационной процедурой
[55], включающей следующие этапы:
- идентификацию моделей для определения подкласса моделей
из общего семейства моделей АРПСС, в пространстве которых
будет проводиться поиск адекватной модели и ее использование;
-оценивание модели для нахождения значений параметров,
определяющих адекватность модели;
-диагностическую проверку модели (проверку адекватности
модели экспериментальным данным).
Рассмотрим последовательно эти этапы и их использование
при работе с радиолокационной измерительной информацией.
2.2. РЛР в сложной радиолокационной обстановке
201
Идентификация моделей. Вначале необходимо преобразо-
вать процесс Zt к стационарному процессу АРСС путем много-
кратного взятия конечной разности d.
Существование нестационарности визуально проявляется в
том, что хотя бы одна статистическая характеристика зависит от
времени. В радиотехнических приложениях наиболее распро-
странены нестационарные процессы по среднему значению и по
дисперсии.
Идентификация модели временного ряда позволяет выбрать
пробную модель исследуемого процесса и получить начальные
приближения для ее параметров. В результате многократного взя-
тия разностей \dZt с целью стационаризации процесса относи-
тельно математического ожидания и дисперсии необходимо найти
оценку параметра d.
Решение об удачной стационаризации процесса принимают по
результатам анализа гистограммы, автокорреляционных функций
и нормированных кумулятивных периодограмм для преобразован-
ного ряда и остатков разностей наблюдаемых величин и прогнози-
руемых данных с помощью модели. После этого задача оценки
параметров сводится к определению параметров авторегрессии
Ф = (Ф1,..., Фр) и скользящего среднего 0 = (0,,...,0?) АРСС.
При выборе параметров модели целесообразно учитывать
принцип экономии, предложенный Боксом и Дженкинсом [55, 56].
Он основан на том факте, что получить оценки с хорошими стати-
стическими свойствами можно, как правило, тогда, когда число
оцениваемых параметров минимально. Параметры моделей авто-
регрессии и скользящего среднего можно определить итерацион-
ным перебором параметров при возрастании порядка модели на
основе минимизации дисперсии шума. Для этого можно использо-
вать критерии Акаике [56], Риссанена [57], Парзена [58]. Эти кри-
терии отличаются формой представления целевой функции и
основаны на минимизации погрешности оценивания авторегресси-
онных параметров, в качестве которых используется оценочные
значения дисперсии белого шума. Недостатки первого и второго
критериев Акаике состоят в том, что для реальных процессов они
приводят к заниженным значениям порядка моделей (относительно
истинных). Критерий Риссанена позволяет повысить точность по-
202
2. Радиолокационная разведка
рядка модели и представляет собой модифицированный вариант
второго (информационного) критерия Акаике.
Общие проблемы применения указанных критериев связаны с
необходимостью обеспечения достаточного объема исходной
реализации. В случае коротких записей амплитуд отраженных
сигналов ни один из указанных критериев не обеспечивает удовле-
творительной точности результатов. Поэтому целесообразно ис-
пользовать эти критерии для выбора начального приближения
порядка модели.
Альтернативный подход к выбору порядка моделей базируется
на вычислении оценок параметров Фь ..., Фр и 01, ..., 09 для раз-
личных пар (р, q) и на выборе наилучшей пары на основе оптими-
зации оценки максимального правдоподобия для дисперсии и2 бе-
лого шума. Сложность такого подхода состоит в необходимости
оценки модели АРСС для каждой пары параметров и вычисления
оценки максимального правдоподобия для дисперсии шума.
Для оценки частной АКФ используют процедуру вычисления
оценок параметров модели авторегрессии возрастающих порядков.
Из серии выборочных коэффициентов авторегрессии Ф;/ получен-
ных, например, с использованием оценок Юла — Уокера [55], вы-
бирают последовательность последних коэффициентов в каждой
серии {Фу}, j = 1, £, которые представляют собой частную АКФ.
Одна из наиболее эффективных процедур вычисления этой
функции основана на рекуррентных формулах Дарбина [59]:
Ф, = 1 при I = 1;
< А1 А А А ___ (2.63)
Фд = Ф/_];7 — Ф//Ф/_1;/_у при I = 2,L,
/-1
где Фп ----уц--------; г — АКФ; L — максимальная задержка.
7=1
Для выбора начальных значений порядков р, q моделей авто-
регрессии в целях сокращения времени выполнения итерационной
процедуры идентификации целесообразно использовать законо-
2.2. РЛР в сложной радиолокационной обстановке
203
мерности поведения выборочных автокорреляционной функции и
частной АКФ процесса. Для этого можно использовать рекомен-
дации, приведенные в работах [55, 60].
Характерная особенность теоретической АКФ состоит в том,
что для авторегрессионных моделей она экспоненциально убыва-
ет, как правило, осциллируя около нуля. Для моделей скользящего
среднего порядка q только первые q значений АКФ отличны от
нуля, а для смешанных АРСС (р, q) моделей АКФ экспоненциаль-
но убывает после первых (q -р) значений.
Например, АКФ процесса АРСС (1, 1) убывает монотонно,
если параметр авторегрессии Ф1 > 0 и убывает экспоненциально,
меняя знак на каждой задержке, если же Ф1 < 0, то
(1- Ф0)(Ф — 0)
1-2Ф0 + 02
при k >2.
Вся совокупность типичных АКФ этой модели описывается
шестью комбинациями различных значений параметров Ф1 и 01.
В общем случае для процесса АРСС (р, q) при q -р < 0 АКФ
рк (к > 0) определяется полиномом Ф(7?) и будет состоять из сово-
купности затухающих экспонент или синусоид, а при q - р > 0
имеются (q -р + 1) начальных значений, которые не подчиняются
этой закономерности.
Частная АКФ для авторегрессионных моделей обрывается и
равна нулю после первых р значений; для моделей скользящего
среднего она монотонно убывает по модулю, а для моделей АРСС
ее поведение после первых (р - q) значений идентично, как и для
моделей скользящего среднего.
Для стационарной АРСС модели, у которой ни один из корней
не лежит близко к границе единичного круга, АКФ быстро затуха-
ет при средних и больших значениях к.
В общем случае АКФ авторегрессионного процесса можно
аппроксимировать совокупностью затухающих экспонент и си-
нусоид. Отсутствие затухания выборочной АКФ можно объяс-
нить тем, что процесс Z, протекает нестационарно, хотя раз-
ность VZ, или разность более высокого порядка стационарна.
Таким образом, признаком нестационарности является отсут-
ствие быстрого спада выборочной АКФ.
204
2. Радиолокационная разведка
Пороговым значением разности d, соответствующей стацио-
нарному процессу, является такое значение, при которой АКФ ря-
да щ = VrfZz быстро затухает. Обычно на практике значение d не
превышает четырех.
Определив значение d, далее целесообразно изучить общий вид
выборочной АКФ и частной АКФ, чтобы найти значениярчд для
операторов авторегрессии и скользящего среднего.
Оценка параметров моделей временных рядов. Под оценкой
модели авторегрессии понимается нахождение оценок неизвест-
ных параметров Фь ..., Фр,с^ по наблюдаемой реализации вре-
менного ряда.
Параметры модели могут быть найдены путем решения линей-
ных уравнений Юла — Уокера, связывающих искомые параметры
с выборочной автокорреляционной функцией. Для этой цели
обычно используют эффективные алгоритмы Левинсона — Дар-
бина, Берга и их модификации либо алгоритм метода наименьших
квадратов.
Алгоритм максимальной энтропии Берга отличается от алгоритма
Левинсона — Дарбина главным образом способом вычисления ко-
эффициентов отражения с помощью метода наименьших квадратов.
Модифицированный алгоритм Берга обеспечивает более высо-
кую точность оценок параметров моделей по сравнению с упомя-
нутыми алгоритмами, особенно для коротких временных рядов.
Диагностическая проверка модели. Проверка согласованно-
сти модели с экспериментальными данными может быть проведе-
на с использованием автокорреляционной функции остаточных
погрешностей или кумулятивной периодограммы остаточных по-
грешностей [55]. Необходимо учитывать, что адекватность модели
проверяется применительно к конкретному временному ряду и при
увеличении объема статистических данных решение об адекватно-
сти может измениться.
Для получения гарантированных оценок целесообразно ис-
пользовать метод диагностической проверки модели, основанный
на усложнении модели путем введения избыточных параметров.
Этот подход эффективен в том случае, если имеются обоснован-
ные данные об отклонениях параметров модели относительно ис-
тинных значений.
2.2. РЛР в сложной радиолокационной обстановке
205
Проверки с помощью АКФ остаточных погрешностей [55] ос-
нованы на том, что для адекватной модели значения dt остаточ-
ных погрешностей, определяемые для модели АРПСС соотноше-
нием =0-1(7?)Ф(7?)сог, по мере увеличения данных ряда
становятся все ближе к белому шуму.
В результате изучения выборочной АКФ процесса {dt} мож-
но выявить необходимость изменения модели. Однако при отсут-
ствии информации об истинных значениях параметров (Ф,0)
рискованно [59] придавать статистическую значимость кажу-
щимся отклонениям автокорреляции rk{a) от их теоретических
значений. Более обоснованный подход к оценке адекватности
модели состоит в проверке совокупного критерия согласия, со-
стоящего в том, что оценка модели проводится по первым к авто-
корреляциям (обычно к > 20). В работе [61] показано, что если
для АРПСС (р, d, q) процесса подгоняемая модель удовлетвори-
тельна, то величина
k
Q =
k=i
с достаточно высокой вероятностью распределена по закону
7j(k - р - q), где п — число наблюдений исходного временного
ряда. Если квантили функции %2, вычисленные при заданной дове-
рительной вероятности и (к - р - q) степенях свободы, не превы-
шают значения параметра, то выбранная модель не может быть
признана адекватно описывающей экспериментальные данные.
Применение кумулятивной периодограммы позволяет выявить
неадекватный учет данных периодического характера по анализу
остаточных погрешностей. Нормированная кумулятивная перио-
дограмма временного ряда [55] имеет вид
= (2-64)
ПОа ! =1
где
/ш=-
^at cos(2ti^0
M=i J
^at sin(27r#)
M=i J
fi=Un —
п
частота.
206
2. Радиолокационная разведка
Для адекватной модели временного ряда статистические свой-
ства остаточных погрешностей должны быть близки к характери-
стикам шума, спектр которого имеет постоянные значения на низ-
ких частотах, а кумулятивная периодограмма в этом случае будет
иметь вид, близкий к прямой. В случае неадекватной модели от-
клонения кумулятивной периодограммы от прямой будут сущест-
венны, особенно на низких частотах.
В качестве примера реализации этой методики проверим адек-
ватность двух моделей временных рядов. Для этого построим мо-
дели АРПСС, соответствующие двум реализациям случайного про-
цесса (СП) на непересекающихся временных интервалах.
Вычисленные оценки параметров р и q этих моделей приведены в
табл. 2.1.
Таблица 2.1
Модель Порядок модели АРПСС Параметры модели Параметр адекватности модели Q
р q
1 (1, 0, 1) 0,3405 0,9725 6,567
2 (1,0, 1) 0,3931 0,9216 8,415
Сравнение параметров Q с 90%- и 95%-ными квантилями кри-
терия %2 и анализ нормированных кумулятивных периодограмм
для двух интервалов свидетельствует о том, что обе модели СП
могут быть адекватно описаны АРПСС (1,0,1).
Это дополнительно подтверждают результаты анализа кумуля-
тивных периодограмм, для которых найдена оценка отклонений (с
использованием критерия Колмогорова) от теоретической линии
для белого шума.
При этом целесообразно исследовать поведение кумулятивной
периодограммы, как указано выше, относительно теоретической
прямой при заданных доверительных границах.
В случае адекватности модели при заданных доверительных
вероятностях кумулятивная периодограмма незначительно откло-
няется от теоретической линии для модели белого шума.
2.2. РЛР в сложной радиолокационной обстановке
207
2.2.4. Оценка статистических радиолокационных
характеристик целей по результатам измерений
2.2.4.1. Метод вычисления спектральных характеристик
нестационарных случайных процессов
Методы спектрального анализа традиционно находят широкое
применение при исследовании динамических систем, моделирова-
нии систем, а также при анализе и оценке погрешностей радиотех-
нических измерений.
Возможность использования статистических методов в радио-
технике впервые показана в работах А.Н. Колмогорова, Н. Винера и
В.А. Котельникова. В дальнейшем методы обработки СП в радио-
технических приложениях развиты и систематизированы в работах
Р.Л. Стратоновича, Р.Е. Калмана, Р.С. Бьюси, В.И. Тихонова.
К основным проблемам спектрального оценивания СП отно-
сятся: обеспечение высокого спектрального разрешения, улучше-
ние способности к обнаружению сигналов, обеспечение заданных
критериев качества оценок.
Повышенное внимание к нестационарным СП объясняется тем,
что к ним неприменимы теоретические выводы и методы анализа,
разработанные для стационарных СП.
В общем случае спектральная структура нестационарного СП
может быть представлена двойными по частоте (обобщенными)
спектрами или частотно-временными мгновенными спектрами (рас-
пределениями Вигнера) [61]. В вычислительном отношении такой
подход является достаточно громоздким. В ряде случаев математиче-
ские трудности препятствуют его практическому применению.
Для большого класса нестационарных СП (в частности, для муль-
типликативных процессов) при вычислении спектральной плотности
мощности можно использовать усреднение спектральных характери-
стик, полученных на коротких интервалах одной реализации. Такая
обработка данных приемлема при ограниченной скорости вариации
модулирующей функции СП (например, при нестационарности по
среднему значению, по дисперсии либо по плотности распределения).
В этом случае предполагается, что указанная скорость вариации
должна быть значительно меньше низкочастотной стационарной со-
ставляющей СП. Такому ограничению удовлетворяет большой класс
208
2. Радиолокационная разведка
процессов, которые протекают при анализе нестационарных линей-
ных и нелинейных систем. В этом случае допустимо для вычисления
спектральных характеристик разделять СП на две составляющие —
стационарную и нестационарную.
Для получения статистически устойчивых и эффективных
спектральных оценок нестационарных СП разработан метод спек-
трального оценивания на основе известного метода Уэлча [62],
обеспечивающего получение более эффективных периодограммных
спектральных оценок для стационарных реализаций СП по сравне-
нию с методами Бартлетта и Даньелла [56].
Рассмотрим сущность метода вычисления спектральных харак-
теристик нестационарных СП (модифицированный метод Уэлча).
Модификация состоит в изменении схемы сегментирования,
усреднении и использовании корреляционных окон для вычисле-
ния спектральных оценок нестационарных СП.
На первом этапе реализацию нестационарного СП разбивают
на локально-стационарные (квазистационарные) интервалы, для
чего применяют статистические непараметрические критерии, не
требующие априорного знания вида распределения. Эффектив-
ными критериями проверки стационарности по среднему значе-
нию являются критерий инверсий, критерий Вилкоксона и его
модификация — критерий Манна — Уитни. Два последних кри-
терия можно применять для проверки стационарности по форме
распределений.
Пусть реализация нестационарного СП состоит из N отсчетов
х(0),..., х(У — 1), отстоящих друг от друга на расстоянии Т.
Для проверки нестационарности по среднему значению, за-
ключающейся в том, что среднее значение на участке реализации,
состоящем из Lk отсчетов, не изменяется, применяют критерий ин-
версий [63]:
(2.65)
, 44
где у. =1-----—;
4(4-1)
2(24-5)
94(4-1)’
гф — квантиль нормаль-
ного распределения; pd — доверительная вероятность;
2.2. РЛР в сложной радиолокационной обстановке
209
/=0 j=i+l
1 при xt >Xj,
0 при xf <Xj.
Критерий инверсий удобен тем, что добавление последующего
отсчета выборки хЛ, ^ может быть учтено рекуррентно.
Минимальное значение Lk определяет объем начальной выбор-
ки при поиске локально-стационарных интервалов. Допустим, что
исходная реализация состоит из М сегментов, расположенных со
сдвигом Sk между ними. При этом максимальное число сегментов
N-Q-k)Lk
определяется целой частью величины мтах =----
kLk
Оценка периодограммы для А-го сегмента в диапазоне частот
1.1
----< jm< — определяется дискретным преобразованием Фурье:
27] 27]
= (2-66)
1 Lk 1
где ck (fm ) = T £ xk (tn )w(tn) exp(-y27^лТ); Uk=—^w2 (tn);
и=0 n=0
w(Z„) — корреляционное окно, которое позволяет уменьшать эф-
фект смещения, обусловленный наличием боковых лепестков в
спектрах с большим динамическим диапазоном амплитуд сигналов.
Среднее значение периодограмм квазистационарных сегментов
представляет собой сглаженную оценку периодограммы модифи-
цированного метода Уэлча:
1 М-1
W/J—IXCO (2.67)
м ы
Дисперсия сглаженной оценки спектральной плотности (2.67),
как и во всех классических методах вычисления спектральных
оценок [56], будет обратно пропорциональна числу сегментов при
их статистической независимости:
210
2. Радиолокационная разведка
Необходимо отметить, что в предложенной схеме сегментиро-
вания исходной реализации число сегментов при вычислении сгла-
женной спектральной оценки может регулироваться только величи-
ной перекрытия сегментов, так как границы локально-стационарных
интервалов определяются статистическими свойствами выборки,
уровнем значимости и шагом увеличения начальной выборки при
использовании критериев оценки стационарности. Увеличение ко-
эффициента перекрытия интервалов приводит к росту числа сег-
ментов и уменьшению дисперсии оценки. Оптимальное перекрытие
будет несколько больше, чем 50%-ное перекрытие в методе Уэлча.
Смещение спектральной оценки может возрасти, если отсчеты
будут использоваться в обработке более двух раз, т. е. они приоб-
ретут больший вес по сравнению с другими отсчетами. Кроме то-
го, недопустима статистическая зависимость сегментов, которая
может проявляться в том, что уменьшение дисперсии спектраль-
ных оценок будет замедлено при увеличении числа сегментов.
К этому может привести неверно выбранный шаг увеличения на-
чальной выборки при использовании непараметрических критери-
ев. Спектральное разрешение зависит от размеров квазистацио-
нарных сегментов и возрастает с увеличением ширины главного
лепестка корреляционного окна.
Таким образом, вычислительная процедура метода вычисления
спектральных оценок нестационарных СП состоит в выполнении
следующих операций [64].
1. Анализ нестационарных свойств реализации СП {А} и опре-
деление с заданным перекрытием квазистационарных интервалов
на основе применения непараметрических критериев (например,
критерия инверсий (2.65)).
2. Вычисление частных периодограмм для найденных квази-
стационарных интервалов в соответствии с соотношениями (2.66).
3. Вычисление сглаженной спектральной оценки для всей реа-
лизации по формуле (2.67).
4. Оптимизация статистического показателя качества спект-
ральной оценки [56]:
J а
(У2 Гр
° rMW
2Г п
т Pmw
где а = (yv(tk),b,pd); b = (Sk -Sk_})/(Sk_} + Lk).
2.2. РЛР в сложной радиолокационной обстановке
211
Схема вычисления спектральных характеристик нестационар-
ных СП изображена на рис. 2.24.
Рис. 2.24. Схема вычисления спектральных характеристик нестационар-
ных СП:
а — схема деления реализации нестационарного СП на стационарные интерва-
лы; б — схема алгоритма итерационного процесса вычисления спектральных
оценок для нестационарных СП
На рис. 2.25 показаны сравнительные результаты оценивания
интегральной спектральной функции одной из моделей нестацио-
нарного СП при использовании различных методов.
Результаты исследования предложенного метода показали сле-
дующее.
1. Применение 50...60%-ного перекрытия интервалов при ис-
пользовании критерия инверсий обеспечивает относительный
выигрыш в статистическом показателе качества оценок нормиро-
ванной интегральной спектральной функции до 10... 15 % по срав-
нению с другими значениями коэффициента перекрытия.
2. Для получения лучшего спектрального разрешения необхо-
димо уменьшать число квазистационарных интервалов, однако
при этом увеличивается дисперсия оценки. Эффективное приме-
212
2. Радиолокационная разведка
Рис. 2.25. Результаты оценивания нормированной интегральной спект-
ральной функции:
1 — метод Блэкмана — Тьюки (прямоугольное окно); 2 — метод Блэкмана —
Тьюки (окно Бартлетта); 3 — метод Уэлча (окно Хэмминга); 4 — модифициро-
ванный метод Уэлча (окно Хэмминга); 5 — истинная оценка
нение метода можно обеспечить только при достижении компро-
мисса между минимальной дисперсией, минимальным смещением
оценок (оптимальной величиной перекрытия сегментов) и их вы-
соким спектральным разрешением.
3. Выбор типа корреляционного окна определяется требова-
ниями к спектральному разрешению и допустимым смещением
оценок вследствие помех в области боковых лепестков.
2.2.4.2. Повышение точности оценивания радиолокационных
характеристик целей по малой выборке
измерительной информации
Для интерпретации результатов моделирования и данных ра-
диолокационного наблюдения целей используют оценки функций
распределения вероятностей при обработке СП, которые наиболее
полно отражают изучаемые статистические закономерности. В ча-
стности, это касается рассеяния электромагнитных волн на телах
2.2. РЛР в сложной радиолокационной обстановке
213
сложной пространственной формы и оценки параметров сложных
систем в реальных условиях эксплуатации.
Применение вероятностного описания процессов обусловлено
случайной природой воздействия дестабилизирующих факторов
на элементы сложных систем и априорной неопределенностью от-
носительно условий взаимодействия их с внешней средой.
При достаточно большом объеме выборки (N > 100) оценки ФР
являются состоятельными, несмещенными и асимптотически эф-
фективными. В случае малой выборки измерений (обычно до 20-50
измерений) применение методов, основанных на группировке на-
блюдений, не позволяет достичь заданной точности и достоверно-
сти оценок ФР. При малом объеме выборки в случае неполной из-
мерительной информации, что часто встречается на практике,
погрешность вычисления функции распределения может достигать
15...20 %. Это обусловлено тем, что при ограниченном объеме из-
мерений применение группировки наблюдений для построения
гистограммы не дает возможности избежать погрешностей, возни-
кающих вследствие невыполнения условия постоянства значений
плотности вероятности случайной величины внутри интервалов
статистического ряда.
Для повышения точности вычисления ФР случайной величины
предложен метод, основанный на совместном применении мето-
дики построения распределений Джонсона [65] и метода равнове-
роятных классов, позволяющего выбрать размеры частных интер-
валов исходя из условия обеспечения равной вероятности
попадания случайной величины в каждый из них. Преимущество
этого подхода состоит в том, что при нахождении границ частных
интервалов распределения он позволяет избежать погрешности,
обусловленные возможным непостоянством плотности распреде-
ления случайной величины внутри данных интервалов.
Одно из главных достоинств метода аппроксимации экспери-
ментальных данных распределениями Джонсона состоит в том,
что он обеспечивает хорошее качество аппроксимации в области
больших и малых значений аргумента. Вместе с тем существуют
ограничения, связанные с неудовлетворительными результатами
при построении ФР с несколькими экстремумами.
Предложенный метод оценивания ФР по экспериментальным
данным состоит в следующем.
214
2. Радиолокационная разведка
1. Определяют границы частных интервалов xi, хь удовле-
творяющие следующему уравнению:
Р(х<ху)=^, (2.68)
где Р(х) — теоретическая ФР из класса распределений Джонсона.
Общее число интервалов к можно найти с учетом рекоменда-
ций [42]:
[N/5
к = I7V710
4-|_0,75(7V-l)2 J
при TVclOO;
при 100<TV<200;
при N > 200,
(2.69)
где N— объем выборки.
Для вычисления границ частных интервалов были получены
аналитические соотношения (в виде, удобном для табулирования),
которые связывают распределения Джонсона (Fr(x),F£(x),7^(x))
с нормированным гауссовским распределением Фм(х):
у + r]Arsh
(2.70)
где у, т|, X, s — параметры распределений Джонсона, аналитиче-
ские соотношения для которых приведены в [42]; А < 10~7.
Используя (2.70), можно представить решение уравнения (2.68)
в следующей форме:
s + Xexpyz
A. + sexpyz +s
1 + ехру-
s + X ехр2 у. -1
2ехруу
для SL -распределения;
для ^-распределения;
для ^-распределения,
(2.71)
2.2. РЛР в сложной радиолокационной обстановке
215
a2i _У
где yf =—----, ait вычисляют на основе обратной интерполяции
Г|
по таблице нормированного гауссовского распределения:
Ф(а2) = Аф(Я,) (2.72)
к
с учетом того, что а\ определяется из соотношения
, A Y + r|ln- для SL -распределения;
1 A 1 Y-r|ln--l для SB -распределения; (2.73)
fX-s'] у + т| Arsh для ^-распределения.
2. После определения границ частных интервалов xi, .... х;. и
вычисления вероятностей попадания случайной величины в каж-
дый из интервалов для построения искомой ФР можно использо-
вать классическую процедуру:
О прих<х^п;
1 7-1
тг при x _j <х<ху;
1 при х > хтзх.
X Шал
F(I>)=в?
(2.74)
Рассмотрим свойства предложенного метода и особенности его
применения на практике.
В качестве математической модели амплитудных распределе-
ний будем использовать соотношение (2.75), которое представляет
собой достаточно общую форму записи плотности вероятности
амплитуды отраженных радиолокационных сигналов [66]:
W(E) = Eexp
(X + X £2 (X sin2 Фр + X 1 cos2 Ф0)£2
4 2
хЁ£Л(Х \)Е I2k(aE0E)cos 2hy, (2.75)
k=0 4
216
2. Радиолокационная разведка
г U
где Е - . — нормированная амплитуда отраженного сигна-
ла С/;
% = — — коэффициент асимметрии;
O0=arctg
— нормированная амплитуда и фаза вектора,
е* =
соответствующего среднему значению сигнала (XQ,YQ,Gx,Gy —
средние значения и дисперсии указанного вектора);
1 при к = 0;
7Д-) — модифицированная функция Бесселя;
2 при к > 1;
а = 7%2 sin2 Фо + %’2 cos2 Фо; tg у = %2 tgФо.
В зависимости от значений параметров х, Ео и Фо вид распре-
деления (2.75) может существенно изменяться. Частными случая-
ми обобщенной модели (2.75) являются известные распределения
Райса (х = 1, о* = су), Хойта (х * 1, £о = 0), Рэлея (х = 1, £0 = 0) и
Бекмена (Фо = 0) [64].
На практике наиболее часто встречаются амплитудные распре-
деления радиолокационных сигналов, соответствующие распреде-
лению (2.75) с параметрами х2 0,1; 0 < Ф < л/2 и go > 1.
Следует отметить, что при х2 = 0,1 и Фо= л/2 функция плотно-
сти вероятности реализаций отраженных сигналов отклоняется от
традиционных унимодальных форм, а при %2 = 0,01 и Фо = л/2 кри-
вая функции распределения имеет явно выраженный бимодальный
характер.
Рассмотрим наиболее часто используемое 5в-распределение
Джонсона [65]. Условие существования двух экстремумов функ-
ции распределения найдем из уравнения, полученного в результате
дифференцирования исходной плотности вероятности,
Г э V — £
(2y-t-&) + (t-&) -ут|-т| In--------------
= 0.
(2.76)
2.2. РЛР в сложной радиолокационной обстановке
217
После замены переменной z = 2у -1 - е запишем
- л 2 i
7-Хцу = Хц m----.
X — z
(2.77)
С геометрической точки зрения уравнение (2.77) имеет одно
решение, если прямая (х) = х - Хцу является касательной в неко-
торой точке (х0,у0) к кривой у2(х) = Хц2 In * + \ Соответствую-
Х-х
щие значения параметров у, X, ц могут быть найдены путем при-
равнивания коэффициентов уравнения касательной
. 2Х2п2 2Х2п2х0 _о.
У = У1+УЫ(х-х^ = х 2+У1~ 2_ 2 (2-78)
к коэффициентам уравнения прямой (х):
2Х2ц2
X2 -Xq
Уо~
2Х2ц2х0
12 _ 2
Aj Jlq
= -Хцу.
(2.79)
Решив уравнения (2.79), получим х0=Х^/1-2ц2, у0 =
Хд/1-2г|2 - цу. Тогда ордината кривой в точке Xi
у2(хо)= 1п%0 = Хц2 in 1 +_ 2Хц2 Arth-y/l-2r]2.
*--*о 1-^1-2т|2
Уравнение (2.77) имеет два решения, если
2, 1 + 1/1-2г|2 0 [\ г, 2
ц 1п----. <2Vl-2r| -т|у.
1-71-2ц2
Таким образом, ^-распределение имеет бимодальный харак-
тер, если параметры ц и у удовлетворяют системе неравенств
218
2. Радиолокационная разведка
П<1/л/2;
| у| < т|-1 л/1-2т|2 - 2т| Arth д/1-2г|2.
(2.80)
Следует отметить, что соотношения (2.80) не зависят от пара-
метров ей/.. которые определяют интервал изменения случайных
величин исходной выборки.
Графическое представление указанной области изменения па-
раметров г| и у показано на рис. 2.26.
Рис. 2.26. Графическое представление области Q
изменения параметров у, ц, определяющих бимо-
дальный характер функций ^-распределения
С учетом соотношений (2.80) и проведенного математического
моделирования показано, что семейство распределений Джонсона
не может обеспечить требуемую точность аппроксимации бимо-
дальных функций распределений. Основная причина этого состоит
в том, что все бимодальные варианты теоретической функции рас-
пределения Джонсона имеют значительно большее расстояние ме-
жду максимумами, чем это необходимо для аппроксимации встре-
чающихся на практике распределений. На рис. 2.27 приведены
полученные расчетным путем зависимости расстояния между мак-
симумами бимодального ^-распределения от параметров туг/ по
отношению к расстоянию между максимумами аппроксимируемого
бимодального амплитудного распределения (2.75) с параметрами
2.2. РЛР в сложной радиолокационной обстановке
219
% - 0,01, Фо - л/2 и Eq - 0.. .5. Так, для аппроксимируемых распре-
делений с наиболее четко выраженными бимодальными свойствами
{Eq - 4...5 в модели (2.75)) расстояния между максимумами в
2,8-3,6 раза меньше соответствующих расстояний для функций из
класса ^-распределения, которые могут быть достигнуты при лю-
бом сочетании параметров ц и у.
Рис. 2.27. Графики зависимости расстояния у(т|, у)
между максимумами ^-распределения Джонсона от
параметров т] и у по отношению к соответствующим
расстояниям бимодального амплитудного распреде-
ления с параметрами % = 0,01, Фо = л/2, Ей = 5
Для оценки параметров ц и у ^-распределения при известных
граничных значениях (в, с+л) изменения исследуемой случайной ве-
личины целесообразно использовать следующие соотношения [42]:
rj = —
In
Z ,-Z
_____ 1-g a__________
(Xl-g'-g) + (^+S-X<x)
. (*a-e)(^ + £-Xl-a')
(2.81)
Y = Zl-a’
(2.82)
где Za, Zi_«, — a l 00- и (1 - a' )• 100-й процентили нормированного
нормального распределения; xa и .Xi a' — соответствующие эмпи-
220
2. Радиолокационная разведка
рические процентили. Если выбраны симметричные процентили,
ТО 2^1-а' Za.
При неизвестных граничных значениях изменения случайной
величины (амплитуды сигнала) параметры ц и у можно найти,
приравнивая эмпирические процентили к процентилям нормаль-
ного распределения.
Для оценивания неизвестных параметров распределений
Джонсона допустимо использовать произвольный набор процен-
тилей (в том числе и несимметричных), но при этом точность ап-
проксимации эмпирических распределений может быть различной.
Однако недопустимо использовать крайние значения процентилей,
поскольку, как справедливо указано в работе [42], это может при-
вести к потере точности из-за большой изменчивости их оценок.
Для повышения точности аппроксимации экспериментальных
данных один из двух несимметричных процентилей необходимо вы-
бирать из области, охватывающей экстремальные значения функции
плотности вероятности, оценку для которой можно получить с ис-
пользованием классической непараметрической процедуры (2.74).
На рис. 2.28 в качестве примера показаны области определения
несимметричных процентилей, полученные в результате матема-
тического моделирования. Эти области обеспечивают получение
оптимальных оценок функций распределения в смысле минимума
невязки между эмпирическим и теоретическим распределениями
при различном объеме исходной выборки применительно к мате-
матической модели (2.75).
Из графиков, показанных на рис. 2.28, видно, что с увеличени-
ем объема выборки указанная область определения процентилей
сужается и плотнее охватывает экстремальные значения аппрок-
симируемой плотности распределения.
Области определения несимметричных процентилей для мень-
ших объемов выборок (п = 30, 50) сильнее «размыты», поскольку
для восстановления функций распределения с несколькими экс-
тремумами требуется больше измерительной информации. Для
повышения точности аппроксимации ФР второй эмпирический
процентиль целесообразно выбирать на «хвосте» распределения,
причем расстояние между несимметричными процентилями долж-
но составлять 60...70 % диапазона значений исследуемой случай-
ной величины (параметр X в (2.70)).
2.2. РЛР в сложной радиолокационной обстановке
221
Рис. 2.28. Области определения несимметричных проценти-
лей xa,xx_a< для вычисления оптимальных оценок функций
распределения модели (2.75) при различном объеме выбор-
ки JV:
------X2 = 0,0b Фо= л/2, £'о= 5;-Х2= 0,01, Фо= л/2, £0= 3
Согласно изложенной модификации метода Джонсона, алго-
ритм оценивания эмпирической функции распределения по экспе-
риментальным данным должен включать следующие этапы:
- определение границ частных интервалов для построения вы-
борочной функции распределения с использованием соотношений
(2.68)-(2.71);
- идентификация типа распределения Джонсона по выбороч-
ным значениям нормированных асимметрии и эксцесса;
- определение интервалов, содержащих экстремальные значе-
ния функции плотности вероятности, с помощью анализа вспомо-
гательной плотности вероятности, построенной с использованием
классической непараметрической процедуры (2.74);
- выбор области определения несимметричных процентилей;
- вычисление эмпирической функции распределения по соот-
ношениям (2.70)-(2.73), (2.81), (2.82).
Результаты моделирования показали, что при выборке 30 эле-
ментов вероятность получения выигрыша до 10 % составляет 0,62.
Для N= 50 соответствующее значение вероятности равно 0,45. Это
222
2. Радиолокационная разведка
объясняется тем, что выбор границ частных интервалов на основе
применения метода равновероятных классов и предложенной ме-
тодики выбора значений несимметричных прцентилей для по-
строения ФР позволяет более продуктивно по сравнению с класси-
ческой процедурой использовать информацию, содержащуюся в
исходных данных.
Результаты анализа и полученные выводы подтверждены при
обработке большого объема экспериментальных данных. Эффек-
тивность применения разработанного метода характеризуется тем,
что он обеспечивает выигрыш (по максимальной и средней невяз-
ке) по отношению к методу построения ФР с использованием
(2.47) в среднем на 10 %.
Результаты исследований подтверждают устойчивость разра-
ботанного метода для выборок объемом 20 < N < 100 при аппрок-
симации сложных видов распределений, в том числе имеющих не-
сколько экстремумов.
При выборке объемом N> 100 эффективность разработанного
метода сравнима с классической процедурой.
2.3. Использование в РЛР принципов ЗГ РЛС
2.3.1. Физические принципы ЗГРЛС
В метровом и миллиметровом диапазонах длин волн макси-
мальная дальность действия РЛР ограничена расстоянием прямой
видимости. Поэтому определенный интерес представляет примене-
ние для радиолокации волн декаметрового диапазона (3...30 МГц),
позволяющих при определенных условиях обнаруживать цели да-
леко за горизонтом. В работе таких РЛС используются ионосфер-
ные (пространственные) радиоволны (рис. 2.29).
