/
















































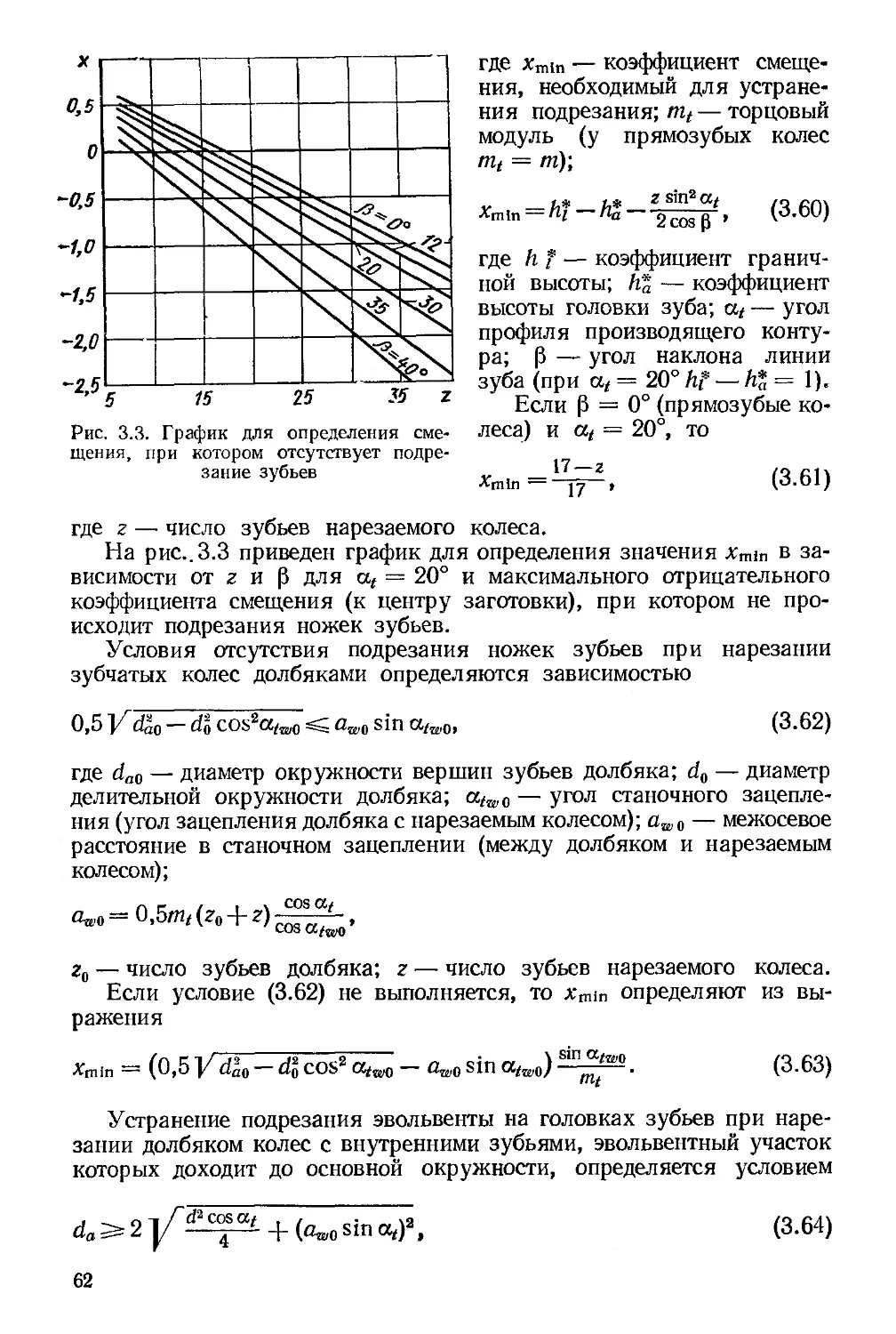
































































































































































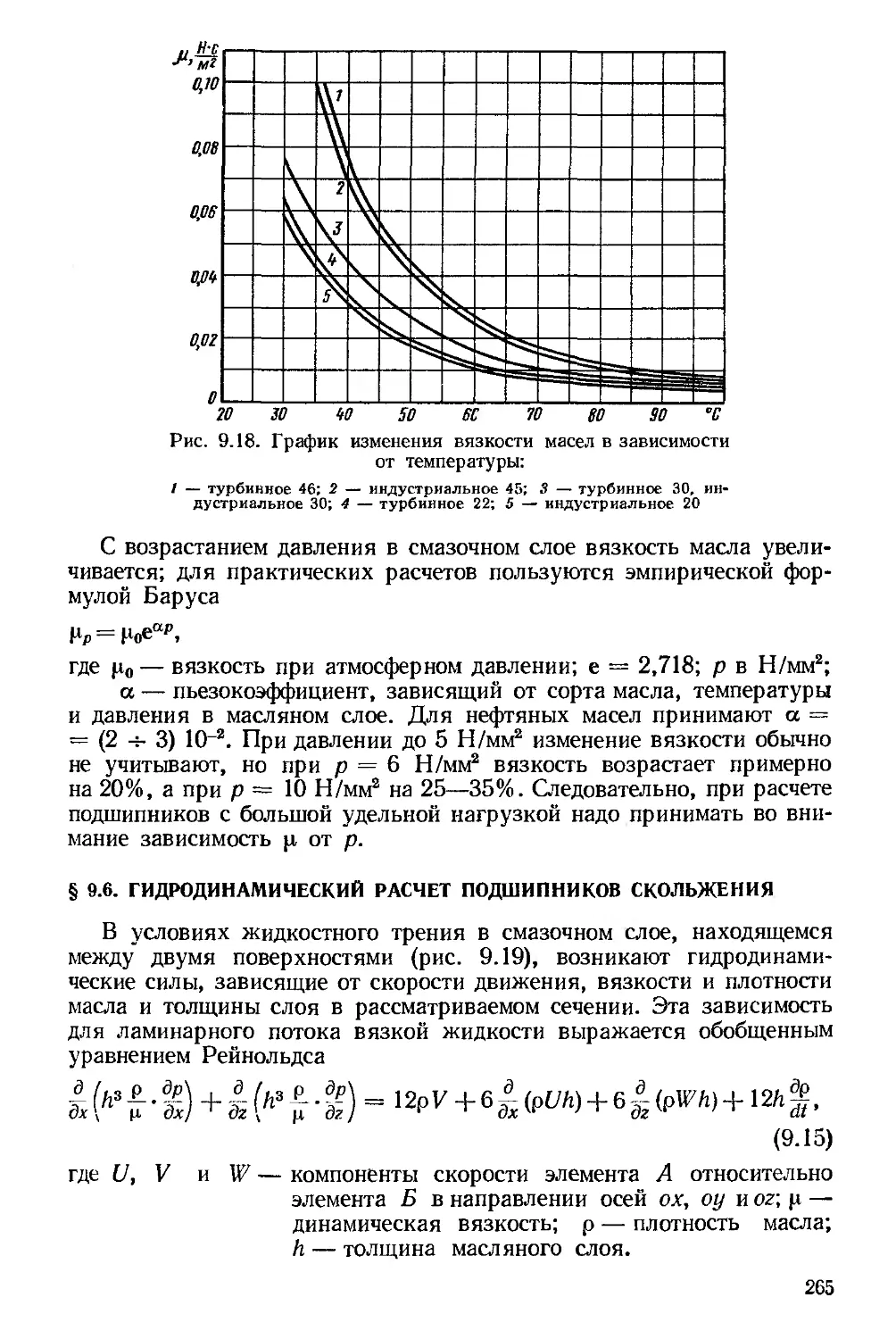

























































































































































































































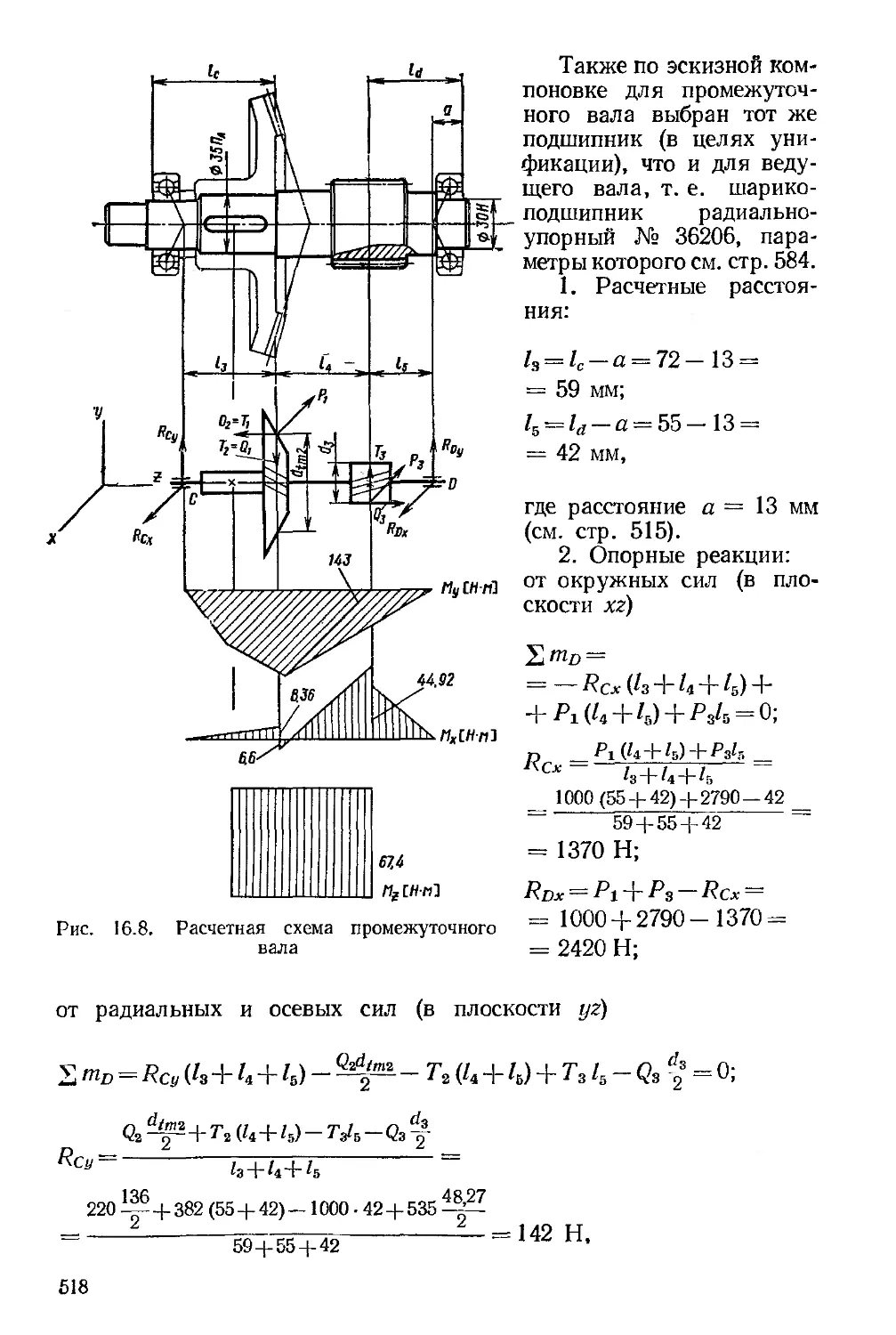












































































Текст
ПРОЕКТИРОВАНИЕ
МЕХАНИЧЕСКИХ
ПЕРЕДАЧ
6П5.3
П79
УДК 621.83.001.12 (075) (031)
Авторы: С. А. Чернявский, Г. М. Ицкович, В. А. Киселев,
К. Н. Боков,! М. А. Бонч-Осмоловский, Б. П. Козинцов
Рецензент канд. техн, наук проф. Г. Б. Столбин
Проектирование механических передач. Учеб, пособие для
П79 немашиностроит. вузов. Изд. 4-е, перераб. М., «Машинострое-
ние», 1976.
608 с. с ил.
На обороте тит. л. авт.: С. А. Чернявский, Г. М. Ицкович, В> А. Кисе-
лев (и др.).
В книге изложены основные принципы кинематического расчета приводных уст-
ройств. методы расчета на прочность и основы конструирования редукторов, вариа-
торов и различных механических передач, даны примеры расчета и конструирования,
помещены необходимые справочные материалы.
В четвертое издание внесены изменения в связи с введением новых стандартов и
нормалей.
Книга предназначена для студентов немашиностронтельных специальностей ву-
зов.
п 31302-42 6П5.3
038(01)-76
© Издательство «Машиностроение», 1976 г.
ПРЕДИСЛОВИЕ
Четвертое издание учебного по-
собия по структуре и основному содержанию
не отличается от предыдущего. В книгу вне-
сены изменения, обусловленные введением ряда
новых ГОСТов и нормалей машиностроения'
Существенной переработке подверглась глава
«Подшипники качения», в которой изложена
новая методика выбора подшипников. Соответ-
ственно переработаны примеры проектирования
приводных устройств и даны новые справоч-
ные таблицы по подшипникам качения.
При подготовке книги к новому изданию
весь графический материал был приведен в соот-
ветствие с требованиями ЕСКД.
Авторы будут признательны за все замеча-
ния и пожелания по настоящему изданию посо-
бия, которые следует направлять по адресу:
г. Москва, Б-78, 1-й Басманный пер., д. 3,
издательство «Машиностроение».
Глава 1
КИНЕМА ТИЧЕСКИЙ
РАСЧЕТ ПРИВОДА
§ 1.1. ВЫБОР ТИПА ПЕРЕДАЧИ
Соединение вала машины с валом электродвигателя
возможно лишь в относительно редких случаях, когда частоты вра-
щения этих валов совпадают, например, в приводах центробежных
насосов, компрессоров, вентиляторов и пр.
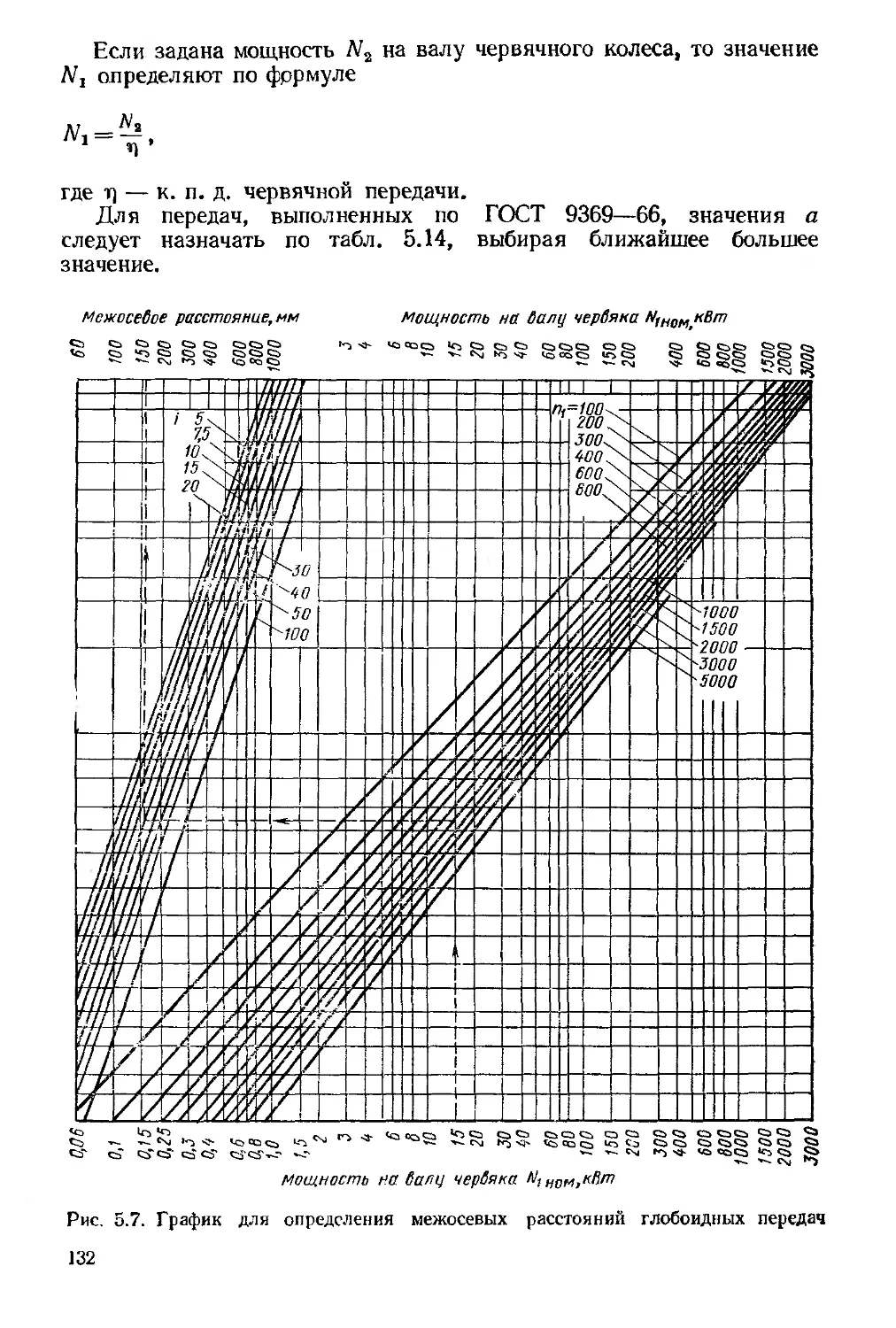
Для привода медленно вращающихся валов необходима специаль-
ная понижающая передача. Для оптимального выбора типа передачи
надо учитывать много факторов: энергетическую характеристику,
эксплуатационные условия, закон изменения нагрузки во времени,
срок службы, размещение и габариты привода, требования техники
безопасности, стоимость привода и его монтажа, эксплуатационные
расходы, удобство обслуживания и ремонта.
При проектировании механических приводных устройств конструк-
тор выбирает тот или иной тип передач: зубчатые, червячные, цепные,
ременные; в редких случаях — фрикционные.
Проектирование приводных устройств следует начинать с кинема-
тического расчета привода. Исходными данными, необходимыми для
расчета, могут быть такие показатели: номинальный вращающий
момент на валу приводимой в движение машины, его угловая скорость,
график изменения нагрузки (или момента) во времени с указанием
соответствующего изменения угловой скорости; для транспортеров
задают нередко вместо момента на приводном валу окружное усилие
на валу барабана (или звездочки), скорость ленты или цепи, диаметр
барабана. По этим данным легко определить значения моментов и
угловых скоростей. Определив предварительно требуемую номиналь-
ную мощность электродвигателя и угловую скорость его вала, вычис-
ляют общее передаточное число для одного или нескольких вариантов.
Оценивая полученное значение передаточного числа всего привода,
намечают конкретные способы его реализации, иными словами, рас-
сматривают несколько вариантов компоновки приводного устройства,
представляющего собой сочетание нескольких передач, например,
зубчатых, зубчато-червячных, ременных, цепных. Решение задачи
может быть существенно упрощено, если воспользоваться для привода
мотор-редуктором с зубчатой передачей, встроенной в корпус электро-
двигателя. Однако это не всегда возможно, нередко требуется устанав-
4
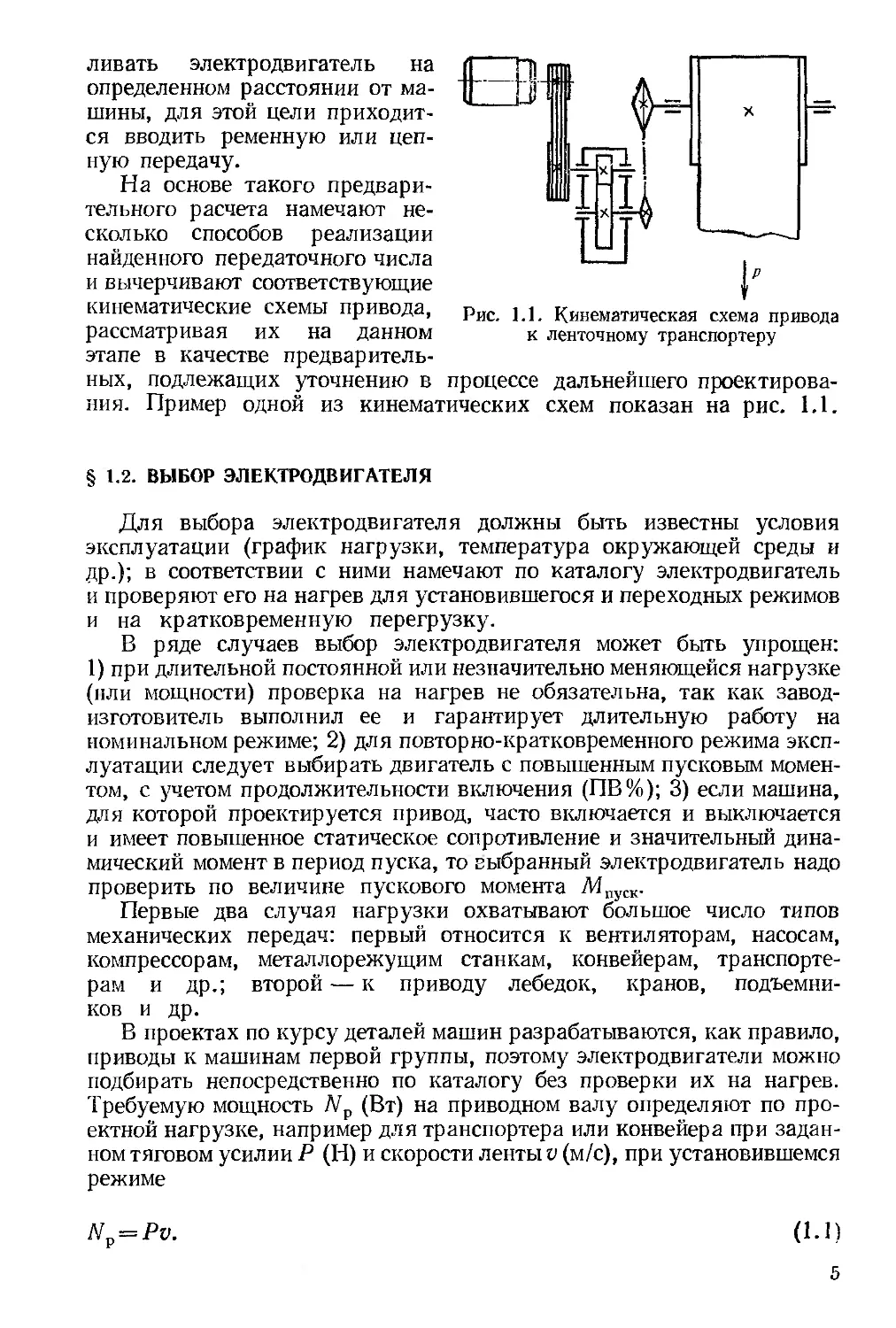
ливать электродвигатель на
определенном расстоянии от ма-
шины, для этой цели приходит-
ся вводить ременную или цеп-
ную передачу.
На основе такого предвари-
тельного расчета намечают не-
сколько способов реализации
найденного передаточного числа
и вычерчивают соответствующие
кинематические схемы привода,
рассматривая их на данном
Рис. 1.1. Кинематическая схема привода
к ленточному транспортеру
этапе в качестве предваритель-
ных, подлежащих уточнению в процессе дальнейшего проектирова-
ния. Пример одной из кинематических схем показан на рис. 1.1.
§ 1.2. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ
Для выбора электродвигателя должны быть известны условия
эксплуатации (график нагрузки, температура окружающей среды и
др.); в соответствии с ними намечают по каталогу электродвигатель
и проверяют его на нагрев для установившегося и переходных режимов
и на кратковременную перегрузку.
В ряде случаев выбор электродвигателя может быть упрощен:
1) при длительной постоянной или незначительно меняющейся нагрузке
(пли мощности) проверка на нагрев не обязательна, так как завод-
изготовитель выполнил ее и гарантирует длительную работу на
номинальном режиме; 2) для повторно-кратковременного режима эксп-
луатации следует выбирать двигатель с повышенным пусковым момен-
том, с учетом продолжительности включения (ПВ%); 3) если машина,
для которой проектируется привод, часто включается и выключается
и имеет повышенное статическое сопротивление и значительный дина-
мический момент в период пуска, то выбранный электродвигатель надо
проверить по величине пускового момента 7Ипуск.
Первые два случая нагрузки охватывают большое число типов
механических передач: первый относится к вентиляторам, насосам,
компрессорам, металлорежущим станкам, конвейерам, транспорте-
рам и др.; второй — к приводу лебедок, кранов, подъемни-
ков и др.
В проектах по курсу деталей машин разрабатываются, как правило,
приводы к машинам первой группы, поэтому электродвигатели можно
подбирать непосредственно по каталогу без проверки их на нагрев.
Требуемую мощность 7Vp (Вт) на приводном валу определяют по про-
ектной нагрузке, например для транспортера или конвейера при задан-
ном тяговом усилии Р (Н) и скорости ленты v (м/с), при установившемся
режиме
Np = Pv. (1.1)
5
Если известны момент Мр на приводном валу (Н м) и угловая
скорость сйр (рад/с), то
2Vp = Mp<op. (1.2)
Требуемай мощность двигателя
Л'
= (1-3)
где т] — к. п. д. привода, равный произведению частных к. п. д.;
П = 1li1h • • • т]й- (1-4)
Значения к. п. д. для передач различных типов приведены в
табл. 1.1; этими данными можно пользоваться как ориентировочными
для предварительной оценки к. п. д. проектируемого привода. Трение
в опорах снижает величину используемой мощности, это учитывается
введением условного к. п. д. подшипников: для одной пары подшип-
ников качения т]п = 0,99 4- 0,995; для одной пары подшипников сколь-
жения т]п = 0,98 4- 0,99 в зависимости от условий смазки.
1.1 Значения к. п. д. механических передач (без учета потерь в подшипниках)
Тип передачи Закрытая Открытая
Зубчатая передача цилиндрическими колесами . . 0,96—0,98 0,93—0,95
То же коническими прямозубыми колесами .... 0,95—0,97 0,92—0,94
Червячная передача: самотормозящая 0,30—0,40 0,20—0,30
несамотормозящая при числе заходов червяка 21=1 0,65—0,70
гх=2 0,70—0,75 —
гх = 3 0,80—0,85 —-
гх = 4 0,85—0,90 —
Цепная передача 0,95—0,97 0,90—0,93
Фрикционная передача 0,90—0,96 0,70—0,80
Ременная передача •—• 0,95—0,96
В приводных механизмах лебедок, кранов и подъемников учиты-
вают дополнительные потери в блоках, обусловленные трением в под-
шипниках и жесткостью канатов; для неподвижного блока т]б = 0,94 4-
4- 0,96; для подвижного блока т]б = 0,97 4- 0,98.
После того как будет найдена требуемая номинальная мощность N
электродвигателя, следует определить тип двигателя для заданных
конкретных условий работы.
Выпускаемые промышленностью электродвигатели по роду тока
подразделяют на следующие типы:
1. Двигатели постоянного тока, питаемые постоянным напряже-
нием (шунтовые, сериесные и компаундные), или с регулируемым
напряжением (система генератор—двигатель); эти двигатели доп ускают
плавное регулирование угловой скорости в широких пределах, осо-
бенно система генератор—двигатель, обеспечивают Плавный пуск,
6
торможение и реверс, поэтому их применяют в приводах электриче-
ского транспорта, в подъемниках и кранах.
2. Трехфазные двигатели переменного тока (синхронные и асин-
хронные).
Угловая скорость синхронных двигателей не зависит от нагрузки
и практически не регулируется; по сравнению с асинхронными они
имеют более высокий к. п. д. и допускают большую перегрузку,
но уход за ними более сложен, стоимость выше.
Трехфазные асинхронные двигатели — самые распространенные
во всех отраслях промышленности. По сравнению с остальными
электродвигателями для них характерны следующие преимущества:
простота конструкции, наименьшая стоимость,^простейший уход, непо-
средственное включение в трехфазную сеть переменного тока без преоб-
разователей. Недостатки их по сравнению с синхронными двигате-
лями — меньший к. п. д.; по сравнению с двигателями постоянного
тока — ограниченная возможность регулирования угловой скорости.
3. Однофазные асинхронные двигатели. Это двигатели небольшой
мощности, применяются для привода швейных машин, вентиляторов
и прочих бытовых механизмов.
При курсовом проектировании привода следует выбирать трехфаз-
ные асинхронные электродвигатели; ниже приводятся сведения о них.
§ 1.3. ХАРАКТЕРИСТИКИ АСИНХРОННЫХ
ЭЛЕКТРОДВИГАТЕЛЕЙ ТРЕХФАЗНОГО ТОКА
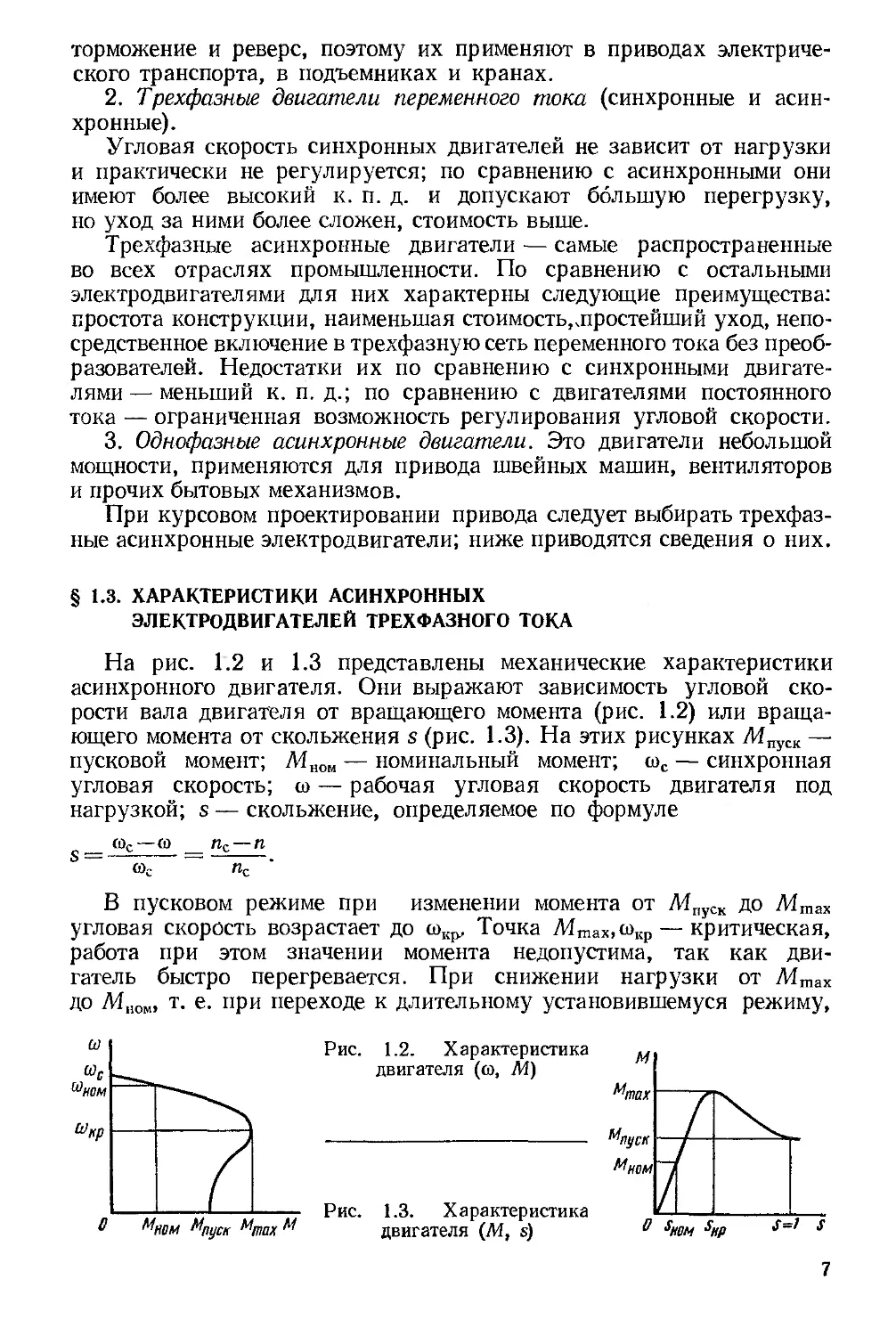
На рис. 1.2 и 1.3 представлены механические характеристики
асинхронного двигателя. Они выражают зависимость угловой ско-
рости вала двигателя от вращающего момента (рис. 1.2) или враща-
ющего момента от скольжения s (рис. 1.3). На этих рисунках Л1пуск —
пусковой момент; Л4,1ОМ — номинальный момент; сос — синхронная
угловая скорость; со — рабочая угловая скорость двигателя под
нагрузкой; s — скольжение, определяемое по формуле
сос—со _ пс—и
сос пс
В пусковом режиме при изменении момента от Л4пуск до Л4гпах
угловая скорость возрастает до сокр, Точка Л4тах,<окр — критическая,
работа при этом значении момента недопустима, так как дви-
гатель быстро перегревается. При снижении нагрузки от Л4тах
до Л41ЮМ, т. е. при переходе к длительному установившемуся режиму,
Рис. 1.2. Характеристика
двигателя (со, М)
Рис. 1.3. Характеристика
двигателя (Л1, s)
7
угловая скорость возрастет до о)ном; точка Л1„ом, <вном соответствует
номинальному режиму. При дальнейшем снижении нагрузки до нуля
угловая скорость возрастает до о)с.
Пуск двигателя осуществляется при s = 1 (рис. 1.3), т. е. при
со = 0; при критическом скольжении sKp двигатель развивает макси-
мальный момент Мпах, работать на этом режиме нельзя. Участок
между Л4тах и Л4пуск почти прямолинейный, момент пропорционален
скольжению. При sHOM двигатель развивает номинальный момент и
может работать в этом режиме длительное время. При s = 0 момент
падает до нуля, а частота вращения (об/мин) без нагрузки возрастает
до синхронной, определяемой по формуле
«с = 6^, (1-5)
где f — частота тока, период/с
р — число пар полюсов.
При нормальной частоте тока в сети, f = 50 период/с, синхронная
частота вращения ротора двигателя зависит только от р:
Трехфазные асинхронные электродвигатели имеют число полюсов
2р = 2 -н 12.
Синхронные частоты вращения этих двигателей имеют следующие
значения:
Число полюсов 2р , , ........ 2 4 6 8 10 12
пс, об/мин.................... 3000 1500 1000 750 600 500
При определении общего передаточного числа надо исходить из
расчетной частоты вращения под нагрузкой, соответствующей номи-
нальному режиму работы.
Условные обозначения электродвигателей
Трехфазные асинхронные электродвигатели новой единой серии
(общего назначения) обозначают следующим образом:
А2 — электродвигатели, защищенные от капель и твердых час-
тиц (падающих под углом^ 45°) и предохраненные от прикосновения
к вращающимся токоведущим частям;
АО2 — закрытые обдуваемые двигатели.
К этим основным обозначениям добавляют буквы, указывающие
особенности двигателя:
П — двигатель с повышенным пусковым моментом;
С — двигатель с повышенным скольжением;
Т — двигатель для текстильной промышленности;
В — двигатель, встроенный в корпус машины;
Л — двигатель с алюминиевым корпусом;
К — двигатель с фазовым ротором и контактными кольцами.
8
Кроме букв марка двигателя содержит цифры,из которых первая
относится к наружному диаметру сердечника статора (габарит),
вторая показывает порядковую длину сердечника; остальные, стоящие
после дефиса, — число полюсов. Например, марка АОП2-82-4 означает
трехфазный асинхронный двигатель, закрытый, обдуваемый, с повы-
шенным пусковым моментом; габарит сердечника статора в услов-
ных единицах — 8, порядковая длина сердечника — 2, число полю-
сов— 4. В обозначении асинхронного двигателя, допускающего из-
менение частоты вращения путем переключения полюсов, справа
от дефиса пишется общее число полюсов и под чертой — число
полюсов после переключения, например, двигатель АО2-82-12/6
имеет 12 полюсов с переключением на 6, что соответствует пс = 500 и
1000 об/мин, двигатель А2-62-8/6/4 имеет 8 полюсов с переключением
на 6 и на 4 и соответственно пс — 750; 1000 и 1500 об/мин.
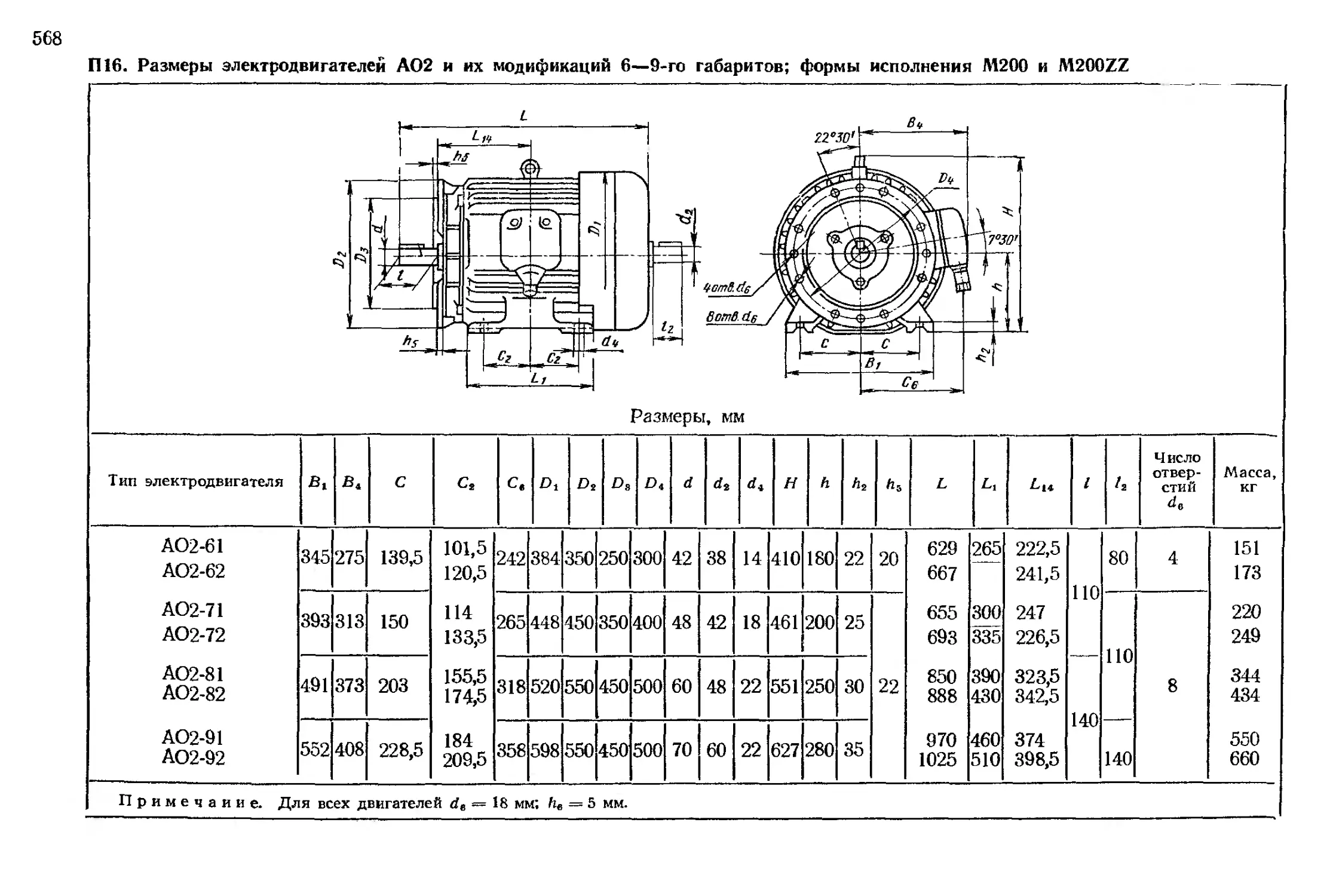
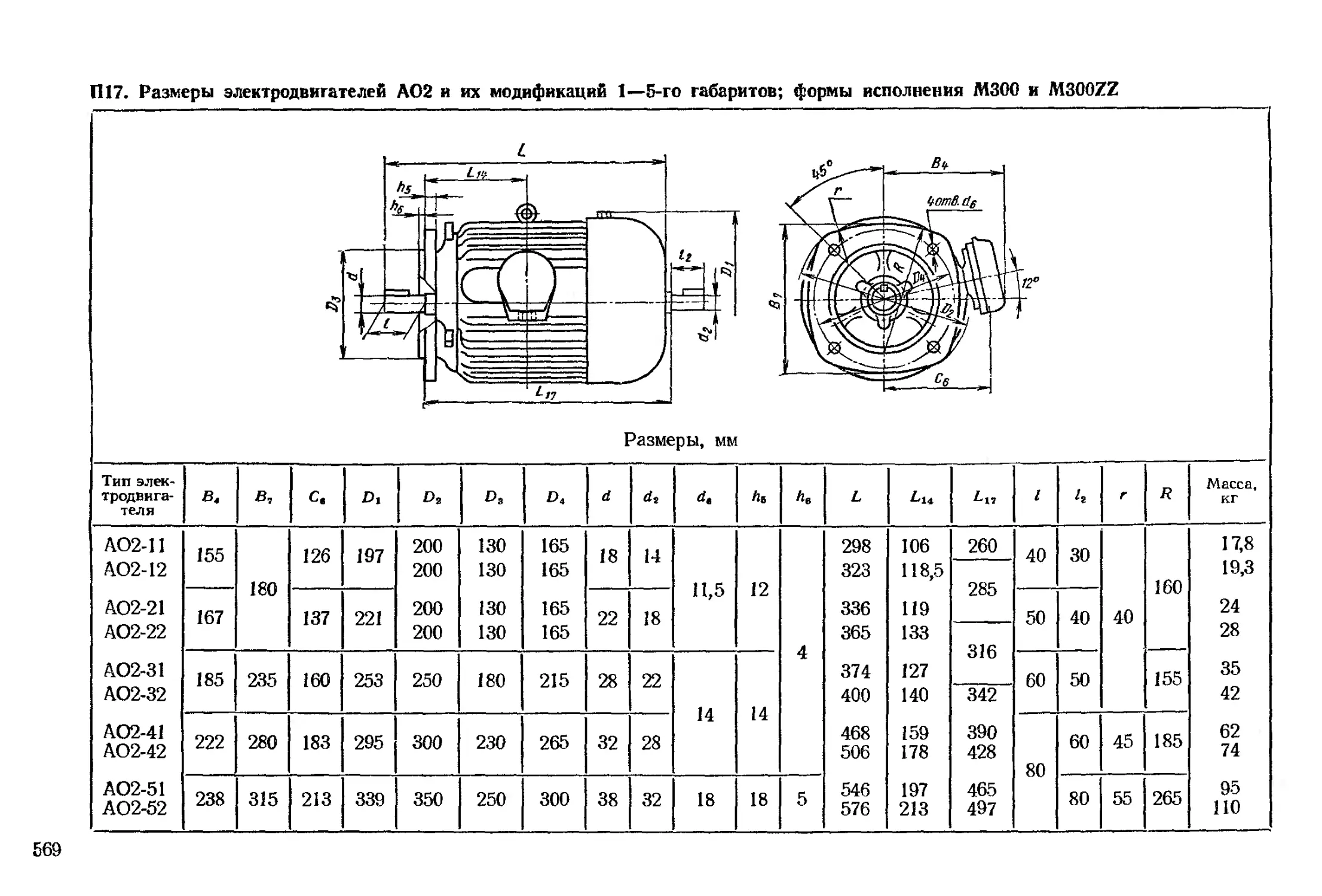
Форма исполнения и способ установки электродвигателей единой
серии отмечаются следующим образом:
М100 — электродвигатели горизонтальные со станиной на лапах;
М200 — горизонтальные на лапах и с фланцем на щите;
М300 — горизонтальные со станиной без лап и с фланцем на щите;
М302 — вертикальные со станиной без лап, с фланцем на щите.
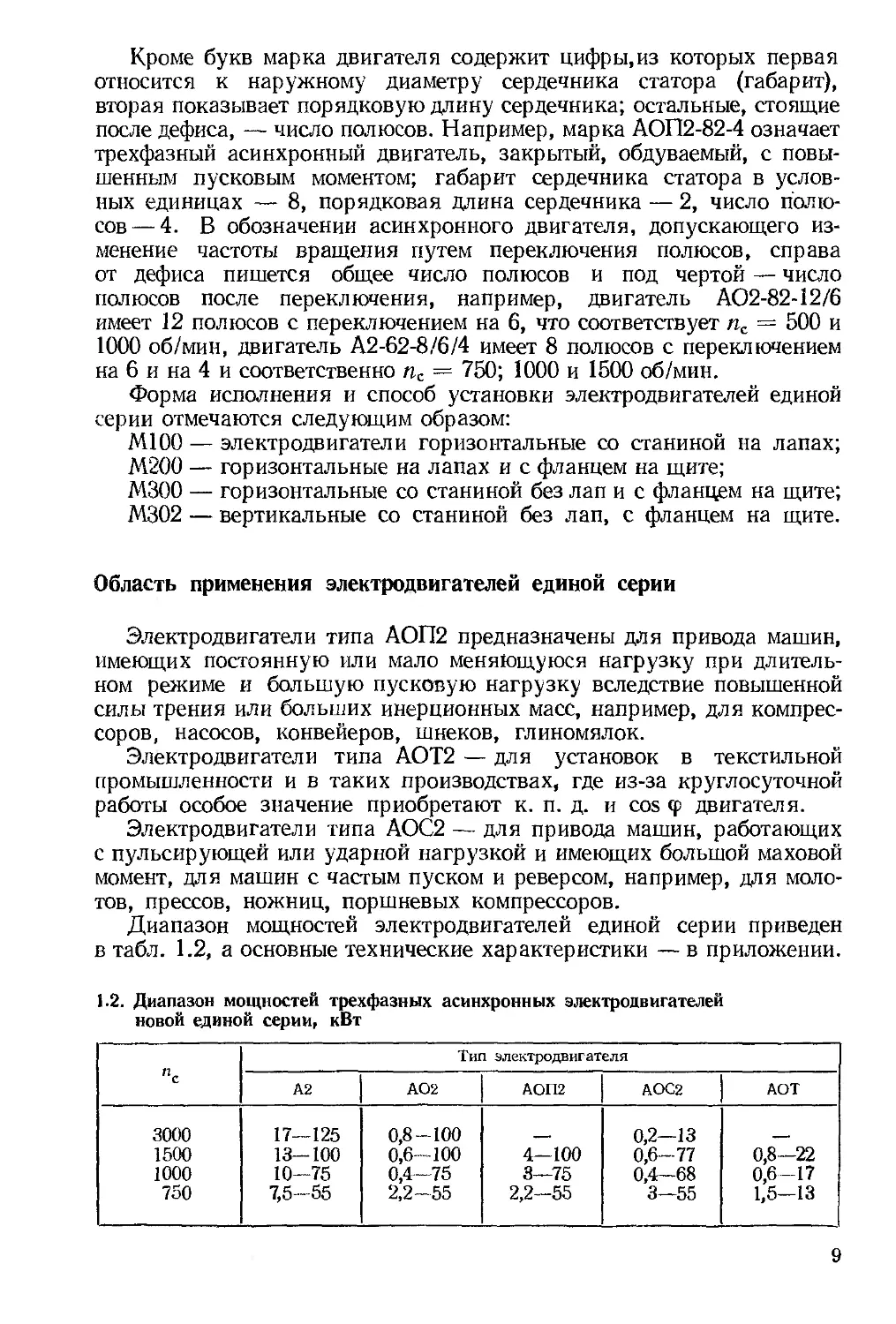
Область применения электродвигателей единой серии
Электродвигатели типа АОП2 предназначены для привода машин,
имеющих постоянную или мало меняющуюся нагрузку при длитель-
ном режиме и большую пусковую нагрузку вследствие повышенной
силы трения или больших инерционных масс, например, для компрес-
соров, насосов, конвейеров, шнеков, глиномялок.
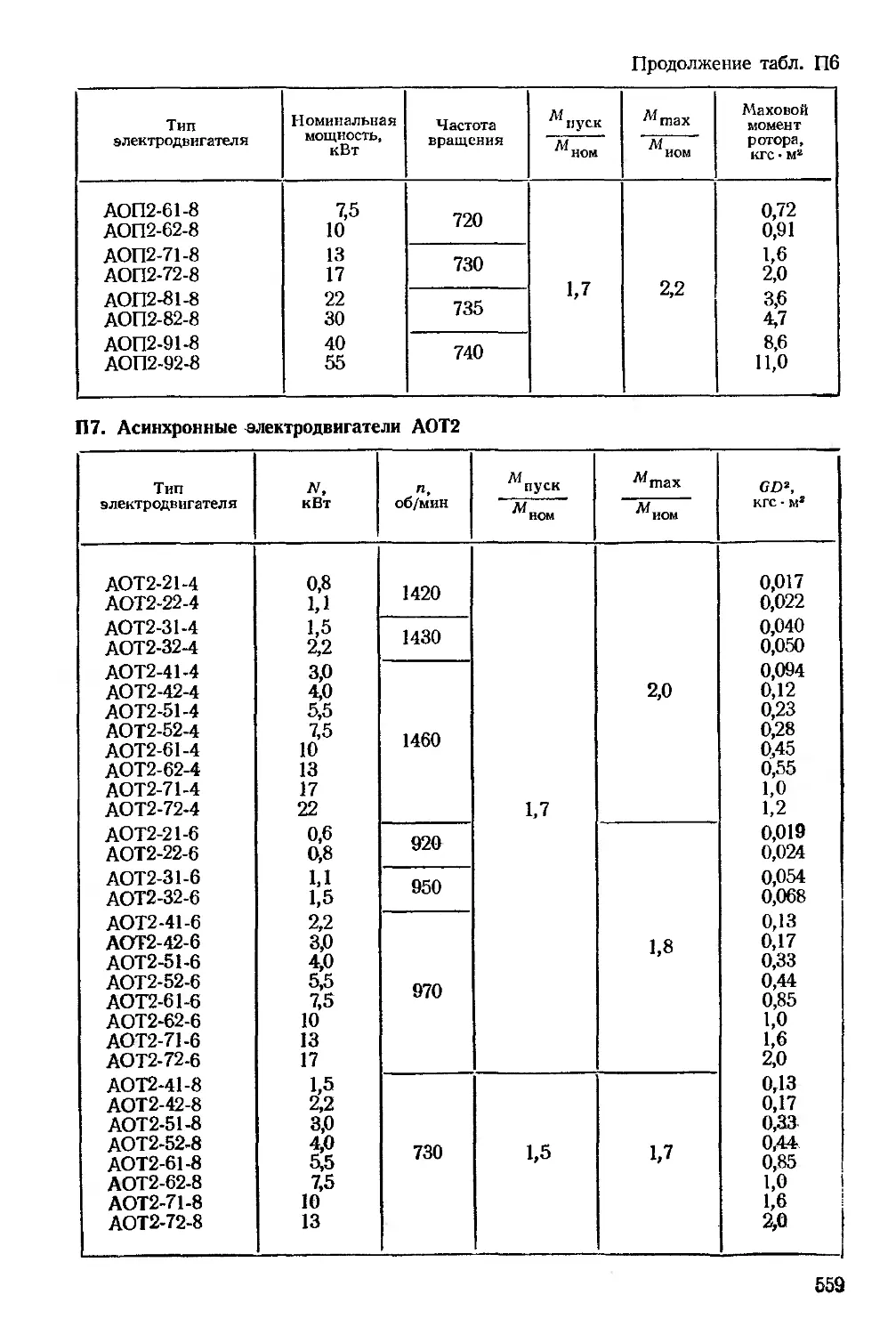
Электродвигатели типа АОТ2 — для установок в текстильной
промышленности и в таких производствах, где из-за круглосуточной
работы особое значение приобретают к. п. д. и cos <р двигателя.
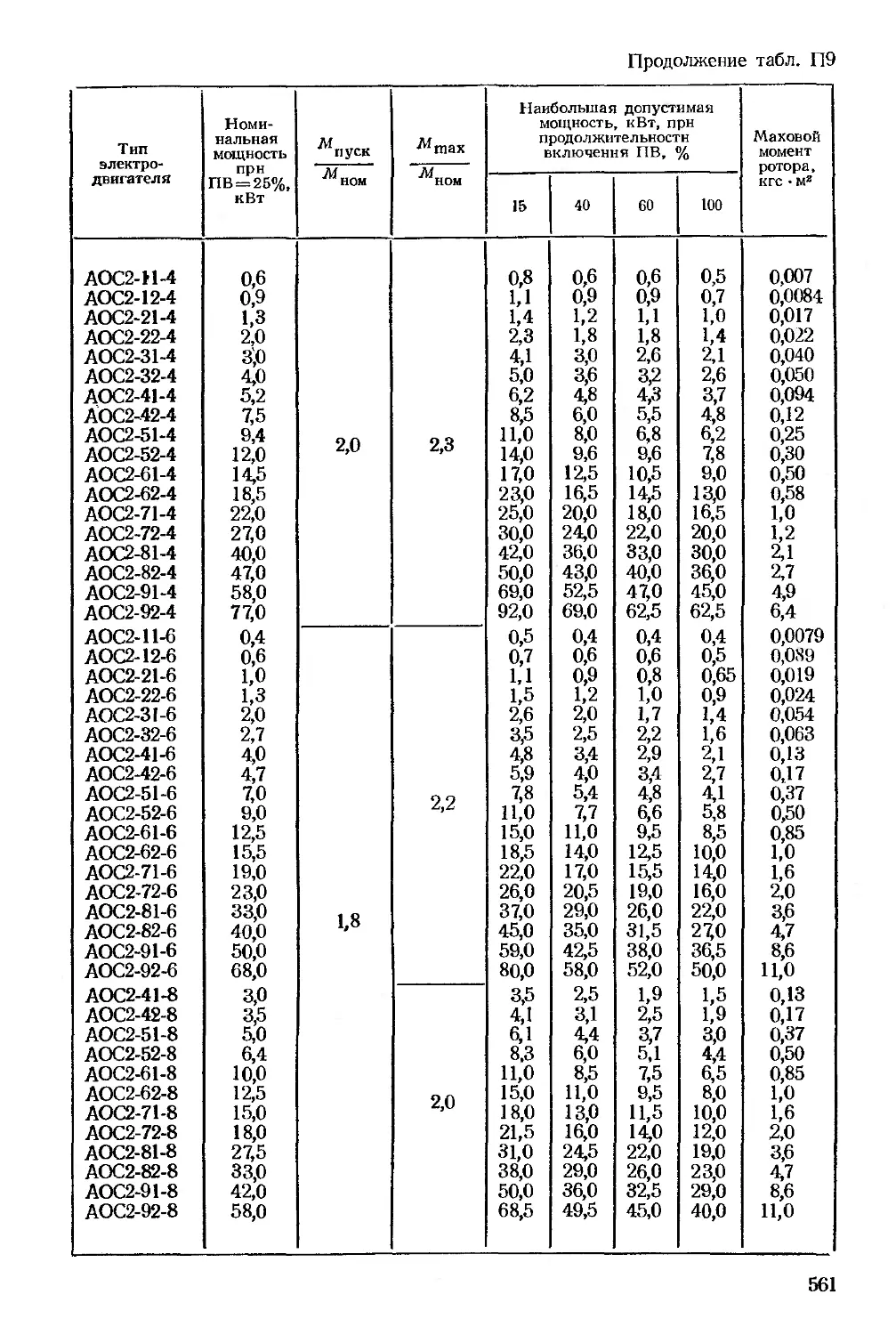
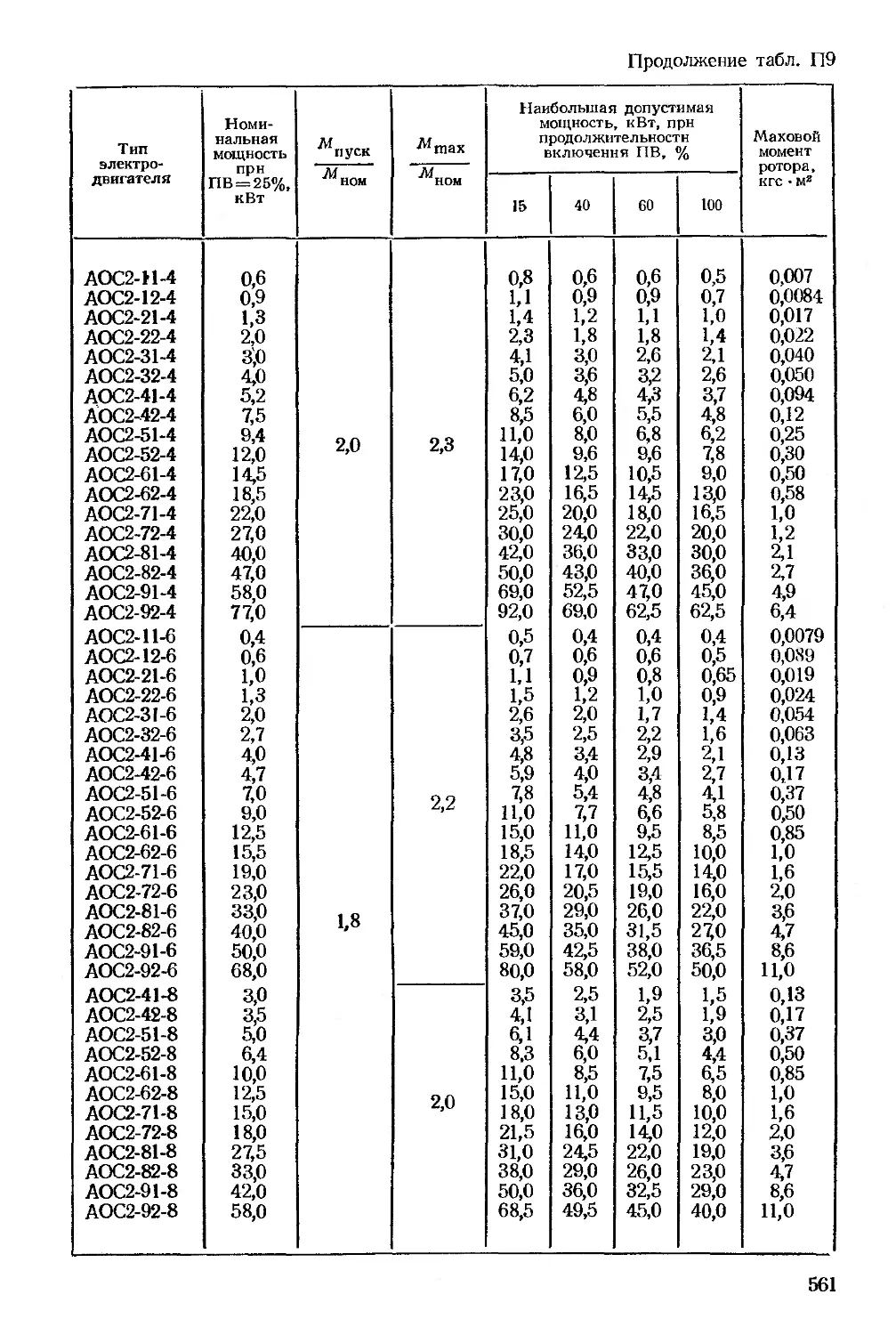
Электродвигатели типа АОС2 — для привода машин, работающих
с пульсирующей или ударной нагрузкой и имеющих большой маховой
момент, для машин с частым пуском и реверсом, например, для моло-
тов, прессов, ножниц, поршневых компрессоров.
Диапазон мощностей электродвигателей единой серии приведен
в табл. 1.2, а основные технические характеристики — в приложении.
1.2. Диапазон мощностей трехфазных асинхронных электродвигателей
новой единой серии, кВт
"с Тип электродвигателя
А2 АО2 АОП2 АОС2 АОТ
3000 17—125 0,8-100 0,2—13
1500 13-100 0,6—100 4—100 0,6-77 0,8—22
1000 10-75 0,4—75 3—75 0,4—68 0,6—17
750 7,5-55 2,2-55 2,2—55 3—55 1,5—13
9
§ 1.4. ПЕРЕДАТОЧНОЕ ЧИСЛО ПРИВОДА
Общее передаточное число привода определяется как отношение
угловых скоростей или частот вращения вала двигателя и ведомого
вала при номинальной нагрузке:
Для сравнительного расчета нескольких вариантов привода можно
выбрать двигатели равной мощности, но с различными частотами
вращения. Полученное для первого варианта общее передаточное
число разбивают по ступеням, руководствуясь данными табл. 1.3.
Для прочих вариантов можно наметить разбивку общего i примерно
пропорционально тем. значениям, какие были выбраны для первого
варианта. Например, если для первого варианта привода от электро-
двигателя с п' = 730 об/мин были намечены конкретные значения
частных передаточных чисел i{, ii, ... i'k так, чтобы
I
то для второго варианта при п" = 1460 об/мин Г будет в 2 раза больше;
можно соответственно умножить каждое частное значение i}{ нау 2,
где т — число всех ступеней привода; для схемы на рис. 1.1 т ~ 4;
следовательно, можно принять/1=^|Д2... 1/г = 4^2 и т. д.; такой
способ далеко не единственный; можно, например, оставить ременной
пли цепной передачи постоянным, варьируя передаточные числа редук-
тора и т. д.
1.3. Передаточные числа
Передача Рекомендуемое значение
среднее наибольшее
Закрытая зубчатая (редуктор): с цилиндрическими колесами с коническими колесами Открытая зубчатая Червячный редуктор Открытая червячная Цепная Плоскоременная открытая Плоскоременная с натяжным роликом Клиноременная 3—6 2—3 3—7 10—40 10—60 2—6 2—5 4—6 2—5 10 6 12 80 120 8 6 8 7
Примечание. При установке венцов ведомых зубчатых колес непосредственно на крупногабаритных деталях приводных машин (например, на барабане сушилки, транс- портера, лебедки, на тарелке питателя) передаточное число одной пары зубчатых колес может быть значительно увеличено.
Для того чтобы габариты передачи не были чрезмерно большими,
рекомендуется придерживаться некоторых средних значений i1( i2...,
по возможности не доводя их до наибольших, допускаемых лишь в
Ю
отдельных случаях; например,
для одной ступени зубчатого ре-
дуктора ГОСТ 2185—66 допускает
1ред = 12,5, однако такой редуктор
окажется более громоздким, чем
двухступенчатый с таким же общим
передаточным числом. В табл. 1.3
приведены значения i для различ-
ных типов передач; ею можно поль-
зоваться для предварительной раз-
бивки общего передаточного числа.
В процессе разработки проекта
передаточные числа уточняют в
соответствии с ГОСТами и конкрет-
ными техническими условиями.
Рис. 1.4. Схема привода (к примеру
расчета):
— электродвигатель; 2 — ременная пе-
редача; 3 — редуктор; 4 — муфта; 5 — лен-
точный транспортер
Пример. На рис. 1.4 представлена кинематическая схема привода к ленточному
транспортеру. Требуется определить общее передаточное число и произвести пред-
варительную разбивку его для трех вариантов — от электродвигателей с синхрон-
ными частотами вращения пс = 750; 1000 и 1500 об/мин. Диаметр барабана D =
= 500 мм, тяговое усилие Р — 11 • 103 Н, скорость ленты v = 0,30 м/с.
Решение. 1. Определяем к. п. д. всего привода по формуле (1.4), пользуясь
данными табл. 1:
4=4 *1 *1п>
‘ ‘рем ’ред "п*
где k — число пар подшипников;
4 = 0,05 • 0,972 . о,993 0,86.
2. Находим требуемую мощность двигателя по формулам (1.1) и (1.3):
Pv 11 -10'. 0,30 QOC/l n О О. п
N = — --------— «з 3850 Вт =s 3,85 кВт.
4 0,8b
3. Подбираем двигатель. Гак как транспортеры работают обычно в пыльной
среде, то выбираем закрытые обдуваемые электродвигатели типа АОП2 (см. прило-
жение, табл. П6) для трех вариантов.
Вариант Двигатель Мощность, кВт Частота вращения, об/мин
синхронная при номинальном режиме
1 АОП2-51-8 4 750 710
2 АОП2-42-6 4 1000 955
3 АОП2-41-4 4 1500 1440
4. Определяем частоту вращения барабана:
60- 1000 п 60-1000.0,30 ,,
лВ~~ = 3,14 - 500 =11’5 0б/МИН-
5. Находим общее передаточное число для каждого варианта и производим
его разбивку (см. табл. 1.3)
п п
11,5 •
11
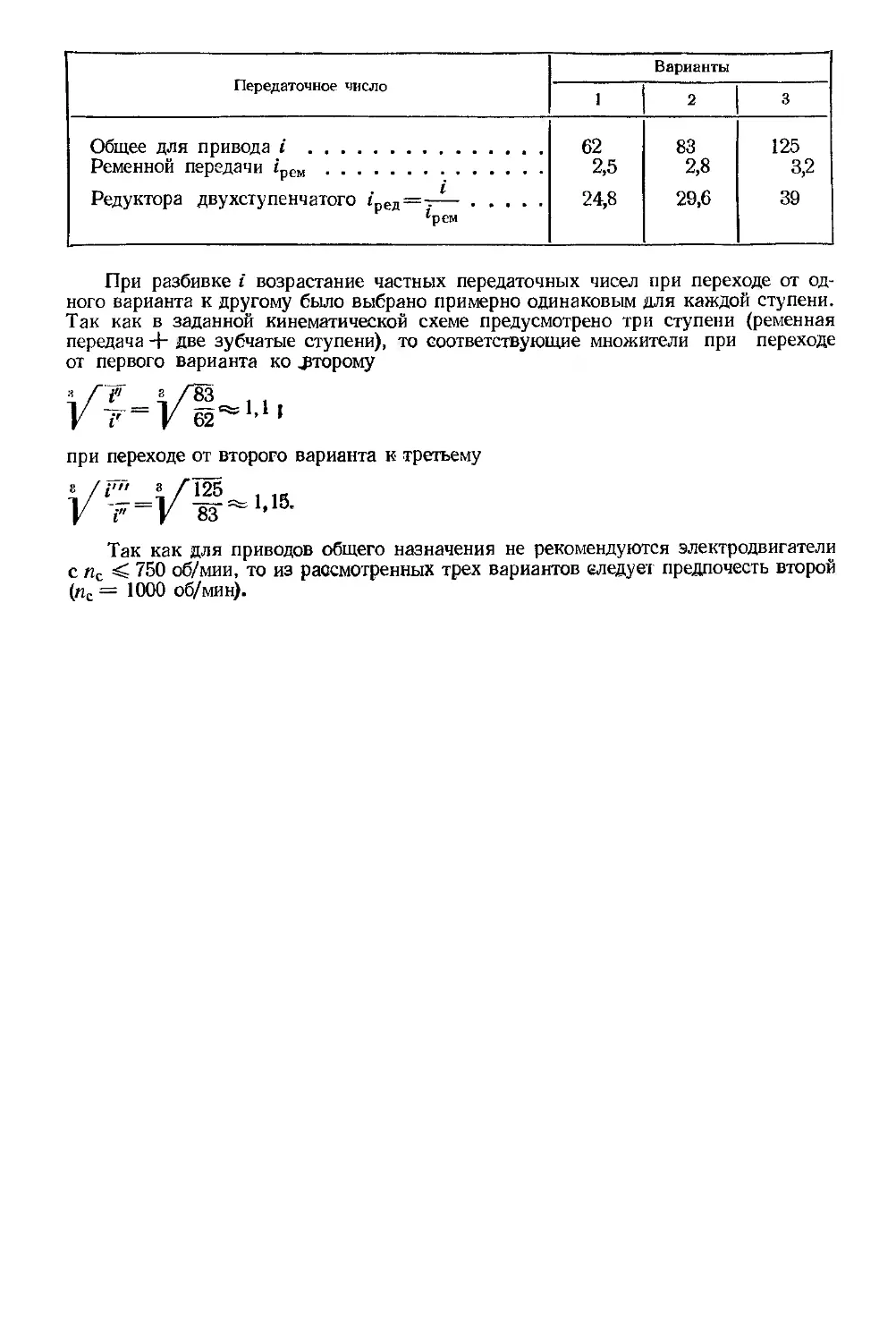
Передаточное число Варианты
1 2 3
Общее для привода i ............... Ременной передачи 1рем 62 2,5 83 2,8 125 3,2
г» . i Редуктора двухступенчатого гред = -— *рем 24,8 29,6 39
При разбивке i возрастание частных передаточных чисел при переходе от од-
ного варианта к другому было выбрано примерно одинаковым для каждой ступени.
Так как в заданной кинематической схеме предусмотрено три ступени (ременная
передача + две зубчатые ступени), то соответствующие множители при переходе
от первого варианта ко второму
при переходе от второго варианта к третьему
Так как для приводов общего назначения не рекомендуются электродвигатели
с ис < 750 об/мии, то из рассмотренных трех вариантов следует предпочесть второй
(ис = 1000 об/мин).
Глава 2
ОБЩИЕ СВЕДЕНИЯ
О РЕДУКТОРАХ
§ 2.1. ОБЗОР ОСНОВНЫХ СХЕМ РЕДУКТОРОВ
Редуктором принято называть механизм, состоящий
из зубчатых или червячных передач (или тех и других вместе), выпол-
ненный в виде отдельного агрегата и служащий для передачи энергии
от двигателя к рабочей машине.
Редуктор состоит из корпуса, отлитого из чугуна или, реже, из алю-
миниевого сплава, или изготовленного посредством сварки из стали.
В корпусе размещены элементы передачи — зубчатые колеса, валы,
подшипники и т. д. Редукторы служат как механизмы для понижения
угловой скорости (частоты вращения) и соответственно повышения
вращающего момента; механизмы для повышения угловой скорости,
выполненные в виде отдельных агрегатов, называют ускорителями или
мультипликаторами.
Редуктор можно проектировать либо для привода определенной
машины, либо по заданной нагрузке (моменту на тихоходном валу)
и передаточному числу без указания конкретного назначения. Вто-
рой случай характерен для специализированных редукторных заво-
дов, на которых организовано серийное производство. При проекти-
ровании приводной установки можно выбрать и заказать на данном
заводе из числа выпускаемых типоразмеров редуктор, подходящий
для заданных условий работы. Как правило, это экономически целе-
сообразнее, чем проектировать новый редуктор специально для данного
привода и изготовлять его в условиях неспециализированного про-
изводства.
Число разновидностей редукторов чрезвычайно велико. На
рис. 2.1—2.26 представлены кинематические схемы наиболее рас-
пространенных типов редукторов, там же приведены фотогра-
фии, дающие представление об общем виде и устройстве некоторых
из них.
На кинематических схемах буквой Б отмечен входной (быстро-
ходный) вал редуктора, а Т — выходной (тихоходный).
Классификация редукторов проводится по следующим основным
признакам: тип передачи (зубчатые, червячные, зубчато-червячные,
червячно-зубчатые, планетарно-зубчатые редукторы), число ступеней
(одноступенчатые, двухступенчатые и т. д.), тип зубчатых колес
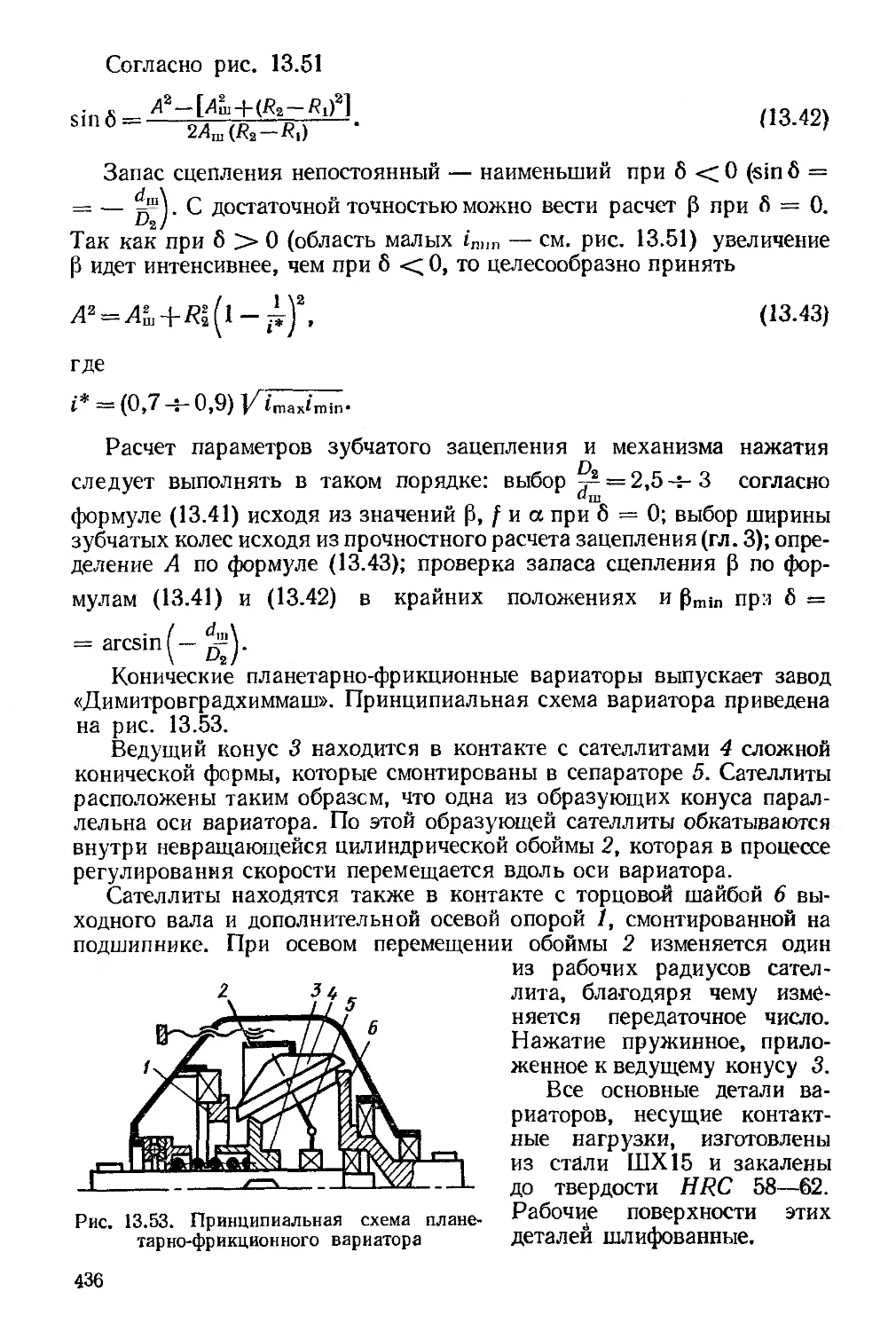
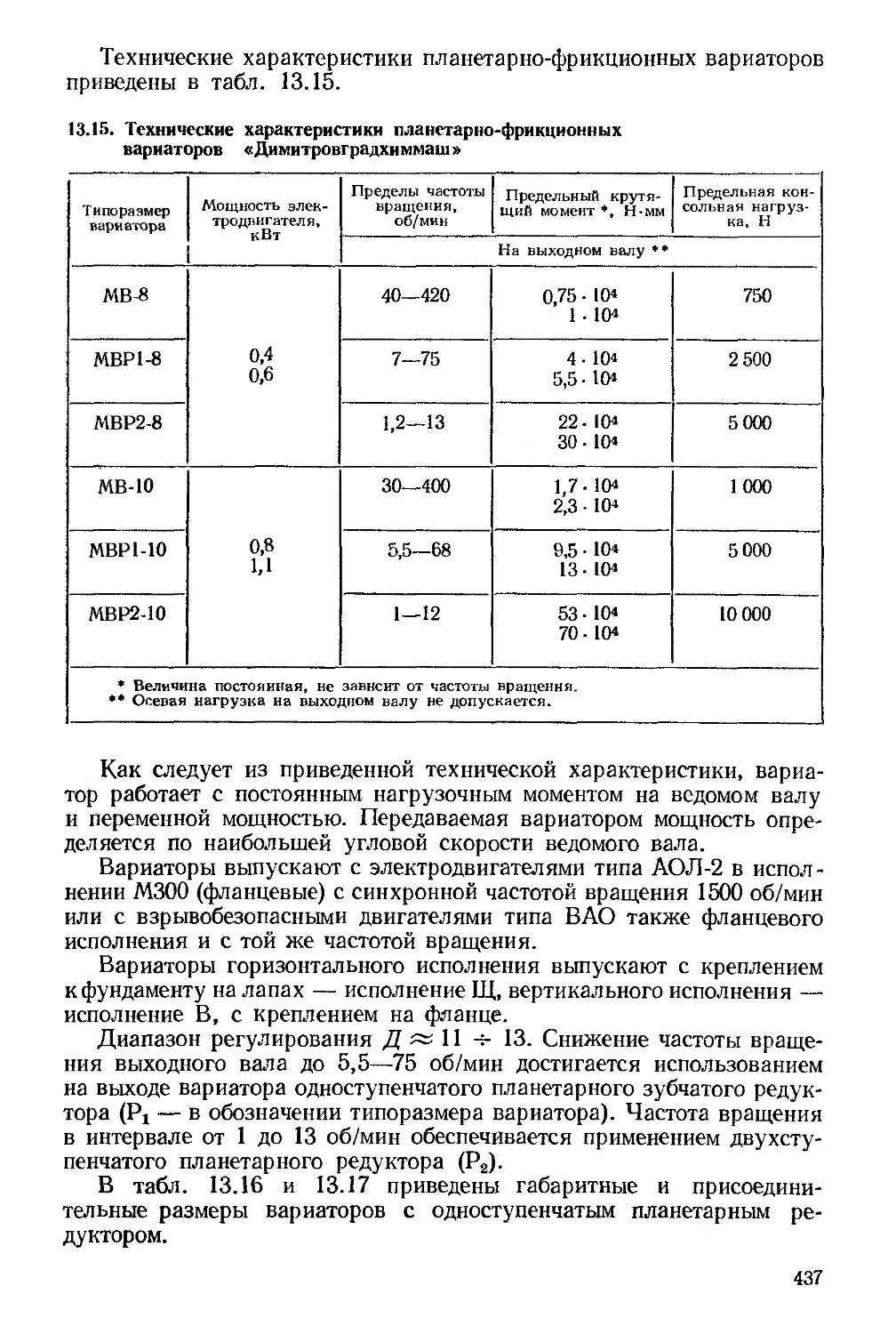
13
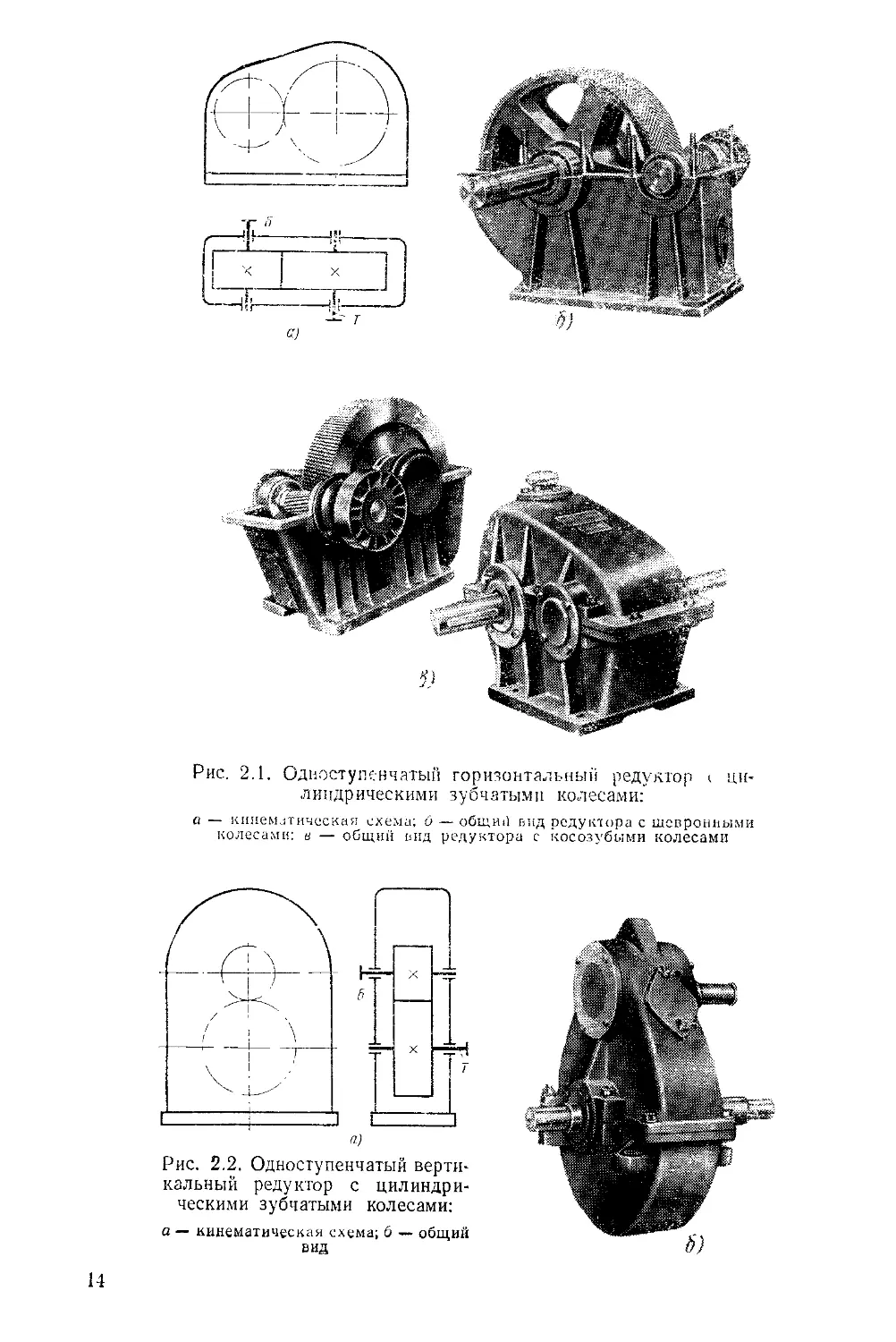
Рис. 2.1. Односггупенчатый горизонтальный редуктор < ци-
линдрическими зубчатыми колесами:
а — кинематическая схема; б — общий вид редуктора с шевронными
колесами: е — общий вид редуктора с косозубыми колесами
Рис. 2.2. Одноступенчатый верти-
кальный редуктор с цилиндри-
ческими зубчатыми колесами:
а — кинематическая схема; б — общий
ВИД
14
(цилиндрические, конические, коническо-цилиндрические редукторы)
относительное расположение валов редуктора в пространстве (гори-
зонтальное, вертикальное и т. д.), особенности кинематической
схемы редуктора (развернутая, соосная, с раздвоенной ступенью
и т. д.).
Возможность получения больших передаточных чисел при малых
габаритах передачи обеспечивают планетарные редукторы. Сведения
о расчете и конструировании редукторов этого типа приведены
в гл. IV.
Специальным типом весьма компактной приводной установки
является так называемый мотор-редуктор. Представление о внешнем
виде и устройстве некоторых типов мотор-редукторов дают фотогра-
фии и схемы, приведенные на рис. 2.27—2.33.
Одноступенчатые цилиндрические редукторы
На рис. 2.1 представлены схема и общие виды горизонтального,
а на рис. 2.2 — вертикального цилиндрического редуктора. Редукторы,
выполненные по той и другой схеме, могут иметь колеса с прямыми,
косыми или шевронными зубьями. Корпуса чаще бывают литыми
чугунными, реже — сварными из стали. При серийном производстве
целесообразнее применение литых корпусов. Валы могут монтиро-
ваться как на подшипниках качения, так и на подшипни-
ках скольжения, последние обычно применяют в тяжелых редук-
торах.
Передаточное число одноступенчатого редуктора, как правило,
i ==g 5, хотя ГОСТ 2185—66 допускает для одноступенчатых зубчатых
передач максимальное передаточное число imsx = 12,5. Нецелесообраз-
ность применения одноступенчатых редукторов со сравнительно
большими передаточными числами иллюстрируется рис. 2.3. Выбор
горизонтальной или вертикальной схемы как для одноступенчатого,
так и для редукторов остальных типов диктуется удобством общей
компоновки привода (относительное расположение двигателя и рабо-
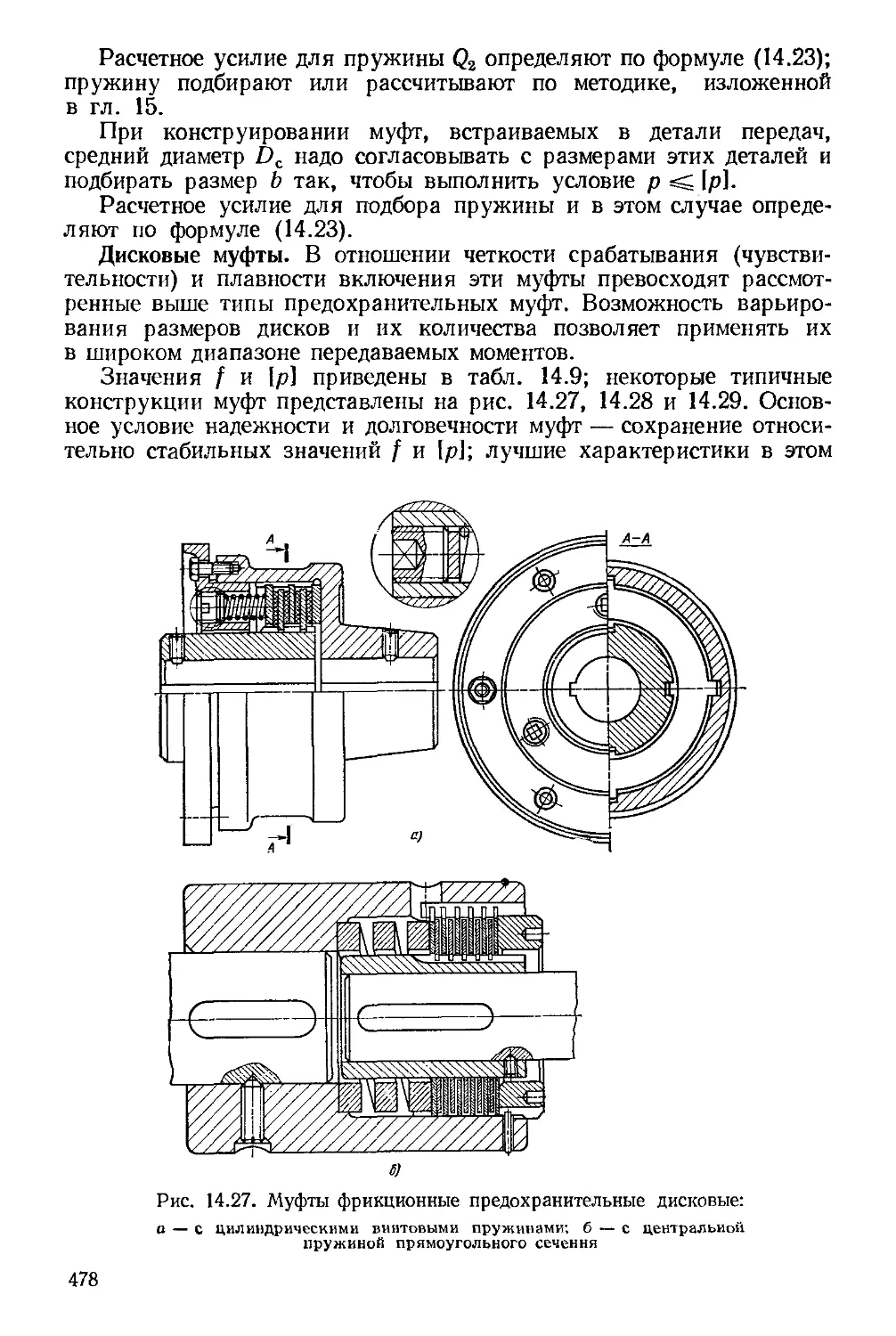
чего вала приводимой в движение рабочей машины и т. д.).
Одноступенчатые конические редукторы
На рис. 2.4, а, б, в представлены схема и общий вид (в двух вари-
антах) горизонтального, а на рис. 2.5, а, б — вертикального кониче-
ского редукторов. На рис. 2.5 показан редуктор с вертикальным рас-
положением тихоходного вала; возможно также вертикальное распо-
ложение быстроходного вала, тогда привод должен осуществляться
от фланцевого электродвигателя (форма исполнения В).
По ГОСТ 12289^-66 максимальное передаточное число для кониче-
ской зубчатой передачи tmax = 6,3, но при прямозубых колесах прак-
тически для конических редукторов i sg 3,0, а при колесах с косыми
или криволинейными зубьями i 5,0.
Валы конических редукторов в большинстве случаев монтируют
на подшипниках качения.
15
Рис. 2.3. Сопоставление габаритов одноступенчатого и двух-
ступенчатого редукторов с цилиндрическими колесами при
одинаковом передаточном числе I = 8,5
Рис. 2.4. Одноступенчатый ре-
дуктор с коническими зубчатыми
колесами
Рис. 2.5. Одноступенчатый ко-
нический редуктор с вертикаль-
ным ведомым валом:
а — кинематическая схема; б — об-
щин вид
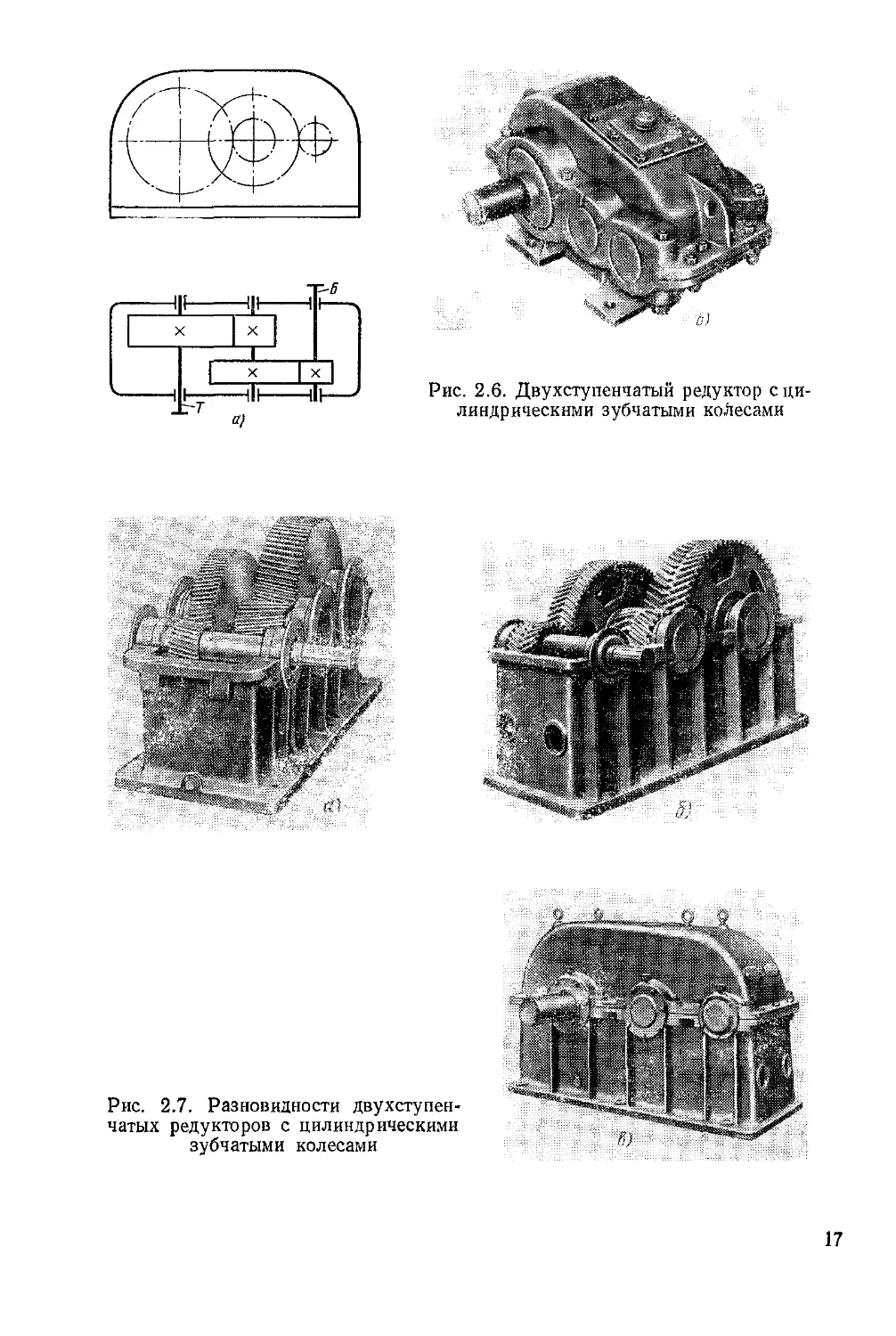
Рис. 2.6. Двухступенчатый редуктор с ци-
линдрическими зубчатыми коЛесами
Рис. 2.7. Разновидности двухступен-
чатых редукторов с цилиндрическими
зубчатыми колесами
17
Двухступенчатые и трехступенчатые
цилиндрические редукторы
Наиболее распространены двухступенчатые горизонтальные редук-
торы, выполненные по развернутой схеме (рис. 2.6, а). Внешний
вид одного из редукторов такого типа показан на рис. 2.6, б. На
рис. 2.7, а показано устройство редуктора с косозубыми колесами,
а на рис. 2.7, б — с шевронными колесами. Общий вид последнего
показан на рис. 2.7, в.
Применение соосной схемы (рис. 2.8, а) позволяет получить мень-
шие габариты по длине, что и служит ее основным достоинством.
На рис. 2.8, б, в показаны два варианта исполнения горизонтальных
цилиндрических двухступенчатых соосных редукторов.
Равенство межосевых расстояний ступеней (аБ = ат) в соосных
редукторах приводит к частой недогрузке быстроходной ступени,
передающей меньшие нагрузки. Правда, при сравнительно небольшом
общем передаточном числе (i = 10-5- 16) можно так произвести раз-
бивку общего передаточного числа (при обеспечении удовлетвори-
тельной компоновки редуктора), что нагрузочная способность быстро-
ходной ступени будет использована полностью. Все же указанное
обстоятельство рассматривают как один из недостатков соосной схемы;
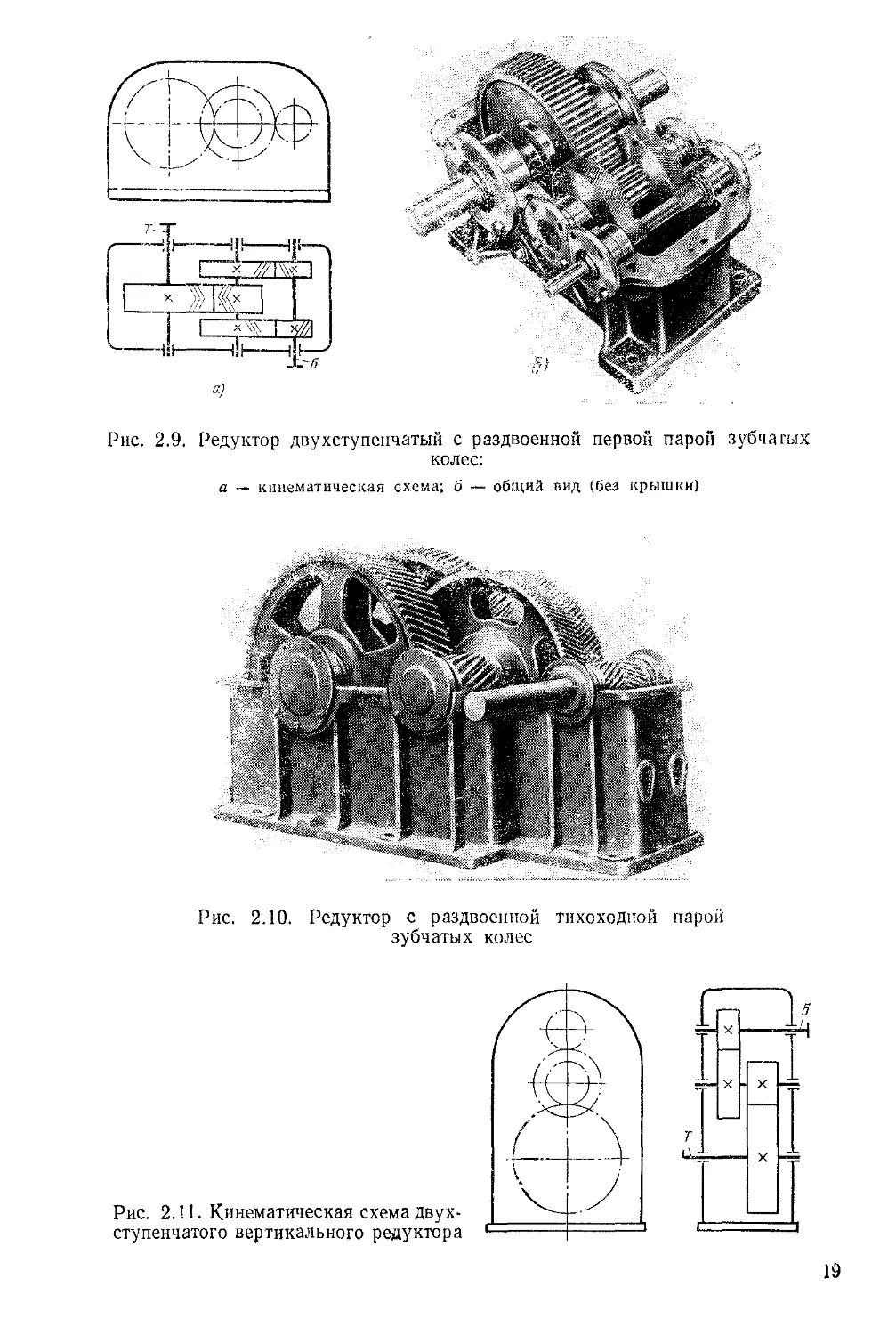
Рис. 2.9. Редуктор двухступенчатый с раздвоенной первой парой зубчатых
колес:
а — кинематическая схема; б — общий вид (без крышки)
Рис. 2.10. Редуктор с раздвоенной тихоходной
парой
19
Рис. 2.12. Кинематическая схема двух-
ступенчатого вертикального соосного
редуктора
Рис. 2.13. Кинематическая схе-
ма трехступенчатого редуктора
кроме того, к ее недостаткам относятся: большие, чем у редукторов,
выполненных по развернутой схеме, габариты по ширине (в направле-
нии осей валов); наличие только одного входного и одного выходного
концов валов, что ограничивает возможности выбора различных
вариантов общей компоновки привода; затрудненная смазка подшип-
ников, расположенных в средней части корпуса; усложненная конст-
рукция корпуса из-за подшипников, расположенных в его средней
части; большое расстояние между опорами промежуточного вала
(требуется увеличение его диаметра для обеспечения достаточной проч-
ности и, главное, жесткости).
В отношении типа зубьев и подшипников в одноступенчатых редук-
торах сказанное справедливо и относительно двухступенчатых цилинд-
Рис. 2.14. Трехступенчатый горизонтальный редуктор с на-
клонным разъемом корпуса
20
Рис. 2.15. Двухступенчатый то-
пическо-цилиндрический ред> к-
тор
д
Рис. 2.16. Двухступенчатый коническо-цилиндрический редактор
с вертикальным ведомым валом
21
рических редукторов. В отдельных случаях делают быстроходную
ступень с косозубыми, а тихоходную — с прямозубыми колесами
(это относится как к соосным, так и к несоосным редукторам).
На рис. 2.9, а представлена схема редуктора с раздвоенной быстро-
ходной ступенью, имеющей косозубые колеса. Тихоходная ступень
в этом случае имеет либо шевронные колеса, как показано на
рис. 2.9, а, либо прямозубые (рис. 2.9, б).
При раздвоенной быстроходной (или тихоходной, как на рис. 2.10)
ступени зубчатые колеса расположены симметрично относительно
опор, и концентрация нагрузки по длине зубьев получается меньше,
чем при применении обычной развернутой схемы. Кроме того, следует
иметь в виду, что в опасном сечении промежуточного вала возникает
крутящий момент, соответствующий половине передаваемой мощ-
ности. Это обстоятельство также относится к достоинствам схемы
с одной раздвоенной ступенью.
На рис. 2.11 и 2.12 даны схемы вертикальных двухступенчатых
редукторов — развернутого и соосного.
Двухступенчатые редукторы обычно применяют для диапазона
передаточных чисел 1 = 84- 30. Крупные двухступенчатые редук-
торы, выпускаемые Новокраматорским машиностроительным заво-
дом (НКМЗ), имеют 1 = 7,33 -4- 44,02. При необходимости иметь
большее значение 1 можно применять трехступенчатые редукторы,
для которых <тах = 400 (НКМЗ выпускает трехступенчатые редук-
торы с i = 31,06 -ь 348), для учебных целей i трехступенчатых редук-
торов должно быть не свыше 120. Схема горизонтального трехступен-
чатого цилиндрического редуктора показана на рис. 2.13. Иногда
оказывается целесообразным выполнение трехступенчатого редуктора
не с горизонтальным, а с наклонным разъемом (рис. 2.14). При наклон-
ном разъеме обеспечивается смазка окуна-
нием всех ступеней без чрезмерно глубо-
кого погружения в масляную ванну колеса,
имеющего наибольший диаметр. Техноло-
гия изготовления корпусов редукторов
с наклонным разъемом несколько слож-
нее, чем с горизонтальным разъемом.
Рис. 2.17. Кинематическая
схема коническо-цилиндри-
ческого редуктора с верти-
кальным ведущим валом
Коническо-цилиндрические редукторы
На рис. 2.15, а, б, в даны схема и внеш-
ний вид (в двух вариантах) горизонталь-
ного, а на рис. 2.16, а, б — вертикального
двухступенчатого коническо-цилиндричес-
кого редуктора, На рис. 2.17 дана также
схема коническо-цилиндрического редук-
тора, но с вертикальным валом кониче-
ской шестерни. Такой редуктор приводится
в движение от фланцевого электродви-
гателя, устанавливаемого непосредственно
на корпусе редуктора.
22
Рис. 2.18. Трсхступснча гыи
кони ческо-цилиндрический
редуктор:
Рис. 2.19. Кинематическая схема трехсту-
пенчатого коническо-цилиндрического редук-
тора с соосными цилиндрическими ступсня.ми
а — кинематическая схема; б —
общий вид; в — то же со снятой
крышкой
В рассматриваемых редукторах коническая ступень может иметь
прямые, косые или криволинейные зубья. Цилиндрическая ступень
также может быть как прямозубой, так и косозубой. Валы, как пра-
вило, монтируют на подшипниках качения.
Для учебного проектирования нормальный диапазон передаточных
чисел для коническо-цилиндрических редукторов i = 8 -г- 15.
Трехступенчатые редукторы с одной конической и двумя цилиндри-
ческими ступенями могут иметь i = 25 ч- 75 (при учебном проекти-
ровании). Цилиндрические ступени могут быть выполнены либо по
развернутой схеме (рис. 2.18, а, б, в), либо соосными (рис. 2.19).
Червячные редукторы
По относительному положению червяка и червячного колеса раз-
личают три основные схемы червячных редукторов: с нижним, с верх-
ним и с боковым расположением червяка.
23
Рис. 2.20. Червячный редуктор с нижним рас-
положением червяка
На рис. 2.20, а дана кинематическая схема редуктора с нижним
расположением червяка; два варианта конструктивного оформления
показаны на рис. 2.20, б, в: на первом из них — с разъемным, а на
втором — с неразъемным корпусом. Редуктор по рис. 2.20, б имеет
искусственный обдув корпуса, что обеспечивает более благоприятный
тепловой режим работы. Несколько иное конструктивное оформление
корпуса редуктора с нижним расположением червяка и с искусствен-
ным обдувом показано на рис. 2.21.
Кинематическая схема редуктора с верхним расположением чер-
вяка и два варианта конструктивного оформления корпуса (разъем-
ный и неразъемный) показаны на рис. 2.22, а — в.
Кинематическая схема и два варианта общего вида редуктора
с вертикальным валом червячного колеса показаны на рис. 2.23. Выход
вала колеса может быть в зависимости от назначения и компоновки
привода сделан либо вверх (рис. 2.23, а), либо вниз (рис. 2.23, б, в).
Редукторы с вертикальным расположением вала червячного колеса
применяют обычно для привода механизма поворота, например, пово-
ротных подъемных кранов.
Червячные редукторы с вертикально расположенным червяком
встречаются редко, а потому их схема не приведена.
В отношении схем с нижним и с верхним расположением червяка
можно отметить, что в первой лучше условия смазки зацепления,
во второй — меньшая вероятность попадания в зацепление металличе-
24
Рис. 2.21. Червячный редуктор с ребристым
корпусом и с искусственным обдувом
Рис. 2.22. Червяч-
ный редуктор с верх-
ним расположением
червяка
«7
Рис. 2.23. Червячный редуктор с вертикальным ведомым валом
25
Рис. 2.24. Двухступенчатый зубчато-червячный
редуктор
Рис. 2.25. Двухступенчатый чер-
вячно-зубчатый редуктор
26
ских частиц— продуктов износа. В конечном счете выбор той или дру-
гой схемы обычно диктуется удобством компоновки привода в целом.
Передаточные числа силовых червячных редукторов по ГОСТ
13563—68* колеблются в пределах 8—80.
В связи со сравнительно невысоким к. п. д. редукторов с цилиндри-
ческими червяками применение их для передачи больших мощностей
нецелесообразно. Практически максимальная мощность, для передачи
которой предназначен редуктор, не превышает 40—50 кВт и лишь
в виде редкого исключения до 150 кВт.
Зубчато-червячные, червячно-зубчатые
и двухступенчатые червячные редукторы
Схема одного из зубчато-червячных редукторов и его общий вид
показаны на рис. 2.24, а, б. Общий вид зубчато-червячного редуктора
с вертикальным валом червячного колеса изображен на рис. 2.24, в.
Передаточные числа редукторов этих типов до 150 и в отдельных слу-
чаях до 250, но при учебном проектирова-
нии следует ориентироваться на диапазон
передаточных чисел 40—80.
Кинематическая схема червячно-зубча-
того редуктора показана на рис. 2.25, а, а
на рис. 2.25, б, в изображены общие виды
этих редукторов с нижним и с верхним
расположением червяка. В отношении пе-
редаточных чисел редукторов этого типа
справедливо сказанное относительно зуб-
чато-червячных редукторов.
Одна из возможных схем двухступен-
чатого червячного редуктора показана на
рис. 2.26, а, а общий вид редуктора, вы-
полненного по этой схеме, — на рис. 2.26, б.
Другой тип двухступенчатого червячного
редуктора показан на рис. 2.26, в.
Рис. 2.26. Двухступенчатый червячный редуктор
27
Рассматриваемые редукторы имеют передаточные числа в пределах
80—2500, но для учебного проектирования следует ограничиваться
i = 150 ч- 400.
Мотор-редукторы
Эта приводная установка представляет собой отдельный агрегат,
состоящий из электродвигателя и редуктора того или иного типа.
В большинстве случаев мотор-редукторы имеют зубчатые передачи,
но встречаются конструкции и с червячными передачами.
Горизонтальный мотор-редуктор с одноступенчатой цилиндриче-
ской передачей изображен на рис. 2.27, а, б. Также горизонтальный
мотор-редуктор, но с двухступенчатой цилиндрической передачей
показан на рис. 2.28, а, б.
На рис. 2.29 дан общий вид горизонтального мотор-редуктора
с планетарной зубчатой передачей. На рис. 2.30, а, б изображены две
кинематические схемы передач, применяемые в редукторе такого
типа.
Общий вид вертикального мотор-редуктора, включающего обыч-
ную зубчатую (первая ступень) и планетарную (вторая ступень) пере-
дачи, показан на рис. 2.31. На рис. 2.32 и 2.33 даны два варианта
28
Рис. 2.28. Мотор-редуктор с соос-
ной двухступенчатой зубчатой пе-
редачей:
а — общий вид; б — продольный разрез
устройства этого редуктора; в первом из них ведущая шестерня наса-
жена на вал электродвигателя, а во втором вал шестерни соединен
с валом электродвигателя зубчатой муфтой.
§ 2.2. РАЗБИВКА ОБЩЕГО ПЕРЕДАТОЧНОГО ЧИСЛА
РЕДУКТОРА ПО СТУПЕНЯМ
От целесообразной разбивки общего передаточного числа по сту-
пеням двух- и трехступенчатого редуктора в значительной степени
зависят его общие габариты, удобство осуществления смазки зацеп-
ления каждой ступени, рациональность конструкции корпуса и удоб-
ство компоновки всех элементов передач в корпусе. Дать какую-либо
методику разбивки передаточного числа, удовлетворяющую всем ука-
занным требованиям, не представляется возможным. Приводимые
ниже рекомендации связаны в основном с обеспечением смазки зацеп-
лений всех ступеней окунанием, но к ним следует относиться как к ори-
29
Рис. 2.29. Общий вид горизонтального мотор-
редуктора
Рис. 2.30. Схемы передач горизонтального мо-
тор-редуктора:
а — одноступенчатая планетарная; б — двухступен-
чатая планетарная
Рис. 2.31. Общий вид верти-
кального мотор-редуктора
ентировочным, подлежащим корректировке в процессе и по результа-
там расчета зацеплений редуктора.
В двухступенчатых горизонтальных редукторах с цилиндриче-
скими зубчатыми колесами (см. рис. 2.6) при смазке зацеплений
окунанием желательно иметь диаметры колес d2 и d4 примерно оди-
наковыми или диаметр dt колеса тихоходной ступени несколько
больше, чем d2. Здесь, как и везде в дальнейшем, колесом называем
большее, а шестерней меньшее из зацепляющихся зубчатых колес.
Указанное соотношение диаметров получается при выборе пере-
даточного числа быстроходной ступени по формуле
4 = (°,01-5-°,°2)Л (2.1)
Г V2
где i — общее передаточное число редуктора; ф4 = ^- и — ко-
эффициенты ширины первой и второй ступеней; Ь4 и ах — ширина
колеса и межосевое расстояние первой ступени; Ь2 и а.2 — то же второй
ступени.
30
Значения ф (ф«) приведены в гл. III. Отношение ~ обычно прини-
мают равным 1,25 или 1,6, реже 2.
Для тяжелых редукторов при разбивке передаточного числа обычно
исходят из условия получения минимальной массы зубчатых колес
или минимального суммарного межосевого расстояния. При этом
обычно равенство d2 — не соблюдается.
Для двухступенчатых горизонтальных соосных редукторов при
сравнительно небольших передаточных числах (i = 8 -г 16) можно
Рис. 2.32. Верти-
кальный мотор-ре-
дуктор с обычной
и планетарной зуб-
чатыми передачами
31
обеспечить такую разбивку передаточного числа, при которой будет
полностью использована нагрузочная способность быстроходной сту-
пени. Соотнршение диаметров колес первой и второй ступеней также
оказывается приемлемым. Для выбора рекомендуется формула
Рис. 2.33. Вертикальный мотор-редуктор, в котором вал ве-
дущей шестерни соединен с валом двигателя зубчатой
муфтой
32
Отношение — обычно принимают равным 1,5 или 1,6 при значениях
ф, соответствующих ГОСТ 2185—66.
В двухступенчатых цилиндрических вертикальных редукторах
(см. рис. 2.11) смазку зацепления быстроходной ступени можно осуще-
ствить с помощью смазочной шестерни, свободно насаженной на тихо-
ходный вал редуктора. При этом желательно, чтобы колесо тихоходной
ступени погружалось в масло не более чем на 1/6 диаметра. Для соблю-
дения этого условия надо принимать ix < i2. Более точные рекомен-
дации для этого случая дать затруднительно.
Для соосных вертикальных редукторов можно также пользоваться
формулой (2.2).
В коническо-цилиндрических редукторах не рекомендуется пере-
даточное число конической ступени > 4, обычно даже sg 3,5. Ориен-
тировочно можно принимать = iKOH = (0,22 -s- 0,28) i, меньшие зна-
чения — при больших общих передаточных числах. Осуществить
смазку ступеней окунанием в этих редукторах удается редко.
В зубчато-червячных редукторах не следует принимать передаточ-
ное число зубчатой пары более чем 2,0—2,5; в червячно-зубчатых
можно придерживаться тех же значений, лишь в отдельных случаях
принимая i3y6 = 3,0. Можно также пользоваться соотношением i3 б =
= (0,03 -J- 0,06) I.
В двухступенчатых червячных редукторах удобство общей компо-
новки обычно обеспечивается при а.2 = 2а,; передаточные числа быстро-
ходной и тихоходной ступеней получаются при этом примерно одина-
ковыми.
2 Зак. 220
Глава 3
РАСЧЕТ ЗУБЧАТЫХ
ПЕРЕДАЧ
§ 3.1. ОБЩИЕ СВЕДЕНИЯ
Для закрытых зубчатых передач редукторного типа
при определении их размеров в большинстве случаев решающую
роль играет расчет рабочих поверхностей зубьев на выносливость
по контактным напряжениям (расчет на отсутствие усталостного
выкрашивания). Этот расчет выполняют как проектный. Кроме того,
производят проверочный расчет зубьев на выносливость по напряже-
ниям изгиба. В большинстве случаев напряжения изгиба в зубьях
колес, рассчитанных на контактную прочность, весьма невелики.
Исключения могут быть в двух случаях:
а) если применена поверхностная термическая или термохимиче-
ская обработка рабочих поверхностей зубьев до высокой твердости
НВ 350, в этом случае вообще может оказаться, что размеры пере-
дачи лимитируются расчетом зубьев на изгиб;
б) если при данном межосевом расстоянии, полученном из расчета
зубьев на контактную прочность, принято большое суммарное число
зубьев (zc = zx + z2), так как в этом случае получаются мелкомодуль-
ные зубья.
Для передач, работающих со значительными кратковременными
перегрузками (пиковые нагрузки), следует дополнительно проверить
контактные напряжения и напряжения изгиба при максимальной
нагрузке.
Первая из этих проверок должна гарантировать отсутствие хруп-
кого разрушения или пластических деформаций рабочих поверх-
ностей зубьев; вторая — отсутствие хрупкого разрушения или пла-
стических деформаций при изгибе.
Максимальные (пиковые) нагрузки действуют весьма непродол-
жительно (в течение малого числа циклов), поэтому указанные про-
верки являются расчетами на статическую прочность.
Открытые зубчатые передачи на выносливость рабочих
поверхностей по контактным напряжениям не рассчитывают, так как
в этом случае процесс абразивного износа поверхностей зубьев колес
происходит быстрее, чем процесс их выкрашивания от действия
переменных контактных напряжений; размеры зубчатых зацеплений
открытых передач определяют из расчета зубьев на выносливость
34
по напряжениям изгиба и в случае наличия пиковых нагрузок про-
веряют на статическую контактную и общую (по изгибу) прочность.
Формулы для расчетов на усталостную и статическую прочность
одинаковы, различны лишь значения принимаемых при этих расчетах
допускаемых напряжений (см. § 3.5). Это относится к расчетам как
на контактную прочность, так и на изгиб.
Применяемые методы расчета зубчатых зацеплений базируются
на одних и тех же теоретических предпосылках, но имеют определенные
различия как в структуре расчетных формул, так и в выборе входящих
в них эмпирических коэффициентов и принимаемых допускаемых
напряжений; отличия в расчетных формулах, приводимых в разных
источниках, объясняются построением их в различных единицах
измерения и тем, что в одном случае в качестве величины, характери-
зующей нагрузку передачи, принимают передаваемую мощность,
в другом — момент, в третьем — окружное усилие.
В учебнике [40] дано несколько иное написание расчетных формул и изменены
обозначения некоторых коэффициентов. Здесь эти изменения не отражены, так как
учебник [40] предназначен для машиностроительных институтов, а в учебной и
справочной литературе, используемой в немашиностроительных вузах, применя-
ются те же формулы и обозначения, которые даны здесь.
Максимальные нормальные напряжения определяют по формуле
Герца, полученной для случая контакта двух бесконечно длинных
круговых цилиндров с параллельными образующими:
ак = 0,4181/’^,
V Рпр
(3.1)
где <7 — нагрузка на единицу длины контактной линии;
„ 2£,£2
Е — -р-т-г---так называемый приведенный модуль упругости
для материалов колес;
1 1 . 1 , .
— = — ±--------приведенная кривизна профилен зубьев в точке
Рпр Pi Рг
контакта (знак плюс — при внешнем зацеп-
лении и минус — при внутреннем).
Для прямозубых цилиндрических колес (при внешнем зацеплении)
имеем
КР = 2£Mt
У b cos a djb-cos а '
„ _ Р1Р2 _ P1U dlu sin а
Рпр~" Р1 + р2 ~ «+1 ~ 2(«+1) •
Здесь /С — коэффициент нагрузки (см. ниже);
с/1 — делительный диаметр шестерни *;
b — ширина зубчатого венца;
и = — — передаточное число (и 1).
* Здесь и в дальнейшем шестерней называем меньшее из зацепляющихся зуб-
чатых колес.
2*
35
После подстановки <7 и р пр в формулу (3.1) получим при угле зацеп-
ления а = 20°
(3.2)
Формула (3.2) справедлива при любых взаимно согласованных
единицах измерения входящих в нее величин.
Для стальных колес при Е — 2,1 • 10® Н/мм2 получим
ок = if (3.3)
к dx f bu ' '
Здесь ЛД в Н • мм, d1 и b в мм, ок в Н/мм2.
§ 3.2. ЦИЛИНДРИЧЕСКИЕ ЗУБЧАТЫЕ КОЛЕСА
С ПРЯМЫМИ, КОСЫМИ И ШЕВРОННЫМИ ЗУБЬЯМИ
Принципиальные основы расчета, его методика, принятые обозна-
чения и вид расчетных зависимостей для прямозубых и косозубых (ше-
вронных) колес практически совпадают. Некоторые отличия в выборе
параметров зацепления и коэффициентов, входящих в расчетные
формулы, даны в приводимых к ним пояснениях.
Прямозубые колеса применяют при умеренной окружной скорости v
порядка до 3—6 м/с. При большей скорости пришлось бы значительно
повышать степень точности таких колес, целесообразнее же перехо-
дить на косозубые колеса.
Шевронные колеса применяют преимущественно для передачи
сравнительно больших мощностей; различают два типа колес: а) с жест-
ким углом шеврона; б) с канавкой между зубьями; колеса с проточкой
могут быть изготовлены более точно, чем с жестким углом шеврона.
Расчет на контактную прочность
Проектный расчет цилиндрических колес основан на формуле
(3.2), входящие в нее две независимые определяемые величины dt и b
выражают через межосевое расстояние aw:
(3.4)
b = (3.4а)
где фв — коэффициент ширины зубчатого венца.
Вводя эти выражения в формулу (3.2) и учитывая условие контакт-
ной прочности ок [о1к, получаем обобщенную формулу для прямо-
зубых, косозубых и шевронных колес
___1,47 (ц-Ь 1) ч /~КМгЕ (ц-pl) /о пх
к— 2aw V bubn
Отсюда искомое межосевое расстояние
а.
'/0,735 \2 КМгЕ
(3.6)
36
Формулы (3.5) и (3.6) справедливы в любой системе единиц при
условии соблюдения правила размерностей.
В международной системе единиц (СИ) для стальных зубчатых
колес Е — 2,1 • 105 Н/мм2; формулы (3.5), (3.6) примут вид
к aw У buk„ ' '
. , , ® Л/340\2
aw - (и +1) у ([aJ J ^и1{п . (3.8)
В формулах (3.7) и (3.8) сгк — расчетное контактное напряжение,
Н/мм2; /С — коэффициент нагрузки, определяемый по данным, при-
веденным в § 3.4; Л4Х — номинальное значение момента, передаваемого
шестерней, Н мм; и — передаточное число, равное отношению числа
зубьев колеса к числу зубьев шестерни [при внутреннем зацеплении
знак плюс в выражении (и + 1) надо заменить на минус]; [о]к — допус-
каемое контактное напряжение для поверхностного слоя зубьев, Н/мм2;
фа — коэффициент ширины колес; для прямозубых колес = 0,2 4-
4- 0,4; для косозубых колес = 0,2 4- 0,6, при этом значения фа <
< 0,4 допустимы лишь при условии соблюдения неравенства
фа5= 2,-mns, (3.9)
т aw sin р ’ ' '
где тп — нормальный модуль зубьев, мм;
Р — угол наклона линии зуба на делительном цилиндре.
Для шевронных колес = 0,5 4- 0,8 (до 1,2).
Значения aw, и и для стандартных редукторов с цилиндрическими
зубчатыми колесами приведены ниже.
kn — коэффициент, учитывающий влияние суммарной длины
контактных линий на повышение нагрузочной способности
передачи: для прямозубых колес kn — 1;
для косозубых колес при твердости НВ 350 и р < 25° kn =
= 1,354- 1,50 (меньшее значение при гх=с20, большее — при zx>40);
при твердости > НВ 350, а также при р > 25° независимо от твер-
дости kn = 1,15.
В некоторых случаях, например в коробках передач, принимают
= 0,12 4- 0,15.
При выборе этого коэффициента надо учитывать следующее:
а) при консольном расположении хотя бы одного из двух сцепля-
ющихся колес не следует принимать большие значения фа;
б) при проектировании передач на небольшие нагрузки, когда
можно ожидать получения малых значений модуля, следует ориенти-
роваться на = 0,2 4- 0,25;
в) для второй (тихоходной) ступени редукторов обычно принимают
большие значения фо, чем для первой;
г) повышение точности изготовления и монтажа передачи позволяет
принимать более высокие значения фа.
Рекомендуется ограничивать отношение 1 — для прямо-
зубых; до 1,5 — для косозубых и до 2,5 — для шевронных колес.
37
В формулы (3.5)—(3.9) следует подставлять [о]к для колеса, изго-
товляемого, как правило, из материала, имеющего более низкие зна-
чения механических характеристик, чем материал шестерни. Твер-
дость рабочих поверхностей зубьев колеса также обычно ниже, чем
шестерни. Для косозубых передач с большой разностью твердостей
поверхностей зубьев (для колеса sC НВ 320, для шестерни HRC 50)
рекомендуется принимать [о]к равным среднему арифметическому
из допускаемых контактных напряжений, определенных для шестерни
и колеса, но не свыше 1,25 [о]к колеса для косозубых и не свыше
1,15 |о]к колеса для шевронных передач.
Если по условиям проектного задания основные параметры редук-
тора должны соответствовать стандарту (это требование обычно ста-
вится при проектировании редукторов, предназначенных для серийного
выпуска), значение aw, вычисленное по формуле (3.8), округляют
до ближайшего по ГОСТ 2185—66.
При проектировании нестандартного редуктора значение aw округ-
лять следует лишь до целого числа миллиметров.
Для выбора модуля и чисел зубьев шестерни и колеса можно реко-
мендовать один из следующих двух способов:
1. Задаются величиной модуля в интервале
т — (0,010 ч-0,020)
и округляют его до ближайшего стандартного по ГОСТ 9563—60**
(табл. 3.1).
3.1. Значения модулей зубчатых передач (по ГОСТ 9563—60**)
0,3 1 (2,75) 4,5 9 16 30
0,4 1,25 3 5 10 18 33
0,5 1,5 (3,25) 5,5 11 20 36
0,6 1,75 3,5 6 12 22 39
0,7 2 (3,75) 6,5 13 24 42
0,8 2,25 4 7 14 26 45
— 2,5 (4,25) 8 15 28 50
Примечание. Значения модулей, указанные в скобках, желательно не применять.
Для косозубых колес в большинстве случаев стандартным является
нормальный модуль тп. Для шевронных колес стандартным может
быть либо нормальный тп, либо окружной модуль mt. Это зависит от
применяемого зуборезного оборудования и инструмента.
Определяют суммарное число зубьев zc = zr + z^. Для прямозубых
колес или шевронных со стандартным торцовым модулем
гс = ^; (3.10)
для косозубых и шевронных колес со стандартным нормальным моду-
лем
_ 2aE, cos р
2с~
(3.11)
38
Угол наклона линии зуба р принимают для косозубых колес в пре-
делах р = 8 -т- 15°, для шевронных р = 25 40° (в отдельных слу-
чаях до 45°).
Определяют
Zc
z2 = zc —zb
(3.12)
После округления модуля по стандарту и и z2 до целых чисел
Z,
уточняют и — ~ и aw:
для прямозубых колес и шевронных со стандартным торцовым
модулем
= (3.13)
для косозубых или шевронных колес со стандартным нормальным
модулем
(3.14)
_?i + z2 m„
" 2 ' cos Р ’
Условие, чтобы aw было стандартным или выражалось целым чис-
лом миллиметров, удовлетворяется (при стандартном т„) путем изме-
нения угла р. Поясним сказанное. Пусть aw, вычисленное по формуле
(3.14), оказалось не целым числом, тогда следует принять aw равным
ближайшему целому числу миллиметров (иногда округляют aw до числа,
кратного пяти) и вычислить соответствующее значение
cosp = (Z1V2)ffl<?-
Это вычисление следует выполнять с точностью до пяти значащих
цифр. Полезно проверить вычисления, определив
л ♦
1 1 COS р ’
fl2 - 22 COS Р
с точностью до сотых долей миллиметра, и убедиться, что
_ ___dj+d2
2
равно принятому значению.
2. Задаются числом зубьев шестерни. Для некорригированных
колес, нарезаемых инструментом реечного типа, минимальное число
зубьев, при котором еще нет подрезания зубьев,
39
здесь а0/ — профильный угол производящей рейки в торцовом сече-
„ .tga
нии, определяемый из равенства tg aoz ==
Для прямозубых некорригированных цилиндрических колес
Р = 0, а0/= 20° и Zmin^n. (3.16)
Для косозубых и шевронных колес
Zmin^ 17cos3₽. (3.17)
Рекомендуется выбирать для I ступени редуктора Zj — 20 -ь 30,
для последующих ступеней zx = 17 ч- 24.
После выбора zx определяют z2 = ZjU, а для косозубых и шеврон-
ных колес, кроме того, выбирают угол р. Затем определяют модуль:
для прямозубых колес и шевронных со стандартным торцовым модулем
г1*Гг2
для косозубых и шевронных со стандартным нормальным модулем
При проектировании стандартного редуктора после кинематиче-
ского расчета следует для каждой ступени принять передаточное отно-
шение, соответствующее указанным в ГОСТ 2185—66 величинам:
1-й ряд . . . 1,0; 1,25; 1,6; 2,0; 2,5; 3,15; 4,0; 5,0; 6,3; 8,0
2-й ряд . . . 1,12; 1,4 ; 1,8; 2,24; 2,8; 3,55; 4,5; 5,6; 7,1; 9,0
Первый ряд следует предпочитать второму.
Указанные значения передаточных отношений (передаточных чисел)
являются номинальными; фактическое значение иф, окончательно
устанавливаемое после выбора гх и г2, не должно отличаться от номи-
нального более чем на 2,5% при и 4,5 и 4% при и > 4,5.
Задаваясь в начале расчета коэффициентом ширины, необходимо
также ориентироваться на указанные в ГОСТ 2185—66 значения, учи-
тывая при этом приведенные выше рекомендации. По ГОСТ 2185—66
значения следует выбирать из ряда:
0,100; 0,125; 0,160; 0,200; 0,250; 0,315; 0,400; 0,500; 0,630; 0,800; 1,00; 1,25
После определения требуемой величины межосевого расстояния
его следует округлить до ближайшего стандартного, выбираемого
из следующих рядов:
1-й ряд . . , 40; 50; 63; 80; 100; 125; 160; 200; 315; 400; 500; 630
2-й ряд . . . 140; 180; 225; 280; 355; 450; 560; 710
Здесь приведены предусмотренные ГОСТом значения aw (в
ГОСТ 2185—66 принято обозначение А) лишь до 710 мм, ГОСТ регла-
ментирует величины aw до 2500 мм.
Поясним ход выбора параметров зацепления на числовом примере.
40
Пример. При расчете одноступенчатого цилиндрического редуктора с прямо-
зубыми колесами было получено требуемое межосевое расстояние по формуле (3.8):
aw = 158 мм; заданное передаточное число i = 3,5. По ГОСТ 2185—66 принимаем
aw = 160 мм; суммарное число зубьев обычно выбирают в пределах zc = 100 200;
примем zc = 160, при этом получим
2ощ, 2 • 160
т———— ,сп°2 мм.
zc 160
Ближайшее стандартное значение передаточного числа и — 3,55.
Определяем число зубьев шестерни:
_ ?С 1 60 Q .
1-w+l 3,55+1 35,3’
принимаем zt = 35.
Число зубьев колеса
г2=гс —гх= 160—35= 125.
Фактическое значение передаточного числа
г2 125
~ 35 ~3,57
отличается от стандартного на 0,6% (допускаемое отклонение ±2,5%). Если при
модуле т = 2 мм прочность зубьев на изгиб окажется недостаточной, надо принять
zc = 128 и т = 2,5 мм. Тогда гх = 28 и г2 = 100; Нф = 3,57, т. е. отличается от
стандартного также на 0,6%.
После окончательного установления размеров колес следует
проверить величину расчетных контактных напряжений по одной
из формул (3.3), (3.5), (3.7).
Такая проверка необходима в первую очередь потому, что после
определения размеров передачи и окружной скорости уточняют
значение коэффициента нагрузки; если он лишь незначительно отли-
чается от принятого предварительно, то все равно имеет смысл выпол-
нить проверку, так как она может выявить вычислительную ошибку,
допущенную при определении aw. Более или менее значительное рас-
хождение величин ок и [о]к будет свидетельствовать о наличии такой
ошибки (конечно, при мало изменившемся значении коэффициента
нагрузки).
Проверка рабочих поверхностей зубьев на отсутствие пластической
деформации или хрупкого разрушения выполняется по формуле
Птах
_ 1/ ^2 max__i_i
-~О«Г М2 пр
(3.20)
здесь Отах — нап ряжение в поверхностном слое зубьев, соответ-
ствующее нагружению передачи максимальным (пи-
ковым) моментом;
ок — напряжение в поверхностном слое зубьев, опреде-
ленное по формуле (3.3) или (3.5),или (3.7);
М2тах — максимальный (пиковый), момент на валу колеса;
Л12 — номинальный момент на валу колеса;
[п1к.пр — допускаемое предельное напряжение, принимаемое
по данным § 3.5.
41
Расчет зубьев на прочность по напряжениям изгиба
Для проверки зубьев цилиндрических колес закрытых передач
на прочность по напряжениям изгиба можно пользоваться формулой
КР
ymnbkm’ (3.21)
здесь 1\ — коэффициент нагрузки, принимаемый при расчете на изгиб
таким же, как и при расчете на контактную прочность;
Р — окружное усилие;
у — коэффициент формы зуба, определяемый в зависимости
от числа зубьев — действительного для прямозубых и
эквивалентного (приведенного) zv для косозубых и шев-
ронных [zv = C0Zs3pj и коэффициента смещения (для корри-
гированных колес) по табл. 3.2;
тп — нормальный модуль зацепления;
b — ширина зубчатого венца;
km, — коэффициент повышения нагрузочной способности на
изгиб косозубых и шевронных колес; значения его такие
же, как и при расчете на контактную прочность: kVM —
= kn [см. пояснения к формулам (3.7), (3.9)], для прямо-
зубых колес kn„ = 1.
Допускаемое напряжение изгиба [о]и следует выбирать по данным,
приведенным в § 3.5.
3.2. Коэффициент формы зуба у при угле зацепления 20е и при /о=-^1- = 1)0
Число зубьев z Зубчатые колеса и шестерни внешнего зацепления и шестерни внутреннего зацепления при коэффициенте смещения исходного контура Зубчатые колеса с внутренними зубьями
—0.6 —0.4 —0,2 0 +0,2 +0,4 +0,6 +1,0
12 — 0,169 0,239 0,308 0,378 0,448 0,516 0,686
14 0,138 0,202 0,266 0,330 0,392 0,458 0,522 0,650
16 0,195 0,249 0,302 0,355 0,408 0,461 0,516 0,621 —
18 0,237 0,283 0,330 0,377 0,424 0,470 0,516 0,610 —
20 0,262 0,307 0,348 0,389 0,431 0,473 0,513 0,596 —
22 0,296 0,331 0,367 0,402 0,437 0,473 0,509 0,579 —.
24 0,325 0,355 0,384 0,414j 0,445 0,475 0,504 0,563
26 0,345 0,373 0,400 0,426 0,455 0,481 0,509 0,563
28 0,358 0,383 0,408 0,434 0,458 0,484 0,509 0,560 0,942
30 0,369 0,392 0,416 0,440 0,464 0,486 0,511 0,558 0,916
35 0,390 0,411 0,431 0,452 0,473 0,494 0,514 0,556 0,863
40 0,406 0,426 0,445 0,465 0,485 0,503 0,523 0,562 0,825
45 0,415 0,434 0,452 0,471 0,490 0,509 0,528 0,565 0,795
50 0,423 0,441 0,459 0,477 0,495 0,513 0,531 0,568 0,769
60 0,440 0,456 0,474 0,490 0,507 0,523 0,540 0,574 0,731
80 0,457 0,471 0,485 0,449 0,512 0,526 0,541 0,569 0,688
100 0,464 0,481 0,494 0,505 0,517 0,530 0,542 0,566 0,660
150 0,492 0,499 0,508 0,515 0,523 0,531 0,540 0,556 0,620
Рейка — — — 0,550 — — — —
42
где
На изгиб следует рассчитывать зубья того из пары сцепляющихся
колес, для которого величина произведения у [о]и меньше.
Проверка зубьев на пластическую деформацию или хрупкий излом
при изгибе производится по формуле
м
<Гцп1ах = (Ги [°1и пр, (3.22)
би шах — напряжение изгиба, соответствующее передаче за-
цеплением максимального (пикового) момента;
ои — напряжение изгиба, определяемое по формуле (3.21);
M2max и /И2 — максимальный (пиковый) и номинальный момент
на колесе;
[о]ипр — допускаемое предельное напряжение изгиба, при-
нимаемое по данным, приведенным в § 3.5.
При проектном расчете открытых передач модуль зацепления
определяют из условия прочности зубьев на изгиб по обобщенной фор-
муле, пригодной для любой системы единиц,
=1
А’^^изи cos Р
(3.23)
В международной системе единиц (СИ) следует выражать М в
Н -мм; [о]и в Н/мм2; тп получится в мм.
Остальные величины безразмерные; величины Миг должны отно-
ситься к одному и тому же зубчатому колесу, т. е. следует подставлять
либо Мг и гъ либо М2 и г2. Дополнительный множитель в числителе —
£изн — коэффициент, учитывающий уменьшение толщины зуба в его
опасном сечении вследствие износа; значения коэффициента /г11яп
в зависимости от процента износа, принятого в качестве допуска-
емого, следующие.
Износ, %, по отношению к первоначальной толщине............. 10 20 30
£изн...................................................... 1,25 1,50 2,00
фт=—------коэффициент ширины зубчатого венца. Для прямозубых
тп
колес с литыми зубьями фт = 6 -5- 10, с нарезанными зубьями фт =
= 10-5-20 (обычно 10—12). Для косозубых колес = 12 ч- 30,
а для шевронных до 60 и в специальных случаях (например, шестерен-
ные валки прокатных станов) даже выше. При выборе следует
учитывать также указания, сделанные в отношении коэффициента фа;
эти коэффициенты связаны друг с другом зависимостью
= (3.24)
"1п
Числом зубьев шестерни следует задаться. При этом надо учиты-
вать, что уменьшение (и как следствие г2) ухудшает ус-
ловия зацепления, но позволяет получить меньшие габариты
передачи. При выборе минимального числа зубьев шестерни в случае
отсутствия коррекции зацепления надо руководствоваться формулой
(3.15) и указаниями к ней.
Расчет ведут для зубьев того из сцепляющихся колес, для которого
произведение у [о]и меньше.
