/







































































Автор: Кореневский Н.А. Попечителев Е.П.
Теги: формы лекарственных средств медицинские материалы оборудование медицина медицинское оборудование
ISBN: 978-5-7681-0471-9
Год: 2009




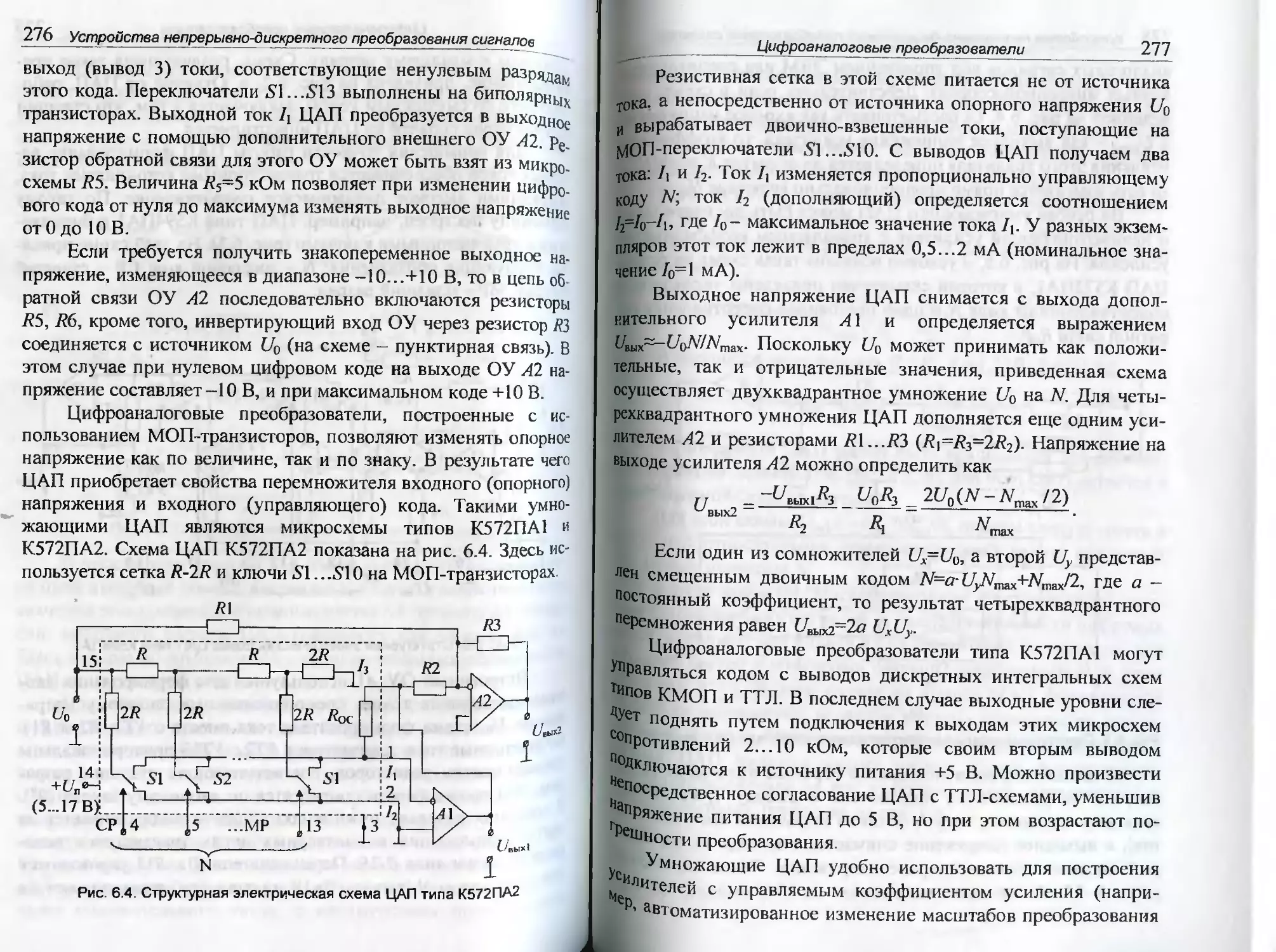
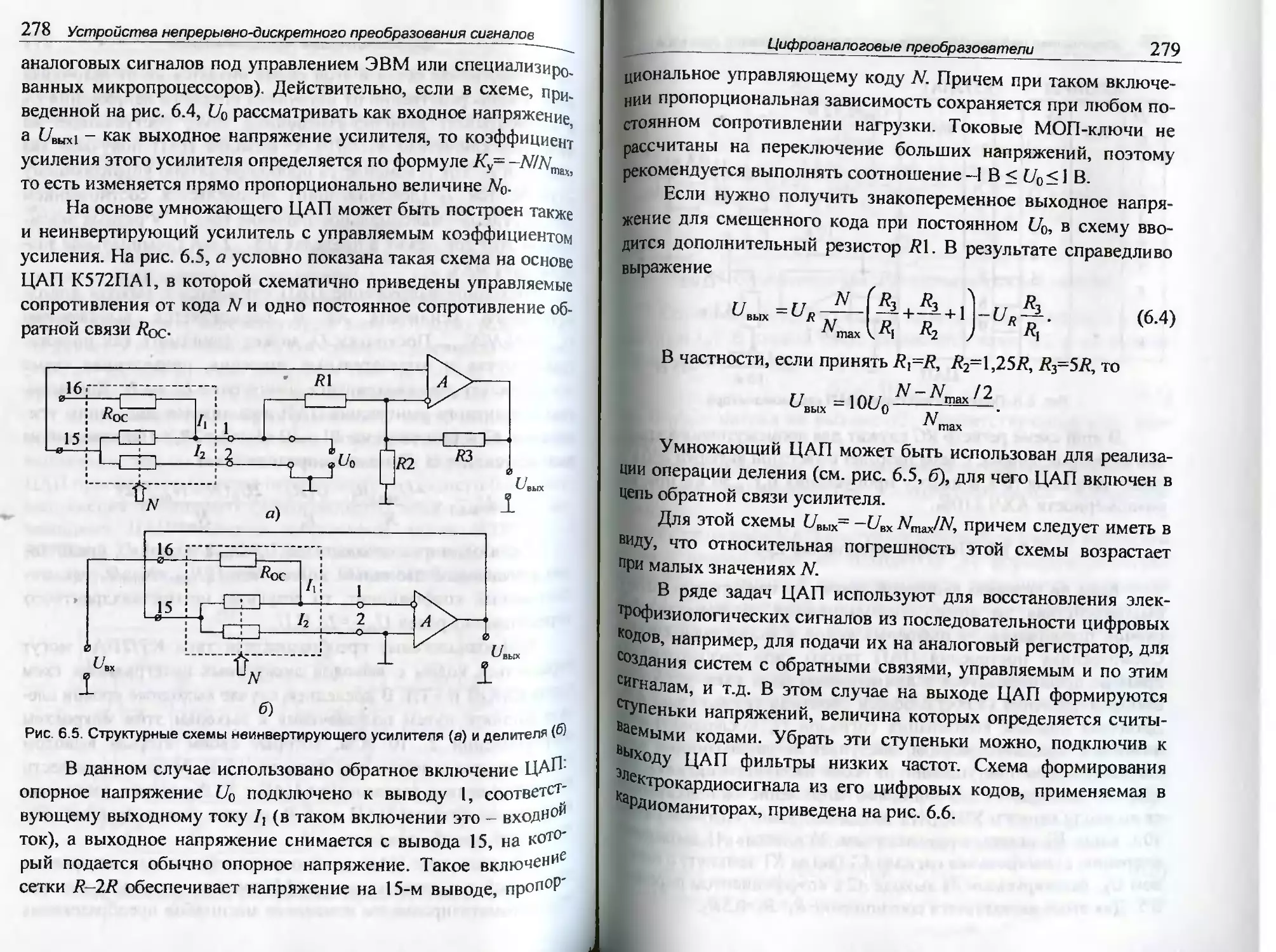
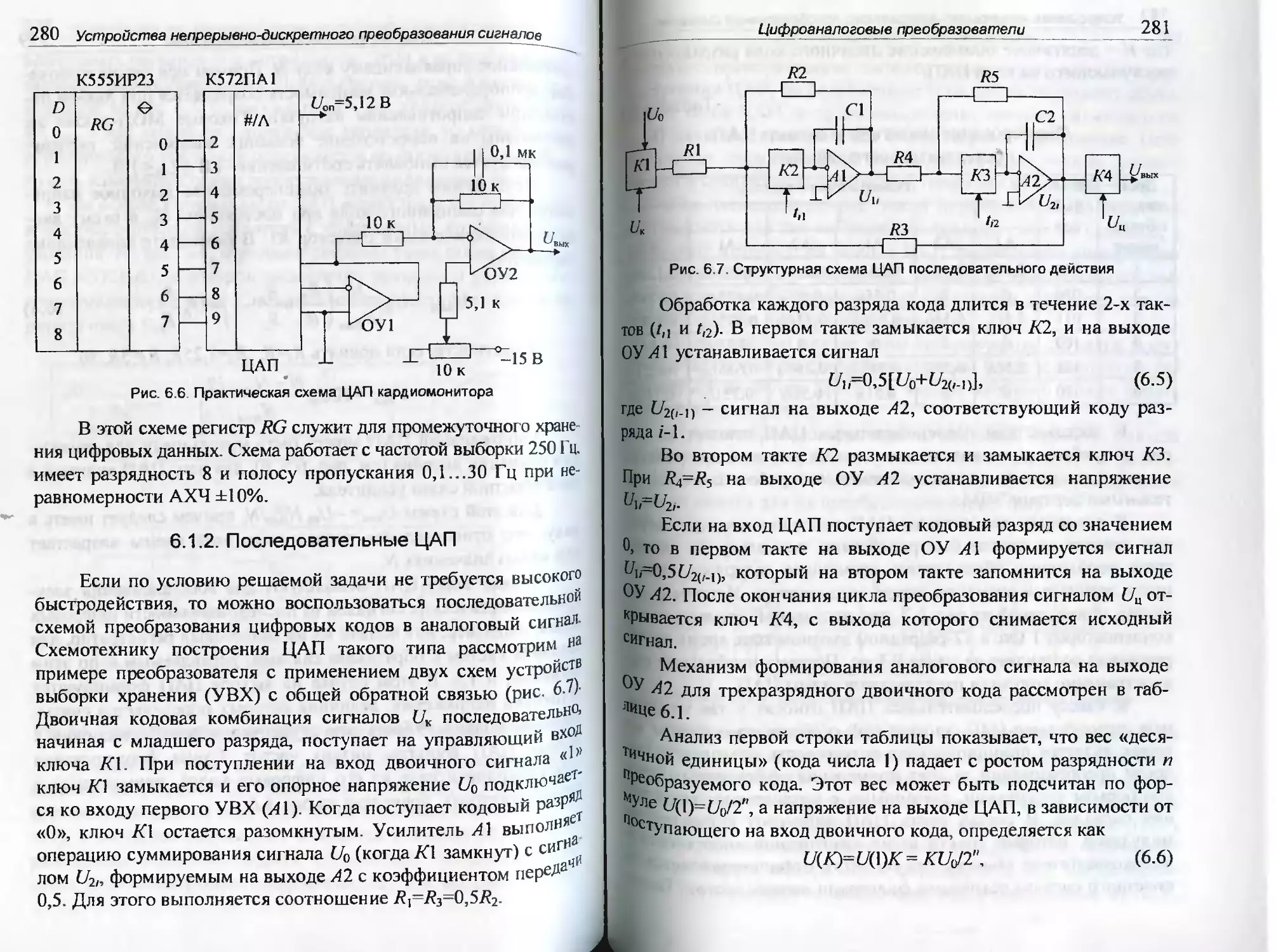
Текст
Элементы и узлы
медицинской техники
И1
и> .? гаи!
\
*s
г
Кореневский Н.А.
Попечителев Е.П.
6i [Off, S)
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
Государственное образовательное учреждение
высшего профессионального образования
«Курский государственный технический университет»
Н.А. Кореневский, Е.П. Попечителев
УЗЛЫ И ЭЛЕМЕНТЫ
МЕДИЦИНСКОЙ ТЕХНИКИ
Учебное пособие для студентов вузов
3043-67-
Рекомендовано Учебно-методическим объединением вузов
Российской Федерации в области радиотехники, электроники,
биомедицинской техники и автоматизации
еЛло.*и.ач«ый государственный |
\ пи$>ер1'итет»
НАУЧНАЯ БИБЛИОТЕКА,
Курск 2009
УДК 615.47
ББК К 967
К 38
Рецензенты:
Доктор технических наук, ведущий
научный сотрудник А.А. Бурмака
Доктор медицинских наук, зав. кафедрой медицины
и логопедии Курского государственного университета,
профессор В.А. Иванов
Кореневский, Н.А.
Узлы и элементы медицинской техники [Текст]: учебное
пособие / Н.А. Кореневский, ЕЛ. Попечителев; Курск, гос. техн.
ун-т. Курск, 2009. 426 с. Библиогр.: с. 424-455.
ISBN 978-5-7681-0471-9
В настоящем учебном пособии рассматриваются принципы
построения и основные схемотехнические решения, используемые в медицинских
приборах, аппаратах, решающих задачи функциональной диагностики,
лабораторных исследований и проведения лечебно-оздоровительных
мероприятий (терапии).
Учебное пособие имеет своей основной целью изложение материала
в такой последовательности и объеме, чтобы оно полностью
удовлетворяло требованиям образовательного стандарта по дисциплине «Узлы и
элементы электронной медицинской аппаратуры», изучаемой студентами
специальности 200401 «Биотехнические и медицинские аппараты и
системы». В известных аналогичных публикациях материал излагается
фрагментарно, делая упор на ограниченные классы и подклассы отдельных
элементов и узлов медицинской техники, не охватывая все то
многообразие, которое должны знать студенты соответствующей специальности.
УДК 615.47
ББК К 967
К 38
ISBN 978-5-7681-0471-9
© Курский государственный
технический университет, 2009
© Кореневский Н.А.,
Попечителев Е.П., 2009
ОГЛАВЛЕНИЕ
ПРЕДИСЛОВИЕ 5
СПИСОК ПРИНЯТЫХ СОКРАЩЕНИЙ И ОБОЗНАЧЕНИЙ 7
ВВЕДЕНИЕ ъ 8
1 УСИЛИТЕЛИ БИОПОТЕНЦИАЛОВ 11
1.1. Контакт усилителя биопотенциалов с кожей через электроды 12
1.2. Входные цепи усилителей биопотенциалов 24
1.3. Операционные усилители в цепях регистрации биопотенциалов ...28
1.4. Применение инвертирующих и неинвертирующих усилителей
в медицинском приборостроении 52
1.5. Схемы подавления синфазных помех с помощью
дифференциальных и инструментальных усилителей 59
1.6. Подключение усилителей биопотенциалов к микроэлектродам 70
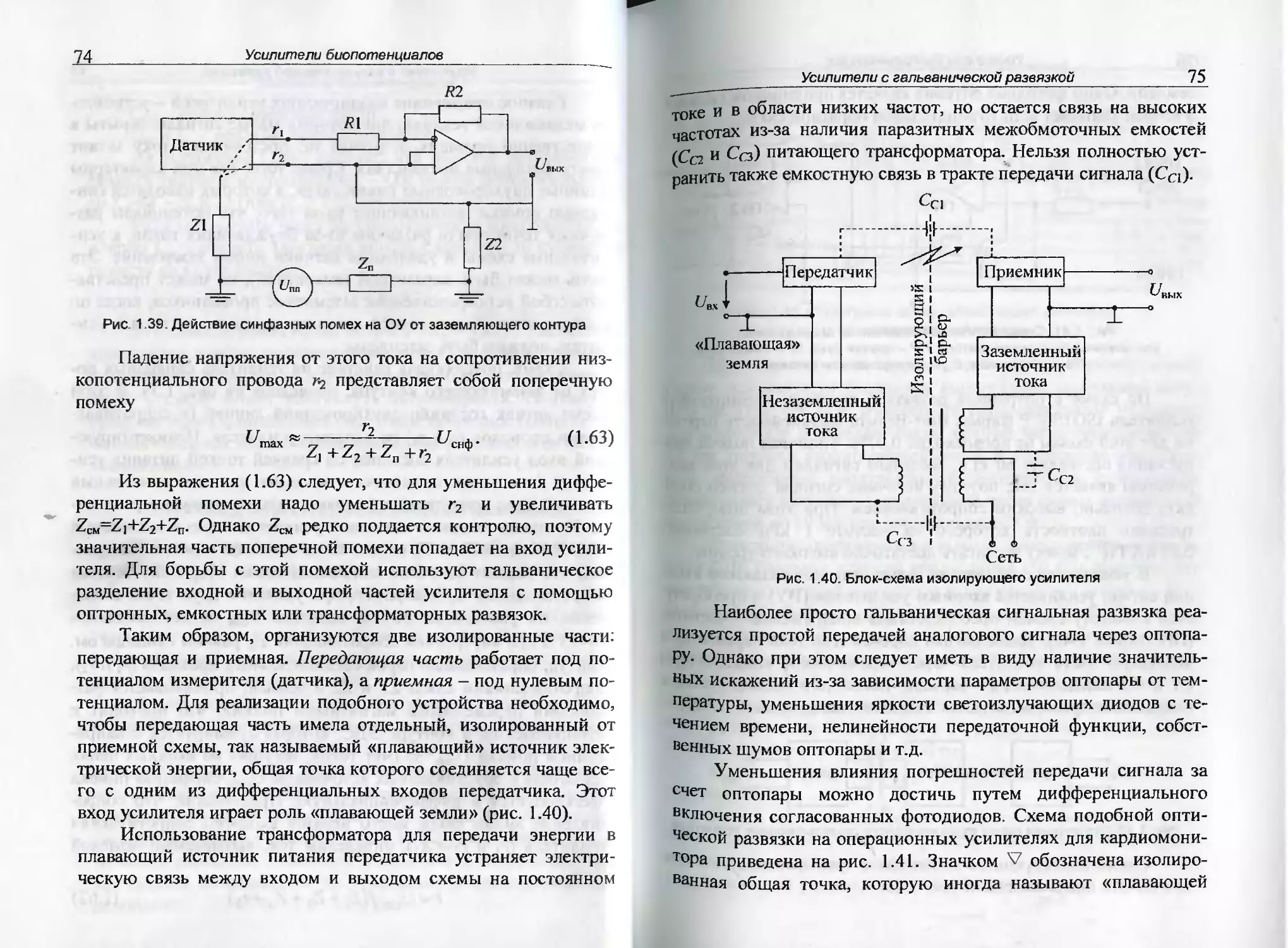
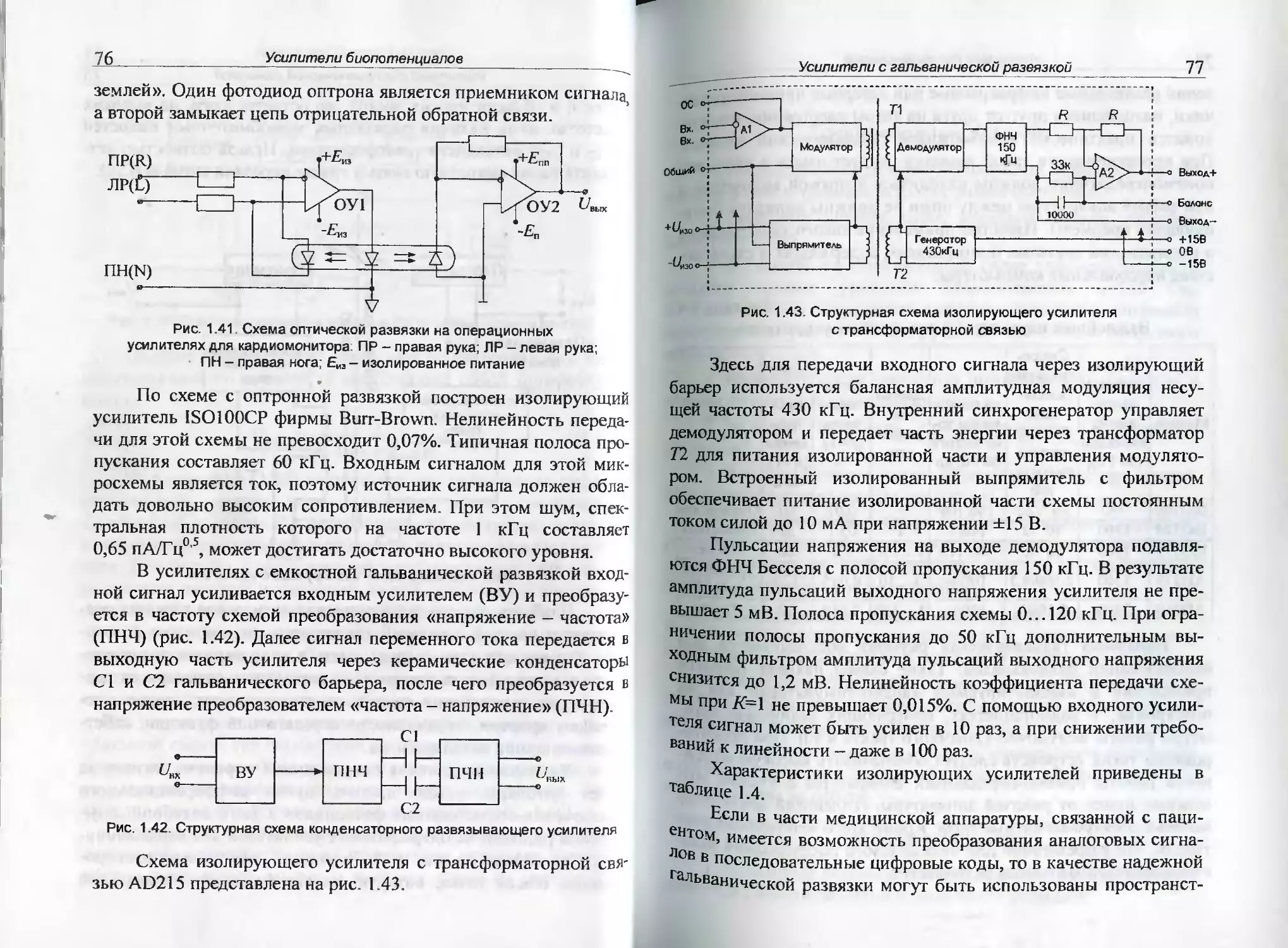
1.7. Усилители с гальванической развязкой 72
Тренировочные задания 79
Тестовые задания 79
2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА НА ОПЕРАЦИОННЫХ
УСИЛИТЕЛЯХ ДЛЯ МЕДИЦИНСКИХ ИЗДЕЛИЙ 82
2.1. Линейные узлы математической обработки
биологических сигналов •. 82
2.2. Активные электрические фильтры 107
2.3. Линейные преобразователи сигналов 127
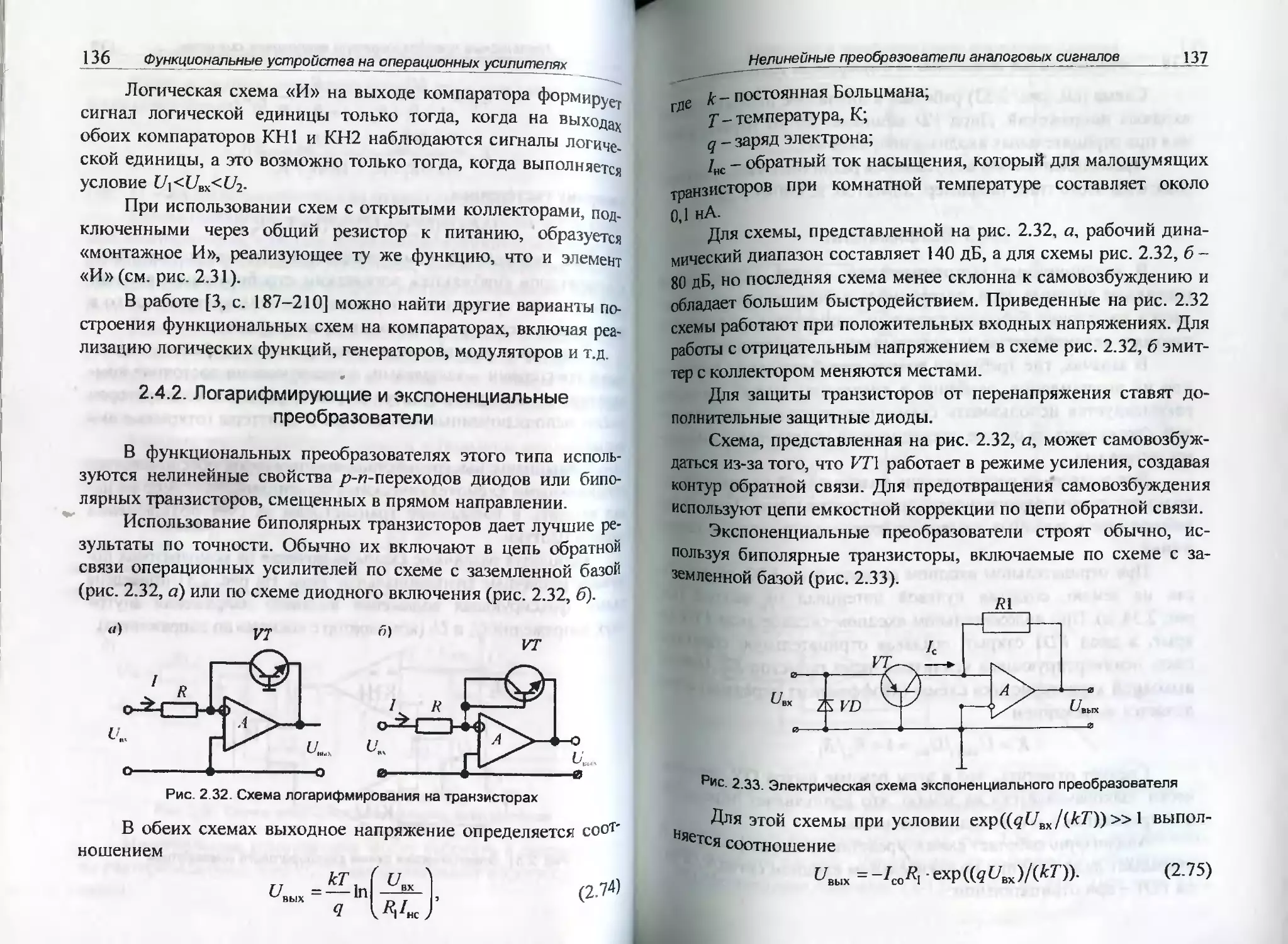