Условия распространения радиоволн существенно зависят от
ионизации атмосферных газов, особенно в верхних слоях атмо-
сферы — в ионосфере (см. п. 2.1.4). Диэлектрическая проницае-
мость и проводимость ионизованного газа определяются концен-
трацией в нем электронов. Относительная диэлектрическая
проницаемость ионизованного газа отличается от единицы вслед-
ствие того, что под действием электрического поля падающей вол-
ны электроны получают смещение относительно равновесного по-
2.3. Использование в РЛР принципов ЗГ РЛС
223
ложения и газ поляризуется. Диэлектрическая проницаемость £
ионизированного газа определяется соотношением
2
е = 1------------- = 1 -3,19 • Ю’2 /э . = 1 - 80,8^-, (2.83)
m3s0(co +v ) со +v f
где тэ — масса электрона (9,10910“31 кг); е — заряд электрона (е «
» 1,60-10-31 Кл); v — частота соударений электронов с ионами и
молекулами атмосферных газов (число соударений за 1 с); со —
угловая частота сигнала; N3 — электронная плотность, 1/см3. При-
ближение в (2.87) получено с учетом того, что в основных диапа-
2 2
зонах радиоволн со » v .
Пространственная волна
Невозвра-
щающаяся
волна
Рис. 2.29. Возможные пути распространения радиоволн
Луч прямой видимости
волна
Распределение электронов в атмосфере зависит от ряда факто-
ров (давления, влажности, температуры в заданном слое атмосфе-
ры) и может изменяться в течение суток и времени года.
Общая картина распределения электронной плотности по вы-
соте h над темной поверхностью изображена на рис. 2.30.
На высотах в интервале 250...400 км имеется основной макси-
мум ионизации. Область ионосферы ниже основного максимума
ионизации принято называть внутренней ионосферой, а область
ионосферы выше основного максимума — внешней. Во внутрен-
ней ионосфере существуют несколько неярко выраженных макси-
мумов концентрации электронов. Традиционно их называют слоя-
ми (иногда — областями), которые принято обозначать символами
D, Е, F\ и 7*2. Вариации изменения электронной концентрации и
224
2. Радиолокационная разведка
высота расположения областей D, Е и F\ имеют суточную перио-
дичность. С наступлением темноты из-за быстрой рекомбинации
электронов и ионов области D и Fi исчезают. В то же время элек-
тронная концентрация области Е сохраняет постоянное значение в
течение всей ночи.
Рис. 2.30. Высотный профиль электронной
концентрации в атмосфере
В области F2 электронная концентрация и высота расположе-
ния максимума значительно изменяются день ото дня. При этом
ионизация различна в летнее и зимнее время. Зимой (в северном
полушарии) электронная концентрация в этой области увеличива-
ется. Суточный ход электронной концентрации области F2 зависит
также от геомагнитной широты (расстояния в градусах дуги от
магнитного экватора Земли до точки наблюдения).
Ионосфера неоднородна и в горизонтальном направлении.
Максимальные горизонтальные градиенты электронной плотности
наблюдаются во время захода и восхода Солнца, но они сущест-
венно меньше вертикальных градиентов.
Наряду с рассмотренными регулярными областями ионосферы
на высоте 95... 125 км иногда образуется так называемый споради-
ческий слой Е& в котором электронная концентрация в несколько
раз превышает концентрацию в слое Е. Слой Ес в средних широтах
чаще образуется днем в летние месяцы. В полярных районах слой
Ес возникает в основном в ночное время.
2.3. Использование в РЛР принципов ЗГ РЛС
225
Основным источником ионизации атмосферы Земли является
солнечное излучение. Замечено, что активность Солнца изменяет-
ся с периодичностью И лет. Критерием солнечной активности
служит относительное число солнечных пятен, которое характери-
зует площадь поверхности Солнца, имеющую наиболее высокую
температуру. В настоящее время разработаны методы прогнозиро-
вания числа солнечных пятен на много лет вперед и более точно
на ближайшие годы.
Регулярная слоистая структура ионосферы временами наруша-
ется, причем эти нарушения вызваны изменением деятельности
Солнца, особенно часто наблюдающимся в годы максимума сол-
нечной активности. Время от времени происходящие на Солнце
вспышки являются причиной извержения потоков заряженных час-
тиц, попадающих в атмосферу Земли и нарушающих нормальный
режим ионизации ионосферы. Структура ионосферы нарушается
также под действием процессов, происходящих в коре Земли и
нижних слоях атмосферы, например во время извержения вулканов.
Изменение ионизации сопровождается изменением магнитного
поля Земли. Это явление носит название ионосферно-магнитной
бури. Во время бури понижается плотность в области F. Наруше-
ния этого вида могут длиться от нескольких часов до двух суток.
Происходят они главным образом в приполярных районах.
Временами на Солнце возникают вспышки интенсивного ульт-
рафиолетового излучения, вызывающего повышенную ионизацию
нижней ионосферы в слое D. Это явление может длиться от не-
скольких минут до нескольких часов и происходит только на ос-
вещенной стороне земного шара.
Исследования показали, что помимо регулярных и квазирегу-
лярных изменений средних значений электронной плотности в
ионосфере происходят непрерывные флуктуации электронной
плотности, в том числе под действием ветра. Причинами образо-
вания неоднородностей в ионосфере являются турбулентное дви-
жение воздуха и неоднородность ионизации.
Неоднородности представляют собой некоторые области с элек-
тронной плотностью, отличной от среднего значения электронной
плотности на данной высоте ионосферы. Размеры неоднородностей
на высоте 60...80 км в слое D составляют до нескольких десятков
метров, на высоте слоя Е — 200.. .300 м, а в слое F размер неодно-
226
2. Радиолокационная разведка
родностей достигает нескольких километров, причем они имеют про-
долговатую форму и вытянуты вдоль силовых линий постоянного
магнитного поля. Отклонение электронной плотности неоднородно-
стей от среднего значения электронной плотности на данной высоте
составляет 0,1... 1,0 %; скорость хаотического движения 1.. .2 м/с.
Как указано выше, зависимость концентрации электронов от
высоты, показанная на рис. 2.30, может быть аппроксимирована
соотношениями (2.13), (2.14).
Частота f, при которой s = 0, называется собственной частотой
ионизированного газа и является удобным параметром для оценки
условий распространения радиоволн. Из (2.83) следует, что
/о=8О,8ЛГэ, (2.84)
где fo измеряется в килогерцах.
Используя (2.84), основное соотношение (2.83) можно перепи-
сать в виде
Если f <fo, относительная диэлектрическая проницаемость s ока-
зывается меньше нуля. Это означает, что коэффициент преломле-
ния в такой среде
н = л/ё (2.86)
является мнимой величиной.
При распространении радиоволны в неоднородной среде ее
траектория искривляется, а при достаточно большой электронной
плотности искривление траектории волны может оказаться на-
столько сильным, что место возвращения волны на поверхность
Земли окажется на некотором расстоянии от места излучения, т. е.
произойдет отражение радиоволны в ионосфере.
Отражение радиоволн, посланных с поверхности Земли на ио-
носферу, происходит не на границе раздела «воздух — ионизиро-
ванный газ», а в толще ионизированного газа. Отражение может
произойти только в той области ионосферы, где электронная плот-
ность с увеличением высоты возрастает, а диэлектрическая прони-
цаемость убывает, т. е. в областях ниже максимума электронной
плотности ионосферного слоя.
2.3. Использование в РЛР принципов ЗГ РЛС
227
Рис. 2.31. Схема отражения радиоволн от ионосферы
Условие отражения связывает угол падения волны на нижнюю
границу ионосферы фо фКр (при фо = фкр возникнет полное внут-
реннее отражение волны) с диэлектрической проницаемостью в
толще самой ионосферы е„ на той высоте, где происходит отраже-
ние волн (рис. 2.31):
sin <р0 = = ji-SO.Syf, (2.87)
где Уо измеряется в килогерцах.
Чем больше значение N3, тем при меньших углах фо возможно
отражение. Угол фо, при котором в данных условиях еще возмож-
но отражение, называют критическим углом.
Из условия (2.83) можно определить рабочую частоту при
которой волны отразятся от ионосферы в случае заданных элект-
ронной плотности и угла падения:
80,8Уэ
СО8ф0
(2.88)
228
2. Радиолокационная разведка
Если волна падает на ионосферу по нормали, то
4=^80,84 =/„. (2.89)
При нормальном падении волны отражение происходит на той
высоте, где рабочая частота равна собственной частоте ионизиро-
ванного газа и, следовательно, £ = 0. При наклонном падении на
этой высоте могут отразиться радиоволны с более высокой часто-
той. Выполняется так называемый закон секанса, утверждающий,
что при наклонном падении волны отражается волна с частотой, в
sec<p0 раз превышающей частоту той волны, которая отражается
при нормальном падении волны на слой заданной электронной
плотности:
4=/о sec Фо- (2.90)
Чем больше электронная плотность, тем для более высоких
частот выполняется условие отражения.
Максимальная частота, при которой волна отражается в случае
нормального ее падения на ионосферный слой, называется крити-
ческой частотой )^р. Отражение волны на этой частоте происходит
вблизи максимума ионизации слоя:
(2-91)
Сферичность Земли ограничивается максимальным значением
угла ф0:
D
*1ПфОтах=—(2.92)
следовательно, и радиоволны с максимальными частотами могут
отразиться от ионосферы при данной электронной плотности.
2.3.2. Режимы работы ЗГ РЛС
РЛС могут работать в режимах прямого и обратного рассеяния
радиоволн. При обратном рассеянии отраженный сигнал принима-
ется в месте излучения или же в режиме прямого рассеяния, когда
2.3. Использование в РЛР принципов ЗГ РЛС
229
падающий и рассеянный потоки радиоволн распространяются
в одну сторону. Принципы работы ЗГ РЛС иллюстрируются
рис. 2.32.
Рис. 2.32. Организация работы ЗГ РЛС
В системах с прямым рассеянием радиоволн декаметрового
диапазона удается получить очень большую дальность обнаруже-
ния. В таких системах передатчик и приемник разнесены на тыся-
чи километров. Если между передающей и приемной позициями в
районе, облучаемом сигналами передатчика, появляется цель, она
обнаруживается по изменениям в характере принимаемого сигна-
ла. Системы с прямым рассеянием работают при меньшей энерге-
тике сигнала в точке приема, но с меньшей информативностью:
они способны только обнаруживать цель, но не могут определять
ее координаты и скорость. Этот недостаток устраняется при ис-
пользовании нескольких приемных позиций с совместной обра-
боткой всех результатов наблюдения. Другое ограничение состоит
в сложности выбора позиций приемной и передающей подсистем.
Таким образом, по крайней мере одну из этих позиций приходится
располагать за государственными границами, на иностранных тер-
риториях. Кроме того, могут возникнуть сложности при синхрони-
230
2, Радиолокационная разведка
зации передающих и приемных подсистем, разнесенных на рас-
стояние более 10 000 км.
При распространении радиоволн в диспергирующей среде (ио-
носфере), в которой коэффициент преломления изменяется по вы-
соте, происходит рефракция. Для радиоволн декаметрового диапа-
зона рефракция выражена настолько сильно, что радиоволны
первый раз отражаются на Землю (на дальности первого скачка)
примерно при 3000 км.
В РЛС обратного рассеяния сигналы, отраженные от Земли,
возвращаются к излучателю тем же путем, что и прямой сигнал.
Распространение может быть не только односкачковым, но и мно-
госкачковым.
В ЗГ РЛС обратного рассеяния передающие и приемные устрой-
ства могут располагаться либо в одном месте (совмещенный вари-
ант), либо на относительно небольшом расстоянии друг от друга
(разнесенный вариант). Электромагнитная энергия, излучаемая пере-
дающей антенной под малым углом к горизонту, распространяется до
встречи с ионосферным слоем в районе первого скачка. После встре-
чи с ионосферным слоем излучаемая энергия распространяется в
пространстве между ионосферой и Землей или между ионосферными
слоями. Рабочую частоту излучения выбирают так, чтобы обеспечить
минимальное затухание энергии на трассе большой протяженности.
При наличии цели отраженный ею сигнал возвращается к РЛС.
Системы обратного рассеяния способны не только обнаруживать
цель за пределами прямой видимости, но и определять ее коорди-
наты. Дальность находят измерением времени распространения до
цели и обратно. Для определения угловых координат применяют
большие антенны, обладающие достаточно узкой ДНА.
По сравнению с обычными для радиолокации волнами санти-
метрового и дециметрового диапазонов используемые ЗГ РЛС де-
каметровые (короткие) волны имеют существенно иные условия
распространения, причем эти условия сильно зависят от состояния
ионосферы.
Декаметровый диапазон заполнен большим числом сигналов
связных и радиовещательных станций, которые влияют на работу
ЗГ РЛС как сосредоточенные по частоте радиопомехи. На некото-
рых участках диапазона суммарная мощность таких помех может
на несколько порядков превышать мощность отраженного сигнала.
2.3. Использование в РЛР принципов ЗГ РЛС
231
Кроме того, в декаметровом диапазоне заметно проявляют себя
атмосферные помехи, космические шумы и другие активные по-
мехи. Поэтому при работе ЗГ РЛС принимают специальные меры
помехозащиты. На работу ЗГ РЛС могут сильно влиять также пас-
сивные помехи, возникающие вследствие отражений от земной
поверхности. Для борьбы с помехами и повышения дальности дей-
ствия средств РЛР применяют радиолокационные средства с
большим потенциалом, что налагает соответствующие требования
на антенно-фидерные, передающие и приемные устройства РЛС.
В ЗГ РЛС предусматривают возможность адаптации к помехо-
вой обстановке путем перестройки рабочей частоты, если она по-
падает в пораженный помехами диапазон. Нужную для адаптации
информацию об условиях распространения сигнала и о текущей
помеховой обстановке получают с помощью вертикального зонди-
рования ионосферы, наклонного зондирования и текущего опреде-
ления степени поражения радиопомехами той части диапазона,
которая оптимальна для радиолокации.
Одним из основных факторов, определяющих уровень прини-
маемого средством РЛР полезного сигнала, является эффективная
отражающая площадь объекта наблюдения. Объектами наблюде-
ния для загоризонтной радиолокации могут быть самолеты и ко-
рабли, стартующие баллистические ракеты, области ионизации
пространства вследствие ядерных взрывов.
Антенны ЗГ РЛС имеют значительный коэффициент усиления
и одновременно обеспечивают быстрое сканирование луча в пре-
делах большой зоны обзора по азимуту. Кроме того, антенны
должны допускать управление по углу места и работать с сигна-
лами большой мощности. Одно из наиболее трудновыполнимых
требований заключается в обеспечении возможности работы ан-
тенн в пределах очень широкого диапазона частот, так как необхо-
димы постоянная отстройка от помех и подбор трассы прохожде-
ния в зависимости от состояния ионосферы. Желательно также,
чтобы уровень боковых лепестков ДНА был по возможности более
низким. Это общее требование к антеннам является особенно важ-
ным для антенны ЗГ РЛС вследствие высокого уровня помех в де-
каметровом диапазоне: помехи, отражающиеся от области поляр-
ных сияний и метеоров и попадающие в приемное устройство по
боковым лепесткам ДНА, могут приходить с больших дальностей.
232
2. Радиолокационная разведка
Для получения узкой ДНА антенны декаметровых волн должны
иметь большие размеры (порядка сотен метров).
ДНА ЗГ РЛС в угломестной плоскости максимально прибли-
жаются к горизонтальной плоскости. При использовании антенн с
горизонтальной поляризацией требования горизонтального распо-
ложения луча приводят к необходимости создания антенных
сооружений значительной высоты, когда применяются антенны с
вертикальной поляризацией, для обеспечения минимально дости-
жимого угла места и уменьшения потерь используют металличе-
ские экраны, расположенные под антенной.
Основным требованием к излучающим элементам, составляю-
щим передающую антенную решетку, является постоянство вход-
ного сопротивления излучателя в широком диапазоне рабочих час-
тот и в заданном секторе сканирования. Обеспечение этого
требования с учетом взаимных связей излучателей в решетке
представляет собой сложную инженерную задачу.
Приемные устройства ЗГ РЛС работают в довольно трудных
условиях. В первую очередь сложности обусловлены высоким
уровнем как активных (от радиостанций), так и пассивных помех
вследствие отражений от Земли и ионосферы. Помимо этого
заметно проявляются замирания сигнала. Требования к радиопри-
емным устройствам значительно усложняются также необходимо-
стью обеспечивать заданные характеристики при работе в широ-
ком диапазоне частот.
ЗГ РЛС, работающие по принципу обратного рассеяния, обла-
дают возможностями, не доступными для радиостанций связи. На-
блюдая за сигналами, отраженными от Земли, ЗГ РЛС получают
информацию о состоянии ионосферы и об условиях прохождения
радиоволн на трассе распространения сигнала. Но для этого в со-
став ЗГ РЛС необходимо включать специальные технические
средства.
Дальность действия загоризонтных средств РЛР составляет
1000...4000 км. Большие дальности могу быть получены за счет
многоскачкового распространения, но при этом ухудшаются пока-
затели точности измерения.
Обычное разрешение ЗГ РЛС по дальности составляет
20...40 км, но может быть и лучше, вплоть до 2 км. Абсолютная
погрешность измерения дальности 10...20 км обеспечивается в слу-
2.3. Использование в РЛР принципов ЗГ РЛС
233
чае правильного определения пути распространения зондирующе-
го и ответного сигналов.
Разрешение по углу определяется шириной луча ДНА; оно
может быть меньше 1 °, что соответствует линейному расстоянию
между разрешаемыми целями 50 км на дальности 3000 км. Точ-
ность по углу обеспечивается образованием нескольких лучей
(до 10) с достаточно высоким отношением сигнал/шум. При уче-
те влияния ионосферы погрешность по углу может составлять
доли градуса.
Разрешение целей по скорости в РЛС возможно при выделении
доплеровских частот до 0,1 Гц и ниже. На частоте 20 МГц значение
0,1 Гц соответствует разности относительных скоростей 2,7 км/ч.
Наиболее современные системы ЗГ РЛС обеспечивают такую
точность при разнесении передающих и приемных позиций на рас-
стояния порядка полутора сотен километров и при работе в диапа-
зоне частот 5...50 МГц с непрерывным излучением с ЧМ. Такие сис-
темы используют передающие и приемные антенные решетки
высотой в десятки и шириной в сотни метров. Максимальная мощ-
ность одновременно работающих на излучение передатчиков может
достигать 0,7 МВт. Формирование луча приемной антенны и управ-
ление режимом передачи зондирующего сигнала осуществляются
цифровыми методами. Существенно, что у таких систем рабочая
зона ограничена: минимальная дальность действия — 800 км, мак-
симальная — около 3000 км.
2.3.3. Зона действия средств ЗГ РЛС
Поскольку зондирующие и отраженные сигналы при загори-
зонтной радиолокации распространяются не прямолинейно, а по
довольно сложным трассам, для определения максимальной даль-
ности работы РЛС в этом случае нельзя пользоваться соотношени-
ем (2.19), полученным в предположении о распространении ра-
диолокационного сигнала в свободном пространстве. Учитывая
сложность трасс и многолучевость распространения сигнала, для
определения размеров рабочей зоны средства ЗГ РЛС можно по-
ступить следующим образом. Пусть в точке И (рис. 2.33) на по-
верхности Земли находится РЛС с антеннами, обеспечивающими
направленное излучение.
234
2. Радиолокационная разведка
Рис. 2.33. Рабочая зона ЗГ РЛС
Можно считать, что максимум ДНА РЛС в азимутальной плос-
кости направлен на цель. В вертикальной плоскости ДНА ориен-
тирована под малыми углами места и ее ширина включает в себя
критический угол места ркр. Если угол падения луча на слой ионо-
сферы больше Ркр, этот луч пронизывает ионосферу и излучается в
космическое пространство. При р < ркр сигнал отражается ионо-
сферой и далее распространяется в космическом пространстве.
Критический угол места зависит от параметров ионосферы и рабо-
чей частоты РЛС:
P^sarccos 1- 1-
(2.93)
где йтах — высота максимума концентрации слоя F ионосферы;
7?з — радиус Земли; /кр — критическая частота вертикального зон-
дирования ионосферы.
Плотность потока мощности в районе цели, находящейся за
горизонтом на расстоянии R и высоте h, будет пропорциональна
эффективной мощности излучения P^G, хотя линейная связь
мощности в точке приема с коэффициентом усиления передаю-
щей системы G может нарушаться, если критический угол места
2.3. Использование в РЛР принципов ЗГ РЛС
235
Ркр выходит из пределов ширины ДНА РЛС в угломестной плос-
кости.
При излучении сигнала под некоторым углом места р < ркр
в узкой трубке, размеры которой определяются шириной ДНА по
углу места Зр и азимуту 5а, в телесном угле 8Q = ЗрЗасовР « ЗрЗа
излучается мощность
(2.94)
4л
Вся энергия, излучаемая в секторе углов места О...ркр, удержи-
вается ионосферой. Каждому лучу, выходящему под некоторым
углом места р на дальности R, можно сопоставить некоторую вы-
соту й(Р, R). Это такая высота на расстоянии R от места располо-
жения РЛС, к которой приходит сигнал, излучаемый под углом р.
Характер функции h(fi,R) при фиксированном значении R сущест-
венно изменяется в зависимости от состояния ионосферы на трассе
и от рабочей частоты РЛС. Во-первых, эта функция однозначна,
т. е. каждому лучу р при заданном значении R однозначно соот-
ветствует высота h. Обратная функция может быть неоднозначной,
т. е. на заданную высоту могут приходить сигналы по разным
лучам при существенно различных значениях угла р. Во-вторых,
область существования функции ограничена интервалом не шире
[О, Йщах]-
Для учета поглощения электромагнитной энергии в ионосфере
и временного запаздывания радиолокационных сигналов при рас-
пространении электромагнитных волн от РЛС до цели каждому
z-му лучу можно поставить в соответствие коэффициент поглоще-
ния Г, и временное запаздывание тг.
Площадь поперечного сечения луча
65, = 5ЛД. (2.95)
При этом расходимость в азимутальном направлении одинакова
для всех лучей и равна
3/г =ЗРгТ?38ш—. (2.96)
236
2. Радиолокационная разведка
При сферической расходимости
и 5/,. =50,7?. (2.97)
Плотность потока мощности электромагнитного поля радиоло-
кационного сигнала, обусловленного z-м лучом, в районе располо-
жения цели с учетом коэффициента поглощения Г, = Гг(0„7?), а
также соотношений (2.95)-(2.97) имеет вид
п JP, 1 _ -PmG(P,) Г 1 г 4
R,
Безразмерную величину
1 5/г,
7?5Р,.
(2.98)
(2.99)
можно назвать высотным множителем, характеризующим относи-
тельное изменение интенсивности поля z-ro луча по высоте 5/z, по
сравнению с изменением интенсивности поля при сферической
расходимости 507?.
На основании (2.98) и (2.99) можно определить плотность по-
тока мощности электромагнитного поля, распространяющегося по
трассе z-ro луча:
П,. = , (2.100)
^12 О')
где
D
PP12(z) = 4л7?7?3 sin—С,.Г,. (2.101)
характеризует ослабление электромагнитной энергии, т. е. затуха-
ние радиоволн при распространении от РЛС до цели по z-му лучу.
Порядок индексов функции W определяется соответствием их но-
мерам падающих и отраженных целью лучей. Если мощность пе-
редатчика Р„зл выражена в ваттах, а входящие в (2.101) R и R3 — в
метрах, то в соответствии с (2.98) плотность потока мощности П,
будет выражаться в ваттах на квадратный метр.
2.3. Использование в РЛР принципов ЗГ РЛС
237
Сложение высокочастотных полей различных лучей происходит
со случайной фазой. Это означает, что средняя плотность потока
мощности электромагнитного поля в месте расположения цели равна
сумме плотностей потоков мощности, приносимой всеми лучами:
Величину
(2.102)
(2.103)
можно назвать суммарным ослаблением электромагнитного поля при
его распространении от РЛС до цели. Напряженность поля в районе
цели имеет случайный характер, так как фазы сигналов в отдельных
лучах медленно и независимо друг от друга меняются при изменении
координат точки наблюдения и времени. Закон распределения на-
пряженности поля зависит от распределения мощности по лучам и от
числа лучей. Скорость изменения напряженности поля во времени и в
пространстве зависит от разности временных запаздываний лучей:
чем больше эта разность, тем выше скорость флуктуации.
При рассмотрении обратного распространения сигнала от цели
до приемной антенны РЛС следует полагать, что диаграмма об-
ратного рассеяния цели в пределах сектора углов прихода лучей
постоянна и эффективная площадь обратного рассеяния равна и, а
также что распространение сигнала в обратном направлении про-
исходит по таким же траекториям, что и у лучей в направлении от
РЛС до цели. При сделанных предположениях очевидно, что лучи
в обратном направлении имеют ту же меру пространственной рас-
ходимости, то же ослабление и то же временное запаздывание.
Поле отраженного целью сигнала в месте расположения радиоло-
катора формируется множеством н2 лучей, т. е. при облучении це-
ли z-м лучом обратное распространение сигнала может происхо-
дить поу-му лучу. При учете для каждого луча выражений (2.102)
и (2.103) лучам будут соответствовать следующие значения плот-
ности потока мощности отраженного сигнала в месте приема
Ппр(^7) =
(2.104)
238
2. Радиолокационная разведка
и временного запаздывания
тО = т(₽,,Я) + г(Р,,Я). (2.105)
При этом
^2(О = Ж2](«) и Wl2(j) = W2t(f) (2.106)
определяются соотношением (2.101). С учетом некогерентности
различных лучей среднюю мощность принимаемого сигнала цели
определяют как сумму мощностей сигналов всех лучей:
п п
/>«Р=22Ппр(>'>Жр(Р,)> (2.Ю7)
/=1 j=l
где 5Пр — эффективная площадь приемной антенны (в системах
ЗГ РЛС обычно используют разные антенны на передачу и на при-
ем, чтобы уменьшить влияние мощного зондирующего сигнала на
принятый сигнал).
Таким образом, для возвратной загоризонтной радиолокации
формула для отношения мощностей принятого сигнала и шума
имеет вид
^np =
рш Ршк
где
(2.108)
(2.109)
Входящий в (2.108) коэффициент W - W12W21 учитывает пол-
ное затухание радиолокационного сигнала на трассе распростра-
нения радиоволн в прямом и обратном направлениях. Это затуха-
ние зависит как от R, так и от 0.
Расчет отношения сигнал/шум в соответствии с (2.108) позво-
ляет определить максимальную дальность действия средства РЛР,
использующего принцип возвратной загоризонтной радиолокации.
Для нахождения отношения сигнал/шум на входе приемников
средств РЛР с прямым рассеянием луча можно пользоваться фор-
мулой (2.108), учитывая, что W должны определяться для сущест-
венно различающихся трасс распространения лучей.
2.3. Использование в РЛР принципов ЗГ РЛС
239
2.3.4. Измерение координат цели
средствами ЗГ РЛС
Средства РЛР, в которых используется принцип загоризонтной
локации, могут измерять дальность и азимут цели с помощью эф-
фекта обратного рассеяния. За счет эффекта прямого рассеяния
можно определять только угловые координаты объекта разведки.
Для нахождения полного вектора пространственного положения
радиолокационной цели приходится формировать несколько неза-
висимых угловых измерений и вычислять пространственные коор-
динаты методом триангуляции.
ЗГ РЛС по задержке сигнала определяет дальность по лучу
(рис. 2.34). Дальность по Земле равна длине дуги большого круга
между точкой расположения передатчика ЗГ РЛС и проекцией
точки расположения цели на земную поверхность.
Рис. 2.34. Координаты цели,
измеряемые средством ЗГ РЛС
Между дальностью по лучу Rn и дальностью по Земле R можно
установить функциональную зависимость R = f(R;l). Параметрами
этой зависимости являются высота отражающего слоя ионосферы
Н и высота объекта над поверхностью Земли h. Для h = 0 номо-
грамма пересчета дальности по Земле в дальность по лучу пред-
ставлена на рис. 2.35.
Как видно на рис. 2.35, для наземных (а часто и для призем-
ных) объектов дальность по лучу совпадает с дальностью по Земле
с приемлемой для практики точностью R = Ra. И это соотношение
выполняется тем точнее, чем больше дальность по лучу.
Высоту объекта h, являющуюся важным параметром зависимо-
сти R = /(7?л), не удается определить средствами ЗГ РЛС. Это обу-
240
2. Радиолокационная разведка
Рис. 2.35. Связь дальности по Земле R и дальности по лучу Rn
словлено наличием множества различных путей распространения
радиолокационного сигнала в ионосфере.
В ЗГ РЛС обратного рассеяния используется импульсное излу-
чение. Частоту следования зондирующих импульсов выбирают,
исходя из условия однозначности измерения дальности. Если даль-
ность (зона действия) находится в пределах до 7?тах 6000 км (ти-
пичное значение), частота следования зондирующих импульсов не
должна превышать 25 Гц (Fn < 27?max/c).
Несущую частоту зондирующего сигнала ЗГ РЛС выбирают с
таким расчетом, чтобы обеспечить фокусировку сигнала на требуе-
мой дальности.
Механизм фокусировки иллюстрируется рис. 2.36.
Реальные передающие антенны средства ЗГ РЛС имеют шири-
ну диаграммы направленности порядка 10... 15°. Лучи, созданные
такой антенной, входят в ионосферу под разными углами и отра-
2.3. Использование в РЛР принципов ЗГ РЛС
241
Рис. 2.36. Фокусировка сигнала при ЗГ РЛС
жаются в сторону Земли в разное время. Поэтому отраженные ио-
носферой лучи не параллельны и при некоторых условиях пересе-
каются в одной точке. Если в этой точке расположена цель, отра-
женный ею сигнал будет иметь мощность большую, чем в каждом
парциальном луче по отдельности. За счет фокусировки лучей
плотность потока мощности сигнала в точке фокуса может увели-
читься примерно в 10 раз. Соответственно увеличатся достовер-
ность обнаружения отраженного целью сигнала и точность опре-
деления его параметров. Поскольку условия отражения сигнала
существенно зависят от состояния ионосферы, на выбор несущей
частоты влияют время года и время суток, а также некоторые дру-
гие факторы. Чтобы оперативно изменить несущую частоту зон-
дирующего сигнала и частоты гетеродина приемника, в составе
средств ЗГ РЛС используют специальные синтезаторы частот, а
для оперативного управления азимутом луча — антенные решетки
с электронным управлением ориентацией максимума диаграммы
направленности.
Кроме аддитивных шумов приемных устройств и помех от ра-
диопередатчиков, которыми очень плотно насыщен диапазон ко-
ротких волн, на работе средств ЗГ РЛС весьма существенно сказы-
ваются сложные, нестабильные и не поддающиеся точному учету
условия распространения сигнала.
Ионосфера весьма неоднородна не только в вертикальной, но и
в горизонтальной плоскости. Изменение концентрации электронов
по горизонтали приводит к искривлению и наклону отражающего
242
2. Радиолокационная разведка
слоя. Это вызывает отклонение направления распространения от-
раженных радиоволн от дуги большого круга, вызывая погреш-
ности измерения азимута цели, а удлинение пути вдоль такого
искривленного луча приводит к погрешности определения даль-
ности.
На коротких волнах в точку приема почти всегда приходят не-
сколько лучей, отраженных от разных областей ионосферы, зем-
ной поверхности и местных предметов, окружающих антенны
РЛС. Одновременное действие многих лучей приводит к появле-
нию интерференционных погрешностей.
2.4. Средства радиолокационного дозора
и дальнего радиолокационного обнаружения
Идея размещения обзорной РЛС дальнего обнаружения на ЛА
возникла еще в начале 1940-х годов. В настоящее время авиацион-
ные комплексы радиолокационного дозора и наблюдения (РЛДН),
или, иначе, комплексы дальнего радиолокационного обнаружения
(ДРЛО) широко распространены и являются одними из основных
средств РЛР.
Поскольку объекты разведки (ударные самолеты, крылатые
ракеты и другие ЛА, надводные корабли) могут летать на малой
высоте и их скорости могут изменяться в широких пределах, со-
временные средства РЛР ДРЛО применяют импульсные и им-
пульсно-доплеровские РЛС со сложными зондирующими сигна-
лами [67]. Такие средства РЛР обнаруживают воздушные и
надводные цели на больших дальностях на фоне отражений от
поверхности Земли и моря.
Помимо самолета-носителя в состав комплекса радиолока-
ционного дозора и наблюдения входят шесть подсистем борто-
вого оборудования РЛС: подсистема радиолокационного опо-
знавания, подсистема навигации и управления, подсистема
связи, подсистема обработки данных, подсистема отображения
данных и подсистема управления. Общая примерная схема ком-
поновки радиоэлектронной аппаратуры на самолете ДРЛО пока-
зана на рис. 2.37.
2.4. Средства радиолокационного дозора и дальнего обнаружения 243
Рис. 2.37. Общая схема компоновки радиоэлектронной аппара-
туры комплекса ДРЛО:
1 — пульт управления подсистемой связи; 2 — аппаратура подсисте-
мы связи; 3 — подсистема обработки данных; 4 — пульт оператора
бортовой ЭВМ; 5 — многофункциональные пульты отображения
данных и управления; 6 — пульт дежурного оператора; 7 — пульт
технического обслуживания РЛС; 8 — приемное устройство и цифро-
вой вычислитель РЛС; 9 — коротковолновая антенна подсистемы
связи; 10 — антенная система РЛС; 11 — антенны подсистемы радио-
локационного опознавания и системы передачи данных; 12 — аппара-
тура радиолокационного опознавания и навигационная аппаратура;
13 — передающее устройство РЛС; 14 — радиоэлектронная аппара-
тура управления полетом; 15 — источник постоянного тока; 16 —
распределительное устройство
Развернутая схема взаимодействия основных функциональных
подсистем средства РЛР в составе комплекса ДРЛО приведена на
рис. 2.38.
Структурная схема обзорной РЛС средства РЛР может быть
проиллюстрирована рис. 2.39.
Современные средства РЛР с системами ДРЛО способны при
высоте полета до 12 км обнаруживать и сопровождать несколько
сотен целей на расстоянии примерно до 650 км, обеспечивая при
этом зону обзора 360° по азимуту и ±30° по углу места.
РЛС ДРЛО могут работать в нескольких режимах:
244
2. Радиолокационная разведка
1) импульсный режим с низкой частотой повторения излучения
зондирующих импульсов при отсутствии помех от Земли;
2) режим слежения за надводными целями при очень коротких
импульсах зондирующего сигнала;
Рис. 2.38. Схема взаимодействия основных функциональных
подсистем комплекса ДРЛО
Рис. 2.39. Структурная схема РЛС ДРЛО
2.4. Средства радиолокационного дозора и дальнего обнаружения 245
3) импульсно-доплеровский режим с высокой частотой повто-
рения импульсов для обнаружения воздушных целей на фоне от-
ражений от земной и морской поверхностей, когда высота полета
целей не измеряется;
4) пассивный режим с выключением передатчика в тех угло-
вых секторах обзора, где организуются помехи, и с использовани-
ем приемников РЛС для обнаружения и определения координат
источников помеховых излучений.
Основное функциональное назначение первого режима — по-
иск, обнаружение и сопровождение воздушных целей, располо-
женных выше линии горизонта, в верхней полусфере. При таком
расположении и характере движения радиолокационных целей
дальность прямой видимости оказывается очень большой. Но что-
бы реализовать работу в большой зоне (при больших 7?^), для
однозначности измерений дальности приходится использовать
зондирующие сигналы с большим периодом (низкой частотой) по-
вторения:
1
Тп 27?,
(2.110)
При высоте полета радиолокационной цели и носителя средст-
ва РЛР порядка 10 км частота Fn < 180 Гц. На практике эту частоту
выбирают еще ниже — порядка 100 Гц.
Для реализации высокой точности измерения дальности и хо-
рошей разрешающей способности в режиме работы в верхней по-
лусфере средства ДРЛО применяют зондирующие сигналы с внут-
риимпульсной частотной или фазовой модуляцией.