43
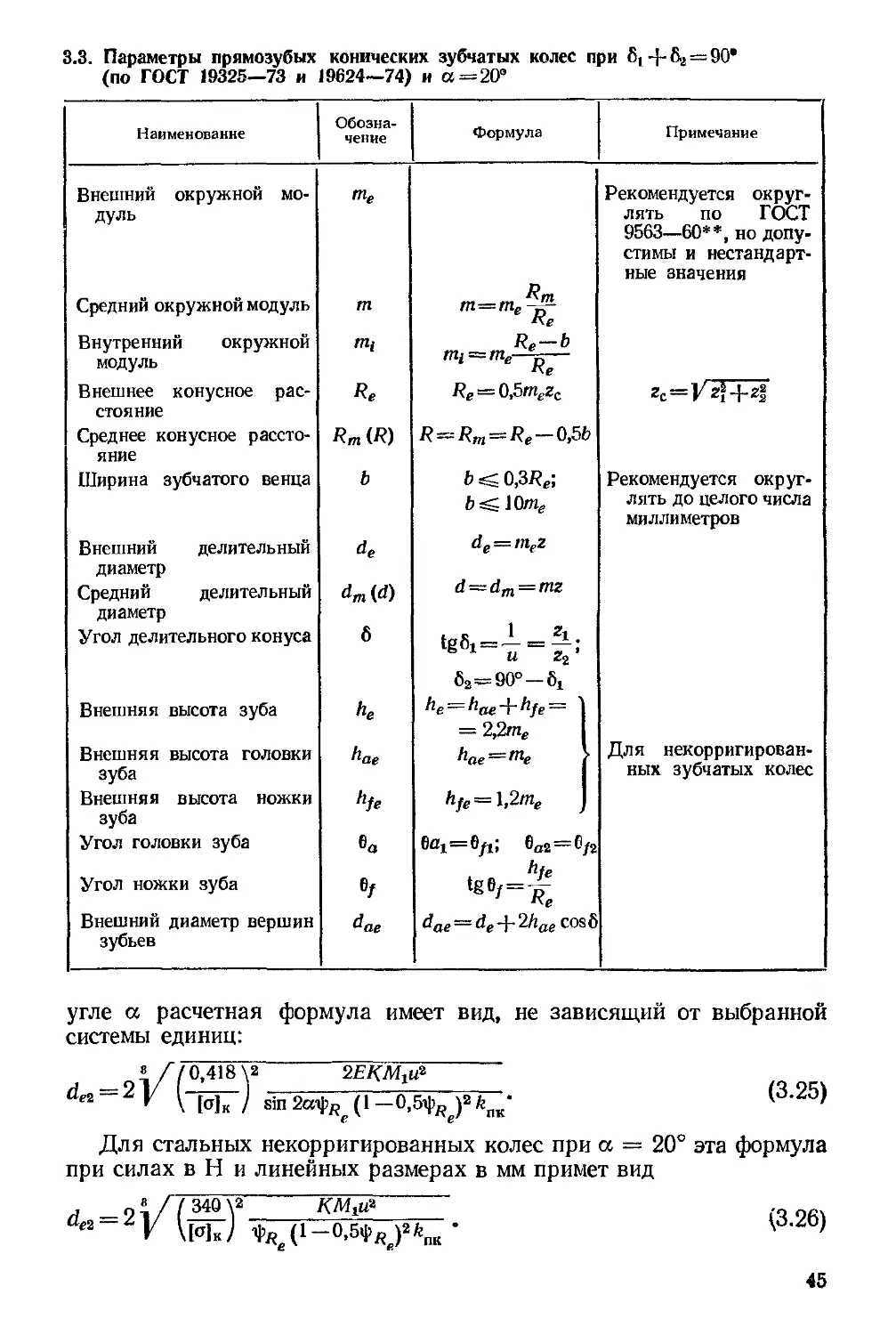
3.3. Параметры прямозубых конических зубчатых колес при 6, + 6.2 = 90*
(по ГОСТ 19325—73 и 19624—74) и « = 20°
Наименование Обозна- чение Формула Примечание
Внешний окружной мо- дуль Средний окружной модуль Внутренний окружной модуль Внешнее конусное рас- стояние Среднее конусное рассто- яние Ширина зубчатого венца Внешний делительный диаметр Средний делительный диаметр Угол делительного конуса Внешняя высота зуба Внешняя высота головки зуба Внешняя высота ножки зуба Угол головки зуба Угол ножки зуба Внешний диаметр вершин зубьев те т mi Re Rm(R) b dfi dm(d) 6 he hae hfe 6a dae r. A « О Й •- s 6I.| f -5 g 11 4. . 2 * § s » s -13 ь + e Я и / II E II 11 V/ V/ I "° II of II T * o' • « II II S V/ « II 1 II « « II w « 5 £ £ * - Ы -111 - II II " “ “ a1 e ft; о ’Ч Рекомендуется округ- лять по ГОСТ 9563—60**, но допу- стимы и нестандарт- ные значения гс=/4+г! Рекомендуется округ- лять до целого числа миллиметров Для некорригирован- ных зубчатых колес
угле а расчетная формула имеет вид, не зависящий от выбранной
системы единиц:
2E/fM1U2
от//0,418 V
= 2 / sin 2«^( 1-0,5^)2/гпк-
(3.25)
Для стальных некорригированных колес при а — 20° эта формула
при силах в Н и линейных размерах в мм примет вид
de2 = 2
т / / 340 V
т \1°1к/ (1 — °»5Фяв)гЛпк
(3.26)
45
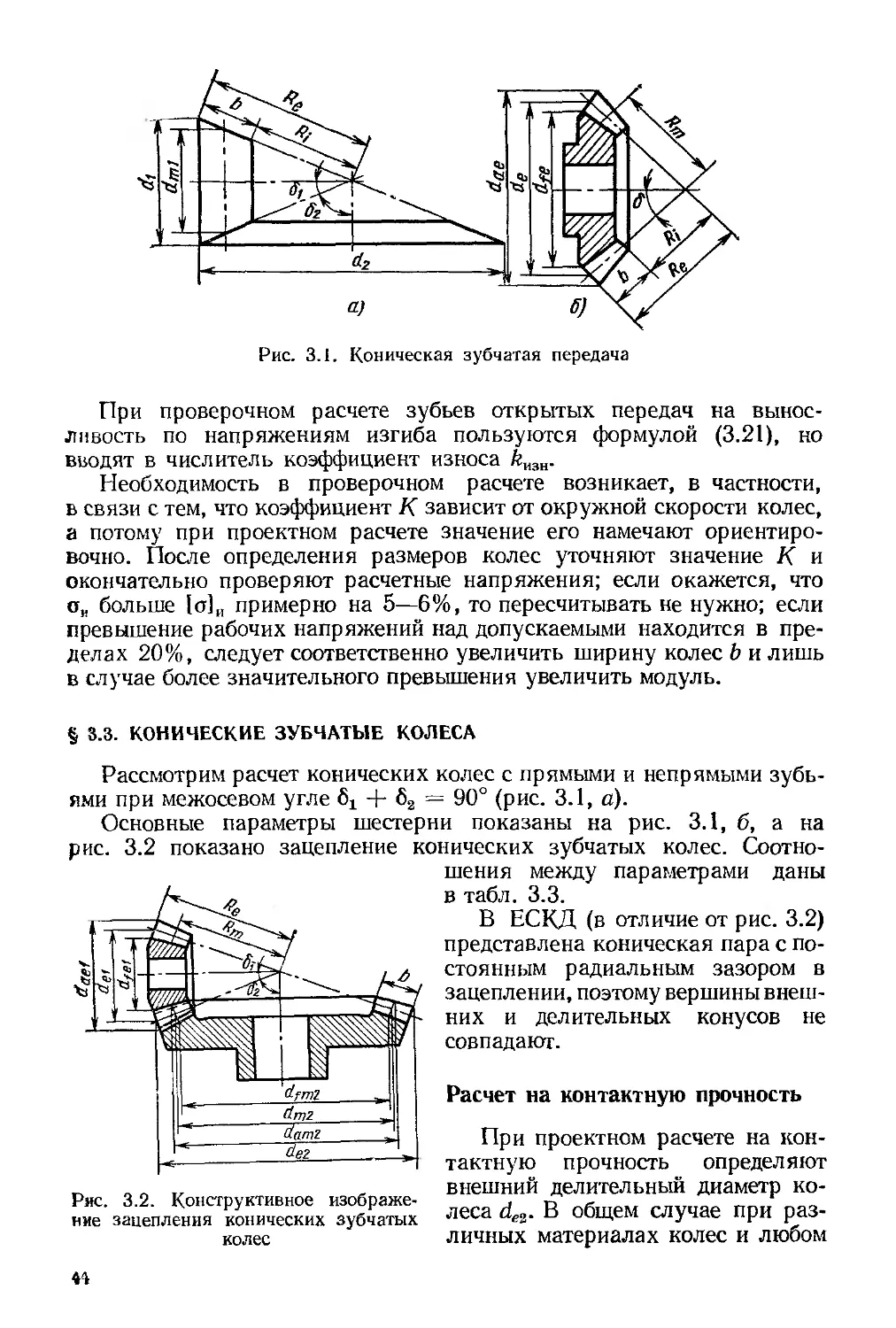
Рис. 3.1. Коническая зубчатая передача
При проверочном расчете зубьев открытых передач на вынос-
ливость по напряжениям изгиба пользуются формулой (3.21), но
вводят в числитель коэффициент износа Дизн.
Необходимость в проверочном расчете возникает, в частности,
в связи с тем, что коэффициент К зависит от окружной скорости колес,
а потому при проектном расчете значение его намечают ориентиро-
вочно. После определения размеров колес уточняют значение К и
окончательно проверяют расчетные напряжения; если окажется, что
ои больше 1о]„ примерно на 5—6%, то пересчитывать не нужно; если
превышение рабочих напряжений над допускаемыми находится в пре-
делах 20%, следует соответственно увеличить ширину колес b и лишь
в случае более значительного превышения увеличить модуль.
§ 3.3. КОНИЧЕСКИЕ ЗУБЧАТЫЕ КОЛЕСА
Рассмотрим расчет конических колес с прямыми и непрямыми зубь-
ями при межосевом угле + 62 = 90° (рис. 3.1, а).
Основные параметры шестерни показаны на рис. 3.1, б, а на
рис. 3.2 показано зацепление конических зубчатых колес. Соотно-
Рис. 3.2. Конструктивное изображе-
ние зацепления конических зубчатых
колес
шения между параметрами даны
в табл. 3.3.
В ЕСКД (в отличие от рис. 3.2)
представлена коническая пара с по-
стоянным радиальным зазором в
зацеплении, поэтому вершины внеш-
них и делительных конусов не
совпадают.
Расчет на контактную прочность
При проектном расчете на кон-
тактную прочность определяют
внешний делительный диаметр ко-
леса de2. В общем случае при раз-
личных материалах колес и любом
44
Вдесь Io]K — допускаемое контактное напряжение, Н/мм2;
Мг — момент на валу шестерни, Н -мм;
и — —— передаточное число; для стандартных редукторов
zi
выбирают из рядов чисел (предпочтителен 1-й ряд):
1-й ряд ... . 1; 1,25; 1,60; 2,0; 2,50; 3,15; 4,0; 5,0; 6,3
2-й ряд ... . 1,12; 1,40; 1,80; 2,24; 2,80; 3,55; 4,5; 4,5
= ~ — коэффициент ширины венца (см. рис. 3.2), при проект-
ном расчете принимают ф^ 0,3; knK — экспериментальный коэффи-
циент нагрузочной способности конических зубчатых колес: для
прямозубых колес = 0,85; для колес с косыми (тангенциальными)
зубьями knK = 1,2 4- 1,3. Для колес с криволинейными (круговыми)
зубьями krK = 1,45, при среднем угле наклона линии зуба 0т = 35°.
Вычисленное значение de2 округляют до стандартного из ряда:
50; (56); 63; (71); 80; 90; 100; (112); 125; (140); 160; (180); 200; (225);
250; 280; 315; 355; 400; 500; 560; 630... (до 1600) мм.
Если принять наиболее расйространенное значение фре = 0,3,
то для стальных зубчатых колес получим следующую формулу:
^==3,781/И?Ж. (3.26а)
г \1и1к/ кпк
Расчет конической пары можно начинать и с определения среднего
конусного расстояния:
^ = У^+Ту/' (3*°)2(3.27)
При фКе = 0,3 получим ф# = 0,354.
Определив ширину венца b = фд R и внешнее конусное расстояние
/?е = Я4-0,5&,
находят
de2 = 2Яе sin 6г. (3.28)
После определения сЦ дальнейший расчет ведут в такой последо-
вательности.
1. Задаются числом зубьев шестерни — обычно в пределах =
= 18 4- 24. Можно принимать в случае необходимости и несколько
меньшие значения. Минимально допускаемое число зубьев шестерни
определяют из условия отсутствия подрезания
Zj
COS Si cos? 2ra!n’
где Zmin — минимальное число зубьев цилиндрического прямозубого
колеса, у которого при данном передаточном числе еще не получается
подрезания зубьев; 0т — средний угол наклона линии зуба на делитель-
46
ном конусе. Для колес с косыми (тангенциальными) зубьями выбирают
наружный угол наклона на делительном конусе по соотношению
tg₽e=s=3,5me^. (3.29)
Связь между углами $т и выражается формулой
tg = tg Ре 1—0,5^ • (3.80)
Для колес с круговыми зубьями можно принимать =* 20 •+• 40°,
часто принимают рт = 35°.
2. Определяют число зубьев колеса:
г2 = г1и.
3. Определяют углы делительных конусов:
6i = arctg-i;
62 = arctg«. .
(3.31)
4. Определяют внешний окружной модуль:
нормальный
/ияг = cos Ре. (3.33)
Для прямозубых колес внешний окружной модуль mte = т
рекомендуется округлять до ближайшего стандартного по
ГОСТ 9563—60 **, но допускаются и нестандартные значения те.
5. Определяют рабочую ширину колес (для прямозубых совпа-
дает с длиной зуба):
b = Re^Re.
Полученное значение b следует округлять до целого числа милли-
метров.
6. Уточняют внешнее конусное расстояние Re, т. е. определяют
его значение, соответствующее окончательно принятым параметрам
передачи (оно может несколько отличаться от полученного из расчета):
<3.34>
Уточняют R = Ре — ~.
7. Определяют величину среднего модуля по формуле
т = те~~. (3.35)
Полученное значение т не надо округлять.
47
8. Находят величину окружной скорости, м/с, соответствующей
среднему диаметру начального конуса:
с₽ 60 • 1000 ’
(3.36)
Уточняют значение коэффициента нагрузки К и проверяют расчет-
ные контактные напряжения при полученных размерах зацепления:
ок = _.- 6^°. —1/~(3.37)
d£2—6sino2 г 6 siri o2knK '
Здесь de2 и b — в мм; M — в Н -мм; <тк — в Н/мм2.
Формула дана для стальных колес 20-градусного зацепления;
в общем случае следует проверять <тк, применяя формулу
0,836 ЛГ~~2ЕКМ^
oK=-j-, . -г- I/ , .. ,—(3.37а)
+2 — b sin ё2 г b sm ё2/гПк яп 2а '
При кратковременном действии максимальных (пиковых) нагрузок
проверку на пластическую деформацию или хрупкое разрушение по-
верхностей зубьев выполняют так же, как и для цилиндрических зуб-
чатых колес.
Расчет зубьев на прочность по напряжениям изгиба
Проверка зубьев закрытых передач на выносливость по напря-
жениям изгиба производится по формулам:
для прямозубых колес
(3-38)
для колес с косыми или криволинейными зубьями
l,39KPcos2Pm
ybmne.t
(3.39)
Значение коэффициента формы зуба у берут из табл. 3.2 в зависи-
мости от эквивалентного числа зубьев рассчитываемого колеса (рассчи-
тывают зубья того колеса, для которого произведение у [о]и меньше):
Zvt COS б COS3 pm
Окружное усилие вычисляют по формуле
р — — — —
~ vcp ~ dm ’
где N — в Вт; пср — в м/с; М — в Н -м; dm — в мм.
Торцовый коэффициент перекрытия
£^[1,88-3,2(1 + ^] cos pm.
L \Z1 Z2 /J
(3.40)
(3.41)
На пластическую деформацию или хрупкий излом при изгибе зубья
проверяют по формуле (3.22).
48
При проектном расчете открытых прямозубых передач средний
модуль зацепления определяют из условия прочности зубьев на изгиб
по формуле (для колес с непрямыми зубьями формулу не приводим,
так как в открытых передачах такие колеса практически не приме-
няются)
т_\[
V у [о[„гфга *
(3.42)
Коэффициент длины зуба ~ в зависимости от выбранного
можно получить из соотношения
*•-4^- <злз>
Здесь
= V ?! 4- zf = Zt
(3.44)
Значения и единицы измерения величин, входящих в формулу
(3.42), те же, что и для цилиндрических колес.
После определения т и длины зуба b вычисляют внешний окружной
модуль
. ь sin б,
те = т Я------
е ' Zj
(3.45)
который можно округлить до стандартного. Затем вычисляют факти-
ческое значение среднего модуля по формуле (3.35), определяют
среднюю окружную скорость, уточняют значение коэффициента на-
грузки и проверяют расчетные напряжения изгиба по формуле
l,25KPfe„3H
и ybm
(3.46)
Увеличивать модуль зацепления следует лишь в том случае, если
расчетные напряжения значительно превышают допускаемые (на 20—
25%), при меньшем превышении целесообразнее несколько увеличить
размер Ь.
§ 3.4. КОЭФФИЦИЕНТ НАГРУЗКИ
Во все приведенные выше расчетные зависимости для определения
основных размеров зубчатых зацеплений или напряжений, возникающих
в зубьях при работе передачи, входит не номинальная, а расчетная
нагрузка. В зависимости от структуры расчетной формулы под
нагрузкой понимают передаваемую мощность, момент или окружное
усилие.
Номинальной мощностью (нагрузкой) передачи называют посто-
янную мощность, соответствующую установившемуся режиму работы
приводимой в движение машины. Практически при работе любой пере-
дачи ее нагрузка не остается постоянной; кроме того, вследствие
49
деформации валов передачи и самих зубчатых колес нарушается при-
нятая при выводе расчетных зависимостей равномерность распреде-
ления нагрузки по длине зубьев, неизбежные неточности изготовления
вызывают при работе передачи дополнительную динамическую на-
грузку зубьев.
Строгий математический учет этих факторов невозможен, поэтому
их влияние на напряжения в зубьях учитывают введением коэффи-
циента нагрузки К, который здесь принят одинаковым при расчетах
на изгиб и контактную прочность.
Единой общепринятой методики определения коэффициента на-
грузки пока не существует. Попытки наиболее полно и обоснованно
учесть все факторы, влияющие на возрастание напряжений в зубьях,
приводят к весьма сложной и громоздкой методике определения рас-
четной нагрузки. В основу приводимой здесь методики положены
данные из монографии [49] с определенными упрощениями, обуслов-
ленными назначением настоящего пособия.
Общий коэффициент нагрузки может быть представлен в виде
произведения двух частных коэффициентов:
К = *Лкц. (3-47)
здесь KR — коэффициент динамичности нагрузки, зависящий от окруж-
ной скорости и точности изготовления передачи; этот коэффициент
приближенно отражает влияние неточностей зацепления на возник-
новение динамических нагрузок, а следовательно, и на возрастание
напряжений в зубьях; /<кц — коэффициент концентрации нагрузки,
приближенно отражающий влияние на прочность зубьев неравномер-
ности распределения нагрузки по длине контактных линий, происхо-
дящей за счет деформаций валов и зубчатых колес.
При проектном расчете передачи, когда окружная скорость и пара-
метры передачи еще неизвестны, можно принимать:
при симметричном (или близком к симметричному) расположении
зубчатых колес относительно опор
К = КдЛкц^1.3;
при несимметричном или консольном расположении
Л = адкц^1,5.
После определения размеров передачи следует уточнить значение
коэффициента нагрузки по табл. 3.4—3.6 и проверить расчетные напря-
жения в зубьях по формулам § 3.2, 3.3. Если окажется, что /<кц > 1,6,
следует уменьшить ширину колес.
Динамический коэффициент для прямозубых колес рекомендуется
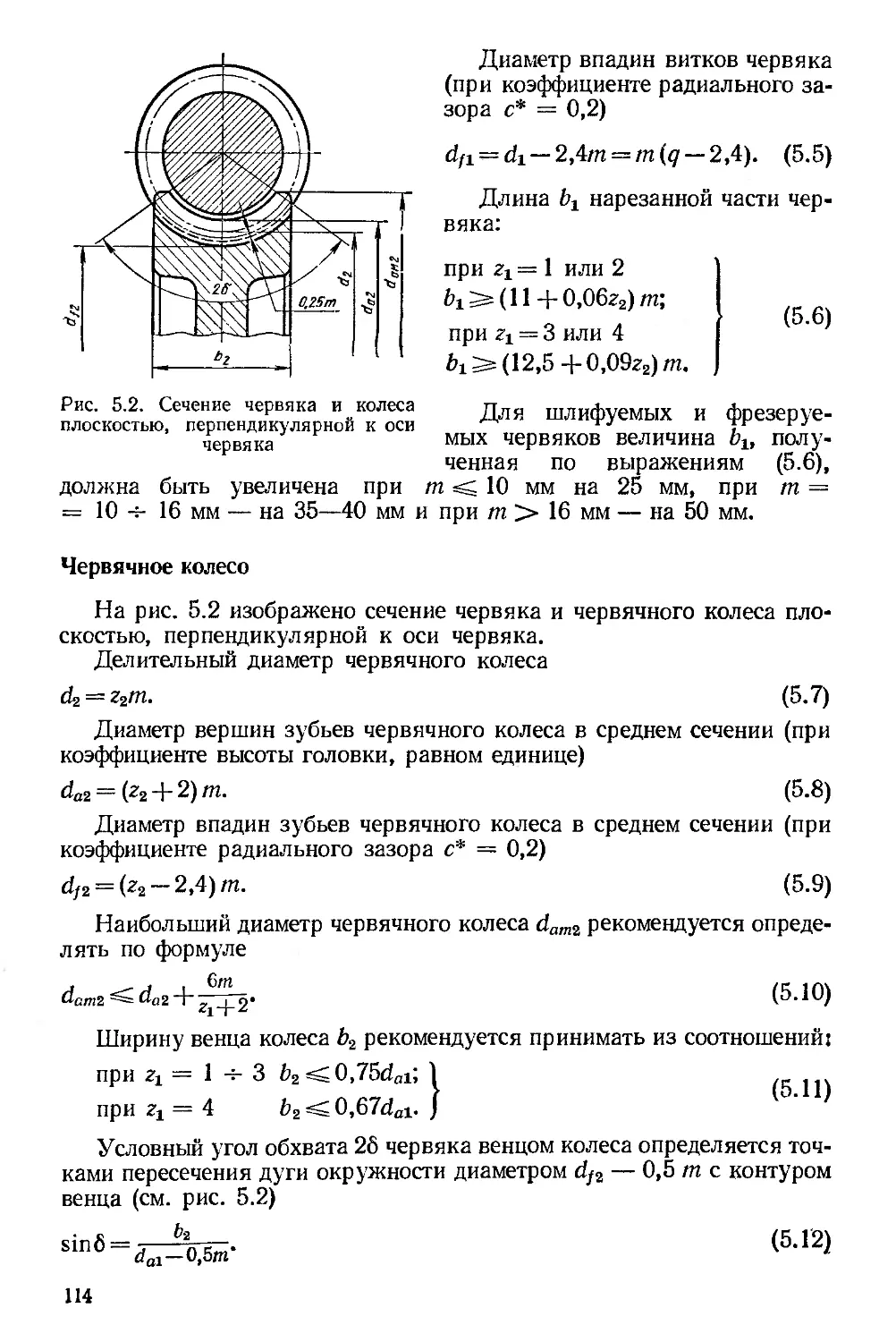
выбирать по табл. 3.4. Данными этой же таблицы следует пользо-
ваться для сравнительно узких цилиндрических косозубых колес
[b < 2^"^‘) • В остальных случаях для косозубых и шевронных колес
следует при выборе Кл пользоваться данными табл. 3.5.
Выбор степени точности зацепления в зависимости от окружной
скорости производится по табл. 3.6.
50
3.4. Значение динамического коэффициента Кд для расчета
прямозубых зубчатых колес, а также косозубых при ширину последних
< 2,5отд
Цилиндрические зубчатые колеса Кониче- ские зуб- чатые колеса Твердость поверхно- стей зубь- ев колеса ^^min Окружная скорость * зацепления V, м/с
Степень точности зацепления по ГОСТу До 1 Св. 1 Св. 3 Св. 8 Св. 12
1643—72 9368—60 До 3 ДО 8 до 12 ДО 18
5-я, 6-я степень для фланкированных зубьев — До 200 200—350 Св. 350 — — 1,1 1,1 1,1 1,2 1,2 1,2 1,4 1,3 1,2
5-я, 6-я степень для не- фланкированных или 7-я для фланкированных — До 200 200—350 Св. 350 1 1 1 1,1 1,1 1,1 1,2 1,2 1,2 1,4 1,3 1,3 1,6 1,5 1,4
7-я степень для нефлан- кированных или 8-я для фланкированных 5-я и 6-я степень До 200 200—350 Св. 350 1 1 1 1,3 1,2 1,2 1,5 1,4 1,3 1,6 1,5 1,4 —
8-я степень для нефлан- кированных 7-я степень До 200 200—350 Св. 350 1,1 1 1 1,4 1,3 1,3 1,6 1,4 1,4 — —
9-я степень для нефлан- кированных ** 8-я степень До 200 200—350 Св. 350 1,2 1,1 1,1 1,5 1,4 1,4 — — —
* Окружную скорость ДЛЯ ного конуса. ♦♦ 9-ю степень точности доп] 9-я степень <онических /скается пр До 200 200-350 Св. 350 колес опре; вменять лих 1,3 1,2 1,2 хеляют 11Ь для т 1,6 1,5 1,5 по сред ихоходн нему дн ых откр аметру н ытых пе ачаль- редач.
3.5. Значение динамического коэффициента Кд для косозубых и шевронных колес
Степень точности Твердость поверх- ностей зубьев Окружная скорость зацепления v, м/с
ДО 3 3-8 8-12 12—18 18-25
зацепления Коэффициент
6-я <350 1 1 1,1 1,2 1,3
>350 1 1 1 1,1 1,2
7-я <350 1 1 1,2 1,3 1,4
>350 1 1 1,1 1,2 1,3
8-я <350 1,1 1,3 1,4 .—.
>350 1,1 1,2 1,3 ““
51
3.6. Степень точности в зависимости от окружной скорости
Вид зубьев Вид передачи НВ Степень точности (по нормам плавно- сти) по ГОСТ 1643—72 и 9368—60
3. 4, 5 6 7 8 9
Окружная скорость, м/с
Прямые Цилиндрическая <350 >350 >12 > 10 До 18 » 15 До 12 » 10 До 6 » 5 До 4 » 3
Коническая <350 >350 >7 >6 » 10 > 9 » 7 > 6 » 4 » 3 » 3 » 2,5
Непрямые Цилиндрическая <350 >350 >25 >20 > 36 » 30 » 25 » 20 » 12 » 9 » 8 » 6
Коническая <350 >350 >16 > 13 » 24 » 19 » 16 > 13 » 9 » 7 » 6 » 5
2.7. Значение коэффициента концентрации нагрузки Ккц
Твердость поверхностей зубьев Значения
> НВ 350 обоих зубчатых колес пары 6-я степень точности Ккц = в 7-я » » Ккц = 1,16 8-я » » Ккц=1,2е 9-я » » Ккц = 1,3в
С НВ 350 хотя бы одного из зубча- тых колес пары Ккц = в(]— 4>)+ф
Примечание. Для чугунных зубчатых колес, если их ширина b > 15m, значения К определенные по настоящей таблице, должны быть умножены на . кц 15m
В табл. 3.7 даны коэффициенты концентрации нагрузки.
Значения вспомогательного коэффициента <р, указанного в табл. 3.7
и зависящего от степени постоянства передаваемой нагрузки, сле-
дующие: при постоянной нагрузке передачи можно принимать <р = 1,0
(следовательно, Кка = 1,0 при твердости < НВ 350), при незначи-
тельных колебаниях передаваемой мощности <р 0,6, при значитель-
ных колебаниях передаваемой мощности <р » 0,2 -ь 0,3.
При уточненных расчетах коэффициент <р можно определять по фор-
муле
____1 _ Мтах1ЫтахпМтах+М11Л + М2^п2 + ... + М^дПд
Mmax ZMmaxnMmax + Zini + Z2na + -" + Z9n9
Здесь Afmax, Мъ М2, ..., Mq — моменты, передаваемые зубчатым
колесом в течение времени ^тах, •••> 4 за весь расчетный срок
52
службы передачи при частотах вращения того же колеса «л?тях, ni<
^2, • Ид-
В формуле (3.48) учитываются все нагрузки, передаваемые зацеп-
лением.
Вспомогательный коэффициент е принимают по табл. 3.8.
3.8. Значение коэффициента О
Расположение зубчатых колес относительно опор Материал зубьев парных зубчатых колес Форма зубьев Кониче- ские зубчатые колеса при-j^ 1 Цилиндрические зубчатые колеса с отношением b/di свыше
1 до 1.6 1,6 ДО 1,8 1,8 ДО 3,5
Симметричное Сталь и сталь, или сталь и чугун, или чугун и чугун Любая 1,1 1,2 1,3 1,4
Несимметричное или консольное, хотя бы одного из зубчатых ко- лес Сталь и сталь Косые или шенрон- ные -g20° 1,4 1,4 1,5 1,5
=>20'J 1,3 1,4 1,4 1,5
Прямые 1,3 1,3 1,4 1,5
Сталь и чугун или чугун и чугун Любая 1,2 1,3 1,4 1,5
Для конических зубчатых колес d1 — средний диаметр начального конуса. При
fe/djCl для прямозубых колес 6 = 1, для косозубых 0 = 1,2
§ 3.5. МАТЕРИАЛЫ ЗУБЧАТЫХ КОЛЕС
И ДОПУСКАЕМЫЕ НАПРЯЖЕНИЯ
Зубчатые колеса редукторов в большинстве случаев изготовляют
из конструкционной углеродистой или легированной стали с содер-
жанием углерода от 0,1 до 0,6%, а при больших размерах (колеса
диаметром > 500 мм) часто применяют стальное литье.
Колесо из стального литья обычно работает в паре с кованой
шестерней. Наиболее распространено стальное литье 40Л, 45Л, 40ХЛ,
ЗОХГСЛ.
Крупные колеса можно изготовлять также бандажированными —
венец кованый из углеродистой или легированной стали, а колесный
центр — из чугунного или стального литья.
Для колес открытых тихоходных малонагруженных передач часто
применяют чугунное литье СЧ 15-32, СЧ 18-36, СЧ 24-44. Для срав-
нительно сильно нагруженных открытых передач, а также для зуб-
53
чатых колес редукторов применяют серый чугун СЧ 28-48, СЧ 32-52,
СЧ 35-36. Легированное и модифицированное чугунное литье в ряде
случаев используют взамен стального литья.
При небольших нагрузках и средних скоростях иногда применяют
колеса из пластмассы в паре со стальным или чугунным колесом;
такое сочетание материалов оправдано в тех случаях, когда
предъявляются повышенные требования к бесшумности пере-
дачи.
Учитывая, что основным материалом для изготовления зубчатых
колес является сталь, ниже приводятся более подробные сведения
по выбору ее марок, назначению термообработки и значениям меха-
нических характеристик.
По твердости рабочих поверхностей и связанной с ней техноло-
гией нарезания и окончательной отделки зубьев различают две группы
стальных зубчатых колес:
а) нарезаемые после окончательной термообработки;
б) нарезаемые до окончательной термообработки.
Твердость колес первой группы < НВ 350. При этом твердость
порядка НВ 320—350 назначают, как правило, лишь для шестерен
небольшого диаметра. Указанные значения твердости являются пре-
дельными, обычно твердость колес этой группы НВ 160—280. Для
получения такой твердости колеса из углеродистой или легированной
стали (с содержанием углерода 0,3—0,6%) подвергают нормализации
или улучшению (закалка с высокотемпературным отпуском). Для рас-
сматриваемой категории колес наиболее часто применяют углероди-
стые стали 40, 45, 50, 50Г и легированные — 40Х, 45Х, 40ХН, ЗОХМА,
ЗОХНЗ.
Применение колес с высокой твердостью (HRC 40—63) рабочих
поверхностей зубьев позволяет значительно повысить нагрузочную
способность передачи. Вместе с тем термообработка, производимая
после окончательного зубонарезания, может привести к некоторому
искажению профилей зубьев.
Цементованные зубчатые колеса малоответственных передач изго-
товляют из сталей 15, 20. В более ответственных случаях применяют
легированные стали 15Х, 20Х, 12НЗА, 20НЗА, 20ХМНА, 15ХФ,
18ХГТ и др.
Окончательную обработку зубьев после цементации и закалки
производят с помощью шлифования или обкатки с применением
специальных паст.
Твердость поверхностей цементованных колес составляет HRC
50—63.
Сплошная закалка, которой могут подвергаться колеса из угле-
родистых и легированных сталей с содержанием углерода 0,35—0,5%,
обеспечивает твердость до HRC 40—60 (в зависимости от размеров
сечения).
Поверхностную закалку т. в. ч. или кислородноацетйленовым
пламенем можно применять при изготовлении колес из углеродистых
и легированных сталей с содержанием углерода 0,35—0,5%, напри-
мер из сталей 40, 45, 50, 50Г, 40Х, 40ХН и др. Особенно целесооб-
54
разно применять этот метод термообработки для колес с большими
размерами сечений.
Высокая твердость рабочих поверхностей зубьев обеспечивается
также при цианировании, азотировании и нитроцементации. Недо-
статком этих методов является малая толщина твердого поверх-
ностного слоя, вследствие чего колеса оказываются весьма чувстви-
тельными к перегрузкам.
При азотировании коробление колес ничтожно, что позволяет из-
бежать шлифования зубьев после термообработки. Для азотирован-
ных колес применяют стали 38МЮА, 35ХЮА, 38Х2Ю, 38Х2МЮА
и др.
Для нитроцементации применяют стали 25ГМ, 25ХГТ. При выборе
стали твердостью < НВ 350 для зубчатых колес редукторов и откры-
тых передач необходимо иметь в виду, что материал шестерни по
своим механическим свойствам должен быть несколько лучше мате-
риала колеса, чтобы компенсировать большее значение числа циклов
нагружений, испытываемых шестерней за время работы передачи.
В редукторостроении часто выбирают для шестерни и колеса
сталь одной и т,ой же марки, но с различной термической обработкой,
например, шестерня из стали 45 улучшенной, а колесо из стали
45 нормализованной. Возможно также применение одинаковой тер-
мической обработки, так как при улучшении механические харак-
теристики снижаются с увеличением размера сечения заготовки и,
таким образом, в этом случае шестерня будет иметь более высокие
механические характеристики, чем колесо. Применение для шестерни
и колеса одной и той же марки стали целесообразнее применения
различных сталей.
При изготовлении колес с твердостью рабочих поверхностей зубьев
до НВ 350 рекомендуется назначать для шестерни твердость на
20—50 единиц НВ выше, чем для колеса.
Для непрямозубых колес в отдельных случаях применяют такую
термообработку, что разность в твердостях шестерни и колеса дости-
гает 100 единиц НВ и даже более, это позволяет существенно повысить
допускаемые контактные напряжения (см. ниже).
При высокой твердости рабочих поверхностей зубьев твердости
шестерни и колеса, как правило, одинаковы.
Механические свойства стали некоторых марок, наиболее часто
применяемых для изготовления зубчатых колес, приведены в табл. 3.9.
Допускаемые контактные напряжения при расчете на предотвра-
щение усталостного выкрашивания принимают в зависимости от твер-
дости рабочих поверхностей зубьев.
Для углеродистых и легированных сталей любых марок при
твердости < НВ 350 (колеса, подвергнутые нормализации или улуч-
шению)
[о]к = 2,75ДВйрк, (3.49)
где &рк — коэффициент режима нагрузки при расчете на контактную
прочность; значения этого коэффициента приведены ниже. В формуле
55
3.9. Механические свойства стали, применяемой для изготовлении
зубчатых колес
Марка стали Диаметр заготовки, мм 0В, Н/мм* от, Н/мм’ Твердость НВ, кгс/мм* Т ермообр аботка
40 До 100 100—300 300—500 550 530 510 280 270 260 152—207 Нормализация
45 До 100 100—300 300—500 590 570 550 300 290 280 167—217
45 До 90 90—120 130—150 780 730 690 440 390 340 207—250 194—222 180—207 Улучшение
50Г До 150 150—400 640 610 370 320 190—229 Нормализация
50Г До 100 100—200 740 690 410 390 241—285 Улучшение
ЗОХГС До 60 100—160 160—250 980 890 790 840 690 640 215—229 Нормализация
ЗОХГС До 140 140—300 1020 930 840 740 235—280 Улучшение
35Х До 60 60—100 100—200 940 740 690 740 490 440 190—241 Нормализация
35Х До 200 740 490 220—260 Улучшение
35СГ До 120 120—150 150—180 180—250 930 880 830 780 690 590 540 490 257—285 243—271 230—257 215—243 Улучшение
40Х До 60 100—200 200—300 300-600 980 760 740 690 790 490 490 440 200—230 Нормализация
40Х До 120 120—150 150—180 180—250 930 880 830 780 690 590 540 490 257—285 243—271 230—257 215—243 Улучшение
56
Продолжение табл. 3.9
Марка стали Диаметр заготовки, мм ов, Н/мм8 ат, Н/мм2 Твердость НВ, кгс/мм2 Термообработка
40ХН До 60 60—100 100—300 300—500 980 840 790 740 790 590 570 550 220—250 Нормализация
40ХН До 150 150—180 180—250 930 880 835 690 590 540 265—295 250—280 235—265 Улучшение
40ХНМА До 120 120—200 1080 980 900 740 275—310 265—240
50Г2 До 80 100—300 740 690 400 350 195—240 Нормализация
50Г2 До 100 790 440 269—320 Улучшение
35Л 40Л 45Л 50Л 55Л 40ГЛ Отливки из углеродис 420 520 540 570 590 630 той и легиро 270 290 310 330 340 320 ванной стали 145 147 153 174 155—217 174 Нормализация
35ГЛ 35ХГСЛ 35ХНЛ 40Г2Л — 590 790 690 630 340 590 490 320 174 202 218—269 190—225 Улучшение
(3.49) НВ в кгс/мм2 и 1о]к в Н/мм2. Допускаемое контактное напря-
жение принимают по твердости материала колеса (обычно по мини-
мальному значению твердости, соответствующему выбранной термо-
обработке).
Для непрямозубых колес при разнице в твердостях шестерни и
колеса, превышающей 100 единиц Бринелля, [о]к выбирают как сред-
нее арифметическое допускаемых напряжений, установленных по
твердостям шестерни и колеса:
[о]к = Ик1+Мк2 = 2 75 .
(3.49а)
2
При этом [о]к не следует принимать выше чем 1,25 [ст]к2 для косо-
зубых колес и выше чем 1,15 [о]к2 для шевронных цилиндрических
колес и непрямозубых конических колес.
57
Для сталей твердостью > НВ 350 (колеса, подвергнутые сплош-
ной или поверхностной закалке зубьев, а также цементации, циани-
рованию или азотированию) [о]к, Н/мм2, определяют по формуле
[Q]K=cHHCminkp&, (3.50)
здесь с — числовой коэффициент, принимаемый по табл. 3.10.
3.10. Значения коэффициента с н зависимости от твердости
и термообработки зубчатых колес
Марка стали Термообработка Т вердость зубьев НЦС С
35ХГС, 35ХМ, 40Х, 40ХН 12ХНЗА, 18Х2Н4МА, 20ХМ, 20ХМНТ, 25ХГТ 25ХГМ, 25ХГТ, ЗОХГТ, 35Х 38Х2МЮА, 38Х2Ю, 40Х, 40ХФА, 40Х2НМА 40Х, 40ХН, 35ХМ Закалка Цементация и закалка Нитроцементация Азотирование Поверхностная закалка ТВЧ 45—55 50—63 56-63 56—63 45—63 25,5 27,5 27,5 27,5 24
В учебнике [40] Дано определение [о]к по средней, а не по минимальной твердо-
сти, чем объясняется меньшее значение коэффициента с.
Для чугуна
Мк = С1ДВпйп- (3.51)
Значения коэффициента Q для различных марок чугуна таковы:
Чугун Предел прочно- сти при растя- жении, Н/мм2 Твердость поверхностей зубьев НВ
Серый СЧ 15-32 > СЧ 24-44 150 240 160 170—190 1,5
Ковкий кч 30-6 > КЧ 35-10 300 350 150 149 1,8
Модифицированный СЧ 32-52 » СЧ 35-56 320 350 170—241 197—248 1,8
При отсутствии данных о твердости поверхностей зубьев допускае-
мое напряжение [о]к можно принимать для стальных колес при твер-
дости <_НВ 350
[о]к^1,72о_^рк, (3.52)
где о_х — предел выносливости материала колеса при симметричном
цикле изгиба.
58
Значения предела выносливости сг_ х могут быть вычислены по
известному пределу прочности ав по эмпирическим формулам:
для углеродистой стали
о_х 0,43ов; (3.53)
для легированной стали
О-х 0,35ов 4- (70 -ь 120) Н/мм2. (3.54)
При высокой твердости поверхностей зубьев (> НВ 350) до-
пускаемое напряжение 1сг]к можно принимать только в зависимости
от числа твердости.
Для чугунных колес допускаемые контактные напряжения
[ст]кяа 1,44авИйрп, (3.55)
где ови — предел прочности на изгиб.
Коэффициент режима нагрузки при расчете на контактную проч-
ность определяют по формуле
(З-66)
здесь — число циклов нагружения каждого из зубьев рассчиты-
ваемого колеса за весь срок службы передачи. Для сталей твердостью
< НВ 350 в качестве базового числа циклов при определении предела
выносливости принимают Л/баз = 107, поэтому минимальное значе-
ние йрк равно единице. Если в результате расчета получится kpK < 1,
следует принять йрк = 1,0. Аналогично для сталей твердостью
> НВ 350 и чугуна базовое число циклов N6a3 = 25-Ю7; (&pK)min —
= 0,585. Если по формуле (3.56) получится йрк < (^рк)тт> т0 сле"
дует принять йрк = 0,585.
Для передач, работающих при постоянной нагрузке, в формулу
(3.56) подставляют действительное число циклов нагружения. Если же
нагрузка передачи переменная (обычно переменная нагрузка условно
рассматривается как ступенчато-переменная), то в формулу (3.56)
надо подставлять эквивалентное * число циклов:
Nц. ЭКВ = дР? 4~ Ц- 4~ •.. 4~ Mqtqtlq),
(3.57)
где Almax — максимальный момент, передаваемый рассчитываемым
колесом в течение tMmax часов за весь срок службы передачи при
частоте вращения пЛ1гпах, об/мин; М1г М2, .... Mq — передаваемые
моменты в течение времени 4, t2, ..., tq при пъ п2, ..., пв оборотах
в минуту соответственно.
При подсчете На,экъ кратковременно действующие пиковые на-
грузки, например возникающие при разгоне машины, не учитываются.
* Эквивалентным называют некоторое расчетное (воображаемое) число циклов,
которое при действии постоянной нагрузки, равной максимальной нагрузке рассчи-
тываемой передачи, дало бы тот же эффект по усталости рабочих поверхностей зубьев,
который дает в течение фактического числа циклов действительная переменная
нагрузка передачи.
59
Значения коэффициентов режима нагрузки для шестерни и колеса
могут оказаться различными, поэтому, хотя, как правило, твердость
шестерни выше твердости колеса, не исключено, что [сг]к будет для
колеса выше.
На величину допускаемых контактных напряжений оказывают
влияние также шероховатость поверхности зубьев (например, для
колес, изготовленных по 7-й степени точности при шлифованных,
шевингованных или прошедших специальную приработку зубьях,
[<х]к может быть повышено на 5—15%), вязкость смазки, наличие
перерывов в работе передачи. Указанные факторы учитывают лишь
при уточненных расчетах особо ответственных передач. Данные о ве-
личинах соответствующих поправочных коэффициентов приведены
в работе [49].
Допускаемые предельные контактные напряжения 1о]к.пр, принимае-
мые при расчетах на предотвращение пластических деформаций или
хрупкого разрушения поверхностей зубьев, указаны в таблице.
Допускаемые напряжения изги-
Материал зубчатого колеса Твердость поверх пости зубьев Допускаемые предельные контактные напряжения ^^к.пр’ Н/мм* ба при расчете зубьев на усталост- ную прочность следует выбирать с учетом двух возможных случаев их нагружения: а) одностороннее действие на-
Сталь 350 >НВ 350 3,1 от 41,3 HRC грузки; в этом случае принимают, что напряжения изгиба изменяют- ся по отнулевому (пульсирующему) циклу; соответствующее допускае- мое напряжение обозначают [о0]и; б) переменное направление на- грузки (зубья работают обеими
Чугун ^НВ 350 > НВ 350 1,8 овр 14 HRC
сторонами); принимают, что напря-
жения изгиба изменяются по симметричному циклу; допускаемое
напряжение обозначают [о_11и.
Для выбора указанных допускаемых напряжений служат следую-
щие зависимости:
[Оо]и =
(1,4-Ь 1,6)о_^р„ .
[л] ka
O-lfepil
(3.58)
[п] — требуемый коэффициент запаса прочности, его выбирают в за-
висимости от материала и термообработки.
Отливки стальные или чугунные, термически необработанные . . [п] = 1,8
Отливки стальные или чугунные, подвергнутые отжигу, нормализации
или улучшению.................................................... [п] — 1,6
Поковки стальные, подвергнутые нормализации или улучшению ... [п] = 1,4
Поковки стальные, зубья подвергнуты сплошной (объемной) закалке
(твердость > НВ 350)............................................. [п] = 1,8
Поковки и отливки стальные термообработанные, зубья имеют твердую
поверхность (> НВ 350) и вязкую сердцевину ...................... [nj = 2,2
60
В передачах, где излом зубьев недопустим по условиям техники
безопасности или связан со значительными производственными поте-
рями, указанные значения [и] должны быть повышены на 50%. ko —
эффективный коэффициент концентрации напряжений у корня ножки
зуба, имеющий следующие значения для стальных зубчатых колес:
нормализованные и улучшенные зубчатые колеса: k„ = 1,4 -т- 1,6
(значения ko возрастают с увеличением предела прочности стали);
закаленные зубья: ko = 1,8; зубья цементованные, азотированные
или цианированные, включая выкружку: ka = 1,2. Для чугунных
колес в среднем ko — 1,2.
Предел выносливости при симметричном цикле изгиба для чугуна
определяют по эмпирической зависимости o_i 0,45овр.
Коэффициент режима нагрузки при расчете на изгиб определяют
по формуле
<359>
При переменной нагрузке пере-
дачи вместо Л^ц принимают экви-
валентное ЧИСЛО ЦИКЛОВ Мц>9кв, к0*
торое определяют по формуле (3.57),
заменяя показатель степени 3
на 9. Минимальное значение /гри
равно 1.
Предельные допускаемые на-
пряжения изгиба [о]и,Пр ПРИ Рас-
чете на предотвращение хрупкого
разрушения или пластических де-
формаций зубьев принимают по
приведенной таблице.
Материал зубчатого колеса Сердцевина зуба Предель- ные допу- скаемые напряже- ния изгиба
Сталь Незакаленная, твердость ^НВ 350 0,8 от
Закаленная, твердость > НВ 350 0,36 овр
Чугун 0,6 овр
§ 3.6. ЗАЦЕПЛЕНИЕ ЦИЛИНДРИЧЕСКИХ ЗУБЧАТЫХ КОЛЕС
СО СМЕЩЕНИЕМ ПРОИЗВОДЯЩЕГО ИСХОДНОГО КОНТУРА
Причины смещения производящего исходного контура
При окончании обработки обычных зубчатых колес методом обката
делительная поверхность обрабатываемого зубчатого колеса катится
без скольжения по делительной поверхности производящего исход-
ного контура. При нарезании методом обката прямозубых колес
с числом зубьев меньше 17 стандартным режущим инструментом рееч-
ного типа с а = 20° головки зубьев режущего инструмента подрезают
ножки зубьев обрабатываемого колеса. Для устранения этого явления
необходимо положительное смещение инструмента — увеличение рас-
стояния между делительной плоскостью производящего контура и цент-
ром заготовки. Величина смещения определяется произведением хттпгь
61
Рис. 3.3. График для определения сме-
щения, при котором отсутствует подре-
зание зубьев
где xmIn — коэффициент смеще-
ния, необходимый для устране-
ния подрезания; mt — торцовый
модуль (у прямозубых колес
mt = т);
= (3.60)
где hf — коэффициент гранич-
ной высоты; ha — коэффициент
высоты головки зуба; at — угол
профиля производящего конту-
ра; р — угол наклона линии
зуба (при at = 20° hf — h%— 1).
Если р = 0° (прямозубые ко-
леса) и at = 20°, то
Хт1п=Ц^, (3.61)
где z — число зубьев нарезаемого колеса.
На рис.. 3.3 приведен график для определения значения Лтш в за-
висимости от z и р для ot = 20° и максимального отрицательного
коэффициента смещения (к центру заготовки), при котором не про-
исходит подрезания ножек зубьев.
Условия отсутствия подрезания ножек зубьев при нарезании
зубчатых колес долбяками определяются зависимостью
0,5 Vdao — do cos2atw0 aw0 sin а/щ,0,
(3.62)
где dao — диаметр окружности вершин зубьев долбяка; d0 — диаметр
делительной окружности долбяка; aiw0 — угол станочного зацепле-
ния (угол зацепления долбяка с нарезаемым колесом); aw0 — межосевое
расстояние в станочном зацеплении (между долбяком и нарезаемым
колесом);
= 0,5т i (г0 -J- г) ,
C<JS
г0 — число зубьев долбяка; z — число зубьев нарезаемого колеса.
Если условие (3.62) не выполняется, то xrain определяют из вы-
ражения
•Train == (0,5 у d£0 — df cos2 atw0 — aw0 sin ato0) s'n ”/B0. (3.63)
• ‘4
Устранение подрезания эвольвенты на головках зубьев при наре-
зании долбяком колес с внутренними зубьями, эвольвентный участок
которых доходит до основной окружности, определяется условием
da 2 j/"--c^sa<- + (aw0 sin at)2,
(3.64)
62
где da — диаметр окружности вершин зубьев нарезаемого колеса;
d — делительный диаметр нарезаемого колеса.
Если условие (3.64) не выполняется, то следует увеличить da.
В общем случае в передачах, где колеса нарезаны со смещением про-
изводящего контура, углы зацепления atw не равны углу профиля
производящего контура at. При этом суммарный коэффициент сме-
щения
хх = xi-f-х2>0 или х^ = х1 + х2<.0
(3.65)
(если Xs, = 0, то alw = cq).
Межосевое расстояние не равно делительному межосевому расстоя-
нию (aw =/= а). Величину
0-2») 61
т
_ cm —0,5m (Zj + Zz)
т
(3.66)
называют коэффициентом воспринимаемого смещения.
Колеса со смещением применяют обычно, когда надо устранить
подрезание ножек зубьев (х > 0), увеличить нагрузочную способ-
ность передачи (х2 > 0), выполнить передачу с межосевым расстоя-
нием, не равным делительному межосевому расстоянию, устранить
возможность пересечения головок зубьев шестерни и колеса внут-
реннего зацепления при малой разности их чисел зубьев.
Формулы для определения основных размеров передач с цилинд-
рическими колесами наружного зацепления, нарезанными со смеще-
нием производящего контура, приведены в табл. 3.11, а внутреннего —
в табл. 3.12.
3.11. Формулы для определения основных размеров прямозубых передач
наружного зацепления с цилиндрическими зубчатыми колесами
со смещением производящего контура
Параметр Формула
Межосевое расстояние / Zi4-Z2 а —2 — ^)т
Диаметр окружности вершин зубьев da=d-j-2 (ftj+x—&у)т
Диаметр окружности впадин df—d—2 (й*-рс«—х) т
Угол зацепления Определяют по рис. 3.5 в зависимости 1000 Ху от величины Z1+Z2
Примечание. Коэффициент уравнительного смещения Az/ определяют по рнс. 3.6 1000 1000 у в зависимости от величины или по рнс. 3.7 в зависимости от величины . Zi+zs z,-pz2
63
3.12. Формулы для определения основных размеров прямозубых передач
внутреннего зацепления с цилиндрическими зубчатыми колесами
со смещением производящего контура
Параметр Формула
Межосевое расстояние — Zi , . \ +ХВ “ &У)т
Диаметр окружности вершин зубьев шестерни dai — di + 2 (h* -|-Xj — Ду) т
Диаметр окружности вершин зубьев колеса da2 = d2 — 2 (h*—x2 — y) т. Величина da2 должна быть проверена на отсутствие пересечения с пере- ходной кривой шестерни
Диаметр окружности впадин шестерни При нарезании инструментом реечного типа dfi = dt — 2 (h* + с*—xj т. При нарезании долбяком ^/1 5=5 daoi
Диаметр окружности впадин колеса df2=2affiоз+da02
Угол зацепления Определяют по рис. 3.5 в зависимости от величины 1000 хг za—Zl
Примечания: 1. Коэффициент уравнительного смещения Д# определяют по рис. 3.6 1000 1000 у в зависимости от величины или по рис. 3.7 в завнснмоссн от величины . 22 —21 К 2а —21 2. Коэффициент воспринимаемого смещения у подсчитывают по формуле aw — 0,5 т (z2 — z,)
Нагрузочная способность (по контактным напряжениям) передачи,
изготовленной со смещением, определяется для прямозубых колес
отношением
Л1Х____sin 2а/а,
М sin 2az *
(3.67)
где Мх и М — моменты, которые могут передавать передачи с коле-
сами, нарезаемыми соответственно со смещением и без смещения
производящего контура; alw — угол зацепления передачи со смеще-
нием; at — угол зацепления передачи без смещения.
Для выбора коэффициентов смещения и х2 можно пользоваться
рис. 3.4 (при atw а=<25о40' и равных высотах головок hal = ha2). Такое
смещение увеличивает нагрузочную способность рабочих поверхно-
стей зубьев примерно на 20% и обеспечивает хорошее сопротивление
64
Рис. 3.4, График для определения коэффициентов смеще-
ния х, н х2
заеданию. В табл. 3.13 приведены максимальные коэффициенты сме-
щения для прямозубых передач из условия наибольшей прочности,
износостойкости и наибольшего сопротивления заеданию.
При выборе других значений коэффициентов смещения, когда
> 0» угол зацепления передачи atw принимают в пределах 25—27°
и дальнейший расчет производят в следующем порядке.
Определяют xs по номограмме (рис. 3.5), при этом гх и гг должны
быть определены из кинематического расчета передачи.
Определяют по номограмме (рис. 3.6) коэффициент уравнительного
смещения
Ду = ХЕ— у (3.68)
и межосевое расстояние
Над —
Вычисляют и х2 по формулам
*2 = Xs—Xi; J
3 Зак. 220
(3.69)
65
ZS
3.13. Рекомендуемые наибольшие коэффициенты смещения исходного производящего контура из условия наибольшего повышения прочности,
износостойкости и сопротивления заеданию
21 12 15 18 22 28 34 42 50 65 80 100 125 Дост гаемь эффе
Xi Х1 х2 Х1 Х2 Xi х2 *1 х2 Х1 х2 Xi х2 Xi х2 Xi Х2 xt х2 х, х2 Xi х2
12 0,38* 0,47 0,36 0,38 0,23 0.36 0,30* 0,53 0,43 0,50 0,22 0,34 0,30* 0,57 0,49 0,61 0,25 0,35 0,30* 0,62 0,53 0,66 0,28 0.38 0,30* 0,70 0,57 0.88 0,26 0,48 0,30* 0,76 0,60 1,03 0.22 0,53 0,30* 0,75 0.63 1,30 0.21 0,67 0,30* 0.58 0.63 1,43 0,16 0,77 0,30 0,55 0,64 1,69 0,35 1,00 0,30 0,54 0,65 1,96 0,54 1.18 0.30 0,53 0.65 2,90 0,76 1,42 — — к и 3
15 — 0,45* 0,58 0,44 0,45 0,28 0,44 0.34* 0,64 048 0,64 0,29 0,46 0,38* 0,73 0,55 0,75 0,32 0,54 0,36* 0,79 0,60 1,04 0,35 0,63 0,13* 0,83 0,63 1,42 0,34 0,72 0,20* 0.92 0,68 1,53 0,32 0.88 0,25* 0,97 0,66 1,65 0,31 1.02 0,26 0,80 0,67 1,87 0,04 1,22 0,30 0,73 0,67 2,14 0.15 1.36 0,36 0,71 0,66 2,32 0.22 1.70 — — к и 3
18 — - — — 0,54* 0,72 0,54 0,54 0,34 0.54 0,60* 0,81 0,60 0,64 0,38 0,63 0,40* 0,89 0,63 1,02 0,38 0,7? 0,30* 0,93 0,67 0.30 0,37 0,82 0,29* 1,02 0,68 1,48 0,36 0,94 0,32* 1,05 0,70 1.63 0,36 1,11 0,41* 1,10 0.71 1,89 0,40 1,35 0,48 1,14 0,71 2,08 0,40 1,61 0,52 1,00 0.71 2.31 0.28 1,99 — — к и 3
22 — — — — 0,68* 0,95 0,67 0.68 0.39 0,67 0,59* 1,04 0,7] 0,94 0,40 0,81 0,48* 1,08 0,74 1,20 0,38 0,90 0,40* 1,18 0,76 1,48 0,38 1,03 0,43* 1,22 1.76 1,60 0,42 1,17 0,5.3* 1.17 0.76 1,80 0,36 1.44 0,61 1.15 0,76 1,99 0,26 1,73 0,65 1,12 0.76 2,19 0,22 1,98 0,75 1,11 0,76 2,43 0,21 2,38 к и 3
28 — — — — — — 0,86* 1,26 0,85 0,86 0.42 0.85 0,86* 1,30 0.86 1,08 0,36 1,00 0,72* 1,24 0,88 2.33 0,31 1,12 0,64* 1,22 0,91 1,60 0,25 1,26 0,70 1.19 0,88 1,84 0.20 1,56 0,75 1,16 0,87 2.04 0,12 1,85 0.80 1.14 0.86 2,26 0,08 2,12 0,83 1,12 0,86 2,47 0,07 2.40 к и 3
34 — - — — — — — 1,01 1,38 1,00 1,01 0,34 1,00 0,90* 1,31 1,00 1,30 0.27 1,16 0.80 1,25 1,00 1,58 0,20 1,31 0,83 1,23 0,99 1.79 0,15 1,55 0,89 1,19 0.98 1,97 0,07 1,81 0,84 1,15 0,97 0.22 0.01 2,15 1,00 1,2 0,92 2,46 0,09 2.40 к и 3
42 — - — — — — — — — — 1,17* 1,35 1,15 1.17 0,20 1,15 1,11* 1,30 1,16 1,41 0,12 1.31 1,05 1,25 1,17 1,75 002 1,59 1,09 1,20 1,14 1,95 0,06 1,86 1,12 1,15 1,12 2,20 0,14 2,18 1,36 1,12 1.03 2,52 0,15 2,37 к и 3
50 - — — — — — — — — — - 1,34* 1,34 1,31 1,34 0.04 1,31 1,32* 1,28 1,32 1,60 0,05 1,58 1,26 1,21 1,28 1,89 0,15 1,84 1,28 1.14 1,20 2,13 0,22 2,09 1,44 1,13 1,06 2,42 0.22 2,22 к и 3
65 — 1,58* 1,32 1,56 1,58 0.12 1,56 1,57* 1,24 1,54 1,83 0,22 1,84 1,55 1.17 1,44 2,10 0,35 2,04 1,54 1,14 1,30 2.32 0,35 2.22 к и 3
82 1,82* 1,25 1,81 1,82 0.32 1,81 1,76 1,18 1,67 2,00 0,45 1,98 1,70 1,14 1,45 2,16 0,46 2.05 к и 3
100 — — — __ — — — — — — — — — — — — — — — 1,90 1,18 1,90 1,90 0,56 1,90 1,79 1,15 1,68 2,05 0,54 2,00 к и 3
* Увеличение смещения ограничивается коэффициентом перекрытия еа — 1,2.
Примечание. К — повышение контактной прочности; И — повышение прочности на изгиб; 3 ~ повышение износостойкости и сопротивления
заеданию.
5q 91 -21’20' -21’10' hhIhuIhiiI :г25° \29‘50' (гпт[гнтрт 727’90' 53-. 52\ 729’50’
-21° - 727’30' -
з\ '720’50' /54 \29°9О' 554 5/4 729’90'
21 -20’90' /54 гт29°30' 39-1 727’20' 50~з_ -
III | 1 И 1 (II -70’30' -20’20' /74 \19°20' 33i 727’10' nliiiiLu 729°30<
о\ -20’10' -20° 16^ -?9°10' \29° ^3 727° lULbllllll 720’20'
-19’50' - 7
4-. 49’90' 15^ \гз°50‘ л 4 728’50' 729’10'
in.lL.Ld л. -19’30' 49’20' 19 4 \l3’90' зо1 ilmibiii . 1 n 1 1 111 II ,11 Illi 11
- -19’10' \гз°зо' — -
-з\ -19° /j4 #4 '726’30' 95~, T
-18050' - -~23°20' 7 728’50'
у-9\ 718’90' /?4 23’10' 28-7 726’20' 993 -
-57 -18’30' -18’20' ii 4 7-23° 273 т76°Ю' 93\ 728’90’
-18’10' -
-б\ -18° '-17’50' м-1 722’50' i-22’90' ^3 726’ 11II11 III 1 728’30'
-77 -17’90' 47’30' \22°30' 753 725°50' 913 728’20'
-17’20' -17’10' \22°20' 7 '725’90'
47’ 722°1О’ 29'3 - 907 '728’10'
- -16’50' - 125’30’
^9-. -16’90' 74 \22° 233 - 39l -
-16’30' 46’20' ^21’50' 725’20' 728°
40- -16’10’ 716° -15’50' ^4 \21°90' 223 775’10' 383 727’50'
~Ц1 715’90' к 53 Чгзо' 212 i 373
1* tr tT fk о tT fr
21J)-. -0,70 : -2,30 ; 195O^\
- -
m,o- I ,,|,|,гг \2^0 i 30,0-. 7,30^
\2JB : 79,20
M-. -050W,03 \2,B029,03 ^°39fi3
- ‘-1J10 J l9,W
- 2
\3,90
8,0- zl/,90 '^z 31’80 28,0:. 3780 3S‘B7
• - - 21,70 : 73,70 :
1 гутгг 17,03 :°.зо : \1^\ 73,6037,03.
- - -3,50 -
-1,50 :
’ 16,0- 26,0z
- 71,90 73,30 :
- -0,20 :
5,03 -0,№ 15.0- '-1,30 25,03 73,20 \ i 35,0-.
I -0.16 ; I -3,10
kt0~. -0J9 : 111 1 1 1 j 1 XUlTlIIHl 7300 ? 39.0:
-0,10 : 31,10 ; 72,90 :
-0,08 -2,80 \
4/7- 0,06!3,0-_ 71,00 23, Oz i- 33,03 -2,70
- -Ц09 :
I ff,«/ : 70.90 72,60 :
-0,0212,03 j 22,Oz
-0,01 4 70,80 7
- - 7290
Iljp 21,0^ 31,01
7,10 5,J>]
-7,00
~S^50,0-
-6,80 :
-6,70
-б.БОЦО-
-6,50 :
607 :
6,31)98,0
-6,20 :
: 97,0-
-6.00 :
-5,90 ;
75,80 96,0-
-5,70 :
-5,80
5.50^.
-5,90 :
5711 \
5.10 \ I 7,80
-5,00 7,70
-9,90
-^o-ooi7'50
W-. -7,90
\7,30
-9J!0 w
‘ 91,0*
10,00
• 9, 30
c 9,89
9,70
к ’
19,60
-9,50
9,90
9,30
9,20
0,10
9,00
4,90
8,60
8,20
\-8,60
‘6,50
- -8,90
8,30
8,20
8,10
-8,00
7,90
7,60
Рис. 3.5. Номограмма для определения
взаимозависимости atw, zQ и л2.
Пример 1. Дано &(w = 25°50', гс = 60.
Определить х^ Находим по номограмме
11)00*2 ‘ 25.2.60
—----= 25,2, откуда *2 = ~~1ббо— ~ 1'51’
С Пример 2. Дано *2 — 1,75; zc = 59.
1000* 2 1000-1,75
Определить -----gg----- 29,7. По
номограмме находим atw — 26°30'.
Примечание. гс ~ г2 — г1- Знак
<+» для наружного зацепления, знак «—»
для внутреннего
Рис. 3.6. Номограмма для определе-
ния взаимозависимости «с и Ду.
Пример. Дано *х = 1-5; zc = 60;
1000*2 Ю00 • 1,5
m=5. Определить aw; —------------=
с 1000Д.Р ,
•= 25, это соответствует —-—— = 3,15,
9 15 Q 15 С
откуда Др = -^-^=-^.60 = 0.189;
aw = (0,5 zc + — Д.0 т = (0,5 • 60 +
4- 1,5 — 0,189) 5 = 156,55 мм. ~
Примечание. zc — z^^z^ Знак
для наружного зацепления, знак «—»
йля внутреннего
3*
67
№
6,0-
V
6jo-_
t 17,0^ 75,0-
: ; 31,90 '
0,50 :
: 3100
- №0 : 76,0
E ’ : WO :
\060 : г
E : 3V0 ':
t /$0- : 73,0-
: WO
-0,30 ;
- : wo
16,0: :
: WO ;
Bfi-.
-0,20 : 71,70
13,0~. t 71,0-
: 1110
V-
3,1)3
7,o-
12,0^0 70fl7
-0,10 L :
-0,09 : t
-0,06 -to,so
-0,07 t
-OJOW-I 19,0-
:о,оз I. :
-0,0710,03 -.цю
g«,® :
: 3,90 :
: ^lC37,C
: 3,70 '
: 3,60 ]
: №31,6
' 3.70 :
3,30 :
i?ll30,0
7,3,10 '-
3,№ :
7,00 E
.770 -
70,0-.
7,BO :
r?,50 :
7.^
2,30 :
6,00 61,0-.
6,70
6.60 -.
’6350
tyo'W-.
6,30 :
Wo -
^396
6,00 ' :
5,90 :
5,60 ’
57036;
5,617 ~
Wo ;
W°3Z0-
5,30
-5,70 :
Wo ;
t 360-
sp :
s;o '
6,so
ynW
6,170 :
WO :
Voj1;
Wo :
№33,0
zl,7D26,03
- 0,01 - '
: - 1.0,60 :
пдЛ
'7,10 :
\?,00 ~-
75,0^
M
10,00
-9,90
3.B0
-9.70
~S,№
-9,50
)9,60
9,30
9.70
79,10
9,00
6,90
\OfO
itJO
-660
-6,50
9g,60
-BJO
,b,?o
-BIO
\e,oo
7,90
77,10
77,70
:7,60
37,50
7,60
77,30
-7,20
\7,10
-7,00
76,90
Рис. 3.7. Номограмма для определения
взаимозависимости у, Обу и гс.
Пример* Дано aw ~ 136 мм; zc ~ 52; т = 5.
Определить х^.
а — 0,бт2„ 136 — 0,6 • б • 52
= w---------с -------------= ! 2
т б
1000и 1000.1,2
---а-=------— = 23.1. Этому соответствует
гс 52
ЮООЛу 3,51г 3,61 -52
• = 3.51, откуда Ду = = 0,18;
хЕ== у 4- = 1.20 +0,18 = 1,38.
Примечание. 2С *= Знак «+»
для наружного зацептгспия, знак «—» для внут-
реннего
для внутреннего зацепления
(г1 + г2) (хо-xd , Л„Д
2 +Л^’ (3.70)
2 (г2 — г,)
где xd — коэффициент разности сме-
щений.
Проверяют величину коэффициен-
та перекрытия:
_ Кd'ai -dhl ~db2 =F2uTO sin atw
2лт cos at
нему), если условие ea 1,15
(знак плюс относится к наружному
зацеплению, а минус — к внутрен-
не выполнено, то надо уменьшить
и повторить расчет.
Проверяют толщин)7 зуба по окружности выступов:
г, dn | л~1- 1,45х , п/ \1
Sna = 2 -----Ь 2 (mv az - inv afl)j;
cos aa = ,
где db — основной диаметр.
Допустимое минимальное значение Sna = 0,4/п. Если коэффици-
енты смещения и х2 выбирают по рис. 3.4, то необходимость в про-
верке Еа и Sna отпадает.
Если межосевое расстояние передачи не равно делительному, то
по номограмме (рис. 3.7) можно определить необходимую величину
суммарного коэффициента смещения х£, затем по рис. 3.5 найти atV)
и далее по формуле (3.£9) вычислить коэффициенты смещения для
шестерни Xj и колеса х2.
бй
Пример. Передача прямозубыми цилиндрическими колесами (т = 5 мм; zt —
= 22; га = 50) должна быть выполнена с межосевым расстоянием aw — 186 мм.
Определить хг и х2.
Решение. Определяем коэффициент воспринимаемого смещения по формуле
(3.66):
aw~0,5m (zx +?2) 186 — 0,5-5(22 + 50)
у =----------------- = ------z---------
я т 5
Подсчитываем:
lOOOy = 1000-1,2 ~
Zt+z2 ~ 22+50 ’
и по рис. 3.7 находим соответствующее значение величины
1000 Ду , о
г|+г2
Вычисляем коэффициент уравнительного смещения:
1,9(21 + г2) _ 1,9(22 + 50)
У~ 1000 ~ 1000 ~ ’
определяем по формуле (3.68) суммарный коэффициент смещения:
х2 =у+Ду = 1,2+0,14= 1,34.
Определяем величину
1000х2 1000-1,34
zi+z2 = 22+50 = 18,6‘
По рис. 3.5 находим соответствующий угол зацепления смещенной передачи
для колес, нарезаемых стандартным режущим инструментом:
а/а, = 24°35'.
По формуле (3.69) определяем
Х1=0’5Ь~йй^“д^=0>5[1’34"54тЗ(1-34-0>14)]=0’44:
х=xs — х. — 1,34—0,44=0,9.
Л Xl J. '
Проверяем величину межосевого расстояния по вычисленным значениям коэф-
фициентов суммарного х2 и уравнительного Ду смещений по формуле (3.66):
са, = (^Ц^-+л:2-Ду)т = ^^±^+1,34-0,14^5=186 мм.
Аналогичные расчеты, когда угол зацепления atw <; 20°, можно
выполнить с помощью номограммы на рис. 3.8.
Для передач с косозубыми цилиндрическими колесами изменение
межосевого расстояния может быть достигнуто проще — путем под-
бора соответствующего угла наклона линии зуба по формуле
m„zc
Uw 2 cos Р ’
Для тяговых передач подвижного состава, а также для других
тяжелонагруженных передач, работающих в аналогичных условиях,
рекомендуются величины смещений производящего контура, разра-
ботанные из условия наивыгоднейшей работы зубьев на изгиб 1371.
69
I п
«5=Г 1.1.1.1.1.1 -77] 11| 11111 пггр -7^-i ТГ| nnpirrfn Ns C-j 1=3 g 4,50 4>" ll .1.4.1 1 1 1.1 -75n о* lIji и I i i -224 Нзо tVO -26- § 4>- ««J- 111 Im ill 11
- 1 - 4,10 - 4.00 - - - l .l.i 111 z~V0 -6,i)0
- - — ~~2^0 -is- -6,00 rSfiO - Z-6,30
- -id- 4.00 -15- 4,90 - - zl60 :-3,S0 - ^6,20
^5~ 1 111 11 -2,70 - 1 I rr 1 T-p-HT is - г -1.50 - —3^0 '-3,70 - --6,10
- - - § СЫ 11111 [..ill - 1111 m 11 - 1 1 1 1 1 ear 1.1 illliJj.L -133 r'.'iO -20 ~ t3,50 '-3^0 -25- § J. 1 1 1 1 f 1 1 1 1
- -0,15 - ЧШ! - 4,90 - - — - тттртп - --3,00 - '-5,60
- ^0,19 -9- - -74- '4.30 - r5r00 - - r * t3,30 t5,70
f-0,13 - — - 11111 -72- <jT ibnilii ~-0t20 Гттттр- -72: ?3,20 - - 5,60
- 41,12 - ~0J0 - H 111 H. - - - - - '^3,10 ~ С СЛ
4,11 - - - zr1t1D r3,00 -24- -5,dU
- ’-0,10 - — - 400 - ~Г0,50 - - - '-290 - t5,W
- 111II1 ~8— ттрт J=3 § -7J- Si lllllllllll - rpnipi ^3 - 4* LXJ-1 § hiiih Г 111 1 rr - -5,30
— - § •< Ilin II ~T0,20 - - -~0,90 - ~-2,70 — t5,20
- =- - ~-l>10 - - '-2,50 - -5J0
- 4,07 Й сгэ* 1.1 1 1 - g llllllllll -17- L § Ullin 'Ъ Go <a> tlniih -10~_ nyrm 47~ '-2,50 - r5,00
- 1 4,60 - rnjn Z-0,07 - 3 '-2,90 -23- -5,90
- -7- - -72- — --3,00 — — — - - -
4,05 4,50 - t3,70 - --0,00 '-0,70 t2,30 -
-2- -1,5- 4,09 4,03 —0,02 -6- J Т j 1| 11 Г[Ч ' 1 Ч’ | - J5» -77- g g 1 ll 11111 U 11 1 1H1 1 1 11 1 1 1 1 1 1 1 1 '~3,50 ~-3,50 тЗ^О "П“гр‘111 1 1 I 1 [ 111111 11 11 I 11 l|r Л Ai А» S & № ^4 4> I I I l I | । I i 1] I l § 5aT 1111 i 11 i i i i 1» 11 -16- -15- 4 55 K J111111.1 till 1111 -22- 5b Q.* s»T 1 1 1 1 I I 1 1 I I I I 1 I I
Ц 11 ik Ik Ik Ik Ik ^1 1Г юооу 2C i> ir ir ik ^1 ik
Рис. 3.8. Номограммы для определения Ду при atw < c 20°
Пример расчета по номограмме 1. Дано гс ~ 57; х-% =—0, 675; т = 10. Определить aw.
l(00xs 1000 (—0,675) ЮООД/у 1,5
----------------------------------------------------=—11,85. Этому соответствует ---------- - = 1,5, откуда Л;/= ,,пп г. =
?с---------------------------------------------------О/-Zc-1UUU с
= -J— 57 = 0,085; aw = (0,5 zc -f- — Д») m = [0,5 -57 + (— 0,675) — 0,085] X 10 ==
® 277,4 мм.
Пример расчета по номограмме II.
а — 0,5mz 800 — 0,5.10-62
Дано aw = 300 мм; zc = 62; т = 10. Определить у~ ——------- == ------—-------=
. 1000// 1000 (—1) ,. _ _ 1000Д# „ А 2,43
«= — г, ——- =-----^2----- — 16»*. Этому соответствует —- = 2,43, откуда Дт/ — Jqqq' zc в
2 43 С С
« «62 = 0,145; х2 = у+ Ьу = — 1 0,145 = —0,855.
Примечание. zc = 22—2г Знак «-)-» для наружного зацепления, знак «—* для
внутреннего
70
Для выбора коэффициента смеще-
ния шестерни %х служит верхний
график рис. 3.9, значение же коэф-
фициента смещения для колеса х2
может быть выбрано по нижнему
графику в определенных пределах,
ограниченных линиями I и II, при
условии, чтобы было соблюдено
равенство
г, +?»
aw---
у=-------f----= 0,5.
и т
Рис. 3.9. График для выбора коэффи<
циентов смещения тяговых и других
тяжелонагруженных передач
Пример. Определить наивыгоднейшие коэффициенты смещения для прямозу-
бой цилиндрической пары электровоза, если гг — 21, z2 = 73.
Решение. По верхнему графику (см. рис. 3.9) для гг = 21 находим xL =
= 0,47. По нижнему графику для г2 = 73 величина х2 может быть выбрана в преде-
лах (0,12)ч- (—0,05). Для определения значения х2, соответствующего величине
у = 0,5, воспользуемся номограммой (см. рис. 3.7). Для этого вычисляем отношение
lOOOy 1000 - 0,5
Zi-|-z2 21 —|—73
находим по рис. 3.7 соответствующее значение
1°°?..АУ.=0,21,
Zl + Z2
откуда
По формуле (3.68)
хг=у -|- Д у=0,5 -|- 0,0197 = 0,5197;
принимаем хг = 0,52,
тогда
х,2 = хг — х1 = 0,52 — 0,47 = 0,05.
Применение смещения для ремонта зубчатых колес
Крупномодульные зубчатые колеса с поврежденными рабочими
поверхностями зубьев можно восстановить, удалив поврежденные
участки с помощью отрицательного (к центру колеса) смещения
производящего контура. При этом парная шестерня должна быть
новая, изготовленная с положительным смещением производящего
контура. Смещение инструмента производящего контура определяют
в зависимости от толщины поврежденного слоя 6 по формулам табл. 3.14.
Если изношена только одна рабочая поверхность зуба колеса, то дру-
гую не срезают и при расчете величины смещения значение 6 берут
в 2 раза меньше.
71
3.14. Величина смещения для ремонта изношенных колес
Зацепление Колесо Шестерня
Со смешением 6 тх2 : sin а/ , 6 тх, -—z sin
Без смещения 6 sin а/ 6 sin сс/
Диаметр окружности вершин зубьев колеса надо уменьшить,
26 п
а шестерен увеличить на -^а-. При значительном износе (больших
значениях 6) число зубьев шестерен следует увеличить на 1 —2 зуба;
суммарный коэффициент смещения в этом случае определяют
так же, как и для передачи с заданным межосевым расстоянием.
Производящий контур смещают преимущественно в прямозубых
цилиндрических передачах и реже в косозубых, так как при изгибе
косой зуб прочнее прямого, а заданное межосевое расстояние aw
можно обеспечить выбором соответствующего угла наклона зуба.
Смещение исходного профиля в конических передачах также при-
меняют сравнительно редко, так как требуемого результата можно
достичь изменением величины конусного расстояния.
Глава 4
ПЛАНЕТАРНЫЕ
ЗУБЧАТЫЕ ПЕРЕДАЧИ
§ 4.1. ОБЩИЕ СВЕДЕНИЯ
Принято разделять планетарные передачи на три
типа: дифференциальные (рис. 4.1), замкнутые дифференциальные
(рис. 4.2) и простые планетарные (рис. 4.3). Дифференциальные пере-
дачи имеют две степени свободы, так как оба центральных колеса *
(на рис. 4.1 колеса 1 и 3) подвижные; их применяют в транспортном
машиностроении (механизмы поворота гусеничных машин, передача
вращения на ведущие колеса автомобиля), авиастроении и в приборах.
Если центральные колеса или одно из центральных колес и во-
дило дифференциальной передачи замкнуть простой зубчатой пере-
дачей, то получим замкнутую дифференциальную передачу, имеющую
одну степень свободы (рис. 4.2) и позволяющую получить большие
передаточные отношения при малых габаритах.
На рис. 4.2 основная дифференциальная передача показана жир-
ными линиями, замыкающая — тонкими.
* Центральными называют колеса, имеющие общую геометрическую ось с води-
ЛОМ.
Рис. 4.1. Дифферен-
циальная планетарная
передача
Рис. 4.2. Замкнутые дифференциальные планетарные пе-
редачи:
а — замыкающая передача соединяет центральные колеса:
б» в — замыкающая передача соединяет одно из центральных
колес с водилом
73
Рис. 4.3. Простая плане-
тарная передача (с одной
степенью свободы)
Если в дифференциальной передаче одно
из центральных колес сделать неподвижным,
(рис. 4.3, колесо 3), то можно получить про-
стую планетарную передачу, имеющую одну
степень свободы.
Передачи, выполненные по рис. 4.3, обла-
дают большей нагрузочной способностью и
более высоким к. п. д. по сравнению с обыч-
ными зубчатыми передачами, имеющими те же
габариты. Передачи, выполненные по рис. 4.4
и 4.5, позволяют получать большие переда-
точные отношения, но имеют низкий к. п. д.
Определение передаточного отношения
Дифференциальная передача (см. рис. 4.1).
Угловые скорости зубчатых колес и водила
обозначают соответственно ®lt co2> со.ч и со-
относительное движение частей не изменится,
если всему механизму сообщить дополнитель-
ное вращение со скоростью (— сод), равной по величине, но обратной
по направлению скорости вращения водила Н.
Звенья механизма будут иметь следующие угловые скорости:
водило Н (йц— ан — 0; колесо / сох — колесо 2 со2 — сод, колесо 3
®3 — «//.
Таким образом, водило Н будет неподвижно, и дифференциал
превратится в простую зубчатую передачу с неподвижными осями.
Передаточное отношение ее
ан) _ ^2 _ mi-mh
13
(4-1)
Рис. 4.4. Простая замедляющая планетарная передача с веду-
щим водилом, имеющая большое передаточное отношение
74
Рис, 4.5. Простая замедляющая планетарная передача с ве-
дущим водилом Н я ведомым сателлитом Г, передача враще-
нии сателлита 1 на ведомый вал V осуществляется механиз-
мом параллельных кривошипов
Для общего случая, когда дифференциальная
передача имеет п колес,
•(H) _ЮЛ~ИН
/fe/l - гл
С0„-® W
п Л
где /<"> — передаточное отношение между централь-
(4.1а)
ными колесами k и п при неподвижном водиле Н
(т. е. передаточное отношение простой передачи т
с ведущим колесом k и ведомым н); соь соп и
— угловые скорости колес k, п и водила Н.
При определении передаточного отношения iW необходимо учи-
тывать его знак: <0, если колеса kun вращаются в разные стороны;
^kn 0» если колеса 11 п вращаются в одну сторону.
Простая планетарная передача. Если в дифференциальной пере-
даче (см. рис. 4.1) жестко закрепить колесо 3, то получим простую
планетарную передачу (см. рис. 4.3), где со3 = 0.
На основании формулы (4.1)
113 О-ю#’
1-ffi,
откуда
(3) _ 1 (Я) I л п\
Ш = 1 “/13 ’
где Zin — передаточное отношение между колесом / и водилом Н при
неподвижном колесе 3.
Для общего случая, когда планетарная передача имеет п колес,
Д'* 1)_1 ,(Н) /д о\
IkH — 1 — Ikn . (4.0)
а между водилом и любым из колес
Д'1) _ 1 1
‘ял— (п) = , -(//)
lkH 1 1 kn
(4.4)
Для передачи по рис. 4.3 при ведущем колесе 1, неподвижном 3
и ведомом водиле Н передаточное отношение
^=1-4з) = 1-(->)(^) = 1 + -?, (4.5)
\ Z1 / \ г2 / г1
т. е. на единицу больше, чем в простой передаче, составленной из
этих же колес. По формулам (4.3) и (4.4) можно также определить
угловую скорость ведомого вала дифференциальной передачи с двумя
ведущими валами, рассматривая его принадлежащим одновременно
двум простым планетарным передачам или одной простой планетар-
ной и одной с неподвижными осями колес, получающимися из диффе-
75
4.1. Формулы для определения передаточного отношении замкнутых
дифференциальных передач
Ведущее звено Ведо- мое звено Звенья, соединен- ные замы- кающей передачей Рис. 4.2 Расчетная формула № фор- мулы
k н Н — п 6 lkH~~' lkn ^lnHl kn (4.9)
k п п — Н 6 1_я i =(•(">+ lkn lkn 1 lnll (4.Ю)
п н H-k в ; ^1 I lnH — 1 1 .(//) ‘fen (4.U)
п k k-H в , _1 ‘fen '*H nk —iWi lkn lkH (4.12)
н п n — k a i — i<H) . _ lkH lkn 1Ип , AH) lkn (4.13)
н k k — n a i' lkn lkn lHk (1_АНЛ,’ V lkn )lkn (4-14)
п k n—H 6 . inH lnk !_ (//), i’ AH) 1 ‘fen + ‘nH‘*n (4.15)
н k H — n 6 _ 1 ‘Wfe= , _ .{H) , .(//) lkn lnH lkn (4-16)
k п k-H 5 . _ lkn lkH kn l-itH);’ 1 ‘fen ‘feH (4.17)
н п H-k в _ i№ i - kn Hn '-^’-‘feH (4-18)
k н k — n a . (’-ig1)'-;. kH i _ iw lkn lkn (4.19)
п н n— k a 1-«<"> i —_ kn nH i _ ;(H) 'kn lkn (4.20)
Условные обозначения: — передаточное отношение замыкающей пере- дачи от центрального колеса п к воднлу И; — передаточное отношение замыкающей передачи от нейтрального колеса Н водилу И; — передаточное отношение замыкающей передачи, соединяющей центральные колеса kun.
76
ренциальной передачи при остановке одного из центральных колес
или водила (например, колес 1, 2 или водила Н на рис. 4.1).
В этом случае
= Чп) + =->- + ->: <4-6)
1пН
+ ~^ТгГ — ыи‘пн + ^kink*; (4.7)
lHn lkn
~ ~ &н1кн + (tinikn • (4-8)
lHk lnk
Если ведомым является водило Н, то следует пользоваться форму-
лой (4.6), если ведомым является центральное колесо п — форму-
лой (4.7), если ведомым является колесо k — формулой (4.8).
Замкнутая дифференциальная передача. Формулы для определения
передаточного отношения, полученные по формуле (4.1а), приведены
в табл. 4.1.
Выбор кинематической схемы
Дифференциальные передачи применяют в двух случаях: когда
движение от одного двигателя надо передать на два ведомых звена
и когда движение от двух двигателей надо передать на один ведомый
вал. Передачи первого типа применяют, например, в ведущих мостах
транспортных машин для получения различных угловых скоростей
левой и правой полуосей.
Передачи второго типа применяют в машиностроении как вариа-
торы скоростей вместо коробок скоростей в приводах большой мощ-
ности, где механизмы переключения скоростей получаются громозд-
кими, а также в приводах повышенной надежности, где ведомый вал
должен вращаться от двух независимых двигателей. В приборострое-
нии эту передачу применяют в тех случаях, когда перемещение ведо-
мого вала является функцией двух независимых переменных величин.
В дифференциальных передачах с двумя ведущими (или ведомыми)
валами и одинаковыми передаточными отношениями между каждым
из ведущих валов и ведомым валом удобно применять схемы, приве-
денные на рис. 4.6.
Числа зубьев центральных колес должны
Рис. 4.6. Схемы дифференциальных
передач с равными передаточными
отношениями между центральными
звеньями (/, 3 и Н)-.
а — конический дифференциал; б — ци-
линдрический
а)
быть равными
77
(гх — г3). Передаточное отношение между центральными колесами
(при неподвижном водиле) —1, а между каждым центральным
колесом и водилом (при неподвижном другом центральном колесе)
i = iffij = 2. Эти схемы удобно также применять и в случае, когда
при равных углах поворота центральных колес отношение углов
поворота водила от каждого из центральных колес (при неподвижном
другом центральном колесе) равно 14-3. Отношение чисел зубьев
центральных колес равно отношению углов поворота водила, вызван-
ных вращением каждого колеса при неподвижном другом централь-
ном колесе.
Для вращения ведомого вала от двух независимых двигателей
можно также использовать схему рис. 4.1. Если передача замедляю-
щая, то ведущими являются центральные колеса 1 и 3, а ведомым —
водило И.
Для передач с двумя ведомыми валами используют те же схемы,
что и для передач с двумя ведущими валами. Отношение угловых
скоростей ведомых валов зависит только от величин моментов, сни-
маемых с них. При одинаковых моментах, снимаемых с центральных
колес 1 и 3 при ведущем водиле Н, дифференциалы, выполненные
по рис. 4.6 (когда = г3), окажутся заблокированными, т. е. будут
одинаковыми угловые скорости водила и центральных колес.
Схема, приведенная на рис. 4.1, при ведущем центральном колесе 1,
колесе 3, когда п3 = —пн, дает
отношение, чем простая плане-
ведомых водиле л и центральном
значительно большее передаточное
тарная передача:
— пн _
‘13 — п ~п j «з ——
”з пн
тогда
1
<ш=1-И<«-1+23
(в простой планетарной передаче I [н = 1 -f-
При выполнении условия |<в3| — |<вн| мощности, снимаемые с во-
дила Н и центрального колеса 3, будут соответственно равны:
N ff = Mffdifj', Ng = Madiff,
Мн и Ms — моменты на водиле Н и центральном колесе 3, опреде-
ляемые из кинетостатического расчета передачи.
Направление вращения ведущих и ведомых звеньев дифференциаль-
ной передачи определяется направлением окружных сил, действую-
щих на них в установившемся режиме: ведущее звено, действует на
ведомое по направлению своего вращения, ведомое на ведущее —
против направления его вращения. Для примера рассмотрим
78
Рис. 4.7. Направление враще-
ния и вектора сил в дифферен-
циальной планетарной пере-
даче
Рис. 4.8. Замкнутая передача, в ко-
торой имеется замкнутая мощность
дифференциальную передачу на рис. 4.1. Направление и относитель-
ные величины окружных усилий, действующих на центральные ко-
леса, сателлит и водило передачи, показаны на рис. 4.7. Сплошны-
ми стрелками показаны направления вращения колес и водила, когда
они являются ведущими, штриховыми — когда они являются ведомыми.
Из рис. 4.7 следует, что при ведущем центральном колесе 1 или 3
и ведомом водиле И и другом центральном колесе направление вра-
щения водила совпадает с направлением вращения ведущего цент-
рального колеса, а ведомое центральное колесо будет вращаться
в противоположную сторону. При ведущем водиле направление вра-
щения водила и обоих ведомых центральных колес будет одинаковым.
Когда ведущими являются центральные колеса, а ведомым
водило, направления вращения обоих центральных колес и
водила совпадают. Если ведущим является водило и одно из централь-
ных колес, а ведомым другое центральное колесо, то направления
вращения водила и ведущего центрального колеса противоположны,
а ведомое центральное колесо будет вращаться в ту же сторону, что
и водило.
Замкнутые дифференциальные передачи позволяют при постоянной
основной дифференциальной передаче, меняя только передаточное
отношение замыкающей, изменять передаточное отношение всей пере-
дачи в широких пределах. Однако с увеличением передаточных от-
ношений к. п. д. снижается из-за появления в передаче так назы-
ваемой «замкнутой» мощности.
Замкнутой мощностью Л/зам называют произведение внутренней
уравновешенной силы, приложенной к звену передачи, на его окруж-
ную скорость (N3aa = Pyv) или произведение внутреннего уравнове-
шенного момента, действующего на звено передачи, на его угловую
скорость (Л/зам = Му®).
Физический смысл термина замкнутая мощность понятен из
схемы передачи на рис. 4.8, применяемой для испытания передач.
Передача нагружена закручиванием вала 3 специальной муфтой 2.
Для нагружения передачи одну половину е муфты 2 закрепляют
79
неподвижно, а другую f поворачивают на определенный угол, прикла-
дывая к валу 3 момент М3, после чего обе половины муфты соеди-
няют. Величина нагрузки, действующей на звенья передачи, пропор-
циональна углу закручивания вала. Передачу, выполненную по схеме
на рис. 4.8, называют замкнутой. Мощность двигателя, приводящего
в движение передачу, затрачивается только на потери в передаче
(Мд = Nпотерь), в то же время в передаче циркулирует замкнутая мощ-
ность Мзам = Aiytoj. Она может быть во много раз больше величи-
ны Мд.
«Замкнутая» мощность возникает в замкнутой дифференциальной
передаче в том случае, когда направление вращения звеньев, соеди-
ненных замыкающей передачей, не соответствует направлению вра-
щения их в дифференциальной передаче при отсутствии замыкания.
При наличии замкнутой мощности через зацепления передается
мощность, в несколько раз большая, чем мощность, передающаяся
от ведущего вала к ведомому.
На рис. 4.9, а приведена схема передачи с замыканием на веду-
щий вал, обеспечивающая большие передаточные отношения, когда
ведущим будет центральное колесо 1, а ведомым — водило Н, но
имеющая из-за наличия замкнутой мощности низкий к. п. д. Анализ
схемы подтверждает наличие замкнутой мощности: центральные
колеса 1 и 3 вращаются в разные стороны, в то время как в диффе-
ренциальной передаче при ведомом водиле ведущие центральные
колеса должны вращаться в одну сторону (см. рис. 4.7).
Колесо 3 является ведомым, так как направление его окружной
скорости совпадает с направлением окружного усилия, действующего
на его зубья, момент от него через замыкающую передачу 3', 4 и 1
возвращается на ведущий вал и нагружает его, а следовательно,
и всю передачу дополнительным моментом М\ (рис. 4.9, б), создаю-
щим при работе передачи замкнутую мощность (N3SK = Af^coj).
С ведущего вала на водило Н передается только мощность Л\ = AfjCOi.
На рис. 4.9, в приведена схема передачи к барабану лебедки,
где замкнутая мощность отсутствует, а поэтому к. п. д. передачи
Рис. 4.9. Замкнутые дифференциальные передачи:
а — кинематическая схема передачи; б — эпюра крутящих моментов на
валу /; в — конструктивная схема привода барабана лебедки
89
высок. Передачи, выполненные по этой схеме, могут иметь переда-
точное отношение не выше 90 при обычно принятых соотношениях
между числами зубьев колес.
Простая планетарная передача. Для передач с относительно малыми
габаритами и высоким к. п. д. обычно применяют схему по рис. 4.3
с диапазоном iin от 3 до 8. Для больших передаточных отношений
соединяют последовательно в одном корпусе несколько таких пе-
редач.
Простые планетарные передачи, выполненные по рис. 4.3, ком-
пактнее передач с неподвижными осями не только вследствие своих
кинематических особенностей, но и потому, что все звенья передачи
находятся внутри неподвижного центрального колеса 3; число сател-
литов в таких передачах (колесо 2) не меньше двух (обычно 3—5),
благодаря этому нагрузка в зацеплении каждой пары колес соот-
ветственно уменьшается и колеса таких планетарных передач полу-
чаются узкими = 10^.
В многоступенчатых передачах разбивку передаточного отношения
по ступеням производят исходя из ряда условий: минимальных габа-
ритов, технологичности конструкции, минимального углового зазора
выходного вала передачи (угловым зазором ведомого вала называют
возможный угол поворота его при заторможенном ведущем вале
за счет выборки зазоров в зацеплениях).
Чтобы получить минимальные габариты и уменьшить частоту вра-
щения сателлитов первой (быстроходной) ступени, ее передаточное
отношение назначают возможно большим.
По технологическим соображениям рекомендуется проектировать
многоступенчатые передачи с возможно большим числом ступеней,
имеющих колеса с одинаковым модулем и одинаковыми числами
зубьев. Условие равнопрочное™ зацеплений различных ступеней до-
стигается при этом изменением ширины колес.
Для уменьшения углового зазора ведомого вала следует назна-
чить на последней ступени возможно большее передаточное отноше-
ние и возможно меньшие боковые зазоры.
Для передач кратковременного действия с большими передаточ-
ными отношениями и малыми нагрузками, а также для кинематиче-
ских (ненагруженных) передач, где главное значение имеют габариты,
а не к. п. д., применяют передачи по рис. 4.4 и 4.5.
Передача по рис. 4.4 при ведущем водиле Н и ведомом колесе 1
в случае zr = 100, z2 = 99, гг- = 100 и г3 = 101 имеет
® - dp=—='о™.
гг' г2, 100 100
Передача по рис. 4.5 при ведущем водиле Н и при = 99 и г2 = 100
имеет
,-д * * 1___}____по
4/1 “,(г) = 1_;(Н) = , г,— 100“
... 1-Л l-w
81
Рис. 4.10. Простая замедляющая планетарная передача с ве-
дущим водилом и ведомым сателлитом; передача вращения
с сателлита на ведомый вал осуществляется крестовой (урав-
нительной) муфтой качения
Передача вращения с колеса 1 на ведомый вал в передачах этого
типа осуществляется параллельными кривошипами (см. рис. 4.5)
или уравнительной муфтой (рис. 4.10).
§ 4.2. РАСЧЕТ ПЛАНЕТАРНЫХ ПЕРЕДАЧ
Кинематический расчет
Числа зубьев колес, составляющих простую планетарную пере-
дачу, при заданном передаточном отношении или удобно
подбирать, используя формулу (4.3) или (4.4):
^ = 1-® (4-21)
,(п) _ |
(4.21а)
lHk
Для передачи, изображенной на рис. 4.3,
;(Н) = ((Н) = _
lkn Чз z, *
82
Подставляя значение i^’, выраженное через отношение чисел
зубьев, в формулу (4.21), получают
= (4.22)
г1
Если передача должна вписаться в определенный габарит, то за-
даются диаметром делительной окружности и числом зубьев колеса 3
(z3), так как оно определяет габариты всей передачи, при этом число
зубьев колеса 1 (zx) не должно быть меньше 15, чтобы избежать под-
резания зубьев. Если габариты не заданы, то выбирают число зубьев
колеса 1 (zx).
При проектировании планетарных передач по рис. 4.1 следует
соблюдать три условия.
1. В передачах, выполненных без смещения исходного контура,
число зубьев сателлита выбирают из условия соосности валов цент-
ральных колес
?2=^. (4-23)
В передачах со смещением исходного контура условие соосности
проверяют равенством межосевых расстояний колес, составляющих
передачу:
«12 = 023. (4.23а)
где «23 — межосевое расстояние между сателлитом 2 и корончатым
колесом 3; а12 — межосевое расстояние между солнечным колесом 1
и сателлитом 2.
2. Из условия возможности сборки передачи сумма чисел зубьев
колес 3 (корончатого) и 1 (солнечного) должна быть кратна числу
сателлитов:
^ = Т. (4.24)
где и — число сателлитов:
у — целое число.
3. Чтобы соседние сателлиты не задевали зубьями друг друга,
должно соблюдаться условие соседства
da2 <2«12 sin (4.25)
где dai — диаметр окружности выступов сателлитов (2).
Разность между 2п1г sin ~ и da2 должна быть ^=0,5 мм.
Окончательно выбранные числа зубьев должны удовлетворять
перечисленным условиям.
Например, для передачи по рис. 4.4 передаточное отношение при
неподвижном водиле
ящ = цну = ъ ъ
lkn 1з Z1 г'
83
Рис. 4.11. Графики для выбора чисел зубьев планетарных
передач по схеме рис. 4.4
Подставляя это значение в формулу (4.21а), получают
* . * = (4.26)
г1 ги' ifi't
Из условия соосности передачи
—г8') = ^12(21 —z2). (4.27)
Обычно принимают одинаковый модуль для обеих пар колес,
тогда
*з —*2' =zi —*2;
Z3 — Zj = Z2> — Zg.
Решая совместно уравнения (4.26) и (4.28), определяют г3,- зада-
ваясь разностями гг — z2 и г3 — гг. Расчет удобно производить, поль-
зуясь графиком (рис. 4.11), где
(4.28)
zc = Zx —г2 = г3 —2.г;
е = г3 — ?! = г2, — г2.
84
Пример. Подобрать числа зубьев колес для планетарной передачи по рис. 4.4
при заданном = 800.
Решение. Принимаем zc = zx — z2 = z3 — z2, = 3. При выборе величины
е = z3 — zx = z2. — z2 следует иметь в виду, что чем меньше е, тем конструкция ком-
пактнее; задаемся е = 1. Из первого графика рис. 4.12 находим z3 = 51. Далее
определяем
z2, = z3— гс=51 —3=48;
гх = г3 —е = 51 — 1 =50;
г2 = г1 — гс = 50 — 3= 47.
Проверяем полученные значения чисел зубьев колес по формуле (4.4):
1 1 z,z„, 50-48
.<8»__________ ________ __ ___1 а_____ ОПЛ
,|н“ ~ । _г2 г3 ~г±г^—г2г3 ~~ 50-48—47-51 ~
13 г1 ’ V
что соответствует заданному передаточному отношению.
Для схемы на рис. 4.5, на основании формулы (4.21а), при ifft <0
г« _ 'я'1 — 1 _ I I + 1
‘‘й “ I'-ftl '
Следовательно, в предельном случае число зубьев сателлита 1 (гх)
можно брать равным передаточному отношению, а число зубьев ко-
рончатого колеса 2 (г2) можно брать на единицу большим.
В случае применения стандартных долбяков (at = 20°) передачи
с малой разностью чисел зубьев корончатого колеса и сателлита
можно выполнить только со значительной угловой коррекцией; если
разность зубьев колес, находящихся в зацеплении, г2 — гх 2s 3, то
удовлетворительные результаты без коррекции дает эвольвентное за-
цепление с at = 30° и коэффициентом высоты головки зуба й* = 0,75.
При подборе зубьев комбинированной передачи, приведенной на
рис. 4.12, сборка осложняется тем, что сдвоенные сателлиты входят
в зацепление с солнечным колесом 1, корончатым колесом 3 и коле-
сом 4. Последнее зацепление возможно при соблюдении вторичного
условия сборки
где и — число сателлитов; у — целое число.
Относительное условное расположение зубьев у всех сдвоенных
сателлитов должно быть одинаковым, что вносит дополнительные
трудности при нарезании зубьев.
Если по условию (4.29) передаточное отношение несовместимо
с техническим заданием, то следует выполнять только условие со-
осности
т23 (г3 — z2) = m2'4 (г4 — г#),
а сборку передачи обеспечивают путем изготовления разъемного
сдвоенного сателлита (2—2'), у которого колесо 2 может вращаться
относительно колеса 2'. Окончательно колеса 2 и 2’ закрепляют на
общем валу при сборке.
85
Рис. 4.12. Комбинированная планетарная передача
Кинематический расчет дифференциальных передач с двумя ве-
дущими валами удобно производить, рассматривая их как сложные
передачи, состоящие из двух планетарных ступеней, имеющих общее
водило и сателлиты [см. формулы (4.6), (4.7), (4.8)]. Кинематические
параметры составляющих простых планетарных ступеней выбирают ис-
ходя из задания на проектирование дифференциала. Далее расчет
ведут по изложенной выше методике.
Кинематический расчет замкнутых дифференциальных передач
также производят путем разбивки всей передачи на простые плане-
тарные передачи и ступени с неподвижными осями. Таким образом,
кинематический расчет планетарных передач всех типов сводится
к расчету простых планетарных или обычных передач с неподвиж-
ными осями.
Определение коэффициента полезного действия
В планетарных передачах к. п. д. зависит от потерь, возникающих
в относительном движении колес, т. е. от потерь в передаче, состав-
ленной из тех же колес, но при неподвижном водиле.
К. п. д. простых планетарных передач. При ведущем центральном
колесе k, ведомом водиле Н и неподвижном центральном колесе п
k потерь
Ч"’
(4.30)
При ведущем водиле Н, ведомом колесе k и неподвижном п
'и(я) —-- --- = — ——--------------
Л^£п)-р гл
II k ~ потерь
(4.31)
86
Здесь /Vj"1 и — соответственно мощности на колесе k и водиле Н,
когда колесо п неподвижно; — потери в относительном дви-
жении, когда водило Н неподвижно.
При определении потерь возможны два случая:
1) колесо k в относительном движении является ведущим, т. е.
сохраняет направление вращения, которое оно имело в простом пла-
нетарном механизме; это будет во всех передачах, где п^>п^, и
в передачах, где n'ff > п<_п) и < 0.
Потери в относительном движении
NZ„„ = № - N'«' _ № - лог? = (1 - С>); (4.32)
2) колесо k в относительном движении является ведомым, т. е.
меняет направление вращения, которое оно имело в простом плане-
тарном механизме; это относится к передачам, где и
Потери в относительном движении
«X.=«"> - Nlm = - ««=: <4-33'
Vkn 4kn
в формулах (4.32) и (4.33) — к. п. д. зубчатой передачи с не-
подвижными осями при ведущем колесе k и ведомом п, получающейся
из планетарной при остановленном водиле. Очевидно, что
'П1п)=11т. (4.34)
где г) — к. п. д. пары зубчатых колес с неподвижными осями (с уче-
том потерь в опорах);
т — число зацеплений в передаче.
Подставляя значения из (4.33) в (4.30) и (4.31), получим
формулы для определения к. п. д. простых планетарных передач
(см. табл. 4.2).
Анализ формул (4.35) и (4.36) показывает, что к. п. д. замедляю-
щих передач (редукторов) с ведущим центральным колесом, выпол-
ненных по рис. 4.3, понижается незначительно при увеличении пере-
даточного отношения. К. п. д. замедляющих передач с ведущим во-
дилом, выполненных по рис. 4.4 и 4.5, быстро убывает с увеличением
передаточного отношения. В одной из передач по рис. 4.4 при 1н\ = 50
к. п. д. равен 0,5; при i’hi = 1600 к. п. д. равен 0,03, а при lift = 10 000
к. п. д. равен 0,005. В передаче по рис. 4.5 при i'h’i = —39 к. п. д. ра-
вен 0,7; при 1н\ = —100 к. п. д. равен 0,33, а при i’hi = —200 к. п. д.
равен 0,2. Большое влияние на к. п. д. оказывает также точность
изготовления передачи.
К. п. д. дифференциальных передач определяется по общей зави-
симости
УЛ/
/Vi _ ведомых
' УЛ/
ведущих
(4.39)
где SWведомых — сумма мощностей на ведомых валах; 2Nведущих —
сумма мощностей на ведущих валах.
87
Для всех возможных случаев применения дифференциальных пере-
дач формула (4.39) может быть записана в необходимых вариантах:
при одном ведущем звене и двух ведомых (ведущим может быть одно
из центральных колес или водило, ведомым — соответственно второе
центральное колесо и водило или оба центральных колеса); при двух
ведущих звеньях и одном ведомом (ведущими могут быть одно из
центральных колес и водило или оба центральных колеса, а веду-
щими — соответственно второе центральное колесо или водило).
4.2. Формулы для определения к. п. д. простых планетарных передач
Звено Область применения Расчетная формула формулы
веду- щее ведо- мое
k и 1. Редукторы 2. Мультипликаторы (^<о) ;(л) _ 1 lkH (4.35)
k и 1. Мультипликаторы (4'Й>о) <«) _ . _ lkn Пкп Ап) (Н) lkH (4.36)
н k 1. Редукторы ('•(/%<о) 2 Мультипликаторы «<«) = (4.37)
и k 1. Редукторы Ш>о) Т1Шг~ 1 (Н) 1 1 6(п> й >kn l + Vnk 1) т (4.38)
Мощность на ведомых валах, так же как и в простых планетарных
передачах, определяется мощностью ведущего вала с учетом потерь,
возникающих в передаче при остановленном водиле, и выражается
произведением момента на угловую скорость.
В табл. 4.3 приведены формулы для определения к. п. д. диффе-
ренциальных передач, выполненных по рис. 4.1 и 4.6.
К. п. д. замкнутых дифференциальных передач определяется как
отношение суммы мощностей на ведомых валах к сумме мощностей
на ведущих.
Ввиду многообразия вариантов, которые можно получить из одной
замкнутой дифференциальной передачи путем изменения ее замыкаю-
щей части, единых формул для определения к. п. д. нет.
В табл. 4.4 приведены формулы для.определения к. п. д. наиболее
распространенных схем замкнутых дифференциальных передач,
характеристики их замыкающих передач и величины замкнутых
мощностей.
88
4.3. Формулы для определения к. п. д. дифференциальных передач
с двумя ведомыми или двумя ведущими звеньями
Веду- щее звено Ведо- мые звенья Область применения Расчетные формулы № фор- мулы
k (сол- неч- ное ко- лесо) п, И ^=^<0 1 lkn Htn Т tkn Bfen ИпН l-ff+'ffr.H (4.40)
п (ко- рон- чатое ко- лесо) k, Н ч"'“ i-e-и.я (4.41)
н (во- дило) k, п Je* * II BP " V Л 1 ~ “ V ° (1-g) Off-и,, о ’н-‘" (h.-ff)(ff-4ff) (4.42) (4.43)
k, Н п (ко- рон- чатое ко- лесо) “'=^«> (4.44)
п, Н k (сол- неч- ное ко- лесо) ЫП ~»пН<° ын (i-e+няя^)^ ч»н-« - <>-е+н.и« (4.45)
k, п и (во- дило) -^-=gfcn>o Ч.-И - O-ff>iff>fa.-iff) (l-<ff)(Ht.-<ff4l«) (4.46) (4-47)
89
4.4. Формулы для определения к. п. д. наиболее распространенных
замкнутых дифференциальных передач
Кинема- тическая схема передачи по рис. 4.2 Характери- стика замыкающей передачи Вели- чина зам- кнутой мощ- ности Расчетная формула № фор- мулы
б колесо k—ве- дущее водило И — ве- домое 1пН <0 0 1+4n)4n)(t»H<H-1) (4.48)
б колесо k—ве- дущее колесо п— ве- домое 1'пН < 0 0 ^knWn (1'пн~^'пн) + ^пн Т)*л //' 1\ l + lkn (1пН~1) (4.49)
в колесо п — ве- дущее водило Н — ве- домое 'ЛН <0 0 _ ^г+^пЧ^Н^Н-1) ^пн ;(Н), _i lkn Т- lkH 1 (4.50)
в колесо п — ве- дущее колесо & —ве- домое ЧгН < 0 0 11«Чя+4п> (4.51)
а водило Н — ве- дущее колесо k — ве- домое <0 1 1 > >ia (4.52)
б колесо п — ве- дущее колесо k—ве- домое l'nH < 0 0 0 - + 4")Гпн) Vkfrl'nH i{kHn (rnH^nH-l)+^kHn (4.53)
б водило Н — ве- дущее колесо k — ве- домое 1'пН < ° 0 ^Hk lkHn (i'nH - ЧаН )+ v/кпКн (4.54)
в колесо ^ — ве- дущее колесо п — ве- домое < 0 0 ’1A" 1-»1"Ч")-4нт1лн (4.55)
90
Продолжение табл. 4.4
Кинемати- ческая схема передачи по рнс. 4.2 Характе- ристика замыкающей передачи Вели- чина зам- кнутой мощ- ности Расчетная формула № фор- мулы
в водило Н — ве- дущее колесо л —ве- домое 0 _ (J-'ftn’-'fcH-) 4пЧн (4.56)
а колесо k — ве- дущее водило Н—ве- домое [ ^kn 1 1 kn I г“н (>-«’) (4.57)
Особенности расчета планетарных передач на прочность
Для определения сил в зацеплениях и в опорах планетарных пере-
дач всех трех типов (дифференциальных, замкнутых дифференциаль-
ных и простых планетарных) рассматривают поочередно равновесие
каждого звена под действием внешних нагрузок. Силы трения при
этом не учитывают. Расчет начинают со звена, где известен внешний
момент.
При этом удобно применять следующую систему обозначений: все
силы взаимодействия звеньев передачи обозначают буквой Р с двумя
нижними цифровыми индексами, первый индекс обозначает номер
звена, со стороны которого действует сила, второй — звено, на кото-
рое действует данная сила. Например, Р12 обозначает окружную
силу, с которой колесо 1 действует на колесо 2 (рис. 4.13 — 4.15).
Для контроля правильности вычисления служит уравнение равно-
весия внешних моментов, приложенных к механизму,
Л1н-Л1з-Л41 = 0, (4.58)
где Л4] — момент внешних сил, приложенных к центральному колесу Р,
Мн — момент внешних сил, приложенных к водилу Д; Л43 — момент
внешних сил, приложенных к центральному колесу 3.
Отношения моментов проверяют по формулам
Л4„ Ми
__н _;сз) . Н _ ;(1)
llH> м3 ~~1зН-
У ведущего вала угловая скорость и внешний момент имеют оди-
наковые направления, а у ведомого — противоположные.
Расчет передач на прочность. Зацепление планетарных передач
всех трех типов рассчитывают на прочность по формулам, приведен-
ным в табл. 4.5, 4.6.
(4.59)
91
Рис. 4.14. Определение сил,
действующих на звенья пла-
нетарной передачи, по схеме
рис. 4.4:
р ^1. р р .
га —~ > р 12 р 21 >
Г1
Рис. 4.13. Определение сил, действую-
щих на звенья планетарной передачи, по
ДЦ
схеме рис. 4.1 и 4.3: Рг\ — —
Г1
Pit —Pxl; pi2 = Р1Я; Р//2 Pit -f- Ptt
= 2Р,г: Рп = — ргг; P2H = —Рц2’
= Ml = о
рН2-2 =
- Рis — Рзг’; Ptf»~ — Рц :
м, — мн — м, == о
Рис. 4.15. Определение
сил, действующих на
звенья замкнутой диффе-
ренциальной передачи:
р . р Р •
*12 — — , Р 12 *32»
Г1
рН2 = 2P'it- Рм- = :
P«s “ Р3'В: ^оь “ 2Рзгв»
М н = ^2МГ2 4- G) 4* ^бвгв
При подсчете числа циклов нагружения следует учитывать только
вращение колес относительно друг друга. Угловые скорости в отно-
сительном движении определяют по формулам
= щС1) — щМ;
со'"»
щ(п) = — _
II Ап)
*kH
Соответственно для сателлита
со!/7» / г. \
«’--ж—
lk сат \ гсат J
(4.60)
(4.61)
(4.62)
Если в передаче есть наружное и внутреннее зацепление, то рас-
считывать на прочность при примерно одинаковых материалах и
термообработке зубчатых колес нужно только зацепление с наруж-
ными зубьями, например, в передаче на рис. 4.1 зацепление колес 1 и 2.
92
4.5. Формулы для расчета на прочность рабочих поверхностей зубьев
цилиндрических зубчатых колес с прямыми зубьями по контактным
напряжениям при 20-градусном зацеплении без смещения
производящего контура
Расчетные зависимости
1. Проверочный расчет:
а) напряжение в поверхностном слое зубьев, Н/мма
± I)3 .
б) допустимый момент на шестерне, Н • мм
i а \2 и'ьМ
1Л1ш1КМкЙо) k (ЦП ± 1)3-
2. Проектный расчет:
а) межосевое расстояние, мм
№
формулы
(4.63)
(4.64)
б) ширина колеса, мм
340 у feM,„ ± I)3
° mJ
(4.65)
(4.66)
Примечание, и" — приведенное число сателлитов, определяемое в зависимости
от числа сателлитов и:
и* — и — 0,7.
Обозначения и размерности остальных величин те же, что и в § 3*2 (Л4Ш — Aft)
Ход расчета зубчатого зацепления зависит от технического задания.
Если размеры передачи ничем не ограничены, то расчет следует на-
чинать с определения межосевого расстояния колес с наружными
зубьями из условия прочности рабочих поверхностей зубьев.
Передачи по рис. 4.1—4.5, встраиваемые в корпус электродвига-
теля, должны иметь диаметр корончатого колеса на 10—20 мм меньше
диаметра корпуса двигателя.
Если полученная по расчету ширина колес будет больше, чем это
Ь Ь
допускается соотношениями ~ или то расчет производят снова.
В тех случаях, когда ширина колес определяется прочностью зубьев
на изгиб, берут больший модуль. Если ширина колес определяется
прочностью рабочих поверхностей, то назначают термообработку,
повышающую твердость рабочих поверхностей зубьев.
Если полученные из расчета соотношения окажутся меньше до-
пускаемых, то ширину колес согласовывают с размерами подшипников
сателлитов или принимают по минимальным значениям допустимых
93
соотношений ее с другими параметрами передачи (т, а и d). При этом
нагрузочная способность зацепления будет использована не полностью.
После определения чисел зубьев и модуля следует подобрать под-
шипники сателлитов. Часто приходится увеличивать размеры колес
из-за того, что в сателлитах нельзя установить подшипники с требуе-
мым коэффициентом работоспособности. Если по соображениям ком-
поновки нельзя увеличивать диаметр сателлитов, то увеличивают их
ширину, ставя на два или три подшипника (см. рис. 4.23).
4.6. Формулы для расчета на прочность зубьев цилиндрических
зубчатых колес с прямыми зубьями по напряжениям изгиба
Расчетные зависимости № формулы
1. Проверочный расчет: а) напряжение изгиба _ 2k Му °и yu'm2bz б) наибольший допустимый момент на валу уи’т2 Ьг 1М]-Ми 2. Проектный расчет: а) ширина колеса ъ 2kMy " уи' [о]Ит2г ’ б) модуль зацепления И 4m'r|>mz [о]и (4-67) (4.68) (4.69) (4.70)
§ 4.3.КОНСТРУИРОВАНИЕ ПЛАНЕТАРНЫХ ПЕРЕДАЧ
Особенности конструкции передач
Конструкция зубчатых дифференциальных и планетарных передач
определяется их назначением, кинематической схемой и величиной
передаваемого момента. Для получения меньших габаритов силовые
передачи по рис. 4.1 и 4.3 надо делать с возможно большим числом
сателлитов.
В силовых малогабаритных передачах наибольшие трудности
встречаются при подборе подшипников качения сателлитов: мини-
мальная толщина обода сателлита должна быть не менее 2,25m, мак-
симально допустимый диаметр наружного кольца подшипника
Дтах = d — 2hf — 2 • 2,25т = тг — 2 • 1,25т — 4,5т = т (г — 7). (4.71)
94
При т sg 0,8 мм толщина обода должна быть не менее 2 мм. Если
подшипники качения не удается разместить в сателлитах, то при-
ходится применять подшипники скольжения. Так как подвод смазки
к ним затруднен, то вкладыши подшипников часто делают из анти-
фрикционных сплавов, которые могут работать в условиях недоста-
точной смазки или совсем без смазки (пластмассовые, графитовые
или металлокерамические вкладыши). При большом сроке службы
необходимо подводить смазку в подшипники под давлением. Исклю-
чением являются дифференциалы с малой относительной подвиж-
ностью сателлитов, для подшипников которых не требуется индиви-
дуальная смазка.
Передачу по рис. 4.4 рекомендуется применять только при не-
большой разности между числами зубьев колес, находящихся в за-
цеплении; из-за малой величины межосевого расстояния можно
выполнить водило в виде вала с эксцентричной шейкой, на которую
устанавливается один сдвоенный сателлит. В быстроходных переда-
чах такого типа для уравновешенного сдвоенного сателлита необхо-
димо ставить противовесы.
В передачах по рис. 4.12 сдвоенный сателлит можно сделать разъ-
емным, что значительно облегчает сборку редуктора. Конструкция
такого сателлита приведена на рис. 4.24 и 4.25.
Неизбежные неточности при изготовлении передач приводят к не-
равномерному распределению нагрузки между сателлитами, что
снижает нагрузочную способность редуктора. Для выравнивания
нагрузки по сателлитам применяют три принципиально различных
способа:
первый — жесткое крепление всех деталей, высокая точность вы-
полнения всех размеров, очень тщательный монтаж, подбор сателли-
тов по зазору в зацеплениях с центральными колесами;
второй — установка плавающего одного из центральных колес
или водила;
третий — установка центральных колес с гибким ободом или ввод
упругой связи между венцами сдвоенных сателлитов.
Наибольшее распространение получили конструкции с плаваю-
щими центральными колесами. На рис. 4.16 показан редуктор с пла-
вающим солнечным колесом 1, а на рис. 4.17 — с плавающим корон-
чатым колесом 3. В этих конструкциях свобода перемещения цент-
ральных колес в радиальном направлении обеспечивается зубчатыми
муфтами. Наилучшее выравнивание нагрузки получается при трех
сателлитах.
На рис. 4.18 показан редуктор с плавающим водилом. Такую
конструкцию целесообразно применять только при небольшой угловой
скорости и малой массе водила. В противном случае из-за неуравно-
вешенности водила появится большая динамическая нагрузка.
Радиальное смещение солнечного колеса можно обеспечить за
счет малой жесткости вала. Такая конструкция показана на рис. 4.19.
Правый конец вала закреплен в двух подшипниках, а левый вместе
с солнечным колесом 1 расположен консольно. Эта конструкция
частично выравнивает нагрузку по сателлитам, но наличие перекоса
95
Рис. 4.16. Конструкция
планетарного редуктора
с плавающим солнечным
колесом 1
Рис. 4.17. Конструкция
планетарного редуктора
с плавающим корончатым
колесом 3
96
снижает нагрузочную способ-
ность передачи, поэтому ее
можно применять только при
достаточно большом отноше-
L .... . b
НИИ -,-5г4и малом —.
b а
Уменьшение жесткости
ободов центральных колес и
осей сателлитов также при-
водит к выравниванию на-
грузки по сателлитам. Но при
этом необходимо учитывать
влияние деформаций на рас-
пределение нагрузки по ши-
рине зубчатых колес.
Конструкция упругой оси
показана на рис. 4.20. На
рис. 4.21 показаны конструк-
ции ободов с внутренними
Рис. 4.18. Конструкция планетарного редук-
тора с плавающим водилом
зубьями. Вариант а применяют при
жесткой конструкции всей передачи; обод запрессовывается в кор-
пус и дополнительно крепится штифтом. Обод, выполненный по ва-
рианту б, обладает небольшой жесткостью, что способствует равно-
мерности распределения нагрузки между сателлитами; минимальную
толщину обода принимают равной трем модулям.
На рис. 4.22 показан трехступенчатый планетарный редуктор со
встроенным электродвигателем. На валу электродвигателя укреплено
штифтом колесо 16 первой ступени. Солнечные колеса 11 и 13 второй
и третьей ступени выполнены как одно целое с водилами 12, 14.
Водило 5 третьей ступени редуктора выполнено как одно целое с вы-
ходным валом 7. Сателлиты 2, 3, 4 вращаются на подшипниках ка-
чения. Водило 14 первой ступени и солнечное колесо 13 второй ступени
центрируются в корпусе подшипниками качения 1, 9. Водило 12
Рис. 4.19. Конструкция планетарного редуктора с гибким валом солнечною колеса
4 Зак. 220 97
Рис. 4.20. Конструкция упру-
гой оси сателлита
с; с)
Рис. 4.21. Конструкции корончатых1 колес:
а — жесткое крепление колеса в корпусе: б — гиб-
кое крепление колеса в корпусе
Рис. 4.22. Трехступенчатый простой планетарный редуктор
второй ступени и солнечное колесо 11 третьей ступени центрируются
валом водила 14. Для уменьшения трения между ними установлена
втулка 10 из антифрикционного материала. Общее корончатое колесо 15
выполнено за одно целое с корпусом редуктора. Редуктор закрывается
крышкой 8. Для защиты от грязи и от вытекания смазки в проточке
водила третьей ступени помещено уплотнительное кольцо 6.
Конструирование сателлитов
На рис. 4.23 показаны конструкции сателлитов на опорах качения.
В варианте а наружные кольца подшипников закреплены пружинными
кольцами 1. Подшипники установлены между кольцами без регули-
ровочных шайб с небольшим зазором. В варианте б подшипники
фиксируются в осевом направлении пружинным кольцом 1 и дистан-
ционной втулкой 2; подшипники могут немного выступать из сател-
лита, благодаря этому расстояние между подшипниками увеличи-
вается, что уменьшает перекос, вызванный неодинаковыми начальными
зазорами в подшипниках и неодинаковыми посадочными диаметрами.
Демонтаж подшипников сложнее, чем в варианте а.
98
Рис. 4.23. Конструкции сателлитов на опорах качения
При специальном подборе подшипников можно значительно умень-
шить перекос.
В случае большой нагрузки сателлиты можно установить на ро-
ликовые или игольчатые подшипники.
На рис. 4.23, в показан сателлит, установленный на игольчатых
подшипниках. Для фиксации сателлита в осевом направлении между
игольчатыми подшипниками поставлен шариковый подшипник. Такая
конструкция может быть применена и для сдвоенного сателлита
(см. рис. 4.12). Если радиальные зазоры в игольчатых подшипниках
будут больше, чем в шариковом, то последний окажется перегружен-
ным. Поэтому для шарикового подшипника лучше сделать в сателлите
выточку.
На рис. 4.23, г показан сателлит на роликовых конических
подшипниках. Для регулировки осевого зазора служат про-
кладки 1.
При установке подшипников внутри сателлитов уменьшаются осе-
вые габариты, упрощается конструкция и сборка, но нагрузочная
способность подшипника уменьшается в 1,35 раза. При установке
подшипников в водиле (рис. 4.23, б) увеличивается габарит, но по-
лучается выигрыш в нагрузочной способности подшипника.
Сдвоенные сателлиты изготовляют из одной заготовки только при
небольшой разнице диаметров венцов (рис. 4.23, д). В остальных
случаях их делают составными. Соединение венцов осуществляют
прессовой посадкой и винтом 1 или с помощью шлицев (рис. 4.24, а, б).
Для соединения шлицами используют подрезанные зубья малого венца.
4*
99
Рис. 4.24. Конструкция
сдвоенных сателлитов
Рис. 4.25. Конструкция сдвоен-
ных сателлитов с устанавливае-
мым «по месту» взаимным угло-
вым расположением колес
В обоих случаях нужно следить за правильным взаимным
расположением венцов. На рис. 4.25 показана конструкция
сдвоенного сателлита, в котором большой венец может поворачи-
ваться относительно малого. После установки венца в заданном по-
ложении гайку I затягивают. При больших нагрузках, когда силы
трения недостаточно, венец дополнительно крепят цилиндрической
шпонкой 2; в гайке предусмотрены отверстия для сверления гнезд
под шпонки.
Конструирование водил
Конструктивно водило может быть выполнено как одно целое
с валом, солнечным колесом последующей ступени или раздельно.
На рис. 4.26 показано водило, выполненное как одно целое с вы-
ходным валом, на котором имеются эвольвентные шлицы. Оси сател-
литов расположены консольно и имеют внутреннюю резьбу для креп-
ления стопорной шайбы внутреннего кольца подшипника. Ось резь-
бового отверстия смещена на величину е по отношению к оси сателлита.
Это предохраняет стопорную шайбу от провертывания, а сам винт
кернится.
На рис. 4.27 и 4.28 показаны конструкции водил, выполненных
как одно целое с солнечным колесом последующей ступени. Гнезда
под сателлиты фрезеруют. Оси сателлитов имеют две опоры, и их
устанавливают в водиле с натягом.
Рис. 26. Конструкция штампованного
водила с солнечным колесом я кон-
сольными осями сателлитов
Рис. 4.27. Конструкция штампован-
ного водила с солнечным колесом и
двумя опорами для осей сателлитов
100
Рис. 4.29. Кон-
струкция сбор-
ного водила
Рис. 4.28. Конструкция водила, изготовленного
из круглого проката
На рис. 4.29 показано водило со съемной щекой. Щека крепится
к основной части водила болтами, поставленными без зазора. В техно-
логическом отношении эта конструкция несколько проще.
На рис. 4.30, а показано водило, выполненное раздельно с солнеч-
ным колесом последующей ступени. Для зубчатого соединения ис-
пользуют подрезанные зубья солнечного колеса. После сборки произ-
водят обжатие зубьев по всей окружности (рис. 4.30, б). Ось сател-
лита может быть сделана как одно целое с водилом или отдельно.
Пример расчета планетарного редуктора
Определить основные параметры планетарного редуктора с пря-
мыми зубьями, встроенного в асинхронный электродвигатель.
Данные для расчета: электродвигатель ВАСЗб-1,5; мощность Л/л =
= 1,5 кВт; частота вращения пд = 950 об/мин (<о = 99 рад/с); диа-
метр расточки корпуса под редуктор D = 190 мм; частота вращения
выходного вала пв = 23 об/мин; срок службы Lh = 50 000 ч.
Кинематический расчет. Передаточное отношение редуктора
/ =5» = ^- = 41,3.
пв 23
Выбор кинематической схемы и разбивка передаточного отношения
по ступеням. Редуктор должен иметь высокий к. п. д., поэтому выби-
раем схему передачи по рис. 4.3. Передаточное отношение i = 41,3
можно выполнить, соединив последовательно две ступени выбранной
схемы. Передаточное отношение первой ступени делаем больше, чем
второй, так как вторая ступень более нагружена. Предварительно
принимаем h — 8; tn ==^-=-|—= 5,17. Кинематическая схема ре-
дуктора приведена на рис. 4.31: й = йн, = 8; Щ = йн, = 5,17.
Число сателлитов для каждой ступени принимаем равным 3.
Подбор чисел зубьев колес. I ступень. Принимаем zt = 20,
тогда z3 = = 20 • 7 = 140. Здесь — 1 определено по формуле
101
Рис. 4.31. Кинематическая схе-
ма рассчитываемого редуктора
Рис. 4.30. Зубчатое (шлицевое) соеди-
нение водила с солнечным колесом
(2.24) не выполняется, поэтому
£ = 7,8.
(4.21). При z-A = 140 условие сборки
принимаем z3 = 136, тогда
—= 20 +136 = 52 (целое число).
Условие сборки выполняется.
Число зубьев сателлитов находим из условия соосности (4.23):
_ гз zi____ 136 20__
22 - 2 ~ 2
Уточняем передаточное отношение при выбранных числах зубьев
колес:
= 1
II ступень. Уточняем передаточные отношения:
i 41.3 к о
in - — 7>8 —5,3.
Принимаем z4 = 16 (минимальное число зубьев из условия от-
сутствия подрезания равно 17, но при г = 16 подрезание незначи-
тельно и коррекцию можно не делать), тогда z3 — zjV'**-, ze — 16 -4,3 ~
«68.
Проверяем условие сборки ступени с тремя сателлитами:
fliZl _ 28 (целое число);
условие сборки выполняется.
Число зубьев сателлитов находим из условия соосности (4.23):
гв — г4 _ 68— 16
г5 — 9 о —
102
Уточняем передаточное отношение при выбранных числах зубьев
колес:
- ®. - > - =1 - (~ t)=1+и=5’25-
Передаточное отношение редуктора
i = Л/’п = 7,8 - 5,25 = 40,95.
Отклонение от заданного составляет А/ — 41,3 — 40,95 = 0,35
(соответственно: у 100 = 100^0,8%^. Такое отклонение вполне
допустимо.
Проверяем условие соседства по формуле (4.25),
I ступень
dO2 < 2а12 sin;
т, . л
tniZ% + 2/Tii < 2 ~2~ (Z} + za) sin -g-;
z2+2<(z1 + za)sin~;
58 + 2 <(20 4-58) 0,865;
0<67,6.
II ступень
daB<2a45sini;
771ц # 7T
mnz5 + 2/nn < 2 (?4 + sin у;
z5 + 2 < (Zj + z5) sin -g-;
26 +2 <(16+ 26) 0,865;
28 <36,4.
Определение к. п. д. редуктора. К. п. д. I ступени: принимаем
— 0,95, тогда
«<»’ —1 7,8—1
Ш = 1 — (1 -<*’) = 1 —Vs- -0.95) 0,96.
К. п. д. II ступени при тД"*> = 0,95
i'4, —1 5,25—1
Чи = 1 - (1 ~ « = 1 - ^25 - П - °’95) - 0>97.
К. п. д. редуктора
т] = тцЧпЧп* = 0,96 • 0,97 0,992 = 0,91.
юз
Здесь т]„л = 0,99 (учитываются потери в подшипниках, на которых
установлено водило).
Определение модуля зацепления. Корончатые колеса 3 и 6 должны
размещаться во внутренней расточке корпуса (ф 190 мм). Исходя
из этого принимаем диаметры делительных окружностей этих колес
одинаковыми и равными 170 мм.
Тогда для 1 ступени
ds I70 1 ок
т\ — — = 1,25 мм;
г3 13b ’
для II ступени
de 170 о с
mii=- = -7„- = 2,5 мм.
^6 оо
Полученные значения модулей соответствуют ГОСТ 9563—60**.
Подбор подшипников сателлитов. Подшипники сателлитов под-
бираем до прочностного расчета зацепления, так как их ширина
обычно определяет наименьшую ширину зубчатых колес.
I ступень
Радиальная нагрузка, действующая на подшипник сателлита 2,
Л1 = Р.я,-2Р„ = 2;^г = 2^^^1060 Н №-108 кгс);
Л11 = —= 15,2 Нм; /«1 = 1,25 мм; ai = 20;
COj УУ
и' — и — 0,7 = 3 — 0,7 = 2,3 (приведенное число сателлитов).
Частота вращения наружного кольца подшипника относительно
водила по формуле (4.62)
«<"> ?! 20
П(н.) = _1— — А П(Щ) = _ 828 = 285 об/мин.
* z2 1 58
Здесь
= n<3) — n(3) = 950 — = 828 об/мин.
Условия работы подшипников: требуемая долговечность Т =
= 50 000 ч; могут быть кратковременные перегрузки; рабочая тем-
пература до 125°С.
Для установки сателлитов выбираем радиальные однорядные шари-
коподшипники серии 300, так как срок службы значителен.
Приведенная нагрузка, действующая на подшипник,
& = /?2УЛбЛт = 108 • 1,2 • 1,2 1,05 = 164 кгс.
Здесь V = 1,2, так как вращается наружное кольцо; /С6 = 1,2;
Кт = 1,05.
Долговечность
L ь= 60п<Я1)7' • 10 е = 60 • 285 • 50 000 • 10 е = 855 млн. оборотов.
101
Из формулы
находим необходимую динамическую грузоподъемность подшипника
C = Q2/Z = 164^855 ъ 1550 кгс.
По табл. П26 можно выбрать подшипник 305 (С = 1760; d = 25;
D = 62; В = 17) или два подшипника 301 (С = 763 • 2; d = 12; О = 37;
В = 12).
Останавливаемся на втором варианте, так как при установке под-
шипника 305 обод сателлита будет тонким.
II ступень
Радиальная нагрузка, действующая на подшипник сателлита 5,
Rl = P,n.»2P<s-2^z-221^H№=5150H (Rs = 525 кгс).
Здесь
М< = Мн, = ШТн.тр = 15,2 • 7,8 • 0,96 ъ 118,5 Нм;
/п11 = 2,5 мм; г4 = 16; и' = 2,3.
Частота вращения наружного кольца подшипника
=£i_ = _ I? 98,8 61 об/мин;
6 «1"*’ Ч * 26
«Г’ = и<«» - ng» = ^ - 98,8 об/мин.
Приведенная нагрузка, действующая на подшипник сателлита 5,
q5 = 7?а уадт = 525 • 1,2 -1,2 -1,05 795 кгс.
Долговечность
L = 60nJH"»T • 10 е = 60 • 61 • 50 000 • 10 6 = 183 млн. оборотов.
Для полученного значения долговечности по каталогу подшипни-
ков находим величину отношения:
£=5,68.
Необходимая динамическая грузоподъемность
С = 5,68Q6 = 5,68 795 4500 кгс.
Максимальный диаметр наружного кольца подшипника, который
может быть установлен в сателлите, £»тах = 50 мм (диаметр делитель-
ной окружности сателлита II ступени d5 = m\\z5 = 2,5-26 = 65 мм);
исходя из этого устанавливаем в сателлит два подшипника 36303
(d =17; D = 47; В = 14). Суммарная динамическая грузоподъем-
ность подшипников С = 2-1310 = 2620 кгс. Отношение
С .2620
795 -*>"•
105
Этому отношению соответствует долговечность
. ОГ -7 г Юе7 10е • 36,7 lnnnn
L = 36,7 млн. оборотов или Lh — —ттщ =--------10 000 ч.
1 60п1Нг) 60-61
Таким образом, при заданных габаритах редуктора подшипники
сателлитов II ступени необходимо заменять через каждые 10 000 ч
работы.
Расчет на прочность зацепления зубчатых колес. Расчет достаточно
выполнить только для внешнего зацепления солнечных колес с сателли-
тами, так как при равных силах, действующих в зацеплениях, контакт-
ные напряжения при внешнем зацеплении будут больше, чем при внут-
реннем (сателлит — корончатое колесо).
Расчет на контактную прочность рабочих поверхностей солнечных
колес и сателлитов. I ступень (колеса 1 и 2):
340 Г(«<«)+ 1)3 =
ОК1-—
340 15,2 - 1№. 1,3(2,9+1)з
= 48,75 V 2,3:24.2,9 - ~ 600 Н/ММ ’
здесь принято К\ = 1,3;
«12 = = -у- (Zi + z2) = - (20 + 58) = 48,75 мм;
Ь] = 2В1 = 2 • 12 = 24 мм
(в сателлит установлены два подшипника, каждый шириной 12 мм);
«' = « —0,7 = 3 —0,7 = 2,3; = |^ = || = 2,9.
II ступень (колеса 4 и 5):
_ _ 340 т / 7ИЛп(1<^, + 1)3 =
ак11 а45 |/
Ku = 1,1;
«45 = (z4 + z6) = ^-(16 + 26) = 52,5 mm;
Ьц = 2Вц = 2-14 = 28 мм
(в сателлит установлены два подшипника, каждый шириной 14 мм);
и'= н — 0,7 = 3 — 0,7 = 2,3; =^ = ^=1,62.
Z4 10
Допускаемые контактные напряжения на рабочих поверхностях
зубьев для предотвращения усталостного выкрашивания. Для всех
зубчатых колес назначаем сталь 38Х2МЮА, зубья (после нарезания)
106
азотированы до твердости HRC 60—65. Число циклов нагружения
зубьев солнечных колес (колеса 1 и 4):
колесо Г.
= &)un\Ht)T = 60 • 3 • 828 50 000 7,45 • 10е;
колесо 4-.
Nai = 60wi<W = 60 3 • 98,8 • 50 000 = 8,9 • 108
(для сателлитов числа циклов нагружения будут меньше).
Числа циклов нагружения колес 1 и 4 больше 25 »107, поэтому
^рк I — ^рк п “ 0,585 и /йри I — /?рип ~ 1 •
Для азотированных зубьев
[о]к =cHRCk^ = 27,5 60 0,585 = 965 Н/мм2.
Расчет показал, что
Ок1<[о]к и окп<[а]к.
Расчет на усталостное разрушение от изгиба зубьев солнечных колее
и сателлитов.
I ступень (колеса 1 и 2):
2ЛДК1 2.15,2 - 10з. 1,3 i 58 Н/мм2;
°и1 — yjU'tn'^ b± 0,39.2,3- 1,253.20 - 24
2М^ _ 2 -15,2.10з. 1,3 ^46 Н/мм2.
°и2~ y2u'm\zrbx 0,49.2,3-1,252.20.24 '
II ступень (колеса 4 и 5):
2Л1Лп 2-118,5-103.1,1 = 113 Н/мм2;
СИ4 ^и'тЪг4ЬП 0,36 - 2,3.2,52.16 - 28
2Л1Лп 2-118,5-103.1,1 94 Н/мм2.
°и5 Дб1''”1!!2?!! 0,43-2,3.2,52.16-28
Допускаемые напряжения изгиба при расчете на усталостную
прочность. Для солнечных колес (/ и 4)
[«.]. - Ж = 2ТО 1 = 255 Н/“’;
= 0,35ов + 108 = 0,35 • 980 + 108 = 450 Н/мм2;
In] = 2,2 (см. стр. 60);
ko — 1,2 (см. стр. 61).
Для сателлитов (колеса 2 и 5)
1° J = 2X7^2 1 = 170 Н/мм2.
Из расчета следует, что во всех случаях
Ри<Ми.
107
108
Рис. 4.32. Общий вид рассчитанного редуктора
Расчет осей сателлитов. Конструкцию водил выбираем с двумя
стенками, чтобы оси сателлитов имели по две опоры.
I ступень
Напряжение изгиба в опасном сечении осн
М . 9,6. 10»
= —173—= 55,5 Н/мм2;
РаИ I, 1060 - 36.10-3
Л1ИI = =-------4----= 9’6 Нм:
здесь /1 — расстояние между опорами водила I ступени;
6, 12
li — bi -}~ 2 ~2 — 24 -}~ 2 — 36 мм;
6j — толщина стенки водила (принимаем 6—12 мм);
№И1 = 0,1- 123173 мм3
(di — диаметр внутреннего кольца подшипника).
II ступень
Напряжение изгиба в опасном сечении оси
М ,, 54- 103
а“11 = = ~490~ = И0 Н/мм2;
Р.и1и 5150 - 42.10-3
Л1и11=-^ =---------4----= 54 Нм;
6П 14
/ц = Ьц -}- 2 ~2~ = 28 -|- 2'2' — 42 мм;
6ц принимаем 14 мм;
№иц «^O.ld'j = 0,1 • 173 = 490 мм3.
Выбираем материал осей сталь 40ХН, от = 600 Н/мм®.
Допускаемое напряжение изгиба для осей
[о]и = 0,3от = 0,3 - 600 = 180 Н/мм2.
Расчет показал, что
< Ни-
Другие детали рассчитывают так же, как и детали обычных редук-
торов.
Общий вид рассчитанного редуктора приведен на рис. 4.32.
Глава 5
РАСЧЕТ ЧЕРВЯЧНЫХ
ПЕРЕДАЧ
§ 5.1. ОБЩИЕ СВЕДЕНИЯ
Червячные передачи относят к категории зубчато-вин-
товых передач. Их применяют в случаях, когда геометрические оси ве-
дущего и ведомого валов перекрещиваются (обычно под прямым
углом).
В § 5.1—5.6 рассмотрены передачи с архимедовым червяком. Рас-
чету глобоидных передач посвящен § 5.7.
Червячные передачи выполняют либо открытыми, либо закрытыми
в виде отдельных агрегатов — червячных редукторов.
Схемы наиболее распространенных типов червячных редукторов
приведены в гл. 2; там же даны схемы двухступенчатых комбинирован-
ных редукторов, в которых одна из ступеней выполнена в виде червяч-
ной передачи, а другая — зубчатой. Для больших передаточных чисел
применяют двухступенчатые червячные редукторы (см. рис. 2.23 и
пример в § 16.2).
Передаточное число червячной передачи
,• = ,. = «1 = «1 _ *2
<02 «2 *1 ’
где <ох, <х>2 и и1> п2 — угловые скорости, рад/с, и частоты вращения,
об/мин, соответственно червяка и червячного
колеса;
z2 — число зубьев червячного колеса;
z± — число витков червяка.
В силовых червячных передачах число витков червяка выбирают
в пределах = 1 + 4*, а число зубьев червячного колеса z2 — 27 ч-
ч- 70** (при небольших нагрузках в отдельных, сравнительно редких,
случаях до 120). Таким образом, посредством одноступенчатой силовой
червячной передачи можно получить i примерно от 7 до 70 и в некото-
рых случаях до 120.
(5-1)
*По ГОСТ 2144—66 червяки с Zj = 3 не предусмотрены, но при проектировании
редукторов для индивидуального производства они все же встречаются.
**z2nnn = 27 принимают при стандартном угле профиля в осевом сечении
витка червяка ах = 20°t
НО
Применение червячных редукторов при малых передаточных числах
(i 10) нецелесообразно.
С увеличением числа витков червяка возрастает угол подъема линии
витка, а следовательно, и к. п. д. передачи, поэтому применение чер-
вяков zt = 1 без крайней необходимости не рекомендуется.
При проектировании нестандартных червячных передач можно
выбирать число витков червяка и число зубьев червячного колеса по
табл. 5.1.
Если необходимо иметь само-
тормозящую передачу (например,
в грузоподъемных механизмах
с ручным приводом), червяк де-
лают с гг = 1 и углом подъема
линии витка червяка меньшим, чем
угол трения.
В ряде случаев целесообразно
провести параллельно два рас-
чета передачи при разных числах
зубьев колеса и витков червяка
и затем уже, исходя из получен-
ных габаритов и к. п. д. пере-
5.1. Рекомендуемые значения zt и г2
для нестандартных червячных
передач
1 *1 2г
7—8 4 28—32
9—13 3—4 27—52
14—24 2—3 28—72
25—27 2—3 50—81
28—40 1—2 28—80
40 и более 1 40 и более
дачи, выбрать более рациональ-
ный вариант. Например, при i — 16 следует произвести расчеты,
принимая гг = 2 и z2 = 32 и гх = 3, z2 = 48.
При проектировании стандартного червячного редуктора зна-
чения zx и гг следует принимать в соответствии с ГОСТ 2144—66
(табл. 5.2).
§ 5.2. ОСНОВНЫЕ ПАРАМЕТРЫ ЧЕРВЯЧНОЙ ПЕРЕДАЧИ
Ниже рассмотрены только некорригированные передачи с архиме-
довым червяком, имеющим угол профиля в осевом сечении витка чер-
вяка ах — 20°.