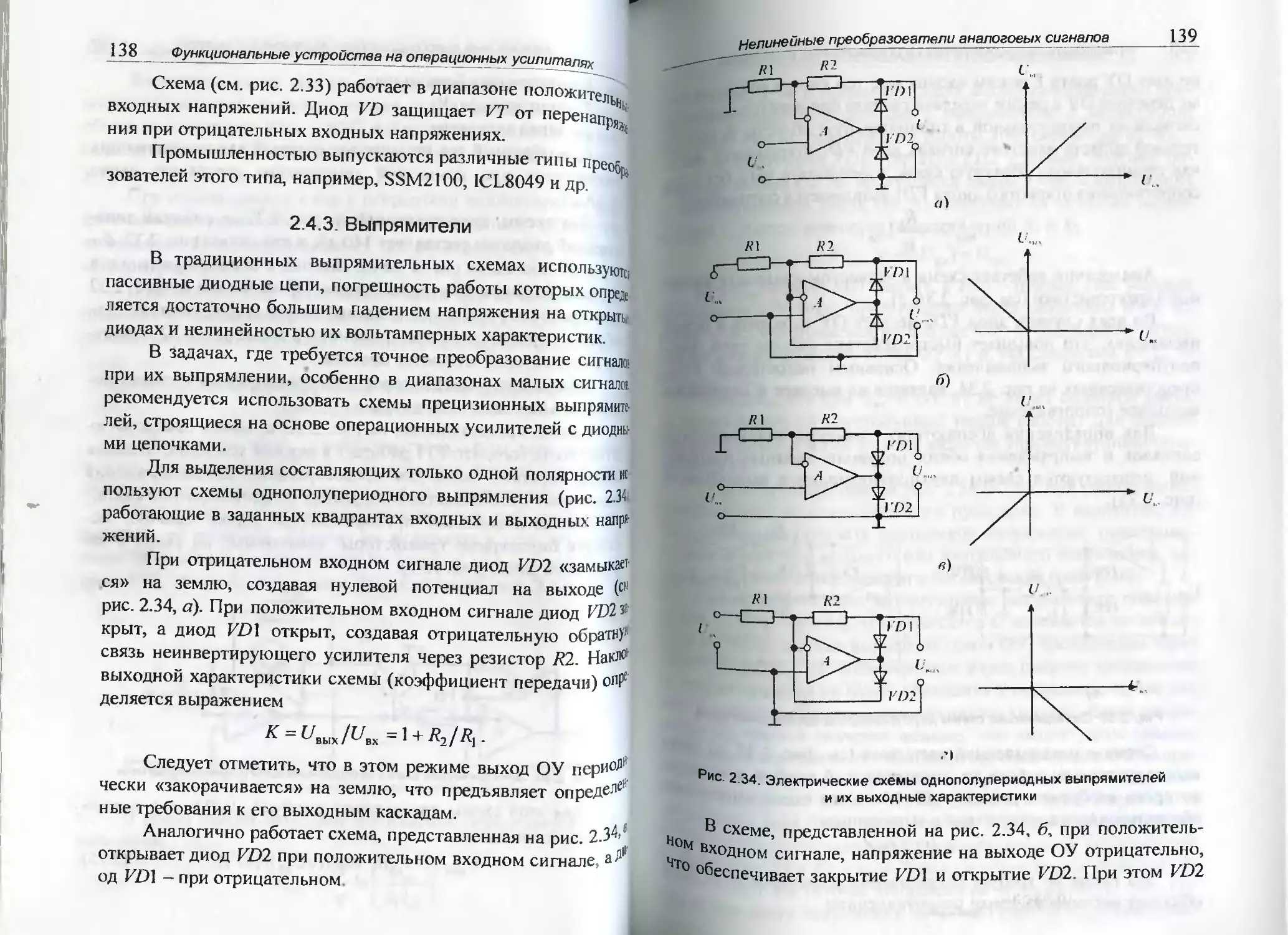
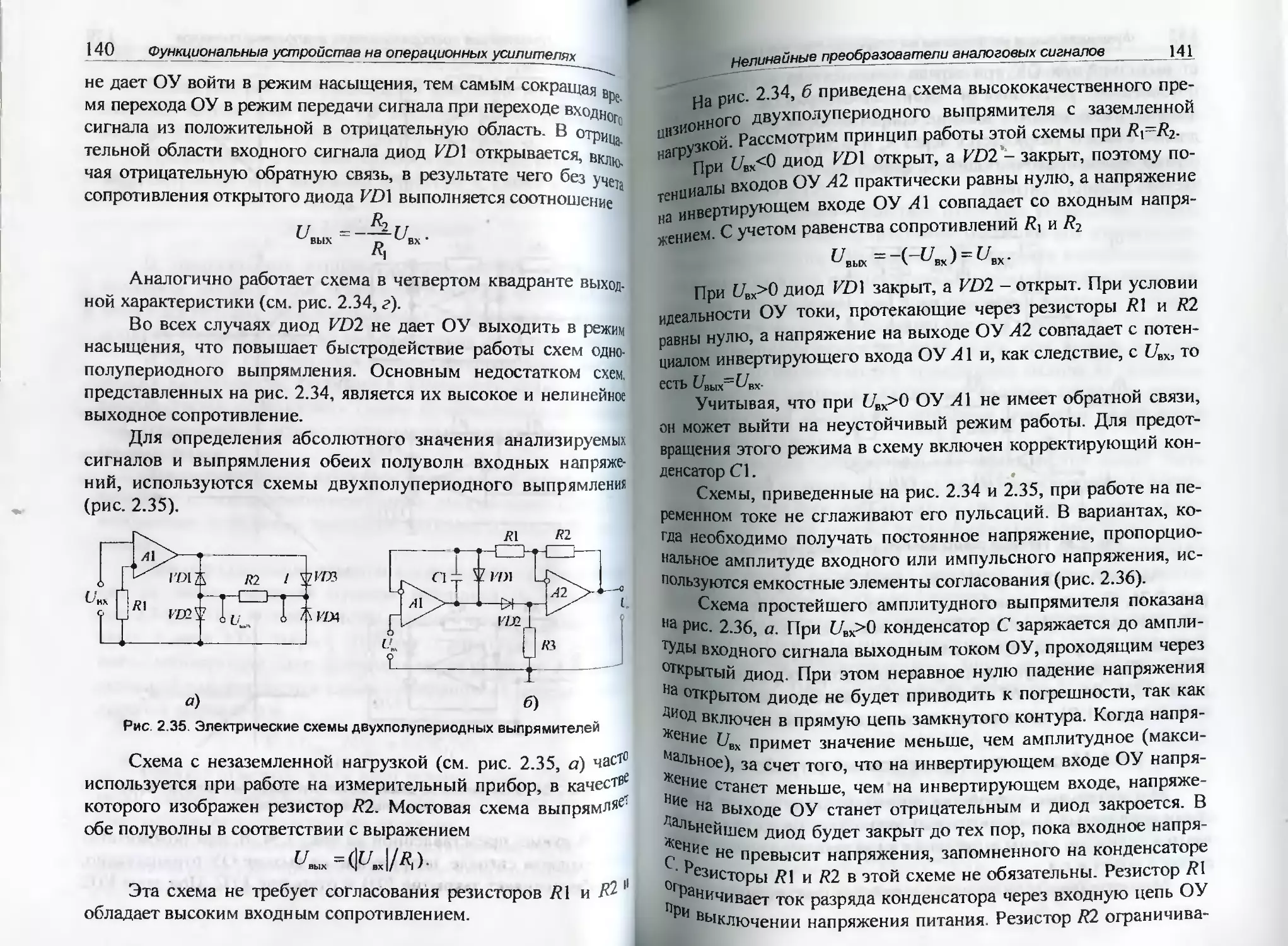
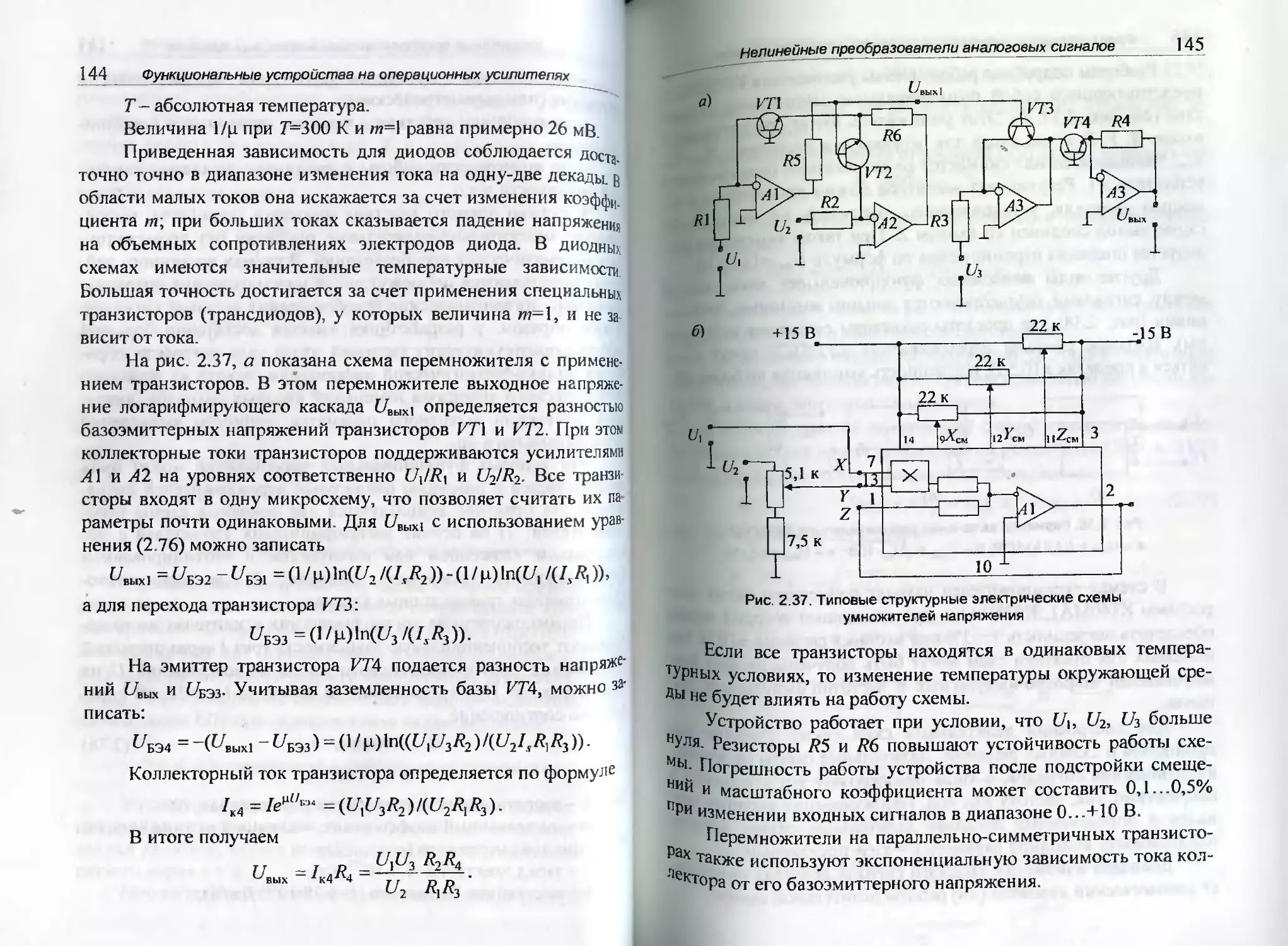
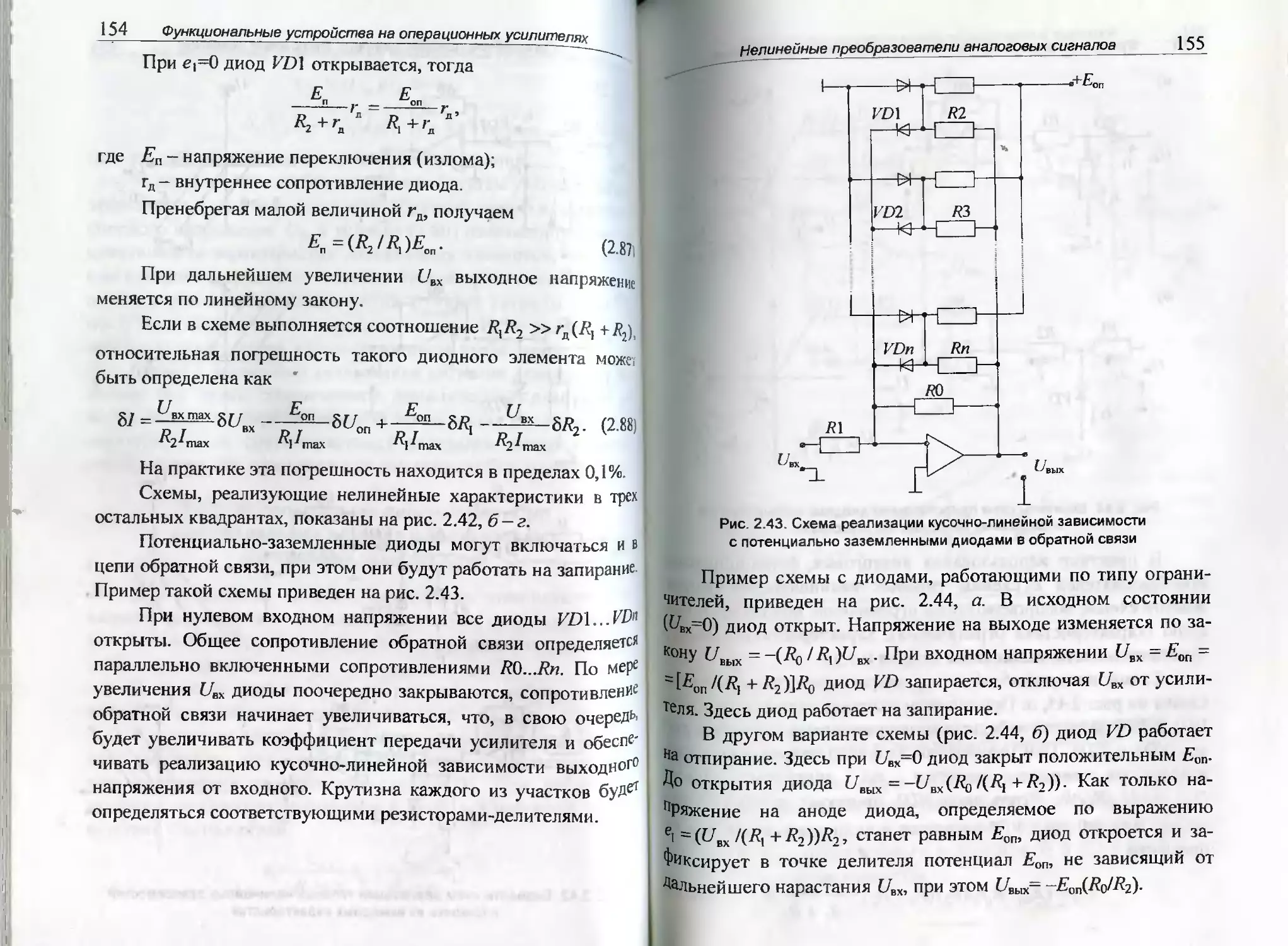
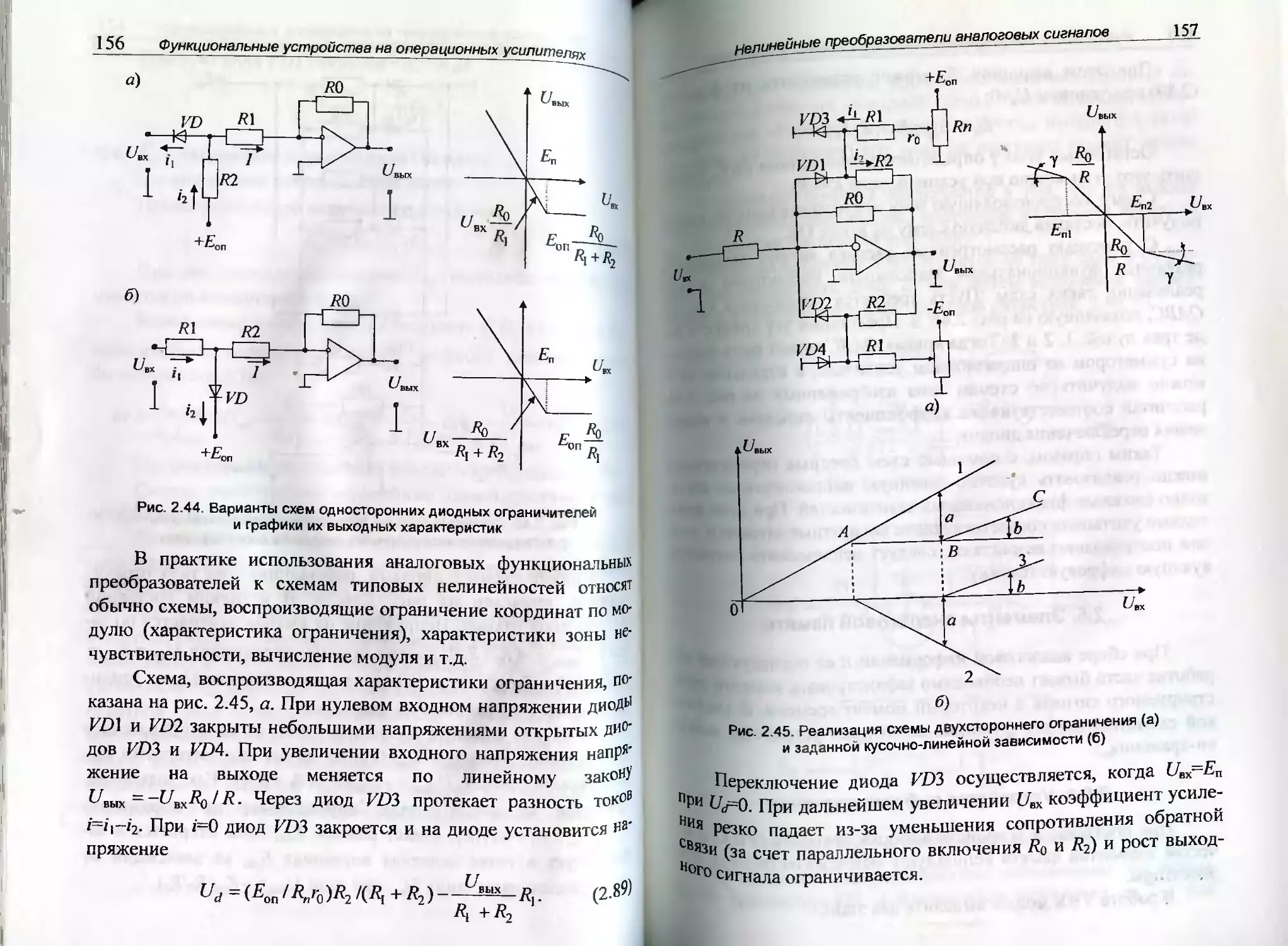
2.4. Нелинейные преобразователи аналоговых сигналов 130
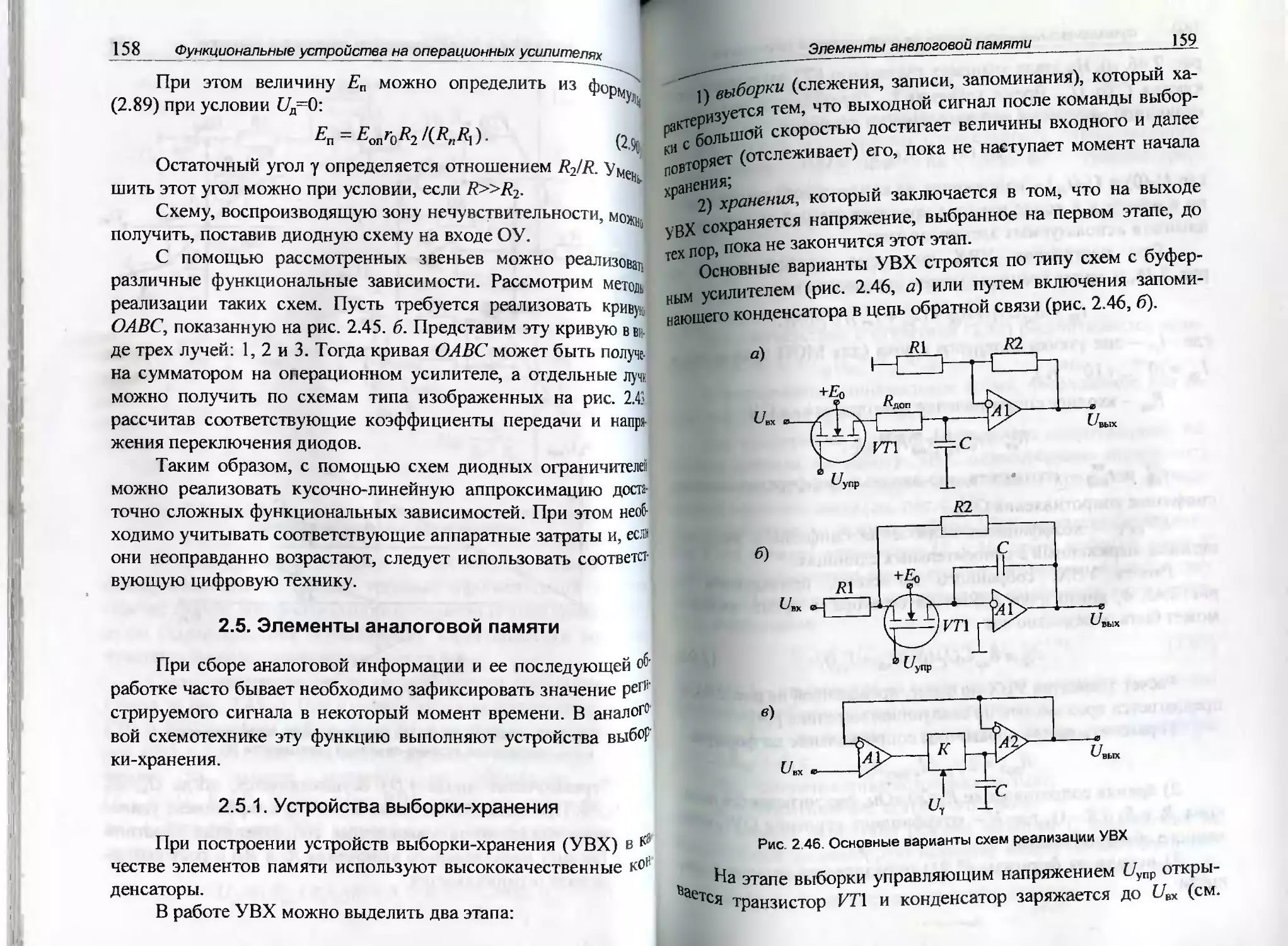
2.5. Элементы аналоговой памяти 158
Тренировочные задания 167
Тестовые задания 168
3. ГЕНЕРАТОРЫ СИГНАЛОВ 171
3.1. Генераторы синусоидальных (гармонических) сигналов 171
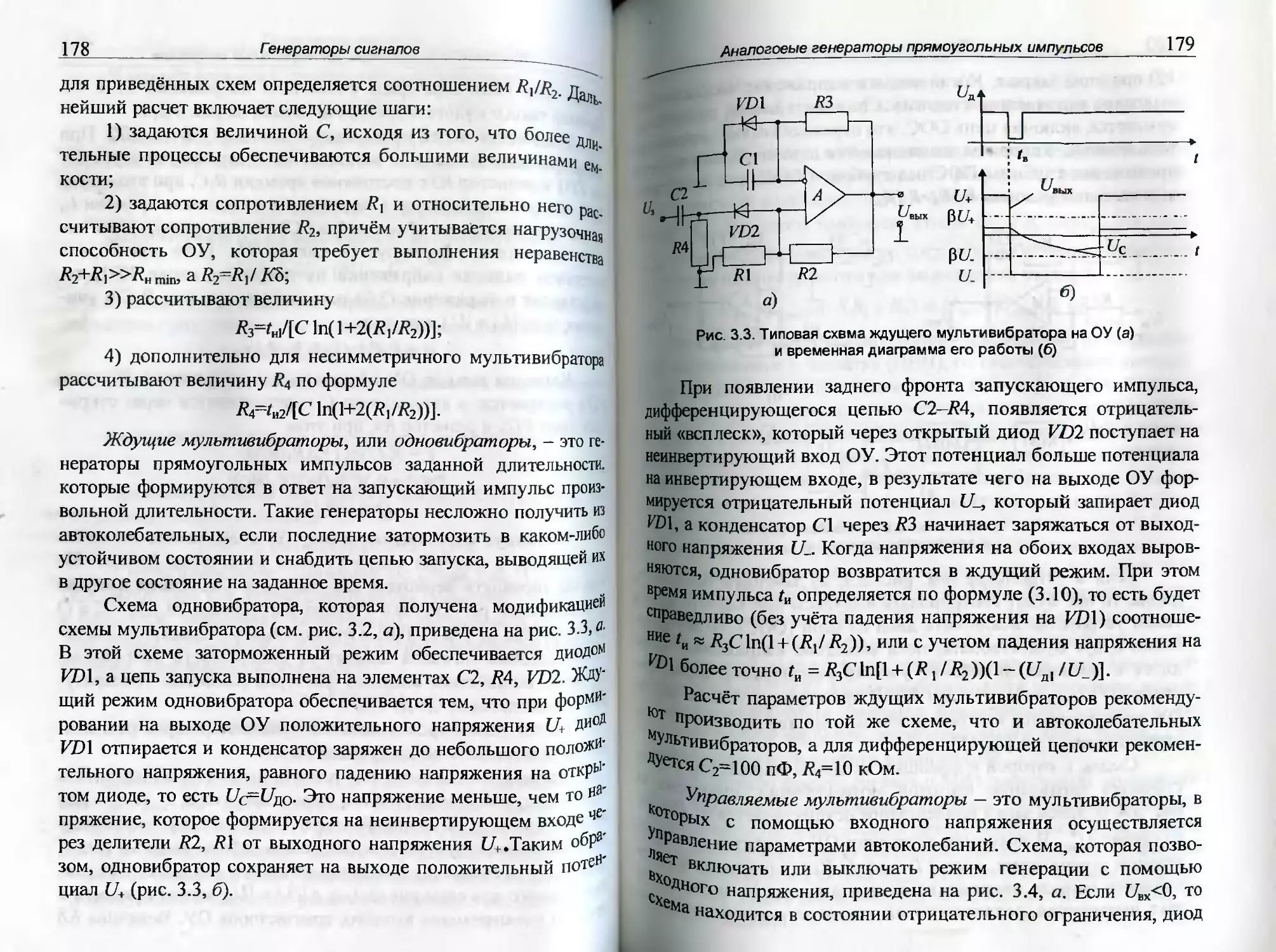
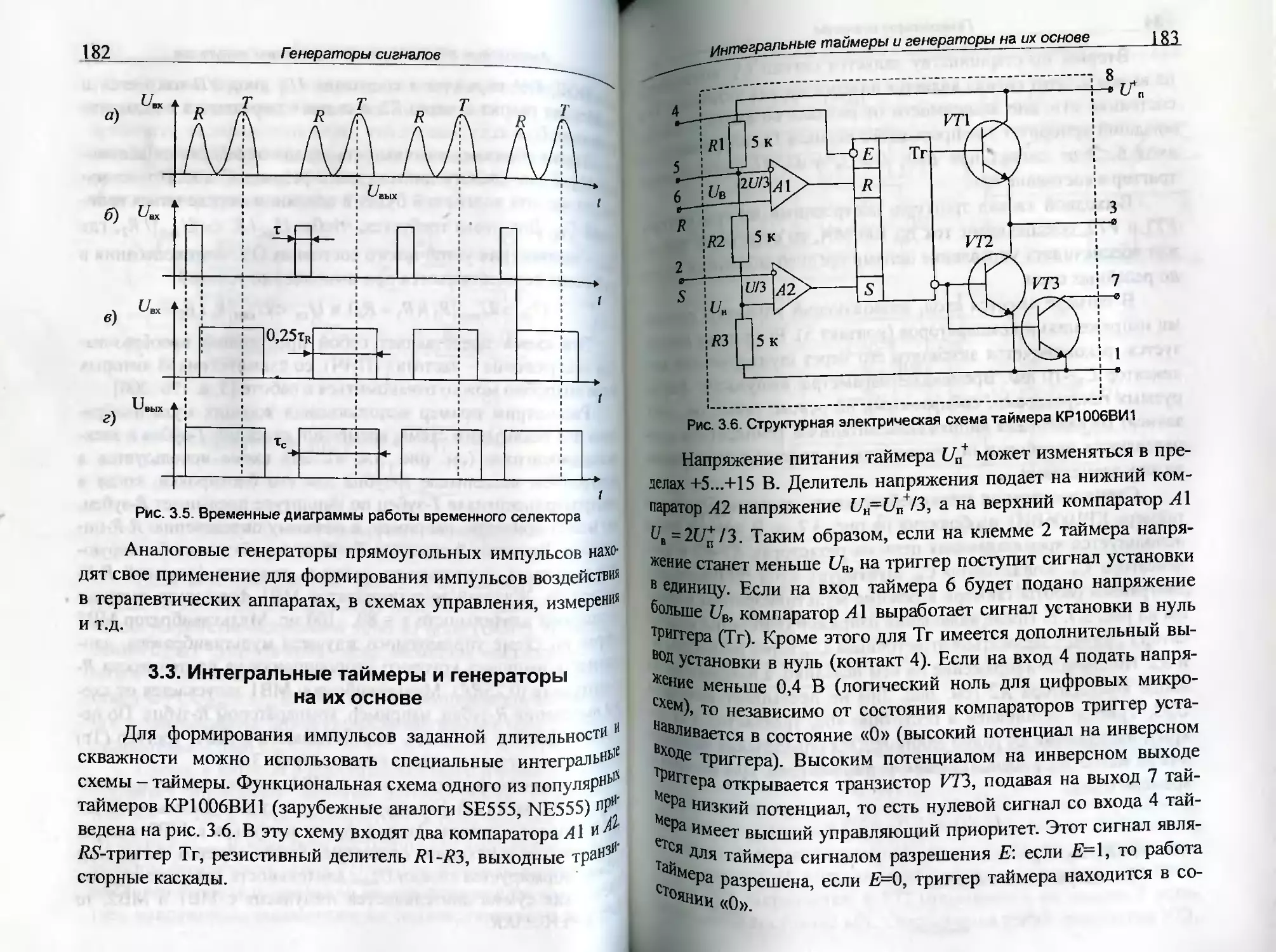
3.2. Аналоговые генераторы прямоугольных импульсов 174
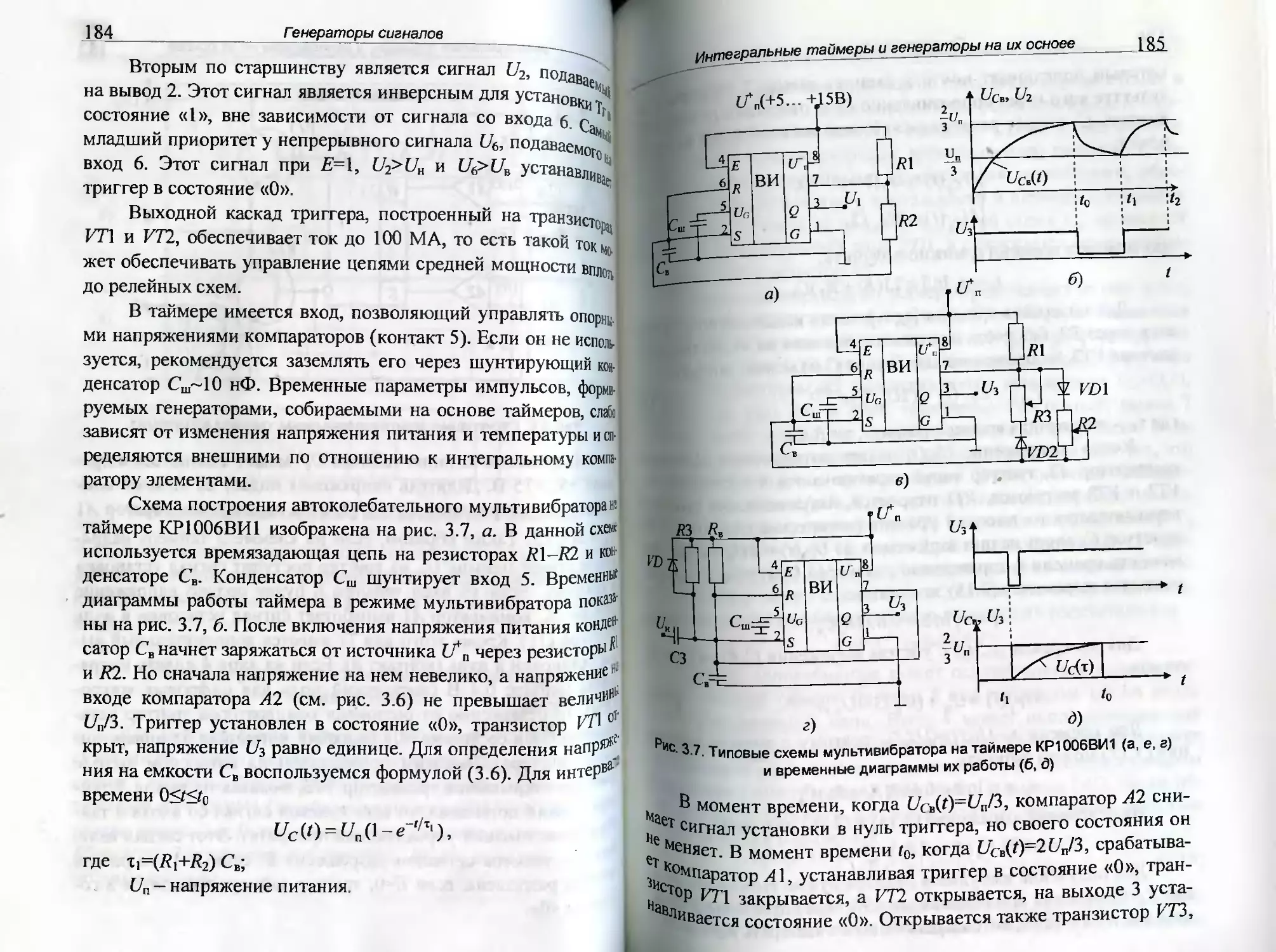
3.3. Интегральные таймеры и генераторы на их основе 182
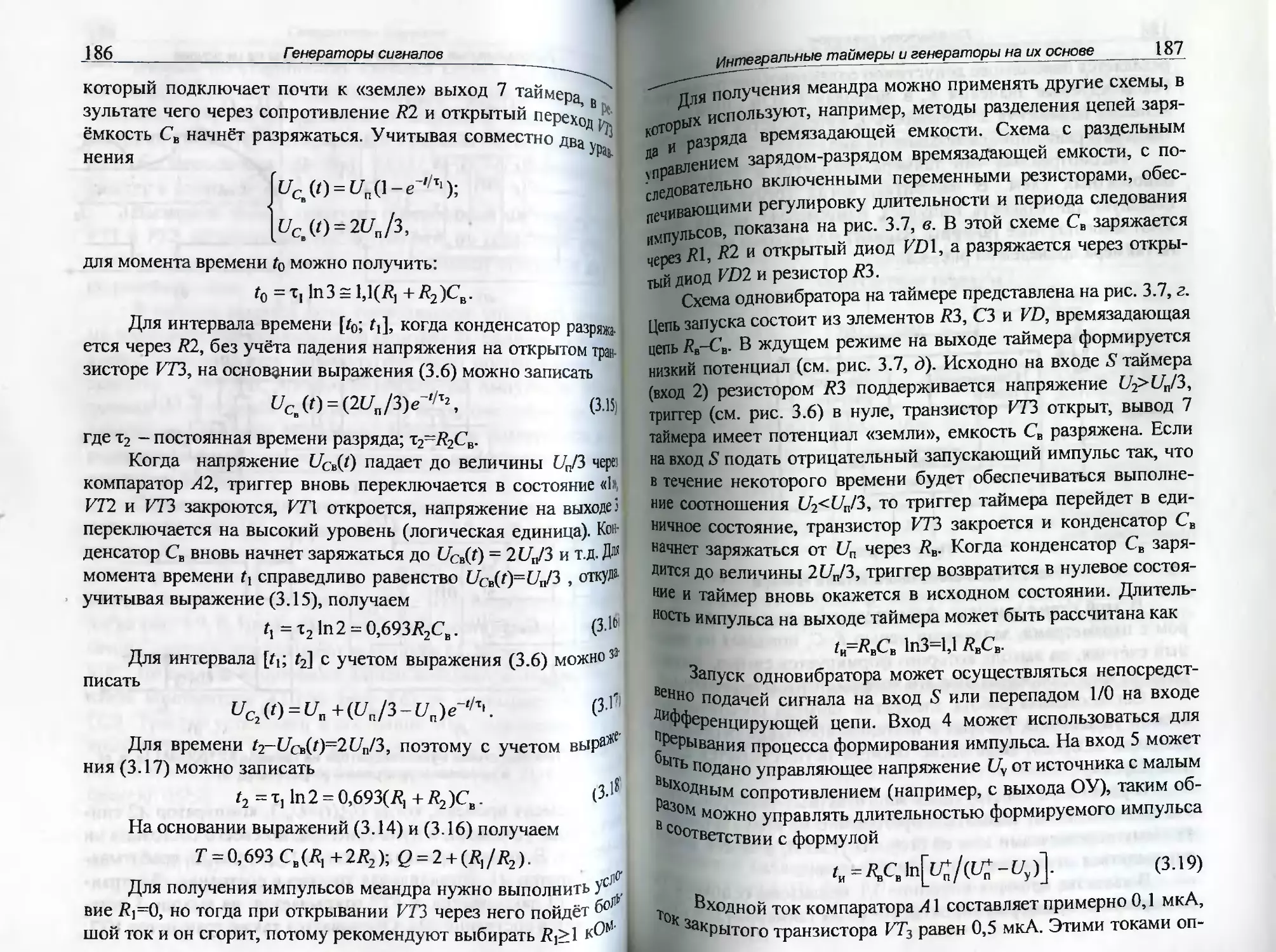
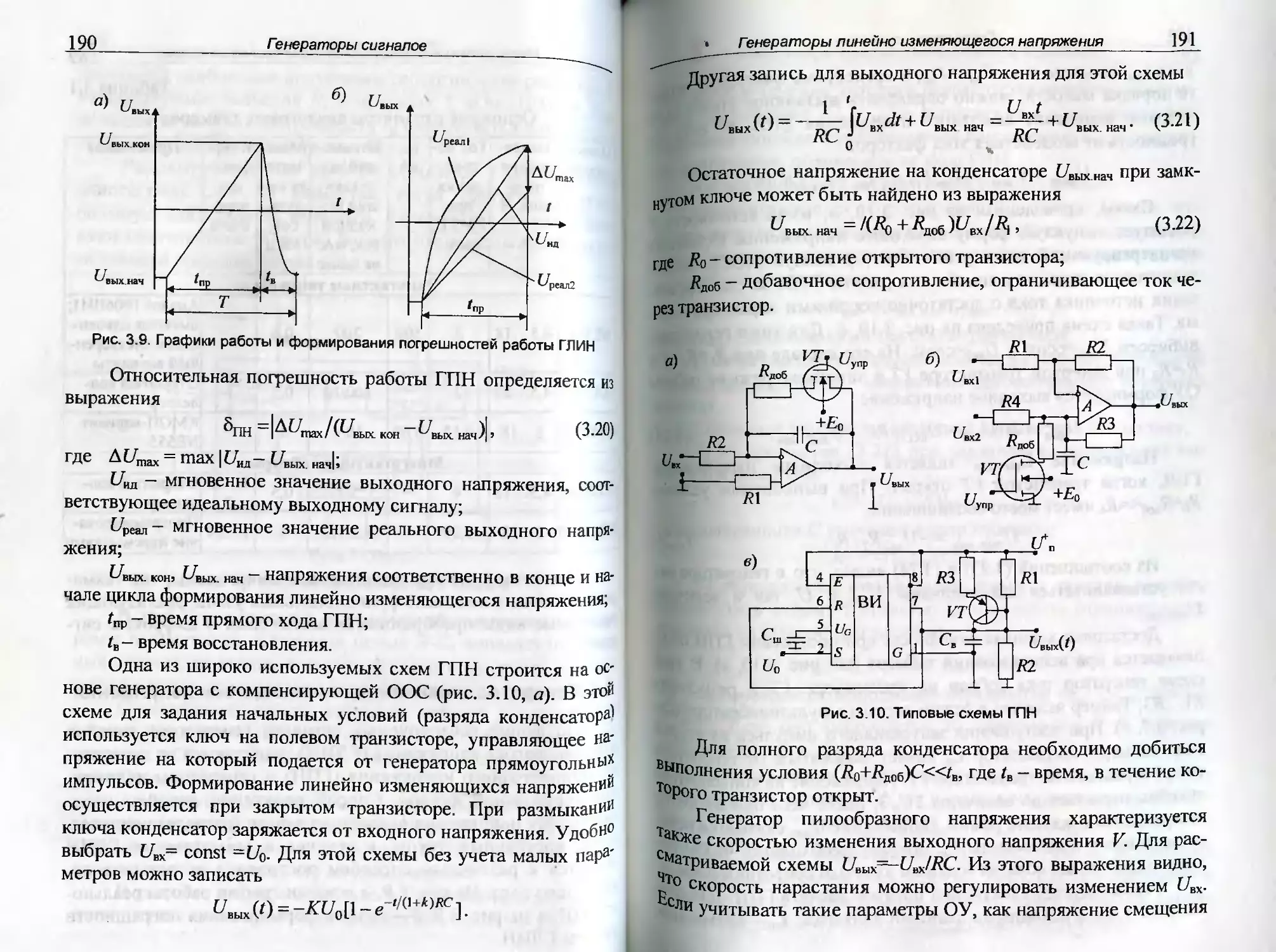
3.4. Генераторы линейно изменяющегося напряжения 189
3.5. Функциональные генераторы 197
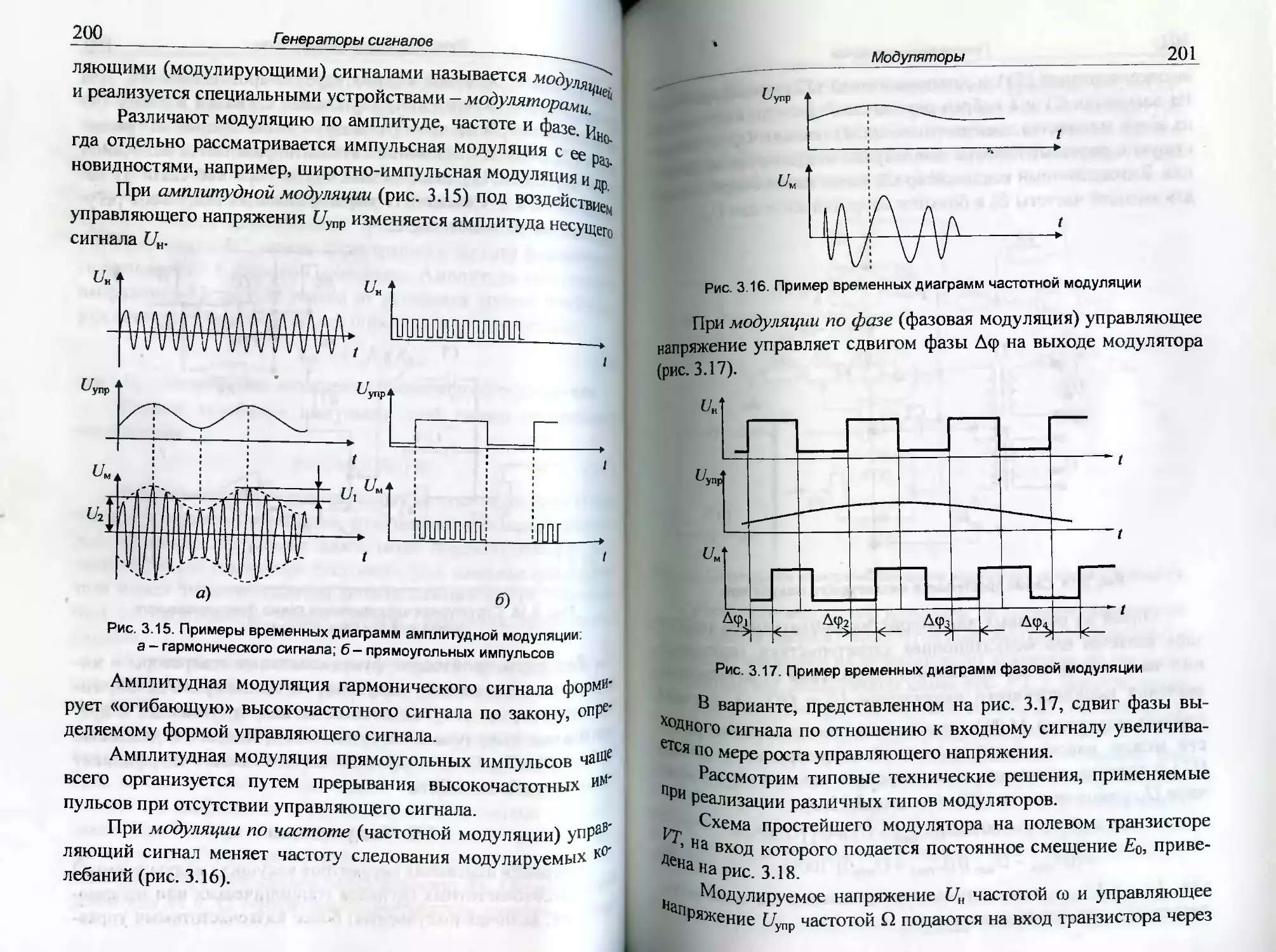
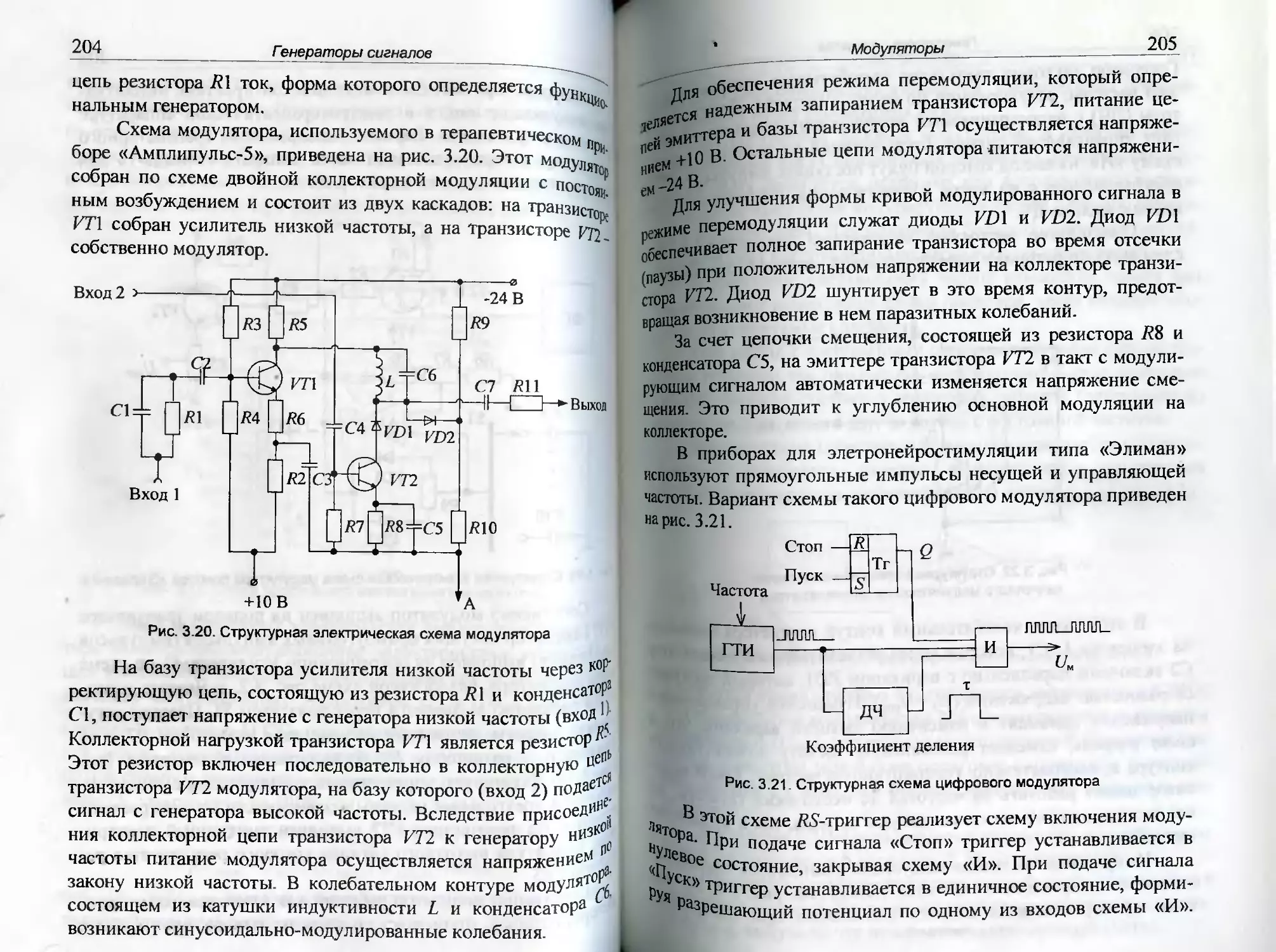
3.6. Модуляторы 199
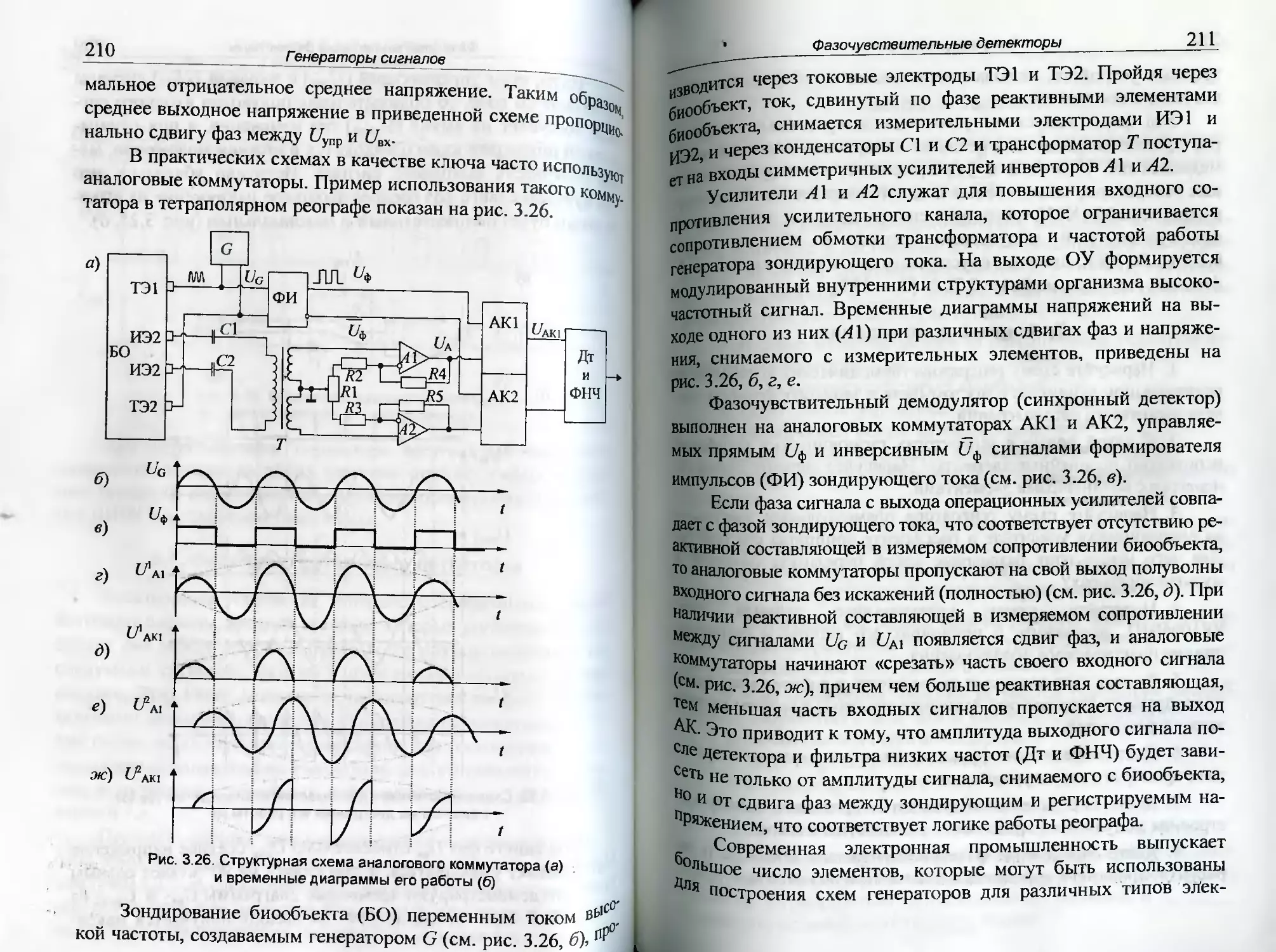
3.7. Фазочувствительные детекторы 208
Тренировочные задания 212
Тестовые задания 213
4. ВТОРИЧНЫЕ ИСТОЧНИКИ ЭЛЕКТРОПИТАНИЯ 215
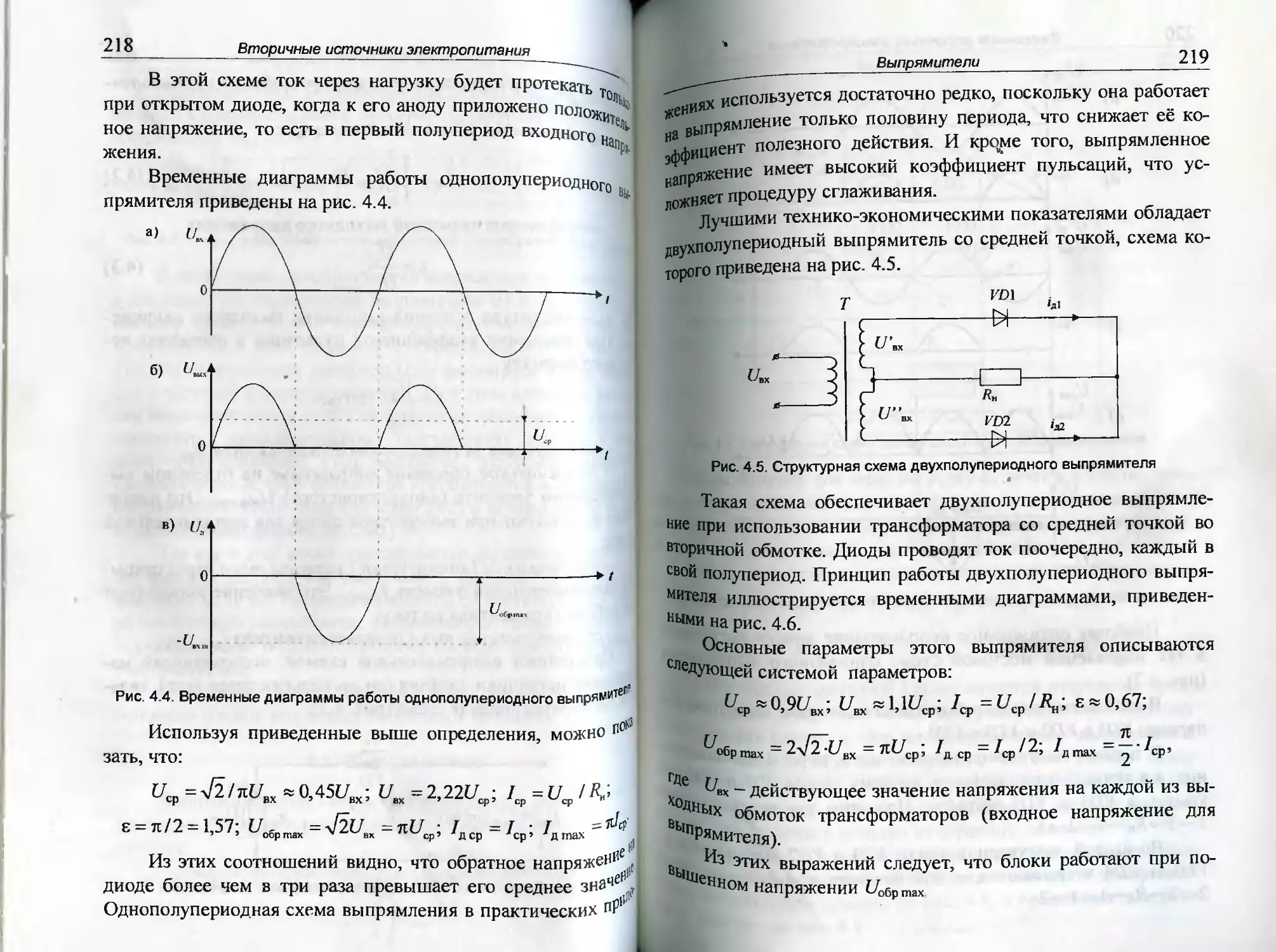
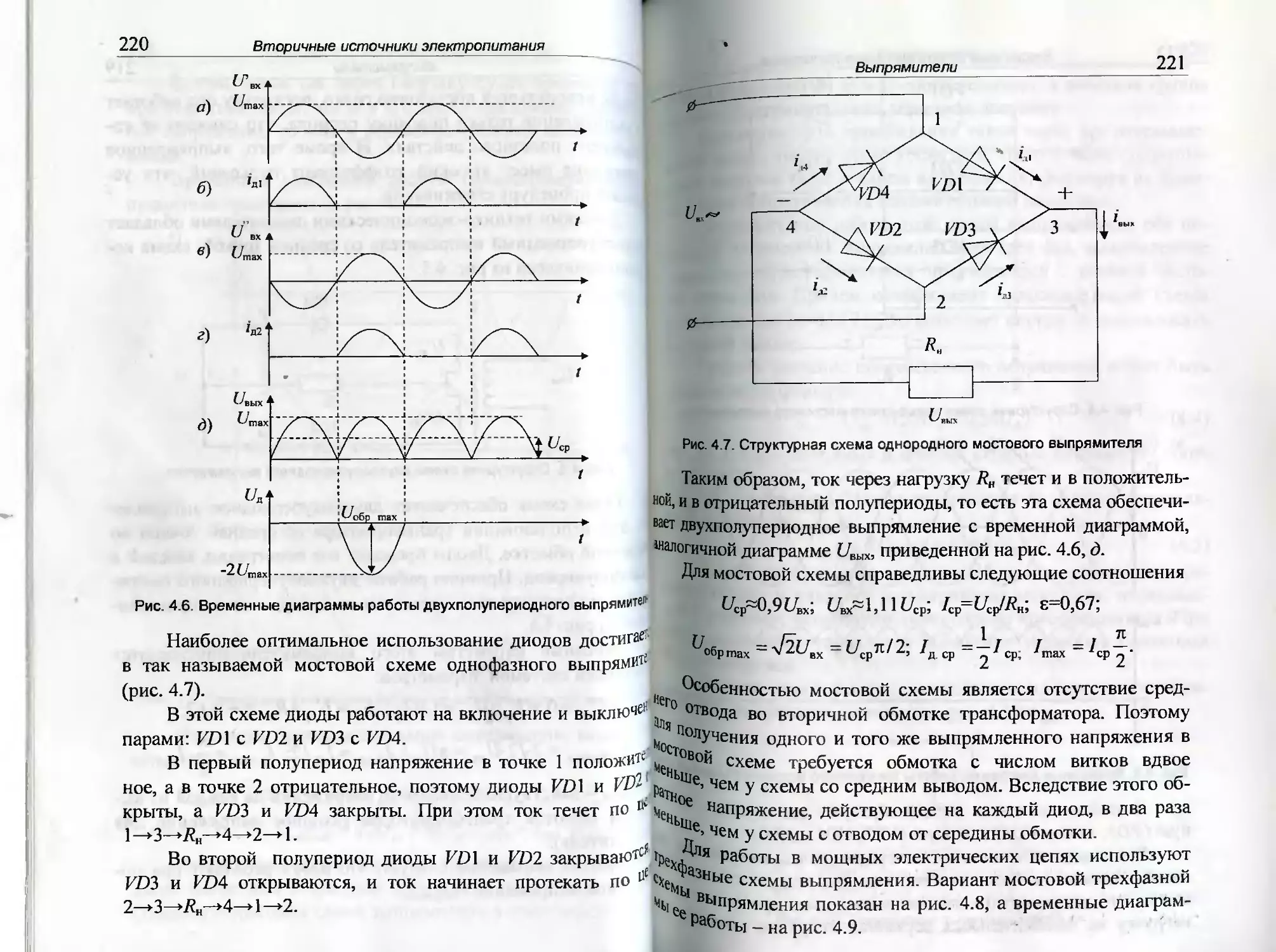
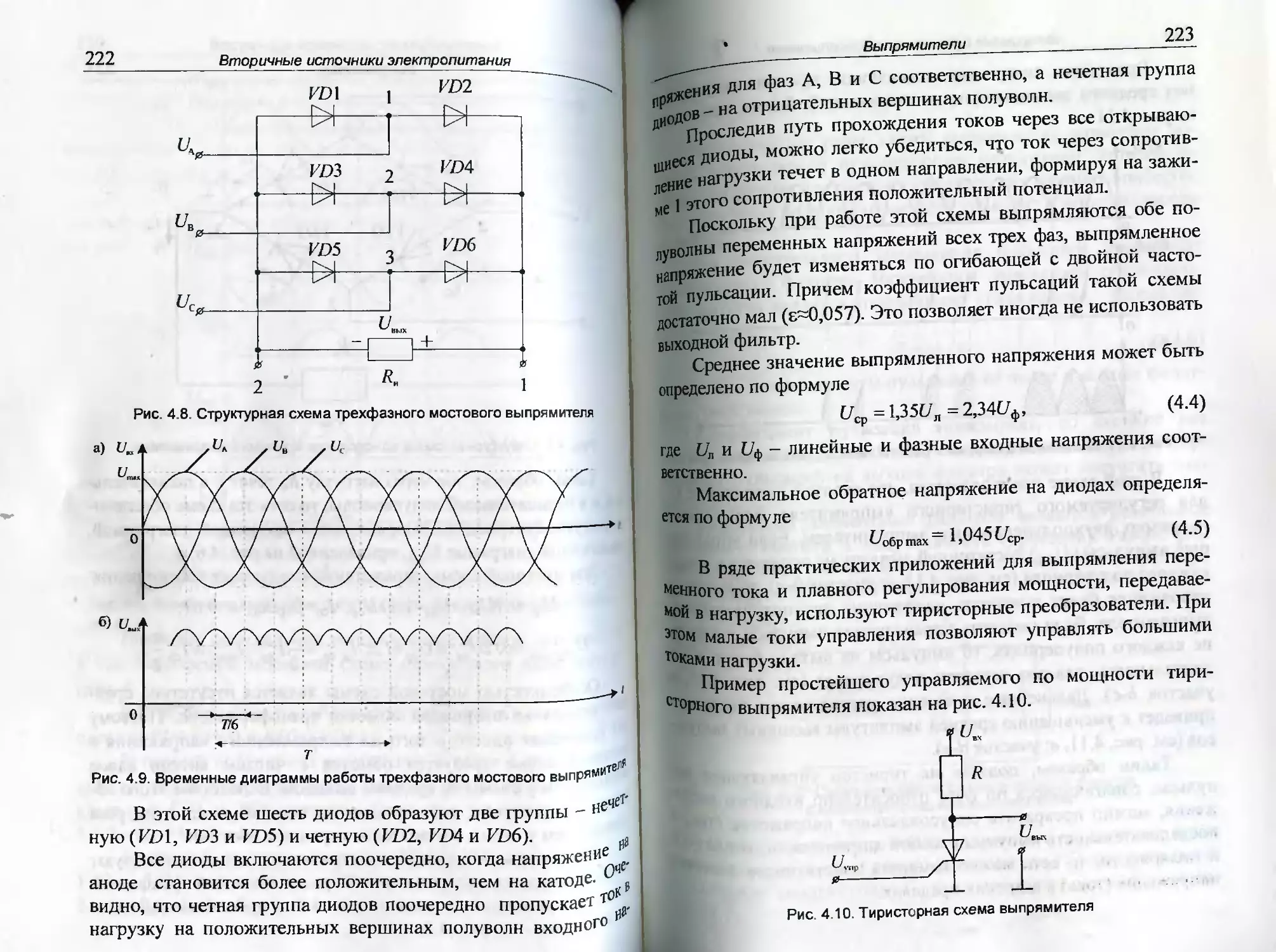
4.1. Выпрямители 216
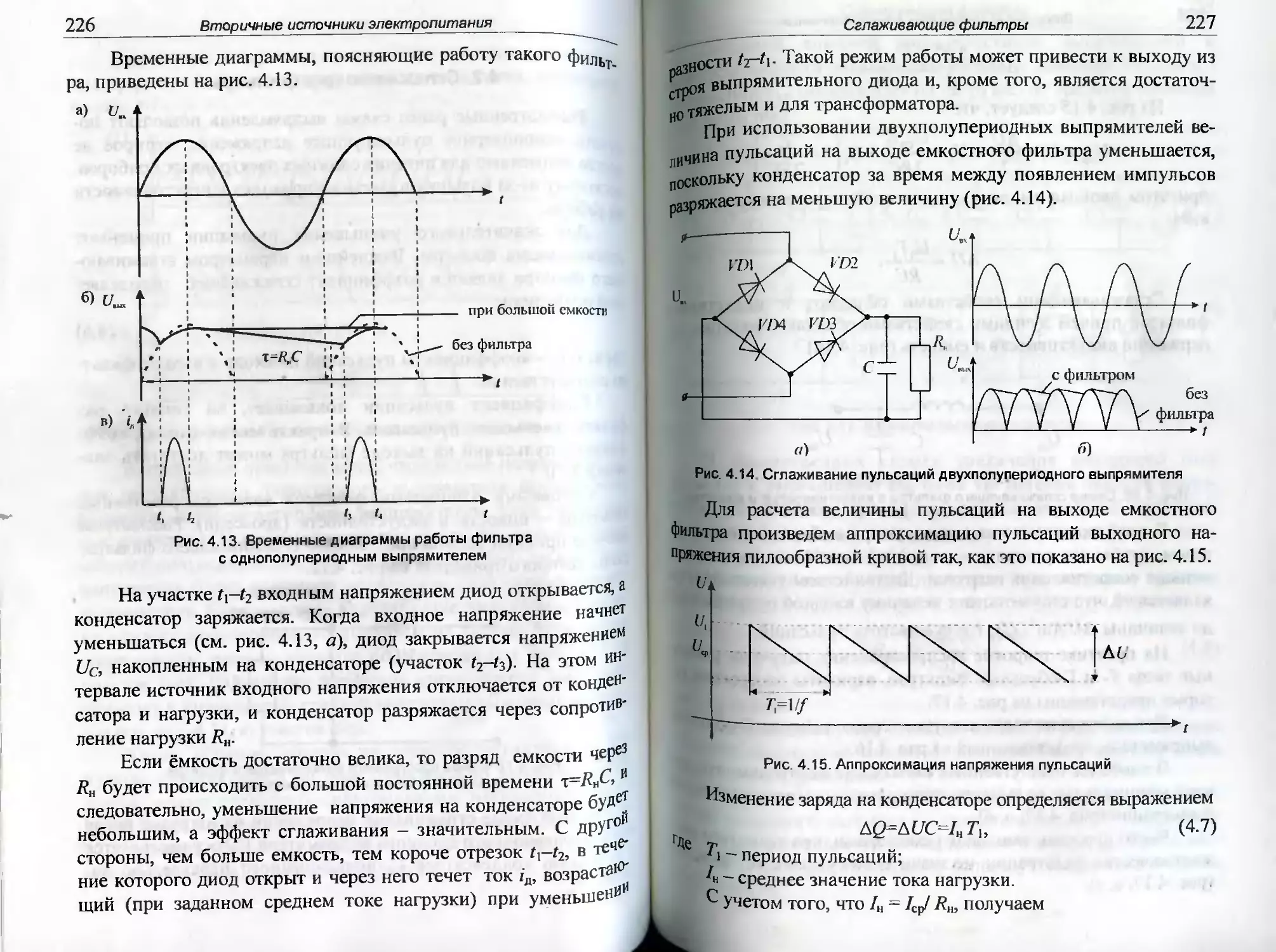
4.2. Сглаживающие фильтры 225
4.3. Линейные стабилизаторы напряжения 230
4.4. Схемотехника импульсных стабилизаторов напряжения 242
4
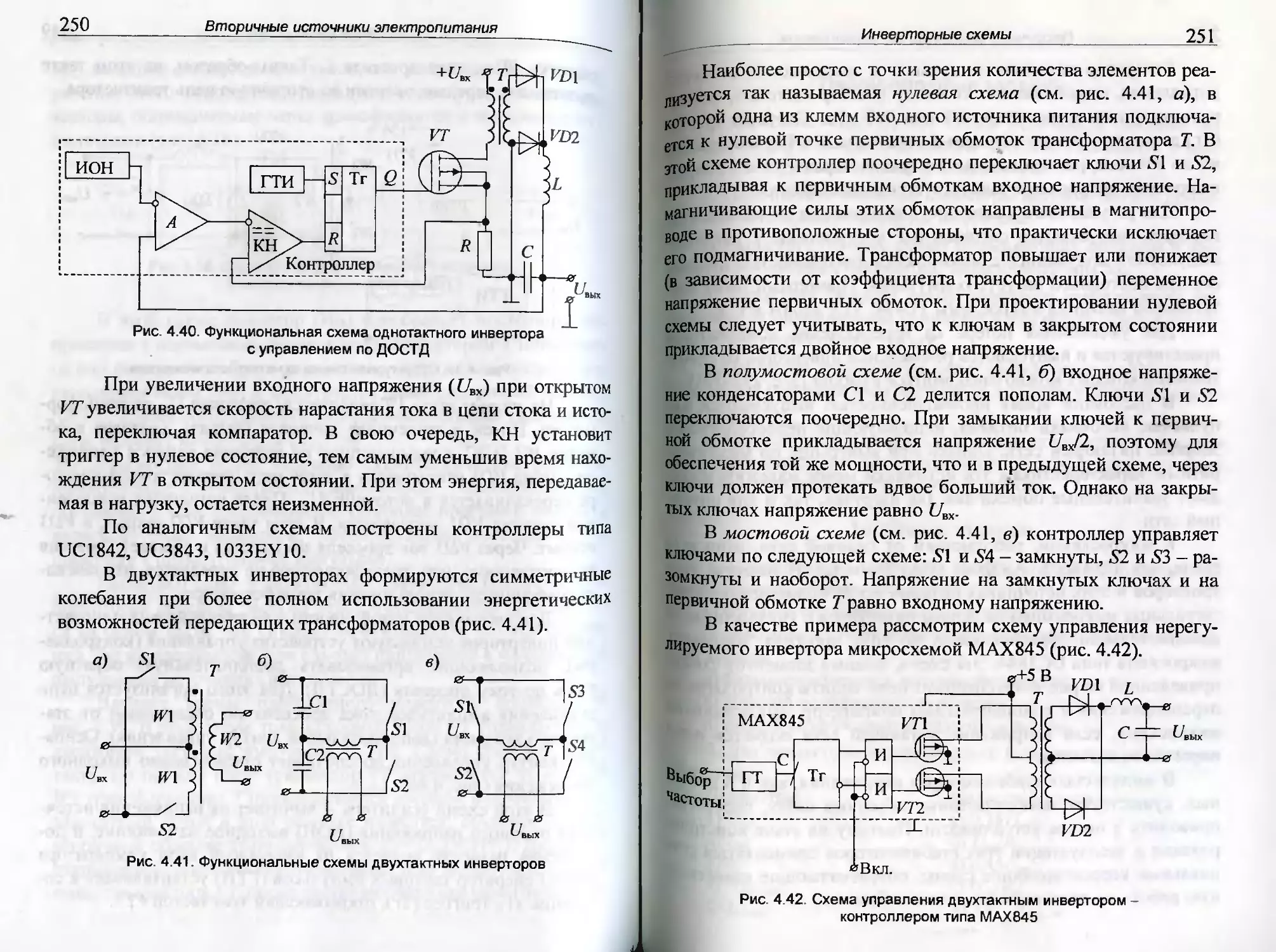
4.5. Инверторные схемы .. 247
Тренировочные задания 253
Тестовые задания 253
5. АНАЛОГОВЫЕ КОММУТАТОРЫ 256
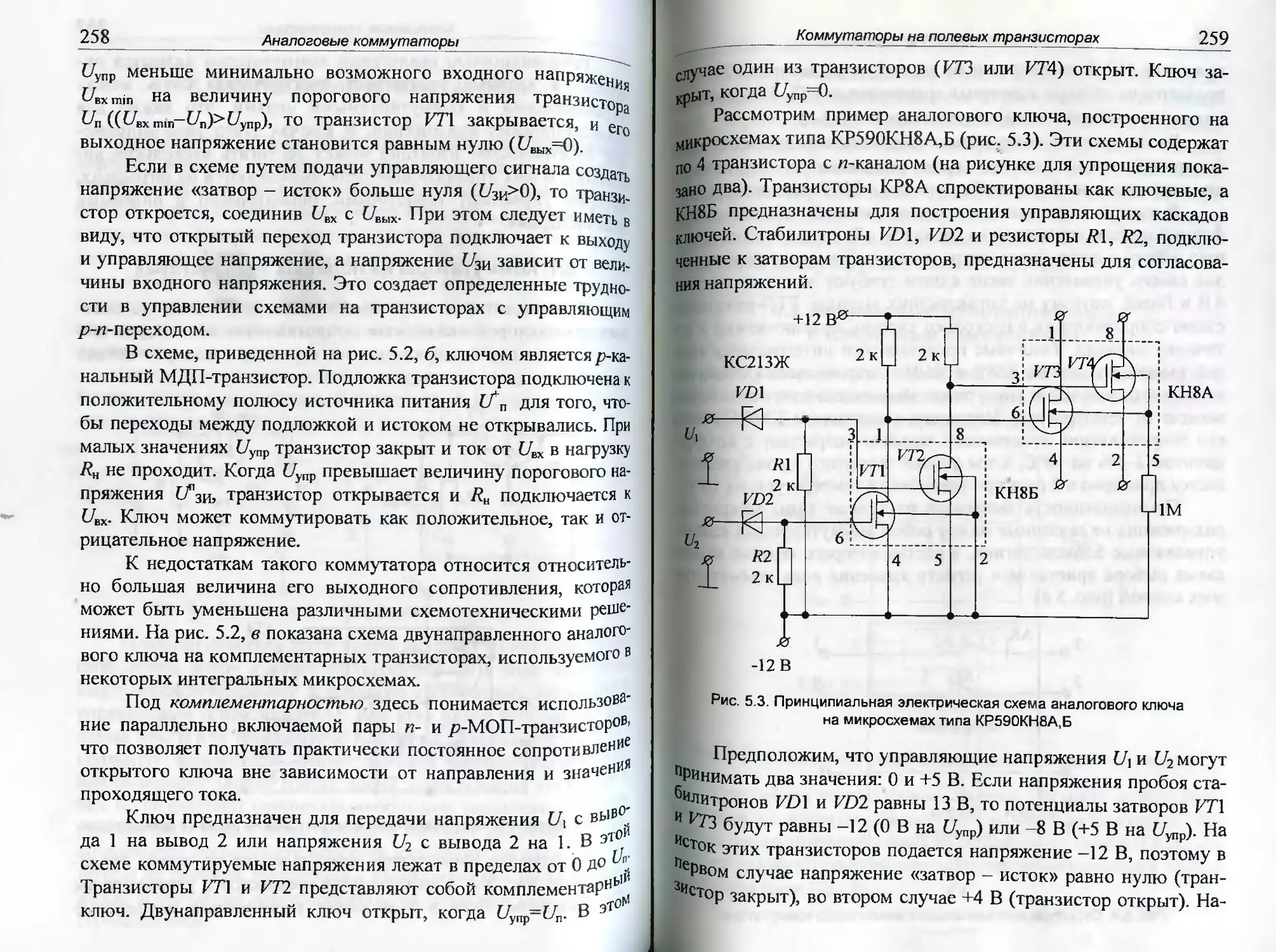
5.1. Коммутаторы на полевых транзисторах 257
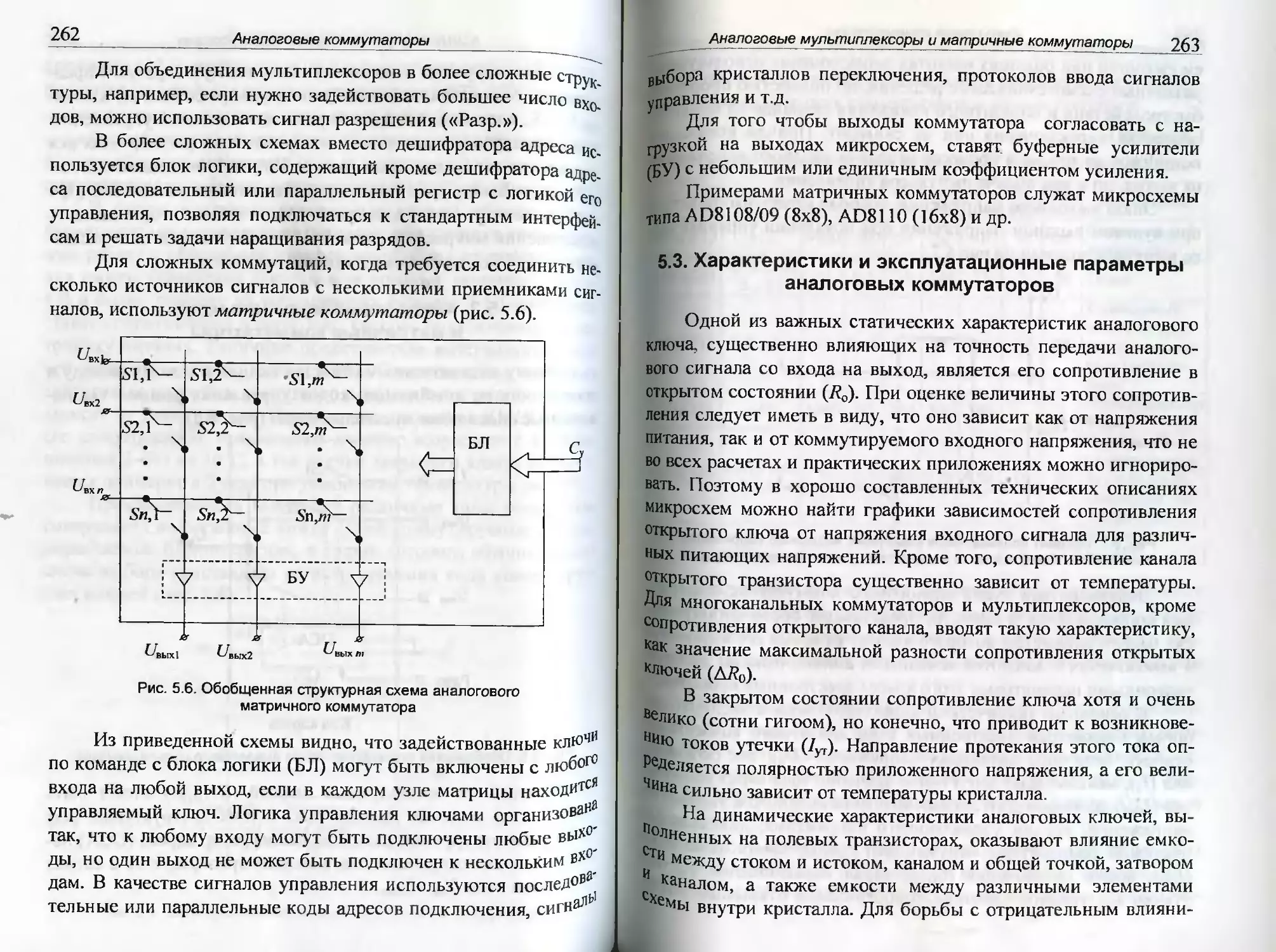
5.2. Аналоговые мультиплексоры и матричные коммутаторы 261
5.3. Характеристики и эксплуатационные параметры
аналоговых коммутаторов 263
Тренировочные задания 266
Тестовые задания 266
6. УСТРОЙСТВА НЕПРЕРЫВНО-ДИСКРЕТНОГО
ПРЕОБРАЗОВАНИЯ СИГНАЛОВ 269
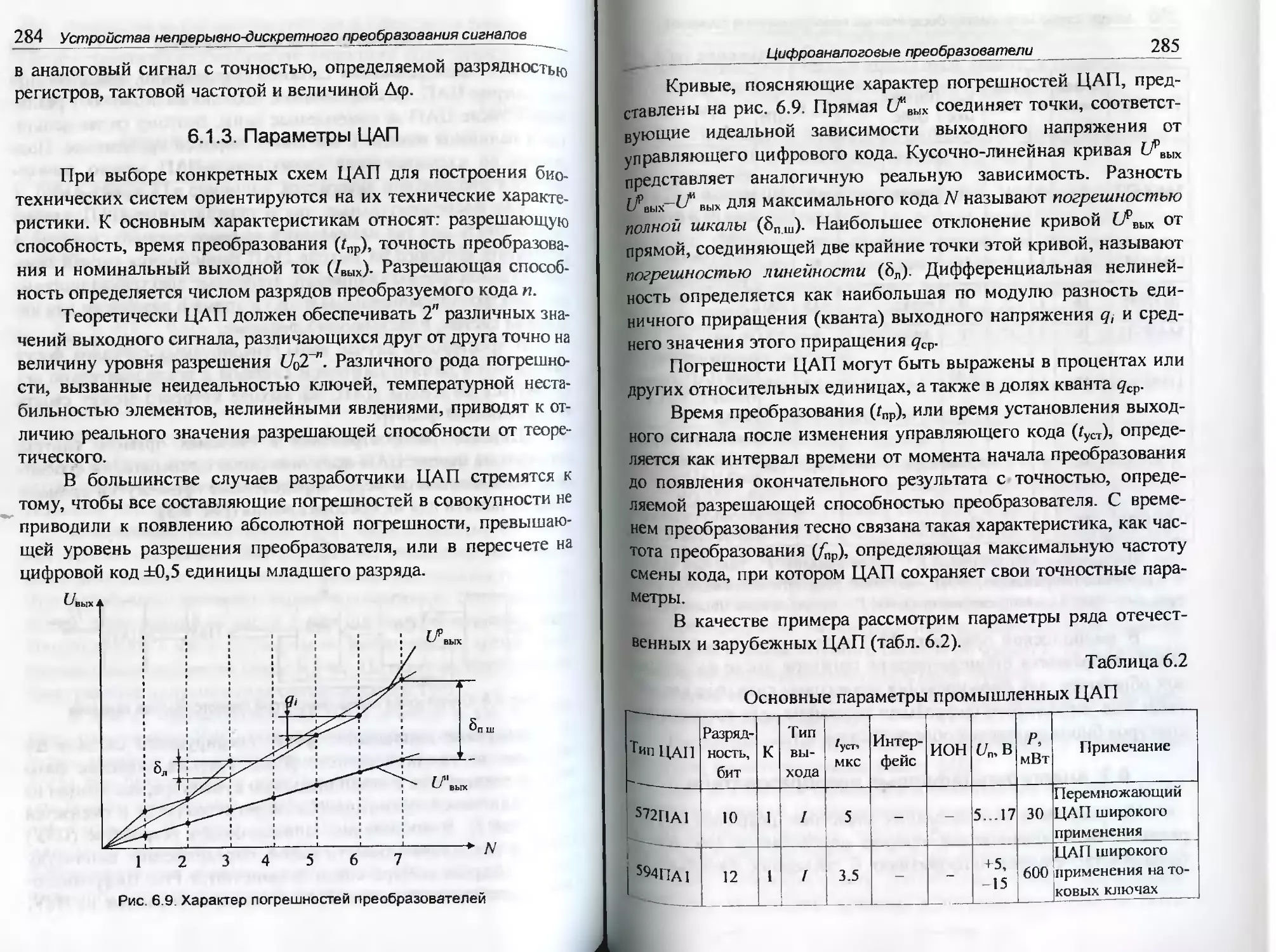
6.1. Цифроаналоговые преобразователи 270
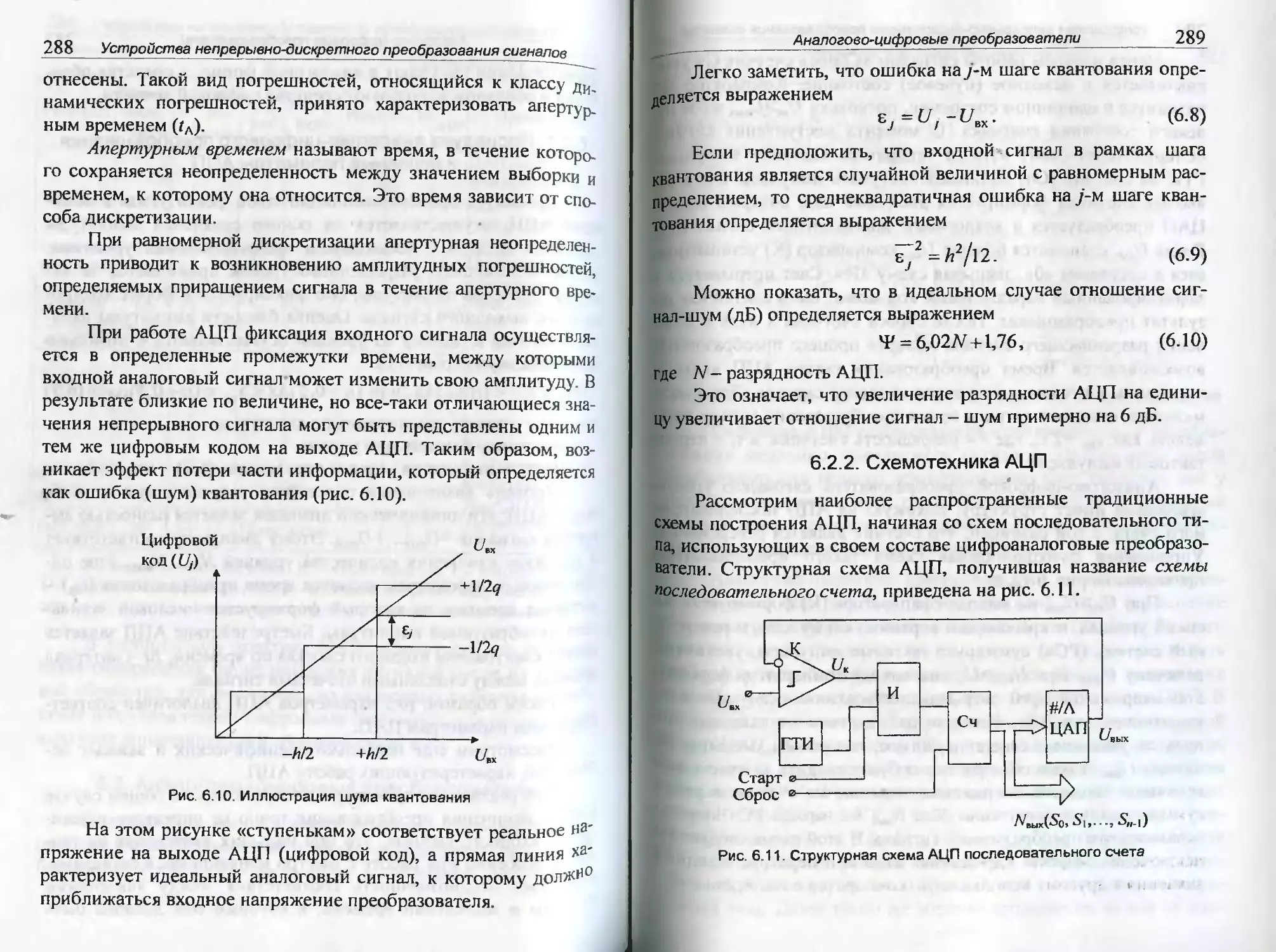
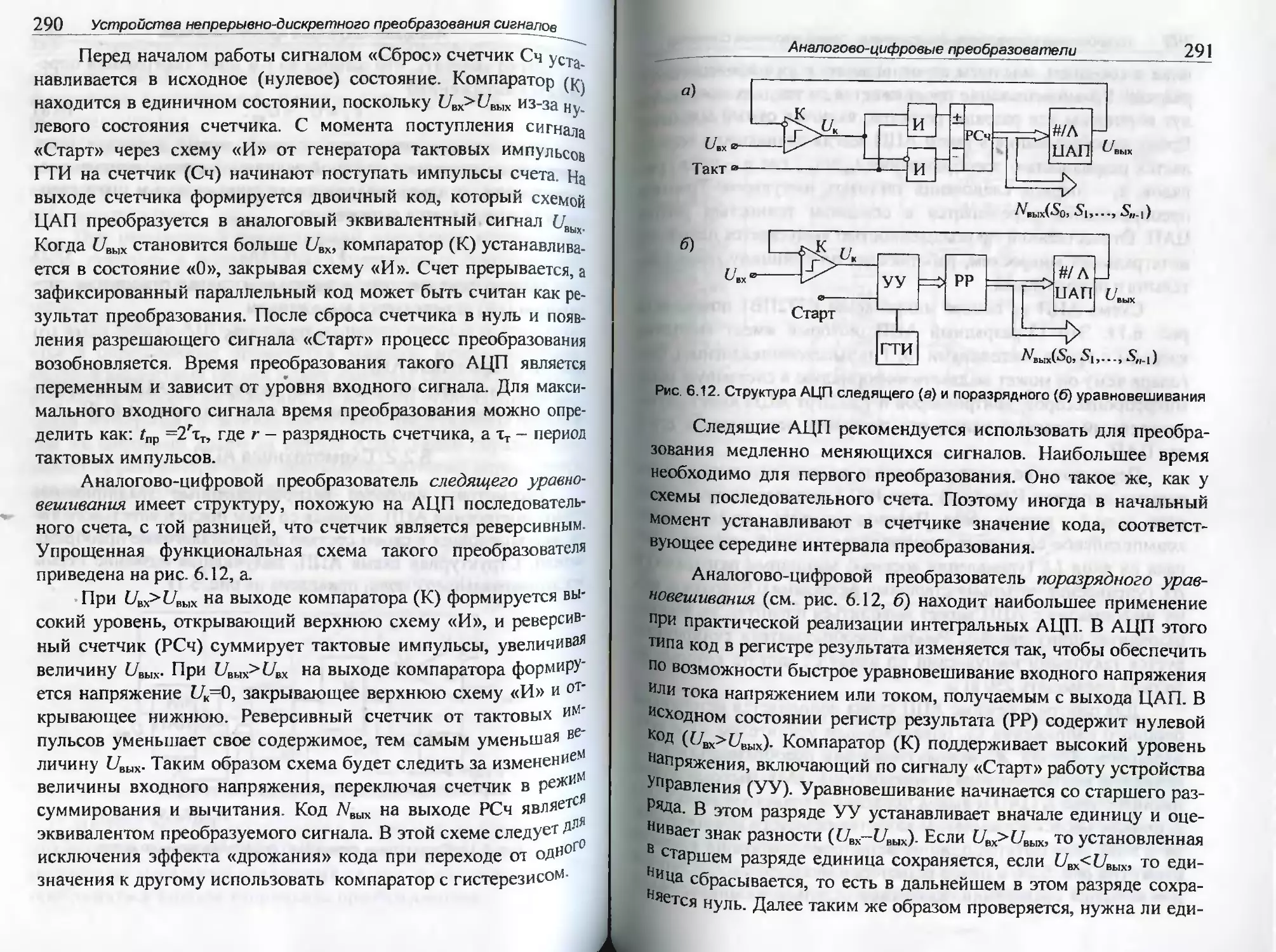
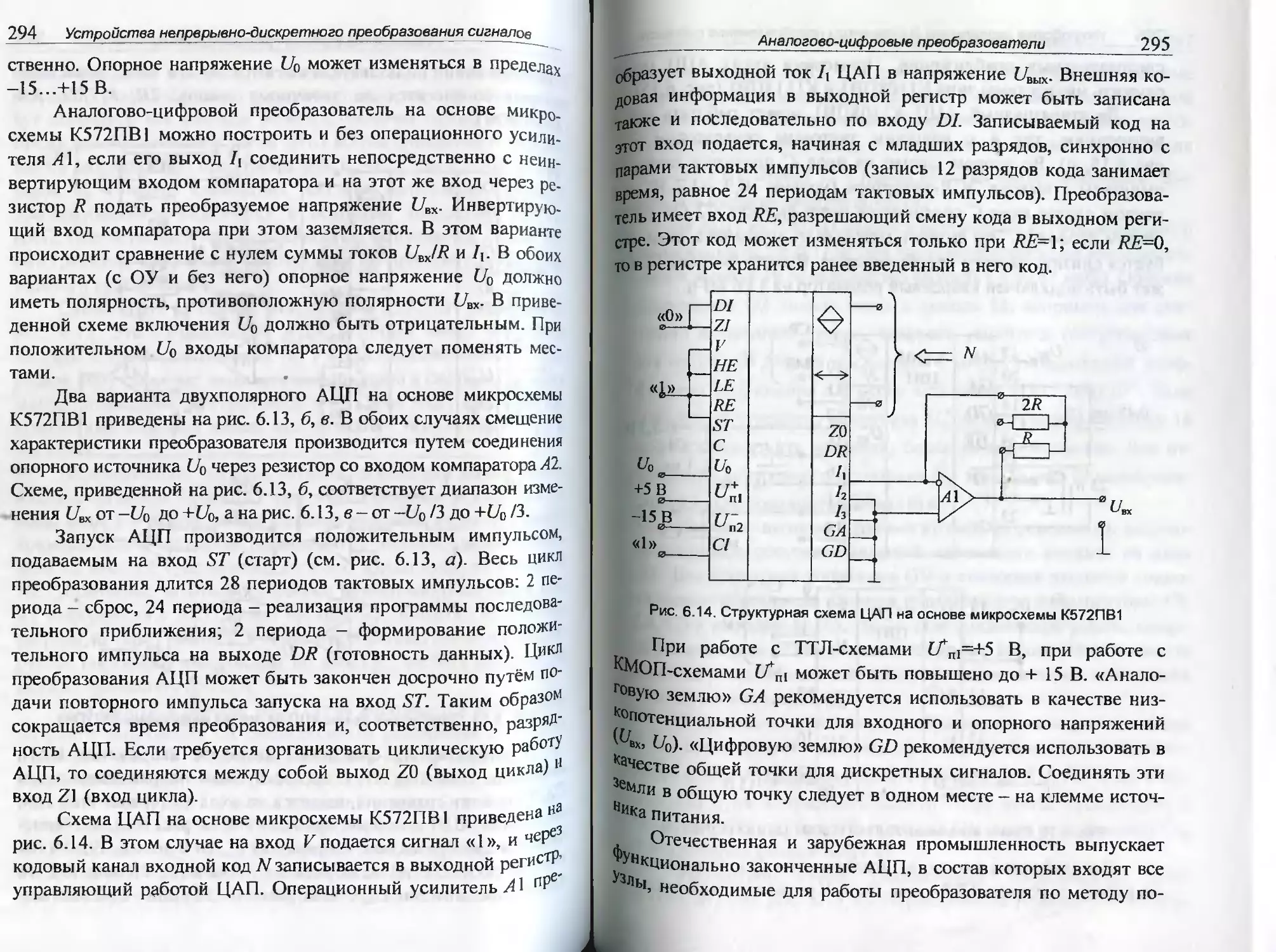
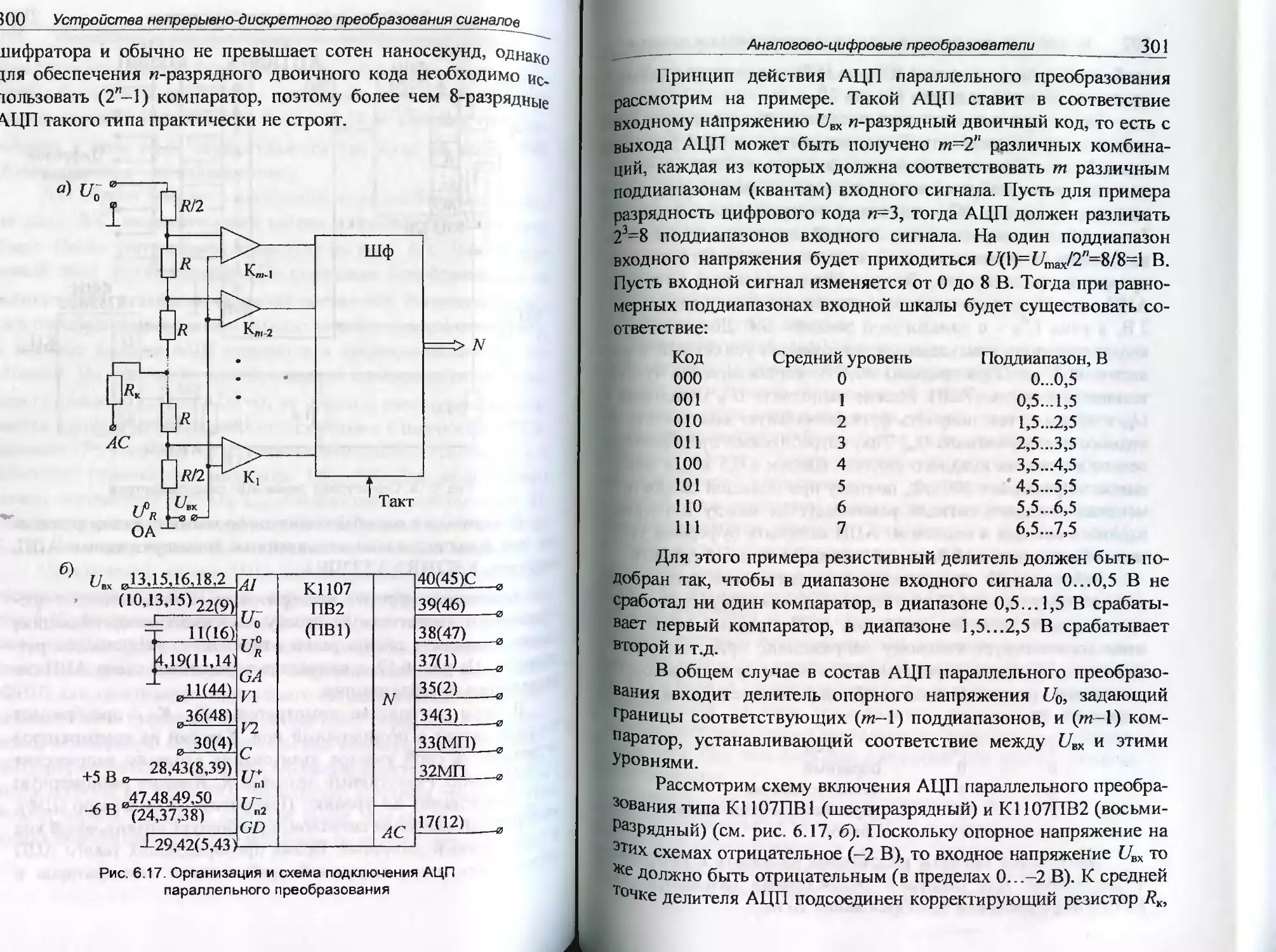
6.2. Аналогово-цифровые преобразователи 286
Тренировочные задания 334
Тестовые задания 334
7. ПРИБОРЫ С ЗАРЯДОВОЙ СВЯЗЬЮ 337
7.1. Устройство ПЗС 337
7.2. Принцип организации ПЗС-матриц 341
7.3. Параметры и характеристики ПЗС 346
Тренировочные задания 351
Тестовые задания 351
8. ИНТЕРФЕЙСЫ ДЛЯ ПОДКЛЮЧЕНИЯ УЗЛОВ
МЕДИЦИНСКОЙ ТЕХНИКИ К МИКРОПРОЦЕССОРАМ,
МИКРОКОНТРОЛЛЕРАМ И ПЭВМ 354
8.1. Интерфейсы магистралей ПЭВМ 354
8.2. Интерфейсы АЦП 395
8.3. Цифровые интерфейсы узлов медицинской техники 400
Тренировочные задания 405
Тестовые задания 406
9. КОМПЬЮТЕРНЫЕ ТЕХНОЛОГИИ РАСЧЕТА И
ПРОЕКТИРОВАНИЯ УЗЛОВ МЕДИЦИНСКОЙ ТЕХНИКИ 408
9.1 Особенности технологического процесса проектирования
средств медицинской техники с использованием САПР 408
9.2. Основные объекты медицинских изделий, проектируемых
с помощью САПР 410
9.3. Автоматизация проектирования печатных плат
и биомедицинских лабораторий на их основе 413
ЗАКЛЮЧЕНИЕ 415
ИТОГОВЫЙ ТЕСТ 416
БИБЛИОГРАФИЧЕСКИЙ СПИСОК 424
ПРЕДИСЛОВИЕ
Основу построения современных медицинских приборов
составляют разнообразные электронные схемы. По оценкам
производителей медицинской техники, годовой объем
биомедицинской электроники в начале нового тысячелетия составляет
100 млрд дол. США и будет расти дальше достаточно быстрыми
темпами [16].