Во втором режиме при работе средства РЛР по целям над вод-
ной поверхностью или вблизи от нее нужно выделять отраженный
целью полезный сигнал на фоне мешающих отражений. Сигнал,
отраженный от морской поверхности, может оказаться очень
большим. Во многих случаях именно этот сигнал, а не шумы при-
емника определяет качество обнаружения, опознавания и значения
параметров движения радиолокационной цели. При импульсном
зондирующем сигнале на подстилающей поверхности высвечива-
ется пятно S характерной формы (рис. 2.40).
246
2. Радиолокационная разведка
Рис. 2.40. Формирование отражающей пло-
щадки при облучении подстилающей поверх-
ности
Контуры пятна S образованы проекцией лепестка ДНА (по уров-
ню A(po,s) и элемента разрешения по дальности, определяемой дли-
тельностью зондирующего импульса Л7? = стим/ 2. Внутри этой
площадки отражающая поверхность неровная. Суперпозиция сиг-
налов, отраженных неровностями, формирует помеховый сигнал на
входе приемника. Мощность помехового сигнала, сформированного
этой площадкой, определяется ее эффективной отражающей по-
верхностью, пропорциональной геометрической площади, т. е.
(2.Ш)
п 2cos0 °’5
где К — коэффициент отражения, зависящий от свойств отра-
жающей поверхности.
Как ясно из формулы (2.111), мощность помехи тем меньше,
чем меньше длительность зондирующего импульса тим.
Работая над морем, РЛС может разрешать и наблюдать раздель-
но волны на водной поверхности, если элемент разрешения РЛС
меньше длины этой волны. При увеличении длительности импульса
2.4. Средства радиолокационного дозора и дальнего обнаружения 247
возрастает размер элемента разрешения —и увеличивается
2cos0
мощность отраженной поверхностью помехи, которая формируется
многими случайными колебаниями и становится все больше похо-
жей на шум приемника. Но при всех преимуществах коротких зон-
дирующих импульсов такой сигнал практически не позволяет ис-
пользовать эффект Доплера для определения скорости.
Назначение третьего режима — поиск и обнаружение большого
числа воздушных целей на фоне отражений от местных предметов.
Поиск целей осуществляется, как правило, по углам и по скорости.
При этом можно обрабатывать информацию о большом числе целей
и сопровождать эти цели, прокладывать их траектории.
Для наблюдения движущихся радиолокационных целей на фо-
не отражений от неподвижных объектов и стационарной поверх-
ности Земли применяют селекторы движущихся целей. В этих се-
лекторах независимо от конкретного способа их технической
реализации используют различие сигналов по доплеровскому
сдвигу несущей частоты. Селекторы подавляют сигналы с нуле-
вым доплеровским сдвигом, созданные неподвижными объектами,
и выделяют сигналы с ненулевым частотным сдвигом, обуслов-
ленным ненулевой скоростью движения радиолокационной цели.
Этот принцип селектирования сигналов от движущихся целей ис-
пользуется в РЛС на стационарных позициях. Однако в случае ис-
пользования средств РЛР на ЛА источники мешающих отражений
перемещаются относительно антенны РЛС в процессе полета.
Движение носителя приводит к тому, что сигналы от местных
предметов приобретают расширенный спектр. Если при этом ДНА
антенны бортовой РЛС ориентирована вперед или назад по на-
правлению полета, существенным является эффект сдвига цен-
тральной частоты. В те моменты времени, когда антенна ориенти-
рована вбок, поперек направления движения, доплеровский сдвиг
распределяется по ширине луча ДНА.
В бортовых РЛС с высокой частотой повторения когерентных
сигналов для осуществления селекции по доплеровской частоте
с определением скорости цели применяют корреляционно-
фильтровые системы обработки. Система первичной обработки в
этом случае представляет собой многоканальный обнаружитель
248
2. Радиолокационная разведка
(по дальности и по скорости) когерентных сигналов со случай-
ными амплитудами и начальными фазами. Такой обнаружитель
сигнала вычисляет модуль корреляционного интеграла (значение
функции неопределенности) и сравнивает его с пороговым уров-
нем, выбранным исходя из принятого критерия оптимальности
обнаружения [2]. Алгоритм первичной обработки (см. рис. 2.39) в
этом случае обеспечивает выполнение жесткой последовательно-
сти действий и сводится к внутрипериодной обработке сигнала в
ячейках «азимут — дальность — скорость», межпериодной ком-
пенсации коррелированных пассивных помех; согласованной
фильтрации в доплеровских фильтрах; накоплению и формиро-
ванию статистики о принимаемых сигналах. На этом этапе обра-
ботки принимают решение об обнаружении цели, оценивают па-
раметры сигналов и формируют отметки обнаруженных целей.
Одно из преимуществ импульсно-доплеровского режима рабо-
ты РЛС ДРЛО — возможность селекции и обнаружения низколе-
тящих целей (рис. 2.41).
Рис. 2.41. Работа средства ДРЛО при отражениях сигнала от земной
поверхности
Спектр результирующего сигнала, отраженного от цели на фоне
пассивных помех, имеет вид, показанный на рис. 2.42. Основная
мощность спектральных составляющих сосредоточена в окрестно-
2.4. Средства радиолокационного дозора и дальнего обнаружения 249
стах частот спектральных составляющих зондирующего сигнала
f0 + kFn, где fo — частота несущего колебания; Fn =1/Тп — часто-
та следования импульсов. В спектре сигнала от подстилающей по-
верхности можно выделить четыре характерные области (рис. 2.42).
Область 1 формируется отражениями в направлении главного лепе-
стка ДНА РЛС.
Рис. 2.42. Спектр принятого сигнала при высо-
кой частоте повторения импульсов
Интенсивность спектральных составляющих в этой области на
20...50 дБ больше, чем у пьедестала 2 и 3, сформированного отра-
жениями по боковым лепесткам. Максимум области 1 приходится
на доплеровскую частоту
A«=/»+^cos9». (2.112)
Л
где ус — скорость самолета — носителя средства РЛР; 0О —
угол наклона ДНА (см. рис. 2.41); X — длина волны несущего
колебания.
Протяженность области 1 определяется шириной главного ле-
пестка ДНА Д6о,5-
Область 2 (см. рис. 2.42) образуется за счет отражений в на-
правлениях боковых лепестков ДНА, расположенных выше глав-
ного, причем максимальная доплеровская частота соответствует
условию 0о = 0 в формуле (2.112), т. е. эта частота равна 2vc/X.
Область 3 формируется отражениями с направлений боковых ле-
пестков, лежащих ниже главного. Доплеровские сдвиги частот в
этой области лежат в интервале [—2vc /X; 0]. Область 4 характе-
250
2. Радиолокационная разведка
ризует отражения от участков, расположенных вблизи нормали к
подстилающей поверхности.
Как видно на рис. 2.42, в спектре принятого сигнала есть участки
на частотах f.
+ (2.113)
Л Л
где не наблюдаются помехи от подстилающей поверхности.
Выбирая частоту повторения зондирующих импульсов равной
+ <2П4>
Л Л
где уц — максимально возможная скорость движения цели, можно
обеспечить прием отраженного целью сигнала в окне, свободном
от помех (кроме, разумеется, собственных шумов приемника).
Эти окна позволяют обнаруживать низколетящие цели на фоне
пассивных помех от подстилающей поверхности. Дальность обна-
ружения целей в этом случае определяется энергией принятого от
цели сигнала и спектральной плотностью собственного шума при-
емников РЛС.
Работа в первом и третьем режимах может осуществляться од-
новременно (так называемый комбинированный режим). В комби-
нированном режиме обнаружение целей, находящихся на различ-
ных дальностях и высотах, осуществляется путем чередования (в
течение одного периода сканирования луча антенны по углу мес-
та) импульсного и импульсно-доплеровского режимов. При обзоре
верхней полусферы РЛС работает в импульсном режиме, а при
обзоре нижней — в импульсно-доплеровском. Комбинированный
режим работы позволяет одновременно обнаруживать и сопрово-
ждать цели на больших и малых дальностях и, таким образом,
полнее использовать возможности РЛС. Для однозначного опреде-
ления дальностей до целей в импульсно-доплеровском режиме
РЛС работает с несколькими периодически изменяющимися крат-
ными частотами повторения импульсов (ЧПИ). Обычно ЧПИ со-
ставляет несколько килогерц. Работа передатчика РЛС с несколь-
кими ЧПИ, а также переключение несущих частот в различных
режимах не только улучшает эффективность и гибкость РЛС, но и
повышает ее помехоустойчивость.
2.4. Средства радиолокационного дозора и дальнего обнаружения 251
Антенна современных РЛС ДРЛО обычно представляет со-
бой плоскую щелевую фазированную решетку (ФАР) с электрон-
ным сканированием луча по углу места. По азимуту антенна
вращается в пределах 360° с невысокой угловой скоростью (око-
ло 6 об/мин). Диаграмма направленности антенны системы
ДРЛО, работающей в сантиметровом диапазоне, имеет ширину в
азимутальной плоскости порядка 1 °. Уровень боковых лепестков
ДНА не превышает -40 дБ.
Условия эксплуатации антенны на самолете обусловливают
серьезные требования к ее конструкции. Во-первых, антенну рас-
полагают под обтекателем, который может вносить искажения в
структуру поля радиолокационного сигнала, ухудшая тем самым
характеристики средства РЛР. Во-вторых, предусматривают ста-
билизацию положения ДНА при эволюциях самолета — носителя
средства РЛР.
Более совершенны конформные антенные системы, не высту-
пающие за обводы планера и не ухудшающие его летно-техни-
ческие и конструктивные характеристики. Такие антенны не долж-
ны вращаться, сканируя по азимуту. Антенны перспективных
средств ДРЛО должны осуществлять электронное сканирование как
по углу места, так и по азимуту.
Передатчик РЛС ДРЛО средства РЛР, работающий на очень
больших максимальных дальностях, обеспечивает выходную им-
пульсную мощность порядка 1 МВт и работает во всех перечис-
ленных выше режимах.
Приемник содержит несколько каналов, согласованных с
разными сигналами в разных режимах работы. Особые требова-
ния к приемникам средств ДРЛО определяются и тем, что при
работе средства РЛР принимаемые сигналы очень сильно разли-
чаются по мощности. Это обусловлено большими различиями
дальностей до целей в рабочей зоне РЛС и большим разнообра-
зием размеров эффективных отражающих поверхностей радио-
локационных целей.
Процессор первичной обработки сигнала реализует алго-
ритмы защиты от помех. Основные алгоритмы первичной обра-
ботки иллюстрируются схемой, показанной на рис. 2.43.
На рис. 2.44 представлен самолет — носитель средства РЛР
для дальнего обнаружения.
252
2. Радиолокационная разведка
Рис. 2.43. Первичная обработка сигнала в РЛС ДРЛО:
АФУ — антенно-фидерное устройство; ФК — формирователь каналов; АП —
антенный переключатель; ФД — фазовый детектор; БПФ — быстрое преобразо-
вание Фурье; РФ — режекторный фильтр; ОЗУ — оперативное запоминающее
устройство; АЦП — аналого-цифровой преобразователь
Рис. 2.44. Самолет — носитель средства РЛР для
дальнего радиолокационного обнаружения
2.5. Средства РЛР с синтезированной апертурой
253
2.5. Средства РЛР с синтезированной апертурой
Другой класс средств РЛР, базирующихся на ЛА (самолетах,
искусственных спутниках Земли), используется для картографиро-
вания подстилающей земной и водной поверхностей, а также для
обнаружения, опознавания и сопровождения объектов на поверх-
ности Земли и моря. В этом классе систем используются синтези-
рованные апертуры (СА) антенны РЛС для получения высокого
разрешения (узкой ДНА) при использовании на борту антенны
сравнительно малого размера. Принцип работы РЛС с СА (РСА)
можно пояснить следующим образом.
Траекторию ЛА, будь то самолет, вертолет или ИСЗ, на корот-
ких интервалах времени (порядка нескольких секунд) можно счи-
тать прямолинейной, а скорость движения по траектории — по-
стоянной. Соответственно равномерно и прямолинейно движется
бортовая антенна ЛА.
ДНА формируется в результате когерентного сложения коле-
баний, принимаемых отдельными ее элементами. Так, если антен-
ная система состоит из п рядом расположенных одинаковых ан-
тенн размером d (линейная решетка) и сигналы, принимаемые
каждой антенной, когерентно суммируются, антенная решетка
имеет такую же узкую диаграмму направленности, как и антенна
размером D = dn (рис. 2.45).
Рис. 2.45. Формирование
диаграммы направленности
антенной решеткой
254
2. Радиолокационная разведка
В РСА применяется небольшая антенна, широкая ДНА кото-
рой неподвижна относительно ЛА и направлена перпендику-
лярно траектории, т. е. осуществляет боковой обзор пространст-
ва. При полете самолета антенна РЛС последовательно занимает
в пространстве положения 1, 2, 3 и т. д. (рис. 2.46) на прямой
линии (траектории полета ЛА), тем самым формируя искусст-
венную (синтезированную) антенную решетку.
Запоминая сигналы, последовательно принимаемые антенной
РЛС в каждой точке траектории, и когерентно их суммируя, мож-
но получить узкую диаграмму направленности искусственно
сформированной антенной решетки. Размер решетки (т. е. размер
синтезированной апертуры антенны РЛС) равен длине участка
траектории, на котором когерентно суммируются сигналы, приня-
тые в разные моменты времени в разных последовательных точках
траектории.
Считается, что с использованием метода синтезирования мож-
но увеличить разрешающую способность РСА по азимуту
в 100 раз и более по сравнению с разрешающей способностью па-
норамных РЛС [4]. По потенциальным характеристикам разре-
шающей способности РЛС с СА приближаются к разрешению, ха-
рактерному для оптических приборов.
Рис. 2.46. Обзор земной поверхности с использованием СА
бортовой антенны
2.5. Средства РЛР с синтезированной апертурой
255
Размер СА, т. е. участок траектории, на котором обрабатыва-
ются сигналы, можно изменять так, чтобы ширина синтезирован-
ной диаграммы направленности уменьшалась пропорционально
увеличению дальности. Этот эффект позволяет получать радиоло-
кационные изображения с постоянной разрешающей способно-
стью независимо от удаленности просматриваемого участка мест-
ности.
Разрешение по наклонной дальности в РСА обеспечивается,
как и в других РЛС, за счет импульсного режима работы РЛС. При
этом могут использоваться сигналы с внутриимпульсной модуля-
цией.
Очевидно, что чем более узкой является отметка сигнала от то-
чечного объекта, тем меньше расстояние между отдельно наблю-
даемыми объектами в суммарном изображении и тем выше разре-
шение. В реальных условиях работы средства РЛР разрешающая
способность зависит также от ряда других факторов. Так, отметки
от объектов с большой мощностью отраженных сигналов оказы-
вают сильное влияние на расположенные рядом отметки от слабо
отражающих объектов. Поэтому разрешение сигналов, амплитуды
которых значительно отличаются друг от друга, будет хуже, чем
разрешение одинаковых или близких по мощности сигналов.
Максимально возможная (потенциальная) угловая разрешаю-
щая способность РЛС по азимуту определяется шириной диаграм-
мы направленности синтезированной антенны
0С= А (2.115)
где L — размер участка траектории ЛА, на котором обрабатыва-
ются принимаемые сигналы и синтезируется апертура.
При такой ширине ДНА разрешение по дальности вдоль траек-
тории полета
sx = ecR (2.П6)
будет очень высоким даже на больших дальностях. Поскольку
размер СА можно изменять в зависимости от дальности наблюде-
ния, можно получить постоянную, не зависящую от дальности
разрешающую способность.
256
2. Радиолокационная разведка
Разрешение РЛС по наклонной дальности обеспечивается им-
пульсным режимом работы
57?=^-, (2.117)
а разрешение по горизонтальной дальности (рис. 2.47), т. е. на по-
верхности Земли, зависит как от разрешения по наклонной дально-
сти 57?, так и от угла 0 наклона луча к поверхности Земли:
5D =
57?
COS0
(2.118)
D
При больших дальностях (по сравнению с высотой полета 77) раз-
решение 57) равно разрешению по наклонной дальности 57?.
При горизонтальных дальностях D, сравнимых с высотой полета
(0 > 45°, см. рис. 2.47), разрешение на поверхности Земли ухудшает-
ся. Поэтому местность, находящаяся непосредственно под ЛА в по-
лосе (2...4)77, с помощью РЛС бокового обзора не просматривается.
Рис. 2.47. Определение разрешающей способно-
сти по горизонтальной дальности
Чем выше разрешающая способность РЛС, тем выше деталь-
ность изображения. При этом не только объекты и фон местности
разделяются на большее число элементов, но и появляются изо-
бражения отдельно стоящих малоразмерных (точечных) объектов,
которые ранее маскировались фоном местности.
Кроме разрешения объектов по координатам, важное значение
имеет разрешение по амплитудам, т. е. возможность определения
2.5. Средства РЛР с синтезированной апертурой
257
мощности отраженных от объектов сигналов. Детальность воспро-
изведения уровней мощности отраженных сигналов определяется
динамическим диапазоном изображения. Для РЛС обзора Земли
динамический диапазон амплитуд отраженных сигналов (отноше-
ние максимального сигнала к минимальному) может составлять
70...80 дБ, в то время как для РЛС другого назначения он обычно
не превышает 20...30 дБ.
Кроме бокового обзора можно реализовать обзор полосы мест-
ности (переднебоковой обзор, обзор в заданном секторе (сектор-
ный), детальный обзор местности в окрестности заданного ориен-
тира (телескопический)). Все другие виды обзора, как правило,
сводятся к комбинации бокового, переднебокового и телескопиче-
ского обзоров. При переднебоковом обзоре радиолокационная ин-
формация формируется в полосе местности, границы которой рас-
полагаются параллельно траектории ЛА (рис. 2.48).
Рис. 2.48. Схема переднебокового обзора РСА
258
2. Радиолокационная разведка
При секторном обзоре антенна РЛС сканирует в горизонталь-
ной плоскости (рис. 2.49) и перемещается вместе с движущимся
носителем по траектории. Поэтому центральная точка области, в
которой формируется радиолокационная информация, совершает
вращательное движение вместе с ДНА. Радиолокационное изо-
бражение формируется в виде сектора.
Рис. 2.49. Схема секторного обзора РСА
При телескопическом обзоре радиолокационное изображение
формируется в виде отдельного кадра. Положение кадра остается
неизменным при пролете носителя средства РЛР в зоне его види-
мости (рис. 2.50).
Существенное влияние на точность измерения координат и
привязки радиолокационных изображений к географическим ко-
ординатам на карте имеет характер рельефа местности. Возвыше-
2.5. Средства РЛР с синтезированной апертурой
259
ние объекта и элементов местности приводит к искажению мас-
штаба по дальности и появлению радиолокационных теней.
Особый характер имеет искажение координат движущихся
объектов в РСА. Если объект движется относительно РЛС с ради-
альной скоростью уп то его отметка на радиолокационном изобра-
жении РСА оказывается смещенной по азимуту относительно
Рис. 2.50. Схема телескопического обзора РСА
истинного положения объекта на местности на угол, пропорцио-
нальный скорости движения объекта. Кроме того, относительное
движение цели по неподвижной подстилающей поверхности по-
зволяет селектировать движущиеся цели на местности. Форма
спектра отраженного целью сигнала дает также дополнительную
информацию для идентификации цели.
260
2. Радиолокационная разведка
Fn - —- sin 0,
д X
При движении РЛС по траектории частота/’ сигнала, отражен-
ного целью, отличается от частоты зондирующего сигнала /о на
значение доплеровского сдвига
(2.119)
где 0 — угол между направлением на объект и боковым направле-
нием.
В пределах ширины ДНА реальной антенны доплеровский
сдвиг частоты сигнала, принимаемого от каждого элемента по-
верхности и от радиолокационных целей, будет изменяться от fmm
до /пах, и это изменение примерно линейно зависит от смещения х
по траектории:
R=^0 = ^l (2.120)
д X XR
Максимальное время То, в течение которого цель находится в
пределах ДНА, равно времени, за которое носитель пролетает рас-
стояние, равное линейной ширине ДНА на данной дальности:
?о=-
vc
Таким образом, каждая цель создает на выходе приемника РЛС
пачку импульсов длительностью То с линейным изменением час-
тоты внутри пачки. Если пропустить такой ЛЧМ-сигнал через со-
гласованный фильтр, пачка будет сжата в один импульс. Длитель-
ность сжатого сигнала на выходе фильтра
(2.121)
Учитывая, что полоса частот Д/ц определяется шириной ДНА
(2.123)
AF»= л 9(
можно оценить значение длительности сжатого импульса
2.5. Средства РЛР с синтезированной апертурой
261
X _ d
2vce0 2vc
(2.124)
Длительность сжатого сигнала определяет разрешающую спо-
собность РСА по дальности вдоль траектории. Мера разрешающей
способности — это расстояние, на которое смещается антенна
РЛС за время тсж:
§ =т v =—. (2.125)
Л СЖ V V z
Как видно из формулы (2.125), максимальная разрешающая
способность РСА не зависит от дальности и равна половине раз-
мера d реальной бортовой антенны.
Вектор скорости движения объекта v4, наблюдаемого средством
РЛР на поверхности Земли, имеет тангенциальную vt (параллельную
траектории движения носителя РЛС) и радиальную vr (совпадаю-
щую с направлением наклонной дальности до РЛС) компоненты.
Наличие тангенциальной компоненты скорости эквивалентно изме-
нению скорости полета носителя РЛС, что незначительно влияет на
изображение объекта. Радиальная компонента скорости вызывает
смещение доплеровской частоты сигнала и, следовательно, всего
спектра на величину, пропорциональную радиальной скорости:
дгг=^е<,. (2.126)
А
Если система обработки сигналов РСА настроена на формиро-
вание изображения неподвижного объекта, то движение объекта
приведет к размытию, расширению отметки на радиолокационном
изображении по наклонной дальности, смещению по дальности
вдоль траектории и ослаблению вплоть до полного пропадания
изображения. Эти эффекты позволяют создавать системы РЛР,
раздельно наблюдающие радиолокационные изображения непод-
вижной местности и перемещающихся по ней объектов, т. е. осу-
ществлять селекцию движущихся целей.
Размывание отметок по наклонной дальности можно объяснить
следующей причиной. За время синтезирования апертуры объект,
имеющий радиальную скорость vr, сместится на расстояние AZ? -
- vrT по наклонной дальности. Следовательно, ширина отметки на
262
2. Радиолокационная разведка
радиолокационном изображении увеличится на А/?. При высокой
разрешающей способности РСА (2.125) это расширение может
быть значительным.
Процесс образования смещения отметки движущегося объекта
иллюстрируется рис. 2.51. Неподвижный и подвижный объекты
находятся на одном направлении в центре диаграммы направлен-
Рис. 2.51. Формирование изображения под-
вижного и неподвижного объектов:
а — расположение объектов; б — изменение допле-
ровских частот сигналов; в — изменение интенсив-
ности отметок
2.5. Средства РЛР с синтезированной апертурой
263
ности реальной антенны (рис. 2.51, а). При полете по траектории
вдоль координаты х (см. рис. 2.50) закон изменения мощности от-
раженных сигналов повторяет форму ДНА, а доплеровские сдвиги
частоты сигналов изменяются линейно с изменением координаты
х. Частота сигналов от неподвижного объекта пропорциональна
углу наблюдения 0:
2v 2v
f«b= — 0 = — х, (2.127)
непидв V
а частота сигналов от подвижного объекта смещена на постоянную
величину AFr:
^движ = ^неподв + = ^Х+^. (2.128)
движ нспидв г Х Z
Если луч, синтезированный ДНА, формируется на нулевой до-
плеровской частоте (на рис. 2.51, б интервал обработки обозначен
утолщенной частью графика Рд(х)), то отметка объекта на радио-
локационном изображении появляется в том месте на оси х, где
доплеровская частота отраженного от этого объекта сигнала равна
пулю. Для неподвижного объекта частота равна нулю в точке
х - 0, т. е. координата отметки совпадает с координатой объекта.
Для подвижного объекта частота равна нулю в точке х - Ах. Ли-
нейный сдвиг Ах определяется следующим соотношением:
Ах =—7?, (2.129)
Vc
т. е. отметка на изображении смещена относительно координаты
объекта на величину Ах, пропорциональную радиальной скорости
объекта. Из (2.129) следует также, что линейный сдвиг Ах пропор-
ционален сдвигу по угловой координате
А0 = —. (2.130)
Vc
В тот момент времени, когда частота сигнала от подвижного
объекта становится равной нулю, объект находится в луче ан-
тенны под углом Д0 и, следовательно, амплитуда сигнала
уменьшается пропорционально уменьшению коэффициента
усиления антенны под углом А0. Соответственно ослабляется
264
2. Радиолокационная разведка
интенсивность отметки движущегося объекта на изображении
(рис. 2.51, в). Если радиальная скорость объекта достаточно ве-
лика, так что смещение отметки АО превышает половину шири-
ны диаграммы направленности, т. е. АО > О,5А0о, амплитуда от-
метки резко уменьшается и изображение движущегося объекта
совсем пропадает.
Так как спектры доплеровских частот сигналов, отраженных от
неподвижных и движущихся объектов (целей), разнесены по оси
частот, появляется возможность раздельной обработки этих сигна-
лов (фильтрации) и получения отдельных изображений неподвиж-
ных и подвижных объектов.
Если обрабатывать участок частот, соответствующий макси-
муму сигнала неподвижных объектов, например в районе нулевой
частоты, то на радиолокационном изображении будут наблюдаться
отметки только неподвижных объектов (точнее, объектов, движу-
щихся со скоростью менее vrmm). Если же обрабатывать полосу
частот AF,-, соответствующую максимуму сигнала объекта, дви-
жущегося со скоростью v„ то отметки объектов, движущихся с
другой радиальной скоростью, а также неподвижных объектов бу-
дут ослабляться или полностью подавляться.
Для выделения объектов с возможно меньшими скоростями
необходимо уменьшать скорость полета носителя РСА и ширину
диаграммы направленности реальной антенны РЛС.
Схема взаимодействия основных подсистем бортового ком-
плекса аппаратуры средств РСА представлена на рис. 2.52, а
структурная схема используемой в радиолокационной разведке
РСА — на рис. 2.53.
Синхронизатор предназначен для формирования запускающих,
управляющих и бланкирующих видеоимпульсов. Он обеспечивает
координацию работы всех функциональных устройств РСА во вре-
мени. Импульсы запуска передатчика, поступающие из синхрони-
затора, определяют моменты излучения зондирующих импульсов.
На выходе передатчика формируется когерентная последователь-
ность радиоимпульсов с внутриимпульсной модуляцией. Частота
повторения зондирующих импульсов изменяется пропорциональ-
но путевой скорости самолета по сигналам, поступающим от
инерциальной навигационной подсистемы.
2.5. Средства РЛР с синтезированной апертурой
265
Рис. 2.52. Схема взаимодействия основных подсистем
средств РСА
Рис. 2.53. Структурная схема средства РЛР с исполь-
зованием РСА
266
2. Радиолокационная разведка
Антенно-фидерная подсистема обычно содержит две антенны,
расположенные слева и справа по бокам ЛА, несущего РЛС.
Диаграммы левой и правой антенн одинаковые: узкие (1...2°) — в
горизонтальной плоскости и широкие — в вертикальной. Их оси
постоянно ориентированы с помощью системы стабилизации пер-
пендикулярно к траектории. Наличие двух антенн позволяет одно-
временно вести обзор двух полос местности слева и справа от на-
правления полета. Форма ДНА в секторе 45° вниз от направления
максимума соответствует функции G(<p) - cosec2 <p7C0S(P • Выбор
косекансной формы ДНА обеспечивает в этом секторе равномер-
ную по дальности интенсивность сигналов, отраженных от одно-
типной местности.
В системе стабилизации антенн используется информация о
курсе, крене и тангаже, поступающая от инерциальной навигаци-
онной системы. Угол наклона оси ДНА в вертикальной плоскости
изменяется в зависимости от высоты полета по сигналам радиовы-
сотомера.
Отраженные от цели радиоимпульсы принимаются антенной
системой и поступают в когерентный приемник. Амплитуда прини-
маемых радиоимпульсов изменяется за время облучения цели в со-
ответствии с диаграммой направленности реальной антенны по
азимуту. Фаза радиоимпульсов изменяется в соответствии с допле-
ровским смещением частоты, определяемым путевой скоростью
носителя средства РЛР и текущим азимутом цели. Когерентный
приемник усиливает эти радиоимпульсы и сжимает их в результате
использования внутриимпульсной модуляции. Для осуществления
когерентного преобразования принятого сигнала из передатчика в
приемник подается опорный сигнал. Для дальнейшей обработки
сигнал с выхода приемника преобразуется в цифровую форму.
Структурная схема, иллюстрирующая принцип работы алгоритма
цифровой обработки сигналов РСА, представлена на рис. 2.54 [2].
С помощью АЦП (см. рис. 2.54) сигналы фазовых детекторов
двух квадратурных каналов преобразуются в цифровой код и по-
даются в ОЗУ, состоящие из N азимутальных каналов и N каналов
дальности. Кодированные сигналы в каждый период повторения
записываются в соответствующий азимутальный канал, имеющий
п ячеек дальности. Поэтому в каждой ячейке дальности оказывает-
2.5. Средства РЛР с синтезированной апертурой
267
Рис. 2.54. Структурная схема устройства цифровой обработки сиг-
налов РСА
ся информация о сигнале, который отражается от цели, находя-
щейся на данном расстоянии и наблюдаемой под определенным
азимутальным углом к направлению полета. Содержимое ОЗУ
считывается с некоторой задержкой относительно момента записи.
При этом в каждом периоде повторения сигнал снимается пооче-
редно с каждого канала дальности, образованного определенными
ячейками дальности азимутальных каналов. Такой сигнал содер-
жит информацию об изменении отраженного сигнала от цели на
дальности R при движении ЛА на интервале синтезирования Дф.
Сигналы с ОЗУ обрабатываются процессором, реализующим при
фокусированной обработке алгоритм
п (ЛГ-1)/2
(2.131)
k=l i=-(N-\)/2
а при нефокусированной обработке алгоритм
п (У-1)/2
Z Ut(i)Wu- (2.132)
k=li=-(N-l)/2
Весовые коэффициенты и фазовые сдвиги <рг формируют
вычислитель опорной функции.
268
2. Радиолокационная разведка
Для фокусированной обработки требуется умножать сигнал
каждого канала дальности на зависящую от дальности функцию
H(Ro). Для этого с помощью вычислителя опорной функции фор-
мируется функция, которая перемножается с сигналом, записан-
ным в ОЗУ. После умножения сигналы с данной дальностью сум-
мируются по всем азимутальным ячейкам, в результате чего
образуются сигналы Х± и У2, соответствующие корреляционным
интегралам квадратурных каналов. Выходной сигнал процессора
вычисляется как корень квадратный из суммы квадратов Х% и Ys.
Компенсирующий сдвиг фазы <р; можно ввести, изменив орто-
гональные проекции вектора сигнала. Эта операция выполняется в
результате изменения компонент сигнала в квадратурных каналах.
В самом деле, если нужно ввести фазовую поправку у к вектору
сигнала U\, имеющему квадратурные компоненты = L/,„cos(pi и
У1 = ITmsintpi, так, чтобы новая фаза этого вектора стала равной фг =
- Ф1 + V, то квадратурные компоненты следует изменить в соот-
ветствии с соотношениями
ЛГ2 =Um cos((ft + у) = Um (cos (ft cos у-sin (ft siny) = Xx cosy-^siny;
Y2 = Um sin(<ft + xp) = Um(sin(ft cosy + cos (ft siny) = cosy 4-Aj siny.
(2.133)
Таким образом, введение поправки сводится к формированию
компонент Хг, Уг после сложения и вычитания квадратурных взве-
шенных с весами cosy и siny компонент Xi и У ь Значение (р, а сле-
довательно, и веса cosy и siny по азимутальным ячейкам изменяют-
ся для различных каналов дальности, так как (р зависит от Ro.
В данном периоде повторения в любом канале дальности (см.
рис. 2.54) формируется сумма сигналов с N азимутальных ячеек
каждого квадратурного канала. Выходы каналов дальности объ-
единяются коммутатором.
Требования, предъявляемые к устройствам цифровой обработ-
ки сигналов средств РСА, можно проиллюстрировать на следую-
щем типичном примере [2]. Если требуется получить разрешение
по дальности 6Z = 6 м на расстоянии Ro = 160 км, используя РЛС с
рабочей длиной волны зондирующего сигнала л = 3 см, то нужно
будет сформировать искусственный раскрыв (апертуру) размером
2.5. Средства РЛР с синтезированной апертурой
269
£ = 7?0(рс =7?оХ/(8/) = 8ООм. При скорости движения носителя ра-
диолокатора 400 м/с потребуется время запоминания сигнала
t -L/v-2 с. Число каналов дальности при 87? = а/ и = Ro =
= 160 км окажется равным п = 7?тах/(8/)«2,5-104. Число сумми-
руемых сигналов равно числу отраженных импульсов за время за-
поминания t и при Fn - 1000 Гц составит 2000. Если динамичес-
кий диапазон системы обработки равен 102, то необходим объем
памяти около 103 двоичных единиц.
Быстродействие системы обработки должно быть достаточным
для получения радиолокационного изображения в реальном мас-
штабе времени. При нефокусированной обработке в каждом кана-
ле дальности за ТП должны выполняться одна операция сложения
(прибавляется очередной отраженный импульс) и одна операция
вычитания (удаляется первый из накопленных импульсов). Ско-
рость обработки при этом должна составить 2nFn« 107 операций/с.
Цифровые устройства обработки сигнала в средствах РЛР, ис-
пользующих синтез апертуры антенны, должны иметь в своем соста-
ве процессоры первичной и вторичной обработки, которые, по сути,
являются специализированными ЭВМ. Причем к этим процессорам
предъявляются жесткие требования по быстродействию, а к опера-
тивным запоминающим устройствам — по большому объему памяти.
Рис. 2.55. Космический локатор обзора земной поверхности
На рис. 2.55 приведена фотография ИСЗ, оснащенного РСА, а
на рис. 2.56 — образец радиолокационного изображения, получен-
ного с его помощью. Радиолокационное изображение совмещено с
топографическим планом картографированной местности.
270
2. Радиолокационная разведка
Рис. 2.56. Радиолокационное изображение — план рай-
она Москвы, полученный средством РЛР из космоса
Таким образом, с помощью РСА может быть построена под-
робная и точная карта местности. Качество такой радиолокацион-
ной съемки сравнимо с качеством снимков в оптическом диапазо-
не. Но проведению радиолокационной съемки практически не
мешают погодные условия и условия освещенности, которые су-
щественно влияют на использование оптики.
2.6. Пассивная радиолокация
2.6.1. Особенности работы пассивных средств РЛР
Средства РЛР, в которых применяется принцип пассивной ра-
диолокации, для обнаружения объекта разведки, определения про-
странственных координат и параметров движения объекта исполь-
зуют излучения собственных радиоэлектронных средств объекта.
В этом состоит их отличие от активных РЛС, при работе которых
применяется отражение объектом разведки зондирующего сигна-
ла, и от средств радиотепловой разведки, которые получают по-
2.6. Пассивная радиолокация
271
лезную информацию благодаря естественному излучению объекта,
обладающего тепловым контрастом с окружающей средой.
Высокая скрытность и помехоустойчивость пассивных
средств РЛР затрудняет их обнаружение и пеленгацию средст-
вами РТР, а также возможность их подавления с помощью при-
цельных помех.