Червяк
Элемент осевого сечения червяка представлен на рис. 5.1. Связь
между шагом р, модулем т и ходом витка червяка рг1 выражается фор-
МУЛОЙ 2e.=w*
р = пт = ~. (5.2)
Делительный диаметр червяка
должен быть кратным модулю чер-
вяка:
= qm,
где q — коэффициент диаметра рИС1 5Л. Элемент осевого сечения ар-*
червяка. химедова червяка
111
112
5.2. Основные параметры некорригированных цилиндрических червячных передач
(по приложению к ГОСТ 2144—66)
т (мм); q', za :
40 1; 16; 64 : 1 2; 10; 30: 1
50 1,25; 16; 64: 1 2; 12; 38 : 1 2; 12; 38:2 2; 12; 38:4 2,5; 10; 30 : 1
63 1,5; 16; 68 : 1 3; 10; 32 :1 3; 10; 32 : 2 3; 10; 32 : 4 4; 9; 31 : 1 4; 9; 32 :2 4; 9; 32 : 4
80 2; 16; 64 :1 2,5; 12; 52 :1 2,5; 12; 52:2 2,5; 12; 52 : 4
100 2,5; 16; 64 : 1 4; 10; 40 :1 4; 10; 40 : 2 4; 10; 40 : 4 5; 9; 31 :1 5; 9; 31 :2 5; 9; 31 : 4
140 3,5; 12; 68 : 1 5; 10; 46 : 1 5; 10; 46:2 5; 10; 46 : 4 7; 9; 31 : 1 7; 9; 31 : 2 7; 9; 31 :4
160 4; 12; 68 : 1 5; 10; 54 : 1 5; 10; 54: 2 5; 10; 54 : 4 8; 8; 32: 1 8; 8; 32 : 2 8; 8; 32 : 4
180 4; 14; 76: 1 4,5; 12; 68: 1 6; 10; 50 : 1 6; 10; 50 : 2 6; 10; 50 : 4 9; 8; 32 :1 9; 8; 32: 2
9; 8; 32: 4
200 5; 12; 68 :1 10; 8; 32: 1 10; 8; 32 : 2 10; 8; 32 : 4
225 4,5; 16; 84 : 1 6; 12; 63:1 9; 8; 42 : 1 9; 8; 42 :2 9; 8; 42:4
250 5; 16; 84 : 1 10; 8; 42: 1 10; 8; 42: 2 10; 8; 42 : 4
280 7; 12; 68 : 1 8; 12; 58: 1 8; 12; 58 : 2 8; 12; 58 : 4 10; 10; 46 :1 10; 10; 40:2 10; 10; 46 : 4
14; 8; 32 :1 14; 8; 32:2 14; 8; 32: 4
315 7; 12; 78 : 1
400 10; 12; 68 : 1 16; 8; 42 : 1 16; 8; 42 : 2 16; 8; 42 : 4
450 10; 12; 78 : 1 12; 10; 65 : 1 18; 8; 42 : 1 18; 8; 42 : 2 18; 8; 42 : 4
Примечание. Все остальные значения сочетаний.величии а, т, q, Zt, zt. указанные в приложении к ГОСТ 2144—66, относятся
к корригированным передачам.
5.3. Модуль т и коэффициент диаметра червяка
(по ГОСТ 2144—66)
tn, мм Q т, мм Q
1 1,125 1,25 1,375 1,5 1,75 2 2,25 2,5 2,75 3 ЗД 4 16 16 16 16 Р; 16 14 10; 12; 14; 16 12; 14 10; 12; 14; 16 10; 12 10; 12; 14 10; 12; 14 9; 10; 12; 14; 16 4,5 5 6 7 8 9 10 11 12 14 16 18 20 10; 12; 16 9; 10; 12; 16 9; 10; 12; 14 9; 10; 12 8; 9; 10; 12 8, 10; 12 8; 10; 12 8; 10; 12 8; 10; 12 8; 10 8; 9 8 7,5
Для сокращения количества размеров фрез, требуемых для нареза-
ния червячных колес, рекомендуется придерживаться стандартных
значений q, указанных в табл. 5.3.
Делительный угол подъема линии витка червяка у связан с числом
витков червяка zY и коэффициентом диаметра q соотношением
tgy = ^. (5.3)
При проектировании самотормозящих червячных передач может
оказаться необходимым отступить от табличных значений q в сторону
их увеличения для обеспечения достаточно малого угла подъема (мень-
шего угла трения). Необходимость увеличения q может возникнуть
также в случае неудовлетворительных результатов расчета червяка на
жесткость (см. § 5.5).
Величины углов подъема у, соответствующие стандартным значе-
ниям q при Zi — 1 4- 4, приведены в табл. 5.4.
5.4. Делительные углы подъема линии витка червяка
Значения у при д, равном
13 12 11 10 9 8
1 4=23'55" 4=45'49" 5° 11'40" 5=42'38" 6=20'25" 7=07'30"
2 8=44'46" 9=27'44" 10°18'17" 11=18'36" 12=31'44" 14=02'10"
3 12=59'41" 14=02'10" 15°15'18" 16=41'56" 18=26'06" 20=33'22"
4 17=06'10" 18=26'06" 19=58'59" 21=48'05" 23=57'35" 26=33'54"
Диаметр вершин витков червяка (при коэффициенте высоты голов-
ки, равном единице)
dai = d1+2m=m(q+2). (5.4)
113
Рис. 5.2. Сечение червяка и колеса
плоскостью, перпендикулярной к оси
червяка
должна быть увеличена при
Диаметр впадин витков червяка
(при коэффициенте радиального за-
зора с* = 0,2)
dfl = d1 — 2,4m = m(q — 2,4). (5.5)
Длина br нарезанной части чер-
вяка:
при = 1 или 2
Ь± 5= (11 + 0,06г2) т;
при = 3 или 4
615г (12,5 +0,09г2) т.
(5.6)
Для шлифуемых и фрезеруе-
мых червяков величина blt полу-
ченная по выражениям (5.6),
т 10 мм на 25 мм, при т =
= 10-4-16 мм — на 35—40 мм и при т > 16 мм — на 50 мм.
Червячное колесо
На рис. 5.2 изображено сечение червяка и червячного колеса пло-
скостью, перпендикулярной к оси червяка.
Делительный диаметр червячного колеса
d2 = z2m. (5.7)
Диаметр вершин зубьев червячного колеса в среднем сечении (при
коэффициенте высоты головки, равном единице)
da2 = (z2 -f- 2) tn. (5.8)
Диаметр впадин зубьев червячного колеса в среднем сечении (при
коэффициенте радиального зазора с* = 0,2)
df2 = (?2 — 2,4) т. (5.9)
Наибольший диаметр червячного колеса dam2 рекомендуется опреде-
лять по формуле
dGm2^da2-\~~. (5.10)
Ширину венца колеса Ь2 рекомендуется принимать из соотношений:
при гг = 1 -г- 3 i>2 =c0,75dai; )
при гг = 4 b2 0,67dol. J
Условный угол обхвата 26 червяка венцом колеса определяется точ-
ками пересечения дуги окружности диаметром dj2 — 0,5 m с контуром
венца (см. рис. 5.2)
114
Коэффициент полезного действия
К. п. д. червячного редуктора с учетом потерь в опорах передачи
и на разбрызгивание и перемешивание масла определяется по формуле
Ч = (0,95-г-0,96)г-Д1_-,
1 v ' tgG’+p1)
(5.13)
здесь р' — приведенный угол трения, определяемый из выражения
р' = arctgf', где f — приведенный коэффициент трения.
При предварительном определении к. п. д., когда параметры пере-
дачи еще неизвестны, можно принимать для стального червяка и брон-
зового венца колеса f = 0,04 -5- 0,06; при стальном червяке и чугун-
ном венце f = 0,08 -г- 0,12 (большие значения — для открытых пере-
дач).
5.5. Приведенные коэффициент трения /' и угол трения р' при работе
червячного колеса из фосфорной бронзы по стальному червяку
Оск, М/с г Р' °ск- м/с Г р'
0,01 0,10 0,25 0,5 1,0 1,5 0,11—0,12 0,08—0,09 0,065—0,075 0,055—0,065 0,045—0,055 0,04—0,05 6° 17'—6Э51' 4°34'—5°09' 3°43'—4° 17' 3°09'—3®43' 2°35'—3°09' 2°17'—2°52' 2,0 2,5 3,0 4,0 7,0 0,035—0,045 0,030—0,040 0,028—0,035 0,023—0,03 0,018—0,026 ю Г- О 00 сэ СО —< О CN о о о о о jHj j о со сЬ cn О со —О О О О О G CN >—।
Примечания: 1. Меньшие значения следует принимать при шлифованных или полированных витках червяка. 2. При венце колеса из безоловянной бронзы значения f' следует увеличивать на 30—50%.
При более точных расчетах редукторов рекомендуется принимать
значения f (р') в зависимости от скорости скольжения по табл. 5.5.
Скорость скольжения, м/с, представляющая собой геометрическую
разность окружных скоростей червяка и колеса, определяют по фор-
муле
vi
оск =——
ск cos у
или
Vai = 19 100г1 + 9а ’
(5.14)
где т — модуль, мм;
«1 — частота вращения червяка, об/мин.
Для ориентировочной оценки к. п. д. червячного редуктора можно
пользоваться данными, приведенными в табл. 2.1.
115
§ 5.3. РАСЧЕТ ЭЛЕМЕНТОВ ЗАЦЕПЛЕНИЯ
НА КОНТАКТНУЮ ПРОЧНОСТЬ И ИЗГИБ
Червячные передачи рассчитывают так же, как и зубчатые, на кон-
тактную прочность и изгиб зубьев. Рассчитывают именно зубья колеса,
имеющие меньшую поверхностную и общую прочность, чем витки нарез-
ки червяка. Применительно к червячной передаче расчет на контактную
прочность должен обеспечить не столько отсутствие усталостного раз-
рушения (выкрашивания) рабочих поверхностей зубьев, сколько от-
сутствие заедания, приводящего к задирам рабочих поверхностей. При
венцах червячных колес, изготовленных из чугуна или твердых безоло-
вянных бронз, опасность заедания несравненно больше опасности уста-
лостного разрушения рабочих поверхностей. Для этих материалов кон-
тактные напряжения ограничивают величинами, установленными на
основе эксперимента и эксплуатационных данных и гарантирующими
от опасности возникновения заедания (см. табл. 5.9). Для открытых чер-
вячных передач (независимо от материалов) опасность заедания еще бо-
лее существенна, чем для закрытых, поэтому в отличие от зубчатых
открытых червячные передачи рассчитывают на контактную прочность.
Следовательно, для червячных передач во многих случаях расчет на
контактную прочность является косвенным расчетом на отсутствие зае-
дания.
Расчет на контактную прочность ведут как проектный, при этом
определяют требуемое межосевое расстояние. При произвольном соче-
тании материалов червяка и венца червячного колеса
о'=Гт+1)|/^У'<л,А'’- <515>
где z2 — число зубьев червячного колеса (указания по выбору г2
см. стр. 111);
q — коэффициент диаметра червяка;
1о]к — допускаемое контактное напряжение (см. § 5.4);
К — коэффициент нагрузки, выбираемый по данным, приведен-
ным в § 5.4;
М, — момент на валу червячного колеса;
2Е Е
Епр — приведенный модуль упругости; —
(Ег — модуль упругости материала червяка; Ё2 — то же венца
червячного колеса).
Приведенная формула справедлива при любых взаимно согласован-
ных единицах измерения входящих в нее величин. Формула (5.15)
и приведенные ниже формулы (5.16), (5.18), (5.19) соответствуют наи-
более распространенной форме венца червячного колеса, при которой
условный угол обхвата 26 100° (см. стр. 114).
Приведенный модуль упругости определяют по известным значе-
ниям модулей упругости материалов червяка и венца червячного ко-
леса. Для стали в среднем Е 2,1 -105 Н/мм2, для чугуна Е ~ (0,885ч-
ч-1,18) -106 Н/мм2, для бронзы Е ~ (0,885 ч- 1,13) -105Н/мм2 (большие
значения — для твердых безоловянных бронз).
116
Учитывая, что средние значения модуля упругости чугуна и бронзы
примерно одинаковы, для упрощения расчетов в формулу (5.15) обычно
вводят среднее значение Е„р = 1,32 -105 Н/мм2; в результате получают
формулу
(5Л6)
где /И2 в Н -мм, aw в мм, [о]к в Н/мм2.
В начале расчета передачи модуль неизвестен, поэтому предвари-
тельно задаются величиной q ориентировочно в пределах 8—12, а затем
уточняют значения т и q.
Допускаемое контактное напряжение [о]к принимают по данным
§ 5.4.
Для чугунных колес (без насадного венца), а также для венцов
из твердой безоловянной бронзы (например, Бр. АЖ9-4Л) величина
[о]к, определяемая из условия отсутствия заедания, зависит от скоро-
сти скольжения, которой в начале расчета приходится задаваться
ориентировочно. После определения параметров передачи следует уточ-
нить значения цск и [о]к и проверить расчетные контактные напряже-
ния: если они превышают допускаемые более чем на 5% (перегрузка
передачи), а также в случае, если ок < 1о]к более чем на 15% (недо-
грузка передачи), то необходимо изменить исходные данные и вновь
определить параметры передачи.
Для ориентировочного выбора скорости скольжения (в начале рас-
чета) можно воспользоваться следующими данными.
Расчетный момент на валу колеса Н-м Частота вращения червяка об/мин Коэффициент диа- метра червяка Скорость скольжения иск’ м/с
20—35 1500 12 2,0—2,5
60—90 1500 12 3,0—3,5
120—200 1500 9—10 4,0—4,3
300—450 1500 11 4,8—5,4
600—1000 1000 8—9 2,9—3,5
(5.17)
Вычислив по формуле (5.15) или (5.16) межосевое расстояние, сле-
дует определить осевой модуль из соотношения
m = ——.
Ц|г2
Полученное значение модуля должно быть округлено до ближайшего
стандартного (табл. 5.3). Округление модуля повлечет зл собой измене-
ние межосевого расстояния, и, кроме того, может оказаться, что пред-
варительно принятое значение q не соответствует найденному модулю.
После выбора стандартных значений т и q необходимо вычислить фак-
тическое значение межосевого расстояния, соответствующее принятым
параметрам. Поясним это на числовом примере.
117
Пример. Пусть при i = 17 было принято = 2, г2 = 34, q = 9. Допустим, что
по формуле (5.16) было найдено aw— 157 мм. Вычисляем значение модуля по формуле
(5.17):
2ле, 2 • 157 _ _
т — —= „-Тот = 7>5 ММ.
z2 + <7 9+34
По табл. 5.2 принимаем т = 8 мм и соответственно q = 8, тогда
aw = т = 81348 = 168 мм.
2 2
В связи с изменением q и aw расчетные контактные напряжения ок будут отли-
чаться от допускаемых, принятых при расчете. Поэтому следует проверить ок и
сравнить с [а]к. В некоторых случаях и допускаемые напряжения тоже могут от-
личаться от предварительно принятых, если выбор их зависит от скорости сколь-
жения.
Расчетные контактные напряжения определяют (при 26 « 100°)
по одной из следующих формул:
при произвольном сочетании материалов червяка и колеса
„ _1.31 -] ГКМ2Епр .
к“ d2 V '
(5.18)
при стальном червяке и червячном колесе, изготовленном из чугуна
или имеющем бронзовый венец,
d2
или
(5.19)
(5.19а)
%
= Т
q
где ок в Н/мм2, dlt d2 и aw в мм, Л42 в Н - мм.
При проектировании редукторов для серийного изготовления сле-
дует принимать aw, гъ г2 т и q в соответствии с ГОСТ 2144—66 (см.
табл. 5.2). Основные размеры зацепления, получаемые в результате
расчета на контактную прочность, следует проверить расчетом зубьев
червячного колеса на выносливость по напряжениям изгиба по формуле
1,2/Щг = 0,6/0% .
и — md2 dLy2 т dry2 ’
(5.20)
здесь Р2 — окружное усилие на червячном колесе;
п _2Л12.
дГ’
К — коэффициент нагрузки, принимаемый таким же, как и при рас-
чете на контактную прочность;
у2 — коэффициент формы зуба червячного колеса, принимаемый по табл.
5.6 в зависимости от эквивалентного (приведенного) числа зубьев чер-
вячного колеса;
г
COS3 у
118
5.6. Коэффициент формы зуба у2 для червячных колес
г2ф 20 28 32 35 40 45 50 60 80 100 150
У2 0,509 0,522 0,550 0,572 0,606 0,634 0,648 0,669 0,704 0,723 0,742
Допускаемое напряжение изгиба [сг]и выбирают из табл. 5.9 в за-
висимости от материала венца и характера действия нагрузки; [сг0]и —
при постоянном направлении нагрузки, [о_11и — при переменном.
Расчет открытых передач ведут также на контактную прочность
(в этом случае, как указывалось выше, этот расчет должен обеспечить
отсутствие заедания), затем проверяют зубья на изгиб. Эту проверку
выполняют по формуле (5.20), но в числитель вводят коэффициент из-
носа /гизп; обычно принимают /гизн = 1,5, что соответствует 20%-ному
износу.
В крайне редких случаях для открытых передач при большом числе
зубьев колеса (г2 > 80) может оказаться, что прочность на изгиб недо-
статочна. В таком случае модуль определяют из проектного расчета
зубьев на изгиб по формуле
(5.21)
Г У2 [о]иг2?
Можно принимать предварительно q = 10 4- 12, при окончательном
выборе параметров зацепления q надо согласовать с ГОСТом.
В тех случаях, когда в передаче возникают пиковые нагрузки, сле-
дует проверить рабочие поверхности зубьев на отсутствие хрупкого
разрушения и пластических деформаций; то же относится к общей
(изгибной) прочности зубьев. Эти проверки производят так же, как и
для зубчатых передач (см. формулы на стр. 41, 43); значения предель-
ных допускаемых напряжений приведены в § 5.4.
Сведения по тепловому расчету червячных редукторов приведены
в гл. 10.
§ 5.4. КОЭФФИЦИЕНТ НАГРУЗКИ, МАТЕРИАЛЫ
И ДОПУСКАЕМЫЕ НАПРЯЖЕНИЯ
Коэффициент нагрузки равен произведению коэффициента кон-
центрации нагрузки Ккц на коэффициент динамичности Кд:
К = КкцКд-
Коэффициент концентрации нагрузки зависит в основном от дефор-
мации червяка. При отсутствии приработки передачи коэффициент кон-
центрации нагрузки (теоретический) определяют по формуле
кКц== 1 +(t)3> <5-22)
где 6 — коэффициент деформации червяка, определяемый по табл. 5.7.
119
5.7. Коэффициент деформации червяка 6
21 Значения 0 при q, равном
7 8 9 10 11 12 13
1 55 72 89 108 127 147 163
2 44 57 71 86 102 117 134
3 39 51 61 76 89 103 118
4 36 47 58 70 82 94 108
Приработка зубьев колеса зависит от колебаний нагрузки. При
постоянной нагрузке передачи происходит практически полная прира-
ботка, и концентрация нагрузки отсутствует, т. е. эффективный (дей-
ствительный) коэффициент концентрации нагрузки Кки = 1,0. При пе-
ременной нагрузке эффективный коэффициент концентрации нагрузки
определяют по формуле
*кц= l+OP1 - *)’
(5.23)
где
Е hnt ’
здесь Mi, tit tii — соответственно вращающий момент, время работы и
частота вращения при режиме i; Л1тах — максимальный длительно
действующий момент.
Коэффициент динамичности нагрузки Кя зависит от точности из-
готовления передачи и от скорости скольжения.
Значения Кл можно принимать по табл. 5.8.
5.8. Значение коэффициента Кя
Степень точности по ГОСТ 3675—56 Скорость скольжения »ск, м/с
До 1.5 св. 1,5 до 3 св. 3 до 7,5 св. 7,5 до 12 св. 12 ДО 16 св. 16 до 25
6 - 1 1,1 1,3 1,5
7 1 1 1,1 1,2 — —
8 1,1—1,2 1,2—1,3 1,4 —
9 1,2—1,3 — — — — —
При малых скоростях скольжения (t'CK 2 м/с) и небольших на-
грузках можно применять чугунные червячные колеса в паре со сталь-
ными червяками. При vCK > 2 м/с червячное колесо делают составным:
колесный центр — из чугуна, а венец — из бронзы. Наилучшими анти-
фрикционными свойствами обладают оловяннофосфорные бронзы
(Бр. ОФ 10-1; Бр. ОФ 6,5—0,15; Бр. ОНФ). Часто применяют также
120
оловянноцинковосвинцовые бронзы (например, Бр. ОЦС 6-6-3) и без-
оловянные бронзы — они значительно дешевле оловянных, имеют высо-
кие механические характеристики, но антифрикционные свойства их
несколько хуже. Из безоловянных бронз для венцов применяют
Бр. АЖ9-4Л; Бр. АЖН 10-4-4Л. Допускаемая скорость скольжения —
до 8 м/с при работе в паре со шлифованным и полированным червяком,
имеющим твердость рабочих поверхностей не ниже HRC 45.
Червячные колеса с венцами из бронзы должны, как правило, рабо-
тать со стальными червяками. Термохимическая обработка червяка до
твердости рабочих поверхностей 2= HRC 45 с последующим шлифова-
нием или полированием позволяет повысить допускаемые контактные
напряжения на 20—25%. Для изготовления червяков применяют сред-
неуглеродистую конструкционную сталь (45, 50, реже 35, Стб), в от-
ветственных случаях — легированную сталь, например, 12ХНЗА,
18ХНВА, 20Х, 20Х2Н4А, 40Х, 38ХГН, 40ХН, 38Х2МЮА (азотируе-
мую) и др. В большинстве случаев червяк нарезается непосредственно
на валу.
Данные о допускаемых напряжениях изгиба [о0]н и [o-il„ при по-
стоянном и переменном направлении нагрузки приведены в табл. 5.9.
Там же указаны допускаемые контактные напряжения [о]к для венцов
из оловянных бронз.
5.9. Допускаемые контактные напряжения [<т]к, допускаемые напряжения
изгиба [ас]и и [п_1]и Для некоторых материалов червячных колес
Марка бронзы илн чугуна Способ отливки Предел прочности ов, Н/мм2 Допускаемые напряжения, Н/мма
!°]к п^и твердости червяка
< HRC 45 ИКС 45
Бр. ОФ 10-1 В землю 180—200 50 36 130 160
Бр. ОФ 10-1 В кокиль 250—350 72 52 190 225
Бр.ОНФ Центробежный 240—340 41 57 210 250
Бр. ОЦС 6-6-3 В землю 150—200 46 33 118 144
Бр. ОЦС 6-6-3 В кокиль 180—220 54 39 134 160
Бр. ОЦС 6-6-3 Центробежный 220—280 63 46 165 198
Бр. АЖ9-4Л В землю 400 100 80 .—
Бр. АЖ9-4Л В кокиль 500 НО 88 —
Бр. АЖН 10-4-4Л То же 600 123 105 —
СЧ 12-28 В землю 120 42 26 —
СЧ 15-32 То же 150 48 30 —
СЧ 18-36 > 180 54 34 .—.
СЧ 21-40 > 210 60 37 — —
Расчетные значения допускаемых напряжений (изгиба и контакт-
ных) получают путем умножения табличных данных на коэффициент
режима нагрузки: kpn — для допускаемых напряжений изгиба, kpK —
для допускаемых контактных напряжений. Значение kpii определяют
по формуле
, »/16»
^ри— у (5.24)
121
Если число циклов нагружения каждого зуба колеса за весь срок
службы передачи окажется больше 25 «107, следует принимать Л/ц =
— 25-Ю7. Таким образом, минимальное значение km равно примерно
0,55.
Величину Nu вычисляют по формуле
ЛГц = 60п2/, (5.25)
где t — срок службы передачи, ч.
При переменном режиме в формулу (5.24) должно быть поставлено
эквивалентное число циклов ЛГЦ. экв, определяемое из выражения
й/ц.9кв — (Mmaxt Afmax^Imax + + Л1^2/г2 + • • - + /И9/9П9), (5.26)
"‘шах
где Л1тах — максимальный момент, передаваемый колесом в течение
ч за весь срок службы передачи при Пл1гоах об/мин; М2............,
Мд — передаваемые моменты в течение времени /х, /2 tq при «1»
п2 ... пд об/мин соответственно.
Коэффициент режима нагрузки при определении допускаемых
контактных напряжений для случаев, когда их значения ограничи-
ваются условиями контактной усталости поверхностей зубьев, опреде-
ляют из выражения
(6.27)
Значения Л/ц подсчитываю!’ по формуле (5.25). При Л/ц> 25-Ю7
принимают Л/ц= 25-107, т. е. (^рк)пип = 0,67.
В случае переменной нагрузки Л^ц.экв определяют по выражению
(5.26), заменяя показатель степени 9 на 4.
В передачах, подвергающихся действию пиковых нагрузок (см.
стр. 34), надо дополнительно проверить зубья червячного колеса на
изгиб по этим нагрузкам. При этом принимают следующие величины
допускаемых напряжений (предельных) изгиба:
[а]и.пр = 0,8<тт для бронзы;
Ми.пр = 0,6(Тв для чугуна.
5.10. Допускаемые контактные напряжения [а]к для венцов
червячных колес из бронзы Бр. АЖ 9-4Л
[а]к Т, Н/мм2, при скорости скольжения ^ск, м/с
0,5 1,0 2,0 3,0 4,0 6,0 8,0
200—220 195—215 190—210 185—205 180—200 170—190 160—180
Примечания? 1. При расчете червячных редукторов с верхним расположением червяка рекомендуется принимать меиьшие из значений, указанных для данной скорости скольжения. 2. Данными настоящей таблицы можно ориентировочно пользоваться при расчете вен- цов из бронзы Бр. АЖН 10-4-4Л, принимая бблыиие из указанных значений.
122
При венцах из безоловянных бронз и при чугунных червячных коле-
сах допускаемые контактные напряжения зависят от скорости скольже-
ния (табл. 5.10 и 5.11).
5.11. Допускаемые контактные напряжения [о]к при чугунных
червячных колесах
Материал [°]к, Н ММ2, при скорости скольжения иск, м/с
червяка колеса 0 0,25 0.5 1 2
СЧ 15-32 или СЧ 21-40 Сталь 20 цементован- ная Сталь 45 или Стб СЧ 12-28 или СЧ 15-32 СЧ 15-32 или СЧ 18-36 СЧ 12-28 или СЧ 15-32 213 187 173 202 158 144 187 130 115 173 115 101 144 86 72
Так как для этих материалов допускаемые контактные напряжения
ограничиваются условием отсутствия заедания, а не контактной уста-
лостью поверхностей зубьев, то коэффициент режима /грк нагрузки не
следует учитывать, т. е. табличные значения [о]к одновременно явля-
ются и расчетными.
§ 5.5. РАСЧЕТ ЧЕРВЯКА НА ПРОЧНОСТЬ И ЖЕСТКОСТЬ
Червяк рассчитывают на прочность как прямой брус, работающий
на совместное действие изгиба, кручения и осевого нагружения (ра-
стяжения или сжатия).
Сила взаимодействия между зубьями червячного колеса и витками
червяка может быть разложена на три взаимно перпендикулярные со-
ставляющие: Qx — осевое усилие червяка (такая же по величине, но
противоположно направленная сила Р2 является окружным усилием
колеса); Рг — окружное усилие червяка (такая же по величине, но
противоположно направленная сила Q2 является осевым усилием ко-
леса); Тг — радиальное усилие червяка (такое же, но противоположно
направленное усилие Т2 — для колеса).
Эти усилия определяют по формулам:
= (5.28)
где Л12 и d2 — соответственно момент и делительный диаметр червяч-
ного колеса;
2М
(5.29)
где ТИх и (1г — соответственно момент и делительный диаметр червяка;
Ti — P^tg ах.
(5.30)
123
Эпюры изгибающих моментов от каждой из перечисленных сил, а
также эпюры крутящих моментов и продольных (нормальных) сил
представлены на рис. 5.3.
Номинальные значения напряжений в среднем (опасном) сечении
червяка определяют, как для цилиндрического бруса диаметром, рав-
ным диаметру впадин dfl червяка.
Максимальные касательные напряжения от кручения
М.
16 dh
(5.31)
Нормальные напряжения от растяжения (сжатия)
°р (с) ~
<21
(5.32)
Максимальные нормальные напряжения от изгиба
(5.33)
где
max = r(MQl+Mr,)3+Mf, = + ^)2 + (^)2.
(5.34)
Условие прочности при использовании гипотезы прочности энергии
изменения формы
°экв = V+ °р(с))2 + ЗТк [o'- 1]и- (5.35)
Этот расчет является приближенным, так как здесь не учитывается
различный характер циклов нормальных и касательных напряжений,
а факторы, влияющие на предел выносливости, относятся к допускае-
мому напряжению, а не к амплитуде цикла. Допускаемое напряжение
принимают, как для симметричного цикла [сг^и, по табл. 5.12.
5.12. Допускаемые напряжения [о_1]и, принимаемые при приближенном
расчете червяка на прочность
Марка стали Характер термообработки .... Допускаемое напряжение K1L’ Н/мм»
.‘'5 Нормализация 55
45 6J
45 Улучшение 70
СтЗ Нормализация 60
15ХА Цементация 65
12ХНЗА » 70
38Х2МЮА Закалка 99
124
Расстояние между серединами
опор вала червяка при прибли-
женном расчете можно принимать
£«(0,9-*- 1,0) <4.
Уточненный расчет на прочность
производят по размерам, взятым с вы-
полненного чертежа, расчет сводится
к определению коэффициента запаса
прочности в опасном сечении, как это
изложено в гл. 7.
Правильность зацепления червяч-
ной пары может быть обеспечена
лишь при достаточной жесткости чер-
вяка. Единых норм для допускаемой
стрелы прогиба [/] червяка не суще-
ствует, обычно принимают
гп —— • т
—200~10б-
При симметричном расположении
опор (см. рис. 5.3) стрелу прогиба
определяют по формуле
L^VTi + Pj
' 48EJ по
Рис. 5.3. Эпюры изгибающих н
крутящих моментов и продольных
и условие достаточной жесткости сил для червяка
имеет вид f ^[f]; в формуле (5.36)
Е = 2,1 ИО* Е * * * 5 * * В * * * * * * * * * Н/мм2 — модуль продольной упругости для стали;
L — расстояние между опорами, мм;
Jnp — приведенный момент инерции сечения червяка, мм4, определяе-
мый по выражению
ndК I „ dnA
J"P = -6r(0’375 + °>625d“)- <5-37)
Как видно из формулы (5.37), /пр>-^-, т- е- здесь учтено увеличе-
ние жесткости червяка за счет витков резьбы.
В случае неудовлетворительных результатов, полученных при рас-
чете на прочность и жесткость, приходится увеличивать коэффициент
диаметра червяка q, в отдельных случаях даже отклоняясь от стан-
дартных значений. Уменьшение расстояния между опорами по кон-
структивным соображениям трудно осуществимо, но все же к этому надо
стремиться.
Если вал червяка опирается с одной стороны на сдвоенный радиаль-
но-упорный подшипник, а с другой — на радиальный, то его условно
можно рассматривать как балку, одним концом защемленную, а дру-
гим — шарнирно опертую. В этом случае стрела прогиба при той же
125
длине червяка будет меньше, чем в случае шарнирных опор на обоих
концах, и может быть подсчитана по формуле
f + (7Р1/.з)2
' — 768£Vnp ‘ (О.ОО)
При других схемах нагружения стрелу прогиба определяют спосо-
бами, изложенными в курсе сопротивления материалов. Например, про-
гиб червяка тихоходной пары двухступенчатого червячного редуктора
можно найти с помощью интеграла Мора, как это сделано в примере
расчета § 16.2.
§ 5.6. ЧЕРВЯЧНОЕ ЗАЦЕПЛЕНИЕ СО СМЕЩЕНИЕМ ЧЕРВЯКА
Смещение червяка в червячном зацеплении делают для выполнения
передачи с заданным межосевым расстоянием и для устранения подре-
зания или заострения зубьев червячного колеса. В стандартных чер-
вячных редукторах смещение червяка применяют для того, чтобы при
данных межосевом расстоянии и модуле передачи получить больший
диапазон передаточных чисел, применяя для нарезания колес мини-
мальное количество фрез.
Нарезание червячного колеса в передаче со смещенным червяком
производят путем изменения на величину Да межосевого расстояния
между червячной фрезой и заготовкой колеса. Величина смещения
червячной фрезы
Да = aw — 0,5m (z2 + q),
где aw — межосевое расстояние передачи (заданное или принятое по
стандарту);
0,5m (z2 + q) — межосевое расстояние передачи, равное сумме радиу-
сов делительных цилиндров червяка и червячного колеса.
Коэффициент смещения червячной фрезы
<*«+?>
Предельные значения коэффициента смещения из условия отсут-
ствия подрезания или заострения зубьев рекомендуется брать в преде-
лах х - ±1.
Отрицательного смещения следует по возможности избегать из-за
опасности подрезания зуба колеса у корня. Предельные значения меж-
осевого расстояния определяют из выражений
а№ mln = 0,5 (dal + mz2 cos2 o£);
аж max = m (0,55z2 — 0,64 — 0,024а*) + 0,5dol,
где aw min — минимальное допустимое межосевое расстояние в передаче
из условия отсутствия подрезания зубьев; аитах — максимальное до-
126
пустимое межосевое расстояние из условия отсутствия заострения
зубьев; ах — угол профиля в осевом сечении исходного червяка.
Если межосевое расстояние, равное 0,5 т (z2 + q), окажется меньше
min или больше англах, то необходимо произвести смещение червяка
или изменить параметры передачи. Для устранения подрезания зубьев
межосевое расстояние при нарезании увеличивается на Да &W min
— 0,5m (z2 + q), для устранения заострения уменьшается на Да =
= Owmax — 0,5т (z2 + q). Если коэффициент смещения выходит за
указанные выше пределы, то устранить подрезание или заострение
можно только изменением параметров передачи.
Формулы для определения параметров, меняющихся при смещении
червяка, приведены в табл. 5.13.
5.13. Формулы для определения параметров червячной передачи
со смещенным червяком
Параметр Формулы
Начальный диаметр червяка dwi d№i=m (? + 2х)
Начальный угол подъема линии витка tg Yw— я
Диаметр вершин зубьев червячного ко- леса da2 = di + 2(fla + x)m
Межосевое расстояние aw aw = 0,5m (za + g + 2x)
§ 5.7. РАСЧЕТ ЧЕРВЯЧНОЙ ГЛОБОИДНОЙ ПЕРЕДАЧИ
Червячная глобоидная передача, схема зацепления которой при-
ведена на рис. 5.4, обладает большей нагрузочной способностью, чем
передача с цилиндрическим червяком, благодаря увеличению числа
зубьев колеса, сцепляющихся с витками червяка, и примерно перпен-
дикулярному расположению контактных линий к направлению вектора
скорости скольжения, что улучшает условия образования масляного
клина в зацеплении.
Основные параметры червячной глобоидной передачи регламен-
тированы ГОСТ 9369—66, распространяющимся на передачи общего
назначения с прямым углом перекрещивания осей валов червяка и
колеса.
Стандарт регламентирует межосевые расстояния а (табл. 5.14),
передаточные числа и (табл. 5.15), а также диаметры окружностей вы-
ступов зубьев колес du2 и ширину колес b в зависимости от межосевого
расстояния (табл. 5.16).
В приложении к стандарту указаны рекомендуемые значения пере-
численных ниже основных элементов зацепления.
127
Рис. 5.4. Схема зацепления червячной глобоидной передачи
5. 14. Межосевые расстояния глобоидных передач, мм
(по ГОСТ 9369—66)
1-Й ряд 40 50 63 80 100 125 140 160 180 200 225 250 280
2-й ряд
1-й ряд 315 400 500 630 800 1000 1250 1600
2-й ряд 355 450 500 710 900 1120 1400
Примечая и е. 1-й ряд следует предпочитать 2-му.
5. 15. Номинальные передаточные числа глобоидных передач
по ГОСТ 9369—66
1-й ряд 12,5 16 20 25 31,5 40 50 63 80
2-й ряд 10 11,2 14 18 22,4 28 45 56 71 90
Примечания: 1. Для межосевых расстояний а — 40 ~ 630 мм не предусматри-
ваются передаточные числа 80 и 90; для а = 710 4- 1600 мм не предусматриваются переда-
точные числа 10 и 11, 2.
2. Передаточные числа 2-го ряда по возможности не применять.
3. Фактические значения передаточных чисел не должны отличаться от номинальных
более чем на 4%.
123
5. 16. Диаметры окружности выступов зубьев колес dG2 и ширина колес b
в зависимости от межосевого расстояния а (по ГОСТ 9369—66)
а 1-Й РЯД 2-й ряд а 1-й РЯД 2-Й РЯД
da2 ь da2 ь da2 ь d«2 ь
40 62 15 54 22 355 620 75 595 95
50 80 17 72 24 400 700 85 670 ПО
63 103 19 95 26 450 790 95 760 120
80 113 21 124 30 500 880 105 840 140
100 170 24 160 34 560 980 120 940 150
125 215 28 205 38 630 1100 135 1060 170
140 242 31 230 42 710 1240 150 1200 190
160 278 34 265 45 800 1400 170 1360 210
180 312 38 300 50 900 1580 190 1520 240
200 348 42 335 55 1000 1750 210 1690 260
225 392 47 378 60 1120 1970 230 1910 280
250 435 55 420 68 1400 2480 280 2400 340
280 490 60 470 75 1600 2850 300 2770 380
315 550 65 530 85
Примечания: 1. 1-й ряд значений с/д2 и b следует предпочитать 2-му
2. Для а > 630 мм величины da2 и b являются рекомендуемыми.
1. Числа зубьев колеса г2 и заходов червяка zt в зависимости от
межосевого расстояния а и передаточного числа и (табл. 5.17).
5. 17. Числа зубьев колеса z2 и заходов червяка в зависимости
от межосевого расстояния и передаточною числа и
и а и а
40-630 710-1600 40—630 710-1600
: г. z2 : zs : zt : Zi
10 40: 4 31.5 63 : 2 61 : 2
11,2 35: 3 — 35,5 35: 1 71 :2
12,5 37:3 49 : 4 40 40 : 1 79:2
14 42:3 55: 4 45 45: 1 91 :2
16 48: 3 49: 3 50 50: 1 49: 1
18 35: 2 55:3 56 56: 1 55: 1
20 40: 2 61 :3 63 63: 1 61 : 1
22,4 45:2 67 : 3 71 71 : I 71 : 1
25 50:2 49: 2 80 — 79: 1
28 56: 2 55: 2 90 — 91 : 1
2. Числа зубьев колес в обхвате червяком zT в зависимости от числа
зубьев колеса г2 (табл. 5.18).
3. Рабочая высота зуба колеса h и высота головки зуба колеса
ha2 в зависимости от межосевого расстояния а и числа зубьев колеса
г2 (табл. 5.19).
Б Зак. 220
129
5.18. Числа зубьев колеса
в обхвате червяком гт
в зависимости от числа
зубьев колеса г2
*2 гт
35—42 4
45—50 5
55—67 6
71—79 7
91 8
4. Минимальный радиальный зазор cmin и
минимальный радиус закругления ножек
зубьев колеса р j2min и витков червяка р дт|п
(рис. 5.5)
Cmin — Pfl min — Pfs min — 0,1/i.
5. Расчетный диаметр профильной окруж-
ности
up 1,6
с округлением по ряду межосевых
стояний 25; 31,5; 40 и далее.
6. Модификация зацепления. Г
должна быть модифицирована по отношению
к классической, у которой рабочая поверхность витка червяка обра-
зована прямой линией, вращающейся в средней плоскости колеса
рас-
Передача
5.19. Рабочаи высота зуба колеса h и высота головки зуба колеса ha2
в зависимости от межосевого расстояния а и числа зубьев колеса г2
а *2
35-37 40—42 45 49; 60 55; 56 61—63 67-71 79 91
h Л йо2 Л h h h hn Л Ла« h ftas h hat
40 3,2 1,4 2,8 1,2 2,5 1,2 2,2 1 2 0,8 1,8 0,8 1,6 0,6
50 4 1,6 3,6 1,6 3,2 1,4 2,8 1,2 2,5 1,2 2,2 1 2 0,8 — —
63 5 2 4,5 2 4 1,6 3,6 1,6 3,2 1,4 2,8 1,2 2,5 1,2 — — — —
80 5 2,5 5,5 2,5 5 2 4,5 2 4 1,6 3,6 1,6 3,2 1,4 — — — —
100 8 3,2 7 2,8 6 2,5 5,5 2,5 5 2 4,5 2 4 1,6 — —- —— —
125 10 4 9 3,5 8 3,2 7 2,8 6 2,5 5,5 2,2 5 2 — —— —— —
140 11 4,5 10 4 9 3,5 8 3,2 7 2,8 6 2,5 5,5 2,2 — -— ——
160 12 5 11 4,5 10 4 9 3,5 8 3 7 2,8 6 2,5 — — —- —
180 14 5,5 12 5 11 4,5 10 4 9 3,2 8 3 7 2,8 —— — — —
200 16 6 14 5,5 12 5 И 4,5 10 3,5 9 3,2 8 3 — — — —
225 18 6,5 16 6 14 5,5 12 5 11 4 10 3,5 9 3,2 —1 1 — — —
250 20 7 18 6,5 16 6 14 5,5 12 4,5 И 4 10 3,5 — — —— —
280 22 8 20 7 18 6,5 16 6 14 5 12 4,5 11 4 .— — — —
315 25 9 22 8 20 7 18 6,5 16 5,5 14 5 12 4,5 —— — — —
355 28 10 25 9 22 8 , 20 7 18 6 16 5,5 14 5 — — -— —
400 32 11 28 10 25 9 22 8 20 6,5 18 6 16 5,5 .— -— —- —
450 36 12 32 11 28 10 25 9 22 7 20 6,5 18 6 — — — —
500 40 13 36 12 32 11 28 10 25 8 22 7 20 6,5 — — — —
560 45 14 40 13 36 12 32 11 28 9 25 8 22 7 — — — —
630 50 15 45 14 40 13 36 12 32 10 28 9 25 8 — — — —
710 40 13 36 11 32 10 28 9 25 7 22 6,5
800 45 14 40 12 36 И 32 Ю 28 8 25 7
900 — — — - —— .— — 50 15 45 14 40 12 36 11 32 9 28 8
1000 55 16 50 15 45 13 40 12 36 10 32 9
1120 — — —— — — 60 17 55 16 50 14 45 13 40 11 36 10
1250 70 19 60 17 55 15 50 14 45 12 40 И
1400 — ——- — — — 80 21 70 19 60 16 55 15 50 13 45 12
1600 — — — — — — 90 24 80 21 70 17 60 16 55 14 50 13
130
Рис. 5.5. Минимальный зазор и
минимальный радиус закругления
ножек зубьев колеса и витков
червяка
Рис. 5.6. Рекомен-
дуемая форма мо-
дификации рабочей
поверхности витка
червяка, Л — глу-
бина модификации,
vc — половина угла
расчетного обхвата
и вместе с ней вокруг оси червяка так, что отношение угловых ско-
ростей этих вращений равно передаточному числу.
Рекомендуемая форма модификации характеризуется кривой моди-
фикации (рис. 5.6), показывающей величину отклонения модифици-
рованной винтовой линии витка червяка от классической. Номиналь-
ная глубина модификации на входе витка червяка
Д = (3-10~44-34 - IO-® «) а.
Определение межосевого расстояния
Межосевое расстояние передачи определяют по графику (рис. 5.7)
в зависимости от номинальной мощности на валу червяка М1ном, частоты
вращения червяка и передаточного числа и. На рис. 5.7 приведен
пример определения межосевого расстояния для случая, когда М1ном =
= 15 кВт, пг = 1000 об/мин и и = 20.
Номинальная мощность на валу червяка
jy —___________
1ном ,
где Л\ — заданная передаваемая мощность на валу червяка;
/См — коэффициент материалов (табл. 5.20);
Кт — коэффициент точности; при повышенной точности принимают
Кт = 1,1; при нормальной точности /<т = 1,0; при понижен-
ной Кт — 0,85;
7\р — коэффициент режима (табл. 5.21).
Б*
131
Если задана мощность на валу червячного колеса, то значение
Л\ определяют по формуле
Л/,
*1 ’
где т) — к. п. д. червячной передачи.
Для передач, выполненных по ГОСТ 9369—66, значения а
следует назначать по табл. 5.14, выбирая ближайшее большее
значение.
Рис. 5.7. График для определения межосевых расстояний глобоидных передач
132
5.20. Значения коэффициента материала Ка
Материал колеса Материал червяка Км
Бр.ОФЮ-1; Бр.ОНФ Бр.ОЦС6-6-3; Бр.ОЦС5-5-5; Бр.СУН7-2 Сталь (HRC 32—38) 1 0,9
Бр.АЖ9-4; Бр.АЖН 10-4-4; Бр.АЖМцЮ-3-1,5; ЛАЖМц 66-6-3-2; АМцС 58-2-2; АМцОС 58-2-2-2 Сталь (HRC 50—55) Сталь (HRC 28—35) 0,8 —0,9 0,9—0,8
СЧ 12-28; СЧ 15-32; СЧ 18-36; СЧ21-40 Сталь (HRC 30—35) 0,5
5.21. Значения коэффициента
режима tfp
Режим работы
Непрерывная работч в те- чение 8— 10 ч с кратко- временными перегруз- ками; ^200% 125% 0,75 0,85
Круглосуточная спокой- ная работа без толчков 1,0
Периодическая работа в течение 15 мин с пере- рывом 2 ч при спокой- ной нагрузке 1,4
Расчет основных геометрических параметров по ГОСТ 17699—72
Исходными данными для определения основных геометрических
параметров передачи являются межосевое расстояние а и передаточное
число и. Ниже дана последовательность расчета геометрических пара-
метров червяка и колеса (рис. 5.8).
1. Число заходов червяка zx: zx = —.
При а sj 630 мм z2min = 35, при а > 630 мм z2m!n = 49. Предпоч-
тительными являются значения z2, не кратные числу заходов червяка.
2. Коэффициент диаметра червяка q выбирают в зависимости от
числа зубьев колеса z2:
До 40 От 41 до 50 От 51 до 60 Св. 60
От 6 до 8 От 7 до 10 От 8 до 11 От 9 до 13
г2..........................
я...........................
3. Диаметр расчетной окружности червяка dr = --^1~.
4. Диаметр расчетной окружности колеса d2 — 2a — d1.
[5]*. Ширина венца колеса
Ь = (0,6 -4- 0,8) di
[округляют до значений по ГОСТ 9369—66 (табл. 5.15)].
6. Модуль
133
t
Рис. 5.8. Основные геометрические параметры глобоидной передачи
7. Расчетный обхват
Л — -
10
(округляют до ближайшего члена ряда 3,5; 4,5; 5,5; 6,5).
8. Теоретический обхват
Лт = (1,1 -т-1,2) £с.
9. Половина угла теоретического обхвата
180° .
vT =--kr
т z2
(уточняют после округления величины £)р).
Для передач, выполненных по ГОСТ 9369—66,
dp
sinvT = -fr.
т d2
10. Половина угла расчетного обхвата
180° ,
Vc = -Z- kc.
г2
* Прямыми скобками отмечены параметры, которые должны быть приведены на
рабочих чертежах червяков и червячных колес,
134
Для передач, выполненных по ГОСТ 9369—66,
sinvc=180°?^^.
г2
[11 ]. Диаметр профильной окружности
Dp = d2 sin vT
(округляют до ближайшего целого числа).
Для передач, выполненных по ГОСТ 9369—66 (со стандартизован-
ными основными параметрами), Dp = (с округлением до величины
25; 28; 31,5; 35,5; 40 и далее по ряду межосевых расстояний).
12. Рабочая высота зуба колеса
/г = (1,4 -г- 1,7) т.
Для передач, выполненных по ГОСТ 9369—66, значения h следует
назначать по табл. 5.19.
13. Высота головки зуба колеса
йо2 = (0,3 ч-0,45) й.
Для передач, выполненных по ГОСТ 9369—66, значения ha2 следует
назначать по табл. 5.19.
14. Высота головки витка червяка
/ioi = h
15. Радиальный зазор
с = (0,15 ч- 0,25) т.
Для передач, выполненных по ГОСТ 9369—66 (со стандартизован-
ными основными параметрами), cmin = 0,1/г.
[16 ]. Радиус переходной кривой:
витка червяка р д = с;
зуба колеса р = с.
[17 ]. Радиус притупления
р* = с.
118]. Радиус впаднн червяка в средней плоскости колеса
Rn = 0,5d2 + с 4-ha2.
Для передач, выполненных по ГОСТ 9369—66 (со стандартизован-
ными основными параметрами),
/?/i = 0,5do24-c,
где da2 по ГОСТ 9369—66.
[19] . Диаметр вершин витков червяка
dai = di + 2/го1.
135
[20] . Диаметр вершин зубьев колеса
d«2 = 2 (/?д — с).
Для передач со стандартизованными основными параметрами значе-
ния da2 следует выбирать по ГОСТ 9369—66.
[21] . Радиус вершин витков червяка в средней плоскости колеса
Rai = a — 0,5del.
[22] . Диаметр впадин червяка
dp = 2 (а — Rfi).
[23] . Диаметр впадин колеса
^/2 = 2(7?ei —с).
[24] . Длина нарезанной части червяка
l = d2 sin vc.
[25] . Наибольший диаметр впадин червяка
dflтвх = 2 la- V (R2fi - 0,5/)2|.
[26] . Угол фаски:
червяка Фх = 20° 4- 45°; колеса Ф2 = 30° 4- 45°.
[27] . Радиус вершин зубьев колеса в средней плоскости червяка
0,53(/д max*
[28] . Глубина модификации
А = (3-10-44-34- 10-6w)a.
[29] . Срез:
глубина Ay = 0,03/г; высота hf = 0,5/i.
30. Завал:
витка L = (0,0005 -4- 0,001)/;
профиля Н = (0,005 -4- 0,01) h.
Глава 6.
ВИНТОВЫЕ ПЕРЕДАЧИ
§ 6.1. ПЕРЕДАЧА ВИНТ-ГАЙКА
С ТРЕНИЕМ СКОЛЬЖЕНИЯ
Передачи винт — гайка применяют для преобразова-
ния вращательного движения в поступательное.
Различают кинематические передачи, используемые в механизмах
настройки и измерительных приборах, и силовые — в грузоподъемных
механизмах, натяжных устройствах и т. п. В металлорежущих станках
передача винт — гайка, применяемая для перемещения суппортов,
одновременно кинематическая и силовая.
Угловая скорость со связана со скоростью v поступательного движе-
ния зависимостью
<0 = 2%, (6.1)
Sn
где S — шаг резьбы;
п — число заходов резьбы.
К. п. д. передачи при ведущем вращающемся звене
= __tgip_.
,вп tgW+p)’
здесь ip — угол подъема винтовой линии; р — приведенный угол тре-
ния.
С учетом дополнительных потерь в резьбе (из-за ошибок шага, ра-
диального биения и т. п.) и потерь в опорах
Ч.. = (0,90 + 0,95)5^. (6.2)
К. п. д. передач винт — гайка в обычном исполнении невысок:
при ip от 2 до 20° ир =5° получим
цвп = 0,25 ч-0,70.
Преобразование поступательного движения во вращательное воз-
можно при ip 2р; в этом случае
г]вп = (0,90 -5- 0,95) (6.3)
137
при ф = 10 20°, р = 5U получим т]вп = 0,45 0,70; при ф р
т]вп 0, т. е. передача движения невозможна (самотормозящая пере-
дача).
Свойства самоторможения используют в простых домкратах.
Для увеличения к. п. д. передачи применяют конструкции, в кото-
рых трение скольжения заменено трением качения (см. § 7.2).
В передачах винт — гайка с трением скольжения, как правило,
применяют трапецеидальную резьбу, а если осевое усилие постоянно
направлено в одну сторону, то упорную. Для уменьшения потерь на
трение в передаче применяют пару сталь — бронза. Винты делают из
сталей 45, 50 или А45 и А50 (без термообработки) и из сталей У10,
65Г, 40Х, 40ХГ (с термообработкой), а гайки — из бронзы ОФ 6,5—
0,15, ОЦС6-6-3 или антифрикционного чугуна.
Значения углов трения р и коэффициентов трения для различных
пар приведены в табл. 6.1.
6.1. Угол трения р и коэффициент трения / в передачах винт — гайка
Материал пары f Р
винт гайка
Сталь Бронза оловянно-фосфорная 0,1 5°43'
Бронза безоловянная 0,12 6°51'
> Антифрикционный чугун 0,13 7°25'
Упорные или радиально-упорные подшипники винтов, восприни-
мающие осевую нагрузку в обоих направлениях, обычно устанавливают
в одной опоре, вторую же делают плавающей. Длинные винты фикси-
руют в двух опорах так, чтобы при любом направлении осевой нагрузки
винт испытывал растяжение. Короткие винты имеют одну опору
в корпусе, а второй опорой служит гайка, скользящая в напра-
вляющих.
Гайки передач с постоянным по направлению осевым усилием вы-
полняют в виде втулок с одним опорным фланцем (рис. 6.1). При пере-
менном направлении осевого усилия применяют конструкцию по
Рис. 6.1. Конструкция
гайки при постоянном
направлении осевого
усилия
Рис. 6.2. Конструкция
гайки при переменном
направлении осевого
усилия
138
рис. 6.2. Если гайка неподвижна,
то от проворачивания в корпусе
она удерживается шпонками или
винтами.
Вращающиеся гайки обычно
устанавливают в корпусе на ша-
риковых упорных или радиально-
упорных подшипниках и радиаль-
ных подшипниках скольжения или
качения, охватывающих гайку
(рис. 6.3 и 6.4).
Гайки точных передач выпол-
няют сдвоенными, благодаря чему
боковой зазор можно устранить осе-
вым перемещением гаек относитель-
но друг друга с помощью резьбы
(рис. 6.5) или пружины (рис. 6.6).
Гайки ходовых винтов, периоди-
чески сцепляющиеся и расцепляю-
щиеся с винтом, делают из двух
половин с разъемом в диаметраль-
ной плоскости. Обе половины гай-
ки при сцеплении и расцеплении
Рис. 6.3. Установка вращающейся гай-
ки в корпусе
с винтом перемещаются по напра-
вляющим, установленным перпендикулярно оси пары, и управляются
кулачками с фигурными прорезями, в которые входят штифты, за-
прессованные в половины гаек (рис. 6.7).
Расчет передачи
Размеры передачи определяют из условного расчета на невыдавли-
вание смазки между рабочими поверхностями резьбы винта и гайки:
где р и [р] — среднее (рабочее и допускаемое) давление между рабочими
поверхностями резьбы винта и гайки; [р] гС 12 Н/мм2 для стали по брон-
зе или антифрикционному чугуну; [р] С 6 Н/мм2 для стали по серому
чугуну; Р — осевая нагрузка на передачу; d2 — средний диаметр резь-
бы; h — рабочая высота профиля (для трапецеидальной резьбы h =
= 0,5S); z — число витков резьбы в гайке: г = ~, где Н — высота
гайки.
Подставляя в уравнение (6.4) значения Лиги выражая Н через
d2 (Н = уЛ2), получаем формулу для расчета винта с трапецеидальной
резьбой:
'41рГ*
(6-5)
139
Рис. 6.4. Конструкция основных узлов винтового подъемника
с вращающейся гайкой:
/ — электродвигатель; 2 — корпус; 3 — шестерня; 4 — зубчатое ко-
лесо; 5 — шарикоподшипник радиальный; 6 — райка; 7 — роликопод-
шипник радиальио-упориый;'# — вннт; 9 — шарикоподшипник упорный
Значения у = 1,2 2,5 — для целых гаек и 2,5—3,5 — для разъем-
ных.
По d2, найденному из уравнения (6.5), подбирают ближайшие стан-
дартные значения параметров резьбы. Тело винта проверяют на проч-
ность в зависимости от вида нагружения. Если винт испытывает сжа-
тие, то во избежание продольного изгиба необходимо обеспечить запас
устойчивости
Лу = >^[«у], (6-6)
где [пу] 4; по формуле Эйлера (при
Р ^EJ
ГкР_ (ц/)2
. '''пред
или по формуле Ясинского (при ^0=^^^^пРеД)
Ркр = ^>.(а-ЬХ);
(6.7)
(6.8)
здесь X — гибкость винта; р, — коэффициент длины (значения р, при-
ведены в табл. 6.2);
140
6.2. Значения коэффициента длины р. в зависимости от закрепления
концов винта
I — длина винта; i — радиус инерции сечения винта
Рис. 6.5. Регулирование осевого
зазора в резьбе осевым переме-
щением Правой половины гайки
Рис. 6.6. Установка пружины для
устранения бокового зазора в резьбе
141
Значения а, b, Хо и Хпред
Материал а, Н/мм8 ь, Н/мм8 Хо ^пред
Стали СтЗ и 20 310 1,14 60 100
» Ст5 и 30 345 1,24 50 90
Тело гайки (см. рис. 6.1) рассчитывают на растяжение (или на сжа-
тие) с учетом напряжений кручения:
1,ЗР 1
°р=—---------^Н₽-
у(О2-й2)
(6.9)
Размеры опорного фланца гайки (см. рис. 6.1) проверяют на срез и
на смятие:
Тс₽ ~ [т1ср:
— 4Р 1
°см — л (D‘i — D‘i)
(6.10)
(6.П)
§ 6.2. ВИНТОВАЯ ШАРИКОВАЯ ПЕРЕДАЧА
По сравнению с обычными винтовыми парами трения скольжения
винтовые шариковые передачи характеризуются значительно большим
к. п. д., меньшим износом, большей точностью хода и повышенной дол-
говечностью. Их применяют в приводах станков с программным управ-
Рис. 6.8. Винтовая шариковая пара:
а — схематичное изображение: 1 — винт; 2 — выход из возвратного канала; 3 — возврат-
ный канал в гайке; 4 — вход в возвратный канал: 5 — неподвижная гайка: б — конструк-
ция винтовой шариковой пары с вращающимся винтом; 1 — шарики; 2 — гайка; 3 — винт;
4 — возвратный канал; 5 — планетарный редуктор; 6 — зпектродвшатель, вращающий
винт; 7 — упорный шарнкоподшипз::.;
142
лением, в дозирующих и регулирующих механизмах и других устрой-
ствах.
В винтовых шариковых парах между рабочими винтовыми поверх-
ностями гайки и винта помещены стальные шарики (рис. 6.8). Скорость
перемещения этих шариков отличается от скорости ведущего и ведомого
звеньев, поэтому для обеспечения непрерывной циркуляции шариков
концы рабочей части резьбы соединены возвратным каналом.
Замкнутую цепь шариков условно делят на активную (рабочую
часть нарезки) и пассивную часть (возвратный канал).
При вращении винта (рис. 6.8, б) шарики благодаря трению пере-
катываются по нарезке и передают движение от винта на гайку, пере-
мещающуюся поступательно; от проворачивания относительно своей
оси гайка удерживается направляющими или шпонкой, зафиксирован-
ной относительно корпуса.
Основные параметры винтовой шариковой пары
Связь а» и v выражена зависимостью (6.1).
Обычно винтовые шариковые пары выполняют одноходовыми с ми-
нимально возможным шагом, так как угол подъема почти не влияет на
к. п. д. пары.
Вращающий момент на гайке
M = P^tg(if+pK); (6.12)
здесь Р — осевая нагрузка; Dcp — диаметр окружности, на которой
располагаются центры шариков; ф — угол подъема винтовой линии по
цилиндру диаметром £>ср; р к — приведенный угол трения качения.
Мощность (Вт), необходимая для передачи усилия Р (Н),
N = ^. (6.13)
Если шариковая винтовая пара нагружена радиальной силой Q,
то гайка при вращении должна преодолеть дополнительный момент
трения
MTp = QfK^, (6.14)
где fK — приведенный коэффициент трения качения.
При закаленных винтовых поверхностях твердостью НРС 53
и стальных шариках твердостью НРС 63 принимают fK = 0,004 -ь
-т- 0,005, когда вращается винт, и [к = 0,006 -s- 0,007, когда вращается
гайка.
К. п. д. при передаче от вращающегося звена к поступательно дви-
жущемуся
<6Л5’
Так как рк «С ф, то к. п. д. винтовой шариковой пары даже при ма-
лых углах подъема винтовой линии достигает 80—90%.
143
При ф > 2° к. п. д. мало увеличивается, поэтому выгодно подби-
рать малый угол, так как при этом снижается необходимый вращаю-
щий момент.
Активная часть винтовой шариковой пары обычно составляет
1—2,5 витка; при большем числе рабочих витков к. п. д. шариковой
пары снижается из-за увеличения трения шариков одного о другой.
Число шариков гш в активной части
'‘''СП» ,
' =--------_-----I
ш Я
иш
(6.16)
где k — число витков в одной замкнутой рабочей цепочке:
d,„ — диаметр шарика.
Если при расчете гш получается дробным числом, то следует прини-
мать ближайшее меньшее целое число.
Число шариков, находящихся в замкнутой цепи, не должно превы-
шать гт — 65. Увеличение гш ведет к снижению к. п. д. Если при рас-
чете окажется г ш> 65, то следует уменьшить их число, увеличив диа-
метр шариков.
Для равномерного распределения нагрузки на шарики надо под-
бирать их так, чтобы разность диаметров не превышала 3 мкм. Так как
шарики нормального класса точности выполняют со значительно боль-
шим полем допуска (до 50 мкм), то при сборке винтовой пары шарики
нужно сортировать на ряд групп. В соответствии с имеющимися груп-
пами шариков должны быть изготовлены винты с разными диаметрами.
Селекционным подбором винтов и соответствующих им групп шариков
достигается требуемая
Рис. 6.9. Профили резьбы винтовой шариковой
пары:
а — треугольный; б — круглый; в — круглый с канавкой
Ряс. 6.10. Схема для определения рабочей базы
гайки
ТОЧНОСТЬ.
На рис. 6.9 показа-
ны различные профили
резьбы. Преимуществом
профиля 6.9, а является
постоянство угла кон-
такта (45°), практически
не зависящего от нагруз-
ки. В профилях 6.9, бив
имеется пространство
под шариками, которое
может служить резер-
вуаром для смазки и
продуктов износа.
Радиус гж желоба
у винта и гайки для
уменьшения трения дол-
жен быть больше радиу-
са шариков: при d,„=gj
^8 мм гж = 0,51; при
с1ш >8 мм гж = 0,53.
144
Рабочая база гайки
Для уменьшения отклонения осевой линии винта в радиальном на-
правлении необходимо иметь рабочую базу гайки достаточной длины.
Обычно такую базу обеспечивают созданием независимых замкнутых
рабочих цепочек шариков, расположенных одна от другой на опреде-
ленном расстоянии.
При заданной длине L2 выпущенной части винта (рис. 6.10),
предельных допускаемых значениях зазора А и отклонения винта 6
можно определить необходимую длину рабочей базы из выражения
Л = 4а2. (6.17)
Величину радиального зазора Д (рис. 6.12) можно определить из
соотношения
A = DH-(2du, + DRH). (6.18)
Если технические условия на величину радиального зазора не уста-
новлены, то при расчете можно рекомендовать
Д = 0,03ч-0,12 мм.
Зависимость между осевым и радиальным зазорами выражается
формулой
С = /(2гж-^ш)Л, (6.19)
где С — осевой зазор (рис. 6.12);
гж — радиус желоба (профиля резьбы).
Нагрузочную способность винтовой шариковой пары определяют
расчетом на контактную прочность по методике, принятой для расчета
радиальных шарикоподшипников.
Осевое нагружение
Обозначения показаны на рис. 6.II, 6.12 и 6.13.
Р — осевая нагрузка, Н;
Q — радиальная нагрузка, Н;
Д — радиальный зазор;
dlu — диаметр шарика, мм;
гж — радиус желоба, мм;
Р — контактный угол давления, градусы.
Рис. 6.11. Схема нагружения винтовой шариковой пары
145
Рис. 6.12. Схема для определения ра-
диального и осевого зазоров
Рис. 6.13. Схема для определения на-
грузочной способности винтовой шари-
ковой пары
Рис 6.14. Графики зависимости р от
°тах п₽и различных значениях относи-
/ fi \
тельного зазора у (для о =£ 103—т-1
\ ММ42 ]
Рис. 6.15. Графики зависимости р от отах
при различных значениях относительно-
го зазора 1 (для и = 10? -5- 2,5 • 103 — -1
146
Рис. 6.16. Г рафики зависимости р от <ттах
при различных значениях относительного
зазора у (для а—2,5 • 103 4 • 10s
Рис. 6.17. Графики зависимости [5 от
°tnax различных значениях отно-
сительного зазора х
Удельная осевая нагрузка
_ Р
р~ гшашУи СОЗФ’
так как угол ф мал, то можно принять
_ Р
Р 2 *
Ш ш ’
(6.20)
здесь у — коэффициент неравномерности нагрузки шариков; обычно
принимают у = 0,8; и — число замкнутых рабочих цепочек; гш —
число шариков в одной цепочке.
По вычисленному значению р может быть определено максимальное
напряжение отах при заданной величине относительного зазора у =
= -^-(рис. 6.14; 6.15; 6.16).
Допускаемое значение [о]тах = 5000 Н/мма для винтовых по-
верхностей винта и гайки, твердость HRC 53, для шариков
твердость HRC 63. Зависимость контактного угла Р от огаах дана
на рис. 6.17.
Допускаемая осевая статическая грузоподъемность
[Л СТ [Р]ст^ш^шТ^» -
(6.21)
где [р]ст — допускаемая удельная статическая нагрузка, определяе-
мая по рис. 6.18 в зависимости от у.
147
Радиальное нагружение
Максимальное контактное напряжение для винтовой поверхности
винта
для винтовой поверхности гайки
(6.23)
где с1ш, DB„, Du, гж в мм, о в Н/мм2.
6.3. Значения коэффициентов v и £
V Е V 1 V 1 V Е V Е
0.0000 1,000 0,73.32 1,182 0.8110 1,260 0,8699 1,354 0,9458 1,606
0,0466 1,001 0,7538" 1.200 0.8150 1,266 0,8737 1,362 0,9488 1,623
0,1075 1,603 0,7579 1,204 0,8190 1,270 0,8774 1,370 0,9517 1,643
0,1974 1,008 0,7620 1,208 0,8230 1,277 0,8811 1,378 0,9574 1,682
0,2545 1,025 0,7702 1,215 0,8310 1,288 0,8849 1,388 0,9705 1,808
0,3204 1,025 0,7702 1,215 0,8310 1,288 0,8885 1,395 0,9818 1,985
0,3954 1,038 0,7743 1,220 0,8350 1,293 0,8922 1,404 0,9909 2,268
0,4795 1,060 0,7784 1,223 0,8389 1,300 0,8958 1,416 0,9973 2,855
0,5342 1,078 0,7825 1,228 0,8428 1,306 0,8994 1,423 1,0000 —
0,5819 1,092 0,7866 1,232 0,8468 1,312 0,9030 1,432 — ——
0 6113 1,108 0,7907 1,237 0,8507 1,318 0,9065 1,444 — —
0,6521 1,128 0,7948 1,240 0,8545 1,325 0,9100 1,455 -— —
0,6716 1,140 0,7988 1,246 0,8584 1,332 0,9134 1,466 -—-
0,7126 1,168 0,8069 1,256 0,8661 1,346 0,9428 1,588 — —
Значения коэффициента £ приведены в табл. 6.3 в зависимости от
величины v:
для винта
JL + _L
£)2 ~ г-2
4-Н-Г-ЖХ; (6'24)
для гайки
•V=-4—------V* <6-25>
r‘i
Допускаемую радиальную статическую грузоподъемность опреде-
ляют по формуле
[QIct=kMA (6.26)
148
где 1</]ст — допускаемая удельная статиче-
ская нагрузка, зависящая от%(см. рис. 6.18).
При одновременном действии осевой и
радиальной нагрузок проверки на контакт-
ную прочность производят отдельно для
каждой нагрузки.
Пример 1. Требуется определить контактное
напряжение н допускаемую статическую нагрузку
шариковой винтовой пары, на которую действует
осевое усилие Р = 20 000 Н.
Дано: Dcp = 65 мм; DBH= 59,98; Ои= 70,02 мм;
Дш= 5 мм; шаг винта S — 6,15 мм.
Угловая скорость гайки со — 1 рад/с.
Число замкнутых цепочек шариков на гайке
и= 2.
Решение:
Определяем угол подъема винтовой линии из
выражения
Рнс. 6.18. Графики зависи-
мости удельной статической
радиальной qCT и осевой рст
грузоподъемности от относи-
тельного зазора %
отсюда ф — 1°45'.
К. п. д. винтовой пары по формуле (6.15) т]в=80%.
Число шариков в рабочей части цепочки по формуле (6.16)
nDcnk л 65 1
=—_____1 =-----
5
Isa 40.
Радиальный зазор
Д=D„—(2ДШ + Овн) = 70,02—(2 • 5 + 59,98)=0,04 мм.
Относительный радиальный зазор
X =-^- = ^=0,008,
Х аш 5
Осевая удельная нагрузка
Р 20 000 ,ОС1Т/ ,
Р~ ~ 40 - 52 • 0,8 • 2 ~ 12,5 Н/ММ“-
По рис. 6.16 при р = 12,5 Н/мм2 и % = 0,008 находим максимальное контактное
напряжение атах = 3000 Н/мм2.
По рис. 6.18 определяем допускаемую удельную осевую статическую нагрузку
1р1ст — 25 Н/мм2.
Допускаемая статическая нагрузка по формуле (6.21)
Нст = 1РКтгш^и = 25.40 • б2.0,8 • 2 = 40 000 Н.
Конструкции винтовых шариковых пар
На рис. 6.19 показана винтовая шариковая пара с вращающимся
винтом и поступательно перемещающейся гайкой 1. Между винтовыми
поверхностями винта и гайки заложены шарики <?. Винт состоит из
обоймы 2а и вкладыша 26. При вращении винта шарики <?, пройдя весь
149
д|
Рис. 6.19. Конструкция винтовой шариковой пары с возвратным ка-
налом в винте
Рис. 6.21. Винтовая шариковая пара с двумя гай-
ками
путь по резьбе обоймы 2а, попадают во вкладыш винта через возврат-
ный канал 4, перекатываются по его винтовой части и снова входят
в рабочую зону.
Гайка для предотвращения проворота удерживается за проу-
шину.
На рис. 6.20 показана винтовая шариковая пара с вращающимся
винтом 1. Возвратный канал 3 в этой паре выполнен в гайке 2. Для
направления шариков 4 из рабочей части в возвратный канал служат
упоры 5.
Для устранения в винтовой шариковой паре осевого зазора приме-
няют конструкцию с двумя гайками на одном винте (рис. 6.21): шари-
ки 1, перекатываясь на рабочей части винтовой линии гайки 2 и винта
6, попадают через паз в возвратный канал 5, приподнимаются над
выступающей частью винтовой линии, затем снова опускаются в вин-
товую канавку, проходя через противоположный паз канала. Таким
образом образуется замкнутая цепочка. Осевой зазор регулируется
поворотом одной гайки относительно другой с фиксированием гайки
при помощи зубьев 4, входящих в обойму 3.
Порядок проектного расчета винтовой шариковой пары,
нагруженной осевой силой
По заданной осевой нагрузке Р определяют из расчета на прочность
(см. §6.1) внутренний диаметр DBH винта. Для длинных винтов,
работающих на сжатие, необходимо произвести проверку на устой-
чивость.
Выбирают шарики стандартного диаметра из соотношения dIU ~
~ (0,08 -ь 0,15) £)вн.
Задаются шагом винта из соотношения S == Зш + (1 -ь 5) мм (с ок-
руглением до целого числа).
Определяют £>ср = £)вн ф- d„f и округляют до ближайшего целого
большего значения, уточняют £)вн.
Определяют угол подъема винтовой линии ф по формуле
‘S*=Tifc-
Определяют к. п. д. шариковой винтовой передачи по формуле
(6.15).
Находят мощность двигателя, нужную для перемещения ходового
винта с заданной скоростью о, м/с:
где т]пр — к. п. д. привода.
Определяют необходимую угловую скорость гайки по фор-
муле (6.1).
151
После предварительной конструктивной проработки винтовой ша-
риковой пары определяют число шариков в рабочей цепи витка по фор-
муле (6.16), а в нерабочей — в зависимости от выбранной конструкции
и длины возвратного канала. Общий суммарный зазор между шариками
должен быть равен (0,7 ч- 1,2) (1Ш.
Определяют удельную осевую нагрузку по формуле (6.20).
Исходя из выбранного радиального зазора А находят относитель-
ный радиальный зазор
По рис. 6.14, 6.15 и 6.16 определяют контактное напряжение отах.
Если оно превысит допускаемое значение, увеличивают число замкну-
тых рабочих цепочек.
Глава 7
РАСЧЕТ ВАЛОВ
§ 7. 1. НАГРУЗКИ ВАЛОВ
Основными нагрузками, вызывающими деформацию
изгиба валов приводных устройств, являются усилия в зубчатых и чер-
вячных зацеплениях, натяжения ветвей ремня или цепи соответствую-
щих передач. Собственный вес вала и насаженных на нем деталей в
большинстве случаев можно не учитывать, исключение составляют
лишь мощные передачи, в которых вес зубчатых колес, муфт, шкивов
и т. п. выражается величинами того же порядка, что и основные
нагрузки.
Ниже приведены формулы и даны схемы нагружения валов различ-
ных передач.
Цилиндрическая прямозубая передача
Силу взаимодействия между зубьями раскладывают на две взаимно
перпендикулярные составляющие, Р — окружное усилие; Т — ра-
диальное усилие (рис. 7.1);
= (7Л)
где Р в Н; N в Вт; v в м/с;
T — Ptga, (7.2)
а — угол зацепления (обычно 20°).
Цилиндрическая косозубая передача
Усилие, возникающее в зацеплении, дает три взаимно перпендику-
лярные составляющие (рис. 7.2): Р — окружное усилие; Т — радиаль-
ное усилие; Q — осевое усилие:
= <7-3>
(7.4)
153
ап — угол зацепления в нормальном сечении (обычно = 20°);
Р — угол наклона линии зуба;
Q = Ptg₽. (7.5)
Направление осевого усилия изменяется при реверсировании (пере-
мене направления вращения) передачи.
Надо также учитывать зависимость направления силы Q от направ-
ления наклона зубьев и от того, является ли колесо ведущим или ведо-
мым *. В частности, в двухступенчатых цилиндрических редукторах
с косозубыми колесами для уменьшения осевых нагрузок подшипни-
ков промежуточного вала следует выбирать направления зубьев колеса
первой ступени и шестерни второй ступени одинаковыми, как показано
на рис. 7.3. При этом осевые усилия первой и второй ступеней при лю-
бом направлении вращения будут действовать в противоположные сто-
роны.
Цилиндрическая шевронная передача
Схема нагружения вала такая же, как для прямозубой передачи
(осевые усилия, действующие на каждую половину шеврона, уравнове-
шиваются).
Окружные и радиальные усилия вычисляют по формулам (7.3) и
(7.4), как для передачи косозубой.
Коническая прямозубая передача
Схема нагружения вала конической шестерни представлена на
рис. 7.4, а вала конического колеса — на рис. 7.5, где Р — окружное
* Направление осевого усилия на рис. 7.2 показано в предположении, что ко-
лесо является ведомым и его вращение происходит в направлении, указанном на
схеме.
154
усилие; Qx — осевое усилие на шестерне;
72 — радиальное усилие на колесе; Q2 — осе-
вое усилие на колесе; Т1 — радиальное уси-
лие на шестерне;
р_ N_ __ 2М
~~ vcp ~ тг ’
Qi = = Р tg a sin 6Х;
Q2 = 7\ = .P tgasinfi2.
(7-6)
(7.7)
(7-8)
а — угол зацепления (обычно 20°).
Углы бх и б2 определяют через передаточное число
n = tg62 = ctg6x.
Направление осевых усилий в конической прямозубой передаче
не зависит от направления вращения — они всегда направлены от вер-
шин конусов к их основаниям.
Передача коническими колесами с косыми
или криволинейными зубьями
В отличие от прямозубой конической передачи направления
осевого и радиального усилий в рассматриваемом случае зави-
сят от направления вращения колес и от направления наклона
зубьев.
Окружное усилие Р определяют по формуле (7.6), в которую сле-
дует проставить среднее значение окружного модуля т. Осевое и ра-
диальное усилия на шестерне определяют по формулам
Qi = ЕБГр (ig sin 6Х ± sin р cos 6Х) = (tg а„ ± и sin 0); (7.9)
T1=TSTp <tg а"cos 61 ± sin 0sin = tg sin 0)’ 10)
здесь 0 — угол наклона линии зуба в середине ширины зубчатого
венца.
Знак перед вторым слагаемым в этих формулах выбирают в зави-
симости от направления вращения шестерни и наклона ее зубьев по
табл. 7.1.
Направление вращения определяют, как показано на схе-
мах, т. е. при взгляде на колесо от основания конуса к его вер-
шине.
Если осевое усилие Qx получилось со знаком минус, то оно должно
быть направлено к вершине конуса.
Если радиальное усилие получилось со знаком плюс, то оно долж-
но быть направлено от точки контакта зубьев к центру шестерни, т. е.
так, как показано на рис. 7.4.
Осевое усилие на колесе Q2 равно по величине и направлено в про-
тивоположную сторону.
Аналогично радиальное усилие на колесе Т2 равно по величине Qx
и направлено противоположно.
155
7.1. Выбор знаков в формулах (7.9) и (7.10)
Направление Знак при втором слагаемом
вращения шестерни наклона зубьев в формуле (7.9) в формуле (7.10)
По часовой с трелке Правое — +
Левое + —
Против часов ой стрелки Правое + —
Левое — +
Червячная передача
Формулы для определения усилий, возникающих в зацепле-
нии, приведены в § 5.5, там же дана схема нагружения вала чер-
вяка.
Схема нагружения вала червячного колеса представлена на рис. 7.6.
Ременная передача
Нагрузка, изгибающая вал, равна геометрической сумме натяже-
ний ведущей Хх и ведомой S2 ветвей ремня:
Х1 = 504-Р/2;
Х2 = Хо-Р/2,
(7.11)
(7.12)
где 50 = g0F — усилие предварительного натяжения; о0 — напряже-
ние от предварительного натяжения (см. гл. 10); F — площадь попе-
речного сечения ремня (в случае клиноременной передачи F = zFu
где z — число ремней; Ft — площадь поперечного сечения одного рем-
ня данного профиля).
Величину и направление суммарного усилия Q целесообразно
определять графически (рис. 7.7), но при углах обхвата ремнем малого
шкива а 150° с достаточной точностью можно вычислить это усилие
по формуле
2S0 sin у
(7.13)
и считать, что оно направлено по линии центров передачи.
156
Цепная передача
Нагрузка вала звездочки определяется формулой
Q = P + 2ktqgA, (7.14)
где Р — окружное усилие; kf — коэффициент, зависящий от относи-
тельного расположения звездочек в пространстве (kf = 1,0 при верти-
кальном положении передачи; kf = 2 4 при наклонном до 40° к го-
ризонту; kf — 6,0 при горизонтальном положении передачи); q — масса
1 м цепи, кг; А — расстояние между осями звездочек, м.
Приближенно можно принимать, что усилие Q направлено по линии
центров передачи.
§ 7.2. ПРОЕКТНЫЙ И ПРОВЕРОЧНЫЙ РАСЧЕТ ВАЛОВ
Методы расчета валов на прочность по степени их точности можно
разделить на ориентировочные, приближенные и уточненные.
Ориентировочный (предварительный) расчет
Этот расчет выполняют как проектный для предварительного опре-
деления диаметра вала. Расчет ведут на чистое кручение по понижен-
ным допускаемым напряжениям без учета влияния изгиба. Диаметр
вала в мм определяют по формуле
а __________
<7Л5>
где Л1к — крутящий момент, Н -мм; [т]к — допускаемое напряжение
на кручение, Н/мм2.
При ориентировочном расчете редукторных валов можно рекомен-
довать сначала определять диаметры выходных концов валов по фор-
муле (7.15), принимая [т)к = 20 4- 25 Н/мм2 для валов из сталей 35,
157
40, 45 (или Ст5, Стб). Полученное значение диаметра должно быть ок-
руглено по ГОСТ 6636—69 до ближайшего из ряда диаметров: 10;
10,5; 11; 11,5; 12; 13; 14; 15; 16; 17; 18; 19; 20; 21; 22; 24; 25; 26; 28;
30; 32; 34; 36; 38; 40; 42; 45; 48; 50; 52; 55; 60; 63; 65; 70; 75; 80; 85;
90; 95; 100; 105; 110; 120; 125; 130; 140; 150; 160.
Примечание. Приведенные данные являются выдержкой из ГОСТ
6636—69 (ряд Ra 40); в ГОСТе приведены нормальные диаметры и длины до 20 000 мм.
В случае необходимости применяют следующие размеры:
в интервале 12 — 26 мм — кратные 0,5;
в интервале 26 — 30 мм — целые числа;
в интервале 50 — 120 мм — оканчивающиеся на 2 и 8, а также размер 115;
в интервале 120 — 260 мм — кратные 5.
После этого диаметры остальных участков вала назначают по кон-
структивным соображениям с учетом удобства посадки на вал подшип-
ников качения, зубчатых колес и т. д. и необходимости фиксации этих
деталей на валу в осевом направлении заплечиками.
При подборе подшипников качения может оказаться (это в основном
относится к быстроходному валу редуктора), что диаметры потребуется
увеличить по сравнению с полученными при ориентировочном рас-
чете.
Для промежуточных валов редуктора следует определить ориенти-
ровочное значение диаметра вала в опасном сечении (в месте посадки
шестерни) по формуле (7.15), принимая [т]к = 10 4- 20 Н/мм2. Если
редуктор имеет один промежуточный вал (двухступенчатый редуктор),
можно принимать [т]к = 10 ч- 13 Н/мм2; в случае двух промежуточ-
ных валов (трехступенчатый редуктор) для более быстроходного из них
также можно принимать [т]к = 10 -ь 13 Н/мм2, а для второго 1т]к =
= 20 Н/мм2. Остальные диаметры валов также намечают по конструк-
тивным соображениям.
Взамен расчета на кручение для предварительного определения
диаметров валов иногда применяют эмпирические формулы. В месте
посадки шестерен на быстроходный и промежуточный валы их диа-
метры определяют соответственно по формулам ~0,22 аБ и dn «
яа 0,3а б> где а Б — межосевое расстояние первой (быстроходной) зуб-
чатой передачи. Для тихоходного вала в месте посадки колеса также
можно принимать ориентировочно dT~0,3aT, где ат — межосевое
расстояние тихоходной ступени.
Диаметр выходного конца быстроходного вала редуктора, соединяе-
мого с валом электродвигателя, независимо от результатов расчета на
прочность следует принимать в пределах d = (0,80 -ь 1,15) da, где
da — диаметр вала электродвигателя.
Приближенный расчет
Этот расчет также обычно выполняют, как проектный. Предвари-
тельно намечают места посадки колес, подшипников и прочих деталей
на вал. Определяют опорные реакции, строят эпюры крутящих и изги-
бающих моментов.
158
По характеру эпюр ориентировочно устанавливают местоположе-
ние опасного сечения вала и находят его диаметр по формуле
d=sl/ -32гЛ4эк1в-, (7.16)
где 2ИЭКВ — эквивалентный или приведенный момент, определяемый
обычно по гипотезе прочности удельной потенциальной энергии изме-
нения формы из выражения
Мэкв = ]/Mh+0,75M| = Г^+^+0,752И1, (7.17)
где Ма — суммарный изгибающий момент; Мх и Му — изгибающие
моменты в плоскостях гОу и zOx;
Л4К = Мг — крутящий момент.
Допускаемое напряжение при приближенном расчете вы-
бирают невысоким *, что связано с необходимостью обеспечения доста-
точной жесткости валов как условия правильной работы зацепления
и подшипников. В среднем для указанных выше марок стали можно
принимать [о_1]и = 50 -ь 60 Н/мм2.
Приближенный проектный расчет вала целесообразно производить
параллельно с подбором подшипников качения, так как возможны слу-
чаи, когда по требуемой динамической грузоподъемности подшипника
возникает необходимость в увеличении диаметра вала по сравнению
с полученным из расчета на прочность.
Как следует из изложенного, для приближенного расчета вала не-
обходимо предварительно выполнить его схему и установить расстоя-
ния между колесами и опорами, без чего невозможно определить реак-
ции и построить эпюры изгибающих моментов. Методика составления
подобных предварительных расчетных схем изложена в примерах про-
ектирования редукторов (см. гл. 16), кроме того, целесообразно исполь-
зовать чертежи выполненных конструкций, аналогичных проектируе-
мой.
Приближенный расчет вала отнюдь не является обязательным.
Если в качестве завершающего этапа намечено произвести уточненный
расчет, то следует ограничиться расчетом ориентировочным, а после
окончательного конструктивного оформления вала произвести уточ-
ненный **.
* Редукторные валы следует рассчитывать на жесткость, устанавливая значения
прогибов и углов поворота, исходя из отсутствия значительной концентрации нагруз-
ки по длине зубьев. Так как расчет на жесткость является более трудоемким, чем
расчет на прочность, то обычно ограничиваются лишь последним, но принимают
заведомо пониженные значения допускаемых напряжений с тем, чтобы диаметры
валов получились достаточно большими, т. е. чтобы они обладали необходимой
жесткостью.
** Сведения о приближенном расчете валов приведены для студентов, изучав-
ших курс сопротивления материалов по сокращенной программе, не содержащей
раздела «Расчеты на прочность при напряженных переменных во времени».
159
Уточненный расчет
Уточненный расчет выполняют, как проверочный, на основе кон-
структивного чертежа вала, он служит для определения расчетного
коэффициента запаса прочности для опасного сечения вала *.
Общий коэффициент запаса прочности определяют из выражения
С точки зрения обеспечения прочности вала достаточно иметь
коэффициент запаса прочности п порядка 1,7, но, учитывая повышен-
ные требования к жесткости валов, рекомендуется п = 2,5 3. При
таких значениях п можно специального расчета на жесткость не про-
изводить.
В формуле (7.18) па — коэффициент запаса прочности по нормаль-
ным напряжениям, определяемый по формуле **
па=1Г~^--------, (7.19)
еа
где о_х — предел выносливости материала вала при симметричном
цикле изгиба, определенный при испытании лабораторных полиро-
ванных цилиндрических образцов малого диаметра (d = 5 4- 10 мм)
без концентраторов напряжений; значения o_j определяют по данным,
приведенным в § 3.5; ka — эффективный коэффициент концентрации
нормальных напряжений; величины ko приведены ниже; ео — масштаб-
ный фактор для нормальных напряжений, принимаемый по данным
табл. 7.2.
При двух факторах концентрации, например шпоночной канавке
и напрессовке, следует учитывать тот из них, для которого величина
к'а- больше.
от, — амплитуда цикла нормальных напряжении.
Можно считать, что
= Ои,
где о„ — номинальное напряжение изгиба (наибольшее) в рассчиты-
ваемом сечении; от — среднее напряжение цикла нормальных напря-
* Во многих случаях не очевидно, какое сечение является опасным, поэтому
коэффициент запаса прочности определяют для нескольких сечений.
Опасным является то сечение, для которого коэффициент запаса прочности
имеет наименьшее значение: оно может не совпадать с сечением, где возникают мак-
симальный изгибающий и крутящий моменты.
Для некоторого упрощения расчета влияние качества поверхности вала на
предел выносливости не учтено. Точнее
° — k ’
pg “Ь ФаЩп
где Р cs0,9 4- 1,0 — коэффициент, учитывающий влияние шероховатости поверх-
ности (указанные значения соответствуют шероховатости поверхности не ниже
5-го класса).
160
жений. Если вал не испытывает действия осевой нагрузки (или ее дей-
ствием пренебрегают), можно считать, что цикл изменения нормальных
напряжении симметричный и от = 0.
7.2. Значения масштабного фактора ео и ет в зависимости от диаметра вала
Вид деформации и материал d, мм
15 20 30 40 50 70 100 200
При изгибе для углеро- дистой стали 0,93 0,92 0,88 0,85 0,82 0,76 0,70 0,61
При изгибе для высоко- прочной легированной стали и при кручении для всех сталей 0,85 0,83 0,77 0,73 0,70 0,65 0,59 0,52
При наличии осевой силы, вызывающей сжатие или растяжение
вала (например, вала червяка),
_ _ N
Gm — °р (с) — nd2 >
"Т
где N — продольная сила (для вала червяка N = Q1 —
осевому усилию червяка);
ф„ = —— коэффициент, зависящий от соотношения пре-
°о
делов выносливости при симметричном и отну-
левом циклах изменения напряжений. Средние
значения его для углеродистой стали при ов =
= 350 -е- 550 Н/мм2 ~0,15, при ов =
= 650 4- 750 Н/мм2 ж 0,2; для легирован-
ной стали ~ 0,25 4- 0,3;
пх — коэффициент запаса прочности по касательным
напряжениям *;
Т-1
п т = -------1------
(7.20)
r x — предел выносливости материала вала при симметричном цикле
кручения, определяемый при испытании малых (d = 5 -4- 10 мм)
цилиндрических образцов без концентраторов напряжений; можно
принимать Т-! «г 0,58 а^; kx—эффективный коэффициент концентра-
ции напряжений при кручении; ег — масштабный фактор для напря-
жений кручения (см. табл. 7.2).
При нескольких концентраторах напряжений учитывают тот из
них, для которого величина — больше; фт= 2тА~То — коэффи-
То
циент, характеризующий соотношение пределов выносливости при
* См. примечание к формуле (7.19).
6 Зак. 220
161
симметричном (t._j) и отнулевом (т0) циклах изменения напряжений
кручения.
Для углеродистой и легированной стали, применяемой для изго-
товления валов, в среднем можно принимать ~0,1. ттах, тт —
соответственно максимальное напряжение, амплитуда и среднее на-
пряжение цикла касательных напряжений кручения.
Поскольку момент, передаваемый валом, в большинстве случаев
колеблется по величине, исходят из наиболее неблагоприятного слу-
чая знакопостоянного цикла, принимая, что напряжения кручения
изменяются по отнулевому (пульсирующему) циклу, тогда
_ __Ттах ___ Мк
Тг, — Тт — 2 — ,
(7.21)
№к — момент сопротивления кручению рассчитываемого сечения.
7.3. Эффективные коэффициенты концентрации напряжений для валов с галтелями
D г v Коэффициент концентрации при изгибе kG для валов из стали, имеющей ов кгс/мм2 Коэффициент концентрации при кручении kx для валов из стали, имеющей ов, кгс/мм2
d
<50 60 70 80 90 > 100 70 80 90 100
0 2,32 2,5 2,71 1,52 1,63 1,72 1,83
0,02 1,84 1,96 2,08 2,2 2,35 2,50 1,36 1,41 1,45 1,50
0,04 1,60 1,66 1,69 1,75 1,81 1,87 1,24 1,27 1,29 1,32
По 11 0,06 1,51 1,54 1, 50 1,18 1,20 1,23 1,24
0,08 1,40 1,42 1,46 1,14 1,16 1,18 1,19
0,10 1,34 1,37 1,39 1,Н 1,13 1,15 1,16
0,15 1,25 1,27 1,30 1,07 1,08 1,09 1,И
0,20 1,19 1,22 1,24 1,05 1,06 1,07 1,09
О 0 2,85 3,10 3,39 1,85 2,04 2,18 2,37
о 0,02 2,18 2,34 2,51 2,68 2,89 3,10 1,59 1,67 1,74 1,81
0,04 1,84 1,92 1,97 2,05 2,13 2,22 1,39 1,45 1,48 1,52
0,06 1, 71 1,76 1,84 1,30 1,33 1,37 1,39
0,08 1,56 1,59 1,64 1,22 1,26 1,30 1,31
3 0,10 1,48 1,51 1,54 1,19 1,21 1,24 1,26
0,15 1,35 1,38 1,41 1,Н 1,14 1,15 1,18
о 0,20 1,27 1,30 1,34 1,08 1,10 1,16 1,15
о 0 3,20 3,50 3,85 2,15 2,40 2,60 2,85
о С4. 0,02 2,40 3,60 2,80 3,0 3,25 3,50 1,80 1,90 2,0 2,10
СЧ 0,04 2,0 2,10 2,15 2,25 2,35 2,45 1,53 1,60 1,65 1,70
0,06 1,85 1,90 2,0 1,40 1,45 1,50 1,53
ф 0,08 1,66 1,70 1,76 1,30 1,35 1,40 1,42
5 0,10 1,57 1,61 1,64 1,25 1,28 1,32 1,35
И 0,15 1,41 1,45 1,49 1,15 1,18 1,20 1,24
0,20 1,32 1,36 1,40 1,10 1,14 1,16 1,20
162
Если вал подвергается частому реверсированию, принимают, что
напряжения кручения изменяются по симметричному циклу, тогда
T'V ~ T'tnax
Гк •
(7.22)
Данные для определения и kx
Галтель (рис. 7.8). Значения ka и kx в зависимости от отношений
и предела прочности ств материала вала приведены в табл. 7.3.
Выточка (рис. 7.9). Значения ka и ах приведены в табл. 7.4.
7.4. Эффективные коэффициенты концентрации напряжений для валов с выточками
t Г ~d Коэффициент концентрации при изгибе kG для валов из стали, имеющей Ов, кгс/мм8 D d d Коэффициент концентрации при кручении для валов из стали, имеющей Ов, кгс/мм2
<65 70 80 90 >100 <85 70 80 90 ^100
Свыше 0,4 до 0,6 0 0,02 0,04 0,06 0,08 0,10 0,15 1,96 1,82 1,77 1,72 1,68 1,63 1,53 2,11 1,92 1,82 1,77 1,72 1,68 1,55 2,26 2,06 1,96 1,87 1,77 1,72 1,58 2,40 2,21 2,06 1,92 1,87 1,77 1,63 2,50 2,30 2,16 1,96 1,92 1,82 1,68 Свыше 1,02 до 1,1 0,02 0,04 0,06 0,08 0,10 0,15 1,29 1,27 1,25 1,21 1,18 1,14 1.32 1,30 1,29 1,25 1,21 1,18 1,39 1,37 1,36 1,32 1,29 1,21 1,46 1,43 1,41 1,39 1,32 1,25 1,50 1,48 1,46 1,43 1,37 1,29
Свыше 0,6 до 1 0 0,02 0,04 0,06 0,08 0,10 0,15 2.0 1,85 1,80 1,75 1,70 1,65 1,55 2,15 1,95 1,85 1,80 1,75 1,70 1,57 2,30 2.10 2,0 1,90 1,80 1,75 1,60 2,45 2,25 2,10 1,95 1,90 1,80 1,65 2,55 2,35 2,20 2,0 1,96 1,85 1,70 Свыше 1,1 до 1,2 — — — — —
0,02 0,04 0,06 1,37 1,35 1,32 1,41 1,38 1,37 1,50 1,47 1,46 1,59 1,55 1,52 1,65 1,62 1,59
Свыше 1 до 1,5 0 0,02 0,04 0,06 0,08 0,10 0,15 2,05 1,89 1,84 1,78 1,73 1,68 1,58 2,20 1,99 1,89 1,84 1,78 1,73 1,60 2,36 2,15 2,05 1,94 1,84 1,78 1,63 2,52 2,31 2,15 1,99 1,94 1,84 1,68 2,62 2,21 2,26 2,05 1,99 1,89 1,73 0,08 0,10 0,15 1,27 1,23 1,18 1,32 1,27 1,23 1,41 1,37 1,27 1,50 1,41 1,37 1,55 1,47 1,37
— — — — —
Свыше 1,5 до 2 0 0,02 0,04 0,06 0,08 0,10 0,15 2,09 1,93 1,87 1,82 1,76 1,71 1,6 2,25 2,04 1,93 1,87 1,82 1,76 1,62 2,42 2,2 2,09 1,98 1,87 1,82 1,66 2,58 2,37 2,2 2,04 1,98 1,87 1,71 2,69 2,47 2,31 2,09 2,04 1,93 1,76 Свыше 1,2 до 1,4 0,02 0,04 0,06 0,08 0,10 0,15 1,40 1,38 1,35 1,30 1,25 1,20 1,45 1,42 1,40 1,35 1,30 1,25 1,55 1,52 1,50 1,45 1,40 1,30 1,65 1,60 1,57 1,55 1,45 1,35 1,70 1,68 1,65 1,60 1,52 1,40
6*
163
Рис. 7.8 Рис. 7.9 Рис. 7.10
Рис. 7.11
Поперечное отверстие- (рис. 7.10). Значения kn и kx приведены
в табл. 7.5. Там же даны формулы для WHmo и №кнетто.
Шпоночная канавка (рис. 7.11). kc = 1,5 4- 2,0; kx~ 1,4 4- 2,1 при
ов = 50 ч- 100 кгс/мм2. Эти значения соответствуют расчету по
нетто-сечению.
7.5. Эффективные коэффициенты концентрации напряжений для валов
с поперечными отверстиями
Характер нагружения Отношение Предел прочности ов, кгс/мм2
70 80 so 100
При изгибе /гс 0,05 sg 4 =£0,15 2,0 2,02 2,12 2,35
«7Еетто =-^(1-1,54^;
ftd3! < а \ 0,15 < 4 < 0,25 а 1,80 1,82 1,90 2,10
к нетто 5=55 "jg” 5 /
При кручении kx 0,05 ==£ 4 =£0,25 а 1,75 1,83 1,90 2,0
При использовании значений ka и /?т, указанных в табл. 7.6,
номинальные напряжения изгиба и кручения определяют по сече-
нию нетто:
И7 нетто’
_ Л1к .
W к нетто
^nd3 bcfd—c)2.
нетто 32 ” 2d
nd3 be (d — с)2
кнетто'-'-'Чб" ~ 2d
(7.23)
(7.24)
(7.25)
(7.26)
Обозначения в формулах (7.25) и (7.26) — по рис. 7.11.
Шлицевые валы. При прямобочных шлицах моменты сопротивле-
ния определяют по формулам:
№к = 2№,
164
где g — поправочный коэффициент: для легкой серии £ = 1,09 4- 1,16;
для средней £ = 1,14 4- 1,27; для тяжелой £=1,14 4- 1,39; d —внут-
ренний диаметр шлицевого участка вала. Для стали с сгв =
= 404-120 кгс/мм2 коэффициенты концентрации: ka = 1,35 4- 1,75;
^ = 2,104-2,80.
Коэффициенты концентрации напряжений от напрессовки на шли-
цевой вал зубчатых колес можно приближенно принимать такими
же, как и для гладких валов с напрессовками.
k
Напрессованные детали. Значения — для валов с напрессованными
®СТ
деталями при среднем давлении р > 30 Н/мм2 приведены в табл. 7.6.
k
7.6. Значения — для валов с напрессованными деталями
(Ув> кгс/мм8 d, мм
14 22 30 40- so 100—200
40 1,75 2,о 2,25 2,5 2,8 2,85
50 1,85 2,15 2,35 2,6 2,9 3,4
60 2,0 2,35 2,6 2,7 3,3 3,7
70 2,3 2,60 2,8 3,2 3,6 3,95
80 2,6 3,0 3,3 3,65 4,0 4,6
90 3,0 3,4 3,8 4,2 4,5 5,1
100 3,3 3,8 4,2 4,6 4,8 5,6
110 3,7 4,2 4,6 5,1 5,3 —,
120 4,1 4,8 5,2 5,6 5,7 —
При давлении напрессовки 10—20 Н/мм2 табличные значения —
следует снизить на 5—15%.
Для касательных напряжений значение ~ можно приближенно
определять по формуле
-1 = 1+ 0,6^-1
\е(Г
§ 7.3. КРАТКИЕ СВЕДЕНИЯ О КОНСТРУИРОВАНИИ ВАЛОВ
При конструировании вала следует обеспечить удобство монтажа
и демонтажа насаживаемых на него деталей, повышение прочности
вала путем возможного снижения концентрации напряжений, простоту
и экономичность изготовления.
На рис. 7.12 показана типовая конструкция тихоходного вала зуб-
чатого редуктора; отдельно вынесены те участки вала, на конструк-
тивное оформление которых следует обратить особое внимание.
При посадках Пр, Гр, Пл и Г на валах должны быть сделаны
скосы (место 7) с целью облегчения монтажа насаживаемых на вал
165
Рис. 7.12
деталей. С той же целью скосы (фаски) под углом 45° должны быть
выполнены везде (независимо от посадки), где вал проходит через
отверстия подшипников, втулок и т. д. (место //).
Рекомендуются следующие размеры скосов, мм:
Диаметр вала d
с
а
10—15 15—30 30—45 45—70 70—100 100—150
1 1,5 2,5 2,5 3 4
1,5 2 3 5 5 8
Угол а принимают: для валов d = 10 4- 100 мм — 30°, для валов
d = 100 4- 150 мм — 10°.
В местах неподвижного соединения деталей входящие углы должны
иметь закругления радиусом г, а выступающие углы — скосы на вели-
чину с (место ///). При этом для плотного прилегания торца втулки
или ступицы насаживаемой детали к буртику вала необходимо соблю-
дать неравенство с > г. Рекомендуются следующие соотношения раз-
меров, мм:
Диаметр вала d
г
с
10-15 30—45 45—70 70—100 100—150
1 1 1,5 2 2,5
1,5 2 2,5 3 4
В зонах сопряжения подшипников качения с буртиками вала кон-
струкцию следует выполнять, руководствуясь указаниями пара-
графа 8.5.
В приведенной конструкции (см. рис. 7.12) у места посадки левого
подшипника (Ш) нет заплечика — предполагается, что между зубча-
тым колесом, посаженным на вал диаметром dxrU, и подшипником
установлена распорная втулка.
При переходе от диаметра d к диаметру D вала в тех случаях,
когда нет насаженных деталей, рекомендуется принимать следующие
радиусы R закруглений:
D — d ......... 2 5 8 10 15 20 25 30
Д.............. 1 2 3 4 5 8 10 12
166
1. Неуказанные предельные отклонения размеров: охватывающих по Л7,
охватываемых по В7, прочих 1/2 допуска 8 кл.
2. Острые кромки притупить 7? 0,3 мм.
3. Термообработка нормализация НВ 140—187.
4. Обработка в центрах. Отверстие центровое В5 ГОСТ 14034—74. Центры со-
хранить с двух сторон.
Рис. 7.13
В конструкции вала, показанной на рис. 7.12, часть вала дли-
ной I имеет при одном и том же номинальном диаметре (d2 = da) два
участка, отличающихся допусками и шероховатостью поверхности.
Участок длиной 1Г обработан с отклонениями, соответствующими
легкопрессовой посадке 2-го класса точности; на этот участок наса*
живают полумуфту или звездочку цепной передачи. Участок, обра-
ботанный с отклонениями, соответствующими скользящей посадке
4-го класса точности, не сопрягается ни с какими деталями, кроме
кольца манжетного уплотнения. Такое конструктивное решение по-
зволяет уменьшить число ступеней вала, отличающихся номиналь-
ными диаметрами, и, как следствие, несколько упростить обработку
вала и уменьшить отходы при его обточке.
Пример оформления рабочего чертежа вала приведен на рис. 7.13,
угловой штамп не дан.
§ 7.4. ШПОНОЧНЫЕ И ЗУБЧАТЫЕ (ШЛИЦЕВЫЕ)
СОЕДИНЕНИЯ
В редукторах зубчатые и червячные колеса соединяют с валами
обычно с помощью обыкновенных призматических шпонок. Шкивы
ременных и звездочки цепных передач соединяют с валами обычно
также призматическими шпонками. Направляющие призматические
шпонки с креплением на валу применяют в тех случаях, когда наса-
женная на них деталь должна иметь возможность перемещаться вдоль
вала, например в коробках скоростей. Данные о размерах шпонок и
пазов приведены в табл. 7.7.
167
7.7 Шпонки призматические
Размеры сечений шпонок и пазов, мм, по ГОСТ 8788—68*
Диаметр вала
Св. 10 до 12
» 12 » 17
» 17 » 22
» 22 » 30
» 30 » 38
» 38 » 44
» 44 » 50
» 50 » 58
Сечение
шпонки
4
5
6
8
10
12
14
16
4
5
6
7
8
8
9
10
Глубина паза
Диаметр вала
Сечение
шпонки
Глубина паза
вала t
втулки
вала f
втулки
2,5 1,8 Св. 58 до 65 18 11 7 4,4
3 2,3 » 65 » 75 20 12 7,5 4,9
3,5 2,8 » 75 » 85 22 14 9 5,4
4 3,3 » 85 » 95 25 14 9 5,4
5 3,3 » 95 »110 28 16 10 6,4
5 3,3 » НО » 130 32 18 11 7,4
5,5 3,8 » 130 »150 36 20 12 8,4
6 4,3
b h
Примечания: 1. Длины призматических шпонок выбирают из ряда (по ГОСТ 8789—
68*) 6- 8-Ю—12-14-16-18-20—22-25-28-32-36—40—45-50—56—63-70—80-90—
100-110—126-150-160-180-200.
2. Предельные отклонения шпонок и пазов —по ГОСТ 7227—58.
3. Таблица приведена с сокращениями против ГОСТ 8788—68* и 8789—68*. в которых
даны размеры сечений для валов диаметром от 6 до 500 мм и длины шпонок до 500 мм.
Примеры условного обозначения призматических шпонок: (при Ь = 18 мм, /г—11 мм,
I = 100 мм): со скругленными торцами (исполнение 1): Шпонка /8х//Х//0 ГОСТ 8789 —68*;
с одним плоским и другим закругленным торцом (исполнение 2): Шпонка 2—/<8х//Х
XlOO ГОСТ 8789—68*; с плоскими торцами (исполнение 3): Шпонка 3—18yJlyJOO ГОСТ
8789—68*.
В тихоходных зубчатых передачах иногда применяют клиновые
шпонки. Существенным недостатком клиновых шпонок, ограничиваю-
щим область их применения, является практически неизбежный пере-
кос насаживаемой на вал детали. Поэтому в точно изготовленных зуб-
чатых и червячных передачах применение их недопустимо.
При валах небольшого диаметра (примерно до 40 мм) в редукторах
можно применять сегментные шпонки. Данные о размерах этих шпо-
нок и пазов для них приведены в табл. 7.8.
Материалом для изготовления шпонок служит конструкционная
углеродистая сталь с пределом прочности не ниже 60 кгс/мм* 2 3 * * *; наиболее
часто применяют стали Стб, 45, 50. Легированную сталь применяют
редко.
Размеры сечения призматической шпонки b X h принимают в зави-
симости от диаметра вала по данным табл. 7.7.
Длину шпонки I выбирают по длине ступицы соединяемой ею де-
тали (на 5—10 мм меньше) из ряда стандартных значений, указанных
в табл. 7.7. Выбранную шпонку проверяют на смятие:
„ 2Л-1 _ г 1 i-г
d (h -1) le И'м’ (7-27)
168
где М — передаваемый шпонкой момент, Н -мм;
d — диаметр вала, мм;
/р — рабочая длина шпонки, мм;
[о]см — допускаемое напряжение смятия; принимают: при сталь-
ной ступице 100—120 Н/мм2 и при чугунной ступице, на-
саживаемой на вал детали, 50—60 Н/мм2.
Эти данные относятся к работе передачи без значительных толч-
ков и ударов. В случае резко неравномерной или ударной нагрузки
их следует понизить на 25—40%.
Для шпонки с плоскими торцами полная длина шпонки I и рабо-
чая /{, совпадают. Для шпонки со скругленными торцами
l^l~b.
Если напряжения смятия получаются значительно ниже допу-
скаемых, целесообразно взять шпонку на номер меньше, чем соответ-
ствующий диаметру вала, и повторить расчет. При превышении расчет-
ными напряжениями допускаемых следует поставить две шпонки
(обычно под углом 180° одна к другой) того же или на номер меньшего
сечения. При установке двух шпонок считают, что каждая из них
передает половину момента.
Сегментную шпонку проверяют на срез, а соединение на
смятие
(7.28)
(Т»^- d^~t) (7-29)
Обозначения в формулах (7.28) и (7.29) — см. табл. 7.8. Допускае-
мое напряжение на смятие [о]см можно принимать таким же, как для
призматических шпонок.
Допускаемое напряжение на срез [т]ср в среднем можно прини-
мать равным 60—90 Н/мм2 (верхний предел при спокойной на-
грузке).
Если прочность шпонки оказывается недостаточной, следует
поставить по длине ступицы насаживаемой на вал детали две
шпонки.
Зубчатые (шлицевые) соединения по сравнению со шпоночными
имеют ряд преимуществ:
а) детали на шлицевых валах лучше центрируются и имеют луч-
шее направление при передвижении вдоль вала;
б) напряжения смятия на гранях шлицев меньше, чем на поверх-
ностях шпонок;
в) прочность шлицевых валов при динамических и переменных
напряжениях выше, чем прочность валов со шпонками.
Наиболее широко распространены прямоугольное (прямобочное)
(табл. 7.9) и эвольвентное зубчатое соединения (табл. 7.10).
169
7.8. Шпонки сегментные по ГОСТ 8794—68*
Размеры, мм
L*. . k , ,^1 /
.1 1 V-
I иавиаайй •W 1
1
— ЯЛ fl
ХОД I io 6
1 л.
Диаметр вала d Номинальные размеры шпонки Глубина паза
ь /1 4, 1 вала t втулки
Св. 10 до 12 4 5 6,5 7,5 9 13 16 19 22 12,6 15,7 18,6 21,6 3,5 5 6,0 7,5 1,8
Св. 12 до 17 5 6,5 7,5 9,0 10 16 19 22 25 15,7 18,6 21,6 24,5 4,5 5,5 7,0 8,0 2,3
Св. 17 до 22 6 7,5 9 10 11 13 15 19 22 25 28 32 38 18,6 21,6 24,6 27,3 31,4 37,1 5,0 6,5 7,5 8,5 10,5 12,5 2,8
Св. 22 до 30 8 9 11 13 15 22 28 32 38 21,6 27,3 31,4 37,1 6,0 8,0 10,0 12,0 3,3
Св. 30 до 38 10 13 15 16 17 32 38 45 55 31,4 37,1 43,1 50,8 10 12 13 14 3,3
Св. 38 до 44 12 19 65 59,1 16 3,3
Примечав в я: 1. Предельные отклонения шпонок и пазов по ГОСТ 7227—58. 2. Пример условного обозначения шпонки размерами 1 = 6 мм, /1 = 10 мм: Шпонка сегм. 6x10 ГОСТ 8795—68.
170
7.9. Номинальные размеры зубчатых (шлицевых) прямобочных соединений
мм (по ГОСТ 1139—58)
Форна. сечения
Бала
Исполнение А
Форт сечения
Втулки.
Исполнение Б
f*H5
d D Число зубьев z ъ dx не менее а не менее f Г d D Число зубьев z ъ d\ не менее а не менее f Г
23 26 28 32 36 42 46 52 26 30 32 36 40 46 50 58 6 6 7 6 7 8 9 10 22,1 24,6 26,7 30,4 34,5 40,4 44,6 49,7 Соед! 3,54 3,85 4,03 2,71 3,46 5,03 5,75 4,89 нен 0,3 ИЯ 0,2 :ред1 56 62 72 82 92 102 112 гей 62 68 78 88 98 108 120 серии 8 10 12 14 16 18 53,6 59,8 69,6 79,3 89,4 99,9 108,8 6,38 7,31 5,45 8,62 10,08 11,49 10,82 0,5 0,5
8 0,4 0,3 10
0,5 0,5
Соединения легкой серии
11 14 3 9,9 ч2 48 8 39,5 2,57 0,4 0,3
13 16 18 21 23 26 28 32 36 16 20 22 25 28 32 34 38 42 6 3,5 4 5 6 7 6 7 12,0 14,54 16,7 19,5 21,3 23,4 25,9 29,4 33,5 — 0,3 0,2 46 52 56 62 72 82 92 102 112 54 60 65 72 82 92 102 112 125 8 9 10 12 14 16 18 42,7 48,7 52,2 57,8 67,4 77,1 87,3 97,7 105,3 2,44 2,5 2,4 з,о 4,5 6,3 4,4 0,5 0,5
1,95 1,34 1,65 1,70 1,02
10
0,4 0,3
8
171
Продолжение табл. 7.9
d
D
Число
зубьев z
dt не
менее
а не
менее
Число
зубьев z
dt не
менее
а не
менее
b
f
d
b
f
Соединения тяжелой серии
16
18
21
23
26
28
32
36
42
20
23
26
29
32
35
40
45
52
10
2,5
3
4
5
6
14,1
15,6
18,5
20,3
23,0
24,4
28,0
31,3
36,9
0,3
0,4
0,2
0,3
46
52
56
62
72
82
92
102
112
56
60
65
72
82
92
102
115
125
10
16
20
7
5
6
7
6
7
8
9
40,9
47,0
50,6
56,1
65,9
75,6
85,5
98,7
104
0,5
0,5
Примечания: 1. Размер а дан для валов в исполнении А соединений легкой и сред-
ней серии при изготовлении методом обкатывания.
2. Размер г у валов в исполнении В дан для случаев, когда вал изготовляют не мето-
дом обкатывания.
3. Боковые стороны каждого зуба вала должны быть параллельны оси симметрии зуба до
пересечения с окружностью диаметра d.
4. Фаска у пазов отверстия втулки может быть заменена закруглением, радиус которого
должен быть равен величине f.
Зубчатое соединение проверяют на смятие рабочих граней шлицев
в предположении, что по рабочим поверхностям давление распреде-
ляется равномерно, но в передаче усилия участвует 0,75 общего числа
шлицев:
— М - Г 1
°см “ 0,75г/7?ср
здесь F — расчетная площадь смятия;
Дср — средний радиус соединения;
[<г]см — допускаемое напряжение смятия, принимаемое по дан-
ным табл. 7.11 (для стали с ств 50 кгс/мма).
Для прямобочного шлицевого соединения
/D-d ОА,
(7.30)
1 V 2 '
где I — длина ступицы насаживаемой на вал
детали;
^ср
4 ’
Для эвольвентного зубчатого (шлицевого)
F^0,8ml,
соединения
где т — модуль зубьев;
Обозначения в приведенных зависимостях
Яср
взяты по табл. 7.9.
172
7.10. Размерный ряд эвольвентных зубчатых (шлицевых соединений)
D — номинальный наружный диаметр; т~ модуль; z—число зубьев;
х—смещение исходного контура
Размеры, мм (по ГОСТ 6033—51)
— — —
12 1
0
14 I
16 0,5 12
0
18 1 14
20 0
22 —0,5 16
24 0 18
26 —0,5 20
28 1 22
32 —0,5 24
34 0 16
173
Продолжение табл. 7.10
D т = 1 m = 1,5 т = 2 m = 2,5 tn = 3,5 т = 5 т — 7
Z X Z X Z X Z X z х Z X Z 1 х
75 80 85 90 95 100 ПО 120 130 140 — — — — 36 38 0,5 1 28 30 32 34 36 38 42 46 50 1,25 20 22 24 26 28 30 34 36 38 0,75 —0,25 —1,25 1,25 0,25 —0,75 0,75 —1,25 0,25 1,75 14 16 18 20 22 24 26 0 2,5 0 2,5 14 16 18 2,5 0,5 —1,5 3,5
7.11. Допускаемые напряжения смятия 1сг]см для боковых граней шлицев, Н/мм3
Соединения Условия эксплу- атации Термообработка материала
Рабочие поверхности шлицев не подвергнуты специальной термообра- ботке Рабочие поверхности шлицев подвергнуты специальной термообра- ботке
Неподвижное Тяжелые Средние Хорошие 35—50 60—100 80—120 40—70 100—140 120—200
Подвижное не под Тяжелые 15—20 20—35
нагрузкой Средние Хорошие 20—30 25—40 30—60 40—70
Подвижное под Тяжелые —- 3—10
нагрузкой Средние Хорошие — 5—15 10—20
Глава 8
ПРОЕКТИРОВАНИЕ
ОПОР ВАЛОВ
НА ПОДШИПНИКАХ КАЧЕНИЯ
§ 8.1. ПОРЯДОК ПРОЕКТИРОВАНИЯ
При проектировании подшипниковых узлов следует
учитывать характер нагрузки, ее величину и направление, частоту
вращения колец подшипника, требуемую долговечность, условия
эксплуатации и окружающую среду (температуру, влажность, запы-
ленность, кислотность), а также стоимость подшипников. Однако даже
безупречно спроектированный подшипниковый узел может оказаться
недолговечным из-за нарушения правил монтажа и эксплуатации.
Поэтому конструктор должен обращать особое внимание на выполне-
ние этих правил.
Проектирование ведут в следующем порядке.
1. Намечают эскизную компоновку узла; на основании расчетной
схемы ориентировочно намечают расстояния между опорами (под-
шипниками) и закрепленными на валу деталями и определяют нагрузки
на опоры. В дальнейшем эти расстояния и нагрузки (реакции опор)
уточняют и расчетную долговечность подшипников определяют по
уточненным данным.
2. Предварительно намечают тип подшипника с учетом условий
эксплуатации, монтажа и конструкции узла.
3. Ориентировочно намечают типоразмер подшипника и проверяют
его теоретическую (расчетную) долговечность, сопоставляя ее с ре-
комендуемой.
4. В зависимости от требований, предъявляемых к работе узла,
назначают класс точности подшипника.
5. Назначают посадки на внутренние и наружные кольца (на вал
и в корпус), а также выбирают способ крепления колец подшипника.
6. Выбирают смазочный материал, систему смазки, дозировки,
конструкцию уплотнений.
7. Окончательно оформляют конструкцию подшипникового узла.
§ 8.2. ВЫБОР ТИПА ПОДШИПНИКА
Радиальные однорядные шарикоподшипники (рис. 8.1) относи-
тельно дешевы; они могут воспринимать одновременно с радиальными
и осевые нагрузки в обе стороны в пределах до 70% неиспользованной
175
Рис. 8.2
Рис. 8.3 Рис. 8.4
допустимой радиальной нагрузки; пригодны в качестве плавающих
опор. Технические данные их приведены в табл. П. 26.
Радиальные роликоподшипники с короткими цилиндрическими
роликами (рис. 8.2 и табл. П. 27) могут воспринимать значительные
радиальные нагрузки, их грузоподъемность выше, чем у однорядных
шарикоподшипников тех же размеров. В зависимости от наличия и
расположения бортов на наружных и внутренних кольцах различают
несколько разновидностей этих подшипников; некоторые из них спо-
собны воспринимать небольшие осевые нагрузки. При обработке поса-
дочных мест необходимо обеспечивать точную соосность; при ее
нарушении возникают значительные кромочные давления роли-
ков на дорожки качения, что резко снижает срок службы подшип-
ников.
Роликоподшипники с длинными роликами (рис. 8.3) и с витыми
роликами (рис. 8.4) воспринимают только радиальные нагрузки,
не фиксируют вал в осевом направлении; их применяют в опорных
узлах тихоходных валов.
Игольчатые роликоподшипники (рис. 8.5) имеют минимальные
радиальные габариты при значительной радиальной грузоподъем-
ности. Осевые нагрузки эти подшипники не воспринимают, очень
чувствительны к прогибам валов и несоосности посадочных мест.
В тех случаях, когда необходимо значительно сократить радиаль-
ные размеры узла, иглы устанавливают непосредственно на дорожки
17б
качения (без колец). Дорожками служат шлифованные поверхности
вала и корпуса, имеющие твердость не ниже HRC 60.
Шариковые радиальные двухрядные сферические подшипники
(рис. 8.6 и табл. П. 28) могут воспринимать радиальные и небольшие
осевые нагрузки в обоих направлениях.
Внутренняя поверхность наружных колец выполнена сферической,
что обеспечивает нормальную работу подшипников при перекосе оси
внутреннего кольца до 3° относительно наружного. Благодаря своей
способности самоустанавливаться сферические подшипники рекомен-
дуется устанавливать в узлах, где может возникнуть несоосность
опор, установленных в отдельных корпусах, не имеющих общей
плиты, а также при валах малой жесткости, когда возможны боль-
шие прогибы. Сферические шарикоподшипники с коническими отвер-
стиями внутреннего кольца устанавливаются на гладких валах без
заплечиков с помощью закрепительных втулок (рис. 8.7).
Роликоподшипники радиальные сферические двухрядные (рис. 8.8)
могут компенсировать значительную несоосность и прогибы вала.
177
Рис. 8.13
способны самоустанавливаться; имеют большую радиальную грузо-
подъемность по сравнению с подшипниками других типов. Они
могут также воспринимать и комбинированную нагрузку, если осевая
грузоподъемность составляет 25% от неиспользованной допустимой
радиальной нагрузки. Устанавливать их только при действии
осевой нагрузки не рекомендуется. Установка в опоре двух сфери-
ческих подшипников рядом нерациональна, так как их свойство
самоустанавливаться полностью исчезнет.
Шарикоподшипники радиально-упорные (рис. 8.9 и табл. П. 29)
могут воспринимать комбинированную радиальную п осевую нагруз-
ку; последнюю—только в одном напр авлении,поэтомудля двусторон-
ней фиксации вала подшипники необходимо устанавливать попарно.
178
Роликоподшипники конические (рис. 8.10 и табл. П. 30 и 31) могут
воспринимать радиальные и осевые нагрузки; при монтаже и в про-
цессе эксплуатации необходимо регулировать осевые зазоры (за счет
перемещения наружного или внутреннего кольца).
Двухрядные конические роликоподшипники (рис. 8.11) не тре-
буется регулировать при монтаже. Зазор, который образуется
во время эксплуатации, устраняется подшлифовкой дистанционных
колец.
Шарикоподшипники упорные (рис. 8.12, 8.13 и табл. П. 32) способны
воспринимать только осевые нагрузки; однорядные в одном, а двойные
(рис. 8.13) в двух направлениях. Упорные подшипники не допускают
больших частот вращения, так как под действием центробежных сил
шарики стремятся выйти из беговых дорожек; возрастает сила трения,
что вызывает повышение температуры и быстрый износ шариков и
дорожек качения; на горизонтальных валах упорные подшипники ста-
вить не рекомендуется. Для компенсации монтажных перекосов под
опорные кольца упорных подшипников помещают прокладки из кожи,
линолеума или мягкого металла. Для этих же целей служат упорные
сферические шарикоподшипники (рис. 8.14). Эти подшипники нестан-
дартные, их изготовляют по индивидуальным заказам.
§ 8.3. КОНСТРУКТИВНЫЕ ТРЕБОВАНИЯ
К ПОДШИПНИКОВЫМ УЗЛАМ
Детали подшипникового узла должны обладать достаточной проч-
ностью и жесткостью. Для уменьшения деформации валов следует
располагать опоры возможно ближе друг к другу. Во избежание за-
клинивания элементов качения вследствие теплового удлинения валов
и из-за дополнительной осевой нагрузки иногда одну опору делают
плавающей, оставляя между наружным кольцом радиального под-
шипника и крышкой редуктора зазор 0,2—1 мм.
Плавающим следует делать тот подшипник, который менее нагру-
жен радиальными усилиями, чтобы силы трения между корпусом и
наружным кольцом подшипника были невелики и не препятствовали
его осевому перемещению.
Типичные конструкции подшипниковых узлов с одной плавающей
опорой представлены на рис. 8.15—8.18. Второй подшипник здесь
жестко закреплен в корпусе и может воспринимать радиальные и дву-
сторонние осевые нагрузки.
В узлах с небольшими расстояниями между опорами и сквозной
расточкой корпуса подшипники можно устанавливать враспор, обес-
печивая при сборке осевой зазор, предохраняющий от заклинивания
при тепловом расширении (рис. 8.19).
Сквозная расточка корпуса без уступов (рис. 8.18 и 8.19) обеспечи-
вает большую точность посадочных мест, облегчает процесс их обра-
ботки с одной установки, число деталей в узле сокращается, монтаж
прост и удобен.
В конструкции на рис. 8.16 крышки закладывают в пазы редуктора
при монтаже и не крепят винтами.
179
Рис. 8.15
180
Рис. 8.20
Рис. 8.21
Рис. 8.22
Рис. 8.23
Рис. 8.24
Рис. 8.25
181
Рис. 8.27
Рис. 8.28
На рис. 8.20 показана уста-
новка роликоподшипников с
одним бортом на внутреннем
кольце. Во избежание заклини-
вания роликов между наружным
кольцом правого подшипника
и крышкой предусмотрен зазор.
Этот подшипник плавающий.
В конструкции узла на рис.
8.21 вал установлен также на
роликоподшипниках. Левый
подшипник жестко фиксирует
вал по отношению к корпусу.
Наружное кольцо правого под-
шипника закреплено в корпусе,
но так как оно не имеет бортов,
то опора плавающая.
Рассмотренные конструкции
подшипниковых узлов широко
применяют в редукторах с ци-
линдрическими зубчатыми коле-
сами.
Если узел монтируют на под-
шипниках регулируемого типа
(шариковые радиально-упорные
или конические роликовые), то
их обычно устанавливают по-
парно враспор и фиксируют по-
ложение вала в осевом направле-
нии в обе стороны (рис. 8.22—
8.25), расстояние между середи-
нами подшипников должно быть
не более 350—400 мм. Если тем-
пература узла при работе будет
не выше 70° С, то допускается
Lraax 450 мм. При увеличении
расстояния между опорами те-
пловое удлинение вала может
превысить осевые зазоры в под-
шипнике и вызвать заклинива-
ние тел качения. Осевой зазор
регулируется комплектом метал-
лических прокладок толщиной
каждая 0,05—0,5 мм (сталь,
фольга), устанавливаемых между
корпусом и крышкой.
При значительном расстоя-
нии между опорами или в тех
случаях, когда на одну из опор
182
действует значительная радиаль-
ная нагрузка совместно с осевой
переменного направления, или,
наконец, когда следует ожидать
большого теплового удлинения
вала, на одной из опор устанавли-
вают враспор два радиально-упор-
ных шарико- или роликоподшип-
ника. Другую опору в этом случае
делают плавающей — с радиальным
шарикоподшипником (рис. 8.26)
или с роликовым без бортов на
наружном кольце (рис. 8.27).
Если регулировка сдвоенных
подшипников в процессе их экс-
плуатации затруднена, то их уста-
навливают с точными дистанцион-
ными кольцами (рис. 8.28). Подшип-
ники жестко закрепляют в осевом
направлении и на валу и в корпусе.
Другая опора плавающая.
Если на узел действуют значи-
тельные осевые нагрузки перемен-
ного направления в сочетании
с радиальными и возможно значи-
тельное тепловое удлинение вала,
то радиально-упорные подшипники
не применяют, а используют кон-
струкции узла с двойным упорным
подшипником в сочетании с пла-
вающими радиальными (рис. 8.29).
Осевой зазор двойных упорных
подшипников необходимо регули-
ровать особенно тщательно; это
делают с помощью комплекта про-
кладок между крышкой и бортом
стакана. При нагрузках перемен-
ного направления один ряд шари-
ков разгружается, возникает осе-
вой зазор, и шарики под действием
центробежной силы стремятся
выйти из беговых дорожек.
Во избежание этого в некото-
рых конструкциях применяют пру-
жины, создающие необходимое да-
вление (рис. 8.30).
В случаях, когда возможны
нарушения соосности (при монтаже
подшипников в отдельно стоящих
Рис. 8.30
Рис. 8.31
Рис. 8.32
>83
корпусах) и появление значительных прогибов валов, следует
применять сферические шарикоподшипники. В одной из опор
(рис. 8.31, 8.32) подшипник жестко закрепляют на валу и в корпусе,
вал не может смешаться в осевом направлении, в другой опоре под-
шипник плавающий.
Некоторые конструкции подшипниковых узлов дают возможность
компенсировать деформации вала за счет соответствующего смещения
самого подшипника в корпусе.
На рис. 8.33 представлена конструкция литого корпуса с расточ-
кой по сфере. Наружное кольцо у подшипников выполнено тоже сфе-
рическим (по внешней поверхности); это дает возможность осущест-
вить самоустановку подшипника в соответствии с упругой линией
вала.
На рис. 8.34 показана конструкция с кольцом из вулканизирован-
ной резины, дающая возможность обыкновенным подшипникам само-
устанавливаться в корпусе.
§ 8.4. КОНСТРУИРОВАНИЕ ОПОРНЫХ УЗЛОВ РЕДУКТОРОВ
Редукторы с цилиндрическими прямозубыми колесами
В этих редукторах осевых усилий нет, однако могут возникать
случайные осевые толчки, поэтому рекомендуется закреплять один
подшипник по внутреннему и наружному кольцам (см. рис. 8.15),
другой подшипник делать плавающим. Такой способ установки под-
шипников допустим при любом расстоянии между опорами, так как
возможность заклинивания тел качения исключена. При небольших
расстояниях между опорами (L 450 мм) можно ставить подшипники
враспор, предусмотрев необходимый зазор между крышкой и подшип-
ником. В тяжелых редукторах следует применять двухрядные
конические роликоподшипники.
Редукторы с цилиндрическими косозубыми
и шевронными колесами
В редукторах с косозубыми колесами на опоры всегда действует
осевая нагрузка, возрастающая с увеличением угла наклона зубьев.
Если угол наклона зубьев (3 9°, то можно устанавливать радиаль-
184
ные шарикоподшипники, а при
Р > 9° — радиально-упорные под-
шипники (шариковые или ролико-
вые).
В передачах с шевронными ко-
лесами или сдвоенными косозубы-
ми колесами, образующими шеврон,
постоянно действующие осевые уси-
лия отсутствуют.
В этих редукторах подшипники
тихоходного вала как более тяже-
лого фиксируют относительно кор-
пуса в осевом направлении. Другие
валы должны быть плавающими,
чтобы у них была возможность
самоустанавливаться по колесу
тихоходного вала. Для плавающих
валов следует применять ролико-
подшипники без бортов на наруж-
ном кольце (рис. 8.35); наружные
кольца подшипников закрепляют
в корпусе между крышкой и пру-
жинным кольцом, а в осевом на-
правлении вал может перемещаться
вместе с внутренними кольцами и
роликами по отношению к наруж-
ным кольцам.
Если грузоподъемность одно-
рядных подшипников недостаточна,
то применяют сферические двух-
рядные шарикоподшипники, между
наружными кольцами которых
и крышками оставляют зазор
(рис. 8.36). В тяжелых редукто-
рах с шевронными колесами при-
меняют сферические роликопод-
шипники и двухрядные конические
роликоподшипники.
Редукторы с коническими
зубчатыми колесами
При конструировании подшип-
никовых узлов конических зубча-
тых редукторов необходимо учиты-
вать постоянно действующее осевое
усилие. Для быстроходных передач
небольшой мощности целесообраз-
но ставить радиально-упорные
Рис. 8.35
Рис. 8.36
Рис. 8.37
185
Рис. 8.38
Рис. 8.39
Рис. 8.40
шарикоподшипники (рис. 8.37),
а при средних мощностях и
меньших скоростях — коничес-
кие роликоподшипники (рис.
8.38, 8.39). Установку подшип-
ников на рис. 8.37, 8.38 следует
считать более рациональной,
чем на рис. 8.39, так как в пер-
вом случае осевая нагрузка вос-
принимается подшипником, на
который действует меньшая ра-
диальная сила.
При установке подшипников
по рис. 8.38 осевой зазор регули-
руют прокладками между флан-
цем стакана и крышкой. Внут-
ренние кольца ставят на вал
с натягом, и в установке закре-
пительных гаек нет необходи-
мости. При монтаже подшипни-
ков по рис. 8.39 необходимы
закрепительные гайки; при на-
греве вал может беспрепятствен-
но расширяться, и подшипники
гарантированы от заклинивания
даже при значительном повыше-
нии температуры вала и боль-
ших расстояниях между опора-
ми. Регулировка осевого зазора
осуществляется резьбовым коль-
цом со стопорной шайбой.
В отношении жесткости узла
конструкция на рис. 8.39 предпо-
чтительнее, чем на рис. 8.38, так
как при одинаковом расстоянии
между опорами (размер Б) вели-
чина опорной базы 12 больше 1Г.
В сравнительно небольших
конических редукторах входной
вал можно монтировать на двух
цилиндрических роликовых под-
шипниках без бортов на на-
ружных кольцах и одном ра-
диальном шарикоподшипнике
(рис. 8.40), наружное кольцо
которого установлено в корпусе
со значительным радиальным
зазором (этот подшипник воспри-
нимает только осевые усилия).
186
Рис. 8.41
Рис. 8.42
В подшипниковом узле (рис. 8.41) радиальный шарикоподшипник
воспринимает радиальную и осевую нагрузки. Цилиндрический роли-
ковый подшипник (без бортов на наружном кольце) воспринимает
только радиальные нагрузки. Конструкция этого узла рекомендуется
для редукторов малой мощности. В некоторых узлах конических ре-
дукторов подшипники устанавливают без общего стакана (рис. 8.42).
Здесь роликовый сферический подшипник воспринимает только ра-
диальные нагрузки, а два радиально-упорных подшипника,
смонтированных в отдельном стакане, несут осевые и радиальные
нагрузки.
При проектировании подшипниковых узлов конических редукто-
ров следует предусматривать регулировку зазора в зацеплении. Обычно
эта регулировка осуществляется комплектом прокладок между флан-
цем стакана и торцом корпуса.
Червячные редукторы
В червячных редукторах широко используют радиально-упорные
шариковые или роликовые конические подшипники. При межосевом
расстоянии а = 150 -ь 180 мм и L = 400 мм вал червяка можно уста-
навливать на радиально-упорных подшипниках враспор (см. рис. 8.25).
При L > 450 мм оба радиально-упорных подшипника следует ста-
вить в одной опоре, а другую делать плавающей (см. рис. 8.26—8.28).
Если подобрать радиально-упорные подшипники не удается, то можно
применять конструкцию узла по рис. 8.29: двойной упорный подшип-
ник воспринимает осевые нагрузки, а шарикоподшипники — радиаль-
ную. В узлах по рис. 8.26—8.29 наружный диаметр червяка должен
быть меньше внутреннего диаметра борта стакана, тогда червяк легко
вынуть; положение червяка относительно колеса можно регулировать
в осевом направлении прокладками между фланцем стакана и корпу-
сом, в глобоидных червячных передачах так обеспечивают достаточ-
ное пятно касания.
Валы червячных колес монтируют на радиально-упорных шарико-
или роликоподшипниках, поставленных враспор. Тяжелые консольно
нагруженные валы следует устанавливать на роликовых сферических
187
Рис. 8.43
Рис. 8.44
или двойных конических подшипниках. Совпадение осевой плоскости
червяка со средней плоскостью колеса (регулировка пятна касания)
осуществляют смещением колеса при помощи прокладок между тор-
цами корпуса и крышки.
Механизмы с вертикальными валами
Вертикальные валы, на которые действуют значительные осевые
нагрузки, направленные сверху вниз, следует устанавливать на сфе-
рических шарико- и роликоподшипниках в сочетании с упорным
(рис. 8.43), если нельзя гарантировать соосность посадочных мест.
В конструкции на рис. 8.44 соосность посадочных мест обеспечена,
так как вертикальный вал смонтирован в общем корпусе. Для компен-
сации небольших перекосов под упорные подшипники подкладывают
прокладки из линолеума или мягкого металла. Упорные подшипники
со сферическими кольцами, используемые
для этой же цели, изготовляют только по
особым заказам для ремонта старого обору-
дования.
Один из способов компенсации переко-
сов показан на рис. 8.45. Компенсирующее
устройство состоит из двух шайб, в одной
из них имеется канавка, в которую зало-
жена заполненная жидкостью резиновая
трубка, обеспечивающая равномерное да-
вление на все шарики.
188
§ 8.5. КЛАССЫ ТОЧНОСТИ И ПОСАДКИ подшипников
НА ВАЛ И КОРПУС
ГОСТ 520—71* установлены классы точности подшипников 0, 6,
5, 4 и 2 (в порядке повышения точности).
Для приводов общего назначения следует выбирать подшипники
класса 0.
Подшипники более высоких классов точности стоят дороже, и вы-
бор их для проектируемых опорных узлов должен быть соответственно
обоснован.
Долговечность подшипников качения в значительной степени за-
висит от характера сопряжения его колец с валом и корпусом. Выбор
посадок зависит от величины, направления и характера нагрузок,
типа и размера подшипника, условий его эксплуатации, метода регу-
лирования радиальных и осевых зазоров и условий сборки.
Различают местное, циркуляционное и колебательное нагружения
неподвижных колец.
Местная нагрузка воспринимается ограниченным участком до-
рожки качения и передается на ограниченный участок корпуса.
Циркуляционная нагрузка воспринимается всей окружностью до-
рожки качения и передается на всю опорную поверхность корпуса.
Колебательная нагрузка распределяется на определенный участок
невращающегося кольца, например, при качательном движении.
Для впашаюшегося кольца, пепедающего внешнее усилие, следует
назначать неподвижные посадки, например в редукторах внутреннее
кольцо подшипника насаживается на вал с натягом. Наружное кольцо
подшипника, сопряженное с неподвижной частью машины, должно
иметь посадку, обеспечивающую весьма малый натяг или даже не-
большой зазор, дающий возможность кольцу при работе несколько
проворачиваться относительно своего посадочного места, что обеспе-
чивает более равномерный износ беговых дорожек. Посадки внутрен-
8.1. Рекомендуемые посадки радиальных подшипников
в зависимости от вида нагружения колец
Вид нагружения кольца Посадки
Посадки внутреннего кольца на вал
Местное пи- С„; Д„; Х„; /7]п; С]п
Циркуляционное Gv Тп; Нп; /7П; Дп; Д„; Н1п; /7щ
Колебательное
Посадки наружного кольца в корпус
Местное ^ЗП» ^1П» Дп
Ци ркуля цио н ное Gl» ^П» ^1П
Колебательное Щ; л1п
Примечание. Посадку Нп следует назначать для корпусов из цветных металлов.
При монтаже сдвоенных подшипников с предварительным натягом можно рекомендовать
плотную посадку Пщ по валу и скользящую Сщ или Сп по корпусу. Как правило, для
подшипников класса точности b и 4 следует выбирать посадки по 1-му классу точности.
189
них и наружных колец на валу и в корпусы в зависимости от видов
нагружения представлены в табл. 8.1, 8.2.
8.2. Рекомендуемые посадки радиально-упорных подшипников
в зависимости от вида нагружения колец
Кольца и вид нагружения Посадки
Нерегулируемые циркуляционно нагруженные кольца всех классов точности Регулируемые циркуляционно нагруженные кольца (вал должен иметь закаленную посадочную шейку, в корпусе должны быть закаленные втулки) Местно нагружённые кольца нерегулируемые или регулируемые, но не перемещающиеся непо- средственно по посадочной поверхности Регулируемые местно нагруженные кольца тп; н„- пп вала и корпуса п„ Пп; Сп вала и Тп; Нп; С„ корпуса С„; Д„ вала и Сп корпуса
Посадки подшипников на вал осуществляют по системе отверстия,
а в корпус — по системе вала; отклонения наружных диаметров под-
шипников и их посадки в корпусы даны в табл. 8.3, отклонения внут-
реннего диаметра подшипников направлены в «минус» от номиналь-
ного диаметра, а не в тело кольца, как это принято по системе отвер-
стия для отверстия (табл. 8.4).
Поэтому посадки внутренних колец подшипников на валы, имею-
щие поля допусков переходных посадок (Г, Т, Н), будут фактически
неподвижными с гарантированным натягом (посадки Гп, Тп, Нп).
8.3. Посадки шарико- и роликоподшипников 0 и 6-го классов точности в корпус
Номи- нальные диа- метры, мм Допускаемые отклонения, мкм
Допу- скасмые отклоне- ния на- ружного диаметра подшип- ника, мкм 7'п Пп Сп СЗП
Предельные отклонения отверстия корпуса
и о О 1 нижнее ₽ нижнее верхнее нижнее верхнее нижнее верхнее нижнее верхнее нижнее верхнее 1 верхнее
18 30 50 80 120 150 180 18 30 50 80 120 150 180 250 0 И И И I ) СО NO к- к- 1 f О tn О0 Сл СО •— о со —24 —30 —35 —40 —45 -52 —52 —60 -5 —6 —7 —8 —10 —12 —12 —15 —19 —23 —27 —30 —35 —40 —40 —45 0 — 14 —17 —20 —23 —26 -30 —30 —35 Нд±+++++ Н-* 0'0 СО СО <1 О) О1 -6 —7 —8 —10 —12 —14 —14 —16 + 13 +16 +18 +20 +23 +27 +27 +30 0 +19 +23 +27 +30 +35 +40 +40 +45 0 +35 +45 +50 +60 +70 +80 +80 +90 соооосмюосоосм ++++++++ +25 +30 +35 +42 +50 +60 +60 +70
190
8.4. Посадки ролико- и шарикоподшипников 0 и 6-го классов точности на вал
Номи- наль- ные диа- метры, мм Допускаемые отклонения, мкм
Допу- скаемые отклоне- ния вну- треннего диаметра подшип- ника, мкм Тп Пи Cn + Хи
Предельные отклонения вала
и о О <4 верхнее нижнее верхнее О) и % к верхнее • верхнее j I нижнее верхнее нижнее ' верхнее 1 0) 0) w % s и верхнее 1 ! нижнее верхнее нижнее
6 10 18 30 50 80 120 180 6 10 18 30 50 80 120 180 250 0 -10 —12 —15 —20 —25 —30 +16 +20 +24 +30 +35 +40 +45 +52 +60 +8 +ю +12 +15 +18 +20 +23 +25 +30 +13 +16 +19 +23 +27 +30 +35 +40 +45 4 4 + + + + -5 -6 -7 -8 -9 10 12 13 15 +9 +12 +14 +17 +20 +23 +26 +30 +35 44 +2 +3 44 44 +5 +6 +7 +8 +10 +12 +14 +16 LL Lli in i О+* №0 00 Jb 0 —8 —10 -12 —14 -17 -10 —23 —27 —30 —4 —5 —6 —8 —10 —12 —15 —18 —22 —12 —15 —18 —22 —27 —32 —38 -45 —52 —10 -13 —16 —20 —25 —30 —40 —50 —60 —22 —27 —33 —40 —50 -60 —75 —90 —105
Поясним это числовым примером. Пусть посадочное место вала
с номинальным диаметром d = 50 мм обработано с допуском Н, соот-
ветствующим напряженной посадке 2-го класса точности. Для этой
посадки верхнее отклонение +20 мкм, нижнее +3 мкм. Отклонения
внутреннего диаметра подшипника класса 0: верхнее 0, нижнее 12-мкм;
таким образом, минимальный натяг 3 мкм и максимальный 32 мкм.