Современная медицинская техника опирается на
использование самых последних достижений в области электроники,
микроэлектроники и вычислительной техники, что требует от
специалистов, проектирующих и эксплуатирующих
медицинские приборы, аппараты и системы, хороших знаний в их
схемотехнике. Однако специальной учебной литературы,
раскрывающей особенности проектирования и использования современной
элементной базы в медицинском приборостроении, в стране
выпускается крайне мало, а с момента подготовки последних
изданий прошло достаточно много времени, за которое кардинально
улучшились параметры известных технических решений и
появились новые высококачественные разработки.
Целью данного издания является частичное восполнение
пробелов, связанных с недостаточностью сведений о
современных схемотехнических решениях, составляющих основу
построения современной медицинской техники. Предлагаемое
учебное пособие предназначено для студентов специальностей
200401 «Биотехнические и медицинские аппараты и системы»
и 200402 «Инженерное дело в медико-биологической практике»,
а также для бакалавров, обучающихся по направлению 200300
«Биомедицинская инженерия». Оно может быть использовано
аспирантами и инженерно-техническими работниками,
занимающимися вопросами разработки и эксплуатации медицинской
техники, а также при реализации технологии дистанционного
образования по соответствующим специальностям.
Данное учебное пособие отличают полнота и соответствие
излагаемого материала требованиям Государственного образо-
6
Предисловие
вательного стандарта по направлению подготовки 200401
«Биотехнические и медицинские аппараты и системы».
Для закрепления пройденного теоретического материала
каждая глава заканчивается расчетными и тестовыми заданиями
с кратким резюме по пройденному материалу.
Предлагаемое учебное пособие является совместным
трудом сотрудников Курского государственного технического
университета (профессор Н.А. Кореневский) и Санкт-Петербургского
государственного электротехнического университета (профессор
Е.П. Попечителев).
Авторы выражают особую благодарность сотруднику
кафедры «Биомедицинская инженерия» Курского
государственного технического университета доценту СВ. Солошенко за
плодотворное сотрудничество и дискуссии по составу и
содержанию предлагаемого учебного пособия, а также за подготовку
материалов седьмой главы.
Как и многие издания, предлагаемое читателю учебное
пособие не свободно от недостатков в подборе материала и его
изложении. Авторы с благодарностью примут замечания и
постараются учесть их в дальнейшей работе.
Замечания, предложения и пожелания направлять по
адресу: 305040, г. Курск, ул. 50 лет Октября, 94, Курский
государственный технический университет, кафедра биомедицинской
инженерии.
СПИСОК ПРИНЯТЫХ СОКРАЩЕНИЙ И ОБОЗНАЧЕНИЙ
АК аналоговый коммутатор
АЦП аналогово-цифровой преобразователь
Вп выпрямитель
Г генератор
ГЛИН генератор линейно изменяющегося напряжения
ГПН генератор пилообразного напряжения
ГР гальваническая развязка
ГТИ генератор тактовых импульсов
Дт детектор
Дрв драйвер
ДЧ делитель частоты
Ин инвертор
Инт интегратор
ИОН источник опорного напряжения
ИСН импульсный стабилизатор напряжения
КН компаратор напряжения
КНГ компаратор с петлей гистерезиса
Мд модулятор ,
МП микропроцессор
МПН стабилизатор с малым падением напряжения
ООС отрицательная обратная связь
ОУ операционный усилитель
ПНЧ преобразователь «напряжение - частота»
ПОС положительная обратная связь
См сумматор
Сч счетчик
С/Ш отношение «сигнал-шум»
ТКН температурный коэффициент напряжения
Тг триггер
УБП усилитель биопотенциалов
УО усилитель ошибки
УС устройство сопряжения
УУ устройство управления
ФИ формирователь импульсов
ФВЧ фильтр высокой частоты
ФНЧ фильтр низкой частоты
ЦАП цифроаналоговый преобразователь
Шф шифратор
ШИМ широтно-импульсная модуляция
ВВЕДЕНИЕ
Современная медицина немыслима без использования
разнообразных технических средств, причем при разработке и
конструировании медицинских аппаратов, систем и комплексов
используются самые последние достижения, полученные в
физике, математике, механике, электронике, вычислительной
технике и других отраслях человеческих знаний.
Значительную роль в обеспечении широких
функциональных возможностей и высокой надежности средств медицинской
техники играет используемая элементная база.
Из-за огромного многообразия схемотехнических решений,
используемых в медицинском приборостроении, в настоящее
время мало книг, в которых с достаточной полнотой изложены
хотя бы основные технические решения построения элементов и
узлов современных медицинских приборов, аппаратов, систем и
комплексов. Поэтому издание учебного пособия, где достаточно
полно описывается схемотехника медицинского
приборостроения, является актуальной задачей.
"" Объектом изучения предлагаемого учебного пособия
являются различные типы биоусилителей, узлы математической
обработки биологических сигналов, вторичные источники
питания, интерфейсы для подключения элементов и узлов
медицинской техники к ПЭВМ и другое электронное оборудование,
используемое для построения диагностической и терапевтической
техники.
В историческом аспекте современное представление об
электричестве в значительной мере связано с биомедициной,
когда задолго до законов Ома и Фарадея Л. Гальвани наблюдал
форму электрического разряда, которую связывал с
генерированием тока биологической тканью. Значительным толчком в
применении технических средств в медицине стало изобретение
электрокардиографии (О. Уолтер, 1865, и В. Эйнховен, 1893).
Благодаря достижениям в области проектирования
биомедицинских электронных систем целый ряд физиологов были
удостоены Нобелевской премии.
Введение
9
С развитием средств электроники, микроэлектроники и
вычислительной техники в медицинском приборостроении
произошел переход к высоким медицинским технологиям, давшим
в руки исследователей аппараты, системы и комплексы,
позволяющие всесторонне изучать функционирование различных
подсистем человека от клетки и ее структуры до
функциональных систем и организма в целом. Появились новые способы
лечения, вплоть до замещения утраченных функций и даже
отдельных органов.
Учебное пособие написано с учетом того, что
обучающиеся уже изучили дисциплины «Общая электротехника»,
«Электроника и микропроцессорная техника» и «Измерительные
преобразователи и электроды».
После прочтения предлагаемого пособия обучающиеся
могут приступать к изучению дисциплин «Медицинские приборы,
аппараты, системы и комплексы», «Проектирование
диагностической терапевтической техники».
Структура учебного пособия учитывает как специфику
элементной базы, используемой в медицинском
приборостроении, так и рекомендации соответствующего Государственного
образовательного стандарта.
Первая глава посвящена одному из наиболее
распространенных и важных узлов медицинской техники - усилителю
биопотенциалов, с помощью которого обеспечивается
функционирование многообразной аппаратуры для исследования
биоэлектрической активности организма.
Во второй главе рассматриваются принципы и устройства
предварительной обработки аналоговых сигналов, характерных
Для медицинских приборов, аппаратов, систем и комплексов, а
третья глава посвящена устройствам формирования
электрических сигналов различной формы, широко используемых как в
терапевтической, так и в диагностической технике.
В следующей главе рассматриваются схемотехнические
решения, используемые при построении схем электропитания
медицинского оборудования с учетом специфических
требований электробезопасности.
10
Введение
Вопросам многоканальной обработки биосигналов и
многоканального управления посвящена пятая глава. Подавляющее
большинство медицинских приборов выполняются с
использованием цифровой техники, включая вычислительные машины,
системы и комплексы. В связи с этим шестая глава посвящена
схемотехнике сопряжения аналоговых и цифровых узлов
медицинских изделий.
Седьмая глава посвящена полупроводниковым приборам,
формирующим электронные копии изображений, включая изо-1
бражения внутренних органов, что значительно расширяет
диагностические возможности современных технических средств.
В восьмой главе рассматриваются вопросы сопряжения
медицинской техники с ПЭВМ через их стандартные
интерфейсы, а девятая глава посвящена применению
автоматизированных систем для проектирования медицинских приборов,
аппаратов, систем и комплексов.
Такая структура работы позволяет с достаточной степенью
подробности раскрыть все вопросы Государственного
образовательного стандарта по дисциплине «Узлы и элементы
медицинской техники».
1- УСИЛИТЕЛИ БИОПОТЕНЦИАЛОВ
При регистрации биопотенциалов их источником служат
живые объекты, которые могут быть представлены
эквивалентными электрическими генераторами. Хорошо известно, что
свойства любого электрического генератора определяются
характером изменения регистрируемого сигнала во времени и его
внутренним сопротивлением. Уровень потенциалов столь
слабый, что для обеспечения возможности их регистрации или
анализа необходим усилитель, который известен как усилитель
биопотенциалов (УБП).
Усилители биопотенциалов являются наиболее
распространенными узлами современной диагностической аппаратуры,
работающими, в отличие от большинства технических систем, в
достаточно сложных условиях, связанных с особенностями
биообъектов. Эти условия обусловлены тем, что в отводимом с помощью
электродов сигнале вместе с полезной составляющей порядка 1 мВ
(и ниже) присутствуют инфранизкочастотная составляющая (до
300 мВ) и синусоидальная помеха (до 10-20 В) частотой 50 Гц от
силовой и осветительной сети. Кроме того, источником шума
может выступать сам усилитель как устройство, обладающее высокой
чувствительностью и содержащее на входе активные элементы.
Борьба с помехами от силовой сети облегчается тем, что
вследствие относительно хорошей электропроводности
биологических структур потенциал помехи практически
одинаков (синфазен) во всех точках объекта, и его можно подавить
(значительно ослабить) путем дифференциального съема
полезного сигнала. Задачи подавления других помех и
обеспечение низкого уровня собственных шумов усилителя
биопотенциалов являются наиболее специфическими и важными
при проектировании УБП.
Решение отмеченных задач осложняется тем, что к
входным зажимам УБП могут быть подключены
дополнительные устройства, обеспечивающие его нормальное
функционирование в различных вариантах его применения. В
общем случае к этим устройствам относятся: кабель отведений,
12 Усилители биопотенциалов
подавитель синфазных помех, переключатель отведений,
калибратор амплитуды, детектор плохого контакта в системе
отведений, буферные электродные усилители. При
необходимости к входу УБП (например, для электрокардиографии)
может подключаться схема защиты от воздействия импульсов
дефибриллятора или выделитель артефакта стимулирующего
импульса и т.п. Поэтому важнейшим становится вопрос
обеспечения согласования входной цепи УБП с источником
возбуждения - эквивалентным генератором.
Отмеченные особенности ставят перед разработчиками
устройств согласования биологического объекта и технических
средств съема и регистрации биопотенциалов ряд проблем,
которые будут подробно рассмотрены в данной главе.
1.1. Контакт усилителя биопотенциалов с кожей
через электроды
При проведении любых электрофизиологических
исследований для съема электрического сигнала, отражающего
изучаемые процессы, используются электроды, от метрологических и
•-медико-технических характеристик которых, прежде всего,
зависит достоверность диагностической информации. Это
заставляет пользователей уделять большое внимание их конструкции,
техническим параметрам и помехоустойчивости. Решение этих
задач возможно лишь при глубоком понимании процессов,
происходящих на участке кожно-электродного контакта.
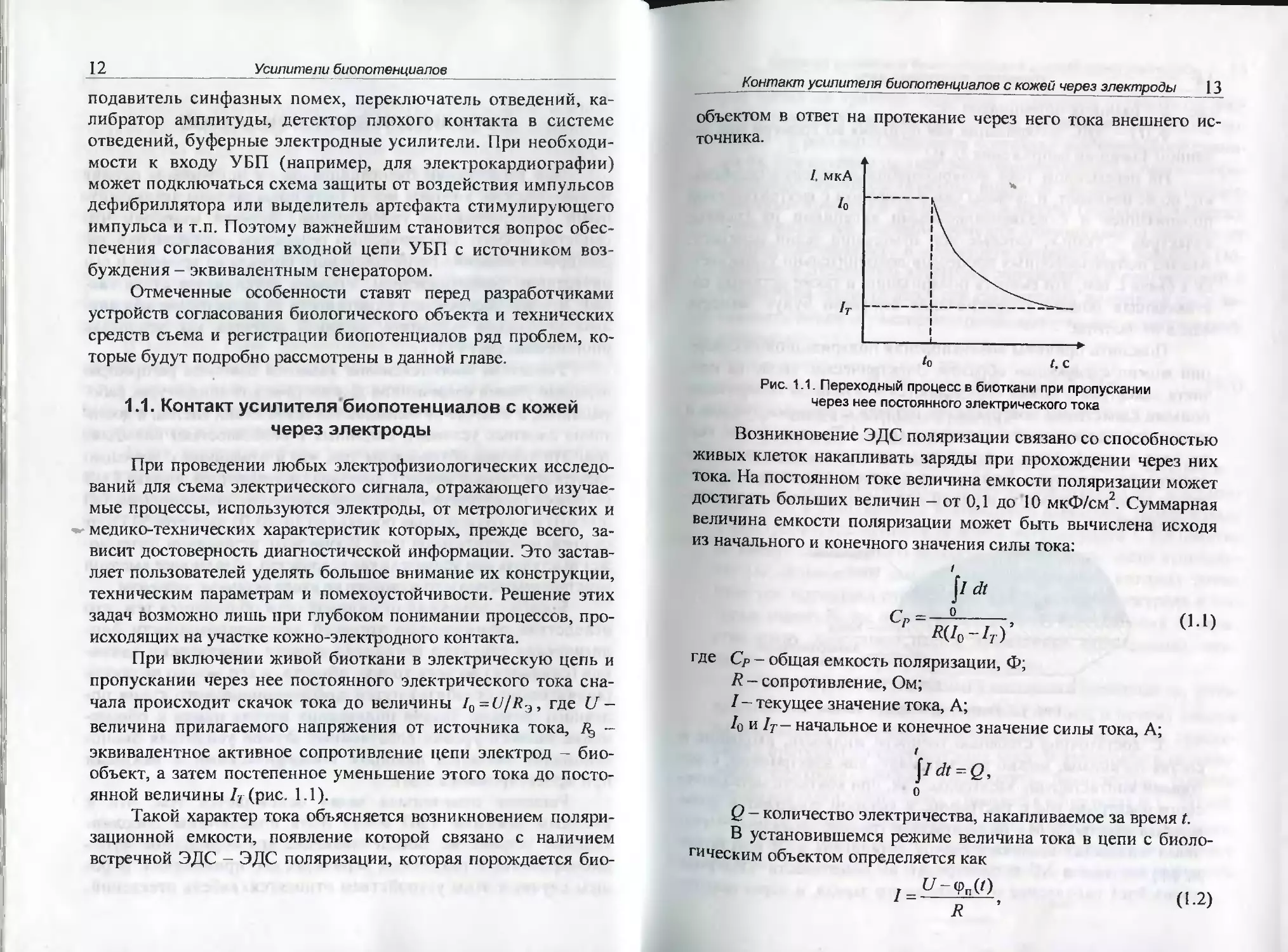
При включении живой биоткани в электрическую цепь и
пропускании через нее постоянного электрического тока
сначала происходит скачок тока до величины I0=U/R3, где U —
величина прилагаемого напряжения от источника тока, Я, -
эквивалентное активное сопротивление цепи электрод -
биообъект, а затем постепенное уменьшение этого тока до
постоянной величины Ij (рис. 1.1).
Такой характер тока объясняется возникновением
поляризационной емкости, появление которой связано с наличием
встречной ЭДС - ЭДС поляризации, которая порождается био-
Контакт усилителя биопотенциалов с кожей через электроды 13
объектом в ответ на протекание через него тока внешнего
источника.
/. мкА
4>
I „^г=__
1 ар
к
Л С
Рис. 1.1. Переходный процесс в биоткани при пропускании
через нее постоянного электрического тока
Возникновение ЭДС поляризации связано со способностью
живых клеток накапливать заряды при прохождении через них
тока. На постоянном токе величина емкости поляризации может
достигать больших величин - от 0,1 до 10 мкФ/см2. Суммарная
величина емкости поляризации может быть вычислена исходя
из начального и конечного значения силы тока:
Udt
СР=-
0-1)
Щ>-/г)
где Ср - общая емкость поляризации, Ф;
R - сопротивление, Ом;
/-текущее значение тока, А;
/о и 1Т- начальное и конечное значение силы тока, А;
\ldt = Q,
о
Q - количество электричества, накапливаемое за время t.
В установившемся режиме величина тока в цепи с
биологическим объектом определяется как
R
(1.2)
14
Усилители биопотенциалов
где U— разность потенциалов, В;
фп(/) - ЭДС поляризации как функция во времени при
заданном значении напряжения U, В.
На переменном токе поляризационные явления
ослабевают, но не исчезают, и связаны они в основном с внутритканевой
поляризацией и с поляризационными явлениями на границе
«электрод - ткань», которые при отмирании ткани исчезают.
Анализ поляризационных процессов дополнительно
усложняется в связи с тем, что емкость поляризации, а также активная
составляющая общего сопротивления биоткани будут зависеть
еще и от частоты.
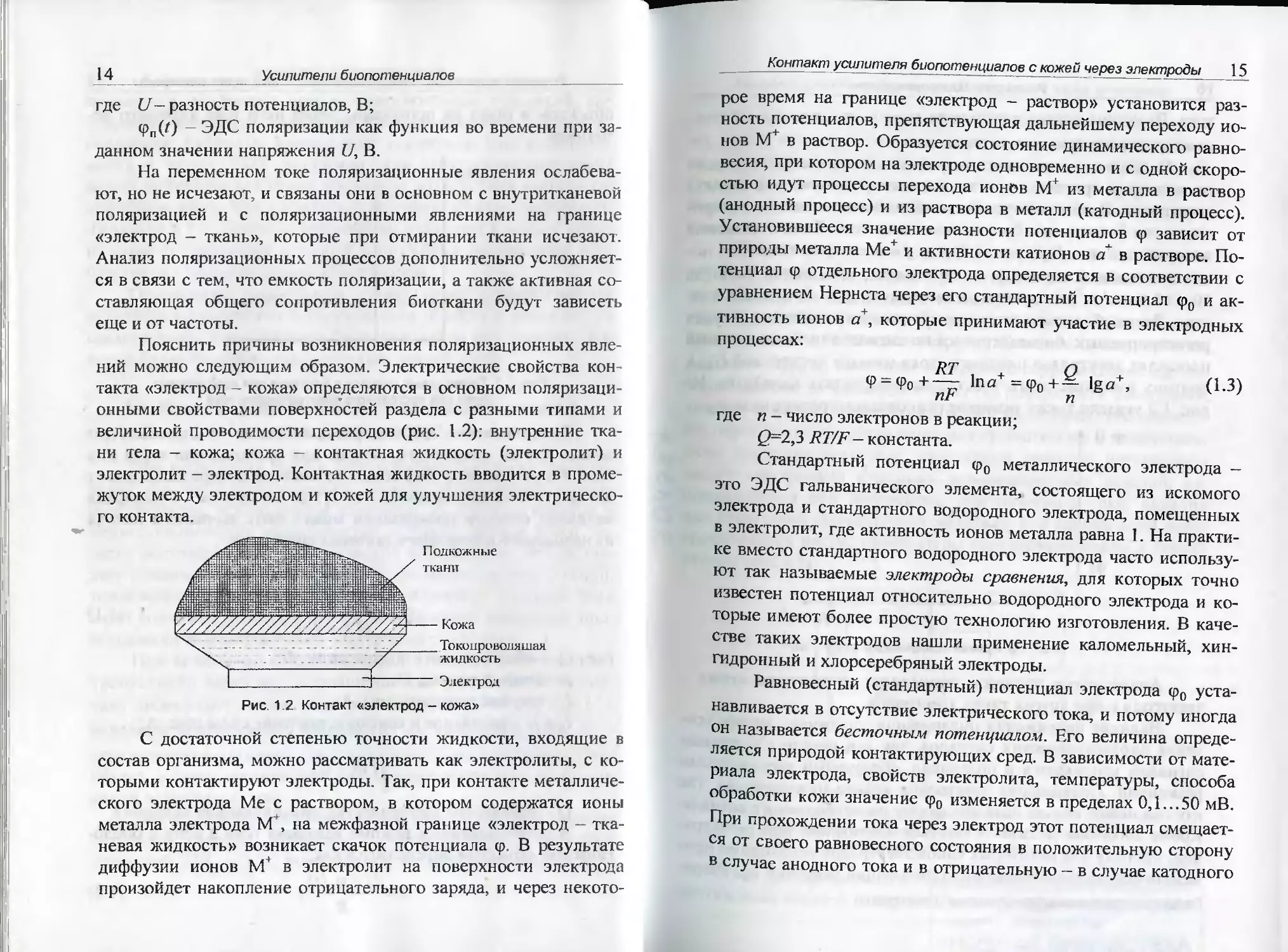
Пояснить причины возникновения поляризационных
явлений можно следующим образом. Электрические свойства
контакта «электрод - кожа» определяются в основном
поляризационными свойствами поверхностей раздела с разными типами и
величиной проводимости переходов (рис. 1.2): внутренние
ткани тела - кожа; кожа — контактная жидкость (электролит) и
электролит - электрод. Контактная жидкость вводится в
промежуток между электродом и кожей для улучшения
электрического контакта.
Подкожные
ткани
Кожа
.Токопроводяшая
жидкость
Электрод
Рис. 1.2 Контакт «электрод - кожа»
С достаточной степенью точности жидкости, входящие в
состав организма, можно рассматривать как электролиты, с
которыми контактируют электроды. Так, при контакте
металлического электрода Me с раствором, в котором содержатся ионы
металла электрода М+, на межфазной границе «электрод -
тканевая жидкость» возникает скачок потенциала ф. В результате
диффузии ионов М+ в электролит на поверхности электрода
произойдет накопление отрицательного заряда, и через некото-
Контакт усилителя биопотенциалов с кожей через электроды 15
рое время на границе «электрод - раствор» установится
разность потенциалов, препятствующая дальнейшему переходу
ионов М+ в раствор. Образуется состояние динамического
равновесия, при котором на электроде одновременно и с одной
скоростью идут процессы перехода ионов М+ из металла в раствор
(анодный процесс) и из раствора в металл (катодный процесс).
Установившееся значение разности потенциалов ф зависит от
природы металла Ме+ и активности катионов а" в растворе.
Потенциал ф отдельного электрода определяется в соответствии с
уравнением Нернста через его стандартный потенциал ф0 и
активность ионов а+, которые принимают участие в электродных
процессах:
RT О
Ф = Фо+— 1па+=ф0+^ lgtf+, (1.3)
nF n
где n - число электронов в реакции;
(2=2,3 RT/F- константа.
Стандартный потенциал ф0 металлического электрода -
это ЭДС гальванического элемента, состоящего из искомого
электрода и стандартного водородного электрода, помещенных
в электролит, где активность ионов металла равна 1. На
практике вместо стандартного водородного электрода часто
используют так называемые электроды сравнения, для которых точно
известен потенциал относительно водородного электрода и
которые имеют более простую технологию изготовления. В
качестве таких электродов нашли применение каломельный, хин-
гидронный и хлорсеребряный электроды.
Равновесный (стандартный) потенциал электрода ф0
устанавливается в отсутствие электрического тока, и потому иногда
он называется бесточным потенциалом. Его величина
определяется природой контактирующих сред. В зависимости от
материала электрода, свойств электролита, температуры, способа
обработки кожи значение ф0 изменяется в пределах 0,1...50 мВ.
При прохождении тока через электрод этот потенциал
смещается от своего равновесного состояния в положительную сторону
в случае анодного тока и в отрицательную — в случае катодного
16
Усилители биопотенциалов
тока. Величина сдвига потенциала (р = (р0-<рР, где ц>Р -
потенциал электрода при прохождении тока.
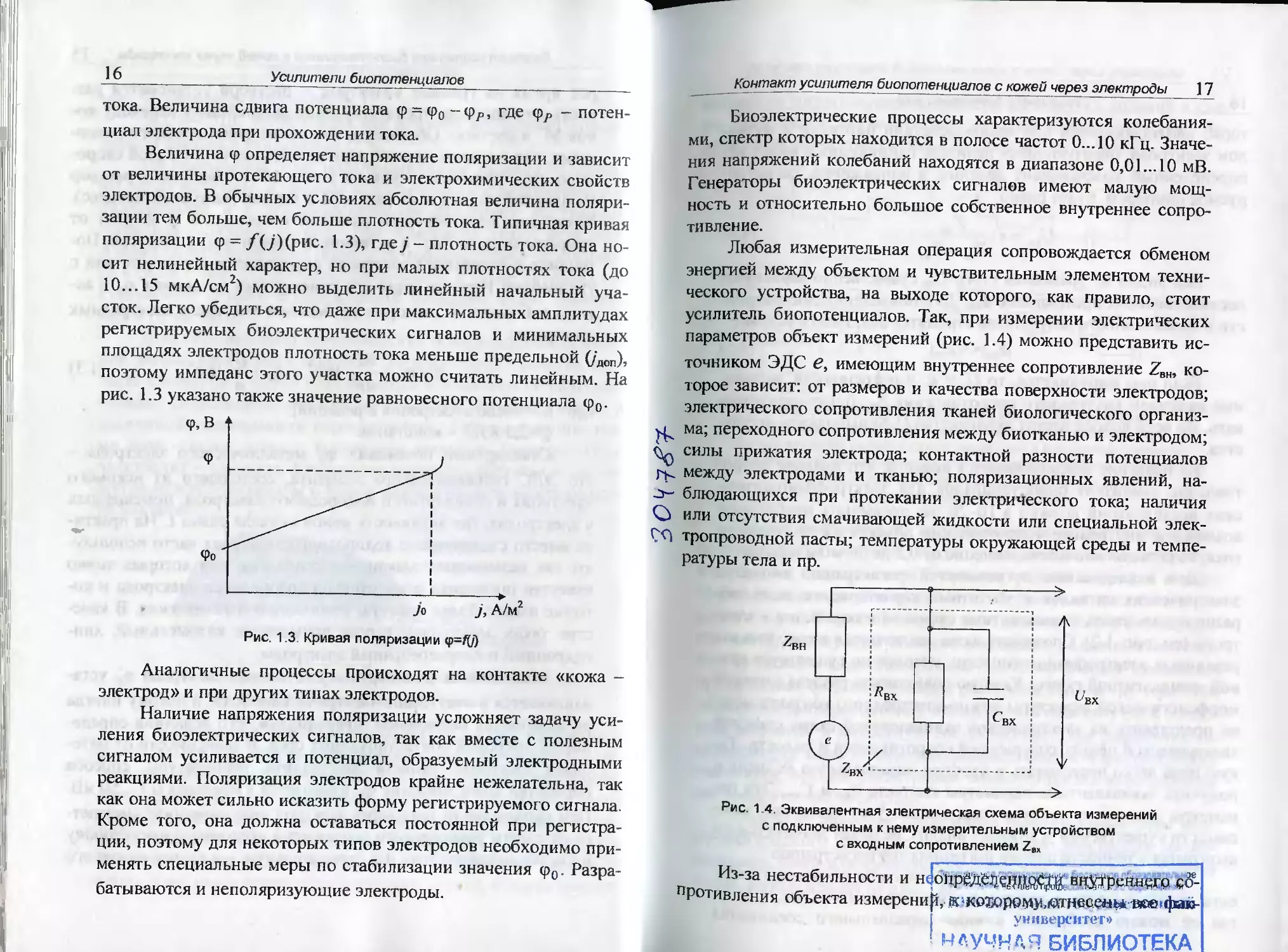
Величина ф определяет напряжение поляризации и зависит
от величины протекающего тока и электрохимических свойств
электродов. В обычных условиях абсолютная величина
поляризации тем больше, чем больше плотность тока. Типичная кривая
поляризации ср = /(у')(рис. 1.3), где у' - плотность тока. Она
носит нелинейный характер, но при малых плотностях тока (до
10... 15 мкА/см ) можно выделить линейный начальный
участок. Легко убедиться, что даже при максимальных амплитудах
регистрируемых биоэлектрических сигналов и минимальных
площадях электродов плотность тока меньше предельной (fROri),
поэтому импеданс этого участка можно считать линейным. На
рис. 1.3 указано также значение равновесного потенциала ф0.
Ф,В ■•
Ф J
Фо !
1 ►
jo j, А/м
Рис. 1.3. Кривая поляризации <p=fi[/}
Аналогичные процессы происходят на контакте «кожа -
электрод» и при других типах электродов.
Наличие напряжения поляризации усложняет задачу
усиления биоэлектрических сигналов, так как вместе с полезным
сигналом усиливается и потенциал, образуемый электродными
реакциями. Поляризация электродов крайне нежелательна, так
как она может сильно исказить форму регистрируемого сигнала.
Кроме того, она должна оставаться постоянной при
регистрации, поэтому для некоторых типов электродов необходимо
применять специальные меры по стабилизации значения ф0.
Разрабатываются и неполяризующие электроды.
Контакт усилителя биопотенциалов с кожей через электроды 17
Биоэлектрические процессы характеризуются
колебаниями, спектр которых находится в полосе частот 0...10 кГц.
Значения напряжений колебаний находятся в диапазоне 0,01...10 мВ.
Генераторы биоэлектрических сигналов имеют малую
мощность и относительно большое собственное внутреннее
сопротивление.
Любая измерительная операция сопровождается обменом
энергией между объектом и чувствительным элементом
технического устройства, на выходе которого, как правило, стоит
усилитель биопотенциалов. Так, при измерении электрических
параметров объект измерений (рис. 1.4) можно представить
источником ЭДС е, имеющим внутреннее сопротивление ZBH,
которое зависит: от размеров и качества поверхности электродов;
электрического сопротивления тканей биологического организ-
yj ма; переходного сопротивления между биотканью и электродом;
^С. силы прижатия электрода; контактной разности потенциалов
г-^ между электродами и тканью; поляризационных явлений, на-
-э- блюдающихся при протекании электрического тока; наличия
О или отсутствия смачивающей жидкости или специальной элек-
ГТ| тропроводной пасты; температуры окружающей среды и
температуры тела и пр.
■« >
Рис. 1.4. Эквивалентная электрическая схема объекта измерений
с подключенным к нему измерительным устройством
с входным сопротивлением Ze>
Из-за нестабильности и н4о'прйд^ВД1?)1ЩЩ; ВЩ^ейнедо
.сопротивления объекта измерени|}, к^кошороад^йтнесейь^-йге^фаю-
| университет»
! илучнДП БИБЛИОТЕКА
18
Усилители биопотенциалов
торы, наблюдающиеся при взаимодействии биоткани с
металлом электрода, образующийся делитель напряжения е имеет
неопределенный коэффициент деления, а напряжение,
регистрируемое прибором, будет равно
UB =е £**—. (1.4)
Z +Z
^вн т^вх
Как видно из уравнения (1.4), С/Ех существенно зависит от
нестабильного сопротивления ZB„. Для повышения
достоверности и объективности результатов стремятся выполнить условие
|ZBH|«|ZBX|. (1.5)
Если оно выполняется, то С/Вх= е, и погрешности,
вызванные наличием внутреннего сопротивления ZBH) будут
отсутствовать. Во всей полосе частот неравенство (1.5) выполнить не
удается.
На практике придерживаются правила, что входное
сопротивление усилителя биопотенциалов для
электрофизиологических исследований должно в 10-20 раз превышать наибольшее
возможное внутреннее сопротивление объекта на постоянном
токе, то есть должно иметь значение от 0,2 до 20 мОм и более.
Для исследования погрешностей регистрации амплитуд
электрических сигналов и частотных характеристик
целесообразно использовать эквивалентные схемы контакта «кожа -
электрод» (см. рис. 1.2). Сложность здесь заключается в том, что для
различных электрофизиологических методов не существует
единой эквивалентной схемы. Каждую поверхность раздела сложной
морфологической структуры кожно-электродного контакта
можно представить на электрической эквивалентной схеме сложной
электрической цепью, содержащей сопротивления и емкости.
Такую цепь легко пересчитать в простую параллельную /?С-цепь и
получить эквивалентные параметры контакта RK.3 и Ск.э. Эти
параметры зависят от частоты тока, однако учет частотной
зависимости существенно усложняет анализ, не давая значительного
выигрыша в точности оценки погрешностей регистрации.
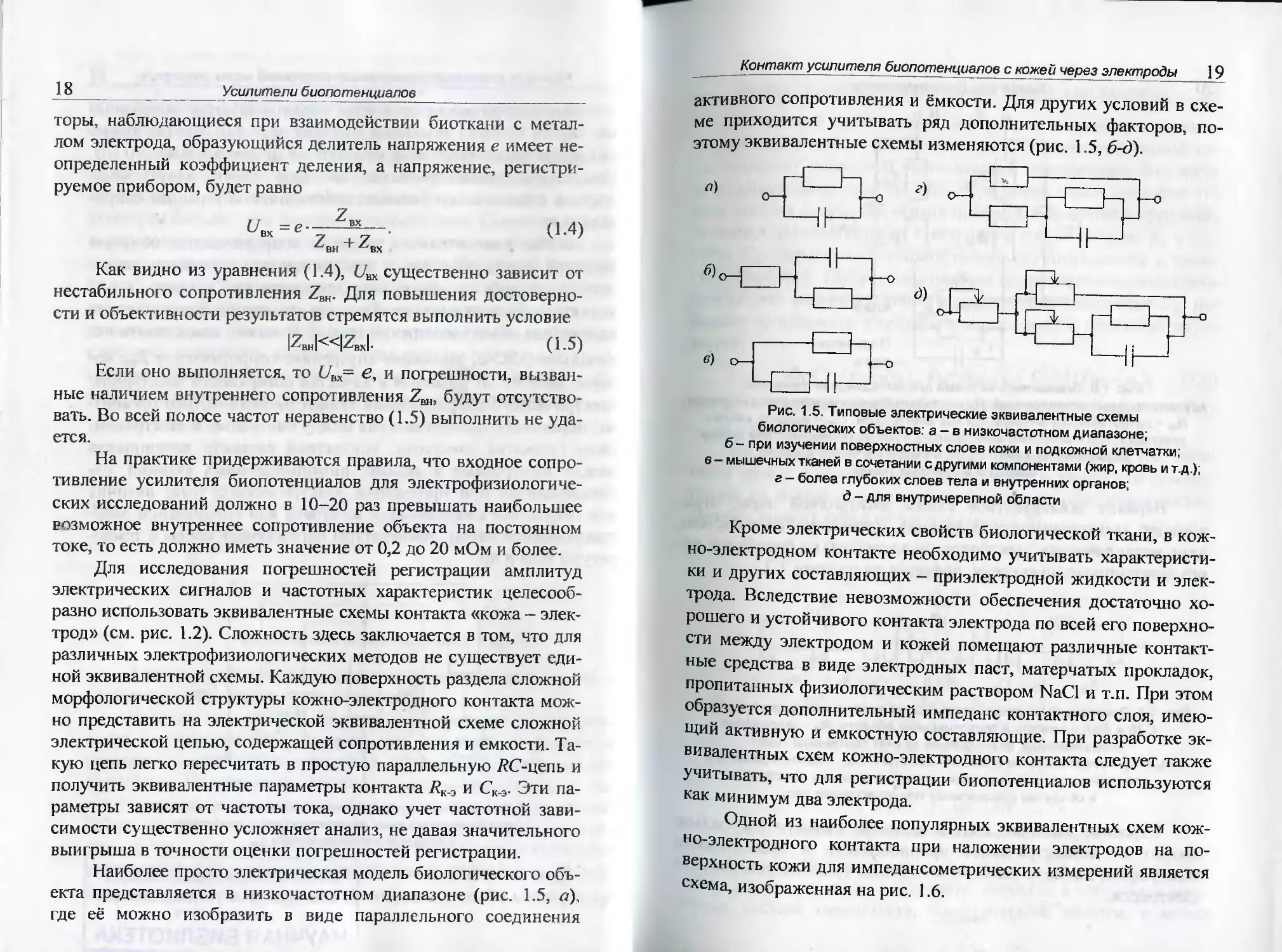
Наиболее просто электрическая модель биологического
объекта представляется в низкочастотном диапазоне (рис. 1.5, а),
где её можно изобразить в виде параллельного соединения
Контакт усилителя биопотенциалов с кожей через электроды 19
активного сопротивления и ёмкости. Для других условий в
схеме приходится учитывать ряд дополнительных факторов,
поэтому эквивалентные схемы изменяются (рис. 1.5, б-д).
а)
")<
в)
Ч"
Рис. 1.5. Типовые электрические эквивалентные схемы
биологических объектов: а - в низкочастотном диапазоне;
б- при изучении поверхностных слоев кожи и подкожной клетчатки;
в - мышечных тканей в сочетании с другими компонентами (жир, кровь и т.д.);
г - болеа глубоких слоев тела и внутренних органов;
д - для внутричерепной области
Кроме электрических свойств биологической ткани, в кож-
но-электродном контакте необходимо учитывать
характеристики и других составляющих - приэлектродной жидкости и
электрода. Вследствие невозможности обеспечения достаточно
хорошего и устойчивого контакта электрода по всей его
поверхности между электродом и кожей помещают различные
контактные средства в виде электродных паст, матерчатых прокладок,
пропитанных физиологическим раствором NaCl и т.п. При этом
образуется дополнительный импеданс контактного слоя,
имеющий активную и емкостную составляющие. При разработке
эквивалентных схем кожно-электродного контакта следует также
учитывать, что для регистрации биопотенциалов используются
как минимум два электрода.
Одной из наиболее популярных эквивалентных схем
кожно-электродного контакта при наложении электродов на
поверхность кожи для импедансометрических измерений является
схема, изображенная на рис. 1.6.
20
Усилители биопотенциалов
Гк.э
R,
С.„
Кожа
Сж |, Подкожная
ткань
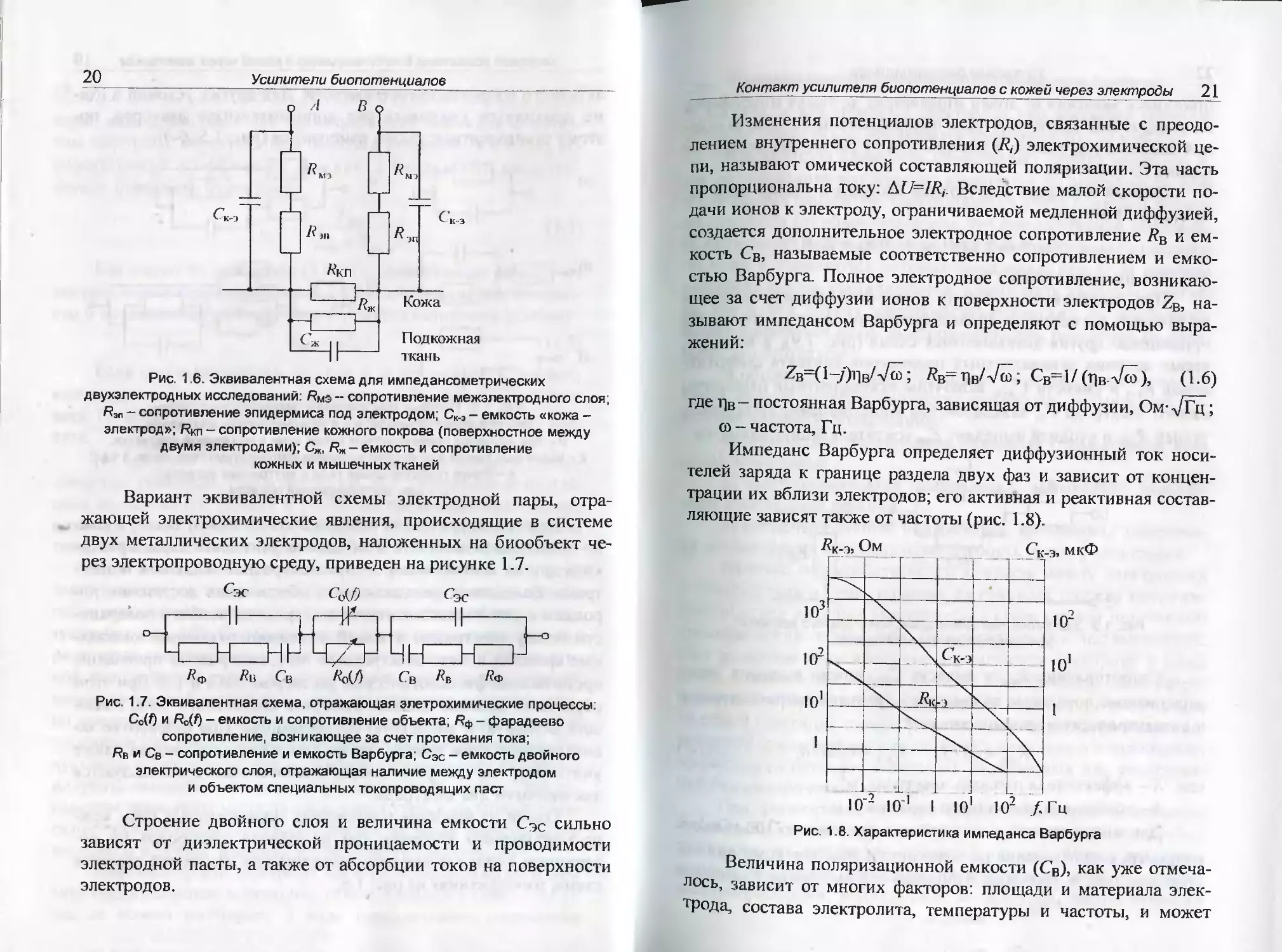
Рис. 1.6. Эквивалентная схема для импедансометрических
двухэлектродных исследований: Rms~ сопротивление межэлектродного слоя;
R3n - сопротивление эпидермиса под электродом; Ск.3 - емкость «кожа -
электрод»; Якп - сопротивление кожного покрова (поверхностное между
двумя электродами); Сж, R„ - емкость и сопротивление
кожных и мышечных тканей
Вариант эквивалентной схемы электродной пары,
отражающей электрохимические явления, происходящие в системе
двух металлических электродов, наложенных на биообъект
через электропроводную среду, приведен на рисунке 1.7.
м i ь* и
Ч^Н^}НН
~И11 II—
Ro
Ru Св
Яо(/)
Св Rb
Яф
Рис. 1.7. Эквивалентная схема, отражающая элетрохимические процессы:
С0(/) и R0(f) - емкость и сопротивление объекта; Яф - фарадеево
сопротивление, возникающее за счет протекания тока;
Rb и Св - сопротивление и емкость Варбурга; СЭс - емкость двойного
электрического слоя, отражающая наличие между электродом
и объектом специальных токопроводящих паст
Строение двойного слоя и величина емкости Сэс сильно
зависят от диэлектрической проницаемости и проводимости
электродной пасты, а также от абсорбции токов на поверхности
электродов.
Контакт усилителя биопотенциалов с кожей через электроды
21
Изменения потенциалов электродов, связанные с
преодолением внутреннего сопротивления (i?,) электрохимической
цепи, называют омической составляющей поляризации. Эта часть
пропорциональна току: Д£/=//?,. Вследствие малой скорости
подачи ионов к электроду, ограничиваемой медленной диффузией,
создается дополнительное электродное сопротивление /?в и
емкость Св, называемые соответственно сопротивлением и
емкостью Варбурга. Полное электродное сопротивление,
возникающее за счет диффузии ионов к поверхности электродов ZB,
называют импедансом Варбурга и определяют с помощью
выражений:
Zb=(H)t)b/Vco ; /?в= Лв/Vco; Cb=1/(tib-Vco), (1.6)
где г)в- постоянная Варбурга, зависящая от диффузии, Ом- •Ч/Гц;
со - частота, Гц.
Импеданс Варбурга определяет диффузионный ток
носителей заряда к границе раздела двух фаз и зависит от
концентрации их вблизи электродов; его активная и реактивная
составляющие зависят также от частоты (рис. 1.8).
Лк.э, Ом _Q-3, мкф
Ю"2 10"' I I01 102 /Гц
Рис. 1.8. Характеристика импеданса Варбурга
Величина поляризационной емкости (Св), как уже
отмечалось, зависит от многих факторов: площади и материала
электрода, состава электролита, температуры и частоты, и может
22
Усилители биопотенциалов
принимать значения от долей микрофарад до тысяч микрофарад
на квадратный сантиметр. Для поляризационного
сопротивления диапазон изменения, в зависимости от тех же факторов, - от
единиц до тысяч ом.
Полный импеданс электродной системы с учетом всех
отмеченных факторов
^c^ + l^C^+I/^+Zb)]-1, (1.7)
где Z0- импеданс кожи, Ом.
При исследовании влияния кожно-электродного контакта
на точность регистрации биоэлектрических потенциалов нашла
применение другая эквивалентная схема (рис. 1.9), в которую,
кроме величин эквивалентных параметров контакта
сопротивления RK.3 и емкости Ск_э, включены эквивалентные параметры
самого электрода Z3, эквивалентное сопротивление подкожных
тканей ЛПк и входной импеданс ZBX усилителя биопотенциалов.
a
Ru
Hh
Як
2о-
Z,
•вху
Рис. 1.9. Эквивалентная схема кожно-электродного контакта
при регистрации биопотенциалов
Сопротивление /?к.э и емкость Ск.э можно выразить через
усредненные локальные параметры - удельное сопротивление р
и диэлектрическую проницаемость 8:
^.э=рЛ/5; CK,3 = e0eS/h, (1.8)
где S - эффективная площадь электрода, м ;
h - толщина высокоомного слоя кожи, м.
Для живых тканей р изменяется в пределах до 100 кОм/см:
например, сопротивление на поверхности участков кожи при
постоянном токе и электроде площадью 4-5 см лежит в пределах
Контакт усилителя биопотенциалов с кожей через электроды
23
5... Ю кОм, а для точечных электродов оно достигает значений
100 кОм. Емкость Ск.э оценивается величиной 10...20 мкФ/см2.
Наибольшую сложность представляет оценка величины h,
так как последняя значительно изменяется по поверхности тела
и для разных пациентов. Необходимость учета полезной
площади электрода (5) объясняется тем, что при наложении
последнего происходит растекание пасты или физиологического раствора
по коже и появляются потовые выделения; при этом размеры
электрода как бы увеличиваются. Кроме того, импеданс
контакта, как и при других электрофизиологических исследованиях,
может изменяться из-за электрохимических процессов на
переходах его структуры.
В общем случае приэлектродные явления сопровождаются
тремя видами электрохимических процессов, вызывающих
появление эффектов поляризации:
1) химическая поляризация, связанная с химической
природой электродов;
2) электрохимическая поляризация, вызываемая
замедлением электродной реакции;
3) концентрационная поляризация, вызываемая
изменением концентрации потенциалопередающих ионов у электродов.
Наличие непосредственного контакта между электродами
и тканями тела и существование на границах раздела
контактирующих сред двойных электрических слоев служит источником
специфических помех при биоэлектрических исследованиях.
При взаимном относительном перемещении электрода и кожи
вдоль поверхности раздела двойные электрические слои
разрушаются, что приводит к мгновенному изменению потенциала,
то есть к генерации помех. Это еще один из специфических
источников помех (наряду с отличиями в величине h и вариациями
эффективной площади электрода), характерных для
исследований биоэлектрических явлений.
При регистрации электрических параметров биообъекта
весьма остро стоит вопрос о борьбе с помехами, иногда
превышающими по амплитуде полезный сигнал. Многочисленные
помехи создаются проводами электрической сети, бытовыми
электроприборами, медицинской аппаратурой, радиостанциями
24
Усилители биопотенциалов
и радиотелефонами. Особенно опасны источники помех, в
которых происходит резкое прерывание электрического тока. При
этом наиболее широкий спектр помех наблюдается в случае
образования искры в момент коммутации. Уровень помех может
быть настолько большим, что на фоне их затруднительно
оценить информационный сигнал. Поэтому при проведении
электрических исследований всегда стремятся уменьшить влияние
внешних электромагнитных полей.
Одним из действенных путей борьбы с помехами является
использование двух дифференциальных входов, конструктивно
реализуемых входными цепями усилителей биопотенциалов.
Общая схема усилителя строится таким образом, что выходной
сигнал равен разности сигналов, подаваемых на
дифференциальные входы. Поля помех обычно создают синфазный сигнал -
одинаковый сигнал на обоих входах. Поэтому на выходе
устройства с дифференциальным входом сигналы помех
существенно ослаблены, а в ряде случаев оказываются подавленными
полностью.
1.2. Входные цепи усилителей биопотенциалов
Как было показано выше, электрофизиологические
сигналы при различных методах регистрации биопотенциалов
измеряются с помощью электродов, расположенных определенным
образом на поверхности тела (или введенных внутрь организма)
в соответствии с некоторой системой отведений. Источники
возбуждения для разных методов различны, разнообразна форма и
параметры регистрируемых потенциалов, различны параметры
сигналов, передающих диагностическую информацию о
состоянии организма. Опыт проведения исследований позволяет
установить, что двойные амплитуды потенциалов живых объектов
лежат в пределах от 5 мкВ до 120 мВ, диапазон частот от 10 до
103 Гц и выше. При клинических наблюдениях, контроле за
состоянием и в ряде исследований эти диапазоны ограничиваются
значениями параметров некоторых биологических сигналов
(табл. 1.1). Однако есть ряд общих особенностей этих
источников возбуждения, которые и определяют специфику
регистрации биопотенциалов.