Для пассивной локации максимальная дальность убывает с
уменьшением мощности сигнала от цели пропорционально корню
квадратному из мощности, тогда как при активной локации — го-
раздо быстрее, как корень четвертой степени. Можно считать [2],
что указанная максимальная дальность обнаружения объекта раз-
ведки определяется соотношением
р /Дф^рлрЛ^ . - .ч
^max / о д I о > 3 т')
У (4я)2Рпор У (4тс)2Рпор
где P0G0 = РЭф — произведение мощности передатчика объекта
разведки и коэффициента усиления его передающей антенны в
направлении на средство РЛР (эффективная мощность излучения
объекта разведки); ц — коэффициент, учитывающий затухание
сигнала на трассе его распространения и в приемном антенно-
фидерном тракте средства РЛР; 1 — рабочая длина волны; Pnop —
пороговая мощность принимаемого сигнала, обеспечивающая тре-
буемое качество работы (достоверность обнаружения и точность
определения параметров) средства разведки.
Относительно Рпор при пассивной радиолокации необходимо
сделать следующие замечания. Значение Р1!Ор существенно зависит
от априорной информации о параметрах принимаемого сигнала.
Активный локатор сам создает зондирующий сигнал и принимает
его отражение целью. При этом имеется достаточная информация
о параметрах принимаемого сигнала, что значительно облегчает
решение задачи обнаружения сигнала на фоне шумов и помех.
Система пассивной радиолокации не создает зондирующего сиг-
нала, поэтому априорных сведений о структуре и параметрах при-
нимаемого сигнала имеется гораздо меньше. За недостаток апри-
орных данных о сигнале приходится расплачиваться либо
ухудшением качества обнаружения, либо увеличением пороговой
272
2. Радиолокационная разведка
мощности принимаемого и обрабатываемого сигнала (при сохра-
нении показателей качества на том же уровне).
Перечисленные факторы, влияющие на увеличение мощности
принимаемого сигнала, могут привести к увеличению дальности
действия пассивной локации по сравнению с соответствующим по-
казателем для активной локации, но увеличение пороговой мощно-
сти приводит к уменьшению дальности. Однако в большинстве слу-
чаев размер рабочей зоны пассивных средств РЛР превышает
максимальную дальность действия активных средств. Приведенные
рассуждения справедливы только для условий прямой видимости.
При всех перечисленных достоинствах принцип пассивной
радиолокации накладывает и некоторые ограничения на возмож-
ности средств РЛР. Так, средства, работающие без запросного
сигнала, не могут определять дальность до радиолокационной
цели по задержке сигнала на трассе его распространения и ско-
рость движения цели по доплеровскому смещению несущей час-
тоты ответного сигнала. Пассивными системами для измерения
используются угловые координаты, определяемые по направле-
нию прихода радиоволны в точки расположения приемных ан-
тенн, и различия в моментах времени приема сигнала в разных
точках пространства. На этих принципах работают соответствен-
но угломерные и разностно-дальномерные системы пассивного
определения местоположения объектов РЛР.
2.6.2. Угломерные методы определения
местоположения объектов РЛР
Для определения пространственных координат объекта развед-
ки на основе угловых измерений используют известные в геодезии
триангуляционные методы. Принцип триангуляционного опреде-
ления местоположения на основе измерений азимута и угла места
источника излучения иллюстрируется рис. 2.57. Линией положе-
ния — геометрическим местом точек, которым соответствуют по-
стоянные значения измеренного азимута а* = const и угла места
Р - const — является прямая. Точка положения излучающего объ-
екта в пространстве может быть определена на пересечении двух
таких прямых, т. е. по двум парам оценок (а , р ) в двух точках,
разнесенных в пространстве.
2.6. Пассивная радиолокация
273
Рис. 2.57. Схема триангуляционного определе-
ния координат объекта разведки
Пеленгаторы расположены на поверхности Земли в точках О\ и
О2 на расстоянии d друг от друга. С пеленгаторами связаны декар-
товы топоцентрические системы координат Oix^zi и
Если в качестве основной системы принять систему Oixy^zi =
= Oxyz, то координаты объекта разведки (ОР) в этой системе мож-
но оценить на основе очевидных из рис. 2.57 геометрических по-
строений:
у = xtgaj = <Ztg(rc/2-a2), (2.135)
откуда
, tga9 ,sina7cosa1
х = d---2-^----= d-----------L;
tga2-tgaj sin^-aj
, tgoutga, ,sina,-sina,
у = d z = d--------------------L.
tg a2 - tg a.j sin(aj - a2)
Координата z определяется из треугольника OiOP'OP:
sin a2 sin(P1 - (p, / 2)
z — a
sin(a2 -a1)cos(P1 + <p2)
(2.137)
где
Ф,=—v—
R3 sm оц
d sin a2
/?3 sin(a2 -aj’
(2.138)
7?з — радиус Земли для той области, где работают пеленгаторы.
274
2. Радиолокационная разведка
Для уточнения координаты z целесообразно использовать ее
значение, получаемое из треугольника О2ОР'ОР:
sin ОЦ 841(0! + <р2/2)
ятСаг-а^сояфг+фз)’
где
(2.139)
(2.140)
R sin а2 R sin(a2 - eq)
Az — превышение точки расположения второго пеленгатора над
точкой О\.
Для определения трех пространственных координат объекта
разведки в принципе достаточно трех независимых измерений.
В четырех измерениях (двух азимутов и двух углов места) содер-
жится избыточность. Но практически число измерений для опре-
деления координат не только не уменьшают, но даже увеличивают
за счет применения большего числа пеленгаторов. Действительно,
при двух пеленгаторах возможны такие ситуации, когда по край-
ней мере две из трех пространственных координат не определяют-
ся. Это непосредственно следует из (2.139) и (2.140) при ai = a2.
Триангуляционный метод с использованием фазового пеленга-
тора, оценивающего направляющие косинусы, проиллюстрирован
на рис. 2.58.
направляющих косинусов
Пусть в четырех разнесенных точках приема Аь ..., А4
(см. рис. 2.59) с базами разнесения AiA2 - Ау44 - d установлены
2.6. Пассивная радиолокация
275
четыре независимых радиопеленгатора любого типа. Каждый пе-
ленгатор измеряет направляющие косинусы пеленгов цели:
cos(p, = fj.; cosG;- = £*, z = l,4. (2.141)
По измерениям направляющих косинусов можно определить
местоположение объекта разведки ОР в системе координат Ozxy,
т. е. декартовы координаты (х, у, z) источника излучения.
Из рис. 2.59 следуют геометрические соотношения
d2 d2
R? = R2 + xd ч-; T?2 = R2 -xd ч-;
4 4
(2-142)
Rl=R2 + yd+c-^y R2=R2-yd+^-.
С учетом соотношений
x + —= x—— = T?2^2; x = 7?3^3 =T?4^4;
_Г = Я1П1=Я2П2; у + У-^КЛ-. (2.143)
^4 П2
из (2.142) можно получить
( и ( И
Г nJ Л М (2.144)
^1^1 = ^2^2 + ^зПз = ^4^4 +
Отсюда следуют соотношения для вычисления дальностей до цели:
R2d~l
П2
(2.145)
276
2. Радиолокационная разведка
а для вычисления двух декартовых координат можно получить со-
отношения
2х
~d
(2.146)
d
Так как 2R2 = R2 + R2 - (d 12)2, можно найти дальность до
объекта разведки:
2R
d
п2;
п2;
(2.147)
Используя выражения (2.139) и (2.147), можно вычислить вы-
соту объекта разведки над поверхностью Земли:
z
d
(2.148)
Зная координаты (х, у, z) и значение R, нетрудно вычислить на-
правляющие косинусы цели:
cos0 = —; cos(p = —; sm0 =—. (2.149)
R R R
При необходимости можно вычислить азимут а и угол места 0
объекта разведки:
tga =
costp _ у
cos0 R’
COS Р = у]cos2 0 + cos2 ф =
(2.150)
Триангуляционное определение координат основывается на ис-
пользовании четырех пеленгаторов, каждый из которых измеряет
два угловых параметра: азимут и угол места источника излучения
(или два направляющих косинуса), т. е. всего используется восемь
оценок угловых координат источника излучения. Такие измерения
2.6. Пассивная радиолокация
277
на первый взгляд избыточны: для определения трех пространствен-
ных координат (х, у, z) необходимы и достаточны только три неза-
висимых измерения, а их можно получить из двух точек (например,
используя два азимута и один угол места). Но при угловых измере-
ниях из двух точек задача определения координат может стать не-
наблюдаемой: по таким измерениям нельзя определить координаты
объекта, если он располагается на прямой, продолжающей базовую
линию двух измерителей. Кроме того, увеличение числа измерений
всегда повышает точность определения местоположения объекта
разведки.
Для триангуляционного определения пространственных коор-
динат объекта разведки вовсе не обязательно использовать непод-
вижные пеленгаторы (см. рис. 2.58). Пеленгаторы могут переме-
щаться в пространстве, но при этом нужно, чтобы законы их
движения (траектории) были известны и временные зависимости
собственных мгновенных координат y(t), учитывались
при обработке. Так, на рис. 2.59, а проиллюстрирован процесс оп-
ределения координат наземного объекта разведки (ОР) по пелен-
гам с борта самолета РТР, а рис. 2.59, б — с борта разведыватель-
ного ИСЗ.
Рис. 2.59. Автотриангуляция — определение местоположения объекта
разведки при пеленгации из трех точек на траектории носителя пассивно-
го средства РЛР
278
2. Радиолокационная разведка
Измеряя пеленги на источник излучения в разных точках, ко-
торые последовательно занимает разведывательный ЛА при дви-
жении по траектории, показанной на рис. 2.59, а, или по орбите,
показанной на рис. 2.59, б, и зная координаты этих точек, можно
вычислить неизвестные координаты неподвижного излучающего
объекта.
2.6.3. Разностно-дальномерные системы
определения местоположения объекта РЛР
Геометрические соотношения, иллюстрирующие применение
разностно-дальномерного способа определения местоположения
объектов РЛР, изображены на рис. 2.60.
Местоположение источника излучения на плоскости определя-
ется в результате измерения разности моментов времени приема
сигнала в двух точках, разнесенных на величину базы d. Геомет-
рическое место точек, соответствующих измеренной разности
дальностей на плоскости Rl(x,y)-R2(x,y)- А7?]*2 = const, — это
гипербола, а в пространстве — гиперболоид вращения. Точка по-
ложения источника излучения находится как точка пересечения
двух гипербол, для построения которых нужно измерить две раз-
ности дальностей АТ?]*-, и А/?23 на двух базах du и J23- Для опреде-
ления трех пространственных координат нужно соответственно
получить три независимых измерения на трех базах.
Рис. 2.60. К иллюстрации принци-
па разностно-дальномерного спо-
соба определения местоположения
РЛР
2.6. Пассивная радиолокация
279
Разность дальностей измеряется по интервалу времени Д? меж-
ду моментами прихода сигнала в точки расположения антенн А\ и
А1. Для измерения этого интервала в пассивных средствах РЛР
применяют взаимокорреляционные измерители. Схема взаимокор-
реляционного измерителя показана на рис. 2.61. Она содержит
двухканальное радиоприемное устройство с общим гетеродином
(Г) на оба канала, измерительную ЛЗ, непосредственно измери-
тель, состоящий из умножителя и интегратора, систему управле-
ния (СУ), синхронно управляющую ЛЗ. В этом следящем измери-
теле сигналы с выходов обоих каналов перемножаются, результат
перемножения усредняется и управляет задержкой в измеритель-
ной ЛЗ, устанавливая значение Дт , при котором максимизируется
выходной эффект измерителя z(t). Оценка Дт — это формируемый
схемой выходной отсчет.
Рис. 2.61. Схема взаимокорреляционного
измерителя разности временных задержек
280
2. Радиолокационная разведка
На выходе измерителя функции взаимной корреляции включе-
на дифференцирующая цепь d/dt для формирования нечетной дис-
криминационной характеристики.
Направление прихода волны от источника излучения составля-
ет угол s с нормалью к базе d = Л1Л2. Поскольку расстояние до ис-
точника излучения очень велико и 7?i = d, лучи, приходящие
на каждую антенну, приблизительно параллельны. При этих усло-
виях в точках 1 и 2 на выходах антенн создаются напряжения
м2(0^е[Д(0е7Ю°'];
W1(0 = u2(t - A/) = Яе[Д (t - А/)еу<Во('"д°],
где
(2.151)
(2.152)
с с
является измеряемой взаимокорреляционным измерителем разно-
стью задержек когерентных сигналов, связанной с пеленгом соот-
ношением
А7?12 = <7cos0 = cAl (2.153)
Общий гетеродин в точке 3 создает напряжение
ur(t) = Re[£’reyfoo+“1);], расстроенное на ац от <о0-
При идеальных идентичных комплексных коэффициентах пе-
редачи приемников в точках 4 и 5 формируются напряжения
г -, (2.154)
и/О = £xRe[£0(*-&)Ё eJ^e~jaoAt\.
Введем в рассмотрение высокочастотную взаимокорреляцион-
ную функцию принимаемого сигнала
г 1
£0(т) = ио(О«о(^+О = «о(0«о(*+= тRe[Ro(r)ехр(у<о0т)], (2.155)
* 2
0
где
т
Ro(t)= jE0(t)E0(t + T)dt (2.156)
о
2.6. Пассивная радиолокация
281
представляет собой огибающую корреляционной функции АГо(т)
(рис. 2.62).
Иногда удобно представить ii0(/) = M0(7)exp[-уф0(/)]. Тогда
(2.155) дает решение
А?0(т) = М(t)cosсо0т + Af(r)sinсо0т = 7?^(т)cos[co0t- Ф0(т)], (2.157)
где
т
М (Г) = j Ео (t)E0 (t + т) cos [<р0 (0 - q>0 (t + т)] dt;
° (2.158)
= JEffijEoit + t)sin[<p„(0 <;>,,!/! т)]<й;
0
ед=7м2(т) + №(г); ®0(T) = arctg-^
M (t)
(2.159)
Выходной эффект измерителя в точке 8 (см. рис. 2.61) имеет вид
т
z(t) = - x)u2(t - =
о
Гг
= К Re HЁо (t - Ы - т)Ёй (t - Ат*)е’7'м°А/е‘7'0)1 (t~^dt >.
I о
(2.160)
Сравнивая полученное решение с (2.157), можно установить,
что полезный выходной эффект измерителя совпадает со смещен-
ной автокорреляционной функцией принимаемого сигнала (2.160):
40 = Z[T - (AZ* - ДО] = КпЛ[т - (Д? - , (2.161)
где А?пи — полный коэффициент передачи измерителя.
Выходной эффект (2.161) измерителя взаимокорреляционной
функции в точке 8 воспроизведен на рис. 2.62.
Полученное решение (2.161) позволяет сделать следующие вы-
воды.
Выходной эффект взаимокорреляционного измерителя соот-
ветствует смещенной на
Ат*-Ат = Атим
(2.162)
282
2. Радиолокационная разведка
Рис. 2.62. Корреляционная функция
и ее огибающая
АКФ Ко(т) принимаемого радиосигнала и отличается лишь часто-
той заполнения (®i вместо <оо)- При установке измерительной ЛЗ
на значение задержки
Дт* = Az = — sine = — (2.163)
с с
z(t) совмещается с К0(т) по методу максимума.
Для повышения точности измерителя система, следящая за за-
держкой Ат, формирует производную dk^/dx. Измерения взаимо-
корреляционной функции можно проводить по огибающей выход-
ного эффекта /?q[Z-(At* - AZ)], но точность отсчета задержки при
этом будет ниже.
Структура цифрового измерителя разности задержек сигнала
на основе системы слежения за максимумом взаимокорреляцион-
ной функции показана на рис. 2.63.
ЛЗ
Рис. 2.63. Схема цифрового измерителя задержки по максимуму
взаимной корреляции
2.6. Пассивная радиолокация
283
Для преобразования сигналов с выхода измерителя (z(t) в точке 8)
в цифровую форму служат два синхронных детектора с ортогональ-
ными опорными напряжениями uonl(0 = Re{ET(/)exp[ja) (/)]} в
точке 10 и uon2(0 - Im{ET(0exp[j© (0]} в точке 11. В результате на
выходах СД1 и СДг формируются аналоговые напряжения
Z; (т) = zx [Дт - (Дт* - ДО] = [т - (Дт* - Дt)] х
хсоз{сопт(Дт* -ДО + Фо[т-(Дт* - ДО]};
z2 (т) = z2 [ Дт - (Дт* - ДО] = KR^ [т - (Дт* - ДО] х
х sin {сопт (Дт* - ДО + Фо [т - (Дт* - ДО] }•
(2.164)
В аналого-цифровом преобразователе (АЦП) эти напряжения
квантуются по уровню и дискретизуются по переменной т с шагом
= п. В результате формируются две последовательности
Д^о
Z][«] = Zj([h] | Дт* - ДО = {[и] - (Дт* - ДО} х
хсо8{<о1(Дт‘-ДО + Ф0[л]};
и2[и] = z2([n]| Дт* - ДО = Х^Ци] - (Дт* - ДО} х
xsinfco^Ar* - Д/) + Ф0[п]}.
Здесь параметр Дтим = Дт* - At считается фиксированным. В точке
14 выделяется огибающая
(2.166)
а в точке 15 — фаза
Ч["Г
Ф0[и] = arctg
= <опр(Дт*-ДО + Ф0([п]).
(2.167)
Дифференцирующая цепь (ДЦ) формирует сигнал так, что в
точке 16 ^-„И, (2.168) ап
284
2. Радиолокационная разведка
Рис. 2.64. Характе-
ристика дискрими-
натора
что соответствует нечетной дискримина-
ционной характеристике с нулем в точке
Дтим= Дт* - Д/ = О (рис. 2.64).
Управляя задержкой сигнала в измери-
тельной линии для поиска по Дт , можно
по достижению нуля выходного эффекта в
точке 16 и 2вых[н] —> 0 сформировать гру-
бый отсчет пеленга по огибающей взаимо-
корреляционной функции
Дт*[т] = —= -(coss)^,.
с с
Более точный отсчет можно получить с помощью (2.168). На-
пример, при приеме АМ-колебания
фо(0 и Vol>] = Юпр(дЛ^]-Д/). (2.169)
Устанавливая с помощью измерительной ЛЗ нуль функции
можно получить более точный отсчет:
Дт*[/п] = —= —(cose)*. (2.170)
с с
В результате совмещения отсчетов (2.169) и (2.170) получают
однозначный и точный отсчет е* или (cos е)*.
Точность взаимокорреляционного измерителя зависит от про-
тяженности базы d. Действительно, из (2.164) следует, что при на-
личии погрешности измерения задержки одт погрешность опреде-
ления пеленга & или (cos е)* составит
Следовательно, для повышения точности местоопределения
нужно увеличивать базу. Но организация работы измерителя
с очень большой базой требует преодоления значительных техни-
ческих трудностей. Прежде всего в таком измерителе придется
транслировать сигналы, принятые удаленными антеннами на
2.6. Пассивная радиолокация
285
большие расстояния без искажения фазы. Для этой цели придется
использовать широкополосные линии передачи (радио-, радиоре-
лейные, волоконно-оптические). Кроме того, из (2.171) следует,
что даже при точных измерениях задержки (при сравнительно ма-
лых Одт) точные измерения е* или (cose)* можно получить только
вблизи нормали к базе, когда cose максимален. При |е| —> л/2 из-
мерения сопровождаются очень большими погрешностями. По-
этому взаимокорреляционный измеритель должен иметь несколь-
ко непараллельных баз.
2.6.4. Определение местоположения
движущегося объекта разведки доплеровским методом
Выше говорилось о том, что пассивные средства радиолокаци-
онной разведки не способны определять дальность, поскольку не
формируют запросного сигнала и не измеряют задержки его рас-
пространения до цели и обратно. Но известен способ применения
пассивных средств для измерения дальности на траверзе движуще-
гося объекта. Точка траверза — это точка, в которой траектория
движущегося объекта пересекается плоскостью, нормальной к ней
и проходящей через позицию измерительной системы. Показанная
на рис. 2.65 траектория движущегося объекта — плоская кривая, а
секущая ее в точке траверза плоскость представлена своей проек-
цией на плоскость, в которой лежат траектория и точка располо-
жения средства РЛР.
Рис. 2.65. Доплеровское изме-
рение дальности на траверзе
286
2. Радиолокационная разведка
Считая, что объект движется со скоростью v и проходит точку
траверза в момент времени /ь, на основании геометрических по-
строений рис. 2.65 можно получить
R =7^+v2(/-i„)2. (2.172)
Используя (2.172), можно определить радиальную скорость
dR _ v2t
^+v\t-tQ)2
(2.173)
и доплеровское смещение частоты принятого сигнала
о - = —- = ~vR —।
с ).^+v2(t-t0)2
(2.174)
На рис. 2.66 показан типичный вид временной зависимости до-
плеровского смещения частоты сигнала, принимаемого пассивным
средством РЛР. Параметр семейства кривых — значение дально-
сти на траверзе Ro.
Рис. 2.66. Изменение доплеровского смещения час-
тоты в окрестности траверза
2.7. Радиотеплолокация
287
Как видно на рис. 2.26, все кривые имеют асимптотические зна-
чения (t -t0) —> ±v/l при |/ — £0| —» оо , а крутизна кривой в точ-
ке t - to= 0 обратно пропорциональна траверзному расстоянию R&
dFR
dt rkRn
t-tQ U
(2.175)
Таким образом, определяя производную
dt
, скорость объек-
t=ta
та v и измеряя частоту (длину волны) принимаемого сигнала, мож-
но измерить расстояние от точки установки средства РЛР до тра-
ектории движущегося объекта разведки.
2.7. Радиотеплолокация
2.7.1. Принцип и применение радиотеплолокации
Радиотепловая (или, иначе, пассивная радиотеплолокационная)
разведка обнаруживает объекты, опознает их и измеряет коорди-
наты, принимая и обрабатывая электромагнитное излучение этих
объектов в диапазоне радиоволн. Средства, использующие прин-
цип радиотеплолокации (РТЛ), будь то средства радиотехнической
разведки, радиоастрономии, радиомониторинга земной поверхно-
сти, радиометеорологии или исследования природных ресурсов
Земли, принадлежат специфическому подмножеству класса систем
извлечения информации — радиотеплолокационных систем.
В РТЛ для обнаружения объектов используется прием их есте-
ственного радиотеплового излучения в диапазонах радиоволн.
В этом заключается одно из принципиальных отличий РТЛ от ак-
тивной локации, основанной на применении искусственно генери-
руемых радиоизлучений.
Все физические тела, температура которых отлична от абсо-
лютного нуля, создают естественное радиотепловое излучение,
обусловленное электродинамическими процессами. Тепловое из-
лучение занимает широкий спектр частот от инфракрасного до
сантиметрового диапазона. Чтобы подчеркнуть физическую при-
288
2. Радиолокационная разведка
роду такого излучения его называют радиотепловым. Поскольку
интенсивность радиотеплового излучения зависит от температуры
объекта и некоторых других его параметров, прием радиотепловых
сигналов позволяет определять эти параметры на основе анализа
создаваемого объектом радиотеплового излучения.
Радиотепловые излучения возникают также в результате аэро-
динамических возмущений среды, например, вызванных истече-
нием газовых струй из сопла ракетного двигателя. При очень вы-
сокой температуре происходит интенсивная ионизация молекул
атмосферных газов, а движение электронов и ионов вызывает из-
лучение в очень широком частотном диапазоне.
Радиотепловые сигналы являются широкополосными, в них
отсутствуют регулярные составляющие, при этом они обладают
очень низкой спектральной плотностью. Поэтому для приема ра-
диотепловых сигналов применяют специальные широкополосные
радиоприемные устройства с низкочастотными интегрирующими
фильтрами. Такие устройства называют радиометрами.
По мере продвижения в область субмиллиметровых волн техни-
ка средств РТЛ по принципам построения имеет большее сходство с
инфракрасной техникой. Уже сейчас РТЛ занимает промежуточное
положение между активной радиолокацией и инфракрасной техни-
кой. Поэтому области применения РТЛ и радиотеплолокационной
разведки в основном совпадают с областями применения инфра-
красной разведки.
К главным областям применения РТЛ относятся: обнаружение
и определение координат наземных, надводных, подводных, воз-
душных и космических объектов, физические исследования ве-
ществ и материалов. Специфические особенности радиотеплоло-
кационной разведки позволяют при любой погоде обнаруживать
источники тепловой энергии; без непосредственного контакта из-
мерять распределения температуры объектов и исследовать их
внутреннюю структуру. При этом информационные возможности
РТЛ сочетаются с абсолютной скрытностью.
2.7.2. Сигналы в радиотеплолокации
Тепловое излучение образуется вследствие преобразования
внутренней тепловой энергии излучающего тела в энергию элек-
2.7. Радиотеплолокация
289
тромагнитного поля, распространяющегося в пространство, за
пределы нагретого тела. Это преобразование выполняется множе-
ством элементарных осцилляторов, возбуждаемых тепловым дви-
жением микроскопических частиц вещества. Такими осциллято-
рами могут быть атомы, заряженные частицы — электроны и
ионы, а также молекулы, обладающие электрическим или магнит-
ным дипольным моментом.
В естественных условиях подобные излучения возникают в ат-
мосфере, покровах Земли и планет. Мощными источниками излу-
чений являются Солнце, космические образования, ионизирован-
ные облака и т. д.
Основным законом, связывающим спектральную плотность
излучения абсолютно черного тела с его температурой и длиной
волны излучения, служит закон Планка, устанавливающий рас-
пределение энергии в спектре излучения в предположении о том,
что излучающее тело находится в равновесном состоянии (излуча-
ется вся энергия, поглощаемая им):
Р(/,П=8ЛГ /мтт-Л 1’ (2Л76)
с ехр \hf /(кТ)) -1
где p(f,T) — объемная спектральная плотность излучения, т. е.
энергия излучения в единице объема, не зависящая от природы
вещества, из которого состоит излучающее тело; f— частота; Т —
температура по шкале Кельвина; h = 6,6252-10"34 Вт/с2 — постоян-
ная Планка; к — 1,380-10“23 Вт-с/К — постоянная Больцмана; с —
скорость света.
Интегрирование (2.176) по всей оси частот дает значение полной
объемной плотности излучения (закон излучения Стефана —
00
Р = |р(/.Л# = оГ4, (2.177)
О
Больцмана):
8л5£4
где а=—
В области радиочастот, где энергия фотона намного меньше
тепловой энергии (hf кГ), закон Планка (2.176) для потока энер-
290
2. Радиолокационная разведка
гии в единице телесного угла трансформируется в закон Рэлея —
Джинса:
= = (2.178)
С X
Излучение реальных тел в большинстве случаев значительно
отличается от излучения абсолютно черного тела как интенсивно-
стью, так и пространственным распределением и спектральной
плотностью. Спектральная плотность радиоизлучения, как видно
из (2.178), зависит от длины волны. Однако в пределах полосы
пропускания приемника средства радиотепловой разведки ее мож-
но считать практически постоянной. Это дает возможность поль-
зоваться представлениями теории теплового излучения и характе-
ризовать интенсивность радиоизлучения только температурой.
Для характеристики интенсивности излучения реальных тел
применяется понятие яркостной температуры, определяемой как
температура абсолютно черного тела, имеющего на данной часто-
те в данном направлении такую же яркость, как и яркость рассмат-
риваемого реального источника излучения.
Формула Рэлея — Джинса (2.178) позволяет характеризовать
мощность, излучаемую объектом, с помощью температуры экви-
валентного по излучению абсолютно черного тела. Эта условная
температура объекта называется эквивалентной температурой Т3 и
определяется произведением его абсолютной температуры Т и из-
лучательной способности s, т. е.
ГЭКВ=£Г. (2.179)
Полное излучение реальных объектов определяется не только
их собственным излучением, но и наличием подсветки, создавае-
мой внешними излучателями. Для объектов радиотепловой раз-
ведки наиболее характерен случай, когда подсветка создается од-
новременно сплошной средой (атмосферой, космическим фоном) и
источниками с малыми угловыми размерами (Солнце, Луна и др.).
Поэтому результирующее полное излучение реального объекта
обусловливается как его собственным излучением, так и отраже-
нием этим объектом энергии, падающей на него из внешней сре-
ды. Эту суммарную излучаемую энергию можно также приравнять
2.7. Радиотеплолокация
291
к энергии излучения абсолютно черного тела, имеющего меньшую
кажущуюся температуру,
Г = Лкв + Х^экв со ’ (2.180)
КаЖ JKB /V JKB.vp2 X z
где Тэкв.ср — эквивалентная температура внешней среды; % — от-
ражательная способность объекта.
Аналитическое выражение для кажущейся температуры доста-
точно сложно и зависит как от яркостной температуры, так и от
целого ряда других факторов (характера поверхности излучателя
(гладкая или шероховатая), степени поглощения среды, угла визи-
рования и т. п.), строгий учет которых весьма затруднителен. Дос-
таточно полные характеристики кажущихся температур различных
объектов получены экспериментальным путем.
Например, кажущиеся температуры земных покровов и некото-
рых наземных объектов при длине волны около 2 см имеют сле-
дующие значения: здания — 230...250 К; металлические конструк-
ции — 50 К; реки, озера — 170.. .200 К; почвы и растительность —
260.. .275 К; лесные массивы — 270.. .285 К.
Объекты можно обнаруживать, если они имеют тепловой кон-
траст с окружающей средой, а возможность различения объектов
определяется наличием между ними температурного контраста,
т. е. разности кажущихся температур. При наличии температурно-
го контраста объекты различаются по интенсивности поступаю-
щих от них излучений.
Тепловое радиоизлучение является результатом возбуждения
очень большого числа элементарных осцилляторов, причем мо-
мент и интенсивность возбуждения каждого осциллятора зависят
от многих случайных факторов. Вследствие этого радиотепловое
излучение является случайным процессом. Радиотепловые сигна-
лы являются реализациями этого случайного процесса. Наиболее
характерные особенности радиотепловых сигналов состоят в от-
сутствии регулярных составляющих и очень низкой спектральной
плотности (по сравнению, например, с радиотепловым излучением
в инфракрасном диапазоне). При этом спектральная плотность, как
правило, оказывается равномерной в пределах полосы пропуска-
ния приемного устройства. Хорошей аналитической моделью ра-
диотепловых сигналов служит соотношение
292
2. Радиолокационная разведка
s(t) = S(f) cos[co0/ + <p(0],
(2.181)
где S(t) — огибающая сигнала и ф(?) — фаза сигнала — случайные
процессы, изменяющиеся во времени существенно медленнее по
сравнению с costoo^; ®о = 2л/о — угловая частота, которую обычно
выбирают так, чтобы она соответствовала центру полосы частот А£
в которой наблюдается радиотепловой сигнал. Обычно работают с
относительно узкополосными сигналами, у которых А/7 /0 «: 1.
Так же, как и спектральную плотность излучения, спектральную
плотность радиотепловых сигналов удобно выражать в условных
температурных единицах. Если частотная характеристика антенно-
фидерного тракта в пределах полосы пропускания приемника сред-
ства разведки равномерна, то спектральную плотность сигнала на
выходе антенного фидера можно представить в виде
GC(/) = *T„ (2.182)
где Gc(f) — спектральная плотность сигнала на выходе антенного
фидера; к — постоянная Больцмана; Та — температура антенны,
зависящая от кажущейся температуры и размеров излучателя, эф-
фективности антенного устройства и взаимного расположения из-
лучателя и антенны.
Мощность радиотеплового сигнала, имеющего такую равно-
мерную в полосе частот Af плотность энергетического спектра,
составляет
Pc=(?c(/)4f = ^aAf. (2-183)
Важными характеристиками радиотепловых сигналов являют-
ся их длительность и форма. Форма сигнала на входе приемника
обзорного радиотеплолокатора определяется формой ДНА средст-
ва РТЛ, которая в процессе сканирования перемещается в про-
странстве, и уровень принимаемого сигнала в каждый момент вре-
мени зависит от формы ДНА в направлении на источник
излучения. В этом случае длительность сигнала определяется по
формуле
АО
Q +Q
СК ц
(2.184)
2.7. Радиотеплолокация
293
где АО — угловой размер ДНА средства РТЛ в направлении ска-
нирования; Оц — угловая скорость относительного движения цели
в направлении сканирования; QCK — угловая скорость сканирова-
ния антенны при обзоре пространства.
Более удобным при анализе и расчетах является понятие эф-
фективной длительности сигнала, под которой понимают дли-
тельность импульса сигнала с прямоугольной формой огибающей
и с такой же энергией, как у импульса сигнала рассматриваемого
реального вида, при условии равенства их пиковых мощностей.
Эффективная длительность сигнала
(2.185)
где —-------нормированная к единице огибающая принимаемого
^атах
сигнала.
Важная характеристика радиотепловых сигналов — их энер-
гия. С учетом определения эффективной длительности сигнала
(2.185) выражение для энергии можно представить в виде
00
Е = {рс(1)Л = Т,Л/т,ф,
О
(2.186)
где А/’— полоса пропускания приемного устройства.
2.7.3. Прием радиотепловых сигналов
Широкополосность и случайный характер изменения амплиту-
ды, частоты и фазы во времени обусловливают специфичность ме-
тодов обнаружения и обработки радиотепловых сигналов. Выде-
ление слабого радиотеплового сигнала на фоне шумов приемного
устройства затрудняется тем, что тепловое радиоизлучение по сво-
ей структуре и статистическим свойствам аналогично собствен-
ным шумам приемника.
Приемник радиотепловых средств РЛР должен обнаруживать
случайный сигнал, для которого нельзя подобрать когерентный
294
2. Радиолокационная разведка
образец и использовать опорное колебание, учитывающее априор-
ные сведения о принимаемом сигнале и облегчающее его обнару-
жение. Принцип работы приемника радиотепловых излучений (ра-
диометра) иллюстрируется структурной схемой, показанной на
рис. 2.67.
Принятый антенной, усиленный и преобразованный на проме-
жуточную частоту сигнал возводится в квадрат квадратичным де-
тектором и усредняется интегрирующим фильтром. Результат ин-
тегрирования, пропорциональный энергии принятого колебания,
сравнивается на компараторе с пороговым уровнем, выбранным в
соответствии с назначенным критерием обнаружения. Если энер-
гия входного колебания превышает пороговый уровень, принима-
ется решение о наличии сигнала на входе.
уровень
обнаружения
Рис. 2.67. Структурная схема радиометра:
УВЧ — усилитель высокой частоты
Основным требованием, предъявляемым к радиометрам, явля-
ется получение на выходе интегратора минимальных флуктуаций,
обусловленных собственными шумами входных каскадов и неста-
бильностью коэффициента усиления (при этом коэффициент уси-
ления, а также постоянная времени выходного устройства радио-
метра полагаются заданными).
Стабильность работы радиометра определяется степенью по-
стоянства коэффициента шума, полосы пропускания приемника, а
также его коэффициента усиления. Первые два параметра изменя-
ются медленно, поэтому их влияние может быть учтено при обра-
ботке результатов измерения. Изменение же коэффициента усиле-
2.7. Радиотеплолокация
295
ния простым способом учесть не удается, поэтому применяют
специальные схемы, стабилизирующие коэффициент усиления или
компенсирующие его изменения.
Компенсационный радиометр содержит специальный каскад,
включенный после интегрирующего фильтра перед компаратором.
Этот каскад вычитает из сигнала постоянное напряжение, обу-
словленное собственными шумами приемника. Недостаток такого
приемника состоит в том, что он не может полностью устранить
флуктуационную составляющую напряжения шумов.
Корреляционный радиометр содержит два параллельных ка-
нала (рис. 2.68).