Наружное кольцо подшипника (номинальный диаметр D = 90 мм)
с нижним отклонением, равным — 15 мкм (см. табл. 8.3), устанавли-
вается в отверстие корпуса, обработанное с допуском С, соответст-
вующим скользящей посадке (в системе вала). Допуск на отверстие
в корпусе равен +35 мкм. Расположение полей допусков для рас-
смотренного примера представлено на рис. 8.46, 8.47. Посадка обеспе-
чивает максимальный зазор 50 мкм и минимальный 0. В том случае,
когда радиальные или радиально-упорные подшипники воспринимают
Рис. 8.46
Роле допуска
наружного поля
Рис. 8.47
191
8.5. Примеры выбора посадок шарико- и роликоподшипников на вал
режим работы Машины и подшипниковые узлы Диаметр под радиальных ЛИННИКОВ, мм радиально- упорных Посадки
шари- ковых роли- ковых шари- ковых роли- ковых
Ва Легкий или нормаль- ный л не вращается, нагружен и Ролики ленточных тран- спортеров, конвейеров и подвесных дорог для не- больших грузов е внутреннего кольца местг Подшипники всех диа- метров ое Дп
Нормаль- ный или тяжелый Передние и задние ко- леса автомобилей, трак- торов, вагонеток С S
Натяжные ролики, бло- ки, ролики рольгангов Си
Вал Легкий или нормаль- ный вращается, нагружение вну Сельскохозяйственные машины трении До 40 0 КОЛЬ До 40 да цир! До 100 <уляцис До 40 иное Дц, л„, л.„
Центрифуги, турбоком- прессоры, центробежные насосы, вентиляторы, электродвигатели, редук- торы, коробки скоростей станков До 100 До 100 Св. 100 До 100 НП» Пп, #11!
Св. 100 Тп
Нормаль- ный или тяжелый Электродвигатели мощ- ностью до 100 кВт, станки, турбины, криво- шипно-шатунные механиз- мы, коробки передач ав- томобилей и тракторов, шпиндели станков, редук- торы До 100 До 40 До 100 До 100 Яп, Пп
Св. 100 До 100 Св. 100 До 180
Св. 180 ^п, Gn
Тяжелый, ударная нагрузка Железнодорожные и трамвайные буксы, колен- чатые валы двигателей, электродвигатели мощ- ностью свыше 100 кВт, ходовые колеса мостовых кранов, ролики рольган- гов, шпиндели тяжелых станков, дробильные ма- шины Подшипники всех диа- метров Ги Ти
Железнодорожные и трамвайные буксы, валки прокатных станов Подшипники на закре- пительно-стяжных втул- ках всех диаметров В3
Нормальный Трансмиссионные валы и узлы, сельскохозяйст- венные машины Подшипники на кони- ческих закрепительных втулках всех диаметров Bt
192
только осевую нагрузку, следует на посадочные шейки валов назна-
чать посадки С„ или Па. При этом необходимо между наружным коль-
цом и корпусом обеспечивать зазор (см. рис. 8.40).
При посадке кольца упорного подшипника на шейку вала обычно
применяют посадку Пп или //„; для упорного роликоподшипника —
посадки Нп и Та.
8.6. Примеры выбора посадок шарико- и роликоподшипников в корпус
(из чугуна или стального литья)
Режим работы Машины и подшипниковые узлы Посадки
Корпус вращается. Нормальный нагружение наружного кольца циркуляци Ролики ленточных транспортеров, натяжные ролики сельскохозяйствен- ных машин онное Тп, НП
Нормальный или тяже- лый Ролики рольганов, подшипники ко- ленчатых валов компрессоров, ходо- вые колеса мостовых кранов Гп
Нормальный или тяже- лый (в точных узлах) Подшипники шпинделей тяжелых станков (расточных и фрезерных) Нт
Вал вращается Нормальный нагружение внутреннего кольца местно Центробежные насосы, вентиляторы, центрифуги. Подшипники шпинделей металлорежущих станков ^п» ^1п
Нормальный или тяже- лый Конические роликоподшипники ко- робок передач и задних мостов авто- мобилей и тракторов ^п» Пп,
Нормальный или тяже- лый Большинство подшипников общего машиностроения, редукторы, железно- дорожные И трамвайные буксы Св
Вал вращается, нс Легкий или нормаль- ный (разъемные корпусы) ггружение кольца местное или колебател Трансмиссионные валы и узлы, сельскохозяйственные машины ьное бзп
Нормальный или тяже- лый Подшипники шпинделей шлифоваль- ных станков, коренные подшипники коленчатых валов двигателей с 5
При осуществлении той или иной посадки подшипника необходимо
тщательно контролировать размеры шейки вала и корпуса. Ослабле-
ние посадки ведет к проскальзыванию вала по внутреннему кольцу и
7 Зак. 220
193
8.7. Допускаемые отклонения от пра-
вильной геометрической формы
вала и корпуса
Класс точно- сти шарике-и .роликопод- шипников Овальность Конусность
в долях допуска на диа- метр посадочной поверх- ности
0кб
5 и 4
бора посадок подшипника на
повышению температуры подшип-
ника. При увеличенном натяге внут-
реннее кольцо подшипника расши-
ряется, радиальный зазор между
внутренним и наружным кольцом
уменьшается и может произойти
заклинивание тел качения. Закли-
нивание может наступить также
при увеличении натяга между на-
ружными кольцами подшипника и
корпусом.
Особенно тщательно следует
осуществлять посадки радиальных
шарикоподшипников. Примеры вы-
вал и в корпус приведены в
табл. 8.5, 8.6.
Шероховатость поверхности и геометрические формы посадоч-
ных мест в значительной степени влияют на долговечность под-
шипников.
Овальность, конусность и биение заплечиков должны быть в пре-
делах установленных допусков (табл. 8.7, 8.8). Классы шероховатости
посадочных поверхностей приведены в табл. 8.9. При проектировании
опорных поверхностей подшипников качения часто не уделяют внима-
ния галтелям и заплечикам валов и корпусов. Радиус галтели вала
должен быть несколько меньше радиуса фаски внутреннего кольца под-
шипника. То же относится и к корпусу и наружному кольцу
(табл. 8.10).
При проектировании валов часто вместо галтелей делают проточки.
Однако они ослабляют вал, вызывая концентрацию напряжений, и
поэтому ими можно заменять галтели только в том случае, если вал
имеет значительный запас прочности.
В тяжелонагруженных валах делать выточки и даже галтели не-
желательно. Здесь рекомендуется осуществлять плавный конусный
переход и ставить специальную упорную шайбу (рис. 8.48).
Размеры заплечиков вала и корпуса должны быть такими, чтобы
при действии значительной осевой нагрузки торцы заплечика не сми-
нались. Однако большие заплечики затрудняют демонтаж подшипни-
ков, так как в этом случае выступающая над заплечиком часть кольца
оказаться недостаточной для захвата съемником.
Ноомальная высота заплечиков должна быть
равна х/2 толщины внутреннего кольца. Устано-
вочные размеры на валах и в корпусах для
радиальных, радиально-упорных и упорных
подшипников приведены в табл. 8.11—8.13.
Если нельзя спроектировать заплечики нормаль-
ной высоты, то применяют кольца с наружным
диаметром 1,2 d и шириной 4—8 мм (большее
значение для подшипников тяжелой серии при
d >50 мм).
подшипника может
Шайба специальная
Рис. 8.48
194
8.8. Боковое биение заплечиков вала, мкм
Номинальный диаметр вала, мм Класс точности подшипников
Св. До 0 6 5 4
— 50 20 10 7 4
50 120 25 12 8 6
120 250 30 15 10 8
250 315 35 17 12 —
8.9. Шероховатость поверхностей в местах посадки подшипников
Номинальный диаметр, мм
Посадочные поверхности Класс точности подшипников до 80 св. 80 до 500
Класс шероховатости, ГОСТ 2789—73
Валы 0 7 6
6 н 5 8 7
4 9 8
Отверстия корпусов 0 7 6
6, 5 и 4 8 7
Торцы заплечиков валов 0 6 6
и корпусов 6, 5 и 4 7 6
8.10. Радиусы галтелей и проточек вала и корпуса в зависимости от координат
фасок подшипника, мм
7*
195
Продолжение табл. 8.10
Г наиб ^норм ^наим t Гъ ь °наиб
1,5 1 3 2,5 0,2 1,3 2 3
2 1 з,5 3 0,3 1,5 3
2,5 1,5 4,5 3,8 0,4 4 4
3 3,5 2 2 5 6 4,5 5 0,5 2,5 4 5
4 5 2,5 3 7 9 5,8 6,8 3 4 5
6 4 11 8,5 0,6 5 8
8 5 14 п,о 6 6
8.11. Установочные размеры для радиальных и радиально-упорных шарико- и
роликоподшипников
Типы подшипников: 0, 1, 2, 3, 6
D2=0,2 (О + 4d); D's=0,16 (О + 5,25d);
dx=0,2(d+4D); d; =0,16 (d +5,250)
Размеры заплечиков, мм
d °1 найм
Св. До
50 3
50 120 5
120 200 6
Примечание. Диаметры di и следует выбирать только для роликоподшип-
ников с безбортовыми кольцами (тип 2) или для тонких бортов наружных колец радиально-
упорных шарикоподшипников (тип 6).
8.12. Установочные размеры для упорных шарикоподшипников
д Dz _ \ ^2 наиб — 0,4 (D -|- 1,5 £)); _ 3L> + 5d . _ 5D+5d иг найм g • “max g > dimin = 0,4 (D + l,5d); d2=^B-\-ci Размеры d и D по ГОСТ 6874—54* Размеры, мм
Е d 1 'a 2 D а
ц Св. До
di J dz 100 200 100 200 600 0,5 1 2
196
8.13. Установочные размеры для конических однорядных роликоподшипников
Обозначение подшипников d Di наиб. di найм d% найм. найм найм D?.
7202 — 15 19 29 32 2 2 21
7203 — 17 23 33 36 23
7204 — 20 20 39 43 27
7205 — 25 31 43 48 О 32
7206 7506 30 37 52 58 3 38
7207 7507 35 43 61 67 44
7208 7508 40 48 68 75 л 3,5 50
7209 7509 45 53 73 80 55
7210 7510 50 58 78 85 58
7211 7511 55 63 87 94 4,5 65
7212 7512 60 69 95 102 5 72
7213 7513 65 75 105 112 78
7214 7514 70 80 108 117 6 5 82
7215 7515 75 85 113 123 88
7216 7516 80 90 122 132 — 95
7217 7517 85 96 130 143 6 100
7218 7518 90 102 138 150 7 105
7219 7519 95 108 146 160 7 115
7220 7520 100 114 155 168 8 120
7304 7604 20 27 43 47 ,— 4 27
7305 7605 20 33 53 57 3 5 32
7306 7606 30 38 61 66 5,5 7 К 38
7307 7607 35 43 68 74 45
7308 7608 40 50 76 82 8 50
7309 7609 45 56 85 93 55
7310 7610 50 62 94 102 5 9 62
7311 7611 55 67 103 111 68
7312 7612 60 73 112 120 75
7313 7613 65 80 121 130 11,5 80
7314 7614 70 85 129 140 85
7315 7615 75 91 138 149 6 12,5 90
7316 7616 80 97 147 159 13 100
7317 7617 85 102 155 167 12 14 105
7318 7618 90 108 169 177 110
197
§ 8.6. МОНТАЖ ПОДШИПНИКОВЫХ УЗЛОВ
Для облегчения монтажа на шейке вала и у расточки корпуса или
стакана надо предусматривать фаски (табл. 8.14). Диаметр вала на
участке перед посадочным местом должен быть меньше диаметра шейки,
чтобы кольцо подшипника свободно проходило через этот участок
(см. рис. 8.38 или 8.49).
8.14. Радиусы галтелей и размеры фасок обрабатываемых валов и втулок, мм
В отдельных случаях допускают равенство номинальных диамет-
ров шейки и расположенного перед ним участка вала, но обработка
должна быть выполнена с различными допусками так, чтобы нагретый
в минеральном масле до t ~ 100° С подшипник свободно проходил
на посадочное место. Например, шейка может иметь отклонения
по посадке Н, а предыдущая часть вала — по посадке Д или С
(рис. 8.49).
В отдельных конструкциях заплечики на валах и корпусах при-
ходится увеличивать. Чтобы при этом обеспечить демонтаж подшип-
ника с вала и из корпуса, необходимо предусмотреть на заплечиках
валов и в корпусах специальные пазы под лапы съемников (рис. 8.50,
8.51).
Если упорный буртик корпуса имеет такой размер, что наружное
кольцо подшипника невозможно захватить лапами съемника (а пазы
Рис. 8.50
198
делать затруднительно), в корпусе предусматривают отверстия с на-
резкой (рис. 8.52) и выдавливают подшипник из корпуса винтами.
Посадочные места вала и корпуса, а также сопряженные с под-
шипником детали перед монтажом необходимо покрыть слоем смазки.
При монтаже подшипников качения необходимо избегать передачи
усилий при запрессовке через тела качения, усилие следует приклады-
вать только к тому кольцу подшипника, которое монтируется. Особо
следует проверять точность совпадения осей вала и корпуса. Демонтаж
подшипников производят при помощи винтовых прессов и гидравли-
ческих съемников. Вращающееся кольцо подшипника не должно про-
ворачиваться относительно посадочного места. Это достигается гаран-
тированным натягом. Для предотвращения осевого перемещения кольца
закрепляют на валу специальными устройствами. При большом осе-
вом усилии и высокой угловой скорости крепление колец подшипни-
ков должно быть особенно надежным.
Способ крепления подшипника на валу и в корпусе выбирают
с учетом величины и направления действующей нагрузки, угловой
скорости, условия монтажа и демонтажа. Способы крепления внут-
ренних колец представлены на рис. 8.53:
а — посадкой с гарантированным натягом;
б — неразъемным упорным кольцом, насаживаемым на вал в на-
гретом состоянии (нагрев в масляной ванне до t = 100° С), и допол-
нительно закрепляемым проволочным замком: конец незамкнутого
проволочного кольца заводят через отверстие упорного кольца в сто-
порное отверстие вала; на кольце имеется полукруглая канавка для
проволоки;
в — пружинным стопорным разрезным кольцом прямоугольного
сечения, вставляемым в проточку вала (табл. 8.15);
г — гайкой и стопорной шайбой, внутренний зуб которой входит
в паз вала, а один из наружных зубьев отгибают в прорезь (табл. 8.16,
8.17);
д — торцовой шайбой и корончатой гайкой со шплинтом;
е — упругой гайкой с прорезью, которая законтривается зажимным
винтом (табл. 8.18);
ж — фасонной гайкой, которая одновременно служит деталью
лабиринтного уплотнения;
з — разъемным кольцом (половинки вставляют в проточку вала
и стягивают проволокой);
и — плоской торцовой шайбой, которая крепится к торцу вала
одним или двумя винтами и стопорится специальной шайбой.
Для валов диаметром от 30 до 100 мм крепление внутреннего кольца
подшипника осуществляют одним винтом (табл. 8.19), при диаметре
от 100 до 150 мм — двумя винтами (табл. 8.20, 8.21). Размеры
центровых отверстий для валов с торцовым креплением приведены
в табл. 8.22.
Способы крепления, представленные на рис. 8.53, а, б, применяют
при незначительной осевой нагрузке и небольшой угловой скорости,
другие способы крепления рекомендуются при значительной осевой
нагрузке и небольшой угловой скорости.
199
200
8.15. Кольца пружинные стопорные для крепления подшипников на валу
Размеры, мм
Вал Кольцо
d d, т п °к D, di S ь R Г
12 11,5 13,6 11 1,8 7,2
15 14,3 1 1 16,8 13,8 1,7 2 8,5 2
17 16,2 1,5 19,2 15,7 1 2,35 9,7
20 19 22 18,5 11,3
25 23,8 27,8 23,3 2 2,95 14
30 28,6 1,0 33,2 27,9 3,45 16,4 ДО
35 33 1,7 38,2 32,2 1,5 3,9 19,3
40 37,5 44 36,5 4,75 21,8 3
45 42,5 2,2 49 41,5 2 5,1 24,5
50 47 54 45,8 5,2 27
55 52 59 50,8 2,5 — 29,5
60 57 65 55,8 5,7 32
65 62 70 60,8 2,5 34,5 3,5
70 67 До 76 65,5 5,85 37
75 72 2,5 81 70,5 6,35 40
80 76,5 88 74,5 7,85 42,5
Примечания: 1. Кольца изготовляют из стали 65Г или из стали других марок
с св = 127 -j- 170 кгс/мм» при установленной для колец твердости.
2. Твердость колец в пределах: HRC 45—50 для d = 12 -j- 40 мм, HRC 43—48 для
d = 40 4- 100 мм.
3. На поверхности колец ие допускаются трещины, окалины и заусенцы
4. Неплоскостиость колец ие более 0.1 мм
201
8.16. Размеры установочных гаек и предохранительных шайб, мм
Гайки установочные
Обозначение гайки с резьбой №20
и шагом 1,5 мм:
Гайка установочная М30\1,5
Шайбы предохранительные
Обозначение предохранительной
шайбы d = 20,5 мм:
Шайба предохранительная 20,5
Резьба D Dt h t Ь d, о2 о, e С l m n k f
№20X1,5 36 27 20,5 30 36 18,5 2 18
40 30 10 5 22,5 34 40 20 5 19,5
№24X1,5 42 33 3 3 24,5 36 42 4,5 4,5 22 21,5
№27X1,5 45 35 27,5 39 45 25 3 24,5
№30x1,5 48 39 5 30,5 42 48 28 27,5
№33X1,5 52 42 33,5 44 52 31 30,5
М36Х1.5 55 45 12 4 6 36,5 47 55 5,5 5,5 33,5 6 33
М39Х1.5 58 48 39,5 50 58 1 36,5 6 36
№42x1,5 62 50 42,5 54 62 39,5 3 39
№45x1,5 68 58 45,5 58 68 6,5 42,5 42
№48x1,5 72 62 7 48,5 62 72 6,5 45,5 45
№52x1,5 78 68 52,5 68 78 50 49,5
№55X1,5 85 72 5 55,5 75 85 53 4 52,5
№60x1,5 90 75 15 8 60,5 80 90 7,5 7,5 57 56,5
№64x1,5 95 80 64,5 83 95 60 8 59,5
№68x1,5 100 85 6 9 68,5 88 100 8,5 65 64,5
202
8.17. Размеры канавки на валу под язычок стопорной шайбы, мм
Диаметр отверстия ПОД ПОДШИП- НИК наиб а ь снаим е ^наим ®наим
17 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100 ПО 120 15,75 18,75 23,5 28,5 33,5 38,5 43,5 48,5 53,5 58,5 63,5 68 73 77,7 82,7 87,7 92,7 97,2 107,2 117 1,5 2 2 6 3,5 1
3 4 1,5
2 5
8
2,5 3
6
5
3 2
10
7,5
3,5
12
Особое внимание следует обращать на закрепление внутренних
колец конических роликоподшипников. В этих подшипниках сепара-
тор выступает над торцом внутреннего кольца и не дает возможности
завернуть гайку до торцовой поверхности внутреннего кольца, по-
этому необходимо между подшипником и шайбой ставить промежу-
точное кольцо (рис. 8.54).
Способы крепления наружного кольца в корпусе показаны на
рис. 8.55:
203
Рис. 8.54
а — кольцами, привинчивае-
мыми к стенкам корпуса;
б — пружинным разрезным
стопорным кольцом, встав-
ленным в проточку корпуса
(табл. 8.23); этот способ приме-
няют в тех случаях, когда не-
возможно осуществить в корпусе
упорный бурт;
в — крышкой и упорным
буртиком в стакане или кор-
пусе; такое крепление допускает
значительные осевые нагрузки;
применяется для радиальных подшипников; в случае радиально-упор-
ных подшипников упорный бурт в корпусе не нужен;
8.18. Прорези с зажимным винтом для стопорения установочных гаек
Размеры, мм
В
Резьба D3 Л Л а С В Винт
М18х1,5 М20х1,5 М24Х1.5 М27х1,5 М30х1,5 МЗЗх 1,5 М39Х1.5 М42Х1.5 М45Х1,5 М48Х1.5 26,5 27,5 33 37,5 39 44 49,5 53,5 56,5 60 М4Х0.7 4,5 2 3 15 М4Х8
18
20
М5Х0.8 5,5 2,5 4 25 М5ХЮ
30
М6Х1 6,5 3 4,5 МбхЮ
204
6.19. Торцовое крепление внутреннего кольца подшипника одним винтом
Размеры, мм
Вал Шайба торцо- вая Планка стопорная Размеры болта
О» а <2, Ч найм г найм D н ds В / ь л наиб С S а /
30 35 40 45 50 55 60 65 70 75 80 85 90 10 5 5 25 40 45 5 5 25 34 4,5 13 0,8 8 25
15 50 30 44 17 1,0 10 32
55
20 6 6 32 60 65 70 80 85 90 100 105 8 6 35 54 5,5 21 2,5 42 42
56 16
Примечание. Материал шайбы — сталь СтЗ, материал стопорной планки — сталь Ст2
205
8.20. Торцовое крепление внутреннего кольца подшипника двумя винтами
Размеры, мм
Рис. 8.55
206
8.21. Торцовое крепление внутреннего кольца подшипника проволочным замком
Размеры мм
Вал Шайба торцовая Размеры болта
а D g Cl dl 6 d е
60 20 25 70 75 80 85 90 100 105 7 16 12 0,1 10 20
65 70 75 30 12 25
17 14
80 85 90 40
8.22. Центровые отверстия для валов с торцовым креплением
Диаметр вала d <71 d2 ^наим Л
Крепление центральным болтом
30, 35 10 10,5 13 25 1,9
40, 45, 50 12 12,5 18 25 2,2
От 55 до 50 16 16,5 22 32 2,4
95, 100 20 20,5 30 35 3,0
Крепление двумя болтами
От 105 до 120 8 20 — 15 10
Резьба основная метрическая
207
8.23. Кольца пружинные стопорные для крепления подшипников в корпусе
Размеры, мм
Отверстие в корпусе Кольцо
D Г>2 т п di s b R / r
26 30 32 35 40 47 52 62 72 80 85 90 100 ПО 120 27,2 31,4 33,7 37 42,5 49,5 55 65 75 83,5 88,5 93,5 103,5 114 124 1,3 1,5 27,8 32,2 34,5 37,8 43,5 50,5 56,2 66,2 76,5 85,5 90,5 95,5 105,5 117 127 23,5 27,5 29,3 32,5 37,3 43,7 49,2 58,8 68 76 80,8 85 94 104 113 2 1,2 2,8 3 10,8 13 14 15 18 21 24,2 29,2 34,5 39 40,8 43,2 48,2 53,7 58,7 6,5 8 9 12 15 17 2,5
2
3,4 3
1,7 2,5 1,5
4 4,5 4,6 5 5,6 6,3 6,4 6,9 7,6 8,6 9,4
2,2 2
2,8 2,5 18 3,5
20
3,3 3 3
3
25
г — крышкой-стаканом; подшипники регулируют набором про-
кладок между крышкой и корпусом;
д — фасонной шайбой, перемещаемой винтом;
е — резьбовым кольцом (табл. 8.24).
Конструкции и рекомендуемые размеры крышек приведены в
табл. 8.25—8.28.
Винты для крышек показаны на рис. 8.56.
Установка наружных колец подшипников в стакан показана на
рис. 8.15, 8.18, 8.21, 8.26.
Крышки и стаканы изготовляют из чугуна не ниже СЧ15-32.
Регулировка зазоров в подшипниках оказывает большое влияние
на их долговечность и точность работы машины. В процессе монтажа
208
Рис. 8.56
подшипник имеет начальный
зазор, после установки подшип-
ника в узле — посадочный за-
зор, в процессе эксплуатации —
рабочий зазор.
Рабочий зазор в радиаль-
но-упорных подшипниках дол-
жен быть таким, чтобы осу-
ществлялось легкое вращение
вала и чтобы при температурном удлинении вала не защемлялись
тела качения.
Регулировку радиально-упорных и упорных подшипников часто
приходится осуществлять во время их эксплуатации, чтобы компен-
сировать зазоры, образующиеся от износа.
8.24. Размеры резьбовых колец для крепления наружных колец подшипников, мм
А~А
D Di о2 Паз di н h 1 ^2 bt z,
а с Число пазов
47 52 М52Х1.5 М56Х1.2 38 42 4 4 18
62 М68х1,5 50 5 6 20 6 8 20
72 80 М76х1,5 М85х1,5 60 68 — 10 Мб 6,5 3,5 5 25 28
85 90 М90х1,5 М95Х1.5 75 78 6 5 7 25 7 10 30
100 М105Х1.5 86 15
209
8.25. Крышки прижимные (по ГОСТ 18511—73)
Размеры, мм
D Di о2 D, Отверстия под винты н Л» Ь
а <*< Число
18—20 28 40 14 4,8 8 10 3 6 — — 2
21—22 24-26 32 36 45 50 16 18 5,8 10 12 3 8 17 5 3
28—32 42 55 24
35—37 48 65 28 18 6
40—42 44—47 54 60 70 78 34 38 7 12 14 4 10 20 5 4
50—52 66 82 44
55—58 60—62 75 95 48 52 22 7
65—68 70—72 75 84 90 105 ПО 58 62 64 9 15 20 4 12 26 8 4
80—85 90—95 100 НО 120 130 72 80 6
100 105—110 115—120 125—130 135—140 145 120 130 140 150 160 170 145 155 165 175 185 195 90 95 105 115 125 130 11 18 24 6 15 32 9 5
210
8.26. Крышки прижимные (по ГОСТ 18512—73)
Размеры, мм
Л
D D, Р. п» г>. Отверстия под винты И h hi В ь S
d dt du Чис- ло
36—37 48 65 28 35 5,8 10 12 4 14 4 8 12 3 4
40—42 47 52 55 60—62 54 60 66 75 78 70 78 82 95 95 34 38 44 48 52 40 47 50 50 60 7 12 14 4 15 5 10 13 5
65—68 70—72 75 84 90 90 105 НО ПО 58 62 64 68 72 72 9 15 20 17 6 12 15 4
80—85 90-95 100 ПО 120 130 72 80 80 92 28 6
100 105—110 115—120 125—130 135—140 145 120 130 140 150 160 170 145 155 165 175 185 195 90 95 105 115 125 130 100 НО 120 125 135 145 11 18 24 6 23 8 15 20 5 7
150—155 160 180 190 210 220 135 145 150 160 13 20 26 28 10 18 25 6 8
211
8.27. Крышки прижимные (по ГОСТ 18513—73)
Размеры, мм
Л.= 7/>
D D, о. Отверстия под вииты н h hi В s
d d, ds Число
28—32 35—37 42 48 55 65 24 28 5,8 10 12 3 4 8 4
40—42 54 70 34 18
44—47 60 78 38
52 66 82 44 7 12 14 5 10 16 5
55 75 95 48 4
60—62 78 52
65—68 84 105 58
70—75 90 НО 62 19 6 12
80—85 100 120 72 9 15 20 6
90—95 ПО 130 80 21 18
100 105—110 120 130 145 155 90 95 11 18 24 6 26 8 15 23 23 7
115—120 140 165 105 28 25
125—130 150 175 115 25
Примечание. Размер а = 2 мм при D 95 мм; а = 3 мм при D 100 мм
212
8.28. Крышки прижимные (по ГОСТ 11641—73)
Размеры, мм
Исполнение 1 Исполнение!
b 2тах
D О, О, Оз Отверстия под винты н h ь
d d2 Число
28—32 35—37 42 48 55 65 24 28 5,8 10 12 3 12 4 3
40—42 44—47 50—52 54 60 66 70 78 82 34 38 44 7 12 14 15 5
55—58 60—62 75 78 95 48 52 4
65—68 54 105 58 4
70-72 75 90 ПО 62 64 9 15 20 18 6
80—85 90—95 100 120 130 72 80
100 105—110 115—120 125—130 135—140 120 130 140 150 160 145 155 165 175 185 90 95 105 115 125 11 18 24 6 23 8 5
Примечание. Профиль каиавкн — см. табл. 8.36.
213
Осевые и радиальные зазоры в ра-
диально-упорных
и в конических
связаны между
(рис. 8.57).
2 sin р 2 tg р ’
где b — осевой зазор; f — радиальный
зазор; 6 — зазор в нормальном сечении.
Осевой зазор следует регулировать
очень тщательно, так как от него зави-
сят долговечность подшипников и точ-
ность вращения вала (табл. 8.29, 8.30).
высокая точность расточки посадочных
Рис. 8.57
шарикоподшипниках
роликоподшипниках
собой зависимостью
Если в узле обеспечена
мест, расстояние между подшипниками невелико и нет опасения за-
щемления тел качения, то следует выбирать нижние пределы осевой
игры. Если вышеуказанные условия не выполняются, то пределы осе-
вого зазора выбирают с учетом теплового удлинения вала, как пока-
зано ниже.
8.29. Осевой зазор
для конических однорядных
роликоподшипников
8.30. Осевой зазор
для радиально-упорных
шарикоподшипников, мкм
Диаметр отверстия подшип- ника. мм Допустимые пределы осевого зазора при угле контакта а
до 16° 25—29°
Св До Наим. Наиб. Наим. Наиб.
30 50 80 120 30 50 80 120 180 20 40 60 80 ПО 80 ПО 140 170 220 20 20 30 40 50 40 50 60 70 90
Диаметр отверстия подшип- пика, мм Допустимые пределы осевого зазора при угле контакта а
12е 26—36°
Св. До Наим. Н анб. Наим. Наиб.
30 30 60 20 30
30 50 30 80 20 40
50 80 40 100 30 50
80 120 50 120 30 60
120 180 80 180 40 80
Пример. Червяк смонтирован на конических роликоподшипниках 7611 средней
широкой серин, поставленных враспор (см. рис. 8.25).
Расстояние между опорами Тд = 250 мм; температура вала во время работы /д =
= 65° С; температура окружающей среды to = 20° С. При d = 55 мм осевой зазор
(по табл. 8.30) b = 0,08 ч- 0,15 мм.
Тепловое удлинение вала
1,13 (Ч—10) Lj
100 000
1,13(65 — 20) 250
“ 100 000
= 0,127 мм.
Учитывая погрешности обработки и монтажа, следует выбрать верхний предел
b = 0,15 мм.
Осевой зазор регулируют различными способами: прокладками
между корпусом и торцом крышки; резьбовыми кольцами на валу или
в корпусе; специальной шайбой, перемещаемой винтом.
214
Прокладками регулируют так: надевают комплект прокладок на
одну из крышек, устанавливают ее в корпус и зажимают болты до
отказа; вторую крышку (без прокладок) также ставят на место; не-
сколько недожав болты до конца, проворачивают вал. Затем сильно
зажимают болты крышки, добиваясь такого положения, чтобы вал
проворачивался туго (зазор полностью уничтожен). Далее замеряют
щупом зазор между фланцем и корпусом. К величине найденного
щупом зазора прибавляют величину необходимого осевого зазора.
Эта сумма размеров и составляет необходимую толщину комплекта
прокладок.
Зазор распределяют между двумя подшипниками. Крышку без
прокладок после измерения осевого зазора следует снять, подобрать
комплект прокладок и снова поставить с прокладками, зажав болты
до отказа. После этого несколько раз проворачивают вал от руки.
Если вал вращается туго, то необходимо добавить еще одну тонкую про-
кладку, после этого следует проверить индикатором или щупом вели-
чину полученного осевого зазора. При регулировании резьбовыми
кольцами (см. рис. 8.39) внутреннее кольцо подшипника зажимают
резьбовым кольцом до исчезновения зазора в подшипниках. Затем
резьбовое кольцо стопорят. Регулировать можно при помощи резь-
бового кольца (см. рис. 8.55, е) или специальной шайбы — чашки
с винтом и контргайкой (см. рис. 8.55, д).
При необходимости устранить зазор (например, в опорах шпин-
делей прецизионных станков) подшипники ставят с предварительным
натягом, создавая при монтаже осевую нагрузку пружинами (рис. 8.58,
а, б) нажимными шайбами или гайками (см. рис. 8.55).
§ 8.7. СМАЗКА И УПЛОТНЕНИЕ ПОДШИПНИКОВЫХ УЗЛОВ
Выбор сорта смазки
Для смазки подшипников качения применяют жидкие масла и
пластичные смазки. Первые по сравнению с пластичными смазками
более стабильны, могут быть заменены без разборки узла, хорошо про-
никают в узкие зазоры, хорошо отводят тепло от подшипника, вымы-
вают из подшипника продукты его износа, но при этом требуются
более сложные уплотнения, более тщательный контроль и уход.
Пластичные (консистентные) смазки надежно удерживаются в узле,
при этих смазках не требуются сложные уплотнения; смазки выдер-
215
живают высокие давления и ударные нагрузки; в меньшей степени,
чем масла, изменяют вязкость при изменении температуры. При вы-
боре смазки пользуются критерием dn, где d — внутренний диаметр
подшипника, мм; п — частота вращения, об/мин.
Жидкие масла следует применять при значительных скоростях
(dn более 300 000 мм -об/мин), при централизованной системе смазки,
для повышения отвода тепла от подшипника, для снижения момента
трения в опорах. Пластичные смазки в подшипниковых узлах реко-
мендуется применять при dn < 300 000 мм -об/мин; когда регулярное
наблюдение за узлом и смена смазки затруднены; если необходимо
изолировать подшипник от окружающей среды; в закрытых подшип-
никах, когда смазку закладывают при сборке на заводе.
Для выбора масла требуемой вязкости в зависимости от внутрен-
него диаметра подшипников, частоты вращения и рабочей темпера-
туры можно пользоваться номограммой (рис. 8.59). Искомую вязкость
216
определяют следующим образом: через точку пересечения вертикаль-
ной линии (соответствующей внутреннему диаметру d подшипника)
с наклонной (соответствующей данной частоте вращения п) проводят
горизонталь до пересечения с вертикалью, которая соответствует
рабочей температуре t. Через эту точку пересечения проводят наклон-
ную прямую параллельно линиям частот вращения — до пересече-
ния с осью ординат, на которой нанесены величины вязкости в санти-
стоксах (сСт) при 50° С. Например, радиальный однорядный подшип-
ник (d = 60 мм при п — 1000 об/мин и t = 75° С) следует смазывать
маслом, имеющим вязкость 42 сСт при температуре 50° С.
Важными техническими характеристиками масел являются тем-
пература застывания и температура вспышки. Минеральные масла,
применяемые для смазки подшипников качения, приведены в табл. 8.31
и табл. 9.13.
8.31. Минеральные масла, применяемые для смазки подшипников качения
Марка масла Область применения
Велосит Л Вазелиновое Т Сепараторное Л Приборное МВП Индустриальное 12 Индустриальное 20 Сепараторное Т Индустриальное 30 Индустриальное 45 Индустриальное 50 Авиационные смазки: МС-14 МС-20 МК-22 МС-24 Легкие опоры веретен и других быстроходных валов Особо быстроходные шпиндели и электродвигатели Центрифуги и сепараторы Приборы, работающие при низких температурах Высокоскоростные шпиндели, веретена и электро- двигатели Станки, вентиляторы, обувные машины Центрифуги и сепараторы Токарные и фрезерные станки, ткацкие станки Насосы, двигателя, компрессоры Машины с большими нагрузками, но тихоходные Тяжелонагруженные быстроходные подшипники
Ниже перечислены пластичные смазки.
Кальциевые смазки (солидолы) имеют температуру плавления
t = 75 ч- 85° С, водоупорны, нерастворимы в воде, их рабочая тем-
пература t < 50—60° С.
Натриевые смазки (консталины) более тугоплавки, их можно
применять при температуре до 125° С, после расслаивания и после-
дующего охлаждения они не теряют своих свойств; чувствительны
к влаге, поэтому не рекомендуются при повышенной влажности окру-
жающей среды.
Натриево-кальциевые смазки обладают промежуточными свойст-
вами между натриевыми и кальциевыми; смазку 1-13 часто применяют
для шарикоподшипников качения при t — 80 100° С.
Литиевые смазки водоупорны, выдерживают низкую температуру;
смазку ЦИАТИМ-201 применяют при температуре от —60 до +90° С.
217
Смазку ЦИАТИМ-202 применяют для высокоскоростных подшип-
ников в диапазоне от —50 до + 100° С; смазку ЦИАТИМ-203 — при
t = —45 4- +100° С.
Смазку ВНИИ НП-242 с противоизносной присадкой дисульфида
молибдена применяют при t як—35 + +110° С.
Смазку ОКБ 122-7 применяют при t = —60 4- +120° С, смазку
ЛЗ-31 применяют в подшипниках закрытого типа при t — —50 4-
4- 130° С.
Алюминиевые смазки водоупорные АМС-1, АМС-3 и МС-70 приме-
няют в узлах, куда может попадать морская вода.
Смазка ЦИАТИМ-221 имеет высокую химическую стабильность,
вызывает меньшее набухание резины (в уплотнениях), чем другие
смазки; выдерживают t от —60 до +150° С. Смазку ЦИАТИМ-221С
применяют при t от —60 до +200° С. Смазка НК-50 (натриевая) со-
держит коллоидальный графит, ее можно применять при t «Д 180° С.
8.32. Ассортимент пластичных смазок
Наименование Марка ГОСТ или ТУ Температура приме- нения, °C
Солидол жировой УС-1 До 40—50
УС-2 УС-3 1033—73 До 50 До 60
Солидол синтетический УСс-1 До 40— 50
УСс-2 УСс-автомо- бильный 4366—64 До 50 До 50
Консталин жировой УТ-1 УТ-2 1957—73 До НО До 130
Консталин УТс-1 УТс-2 — До ПО До 130
ЦИАТИМ 201 6267—74 50—60
203 8773—73 — (45-50) +100
221С 9433—60* —60+150
221С ВТУНП 18—58 —60+200
ЛЗ-31 — 5575—69*** —50+130
лнтол 24 ТУ38-1-285—69 —40+10
ОКБ 122 7 ТУЕУ 169—59 —60+120
1—13 — 1631—61 До 100
Автомобильная ЯНЗ-2 9432—60 До 100
НК-50 НК-50 5573—67* До 180
НП (зимняя) ИПН-3 3257—74 До 60
АМС-1 —_ 2712—75 .—
АМС-3 "" 2712—75 .—
МС-70 — 9762—61* —
Основные марки пластичных смазок даны в табл. 8.32. Избыток
смазки (как и ее недостаток) отрицательно влияет на работу
подшипников: увеличиваются потери на трение, так как большие
объемы смазки вовлекаются во вращательное движение; повышает-
ся температура, нарушается структура и качество пластической
смазки.
218
Количество смазки зависит от скоростного режима подшипника.
Для быстроходных подшипников (dn > 100 000 мм -об/мин) узел за-
полняется на */2—*/з свободного объема узла; при средних и неболь-
ших скоростях — х/2—2/3 объема. Если есть опасение, что в подшип-
ник может проникнуть пыль и скорость его вращения невелика, узел
полностью заполняют смазкой.
Способы смазки
Для подачи в узел жидкой смазки применяют масляную ванну,
капельные масленки, фитили, разбрызгивание, циркуляционную си-
стему, масляный туман.
Масляная ванна применяется в узлах с горизонтальными валами,
изолированными от общей системы смазки. Масло заливается в корпус
подшипника через масленки (рис. 8.60)
или через резьбовые отверстия в кор-
пусе.
При п < 3000 об/мин масло зали-
вается до центра нижнего ролика или
шарика. При п > 3000 об/мин уровень
должен быть ниже центра. Для контроля
служит масленка с откидной крышкой,
уровень масла в ней совпадает с уров-
нем масла в узле; масленки должны
быть заполнены до краев.
В узле (рис. 8.61) масло перетекает
от меньшего диаметра ролика к боль-
Рис. 8.60
тему, а затем перетекает по каналам
в корпус.
Рис. 8.61
Рис. 8.62
219
Рис. 8.63
Рис. 8.64
Капельные масленки применяют в узлах горизонтальных и вер-
тикальных валов, работающих периодически. Скорость подачи
масла зависит от конкретного узла и колеблется в широком интер-
вале от нескольких капель в минуту до нескольких капель в час.
Рис. 8.65
Капельные (дозирующие) мас-
ленки для смазки горизонталь-
ных валов представлены на рис.
8.62, 8.63.
Фитильная смазка применяется
для смазки подшипников горизон-
тальных и вертикальных валов
при dn <0,6-106 мм-об/мин. На
рис. 8.64—8.67 показан один из
способов подвода смазки: один
йз концов фитиля опущен в масло,
Рис, 8,66
220
Рис. 8.69
Рис. 8.70
а другой прилегает к малому диаметру конуса (втулка, уступ вала);
масло, поступающее с фитиля на конус (за счет капилляров), под
действием центробежных сил отбрасывается к подшипнику.
Другой способ подвода смазки показан на рис. 8.68—8.70: фитиль
подает масло на подшипники из маслосборника, который находится
ниже или выше их. Для контроля уровня служит масленка с крышкой
или кран (рис. 8.68, 8.69).
Смазка разбрызгиванием осуществляется там, где подшипники
не изолированы от общей системы смазки: от вращающихся деталей
(дисков, зубчатых колес) масло попадает в опорные узлы.
При сравнительно небольшой частоте вращения такой способ смазки
удобен, но он имеет тот недостаток, что в масло, которым смазываются
подшипники, попадают продукты износа.
На рис. 8.71, 8.72 представлены подшипниковые узлы, в которых
поддерживается определенный уровень масла.
Различные варианты подачи масла к подшипникам вертикальных
валов представлены на рис. 8.73—8.75.
221
На рис. 8.74 подача масла осуществляется винтовыми канавками;
на рис. 8.75 конические насадки нагнетают жидкое масло в направле-
нии от меньшего основания конуса к большему, и таким образом оно
попадает в подшипник.
Циркуляционная система обеспечивает непрерывную подачу масла
в подшипник под давлением с помощью форсунки; применяется для
тяжелонагруженных, быстроходных подшипниксв при dn 2,5 X
X 10е мм-об/мин.
Смазка масляным туманом применяется для быстроходных легко-
нагруженных подшипников. Туман получается от распыления масла
специальными распылителями (инжекторами). Такая смазка обеспе-
чивает хорошее охлаждение подшипника при минимальном расходе
смазки; избыточное давление в узле препятствует проникновению в
подшипник пыли.
Уплотнения
Уплотнения должны предотвращать утечку смазки из узла и попа-
дание в него посторонних веществ из окружающей среды (влаги,
пыли, паров).
Уплотнения для подвижных деталей выполняют двух типов:
с контролируемыми зазорами и с контактом подвижных и неподвижных
деталей.
К первым относятся лабиринтные и щелевые уплотнения. Принцип
их работы основан на дросселировании жидкости в узких зазорах.
К недостаткам таких уплотнений следует
ность смазки в узле.
Рис. 8.71
Рис. 8.72
отнести неполную сохран-
Рис. 8.73
222
Рис. 8.74
Контактные уплотнения применяются там, где необходима полная
герметичность узла. При жидкой смазке уплотнения с контролируе-
мыми зазорами работают вполне эффективно. При пластичных (кон-
систентных) смазках можно выбирать любые уплотнения. Наиболее
просты уплотнения щелевого типа с небольшим зазором между крыш-
кой и валом (см. рис. 8.21, 8.26). Рекомендуемый зазор на сторону
0,2—0,5 мм; шероховатость поверхности вала не ниже 7-го класса.
8.33. Размеры кольцевых проточек, мм
Размеры канавок приведены в табл. 8.33. Лабиринтные уплотнения
более сложны, но они лучше защищают подшипниковые узлы от за-
грязнения; они не имеют трущихся деталей, пригодны для любых
223
Рис. 8.76
Рис. 8.78
скоростей; их часто применяют в комбинации с уплотнениями других
типов. На рис. 8.76 показано осевое уплотнение, а на рис. 8.77 —
радиальное (см. также рнс. 8.72 и 8.23).
Осевые уплотнения можно применять только при разъемных кор-
пусах; зазоры выбирают в зависимости от размеров подшипников
(радиальные 0,2—0,5 мм; осевые 0,8—2,5 мм). Размеры лабиринтно-
канавочных уплотнений приведены в табл. 8.34.
8.34. Размеры лабиринтно-канавочных уплотнений, мм
Для защиты подшипниковых узлов от попадания в них продуктов
износа и от утечки масла применяют шайбы различных конструкций.
Неподвижные защитные шайбы, закрепленные в корпусе, показаны
на рис. 8.78. Зазор между шайбой и валом 0,1—0,6 мм.
На рис. 8.79 показаны конструкции вращающихся шайб: под
действием центробежных сил жидкое масло и твердые частицы отбра-
сываются в корпус. В редукторах с косозубыми колесами такие шайбы
ограничивают проток масла в подшипники.
Если в подшипниковый узел уплотнения поставить нельзя,
устанавливают подшипники с защитными шайбами (рис. 8.80).
Консистентную смазку закладывают в него на заводе-изготови-
теле.
224
Чтобы отделить конси-
стентную смазку подшип-
никового узла от общей
жидкой смазки, применяют
мазеудерживающие кольца
(рис. 8.81). Они вращают-
ся вместе с валом; кольцо
имеет две — четыре круго-
вые канавки треугольного
Рис. 8.79
сечения; зазор между коль-
цом и корпусом (стаканом) 0,1—0,3 мм. Кольцо следует устанавли-
вать так, чтобы его торец выходил за стенку корпуса или торец
стакана на 1—2 мм.
На рис. 8.82, 8.83 показаны простые уплотняющие устройства
центробежного типа, которые служат для предотвращения утечки
жидкой смазки.
Под действием центробежных сил масло, скопившееся у грани
канавки или выступа вала, отбрасывается в полость крышки
корпуса и по каналу стекает обратно в корпус. Такие уплотнения
работают эффективно только при окружной скорости не менее
7 м/с.
Если подшипниковый узел работает в достаточно чистой среде,
можно применять конструкцию уплотняющих устройств с винтовыми
канавками. Эти уплотнения основаны на свойстве винта транспорти-
ровать смазку вдоль винтовой канавки. Если выполнить канавку на
валу нельзя, то ее нарезают на вспомогательной втулке. Такие
уплотнения могут работать при вращении вала в одном напра-
влении.
Для защиты подшипников от действия влажной сильно за-
пыленной среды применяют двусторонние винтовые уплотнения
с правой и левой резьбой. Контактные уплотнения в виде колец из
войлока или фетра (табл. 8.35) перед укладкой в гнездо про-
питывают маслом, нагретым до 80—90° С.
Размер b принимают равным
высоте буртика вара
Рис. 8.81
Войлочные уплотнения более надежны при
консистентной смазке; допустимая темпера-
тура от —50 до 4-120° С.
Чтобы увеличить срок службы ко-
лец и обеспечить хороший контакт между
Рис. 8.83
8 Зак. 220
225
трущимися поверхностями, применяют поджим уплотнения (см.
рис. 8.27).
В манжетных уплотнениях давление между кольцами и валом соз-
дается за счет упругости манжеты или кольцевой (браслетной) пру-
жиной.
Материал уплотнений — резина, кожа, синтетический каучук
(севанит) и пр.
Манжетные уплотнения делят на кассетные и бескассетные; по-
следние подразделяют на каркасные и бескаркасные. Типовое кассет-
ное уплотнение (табл. 8.36) состоит из штампованного кожуха 1 с ман-
жетой 2, на которую надета пружина <3; манжета прижата к кожуху
кольцом 4 и снаружи закрыта шайбой 5; уплотнение устанавливают
в крышку или корпус с натягом, и дополнительных креплений не
требуется.
Конструкции и размеры бескассетных и бескаркасных уплотне-
ний для разъемных и неразъемных корпусов приведены в табл. 8.37.
Если окружающая среда достаточно чиста, то манжету устанавливают
уплотняющей кромкой в сторону подшипника, в сильно загрязненной
среде манжету устанавливают кромкой в обратную сторону. Если же
необходимо, чтобы уплотнение удовлетворяло одновременно двум
требованиям, то ставят сдвоенное уплотнение кромками в разные
стороны (рис. 8.84).
226
8.36. Размеры манжетных уплотнений, мм
Ду
5 г — ~ 3 1
А
•° 1 и ч, (L
- —-
d Da dt ь d ь
10 30 15 10 45 75 52 12
12 32 50 80
(13) 55 85 62
14 35 18 60 90
15 65 95 72
(16) 70 100
(17) 40 20 10 75 105 82 14
18 80 НО
20 45 24 85 115 92
22 90 120
25 50 30 95 130 102
28 100 140
30 55 34 12 (Ю5) 105 112
(32) 60 НО 160
35 65 42 115 170 122
40 70 120 180
В*
227
8.37. Бескассетные манжетные уплотнения
Размеры, мм
Для разъемт
&~0,3
Пружина
d d п
вала “ Пру- вала “
жииы
30 55 29 55 80
35 60 34 60 85
40 65 12,5 39 65 90
45 70 44 70 95
50 75 49 75 100
Для неразъек'
П-о,з
* . Ч>
%
Пружина -*
Масса
d манже-
вала D " £>i пружи- ты с
ны пружи-
ной, кг
30 55 12 46 29 0,021
35 60 12 51 34 0,024
40 65 12 56 39 0,027
45 70 12 61 44 0,029
50 75 12 66 49 0,032
55 80 12 71 54 0,034
60 85 12 76 59 0,037
65 90 12 81 64 0,039
Примечание. Материал манжеты —
рическая пружина: наружный диаметр 3,5 к
диаметром до 100 мм
кого корпуса
<4
Л1 анжета
н без пру- жины d вала D н без пру- жины
12,5 54 59 64 69 74 80 85 90 95 100 105 ПО 115 120 130 12,5 14 79 84 89 94 99
много корпуса
л
—1 II 1 1 ' ' 1
0,3 J.
d вала D Н £>i без пружи- ны Масса манже- ты с пружи- ной, кг
70 75 80 85 90 95 100 95 100 105 ПО 115 120 130 12 12 12 12 12 12 12 86 91 96 101 106 111 120 69 74 79 84 89 94 99 0,042 0,044 0,047 0,049 0,052 0,054 0,087
севаннт 11; плотность 1,3-103 кг/м3. Цилннд- мм при диаметре проволоки 0,7 мм для валов
228
В каркасных (армированных) ман-
жетных уплотнениях уплотняющий эле-
мент из синтетического материала обра-
зует неразъемное соединение с металли-
ческим кольцом (табл. 8.38). Отверстие
под его установку может быть выполне-
но с меньшей точностью, чем для кас-
сетных, так как резина допускает при
установке некоторую деформацию (на
0,25—0,5 мм). Дополнительный выступ
(пыльник) защищает подшипник и в
сильно запыленной среде.
Допустимая скорость скольжения
для кожаных уплотнений — до 10 м/с,
для синтетических — до 15—20 м/с.
Рис. 8.84
Уплотнения с графитовыми (рис. 8.85) или металлическими эле-
ментами надежно работают при сравнительно высокой температуре,
больших перепадах давления, во влажной, запыленной среде, содер-
жащей пары кислот, при значительных скоростях. Но эти уплотнения
сложны в изготовлении.
На рис. 8.86 показано уплотнение с упругими разрезными кольцами
из высококачественного чугуна, допускаемая скорость скольжения
10 м/с.
Конструкции уплотнений для вертикальных валов обычно сложнее
чем для горизонтальных валов, что связано с большими трудностями
защиты подшипников от проникновения в их камеры жидкой смазки
из корпуса редуктора.
§ 8.8. ПОДБОР ПОДШИПНИКОВ КАЧЕНИЯ
В зависимости от частоты вращения колец подшипников их подби-
рают либо по статической, либо по динамической грузоподъемности
(по долговечности). Динамической грузоподъемностью называют на-
грузку (радиальную для радиальных и радиально-упорных и осевую
для упорных и упорно-радиальных подшипников), которую подшип-
ник может выдержать в течение миллиона оборотов без усталостного
8.38. Манжеты резиновые армированные (по ГОСТ 8752—70*)
Тип 1 Тип 2
Размеры, мм
d D hi л2 d D hi Л8
8 24 26 7 8 20 32 6 —
35 37 38 8 8 8 12
10 20 26 28 5 7 8
40 42 10 10 14
12 26 28 30 8 7 8
22 35 36 40 42 8 7 10 10 12 14 14
14 26 28 30 32 6 7 8 8
24 38 7
15 28 30 32 7 7 8 40 42 45 10
14
16 28 30 32 35 6 7 8 8 25 39 40 42 45 7 8 10 10 12 14 14
18 30 32 35 37 6 8 7 8 28 45 47 50 10 14
230
Продолжение табл. 8.38
d D hi h2 d D hl hi
30 м 50 52 10 14 55 75 10 14
80 82 12 16
32 48 50 52 10 14
58 75 10 14
35 50 55 57 58 10 14
80 82 12 16
60 80 82 10 14
36 52 55 58 10 14
85 12 16
62 80 82 85 10 14
38 58 60 62 10 14
65 90 95 12 16
40 58 60 62 10 14
68 90 95 12 16
42 62 65 68 10 14 70 95 100 12 16
75 95 100 102 12 16
44 62 65 10 14
45 62 65 70 10 14 80 105 110 12 16
85 110 115 12 16
48 65 70 72 10 14
90 115 120 125 12 16
50 70 72 75 10 14
95 120 125 130 12 16
52 72 75 10 14
100 125 130 135 12 16
80 12 16
231
разрушения поверхностей тел качения или беговых дорожек колец.
Для радиальных и радиально-упорных подшипников это нагрузка,
действующая на подшипник с вращающимся внутренним кольцом.
8.39. Рекомендации по выбору типа подшипника
Отношение ‘а ‘г Конструктивное обозначение и угол кон- такта Осевая состав- ляющая ра- диальной на- грузки S в долях от Fг Примечание
<0,35 Сдвоенные радиальные шарикопод- шипники — В случае возможности использова- ния легкой серии получаются опти- мальные результаты по предельной быстроходности
От 0,35 до 0,7 36 000 а =12° о,3 Fr Допустимо использование особо лег- кой и сверхлегкой серии
От 0,71 до 1,0 46 000 а = 26° 0,6 Fr При весьма высоких скоростях лег- кая серия предпочтительнее
Свыше 1,0 66 000 а = 36° 0,6 Fr Для высоких скоростей подшипник с данным углом контакта непригоден
F Примечание. При - а- 2> 1,5 рекомендуется применять конические раднальио- г г упорные подшипники или спаренные радиальио-упориые шариковые.
Типоразмер подшипника намечают ориентировочно (табл. 8.39),
из каталога находят значение его динамической грузоподъемности
и вычисляют величину его теоретической расчетной долговечности
(L — в млн. оборотов, Lh — в ч). L определяют по формуле
А = (-р-)Р, (8.1)
где С — динамическая грузоподъемность подшипника, указанная
в каталоге (см. табл. П26—П32); Р — эквивалентная (приведенная)
нагрузка подшипника, определяемая, как указано ниже; р — показа-
тель степени, зависящий от вида кривой контактной усталости: для ша-
риковых подшипников р = 3, для роликовых р — 10/3.
Долговечность в часах Lh связана с долговечностью L в млн. оборо-
тов зависимостью
10<£
Lh~ 60п ’
где п — частота вращения кольца подшипника.
Из формул (8.1), (8.2) следует
Lh~60n\p) ’
(8.2)
(8-3)
232
Долговечность подшипника, определенную по формуле (8.3),
сравнивают с желаемой (требуемой), и при неудовлетворительном
результате выбирают другой типоразмер подшипника и повторяют
расчет. Для зубчатых редукторов ресурс работы подшипников можно
принимать равным ресурсу работы самого редуктора (по ГОСТ 36000 ч),
минимально допустимая долговечность подшипника 10000 ч. Анало-
гично для червячных редукторов их ресурс установлен в 20 000 ч,
желательно, чтобы расчетная долговечность подшипника была не
ниже; минимально допустимая — 5000 ч.
Эквивалентная (приведенная) нагрузка Р для радиальных и ради-
ально-упорных подшипников есть такая постоянная нагрузка, которая
при приложении ее к подшипнику с вращающимся внутренним коль-
цом обеспечивает такую же долговечность, которую подшипник будет
иметь при действительных условиях нагружения и вращения.
Для упорных и упорно-радиальных подшипников эквивалентной
называют такую постоянную чисто осевую нагрузку, которая при
приложении ее к подшипнику с вращающимся посадочным кольцом
на валу и неподвижным в корпусе обеспечивает такую же долговеч-
ность, какую подшипник будет иметь при действительных условиях
нагружения и вращения.
Для однорядных радиальных шарикоподшипников и однорядных
радиально-упорных шарико- и роликоподшипников
P = (XVFr + YFa)K6K,. (8.4)
Для радиальных подшипников с короткими цилиндрическими
роликами
Р = ЛГадт; (8.5)
для упорно-радиальных подшипников
P = (XFr+YFa)K^-, (8.6)
для упорных подшипников
Р = ЛЛ<Лт- (8.7)
В формулах (8.4) — (8.7) X — коэффициент радиальной нагрузки;
V — коэффициент вращения (при вращении внутреннего кольца
V = 1; при вращении наружного кольца V = 1,2); Fr — радиальная
нагрузка; Y — коэффициент осевой нагрузки; Fа — осевая нагрузка;
Кв — коэффициент безопасности (табл. 8.40) — отражает влияние на
долговечность подшипника динамичности действующей на него на-
грузки; Ki — температурный коэффициент, отражающий влияние
на долговечность подшипника повышения температуры.
Рабочая температура подшипника... 125 150 175 200 225 250
Температурный коэффициент Ki ...... 1,05 1,10 1,15 1,25 1,35 1,40
Значения коэффициентов X и Y для подшипников различных типов
приведены в табл. 8.41—8.44.
233
8.40. Значения коэффициента /<б
Характер нагрузки на подшипник Кб Примеры
Спокойная нагрузка без толчков 1,0 Ролики ленточных конвейеров
Легкие толчки; кратковременные перегрузки до 125% от номиналь- ной (расчетной) нагрузки 1,0—1,2 Прецизионные зубчатые пере- дачи; металлорежущие станки (кроме строгальных и долбеж- ных); блоки, электродвигатели малой и средней мощности; лег- кие вентиляторы и воздуходув- ки
Умеренные толчки; вибрационная нагрузка; кратковременная пере- грузка до 150% от номинальной (расчетной) нагрузки 1,3—1,5 Буксы рельсового подвижного состава; зубчатые передачи 7-й и 8-й степени точности, редук- торы всех конструкций
То же в условиях повышенной надежности 1,5—1,8 Центрифуги; мощные электри- ческие машины, энергетическое оборудование
Нагрузки со значительными толч- ками и вибрацией; кратковремен- ные перегрузки до 200% от номи- нальной (расчетной) нагрузки 1,8—2,5 Зубчатые передачи 9-й степени точности, дробилки и копры; кривошипно-шатунные механиз- мы; валки прокатных станов; мощные вентиляторы
Нагрузки с сильными ударами, кратковременные перегрузки до 300% от номинальной (расчетной) нагрузки 2,5—3,0 Тяжелые ковочные машины; лесопильные рамы; рабочие роль- ганги у крупносортных станов, блюмингов и слябингов
Коэффициент Y для шариковых радиальных и радиально-упорных
подшипников зависит от параметра осевого нагружения е, который,
в свою очередь, зависит от отношения осевой нагрузки подшипника
Р
к его статической грузоподъемности -2- (см. табл. П26—П32). Для
радиально-упорных подшипников осевую нагрузку определяют с уче-
том осевых составляющих от радиальных нагрузок (см. ниже), а по-
следние зависят от параметра е. Поэтому приходится определять е
вначале приближенно, ориентируясь на отношение внешней осевой
силы (например, усилия в зацеплении), а не полной осевой нагрузки,
к статической грузоподъемности, следовательно, и коэффициент У
вначале определяют приближенно. Затем уточняют все величины и
окончательно определяют расчетную долговечность.
При выборе двухрядных радиально-упорных шариковых или кони-
ческих роликовых подшипников следует учитывать, что при отношении
FaIVFrs^e динамическая грузоподъемность таких подшипников
равна динамической грузоподъемности однорядного подшипника, умно-
женной на 20’7 ~ 1,625 для шариковых и на 2 779 = 1,715 для ролико-
вых подшипников.
Если FarVFr > е, то в этих двухрядных подшипниках будет рабо-
тать только один ряд тел качения, и величину динамической грузо-
подъемности следует принимать, как для однорядного подшипника,
следовательно, при FaIVFr > е двухрядные (сдвоенные) подшипники
применять нецелесообразно.
234
8.41. Коэффициенты X и У для радиальных и радиально-упорных
шарикоподшипников (по ГОСТ 18855—73)
Угол кон- такта а° Fa С„ iFa Се Однорядные Двухрядные е
VFr F а Л
X Y X Y X Y
0 0,014 0,028 0,056 0,110 0,170 0,280 0,420 0,560 — 0,56 2,30 1,99 1,71 1,45 1,31 1,15 1,04 1,00 1 0 0,56 2,30 1,99 1,71 1,45 1,31 1,15 1,04 1,00 0,19 0,22 0,26 0,30 0,34 0,38 0,42 0,44
5 — 0,014 0,028 0,056 0,085 0,110 0,170 0,280 0,420 0,560 0,56 2,30 1,99 1,71 1,55 1,45 1,31 1,15 1,04 1,00 1 2,78 2,40 2,07 1,87 1,75 1,58 1,39 1,26 1,21 0,78 3,74 3,23 2,78 2,52 2,36 2,19 1,78 1,69 1,63 0,23 0,26 0,30 0,34 0,36 0,40 0,45 0,50 0,52
10 — 0,014 0,029 0,057 0,086 0,110 0,170 0,290 0,430 0,570 0,46 1,88 1,71 1,52 1,41 1,34 1,23 1,10 1,01 1,00 1 2,18 1,98 1,76 1,63 1,55 1,42 1,27 1,17 1,16 0,75 3,06 2,78 2,47 2,29 2,18 2,00 1,79 1,64 1,63 0,29 0,32 0,36 0,38 0,40 0,44 0,49 0,54 0,54
12 — 0,014 0,029 0,057 0,086 0,110 0,170 0,290 0,430 0,570 0,45 1,81 1,62 1,46 1,34 1,22 1,13 1,04 1,01 1,00 1 2,08 1,84 1,69 1,52 1,39 1,30 1,20 1,16 1,16 0,74 2,94 2,63 2,37 2.18 1,98 1,84 1,69 1,64 1,62 0,30 0,34 0,37 0,41 0,45 0,48 0,52 0,54 0,54
15 — 0,015 0,029 0,058 0,087 0,120 0,170 0,290 0,440 0,580 0,44 1,47 1,40 1,30 1,23 1,19 1,12 1,02 1,00 1,00 1 1,65 1,57 1,46 1,38 1,34 1,26 1,14 1,12 1,12 0,72 2,39 2,28 2,11 2,00 1,93 1,82 1,66 1,63 1,63 0,38 0,40 0,43 0,46 0,47 0,50 0,55 0,56 0,56
235
Продолжение табл. 8.41
Угол кон- такта а° ® а а Со Однорядные Двухрядные е
VFr > Fa _£й_>е VFr
X Y X Y X | Y
18, 19,20 24,25,26 30 35, 36 40 — — 0,43 0,41 0,39 0,37 0,35 1,00 0,87 0,76 0,66 0,57 1 1,09 0,92 0,78 0,66 0,55 0,70 0,67 0,63 0,60 0,57 1,63 1,41 1,24 1,07 0,93 0,57 0,68 0,80 0,95 1,14
Подшипники сфериче- ские 0,40 0,40 ctg а 1 0,42 ctg а 0,65 0,65 ctg а 1,50 tga
Примечания: 1. Со — статическая грузоподъемность радиальных и раднальио- упорных подшипников. F 2. Для однорядных подшипников при ———принимают X 1 и Y — 0. VFr F„ IF 3. Коэффициенты Y и е для промежуточных величии отношений —~— и — опре- Со Со деляют интерполяцией.
8.42. Коэффициенты X и Y для
радиально-упорных роликовых
подшипников (по ГОСТ
18855—73)
8.43. Коэффициенты X и Y для упорно-
радиальных шариковых
подшипников
VFr - _^>е VFr > е
Х Y X У
Подшипники однорядные
0 0,40 0,40 ctg а 1,5 tga
Подшипники двухрядные
1 0,45 ctg а 0,67 0,67 ctga 1,5 tga
£ я с о >5 8 Одинарные подшип- ники Двойные подшипники е
Fa F г > е V/ Fa F г > е
X У X У X У
45 0,66 1,18 0,59 0,66 1,25
60 0,92 1 1,90 0,54 0,92 1 2,17
75 1,66 3,89 0,52 1,66 4,67
8.44. Коэффициенты X и Y для упорно-радиальных роликовых подшипников
Одинарные подшипники Двойные подшипники е
-V>e /л г
X У X У X У
tga 1 1,5 tga 0,67 tga 1 1,5 tga
236
Рис. 8.87
В радиально-упорных подшипниках при действии на них радиаль-
ных нагрузок возникают осевые составляющие S от радиальных реак-
ций, определяемые по формулам:
для радиально-упорных шарикоподшипников
S = eFr; (8.8)
для конических роликоподшипников
S = 0,83eFr. (8.8а)
При установке двух радиально-упорных подшипников по концам
вала (враспор) (рис. 8.87) результирующие осевые нагрузки каждого
подшипника определяют с учетом действия внешней осевой нагрузки
и осевых составляющих. Формулы для расчета осевых нагрузок приве-
дены в табл. 8.45, где Si и 5ц — осевые составляющие от радиальных
нагрузок, приложенных к подшипникам 1 и 2.
При определении осевых нагрузок двухрядных (сдвоенных) ради-
ально-упорных подшипников, когда нагрузку воспринимают оба
ряда тел качения, осевые составляющие S учитывать нет необходимости.
8.45. Формулы для определения осевой нагрузки
Схема нагружения Соотношение сил Результирующая осевая нагрузка
Fa ’со ео “мео & VW ОСО ьэ F at = $1
flj “Ч Со & VA № 1 Со F O2=S14-F a
Fa _ * sz s> Si S2 Fa\~S^ F a
а F a^F а ' 51 F ai — Si
237
При выборе радиально-упорных подшипников необходимо учиты-
вать, что радиальные реакции считаются приложенными к валу в точ-
ках пересечения нормалей, проведенных к серединам контактных
площадок. Расстояние а (см. рис. 8.87) между этой точкой и торцом
подшипника определяют по формулам:
для однорядных радиально-упорных шарикоподшипников
с = 0,5 [В + tg а] ;
(8-9)
для однорядных конических роликоподшипников
для двухрядных радиально-упорных шарикоподшипников (работает
один ряд тел качения)
(8.П)
для двухрядных конических роликоподшипников (работает один
ряд тел качения)
величины В\ d; D\ а; Т выбирают из каталога (см. табл. П26—П32).
Если в двухрядных радиально-упорных подшипниках работают
оба ряда тел качения, то принимают, что радиальная реакция прило-
жена посредине подшипника.
В тех случаях, когда в подшипниковых узлах частоты вращения
и нагрузки изменяются во времени (коробки передачи, канатные бара-
баны и пр.), выбор подшипников производят поэквивалентней нагрузке
и условной частоте вращения. Если нагрузка меняется по линейному
закону от Pmin до Ртах (при постоянной частоте вращения), то эквива-
лентная нагрузка
Pmin + 3^max
3
(8.13)
Если нагрузка и частота вращения изменяются по более сложным
законам, то
>^1+^2 + P3Z-3+-+pnz-„
(8.14)
Здесь Рь Р2, Р3, ... , Рп — постоянные нагрузки, действующие в те-
чение соответственно Lr, L%, L3, ... , Ln оборотов; L — общее число
оборотов, в течение которого действуют указанные нагрузки.
Если кольцо нагруженного подшипника вращается с частотой
п eg 1 об/мин, то выбирать подшипник следует по статической грузо-
подъемности Со. При действии комбинированной статической нагрузки,
238
вводят понятие об эквивалентной статической нагрузке, которая
должна вызывать такие же остаточные деформации, как те, которые
возникают при действительных условиях нагружения. Для радиальных
и радиально-упорных подшипников эквивалентную нагрузку выбирают
как чисто радиальную, а для упорных и упорно-радиальных — как
чисто осевую.
Подшипники подбирают путем сравнения требуемой величины
статической грузоподъемности Ро (эквивалентной статической нагрузки
с ее табличным значением по каталогу) Со:
Ро Со-
(8.15)
Для радиальных и радиально-упорных шарико- и роликоподшип-
ников величину эквивалентной статической нагрузки определяют
как наибольшее значение из двух выражений:
po=XoC+roFa; ,О1Сх
P0 = F,‘, <816>
здесь Хо — коэффициент радиальной статической нагрузки (из ката-
лога); Fr — радиальная нагрузка; Yo — коэффициент осевой стати-
ческой нагрузки (из каталога); Fa — осевая нагрузка.
Для радиальных роликоподшипников с короткими цилиндричес-
кими роликами
Po = F,. (8.17)
Эквивалентная статическая нагрузка для упорно-радиальных ша-
рико- и роликоподшипников
P0=2,3F,tga+Fo, (8.18)
и — номинальный угол контакта подшипника (угол между направле-
ниемдействия результирующей нагрузки на тело каченияи плоскостью,
перпендикулярной к оси подшипника).
Проиллюстрируем методику выбора подшипников по заданной
долговечности на двух примерах.
Пример 1. При расчете первого вала редуктора были определены реакции опор
Frl = 360 кгс; Fr2 = 180 кгс; осевая нагрузка Fa= 140 кгс; подшипники установ-
лены по схеме а (см. табл. 8.45). Диаметр шейки вала d= 50 мм; п = 1440 об/мин;
К6= 1,4.
Решение. Осевая нагрузка действует на вторую опору, поэтому определяем
отношение Fa!Fr для этой опоры:
Zk = —=0,78.
F„ 180 ’
Учитывая довольно большую величину этого отношения, выбираем шариковые
радиально-упорные подшипники. Первоначально принимаем подшипник легкой
серии 36210, для которого С = 3390 кгс, Со — 2760 кгс (табл. П29).
А 140
Величине отношения = - п- = 0.0509 соответствует значение е = 0,365.
Со
239
Осевые составляющие реакций от радиальных нагрузок:
первой опоры
Sj =е/?г1 =0,365 • 360= 131 кгс;
второй
S2=e/>2=0,365 • 180 = 65,5 кгс.
Так как Sx > S2 и Fa > 0, то из табл. 8.41 следует
Fal = S1= 131 кгс;
77e2 = S14-fo= 131 4-140 = 271 кгс.
Проверяем отношение:
Fa2 271
Со 2760
= 0,098.
Уточняем (по табл. 8.41): е = 0,44.
Для первой опоры
.Fal- = - ‘З1--=0,364 < е.
VFrl 360-1 ’
Следовательно (см. примечание к табл. 8.41), X = 1, Y = 0.
Приведенная нагрузка
= XVFnK6K^ = 1 - 1 • 360 -1,4 -1 = 504 кгс.
Для второй опоры
Fаг 271 _ 1 51 р
VFr2 180 • > •
Следовательно (табл. 8.41), X — 0,45; Y = 1,25;
P2 = (XVfr24-^o2)^T = (0,45. 1804-1,25.271). 1 -1,4 =
= (81-1-340). 1,4 = 590 кгс.
Так как Р2 > Рг, проверяем долговечность более нагруженной второй опоры:
, 10» ( С \з 10в /зз90\з
L/1~60n(p2) 60-1440 (.590/ Ч’
что явно недостаточно (см. стр. 233).
Проверим подшипник средней серии 36310, у которого С = 5920 кгс; Со =
= 4880 кгс.
F 140
Отношению — = -Тоол =0,029 соответствует значение е = 0,34.
С>([ 4оои
Определяем осевые составляющие:
Sj =0,34-360= 122 кгс;
S2 = 0,34 • 180=61,2 кгс.
Из первого расчета следует, что более нагружена вторая опора. Для этой опоры
/7в2 = 514-Го = 1224-140 = 262 кгс.
Уточняем: = 0,0538.
Gq 4оои
Соответственно е яг 0,37.
=0,37• 360= 134 кгс; Рв2= 134-|-140 = 274 кгс,
= 1,52 >е, при этом
Гг2
X = 0,45; Y = 1,46,
240
Приведенная нагрузка
Pi=(XVFr?+ YFa2) KtK^ = (O,^> • 1 • 180 + 1,46 - 274) • 1 - 1,4 = 673 кгс.
Расчетная долговечность
, 10» / С \з Ю» /5920\з
А 60л \Рг) ~ 60 • 1440 \ 673 ) —7850 ч-
Такая расчетная долговечность также недостаточна.
Рассмотрим вариант с шариковым радиально-упорным подшипником средней
серии 46310, для которого С — 5630 кгс; Со = 4480 кгс (табл. П29).
Из табл. 8.41 имеем е — 0,68;
Fa 140 о по
так как г -= , о7, = 0,78 > е, то
г r I oil
Х = 0,41; Y = 0,87 (табл. 8.41).
Осевая составляющая Sj = eFn = 0,68-360 = 245 кгс.
Осевая расчетная нагрузка на вторую опору
fO2=S)+Fo=245+140 = 385 кгс.
Приведенная нагрузка второй опоры
P2=(XVFn+ YFai) КтКб=(0,41.1 -180 + 0,87 385) -1,4 -1 =570 кгс.
Расчетная долговечность
10»/С\з 10» /5630\з
60л \ Р / — 60-1440 \ 570 )
Такая расчетная долговечность приемлема.
Пример 2. Подобрать подшипники для вала редуктора, у которого реакции
опор Frl = 360 кгс, Fr2 — 180 кгс, осевая нагрузка Fa = 300 кгс, подшипники
установлены по схеме а (см. табл. 8.45).
Диаметр шейки вала d = 50 мм; л = 400 об/мин; Kq — I,4-
Решение. Определяем отношение
F а 300 _
^+=jgQ = l,67 и намечаем конический роликовый подшипник легкой серии
7210 (табл. П30), у которого угол контакта а — 14°; С — 5290 кгс; Со = 4060 кгс.
Определяем:
е= 1,5 tga = 1,5 - 0,2493 = 0,374 (табл. 8.42);
$!=0,83 eFn =0,83 - 0,374 - 360 =112 кгс;
S2=0,83 eFr2 = 0,83-0,374-180 = 56 кгс;
fo) = S1 = 112 кгс;
Fa-i = si+Fa = 112 + 300 = 412 кгс.
Проверяем величину отношения:
В этом случае X = 1; Y = 0 (табл. 8.42).
Приведенная нагрузка Pt = VXFn КбКт = 1-1-360-1,4 = 505 кгс. Так как
F 412
отношение — 2,24 > е, то, следовательно, по табл. 8.42 Х= 0,4; Y =
* Г2 1 OV
= 0,4 ctg a = 0,4 ctg 14° = 1,6;
P2=(XVFr2+ УРо2) КбКг = (0,4.180 +1,6 • 412) -1,4 «s 1030 кгс.
241
Расчетная долговечность
106 / c \ю/з 10“ t
Lh 60n \ P
IO»
— 60 • 400
этого недостаточно.
Возьмем подшипник легкой широкой серии 7510; а= 14° (табл. ПЗО); С =
= 5980 кгс; Со— 5450 кгс; е= 1,5 tg 14°= 0,374.
Sj = 0,83 eFrl=0,83 - 0,374 - 360 = 112 кгс;
Fм = Si+Fa = 112 + 300 = 412 кгс;
P = (0,4.180 + 1,6-412). 1,4 = 1030 кгс;
10» ( С \10/з 106 /5980X1 о/З
Lh=60n\P~) — 60-400 \103oJ
Результат приемлемый.
Глава 9
ПОДШИПНИКИ СКОЛЬЖЕНИЯ
§ 9.1. ВЫБОР ТИПА ПОДШИПНИКА
Перед конструктором, проектирующим опоры осей
и валов, возникает прежде всего вопрос о том, какой подшипник
выбрать — качения или скольжения. Часто отдают предпочтение
подшипникам качения: благодаря массовому производству они недо-
роги и обладают ценным качеством — полной взаимозаменяемостью.
Задача конструктора упрощается и сводится к подбору подшипника
по каталогу в зависимости от диаметра шипа и требуемой долговеч-
ности. Однако такое простое решение не всегда возможно. Например,
для быстровращающихся валов трудно подобрать подшипник качения
нормальной точности, так как допускаемая частота вращения для них
ограничена относительно низким пределом. Стоимость же подшипников
высокой точности быстро возрастает с повышением класса точности;
в подобных случаях проектирование опор на подшипниках скольже-
ния вполне оправдано. Сравнительная экономическая оценка опор для
валов большого диаметра показывает, что при d 200 мм опоры сколь-
жения дешевле опор качения и габариты их меньше. Надо учитывать
также и такие ценные свойства подшипников скольжения, какими под-
шипники качения не обладают: демпфирование колебаний, бесшум-
ность, работоспособность при высокой частоте вращения; подбором со-
ответствующих материалов можно обеспечить надежность их работы
в широком диапазоне температур и в химически активной среде. Потери
на трение и износ в подшипниках скольжения, работающих в режиме
жидкостного трения, не выше, чем в подшипниках качения. Благодаря
этим свойствам опоры скольжения широко применяют в турбинах,
электромашинах, центробежных насосах, центрифугах, шлифовальных
шпинделях, металлообрабатывающих станках, тяжелых редукторах.
Для конструирования и расчета опор скольжения большое значение
имеет исследование процесса трения, так как с трением связаны нагрев
и износ рабочих поверхностей.
Трение в опорах скольжения
Работа опоры скольжения зависит от многих факторов: нагрузки,
материалов трущихся деталей и состояния их поверхности, скорости
скольжения, теплоотвода, рода смазки, ее физико-химических свойств,
243
рактеристики режима
давления подачи, температуры окружаю-
щей среды. Все эти факторы влияют на
работоспособность опоры, ее долговечность
и надежность; с ними непосредственно
связана важнейшая характеристика опоры
скольжения — величина потерь на трение.
Для оценки этой величины служит услов-
ный коэффициент трения f, связанный с си-
лой трения Т и нагрузкой Р формальной
зависимостью
1 Р '
Для однотипных подшипников с одина-
ковым соотношением основных размеров
изменение величины f иллюстрируется кри-
вой Штрибека — Герси (рис. 9.1) в зависимости от безразмерной ха-
Р
здесь р, — динамическая вязкость смазки; <о — угловая скорость
шипа; р — средняя удельная нагрузка.
При очень малой скорости скольжения (порядка 1 см/мин) тру-
щиеся поверхности непосредственно касаются друг друга, коэффи-
циент трения почти постоянен (участок f0— 1); если смазка отсутствует,
то трение называют сухим', при очень тонкой масляной пленке (до
0,1 мкм) имеет место граничное трение.
С увеличением скорости скольжения коэффициент трения быстро
уменьшается (участок 1—2), при этом трение переходит в полужид-
костное, характеризующееся тем, что поверхности скольжения еще
не полностью разделены слоем смазки, так что выступы неровностей
соприкасаются. В точке 2 начинается участок 2—3 жидкостного
трения: толщина смазочного слоя возрастает от минимальной, доста-
точной лишь для покрытия всех выступов, до избыточной, перекры-
вающей все неровности с запасом. При жидкостном трении рабочие
поверхности полностью отделены друг от друга, и сопротивление отно-
сительному движению их обусловлено не внешним трением контакти-
рующих элементов, а внутренними силами вязкой жидкости. Теорети-
чески наилучшие условия работы подшипника обеспечиваются в точ-
ке 2 — здесь сопротивление движению и соответствующее тепловыде-
ление наименьшие, но нет запаса толщины слоя; поэтому практически
оптимальные условия будут в зоне справа от точки 2. Расчет подшип-
ника, работающего в режиме жидкостного трения, выполняется на
основе гидродинамической теории смазки. Однако такой режим может
быть осуществлен лишь при достаточно большом значении характерис-
тики режима X > Хкр, где >.кр — значение характеристики режима
в точке 2. Для опор тихоходных валов это условие в большинстве
случаев не выполняется, а для быстроходных оно нарушается в периоды
пуска и останова, когда частота вращения вала мала.
244
§ 9.2. ЭЛЕМЕНТАРНЫЙ РАСЧЕТ
ПОДШИПНИКОВ СКОЛЬЖЕНИЯ
При недостаточной смазке, малой скорости скольжения и большой
удельной нагрузке подшипники скольжения работают в области
граничного и сухого трения (участок f0— 1, рис. 9.1): коэффициент
трения наибольший, величина его постоянная. Критериями работо-
способности опоры служат следующие величины:
р
среднее давление р = у-, где F — проекция опорной повер-
хности на плоскость, перпендикулярную к вектору нагрузки Р;
произведение pv, где v —окружная скорость шипа (скорость сколь-
жения).
Это произведение связано с работой сил трения и с тепловыделе-
нием в подшипнике; в самом деле, сила трения при отсутствии смазки
может быть определена по закону Амонтона
T=fP=fpF;
секундная работа трения Ат = Tv = fpvF; удельная работа трения,
отнесенная к единице проекции поверхности, равна fpv.
При f ~ const удельная работа трения пропорциональна произ-
ведению pv; чтобы опора не перегревалась и износ рабочих поверх-
ностей оставался в допустимых пределах, это произведение не должно
превышать допускаемого значения, устанавливаемого для однотипных
подшипников опытным путем. Аналогичное ограничение накладывается
и на величину р. Таким образом, при элементарном расчете опор
скольжения должны быть удовлетворены два условия:
1) ограничение среднего давления во избежание интенсивного
износа
(9-1)
Рис. 9.2. Подшипник с ра-
диальной нагрузкой
2) ограничение произведения риво избежание интенсивного нагрева
pv^[pv]. (9.2)
Для цилиндрического подшипника, несущего ра-
диальную нагрузку Рг (рис. 9.2),
F = bd,
тогда выражение (9.1) примет вид
Р=Й- (9.3)
Входящая в выражение (9.2) скорость
скольжения, м/с
л dn
V~~ 60- 1000 ’
где d в мм; п в об/мин.
(9.4)
245
Диаметр шипа d обычно определяют не расчетом на прочность, а
конструктивно — в соответствии с диаметром вала и с учетом необ-
ходимых буртиков или галтелей. Ширину вкладыша b принимают
равной (0,5 + 1,0) d, в редких случаях, например для самоустанав-
ливающихся подшипников, до l,5d. Подшипник с выбранными разме-
рами b и d проверяют по формулам (9.2) и (9.3); если окажется, что
р > [/Я или pv > [pv\, то надо соответственно увеличить b и d, сох-
раняя примерно ранее принятое отношение
При проверке шипа на прочность принимают, что нагрузка Р
Р ь
сосредоточена в середине шипа и изгибающий момент —
Для сплошного шипа расчетное напряжение
Л4„ Prb р\2
2-0,Id3 °P\d) •
(9-5)
Из условия прочности о„ [о]„следует, что прир002^О,2[ст]а
проверять шип на изгиб не нужно; это неравенство всегда удовлетво-
ряется даже для шипа из стали Ст5 при р сС 10 Н/мм2 и 1. Для
шипов из более прочной стали предельные значения р и~ соответственно
повышаются. Так как в типичных конструкциях подшипников, раз-
рабатываемых в курсовых проектах, значения р обычно не превышают
10 Н/мм2 и b eg d, то практически необходимость расчета шипа на изгиб
отпадает.
В табл. 9.1 приведены средние значения [р] и Ipvl; ими можно
пользоваться для предварительного расчета подшипников скольжения
тех машин и приводов, которые часто встречаются в заданиях на кур-
совое проектирование деталей машин. Более точные данные для раз-
личных подшипниковых материалов приведены в § 9.3.
Для подшипников точных механизмов и приборов существен-
ное значение имеет момент трения, определяемый по формуле
МЛ = Т~ = 0,5fpbd2. (9.6)
9.1. Средние значения [р] и |рц| для подшипников
с чугунными или бронзовыми вкладышами
Тип машины [п], Н/мм2 [р»1, Н/мм2
Редукторы общего назначе- ния 2—6 4—8
Редукторы тяжелого типа 6—12 6—20
Трансмиссии и контрпри- воды 1—4 3—8
Транспортеры ленточные и цепные . 2—5 2—8
Рис. 9.3. Кольцевая
пята
246
С увеличением диаметра шипа момент трения возрастает пропор-
ционально квадрату диаметра, при этом чувствительность прибора
соответственно уменьшается. Отсюда следует, что опоры точных меха-
низмов и приборов надо проектировать с возможно меньшим диаметром.
Плоские подпятники
Давление плоской сплошной пяты на подпятник распределяется
по гиперболическому закону — в центре оно весьма велико (теорети-
чески стремится к бесконечности). Для выравнивания давления пяту
делают кольцевой (рис. 9.3); опорная поверхность ее
F=^(d*-dl).
Расчет ведут по среднему давлению р и произведению pvz, тогда
формулы (9.1) и (9.2) примут вид
рос < [М (9.8)
Расчетную скорость ис, входящую в формулу (9.8), вычисляют на
приведенном радиусе /?пр пяты.
По определению
MT = 77?np=fp ~(d*-dl)Rap-,
отсюда
п ________________
'ир л
Для кольцевой пяты
M, = ~fp(d3-dl), (9.9)
где
1 из_________из
(9.10)
Расчетная окружная скорость на приведенном радиусе
^с = Ю^пр- (9.11)
Допускаемые значения [р] и [рис] для кольцевой пяты примерно
такие же, как и [р] и 1ро] для подшипников.
В случае сплошной пяты d0 — 0, расчет ведут по условному сред-
нему давлению
P = (9.12)
4
247
и по произведению рпс [рп] [формула (9.8)], где vc относится к при-
веденному радиусу; на основании формулы (9.10) получим
Япр = -р. (9.13)
Для момента трения на основании формулы (9.9) получим
MT = ^fpd3.
Гребенчатую пяту рассчитывают по тем же зависимостям, что и
кольцевую пяту, но с учетом числа гребней г; на основании формул
(9.7) и (9.9) получим
рпс [рп].
Приведенный радиус Rnp и скорость vc определяют по формулам
(9.10) и (9.11).
Так как теплоотвод от сплошных и гребенчатых подпятников
затруднен, то значения [р] и [рп] для них надо брать на 20—40%ниже
значений [р] и [рп], указанных для радиальных подшипников.
При комбинированной радиальной и осевой нагрузках в подшипник
устанавливают вкладыш с буртом, воспринимающим осевую нагрузку;
так как в данном случае бурт играет роль кольцевого подпятника,
то для расчета его служат формулы (9.7)—(9.11).
§ 9.3. ПОДШИПНИКОВЫЕ МАТЕРИАЛЫ
Так как рабочие поверхности шипа и подшипника больше всего
изнашиваются в процессе работы в режиме сухого и граничного тре-
ния, то для уменьшения износа и увеличения долговечности опоры
надо подбирать такие сочетания материалов трущихся пар, при кото-
рых коэффициент трения наименьший. Такие пары называют анти-
фрикционными', но так как валы, как правило, делают из стали, то
название «антифрикционные материалы» относят фактически к мате-
риалам, из которых изготовляют вкладыши. Номенклатура таких
материалов весьма обширна: в нее входят черные и цветные металлы
и сплавы, металлокерамика, древесно-слоистые пластики, синтети-
ческие материалы, специальные сорта резины; для опор приборов
применяют искусственные и естественные минералы. В этом пособии
приведен краткий обзор наиболее распространенных подшипниковых
материалов применительно к программе кускового проектирования
деталей машин.
Чугун серый и антифрикционный. Для опор тихоходных валов
при умеренном давлении р ~ 1 4- 2 Н/мм2 и спокойной нагрузке
можно применять вкладыши из серого чугуна марок СЧ 15-32,
СЧ 18-36, СЧ 21-40, СЧ 24-44 (по ГОСТ 1412—70); окружную ско-
рость цапфы рекомендуется ограничить величиной 0,5—2 м/с.
248
Для опор, работающих периодически с продолжительными пере-
рывами, значение р может быть увеличено до 3—4 Н/мм2 при v «С
0,5 м/с. Однако во всех ответственных случаях рекомендуется при-
менять для вкладышей вместо обычного серого чугуна отливки из
специального антифрикционного чугуна (табл. 9.2).
9.2. Антифрикционный чугун для подшипников скольжения (по ГОСТ 1585-70)
Марка Твер- дость НВ X арактеристика Допускаемые значения
Р, Н/мма V, м/с pv, Н-м
мм2-с
АСЧ-1 180—229 Серый чугун, легированный хро- мом и никелем. Предназначен для работы в паре с закаленным нли нормализованным валом 0,05 9,0 2 0,2 0,1 1,8
АСЧ-2 190—229 Легирован хромом, никелем, тита- ном и медью. Для работы с зака- ленным и нормализованным валом 0,1 6,0 3 0,75 0,3 4,5
АСЧ-3 160—190 Легирован титаном н медью. Для работы в паре с незакаленным валом 0,1 6,0 3 0,75 0,3 4,5
АВЧ-1 210—260 Высокопрочный чугун, обработан- ный магнием (форма графита — шаровидная). Предназначен для работы в паре с закаленным или нормализованным валом 0,5 12 5 1,0 2,5 12
АВЧ-2 167—197 То же, но для работы с незакален- ным валом 0,5 12 5 1,0 2,5 12
АКЧ-1 197—217 Ковкий чугун. Предназначен для работы в паре с закаленным или нормализованным валом 0,5 12 2 1,0 2,5 12
АКЧ-2 167—197 То же, ио для работы с незакален- иым валом 0,5 12 5 1,0 2,5 12
Примечания. 1. Предельные значения р и pv не относятся к режиму жидкост-
ного трения. 2. Для увеличения долговечности опор должны быть соблюдены следующие
условия: тщательный монтаж и отсутствие перекоса; непрерывная качественная смазка;
повышение зазоров по сравнению с установленными для бронзы на 15—30%, а в случае
значительного иагрева подшипника — до 50 %; приработка на холостом ходу и постепенное
повышение нагрузки до расчетной; недопустимость искрения.
Для уменьшения износа цапф следует подбирать марку антифрик-
ционного чугуна так, чтобы твердость его была ниже, чем у цапфы.
Бронза. Наиболее употребительные марки бронз для подшип-
ников приведены в табл. 9.3. Перечень этот не является исчерпываю-
щим, так как общее количество марок бронз, пригодных для узлов
трения скольжения, весьма велико, и оно непрерывно пополняется
новыми сплавами, отвечающими повышенным требованиям эксплуата-
ции машин. О составе бронзы можно судить по марке ее, так как
буквы, входящие в обозначение, соответствуют компонентам сплава,
а цифры указывают на примерное содержание этих компонентов в про-
центах. Например, бронза Бр. ОЦС 6-6-3 содержит олова 6%, цинка 6%,
свинца 3%, остальное медь.
249
9.3. Бронза для подшипников
Название Марка Характеристика
Оловянноцинковос- винцовая Оловяннофосфорная литейная, обрабатыва- емая давлением Без Алюминиевожелез- ная Алюминиевожелезо- марганцевая Алюмин иевожелезо- свинцовая Свинцовая Оловянные лип Бр.ОЦС 5-5-5 Бр.ОЦС 6-6-3 Бр.ОЦС 4-4-17 (ГОСТ 613—65) Бр.ОФ 10-1 (нестандарт.) Бр.ОФ 6,5-0,15 (ГОСТ 5017—49 оловянные бронзы Бр.АЖ 9-4 (прутки и по- ковки) Бр.АЖ 9-4Л (литейная) Бр.АЖМц 10-3-1,5 (прутки, по- ковки, литье) Бр.АЖС 7-1,5-1,5 (литейная) Бр.СЗО (литейная) гейные бронзы Высокие антифрикционные качества, но умеренная прочность. Широко при- меняют при небольшой и средней удель- ной нагрузке (р ==S 6 Н/мм2) и средней скорости (о а-5 м/с); pvs^ 10Н-м/(мм2-с) Отличается весьма высокими анти- фрикционными качествами. Применя- ют в ответственных конструкциях при умеренных и значительных нагрузках (р 15 Н/мм2) и средней и повышен- ной скорости; ро sg 15 Н • м/(мм2 • с) (ГОСТ 493 — 54**) Высокопрочная бронза с хорошими антифрикционными и антикоррозион- ными свойствами. Применяют при зна- чительных нагрузках и средней ско- рости: р=<20 Н/мм2; игС4 м/с, pv^ sg 12 Н • м/ (мм2 • с) То же. Имеет более высокую плас- тичность по сравнению с предыдущей Применяют только как литейную бронзу при средних значениях p-g 8Н/мм2; v^5 м/с; ро^12Н-м/(мм2-с) Применяют для подшипников, испы- тывающих значительную ударную на- грузку (до 25 Н/мм2) при повышенной скорости (о ~ до 12 м/с) в условиях жидкостного трения в паре с валом по- вышенной твердости (не меиее НВ 250), во избежание износа. Отливка вкла- дышей должна производиться в ме- таллическую форму
Примечание. Значения р и pvt указанные в табл. 9.3, не относятся к режиму жидкостного треиия.
Алюминиевый антифрикционный сплав. Для подшипников, вос-
принимающих ударную нагрузку, например для тракторных подшип-
ников, применяют сплав АСМ (3,5—4,5% Sb; 0,3—0,7% Mg, осталь-
ное Al), успешно заменяющий свинцовистую бронзу: он отличается
высокой теплопроводностью, хорошо прирабатывается. Для увеличе-
ния прочности и жесткости вкладышей их штампуют из биметалличес-
кой ленты, получаемой совместной прокаткой полос АСМ и малоугле-
родистой стали типа армко (сталь 0,5 или 0,8). Наибольшая удельная
нагрузка р до 25 Н/мм2; v до 10 м/с.
250
Латунь применяют для подшипников при небольшой скорости
(до 2 м/с). Наиболее распространенные марки литейной латуни для
вкладышей приведены в табл. 9.4.
S.4. Латунь литейная для вкладышей (по ГОСТ 17711—72)
Марка Техническая характеристика и область применения
ЛАЖМЦ 66-6-3-2 ЛМцОС 58-2-2-2 Литье в кокиль, в землю или центробежное. Применяют при значительной нагрузке, в тихоходных передачах заме- няют оловянную бронзу: р sg 12 Н/мм2; pv 10 Н м/(мм2-с)
ЛМцЖ 52-4-1 ЛМцС 58-2-2 Литье в землю. Применяют при легком режиме работы: р 4 Н/мм2; pv 6 Н м/(мм2 с)
ЛКС 80-3-3 Литье в кокиль и в землю. Применяют для подшипни- ков экскаваторов, дробилок и других машин, работающих в тяжелых условиях с ударной нагрузкой; р до 12 Н/мм2; v^2 м/с; pnsglO Н-м/(мм2-с)
Буквами обозначены компоненты сплава: А — алюминий, Ж —
железо, Мц — марганец, О — олово, С — свинец, К — кремний;
двузначное число показывает примерное содержание меди, последую-
щие цифры — содержание соответствующих компонентов в процентах
(остальное цинк).
Баббит. Сложные антифрикционные белые сплавы, объединенные
общим названием «баббит», характеризуются мягкой основой из олова
или свинца с вкрапленными твердыми зернами сурьмы, меди, щелоч-
ных металлов и пр. По механическим свойствам баббиты значительно
уступают бронзе и чугуну, например у оловянного баббита предел
текучести а-г = (8 9) Н/мм2, предел выносливости <!_!= 2,5 Н/мм2,
поэтому баббит применяют только для покрытия рабочих поверхностей
подшипников тонким слоем порядка десятых долей миллиметра.
Такой слой предохраняет поверхности шипа и вкладыша подшипника
от заедания и задиров, снижает коэффициент трения и износ в период
пуска и останова машины, прочность же подшипника обеспечивается
достаточно жестким вкладышем из бронзы, чугуна или стали.
Область применения баббитов различных марок указана в табл. 9.5.
Металлокерамические материалы. Пористые втулки и вкладыши
из медных или железных порошков с различными присадками изготов-
ляют методом спекания при температуре 850—1100° С и среднем
давлении 300—600 Н/мм2. В процессе изготовления детали, имеющие
пористость 20—30%, пропитывают минеральным маслом, солидолом
или маслографитовой эмульсией. Втулки запрессовывают в гнезде
с натягом, при этом внутренний диаметр уменьшается на 0,6—0,9
величины натяга. Окончательная доводка до расчетного размера долж-
на осуществляться калибровкой, а не резанием во избежание завола-
кивания пор.
251
Металлокерамические втулки применяют для подшипников сель-
скохозяйственных машин, насосов, рольгангов, они выдерживают
высокую удельную нагрузку при малой скорости скольжения.Втулки,
пропитанные маслографитной эмульсией, могут работать продолжи-
тельное время без дополнительной смазки, тогда как втулки с обычной
пропиткой минеральным маслом выдерживают лишь кратковременную
работу без подачи смазки. Для увеличения срока их службы следует
предусмотреть в конструкции подшипника масляную ванну или резер-
вуар с фитильной подачей смазки, а при повышенной скорости сколь-
жения (и > 1 м/с) обеспечить подачу жидкой смазки такими же спо-
собами, как и в конструкциях обычных подшипников.
9.5. Баббиты для заливки подшипников
Марка баббита Область применения
Б83 Подшипники паровых турбин, турбогенераторов, двигателей внутреннего сгорания; выдерживают ударную нагрузку до р ее 2 Н мм2
Б16 Подшипники электродвигателей, тракторов, компрессоров, шаровых мельниц — при умеренной ударной нагрузке; pvs:^ ==£ 10 Н • м/(мм2 • с)
Б6 То же; pv si 5 Н • м/(мм2 • с)
БН Подшипники паровых турбин и электродвигателей средней мощности, поршневых и других машин, работающих с удар- ной нагрузкой; р-<20 Н/мм2; 10 Н-м/(мм2-с)
БКА БК2 Подшипники прокатных станов, металлообрабатывающих станков, редукторов, поршневых и других машин, работающих как при спокойной, так и ударной нагрузке; psg20 Н/мм2; pv sg 6 Н • м/(мм2 • с)
Примечание. Значения pv не относятся к работе в условиях жидкостного треки я.
Основные характеристики подшипников с металлокерамическими
втулками приведены в табл. 9.6.
Графитовые втулки могут работать без смазки в широком диапа-
зоне температур и в химически активной среде, разъедающей металл.
Втулки, прессованные из чистого графита, отличаются значительной
пористостью. Поры могут быть заполнены свинцом или баббитом,
что позволяет значительно повысить нагрузочную способность под-
шипника. Для уменьшения пористости в графит добавляют фенол-
формальдегидную смолу; втулки, прессованные из такой смеси, назы-
вают пластиграфитовыми.
252
9.6. Металлокерамические втулки
Химический состав Пористость, % Значения р (Н/мм2) при v (м/с), равной
0.5 1 2 3
Бронзографит: 9—10% олова, до 3% 15—20 7 6 5 3,5
графита, остальное медь 20—25 6 5 4 3
25—30 5 4 3 2,5
Делезографит: 97—99% Fe; остальное 15—20 8,5 8 6,5 4,5
графит 20—25 7 6,5 5,5 3,5
25—30 5,5 5 4 2,5
При работе без смазки коэффициент трения 0,15-ь 0,20;
с водяной смазкой он уменьшается до 0,06—0,10. Втулки с гладкой
поверхностью могут работать в режиме жидкостного трения с мине-
ральным маслом, а при большой скорости и малой нагрузке — с газо-
вой или воздушной смазкой. Основные характеристики графитовых
втулок приведены в табл. 9.7.
9.7. Графитовые втулки
Материал Марка Предельные значения удельной нагрузки р, Н/мм2, при V 1 м/с
без смазки С водой с маслом индустриаль- ным 45
Графит чистый . Графит со свинцом Графит с баббитом Пластографит св БН АТМ-1 1,5 1—1,5 1—1,5 1—1,5 15 14 13 10 10 8
Пластмассы. Исходным материалом для пластмассовых вклады-
шей и втулок служат термореактивные и термопластичные смолы
с различными наполнителями. Термореактивные смолы затвердевают
в пресс-формах при определенной температуре и давлении и при пов-
торном нагреве не меняют формы; к их числу относится фенолформаль-
дегидная смола, получаемые из нее материалы известны под названием
карболит, бакелит, текстолит (с наполнителем из хлопчатобумажной
ткани), волокнит и пр. Термопластичные смолы при повторном наг-
реве снова становятся вязкими и плавятся, поэтому изделия из них
могут перерабатываться; для подшипников используются главным
образом полиамидные смолы, например капрон, нейлон, смолы марок
П6, П68, АК7 и пр.
Пластмассы отличаются большой износостойкостью, имеют срав-
нительно низкий коэффициент трения в паре со стальным валом;
абразивные частицы, попадающие в подшипник, вминаются в пласт-
массу и не повреждают трущиеся поверхности. Для повышения анти-
253
фрикционных свойств в полиамидные смолы вводят специальные при-
садки — тальк, графит, дисульфид молибдена; при добавлении при-
мерно 1% MoSa и работе без смазки коэффициент трения по стали
/ « 0,06.
Подшипники с пластмассовыми вкладышами применяют в прокат-
ных станах, в машинах, работающих в пыльной среде, например
в цементной промышленности, в сельскохозяйственных машинах;
они хорошо работают в опорах с возвратно-вращательным движением;
удовлетворительно работают в узлах трения, смазываемых водой,
однако грузоподъемность и износоустойчивость их при этом снижаются.
Основные характеристики некоторых пластмасс приведены в
табл. 9.8.
9.8. Пластмассы для подшипников
Свойства Текстолит Полиамидные смолы
П6, П68 АК7 Капрон
Плотность, г/см3 1,3—1,4 1,12 1,14 1,13
Температура плавления, °C — 220 240 215
Твердость НВ 30—35 14—15 15—18 10—12
Коэффициент теплопроводности, 0,18—0,35 0,29—0,34
Вт/(м °C) До 80
Допускаемая рабочая темпера- Не выше 90
тура, <’С При о=2 м/с р 10
Допускаемое давление р, Н/мм2 (при смазке маслом с услов- При Osa 1 -I- 4 м/с
ной вязкостью 2—6°ВУ) При о=6 м/с psS4 ро 20 Н • м/(мм2 • с) 6,5 20 7,5
Коэффициент треиия по стали 0,12—0,18 0,10—0,15
без смазки
Так как коэффициент теплопроводности пластмасс очень мал
(в 200—300 раз меньше, чем стали), то теплоотвод в корпус подшипника
весьма затруднен. Для улучшения теплоотвода вкладыши изготавли-
вают с металлическими наполнителями или же делают по возможности
тонкостенными.
Древесно-слоистые пластики (ДСП) применяют для вкладышей
подшипников гидротурбин, гидравлических насосов и других машин,
работающих с водяной смазкой. По техническим данным ДСП доволь-
но близки к текстолиту. Основные свойства — см. ГОСТ 8697—58**.
Пластифицированная древесина (лигностон) — из прессованных
брусков березы или бука с пропиткой — применяется для подшипни-
ков легких прокатных станов и транспортеров при удельной нагрузке
р не свыше 10 Н/мм2 и 1 м/с.
Лигнофолевая (древесная) крошка. Цельнопрессованные вкла-
дыши применяют для подшипников мелких прокатных станов, опле-
точных машин кабельной промышленности и других механизмов
с легким режимом работы: р 6 Н/мм2, v 1 м/с.
254
Все древесные пластики лучше работают с водяной смазкой, от
минеральных масел они разбухают.
Текстолитовая крошка служит для изготовления вкладышей мето-
дом прессования — для тяжелонагруженных подшипников, работаю-
щих при небольшой скорости; из-за низкой теплопроводности тексто-
лита применение их ограничено. Подшипники с металлическими вкла-
дышами, облицованными текстолитовой крошкой, при смазке водой
и скорости v — 1 -е- 4 м/с допускают р = 9 15 Н/мм2. Для вклады-
шей, облицованных текстолитовой крошкой с присадкой фторопласта-4,
при тех же условиях р = 15 -г- 20 Н/мм2, f «0,005, но при смазке
маслом р 11 Н/мм2, f «0,008.
Резина применяется для облицовки рабочих поверхностей вклады-
шей подшипников гидротурбин, турбобуров, водяных насосов и
других машин, работающих с водяной смазкой. Допускаемое среднее
давление р до 2 Н/мм2 для мягкой резины и до 5 Н/мм2 для твердой
вулканизированной резины. Вкладыш с мягкой резиной, имеющий
продольные канавки, хорошо работает даже в загрязненной среде:
абразивные частицы легко выносятся водой через продольные канавки
и не повреждают поверхность шипа.
§ 9.4. КОНСТРУКЦИИ подшипников скольжения
Неразъемные подшипники наиболее просты по конструкции; их
отливают из серого чугуна марки СЧ 18-36 и выше. Растачивают обычно
для работы непосредственно с валом (без вкладыша) под посадку Х4,
но могут быть расточены и на больший диаметр для установки втулки
из антифрикционного чугуна или бронзы. Область применения: опоры
тихоходных валов с небольшой нагрузкой (в сельскохозяйственных
машинах, лебедках с ручным приводом, транспортерах) р 1 Н/мм2,
pv 0,5 Н/мм2 -с. Для подшипников с втулками значения р и pv
могут быть повышены в соответствии с материалом втулки и условиями
работы.
Разъемные подшипники с вкладышем широко применяют для опор
валов механических передач—ременных, цепных, фрикционных, откры-
тых зубчатых, а также для лебедок, транспортеров и пр. Корпус и крыш-
ку отливают из чугуна СЧ 15-32 или стали 35Л, вкладыши — из
антифрикционных материалов в соответствии с условиями работы.
В приложении (табл. П34-—П36) приведены основные типоразмеры
разъемных подшипников и чугунных вкладышей к ним по нормалям
машиностроения.
На рис. 9.4 показан разъемный подшипник с кольцевой смазкой
(по нормали электропромышленности); смазка осуществляется двумя
свободно висящими латунными кольцами (см. рис. 9.4). Подшипники
этого типа применяют для цапф диаметром от 100 до 500 мм при ок-
ружной скорости а от 2 до 12,5 м/с. При v <; 2 м/с надо подводить
дополнительную смазку (рис. 9.5). При v > 12,5 м/с переходят к кон-
струкции подшипника с принудительной циркуляционной смазкой
под давлением, регулируемым калиброванными шайбами в пределах
0,25—0,50 бар (рис. 9.6).
255
Рис. 9.4. Подшипник с кольцевой смазкой
Рис. 9.5. Подшипник с комбинированной смазкой
256
Рис. 9.6. Подшипник с циркуляционной смазкой
Встроенные подшипники монтируют непосредственно в корпусе
машин. Такое устройство характерно для подшипников редукторов,
паровых турбин, турбогенераторов и электрических машин. На рис. 9.7
показана типичная конструкция опоры тихоходного вала редукторов,
предназначенных для приводов от электродвигателей мощностью
до 10 кВт при частоте вращения ведущего вала 750—1000 об/мин;
втулка из антифрикционного чугуна устанавливается в корпус с не-
большим натягом и удерживается от проворачивания ниппелем для
9 Зак. 220
257
Рис. 9.8. Стальной вкладыш с баббитовым слоем
колпачковой масленки.
Смазка консистентная,
поступает в подшипник
периодически по мере
подвертывания крышки
масленки; режим жидко-
стного трения здесь,
конечно, не обеспечи-
вается.
Вкладыши. Наиболее
просты по конструкции
неразъемные вкладыши-
втулки, изготовляемые
из антифрикционного чугуна или из бронзы. Размеры гладких цилин-
дрических втулок по ГОСТ 1978—73 приведены в приложении,
табл. П37. Втулки предназначены главным образом для неразъемных
подшипников, но могут устанавливаться и в разъемных конструк-
циях (см., например, рис. 9.7). На рис. 9.8 показана стальная
втулка с баббитовым слоем, с двумя канавками для смазки,
поступающей под давлением через боковые отверстия, просвер-
ленные с обеих сторон. Такие втулки применяют для тяжелонагру-
женных подшипников при условии обеспечения режима жидкостного
трения, например для прокатных станов. Для предохранения втулок
от проворачивания их ставят в корпус с натягом или фиксируют штиф-
тами, винтами, ниппелем колпачковой масленки.
Основной недостаток неподвижных втулок заключается в том, что
в процессе эксплуатации они изнашиваются неравномерно, причем
зазор между цапфой и вкладышем нельзя отрегулировать. Поэтому при
переменных нагрузках или при неполном вращении шипа (качательном
движении) рекомендуется устанавливать втулки, которые имеют зазор
не только в сопряжении с шипом, но и с корпусом. Под действием
переменной нагрузки такая втулка поворачивается относительно кор-
пуса, что и обеспечивает более равномерный износ ее. Для улучшения
смазки внутренней и внешней поверхности втулки служит ряд радиаль-
ных отверстий.
Разъемные вкладыши изготовляют обычно из двух частей со стыком
в плоскости разъема подшипника. Толщина стенки стального или брон-
зового вкладыша примерно
0,03 d + (1 — 3) мм, чугунного
примерно 0,03 d + (2 — 5) мм.
При значительной нагрузке
на подшипник деформация
вкладыша может привести к
защемлению вала; во избежа-
ние этого следует делать стык
половин вкладыша ступен-
чатым или устанавливать
штифты (рис. 9.9). Посадка
вкладыша в корпус обычно
Рис. 9.9. Разъемный вкладыш:
а — со ступенчатым стыком; б — со штифтом
258
AAA
у;чтобы вкладыш не проворачивался, ставят закрепительную
втулку или штифт (рис. 9.10), размеры которых даны в табл. 9.9.
9.9. Размеры закрепительных штифтов и втулок, мм (обозначения см. рис. 9.16,
D 25 28—40 45—70 75—90 95—120
d 1 6—8 8—16 10—12 12—20 12—14 16—30 16—18 20—40 18—20 30—45
На рис. 9.11 показана конструкция опоры вала редуктора для ра-
диальной нагрузки: вкладыши без буртов удерживаются от провора-
чивания и осевого перемещения штифтом. Смазка поступает из корпуса
редуктора по каналам, профрезерованным в плоскости разъема,
попадает в кольцевую проточку под вкладышем и через сверления
в последнем — в зазор между шипом и вкладышем. Для обеспечения
смазки в начальный момент пуска имеется отверстие в крышке с нарез-
кой под колпачковую масленку.
Рис. 9.11. Конструкция подшипника редуктора при ра-
диальной нагрузке
Рис. 9.12. Вкладыш
для радиальной и
осевой нагрузок
9»
259
Рис. 9.13. Конструкция опоры для радиальной и небольшой осевой
нагрузки
При наличии осевых усилий вкладыш делают с буртиками, воспри-
нимающими осевую нагрузку (рис. 9.12); размеры вкладышей из брон-
зы или чугуна без заливки: толщина s = 0,03 d + 2 5 мм; высота
буртика И — (1,1 + 1,3) s + 5 мм; ширина буртика h = 0,57/.
Если осевая нагрузка невелика, то буртики можно делать не на
вкладыше, а на самом валу (рис. 9.13).
Если на опору действует постоянная по направлению значительная
осевая нагрузка, как в редукторах с коническими зубчатыми колесами
или в нереверсивных червячных редукторах, то буртик на вкладыше
делают с одной стороны, с другой же стороны вкладыш упирается
в крышку (рис. 9.14). Точная установка вкладыша регулируется ка-
либрованными стальными прокладками, располагаемыми между крыш-
кой и корпусом подшипника. На рис. 9.15 представлены конструкции
Рис. 9.14. Конструкция опоры для радиальной и односторонней
осевой нагрузок
260
Рис. 9.15. Конструкции вкладышей
подшипников редукторов
вкладышей с баббитовой заливкой для подшипников редукторов:
тип а — вкладыш без бурта только для радиальной нагрузки; тип б —
вкладыш с одним буртом, имеющим торцовую заливку баббитом,
воспринимает радиальную и одностороннюю осевую нагрузку. Вкла-
дыши для подшипников с принудительной циркуляционной смазкой
под давлением показаны на рис. 9.16; тип а — для радиальной наг-
рузки; тип б — для радиальной и осевой нагрузок, действующих
в любом направлении.
Толщина слоя баббита должна быть возможно меньше — порядка
0,1—0,5 мм, так как с увеличением ее усталостная прочность слоя
баббита уменьшается. В справочной литературе нередко рекомендуется
определять толщину слоя заливки в зависимости от диаметра вала,
Рис. 9.16. Конструкции вклады-
шей для подшипников с цирку-
ляционной смазкой под давле-
нием
261
Рис. 9.17. Расположение смазочной канавки
порядка 0,01 d + (0,2 4- 0,5) мм и предусматривать для лучшего сцеп-
ления пазы или нарезку на поверхности вкладыша глубиной 0,5—0,8
от толщины слоя баббита или же оставлять поверхность вкладыша
грубообработанной со следами резца. Такую рекомендацию можно до-
пустить только в случае заливки антифрикционным сплавом, плохо
пристающим к материалу вкладыша (например, баббит по чу-
гуну).
Для распределения смазки по длине вкладыша на его внутренней
поверхности делают канавки или выемки (карманы). Их располагают
в месте подвода смазки. При постоянной нагрузке и постоянном нап-
равлении вращения ограничиваются одной канавкой, при переменном
вращении необходимы две канавки. Расположение канавок в разъем-
ном вкладыше схематически показано на рис. 9.17. Чтобы ограничить
поток масла в направлении к торцам вкладыша, канавки не доводят
до торцов, оставляя расстояние а ~ (0,06 4- 0,1) Ь; ширина канавки
h ~ (0,15 4- 0,25) d, рекомендуемые размеры канавок приведены в
табл. 9.10.
9.10. Размеры смазочных канавок, мм (обозначении см. рис. 9.17)
Диаметр а Л е
До 60 5 14 6
Св. 60 до 80 6 16 8
» 80 » 90 8 20 10
» 90 » 110 8 26 12
» ПО > 140 10 32 14
» 140 » 180 12 40 16
» 180 » 260 15 60 20
» 260 » 380 20 80 24
» 380 » 500 25 100 32
262
§ 9.5. СМАЗОЧНЫЕ МАТЕРИАЛЫ
Для смазки подшипников, работающих с большой удельной на-
грузкой при малой скорости скольжения, можно применять консистен-
тные смазки. Для смазки подшипников скольжения, работающих
в любом режиме — от жидкостного до граничного трения, служат
главным образом жидкие нефтяные масла и в особых случаях — син-
тетические масла.
Для оценки жидких масел большое значение имеют два показателя:
смазочная способность (или маслянистость) и вязкость. Смазочная
способность характеризует свойство масла уменьшать трение и износ
при работе в режиме граничного и отчасти полужидкого трения. Это
свойство связано с прочностью тонкой адсорбированной пленки,
образующейся на поверхностях скольжения; при повышении темпе-
ратуры в рабочей зоне подшипника до некоторой критической величи-
ны эта пленка разрушается: возникает сухое трение, что влечет за
собой дальнейшее повышение температуры и схватывание трущихся
поверхностей. Критические температуры для некоторых сортов
масел приведены в табл. 9.11. Для повышения критической температуры
и улучшения смазочных свойств масел применяют различные присадки,
содержащие серу, хлор, барий, например присадки АзНИИ-ЦИАТИМ
(ГОСТ 7189—54), ЦИАТИМ-339 (ГОСТ 8312—57*) и пр.
9.11. Критическая температура
некоторых масел
Марка масла Вязкость кинемати- ческая. сСт Критическая темпе- ратура, °C 1 КИ, °C I
при 50 °C о о Я к
Индустриальное 12 12 — 165 165
Турбинное 22 22 —. 120 180
Турбинное 30 30 —> 140 180
Индустриальное 50 50 —• 140 180
Автотракторное АКЮ — 10 150 210
Авиационное МС 20 — 20 165 250
9.12. Температурная поправка
Плот- ность, г/сма Темпера- турная поправка иа 1° Плот- ность, г/сма Темпера- турная поправка иа 1°
0,80—0,81 0,000765 0,88—0,89 0,000660
0,81—0,82 0,000752 0,89—0,90 0,000647
0,82—0,83 0,000738 0,90—0,91 0,000633
0,83—0,84 0,000725 0,91—0,92 0,000620
0,84—0,85 0,000712 0,92—0,93 0,000607
0,85—0,86 0,000699 0,93—0,94 0,000594
0,86—0,87 0,000686 0,94—0,95 0,000581
0,87—0,88 0,000673 0,95—0,96 0,000567
В гидродинамические расчеты входит динамическая вязкость р,
Н -с/м2.
В технических условиях на смазочные масла указывают обычно
кинематическую вязкость v, Ст или сСт.
Для перехода от кинематической вязкости в сСт к динамической
в Н -с/м2 служит формула р = 10*3pv, где р в г/см3.
263
Плотность масла зависит от температуры:
Р/ = Р2о ——20),
где р2о— плотность масла при t = 20° С;
X — температурная поправка, указанная в табл. 9.12.
Основные технические характеристики некоторых марок масел,
применяемых для смазки подшипников скольжения, приведены в
табл. 9.13.
9.13. Нефтяные масла для смазки подшипников скольжения
Марка масла Вязкость кинематическая, сСт
при 50° С при 100 °C
Индустриальные масла (по ГОСТ 1707—51): индустриальное 12 . . > 20 > 30 > 45 > 50 Турбинные масла (по ГОСТ 32—74): турбинное Т22 > Тао 10—14 17—23 27—38 38—52 42—58 20—23 28—32 44—48 55—59 2s 70 2s 135 2s 92 2s 157 2s 192 2s 192 WWWW VW Illi Illi! W —
> Т4в
» т67 Автотракторные масла (по ГОСТ 1862—63): автотракторное АК-20 ... . > АК-15 трансмиссионное (по ГОСТ 542—50): зимнее........ . . .......... летнее
Авиационные масла (по ГОСТ 1013—49*): авиационное МС-14 > МС-20 > МК-22 > МС-24
Вязкость масла при повышении температуры уменьшается. На
рис. 9.18 представлены кривые, выражающие зависимость динами-
ческой вязкости от температуры для индустриальных и турбинных
масел. Можно также пользоваться приближенной зависимостью,
дающей достаточно точные результаты в интервале температур от
50 до 100° С:
/50\т
Р/ — Pso ) »
где t — рабочая температура масла, ° С;
т — показатель степени, зависящий от сорта масла; средние
значения его в зависимости от кинематической вязкости
(сСт) следующие:
при Vjo = 20 30 40 50 70 90 120 н более
т = 1,9 2,5 2,6 2,7 2,8 2,9 3,0
264
1 — турбинное 46; 2 — индустриальное 45; 5 — турбинное 30, ин-
дустриальное 30; 4 — турбинное 22; 5 — индустриальное 20
С возрастанием давления в смазочном слое вязкость масла увели-
чивается; для практических расчетов пользуются эмпирической фор-
мулой Баруса
Рр = Рое“р,
где ро — вязкость при атмосферном давлении; е = 2,718; р в Н/мм2;
а — пьезокоэффициент, зависящий от сорта масла, температуры
и давления в масляном слое. Для нефтяных масел принимают а =
= (2 4-3) 10-2. При давлении до 5 Н/мм2 изменение вязкости обычно
не учитывают, но при р = 6 Н/мм2 вязкость возрастает примерно
на 20%, а при р — 10 Н/мм2 на 25—35%. Следовательно, при расчете
подшипников с большой удельной нагрузкой надо принимать во вни-
мание зависимость р от р.
§ 9.6. ГИДРОДИНАМИЧЕСКИЙ РАСЧЕТ ПОДШИПНИКОВ СКОЛЬЖЕНИЯ
В условиях жидкостного трения в смазочном слое, находящемся
между двумя поверхностями (рис. 9.19), возникают гидродинами-
ческие силы, зависящие от скорости движения, вязкости и плотности
масла и толщины слоя в рассматриваемом сечении. Эта зависимость
для ламинарного потока вязкой жидкости выражается обобщенным
уравнением Рейнольдса
# (hs ± (h3 £- д/\ = 12р V + 6 £ (pUh) + 6 (pWh) +12/Ж
дх \ р, дх] 1 дг\ ц дг J r дх4 71 дг 4 ' at ’
(9.15)
где U, V и W — компоненты скорости элемента А относительно
элемента Б в направлении осей ох, оу йог; у —
динамическая вязкость; р — плотность масла;
h — толщина масляного слоя.
265
Рис. 9.19. Движение плоской пласти-
ны по смазочному слою
Для установившегося движения
с постоянной скоростью в направ-
лении оси ох имеем U = const;
V = 0; W = 0; если не учитывать
течение масла в направлении оси
Oz, т. е. предположить, что длина
элемента А в направлении этой
оси бесконечно велика, то тг = 0;
усредняя значения ц и р по всей
нагруженной зоне смазочного слоя
и считая их постоянными, получим
а(йгй)=61*ж(та);
h3d£=6pUh+c.
Постоянная интегрирования определится из условия: при pwax
толщина слоя h = hm, ^ = 0, следовательно,
С = — 6pUhm,
и окончательно
dp
dx
(9.16)
это выражение может быть применено
нику. Шип, несущий радиальную
нагрузку Рг и вращающийся с угло-
вой скоростью о, под действием
гидродинамических сил всплывает
в смазочном слое, смещаясь в сто-
рону вращения. Положение его в
подшипнике определяется эксцентри-
цитетом е и углом между линией
центров и направлением нагрузки
(рис. 9.20).
Начало несущей зоны определяется
углом <ръ а конец — углом ф2, отсчи-
тываемыми от линии центров; да-
вление достигает максимума в сече-
нии, расположенном под углом фт
к линии центров. Толщина смазоч-
ного слоя в произвольном сечении
под углом ф к линии центров (см.
рис. 9.20) определится из уравнения
h = R — г cos у — е cos (180 — ф),
и к цилиндрическому подшип-
Рис. 9.20. Положение шипа в под-
шипнике при жидкостном трении
266
где R и г — радиусы подшипника и шипа; так как угол у весьма мал,
то можно принять
R — r cos у R — г — 6,
где 6 — радиальный зазор; обозначив отношение у = X (относительный
эксцентрицитет), получим
Л = 6 (1 4-xcos <р); (9.17)
при <р = фт, т. е. для сечения, в котором р = ртах, имеем
Лт = 6(1+хсо8фт). (9.18)
Наименьшая толщина будет в сечении, совпадающем с линией
центров, т. е. при ф = 180°, следовательно,
Amin = 6 (1-Х). (9.19)
Возвращаясь к выражению (9.16) и переходя к полярным коорди-
натам, заменим h и hm в соответствии с уравнениями (9.17), (9.18):
dx = г dtp; U = гео;
обозначим у = ф (относительный зазор); для цилиндрического под-
шипника получим
= 6 . X(cos<p—C0S<pm).
dtp ф2 (1 cos <р)3 '
отсюда давление на единицу поверхности в сечении под углом ф
ф
п _ с МИ С У. (cos ф —cos фт) .
Р<₽ Ф2 (1 +х cos <р)3
давление на бесконечно малую поверхность brdq будет
ф
Ф1
По условию равновесия сумма проекций элементарных сил на
направление внешней нагрузки должна равняться этой нагрузке:
Ф2 Ф
3 J $ y ((f+xT^m) d(p C0S + ФаИ d(P = pr- (9.20)
Ф1 Ф1
Обозначим
3 S X d(p H C0S )] = Фр’
<₽t <pl
где Фр — безразмерная величина, называемая коэффициентом нагру-
женное™ подшипника; уравнение (9.20) примет вид
рг = ^~Фр. (9.21)
267
Рис. 9.21. Схема 120°-ного подшип-
ника
Коэффициент нагруженное™ ФР
находят численным интегриро-
ванием с учетом конечной длины
подшипника и границ <plt <р2 сма-
зочного слоя. Подшипник назы-
вают полным, если он охватывает
шип по всей окружности и смазка
подается в зону максимального за-
зора; при дуге охвата 180° и под-
воде смазки в плоскости, перпен-
дикулярной к вектору нагрузки,
подшипник называют половинным;
если в месте подвода смазки сде-
ланы выемки (карманы), уменьшаю-
щие эффективный угол обхвата до
120° (рис. 9.21), то подшипник
называют 120°-ным и т. д.
В табл. 9.14 приведены значе-
ния ФР для полного, половинного и
120°-ного подшипников в зависимости от относительного эксцентри-
цитета е и отношения b/d.
При расчете подшипника нагрузка Рг и угловая скорость со известны,
смазка выбрана, размеры bud определены в процессе расчета шипа,
относительный зазор ф назначен в соответствии с требуемой посадкой;
на основании уравнения (9.21) вычисляют
р ficobd
(9.22)
Далее, определив по соответствующей таблице величину %, находят
минимальную толщину смазочного слоя hmln по формуле (9.19).
Для обеспечения жидкостного трения должно быть удовлетворено
условие 1, где hK„ — критическая толщина слоя:
“кр 1
^кр — R.1 + Д?2 + Уо, (9.23)
где Rzl и RZ2 — средние значения неровностей рабочей поверхности
шипа и подшипника по ГОСТ 2789—73 в зависимости от шероховатости
поверхности; у0 — прогиб шипа, определяемый по формуле
Й=1.б0та4, (9-24)
где «/max — максимальный прогиб вала; b — ширина вкладыша (длина
шипа); L — расстояние между серединами опор.
Трение в подшипнике. Смазочный слой оказывает сопротивление
вращению шипа, зависящее от вязкости жидкости и градиента скорости
dU/dh; удельное сопротивление или сила вязкого сдвига по закону
Ньютона
268
9.14. Безразмерный коэффициент Фр нагруженности подшипника
Подшип- ник ь d X
0.3 од 0,5 0.6 0,65 0,7 0.75 0.8 0,85 0,9 0,925 0,95 0,975 0,99
0,4 0,070 0,110 0,174 0,267 0,333 0,423 0,551 0,767 1,169 1,951 3,133 5,330 13,23 45,32
0,5 0,106 0,166 0,263 0,399 0,496 0,627 0,82] 1,121 1,688 2,773 4,396 7,329 17,59 57,05
0,6 0,149 0,232 0,363 0,547 0,677 0,851 1,093 1,496 2,227 3,598 5,630 9,188 21,46 66,48
0,7 0,196 0,303 0,471 0,704 0,867 1,082 1,381 1,877 2,758 4,286 6,779 10,90 24,77 73,96
0,8 0,216 0,380 0,584 0,865 1,060 1,316 1,667 2,247 3,254 5,195 7,818 12,41 27,55 79,90
Полный 0,9 0,299 0,458 0,609 1,025 1,252 1,544 1,943 2,599 3,737 5,775 8,742 13,67 29,88 84,64
1,0 0,354 0,539 0,814 1,184 1,437 1,764 2,203 2,928 4,156 6,466 9,553 14,78 31,82 88,55
1,1 0,409 0,619 0,927 1,333 1,615 1,971 2,450 3,231 4,556 6,889 10,26 15,73 33,47 91,75
1,2 0,464 0,698 1,036 1,482 1,778 2,163 2,676 3,509 4,807 7,353 10,88 16,55 34,86 94,45
1,3 0,518 0,775 1,141 1,617 1,940 2,345 2,884 3,762 5,224 7,862 11,43 17,27 36,05 96,73
1,5 0,622 0,921 1,336 1,868 2,221 2,664 3,248 4,198 5,760 8,447 12,33 18,42 37,97 100,39
0,4 0,089 0,141 0,216 0,339 0,431 0,573 0,776 1,179 1,775 3,195 5,055 8,39 21,00 65,26
0,5 0,133 0,209 0,317 0,493 0,622 0,819 1,098 1,572 2,428 4,261 6,615 10,71 25,62 75,86
Половин- ный 0,6 0,182 0,283 0,427 0,655 0,819 1,070 1,418 2,001 3,036 5,214 7,956 12,64 29,17 83,21
0,7 0,234 0,361 0,538 0,816 1,014 1,312 1,720 2,399 3,580 6,029 9,072 14,14 31,88 88,90
0,8 0,287 0,439 0,647 0,972 1,199 1,538 1,965 2,754 4,053 6,721 9,992 15,37 33,99 92,89
269
270
Продолжение табл. 9.14
Подшипник ь а X
о.з 0.4 0.5 0,6 0,65 0.7 0,75 0.8 0,85 0.9 0.925 0.95 0,975 0.99
0,9 0,339 0,515 0,754 1,118 1,371 1,745 2,248 3,067 4,459 7,294 10,75 16,37 35,66 96,35
1,0 0,391 0,589 0,853 1,263 1,528 1,929 2,469 3,372 4,808 7,772 11,38 17,18 37,00 98,95
Половин- 1,1 0,440 0,658 0,947 1,377 1,669 2,097 2,664 3,580 5,106 8,186 11,91 17,86 38,12 101,15
ный 1,2 0,487 0,723 1,033 1,489 1,796 2,247 2,838 3,787 5,364 8,533 12,35 18,43 39,04 102,90
1,3 0,529 0,784 1,111 1,590 1,912 2,379 2,990 3,968 5,586 8,831 12,73 18,91 30,81 104,42
1,5 0,610 0,891 1,248 1,763 2,099 2,60 3,242 4,266 5,947 9,304 13,34 19,68 41,07 106,84
0,4 0,072 0,132 0,198 0,325 0,448 0,602 0,846 1,259 2,050 3,706 5,497 9,73 25,73 83,10
0,5 0,103 0,188 0,261 0,463 0,620 0,826 1,144 1,676 2,674 4,717 6,880 12,57 29,33 90,50
0,6 0,135 0,245 0,364 0,592 0,788 0,979 1,420 2,052 3,209 5,556 7,994 13,55 32,72 95,52
0,7 0,166 0,299 0,441 0,709 0,935 1,221 1,656 2,365 3,654 6,213 8,849 14,80 34,30 99,03
0,8 0,195 0,349 0,512 0,815 1,068 1,385 1,862 2,632 4,013 6,749 9,537 15,78 35,86 101,73
120°-ный 0,9 0,221 0,395 0,576 0,909 1,184 1,525 2,043 2,856 4,312 7,181 10,08 16,56 37,19 103,79
1,0 0,245 0,436 0,633 0,992 1,285 1,644 2,185 3,042 4,540 7,508 10,53 17,22 38,08 105,47
1,1 0,276 0,473 0,633 1,064 1,372 1,749 2,311 3,206 4,766 7,800 10,90 17,70 38,90 106,84
1,2 0,286 0,506 0,722 1,126 1,448 1,838 2,419 3,335 4,941 8,075 11,21 18,13 39,58 107,98
1,3 0,303 0,535 0,766 1,181 1,513 1,914 2,519 3,450 5,089 8,283 11,47 18,49 40,15 108,93
1,5 0,332 0,583 0,831 1,271 1,622 2,041 2,663 3,667 5,328 8,618 11,89 19,06 41,06 110,48
Сила трения по всей поверхности шипа
Т=^ЬЛФт,
где Фт—безразмерный коэффициент сопротивления вращению; для
расчета подшипника удобнее пользоваться условным коэффициентом
трения
и отношением
•ф Фр
Значения приведены в табл. 9.15. При х 0,8 достаточно точные
результаты дает формула Орлова
{-<+°-55(4Г. <9-26>
при b d множитель (у) принимают равным 1. Эта формула удобна
тем, что входящие- в нее множители — безразмерные величины.
Мощность, затрачиваемая на преодоление трения в подшипнике, Вт
NT = fPrv. (9.26)
При установившемся режиме работу количество тепла, выде-
ляющегося в единицу времени, выражается тем же уравнением (9.26).
Для теплового равновесия необходимо, чтобы выделяющееся тепло
непрерывно отводилось от подшипника. Если пренебречь отводом
тепла по валу, то уравнение теплового баланса будет иметь вид
№r = + (9.27)
где Wn—количество тепла, отводимого через корпус подшипника
в окружающую среду, Вт; WK — количество тепла, отводимого цир-
кулирующим маслом, Вт.
Теплопередача представляет собой сложный процесс теплообмена
конвекцией, теплопроводностью и излучением. Так как при сравни-
тельно низкой температуре подшипника, не превышающей обычно
100° С, доля теплоизлучения весьма мала, то для определения Wn поль-
зуются формулой
1ГП = ^(/М-/В), (9.28)
где k — коэффициент теплопередачи, Вт/м2 -°C;
F — наружная поверхность подшипника, омываемая воздухом, м2;
/м— средняя температура смазочного слоя;
tB — температура воздуха, омывающего подшипник.
271
9.15. Значение отношения
Ф Фр
Подшип- ник ь d X
0.3 0.4 0.5 0.6 0,65 0.7 0.75 0.8 0.85 0,90 0,925 1 0.95 0,975 0.99
_ • i Полный ОД 0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,5 47,35 31,25 22,25 16,96 13,52 11,15 9,43 8,19 7,23 6,49 5,42 31,34 20,82 15,02 11,47 9,20 7,66 6,54 5,71 5,09 4,60 3,90 21,25 14,02 10,22 7,92 6,42 5,40 4,69 4,15 3,72 3,39 2,93 14,95 10,08 7,42 5,83 4,78 4,07 3,56 3,19 2,89 2,67 2,35 12,67 8,59 6,37 5,02 4,15 3,56 3,13 2,81 2,58 2,38 2,12 10,64 7,27 5,42 4,32 3,60 3,11 2,75 2,49 2,29 2,14 1,91 8,89 6,12 4,42 3,70 3,12 2,72 2,43 2,21 2,05 1,92 1,73 7,10 4,94 3,77 3,06 2,60 2,28 2,05 1,89 1,76 1,66 1,51 5,33 3,77 2,93 2,41 2,08 1,85 1,69 1,56 1,48 1,40 1,29 3,90 2,85 2,26 1,94 1,63 1,50 1,36 1,30 1,23 1,16 1,10 2,87 2,11 1,69 1,44 1,28 1,17 1,08 1,02 0,98 0,94 0,89 2,08 1,56 1,28 1,11 0,99 0,92 0,86 0,82 0,79 0,76 0,73 1,20 0,93 0,79 0,70 0,65 0,61 0,58 0,56 0,54 0,53 0,51 0,58 0,48 0,43 0,39 0,37 0,35 0,34 0,33 0,33 0,32 0,31
I Половинный 0,4 0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,5 36,95 24,85 18,28 14,19 11,61 9,85 8,54 7,62 6,88 6,34 5,53 21,45 16,55 12,25 9,66 7,97 6,81 5,97 5,36 4,98 4,52 4,01 16,95 11,61 8,69 6,94 5,79 4,98 4,44 4,02 3,70 3,44 3,09 11,78 8,18 6,21 5,02 4,25 3,72 3,28 3,05 2,84 2,67 2,44 9,80 6,87 5,26 4,30 3,66 3,23 2,92 2,69 2,51 2,37 2,18 7,90 5,59 4,32 3,57 3,08 2,74 2,49 2,32 2,17 2,07 1,97 6,34 4,54 3,57 2,98 2,64 2,33 2,14 2,01 1,89 1,81 1,69 5,07 3,55 2,83 2,41 2,12 1,95 1.71 1,68 1,60 1,54 1,44 3,57 2,67 2,18 1,88 1,68 1,55 1,45 1,37 1,32 1,28 1,21 2,48 1,88 1,57 1,39 1,27 1,18 1,12 1,08 1,04 1,01 0,97 1,80 1,42 1,12 1,07 0,99 0,94 0,90 0,86 0,84 0,82 0,79 1,36 1,09 0,95 0,87 0,81 0,77 0,74 0,72 0,70 0,62 0,67 0,79 0,67 0,61 0,56 0,54 0,52 0,50 0,49 0,48 0,48 0,47 0,42 0,38 0,35 0,33 0,32 0,31 0,31 0,30 0,30 0,29 0,29
120°-ный 0,4 0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2 1,3 1,5 45,81 32,09 24,48 19,93 16,96 14,98 13,55 12,49 11,62 10,96 10,03 26,12 18,39 14,12 11,58 9,95 8,81 7,98 7,37 6,90 6,53 6,01 18,41 14,05 10,11 8,31 7,23 6,43 5,87 5,46 5,17 4,88 4,52 12,26 8,63 6,79 5,71 4,98 4,48 4,12 3,86 3,65 3,48 3,25 9,37 6,83 5,42 4,58 4,04 3,66 339 3,18 3,03 2,90 2,72 7,49 5,51 4,68 3,78 3,35 3,06 2,86 2,70 2,57 2,47 2,33 5,79 4,33 3,52 3,04 2,73 2,50 2,35 2,23 2,14 2,06 1,96 4,33 3,29 2,73 2,39 2,17 2,01 1,90 1,81 1,75 1,70 1,60 3,09 2,40 2,03 1,81 1,66 1,56 1,49 1,43 1,38 1,35 1,30 2,11 1,69 1,46 1,32 1,23 1,17 1,12 1,09 1,06 1,03 1,00 1,66 1,36 1,19 1,09 1,02 0,98 0,94 0,91 0,89 0,87 0,85 1,17 0,93 0,88 0,82 0,78 0,75 0,72 0,70 0,69 0,68 0,67 0,66 0,59 0,53 0,51 0,50 0,48 0,47 0,46 0,46 0,46 0,45 0,35 0,32 0,31 0,30 0,30 0,29 0,29 0,29 0,28 0,28 0,28
Для определения k удобно пользоваться обратной величиной
R . называемой термическим сопротивлением теплопередачи; для
плоской многослойной стенки (рис. 9.22)
(9.29)
272
Рис. 9.22. Схе-
ма теплопереда-
чи через много-
слойную пло-
скую стенку
Рис. 9.23. Схема те-
плопередачи через
многослойную ци-
линдрическую стен-
ку
Рис. 9.24. Схе-
ма теплопереда-
чи через ребри-
стую стенку
для многослойной цилиндрической стенки (рис. 9.23)
п
(9.29а)
R
для ребристой стенки (рис. 9.24) при расчете на единицу ребристой
поверхности
2 I 2 • I
X'Г,
(9.296)
ссв
здесь ам и ав — коэффициенты теплоотдачи соответственно от сма-
зочного слоя вкладышу и от подшипника воздуху;
X, — коэффициент теплопроводности стенки,
Вт/(м -°C); 6/ — толщина стенки, м; Fi и F2 — глад-
кая и оребренная поверхности, м2.
Значения ам для масел, соприкасающихся с металлическим вкла-
дышем, изменяются в широком диапазоне — от 100 до 1800 Вт/(м2 - °C)
в зависимости от вязкости масла, скорости движения, температуры,
коэффициента теплопроводности и ряда других факторов. Для ориенти-
ровочных расчетов принимают для минеральных масел с кинемати-
ческой вязкостью от 20 до 50 сСт при скорости скольжения от 1 до
10 м/с ам = 600 4- 1200 Вт/(м2 >°С); большие значения — при меньшей
вязкости и большей скорости.
Значение коэффициента теплоотдачи ав от поверхности корпуса
подшипника воздуху тоже колеблется в широких пределах — от 1 до
60 Вт/(м2-°С). Для шероховатой поверхности чугунного или стального
подшипника при скорости воздуха до 1 м/с принимают ав = 12 -ь
4- 18 Вт/(м2-°С), при обдуве со скоростью v> 1 м/с значение ав =
= 18 Vv Вт/(м2-°С).
273
Значения коэффициента теплопроводности X основных подшипни-
ковых материалов приведены в табл. 9.16.
9.16. Значение X, Вт/(м • °C), в интервале температур 10—100 °C
Чугун серый..............56—64
Сталь углеродистая.......47—56
Алюминий................. 200—210
Дюралюминий..............165—180
Бронза оловянная.........52—70
Бронза алюминиевая .... 75—87
Баббит оловянный.........40—64
Баббит свинцовый.........29—47
Текстолит................0,23—0,35
Капрон ..................0,29—0,34
Для подшипников с металлическим вкладышем величины— и
1 ам л
значительно меньше величины—, поэтому для приближенных расчетов
ав
термическое сопротивление теплопередачи в основном определится
величиной —; с достаточной для практических целей точностью при-
ав
нимаюг
fe = 9-г-16Вт/(м2-°С),
а при обдуве со скоростью v, м/с
k = 16 Вт/(м2 • °C).
Тепло, отводимое циркулирующим через подшипник маслом, опре-
деляют по формуле
(9.30)
где с—удельная теплоемкость масла, Дж/(кг-°С); р — плотность
масла, кг/м3; Q — объем масла, протекающего через подшипник;
/2 — температура масла, вытекающего из подшипника, °C; — темпе-
ратура масла, поступающего в Подшипник, °C.
С увеличением температуры плотность масла р уменьшается, а
теплоемкость увеличивается, однако для минеральных масел с вяз-
костью v = 20 50 сСт при средней температуре 40—80° С произве-
дение ср ~ const.
Средние значения:
р^890 кг/м3;
с 1,92 103 Дж/(кг °C);
ср 1,7 • 10е Дж/(м3 - °C).
Расход масла, м3/с
Q = ^W7M2.