Входные цепи усилителей биопотенциалов 25
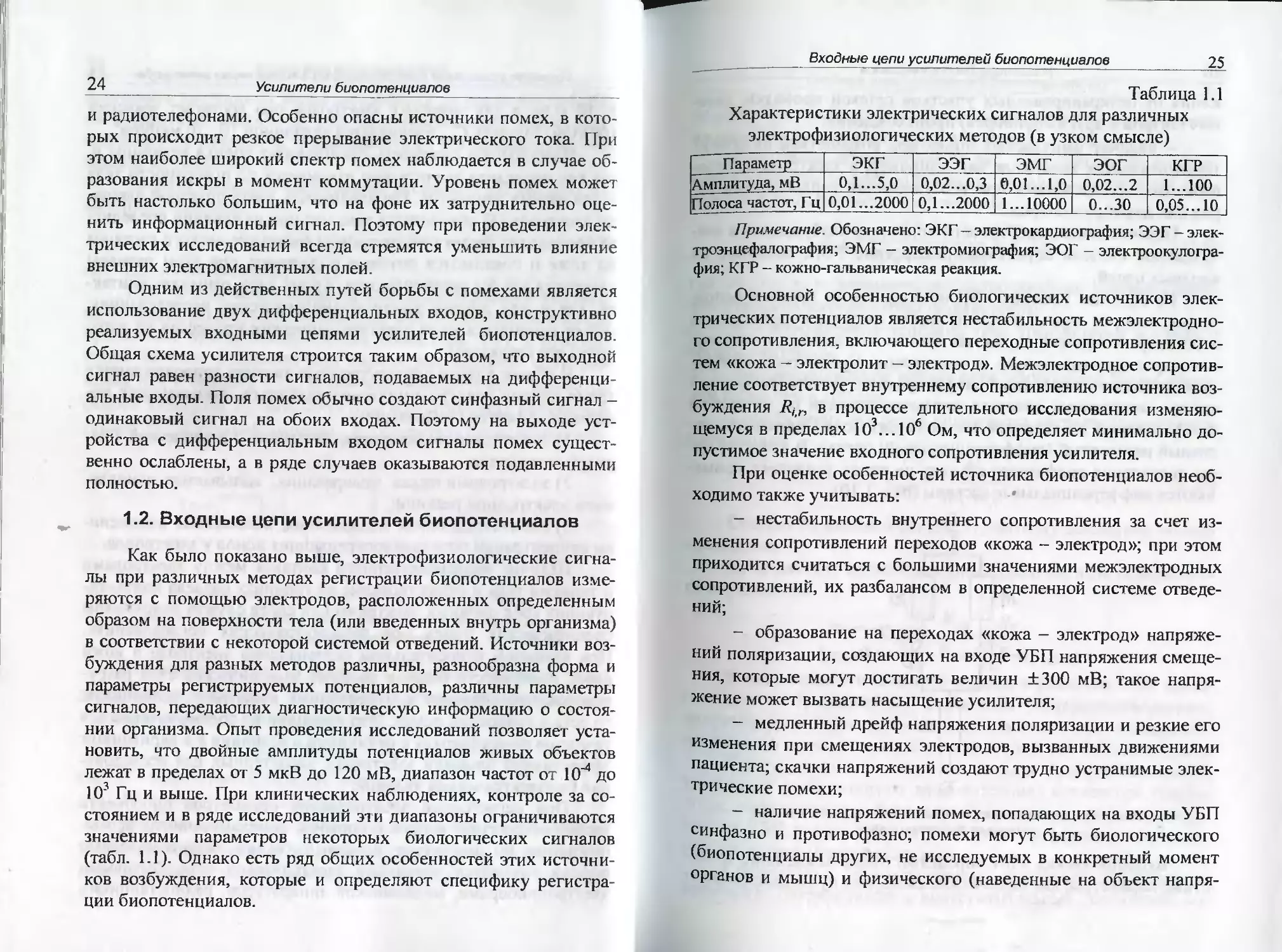
Таблица 1.1
Характеристики электрических сигналов для различных
электрофизиологических методов (в узком смысле)
Параметр
Амплитуда, мВ
Полоса частот, Гц
ЭКГ
0,1...5,0
0,01...2000
ЭЭГ
0,02...0,3
0,1...2000
эмг
6,01... 1,0
1... 10000
ЭОГ
0,02...2
0...30
КГР
1...100
0,05... 10
Примечание. Обозначено: ЭКГ — электрокардиография; ЭЭГ -
электроэнцефалография; ЭМГ - электромиография; ЭОГ - электроокулогра-
фия; КГР - кожно-гальваническая реакция.
Основной особенностью биологических источников
электрических потенциалов является нестабильность
межэлектродного сопротивления, включающего переходные сопротивления
систем «кожа - электролит — электрод». Межэлектродное
сопротивление соответствует внутреннему сопротивлению источника
возбуждения Rir, в процессе длительного исследования
изменяющемуся в пределах 10 ...106 Ом, что определяет минимально
допустимое значение входного сопротивления усилителя.
При оценке особенностей источника биопотенциалов
необходимо также учитывать: -*
- нестабильность внутреннего сопротивления за счет
изменения сопротивлений переходов «кожа - электрод»; при этом
приходится считаться с большими значениями межэлектродных
сопротивлений, их разбалансом в определенной системе
отведений;
- образование на переходах «кожа - электрод»
напряжений поляризации, создающих на входе УБП напряжения
смещения, которые могут достигать величин ±300 мВ; такое
напряжение может вызвать насыщение усилителя;
- медленный дрейф напряжения поляризации и резкие его
изменения при смещениях электродов, вызванных движениями
пациента; скачки напряжений создают трудно устранимые
электрические помехи;
- наличие напряжений помех, попадающих на входы УБП
синфазно и противофазно; помехи могут быть биологического
(биопотенциалы других, не исследуемых в конкретный момент
органов и мышц) и физического (наведенные на объект напря-
26
Усилители биопотенциалов
жения от неэкранированных участков сетевой проводки,
сетевых шнуров и других приборов) происхождения;
- наличие импульсных помех при воздействии на объект
терапевтических аппаратов, как, например, в
электрокардиографических исследованиях при использовании
кардиостимуляторов или дефибрилляторов.
Перечисленные особенности источника возбуждения в
значительной степени определяют построение УБП, особенно их
входных цепей.
На входных зажимах УБП не допускается наличие
напряжения, которое через электроды может оказаться подведенным
к объекту исследования, так как оно может вызвать появление
неконтролируемых микро- и макротоков. Кроме того,
необходимо подавлять паразитный сигнал среднего уровня (синфазный
сигнал, источником которого являются наводки от питающей
сети), который по величине во много раз может превысить
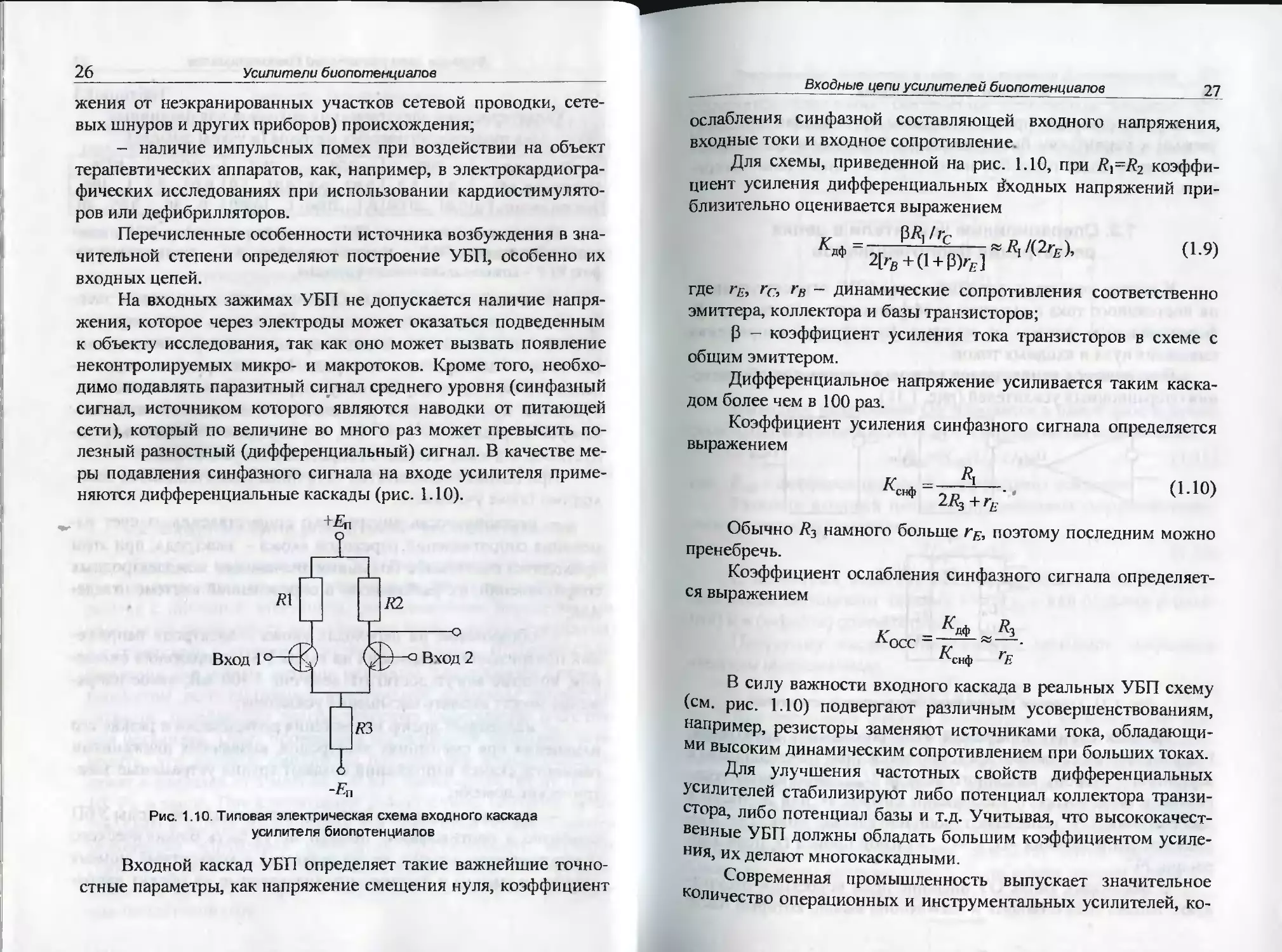
полезный разностный (дифференциальный) сигнал. В качестве
меры подавления синфазного сигнала на входе усилителя
применяются дифференциальные каскады (рис. 1.10).
+£п
Вход 1
Вход 2
Рис. 1.10. Типовая электрическая схема входного каскада
усилителя биопотенциалов
Входной каскад УБП определяет такие важнейшие
точностные параметры, как напряжение смещения нуля, коэффициент
Входные цепи усилителей биопотенциалов
27
ослабления синфазной составляющей входного напряжения,
входные токи и входное сопротивление
Для схемы, приведенной на рис. 1.10, при Ry=R2
коэффициент усиления дифференциальных входных напряжений
приблизительно оценивается выражением
"'-WW"**** С')
где гЕ, гс, гв - динамические сопротивления соответственно
эмиттера, коллектора и базы транзисторов;
Р - коэффициент усиления тока транзисторов в схеме с
общим эмиттером.
Дифференциальное напряжение усиливается таким
каскадом более чем в 100 раз.
Коэффициент усиления синфазного сигнала определяется
выражением
*^-2^- <М0)
Обычно /?3 намного больше гЕ, поэтому последним можно
пренебречь.
Коэффициент ослабления синфазного сигнала
определяется выражением
Kqcc
^снф ГЕ
В силу важности входного каскада в реальных УБП схему
(см. рис. 1.10) подвергают различным усовершенствованиям,
например, резисторы заменяют источниками тока,
обладающими высоким динамическим сопротивлением при больших токах.
Для улучшения частотных свойств дифференциальных
Усилителей стабилизируют либо потенциал коллектора
транзистора, либо потенциал базы и т.д. Учитывая, что
высококачественные УБП должны обладать большим коэффициентом усиле-
ния, их делают многокаскадными.
Современная промышленность выпускает значительное
количество операционных и инструментальных усилителей, ко-
28
Усилители биопотенциалов
торые удовлетворяют практически всем требованиям,
предъявляемым к усилителям биопотенциалов. Поэтому в дальнейшем
остановимся более подробно на этом классе аналоговых
микросхем.
1.3. Операционные усилители в цепях
регистрации биопотенциалов
К классу операционных усилителей (ОУ) относят
усилители постоянного тока с высоким коэффициентом усиления,
дифференциальным входом и малыми значениями напряжения
смещения нуля и входных токов.
В литературе используется несколько вариантов
обозначения операционных усилителей /рис. 1.11).
>
а)
б)
в)
3
Рис. 1.11. Условные обозначения операционных усилителей
На всех схемах инверсный вход обозначают кружочком.
Графическое изображение представляется либо треугольником с
вершиной в сторону выходного вывода С/Вых, либо
прямоугольником, в поле которого изображают символ > или А. Часто в
изображении ОУ используют дополнительные поля, где
изображают цепи питания -U„ и +U„, нулевой провод G, цепи
коррекции FC.
В некоторых типах ОУ внешние цепи коррекции
отсутствуют. Может отсутствовать и «земляной» вывод, который часто
Операционные усилители в цепях регистрации биопотенциалов 29
образуется как точка соединения источников питания ОУ
(рис. 1.12). Такая схема обеспечивает работу операционного
усилителя с двухполярными входными и выходными сигналами.
-У
^ВЫХ
У
Т+ 1+ 1+ 1-± I
Рис. 1.12. Схема подключения ОУ к двухполярному источнику питания
Выходное напряжение ОУ находится в одной фазе с
разностью входных напряжений £/ь Е/2 и определяется выражением
ивьа=Кдф(их-и2), (1.11)
где Кяф—дифференциальный коэффициент усиления.
Разность входных напряжений называют
дифференциальным входным напряжением:
UtiTUr-U* (Ы2)
В некоторых изданиях неинвертирующие и
инвертирующие входы обозначают знаками «+» и «-» или буквами р
(positive) и n (negative) соответственно.
Полусумму входных напряжений называют синфазным
входным напряжением:
и^ч^+щп. (1.13)
Для упрощения анализа параметров и возможностей
операционного усилителя вводят понятие идеального
операционного усилителя, придавая ему следующие идеализированные
свойства: коэффициент усиления по напряжению считается
бесконечно большим; при равенстве входных напряжений выходное
напряжение равно нулю, независимо от синфазного входного
напряжения, что соответствует равенству нулю напряжения
смещения нуля; входные токи i+, L по обеим входам равны
нулю; выходное сопротивление равно нулю; коэффициент усиле-
t>
6
30
Усилители биопотенциалов
ния синфазного сигнала (КСИф) равен нулю; операционный
усилитель является безынерционным устройством, в котором
выходной сигнал появляется одновременно с входным сигналом.
В реальных ОУ все перечисленные параметры
отличаются от идеальных: коэффициент усиления по напряжению
лежит в пределах 103...30-10 ; напряжение смещения нуля -
1 мкВ...50 мВ; входные токи - 0,01 нА...Ю мкА; выходное
сопротивление - 1 Ом... 10 кОм; время установления выходного
сигнала при подаче на вход единичного скачка напряжения -
1 НС...1 МС.
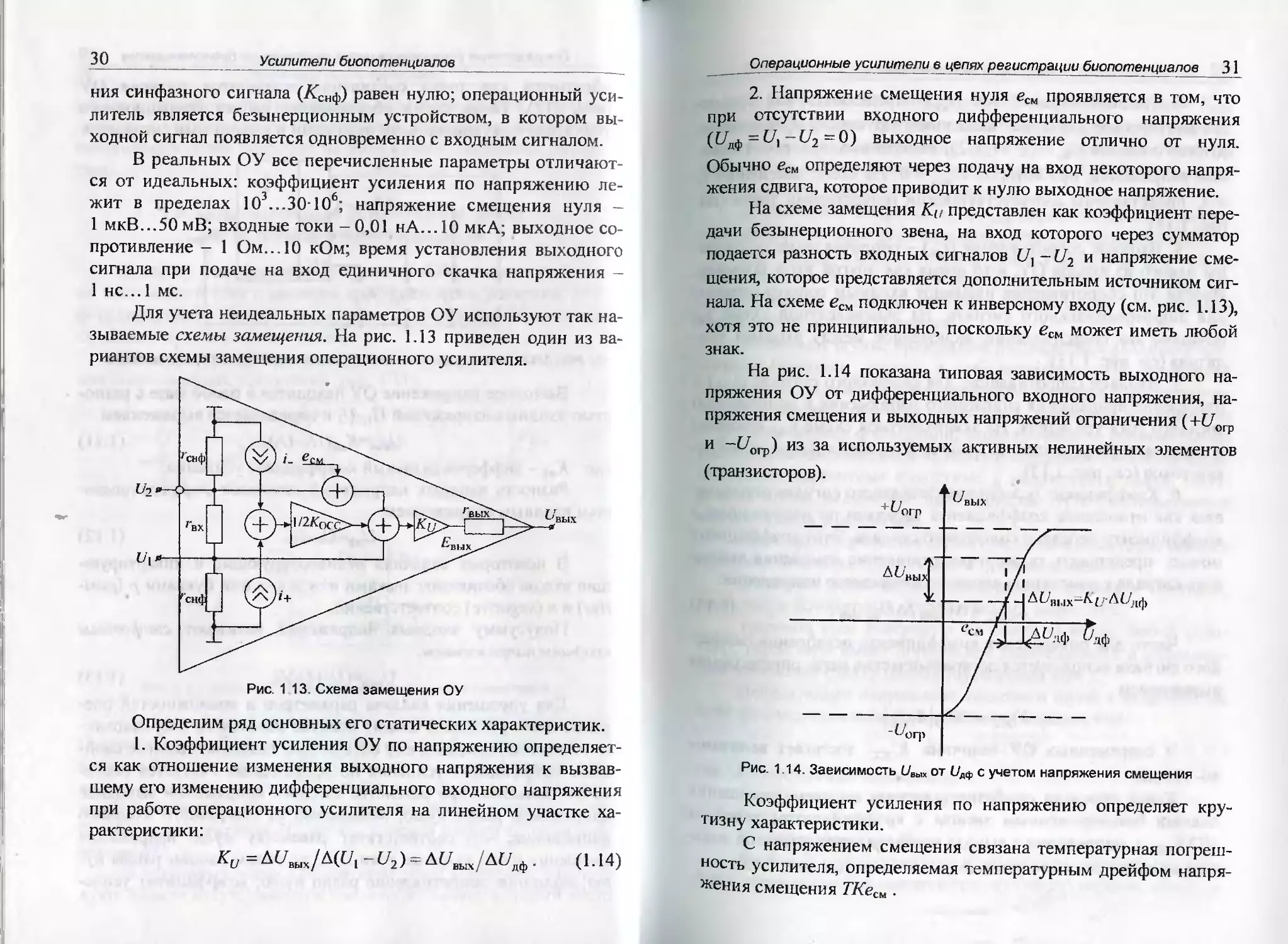
Для учета неидеальных параметров ОУ используют так
называемые схемы замещения. На рис. 1.13 приведен один из
вариантов схемы замещения операционного усилителя.
Рис. 113. Схема замещения ОУ
Определим ряд основных его статических характеристик.
I. Коэффициент усиления ОУ по напряжению
определяется как отношение изменения выходного напряжения к
вызвавшему его изменению дифференциального входного напряжения
при работе операционного усилителя на линейном участке
характеристики:
Kv = АС/В61Х/А(С/, - U2) = Д£/вых/Д[/дф . (1.14)
Операционные усилители в цепях регистрации биопотенциалов 31
2. Напряжение смещения нуля есм проявляется в том, что
при отсутствии входного дифференциального напряжения
(U . = £/,-£/2 =0) выходное напряжение отлично от нуля.
Обычно есм определяют через подачу на вход некоторого
напряжения сдвига, которое приводит к нулю выходное напряжение.
На схеме замещения Ки представлен как коэффициент
передачи безынерционного звена, на вход которого через сумматор
подается разность входных сигналов U]-U2 и напряжение
смещения, которое представляется дополнительным источником
сигнала. На схеме есм подключен к инверсному входу (см. рис. 1.13),
хотя это не принципиально, поскольку еш может иметь любой
знак.
На рис. 1.14 показана типовая зависимость выходного
напряжения ОУ от дифференциального входного напряжения,
напряжения смещения и выходных напряжений ограничения (+С/огр
и -£/огр) из за используемых активных нелинейных элементов
(транзисторов).
"■и
г; "^ВЫХ
Л^'выхТ
1
"Morp
■ X
I/ '
У-]Д*Лих=^
''СЧ/>1 1^4 'л
Рис. 1.14. Зависимость 1/вь1Х от С/Дф с учетом напряжения смещения
Коэффициент усиления по напряжению определяет
крутизну характеристики.
С напряжением смещения связана температурная
погрешность усилителя, определяемая температурным дрейфом
напряжения смещения ТКесы .
32
Усилители биопотенциалов
3. Средний входной ток (/вх) определяется как
среднеарифметическое значение токов инвертирующего и неинверти-
рующего входов (/вх =(i_ +/+)/2), измеренных при таком
входном напряжении, при котором С/вых =0. На схеме замещения /_
и /+ представлены соответствующими генераторами токов (см.
рис. 1.13).
4. Входное сопротивление (гвх) - сопротивление со
стороны одного из входов ОУ, в то время как другой вход заземлен.
Иногда это сопротивление называют входным сопротивлением
для дифференциального сигнала. На эквивалентной схеме Г&,
показано как сопротивление, включенное между входами
усилителя (см. рис. 1.13).
5. Входное сопротивление для синфазного сигнала (гСНф) -
отношение приращения синфазного напряжения к приращению
среднего тока усилителя. На эквивалентной схеме гСНф показано
в виде двух сопротивлений, включенных параллельно
источникам токов (см. рис. 1.13).
6. Коэффициент ослабления синфазного сигнала
определяется как отношение коэффициента передачи по напряжению к
коэффициенту передачи синфазного сигнала. Этот коэффициент
можно представить также через отношение изменения
выходного сигнала к изменению входного синфазного напряжения:
вх. снф "
(1.15)
Часто для определения коэффициента ослабления
синфазного сигнала используется логарифмическая мера, определяемая
выражением
^c=20ig|/:occl.
В современных ОУ величина jK^cc достигает величины
80-120 дБ.
Канал передачи синфазного сигнала на схеме замещения
показан безынерционным звеном с коэффициентом передачи
1/(2Л:оСС), напряжение с выхода которого через сумматор
подается на вход основного усилительного звена (см. рис. 1.13).
Операционные усилители в цепях регистрации биопотенциалов 3 3
7. Коэффициент подавления нестабильности питания Кт
обычно определяют как отношение очень медленного
(статического) изменения напряжения одного из источников питания
(обычно на 1 В) к приведенному ко входу ОУ
соответствующему изменению выходного напряжения.
8. Выходное сопротивление гвых определяется
схемотехникой построения выходных каскадов операционного усилителя.
При использовании операционных усилителей для
усиления биологических сигналов малой амплитуды (например,
энцефалограмма) существенную роль играют шумы ОУ,
накладывающиеся на полезный сигнал.
Различают шумы, пришедшие в усилитель с входными
сигналами (внешние шумы), и собственные шумы усилителей
(внутренние шумы). С первыми можно бороться
схемотехническими и конструктивными средствами, например, усреднением
и другими видами фильтрации, экранированием, рациональным
расположением элементов на плате и созданием связей,
компенсирующих паразитные емкостные и индуктивные связи.
Внутренние шумы уменьшают преимущество путем использования
малошумящих усилителей.
Шум характеризуется своим частотным спектром,
распределением амплитуд и источником происхождения.
Основные виды шума в электронных схемах - тепловой,
дробовой и фликкерный. Рассмотрим их подробнее.
Тепловой шум генерирует на своих выводах любой
резистор; такой шум имеет нормальное распределение и
равномерный частотный спектр (белый гауссовский шум).
Действующее напряжение теплового шума в незамкнутой
цепи на сопротивлении R определяется выражением
EN=j4kTRAf, (1.16)
где к - постоянная Больцмана;
Т- абсолютная температура, °С;
/- частота, Гц;
R - сопротивление, Ом.
Дробовой шум порождается движением дискретных
зарядов в проводнике. Он связан с тем, что число зарядов, проходя-
34 Усилители биопотенциалов
щих через некоторое сечение проводящей среды в единицу
времени, случайным образом флуктуирует относительно
некоторого значения.
Действующее значение флуктуирующего тока
определяется формулой
IN*>j2eIaAf, (1.17)
id
где е - заряд электрона (1,6-10" Кл);
1К - постоянная составляющая (среднее или
установившееся значение тока);
Д/ - ширина полосы пропускания, Гц.
Фликкерный шум вызывается флуктуирующим захватом
зарядов ловушками, образованными неоднородностями
структуры полупроводника. Частотный спектр этого шума
описывается зависимостью обратной частоты (1//) и имеет максимум в
области низких частот. Спектральная плотность этого шума
оценивается приблизительно соотношением eN ~1//.
Все шумовые компоненты порождают на выходе ОУ
определенное шумовое напряжение, спектральная плотность которо-
*■ го, приведенная ко входу, определяется формулой
^общ = V4 + UTRs + 4(iNRs)2 , (1.18)
где iN - спектральная плотность входного тока шума от
входного напряжения шума;
Rs - внутреннее сопротивление источника сигнала.
Шумовые свойства операционных усилителей часто
определяются их коэффициентом шума F, который показывает, во
сколько раз отношение мощности шума к мощности сигнала на
выходе усилителя увеличивается по сравнению с аналогичным
отношением на его входе.
Для определения величины F можно воспользоваться
выражением
*' = Rn**/Rs, (1-19)
где /?д,экв - эквивалентное шумовое сопротивление.
Часто используют логарифмический коэффициент шума,
определяемый выражением
Операционные усилители в цепях регистрации биопотенциалов 3 5
~~~ NF = \g(F). (1.20)
Операционный усилитель включает большое число
элементов, содержащих паразитные емкости и внутренние
обратные связи. Такие устройства при большом коэффициенте
усиления склонны к самовозбуждению с появлением на выходе
непрерывных или прерывистых автоколебаний достаточно
большой амплитуды, даже если входной сигнал отсутствует.
Причина автоколебаний - нежелательные фазовые сдвиги в усилителе,
приводящие к возникновению положительных обратных связей
на некоторых частотах.
Теория возникновения автоколебаний и методы борьбы с
ними с помощью цепи коррекции рассматриваются в
специальных курсах, например, в теории автоматического регулирования.
Применительно к операционным усилителям для
устойчивости их работы используют внутренние и внешние
корректирующие цепочки, содержащие емкости и сопротивления,
включаемые в схемы с целью создания отрицательных
обратных связей.
Устойчивая работа ОУ обеспечивается в том случае, если
схемы коррекции имеют такие же частотные свойства, что и
фильтр нижних частот первого порядка (инерционное звено),
причем это требование должно выполняться вплоть до
частоты единичного усиления /Т, то есть до частоты, на которой
дифференциальный коэффициент усиления Ки уменьшается до
единицы.
Известно, что амплитудно-частотная характеристика (АЧХ)
представляет собой зависимость коэффициента передачи
фильтра Кп от частоты (рис. 1.15).
кп=к,г
1 - ----- V
FT f
Рис. 1.15. Типовая АЧХ фильтра нижних частот
первого порядка (скорректированного ОУ)
36 Усилители биопотенциалов
Приведенная АЧХ относится к так называемым
динамическим параметрам ОУ, которые разделяют на две группы:
параметры для малого и большого сигналов.
К первой группе относят рассмотренную частоту
единичного усиления./т , полосу пропускания^ и время установления
tycr. Остановимся на этих характеристиках более подробно.
При исследовании динамических параметров ОУ
используют логарифмические характеристики, переходя от
амплитудно-частотных характеристик (АЧХ) к логарифмическим
амплитудно-частотным характеристикам (ЛАЧХ) с использованием
соотношения Z(/) = 20lg|A[/(/)|.
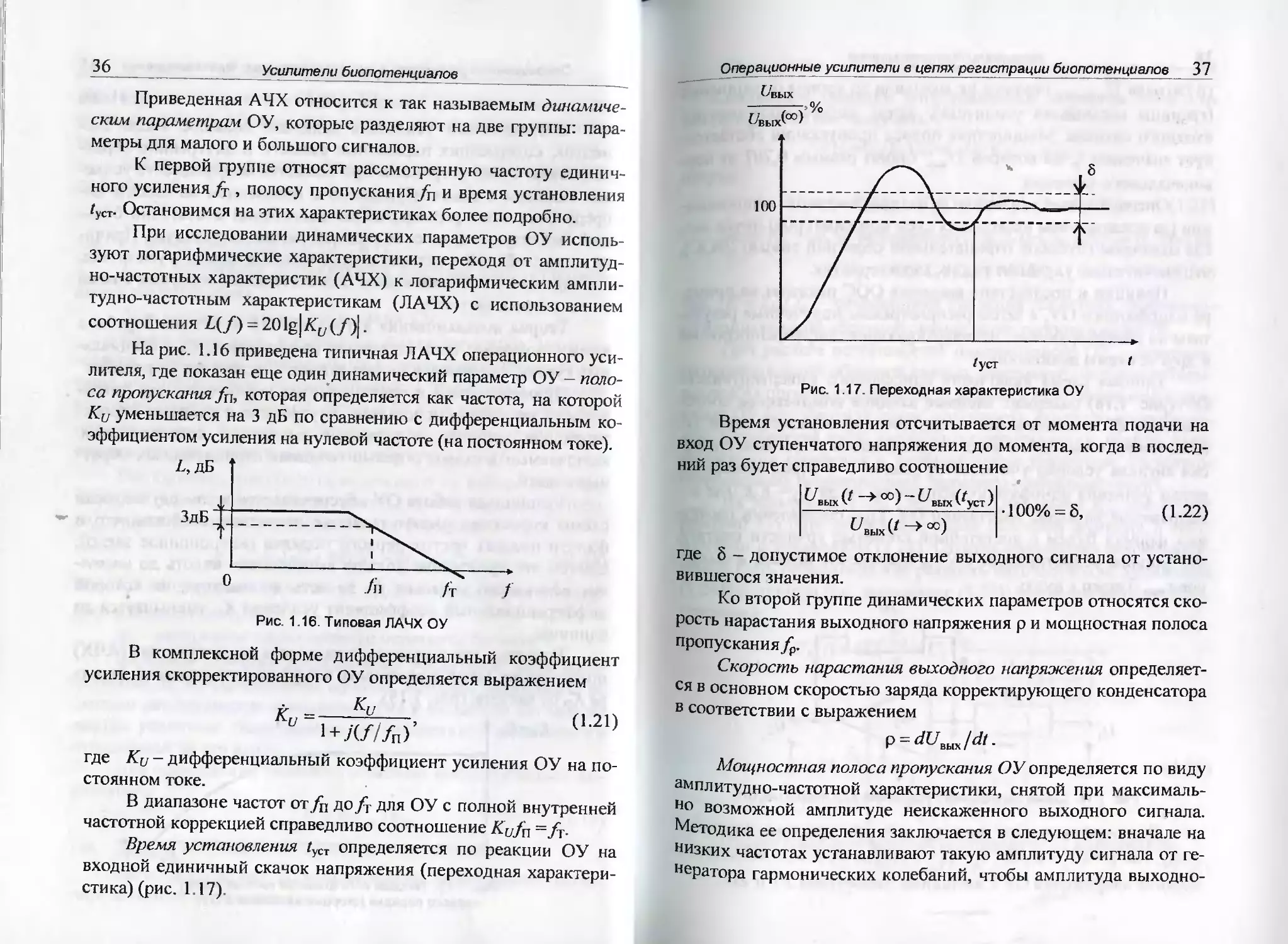
На рис. 1.16 приведена типичная ЛАЧХ операционного
усилителя, где показан еще один_ динамический параметр ОУ —
полоса пропускания fn, которая определяется как частота, на которой
Ки уменьшается на 3 дБ по сравнению с дифференциальным
коэффициентом усиления на нулевой частоте (на постоянном токе).
Ь,дВ
Рис. 1.16. Типовая ЛАЧХ ОУ
В комплексной форме дифференциальный коэффициент
усиления скорректированного ОУ определяется выражением
Ки= ^Ц , (1.21)
1 + /(///п)
где Кц - дифференциальный коэффициент усиления ОУ на
постоянном токе.
В диапазоне частот отуп до/г для ОУ с полной внутренней
частотной коррекцией справедливо соотношение Кц/и ~fr-
Время установления tyCT определяется по реакции ОУ на
входной единичный скачок напряжения (переходная
характеристика) (рис. 1.17).
Операционные усилители в цепях регистрации биопотенциалов 3 7
£/вых
uKhJp°)
-т>%
Рис. 1.17. Переходная характеристика ОУ
Время установления отсчитывается от момента подачи на
вход ОУ ступенчатого напряжения до момента, когда в
последний раз будет справедливо соотношение
^('-►«О-^выхСуст)
и.
•100% = 5,
(1.22)
где 8 - допустимое отклонение выходного сигнала от
установившегося значения.
Ко второй группе динамических параметров относятся
скорость нарастания выходного напряжения р и мощностная полоса
пропускания^,.
Скорость нарастания выходного напряжения
определяется в основном скоростью заряда корректирующего конденсатора
в соответствии с выражением
Мощностная полоса пропускания ОУ определяется по виду
амплитудно-частотной характеристики, снятой при
максимально возможной амплитуде неискаженного выходного сигнала.
Методика ее определения заключается в следующем: вначале на
низких частотах устанавливают такую амплитуду сигнала от
генератора гармонических колебаний, чтобы амплитуда выходно-
38
Усилители биопотенциалов
го сигнала £/ВЬ|Хтах немного не доходила до уровня ограничения
(границы насыщения усилителя), затем увеличивают частоту
входного сигнала. Мощностная полоса пропускания
соответствует значению^,, на которой С/ВЬ1Х станет равным 0,707 от
первоначального значения.
Операционные усилители в их практическом
использовании (за исключением нескольких схем компараторов) почти
всегда охвачены глубокой отрицательной обратной связью (ООС),
что значительно улучшает ряд их характеристик.
Принцип и последствия введения ООС покажем на
примере однофазного ОУ, а затем распространим полученные
результаты на инвертирующие, неинвертирующие, дифференциальные
и другие схемы включения.
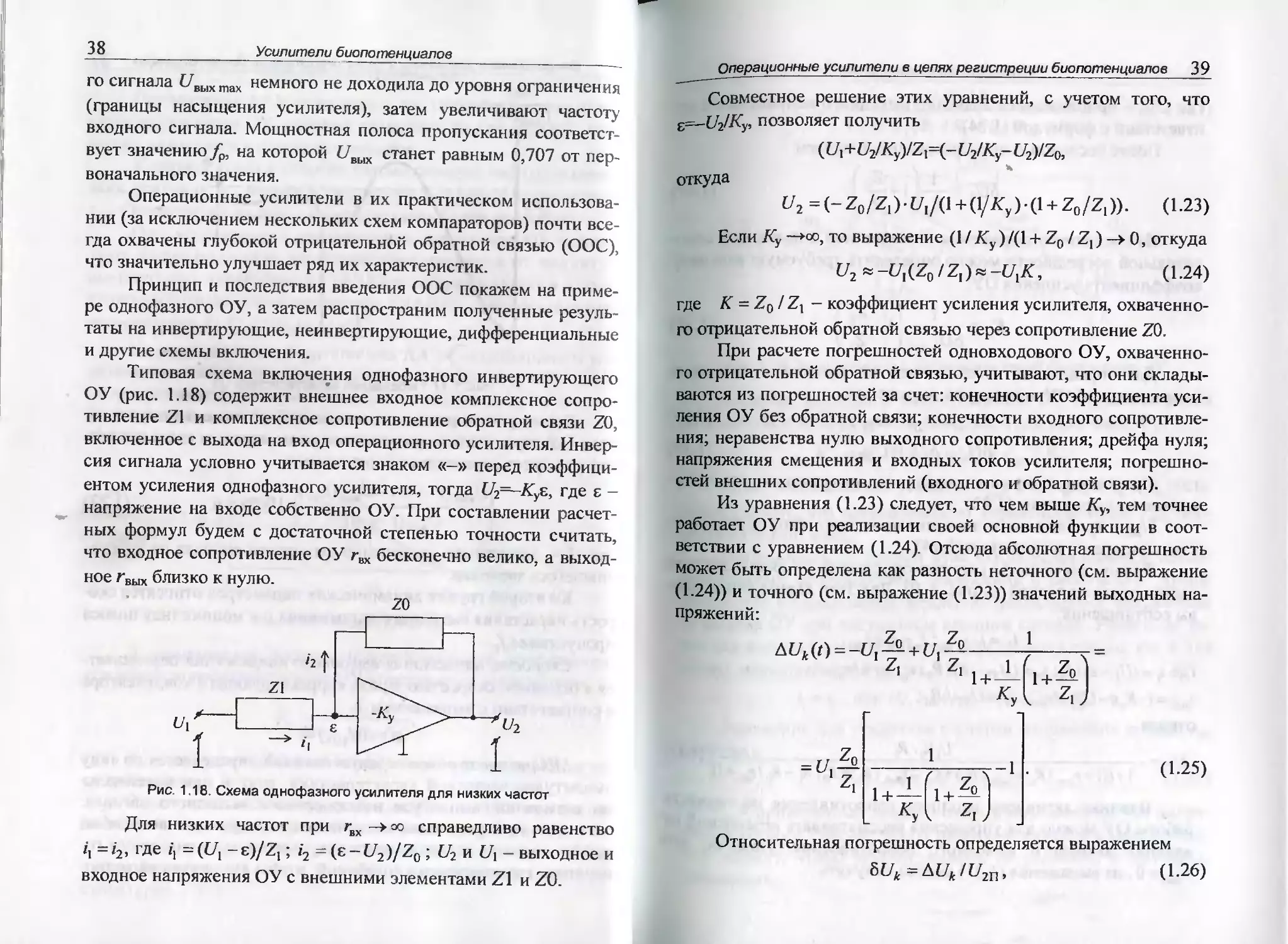
Типовая схема включения однофазного инвертирующего
ОУ (рис. 1.18) содержит внешнее входное комплексное
сопротивление Z1 и комплексное сопротивление обратной связи Z0,
включенное с выхода на вход операционного усилителя.
Инверсия сигнала условно учитывается знаком «-» перед
коэффициентом усиления однофазного усилителя, тогда U2=—Kye, где е -
напряжение на входе собственно ОУ. При составлении
расчетных формул будем с достаточной степенью точности считать,
что входное сопротивление ОУ гвх бесконечно велико, а
выходное гВЬ1х близко к нулю.
Z0
Рис. 1.18. Схема однофазного усилителя для низких частот
Для низких частот при гвх ->«з справедливо равенство
/, = /2, где /] =(С/, -e)/Z,; i2 = (e-t/2)/Z0 ; С/2 и U\ - выходное и
входное напряжения ОУ с внешними элементами Z1 и Z0.
Операционные усилители в цепях регистреции биопотенциалов 39
Совместное решение этих уравнений, с учетом того, что
E=_t/2/^y> позволяет получить
{U,+U2lKy)IZ^{rU2IKy-U2)IZ0,
откуда
U2 =(-Z0/Z1).t/I/(l + (V^y)-(l + ^0/Z1)). (1.23)
Если Ку -+оо, то выражение (1 / Ку ) /(1 + Z0 / Z,) -> 0, откуда
U2 « -C/,(Z0 /Z,)« -UYK, (1.24)
где К = Z0/Z} - коэффициент усиления усилителя,
охваченного отрицательной обратной связью через сопротивление Z0.
При расчете погрешностей одновходового ОУ,
охваченного отрицательной обратной связью, учитывают, что они
складываются из погрешностей за счет: конечности коэффициента
усиления ОУ без обратной связи; конечности входного
сопротивления; неравенства нулю выходного сопротивления; дрейфа нуля;
напряжения смещения и входных токов усилителя;
погрешностей внешних сопротивлений (входного и обратной связи).
Из уравнения (1.23) следует, что чем выше Kv, тем точнее
работает ОУ при реализации своей основной функции в
соответствии с уравнением (1.24). Отсюда абсолютная погрешность
может быть определена как разность неточного (см. выражение
(1.24)) и точного (см. выражение (1.23)) значений выходных
напряжений:
Аик«) = -иЛ + иу?>
= <уД
1
1+-
/С
1+-
-1
(1.25)
Относительная погрешность определяется выражением
8Uk=AUk/U2n, (1-26)
40 Усилители биопотенциалов
где (/гп - приближенное значение выходного напряжения в
соответствии с формулой (1.24).
После несложных преобразований получаем
К,
f Z\
(1.27)
Из последнего выражения по известной допустимой
относительной погрешности можно определить требуемую величину
коэффициента усиления ОУ:
у bU
к доп
. ZJ
(1.28)
Для определения погрешностей от входных и выходных
сопротивлений ОУ используем выражения:
&Uz=Um-U2T; (1.29)
SUZ = AUZ-Um, (1-30)
где U2t - точное значение выходного напряжения,
рассчитываемое по выражению (1.23);
{/гп _ приближенное значение выходного напряжения,
рассчитываемое по выражению (1.24).
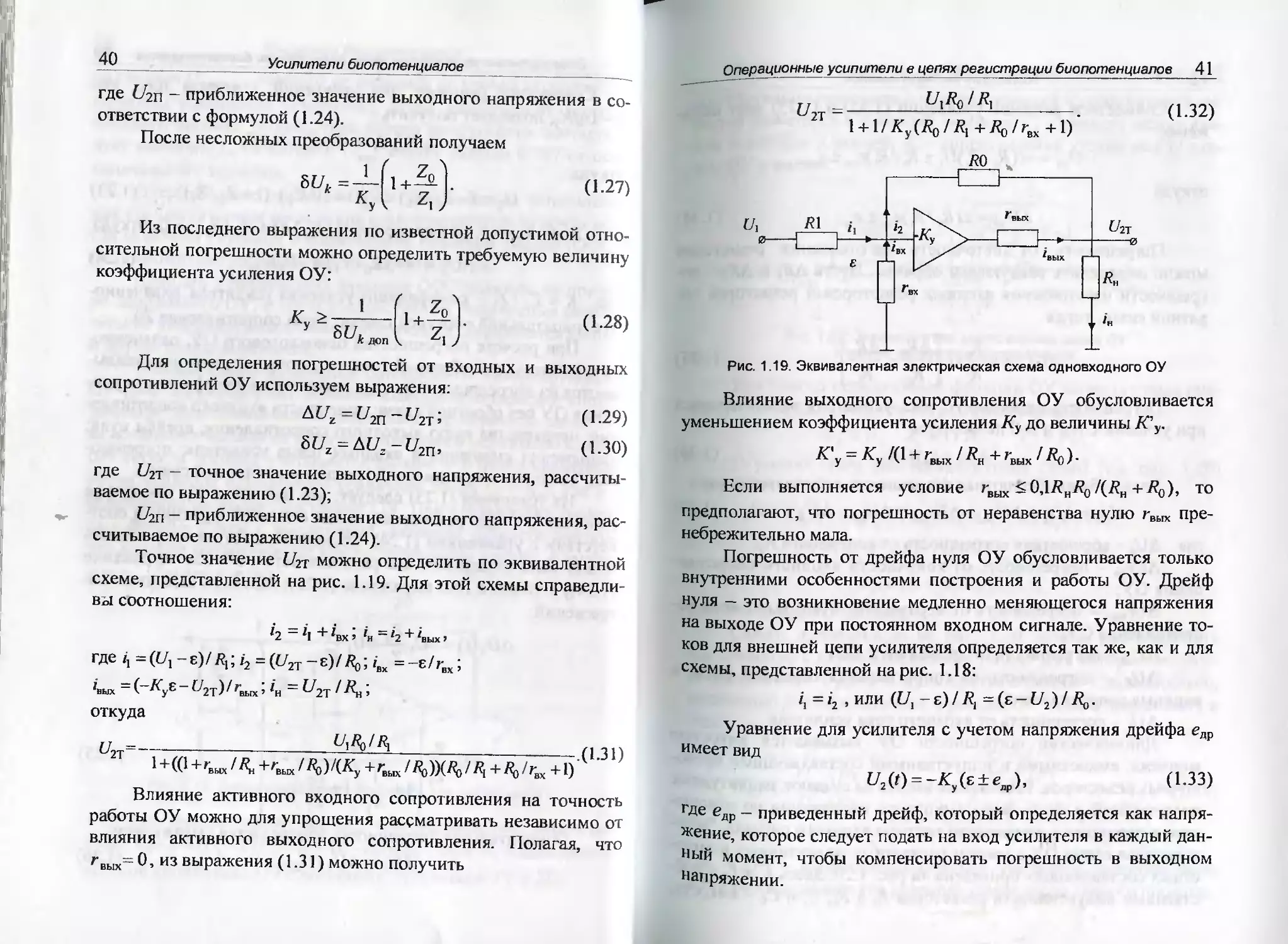
Точное значение £/2т можно определить по эквивалентной
схеме, представленной на рис. 1.19. Для этой схемы
справедливы соотношения:
h = h + V '■> 'и - h + 'вых >
где /, = (£/, - е)/Я,; /2 = (£/2Т -г)1 Rq; /вх = -е/гвх ;
W = (-Лув - и„)/Гта; /н =U2T/R„;
откуда
2Т 1+((1+гвьк /^ +rBbJRo)KKy +гвых /^)Х^ / ^ + Ro /rBX +1)'
Влияние активного входного сопротивления на точность
работы ОУ можно для упрощения рассматривать независимо от
влияния активного выходного сопротивления. Полагая, что
гвых=0, из выражения (1.31) можно получить
Операционные усилители в цепях регистрации биопотенциалов 41
U„ =
ВД/*1
1 + 1/K/V Я,+^/^+1)
(1.32)
Рис. 1.19. Эквивалентная электрическая схема одновходного ОУ
Влияние выходного сопротивления ОУ обусловливается
уменьшением коэффициента усиления Ку до величины /Су.
Если выполняется условие гвь1х <0,IRhRq/(Rh +Rq), to
предполагают, что погрешность от неравенства нулю гвых
пренебрежительно мала.
Погрешность от дрейфа нуля ОУ обусловливается только
внутренними особенностями построения и работы ОУ. Дрейф
нуля — это возникновение медленно меняющегося напряжения
на выходе ОУ при постоянном входном сигнале. Уравнение
токов для внешней цепи усилителя определяется так же, как и для
схемы, представленной на рис. 1.18:
/, =/2 , или (£/, -е)/Rt =(e-f/2)/JR0.
Уравнение для усилителя с учетом напряжения дрейфа ецр
имеет вид
U2(t) = -K(e±eV
(1.33)
Где едр - приведенный дрейф, который определяется как
напряжение, которое следует подать на вход усилителя в каждый
данный момент, чтобы компенсировать погрешность в выходном
напряжении.
42 Усилители биопотенциалов
Совместное решение уравнений (1.32) и (1.33) дает
выражение
U2T =-((V/W ±V*,KP ±еяр,
откуда
AUap=±(R0/Rl)eBp±eap. (1.34)
Погрешность от неточности изготовления резисторов
можно определить следующим образом. Пусть ARX и AR2 _
погрешности изготовления входных резисторов и резисторов
обратной связи, тогда
(1.35)
Погрешность от входного тока усилителя рассчитывается
при условии Г/]=0 и 8=0 по формуле
м/,=и'К- 0-36)
Тогда общая абсолютная погрешность определяется как
Д£/0 = Д£/я + Д[/гЮ( + Д[/гвьв + Д[/др + Д£/л + Д[/„ (1.37)
где AUK - абсолютная погрешность от конечности /Гу;
AUrBX - погрешность от конечности входного
сопротивления ОУ;
Л^вых _ погрешность от неравенства нулю выходного
сопротивления ОУ;
Д£/др - погрешность от дрейфа нуля ОУ;
AUr - погрешность от сопротивления обратной связи и
входных сопротивлений;
AU,i — погрешность от входного тока усилителя.
Динамические погрешности ОУ вызываются емкостью
монтажа, емкостными и индуктивными составляющими
проволочных резисторов. Реактивные элементы создают амплитудные
погрешности и сдвиг фазы выходного напряжения по
отношению к входному с изменением частоты входного сигнала.
Эквивалентная схема ОУ с учетом паразитных индуктивных и
емкостных составляющих приведена на рис. 1.20. Здесь LjU L0-
собственные индуктивности резисторов /?, и R0; Cj и С0 - емкости,
Операционные усилители в цепях регистрации биопотенциалов 43
шунтирующие резисторы и складывающиеся из собственных
емкостей резисторов и емкостей монтажа; Сс - емкость между
входом усилителя и землей; Re - сопротивление утечки между
входом ОУ и землей. *
.Со
U.
ВХ(Г)
Рис. 1.20. Эквивалентная электрическая схема ОУ
с учетом паразитных составляющих
Для вывода передаточной функции ОУ воспользуемся
операторным представлением всех сопротивлений:
ZR=R; Zc=l/PC; ZL=PL.
С учетом этого для эквивалентной схемы (см. рис. 1.20)
получаем '
Z,{P) = (Rj +PL})I (P2CjLj + PRjC; +1);
Z0(P) = {R0 + PL,) I (P2C0L0 + PR.C, +1);
Zc(P) = RJ(PRcCc+l),
где Р - оператор Лапласа.
Схему, приведенную на рис. 1.20, можно рассматривать
как сумматор с двумя входами Z}{P) и ZC(P), на которые
подаются напряжения UByj{P) и нуль соответственно. Следовательно,
выражение для передаточной функции ОУ можно представить в
виде
W(P) =
fZ0(P)
juZjjP)
]+-
КАР)
1-Е
^Z^P) + Z0(P)
V
(1.38)
%Zj(P) ZAP).
гДе Ку(Р) - передаточная функция усилителя, которую чаще
всего рассматривают как апериодическое звено первого порядка;
44
Усилители биопотенциалов
К0 - коэффициент усиления ОУ на нулевой частоте (при
постоянных входных сигналах);
ту - постоянная времени ОУ, которая может быть найдена
экспериментально или рассчитана через параметр р,
определяющий максимальную скорость нарастания выходного
напряжения, из справочных данных на ОУ.
Амплитудные искажения суммирующего усилителя
определяются по формуле
Л(со) = ^[£/2(со) + Г2(со)], (1.39)
а фазовые искажения - по формуле
Ф(со) = arctg(F(co) / t/(co)), (1.40)
где [/(со) - действительная составляющая передаточной
функции fVQw);
F(co) - мнимая составляющая передаточной функции
ЩЪ).
На частотах в полосе до сотен килогерц, на которых рабо-
^ тает большинство приборов медицинского назначения,
влиянием паразитных емкостей (и особенно индуктивностей) можно
пренебречь. В этой полосе частот ОУ с цепью частотной
коррекции по своим динамическим свойствам приближается к
инерционному звену первого порядка с передаточной функцией
К{Р) = К0/(1 + Рху)
и частотной характеристикой
K(f) = K0/(l + jnfzy),
где ту - постоянная времени ОУ.
Амплитудно-частотная характеристика ОУ определяется
выражением
V1+fflTy
а фазовые искажения определяются соотношением
(p(co) = arctg(-coxy).
Операционные усилители в цепях регистрации биопотенциалов 45
Динамические характеристики можно оценить по реакции
ОУ на единичный входной сигнал:
t(/) = -tfy(l-£fI/T').
С ростом частоты сигнала, начиная с некоторой частоты
среза fCp, модуль коэффициента усиления снижается со
скоростью примерно 20 дБ на декаду, что означает, что при
увеличении частоты в 10 раз во столько же раз уменьшается и модуль
коэффициента усиления \K(f)\&К0/2к/ту. Если бы такая
скорость сохранялась во всем диапазоне частот, то величина ху
могла быть найдена из простого соотношения: ту - К/2nfu где/i -
частота единичного усиления. Однако в большинстве случаев
для значений / « /, ОУ ведет себя как динамическое звено
второго или третьего порядка, поэтому значение ту может быть
несколько завышенным.
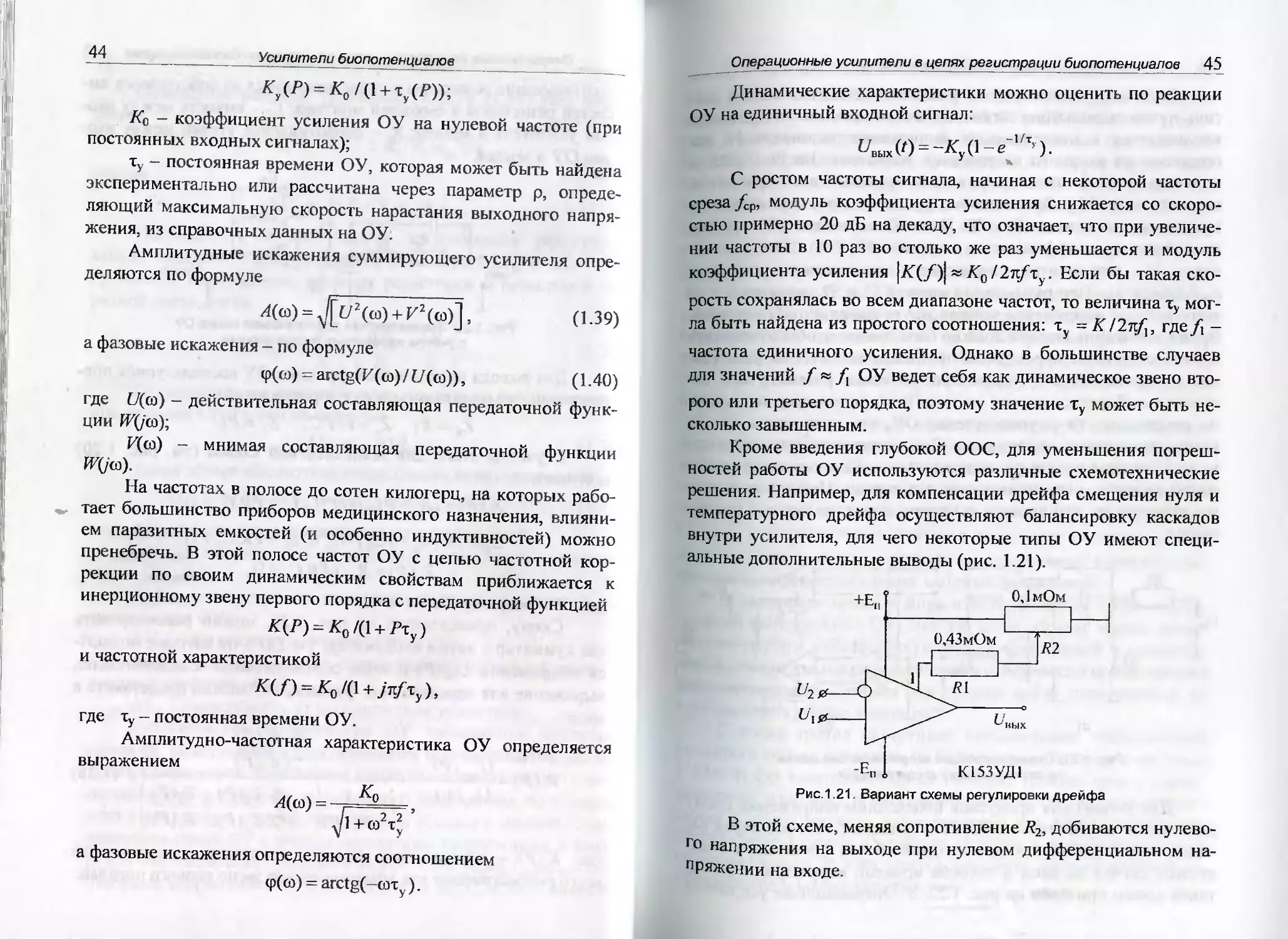
Кроме введения глубокой ООС, для уменьшения
погрешностей работы ОУ используются различные схемотехнические
решения. Например, для компенсации дрейфа смещения нуля и
температурного дрейфа осуществляют балансировку каскадов
внутри усилителя, для чего некоторые типы ОУ имеют
специальные дополнительные выводы (рис. 1.21).
1
ОДЗмОм
0,1 мОм
|
1
R2
К153УД1
Рис.1.21. Вариант схемы регулировки дрейфа
В этой схеме, меняя сопротивление R2, добиваются
нулевого напряжения на выходе при нулевом дифференциальном
напряжении на входе.
46 Усилители биопотенциалов
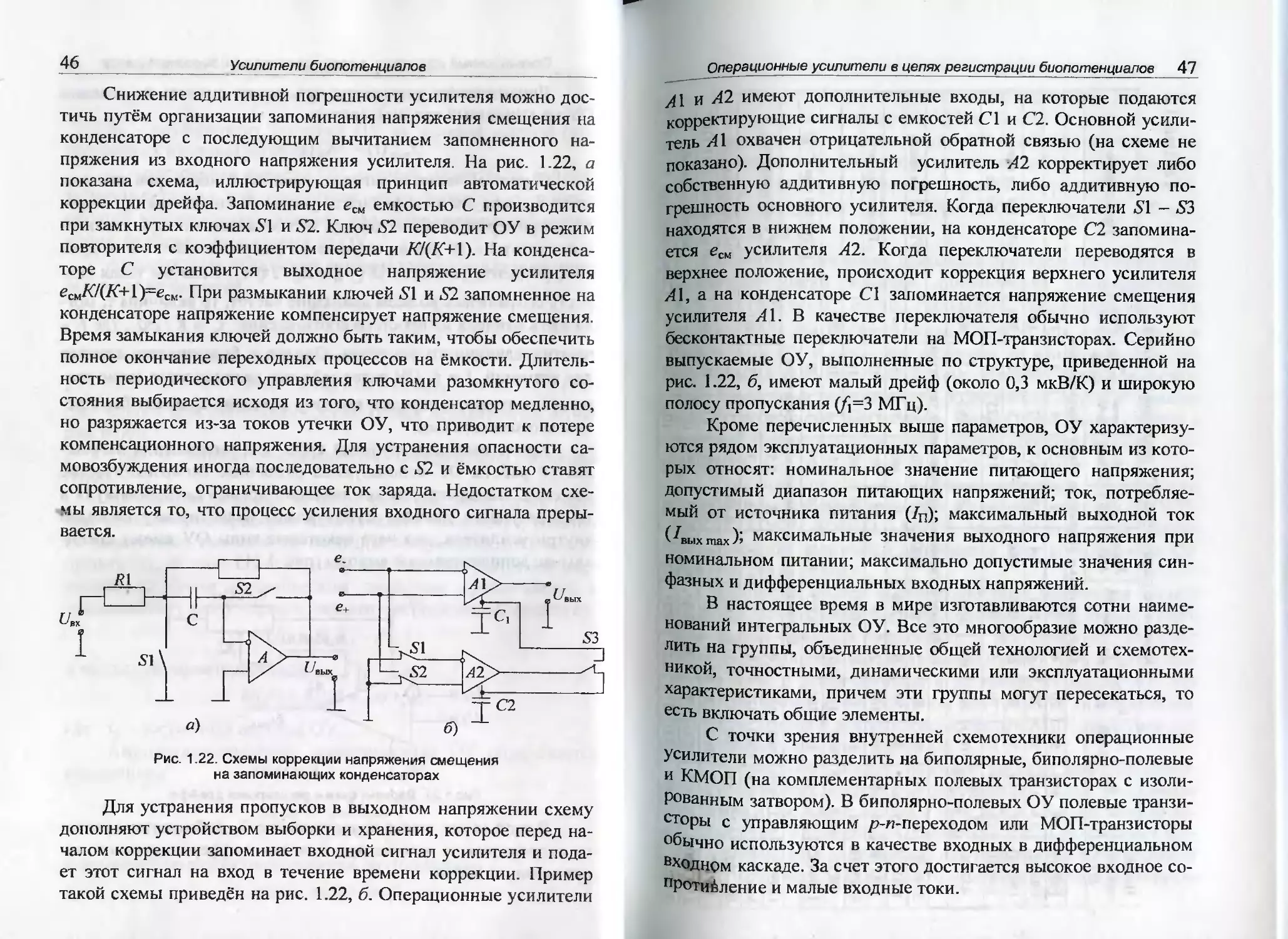
Снижение аддитивной погрешности усилителя можно
достичь путём организации запоминания напряжения смещения на
конденсаторе с последующим вычитанием запомненного
напряжения из входного напряжения усилителя. На рис. 1.22, a
показана схема, иллюстрирующая принцип автоматической
коррекции дрейфа. Запоминание еш емкостью С производится
при замкнутых ключах 51 и 52. Ключ 52 переводит ОУ в режим
повторителя с коэффициентом передачи К1(К+\). На
конденсаторе С установится выходное напряжение усилителя
есмК/(К+1)=еш. При размыкании ключей 51 и 52 запомненное на
конденсаторе напряжение компенсирует напряжение смещения.