Рис. 2.68. Схема корреляционного радиометра
Собственные шумы двух параллельно включенных приемни-
ков Прм1 и Прм2 взаимно независимы, а сигнал, принятый антен-
ной, одинаков в обоих. Поэтому на перемножитель поступают два
колебания
•*1(0 = s{t) + um\ty,
(2.187)
Выходное напряжение системы, полученное в результате пе-
ремножения 51 (г) и s2(t\ содержит постоянную составляющую,
пропорциональную квадрату напряжения сигнала
<Лых = f = J s\t)dt, (2.188)
тс тс
и относительно небольшую флуктуационную составляющую, рав-
ную усредненному за конечное время тс значению произведения
296
2. Радиолокационная разведка
независимых собственных шумов двух приемных трактов. Таким
образом, корреляционный интерферометр существенно ослабляет
влияние на регистрируемый сигнал изменений параметров радио-
метра и шумов приемного тракта.
Для успешной работы корреляционного радиометра необходи-
ма полная идентичность амплитудно-фазовых характеристик обо-
их каналов и их совершенная развязка. В ряде случаев это условие
заставляет применять в каналах отдельные разнесенные антенны.
При использовании супергетеродинных приемников их гетероди-
ны должны быть синхронизированы. Один общий гетеродин при-
менять нельзя: его собственный шум попадает в оба приемных
канала и воспринимается коррелятором как сигнал. Все это суще-
ственно усложняет конструкцию.
Изменения фазочастотных характеристик каналов корреляци-
онного радиометра приводят к возникновениию на выходе прием-
ника дополнительных флуктуаций, аналогичных вызываемым не-
стабильностью коэффициента усиления. Например, при различии
фазовых сдвигов в каналах на л/2 сигнал на выходе умножителя
становится тождественно равным нулю. Кроме того, такой радио-
метр обладает меньшей надежностью, чем радиометры других ти-
пов, поскольку его работоспособность нарушается при неисправ-
ности любого канала.
Перечисленные недостатки привели к тому, что корреляцион-
ные радиометры не получили широкого распространения в одно-
канальных устройствах, предназначенных для обнаружения и из-
мерения интенсивности радиотепловых сигналов. Однако в
многоканальных устройствах, предназначенных для точного оп-
ределения координат целей, корреляционные радиометры неза-
менимы.
Модуляционный радиометр реализует неоптимальный спо-
соб обработки сигнала, но позволяет существенно упростить кон-
струкцию и снизить аппаратурные погрешности. Работа модуля-
ционного радиометра основана на простом усреднении сигнала
после квадратичного детектора. Но этому сигналу придается при-
знак, отличающий его от собственных тепловых шумов приемни-
ка. Модуляция принимаемого сигнала c(Z) непосредственно на
входе приемника осуществляется синусоидальным или прямо-
угольным напряжением низкой частоты. Собственные шумы при-
2.7. Радиотеплолокация
297
Рис. 2.69. Схема модуляционного радиометра
емника не подвергаются такой вспомогательной модуляции.
В дальнейшем принимаемый шумовой сигнал и собственный шум
приемника селектируются по модулируемому параметру.
Структурная схема модуляционного радиометра представлена
на рис. 2.69. Работа схемы иллюстрируется осциллограммами, по-
казанными на рис. 2.70.
Принимаемое антенной тепловое радиоизлучение (рис. 2.70, а)
поступает на модулятор входных сигналов. Модулятор периодиче-
ски подключает вход приемника к антенне и эталонному источни-
ку шума, температура которого равна температуре входных цепей.
В результате колебание на входе усилителя высокой частоты ока-
зывается модулированным (рис. 2.70, б). Это колебание усилива-
ется и детектируется. Выделенная детектором огибающая (рис.
2.70, в) преобразуется синхронным детектором, опорное напряже-
ние которого синхронно с модулирующей функцией. Форма про-
детектированного сигнала представлена на рис. 2.70, г. Выделен-
ная детектором огибающая беспрепятственно проходит через
фильтр, настроенный на частоту модуляции, и поступает на вход
синхронного детектора, при этом немодулированный собственный
шум приемника резко ослабляется. Собственный шум приемника
может попадать на выход только благодаря флуктуациям коэффи-
циента усиления с частотами, близкими к частоте модуляции.
Вследствие малой скорости этих флуктуаций спектр их группиру-
ется около нулевой частоты. Для уменьшения влияния флуктуаций
коэффициента усиления частоту модуляции обычно выбирают
равной не менее нескольких десятков герц. Периодическая состав-
ляющая формирует постоянное напряжение на выходе синхронно-
го детектора, а спектр шумов смещается в область частот, примы-
298
2. Радиолокационная разведка
О
s Д Входное колебание
а
Входной Шум
Si I шум лприемника
О
t
Рис. 2.70. Преобразование сигнала
модуляционным радиометром
кающих к частоте f- 0. Полезный сигнал после узкополосного
фильтра поступает на выход.
Чувствительность модуляционного радиометра оказывается в
принципе ниже чувствительности компенсационного радиометра,
поскольку модуляционный радиометр осуществляет неоптималь-
ную обработку сигнала. Другой причиной снижения чувствитель-
ности является то, что в модуляционном радиометре сигнал при-
нимается лишь в течение половины времени наблюдения.
В течение другой половины на вход приемника подключен экви-
валент. Тем не менее модуляционные радиометры получили наи-
более широкое распространение в качестве приемных устройств
РТЛ благодаря своей простоте, надежности и малой подверженно-
сти вредному влиянию нестабильностей коэффициента усиления.
2.7. Радиотеплолокация
299
2.7.4. Чувствительность радиометров
Чувствительность — это значение температуры антенны, соот-
ветствующее выходному отношению сигнал/шум, равному едини-
це. Для определения чувствительности 8Z пользуются соотноше-
нием
8Т = /> (2.189)
7ЛАс
где Тш — шумовая температура приемника радиометра; А/'— по-
лоса пропускания линейной части радиометра (до квадратичного
детектора); тс — постоянная времени (постоянная времени радио-
метров — величина, обратная ширине полосы пропускания AF ин-
тегрирующего фильтра, т. е. тс — &F~X); b — коэффициент, зави-
сящий от типа радиометра и вида модулирующей функции в
модуляционном радиометре, 0,7 < b < 1,5.
Полезный сигнал радиотеплолокатора может быть очень слабым
по мощности. Для панорамного приемника мощность полезного
входного сигнала имеет порядок 1011.. .10 15 Вт и менее. Поэтому
чувствительность приемника должна быть очень высокой.
На практике получение оценок мощности радиотеплового излу-
чения затруднено вследствие маскировки полезного сигнала коле-
баниями выходного напряжения, вызванными медленными флук-
туациями среднего уровня собственного шума на входе приемника,
или флуктуациями коэффициента усиления, или обоими этими фак-
торами одновременно. Чувствительность, определенную с учетом
этих факторов, иногда называют технической чувствительностью.
Кроме того, при сравнении радиометров различных типов при-
ходится учитывать степень сложности технической реализации
того или иного типа приемника. Так, очевидный выигрыш по чув-
ствительности корреляционного радиометра не компенсируется
его сложностью, относительно невысокой надежностью и другими
недостатками. Поэтому наиболее широкое применение в настоя-
щее время получили радиометры модуляционного типа.
Один из наиболее эффективных путей решения задачи повы-
шения чувствительности состоит в уменьшении шумовой темпера-
туры приемного тракта, прежде всего входных каскадов (шумы
300
2. Радиолокационная разведка
входных цепей многократно усиливаются всеми последующими
каскадами). Поэтому на входе современных радиометрических
приемников средств РТЛ применяются малошумящие усилители:
квантовые, параметрические, усилители на полевых приборах,
туннельных диодах и малошумящих лампах бегущей волны. Чув-
ствительность повышается за счет расширения полосы пропуска-
ния приемного тракта по высокой частоте.
Кроме того, требуемая чувствительность может быть обеспе-
чена сужением полосы пропускания интегрирующего фильтра.
Однако при этом возрастает инерционность приемного устройства,
что нежелательно в целом ряде практически важных случаев.
Часто для сравнения различных радиометров используют па-
раметр Q, называемый качеством радиометра, значение которого
определяют по соотношению
щ _ №
Ш Тт/Т0+1’
(2.190)
где Ш — коэффициент шума радиометра; То = -293 К.
Качество радиометра характеризуется шумовыми свойствами и
полосой пропускания усилительных и преобразовательных эле-
ментов, применяемых во входных каскадах радиометра.
2.7.5. Определение координат и параметров движения
объектов радиотеплолокационной разведки
Ранее мы отметили основную особенность, отличающую сред-
ства РТЛ от других типов РЭС, — это принципиальная невозмож-
ность применения в процессе приема и обработки сигнала опор-
ных колебаний, когерентных с принятыми. Поэтому в РТЛ особое
значение имеют методы пространственной селекции, основанные
на использовании направленных свойств антенных систем. Функ-
циональная схема радиотеплолокатора может содержать лишь ан-
тенную систему, радиометр, индикатор и устройство, управляю-
щее движением ДНА в процессе сканирования (рис. 2.71).
Единственным информативным параметром для одиночного
канала является средняя мощность сигнала радиотеплового излу-
чения или температура источника сигнала, преобразуемая в тем-
2.7. Радиотеплолокация
301
Рис. 2.71. Функциональная схема одноканального радиоте-
плолокатора
пературу антенны, однозначно определяющую наблюдаемый на
выходе радиометра эффект.
Зависимость температуры антенны от характеристик цели,
дальности до нее, а также параметров радиотеплолокатора опреде-
ляют для точечной цели по соотношению
?;=П^Гц+ПГфон, (2.191)
К Л.
где
— сопротивление излучения антенны; Rn — сопротивление по-
терь антенны; пц — эффективная площадь цели; R — дальность до
цели; Sa — эффективная площадь антенны средства РТЛ; X — ра-
бочая длина волны радиометра; Тц — кажущаяся температура це-
ли; Тфон — кажущаяся температура фона.
Для цели, угловые размеры которой превышают угловую ши-
рину главного лепестка ДНА (когда цель протяженная),
(2.193)
где р — коэффициент рассеяния антенны, характеризующий отно-
сительную роль боковых и задних лепестков диаграммы направ-
ленности и указывающий на долю мощности, излучаемой (или
принимаемой) этими лепестками.
Коэффициент рассеяния антенны определяют по формуле
302
2. Радиолокационная разведка
у(0,ч>МП
^бок________
f F(e,q>)JQ ’
J 4л
где Q6oK = 4л - Qri; Qr i — телесный угол, в котором сосредоточен
главный лепесток ДНА F(0, ср).
Для протяженных целей температура антенны не зависит ни от
абсолютной площади цели, ни от дальности, ни от направленных
свойств антенны. Кроме того, температура антенны не зависит от
рабочей длины волны средства РТЛ.
Для измерения угловых координат применяются те же фи-
зические принципы, на основе которых работают пеленгаторы
средств активной локации, радионавигации, РРТР. Используя
направленные свойства приемных антенн, обзорные средства
РТЛ измеряют угловые координаты целей на проходе по методу
максимума: наибольший уровень принимаемого излучения от
цели наблюдается в тот момент, когда ось диаграммы направ-
ленности сканирующей антенны направлена на цель. Разумеет-
ся, измерения в окрестности максимума ДНА, где зависимость
уровня сигнала от направления его прихода очень слабая, со-
провождаются большими погрешностями. Поэтому для точного
измерения угловых координат применяют метод сравнения.
Этот метод используется в системах РТЛ сопровождения по уг-
ловым координатам. Такие пеленгаторы работают по тому же
принципу, что и моноимпульсные активные РЛС. Схемные ре-
шения подобных радиотеплопеленгаторов не отличаются каки-
ми-либо существенными особенностями от аналогичных схем,
используемых в системах РТЛ.
Определение угловых координат объектов может осуществлять-
ся, кроме того, с помощью корреляционных методов, основанных
на применении антенных систем с большими базами (d » X). Пер-
воначально такие пеленгаторы использовались в радиоастроно-
мии, поэтому за ними часто сохраняется заимствованное из этой
предметной области название «радиоинтерферометры». Радиоин-
терферометры можно применять не только для точного измерения
угловых координат источников излучения, но и для получения
2.7. Радиотеплолокация
303
информации об угловой скорости движения объекта радиотепло-
локационной разведки.
Измерение дальности в системах РТЛ, как и в других пассив-
ных измерительных системах, по задержке сигнала невозможно.
Поэтому для измерения дальности и пространственных координат
объекта разведки прибегают к различным косвенным методам, в
которых используется связь между расстоянием до объекта и его
угловыми координатами.
Очевидна возможность применения для определения дально-
сти триангуляционного (угломерно-базового) метода. Использова-
t
Рис. 2.72. Угломерно-базовый метод измерения
дальности с временным формированием базы
304
2.7. Радиотеплолокация
ние корреляционных систем обработки сигналов в многоканаль-
ных радиометрах позволяет применять более точные разностно-
дальномерные методы определения пространственных координат
объектов разведки. Кроме того, можно применять методы при-
ближенного определения дальности, основанные на измерении
времени прохождения цели через ДНА средства РТЛ при относи-
тельном перемещении с известной скоростью.
Суть этих методов можно понять с помощью рис. 2.72.
Время прохождения цели через лепесток диаграммы направ-
ленности прямо пропорционально ширине лепестка Дер, дальности
до цели R, обратно пропорционально скорости уц перемещения
цели относительно радиотеплолокатора и зависит от угла <pv между
вектором скорости цели и направлением на цель:
(2.195)
(2.196)
2R . Am 1
тс =—sin— -------.
уц 2 вшфу
Таким образом,
УцТс8Шфу
/С — ---7--
О • I Д(р I
2sm —21
I 2 J
Этот метод не позволяет получить высокую точность измере-
ния дальности, так как для отсчета времени тс требуется фиксиро-
вать положение цели на краях диаграммы направленности, где от-
ношение сигнал/шум мало и точность измерения тс невелика.
Лучшие результаты, по-видимому, может дать метод, основан-
ный на использовании двух антенн с диаграммами направленно-
сти, разнесенными на угол фр (см. рис. 2.72, б). При установке
средства РТЛ на подвижном объекте возможно временное форми-
рование базы. Измерение курсового угла цели осуществляется
дважды на временном интервале Тб- Интервал Тб измеряется по
максимумам уровней сигналов цели, когда эти сигналы принима-
ются разными лепестками ДНА.
Дальность действия станций РТЛ в режиме слежения за точеч-
ной целью, имеющей малые угловые размеры, определяется по
формуле
2. Радиолокационная разведка
305
1 рС
---4 ---------------Л4 ---’
4л\ ^0 У<7вых
I V I DD1A
(2.197)
где к.А = ехр[-р7?]; р — коэффициент, учитывающий поглощение
энергии на трассе распространения сигналов в пространстве меж-
Т
ду целью и антенной РТЛ; кш =---------ш----- — приведенный
+ ^а.с + ^а.ф
коэффициент шума; Тас и Таф — приращения температуры антен-
ны за счет излучения среды и фона соответственно; ц — КПД ан-
тенно-фидерного тракта средства РТЛ; оц — эффективная пло-
щадь цели; Тц = Тц0 - Тф; Гц0 — кажущаяся температура цели; Гф —
кажущаяся температура фона; Q — качество радиометра; G — ко-
эффициент усиления антенны; двых — пороговое соотношение
сигнал/шум; тс — длительность сигнала; 7о= 290 К.
Величина входящая в (2.197), зависит от ряда факторов.
Она определяется принятым критерием обнаружения, рабочими
характеристиками энергетического обнаружителя при заданных
вероятностях правильного обнаружения и ложной тревоги, мето-
дом приема (типом радиометра), а также полосой пропускания
УПЧ и интегрирующего фильтра.
Для обзорного средства РТЛ в случае протяженной цели с
большими угловыми размерами
Афц
(/вых^ск
+ 1,2к
(2.198)
где Афц — угловой размер объекта; Q* — угловая скорость скани-
рования; Q— качество радиометра, МГц0,5.
На основании (2.198) можно заключить, что сильнее всего на
дальность действия средства РТЛ влияют площадь и кажущаяся
температура цели, а также качество радиометра. Влияние коэффи-
циента усиления антенны на дальность сильнее проявляется у сле-
дящих систем РТЛ. Для обзорных систем РТЛ это влияние слабее,
а его степень зависит от режима обзора и относительных размеров
цели.
306
2.7. Радиотеплолокация
Измерение скорости, как и измерение дальности с помощью
пассивных средств РТЛ, сопряжено с определенными трудностя-
ми, обусловленными отсутствием опорного сигнала, когерентного
запросному сигналу. Кроме того, использованию доплеровских
методов мешает и случайная структура сигналов. Тем не менее
некоторые возможности измерения скорости с помощью средств
РТЛ существуют и применяются на практике.
Методы измерения скорости могут быть подразделены на две
группы: 1) методы, в которых используются спектральные отличия
естественных радиоизлучений от спектра белого шума для опреде-
ления смещения спектра и радиальной скорости движения цели;
2) методы, в которых используются интерферометрические изме-
рения для определения тангенциальных компонент скорости (уг-
ловой скорости).
Методы первой группы сравнительно давно используются в
радиоастрономии для определения скорости движения облаков
нейтрального водорода, излучающего на дискретной частоте
1420 МГц (X = 21,1 см). Поскольку истинное значение частоты из-
лучения известно с высокой точностью, измеряя частоту этого из-
лучения, принимаемого на Земле, можно судить о скорости и ради-
альной скорости перемещения водородных облаков. Точно так же
можно определять скорости движения целей определенного класса,
спектр теплового радиоизлучения которых хорошо известен.
Измерение скорости методами второй группы осуществляется с
помощью многоканальных (в частности, двухканальных) станций
РТЛ. На рис. 2.72, в дана иллюстрация использования двухканаль-
ного интерферометра. При относительном перемещении излучаю-
щей цели и многолепестковой, изрезанной ДНА интерферометра на
его выходе будет наблюдаться радиоимпульс с частотой заполнения
Если дальность до цели известна, то можно найти тангенци-
альную скорость движения цели:
~ 27?sin(Acp/2) 7?Афс
V4 =
(2.199)
Тс
В (2.199) Афс и тс представляют собой соответственно угловую
ширину лепестка интерферометрической диаграммы и время про-
2. Радиолокационная разведка
307
хождения цели через этот лепесток. Учитывая связь частоты за-
полнения отклика интерферометра на сигнал перемещающейся
цели fc = тс‘, можно определить тангенциальную составляющую
скорости движения цели:
уц=ДЧ>лЛ (2-200)
Разделив правую и левую части (2.200) на R, можно найти уг-
ловую скорость движения цели:
Ч=А<Ри/с> (2.201)
где fc — частота заполнения выходного сигнального импульса.
Выражение (2.201) свидетельствует о возможности измерения
угловой скорости относительного движения. Если значение одной
из интересующих нас величин (R или гц) известно, можно опреде-
лить значение второй.
2.7.6. Основные схемные элементы радиотеплолокаторов
Современные радиотеплолокаторы работают в широком спек-
тре частот (от единиц до сотен гигагерц), что соответствует санти-
метровому, миллиметровому и субмиллиметровому диапазонам
радиоволн. Этим объясняется большое разнообразие схемных ре-
шений, применяемых в таких устройствах. Схемные элементы,
используемые в радиотеплолокаторах сантиметрового диапазона,
аналогичны соответствующим элементам, применяемым в актив-
ной радиолокации. Радиотеплолокаторы миллиметрового и суб-
миллиметрового диапазонов имеют много общего с радиометрами,
применяемыми в инфракрасном диапазоне.
Основными схемными элементами систем РТЛ являются ан-
тенно-фидерная система, приемное устройство (радиометр) и вы-
ходное индикаторное устройство.
Антенно-фидерная система радиотеплолокатора, по сущест-
ву, не отличается от аналогичных систем, применяемых в актив-
ной локации. Характерными требованиями, которым должны
удовлетворять антенны, являются максимальный коэффициент
направленного действия, максимальный КПД и минимальный уро-
вень боковых лепестков. Кроме того, такие антенны должны рабо-
308
2.7. Радиотеплолокация
тать в очень широкой полосе частот, составляющей 20...30 %
средней частоты диапазона. При этом желательно, чтобы конст-
рукция антенны допускала возможность электронного сканирова-
ния. Названным требованиям в наибольшей степени отвечают
апертурные антенны типа зеркальных параболических и линзовых
антенн, а также многоэлементные синфазные антенны.
Приемное устройство представляет собой наиболее важный
элемент радиотеплолокатора и в значительной мере определяет его
характеристики.
Уровень широкополосных шумоподобных сигналов, приме-
няемых в РТЛ, обычно весьма мал (как уже указывалось, порядка
10-11...10-15 Вт). Отсюда следует, что одним из основных требова-
ний, предъявляемых к приемникам, является высокая чувстви-
тельность. Максимизация соотношения (2.190), определяющего
качество радиометра, достигается как расширением полосы про-
пускания, так и уменьшением шумовой температуры радиометра.
Следует, однако, отметить, что требования уменьшения шумовой
температуры и расширения полосы пропускания не являются вза-
имно независимыми. В общем случае расширение полосы вызыва-
ет ухудшение шумовых свойств приемного устройства, вследствие
чего необходимо выбирать разумное соотношение этих парамет-
ров. Для получения наилучшего качества радиометра следует
стремиться к минимизации функции (Ш— Г)/ д/Д f, т. е. расширять
полосу пропускания А/до тех пор, пока параметр (Ш - 1) растет
медленнее, чем параметр д/Д f.
Таким образом, при прочих равных условиях чувствительность
целесообразно повышать за счет уменьшения шумовой температу-
ры. Для этого в качестве входных каскадов радиометрических при-
емников целесообразно использовать малошумящие усилители
высокой частоты.
Конструкции радиотеплолокаторов отличаются большим разно-
образием. На выборе конструкции сказываются назначение, область
применения, особенности эксплуатации и обслуживания каждого
конкретного средства РТЛ. Разумеется, компоновка бортовых
средств РТЛ отличается от конструкции наземных стационарных
интерферометров, в которых используются радиометры.
2. Радиолокационная разведка
309
2.8. Подповерхностная радиолокация
2.8.1. Физические основы подповерхностной радиолокации
Проникающая способность радиоволн обеспечивает возмож-
ность обнаружения и определения характеристик объектов,
замаскированных от наблюдения, по излучению в других частот-
ных диапазонах электромагнитного излучения. Такими объекта-
ми могут быть протяженные неоднородности в среде распростра-
нения радиоволн (подземные коммуникации и искусственные
сооружения), отдельные малоразмерные радиолокационные цели
(предметы, по размерам соизмеримые с длиной волны зонди-
рующего сигнала). За счет использования возможностей радио-
локационного разрешения сигналов техническим средствам РЛР
удается различать объекты, мало отличающиеся по дальности и
по угловым координатам. Все это делает подповерхностную ра-
диолокацию очень важным инструментом в арсенале техниче-
ских средств разведки.
Условия распространения радиоволн существенно зависят от
электрических параметров среды, в основном от диэлектрической
проницаемости еа и проводимости у. Покровы Земли, с которыми
приходится взаимодействовать электромагнитному излучению под-
поверхностных радиолокаторов, представляют собой довольно
сложные композиции. Они состоят в основном из твердого компо-
нента — сухого грунта — и жидкого компонента — водного рас-
твора различных солей. Для таких полупроводящих сред у ф 0, в от-
личие от идеального диэлектрика — вакуума и космического
пространства. Кроме того, на практике можно не принимать во
внимание магнитные свойства материалов, полагая ца = цо, где Цо =
— 4 л-10-7. Наконец, для удобства записи обычно вместо абсолютной
диэлектрической проницаемости применяют ее относительное значе-
ние s = еа /е0, т. е. безразмерную величину, где е0 = 1/(3 6л) • 10~9 —
диэлектрическая проницаемость свободного пространства. Таким
образом, в вакууме (космическом пространстве) е - 1.
Идеальным однородным диэлектриком называют среду, для
которой у = 0, а 8 = const. Процессы распространения волн в такой
среде отличаются от распространения волн в свободном простран-
310
2.8. Подповерхностная радиолокация
стве следующим образом: во-первых, скорость распространения
волн принимает значение
у=-=к> (2.202)
п Vs
во-вторых, при заданном значении напряженности Ет электриче-
ского поля напряженность магнитного поля выражается соотно-
шением
F -Jf
Нт=^^, (2.203)
т 120л
где 120 л/Vs — волновое сопротивление идеального диэлектрика.
Вектор напряженности электрического поля перпендикулярен век-
тору магнитного поля и оба поля во времени и в пространстве сов-
падают по фазе.
Существенные различия возникают в тех случаях, когда волны
распространяются в полупроводящей среде. Прежде всего очень
удобно ввести представление о комплексной диэлектрической
проницаемости полупроводящей среды. Для таких сред первое
уравнение Максвелла имеет вид
(2.204)
dt
где первое слагаемое в левой части характеризует плотность тока
смещения, а второе — плотность тока проводимости.
Если электрическое поле волны меняется во времени по гар-
моническому закону
Е = Ео exp(jotf), (2.205)
то, продифференцировав (2.205), можно представить (2.104) в форме
к-У1 k + YE = rotH. (2.206)
V со J ot
Уравнение (2.206) совпадает с уравнением Максвелла для иде-
ального диэлектрика (2.204), если в него ввести комплексную ди-
электрическую проницаемость полупроводниковой среды
2, Радиолокационная разведка
311
. Y
£a=&a+J--
(О
(2.207)
При расчетах удобнее применять относительную (безразмер-
ную) комплексную диэлектрическую проницаемость
ek= — = & += (2.208)
6q
Если плотность тока смещения /см = ваЭЕ / dt, а плотность то-
ка проводимости jnp- уЕ, то их отношение для гармонической вол-
ны, когда dE/dt = /<вЕ,
7см
7пр
К^Е
ZE
2лсееа _ в
Ху 60Ху
(2.209)
полностью определяется параметрами, от которых зависит ком-
плексная диэлектрическая проницаемость среды (2.207).
Электрическое поле волны, распространяющееся вдоль коор-
динаты х, изменяется во времени и в пространстве как
Ez =£’mexp[y(®^-fcr)],
(2.210)
где k-ln/X-o/c — модуль волнового коэффициента (про-
странственная частота).
Пользуясь представлением о комплексной диэлектрической
проницаемости, можно получить выражения для напряженностей
электрического и магнитного поля в полупроводящей среде:
Ez = ЕТО ехр(-8х)ехр
хп\
t-
С )
(2.211)
Ну
П*Р Ет ехр(-бх)ехр J(Oр- — j-arctg
120л: L к с / п
где 8 = — р — коэффициент поглощения;
с
312
2.8. Подповерхностная радиолокация
п = £ + 7е2+(60А,у)2 ; (2.212)
P = J- £ + д/-£2+(60А.у)2 . (2.213)
V 2 — —
Анализ соотношений (2.211) позволяет сформулировать сле-
дующие свойства волн, распространяющихся в полупроводящих
средах.
1. Эффект поглощения характеризуется экспоненциальным
множителем е б'Л. Для сред, приближающихся по свойствам к про-
водникам, в которых преобладает ток проводимости (jnp » jCM),
выражение для коэффициента затухания упрощается:
§ = 2л^^р-, (2.214)
откуда следует, что поглощение возрастает по мере увеличения
проводимости и укорочения длины волны. Для увеличения глуби-
ны обнаружения объектов разведки, скрытых под поверхностью,
нужно увеличивать длину волны и соответственно уменьшать час-
тоту зондирующего сигнала.
2. Обе компоненты Е\\Н распространяются с одинаковой ско-
ростью, зависящей от электрических свойств среды. Величина
v=- (2.215)
п
характеризует скорость распространения фазы волны и поэтому
называется фазовой. Поскольку п, как следует из (2.212), зависит
от частоты, от частоты будет зависеть и скорость распространения.
Подобные среды называют диспергирующими. Поскольку разные
спектральные компоненты распространяются с разной скоростью,
распространение сигнала в диспергирующих средах сопровожда-
ется искажением его формы. Энергия волны распространяется с
иной, групповой скоростью:
n + odn! do
2. Радиолокационная разведка
313
Если коэффициент преломления не зависит от частоты, т. е. если
dn! d& = 0, то групповая скорость совпадает с фазовой скоростью
так же, как в идеальном диэлектрике.
2.8.2. Подповерхностное зондирование протяженных объектов
Предельно упрощенная схема, поясняющая работу подповерх-
ностного радиолокатора, приведена на рис. 2.73.
Рис. 2.73. Схема зондирования (а) и отраженные
сигналы (6) при подповерхностной радиолока-
ции протяженного объекта (слоя)
314
2.8. Подповерхностная радиолокация
Радиолокатор обнаруживает сигнал, измеряет задержки и реги-
стрирует результаты измерений. Он содержит передатчик, прием-
ник, передающую и приемную антенны и устройство обработки.
При радиолокационном зондировании слоя толщиной h на
вход приемной антенны поступают три сигнала: прямой, посту-
пающий с выхода передатчика, отраженный от верхней границы
слоя и отраженный от нижней границы слоя. Могут наблюдаться
также и сигналы от промежуточных неоднородностей между
верхней и нижней границами слоев. При импульсном методе ло-
кации можно использовать одну приемопередающую антенну с
антенным переключателем. Но мощный зондирующий импульс
передатчика всегда просачивается на вход даже запертого («блан-
кирующегося») приемника, создавая прямой сигнал.
Для радиолокатора, платформой которому служит ЛА, находя-
щийся на высоте Н, зондирующий сигнал не оказывает влияния на
отраженный сигнал (зондирующий и отраженный сигналы не пере-
крываются по времени), если интервал t = 2Н / с превышает дли-
тельность зондирующего импульса тим. При зондировании слоя сиг-
налы, отраженные от границ, сдвигаются друг относительно друга
по времени. При дальнейшей обработке в приемнике используются
либо сами эти отраженные и разнесенные по времени сигналы, либо
их огибающие, полученные в результате детектирования.
Радиолокационное измерение толщины слоя h основано на оп-
ределении интервала времени А/1 между сигналами, отраженными
от его границ:
, v&t
h=~-
где v — скорость распространения радиосигнала в слое.
Таким образом, минимально измеряемая толщина слоя обуслов-
лена минимально измеряемым интервалом времени A/min между мо-
ментами приема импульсов, отраженных от верхней и нижней гра-
ниц слоистой неоднородности. Чтобы измерить такой интервал
времени, нужно наблюдать эти импульсы раздельно, т. е. разрешать
их. Разрешение импульсов одинаковой амплитуды возможно, если
временной сдвиг между ними не меньше их длительности по уров-
ню половины амплитуды, т. е. A?min= То,5. Поэтому
2. Радиолокационная разведка
315
(2-218)
где v — фазовая скорость электромагнитной волны в среде (2.215).
Как ясно из формулы (2.218), для снижения минимальной из-
меряемой толщины слоя требуется уменьшать длительность зон-
дирующего сигнала.
Требования по использованию низкочастотных излучений,
способных глубоко проникать под поверхность, и коротких сиг-
нальных импульсов, допускающих обнаружение и определение
толщины слоев подповерхностных неоднородностей, находятся в
известном противоречии. Практически оказывается, что требуемая
длительность импульсов зондирующего сигнала соизмерима с пе-
риодом его несущей частоты. Поэтому в средствах подповерхно-
стной радиолокации для зондирования используют видеоимпульс-
ный сигнал, но без постоянной составляющей (нельзя создать
антенну, способную излучать и принимать колебания нулевой час-
тоты). Типичный вид однопериодного зондирующего сигнала под-
поверхностной радиолокации показан на рис. 2.74, а, а примерный
вид его частотного спектра — на рис. 2.74, б.
Максимум спектральной плотности такого сигнала приходит-
ся на частоту fo, заметно меньшую ширины спектра А/.' Поэтому
такие видеоимпульсные сигналы иначе называют сверхшироко-
полосными.
Термин «широкополосность» неоднозначен. Используя этот тер-
мин, имеют в виду одно или даже сразу несколько свойств сигнала.
Рис. 2.74. Однопериодный сигнал (а) и его спектр (б)
316
2.8. Подповерхностная радиолокация
1. Широкополосные сигналы противоположны узкополосным,
у которых отношение ширины спектра к центральной частоте
очень мало (Д/7 /о <cl). Такие узкополосные сигналы по многим
свойствам и даже по виду осциллограмм очень похожи на гармо-
нические колебания, поэтому для их описания и для исследования
их взаимодействия с различными техническими системами и сре-
дой распространения очень хорошо подходит модель синусои-
дального сигнала (может быть, с изменяющимися амплитудой и
фазой). Но из такого определения вовсе не следует, что у широко-
полосных сигналов ширина спектра больше центральной частоты.
Важно только то, что для их представления нельзя применять мо-
дель гармонического (или квазигармонического) колебания.
2. Широкополосными называют сигналы с большим значением
базы — произведения ширины спектра и длительности: В - AfT » 1.
Естественно, что сигналы, широкополосные в смысле двух
этих определений, образуют пересекающиеся множества: увеличе-
ние базы сигнала возможно и за счет расширения спектра, и за
счет увеличения длительности сигнала.
3. Очень часто широкополосность понимают в техническом
смысле: сигналы, занимающие полосу частот 1 МГц, более широ-
кополосны, нежели сигналы с шириной спектра 1 кГц, и первые
называют широкополосными (по сравнению со вторыми) незави-
симо от средней частоты.
Для обозначения свойств сигналов в подповерхностной радио-
локации понятие широкополосности используется в том смысле,
что у них относительная ширина спектра больше единицы:
А/’ / /0 >1. И это главное отличительное свойство таких сигналов.
Хотя фазовая скорость распространения радиоволн в полупро-
водящей среде при подповерхностной радиолокации заметно мень-
ше, чем в свободном пространстве, согласно соотношению (2.215) к
длительности зондирующего импульса предъявляют довольно же-
сткие требования. Типичные значения длительности импульса то,5
для средств подповерхностной РЛР (их также называют георадара-
ми) — несколько единиц наносекунд, а ширины спектра — соответ-
ственно сотни мегагерц. Такие системы позволяют измерять тол-
щины замаскированных слоистых образований и конструкций
порядка нескольких десятков сантиметров (меньше метра).
2. Радиолокационная разведка
317
2.8.3. Подповерхностная радиолокация малоразмерных целей
Малоразмерные цели — это такие цели, размеры которых со-
измеримы с длиной волны в среде или даже меньше длины волны:
(2.219)
Чп д/ец
Обычно в радиолокации рассматривается эффективная отра-
жающая поверхность идеально проводящих тел, располагающихся
в дальней зоне однопозиционной РЛС. Системы подповерхност-
ной радиолокации вынуждены работать в сильно поглощающих
средах и являются, по существу, ближней — дальность по трассе
распространения цели внутри среды имеет порядок нескольких
длин волн. При этом наземный радиолокатор с раздельными пере-
дающей и приемной антеннами, по сути, является двухпозицион-
ной системой, работающей в ближней зоне. Все сказанное затруд-
няет точный анализ и определение ЭПР цели и, следовательно,
определение такой важной тактико-технической характеристики
средства РЛР, как дальность (или зона действия).
Другая особенность подповерхностной радиолокации мало-
размерных целей заключается в трудности идентификации и рас-
познавания объектов, электрические характеристики материала
которых обычно мало отличаются от соответствующих характери-
стик окружающей среды.
3. ПРОТИВОРАДИОЛОКАЦИОННАЯ МАСКИРОВКА
3.1. Уменьшение радиолокационной заметности
3.1.1. Заметность объектов РЛР
В главе 1 уже указывалось на то, что заметность объектов для
средств радиолокационной разведки принято оценивать значением
ЭПР [2]:
= ^ = = 5,цО(а, ₽)5,
И] ilj
(3.1)
где S, е [0; 1] — коэффициент деполяризации рассеянного целью
поля (£,); Р0Тр — мощность отраженного радиолокационной целью
сигнала; П1 — плотность потока мощности радиолокационного
сигнала в окрестности точки расположения цели; /Э(а, 0) — функ-
ция диаграммы обратного рассеяния (ДОР) цели в направлении на
радиолокатор; Sp ц — полная площадь рассеяния цели.