(9.31)
274
9.17. Безразмерный коэффициент qx торцового истечения смазки из нагруженной зоны подшипника [6]
Подшипник ъ d X
0.3 0,4 0.5 0.6 0.65 0,70 0,75 0.80 0.85 0,90 0,925 0,95 0.975 0,99
0,4 0,115 0,162 0,209 0,258 0,282 0,306 0,334 0,348 0,366 0,378 0,380 0,376 0,365 0,314
0,5 0,113 0,158 0,203 0,249 0,271 0,292 0,318 0,330 0,343 0,351 0,348 0,340 0,317 0,268
0,6 0,110 0,152 0,196 0,238 0,259 0,278 0,302 0,310 0,320 0,323 0,318 0,306 0,280 0,230
0,7 0,107 0,148 0,189 0,228 0,247 0,264 0,283 0,291 0,297 0,297 0,289 0,275 0,248 0,200
0,8 0,104 0,144 0,181 0,217 0,234 0,249 0,267 0,272 0,275 0,273 0,263 0,248 0,222 0,177
Полный 0,9 0,100 0,138 0,174 0,206 0,222 0,235 0,250 0,254 0,255 0,250 0,240 0,225 0,199 0,158
1,0 0,097 0,138 0,166 0,196 0,209 0,221 0,235 0,236 0,237 0,230 0,220 0,205 0,188 0,142
1,1 0,094 0,128 0,158 0,186 0,198 0,208 0,220 0,221 0,220 0,212 0,203 0,188 0,165 0,129
1,2 0,090 0,122 0,150 0,176 0,181 0,196 0,207 0,206 0,205 0,197 0,187 0,174 0,151 0,119
1,3 0,087 0,117 0,143 0,143 0,167 0,185 0,194 0,193 0,191 0,183 0,174 0,160 0,140 0,110
1,5 0,080 0,108 0,130 0,150 0,158 0,164 0,172 0,171 0,168 0,160 0,152 0,140 0,122 0,095
0,4 0,114 0,141 0,174 0,206 0,220 0,232 0,240 0,247 0,242 0,235 0,223 0,207 0,174 0,135
Половин- ный 0,5 0,109 0,135 0,166 0,194 0,206 0,217 0,222 0,224 0,218 0,208 0,194 0,178 0,145 0,110
0,6 0,105 0,129 0,156 0,182 0,192 0,200 0,203 0,203 0,196 0,184 0,170 0,153 0,123 0,093
0,7 0,100 0,122 0,147 0,169 0,178 0,185 0,186 0,185 0,176 0,163 0,150 0,134 0,107 0,089
0,8 0,095 0,115 0,138 0,158 0,165 0,170 0,172 0,168 0,158 0,146 0,133 0,118 0,099 0,070
275
276
Продолжение табл. 9.17
Подшипник ь d и.
0,3 ОД 0,5 0.6 0,65 0,70 0,75 0,80 0,85 0.90 0,925 0,95 0,975 0,99
0,9 0,090 0,107 0,129 0,146 0,153 0,157 0,156 0,153 0,143 0,131 0,119 0,106 0,084 0,062
1,0 0,085 0,102 0,121 0,136 0,141 0,145 0,143 0,138 0,130 0,119 0,108 0,096 0,075 0,056
Половин- 1,1 0,081 0,096 0,113 0,127 0,131 0,139 0,132 0,128 0,119 0,109 0,098 0,087 0,068 0,050
ный 1,2 0,076 0,091 0,106 0,118 0,122 0,124 0,122 0,119 0,110 0,100 0,090 0,080 0,063 0,046
1,3 0,072 0,086 0,100 0,111 0,114 0,117 0,114 0,110 0,102 0,092 0,084 0,074 0,058 0,043
1,5 0,065 0,076 0,088 0,098 0,101 0,101 0,099 0,096 0,088 0,080 0,072 0,064 0,050 0,037
ОД 0,078 0,094 0,106 0,115 0,122 0,127 0,131 0,132 0,129 0,122 0,115 0,104 0,079 0,049
0,5 0,072 0,087 0,098 0,106 0,111 0,115 0,117 0,117 0,113 0,105 0,098 0,087 0,064 0,039
0,6 0,067 0,080 0,089 0,096 0,100 0,103 0,104 0,103 0,098 0,090 0,084 0,074 0,054 0,033
0,7 0,062 0,074 0,082 0,087 0,090 0,093 0,093 0,092 0,086 0,079 0,073 0,064 0,046 0,028
0,8 0,057 0,068 0,075 0,079 0,082 0,084 0,084 0,082 0,077 0,070 0,064 0,056 0,041 0,025
120°-ный 0,9 0,053 0,062 0,069 0,072 0,074 0,076 0,075 0,074 0,069 0,062 0,057 0,050 0,036 0,022
1,0 0,048 0,058 0,063 0,066 0,068 0,069 0,069 0,067 0,063 0,057 0,052 0,045 0,032 0,020
1,1 0,045 0,053 0,058 0,061 0,062 0,063 0,063 0,061 0,057 0,052 0,047 0,041 0,030 0,018
1,2 0,042 0,050 0,054 0,056 0,058 0,058 0,058 0,056 0,052 0,047 0,043 0,038 0,027 0,016
1,3 0,039 0,046 0,050 0,052 0,053 0,054 0,054 0,052 0,048 0,043 0,040 0,035 0,025 0,015
1,5 0,034 0,040 0,044 0,046 0,046 0,047 0,047 0,044 0,042 0,038 0,034 0,030 0,022 0,013
В этой формуле b и d в м; q — полный
безразмерный коэффициент расхода масла,
равный сумме трех безразмерных коэффи-
циентов:
<7 = <71 + + <7з> (9.32)
где qlt q2 — коэффициенты расхода масла через
торцы нагруженной и соответственно не-
нагруженной зоны; qa— коэффициент расхода
масла через канавки.
Значения qt приведены в табл. 9.17; вели-
чину q2 определяют по формуле
= <9'33>
где р — коэффициент, определяемый по
табл. 9.18; р№ — давление масла, подаваемого
в подшипник; р — среднее удельное давле-
ние на подшипник.
Величину qa определяют в зависимости от
числа и расположения канавок; для наиболее
типичного случая — половинного подшипника
с двумя закрытыми канавками, расположен-
ными в плоскости разъема (см. рис. 9.17),
qs определяют по формуле
(9.34)
значения •& приведены в табл. 9.18; размеры
а и h см. на рис. 9.17 ив табл. 9.10.
Порядок гидродинамического расчета под-
шипника. Входящие в расчетные формулы ве-
личины Фр, Ц, W, ф, t, Ь, d, /imin, f, WT и
другие взаимно связаны, и изменение одной
их них влечет за собой изменение других.
Поэтому при гидродинамическом расчете под-
шипника обычно выбирают соотношения па-
раметров примерно такие же, как и в анало-
гично выполненных конструкциях, учитывая
при этом технологические и эксплуатационные
особенности проектируемой опоры. В общем
случае исходными для расчета подшипника
величинами являются внешняя нагрузка Рг,
задаваемая по величине и направлению,
и частота вращения шипа; диаметр шипа
определяют, как правило, не из расчета на
прочность, а конструктивно — в соответ-
ствии с размерами вала, найденными пред-
шествующим расчетом, учитывая необходимые
277
радиусы галтелей, размеры буртиков и пр. При выборе отношения^
следует отдавать предпочтение короткому шипу, так как он меньше
деформируется; неточности изготовления и монтажа влияют на работу
опоры меньше, чем в случае длинного шипа; с уменьшением отношения
увеличивается поток масла, проходящего через подшипник, что
благоприятно влияет на теплообмен; с другой стороны, одновременно
снижается несущая способность смазочного слоя, т. е. при прочих
равных условиях относительный эксцентрицитет е увеличивается —
это повышает виброустойчивость шипа в подшипнике, но уменьшает
^min-
В выполненных конструкциях отношение имеет следующие зна-
чения:
Зубчатые и червячные редукторы................................ 0,8—1,2
Тихоходные передачи ... ............................. 1,0—1,2
(до 1,5)
Паровые турбины и турбогенераторы.......................... 0,6—1
Электродвигатели.......... ...................................0,8—1,2
Воздуходувки, центробежные насосы и компрессоры при малых нагрузках
и большой скорости . . ...... 0,4—0,8
Относительный зазор ф выбирают в зависимости от удельной на-
грузки и скорости: чем меньше нагрузка и больше скорость, тем боль-
шее значение принимают для ф. Для выполненных конструкций
характерны такие значения ф:
Тяжелонагруженные подшипники при малой скорости............. 0,0003—0,001
Средние и небольшие редукторы при умеренной нагрузке на под-
шипник и небольшой скорости............................. ... 0,0005—0,0015
Электродвигатели и генераторы............................... 0,001—0,002
Паровые турбины, турбогенераторы .......................... 0,0015—0,0025
Турбовоздуходувки, вентиляторы при небольшой нагрузке и значи-
тельной скорости .......................................... 0,003—0,005
(при малых
диаметрах
цапфы —до 0,01)
При выборе ф следует учитывать фактически получающиеся зазоры
при той или иной посадке.
Вязкость масла р, зависит от сорта масла и от его рабочей темпера-
туры в подшипнике. Чем больше удельная нагрузка и меньше скорость,
тем большей вязкостью должно обладать масло.
Технические характеристики масел для подшипников скольжения
приведены в предыдущем параграфе.
Температура масла оказывает весьма существенное влияние на
вязкость масла, поэтому температурный перепад kt = — tr ограни-
чивают узкими пределами. Так, для подшипников с кольцевой смазкой
(см. рис. 9.4) выбирают AZ « 8 4- 15°С, для подшипников с принуди-
тельной циркуляционной смазкой (см. рис. 9.6) А/ ~ 10 25° С,
для подшипников паровых турбин и турбогенераторов А/ 8 12°С.
Температура входящего масла в большинстве случаев не ниже
278
35—40°С, температура выходящего масла t2 ~60 -р 80°С (до 100°С
для масел высокой вязкости).
Выбор способа смазки зависит от общей системы смазки; например,
для редукторов, зубчатые колеса которых смазываются окунанием,
смазка подшипников осуществляется разбрызгиванием. В турбинах
и генераторах, имеющих общую систему циркуляционной смазки,
подшипники включаются в ту же систему. Для отдельно стоящих
подшипников рекомендуется выбирать способ смазки по следующим
эмпирическим зависимостям:
если J^pv3<Z 16, то может быть применена смазка свободно вися-
щими кольцами;
если j/py3 16-Г-32, то применима смазка свободно висящими
или закрепленными кольцами (или дисками) при условии искусствен-
ного охлаждения;
если ргру3>32, то необходима циркуляционная смазка под дав-
лением;
здесь р — среднее давление, Н/мм2; v — скорость, м/с. Приведен-
ные зависимости являются ориентировочными; в процессе расчета
надо уточнять систему смазки и вносить соответствующие коррективы.
Шероховатость рабочих поверхностей шипа и вкладыша назначают
в зависимости от требуемой точности, условий эксплуатации и предпо-
лагаемых значений hmin или %.
Пример 1. Рассчитать подшипник вала цепной передачи при следующих усло-
виях: нагрузка на подшипник Рг — 22 000 Н; частота вращения вала п = 500 об/мин;
диаметр шипа d = 150 мм; расстояние между серединами опор L — 750 мм; макси-
мальный прогиб в середине вала у0 = 0,05 мм.
Передача должна работать в закрытом помещении при температуре воздуха
tB = 20° С.
Решение. Принимаем отношение = 1; b = d = 150 мм. Определяем сред-
нюю удельную нагрузку:
Р 22 000
р = = 0,98 Н/мм2=0,98 • 106 н/м2.
bd 150 • 150 '
Определяем скорость скольжения:
л dn
С==60-1000
3,14-150-500
60• 1000
3,93 м/с;
угловая скорость
v 3,93 _0 .
ш=7 = 75Лб^ = 52’4 рад/с;
проверяем критерий:
= ^0,98-З.ЭЗ3 =7,8;
при V pv3 < 16 допустима кольцевая смазка. Выбираем тип подшипника по рис. 9.4.
Задаемся относительным зазором 4' = 0,001 -s- 0,002 и подбираем ближайшую
подходящую посадку 0 150—; отверстие 0150м’040; вал 0 150;§;J|J;
наибольший зазор
smax=0,040 + 0,210 = 0,250 мм;
279
наименьший зазор
smin=0-150 мм;
следовательно,
'Ртах = -^- = 0,00167;
Вкладыш чугунный с заливкой баббитом Б16. Назначаем 8-й класс шерохова-
тости поверхности шипа и вкладыша, высота неровностей Rz = 3,2 мкм. Прогиб
шипа в подшипнике по формуле (9.24)
!У(,= 1,6^-</гпах = 1,6 *|5.0,05 = 0,016 мм.
Критическая толщина масляного слоя — по формуле (9.23)
^кр — ^zi + ^za+1/о — 3,2-}-3,2-]-16 = 22,4 мкм.
Выбираем для смазки масло индустриальное 45 с кинематической вязкостью
v60 = 45 сСт. Динамическая вязкость масла при той же температуре (см. рис. 9.18)
Но = 0,04 Н-с/м2. Для расчета подшипника надо знать вязкость масла при рабочей
температуре, определяемой из уравнения теплового баланса; но величины, входящие
в это уравнение, в свою очередь, тоже зависят от температуры. Такие задачи решают
методом последовательных приближений или графическим способом.
Для подшипника с кольцевой смазкой без принудительной циркуляции масла
условие теплового равновесия выражается формулой
WT=W = № , (9.35)
/мп’ '
т. е. все тепло трения отводится маслом, протекающим в зазоре между шипом и
вкладышем, и это же количество тепла должно передаваться корпусом подшипника
в окружающую среду. Расчет подшипника следует проводить для двух предельных
случаев — при минимальном и максимальном зазорах. Последовательность расчета
и численные результаты приведены в табл. 9.19, из анализа которой следует, что
вслучаефт;п уравнение (9.35) справедливо при /ср »65°С; при этой температуре
й 36
X = 0,52; ftrain = 36 мкм; 7^ = 22^ >.6,
Аналогичный расчет, выполненный для максимального зазора smax=250 мкм и
h ,
соответственно фтах = 0,00167, дает t = 62° С; х = 0,73; /imin =34 мкм; -г— =
р “кр
= 1,5. Найденные значения х и /ср вполне приемлемы.
Если расчет покажет, что уравнение (9.35) при выбранных параметрах под-
шипника не может быть удовлетворено, то следует просчитать другие варианты,
b
например, заменив марку масла, выбрав иное отношение —, взяв другую посадку.
Для снижения и стабилизации температуры масла в резервуаре подшипника приме-
няют охлаждение или термостат; расчет охлаждения масляной ванны с помощью
змеевика приведен в гл. 10.
Расчет подшипника скольжения с принудительной смазкой под
давлением. При подаче масла в подшипник насосом циркуляционный
расход его может быть значительно увеличен в зависимости от давления
масла на входе р„. Увеличение расхода оказывает существенное
влияние на температуру масляного слоя и на те величины, которые
от этой температуры зависят.
280
9.19. Расчет подшипника при ipmin = 0,001; smin=150 мкм
Определяемые величины Обозначение и расчетная формула Численные значения
Средняя температура сма- зочного слоя в подшип- нике /ср °C (задаемся) 50 55 60 65
Динамическая вязкость р. Н с/м2 (по рнс. 9.20) 0,04 0,032 0,025 0,02
Безразмерный коэффи- циент наг руженн ости подшипника Фр=^ к цсо 0,047 0,585 0,75 0,93
Относительный эксцентри- цитет % (по табл. 9.14) 0,35 0,40 0,46 0,52
Минимальная толщина слоя, мкм S 5' II bOj и Г 49 45 40 36
Коэффициент запаса ^min ^кр 2,2 2,0 1,8 1,6
Безразмерная характери- стика трения (по табл. 9.15) 7,25 5,97 5,10 4,2
Коэффициент трения 0,007 0,006 0,005 0,004
Тепловыделение от тре- ния, Вт 590 510 420 350
Безразмерные коэффи- циенты (по табл. 9.17) Р (по габл. 9.18) 0,094 0,210 0,102 0,227 0,112 0,250 0,120 0,280
. 1 d \2 рм V <? = <?1 + <72 0,011 0,105 0,013 0,115 0,019 0,131 0,027 0,146
Количество масла, про- текающего через под- шипник, м3/с 0,009 0,010 0,012 0,013
Разность температур на выходе и входе масла в зазор [при Ср «з 1,7 X X Ю« Дж/(м3 • °С)[ cpQ 38 30 20 16
Температура масла в ван- не t -t-t 31 40 50 57
Теплопередача от корпуса подшипника в окру- жающую среду, Вт [А = = 16 Вт/(м2. °C); F = — 0,59 м2—приближен- но по чертежу; /в = = 20° С] №п = /гД(4.-*в) 104 189 283 354
281
Методика расчета варьируется в зависимости от того, какие пара-
метры заданы или выбраны конструктором и какие подлежат опре-
делению. На практике обычно встречаются следующие случаи:
а) даны Рг, п, b, d, чр>, сорт масла, t и А/; требуется определить
давление масла на входе рм, при котором обеспечивается жидкостное
трение и удовлетворяется уравнение теплового баланса;
б) давление масла рм задано, известны и остальные необходимые
для расчета параметры, за исключением t, которую надо найти из
теплового расчета, после чего проверить hmin и у.
Значительно реже приходится определять оптимальные значения
относительного зазора, так как в практике проектирования узлов
трения выработались определенные рекомендации для ф в зависимости
от типа машины, то же можно сказать и в отношении выбора сорта
масла, величины Ы перепада температур и средней температуры
масляного слоя. Поэтому ограничимся рассмотрением двух примеров
расчета подшипника с постоянной нагрузкой. О расчете подшипников
жидкостного трения при переменной по величине и направлению
нагрузке см. работу [23[.
Пример 2. Определить требуемое давление масла на входе в подшипник генера-
тора прн следующих данных: нагрузка на подшипник Рг = 19 200 Н; частота враще-
ния п = 1500 об/мин; диаметр шипа d = 200 мм; ~ = 0,8; относительный зазор
ф = 0,002; смазка осуществляется маслом турбинным 22; средняя температура /ср =
= 50° С; = 10° С. Класс шероховатости поверхностен шипа н вкладыша —8-й.
Прогиб вала утах = 0,11 мм = ПО мкм. Расстояние между опорами L = 1600 мм
Решение. Определяем среднее удельное давление:
Р 19 200
Р = fd = 16<Г2бб = °’6 Н/“2 = 0-6 •100 «А’2-
Находим угловую скорость вала:
пп 3,14-1500 1с
®=30 =—30— = 157 рад/с-
Для масла турбинного 22 имеем при t= 50° С; v-n = 22 сСт; по рис. 9.18 на-
ходим Що — 0,02 Н-с/м2.
Определяем коэффициент
нагруженности подшипника:
рф2 0,6 - Юо - 22 • 1О~6
Фр~ ~ 2- 10 2.157
0,766.
Находим по табл. 9.14 и рис. 9.25 % = 0,54. Тогда
Лпип = | (1 —Х) = 0,00^' 200 (1-0,54) = 0,092 мм = 92 мкм.
Для определения ftKp находим у0 по формуле (9.24):
»о=1.б|ртах= 1,6^-110=17,6 мкм
(в случае самоустанавливающегося подшипника прогиб ув не принимается в расчет);
Лкр=Pzi"Т — 5,2 -|- 3,2-ф17,6 = 24 мкм
282
Коэффициент надежности
^min _ о
Лкр ~24~3’8-
Из табл; 9.15 или рис. 9.25 находим
L =5,1; /=5,1-0,002 = 0,0102;
ф '
W 7=/Ргс=0,0102 - 19 200 -15,7=
= 3020 Вт;
здесь
v = 0,5dco=0,5 - 0,2 -157 = 15,7 м/с.
Примем (см. стр. 274)
ср 1,7 • 10е Дж/(м8 • °C).
Определяем по формуле (9.30)
1)7М=ср Д(<?= 1,7 -10» • 10Q = 1,7 - 10’Q Вт.
Вычисляем по формуле (9.28)
W'„=feFo (4i 4)>
здесь Fo — часть поверхности корпуса
подшипника, примыкающая к вкладышу и
омываемая снаружи воздухом; принимаем ориентировочно по рис. 9.6 Fo — 0,15 м2;
прн охлаждении в спокойном воздухе принимаем k= 9 Вт/(м2-°С);
/м = /ср=50°С; 4=20°С.
Следовательно,
№'„ = 9-0,15-30^40 Вт.
Так как
ТО
№'м = №'7—Мп = 3020 — 40 = 2980 Вт.
Отсюда по формуле (9.30)
“'•|75'
но по формулам (9.31) и (9.32)
л . М2ф<о
<2 — (ft + ft + ft) —2— ’
вычисляем
М2ф<о 0,16-0,22.0,002.157 n пп, ,,
—==—-’-----------2---------0,001 м8/с;
(9.36)
следовательно,
, , 0,175-10-3
ft+ft+<7з — —0 001-----—0,175.
По табл. 9.17 (см. также рис. 9.25) находим при расчетном %= 0,54 значение
ft = 0,147; по формуле (9.32) определяем
?2=РФ (-1? Р* = 0,294 • 0,766 Р» = 0,352
И\Ь J р \ 160,' р р •
здесь Р = 0,294 (см. табл. 9.18 и рис. 9.25).
283
По формуле (9.34)
<7з= -&Ф,
принимаем h = 0,15 d; а = 0,1 b; по табл. 9.18 (см. также рис. 9.25) находим & =
= 12, тогда
q3=0,12.0,766
0,15 (10 —2)^ 0,172 — .
\160y ' р р
Подставляя найденные значения ?1( и qs в уравнение (9.36), получим
0,147 + 0,352 + 0,172 —=0 175,
Р Р
отсюда
рм_ 0,175-0,147
р 0,352 +0,172 ’
Искомое давление масла иа входе
рм=0,052р=0,052 - 0,6 = 0,031 Н/мм2.
Одна из конструкций подшипника с принудительной смазкой под Давлением
рм = 0,25 -J- 0,50 бар показана на рис. 9.6. Давление масла регулируют калиброван-
ной шайбой, устанавливаемой на линии подачи масла. Вкладыш самоустанавливаю-
щийся с баббитом.
Пример 3. Рассчитать подшипник скольжения турбогенератора при следующих
данных: Рг = 36 500 Н; п — 1500 об/мии; d — 250 мм; Ь = 200 мм; ф = 0,002.
Смазка маслом турбинным 22; рм = 1 бар. Допускаемый температурный перепад
А/ = 10 = 15° С. Расстояние между опорами L = 1800 мм: максимальный прогиб
Утах ~ мм = 180 мкм.
Решение. Определим температуру масляного слоя в подшипнике по уравне-
нию теплового баланса WT = ^„-г Так как U7n в данном случае весьма мало
по сравнению с 1Гн, то с достаточной точностью можно принять WT = W+ Ход
решения такой же, как и в примере 1, т. е. задаемся рядом значений t и строим кри-
вые WT и 1F в зависимости от t, точка пересечения этих кривых определяет иско-
мый режим работы подшипника. Предварительно вычислим параметры, ие связан-
ные с температурой:
Рг 36 500
P~~bd~
ЛП
w~30 “ 30
p = 0,5dw=0,5 - 0,25-157=19,6 м/с.
Как и в предыдущем примере, примем произведение ср — 1,7-10’ дж/(м3-°С).
Для определения % в зависимости от Фр, а величин , qx, р и & в зависимости
от % можно воспользоваться рис. 9.25 (см. пример 2), так как и в данном примере
b 200 „ о л
отношение -= =.-7;=0,8. Последовательность расчета и результаты вычислении
a 250
приведены в табл. 9.20.
Строим кривые WT и W в зависимости от t и для точки пересечения находим
(рис. 9.26) t т 45° С;
1Гг=1Гм = 7220 Вт; у =0,53;
ftmln=0,5s(1—x) = 0,5-0,002-250 (1—0,53)=0,117 мм = 117 мкм.
оЗГОГ-0-73-'“,н/",:
3,14-1500 ,,,
------— 157 рад/с;
284
8.20. Гидродинамический расчет подшипника скольжения (по данным примера 3)
Определяемые величины Средняя температура масла, °C
40 45 50 55
р, Н-с/м2, по рис. 9.18 0,033 0,025 0,020 0,016
Фр=^ 0,56 0,74 0,93 1,16
р р,со
X по рис. 9.25 0,46 0,53 0,59 0,64
по рис. 9.25 6,50 5,15 4,25 3,65
'-(4h 0,013 0,0103 0,0085 0,0073
W\p=fPo, Вт 9120 7230 5980 5150
<?! по рис. 9.25 0,128 0,146 0,156 0,163
Р по рис. 9.25 0,255 0,290 0,316 0,344
% по формуле (9.33) 0,031 0,046 0,063 0,086
0 по рис. 9.25 0,112 0,113 0,124 0,128
qa по формуле (9.34) 0,016 0,023 0,030 0,038
9=91 + 92 + % 0,175 0,215 0,249 0,287
Q, м3/с. по формуле (9.31) 0,000345 0,00042 0,00049 0,00056
WK, Вт, по формуле (9.30) 5900 7250 7950 9650
Для определения йкр находим прогиб шипа
Уч = 1’6 £ Утах\
180 = 32 мкм-
Высота неровностей 7?г1 = — 3,2 мкм;
Лкр = Лг1 + = 3,24-3,2+ 32 = 38,4 мкм.
Коэффициент надежности
^min___ 117 g
*kd — 38,4
Приведем вариант расчета при том же перепаде Д( = 10° С, но при давлении
масла на входе вдвое меньшем: рм = 0,5 бар. В этом случае все коэффициенты оста-
нутся прежними, за исключением q2 и qs, которые
уменьшатся вдвое, как и давление рм: wtBm
t 40 45 50 55 7,5-W1
92 0,016 0,023 0,032 0,053
9з 9 = 91 + 9г + 9з <2 W'm 0,008 0,152 0,30 5140 0,012 0,181 0,35 5980 0,015 0,203 0,40 6850 0,019 0,225 0,44 7500 уг-io1 4- Рис. 9
0 45 50 55 °В 26. График к примеру 3
285
Построив кривую 1ГМ (рис. 9.26), найдем в точке пересечения ее с кривой IVг
t= 48° С;
WT=W =6,53-Юз Вт;
т м ’ ’
Х = 0,57;
Amin=0,250 (1 — 0,57) = ПО мкм;
^min _ ИО
Лкр “ 38,4“ Z’S'
f1 = 43°C; <г = 53°С.
Аналогично рассчитывают подшипники и в тех случаях, когда
требуется найти оптимальные значения 4> или подобрать сорт масла.
Глава Ю
КОНСТРУИРОВАНИЕ
ДЕТАЛЕЙ РЕДУКТОРОВ
И КОРОБОК ПЕРЕДАЧ.
СМАЗКА ЗУБЧАТЫХ
И ЧЕРВЯЧНЫХ ЗАЦЕПЛЕНИЙ
§ 10.1. КОНСТРУИРОВАНИЕ ЗУБЧАТЫХ
И ЧЕРВЯЧНЫХ КОЛЕС И ЧЕРВЯКОВ
Типовые конструкции металлических колес
При конструировании зубчатого колеса следует учи-
тывать материал, из которого оно будет изготовлено, требуемый диа-
метр и способ получения заготовки.
Стальные зубчатые колеса диаметром до 150 мм обычно изготов-
ляют из круглого проката, но предпочтительнее применять кованые
или штампованные заготовки, имеющие более высокие механические
характеристики.
Шестерни делают часто за одно целое с валом, если расстояние
х от впадины зуба до шпоночного паза меньше 2,5mz для цилиндричес-
ких и l,6mZf для конических шестерен (рис. 10.1, а, б).
Цилиндрические зубчатые колеса диаметром до 400—500 мм (в от-
дельных случаях до 600 мм) можно выполнять коваными, штампованны-
ми, литыми или сварными.
Типовые конструкции зубчатых колес и основные соотношения
их элементов даны на рис. 10.2—10.11. Конструкцию кованых зубча-
тых колес (рис. 10.2) применяют при наружном диаметре колеса
da sS 200 мм или при нешироких колесах (ф„ sg 0,2) диаметром da
до 400 мм. Кованые и штампованные колеса даны на рис. 10.3, а и б,
а литые — на рис. 10.4—10.6. Форма и соотношения элементов спиц
для литых колес приведены на рис. 10.7. Спицы эллиптического сечения
применяют в малонагруженных, спицы крестообразного и таврового
сечения — в средненагруженных, а спицы двутаврового сечения —
в тяжелонагруженных передачах. Зубчатые колеса большого диаметра
(da 600 мм) иногда делают бандажированными (рис. 10.8): венец —
стальной кованый (бандаж), а колесный центр — из стального или
чугунного литья. Венец сопрягается с колесным центром посадкой
с гарантированным натягом. Для большей надежности в плоскости
соединения венца с центром ставят винты; соединения проверяют
на смятие по материалу колесного центра: при стальном колесном
центре [о]см «S 0,3 о,, при чугунном [о]сн 0,4 ови.
При индивидуальном изготовлении колеса иногда делают сварными
(рис. 10.9).
287
Рис. 10.2. Кованое цилиндрическое зубчатое колесо:
da 200 мм; dCT = 1.6 dB; ZCT > Ь при соблюдении усло-
вия 1СТ — (1,2 ч- 1,5) dE; Со = 2,5 тп, но не менее 8—10 мм;
п = 0,5 тп; £>отв = 0,5 (£>n + dCT); dOTB = 12 ч- 20 мм: при
малых da отверстия не выполняют
Рис. 10.3. Цилиндриче-
ские зубчатые колеса:
а — штампованное; б— кова-
ное; da 500 мм; t/CT =
— 1,6 dE; /ст при соблю-
дении условия /ст =
= (1,2 + 1,5) dB; бо =
= (2,5 -ь 4) тл, но не менее
8—10 мм; п = 0,5 тп. £>отв=
= 0,5 (О„ + «1ст); ’ dOTB =5,
= 15 ч- 25 мм; с = (0,2 ч- 0,3)6
для штампованных н
^0,3 b для кованых колес
Рис. 10.4. Литое цилиндрическое зуб-
чатое колесо с прямым диском:
$00 мм> 6'ст ~ 1-6 Для стального
литья; dCT = 1,8 dB для чугунного лнтья;
lCT b при соблюдении условия /ст
> (1,2 - 1,5) 6о = (2,5 -ь 4) тп, но
не менее 8—15 мм; п — 0,5 тл; £>отв =
= 0.5 (£>о ^ст^’ ^отв ~ 0,25 (£>0 — dCT)i
0,2 Ь
Рис. 10.5. Литое цилиндрическое зуб-
чатое колесо с наклонным диском:
da 600 мм. Размеры элементов см. на
рнс. 10.4
288
Рис. 10.6. «Питое цилиндрическое зубча-
тое колесо:
da "* *000 мм; b 200 мм; dCT *= 1,6 dB
для стального литья; dCT ~ 1,8 для чугун-
ного литья; lCT b при соблюдении усло-
вия /ст = (1,2 ч- 1,5) 60 — (2,5 ч- 4) mni
но не менее 8—15 мм; п — 0,5 т„; с — —но
* 5
не менее 10 мм; s » —# но не меиее 10 мм;
б
е = 0.8 6 ; Н~ 0,8 dB; Я = 0,8/7; Л —
вписанная дуга окружности
Рис. 10.7. Формы сечения спиц литых зубчатых колес:
а — эллиптическая; б — тавровая; в — крестообразная; г, д — двутаврован
Вариант для прямозубых
и косозибых колес
Рис. 10.8. Бандажиро-
ванное зубчатое ко-
лесо:
da свыше 600 мм; dCT =*
= l,6dB для стального
литья# dCT = 1,8 dB для
чугунного литья; 7СТ
при соблюдении уело*
вия ZCT= (1,2 -г- 1,5) rfB;
с — 0,15 b', /»о ~ 4 mnt
но не менее 15 мм; t =
= 60; 0,8 6о;
«а (0,05 ^0,1) dB; lt =
= 3 dt. Прн b 300 мм
применяют 2 бандажа
10 Зак. 220
289
При диаметре зубчатых колес
da 1500 мм для удобства сборки
их делают разъемными — из двух
половин.
Конические зубчатые колеса
изготовляют коваными, штампо-
ванными (рис. 10.10) и литыми
(рис. 10.11).
Бандажированные и сварные
конические зубчатые колеса при-
меняют сравнительно редко, по-
этому конструкции их не приво-
дятся.
В дисках цилиндрических и ко-
нических зубчатых колес предус-
матривают отверстия (dOTB), исполь-
зуемые для закрепления при обра-
ботке на станках и при транспор-
тировке.
Неметаллические зубчатые ко-
леса из пластмасс (текстолит, дре-
Рис. 10.9. Сварное зубчатое колесо:
^ст = ^ст = (1,2 ч- 1,5) rfB; =
= 2,5 но не менее 8 мм; х — 5 мм:
с — (0,1 -г- 0,15) Ь, но не менее 8 мм;
s= 0,8 с; ^отв ~ 6,5 Н- dCT): ^отв
15 20 мм. Катеты швов: 0,05 dB;
Kg= 0,1 dB, но не менее 4 мм. Ребра
приваривают швом Kg
вопластики, полиамиды и т. п.) работают бесшумно, что имеет особое
значение при больших скоростях. Чтобы понизить коэффициент
трения между зубьями, одно зубчатое колесо делают из пластмассы,
а второе выполняют металлическим. Пластмассы обладают сравнитель-
но небольшим сопротивлением срезу и смятию, поэтому в большинстве
случаев для передачи момента применяют стальную втулку — ступицу,
прочно соединяемую с телом колеса. В небольшие колеса ступицу
устанавливают при формовании. Для лучшего сцепления наружную
поверхность ступицы делают рифленой (накатанной) (рис. 10.12).
Для предотвращения выкрашивания и откалывания отдельных слоев
Рис. 10.10. Конические зубчатые колеса:
а— штампованное; б — кованое; dae до 500 мм; dCT =
'ст — (1.0 + 1.2) da: = (3 + 4) тп, но не менее 10 мм; с =
-=<0.1 -в 0,17) Re. Размеры D0TB и dcftB определяют конструктивно
290
Рис. 10.11. Литое коническое зубчатое
колесо:
Стальная Втулка
Рис. 10.12. Зубчатое
колесо из пластмассы
со стальной втулкой
(ступицей), установ-
ленной при формо-
вании колеса
dae 300 мм; dCT = 1.6 dB — стальное литье;
dCT= 1,8 dB — чугунное литье; ZCT = (1 -t-
-» 1,2) dB; 6о=(3 + 4) т, но не менее 10 мм;
с= (0,1 + 0,17) Re, но не менее 10 мм; s =
= 0,8 с, но не менее 10 мм; DOTB и dOTB по
конструктивным соображениям
Рис. 10.13. Зубчатое колесо (шестерня)
из пластмассы со стальной сборной сту-
пицей
Рис. 10.14. Сборное зубчатое колесо
1 — венец из секций древесного пластика;
2 — колесный центр; 3 — прижимное кольцо
10»
291
пластмассы края зубьев защищают стальными дисками (рис. 10.13).
Толщину диска рекомендуется принимать равной половине модуля,
но не более 8 мм и не менее 2 мм. Материал дисков — сталь Ст2, СтЗ.
Зубчатые колеса больших размеров обычно делают сборными из
отдельных секций (рис. 10.14).
Ширину зубчатого колеса из пластмасс принимают равной ширине
сцепляющегося с ним металлического колеса или несколько меньше
во избежание местного износа и выработки зубьев.
Червяк в большинстве случаев делают за одно целое с валом;
витки червяка могут быть получены фрезерованием, если do > d/x
(рис. 10.15, а), или нарезаны на токарном станке, если d0 <dfl, т. е.
имеется свободный выход резца.
Червячное колесо для закрытых передач в большинстве случаев
выполняют составным из бронзового венца и чугунного центра, соеди-
няемых посадкой с натягом (рис. 10.16, а и б), либо болтами, постав-
Рис. 10.15. Конструкция червяков:
а—с фрезерованными витками; б — с витками, нарезанными на токарном станке
Рис. 10.16. Конструкции червячных колес:
а и б — с напрессованным венцом; е — с привернутым венцом; г — цель-
нолитое червячное колесо из чугуна; д — фиксация напрессованного
венца болтом; ~ б2 = 2m, не менее 10 мм; с?ст= (1,6 1,8)
ZCT= (1,2 * 1,8) dB; <*винта= (1.2 * 1,5) m; /винта== (0,3 - 0,4) b2
292
Рис. 10.17. Венец, отлитый иа чугунном колесном центре:
а — с боковыми скосами; б — с прорезями
ленными без зазора (рис. 10.16, в). В первом случае в плоскости стыка
обычно устанавливают 4—6 винтов, как показано на рис. 10.16, а.
Иногда вместо винтов устанавливают болты, причем выступающую
часть нх спиливают (рис. 10.16, д). Соединение по рнс. 10.16, а, д
проверяют на смятие по материалу венца (бронзе) при стальном колес-
ном центре и по материалу колесного центра, если он выполнен из
чугуна. Допускаемое напряжение смятия [о]см « 0,3 от для бронзы
и [о]см = 0,4 ови для чугуна. Болты по рис. 10.16, в проверяют на срез
[т]ср — 0,25 от и стенки отверстий на смятие [о]см — 0,3от для бронзы,
а при чугунном колесном центре Ысм = 0,4 ави.
Венец соединяют с центром червячного колеса без болтов — от-
ливкой бронзового венца в литейную форму, в которую заранее уста-
навливают чугунный центр колеса (рис. 10.17, а и б). Для гарантии
против проворота венца на боковых поверхностях чугунного центра
делают пазы, заполняемые металлом венца при его отливке.
Форма обода для червячного колеса, выполняемого из чугуна без
насадного венца, показана на рис. 10.16, г. Остальные данные о разме-
рах венца приведены в § 10.2.
Примеры выполнения рабочих чертежей
При выполнении рабочих чертежей особое внимание следует обра-
щать на полноту и правильность простановки размеров с указанием
соответствующих допусков и чистоты обработки отдельных поверх-
ностей. Правильный и рациональный выбор класса шероховатости
для той или иной поверхности детали представляет довольно сложную
задачу и требует значительного опыта.
Для облегчения этой задачи в табл. 10.1 дана связь классов шеро-
ховатости с назначением обрабатываемой поверхности, а в табл. 10.2
дана зависимость классов шероховатости поверхности от методов
обработки. При выполнении чертежей литых деталей необходимо преду-
смотреть литейные уклоны, определенной величины радиусы скругле-
ний, переходы и т. п. Соответствующие рекомендации приведены
в табл. 10.12 и 10.13.
На чертежах зубчатых колес, червяка и червячного колеса тре-
буется определенная система простановки размеров. Кроме того,
чертеж должен иметь характеристику и допуски на зацепление. На
рис. 10.18 и 10.19 приведены рабочие чертежи с учетом требований
ЕСКД (ГОСТ 2.403—75) цилиндрического и конического колес, а на
293
10.1. Примеры назначения шероховатости поверхности детален машин
Класс ше- роховатос- ти Обозначение * Характеристика поверхности
— У Черные, но ровные поверхности отливок, поко- вок, проката
1-й 2-й Rz Зачищенные поверхности отливок и поковок и пр.
3-й Rz80^/ Поверхности отверстий нз-под сверла, зенковок, фасок и пр. Нерабочие поверхности деталей. Посадочные, нетрущнеся поверхности изделий не выше 5-го класса точности (Л5, С5, Х6)
4-й Точно прилегающие поверхности. Отверстия после черновой развертки. Поверхности под шаб- рение. Посадочные нетрущнеся поверхности изде- лий не выше 3-го класса точности (А3, С3, Х3, Ал, С4, Х4)
5-й Rz2ti/ Отверстия в неподвижных соединениях всех классов точности. Отверстия в трущихся соедине- ниях 4-го и 5-го классов точности. Боковые по- верхности зубьев зубчатых колес 8-й и 9-й сте- пени точности
6-й 2^/ Отверстия в трущихся соединениях 2-го и 3-го классов точности. Отверстия под подшипники ка- чения. Поверхности валов в трущихся соединени- ях 4-го и 5-го классов точности. Поверхности чер- вяков и ходовых винтов. Боковые поверхности зубьев зубчатых колес 7-й степени точности
294
Продолжение табл. 10.1
Класс ше- рохова- тости Сбозначение * Характеристика поверхности
7-й Поверхности валов в трущихся соединениях 2-го и 3-го классов точности. Поверхности валов под подшипники качения класса точности 0. Бо- коваи поверхность зубьев зубчатых колес 7-й и 6-й степени точности
8-й оз/ То же, для более ответственных поверхностей. Поверхности валов под подшипники качения 2-го класса точности
9-й /** 0,31/ Весьма ответственные трущиеся поверхности валов либо других охватываемых деталей
* Обозначение шероховатости приведено по ГОСТ 2.309—73. В обозначении класса шероховатости приведены максимальные значения параметров шероховатости для данного класса согласно приложению 1 ГОСТ 2789—73. * * Значение параметра шероховатости для 9-го класса.
рис. 10.20 и 10.21 — червяка и червячного колеса. На рис. 10.21 пока-
зано, какие размеры необходимо поставить для обработки венца после
его сборки с червячным центром и для нарезания зубьев. Остальные
размеры червячного центра и венца указывают на рабочих чертежах
этих деталей.
Размеры конических зубчатых колес, необходимые для рабочего
чертежа, определяют по формулам, приведенным в гл. 3.
Комплекс контролируемых параметров зацепления указывают
согласно ГОСТ 2.403—75. На приведенных здесь чертежах (рис.
10.18—10.21) эти параметры не даны.
§ 10.2. КОНСТРУИРОВАНИЕ КОРПУСОВ РЕДУКТОРОВ
И КОРОБОК ПЕРЕДАЧ
Корпус служит для размещения в нем деталей передач, для обес-
печения смазки передачи и подшипников, предохранения деталей
от загрязнения и для восприятия усилий, возникающих при работе;
он должен быть достаточно прочным и жестким, так как при значи-
295
296
10.2, Зависимость классов шероховатости от методов обработки
Класс шерохо- ватости Обозна- чение * Литье, ковка, штамповка, прокат Метод обработки
Стро- гание Точение и растачива- ние Сверление и зенке- рование Фрезеро- вание ци- линдриче- ское Фрезеро- вание торцовое Раз- вер- тыва- ние Зубо- фрезе- рова- ние Слесарная обработка Протяги- вание и прошива- ние Шлифова- ние Хо- нинго- вание Полиро- вание и доводка
чер- новое чисто- вое чер- новое ! чисто- вое тон- кое чер- । новое чисто- вое обди- ! р оч- ное ЧИСТО- : вое обди- роч- ное чисто- вое | чисто- вое 6 «о к о сх и опили-1 вание 1 ю а □ о. за- шку- рива- ние рядо- вое 6 О 0J sg гру- бое чисто- вое^ тон- кое | чисто- вое чисто- вое эер- | к ал fa- il ое
1-й 2-й 3-й 4-й 5-й 6-й 7-й Rz32^/ RzKO// Rztw/ RzW^ V у & X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X X
Продолжение табл 10,2.
Класс шерохо- ватости Обозна- чение * Литье, ковка, штамповка, прокат Метод обработки
Стро- гание Точение и растачива- ние Сверление и зенке- рование Фрезеро- вание ци- линдриче- ское Фрезеро- вание торцовое раз- вер- тыва- нне Зубо- фрезе- рова- ние Слесарная обработка Протяги- вание и прошива- ние Шлифова- ние Хо- нинго- вание Полиро- вание и доводка
чер- новое чисто- вое чер- новое чисто- вое ; тон- кое | чер- новое чисто- вое в » к? о ф о о. к чисто- вое в • И ЕГ Ф vo о о О СХЯ чисто- вое , чисто- 1 вое рядо- вое опили-1 вание | шаб- рение за- шку- рнва- ние рядо- вое чисто- вое ЙТ 1 бое 6 S ® а © а а а £ ЧИСТО-1 вое чисто- вое Q.4 ф ф га о а а К
8-й 9-й 10-й 11-й 12-й 13-й 14-й У Rt0p5/ См. примем ание к та 5л. 0.1. X X X X X X X X X X X X X X X X X
297
298
ВО
50
5
1,25
Jx45°
2 Траски
W
2 фаски
2x45°
2 Траски
1,25
Юн Шао
Ризрав.
Консулып.
Rz80,
V(v)
Модуль нормальный
Число зубьев________
Угол наклона зуба
Направление зуба
Исходный контур
Коэффициент смещения
исходного контура
Степень точности по
ГОСТ 1643 - Т2
тП
г
fi
2,5
118
3°42'
Левое
ГОСТ
13755-ВВ
О
6-0
1. Неуказанные предельные отклонения размеров:
охватывающих по А7, охватываемых по В7,
прочих ±J допуска в кл.
2. Термообработка-нормализация Н8200...НО
fioto-
(jama
Зубчатое колесо
Сталь Я)
лит. Масса масштаб
/7 ист 1 | листов 1
Рис. 10.18. Рабочий чертеж цилиндрического зубчатого колеса
299
Вид А поВернуто
М2:1
। Рабочий профиль
л?
ЗВ,7
44
59,3
3x45°
2 фаски
2x45°
2фаски §
V(v)
Модуль торцовый тр 2,5
Число зудьеб Z ВО
Тип зуба - Прямей
Исходный контур - ГОСТ „ 13754-6R
Коэффициент смещения исходного контура £ 0
Угол делительного конуса. S 7Г35'
Угол Впадин конуса Sf В9°20>
Степень точности по ГОСТ 1758 - 58 - Ст.8Х
Обозначение чертежа сопряженной шестерни -
t Неуказанные предельные отклонения размеров:
охватывающих по А7, охватываемых по В7,
прочих 1 допуска 8 кл.
I. Острые кромки притупить В ~ 0,3.
3. Термообработка-нормализация НВ200...220
нзм. Лист №докум. подл. Дата
Разраб.
Консульт.
Сталь 50
Коническое
зубчатое колесо
Лит. масса Масштаб
77
Лист | листов
Рис, 10.19. Рабочий чертеж конического зубчатого колеса
300
320
Модуль ____
число Витков червяка
Тип червяка_________
Угол подьема линии Витка
Направление Витка
Ход Витка
т
X
Pz
5
2
Архимедов
1Г№'38'’
Правое
31,4
ЯМ
V(V)
Параметры профиля витков Угол прщриля 20°
Высота Витка 1Т
Степень точности па ГОСТ 3625 -58 Ст.8Ш
ОЦЗ
00,5
^20,
Рабочий
профиль
1x45°
Траски
04
W
5
50
55
1. Неуказанные предельные отклонения размеров:
охватывающих по Л7, охватываемых по By,
прочихj допуска 8кл.
2. Острые кромки притупить Я^О.З.
3. Одрадотка В центрах. Отверстие центровое В5
Г0СТ14034-В8 с двух сторон. Центры сохранить.
,^.Термообработка-Витки калитьт.В.ч. Н8С45...50
из»
yum
Разраб.
НЧвкум.
Квнсушп.
8,40.
/]gg?|dg|
Д
Подп.
Пат
Червяк
Сталь 45
Лит. Масса Ммишв
1:1
Лист 1 I Листов 1
Рис. 10. 20. Рабочий чертеж червяка
301
R,W.
5Wj
3 отв. М8 сверлить и нарезать
после напрессовки венца
После затяжки Выступающую
часть спилить и раскернить
22,5±0,3
Илл Выточки
22,510,085
eo*
иж Лист Н°двкум. Подо. Дата
Разраб.
Консуяьт.
Червячное колесо
Рис, 10.21, Рабочий чертеж червячного колеса
Модуль т 5
Число зудьев 1г S0
Сопря- женный червяк Тип червяка —
Число Витков червяка 1, 2
направление битка - Правое
Межцентровое рассто- яние в oSpcSomKC °0 ISO
Степень точности по Г0СТ3675-5В Ст. 8111
ССпря-~ женный червяк Угол профиля 20°
Высота Витка Л 11
Код витка Pz 31,4
Диаметр вер- шин Витков ^а во
Коэффициент смещения 0
* Размеры длл справок
Лею. масса Масштаб
lucm 1 % Листов 1
Рис. 10.22. Основание и крышка литого корпуса редуктора
тельных деформациях корпуса возможны перекос валов и вследствие
этого повышение неравномерности распределения нагрузки по длине
зубьев.
Для повышения жесткости корпуса его усиливают ребрами, рас-
полагаемыми снаружи, у приливов под подшипники. Для удобства
монтажа деталей корпус обычно выполняют разъемным. Плоскость
разъема проходит через ось валов (рис. 10.22). В вертикальных цилин-
дрических одноступенчатых редукторах обычно делают разъемы по
двум плоскостям, а в двухступенчатых даже по трем. Однако в короб-
ках передач, в отдельных конструкциях червячных редукторов, лег-
Рис. 10.23. Корпус зубчатого цилиндрического редукто-
ра выполненный цельнолитым без разъема
302.
303
ких зубчатых редукторах (рис. 10.23) и в мотор-редукторах (см. гл. 2)
применяют целые корпуса со съемными крышками.
Корпус с одной плоскостью разъема состоит из основания и крышки
(см. рис. 10.22). Корпус обычно изготовляют из чугунного литья,
а в тяжелонагруженных редукторах — из стального литья. При инди-
видуальном изготовлении крупные корпуса выполняют сварными
из листовой стали Ст2, СтЗ. Толщина стенок сварных корпусов на
20—30% меньше, чем чугунных.
На рис. 10.24 показаны литые основания и крышка корпуса одно-
ступенчатого цилиндрического редуктора, на рис. 10.25 — червяч-
ного редуктора. Конструкция сварного корпуса цилиндрического
одноступенчатого вертикального редуктора представлена на рис. 10.26.
Специализированные заводы по производству редукторов при кон-
струировании корпусов предусматривают возможность использова-
ния одного и того же корпуса (при постоянном межосевом расстоянии)
для ряда передаточных чисел. При конструировании следует соблю-
дать также техническую эстетику.
Ориенторовочные размеры основных элементов литого корпуса
приведены в табл. 10.3; отчасти ею можно пользоваться также при
конструировании сварных корпусов. Размеры лап и фланцев даны
Рис. 10.26. Сварной корпус ре-
дуктора
304
10.3. Соотношения размеров основных элементов корпуса из чугунного литья
(см. рис. 10.24 и 10 25)
Параметры Ориентировочные соотношения (размеры, мм)
Толщина стенки корпуса и крышки редуктора: одноступенчатого цилиндрического Во всех случаях 6 и 6( 8 мм 6 = 0,025а+1; 64 = 0,02а+ 1
одноступенчатого конического 6 = 0.05^е+1; 61=0,04^е+1
одноступенчатого червячного 6 = 0,04а+ 2; 6= 0,032а+ 2
двухступенчатого 6 = 0,025ат+3; 6,=0,02ат+3
Толщина верхнего пояса фланца кор- пуса 6=1,56
Толщина нижнего пояса (фланца) крышки корпуса bt = 1,56л
Толщина нижнего пояса корпуса: без бобышки при наличии бобышки р = 2,356 Рл = 1,56; р2 = (2,25 4-2,75) 6
Толщина ребер основания корпуса m = (0,85 4- 1) 6
Толщина ребер крышки = (0,85 4- 1) 6л
Диаметр фундаментных болтов di = (0,03 4-0,036) а+12 мм
Диаметр болтов: у подшипников соединяющих основания корпуса с крышкой d2 = (0,7 4-0,75) dt d3=(0,5 4- 0,6) dr
крепящих смотровую крйшку ds=(0,34-0,4) dx или по рис. 10.28
Расстояние от наружной поверхности стенки корпуса до оси болтов dlt d2, da ci выбирают по табл. 10.4
Ширина нижнего и верхнего пояса основания корпуса Kt выбирают по табл. 10.4
Размер q, определяющий положение болтов d2 q * +0,5d2 + d4
Высота бобышки Лд под болт d2 Ag выбирают конструктивно так, чтобы образовалась опорная поверхность под головку болта и гайку
Размеры элементов бобышки /?б=0,5£>л (Dj по табл. 10.5); Гл я= 0,15/?б
305
Продолжение табл. 10.3
Параметры Ориентировочные соотношения (размеры, мм)
Размеры опорной поверхности Dr и h под головки болтов и гайки Принимают по табл. 10.5
Гнездо под подшипник Диаметр отверстия Dn-~ по нар у-жному диа метр у подшипника или стакана
Винты крепления крыш- ки подшипника d4 Число винтов п Диаметр окружности расположения винтов DB Принимают по ГОСТ 18511—73-5- 18514—73
Диаметр гнезда Длина гнезда Ок=О2-|-2-5-5 мм Dz—диаметр фланца крышки; 1 ** = б+л:-|-с2-|-7?б+3 4-5 мм
Диаметр рым-болта dp выбирают по ГОСТ 4751—73 в зависимости от массы редуктора по табл. 10.6 (масса редукторов по табл. 10.7)
Размеры штифта Диаметр Длина dm ds (размеры по ГОСТ 3129—70; табл. 10.6) /щ - Ъ —|— b-у —|— 5 мм
Наименьший зазор между наружной поверхностью колеса и стенкой кор- пуса: до диаметру по торцам А = 1,26 At = 6 (на чертеже не показаны)
* Следует проверить также размер (1 -г- 1,2) d2- *♦ Для удобства механической обработки торцов бобышек и проверки перекоса ©сей отверстий размер Е обычно принимается одинаковым для всех опор, поэтому и размер 1 принимается для всех гиезд одинаковым.
в табл. 10.4 и опорных поверхностей под крепежные детали в табл.
10.5. Рым-болты выбирают по ГОСТ 4751—73 (табл. 10.6) в зависи-
мости от массы редуктора (табл. 10.7).
Взаимное положение основания корпуса и крышки фиксируют
двумя коническими штифтами, устанавливаемыми до расточки гнезд
под подшипники; размеры штифтов берут по ГОСТ 3129—70.
Для предотвращения вытекания масла через плоскость разъема
места разъема смазывают спиртовым лаком или жидким стеклом.
Прокладки в плоскости разъема не ставят, так как при этом наруша-
ется посадка подшипников в корпус. У редукторов, имеющих гори-
зонтальный разъем, на плоскости разъема основания корпуса иногда
зое
10,4. Размеры лап и фланцев редукторов (см. рис. 10.24 и 10.25), мм
Параметры Болты
Мб М8 MIO MI2 М16 М20 М24 М27 мзо
К, 22 24 28 33 39 48 54 58 65
Cl 12 13 16 18 21 25 34 36 40
^°max 5 5 5 5 8 8 10 10 10
rmax 3 3 3 3 5 3 8 8 8
10.5. Опорные поверхности под крепежные детали (ГОСТ 12876—67 *)
Размеры, мм
Назначение поверхности
Под болты с шестигранной голов-
кой, под гайки шестигранные, под
шайбы пружинные, стопорные с на-
ружными зубьими, стопорные с вну-
тренними зубьями
Di при диаметре резьбы d
6 8 ! 10 12 14 16 1 18 1 20 22 24 27 30
14 20 24 26 30 32 36 40 42 45 52 60
18 24 28 30 34 38 42 45 48 52 60 65
Под шайбы
14 20 26
18 24 30
Примечания: 1. Предельное отклонение размера £> по А-,.
2. Размер Л устанавливает конструктор (часто обработка до шероховатости 4-го класса).
307
10.6. Рым-болты и гнезда под них (по ГОСТ 4751—73)
<4
Условное обозначение рым-болта с резьбой MIO: J
Рым-болт М10 ГОСТ 4751—73
Диаметр резьбы d М8 М10 М12 М16 М20 М24 мзо
Рым-болт di 36 45 54 63 72 90 108
^2 20 25 30 35 40 50 60
dg 8 10 12 14 16 20 24
dg 20 25 30 36 40 50 63
b 10 12 14 16 19 24 28
h 12 16 18 20 24 29 37
hi 6 8 10 12 14 16 18
I 18 21 25 32 38 45 55
Zj, не менее 12 15 19 25 29 35 44
Г 2 3
Tt 4 6 8 12 15
Масса 1 шт., кг 0,05 0,12 0,19 0,31 0,5 0,87 1,58
Гнездо под рым-болт dg 13 15 17 22 28 32 38
hg 5 6 6 7 9 10 11
^2 19 22 26 33 39 47 57
308
Продолжение табл. 10.6
Грузоподъемность на 1 рым-болт, кг
Диаметр резьбы d
М8
мю
М12 М16 М20 М24 МЗО
по вер-
тикаль-
ной оси
рым-
болта
120
200
300 550 850 1250 2000
При на-
правле-
нии
строп
80 125 175 250 325 500 700
40 65 90 125 150 250 350
Примечание. При подъеме груза направление строп под углом от вертикальной оси
рым-болта свыше 45° не допускается.
10.7. Массы некоторых типов редукторов
Зубчатые цилиндрические одноступенчатые редукторы
Межосевое расстояние aw, мм Масса редуктора, кг 100 45 160 85 200 140 250 250 315 330
Зубчатые цилиндрические двухступенчатые редукторы
Межосевое расстояние ат X 100X160 125 X200 160x 250 200X 315 250X400
ХЯи,2. мм Масса редуктора, кг 100 200 300 400 700
309
Продолжение табл. 10.7
Зубчатые цилиндрические двухступенчатые соосные редукторы
Межосевое расстояние aw, мм Масса редуктора, кг 100 90 160 180 200 280 250 380 315 500
Зубчатые конические редукторы
Конусное расстояние Re, мм Масса редуктора, кг 100 50 160 60 200 100 250 190
Зубчатые коническо-цилиндрические редукторы
Конусное расстояние Re, мм Межосевое расстояние aw, мм Масса редуктора, кг 100 160 170 100 200 200 160 250 400 200 315 500
Червячные редукторы
Межосевое расстояние aw, мм Масса редуктора, кг 80 100 30 60 125 160 180 225 70 120 170 210 250 270
фрезеруют канавку для сбора масла, которое стекает обратно в кор-
пус (см. рис. 10.24, разрез по Г —Г). На поясе крышки часто уста-
навливают два отжимных болта (см. рис. 10.24) для облегчения раз-
борки редуктора. Для захватывания редуктора при его подъеме к осно-
ванию корпуса у верхнего пояса его прилиты крюки (у легких редук-
торов крюков не делают).
Для подъема крышки редуктора иногда вместо рым-болтов делают
в литье крюки или петли (рис. 10.27). На крышке корпуса для осмотра
механизма и заливики масла имеется окно (люк). Его закрывают
б)
Рис. 10.27. Крышки корпуса редуктора:
а — с крюками; б — с петлями для подъема
310
А В 41 В. с С, к R Размер винта Число винтов
100 150 200 75 100 150 150 190 250 100 140 200 125 175 230 130 too 120 180 12 12 15 M8X22 M8X22 M10X22 4 4 6
Рис. 10.28. Крышка смотрового отверстия редуктора:
1 — крышка; 2 — ручка-отдушина; 3 — прокладка (картон); 4 — винт
крышкой, примерные размеры которой даны на рис. 10.28. Литая
крышка для небольших редукторов показана на рис. 10.29. Во избе-
жание попадания посторонних примесей в масло при заливке его
в редуктор рекомендуется устанавливать в люке съемной фильтр-
сетку (рис. 10.30). В нижней части корпуса имеется отверстие с резь-
бой для спуска масла и промывки редуктора (см. рис. 10.24). Отвер-
стие закрывают пробкой (табл. 10.8) с прокладкой из маслостойкой
резины или кожи.
Диаметр прокладки принимают равным диаметру буртика пробки,
а толщину 2—4 мм в зависимости от диаметра.
Применяют также пробки с трубной конической резьбой, обеспе-
чивающие герметичность соединения без прокладок. Конструкция
и размеры таких пробок приведены в табл. 10.9.
Редукторы с большим тепловыделением (например, червячные)
должны иметь отдушину, устанавливаемую на крышке корпуса (или
на крышке смотрового отверстия).
Вследствие разбрызгивания масла быстровращающимися деталями
воздушная среда внутри корпуса имеет взвешенные частицы масла
(масляный туман). Наличие отдушины предотвращает повышение
311
Рис. 10.29. Литая крыш-
ка-отдушина
Рис. 10.30. Фильтр-сетка:
1 — крышка; 2 — ручка; 3 — сетка (фильтр)
10.8. Размеры пробок к маслоспускным отверстиям, мм
d Ь т а f L С Q Dt D s I
М16Х1,5 12 8 3 23 2 13,8 16 26 17 19,6
М20Х2 М22Х2 15 9 10 3 28 29 2,5 17,8 19,8 21 30 32 22 25,4
М27Х2 18 12 4 34 3,5 24 25,5 38 27 31,2
М30Х2 14 4 36 4 27 30,5 45 32 36,9
МЗЗХ2 20 38 30 48
M36X3 25 16 5 6 45 4,5 31,5 34 50 36 41,6
312
Рис. 10.31. Пробка-отдушина
Рис. 10.32. Отдушина:
/ — корпус; 2 — колпак; 3 — сетка; 4 —
прокладка
давления воздушной среды и просачивание воздуха со взвешенными
частицами масла через стык корпуса и уплотнения валов в крышках
подшипников.
Простейшие отдушины для небольших редукторов выполняют
в виде ручки крышки люка со сверлеными внутри нее отверстиями
(см. рис. 10.28, 10.29), в виде отдельной пробки с отверстиями (рис.
10.31) или же в комбинации с жезловым маслоуказателем, см. рис.
10.80). Более совершенная конструкция отдушины приведена в табл.
10.10.
На рис. 10.32 дана конструкция отдушины, применяемая в круп-
ных редукторах.
При конструировании литого корпуса следует соблюдать допу-
стимые минимальные значения толщин стенок (табл. 10.11), необхо-
димые сопряжения и переходы (табл. 10.12), линейные уклоны
(табл. 10.13), радиусы галтелей.
10.9. Размеры пробок с конической трубной резьбой к маслоспускным
отверстиям, мм
30°
— —
h 8
1 s
Диаметр резьбы d 1 D Dx 5 tl
VT—19н 19н V2"—14н з//—14н Г—11н u/2"—11н 2"—11н 16 18 21 25 30 38 44 13,5 17 21,4 26,9 33,8 48,3 60,1 11,5 13,8 16,2 19,6 25,4 41,6 53,1 10 12 14 17 22 36 46 5 6 7 9 10 16 20
Примечание. Резьба коническая трубная по ГОСТ 6211-69 *.
313
10.10. Размеры отдушины, мм
10.11. Минимальная толщина стенок литых заготовок
при отливке в земляные формы
Материал Минимальная толщина стенок заготовок, мм
мелких средних крупных
Чугун Сталь Бронза Алюминий 3—5 6 8—10 10—12 12-15 15-20
3-5 5-8
Радиусы закруглений в литых деталях принимают по следующим
данным: при толщине стенок до 25 мм — примерно равным 1/3) а при
толщине стенок 25 мм — равным 1/6 средней арифметической толщины
сопрягаемых стенок.
Ряд радиусов 7? для галтелей следующий: 1; 2; 3; 5; 8; 10; 15; 20;
25; 30; 40 мм.
В зависимости от назначения и конструктивных особенностей
редуктора возможны те или иные отклонения размеров элементов
корпуса по сравнению с указанными в табл. 10.3 в целях уменьшения
массы. Экономии металла можно достичь уменьшением сечения эле-
ментов корпуса (но не за счет его жесткости) или изменением кон-
структивных форм корпуса редуктора. На рис. 10.33 показаны раз-
личные формы корпуса. Масса корпусов редукторов по отношению
к типу а составляет: для типа б — 77%, типа в — 74% иг — 67%.
314
10.12. Сопряжение в литых деталях
Характер сопряжений Эскизы сопряжений
с == h с < Л
Угловые сопряжения а = =75“-У 105“ Rrr+C 1 / ЖУ ♦=*
а > 105’ R,=r+h У «к R^R+m т=с+Х
Сопряжение трех стенок
Постепенное изменение сече-
ния
Rf-C+h
*5
с
с
-е
Примечания:
мм:
Значения х и
Толщина стенки, мм X V
10—15 3 15
15—20 4 20
20—25 5 25
R,=R+m
т=С+Х
2h
2 ~ 531 *
Ж»
2. Указанные размеры переходов реко-
мендуются при ft =ss (2 4- 3)6. При h > 36 таб-
личные значения следует увеличить, а прн
ft < 26 переходы необязательны.
315
Рис. 10.33. Различное конструктивное выполнение разъемных корпу-
сов цилиндрических зубчатых редукторов
В корпусе типа в применен наклонный разъем, позволяющий умень-
шить емкость масляной ванны, обеспечить одинаковое погружение
колес в масло и снизить потери мощности на перемешивание масла.
Однако косой разъем усложняет механическую обработку корпуса.
10.13. Рекомендуемые литейные уклоны
a-h Уклон Величина угла Рекомендуемое применение
,g, г 1:5 11-30' h до 25 мм
с 1 : 10 1:20 5-30’ з- Для стали h — 25-4-500 мм
У/у/Х//, "1 : 50 1“ h > 500 мм
1 : 100 30” Для цветных металлов —
Редуктор и электродвигатель обычно устанавливают на общей
сварной раме, реже на литой плите. Количество и диаметр фундамент-
ных болтов, крепящих редуктор, выбирают по табл. 10.3. После
размещения фундаментных болтов следует проверить их на проч-
ность. Если болты окажутся недогруженными, уменьшать их диа-
метр или количество не следует. Если же напряжения в болтах ока-
316
жутся выше допускае-
мых, то необходимо уве-
личить их диаметр (или
количество).
Расчет ведут в пред-
положении, что усилия
в болтах прямо пропор-
циональны их расстоя-
ниям от ребра опроки-
дывания (ось х на рис.
10.34, а) и сумма момен-
тов от усилий в болтах
уравновешивает внешний
опрокидывающиймомент.
Этот момент равен
алгебраической сумме
трех моментов; М Б —
активного, приложенно-
го к быстроходному ва-
лу; Л4т — реактивного,
приложенного к тихо-
ходному валу, и 44q —
момента от веса редук-
тора:
Л10прл- = A4e4-A4t + A4q.
(Ю.1)
При проверке проч-
ности болтов в легких
Рис. 10.34. Схема нагружения фундаментных бол-
тов корпуса редуктора
и средних редукторах
моментом Mq обычно пренебрегают, что увеличивает запас надежности.
При вычислении опрокидывающего момента следует учитывать отно-
сительное направление моментов Л4Б и Л4т- Например, в одноступен-
чатом цилиндрическом редукторе они направлены в одну сторону.
Усилие в наиболее нагруженном болте от момента Л4опрд. опреде-
ляют по формуле
^опр х^х
Р1Х 2(Чх + 11х + -+1пх)'
(10.2)
На редуктор может действовать также опрокидывающий момент
относительно оси у (или у^. Например, в горизонтальных конических,
червячных, коническо-цилиндрических редукторах один из моментов
(например, Л4Б) опрокидывает редуктор вокруг оси у, а другой (на-
пример, Л4Т) — вокруг оси х.
Усилие в наиболее нагруженном болте от момента
р__________МопР^________ /10 31
1у~ п^ + ^+^+...^-nl^ *
317
где п — число болтов, расположенных по одной из сторон нижнего
пояса параллельно оси опрокидывания (рис. 10.34, б).
Полное усилие, растягивающее наиболее нагруженный болт (один
из угловых болтов),
Р шах — Р lx + Ply
Условие прочности этого болта
п l-S^max Г
°экв ~ ndj К
4
(Ю.4)
(10.5)
Допускаемое напряжение [о]р для болтов из стали СтЗ в зависи-
мости от их диаметра принимают равным:
d болта, мм.............................................. 12 16 18 24 30 и выше
(о]р, Н/мм2 ............................................. 45 55 65 80 90
Для расчета редукторов с вертикальным валом эта методика не-
приемлема. В этом случае следует рассчитывать болты на затяжку
так, чтобы момент сил трения на опорной поверхности редуктора урав-
новесил момент Л4Т.
§ 10.3. КОНСТРУКЦИИ МЕХАНИЗМОВ ПЕРЕКЛЮЧЕНИЯ
СКОРОСТЕЙ В КОРОБКАХ ПЕРЕДАЧ
Угловую скорость валов в коробках передач с зубчатыми коле-
сами изменяют переключением муфт (кулачковых или зубчатых)
(рис. 10.35, а) или шестерен (блока шестерен) (рис. 10.35, б), или
их совместным применением (рис. 10.36, г). На рис. 10.36 представ-
лены некоторые конструкции зубчатых колес в зависимости от числа
ступеней скоростей.
Ширину b шестерен принимают одинаковой. Для облегчения ввода
зубьев в зацепления предусматривают боковой скос на всю высоту
Рис. 10.35. Схемы коробок передач:
д — с переключением скоростей муфтами; б — с переключением скоростей блоком
шестерен
31В
Рис. 10.36. Компоновка зубча-
тых зацеплений коробок пере-
дач:
а — двухступенчатая передача;
б — трехступенчатая; в — четырсх-
ступевчатая с двумя блоками под-*
вижиых шестерен; г — четырехсту-
пенчатая с одним подвижным бло-
ком шестерен и встроенной кулач-
ковой муфтой
зуба (см. рис. 10.36, а) и округление кромок профиля зубьев на ско-
шенном торце шестерни. При нарезании зубьев на зубодолбежном
станке следует предусмотреть кольцевую проточку шириной q и высо-
той h (см. рис. 10.36). Размеры q и h принимают по ГОСТ 14755—74.
При компоновке зубчатых передач следует учитывать нейтральные
положения муфт (см. рис. 10.35, а) или блока шестерен (см рис. 10.36,
а, в) при их переключении. Между выступами кулаков незамкнутых
муфт (см. рис. 10.35, а), а. также между торцами шестерен подвижного
блока и неподвижно закрепленных шестерен (см. рис. 10.36, а, в, г)
должен быть зазор А ~ 1 4- 3 мм.
В несложных по устройству коробках передач ставят ручное пере-
ключение. Наиболее распространены рычажные механизмы переклю-
чения и механизмы, в которых переключение осуществляется пол-
зуном с вилкой. Первые представлены на рис. 10.37 и 10.38. Конструк-
ция, изображенная на рис. 10.38, имеет усиленный (вильчатый) рычаг
и зубчатую передачу с н > 1, обеспечивающую большее усилие вклю-
чения.
319
Рис. 10.37. Рычажный механизм переключения муфт и ше-
стерен:
а — конструкция механизма; / — переводной камень; 2 — рычаг;
5 — валик; 4 — рукоятка; 5 — ступица рукоятки; 6 — блок шесте-
рен: 7 — шариковый фиксатор; б, в — схемы положения рычага
при двух- и трехступенчатых передачах
Рис. 10.38. Механизм переключения с зубчатой передачей:
1 — переводной камень; 2 — рычаг-вилка; 5 — валик; 4 — зубча-
тый сектор; 5 — шестерня; 6 — валик; 7 — шариковый фиксатор;
S — рукоятка
320
Рис. 10.39. Конструкции подвижного блокз шестерен:
а — варианты расположения кольцевого паза под переводной камень; б, в — конструкции
переводных камней
Муфта и подвижные шестерни имеют кольцевые пазы шириной
В для соединения с рычагом (рис. 10.39, а) или ползуном (рис. 10.41).
Переводные камни в основном изготовляют из серого или антифрик-
ционного чугуна, а также из текстолита и бронзы. Конструкции кам-
ней представлены на рис. 10.39, б, в.
На рис. 10.40 показаны переводные вилки. Применение их целе-
сообразно при небольших диаметрах шестерен, так как возможно
заклинивание под действием момента М = Рнг (Рв — усилие вклю-
чения, см. рис. 10.40). При относительно большом ходе, особенно
при малом радиусе рычага R (см. рис. 10.37, а и б), имеет место зна-
чительное радиальное перемещение Дг переводного камня, и он может
выйти из кольцевого паза муфты или блока шестерен. Допускается
Дг 0,ЗЯ, где И — высота переводного камня. Если Дг > 0,37/,
то применяют конструкции со скользящим ползуном и вилкой (рис.
10.41, 10.42, 10.43). Ползун перемещается по неподвижной направляю-
щей (см. рис. 10.41 и 10.42) или
его закрепляют на поступательно
движущейся скалке (см. рис. 10.43).
На рис. 10.44, а, б представлены
часто применяемые способы креп-
ления неподвижных направляю-
щих ползунов.
На рис. 10.45 показана кон-
струкция с двойным рычажным
механизмом. Для предотвращения
самовыключения муфт или бло-
ков шестерен применяют фикса-
торы, установленные непосред-
ственно в рукоятке рычага
(рис. 10.46) либо на промежуточ-
ных деталях (рис. 10.47), см.
также рис. 10.38, 10.41, поз. 7;
Рис. 10.40. Конструкции переводных
вилок
11 Зак. 220
321
(рис. 10.43, поз. 4). В конструкции на рис. 10.48 показана фиксация
блока шестерен на валу.
Размеры поперечного сечения рукоятки механизма управления
переключением назначают конструктивно. В момент включения руко-
ятка подвергается действию изгибающего момента от усилия, при-
лагаемого рабочим на ее конце. Это усилие становится наибольшим
в момент ввода в зацепление зубьев шестерни или кулачков муфты.
Усилие рабочего ориентировочно может быть принято равным 100—
150 Н. Допускаемое напряжение изгиба принимают пониженным
([ <у]и ~ 20 4- 30 Я/мм2), чтобы обеспечить жесткость рычага.
Рис. 10.41. Механизм переключения муфт и шестерен при
помощи ползуна с вилками:
1 — ползун-вилка; 2 — направляющая ползуна; 3 — рейка; 4 — зубчатый сектор; 5 — валик;
6 — рукоятка; 7 — шариковый фиксатор; 8—блок шестерен
7
Рис. 10.42. Механизм переключения муфт и шестерен при
помощи ползуна-вилки, перемещаемой рычагом:
/ — направляющая; 2 — ползун-вилка; 3 — вилка; 4 — рычаг; 5 — ва-
лик; 6 — рукоятка; 7 — шариковый фиксатор; 8 — блок шестерен
322
Рис. 10.43. Механизм переключения с подвижной направляющей
ползуна:
1 — шариковый фиксатор; 2 — рукоятка; 3 — ползун-вилка; 4 — наира*
вляющая (скалка); 5 — блок-шестерня; 6 — синхронизатор
Рис. 10.44. Способы крепления неподвижных направляющих
ползунов
Рис. 10.45. Двойной рычаж-
ный механизм переключения
Рис. 10.46. Фиксатор
11»
323
Рис. 10.48. Фиксация блока ше-
стерен на валу
Рис. 10.47
§ 10.4. СМАЗКА РЕДУКТОРОВ
Смазка подшипников качения в редукторах рассмотрена в гл. 8
и подшипников скольжения — в гл. 9.
Вопрос о способе смазки следует решать при компоновке редук-
тора, так как это часто отражается на конструкции деталей редук-
тора.
По способу подвода смазки к зацеплению различают картерную
и циркуляционную смазку.
Картерная смазка осуществляется окунанием зубчатых и червяч-
ных колес или червяков, или же вспомогательных деталей (смазоч-
ных шестерен, колец и т. п.) в масло, заливаемое внутрь корпуса
Рис. 10.49. Редуктор с брызговиками на валу червяка
324
Рис. 10.50. Редуктор со смазочной шестерней
редуктора; ее обычно при-
меняют для зубчатых пе-
редач при окружных ско-
ростях в зацеплении до
о < 12 м/с, а для червяч-
ных передач при окруж-
ной скорости червяка до
v 10 м/с. При большей
скорости масло сбрасывает-
ся со смазываемых дета-
лей, значительно возра-
стают потери мощности на
перемешивание масла и
температура его. Большая
скорость колес вызывает
чрезмерное разбрызгива-
ние масла и его окисление.
Зубчатые и червячные
колеса погружают в масло
на высоту зуба, а червяк
(при нижнем его располо-
жении)— на высоту витка, но не выше центра нижнего шарика или
ролика подшипиника качения вала червяка. Если по условию нор-
мальной работы подшипников качения вала червяка установленный
уровень масла не позволяет погружать червяк в масло или не обеспе-
чивает достаточную высоту погружения витка червяка, то применяют
брызговики (целые или разъемные), забрасывающие масло на червяч-
ное колесо, чтобы оно входило в зацепление уже со смазанными зубьями
/рис. 10.49). Обычно устанавливают два брызговика, чтобы обеспечить
смазку зацепления при изменении направления вращения червяка.
В конических редукторах рекомендуется погружать зубья колеса
на всю длину. В многоступенчатых и комбинированных редукторах
часто не удается погружать зубья всех колес в масло, так как для
этого необходим очень высокий уровень его, что может повлечь за
собой слишком большое погружение зубчатого колеса тихоходной
ступени, а в вертикальных зубчатых редукторах могут оказаться
погруженными в масло также и подшипники. В этих случаях при-
меняют смазочные шестерни (рис. 10.50), смазочные диски (рис. 10.51),
смазочные кольца (рис. 10.52), раздельные ванны и другие устройства.
Смазочные шестерни часто делают из текстолита или других неметал-
лических материалов, применяемых для изготовления зубчатых колес,
при этом ширина шестерни должна быть значительно меньше ширины
колес зубчатой пары, которую она смазывает (до 0,3 Ь). При неболь-
шой окружной скорости (порядка 0,5—0,8 м/с) предельной высотой
погружения колеса в масло следует считать 1/е его радиуса, а для
тихоходных передач — до */3 радиуса колеса. При смазке окунанием
объем масляной ванны редуктора определяют из расчета 0,4—0,8 л
масла на 1 кВт передаваемой мощности. Меньшее значение прини-
мают для крупных редукторов.
325
326
Рис. 10.51. Редуктор со смазочными дисками:
I — диски; 2 — каналы для смазки подшипников; 3 — уплотнение
Рис. 10.52. Редуктор со смазочным кольцом
Рис. 10.53. Принципиальная схема циркуляционной смазки:
1 — манометр; 2 — трубопровод напорный; 3 — отвод масла на прочие агрегаты;
4 — клапан редукционный (перепускной); 5 — обратный клапан; 6 — трубопровод
для заполнения бака; 7 — сбросный пружинный клапан; 8 — иасос; 9 — трубо-
провод всасывающий; 10 — пусковой ручной насос; И — обратный клапан; 12 — бак
для масла; 13 — сливной трубопровод; 14 — регулировочный вентиль; /5 — термо-
метр; 16 — фнльтр-охладитель; 17 — воронка; 18 — охлаждающая вода
Рис. 10.54. Смазка зацепления с по-
мощью сопла: а — расположение соп-
ла; б — форма сопла
Рис. 10.55. Смазка широких
колес с помощью коллектора
327
Основные размеры плунжерных насосов, мм (по данным ЭНИМСа)
Диаметр плунжера, d, мм П роизво- дитель- ность, л, мин н наиб Hi А ^наиб а ь k D Dt h I u
8 0,003 80 — 78 115 15 56 10 9 14 32 — 38 35 20
12 0,006 16
18 0,014 90 118 100 142 20 76 12 11 17 48 25 45 55 30
25 0,026
Рис. 10.56. Плунжерный насос ЭНИМСа:
с — с креплением вертикальным; б — с креплением горизонтальным; 1 — корпус; 2 — пру-
жина; 3 — прокладка; 4 — направляющая втулка; 5 — плунжер; 6 — плунжер с роликом:
7 — шпилька; 8 — втулка; 9 — ролик; 10 — палец
Циркуляционная смазка применяется при больших скоростях
передачи (о > 12 м/с), а в тяжелых редукторах — и при меньшей
скорости. Ее применяют также и в редукторах небольшой мощности
и скорости, если конструкция не позволяет осуществить картерную
смазку. Принципиальная схема циркуляционной смазки показана
на рис. 10.53. Л1асло из картера редуктора или специального бака
подается насосом в места смазки по трубопроводу через сопла (рис.
328
Рис, 10.57. Номо-
грамма производи-
тельности плунжер-
ного насоса в зави-
симости от хода S
плунжера, его диа-
метра и числа двой-
ных ходов (для
плунжера d = 25 мм
Q совмещена с осью
ординат графика)
Ход плунжера
Рис. 10.58. Шестеренчатый насос:
а — с присоединением трубопровода сбоку; б — с присоединением
трубопровода с торца
329
Рис. 10.59. Номограмма производи-
тельности шестеренчатого насоса
(по рис. 10.58). Высота всасывания
1000 мм
10.54, а, б) или при широких коле-
сах через коллекторы (рис. 10.55).
Для очистки и охлаждения масла
устанавливают фильтры, охладители и
другие устройства. В небольших ре-
дукторах схема циркуляционной смаз-
ки упрощается — исключаются охла-
дители, специальные фильтры, ручные
пусковые насосы и т. п. При окруж-
ных скоростях до 20 м/с для прямозу-
бых и до 45 м/с для косозубых и
шевронных передач масло подается со
стороны входа зубьев в зацепление,
а при больших скоростях во избежание
значительных потерь мощности на вы-
жимание избытка масла и возможного
гидравлического удара — с противопо-
ложной стороны. Если передача ревер-
сивная, то масло к месту зацепления
подводят с двух сторон (см. рис. 10.54).
Смазочные насосы и их харак-
теристики приведены на рис. 10.56—
10.61. Насосы приводят в действие либо от отдельного электродви-
гателя, либо от одного из валов редукторов (рис. 10.62, 10.63). Коли-
чество масла, необходимого для смазывания (поливания) зацепления,
из условия охлаждения зубчатых колес и допустимого нагрева масла
определяют по формуле
tvz________Фзац
м бОср Д/мт|м ’
(10.6)
где Q3au — количество тепла, выделяемого в зацеплении, ккал/ч
с ~ 0,4 4- 0,45 ккал/кг «°C — удельная теплоемкость масла; р »
Рис. 10.60, Лопастной насос,
предназначенный для встройки в механизм
330
Рис. 10.61. Номограмма произ-
водительности лопастного на-
соса (по рис. 10.60)
Рис. 10.62. Привод от вала редукто-
ра шестеренчатого насоса, встроен-
ного в крышку подшипника:
1 — насос; 2 — крышка; 3 — вал
я» 0,9 — плотность масла; Л/м = 5 4- 10° С — допустимое повышение
температуры масла; т]м = 0,5 ч- 0,8 — коэффициент использования
масла.
Этим коэффициентом учитывают, что не все масло, поливаемое
на зубчатые колеса, одинаково участвует в теплообмене, так как часть
его отбрасывается центробежной силой или потоком воздуха; вели-
чина т]м зависит от места подвода масла и скорости вращения колес.
При подаче масла снизу вверх и больших скоростях следует брать
меньшее значение коэффициента использования масла. Количество
тепла, выделяемого в зацеплении, ккал/ч
<?зац = 860Л5тр, (10.7)
где Л5гр — потеря мощности на трение в зацеплении;
Л/тр = ^(1~П). (Ю.8)
где N-l — мощность, подводимая к зубчатому зацеплению, кВт;
т] — общий к. п. д. редуктора,
Л = (10.9)
Рис. 10.63. Привод плунжерного насоса от вала редуктора:
1 — насос; 2 — втулка с эксцентриситетом; 3 — вал; 4 — винт для
крепления втулки иа валу; 5 — шарикоподшипник; б — кольцо за-
мочное
331
Рис. 10.64
К. п. д. одной зубчатой пары
может быть определено по формуле
т)зуб^ 1 - 2,3f(J-± 1); (10.10)
здесь f = 0,08 4-0,1 — коэффи-
циент трения в зацеплении;
z,„ и zK — числа зубьев шесте-
рен и зубчатого колеса; знак
«минус» в фррмуле относится
к случаю внутреннего зацепления.
Пример. Определить количество масла, необходимого для смазки зубчатых
зацеплений и подшипников коническо-цилиндрического редуктора (рис. 10.64),
и подобрать тип насоса.
Дано: Л\ = 4 кВт — мощность на ведущем валу редуктора; п, = 960 об/мин
ведущего вала. Коническая пара имеет гг = 25 и г2 = 75; цилиндрическая пара г3 =
= 20 и г4 = 80; зубья приработаны.
Принимаем / = 0,07;
т]п = 0,995 — коэффициент, учитывающий потери пары подшип-
ников качения.
К. п. д. конической пары
П.уб, ков = 1 - 2,3 • 0,7 0,992.
К. п. д. цилиндрической пары
ТЬуб. цил = 1 - 2,3 • 0,7 (1 + 1) = 0,99.
Общий к. п. д. редуктора
Ш- П,уб. конЛзуб, цил Tin = 0,992 - 0,9 • 0,9953 = 0,97.
Потеря мощности на трение
Л'тР = Л'1 (1 — И) = 4 (1 —0,97)=0,12 кВт.
Количество тепла, выделяющегося в зацеплении при работе редуктора,
Qsan = 860Л'тр = 860 • 0,12 103 ккал/ч.
Количество масла, необходимого для поливания зубчатых зацеплений, при
Д/м — 5° С и т]м = 0,8
Q,aa 103 . пс ,
G0cpAUlM “60-0,45-0,9-5-0,8^ -05 л/мин’
Выбираем тип насоса Привод удобно осуществлять от промежуточного или
ведомого валов редуктора, поэтому определим частоты вращения этих валов:
пг 960
л2=— = —— = 320 об/мин;
пк о
здесь
?2 75 <5
г, ~ 25 ~3,
490
-^— — 80 об/мин.
“и
где
и -А = ^°-=4
“д~ гз 20
332
Рис. 10.67. Маслорас-
пределитель регули-
руемый
Рис. 10.65. Предохра-
нительный клапан
Рис. 10.66. Обратный
клапан
Приняв избыточное давление масла 0,5 кгс/см2, находим по рис. 10.59, что при-
годен шестеренчатый насос с приводом от промежуточного вала редуктора (п2 =
= 320 об/мин). Можно применять также и лопастной насос, но он имеет большие
габариты.
Для ограничения давления применяют предохранительные кла-
паны (рис. 10.65), которые отводят часть масла в бак (или внутрь
корпуса редуктора), пока давление в маслопроводе не упадет до необ-
ходимого значения.
Если насос расположен выше уровня масла в резервуаре, то для
обеспечения его бесперебойной работы устанавливают обратный кла-
пан (рис. 10.66); при остановке насоса он препятствует маслу, нахо-
дящемуся во всасывающем трубопроводе, стекать обратно в резер-
вуар. При подводе смазки ко многим местам иногда оказывается
удобнее, чтобы масло поступило сначала от насоса в промежуточный
резервуар, а из него самотеком по трубкам отводилось к месту смазки.
Для подвода масла к насосу и от насоса к местам смазки в небольших
редукторах применяют медные (ГОСТ 617—72) или латунные (ГОСТ
494—69) трубки и различные соединительные устройства к ним: нип-
пели, накидные гайки, угольники, тройники.
При необходимости регулирования расхода масла применяют
дозаторы и маслораспределители (рис. 10.67).
Масла для редукторов
В зависимости от назначения различают масла индустриальные,
автомобильные и тракторные, авиационные, турбинные и др. Техни-
ческие характеристики их приведены в табл. 9.13.
333
10.14. Цилиндровые масла, применяемые для смазки тяжелонагруженных редукторов
Наименование и марка ГОСТ Кинематичес- кая вязкость при 100°С, сСт Темпрату- ра засты- вания, °C, не выше
Цилиндровое 11 (цилиндровое 2) . . . . — 9—13 +5
Цилиндровое 24 (вискозин) —— 20—28 —
Цилиндровое тяжелое 38 (цилиндровое 6) 6411—52* 32—44 + 17
Цилиндровое тяжелое 52 (вапор) .... 6411—52* 44—59 — 5
10.15. Рекомендуемые значения кинематической вязкости масел для зубчатых колес
Материал зубчатых колес ов, Н/мм2 Кинематическая вязкрсть v50 (v100), сСт, при окружной скорости', м/с
ДО 0,5 0,5—1 1-2,5 2,5-5 5-12,5 12,5-25 25
Пластмасса, чу- гун, бронза — 177 (20,5) 118 (11+) 81,5 59 44 32,4 —
Сталь До 1000 Св. 1000 до 1250 Св. 1250 до 1600 266 (32,4) 177 (20,5) 118 (11,4) 81,5 59 44 32,4
266 (32,4) 177 (20,5) 118 (Н,4) 81,5 59 44
444 (52) 266 (32,4) 177 (20,5) 118 (11,4) 81,5 59
Сталь цементо- ванная или с поверхностной закалкой —
Примечание. Для смазки зубчатых колес нз хромоникелевых еталей (нецементо-
ванных) при О > 800 Н/мм2 следует брать масла, вязкость которых на одну ступень гра-
дации выше, чем указано в таблице для данной скорости.
10.16. Рекомендуемые значения кинематической вязкости масел для смазки
червячных передач и способы смазки
Характеристики Скорость скольжения иск, м/с
до 1 1-2,5 ДО & 5—10 10—15 15-25
Условия работы Кинематическая вязкость vs0 (v100), сСт Тяж 444 (52) елые 266 (32,4) Сред 177 (20,5) шие 118 (11,4) 81,5 59
Способ смазкн Окунанием Струйная или окунанием СтруЙ! да вл 0,07МПа (—0,7 кгс/см2) 1ная под ением 0,2МПа <~2 кгс/см2)
334
Индустриальные масла широко применяют для смазывания раз-
личных машин. Для циркуляционной смазки редукторов рекомен-
дуется масло индустриальное 45 (выщелоченное).
Турбинные масла благодаря их высоким качествам наиболее при-
годны для циркуляционной смазки быстроходных зубчатых передач.
Из автотракторных масел для смазки редукторов применяют
масла АК10 и АК.15.
Трансмиссионные автотракторные масла могут быть использованы
для смазки тяжелонагр уженных цилиндрических и червячных редук-
торов. Для циркуляционной смазки эти масла непригодны, так как
содержат смолистые соединения.
Масла цилиндровые (для паровых машин) имеют большую вяз-
кость. Они пригодны и для смазки тяжел она груженных редукторов.
цилиндровые 11 и 24 — для циркуляционной смазки, но лишь при
небольшой протяженности трубопроводов; цилиндровое тяжелое 52
. (вапор) вследствие большой вяз-
Рис. 10.68. Подвод масла к подшипни-
кам редуктора при помощи желоба иа
фланце корпуса
кости можно применять только
для картерной смазки. Техниче-
ские данные цилиндровых масел
приведены в табл. 10.14.
Для выбора сорта масла сначала
следует установить необходимую
вязкость масла (для зубчатой пе-
редачи по табл. 10.15 и для
Лоток
Рис. 10.69. Подвод жидкой смазки
к подшипникам ведущего вала кони-
ческо-цилиндрического редуктора при
помощи лотков
335
Рис. 10.70. Подвод жидкой смазки
к подшипникам вала червячного
колеса редуктора при помощи
скребков с лотками
червячной передачи по табл. 10.16).
Затем по табл. 9.13 выбирают сорт
масла в зависимости от вязкости.
Для многоступенчатых редукто-
ров сорт масла выбирают по сред-
нему значению вязкости, определяе-
мому для первой и последней сту-
пени.
Смазка подшипников качения рас-
смотрена в гл. 8. Здесь ограничимся
указанием на некоторые способы по-
дачи жидкой смазки в подшипники.
Если попадание масла в камеры под-
шипников затруднено, то применяют
дополнительные устройства в виде
желобов на фланцах корпуса зубча-
того редуктора (рис. 10.68), лотков
на внутренних стенках корпуса
(рис. 10.69). Масло, попав на стенки
корпуса при разбрызгивании, стекает
в желоба или лотки, а из них само-
теком поступает в камеры подшипни-
ков. Для смазки подшипников вала
червячного колеса применяют специальные скребки, подающие масло
к подшипникам непосредственно (рис. 10.70) или по желобам на фланце
корпуса (рис. 10.71). В высокоскоростных и тяжелонагруженных
передачах применяют принудительную подачу масла от общей системы
(см. рис. 10.53 и 10.72).
Контроль уровня масла
Уровень масла, находящегося в корпусе редуктора, контролируют
различными маслоуказателями.
На рис. 10.73 показан крановый маслоуказатель, на рис. 10.74, а
даны конструкция и размеры фонарного маслоуказателя с гладким
глазком, а на рис. 10.74, б — с рифленым глазком, выполненным
из стекла или прозрачной пластмассы. Глазки с рифлением удобны
при установке редуктора в слабоосвещенных местах. Размеры глаз-
ков с рифлением даны на рис. 10.75. Размер h выбирают в зависимости
от A/i = /imax — hmin, где /imax и hmin — наибольший и наименьший
допускаемые уровни масла в корпусе редуктора.
На рис. 10.76 приведена конструкция фонарного маслоуказателя
из оргстекла.
Трубчатый маслоуказатель со стеклянной трубкой и металличе-
ским кожухом с необходимыми размерами показан на рис. 10.77.
На рис. 10.78 приведена конструкция трубчатого маслоуказателя
с трубкой из оргстекла. Жезловый маслоуказатель показан на рис.
10.79; для возможности контроля уровня масла во время работы
маслоуказатель размещают в трубке, ввернутой в корпус (рис. 10.80, а),
336
Редуктор червячный
Рис. 10.71. Смазка
подшипников червяч-
ного редуктора:
1 — лоток для подвода
масла к подшипникам
червяка; 2 — скребок для
съема масла с торцов чер-
вячного колеса; 3 — же-
лоб на фланце корпуса
р еду ктор а дл я подвода
масла к подшипникам
вала червячного колеса
Рис. 10.72. Подвод масла
к подшипникам при цирку-
ляционной системе смазки
редуктора
Рис. 10.73. Крановый масло-
указатель:
1 — контргайка; 2, 3 — кольцо
уплотнительное; 4— корпус кра-
на; 5 — кран
337
Рис. 10.74. Круглый маслоуказатель (фонар-
ный):
Размеры, мм
Размер глазка D £>i 1 h
20 55 40 10 6
32 70 58 12 8
50 90 72 И 12
а — с гладким глазком; б — с рифленым глазком;
1 — прокладка; 2 — экран; 3 — глазок; 4 — кольцо;
5 — винт М-6 X 15
Размеры, мм (к рис. 10.75)
Размер глазка D Dt В 1 h Число каиавок (рифлений)
20 28 20 8 3 1.5 6 6
32 40 30 10 3 1.5 8 8
50 60 50 12 4 2 12 10
Рис. 10.75. Глазки с рифлением
3
Рис. 10.76. Фонарный
маслоуказатель
338
Рис. 10.77. Трубчатый маслоуказатель:
I — корпус (сталь СтЗ); 2 — кожух (сталь
СтЗ); 3 — трубка; 4 — прокладка (кар-
тон или кожа — 2 шт.); 5 — колпачок
(сталь СтЗ)
Рис. 10.78. Маслоуказатель с
трубкой из оргстекла
Рис. 10.79. Жезловый маслоуказатель:
а — установка в нижней части корпуса редуктора; б — установка в крышке
корпуса; в — примерные размеры маслоу казателя для небольших редукторов
339
или отделяют перегородкой
(рис. 10.80, б). Иногда в не-
больших редукторах масло-
указатель совмещают с про-
стой по конструкции отдуши-
ной (рис. 10.80, б).
Смазка открытых зучбатых
передач
Открытые зубчатые пере-
дачи обычно смазывают пе-
риодически — наносят смаз-
ку на рабочие поверхности
зубьев. Для этих целен
используют смазку графит-
ную УСА (ГОСТ 3333—55),
полугудрон и шестеренную
мазь (полугудрон 8096 и
нефтебитум 2096, ГОСТ
1544—52*).
Рис. 10.60. /Кезловый маслоуказ а тел ь с проб-
кой-отдушиной
Периодичность смазки определяется в основном условиями экс-
плуатации и сортом смазки: от 1 раза в смену (тяжелые условия ра-
боты) до 1 раза в 10 дней (передачи, работающие периодически).
§ 10.5. ТЕПЛОВОЙ РАСЧЕТ РЕДУКТОРОВ
Потери мощности при расчете редуктора, вызванные трением
в зацеплении и в подшипниках, разбрызгиванием и перемешиванием
масла, вызывают нагрев деталей редуктора и масла. При нагреве вяз-
кость масла резко падает, что приводит к нарушению режима смазки,
а в отдельных случаях даже к заеданию зубьев и преждевременному
износу подшипников. Нормальная работа редуктора будет обеспе-
чена, если температура масла не превысит допускаемой. Таким обра-
зом, задачей теплового расчета является проверка температуры масла
в редукторе при установившемся режиме работы. Принципиально
рассматриваемый ниже метод расчета применим к редукторам всех
типов, но практически для зубчатых редукторов малой и средней мощ-
ности он является излишним, так как к. п. д. их высок, а следо-
вательно, тепловыделение невелико. Для червячных и комбиниро-
ванных зубчато-червячных редукторов этот расчет обязателен.
Количество тепла (Вт), выделяющегося в редукторе в секунду,
определяют по формуле
^ = ^(1—11), (10.11)
где — мощность на ведущем валу, Вт; т| — к. п. д. редуктора.
Это тепло передается окружающей среде (воздуху). Количество
тепла, отводимого с поверхности корпуса редуктора, Вт,
Q2 = KS(4-/b), (10.12)
340
где К — коэффициент теплопередачи корпуса редуктора, Вт/м2-°С;
в среднем при естественном охлаждении К ~ Ю 4- 16; большее зна-
чение выбирают при хорошей циркуляции и малой запыленности воз-
духа в помещении и свободной циркуляции масла внутри корпуса
редуктора; S —- площадь теплоотдающей поверхности, соприкасаю-
щейся с воздухом и омываемой внутри корпуса маслом, м2; при опре-
делении этой площади в расчет вводят также 50% ребер и бобышек,
а также площадь днища, если обеспечивается достаточная циркуля-
ция воздуха у дна корпуса; tK — температура масляной ванны, °C;
t,, — температура окружающего воздуха, °C (принимают в среднем
20° С).
При установившемся режиме работы редуктора все выделяющееся
тепло отдается через его стенки окружающему воздуху (Qi — Qa)-
Следовательно, перепад температур между маслом и окружающим
воздухом
д/=/в-/в = А-. (10.13)
Условие нормальной работы редуктора А/ [А/], где ГД/1
40 ч- 60° С — допускаемый перепад температур между маслом и
окружающим воздухом (меньшее значение — для редуктора с верх-
ним расположением червяка).
При повторно-кратковременной работе редуктора (при естествен-
ном охлаждении) проверку на нагрев производят по формуле
(10.14)
где ЪТ — сумма рабочих периодов в течение 1 ч, выраженная в мин.
Если А/ > [А/], то определяют требуемую поверхность охлажде-
ния исходя из допускаемого перепада температур и принятого зна-
чения К и сравнивают с фактической поверхностью охлаждения редук-
тора.
Для улучшения теплоотвода корпус редуктора делают с ребрами
(рис. 10.81).
Существенный эффект дает обдув корпуса струей воздуха от вен-
тилятора (крыльчатки), устанавливаемого на валу червяка снаружи.
Если оба способа оказываются недостаточ-
ными для необходимого теплоотвода, то приме-
няют циркуляционное водяное охлаждение
масла в редукторе (рис. 10.82).
Установка вентилятора с кожухом, напра-
вляющим поток воздуха вдоль охлаждаемых
поверхностей, показана на рис. 10.83. Располо-
жение ребер в зоне, обдуваемой вентилятором,
должно соответствовать направлению потока
воздуха. Обдувать удается лишь часть по-
верхности корпуса, теплообмен в остальной его
части будет происходить естественным путем.
Если на необдуваемой части корпуса для уве-
личения поверхности охлаждения требуется
И=(Ь-5)$; a=ff; r--C,56.
г, =0,25$; b-2$
Рис. 10.81. Профиль
охлаждающих ребер
341
Рис. 10.82. Червячный редуктор со змеевиком для охлаждения масла. Узел
/ — уплотнение трубки змеевика при выводе ее из корпуса
сделать ребра, то их располагают вертикально для обеспечения
естественной циркуляции (рис. 10.83).
Коэффициент теплопередачи для обдуваемой поверхности, Вт/м2 °C,
Кс^16]/о, (10.15)
где v — скорость воздуха; принимают (но не более 8 м/с);
— частота вращения червяка, об/мин.
Полное количество тепла, отводимого с обдуваемой и необдувае-
мой поверхностей, Вт,
Q2 = (/<oS0+/<sh)(^-Q. (10.16)
где So и SH — соответственно площади теплоотдающей обдуваемой
и необдуваемой поверхности корпуса редуктора, м2.
При установившемся тепловом режиме Q2 — Qi> из формулы (10.16)
следует
А/ = /„ — /в = Kos^-KS„ ’ (10.17)
Количество воздуха, омывающего редуктор, м3/с,
Гв =-----, (10.18)
Твсв fe —^в) Лв
342
где Q2o — количество тепла, от-
водимого с обдуваемой поверх-
ности редуктора, Вт;
&0 = tf0S0AC, (10.19)
•у,, — плотность сухого воздуха;
у,, « 1,29 кг/м3; св — теплоем-
кость воздуха при постоянном
давлении; сн ~Ю00 (или
0,24 j; т]в — коэффициент
использования воздуха — около
0,8; /в — температура воздуха,
отходящего от редуктора; в рас-
четах принимают на 3—6° С
больше температуры воздуха в
помещении.
Вентилятор выбирают по таб-
лицам или рассчитывают по
полученным значениям скорости
воздуха и количества его. Рас-
чет вентилятора рассматривается
в специальном курсе, здесь же ограничимся определением указанных
выше величин. При конструировании вентилятора можно восполь-
зоваться, например, конструкцией, представленной на рис. 10.84;
Рис. 10.83. Червячный редуктор с прину-
дительным воздушным охлаждением кор-
пуса:
1 — вентилятор; 2 — направляющий кожух;
3 — предохранительная решетка; 4 и 5 —
ребра в обдуваемой части корпуса; 6 — верти-
кальные ребра в необдуваемой части корпуса
Рис. 10.84. Конструкция вентилятора:
1 — кожух; 2 — крыльчатка; 3 — решетка
343
Рис. 10.85. Конструкция корпуса редуктора без охлаждающих ребер:
1 — ориентировочная граница зоны, омываемой внутри маслом; 2 — граница
зоны обдува; 1—2 — зона необдуваемой теплоотдающей поверхности
принимают диаметр крыльчатки £>в ~ (0,6—0,8) d2 с условием, чтобы
высота ребер корпуса (см. рис. 10.84) перекрывалась полностью.
Пример. Произвести тепловой расчет червячного редуктора (рис. 10.85) для
привода сборочного конвейера, работающего непрерывно в две смены. Потребляемая
мощность иа валу червяка Л\ = 5 кВт при частоте вращения = 960 об/мин.
Основные данные передачи а = 180 мм; т = 8 мм; q = 8; у = 7°7'30"; а — 20°;
г2 = 37; гх = 1; и = 37. Редуктор расположен внутри помещения со средней темпе-
ратурой воздуха tB — 20° С. Материал венца — бронза Бр. АЖ 9-4, червяк шли-
фован.
К. п. д. редуктора
tgTTSO’
Чр-0,96 tg(v8Xp) ~0-96 tg(7-7%0" + 2°50') Яа°’69,
где р = arctg f — arctg 0,05 « 2°50'; f — 0,05 — коэффициент трения для стали
по бронзе при наличии смазки.
Количество тепла, выделяющегося при работе редуктора, по формуле (10.11)
Qx = A'i (1 — т]р) = 5 Ю3 (1 — 0,69) »= 1550 Вт.
Теплоотдаюшая поверхность редуктора (без ребер) (рис. 10.85) с учетом дна и
50% поверхности бобышек S « 0,5 м2.
При разности температур масла и воздуха Д/ = 55° С и коэффициенте теплопе-
, Вт
редачи д = 14 необходима поверхность корпуса
о_________Qi_
•>треб — К
1550
14-55
2,02 м2
Так как полученное значение существенно превышает поверхность гладкого
корпуса S = 0,5 м2, то следует применять оребрение корпуса и обдув.
п1 960
Задаемся скоростью воздуха с = -gjg- — goo'"4’” м^с ’ 0ПРеДеляем коэффициент
теплопередачи для обдуваемой поверхности редуктора;
Ко = 16^v = 16 Г 4,8 «= 35 -
344
При определении обдуваемой
поверхности принимаем всю по-
верхность ребер (см. рис. 10.8),
так как они полностью омываются
потоком воздуха; из чертежа имеем
So 0,75 м2.
Требуемая поверхность необ-
дуваемой части редуктора по фор-
муле (17)
<- Qi-K0S0M _
н К Д/
1550-35-0,75-55 . ,. „
=------............«= 0,14 м«.
14-о5
Располагаемая поверхность
(с учетом 50% поверхности бобы-
шек) составляет S'H ~ 0,15 м2;
условие 5ц > SH выполнено.
Для расчета вентилятора опре-
деляем количество отводимого
тепла:
<?2о= К050Д/= 35-0,75-55 =
= 1440 Вт.
Рис. 10.86. Червячный редуктор с охлаж-
дающими ребрами и вентилятором
Требуемая
производительность вентилятора по формуле (10.18)
U7B==_________________
7в^в ^в) Лв
---------------------- ке 0,27 м3/с.
1,29- 103(25 — 20) 0,8
Конструкцию вентилятора выполняем по рис. 10.84. Общий вид редуктора
представлен на рис. 10.86.
Охлаждение масла змеевиком
Методика расчета, приводимая ниже, применима к редукторам
всех типов.
Количество тепла, отводимого змеевиком при заданной темпера-
туре масла в редукторе, Вт,
Q3M = Q1-Q2- (10.20)
Секундный расход воды Wv!1 для охлаждения, м3/с, определяем
по формуле, аналогичной (10.18):
где А/Вд = 2 4- 10° С — повышение температуры воды в змеевике.
?вд= ЮОО-^; свд = 4,187-Ю3^.
Температура воды при выходе из змеевика
/2 = /x + A/m, (Ю.22)
345
где fj — температура воды на входе в змеевик, которую при отсут-
ствии особых указаний принимают равной 20° С.
10.17. Сортамент красномедных труб для змеевика
Наружный диаметр, мм (по ГОСТ 617—72) Толщина стеккн, мм Наружная поверх- ность 1 м трубы, 1т. ы2 Масса 1 м трубы, кг
13 1,5 0,041 0,49
15 1,5 0,047 0,57
18 2 0,056 0,895
22 2 0,069 1,13
26 2 0,082 1,36
30 2,5 0,94 1,94
36 3 0,13 2,8
Выбрав внутренний диаметр трубы d для змеевика (табл. 10.17),
находим скорость потока воды в трубе, м/с:
где 1ГВЛ в м3/с, d в м. Так как в справочных таблицах приводят зна-
чения 1ГПД в дм3/мин, a d в мм, то из предыдущего выражения получим
= (10.23)
Отсюда требуемый внутренний диаметр трубы
d = 4,61/~
г ивд
ММ.
Задаваясь скоростью воды в змеевке, можно определить диаметр
трубы по табл. 10.18.
10.18. Расходы воды №вд, дм3/мин, в зависимости от d трубы и скорости овц
(/, мм Расход воды, дм®/мии, при скорости о , м/с ВД
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1.0
10 0,47 0,94 1,41 1,88 2,35 2,82 3,29 3,76 4,23 4,7
12 0,65 1,30 1,95 2,60 3,25 3,90 4,55 5,20 5,85 6,5
14 0,92 1,84 2,76 3,68 4,60 5,52 6,44 7,36 8,28 9,2
16 1,20 2,40 3,60 4,80 6,00 7,20 8,40 9,60 10,8 12,0
18 1,52 3,04 4,56 6,08 7,60 9,12 10,64 12,16 13,68 15,2
20 1,88 3,76 5,64 7,52 9,40 11,28 13,16 15,04 16,92 18,8
22 2,27 4,54 6,81 9,08 11,35 13,62 15,89 18,16 20,43 22,7
25 2,94 5,88 8,82 11,76 14,70 17,64 20,58 23,52 26,46 29,4
28 3,68 7,36 11,04 14,72 18,40 22,08 25,76 29,44 33,12 36,8
30 4,23 8,46 12,69 16,92 21,15 25,38 29,61 33,84 38,07 42,3
346
Перепад температур масла и воды в начале змеевика при уста-
новленной (желаемой) температуре масла
Д/И = /В-/1°С. (.10.24)
Конечный температурный перепад
Д/К=4.-4ОС. (10.25)
Средний температурный перепад
Д/ср = 0,5 (Д/Н4-Д/К)°С. (10.26)
Наружная поверхность охлаждения змеевика
где Кзм — коэффициент теплоотдачи, определяемый по табл. 10.19
в зависимости от окружной скорости зубчатого колеса или червяка.
Вт
М2 °C
10.19. Значение Каи для змеевика из красномедной трубки,
Окружная скорость зубчатого колеса или червяка, м/с Скорость воды, м/с
0,1 0,2 0,4 и более
До 4 146 157 165
4—6 153 163 174
6-8 162 174 186
8—10 168 180 195
12 174 186 203
По найденной величине S3M определяют длину трубы и конструк-
цию змеевика; минимальный радиус оправки при изгибании труб
на 180° рекомендуется принимать для красномедных труб 1,5 d,
а для латунных 2а 2d (d — наружный диаметр).
Пример. Рассчитать змеевик для охлаждения масла в червячном редукторе,
представленном на рис. 10.82. Передаваемая мощность на валу червяка = 10 кВт;
частота вращения червяка пг = 960 об/мин; передаточное число и = 30; а = 210 мм;
т = 8 мм; q = 8; г, = 2; г2 = 60.
К. п. д. редуктора t]p = 0,8; теплоотдающая поверхность редуктора S = 0,6 м2.
Редуктор расположен внутри помещения с температурой окружающего воздуха
/в = 20° С. Количество воды не ограничено. Режим работы — непрерывный с по-
стоянной нагрузкой.
Определим количество выделяющегося тепла:
С?±=Л7г(1 — 1]р) = 10-103 (1 -0,8) = 2000 Вт.
При температуре масла в редукторе /м = 65° С, Л/ = /„ — tB = 65° — 20° =
= 45° С и коэффициенте теплопередачи К = 14 Вт/м2 • °C количество тепла, отво-
димого поверхностью редуктора, по формуле (10.12)
С2 = ЗКД/= 0,6-14-45^ 380 Вт.
Так как > Q2> то установим для охлаждения масла змеевик из красномед-
ных труб.
347
Количество тепла, которое должен отводить змеевик,
Qm = Qi - Q2 = 2000 - 380 = 1620 Вт.
Потребное количество воды для охлаждения — по формуле (10.21)f
WBJ[ =----= тлл юз с «=0,078- Ю-з^-«= 4,7 дмз/мин,
ТвдСвдД/вд 1000-4,187.103-5 с ’ ' '
где Д/вд = 5° С — повышение температуры воды в змеевике.
Температура воды при выходе из змеевика
t, = \ + Д/вд = 20’ ]- 5° = 25’ С,
t, = 20° С — температура воды на входе в змеевик.
Из табл. 10.17 выбираем для змеевика трубу 18 Х2 (d = 14 мм), fT — 0,056 м2/м.
Скорость потока воды в трубе — по формуле (10.23):
21,2117вд 21,2-4,7 ,
Цвд-----^2 “ Й12 ' М/С-
<Р 142
По табл. 10.18 проверяем при найденных значениях цвд и d расход воды:
V/пд = 4,8 дм3/мин.
Перепад температур масла и воды в начале и в конце змеевика
Д/н=С — 4 = 65° — 20’ = 45 "С;
Д/к = t„ — t.. = 65’ — 25° = 40 ’С.
Средний температурный перепад
Д/ср = 0,5 (Д t„ + Д/к) = 0,5 (45’ -J- 40’) = 42,5 ’С.
Наружная поверхность змеевика
с_______Озм_______ 1620 ол м2.
5зм КзмЛОр 165-42,5 ~ ’2 ’
Вт
здесь Кзм — по табл. 10.18 при < 4 м/с; КЗМ = 165- 9сГг.
м4 с
Длина трубы
5,и 0,23 . .
а = -^ = 7“^ =«4,1 м.
/г 0, Обо
Если расчетная длина трубы окажется слишком большой и змеевик не поме-
стится в корпусе, то следует увеличить диаметр трубы.
§ 10.6. ПОСАДКА ОСНОВНЫХ ДЕТАЛЕЙ РЕДУКТОРОВ
Типичные сопряжения основных деталей редукторов приведены
в табл. 10.20.
При назначении посадок на шпоночные соединения следует руко-
водствоваться ГОСТ 7227—58, выдержки из которого приведены
в табл. 10.21.
§ 10.7. ФУНДАМЕНТНЫЕ ПЛИТЫ
Общая фундаментная плита дает возможность обеспечить при
монтаже соосность валов механизмов привода, облегчает демонтаж
и повторный монтаж привода при ремонтных работах. Фундаментные
плиты выполняют сварными из листовой стали (рис. 10.88), из про-
фильного проката (рис. 10.87) или же отливают из серого чугуна (рис.
10.89).
348
10.20. Сопряжения основных деталей редукторов
Название посадки Примеры применения Условия сборки и разборки
Прессовая А Пр Зубчатые колеса на валы при тяже- лых и ударных нагрузках; большие осевые усилия воспринимаются без дополнительных креплений Сборка и разборка под прессом
Легкопрессовая А Пл Венцы червячных колес на центры. Зубчатые колеса и зубчатые муфты на валы. Умеренные осевые нагрузки воспринимаются без дополнительных креплений Под прессом
Глухая А Г Шестерни на валах электродвигате- лей, фрикционные и кулачковые муф- ты, червячные венцы. Для восприя- тия осевых сил требуется дополни- тельное крепление Под прессом; съемниками, молотками
Тугая “Т- Конические шестерни и колеса при частых съемах (для уменьшения из- носа посадочных мест) Под прессом; съемниками, дере- вянными ручниками
И с Стаканы под подшипники качения в корпус редуктора От руки
А с3 Крышки торцовые узлов на подшип- никах качения
А3 с3 Распорные кольца, сальники, валы под подшипники на конических зак- репительных втулках
Ходовая А3 х3 Валы в подшипниках скольжения, сальники
10.21. Допускаемые отклонения ширины шпоиок и пазов для соединений
с призматическими и сегментными шпонками (по ГОСТ 7227—58)
Вид соединен ня Предельные отклонения размера Назначение
ШпбНка Паз вала Паз втулки
Неподвижное напря- женное на валу, скользя- щее во втулке Вй пш •^3 Для индивидуально- го и серийного произ- водства
Неподвижное плотное на валу, ходовое во втулке Х3 Для направляющих шпонок
349
Рис. 10»87. Сварная фундаментная плнта из проката
Рис. 10.88. Установка привода на сварной плите из ли-
стовой стали:
1 — электродвигатель; 2 — упругая муфта; 3 — червячный ре-
дуктор; 4 — сварная плита
350
Рис. 10.89. Литая фундаментная плита
Рис. 10.90. Размещение
крепежных деталей на
раме
Рис. 10.91. Стык швел-
леров, усиленный при-
варенными накладками
Рис. 10.92. Кон-
струкция соеди-
нения швеллеров
Рис. 10.93. Установка косых на-
кладок в местах расположения фун-
даментных болтов
Рис. 10.94. Ребра жесткости
351
Рис. 10.95. График для определения толщины стен-
ки чугунной фундаментной плиты;
, I г «_ 1
у ==.-L——!—I — длина; о — ширина; п — высота от-
ливки, м
Рис. 10.96. Креп-
ление механизма
к раме шпильками
Форма и размер фундаментной плиты определяются размещением
устанавливаемых на ней механизмов — электродвигателя, редуктора
и др. В сварных плитах из профильного проката применяют в основ-
ном швеллеры. Номер швеллера определяется главным образом раз-
мерами головок болтов крепления механизмов и размерами гаек
фундаментных болтов крепления рамы (рис. 10.90), а также разме-
рами лап механизмов, опирающихся на полки швеллера. Для удоб-
ства постановки болтов швеллер плиты располагают полками наружу.
Места стыка швеллеров обваривают по контуру, а в тяжелонагру-
женных плитах их усиливают накладками (рис. 10.91).
В случае расположения полок швеллеров внутри рамы их сты-
куют, как указано на рис. 10.92.
В местах расположения болтов применяют косые шайбы (табл.
10.22). Для усиления полки швеллера в местах установки фундамент-
ных болтов приваривают косые накладки (рис. 10.93).
В плитах с небольшой высотой швеллера фундамент-
ные болты проходят через обе полки швеллера, уси-
ленные ребрами жесткости (рис. 10.94). В местах
расположения опорных площадок механизмов обычно
приваривают накладки, поверхности которых обра-
батывают.
Поверхности фундаментной плиты, на которые
Рис. 10.97. Кре-
пление механиз-
ма крана бол-
тами
монтируют механизмы, фрезеруют или строгают для
обеспечения правильного взаимного расположения
(соосности) механизмов.
Литые плиты меньше распространены вследствие
дороговизны их изготовления; при конструирова-
нии следует предусматривать легкость и жесткость
конструкции, поэтому литые плиты делают пусто-
телыми с ребрами жесткости. Толщину стенки
ориентировочно можно выбрать по графику (рис.
10.95).
Для механической обработки опорных поверхно-
стей плиты должны быть предусмотрены припуски.
Места расположения фундаментных болтов усили-
352
вают приливами. Механизмы крепят к плите шпильками (рис. 10.96)
или болтами (рис. 10.97).
10.22. Шайбы косые (по ГОСТ 10906—66**)
Ъ 4 „Пр контуру Rl,6ma Г »ХХ
4Q "/ill /fh Ы.
полок дв
* > 10% Для плоских швелле ** Размер для справок. Размеры, мм н утавровых балок.
ров и 12% ДЛ5
Номинальный диаметр резьбы болта d в Hi справ. н Наименование номера профилей, для которых рекомендуется размер шайбы
швеллеров по ГОСТ 8240—72 балок двутав- ровых по ГОСТ 8239—72
10 11 2 0 5,1 5 8 14
12 14 16 13 15 17 3 0 5,7 6 10 12 14 18 18а
18 20 22 19 22 24 4 0 6,2 7 16 18 20а 22а 24а 30а
24 26 5 0 6,8 9 22а 40
Пример условного обознг из материала группы 01, без Примечания: 1. До 2. Размер Н рекомендует штамповки. чен токр nyci ся ия косой шайбы для болта номинальным диаметром 20 мм, ытия: Шайба 20.01 ГОСТ 10906—66. сается вместо радиуса Я1»6тах делать фаску 1,6x45°. 1ри получении шайб способом механической обработки или
Для удобства монтажа головки болтов часто располагают в спе-
циальных пазах (рис. 10.97), предотвращающих проворот болта при
сборке.
При конструировании плит следует предусматривать литейные
уклоны, галтели, переходы и т. п. (см. § 10.2).
12 Зак. 220
Глава 11
РЕМЕННЫЕ ПЕРЕДАЧИ
§ 11.1. ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ
ПЕРЕДАЧИ
В механических приводах ременные передачи при-
меняют главным образом для увеличения вращающего момента
на приводном валу (i > 1), значительно реже — для увеличения
частоты вращения (i< 1), например, в приводах центрифуг, центро-
бежных насосов и др. В том и в другом случае место ременной пере-
дачи в общей кинематической схеме привода выбирают так, чтобы
скорость ремня не превышала значений, приведенных в табл. 11.1.
11.1. Наибольшая допускаемая скорость ремня, м/с
Тип ремня Способ соединения
Все плоские ремни Сшитые внахлестку . . . До 10
То же Сшитые встык > 20
Шарнирное проволочное > 25
Плоские: кожаные Склеенные 40
прорезиненные Бесконечные 30
хлопчатобумажные 20
тканые синтетические » 100
Клиновые 30
Выбор передаточного отношения i зависит от расположения ремен-
ной передачи (рис. 11.1), условий эксплуатации и способа регулиро-
с)
Рис. 11.1. Схемы ременных передач:
а — открытая; б — перекрестная; в — полуперекрестная
354
вания натяжения ремня. В табл. 11.2 приведены значения для пони-
жающих передач.
11.2. Значения передаточного числа i для ременных передач
Способ регулирования натяжения ремня Тип передач i
среднее наибольшее
Периодическое регулн- Открытая 2-5 7
рование изменением дли- Перекрестная 1-3 5
ны ремня или межосево- Полуперекрестная .... 1-2 3
го расстояния С направляющими роли- ками 1-3 4
Автоматическое регули- Самонатяжная 2—5 8
рование С натяжным роликом . . 3—6 10
Выбор типа ремня
Плоские кожаные ремни (табл. 11.3) обладают высокой упру-
гостью, допускают кратковременную перегрузку на 50% и перемен-
ную нагрузку с частыми переключениями, надежно работают в пере-
крестных и полуперекрестных передачах. Сравнительно высокая
стоимость ограничивает область их применения.
11.3. Ремии кожаные (по ГОСТ 18697—73)
Размеры, мм
Ширина b Толщина б Ширина b Толщина б
оди- нар- ных ДВОЙ- НЫХ оди- нар- ных двой- ных
20, 25, 30 (35), 40, (45), 50 60, 70, (75), 80 3 3,5 4 — 100, 115 4,5 7,5
125, 150 175, 200, 225, 250 (275), 300 5 5,5 9 9,5
(85), 90, (95) 4,5 —
Хлопчатобумажные ремни (табл. 11.4) допускают кратковремен-
ную перегрузку на 40%, удовлетворительно работают при значитель-
ных колебаниях нагрузки, не разрушаются под действием паров
щелочей и нефтепродуктов, но непригодны для работы в помещениях
с повышенной влажностью и с парами кислот.
Прорезиненные ремни (табл. 11.5) допускают кратковременную
перегрузку на 30%, но при резких колебаниях нагрузки пробуксо-
вывают; ремни с двусторонней резиновой обкладкой пригодны для
работы в помещениях с повышенной влажностью и с парами кислот,
но под действием паров нефтепродуктов расслаиваются.
12*
355
11.4. Ремни хлопчатобумажные цельнотканые пропитанные (по ГОСТ 6982—75)
Размеры, мм
Ширина ремня Ъ Число слоев Толщина 6
30, 40, 50, 60, 75, 90, 100 4 4,5
30, 40, 50, 60, 75, 90, 100, 115, 125, 150, 175 6 6,5
50, 75, 90, НО, 115, 125, 150, 175, 200, 225, 250 8 8,5
11.5. Ремни прорезиненные (по ГОСТ 101-54*)
Ширина ремня bt мм Число прокладок z
Тип ремня Тип ремня
А Б в А | Б в
ОПБ-5, ОПБ-12 уточная шнуровая из бельтинга Б-820
— 20, 25, 30, 40, 45 20, 25, 30, 40 — — 2 3
20, 25, 30, 40, 45, 50, 60, (65), 70, 75 — 50, 60, (65), 70, 75 — 3—5 __ 3—5
80, 85, 90, 100 — 80, 85, 90, 100 — 3—6 — 3—6
(115), (120), 125, 150, (175), 200, (225), 250 150, 200, 250 125, 150, 200, 250 3 4—6 4—6 4—6
250, (275), 300, 350 250, 300 250, 300 3 4—8 4—8 4—8
400, 450 375, 400, 425, 500 375, 400, 425, 450 3—4 5—8 5—8 5—8
500 500 500 3—4 5—9 5—9 5—9
(550), 600, 700 — — 5 — — —
800, 900, 1000, 1100, (1200) — — 5—8 — — —
Толщина одной прокладки, мм: с резиновой прослойкой без резиновой прослойки 2,00± ±0,25 1,75± ±0,25 1,50± ±0,25 1,25± ±0,25 1,50± ±0,25 1,25± ±0,25 1,50± ±0,25 1,25± ±0,25
Примечание. Ремни типов А и В могут изготовляться бесконечными.
356
Ремни типа А применяют при скорости v 20 м/с; они имеют
нарезной- каркас с резиновыми прослойками между всеми проклад-
ками, кромки их защищены водоупорным составом. Ремни типа Б
предназначены для тяжелых условий работы с прерывной нагрузкой
при v до 20 м/с, имеют послойно завернутый каркас как с резиновыми
прослойками между прокладками, так и без прослоек.
Ремни типа В имеют спиральнозавернутый каркас без резиновых
прослоек между прокладками, v до 15 м/с.
Прорезиненные ремни всех типов могут иметь резиновые обкладки
с одной или с обеих сторон.
Данные о клиновых ремнях приведены в § 11.3.
§ 11.2. РАСЧЕТ ПЛОСКОРЕМЕННОЙ ПЕРЕДАЧИ
Геометрические параметры открытой плоскоременной передачи
(см. рис. 11.1):
угол обхвата малого шкива
а; =180°-60 Ра~Р1 ; (11.1)
длина ремня (без припуска на соединение)
Л = 2Л + g (Вд + В2) + (Ра; (11.2)
диаметр ведущего шкива определяют по формуле М. А. Саверина:
0^(110 ч- 130)]/ мм,
(11.3)
где N в Вт, с последующим округлением по ГОСТ 17383—73.
Диаметр ведомого шкива О2 вычисляют предварительно без учета
скольжения е в соответствии с заданным передаточным числом: О2
«Dii; затем, после округления его по ГОСТу, уточняют:
<01 _ Р2
®2 — £>i(l —е) ’
(П.4)
(02 = (01
£>i(l —е)
Рг
И
«2= «1
£>i (1 — е)
D2
(Н.5)
Принимают межосевое расстояние А — (1,5 4- 2) (Ох + О2).
Определив далее скорость ремня v — (где в м) и окруж-
ное усилие Р — ~ (где N в Вт, а Р в Н), рассчитывают площадь попе-
речного сечения ремня по критерию тяговой способности:
(1L6)
357
где I/?l — допускаемая удельная тяговая способность ремня (так назы-
ваемое «допускаемое полезное напряжение»);
| /г] = ^0СаСФСрСе; (И-7)
kn — оптимальная удельная тяговая способность, определяемая
по эмпирической формуле
k0 = a — w-j^—. (П.8)
^ir.in
Значения величин а и w и наибольшего допускаемого отношения
б/Е>т1п приведены для различных ремней в табл. 11.6 в зависимости
от б0 — напряжения, возникающего при предварительном натяжении
ремня.
11.6. Значения величин a, w и отношения ------
b'mln
Напряжение от предвари- а, Н/мм2 для ремней
тельного натяжения о0, Н/мм2 кожаных прорезиненных хлопчатобумажных
1,6 1,8 2,0 2.7 2,9 3,1 2,3 2,5 2,7 2,0 2,1 2,2
СУ 30 10 15
б — не более ь/min 1 35 40 1 30
Примечание. Для открытых периодически регулируемых передач принимают ос=:
= 1,6 -г 1,8 Н/мм2; для автоматически регулируемых о0 = 2,0 Н/мм2.
Коэффициенты Са, Cv, Ср и Се, входящие в формулу (11.7), учи-
тывают влияние угла обхвата а, скорости v, режима работы и угла 0
наклона линии центров к горизонту; их определяют следующим обра-
зом:
Са =1-0,003 (180°-cti);
СФ= 1,04-0,0004 с/2;
Ср —по табл. 11.7;
Cg —по табл. 11.8.
(П.9)
(11.10)
По найденной величине F подбирают ширину b и толщину б ремня
по соответствующему стандарту, соблюдая условие, чтобы отношение
б/Drnin не превышало допускаемого значения. Следует иметь в виду,
что с уменьшением б/От|п ресурс работы ремня возрастает.
Рассчитанный ремень рекомендуется проверить на прочность
и на долговечность.
358
11.7. Коэффициент режима Ср для односменной работы (при передаче от
электродвигателей: постоянного тока, переменного тока, асинхронных
с короткозамкнутым ротором)
Характер нагрузки Приводимые в движение машины СР
Пусковая нагрузка до 120%. Рабочая нагрузка постоянная Вентиляторы и воздуходувки, цен- тробежные насосы и компрессоры; станки токарные, сверлильные и шли- фовальные. Ленточные транспортеры 1,0
Пусковая нагрузка до 150%. Рабочая нагрузка с небольши- ми колебаниями Станки фрезерные и револьверные. Поршневые компрессоры и насосы. Пластинчатые транспортеры 0,9
Пусковая нагрузка до 200%. Рабочая нагрузка со значитель- ными колебаниями Реверсивные приводы: станки стро- гальные и долбежные. Прессы винто- вые и эксцентриковые. Станки ткацкие и прядильные. Транспортеры винто- вые и скребковые; элеваторы 0,8
Пусковая нагрузка до 300%. Рабочая нагрузка весьма не- равномерная ударная Бегуны и глиномялки. Лесопильные рамы. Ножницы, молоты, дробилки, шаровые мельницы. Подъемники и экскаваторы 0,7
Примечания: 1. Для приводов от электродвигателей переменного тока синхрон- ных, а также асинхронных с контактными кольцами, от поршневых двигателей значения Ср снижать на 0,1. 2. Прн работе в 2 смены значения Ср снижать на 0,1, при работе в 3 смены — на 0,2.
11.8. Значение С0
Тип передачи Угол наклона к горизонту 6°
С—60 60—80 80—90
Периодически регулируемая: открытая .............. перекрестная , полу перекрестная Автоматическая регулируемая 1 0,9 0,8 1 0,9 0,8 0,7 1 0,8 0,7 0,6 1
Для выполнения первого условия определяют максимальное напря-
жение в сечении, набегающем на ведущий шкив:
Отах = °1 + °и + °и>
где
__ ‘Si _ So+0,5P __ । Р .
— р — р т 2Р •
(11.11)
(11.12)
359
So
у = <т0 — напряжение от предварительного натяжения, оптималь-
ное значение о0 = 1,8 Н/мм2;
о„ = £иТ^; (11.13)
^min
для прорезиненных ремней модуль упругости при изгибе
Ек 80 -т-100 Н/мм2;
для хлопчатобумажных
£„ = 40-5-50 Н/мм2.
Напряжение от центробежной силы, Н/мма
<тг, = ру2-10-«. (11.14)
Здесь плотность р в кг/м3, v в м/с.
Условие прочности:
Птах [п]р,
для ремней прорезиненных
[о]р«=»6-5- 8 Н/мм2;
для ремней кожаных
[о]р?«5-5- 7 Н/мм2;
для ремней хлопчатобумажных
1п]Р^4-г-5 Н/мм2;
для ремней клиновых
(ojp^ 9-5-10 Н/мм2.
Расчетную долговечность ремня определяют по рабочему числу
циклов:
/ \т
= ^цб, (11.15)
\ итах/
где т = 5 — для плоских ремней; т — 8 — для клиновых; базовое
число циклов МцБ = 10’.
Предел выносливости для прорезиненных ремней с прослойками
<ту = 6 Н/мм2;
для прорезиненных ремней без прослоек
оу = 7 Н/мм2;
для хлопчатобумажных ремней
оу = 4-5-5 Н/мм2.
360
Так как за каждый пробег ремень испытывает два цикла нагру-
жения, то рабочее число циклов за h рабочих часов составит
/Vu = 2-3600/iv,
где v = — число пробегов в секунду.
Расчетная долговечность
Здесь Ct — коэффициент, учитывающий влияние передаточного числа:
при i=12 4
С, = 1 1,7 1,9
Сю — коэффициент, учитывающий непостоянство нагрузки: при посто-
янной нагрузке Св = 1, при изменении нагрузки в интервале
от 0 до расчетной величины Св = 2.
В заключение расчета определяют силу давления на валы Q.
Для передач с автоматическим регулированием натяжения ремня
принимают
Q = 2S0 sin-у-,
(П.17)
где So = о0 56 — предварительное натяжение каждой ветви ремня.
Если принять для приближенного расчета коэффициент тяги
<р = ^-^0,5, то S0^P и Q^2Psin-91.
Для передач с периодическим регулированием начальное натяже-
ние So примерно в 1,5 раза больше и
Q^3Psin
Шкивы для плоскоременной передачи
Материал для шкивов выбирают в зависимости от скорости ремня;
при v 25 м/с применяют шкивы из чугуна СЧ 12-28; при v = 25 ч-
-ь 30 м/с — из чугуна СЧ 15-32; при v = 30 ч- 35 м/с — из чугуна
СЧ 18-36 и СЧ 21-40; при v до 45 м/с — шкивы стальные литые или
сборные сварной конструкции из сталей СтЗ—Ст5. Для быстроход-
ных ременных передач применяют шкивы из легированной стали или
дюралюминия.
Конструкции чугунных литых шкивов показаны на рис. 11.2
и 11.3. Основные размеры их по ГОСТ 17383—73 приведены в табл.
361
a)
Рис. 11.2. Конструкция чугунных литых шкивов:
а — с одним рядом спиц; б с двумя рядами спиц
Рис. 11.3. Разъемный чугунный шкив
11.9. Остальные размеры определяются в зависимости от диаметра:
толщина обода у края s = 0,005£> + 3 мм; высота рифта е = s +
+ 0,02В; диаметр ступицы D„ = (1,8 s- 2) dBaM; длина ступицы
LCT ~ (1.5 -г- 2) d, но обычно не больше В. Число спиц г = 4 при
ширине обода В 300 мм и О < 500 мм; г = 6 при D от 500 до 1600;
при D 1600 мм г = 8; если В > 300 мм, то число спиц удваивают
и располагают их в два ряда. Сечение спиц — эллиптическое с отно-
362
шепнем осей а : h = 0,4 (до 0,5); W — ~ahs, спицы рассчитывают
Л 1 п
на изгиб от окружного усилия, причем в расчет принимают ?г. При
этих допущениях размер большой оси в условном сечении на продол-
жении спицы до пересечения с диаметральной плоскостью определяют
из условия прочности на изгиб
О [UJh
следовательно,
, / 40 PD
1/ , ,
Г Z [о]и
мм.
(11.18)
Здесь Р в Н, D в мм, [о]и в Н/мма.
11.9. Основные размеры шкивов, мм (по ГОСТ 17383—72)
Диаметр D
40 45 50 56 63 71 80 90 100 112 125 140 160 180 200 224 250 280 315 355 400 450 500 560 630 710 800 900 1000 1120 1250 1400 1600 1800 2000
Ширина обода шкива В в зависимости от шнрнны ремня Ь
ь В 6 в
40 50 63 71 80 90 100 112 125 50 63 71 80 90 100 112 125 140 140 160 180 200 224 250 280 315 355 400 160 180 200 224 250 280 315 355 400 450
К ободу размеры а и h уменьшают на 20%. При D 300 мм шкивы
отливают без спиц с диском, толщина которого 8Д ~ (0,8 -г- 1) s. При
v >30 м/с шкивы выполняют дисковой конструкции при любом
диаметре.
363
11.10. Пример расчета ременной передачи
(N = 7 кВт, zij= 900 об/мин, i % 3)
Параметры Расчетные формулы Ч меловой результат Примечание
Диаметр ведущего шкива, мм Ближайший диаметр по ГОСТ 17383—72, мм Диаметр ведомого шкива, мм Ближайший диаметр по ГОСТ 17383—72, мм Уточненное передаточное число Частота вращения ведо- мого шкива, об/мин Межосевое расстояние, мм Угол обхвата меньшего шкива, град Коэффициент Са Скорость ремня, м/с Коэффициент скорости Коэффициент режима Коэффициент угла накло- на передачи k0, Н/мм2 [/г], Н/мм2 Окружное усилие, Н Требуемая площадь попе- речного сечения ремня, мм2 Тип ремня по ГОСТ 101—54* (табл. 11.5) Число прокладок Толщина ремня Ширина ремня, мм Длина ремня, м О1 = (1Ю4-130)|/^- (11.3) (по табл. 11.9) D2 = Dj Z (1—е) D2 (по табл. 11.9) (ПЛ) п, 900 ”2=Т = 2Д7 А 1,5 + Z)2) а, = 180 — 60 ^=-51 А Са=1 — 0,003(180—eq) (11.9) — л£М1 _ 3,14-250-900 v 60 1000 60 1000 С\,= 1,04-4-0,00041)2 Ср (по табл. 11.7) Се (по табл. 11.8) /г0 = 2,5 —10 А (11.8) И=Л0СаСтСрСв (11.7) АГ 7 -10» v 12,5 f=fc6 = [& (1L6) В г 6= 1,25г b L=2A-]--2 (О,+D,) + + <iV- (11.2) 220—260 250 742 710 2,87 313 1400 160 0,94 12,5 0,98 0,9 1 2,25 1,86 560 300 3 3,75 80 4,35 N в Вт При е = 0,01 гт 5 1 При Di 40 N в Вт
364
Продолжение
Параметры j Расчетные формулы Числовой результат Примечание
Напряжение от Slt Н/мм2 Напряжение изгиба, Н/мм2 Напряжение от центро- бежной силы, Н/мм2 Полное напряжение, Н/мм2 Число пробегов в секун- ду Долговечность, ч Сила давления на вал, Н ai=°o + 2p’ (П-12) ь,“,0С1И7 11 "31 0F7, = pt)2.io-e (П.14) atnax==ai+aH + 0® V / Ov \б 10<C;CH <2=2o0F sin (11.17) 2,73 1,5 0,19 4,52 2,9 9000 1060 При о0 = = 1,8 Н/мм2 При Еп = = 100 Н/мм2 При р = = 1200 кг/м3 Менее допу- скаемого [oL,^64- 4-8 Н/мм2 Меньше М = 5-1 При оу = = 7 Н/мм2; С, = 1,8; Сн=1
Для удобства монтажа шкивов, в особенности при крупных раз-
мерах их, применяют конструкцию с разъемом по спицам (рис. 11.3),
причем размер /гх — 1,4 h, а малая полуось берется того же размера,
что и у неразъемной спицы.
Диаметры болтов у обода
do = 0,45 + 5 мм при одном болте
в стыке;
d0 = 0,35 ]/двВ + 5 мм при двух болтах;
у ступицы
dc = 0,15d-}-(8ч-15) мм при одном болте;
dc — 0,12d-}-(8-r-15) мм при двух бол-
тах, где d — внутренний диаметр сту-
пицы; 60 — толщина обода.
Пример 1. Рассчитать для привода пластин-
чатого транспортера (рис. 11.4) плоскоременную
передачу от электродвигателя к редуктору по сле-
дующим данным: передаваемая мощность N =
= 7 кВт; частота вращения п = 960 об/мин; пере-
даточное число i «3; расположение передачи
горизонтальное. Последовательность и результаты
расчета приведены в табл. 11.10.
Рис. 11.4. Схема привода
(к расчету плоскоремениой
передачи):
1 — асинхронный электродвига-
тель; 2 — ременная передача;
3 — редуктор; 4 — пластинча-
тый транспортер
365
Расчет передачи с натяжным роликом
При проектировании открытых ременных передач приходится учи-
тывать, что с уменьшением межосевого расстояния и с увеличением
i уменьшается угол обхвата и возрастает скольжение ремня. Поэ-
тому плоскоременные передачи с большим передаточным числом
(i > 5) и сравнительно малым межцентровым расстоянием А < 1,5 X
X(Dj + D2) проектируют с натяжным роликом, обеспечивающим зна-
чительное увеличение угла обхвата aL > 180°. Однако следует иметь
в виду, что применение натяжного ролика усложняет и удорожает
передачу и не дает возможности использовать ее в качестве реверсив-
ной.
Геометрические соотношения рекомендуются следующие (рис. 11.5).
Диаметр ролика Do = (1 до 0,8) Dt.
Расстояние между малым шкивом и роликом в свету
_ Д
Ci 2s а1-
Уменьшение аъ доводимое иногда на практике до 35—50 мм, заметно
снижает долговечность ремня. Наименьшее межцентровое расстояние
= 0,5 (Di 4*D2) 4* -}- a2 2s 0,5Dj (1 + *)•
Длину ремня L выбирают с таким расчетом, чтобы угол 2<р был
равен примерно 120°. Для предварительной компоновки передачи
центр ролика сначала помещают на линии, соединяющей центры
шкивов, а затем вносят необходимые коррективы. Углы обхвата
и а2> а также полную длину ремня L (без учета припуска на сшивку)
определяют непосредственно по чертежу. Для уменьшения нагрузки
на ролик его располагают на ведомой ветви. Наименьшее расстояние
Рис. 11.5. Схема ременной передачи с на-
тяжным роликом
между ветвями ремня в свету
Amin = 50 ММ.
Сечение ремня определяют
по формуле (11.6), но с учетом
следующих особенностей: коэф-
фициент С0 = 1 при любом рас-
положении передачи; Са =
= 1 4- 0,005 (а!— 180°); величи-
ну полезного напряжения k0
определяют по формуле (11.8)
и табл. 11.6 при о0 = 2 Н/мм2.
Расчетная площадь поперечного
сечения ремня для передачи с
натяжным роликом при равных
условиях получается меньшей,
чем для открытой передачи. Но
в отношении долговечности рем-
ня передача с натяжным роли-
ком находится в более тяжелых
366
Рис. 11.6. Натяжной ролик с одним рычагом
условиях, так как за один пробег происходит три цикла нагружения,
причем при набегании на ролик ремень подвергается перегибу с пере-
меной знака напряжений. Поэтому рекомендуется уменьшать число
пробегов v до 2 в секунду и выбирать отношение на 20%
ниже значений, указанных в табл. 11.6. Расчетную долговечность
определяют по формуле (11.16), заменяя в знаменателе 2 на 3.
Массу груза G находят из условия равновесия ролика — равен-
ства нулю суммы моментов всех приложенных сил относительно оси
качания рычага ролика. Например, для рис. 11.5 получим
__Rh—Gili— G2l2—G3I3
I ’
величины h и lt определяют непосредственно по чертежу передачи;
массы рычагов и роликов подсчитывают по их объему и плотности.
Силы давления на ролик и на валы определяют графически,
вычислив предварительно натяжения ветвей:
для ведущей ветви
Si — стоТ Ч—2 ’
для ведомой ветви
Sa = QqF —
При 2ф — 120° сила на ролик R = 2Sa cos ф — S2.