Время замыкания ключей должно быть таким, чтобы обеспечить
полное окончание переходных процессов на ёмкости.
Длительность периодического управления ключами разомкнутого
состояния выбирается исходя из того, что конденсатор медленно,
но разряжается из-за токов утечки ОУ, что приводит к потере
компенсационного напряжения. Для устранения опасности
самовозбуждения иногда последовательно с 52 и ёмкостью ставят
сопротивление, ограничивающее ток заряда. Недостатком
схемы является то, что процесс усиления входного сигнала
прерывается.
Рис. 1.22. Схемы коррекции напряжения смещения
на запоминающих конденсаторах
Для устранения пропусков в выходном напряжении схему
дополняют устройством выборки и хранения, которое перед
началом коррекции запоминает входной сигнал усилителя и
подает этот сигнал на вход в течение времени коррекции. Пример
такой схемы приведён на рис. 1.22, б. Операционные усилители
Операционные усилители в цепях регистрации биопотенциалов 47
д\ и Л2 имеют дополнительные входы, на которые подаются
корректирующие сигналы с емкостей О и С2. Основной
усилитель А\ охвачен отрицательной обратной связью (на схеме не
показано). Дополнительный усилитель А1 корректирует либо
собственную аддитивную погрешность, либо аддитивную
погрешность основного усилителя. Когда переключатели 51-53
находятся в нижнем положении, на конденсаторе С2
запоминается еш усилителя А2. Когда переключатели переводятся в
верхнее положение, происходит коррекция верхнего усилителя
А\, а на конденсаторе О запоминается напряжение смещения
усилителя А\. В качестве переключателя обычно используют
бесконтактные переключатели на МОП-транзисторах. Серийно
выпускаемые ОУ, выполненные по структуре, приведенной на
рис. 1.22, б, имеют малый дрейф (около 0,3 мкВ/К) и широкую
полосу пропускания (/j=3 МГц).
Кроме перечисленных выше параметров, ОУ
характеризуются рядом эксплуатационных параметров, к основным из
которых относят: номинальное значение питающего напряжения;
допустимый диапазон питающих напряжений; ток,
потребляемый от источника питания (/л); максимальный выходной ток
(/ВЬ1хтах); максимальные значения выходного напряжения при
номинальном питании; максимально допустимые значения
синфазных и дифференциальных входных напряжений.
В настоящее время в мире изготавливаются сотни
наименований интегральных ОУ. Все это многообразие можно
разделить на группы, объединенные общей технологией и
схемотехникой, точностными, динамическими или эксплуатационными
характеристиками, причем эти группы могут пересекаться, то
есть включать общие элементы.
С точки зрения внутренней схемотехники операционные
усилители можно разделить на биполярные, биполярно-полевые
и КМОП (на комплементарных полевых транзисторах с
изолированным затвором). В биполярно-полевых ОУ полевые
транзисторы с управляющим p-n-переходом или МОП-транзисторы
обычно используются в качестве входных в дифференциальном
Годном каскаде. За счет этого достигается высокое входное
сопротивление и малые входные токи.
s
VO
и
о
с
IX ТИ
л
личн
ры ОУ раз
вные парамет]
о
Осн
ание
X
о
S
S
с
о| О
К <и
■Я
и
а
6.JS
оа
Я"
<
X
ёч
J*
-оа
. >• S
и
оа
£
аиме-
ваиие
ОУ
i
S
о применен
1 обще
ител!
рационные усил
ы
С
О
1
150
и-\
*?
2,5
-
го
о
vi
VO
о
г-
о
v\
оо
-и
vi
+1
>
о
-а-
1
150
«Л
СП
0,7
0,8
-а-
сГ
200
тг
о
г-
о
v\
оо
-Н
vi
-Н
>
о
2
а входе
С
ОУс
200
v>
«л
V4
-
о
о
о
0,2
о
СЧ
о
оо
о
vi
оо
-н
vi
-Н
оо
о
-а-
о
о
(—'
1
•ч-
0,25
"Л
-я-
1
0,1
«о
о
v\
CN
ОО
-н
v~t
-н
441
U,
J
1
400
*
0,62
го
ос^
1-
с
0,002
сГ
о
оо
о
о
о
■"-
оо
vo" -H
го :
: ч-\
-Н
D820
<
ч
силите
ыеу
стродействующие операцион
J3
И
а входе
X
С
ОУс
i
ч-\
со"
о
v\
1000
0,3
CN
о
оо
о
«о
ЧО1
-Н
-н
УДЗ
-л-
wo
1
1
VI
г-
400
о
го
-
О
о
о)
чО
О
1—
оо
г-
-Н
V)
-Н
5
>>
'гГ
V)
ндарт
ста
s
о.
С
1
о
гм
VO
о
«о
го
VO
CN
100
200
о
гм
-н
vi
-н
оо
1
1
о
wo
CN
006
800
1
10000
о
-а-
о
VO
-н.
1
о
VI
-я-
VI
о
1
»/о
ГО
0,01f
112
о
о
о
г-
оо
■н
»/о
*,*
541В
2 гм
1^
го
CN
л
s
о.
с
ш
3"
Устой
1
о
CN
VI
300
150
0,02
3000
ГП
102
оо
СО
оо
-н
со'
•Н
6165
см2
ители
усил
ионны
ерац
Лрсцнзнонные оп
шанием
ерь
с
ОУс
i
i
WO
2,5
со
1
-
0,05
120
о
о
о
-"<
.±20
сч
-н
140УД21
i
о
v\
1
ГОп
о"
0,6
о
-
0,01
120
о
о
о
"
оо
-н
-Н
ОС400
2
о
s
X
ев
а
ерь
с
ОУс
i
i
CN
0,6
0,45
i
0,03
0,005
120
о
о
о
—
00
-н
±2,5
7652
, 1
у
г—
ОР07, ОР
итие линии
и
а
р.
о
О
1,6
0,3
0,6
о
*т
0,01
130
о
о
о
V)
оо
-Н
СО
-И
177
с-
О
ой
о
."Я
9
Свер
i
о
CN
0,75
»0
1,3
>1Г0м
25 фА
0,35
г-
о
о
о
v\
VI
-и
-Н
С6001
а
(5
1
IS
хмаль
п.
U
и
1
о
v^
10,5
12,7
о
0,075
900
0,04
114
о
о
о
■"-
оо
-н
u-i
+1
С7-
г
о
<
Операционные усилители в цепях регистрации биопотенциалов 49
В таблице 1.2 приведены основные параметры некоторых
типов ОУ различного назначения [3, с. 52-53].
Большая часть номенклатуры ОУ относится к усилителям
общего назначения. Это дешевые усилители среднего
быстродействия, невысокой точности и малой выходной мощности.
Обычные параметры: Ки =20000...200000; еш =0,1...20 мВ;
/т =0,1-10 МГц.
Быстродействующие усилители при средних точностных
параметрах имеют высокие динамические характеристики:
/т= 20...1000МГц; р = 10...Ю00В/мкс. Быстродействие ОУ
ограничивают два обстоятельства. Одно из них имеет место в
биполярных ОУ с />я-/>транзисторами во входном
дифференциальном каскаде. Эти транзисторы обладают худшими
частотными свойствами из-за меньшей подвижности дырок по
сравнению со свободными электронами. Второе ограничение связано с
конечной скоростью нарастания заряда корректирующего
конденсатора.
Типичные представители высокочастотных ОУ обычного
типа (с сигналом обратной связи в виде напряжения): 574УДЗ,
154УД4, AD825, AD8042, LM6165. Заметное повышение
скорости нарастания выходного напряжения дает применение в ОУ
обратной связи по току.
Некоторые модели высокоскоростных усилителей лишь с
натяжкой можно назвать операционными - они имеют всего
один каскад усиления напряжения и, как следствие, довольно
низкий коэффициент усиления (менее 10000). Зато практически
нет проблем с устойчивостью и не требуется коррекция. Эти
усилители применяют в основном для усиления видеосигналов,
в качестве буферов для высокоскоростных АЦП, драйверов для
высокочастотных линий передачи.
Прецизионные усилители имеют высокий
дифференциальный коэффициент усиления по напряжению, малые напряжения
смещения нуля, малые входные токи и, как правило, низкое
быстродействие. Увеличение Ки возможно путем усложнения
каскадов усиления по напряжению или применения трехкаскадной
схемы (например, 5514УД1), что усложняет частотную коррек-
50 Усилители биопотенциалов
цию. Радикально уменьшить смещение нуля позволяет
применение периодической компенсации дрейфа (прерывание).
Типичные примеры прецизионных усилителей: AD707, 140УД26,
МАХ400М (без прерывания), 140УД24, МАХ430, AD8571 (с
прерыванием).
Кроме перечисленных в таблице 1.2 типов ОУ, различают
также микромощные усилители, используемые в приборах,
получающих питание от гальванических или аккумуляторных
батарей. Эти усилители потребляют очень малый ток от
источников питания (например, ОУ МАХ406 потребляет ток не более
1,2 мкА). Все другие параметры (особенно быстродействие) у
них обычно невысокие. Появился целый класс микросхем (так
называемых наноамперных), работающих при напряжении
питания 3 В и потребляющих при этом ток менее 1 мкА.
Примерами ОУ с наноамперным потреблением могут служить TLV2401
(880 нА) и сдвоенный LMC66442 (950 нА на усилитель).
Для того чтобы дать возможность разработчику самому
найти компромисс между малым потреблением и низким
быстродействием, некоторые модели микромощных ОУ выполняют
программируемыми. Программируемый ОУ имеет специальный
вывод, через который внешний резистор соединяется с общей
точкой или источником питания определенной полярности.
Сопротивление резистора задает ток системы токовых зеркал
усилителя, которые выполняют функции генераторов стабильного
тока и динамической нагрузки каскадов усилителя. Уменьшение
этого резистора приводит к увеличению быстродействия ОУ и
увеличению потребляемого тока, увеличение — к обратному
результату. Типичные примеры программируемых ОУ: 140УД12,
1407УД2.
Обычная величина тока потребления для микромощных и
программируемых ОУ составляет десятки микроампер.
Микромощные ОУ, как правило, допускают питание от весьма низких
напряжений. Например, ОУ типа МАХ480 допускает работу от
источников с напряжением ±0,8...±18 В при токе потребления
15 мкА.
Если источник сигнала однополярный (например,
фотодиод), целесообразно использовать операционный усилитель с од-
Операционные усилители в цепях регистрации биопотенциалов 51
нополярным питанием. Это позволит питать усилитель от одной
батареи или даже элемента (например, от литиевого элемента
напряжением 3 В). Характерная особенность ОУ с однополяр-
ным питанием состоит в том, что еслиьдиапазон входных
синфазных сигналов выходит за рамки верхнего и нижнего уровней
напряжения питания, то диапазон выходных сигналов должен
обязательно лежать в этих пределах. При этом один из этих
уровней (в зависимости от полярности напряжения питания)
привязан к потенциалу земли.
Многие фирмы выпускают многоканальные усилители.
Это микросхемы, имеющие на одном кристалле два, три или
четыре однотипных ОУ. Например, ИМС типа 140УД20 имеет
в своем составе два ОУ 140УД7. Микромощные ИМС
МАХ406/407/409 включают соответственно один, два и четыре
однотипных усилителя. При построении схем многоканальных
ОУ возникает необходимость в снижении уровня перекрестных
связей между усилителями, которые могут достигать 100% на
высоких частотах.
Большинство типов ОУ общего применения рассчитаны на
напряжение питания ±15 В, некоторые допускают питание от
источников вплоть до ±22 В. Однако этого совершенно
недостаточно для управления, например, пьезоэлектрическими
преобразователями, которые применяются в ряде физических и
биологических исследований. Для этих целей промышленность
производит высоковольтные ОУ, допускающие более высокие
питающие и выходные напряжения. К высоковольтным относят
операционные усилители, имеющие разность положительного и
отрицательного питающих напряжений свыше 50 В. Проблема
повышения напряжений в интегральных полупроводниковых
(монолитных) ОУ связана с трудностью создания интегральных
высоковольтных транзисторов и прочной изоляции между
элементами в кристалле. Поэтому большинство ОУ с напряжением
Питания свыше 100 В изготавливаются в виде гибридных ИМС.
В то же время фирма Aplex microtechnology (США) производит
полупроводниковый интегральный ОУ РА41 с номинальным
Напряжением питания ±175 В, выходным напряжением ±165 В и
выходным током до 60 мА. Одна из наиболее высоковольтных
52
Усилители биопотенциалов
моделей этой фирмы - гибридный РА89 с напряжением питания
до ±600 В и выходным током до 75 мА.
Таким образом, отечественная и зарубежная
промышленность выпускает большой арсенал ОУ различных типов и
назначений, которые могут использоваться в медицинском
приборостроении.
1.4. Применение инвертирующих и неинвертирующих
усилителей в медицинском приборостроении
Как было отмечено выше, большинство ОУ выпускается
с двумя входами: инвертирующим и неинвертирующим. В
практике медицинского приборостроения часто возникает
потребность в однофазных усилителях, которые легко
реализуются из двухфазных ОУ с дифференциальным входным
каскадом, при этом обеспечиваются высокая стабильность и
точность усиления.
На основе схем дифференциальных усилителей создаются
схемы инвертирующего и неинвертирующего усилителей
(рис. 1.23). При анализе этих схем на практике обычно считают,
что входные токи im(U и /_) малы и их принимают равными
нулю, а напряжения на его инверсном и неинверсном входах
равными между собой (t/+={/_). Для инвертирующего усилителя,
полагая, что Ку стремится к бесконечности, при /_=0 получают:
/',=/2 или t/BX/#i=-£/Bblx//?o, откуда
UBUX=-UeiLRo/Rr=-KUm. (1.41)
ию
Рис. 1.23. Структурные электрические схемы инвертирующего (а)
и неинвертирующего (б) усилителей
Применение инвертирующих и неинвертирующих усилителей 53
Для неинвертирующего усилителя при Ку, стремящемся
к бесконечности, напряжение на инвертирующем входе
можно определить как
£/_=£/вы,Л/(/ч)+Дг).
При U_ =U^ можно записать
С/вы*=С/вх(1+До/Д.). (1.42)
При i?o=0 UBm= UBX, то есть усилитель работает в режиме
повторителя. Такая схема может быть использована для
повышения входного сопротивления и снижения выходного
сопротивления.
Иногда при расчётах схем с инвертирующими и неинвер-
тирующими усилителями используют понятие коэффициента
обратной связи, который для обеих схем вычисляют по формуле
р=вдг,+/ч)). (1.43)
В инвертирующем усилителе входное напряжение UBX
проходит на инвертирующий вход с коэффициентом
u=/?o/(tf,+/?o). ' (1-44)
С учётом конечного значения Ку усилителя из формул
(1.42) и (1.43) можно получить формулы для расчёта
коэффициентов усиления инвертирующего (К„) и неинвертирующего
(Кн) усилителей:
К„ = - цЯУ(/ф+1) = -ДЬВД/О + 1//Ф));
Кя= /ВДЗ+1) = (ад,+1)(1/(1+1//ф)),
откуда при /ф » 1 легко получить
Кн = — R(/R\; КИ — 1 + Rq)R\.
Мультипликативная погрешность инвертирующего
усилителя, вызванная неточностью изготовления резисторов R0 и
R1, определяется формулой
5И[ДЛЬ AR0] = ARo/Ro - AiV^i = 8Д0 - 5/?ь
а соответствующая погрешность неинвертирующего усилителя -
8Н[ДЛ,, AR0] = R0(5R0 - 5/?,)/(/?,+/?0).
Эти соотношения показывают, что погрешность падает
пРи равенстве относительных погрешностей /?0 и Rt, поэтому
54
Усилители биопотенциалов
необходимо выбирать резисторы с одинаковыми (по модулю и
знаку) температурными коэффициентами.
Относительная погрешность из-за нестабильности
коэффициента усиления одинакова для обеих схем и вычисляется как
8и[Д/а = 8н[ДА] = 5к/(/ф+1).
Из полученного соотношения следует, что погрешности
усилителей из-за нестабильности К уменьшаются
пропорционально значению /ф+1 при использовании инвертирующих и
неинвертирующих схем с отрицательной обратной связью (см.
рис. 1.23).
Погрешности, вызываемые напряжением смещения (есм)
и входными токами (/., i+), определяют обычно из анализа
схемы, приведенной на рис. 1.24, а. Для этой схемы абсолютная
погрешность от есм , L, /"+ определяется из выражения
АС/ВЫХ = №+ДоУ #i (еси + i+R2 - L Л, R0/(Ri+R0)). (1.45)
RI 'i RG h
Рис. 1.24. Схемы для расчета погрешностей от напряжения смещения
Это выражение может быть получено с учетом того, что
i\=i2, а и+= £/_, то есть прямой и инвертирующий входы имеют
одинаковый потенциал и на эквивалентной схеме могут
рассматриваться как точка соединений. Поэтому эквивалентная
схема может быть в виде, представленом на рис. 1.24, б.
Падение напряжения на R] обеспечивается тремя источниками: еш,
L, /+. От неинвертирующего входа имеем составляющую
напряжения LR2+eCK. Составляющая падения напряжения от тока L
определяется для параллельного соединения сопротивлений /?1
Применение инвертирующих и неинвертирующих усилителей 55
и R0 с учетом того, что выходное сопротивление усилителя
мало, то есть
U, =LRlR0/(Rl+R2).
Тогда суммарный ток, протекающий через RI,
определяется как
(еСм + UR2-LRiRoKRi+Ro))fRu
откуда, с учетом равенства /', =/2, At/BbIX определяется как сумма
падений напряжений на резисторах RI и R0 в соответствии с
выражением (1.45).
Резистор R1 вводится в усилитель с целью уменьшения
погрешности от входных токов /+ и /_, причем в случае их
равенства полная коррекция влияния этих токов достигается при
условии равенства сопротивлений R2 и параллельного соединения
сопротивлений R\ и R0, то есть R2=zR[Ro/(Ri+Ro)- Однако в
общем случае /+ не равно /'_, тогда
А±*оГ, . ..■ «Л 1
где Ai=i++L.
Отсюда можно найти приведённые аддитивные погрешно
сти для инвертирующего и неинвертирующего усилителей:
8 \е АЛ- AU™* - е™ ^+К° i AiRl
ВЫХ. НОМ ^ВХ. НОМ '"О ^ВХ. НОМ
(1.46)
он[есм,А/] = -^ = -^+ R* А//?' , (1.47)
^вых. ном ^вх. ном 1 "*" "2 ^вх. ном
где ^вх. ном и ишк ном - номинальные (наибольшие) значения
входного и выходного напряжений усилителей.
Если Rq » Ri (усилительные схемы, компараторы), то
приведённые погрешности для обоих типов усилителей
примерно равны и определяются выражением
5и[есм,Д/] = 5н[есм,Д,] = (есы + Д/Л,)/[/вх. ном. (1.48)
В процессе начальной регулировки измерительных и уси-
ительных схем обычно производят коррекцию аддитивной
погрешности (регулировку нуля) по различным схемам, например,
36 Усилители биопотенциалов
от дополнительного источника эталонного напряжения через
дополнительное подстроенное сопротивление. Однако со
временем эта погрешность вновь появляется из-за нестабильности
еш и А/.
Наибольший дрейф вызывается обычно изменением
температуры. Поэтому после регулировки нуля аддитивную
погрешность можно приближённо оценить как
&а[еш,М]~8и[еш,Ы]*(ТКеш + (TKAi)Rl)At°/UBXmu, (1.49)
где ТКесм и TKAi - температурные коэффициенты еси и А/;
At - изменение температуры окружающей среды по
отношению к температуре, имеющей место при регулировке нуля.
Из выражений (1.46) - (1.49) следует, что для уменьшения
аддитивной погрешности усилителя целесообразно уменьшить
сопротивления Rx и Ro- В частности, если RlR0/(Rl +R0)«eCMIAi,
входные токи ОУ практически не влияют на аддитивную
погрешность. В случае применения начальной коррекции нуля
рекомендуется выполнять соотношение RlR0/(Rl + R2)«eCM/iBX.
В случае выполнения последнего соотношения температурный
дрейф определяется в основном дрейфом есм.
Отношение есм//вх для большинства современных
биполярных ОУ составляет 10-50 кОм. В этом случае рекомендуется
выполнить следующее условие: Ri\Ro< 3-10 кОм. Однако
имеются ОУ с другими соотношениями есыНък, тогда выбор R\ и R0
делается конкретно для данного типа ОУ. Так, для ОУ с
полевым транзистором на входе -ескНъх >1 МОм. Это даёт
возможность в большинстве случаев не учитывать входные токи.
Входное сопротивление инвертирующего усилителя
определяется как отношение входного напряжения £/вх к току /0,
генерируемому источником тока, подключённым ко входу
усилителя в соответствии со схемой, приведённой на рис. 1.25, а. Эту
схему удобно для расчетов представить в виде эквивалентной
схемы, приведенной на рис. 1.25, б.
В этой схеме цепь, содержащую эквивалентный
генератор выходного напряжения UBUK и сопротивление обратной
связи ДО, по которому течёт ток /'0, можно представить в ви-
Применение инвертирующих и неинвертирующих усилителей 57
де эквивалентного сопротивления Roc=s/io- С другой
стороны, io=[e -(Е ЮУ Ro, тогда
Roc=e/e[(\ + K)/R0] = R0/(K + l).
С учетом этого сопротивления можно записать
UBX = /0Л, + /0(гвх \\Roc) = /0Д, + /0(гвх ||[^ ЦК +1)]).
Входное сопротивление при этом определяется как
R.^,=UJh=Ri+rsx \\[Ro/(K+1 )]■
Для практических схем Rq/{K+1)«R[, тогда последнее
выражение может быть представлено в виде RBx.K~R]-
Rl RO
Т
Г
Рис. 1.25. Схемы для расчета погрешностей инвертирующего усилителя
Аналогично для неинвертирующего усилителя определяет-
Ся Rex-UKK/I0=e+/Io. Используя схему, приведенную на рис. 1.26,
и обозначение внутренних элементов, показанных на схеме
Рис. 1.13, можно получить выражение
Где *э =гвх( 1 +ЯрЧ),5/ф/ЛЬосУ( 1 -даЪсс)*к( 1 +1ф)К1-КЩоос).
Применение инвертирующих и неинвертирующих усилителей 59
Рис. 1.26. Схема для расчета параметров ОУ
Обычно Коос лежит в диапазоне ±(103...105). В
зависимости от знака этот коэффициент может как увеличивать, так и
уменьшать Лвх и (как правило, Лвх „ существенно выше RBX и).
Выходное сопротивление инвертирующего и неинверти-
рующего усилителей одинаково и может быть определено как
Л-ых«гвнх/(/ф+1). (1.50)
Динамические свойства усилителя можно определить на
основе анализа их передаточных функций. Для инвертирующего
усилителя передаточная характеристика определяется
выражением
Ro Кр 1
КЛП' ^(*р + 1)(1 + рту/(/ф + 1))'
для неинвертирующего -
Ro + R, Кр 1
КЛП-
(1.51)
(1.52)
Л, (*р + 1)(1+рту/(/ф + 1))
Выражения (1.51) и (1.52) показывают, что в усилителях,
охваченных отрицательной обратной связью, эквивалентная
постоянная времени уменьшается в (/ф+1) раз, где /ф называется
петлевым усилением.
Полученные соотношения пригодны для усилителей с
внутренней коррекцией и для линейного участка функции
передачи. При использовании внешней корректирующей цепи её
параметры обычно изменяются при изменении Кр. С ростом Кр
увеличивают корректирующие емкости, тогда отношение
ту/(/ф+1) остается примерно постоянным.
При переходе усилителей в режим ограничения цепь
обратной связи как бы размыкается и при этом, пока усилитель
не войдет в линейный режим, процесс распространения
выходного сигнала будет развиваться с постоянной времени ту.
При резких скачках выходного напряжения выходное
сопротивление ОУ Явых = гвых. И только после того, как сигнал
пройдет по цепи обратной связи, выходное сопротивление опять
будет определяться выражением (1.50).
1.5. Схемы подавления синфазных помех с помощью
дифференциальных и инструментальных усилителей
Как было показано ранее, одним из источников помех в
приемных трактах медицинской аппаратуры, содержащих
усилительные каналы, являются помехи, наводимые во входных
цепях усилителей (например, помехи, возникающие в проводах,
соединяющих электроды (датчики) с входами усилителя). Если
помеха, создаваемая за счет индуктивных и емкостных связей,
за счет ЭДС поляризации электродов и т.д., в равной мере
наводится в обоих проводниках, подключённых к инвертирующему
и неинвертирующему входам дифференциального усилителя, то
она называется синфазной помехой С/СНф (или продольной
помехой, помехой общего вида). Если помеха создает разность
напряжений между этими проводниками, то есть идет вместе с
полезным сигналом, то её называют дифференциальной помехой
илф (противофазной, поперечной).
На рис. 1.27 приведена эквивалентная схема,
показывающая, как приложены названные помехи по отношению к
источнику сигнала и первому усилительному каскаду.
Z1
рис. 1.27. Схема приложения продольных и поперечных помех к ОУ
60
Усилители биопотенциалов
Поперечную помеху С/Дф, особенно если ее спектр
совпадает со спектром полезного сигнала UBX, очень трудно отделить от
С/Вх. Основными способами борьбы с ней являются:
экранирование мощных источников электромагнитного излучения и
малосигнальных цепей, использование симметричных схем датчиков
и их соединительных линий, пространственное разделение
силовых и информационных элементов схем.
Синфазная помеха прикладывается ко входам усилителя
иначе, чем полезный сигнал, что существенно облегчает борьбу
с ней. На рис. 1.28 представлена схема усиления аналогового
сигнала, получаемого от удалённого источника при наличии
синфазной помехи. Сопротивление проводов i?npl и Rnp2 будем
считать активным и, в общем случае, различным.
и„ £
^Лнф/О,
^npl
1 I*
1 !•
Rnp2
Rl
И
с
до
П г-
1—
Ь^
г ь
+£.
°
t-^вых
г~ш г-£>
0 +Ь2
-Ег
Рис. 1.28 Схема усиления сигнала от удаленного источника
с синфазной помехой
Синфазная помеха может быть создана из-за емкостных и
индуктивных связей, падением напряжения на общем
соединительном проводе (при наличии гальванической связи источника
полезного сигнала с корпусом усилителя), напряжением
поляризации электродов для отведения биопотенциалов и т.д.
Рассмотрим способ подавления синфазных помех, который используется
в усилителе по схеме с инвертирующим входом (см. рис. 1.28).
Составляющая выходного напряжения от полезного
сигнала определяется как
С/' =-
*,+KPi
-с/..
Схемы подавления синфазных помех с помощью усилителей 61
составляющая от синфазной помехи
U"
Ro + Ri+Kvx
^снф _"
*о
' ^снф ^снф'
то есть полезный сигнал усиливается в Rq /(Ri+Rnpi) раз, а
синфазная помеха передаётся на выход без усиления. Если неинвер-
тирующий вход усилителя соединить с его общим проводом,
произойдёт усиление помехи в R0 /(Ri+Rnp\) раз. Следовательно,
такое соединение делать нельзя.
Характеристикой, позволяющей оценить способность
схемы к подавлению синфазных помех, является коэффициент
ослабления синфазного сигнала АГосс (отношение коэффициента
передачи полезного сигнала к коэффициенту передачи
синфазного сигнала помехи). Для схемы, приведенной на рис. 1.28,
^ОСС=А/№ +^пр 1 )•
Наилучшим способом подавления синфазных помех
является использование дифференциальных усилителей с
симметричным включением (рис. 1.29). Для этой схемы
U,ma=-iB0tR\yUa, (1.53)
U"
Л,
Ro+R'
R'2 + R3
R\
xu^-^u.
Ro
снф
Я',
снф'
(1.54)
где /?, =Rl+Rnpl; R2 =R2+Rnp2.
Рис. 1.29. Подавление синфазных помех по схеме
с симметричным включением
62
Усилители биопотенциалов
Если обеспечить соотношения R0-R3 и R,\=R'2, то Ц"вых~ 0.
Следовательно, существует теоретическая возможность полного
подавления синфазных помех. Практически достигаются
величины АГосс= 80... 100 дБ. Для обеспечения более полного
подавления синфазной помехи необходимо как можно более точно
выполнять соотношения (1.53) и (1.54), (при больших входных
сопротивлениях усилителя). В этом случае из-за относительной
малости величин Rnpi и Rnp2 необходимо обеспечивать
равенство Rx и R2.
Рассчитать реальное значение величины Косе ПРИ
отклонении значений резисторов от расчетных можно по выражениям
(1.53) и (1.54).
Пример эквивалентной схемы подключения
предварительного усилителя к биообъекту для кардиомониторов с
гальванической связью между входом и выходом приведен в работе [14,
с. 233]. Биообъект представлен полными внутренними
сопротивлениями Zl, Z2 и Z3 и генераторами ЭДС полезного сигнала
Е=Е\+Е2 и синфазных внутренних и внешних помех ЕЪ
(рис. 1.30).
Рис. 1.30. Эквивалентная электрическая схема подключения ДУ
кардиомонитора к биообъекту
Подключение дифференциального усилителя к биообъекту
осуществляется двумя активными (Э1 и Э2) и одним пассивным
(ЭЗ) электродами. Пассивный электрод ЭЗ соединяется с общим
проводом ОУ. На входе ОУ создается мостовая схема из
сопротивлений Zl, Z2, ZBX1, ZBX2. Поскольку Zl и Z2 зависят от сопро-
Схемы подавления синфазных помех с помощью усилителей 63
тивлений переходов «кожа - электрод», для которых достигнуть
полного равновесия практически невозможно, то полный баланс
моста не обеспечивается. Кроме того, дополнительный
разбаланс создается из-за того, что в силу технических ограничений
Zxi и ^№2 отличаются друг от друга на 0,1... 10%. В результате
разбаланса создаются токи 1\ и /2, образуя противофазное
напряжение помех.
Для схемы, приведенной на рис. 1.30, Koc(~ZBX/AZ, где
Zbx~Zbxi~Zbx23 AZ=|Z2-Zi|. Поскольку противофазный сигнал помехи
усиливается вместе с полезным сигналом, то сигнал-помеху
необходимо ослаблять до значения пороговой чувствительности ОУ.
Реальные схемы подавления синфазных помех строятся с
помощью специально организуемых дифференциальных
каскадов и так называемых инструментальных усилителей, которые
в отечественной литературе часто называют измерительными
усилителями.
Инструментальные усилители - это устройства с
дифференциальным входом, построенные так, что они усиливают
только разность напряжений, поданых на их входы, и не
реагируют на синфазные напряжения [3, с. 114].
По такому принципу работают приведенные выше
эквивалентные схемы и организуются так называемые
дифференциальные усилители. В этом смысле класс дифференциальных
усилителей является подклассом инструментальных (измерительных)
усилителей.
Простейшая схема дифференциального усилителя (ДУ)
приведена на рис. 1.31. Используя выражения для
коэффициентов усиления инвертирующего и неинвертирующего усилителя
и рассматривая выходное напряжение как сумму двух
независимых составляющих U\ и U2, получаем
■иЛ. (1-55)
ивых=и2
я.
Ri+R-,
1+^
#,
Если выполнить соотношение R2 /Ry= R\ /Ro, получим
выражение
U^{U2-U{){RolRi).
64 Усилители биопотенциалов
Рис. 1.31. Схема простейшего ДУ
При выполнении указанного соотношения усиление
дифференциального сигнала намного больше усиления синфазного
сигнала, а коэффициент ослабления синфазного сигнала будет
максимальным.
Учитывая неидеальность изготовления внешних по
отношению к ОУ резисторов, коэффициент усиления синфазного
сигнала, обусловленный их рассогласованием, определяется как
_RlR3-R0JR2
снф1 ад+д3)
(1.56)
а коэффициент, обусловленный конечным значением (^оос)
операционного усилителя:
К.
снф2
*0
•"i^occ
(1.57)
где КЪсс
относительная величина, измеренная не в
логарифмической шкале.
Коэффициент ослабления синфазного сигнала всей схемы
определяется выражением
^ОСС = Кпф/(Кснф\ + ^снфг) > С1-58)
где КДф - дифференциальный коэффициент усиления.
При выполнении условия R2/R3=Ri/Ro
К
и„
дф
и, -и,
,_Ro
1
Rll+*o
1
(1.59)
R, К,,
Схемы подавлений синфазных помех с помощью усилителей 65
Дифференциальное входное сопротивление определяется
выражением
Лдф =Л1 +-/?0-
ъ
Недостатками простейшего дифференциального усилителя
являются низкие входные сопротивления и невозможность
регулировки коэффициента усиления одним резистором. В
последнем случае необходимо изменять одновременно как минимум
два сопротивления, например Ro и R3.
Для обеспечения регулировки коэффициента усиления
одним резистором применяются специальные схемы (рис. 1.32).
RI
C/i
U,
1 Л4
HZZ>
1
R2
R3
R5
Ю
а^ЪЫХ
R6
а)
R\
R2
V,
U7
1 R3
'1
С/.ь
RA
R5
R6
б)
Рис. 1.32. Схемы с регулировкой Ку одним резистором
При &!=/?!, R5=R2, Re=R3 (см. рис. 1.32, а) выходное
напряжение определяется выражением
(R. + R, Л-йЛ
*2 + #з |2^з
Rx R{R7 /
Тогда регулировка коэффициента усиления
осуществляется сопротивлением R1. При Ri=R3, Л2=Л| (см- Рис- 1-32, б)
и„*={иг-их).
'R2 1
кЩ \-K2j
66
Усилители биопотенциалов
где К2 - коэффициент усиления усилителя, построенного на
операционном усилителе А2.
Регулировка коэффициента усиления осуществляется
путём изменения коэффициента усиления усилителя А2, то есть
сопротивлением R6.
Более высокое качество, по сравнению с рассмотренными
схемами дифференциальных усилителей, обеспечивают
инструментальные усилители, на входе которых используются каскады
ОУ с неинвертирующим включением. Такие усилители
обладают большим входным сопротивлением (сотни гигоом) и имеют
наноамперные входные токи при коэффициентах ослабления
синфазного сигнала около 100 дБ и выше.
На рис. 1.33 приведена структурная схема
инструментального усилителя типа INA155, построенная на двух
операционных усилителях (А\ иА2).
R\
KZZb
X
Л5
т
RA
U2c
А\
ИЗ
IH-
R2
лг
и„
Рис. 1.33. Структурная электрическая схема инструментального
усилителя типа INA155
Для этой схемы при соблюдении условий R2/R3=R5/R4
выходное напряжение определяется выражением
вых
1+^+ьщ{и^их),
Л,
#1
если соблюдается условие R2=R3-R4=Rs, то
Схемы подавления синфазных помех с помощью усилителей 67^
^=2 1+-^(t/2-[/,).
Внешним резистором коэффициент передачи в этой
микросхеме может быть установлен в пределах 10...50, А"оос=92 дБ,
входной ток 1 нА.
Еще лучшими характеристиками обладают схемы,
устроенные на трех операционных усилителях, так называемые
«тройки» (рис. 1.34). В этих схемах обычно между
сопротивлениями устанавливают соотношения R2~R\ и R3=R4=Rs=R6,
тогда коэффициент усиления по дифференциальному входу:
27?
-^,апри С/3=0 С/вых =КД(и1 -U2).
Яр
К„=\+:
ViT
,А\.
ХА2
R3
X
IU
RP
т
R2
X
Й5
RA
A3
U,
вых
о
R6
X,
Рис. 1.34. Схема измерительного усилителя на трех ОУ
Если UyfiO, выходное напряжение смещается в
соответствии с выражением
^вь,х-С/з=*д(^-С/2)-
Коэффициент усиления синфазного сигнала из-за
разбаланса резисторов определяется как
.2° Усилители биопотенциапов
-^снф!
R6R3-R4R5
R}(R5 + R6)'
а из-за конечного значения коэффициента ослабления синфазного
сигнала ( ATqcc ) тремя усилителями - определяется выражением
-Кснф2= 1/^ОСС"
Общий коэффициент ослабления всей схемы определяется
выражением (1.58). По такой схеме построены измерительные
усилители типа AD620, LM363, ICL7605 и др.
Основные параметры некоторых типов дифференциальных
и измерительных усилителей приведены в таблице 1.3.
На рис. 1.35 приведена структурная схема
инструментального усилителя типа INA118. Внешнее сопротивление RG
позволяет подбирать требуемый коэффициент усиления, а
сопротивление RL является нагрузкой усилителя.
Условное изображение
Рис. 1.35. Структурная электрическая схема инструментального усилителя
Примечание
■'ncrr.s
А
Р-
3/мкс
'ч
1
Погр.
усиления
(К=10),%
4%
J*
Коэффициент
усиления, Ку
Модель
Один ОУ с переключаемыми
выводами резисторов
0,95
V~l
oo
1
1
0,25
0,1; 10
±2,25...±18
INA143
Один ОУ |
0,05
i
i
о
1
0,5
о
2,7...7,5 |
МАХ4199
Два ОУ; допустимые синфазное
и дифференциальное
напряжения ±100 В
0,57
0,45
о
оо
1
1
V~l
0,1...100
±2,25...±18
INA146
Три ОУ; допустимые синфазное
и дифференциальное
напряжения ±40 В
оо
m
О
0,9
110(К=10)
0,02
m
0,12
1...1000
±1,35...±18
INA118
То же 1
~
0,8
о
о
т
чо
о
0,02
25 фА
-
1...1000
±4,5...±18
чо
<
Программируемый
коэффициент усиления
5,2
0,7
110(К=100)
0,024
о
0,05
1; 10; 100;
1000
±6...±18
PGA204
Три ОУ; очень дешевый; может
работать с одним источником
питания
0,58
0,3
90(К=10)
0,35
0,2
1...1000
±2,5...±6
AD623
Три ОУ; широкополосный
ю
»п
105(К=10)
0,02
V~l
0,02
1... 10000
±6...±18
IAD625
Три ОУ; допустимые синфазное
и дифференциальное
напряжения ±100 В
i
i
120(К=100)
1
0,08
о"
0,06
1... 10000
±2,3...±18
LT1167
Три ОУ; фиксированный
коэффициент усиления
0,11
1
i
0,05
(К=100)
i
0,15
100
2,7...7,5
МАХ4197
70 Схемы подавления синфазных помех с помощью усилителей
На рис. 1.36 приведен вариант использования усилителя
INA118 во входной цепи электрокардиографа. В этой схеме
дополнительные усилители типа ОРА 2684 образуют цепи
обратной связи, обеспечивающие дополнительное подавление
синфазных помех.
Рис. 1.36. Схема усилителя ЭКГ-сигналов
на инструментальном усилителе
С другими вариантами использования операционных и
инструментальных усилителей при построении медицинских
приборов, аппаратов, систем и комплексов можно ознакомиться в
специальной литературе, например в [14, с. 228-319].
1.6. Подключение усилителей биопотенциалов
к микроэлектродам
Характерной особенностью микроэлектродов является то,
что они имеют очень большое сопротивление при значительной
величине собственной емкости. Приближенная эквивалентная
схема микроэлектродной цепи (рис. 1.37), состит из емкости
между клеточной жидкостью или внешним электролитом и
кончиком электрода О; сопротивления кончика электрода /?1;
емкости между стволом электрода и внешним электролитом С2;
сопротивления канала ствола R2; паразитной емкости входной
цепи усилителя биопотенциалов (УБП) Сп.
Подключение усилителей биопотенциалов к микроэлектродам 71
U,
О Г1
Рис. 1.37. Эквивалентная схема микроэлектродной цепи
При подключении к усилителю микроэлектроды ведут себя
как фильтры нижних частот, что хорошо видно из рисунка 1.37,
в то время как металлические электроды оказываются
фильтрами верхних частот. Типовым микроэлектродам присуща
большая шунтирующая (проходная) емкость С\ и высокое
последовательное сопротивление R\.
Для согласования УБП с высокоомным выходом
микроэлектрода используют операционные усилители с большим
входным сопротивлением, а для компенсации высокой
паразитной емкости операционный усилитель охватывается
положительной обратной связью, что создает компенсирующую
отрицательную эквивалентную входную емкость.
Для получения отрицательной входной емкости
используют схему, приведенную на рис. 1.38.
>-
Микро'мюктрод
-#
IL
> #
Рис. 1.38. Вариант схемы с отрицательной эквивалентной
входной емкостью
Считая входное сопротивление ОУ бесконечно большим,
Для данной схемы можно записать
и„=-
1
(1-tfJCoc
-»»*<#>
(1.60)
гл-е Ку - коэффициент усиления, выбираемый небольшим;
72
Усилители биопотенциалов
Сое - емкость обратной связи;
С^вх и 'вх- входные напряжение и ток.
Из выражения (1.60) следует, что входная эквивалентная
емкость системы микроэлектрод - ОУ определяется
выражением Сэ=(1 - Ку)Сос (при Ку > 1 С, отрицательна).
Если обозначить через RM сопротивление микроэлектрода
и через См - емкость электрода вместе с кабелем, то суммарная
емкость на входе составит
С = См+(\-Ку)Сос. (1.61)
Эта емкость равна нулю, если См=(Ку - 1)С0с- Реализовать
это условие можно, подбирая величины Ку и Cqq, но при этом
надо иметь в виду, что в силу наличия положительной обратной
связи в схеме может возникнуть автогенерация. Поэтому на
практике Ку и См подбирают так, чтобы последнее соотношение
выполнялось как можно более точно, без перехода в режим
автоколебаний.
1.7. Усилители с гальванической развязкой
Работа с биообъектами выдвигает ряд особых требований
к усилительным каскадам, причем в качестве основных из них
выделяют необходимость качественного усиления малых
сигналов на фоне высокого уровня синфазных помех и обеспечение
защиты от попадания опасных токов на объект. Эти требования
в значительной степени реализуются с помощью
развязывающих (изолирующих) усилителей.
Изолирующие усилители обеспечивают развязку междУ
входом и выходом по постоянному току при допустимых
уровнях синфазных напряжений от 2 до 7,5 кВ. Коэффициент
подавления синфазных помех достигается более 100 дБ. Входные
сопротивления обычно лежат в диапазонах 108...Ю" Ом. Они
имеют узкую полосу пропускания: 0...3 кГц для усилителей с
трансформаторной развязкой и 0...15 кГц для усилителей с
оптической развязкой. Усилители с оптической развязкой облада'
ют худшей линейностью по сравнению с трансформаторное
развязкой.
Усилители с гальванической развязкой 73
Главное применение изолирующих усилителей -
устройства медицинской техники, для которых малые сигналы скрыты в
существенно больших, а утечка по постоянному току может
иметь фатальные последствия. Кроме того, для них характерны
длинные двухпроводные линии связи, в которых наводятся
синфазные помехи, возникающие из-за того, что потенциалы
различных точек земли различны из-за блуждающих токов, а
усилительные схемы и удалённые датчики имеют заземление. Эта
связь может быть паразитной (емкостной), но может
представлять собой непосредственное заземление проводников, когда по
соображениям безопасности источник входного сигнала и
усилитель должны быть заземлены.
Схема, поясняющая действие на усилитель синфазных
помех от заземляющего контура, приведена на рис. 1.39. В этой
схеме датчик соединён двухпроводной линией (с
сопротивлениями проводов ri и г2) со входами усилителя. Неинвертирую-
щий вход усилителя соединён со средней точкой питания
усилителя (эта точка схематично показана как дополнительный
средний вход усилителя) и с экранирующим корпусом
усилителя. Источник входного сигнала и усилитель через комплексные
сопротивления Z1 и Z2 имеют связь с землёй в различных
точках, что создаёт источник синфазных помех С/Снф с внутренним
сопротивлением Zn. Например, при удалении двух точек
заземления на расстоянии 500 м разность С/СНф может составить
Ю-15 В при внутреннем сопротивлении Z„, равном единицы ом.
Контур, образованный парой соединительных проводов (ri и г2),
сопротивлениями связи Z1 и Z2 и землёй, пронизывается
различными переменными магнитными полями, что приводит к
возникновению в контуре ЭДС, которая суммируется с
напряжением помехи t/снф. За счёт токов, текущих во входных цепях
усилителя и обусловленных источником С/СНф, синфазная помеха
преобразуется в дифференциальную. Предполагая, что
сопротивление линии связи много меньше входного сопротивления
Усилителя (ri и r2«R\), определим ток, вызываемый помехой
^енф
/ = C/cl4/(Z1+Z2+Zn+r2). (1.62)
74 Усилители биопотенциалов
R2
Датчик /
ZI Г
П
гг
1 ■ - i
1
1 ■ "
п
1 1
1 \
-V
т
I
Z2
■h—©—[—'—i-
Рис. 1.39. Действие синфазных помех на ОУ от заземляющего контура
Падение напряжения от этого тока на сопротивлении
низкопотенциального провода г-2 представляет собой поперечную
помеху
U™aZ+Zrlz +rU°*- (L63)
z,, +z,2 +zn +r2
Из выражения (1.63) следует, что для уменьшения
дифференциальной помехи надо уменьшать г2 и увеличивать
Zm-Zi+Z2+Zn. Однако ZCM редко поддается контролю, поэтому
значительная часть поперечной помехи попадает на вход
усилителя. Для борьбы с этой помехой используют гальваническое
разделение входной и выходной частей усилителя с помощью
оптронных, емкостных или трансформаторных развязок.
Таким образом, организуются две изолированные части:
передающая и приемная. Передающая часть работает под
потенциалом измерителя (датчика), а приемная - под нулевым
потенциалом. Для реализации подобного устройства необходимо,
чтобы передающая часть имела отдельный, изолированный от
приемной схемы, так называемый «плавающий» источник
электрической энергии, общая точка которого соединяется чаще
всего с одним из дифференциальных входов передатчика. Этот
вход усилителя играет роль «плавающей земли» (рис. 1.40).
Использование трансформатора для передачи энергии в
плавающий источник питания передатчика устраняет
электрическую связь между входом и выходом схемы на постоянном
Усилители с гальванической развязкой
75
токе и в области низких частот, но остается связь на высоких
частотах из-за наличия паразитных межобмоточных емкостей
{Со. и Со) питающего трансформатора. Нельзя полностью
устранить также емкостную связь в тракте передачи сигнала (СС\)-
Сп
А......
Передатчик
ик
"X
«Плавающая»
земля
Незаземленный
источник
тока
И5"
i
IS 1
lie-
о. о.
S • га
с; 1Ю
О I
к!
i
1
i
Приемник
ик
"Г
Заземленный
источник
тока
-сз
TQ
С2
Сеть
Рис. 1.40. Блок-схема изолирующего усилителя
Наиболее просто гальваническая сигнальная развязка
реализуется простой передачей аналогового сигнала через оптопа-
РУ- Однако при этом следует иметь в виду наличие
значительных искажений из-за зависимости параметров оптопары от
температуры, уменьшения яркости светоизлучающих диодов с
течением времени, нелинейности передаточной функции,
собственных шумов оптопары и т.д.
Уменьшения влияния погрешностей передачи сигнала за
Счет оптопары можно достичь путем дифференциального
включения согласованных фотодиодов. Схема подобной
оптической развязки на операционных усилителях для кардиомони-
т°ра приведена на рис. 1.41. Значком V обозначена
изолированная общая точка, которую иногда называют «плавающей
76 Усилители биопотенциалов
землей». Один фотодиод оптрона является приемником сигнала,
а второй замыкает цепь отрицательной обратной связи.
riP(R)
ЛР(£)
riH(N)
Рис. 1.41. Схема оптической развязки на операционных
усилителях для кардиомонитора: ПР - правая рука; ЛР -левая рука;
• ПН - правая нога; Еиз - изолированное питание
По схеме с оптронной развязкой построен изолирующий
усилитель ISO100CP фирмы Burr-Brown. Нелинейность
передачи для этой схемы не превосходит 0,07%. Типичная полоса
пропускания составляет 60 кГц. Входным сигналом для этой
микросхемы является ток, поэтому источник сигнала должен
обладать довольно высоким сопротивлением. При этом шум,
спектральная плотность которого на частоте 1 кГц составляет
0,65 пА/Гц ' , может достигать достаточно высокого уровня.
В усилителях с емкостной гальванической развязкой
входной сигнал усиливается входным усилителем (ВУ) и
преобразуется в частоту схемой преобразования «напряжение - частота»
(ПНЧ) (рис. 1.42). Далее сигнал переменного тока передается в
выходную часть усилителя через керамические конденсаторы
С\ и С1 гальванического барьера, после чего преобразуется в
напряжение преобразователем «частота - напряжение» (ПЧН).
U»,
ВУ
ПНЧ
С1
С2
ПЧМ
Рис. 1.42. Структурная схема конденсаторного развязывающего усилителя
Схема изолирующего усилителя с трансформаторной
связью AD215 представлена на рис. 1.43.
Усилители с гальванической развязкой
77
ос ■»■ " 1
Вх.
Вх.
t$>L
Обший
*ц»
ли
Модулятор
Выпрямитель
D
Л
[
Демодулятор
ФНЧ
150
■-&у^-
и
Генератор
430кГц
Т2
-о ВЫХОД+
-о Баланс
-о Выход—
-о +15В
-о 0В
-о -15В
Рис. 1.43. Структурная схема изолирующего усилителя
с трансформаторной связью
Здесь для передачи входного сигнала через изолирующий
барьер используется балансная амплитудная модуляция
несущей частоты 430 кГц. Внутренний синхрогенератор управляет
демодулятором и передает часть энергии через трансформатор
72 для питания изолированной части и управления
модулятором. Встроенный изолированный выпрямитель с фильтром
обеспечивает питание изолированной части схемы постоянным
током силой до 10 мА при напряжении ±15 В.
Пульсации напряжения на выходе демодулятора
подавляются ФНЧ Бесселя с полосой пропускания 150 кГц. В результате
амплитуда пульсаций выходного напряжения усилителя не
превышает 5 мВ. Полоса пропускания схемы 0...120 кГц. При
ограничении полосы пропускания до 50 кГц дополнительным
выходным фильтром амплитуда пульсаций выходного напряжения
снизится до 1,2 мВ. Нелинейность коэффициента передачи
схемы при К=\ не превышает 0,015%. С помощью входного
усилителя сигнал может быть усилен в 10 раз, а при снижении
требований к линейности - даже в 100 раз.
Характеристики изолирующих усилителей приведены в
таблице 1.4.
Если в части медицинской аппаратуры, связанной с паци-
т°м, имеется возможность преобразования аналоговых сигна-
0в в последовательные цифровые коды, то в качестве надежной
альванической развязки могут быть использованы пространст-
78 Усилители биопотенциелов
венно разнесенные инфракрасные или лазерные
приемопередатчики, находящиеся друг от друга на таком расстоянии, что
становится практически невозможным гальванический контакт.
При проектировании такой развязки следует иметь в виду, что
приемопередатчики должны находиться в прямой видимости и
при работе аппаратуры между ними не должны попадать
«затеняющие» предметы. Известно применение такого типа развязки
в медицинских системах и комплексах, содержащих в своем
составе персональные компьютеры.
Таблица 1.4
Важнейшие параметры изолирующих усилителей
Модель
ISO 100
ISO 124
IS0175
AD215
AD210
Максимальное
напряжение
изоляции
(60 Гц),
В
750
1500
1500
1500
2500
Сопротивление
изоляции,
Ом/проходная
емкость,
пФ
1012/2,5
10'72
10'76
2-109/4,5
5-109/5
Кобе
на
постоянном
токе/частоте
60 Гц, дБ
146/106
140/-
160/115
100/-
120/-
Диапа-
зон
усиления
-
1
1...100
1...10
1...100
нейность
(#=1),
%
0,07
0,01
0,1
0,015
0,012
Полоса
пускания
(К=1),
кГц
60
50
60
120
20
Тип
развязки
Оптическая
Емкостная
Тоже
Трансформаторная
Тоже
Идеальная гальваническая развязка обеспечивается при
использовании радиоканалов. Такие схемы находят широкое
применение в имплантируемых кардиостимуляторах для их
подстройки; в радиотаблетках, измеряющих различные
параметры работы желудочно-кишечного тракта и т.п. При
проектировании таких устройств следует обеспечивать высокую
надежность работы приемо-передающей аппаратуры с учетом
возможных помех от рабочей аппаратуры, создающей достаточно
мощные электромагнитные поля. Кроме этого необходимо
учитывать, что разрешенной для медицинского оборудования
является определенная полоса радиочастот.
Тренировочные задания
1. Расскажите о характере электрических процессов,
протекающих в зоне контакта электрода с живой биотканью.
2. Нарисуйте типовую схему входного каскада усилителя
биопотенциалов.
3. В типовой двухтранзисторной схеме дифференциального
входного каскада усилителя биопотенциалов гэ=250 Ом,
/г,=/г2=/?з= 100 Ом. Определите дифференциальный и синфазный
коэффициенты усиления и коэффициент ослабления синфазного
сигнала.
4. Нарисуйте схему замещения операционного усилителя и
перечислите его основные параметры.
5. Назовите источники самовозбуждения операционных
усилителей.
6. Как определяются полоса пропускания и частота
единичного усиления операционного усилителя?
7. Нарисуйте схемы инвертирующего и неинвертирующего
усилителей и приведите основные аналитические соотношения
для определения их коэффициентов усиления по напряжению,
входных и выходных сопротивлений.
8. Нарисуйте схему простейшего дифференциального
усилителя на одном операционном усилителе и запишите выражения
Для определения коэффициента ослабления синфазного сигнала.
9. Нарисуйте структурные схемы инструментальных
усилителей на двух и трех операционных усилителях. Объясните для
них принцип подавления синфазных помех.
10. Нарисуйте структурные схемы изолирующих усилителей
с оптронной, емкостной и трансформаторной развязкой и
объясните принципы их работы.
Тестовые задания
1. Суммарная величина емкости поляризации при контакте
эЛектрода с живым объектом определяется формулой
80 Усилители биопотенциалов
)ldt
г - fi-
L-p -
2. Для типовой двухтранзисторной дифференциальной
схемы входного каскада усилителя биопотенциалов коэффициент
усиления синфазного сигнала определяется выражением
К Ri
снф [щ+ъ
3. Входное сопротивление операционного усилителя - это:
а) сопротивление между прямым и инверсным входами при
условии, что они ни к чему не подключены;
б) сопротивление, включенное параллельно источнику тока
входного сигнала;
в) сопротивление со стороны одного из входов
операционного усилителя, когда другой заземлен;
г) отношение приращения синфазного напряжения к
приращению среднего тока усилителя;
д) отношение напряжения смещения ко входному току
усилителя.
4. Полоса пропускания операционного усилителя
определяется как частота, на которой коэффициент усиления по
напряжению уменьшается на дБ (вставьте пропущенную цифру).
5. Общая абсолютная погрешность операционного
усилителя определяется выражением
Л£/0 = AUK + AUrBX + AUrBblK + Д _/др + Д £/,. + Д[ ].
6. Относительная погрешность инвертирующего и неинвер-
тирующего усилителей из-за нестабильности коэффициента
усиления определяется выражением
g[Aq _______
7. Входное сопротивление инвертирующего усилителя опрб'
деляется следующим образом:
a) Ri/Rf, б) Ro/Ri; в) {Rl+R2)/R0; г) Я,; д) (tf,+tf0)/tf2.
Тестовые задания
81
8 Выходное напряжение для типового дифференциального
усилителя на одном операционном усилителе определяется
выражением
вых 2R2+R3
9. Для типового дифференциального усилителя на одном
операционном усилителе коэффициент усиления синфазного
сигнала, обусловленный рассогласованием внешних сопротивлений,
определяется выражением
к _ ^3 ~ ^о^2
снф1 [](Я_ + Я,)'
10. Для инструментального усилителя, выполненного по
схеме «тройка», коэффициент ослабления синфазного сигнала
определяется выражением
[]
^осс :
^снф! + ^снф2
11. Для компенсации собственной емкости микроэлектродов
в усилителях биопотенциалов используют емкость,
подключаемую между:
а) прямым и инверсным входами;
б) прямым входом и «землей»;
в) инверсным входом и «землей»;
г) выходом и инверсным входом;
д) выходом и прямым входом.
12. В типовую структурную схему изолирующего усилителя
с емкостной развязкой входят: входной усилитель; два
керамических конденсатора; преобразователь «частота - напряжение» и
—____ (допишите название недостающего узла).
13. В типовую схему изолирующего усилителя с
трансформаторной связью входят: два операционных усилителя, два
трансформатора; модулятор; демодулятор; фильтр нижних частот и
(допишите название недостающего узла).
2. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА
НА ОПЕРАЦИОННЫХ УСИЛИТЕЛЯХ
ДЛЯ МЕДИЦИНСКИХ ИЗДЕЛИЙ
Значительную долю различных функциональных
преобразований в современных электронных приборах, включая и
медицинскую технику, выполняют цифровые устройства, системы
и комплексы. Однако специфика медицинской техники, где
исходная информация представляется, как правило, аналоговыми
сигналами, требует использования определенной доли
аналоговых электронных схем, которые, кроме усиления и подавления
помех, могут применяться для выполнения некоторых
вычислительных операций и других функциональных преобразований.
2.1. Линейные узлы математической обработки
биологических сигналов
Среди множества различных аналоговых функциональных
*• устройств определенное место занимают схемы,
осуществляющие линейные преобразования над аналоговыми сигналами:
масштабирование, суммирование, интегрирование,
дифференцирование и ряд других. Рассмотрим некоторые из них.
2.1.1. Схемы масштабирования
и аналоговые сумматоры
Схемы масштабирования используют для
пропорционального изменения сигнала, что эквивалентно умножению его
величины на постоянный коэффициент. Для этой цели используют
инвертирующие и неинвертирующие усилители.