Физически ЭПР представляет собой размерный коэффициент
пропорциональности между мощностью отраженного радиолокаци-
онной целью сигнала и плотностью потока мощности электромаг-
нитного поля, созданного антенной радиолокатора в окрестности
точки расположения цели. Очевидно, что оо измеряется в кубических
метрах и зависит от формы, размеров и электрических свойств мате-
риала поверхности цели. Объекты радиолокационной разведки —
радиолокационные цели — имеют весьма сложную форму и рассеи-
вают электромагнитные волны не изотропно. Значения ЭПР для каж-
дого конкретного направления (а, 0) могут сильно различаться. По-
этому обычно ЭПР представляют в виде произведения [5]:
<*0=°0maxW>P)> (3.2)
3.1. Уменьшение радиолокационной заметности
319
где сто max — максимальная ЭПР; £>(а, 0) — функция ДОР радиоло-
кационной цели.
В принципе ЭПР можно определить расчетным путем на осно-
ве анализа рассеяния электромагнитного поля объектом разведки.
Решить электродинамическую задачу рассеяния электромагнитно-
го поля для реальных тел очень трудно. Однако для многих тел
несложной, элементарной формы эта задача имеет довольно про-
стое решение. Некоторые результаты решений представлены в
табл. 3.1, где указаны значения ЭПР простейших поверхностей, из
которых формируются сложные поверхности ЛА и других техни-
ческих объектов. В табл. 3.1 кроме значений оо(а, 0) приведены
максимальные значения ЭПР Отах. Усредненные значения по всем
направлениям облучения радиолокационной цели могут быть по-
лучены следующим образом:
2л 2л
о = —2 j j o(a,0)tZouZ0. (3.3)
о о
Таблица 3.1
Вид цели
Г еометрическая
форма
Метал-
лический
шар
(г»2Х,
r« 2Х)
а0 =
Плоский
лист
4nzzZ>
. ( 2яа . У . (2nb .
sin ---sina sin-----sinB
X )
2ita .
----sina
%
2л& . п
----snip
X
^Omax ^2
320
3. Противолокационная маскировка
Продолжение табл. 3.1
Вид цели Г еометрическая форма ЭПР
Диск \ 9 / \ г 4л2 г4 а° - к2 ст, f 4 л А J, — rsinO V ) — rsinO X г2 — — Отах ^2 cos20;
Выпуклая поверхность с радиусами кривизны pi ирг ^Отах ^Р1Р2
Уголковый отражатель с прямо- угольными гранями а а4 ^Отах ~ 2 Л
Бикониче- ский отра- жатель 90°Г\^/ Z>, УЛ \ '
Конус (вдоль оси) ~— ^Omax^^tg2»
Цилиндр 1 2г 4л2г/2 СТ°“ к <?0 • f4я/ • sin Sint) \ X ) ^Tll . n sinO к rl2 = 1 9jt max 14Я ^2 -2 sin 0;
3.1. Уменьшение радиолокационной заметности
321
Как ясно из табл. 3.1, плоские поверхности имеют большую
ЭПР только при направлениях облучения, близких к нормали. При
всех других направлениях облучения ЭПР плоских поверхностей
гораздо меньше. То же справедливо и для цилиндрических по-
верхностей, если они облучаются с направления нормали к обра-
зующей. Малоотражающими формами являются клин и конус при
облучении со стороны вершины. При одинаковых размерах наи-
большими значениями ЭПР обладают трехгранные уголковые от-
ражатели с углом при вершине 90°.
Поскольку реальные рассеивающие объекты имеют сложную
форму, в точке приема наблюдается интерференционная картина
парциальных сигналов, отраженных от различных частей разными
элементарными отражателями. Сравнение ЭПР различных элемен-
тарных отражателей, имеющих примерно равные значения площа-
дей проекций на плоскость, нормальную направлению наблюде-
322
3. Противолокационная маскировка
ния, показывает, что их ЭПР может отличаться на 30...40 дБ,
а ширина главного лепестка ДОР может изменяться в широких
пределах. Поэтому ЭПР реальных сложных объектов существенно
зависит от формы их наружной поверхности, образованной набо-
ром элементарных отражателей. Зависимость ЭПР от габаритов
выражена гораздо слабее. Кроме того, большое влияние на ЭПР
оказывает угловое расположение элементарных отражателей и на-
правление излучения. Так, при облучении диска под углом 10° к
нормали его ЭПР на 28 дБ меньше ЭПР трехгранного отражателя,
а при нормальном падении волны на диск его ЭПР на 3 дБ больше,
чем у того же уголкового отражателя.
ДОР отдельных элементов поверхности объекта существенным
образом влияет на формирование результирующей ДОР. Напри-
мер, если в образовании суммарного отраженного сигнала участ-
вуют элементы с широкими ДОР, то результирующая ДОР будет
иметь большее число и большую ширину лепестков, чем в том
случае, когда отдельные элементы имеют узкие ДОР.
Объяснить этот эффект можно тем, что при изменении взаим-
ного расположения элементов относительно приемной антенны
изменяются не только фазы сигналов. При формировании сово-
купности элементов с узкими ДОР резче изменяются амплитуды
парциальных сигналов. Кроме того, в этом случае результирующая
интерференционная картина вторичного поля формируется в более
узком угловом секторе пространства. Таким образом, исключение
широконаправленных отражателей из архитектуры объекта приве-
дет к увеличению дисперсии ЭПР. А это, в свою очередь, умень-
шит вероятность обнаружения отраженного сигнала и соответст-
венно улучшит радиолокационную незаметность объекта. Если же
число элементов с узкими ДОР окажется настолько большим, что
их диаграммы будут совмещаться, то при любом угловом положе-
нии объекта всегда найдутся такие элементы поверхности радио-
локационной цели, сигналы от которых будут складываться.
Действительно, за счет интерференции сигналов от двух оди-
наковых элементарных отражателей с ЭПР ст у каждого суммарная
ЭПР будет изменяться в пределах 0.. .4ст, имея в среднем значение
2ст. Следовательно, наличие элементов с одинаковой ЭПР увели-
чивает радиолокационную заметность.
3.1. Уменьшение радиолокационной заметности
323
На основе приведенных соображений можно сформулировать
ряд принципов, которым нужно следовать при проектировании
внешнего облика малоотражающего объекта.
1. Для увеличения радиолокационной незаметности объекты
нужно компоновать из элементов с минимальной шириной ДОР.
2. При создании малозаметных для РЛС объектов рекоменду-
ется использовать элементы с минимальными значениями ЭПР и
минимизировать число отражателей. Прежде всего следует избе-
гать использования взаимно перпендикулярных поверхностей, ко-
торые образуют уголковые отражатели.
3. Взаимное расположение элементов, из которых состоит
сложный объект, должно минимизировать число направлений, на
которых могут совмещаться главные лепестки ДОР. Если такого
совмещения избежать не удается, нужно минимизировать значе-
ния ЭПР элементов по данным направлениям.
Для иллюстрации практического применения этих принципов
на рис. 3.1 приведена компоновочная схема одной из модификаций
малозаметного высотного самолета воздушной разведки SR-71.
Рис. 3.1. Компоновочная схема малозаметного для РЛР самолета
На рис. 3.1 видно, что нижняя поверхность планера делается
максимально плоской. Поэтому самолет имеет значительную ЭПР
только относительно РЛС, расположенных непосредственно под
ним. Хвостовое оперение не имеет взаимно ортогональных по-
324
3. Противолокационная маскировка
верхностей, которые могли бы образовать уголковый отражатель.
Для этого применяют два отклоненных от вертикали стабилизато-
ра. Такая конфигурация создает заметную ЭПР только со стороны
РЛС, расположенных выше плоскости траектории полета. Резкие
изломы поверхности и кромки, имеющие большие ЭПР, в основ-
ном располагают так, чтобы они экранировались фюзеляжем от
излучений РЛС, расположенных ниже траектории полета этого
высотного самолета. Носовая часть самолета близка к конической
с малым углом при вершине. Очень большой вклад в ЭПР дают
резкие переходы и изломы поверхностей в узлах крепления на-
ружных подвесных контейнеров и средств вооружения. Для улуч-
шения радиолокационной незаметности избегают использовать
подвесные элементы на пилонах и стремятся к внутрифюзеляжно-
му расположению всего дополнительного оборудования.
При изменении ориентации объекта относительно РЛС его
заметность тоже изменяется вместе с изменением ЭПР. При
этом удобно считать, что мощность сигнала, отраженного объ-
ектом, флуктуирует случайным образом. Но вероятность пра-
вильного обнаружения флуктуирующего сигнала меньше, чем
вероятность обнаружения детерминированного сигнала при той
же средней мощности. Значит, для увеличения незаметности
следует не только уменьшать среднее значение ЭПР радиолока-
ционных целей, но и увеличивать дисперсию ее флуктуаций.
Иначе говоря, ДОР малозаметного объекта должна иметь мно-
голепестковую форму, амплитуды лепестков которой могут зна-
чительно отличаться.
3.1.2. Применение противорадиолокационных покрытий
Применение радиопоглощающих материалов и покрытий —
мощный резерв уменьшения радиолокационной заметности за счет
уменьшения ЭПР. Работа радиопоглощающих материалов сводит-
ся к тому, что они преобразуют энергию электромагнитного поля
радиодиапазона в другие виды энергии. При взаимодействии элек-
тромагнитного поля с материалом наблюдаются поглощение, рас-
сеяние и интерференция волн. Поглощение ослабляет поле па-
дающей волны за счет перехода электромагнитной энергии в
теплоту вследствие диэлектрических и магнитных потерь и рас-
3.1. Уменьшение радиолокационной заметности
325
сеяния в материале. Интерференция радиоволн характеризует от-
ражательную способность радиопоглощающего материала в на-
правлении наибольшего вторичного излучения от поверхности за-
щищаемого объекта.
По конструктивному применению обычно различают радиопо-
глощающие материалы, которые наносятся на поверхность защи-
щаемого объекта (противорадиолокационные покрытия) и радио-
поглощающие конструкционные материалы, используемые для
создания малозаметных объектов. Радиопоглощающие материалы
независимо от типа должны обеспечивать минимальное отражение
радиоволн от поверхности защищаемого объекта, максимальное
поглощение электромагнитных волн, широкий частотный диапа-
зон поглощаемой энергии. Они также должны иметь высокую
прочность, способность работать в широком диапазоне механиче-
ских и температурных воздействий, стойкость к агрессивным сре-
дам, надежность и долговечность, возможно меньшие удельную
массу и стоимость.
По принципу работы все радиопоглощающие материалы и про-
тиворадиолокационные покрытия подразделяют на интерференци-
онные и поглощающие. В интерференционных покрытиях создают-
ся такие условия, при которых падающая и отраженная волны
взаимно компенсируют друг друга. Материал поглощающих покры-
тий выбирают из условия максимального преобразования в нем
падающей электромагнитной энергии в тепловую в результате
наведения вихревых токов, магнитно-гистерезисных и (или) высо-
кочастотных диэлектрических потерь.
В зависимости от электрических и магнитных свойств радио-
поглощающие материалы можно подразделить на диэлектрические
и магнитодиэлектрические.
Маскирующее действие радиопоглощающих материалов эф-
фективно лишь в случаях, когда линейные размеры плоских по-
верхностей защищаемых объектов или же радиусы кривизны их
поверхностей значительно превышают длину волны в материале
покрытия:
2 тс
V5o6»l> (3.4)
К
где 50б — площадь поперечного сечения объекта.
326
3. Противолокационная маскировка
Если длина волны превышает максимальный размер объекта,
то наблюдается рэлеевское рассеяние, примерно одинаковое у объ-
ектов с конечной и с бесконечной высокой проводимостью.
Вследствие этого покрытие с конечной проводимостью ведет себя
как идеальный проводник и падающая электромагнитная энергия
им не поглощается.
Поглощающий материал соответствует своему назначению в
том случае, когда в нем отсутствует отражение электромагнитной
волны от внешней кромки поверхности, а энергия, проникающая
внутрь материала, полностью им поглощается. Выполнение этих
условий достигается соответствующим подбором электрических
свойств материала, в первую очередь комплексной диэлектриче-
ской и комплексной магнитной проницаемостей.
Отражение электромагнитной волны от бесконечной идеально
проводящей поверхности, покрытой радиопоглощающим материа-
лом, проиллюстрировано на рис. 3.2.
Рис. 3.2. Структура поглощающего противо-
радиолокационного покрытия
Комплексный коэффициент отражения плоской волны от пло-
ской границы раздела двух сред зависит от различия волновых со-
противлений:
z-zQ
Z + Z.
(3-5)
где Zo — волновое сопротивление свободного пространства,
= 120л = 377 Ом;
(3.6)
3.1. Уменьшение радиолокационной заметности
327
Z — волновое сопротивление поглощающего покрытия,
Z = V^; (3.7)
£ и ц — комплексные диэлектрическая и магнитная проницаемо-
сти материала покрытия соответственно:
£ = ej + iz'2; ц = pj + щ'2.
Подставляя (3.6) и (3.7) в (3.5), можно получить
l + ^/s/p
(3-8)
(3-9)
(З.Ю)
з.п
а учитывая, что
д/ер = п + jk,
Tj\e п — коэффициент преломления среды, а к — коэффициент за-
тухания, соотношение (3.8) можно преобразовать к виду
ц + и + jk
Из (3.10) следует, что коэффициент отражения от границы раз-
дела двух сред (у = 0) равен нулю при ц = п + jk.
С учетом формулы (3.7) условие полного поглощения прини-
мает вид
pq = лг; ц2=£. (3.12)
Условию (3.12) удовлетворяют покрытия, в состав которых
входят вещества, обеспечивающие достаточно большие потери
энергии (например, ферромагнетики). Структуру таких покрытий
образуют частицы ферромагнетика, сцементированные изоляци-
онным материалом из немагнитного диэлектрика. Однослойные
покрытия этого типа достаточно эффективны в диапазоне метро-
вых и дециметровых волн. Эффективность действия покрытия по-
вышается, если оно неоднородно и его коэффициент поглощения
постепенно увеличивается от наружной поверхности покрытия к
поверхности защищаемого объекта.
328
3. Противолокационная маскировка
Для поглощения волн сантиметрового диапазона, в котором
работают основные современные средства РЛР, используют мно-
гослойные покрытия с параметрами, изменяющимися от слоя к
слою так, что проницаемость s возрастает от наружной поверхно-
сти вглубь. Каждый слой таких покрытий образуется компаундом
на основе пенополистирола или каучука, а поглотителем служит
углерод (графит или сажа). Концентрация поглотителя от слоя к
слою меняется. Для согласования покрытия с внешним (свобод-
ным) пространством относительная диэлектрическая проницае-
мость наружного слоя должна равняться единице, т. е. е{ - е0, а
мнимая составляющая (тангенс угла диэлектрических потерь) —
быть близкой к нулю. Резкое изменение параметров е и ц от слоя к
слою недопустимо, поскольку это приводит к увеличению коэф-
фициента отражения от границы раздела двух слоев.
Для уменьшения остаточного отражения широко применяют
покрытия, наружная поверхность которых представляет собой
рельефную геометрическую неоднородность, состоящую из пе-
риодически повторяющихся неровностей в виде пирамидальных
или конических шипов (рис. 3.3).
Рис. 3.3. Сечение рельефной
поглощающей поверхности
Чтобы уменьшить отражательную способность поверхности
покрытия за счет увеличения числа отражений между шипами,
необходимо угол 0 при вершине выбирать небольшим.
3.1. Уменьшение радиолокационной заметности
329
Если в поглощающих покрытиях большая часть энергии пре-
вращается в теплоту, до того как электромагнитные волны достиг-
нут отражающей поверхности защищаемого объекта, то в интерфе-
ренционных покрытиях уменьшение отражения от маскируемого
объекта происходит в результате интерференции двух радиоволн:
отразившейся от поверхности объекта и от поверхности покрытия
(рис. 3.4).
Рис. 3.4. Интерференционное противо-
радиолоканионное покрытие
Падающая волна отражается от поверхности покрытия и скла-
дывается в противофазе с волной, отраженной от границы раздела
двух сред «покрытие — объект». Естественно, что при этом рас-
стояние между отражающими поверхностями (толщина покрытия)
должно быть таким, чтобы обеспечивалось сложение радиоволн в
противофазе.
Отсутствие отражения от интерференционного покрытия дос-
тигается при условии
п
E.„=ZE.=0> <ЗЛЗ)
г=0
где Е( — составляющая отраженной волны от границы раздела
«свободное пространство — покрытие».
Суммарная напряженность отраженного поля (3.13) в направ-
лении источника падающей волны равна нулю, если выполняются
условия
330
3. Противолокационная маскировка
P = ln-; eZ = (2z + l)^, z = l,2,...,n; (3.14)
г 4
₽ = lnl; rf = (2i+l)^.,/ = 1,2,..., (3.15)
|г| 4
где Р — коэффициент затухания волны за одно прохождение по-
глощающего покрытия в прямом и в обратном направлениях;
г = |г| — модуль коэффициента отражения покрытия; d — общая
толщина покрытия; ХЕ,Ц — длина волны в материале покрытия с
параметрами виц,
Хо — резонансная длина волны.
Интерференционные покрытия тоньше поглощающих по-
крытий. Однако, как следует из их принципа действия, они менее
универсальны (более узкополосны), что нередко ограничивает
возможности их применения. По-видимому, наиболее перспектив-
ными являются комбинированные многослойные покрытия.
Чтобы интерференционное покрытие обладало также и погло-
щающими свойствами, в его состав вводят ферромагнетики и ком-
паунды на основе различных пластмасс или каучука с примесями
сажи или порошка графита в качестве поглотителя. Достоинством
интерференционных покрытий являются их значительная механи-
ческая прочность, гибкость, сравнительно малая толщина и не-
большая масса.
Эффективность действия интерференционных покрытий зави-
сит от угла падения волн электромагнитного поля на их поверх-
ность. Минимальное отражение достигается при нормальном па-
дении радиоволн. При других углах падения коэффициент
отражения резко увеличивается. Таким образом, покрытие интер-
ференционного типа представляет собой резонансный поглоти-
тель, состоящий из слоя диэлектрика, наложенного на защищае-
мый металл. Толщину слоя диэлектрика, его диэлектрическую
постоянную и тангенс угла диэлектрических потерь можно выби-
рать так, чтобы коэффициент отражения на некоторой наиболее
вероятной длине волны был равен нулю. При этом наибольшее
3.1. Уменьшение радиолокационной заметности
331
отклонение частоты падающей волны от резонансной частоты по-
глощаемого излучения не должно превышать ±5 %, иначе эффек-
тивность поглощения энергии падающих волн электромагнитного
поля значительно понижается.
Поглощающая способность многослойных интерференцион-
ных покрытий и их динамический диапазон существенно зависят
от количества и толщины слоев, а также от электрических пара-
метров используемых материалов. При соответствующем подборе
значений проводимости и диэлектрической проницаемости можно
считать, что параметры каждого слоя согласованы с колебаниями в
узкой полосе около одной частоты, а несколько слоев обеспечива-
ют малое значение коэффициента отражения в динамическом диа-
пазоне. Для иллюстрации этого утверждения на рис. 3.5 приведены
зависимости коэффициента отражения для интерференционных
покрытий с многослойными структурами из чередующихся ди-
электрических слоев [7].
Рис. 3.5. Коэффициент отражения
линейного интерференционного
покрытия:
1 — один слой; 2 — три слоя; 3 —
пять слоев
Следует иметь в виду, что интенсивность отражения электро-
магнитной энергии многослойными поглощающими структурами
зависит также от угла падения волны, ее поляризации и макси-
мально допустимой рабочей температуры материала.
Таким образом, в современных разработках радиопоглощаю-
щих материалов и противорадиолокационных покрытий для
поглощения энергии электромагнитных волн в основном исполь-
332
3. Противолокационная маскировка
зуются традиционные материалы. Это наполнители — электро-
проводящие дисперсионные (сажа, графит, металлические части-
цы), волокнистые (углеродные, металлические, полимерные ме-
таллизированные) и магнитные (спеченные ферритовые пластины,
порошки ферритов, оксида железа и карбонильного железа). На-
полнители применяют как по отдельности, так и совместно. Выбор
связующего материала зависит не только от радиотехнических, но
и от конструктивных и эксплуатационных требований. В настоя-
щее время для радиопоглощающих материалов и противолокаци-
онных покрытий используются диэлектрические полимерные и
эластомерные компаунды, краски, нетканые материалы, керамики.
Применение таких материалов позволяет уменьшить коэффициент
отражения до 20 дБ и более в широкой полосе (до 30 % от средней
рабочей частоты).
Малоподвижные или стационарные объекты и сооружения для
противорадиолокационной маскировки можно покрывать специ-
альными накидками из поглощающих материалов, работающих по
тем же принципам, что и радиопоглощающие материалы покрытия
летательных аппаратов. Для уменьшения ЭПР зданий и сооруже-
ний используются специальные объемно-поглощающие строи-
тельные материалы (бетоны с примесями порошков проводящих
материалов и ферромагнетиков).
3.1.3. Уменьшение радиолокационной заметности
антенных систем
Значительный вклад в радиолокационную заметность объектов
разведки вносят их антенные системы. Так, самолет в зависимости
от типа и назначения может нести на своем борту до 100 и более
антенн бортового радиоэлектронного комплекса. В состав ком-
плекса входят радиолокационный прицел, радиолокатор бокового
обзора, автономные средства радионавигации (радиовысотомеры,
радиовертикант, доплеровский измеритель скорости и угла сноса),
средства ближней, дальней и спутниковой радионавигации, систе-
мы передачи информации и связи, радиолокационный визир, сред-
ства РРТР, активные средства радиопротиводействия. На борту
ракет могут работать системы радиоуправления и радиосистемы
автономной навигации, радиотелеметрические системы.
3.1. Уменьшение радиолокационной заметности
333
Радиоэлектронными средствами также оснащены морские ко-
рабли, наземные мобильные и стационарные объекты. Во всех
этих средствах и системах применяются как передающие, так и
приемные антенны, которые увеличивают радиолокационную за-
метность. По имеющимся оценкам, вклад антенн бортовых радио-
электронных комплексов в ЭПР самолетов фронтовой авиации
составляет от 10...20 до 40...50 %. У ракет с головками самонаве-
дения в наиболее опасном секторе углов облучения в передней
полусфере ЭПР антенны находится в пределах 30...90 % общей
ЭПР. У крылатых ракет этот показатель составляет 50...60 % об-
щей ЭПР. При этом вклад различных типов антенн в общую ЭПР
ЛА неодинаков: наибольшую ЭПР имеют зеркальные антенны
большой апертуры (антенны радиолокационного прицела, радио-
локационного визира и т. п.), а также плоские антенные решетки.
Такие антенны имеют узкую ДОР. Подобных антенн с большой
ЭПР на борту ЛА немного, как правило, единицы (от 1 до 5). Ос-
тальные антенны имеют в основном небольшую ЭПР (0,01... 1 м2),
но обладают большой (до 180°) шириной ДОР.
В связи с этим возникает проблема разработки методов и
средств уменьшения радиолокационной заметности антенн. Реше-
ние этой проблемы предусматривает три основные направления
исследований и разработок.
Первое направление включает такие комплексные подходы к
проектированию радиоэлектронных средств, согласно которым
минимизируется общее число антенн, используемых радиоэлек-
тронными средствами различного функционального назначения и
структуры. Сэкономить на числе антенн можно, используя на бор-
ту ЛА универсальные многофункциональные антенные решетки,
которые одновременно способны обслуживать радиолокационные
средства, средства радиоэлектронного противодействия, средства
предупреждения о нападении ракет противника, средства опозна-
вания «свой — чужой», средства радиосвязи и передачи данных и
т. п. Уменьшить общее число антенн при сохранении объема необ-
ходимой текущей информации, получаемой на борту ЛА, можно и
в том случае, когда такая информация поступает от других источ-
ников, например от спутниковых навигационных систем и систем
обнаружения, распознавания и сопровождения целей, разведыва-
тельно-ударных комплексов и комплексов дальнего радиолокаци-
334
3. Противолокационная маскировка
онного обнаружения. При этом приемные антенны размещаются в
местах, удобных для приема поступающей информации (напри-
мер, с ориентацией ДНА в верхнюю полусферу, откуда принима-
ются сигналы спутниковых систем). Такие антенны не будут вли-
ять на ЭПР ЛА в нижней полусфере, наиболее опасной при
наблюдении ЛА наземными и воздушными радиолокационными
системами.
Второе направление связано с разработкой методов и средств
уменьшения заметности каждой антенны радиоэлектронного ком-
плекса и комплекса бортовых средств РЭП.
Излучение, рассеянное антенной, по характеру своего возник-
новения подразделяется на две составляющие. Первая составляю-
щая появляется в результате приема и последующего переизлуче-
ния энергии падающих волн электромагнитного поля. Она
характерна для антенны, короткозамкнутой на выходе. Вторая со-
ставляющая не связана с антенной спецификой и появляется в ре-
зультате дифракции падающей волны на внешних элементах кон-
струкции антенны. В общем случае обе составляющие существуют
одновременно, но в направлении главного лепестка ДОР и вблизи
него второй составляющей можно пренебречь. В направлениях,
значительно отклоняющихся от главного лепестка, пренебрежимо
малой становится первая составляющая. При этом следует отме-
тить, что в связи с использованием в современных антеннах не-
скольких функциональных облучателей главный лепесток ДОР
оказывается значительно шире ДНА.
Анализируя соотношения между антеннами как рассеивателя-
ми и как отражателями, ЭПР антенны можно представить в сле-
дующем виде:
G " (1 " еХР0’ф)]2 ’ (3•16)
где Остр — структурная часть ЭПР; аау — антенная часть ЭПР;
Ка — коэффициент отражения антенны; /ср — относительная фаза.
При коротком замыкании Ka - 1 и асгр = окз, а при разомкнутой
цепи Ка- -1. Поэтому
аР.ц=ехр(“р)]2 •
3.1. Уменьшение радиолокационной заметности
335
Для достижения идеального рассеяния необходимо, чтобы зна-
чение о в (3.16) обратилось в нуль. Для этого должны быть выпол-
нены следующие очевидные условия:
Re{/Ca} = l- —— coscp; Im{/Ca} = sin ср.
У ^a.y у ^a.y
(З.П)
Поскольку
Za “
___ a____H
a
^a+V
(3.18)
где Za — выходное сопротивление антенны; Za — сопротивление
нагрузки, посредством подбора нагрузки можно определить такое
значение КЛ, при котором напряженность поля, рассеянного в за-
данном направлении и на заданной частоте, обратится в нуль.
Можно использовать и другие приемы создания антенн, мало-
отражающих в главных лепестках ДНА.
Непосредственное применение радиопоглощающих материа-
лов и противорадиолокационных покрытий для уменьшения ра-
диолокационной заметности антенн во многих случаях затрудне-
но, поскольку такие покрытия, располагаемые на антеннах,
поглощая электромагнитное излучение средств РЛР противника,
одновременно нарушают нормальное функционирование антенн в
их рабочих диапазонах длин волн. Имеющиеся методы и средства
уменьшения ЭПР антенн по второму направлению можно условно
подразделить на три основные группы.
В первой группе непосредственно в антеннах используются
частотно-селективные и поляризационно-селективные структуры с
неизменяемыми во времени параметрами. Такие структуры радио-
прозрачны или отражают, как металл, на рабочих частотах и поля-
ризациях антенны и непрозрачны или сильно поглощают на всех
других частотах и поляризациях.
Во второй группе ЭПР антенн уменьшается за счет ухудшения
характеристик антенн в нерабочие промежутки времени (между
излучением и приемом сигналов РЛС или в то время, когда не ра-
ботают системы передачи информации). Для изменения характе-
ристик антенн используют электрически управляемые во времени
336
3. Противолокационная маскировка
среды или электрически поворачиваемые металлические экраны.
В рабочие промежутки времени характеристики антенн восстанав-
ливаются. Электрически управляемые среды имеют малую инер-
ционность по сравнению с металлическими экранами. Они позво-
ляют переключать электрические характеристики антенн с
высокой частотой. Сигнал управления изменением отражательных
характеристик антенн может подаваться от приемников обнаруже-
ния радиолокационного излучения объекта разведки или по дру-
гим командам.
В третьей группе невидимые для РЛС зеркальные антенны по-
лучаются, если раскрыв антенны прикрыть экраном, отражающим
падающие на него из внешнего пространства волны в направлени-
ях, не совпадающих с направлениями их прихода. Такие экраны
создаются на основе радиопрозрачных плоскослоистых сред, обра-
зованных прилегающими друг к другу слоями диэлектрических
материалов.
Обычно применяются конструкции экранов в виде металличе-
ских поверхностей или плоскослоистых диэлектрических сред с
прорезанными щелями. Такие экраны прикрывают раскрыв зер-
кальной антенны. Подбором толщины, диэлектрической прони-
цаемости слоев и геометрии решетки, образованной щелями, уда-
ется синтезировать структуру, пропускающую только волны с
частотой и поляризацией собственного излучения и не прозрачную
для волн РЛС, облучающих защищаемый объект. Исследования
показывают, что использование таких селективных экранов спо-
собно уменьшить ЭПР зеркальной антенны на 15...30 дБ.
Для управления радиолокационной заметностью линейных ан-
тенн коротковолнового и ультракоротковолнового диапазонов на
металлические стержни, из которых изготовляется антенна, наносят
слой радиопоглощающего материала, незначительно ослабляющего
сигнал на рабочей частоте. Слой поглотителя увеличивает попереч-
ное сечение проводника, что приводит к увеличению ЭПР антенны,
но одновременно уменьшает его длину, необходимую для обеспе-
чения резонанса на рабочей частоте. Но в сантиметровом радиоло-
кационном диапазоне ЭПР таких антенн становится заметно мень-
ше (примерно на 15 дБ).
К настоящему времени разработано много видов диэлектриче-
ских и ферритовых покрытий, предназначенных для уменьшения
3.1. Уменьшение радиолокационной заметности
337
габаритов антенн КВ- и УКВ-систем радиосвязи. Все эти покрытия
имеют малые потери и обеспечивают достаточно высокий КПД
антенн. В сантиметровом диапазоне антенны с такими покрытия-
ми, несмотря на уменьшенные габариты, имеют довольно значи-
тельные ЭПР вследствие большого рассогласования характеристик
на границе раздела «воздух — покрытие». Для уменьшения ЭПР
антенн сантиметрового диапазона разрабатывают радиопогло-
щающие покрытия с высокой магнитной проницаемостью.
Другим эффективным способом уменьшения радиолокацион-
ной заметности линейных антенн является включение в них реак-
тивных сосредоточенных нагрузок (конденсаторов и индуктивных
элементов). Подбирая значения емкостей, индуктивностей и места
их включения, можно синтезировать линейные антенны таким об-
разом, чтобы мощность волны сантиметрового диапазона, отра-
женной в обратном направлении, была минимальной.
Требование сохранения рабочих характеристик на основной
рабочей частоте и требование минимальной радиолокационной
заметности противоречат друг другу. В общем случае для разре-
шения противоречия между этими требованиями конструкцию ан-
тенн приходится оптимизировать по комплексному критерию.
Известно много технических решений для создания антенн с
переменной управляемой ЭПР. Например, в пространстве под об-
текателем перед антенной можно создавать плазменный экран.
Плазма создается тогда, когда антенна не работает на излучение
или на прием. За счет поглощения энергии электромагнитной вол-
ны в плазме вся система, состоящая из антенны, обтекателя и плаз-
менного экрана, будет иметь малую ЭПР, если только электронная
концентрация в плазме была выше критической на всех опасных
частотах излучения.
Практическая реализация такого способа управления радиоло-
кационной заметностью сводится к выбору конструкции электро-
дов, давления газа, источников возбуждения плазмы и способов
управления возбуждением.
Для управления ЭПР подходят плоскослоистые среды с управ-
ляемыми слоями (рис. 3.6, где в разрезе показаны неуправляемые
диэлектрические слои (НДС) и управляемый слой (УС)).
Управляемые слои представляют собой тонкие (по сравнению
с длиной волны) двумерно-периодические решетки, нагруженные
338
3. Противолокационная маскировка
Рис. 3.6. Плоскослоистая среда
активными и пассивными переключательными элементами. Эти
элементы должны выдерживать высокий уровень мощности па-
дающего на них СВЧ-сигнала. Поэтому в качестве таких элемен-
тов применяют мощные p-z-я-диоды или сегнетокерамические
конденсаторы.
Неуправляемые диэлектрические слои — это слои однородных
диэлектриков без потерь или двумерно-периодические ненагру-
женные решетки. Уменьшить радиолокационную заметность с по-
мощью управляемых плоскослоистых сред можно, либо нанося их
на поверхность антенн, либо создавая на их основе обтекатель с
управляемым коэффициентом передачи по мощности.
Третья группа методов уменьшения заметности предусматри-
вает миниатюризацию антенн при сохранении их основных рабо-
чих характеристик. Естественно, что за счет уменьшения габари-
тов антенн мощность вторичного излучения существенно
снижается. Исторически миниатюризация была обусловлена не
потребностями уменьшения радиолокационной заметности, а не-
обходимостью уменьшения габаритов антенных систем. Первым
техническим решением по этому направлению было создание фер-
ромагнитных антенн. При заданной действующей высоте ферри-
товые приемные антенны имеют на рабочей частоте в цд раз
меньшую площадь (цд — действующая проницаемость ферромаг-
нетика). При уменьшении длины волны действующая проницае-
мость магнитопровода снижается, а потери в нем растут. Поэтому
магнитные антенны при заданной действующей высоте имеют су-
щественно меньшие значения ЭПР в сантиметровом диапазоне,
чем антенны других типов.
3.1. Уменьшение радиолокационной заметности
339
Одно из перспективных направлений микроминиатюризации
антенных систем сверхвысокочастотного диапазона предусматрива-
ет использование в качестве элементов ФАР параметрических маг-
нитных элементов, позволяющих осуществлять как усиление
принимаемого сигнала, так и фазирование антенной системы по-
средством управления амплитудой и фазой сигнала накачки.
Антенны такого типа дают возможность не только увеличить коэф-
фициент усиления, отношение сигнал/шум и разрешающую способ-
ность при заданных линейных размерах, но и существенно снизить
радиолокационную заметность.
Этот эффект объясняется совокупным действием факторов,
уменьшающих линейные размеры антенных систем такого типа, а
также параметрическим усилением и эффектом уменьшения дли-
ны волны в материале ферромагнетика.
Уменьшение радиолокационной заметности может быть достиг-
нуто в результате компромиссного выбора типа антенны при неко-
тором допустимом ухудшении ее рабочих характеристик. Так, при
выборе антенны для приема сигнала сверхвысокочастотного и вы-
сокочастотного диапазонов из космоса в некоторых случаях при
достаточно высоком уровне принимаемой мощности необязатель-
но применять зеркальные антенны, которые вследствие обращения
волнового фронта падающей волны имеют большую ЭПР. Для
этой цели целесообразнее, например, использовать директорно-
волноводную систему.
3.1.4. Комплексное применение методов
противорадиолокационной маскировки
Все изложенные выше методы противорадиолокационной мас-
кировки дают заметные результаты. Однако самое значительное
снижение радиолокационной заметности происходит тогда, когда
все или почти все эти методы применяются в комплексе. Можно
утверждать, что совместное комплексное применение методов
противорадиолокационной маскировки дает больший эффект, чем
сумма возможных эффектов от применения каждого конкретного
способа отдельно и независимо от других. В последние годы ком-
плексные исследования и разработки методов уменьшения вероят-
ности обнаружения объектов вооружения и военной техники име-
340
3. Противолокационная маскировка
нуются собирательным термином «технология Stealth». Программа
Stealth объединяет ряд исследовательских, конструкторских и тех-
нологических направлений, ставящих целью уменьшение радио-
локационной и тепловой заметности объектов посредством совер-
шенствования форм их наружной поверхности, устранения
блестящих точек и применения специальных конструкционных
материалов.