Сила давления на вал малого шкива
Ql = S't + — 2SiS2 cos av
Сила давления на вал большого шкива
Q2 — — 2SpSa cos ctg.
Типичные конструкции натяжных роликов представлены на рис. 11.6
и 11.7. Однорычажные ролики применяют при диаметре малого
шкива 400 мм, при ширине шкивов В «с 200 мм и массе груза
G sg 30 кг; размеры рычагов и оси назначают из условия жесткости
и проверяют на изгиб, а рычаг ролика (в однорычажной конструк-
ции) — на изгиб и кручение.
367
363
Рис. 11.7. Натяжной ролик с двумя рычагами
§ 11.3. РАСЧЕТ КЛИНОРЕМЕННОЙ ПЕРЕДАЧИ
Основное преимущество клиновых ремней — лучшее сцепление
их со шкивом и относительно малое скольжение по сравнению с пло-
скими ремнями; благодаря этому можно осуществлять передачи
с большим i (до 10) и меньшим а1( причем габариты передачи полу-
чаются значительно меньше, чем при плоском ремне. При выборе
минимального межосевого расстояния принимают
^min ~ 0,55 (Z?i 4-П2) +^,
где h — толщина ремня. Угол обхвата малого шкива [по формуле
(11.1)] должен быть не менее 120°, а при огибании трех шкивов 70°.
Наибольшее межосевое расстояние
A max — Di -[-
Из формулы (11.1) при ccj 120° и imax = Ю следует А 0,9£>2;
поэтому часто в предварительных расчетах принимают А = (0,8 <-
4- 1)Z)2. Так как клиновые ремни имеют стандартную длину, то окон-
чательно межцентровое расстояние после подбора ремня должно
быть уточнено по формуле
А = 2Е-л(Р1+Р2)+Г[2Е-л(Р1+Р2)]^-8(Р2Т^)-2 . 9
здесь L — расчетная длина ремня, измеряемая по нейтральному
слою. Для удобства монтажа и смены ремней должна быть предусмо
трена возможность уменьшения А
на величину ^0,015L, а для созда-
ния натяжения — увеличения А на
^0,03L. Это достигается установ-
кой электродвигателя на салазках
Рис. 11.8. Установка электро
двигателя на салазках
Рис. 11.9. Установка электродвигателя
на шарнирной плите
369
или на шарнирной плите (рис. 11.8, 11.9). Натяжные ролики при-
меняют лишь в крайнем случае, так как при этом в сечении ремня
возникают знакопеременные напряжения изгиба и долговечность
ремня уменьшается.
Основные размеры клиновых ремней приведены в табл. 11.11.
11.11. Клиновые ремнн (по ГОСТ 1284—68)
Размеры, мм
Обозна- чение Сечение ремня
О А Б В Д Е
^0 h F, мм2 10 6 8,5 47 13 8 11 81 17 10,5 14 138 22 13,5 19 230 32 19 27 476 38 23,5 32 692 50 30 42 1170
т_
Интервал длин ремня 400 до 2500 560 до 4000 800 ДО 6300 1800 до 10 000 3150 ДО 15 000 4500 до 18 000 6300 до 18 000
Стандартный ряп длин: 400 (425) 450 (475) 500 (530) 560 (600) 630
(670) 710 (750) 800 (850) 900 (950) 1000 (1060)
1120 (1180) 1250 (1320) 1400 (1500) 1600
(1700) 1800 (1900) 2000 (2120) 2240 (2360)
2500 (2650) 2800 (3000) 3150 (3350) 3550 (3750)
4000 (4250) 4500 (4750) 5000 (5300) 5600 (6000)
6300 (6700) 7100 (7500) 8000 (8500) 9000 (9500)
10 000 (10 600) 11 200 (11 800) 12 500 (13 200)
14 000 (15 000) 16 000 (17 000) 18 000
Примечания: 1. Площадь поперечного сечения ремня F в стандарте не указана —
она определена по размерам н h при <ро=4О°.
2. Размер относится к нейтральному слою.
11.12. Выбор сечения ремня
Передаваемая мощность N, кВт Сечение ремня прн ско- рости v, м/с Передаваемая мощность N, кВт Сечен не ремня при ростн V, м/с ско-
до 5 св. 5 ДО Ю св. 10 ДО 5 св. 5 ДО Ю св. 10
До 1 вкл О, А О, А О Св. 15—30 в, г в, г
Св. 1—2 О, А, Б О, А 0, А » 30—60 . г, д в, г
» 2—4 А, Б О, А, Б О, А » 60—120 .— д г, д
» 4—7,5 Б, В А, Б А, Б » 120—200 .—- Д, Е Г, д
> 7,5—15 В Б, В Б, В > 200 — — Д, Е
370
При расчете клиноременной передачи предварительно выбирают
сечение ремня в зависимости от передаваемой мощности и предпо-
лагаемой скорости ремня по табл. 11.12.
Так как для передачи заданной мощности могут подойти 2—3
сечения ремня, то при проектировании клиноременной передачи
рекомендуется просчитать соответствующее число вариантов и выбрать
оптимальное решение.
Шкивы для клиновых ремней изготовляют с канавками стандарт-
ного профиля; размеры их приведены в табл. 11.13, там же указаны
расчетные диаметры шкивов, относящиеся к окружности, проходя-
щей через центры тяжести сечений ремня.
Конструкции шкивов для клиновых ремней показаны на рис.
11.10 и 11.11.
11.13. Шкивы для клиновых ремней (по ГОСТ 1284—68)
Размеры, мм
Расчетные диаметры окруж-
ностей, проходящих через центр
тяжести сеченнй ремня
63 71 80 90 100 112 125 140 160 180 200 224
250 280 315 355 400 450 500 560 630 710 800
900 1000 1120 1250 1400 1600 1800 2000 2240
2500 2800 3150 3550 4000
Сече- Размеры канавок Расчетные диаметры шкивов при ф°
ремня с е t S k 34 36 38 40
О 2,5 10 12 8 5,5 63—70 80—100 112—160 180
А 3,5 12,5 16 10 6 90—112 125—160 180—400 450
Б 5 16 20 12,5 7,5 125—160 180—224 250—500 560
В 6 21 26 17 10 200 224—315 355—630 710
Г 8,5 28,5 37,5 24 12 — 315—450 500—900 1000
д 10 34 44,5 29 15 — 500—560 630—1120 1250
Е 12,5 43 58 38 18 — — 800—1400 1600
Примечание. Размеры с, е, t, s ие распространяются на шкивы для передач с вер-
тикальными валами и полуперекрестных, а также на шкивы сварные. Шнрниа шкива
В = (z — 1) t -J- 2s.
371
Рис. 11.10. Литой шкив для клиновых рем-
ней
Рис. 11.11. Свар-
ной шкив для
клиновых ремней
Методика расчета. В основе своей она сходна с рассмотренной
в предыдущем параграфе, но имеет особенности: расчет начинают
с выбора сечения ремня по мощности и предполагаемой скорости
(табл. 11.12), затем выбирают расчетный диаметр меньшего (веду-
щего) шкива (табл. 11.13). Не следует обязательно придерживаться
наименьшего допускаемого значения Dmin. лучше взять его на 1—2
номера больше, это обеспечит большую долговечность ремней. Далее
определяют D2, уточняют i и п2, задаются предварительно величиной
А и вычисляют длину ремня L. Округлив ее по стандарту (табл. 11.11),
уточняют А по формуле (11.19). Коэффициент Са находят по формуле
(11.9), Ср — по табл. 11.7; Се при любом расположении передач при-
нимают равным единице.
Коэффициент
С„ = 1,05 — 0,0005о2. (11.20)
(11.21)
Значения k0 приведены в табл. 11.14; [£] = k0CaCvCv.
Определив окружное усилие, Н
v ’
находят требуемое число ремней
Р
Z~ И'1 F-
Если оно окажется слишком большим (свыше 6—8), то надо уве-
личить диаметры шкивов или выбрать ремни большего сечения.
Полное напряжение находят по формуле (11.11), в которой
О1 = ^о + ^;
17
°и —-Си р“.
(11.22)
(11.23)
372
11.14. Значения k0 для клиновых ремией
Диаметр малого шкива, мм Сечение ремня /?0, Н/мм2
о0 = 0,9 Н/мм2 о0 = 1,2 Н/мм2 1 о0 = 1,5 Н/мм2
71 1,18 1,45 1,62
80 0 1,28 1,57 1,74
90 и более -— 1,65 1,86
100 1,23 1,51 1,67
112 А 1,31 1,61 1,80
125 и более — 1,70 1,91
140 1,23 1,51 1,67
160 Б 1,36 1,67 1,88
180 и более — 1,74 2,05
200 1,23 1,51 1,67
224 1,38 1,69 1,89
250 — 1,84 2,07
280 и более — 1,91 2,24
315 1,23 1,51 1,67
355 1,40 1,72 1,93
400 -— 1,91 2,16
450 и более — 1,92 1,24
500 1,23 1,51 1,67
560 Д 1,40 1,72 1,93
630 и более — 1,92 2,24
900 1,23 1,51 1,67
800 Е — 1,73 1,95
1000 и более — 1,92 2,24
Примечание. При числе пробегов v ^5 в секунду рекомендуется принимать о0 =
= 1,5 Н/мм2; при v свыше 5 до 10 в секунду рекомендуется принимать а0=1<2 Н/мм2; при
V>10 1/с следует принимать Go — 0,9 Н/мм2.
Расчетную долговечность клиновых ремней можно определять
по формуле (II. 16) при т — 8; оу = 9 Н/мм2, Л/цБ = Ю7.
Сила давления на валы
Q = 2o0Fz sin y- (11.24)
Для разгрузки вала от изгибающего момента при консольном
расположении шкива применяют конструкцию, показанную на рис.
11.12.
373
Рис. 11.12. Установка клиноременного
шкива на разгрузочной втулке
Рис. 11.13. Схема привода
(к расчету клиноременной пе-
редачи):
1 — асинхронный электродвига-
тель; 2 — клиноременная пере-
дача; 3 — редуктор; 4 — ленточ-
ный транспортер
Пример. Для привода, схема которого представлена на рис. 11.13, требуется
рассчитать клиноременную передачу по следующим данным:
передаваемая мощность N = 6 кВт;
частота вращения вала электродвигателя (асинхронная) п — 960 об/мин;
передаточное число от электродвигателя к редуктору i ~ 3.
Решение.
Для заданных условий подходят ремни сечений А, Б к В (см. табл. 11.12).
Чтобы найти оптимальное решение, рассчитываем все три варианта.
Результаты расчета сводим в табл. 11.15.
Из трех рассмотренных вариантов останавливаемся окончательно на сред-
нем— с ремнями сечения Б, так как для первого варианта число ремней велико,
а для последнего ремень сечения В не подходит по скорости (см. табл. 11.12). Для
выбранного варианта определяем расчетную долговечность. Находим по формуле
(11.22)
О1 = °о+ 9^т=1.5+-9 +Уо5 ==2.12 Н/мм2;
£ * О * I ОО
по формуле (11.14)
oT=po2 10-в= 1,2 Юз . 72- 10~в = 0,06 Н/мм2;
по формуле (11.23)
ои = £и-^- = 80-^-=6,0 Н/мм2.
Полное напряжение
о„я„=о,+а+а =2,12+0,06+6,0 = 8,18 Н/мм2
III <1 л X v Н
(при допускаемом [о]р = 9 Н/мм2).
Число пробегов в секунду
v = i = ^ = 4,12 1/с.
(при допускаемом до 10 1/с).
374
11.15. Пример расчета клиноременной передачи (N = 6kBt, «,=960 об/мин,
i «=3)
Определяемые величины Расчетные формулы Сечение ремня
А В В
Ширина ремня fr0, мм По табл. 11.11 13 17 22
Толщина ремня h, мм То же 8 10,5 13,5
Площадь поперечного сечении F, 81 138 230
мм2 Диаметр малого шкива Dlt мм По табл. 11.13 100 140 200
Диаметр большого шкива О2, мм D2^Dti (1—е) 300 420 600
Ближайший диаметр по стандарту По табл. 11.13 280 400 560
Расчетное передаточное число прн 2,83 2,88 2,83
е = 0,01 А (1—8)
Скорость ремня, м/с л Dj/ii 5 7 10*
60 -1000
Межосевое расстояние, мм Л«=О2 280 400 —
Расчетная длина ремня £р, мм По формуле (11.2) 1185 1690 —
Ближайшая стандартная длина По табл. 11.11 1180 1700 —
ремня L, мм Межосевое расстояние А, мм По формуле (11.19) 278 406 —
Угол обхвата малого шкива По формуле (11.1) 142 140 —
Коэффициенты Са=1— 0,003(180 — а1) 0,89 0,88 —
(Н-9)
Сд = 1,05 — 0,0005ц2 1,04 1,02 —
(11.20) 1,0
Ср — по табл. 11.7 1,0 ——
k0, Н/мм2, при а0=1,5 Н/мм2 По табл. 11.14 1,67 1,67 —
Окружное усилие Р, Н р= N_ _ 6000 V V 1200 860 —
Число ремней р 11 5
* При N 7,5 кВт и р>5 м/с ремень сечения В применять не рекомендуется (см.
табл. 11.12).
Расчетная долговечность по формуле (11.16) при т = 8 н av = 9 Н/мм2; Ci =>
= 1,8 и Cu = 1
°v \т
---— . 10'C;CH
, °max / ( 9 \8 1,8
2 • 3600V \ 8,18/ 2 • 3600 - 4,12
Сила давления на валы по формуле (11.24)
Q=2o0a/'sin = 2-1,5-5-138-0,94=1950 Н.
Вычисленная по формуле (11.6) долговечность ремня 1250 ч ниже минимальной
нормативной, рекомендуемой для ременных передач общего назначения (2000 ч).
375
Чтобы повысить расчетный ресурс работы, следует уменьшить максимальное
напряжение в опасном сечении ремня.
Анализ величин, влияющих на отах, показывает, что желаемый эффект может
быть получен, если взять ведущий шкив большего диаметра.
Выполним вариант расчета, приняв D, = 160 мм (вместо 140 мм), сечение ремня
Б, как и раньше.
Определяем диаметр ведомого шкива при i т 3:
D2 =& iDx = 3 160 = 480 мм.
Ближайший диаметр по стандарту (табл. 11.13)
£)2 = 450 мм.
Уточняем передаточное число, принимая в = 0,01:
i =----——---=-----152----— 2 88.
DUl-e) 160(1 —е)
Скорость ремня
лО1Пг 3,14-160 - 960
v ~ 60 - 1000 ~ 60-1000 м/с>
Принимаем предварительно межосевое расстояние
Д = О2=450 мм.
Расчетная длина ремня по формуле (11.2)
£р = 1905 мм.
Ближайшая стандартная длина по табл. 11.11
L = 1900 мм.
Уточняем межосевое расстояние по формуле (11.19):
А = 448 мм.
Угол обхвата по формуле (11.1) <4 = 141°.
Са= 1 -0,003 (180- 141) = 0,88;
Cv = 1,05 — 0,0005 • 82 = 1,02;
Ср=1 (без изменения).
Находим из табл. 11.14 при о0 — 1,5 Н/мм2
fe0=l,88 Н/мм2;
(ft] = kt,CaCvCp =1,88- 0,88 • 1,02 = 1,69 Н/мм2.
Окружное усилие
Число ремней
Р 750
2~ [/г]А “ 1,69-138
Принимаем z= 4. Так как число ремней на 25% больше расчетного, то допу-
стимо соответственно уменьшить напряжение от предварительного натяжения,
приняв о0 = 1,2 Н/мм2.
Тогда k0 — 1,67 Н/мм2 (по табл. 11.14),
[ft] = 1,67 • 0,88 • 1,02 = 1,5 Н/мм2.
376
Проверим снова
750
~ 1,5-138
3,6, округляем до 4.
Определяем напряжение в опасном сечении:
р 750
°1=p°+w=1’2+ 2:Т38-'4 =1’87 н/мм2;
ощ = рг>2-10-6=1,2- 103.82. 10-в==0,08 Н/мм2;
„ Л 80-10,5 „
ои=£и — = —1ёо-=5,25 Н/мм2;
оП]ах = 1,87+0,08-|-5,25 = 7,2 Н/мм2.
Число пробегов
v=T = iy==4’2 1/с-
Расчетная долговечность при тех же значениях С,= 1,8 и Сн= 1
’ оу yi 1О’СгСн ( 9 у* ltf.1,8
,0^7/ *2 - 3600v = / * 2 • 3600 • 4,2
что вполне приемлемо.
Увеличение диаметра ведущего шкива со 140 до 160 мм (примерно в 1,14 раза)
и соответствующее изменение всех величин, связанных с ним, позволило повысить
расчетную долговечность ремни до 3500 ч против 1250 ч по предыдущему варианту,
\®
*
Сила давления на валы
Q=2o0Fz sin -у-=2 • 1,2 • 138 • 4 • 0,94 = 1250 Н.
Сравнение результатов расчетов по двум вариантам показывает явное преиму-
щество последнего варианта: число ремней уменьшилось, долговечность сущест-
венно возросла, давление на валы снизилось. Некоторое увеличение габаритов пере-
дачи, обусловленное увеличением D± и связанных с ним геометрических параметров,
можно оценить как умеренное и вполне допустимое.
Глава 12
ЦЕПНЫЕ ПЕРЕДАЧИ
§ 12.1. ОБЩИЕ СВЕДЕНИЯ.
ТИПЫ ПРИВОДНЫХ ЦЕПЕЙ
В приводах сельскохозяйственных машин, транспор-
теров, металлообрабатывающих станков и других цепные передачи
применяют в основном для понижения угловой скорости и со-
ответствующего увеличения вращающего момента ведомого вала.
На рис. 12.1—12.3 показаны наиболее распространенные типы
приводных цепей, а в табл. 12.1—12.6 приведены их технические
характеристики.
При проектировании передач с пластинчатыми цепями рекомен-
дуется располагать линию центров звездочек под углом не более 45°
к горизонту. При этом условии провисание цепи обеспечивает необ-
ходимое натяжение ее; ведущую ветвь следует иметь верхнюю, в про-
тивном случае возникает опасность соприкосновения ветвей. При
большем угле следует предусматривать устройства для регулирования
натяжения.
12.1. Цепи приводные роликовые типа ПР (по ГОСТ 10947—64* и 13568—68*)
Размеры, мм (обозначения см. рис. 12.1)
t В Ввн S D d Ь 1 Q, кгс Q, кг/м
12,70 8,90 5,40 1,65 8,51 4,45 Н.8 15,5 1 800 0,62
12,70 11,30 7,75 1,65 8,51 4,45 П,8 17,9 1 800 0,71
15,875 10,78 6,48 1,65 10,16 5,08 14,7 19,0 2 300 0,80
15,875 13,95 9,65 1,65 10,16 5,08 14,7 23,2 2 300 0,96
19,05 17,75 12,70 2,20 11,91 5,96 18,1 30,6 2 500 1,52
25,40 22,80 15,88 3,25 15,88 7,95 24,1 38,5 5 000 2,57
31,75 27,50 19,05 4,20 19,05 9,55 30,2 46,0 7 000 3,73
38,10 35,50 25,40 4,80 22,23 11,12 36,1 56,9 10 000 5,50
44,45 37,19 25,40 5,60 25,40 12,72 42,2 61,3 13 000 7,50
50,80 45,20 31,75 6,40 28,58 14,29 48,3 72,0 16 000 9,70
Обо з и а ч е н и я: t — шаг; В — ширина внутреннего звена; Ввн — расстояние между пластинами внутреннего звена; s — толщина пластин; D — диаметр ролика; d — диаметр валика; Ь — ширина пластины; 1 —длина вали- ка; Q — разрушающая нагрузка, кгс; о — масса 1 м цепи, кг/м.
Пример обозначения приводной роликовой цепи нагрузкой Q = 5000 кгс: Цепь ПР — 25,4—5000 ГОСТ 10947—6< шагом t и ГОСТ = 25,4 мм и разрушающей 13568—68.
378
Рис. 12.1. Цепь роликовая одноряднаи:
J — соединительное звено; 2 — переходное звено
Рис. 12.2. Цепь роликовая трехрядная:
/ — соединительное звено; 2 — переходное звено
Рис. 12.3. Цепь зубчатая с шарнирами качения
379
12.2. Цепи приводные роликовые типа ПРУ (по ГОСТ 10947—64*, 13568—68*)
Размеры, мм (обозначения см табл. 12.1, рис. 12.1)
t В /?вн S D d ь 1 Q, кгс Q, кг/м
19,05 17,75 12,7 2,2 11,91 5,96 18,1 30,6 3 200 1,52
25,4 22,8 15,88 3,25 15,88 7,95 24,1 38,5 6 000 2,57
31,75 27,5 19,05 4,2 19,05 9,55 30,2 46,0 8 900 3,73
38,1 35,5 25,4 4,8 22,23 11,12 36,1 56,9 12 700 5,5
44,45 37,19 25,4 5,6 25,4 12,27 42,2 61,3 17 200 7,5
50,8 45,2 31,73 6,4 28,58 14,29 48,3 72,0 22 700 9,7
Пример обозначения цепи с шагом t — 25, Цепь ПРУ 25,4 — 6000 ГОСТ 4 мм н разрушающей нагрузкой Q = 6000 кгс: 10947 — 64, ГОСТ 13568—68.
12.3. Цепи приводные роликовые двухрядные типа 2ПР (по ГОСТ 10947—64)
Размеры, мм (обозначения см. табл. 12.1, рис. 12.2)
t В Ввн $ D d ь 1 Q. кгс <7» кг/м
12,7 11,3 7,75 1,65 8,51 4,45 11,8 34,9 3 200 1,35
15,875 13,28 9,65 1,65 10,16 5,08 14,7 40,3 4 500 1,85
19,05 17,75 12,7 2,2 11,91 5,96 18,1 53,4 6 400 2,90
25,4 22,61 15,88 3,25 15,88 7,95 24,1 67,8 11 400 5,0
31,75 27,46 19,05 4,2 19,05 9,55 30,2 81,8 17 700 7,3
38,1 35,46 25,40 4,8 22,23 11,12 36,1 102,4 25 400 11,0
44,45 37,19 25,40 5,6 26,40 12,72 42,2 110,2 34 400 14,36
50,4 45,21 31,75 6,4 28,58 14,29 48,3 130,5 45 400 19,1
Пример обозначения цепи двухрядной Q = 11 4 00 кгс: Цепь 2ПР 25,4— с шагом 25,4 мм н разрушающей нагрузкой -11400 ГОСТ 10947—64.
12.4. Цепи приводные роликовые трехрядные типа ЗПР (по ГОСТ 10947—64)
Размеры, мм (обозначения см. табл. 12.1, рис. 12.2)
t В йвн S D d Ь 1 Q, кгс 9. кг/м
12,7 11,3 7,75 1,65 8,51 4,45 11,18 48,8 4 600 2,0
15,875 13,28 9.65 1,65 10,16 5,08 14,7 56,9 6 800 2,8
19,05 17,75 12,7 2,20 11,91 5,96 18,1 76,2 9 600 4,3
25,4 22,61 15,88 3,25 15,88 7,95 24,1 97,1 17 100 7,47
31,75 27,46 19,05 4,2 19,05 9,55 30,2 117,1 26 000 11,01
38,1 35,46 25,40 4,8 22,23 11,12 36,1 147,8 38 100 16,50
44,45 37,10 25,40 5,6 25,40 12,72 42,2 159,1 51 600 21,70
50,8 45,21 31,75 6,4 23,58 14,29 48,3 189,1 58 100 28,30
Пример обозначения трехрядной Цепь ЗПР цепи с шагом 25,4 мм н Q — 25,4—17100 ГОСТ 10947—6* 17 100 кгс: 1.
380
12.5. Цепи приводные роликовые четырехрядные (по ГОСТ 10947—64)
Размеры, мм (обозначения см. табл. 12.1, рис. 12.2)
t В Ввн S D а Ь 1 Q, кгс Я, кг/м
19,05 17,75 12,7 2,2 11,91 5,96 18,1 101,9 12 800 5,75
25,4 22,61 15,88 3,25 15,88 7,95 24,1 129,9 22 800 10,40
31,75 27,46 19,05 4,2 19,05 9,55 30,2 157,5 35 500 14,74
38,1 35,46 25,4 4,8 22,23 11,12 36,1 197,1 50 800 22,0
44,45 37,19 25,4 5,6 25,4 12,72 42,2 212,2 68 800 29,2
50,8 45,21 31,75 6,4 28,58 14,29 48,3 252,3 90 000 38,0
Пример обозначения цепи четырехрядной с шагом 25,4 мм и Q — 22 800 кгс: Цепь 4ПР 25,4—22 800 ГОСТ 10947—64.
Скорость цепей ограничивают во избежание появления больших
динамических нагрузок: так, для роликовых цепей допускают v до
6—8 м/с в открытых передачах, до 10—12 м/с в закрытых (до 15 м/с
в приводах к металлообрабатывающим станкам). Большие значения
относятся к цепям малого шага, примерно до 25,4 мм; для зубчатых
цепей предельные значения скорости примерно в полтора — два раза
больше.
К. п. д. цепных передач — порядка 0,92—0,98 в зависимости
от условий монтажа и эксплуатаций; меньшие значения — для откры-
тых передач, например в сельскохозяйственных машинах.
§ 12.2. ВЫБОР ОСНОВНЫХ ПАРАМЕТРОВ ЦЕПНОЙ ПЕРЕДАЧИ
Межосевое расстояние А (рис. 12.4) рекомендуется выбирать
в пределах 30—50 шагов:
А = (30 -j- 50) t. (12.1)
Допускаемые предельные значения:
Я min = 0,6 (Del4*(30-г-50) мм; (12.2)
Яшах = 80/. (12.3)
Здесь Del и — наружные диаметры звездочек:
для роликовой цепи
= —[§ог + О,6/; (12.4)
tg —
для зубчатой
= 180s-* (12.5)
ig—
381
12.6. Зубчатые цепи (по ГОСТ 13552—68)
Размеры, мм, см. рис. 12.3
Параметры цепи В 1 Q, кгс <7. кг/м
1=12,7; 6 = 13,4; &г= 7,0; s=l,5; и = 4,76 22,5 30 2 400 1,3
28,5 36 2 900 1,6
34,5 42 3 400 2,0
40,5 48 4000 2,3
46,5 54 4 700 2,7
52,5 60 5 300 з,о
7=15,875; 6 = 16,7; 6i=8,7; s=2; и=5,95 30 39 3 900 2,2
38 47 4 800 2,7
46 55 5 700 3,3
54 63 6 700 3,9
62 71 7 800 4,4
70 79 8 900 5,0
1=19,05; 6=20,1; 6i = 10,5; s=3; ц = 7,14 45 56 7 200 3,9
57 68 8 700 4,9
69 80 10 300 5,9
81 96 12 200 7,0
93 104 14 100 8,0
1 = 25,4; 6 = 26,7; 6t = 14,0; s = 3; и = 9,52 57 68 11600 6,5
69 80 13 800 7,9
81 92 16 300 9,3
93 104 18 900 10,6
105 116 21 600 12,0
1 = 31,75; 6 = 34,4; 6r=17,5; s = 3,0; и= 11,91 69 81 82,5 94,5 17 100 20 200 10 11,6
93 105,5 23 500 13,3
105 118,5 28 600 15,0
117 130,5 30 300 16,7
Обозначения: / — шаг цепи; В — ширина цепи в сборе; £ — высота пластины; bi —
расстояние от вершины зубца цепи до оси отверстия под шарнир- ные призмы: s — толщина пластины; Z —габаритная ширина цепи по
шарнирам; Q — разрушающая нагрузка; q — масса 1 м цепи, кг/м.
12.7. Рекомендуемое число зубьев г± малой звездочки
Тип цепи Передаточное число Z1 min
до 2 2—3 3-4 4-5 5-6
Число зубьев
Роликовая . , , , . Зубчатая 29—27 35—33 27—25 33—29 25—22 29—25 22—19 25—23 19—17 23—19 9—0,21 15—0,21
382
Диаметр делительной
окружности звездочки
W"- (12-6)
sin ———
2
Передаточное число и =
== — (оно не равно отно-
г1
шению диаметров d2: dj
выбирают из ряда предпоч-
тительных чисел в интер-
вале от 1 до 7,1.
Рис. 12.4. Схема цепной передачи
Число зубьев zx малой звездочки рекомендуется выбирать по табл.
12.7.
Наибольшее число зубьев г2 ведомой звездочки роликовой цепи
120, зубчатой — 140. Эти ограничения накладываются во избежание
опасности соскакивания цепи.
Длина цепи
L = 2A +0,5zc/ + ^
(12.7)
где zc = zx + 2/, А = Д^1.
Разделив обе части выражения (12.7) на t и обозначив y =
д
-y = At, получим формулу для определения числа звеньев цепи
Z., = 2A + 0,5zc + -^-. (12.8)
Найденное значение Lt следует округлить до целого числа, жела-
тельно четного, чтобы можно было обойтись без соединительного
звена.
После округления Lt следует пересчитать At:
А t = Lt - 0,5zc+Г (£< - 0,5?с)* - 8Д-2 . (12 9)
Полученную величину А округлять не следует. Расчетное меж-
осевое расстояние
Л=Л/.
Так как холостая ветвь цепи должна свободно провисать на вели-
чину f ~ 0,01 А, то при монтаже цепной передачи предусматривают
возможность уменьшения А примерно на 0,5/. Средняя скорость
цепи v, м/с
и = 60'юоо" ’ (12.10)
где t в мм, п в об/мин.
383
Так как с увеличением скорости возрастают динамические на-
грузки на цепь (примерно по квадратичной зависимости) и износ
шарниров (примерно по кубической зависимости), то в приводах
общего назначения ограничивают скорость: для роликовых цепей —
не больше 10 м/с, для зубчатых — до 15 м/с.
При особо благоприятных условиях эксплуатации и точном монтаже
допускается повышение предельных значений отах в полтора — два
раза.
Предельные значения частот вращения пх малой звездочки, вычис-
ленные в соответствии с указанными ограничениями, приведены
в табл. 12.8.
12.8. Допускаемые значения nlt об/мин, малой звездочки
Тип цепи Шаг цепи /, мм
12,7 15,875 19,05 25,4 31,75 38,1 44,45 50,8
15 1250 1000 900 800 630 500 400 300
Роликовая 19 1300 1040 940 840 650 520 420 310
23 1350 1080 980 880 680 540 430 320
Ss25 1400 1100 1000 900 700 550 430 330
Зубчатая 2s 17 2000 1600 1300 1000 800 — — —
По опытным данным наибольшие значения пг не должны превы-
шать
Птах = (14-7- 17)-^-- 103 Об/МИН. (12.11)
Здесь меньший множитель перед корнем относится к роликовым
цепям, больший — к зубчатым.
Расчетное число ударов цепи при набегании на зубья звездочек
и сбегании с них
.. ^1»!
60Lt •
(12.12)
Допускаемые значения v приведены в табл. 12.9.
12.9. Допускаемое число ударов v в секунду
Тип цепи Шаг цепи Д мм
12,7 15,875 19,05 25,4 31,75 38,1 44,45 50,8
Роликовая 40 30 25 20 16 14 12 10
Зубчатая 60 50 40 25 20 — — —
384
Основным критерием пригодности цепи для данных условий экс-
плуатации передачи считается среднее давление в шарнирах, опре-
деляемое из выражения
(12.13)
Здесь Р — окружное усилие; F — проекция опорной поверхности
шарнира скольжения на плоскость, проходящую через его ось;
для роликовых цепей F = Bd\ — коэффициент, учитывающий
конкретные условия монтажа и эксплуатации передачи; его опреде-
ляют как произведение шести коэффициентов:
(12.14)
йд — динамический коэффициент; его принимают в зависимости
от колебаний нагрузки от 1 до 3 (меньшее значение — при спокой-
ной нагрузке, например в передачах к ленточным транспортерам,
большее — при ударных нагрузках, например в передачах к дро-
билкам); kA учитывает влияние межосевого расстояния: при А
=С25/ kA = 1,25; при А до 60/ 1гА — 1, при A kA = 0,8;
/ен отражает влияние угла наклона линии центров к горизонту: если
он не превышает 60°, то ka = 1; при вертикальном расположении
передачи kn = 1,3. Для передач с автоматическим регулированием
натяжения цепи k„ — 1 при любом угле наклона; kp = 1,25 при перио-
дическом регулировании натяжения цепи; kp = 1 при автоматическом
регулировании; kc учитывает способ смазки цепи: при периодической
смазке kc = 1,5; при капельной kc = 1,2; при непрерывной kc = 0,8;
/еп учитывает продолжительность работы в сутки: при односменной
работе kn = 1; при двух сменах kn = 1,25; при трех kn = 1,5.
Формула (12.13) служит для проверки цепи: если расчетное зна-
чение среднего давления р не превышает допустимого [р], указан-
ного в табл. 12.10, то цепь считается пригодной. Можно пользоваться
этой формулой и для подбора цепи при проектировании передачи:
наметив шаг цепи ориентировочно, проверяют р, и в случае несоот-
ветствия его величине [р] вносят необходимые коррективы (например,
изменяют число зубьев, назначают иной шаг, увеличивают рядность)
и повторяют проверку.
Однако для проектного расчета передачи удобнее определять шаг
цепи непосредственно. Заменим в формуле (12.13)
р=Л= 244L== 24^ (12.15)
v dx zrt ' '
л
здесь принято
Для роликовых цепей
F^O.28/2.
Следовательно, условие пригодности цепи примет вид
24VGn_ (12.16)
р Zit- 0,28/2 —-1PJ*
13 Зак. 220
385
12.10. Допускаемое давление [р] (Н/мм2) для роликовых цепей типа ПР в зависи-
мости от шага цепи t и частоты вращения % (об/мин) меньшей звездочки
при Zj = 17
Частота вращения лп об/мин Шаг цепи
12,7 15,875 19,05 25,4 31,75 38,1 44,45 50,8
До 20 52.0 52,0 52,0 49,0 45,6 42,8 40,8 39
50 45,0 42,5 40,0 36,2 34,0 32,0 30,0 29,0
100 36,2 34,0 32.0 29,0 27,0 25,1 24,0 23,5
200 28,8 26,5 25,0 22,7 21,2 20,0 19,0 18,0
300 25,0 23,2 22,0 20,0 18,5 17,3 16,5 15,5
400 22,7 21,2 20,0 18,0 16,8 15,8 15,0 14,2
500 21,2 19,6 18,4 16,8 15,6 14,6 13,9 13,3
750 18,5 17,2 16,1 14,6 13,6 12.7 12,2 11,5
1000 16,8 15,6 14,6 13,3 12,6 11,6 н,о -—.
1250 15,6 14,4 13,6 12,3 11,5 10,8 — —
1500 14,6 13,6 12,7 11,6 10,8 — — —
2000 11,4 10,4 9,8 •— — — — —
Примечания: 1 Если 17, то табличное значение [р] надо умножить на = 1 -|-
4- 0,01 (г, — 17);
при z, = 11 13 15 19 21 23 25
*г=0,94 0,96 0,98 1,02 1,04 1,06 1,08.
2. Для цепей ПРУ табличное значение [р] умножить иа 1,2.
Отсюда искомый шаг цепи
'Э=2’П/Т>- <1217>
Все величины, входящие в эту формулу, должны быть выражены
в соответственных единицах; применительно к международной системе
для того, чтобы получить значение t в мм, надо выразить [р] в Н/мм2,
М — в Н -мм.
Полученный по формуле (12.17) результат округляют до ближай-
шего стандартного значения шага, проверяют среднее давление в шар-
нирах по формуле (12.13) и определяют коэффициент запаса проч-
ности
Полученное значение п должно быть не меньше допускаемого
п > [п], приведенного в табл. 12.11; Q — разрушающая нагрузка
(см. табл. 12.1—12.6); она и величины, входящие в знаменатель,
должны быть выражены в одинаковых единицах. Так как в дальней-
ших расчетах за единицу силы принят ньютон, то табличные значе-
ния Q, выраженные в кгс, надо переводить в ньютоны; Р — окружное
усилие; — динамический коэффициент, указанный выше [(см.
пояснения к формуле (12.13)1; Pv — нагрузка, испытываемая цепью
от центробежных сил, Н: Pv — q~c2, где q — масса 1 м цепи, кг; v —
скорость цепи, м/с; Pf — усилие от провисания цепи, Н:
Pf = kfqgA = 9,81kjqA; (12.19)
386
здесь kf — коэффициент, учитывающий влияние угла наклона линии
центров звездочек: kf = 1 при вертикальном расположении цепи;
kf = 6 при горизонтальном расположении.
12.11 Коэффициент рг] запаса прочности цепей в зависимости от ?! и гц
Шаг t, мм Частота вращения меньшей звездочки, об/мин
50 100 200 300 400 500 600 800 1000
Значения [л] для роликовых цепей ПР и ПРУ
12,7 7,1 7,3 7,6 7,9 8,2 8,5 8,8 9,4 10
15,875 7,2 7,4 7,8 8,2 8,6 8,9 9,3 10,1 10,8
19,05 7,2 7,8 8,0 8,4 8,9 9,4 9,7 10,8 Н,7
25,4 7.3 7,6 8,3 8,9 9,5 10,2 10,8 12,0 13,3
31,75 7,4 7,8 8,6 9,4 10,2 11,0 11,8 13,4 —
38,1 7,5 8,0 8,9 9,8 10,8 11,8 12,7 —. —
44,45 7,6 8,1 9,2 10,3 П,4 12,5 —. — —
50,8 7,6 8,3 9,5 10,8 12,0 — — — —
Значения [п] для зубчатых цепей
12,7 20 21 22 23 24 25 26 28 30
15,875 20 21 22' 24 25 26 27 30 32
19,05 21 22 23 24 26 28 29 32 35
25,4 21 22 24 26 28 30 32 36 40
31,75 21 22 25 28 30 32 35 40 —
Звездочки цепных передач. При умеренной скорости (о до 4 м/с)
звездочки цепных передач общего назначения (в том числе и сельско-
хозяйственных машин и приводов) допускается изготовлять из анти-
фрикционного чугуна марки АВЧ-1 и высокопрочного чугуна ВЧ 45-0
с отбеленной рабочей поверхностью на глубину от 2 мм до 1/3 ширины
зуба.
При ударных нагрузках для звездочек рекомендуются стали
45, 45Г, 50Г; крупногабаритные звездочки — из стального литья
45Л, 50Л; термообработка — закалка с последующим отпуском,
твердость рабочих поверхностей HRC 45—50.
Для обеспечения высокой износостойкости рабочих поверхностей
звездочек рекомендуется изготовлять их из легированных сталей 15Х
20Х с цементацией, закалкой и отпуском до твердости HRC 55—60; из
сталей 40Х, 40ХН, 45Х, 45ХН с закалкой и отпуском до HRC 50—55.
Профилирование зубьев звездочек стандартизовано (см. ГОСТ
591—69).
§ 12.3. ПРИМЕР РАСЧЕТА ЦЕПНОЙ ПЕРЕДАЧИ
Рассчитать цепную передачу к ленточному транспортеру (рис. 12.5).
Исходные данные: тяговое усилие на барабане транспортера Рб =
= 2000 Н; скорость ленты v6 = 2 м/с; диаметр барабана D6 = 360 мм;
передаточное число от редуктора к барабану I = 2,5; режим работы —
в одну смену; смазка цепи и регулирование натяжения цепи — перио-
дические; расположение цепи — горизонтальное.
13*
387
Рис. 12.5. Привод к ленточному транс-
портеру (к примеру расчета)
Расчет. Выбираем цепь роли-
ковую по табл. 12.1. Число зубьев
малой звездочки принимаем из
табл. 12.7:
гх = 25; число зубьев ведомой
звездочки г2 = ztl = 25 • 2,5 = 62,5;
округляем га = 62 и уточняем
Так как при уменьшении переда-
точного отношения частота враще-
ния барабана и скорость ленты возрастают, то пересчитываем v6 =
9 5
= 2= 2,02 м/с. Отклонение от заданного значения составляет
1% , что меньше допускаемого (до 3%).
Определяем значения коэффициентов, входящих в формулу (12.13):
для привода к ленточному транспортеру ka = 1; если не выходить
за пределы рекомендованного А = (30 — 50) t, то kA = 1; при гори-
зонтальном расположении цепи kH = 1; при периодической смазке
kc = 1,5; при периодическом регулировании натяжения цепи kp =
— 1,25; при односменной работе kn = 1. Результирующий эксплуа-
тационный коэффициент
= kJzAknk(kpka = 1,5-1,25 = 1,88.
Определяем вращающий момент на валу барабана:
Л4б = Рб = 2000 = 360 • Юз Н . мм>
Принимаем к. п. д. передачи т] = 0,94 и вычисляем вращающий
момент на валу ведущей звездочки
.. 360 • 103 . r . t пч и
/Их = -= = '248. ojj.f = 154-10- Н • мм.
Частота вращения ее
= in6 = 2,48-107 = 265 об/мин.
Здесь
60уб 60 - 2,02
/гб — ~ 3,14 - 0,360 — 107 °б/мин-
По найденной частоте вращения /гх на основании табл. 12.10 при-
нимаем ориентировочно [р] = 22 Н/мм2 (примерно среднее значение
для цепей с шагом 19,5 и 25,4 мм при 265 об/мин).
По формуле (12.17) вычисляем шаг цепи:
/>=2,81/= 2,8 1/154 Д°3;1'^ = 22,5 мм.
V г11Р1 т 25-22
Округляем до ближайшего большего значения t = 25,4 мм.
388
Проверяем цепь по допускаемой частоте вращения: из табл. 12.8
имеем nlmax = 700 об/мин — условие п± = 265 < nlmax выполнено.
Уточняем среднее расчетное давление в шарнирах: из формулы (12.17)
имеем
По табл 12.10 при найденных п± и t, с учетом примечания 1, [р] ~
» 23 Н/мм2; условие р [р] выполнено.
Так как расчетное значение р оказалось примерно в полтора раза
меньше допускаемого, то имеет смысл проверить, не подойдет ли цепь
ближайшего меньшего шага t = 19,05 мм.
На основании формулы (12.17) получим
п о.. 154- 10». 1,88 ос . ,
р —2,8' 25-19,053 —36,4 Н/мм.
Из табл. 12.10 имеем для цепи с шагом t— 19,05 мм при пх —
— 265 об/мин.
[р] = (22+ 251о~о22 35) 1 >07 = 24>6 Не-
расчетное р > [р], следовательно, цепь с шагом t — 19,05 мм не
годится. Итак, принимаем цепь с шагом t = 25,4 мм; из табл. 12.1
выписываем ее данные:
Цепь ПР 25.4—5000 ГОСТ 10947—64, диаметр валика d = 7,95 мм;
длина втулки В — 22,8 мм; диаметр ролика D = 15,88 мм; толщина
пластин s = 3,25 мм; ширина пластин b = 24,1 мм; разрывное усилие
Q = 5000 кгс я» 49 000 Н; масса 1 м цепи q = 2,57 кг/м.
Геометрические характеристики звездочек:
Число зубьев г......................
Диаметр делительной окружности <7Д
Наружный диаметр De ................
Ведущая
25
202
216,2
Ведомая
62
505
517,2
Примечание
По формуле (12.6)
То же (12.4)
Окружное усилие
Уточняем величину среднего давления в шарнирах цепи:
допускаемое значение [р] = 21,6 Н/мм2.
Хотя условие р < [р] удовлетворено, значительная разница между
ними свидетельствует о недостаточном использовании нагрузочной
способности цепной передачи. Выше было показано, что уменьшение
шага цепи до ближайшего значения t = 19,05 мм приводит к увеличе-
нию р > [р]. Рассчитаем второй вариант с целью приближения р
к [р].
389
На основании формулы (12.17) заключаем, что при неизменных
значениях Мъ Кэ и t произведение Zjp должно оставаться тоже неиз-
менным, т. е. Zip = zip' = const.
Следовательно,
21 — р’ ~ 21,6 “
Округляем полученное значение числа зубьев до 19 и проверяем
по табл. 12.8 минимальное число зубьев:
21min = 9 + 0,2/ = 9 + 0,2 • 25,4 = 14.
Условие z\ > zlmin выполнено.
Пересчитываем основные параметры звездочек:
Ведомая Примечание
48 I = 2,53
388
Число зубьев г............................
Диаметр делительной окружности, мм,
. *
. 180° • ’ ' ’• ' '
sin-----
z
Диаметр наружной
РД= . 180° + 0,6Z
tg —
окружности, мм
19
153,6
167,2
403,2
Новые значения
окружное усилие
Р 2Мг 2 • 154 • 103
— 153,6
расчетных величин:
= 2-103 Н;
среднее давление
РКэ 2-103.1,88 олотт, 2
Р— Bd ~~ 22,8• 795 “ 2®’8 ^/ММ .
Полученное значение р достаточно близко
второй вариант расчета и продолжим его:
к [р], поэтому примем
межосевое расстояние
А = 40/ = 40 -25,4 =1016 мм;
длина цепи, выраженная в шагах (т. е. число ее звеньев),
А/ = 4==2Л< + °’5^ + + = 2-40 + 0,5-67+^ = 114.
Здесь
Л<=А = 40; zc = Zi + z2=19 + 48 = 67;
* _ Zg —?i _ 48 — I9 — 4 62
Ь— 2л “2-3,14 -4»02-
390
Если Lt получается дробным, то его округляют до целого числа
(желательно четного во избежание установки переходного звена) и
пересчитывают At по формуле (12.9).
Расчетная длина цепи
L = Ltt =114-40- 10 s = 4,56 м.
Число ударов цепи
у—^3^1 — 4-19-264 — g 4 1/с
60L/ 60 - 40 °’ 1/е-
По табл. 12.9 Ы — 20 1/с: условие v [у] выполнено. Проверим
коэффициент запаса прочности цепи по формуле (12.18):
Q
п - Pka+Pv+Pf-
По табл. 12.1 для выбранной цепи Q — 5000 кгс = 49 000 Н; q =
= 2,57 кг/м.
Определим среднюю скорость цепи:
гщ,/ 19 • 25,4 264 о . _ ,
V = 66Л№ = - 6ОП№....= 2’12 М/С=
Pv = qv2 = 2,57-2,122= 11,5 Н;
Р/ = ^Л = 6-2,57-9,81 • 1,016 = 153 Н;
49 000 „ „
2000+11,5+153 —
По табл. 12.11 для цепи 25,4 мм при = 264 об/мин
[п] = 8,3 +^]0(Г^ 64 = 8’7'
Условие п [п] выполнено.
Нормальная стрела провисания
/ = (0,5ч-1)1(Е2 А.
Для обеспечения требуемого провисания цепи расчетное расстоя-
ние А следует уменьшить примерно на 0,5/.
§ 12.4. СМАЗКА ЦЕПЕЙ
Для смазки цепей в приводах общего назначения употребляют
главным образом индустриальные масла с кинематической вязкостью
v60 — 30 -т- 50 сСт (см. табл. 9.13 в гл. 9) и консистентные смазки.
Способ подвода смазки к цепи выбирают в зависимости от условий
эксплуатации и скорости цепи.
Для открытых передач при скорости 1—3 м/с допускается перио-
дическая. смазка кистью или масленкой по мере надобности примерно
через 2—3 смены. При скорости до 6 м/с рекомендуется непрерывная
смазка, подаваемая капельной масленкой, или же консистентная
смазка, вводимая в шарниры при погружении цепи в подогретую до
391
разжижения смазку: периодичность промывания цепи и повторения
операции заполнения шарниров цепи в передачах, работающих в за-
крытых помещениях, — около 200 ч; при неблагоприятных условиях
эксплуатации в абразивной среде, например в приводах сельскохо-
зяйственных, горнорудных, дорожностроительных и других машин,
частая замена консистентной смазки противопоказана, так как при
этом в зону трения проникают новые абразивные элементы, вызываю-
щие повышенный износ. В сельскохозяйственной практике оптималь-
ная периодичность замены внутришарнирной консистентной смазки —
один раз за весь сезон.
При скорости цепи свыше 6 м/с следует переходить к картерной
смазке окунанием цепи: ведомая ветвь цепи должна погружаться
в масляную ванну на ширину пластины, приемлема также смазка раз-
брызгиванием, осуществляемая соответствующими насадками и жело-
бами, подводящими жидкую смазку к пластинам цепи. Смена смазки
с очисткой корпуса от накопившихся осадков — примерно через
400 ч работы.
Лучший способ подведения непрерывной смазки при скорости
v > 8 м/с — шестеренными (реже лопастными) насосами; в систему
смазки должен быть включен фильтр, заменяемый через 100—200 ч
работы, в зависимости от состояния окружающей среды: относительно
частая смена фильтра позволяет существенно удлинить сроки замены
масла.
Жидкие индустриальные масла подбирают для цепных передач
с учетом давления в шарнирах, скорости цепи и условий эксплуатации.
Критерием для подбора служит кинематическая вязкость т при 50 °C,
выраженная в сСт; на основании опытных данных рекомендуемое
значение v5n можно определять по таким эмпирическим формулам:
для открытых передач
V5o = p+6n;
для закрытых передач при картерной смазке
v5o — Р + Зп;
здесь р — среднее давление в шарнирах, Н/мм2; v — скорость цепи,
м/с.
Характеристики минеральных масел приведены в табл. 9.13 (см.
гл. 9).
Глава 13
ПРОЕКТИРОВАНИЕ
ВАРИАТОРОВ
§ 13.1. ОБЩИЕ СВЕДЕНИЯ О МЕХАНИЧЕСКОМ
БЕССТУПЕНЧАТОМ РЕГУЛИРОВАНИИ СКОРОСТИ
В ряде случаев для осуществления заданного техно-
логического процесса необходимо регулировать угловую скорость
рабочей машины. Эта задача легко решается в приводах от электро-
двигателя постоянного тока, но при переменном токе приходится при-
менять сложные электрические схемы регулирования или же проекти-
ровать для этой цели механические устройства. В простейшем случае —
это ступенчатые ременные шкивы, сменные зубчатые колеса или звез-
дочки, более сложные — коробки передач. Однако они допускают лишь
ступенчатое регулирование скорости, что не всегда приемлемо по ус-
ловиям производственного процесса. Если необходимо плавное бес-
ступенчатое изменение скорости, применяют вариаторы. С технико-
экономической точки зрения установка их целесообразна, например,
в приводах конвейеров сушильных, закалочных, отжигательных
печей, установок пылепитания котлов, машин пищевой промышлен-
ности; для намоточных устройств бумагоделательных машин, воло-
чильных, изолировочных машин, так как в таких машинах при неиз-
менной производительности угловая скорость приемной катушки или
барабана должна плавно меняться в связи с изменением радиуса
намотки; для установок, в которых скорость должна регулироваться
автоматически, для чего необходимо ее плавное изменение; в иссле-
довательских установках и опытных экземплярах машин с целью вы-
явления оптимального темпа их работы.
Кинематические зависимости
Для характеристики вариатора должны быть известны частоты
вращения ведущего вала п1 и ведомого вала от n2min до п2шах> диапазон
передаточного отношения от
_ П1 „„ ,. __ щ
Imax — ~ ДО Imin — ~ •
n2min "2 max
Возможны три различные принципиальные схемы регулирования
(рис. 13.1).
393
Рис. 13.1. Принципиальные схемы регулирования
1. Радиус ведущего фрикционного диска неизменен (рис. 13.1, а):
Ri = const;
радиус R2 ведомого диска может изменяться от Т?2111ш ДО /?2тах. следо-
вательно,
. п1 ^2 max - п1 _________ ^2 min
здесь е — относительное скольжение в передаче.
Диапазон регулирования
Дп2тах ('тах ^2 max /1о 1ч
— 7 7 ” 7? ’ *1г’’ *7
''2min lmin х2тт
2. Радиус ведомого фрикционного диска неизменен (рис. 13.1, б),
тогда
______ п1 ___ Т?2 ф . ___ «1 ___ Т?2
таХ “' «2 min “^1 min (1-е)’ ~ «2 max ~ *1 max 0 “*) ’
п
(13.2)
*4 min
3. Изменяются одновременно радиусы /Д и R2 (рис. 13.1, в), тогда
. п1 _____ ^2 max • __ п1 ____ ^2 min
1гаах ~ - 7?! min (1 -6); Imin - - 7?! тах (1 -е) •
JJ* _^1 max ^2 max
min ^2 min
В случае симметричного регулирования (при 7?imin = Aimin’.
Д1тах = Дгтах, 1"т1п ? ) ПОЛучаеМ
1тах
/7? \2
4 = =г^ах. (13.3)
у1'min /
Обычно для первых двух систем Дтах «3-5- 4; для третьей Д1ПЯХ «
12 (до 16).
394
Кинематический расчет привода в случае применения вариаторов
первых двух схем выполняют по заданной наибольшей скорости рабо-
чей машины, тогда наименьшая скорость достигается выбором соот-
ветствующего диапазона регулирования вариатора.
Для вариаторов третьей схемы при симметричном регулировании
кинематический расчет привода выполняют при средней геометриче-
ской скорости пср = а скорости пгаах и <Jrnin обеспечиваются
соответствующим выбором передаточного отношения вариатора: в сто-
роиу замедления (редукции) Zmax = —— и В сторону ускорения Imjn =
^min
'L'CP Д ^max
г'тах ^min
Силовые зависимости
В передаче силами сцепления необходимо усилие нажатия; оно
может быть постоянным или переменным, изменяющимся в зависимо-
сти от нагружения привода.
В вариаторах первой схемы (/?, = const) при постоянном усилии
нажатия имеем ЛД = const и = const.
Такие вариаторы следует применять в приводах к машинам, у ко-
торых при всех режимах работы потребная мощность N2 не меняется.
Принцип использования двигателя на оптимальном режиме с наи-
большим к. п. д. при постоянной отбираемой мощности экономически
наиболее целесообразен. Так эксплуатируют, например, многие транс-
портирующие машины и металлорежущие станки, т. е. с уменьшением
нагрузки скорость повышают.
Если мощность N2 задана, то максимальный момент на ведомом
валу вариатора, Н -м
где N2 в Вт, со2 в рад/с.
Момент на ведущем валу
*гпахЧ
расчетное окружное усилие
м. м9гпях м
(13.4)
^2 max ^2
Уточненное значение Р может быть получено с учетом изменения т]
при разных режимах работы вариатора.
Вариаторы второй схемы при постоянном усилии нажатия передают
постоянный предельный момент на ведомом валу. В некоторых машинах
силовая нагрузка не меняется при изменении скорости, например,
во многих технологических конвейерах (сушильных, покрасочных,
395
травильных), работающих с малыми скоростями; в намоточных уст-
ройствах нагрузка может быть принята не зависящей от скорости,
привод работает при постоянном моменте и переменной мощности.
Тогда расчетный момент на ведущем валу вариатора
Расчетное окружное усилие
Р = < =
max
(13.5)
В вариаторах третьей схемы при постоянном усилии нажатия
мощность, которую может передать вариатор при различных i, не
остается постоянной, одновременно меняется и Л42.
Расчетное окружное усилие, Н
Р = О = , (13.6)
\/?1/тах <л>1\1]/?1/тах
где 1V2 в Вт, в м, в рад/с.
В вариаторах с переменным усилием нажатия расчетное окружное
усилие определяется в зависимости от изменения внешней нагрузки
и характеристики нажимного устройства.
Расчет нажимных устройств и отдельных деталей вариаторов
ведут по определенному выше расчетному окружному усилию.
13.2. ВАРИАТОРЫ С ГИБКОЙ СВЯЗЬЮ
Вариаторы с гибкой связью (ременные и ременно-колодочные)
просты по конструкции, и поэтому высокая точность их изготовления
не требуется; но диапазон регулирования у них мал, габариты отно-
сительно велики.
Диапазон регулирования
В вариаторах с клиновым ремнем (рис. 13.2) изменение передаточ-
ного отношения достигается одновременным изменением расчетных
диаметров ведущего Dx и ведомого D2 шкивов, что осуществляется
сближением и раздвижением конусов. При минимальном или макси-
мальном передаточном отношении ремень на конусах располагается
в крайних положениях (рис. 13.3).
Из чертежа следует
Ьо~ (Pl max min + 2/l) tg^-f-A.
Расчетная ширина ремня по нейтральному слою (рис. 13.4)
Ьр = Ьо - 2ур tg = (Di max - Di min) tg | + h tg | + A.
396
Рис. 13.2. Принци-
пиальная схема ва-
риатора с гибкой
связью
Рис. 13.3. Положе-
ние ремня и раз-
движных конусов
при i “= tmin
Рис. 13.4. Вариаторный ремень:
а — недеформированный; б — де-
формированный при изгибе
Полагая зазор между конусами в крайнем сдвинутом положении
А = 0,05Ьр и обозначая ~ = v и -уА = g, получаем для симметрич-
ного регулирования при £>niax = £>min [ Г~Д
/O,95vctg^-1
дЦ—+1
Если раздвижной только один шкив, то
0,95v ctg 1
Д=----Н—+ 1-
(13.7)
(13.8)
Анализ соотношений (13.7), (13.8) показывает, что для повыше-
ния диапазона регулирования возможны следующие пути:
1. Увеличение отношения v = -^-. Для стандартных клиновых
ремней v = 1,33 4- 1,42. Широкие клиновые ремни, по данным ряда
иностранных фирм, имеют отношение v от 1,65 до 4,7.
Для широких клиновых ремней по нормали НИИРП —ЭНИМС
(табл. 13.1) v = 3,1 4- 3,2.
2. Уменьшение отношения g = Для стандартных клиновых
ремней минимальные значения g таковы:
Тип ремня ... О А Б В Г Д Е
£ . ......... 10,5 11,3 11,9 14,8 16,6 21,2 26,7
чпш............. ’ ' ' ' ' '
397
Рис. 13.5. Широкий клиновый ремень с увеличенной поперечной жесткостью
Надо учитывать, что уменьшение £ ведет к увеличению деформации
ремня (см. рис. 13.4), повышению напряжений изгиба и к значитель-
ному снижению долговечности.
Для увеличения продольной гибкости и обеспечения поперечной
жесткости ремни выполняют с зубьями на наружной или внутренней
поверхности (рис. 13.5, а) или на обеих поверхностях (рис. 13.5, б).
Для широких клиновых ремней значения £т;п = 5 ч- 7.
3. Уменьшение угла клина ф0. Для стандартных клиновых ремней
Фо = 40°. В зарубежной практике применяют широкие клиновые
ремни с минимальными значениями ф0 = 20 -т- 24°. Но уменьшение
Фо может повести к заклиниванию ремня в канавке и увеличению бо-
кового давления.
4. Применение шкивов с прорезями (рис. 13.6), позволяющими
сближать конусы, поэтому при том же можно получить большее
Рис. 13.6. Шкив с прорезями для стандартных клиновых ремией
398
Dmax и увеличить диапазон регулирования.
Однако при этом срок службы ремней сни-
жается.
Из рнс. 13.7 получаем
Расчетная ширина
< ^max ®mini Фо i
Ьр=------2----+
откуда
fl.9vctg^ Г
(13.9)
Рис. 13.7. К определению
диапазона регулирования
шкивов с прорезями
(13.10)
где т — число раздвижных шкивов.
Значения D при двух раздвижных шкивах и симметричном регу-
лировании показаны на рнс. 13.8 и 13.9.
Расчет сечения ремня
Сечение стандартного клинового ремня для вариатора определяют
методом, принятым для нерегулируемой передачи (см. гл. И).
Характеристики широких клиновых ремней приведены в табл. 13.1.
Рис. 13.9. Диапазон регули-
рования для широких рем-
ней
Рис. 13.8. Диапазон регули-
рования для стандартных
клиновых ремней
399
13.1. Ряд широких клиновых ремней ЭНИМСа и НИИРПа
(по НМ 2—58)
— —5 Размеры сечений, мм Конструкция Диапазон регулирова- ния, Д Расчетные диаметры шкива, мм /V при v = 20 М/с, к Вт Диапазон регулирова- ния по фор- муле (13.7) У при v = 20 м/с, кВт
ЬР h ^0 ^min
8 28 С зубьями 5,0 150 67 1,8 4,50 3,0
25 8 27 Без зубьев .... 3,5 180 95 1,8 —-
— 11 10 28 35 С зубьями С зубьями 3,5 5,0 170 200 90 90 3,5 3,0 3,04 4,37 5,9 4,5
32 10 34 Без зубьев .... 3,5 212 112 3,0 — —
— 14 13 36 44 С зубьями С зубьями 3,5 5,0 212 236 112 106 5,9 5,0 3,11 4,56 10,6 7,8
40 13 43 Без зубьев .... 3,5 315 170 5,0 — —
— 18 16 45 55 С зубьями С зубьями 3,2 5,0 300 315 170 140 9,5 8,5 2,63 4,33 15,9 11,8
50 16 53 Без зубьев .... 3,5 375 200 8,5 — —
— 22 20 56 69 С зубьями С зубьями 3,2 5,0 375 400 212 180 14,0 12,5 2,65 4,27 23,6 18,3
63 20 67 Без зубьев .... 3,2 530 300 12,5 — —
Примечание. Угол клина: ремней ф0 = 34°;
шкивов ф = 28°.
Расчетная методика та же, что и в случае стандартных клиновых
ремней:
р
/?0 2 — 0,4v Н/мм2;
(13.11)
(13.12)
Ср — коэффициент режима работы.
Усилие нажатия
Из рис. 13.10 следует
T = P„cos|.
Нормальное усилие Рп связано с расчетным окружным усилием
зависимостью
р _₽f
Гп~ 2/’
Следовательно,
7" = — cos —
1 <2f СОЬ 2 ’
(13.13)
400
Рис. 13.10. К определению уси-
лия нажатия в ременных ва-
риаторах
Рис. 13.11. К определению геомет-
рической длины ремня
здесь р = 1,2 4- 1,4 — при нажатии со стороны ведомого конуса;
|3 = 1,7 -4-2,2 — при нажатии на ведущий конус. Коэффициент тре-
ния f ~ 0,3.
Механизм регулирования
Геометрическая длина ремня вариаторов с гибкой связью
L = + + + (13.14)
(обозначения по рис. 13.11).
Выражая текущие значения диаметров через средний диаметр
получаем
Z. = 2Л + 2 [2^сР + № - ДО1)] + -А-Р2-4УР112-
Обозначая
Li-i = 2Л 4~ лОср,
получаем
L = f (ДО2 - ДРт) +(13.15)
Перемещение конусов (рис. 13.12) при раздвижении
при сближении
x2 = ^tg|. (13.16)
При |%11 = |*2 I 11 ^Di = ^2 нз выражения (13.15) следует,
что геометрическая длина ремня при раздвижении и сближении уве-
личивается. Ремень, длина которого определена при i' — 1, при край-
них значениях i будет иметь недопустимо большое натяжение. Если
401
же выбрать длину ремня по imax, то при / -С iinax его натяжение
будет недостаточно для передачи заданной мощности.
Механизм регулирования должен поддерживать постоянное натя-
жение ремня при всех режимах работы вариатора.
13.2. Длины широких клиновых ремней нормали по НМ—2—58
Для определения длины ремня необходимо задаться межосевым рас-
стоянием. В ременных и ременно-колодочных вариаторах принимают
>1 = (0,6 —0,9) (Dmax +-Drain)-
Для стандартных клиновых ремней сле-
дует в дальнейшем уточнить А по стандарт-
ному значению L (см. гл. 11, § 11.3). Анало-
гично поступают и с широкими ремнями,
выравнивая длину ремня по табл. 13.2.
Рис. 13.12. Перемещение кону-
сов и изменение расположения
ремня
Рис. 13.13. Схема пере-
мещения электродвига-
теля, при которой ре-
гулирование осущест-
вляют изменением меж-
осевого расстояния
402
Рис. 13.14. Бесступенчатая передача с тремя ремнями с регули-
руемым ведущим шкивом и непостоянным межосевым расстоянием
Передача с непостоянным межосевым расстоянием
Наиболее простая схема регулирования, при которой электродви-
гатель перемещается на салазках, представлена на рис. 13.13. Если
на ведомом валу один из конусов фиксирован от осевого смещения
(на рис. 13.13 левый конус), то во избежание перекоса ремня электро-
двигатель должен перемещаться под углом Р к центровой линии ремня.
Перемещение х центровой линии
V__х2 _ Фо
Л 2 4 ё 2 ’
где ДО2 = Dr (Д — 1) для одностороннего регулирования при неиз-
менном Dr и при условии, что
^2min
X Л L — nD1 .
1 ; -rl max — 9 I
max min
Arnin определяют по формуле § 11.3
при ~ Г)2тах ~ ДР1-
В схеме с D1 = const нецеле-
сообразно применять O2min > Dlt
так как это приводит к большим
значениям £ и уменьшению диапа-
зона регулирования.
Для бесступенчатого снижения
угловой скорости лучше применять
вариаторы с регулируемым веду-
щим шкивом (рис. 13.14), усилие
нажатия создается пружинами или
резиновой втулкой (рис. 13.15).
Выбор той или иной схемы опре-
Рис. 13.15. Шкив с пружинящей рези-
новой втулкой
403
Рис. 13.16. Шкивы, обеспечивающие равное перемещение конусов:
а — конструкция с уравнительным рычагом; б — конструкция с зубчатореечным
механизмом
деляется нагрузочной характеристикой привода; при постоянной
передаваемой мощности целесообразна конструкция с регулируемым
ведущим шкивом (рис. 13.14), а для постоянного момента на валу —
с регулируемым ведомым шкивом (см. рис. 13.13).
Шкивы с равным перемещением обоих конусов (рис. 13.16) позво-
ляют раздвигать валы вдоль средней линии ремня, что упрощает кон-
струкцию. При увеличении межосевого расстояния передачи правый
конус (рис. 13.16, а) под действием ремня сдвинется вправо; уравни-
тельный рычаг, ось вращения которого несколько смещена от оси вала,
повернется и отведет левый конус в левую сторону. При конструиро-
вании следует предусмотреть хорошую смазку поверхностей, по кото-
рым происходит осевое смещение. Аналогичная конструкция приве-
дена на рис. 13.16, б, но здесь равное перемещение конусов обеспечи-
вается двумя зубчатыми рейками и зубчатым колесом. Изменение
межосевого расстояния может быть
Рис. 13.17. Схема бесступенчатой
передачи с электродвигателем на
качающейся плите
осуществлено расположением элек-
тродвигателя на качающейся плите
(рис. 13.17). Шкив на двигателе
должен быть выполнен по рис. 13.16,
чтобы не происходило смещения сред-
ней линии ремня при регулиро-
вании.
Завод «Выдвиженец» (г. Псков) из-
готовляет вариаторы с раздвижными
конусами на валу электродвигателя.
Технические данные таких вариато-
ров приведены в табл. 13.3, а габа-
ритные и присоединительные размеры
их — на рис. 13.18 и в табл. 13.4.
404
Рис. 13.18. Габарит-
ные и присоедини-
тельные размеры
вариаторов ВРС1,
ВРСЗ
Рис. 13.19. Двух-
ступенчатая регу-
лируемая передача:
а — схема передачи
а)
Двухступенчатая передача с переменным межосевым расстоянием
приведена на рис. 13.19, а. Шкивы ведущего и ведомого валов передачи
нерегулируемые, а промежуточный вал расположен на качающейся
рамке. В зависимости от ее расположения средний плавающий сдвоен-
ный конус шкива (рис. 13.19, б) занимает соответствующее положение,
при этом меняется передаточное отношение обеих ступеней передачи.
13.3. Технические данные вариаторов завода «Выдвиженец»
Вариа- тор Тип электро- двигателя (форма : использования) i М300 1.. Мощность электродвига- теля, кВт Частота враще- ния ведущего вала, об/мин Частота враще- ния ведомого вала, об, мин Диапазон регу- лирования Мощность на ведущем валу, кВт, при с Размеры ремня, мм Масса с учетом электродвига- теля, кг
"пип пгпах
ВРС1 ВРСЗ ЛО2-51-4 ЛО2-32-4 7,5 з,о 1500 1500—3000 2 7 2,8 10 4 0,8—0,9 63x20, <р=34° 40 X 13, q>=34° 150 75
* Мощность указана для длительной работы ремня на всем диапазоне регулиро- вания скорости. * * Мощность указана для прерывистой работы ремня при частоте вращения ведомого вала более 1300 об, мин.
405
13.4. Габаритные и присоединительные размеры вариаторов BPCI, ВРСЗ
Обозначения см. на рнс. 13.18
Размеры, мм
Вариатор L А Д! Дг н Л1 Л2 D
ВРС1 ВРСЗ 680 515 382 468 342 252 528 432 120 320 270 340 230
Вариаторы с неизменным межосевым расстоянием
и подпружиненными шкивами
При постоянном межосевом расстоянии геометрическая длина
ремня изменяется в процессе регулирования угловой скорости. Для
поддержания постоянного натяжения применяют конструкцию с пру-
жинным нажатием конусов (рис. 13.20). В схеме а на ведущем валу
один конус предохранен от осевого смещения на валу, а второй под-
пружинен, на ведомом валу один из конусов имеет принудительное
осевое перемещение, а второй фиксирован от осевого перемеще-
ния. В схеме б подпружиненный конус установлен на ведомом
валу.
В схеме а при смещении правого ведомого конуса влево подвижный
ведущий конус под действием натяжения ремня отодвигается, сжимая
пружины и увеличивая усилие нажатия. Таким образом, происходит
пропорциональное увеличение Р при уменьшении Db т. е. ЛК = const
и, следовательно, N = const.
Схему б применяют для вариаторов с постоянным моментом
на ведомом валу М2 = const. Усилие Ттах, действующее на пру-
жину, определяют из соотношения
Рис. 13.20. Схема установки пру-
жин н перемещения конусов в ре-
менных вариаторах
а — для N= const; б — для — const
^max _
T’min Ч ’
где х — максимальное смещение ко-
нуса; Хо — предварительная осадка
пружины при Т = Tmin; усилия
нажатия определяют по формуле
(13.13).
Перекрестное расположение кону-
сов, заклиненных на валах, предохра-
няет ремень от перекоса при регули-
ровании. Конструкции таких вариа-
торов приведены на рис. 13.21.
Конструкции вариаторов ЭНИМСа
ВР1 и ВРЗ, выпускаемые заводом
«Выдвиженец», показаны на рис. 13.22.
406
Рис. 13.21. Вариаторы
с широким клиновым
ремнем:
а — горизонтальный; б —
вертикальный
Схема вариаторов соответ-
ствует рис. 13.19, а, т. е.
с постоянной передаваемой
мощностью. Конус 3 за-
клинен на валу 2 фланце-
вого двигателя 1. Управле-
ние осуществляется серво-
двигателем 4 через червяч-
ную передачу 5. Червячное
колесо служит одновремен-
но и гайкой, создающей
поступательное движение
винта, от которого переме-
щение через систему рыча-
гов передается на конус 6.
На конец вала 7 установле-
ны кулачок 8 и два конечных выключателя, отключающих серводвига-
тель в крайних положениях конуса 6. На конце ведомого вала устано-
влен тахогенератор 9, указывающий частоту вращения ведомого вала.
В табл. 13.5 приведены технические данные вариаторов, а в
табл. 13.6 — габаритные и присоединительные размеры их.
В конструкциях с осевым перемещением обоих конусов необходимо
обеспечить равное смещение их во избежание перекоса ремня. Регули-
407
Рис. 13.22. Вариаторы ВР1 и ВРЗ
13.5. Технические данные вариаторов ВР1, ВРЗ
Вариатор Тип электродви- гателя (форма исполнения Ф 2) Мощ- ность электро- двигате- ля, кВт Частота враще- ния ве- дущего вала, об/мин Частота вращения ведомого вала, об/мин Два- пазон регул и- рова- ния Мощность на ведущем валу, кВт, при ча- стоте вращения К. п. д. Размеры ремня, мм Г абаритные размеры, мм Масса с учетом электро- двигате- ля, кг
n2min n2max.
ВР1 А02-52-6 7,5 1000 500 2000 4 5 10 0,8—0,9 63X20 £ =1600 <р = 34® 830x590x1030 400
ВРЗ АОЛ2-32-4 3 1500 750 3000 4 2,8 4 0,8—0,9 40X13 £р=1120 <р = 34° 435x 645 x775 150
* Мощность указана для длительной работы ремня иа всем диапазоне регулирования скорости.
*♦ Мощность указана для прерывистой работы ремня при частоте вращения ведомого вала более 1500 об/мин.
13.6. Габаритные и присоединительные размеры вариаторов ВР1, ВРЗ
Размеры, мм
Вариатор А А В Si С С1 D н d F
ВР1 ВРЗ 920 605 470 330 590 435 340 190 1030 775 230 170 180 160 440 320 20 14 375 247
Примечание. В — габаритный размер по ширине; Bt~ расстояние между осями отверстий под крепежные болты в той же плоскости.
409
руемый шкив (рис. 13.23) получает перемещение от маховика; уравни-
тельный рычаг (см. рис. 13.16, а) обеспечивает равное перемещение
конусов. На втором валу подпружиненный шкив также должен осу-
ществить одинаковое перемещение конусов. На рис. 13.24 это дости-
гается уравнительным рычагом, на рис. 13.25 — посредством двух
пружин одинаковой жесткости. Вариаторы с постоянным межосевым
Рис. 13.23. Регулируемый шкив, обес-
печивающий равное перемещение ко-
нусов
Рис. 13.24. Подпружиненный
шкив с уравнительным рычагом
Рис. 13.25. Подпружиненный шкив, обеспечивающий равное перемещение конусов
410
расстоянием и компен-
сацией изменения длины
ремня посредством под-
пружиненных шкивов
просты по конструкции,
однако имеют тот недо-
статок, что компенси-
рующее перемещение ко-
нусов ведет к уменьше-
нию диапазона регули-
рования.
Ременно-колодочные
вариаторы
В ременно-колодоч-
ных вариаторах гибкое
звено состоит из плоского
ремня с прикрепленны-
Рис. 13.26. Гибкая связь ременно-колодочного ва-
риатора:
а — общий вид; б — крепление колодок
ми к нему деревянными
колодками (рис. 13.26).
Основные недостатки
таких вариаторов: огра-
ниченная угловая ско-
рость ведущего вала, недолговечность ремня и колодок. Вариаторы
выполняют с неизменным межосевым расстоянием и с принудительным
рычажным перемещением обоих валов; для поддержания постоянного
натяжения необходимо предусматривать специальное корректирующее
Рис. 13.27. Ременно-колодочный вариатор
411
устройство, обеспечивающее на
основании формулы (13.15) усло-
вие
(AD2 - ADX) + (APat#)1)2 = О-
В вариаторах на рис. 13.27
корректировка обеспечивается
механизмом крепления оси ка-
чания регулировочных рыча-
гов.
В конструкциях вариаторов
(рис. 13.28 и 13.29) для изме-
нения передаточного отношения
служит маховичок 1 (рис. 13.30).
С помощью червячных колес 2
движение передается на регу-
лировочные валики 3. Гайки 4
каждого валика перемещаются
Рис. 13.28. Рем<'1пю-колодо'1нып влриаюр Б разные стороны, так как на
завода <-Дим1провградхиммаш» валиках выполнена правая и
левая резьба. Ось вращения ре-
гулировочного рычага 5 укреплена на гайке, а свободный конец
его скользит по скосу гайки 4. Технические характеристики,
габаритные и присоединительные размеры вариаторов приведены
в табл. 13.7, 13.8.
Вариаторы с неизменным межосевым расстоянием
и криволинейной формой конусов
В вариаторах с широким клиновым ремнем и рычажным пе-
ремещением конусов можно не применять корректирующие устрой-
ства, если форму конической поверхности выполнить криво-
линейной.
В работе [35] рекомендуется профилировать диски (рис. 13.31)
по зависимости
, 8ARx , \ лЛ , срг1
1------1 - Ш 1 '1
1 лД 4 2
(13.17)
здесь А7?х — координата профиля диска, отсчитываемая от среднего
радиуса; А — неизменное межосевое расстояние; <рср — угол конуса
шкивов на среднем диаметре, выбираемый из условия изменения
поперечного сечения ремня при его изгибе;
ФсР =-=Ч'о- Афер,
АТср-'
180 , ! 1
л
L
412
А-А
Рис. 13.29. Ременно-колодочный вариатор завода «Димитровградхиммаш»
Рис. 13.30. Схема
механизма регули-
рования вариатора
завода «Димитров-
градхиммаш»
Рис. 13.31. Профи-
лирование криво-
линейной формы ко-
нусов (Вщ— веду-
щий; Вм — ведо-
мый)
413
414
13.7. Технические характеристики ременно-колодочных вариаторов завода «Димитровградхиммаш»
Вариатор Параметры Класс вариации
А Б в г д Е Ж 3 И
Диапазон регулирования
2 3 4 5 6 7 8 9 10
Х1В-Г «Imax* об/МИН «2 min- об/МИН n2max> об/МИП N ПРИ «2 min* кВт N ПРИ «2 max* кВт 565 399 799 1,19 1,07 525 303 911 0,55 0,96 500 250 1000 0,44 0,99 485 205 1084 0,40 0,98 475 194 1163 0,33 0,81
Х2В-Г «1тах* об/мин «2min> об/МИП «2 max’ 0б/МИП JV при n2min, кВт /V при П2тах, кВт 510 360 721 1,56 2,20 475 274 822 1,10 1,91 455 227 910 0,81 1,77
хзв-г «imax* g6'/MWI «2min* об/мин «2тах* o6A™H Л' при n2min, кВт N ПРИ «2max* кВт П1тах, об/мин «2min* об/мин «2 max* Об/мин N при n2min, кВт N "PH rt2max* кВт 525 371,2 742,35 3,09 4,40 525 371,2 742,4 6,25 8,80 485 280 840 2,35 4,84 490 283 848,7 4,41 7,72 470 235 940 1,84 4,68 470 235 940 3,77 7,36 455 203,4 1017,48 1,59 3,53 455 203,4 1017,4 2,94 6,61 445 181,7 1089,8 1,40 3,38 445 182 1089,8 2,57 6,25 435 164,4 1150 0,78 2,96 440 166,3 1163,8 2.21 5,87 430 152,5 1216 2,06 5,87 425 141,6 1275 1,84 5,52 420 132,7 1329 1,84 5,52
13.8. Габаритные и присоединительные размеры вариаторов завода
«Димитровградхиммаш»
Вариатор Е Г н L 1 d, d2 м м Масса, кг
Х1В Х1Г 223 428 438 430 297 335 500 70 24 195 290 450 53 58
Х2В 275 612 555 420 120 14 29 260 370 100
Х2Г 437 367 610 550 105
ХЗВ 305 577 620 470 90 34 280 410 120
ХЗГ 500 412 680 620 125
Х4В Х4Г 335 584 670 732 476 525 780 НО 20 39 338 475 730 201 206
Цепные вариаторы
В качестве гибкой связи используют пластинчатую цепь, которая
входит в зацепление с конусами, имеющими радиальные канавки
(рис. 13.32 и 13.33).
Цепные вариаторы работают в масляной ванне.
По сравнению с ременными они имеют меньшие габариты, более
долговечны и надежны в работе, но дороже.
Для постоянства натяжения цепи служат поджимные полозья с
наружной стороны. Пружинное поджатие демпфирует колебания цепи
и уменьшает неравномерность хода, присущую всем цепным пе-
редачам.
В табл. 13.9 приведены технические данные вариаторов Киев-
ского завода «Машпром», габаритные и присоединительные раз-
меры их по рис. 13.34 приведены в табл. 13.10. Для удобства компо-
новки привода с вариатором последние выпускают с различными
схемами сборок (рис. 13.35).
415
Рис. 13.32. Цепной вариатор
Рис. 13.33. Цепной вариатор (без корпуса)
416
14 Зак. 220
13.9. Технические характеристики цепных пластинчатых вариаторов Киевского механического завода
Вариатор Диапазон регу- лирования Д Частота вращения, об/мнн Передаваемая мощность, кВт, при Крутящий момент на выходном валу, Н-мм, при Число оборотов ; регулировочного винта в преде- 1 лах диапазона Вариатор Диапазон регу- лирования Д Частота вращения, об/мнн Передаваемая мощность, кВт, при Крутящий момент на выходном валу, Н-мм, при Число оборотов регул и ров оч кого винта в преде- лах диапазона
на входе вариатора О о к _ я .£ Е 3 К £1 ш га Е с Е см е "2 max Е Е см с X сз Е см с на входе вариатора ni ВЫХОДНОГО вала n2min Е Е см Е Е см Е с Е см Е n2max
ВЦ1 3 920 820 730 532 475 420 1,1 1,0 0,85 1,5 1,3 1,15 2 • 104 0,9 • 104 8 ВЦ4 3 920 820 730 532 475 420 5,2 4,7 4,1 7,5 6,7 6,0 9,6 • 104 4,6 • 104 12
4,5 920 820 730 434 390 344 0,9 0,8 0,7 1,4 1,25 1,1 0,7 • Ю4 9,6 4,5 920 820 730 434 390 344 4,3 3,8 3,4 7,4 6,65 5,9 3,7 • 104 14,4
6 820 730 335 300 0,7 0,6 1,25 1,1 0,6-104 11 6 820 730 335 300 3,3 3,0 6,6 5,9 3,2 • 104 16,8
ВЦ2 3 920 820 730 532 475 420 2,2 2,0 1,7 з,о 2,6 2,3 4- 104 1,8 • 164 7,8 ВЦ5 3 920 820 730 532 475 420 9.9 8,8 7,8 Н,2 11,8 10,5 18,1 • 104 8,1 • 104 14,5
4,5 920 820 730 434 390 344 1,8 1,6 1,4 2,8 2,5 2,2 1,4- Ю4 9,5 4,5 920 820 730 434 390 344 8,0 7,2 6.4 13,0 11,9 11,1 6,5-104 6,6 • Ю4 7,0 • 104 18
6 820 730 335 300 1,4 1,2 2,5 2,2 1,2 - 104 10 6 820 730 335 300 6,2 5,6 10,9 10,3 5,3 • 104 5,6 • 104 19,3
ВЦЗ 3 920 820 730 532 472 420 3,3 3,0 2,6 4,75 4,25 3,75 6,1 • 104 2,9 • 104 10,2 ВЦ6 3 625 360 11,2 19 30 • Ю4 18 • Ю4 14,2
4,5 920 820 730 434 350 344 2,7 2,45 2,15 4,6 4,15 3,65 2,3 • 104 12,3 4 625 312 9,5 19 14 Ю4 17,3
6 820 730 335 300 2,1 1,9 4,1 3,7 2.0- 104 13,1 5,6 550 233 7,5 16,2 12 • Ю4 19,8
Примечание. На выходе п2max = ^”2min.
417
Рис. 13.34. Габарит-
ные и присоединитель-
ные размеры цепных
пластинчатых вариато-
ров
Рис. 13.35. Схемы сборок цепных пластинчатых вариаторов
13.10. Габаритные и присоединительные размеры в мм цепных пластинчатых
вариаторов. Обозначения см. на рис. 13.34
Вариа- тор L В н а Л b fti ^2 Z Z, /а С р S d т Мас- са, кг
ВЦ1 408 300 250 80 132 150 130 150 320 160 370 50 20 15 24 50 45
ВЦ2 530 370 313 95 150 185 165 240 480 240 530 70 23 28 60 76
ВЦЗ 670 470 353 125 170 235 190 250 620 310 670 80 25 32 121
ВЦ4 816 516 420 150 200 258 238 290 760 380 816 122 30 25 38 80 216
ВЦ5 940 660 510 160 250 330 276 360 880 440 940 130 28 45 ПО 352
ВЦ6 1120 794 635 212,5 300 397 310 410 1050 525 1120 155 36 60 140 670
Примечание. На вариаторах ВЦ1 грузовые винты не устанавливают.
418
Рис. 13.37. Схемы сборок цепных вариаторов с встроенной
зубчатой парой на входе
Технические данные вариаторов со встроенной зубчатой парой на
первом звене приведены в табл. 13.11, габаритные и присоединительные
размеры по рис. 13.36 — в табл. 13.12. Схемы сборок показаны на
рис. 13.37.
13.3. ФРИКЦИОННЫЕ ВАРИАТОРЫ
Фрикционные вариаторы с непосредственным касанием контакти-
рующих тел значительно компактнее вариаторов с гибкой связью;
их применяют при высоких угловых скоростях, они обладают большим
диапазоном регулирования. Хорошая работа их в значительной мере
зависит от обеспечения необходимого взаимного положения контакти-
рующих тел, что налагает высокие требования на точность изготовле-
ния и монтажа.
14»
419
420
13.11. Технические характеристики цепных вариаторов со встроенной зубчатой передачей
Вариатор Диапазон регу- лирования Д Частота враще- ния, об/мин Передаваемая мощность, кВт, при Крутящий момент на выходном валу, Н - мм, при Число оборотов ре гул ировоч н ого вннта в пределах диапазона Вариатор Диапазон регу- лирования Д Частота враще- ния, об/мнн Передаваемая мощность, кВт, прн Крутящий момент на выходном валу, Н • мм, прн Число оборотов регул н ровочного винта в пределах диапазона
иа входе приставки п на входе вариатора ВЫХОДНО- ГО вала n2min n2min ra2max n2min ra2max на входе приставки п на входе вариатора nt О = S <- .Е о " х к Е ”2 min ”2 max с Е CN е ”2 max
ВЦ1 3 1420 920 820 730 532 475 420 1,1 1,0 0,85 1,5 1,3 1,15 2-104 0,9 • IO4 8 ВЦ4 3 920 1450 920 820 730 532 475 420 5,2 4,7 4,1 7,5 6,7 6,0 9,6 IO4 4,6 • IO4 12
4,5 6 920 820 730 434 390 344 0,9 0,8 0,7 1,4 1,25 1,1 0,7 • 104 9,6 4,5 920 820 730 434 390 344 4,3 3,8 3,4 7,4 6,65 5,9 3,7 • IO4 14,4
820 730 335 300 0,7 0,6 1,25 1,1 0,6 • 10« И 6 820 730 335 300 3,3 3,0 6,6 5,9 3,2 • IO4 16,8
ВЦ2 3 4,5 1440 920 820 730 532 475 420 2,2 2,0 1,7 3,0 2,6 2,3 4-Ю4 1,8 • 104 7,8 ВЦ5 3 1450 920 820 730 532 475 420 9,9 8,8 7,8 13,2 11,8 10,5 18,1-104 8,1 IO4 14,5
920 820 730 434 390 344 1,8 1,6 1,4 2,8 3,5 2,2 1,4- IO4 9,5 4,5 920 820 730 434 390 344 8,0 7,2 6,4 13,0 11,9 И,1 5,5 • IO4 6,6 IO4 7,0 • IO4 18
6 820 730 335 300 1,4 1,2 2,5 2,2 1,2. IO4 10 6 820 730 335 300 6,2 5,6 10,9 10,3 5,3-104 5,6 • 104 19,3
ВЦЗ 3 1440 920 820 730 532 475 420 3,3 3,0 2,6 4,75 4,25 3,75 6,1 • Ю4 2,9-104 10,2 ВЦ6 3 1460 625 360 11,2 19
4,5 920 820 730 434 390 344 2,7 2,45 2,15 4,6 4,15 3,65, 2,3 - IO4 12,3 4 312 9,5 19
6 820 730 335 300 2,1 1,9 4,1 3,7 2,0 • IO4 13,1 5,6 550 233 7,5 16,2
Примечание. На выходе п%тах = Д«2 min-
13.12. Габаритные и присоединительные размеры цепных вариаторов
с встроенной зубчатой парой на входе
Обозначения см. на рис. 13.36
Ва- риа- тор L Н а h ь ь, 1 ' 1 ^2 С р S d
ВЦ1 408 348 250 80 132 150 150 320 160 370 50 20 15 24
ВЦ2 530 455 313 95 150 165 240 480 240 530 70 23 28
ВЦЗ 670 580 353 125 170 190 250 620 310 670 80 25 18 32
ВЦ4 816 636 420 150 200 238 290 760 380 816 122 39 25 38
ВЦ5 940 717 510 180 250 276 360 880 440 940 130 28 45
ВЦ6 1120 905 635 212,5 300 310 410 1050 525 1120 155 36 60
Примечание. На вариаторах ВЦ1 грузовые винты не устанавливают.
Скольжение на площадке контакта
В нерегулируемых фрикционных передачах наблюдается неболь-
шое упругое скольжение, вызванное деформациями контактирующих
тел.
Для регулируемых фрикционных передач характерно геометри-
ческое скольжение, вызванное распределением скоростей на площадке
контакта.
Окружная скорость точек контакта ведущего конуса Вщ (рис. 13.38)
изменяется по прямой а ведомого Вм — по 02А2. По контактной
линии ad лишь в одной точке с скорости равны: иВщ = vBm. Точку с
называют нескользящей точкой площадки контакта.
Скорость скольжения пск = иВщ = vB„ имеет разные знаки в точ-
ках контактной линии, расположенных по разные стороны от несколь-
Рис. 13.38. Схема геометрического скольжения во фрикционных ва-
риаторах
421
зящей точки с, моменты сил трения на участках площадки контакта
также будут различны по направлению и величине. Момент М2, пере-
даваемый вариатором, создается разностью моментов сил трения на
площадке контакта. В случае идеального холостого хода (Л12 = 0)
моменты сил трения должны быть равны по величине, но противопо-
ложны по знаку, что соответствует совпадению нескользящей точки с
с центром площадки контакта О.
Для обеспечения надежной работы вариатора необходимо соблю-
дение условия
M2<fQRo;, (13.18)
здесь f — коэффициент трения, принимаемый при расчетах не зави-
симым от давления и скорости; Q — усилие нажатия (нормальное
усилие в месте контакта); Д02 — радиус ведомого звена (расстояние
от оси вращения до центра площадки контакта, рис. 13.38).
Запас сцепления вариатора
Нт?- <13-ВД
Если нагрузка вариатора меняется или различен запас сцепления
Р, то изменяется и положение нескользящей точки с.
Реальное передаточное отношение вариатора ip зависит от поло-
жения нескользящей точки с и определяется формулой
ip=r/. (13.20)
р Г1
Отличие L от г — оценивается коэффициентом скольжения
е=1 —4-. (13.21)
'р
Данная на рис. 13.38, а схема геометрического скольжения приме-
нима и для фрикционных тел двоякой кривизны, в этом случае обра-
зующие конуса следует рассматривать как касательные, проведенные
через средние линии поясков контакта.
Если нагрузка вариатора меняется, а усилие нажатия постоянно,
то происходит изменение положения нескользящей точки на площадке
контакта и передаточное отношение вариаторов (при том же относи-
тельном положении ведущего и ведомого конусов) изменяется. Для
получения жесткой характеристики вариатора, т. е. независимости
передаточного отношения от нагрузки, необходимо иметь постоянный
запас сцепления р, что достигается регулированием усилия нажатия Q
в соответствии с изменением М2. Это одновременно приводит и к увели-
чению долговечности вариатора. Передаточное отношение вариатора мо-
жет измениться и в результате деформации валов и других деталей пере-
дачи при изменении нагрузки, что вызывает изменение в относительном
положении конусов. При проектировании во избежание этого явления
надо стремиться к увеличению жесткости деталей передач.
422
Рис. 13.39. Коэффициент скольжения е в зависимости от пере-
даточного отношения i. Схемы вариаторов:
1 — торовый (ЦНИИТМАШ); 2 — шаровой (ЭНИМС): 3 — с раз-
движными конусами; 4 — лобовой; 5 — конусный
Для линейного контакта коэффициент скольжения можно опреде-
лить по формуле [351
е== 1+Р_Г1_Л-д1д1\±11.
2Рф±1[ \ sinaj J’
(13.22)
здесь ф = у; I — длина образующей короткого конуса (т. е. такого,
у которого I наименьшее).
Правило знаков для формулы (13.22) следующее: «плюс» — при
ведущем длинном конусе, т. е. имеющем большую образующую; «ми-
нус» — при ведущем коротком конусе. Например, для схемы
рис. 13.38, а образующая ведущего конуса 1г > 12, и в формуле (13.22)
следует брать знак «плюс»; но если вершина конуса Ог окажется между
точками О2 и С (рис. 13.38, б), то для ведущего конуса при Я о, > Ro2
имеем 4 < 4» следовательно, в формуле (13.22) надо брать знак «минус».
Для вариаторов с промежуточными телами коэффициент скольже-
ния
ec^ei + e2,
где и е2 — коэффициенты скольжения в парах «ведущий каток —
промежуточный» и «промежуточный каток — ведомый».
Геометрическое скольжение является важнейшим критерием кон-
струкции вариатора, оно в значительной мере определяет к. п. д. и
нагрев вариатора, передаваемую мощность, износ и долговечность
передачи; значения е для различных схем вариаторов приведены на
рис. 13.39.
423
Уменьшение скольжения достигается:
1) применением рациональной схемы вариатора;
2) уменьшением запаса сцепления р, который не следует для сило-
вых передач брать более 1,25—1,3;
3) применением конструкции с таким автоматическим нажатием,
чтобы при любом передаточном числе р — 1,25 4- 1,3;
4) уменьшением относительных размеров площадки контакта.
Вариаторы с первоначальным контактом в точке имеют, при про-
чих равных условиях, потери на трение на площадке контакта меньше,
чем вариаторы с первоначальным касанием по линии, что объясняется
меньшими относительными размерами площадки контакта. Однако
вариаторы с точечным касанием имеют менее жесткую характеристику.
Допускаемый коэффициент скольжения [е] зависит от продолжи-
тельности работы вариатора на различных режимах, его срока службы,
материалов фрикционных тел, передаваемой мощности, условий смазки
и охлаждения и других причин и изменяется в значительных пределах.
Принимают для длительно работающих на одном режиме передач
при стальных телах качения без смазки [е] = 1 4- 1,5%; при тексто-
лите по стали или чугуну [е] = 1,5 4- 3%; при кратковременной
работе на одном режиме [е] ~ 7 4- 10%; для передач, работающих
со смазкой, можно допускать [е] — 10 4- 15% [35].
Расчет на прочность
В основу расчета на прочность положены нормальные напряжения
в месте контакта ок; для линейного контакта
(0к)п>ах = 0,418 (13.23)
' Рпр
здесь
Qp Р1Р2
9=т;
<2Р — расчетное нормальное усилие в месте контакта, Н; b — длина
линии контакта, мм.
Для вариаторов с первоначальным контактом в точке
1 /
(OK)max —m ]/ ~Ts • (13.24)
’ Рпр
Коэффициент т определяют в соответствии с формой контактирую-
щих тел.
По зависимости (13.23) для вариаторов с начальным линейным
контактом получаем формулу для проектировочного расчета
Л1Э.0,444/£ ^£^Sin2o.(l ±^). (13.25)
Правило знаков: «плюс» — при внешнем касании, «минус» — при
внутреннем.
424
13.13. Значение коэффициента трения f для вариаторов [35|
Материал пары Условия работы Коэффициент трения
Закаленная сталь по закаленной стали Закаленная сталь по закаленной стали или чугуну Текстолит по чугуну или стали В масле Без смазки То же 0,04—0,05 0,15—0,20 0,2—0,25
В формуле (13.25) /?, — радиус ведущего фрикционного катка, мм;
Р — запас сцепления для силовых передач; Р = 1,25 4- 1,3; f — коэф-
фициент трения (табл. 13.13); Мг — момент на ведущем валу вариатора,
Н -мм; £пр — приведенный модуль упругости; и — число параллель-
ных потоков передачи нагрузки вариатора; [о]к — допускаемое кон-
тактное напряжение (табл. 13.14);
р .
ф = = ---коэффициент, которым задаются в соответствии
с величиной е по формуле (13.22); i выбирают в зависимости от схемы
регулирования вариатора по заданному Д.
13.14. Допускаемые контактные напряжения для вариаторов [35|
Материал пары Условия работы [о]к, Н/мм8
Закаленная сталь по закаленной стали НВ 350 Сталь по стали й<//Е 350 Чугун по чугуну Текстолит по стали или чугуну В масле То же Без смазки 2,6 НВ 2,3—2,6 НВ 1,5 сгви 50—70
Если в вариаторе принятой схемы Rx = var, то расчет по формуле
(13.25) ведут для 7?linin, и в этом случае i — imax*
Если 7?! = const, то опасный случай для расчета, когда = Л41тах,
т. е. при i = imin.
Определив Rx по формуле (13.25), находят остальные размеры по
значению Д и принятому коэффициенту ф.
Приведенные в табл. 13.14 допускаемые напряжения даны для
107 циклов нагружения при постоянной работе.
При переменном режиме 1о1к следует умножить на коэффициент
k -1/^
Йрк-|/ ЛГЦЭ>
где Л^цэ — эквивалентное число циклов, определяемое по формуле
(3.57).
425
Нажимные устройства
Наиболее распространены такие способы нажатия: постоянное
усилие пружинами; автоматическое нажатие силами, возникающими
в передающих механизмах, или специальными нажимными устройст-
вами.
Автоматическое нажатие с усилием, пропорциональным нагрузке
вариатора, позволяет иметь неизменный запас сцепления, постоянное
передаточное отношение при данном режиме, большую долговечность
и высокий к. п. д.
На рис. 13.40 показано шариковое автоматическое нажимное
устройство. Два или три шарика расположены в клиновых канавках,
составляющих угол у с плоскостью диска. Под действием момента М
на радиусе центров шариков создается осевое усилие
м
Л,„ tgy *
(13.26)
Усилие нажатия
С=-4-
sin а
(13.27)
где а — угол между образующей конуса диска и осью вала; однако
п=1.
4 f
Решая совместно
(13.28)
Рис. 13.40. Схема шари-
кового нажимного устрой-
ства
(13.28), получаем
(13.29)
= const И Л\ =
и с неизменным
уравнения (13.26), 13.27) и
Мд
рЛшяпа’
Для вариаторов с 7?д
= const или с М2 = const
радиусом ведомого диска угол у постоянен.
Для вариаторов с 7?д const выполняют
шариковое нажимное устройство с перемен-
ным углом клиновой канавки или распола-
гают канавки по спирали (Дш const).
Для создания предварительного прижатия
во избежание пробуксовки на холостом ходу
шариковое нажимное устройство должно
иметь пружину.
Винтовое нажимное устройство (рис. 13.41)
при среднем радиусе резьбы гср и угле подъема
винтовой линии X создает осевое усилие
Л-_. м
rcp tg (Х±р)’
при увеличении М — знак «+», при уменьше-
нии — знак «—» при установившемся режиме
(13.30)
426
м
^Ср 1g
4 =
Винтовое нажимное устройство
конструктивно проще шарикового, но вслед-
ствие большого трения менее чувствительно
к изменению нагрузки и больше изнашивается.
Лобовые вариаторы
Из всех типов фрикционных бесступенчатых
передач с твердыми телами касания лобовые
вариаторы конструктивно наиболее просты.
На основании формулы (13.22) геометриче-
ское скольжение
Рис. 13.41. Схема вин-*
тового нажимного
устройства
2₽ф Jt 1 ’
(13.31)
здесь знак «+» — для ведущего колеса (рис. 13.42, а), знак «—» —
Z R
для ведущего диска (рис. 13.42, б); ф = -&-=-^, где Дд— радиус
диска; при Дд mjn скольжение максимальное (см. также рис. 13.39).
Основной недостаток лобовых вариаторов — большое скольжение,
поэтому в силовых передачах диапазон регулирования их приходится
ограничивать Д <3 4- 4.
Приведем следующий пример. Диаметр ведущего колеса Dx =
= 100 мм; b = 20 мм и конструктивно допустимый наибольший
диаметр диска D2max = 1000 мм (по рис. 13.42, а).
Пусть р = 1,25. Так как £>2min = то по формуле (13.31)
получаем максимальный коэффициент скольжения:
Д......... 2 3 4 5 6 7 8
етах> % • • • 7>° 10>3 13’5 16>6 19’7 22>7 25’6
При контакте на малых диаметрах диска (при большом Д) сколь-
жение недопустимо велико.
При ведущем колесе (по рис. 13.42, а) его радиус
/?1 = 0,444\/ | X, (13.32)
г I 1и1к min
R
где = выбирают в зависимости от принятой величины е.
а) в) I е) L
Рис. 13.42. Схемы лобовых вариаторов:
а — с ведущим колесом; б — с ведущим диском; е — сдвоенный
427
При ведущем диске (рис. 13.42, б) для случая Л12 = const радиус
ведомого колеса
Rt = 0,444 £Пр /гаах Ф ;
(13.33)
, R 1 min
здесь ip = ——.
Определив Д, или Д2, остальные размеры находят по значениям
Д и ip.
При проектном расчете принимают: для передач с регулируемым
нажатием р ж 1,3 при етах = 5 ч- 10%; ip = 18 ч- 10 соответственно.
Для передач, работающих с постоянной мощностью N2 — const,
ведущим выполняют цилиндрическое колесо, при постоянном моменте
М2 = const ведущим выполняют диск. Лобовые вариаторы допус-
кают простое реверсирование передачи.
Простейшая конструкция лобовой передачи применена в приводе
к приемной корзине изолировочных машин силового кабеля (рис. 13.43).
Кабель укладывается в корзину 1 по спирали, и поэтому при посто-
янной производительности машины угловая скорость корзины должна
плавно регулироваться. Ведущее колесо 2 вариатора перемещается
относительно ведомого диска 4 винтом <3, последний имеет индиви-
дуальный электропривод. Значительная изгибающая нагрузка на
Рис. 13.43. Привод к приемной корзине изолировочной
машины для силового кабеля с лобовой передачей
428
Рис. 13.44. Лобовой вариатор усовершенствованной конструкции с шариковым
нажимным устройством на ведомом валу
ведущий вал при вынужденно большом расстоянии между его опорами
является существенным недостатком подобных конструкций.
Жесткость конструкции имеет первостепенное значение, так как
с ней связано распределение напряжений в зоне контакта фрикцион-
ных тел.
Более совершенная конструкция лобового вариатора представлена
на рис. 13.44. К достоинствам ее следует отнести разгрузку валов от
изгибающих моментов, двухпоточное распределение мощности, регу-
лирование усилия нажатия, уменьшенное скольжение.
Коэффициент скольжения ес для обычной сдвоенной лобовой пере-
дачи (рис. 13.42, в) в крайнем положении (i = imax) определяем, пре-
небрегая единицей в знаменателе формулы (13.31) и принимая (3=1:
ес — fci + е2 — р-----------Ь п-------— п---------(Д + 1).
'дпйп Хдп1ах лдшах
429
Рис. 13.45. Схема лобового вариатора усовер-
шенствованной конструкции:
а — при i— 1; б — при i= imax
где Ra — радиус ведущего
и ведомого дисков (размеры
дисков одинаковые).
Для усовершенствован-
ной конструкции лобового
вариатора (см. рис. 13.44)
при тех же упрощениях
= £1 + 62 —
цдшах
Как видно, её < ес, и
суммарное скольжение не
зависит от угла а.
Когда ось вращения
промежуточного ролика пе-
ресекает ось вращения
отсутствует (рис. 13.45, а).
диска в его центре, то скольжение
Если принять симметричное регулирование, то целесообразно, чтобы
при i -= 1
^д. ср
^д max +«д min
2
Для проектного прочностного расчета (при симметричном регу4-
лировании, рис. 13.45, б)
min =3 0,4447 • £прФ(1<У—- sin2 а cos а ;
(13.34)
здесь, как и ранее,
п
_ цт!п
b
Обычно принимают а = 30 ч- 45°; при малых а возрастают ради-
альные габариты вариатора, выбор больших а приводит к значитель-
ному увеличению расстояния между дисками.
Промежуточный ролик имеет постоянный поясок контакта и удвоен-
ное число циклов нагружения. Рекомендуются сочетания материалов:
сталь ШХ15 (ролик) и сталь 45 (диск) со смазкой или сталь — тексто-
лит без смазки.
В конструкции на рис. 13.44 применено шариковое нажимное
устройство, установленное на ведомом валу вариатора; подобный
вариатор целесообразно эксплуатировать при Л12 = const. Вариаторы
такой конструкции рассчитаны на диапазоны регулирования Д sg: 10
при Их = 1400 об/мин и N ~ 13 кВт при максимальной частоте вра-
щения ведомого вала; регулирование несимметричное: imin — 0,5 и
£тах ~ 5.
430
На рис. 13.46 изображен
вариатор аналогичной кон-
струкции, но с винтовым на-
жимным устройством на ведо-
мом валу.
Конусные вариаторы
Типичная конструкция ко-
нусного вариатора показана
на рис. 13.47.
Ведущий конус располо-
жен непосредственно на валу
фланцевого электродвигателя.
Последний крепится к кор-
пусу вариатора винтовым
регулировочным механизмом,
управляемым штурвалом.
Зубчатая передача от винта
осуществляет привод на ука-
затель скорости ведомого вала п 1О ЛС ГТ -
1 Рис. 13.46. Лобовой вариатор усовершенство-
вариатора. ванной конструкции с винтовым нажимным
Коэффициент скольжения устройством на ведомом валу
е зависит от углов конусов
а( и а2 (рис. 13.48). На рис. 13.49 даны значения е в крайних по-
ложениях. Скольжение определялось в функции а2 при различных
значениях Д = а2 — аг.
При i = imax коэффициент скольжения с увеличением а2 интен-
сивно возрастает (кривые ар, Ьр и ср), в то время как при работе на уско-
рение (i = imin) увеличение е незначительно (кривые ау, q^, су). Оце-
нивая скольжение по средней величине (кривые аср, Ьср, сср), можно
заключить, что для уменьшения е целесообразно принимать большие
значения Д.
Выбор меньших значений а2 и cq позволил бы уменьшить е, но при
этом увеличиваются осевые габариты передачи, так как высота веду-
щего конуса (см. рис. 13.48)
ftj -— max Ctg ОС — minZZ Ctg CXj.
Углы cq и а2 влияют также на ограничение imin вариатора вслед-
ствие возможного касания ведущего конуса с ведомой чашкой в диа-
метрально противоположной точке М.
Согласно рис. 13.48, б имеем
max — (Т?2 ~Ь Утах) . 1
Ы11 Ctg
(Т?2 ~Ь Утах) Ctg СС2 — (Т?2 Утах) tg ф?
(13.35)
(13.36)
здесь <р = 90° — (2ах — оса).
431
Рис. 13.47. Конусный вариатор «Вебо»
Рис. 13.48. Схема конусного вариатора
«Вебо»:
Рис. 13.49. Зависимость коэффи-
циента скольжения е от а2 и А —
= а2—«1 для вариаторов «Вебо»:
°р- *р- ср п₽н ‘max (Редуцирование):
Су, бу, су прн tmin (ускорение); сср,
ст — среднее значение коэффн-
vp, VP
цнента скольжения
а — произвольное положение; б — в положе-
нии i = imin
432
Совместное решение уравнений (13.35) и (13.36) приводит к выраже-
нию
sin а2
7 , sin 2(а2—tZj)‘
sin а, Ч------------—
1 2 cos at
(13.37)
При небольших значениях exj и малой разности Д значение imln > 1
и работа вариатора на ускорение практически неосуществима; уве-
личение сс, позволяет значительно расширить диапазон регулирования
в области i <z 1.
Таким образом, соответствующий выбор и а2 позволяет проекти-
ровать передачу для конкретных условий, например с минимальным
скольжением, малыми габаритами или с расширенным диапазоном
регулирования.
В вариаторах «Вебо» = 80 -ь 85°, а2 = 85 -4- 90°, при этом
imin ~0,6 -ь 0,8; из условий допустимого скольжения lmax = 1,5 -ь
-т- 2,0, тогда Д = 2 3,5.
Ведущий конус вариатора стальной или чугунный; ведомая
чашка — со сменным текстолитовым кольцом; передача работает без
смазки.
Преобразовывая выражение (13.25), получаем следующую зависи-
мость для проектного расчета:
lx л л Д Р 2Л4, с • / cosa2\
₽2 0,444 1/ 5- • Епр max sin ос2 cos а, — ,
* I \ {max /
(13.38)
, /2 ^2
где ib = —.
T b b sm a2
Основные размеры вариатора определяют в такой последователь-
ности: 1) выбирают углы конусов сс( и а2; 2) находят Т?2 по формуле
(13.38) при ф = 10 -4- 20; 3) определив 7?1ГП1П, 7?imaX, делают первую
эскизную компоновку фрикционных тел вариатора. Построение целе-
сообразно выполнить в положении при е = 0, т. е. когда вершины
конусов совпадают; 4) находят imin по формуле (13.37) и е в крайних
точках при imax, imin по формуле (13.22); 5) в заключение проверяют
эскизную компоновку и.значения imin и е и вносят необходимые кор-
рективы в принятые ранее alt а2 и ф.
Усилие нажатия при М2 = const постоянно, в этом случае при
подпружиненной ведомой чашке целесообразно принимать а2 = 90°
и брать пружину малой жесткости.
При Ai2 = const усилие нажатия Q меняется, и переменное усилие
пружины
7 - P . i£
f sin a2 ' R2
Горизонтальное перемещение х ведомой чашки (рис. 13.48):
К2 /1 _ sin at\ coscz2
i \ sin а2/ sin '
(13.39)
433
Жесткость пружины
т т
_ * max * min
^шах
Используя выражение для Т и х, получаем
Г-Л
f ' R1
^max *min
cosa2
/ sin a2
Vmaxsinai~
Если привод работает с изменением как ТИ2, так и N2, то целесо-
образно применить косозубую передачу между валами вариатора
(см. рис. 13.47) для обеспечения прижатия соответственно передавае-
мой нагрузке. Угол наклона зуба 0Ш шестерни диаметра определится
из выражения
to в =_______Р_____
® f sin а2 D2
(13.40)
Первый вал вариатора выполняют в такой конструкции плавающим.
Ширину шестерни Ьш при а2 < 90° следует выбирать с учетом наиболь-
шего горизонтального перемещения %тах- Пружина с малой жестко-
стью обязательна во избежание пробуксовки на холостом ходу. Однако
так как рш ограничивается значениями 8 — 15°, то по формуле (13.40)
получаем jy у /о ’ чт0 часто приводит к неудачным конструктив-
ным решениям. В таких случаях применяют комбинированный нажим
косозубой парой и пру-
Рие. 13.50. Конусный вариатор с параллельными
валами
жиной.
Конусный вариатор
с параллельными вала-
ми, представленный на
рис. 13.50, выполняют
обычно в комбинации
с зубчатой передачей;
вал вариатора с кони-
ческой чашкой и шестер-
ней может свободно по-
ворачиваться около оси
зубчатого колеса в пре-
делах необходимого угла
(рис. 13.51). Регулиро-
вание осуществляется
перемещением ведущего
конуса вариатора вдоль
его оси, одновременно
поворачивается вал с ве-
домым конусом. Осевое
перемещение конуса осу-
ществляют или совмест-
434
Рис. 13.51. Схема конусного вариатора с пареллельными
валами
но с электродвигателем, расположенным на салазках, или вдоль
вала двигателя на скользящей втулке (рис. 13.52).
В передаче с параллельными валами (ах = а2 = а) вариатор пони-
жает угловую скорость; по формуле (13.37) imin = 1; практически
принимают imin = 1,5 -г- 1,25, R2 находят по формуле (13.38).
Выбор малых углов нецелесообразен, так как при этом увели-
чиваются осевые и радиальные габариты передачи. При боль-
п
ших а уменьшается 4’ = ^^ и возрастает скольжение; обычно
принимают а = 50 ч- 60°; imax = 2,5 -ч-4, и тогда Д »2 ч 3.
Так как в рассматриваемых вариаторах скольжение больше, чем
в передачах «Вебо», то приходится при-
нимать
гр = гД-^25-ь40.
т о sin а
Последовательность расчета анало-
гична рассмотренной выше.
Нажатие в вариаторе осуществляет-
ся реактивным моментом зубчатого за-
цепления и, следовательно, зависит от
внешней нагрузки.
Рассматривая равновесие качающего-
ся рычага, получаем (см. рис. 13.51)
1 sin 6
0 =____— р
** cos a cos 6 ш‘
Так как Рш — Р^-, то запас сцеп-
ления
Рис. 13.52. Ведущий конус ва-
риатора на скользящей втулке
в=& = _£____
н Р cos a cos Р
(g+si”6).
(13.41)
435
Согласно рис. 13.51
sin 6 =
д2-[д^+(^2-^)21
2ДШ (R2-Ri)
(13.42)
Запас сцепления непостоянный — наименьший при 6 < О (sin б =
= — . С достаточной точностью можно вести расчет 0 при 6 = 0.
Так как при 6 > О (область малых innn — см. рис. 13.51) увеличение
р идет интенсивнее, чем при 6 <; 0, то целесообразно принять
Дг = Л^+^(1-^)2, (13.43)
где
I* = (0,7 -J- 0,9) (maximin-
Расчет параметров зубчатого зацепления и механизма нажатия
следует выполнять в таком порядке: выбор ^ = 2,5ч-3 согласно
формуле (13.41) исходя из значений р, f и а при 6 = 0; выбор ширины
зубчатых колес исходя из прочностного расчета зацепления (гл. 3); опре-
деление А по формуле (13.43); проверка запаса сцепления р по фор-
мулам (13.41) и (13.42) в крайних положениях и pmin при 6 =
* ( Фи \
= arcsin — гт).
Конические планетарно-фрикционные вариаторы выпускает завод
«Димитровградхиммаш». Принципиальная схема вариатора приведена
на рис. 13.53.
Ведущий конус 3 находится в контакте с сателлитами 4 сложной
конической формы, которые смонтированы в сепараторе 5. Сателлиты
расположены таким образом, что одна из образующих конуса парал-
лельна оси вариатора. По этой образующей сателлиты обкатываются
внутри невращающейся цилиндрической обоймы 2, которая в процессе
регулирования скорости перемещается вдоль оси вариатора.
Сателлиты находятся также в контакте с торцовой шайбой 6 вы-
ходного вала и дополнительной осевой опорой 1, смонтированной на
подшипнике. При осевом перемещении обоймы 2 изменяется один
из рабочих радиусов сател-
лита, бла-годяря чему изме-
няется передаточное число.
Нажатие пружинное, прило-
женное к ведущему конусу 3.
Все основные детали ва-
риаторов, несущие контакт-
ные нагрузки, изготовлены
из стали ШХ15 и закалены
до твердости HRC 58—62.
Рабочие поверхности этих
деталей шлифованные.
Рис. 13.53. Принципиальная схема плане-
тарно-фрикционного вариатора
436
Технические характеристики планетарно-фрикционных вариаторов
приведены в табл. 13.15.
13.15. Технические характеристики планетарно-фрикционных
вариаторов «Димитровградхиммаш»
Типоразмер вариатора Мощность элек- тродвигателя, кВт Пределы частоты вращения, об/мин Предельный крутя- щий момент ♦, Н-мм Предельная кон- сольная нагруз- ка, Н
На выходном валу **
МВ-8 0,4 0,6 40—420 0,75 • 10* 1 • 10« 750
МБР 1-8 7—75 4-104 5,5 • 104 2 500
МВР2-8 1,2—13 22 - 104 30 • 104 5 000
МВ-10 0,8 1,1 30—400 1,7-104 2,3 - 104 1 000
МВР1-10 5,5—68 9,5 • 104 13 • 104 5 000
МВР2-10 1—12 53 • 104 70 • 104 10 000
* Величина постоянная, не зависит от частоты вращения.
•• Осевая нагрузка на выходном валу не допускается.
Как следует из приведенной технической характеристики, вариа-
тор работает с постоянным нагрузочным моментом на ведомом валу
и переменной мощностью. Передаваемая вариатором мощность опре-
деляется по наибольшей угловой скорости ведомого вала.
Вариаторы выпускают с электродвигателями типа АОЛ-2 в испол-
нении М300 (фланцевые) с синхронной частотой вращения 1500 об/мин
или с взрывобезопасными двигателями типа ВАО также фланцевого
исполнения и с той же частотой вращения.
Вариаторы горизонтального исполнения выпускают с креплением
к фундаменту на лапах — исполнение Щ, вертикального исполнения —
исполнение В, с креплением на фланце.
Диапазон регулирования Д ~ 11 4- 13. Снижение частоты враще-
ния выходного вала до 5,5—75 об/мин достигается использованием
на выходе вариатора одноступенчатого планетарного зубчатого редук-
тора (₽! — в обозначении типоразмера вариатора). Частота вращения
в интервале от 1 до 13 об/мин обеспечивается применением двухсту-
пенчатого планетарного редуктора (Р2).
В табл. 13.16 и 13.17 приведены габаритные и присоедини-
тельные размеры вариаторов с одноступенчатым планетарным ре-
дуктором.
437
13.16. Габаритные и присоединительные размеры
горизонтальных планетарно-фрикционных вариаторов
Размеры, мм
Типоразмер
вариатора
МВ-8Щ
МВР1-8Щ
МВР2-8Щ
МВ-ЮЩ
МВР1-10Щ
МВР2-10Щ
Примечание. Размеры La, относятся к электродвигателям: для АОЛ-2 оин
равны 240 и 107 мм (N = 0,4 кВт); 255 и 146 мм (0,6 кВт); 280 и 146 мм (0,8 кВт);
280 и 150 мм (1,1 кВт). Для электродвигателей типа В АО: 270 и 155 мм (0,4 кВт); 290 и
163 мм (0.6 кВт); 305 и 163 мм (0,8 кВт); 335 и 250 мм (1,1 кВт).
В процессе работы детали обильно смазывают жидкой смазкой,
заливаемой в корпус вариатора.
Торовые вариаторы
Торовые вариаторы имеют наилучшие показатели по геометриче-
скому скольжению.
Передаточное отношение изменяют поворотом промежуточного
ролика (рис. 13.54) относительно ведущей и ведомой тороидальных
соосных чашек.
Вращающий момент с ведущего вала (рис. 13.55) передается на
тороидальную чашку через шариковое нажимное устройство, взаимо-
заменяемым выполнен подобный узел и ведомого вала. Ставят два
промежуточных ролика со сменным текстолитовым кольцом, этим до-
стигается разгрузка валов от изгибающих моментов. Поворот осей
двух промежуточных роликов осуществляется одновременно рычаж-
ным механизмом (поворотной рамкой) с приводом от маховика.
438
13.17. Габаритные и присоединительные размеры вертикальных планетарно-
фрикционных вариаторов
Размеры, мм
Поворотная рамка выполнена плавающей так, чтобы ролики могли
самоустанавливаться относительно тороидальных чашек, обеспе-
чивая тем самым равномерность распределения усилий и износа
роликов.
При проектировании необходимо выполнять конструкцию макси-
мально жесткой, чтобы деформации деталей не вызывали существен-
ного нарушения контакта между фрикционными телами и изменения
передаточного отношения. Весьма важна и хорошая работа уплотне-
ний подшипниковых узлов, чтобы избежать попадания смазки между
фрикционными телами.
На эти требования при конструировании должно быть обращено
серьезное внимание.
Недостаток торовых вариаторов — сложность конструкции, обус-
ловливающая высокие требования к точности изготовления и монтажа.
Неженский механический завод
стальными фрикционными телами
(работающими со смазкой), рас-
считанный на передачу мощности
W = 10 кВт при длительной работе.
Частота вращения ведущего вала
пх = 970 об/мин, ведомого в пре-
делах ОТ n2min = 345 об/мин ДО
Zl2min = 2720 об/мин.
Регулирование симметричное;
к. п. д. вариатора т] = 0,95. Габа-
ритные и присоединительные раз-
меры см. рис. 13.56.
выпускает торовый вариатор со
Рис. 13.54. Схема торового вариа-
тора
439
440
Рис. 13.55. Торовый вариатор
Рис. 13.56. Габаритные и присоединительные размеры торового вариатора Не-
жинского механического завода
Передаточное отношение торового вариатора
. _ Н — R cos (6 + 6)
1 ~ //-Rcos(e-6)
(обозначения см. на рис. 13.54).
Скольжение определяют по формуле (13.22), причем
«! = 6 — 6; а2 = 90° — 6.
(13.44)
Согласно рис. 13.37 наибольшее скольжение в торовом вариаторе
наблюдается в крайних положениях и при i = 1, в этих точках и тре-
буется проверять величину ес. В целях получения меньшего сколь-
жения и постоянства [3 соотношения между размерами вариатора сле-
дует принимать
^ = —-=1,25; с2 = ^-^ 0,85-^0,97; с3 = ^^0,1;
''max ^max /'max
cose = = (0,85-5-0,97)/?max (1,25 - Д Y
H \ V 11!
Преобразование формулы (13.25) приводит к следующей расчетной
зависимости:
Я1„.г0,444|/|.^£„р7Д=. (13.45)
Нажатие в торовых вариаторах осуществляется шариковым уст-
ройством.
Усилие нажатия (см. рис. 13.54)
4=Qsina,;
441
Шариковое нажимное устройство с у — const и /?ш = const не
обеспечивает постоянного запаса сцепления 0, поэтому расчет следует
вести при минимальном 0, ему соответствует
По значению А рассчитывают нажимное устройство и затем опре-
деляют 0 при любом положении вариатора:
~' 2/?1П tg у sin (6 ± б)’ <13-46)
знак «плюс» — при работе на ускорение, знак «минус» — при работе
на замедление 1351.
При необходимости проверить контактные напряжения в разных
положениях вариатора полученные значения 0 подставляют в формулу
(13.45), которую решают относительно ок при текущем значении Rt.
§ 13.4. ПОДБОР ВАРИАТОРА
В задания на курсовое проектирование не следует, как правило,
включать разработку вариаторов — целесообразно подбирать готовый
вариатор из числа выпускаемых промышленностью.
Подбор вариатора следует выполнять на самой первой стадии про-
ектирования привода одновременно с подбором электродвигателя.
Выбор вариатора с определенной технической характеристикой, так же
как и выбор электродвигателя, определяет кинематическую схему
всего привода. При подборе руководствуются основными показате-
лями вариатора — нагрузочной способностью, диапазоном регулиро-
вания, угловой скоростью ведущего вала вариатора.
Рекомендуется располагать вариатор в общей схеме привода там,
где угловая скорость наибольшая, а момент — наименьший.
Фрикционные вариаторы позволяют использовать их на первом
звене привода, сразу за электродвигателем.
Вариаторы клиноременные и с широким клиновым ремнем также
могут применяться в качестве первого звена привода.
Для цепных вариаторов частота вращения ведущего вала ограни-
чивается, однако использование таких вариаторов со встроенной
зубчатой передачей позволяет применять их непосредственно за
электр одв игателем.
Ременно-колодочные вариаторы следует располагать после по-
нижающей передачи от вала электродвигателя, как правило, ре-
менной.
Нагрузочная способность вариатора характеризуется передава-
емой мощностью, угловой скоростью ведущего вала и диапазоном регу-
лирования. Первые два параметра определяют допускаемый момент
на ведущем валу вариатора, третий позволяет найти допускаемый
момент на ведомом валу. Если вариатор используется с угловой ско-
ростью ведущего вала меньшей, чем указано в его паспорте, необхо-
442
димо, чтобы передаваемая мощность в этом случае была соответственно
меньше, чем по паспортным данным.
Увеличение по сравнению с паспортным значением и соответ-
ственно увеличение Л\ допустимо не всегда, так как долговечность
работы, тепловыделение и другие показатели зависят от ско-
рости.
Диапазон регулирования характеризует кинематические возмож-
ности вариатора. Расчетный диапазон регулирования не должен пре-
вышать паспортного значения. Допускается использование вариатора
с меньшим, чем по паспорту, диапазоном.
Однако с экономической точки зрения такое решение не всегда
оправдывается.
Общая компоновка всего привода с вариатором дает дополнитель-
ную информацию для рационального выбора вариатора.
Окончательным критерием оптимальности выбора вариаторов слу-
жит технико-экономический расчет.
Пример. Привод должен обеспечить частоту вращения рабочей машины в ин-
тервале от прП]ах = 300 об/мин до npmin = 60 об/мин.
Передаваемая мощность постоянна: Np = 0,6 кВт.
Решение.
«птах 300
1. Расчетный диапазон регулирования Д = =5. Такой диапазон
«р min
регулирования обеспечивают отечественные вариаторы: ременно-колодочные, цеп-
ные, планетарно-фрикционные и торовые.
2. По техническим характеристикам применение торового вариатора для задан-
ной малой мощности нецелесообразно.
3. Из планетарно-фрикционных вариаторов, приведенных в табл. 13.15, сле-
дует проверить те, для которых предельный момент на ведомом валу соответствует
Jtninin_3,14- 60
требуемому, достигающему наибольшего значения при comin = —————— =
ои ои
= 6,28 рад/с:
ЛДпеб = —= в*с = 95,5 Н • м=9,55 • 104 Н • мм.
Р “min 6>28
Такой момент допустим для вариатора МВР1-10 при N = 0,8 кВт.
4. Из ременно-колодочных вариаторов (табл. 13.7) подходит по нагрузочной
способности ХЗ (В или Г), но в этом случае соединение с валом электродвигателя,
имеющим пэ = 1000 об/мин, необходимо выполнить посредством ременной передачи
с передаточным числом i — — = =2,25.
Средняя частота вращения ведомого вала вариатора
«в. ср = К«в max«Bmin = V1089 • 181,7 = 455 Об/миН (при iB = 1).
Средняя частота вращения рабочей машины
«р ср = K«pmax«pmin = 1Л300• 60 = 134 об/мин.
Передаточное число редуктора от вариатора к валу рабочей машины
• «в со 455
» = вср = -—=3,32.
«р ср 134
443
5. Из цепных вариаторов (табл. 13.9) подходит по нагрузочной способности
«в. ср 820
-------------------------------------------------------------= . =6,1
^р. ср 134
ВЦ1 с Д = 6 и пв,Ср = 820 об/мин. Передаточное
и максимальный момент на выходном валу вариатора
ЧИСЛО 1 =
М _^рт
/ив2тах
9,55 • 10‘
га-1*'"’"-'
что меньше допускаемого [/WmaxJ = 2-101 Н-мм.
Так как электродвигатели единой серии с ns = 750 об/мин малой мощности не
выпускаются, то приходится ориентироваться на электродвигатель с п3 — 1000 об/мин
и ременной передачей или на электродвигатель типа АОС с пэ = 860 об/мин. В по-
следнем случае вариатор остается тот же, несколько увеличивается передаточное
число редуктора.
6. Из цепных пластинчатых вариаторов с зубчатой парой (табл. 13.10) под-
ходит ВЦ1. Дополнительного привода от электродвигателя к вариатору не требу-
ется, передаточное число редуктора i = 6,1.
7. Наибольшие габариты имеет привод с вариатором ХЗ, затем ВЦ1 и наимень-
шие — ВЦ1 с встроенной зубчатой парой. На этом варианте и следует остановиться.
Наиболее компактен планетарно-фрикционный вариатор, но он значительно дороже.
Глава 14
МУФТЫ
§ 14.1. ВЫБОР ТИПА МУФТ
При монтаже приводных установок следует строго
соблюдать соосность соединяемых валов; если в процессе эксплуата-
ции она не нарушается, то валы можно соединять жесткими муфтами.
Однако в реальных условиях не всегда удается обеспечить соос-
ность: под действием тепловых и силовых факторов возникают опреде-
ленные деформации, приводящие к смещениям валов — осевому
радиальному и угловому (рис. 14.1).
Для устранения вредных последствий таких смещений выбирают
жесткие компенсирующие муфты.
Для защиты узлов передач от ударных нагрузок в кинематической
схеме привода предусматривают упругие муфты.
Опасные перегрузки могут быть ослаблены или устранены вве-
дением в привод предохранительных муфт.
Частые пуски и остановки машин без выключения двигателя осу-
ществляют с помощью сцепных муфт.
Здесь приведены данные для выбора и расчета наиболее распро-
страненных конструкций муфт указанных типов, применяемых в при-
водах общего назначения.
При проектировании механических приводных устройств редко
возникает необходимость разрабатывать конструкции муфт того или
иного типа, так как их параметры определены нормалями и стандар-
тами. Задача в большинстве случаев практически сводится к подбору
муфты в соответствии с техническими требованиями и проверочному
расчету некоторых ее элементов.
Основным показателем при выборе муфты служит номинальный
диаметр соединяемых валов, а при проверке ее — расчетный вращаю-
щий момент, частота вращения и условия эксплуатации.
В общем случае расчетный момент Л1р вычисляют с учетом влия-
ния инерционных масс по зависимости
м =М /1+А
*'ЛнОМ ц >
где /lf 12 — моменты инерции вращающихся масс ведущего и ведомых
валов с насаженными, на них деталями, приведенные к оси того вала,
445
на который устанавли-
вается муфта; Л4НОМ —
номинальный вращаю-
щий момент.
При проектировании
механических передач к
объектам, обычно вклю-
чаемым в курсовые за-
дания, можно пользо-
ваться упрощенной за-
висимостью
Ч = /гЛнОМ. (14.1)
где kp — расчетный коэффициент, учитывающий условия эксплуата-
ции; средние значения kp приведены в табл. 14.1.
14.1. Значения коэффициента режима kp (при передаче от электродвигателя)
Тип машины *р
Транспортеры ленточные Транспортеры цепные, винтовые, скребковые Воздуходувки и вентиляторы Насосы центробежные Насосы и компрессоры поршневые Станки металлорежущие с непрерывным движением Станки металлорежущие с возвратно-поступательным движением Станки деревообделочные Мельницы шаровые, дробилки, молоты, ножницы Краны подъемные, элеваторы 1,25—1,50 1,50—2,0 1,25—1,50 1,50—2,0 2,0—3,0 1,25—1,50 1,50—2,50 1,50—2,0 2,0—3,0 3,0—4,0
При передаче от паровой турбины к генератору, центробежным насосам или воздуходув- кам fep— 1,24-1,50; прн передаче от поршневых двигателей к поршневым машинам (компрес- сорам, насосам) ~ 4 4“ 5; к центробежным насосам = 3 4- 4; к генераторам == 1,5 4" 2.
§ 14.2. ЖЕСТКИЕ МУФТЫ
Для постоянного соединения валов в стабильную приводную
линию служат жесткие муфты втулочные, фланцевые и продольно-
свертные.
Втулочные муфты имеют три модификации в зависимости от спо-
соба соединения их с валами: штифтовые, шпоночные и шлицевые
(рис. 14.2). Размеры их регламентированы машиностроительными
нормалями МН 1067—60, 1068—60 и 1069—60; при диаметре вала от
20 до 100 мм примерное соотношение размеров таково:
наружный диаметр
0^(1,5-2-1,6) d;
общая длина
L^3d.
446
a — co штифтами; б — и а шпонках; в — шлицевые
Материал муфт — сталь той же марки, что и для валов; штифты
из стали Стб, стали 45. Рассчитывать элементы муфт на прочность
практически не требуется, так как их размеры назначены в нормалях
с достаточным для передачи расчетного момента запасом прочности —
не ниже, чем у соединяемых валов. Но в случае необходимости, в част-
ности в курсовых проектах, выполняют проверочный расчет штифтов
на срез, а поверхностный соприкосновения — на смятие, шпоночные
и зубчатые (шлицевые) соединения проверяют по методике, изложен-
ной в § 7.3.
14.2. Муфты фланцевые закрытые (по МН 2729—61)
</,мм [М]. Н-м D L S Болты Масса, кг Маховой мо- мент GD2, кг-м2
мм Размер Кол-во
20 22 60 80 по по 16 М8Х55 4 3,86 3,76 0,023
25 28 100 160 150 165 16 МЮхбО 4 6,32 6,22 0,048
32 36 250 320 150 165 16 М10Х65 4 11,1 10,7 0,092
40 45 500 600 170 230 20 М12Х60 4 16,6 15,5 0,234
50 55 1000 1200 200 230 20 М12х85 4 24,2 23,5 0,444
60 70 1600 2500 240 290 20 М16Х95 6 38,3 35,9 0,984
80 90 3600 4800 280 350 20 М16Х100 6 67,9 65,3 2,28
100 6300 360 425 25 М20Х120 6 133 5,66
Фланцевые муфты центрируются на валах ступенчатым стыком
или закладными полукольцами (рис. 14.3). Размеры муфт для валов
диаметром 20—100 мм приведены в табл. 14.2. Из общего количества
болтов, стягивающих обе части муфты, половина ставится в отверстия
без зазора — их и надо проверять, в случае необходимости, на срез;
а болты, входящие в отверстия с зазором, вообще проверять не надо,
так как момент от сил сцепления, возникающих при затяжке этих
болтов, в расчет не принимается.
447
L
Рис. 14.3. Муфта фланцевая
Материал муфт и колец — стали 35, 40, 40Л, а при окружной
скорости до 30 м/с допускается чугун СЧ 21-40; болты из стали 35;
о, » 300 Н/мм2; [т]с 0,2от.
Муфты продольно-свертные (рис. 14.4) допускаются только при
частоте вращения не свыше 250 об/мин для валов диаметром до 100 мм,
а при большем диаметре — до 100 об/мин. Выполняют двух модифика-
ций с центрирующим разъемным кольцом и без него. Данные для пер-
вой из названных модификаций муфт приведены в табл. 14.3. Материал
муфт — чугун СЧ 21-40, болтов — сталь 35.
Проверочный расчет выполняют, как для клеммового фрикцион-
ного соединения без учета шпонки.
Момент, который может передать муфта, должен быть не меньше 7Ир:
где / — коэффициент трения; Р — усилие от затяжки каждого болта;
2Л4р
г — общее количества болтов; d — диаметр вала. Отсюда
Расчетное напряжение в ослабленном сечении болта
1,ЗР
°р~ ndf
Д'
Рис. 14.4. Муфта продольно-свертная
448
14.3. Муфта продольно-свертная с фиксирующим разъемным кольцом
(по МН 2600—61)
d, мм [лп Н-м D 1 L Болты Масса, кг Маховой мо- мент, CD2. КГ’М1
мм Размер Кол-во
28 120 105 ПО М12Х45 4 3,86 0,025
32 200 3,66
36 40 320 400 120 160 М12Х50 6 6,5 6,3 0,06
45 50 500 600 140 180 М12Х60 6 8,5 8 0,12
55 60 800 1000 150 190 М12х65 6 13,2 12,5 0,20
70 1600 170 250 М16Х75 8 21,6 0,40
80 2000 190 280 М16Х90 8 29 0,90
90 3200 220 300 М20Х95 8 41,5 1,5
100 5000 240 340 М24 х 100 8 48,4 2,0
Монтажный зазор: прн d sc 50 ММ S = = 2 мм;
при d>50 ММ S = = 3 мм.
§ 14.3. КОМПЕНСИРУЮЩИЕ МУФТЫ
Если в процессе эксплуатации привода возможны только осевые
смещения валов, достигающие при длинных валах относительно боль-
ших величин, например при колебаниях температуры в широком диа-
пазоне, то для компенсации таких смещений устанавливают расши-
рительные муфты. Одна из конструкций муфт этого типа представлена
на рис. 14.5.
Материал муфт — чугун СЧ 21-40, стали 40 и 45; центрирующая
втулка из антифрикционного чугуна или бронзы; посадка полумуфг
на валы и втулки в муфту — прессовая, сопряжение вал — втулка —
по ходовой посадке.
Примерное соотношение основных размеров:
D~2,5d; Dt~0,5D; L ~ 3,5d; ширина втулки b ~Q,7d\ осевой
зазор е ~ 0, Id + (3 ч- 5) мм.
Среднее давление на рабочих поверхностях кулачков
Р
Pt~zF 1
наибольшее значение ртах = 2рс; здесь Р — окружное усилие на
D+D, 2МР.
среднем диаметре Dc = —х—; Р = -р— • г — число кулачков на
одной полумуфте, рабочая поверхность F — ------— 2е);
А — зазор между втулкой и кулачками второй полумуфты, равный
примерно 2—5 мм.
15 Зак. 220
449
Рис. 14.5. Муфта расширительная ку-
лачковая
/ 2 3
Рис. 14.6. Муфта с плаваю-
щим диском
Максимальное давление не должно превосходить допускаемого —
для чугунных муфт |р] Ю Н/мм2, для стальных — до 20 Н/мм2.
Для компенсации радиального смещения валов при ограниченной
частоте вращения допускается установка муфты Ольдгема — типа
крестово-кулисной; средняя часть муфты (рис. 14.6) — плавающий
диск 2 с выступами, входящими в пазы полумуфт 1 и 3. При радиаль-
ном смещении валов диск совершает сложное движение со скольже-
нием в пазах; для снижения потерь на трение рабочие поверхности
должны смазываться; сопряжение выступов с пазами — с гаранти-
рованным зазором типа ходовой посадки.
Во избежание появления больших инерционных нагрузок такие
муфты допускается применять для соединения валов диаметром до
100 мм при п 250 об/мин, при большем диаметре валов
п «С 100 об/мин.
Основные данные муфт Ольдгема приведены в табл. 14.4.
14.4. Муфты с плавающим диском (по МН 2701—61)
d, мм [М], Н-м £> | О. | Ь | Л | Масса, кг Маховой мо- 2 мент GDI, кг-м2
мм
20—30 250 70 32 115 10 14 2,6 0,008
36—40 500 110 60 160 16 19 5,4 0,026
45—50 800 130 80 200 20 19 10 0,07
55—60 1250 150 95 240 25 19 15,4 0,14
65—70 2000 170 105 275 30 24 22,4 0,25
75—80 3200 190 115 310 34 29 31,5 0,5
85-90 5000 210 130 355 38 33 44,7 0,9
95—100 8000 240 140 395 42 33 59,4 1,6
Примечания: 1. Допускаемые смещения валов: радиальное — не более 0,04<7,
угловое - не более 30’.
2. Зазор между плоскостями диска и полумуфт при d 80 мм s — 0,5 мм, при
<7 >80 мм s = l мм.
Допускаемые смещения:
радиальное — до 0,04d;
осевое — в пределах осевого зазора s = (0,5 -s- 1) мм;
угловое — до 30°.
Материал полумуфт — высокопрочный чугун ВЧ 60-2, сталь 20
с цементацией рабочих поверхностей, стали 20Х, 45 и др., диск —
450
из тех же марок стали, твердость рабочих поверхностей — HRC
50—60.
Выбранную муфту проверяют в случае необходимости по макси-
мальному давлению на периферийных участках, принимая закон
распределения по треугольнику:
_ 9 _ 2Р .
Ртах — ~Рс р »
ГР
здесь окружное усилие
2ЛК
р=____£.
Dc ’
п D-\-d
2 '
Расчетная поверхность
2Fp = (D-d)(/i-s),
где h — высота выступа; s — осевой зазор.
Максимальные значения р не должны превышать допускаемых:
для стальных закаленных поверхностей
[p]sg30 Н/мм2;
для чугунных муфт марок ВЧ
[р] -С 20 Н/мм2.
Потери на преодоление трения в пазах достигают в описанных
муфтах 5%.
С учетом радиального смещения Дг наибольшее давление
12МР
/’тах = (Л—s) (2D+d —Дг) (D-d-2ДГ)'
Если пренебречь малыми величинами Дг и s, то приближенно
12Мр
/’max A(2D+d) (D-d) •
Муфта с плавающим сухарем (рис. 14.7) имеет то же назначение,
что и предыдущая, но допускает значительно большую угловую
15» 451
Место маркировки
Рис. 14.8. Муфта цепная
Материал муфт — чугун не ниже СЧ 21-40, сталь марок 40, 40Л,
45.
Сухарь из пластмасс типа текстолита, капрона и др.
Основные данные муфт приведены в табл. 14.5.
Наибольшее давление на рабочих поверхностях сухаря определяют,
как и в предыдущем случае, исходя из закона распределения давления
по треугольнику; вид расчетной зависимости такой же, как и при
расчете балки сечением b X h на изгиб:
__Л1р
Ртах - ht)2
Допускаемое значение
[р]«=:10 Н/мм2.
Потери на трение в описанных муфтах — порядка 3%.
Муфты цепные выполняют в различных модификациях: с одно-
рядными и двухрядными роликовыми цепями, с зубчатыми цепями.
Зазоры в зацеплении цепей со звездочками определяют возможные
смещения в радиальном направлении и угловое; осевое смещение огра-
ничено торцовым зазором.
На рис. 14.8 показана муфта с однорядной цепью, охватывающей
звездочки, насаженные на соединяемые валы. Основные данные ее
приведены в табл. 14.6. Муфта заключена в разъемный корпус из
алюминиевого сплава. Монтажный зазор между торцами с = 1
-> 2 мм; допускаемое угловое смещение до 1°, радиальное — от 0,5 мм
при диаметре вала 20 мм до 1,2 мм при d 40 мм. При проверочном
расчете выбранной муфты ограничиваются определением коэффици-
ента запаса прочности цепи (см. гл. 12):
452
14.5. Муфты со скользящим сухарем. Размеры мм
d (MJ. Н-м nmax> об/мин D L ь h d 1М]. Н-м rimax* об/мии D L b h
20 22 40 50 7000 80 104 50 20 50 55 500 600 3200 180 224 100 40
25 28 80 110 5700 100 124 60 20 60 65 860 1100 2600 220 254 120 50
30 32 130 160 4700 120 149 70 25 70 75 1370 1690 2200 250 274 140 50
35 210 4700 120 149 70 25 80 85 2040 2450 1800 290 304 160 60
40 320 450 184 80 30
45 3800 150 90 2900 1700 330 344 180 60
14.6. Муфты цепные однорядные (по МН 2091—61). Размеры, мм
d [Af], Н-м "max- об/мин D L Цепь ПР Масса, кг Маховой момент, кг-м8
Шаг Число звеньев Расстоя- ние меж- ду пла- стинами
20 22 80 100 1600 110 90 19,05 12 12,9 1,8 1,75 0,007
25 28 160 200 1400 125 110 25,4 10 15,9 2,90 2,75 0,014
32 36 250 320 1200 140 120 25,4 12 15,9 4,25 4,05 0,027
40 45 50 400 600 800 1000 180 150 38,1 10 23,15 9,5 9,1 8,5 0,089 0,094 0,096
55 60 1000 1400 800 210 170 180 38,1 12 23,15 12,7 12,3 0.17Х 0,183
70 80 90 2000 2500 3200 700 280 210 240 270 50,8 12 31 28,6 30,2 32,2 0,72 0,82 0,89
100 4000 500 350 300 50,8 16 31 50 1,88
Примечания: 1. Допускаемое радиальное смещение при d < 22 мм Аг = 0.5 мм,
при d = (25 ~ 36) мм Дг = 1 мм; при d 40 мм Дг = 1,2 мм.