Промышленность выпускает различные типы таких схем. В них для
измерения масштабов преобразования предусматриваются
переключаемые сопротивления в цепях обратной связи и выводы для
подключения внешних сопротивлений для регулировки
коэффициентов передачи. Схемы масштабирования легко
реализуются и с помощью ОУ общего назначения путем выбора
соответствующих номиналов сопротивлений на входе и в цепях
обратной связи.
ni шейные узлы математической обработки биологических сигналов 83
В задачах съема и обработки медико-биологической
информации часто приходится сталкиваться с сигналами,
изменяющими амплитуду в широких пределах (большие
динамические диапазоны) так, что использование масштабного звена на
ОУ с фиксированным коэффициентом усиления не дает
удовлетворительных результатов. В этом случае можно использовать
схемы с электронной перестройкой коэффициента усиления с
помощью транзисторных ключей или соответствующих
микросхем, реализующих функции аналоговых коммутаторов. Пример
такой схемы с регулировкой коэффициента усиления по цепи
обратной связи приведен на рис. 2.1, о. В этой схеме подача
управляющего напряжения Uy„pi открывает соответствующий
транзистор VTi, закорачивая соответствующий резистор RJ в
цепи обратной связи, уменьшая тем самым общую величину
Roc, а следовательно, и коэффициент передачи ОУ. Для данной
схемы справедливо соотношение £/вых= -UBXRoc/R\. Для более
точных расчетов при определении величины Roc учитываются
не только замкнутые ключи, но и сопротивления открытых
ключей г0 и токи утечки /0 закрытых ключей.
Для реализации автоматической перестройки с целью
предотвращения выхода ОУ на нелинейный участок из-за высоких
значений входного сигнала можно использовать пороговые
элементы, фиксирующие уровни выходных или входных
напряжений ОУ. На рис. 2.1, б показана схема изменения коэффициента
усиления ОУ при достижении заданного выходного напряжения
Ць на который настраивается пороговый элемент (ПЭ),
управляющий отпиранием ключа VT1. На рис. 2.1, в показан вариант
схемы автоматического управления коэффициентом усиления
несколькими пороговыми элементами, отслеживающими разные
величины входного напряжения: UnU U„2, С/п3 и С/л4. На
усилителе А2 собрано согласующее масштабное звено (для разгрузки
источника входного напряжения), коэффициент усиления
которого определяется соотношением сопротивлений R3, RA.
Часто для управления коэффициентом усиления в
автоматическом режиме используют ЭВМ, которая передает код пре-
°бразуемого коэффициента усиления через согласующие
устройства на управляющие входы ключей.
84 Функциональные устройства на операционных усилителях
+£о
Цпр1 <Уупр2 (У^рЗ <уупр4
VT\ VTl] уд] VTA]
Ro
Ц
1£Г
х R2
tZZKZZhM
Л„2
Д,з
Л04
Ло
я)
с/.
UB;
RI
HCZD-
л„ л'0
J
пэ
б)
1с/„
Л2
ЛО
^BfelX
./О. /г'„2 /г'„з /г'04
.с/.
i ч
uBt
Рис. 2.1. Схемы с управляемым коэффициентом усиления
гцшвиные узлы математической обреботки биологических сигналов 85
В ряде практических задач возникает необходимость
управления коэффициентом передачи с помощью непрерывного
управляющего сигнала. В этом случае можно также создавать
управляемые сопротивления как по цепи обратной связи, так и
по цепи входного сопротивления. На рис. 2.1, г изображен
вариант практической схемы управления коэффициентом усиления
масштабного звена по цепи входного сопротивления. Ниже
будут рассмотрены варианты управления коэффициентом
передачи аналогового сигнала с помощью других схемотехнических
решений, например, с помощью умножающих цифроаналоговых
преобразователей.
С использованием одновходовых и дифференциальных ОУ
легко реализуются различные варианты аналоговых суммато-
ров-вычитателей. На рис. 2.2, а приведена схема одновходового
сумматора. Основное уравнение его работы можно получить
аналогично тому, как это сделано для схемы рис. 1.18.
Будем считать, что ко входу усилителя подключены
входные сопротивления Z\b Zn,—, ZXn, на которые подаются
напряжения Uu, Uu,...,U\n, тогда будут справедливы соотношения:
iij=(Uv-e)/Zv, j=\,n;
U2 = -KyE,
откуда
U -л- — •
2T
1 +
к.
Если Ку—кя, то
" 1
1 + Z0Y —
откуда
1
1 + ZoZ^
V 7=1 Z0 )
•о,
и.
2 _ Zo2-i~^~
7=1 ZU
(2.1)
86 Функциональные устройства не операционных усилителях
Уравнение (2.1) считают основным уравнением реального
одновходового ОУ, которое часто записывают в виде
^=-t^ulJ^-±Kjuj,
7=1 Л1У 7=1
где Kj=ZqIZ\j - коэффициенты усиления поу'-м входам.
z\\ iiv zo
Z12 lii.
Zl«
a)
Л1
1
u2=uBt
cl .
e" •
w.
t/2
t/..
1 1
1 1
R2
1 !
Rn L
I i
1 1
r\
1 1
rl
I \
rm 1-
1 1
1
Л0
1 1
1
U-
A\^>
u+
i i
6)
Рис. 2.2. Сумматоры-вычитатели на ОУ
Для активных сопротивлений входа Rj и обратной связи Я>
абсолютная погрешность от конечности Ку определяется фор'
мулой
не,7ные узлы математической обработки биологических сигналов 87
" р *""R. J
7=1 fy
*У
V*b
-if",
7=1 Л7
1 + ^^
i+-L
7^ д.
V 7=1 J J J
Относительная погрешность определяется выражением
bUK=AUJU2n, где U2n - приближённое значение выходного
напряжения. Тогда после преобразований получим
ъи.
/С
(
i+Z
^*о
\
R,
(2.2)
У V 7=' 7 ) •
Зная допустимую относительную погрешность, можно
ставить задачу выбора типа ОУ с необходимым Ку, исходя из
выражения
К>
у W,
— i+Z—
^ 7=1 Л7 J
На рис. 2.2, б приведена схема сумматора-вычитателя на
основе дифференциального ОУ. При равенстве нулю входных
°ков усилителя для неинверсного входа можно записать
и+ =
l^uA/lt^i
\М Гг
>i=l Ч J
Для
инверсного входа получаем
У=1 Rj ^0
Л
\М RJ )
и.
*о
Принимая во внимание, что £/_= U+, получим выражение
88 Функциональные устройства на операционных усилителях
2>0/r,+i) ыхГ> j=xKj
./=1
В частном случае, когда все сопротивления в схеме равны
(R0=Rj=r0=rj=R), получаем
т
(=1 у=1
Погрешность суммирования с учетом напряжения
смещения ОУ для инвертирующего сумматора определяется
выражением
Аиоы=еш
l + ZW*/)
Для неинвертирующего входа погрешность от смещения
нуля определяется по формуле
Л£4м=есм(1+адвх),
где R^ - внешнее сопротивление инвертирующего входа,
подключенного ко входу ОУ и к земле.
Таким образом, погрешность неинвертирующего входа не
зависит от числа входов сумматоров и может быть
скомпенсирована путем подключения компенсирующего напряжения.
2.1.2. Усилители переменного тока
При необходимости усиливать только переменную
составляющую входного сигнала во входные цепи ОУ обычно
включают разделительные конденсаторы (рис. 2.3, о). При R3=Ro,
/?,=/?2 и Ci=C2 нижняя граничная частота такого усилителя по
уровню 3 дБ (частота, на которой коэффициент усиления падает
примерно на 30%) равна l/(2PRxCi) для обоих входных сигналов-
Верхняя граничная частота зависит от инерционности
используемого ОУ и от параметров цепей частотной коррекции.
линейные узлы математической обработки биологических сигналов 89
П R\ R0
г-ЧЬ-ЧГ^- —
C/i
и.
1
С2 R2
1
X
R\
R3
а) "
С\ R0
в^ВЫХ
и.
и2
a
R2
X
1
б)
1
с/.
Рис. 2.3. Усилители переменного тока
Для неинвертирующего усилителя обычно используют
схему, приведенную на рис. 2.3, б. Достоинство этой схемы -
высокое входное сопротивление. Передаточная функция этой
схемы определяется выражением
l + Rp/Ri +1 /(/?СД) + 1/(/'С1/г2)
ЩР) = -
(2.3)
l + l/(PClRl) + l/{PClR2) + l/(P2ClR1C2R2)
Из последнего выражения следует, что для уменьшения
погрешности усилителя на низких частотах следует
увеличивать постоянные времени С,/гь CXR2 ,C2R2.
2.1.3. Схемы интегрирования
Интегрирующим операционным преобразователем, или
Просто интегрирующим усилителем, называют ОУ, охваченный
0тРицательной обратной связью и реализующий математическую
°перацию интегрирования напряжения, поданного на его вход.
Схема простейшего интегрирующего ОУ приведена на
Рис. 2.4. Для этой схемы, пренебрегая г'вх, имеем ii=i2, и
учитывая.
>что ic = CdUc/dt:
90 Функциональные устройства на операционных усилителях
[Um-e_]/R = C
dt
(2.4)
Рис. 2.4. Схема простейшего интегрирующего усилителя
С другой стороны, напряжение на выходе усилителя
Совместное решение уравнений (2.4) и (2.5) позволяет
получить выражение
^вь,х(0]
dt
1
;Ц*х(0 = -
к„
1
*:у+1яс~вх
UBX(t). (2.6)
RC(Ky+l)
Проинтегрировав выражение (2.6), получаем в явном виде
выходное напряжение
При больших значениях коэффициента усиления ОУ
отношение Ку 1{Ку +1)«1; 1/(Ку+1)&0, и следовательно, с
большой точностью можно записать
кс 0
(2.8)
Увеличение постоянной времени (произведения RC)
интегрирующего усилителя приводит к значительному
возрастанию времени интегрирования /j в пределах допустимой
погрешности 8идоп:
tl=2RC(Ky+l)8Umi.
пциейные узлы математической обработки биологических сигнелов 91
Идеальное интегрирование достигается при идеальном
ОУ. Если определять передаточную функцию интегратора с
учетом величины Ку и входного сопротивления гвх, то можно
получить *
U (Р) KJ(l + R/r)
W(P)=U™A > L^ »±1 . (2.9)
k U„(P) PRC[rBX/(R + rBX) + Ky/(l + R/rBX)] + l
Если rBX»R и Ку»1, то выражение для W(P) упрощается:
W(P) = у- . (2.10)
PRCKy+\
Из выражения (2.10) следует, что реальный интегратор
ведет себя как инерционное звено первого порядка, имеющее
коэффициент усилителя Ку и эквивалентную постоянную времени
Тэ=ЛуТ 1 =Лу./?С.
Если на вход такого звена в момент времени t=0 подать
скачок напряжения Um, то напряжение на его выходе будет
изменяться по закону .
UBbK(t) = -UBXKy{l-e-"T>) + UltbMe-'^, (2.11)
где £Лыхо - начальное напряжение (при t=0) на выходе
интегрирующего усилителя за счет неразряженной емкости С.
Таким образом, на выходе реального интегратора при скачке
напряжения на входе выходное напряжение будет меняться не
линейно, как в случае идеального интегратора, а по экспоненте.
Однако если время t, в течение которого развивается эта
экспонента, много меньше постоянной времени хм то начальный
участок экспоненты мало отличается от прямой (рис. 2.5).
При выполнении условия т«гэ из выражения (2.11) можно
получить соотношение
ивыл*)*-ивх-~+ивыХ0,
При ^выхо= 0 получаем
92 Функциональные устройства на операционных усилителях
Таким образом, отношение t/RC можно рассматривать как
эквивалентный коэффициент усиления интегратора КИЭ.
Реальный интегратор по своему выходному напряжению будет мало
отличаться от идеального, если Кк э «Ку, где Ку - коэффициент
усиления ОУ.
LW
Реальное интегрирование
-"~ Нагытттрнир усИЛИТеЛЯ
Идеальное
интегрирование
Рис. 2.5. Временная диаграмма работы интегратора на ОУ
Частотные характеристики интегрирующего усилителя без
учета малых параметров рассмотрим путем анализа
передаточной функции, получаемой из выражения (2.6):
К(П
и^П
К(Р)
UBX(P) RC(K(P) + l)P + \-
С учетом того, что передаточная функция самого ОУ
определяется выражением
К{Р)
кп
1 + гуР
получаем
К(Р) =
к«
RCzP2 + (K0RC + RC + xy)P + \
где Ко - коэффициент усиления ОУ на нулевой частоте;
Ту - постоянная времени ОУ.
Амплитудно-фазочастотную характеристику удобно
исследовать при подаче на вход исследуемого устройства сину
линейные узлы математической обработки биологических сигналов 93
соидального сигнала с меняющейся частотой ю. В случае
синусоидального сигнала удобно для исследования использовать
передаточную функцию при замене оператора Р на./©:
WJJa>) = -
Кп
(2.12)
(1 - RCxyaz) + MK0RC + RC + xy)
которую в общем виде можно представить выражением
W{j<s>) = U((u) + jV(G)).
Амплитудно-частотная характеристика интегратора
определяется как модуль передаточной функции
A(a>) =\W„U<4 = <Ju2(a>)+V\a>) =
^п
(2.13)
^(1-ДСту©2)2 + ю2[С*:0 + \)RC + ту]2
Фазочастотная характеристика определяется выражением
К(оо) юр:0+1)ДС + ту]|
ф(ю) = arctg \ = arctg •(
С/(оо)
1-ДСтуоГ
(2.14)
На малых и средних частотах, когда частотные свойства
ОУ не оказывают существенного влияния, графики
амплитудных и фазовых характеристик (без учета' инвертирующего
свойства ОУ) будут иметь вид, представленный на рис. 2.6.
20 дБ/дек
Рис. 2.6. Амплитудно- (а) и фазочастотная (6) характеристики
интегрирующего ОУ
94 Функциональные устройства на операционных усилителях
Из выражения (2.13) и графика рис. 2.6, а следует, что
интегрирующий ОУ обладает сглаживающими свойствами, то
есть при интегрировании низкочастотного сигнала с
высокочастотными помехами последние на выход интегратора
поступать не будут, поскольку для них величина коэффициента
передачи мала.
В реальных схемах на точность операции интегрирования
влияют следующие параметры: конечное значение
коэффициента усиления ОУ; первичные погрешности элементов R и С;
погрешности интегрирования, определяемые выходными токами;
дрейф нуля ОУ; динамические погрешности.
При К^»1 можно считать, что на выходе интегратора
формируется напряжение
еию-"-*4'
RC
к 2KyRC
(2.15)
Напряжение на выходе идеального интегратора
соответствует выражению
^х(0 = -^, (2Л6)
тогда относительная погрешность от конечности коэффициента
усиления определяется как
Ш = AU« =[^Bb,x(0-^b,x(Q]= * (2 17)
к u^m(t) <уивых(о ik^rc
Абсолютная погрешность от изменений величин R и С
определяется как
А£/яс=^ДЛ(0 + ^АС(0, (2-18)
где U0 - идеальное значение выходного напряжения для
интегрирующего ОУ; U0=UK. вых(0-
Преобразуя выражение (2.18), получаем
AUpc = -U0[AR(t)/R + AC(t)/C] , (2.19)
где А/?(0 и AC(f) - первичные погрешности элементов.
Ппнейные узлы математической обработки биологических сигналов 95
Емкость конденсатора существенно зависит от
температуры. Для уменьшения температурной погрешности емкость
иногда термостатируют. Кроме этого на нестабильность и точность
интегратора влияют сопротивление утечки конденсатора,
явление адсорбции в диэлектрике, а также дополнительные элементы,
подключенные к конденсатору (например, ключи для разряда
емкости интегратора, монтажные провода и др.). Все указанные
элементы можно свести к одному эквивалентному
сопротивлению R3, подключённому параллельно конденсатору (рис. 2.7).
Система уравнений для такой схемы имеет вид
t(0_C/„(0-ee(Q.
с</[ес(0-Ц«х(0] + ес(Г)-U^
£/..
dt
<{t) = -Kec{f\
Я,
R
откуда
С/„(0-(2.20)
Рис. 2.7. Схема интегрирующего ОУ с эквивалентными
«паразитными» составляющими
Проинтегрировав уравнение (2.20) и решив его
относительно UBbK(t), получим
К 1 ' 1 '
^««(0 = {Um(t)dt \UBbK(t)dt-
K+IRCZ RC(K„+\)Z
1 ',
W
jUBUX(t)dt.
(2.21)
96 Функциональные устройства на операционных усилителях
Сравнивая полученное выражение с формулой (2.7) для
нормальной схемы интегратора ОУ, получим
Аг7у(0 = ~КыХ(0Л- (2.22)
Для уменьшения этой погрешности выбирают конденсатор
с большим сопротивлением утечки и малым коэффициентом
абсорбции (на полистироловых, тефлоновых и других пленках),
экранируют подводящие провода, заземляют корпус
конденсатора. В цепях разряда конденсатора используют схемы с
малыми токами утечки и релейные схемы.
Для схемы, приведенной на рис. 2.4, при условии, что
iBX Ф- 0, справедливы уравнения
R dt вх(
UBbIK(t) = -Kyec(t).
Приняв допущение, что UBX(t) = 0; ec(t) = -UBbK(t)/K^ ~0,
получим
CdUtTit) = imd{t)y (2.23)
at
откуда погрешность интегрирования от входных токов ОУ
определяется соотношением
LU,{f) = ^\im{t)dt. (2.24)
*~ о
Если частота изменения входного тока /вх(/) небольшая, то
считая за время работы интегратора im(t) = const, получаем
двд=/вх//с.
Для ОУ с дифференциальным входным каскадом вместо
'вх(0 берут разность Ai^it), то есть
AC/^(0 = Ailx//C (2.25)
Погрешность интегратора от дрейфа нуля ОУ в основном
определяется дрейфом напряжения смещения и входного тока
ПинеОные узлы математической обработки биологических сигналов 97
(для дифференциальных ОУ - разностью входного тока). С
учетом дрейфа этих параметров для схемы, приведенной на
рис. 2.4, можно записать
'Цх(0-вс(0_с«*Ы0-Цых(0].
R dt (2.26)
1^ВЫх(0 = -*уК(0±едр(0].
Совместное решение этих уравнений, их интегрирование и
решение относительно С/ВЬ1Х(/) дает выражение
Ку+\ др Ky+IRC>
Принимая во внимание, что Ку/(Ку+1)~1, и сравнивая
выражение (2.27) с уравнением (2.7), получаем
Л£/„р(0 - ±едр(0 + -^ \e^t)dt. (2.28)
КС 0
Уровень нуля ОУ изменяется очень медленно, поэтому
значительную ошибку вносит второй член выражения (2.28).
Допустим, что в течение времени интегрирования едр = const,
тогда
J_
RC
то есть ошибка на выходе растет по линейному закону от времени.
С учетом только второго члена выражения (2.28) при
заданной допустимой погрешности дрейфа должно выполняться
соотношение
А^др.доп^—^др СО-
Общая абсолютная статическая погрешность интегратора
°пределяется выражением
ДЦ(0=ЛВД+Л£//г(0+ЛЦ,(0+ДЦ(0+Л^др(0- (2.29)
bUnp(t) = enp+—eap-t,
98 Функциональные устройства на операционных усилителях
Общая относительная статическая погрешность
интегратора определяется выражением
_r,/rt AUc(t) RCAUc{t)
5Uc(t)= гг cW = -^-L. (2.30)
Динамические погрешности интегрирующего ОУ
возникают вследствие действия реактивных элементов схемы и могут
быть определены с помощью анализа амплитудно- и фазоча-
стотных характеристик (см. выражения (2.13) и (2.14) при их
сравнении с идеальными характеристиками интегратора).
Погрешность выходного напряжения особенно велика,
если на вход подаётся «скачок» напряжения (в первый момент
времени «выброс» на рис. 2.5 при t<3zy/Ky). По истечении
времени, равного нескольким ту/К0, напряжение у реального
интегратора (см. рис. 2.5, сплошная линия) изменяется по линейному
закону, но с отставанием по времени.
Скорость изменения СВЬ1Х определяется из выражения
а сдвиг выходного сигнала по уровню - из соотношения:
откуда время отставания определяется из уравнения
(W-"y№)_ (W^y)
(2.31)
т К
где тЕЬ1Х = гЕЬ1ХС; x=RC; тэ=Кт.
Для коррекции такого отставания последовательно с
конденсатором можно подключить резистор Яд, сопротивление
которого определяется по формуле
r =:W+Jcy_. (2.32)
* К КС
Чаще всего из-за малости запаздывания Ra не ставят.
Физически различие реакции идеального и реального
интегрирующего ОУ можно объяснить следующим образом.
В первый момент «скачка» напряжения на входе ОУ не
успевает его отрабатывать (свойство инерционности ОУ), и вы-
ПинеРныеузлы математической обработки биологических сигналов 99
чодное напряжение в начале изменяется под воздействием части
входного сигнала, проходящего на выход через элементы R и С.
Затем срабатывает ОУ и начинает изменять £/ВЬ1Х по линейному
закону, но с отставанием из-за инерционности схемы. Из-за
инерционности ОУ при «скачке» входного напряжения он
может выйти в насыщение. При этом возникает эффект разрыва
обратной связи, и переходный процесс будет определяться не
постоянной времени Ку/К0, а постоянной времени ху.
При работе интегратора емкость накапливает
соответствующий заряд и, чтобы провести новое интегрирование, нужно
иметь возможность ее разряда. Это можно делать с помощью
реле или электронных ключей.
На рис. 2.8 показана схема разряда на полевых
транзисторах. Пара транзисторов используется для уменьшения токов
утечки. Здесь могут использоваться и схемы интегральных
аналоговых ключей.
Jr^ ГА" 0С6РОС
1 1
Рис. 2.8. Схема разряда на полевых транзисторах
При решении дифференциальных уравнений с помощью
интеграторов часто требуется задавать начальные условия в
виде постоянных напряжений, прикладываемых к конденсатору до
Начала интегрирования. Известно достаточно большое количе-
Ств° схем установки начальных условий [14, с. 258]. На рис. 2.9
°казана одна из таких схем.
100
Функциональные устройства на операционных усилителях
Рис. 2.9. Схема начальной установки интегратора
В режиме задания начальных условий контакты SA1 и SA2
находятся в положении 1, при этом конденсатор С через
резистор Re включается между выходом схемы ОУ и нулевой точкой
схемы; ОУ работает как масштабное звено, так как в обратной
связи у него резистор R„2, а на входе резистор RHl. На выходе
действует напряжение
^2
Е/.
Л0 = -^-аЕ0,
^1
или при i?„i= RK2 получаем
^вь,х (0 = -<*£<, ■
Это напряжение заряжает конденсатор С. Постоянная
времени цепи заряда небольшая из-за малости величины гвьк ОУ-
Переключатель SA3 задает знак начального уровня. В позиции 2
ключей SA1 и SA2 конденсатор включается в цепь обратной
связи, а на вход подключается резистор R, то есть создаётся
типовая схема интегратора. Резистор Л0с = 0,1 — 1 МОм служит для
сохранения цепи обратной связи в момент переключения
ключей SAI и SA2. Если цепь обратной связи разрывается, то при
больших Ку может измениться потенциал на выходе схемы.
Когда требуется определить напряжение, равное интегралу
от алгебраической суммы нескольких напряжений, можно
выбрать один из двух способов: 1) построить вначале многовходо-
вый сумматор и затем включить схему интегратора; 2) сразу
построить схему многовходового интегратора. Напряжение на вы-
Пинейные узлы математической обработки биологических сигналов 101
ходе интегросуммирующего усилителя должно соответствовать
формуле
Ц*х (0 = ~ JS^MO*- (2-33)
Схема интегратора, реализующего с достаточно большой
точностью выражение (2.33), приведена на рис. 2.10, а.
Для многовходового интегратора справедливы все
формулы, приведенные для одновходового интегратора.
Многовходовый интегрирующий ОУ строят и на основе
дифференциального усилителя. Простейшая схема на два входа
приведена на рис. 2.10, 6.
Учитывая условия уменьшения дрейфа нуля, стремятся
обеспечить равенство входных токов по инверсному и
неинверсному входу. Выполнение этого условия обеспечивается
равенством проводимости этих входов. Для схемы, приведенной
на рис. 2.10, б, условие равенства проводимости записывается
следующим образом:
—!— + R, =—— + R2.
РСХ PC2
При Ri = R2 = R и С] = С2 =С имеем
RC.
^A0 = ^z;)[UBx2(t)-UBX,(t)]dt. (2.34)
кс о
На рис. 2.10, в показана схема многовходового
дифференциального ОУ для выполнения операций интегрирования.
Обычно для этой схемы выбирают Су=Сг—С, а сопротивление
резисторов R, и г, - исходя из требуемых коэффициентов
интегрирования \IRjC и 1/г/С. Сумматорные проводимости по
инверсному и неинверсному входам
g'=Y(MR,);g+=f4(\lri) (2.35)
i=i i=i
Должны быть равны.
Если равенство не выполняется, то к инвертирующему или
неинвертирующему входу подключают сопротивление, соеди-
Ненное с землей, с тем расчетом, чтобы обеспечивалось выпол-
Нение равенства g+=g~.
102
Функциональные устройства на операционных усилителях
Ml£
R1
CW0
I
X
%ч
ю.
J .
UU0
щ-
Rn
1
ию
RI
0 Г
Ubx2
t/«l,
R2
R\
£/»
£/-
IT
0-
вх]
SO-
Sh-
R2
Rn
J±
£L
U\
0 [
xa_
,C
a)
iCl
or
6)
,C1
,C2
1
.£/■
*1
r
£/-
i
t/««(0
e)
Рис. 2.10. Схемы суммирующих интеграторов
Линейные узлы математической обработки биологических сигналов 103
Для построения интеграторов чаще всего используют ОУ
обшего назначения. Однако имеются и специализированные
схемы, например ASF2102.
К операционным усилителям, работающим в схемах
интеграторов, предъявляются повышенные требования к
дифференциальному коэффициенту усиления по напряжению, входному
току и напряжению смещения нуля, поскольку большой
входной ток и напряжение смещения могут вызвать существенный
дрейф выходного напряжения при отсутствии сигнала на входе.
2.1.4. Схемы дифференцирования
Простейшая схема для реализации операции
дифференцирования приведена на рис. 2.11, о.
R Ь-*
С/»
42-чМ
t/выхС)
two
Рис. 2.11. Схемы дифференцирующих усилителей
Для идеального ОУ при равенстве токов iy=i2 на основании
законов Кирхгоффа можно записать
[Cd[UBX(t)-ec(t)]/dt = fe(0- Е/выхС)]/Л;
\ec(t) = -UBbK(t)/Ky,
°ткуда получаем
104 Функциональные устройства на операционных усилителях
dU^W ЦшыкМКу+1)_ dU„(t) Г^
dt RC у Л К" 6)
Проинтегрировав выражение (2.36) относительно выход.
ного напряжения, получаем
вых Ку+\ dt Ку+\ dt '
Учитывая, что при Ky»l Ку/(Ку+1)~1, можно полагать, что
первый член выражения (2.37) соответствует операции
дифференцирования:
вых dt
а второй член определяет погрешность
RC <Я/ВЬ1Х(0
AU(t) = -
*:y + i dt
При больших Ку этой составляющей можно пренебречь.
Для определения времени, начиная с которого
погрешность в выходном напряжении лежит в заданных пределах,
решают дифференциальное уравнение (2.36).
При Ку »1 получаем
^„.х О = -ЛС^*Ф [1 - e-'{K^/RC]. (2.38)
dt
Абсолютная и относительная погрешности определяются
как
Дt/(0 - tW) 7 ^вых (0 = 'КС^~- е-'{КУ+1),КС, (2.39)
5С/(0= At/(° = е"(Х>+1)/ДС. (2.40)
^вь,хо(0
Из выражения (2.40) можно определить, через какое время
(?,) выходное напряжение достигнет своего значения с заданной
относительной погрешностью.
t^\n5UUOtlRC/(Ky + l). (2.41)
линейные узлы математической обработки биологических сигналов 105
Вывод уравнений погрешности производится аналогично
tomYi как это делалось для интегрирующих ОУ. Погрешность от
оазброса параметров R и С определяется как
AURC(t) = UBm0(t)-(AR/R ч- АС/С), (2.42)
погрешность от наличия в схеме дополнительного
сопротивления утечки (параллельного емкости С) -
AUy(t) = -UBX(t)-^, (2.43)
погрешность от дрейфа нуля ОУ -
ДЕ^СО = RC ■ de^/dt ± вдр(0, (2.44)
а погрешность от влияния входных токов
Д^(0 = Я,вх(0. (2-45)
Общую абсолютную статическую погрешность можно
определить как
Д С/ст (О = AURC (О ч- Шу (О + Д ияр (0 + Д U, (0. (2.46)
Динамические погрешности дифференцирующего ОУ (как
и динамические погрешности интегрирующего ОУ) можно
получить исходя из анализа передаточных функций и амплитудно-
фазочастотных характеристик, полученных из них. Без учета
малых параметров и при малых значениях постоянной времени
ОУ (ху=0) получаем выражение для передаточной функции
WJP)= K°RCP . (2.47)
д RCP + K0+l
Амплитудно-фазочастотная характеристика при P=ja>
имеет вид
W(ia>\- K°R2c2(i>2 , ;- K0(K0 + l)RCa
uU } (К0 ч-1) ч- R2CW J (К0 ч-1) + R2CW '
°ткуда ее амплитудно-частотная характеристика определяется
Сражением
а фазоч;
А(ы) = K0RCcy/yl(K0 ч-1)2 + R2CW , (2.48)
астотная характеристика - выражением
106 Функциональные устройства на операционных усилителях
АЖдО<в) = -_ _ °ч2 _ ч- ,° ' . (2.51)
<p(cB) = arctg-£—. (2.49)
Погрешность в передаточной функции определяется как
разность идеального и реального выражений:
AWA(F) = PRC- K°PRC + l = PRC PRC + l , (2.50)
K0 + l + PRC K0+l + PRC '
а погрешность амплитудно-фазочастотной характеристики -
K0R2cW . (K0+l) + R2cW
(K0 +l)2 + R2cW + J (K0 +l)2 + R2cW
Фазовые искажения выходного напряжения в зависимости
от частоты определяются с помощью выражения
Aq>(G>) = aictg[-l/(RC®)-l/(K0RC(i))-RCG>/K0]. (2.52)
Абсолютная амплитудная погрешность при /С0»1
**<»> = R»2% jR2C2<»\K20+R2C2c>)+Kl. (2.53)
A.q + К С со
Из выражения (2.53) следует, что амплитуда сигнала растет
с ростом частоты, что говорит о высокой чувствительности
схемы к высокочастотным помехам. Это создает ограничения к
практическому использованию таких схем. Для уменьшения
влияния шумов и улучшения стабильности схемы
последовательно с конденсатором включают небольшой резистор (см.
рис. 2.11, б). Передаточная функция такой схемы имеет вид
ЩР) = -7^/(Г2Р +1) =ивьа(Р)/ивх(Р), (2.54)
где T^R0C;T2=RlC.
Для этой схемы справедливо выражение
^^Ъ^Ш + Ъ^в*®.. (2.55)
ВЬ1Х ' dt 2 dt K
Второй член в уравнении (2.55) - погрешность
преобразования:
AU(t) = T2-
ВЫХ '
dt
Пинейные узлы математической обработки биологических сигналов
которая уменьшается с уменьшением Гг. В реальных схемах
иШУт компромисс между точностью дифференцирования и
уровнем помех.
2.2. Активные электрические фильтры
Наряду со схемами подавления синфазных помех
основным средством борьбы с помехами, сопровождающими
биологические сигналы, снимаемые с многообразных датчиков,
являются активные электрические фильтры. Кроме этого
фильтры часто используют для того, чтобы из широкого спектра
частот выделить те или иные частотные составляющие или их
комбинации.
2.2.1. Классификация и основные
характеристики фильтров
Фильтры можно классифицировать различными
способами. Один из наиболее распространенных принципов
классификации определяет меру того, какая часть диапазона частот,
поступивших на вход фильтра, попадает на его выход.
Фильтры нижних частот (ФНЧ) пропускают на выход все
частоты, начиная с нулевой и до некоторой заданной частоты,
называемой частотой среза fcv. Для частот выше частот среза
фильтры нижних частот ослабляют сигнал (рис. 2.12, а).
Диапазон частот от нуля ао/ср называют полосой пропускания. Частота
среза - это частота, при которой напряжение на выходе фильтра
падает до уровня 0,707 от напряжения в полосе пропускания U„
(т.е. падает на 3 дБ). Начиная с некоторой частоты^ ФНЧ
практически не пропускают (достаточно сильно с точки зрения
решаемой задачи подавляют) входной сигнал переменного тока.
Полоса частот, в которой входной сигнал практически не
пропускает на выход ФНЧ или, по крайней мере, может не учиты-
ваться при решении конкретных задач, называется полосой
подавления (или заграждения). Частота/в - это частота, при кото-
Рой выходное напряжение на ЗдБ выше, чем выходное напряже-
НИе в полосе подавления. Интервал частот orfCf) до ./в называют
еРеходным участком.
108 Функциональные устройства на операционных усилителях
0,707 С/п
Полоса пропускания \ Полоса подавления
Переходный участок
/
в) £/цых
0,707 С/п
Полоса подавления /» Уч> Полоса Верхний
\ пропускания частотный
Переходный участок предел схемы
f] 4pl f = If ■ f Лрг h f
I ./0 \/./cp] Jcp2 I
Полоса пропускания
г) UB№
0,707 U„
Полоса подавления
Рис. 2.12. Амплитудно-частотные характеристики
фильтров различных типов
Активные электрические фильтры
109
фильтр верхних частот (ФВЧ) ослабляет все частоты,
начиная от 0 и до частоты У^р, и пропускает все частоты выше/^,
по верхнего частотного предела используемой схемы ОУ (в
идеале - до бесконечности) (рис. 2.12, б).
Полосовой фильтр пропускает все частоты в полосе между
нижней и верхней частотой среза^р1 nfcp2. Все частоты ниже^р1 и
^р2 подавляются (рис. 2.12, в). Диапазоны от/j до^р1 и fcp2 jspfi
являются переходными участками. Геометрическое среднее частот
^pi и^Р2 называют средней центральной частотой /0 = ,//ср1 ■ /ср2 -
Режекторный полосовой фильтр (заграждения) ослабляет
все частоты между fcpi ufcp2 и пропускает все остальные частоты
(рис. 2.12, г). Эти фильтры используют чаще всего для
подавления сигнала помехи, например, сетевой помехи частотой 50 Гц.
При расчете фильтров и изображений их частотных
характеристик часто на практике используют логарифмический
масштаб. Коэффициент усиления в логарифмической шкале А
выражается в децибелах y4QiB)=20-Ig/4, где А - числовое значение
коэффициента усиления.
Шкала частот представляется в логарифмическом
масштабе и использует два варианта разметки. Октавой называется
изменение (увеличение или уменьшение) частоты вдвое.
Например, если частота увеличивается от 500 до 1000 Гц, говорят, что
она возрастает на одну октаву. Декадой называется
десятикратное увеличение или уменьшение частоты. Так, если частота
увеличивается от 100 до 1000 Гц, она возрастает на одну декаду. На
Рис. 2.13 показана частотная характеристика фильтра низких
частот, имеющего скорость спада 6 дБ/октаву или 40 дБ/декаду.
Среди недостатков активных фильтров отмечают то, что
°ни требуют наличия источников питания, а их рабочий
диапазон ограничивается частотными свойствами ОУ.
Дадим определения, характеризующие основные
параметры активных фильтров.
Полюсами фильтра с практической точки зрения называют
слагаемые наклона его частотной характеристики на
переходном участке, обусловленное наличием ЛС-цепей, используемых
Для формирования частотных характеристик.
110 Функциональные устройства на операционных усилителях
0,001 0,01 0,1 /сР 1 10 100 Ю00 /.кГц
Рис. 2.13. Частотная характеристика ФНЧ
Порядок фильтра - это число его полюсов. Каждый
полюс вносит в наклон переходного участка 6 дБ/октаву или
20 дБ/декаду. Число полюсов фильтра связывают также со
степенью полиномов передаточных функций фильтров.
Коэффициент затухания (а) определяет форму
характеристики фильтра на переходном участке и вид выброса
характеристики в полосе пропускания вблизи переходного процесса.
Таким образом, коэффициент затухания определяет форму
частотной характеристики фильтра, то есть его тип. На рис. 2.14
представлены частотные характеристики фильтров различных
типов с различным коэффициентом затухания.
1,дБ<
10
5 "
0 1
-5 "
-10"
-15"
-20"
-25"
-30"
-35"
-40"
^
^~4Г\4
] ^Л\\
VVtvv 1
/,кГ
'
Рис. 2.14. Частотные характеристики фильтров различных типов:
1 - фильтр Бесселя (а = 1,732); 2 - фильтр Баттерворта (а = 1,414);
3 - фильтр Чебышева с неравномерностью 1 дБ;
4 - то же с неравномерностью 3 дБ
Активные электрические фильтры
111
Неравномерность связывают с величиной отклонений
(колебаний) вершины логарифмической амплитудно-частотной ха-
пактеристики в полосе его пропускания (AL).
Добротность (Q) связывает среднюю частоту полосы
пропускания и её ширину на уровне 3 дБ (рис. 2.15). Численно
добротность определяют как
/о
Q-
h
_ Щг
■Л (/г-/0'
(2.56)
где -JfiK ~ средняя частота;/] af2 - соответственно нижняя и
верхняя частота среза на уровне 3 дБ от Кп в полосе пропускания.
Ки'
г
0,8-
0,707-
0,6-
о,4;
0,2]
i
o,i
0|40',60',8/
Л, дБ
\ve=2
W \*
их6"5
уг\е=1о
о L21,4l'6b8 2 /]
Рис. 2.15. Основные характеристики фильтров
для различных добротностей Q
Для активных фильтров Q=l/a. Коэффициент усиления в
полосе пропускания активного фильтра определяют как
*п=С/вьк/£/вх.
Чувствительность (S) определяется как выраженное в
процентах изменение характеристики схемы при частичном
изменении одной из независимых переменных в схеме.
Чувствительность данного характеристического параметра, например,
избирательности Q активного фильтра относительно частичного
изменения параметра элементов схемы фильтра определяется в
СледуЮщем
виде:
112 Функциональные устройства на операционных усилителях
&
8Q/Q X 8Q
х дХ/Х 0 8Х'
(2.57)
где X может быть любым из параметров пассивных элементов
или усилителя.
Например, запись 5,Л1(ю0)=-0,5 (где со0=2л/о, a R^ -
сопротивление активного фильтра) показывает, что ou0 уменьшается
на 0,5%, если Rt увеличивается на 1%.
В таблице 2.1 приведены основные характеристики
фильтров второго порядка различного типа.
Таблица 2.1
Характеристики фильтров второго порядка
Тип фильтра
Баттерворта
Бесселя
Чебышева:
неравномерность 0,5 дБ
неравномерность 1 дБ
неравномерность 2 дБ
неравномерность 3 дБ
Отношение /3ол//ср
1,414
1,732
1,578
1,059
0,886
0,766
1,00
0,785
1,390
1,218
1,074
1,000
Фильтр Баттерворта характеризуется тем, что его
амплитудно-частотная характеристика в пределах полосы
пропускания близка к равномерной. Поэтому фильтр Баттерворта
используют тогда, когда желательно иметь постоянный
коэффициент усиления для всех частот полосы пропускания. Данный
фильтр даёт нелинейную фазочастотную характеристику.
Амплитудно-частотная характеристика фильтра Чебышева
имеет волнообразные зубцы в полосе пропускания и равномерна
в полосе подавления. Количество зубцов в таких фильтрах тем
больше, чем больше его порядок. Амплитуда этих зубцов может
быть задана в процессе проектирования. Фильтр Чебышева
обеспечивает на переходном участке крутые характеристики.
Фазочастотная характеристика фильтра Чебышева ещё более
нелинейна, чем у фильтра Баттерворта. Наклон характеристики
у фильтра Чебышева может превышать 6 дБ/октаву на один
полюс. Зависимость ослабления (дБ) на переходном участке для
этого фильтра от частоты имеет вид
Активные электрические фильтры
113
OS = 20 lg E + 6(и -1) + 20« Ig(to/cocp ), (2.58)
где п - порядок фильтра; {оср=2л£р;
Е - постоянная, принимающая значение от 0 до 1 и
характеризующая неравномерность характеристики в полосе пропускания.
Фильтры Бесселя обладают линейной фазовой
характеристикой. В отличие от фильтров Баттерворта и Чебышева эти
фильтры практически не дают выбросов при подаче на вход
ступенчатых сигналов, поэтому их применяют для фильтрации
прямоугольных импульсов без изменения их формы. Фильтры
Бесселя дают наклон меньше 6 дБ/октаву. Частота среза фильтра
Бесселя определяется как частота, на которой запаздывание по
фазе © равно половине запаздывания, максимально возможной
для данного фильтра:
®(/сР) = ©шах/2 = (ия/2)/2 рад. (2.59)
Выбирая типы и характеристики фильтров можно
обеспечить требуемые преобразования биомедицинских сигналов в
частотной области, например, с целью подавления помех
различной природы.
2.2.2. Типовые схемы активных фильтров
Схема одного из популярных фильтров нижних частот
второго порядка Саллена - Кея представлена на рис. 2.16, а.
Каждая из ЯС-цепей вносит наклон 6 дБ/октаву на
переходном участке. Сопротивления RA и RB определяют
коэффициент затухания. Характеристика вблизи края полосы пропускания
формируется за счет обратной связи через конденсатор О. Если
R\~R2 и Ci=C2, то методика расчета фильтра достаточна проста.
Расчет фильтра начинается с выбора его типа и
определения величины/^.
1. Из таблицы 2.1 для выбранного типа фильтра выбираем
°тношение/здБУ£р=^ и определяем величинуУср^/здв/^-
2. Выбираем величину С=СХ=С2 и рассчитываем величину
R из соотношения/ср=1/(27гДС), R=RX=R2.
Возможно пп. 1 и 2 придется повторить, чтобы величина R
лежала в разумных пределах.
114 Функциональные устройства на операционных усилителях
3. Из таблицы 2.1 находим величину коэффициента
затухания а.
4. Выбираем подходящее значение RA, которое удобно
выбирать равным R, и находим величину RB=(2-a.)RA.
5. Находим коэффициент усиления в полосе пропускания
по формуле Ka=RBIRA+\.
Um
1
KL
ТП^тги.
г
Рис. 2.16. Фильтры Саллена - Кея низких (а) и верхних (б) частот
Схема фильтра верхних частот Саллена - Кея с равными
компонентами приведена на рис. 2.16, б. Каждая из ЯС-цепей
вносит наклон по 6 дБ/октаву. Характеристика вблизи края
полосы пропускания формируется за счет обратной связи через
сопротивление R\. При расчёте параметров фильтра, как и для
фильтра нижних частот, с помощью таблицы 2.1 находится
величина fcpSn^d. Полагая, что С=СХ=С2 и R=Ri=R2, выбираем
величину С из соотношенияУсР=1/(2л/?С). Из таблицы 2.1 находим
величину а, соответствующую выбранному типу фильтра.
Задавая величину RA, находим Rb'- Rb=(2-o)Ra.
По формуле K„=Rb/Ra+1 находим коэффициент усиления в
полосе пропускания.
Активные электрические фильтры Ц5^
Оба фильтра (верхних и нижних частот) Саллена - Кея
настраивают следующим образом:
1. Величина/^ устанавливается совместным изменением
G и Съ R\ и ^2-
2. Величина а устанавливается изменением Rb-
Схема простого и хорошо работающего полосового
фильтра с умеренными добротностями (имеет Q порядка 10)
приведена на рис. 2.17, а. В ней часть характеристики, соответствующая
фильтру низких частот, обеспечивается элементами R\ CI, a
часть характеристики, соответствующая фильтру верхних
частот, обеспечивается элементами R2, С2. Параллельное
включение R3, С1 в цепи обратной связи обеспечивает положение
максимума АЧХ вблизи частоты f0. Сопротивление R2 -
необязательный элемент, оно служит для увеличения RBX и обеспечивает
возможность задания коэффициента усиления в полосе
пропускания.
..С1
а)
U.
RI
-С
1
С2
R3
Jr
R2
2Г
Ah
R4
Un
1
Г
Рис. 2.17. Схемы полосовых фильтров
Процедура расчета фильтра по схеме, приведенной на
РИс- 2.17, а, без сопротивления R2 состоит из следующих этапов.
116 Функциональные устройства на операционных усилителях
1. Выбираются значения частот среза/1 uf2 и находятся
величины
/о=7Л/Ги0=/о/(/2-/1).
Если 0<15, оставляется схема рис. 2.17, о; если Q>\5, то
выбирается более сложная схема, например, схема
биквадратного фильтра (рис. 2.17, б).
2. Выбирается тип ОУ, такой, что его коэффициент
усиления должен удовлетворять соотношению A>2Q1.
3. Полагаем С\-С2=С и находим
Rx=-^foQCRxn Ri=~nf0C.
4. Рассчитываем коэффициент усиления в полосе
пропускания: К„ = 2Q1.
Процедура расчета схемы с резистором R2 отличается тем,
что после определения параметров/), Q и С выбирается
желаемое значение К„ из условия K„<2Q2.
Расчет резисторов схемы производится по формулам
„ Л, = Q/(2nf0CKn);R2 =Q/[2nf0C(2Q2-Kn)];R3 = 2Q/(2nf0C).
Далее проверяется значение Ka-R^2R].
Настройка схемы осуществляется следующим образом:
l)fo устанавливается с помощью одновременного
изменения С\ и С2 или R\ и R2;
2) Q устанавливается с помощью изменения величин
отношения R3/R\, причем величина произведения Rx и R3 должна
оставаться постоянной;
3) коэффициент усиления в полосе пропускания
устанавливается с помощью резистора R2.
Биквадратный (биквадный) фильтр - это стабильный
фильтр, позволяющий в случае использования его в качестве
полосового достигать добротности, превышающие 100. Он
легко соединяется в последовательные схемы для получения
многокаскадных фильтров. Одним из свойств этого фильтра
является неизменность его полосы пропускания при изменении
средней частоты, так что в настраиваемых биквадратных фильтрах
добротность увеличивается с ростом частоты.
Активные электрические фильтры 117
Схема биквадратного полосового фильтра (см. рис. 2.17, б)
состоит из двух интеграторов, включенных через
инвертирующий усилитель. Если R\=R2, то K„=RK/R]. Работает биквадратный
фильтр следующим образом. Суммирующий интегратор А]
вычитает из входного напряжения выходной сигнал фильтра
низких частот (они сдвинуты по фазе на 180°). На частотах,
лежащих ниже переходного участка, эти сигналы взаимно
уничтожаются и выходной сигнал отсутствует. Когда частота достигает
переходного участка, выходной сигнал больше не может
компенсировать входной сигнал, поэтому на выходе биквадратного
фильтра появится ненулевой сигнал. На частотах выше f0
суммарный спад частотной характеристики двух последовательно
соединенных интеграторов обеспечивает ослабление выходного
сигнала, и таким образом формируется характеристика
полосового фильтра.
Процедура расчета биквадратного фильтра состоит из
следующих этапов.
1. Выбираются/!,^ и Кп. Вычисляются^ и Q: fQ = yjfi/г ,
2. Вычисляется параметр о: а = Q/Kn.
3. Вычисляются /?, и RK: Ri = о7(2л/0С); RK, = g/(2jt/0C).
4. Полагаем, что **Ы*Г*гК, и вычисляем R: R=\nf0C.
5. Рассчитываем Лкомп = RK\\ Rx \\ Rr
Настройка схемы производится в следующей
последовательности:
1) устанавливается/£> изменением R2;
2) устанавливается Q изменением RK;
3) устанавливается К„ изменением R\.
Если нужен фильтр с числом полюсов больше двух, то его
егк° можно построить, соединив последовательно несколько
Фильтров более низкого порядка. Последовательное соединение
Фильтров первого и второго порядков могут дать схемы фильт-
Ров любого порядка.
Фильтры нечетных порядков обычно строят из фильтра
Рвого порядка, стоящего на входе нужного числа фильтров
118 Функциональные устройства на операционных усилителях
второго порядка. Фильтры четных порядков строятся из л/2
каскадов второго порядка. Следует иметь в виду, что каскадное
соединение фильтров снижает его полосу пропускания.
Неравномерность характеристики многокаскадного фильтра выше
неравномерности каждого из фильтров, поскольку K=KXK2=AX+A2.
Для получения наилучших результатов при
конструировании многокаскадных фильтров оказывается необходимым
использовать каскады с неодинаковыми значениями a nfcp, если фильтр
не является фильтром Баттерворта При этом можно использовать
одни и те же схемы, но с разными параметрами. Если ширина
полосы пропускания полосового фильтра больше, чем 50% от jo,
рекомендуется строить его из двух фильтров верхних и нижних
частот, соединив эти фильтры каскадно. Примеры реализации
фильтров первого порядка приведены на рис. 2.18.
«)
т
ив
ч:
i
a
,ci
R2
\А\
.и*
Рис. 2.18. Типовые схемы фильтров первого порядка:
а - ФВЧ (/ср=1/(2л RC); а=1. Ас=1); б — ФНЧ (/Ьр=1/2л RC; а=1; /с=1);
в - полосовой фильтр (а=1; f,=1/(2n R,d); f2=1l(2n R2C2)\ K=f?2/f?i)
Активные электрические фильтры
119
Используя различные сочетания схем фильтров, можно
решать широкий спектр задач, связанных с преобразованием
биомедицинских сигналов в частотной области.
2.2.3. Методы расчета фильтров на основе анализа
передаточных функций
В практических приложениях для расчета активных
фильтров широко используют амплитудно-частотные (АЧХ) и фазо-
частотные характеристики (ФЧХ) фильтров. Причем
аппроксимация их характеристик сводится к выбору таких
коэффициентов полиномов передаточных функций, которые в том
или ином смысле обеспечивают приближение к желаемым АЧХ
и ФЧХ. В фильтре Баттерворта нормированная АЧХ имеет вид
\A(w)\ = l/ ylw2"+\\ (2.60)
w=(a /cocp;
где w - относительная (безразмерная) частота;
соср - частота среза;
п - порядок фильтра.
Все производные функции (2.60) от первой до (2/1-1)
включительно в точке W=0 равны нулю. Поэтому фильтр Баттерворта
называют фильтром с максимально плоской АЧХ.
В фильтре Чебышева аппроксимирующая функция
выбирается так, чтобы в полосе пропускания фильтра получить
отклонение его АЧХ от идеальной, не превышающее некоторой
заданной величины. За пределами полосы пропускания фильтр
Должен иметь возможно меньший коэффициент передачи. При
таких исходных условиях наилучшей оказывается
аппроксимация вида
МИ = 1/
(2.61)
гДе е - некоторый постоянный коэффициент, определяющий
неравномерность АЧХ фильтра в полосе пропускания;
^п - полином Чебышева первого рода п порядка.
120 Функциональные устройства на операционных усилителях
В полосе пропускания квадрат АЧХ H(w)|2 фильтра
Чебышева колеблется в диапазоне между уровнями 1 и 1/^(1+8?,
причем число таких колебаний тем больше, чем выше порядок
фильтра. Амплитуда этих колебаний одинакова.
В инверсном фильтре Чебышева АЧХ монотонно
изменяется в полосе пропускания и пульсирует в полосе заграждения.
Для этого фильтра
\Awf=Jlp^L.. (2.62)
В полосе заграждения И(со)| пульсирует в диапазоне [0;
е2/(1+е2)].
В общем виде передаточные функции фильтров могут
быть разложены на сомножители 2-го и 1-го порядка. В случае
четного п передаточная функция фильтров низких частот, так
называемых полиноминальных фильтров (Баттерворта,
Чебышева, Бесселя), имеет вид
л/2 ССО2
W{P) = T\—2 '-* -. (2.63)
Инверсный фильтр Чебышева и эллиптический фильтр,
которые относят к неполиноминальным фильтрам для фильтров
нижних частот, имеют передаточные функции вида
^2 (Р2+а(ю2)с,а,
W(P) = П-i ' cpJ ' ' , (2.64)
%fP2+Pb^cp+c^2cp
где a,, bt, с, - коэффициенты.
Значения коэффициентов a,., bt, с, для наиболее распрО'
страненных практических схем приведены в таблице 2.2.
Коэффициенты ah b„ с, (см. табл. 2.2) рассчитаны так, что
на частоте соср АЧХ фильтров Баттерворта и инверсного
фильтра Чебышева имеют спад около -3 дБ (уменьшаются до уровня
l/V2). Для фильтров Чебышева и эллиптического фильтр3
АЧХ в полосе пропускания пульсируют между уровням*1
1/(1091/20)и1.
Активные электрические фильтры
121
Таблица 2.2
Таблица расчетных коэффициентов
1—■
Тип фильтра
Баттерворта
Чебышева
^,=0,5 дБ)
Чебышева
toi=l ДБ)
Чебышева
(9i=2 дБ)
Инверсный
Чебышева
(<72=-40 дБ)
Эллиптический
(<7г=2дБ;
<72=-40дБ)
Бесселя
с
Ь
с
Ь
с
Ь
с
a
Ь
с
a
Ь
с
a
Ь
Порядок фильтра
2
4 '--
6
Номер звена
1
1,4142
1,0000
1,4256
1,5162
1,0977
1,1025
0,8038
0,8231
100,99
1,4141
1,5214
65,875
0,7987
0,8293
3,0000
3,0000
1
0,7654
1,0000
0,3507
1,0635
0,2791
0,9865
0,2098
0,9287
4,7485
0,6892
0,4478
2,2207
0,5545
0,2991
5,7924
9,1401
2
1,8478
1,0000
0,8467
0,3564
0,6737
0,2794
0,5064
0,2216
27,676
2,0315
1,0514
10,214
0,1518
0,9598
4,2076
11,488
1
0,5176
1,0000
0,1553
1,0230
0,1244
0,9907
0,0939
0,9660
2,1487
0,3791
0,3176
1,5696
0,4905
0,2315
5,0319
26,514
2
1.4142
1,0000
0,1243
0,5900
0,3398
0,5577
0,2567
0,5329
4,0094
1,3338
0,7965
7,6393
0,1704
0,7759
8,4967
18,801
3
1,9319
1,0000
0,5796
0,1570
0,4641
0,1247
0,3506
0,0999
29,927
2,5582
1,0142
1,1786
0,0317
0,9905
7,4714
20,853
Примечание. Обозначено: qt - уровень минимумов пульсации АЧХ
в полосе пропускания (уровень максимумов принят за 0 дБ); д2 — уровень
максимумов пульсации АЧХ в полосе заграждения (между этими
максимумами АЧХ спадает до нуля); уровень —40 дБ соответствует J %.
Для фильтра типа Саллена - Кея (см. рис. 2.16, а)
передаточная функция имеет вид
W(JP) =
1 + PC2(/?, +R2)~PClRlRB/RA+P2ClC2R,R2
(2.65)
Для фильтра, изображенного на рис. 2.19 и называемого
СтРУктурой Рауха:
W(P) =
R2/R,
\ + PC2(R2+R3+ R^R, / Я,) - P^C^R,
(2.66)
Функциональные устройстве на операционных усилителях
Рис. 2.19. Фильтр со структурой Рауха
Если сравнивать выражения (2.65) и (2.66) с выражениями
(2.63) и (2.64), можно сделать вывод о том, что схемы,
представленные на рис. 2.16 и 2.19, пригодны лишь для реализации
полиноминальных фильтров (Баттерворта, Чебышева и Бесселя).
Более универсальным фильтром является биквадратный
фильтр, один из вариантов схемы которого приведен на
рис. 2.20. Для этой схемы
UJ.F)
-^ + РС.
*Л
Л»
\*>
-Pqc^Be
! , PC&R& , P2CiC2R3R5R6
R,
-,(2.67)
(*Л)
R,
WJP) =
r^rAk_rX\(x+PCir2)
ri ^Л^? дАу
\ + PC2RARk + P^CfzR2R^
(2.68)
ОВД
иьЪ!я.
Рис. 2.20. Вариант схемы биквадратного фильтра
Активные электрические фильтры
123
Если принять i?]i?3=^2i?7, то для выражения (2.67) в
качеству Х1 можно использовать выходное напряжение звена
эллиптического фильтра или инверсного фильтра Чебышева. Если же
р=^8=°°, то для выражения (2.68) С/вшсг соответствует звену
второго порядка.
Биквадратный фильтр менее чувствителен к неточности
элементов и проще в настройке. Сопоставляя приведенные
формулы, нетрудно вывести формулы для расчета сопротивлений и
емкостей звеньев второго порядка.
Исходными данными являются частота среза фильтра
^р=соср/(2п) и коэффициент усиления звена в полосе пропускания
А. Расчет начинается с выбора емкости Сь причем
рекомендуется Ci=10^cP, где_/сР - частота среза, Гц.
Для схемы, приведенной на рис. 2.16, а, определяются С2,
R] и Л2 (значения а, Ь, с берутся из табл. 2.2):
С2<[А-1+Ь2/(4с)]Си
1
*>
(7i/cpC, )[b + Л/й2+4с(^-1)-4сС2/С1]'
R,=
1
2 cC]C2R1(2nfcp)2'
Если А=\, то i<U=oo; /?в=0; если А>\, то RA=A(Ri+R2 )/(A-\);
RirA(Rl+R2).
Для схемы, изображенной на рис. 2.19, порядок расчета
иной:
*2=-
С,~10//сР;
{\А
C2<i2C,/[4c(H|+l)];
b + jb2-4c(\A\-l)C2/Cx
Лз=1/[сС1С2(271/ср)2Л2].
Для биквадратного полиноминального фильтра (см. рис. 2.20)
Годным напряжением £/вых2:
124 Функциональные устройства на операционных усилителях
R-T со; Д8=со; С,=10//ср(мкФ); С2=СХ; R4^l/(2nfcpCl);
RjtRa^Rs, R^RaUAc); R2=RJb; R^RJc.
Для биквадратного неполиноминального фильтра с вы
ходным напряжением иъык\'-
С,=10//ср; С2=С,; Rx=al(Abc-2nfcvCx); R2=l/(b-2ifcpC]); R4=R}-
Л3=1/(27с/срС,); Rs^RJC; Дб=1/(2я/срС1%£); R^aR^Ac);
Rs=\/(2nfcpC2yfc).
Передаточные функции фильтров верхних частот можно
получить, воспользовавшись выражениями (2.63) и (2.64), если
произвести замену Р на со IP. Для неполиноминальных ФВЧ
характер передаточной функции сохраняется, изменяются лишь её
коэффициенты. Таким образом, можно пользоваться теми же
схемами, но с другими сопротивлениями и емкостями.
Для поли номинальных ФВЧ меняется характер
передаточных функций. Во всех случаях параметры ФВЧ могут быть
рассчитаны по данным таблицы 2.2 на заданной частоте среза
2.2.4. Подавление помех активными фильтрами
Эффективным способом подавления продольных помех,
как было показано выше, является применение
дифференциальных схем подавления синфазных помех и применение
гальванических развязок. Одним из эффективных способов подавления
дифференциальных помех, если спектры мощности помех и
сигналов не совпадают, является фильтрация сигналов.
Для оценки степени «засоренности» полезного сигнала п°'
мехами используют известное отношение «сигнал - ШУ*1*
(С/Ш). Через это отношение удобно, например, выразить
степень улучшения качества сигнала дифференциальным усилит**
лем с высоким коэффициентом ослабления синфазного сигнал3.