Уменьшение радиолокационной заметности прямо связано с
уменьшением ЭПР объекта. В рамках программы Stealth была по-
ставлена задача уменьшить ЭПР самолетов до 0,01...0,001 м2. При
этом имеются теоретические и практические основания для
достижения такого уровня ЭПР. А это позволяет создать самолет,
практически невидимый для моностатических РЛС.
Применительно к надводным кораблям основная концепция
программы сводится к уменьшению их радиолокационной заметно-
сти до уровня, при котором становится эффективным применение
искусственных помех, создаваемых средствами радиопротиводей-
ствия. Но в отличие от самолетов и ракет, сделать корабли невиди-
мыми на фоне естественных помех, по-видимому, невозможно.
Выполнение программы Stealth основано на практической реа-
лизации перечисленных выше принципов формирования рацио-
нальной архитектуры объектов, на определении типа радиопогло-
щающих материалов и оптимальной топологии их применения.
Поскольку специфическими отражателями, обладающими доста-
точно широкими ДОР и вносящими значительный вклад в суммар-
ное отраженное поле, являются прямоугольные элементы конструк-
ции и антенные устройства, прежде всего приходится заботиться
о снижении вторичного радиолокационного поля, создаваемого та-
кими отражателями.
Основные принципы компоновки малоотражающего объекта, на
которых основывается технология Stealth, сводятся к следующим
факторам:
- для существенного уменьшения ЭПР уголковых отражателей,
образуемых пересекающимися аэродинамическими и другими по-
верхностями ЛА, необходимо подбирать соответствующие углы и
материалы противорадиолокационных покрытий; на разных по-
верхностях нужны покрытия с разными импедансами; предпочте-
ние следует отдавать тупым углам пересечения поверхностей, по-
3.1. Уменьшение радиолокационной заметности
341
скольку в этом случае не возникают отражения высоких порядков
(выход в обратном направлении многократно переотраженных
волн);
- применение покрытия эффективно не только на прямоуголь-
ных конструкциях, но и на уголковых отражателях с углом между
гранями, отличающимся от прямого;
-для оптимального использования покрытий необходимо в
каждом случае выделять доминирующие механизмы рассеяния и
подбирать соответствующий поверхностный импеданс в требуе-
мом угловом секторе; архитектурные решения и применение
покрытий взаимно дополняют друг друга, что позволяет весьма
существенно уменьшить ЭПР не только отдельных элементов кон-
струкции, но и всего объекта в целом.
Для уменьшения вклада, вносимого антеннами в ЭПР маски-
руемого объекта, технология Stealth предусматривает применение
антенн, малоотражающих в главных лепестках ДНА.
Практические работы по реализации принципов создания ма-
лоотражающих объектов, аналогичных принципам программы
Stealth, ведутся многими фирмами в разных странах мира. При
проектировании основное внимание уделяется оптимизации аэро-
динамических характеристик этих самолетов, минимизации ра-
диолокационной и тепловой заметности и учету взаимосвязей пе-
речисленных факторов.
Основные технические проблемы, которые решаются в про-
цессе проектирования и компоновки самолетов по технологии
Stealth: размещение двигателей внутри элементов конструкции
самолета; уменьшение площади поперечного сечения самолета;
создание адаптивной многофункциональной антенной системы с
управляемым минимумом диаграммы направленности, совме-
щающей три функции: глобальной системы навигации, объеди-
ненной системы распределения тактической информации и систе-
мы опознавания «свой — чужой».
Усредненная по разным ракурсам ЭПР самолета, выполненно-
го по технологии Stealth, составляет примерно 0,01...0,001 м2. Для
предотвращения излучения (и соответственно отражений) от эле-
ментов конструкции внутри кабины экипажа на фонарь кабины
наносится специальное покрытие. ДОР такого самолета имеет бо-
лее четырех лепестков рассеяния, поскольку внешняя поверхность
342
3. Противолокационная маскировка
фасеточная, а передняя и задняя кромки не параллельны. Для по-
лучения столь малой ЭПР были разработаны программные средст-
ва оптимизации архитектуры наружной поверхности самолета. При
этом был использован принцип формирования рациональной архи-
тектуры, заключающейся в концентрации всех отражений в не-
скольких узлах сектора; применена четырехлепестковая схема —
параллельные передние и задние кромки корпуса и пилообразные
кромки других элементов, которые формируют Х-образно распо-
ложенные четыре основных сектора отражения. Все вооружение
таких самолетов размещено внутри фюзеляжа. По бокам кабины
экипажа расположены две двигательные гондолы с отогнутыми
вниз носками обечайки воздухозаборника, что позволяет экрани-
ровать лопатки компрессора от излучения РЛС. На самолете уста-
навливается бортовая РЛС с синтезируемой апертурой, работаю-
щая в диапазоне частот 12,4... 18,0 ГГц. В РЛС применяются
конформные (невыступающие за поверхность планера) антенные
решетки. Используемые радиопоглощающие композитные мате-
риалы по своим прочностным характеристикам превосходят сталь
и титан и на 30 % легче алюминия.
Совершенно иная идеология программы Stealth используется
при построении малоотражающих надводных кораблей. Целесо-
образный и реально достижимый уровень радиолокационной
заметности надводных кораблей связан с техническими возмож-
ностями активных и пассивных средств радиоэлектронного про-
тиводействия. Поэтому все мероприятия по уменьшению радио-
локационной заметности кораблей направлены на обеспечение
более надежной их защиты от оружия, оснащенного радиосисте-
мами самонаведения.
При проектировании современных кораблей на основе техно-
логии Stealth используют низкосидящие корпуса выпуклой формы.
Надстройкам придают форму простых архитектурных образований
(усеченные пирамиды с наклоном стенок 8... 10°, конусы и т. п.).
Вооружение встраивают под обводы корпуса и надстроек. Приме-
няют многофункциональные боевые информационные системы,
оснащенные ФАР. Избегают использования уголковых образова-
ний на переходах от плоских к криволинейным поверхностям, фо-
кусирующим вторичное излучение в узких секторах и в заданных
направлениях. Широко применяются как стационарные, так и
3.2. Маскирующие воздействия на среду распространения сигнала 343
съемные радиопоглощающие материалы и противорадиолокаци-
онные покрытия. Все эти принципы и приемы в совокупности по-
зволяют уменьшить ЭПР «не заметного» для РЛС корабля на по-
рядок по сравнению с ЭПР надводных кораблей аналогичных
классов.
3.2. Маскирующие воздействия
на среду распространения сигнала
3.2.1. Модификация среды распространения сигнала
К настоящему времени известно очень много методов и
средств воздействия на среду распространения сигнала для изме-
нения наблюдаемости объектов разведки. Арсенал методов и
средств модификации среды распространения сигналов постоянно
пополняется как за счет использования новых физических эффек-
тов, так и за счет совершенствования способов применения из-
вестных механизмов рефракции, поглощения, отражения, рассея-
ния сигнала в среде. Очень разнообразны и технические средства
модификации среды, реализующие разные способы организации
маскирующих завес, вносящие изменения в характеристики объек-
тов разведки, уменьшающие радиоконтраст объектов на окру-
жающем их фоне.
Модификация среды позволяет маскировать объекты от
средств радиоэлектронных разведок и от РЛС обнаружения и со-
провождения не за счет излучения специальных помеховых сигна-
лов. Поэтому многие способы воздействия на среду для маскиров-
ки называют пассивными, в отличие от активных способов,
предполагающих маскировку излучаемыми помехами. Названия
«пассивные методы» маскировки и «пассивные помехи» столь же
традиционны, сколь и неудачны: их применение предусматривает
вполне активные действия. Тем не менее термин «пассивные по-
мехи» для обозначения отдельных способов радиомаскировки ис-
пользуется в технике радиолокации и радиоэлектронной борьбы
без кавычек.
Под пассивными помехами понимают помехи, образующиеся в
результате рассеяния и переотражения электромагнитных волн от
массовых и пространственно распределенных объектов (сред) [7].
344
3. Противолокационная маскировка
К пассивным помехам относятся также различные ионизован-
ные плазменные образования, которые являются протяженными
объектами, модифицирующими электрические свойства среды
распространения электромагнитных волн.
Таким образом, следует выделить два основных класса пассив-
ных помех: пассивные пространственно протяженные помехи и
средства, модифицирующие свойства среды распространения
электромагнитных волн. Иногда к средствам создания пассивных
помех относят ложные цели, пассивно отражающие электромаг-
нитные волны. Но эти цели образуют помехи не вследствие моди-
фикации среды распространения сигнала. Они относятся к про-
странственно разнесенным объектам (радиолокационным целям)
точечного типа и составляют отдельный класс помех, изменяющих
сигнальную обстановку и дезинформирующих средства РЛР и
РЛС другого назначения об истинных свойствах и характеристи-
ках объектов.
Классификация способов модификации среды для обеспечения
радионезаметности приведена на рис. 3.7.
Способы модификации среды
распространения сигнала
Пассивные помехи
Дипольные отражатели
Плазменные Аэрозоли
образования
Локальные
Глобальные
Рис. 3.7. Способы модификации среды распространения сигналов
К пассивным помехам относят облака дипольных отражателей,
которые способны поглощать и рассеивать энергию электромагнит-
ных волн, создаваемых передающими антеннами средств активной
РЛР. Дипольные отражатели могут применяться и в комплексе с ак-
тивными помехами, когда они подсвечиваются передатчиками
средств РЭП и создают ложную сигнальную обстановку. В результа-
те средства РЛР дезинформируются относительно параметров про-
3.2. Маскирующие воздействия на среду распространения сигнала 345
странственного положения и движения маскируемого объекта. Аэро-
зольные образования используются для маскировки от средств ра-
диоэлектронных разведок в высокочастотной части шкалы электро-
магнитных волн — видимого и инфракрасного диапазонов. При
некоторых условиях аэрозоли могут поглощать и рассеивать сигналы
миллиметровых РЛС.
Плазменные образования возникают в результате сжигания в
атмосфере углеводородного топлива, обычно со специальными
легко ионизируемыми добавками. Так создаются локальные иони-
зованные области, не прозрачные для сигналов, используемых
средствами радиоэлектронных разведок. Локальные плазменные
облака могут возникать и при движении ЛА (прежде всего голов-
ных частей баллистических ракет) в разреженной высотной атмо-
сфере. Глобальные плазменные образования в атмосфере (а точ-
нее, большие пространственные области высокой ионизации)
возникают в результате ударной ионизации молекул атмосферных
газов частицами высокой энергии, образующимися при высотных
ядерных взрывах [7].
3.2.2. Дипольные помехи
Дипольные помехи (станиолевые ленты) — это самые первые
средства, которые начали использоваться для целей радиоэлек-
тронной маскировки. Тем не менее их с успехом применяют до
сих пор. В настоящее время диполи длиной kk/2 (k — целое
число) изготовляют из диэлектрика с проводящим покрытием.
Возможно также применение и поглощающих («черных») дипо-
лей с графитовым покрытием. Диполи разных длин собирают в
пачки, обеспечивающие при сбрасывании с ЛА и рассеянии в
пространстве отражение в широкой полосе частот Af / /0 ~
~ 5... 15 %. Для поддержания большой ЭПР развернутой пачки
(сУд0 » Ола) их сбрасывают достаточно часто с небольшим интер-
валом времени. Полученные дипольные облака (рис. 3.8) являют-
ся яркими (на экранах индикаторов РЛС) пространственно
распределенными помехами, долго находящимися в среде рас-
пространения радиолокационного сигнала и мешающими как
РЛС обнаружения, так и РЛС комплексов управления оружием.
346
3. Противолокационная маскировка
Толщина диполей обычно мала (десятки микрометров), при ее
выборе учитывают лишь поверхностный эффект и механическую
прочность.
Для тактики применения пассивных дипольных помех очень
важен вопрос о динамике развертывания дипольного облака. ЛА
(рис. 3.8, а) выбрасывает по ходу полета пачку диполей числом Ns.
Процесс развертывания пачки в выходной струе двигателя ЛА яв-
ляется нестационарным случайным процессом. Так, ширина обла-
ка по оси х(1) является случайной величиной с плотностью вероят-
ности р(хЮ — рис. б. Эффективная ширина плотности
распределения 1(f), естественно, зависит от времени. На рис. 3.8
приведены два значения Zb Z2 для моментов времени t\ и /2 соответ-
ственно.
Рис. 3.8. Развертывание пачки диполей:
а — развертывание точки дипольных отражателей во времени;
б — плоскость распределения дипольных отражателей в облаке
3.2. Маскирующие воздействия на среду распространения сигнала 347
Похожая картина развертывания облака диполей наблюдается
и при постановке защитного облака пассивных помех кораблями.
Чаще всего диполи выбрасываются вместе с горячими газами че-
рез дымовые трубы. Так же развиваются облака дипольных отра-
жателей, забрасываемых специальными ракетами — постановщи-
ками противорадиолокационных помех.
Парциальные скорости каждого диполя v0 случайны, так как
диполи тормозятся встречным потоком воздуха. В результате
Ду,- = v, - Уо в среднем (v ) с течением времени уменьшается и, как
правило, к концу развертывания пачки Ы величина v - v0 = Ду
достигает большого значения.
Общее число диполей из пачки (7V), попадающих в единичный
объем пространства V= 1, со временем изменяется. В результате к
концу периода времени Д/ в единицах объема по облаку будет раз-
личное число диполей (N).
В теории дипольных помех [7] ЭПР одиночного полуволнового
диполя (рис. 3.9) определяется как
<71 (6) = almax cos4 9 = 0,86Х2 cos4 9. (3.19)
Для расчета среднего значения ЭПР диполя (oj) в единице объ-
ема нужно учесть (рис. 3.19) поверхности гЙЭ,.
Рис. 3.9. Схема функцио-
нирования полуволнового
дипольного отражателя
Рис. 3.10. К расчету ЭПР
дипольного облака
Поляризация всех отражений от диполей одинакова. Вероят-
ность того, что диполь очутится в пределах элементарного угла dQ.,
348
3. Противолокационная маскировка
p(O)d& = —
4л
(3.20)
Среднее значение ЭПР одного диполя, положение и ориентация
которого случайны и равновероятны, можно найти усреднением:
л 2л
(a,) = J"i(9W)ds2=J J ^(9)
Я 0 0
sint/tp _ <т1тах
4л 5
= 0,17k2.
(3-21)
Если в пачке содержится диполей, их полная ЭПР в объеме
(рис. 3.11) после полного развертывания составит
<js = = 0,17А.Х. (3.22)
Обычно учитывают КПД диполей (часть диполей слипается, лома-
ется), и тогда
Q5=0,17V-q2Vs. (3.23)
Иногда требуется знать ЭПР диполя для разнесения точек из-
лучения и приема сигнала (см. рис. 3.11).
Рис. 3.11. К расчету ЭПР диполя при раз-
несении точек приема и передачи
Рис. 3.12. Быстрые и медленные диполи
3.2. Маскирующие воздействия на среду распространения сигнала 349
В работе [7] приведена следующая формула для расчета ЭПР
диполя:
оДу) = 0,17Х2 cos2 \|/ + 0,11А,2 sin2 \|/. (3.24)
Максимальная мощность рассеяния соответствует углам у = 0,
V = л, а минимальная (у = тг/2; 3/2тс) « 0,65о1тах. Чтобы подсчитать
ЭПР диполей в объеме V(t) (рис. 3.12), надо знать количество (в
процентах от полного количества диполей в пачке) диполей в еди-
ничных объемах в различное время.
Как уже отмечалось, парциальная скорость диполя v, — величи-
на случайная и зависит от ряда факторов: турбулентности атмосфе-
ры; аэродинамических характеристик диполей; особенностей дви-
жения под действием ветра; скорости снижения диполей под
влиянием силы тяжести; влияния выходной струи двигателя ЛА.
Кроме того, флуктуации отраженного сигнала вызываются собст-
венным вращением диполей, неравномерностью ДНА антенн РЛС, а
также рядом других причин. При этом различают быстрые и мед-
ленные вращающиеся диполи (см. рис. 3.12).
Вследствие этого эффекта функция распределения скоростей
р(у) оказывается двухмодальной. Ее график имеет вид, показанный
на рис. 3.13.
Медленные диполи стремятся сориентироваться горизонталь-
но. Наличие быстрых диполей обусловлено дефектами диполей:
зазубринами, деформациями, что делает их похожими на аэроди-
намические рули с вертикальной ориентацией. Данные экспери-
ментов свидетельствуют о преимущественной горизонтальной
ориентации диполей.
->
V
о
Рис. 3.13. Двухмодальное распре-
деление скоростей диполей
350
3. Противолокационная маскировка
Излучение спектра флуктуаций гармонических сигналов [7],
отраженных от дипольного облака, свидетельствует, что он имеет
характер гауссовской кривой (квадратичной экспоненты):
(7(F) - ехр
= ехр
F2X2
!«!<>’
(3.25)
Вид этой кривой показан на рис. 3.14. Эффективная ширина спек-
тра флуктуаций
а 120
-. (3.26)
Для длины волны А, - 3 см расширение спектра составляет при-
мерно 70 Гц.
Если считать, что элементарный объем облака площадью 5 =
= 1 м2 и толщиной dx рассеивает энергию пропорционально своей
эффективной отражающей поверхности, то
dP = -(aM)dx, (3.27)
где Р — мощность сигнала, падающего на элементарный объем;
(оэо) — удельная ЭПР диполей, распределенных в единице объ-
ема, м2/м3.
Можно показать [7], что коэффициент ослабления электромаг-
нитной волны
Р = 0,73Х2п, (3.28)
где п — среднее число диполей в единице объема.
Рис. 3.14. Спектр флуктуаций сигналов,
отраженных диполями
3.2. Маскирующие воздействия на среду распространения сигнала 351
Поэтому мощность электромагнитной волны, прошедшей че-
рез облако толщиной х в одном направлении,
Р = Ро1О’о>1₽х. (3.29)
Если предположить, что дипольное облако является экраном
для сигнала РЛС и ослабляет мощность электромагнитной волны в
10 раз (PIPо = 0,1), то можно рассчитать требуемую для этого кон-
центрацию диполей. Так, для облака толщиной х = 1 км требуется
й«15 диполей/м3.
Основной эффект от применения дипольных отражателей со-
стоит в маскирующем экранирующем эффекте, когда облако, рас-
полагаясь между целью и РЛС, ослабляет проходящие через него
зондирующие и отраженные сигналы. Вследствие этого эффекта
обычная РЛС, измеряющая дальность и пеленг, «не видит» цель за
облаком. Условием эффективности дипольных отражателей явля-
ется создание должной концентрации диполей в единице объема,
т. е. в итоге определяется числом сброшенных пачек. Импульсный
объем РЛС (рис. 3.15) определяется соотношением
И ~ ^А0а7?Афасти , (3.30)
где А0а, Афа — эффективные ширины луча ДНА РЛС; ти — дли-
тельность импульса РЛС.
В этом объеме должно оказаться столько диполей (л), чтобы
ЭПР объема составила
аг =«Г(а1)=<„)Я2де,Д<Р.£ук<а|), (3.31)
где (ci) = O,17X2cos40 — усредненная ЭПР одного диполя.
Рис. 3.15. Импульсный объем РЛС
352
3. Противолокационная маскировка
Эффективность дипольных отражателей будет достаточной,
если стц. В процессе динамического развертывания облака <Sv
постоянно меняется. Это следует учитывать при расчетах. Решая
задачу об обнаружении точечной цели на фоне дипольного облака,
рассеянный и переотраженный облаком сигнал уподобляют внеш-
нему гауссовскому небелому шуму со спектральной плотностью
G(F) (рис. 3.16). Поэтому теория обнаружения цели среди диполь-
ных отражателей не отличается от классической теории обнаруже-
ния точечной цели на фоне небелого шума.
На основе теории обнаружения можно рассчитать эффектив-
ную ширину £.,<)) маскируемой дипольной помехой области [7]. На
рис. 3.16 показано отношение мощности помех (отраженных от
дипольных отражателей) к мощности сигнала РЛС в зависимости
от пеленга 0 цели.
Случай 1 (высокая концентрация диполей в облаке) дает эффек-
тивную ширину маскируемой области £41, т. е. линейное расстоя-
ние, внутри которого сигнал не виден ни при каком пеленге. Для
облака с меньшей концентрацией (случай 2) эта область L^2 мень-
ше. Размер маскируемой области рассчитывается по формуле, при-
веденной в работе [7]:
£э=ЛА0а+/пэ, (3.32)
где /пэ — эффективная ширина облака дипольных отражателей.
Рис. 3.16. Сигналы и помехи, отраженные
диполями:
1 — помехи от дипольных отражателей высокой
концентрации; 2 — помехи от дипольных отража-
телей низкой концентрации; 3 — полезный сигнал
3.2. Маскирующие воздействия на среду распространения сигнала 353
В технике РЛР, как и вообще в радиолокации, для борьбы с
пассивными дипольными помехами применяют импульсно-
когерентные РЛС с устройствами селекции движущихся целей
(СДЦ), основанными на работе устройств череспериодной ком-
пенсации (рис. 3.17).
Рис. 3.17. Схема СДЦ, основанного на прин-
ципе череспериодной компенсации:
АП — антенный переключатель; Г — задающий гене-
ратор; КГ — когерентный гетеродин; М и МГ — мо-
дуляторы; CMi, СМ2 — смесители; ЛЗ — линия за-
держки на время Г; У О—устройство отображения
РЛС, излучая импульсный некогерентный сигнал длительно-
стью т с периодом повторения Т, синхронизирует (на время Т) ко-
герентный гетеродин (КГ) с точностью до фазы. В результате от-
раженный сигнал становится когерентным с напряжением КГ (uc(t)
на рис. 3.18). Сигнал, отраженный от неподвижной цели (напри-
мер, заторможенного дипольного отражателя), будет иметь посто-
янную амплитуду (рис. 3.18, а).
Сигнал, отраженный от движущейся цели, будет иметь допле-
ровский сдвиг частоты F%:
uc(t) = ЕЛ cos[2%(/0 + F,)t-Фс(/)]. (3.33)
Биения с сигналом КГГ
иг (() = cos[2Tt/V—Фс (/)] (3.34)
дадут на выходе видеодетектора радиоприемного устройства ко-
лебание
354
3. Противолокационная маскировка
u&(f) = kE cos ErQ cos 2nFpt,
(3-35)
т. e. импульсное колебание, промодулированное по амплитуде
(рис. 3.18, б) синусоидой с доплеровской частотой.
Устройство череспериодной компенсации (см. рис. 3.17) по-
зволяет выделить на выходе от движущейся цели ненулевой сиг-
нал. Устройство СДЦ способствует снижению эффекта от приме-
нения дипольных отражателей примерно на 20 дБ.
Uc(0a Vu^ ~ °
Рис. 3.18. Сигналы, отраженные
неподвижной (а) и движущейся
(б) целями
Для обеспечения высокой эффективности подавления им-
пульсных когерентных РЛС необходимо создавать облако диполь-
ных отражателей с большой концентрацией диполей. Эффект от
применения схем СДЦ ослабляется, если дипольные отражатели
имеют ненулевую скорость. Для повышения эффективности мас-
кировки с учетом торможения диполей необходимо пополнять об-
лако дополнительными диполями за счет дополнительного их
вбрасывания. Более подробный анализ и описание схем СДЦ мож-
но найти в работах [2, 7].
Современные РЛС с непрерывным сигналом когерентного типа
непосредственно измеряют скорость движения объекта с помощью
автоматических систем сопровождения по скорости. Поскольку
дипольные отражатели быстро тормозятся встречным потоком
ветра, облако быстро уходит из следящего строба автосопровож-
дения и помеха быстро теряет эффективность. Поэтому примене-
ние дипольных отражателей против РЛС с непрерывным излуче-
нием малоэффективно.
3.2. Маскирующие воздействия на среду распространения сигнала 355
Отражения от диполей имеют резонансный характер, и ЭПР
диполя зависит от его длины (рис. 3.19).
На ЭПР диполей влияют эффект слипания их и перемешива-
ния; динамика развертывания диполей; поляризация падающей
волны; методы рассеяния дипольных отражателей; окружающая
атмосфера; экранирующий эффект; скорость падения диполей и
<^1тах
0,5 1,0 1,5 2,0 2,5
1_
X
Рис. 3.19. Резонансы дипольных
отражателей
т. д. Поэтому многие методы расчета, изложенные выше, позволя-
ют получить лишь приближенные данные для планирования меро-
приятий РЭП с применением дипольных отражателей.
Пачки диполей разбрасываются с такой частотой, при которой
расстояние между дипольными отражателями соседних пачек бы-
ло бы меньше разрешающего объема РЛС по дальности 87? и по
углу. Обычно отношение мощностей, отраженных от цели и от
облака внутри импульсного объема РЛС, превышает 3 дБ. При раз-
вертывании диполей следует учитывать полное время развития
облака из пачки — от десятых долей секунды до нескольких се-
кунд в зависимости от типа диполей и атмосферных условий (в
верхних слоях атмосферы развитие происходит быстрее). В сред-
нем время падения диполей составляет примерно 75 м/мин (для
тонких диполей ленточного типа).
Интенсивное развитие методов и средств постановки пассив-
ных помех привело к созданию дипольных отражателей более
сложных и оригинальных конструкций, придающих этим средст-
вам радиомаскировки новые качества. Во-первых, диполи стали
делать из тонких, прочных и упругих нитей (из стекловолокна, уг-
лепластика), покрытых слоем металла. Такие нити плотнее упако-
вываются в пачки и меньше спутываются и рвутся. В результате
каждая пачка может создать облако с большей ЭПР, чем пачка ста-
356
3. Противолокационная маскировка
ниолевых полосок. Во-вторых, были разработаны специальные
формы и конструкции, позволяющие диполям дольше плавать в
атмосфере. Для этого созданы диполи из очень тонких (диаметром
порядка 1 мм) металлизированных трубок, наполненных легким
газом. Трубка герметизирована, а ее длина примерно равна поло-
вине рабочей длины волны РЛС.
При нормальном атмосферном давлении дипольный элемент
частично сложен. На высоте, где его вес равен весу вытесняемого
им воздуха, он полностью раздувается давлением газа внутри
трубки. Используя это техническое решение, можно создавать ди-
поли, остающиеся во взвешенном состоянии на различной высоте
над землей в условиях стандартной атмосферы. Были также созда-
ны диполи, которые медленнее опускаются за счет авторотации
(рис. 3.20).
Вращающийся диполь выполняют из тонкой металлизирован-
ной пленки. Два стабилизатора, размещенные на конце диполя,
отогнуты друг относительно друга на 45°. При выбросе диполей с
ЛА в больших количествах каждый отдельный диполь будет вра-
щаться относительно своей центральной оси. Малый вес отдель-
ных диполей в сочетании с вращательным движением позволяет
им оставаться практически на одной и той же высоте в течение
относительно большого интервала времени. Кроме того, вращение
стабилизирует вертикальную ориентацию диполя в любой момент
времени и способствует доплеровскому расширению спектра от-
раженного сигнала, препятствуя селекции движущейся цели на
фоне отражений от дипольных облаков.
Дипольные отражатели, используемые для
прикрытия головных частей баллистических ра-
кет, должны работать в условиях гиперзвуковых
скоростей, не разрушаться на участке спуска в
атмосфере вплоть до очень малых высот и дви-
гаться в атмосфере по траектории, подобной тра-
ектории спуска головной части баллистической
м ракеты. Кроме того, диполи должны ориентиро-
ваться поперек луча РЛС. Необходимые аэроди-
Рис. 3.20. Вра- намические, баллистические и электродинамиче-
щающийся ди- ские характеристики обеспечиваются у диполей,
поль выполненных в виде плоских конструкций с кли-
3.2. Маскирующие воздействия на среду распространения сигнала 357
новидными концами, один из которых длиннее другого. Это по-
зволяет сместить центр тяжести диполя вперед. У задней кромки
выполняют отверстие, чтобы сместить центр тяжести относитель-
но центра приложения аэродинамических сил.
Рис. 3.21. Специальные формы самостаби-
лизирующихся и самоориентирующихся
диполей
Диполи могут иметь различную толщину по длине. Тонкая уд-
линенная конфигурация обеспечивает низкое сопротивление и вы-
сокий баллистический коэффициент. Изменяя угол атаки, под ко-
торым отдельные диполи будут стабилизироваться в полете,
можно задать высоту, на которой они изменят ориентацию. Изме-
нение углов атаки обеспечивается отогнутыми частями с разными
углами и площадью отгиба. Эти конструктивные приемы изобра-
жены на рис. 3.21.
3.2.3. Маскировка сигнала плазменными образованиями
Неоднородности, в которых преломляются, поглощаются и от
которых отражаются электромагнитные волны, могут создаваться
не только макроскопическими объектами вроде облаков диполь-
ных отражателей. Такие же эффекты наблюдаются при взаимодей-
ствии электромагнитной волны с ионизованной газовой средой,
где среднее расстояние между заряженными частицами меньше
длины волны. Поэтому модификация среды на трассе распростра-
нения сигнала, предусматривающая искусственное создание плаз-
менных образований, может использоваться для радиомаскировки
[7]. Механизм действия искусственных плазменных образований
ничем не отличается от механизма, который отвечает взаимодей-
ствию радиосигнала с электронной плазмой в ионосфере. Точно
358
3. Противолокационная маскировка
(3.36)
так же неоднородности, искусственно созданные на трассе распро-
странения радиолокационного сигнала, вызывают отражение, рас-
сеяние и поглощение его энергии.
Свободные электроны под действием электрического поля па-
дающей волны совершают вынужденные колебания. Частота коле-
баний равна несущей частоте радиосигнала. В процессе колеба-
тельного движения электроны сталкиваются с нейтральными
молекулами, атомами и ионами. При этом энергия электронов пе-
редается другим частицам, т. е. энергия электрического поля пере-
ходит в тепловую энергию среды.
Коэффициент поглощения радиоволн, измеряемый в децибелах
на километр длины трассы распространения их в плазменном облаке,
1,8-10-27Vk
Р — 2 2
со +к2
где N — средняя концентрация электронов в плазменном обла-
ке; к — число соударений электронов с ионами, атомами и мо-
лекулами газов; со = 2 л/'— угловая частота радиолокационного
сигнала.
Как ясно из (3.36), поглощение имеет резонансные свойства:
коэффициент Р максимален при некотором значении частоты сиг-
^>0
нала, когда Р = ртах при — = 0, т. е. со = к. Но частота соударений
Зсо
пропорциональна плотности воздуха, она меняется с высотой и с
изменением метеорологических условий. Поэтому всегда сущест-
вует высотный слой, на котором затухание сигнала максимально.
В естественных (нормальных) условиях затухание максимально в
полосе шириной примерно 16 км около высоты 72 км. Частота со-
ударений на этой высоте примерно равна 106 с-1.
На частотах более 5 МГц длина волны намного меньше длины
свободного пробега электронов, со2»к2. Поэтому можно (3.36)
упростить и рассчитать коэффициент затухания по формуле
Р^0,45-10’34г-
(3.37)
Из формулы (3.37) следует, что для создания условий требуе-
мого поглощения электромагнитной волны локальным плазмен-
3.2. Маскирующие воздействия на среду распространения сигнала 359
ным образованием нужно в облаке плазмы обеспечить концентра-
цию электронов
№2,2-1О30/2 м’3. (3.38)
Например, для обеспечения затухания 0 » 10 дБ на высоте
Н « 72 км на волне длиной Л ® 3 см нужно обеспечить концентра-
цию электронов N= 0,39-1018 м-3. Практически заметное поглоще-
ние радиоволн может иметь место на малых высотах уже при кон-
центрациях N= 10п...1014м-3.
В настоящее время разработаны и применяются различные ме-
тоды создания искусственных плазменных образований в атмо-
сфере. Ионизацию атмосферных газов с образованием свободных
электронов можно получить в результате реакций термического
или взрывного типа. Так, работающие на большой высоте ракет-
ные двигатели могут генерировать плазму с высокой концентраци-
ей заряженных частиц, особенно если добавить в топливную ком-
позицию легко ионизируемые вещества (легкие металлы и
некоторые их соединения). В результате сгорания топлива образу-
ется большое количество свободных электронов и пары металлов.
Под влиянием солнечного света на высоте проведения реакции
нейтральные металлы подвергаются фотоионизации, увеличивая
продолжительность жизни плазменного облака. В качестве иони-
зующих добавок к топливам можно использовать алюминий с нит-
ратами калия или цезия. Пары этих металлов имеют потенциал
ионизации всего 3...5 эВ. Недостатками таких методов формиро-
вания ионизированных образований являются низкая эффектив-
ность преобразования вещества в ионы и ограничения по высоте
формирования облака (не менее 100 км над поверхностью Земли).
На меньших высотах можно сформировать ионизированные
облака за счет распыления из сопла ракетного двигателя микро-
сфер, покрытых аблирующим материалом (гидратами лития или
натрия). Аблирующее покрытие уносится струей горячего газа и
под действием фотонов солнечного излучения подвергается фото-
ионизации, образуя положительно заряженные ионы металлов и
свободные электроны. Расчеты и эксперименты показывают высо-
кие значения КПД такого метода: из каждого килограмма гидрата
лития LiH получается 875 г ионизированного элементарного лития
и примерно 7-1022 свободных электронов. При распределении это-
360
3. Противолокационная маскировка
го количества электронов в объеме около 100 м3 (это объем газово-
го облака из сопла небольшого ракетного двигателя) можно до-
биться концентрации электронов N « 1014. Такой метод создания
плазменных облаков может применяться на меньших высотах
(15...60 км).
Известны и другие методы термических реакций для создания
плазменных образований. Например, способы, основанные на до-
полнительной ионизации высокотемпературных продуктов сгора-
ния, выводимых из сопла реактивного двигателя. Для дополни-
тельной ионизации используют порошки алюминия, цезия, магния
и других металлов в углеводородном топливе. Эти вещества вно-
сятся в топливную композицию или распыляются за срезом сопла
двигателя.
На эффективность ионных образований, создаваемых посред-
ством рассеяния частиц химических веществ и последующей фо-
тоионизации, сильно влияет влажность воздуха. Сами вещества
небезопасны в обращении и при хранении.
Принципиально другие механизмы ионизации атмосферных
газов основаны на использовании лазерного излучения. Взаимо-
действуя с веществом, лазерный луч способен ионизировать ато-
мы газов на трассе их распространения. Но чем больше степень
ионизации, тем больше поглощение и рассеяние самого лазерно-
го луча. Высокие уровни ионизации приводят к поглощению
энергии и делают след существенно непрозрачным для лазерного
луча. Поэтому в литературе обсуждаются некоторые технические
идеи и решения, основанные на применении пространственно
распределенной системы лазеров, излучение которых фокусиру-
ют в заданном объеме пространства. Интенсивность излучения
каждого лазера невелика и не вызывает ионизации атмосферы.
Однако суммарный эффект действия излучений нескольких лазе-
ров, сфокусированных в заданной области, может выделить в
этой области энергию, достаточную для создания значительных
плазменных образований. Разумеется, для использования систе-
мы лазеров требуются специальные устройства наведения и син-
хронизации, если лазеры работают в импульсном режиме.
Лазерный луч можно применять для формирования ионизиро-
ванного следа относительно большой длины с ионизацией низкого
уровня или для формирования высокоионизированного канала
3.2. Маскирующие воздействия на среду распространения сигнала 361
малой длины. Для получения высокой ионизации на больших рас-
стояниях в плотной газовой среде можно использовать маломощ-
ный лазер с импульсным или непрерывным излучением, создаю-
щий след с низкой ионизацией.
Импульсный режим имеет некоторые преимущества. Во-
первых, импульсная система обеспечивает более высокие мгно-
венные уровни энергии, в результате чего может быть увеличена
эффективная длина ионизированного канала. Во-вторых, с течени-
ем времени от момента образования высокоионизированного ка-
нала его исходная прямолинейная конфигурация будет постепенно
искажаться за счет перемещений в поперечных направлениях. По-
этому периодическое гашение канала в импульсной системе
позволяет подавить нестабильную ионизацию и повторно восста-
новить новый высокоионизированный канал.