2. Монтажный зазор с — 1 ~ 2 мм
453
здесь Р — окружное усилие на делительном диаметре звездочки;
р™,.
kR — динамический коэффициент, значение которого дано в гл. 12,
там же указано и требуемое значение коэффициента [п]. Условие при-
годности муфты: п [п].
Зубчатые муфты (рис. 14.9) компенсируют смещения: радиаль-
ное — в пределах зазора в зацеплении; осевое — благодаря тому,
что венец обоймы шире венца полумуфты; угловое, допускаемое сфе-
рической обточкой зубьев по наружной окружности. Материал муфт —
стали 45, 45Л; твердость рабочих поверхностей не ниже HRC 35
для зубьев обойм и не ниже HRC 40 для зубьев втулок; при умерен-
ной окружной скорости порядка до 5 м/с допускается снижение твер-
дости соответственно до НВ 280—310.
Болты для соединения обойм ставят в отверстия без зазора. По
условиям техники безопасности описываемые муфты должны иметь
ограждения.
Смазка трансмиссионным автомобильным маслом; уровень масла
при заправке муфты — до погружения зубьев, расположенных внизу.
Основные размеры муфт типа М3 и МЗП (с промежуточным валом)
приведены в табл. 14.7.
Муфту, подобранную по стандарту в зависимости от диаметров
соединяемых валов, проверяют по величине максимального допускае-
мого вращающего момента, указанной в таблице; муфту считают при-
годной, если выполнено условие
Здесь /С] — коэффициент ответственности передачи; его принимают
от 1 до 1,8 в зависимости от серьезности последствий, вызываемых
Рис. 14.9. Муфта зубчатая
154
поломкой муфты; К2 — коэффициент, учитывающий условия работы
передачи: при равномерной нагрузке и спокойной работе = 1,
при значительных колебаниях нагрузки и работе с ударами = 1,5.
14.7. Муфты зубчатые (по ГОСТ 5006—55*). Размеры, мм
d [М], Н-м птпах» об/мин ^min D Dt L е Зубья Масса, кг Маховой момент GDZ, кГ'М2
т ь Z
40 50 60 75 90 105 120 710 1 400 3 150 5 600 8 000 11 800 19 000 6300 5000 4000 3350 2800 2500 2120 49 75 95 125 145 160 185 170 185 220 250 290 320 350 по 125 150 175 200 230 260 55 70 90 ПО 130 140 170 115 145 170 215 235 255 285 12 12 18 18 25 25 30 2,5 2,5 3 3 3 4 4 12 15 20 25 25 30 35 30 38 40 48 56 48 56 10,2 14,3 24 38 57 80 ПО 0,12 0,21 0,42 0,85 1,86 2,80 4,68
Примечания: 1. Толщина фланцев В и зазор с между торцами втулок: d 40—50 60—75 90 В 34 40 50 с 2.5 2.5 5 2. Кратковременный наибольший момент не должен превышать 2 [ЛГ].
§ 14.4. УПРУГИЕ МУФТЫ
В процессе эксплуатации приводных устройств колебания нагрузки
той или иной интенсивности практически всегда имеют место, поэтому
упругие муфты находят очень широкое применение. При всем мно-
гообразии конструкций этих муфт их все же можно разделить на две
основные группы: с неметаллическими упругими элементами и с пру-
жинами.
Муфты с неметаллическими элементами. Наиболее простая из этой
группы — муфта упругая втулочно-пальцевая, сокращенно МУВП
(рис. 14.10). Полумуфты не имеют непосредственного металлического
контакта, окружное усилие передается резиновыми втулками, наде-
тыми на стальные пальцы. Так как объем этих втулок невелик, то
и амортизирующая способность тоже мала. Муфты допускают неболь-
шое осевое смещение в пределах не свыше половины монтажного за-
зора. Хотя в некоторых источниках имеются указания на возможность
радиального и углового смещений, однако такие смещения вызывают
неравномерное распределение нагрузки и быстрый износ втулок, поэ-
тому муфту не следует рассматривать как компенсирующую.
Основные данные МУВП приведены в табл. 14.8.
Предусмотрено два исполнения: I — с цилиндрической расточ-
кой отверстий, II — с конической. Допускается соединение валов
с диаметрами, отличающимися один от другого в пределах каждого
диапазона, например 0 25 и 28, 0 30 и 38 и т. д., при условии, что
обе полумуфты имеют одинаковый наружный диаметр. Материал
полумуфт — чугун не ниже марки СЧ 21-40, стали 35 и 40; пальцы —
из стали 45 нормализованной.
455
14.8. Муфты упругие втулочно-пальцевые (по МН 2096—64), Размеры, мм
d (М] Н*м nmax D ^тах с Е CQ Пальцы Втулка Масса, кг Маховой мо- мент GD*, кг«мг
Диаметр Длина Резьба Кол-во 1 Диаметр наружный Длина I
20 55 5600 100 104 28 10 19 М8 4 19 15 1,6 0,006
22 130 4750 120 125 42 14 33 М10 4 27 28 4,4 0,03
25 28 240 4000 140 165 42 14 33 М10 6 27 28 6,6 0,06
30 38 450 3350 170 226 55 18 42 М12 6 35 36 13 0,17
40 45 700 3000 190 226 55 18 42 М12 8 35 36 17 0,26
48 55 1100 2650 220 286 55 18 42 М 12 10 35 36 23 0,52
60 65 2000 2240 250 288 70 24 52 М16 10 45 44 36 1,15
70 75 4000 1700 320 350 85 30 66 М24 10 56,5 56 73 3,7
80 95 100 8000 1400 400 432 ПО 38 84 МЗО 10 70,5 72 151 11,6
Приме ч а ни я : 1. Монтажный зазор минимальный: для муфт, соединяющих валы
до ф 38 мм, г min “ 1 мм; при ф от 40 мм и выше cmin ~~ 2 мм; наибольший зазор с max
==» (0,12-M),20)d (большее значение для ф 25 мм, меньшее — для 2. Диаметр отверстий под втулки DQ — DB -f- 1 мм, где £>в - ф 100 мм). -наружный диаметр втулки.
Размеры элементов муфт, указанные в нормалях, определены
с достаточным коэффициентом запаса прочности, поэтому провероч-
ные расчеты выполняют лишь в случае необходимости, например
в учебных целях при разработке курсовых проектов. Обычно ограни-
чиваются проверкой пальцев на изгиб, а резиновых втулок — по
среднему давлению, приходящемуся на единицу проекции поверх-
ности, охватывающей палец, равной произведению диаметра пальца
на длину втулки:
_ Р
Р~ dnlB’
2Л4„ D+d
где Р — z — число пальцев; ----диаметр окружно-
сти, на которой расположены центры пальцев; dn — диаметр пальца;
/„ — длина втулки.
Допускаемое значение |р] = 2 Н/мм2.
456
Исполнение I
Рис. 14.10. Муфта упругая втулочно-пальцевая
Рис. 14,11. Муфта с упругой звездочкой
457
Рис. 14.12. Муфты упругие:
а — с шестигранными вкладышами; б — с прямоугольными вкладышами
Муфты с упругой звездочкой (рис. 14.11) допускают большие
смещения, чем втулочно-пальцевые: радиальные — порядка 0,Old,
осевые — в пределах монтажного зазора, угловые — 1°30'. Соответ-
ственно выше и демпфирующая способность.
Материал полумуфт — сталь 35 и выше, допускается чугун СЧ
21-40; звездочки — из специальной маслостойкой резины.
Примерное соотношение размеров муфт для валов диаметром
от 12 до 45 мм: наружный диаметр D = 2,5d; длина L = (4 4- 4,5)d.
Расчетный момент [Л1]р соответствует [Л1]к для вала того же номи-
нального диаметра d при [т]к ~ 10 Н/мм2.
Поверхности звездочек проверяют на смятие; допускаемое зна-
чение [а]см определяют с учетом частоты вращения вала: при п =
= 1000 об/мин принимают [а]см — 4 Н/мм2, при иных п указанное
значение [а]см умножают на поправочный коэффициент
Муфты с резиновыми вкладышами составляют обширную группу
упругих муфт, различающихся конфигурацией и расположением
вкладышей; некоторые из разновидностей этих муфт показаны на
рис. 14.12.
Муфты упругие с резиновой оболочкой выполняются в различ-
ных модификациях — с оболочками цельными, разрезными или набор-
ными (в виде хомутов), со стыкованными из двух симметричных частей
и др. На рис. 14.13 приведены некоторые примеры конструктивного
оформления муфт.
Соотношение размеров муфты по рис. 14.13, а примерно таково:
наружный диаметр D = (4 4- 5)d; длина L — (3 4- 4)d; наружный
диаметр фланцев £>! = (3 -г 4)d; толщина оболочки s = 0,05D «
~ (0,2 4- 0,3)d; диаметр ступицы (1,8 4- 2)d; наружный радиус обо-
лочки в поперечном сечении R = 0,1257).
Нагрузочная способность муфты зависит от конструкции и мате-
риала оболочки и корда; приближенную проверку резиновой неразрез-
458
ной оболочки можно выполнить по напряжению кручения и по напря-
жению сдвига. На цилиндрической поверхности диаметром Di
Р 2Мр
Тс siDtS n£>|s ’
значение [т]с 2 Н/мм2.
Муфты пружинные. В зависимости от деформации упругих эле-
ментов муфты этого типа делятся на муфты постоянной и переменной
жесткости; характеристика первых — прямолинейная, вторых — кри-
волинейная, выпуклостью в сторону абсциссы, по которой отложены
углы относительного поворота полумуфт; по оси же ординат — пере-
даваемый вращающий момент.
Амортизирующая способность муфты зависит от величины потен-
циальной энергии деформации U, определяемой для муфт с упругими
элементами, работающими на изгиб, по формуле
,, _КнМи
Ыи 2Е
zV,
а с элементами, работающими на кручение,
У ==/<кДТкгу;
ык 2G
459
здесь Кк, К* — коэффициенты, зависящие от формы упругих эле-
ментов: для плоских пластин Кн = 0,22; для винтовых цилиндриче-
ских пружин Кк — 0,5; z — число упругих элементов в муфте; V —
объем каждого упругого элемента.
Соответственно энергия деформации, отнесенная к объему Ум
всей муфты,
т _ Д. _ Ки[а]и zV .
и Им 2Е ‘W
т М2
к — V„ 2G ’ ’
Эти зависимости показывают, что для увеличения амортизирую-
щей и демпфирующей способности муфты надо стремиться к исполь-
зованию возможно большего объема муфты для размещения в нем упру-
гих элементов, так как при этом возрастает величина отношения
zV/VK. Из тех же зависимостей следует, что материал упругих эле-
ментов должен обладать высокими механическими свойствами, обес-
печивающими [о]и порядка 600 Н/мм2 и выше, а [т] примерно 500 Н/мм2.
При проектировании упругих муфт надо учитывать пусковые
нагрузки и кратковременные перегрузки ударного характера.
В первом случае следует определять расчетный момент по форму-
лам § 14.1; во втором— при ударной нагрузке:
где Л4у — величина момента при ударе; /1Г /2 — приведенные к оси
муфты моменты инерции вращающихся масс.
Наибольший относительный поворот полумуфт
_ Мтпах
Фтзх — q 9
где С — жесткость муфты.
В приводах общего назначения с относительно умеренными коле-
баниями нагрузки допустимо пользоваться для определения рас-
четного момента формулой (14.1) и данными табл. 14.1.
Муфта упругая постоянной жесткости. Одна из конструкций муфты
с цилиндрическими винтовыми пружинами показана на рис. 14.14:
вращающий момент передается от ведущей полумуфты ведомой пру-
жинами, вставленными в пазы венцов обеих полумуфт с начальным
сжатием силой Ро. Пружины замкнуты стальными закаленными
грибками, опирающимися на боковые поверхности пазов. Если рабо-
чий момент превышает момент от начального сжатия Л10 — PqRz,
то осадка пружин соответственно возрастает, следуя линейному
закону, т. е. муфта характеризуется постояннойжесткостью(рис. 14.15).
Материал муфт — сталь 45, рабочие поверхности пазов закалены до
HRC 50—60. Примерное соотношение основных размеров: Do =
= (4 4- 5)d; L = (3,5 4- 4)d; число пружин г = 6 4- 12 при одноряд-
ном исполнении и вдвое больше при двухрядном; располагают пру-
460
жины так, чтобы их центры тяжести лежали на окружности возможно
большего радиуса. Сечение пружинной проволоки и размеры пружин
определяют по методике, изложенной в гл. 15.
Упругие элементы могут быть встроены в звездочку цепной пере-
дачи, в зубчатое колесо, как показано на рис. 14.15.
Порядок расчета подобной конструкции изложен в приведенном
ниже примере.
в-в
Рис. 14.14. Муфта упругая с цилиндрическими винтовыми пру-
жинами
Рис. 14. 15. Муфта пружинная, встроенная в зубчатое колесо:
а — конструкция муфты; 6 — характеристика пружины
461
co
У980-103 _п
/ оУЛГ^7Омм-
Пример. Рассчитать упругую муфту постоянной жесткости, встроенную в зуб-
чатое колесо (см. рис. 14.16); номинальная передаваемая мощность N = 75 кВт,
п = 730 об/мин, максимальный момент /Итах = 1,6/ИН0М.
Определяем диаметр вала dB из расчета на кручение при пониженном (т]к =
= 15 Н/мм2. Предварительно вычисляем
ли 3,14-730
= ~30~= 30 = 76’5 рад/с:
N 75 • 103
ном = — = = 980 Н • м = 980 • Юз Н • мм;
со 76,5
,_, *| У Миом
0,2 [т)к
Принимаем
Do = 5dB = 5 • 70 = 350 мм; /?о = 175мм.
Окружное усилие номинальное при г = 8 на каждую пружину
р Мном 980 • 103 700 н.
''ном- zRo 8-175 н'
ртах = 1.6Р =1,6-700 = 1120 Н.
max » ном ’
Выбираем проволоку пружиную 1-го класса ов — 1450 Н/мм2. Диаметр про-
DC к , с f 4с+2
волоки определяем, приняв индекс пружины с= —р= 5; коэффициент k =
и qc — о
= 4 f-3 = 1,3; 1x1 = 0,4°в = °’4’1450 = 580 н/мм“:
8 - 1120-5-1,3
d = l/^n^
V n [t]
Принимаем d = 6 мм.
Диаметры пружины: средний
Dc=cd=5 • 6=30 мм;
3.14 - 580 - 5.7 мм-
наружный
DH=Dc + d = 304-6 = 36 мм;
внутренний
DB—DC— d=30 — 6 = 24 мм
Назначаем число рабочих витков пружины п — 6; добавляем торцовые витки
(поджатые и сошлифованные) по 0,75 с каждой стороны; всего витков л0 = 6 4~ 2 X
X 0,75 = 7,5.
Минимальная высота пружины, сжатой до соприкосновения витков,
flmin = (no—°,5) <1 = 7.6=42 мм;
минимальный зазор при наибольшей нагрузке s «(0,1 0,2) d я; (0,1 0,2) 6
расчетная высота
И =//min4-sn = 424-6 = 48 мм.
р пип * 1
Высота свободной пружины
8Р „„Db 8-1130.303.6
^=^+^-48+ X ~ = 48 + 64.'8ГГ0— = 48+ 15 = 63
462
н
Пружины с большой относительной высотой 2,6 надо проверять на устой-
_ Но 63 „ . „ _
чивость. В данном случае -ft-= ™ = 2,1 ““ меньше критического значения 2,6;
ZJC oU
следовательно, устойчивость пружины обеспечена.
По максимальной осадке пружины под полной нагрузкой определяем наиболь-
ший угол относительного поворота:
15
-== = 0,086 рад «= 5°40'.
I/O
__ ^тах
’Ртах
Жесткость муфты
£___ /'jmax
’Ртах
1,6-980. Юз
----008g----= 1,82- 107 Н• мм/рад.
Назначаем предварительную затяжку пружины
Рнач = 0,8Рном=0,8 • 700 = 560 Н.
Соответствующее значение
ЖНач=0,8Жном=0,8- 980 = 784 Н-м;
= 0,8Хнсм = 0,8 Д- = 7,5 мм;
здесь Хном=^у^. так как по условию Мтах = 1,6 Л1НОМ
Шаг свободной пружины
z==rf+2^_ + s==6+-^-+ 1=9,5 мм.
п 6
Угол подъема винтовой линии
t 9 5
a=arctfi arctg3jn30~5°45'*
Длина заготовки
лОсп0 __ 3,14 • 30 • 7,5
cos а 0,995
«и 710 мм.
Рекомендуется построить характеристику рассчитанной пружины в системе
координат (ХР) — это будет прямая, проходящая через начало координат и точку
1 р
max’ •'max*
По вычерченной характеристике следует проверить вычисленные значения
Рнач> ^тач> Дном и Хиоы, а по компоновочному чертежу — условие сборки и степень
заполнения.
В случае необходимости вносят коррективы в компоновку и выполняют варианты
расчетов с целью отыскания оптимальных значений Dz, г, п.
Упругие муфты с плоскими пружинами. Пазы полумуфт распола-
гают в осевом направлении или в радиальном (рис. 14.16 и 14.17).
Пружины собирают из нескольких тонких пластин и закладывают их
в пазы прямоугольного или трапецеидального сечения; в первом
случае муфта будет иметь постоянную жесткость, во втором — пере-
менную: при относительном повороте полумуфт пакет деформируется
так, что точка приложения окружного усилия перемещается, изги-
бающий момент и прогиб пружин изменяются нелинейно; происходя-
щее при этом скольжение пластин с трением способствует демпфи-
рованию колебаний.
463
Рис. 14.16. Муфта упругая с осевыми плоскими пружинами
Рис. 14.17. Муфта упругая с радиальными плоскими пружинами
Материал муфт — сталь 45, пружин — стали 65Г, 60С2, 60С2Х и др.
Примерные соотношения размеров муфт по рис. 14.17 таковы:
наружный диаметр D = (3 л- 4)d; общая длина L = (2,5 -ь 3)d;
В = (0,5 ч- 0,6)d; радиальный зазор а = (0,1 4- 0,2)d.
Положение пружины в муфте в зависимости от величины нагрузки
и от деформации представлено схематически на рис. 14.18, где
а — половина профильного угла паза; ф — относительный угол по-
ворота полумуфт; у — стрела прогиба пружины в сечении, где при-
ложена нагрузка Р; f — стрела прогиба на конце пружины; г —
число пакетов пружин; i — число пластин в пакете. Индекс х отно-
сится к сечению, отстоящему от места защемления на расстоянии х;
индекс 1 относится к сечению при х = I, когда касательная к упругой
линии пружины совпадает с линией скоса паза. В этом положении
Р —
1 г (/? + /) ’
торцовая поверхность повернется на угол
Р,/2
е1 = Ф14-а = ™.
464
Рис. 14.18. Положение пружины:
а — начальное прн М =а 0; б — промежуточное; а — конечное прн М = М тах;
г — характеристика муфты переменной жесткости
При увеличении нагрузки зона прилегания пружины к скосу паза
расширяется; для промежуточного положения, когда I > х > а.
м = м. р — м* .
т мх, rx +
Р г2
е-=^+“=-^7г;
Ух~ ЗЕН = ¥ *(*₽* + «)-
(14.2)
(14.3)
(14.4)
В этом выражении Рх заменено на основании формулы (14.3).
Так как углы <рЛ и а малы, то с достаточной степенью точности можно
принять
fx = yx + (l — Х)(фд: + а) =
2 / х
= у X (фж + а) + (/ — х) (<рА + а) = (<Рл: + а) U ~ 3
(14.5)
«.„-к., (Н)
R + l R + 1
отсюда
3Z—х
(Px~a3R + ^'
(14.6)
465
При максимальном значении вращающего момента Л4тах — М2
зона прилегания распространится на весь скос паза, при этом х = с;
это положение отмечено индексом 2;
Р ____ ТИ2
2 г(/?+в)’
Р2а3
(14.7)
(14-8)
На основании формулы (14.5)
/2 = (<Рг + а) (*~у).
Соответственно на основании формул (14.3) и (14.6)
«„.g”’.; (14.9)
% = (В.10)
Однако из последнего выражения еще нельзя определить значения
углов <р2 и а, дополнительное условие
= (14-И)
позволит решить поставленную задачу. После замены Р2 на основании
формулы (14.9) и соответствующего преобразования
<р2 + а=у.-^; (14.12)
совместное решение уравнений (14.10) и (14.12) дает искомые зна-
чения <р2 и
Для определения числа пластин i в каждом пакете надо предвари-
тельно задаться размерами сечения b, s и вычислить W = тогда
из формулы (14.11)
Для построения участка 1—2 характеристики муфты переменной
жесткости служат формулы (14.2) и (14.6): задаваясь рядом значений
х в интервале от а до /, находят значения <рЛ и Рх; с помощью формул
(14.4) и (14.8) получают
2EIiz(R + x) (<рх+а)
л— Х2
(14.14)
Пример. Рассчитать муфту переменной жесткости с пакетами пружин, распо-
ложенными радиально. Муфта соединяет вал электродвигателя АОП2 91-6 с валом
редуктора, установленного в приводе к компрессору. Номинальная используемая
мощность совпадает с мощностью электродвигателя.
По каталогу электродвигателей (табл. П1 и П2) находим N = 55 кВт; п —
= 980 об/мин; d = 70 мм; коэффициент режима работы принимаем из табл. 1.1:
k = 2.
466
Определяем угловую скорость вала электродвигателя
тг 3,14-980
30 — 30 ~
103 рад/с.
Номинальный момент
Максимальный момент
Mmax=feAlH = 2.523= 1064 Н-м.
В соответствии с рекомендуемыми соотношениями размеров муфты принимаем
D =3,5d=3,5 • 70 =» 240 мм;
L=2,5d = 2,5-70=a 180 мм;
B=0,5d=0,5-70 = 35 мм;
/? = й = 70мм; 1 = (0,4 -г- 0,5) D—/? = 40мм;
зазор а = 10 мм; сечение пластин b X s = 30 X 1 мм; число пакетов г = 6; мате-
риал пластин — сталь 60С2; ов = 1300 Й/мм2; (а]й = 0,5ов = 0,5-1300 = 650 Н/мм2.
По формуле (14.7) определяем наибольшую нагрузку на каждый пакет пружин
Л1тах 1064-Юз
Рг-Ртах - 7(Д + а) - 6(70+10) “ 2220 Н’
По формуле (14.13) определяем число пластин в каждом пакете, вычислив пред-
варительно W = -g— = -g- = 5 мм3:
Ртяуа 2220 -10
г шах ______ /? о.
W (а]„ 5-650 ’ ’
принимаем i = 6 и уточняем ои — оно изменится обратно пропорционально числу
пластин:
к я
ои = 650 —g- = 740 Н/мм2.
Так как это превышает [а]и для стали 60С2, то возьмем для пластин сталь 60G2X,
имеющую ов = 1600 Н/мм2, для нее [а]и = 0,5 ов = 0,5-1600 = 800 Н/мм2, что
удовлетворяет условию прочности.
Вычисляем е2 по формуле (14.12):
62 = &тах=Ф2+« = > = = 3,5 • 10~2 рад
Так как по формуле (14.10)
<?>2=а^+^= ®2—а==3,5-10-2—а,
то
„ = 3,5.10-2(3/?+а) 3,5-10-2(3-70+10) _
3(7? + Z) 3(70+40) 0,023 рад,
ф2=62—а=0,035 — 0,023 = 0,012 рад.
Итак, координаты точки 2 таковы:
ф =0,012 рад; М = Л4тях = 1064 Н • м = 1064 - 103 Н • мм.
467
Для определения координат точки 1 находим по формуле
2Z 2-40
^ = “-3R+T = 0’°233770 + 40 = °-0074 ₽ад’
По формуле (14.3) вычисляем
D , , , 2E/i , bs< 30
Pl = (<P1 + Ct) —p- > 1 = T2~ = '12 = 2,5 MM ’
2.21. 10^2 5.6
P1== (0,0074 + 0,023) ’ 402 ~ «= 120 H;
Ml = P1z(7? + Z)=120 - 6(70 + 40)=79 200 H • mm.
Для промежуточных точек участка 1—2 значения <рх определяют по формуле
(14.6); Мх — по формуле (14.14).
Другие типы упругих муфт здесь не рассматриваются, их конструк-
ции и расчет см. 134].
14.5 ПРЕДОХРАНИТЕЛЬНЫЕ МУФТЫ
Для предохранения деталей приводов от перегрузок в кинемати-
ческой схеме предусматривают установку муфт, автоматически раз-
мыкающих передачу при достижении вращающим моментом предель-
ного значения Л4тах = РЛ4₽; здесь р — коэффициент запаса, вводи-
мый в расчет для того, чтобы муфта не срабатывала при перегрузках,
возникающих, в частности, в период пуска. Принимают часто Р =
= 1,25 4- 1,50. При необходимости более точного определения р
следует учитывать оптимальную продолжительность срабатывания,
особенности технологического процесса, для которого проектируются
привод и условия эксплуатации. Однако всегда должно соблюдаться
основное требование — быстродействие муфты, четкость ее срабаты-
вания; с этой целью следовало бы располагать муфту на том участке
кинематической цепи, который порождает перегрузки; однако это
не всегда возможно, так как габариты муфты, устанавливаемой в зоне
низких частот вращения, оказываются зачастую непомерно боль-
шими, поэтому в реальных условиях нередко приходится располагать
предохранительную муфту между электродвигателем и редуктором.
Из общего весьма большого количества разнообразных типов
предохранительных муфт здесь рассматриваются лишь некоторые кон-
струкции муфт, применяемых в приводах общего назначения, напри-
мер для транспортеров,
конвейеров, смесителей, до-
заторов; к ним относятся
муфты с разрушающимися
элементами, муфты с кон-
тактирующими элементами
(пружинные кулачковые и
шариковые), фрикционные.
Наиболее простые —
муфты со срезным штиф-
том (рис. 14.19). Штифты
(гладкие или с проточкой)
468
должны обеспечивать быструю срабатываемость, поэтому изготавли-
вают их из сталей 45, 50 с закалкой, вязкая сталь недопустима;
втулки — из стали 40Х, закаленной до твердости не ниже HRC 48.
Предельный момент, при котором штифт должен срезаться,
Afmax = -Ятв.срг,
где d — диаметр штифта в опасном сечении; R — радиус окружно-
сти, на которой расположены оси штифтов; предел прочности на срез
тв,Ср ~ 0,7ов; z — число штифтов (не более 2).
Размеры штифтов, мм, можно выбирать из ряда:
dxl 1,6x18; 2X18 3x30; 4X30; 5X30 6Х*5; 8x45; 10x45
Наружный диаметр втулки D 10 15 25
Выбрав диаметр штифта и определив из конструктивных сообра-
жений R, проверяют напряжение среза:
тср
Мтах
если оно отличается от тв ср, то вносят соответствующие коррективы,
варьируя значения d и R так, чтобы достичь совпадения тср и твс
Муфта со срезным штифтом неудобна в приводах с резкими коле-
баниями нагрузки, так как часто срабатывает, после чего надо заме-
нять штифты; такие муфты предпочтительно устанавливать в пере-
дачах с примерно постоянной нагрузкой, где они могут выполнять
функции аварийного звена.
Муфты кулачковые предохранительные. Вращающий момент пере-
дается кулачками трапецеидального профиля, прижимаемыми друг
к другу одной центральной пружиной или несколькими, расположен-
ными по окружности. Пружины устанавливают с предварительным
сжатием с таким расчетом, чтобы усилие, развиваемое ими, было доста-
точным для передачи номинального вращающего момента. При увели-
чении момента до предельного значения Л4тВх осевые составляющие
усилий, действующих на кулачки, сжимают пружины и муфта сраба-
тывает, предохраняя привод от опасных перегрузок.
На рис. 14.20, а показана муфта для соединения двух валов, кото-
рые должны быть точно центрированы относительно друг друга.
На рис. 14.20, б предохранительное устройство смонтировано
на одном валу с зубчатым колесом, свободно сидящим на том же
валу, принцип действия тот же, что и в предыдущей конструкции.
Профиль кулачков показан на рис. 14.20, в. Материал колец, на
которых фрезеруются кулачки, — сталь 20Х цементируемая и зака-
ленная до твердости рабочих поверхностей HRC 56—62, сталь 40Х
469
Рис. 14.20. Муфта предохранительная кулачковая
с той же твердостью рабочих поверхностей. Кольца напрессовываются
на посадочные места полумуфт и в случае необходимости фиксиру-
ются штифтами. Кулачки выполняются с плоской или винтовой ра-
бочей поверхностью, в последнем случае достигается более полное
включение муфты после срабатывания.
Соотношение размеров элементов муфт: наружный диаметр кулач-
ков £)н > 2d, где d — диаметр вала (для шлицевого соединения —
наружный диаметр вала); ширина кулачков (размер в радиальном
направлении) b ~ (0,12 4- 0,15) £)н; средний диаметр кулачков Dc —
= DH — b; высота кулачков h « (0,5 4- 0,6)5; наружный диаметр
подвижной втулки £)вт ~ (1,5 4- l,8)d; ее длина L я» (0,8 4- l,8)d;
число кулачков г = 3 4- 15.
В переходных процессах при колебании передаваемого момента
муфта срабатывает и снова включается через короткие промежутки
времени, пока не установится постоянный режим работы; при таких
колебаниях возникают динамические нагрузки. Для их ограничения
рекомендуется помещать предохранительное звено на тихоходном валу
при частоте вращения не более 300 об/мин.
В зоне соприкосновения кулачков при передаче окружного уси-
р
лия Рг возникает сила нормального давления Рп = и осевая
сила Q; во включенном состоянии при передаче номинального мо-
мента, когда осевого перемещения нет, пружина должна создавать
усилие, уравновешивающее осевую составляющую силу
Qi = Atga, (14.15)
2/И
где Рг =—при возрастании момента до 7Wmax окружная сила
2М
увеличится до Ртах =—гт^> ПРИ этом мУФта должна срабатывать,
т. е. подвижная втулка должна смещаться от первоначального поло-
жения на высоту кулачка h. Усилие, действующее на пружину при
470
выключении, определяется с учетом трения кулачков при их относи-
тельном движении и трения втулки по валу:
Q8 = Pmax[tg(a-p)-f^], (14.16)
где р » 2 4- 5° — угол трения; f — коэффициент трения при сколь-
жении подвижной втулки по валу, f »0,05 4- 0.10, меньшее значе-
ние относится к хорошо смазываемым муфтам, испытывающим пере-
менную нагрузку.
Пружины устанавливают в муфту с предварительным сжатием на
величину Z^, достаточную для создания усилия удерживающего
муфту во включенном состоянии:
^1 = -^^-, (14.17)
где £)пр — средний диаметр пружины; i — число рабочих витков;
G — модуль сдвига, принимаемый для стали равным 8-Ю4 Н/мм2;
dnp — диаметр проволоки.
Под действием усилия Q2 пружина должна дополнительно сжи-
маться на высоту кулачка h, полная осадка при этом
= + 8^£"pf. (14.18)
При возвращении к номинальному режиму усилие Q2 должно
быть достаточным для включения муфты, т. е. должно преодолевать
сопротивление Qs, определяемое с учетом сил трения, препятствующих
включению:
(« + Р)+/^Г|- (14.19)
Таким образом, для правильного функционирования кулачковой
муфты необходимо соблюдение неравенств:
Qa > Qi и Qs > Qe-
При проектировании муфты принимают отношение
/И
0 = 1,254-1,50.
*vl ном
Пример. Рассчитать кулачковую предохранительную муфту.
Исходные данные: номинальный момент Мном = 72 Н-м; диаметр вала d =
= 30 мм; коэффициент р= 1,45.
Определяем Мтах = ₽Л4ном — 1,45-72 « 105 Н;м.
Принимаем диаметр окружности, проходящей через середину кулачков, Dc —
= 2d = 2-30 = 60 мм; ширина кулачка b = 10 мм; наружный диаметр подвижной
втулки dBT — 1,5 d = 1,5-30 = 45 мм.
Число кулачков г = 5; угол а = 45°; угол трения р = 2°, коэффициент трения
f= 0,05.
Окружное усилие при передаче номинального момента
р 2Мм = ,2'72- 103 = 2 4.10з н.
Ос 60
471
Окружное усилие при передаче максимального момента
Осевые составляющие во включенном состоянии по формуле (14.15): Qj —
= Pi tga = 2,4-103 H;
при выключении муфты по формуле (14.16)
0»=Лпах[tg(«-p)-^] = 3,5-Юз £tg(45°—2*)—0,05 = 2,9-10* Н;
для включения муфты при возвращении к номинальному режиму по формуле
(14.19)
Q8 = Phom [tgfa+pl+f ^г] = 2,4- Ю3 [tg(45°+2e)+0,05^]=2,8. IO3 Н.
Условия Q2 > Qi и Q2 > Q3 выполнены.
Рассчитываем пружину, отвечающую указанным условиям: диаметр пружин-
ной проволоки
Ы<С
dnp
Опр
здесь с — индекс пружины; принимаем с= -j— = 6; тогда
“по
ft=±±|_ = ±|±|=l,24:
4с — 3 4-6 — 3
8-2,9.103.1,24.6
-----------L------10 мм.
3,14-580
Здесь допускаемое напряжение для пружинной стали принято
[т]=0,4а„ = 0,4- 1450 = 580 Н/мм*.
Предварительное сжатие при числе рабочих витков пружины I = 6:
8Q^i 8.2,4.103.63.6 _
К1 = = —ело* По---------31 мм-
Максимальная осадка при выключении
, ч , ь SQ^i 8-2,9.103.63.6 „
X2~X,+h- Gdnp “ 8-103.10 -37мм-
Высота кулачков
Л=Х2—^ = 37—31=6 мм.
Проверяем кулачки на смитие и контактное напряжение при действии наиболь-
шего окружного усилия Ртах = 3,5-103 Н.
Сила нормального давления на кулачки
Р 3,5-Юз
тах =----- = 4 95.10з н
cos a cos 45
Принимаем радиус закругления кулачков г = 2 мм;
Р 4,95 103
что меньше [о]см ~30 Н/мма.
472
Контактное напряжение
ок = 0 418 1/^ = 0,418 1/4,951№ = 1350 Н/мм2;
у Ьг у 10-2-5
при твердости кулачков HRC 60 допускаемое контактное напряжение
[о]к = 25//РС = 25 • 60= 1500 Н/мм2.
Следовательно, условие ок 1о]к выполнено.
Наружный диаметр пружины £>н = Dnp + dnp = 60 + 10 = 70 мм; внутрен-
ний диаметр DB = Dnp — dnp = 60 — 10 = 50 мм.
Так как пружина должна охватывать подвижную втулку, то надо проверить
условие DB > dBT; в данном случае оно выполнено.
Остальные размеры пружины определяют по расчетным зависимостям гл. 15.
Шариковые предохранительные муфты. Для соединения двух валов
эти муфты применяют редко из-за трудности центровки; обычно же
предохранительное устройство встраивают в детали привода — шкивы,
звездочки, зубчатые колеса.
На рис. 14.21-—14.23 представлены шариковые муфты с централь-
ной пружиной и с индивидуальными пружинами, на рис. 14.24 —
Рис. 14.21. Муфта предохранительная шарико-
вая с центральной пружиной
Рис. 14.22. Муфта предохрани-
тельная шариковая с пружинами,
расположенными по окружности
Рис. 14.23. Муфта предохранительная шариковая (по ГОСТ 15621—70)
473
сопряжения шариков с пазами. По принципу действия эти муфты
сходны с кулачковыми предохранительными муфтами.
Соотношение основных размеров шариковых муфт:
диаметр окружности расположения центров шариков Dc «2d;
диаметр шариков d,u = (0,3-4-0,5)d;
высота выступающей части шариков h ~ (0,2-4-0,4)dIH;
диаметр отверстий для шариков — при центральной пружине
do = dlu (отклонение Л4);
при индивидуальных пружинах — на 0,3—0,5 мм больше;
длина ступицы подвижной втулки LBT = (1-s-l,5)d;
число шариков г = 6 ч- 12, оно должно быть не больше 2,25
по условию размещения их на окружности диаметром Dc;
диаметр окружности, на которой располагаются точки приложе-
ния окружной силы: в конструкциях с тороидными пазами или при
действии шариков на шарики £)р = ]/ Dl — dh; при конусных или приз-
матических пазах £>р = Ос;
угол наклона касательной в точке контакта шариков sin а =
474
Как и в кулачковых предохранительных муфтах, пружина должна
устанавливаться с предварительным сжатием, обеспечивающим пере-
дачу номинального момента. Необходимое усилие определяют по фор-
муле (14.15); соответствующую осадку вычисляют по формуле
(14.17). Осевую составляющую при выключении в конструкциях
с контактирующими шариками определяют по формуле (14.16), а в кон-
струкциях с шариками, перемещающимися вдоль оси отверстий,
Q2 = Anax[tg(a-p)-fl. (14.20)
Значения р и f такие же, как и в кулачковых муфтах. Осадку
пружины при выключении Х2 определяют по формуле (14.18). Сжатая
пружина должна обеспечивать усилие Q3, необходимое для включения
муфты при отсутствии перегрузки.
Значение Q3 определяют по формуле (14.19), а для конструкций
с шариками, перемещающимися вдоль оси отверстий,
Q3 = PHoM[tg(a + p) + fl. (14.21)
По опытным данным, предельное допускаемое давление на ша-
рики, Н
Рп — kndm,
где ktl — 10 4- 12 Н/мм; dm в мм.
Необходимое число шариков может быть определено по зависимо-
сти
PmaxcosP г е р _ 2Л,тах
Z-pncos(a-py 1Де Ос
Расчет пружин изложен в гл. 15.
Фрикционные предохранительные муфты. По форме рабочих по-
верхностей они носят названия конусных, дисковых и цилиндриче-
ских муфт.
Основные требования, которым должны удовлетворять все эти
муфты, — условие работоспособности
/ИТр р/Ином
и условие износостойкости
Конусные муфты конструктивно несложны, выполняются с про-
стым или двойным конусом (рис. 14.25 и 14.26). Как и предыдущие
предохранительные муфты, их чаще применяют в сочетании с дета-
лями передач, что облегчает центровку полумуфт.
При конструировании и изготовлении муфт для соединения валов
надо обеспечивать строгую соосность валов, равномерный контакт
трущихся поверхностей, предусматривая с этой целью приработку
конусов. Материал полумуфт — чугун СЧ 15-32, СЧ 21-40; для тру-
щихся поверхностей — сочетание чугун по чугуну, по стали, по
бронзе, допускается применение асбестовых обкладок и металлокера-
мических покрытий. Конусность назначают с тем расчетом, чтобы угол
475
Рис. 14.25. Муфта предохранительная конусная
Рис. 14.26. Муфта упруго-предохранительная с двойным ко-
нусом:
а — с пальцами; б — с втулками
а был значительно больше угла трения, практически принимают а «
« 15 ч 30°.
Основания для расчета дает анализ усилий, возникающих в муфте
под действием пружины: сила ее нажатия Qj должна вызывать такое
нормальное усилие Q„, под действием которого возникает сила тре-
ния, достаточная для передачи окружного усилия Ро:
fQn = Po = -^, где Mmax = ₽MH0M; ₽ = 1,25 ч- 1,5;
Qn = ; Qi = Q„sina
sin а
или
Ро sin а
f ~
2jWmax sin «
DJ
(14.22)
476
Такого усилия со стороны пружины достаточно для удержания
муфты во включенном состоянии; однако после срабатывания муфты
пружина должна обеспечивать включение муфты с преодолением доба-
вочного сопротивления от составляющей силы трения fQn cos а:
2Л4 v
Ог = Qi + fQn cos а = —rj-г—(sin а4-f cos а). (14.23)
^с/
Критерием работоспособности муфты служит величина среднего
давления, приходящегося на единицу поверхности трения:
<|Р1-
заменяя Qn — —и вводя обозначение ф = получим
i-'cl
2М
max
SlDcfty
Отсюда
3/" 2ТИ
Dc-V -iSTFT. (14-24)
с г л/ф [р] '
Значения f и [9] приведены в табл. 14.9, отношение ф =-р- при-
нимают в интервале (0,15 -ь 0,25) Dc.
14.9. Значение коэффициента трения f и допускаемого давления |р| для фрикцион-
ных муфт
Трущиеся поверхности f [р], Н/мм2, конусных | для муфт дисковых
Со смаз- кой Сталь по стали (закаленные) . . . Чугун по чугуну нлн стали . . . Металлокерамика по стали .... Бронза по чугуну или закаленной стали Сталь по текстолиту 0,08—0,10 0,1—0,15 0,05—0,08 0,05—0,08 0,15 1 — 1,2 0,8-1,0 0,2—0,5 0,3—0,6 0,3—0,6 0,5—0,8 0,2—0,5 0,2—0,5
Без смаз- ки Чугун по чугуну или стали . . . Асбестовая обкладка по стали нлн чугуну Ретинакс по стали или чугуну . . Металлокерамическое покрытие по стали или чугуну 0,15 0,3 0,3 0,1—0,2 0,3—0,4 0,2—0,3 0,8—1,0 0,2—0,3 0,2—0,3 1,0—1,5 0,8—1,0
Примечания: 1. Большие значения f и [р] относятся к муфтам, пробуксовываю- щим редко н передающим вращающие моменты в сравнительно узком диапазоне (р 1,3); меньшие значения f и [р] принимать для часто пробуксовывающих муфт прн сравнительно значительных колебаниях нагрузки (0 > 1,3). 2. Для сцепных муфт следует принимать [р] пй нижнему пределу и вводить поправ- ку, учитывающую среднюю окружную скорость иа приведенном радиусе поверхности тре- ния; с этой целью табличные значения [р] надо умножать на скоростной коэффициент * "у У V где v в м/с.
477
Расчетное усилие для пружины Q2 определяют по формуле (14.23);
пружину подбирают или рассчитывают по методике, изложенной
в гл. 15.
При конструировании муфт, встраиваемых в детали передач,
средний диаметр Dc надо согласовывать с размерами этих деталей и
подбирать размер b так, чтобы выполнить условие р «с [р].
Расчетное усилие для подбора пружины и в этом случае опреде-
ляют по формуле (14.23).
Дисковые муфты. В отношении четкости срабатывания (чувстви-
тельности) и плавности включения эти муфты превосходят рассмот-
ренные выше типы предохранительных муфт. Возможность варьиро-
вания размеров дисков и их количества позволяет применять их
в широком диапазоне передаваемых моментов.
Значения f и [р] приведены в табл. 14.9; некоторые типичные
конструкции муфт представлены на рис. 14.27, 14.28 и 14.29. Основ-
ное условие надежности и долговечности муфт — сохранение относи-
тельно стабильных значений f и [р]; лучшие характеристики в этом
Рис. 14.27. Муфты фрикционные предохранительные дисковые:
а — с цилиндрическими винтовыми пружинами; б — с центральной
пружиной прямоугольного сечення
478
Рис. 14.28. Муфта фрикционная
предохранительная сухая
Рис. 14.29. Муфта фрикционная
предохранительная дисковая со
смазкой
отношении имеют пары трения сталь—асбест и сталь — металлокера-
мика, наносимая на диски слоем толщиной 0,5—1 мм.
При проектировании дисковых муфт придерживаются примерно
таких соотношений размеров:
наружный диаметр кольца трения DK ~ (3 ч- 4)d, где d — диа-
метр вала; внутренний диаметр кольца DB ~ (0,5 -ь 0,6)1)н; приве-
денный радиус кольца трения
^ПР — о
О
Рн-Рв
Рн-Рв ’
Допускаемая осевая сила от всех пружин
1Р]я(Рн —Pl)
(14.25)
(14.26)
Наибольший передаваемый муфтой момент на границе пробуксо-
вывания
(14.27)
(14.28)
Л1тах = f [Q] ^?прг-
Отсюда требуемое число пар трения
__ ^тах
f[Q]^np *
Полученное число округляют до ближайшего четного и определяют
количество ведущих дисков гг — 0,5z и ведомых г2 = гг + 1.
Пример. Рассчитать дисковую фрикционную предохранительную муфту для
передачи номинального момента Л4иом = 140 Н м, (5 = 1,4; диаметр вала d = 40 мм.
479
Определяем предельный момент
Mmajt = ₽MIIOM=l,4-140=196 Н-м=196-10з Н-мм.
Выбираем материал пары трення сталь — металлокерамика; по табл. 9 прини-
маем f — 0,3, [р] = 0,2 Н • мм2.
Диаметры кольца трения;
наружный
£>H = 4d = 4»40=160 мм;
внутренний
7)в=0,57)н = 0,5 • 160 = 80 мм.
Приведенный радиус #пр по формуле (14.25)
D 1 Он-Ов 1 1603-803
₽ -------------— = — .-----------= 62 мм.
3 D„^DB 3 1602-802
Допускаемое осевое усилие — по формуле (14.26)
[Q] = (р] (Он-Ов)=0,2 i (1602-802) = 3000 Н.
Число пар трения — по формуле (14.28)
Чпах 196-103
,__ тах_______________________Q К
f ]Q] 7?„р 0.3 - 3000 - 62 ’
Округляем до четного числа: z = 4.
Количество ведущих дисков г( = 0,5 z = 0,5-4 — 2.
Количество ведомых дисков Za = гг + 1 = 2+ 1 = 3.
Толщина стальных дисков 1—3 мм, асбестовых обкладок — до 3 мм. Сопряже-
ние дисков с полумуфтами проверяют так же, как и шлицевые соединении, — на
смятие соприкасающихся поверхностей. Пружины рассчитывают по усилию, при-
ходящемуся на каждую из них:
где т — число пружин; Qp — уточненное расчетное усилие, вычисляемое с учетом
округлений, введенных прн проектировании; на основании формулы (14.27) имеем
для заданного примера
Mmax 196-103
'р=7«п77= 0.3-62-4
2500 Н;
уточненное значение
Qp 2500
ро=--------------=----------------
-5.(1602 - 802)
0,166 Н/мм2.
Приняв число пружин т = 6, получим
Опр —
2500
6
= 417
Н.
Необходимые формулы для расчета пружин даны в гл. 15.
При проектировании встроенных предохранительных муфт (см.
рис. 14.26 или 14.28) размеры дисков определяют конструктивно,
в соответствии с размерами шкива, звездочки и пр. Во избежание
480
перекоса болтов, регулирую-
щих силу сцепления, сле-
дует предусматривать установку
пальцев (обычно не менее трех)
или заключать болты в короткие
втулки, не препятствующие ре-
гулированию затяжки. В один
из дисков пальцы ставят с га-
рантированным натягом, в дру-
гой они входят с зазором,
чтобы диск мог перемещаться в
осевом направлении (рис. 14.30).
Пальцы проверяют на срез,
Рис. 14.30. Посадка направляющего
пальца
а поверхность отверстия, сопри-
касающуюся с пальцем, — на смятие. Расчетное окружное уси-
лие Рр, приходящееся на каждый палец, определяют из условия
передачи ими половины момента:
D __ ^тах
где Do — диаметр окружности расположения пальцев;
п — число пальцев. Материал пальцев — стали Стб, 45.
Некоторые относительно простые конструкции предохранитель-
ных и комбинированных муфт показаны на рис. 14.31.—14.35.
Конструкции и расчет предохранительных специальных муфт,
в том числе центробежных, обгонных и др., см. работу [34].
Рис. 14.31. Муфты фрикционные предохранительные дисковые для
сельскохозяйственных машин
16 Зак. 220
481
Рис. 14.32. Муфта предохранительная дисковая (по ГОСТ
15622—70)
Рис. 14.33. Муфта упруго-предохрани-
тельная
Рис. 14.34. Муфта комбинированная —
зубчатая и фрикционная предохранитель-
ная дисковая
Рис. 14.35. Муфта фрикционная предо-
хранительная в сочетании с упругой
482
§ 14. 6. СЦЕПНЫЕ МУФТЫ
В приводных устройствах, часто включаемых и выключаемых,
например в трансмиссиях тракторов и автомобилей, в передачах
к металлообрабатывающим станкам, конвейерам, транспортерам и
другим машинам с переменным режимом работы, устанавливают управ-
ляемые сцепные муфты. Их конструктивное оформление отличается
большим разнообразием, однако в заданиях на курсовое проектиро-
вание деталей машин встречаются главным образом муфты сцепные
кулачковые и фрикционные, краткие сведения о которых и приводятся
в данном параграфе.
Кулачковые сцепные муфты. Наиболее простая конструкция муфты
с прямоугольным профилем кулачков показана на рис. 14.36; соот-
ношение размеров ее таково: наружный диаметр D « 2,5 d; длина
ступицы неподвижной полумуфты /j «1,5 d, то же подвижной /2«
«(2 4- 2,5)d, осевой зазор е « 5 -5- 10 мм, число кулачков г =
= 3-^-5, высота кулачка h ~ (0,3 4- 0,5)d. Полумуфты должны строго
центрироваться на валах, для точности расположения которых слу-
жит втулка в одной из полумуфт.
Эти муфты применяют для передач значительных моментов, вклю-
чение их возможно лишь при весьма малой относительной угловой
скорости (порядка 1 рад/с) или же лучше при полной остановке.
Для проверки кулачков на смятие служит формула
2Л1р
G<M~~ DczF ’
(14.29)
где Мр = р/Ином; £)с — диаметр окружности, проходящей через се-
редину кулачков; F — поверхность соприкосновения кулачков (од-
ной пары); допускаемое напряжение для кулачков, имеющих зака-
ленную рабочую поверхность до твердости HRC 50—60, при включе-
нии во время остановки [о]см до 100 Н/мм2.
Муфты с треугольными и трапецеидальными кулачками допу-
скают включение на ходу при разности окружных скоростей на сред-
Неподвижная
полумуфта
Подвижная
полумуфта
Рис. 14.36. Муфта сцепная с кулачками прямоугольной формы
483
нем диаметре до 0,8 м/с. На рис. 14.37 показана кулачковая муфта
для включения зубчатого колеса, расположенного на том же валу;
на рис. 14.38 представлены профили кулачков; треугольный профиль
с углом а = 30 40й пригоден для легких передач с небольшим зна-
чением Л4НОМ, так как при значительных нагрузках кулачки смина-
ются и изнашиваются за сравнительно короткий срок; число кулач-
ков г до 60, что обеспечивает плавность включения.
Трапецеидальный профиль считают оптимальным для средненагру-
женных муфт; угол а ~ 3 -т- 10°, число кулачков г = 5 4- 12, высота
кулачка h ~0,1 Ос; ширина в радиальном направлении b ~ (1,5 -5-
2) h. Твердость рабочих поверхностей HRC 50—60. Осевое усилие
для включения муфты, отнесенное к оси вала,
О
Ql Dc
[f + tg («4-Р)],
(14.30)
где Ос — диаметр окружности, проходящей через середину кулач-
ков; коэффициент трения f ~ 0,08 4- 0,15; угол трения р — 5 -г- 8°;
d — диаметр вала, по которому скользит подвижная полумуфта.
Усилие для поддержания муфты во включенном состоянии
(14.31)
Усилие для выключения муфты
2Л4О Г Dc 1
Q2=-of-[/-7r-tg(a-p)|.
(14.32)
Кулачки проверяют на смятие по формуле (14.29).
Фрикционные сцепные муфты. По конструкции и принципу дей-
ствия они сходны с предохранительными муфтами соответствующих
типов (см. предыдущий параграф). Соотношение основных размеров
исключением длины ступицы подвижной
полумуфты — она должна быть больше
с учетом размещения механизма вклю-
чения.
На рис. 14.39 показана схемати-
чески конусная сцепная муфта. Угол а
примерно одинаковое, за
Рис. 14.37. Муфта сцепная ку-
лачковая с зубчатым колесом
Рис. 14.38. Профили кулачков сцепных
муфт
484
во избежание заклинивания муфты
должен быть больше угла трения р;
для чугунных муфт обычно принимают
а = 8 -4- 15°. По аналогии с расчет-
ными зависимостями, приведенными
в § 14.6, усилие для включения муфты
2Л4П / sin а \
Qi = ~n—(—г-----l-cosa). (14.33)
Для поддержания муфты во вклю-
ченном состоянии достаточно прило-
жить усилие
Рис. 14.39. Муфта сцепная конусная
(14.35)
Здесь Л4р — расчетный момент, равный рЛ4Н0м; Dc — средний диа-
метр конической части; Z)c «(2,5 -ь 4) d, где d — диаметр вала, по
которому скользит подвижная полумуфта; f — коэффициент трения —
по табл. 14.9 (брать большие значения).
Муфту проверяют по среднему давлению, приходящемуся на еди-
ницу поверхности трения:
_ 2Мр
Р ~ nD^bf ’
Значения [р] даны в табл. 14.9.
Дисковые фрикционные сцепные муфты. По конструкции и прин-
ципу действия эти муфты сходны с предохранительными муфтами того
же типа, но они имеют механизм управления. Соотношения основных
размеров приведены в § 14.6, а необходимые для расчета данные —
в табл. 14.9.
При проектировании дисковых муфт их габаритные размеры,
диаметры кольцевых поверхностей трения и другие размеры опреде-
ляют конструктивно и затем находят необходимое число пар трения,
количество ведущих и ведомых дисков по расчетным зависимостям
(14.25)—(14.28).
Рис, 14.40. Муфта сцепная фрикционная дисковая с внутренним
рычажным механизмом управления
485
Рис. 14.41. Муфта сцепная фрикцион-
ная дисковая с маховиком
Рис. 14.42. Муфта сцепная фрикционная
дисковая
Некоторые относительно несложные конструкции дисковых сцеп-
ных муфт показаны на рис. 14.40—14.42.
Муфта по рис. 14.40 отличается малыми габаритами благодаря
компактности фрикционной части и механизма управления; при
одной и той же величине силы нажатия Q муфты одинакового диа-
метра, но с различным числом дисков, можно применять в сравни-
тельно широком диапазоне передаваемых моментов.
В механизме управления предусматривают 3—4 рычага из пру-
жинной стали. Усилие, приходящееся на длинное плечо каждого
рычага при включении муфты, может быть определено из условия рав-
новесия рычага, на короткое плечо которого действует сила
с __Qi __
1— т ~~ fRnpZm ’
где т — число рычагов; /?пр — приведенный радиус по
(14.25); можно с допустимой степенью точности принимать
7?пр = 0,25(Е>н + Г)в).
Уравновешивающая сила S2 на длинном плече рычага
„ _ Si(a+ctgp)
2 *ctg(y+p)—h'
По этим усилиям и изгибающим моментам рассчитывают рычаги
управления и их оси. Механизмы включения, представленные на
рис. 14.41—41.42, принципиально сходны с рассмотренным рычаж-
ным устройством; усилия, действующие на них в процессе включе-
ния, определяются так же, как и в предыдущем случае — из усло-
вия равновесия. Муфты с электромагнитным управляющим механиз-
мом, с пневматическим управлением и другие специальные муфты
редко встречаются в заданиях на курсовое проектирование, поэтому
здесь они и не рассматриваются. Необходимые данные см. в работе [34].
(14.36)
формуле
(14.37)
Глава 15
РАСЧЕТ ПРУЖИН
§ 15.1. ЦИЛИНДРИЧЕСКИЕ ВИНТОВЫЕ
ПРУЖИНЫ РАСТЯЖЕНИЯ — СЖАТИЯ
Цилиндрические винтовые пружины растяжения—
сжатия предназначены для восприятия осевой растягиваю-
щей или сжимающей нагрузки. Наибольшее распространение
имеют цилиндрические пружины из проволоки круглого се-
чения.
На рис. 15.1, а показана пружина сжатия, а на рис. 15.1, б —
пружина растяжения.
По ГОСТ 13764—68 предусмотрено деление пружин на три класса.
К I классу относят пружины, испытывающие циклическую нагрузку,
при работе которых нет соударения витков и выносливость которых
не ниже 5-I06 циклов. Пружины II класса подвергаются цикличе-
ской или статической нагрузке, соударение витков отсутствует, наи-
меньшая выносливость 1 -105 циклов. К III классу относят только
пружины сжатия, испытывающие циклические нагрузки при возмож-
ном соударении витков и выносливости ^2 -103 циклов. Таким обра-
зом, пружины, встречающиеся в объектах курсового проектирования
деталей машин, как правило, II класса. ГОСТ предусматривает деление
классов на разряды.
Пружины изготовляют из высокоуглеродистой стали марок 65,
70, 75, 85, 65Г или (в ответственных случаях) из легированной стали
марок 60С2, 60С2А, 65С2ВА, 70СЗА, 50ХФА.
Иногда специальные пружины (нержавеющие, жаро- и кислото-
упорные) изготовляют из сплавов цветных металлов, например кад-
миевой бронзы.
В табл. 15.1 приведены стандартные диаметры и пределы прочности
стальной углеродистой пружинной проволоки.
Расчет пружин на прочность
Расчет пружин на прочность производят по касательным напряже-
ниям. Условие прочности пружины имеет вид
(15.1)
487
где т — расчетное напряжение в поперечном сечении витка;
k — коэффициент, учитывающий влияние кривизны витков и
поперечной силы;
(15.2)
D„
здесь с =—р- —индекс пружины;
Р — сила, растягивающая (или сжимающая) пружину; Do —
средний диаметр пружины (см. рис. 15.1); d — диаметр проволоки
пружины; [т] — допускаемое напряжение.
Рекомендуется соблюдать следующую зависимость между d и с:
d, мм.................. 1—2,5 3—5 6—12
с........................ 5—12 4—12 4—9
Допускаемое напряжение [т] выбирают в зависимости от класса
и разряда пружин, а также от их материала. Для пружин II класса
ГОСТ предусматривает четыре разряда. Пружины 1-го и 2-го разря-
дов изготовляют из проволоки клас-
сов I и II по ГОСТ 9389—75
(см. табл. 15.1). В этом случае
принимают [т] = 0,4ов. При диа-
метре проволоки больше 5 мм пру-
жины относят к 3-му или к 4-му
разрядам. Так, 3-й разряд вклю-
чает пружины с d = 3 4- 12 мм
из сталей 65Г, 60С2А, 65С2ВА,
БСХФА; допускаемое напряжение
Рис. 15.1
15.1. Проволока стальная
углеродистая пружинная
(по ГОСТ 9389 — 75)
d. мм Предел проч- ности при растяжении °в» кгс/мм2, не ниже dt мм Предел проч- ности при растяжении °в, кгс/мм®» не ниже
Класс Класс
II I 11 1
0,50 0,56 220 265 2,00 2,30 180 170 205 195
0,60 220 2,50 2,80 3,00 165 185 180 175
0,70 260
0,80 215 3,50 4,00 155 170 165
0,90 255 250
4,50 5,00 140 150
1,00 205
1,10 1,20 200 240 5,60 6,00 135 145
1,30 1,40 200 195 235 230
1,50 1,60 190 220
1,80 180 210
488
It] = 750 Н/мм2; наконец, при больших диаметрах (d = 14 -т- 50 мм)
материал пружин — стали 60С2А, 60С2, 65С2ВА, 70СЗА, 50ХФА,
65Г; допускаемое напряжение [т] — 650 Н/мм2.
Расчет пружин на жесткость
Изменение высоты (осадку) цилиндрической винтовой пружины
из проволоки круглого сечения определяют по формуле
= (15.3)
где п — число рабочих витков пружины; G — модуль сдвига (для
стали в среднем G = 8,0-Ю4 Н/мм2).
Из формулы (15.3) следует, что осадка пружины Л прямо пропор-
циональна ее нагрузке. Следовательно, график зависимости X от Р.
так называемая характеристика пружины, представляет собой пря-
мую линию.
Размеры пружин
Пружины сжатия. Пружины сжатия навивают таким образом,
чтобы между витками оставались зазоры s0 (см. рис. 15.1, а). Вели-
чину зазора выбирают с таким расчетом, чтобы при напряжении
в пружине, равном допускаемому, между витками оставался гаран-
тированный зазор sp «0,1 d. При этом рабочая нагрузка не должна
превышать 80—90% от предельной нагрузки, при которой витки
соприкасаются. Таким образом, прн статической нагрузке пружины
исключается возможность посадки витка на виток во время работы.
Шаг t пружины в свободном состоянии
( = d + A+Sp. (15.4)
Обычно применяют пружины со сравнительно небольшим шагом
. Do Dv
t = редко t
Торцовые витки пружины должны прижиматься к соседним вит-
кам (см. рис. 15.1, а). После навивки и закалки пружины торцовые
поверхности ее шлифуют для обеспечения перпендикулярности тор-
цов к продольной оси. Это необходимо для предотвращения перекоса
пружины под нагрузкой. Таким образом, концевые витки, частично
сошлифованные, не принимают участия в работе пружины. Поэтому
полное число витков пружины nt больше числа рабочих витков п.
Принимают
П1 = п + (1,5-ь2). (15.5)
Высота Н3 при полном сжатии (при посадке витка на виток)
Ws = (n1-0,5)d. (15.6)
Высота Но пружины в свободном состоянии
Но~ — d). (15.7)
4S9
Рис. 15.2
Длина I заготовки проволоки
для пружины
(158)
cos а ' '
Угол а подъема витка пружины
в среднем принимают равным 6—9°.
Чтобы исключить опасность по-
тери устойчивости пружины сжа-
тия, следует соблюдать условие
f-°sC2,6. (15.9)
В случае До > 2,6£>О пружина должна быть смонтирована в гильзе
или на оправке, если же это невозможно, то пружину следует рассчи-
тать на устойчивость (см. например, [38]).
Пружины растяжения. Витки пружин растяжения (см. рис. 15.1, б)
навиваются плотно один к.другому, и между ними возникает перво-
начальное усилие нажатия Pt; поэтому характеристика пружины имеет
вид, изображенный на рис. 15.2.
Зависимость Рг от предельной нагрузки Р„рел = Ps установлена
опытным путем:
Л
Pi
Рз
4
при d<5 мм;
при d3=5 мм.
(15.10)
При рабочей нагрузке Рр = Р2 напряжение в опасной точке
пружины должно быть примерно равно допускаемому. Может быть
допущена некоторая перегрузка пружины до Ра. Связь между Р2
и Р3 устанавливается зависимостью
где би — относительный инерционный зазор пружины сжатия. Этот
зазор для пружины растяжения служит ограничением максимального
перемещения. Для пружин сжатия I и II классов би == 0,05 4- 0,25.
Для пружин растяжения би = 0,05 4- 0,10.
Длина Н'о ненагруженной пружины (вместе с прицепами)
^ = nd + (l-4-2)D0. (15.12)
Значение второго слагаемого в формуле (15.12), представляющего
собой прибавку к собственной (рабочей) длине пружины, определя-
ется принятой конструкцией прицепов.
Длина 10 заготовки проволоки для пружины
z . (15 л
и cos а пр '
где /пр — длина прицепов.
490
Конструирование пружин
При конструировании пружин обычно за-
дают усилие, нагружающее пружину, и пре-
дельные габариты, в которые должна впи-
саться проектируемая пружина. Нередко
требуется также обеспечить заданную жест-
кость пружины.
Для определения размеров проектируемой
пружины имеется два расчетных уравнения:
условие прочности (15.1) и формула (15.3)
для изменения высоты пружины под нагруз-
кой. Неизвестных же величин три — средний
диаметр пружины Do, диаметр проволоки d
и число рабочих витков п. Оптимальное ре-
шение может быть найдено путем ряда после-
довательных приближений.
Рис. 15.3
Пример 1. Для обеспечения передачи заданного момента диски фрикциоииой
управляемой муфты (рис. 15.3) должны сжиматься силой Q = 6480 Н (допуск на
величину усилия ±2%). По окружности муфты можно расположить 12 цилиндриче-
ских винтовых пружин при условии, что их внешний диаметр Da ие будет превы-
шать 40 мм.
При выключении муфты пружины дополнительно сжимаются иа 3 мм. При этом
приращение усилия AQ не должно превышать 20% от Q.
Спроектировать пружины муфты.
Решение. 1. Определяем усилие, действующее на одну пружину при вклю-
ченной муфте:
Р1Л^540 Н.
2. Определяем усилие, действующее иа одну пружину при выключенной муфте:
р р £+AQ _ 540.1 2 = 648 Н.
2 1 Q
3. Строим график зависимости Р от X, учитывая, что при изменении
усилия пружины от Рг до Р2 осадка пружины увеличивается на 3 мм
и характеристика пружины линейна (рис. 15.4).
4. Из графика (рис. 15.4) определяем X, рас-
сматривая подобие треугольников АОВ и СОЕ'.
Xg Р а
Х2—3 Ру *
. ЗР2 3-648
Р2-Ру ~ 648 — 540 ~ 18 ММ'
Так как посадка витка на виток не до-
пускается, предельное усилие Р3 должно быть
больше Р2.
Таким образом, следует спроектировать пру-
жину с рабочей нагрузкой Рр = Р2 и Х = 18 мм.
При нагрузке Р2 расчетные напряжения в пру-
жине можно принять равными [т], а зазор-
между витками sp — 0,ld.
491
5. Задаемся материалом пружины и выбираем величину допускаемого напря-
жения.
Материал — стальная углеродистая пружинная проволока II класса по ГОСТ
9389—75. Для предварительного расчета принимаем минимальное допускаемое
напряжение (см. стр. 488 и табл. 15.1) [т] = 0,4 ов = 0,4-140 = 56кгс/мм2 ~
^560 Н/мм2.
6. На основе формулы (15,1) получаем
8Р2С Г 1
откуда
d
Задаемся с = 6, тогда
4с+2 4-6 + 2
4с-3 4-6 — 3 ’ '
При этом
^-.<1,24 - 8 - 648 -6 лс._
dSs]/ ~ 3.14.560 = 4-67 мм-
Округляя по табл. 15.1, принимаем d = 5 мм; тогда Do = cd = 6-5 = 30 мм.
Проверка расчетных напряжений не нужна, так как [т] было принято для d = 5 мм.
7. Определяем число рабочих витков пружины. Из формулы (15.3) следует
Gd^ 8,0. КИ-54- 18
”-8P2D^ ~ 8 - 648 - 303 -b’ ’
С некоторым округлением принимаем п — 7.
8. Полное число витков
/I1 = n + (l,5 4-2) = 7+(l,5 4-2,0) = 9.
9. Определяем шаг пружины:
b-d+--2+sp==5+178+0, 1-5 = 8,08 мм.
10. Определяем высоту пружины при полном сжатии витков:
7/3=(п1 —0,5) d = (9—0,5) 5 = 42,5 мм.
11. Определяем высоту свободной пружины:
= Н3+п (t—d) = 42,5 + 7 (8,08 — 5) = 64,06 мм.
12. Вычисляем отношение ~ для выяснения необходимости проверки пружины
Я®
устойчивость:
= 2,13 <2,6,
на
Яр
следовательно, проверка на устойчивость не нужна.
§ 15.2. ТАРЕЛЬЧАТЫЕ ПРУЖИНЫ
Тарельчатые пружины применяют в основном при больших ста-
тических и динамических нагрузках. Жесткость этих пружин велика,
поэтому их следует ставить в тех случаях, когда требуется, чтобы
пружина развивала значительное усилие при небольшой осадке.
492
Рис. 15.5
Конусные диски (тарелки)
пружин (рис. 15.5) изгото-
вляют из листовой стали
(толщиной 0,5—10 мм) путем
холодной или горячей штам-
повки. Угол подъема у кону-
сов не превышает 2—6°. Вы-
сота h0 конуса обычно нахо-
дится в пределах 2—9 мм.
Тарельчатые пружины стандартизованы (ГОСТ 3057—54). В
табл. 15.2 приведены выдержки из этого ГОСТа.
Основным материалом пружин является сталь 60С2А, но допуска-
ется применение пружинной стали других марок в виде листового
или полосового проката при условии, что механические характеристики
выбранного материала не ниже, чем у стали 60С2А.
ГОСТ 3057—54 предусматривает деление тарельчатых пружин
по точности их изготовления на две категории: Н — пружины нор-
мальной точности и П — пружины повышенной точности, у которых
поверхности обреза, получаемые после штамповки, подвергаются
механической обработке.
Рассматриваемые пружины в большинстве случаев составляются из
нескольких дисков, соединяемых попарно по периметру кромок в секпии
(рис. 15.6). Секции пружины монтируются в гильзах или на оправках.
На рис. 15.7 показано применение тарельчатой пружины в чер-
вячном редукторе, имеющем фрикционное предохранительное устрой-
ство для ограничения предельной величины передаваемого момента.
По характеру нагрузки, для восприятия которой предназначена
пружина, ГОСТ 3057—54 предусматривает деление тарельчатых пру-
жин на три группы:
С — пружины статического действия;
Д — пружины динамического действия;
М — пружины многократного действия.
Для каждой из этих групп установлены особые правила испыта-
ний и приемки.
По жесткости пружины де-
лят на две категории: большой
жесткости для которых отно-
Рис. 15.7
Рис. 15.6
493
15.2 Тарельчатые пружины (по ГОСТ 3057—54)
D d S ho Усилия при про- гибе, кгс
т 1 . ОО о II чЛ4 8 о II ст
ММ рт Рг
Пружины большой жесткости
23 12 1,5 0,8 2,3 500 410 350
30 15 0,6 2,6 830 670 550
32 10 0,9 2,9 910 750 610
35 2,0 0,8 2,8 900 720 600
—— 20
1,0 3,0 730 620 520
4U 0,8 3,3 1500 1200 990
.. —. 2,5 —
25 1,0 3,5 1250 1000 840
45 3,0 4,0 2200 1750 1450
20 2,2 1,3 3,5 730 610 510
OV 30 1,0 4,0 1850 1500 1250
—. 3,0
24 1,4 4,4 1700 1400 1150
25 1050 900 760
— 2,5 1,5 4,0
20 830 700 580
60 26 3,8 1,4 5,2 2900 2300 1900
3,0 4,5 1700 1400 1150
3,5 5,0 2600 2100 1750
1,5
32 3,0 4,5 1400 1100 950
Ь5 35 3,5 5,0 2300 1900 1550
26 5,0 1,1 6,1 3500 2800 2300
70 28 3,8 1,8 5,6 2600 2100 1750
40 4,0 5,5 3100 2500 2100
1,5
28 5,0 6,5 3700 2900 2400
32 7,0 1,0 8,0 6900 5500 4500
80 36 3,7 5,7 2100 1750 1500
40 4,0 6,0 2800 2300 1950
50 5,0 1,5 6,5 5100 4100 3400
D d S ho Усилия при про- гибе, кгс
J5 II ОО о II •Л о о II CJ
мм tn Рг
25 5,0 2,0 7,0 3 800 3100 2500
32 4,0 2,3 6,3 2 300 1900 1600
90 40 4,5 2,5 3 800 3100 2600
— .—,—— 7,0
5,0 4 800 3900 3200
50 6,0 2,0 8,0 8 300 6700 5500
36 4,8 2,5 7,3 3 500 2800 2400
40 6,0 2,2 8,2 6 100 4900 4100
100 5,0 2,5 7,5 4500 3600 3000
6,0 8,5 7 600 6200 5200
60 7,0 2,0 9,0 11 500 9200 7500
Пружины малой жесткости
30 15 1,0 1,0 2,0 170 150 140
35 1,5 2,5 380 330 280
40 20 1,0 1,5 140 140 130
45 25 1,5 3,5 3,0 400 350 320
20 2,0 3,5 630 530 460
50 —
1,5 1,5 3,0 300 260 240
25 3,5 550 480 410
55 2,0 —— 4,0 590 530 480
60 1,5 2,0 3,5 270 270 250
65 30 2,5 4,5 1 020 880 760
70 2,0 2,5 540 510 480
з,о 2,0 5,0 1450 1250 1050
80 35 2,5 5,5 1 400 1200
40 2,0 3,0 5,0 550 550 530
100 4,0 7,0 2 450 2100 1850
ПО* 50 2,5 3,5 6,0 780 740 740
* По ГОСТ 3057—54 стандартизованы пружины с наружным диаметром до 0 = 300 мм.
494
шение максимально возможного (предельного) прогиба (осадки) fm
к толщине тарелки S
^=С0,6,
о
и малой жесткости, для которых
0,6<4^1.5.
В спецификациях к чертежам должно быть указано полное обоз-
начение пружины. Например, пружину нормальной точности стати-
ческого действия с наружным диаметром D = 70 мм, внутренним
d = 30 мм, толщиной 5 — 3 мм и предельной осадкой fm = 2 мм обоз-
начают так:
Пружина тарельчатая НС70 X 30 х 3 X 2 ГОСТ 3057—54.
Тарельчатые пружины имеют нелинейную характеристику, выра-
D . „ -
жаемую при отношении диаметров диска т = > 2,5 следующей
приближенной формулой:
~ wb) (f” ~ т) + S2] •’ <15-14>
здесь Р2 — нагрузка пружины (усилие, развиваемое при осадке /2);
Е — модуль продольной упругости материала пружины; /2 — осадка
пружины (одного диска) при рабочей нагрузке; А — коэффициент,
имеющий в зависимости от отношения диаметров пружины следующие
значения:
т = 2,5 2,0 1,5
Л = 0,76 0,66 0,50
р — коэффициент Пуассона материала пружины (обычно ц ~ 0,3).
Значения остальных величин, входящих в формулу (15.14), были
приведены выше.
Подбор пружин по заданному усилию и прогибу (осадке) произ-
водят по ГОСТ 3057—54. При этом, конечно, учитывают требования,
предъявляемые к габаритным размерам выбираемой пружины.
Если каждый из дисков выбранной пружины должен давать осадку,
составляющую 0,65 или 0,8 от предельно возможной, т. е. при /2 =
— 0,65/т или /2 = 0,8/т, формулу (15.14) применять не нужно, так
как усилия Р2, соответствующие указанным осадкам, приведены в таб-
лице ГОСТ 3057—54. Фактическое усилие, развиваемое пружиной
при данной осадке, может отличаться от указанного в ГОСТе на
±20% для пружин нормальной и на ±10% для пружин повышенной
точности. Эти допуски на величину усилий также оговорены в ГОСТе.
При подборе пружин для статической нагрузки следует исходить
из того, чтобы осадка каждой тарелки не превышала 0,8 fm (лучше
даже 0,7 fm). При динамической нагрузке максимально допустимой
осадкой считают /2Гпах 0,65/m.
495
Пружины, выбранные по ГОСТу, рассчитывать на прочность
не нужно, поэтому формулы для определения напряжений в тарель-
чатых пружинах здесь не приведены.
Расчетные значения максимальных напряжений, соответствующих рабочей на-
грузке пружины, выбранной по ГОСТу, весьма высоки, но, как показывают специ-
альные исследования, эти расчетные значения существенно выше фактических,
что связано с наличием начальных напряжений, обусловленных предварительным
обжатием пружин до их полного сплющивания.
Данные ГОСТа базируются на результатах экспериментального исследования
пружин, поэтому можно считать, что при указанной в ГОСТе нагрузке напряжения
в пружине не превышают допускаемых.
Пример. Подобрать тарельчатую пружину для червячного редуктора (см.
рис. 15.7), если пружина должна создавать усилие нажатия 720 кгс при ходе пру-
жины X = 5 6 мм. Наружный диаметр пружины должен быть не более 70 мм.
Решение. Наиболее подходящей (см. табл. 15.2) является пружина малой
жесткости с наружным диаметром D = 65 мм, развивающая при прогибе (одного
диска) f2 — 0,65 fm = 0,65-2 = 1,3 мм усилие Р2 = 760 кгс. Это несколько больше
требуемого, поэтому будем исходить из меньшего прогиба диска, а именно f2 =
= 0,6 = 0,6-2 = 1,2 мм.
Требуемое число дисков при X = 6 мм
. X 6 к
‘-S"R-5
Усилие, развиваемое пружиной при прогибе каждого из дисков /2 = 1,2 мм,
определим по формуле (15.14), принимая модуль продольной упругости Е = 2,2 X
X 10* кгс/мм2, коэффициент Пуассона р = 0,3 и А = 0,70 при т = 2,17. Значения
остальных величин, входящих в указанную формулу, приведены в табл. 15.2:
n 4ESh
Р2~ДО2(1-р2)
4-2,2-10*-2,5-1,2 Г
0,70 • 652 (1 —-О.З2) L ’ ’
' 1 2\ 1
2 —у j+2,52 =722
кгс,
что соответствует заданному усилию.
Глава 16
ПРИМЕРЫ ПРОЕКТИРОВАНИЯ
§ 16.1. ПРОЕКТИРОВАНИЕ ПРИВОДА
С КОНИЧЕСКО-ЦИЛИНДРИЧЕСКИМ
РЕДУКТОРОМ
Техническое задание. Спроектировать редуктор при-
вода пластинчатого конвейера для перемещения сыпучих материалов
(рис. 16.1) по следующим данным: тяговое усилие на цепи конвейера
Р = 5000 Н; скорость цепи v = 0,35 м/с; шаг цепи t = 100 мм;
число зубьев ведущей звездочки г — 12. График нагрузки —
по рис. 16.2.
Температура воздуха в зоне расположения привода /в =
= 25 -ь 30° С.
Расстояние от пола до оси ведущей звездочки конвейера Н як 800 мм.
Привод разместить под конвейером.
Спроектировать также редуктор к смесителю с вертикальным валом
(рис. 16.3), используя детали редуктора конвейера.
Потребляемая мощность на валу смесителя Nc = 1,7 кВт при ча-
стоте вращения вала пя = 50 ± 5 об/мин. Направление вращения
вала смесителя см. на рис. 16.3. Нагрузка постоянная.
Срок службы каждого редуктора 10 лет, а подшипников не менее
20 000 ч. Передачи нереверсивные. Работа в одну смену.
Рис. 16.1. Кинематическая схема привода конвейера:
1 — электродвигатель; 2 — упругая муфта; 3 — зубчатый коническо-цилиндрический ре-
дуктор; 4 — цепная передача; 5 — ведущий вал конвейера; 6 — ведущая звездочка конвейера
7 — цепь конвейера
497
Рис. 16.2. График нагруз-
ки конвейера
Рис. 16.3. Кинематическая схема привода
смесителя:
1 — электродвигатель; 2, 4 — упругая муфта;
3 — зубчатый коническо-цилиндрический ре-
дуктор с вертикальным ведомым валом; 5 —
вертикальный вал смесителя; 6 — смеситель
I. Кинематическая схема привода конвейера
и подбор электродвигателя
1. Выбор кинематической схемы. Вследствие сравнительно боль-
шого расстояния от пола до конвейера в качестве последней ступени
привода применяем цепную передачу. В результате анализа несколь-
ких схем редукторов выявлена целесообразность применения как для
привода конвейера, так и для смесителя коническо-цилиндрического
редуктора. На рис. 16.1 и 16.3 представлены окончательные варианты
схем приводов.
2. Определение потребной мощности электродвигателя для при-
вода конвейера.
Общий к. п. д. привода
1] = = 0,97 • 0,98 0,993 • 0,9 • 0,99 = 0,823,
где 1^ = 0,97 — к. п. д. конической зубчатой передачи редуктора;
т]2 = 0,98 — к. п. д. цилиндрической зубчатой передачи редуктора;
т)3 == 0,99 — коэффициент, учитывающий потери в одной паре под-
шипников качения редуктора; = 0,9 — к. п. д. открытой цепной
передачи; = 0,99 — коэффициент, учитывающий потери пары под-
шипников качения вала ведущей звездочки конвейера.
Требуемая мощность электродвигателя
Аэ = -=^—^ = 2120 Вт = 2,12 кВт.
э г] 0,«23 ’
3. Подбор электродвигателя по каталогу.
По каталогу (табл, п.4 приложения) имеются электродвигатели
типа АО2 (асинхронные обдуваемые общего назначения) с номиналь-
ной мощностью N — 2,2 кВт, но с разной частотой вращения вала
пэ; 2860; 1430; 950 и 720 об/мин.
498
Электродвигатель с пэ = 720 об/мин имеет большие габариты и
массу, поэтому его не используем. Привод от электродвигателей
с п3 = 2860 об/мин и п3 = 1430 об/мин должен иметь большое пере-
даточное отношение, а следовательно, и большие габариты. Напри-
мер, при пэ = 1430 об/мин
_«э _ ИЗО
lo£ta~ щ ~ 17,5
= 81,6,
где и4 — частота вращения ведущей звездочки конвейера;
D-60-103 0,35-60-103 .
п* = —------= 12-100 = 17’5 0б/МИН-
Приняв для цепной передачи передаточное отношение i3 = — = 3,
получим для коническо-цилиндрического редуктора L = =
= 27,2, что затрудняет осуществление принятой схемы привода.
Выбираем электродвигатель АО2-32-6 с пэ = 950 об/мин и N3 =
= 2,2 кВт.
4. Общее передаточное отношение привода при выбранном элек-
тродвигателе
; _пэ 950 с д о
*общ— „4 — 17,5 —04'°-
5. Разбивка передаточного отношения 10бщ.
В соответствии с рекомендациями, приведенными в гл. 1, примем
is — 3. Для конической пары редуктора выберем передаточное число
согласно ГОСТ 12289—66: ut = 3,15, тогда для цилиндрической пары
получим
.. *общ ____
2 Ulis 3, 15 - 3
54,3 - 5,74,
а всего редуктора
Hp = UiH2 = 3,15-5,74= 18,1.
6. Определение частоты вращения ведомого вала редуктора.
При i3 = 3
Из = /зп4 = 3-17,5 = 52,5 об/мин.
т. е. соответствует заданной частоте вращения вала смесителя.
II. Расчет редуктора привода конвейера (рис. 16.4)
Частота вращения валов:
ведущего
Hi = иэ = 950 об/мин;
промежуточного
Иг = = 302 об/мин;
499
Рис. 16.4. Кинематическая схема зубчатого коническо-цилиндриче-
ского редуктора привода конвейера
ведомого
п3 = — = = 52,5 об/мин.
Wp 1 о, 1
Вращающие моменты
на ведущем валу при Л\ = Л4
.. Ni 2,12-Юз
/14!= ^= ’ - =21,4 Н-м,
1 <01 99,3 ’
где
лщ л • 950 пп о
= —зд— = 99,3 рад/с;
на промежуточном валу
Мг^Мм = 21,4-3,15 = 67,4 Н-м;
на ведомом валу
Л18 = Л11ир = 21,4-18,1 =387 Н-м.
При определении вращающих моментов потери не учитывались.
Расчет зубчатых передач
Расчет конической зубчатой передачи (щ = 3)
Для повышения плавности и бесшумности редуктора коническую
и цилиндрическую зубчатые передачи выполняем косозубыми. Примем
= 10° (предварительно).
1. Номинальное число часов работы за весь срок службы редук-
тора (10 лет, односменная работа; 300 раб. дней в году по 8 ч)
7 = 8-300- 10 = 24 000 ч.
2. Продолжительность действия отдельных моментов за весь срок
службы редуктора (см. рис. 16.2)
Л11 = 0,ЗЛ1и; 4 = 0,67;
/Ип = Ми; 4 = 0,17;
Мш = 0,7Ми; 4 = 0,37.
500
3. Эквивалентное число циклов нагружения зубьев при расчете
на контактную прочность
N
ц. экв— (-Л^тах^тах^тах 4" • • • 4" M^tgtlg).
/Иглах
В нашем случае nj = п — const, Л4тах = Мн.
Для шестерни
^ц.экв1 = ^[(0,ЗМн)3 0,67 + /4,‘,-0,1Г + (0,7О3 0,37] = 13^7=
= 13-950-24-103 = 29,6-105 6 7 *;
для колеса г2
N /Уц-экв! 29гб110’
“•ЭКв2 Ы1 3,15 *V •
4. Эквивалентное число циклов нагружения зубьев:
при расчете на изгиб
Нц. экв “ ТД5 (/^rnax^maxHmax 4~ 4~ • • *4" MgtgHgj.
/Иглах
Для шестерни Zj
К. вкв 1 = [(0, ЗЛ1Н)9 0,67 4-ДО’. 0,17 4- (0,7Мн)9 - 0,37 =
= 6пг7 = 6 • 950 • 24 • 103 = 13,6 • 107;
для колеса г2
АГц. экв2 = = 4,3 • 107.
Ill OtLi)
5. Материал зубчатой пары выбираем по табл. 3.10.
Выберем для шестерни гг сталь 45 (сг„ = 900 Н/мм2; от = 440 Н/мм2;
НВ 230) и для колеса сталь 45 (ов = 590 Н/мм2; от = 300 Н/мм2;
НВ 200).
6. Допускаемое контактное напряжение для зубьев колес
[о]к = 2,75/7В min^pm
где Арк = 1/ -г,---коэффициент режима.
т /*Ц. экв
Так как Нэ_ цкв > Ю7, то kpK = 1, тогда
[о]к1 = 2,75 -230 /=«630 Н/мм2;
[о]к2 = 2,75-200 = 550 Н/мм2.
Для косозубых колес при значительном перепаде твердостей
[о]к = 0,5 ([о]к14- Ыкг) = 0,5 (630 4- 550) = 590 Н/мм2.
7. Коэффициент нагрузки К примем предварительно К = КвКк =
= 1,5 (см. § 3.4), учитывая консольное расположение конической
шестерни.
501
8. Требуемый внешний делительный диаметр колеса из условия
контактной прочности
и _o-.yz^W -
е2 V \[о]J (1 -0,5^у Лпк
О-,3/?340? 21,4- 103-1,5 - 3,152 _ ,с,
\590/ 0,3(1—0,5-0,3)2-1,2^ мм’
где 4 ==^ принимаем равным 0,3; kns — 1,2.
По ГОСТ 12289—66 принимаем de2 = 160 мм.
9. Числа зубьев шестерни и колеса.
Примем Zj = 20, тогда z2 = = 20-3,15 = 63.
10. Внешний окружной модуль
f/oO 160 о ст л
mte = -^ = -gg = 2,54 мм.
По ГОСТ 9563—60* * принимаем т/е = 2,5 мм.
11. Уточняем числа зубьев и передаточные числа:
_ de2 _ 160 _ рд „ „ 7 — £2 _ 64 _ 2„ .
Z2 — mte ~ 2,5 ~ь4, Т0Гда Z1—«1 — 3,15 2и’4,
принимаем гх = 20; окончательно
W1 = ^ = 3,2.
Отклонение от стандартного значения их = 3,15 составляет 1,5%
(допускается ±3%).
12. Внешнее конусное расстояние и длина зуба (по принятому
значению модуля mte)
Re = 0,5/n^Z! УйГП = 0,5 • 2,5 20 ]/3,22 +1 83,75 мм.
Ширина зубчатого венца
b = tyReRe = 0,3 • 83,75 «й 25,2 мм.
Назначаем b = 26 мм, тогда
. __ b____26 ___р q 11
— R~e ~ 83,75 ~
13. Уточняем угол рт:
1 О О К Re — b п Г О Г 83,75 — 26 ____ n QQQ.
tg Pt-Ss 3,5m/t, R^b — 3,5-2,5 g3 75 26 — 0,233,
ре=13°07';
tg Pm 5s tg Pc 1—0,5lp„ " 1-0,5-0,311 = °’273,
pm » 15°18' — больше принятого предварительно значения pm = 10°.
Окончательно принимаем pm = 16°.
14. Углы делительных конусов:
61=17°15'; б2 = 90°—17О15' = 72°45'.
502
15. Средний окружной модуль
b sin б, о с 26 sin 17’15' о 1О
mttn = mte----^- = 2,5-------------я» 2,12 мм;
тпт = tntm cos pm = 2,12 cos 16° = 2,04 мм.
16. Средняя окружная скорость в зацеплении
_ _____________ 3,14 - 2,12 - 20 - 950 о 1R м/с
~ 60 • 1000 60 • 1000 ~ '
При данной скорости назначаем 8-ю степень точности передачи
(по ГОСТ 1758—56) (см. табл. 3.7).
17. Уточняем коэффициент нагрузки:
Значение динамического коэффициента принимаем (табл. 3.4)
ят/е(1 — Ф/? ) b
/<д^1 при & = —^р—
Коэффициент концентрации нагрузки (табл. 3.8)
Кк ~ 0 (1 — ф) + ф (при твердости < НВ 350), где ф — коэффи-
циент, характеризующий степень равномерности подводимой нагрузки;
по формуле (3.48)
_ 1 /Л!тах<МП1ахпМП1ах + Л!Ап1+--- + Л!^я?\
Ф Мтах\ <Мтах”мП1ах + <Л + - + <Л /
В нашем случае пг — п2 = const.
Значения М{ и t{ приведены на рис. 16.2.
Ф-ЛГ2---------h+fe+fs----1 Т~^+^+^
ф = (0,ЗМн - 0,67 + 0, Шн • 0,17 + 0,7/И н - 0,37) == 0,49.
По табл. 3.9 при
b _ ь 26 .
dm tntmZi ~ 2,12-20
находим 0 = 1,4. Тогда Кк — 1,4 (1 — 0,49) + 0,49 » 1,2; К =-
= КдКк = 1-1,2= 1,2.
18. Контактные напряжения по формуле (3.37)
— 680 -у [ MiKuf _
к ~ de2 — b sin б2 Г bknK sin б2 ~
68° т/"21,4-103-1,2-3,22 дпп и, я
~ 160-26 sin 72°45' V 2 6 - 1,2 sin 72’45' — 4Уи П/ММ "
Полученное значение ок ниже принятого [сг]к = 590 Н/мм2. Раз-
ница составляет (590—490)-100 = 16,9%, ее можно компенсировать
соответствующим снижением твердости зубьев шестерни и колеса.
503
19. Составляющие силы, действующие в зацеплении.
Средний угол наклона линии зуба рт = 16°. Направление спирали
зубьев шестерни — левое; направление вращения вала (со стороны
большего диаметра шестерни) — по часовой стрелке.
Окружное усилие
2М1 = 2 12М 1Оз^1ооо
d/mi 42,4
где dtml = mtmzx — 2,12-20 = 42,4 мм.
Осевое усилие на шестерне (радиальное Т2 на зубчатом колесе),
формула (7.9).
Qi = Р1 <tg + U1 sin =
= 1000—(to 20°+ 3,2 sin 16°) ^382 H.
cos 16° ' b 11 ’
Радиальное усилие на шестерне (осевое Qz на зубчатом колесе),
формула (7.10)
ггу sin Gi , , • л \
Л = Pl —~ (th tg ап - sin pm) =
CUb pm
= 1000 (3,2 tg 20° - sin 16°) № 220 H.
20. Проверяем прочность зубьев на изгиб. Допускаемое напряже-
ние изгиба при отнулевом цикле (конвейер движется в одном направ-
лении)
г -1 1,4o_i ,
/?ри’
где [и] — требуемый коэффициент запаса прочности (см. стр. 60),
принимаем равным 1,4 (стальные поковки, подвергнутые нормали-
зации или улучшению); /го — эффективный коэффициент концентра-
ции напряжений у корня зуба; ka = 1,5 (см. стр. 61); /гри — коэффи-
циент режима нагрузки;
9
107
tVu. ЭКВ ’
так как /Уц. экв > Ю7, то /гри = 1.
Для углеродистых сталей о-х = 0,43 ов.
Для шестерни
о_х = 0,43-800 = 344 Н/мм2
и
[Оо]и1=й^ = 230 Н/мм2.
Для колеса
а_х = 0,43ов = 0,43-590 = 254 Н/мм2
и
170 и/мм2-
504
Напряжения изгиба в зубьях конической пары
l,39KPcos2pm
“ ybrnnm&t
где у — коэффициент формы зуба, находим по эквивалентному числу
зубьев.
Для шестерни zx = 20
2 = 21 —_______—_______23'
cosfi1cos3pm cos 17° 15'cos316° ’
для колеса при г2 = 64
г8 64
2,0/2 cos 62 cos3 pm cos 72°45' cos3 16° ~ 246.
По табл. 3.3 при а = 20° и х = 0 получаем уг = 0,39; у2 = 0,492.
Напряжение изгиба в зубьях шестерни при 1,6
°и1 —
1,39- 1,2.103 cos3 16°
0,39 - 2,04.26-1,6
47 Н/мм2.
Напряжение изгиба в зубьях колеса
0Ц11/1 47 • 0,39 „ _ ц q
°"2 = = = 3’7 Не-
полученные напряжения ниже допускаемых.
21. Основные размеры конической зубчатой пары сводим в таб-
лицу.
Параметр Формула Размеры
шестерни, Zi = 20 колеса, z2==64
Внешний делитель- ный диаметр Внешний диаметр вершин зубьев Ширина зубчатого венца Внешняя высота головки зуба Внешняя высота ножки зуба Угол ножки зуба Угол головки зуба Угол конуса вер- шин Угол конуса впа- дин Средний угол на- клона линии зу- ба Направление спи- рали sx м м И “ г» те а, II II II II И “ II % 1 1 II + а I I J__L ’ ’ S ? ND 5 сэсэсвсв <ъ з > s a » о СЛ Os 2,5 - 20 = 50 мм 50 + 2-2,5 X Xcosl 7’15’^54,77мм 26 мм 2,5 мм 1,2-2,5 = 3 мм a ^=0,02845 еЛ=2°оз' 6д1 = 6/2 17°15'+2°ОЗ' = = 19° 18' 17°15' —2°03' = =15°12' 16° Левое 2,5-64=160 мм 150+2-2,5-cos72°45'«= «=151,48 мм 26 мм 2,5 мм 1,2 • 2,5=3 мм 6/2=2о02' ®<Z2 — 6/1 72°45' + 2°03' = = 74°48' 72°45' —2°03' = = 7042' 16° Правое
505
Расчет цилиндрической зубчатой передачи
1. Уточненное значение передаточного числа
“р 183
^=ыг=ж=5’65-
2. Материалы цилиндрической пары выбираем те же, что и для
конической, т. е. для шестерни г3 сталь 45 улучшенную и для колеса
z4 сталь 45 нормализованную.
3. Эквивалентное число циклов нагружения зубьев шестерни г3
и колеса z4 при расчете на контактную прочность:
для шестерни г3
^ц.Вквз = Мц.ВКВ2 = 9,4-10’
(так как шестерня г3 находится на одном валу с колесом z2);.
для колеса z4
Nn экв4 = = 9,rJ<7 =1,66-10’.
4. Допускаемое контактное напряжение |о]к будет тем же, что и
для конической передачи, так как Мц.ЭКв> Ю7.
5. Эквивалентное число циклов нагружения зубьев при расчете
на изгиб:
для шестерни г3
#ц.8квз = М'ц.8КВ2 = 4,3-107>107,
следовательно, kpa = 1.
для колеса z4
ЛГ ЛГ 1 4,3 107 л ТС 107
Мц.вкв4 — Мд.8КвЗ" — 5 g5 0,76-10
и
₽И“|/ Л?Д.ЭКВ4
_____103^1
V 0,76 • 107 — 1 1
(значение М'п.ЭКВ2 см. стр. 501).
6. Допускаемое напряжение изгиба [о0]и будет таким же, что и
для конической зубчатой пары, так как kpw = 1.
7. Коэффициент длины зуба примем равным 0,25.
8. Коэффициент нагрузки К = KrKk-
Степень точности передачи принимаем восьмую (по ГОСТ 1643—72)
ввиду небольшой окружной скорости.
Динамический коэффициент Кд « 1 (при b > (табл. 3.5).
Коэффициент концентрации нагрузки при твердости <zHB 350
(табл. 3.8)
Кк = 6 (1 - <р)4-(р,
<р = 0,49 (см, стр. 503).
506
Из табл. 3.9 при ^-<1,6 находим е = 1,4. тогда Kv = 1.4 (1—
—0,49) + 0,49 = 1,2 и К = 1 -1,2 = 1,2.
9. Межосевое расстояние (передачу выполняем с косозуоыми ко-
лесами)
____, , 1Ч,3/7340\а Л42Д
, n,3//340\2 67,4-103.1,2
— (5,65 1) |/ ^5g0j чс;^161 мм,
3|’аи2^п
7),25 • 5,65 • С35
где kn= 1,35 — коэффициент повышения допускаемой нагрузки
для непрямозубых колес.
Примем aw = а = 160 мм в соответствии с ГОСТ 2185—66.
10. Нормальный модуль зацепления принимаем тп = 2,5 мм по
ГОСТ 9563—60 **, руководствуясь соотношением тп = (0,01—0,02) а.
11. Числа зубьев шестерни и колеса и угол наклона зубьев. При-
мем предварительно делительный угол наклона линии зубьев 0 = 10°.
Суммарное число зубьев zz — zs + z4:
2а cos б 2-160 cos 10° ,
zc ==----L =-----„-=---=126;
с тп 2,5
?з = т+^ = 'П'Кбб = 19>95; пРимем гз = 19;
г4 = гс — г3 = 126 — 19 = 107.
Уточняем угол наклона линии зубьев:
cos 0=^ = 1^ = 0,9843;
0 = 1О°1О'.
Так как фо < 0,4, то проверим условие
^e^z7tg₽’ 126tg 1040' = 0,222 <'‘l’0 = °’25’
т. е. принятое значение угла 0 при фа — 0,25 приемлемо.
12. Фактическое передаточное число
tz2 —— — 1д —5,64,
т. е. меньше найденного ранее лишь на 0,5%, поэтому пересчета не
производим.
13. Уточнение частот вращения валов:
«з=5г = з^ё4=52,6 об/мин;
п2 = —= |^ = 297 об/мин.
Л-2
14. Окружная скорость в зацеплении
_ лтпг3п2 _ 3,14-2,5-19-297 _
V ~ cos р • 60 • 1000 ~ cos 10’10'-60-1000 ~ м'с-
507
15. Основные размеры зубчатой пары:
шестерня, z3= 19 колесо, г4 = 107
j тпгз ___ 2,5-19 , мпг^ 2,5-107 _____„
«з— 1 Aoi л7 • ММ, Цл~ р inowv == мм,
* cos р cos 10 10' ’ ’ 4 cos р cos 10 10' *
da3 = da + 2mn — 48,27 4- 2 • 2,5 = 53,27 мм; doi = cf4 4- 2mn = 271,73 4-
4-2-2,5 = 276,73 мм;
fe3 = фаа 4- 5 мм = 0,25 160 4- 5 = 45 мм. = ipaa = 0,25 • 160 = 40 мм.
Проверка:
d3 + d4 48,274-271,73
3 2 - = —-——I— — 160 мм = a.
Вычислять ds и cf4 следует с точностью до сотых долей миллиметра.
16. Контактные напряжения согласно принятым параметрам пере*
дачи
340 ЛЛ4аК (ы2 + I)3 _ 340 1 Г67,4- 103- 1,2 (5,644-1)3 _
°к — ~а~ Г bujtB ~ 160 Г 45-5,64-1,35 “
= 560 Н/мм2 < [о]к.
П Г 1 (590 — 560) • 100-
Разница с принятым значением 1спк составляет -------»
5%, что вполне допустимо.
17. Составляющие силы, действующей в зацеплении:
окружное усилие
Рз = = -'1Й7103 = 2790 Н’
радиальное усилие
Т3 = Ps^-= 2790ъ 1000 Н;
* ,5cosp cos 10 10
осевое усилие
Сз = Рз tg 0 = 2790 tg 10°1 О' = 535 Н.
18. Проверка прочности зубьев шестерни и колеса на изгиб:
<7.1 =-[<7о]и,
ymnbkBB
где km =1,4 — коэффициент, учитывающий повышение несущей
способности косозубых колес по изгибу по сравнению с прямозубыми.
Эквивалентное число зубьев
2 _ гз = 19___= 21 •
13 cos3 р cos310° 10' ’
2 — Zi — 107___ — 1 13
vi ~~ cos3 Р cos3 1040'
По табл. 3.3 находим коэффициенты формы зуба:
f/3 = 0,378; у4 = 0,482.
508
Напряжение изгиба в зубьях шестерни
2790-1,2 „„ „ ,
°и3 — 0,378 - 2,5 - 40.1,4 ^2,7 Н/мм .
Напряжение изгиба в зубьях колеса
ОизУз 62,7-0,378 ипо и, а
0/82...= 49’2 Н/ММ ’
°ИЗ и °и4 < [О0]и-
Ои4
Расчет цепной передачи (рис. 16.5) (i3 = 3)
1. Выбор типа цепи. Цепная передача является последней ступенью
привода, поэтому при небольшой скорости движения она будет нагру-
жена значительно. Выбираем приводную роликовую цепь.
2. Вращающий момент, передаваемый ведущей звездочкой,
Лк = 387 Н -м.
3. Выбор числа зубьев звездочек. Учитывая малую скорость цепи,
примем число зубьев ведущей звездочки г5 — 15.
Для ведомой звездочки
ze = z5u3 ==15-3 = 45.
4. Расчетный коэффициент нагрузки (см. гл. 12)
где /?д — динамический коэффициент. При спокойной нагрузке (привод
конвейера) примем ka = 1; kA учитывает влияние межосевого расстоя-
ния. При Дц = (30 50) t kA = 1 (полагаем, что Дц будет в указан-
ных пределах); /?„ учитывает влияние угла наклона передачи. При
наклоне до 60° kK = 1 (в нашем
случае наклон 45 — см. рис. 16.1);
Лр учитывает способ регулирования
натяжения цепи. Согласно схеме
натяжение не предусматривается.
Поэтому fep = 1,25; kc учитывает
способ смазки цепи. Смазка перио-
дическая, kc = 1,5; kn учитывает
продолжительность работы; при
односменной работе kn = 1;
К9 = 1 1 1 -1,25-1,5-1 = 1,875.
5. Шаг цепи предварительно
определяем по формуле (12.17):
V гв [р] т
Рис. 16.5. Кинематическая схема цеп-
ной передачи
tn — 1 — цепь однородная.
509
Прн па = 52,5 об/мин по табл. 12.10 принимаем [р] = 34 Н/мм2,
тогда
. о 3/387- 103- 1,875 л
/ = 2,8у —щТзП— = 31,6 мм.
По табл. 12.1 выбираем предварительно цепь с /=31,75 мм.
Размеры цепи: внутренний диаметр втулки d = 9,55 мм; длина втулки
В = 27,5 мм; расстояние между внутренними пластинами Вви =
= 19,05 мм; длина соединительного валика I = 46 мм; разрушающая
нагрузка Q = 7000 кг = 68 700 Н; масса 1 м цепи q = 3,73 кг.
6. Скорость цепи
z5tn3 15 - 31,75 - 52,5 п ,
v = 60ЛОЗ—607Т1Р- ~ °>42 м/с-
Ввиду малой скорости число ударов цепи в секунду не проверяем.
7. Окружное усилие
Р = 4760 Н
v 0,42 •
8. Среднее давление в шарнире
РЛ, = 4™ц!в73 3319Н/мм,;
P— F ~ 263
р < [р] = 34 Н/мм2.
Здесь F = Bd = 27,5 -9,55 — 263 мм2 — проекция опорной поверх-
ности шарнира.
9. Усилие от провисания цепи
Pf = kfqA = 1,5-3,73-9,81 -0,952 = 55 Н,
здесь kj — коэффициент, учитывающий влияние расположения пере-
дачи. При наклоне цепи более 40° kf = 1,5.
А = 30 t = 30-31,75 = 952 мм — предварительно принятое меж-
осевое расстояние.
10. Усилие от центробежной силы ввиду малой скорости цепи можно
не учитывать: в самом деле,
pv = qv* = 3,73 0,422 0,65 Н,
что пренебрежимо мало по сравнению с Рц.
11. Коэффициент запаса прочности
Q 68 700 . . „
n~k^Pa + Pf ~ 1-4760 + 55
и^>[п] = 7 (см. табл.12.11.)
12. Сила давления на вал
/?ц=Рц +2^ = 4760 + 2.55 = 4870 Н.
Условное обозначение приводной роликовой однорядной цепи
с шагом t = 31,75 м:
Цепь ПР —31,75 —7000 ГОСТ 10947—64.
510
13. Основные размеры ведущей звездочки
г> t 31,75 im О .
П<*-~ 180. — 180о —152,8 мм,
sm---- sm —г=-
z6 15
Deb = t (о,6 + Ctg = 31,75 (o,6 + ctg~) = 164,8 мм;
t?i = 0,93BH = 0,93-19,05= 17,7 мм.
Размеры ступицы принимаем по соотношениям, приведенным для
цилиндрических зубчатых колес.
Компоновка редуктора
На основании полученных из расчета основных параметров пере-
дачи выполняем компоновочный чертеж, как правило, в масштабе 1 : I
на чертежной или миллиметровой бумаге.
На компоновочном чертеже размещаем основные детали, намечаем
их конструктивные формы с учетом технологии изготовления и мон-
тажа. Одновременно с компоновкой производим расчеты деталей редук-
тора и вносим необходимые коррективы. Начинают обычно с опреде-
ления диаметров валов, размеров элементов конструкции зубчатых
колес и корпуса редуктора.
Ориентировочный расчет валов
Ведущий вал. Минимальное значение диаметра выходного конца
вала из расчета на кручение при [т]к = 15 Н/мм2
, V16.21,4. Юз
di = 1/ — Г1 - = 1/ -— = 19.2 мм.
V л Мк V л -15
Диаметр выходного конца вала обычно принимают близким к диа-
метру вала электродвигателя; диаметры остальных участков вала
назначают конструктивно. В целях уменьшения количества типораз-
меров шарикоподшипников принимаем их одинаковыми для ведущего
и промежуточного валов.
Окончательно размеры ведущего вала установим после ориентиро-
вочного расчета промежуточного вала.
Промежуточный вал. Диаметр вала в опасном сечении под шесте-
рней г3 определим предварительно из расчета на кручение по понижен-
ному напряжению [т]к = 15 Н/мм2:
, ,3/”16Л4г ,3/16-67,4-103
da=V тыг = У -^7Г5~=28’2мм-
Учитывая указания, изложенные при расчете ведущего вала, наме-
чаем d2 = 35 мм и под подшипником d'v = 30 мм. Диаметры ведущего
вала: под подшипником d[ = 30 мм и конец вала = 22 мм.
511
Ведомый вал. Диаметр вала под подшипником (опасное сечение)
при [т]к = 20 Н/мм2
. ,3/ТбМ7 ,3/16.387-10-'' .„
d3 = 1/ , , = 1/ ---™46 мм.
» л [т]к V я • 20
Примем под подшипником d'z = 45 мм и под зубчатым колесом г4
di = 50 мм.
Конструктивные размеры зубчатых колес
Коническую шестерню гг и цилиндрическую г3 ввиду малого диа-
метра выполняем заодно с валом, а зубчатые колеса г2 и?4 — из поков-
ки. Размеры элементов конических колес принимаем по рис. 10.10,
а цилиндрических — по рис. 10.3.
Размеры элементов корпуса и крышки редуктора
Корпус выполняем литым из чугуна с горизонтальным разъемом
по осям валов. Размеры элементов определяем.по рис. 10.24.
Разработка компоновочного чертежа
Компоновку проводим в два этапа. На первом этапе выявляем
расстояние между зубчатыми колесами, опорами валов и положение
зубчатых колес и звездочки относительно опор для последующего
определения опорных реакций и подбора подшипников. На втором
этапе конструктивно оформляем зубчатые- колеса, валы, корпус,
звездочку, подшипники для последующей проверки прочности валов,
шпонок и других деталей. Компоновочный чертеж выполняем в одной
проекции — разрез по осям валов при снятой крышке редуктора.
Первый этап компоновки (рис. 16.6). Чертеж следует выполнять
тонкими линиями, чтобы после завершения расчетов использовать его
для второго этапа.
Перед вычерчиванием решаем вопрос о смазке зубчатого зацепле-
ния и подшипников. Ввиду большой разницы диаметров зубчатых
колес конической и цилиндрической передач осуществить смазку
зацепления конической передачи путем окунания колеса в масляную
ванну невозможно. Поэтому применяем смазку поливанием маслом,
которое подается насосом, приводимым от промежуточного вала.
Смазка подшипников промежуточного и ведомого валов осуществляется
благодаря разбрызгиванию масла колесами.
Чертеж выполняем в определенной последовательности.
1. Устанавливаем масштаб чертежа, учитывая возможность раз-
мещения конструкции на листе формата 24 (841 х 594). Далее прово-
дим в середине листа горизонтальную осевую линию ведущего вала
и намечаем положение осей промежуточного и ведомого валов (верти-
кальные линии).
2. Вычерчиваем в зацеплении конические и цилиндрические зуб-
чатые пары.
512
3. Выбираем для ведущего вала конструкцию подшипникового
узла по рис. 8.37.
4. Намечаем ориентировочно для ведущего и промежуточного
валов радиально-упорные, а для ведомого радиальные шарикоподшип-
ники легкой серии, подбирая их по диаметру вала.
5. Размещаем подшипники ведущего вала: зазор х между dae2
и торцом подшипника зависит от размера колес и способа смазки
(при наличии мазеудерживающего кольца принимают большие значе-
ния). Зазор между dac2 и внутренней стенкой корпуса должен быть
не менее (1,1 — 1,2) 6 (6 — толщина стенки корпуса). Принимаем
х = 12 мм и вычерчиваем габариты подшипника; замеряем размер
1а от торца подшипника до среднего диаметра конической шестерни;
размер 1Ь обычно принимают равным (2,5—4) 1а; принимаем 1Ь ~ 3/о
и вычерчиваем габариты второго подшипника.
6. Для промежуточного вала намечаем конструкцию подшипни-
ковых узлов по рис. 8.23.
7. Устанавливаем зазор между торцом ступицы конического колеса
и внутренней стенкой корпуса уг = 5 мм, т. е. меньше рекомен-
дуемого (1,1—1,2)6, так как ступица имеет меньший диаметр,
чем диаметр наружного кольца подшипника, и, следовательно,
не сможет соприкасаться с корпусом. Наносим линию внутренней
стенки.
8. Вычерчиваем габариты подшипников промежуточного вала,
углубив их торцы лишь на 2—3 мм от внутренней стенки корпуса,
чтобы облегчить попадание брызг масла в подшипники.
17 Зак. 220
513
Из компоновки определяем размер с (см. рис. 16.6). На том же
расстоянии от оси ведущего вала размещаем 2-й подшипник, чтобы
корпус выполнить симметричным. Наносим линию внутренней стенки.
9. Вычерчиваем по габаритным размерам цилиндрическую зубча-
тую пару, приняв зазор между ступицей зубчатого колеса и внутрен-
ней стенкой у2 = 10 мм.
10. Для ведомого вала выбираем конструкцию подшипникового
узла по рис. 8.19.
11. Размещаем подшипники ведомого вала.
12. Так как на ведомом валу консольно насажена звездочка цепной
передачи, то для определения ее положения относительно опоры вала
вычерчиваем часть корпуса (гнездо подшипника) с крышкой под-
шипника (ориентируясь на конструкцию по рис. 8.19) и болтом креп-
ления ее.
На расстоянии от оси вала наносим соединительный валик
цепи длиной I так, чтобы торец его был удален на величину Е = 10 ч-
-е- 15 мм от ближайшей к нему выступающей части корпуса
(в данном случае от головки болта крепления крышки подшипника).
пятпз
Рис. 16.7. Расчетная схема ведущего вала
На расстоянии ~ про-
водим осевую линию (это
будет середина ширины зу-
ба Ь звездочки), параллель-
ную оси симметрии редук-
тора, и наносим профиль
поперечного сечения зуба
звездочки (см. рис. 16.6).
Из компоновки устана-
вливаем необходимые для
дальнейших расчетов раз-
меры (см. рис. 16.6): для
ведущего вала 1а = 23 мм,
1Ь = 68 мм; для промежу-
точного вала 1С = 72 мм,
1а = 55 мм, Z4 = 55 мм;
для ведомого вала /6 =
= 75 мм, /7 — 125 мм,
/8 = 50 мм.
Проверка долговечности
подшипников
Ведущий вал (рис. 16.7).
Из предыдущих расчетов
Л = 1000 Н; Л = 220 Н;
Qx = 382 Н и по эскизной
компоновке (рис. 16.6)
1а = 18 мм, 1Ь = 78 мм.
514
Параметры шарикоподшипника радиально-упорного № 36206,
выбранного по эскизной компоновке:
d х D х В = 30 х 62 х 16; С = 1820 кгс«^ 18200 Н;
Со = 1330 кгс 13 300 Н; ₽ = 12°.
1. Расчетные расстояния и /2 (см. рис. 16.7):
/1==/o + a = 23-J-13 = 36 мм;
/2 = 1Ь — 2а = 68 — 2 • 13 = 42 мм,
где а — расстояние от точки приложения реакции подшипника к валу
до торца подшипника.
Для радиально-упорного подшипника (см. стр. 238)
а = 0,5 [В + (^±5) tg ₽] = 0,5 [16 + tg 12°] 13 мм.
2. Опорные реакции при Л4Н = Mf.
от силы (в плоскости хг)
2 — Р1 (11+1а) — RbxIz —
RBx = ^ll±l*>. = 1009^±1^.= i860 Н;
Rax = Ра. - Pi = I860 -1000 = 860 Н.
От силы Qi и 7\ (в плоскости уг)
= ^f-T^ + l^ + Rnyl^O-,
-Q^+TAh+k) -382^+220(36 + 42)
RBy =-------------------------^-42---------= 216 Н,
где dtml = 42,4 мм;
Рд^ = Р1 —Рв{/ = 220 —216 = 4 Н.
Суммарные реакции
Ra = VR2Ax+R2Ay = У8602 + 42 = 860 Н;
RB=VRaBx+R2By=*VI86024-2162= 1870 Н.
3. Ресурс подшипника за весь срок службы при заданной долго-
вечности Lh = Т = 24 -103 ч
L — Lh-60th = 24• 103• 60• 950 = 1370 млн. об.
17*
515
4. Число оборотов подшипника за время действия нагрузки выби-
раем согласно графику (см. рис. 16.2):
Передаваемый редуктором момент Продолжи- тельность действи я момента, % от вре- мени цик- ла Число оборотов
0,ЗМн 60 £х = 0,6£
1,0Мн 10 £.а=0,1£
0,7Мн 30 = 0,3£
5. Определяем эквивалентные динамические нагрузки при дейст-
вии Ми = Му.
Осевые составляющие от радиальных нагрузок, приложенных к под-
шипникам,
S — eFr.
р
Из табл. 8.41 по отношению — находим в:
Fo = Qj = 382 H; Со= 13 300 Н;
0.0287; е = 0,336 (интерполируем линейно);
Л(Л)=ЯЛ = 86О Н; F,(B)=7?c=1870 Н;
Зл = Fr(A}e = 860 0,336 = 288 Н;
Sb = Fr(B)e = 1870 -0,336 = 630 Н.
Осевые силы, действующие на подшипники (см. табл. 8.45) при
SB>SA, Fo(B) = Sb = 630 Н.
FalA} = SB + Fa = 630 + 382 = 1012 Н.
Эквивалентная динамическая нагрузка
P = (XVFr+YFa)K6Ki.
Уточняем значение е по табл. 8.41:
“7^ = Тччлп = 0.076; в = 0,39.
Ср 1 о OVV
Для опоры А
/7(Л)=ЯЛ = 86ОН; ДО(Л1 = 1012 Н;
F О(Л) _ Ю12
^г(Л)_Ь860^е’
516
следовательно, согласно табл. 8.41 X = 0,45; Y = 1,38; V_= 1 — вра-
щается внутреннее кольцо; /<б = 1,4 — умеренные толчки (табл. 8.40);
/<т=1 при /<125° С.
Р(Д) = (0,45-1 -860+1,38.1012) 1,4 -1 = 2500 Н.
Для опоры В
/>(В)=ЯВ=187О Н; (В) = SB = 630 Н;
= о’344 < е'
W>(B) 1 •1830
Следовательно, согласно табл. 8.41 X = 1 и У = 0, V = 1, =
= 1,4; Дт — те же значения, что и для опоры А,
Р(В) = 1-1870-1,4-1=2620 Н.
Дальнейшие расчеты ведем по большей эквивалентной динамиче-
ской нагрузке Qb = P(B) = 2620 Н.
6. Эквивалентная нагрузка
л <2iZ.i+-<2iib2iiiZ-3
V3KB У £ >
где согласно режиму работы
Qi = 0,3QB и Л1 = 0,6Л;
Qh = 1,0Qb и Л2 = 0,1£;
Qiii==0,7Qb и £3 = 0,3£;
п _ -1 +(0,3QB)3 0,6L + (1,0QB)3 O,1L + (O,7QB)3 0.3L
ЧэквВ у -------------------------------------
= 0,49QB = 0,49-2620 = 1280 Н.
7. Требуемая динамическая грузоподъемность
2 2
Св = £3 Q9kbB= 1370 3 -1280 = 14 400 Н,
т. е. меньше указанной в каталоге для данного подшипника, поэтому
выбранный типоразмер подшипника принимаем к исполнению.
8. Долговечность подшипника (расчетная)
. 10« / С \з 10® /18 200X3
Lh~ 60щ ^Q9kbBJ “60-950 \ 1280 ) > W Ч'
т. е. больше заданной.
Промежуточный вал (рис. 16.8). Из предыдущих расчетов
Pt = 1000 Н; Т2 = Qj = 382 Н; Q2 = 7\ = 220 Н; Р3 = 2790 Н;
Т3 = 1000 Н; Q3 = 535 Н. По эскизной компоновке 1С =80 мм;
1а — 63 мм; /4 = 55 мм (см. рис. 16.6).
517
HytHlil
,92
n^Hni
S7.4
riglHnl
Рис. 16.8. Расчетная схема промежуточного
вала
Также по эскизной ком-
поновке для промежуточ-
ного вала выбран тот же
подшипник (в целях уни-
фикации), что и для веду-
щего вала, т. е. шарико-
j|_ подшипник радиально-
упорный № 36206, пара-
метры которого см. стр. 584.
1. Расчетные расстоя-
ния:
^Су
т2^о,
"Оу
13 — 1с — п — 72 — 13 —
= 59 мм;
15 — 1а — а = 55 — 13 =-
= 42 мм,
где расстояние a = 13 мм
(см. стр. 515).
2. Опорные реакции:
от окружных сил (в пло-
скости xz)
= ~ Rex (4 + Ц + 4) +
п PiUi + hJ + Psh.
Rcx~ l3+h+l-a ~
1 000 (55 + 42) + 2790 — 42
~ 59 + 55 + 42 ~
= 1370 Н;
Rdx ~ Pl + Р3 ~ Rex —
= 1000 + 2790-1370 =
= 2420 Н;
от радиальных и осевых сил (в плоскости уг)
YlmD^RCy(ls+li + l6)-^—T2(li + l6) + T3l&-Q3^ = 0-,
Q3 (/4+^5) — Рз^5 — Qs
----/Й+4+----------=
220 +382 (55 + 42) - 1000 • 42 + 535
= ~---------59+W42------------- = 142 Н*
518
где dtm2 = mtmz2 = 2,12 -64 ~ 136 мм; d3 = 48,27 мм;
= Rcy - Л + T3 = 142 - 382 + 1000 = 760 Н.
Суммарные реакции
Rc = Wcx + ЯЬ = К13702 4-1422= 1374 Н;
Rd = VRbx+Rby = ]/24202 + 7602 = 2530 Н.
3. Определяем эквивалентные динамические нагрузки. Осевые
составляющие от радиальных нагрузок, приложенных к подшипникам
S=eFr;
Fr(c> = Яс = 1374 Н; Fr(C) =Яд = 2530 Н.
р
Согласно табл. 8.41 по отношению ~ получаем значение е.
^0
Осевая сила на валу
Fa = —Q2 + Q3 = —220 + 535 = 315 Н и направлена в сторону
опоры D (см. рис. 16.9);
— _?15__о 0226 p«rfO 32-
Со 13 300 ,и ’ e~u,oz,
Sc = Л to 6=1374-0,32 = 430 Н;
So = Л го» е = 2530-0,32 = 810 Н.
Осевые силы, действующие на подшипники (см. табл. 8.45) при
Хд > Хд, Fg^ = Хд = 810 Н,
Fa(C} = Хд + ^ = 810 + 315=1125 Н.
Эквивалентная динамическая нагрузка
P = (XVFr + YFa)K6KT.
Уточняем значение е. По табл. 8.41
П25
= 13 300 = °’085’ е==0>4-
Для опоры С
F„,rx 1125
FrfO=7?c=1374 Н; FO(C)=1125 Н; -р^- = гаг = 0,818>е,
следовательно, согласно табл. 8.41 X = 0,45 и Y = 1,35; V = 1,
Кб — 1,4; Кт = 1 (значения те же, что и для ведущего вала).
Р(С) = (0,45• 1 • 1374 +1,35• 1125) 1,4 • 1 = 3000 Н.
Для опоры D
Fr(D) = 2530 H; Fa(D) = 810H; -p^J-= = 0,32 < е.
Следовательно, согласно табл. 8.41 X = 1; Y = 0; V = 1; Кб —
= 1,4; /<т = 1.
P(D)= 1-2530-1,4-1=3540 Н.
519
Дальнейшие расчеты ведем по большей эквивалентной динами-
ческой нагрузке QD — — 3540 Н.
4. Число оборотов подшипника за весь заданный срок службы
(La= 7' = 24-103 ч)
L' = L —= 1370 Х> = 428 млн. об. Значения L см. стр. 515.
«I 3,2 г
5. Число оборотов подшипника за время действия нагрузки соглас-
но графику.
Передаваемый редуктором момент Продолжи- тельность действия момента, % от вре- мени цик- ла Число оборотов
0,3MH 60 L( = 0,6L'
1,0Мн 10 £'=0,1£'
0,7Л1н 30 L' = 0,3£'
Сэкв
6. Эквивалентная нагрузка
__QiZ-i + Qn £2+ Qm £з
После подстановки значений имеем
Q9kbD = 0,49Qc = 0,49 • 3540 =1735 Н.
7. Требуемая динамическая грузоподъемность
£
CD = U') 3 Зэквл = 428 1735 = 13 250 Н,
т. е. меньше указанной в каталоге для данного подшипника.
8. Долговечность подшипника (расчетная)
т 106 / С \з Юв /18 200X3
Lh ~ 60пД<2эквСу ” 60 • 302 \ 1735 ) ч»
т. е. больше заданной.
Ведомый вал (рис. 16.9). Из предыдущих расчетов Р3=2790 Н;
Т3 = 1000 Н; Q3 = 535 Н и Qx = Qu = Дц sin 45° = 4870 sin 45° =
= 3440 Н. По эскизной компоновке /в = 75 мм; 17 = 125 мм; 18 = 50 мм.
Параметры подшипника, выбранного по эскизной компоновке:
шарикоподшипник радиальный № 209 размерами d X D X В =45 X
85 X 19; С = 2570 кгс 25 700 Н и Со = 1810 кгс « 18 100 Н.
1. Реакции опор:
в плоскости xz
2 Щр-------Qx (1е 4- + Z8) + Rex (^7 + U — R3^8 ~ 0;
Qx(le+li + h)+P^ _ 3440 (754-125 + 50)+ 2790 - 50 _ __
/j + Z8 125 + 50 °
tffx = Qx - Rex + p3 = 3440 - 5700 + 2790 = 530 H;
520
Рис. 16.9. Расчетная схема ведомого вала
в плоскости уг
^mP=Qy (1в + /7 + /8) - REy (17 + /8) - Т318 -Q3 % = 0;
Qy
-------ТО-----------
3440 (75+ 125 + 50)— 1000.50—535
=-----------125+50-----------= 4210 Н;
Rpy = Qy- Rpy -т3 = 3440 - 4210 - 1000 = — 1770 Н;
Re = VR2ex +R2ev^ V57OO24-421O2 = 7100 Н;
Rf = VMx+ЯЬ = У5302 + (— 1770)2 = 1850 Н.
Дальнейшие расчеты выполняем для более нагруженной
опоры Е.
521
2. Эквивалентная динамическая нагрузка для подшипника опоры Е
Р (£) = (X VFr (£) + YFa (£)) КбКт,
Fr{E) = Re = l\W Н, FC(£) = Q8 = 535 Н.
По табл. 8.41 е — 0,22, потому что
F 535
~7^= 18100 = °’0296-
Так как - ”(£) = 0,79>е, то по табл. 8.41 X = 0,56 и Y = 2,0;
VFrE
V = 1 — вращается внутреннее кольцо; Кт = 1 при t < 125° С;
К& = 1,5 — больше, чем на ведущем и промежуточном валах, так как
имеется динамическая нагрузка от цепной передачи.
Р (Е) = (0,56 1 • 7100 + 2 535) 1,5-1^ 7480 Н.
3. Эквивалентная нагрузка
<?эквв = 0.49Р (Е) = 0,49 • 7480 = 4670 Н.
4. Динамическая грузоподъемность
± А
С£ = Рэквв(Г)3 = 4670-75,63 = 19 800 Н,
L 1370
где Л" = — = то-г = 75,6 млн. об. Значение L см. стр. 515.
10,1
Для выбранного подшипника
СЕ<С.
5. Долговечность
106 / с \3 106 /25 700\з^ П5
£а —60я3((? „ ) ~ 60-52,5 \ 4670 / Ч‘
т. е. больше заданной.
Второй этап компоновки (рис. 16.10). На этом этапе разработки
конструктивно оформляем зубчатые пары, валы, корпус и т. п. Вычер-
чиваем редуктор, как и в первом этапе, в масштабе 1:1с учетом из-
менений, выявленных в начальной стадии конструирования. Если воз-
можно, то следует использовать чертеж первого этапа компоновки
редуктора. После вычерчивания уточняем расстояние между опорами
и положение зубчатых колес относительно опор. Если размеры зна-
чительно отличаются от полученных на первом этапе компоновки, то
необходимо внести изменения в ранее проведенные и последующие
расчеты.
Для рассчитываемого редуктора полученные в результате второго
этапа компоновки размеры, определяющие положение зубчатых пар
и звездочки относительно опор и расстояния между опорами, незна-
чительно отличаются от ранее принятых, поэтому пересчет не произ-
водим.
622
Рис. 16.10. Компоновочный чертеж редуктора (2-й этап)
Уточненный расчет валов
Определяем коэффициенты запаса прочности для опасных сечений
всех валов, принимая, что нормальные напряжения изменяются по
симметричному, а касательные — по пульсирующему циклу.
В качестве примера рассмотрим наиболее нагруженный в рассчи-
тываемом редукторе ведомый вал (см. рис. 16.10). Материал вала —
сталь 35; ав = 610 Н/мм2; ат = 320 Н/мм2; = 0,43 ав = 0,43 X
X 610 = 262 Н/мм2; т_х = 0,58 а_х = 0,58 -62 = 152 Н/мм2.
Сечение посередине диска звездочки. Эта часть вала работает
только на кручение. Концентрация напряжений в данном сечении
обусловливается наличием шпоночной канавки.
Коэффициент запаса прочности
т 1
где xv и хт — амплитуда и среднее напряжение цикла касательных
напряжений;
__ _Тгпах _ 1
Ху Хт — п • W/ >
* z w рнетто
здесь ТГрнетто — полярный момент сопротивления нетто: по табл. 7.8
имеем t = 5 мм; b == 12 мм; по формуле (7.26)
==^_bt(d-ty jJ4140jL_ 12-5&5)2-= 116.1Q3 мм3.
w Р нетто— 16 2d 16 2 - 40 ’ ’
387-103 1с_и, 2
Ту —• Хт — 2-11 6 • 103 — 16,7 Н/ММ •
523
По ланным гл. 7 принимаем = 0,1; kx = 1,4; — 0,81. Тогда
коэффициент запаса прочности
152
п — щ—-j— ра 5.
^1-16,7+0,1.16,7
Сечение посередине опоры Е. Концентрация напряжения будет
иметь место у края подшипника, посаженного на вал с гарантиро-
ванным натягом; ввиду относительно небольшой ширины шейки расчет
будем вести по среднему сечению.
Изгибающий момент
Мк = /?„/в = 4870 • 75 = 358 000 Н мм.
Момент сопротивления сечения
№^0,М3 = 0,1 -453 = 9-103 мм3.
Амплитуда напряжений изгиба
М„ 358.10»
Оф = Отах = 1/ = 9;t03 =40 Н/ММ2.
Полярный момент сопротивления
Wp 0,2d3 = 0,2 • 453 = 18,0 • 103 мм3.
Амплитуда и среднее значение цикла касательных напряжений
1 М3 387-103 1Л о 1Л, 2
— гт— 2 ' Wp~ 2-18,0- 10s — 10’8 Н/ММ .
Коэффициент концентрации напряжений находим по табл. 7.6
(интерполированием)
— = 2,75; — = 2.
% et
Коэффициент запаса прочности
п — °~г — 262 — 2 4
°~k„ ~ 2,75-40 “ 2 ’* *•
е
Коэффициент запаса прочности
152
~ 2- 10,8+0,1 - 10,8 '
ет
Общий коэффициент запаса прочности
м _ папт: ___ 2,4 • 7 _п о
• 4 - г г-~ .—-. —— ——
j/nj+n» /2,42+72
Аналогично проверяем сечение под колесом, где концентрация на-
пряжений вызывается наличием шпоночной канавки.
524
по нормальным напряжениям
по касательным напряжениям
7.
Проверка прочности шпоночных соединений
Выбираем для шпонок сталь 45 улучшенную.
Результаты расчета рекомендуется сводить в таблицу.
Вал Размер шпонки, мм, bxhxl Диаметр вала, мм Крутящий момент М , Н-м 4,4М 0 ~ Г!— CM dh (1 — Ь) Значение °см’ н/мм2
1-й 2-й 3-й
Вычерчивание редуктора
На основании эскизной компоновки и произведенных расчетов
выполняем чертеж общего вида редуктора в двух проекциях
(рис. 16.11) с основной надписью, располагаемой в правом нижнем
углу чертежа. К чертежу составляется спецификация всех деталей
(см. стр. 531, 532).
Смазка зубчатых колес и подшипников
Способ смазки установлен при компоновке редуктора. Смазка
зубчатого зацепления конических колес, а также подшипников веду-
щего вала производится поливанием масла, подаваемого насосом.
Цилиндрическая зубчатая передача смазывается путем окунания колеса
в масло; подшипники промежуточного и ведомого валов смазываются
благодаря разбрызгиванию масла зубчатыми колесами.
По табл. 10.15 выбираем кинематическую вязкость масла в зависи-
мости от окружной скорости зубчатых пар для каждой ступени передач.
При Uj = 2,1 м/с вязкость масла должна быть 118 сСт, при и2 =
= 0,7 м/с — 177 сСт; средняя вязкость 147,5 сСт; близкую вязкость
имеет масло автотракторное АК15 (вязкость 135 сСт при 50° С).
Определяем необходимое количество масла для поливания и подбираем
насос по методике, изложенной в гл. 10. Для данного редуктора выбран
шестеренчатый насос, привод которого осуществлен от промежуточ-
ного вала.
111. Расчет редуктора для привода смесителя (рис. 16.12)
Расчет зубчатых зацеплений
Согласно техническому заданию используем все детали редуктора
привода конвейера (кроме корпуса), поэтому геометрические параметры
зубчатых колес и их материалы остаются прежними.
Вращающий момент на ведущем валу
.. Nt 1,75-10з
Ж1 = ^ = -г99^-:=17’6 Н’М
(значение см. стр. 500).
525
626
~575
Ф22Р
Техническая характеристика
Наименование Обозна- Ионич. Цилинд).
параметра чение передач передав
Модуль зацепления mt^mn Z,e\- -lz,5
Число Шестерни zt ZO 10
зубьев Налеса Zz ем 107
Угол наклона зуба Pm| P ie° 1О°1О‘
Конусное расстояние Pg, мм 83,75 —
Мелсосевое расстоян. а, мм — 160
Ширина зубчатого венца b, мм 2в МО
Общее оередатач. число U 18,1
Момент ни выходном валу fifa H-M 387
Лит. \Macca
Мшжаа
i:z
ТЛиафт
Листов J
Лисп
Редуктор
конически—
цилиндрический
Рис. 16.11. Общий вид редуктора привода конвейера
527
528
Ф22Г
Рис. 16.12. Общий вид редуктора привода смесителя
529
Число циклов нагружения зубьев всех колес при Т = 24-Ю3 ч
(заданный срок службы) будет больше Nn = 107, следовательно,
[о]к и [о]и останутся прежними.
Так как Мг меньше момента, передаваемого ведущим валом редук-
тора конвейера, а геометрические параметры колес остались неизмен-
ными, то колеса будут менее нагружены и соответственно будут меньше
ок и ои, чем в редукторе привода конвейера. Дальнейшие расчеты
поэтому не производим.
Долговечность подшипников
Направление вращения валов согласно техническому заданию про-
тивоположно направлению вращения валов редуктора конвейера,
поэтому действующие силы будут иметь направление, противополож-
ное указанному на рис. 16.8, 16.9, 16.10.
Подшипники ведущего и промежуточного валов остались преж-
ними, а у ведомого вала радиальные подшипники для удобства сборки
редуктора заменены радиально-упорными легкой серии № 36209.
Так как передаваемый момент меньше, чем у редуктора конвейера,
то долговечность подшипников оказалась больше (поскольку расчеты
аналогичны выполненным выше, то они не приводятся).
Другой причиной, повышающей долговечность подшипников ведо-
мого вала, является отсутствие цепной передачи и, следовательно,
давления на вал.
Прочность валов
Уменьшение передаваемого момента, а следовательно, и сил,
приложенных к валу, повысило коэффициент запаса. Для ведомого
вала коэффициент запаса значительно повысился для сечения под
нижним подшипником вследствие отсутствия давления от цепной
передачи и вызванного им изгибающего момента. Расчеты не приво-
дятся.
Конструкция редуктора (рис. 16.12)
Для удобства сборки корпус выполняем с горизонтальным разъемом,
проходящим через ось ведущего вала. Ввиду невозможности смазки
зубчатых зацеплений окунанием колес в масло, а подшипников раз-
брызгиванием смазку их осуществляем поливанием маслом, подаваемым
насосом. Смазка нижних подшипников промежуточного и ведомого
валов осуществляется благодаря погружению их в масло.
IV. Посадки сопрягаемых деталей редуктора
Выбор вида посадок производим согласно рекомендациям, приве-
денным в гл. 8 для колец шарикоподшипников и в гл. 10 для деталей
редуктора.
530
Фор- мат Зона Поз. Обоз- наче- ние Наименование Коли- чество Приме- чание
41 Документация Расчетно-пояснительная записка Сборочные единицы Коническо-цилиндрический редук- тор Напорный маслопровод 1 1 1
49 Всасывающий маслопровод 1
1 Детали Вал-шестерня ведущий 1
3 Кольцо пружинное упорное 1
6 Крышка подшипника ведущего вала 1
7 Прокладка регулировочная 1 Комплект
8 Стакан 1
9 Втулка распорная 1
10 Шайба стопорная 1
11 Гайка специальная 1
13 Крышка подшипника промежуточ- 1
14 кого вала глухая Прокладка регулировочная 0 62 2 Комплект
15 Вал-шестерня промежуточный 1
16 Колесо зубчатое цилиндрическое 1
18 Вал ведомый 1
19 Кольцо распорное 1
20 Крышка подшипника 2
23 Прокладка 2
24 Крышка подшипника 1
25 Звездочка 1
26 Г айка 1
28 Шайба 1
29 Втулка 1
30 Кольцо пружинное 1
34 Крышка подшипника промежуточ- 1
37 ного нала сквозная Кольцо 1
38 Заглушка 3
42 Крышка люка 1
43 Прокладка крышки люка 1
47 Маслоуказатель жезловый 1
48 Прокладка маслоспускная 1
50 Прокладка фланца 1
51 Фланец 1
1
1
Изм. | Лист № докум. Подп. Дата
Разраб. Редуктор кониче- ско-цилиндри- ческий привода конвейера Лит. Лист Листов
Пров.
Н. контр.
Утв.
531
Продолжение
Фор- мат Зона Поз. Обоз- наче- ние Наименование Коли- чество Приме- чание
52 Штуцер 1
53 Уплотнительное кольцо 1
54 Нажимное кольцо 1
Стандартные изделия
44 Болт М6Х15.58.С ГОСТ 7798—70* 4
5 Болт М8х25.58.С ГОСТ 779&-70* 4
33 Болт М8Х20.58.С ГОСТ 7798—70* 12
32 БолтМ10х25.58.С ГОСТ 7798—70* 12
45 БолтМЮх30.58.С ГОСТ 7798—70* 4
40 Болт М12 х 130.58.СГОСТ 7798—70* 10
39 Гайка М12.6 ГОСТ 5915—70* 10
4 Манжета 1—25x 42—3 ГОСТ 1
8752—70
31 Манжета 1—50 x80—3 ГОСТ 1
8752—70
12 Подшипник 36206 ГОСТ 831—62* 4
17 Подшипник № 209 ГОСТ 8338—75* 2
2 Шпонка 6x6x40 ГОСТ 8789—68* 1
36 Шпонка 10x8x40 ГОСТ 8789—68* 1
21 Шпонка 10x8x50 ГОСТ 8789—68* 1
27 Шпонка 12x8x40 ГОСТ 8789—68* 1
22 Штифт 10x35 ГОСТ 3129—70* 2
Прочие изделия
35 Насос шестеренчатый 1
§ 16.2. ПРОЕКТИРОВАНИЕ ПРИВОДА С ВАРИАТОРОМ,
ДВУХСТУПЕНЧАТЫМ ЧЕРВЯЧНЫМ РЕДУКТОРОМ И СВАРНОЙ РАМОЙ
Задание. Спроектировать привод к конвейеру закалочной печи.
Установка работает в две смены. Расчетный срок службы 5 лет.
Основные данные: шаг цепи конвейера t = 125 мм;
число зубьев звездочки z — 8; полезное усилие, передаваемое цепью
конвейера, Р = 12 000 Н. Скорость цепи конвейера должна плавно
регулироваться в пределах от ymin = 2 м/мин до ктах = 8 м/мин.
Нагрузку на цепь принять не зависящей от скоростного режима работы
конвейера.
Кинематический расчет привода и подбор электродвигателя
Определение частоты вращения лр звездочки конвейера при средней
скорости. При симметричном регулировании (см, § 13,1)
Уср = '/t'maxt'min = 1^8 • 2 = 4 М/МИЩ
1000оср 1000 -4
Ир=-^-= 87125 =4 об/мин.
532
Предварительная оценка общего передаточного отношения привода:
; —
'•общ —‘ „
rlt)
Синхронная частота вращения электродвигателя
пс, об/мин ............................................. 3000 1500 1000 750
«об1Ц.................................................... 750 375 250 187,5
Ориентируясь на пс = 1000 об/мин, принимаем схему привода,
состоящую из вариатора на первом звене привода и двухступенчатого
червячного редуктора.
Определяем к. п. д. всей установки, принимая ориентировочно:
к. п. д. цепного вариатора (с учетом потерь в опорах) тц = 0,85; к. п. д.
двухступенчатого червячного редуктора (с учетом потерь в опорах)
т]2 = 0,722 = 0,56; к. п. д. пары подшипников опор ведущего вала
конвейера т]3 = 0,98; к. п. д. всей установки т] = тиадз = 0.85 X
х 0,56 -0,98 = 0,465.
Требуемая мощность электродвигателя (при наибольшей скорости
конвейера)
12 000-8
Na = —™ = 3430 Вт = 3,43 кВт.
э т] 60 0,465
По табл. П6 приложения выбираем асинхронный обдуваемый
электродвигатель АОП2-42-6 с повышенным пусковым моментом:
N, = 4,0 кВт; пэ = 955 об/мин; диаметр вала d3 = 32 мм.
Расчет двухступенчатого червячного редуктора
Передаточное число редуктора
i = "2 =-’1^240.
р Пр 4
Разбивка передаточного числа редуктора. Рассмотрим три варианта:
\ • о • 240 «л
а) «б = 8; «т = гр-=- -= 30;
б) /Б =^ = /240^ 15; tT = ~=16;
г 13
• QA. 240 О
в) «б —30, zT = *зо = 8.
В соответствии с принятой разбивкой ip получим частоту вращения
червяка тихоходной пары пц — пр«т:
а) П1т = 4-30=120 об/мин;
б) П1т = 4-16 = 64 об/мин;
в) П1т = 4-8 = 32 об/мин.
Расчет тихоходной пары. Материалы и допускаемые
напряжен и я.
Принимаем для червячного колеса Бр. АЖ9-4Л (отливка в землю);
для червяка — сталь 45 закаленная (HRC 45—50). По табл. 5. 10
[п]к = 210 Н/мм2; по табл. 5.9 [о0]и = Ю0 Н/мм2.
533
Вращающий момент на валу колеса
J,. PD0 12-103.326 о lnfi и
^2Т~ 2т)3 — 2-0,98 —2-10 Н-мм;
здесь Do — диаметр звездочки конвейера (см. § 12.2);
г> t 125 one
. 180 — 180 — 326 мм’
sin — sin -g-
к. п. д. опор ведущего вала конвейера т]3 ~ 0,98.