Если отношение С/Ш на входе усилителя обозначить как *¥BV T
на выходе это соотношение будет определяться как
ч> - ч> г2 (20
где Kqcq - коэффициент ослабления синфазного сигнал3'
-Косс~-^пс/^псс;
Активные электрические фильтры 125
£пг - коэффициент передачи полезного сигнала;
К ее " коэффициент передачи синфазного сигнала помехи.
В обшем случае как полезный сигнал,, так и сигнал помехи
ясно считать случайными функциями времени, свойства кото-
задаются вероятностными характеристиками. Часто бывают
известны две из них: интенсивность сигнала (задаваемая либо
среднеквадратичным значением, либо среднеквадратичной
погрешностью) и граничная частота спектра сигнала согр,
определяемая полосой частот, в которой сосредоточена большая часть
мощности сигнала.
На рис. 2.21 приведен пример спектрального состава
полезного Sc(a>) и шумового SjXco) сигналов с граничными
частотами спектра оа^с и согрп соответственно.
Рис. 2.21. Подавление помех фильтрами
Если на выходе устройства, несущего полезный сигнал и
сигнал-помеху, поставить фильтр нижних частот с частотной
характеристикой Аф(со), которая согласована со спектром полез-
ОГо сигнала (пропускает без подавления полезный сигнал), то
я этого примера нетрудно видеть, что значительная часть сиг-
ада помехи будет подавлена. Отношение С/Ш на выходе
ЬтРа можно оценить по приближенной формуле
^вь,х=0.5^у(согр.п/соср), (2-70)
гДе ш
ocv ~ отношение С/Ш на выходе усилителя, после которого
-^твляется фильтрация.
Пом обеспечить реализацию комплексного подавления
Хи (нормализацию сигнала) с помощью схемы синфазного
устройства на операционных усилителях
подавления и схемы фильтрации, то совместная запись
выражений (2.69) и (2.70) позволяет получить соотношения
1|/ф/1|/вх =0,5(швых/Юср)К£сс. (2.71)
Последнее соотношение позволяет оценить общее
повышение отношения С/Ш схемой нормализации.
При оценке реально достижимого отношения С/Ш для
рассматриваемого случая необходимо учитывать несколько
взаимно противоречивых факторов. Понижение частоты среза
фильтра низких частот приводит к улучшению подавления
помех, но нельзя юср выбирать ниже граничной частоты спектра
полезного сигнала, чтобы не искажать полезную информацию.
С другой стороны, любой ФНЧ - это инерционная
динамическая система, и с понижением юср ее инерционность растёт. Эти
соображения необходимо учитывать при реализации любых
фильтров. Кроме того, учитывая качество сигнала, необходимо
иметь в виду, что нет смысла «давить» шумы существенно
ниже, чем погрешность регистрации полезного сигнала.
В книге [14, с. 279] приведена практическая схема режек-
торного фильтра с высокой добротностью, которая
рекомендуется для подавления сетевой помехи частотой 50 Гц (рис. 2.22).
Для этой схемы частота режекции определяется выражением
fp=l/2nRC, откуда могут быть рассчитаны значения Яи С
мостовой схемы фильтра.
С/.:
Добротность
Рис. 2.22. Режекторный фильтр подавления сетевой помехи
Активные электрические фильтры
127
На рис. 2.23 приведены частотные характеристики
фильтра с регулируемой добротностью.
К,'
1 '
ид •
0,01"
L
—1—1—1—1—1
^
(
(>=io
е=з
—1—1—1—1 ►
10 30 50 70 90 /Гц
Рис. 2.23. Частотные характеристики режекторного фильтра
Учитывая высокую степень «зашумленности»
биологических сигналов задача подавления помех при проектировании
приборов медицинского назначения является весьма
актуальной, а часто и обязательной операцией, от которой зависит
качество принятия врачебных решений
2.3. Линейные преобразователи сигналов
В случаях, когда по условию задачи требуется достаточно
точно измерить малые токи (например, при построении цифро-
аналоговых преобразователей), используют источники тока,
Управляемые напряжением. Эти источники имеют второе
название - преобразователи «ток - напряжение» (условное
обозначение приведено на рис. 2.24, а). В идеальных преобразователях
такого типа входные и выходные сопротивления равны нулю.
Для преобразования слабых токов (рис. 2.24, б), втекающих в
общую точку, используются простейшие схемы, входное
сопротивление которых при конечных величинах Ки определяется
Сражением
R - * R
\ + к„
К„
Выходное сопротивление определяется как
128 Функциональные устройства на операционных усилителях
Кы
R + K
где гВ1
выходное сопротивление ОУ;
i?„ - сопротивление источника входного сигнала.
In
I
АХ
-О
б)
Рис. 2.24. Условное обозначение и электрическая схема
преобразователя «ток - напряжение»
Для преобразования и измерения относительно болыш
токов используют более сложные схемы, например, с
применением специальных микросхем (рис. 2.25). Такие схемы
используются для измерения тока 1Н, протекающего через сопротивле
ние нагрузки R4, и выполнены на преобразователе «ток -
напряжение» типа INA 168.
Рис. 2.25. Схема измерителя тока
Для схемы, приведенной на рис. 2.25, с учетом идеаЛь"
сти ОУ, малого тока базы транзистора VTX и равенства соЯР
тивлений R\ta R2 выполняется соотношение
U..
Я,
Линейные преобразователи сигналов
129
измерителях сопротивлений некоторых типов терапев-
ой аппаратуры требуется обеспечивать ток нагрузки неза-
ТИЧССК0 от выходного напряжения, а величину тока определять
В"СИчиной входного управляющего напряжения. Такие схемы
ВСЛ шают преобразователями «напряжение - ток» (рис. 2.26, а).
"реальном варианте преобразователи этого класса имеют бес-
онечно большие входные и выходные сопротивления
/2 R1
1
-о
А1
R1
ц.
J*
ш
а)
б)
«)
Рис. 2.26. Условное обозначение (а) и варианты источников тока
с нагрузкой в цепи обратной связи (б, в)
Варианты схем преобразователей «напряжение - ток»,
выполненные с использованием ОУ, включенных по инверсной и
неинверсной схемам, представлены на рис. 2.26, бив
соответственно. В обоих вариантах сопротивление нагрузки R2, по
которому течет ток нагрузки 12, включено в цепь обратной связи.
Выходные сопротивления (между выходом А\ и его инверсным
входом) определяются выражением
Схему рис. 2.26, б отличает то, что при использовании ОУ
с большим выходным током она может управлять мощной на-
гРУзкой, например электродвигателем.
На рис. 2.27 приведена схема преобразователя «напряже-
НИе ~ ток с заземленной нагрузкой» (схема Хоуленда).
в этой схеме роль нагрузки выполняет резистор R6- При
Условии выполнения соотношений Ri=R3, #2=^4 выходной ток
РеДеляется выражением
*г =
-+-
1
ЯД Д,+Д2
-с/.
130 Функциональные устройства на операционных усилителях
R2
1-чМ
R\
Рис. 2.27. Структурная электрическая схема источника тока
с заземленной нагрузкой
К классу линейных преобразователей аналоговых сигналов
относят схемы инверторов сопротивлений, используемые для
компенсации потерь и повышения добротности колебательных
контуров, а также гираторы для физического или полунатурного
моделирования катушек индуктивности до некоторых сотен
генри. Со схемотехникой этих и других типов линейных
преобразователей можно ознакомиться в специальной литературе [3,
с. 77-111].
2.4. Нелинейные преобразователи
аналоговых сигналов
В задачах обработки биомедицинских сигналов и
формирования различных видов воздействия на биообъекты часто
приходится пользоваться нелинейными преобразователями вида
^Вь.х ~/WbX)- Такие преобразования реализуются двумя
способами: 1) на основе использования нелинейных физических
эффектов; 2) с помощью различных методов аппроксимации.
2.4.1. Сравнивающие устройства (компараторы)
Аналоговые компараторы предназначены для сравнения
величин двух аналоговых сигналов в соответствии с соотношением
п J^Lx при £/„-£„ >0;
вых 1 п
[/?..„ при £/вх-£оп<0,
(2.72)
'ВЫХ "Г" '-' ВХ *-Ч)П
где UBX — анализируемый входной сигнал;
Еоп — опорный сигнал (уровень сравнения);
Нелинейные преобразователи аналоговых сигналов
131
у! - уровень выходного сигнала при превышении
входного сигнала над опорным;
U0 - уровень выходного сигнала при превышении
опорного сигнала над входным.
Таким образом, компаратор по своему выходному сигналу
имеет два состояния, что позволяет рассматривать его как
элемент перехода от аналоговых к цифровым сигналам.
Аналоговые компараторы строятся на операционных
усилителях или реализуются как самостоятельные изделия.
Работа компаратора, построенного на ОУ, основана на том,
что из-за большого коэффициента усиления при разорванной
цепи обратной связи даже небольшая разность потенциалов на
его прямом и инверсном входах приводит к переходу ОУ в
режим насыщения с напряжением, близким к уровню питающего
напряжения. Для ограничения уровня выходного напряжения
могут быть использованы стабилитроны (рис. 2.28, а).
Стабилитрон ограничивает уровень выходного сигнала на
уровне напряжения стабилизации С/вых = UCT и на уровне своего
прямого напряжения С/°ых = U* (рис. 2.28, б).
Изменение полярности напряжения С/ВЬ1Х происходит при
переходе через нуль напряжения £/„, то есть при C/BX=f/on(/?i/i?2)-
<-хемы с аналогичными характеристиками могут быть использо-
^ны для фиксации момента достижения входным сигналом
заданного уровня (порога). На рис. 2.28, в показана временная
Диаграмма работы компаратора, настроенного на величину
порогового напряжения Е„.
При использовании сумматора на входе компаратора мож-
Реализовать схемы линейного порогового элемента, которые
Роко используются, например, при реализации функции ней-
ного элемента в теории распознавания образов (рис. 2.28, г).
схема воспроизводит функцию вида:
Г = яеп(|>Л-зД (2.73)
3 М| ~ весовые коэффициенты, задаваемые переменными
ребрами.
132 Функциональные устройства на операционных усилителях
X,.
Х-,
Х„т
-Го 1"
1*
^ВЫХ 4 к
и„
if
En
-й-
t/B
I
Г1
г) д)
Рис. 2.28. Варианты схем реализации компараторов
Сравнивающие устройства можно выполнять на ОУ бе3"
ратной связи, используя свойства выходных каскадов вхоД^
режим насыщения (рис. 2.28, д). Эти схемы обладают хор0
Нелинейные преобразователи аналоговых сигналов 133
остью и низким быстродействием из-за того, что необходимо
Т a на восстановление транзисторов выходных каскадов. Общее
время п«
й стродействие ухудшается еще и инерционностью стабилитрона.
Приведенные схемы (см. рис. 2.28),обладают низкой поме-
озащищенностью, поскольку наличие помехи в районе порога
срабатывания может приводить к ложным срабатываниям. Для
повышения помехозащищенности устройств сравнения или для
образования двух порогов переключения вводят цепь
положительной обратной связи (рис. 2.29, а). Цепь обратной связи
образует в передаточной функции ОУ гистерезис шириной
д£ = ЕЛ-Еа1. Наличие указанной связи позволяет сохранять
одно из двух устойчивых состояний [/вы* или 1ГВЬЖ, даже если
[/вх=0. Пороги переключения £п] и Е^ легко найти из условия
равенства напряжений Ua и U„ (рис. 2.29, б), пренебрегая,
например, влиянием входных токов:
■■UL
\ + RJR2
\ + RJR3
+ £..
Я„.
:и-_±±ЫА+Е_
i+уд
с 1 + Я4/Яз
1 + RJR,
с)
А
R2
А
>0;
<0;
-и:
■■ 2UL
vL.=UL
l + Rj/Rj
l + R4/R3
с)
U «1
WBXI r—
—-и-
'«1 Г
б)
£П.
1 к
Д£с
1 "£п2.
~~^-~-
(-^ вых
и„
Рис. 2.29. Компаратор с петлвй гистерезиса
134 Функциональные устройства на операционных усилителях
Если включить ограничивающий диод (см. рис. 2.29
штриховая линия), то
' О,
Jnl
<£/„
я, „л+у/г2
/г,
■-£/
i+VV
где
£/ - падение напряжения на открытом диоде.
Промышленность выпускает различные типы интеграль-
ных компараторов, которые представляют собой усилители
постоянного тока с большим усилением, малым дрейфом, малым
смещением нуля, большим коэффициентом ослабления
синфазного сигнала.
Компаратор обладает логическим (двоичным) выходом, а
его входной каскад должен выдерживать большие синфазные и
дифференциальные напряжения на входах, не попадая в режим
насыщения, что позволяет обеспечивать повышенное
быстродействие.
Условие малой чувствительности к большим входным
напряжениям может быть реализовано использованием двух
ограничивающих диодов (рис. 2.30, а).
«)
Ц»
-и„
н:
v z^
-t/„
б)
£/„ —[
R1
R2
~И
II Г\
R3
.ия
I
в) U
£ni
вых
U вых
Д£с t
if
_^"L_+
Рис. 2.30. Схемы включения интегральных компараторов
Интегральные компараторы могут работать в режиме пеТ'
ли гистерезиса (рис. 2.30, б). Такая схема имеет пороги срабать1'
вания:
■"п!
\ + RJR2
\ + R2/R3
ЕЛ=-
U°.
<о,
] + R3/R2 1 + /^/^
и ширину гистерезиса
bEc=(Ul„-U:bj/{l + R3/R2).
Для повышения помехозащищенности некоторые типы
компараторов снабжаются логическим стробирующим входом,
реализующим сравнение и переключение компаратора только в
задаваемые внешним сигналом интервалы времени.
Некоторые модификации компараторов снабжены
выходными триггерами - защелками, фиксирующими состояние
компаратора по синхроимпульсу. Ряд интегральных компараторов
имеют неподключенные коллекторы и эмиттеры (открытые
выходы).
Повышение быстродействия компараторов обеспечивается
специальными схемотехническими решениями, например не
давая входить в насыщение транзисторам за счет подключения
диодов Шоттки.
Используя различные схемы включения на компараторах
получают различные функциональные узлы. На рис. 2.31 приведена
схема, фиксирующая положение входного напряжения внутри
Двух напряжений U\ и U2 (компаратор с «окном» по напряжению).
рис. 2.31. Электрическая схема двухпорогового компаратора
136 Функциональные устройства на операционных усилителях
Логическая схема «И» на выходе компаратора формирует
сигнал логической единицы только тогда, когда на выходах
обоих компараторов КН1 и КН2 наблюдаются сигналы
логической единицы, а это возможно только тогда, когда выполняется
условие U]<UBx<U2.
При использовании схем с открытыми коллекторами,
подключенными через общий резистор к питанию, образуется
«монтажное И», реализующее ту же функцию, что и элемент
«И» (см. рис. 2.31).
В работе [3, с. 187-210] можно найти другие варианты
построения функциональных схем на компараторах, включая
реализацию логических функций, генераторов, модуляторов и т.д.
*
2.4.2. Логарифмирующие и экспоненциальные
преобразователи
В функциональных преобразователях этого типа
используются нелинейные свойства /э-и-переходов диодов или
биполярных транзисторов, смещенных в прямом направлении.
Использование биполярных транзисторов дает лучшие
результаты по точности. Обычно их включают в цепь обратной
связи операционных усилителей по схеме с заземленной базой
(рис. 2.32, а) или по схеме диодного включения (рис. 2.32, б).
«)
VI
о)
o-^-CZD-iS
VT
t'„.
г
, .СФ
иш
Рис. 2.32. Схема логарифмирования на транзисторах
В обеих схемах выходное напряжение определяется сооТ'
ношением
(2.74)
£/-..,* = — In
Я И'нсУ
Нелинейные преобразователи аналоговых сигналов 137
где
к - постоянная Больцмана;
Т- температура, К;
q - заряд электрона;
/нс _ обратный ток насыщения, который для малошумящих
тоанзисторов при комнатной температуре составляет около
0,1 нА.
Для схемы, представленной на рис. 2.32, а, рабочий
динамический диапазон составляет 140 дБ, а для схемы рис. 2.32, б -
80 дБ, но последняя схема менее склонна к самовозбуждению и
обладает большим быстродействием. Приведенные на рис. 2.32
схемы работают при положительных входных напряжениях. Для
работы с отрицательным напряжением в схеме рис. 2.32, б
эмиттер с коллектором меняются местами.
Для защиты транзисторов от перенапряжения ставят
дополнительные защитные диоды.
Схема, представленная на рис. 2.32, а, может
самовозбуждаться из-за того, что VT\ работает в режиме усиления, создавая
контур обратной связи. Для предотвращения самовозбуждения
используют цепи емкостной коррекции по цепи обратной связи.
Экспоненциальные преобразователи строят обычно,
используя биполярные транзисторы, включаемые по схеме с
заземленной базой (рис. 2.33).
R\
Рис. 2.33. Электрическая схема экспоненциального преобразователя
Для этой схемы при условии exp((qUBX/{kT))>> 1 выпол-
Тся соотношение
и„
/соЯ1-ехр(((?£/вх)/(А:Г)).
(2.75)
138 Функциональные устройства на операционных усилителях
Схема (см. рис. 2.33) работает в диапазоне положитель
входных напряжений. Диод VD защищает VT от перенапро-
ния при отрицательных входных напряжениях. '
Промышленностью выпускаются различные типы преок
зователей этого типа, например, SSM2100, ICL8049 и др.
2.4.3. Выпрямители
В традиционных выпрямительных схемах используютс|
пассивные диодные цепи, погрешность работы которых опред
ляется достаточно большим падением напряжения на открыть'
диодах и нелинейностью их вольтамперных характеристик.
В задачах, где требуется точное преобразование сигналю
при их выпрямлении, особенно в диапазонах малых сигналов
рекомендуется использовать схемы прецизионных выпрямите
лей, строящиеся на основе операционных усилителей с диоднн
ми цепочками.
Для выделения составляющих только одной полярности к
пользуют схемы однополупериодного выпрямления (рис. 2.34
работающие в заданных квадрантах входных и выходных
напряжений.
При отрицательном входном сигнале диод VD2 «замыкав
ся» на землю, создавая нулевой потенциал на выходе №
рис. 2.34, а). При положительном входном сигнале диод VD2 *
крыт, а диод VD\ открыт, создавая отрицательную обрати)11
связь неинвертирующего усилителя через резистор R2. Най*
выходной характеристики схемы (коэффициент передачи) опрс
деляется выражением
K = Unix/Um=l + R2/Rl.
Следует отметить, что в этом режиме выход ОУ период
чески «закорачивается» на землю, что предъявляет опреде^
ные требования к его выходным каскадам.
Аналогично работает схема, представленная на рис. 2.34>
открывает диод VD2 при положительном входном сигнале, а^
од VD\ - при отрицательном
1!еЛ111^и^^^о6рвзоеатвпи аналоговых сигналоа_
139
К\ К2
в)
t;.,.,.
и„
в)
tfl K2
U.
рис. 2.34. Электрические схемы однополупериодных выпрямителей
и их выходные характеристики
В схеме, представленной на рис. 2.34, б, при положитель-
Ном входном сигнале, напряжение на выходе ОУ отрицательно
Что обеспечивает закрытие VD\ и открытие VD2. При этом VD2
140 Функциональные устроОстаа на операционных усилителях
не дает ОУ войти в режим насыщения, тем самым сокращая
вРе-
мя перехода ОУ в режим передачи сигнала при переходе входц0г
сигнала из положительной в отрицательную область. В отриЦа
тельной области входного сигнала диод VD\ открывается, вклю.
чая отрицательную обратную связь, в результате чего без уЧет,
сопротивления открытого диода VD\ выполняется соотношение
и„
R,
Я.
-£/„.
Аналогично работает схема в четвертом квадранте
выходной характеристики (см. рис. 2.34, г).
Во всех случаях диод VD1 не дает ОУ выходить в режим
насыщения, что повышает быстродействие работы схем одно-
полупериодного выпрямления. Основным недостатком схем.
представленных на рис. 2.34, является их высокое и нелинейное
выходное сопротивление.
Для определения абсолютного значения анализируемых
сигналов и выпрямления обеих полуволн входных
напряжений, используются схемы двухполупериодного выпрямления
(рис. 2.35).
R\
Г
ni %vn\
Т
А\
VU1
R1
\Л2
Ю
о) б)
Рис. 2.35. Электрические схемы двухполупериодных выпрямителей
Схема с незаземленной нагрузкой (см. рис. 2.35, а) част"
используется при работе на измерительный прибор, в качеств
которого изображен резистор R2. Мостовая схема выпрямляе
обе полуволны в соответствии с выражением
^=(К1М)-
Эта схема не требует согласования резисторов RI и $■
обладает высоким входным сопротивлением.
Неринайные преобразователи аналоговых сигналов Ш
м рИС. 2.34, б приведена схема высококачественного пре
иного двухполупериодного выпрямителя с заземленное
ци3 УзКой. Рассмотрим принцип работы этой схемы при /?i=/?2-
При Um<0 диод VD\ открыт, a VD2"- закрыт, поэтому по-
нииалы входов ОУ А2 практически равны нулю, а напряжение
инвертирующем входе ОУ А\ совпадает со входным
напряжением. С учетом равенства сопротивлений R\ и R2
tf.« =-№*) = £/«•
При Свх>0 диод VD\ закрыт, a VD1 - открыт. При условии
идеальности ОУ токи, протекающие через резисторы R\ и R2
равны нулю, а напряжение на выходе ОУ А2 совпадает с
потенциалом инвертирующего входа ОУ А1 и, как следствие, с t/BX, то
есть ишх=ивх.
Учитывая, что при f/BX>0 ОУ А\ не имеет обратной связи,
он может выйти на неустойчивый режим работы. Для
предотвращения этого режима в схему включен корректирующий
конденсатор С1.
Схемы, приведенные на рис. 2.34 и 2.35, при работе на
переменном токе не сглаживают его пульсаций. В вариантах,
когда необходимо получать постоянное напряжение,
пропорциональное амплитуде входного или импульсного напряжения,
используются емкостные элементы согласования (рис. 2.36).
Схема простейшего амплитудного выпрямителя показана
а Рис. 2.36, а. При СвХ>0 конденсатор С заряжается до ампли-
УДЫ входного сигнала выходным током ОУ, проходящим через
крьпый диод. При этом неравное нулю падение напряжения
°ткрытом диоде не будет приводить к погрешности, так как
°Д включен в прямую цепь замкнутого контура. Когда напря-
Ие ^вх примет значение меньше, чем амплитудное (макси-
ьное), за счет того, что на инвертирующем входе ОУ напря-
Ни ИС Станет меньше, чем на инвертирующем входе, напряже-
д На ВЬ1х°Де ОУ станет отрицательным и диод закроется. В
неишем диод будет закрыт до тех пор, пока входное напря-
С р> С не пРевЬ1сит напряжения, запомненного на конденсаторе
0г езисторы R] и R2 в этой схеме не обязательны. Резистор RI
Пр НИчивает ток разряда конденсатора через входную цепь ОУ
включении напряжения питания. Резистор R2 ограничива-
142 Функциональные устройства на операционных усилителе
ет выходной ток ОУ при заряде конденсатора и способст "
повышению устойчивости цепи. Последующие устройгС'
должны иметь высокое входное сопротивление. В реальных ^
ловиях емкость разряжается через RH и коэффициент пульсап
можно ориентировочно оценить формулой 1/(2Р/С7?н), где г
частота входного сигнала.
а)
10к
V.
Rl 11VD J=C 1
R1
100
f/«
т
б)
RI
ию
%VD2
R1
и—i-—ы
All
1 i
VD3
Т
Urn
VD\ J_ J
Рис. 2.36. Типовые схемы амплитудных выпрямителей
Амплитудный выпрямитель, схема которого приведена на
рис. 2.36, б, имеет низкое выходное сопротивление благодаря
повторителю А2. Цепочка VD2 - RI исключает перегрузку уС"
лителя по входу при отрицательном входном сигнале, а цепочка
VD3 - R2 препятствует разряду конденсатора обратным токоМ
диода VD\. Резистор R2 обеспечивает эквипотенциальность
зажимов диода VD\ при отрицательном входном сигнале.
2.4.4. Множительно-делительные устройства
Множительные устройства занимают значительное месТ
среди аналоговых вычислительных устройств. На их основе №
лаются делители, схемы возведения в квадрат, извлечения квзД
ратного корня и т.д.
Множительно-делительные устройства классифицирую^ ■
Нелинейные преобразователи аналоговых сигналов 143
по структуре - замкнутые (с контуром обратной связи) и
, ытые (или параметрические);
0 - по принципу действия - прямые, косвенные и
комбинированные;
-по возможности работы с входными сигналами
различной полярности и т.п.
К схемам прямого действия относятся устройства,
выполняющие множительно-делительные операции без
промежуточных математических преобразований. В схемах косвенного
действия используются промежуточные математические операции,
например, логарифмические преобразования входных сигналов.
Таким образом, у разработчика имеется достаточно большой
выбор схемотехнических решений этого узла устройств
обработки медико-биологической информации, исходя из заданного
динамического диапазона изменений входных сигналов,
диапазона изменений выходного параметра, точности вычислений
этого параметра и др.
Ряд типовых функциональных зависимостей может быть
воспроизведен с помощью аналоговых перемножителей
напряжений. На практике используются две основные схемы
перемножителей: 1) на основе логарифмических усилителей с
последующим сложением или вычитанием и потенцированием
(перемножители косвенного действия); 2) на параллельно-
симметричных транзисторных каскадах.
Перемножители на логарифмических усилителях часто ис-
°льзуют экспоненциальную зависимость тока / через открытьги
переход полупроводникового диода от напряжения U на
°м переходе. При напряжении на переходе U »26 мВ спра-
еДливо соотношение
£/ = (1/р)1п(///,); (2.76)
р = q l(nikT),
'»■- теоретический обратный токр-и-перехода, А;
в *" ~ поправочный коэффициент, зависящий от типа диода и
Чины тока через него {т=\ ,...,2);
Ч - заряд электрона (1,6-10"19 Кл);
*- постоянная Больцмана (/с=1,3810"23 Дж/К);
144 Функциональные устройства на операционных усилитепях
Г—абсолютная температура.
Величина 1/ц при 7>300 К и т=\ равна примерно 26 мВ
Приведенная зависимость для диодов соблюдается д0ста
точно точно в диапазоне изменения тока на одну-две декады в
области малых токов она искажается за счет изменения коэффи
циента т; при больших токах сказывается падение напряжения
на объемных сопротивлениях электродов диода. В диодных
схемах имеются значительные температурные зависимости
Большая точность достигается за счет применения специальных
транзисторов (трансдиодов), у которых величина т=\, и не
зависит от тока.
На рис. 2.37, о показана схема перемножителя с
применением транзисторов. В этом перемножителе выходное
напряжение логарифмирующего каскада C/Bblxi определяется разностью
базоэмиттерных напряжений транзисторов VT\ и VT2. При этом
коллекторные токи транзисторов поддерживаются усилителями
А\ и А2 на уровнях соответственно С/,//?, и U2IR2. Все
транзисторы входят в одну микросхему, что позволяет считать их па
раметры почти одинаковыми. Для UBuxl с использованием
уравнения (2.76) можно записать
^вь,х. = ^БЭ2 " ^БЭ1 = 0 / И)HU2 /(/,Д2 ))-(!/ Ц) ВД /(/Д )),
а для перехода транзистора VT3:
г/Бээ=(ВД1п(с/з/(/,/г3)).
На эмиттер транзистора VTA подается разность
напряжений С/вых и С/БЭ3. Учитывая заземленность базы VTA, можно
записать:
^БЭ4 =<ипой -^БЭз) = (1/ц)1п((С/1с/з/г2)/(с/2/,л1л3))-
Коллекторный ток транзистора определяется по формуле
/к4 = /еи"- = (UXU3R2)I{U2R,R,).
В итоге получаем
IT ~T R - UlU2 ^2^4
вых~ к4 4" U2 R,R3-
Нелинейные преобразователи аналоговых сигналов 145
б)
+15 В
22 к
и2
5,1 к
7
III
Г 1
Т
7,5 к
22 к
22 к
—С
9^Cn
-15 В
X
ю -1-
Рис. 2.37. Типовые структурные электрические схемы
умножителей напряжения
Если все транзисторы находятся в одинаковых темпера-
тУрных условиях, то изменение температуры окружающей сре-
Ды не будет влиять на работу схемы.
Устройство работает при условии, что U\, U2, t/3 больше
Уля. Резисторы R5 и R6 повышают устойчивость работы схе-
ь<- Погрешность работы устройства после подстройки смеще-
Ии и масштабного коэффициента может составить 0,1...0,5%
Ри изменении входных сигналов в диапазоне 0...+10 В.
Перемножители на параллельно-симметричных транзисто-
х также используют экспоненциальную зависимость тока кол-
•чекто
Ра от его базоэмиттерного напряжения.
146
Функциональные устройстеана операционных усилите™,*
Разберем подробнее работу схемы умножителя КП525ПС
представляющего собой функциональное законченное устр0«'
ство (см. рис. 2.37, б). Этот умножитель имеет три сигнальны
входа: X, Y, Z, и три входа для регулировки смещений: ЛГСЫ] у*
ZCM. Выходной сигнал снимается со встроенного операционного
усилителя А\. Регулировку масштаба можно производить с по.
мощью делителя, установленного, например, на входе Y. На
схеме выход соединен со входом Z. При таком включении pea.
лизуется операция перемножения по формуле UBblx=UiU2/\0.
Другие виды возможных функциональных зависимостей
между сигналами осуществляются иными внешними
соединениями (рис. 2.38; для простоты резисторы смещения не
показаны). Входные сигналы перемножителя К525ПС2 могут
изменяться в пределах ±10,5 В, погрешность умножения не более 1%.
иш
U„
Z
44
с/.
а)
б)
в)
Рис. 2.38. Варианты включения умножителя типа К525ПС2:
а - CU = (Щи2)Ю В; б - UBUX =JU„-A0B; в - U^ =t£/10
В схемах перемножителей находят применение также
микросхемы К140МА1, К572ПА1 и др., с помощью которых можно
обеспечить погрешность 1...3% при входных сигналах ±10 В. Ря"
полезных для практики схем могут быть получены на базе ф°Р'
мирователей широтно-импульсных и частотно-импульсных
сигналов.
Для построения делительных схем также известен р^
принципов и схемных решений. Делительные схемы не измер"'
ют отношение сигналов, а лишь преобразуют это отношение в
напряжение, ток, частоту или код. При изменении входных сиГ'
налов в определенных пределах делительные схемы долЖнЬ'
поддерживать выходной параметру — Х\1х2 постоянным.
Диапазон изменения входного сигнала делителя оп редел*'
ет динамический диапазон (дБ) работы делительной схемы
Нелинейные преобразователи аналоговых сигналов 147
Д.
:20^x2mx/x2mjn).
(2.77)
этом статическая погрешность деления не превышает
заданной величины.
Диапазон измеряемых отношений (дБ) можно выразить как
Z)r = 201g(/-max/rmin), (2.78)
где Лпах и ''min _ максимальное и минимальное значения
отношения сигналов;
/х,
"1 тах'л2 min
И /'
Ч min
Ix,
X] пит *1 max И Хт mm, *2 max ~ МИНИМалЬНЫе И МаКСИМЭЛЬНЫе
значения делимого и делителя соответственно.
Делительные схемы характеризуются также частотным
диапазоном, быстродействием, чувствительностью по обоим
каналам, а также погрешностями деления.
Наиболее простой делительной схемой является схема
косвенного действия на логарифмических усилителях (ЛУ1 и ЛУ2)
(рис. 2.39, а), в которой используется соотношение
log» (х, / х2) = loga х, - loga х2,
где а - основание логарифма.
(2.79)
а) Л\
XI
б) Х\
XI
в)
х\
XI
ЛУ1
ЛУ1 * И
оп -
гпн
t
пнч
' »
г
Y
1 ,,
1
п
у
АДт
У
Рис. 2.39. Варианты построения структурных схем
делителей напряжения
148 Функциональные устройства на операционных усилителях
Инвертор (И) и сумматор (С) (см. рис. 2.39, а) позволяв
вычислить значение отношения логарифмов. Однако для пол
чения величины отношения необходим еще блок потенцир0Ва
ния. Практические схемы этого вида различаются в основное
видом логарифмического преобразования, от которого в
значительной мере зависят точность, динамический диапазон и ело».
ность схем. Для их реализации используют логарифмирующие
усилители, функциональные преобразователи с кусочно-
линейной аппроксимацией логарифмической функции,
операционные усилители с нелинейной экспоненциальной обратной
связью и др.
К этому же виду делительных схем относится и схема с
функциональным преобразованием сигнала канала делителя в
обратную величину (ОП - обратный преобразователь) с
последующим перемножением (П - перемножитель) с сигналом
канала делимого (рис. 2.39, б). Варианты схем деления этого типа
отличаются способами преобразования сигнала делителя в
обратную величину. Один из распространенных вариантов -
использование время-импульсного преобразования (рис. 2.39, в).
Например, сигнал делимого управляет наклоном пилообразного
напряжения генератора (ГПН), а сигнал делителя задает частоту
на выходе преобразователя «напряжение - частота» (ПНЧ).
Если период импульсов, управляющих частотой повторения ГПН.
обратно пропорционален величине х2, то выходное напряжение,
снимаемое с амплитудного детектора (АДт):
у = Схх1х2.
Рассмотренная делительная схема с время-импульсным
преобразованием далеко не единственная, нашедшая примени
ние в практике проектирования медицинской техники. Широкое
распространение схемы такого типа получили при разработке
фотометрической аппаратуры, когда для вычисления фотомет'
рических параметров требуется определение отношения ампЛИ'
туд двух и более сигналов. Принцип построения подобных уст'
ройств иллюстрирует схема, представленная на рис. 2.40.
Нелинейные преобразователи аналоговых сигналов 149
Ui
h
* т
Пш
,.
гти
с^
''
Тг
и.
Рис. 2.40. Структурная схема делителя фотометрических сигналов
Схема включает генератор пилообразного напряжения
(ГПН), скорость изменения напряжения на выходе которого
регулируется сигналом делителя U2- Генератор тактовых
импульсов (ГТИ) определяет частоту работы ГПН, устанавливая в
начале цикла измерения триггер (Тг) в состояние 1. Сигнал с ГПН
поступает на схему сравнения (СС), где он сравнивается с
сигналом делимого U\ (см. рис. 2.40). В момент t„ оба сигнала
равны. Этот момент фиксируется выходным импульсом схемы
сравнения, который переводит триггер опять в состояние 0.
Легко убедиться, что при идеальных схемах ГТИ и СС
длительность импульса на выходе Тг пропорциональна отношению
сигналов; остается только получить цифровой эквивалент его
значения. Реально добиться высокого качества работы этих схем не
Удается, поэтому практические схемы более сложные.
Параметры схем этого типа в основном определяются
параметрами функциональных преобразователей сигналов
делимого и делителя. Среди делительных схем прямого действия
выделяют открытые (или параметрические) и замкнутые схемы,
схемах первого типа обратные связи отсутствуют и деление
происходит либо за счет функционального преобразования
нелинейным элементом, либо при использовании различных
физических явлений: эффекта Холла, явления электромагнитной
чдукции, гиперболических характеристик некоторых полупро-
°Дниковых элементов. Такие устройства характеризуются по-
РеШностью в несколько процентов и узким динамическим диа-
азон°м. В замкнутых схемах используются глубокие отрица-
Льные обратные связи, что приводит к усложнению делитель-
1Х схем, но позволяет получить высокие эксплуатационные
*аРактеристики (рис. 2.41). Широкий динамический диапазон
150
Функциональные устройства на операционных усилителях
(до 50 дБ и более) и высокая точность (десятые доли проце1. "
способствовали их широкому распространению.
о) U-
б) и,
Рис. 2.41. Делительные схемы с глубокими отрицательными
обратными связями
Принцип действия этих схем заключается в том, что
коэффициент передачи прямой цепи К при помощи схемы
автоматической регулировки усиления (АРУ) устанавливается обратно
пропорциональным одной из входных величин, то есть K=cjlxi,
где с2 - постоянный коэффициент преобразования сигнала хг
При подаче второго сигнала xt на вход прямой цепи выходная
величина будет определяться как
у-с2х}/х2.
Для схемы, приведенной на рис. 2.41, а, получаем
k(Up) = k0-S(Up)Up, (2.80)
где S{Up):=dk{Llp)ldUp - крутизна управления коэффициентов
передачи;
Ао - начальный коэффициент передачи.
В частном случае, при Аг0=0 и S(Up)=So, цепь с управляемые
коэффициентом передачи представляет собой идеальную мН"'
жительную схему (МС). Сумматор (См) реализует операции
вычитания U\ из U. Так как t/=£(C/p)t72, a At/=t/-£/,
приближается к нулю при большом коэффициенте усиления усилител*
цепи обратной связи (УОС), то k(Up)=UJU2. Нетрудно пока'
Нелинейные преобразоввтели
также, что U'=(1 / S0XU^ IU2), то есть при использовании
ной множительной схемы можно получить значение ча-
И ого в аналоговой форме. Такое представление результата де-
ниЯ не получило широкого распространения, так как для этой
-емы требуется обеспечение высокой точности и широкого
динамического диапазона множительной схемы.
В схеме, представленной на рис. 2.41, б, процесс деления
осуществляется более просто, без особых требований к
управляющим элементам. В этой схеме использованы два
множительных элемента с управляемым коэффициентом передачи -
МС1 и МС2. Для канала передачи сигнала С/2 можно записать
U' = kl{Up)U2 и AU=U'-U0 ->0.
Тогда
tf,=*bc(>,(tW-tfo]. (2-81)
где кос - коэффициент усиления УОС;
к\(Ур) — коэффициент передачи первого управляемого
элемента МС1.
Подставив значение kt(Up) из выражения (2.80) в (2.81) и
решив последнее уравнение относительно Up, имеем
U =кос(к1и2-ио\ (2.82)
Так как одно и то же управляющее напряжение подано на
003 элемента с переменным коэффициентом передачи, то вы-
°Дное напряжение со второго элемента (МС2) определяется как
U3 = Ut[k2-S2(Up)Up]. (2.83)
Подставляя в выражение (2.83) значение U„ из (2.82),
поучаем
Kac~bi\.Up)U2
и соблюдении условий:
JocW,)»!; <284)
152 Функциональные устройства на операционных усилителях
kocS2(Up)Uo»k2'> (2.8s j
Sx{Up)k2 ^S2Upk, -U3 =cU, 1Щ, (2.86,
где с - постоянный коэффициент преобразования.
Условия (2.84) - (2.85) выполняются путем увеличения ко-
эффициента усиления усилителя обратной связи и величины
опорного напряжения Со, а условие (2.86) означает требование
идентичности характеристик управляемых элементов,
выполнение которого затруднено. Поэтому нашли применение схемы с
одним управляемым элементом, на который сигналы Ut и (/,
поступают последовательно за счет их временного разделения с
помощью коммутатора, установленного на входе схемы.
Схемы с временным разделением сигналов делимого и
делителя без труда обеспечивают динамический диапазон до
40 дБ, обладают широкой полосой пропускания (до нескольких
мегагерц), после соответствующей настройки имеют
погрешность порядка 1%, но отличаются сниженным быстродействием.
2.4.5. Использование диодных структур
для реализации типовых и произвольных
нелинейных зависимостей
Для реализации типовых нелинейных зависимостей
выходного напряжения от входного используют
специализированные нелинейные функциональные преобразователи различных
типов и назначений.
В качестве первого примера рассмотрим работу схемы с
потенциально-заземленными диодами (рис. 2.42, а).
В исходном состоянии при нулевом сигнале диод VD\ за'
крыт небольшим отрицательным напряжением е\, равным паде*
нию напряжения на открытом диоде VD2. При увеличении
входного напряжения напряжение в точке в\ изменяется в
соответствии с выражением
Нелинейные преобразователи аналоговых сигналов 153
Л0
а)
кг
R\
V
.VD\
е\
VD2
1
б)
R2
гС
/Ю
Л1
Т
-кэ-
VD2
1
в)
и.
1ЫХ
Есп>0
/Г" /Г»
& ^ Е* П +
\£ог<0
£Оп=0
£/.
R
•—I 1
R0
R2 VD\
ZZI т м *
R\
Г
1>
иа
VD2
1
ит
ия
JSJL
R2 , VD\
У
Rl
т
■&-*■
VD2
1
£/«
ик
Рис. 2.42 Варианты схем реализаций типовых нелинейных зависимостей
и графики их выходных характеристик
154 Функциональные устройства на операционных усилителях
При е|=0 диод VD\ открывается, тогда
£„ Е_
-г*>
где
Еп - напряжение переключения (излома);
гд— внутреннее сопротивление диода.
Пренебрегая малой величиной гд, получаем
En={R2IRx)Em.
При дальнейшем увеличении £/вх выходное напряжение
меняется по линейному закону.
Если в схеме выполняется соотношение RXR2 » гд(/г, +&,),
относительная погрешность такого диодного элемента может
быть определена как
(2.87)
67 =
U.
^2Лпах
-ьи„
Л17тах
8^оп+-
-Щ -
с/.
-6Л,. (2i
На практике эта погрешность находится в пределах 0,1%.
Схемы, реализующие нелинейные характеристики в трех
остальных квадрантах, показаны на рис. 2.42, б —г.
Потенциально-заземленные диоды могут включаться и в
цепи обратной связи, при этом они будут работать на запирание-
Пример такой схемы приведен на рис. 2.43.
При нулевом входном напряжении все диоды VD\...VDn
открыты. Общее сопротивление обратной связи определяется
параллельно включенными сопротивлениями R0...Rn. По мере
увеличения UBX диоды поочередно закрываются, сопротивление
обратной связи начинает увеличиваться, что, в свою очередь
будет увеличивать коэффициент передачи усилителя и обеспе'
чивать реализацию кусочно-линейной зависимости выходного
напряжения от входного. Крутизна каждого из участков буД^
определяться соответствующими резисторами-делителями.
Нелинейные преобразователи аналоговых сигналов
»+£оп
155
-М-
VD\
-цэ-
R1
-й-
ут
R3
R\
£Л,
-С
—й-
VDn
-43-
Rn
RO
Г
1
Um
Рис. 2.43. Схема реализации кусочно-линейной зависимости
с потенциально заземленными диодами в обратной связи
Пример схемы с диодами, работающими по типу
ограничителей, приведен на рис. 2.44, а. В исходном состоянии
(Цж=0) диод открыт. Напряжение на выходе изменяется по за-
к°ну С/ВЬ1Х =-(/?(,//?, )С/ВХ. При входном напряжении UBX = Ет =
= t^on KR\ + R2 )]Ro Диод VD запирается, отключая UBX от усили-
Теля. Здесь диод работает на запирание.
В другом варианте схемы (рис. 2.44, б) диод VD работает
На отпирание. Здесь при £/вх=0 диод закрыт положительным Е0„.
До открытия диода UBblx=-UBX(R0/(Rl+R2)). Как только
наряжение на аноде диода, определяемое по выражению
ei =(C/BX/(i?, +R2))R2, станет равным .Ее, диод откроется и
зафиксирует в точке делителя потенциал Еоп, не зависящий от
^ьнейшего нарастания (Увх, при этом Свь,х= -Eon(Ro/R2)-
156
Функциональные устройства на операционных усилителя*
а)
VD R\
■'А
R2
т
+Ет
б)
U„
Л1 R2
1 ,
+Е,
VD
R0
^ЧЭТ^
С/.
1
до
1
£/-■
*о
И
Ri+R2
и-
К1
Ло
Рис. 2.44. Варианты схем односторонних диодных ограничителей
и графики их выходных характеристик
В практике использования аналоговых функциональных
преобразователей к схемам типовых нелинейностей относят
обычно схемы, воспроизводящие ограничение координат по
модулю (характеристика ограничения), характеристики зоны
нечувствительности, вычисление модуля и т.д.
Схема, воспроизводящая характеристики ограничения,
показана на рис. 2.45, а. При нулевом входном напряжении диоДь1
VD\ и VD2 закрыты небольшими напряжениями открытых ди°"
дов VD3 и VD4. При увеличении входного напряжения напря"
жение на выходе меняется по линейному закойУ
^вых --UbkRq/R- Через диод VD3 протекает разность ток"6
/=/|-/2. При i=0 диод VD3 закроется и на диоде установится *>а'
пряжение
Ud=(Eon/Rnr0)R2/(R. + R2)-
/г, +R,
-л.
(2.
.89)
б)
Рис. 2.45. Реализация схемы двухстороннего ограничения (а)
и заданной кусочно-линейной зависимости (о)
Переключение диода VD3 осуществляется, когда UB*=En
"Рч ЦрО. При дальнейшем увеличении UBX коэффициент усиле-
НИя Резко падает из-за уменьшения сопротивления обратной
Св*зи (за счет параллельного включения Д0 и R2) и рост выход-
Н°г° сигнала ограничивается.
158 Функциональные устройства на операционных усилителях
При этом величину Еп можно определить из форм"4
(2.89) при условии С/д=0: У^
Еп = -Еоп'ЬЛ2 KRnR\) ■ (2.9(|
Остаточный угол у определяется отношением R2/R. yMeh
шить этот угол можно при условии, если R»R2.
Схему, воспроизводящую зону нечувствительности, иощ
получить, поставив диодную схему на входе ОУ.
С помощью рассмотренных звеньев можно реализовав
различные функциональные зависимости. Рассмотрим методь
реализации таких схем. Пусть требуется реализовать кривую
ОАВС, показанную на рис. 2.45. б. Представим эту кривую в
виде трех лучей: 1, 2 и 3. Тогда кривая ОАВС может быть
получена сумматором на операционном усилителе, а отдельные луч
можно получить по схемам типа изображенных на рис. 2.45
рассчитав соответствующие коэффициенты передачи и
напряжения переключения диодов.
Таким образом, с помощью схем диодных ограничителе!
можно реализовать кусочно-линейную аппроксимацию
достаточно сложных функциональных зависимостей. При этом необ
ходимо учитывать соответствующие аппаратные затраты и, если
они неоправданно возрастают, следует использовать
соответствующую цифровую технику.
2.5. Элементы аналоговой памяти
При сборе аналоговой информации и ее последующей
обработке часто бывает необходимо зафиксировать значение ре!*
стрируемого сигнала в некоторый момент времени. В аналог"
вой схемотехнике эту функцию выполняют устройства выбор
ки-хранения.
2.5.1. Устройства выборки-хранения
При построении устройств выборки-хранения (УВХ) в $
честве элементов памяти используют высококачественные Koti
денсаторы.
В работе УВХ можно выделить два этапа:
Элементы аналоговой памяти
159
'^^ZZu (слежения, записи, запоминания), который ха-
° №ётся тем что выходной сигнал после команды выбор-
РаКТе?3миой скоростью достигает величины входного и далее
ки с^ (0ТСлеживает) его, пока не наступает момент начала
^Тхоанения, который заключается в том, что на выходе
VBX сохраняется напряжение, выбранное на первом этапе, до
« пос пока не закончится этот этап.
Основные варианты УВХ строятся по типу схем с
буферным усилителем (рис. 2.46, а) или путем включения
запоминающего конденсатора в цепь обратной связи (рис. 2.46, б).
Рис. 2.46. Основные варианты схем реализации VBX
На этапе выборки управляющим напряжением £/упр откры-
ТСя транзистор VT\ и конденсатор заряжается до UBX (см.
160 Функциональные устройства на операционных усилителях
рис. 2.46, а). На этапе хранения транзистор VT\ закрываете^
ключая С от t/Bx. Время хранения txp определяется допустцщ
величиной относительной погрешности хранения
5хр=|с/с(0)-С/с(/хр)|/[/с(0),
где Uc{0) и Uc{txp) - напряжение на конденсаторе соответствен
но в начале и в конце периода хранения (разряд за счет неиде
альности используемых элементов схем).
При построении УВХ по схеме, представленной
рис. 2.46, а, время хранения можно определить как
Элементы аналоговой памяти
161
-"хр'
txp = 5хрС7[1/Явх + (£ + /ут)/[/с(0)],
(2.91
где Iyi - ток утечки запертого ключа (для МОП транзисторов
*уг
а(Г9... + 1(Г10А);
RBJi - входное сопротивление повторителя на ОУ;
D ВХ I \ ВХггЪИ
^вх _ Чиф | | 'дфл ОСС'
глФ и 'енф - соответственно входные дифференциальное!
синфазное сопротивления ОУ;
<К*хосс — коэффициент ослабления синфазного входное
сигнала, выраженный в относительных единицах.
Работа УВХ, собранного по схеме, приведенной »
рис. 2.45, б, аналогична работе интегратора, а время хранен^
может быть определено как
'xP=6xpCt/c(0)/0BX+/yT). 0-
Расчет элементов УВХ по схеме, приведенной на рис. 2.46,"
предлагается производить по следующей методике [14]:
1) рассчитывается добавочное сопротивление по формуй
Ядоб^^вх^стах-ЯЬ;
2) приняв сопротивление R2=20 кОм, рассчитывается вел
чина /?, = R2 /(K-1), где К - коэффициент усиления ОУ, °xS
ченного обратной связью;
3) исходя из формулы (2.91) определяется величина е
кости
С = '„№й1 №осс) + (Сх +/уг)/С/с(0)]/8,
/П определяется минимальное время хранения,
необходима записи информации (длительность отрицательного
Ч,° вляюшего импульса на затворе транзистора):
^3...5(/?доб+ло)С-
Схема расчета УВХ по схеме, приведенной на рис. 2.46, б,
иная:
1) приняв Rf=20 кОм, рассчитывается RX=R2IK;
2) находится напряжение, до которого заряжается
конденсатор в режиме хранения: £/с{0)=£/вх К;
3) в соответствии с формулой (2.92) рассчитывается
величина емкости: С = txp(i~x + 7^)8^,1^(0);
4) определяется минимальное время, необходимое для
записи информации: tK =3...5RXC.
Для исключения влияния внутреннего сопротивления
источника сигнала на работу УВХ целесообразно подключить
входной каскад на ОУ, охваченный общим контуром
отрицательной обратной связи (см. рис. 2.46, в).
Переключение режима работы УВХ осуществляется
ключом К по сигналу управления £/упр. На этапе выборки ключ К
замкнут и конденсатор заряжается от источника входного сиг-
а ^вх- Напряжение на конденсаторе изменяется в соответст-
вии с выражением
(2.93)
£/С(0 = £/вх +(^c(^xp)-t/Bx)e_1/T3'
где
%р) - напряжение на конденсаторе к моменту начала но-
Вог° Цикла выборки (концу цикла хранения);
тз - постоянная времени заряда конденсатора;
Тз = С(р
/?ис_
сопротивление источника сигнала;
^з - сопротивление замкнутого ключа.
,n B момент окончания режима выборки t, напряжение на
°нДенсаторе на некоторую величину может не достигать зна-
н0НсИЯ V" и будет равно C/KU- Тогда относительная погреш-
Ть выборки будет определяться выражением
162 Функциональные устройства на операционных усилите п^х
8В =[£/„ ~Uc{tB))/UBK =[\-Uc(tB)/UBX]e-'-'b. q
Из выражения (2.94) легко определяется необходимо
мя выборки tB, чтобы ошибка выборки не превышала зада
величины: '
fB>T3ln[(l-C/(fxp)/£/BX)/6B].
В режиме хранения ключ К разомкнут и конденсатор ц.
ленно разряжается через входное сопротивление буферногоv>
када, выполненного на повторителе А2 с высоким входным
противлением, через сопротивление разомкнутого ключа и ц
противление утечки самого конденсатора.
Учитывая уравнение для разряда конденсатора, можно
писать, что для некоторого момента времени хранения /'хрГ
пряжение на конденсаторе определяется как
Uc(t'xp) = Uc(tB)e-1'^^, (Ш
где txv=C-R3;
R3 - эквивалентное сопротивление схемы, определяем»
последовательно включенными сопротивлениями входного и
када А2, разомкнутого ключа К и утечки конденсатора С.
Уменьшение напряжения на конденсаторе памяти за с*
разряда приводит к ошибке хранения. Относительная погре1
ность хранения может быть определена с помощью выражения
откуда
По схеме, приведенной на рис. 2.46, в, выполнены "Р*
мышленные интегральные микросхемы типа LF398 и ПО"
(рис. 2.47).
Управление ключом 5" осуществляется через операци0"
усилитель A3 по сигналам S/H, S/H. При замкнутом кЯ
вследствие действия отрицательной обратной связи напря* '
на выходе А1 устанавливается таким, что £/вых отличается °
на величину напряжения смещения А\, а смещение из-за к"
у второго ОУ (AT) стремится к нулю. Диоды VD\ и VD2 з3
Элементы аналоговой памяти
163
малого напряжения смещения А\. При размыкании
тЫ И3'3с управляющим напряжением может возникнуть разрыв
кЛюча Ь У^о„ обратной связи у А\, что может повлечь переход
0ТрИЦаТ!илителя в режим насыщения^ Этот неблагоприятный
^./устраняется диодами VD\, VD2 и резистором К1. При
р£ЖИ снижается время переходного процесса при повторном
замыкании ключа S.
Рис. 2.47. Структурная схема микросхемы типа 1100СК2
На точность работы рассмотренных схем влияет ряд
параметров: токи утечки ключей, входные токи ОУ, паразитные
емкости и сопротивления и др. Чтобы уменьшить влияние этих
погрешностей, прибегают к специальным схемным решениям,
например, строят УВХ с компенсацией. Эти УВХ используются
Ри обработке медленно меняющихся сигналов, характеризую-
и* процессы жизнедеятельности с большой постоянной вре-
ени (время хранения до десятков минут). Структурная схема
кого УВХ и временная диаграмма его работы приведены на
■ 2.48. В момент окончания времени выборки tB на конденса-
Ре Устанавливается напряжение Uc{tB) в соответствии с
выражением
ис«) = ит+(ис«хр)-ивх)е-"ъ.
В
- момент выборки сигналом Uy на выходе интегратора
п°ДДеРЖивается нулевой потенциал. С момента начала режима
164 Функциональные устройства на операционных усилителях
хранения напряжение на конденсаторе начинает изменять
гласно выражению зависимости (2.94).
и »
иу
к
1
1
i
БК
г1
. 1
Инт -
\0м
1L
^ВЫХ
►
и„
"*--Jk
я)
б)
Элементы аналоговой памяти
165
Рис. 2.48. Схема УВХ с компенсацией (а) и временная диаграмма
его работы (б): К- ключ; С - конденсатор памяти; БК- буферный каскад
Инт- интегратор; АСм - аналоговый сумматор
Если коэффициент передачи БК (например, повторите..
равен единице, то напряжение Uc{t\v) поступает на вход и
логового сумматора, и интегратора. После интегрирования а,
ражения (2.94) для выхода интегратора получаем
и„=[исОв)х^/ТИ][\-е-''^П, Р*
где Т„ - постоянная времени интегратора.
Если выполнить условие тхр=^и и принять весовые к<#
фициенты сумматора равными единице, то на его выходе сф'
мируется сигнал
Ц*х=^с('.)-
Следовательно, за счет суммирования двух экспоне№1
альных напряжений производится компенсация погреШ^
возникающей в режиме хранения.
Примером УВХ с интегратором служит микро-
SHC5320.
2.5.2. Амплитудные (пиковые) детекторы
Второй тип аналоговых элементов памяти составляв
ковые или амплитудные детекторы, которые выполняют Ч^
ции, близкие к УВХ. Эти устройства предназначены для
минания экстремальных значений входного сигнала. ОнИ t
-^^^^в режимах выборки и хранения, но режим определяет-
работа сигналом. При возрастании входного сигнала пико-
сЯ -Х ектор работает в режиме выборки, а при уменьшении - в
вЬ'и Д vnaHeHHfl и запоминает предыдущее максимальное зна-
входного сигнала. Режим хранения продолжается до при-
ЧС сигнала, превышающего запомненный, или до прихода
Ч° та сброса. Реализуются пиковые детекторы путем замены
С-1Юча в схемах УВХ диодом; в режиме выборки диод открыт, а
в режиме хранения - закрыт.
Один из вариантов схемы амплитудного детектора
приведен на рис. 2.49, а. При увеличении С/вх диод VD\ открыт, a VD2
закрыт. Конденсатор С, подключенный к выходу ОУ,
заряжается. При уменьшении U^ диод VD\ запирается более высоким
потенциалом, накопленным на конденсаторе, и схема переходит
в режим хранения накопленного напряжения. Диод VD2
фиксирует выходные отрицательные напряжения ОУ на одном уровне,
что уменьшает время перехода из режима хранения в режим
слежения за входным сигналом. Перед новым циклом
детектирования конденсатор разряжается путем замыкания
транзисторного ключа по сигналу «Сброс».
а) ~~~
U.
VD\
1
VU1
■U-
иш
Ж СФ
VT
R
-й-
VBS
Сброс
Рис 2.49. Варианты схем амплитудных детекторов
166 Функциональные устройства на операционных усилителях
Лучшими характеристиками обладает схема амплитуда
детектора, приведенная на рис. 2.49, б. "
В этой схеме при UBX >-Uc(RjR2) напряжение навцу
де первого инвертирующего операционного усилителя стаи
вится отрицательным и диод VD1 открывается, заряжая кондек
сатор О. С учетом общей отрицательной обратной связи дд.
двух усилителей £/ВЬ1Х = -£/вх (Л2/Д,).
Если входное напряжение начинает снижаться, то (У, уВе
личивается, в результате чего диод VD2 закрывается, а диод
VD\ открывается, замыкая внутреннюю обратную связь усили-
теля АЛ, не давая ему входить в область насыщения из-за разры
ва его обратной связи диодом VD2.
Пиковое напряжение, инвертированное и промасштабирс-
ванное в {R2j' Rx) раз запоминается на конденсаторе С\.
Схема двухстороннего амплитудного детектора для
обработки положительного и отрицательного напряжений приведена
на рис. 2.50. Детектор положительного сигнала выполнен га
усилителе А2, диодах VD\, VD2 и емкости О. Усилители А\,&
реализуют инвертирующий амплитудный детектор
отрицательного сигнала. Выход детектора положительного сигнала
обеспечивает опорное напряжение для детектора отрицательного
сигнала, поэтому A3 суммирует усиленное в два раза напряжен*
положительного детектора с выходным напряжением детектор
отрицательного сигнала. Делитель из резисторов RI служит 0
согласования опорных потенциалов обоих детекторов.
Данная схема обладает довольно высокой точностью Ра'
боты поскольку наличие двух емкостей обеспечивает части4'
ную компенсацию влияния входных токов A3. Кроме того, вЬ''
бором величин емкостей можно скомпенсировать влиянИ
входных токов А1 и А2 на разряд конденсатора О. При paBel1
стве входных токов всех трех ОУ условие компенсации оПр
деляется соотношением С1=ЗС2. Погрешность двухсторонн^
детектора определяется суммой погрешностей обоих детект
ров. Быстродействие ограничивается длительностью зар5^
конденсаторов С\ и С2.
Элементы аналоговой памяти
167
Рис. 2.50. Структурная электрическая схема двухполярного
амплитудного детектора
Погрешности амплитудных детекторов определяются
погрешностью выборки (заряда, подзаряда) и разрядом
запоминающего конденсатора. Конденсатор разряжается за счет токов
утечки диода, транзистора цепи сброса, самого конденсатора, а
также за счет входного тока ОУ. Методики расчетов схем с
емкостными элементами памяти рассмотрены в целом в ряде
работ, посвященных расчетам электронных узлов на основе ОУ с
частотно-зависимыми обратными связями (см., например, [3,
с- 372-382; 14, с. 296-300]); можно воспользоваться материалом
соответствующих разделов данного издания (см. главы,
посвященные расчетам интеграторов и устройств выборки-хранения).