Степень ионизации, обусловленная действием лазерного излу-
чения, формирующего исходный след, при атмосферном давлении
может составить Ю10...Ю15 ионов/см3. Концентрация ионов в ла-
зерном следе, повышенная в результате дополнительного разряда,
может составить 1018 ионов/см3. Эффективность дополнительной
волны ионизирующего потенциала от высоковольтного генератора
может быть увеличена вследствие наложения пульсаций перемен-
ного тока достаточно высокой частоты на вершину импульса гене-
ратора (например, частота пульсаций 100 кГц позволяет создать
около 20 циклов переменной составляющей на длительности ла-
зерного импульса 100 мкс).
Самый мощный источник ионизации атмосферных газов —
ядерный взрыв [7]. Взрывы на высотах менее 16 км не вызыва-
ют продолжительной и устойчивой ионизации. Поэтому они не
оказывают существенного влияния на условия распространения
радиоволн. Области сильного поглощения и отражения могут
образовываться при наземных взрывах. Но они связаны не с ио-
низацией, а с выбросом в атмосферу большого количества пыли,
водяного пара и аэрозолей. При взрывах на больших высотах
(около 40...50 км) образуются устойчивые области с невысокой
концентрацией электронов (N » 1010...10н м-3). При этом на ио-
низацию атмосферных газов расходуется 10...80 % энергии вы-
сотного ядерного взрыва. Эти области могут существовать не-
сколько часов.
362
3. Противолокационная маскировка
В первом приближении можно рассматривать ионизированные
области двух видов. Первый вид — области с преобладанием мед-
ленных электронов. Эти электроны образуются вследствие иони-
зации среды тепловым рентгеновским излучением. Поперечники
этих областей составляют сотни километров. Концентрация элек-
тронов в них убывает с течением времени:
1013
N = ^~, (3-39)
где t — время, с.
Развиваются эти области в основном по законам диффузии.
Второй вид — области быстрых (релятивистских) электронов
(р-частиц). Эти частицы излучаются радиоактивными продуктами
деления. Быстрые электроны захватываются магнитным полем
Земли (рис. 3.22).
магнитный
полюс
Рис. 3.22. Траектории электронов в магнитном
поле Земли
В результате ионизация приобретает глобальный характер. На
электроны в магнитном поле действует сила Лоренца:
F=e[v,xH],
(3.40)
3.2. Маскирующие воздействия на среду распространения сигнала 363
где е — заряд электрона; ve — вектор скорости электрона; Н —
вектор напряженности магнитного поля Земли.
Если бы магнитное поле было соленоидально, электроны дви-
гались бы по цилиндрической спирали (сила F направлена по нор-
мали к векторам уе и Н) с постоянным шагом и радиусом цилиндра
(ларморовским радиусом)
mv
~еН’
(3.41)
где т — масса электрона.
В неоднородном магнитном поле, когда силовые линии схо-
дятся под углами у (см. рис. 3.22), имеются тангенциальная ком-
понента вектора напряженности магнитного поля Земли Нх, соз-
дающая центростремительную силу для вращения электронов, и
нормальная его компонента Нп, выталкивающая электрон в зону с
меньшей напряженностью поля. Поскольку скорость электронов
при этом сложном движении почти не уменьшается, они начинают
двигаться по коническим спиралям.
Соотношение между компонентами Нх и Нп изменяется в про-
странстве. И это приводит к изменению компонент вектора скоро-
сти электрона (см. рис. 3.22). При этом
• 2 *2
sin а0 = sin a
Н. Н
откуда
sin a0 =—sin a. (3.43)
но
Поступательное движение электрона прекратится, когда вы-
полнится условие sin a = 1, т. е. когда
Я = —ф—. (3.44)
sin a0
Соотношение (3.44) означает, что электроны не могут прони-
кать в области с высокой напряженностью магнитного поля.
Достигнув этих областей, электроны меняют знак скорости. Об-
364
3. Противолокационная маскировка
разно говоря, магнитное поле служит зеркалом для электронов.
Такие отражающие области располагаются в зонах магнитных
полюсов Земли.
Кроме движения к магнитным полюсам электроны смещаются
в направлении с востока на запад. Это обусловлено неоднородно-
стью магнитного поля по высоте.
Таким образом, два эффекта — смещение к полюсам и дрейф с
востока на запад — обусловливают глобальный характер иониза-
ции околоземного пространства в результате высотного ядерного
взрыва.
Ионизированные области вблизи полюсов способны сохра-
няться в течение нескольких дней, но концентрация быстрых элек-
тронов при их глобальном размывании невелика. Поэтому иониза-
ция способна оказывать влияние только на работу ЗГ РЛС
метрового диапазона.
3.2.4. Противодействие средствам РЛР
на основе модификации сигнального пространства
Мощный способ противодействия средствам РЛР — создание
ложной сигнальной обстановки путем применения ложных радио-
локационных целей. Пассивные ложные цели (ЛЦ) не изменяют
электрических свойств среды распространения сигнала. Они иска-
жают свойства и характеристики информационной среды функ-
ционирования средств РЛР, имитируя реальные цели и дезинфор-
мируя РЛС противника. Обычно ЛЦ — это малоразмерные
(точечные) объекты с пассивными отражателями. Пассивные ЛЦ,
как правило, размещаются на дистанционно пилотируемых лета-
тельных аппаратах (ДПЛА), планерах, аэростатах, парашютах. Они
могут выбрасываться в зону действия РЛС (рис. 3.23, а) и создавать
впечатление массированного налета (эффект размножения строя
ударных ЛА). На рис. 3.23, б пассивные ложные цели выбрасыва-
ются с ДПЛА (в переднюю или заднюю полусферу), а также вы-
брасываются с ударных ЛА для их индивидуальной и взаимной
защиты.
В качестве пассивных ЛЦ применяют уголковые отражатели;
линзы Люнеберга; аэростаты с металлическим покрытием; решет-
ки Ван-Атта; большие металлические экраны.
3.2. Маскирующие воздействия на среду распространения сигнала 365
Рис. 3.23. Применение ЛЦ:
а — в зоне действия РЛС; б — для индиви-
дуальной защиты ЛА
РЛС
РЛС
Как и дипольные отражатели, пассивные ложные цели после
выброса в атмосферу тормозятся, снижая скорость по сравнению
со скоростями ЛА. Эффект торможения позволяет селектировать
ложные цели от истинных с помощью СДЦ. Линза Люнеберга [7]
представляет собой диэлектрический шар (рис. 3.24). Коэффици-
ент преломления диэлектрика в идеальной линзе Люнеберга за-
висит только от отношения текущего радиуса линзы г к наруж-
ному радиусу линзы R:
п =
На рис. 3.24 изображены траектории лучей
в линзе Люнеберга. Центральный луч не ис-
пытывает преломлений в линзе, в то время как
траектории остальных лучей искривляются.
В результате все лучи фокусируются в точке
на внутренней стороне сферы, покрытой ме-
(3-45)
Рис. 3.24. Линза
Люнеберга
366
3. Противолокационная маскировка
таллической пленкой. Эта точка, являясь источником вторичных
электромагнитных волн, будет создавать на выходе линзы синфазное
распределение поля, поэтому максимум диаграммы переизлучения
будет совпадать с направлением прихода падающей волны.
Отраженная
мощность, дБ
Сектор
прикрытия, град
Рис. 3.25. ДОР линз Люнеберга
Максимальная эффективная площадь рассеяния линзы Люнебер-
га может быть найдена из соотношения, приведенного в работе [7]:
, Я4
оп=4713—. (3.46)
А
Ложные цели на основе линз Люнеберга могут иметь различ-
ную угловую зону переизлучения 90... 180° и значительную ЭПР.
Важной характеристикой пассивных ЛЦ является диаграмма
обратного рассеяния (диаграмма направленности на отражение).
Подобная диаграмма для линз Люнеберга изображена на рис. 3.25.
Здесь же для сравнения показаны ДОР уголкового отражателя и
металлической пластинки.
Для противодействия двухпозиционным РЛС созданы биста-
тические отражатели (рис. 3.26, а). Диаграмма обратного рассея-
ния линзы Люнеберга такого типа показана на рис. 3.26, б.
На рис. 3.27 показаны эскизы конструкции и формы диаграмм
обратного рассеяния для трех типов уголковых отражателей: пря-
моугольных, треугольных, восьмиугольных.
3.2. Маскирующие воздействия на среду распространения сигнала 367
б
Рис. 3.26. ДОР линз Люнеберга бистатических
отражателей:
а — бистатический отражатель; б — ДОР бистати-
ческого отражателя
а
Угол падения волн, град
в
Рис. 3.27. Уголковые отражатели:
а — прямоугольные; б — треугольные; в —
восьмиугольные
Обычно ЭПР уголка связана с длиной ребра а и длиной волны
X следующими соотношениями применительно для перечислен-
ных выше указателей:
368
3. Противолокационная маскировка
. 12ла4
а)о =
б) а =
V
4 ла 4
в) а =
3Z2 ’
Зла4
I2”*
(3-47)
Имеется много технических решений, позволяющих преодо-
леть главный недостаток пассивных ложных целей — малую ско-
рость движения в атмосфере. Различие скоростей истинных и
ложных целей позволяет селектировать их, снижая эффективность
дезинформации РЛС. Столь же очевидный, сколь дорогой способ
создавать ЛЦ, не различимые с источником маскируемого сигнала,
предусматривает применение специальных отстреливаемых ракет.
Такие ракеты могут использоваться для маскировки самолетов и
баллистических целей на траектории.
Заметное развитие получили пассивные средства имитации
подвижных целей, вносящие частотные искажения в отражае-
мый сигнал. Различные варианты таких средств, выполненных
на основе вращающихся уголковых отражателей, изображены
на рис. 3.28.
В варианте, показанном на рис. 3.28, а, несколько уголковых
отражателей собраны в блок и закреплены на основании, продоль-
ная ось которого приводится во вращение специальным двигате-
лем или набегающим воздушным потоком. Скорость вращения
складывается со скоростью поступательного движения платфор-
мы, на которой установлен блок уголковых отражателей. В резуль-
тате сигнал, отраженный решеткой из уголков, приобретает боль-
ший доплеровский сдвиг, чем сигнал, отраженный от платформы.
Но поскольку ЭПР решетки уголковых отражателей очень велика
(гораздо больше, чем у платформы), слабый сигнал с меньшим до-
плеровским сдвигом маскируется мощным сдвинутым по частоте
сигналом. Если систему уголковых отражателей вращать так, что-
бы ее скорость была направлена в сторону, противоположную на-
правлению движения носителя, ложная цель будет имитировать
удаление от РЛС.
3.2. Маскирующие воздействия на среду распространения сигнала 369
Система уголковых отражателей
вращения
Рис. 3.28. Модифицированные конструкции уголковых от-
ражателей:
а — вращающаяся сборка объемных уголковых отражателей;
б — уголковый отражатель с вибрирующей гранью
Вибрирующая грань
Подобное устройство можно использовать на условно неподвиж-
ной Земле как имитатор движения объекта. Его можно применять на
защищаемом объекте для искажения информации о скорости. Поме-
ха, создаваемая таким устройством, инвариантна относительно час-
тоты запросного сигнала РЛС и потому эффективна против РЛС со
скачками частоты. Устройство можно также применять на беспилот-
ном ЛА или в качестве сбрасываемых с ЛА ловушек, его можно под-
вешивать на парашюте или на воздушном шаре.
Отражатели выполняют из металлической сетки или помещают
их в радиопрозрачную оболочку. С помощью конструктивных
приемов, предусматривающих комбинирование различных типов
отражателей, могут быть получены различные поляризационные и
модуляционные характеристики отраженного сигнала.
На рис. 3.28, б представлена еще одна пассивная система пере-
излучения радиолокационного сигнала с введением ложного
доплеровского сдвига. Одна из граней уголкового отражателя,
последовательно переотражающих падающий сигнал, вибрирует.
Вибрация может создаваться разными механическими и электро-
магнитными приводами, акустическими и пневматическими
устройствами. Вследствие вибрации отраженный сигнал будет мо-
дулирован по частоте, т. е. около каждой спектральной состав-
ляющей сформируются комбинационные составляющие. Соседние
составляющие отстоят друг от друга на частоту, с которой колеб-
лется грань уголкового отражателя. Частота вибраций сравнитель-
но невелика: для имитации движения ложной цели с радиальной
370
3. Противолокационная маскировка
скоростью v « 100 км/ч при несущей частоте зондирующего сигна-
ла РЛС fo« Ю10 Гц требуется сдвиг по частоте &f = 2 кГц.
Ответчик Ван-Атта — это антенная решетка, выполненная из
большого количества элементарных антенн (диполей или спира-
лей). На рис. 3.29 изображена решетка Ван-Атта, составленная из
вибраторов [7].
Рис. 3.29. Ложная цель на основе решетки Ван-Атта
Диполи находятся на равном удалении от оси симметрии от-
ветчика и попарно соединены коаксиальным кабелем одинаковой
электрической длины. Электромагнитная волна, принимаемая ди-
полем 1, переизлучатся диполем 12. В свою очередь, диполь 1 пе-
реизлучает волну, принимаемую диполем 12. Сигналы, принятые и
переизлучаемые диполями, проходят одинаковый путь. Поэтому
направление максимума диаграммы переизлучения будет совпа-
дать с направлением прихода падающей волны.
Решетки рассчитывают на отражение волн с любой поляриза-
цией. Для этого диполи располагают на металлическом экране под
различными углами (как правило, каждая пара диполей под углом
90° к соседней паре).
Эффективная площадь рассеяния ответчика, образованного п
полуволновыми диполями, расположенными на расстоянии 1/2
друг от друга и на расстоянии 1/4 от отражающего экрана, может
быть найдена по формуле, приведенной в работе [7]:
<т = 4л— sin —cos 0
I2 <2
(3-48)
где 0 — угол падения волны; S — площадь раскрыва решетки.
3.2. Маскирующие воздействия на среду распространения сигнала 371
Учитывая, что можно получить выражение для
максимальной ЭПР решетки Ван-Атта:
о = ^и2к2. (3.49)
Недостатком отражателя Ван-Атта является его относительная
узкополосность.
Для создания распределенных в пространстве образований, из-
лучающих помехи, используют естественные и искусственные
объекты. Естественные объекты — водная и земная поверхности,
метеообразования, искусственные — дипольные облака, плазмен-
ные образования и т. п. Чтобы эти образования излучали помехи,
их подсвечивают излучением станций постановки активных
помех. Обычно станции подсвета располагаются на самолетах со-
провождения или на ударных самолетах. В результате такие обра-
зования становятся нестационарными, неоднородными, простран-
ственно протяженными помехами со спектральной плотностью
6(/',ос, ?), зависящей от частоты, углового положения и времени.
Подбор облучающего сигнала при создании пассивно-актив-
ных помех позволяет исправить многие дефекты, снижающие
эффективность пассивных помех. Поэтому пассивно-активные
помехи могут с успехом применяться как против когерентных
РЛС с непрерывным сигналом, так и против РЛС с СДЦ. Эти
помехи, как правило, являются перенацеливающими и исполь-
зуются для индивидуально-взаимной защиты ЛА от средств пе-
рехвата противовоздушной обороны.
Перенацеливающие помехи обычно создаются так, как показа-
но на рис. 3.30. На рис 3.30, а помеха перенацеливает РЛС на ди-
польные облака и на Землю (помеха типа «антипод»). Как видно
на рис. 3.30, б, станция активных помех организует подсвет отра-
жающих объектов и искусственных образований, модифицирую-
щих среду распространения сигнала, антеннами с узконаправлен-
ной диафрагмой.
В прямом направлении на РЛС диаграмма направленности стан-
ции активных помех имеет провал. Остронаправленные лучи стан-
ции активных помех нужны для того, чтобы создать достаточный
энергетический потенциал помех, рассеянных дипольным облаком
372
3. Противолокационная маскировка
Рис. 3.30. Использование отражений для
создания перенацеливающих помех:
а — перенацеливание РЛС на облака ДО; б —
подсвет ДО и Земли
(с учетом потерь 15...20 дБ) и Землей (потери до 30 дБ). Подоб-
ные антенные системы изготовляются в виде фазированных ан-
тенных решеток. Подсвет организуют двумя видами сигналов:
шумовыми (прицельными и заградительными) или имитацион-
ными. Помехи с шумовым подсветом сегодня считаются самыми
эффективными пространственно распределенными помехами.
Вид имитационных помех зависит от назначения и типа подав-
ляемой РЛС.
На рис. 3.31 показано, как ударный ЛА сбрасывает пассивно-
активные дипольные помехи. Он имеет двухканальную станцию
активных помех с носовой и хвостовой антеннами. Хвостовая ан-
тенна с коэффициентом усиления G < 40 дБ подсвечивает облако
диполей, сброшенное в заднюю полусферу для создания простран-
ственно распределенной помехи ип.до(0- Мощность боковых лепе-
стков ДНА должна быть значительно ниже мощности главного
лепестка, чтобы прямое излучение помехи не попало в РЛС. В пе-
редней полусфере располагается вторая антенна обычного типа с
G « 20 дБ. Эта антенна создает уводящую помеху un(f). Например,
перенацеливающую РЛС по углу на подсвеченное дипольное об-
3.2. Маскирующие воздействия на среду распространения сигнала 373
лако. Доплеровские сдвиги сигналов wn(0 и ип.до(0 различаются,
что должно учитываться в двухканальной станции активных по-
мех. Этот способ эффективен для противодействия следящим РЛС
сопровождения, а также радио- и радиолокационным головкам са-
монаведения ракет.
Рис. 3.31. Пассивно-активная
помеха
Рис. 3.32. Внутренний подсвет
пассивно-активными помехами
Еще один способ сброса дипольных отражателей для создания
пассивно-активных помех показан на рис. 3.32.
Постановщик помех выбрасывает дипольные отражатели в пе-
реднюю полусферу и сам же подсвечивает их изнутри. В подсве-
ченном облаке летят и ударный ЛА, и постановщик помех. Здесь
постановщик помех использует станцию активных помех с имита-
ционной помехой в полосе РЛС. Иногда станция активных помех
на постановщике помех создает ответную импульсную помеху для
подавления РЛС. В некоторых случаях удобно подсвечивать ди-
польное облако со специального постановщика помех, летящего
навстречу ударному ЛА (рис. 3.33). В этом случае от станции ак-
тивных помех требуется излучение со значительно меньшим энер-
гетическим потенциалом.
Отражения от земной и водной поверхности могут обеспечивать
очень хорошую индивидуальную защиту ЛА на малых высотах.
Рис. 3.33. Вариант подсветки
дипольного облака
374
3. Противолокационная маскировка
Самолет, летящий на малой высоте, имеет двухканальную
станцию активных помех с двумя антеннами. Каждая антенна ори-
ентируется в направлении полета ЛА, имеет коэффициент усиле-
ния, примерно равный 50 дБ. Антенна подсвечивает площадку S на
подстилающей поверхности. Пространственно распределенная
помеха воздействует на радиоголовку самонаведения ракеты и
создает смещение оценки угловой координаты цели. Чтобы пере-
нацелить радиоголовку самонаведения на эту ложную цель, соз-
дают уводящую помеху по углу. Помехи типа «антипод» с успе-
хом используют на авиационных крылатых ракетах для их
обороны от ракет класса «воздух - воздух».
Пассивно-активные помехи могут применяться против РЛС с
взаимокорреляционной обработкой. При работе в условиях пас-
сивно-активных помех в антенную систему пеленгатора кроме
сигнала попадают помехи, рассеянные пространственными обра-
зованиями. В частности, такими рассеивающими образованиями
могут быть облака дипольных отражателей.
ЛИТЕРАТУРА
1. Военный энциклопедический словарь. М.: Воениздат, 1986.
2. Бакулев П.А., Сосновский А.А. Радиолокационные и радионавига-
ционные системы: учеб, пособие для вузов. М.: Радио и связь, 1994.
3. Меньшаков Ю.К. Защита объектов и информации от технических
средств разведки. М.: Изд-во РГГУ, 2002.
4. Радиолокационные станции воздушной разведки / под ред. Г.С. Конд-
ратенкова. М.: Воениздат, 1983.
5. Цветное В.В., Демин В.П., Куприянов А.И. Радиоэлектронная борь-
ба: радиоразведка и радиопротиводействие. М.: Изд-во МАИ, 1998.
6. Цветное В.В., Демин В.П., Куприянов А.И. Радиоэлектронная борь-
ба: радиомаскировка и помехозащита. М.: Изд-во МАИ, 1999.
7. Вакин С.А., Шустов Л.Н. Основы радиоэлектронной борьбы: учеб,
пособие. Ч. 1. М.: ВВИА им. проф. Н.Е. Жуковского, 1998.
8. Цифровые радиоприемные системы: Справочник / под ред. М.И. Жод-
зижского. М.: Радио и связь, 1990.
9. Тихонов В.И. Статистическая радиотехника. М.: Радио и связь,
1982.
№. Хореев А.А. Технические средства и способы промышленного
шпионажа. М.: ЗАО Концерн «Дальснаб», 1997.
11. Березин Л.В., Вейцель В.А. Теория и проектирование радиосистем:
учеб, пособие для вузов. М.: Сов. радио, 1977.
12. Покровский Н.Б. Расчет и измерение разборчивости речи. М.:
Связьиздат, 1962.
13. Основы радиоуправления / П.А Агаджанов, В.А. Вейтцель, С.А Вол-
ковский и др. М.: Радио и связь, 1995.
14. Теоретические основы радиолокации / под ред. В.Е. Дулевича. М.:
Сов. радио, 1978.
15. Ширман ЯД. Теоретические основы радиолокации. М.: Сов. ра-
дио, 1970.
376
Литература
16. Сосулин Ю.Г. Теоретические основы радиолокации и радионави-
гации. М.: Радио и связь, 1992.
17. Вайнштейн Л.А. Электромагнитные волны. М.: Радио и связь, 1988.
18. Стадник А.М., Ермаков Г.В. Искажение СШП электромагнитных
импульсов в атмосфере Земли // РТиЭ. 1995. Т. 40. Выл. 7.
19. Уфимцев П.Я. Метод краевых волн в физической теории дифрак-
ции. М.: Сов. радио, 1962.
20. Боровиков В.А., Кинбер Б.Е. Геометрическая теория дифракции.
М.: Связь, 1978.
21. Keller J.B. Gtometrical theory of diffraction // Opt. Sec. Am. 1962.
V. 52. N 2.
22. Кобак В.О. Радиолокационные отражатели. М.: Сов. радио, 1975.
23. The scattering of electromagnetic waves by conducting spheres and
discs / J.S. Hey, G.S. Steward, J.J. Pinson, P.E.W. Prince // Proc. Phys. Soc. B.
1956. V. 69.
24. Отражательная способность радиолокационных целей // ТИИЭР.
1965. Т. 53. №8.
25. Гринберг ГА., Пименов Ю.В. К вопросу о дифракции ЭМВ на беско-
нечно тонких идеально проводящих экранах // ЖТФ. 1957. Т. 27. № 27.
26. Ross R.A. Scatteriry by finite cylinder // Proc. IEEE. 1967. V. 114. N 7.
27. Хенл X, Мауэ А., Вестпфаль KT. Теория дифракции: пер. с англ.
М.: Мир, 1964.
28. Гольдштейн Л.Д., Зернов Н.В. Электромагнитные поля и волны,
М.: Сов. радио, 1971.
29. De Lano R.N. A Teory of Target Glint or Angular Scintillation in Ra-
dar Tracking // Propc. IRE. 1953. V. 41. N 4.
30. Штагер E.A. Рассеяние радиоволн на телах сложной формы. М.:
Радио и связь, 1986.
31. Борзов А.Б., Быстров Р.П., Соколов А.В. Анализ радиолокационных
характеристик объектов сложной пространственной конфигурации: Лекция
для студентов физич. факультета МГУ. М.: Изд-во Моск, ун-та, 1998.
32. Космические траекторные измерения / под ред. П.А. Агаджа-
нова, В.Е. Дулевича, А.А. Коростелева. М.: Сов. радио, 1970.
33. Петренко П.Б., Бонч-Бруевич А.М. Моделирование и оценка
ионосферных искажений широкополосных радиосигналов в локации и
связи // Вопросы защиты информации. 2007. № 3.
34. Васин В.В., Степанов Б.М. Справочник-задачник по радиолока-
ции. М.: Сов. радио, 1977.
Литература
311
35. Алтунин А.Е., Семухин М.В. Модели и алгоритмы принятия реше-
ния в нечетких условиях. Тюмень: Тюменский гос. ун-т, 2000.
36. Newell A. Heuristic Programming: Ill Structured Problem // Progress
in Operation Pexarch. V. 3. New York: New Yorks Weley and Sons, 1969.
37. Левин Б.Р. Теоретические основы статистической радиотехники: в
3 кн. Кн. 3. М.: Сов. радио, 1976.
38. Справочник по теории автоматического управления / под ред.
А. А. Красовского. М.: Наука, 1987.
39. Тихонов А.И., Арсенин В.Я. Методы решения некорректных задач.
М.: Наука, 1974.
40. Калиткин Н.Н. Численные методы. М.: Наука, 1978.
41. Статистические методы обработки результатов наблюдений /
под ред. Р.М. Юсупова. М.: МО СССР, 1984.
42. Хан Г., Шапиро С. Статистические методы в инженерных задачах:
пер. с англ. М.: Мир, 1969.
43. Гаскаров Д.В., Шаповалов В.И. Малая выборка. М.: Статистика,
1978.
44. Царьков В.М. Многоканальные радиолокационные измерители.
М.: Сов. радио, 1980.
45. Принцип инвариантности в измерительной технике / Б.Н. Петров,
В.А. Викторов, Б.В. Лукин и др. М.: Наука, 1976.
46. Белорусец В.Б. Метод вспомогательных систем для идентифика-
ции динамических объектов при неизвестном входном воздействии //
Автоматика и телемеханика. 1981. № 8.
47. Функциональный анализ / под ред. С.Г. Крейна. М.: Наука, 1972.
48. Стрюков Б.А., Барон Л.П., Петренко П.Б. Об устойчивости мето-
да вспомогательных систем для идентификации динамических объектов
при неизвестном входном воздействии // Изв. вузов СССР. Приборо-
строение. 1987. № 2.
49. Loeb J.M., Cahen G.M. More about process identification // IEEE
Trans. Control. 1965. July. V. 10, N 4.
50. Беляевский Л.С., Новиков В.С., Олянюк П.В. Основы радионавига-
ции. М.: Транспорт, 1982.
51. Петренко П.Б., Стрюков Б.А. Повышение точности измерения
дальности на основе параметрической идентификации измерительных
каналов // Радиотехника. 1990. № 8.
52. Чайлдерс Д.Дж., Скиннер Д.П., Кемерейт Р.Ч. Кепстр и его при-
менение при обработке данных: Обзор // ТИИЭР. 1977. Т. 65. № 10.
378
Литература
53. Стокхэм Т., Кэннон Т., Ингебретсен Р. Цифровое восстановление
сигналов посредством неопределенной инверсной свертки: пер. с англ. И
ТИИЭР. 1975. Т. 63, № 4.
54. Подповерхностная радиолокация / под ред. М.И. Финкенпггейна.
М.: Радио и связь, 1994.
55. Бокс Дж., Дженкинс Г. Анализ временных рядов. Прогноз и
управление: пер. с англ. М.: Мир, 1974. Вып. 1.
56. Марпл-мл. С.А. Цифровой спектральный анализ и его приложе-
ния: пер. с англ. М.: Мир, 1990.
57. Rissanen J. Universal prior for the integers and estimation by mini-
mum descriptions length // Ann. Stat. 1983. V. 11.
58. Parzen E. On Consistent Estimates of the Spectrum of a Stationary
Time Series I I Ann. Math. Stat. 1957. V. 28.
59. Durbin J. An alternative to the bounds tests for testify serial correla-
tion in east squares regression // Economica. 1969. № 37.
60. Боровиков В.П., Ивченко Г.И. Прогнозирование в системе
STATISTIKA в среде Windows. М.: Финансы и статистика, 1999.
(А. Бендат Дж., Пирсол А. Прикладной спектральный анализ слу-
чайных процессов: пер. с англ. М.: Мир, 1989.
62. Welch P.D. The use of Furrier transform for Estimation of Power
Spectra // IEEE Trans. Audio and Electroacoustic. 1967. V. AU-15. N 2.
63. Жовинский A.H., Жовинский B.H. Инженерный экспресс-анализ
случайных процессов. М.: Энергия, 1979.
64. Петренко П.Б. Метод вычисления спектральных характеристик
нестационарных случайных процессов // Вопросы защиты информации.
2007. № 1.
65. Jonson N.L. Systems of Frequancy Curves Genererated by Method of
Translation // Biometrica. 1949. V. 36.
66. Фельдман Ю.И., Мандуровский И.А. Теория флуктуаций локаци-
онных сигналов, отраженных распределенными целями. М.: Радио и
связь, 1988.
67. Куприянов А.И., Сахаров А.В. Радиоэлектронные системы в ин-
формационном конфликте. М.: Вузовская книга, 2003.
ОГЛАВЛЕНИЕ
Введение...........................................................3
Список сокращений..................................................7
1. Радиоразведка и радиотехническая разведка.................9
1.1. Принципы работы технических средств
радиоэлектронной разведки ................................. 9
1.1.1. Состав аппаратуры средств РРТР.....................10
1.1.2. Анализ сигнальной обстановки.......................12
1.1.2.1. Поиск информативных радиосигналов средствами РРТР ..12
1.1.2.2. Поиск по частоте .............................13
1.1.2.3. Поиск в пространстве (по направлению).........22
1.2. Обнаружение сигнала средствами РРТР....................27
1.2.1. Оптимальный приемник РРТР для обнаружения сигнала........27
1.2.2. Показатели качества обнаружения точно известного сигнала.34
1.2.3. Качество обнаружения при ограниченных
априорных сведениях о сигнале............................37
1.3. Измерение параметров сигналов..........................47
1.3.1. Измерение и запоминание частоты сигнала средствами РРТР ....47
1.3.2. Пеленгация РЭС средствами РРТР.....................53
1.4. Точность определения сигнальных параметров средствами РРТР ...67
1.4.1. Условия возникновения погрешности. Нормальные
и аномальные погрешности.................................67
1.4.2. Аномальные погрешности при измерении задержки
и частоты радиосигнала ..................................84
1.5. Перехват сообщений средствами радиоразведки............97
1.5.1. Перехват аналоговых сообщений......................97
1.5.2. Перехват сигналов систем с кодово-импульсной модуляцией .... 118
2. Радиолокационная разведка...............................130
2.1. Технические основы РЛР................................130
2.1.1. Задачи и организация РЛР..........................130
2.1.2. Принципы формирования и извлечения радиолокационной
информации..............................................136
380
Оглавление
2.1.2.1. Прямолинейность и постоянство скорости распростра-
нения электромагнитного поля ..........................137
2.1.2.2. Отражательная способность радиолокационных целей
и физическая природа рассеяния электромагнитных волн ... 138
2.1.2.3. Эффект Доплера ...............................143
2.1.2.4. Эффект направленного излучения и приема радиоволн
антенными системами.....................................145
2.1.3. Классификация и сравнительный анализ методов
расчета ЭПР...............................................146
2.1.4. Оценка влияния атмосферы на распространение сигналов
при широкополосном радиолокационном зондировании
объектов .................................................151
2.1.5. Показатели качества работы средств РЛР.............159
2.1.6. Зондирующие сигналы средств РЛР....................164
2.2. РЛР в сложной радиолокационной обстановке .............176
2.2.1. Особенности ведения радиолокационной параметрической
разведки в условиях неопределенности......................176
2.2.2. Повышение точности радиолокационных измерений на основе
параметрической идентификации измерительных каналов ......180
2.2.3. Идентификация радиолокационных целей по результатам
измерений в условиях неопределенности.....................194
2.2.3.1. Применение методов нелинейной фильтрации для
идентификации целей на фоне помех .....................194
2.2.3.2. Идентификация радиолокационных целей по динами-
ческим радиолокационным характеристикам на основе
использования моделей временных рядов..................199
2.2.4. Оценка статистических радиолокационных характеристик
целей по результатам измерений ...........................207
2.2.4.1. Метод вычисления спектральных характеристик
нестационарных случайных процессов......................207
2.2.4.2. Повышение точности оценивания радиолокационных
характеристик целей по малой выборке измерительной
информации ............................................212
2.3. Использование в РЛР принципов ЗГ РЛС ..................222
2.3.1. Физические принципы ЗГ РЛС.........................222
2.3.2. Режимы работы ЗГ РЛС...............................228
2.3.3. Зона действия средств ЗГ РЛС.......................233
2.3.4. Измерение координат цели средствами ЗГ РЛС ........239
2.4. Средства радиолокационного дозора и дальнего
радиолокационного обнаружения...............................242
2.5. Средства РЛР с синтезированной апертурой...............253
Оглавление 381
2.6. Пассивная радиолокация..................................270
2.6.1. Особенности работы пассивных средств РЛР............270
2.6.2. Угломерные методы определения местоположения
объектов РЛР.............................................272
2.6.3. Разностно-дальномерные системы определения
местоположения объекта РЛР...............................278
2.6.4. Определение местоположения движущегося
объекта разведки доплеровским методом....................285
2.7. Радиотеплолокация ......................................287
2.7.1. Принцип и применение радиотеплолокации..............287
2.7.2. Сигналы в радиотеплолокации.........................288
2.7.3. Прием радиотепловых сигналов........................293
2.7.4. Чувствительность радиометров .......................299
2.7.5. Определение координат и параметров движения объектов
радиотеплолокационной разведки...........................300
2.7.6. Основные схемные элементы радиотеплолокаторов ......307
2.8. Подповерхностная радиолокация ..........................309
2.8.1. Физические основы подповерхностной радиолокации.....309
2.8.2. Подповерхностное зондирование протяженных объектов .313
2.8.3. Подповерхностная радиолокация малоразмерных целей ..317
3. Противорадиолокационная маскировка........................318
3.1. Уменьшение радиолокационной заметности..................318
3.1.1. Заметность объектов РЛР ............................318
3.1.2. Применение противорадиолокационных покрытий.........324
3.1.3. Уменьшение радиолокационной заметности
антенных систем...........................................332
3.1.4. Комплексное применение методов противорадиолокацион-
ной маскировки ...........................................339
3.2. Маскирующие воздействия на среду распространения сигнала.343
3.2.1. Модификация среды распространения сигнала ..........343
3.2.2. Дипольные помехи....................................345
3.2.3. Маскировка сигнала плазменными образованиями........358
3.2.4. Противодействие средствам РЛР на основе модификации
сигнального пространства.................................364
Литература ..................................................375
Учебное издание
Куприянов Александр Иванович
Петренко Павел Борисович
Сычев Михаил Павлович
ТЕОРЕТИЧЕСКИЕ ОСНОВЫ
РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ
Редактор С.А. Серебрякова
Технический редактор Э.А. Кулакова
Корректоры Е.В. Авалова. Г.С. Беляева
Художник Н.Г. Столярова
Компьютерная верстка С.А. Серебряковой
Оригинал-макет подготовлен
в Издательстве МГТУ им. Н.Э. Баумана.
Санитарно-эпидемиологическое заключение
№ 77.99.60.953.Д.003961.04.08 от 22.04.2008 г.
Подписано в печать 31.01.2010. Формат 60x90/16.
Усл. печ. л. 24,0. Тираж 500 экз. Заказ
Издательство МГТУ им. Н.Э. Баумана.
105005, Москва, 2-я Бауманская ул., 5.
E-mail: press@bmstu.ru
http://www.baumanpress.ru
Отпечатано в ГУП ППП «Типография «Наука».
121099, Москва, Шубинский пер., 6.
ISBN 975-5-7038-3325-4
9
785703
833254