Число заходов червяка в соответствии с принятыми значениями 1т
для рассматриваемых трех вариантов:
а б в
?! = 1 ?i = 2 ?i = 4
?2 = 30 ?2 — 32 ?2 = 32
Для всех вариантов примем предварительно (см. § 5.2) q = 9.
Межосевое расстояние при К = 1,25 (§ 5.3)
Для варианта а
^+1)^&У|,25'2'|0'=229 мм:
для вариантов бив
«. = (3|+l)j/'pL\’l,26.2.10--231 мм.
Основные параметры:
вариант а:
_ 2а _ 2 • 229
т ~ ~ 9 + 30
= 11,8 мм.
По табл. 5. 3 примем т = 12 мм; q = 8;
варианты бив:
2-231 .. о
т — 9_|_32 — 11,3 мм.
Примем т = 12 мм и q = 8.
Определение скорости скольжения и проверка
Скорость скольжения по формуле (5.14)
19100 1^1-Ь1?2’
534
Для варианта а
°- = 191S = О.61 м/с.
Для варианта б
^ = 11^/24^= °,33 м/с.
Для варианта в
^ = ^/44^= °,18 м/с.
Уточняем межосевое расстояние для передачи, выполняемой без
коррекции:
aw =у (q + z2).
Для варианта а
ат = у (8 + 30) — 228 мм.
Для вариантов бив
12
ст = т,- (8 + 32) = 240 мм.
Расчетные контактные напряжения, Н/мм2, по формуле (5.19),
+ =4° УЖ
к d2 F di ’
где
d2 — mz2, dx = mq\ М2 в Н-мм.
Для варианта а
476 , Г 1,25-2.10» ofo U, 2
~ 30- 12 У 8-12 —213 Н/ММ.
Для вариантов бив
476 ,/'1^5.2.10в ,
+ 32-12 У 8-12 —199 Н/мм.
Полученныезначения ок достаточно близки к [ак] при соответствую-
щей пск (табл. 5.10), поэтому пересчета не производим.
Основные размеры зацепления тихоходной пары, мм
Варианты Диаметр делительной окружности колеса d2 = z2m Диаметр делительного цилиндра червяка di = qm
а 360 96
бив 384 96
535
К. п. д. по формуле (5.13)
Пт = (0,95ч-0,97).
' tg(T-b-p')
Результаты вычислений сводим в таблицу.
К определению к. п. д. тихоходной пары редуктора
Определяемая величина Варианты
а б В
Угол подъема у ..... . Скорость скольжения оск [по формуле (5.14)], м/с Угол трения р' (табл. 5.5) с увеличе- нием f на 30—50% для безоловян- ной бронзы К. п. Д. Т| 7*07'30" 0,61 3*45' 0,625 14*02'10" 0,33 5*00' 0,695 26*38'54" 0,18 6*00' 0,75
Проверка зубьев колеса на изгиб по формуле (5.20)
__ 0,6 ДР,
°и — qm-y2
вариант а:
Р2 = ^11 = ООО Н;
ст 2 «jOU
варианты б и в:
Р2=10 400 Н.
Определяем эквивалентное число зубьев.
Для варианта а
30 чл к
cos3 7°07'30" ~
По табл. 5.6 коэффициент у2 = 0,536.
При том же значении К = 1,25 находим
0,6 -1,25-11 000 1О . 2
8 • 122 0,536 —' 13’4 Н/мм .
Для варианта б
z---------—---------35'
° cos314°02'10" '
_ 0,6-1,25-10 400 _
°и ~ 8 • 122 • 0,572 ~
Уъ = 0,572;
11,9 Н/мм2.
Для варианта в
39
^==cos326~38;54;;^=54: 1/2 = 0,634; ои = 10,7 Н/мм2.
Расчет быстроходной пары приводим в табличной форме (табл. 16.1).
536
16.1. Расчет быстроходной пары редуктора (по формулам гл. 5)
Определяемая величина Варианты
а б В
Номинальный момент на валу колеса Л1г Л1к =-—— , Н • мм *тЧт Передаточное число быстроходной па- ры «Б Число заходов червяка zt (в соответст- вии с iB) Число зубьев колеса г2 = Допускаемое контактное напряжение [о]к, Н/мм2 Расчетное межосевое расстояние а, мм, прн q = 9 н К = 1,25 2а Модуль осевой т=—, мм <7+*2 Относительный диаметр червяка q Уточненное межосевое расстояние не- корригированной передачи Скорость скольжения оСк, м/с Допускаемое контактное напряжение 1<Чк, Н/мм2 Расчетные контактные напряжения ок, Н/мм2 Диаметр делительного цилиндра чер- вяка dt — qm, мм Делительной диаметр колеса d2 = = ггт, мм Угол подъема витка у Приведенный угол трення р' К. п. д. ц Окружное усиление на колеса Р2 — = ^,Н “а Коэффициент формы зуба у2 Напряжение изгиба в зубьях колеса ои, Н/мм2, при К = 1,25 Общий к. п. д. редуктора 1]г = ’)в1)т 10,7 • 104 8 4 32 200 90 5 10 105 2,64 197 155 50 160 21’48’09” 2’35’ 0,885 1340 0,60 6,8 0,552 18 • 10* 15 2 30 200 106 6 9 117 2,77 197 172 54 180 12'31'44” 2°ЗГ 0,825 2000 0,55 8,5 0,574 39,3 • 104 30 1 30 200 130 7 9 136,5 3,18 194 188 63 210 6’20’25” 2’14' 0,737 3170 0,53 10,3 0,553
537
Выбор оптимального варианта редуктора
Выполняем первую эскизную компоновку редуктора в трех вариан-
тах (рис. 16.13); наименьшие габариты редуктора и наилучшие условия
смазки окунанием (примерно одинаковое погружение в масло червяка
тихоходной ступени и колеса быстроходной) получаем при разбивке
передаточного числа по варианту a: = 8; iT = 30.
Так как к. п. д. для варианта а несколько ниже, чем для варианта б,
то потери энергии и эксплуатационные расходы по варианту а будут
немного больше.
Однако передаваемая мощность невелика, существенного разли-
чия при экономическом сравнении вариантов а и б не будет. Поэтому
принимаем вариант а.
Общий к. п. д. редуктора для варианта а оказался немного ниже,
чем определенный предварительно (0,552 против 0,56). Но так как
отличие незначительное, то можно оставить ранее выбранный двига-
тель АОП2-42-6.
Расчет и конструирование промежуточного вала редуктора (кон-
струирование и расчет остальных валов следует выполнять аналогично).
Усилия [см. формулы (5.28) — (5.30)]. В тихоходной паре
окружное усилие червячного колеса Р2т = 11 000 Н.
Окружное усилие червяка
2М.Т 27И9Т 2.2.106
р1т = Л 2Т = -^-11 = = „К n = 2220 Н.
1 1 d1T iTd1Tt]T 30 - 96 - 0,625
Радиальное усилие
Тт^P2Ttgax= 11 000-0,364 = 4000 Н.
В быстроходной паре
27И9К 2-10,7-104
Р2б= 1340 Н; Р1б = А2б= »б</1б1]б = 8 - 50 0,885 = 605 Н’
Тб Р2б tg ах = 1340 • 0,364 = 487 Н.
Рис. 16.13. Сравнение габаритов червячных редукторов
538
Первая компоновка вала (рис.
16.14). Наносим осевые линии и
контуры червяка по d1T, dalr,
d/хт и длине нарезанной части
Затем определяем размеры тихоход-
ного колеса by и dam2y, размещаем
подшипники и колесо быстроход-
ной пары и графически находим
размер А.
Наметим первый вариант рас-
положения опор вала; между коле-
сом и червяком установим пла-
вающий радиальный подшипник,
а с другой стороны — сдвоенный
радиально-упорный подшипник.
Определяем d вала под колесом
Рис. 16.14. Первая компоновка вала
(первый вариант)
из расчета на кручение, для обеспе-
чения высокой жесткости вала принимаем пониженное [т] = 15 Н/мм2,
У10’7'104 „qq
с учетом ослабления вала шпоночной канавкой принимаем d = 35 мм.
Диаметр вала в месте установки радиального подшипника примем
d = 45 мм, ширину и наружный диаметр подшипника выбираем пред-
варительно из средней серии. Для радиально-упорных подшипников
принимаем d = 55 мм, размеры выбираем также из средней серии.
Наружный диаметр стакана определяем из условия обеспечения мон-
тажа червяка. Нанося внутренние очертания стенок и прилива, наме-
чаем расположение радиально-упорных подшипников. Таким образом
получаем расстояние между опорами.
Рассматриваемый вариант расположения опор имеет тот недостаток,
что в результате теплового расширения вала (при фиксированной в осе-
вом направлении левой опоре) червячное колесо быстроходной пары сме-
щается относительно оси червяка, в зацеплении с которым оно находится.
При монтаже редуктора можно отрегулировать совпадение средних
плоскостей червячного колеса и червяка регулировочными проклад-
ками левой опоры лишь для одного заранее принятого температурного
режима.
Проверим удлинение вала.
Для углеродистой стали а = 12-10-6. Примем I из соотношения
I » (0,9 ч- 1) d2 = 320 мм; принимая разность температур при различ-
ных режимах работы редуктора А/ = 25° С, получаем
А/= 12- 10-6-320-25 = 0,096 мм = 96 мкм.
Допускаемые отклонения на несовпадение средних плоскостей чер-
вячного колеса и червяка составляют по ГОСТ 3675—56 для 7-й сте-
пени точности:
верхнее отклонение ABG = 42 мкм;
нижнее отклонение ABG = 42 мкм.
539
Таким образом, рассматрива-
емый вариант расположения опор
оказался для данной конструк-
ции непригодным. Достаточно
точно отрегулированное положе-
ние червячного колеса по отно-
шению к оси червяка оказыва-
ется нарушенным вследствие
температурных деформаций. Та-
кое расположение опор можно
применять при малых колеба-
ниях в температурном режиме
работы или коротких валах.
Рассмотрим второй вариант,
расположив плавающую опору
слева (рис. 16.15), осевые перемещения сечений червяка при темпера-
турных колебаниях в этом случае не отразятся на работе тихоход-
ной червячной пары. Так как с увеличением расстояния между опо-
рами жесткость вала уменьшается, то для компенсации этого уве-
личиваем диаметр вала под колесом; ориентируясь на сф? = 672 мм и
соблюдая переходы, примем под колесом ф 60 мм, под радиально-
упорные подшипники ф 50 мм и под радиальный подшипник ф 40 мм.
Диаметр стакана надо значительно увеличить, чтобы обеспечить
монтаж колеса с червяком через отверстие в корпусе; этим облегча-
ется возможность выполнить соединение колеса с валом с натягом.
Подбор подшипников. В соответствии со вторым вариантом компо-
новки составляем расчетную схему вала (рис. 16.16).
540
В целях упрощения рассчитываем вал как статически определимую
балку с шарнирными опорами на концах; более точное решение может
быть получено, если рассматривать правую опору со сдвоенными под-
шипниками как жестко закрепленную. Принятое упрощение идет
в запас прочности.
Из предыдущего расчета имеем
Р2Б = 1340 Н; Л2Б = 605 Н; Тб = 487 Н;
Р2Т = 11 000 Н; Л2т = 2200 Н;
Тт = 4000 Н; d2B = 160 мм; dn — 96 мм.
Реакции опор:
в плоскости хОг
Р2Б 330 -Л2Т•140 - R2x • 405=0;
„ 1340-330 — 2200-140 „
Агх— 4Q5 —333 г1,
Л2Т • 265 - Р2Б - 75 - Rix 405 = 0;
„ 2200-265-1340-75 11ПП „
”-----Af\T*----’ ’- * 1Уи П»
405
Проверка:
Rlx + Р2в - Л2Т - R2X = 1190 + 1340 - 2200 - 333 = 3 0-
в плоскости yOz
-Riy • 405 + Тъ • 330 - Л2Б + Р2Т + Тт • 140 = 0;
,, 487 • 330 — 605 804-11 000 484-4000 - 140
К2у — — zyol) п,
Rly • 405 - Тг • 265 + Р2Т - А2Б - Тъ - 75 = 0;
П 4000.265—11 000-48 +605-804-487 - 75 , -Q- „
Kiy------------------405---------------— 1OZO п.
Проверка:
Rly + Ягу - 7Т - ТБ = 1525 + 2960 - 4000 - 487 = -2^0.
По оси z
R2z = Р2Т — л2Б = 11 000 - 605 = 10 395 Н.
Определяем эквивалентную нагрузку для радиального шарико-
подшипника левой опоры (при средней скорости).
По данным § 8.8
С = М%б/Ст= 1940-1-1,1-1 =2140 Н^218 кгс.
Fr^Ri = +AL = 1/"15252 + 11903 = 1940 Нъ 198 кгс.
Для червячных редукторов требуемую долговечность подшипни-
ков принимают в пределах 10 000—20000 ч. Ориентируясь на сред-
нее значение, примем Lh= 15000 ч.
541
Намечаем шарикоподшипник особо легкой серии 108, d = 40 мм,
С = 1320 кгс. Его расчетная долговечность
, 10» /С\з 10» /132О\3 onnnn
Lh 60п2Б \ Q ) ~ 60 • 120 ( 218 ) ~ 30 000 41
Для правой опоры
Р2 = VRly + Rlx = 1/29602 + 3332 = 2960 Н.
В нашем случае отношение осевой нагрузки Fa — P2r — Л2б =
= 11000 — 605=10395 Н к радиальной /г2 =/?2 = 2960 Н значи-
тельно больше коэффициента е и, следовательно, в сдвоенном ради-
ально-упорном подшипнике работает лишь один ряд роликов. Обозна-
чая подшипник, воспринимающий радиальную и осевую нагрузки,
цифрой II по табл. 8.45, получаем, что Fan=Fa, так как при при-
нятом предположении, что конический подшипник I не работает,
имеем: Sj = O.
Пользуясь данными табл. ПЗО и ориентируясь на подшипники
7310, находим Х = 0,4, У =1,937. Эквивалентная нагрузка подшип-
ника
Q2 = (XVFr2 + YFa2) Кб = (0,4 • 2960 + 1,937 - 10395) 1,1 = 22,4 - 103Н =
= 2200 кгс.
Динамическая грузоподъемность
= 9660 кгс.
Расчетная долговечность
выбранного подшипника С =
— 106
Л 60л2Б
/С\з.зз_ 10» /9660\з,зз
VQ/ — 60- 120\2200/
Расчет вала на прочность. Строим эпюры моментов (рис. 16.16).
Проверяем напряжения.
В сечении /—/
М„ = УМ2У + Ml = У (—0,16 • 10е)2 + (0,743 • 10е)2 = 0,76 • 10е Н • мм,
где
My = Rlx-140 = -1190-140 = —0,16- Ю6 Н-мм;
Мх = Rly • 140 + Р2Т = 1525 -140+11 000 • 48 = 0,743 -10е Н • мм;
__ Ми Мя____. 0,76 - 10» Q г о и /мм2.
п ~ W„ ~ 0,ld|IT — 0,1 -67,23 ~ 25,3 Н/мм ’
Р9Т пооо
Осж = ]— = —К79Г = 1 ’47 Н/мм2;
сж ла^1т л 67,22
~4 ' ' 4
М9Т 10,7-10»
т = = 0>2 67 23 = 1,78 Н/мм ;
+кв = VX + <M2 + 3t2 = У(25,3+ 1,47)2 + 3-1,782 = 26,9 Н/мм2.
542
В сечении //—II
Мг/ = Я2х-75 = 333-75 = 2,5-104 Н-мм;
Мх = R2y 75 + Л2Б^ = 2960 • 75 + 605 • 80 = 0,27 • 10е Н • мм;
0,27 • 106 ,
='0ЛТбоГ = 12*5 Н/мм2;
11000 on U, 2 10,7-104
°™ = "зт-бб^ = 3,9 Н/ММ ; Т = '0,2 -603 = 2’48 Н/мм2;
o9IfB = F(12,5 + 3,9)24-3-2,482 = 16,9 Н/мм2.
Так как напряжения оэкв в обоих сечениях значительно меньше
допускаемых, уточненный расчет можно не проводить.
Направление действующих сил (рис. 16.16, а) выбрано по наиболее
опасному случаю. Конструктор в целях отыскания более выгодного
решения может варьировать направление вращения валов, сохраняя
заданное направление вала рабочей машины, т. е. располагая привод
по ту или другую сторону закалочного конвейера. На рис. 16.16, б
показана схема действующих сил в случае обратного направления вин-
товой линии тихоходного червяка. Направление Р2т изменено на обрат-
ное. В этом случае
Я1г/ = 4120 Н; Рзд = 367 Н; 7?2г=11 605 Н
и Мх max = 0,575- 10е Н-ММ.
Изменение направления Р2т на обратное позволило уменьшить
момент в опасном сечении, однако существенно возросла радиальная
нагрузка левой опоры и несколько увеличилась осевая нагрузка
правой опоры.
В случае реверсивной работы привода необходимо выполнить рас-
чет как для прямого, так и для обратного направления вращения.
Расчет вала на жесткость. Разобьем вал на восемь участков постоян-
ной жесткости (рис. 16.17) и определим прогиб в сечении 1—I по фор-
муле Мора:
х V С MtMi dz
ЕЦ
здесь f — прогиб рассмат-
риваемого сечения вала,
в котором приложена еди-
ничная сила; li — длины
участков вала; Mt — изги-
бающий момент в текущем
сечении рассматриваемого
участка вала от действую-
щих нагрузок; M'i — изги-
бающий момент в текущем
543
16.2. К расчету вала на жесткость. Значения изгибающих моментов для участков вала (см. рис. 16.17)
Момент Уча сток
1 2 3 4 5 6 7 8
в на- чале в конце в начале в конце в начале в конце в начале в конце в начале в конце в начале в конце в начале в конце в начале в конце
Л4у, Н • мм 0 1,8- 104 1,8 • Ю4 7,7 • 104 7,7 • 104 16 • 104 16- 104 9,1 - Ю4 9,1 • 104 1,5-104 1,5 • Ю4 -2,6- 104 —2,6 104 —1,3 • 104 —1,3.104 0
Мх, Н • мм 0 2,3 • 104 2,3 • 104 9,9 • 104 9,9 • Ю4 21,3 -104 74,3 • 104 44,3 Ю4 44,3-104 36,9-104 36,9 • Ю4 27 • 104 22,2 104 11,8-104 11,8 - 104 0
Му, мм 0 9,8 9,8 42,5 42,5 91,6 91,6 65,5 65,5 39,6 39,6 25,9 25,9 13,8 13,8 0
М'х, мм 0 9,8 9,8 42,5 42,5 91,6 91,6 65,5 65,5 39,6 39,6 25,9 25,9 13,8 13,8 0
сечении рассматриваемого вала от единичной силы, приложенной
в сечении; Л — момент инерции сечения вала на рассматриваемом
участке постоянной жесткости.
Значения изгибающих моментов Mt и Ml в начале и в конце участка
вала приведены в табл. 16.2.
Определяем значения интегралов Мора для всех участков вала
с постоянной жесткостью и одним законом изменения моментов. Резуль-
таты вычислений сводим в таблицу (табл. 16.2 и 16.3).
Прогиб вала в сечении //—II определяем аналогично. В данном
случае вал весьма жесткий, поэтому прогиб во втором сечении не про-
веряем.
Вторая компоновка вала. Проведенные расчеты вала и подбор
подшипников позволяют принять первую компоновку вала за основу
для дальнейшего конструирования.
Вторую компоновку вала выполняют обычно при окончательной
разработке конструкции редуктора (см. рис. 16.19). На этом этапе
проектирования подбирают стандартные или нормализованные детали
конструкции, уточняют переходы сечений вала, радиусы галтелей и пр.
В случае необходимости в принятые ранее размеры вносят частич-
ные изменения, как правило, незначительные, не требующие допол-
нительного проверочного расчета.
Тепловой расчет редуктора (см. § 10.5)
В поверхность теплоотдачи S включается и площадь дна редуктора
в предположении, что весь привод устанавливается на сварной раме
на высоте вала конвейера. По рис. 16.18
S = 0,4 0,5 2 + 0,4 0,32 2 + 0,5 • 0,32 + л'°2’232 2
+ л-0,23-0,32^ 1,22 мм2.
Наибольшая мощность, подводимая к редуктору,
__ РУтпах _ 12 000 8_9960 Вт
"тах - Вд2 — 60 0,98 • 0,552 ~ 2УЬи ь •
Принимаем коэффициент теплоотдачи k = 5 Вт/м2 -°C и определяем
разность температур масла и окружающего воздуха:
л/ _ N (’ ~’ll _ 2960(1-0,552) „ ор
Ш “ kS ~ 16-1,22
Обычно принимают температуру окружающего воздуха tB — 20° С,
в данном случае следует учесть повышение tB близ закалочной печи
на 5—10° С, но и при этом условии температура масла в редукторе
tM = tB + не превысит 90° С, что допустимо; дополнительных уст-
ройств, повышающих теплоотдачу, вводить
не требуется. Следует иметь в виду и то,
что тепловой расчет выполнен для самого
опасного случая — непрерывной работы на
режиме максимальной скорости конвейера за-
калочной печи.
Конструкция редуктора представлена на
рис. 16.19, спецификацию к чертежу см.
стр. 549.
Смазка редуктора
Смазка подшипников червяка 2 и вала 24
консистентная, выбираем универсальную туго-
плавкую смазку УТ-1.
Сорт масла для смазки зацепления обеих
червячных пар и подшипников червяка 39
выбираем по средней вязкости. В данном слу-
чае подходит масло трансмиссионное авто-
тракторное летнее.
Для защиты подшипника 41 от излишнего
попадания масла поставлено маслоотбойное
кольцо 40.
Рис. 16.18. Габаритные
размеры редуктора (к те-
пловому расчету)
544
545
18 Зак. 220
16.3. Значения интегралов Мора для различных участков вала (см. рис. 16.17)
Уча- сток Формула Численное значение
в ПЛОСКОСТИ XOZ в плоскости уог
Подстановка Результат Подстановка | Результат
1 O,147Ed| М*М* 15 0,147Е-404 -10‘-9,8 6,8 15 . 9.3.104. QR 9,0
Е 0,147£-404 'J’8 E
2 + м2 (2M's+M't)J 50 0,294Е.65И1>8-1°4(2-9-8 + 42>5)+ + 7,7 • 104 - (2 • 42,5 + 9,8)] 23,4 50 0.294Е-654 [2,3-Ю4(2.9,8+42,5) + +9,9-104 (2-42,5+9,8)] 102
Е E
3 • 6д/п [М, (2М;+М')+ +М2&М'2+М')] 75 177 . 104/9.49 5-LQ1 to_!_ 425 75 10 0.104/9.4 Q 5 J_O1 to I. 560
6£ • 146 • 104 *’* 1U 4Z,O-j-yi,b}-j- + 16. IO4-(2.91,6+42,5)] Е 6£ • 146-104 1U 1о,о Ь л,0)1- + 21,3- 104 (2 - 91,6 + 42,5) E
4 [М1(2М'1+М’2) + П+М2(2М'2 + М{)] 6/Гй 4 6- Тб4 16 ~104 <2 -91,6+65,5) + + 9,1 • 104 (2 • 65,5+91,6)] 480 75 Г74 3. Ю4 (9 . QI 6-UFL5 5’1-1. 1470
Е 6£ • 146 • 104 1,0 1V J-г о°»о> + + 44-3. 104 (2 - 65,5+91,6)] E
5 + Л42 <2Afa -J-Afj)] 75 О^Е.бб4'9’1-10^2-65’^39’6^ + 1,5-10«(2-39,6+69,5)] 254 75 144.4.104/9.05 5 I .RO to f 1840
Е 0 294£ • 654 |-vv,o)-|- +36,9 -104 (2 • 39,6 + 65,5)] E
6 о,жИ. т<2м;+ма+ + М2(2М'2 + М',)] 40 О,294£.6О4^5-1О4{2-39’6 + 29’9) -2,6- 104 (2 -25,9+39,6)] —8,5 40 т f.Rfi Q . 104 /9 . .RQ А 1 95 L 665
Е 0 294£ - 604 l°o,j ' J,D ’ ’ +27-Ю4(2-25,9+39,6)] E
7 + М2(2М'2 + М',)] Я5 0.294Е 604 t2’6 •104 (2 •35’9 + 13’8) -1,3-104 (2-13,8+25,9)] —22 35 Г99 9.104/9.95 0 U1QRX f 193
Е 0,294В-604 Ь-^10 rld,»)l- + 11,8 -104 (2-13,8+25,9)] E
8 0,147Ed4 M1Mi 40 ( 1 3 - 104- 1381 —19 40 173
0,147Е-404 ' ’ Е 0.147E-404 11,8 10 13,8 E
у С Л4ЛГ <4,^. 1 (6,8 + 23,4+ 425+ 488 + 254 - 8,5 - 22-19) 1148 fy = jT (9+ 102+ 560+ 1470+ 1840+ + 665+193+173) 4012
м J li Е E
1/ 11ДЯ2 Ц-40192 4160
f-m+fi= 1 Ш8£‘ мм= Условие f < [/] выполнено. l/J 2000 12 2000“ ~ 0,06 MM’
Примечания: Mt и М, — изгибающие моменты от действующих сил соответ- менты от единичной силы, приложенной в сечении I—I, в конце и в начале рассматривае- Приведенный момент инерции /пр для нарезанного участка вала определяется форму- ственно в начале и в конце рассматриваемого участка вала} 7W' и М' — изгибающие мо- мого участка вала. лой (5.37);
sid/o / 4„п \ Г =-45. 0,375 + 0.625 = по 64 \ т 4Й } 67 4* / 12 \ . -У— 0,375 + 0,625 -z-v = 146 • 10* мм*. 64 \ 6,/ J
546
547
1Б*
548
Рис. 16.19. Редуктор червячный двухступенчатый
Фор- мат Зона Поз. Обозначение Наименование Коли- чество Приме- чание
01 02 04 11 15 17 20 22 24 27 29 30 31 32 33 35 36 37 38 39 41 47 46 43 44 45 49 18 25 50 26 13 14 Документация Расчетно-пояснительная за- писка Сборочные единицы Редуктор чериячный двух- ступенчатый Детали Корпус редуктора Червяк, т = 5, q—Ю, z=4 Крышка подшипника Крышка корпуса Червячное колесо, т= 12, z=80 Кольцо мазеудерживающее Крышка подшипника Кольцо уплотнительное Вал ведомый Кольцо распорное Кольцо мазеудерживающее Маслоуказатель жезловый Прокладка регулировочная Прокладка регулировочная Стакан Гайка установочная М52Х1.5 Шайба предохранительная 0 52,5 Крышка подшипника Кольцо распорное Червячное колесо, т = 5, z = 32 Червяк, т = 12, q = 8, z = 1 Кольцо маслоотбойное Крышка подшипника Кольцо пружинное Прокладка уплотнительная Пробка маслоспускная М20 Прокладка уплотнительная Прокладка регулировочная Крышка подшипника Крышка подшипника Прокладка регулировочная Крышка люка Отдушина 1 1 1 1 1 2 1 1 1 2 2 1 Набор Набор 1 1 1 1 1 1 1 1 1 1 1 1 1 Набор 1 1 Набор 1 1
Изм. Лист № докум. Подп. Дата
Разраб. Редуктор двухсту- пенчатый чер- вячный привода конвейера Лит. Лист Листов
Пров. | |
Н. Контр.
Утв.
549
Продолжение
Фор- мат Зона Поз. Обозначение Наименование Коли- чество Приме- чание
12 5 19 51 48 6 9 7 10 3 40 23 16 8 34 21 28 42 Стандартные изделия Болт М8х20 ГОСТ 7798—70* Болт М12 X 28 ГОСТ 7798—70* Болт М14Х40 ГОСТ 7798— 70* Болт М16Х26 ГОСТ 7798— 70* Рым-болт М16 ГОСТ 4751— 73 Гайка М16 ГОСТ 5927 - 70* Гайка М20 ГОСТ 5927—70* Шпилька М16х60А1-1 Шпилька М20 х 140А1-К Шпонка 10 х 8 х 40 ГОСТ 8789—68* Шпонка 18x11x63 ГОСТ 8789—68* Шпонка 20 х 12 х 100 ГОСТ 8789—68* Шпонка 25 X 14 X 1Ю ГОСТ 8789—68* Штифт 8 х 40 ГОСТ 3129-70 Подшипник 7606Н ГОСТ 333—71 Подшипник 73 ЮН ГОСТ 333—71 Подшипник 7315 ГОСТ 333 7[ Подшипник 108 ГОСТ 8338— 75 4 12 20 4 2 8 4 4 4 1 1 1 1 2 2 2 2 1
Подбор вариатора
Основой для подбора вариатора служат необходимый для при-
вода диапазон Д регулирования и нагрузочная способность вариа-
тора.
Диапазон регулирования определяется заданным отношением ско-
ростей конвейера:
Д = ^=* 4.
Выше, при кинематическом расчете привода, передаточное отноше-
ние вариатора принимали iB = 1, следовательно, необходимо подби-
рать вариатор с симметричным регулированием и с Д 2== 4.
550
Нагрузочная способность вариатора определяется передаваемой
мощностью и моментом на его выходном валу, равным моменту на вход-
ном валу редуктора:
/И 2 • 10б
~ 8 - 30 - 0,552 = Ь5-104 Н-мм.
По этому моменту подходит цепной вариатор ВЦ-3 с Д — 4,5
(табл. 13.9).
Конструирование сварной рамы привода
Для конструирования сварной рамы необходимо знать габаритные
и установочные размеры электродвигателя, вариатора (они приво-
дятся в каталогах) и редуктора. Соответствующие размеры редуктора
получены в процессе его конструирования.
Взаимное расположение электродвигателя, вариатора и редуктора
определяется также размерами муфт, которые применены для соеди-
нения их валов.
Выбираем упругие втулочно-пальцевые муфты (табл. 14,8).
Момент на валу электродвигателя
.. Na 3200 „
Мэ — m — 100 — 32 Н-м,
(0э
где
= = 2720 =3200 в
Ивар 0,85
«тп» jt • 958 «
= 'зб' ~ зб~ = рад/с-
Момент на входном валу редуктора Л/1Б = 15 Н -м. С учетом диа-
метров валов электродвигателя (da = 35 мм), вариатора (dB = 38 мм)
и редуктора (d„ = 25 мм) принимаем муфту с передаваемым моментом
[Жр] = 240 Н -м.
Чтобы использовать эту муфту для соединения валов вариатора
и редуктора, требуется запрессовка специальной втулки в посадочное
отверстие той половины муфты, которая соединяется с валом редуктора.
Муфгга с [Л1р| = 55 Н -м более подходящая по передаваемому моменту,
однако диаметры валов электродвигателя и вариатора не позволяют
использовать эту муфту.
Проектирование рамы начинают со схематичного изображения
общего вида привода. На плане (рис. 16.20) отмечают очертания элект-
родвигателя, вариатора, редуктора, расположение их осей и фунда-
ментных отверстий. На второй проекции (рис. 16.21) вычерчивают рас-
положение всех объектов в вертикальной плоскости так, чтобы оси дви-
гателя, вариатора и первого вала редуктора располагались на одной
горизонтальной прямой. Наибольшее расстояние от этой прямой до
установочной плоскости имеет редуктор.
Чтобы обеспечить удобное расположение головок крепежных бол-
тов М20, выбираем для рамы швеллер № 14а. Расстояние между швел-
551
Рис. 16.20. Схематический чертеж привода в плане
Рис. 16.21. Сварная рама со схематичным расположением
на ней электродвигателя, вариатора и редуктора
Рис. 16.22. Сварная рама (вид сверху)
350
Е52
лерами в свету 270 мм (рис. 16.22) определяем в соответствии с разме-
ром 350 мм на чертеже редуктора и расположением осей отверстий под
болты на полках швеллеров. Для крепления средних болтов основания
редуктора ставим поперечные швеллеры такого же номера, они одно-
временно связывают два продольных швеллера.
Для установки вариатора ставим дополнительно два швеллера
№ 8, чтобы поднять вариатор на расчетную высоту; для установки
электродвигателя берем два швеллера № 12. Расстояние между швел-
лерами № 8 и № 12 определяется расположением отверстий под креп-
ление электродвигателя и вариатора на полках швеллеров.
В месте расположения отверстий под болты приваривают накладки:
под редуктор и вариатор накладки толщиной 10 мм, под электродви-
гатель — 8 мм. Это позволяет уровнять высоты.
Установка элементов привода на накладках позволяет после сварки
обработать их поверхность (прострогать или профрезеровать и устра-
нить перекосы, которые возникают вследствие деформации рамы в про-
цессе сварки).
В целях упрощения чертежа (рис. 16.22) сварные швы и обработка,
которую необходимо выполнить после сварки рамы, на чертеже не пока-
заны.
В спецификации к чертежу сварной рамы желательно для деталей
из сортового проката указывать форму проката (швеллер, сталь про-
катная угловая равнобокая и пр.) и его номер, а также длину, также
желательно приводить размеры деталей простейшей формы, например
длину, ширину и толщину прямоугольных накладок. Это позволяет
уменьшить число детальных чертежей, необходимых для изготовления
сварного узла.
ПРИЛОЖЕНИЯ
П1. Модификации электродвигателей единой серии
Габа- рит Электродвигатели с короткозамкнутым ротором Электро- двигатели с фазным ротором
с повы- шенным пусковым моментом с повы- шенным сколь- жением с переключением на частоты вращения с повы- шенными энергети- ческими показа- телями мало- шумные
две три че- тыре
1 2 3 АОС2, А0ЛС2 А02, АОЛ2 А02, А0Л2
А0Т2
А02, А0Л2
4 5 6 7 8 9 А0П2 А0С2 А02 А02 А02 А0К2
А02
АК2, А0К2
Примечание. Электродвигатели АО2 1—3-го габаритов (основного исполнения)
имеют повышенные значения пускового момента на уровне требований электродвигателей
АОП2.
П2. Номинальные мощности и частоты вращения электродвигателей А2 и А02
Тип электродвигателя Мощность иа валу, кВт, при снихрониой частоте вращения, об/мин
3000 1500 1000 750
Защищенное ис полнение А2
А2-61 17 13 10 7,5
А2-62 22 17 13 10
A2-7I 30 22 17 13
А2-72 40 30 22 17
А2-81 55 40 30 22
А2-82 75 55 40 30
А2-91 100 75 55 40
А2-92 125 100 75 55
Закрытое обдуваемое исполнение А02 и АОЛ2
А02, АОЛ2-11 0,8 0,6 0,4
А02, АОЛ2-12 1,1 0,8 0,6
А02, АОЛ2-21 1,5 1,1 0,8
А02, АОЛ2-22 2,2 1,5 1,1
А02, АОЛ2-31 3,0 2,2 1,5
А02, АОЛ2-32 4,0 3,0 2,2
554
Продолжение табл. П2
Тип электродвигателя Мощность на валу, кВт, при синхронной частоте вращения, об/мии
3000 1500 1000 750
АО2-41 5,5 4,0 3,0 2,2
АО2-42 7,5 5,5 4,0 3,0
АО2-51 10 7,5 5,5 4,0
АО2-52 13 10 7,5 5,5
АО2-61 — 13 10 7,5
АО2-62 17 17 13 10
АО2-71 22 22 17 13
АО2-72 30 30 22 17
АО2-81 40 40 30 22
АО2-82 55 55 40 30
АО2-91 75 75 55 40
АО2-92 100 100 75 55
ПЗ. Асинхронные электродвигатели А2 защищенные, станина
и щиты чугунные
Тнп электро- двигателя Номинальная мощность, кВт Частота вращения, об/мин ^пуск ^ном р ! С Я Маховой момент ротора, кгс • м8
А2-61-2 А2-62-2 А2-71-2 А2-72-2 А2-81-2 А2-82-2 А2-91-2 А2-92-2 А2-61-4 А2-62-4 А2-71-4 А2-72-4 А2-81-4 А2-82-4 А2-91-4 А2-92-4 А2-61-6 А2-62-6 А2-71-6 А2-72-6 А2-81-6 А2-82-6 А2-91-6 А2-92-6 А2-61-8 А2-62-8 17 22 30 40 55 75 100 125 13 17 22 30 40 55 75 100 10 13 17 22 30 40 55 75 7,5 10 2900 1,2 2,2 0,25 0,28 0,38 0,47 0,88 1,0 2,0 2,4 0,4 0,5 0,7 0,96 1,5 2,0 3,5 4,3 0,7 0,9 1,3 1,6 2,7 3,5 6,2 8,4 0,7 0,9
1,1
1,0
2920
1450 1,3 2,0
1455 1,2
1460 1,1
1470
965 1,2 1,8
970 1,1
980
725 1,2 1,7
655
Продолжение табл. ПЗ
Тип электро- двигателя Номинальная мощность, кВт Частота вращения, об/мин ^пуск ^тах Маховой момент ротора, кгс • м2
^ном ^иом
А2-71-8 А2-72-8 А2-81-8 А2-82-8 А2-91-8 А2-92-8 13 17 22 30 40 55 1,1 1,7 1,3 1,6 2,7 3,5 6,2 8,4
730
П4. Асинхронные электродвигатели АО2, закрытые обдуваемые,
станина и щиты чугунные и из алюминиевого сплава (А0Л2)
Тип электро- двигателя Номинальная мощность, кВт Частота вращения, об/мин ^пуск ^ном & = а О в> г х Маховой момент ротора, кгс - м2
АО2-11-2 АО2-12-2 АО2-21-2 АО2-22-2 АО2-31-2 АО2-32-2 АО2-41-2 АО2-42-2 АО2-51-2 ДО2-52-2 АО2-62-2 АО2-71-2 АО2-72-2 АО2-81-2 АО2-82-2 АО2-91-2 АО2-92-2 АО2-11-4 АО2-12-4 АО2-21-4 АО2-22-4 АО2-31-4 АО2-32-4 АО2-41-4 АО2-42-4 0,8 1,1 1,5 2,2 3,0 4,0 5,5 7,5 10 13 17 22 30 40 55 75 100 0,6 0,8 1,1 1,5 2,2 3,0 4,0 5,5 2815 1,9 2,2 0,0051 0,0060 0,011 0,014 0,033 0,041 0,076 0,098 0,015 0,18 0,3 0,46 0,55 1,1 1,3 2,5 3,0 0,007 0,0084 0,017 0,022 0,040 0.050 0,094 0,12
2860 1,8
2880 1,7
2900 2910 1,6
2900 1,5
1,2
1,1
2920 1,0
2940
1360 1,8
1400
1430
1450 1,5 2,0
556
Продолжение табл. П4
Тип электро- двигателя Номинальная мощность, кВт Частота вращения, об/мин № пуск ^max Маховой момент ротора, кгс - м8
MflOM Л< НОМ
АО2-51-4 А02-52-4 АО2-61-4 АО2-62-4 АО2-71-4 АО2-72-4 АО2-81-4 АО2-82-4 АО2-91-4 АО2-92-4 АО2-11-6 АО2-12-6 АО2-21-6 АО2-22-6 АО2-31-6 АО2-32-6 АО2-41-6 АО2-42-6 АО2-51-6 АО2-52-6 АО2-61-6 АО2-62-6 АО2-71-6 АО2-72-6 АО2-81-6 АО2-82-6 АО2-91-6 АО2-92-6 АО2-41-8 АО2-42-8 АО2-51-8 АО2-52-8 АО2-61-8 АО2-62-8 АО2-71-8 АО2-72-8 АО2-81-8 АО2-82-8 АО2-91-8 Л02-92-8 7,5 10 13 17 22 30 40 55 75 100 0,4 0,6 0,8 1,1 1,5 2,2 3,0 4,0 5,5 7,5 10 13 17 22 30 40 55 75 2,2 3,0 4,0 5,5 7,5 10 13 17 22 30 40 55 1450 1,4 2,0 0,23 0,28 0,45 0,55 1,0 1,2 2,1 2,7 4,9 6,4 0,0079 0,0089 0,019 0,024 0,054 0,068 0,13 0,17 0,33 0,44 0,85 1,0 1,6 2,0 3,6 4,7 8,6 11,0 0,13 0,17 0,33 0,44 0,85 1,0 1,6 2,0 3,6 4,7 8,6 11,0
1,3
1455 1,2
1460 1,1 2,0
1470
915 1,8 2,2
930
950
960 1,3 1,8
970
1,2
980 1,1
985
720 1,2 1,7
725
1,1
730
740
057
П5. Номинальные мощности и частоты вращения электродвигателей АОП2
Типоразмер электродвигателя Мощность на валу, кВт, при синхронной частоте вращения, об/мин
1600 1000 750 600
АОП2-41 4,0 3,0 2,2
АОП2-42 5,5 4,0 3,0
АОП2-51 7,5 5,5 4,0
АОП2-52 10 7,5 5,5
АОП2-6! 13 10 7,5 —,
АОП2-62 17 13 10
АОП2-71 22 17 13
АОП2-72 30 22 17
АОП2-81 40 30 22 17
АОП2-82 55 40 30 22
АОП2-91 75 55 40 30
АОП2-92 100 75 55 40
П6. Асинхронные электродвигатели АОП2 с повышенным пусковым
моментом, закрытые, обдуваемые, станина и щиты чугунные
Тип электродвигателя Номинальная мощность, кВт Частота вращения к я & § е а= 5 & * s 5 о в» 2 И Маховой момент ротора, кгс • м8
АОП2-41-4 АОП2-42-4 АОП2-51-4 АОП2-52-4 АОП2-61-4 АОП2-62-4 АОП2-71-4 АОП2-72-4 АОП2-81-4 АОП2-82-4 АОП2-91-4 АОП2-92-4 АОП2-41-6 АОП2-42-6 АОП2-51-6 АОП2-52-6 АОП2-61-6 АОП2-62-6 АОП2-71-6 АОП2-72-6 АОП2-81-6 АОП2-82-6 АОП2-91-6 АОП2-92-6 АОП2-41-8 АОП2-42-8 АОП2-51-8 АОП2-52-8 4,0 5,5 7,5 10 13 17 22 30 40 55 75 100 3,0 4,0 5,5 7,5 10 13 17 22 30 40 55 75 2,2 3,0 4,0 5,5 1440 1,8 2,2 0,094 0,12 0,23 0,28 0,40 0,48 1,0 1,2 2,1 2,7 4,9 6,4 0,13 0,17 0,33 0,44 0,72 0,91 1,6 2,0 3,6 4,7 8,6 11,0 0,13 0,17 0,33 0,44
1450
1470
1480
955
970
980
710 1,7
Б58
Продолжение табл. П6
Тип электродвигателя Номинальная мощность, кВт Частота вращения а х = s я Й * s 3 о м S X Маховой момент ротора, кгс м2
АОП2-61-8 АОП2-62-8 АОП2-71-8 АОП2-72-8 АОП2-81-8 АОП2-82-8 АОП2-91-8 АОП2-92-8 7,5 10 13 17 22 30 40 55 720 1,7 2,2 0,72 0,91 1,6 2,0 3,6 4,7 8,6 н,о
730
735
740
П7. Асинхронные электродвигатели АОТ2
Тип электродв игател я N, кВт Л, об/мин Л,пуск ^шах GD2, кгс - м2
^ном ^ИОМ
АОТ2-21-4 АОТ2-22-4 АОТ2-31-4 АОТ2-32-4 АОТ2-41-4 АОТ2-42-4 АОТ2-51-4 АОТ2-52-4 АОТ2-61-4 АОТ2-62-4 АОТ2-71-4 АОТ2-72-4 АОТ2-21-6 АОТ2-22-6 АОТ2-31-6 АОТ2-32-6 АОТ2-41-6 АОТ2-42-6 АОТ2-51-6 АОТ2-52-6 АОТ2-61-6 АОТ2-62-6 АОТ2-71-6 АОТ2-72-6 АОТ2-41-8 АОТ2-42-8 АОТ2-51-8 АОТ2-52-8 АОТ2-61-8 АОТ2-62-8 АОТ2-71-8 АОТ2-72-8 0,8 1,1 1,5 2,2 3,0 4,0 5,5 7,5 10 13 17 22 0,6 0,8 1,1 1,5 2,2 3,0 4,0 5,5 7,5 10 13 17 1,5 2,2 3,0 4,0 5,5 7,5 10 13 1420 1,7 2,0 0,017 0,022 0,040 0,050 0,094 0,12 0,23 0,28 0,45 0,55 1,0 1,2 0,019 0,024 0,054 0,068 0,13 0,17 0,33 0,44 0,85 1,0 1,6 2,0 0,13 0,17 0,33 0,44 0,85 1,0 1 1,6 2,0 1
1430
1460
920 1,8
950
970
730 1,5 1,7
559
П8. Номинальные мощности и частоты вращения электродвигателей АОС2
при номинальном повторно-кратковременном режиме работы ПВ — 25%
Типоразмер электро- двигателя Мощность на валу, кВт, при синхронной частоте вращения, об/мнн
3000 1500 1000 750 600
АОС2-11 0,9 0,6 0,4
АОС2-12 1,3 0,9 0,6
АОС2-21 1,8 1,3 1,0
АОС2-22 2,5 2,0 1,3
АОС2-31 3,5 3,0 2,0
АОС2-32 4,8 4,0 2,7
АОС2-41 6,8 5,2 4,0 3,0
АОС2-42 9,0 7,5 4,7 3,5
АОС2-51 11,0 9,4 7,0 5,0
АОС2-52 13,0 12,0 9,0 6,4
АОС2-61 14,5 12,5 10,0
АОС2-62 18,5 15,5 12,5
АОС2-71 22,0 19,0 15,0
АОС2-72 27,0 23,0 18,0
АОС2-81 — 40,0 33,0 27,5 19,8
АОС2-82 47,0 40,0 33,0 24,3
АОС2-91 58,0 50,0 42,0 31,6
АОС2-92 77,0 68,0 58,0 37,9
П9. Асинхронные электродвигатели АОС2 с повышенным скольжением,
закрытые, обдуваемые, станина и щиты чугунные (АОС2)
и из алюминиевого сплава (АОЛС2)
Тип электро- двигателя Номи- нальная мощность при ПВ=25%, кВт ^пуск ^ном ^тах Наибольшая допустимая мощность, кВт, прн продолжительности включения ПВ, % Маховой момент ротора, кгс • м2
^ном 15 40 60 100
АОС2-11-2 0,9 1,1 0,9 0,8 0,8 0,0051
АОС2-12-2 1,3 1,6 1,3 1,3 1,1 0,0060
АОС2-21-2 1,8 2,0 1,6 1,5 1,5 0,011
АОС2-22-2 2,5 2,7 2,1 2,0 2,0 0,014
АОС2-31-2 3,5 2,2 2,4 4,6 3,4 3,0 2,8 0,033
АОС2-32-2 4,8 6,5 4,7 4,3 3,8 0,041
АОС2-41-2 6,8 8,6 6,3 5,7 5,0 0,076
АОС2-42-2 9,0 11,3 8,3 7,2 6,5 0,098
АОС2-51-2 11,0 14,0 10,0 8,8 8,3 0,16
АОС2-52-2 13,0 16,4 11,8 10,7 10,0 0,20
560
Продолжение табл. П9
Тип электро- двигателя Номи- нальная мощность при ПВ = 25%, кВт ^пуск ^ном Л,тах Наибольшая допустимая мощность, кВт, прн продолжительности включения ПВ, % Маховой момент ротора, кгс • м2
^ном 15 40 60 100
АОС2-Н-4 АОС2-12-4 АОС2-21-4 АОС2-22-4 АОС2-31-4 АОС2-32-4 АОС2-41-4 АОС2-42-4 АОС2-51-4 АОС2-52-4 АОС2-61-4 АОС2-62-4 АОС2-71-4 АОС2-72-4 АОС2-81-4 АОС2-82-4 АОС2-91-4 АОС2-92-4 АОС2-11-6 АОС2-12-6 АОС2-21-6 АОС2-22-6 АОС2-31-6 АОС2-32-6 АОС2-41-6 АОС2-42-6 АОС2-51-6 АОС2-52-6 АОС2-61-6 АОС2-62-6 АОС2-71-6 АОС2-72-6 АОС2-81-6 АОС2-82-6 АОС2-91-6 АОС2-92-6 АОС2-41-8 АОС2-42-8 АОС2-51-8 АОС2-52-8 АОС2-61-8 АОС2-62-8 АОС2-71-8 АОС2-72-8 АОС2-81-8 АОС2-82-8 АОС2-91-8 АОС2-92-8 0,6 0,9 1,3 2,0 зХ> 4,0 5,2 7,5 9,4 12,0 14,5 18,5 22,0 27,0 40,0 47,0 58,0 77,0 0,4 0,6 1,0 1,3 2,0 2,7 4,0 4,7 7,0 9,0 12,5 15,5 19,0 23,0 33,0 40,0 50,0 68,0 3,0 3,5 5,0 6,4 10,0 12,5 15,0 18,0 27,5 33,0 42,0 58,0 2,0 2,3 0,8 1,1 1,4 2,3 4,1 5,0 6,2 8,5 11,0 14,0 17,0 23,0 25,0 30,0 42,0 50,0 69,0 92,0 0,5 0,7 1,1 1,5 2,6 3,5 4,8 5,9 7,8 11,0 15,0 18,5 22,0 26,0 37,0 45,0 59,0 80,0 3,5 4,1 6,1 8,3 11,0 15,0 18,0 21,5 31,0 38,0 50,0 68,5 0,6 0,9 1,2 1,8 3,0 3,6 4,8 6,0 8,0 9,6 12,5 16,5 20,0 24,0 36,0 43,0 52,5 69,0 0,4 0,6 0,9 1,2 2,0 2,5 3,4 4,0 5,4 7,7 11,0 14,0 17,0 20,5 29,0 35,0 42,5 58,0 2,5 3,1 4,4 6,0 8,5 11,0 13,0 16,0 24,5 29,0 36,0 49,5 0,6 0,9 1,1 1,8 2,6 3,2 4,3 5,5 6,8 9,6 10,5 14,5 18,0 22,0 33,0 40,0 47,0 62,5 0,4 0,6 0,8 1,0 1,7 2,2 2,9 3,4 4,8 6,6 9,5 12,5 15,5 19,0 26,0 31,5 38,0 52,0 1,9 2,5 3,7 5,1 7,5 9,5 11,5 14,0 22,0 26,0 32,5 45,0 0,5 0,7 1,0 1,4 2,1 2,6 3,7 4,8 6,2 7,8 9,0 13,0 16,5 20,0 30,0 36,0 45,0 62,5 0,4 0,5 0,65 0,9 1,4 1,6 2,1 2,7 4,1 5,8 8,5 10,0 14,0 16,0 22,0 27,0 36,5 50,0 1,5 1,9 3,0 4,4 6,5 8,0 10,0 12,0 19,0 23,0 29,0 40,0 0,007 0,0084 0,017 0,022 0,040 0,050 0,094 0,12 0,25 0,30 0,50 0,58 1,0 1,2 2,1 2,7 4,9 6,4 0,0079 0,089 0,019 0,024 0,054 0,063 0,13 0,17 0,37 0,50 0,85 1,0 1,6 2,0 3,6 4,7 8,6 11,0 0,13 0,17 0,37 0,50 0,85 1,0 1,6 2,0 3,6 4,7 8,6 11,0
1,8 2,2
2,0
561
Продолжение табл. П9
Тип электро- двигателя Номи- нальная мощность прн ПВ = 25%, кВт ^пуск ^ном Л,тах Наибольшая допустимая мощность, кВт, прн продолжительности включения ПВ, % Маховой момент ротора, кгс • м2
^ном 15 40 60 100
АОС2-Н-4 АОС2-12-4 АОС2-21-4 АОС2-22-4 АОС2-31-4 АОС2-32-4 АОС2-41-4 АОС2-42-4 АОС2-51-4 АОС2-52-4 АОС2-61-4 АОС2-62-4 АОС2-71-4 АОС2-72-4 АОС2-81-4 АОС2-82-4 АОС2-91-4 АОС2-92-4 АОС2-11-6 АОС2-12-6 АОС2-21-6 АОС2-22-6 АОС2-31-6 АОС2-32-6 АОС2-41-6 АОС2-42-6 АОС2-51-6 АОС2-52-6 АОС2-61-6 АОС2-62-6 АОС2-71-6 АОС2-72-6 АОС2-81-6 АОС2-82-6 АОС2-91-6 АОС2-92-6 АОС2-41-8 АОС2-42-8 АОС2-51-8 АОС2-52-8 АОС2-61-8 АОС2-62-8 АОС2-71-8 АОС2-72-8 АОС2-81-8 АОС2-82-8 АОС2-91-8 АОС2-92-8 0,6 0,9 1,3 2,0 зХ> 4,0 5,2 7,5 9,4 12,0 14,5 18,5 22,0 27,0 40,0 47,0 58,0 77,0 0,4 0,6 1,0 1,3 2,0 2,7 4,0 4,7 7,0 9,0 12,5 15,5 19,0 23,0 33,0 40,0 50,0 68,0 3,0 3,5 5,0 6,4 10,0 12,5 15,0 18,0 27,5 33,0 42,0 58,0 2,0 2,3 0,8 1,1 1,4 2,3 4,1 5,0 6,2 8,5 11,0 14,0 17,0 23,0 25,0 30,0 42,0 50,0 69,0 92,0 0,5 0,7 1,1 1,5 2,6 3,5 4,8 5,9 7,8 11,0 15,0 18,5 22,0 26,0 37,0 45,0 59,0 80,0 3,5 4,1 6,1 8,3 11,0 15,0 18,0 21,5 31,0 38,0 50,0 68,5 0,6 0,9 1,2 1,8 3,0 3,6 4,8 6,0 8,0 9,6 12,5 16,5 20,0 24,0 36,0 43,0 52,5 69,0 0,4 0,6 0,9 1,2 2,0 2,5 3,4 4,0 5,4 7,7 11,0 14,0 17,0 20,5 29,0 35,0 42,5 58,0 2,5 3,1 4,4 6,0 8,5 11,0 13,0 16,0 24,5 29,0 36,0 49,5 0,6 0,9 1,1 1,8 2,6 3,2 4,3 5,5 6,8 9,6 10,5 14,5 18,0 22,0 33,0 40,0 47,0 62,5 0,4 0,6 0,8 1,0 1,7 2,2 2,9 3,4 4,8 6,6 9,5 12,5 15,5 19,0 26,0 31,5 38,0 52,0 1,9 2,5 3,7 5,1 7,5 9,5 11,5 14,0 22,0 26,0 32,5 45,0 0,5 0,7 1,0 1,4 2,1 2,6 3,7 4,8 6,2 7,8 9,0 13,0 16,5 20,0 30,0 36,0 45,0 62,5 0,4 0,5 0,65 0,9 1,4 1,6 2,1 2,7 4,1 5,8 8,5 10,0 14,0 16,0 22,0 27,0 36,5 50,0 1,5 1,9 3,0 4,4 6,5 8,0 10,0 12,0 19,0 23,0 29,0 40,0 0,007 0,0084 0,017 0,022 0,040 0,050 0,094 0,12 0,25 0,30 0,50 0,58 1,0 1,2 2,1 2,7 4,9 6,4 0,0079 0,089 0,019 0,024 0,054 0,063 0,13 0,17 0,37 0,50 0,85 1,0 1,6 2,0 3,6 4,7 8,6 11,0 0,13 0,17 0,37 0,50 0,85 1,0 1,6 2,0 3,6 4,7 8,6 11,0
1,8 2,2
2,0
561
П10. Размеры электродвигателей А2 6—9-го габаритов; формы исполнения М101 и M101ZZ
Тип электро- двигателя В, В4 С С2 £>1 d dt dt н h hz L Lt L, I h Масса, кг
А2-61 345 275 139,5 101,5 242 368 42 38 14 410 180 22 558 265 216,5 110 80 128
А2-62 120,5 596 300 235,5 144
А2-71 393 313 159 114 265 433 48 42 18 461 200 25 601 239 110 110 166
А2-72 133,5 640 335 258,5 198
А2-81 А2-82 491 373 203 155,5 174,5 318 488 60 48 22 551 250 30 784 822 390 430 290,5 318,5 140 110 29 345
А2-91 А2-92 552 408 228,5 184 209,5 358 564 70 60 627 280 35 894 944 460 510 357 383 140 140 455 510
564
П12. Размеры электродвигателей А2 6 — 7-го габаритов; формы исполнения М301 и M301ZZ
П13. Размеры электродвигателей АО2 и их модификаций 1 — 5-го габаритов; формы исполнения Ml00 и M100ZZ
Тип элект- родвигате- ля в, С Cs С, d dz dt Н Л hz L Л, ^-e A? I h Мас- са, кг
АО2-11 АО2-12 183 155 04 70 50 62,5 126 18 14 9 90 10 298 323 135 160 102,5 115 43,5 56 104 40 30 17,5 19,2
АО2-21 АО2-22 208 167 106 80 56 70 137 22 18 100 12 336 365 157 185 114 128 55 63 113 50 40 23,5 22,5
АО2-31 243 185 122 95 57 160 28 22 12 266 112 14 374 162 124 63 70 132 60 50 35
АО2-32 70 400 188 137 43
АО2-41 274 222 143 108 183 32 28 310 132 468 186 154 89 161 70 60 62
АО2-42 89 506 224 173 85 74
АО2-51 318 238 165 127 213 38 32 361 160 18 546 227 192 108 179 80 80 95
АО2-52 105 14 576 259 208 ПО
565
566
П14. Размеры электродвигателей А02 6 — 9-го габаритов; формы исполнения М100 я M100ZZ
се
L,~В,
Размеры, мм
Т ип элект- родвига- теля Вт С с, с. D, d d, dt н h h. L Lt L. L, I Мас- са, кг
АО2-61 АО2-62 АО2-7] АО2-72 АО2-81 АО2-82 АО2-91 АО2-92 345 275 139,5 101,5 120,5 114 133,5 155,5 174,5 184 209,5 242 384 42 38 14 410 180 22 629 667 655 693 850 888 970 1025 300 300 335 390 430 460 510 216,5 235,5 239 258,5 299,5 318,5 357 383 116 110 80 143 165 208 236 335 415 530 640
393 313 159 265 448 48 42 18 461 200 25 118 110
491 373 203 318 520 60 48 22 551 250 30 164 140
552 408 228,5 358 598 70 60 22 627 280 35 157 140
Ш5. Размеры электродвигателей А02 и их модификации 1 — 5-го габаритов; формы исполнения М200 и M200ZZ
L
В,
Размеры, мм
Тип элект- родвига- теля В, С С„ С. Dz D, £>4 d d, d. di H h ht h. h. L ^-X4 I h R Мас- са, кг
АО2-11 АО2-12 АО2-21 АО2-22 АО2-31 АО2-32 АО2-41 АО2-42 АО2-51 АО2-52 183 155 70 50 62,5 56 70 57 126 200 130 165 18 14 9 11,5 — 90 10 12 4 298 323 336 365 374 400 468 506 546 576 135 160 157 185 162 188 186 224 227 259 106 118,5 119 133 127 140 159 178 197 213 40 30 160 18,6 21 24,6 29 38 45,5 65 77 102 117
208 167 80 137 22 18 12 100 12 50 40
243 185 95 160 250 180 215 28 22 14 266 112 14 14 60 50 155
70
274 222 108 183 300 230 265 32 28 310 132 16 80 60 185
89
318 238 127 213 350 250 300 38 32 14 18 361 160 18 18 5 80 265
105
567
568
П16. Размеры электродвигателей А02 и их модификаций 6—9-го габаритов; формы исполнения М200 и M200ZZ
~Се
Размеры, мм
Тип электродвигателя В, В. С сг с. Ds Ds Dt d d% <4 H h hi L I 4 Число отвер- стий Масса, кг
АО2-61 АО2-62 345 275 139,5 101,5 120,5 242 384 350 250 300 42 38 14 410 180 22 20 629 667 265 222,5 241,5 110 80 4 151 173
АО2-71 АО2-72 393 313 150 114 133,5 265 448 450 350 400 48 42 18 461 200 25 655 693 300 335 247 226,5 110 220 249
АО2-81 АО2-82 491 373 203 155,5 174,5 318 520 550 450 500 60 48 22 551 250 30 22 850 888 390 430 323,5 342,5 140 8 344 434
АО2-91 АО2-92 552 408 228,5 184 209,5 358 598 550 450 500 70 60 22 627 280 35 970 1025 460 510 374 398,5 140 550 660
Примечание. Для всех двигателей = 18 мм; he = 5 мм.
П17. Размеры электродвигателей А02 и их модификаций 1—5-го габаритов; формы исполнения М300 и 1W300ZZ
Размеры, мм
Тип элек- тродвига- теля В4 в, с. D, о2 D„ £>„ d d. Лв Л. L Lu, Ll7 I /г Г R Масса, кг
АО2-11 АО2-12 155 180 126 197 200 200 130 130 165 165 18 14 11,5 12 298 323 106 118,5 260 285 316 342 40 30 160 17,8 19,3
АО2-21 АО2-22 167 137 221 200 200 130 130 165 165 22 18 4 336 365 119 133 50 40 40 24 28
АО2-31 АО2-32 185 235 160 253 250 180 215 28 22 14 14 374 400 127 140 60 50 155 35 42
АО2-41 АО2-42 222 280 183 295 300 230 265 32 28 468 506 159 178 390 428 80 60 45 185 62 74
АО2-51 АО2-52 238 315 213 339 350 250 300 38 32 18 18 5 546 576 197 213 465 497 80 55 265 95 НО
569
570
П18. Размеры электродвигателей АО2 и их модификаций 6—7-го габаритов; формы исполнения МЗОО и M300ZZ
Размеры, мм
Тип электро- двигателя в. в» Dt D, в. d а. Л. L Lt. ^*17 Число отвер- стий dt Масса, кг
АО2-61 АО2-62 275 192 410 242 384 350 250 300 42 38 20 629 637 222,5 241,5 519 557 80 4 143 154
АО2-71 А 02-72 313 224 487 265 448 450 350 400 48 42 22 655 693 247 266,5 551 590 ПО 8 208 236
Примечание. Для всех двигателей de = 18 мм; he = 5 мм; 7=110 мм.
П19. Размеры электродвигателей АО2 8—9-го габаритов; формы исполнения ГЛ302 и M302ZZ (МЗОЗ и M303ZZ)
Вид Б
гг°зп'
Bomidc
Размеры, мм
Тип электро- двигателя в* в. в. с. Dt d d, L Ltl ^17 Масса, кг
АО2-81 АО2-82 373 260 569 318 520 60 48 850 888 323,5 342,5 719 757 110 345 425
АО2-91 АО2-92 408 299 665 358 598 70 60 970 1025 374 398,5 838 887 140 542 652
Примечание. Для всех двигателей £>а — 550 мм; D3 = 450 мм; D, = 500; zf, — 18 мм; йа = 22 мм; ht — 5 мм; I = 140 мм.
571
572
П20. Размеры электродвигателей А0Л2 1—2-го габаритов (формы исполнения М100 и M100ZZ) и А0Л2 3-го габарита
(формы исполнения М101 и M101ZZ)
Размеры, мм
Тип электро- двигателя С с2 С, d 6?2 Hi h hs L Lt L, I ^2 Масса, кг
АОЛ2-11 АОЛ2-12 АОЛ2-21 АОЛ2-22 АОЛ 2-31 АОЛ2-32 172 146 88 70 50 62,5 56 70 57 70 117 18 14 9 183 90 16 292 317 328 356 361 387 132 157 146 174 168 194 104 117 115 129 124 137 40 30 11 12,4 16,3 19,8 26 31
194 150 98 80 125 22 18 12 203 100 17 50 40
244 172 118 95 150 28 22 12 235 112 18 60 50
П21. Размеры электродвигателей А0Л2 1—2-го габаритов (формы исполнения М200 и M200ZZ)
и А0Л2 3-го габарита (формы исполнения М201 и M201ZZ)
L
О*
Сц
Размеры, мм
Тип электро- двигателя в» в4 С Сг С. Dt d4 d da de na h /12 L Lt Д14 I 1г R Мас- са, кг
АОЛ2-11 АОЛ2-12 АОЛ 2-21 АОЛ2-22 АОЛ2-31 АОЛ2-32 172 146 70 50 62,5 56 70 57 70 117 200 130 165 18 14 9 11,5 183 90 16 12 292 317 328 356 361 387 132 157 146 174 168 194 106 118,5 119 133 127 140 40 30 180 11,7 13,1 18,1 21,7 27 32
194 150 80 125 22 18 12 203 100 17 50 40 145
244 172 95 150 250 180 215 28 22 14 235 112 18 14 60 50 155
Примечание. Для всех двигателей Л, = 4 мм.
573
574
П22. Размеры электродвигателей А0Л2 I—3-го габаритов; формы исполнения М300 и M300ZZ
Тип электро- двигателя В, С. О, о2 Da D. а <?• л. L £•1? 1 Г R М ас- са» кг
АОЛ2-11 АОЛ2-12 АОЛ 2-21 АОЛ2-22 АОЛ2-31 АОЛ 2-32 146 174 117 185 200 130 165 18 14 11,5 12 292 317 328 356 361 387 106 118,5 119 133 127 140 258 283 286 40 30 17,5 180 И,2 12,6 17,5 21 25 30
150 180 125 206 22 18 50 40 145
314
172 235 150 245 250 180 215 28 22 14 14 60 50 40 155
340
Примечание. Для всех двигателей he — 4 мм.
П23. Шкивы, муфты, салазки и фундаментные болты. Размеры, мм
Твп двигателя Синхронная частота вра- щения, об/мин Шкивы Муфта Салазки Болт фунда- ментный
Для плоских ремней Для клиновых ремней
Диаметр Ширина Диаметр Ширина Сечение Число ремней
АО2-11, АОЛ2-11 АО2-12, АОЛ2-12 3000, <500, 1000 100 50 90 28 0 2 МУВП 1-18 С2-1 Ф2-1
40 3
АО2-21, АОЛ2-21 125 60 100 36 А 2 МУВП 1-22 С2-2 Ф2-2
АО2-22, АОЛ2-22 52 3
АО2-31, АОЛ2-31 140 85 125 52 А 3 МУВП 1-28 С2-3 Ф2-3
АО2-32, АОЛ2-32 68 4
АО2-41 3000, 1500, 1000, 750 160 125 160 65 Б 3 МУВП 1-32 С2-4 Ф2-4
АО2-42 85 4
АО2-51 200 150 200 105 Б 4 МУВП 1-38 С2-5 Ф2-5
АО2-52 5
А2-61, АО2-61 224 112 В 4 М2-6 С2-6 Ф2-6
А2-62, АО2-62 280
А2-71, АО2-71 280 250 М2-7 С2-7 Ф2-7
А2-72, АО2-72 360 164 236 6 8
А2-81, АО2-81 3000, 1500, 1000, 750, 600 315 224 315 Г М2-8-1, М2-8-2 С2-8 Ф2-8
А2-82, АО2-82 400
А2-91, АО2-91 250 400 М2-9-1, М2-9-2 С2-9 Ф2-9
А2-92, АО2-92 500 310
575
П24. Салазки для электродвигателей
Тип салазок а L 2С, d% Л1 6 Масса ком- плектов салазок, КГ Болты для крепления двигателя
С2-1 14 40 360 290 330 10 M8 11 32 40 43 3,3 М8х35
С2-2 385 315 350 M10 13 35 43 55 3,8 М10Х35
С2-3 16 52 425 355 390 12 M12 36 46 4,2
С2-4 490 410 455 18 46 56 57 6,5 М10Х40
С2-5 20 60 570 480 530 22 55 66 65 11,3 М12х40
С2-6 23 65 650 500 600 14 M16 18 50 62 75 14,4 М12Х45
С2-7 29 75 750 580 690 18 20 55 70 90 18,6 М16Х55
С2-8 С2-9 35 38 90 105 870 950 700 780 810 890 24 M20 24 26 65 70 80 88 105 125 32,4 44 М20Х70
Примечание. Комплект состоит из двух салазок.
П25. Фундаментные болты
Размеры, мм
Тип фундаментных болтов di Zj 1 1г т Масса 1 шт., кг
Ф2-1 Ф2-2, Ф2-3, Ф2-4 М8 М10 55 25 125 16 18 0,07 0,09
Ф2-5 М12 70 160 24 0,16
Ф2-6 60 200 25 0,2
Ф2-7 М16 80 40 320 30 0,4
Ф2-8 М20 100 45 38 0,63
Ф2-9 113 56 320 0,8
Примечание. Допускается применение фундаментного болта Ф2-9 вместо Ф2-8.
576
П26. Шарикоподшипники радиальные однорядные (по ГОСТ 8338—75)
Г
1 * '
ж? LI
t+^
D
F ’азмеры, мм
Грузоподъемность, кгс
Условное
обозначение а D В динамиче- статическая
подшипников ская С Со
Особолегкая серия 100
100 10 26 360 200
101 1.2 28 8 0,5 400 227
104 20 42 736 454
105 25 47 12 1,0 790 504
106 30 55 13 1040 702
107 35 62 14 1250 866
108 40 68 15 1.5 1320 945
109 45 75 1650
НО 50 80 16 1630 1240
111 55 90 2220 1730
112 60 95 18 2410 1850
113 65 100 2400 2000
114 70 ПО 2 3030
115 75 115 20 ЗОЮ 2460
116 80 125 3740
117 85 130 22 3710 3190
118 90 140 2,5 3110
119 95 145 24 4080 3570
120 100 150 4230 3830
Легкая серия 200
200 10 30 9 469 266
201 12 32 10 1 478 270
202 15 35 11 1 597 354
203 17 40 12 752 447
204 20 47 14 1000 630
205 25 52 15 1,5 1100 709
206 30 62 16 1530 1020
207 35 72 17 2010 1390
208 40 80 18 2 2560
209 45 85 19 1810
210 50 90 20 2570 2020
19 Зак. 220
577
Продолжение табл. П26
Условное обозначение подшипников d D В Г Грузоподъемность, кгс
динамиче- ская С статическая Со
211 55 100 21 3400 2560
212 60 110 22 4110 3150
213 65 120 23 2,5 4490 3470
214 70 125 24 4880 3810
215 75 130 25 5190 4190
216 80 140 26 5700 4540
217 85 150 28 3 6540 5410
218 90 160 30 7530 6170
219 95 170 32 8530 7090
220 100 180 34 О,О 9580 8060
Средняя серия 300
300 10 35 11 1 636 383
301 12 37 12 763 473
302 15 42 13 1,5 890 551
303 17 47 14 1 090 680
304 20 52 15 1 250 794
305 25 62 17 2 1 760 1 160
306 30 72 19 2 200 1510
307 35 80 21 2 620 1 790
308 40 90 23 2,5 3 190 2 270
309 45 100 25 3 780 2 670
310 50 НО 27 4 850 3 630
311 55 120 29 5 600 4 260
312 60 130 31 6410 4 940
313 65 140 33 7 270 5 670
314 70 150 35 3,5 8 170 6 456
315 75 160 37 8 900 7 286
316 80 170 39 9 650 8 170
317 85 180 41 10 400 9100
318 90 190 43 11 200 10 100
319 95 200 45 4 12000 11 100
320 100 215 47 13 600 13 300
Тяжелая серия 400
403 17 62 17 2,0 1 780 1 210
405 25 80 21 2 920 2 080
406 30 90 23 2,5 3 720 2 720
407 35 100 25 4 360 3 190
408 40 ПО 27 5 030 3 700
409 45 120 29 О 6040 4 640
410 50 130 31 6 850 5 300
411 55 140 33 3,5 7 870 6 370
412 60 150 35 8 560 7 140
413 65 160 37 9 260 7 960
414 70 180 42 11 300 10 700
415 75 190 45 4 11900 11 700
416 80 200 48 12 800 12 700
417 85 210 52 5 13 600 13 800
578
П27. Роликоподшипники радиальные с короткими цилиндрическими роликами
(по ГОСТ 8328—57)
Тип 92000
Тип 2200
Тип 32000
Тип 42000
Тип 12000
Размеры, мм
Условное обозначение подшипников типов Грузоподъем- ность, кгс
2200 32000 42000 12000 92000 d D В Г динами- ческая стати- ческая
2104 Особо легка? 20 сери 42 я 12 1,0 0,8 812 479
32106 30 55 13 1100 702
32109 45 75 16 1,5 1,0 1910 1340
2110 32110 50 80 2150 1570
2111 2113 32111 — — — 55 65 90 100 18 2,0 1,5 3200 3100 2420 2690
— 32114 32116 70 80 ПО 125 20 22 4240 5130 3430 4260
2118 32118 90 140 24 2,5 6130 5230
32119 95 145 2,0 6090
32121 105 160 26 3,0 8150 7410
— 32202 42202 . Легка? узка 15 я серр 35 1Я 11 1,0 0,5 563 308
2204 32204 42204 12204 .— 20 47 14 1190 718
2205 32205 42205 25 52 15 1,5 1,0 1340 861
2206 32206 42206 92206 30 62 16 1730 1140
2207 32^07 42207 12207 12208 35 72 17 2560 1750 2400 2570
2208 2209 32208 32209 42208 42209 40 45 80 85 18 19 2,0 2,0 3370 3530
2210 32210 42210 12210 50 90 20 3870 2920
32211 42211 12211 — 55 100 21 4370 3290
2212 32212 42212 12212 60 ПО 22 5480 4280
2213 32213 42213 12213 65 120 23 2,5 2,5 6210
2214 32214 42214 — 70 125 24 6180 4860
1S*
579
Продолжение табл. П27
Условное обозначение подшипников типов d D в Г г* Грузоподъем- ность, кгс
2200 32000 42000 12000 92000 динами- ческая стати- ческая
2215 32215 42215 75 130 25 2,5 2,5 7 540 6 100
2216 32216 42216 — 80 140 26 3,0 3,0 7 950 6 340
2217 42217 92217 85 150 28 9 900 8 240
2218 32218 42218 12218 92218 90 160 30 3,0 3,0 12 100 10100
— 32219 42219 92219 95 170 32 3,5 3,5 13 200 11 100
2220 32220 — 92220 100 180 34 3,5 3,5 13 500 11 100
1егкая ШИрО] <ая се рия
2505 25 52 18 1,5 1,0 1 800 1 260
32507 35 72 23 2,0 3 930 3 040
32508 40 80 2,0 4 650 3 630
32512 60 110 28 2,5 2,5 7 470 6 340
32518 92518 90 160 40 3,0 3,0 17 600 16 400
2519 32520 — 95 100 170 180 43 46 3,5 3,5 19 100 20 600 17 800 19 300
Средня ? узка я серг 1Я
— 32302 —. 12302 — 15 42 13 1,5 1,0 1 030 650
2305 42305 92305 25 62 17 2,0 2,0 2 260 1 480
2306 32306 42306 30 72 19 3 020 2 060
2307 42307 12307 35 80 21 2,0 3 410 2 320
2308 2309 32308 32309 42308 12308 12309 — 40 45 90 100 23 25 2,5 2,5 4 100 5 650 2 320 4 070
2310 32310 42310 12310 50 ПО 27 3,0 3,0 6 520 4 750
2311 32311 42311 12311 55 120 29 8 400 6 280
2312 32312 42312 12312 92312 60 130 31 10 000 7 720
2313 32313 42313 — 65 140 33 10500 8 040
2314 32314 42314 92314 70 150 35 3,5 3,5 12 300 9 730
2315 32315 42315 12315 75 160 37 14 200 11 200
2316 32316 —- 12316 80 170 39 15000 12 100
2317 32317 42317 — 92317 85 180 41 17 900 14 600
2318 2319 32318 32319 — 12318 — 90 95 190 200 43 45 4,0 4,0 19 400 21 000 16 000 17 500
2320 32320 42320 12320 92320 100 215 47 24 300 20 500
580
Продолжение табл. П27
Условное обозначение подшипников типов d D В Г г, Грузоподъем- ность, кгс
2200 32000 42000 12000 92000 динами- ческая стати- ческая
Средняя широкая серия
32605 25 62 24 3 740 2 830
__ 2,0
— 42606 30 72 27 2,0 4 160 3120
32607 42607 35 80 31 4 670 3 480
32608 40 90 33 2,5 2,5 6 100 4 750
2609 — 12609 — 45 100 36 7 930 6 280
2611 32610 50 55 ПО 120 40 43 3,0 3,0 10400 11 500 8 710 9 420
2612 32612 42612 60 130 46 14 000 11 800
— 32613 42613 65 140 48 15 200 12 900
2614 —. 42614 92614 70 150 51 3,5 3,5 18 100 15900
32615 — 92615 75 160 55 21200 18 700
32616 92616 80 170 58 22400 20 200
32617 92617 85 180 60 25 900 23 500
32619 42618 90 95 190 200 67 4,0 4,0 27 000 30 900 24 500 28 700
—— 42620 100 215 73 36 300 34 300
Тяжелая серия
— 42408 42409 40 45 ПО 120 27 29 з,о 3,0 7 800 9 400 5 760 7140
32410 42410 50 130 31 10200 7 650
2411 — 42411 55 140 33 3,5 3,5 11000 8 340
—— 32412 42412 •—• 92412 60 150 35 13 300 10 300
2413 32413 42413 65 160 37 14 600 11 400
32414 70 180 42 18 700 15 000
— 42415 75 190 45 4,0 4,0 21 600 17 600
2416 32416 42416 12416 80 200 48 24 800 20400
32417 42417 — 92417 85 210 52 27 100 22 500
32418 12418 90 225 54 5,0 30 700 25 700
32419 — 95 240 55 5,0 32 700 27 800
42420 100 250 58 36 700 31 500
* с 1 января 1976 г. вводится ГОСТ 8328—75.
581
П28. Шарикоподшипники радиальные сферические двухрядные
(по ГОСТ 5720—51 и 8545—57)
а.
Тип 1000 Тип 11000
Размеры, мм
Условное обозначе- ние подшипников типов d D В L Г Г рузоподъемность. кгс
1000 И 000 динамиче- ская С статиче- ская Сб
Легкая серия
1200 10 30 9 1,0 424 136
1202 15 35 И 579 205
1203 17 40 12 613 247
1204 20 47 14 1,5 772 324
1205 11204 25 20 52 15 26 944 410
1206 II205 30 25 62 16 27 1220 592
1207 11206 35 30 72 17 29 1230 678
1208 11207 40 35 80 18 31 2,0 1510 872
1209 11208 45 40 85 19 33 1700 977
1210 11209 50 45 90 20 35 1770 1100
1211 11210 55 50 100 21 37 2100 1360
1212 11211 60 55 ПО 22 38 2380 1580
1213 11212 65 60 120 23 40 2,5 2440 1750
1214 — 70 125 24 — 2700 1910
1215 11213 75 65 130 25 43 3050 2180
1216 11214 80 70 140 26 46 3140 2400
1217 11215 85 75 150 28 50 3,0 3870 2900
1218 11216 90 80 160 30 52 4470 3240
11217 95 85 170 32 55 3,5 5020 3750
1220 11218 100 90 180 34 58 5440 4120
Средняя серия
1300 10 35 11 1,0 569 184
1301 12 37 12 739 240
1302 15 42 13 1,5 737 268
1303 1 I 17 47 14 973 373
82
Продолжение табл. П28
Условное обозначе- ние подшипников типов а di D В L г Грузоподъемность, кгс
1000 И 000 динамиче- ская С статиче- ская Со
1304 20 52 15 976 409
1305 25 62 17 2,0 1 410 612
1306 11305 30 25 72 19 31 1680 790
1307 11306 35 30 80 21 35 2 000 1000
1308 11307 40 35 90 23 36 2,5 2 330 1240
1309 11308 45 40 100 25 39 3 000 1620
1310 11309 50 45 110 27 42 3,0 3 410 1780
1311 11310 55 50 120 29 45 4 060 2290
1312 11311 60 55 130 31 47 4 580 2710
1313 11312 65 60 140 33 50 4 920 2990
1314 — 70 — 150 35 .— 3,5 5 860 3590
1315 11313 75 65 160 37 55 6 240 3910
1316 11314 80 70 170 39 59 6 990 4300
1317 — 85 — 180 41 — 7 720 4950
1318 11316 90 80 190 49 65 4,0 9 180 5720
1320 11318 100 90 215 47 71 11 300 7940
Легкая широкая серия
1500 — 10 — 30 14 — 1,0 602 173
1506 11505 30 25 62 20 31 1,5 1 190 581
1507 11506 35 30 72 35 1 690 838
1508 40 80 23 2,0 1 750 964
1509 45 85 1 820 1090
1510 50 90 1156
1515 75 130 31 2,5 3 490 2450
1516 80 140 33 3,0 3 830 2740
1517 85 150 36 3,0 4 576 3210
Средняя широкая серия
1605 — 25 — 62 24 — —. 1 890 760
1606 11605 30 25 72 27 38 2,0 2 440 1020
1607 11606 35 30 80 31 43 3 050 1300
1608 40 90 33 2,5 3 490 1600
1609 45 100 36 4 230 1980
1610 11609 50 45 ПО 40 55 3,0 5 000 2390
1611 — 55 — 120 43 — 5 860 2860
1612 11611 60 55 130 46 62 6 770 3360
1613 65 140 48 3,5 7 530 3930
1614 .—. 70 — 150 51 —— 8 570 4540
1616 80 170 58 10 700 5880
583
П2Э. Шарикоподшипники радиально-упорные однорядные
(по ГОСТ 831—62)
D
г
t - т
Г"! L/V Т
Размеры, мм Тип 36000, Тип 46000, Тип 66000, II II II СО ND — О СП ND о о с
Условное обозначе- Г рузоподъемность, кгс
вне под- шипников d D В Г динамиче- ская С статиче- ская Со
Особолегкая серия, р = 26°
46106 46108 46109 30 40 45 55 68 75 13 15 16 1,5 0,5 1 120 1 460 1 730 803 1 130 1 370
46111 46112 55 60 90 95 18 2 520 2 880 2 150 2 500
46114 46115 70 75 110 115 20 2 1 3 560 3 530 3 230 3 230
46116 46117 80 85 125 130 22 4 320 4 430 4 090 4 300
46118 46120 90 100 140 150 24 2,5 1,2 4 740 5020 4590 4 850
Легкая серия Р=12°
36201 12 32 10 — — —
36202 36203 36204 15 17 20 35 40 47 11 12 14 1 0,3 558 638 943 340 390 624
36205 36206 36207 25 30 35 52 62 72 15 16 17 1,5 0,5 1 230 1310 1 830 847 924 1 330
36208 36209 36210 36211 40 45 50 55 80 85 90 100 18 19 20 21 2 1 2 400 3 060 3 230 3 390 1 810 2 370 2 560 2 760
36212 36213 36214 36215 60 65 70 75 НО 120 125 130 22 23 24 25 2,5 1,2 4 820 5 790 6 300 6 560 4 010 5 100 5590 5 970
584
Продолжение табл. П29
Условное обозначе- ние под- шипников d D В Г П Г рузоподъемность, кгс
динамиче- ская С статиче- ская Со
36216 80 140 26 7 350 6 660
36217 85 150 28 3 1,5 7 900 7 220
36218 90 160 30 9 280 8 460
36219 95 170 32 3,5 11 000 10400
36220 100 180 34 12 400 11 800
Легкая серия, р = 26с
46200 10 30 9 496 279
46202 15 35 11 1 0,3 607 358
46203 17 40 12 900 573
46204 20 47 14 1 160 779
46205 25 52 15 1,5 0,5 1 240 850
46206 30 62 16 L720 1220
46207 35 72 17 2 270 1660
46208 40 80 18 о 2 890 2 170
46209 45 85 19 3 040 2 360
46210 50 90 20 3 180 2 540
46211 55 100 21 3 940 3 210
46212 60 110 22 4540 3 680
46213 65 120 23 2,5 1,2 5 440 4 680
46214 70 125 24 5 910 5140
46215 75 130 25 6 150 5 480
46216 80 140 26 6 890 6120
46217 85 150 28 3 1,5 7 400 6 640
46218 90 160 30 8 710 7 776
46219 95 170 32 3,5 9 10 300 9 560
46220 100 180 34 11600 10 900
Средняя серия, р = 12 о
36302 15 42 13 1,5 0,5 1 040 693
36303 17 47 14 1 310 887
36305 25 62 17 9 2 200 1620
36306 30 72 19 2 690 2 040
36307 35 80 21 3 550 2 740
36308 40 90 23 2,5 1,2 4130 3 340
36309 45 100 25 5 050 4 100
36310 50 ПО 27 3 1,5 5 920 4880
36312 60 130 31 3,5 8 300 7 250
36313 65 140 33 2 9 410 8 320
36318 90 190 43 4 13 700 13 600
585
Продолжение табл. П29
Условное обозначе- ние под- шипников а D В Г *1 Г рузоподъемность, кгс
динамиче- ская С статиче- ская Со
Средняя серия, р = 26 о
46303 17 47 14 1,5 0,5 1260 815
46304 20 52 15 1 400 917
46305 25 62 17 2 1 2 ПО 1490
46306 30 72 19 2 560 1 870
46307 35 80 21 3 340 2 520
46308 40 90 23 2,5 1,2 3 920 3 070
46309 45 100 25 4810 3 770
46310 50 ПО 27 5 630 4 480
46311 55 120 29 О 6 890 5740
46312 60 130 31 7 880 6 660
46313 65 140 33 3,5 8 900 7 640
46314 70 150 35 2 10000 8 700
46318 90 190 43 12 900 12500
46320 100 215 47 4 16 700 18 000
Легкая серия, р=36°
66211 55 100 21 3 630 2 890
66214 70 125 24 2,5 1,2 4640 3 770
66215 75 130 25 5 640 4 930
66219 95 170 32 3,5 2 9 510 8 600
Средняя серия, р=36
66311 55 120 29 3 1,5 6 060 4 740
66314 70 150 35 3,5 9 330 7 830
66322 ПО 240 50 4 17 400 19 000
Тяжелая серия, Р=36"
66406 30 90 23 9 3 840 2810
66407 35 100 25 4 540 3 370
66408 40 ПО 27 о 1 *4 5 270 3 880
66409 45 120 29 6 400 4820
66410 50 130 31 7 760 6120
66412 60 160 35 0,3 2 9 800 8 100
66414 70 180 42 4 11900 11 100
66418 90 225 54 5 2,5 16 300 17 200
586
ПЗО. Роликоподшипники конические однорядные
(по ГОСТ 333—71)
Размеры, мм
наиб
Условное
обозначение
подшипников
статиче-
ская Со
динами-
ческая С
Г рузоподъемность,
кгс
Особолегкая серия, [3=114- 15’
2007106 30 55 17,2 16 14 2 350 1990
2007107 35 62 18,2 17 15 1,5 0,5 2 560 2 300
2007108 40 68 19,2 18 3 190 2 840
2007109 45 75 20,2 19 16 4000 3 480
2007111 55 90 23,3 22 19 4910 4520
2007113 65 100 5 290 5 130
2007114 70 ПО 25,3 24 20 2 6 760 6 580
2007115 75 115 0,8 12 000 10 800
2007116 80 125 29,3 27 23 8 840 8 550
2007118 90 140 11 100 11 100
2007119 95 145 32,4 30 26 2,5 11400 11500
2007120 100 150 11 700 12 000
587
Продолжение табл. ПЗО
Условное обозначение подшипников d D т наиб В с Г П Грузоподъемность, кгс
динамиче- ская С статиче- ская Ср
Легкая серия p=12-j- 16°
7202 15 35 12 11 9 1 0,3 878 614
7203 17 40 13,5 12 11 1 380 930
7204 20 47 15,5 14 12 1,5 0,5 1 910 1 330
7205 25 52 16,5 15 13 2 390 1790
7206 30 62 17,5 16 14 2 980 2 230
7207 35 72 18,5 17 15 3 520 2 630
7208Н 40 80 20 20 16 9 4 240 3 270
7209 45 85 21 19 4 270 3 340
7210Н 50 90 22 21 17 0,8 5 290 4 060
7211 55 100 23 18 5 790 4 610
7212Н 60 ПО 24 23 19 2,5 7 220 5 840
7214Н 70 125 26,5 21 9 590 8210
7215Н 75 130 27,5 26 22 9 760 8 450
7216 80 140 28,5 10 600 9 520
7217 85 150 31 28 24 3 1 10 900 9 140
7218Н 90 160 33 31 26 14 100 12 500
7219 95 170 35 32 27 3,5 1,2 14500 13 100
7220 100 180 37,5 34 29 16 200 14 600
Легкая широкая серия, Р=12- Ь 16°
7506Н 30 62 21,5 20 17 1,5 0,5 3 490 2 750
7507 35 72 24,5 23 20 5 020 4 030
7508Н 40 80 2 5 390 4 480
7509Н 45 85 25 23 19 5160 4 260
7510Н 50 90 5 980 5 450
7511 55 100 27 28 21 0,8 7 220 6 160
7512 60 ПО 30 24 8 400 7 560
7513 65 120 33 2,5 10 900 9 890
7514 70 125 33,5 31 27 11 000 10 100
7515 75 130 11 500 10 800
7516 80 140 35,25 33 28 13 300 12 600
7517 85 150 39 36 30 3 1 15100 14 100
7518 90 160 43 40 34 17 900 17 100
7519Н 95 170 46 43 37 3,5 1,2 22 500 22 500
7520 100 180 49,5 46 39 23 200 23 600 _
688
Продолжение табл. ПЗО
Условное обозначение подшипников а D Т в С Г Г рузоподъемность, кгс
динамиче- ская С статиче- ская Со
Средняя серия, {5=11 ~ 15
7304Н 20 52 16,5 15 13 2500 1770
7305 25 62 18,5 17 15 2 2960 2090
7306 30 72 21,0 19 17 0,8 4000 2990
7307 35 80 23,0 21 18 4 810 3 530
7308 40 90 25,5 23 20 2,5 6100 4 600
7309Н 45 100 27,5 25 22 7 610 5930
73 ЮН 50 ПО 29,25 27 22 3 9 666 7 590
7311 55 120 32 29 25 10 200 8 150
7312 60 130 34 31 27 11 800 9 630
7313 65 140 36,5 33 28 3,5 1,2 13 400 11 100
7314Н 70 150 38,5 35 30 16 800 13 700
7315 75 160 40,5 37 31 17 800 14800
7317 85 180 45 41 35 1,5 22 100 19 500
7318 90 190 47,0 43 36 24 000 20100
Средняя широкая серия, р=п 4- 15°
7604 20 52 22,5 21 18,5 2 950 2 200
7605 25 62 25,5 24 21,0 2 4550 3 660
7606Н 30 72 29 27 23 0,8 6190 5 100
7607 35 80 33 31 27 7 160 6150
7608 40 90 35,5 33 28,5 2,5 8 000 6 720
7609 45 100 38,5 36 31 10400 9 050
7610 50 ПО 42,5 40 34 3 1 12 200 10 800
7611H 55 120 46 43 35 14 800 14000
7612Н 60 130 49 46 37 3,5 17 100 15 700
7613 65 140 51,5 48 41 17 800 16 800
7614 70 150 54,5 51 43 1,2 20400 18 600
7615 75 160 58,5 55 46,5 3,5 24 900 23500
7616Н 80 170 62 58 48 29 400 29 100
7618Н 90 190 68 64 513 1,5 36 900 36 300
7620 100 215 78 73 61,5 45 100 45 900
689
П31. Роликоподшипники конические однорядные с большим углом конуса
(по ГОСТ 7260—70)
Размеры, мм
Условное обозна- чение подшип- ников d D т наиб В С Г п Угол 3° Грузоподъемность, кгс
динамиче- ская С статиче- ская Со
27306 30 72 21 19 14 2 26 3 000 2 100
27307 35 80 23 21 15 0,8 3 940 2 950
27308 40 90 25,5 23 17 2,5 28 4 840 3 710
27310Н 50 110 29,5 27 19 3 1 6 930 5 420
27311 55 120 32 29 21 29 7 250 5 890
27312 60 130 34 31 22 25 8050 6 200
27313 65 140 36,5 33 23 3,5 1,2 27 8 900 7 140
27315 75 160 40,5 37 26 29 11900 9510
27317 85 180 45 41 30 4 1,5 27 16 500 14 600
1027320 100 215 57 51 37 25 23 800 21000
590
П32. Шарикоподшипники упорные (по ГОСТ 6874—54* и 7872—56)
Размеры, мм
Условное обозначе- ние подшипников типов d it D И Нг а г h Г рузоподъемность, кгс
8000 38 000 динамиче- ская С статиче- ская Со
8100 8101 8102 8103 8104 8105 8106 8107 8108 8109 8110 8111 8112 8113 8114 8115 8116 8117 8118 8120 — 10 12 15 17 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 100 — 24 26 28 30 35 42 47 52 60 65 70 78 85 90 95 100 105 НО 120 135 9 — — 0,5 2,5 658 697 743 822 1 100 1 250 1 380 1 680 2 300 2 430 2 570 3 420 3 750 4 280 4 600 4 740 4 870 5 000 6 180 8 160 1 130 1 250 1 360 1 590 2 160 2 620 2 930 3 720 5 100 5610 6 120 8 300 9 150 10 400 11 300 11 800 12 200 13 200 16 100 21 800
10 2,7
11 1 3,2
12 13 3,6
14 4,1
16 17 4,6 5
1,5
18 5,2
19 5,6
22 25 6,5 7,4
591
Продолжение табл. П32
Условное обозначе- ние подшипников типов d dz D н н. а Г h Гру зоподъемиость, кгс
8000 38 000 динамиче- ская С статиче- ская Со
Легкая серия
8201 12 28 11 3,3 868 1 540
8202 15 32 12 3,7 987 1 860
8204 38204 20 15 40 14 26 6 1 4 1 580 3 060
8205 38205 25 20 47 15 28 4,2 2 040 4 100
8206 38206 30 25 52 16 29 4,8 2 300 4 720
8207 38207 35 30 62 18 34 8 5 3160 6800
8208 38208 40 68 19 36 5,2 3 750 7 990
8209 38209 45 35 73 20 37 9 5,7 3 950 9 050
8210 38210 50 40 78 22 39 6,3 4 600 10 500
8211 38211 55 43 90 25 45 1,5 7,1 5 660 12 900
8212 38212 60 50 95 26 46 7,3 6 580 15 500
8213 — 65 — 100 — .—. 6 580 15 300
8214 38214 70 55 105 27 47 10 8 6 840 16 900
8215 — 75 — НО 7 630 19 100
8216 38216 80 65 115 28 48 10 8,3 9 470 23 900
8217 38217 85 70 125 31 55 12 8,8 11 200 29 000
8218 90 135 35 10,5 13 200 33 500
8220 100 150 38 11,1 13 800 39 400
Средняя серия
8305 25 52 18 5 2 570 4 990
8306 30 60 21 6 3 290 6 790
8307 35 68 24 1,5 7 4 080 8 500
8308 40 78 26 7,6 5 130 10 900
8309 45 85 28 8,2 5 920 13 300
8310 50 95 31 9,1 7 100 16 400
8311 8312 55 60 105 НО 35 2 10,1 9210 9210 21 700
8313 65 115 36 10,5 10 400 25 400
8314 70 125 40 12,0 12 000 29 800
8315 75 135 44 13 13 800 34 600
8316 38316 80 65 140 79 18 2,5
8318 90 155 50 14,5 17 100 45 200
8320 100 170 55 16 18 400 49 000
Примечание. Для подшипников диаметром d < ; юо лм размер dj == d ~f- 0,2 мм.
S92
ПЗЗ. Подшипники скольжения неразъемные
(по ГОСТ 11521-65 *)
Узкие Широкие
Размеры, мм
d dt С Ci Г h /11 I
16 18 12 70 20 18 9 40 30
20 22 20 10 42 35 50
25 28 14 80 24 24 50 40 60
30 32 90 26 26 54 50 75
36 38 100 28 28 12 58 60 90
513
П34. Подшипники скольжения разъемные с двумя болтами
(по МН 2085—61)
Резьба под масленку: при d=g65 мм—МЮх1;
при d>65 мм—М14х1,5
Исполнение!!
Исполнение I
Размеры, мм
Номи- наль- ный диа- метр вала d Диаметр расточки под вкла- дыш D dt В ь Н h Л1 L А А, Мас- са, кг Болт Для исполне- ния I Шпилька ДЛЯ исполне- ния II
25 28 30 28—34 32—36 34—38 11 26 22 68 32 15 140 115 60 0,56 М8Х60 М8Х35
32 35 36 36—40 38—45 40—45 13 32 28 85 42 18 165 135 75 0,99 М10х75 М10Х45
40 45—50 13 40 36 90 45 170 140 80 1,42 М10Х80 МЮХ45
45 50—55 45 40 100 50 20 175 145 85 1,80 М10х90 М10х50
50 55—60 17 50 102 200 160 90 2,35 М12х90 М12Х55
55 60—65 55 45 112 55 210 170 95 3,27 М12Х100
60 6:> 65—70 70—75 60 65 50 55 118 125 60 65 25 240 250 190 200 100 НО 4,07 4,41 М1бх1ю М16Х120 М16Х65
70 75 75—85 85—90 22 70 75 60 65 135 145 70 75 30 260 270 210 220 120 130 5,75 6,86 М16Х125 М16Х130 Ml 6X70
80 90 90-95 100—105 26 80 90 70 80 158 168 80 84 35 290 300 240 250 140 150 8,74 10,41 М20Х140 М20х80 М20Х85
100 110—115 32 105 115 90 100 180 190 90 95 45 340 350 280 290 160 170 14,05 15,86 М24Х160 М24Х170 М24Х90 М24Х95
594
595
П35. Подшипники скольжения разъемные с четырьмя болтами (по МН 2086—61)
Исполнение I
Исполнение Л
Резьба под масленку: при 60 мм—MlOxl;
при d>60 мм—М14х1,5
Размеры, мм
Диаметр вала d Диаметр расточки под вкладыш D di В Ь н h L А At Аг Масса, кг Болт для исполнения I Шпилька для исполнения II
50 55 55—60 60—65 13 65 70 60 65 100 110 50 55 25 200 210 160 170 90 95 30 35 3,63 4,65 МЮ X 90 МЮ х 100 МЮХ50 МЮ X 55
60 65—70 17 80 75 122 60 240 190 100 40 5,59 М12Х ПО М12 X 60
70 75—85 95 90 137 70 30 260 210 120 45 8,40 М12Х 125 М12Х65
80 90 90—95 100—105 22 105 120 100 115 155 165 80 85 35 290 300 240 250 140 150 55 70 12,10 15,33 М16Х 140 М16Х 150 М16Х75 М16 X 80
100 110—115 135 130 175 90 40 340 280 160 80 19,45 М16 X 160 М16Х85
П36. Вкладыши чугунные к разъемным подшипникам скольжения
(по МН 2089—61)
b £_
liatt/' .pits'1
s s
Размеры, мм
d D D, b
25 28 (30) 34 36 38 42 45 48 34 26
32 (35) 36 40 45 52 55 42 32
40 45 50 55 60 (65) 70 (75) 80 90 100 50 55 60 65 70 75 85 90 95 105 115 60 65 70 75 80 85 95 100 110 120 130 50 55 60; 75 65; 80 70; 90 75 80; 105 85 95; 120 105; 135 120; 150 40 45 50; 65 55; 70 60; 80 65 70; 95 75 80; 105 90; 120 100; 135
596
П37. Втулки подшипников гладкие (по ГОСТ 1978—73)
Материал — чугун или бронза
1 I Ч
Л
Размеры, мм
d D 1 d D I
10 12 14 16 18 20 8—25 10—30 12—35 (42) 45 (48) 50 (52) 55 60 (62) 65 70 75 80 85 90 95 100 52 55 58 60 62 65 70 75 80 85 90 95 100 105 НО 115 25—90 (28)—100
(15) 16 (17) 18 20 22 25 28 30 32 35 (38) 40 22 12—40 30-110
(32)—120
25
12—45 35—130
28 30 32 35 38 40 45 48 50 40—140
15—50
45—150
18—60
50—160
20—70
60—170
(22)-80 25—90
СПИСОК ЛИТЕРАТУРЫ
1. Анфимов М. И. Редукторы. Конструирование и расчет (альбом). Изд. 3-е.
М., «Машиностроение», 1972, 284 с.
2. Артоболевский С. И. Теория механизмов и машин. Изд; 3-е. М., «Высшая
школа», 1968, 366 с.
3. Асинхронные двигатели единой новой серии. Каталог-справочник. М.,
Информэлектро, 1968, 120 с.
4. Бейзельман Р. Д., Цыпкин Б. В., Перель <П. Я- Подшипники качения.
Справочник. М., «Машиностроение», 1975, 575 с.
5. Биргер И. А., Шорр Б. Ф., Шнейдерович Р. М., Расчеты на прочность
деталей машин. М., «Машиностроение», 1966, 616 с.
6. Борисов С. М. Пневмокамерные фрикционные муфты. М., «Машинострое-
ние», 1971, 183 с.
7. Борисов С. Г., Эглит И. М. Муфты сцепления тракторов. М., «Машино-
строение», 1972, 208 с.
8. Валы и оси. М., «Машиностроение», 1970,319 с. Авт.:С. В.Серенсен.М. Б. Гро-
ман, В. П. Когаев, Р. М. Шнейдерович.
9. Воробьев Н. В. Цепные передачи. М., «Машиностроение», 1968, 251 с.
10. Готовцев А. А., Столбин Г. Б., Котенок И. П. Проектирование цепных
передач. М., «Машиностроение», 1973, 376 с.
11. Гузенков П. Г. Детали машин. М., «Высшая школа», 1975, 424 с.
12. Детали машин. Атлас конструкций. Под ред. Д. Н. Решетова. М., «Машино-
строение», 1968, 360 с.
13. Детали машин. Расчет и конструирование. Справочник. В 3-х т. Под ред.
Н. С. Ачеркана. М., «Машиностроение», 1969, 440 с.
14. Детали машин. Учебник для вузов. Изд. 6-е. М., «Машиностроение», 1972,
503 с. Авт.: В. А. Добровольский, К. И. Заблонский, С. Л. Мак.
15. Детали машин. Учебник для техникумов. Изд. 6-е. М., «Машиностроение»,
1970, 467 с. Авт.: А. Т. Батурин, Г. М. Ицкович, Б. Б. Панич, И. М Чернин.
16. Дмитриев В. А. Детали машин. Л., «Судостроение», 1970, 791 с.
17. Дунаев П. Ф. Конструирование узлов и деталей машин. М., «Высшая школа»,
1971, 368 с.
18. Дьяченко С. К., Киркач И. Ф. Предохранительные муфты. Киев, Гостех-
издат, 1962, 122 с.
19. Дьяченко С. К., Столбовой С. 3. Детали машин. Атлас Киев, «Техника», 1965.
20. Зак П. С. Глобоидная передача. М., «Машгиз», 1962, 256 с.
21. Иванов А. И. Технические измерения. М., «Колос», 1970, 408 с.
22. Иванов М. Н. Детали машин. М., «Высшая школа», 1967, 431 с.
23. Коровчинский М. В. Теоретические основы работы подшипников скольже-
ния. М., «Машгиз», 1959, 403 с.
24. Кудрявцев В. Н., Державец Ю. А., Глухарев Е. Г. Конструкция и расчет
зубчатых редукторов. М. — Л., «Машиностроение», 1971, 328 с.
25. Кудрявцев В. Н. Планетарные передачи. М. — Л., «Машиностроение»,
1966, 307 с.
598
26. Курсовое проектирование деталей машин. Учебное пособие для техникумов.
Изд. 6-е. М„ «Машиностроение», 1970, 560 с. Авт.: Г. М. Ицкович, В. А. Киселев,
С. А. Чернавский, К. Н. Боков, Б. Б. Панич.
27. Мазырин И. В. Смазочные устройства. М., «Машгиз», 1963, 247 с.
28. Миловидов С. С. Детали машин и приборов. М., «Высшая школа», 1971,
328 с.
29. Мягков В. Д. Краткий справочник конструктора. М., «Машиностроение»,
1975, 814 с.
30. Николаев Г. А., Куркин С. А., Винокуров В. А. Проектирование сварных
конструкций в машиностроении. М., «Машиностроение», 1975, 740 с.
31. Опоры осей и валов машин и приборов. М. — Л., «Машиностроение», 1970,
520 с. Авт.: Н. А. Спицын, М. М. Машнев, Е. А. Красновский и др.
32. Орлов П. И. Основы конструирования. М., «Машиностроение», т. 1, 1968,
568 с.; т. 2, 1972, 527 с.
33. Подшипники качения. Каталог-справочник. М., НИИНАВТОПРОМ, 1972,
469 с. Авт.: Н. А. Спицын, С. М. Анофриев, Е. И. Громыко и др.
34. Поляков В. С., Барбаш И. Д. Муфты. Л., «Машиностроение», 1973, 336 с.
35. Пронин Б. А., Ревков В. А. Бесступенчатые клиноременные и фрикционные
передачи. М., «Машиностроение», 1967, 404 с.
36. Рабинер Е. Г. Монтаж и эксплуатация подшипниковых узлов. М., «Машгиз»,
1960, 275 с.
37. Рабинович С. В. Система корригирования зубчатых зацеплений тяговых
передач. — «Вестник НИИ ж.-д. транспорта», 1958, № 7, с. 38—43.
38. Расчеты на прочность в машиностроении. М., «Машгиз», 1958—1959, т. 1,
884 с.; т. 2, 974 с.; т. 3, 1118 с. Авт.: С. Д. Понаморев, В. Л. Бидерман, К. К. Лиха-
рев и др.
39. Редукторы цилиндрические. Каталог-справочник. М., Информтяжмаш, 1967,
107 с.
40. Решетов Д. Н. Детали машин. Учебник для вузов. Изд. 3-е, испр. и перераб.
М., «Машиностроение», 1974, 655 с.
41. Решетов Л. Н. Конструирование рациональных механизмов. М., «Машино-
строение», 1967, 208 с.
42. Ришин А. Е. Восстановление изношенных зубьев колес методом коррекции.
«Вестник машиностроения», 1956, № 3, с. 47—53.
43. Руденко Н. Ф. Планетарные передачи. М., «Машгиз», 1947, 756 с.
44. Сборник задач и примеров расчета по курсу деталей машин. М., «Машино-
строение», 1974, 286 с. Авт.: Г. М. Ицкович, С. А. Чернавский, В. А. Киселев и др.
45. Серенсен С. В., Шнейдерович Р. М., Когаев В. П. Несущая способность и
расчеты деталей машин на прочность. М., «Машиностроение», 1975, 451 с.
46. Справочник по корригированию зубчатых колес. М., «Машиностроение»,
1967, 576 с. Авт.: Т. П. Болотовская, И. А. Болотовский, Г. С. Бочаров и др.
47. Тепинкичиев В. К- Предохранительные устройства от перегрузки станков
М., «Машиностроение», 1968, НО с.
48. Уплотнения. Сб. статей. Под ред. В. К- Житомирского. М., «Машинострое-
ние», 1964, 295 с.
49. Часовников Л. Д. Передачи зацеплением. М., «Машиностроение», 1969,
488 с.
50. Чернавский G А. Подшипники скольжения. М., «Машгиз», 1963, 244 с.
51. Чернавский С. А.: Ерохин М. Н. Методические указания по подбору под-
шипников качения. М., МИИСП, 1974, 40 с.
52. Чернин И. М. Графические расчеты механических передач. М., МИТХ,
1969, 128 с.
53. Чернин И. М., Кузьмин А. В., Ицкович Г. М. Расчеты деталей машин.
Минск, «Высшая школа», 1974, 592 с.
54. Шабанов К. Д. Замкнутые дифференциальные передачи. М., «Машино-
строение», 1972, 160 с.
55. Якушев А. И. Взаимозаменяемость, стандартизация и технические измере-
ния. М., «Машиностроение», 1974, 471 с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Б
Баббит 25!. 252
Биение боковое заплечиков вала 195
Болты — Допускаемое напряжение 318 —
Условие прочности 318
— — фундаментные — Схема нагружения
317 — Типы и размеры 576
Бронза 249, 250
Брызговики 324, 325
В
Валы — Конструирование 165—167
— Нагрузки 153—157
— Ориентировочный расчет 157—158
— Приближенный расчет 158—159
— Пример оформления рабочего чертежа
167
— Пример расчета и конструирования
514—522, 523—524, 538—544, 546—547
— Проектный и проверочный расчеты
157 — 165
Валы вертикальные 188
— — шлицевые 164
Ваниа масляная 219
Вариаторы — Диапазон регулирования
396—399
— Кинематические зависимости 393—395
— Подбор 442—444
— Применение 393
— Пример подбора 550—551
— Силовые зависимости 395—396
— Схемы регулирования 394-
Вариаторы конусные 431—438
— — лобовые 427—43!
— — планетарно-фрикционные 436, 437.
438, 439
— — ременно-колодочные 411—412, 413,
414, 415 '
— — с неизменным межосевым расстоя-
нием 406—41!
— — с неизменным межосевым расстоя-
нием и криволинейной формой конусов
412—413
— — торовые 438, 439—442
— — фрикционные 419, 421—442 — Рас-
чет на прочность 424—425 — Скольже-
ние 421—424
— — цепные 415—419, 420, 421
Вариаторы с гибкой связью 396—419 —
Диапазон регулирования 396—399
— Механизм регулирования 401—402
— Передача с неизменным межосевым рас-
стоянием 406—411
— Передача с непостоянным межосевым
расстоянием 403—406
— Принципиальная схема 397
— Расчет сечения ремня 399—400
— Усилие нажатия 400—401
Вентилятор 343
Вилки переводные 321
Винт — Расчет на устойчивость 140
Винтовая передача винт—гайка с треиием
скольжения — см. Передача винт—гай-
ка с трением скольжения
Винтовая шариковая пара — Конструкции
149—151
— Осевое нагружение 145 —147
— Основные параметры 143—144
— Порядок проектного расчета 151 —152
— Профили резьбы 144
— Рабочая база гайки 144, 145
— Радиальное нагружение 148—149
— Схема для определения нагрузочной
способности 146
— Схема нагружения 145
Вкладыши 258—262, 596
Водила — Конструирование 100—10!
Втулки графитовые 252, 253
— — закрепительные 259
— — металлокерамические 251—252
— — пластиграфитовые 252
— — подшипниковые гладкие 5$7
ВТУНП 18—58 218
Выточка 163, 164
Вязкость динамическая 263, 264, 265
— — кинематическая 263, 264. 334, 392
Г
Гайки — Конструкции 138, 141 — Расчет
на прочность 142
— — установочные 202. 204
Галтель 163. 164
ГОСТ 2. 309—73 295
2. 403—75 293, 295
32—74 264
101—54* 356
333—71 550, 587
493—54** 250
494—69 333
520—71* 189
542—50 264
592—69 387
613—65 250
617—72 333, 346
831—62* 532. 584
1013—49* 264
1033—73 218
600
ГОСТ 1139—58 171
1284—68 371
1412—70 248
1544—52* 340
1585—70 249
1631—61 218
1643—72 51, 52, 506
1707—51 264
1862—63 264
1957—73 218
1978—73 258, 597
2144—66 НО, 111, 113, 118
2185—66 14, 33, 38, 40, 507
2712-75 218
2789 — 73 268, 295
3057—54 493, 494, 495
3129—70 306. 532, 550
3257 — 74 218
3333—55 340
3675—56 539
4366—64 218
4751—73 306, 550
5006—55* 455
5017—49 250
5573—67* 218
5575—69*** 218
5915—70* 532
5927—70* 550
6033—51 173^.
6211—69* 313
6267—74 218
6411—52* 334
6636—69 158
6874—54* 591
6982—75 356
7189—54 263
7227—58 168, 170, 348, 349
7260—70 590
7.798—70* 532, 550
7872—56 59j
8239—72 353
8240—72 353
8312—57* 263
8328—75 579
8338—75 532, 550, 577
8697—58** 254
8752—70* 230, 532
8773—73 218
8788—68* 168
8789—68* 168, 532, 550
6794—68* 170
8795—68 170
9368—60 51» 52, 503
9369—66 127, 128, 129, 132. 134. 135
9389—75 488, 492
9432—60 218
9433—60* 218
9563—60** 38. 45, 47, 104, 502, 507
9762—61* 218
10906—66** 353
10947—64* 378, 380, 381, 510
11521—65* 593
11641—73 213
12289—66 14. 499, 502
12876—67* 307
13552—68 382
13563—68* 27
13568—68* 378, 380
13764—68 487
14755 — 74 319
15621—70 473
17383—73 357, 361, 363
17699—72 133
17711—72 251
18511—73 210, 306
18512 -73 211, 306
18513—73 212, 306
18514—73 306
18555—73 235, 236
18697—73 355
19325—73 45
19624—74 45
Графит 252, 253
Грузоподъемность подшипников качения
динамическая 229
— — статическая допускаемая 147, 148
Д
Детали напрессованные 165
Диски смазочные 326
Дифференциальные передачи 73 — Направ-
ление вращения 78—79 — Передаточное
отношение 74—75 — Схемы 77—79
— — замкнутые 79—81
Древесина пластифицированная 254
3
Зазор осевой для подшипников 214, 215
— — относительный 146, 147
— — угловой 81
Запас сцепления 435, 436, 442
Звездочки ценных передач — Диаметры
381 — Материалы 387 — Число зубьев
382
Зубчатые зацепления — Пример расчета
525, 530
Зубчатые колеса — Материалы 53—55 —
Примеры выполнения рабочих черте-
жей 293—295. 296—299 — Твердость
54—55
— — баидажированные 289
— — нз пластмассы 291
— — конические — см. Колеса зубчатые
конические
— — литые 289
— — неметаллические 290, 291—292
— — сборные 291
— — сварные 290
— — со смещением производящего исход-
ного контура 61—72
— — цилиндрические — см. Колеса зуб-
чатые цилиндрические
Зубчатая передача коническая — Пример
расчета 500—505
— — цилиндрическая — Пример расчета
506—509
К
Камни переводные 321
Канавки под стопорные шайбы 203
Кинематический расчет привода 4—12
Клапан обратный 333
— — предохранительный 333
Классы точности подшипников 189
Клииоремениая передача — Расчет 369—
377
Колеса зубчатые конические — Проектный
расчет 49 — Расчет зубьев на проч-
ность 44—49
— — прямозубые 45
Колеса зубчатые цилиндрические — Конст-
рукции 287—290
— Пример выбора параметров зацепления
41
— Проверка зубьев на пластическую де-
формацию или хрупкий излом при из-
гибе 41, 43—44
— Проектный расчет открытых передач
43—44
— Расчет зубьев на прочность 42—43,
36—41
— Способы выбора чисел зубьев 38 — 41
Коллекторы смазочные 327, 328
Кольца мазеудерживающие 225
— — пружинные стопорные 201, 208
— — резьбовые для крепления колеи под-
шипников 209 — Вид нагружения 189
— — смазочные 326
Компоновка приводного устройства 4
Коническая передача косозубая 155, 156
— — прямозубая 154, 155
— — с криволинейными зубьями 155, 156
601
Коробки передач — Компоновка зубчатых
зацеплений 319 — Конструирование ме-
ханизмов переключения скоростей 318—
324
Корончатые колеса 83, 98
Коэффициент безопасности 233, 234
— — вращения кольца подшипника 233
— — вспомогательный 0 53
— — граничной высоты 62
— — деформации червяка 119, 120
— — диаметра червяка 111, ИЗ
— — динамический 50, 51, 120
— — длины винта 141
— — длины зуба 49
— — запаса сцепления 468
Коэффициент износа 43
— — использования воздуха 343
— — использования масла 331
— — концентрации нагрузки 50, 52, 119
— — концентрации нагрузки эффектив-
ный 120
— — концентрации напряжений при кру-
чении 161
— — концентрации напряжений эффек-
тивный 61, 160, 162, 163, 164, 165
— — материалов 133
— — нагрузки 37, 119
— — нагрузки общий 50
— — нагрузочной способности 46
— — нагружениости подшипника 267—
268, 269 — 270
— — неравномерности нагрузки шариков
147
— — осевой нагрузки 233, 234, 235—236
— — осевой статической нагрузки 239
— — ответственности передачи 454
— — повышения нагрузочной способности
зубьев на изгиб 42
— — радиальной нагрузки 233, 235—236
— — разности смещений 68
Коэффициент расхода масла 275, 276
— — режима 131, 133, 446
— — режима нагрузки 59, 61, 122
— — скольжения 422, 423, 424, 427, 429*
431, 432
— — скоростной 477
— — смещения 62, 63, 65, 66, 71
— — смещения червячной фрезы 126
— — температурный 233
— — теплоотдачи 273
— — теплоотдачи змеевика 347
— — теплопередачи 271, 341, 342
— — теплопроводности 274
— — точности 131
— — трения 138, 253, 425, 477
— — трення приведенный 115
— — трения условный 244, 271
— — уравнительного смещения 63, 64
— — формы зуба 42, 118, 119
— — ширины зубчатого венца 36, 37, 43,
46
Коэффициент запаса прочности 60
— — общий 160
— — по касательным напряжениям 161
— — по нормальным напряжениям 160
— — цепи 386, 387, 452
Коэффициент полезного действия винто-
вой шариковой пары 143
— — механических передач 6
— — передачи винт—гайка 137
— — планетарных передач 86, 87, 88, 89,
90, 91
— — подшипников условный 6
— — привода 6
— — цепных передач 381
— — червячной передачи 115
Кривая модификации 131
— — Штрибека — Герси 244
Критерий тяговой способности ремня 357
Крошка древесная 254—255
— — лигнофолевая 254—255
— — текстолитовая 255
Крышки прижимные 210, 211, 212, 213
— — смотрового отверстия редуктора 31lf
312
Кулачки — Проверка на смятие 483
Л
Латунь 251
Лигиостои 254
М
Манжеты резиновые армированные 230, 231
Масла — Критическая температура 263
— — минеральные для смазки подшипни-
ков 217
— — нефтяные 263, 264
— — синтетические 263
Масла смазочные — Способы подвода в под-
шипники 335, 336, 337
— — для редукторов 333—336
— — индустриальные 335
— — трансмиссионные автотракторные
335
— — турбинные 335
— — цилиндровые 334, 335—336
Масленки дознруюшие 219, 220
— — капельные 219, 220
Масло распределит ель регулируемый 333
Маслоуказатель жезловый 336, 339, 340
— — крановый 336. 337
— — круглый 336, 338
— — трубчатый 336, 339
— — фонарный 336, 338
Масштабный фактор 160, 161
Материалы металлокерамические 251—252;
253
— —• смазочные 263—265
Материалы подшипниковые — Алюминие-
вый антифрикционный сплав 250
— Баббит 251* 252
— Бронза 249—250
— Графит 252—253
— Древесная крошка 254—255
— Древесно-слоистые пластики 254
— Латунь 251
— Лигнофолевая крошка 254—255
— Пластмассы 253—254
— Резина 255
— Текстолитовая крошка 255
— Чугун антифрикционный 248, 249
— Чугун серый 248
Механизм переключения коробок передач
319, 320, 322, 323
Модуль зубчатых передач 38
— — упругости приведенный 116
— — червяка 213
МН 2085—61 594
2086—61 595
2089—61 596
2091—61 453
2096—64 457
2600 — 61 449
2701—61 450
2729—61 447
Мотор-редуктор 28, 29, 30, 31, 32
Мощность двигателя 6
— — замкнутая 79, 80
— — на приводном валу 5
— — номинальная 49
Мультипликаторы — Понятие 13
Муфты жесткие втулочные 446—447
— — компенсирующие 445
— — продольно-свертиые 448—449
— — фланцевые 447—448
Муфты компенсирующие зубчатые 454—455
— — Ольдгема 450
— — расширительные 449—450
— — с плавающим диском 450
— — с плавающим сухарем 451—452, 453
— — цепные 452, 453—454
602
Муфты предохранительные 445
— — кулачковые 469—471 — Пример рас-
чета 471—473
— — со срезным штифтом 468—469
— — фрикционные 475—478
— — фрикционные дисковые 478—482 —
Пример расчета 479—480
— — фрикционные конусные 475—476
— — шариковые 473—475
Муфты сцепные конусные 484—485
— — кулачковые 483—484
— — фрикционные 484—485
— — фрикционные дисковые 485—486
Муфты упругие втулочно-пальцевые 455,
456, 457
— — постоянной жесткости 460—461 —
Пример расчета 462—463
— — пружинные 459—460, 461
— — с неметаллическими элементами 455
— — с плоскими пружинами 463—466 —
Пример расчета 466—468
— — с резиновыми вкладышами 457—458
— — с резиновой оболочкой 458—459
— — с упругой заездочкой 455, 456, 457
Н
Нагрузка колец подшипников 189
— — осевая 237
— — пиковая 34
— — статическая эквивалентная 239
— — удельная статическая 147, 149
— — эквивалентная (приведенная) 233,
238
Нажимное устройство винтовое 426—427
— — шариковое 426, 430
Напряжения изгиба допускаемые 60, 121,
122, 124
— — изгиба допускаемые предельные 61
— — контактные 425
— — контактные допускаемые 55, 57, 58,
59, 121, 122, 123 — Влияние шерохова-
тости поверхности 60
— — контактные допускаемые предель-
ные 60
Насос лопастной 330
— — плунжерный 328, 329 — Привод от
вала 331
— — смазочные 328, 329, 330, 331
— — шестеренчатый 329 — Привод от ва-
ла 331
НМ 2 — 58 400, 402
Номограмма для определения вязкости мас-
ла 216
— — производительности насоса 329, 330,
331
О
Опоры валов — Выбор типа подшипника
175—179 — Порядок проектирования
175
— — плавающие 179, 180, 183
— — скольжения — Треиие в опорах
243—244
Опорные узлы механизмов с вертикальны-
ми валами 188
— — редукторов конических передач
185—187
— — редукторов цилиндрических передач
184—187
— — червячных редукторов 187—188
Отверстия поперечные 164
— — центровые для валов 207
Отдушина 313, 314
Охлаждение водяное циркуляционное 341,
342
— — воздушное 340—341
— — аоздушиое принудительное 341—343
— — масла змеевиком — Методика рас-
чета 345—347 — Пример расчета 347—348
П
Передаточное отношение — Определение
74—77
— — число 10, 30, 33 — Пример опреде-
ления 11 — 12
Передача виит—гайка с трением скольжения
137—142 — Запас устойчивости винта
140
— Конструкция гаек 138
— Определение размеров 138
— Условный расчет на неаыдавливание
смазки 139
Передачи — Выбор типа 4—5
— — винтовые — см. Винтовая передача
— — зубчатые — см. Зубчатая передача
— — конические — см. Коническая пере-
дача
— — планетарные — см. П ланетарные пе-
редачи
— — плоскоременные — см. Плоскоремен-
ная передача
— — понижающие 4
— — ременные — см. Ременные передачи
— — цепные — см. Цепные передачи
— — цилиндрические — см. Цилиндриче-
ская передача
— — червячные — см. Червячная пере-
дача
Планетарные передачи — Выбор кинема-
тической схемы 77—82
— График для выбора чисел зубьев 84
— Кинематический расчет 82—86
— Конструирование 94 —109
— Определение к. п. д. 86—91
— Определение сил, действующих на
звенья 92
— Пример расчета 85
— Расчеты иа прочность 91—94
— Условие возможности сборки 85
— Условие соосности 85
— Условия проектирования 83
Планетарные передачи дифференциальные
73, 74—75
— — замкнутые дифференциальные 73,
80 — Формулы для определения пере-
даточного отношения 76, 77
— — Простые 74, 75, 77, 81—82
Пластики древесно-слоистые 254
Пластмассы 253—254
Плиты фундаментные 348, 350—353
— — литые 349, 351
— — сварные 349, 350, 351
Плоскоременная передача — Формулы для
расчета 357—368 — Пример расчета
364—365
Плотность масла 264
Подпятники плоские 247—248
Подшипники качения — Виды нагружеиня
колец 189
— Выбор посадок на вал и в корпус 189—
193
— Долговечность 232
— Классы точности 189
— Монтаж 198
— Подбор 229—242, 540—542
— Способы крепления внутренних колец
199, 200, 205, 206, 207
— Способы крепления наружных колец
203, 204, 206
— Установочные размеры 196, 197
— Шероховатость поверхностей посадоч-
ных мест 195
Подшипники качения плавающие 182
Подшипники скольжения — Вкладыши
258—262
— Выбор типа 243—244
— Гидродинамический расчет 265—286
— Конструкции 255—262
— Момент треиия 246
— Расположение н размеры смазочной ка-
навки 262
603
— Среднее давление 245, 246
— Треиие в опорах скольжения 243—244
— Элементарный расчет 245—248
Подшипники скольжения встроенные 257—
258
— — неразъемные 255, 593
— — полные 268
— —- половинные 268
— — разъемные 255—257
— — с двумя болтами 594
— — с четырьмя болтами 595
— — с принудительной смазкой 280, 282—
286
Подшипниковые узлы — Конструктивные
требования 179—184
Ползуны — Способы крепления направля-
ющих 323
Посадки деталей редукторов 348, 349
— — подшипников на вал н в корпус
189—193
Предел выносливости 59
Привод — Конструирование сварной ра-
мы 551—553 — Передаточное число 10 —
12 — Проектирование 4
— — с вариатором, двухступенчатым чер-
вячным редуктором — Пример проек-
тирования 532—553
— — с коническо-цилиндрическим редук-
тором — Пример проектирования 497—
532
Пробки к маслоспускным отверстиям ци-
линдрические 312
— — конические 313
Проволока 488
Пружины — Жесткость 434 — Размеры
490
— — растяжения-сжатия цилиндрические
винтовые — Конструирование 491—492
— Размеры 489—490 — Расчет на жест-
кость 489 — Расчет на прочность 487—
489
— — сжатия — Размеры 489—490
— — тарельчатые 492—496 — Пример
подбора 496
Пьезокоэффициент 265
Пята кольцевая 246, 247
Р
Радиусы галтелей 195, 196, 198
— — закруглений 166
— — проточек 195, 196
Расточка сквозная 179, 180
Расход воды 346
Ребра жесткости 35
— — охлаждающие 341
Редукторы — Кинематические схемы 13,
15—27
— Конструирование корпусов 295, 302—
318
— Конструирование опорных узлов 184—
188
— Конструкция и размеры отдушины 314
— Конструкция и размеры пробок к масло-
спускным отверстиям 312, 313
— Контроль уровня масла 336—340
— Литые детали 314, 315
— Масла смазочные 333—336
— Общий вид редуктора 526—529
— Опорные поверхности под крепежные
детали 307
— Охлаждение 341. 342
— Пример компоновки 511—523
— Разбивка передаточного числа 29—30,
— Размеры ламп и фланцев 307
— Смазка 324—340
— Тепловой расчет 340—348
— Фундаментные болты 317
Редукторы для привода смесителя — При-
мер расчета 525, 528—530
— — зубчато-черзячные 26, 27
604
— — конические 185—187
— — конические одноступенчатые 14, 16
— — коннческо-цилиндрические 21, 22 —
497~ 532ИМеР пРоектиРования привода
— — планетарные 95, 96. 97, 98 — При-
мер расчета 101 — 109
— — цилиндрические двухступенчатые 16*
17, 18, 19, 20, 22
— — цилиндрические одноступенчатые 14,
15, 16
— — цилиндрические трехступенчатые 20,
22
— — червячные 23—25, 27, 187—188 —
Пример теплового расчета 344—345,
544—545
— — червячные двухступенчатые 27, 548
— — червячно-зубчатые 26, 27
Резина 255
Ременные передачи — Выбор основных па-
раметров 354—355
— Нагрузки валов 156
— Передаточные числа 355
— Расчет 366—368
— Скорости ремня 354
— Схемы 354, 366
Ремни — Выбор типа 355—357 — Допуска-
емое напряжение растяжения 360 —
Модуль упругости 360 — Предел вы-
носливости 360 — Размеры 355, 356 —
Расчет сечения 399—400
— — клиновые — Выбор сечеиия 370 —
Размеры 370
— — клиновые широкие 398. 400, 402
— — кожаные 355
— — прорезиненные 355, 356
— — хлопчатобумажные 355, 356
Ролик натяжной 367, 368
Роликоподшипники игольчатые 176
— — конические 178, 179
— — конические однорядные 587—589*
590
— — радиальные с короткими цилиндри-
ческими роликами 176, 579—581
— — с витыми роликами 176
— — с длинными роликами 176
— — сферические 177—178
Рым-болты 308
С
Салазки для электродвигателей 576
Самотормозящая передача 138
Сателлиты 98—100
Сечение нетто 164
Сила греиия 271
Скорость скольжения 115, 121
Скосы 166
Смазка — Выбор способа 278
— — картерная 324—326
— — масляным туманом 222
— — открытых зубчатых передач 340
— — пластичная 217—218
— — разбрызгиванием 221—223
— — редукторов 324—-340 — Контроль
уровня масла 336—340 — Масла сма-
зочные 333—336
— — фитильная 220, 221
---цепей 391—392
— — циркуляционная 327, 328—333
Смазка подшипниковых узлов — Выбор
сорта 215—219
— Капельные масленки 219, 220
— Критерий при выборе смазки 216
— Масляная ванна 219
— Минеральные масла 217
— Номограмма для определения вязкости
масла 216
— Способы 219—222
— Циркуляционная система 222
Смазочная канавка 262
— — способность 263
Смазочные диски 326
— — кольца 326
— — сопла 327, 328
— — шестерни 325
Смещение производящего исходного кон-
тура 61
— — червячной фрезы 126
Соединения зубчатые (шлицевые) 169, 171 —
174
— — шпоночные 167—169, 170
Солнечное колесо 83
Степень точности 52
Т
Термическое сопротивление теплопередачи
272, 273, 274
Теплопередача 271 — Схемы 273
Тренне граничное 244
— — в опорах скольжения 243—244, 268,
271—277
— — жидкостное 244 — Условие 268
— — полу жидкостное 244
— — сухое 244
Трубы для змеевиков 346
ТУ 38—1—285—69 218
ТУЕУ 169—59 218
Тяговая способность ремня 358
У
Угол контакта подшипника номинальный
239
— — трення в передаче винт—гайка 138
— — приведенный 115
Уплотнения войлочные 225, 226
— — двусторонние винтовые 225
— — контактные 223
— — лабиринтные 223—224
— — лабиринтно-канавочные 224, 22b
— — манжетные бескассетпые 228
— — манжетные кассетные 226, 227
— — с графитовыми нлй металлическими
элементами 229
— — С упругими разрезиымн кольцами
229
— — центробежного типа 225
— — щелевые 181, 182 — Размеры коль-
цевых проточек 223
Уравнение Рейнольдса 265
— — теплового баланса 271
Ускорители 13
Условие возможности сборки передачи 83
— — износостойкости муфт 475
— — отсутствия подрезания ножек зуба
— — работоспособности муфты 475
— — соосности 83
— — соседства 83
Ф
Фаски 198
Фиксаторы 323
Формула Баруса 265
— — Герца 35
— — Орлова 271
— — Савернна 357
— — Эйлера 140
— — Ясинского 140
Ц
Цепи приводные зубчатые 379, 382
— — роликовые 378, 379, 380, 381
Цепные передачи — Выбор основных па-
раметров 381—387
— Давление в шарнирах цепи 385, 386
— Длина цепи 383
— Коэффициент запаса прочности цепей
386, 387, 452
— Межосевое расстояние 381
— Нагрузки валов 157
— Пример расчета 387—391, 509—511
— Смазка цепей 391—392
— Типы приводных цепей 378—381
Цилиндрическая передача зубчатая 506—
509
— — косоэубая 153, 154
— — прямозубая 153
— — шевронная 154
Ч
Червяк — Действующие усилия 123
— Допускаемая стрела прогиба 125
— Конструкции 292
— Основные параметры 111 —14
— Примеры выполнения рабочих черте-
жей 293—295, 300
— Расчет на жесткость 125
— Расчет на прочность 123, 124
— Число витков ПО—111
Червяк архимедов П1—114
Червячная передача ПО—136 — К. п. д.
115
— Основные параметры 111—116
— Передаточное число ПО
— Пример расчета 533—538
— Расчет зубьев червячного колеса на вы-
носливость 118
— Расчет на контактную прочность 116,
П7
— Скорость скольжения 115
Червячная передача глобоидная — Опре-
деление меж осевого расстояния 127—
131 — Основные параметры 131—133 —
Расчет геометрических параметров 133—
136
Червячное зацепление со смещением чер-
вяка 126—127
Червячные колеса — Конструкции 292—
293 — Примеры выполнения рабочих
чертежей 293—295, 301 Расчет 114
Число циклов базовое 59
— — нагружения действительное 59
— — сателлитов приведенное 93
— — эквивалентное 59, 122
Чугун антифрикционный 248, 249
— — серый 248
Ш
Шайбы вращающиеся 224, 225
— — косые 353
— — неподвижные 224
— — предохранительные 202
— — упорные 194
Шарикоподшипники радиально-упорные
177, 178
— — радиально-упорные однорядные
584 586
— — радиальные однорядные 175—176,
577—578
— — радиальные сферические 177
— — радиальные сферические двухряд-
ные 582—583
— — упорные 178, 179, 591—592
Швеллеры 351
Шероховатость поверхности — Зависи-
мость от методов обработки 296—297 —
Примеры назначения 294—295
605
— — в местах посадки подшипников 195
Шестерня — Понятие — Способы выбора
чисел зубьев 38—41
— — смазочная 325
Шип 245, 246, 266
Шкивы 403, 404, 410
— — для клиновых ремней 371, 398
— — для электродвигателей 575
— — литые 372
— — Плоскоременной передачи 361—363,
365
— — сварные 372
Шлицы — Допускаемые напряжения смя-
тия 174
Шпонки призматические 168
— — сегментные 168. 169, 170
Шпоночные канавки 164
— — соединения — Проверка прочности
525
Штифты закрепительные 259
Э
Электродвигатели — Выбор 5—7 — Габа-
ритные размеры 562—574 — Типы и
параметры 6—7, 554—561 — Условные
обозначения 8
— — асинхронные однофазные 7
— — асинхронные трехфазные 7—9
— — единой сернн 9
— — переменного тока 7
— — постоянного тока 6—7
ОГЛАВЛЕНИЕ
Предисловие ............................................................. 3
Глава 1. Кинематический расчет привода (С. А. Чернавский)................ 4
§ 1.1. Выбор типа передачи......................................... 4
§ 1.2. Выбор электродвигателя...................................... 5
§ 1.3. Характеристики асинхронных электродвигателей трехфазного
тока......................................................... 7
§ 1.4. Передаточное число привода................................. 10
Г л а в а 2. Общие сведения о редукторах (Г. М. Ицкович)................. 13
§ 2.1. Обзор основных схем редукторов............................... 13
§ 2.2. Разбивка общего передаточного числа редуктора по ступеням . . 29
Г л а в а 3. Расчет зубчатых передач (Г. М. Ицкович).................... 34
§ 3.1. Общие сведения............................................... 34
§ 3.2. Цилиндрические зубчатые колеса с прямыми, косыми и шеврон-
ными зубьями.................................................... 36
§ 3.3. Конические зубчатые колеса.................................. 44
§ 3.4. Коэффициент нагрузки......................................... 49
§ 3.5. Материалы зубчатых колес и допускаемые напряжения............ 53
§ 3.6. Зацепление цилиндрических зубчатых колес со смещением произ-
водящего исходного контура (Б. И. Козинцов)..................... 61
Глава 4. Планетарные зубчатые передачи (F. И. Козинцов) ................. 73
§ 4.1. Общие сведения............................................... 73
§ 4.2. Расчет планетарных передач................................... 82
§ 4.3. Конструирование планетарных передач (Е. П. Иванов)...... 94
Глава 5. Расчет червячных передач (Г. М. Ицкович)........................ НО
§ 5.1. Общие сведения............................................... ПО
§ 5.2. Основные параметры червячной передачи.......... ........ 111
§ 5.3. Расчет элементов зацепления на контактную прочность и изгиб 116
§ 5.4. Коэффициент нагрузки, материалы н допускаемые напряжения 119
§ 5.5. Расчет червяка на прочность и жесткость..................... 123
§ 5.6. Червячное зацепление со смещением червяка (Б. П. Козинцов) 126
§ 5.7. Расчет червячной глобоидной передачи (Б. П. Козинцов) .... 127
Глава 6. Винтовые передачи.............................................. 137
§6.1. Передача винт — гайка с трением скольжения (Б. П. Козинцов) 137
§ 6.2. Винтовая шариковая передача (Е. И. Иванов, Е. Г. Коган) . . 142
Глава 7. Расчет налов (Г. М. Ицкович) .................................. 153
§ 7.1. Нагрузки валов.............................................. 153
§ 7.2. Проектный и проверочный расчет валов........................ 157
§ 7.3. Краткие сведения о конструировании валов . 165
§ 7.4. Шпоночные и зубчатые (шлицевые) соединения.................. 167
Глава 8. Проектирование опор валов на подшипниках качения (К. И. Бо-
ков) ............................................................... 175
§ 8.1. Порядок проектирования...................................... 175
§ 8.2. Выбор типа подшипника....................................... 175
§ 8.3. Конструктивные требования к подшипниковым узлам............. 179
§ 8.4. Конструирование опорных узлов редукторов.................... 184
§ 8.5. Классы точности и посадки подшипников на вал и в корпус ... 189
§ 8.6. Монтаж подшипниковых узлов.................................. 198
§ 8.7. Смазка и уплотнение подшипниковых узлов..................... 215
§ 8.8. Подбор подшипников качения.................................. 229
Глава 9. Подшипники скольжения (С. А. Чернавский)....................... 243
§ 9.1. Выбор типа подшипника....................................... 243
§ 9.2. Элементарный расчет подшипников скольжения.................. 245
§ 9.3. Подшипниковые материалы..................................... 248
§ 9.4. Конструкции подшипников скольжения.......................... 255
§ 9.5. Смазочные материалы......................................... 263
§ 9.6. Гидродинамический расчет подшипников скольжения......... 265
607
Глава 10. Конструирование деталей редукторов и коробок передач. Смаз-
ка зубчатых и червячных зацеплений (В. А. Киселев) ...... 287
§ 10.1. Конструирование зубчатых и червячных колес и червяков . . . 287
§ 10.2. Конструирование корпусов редукторов и коробок передач .... 295
§ 10.3. Конструирование механизмов переключения скоростей в короб-
ках передач....................................................... 318
§ 10.4. Смазка редукторов........................................ 324
§ 10.5. Тепловой расчет редукторов............................... 340
§ 10.6. Посадка основных деталей редукторов......................348
§ 10.7. Фундаментные плиты....................................... 348
Глава 11. Ременные передачи (С. А. Чернавский)..................... 354
§ 11.1. Выбор основных параметров передачи....................... 354
§ 11.2. Расчет плоскоременной передачи...........................357
§ 11.3. Расчет клиноременной передачи............................ 369
Глава 12. Цепные передачи (С. А. Чернавский)......................... 378
§ 12.1. Общие сведения. Типы приводных цепей..................... 378
§ 12.2. Выбор основных параметров цепной передачи................ 381
§ 12.3. Пример расчета цепной передачи....... 387
§ 12.4. Смазка цепей............................................. 391
Глава 13. Проектирование вариаторов (Л4. А. Бонч-Осмоловский)........393
§ 13.1. Общие сведения о механическом бесступенчатом регулировании
скорости.......................................................... 393
§ 13.2. Вариаторы с гибкой связью................................ 396
§ 13.3. Фрикционные вариаторы.................................... 419
§ 13.4. Подбор вариатора ................................... 442
Глава 14. Муфты (С. А. Чернавский)................................... 445
§ 14.1. Выбор типа муфт......................................... 445
§ 14.2. Жесткие муфты .......................................... 446
§ 14.3. Компенсирующие муфты ................................... 449
§ 14.4. Упругие муфты........................................... 455
§ 14.5. Предохранительные муфты................................. 468
§ 14-6. Сцепные муфты........................................ . 483
Глава 15. Расчет пружин (Г. М. Ицкович).............................. 487
§ 15.1. Цилиндрические винтовые пружины растяжения — сжатия . . . 487
§ 15.2. Тарельчатые пружины.....................................492
Глава 16. Примеры проектирования..................................... 497
§ 16.1. Проектирование привода с коническо-цилиндрическим редук-
тором (В. А. Киселев)............................................ 497
§ 16.2. Проектирование привода с вариатором, двухступенчатым червяч-
ным редуктором и сварной рамой (Л4. А. Бонч-Осмоловский) ... 532
Приложения........................................................... 554
Список литературы.................................................... 598
Предметный указатель................................................. 600
Сергей Александрович Чернавский, Георгий Михайлович Ицкович,
Вячеслав Александрович Киселев, Кирилл Николаевич Боков,
Михаил Александрович Бонч-Осмоловский, Борис Павлович Козинцов
«ПРОЕКТИРОВАНИЕ МЕХАНИЧЕСКИХ ПЕРЕДАЧ»
Редактор издательства Т. С. Грачева
Технический редактор А. И. Захарова. Корректор Ж. Л. Суходолова
Переплет художника А. Я. Михайлова
Сдано в набор 23/IX 1975 г. Подписано к печати 26/V 1976 г. Т-08955. Формат бОХбО’Лв.
Бумага типографская № 3. Усл. печ. л. 38,0. Уч.-изд. л. 40,15. Тираж 113 000 экз. Заказ 220.
Цена 1 р. 51 к.
Издательство «Машиностроение» 107885, Москва, Б-78, 1-й Басманный пер., д. 3
Ордена Трудового Красного Знамени Ленинградское производственно-техническое объ-
единение «Печатный Двор» имени А. М. Горького Союзлолиграфпрома при Государствен-
но» комитете Совета Министров СССР ио делам издательств, полиграфии и книжной
торговли. 197136, Ленинград, П-136, Гатчинская ул., 26.