Тренировочные задания
1. Назовите основные функции, выполняемые аналоговыми
Линейными преобразователями сигналов, и нарисуйте их типовые
Стройные схемы.
2. Нарисуйте структурную схему устройства для автомати-
Чес*ого изменения коэффициента усиления масштабного звена
При выходе выходного напряжения за заданное пороговое зна-
ЧенИе.
. на операционных усилителях
3. Нарисуйте простейшую схему интегратора на операц ^
ном усилителе и напишите выражение для определения его ^
ходного напряжения и для передаточной функции. **
4. Нарисуйте схему дифференцирующего каскада и залит
те выражение для его выходного напряжения с учетом конечносп,
коэффициента усиления операционного усилителя. Как уМен.
шить влияние помех на простейший дифференциатор?
5. Дайте определения и нарисуйте графики амплитуду.
частотных характеристик для фильтров верхних и нижних часто!
а также полосовых и режекторных фильтров.
6. Нарисуйте схемы фильтров Салена - Кея для верхних и
нижних частот и расскажите о порядке их расчета.
7. Нарисуйте схему преобразователя «напряжение - ток» с
заземленной нагрузкой и запишите выражение для определения
тока нагрузки.
8. Нарисуйте схему компаратора на операционном
усилителе с петлей гистерезиса, расскажите о принципе его работы и
запишите выражения, определяющие ширину его петли гистерезиса
и пороги срабатывания.
9. Нарисуйте структурную схему делителя, извлечения
квадратного корня и возведения в квадрат на основе умножителя типа
К525ПС2.
10. Нарисуйте базовые схемы устройств выборки-хранения,
объясните принцип их работы и расскажите об источниках
погрешности их работы.
11. Нарисуйте схему амплитудного детектора для двухп0'
лярного входного сигнала и объясните принцип ее работы.
Тестовые задания
1. Относительная погрешность аналогового сумматора "
операционном усилителе из-за конечности коэффициента усиле
ния определяется выражением
I ( " I л
ъик=— 1 + ХпД
ЛУ V, 1=1 /
Тестовые задания
169
-"""Т пля простейшего интегратора на операционном усилителе
ловии, что rBX»R и Ку »1, выражение для его
переданной фун^ии имеет вид
W(P) = 2 .
pCR[] + l
3. Общая относительная статическая погрешность
простейшего интегратора на операционном усилителе определяется
выражением
ад)П
4. Для уменьшения чувствительности схемы
дифференцирования на операционном усилителе к высокочастотным помехам
используют:
а) сопротивление, подключаемое параллельно входному
конденсатору;
б) сопротивление, подключаемое параллельно емкости
обратной связи; .
в) конденсатор, подключаемый параллельно сопротивлению
обратной связи;
г) конденсатор, подключаемый между выходом
операционного усилителя и «землей»;
д) сопротивление, подключаемое последовательно со входом
конденсатора.
5. Добротность фильтра определяется выражением
о. В биквадратных полосовых фильтрах полоса подавления
образуется за счет:
а) вычитания из входного сигнала выходного, сдвинутого
н°сительно первого на 90°;
о) использования емкостей, включаемых между выходами
Жителей и «землей»;
в) вычитания из входного сигнала выходного, сдвинутого
осительно первого на 180°;
Ьеп использования последовательно включаемых фильтров
Их и нижних частот;
Ых
170 Функциональные устройства на операционных усилителя*
д) использования режекторных фильтров, включает
цепь обратной связи операционного усилителя
7. В схеме преобразователя «напряжение - ток» с зазем
ной нагрузкой (схема Хоуленда) ток нагрузки определяется ^
жением ^
я,
■+-
[]
и.
8. Аналоговые компараторы предназначены для:
а) фиксации максимального значения входного сигнала;
б) фиксации минимального значения входного сигнала;
в) масштабного преобразования входного сигнала;
г) сравнения величин двух аналоговых сигналов;
д) выделения из. сигналов заданной частотной
составляющей.
9. В логарифмических преобразователях, использующих
биполярные транзисторы в цепях обратной связи, выходное
наложение определяется выражением
f тт \
£/«=Щь
t/.
№
coy
10. Одна из базовых схем устройств выборки-хранения
содержит входной резистор, подключенный через ключ на полевом
транзисторе к инверсному входу операционного усилителя (ОУ)"
через второй резистор к выходу ОУ, прямой вход которого
подключен к «земле» и , подключенным между йй'
версным входом и выходом усилителя (допишите название неДОс'
тающего элемента).
11. Структурная схема устройства выборки-хранения с к°
пенсацией содержит: ключ, конденсатор памяти, буферный $
кад, аналоговый сумматор и (допишите назван
недостающего блока).
12. Схема варианта амплитудного детектора на одном оР
рационном усилителе содержит: операционный усилитель, к°
денсатор, транзисторный ключ, резистор и три __^/
(допишите название недостающих элементов).
3. ГЕНЕРАТОРЫ СИГНАЛОВ
Генераторы сигналов различных типов и назначений ши-
используются в медицинском приборостроении. Это могут
fi ть устройства воздействия на биообъект с терапевтической
елью, блоки зондирования внутренних структур организма,
узлы управления работой медицинской аппаратуры и т.д.
Схемотехнически электронные генераторы представляют
собой усилители, охватываемые положительной обратной
связью. Усилители могут быть построены на дискретных
элементах, на базе таймеров, цифровых интегральных схем и на
операционных усилителях.
3.1. Генераторы синусоидальных (гармонических)
сигналов
Генераторы гармонических колебаний преобразуют
энергию источника постоянного тока (источника питания) в энергию
колебаний синусоидальной формы. Основными элементами
генераторов являются резисторы, конденсаторы и активные
элементы для частоты до сотен килогерц. Для более высоких частот
применяют катушки индуктивности. Активный элемент в
генераторах принципиально необходим для восполнения потерь
ергии в пассивной цепи, которая чаще всего имеет второй
порядок. Обычно генератор гармонических колебаний описывает-
Характеристическим уравнением
(3.1)
a2p2+OiP + ao=0>
где
Р - оператор Лапласа;
о, - коэффициенты характеристического уравнения. ^
Необходимое условие существования автоколебании тре-
^ выполнения неравенства о,<0, а частота автоколебании
Оделяется выражением в = Й' Колебания будут устой-
^ивыми, когда амплитудная характеристика активного элемента
еет область насыщения.
172
Генераторы сигналов
Схема популярного генератора с мостом Вина приве
на рис. 3.1, а.
■Щ
о)
гЧ гЧ
R1
С1 =
, i
ь1
ЛЗ
1 <
я
4 1
К2 4=
.£/„
б)
R3
С\
VD\
—кэ-
FD2
Hhr
^i
С2
X
a
R2
Ml
11
{/-
Рис. 3.1. Типовые схемы генераторов синусоидальных колебаний
При R^IR^>R\IR2+C\IC2 в устройстве возникают
автоколебания с частотой
со0=Л/№Л2С1С2)- (3j
Обычно в мосте Вина обеспечивают выполнение равенсА
Rr=R2=R, C\=C2=C. Тогда частота автоколебаний определяете'
выражением fo=l/(2TiRC). Автоколебания возникают при условие
что коэффициент усиления усилителя, составленного из ОУ и Р
зисторов R3 и R4, больше трех. Это условие обеспечивается вь
полнением неравенства R^R^>2. Установившиеся автоколебания^
замкнутой цепи возможны только при условии точного равенств"
единице коэффициента петлевого усилителя на частоте/), но Д
возникновения автоколебаний нужно, чтобы вначале коэфФйи
ент петлевого сопротивления был больше единицы.
После возникновения автоколебаний их амплитуда ста0
лизируется на том уровне, когда коэффициент петлевого усИ f
ния будет равен единице. Для реализации эффекта измене11
Генераторы синусоидальных (гармонических) сигналов 173
вого коэффициента усиления в цепи обратной связи ис-
петЛ ют нелинейные элементы.
П° Получение гармонических колебаний с малыми искаже-
и обеспечивается использованием инерционно-нелинейных
пей отрицательной обратной связи ОУ. Нужный характер не-
■шнейности создается тогда, когда с ростом амплитуды сигнала
уменьшается сопротивление R^ или увеличивается
сопротивление i?4- Поэтому вместо резистора R3 можно включить
миниатюрный полупроводниковый терморезистор либо вместо R4
использовать металлический терморезистор или лампочку
накаливания.
Схема ЖГ-генератора с так называемой лестничной
потенциально-токовой ЛС-цепью приведена на рис. 3.1, б. Частотно-
зависимая цепь содержит элементы CI, C2, СЗ, R\, R2. Частота
автоколебаний этого генератора определяется по формуле
ш0 = ]Д/ед (са+од+СзСз) . (з.з)
Для возникновения автоколебаний необходимо
выполнение условия
Ry>Rl(Cl+C2)/C3+R2(C2+C3)/C3, (3.4)
гДе Сэ=САС3/(СА+СА+С2Сз).
Если С1=С2=Сз и Ri=R2=Rj, то частота автоколебаний
определяется как
/0Лл/З^С, (3.5)
Ли ОКОле^ания возникают при выполнении условия Rj>\2R.
^ л i VD\ и VD2 обеспечивают нелинейность петлевого уси-
Мал - И слУжат Для стабилизации амплитуды колебаний. При
вог И амплитУДе сигнала диоды закрыты и коэффициент петле-
^Усиления гораздо больше единицы. Это обеспечивает бы-
бИл Возбуждение генератора. Затем амплитуда колебаний ста-
Дов И^ется на таком уровне, при котором сопротивление дио-
4ля ВМестно с Л3 обусловливает единичное петлевое усиление
Ровной гармоники сигнала.
НоВи а РИс- 3.1 приведены основные схемы генераторов, раз-
остей которых известно достаточно большое количество.
174
Генераторы сигналов
Управляют амплитудой и частотой генераторов путем изм
ния величины соответствующих резисторов и емкостей ^
чего могут быть использованы переменные резисторы и ём
сти, а также полевые транзисторы, фоторезисторы, термоп?
сторы и т.д.
3.2. Аналоговые генераторы
прямоугольных импульсов
Наиболее простые генераторы импульсов (мультивибрато.
ры) обычно строят, охватывая ОУ цепями положительной и
отрицательной обратной связи (ПОС и ООС), причем действие
ПОС должна опережать действие ООС. В этом случае цепь ПОС
обеспечивает лавинообразный переход мультивибратора из
одного состояния в другое, а цепь ООС совместно с ПОС
ограничивает время пребывания устройства в каждом из состояний.
Один из вариантов построения такого мультивибратор;.
показан на рис. 3.2, a [14, с. 312]. Цепь ПОС в этой схеме
выполнена на элементах Rl, R2, а цепь ООС содержит пассивный
интегратор С и R3. Коэффициент передачи по петле ПОС в
этой схеме определяется по формуле рп= ^i№+#2). Временна»
диаграмма работы этого мультивибратора представлена на
рис. 3.2, б.
Поскольку коэффициент передачи по ПОС определяется
выражением рп= Ri(R\+R2), то на неинвертирующий вход
поочередно подается положительное ([/+) или отрицательное (£/-)
выходное напряжение величиной pt/+ или pt/_. Выходным
сигналом положительной полярности через резистор R3 конденсатор
С заряжается, а выходным сигналом отрицательной полярное?"
разряжается. Когда напряжение на заряжающемся конденсатор£
UdO достигает и затем начинает превышать величину pt/+, то и8
инвертирующем входе потенциал становится более положит6'
лен, чем на неинвертирующем, и ОУ лавинообразно по свое!*
выходу переходит в отрицательную область, формируя сигн*
[/_. Конденсатор С через резистор R3 выходным напряжение
начинает разряжаться до величины pt/_, после чего начине
преобладать напряжение на неинвертирующем входе по отЯ0'
^н^ —
к инвертирующему, и ОУ переходит в область положи-
ше"и1° вЫХодного напряжения U.
тельН°г
Рис. 3.2. Типовые схемы мультивибраторов на ОУ
Длительность импульсов генератора можно найти,
пользуясь выражением для напряжения на конденсаторе в процессе его
пеРезаряда:
tfc(0 = t/c|,-».+(tfc|,=o- ^cU«>~'/T, (3-6)
fle Ц?|<->оо - напряжение на конденсаторе, которое должно
Тановиться при t, стремящемся к бесконечности;
^с|(=о ~ напряжение на конденсаторе в момент начала
пР°Цесса перезаряда;
т. - постоянная времени цепи перезаряда.
Для интервала времени [t0; t{\ для схемы, представленной
Рис. 3.2, а, на основании формулы (3.6) получаем
t/r(0=C/++(-Pnt/ -U+yr4^. ' (3.7)
176 Генераторы сигналов
В момент времени t\ справедливо соотношение
£/<&) = P..U+. (з.8)
Совместное решение уравнений (3.7) и (3.8) позволЯе
определить длительность импульса положительной полярц0
сти [t0; и]
t+= R3C 1п[([/++[3£/_)/(£/+-рп£/+)]- (3>9)
Для интервала [tx; t2] выражение (3.6) преобразуется:
Uc(t) = ~U_ +фи+-и_)е-тс.
С читая, что процесс перезаряда начинается со времени t
определим продолжительность отрицательного импульса:
t.= R3C 1п[(С/_+рп£/+)/(£/_-рп[/_)]. (З.Ю)
Период повторения импульсов определяется отношением
T=h+t2. (3.11)
Скважность импульсов определяется отношением
С=Г/г,. (3.12)
При симметричном напряжении питания ОУ |[/+|=|1Ц
тогда справедливо соотношение
ti=tf=Ri 1п(1+2Л,//г2); T=2ti\ 6=2.
В мультивибраторе, собранном по схеме рис. 3.2, в, цепь
ПОС выполнена как дифференцирующая (элементы О, /?1, Щ,
а цепъ ООС образована резистивным делителем R2-RI. Для
этой схемы Рп=^з/(^з+^4), a ^=Rx/(Rl+R2). Введем постоянную
времени, определяемую по формуле:
т = С(Л3+Л4)- (3-Н)
Тогда справедливо выражение
Г=2т1п[2/(рУРоН]- (ЗЛ4)
Данный мультивибратор (см. рис. 3.2, в) работоспособен
при Рп>Ро> то есть должно выполняться соотношение
RilR4>R\IRj- Нестабильность длительности генерируемых коле
баний в рассматриваемых схемах определяется нестабильн
стью источников питания. Для реализации мультивибратор0'
генерирующих импульсы с различной скважностью, использУ10
Аналоговые генераторы прямоугольных импульсов 177
"Сдельные цепи перезаряда ёмкости от напряжений U+ и £/_.
гт имер такого мультивибратора приведен на рис. 3.2, г.
Разделение цепей производится диодами VD\ и VD1. При
мИровании сигнала L/+ конденсатор С заряжается через ди-
VDI и резистор R3 с постоянной времени R^C, при этом диод
т/г)2 заперт. Конденсатор С заряжается до момента времени th
гда напряжения на обоих входах ОУ станут равны, и на вы-
•оде усилителя сформируется сигнал £/_. Если пренебречь
лиянием падения напряжения на открытом диоде VDX, то,
подставляя в выражение (3.9) постоянную времени R$C и
учитывая, что \Щ = \Щ, получим
t+= R3C \n(\+2(Ri/R2)).
Когда на выходе ОУ сформировано напряжение [/_, диод
VD\ запирается, а конденсатор С перезаряжается через
открытый диод VD2 и резистор R4, при этом
L= R4C \n(l+2(Rj/R2));
T={R3+Ra)C 1п(1+2(Л,/Л2));
Q=l+(R3/R4).
Регулируя соотношения между R3 и R4, можно изменять
скважность, а изменяя сопротивление резисторов R1 или R2,
можно управлять периодом или частотой следования
импульсов. Диапазон регулировки Г лежит в интервале 10... 10"6 с, а б
регулируется от 100 до 0,01. Относительная погрешность
частоты следования сигналов зависит от стабильности напряжений
питания, воздействия внешних факторов (особенно
температуры) и колеблется от 0,5 до 1%.
Расчёт параметров элементов мультивибраторов
рекомендуется производить по следующей схеме.
Исходными данными для расчёта являются: длительность
пУльса tH для симметричного мультивибратора; tn\ и t„2 ~ для
симметричного мультивибратора. Обычно задают величину
по' еспечивающую безопасный режим работы входных цепей,
ольку превышение дифференциального входного
напряжено* РаВНОГО Для схем рис. 3.2, а, г\Щ = \Щ, может привести к
°ю P-i-переходов входных транзисторов ОУ. Величина К&
178
Генераторы сигналов
для приведённых схем определяется соотношением Rx/R2 n
нейший расчет включает следующие шаги:
1) задаются величиной С, исходя из того, что более дл
тельные процессы обеспечиваются большими величинами
кости;
2) задаются сопротивлением R\ и относительно него рас
считывают сопротивление R2, причём учитывается нагрузочная
способность ОУ, которая требует выполнения неравенства
R2+R]»RHmiruaR2=R]/Kb;
3) рассчитывают величину
R^U[Cln(\+2(R]/R2))];
4) дополнительно для несимметричного мультивибратора
рассчитывают величину R4 по формуле
R4=tlt2/[C\nO+2(R]/R2))].
Ждущие мультивибраторы, или одновибраторы, - это
генераторы прямоугольных импульсов заданной длительности.
которые формируются в ответ на запускающий импульс
произвольной длительности. Такие генераторы несложно получить из
автоколебательных, если последние затормозить в каком-либо
устойчивом состоянии и снабдить цепью запуска, выводящей их
в другое состояние на заданное время.
Схема одновибратора, которая получена модификацией
схемы мультивибратора (см. рис. 3.2, а), приведена на рис. 3.3, о-
В этой схеме заторможенный режим обеспечивается диодом
VD\, а цепь запуска выполнена на элементах С2, R4, VD2. ЖДУ'
щий режим одновибратора обеспечивается тем, что при форМИ'
ровании на выходе ОУ положительного напряжения U+ Ди°^
VD\ отпирается и конденсатор заряжен до небольшого полож"'
тельного напряжения, равного падению напряжения на открь1'
том диоде, то есть Uc=Uao. Это напряжение меньше, чем то йа'
пряжение, которое формируется на неинвертирующем входе че'
рез делители R2, RI от выходного напряжения U+ .Таким обр3'
зом, одновибратор сохраняет на выходе положительный поте"
циал U+ (рис. 3.3, б).
Аналоговые генераторы прямоугольных импульсов 179
п
VD\
Чг-
R3
С2
№
VD2
1
*/.♦
и+
pi/.
и.
/
б)
/
ис ,
RI R2
о)
Рис. 3.3. Типовая схвма >кдущего мультивибратора на ОУ (а)
и временная диаграмма его работы (б)
При появлении заднего фронта запускающего импульса,
дифференцирующегося цепью C2—R4, появляется
отрицательный «всплеск», который через открытый диод VD2 поступает на
неинвертирующий вход ОУ. Этот потенциал больше потенциала
на инвертирующем входе, в результате чего на выходе ОУ
формируется отрицательный потенциал [/_, который запирает диод
VD\, а конденсатор С\ через R3 начинает заряжаться от
выходного напряжения С/_. Когда напряжения на обоих входах
выровняются, одновибратор возвратится в ждущий режим. При этом
время импульса t« определяется по формуле (3.10), то есть будет
справедливо (без учёта падения напряжения на VDY) соотноше-
НИе 'и « RiC\n{\ + {Rxl R2)), или с учетом падения напряжения на
^1 более точно ta = R3C\n[\ + (Ri/R2))(\-(Ual/U_)].
Расчёт параметров ждущих мультивибраторов рекоменду-
т производить по той же схеме, что и автоколебательных
Ультивибраторов, а для дифференцирующей цепочки
рекомендуется С2=Ю0 пФ, Л4=10 кОм.
Управляемые мультивибраторы — это мультивибраторы, в
°Рых с помощью входного напряжения осуществляется
Равление параметрами автоколебаний. Схема, которая позво-
й включать или выключать режим генерации с помощью
ДНого напряжения, приведена на рис. 3.4, а. Если Свх<0, то
Ма находится в состоянии отрицательного ограничения, диод
180
Генераторы сигналов
/1ияпдговые генераторы прямоугольных импульсов
181
VD при этом закрыт. Когда входное напряжение полоши4 -^тпСОУ перейдет в состояние [/_, диод VD откроется и
выходное напряжение становится положительным, диод "^ пЬ,° дойдет разряд С через F2, а схема возвращается в исходное
крывается, включая цепь ООС, что переводит схему в pe)Kll ^ пС° " "" ~ "
токолебаний. Условием возникновения автоколебаний *
пр
U+ и т.д.
превышение глубины ПОС над глубиной ООС, что достигает
выполнением условия R3/R4>R]/R2.
^
RI
R1 VD
Hi Н*Э-|
КЗ
и„
1
И-н
иш
а)
иа
МВ1
ТНМВ2
У1
Тг
б)
Ц,,
в)
Рис. 3.4. Типовые схемы мультивибраторов (а, б)
и временной селекции (в)
Если в устройстве (см. рис. 3.4, а) заменить полярное"
диода, то оно будет генерировать импульсы при UBX < 0. Если
таком устройстве исключить диод из цепи (ООС), то авток0*
бания будут существовать, пока выходное напряжение Ha,v
дится в границах линейного участка амплитудной характер
стики ОУ: Е/вых =[/BX(l + i?2 /i?,). В противном случае на вы*0-"
ОУ устанавливается положительное напряжение (при Uex > ") ' ■
отрицательное (при С/вх< 0). I
Схема, в которой с помощью входного напряжения осу
ствляется управление частотой автоколебаний, приведен3
рис. 3.4, б. Здесь заряд конденсатора осуществляется от в^
го сигнал £/*х. В исходном состоянии ОУ находится в поЛ ,
тельном ограничении, диод VD закрыт. Когда под воздейст
входного сигнала напряжение на инвертирующем входе Д° ^
гает напряжения,- задаваемого на неинвертирующем вхоДе
состояние-^
Таким образом, длительность заряда определяется величи
а \] .. Если сделать длительность разряда С достаточно ма-
й то частота колебании будет в основном определяться
величиной Un. Д™ этого требуется, чтобы UBX/Rt «\UBhK\/R2, где
ц - напряжение устойчивого состояния ОУ. Автоколебания в
этой схеме осуществляются при выполнении условий
С/вх > \UhjR3 /(Д3 + R4) и Um < \UBJRX IR2.
Эта схема представляет собой простейший
преобразователь «напряжение - частота» (ПНЧ), со схемотехникой которых
более подробно можно ознакомиться в работе [3, с. 196-200].
Рассмотрим пример использования ждущих
мультивибраторов для реализации схемы временной селекции Г-зубца в элек-
трокардиосигнале (см. рис. 3.4, в). Эта схема используется в
электронном выделителе Л-зубца для его блокировки, когда в
электрокардиосигнале Г-зубец по амплитуде превышает Л-зубец,
что может привести, например, к ложному определению R-R-hh-
тервалов. Временной селектор Г-зубца вырабатывает
блокирующие импульсы, длительность которых является функцией R-R-
Ин-тервала. Ждущий мультивибратор МВ1 формирует импульс
постоянной длительности т. = 80... 100 мс. Мультивибратор МВ2
°°ран по схеме управляемого ждущего мультивибратора, дли-
льность импульса которого пропорциональна длительности R-
*-чнтервала (0,25ДД). Мультивибратор МВ1 запускается от схе-
выделения Л-зубца, например, компаратором /?-зубца. По пе-
ДНему фронту импульса, вырабатываемого МВ1, триггер (Тг)
Чавливается в состояние единицы (рис. 3.5).
t>T заднего фронта сигнала с MB 1 запускается мультивиб-
Р МВ2, который формирует импульс длительностью 0,25RR
ц. ^'ДУЩего периода. Задний фронт импульса с МВ2
возврате Т^ИггеР в исходное состояние. Таким образом, на выходе
л«е Ы Ф°рмируется сигнал С/вых, длительность которого опреде-
ес_ я ^к сумма длительностей импульсов с МВ1 и МВ2, то
^т+ОДбЛЯ.
182
Генераторы сигналов
J
£/« '
С/вх '
UBbix '
к
1
L
А/
Т
\
т
/
0,26
Тс
-»
Ч
У
т
\
(-'вых
/
\/
т
\
Л/
т
)
—►
1
1
1
я)
б)
в)
г)
Рис. 3.5. Временные диаграммы работы временного селектора
Аналоговые генераторы прямоугольных импульсов
находят свое применение для формирования импульсов воздействи»
в терапевтических аппаратах, в схемах управления, измерения
и т.д.
3.3. Интегральные таймеры и генераторы
на их основе
Для формирования импульсов заданной длительности
скважности можно использовать специальные интегралы*
схемы - таймеры. Функциональная схема одного из популяре'
таймеров КР1006ВИ1 (зарубежные аналоги SE555, NE555) пР
ведена на рис. 3.6. В эту схему входят два компаратора А1 я fi
ДО-триггер Тг, резистивный делитель R\-R3, выходные трэй
сторные каскады.
1111ГГ**ральные таймеры и генераторы на их основе JJ&
Рис. 3.6. Структурная электрическая схема таймера КР1006ВИ1
Напряжение питания таймера С/п+ может изменяться в
пределах+5...+15 В. Делитель напряжения подает на нижний
компаратор А2 напряжение С/Н=С/П+/3, а на верхний компаратор А\
^в =21Г|73. Таким образом, если на клемме 2 таймера
напряжение станет меньше С/н, на триггер поступит сигнал установки
8 единицу. Если на вход таймера 6 будет подано напряжение
°льше UB, компаратор А\ выработает сигнал установки в нуль
Риггера (Тг). Кроме этого для Тг имеется дополнительный вы-
Я установки в нуль (контакт 4). Если на вход 4 подать напря-
Ние меньше 0,4 В (логический ноль для цифровых микро-
м)> то независимо от состояния компараторов триггер уста-
"Ьо"тся в состояние «0» (высокий потенциал на инверсном
Навливае
входе
триггера). Высоким потенциалом на инверсном выходе
^ггера открывается транзистор VTS, подавая на выход 7 тай-
МеРа низкий потенциал, то есть нулевой сигнал со входа 4 тай-
МеРа Имеет высший управляющий приоритет. Этот сигнал явля-
^я Для таймера сигналом разрешения Е: если Е=\, то работа
с^МеРа разрешена, если Е=0, триггер таймера находится в со-
0яиии «о».
184
Генераторы сигналов
Вторым по старшинству является сигнал U2, подав N
на вывод 2. Этот сигнал является инверсным для установки т"
состояние «1», вне зависимости от сигнала со входа 6. СяГ'
младший приоритет у непрерывного сигнала U6, подаваемог ^
вход 6. Этот сигнал при Е=\, U2>U„ и U6>UB устанавлив
триггер в состояние «О».
Выходной каскад триггера, построенный на транзистоп
VT\ и VT2, обеспечивает ток до 100 МА, то есть такой токц*
жет обеспечивать управление цепями средней мощности вплол
до релейных схем.
В таймере имеется вход, позволяющий управлять опорщ,
ми напряжениями компараторов (контакт 5). Если он не испои-
зуется, рекомендуется заземлять его через шунтирующий
конденсатор Сш~10 нФ. Временные параметры импульсов,
формируемых генераторами, собираемыми на основе таймеров, слабо
зависят от изменения напряжения питания и температуры и
определяются внешними по отношению к интегральному
компаратору элементами.
Схема построения автоколебательного мультивибратора иг
таймере КР1006ВШ изображена на рис. 3.7, а. В данной схеме
используется времязадающая цепь на резисторах RX-R2 и
конденсаторе С„. Конденсатор Сш шунтирует вход 5. Временны*
диаграммы работы таймера в режиме мультивибратора показ»
ны на рис. 3.7, б. После включения напряжения питания конде
сатор Св начнет заряжаться от источника £/"„ через резисторы"
и К2. Но сначала напряжение на нем невелико, а напряжение"
входе компаратора А2 (см. рис. 3.6) не превышает величи
UJ3. Триггер установлен в состояние «0», транзистор ИП °
крыт, напряжение С/з равно единице. Для определения напр^
ния на емкости Св воспользуемся формулой (3.6). Для интерБ
времени 0</<f0
c/c(0 = t/n(i-e-'/T'),
где xHRi+Ri) CB;
Un — напряжение питания.
^„грояральные таймеры и генераторы на их основе LSI
t/„(+5.- +J5B>
Ua, U2
~^KZ±
fUcM
! '. W
Г :<o \h \h
t i ; I
L_
Рис- 3.7. Типовые схемы мультивибратора на таймере КРЮ06ВИ1 (а, е, г)
и временные диаграммы их работы (б, д)
. В момент времени, когда UCB(t)=UnB, компаратор А2 сни-
, ет сигнал установки в нуль триггера, но своего состояния он
"е Меняет. В момент времени t0, когда UCB(t)=2U„/3, срабатыва-
* к°Мпаратор А\, устанавливая триггер в состояние «0», тран-
^тор m закрывается, a VT2 открывается, на выходе 3
устаивается состояние «0». Открывается также транзистор VI?,
186
Генераторы сигналов
который подключает почти к «земле» выход 7 таймера,
зультате чего через сопротивление R2 и открытый переход w
ёмкость Св начнёт разряжаться. Учитывая совместно два v
нения
[с/Св(0 = с/п(1-в-'/т');
с/Св(0 = 2С/п/з,
для момента времени to можно получить:
*0=т,1пз = и(^+/г2)Св.
Для интервала времени [t0; tx\ когда конденсатор
разряжается через R2, без учёта падения напряжения на открытом
транзисторе VT3, на основании выражения (3.6) можно записать
UCtt(t) = (2Uj3)e^\ (3.15)
где т2 - постоянная времени разряда; т2=/?2Св.
Когда напряжение UCb(J) падает до величины С/п/3 чера
компаратор А2, триггер вновь переключается в состояние «1»,
VT2 и VT3 закроются, VT\ откроется, напряжение на выходе.'
переключается на высокий уровень (логическая единица).
Конденсатор С„ вновь начнет заряжаться до UcB(t) = 2UJ3 и т.д. Дм
момента времени tx справедливо равенство С/Св(г)=С/п/3 , откуда
учитывая выражение (3.15), получаем
^=т.21п2 = 0,693Л2Св. (з161
Для интервала \tx; t2] с учетом выражения (3.6) можно33
писать
UC2(t) = Un+(Uj3-Un)e~^. (3]l1
Для времени t2-UCB(t)-2Un/3, поэтому с учетом выра*
ния (3.17) можно записать (
t2 = т, In2 = 0,693(Я, + R2)CB. 0-]i
На основании выражений (3.14) и (3.16) получаем
Т = 0,693 CB(R1+2R2); Q = 2 + (RjR2).
Для получения импульсов меандра нужно выполнить Ус
вие R]=0, но тогда при открывании VJ3 через него пойдёт 6°
шой ток и он сгорит, потому рекомендуют выбирать R{>1 vP
интегральные таймеры и генераторы на их основе 187
"~^Пля получения меандра можно применять другие схемы, в
ых используют, например, методы разделения цепей заря-
к°т оазряда времязадающей емкости. Схема с раздельным
йа рдением зарядом-разрядом времязадающей емкости, с по-
• Гцовательно включенными переменными резисторами, обес-
ечивающими регулировку длительности и периода следования
мпульсов, показана на рис. 3.7, в. В этой схеме Св заряжается
через RI, ^2 и открытый диод VD\, а разряжается через
открытый диод VD2 и резистор R3.
Схема одновибратора на таймере представлена на рис. 3.7, г.
Цепь запуска состоит из элементов R3, СЪ и VD, времязадающая
цепь RB-C„. В ждущем режиме на выходе таймера формируется
низкий потенциал (см. рис. 3.7, д). Исходно на входе S таймера
(вход 2) резистором R3 поддерживается напряжение U2>UJ3,
триггер (см. рис. 3.6) в нуле, транзистор VT3 открыт, вывод 7
таймера имеет потенциал «земли», емкость С„ разряжена. Если
на вход S подать отрицательный запускающий импульс так, что
в течение некоторого времени будет обеспечиваться
выполнение соотношения U2<UJ3, то триггер таймера перейдет в
единичное состояние, транзистор VT3 закроется и конденсатор Св
начнет заряжаться от С/п через RB. Когда конденсатор Св
зарядится до величины 2UJ3, триггер возвратится в нулевое
состояние и таймер вновь окажется в исходном состоянии.
Длительность импульса на выходе таймера может быть рассчитана как
tK=RBC* 1пЗ=1Д R ВСВ.
Запуск одновибратора может осуществляться непосредст-
но подачей сигнала на вход 5 или перепадом 1/0 на входе
Фференцирующей цепи. Вход 4 может использоваться для
с Рь1вания процесса формирования импульса. На вход 5 может
ь подано управляющее напряжение C/v от источника с малым
р 0^HbiM сопротивлением (например, с выхода ОУ), таким об-
в М можно управлять длительностью формируемого импульса
°°тветствии с формулой
t^RBCB\n[irJ(irn-Uy)\. (3.19)
ток ХоДноЙ ток компаратора А1 составляет примерно 0,1 мкА,
Скрытого транзистора VT3 равен 0,5 мкА. Этими токами оп-
188
Генераторы сигналов
ределяется наибольшее допустимое сопротивление резист
Рекомендуемые значения RB в пределах 1 кОм...10МОм и
меньшая возможная длительность tw определяется парамет ^
таймера и равна приблизительно 10 мкс. ^
Рассмотренный тип таймера относится к разновидНо
однотактных схем. В вариантах, когда требуется получи
большую длительность импульса, измеряемую часами, прим
няют многотактные таймеры. Вариант блок-схемы многотактно-
го таймера приведен на рис. 3.8.
.+£_
± С
Однотактный
таймер
Двойной
счетчик
Схема
управления
Выход
Пуск Сброс
Рис. 3.8. Блок-схема многотактного таймера
В этой схеме импульс, формируемый однотактным таш*
ром с параметрами, заданными цепью R-C, попадает на дв°и4'
ный счетчик, на выходе которого формируется сигнал, «затяи)
тый» на время, определяемое его коэффициентом пересчета.
Согласованная работа элементов таймера обеспечивав
схемой управления, которая в исходное состояние перевод*1
„„„..„„_.. ..«-^ ~ - -м^
сигналом «Сброс». Включение таймера осуществляется с
„л. . ,.тт
лом «Пуск»
; иН-ГеР"
В различных конструкциях многотактных таймеров -
вал времени может задаваться программно по коду, устанэв
ваемому перемычками или со стороны ПЭВМ, а может #еС
определяться внутренней структурой счетчика. ^
В качестве примера в таблице 3.1 приведены основнЫ^,
рактеристики некоторых типов зарубежных таймеров [3, с 2 '
Интегральные таймеры и генераторы на их основе ] go,
Таблица 3.1
Основные параметры аналоговых таймеров
Модель
таймера
Напряжение
питания, В
Ток
требления
при
Кг=5В,
мА
-*ВХ)
нА
Втекаю-
щий/вы-
текаю-
щий
выходной
ток, мА,
не более
Макс.
частота им-
пуль-
сов,
МГц
фициент
пересчета
Примечание
NE555
i XR320
1CM7555I
Однотактные таймеры
4,5...18
4,5...20
2...18
0,12
500
0,05
200
100/10
10/4
0,5
0,5
1
Аналог 1006ВИ1;
имеются
сдвоенный и счетверен-
ный варианты
Открытый кол-
лектор
КМОП-вариант
INE555
1CL8240
4,5...18
Многотактные таймеры
5/1
0,5
1...25
5
Открытый кол-
|лектор
'1СМ7250
2...18
0,25
3,2/0,3
1...99
Программирование перемычками
Известны многофункциональные микросхемы, где
таймеры включены в комплекс функциональных узлов, реализующих
Различные виды преобразования аналоговых и цифровых
сигналов.
-4- Генераторы линейно изменяющегося напряжения
Но форме генерируемых сигналов генераторы линейно
еНяющегося напряжения (ГЛИН) разделяются на генерато-
илообразного напряжения (ГПН) и генераторы напряже-
Ня ТРеУГольнои формы. Способ получения линейно изме-
То ^ег°ся напряжения основан на заряде (разряде) конденса-
сВо п°стоянным током, а отличия в схемотехнике ГЛИН
сТо Тся к различным способам построения источников по-
г0 гт-^0143 тока. На рис. 3.9, а показан график работы реально-
Pafi ' а на Рис- 3.9, б - график формирования погрешности
°Ть1ГЛИН.
190 Генераторы сигналов
fl> Um
ия
и..
и„
реал2
Рис. 3.9. Графики работы и формирования погрешностей работы ГЛИН
Относительная погрешность работы ГПН определяется из
выражения
6ПН ЧАС4ах/(Ц,ЬК кон -^ВЬК „ач)|> (3-20)
где А С/тах = max | ит - С/вых. нач|;
UKR - мгновенное значение выходного напряжения,
соответствующее идеальному выходному сигналу;
^реал- мгновенное значение реального выходного
напряжения;
Ц)ых. kohj £Лых. нач - напряжения соответственно в конце и
начале цикла формирования линейно изменяющегося напряжения;
^пр _ время прямого хода ГПН;
tB- время восстановления.
Одна из широко используемых схем ГПН строится на
основе генератора с компенсирующей ООС (рис. 3.10, а). В этой
схеме для задания начальных условий (разряда конденсатора'
используется ключ на полевом транзисторе, управляющее на'
пряжение на который подается от генератора прямоугольны*
импульсов. Формирование линейно изменяющихся напряжений
осуществляется при закрытом транзисторе. При размыканий
ключа конденсатор заряжается от входного напряжения. Удобн0
выбрать С/вх= const -Щ. Для этой схемы без учета малых пар3'
метров можно записать
С/вых(0 = - KU0[l-e-^«c].
Генераторы линейно изменяющегося напряжения 191
Другая запись для выходного напряжения для этой схемы
им
(0 = --^Jt/„A + t/,
вых нач „„ ^ вых. нач ■
(3.21)
Остаточное напряжение на конденсаторе С/ВЬ1Х нач при
замкнутом ключе может быть найдено из выражения
(3.22)
^вых. нач - /(^0 + Лдоб )^вх/^ ■■
где Ro - сопротивление открытого транзистора;
Ядоб _ добавочное сопротивление, ограничивающее ток
через транзистор.
о)
1/«
Яд0б
ти„
R1
б)
R\
Р2
+Е0
R4
U™2 R**
T1/R3
JUa
Rl
e)
* (-'вых
u0
ВИ
—•—
Tt;
R3
уШ
Rl
Rl
l •*
Рис. 3.10. Типовые схемы ГПН
Для полного разряда конденсатора необходимо добиться
Вып°лнения условия (Л0+/?ДОб)С«/в, где tB - время, в течение ко-
°рого транзистор открыт.
Генератор пилообразного напряжения характеризуется
а*Же скоростью изменения выходного напряжения V. Для
раскуриваемой схемы UBUK=—UBX/RC. Из этого выражения видно,
° скорость нарастания можно регулировать изменением t/BX.
ли учитывать такие параметры ОУ, как напряжение смещения
192
Генераторы сигналов
нуля
^см5 входные токи / вх и i вх, и пренебречь факторами вти*
го порядка малости, можно определить вызванное этими па
метрами изменение выходного напряжения ГПН, то есть
грешность от воздействия этих факторов
^погр = ^вых ='(СЛ/*-'« -ecJR)/C
Схема, приведенная на рис. 3.10, а, из-за конечности if
реализует выпуклую форму выходного напряжения. Используя
неинвертирующий вход усилителя (организуя ПОС), можно
значительно повысить линейность работы ГПН за счет
организации источника тока с достаточно хорошими
характеристиками. Такая схема приведена на рис. 3.10, б. Для этого генератора
выбираем [/BX]=const и £/Bx2=const. На его выходе при /?1=/f4=i? и
i?2=i?3 при запертом транзисторе VT в линейном режиме работы
ОУ формируется выходное напряжение
t/«x = 2'(£/вх2 - U^)lRC + С/вых. нач. (3.23)
Напряжение С/вых нач является выходным напряжением
ГПН, когда транзистор VT открыт. При выполнении условии
R0+RRO5«Ri имеет место соотношение
Из соотношений (3.23) и (3.24) видно, что в генераторе
могут устанавливаться как величины UBbK и U, так и величий
Г Г
^вых. нач
- dbia. пан-
Достаточно хорошая линейность при построении ГПН
обеспечивается при использовании таймера (см. рис. 3.10, в). В это"
схеме генератор тока собран на транзисторе VT и резистор3*
RI...R3. Таймер включен в режим ждущего мультивибратораlcJlj
рис. 3.7, г). При поступлении запускающего импульса на втор
вход таймера, конденсатор С„ начнет заряжаться от
генератор2
тока, собранного на транзисторе VT. Напряжение на конденсат°Р
линейно нарастает до величины 2UJ3, после чего одновибрат г
возвращается в ждущий режим. Напряжение £/вых снимается не
средственно с конденсатора Св, поэтому необходимо, чтобы
следующий каскад обладал большим входным сопротивлением-
Рекомендуется следующий порядок расчета ГПН. Для с
мы рис. 3.10, ^исходными данными являются: tnp - время я"
I
•
Генераторы линейно изменяющегося напряжения |93
о хода, в течение которого формируется линейно
изменяются напряжение; |£/ВЬ1Х кон| - напряжение в конце цикла
формования линейно изменяющегося напряжения; С/вх - постоян-
ое напряжение, подаваемое на вход ГПН.
Алгоритм расчета состоит из следующих этапов:
1) рассчитывается сопротивление Лдо6 таким образом,
чтобы при разряде конденсатора ток через МОП-транзистор не
превысил предельно допустимый. Это условие обеспечивается при
выполнении неравенства
^доб >| ^вых. ко|Дс тахЫ?0>
где Ic max _ максимальный ток стока транзистора;
2) сопротивление R2 рассчитывается из условия R2»RR05+Ro
и R2>En/IBUX max, где Е„ - напряжение положительного источника
питания.
Последнее условие не позволяет перегрузить ОУ по току;
3) из уравнения (3.21) при заданном tnp определяют
емкость конденсатора
и для выбранного С уточняется сопротивление
*^2 '-'вх'пр' V*- ^ВЫХ. КОН79
4) определяется минимальное время, в течение которого
Должен быть открыт транзистор (длительность отрицательного
импульса на затворе транзистора)
T-tnp = t; = niRo + Ядо6 )С {n = 3...5);
5) проверяется выполнение неравенства i?/BX < еси, приняв
в* ~ 'вх ■ Если оно выполняется, то принимается R\=0, если не
ВЬ1полняется, то Я,=Я2;
6) вычисляются максимальное и минимальное входные на-
я*ения, при которых ОУ не входит в насыщение, по
формуем и +
fixmin =-^выхЛС/'пр И ^вхтах = "^вых^С I *пр ■
Для схемы, представленной на рис. 3.10, б, исходными
в llHm являются: tnp, [С/вых ,«,„], [/„, , С/вх2, С/Вх. нач - напряжение
Ujg Ле цикла формирования линейно изменяющегося напря-
я- Последовательность расчета схемы следующая:
194
Генераторы сигналов
1) конденсатор С и резистор /?доб можно рассчитать анал
гично методике, приведенной выше; °"
2) находятся сопротивления R^R^R по формуле (ззи
При УСЛОВИИ, ЧТО t=tnp И С/вых^^выхкон: ' '
р 2?пр([/вх2 - С/ю|)
л = ;
кон ^вых нач'
3) рассчитывается сопротивление R2 по формуле
"2 "'-'вых. нач''-'вх!>
МОЖНО ПРИНЯТЬ Ry=R2',
4) проверяется выполнение условия Rj\\R4<RH, где i?H -
минимальное сопротивление нагрузки. Если оно выполняется,
расчет заканчивается; если не выполняется, то емкость
уменьшается в /?н/(./?з1|.&0 раза и расчет элементов схемы повторяется.
В отличие от ГПН в генераторах треугольных импульсов и
заряд, и разряд конденсатора производится постоянным током,
за счет чего достигается линейный рост и спад напряжения. В
большинстве случаев для создания такого режима работы на
вход интегратора подаются разнополярные прямоугольные
импульсы. Поддержание требуемых характеристик сигнала
достигается введением ООС.
Возможные варианты включения ООС в генераторах
треугольной формы приведены на рис. 3.11, а. Локальная ООС1
охватывает интегратор обратной связью по постоянному т°кУ'
компенсируя постоянное смещение на выходе генератора-
Улучшение характеристик линейности выходного сигнала обес'
печивается за счет ООС2, которая воздействует на скважность
импульсов, подаваемых на вход интегратора. Временная Ди
грамма работы генератора треугольных импульсов (ГТИ) г>Р
ведена на рис. 3.11,6.
Простейшая схема ГТИ приведена на рис. 3.11, е. Эта схеДО
представляет собой интегратор, охваченный глубокой ООС по А
стоянному току; ООС поддерживает близким к нулю среднее вЬ
ходное напряжение и построена на Г-образной цепочке /?ось ^°^
Сое- На вход интегратора поступают разнополярные прямоуг0^
ные импульсы типа меандра с параметрами 1Гущ>, С/упр, /+и, Гй-
' Генераторы линейно изменяющегося напряжения
Л95.
Ц.ЫХ +
с/.,
*пр
: г'
\ '
'обр
^вых min
я)
б)
А\
и„
R2
Rqq\
Roc2
- Щ 1
Coc^jJ
II
II
^ С
А У
1 В
х*
т
в)
JJ*
,с
,г/гз ra
ТГ
R2
RI
Х-
и
R5
лг:
t
г)
Рис. 3.11. Типовые схемы генераторов треугольных импульсов
и временная диаграмма
^ Исходными данными для расчета являются параметры
"р"~'обр и управляющее напряжение ±С/упр (например, ±10В). Рас-
Так°го генератора состоит из следующих этапов:
л 1) сопротивление резисторов R2 и R] и емкость С опреде-
р Тся по тем же соображениям, что и для схемы ГПН (см.
°' 3-Ю, а);
196
Генераторы сигналов
2) амплитуды выходных напряжений рассчитываются
формуле с
^вых max — ~^вых min ~ 'пр v упр — упр'' *-ЩУ \ (3.25|
3) сопротивления i?oci=^oc2=^oc определяются из условия
IOR2>ROC>RH;
выполнение этого неравенства обеспечивает
удовлетворительную стабилизацию по постоянному току и исключает перегруз-
ку ОУ по току;
4) емкость цепи ООС рассчитывается по формуле
Qx=20fnp/ -Яос-
Более высокое качество треугольных импульсов получают
в схемах с общей ООС (рис. 3.11, г). Усилитель А\ с
резисторами R\, R2, R5 служит пороговым устройством с гистерезисом,
вырабатывающим прямоугольные импульсы. Второй ОУ - А2 с
элементами R3, R4, С представляет собой интегратор. Когда на
выходе А1 формируется напряжение отрицательной полярности,
на выходе интегратора генерируется возрастающая часть
сигнала треугольной формы. Часть этого сигнала через R5 поступает
на неинвертирующий вход ОУ А\ и компенсирует часть
сигнала, поступающего с его же выхода через R\ и R2. При равенстве
сигналов со стороны R5 и RI на входе А\ этот ОУ
переключается в состояние положительного выходного напряжения, в Ре'
зультате чего на выходе интегратора начинает формировать'
спад отрицательного сигнала треугольной формы. Амплитуд
выходного сигнала А2 регулируется резистором R2, с помошь
которого изменяется отношение R5/(R]+R2). Частота следован"
импульсов определяется постоянной времени интеграт°Р
(R3+R4)C и регулируется сопротивлением R3.
При высоких требованиях к линейности не рекомендУеТ
превышать частоту следования треугольных импульсов в Ю ^
из-за ограничений на характеристики ОУ. Для больших час
рекомендуют выбирать высокочастотные ОУ или использов
таймеры.
3.5. Функциональные генераторы
Для формирования управляемых сигналов различной фор-
а также для формирования синусоидальных сигналов при
инимальных искажениях, особенно в области низких и инфра-
низких частот, используют так называемые функциональные
генераторы (рис. 3.12).
Триггер
Шмитта!
_ПЛ_Г
Интегратор
W4
Формирователь
синусоидального
напряжения
ПУХ,
I
С/_
и;
(У,
Рис. 3.12. Блок-схема функционального генератора
_#
На этом рисунке триггер Шмитта с интегратором
формируют прямоугольные и треугольные импульсы, а формирователь
синусоидального сигнала - гармонический сигнал.
Схемотехника построения генераторов прямоугольных и
^угольных импульсов была рассмотрена выше.
Вариант принципиальной схемы цепочки триггер
Шмитта - интегратор, охваченный общей обратной связью, показан
На рис. 3.13.
{/, VV4/
рис. 3.13. Электрическая схема формирования прямоугольных
и треугольных импульсов
198
Генераторы сигналов
В этой схеме на операционном усилителе А1 собран трИг
гер Шмитта, а на Л2 - генератор треугольных импульсов. Когда
выходное напряжение интегратора достигает порога срабатыва.
ния триггера, напряжение на его выходе U„ скачком меняет свой
знак. Вследствие этого напряжение на выходе генератора начи-
нает изменяться в противоположную сторону, пока не достигнет
другого порога срабатывания триггера. Изменяя постоянную
интегрирования RC, можно перестраивать частоту
формируемого напряжения в широком диапазоне. Амплитуда треугольного
напряжения UT зависит только от установки уровня
срабатывания триггера Шмитта, который определяется выражением
Un=UHRjR2, (3.26)
где UH — напряжение насыщения операционного усилителя.
Период колебания импульсов этой схемы определяется
выражением
T = (4R3CRI)/R2. (3.27)
Формирователи синусоидальных сигналов обычно
выполняются по схемам нелинейных функциональных
преобразователей, например, на основе аналоговых перемножителей. Если
частота работы генератора постоянна, то в качестве
формирователя может быть использован фильтр нижних частот,
настроенный на пропускание только первой гармоники треугольного
сигнала.
В качестве конкретного примера рассмотрим вариант
реализации функционального генератора, используемого в
аппарате для рефлексотерапии типа «Эллада-7» (рис. 3.14). В этой
схеме цепочка триггер Шмитта - генератор треугольных
импульсов, называемый генератором-формирователем (ГФ),
собран на основе классической схемы генератора линейно
изменяющегося напряжения с двумя основными цепями обратной
связи. При этом на операционном усилителе А\ собран
интегратор, а на А2 — генератор прямоугольных импульсов с
положительной обратной связью через резистор R4. Операционные
усилители А\ и А2 генератора-формирователя охвачены обше"
Функциональные генервторы
Ш.
трицательной обратной связью через сопротивление RI. Для
Нормирования «почти» синусоидальных сигналов в схему ГФ
включен нелинейный преобразователь, выполненный на
транзисторе VT. Период следования сигнала определяется величиной
емкостей (С1...С11), включаемых в цепь обратной связи А\
переключателем S. Скважность вырабатываемых импульсов
регулируется сопротивлением R2.
Рис. 3.14. Структурная электрическая схема функционального
генератора прибора «Эллада-7»
Ряд фирм производит функциональные генераторы в
интегральном исполнении, например, микросхему МАХ038, ко-
Торая генерирует синусоидальный сигнал, треугольные и пря-
МоУгольные импульсы с частотой, изменяющейся в диапазоне
>1 Гц...20 МГц. Синусоидальные сигналы имеют коэфФиДиент
ГаРмоник не более 0,75%.
3.6. Модуляторы
Операция изменения параметров несущих (модулируемых)
°лее высокочастотных сигналов (гармонических или негармо-
Нических, включая импульсные) более низкочастотными управ-
200
Генераторы сигналов
ляющими (модулирующими) сигналами называется ModvnT^
и реализуется специальными устройствами - модуляторами
Различают модуляцию по амплитуде, частоте и фазе. Ин
гда отдельно рассматривается импульсная модуляция с ее п
новидностями, например, широтно-импульсная модуляция и т
При амплитудной модуляции (рис. 3.15) под воздействием
управляющего напряжения £/упр изменяется амплитуда несущего
сигнала £/н.
ик
Утв*.
Рис. 3.15. Примеры временных диаграмм амплитудной модуляции:
а - гармонического сигнала; б- прямоугольных импульсов
Амплитудная модуляция гармонического сигнала форми"
рует «огибающую» высокочастотного сигнала по закону, опре
деляемому формой управляющего сигнала.
Амплитудная модуляция прямоугольных импульсов чай
всего организуется путем прерывания высокочастотных иК
пульсов при отсутствии управляющего сигнала.
При модуляции по частоте (частотной модуляции) упР
ляющий сигнал меняет частоту следования модулируемых "
лебаний (рис. 3.16).
Модуляторы 201
Рис. 3.16. Пример временных диаграмм частотной модуляции
При модуляции по фазе (фазовая модуляция) управляющее
напряжение управляет сдвигом фазы Дф на выходе модулятора
(рис. 3.17).
и*
] \
ик
Дф4
Дф2
1—_|
Ь%1
д
ф4
Рис. 3.17. Пример временных диаграмм фазовой модуляции
В варианте, представленном на рис. 3.17, сдвиг фазы вы-
Дного сигнала по отношению к входному сигналу увеличива-
я по мере роста управляющего напряжения.
Рассмотрим типовые технические решения, применяемые
реализации различных типов модуляторов.
Р^ ^хема простейшего модулятора на полевом транзисторе
' н& вход которого подается постоянное смещение Ео,
привела рис. 3.18.
Модулируемое напряжение UH частотой ш и управляющее
Ряжение t/ynp частотой Q подаются на вход транзистора через
202
Генераторы сигналов
высокочастотный (П) и низкочастотный (72) трансформат0
На элементах О и L собран резонансный фильтр, выделякш 1
из всего множества спектральных составляющих UH только и
сущую и полезные боковые амплитудно-модули-руемые колеб
ния. Блокировочный конденсатор С2 имеет малое сопротивлени
для высокой частоты £/„ и большое сопротивление для Ц,п
Рис. 3.18. Схема простейшего амплитудного модулятора
Одной из основных характеристик амплитудного модул*"
тора является его модуляционная характеристика,
определяющая зависимость модулированного напряжения от
мгновенного
значения модулирующего напряжения £/м =/(£/). а так*
глубина модуляции М (%), определяемая как отношение разн
сти между максимальной величиной модулируемого сигн^
(£/i) и средним значением модулируемого сигнала (£/2) к вел
чине £/2, умноженное на 100% (см. рис. 3.15, а).
Л/ = (£/1/£/2)-100% = [(£/тях-С/2)/£/2].100% =
(3.2Й
= [(С„
-Ц™)/(£/™х+Ц™,
)]100%,
Модуляторы
203
Широкое применение в медицинской практике амплитуд-
одуляторы нашли в электротерапевтической аппаратуре
НЬ1С чного назначения. Вариант использования транзисторного
Р улЯТора в терапевтической части аппарата «Эллада-7» для
флексотерапии показан на рис. 3.19.
ис- 3.19. Структурная электрическая схема модулятора прибора «Эллада-7»
Собственно модулятор выполнен на полевом транзисторе
• Генератор несущих прямоугольных импульсов (импульсов
лнения) выполнен на операционном усилителе А1 по схеме
ьтивибратора, аналогичной схеме рис. 3.2, г. Частота
заполни Я ДискРетно выбирается переключателем S\. Плавная регу-
Ск Ка частоты заполнения регулируется резистором R1, а ее
Риг ^^ ~ Резистором R9. Функциональный генератор (см.
Рис.
Дал]
14) ф,
ьные и
ормирует управляющие прямоугольные, синусои-
реЦ] - ** треугольные сигналы в зависимости от выбираемого
ТеЛь Ия- На транзисторе VT2 выполнен эмиттерный повтори-
3Игт1 амплитуда выходного сигнала которого регулируется ре-
ТоРом Rs.
гДе ^тах и Umi„ - максимальное и минимальное значения М<^ Зцс обственно модулятор работает как ключевая схема тран-
лируемого сигнала соответственно.
;т°Ра,
который, открываясь со стороны затвора, пропускает в
204
Генераторы сигналов
^ЧИо.
цепь резистора R\ ток, форма которого определяется фуНк
нальным генератором.
Схема модулятора, используемого в терапевтическом п
боре «Амплипульс-5», приведена на рис. 3.20. Этот модуЛят
собран по схеме двойной коллекторной модуляции с постояи
ным возбуждением и состоит из двух каскадов: на транзистор
VTI собран усилитель низкой частоты, а на транзисторе VTl~
собственно модулятор.
Вход 2 >
- Выход
+10 В ТА
Рис. 3.20. Структурная электрическая схема модулятора
На базу транзистора усилителя низкой частоты через кор
ректирующую цепь, состоящую из резистора^! и конденсат Р
С\, поступает напряжение с генератора низкой частоты (вход
Коллекторной нагрузкой транзистора VTX является резистор
#
Этот резистор включен последовательно в коллекторную ц
транзистора VT1 модулятора, на базу которого (вход 2) поДа
сигнал с генератора высокой частоты. Вследствие присоеД
ния коллекторной цепи транзистора VT2 к генератору нИЗ 0
частоты питание модулятора осуществляется напряжение
закону низкой частоты. В колебательном контуре модуЛяТ^
состоящем из катушки индуктивности L и конденсатор3
возникают синусоидально-модулированные колебания.
Модуляторы
205
—Пля обеспечения режима перемодуляции, который опре-
тСя надежным запиранием транзистора VT2, питание це-
1в" миттера и базы транзистора VTX осуществляется напряже-
+10 В. Остальные цепи модулятора питаются напряжени-
пей
ниеМ
ем-24 В.
Для улучшения формы кривой модулированного сигнала в
режиме перемодуляции служат диоды VD\ и VD2. Диод VDX
обеспечивает полное запирание транзистора во время отсечки
(паузы) при положительном напряжении на коллекторе
транзистора VT2. Диод VD2 шунтирует в это время контур,
предотвращая возникновение в нем паразитных колебаний.
За счет цепочки смещения, состоящей из резистора /?8 и
конденсатора С5, на эмиттере транзистора VT1 в такт с
модулирующим сигналом автоматически изменяется напряжение
смещения. Это приводит к углублению основной модуляции на
коллекторе.
В приборах для элетронейростимуляции типа «Элиман»
используют прямоугольные импульсы несущей и управляющей
частоты. Вариант схемы такого цифрового модулятора приведен
на рис. 3.21.
Стоп
Частота
ГТИ
Пуск
_пллл
R
Тг
Q
Ч Л4
и
ЛШШ_ПЖП_
иы
Коэффициент деления
рис. 3.21. Структурная схема цифрового модулятора
В
В
Лят Эт°й схеме /iS-триггер реализует схему включения моду-
Нул ' *РИ подаче сигнала «Стоп» триггер устанавливается в
е с°стояние, закрывая схему «И». При подаче сигнала
u л ...
Уск» триггер устанавливается в единичное состояние, форми-
разрешающий потенциал по одному из входов схемы «И».
206
Генераторы сигналов
Генератор тактовых импульсов вырабатывает импульсы"4
щей частоты, регулируемой по входу «Частота». Делител ^
тоты (ДЧ) с перестраиваемым коэффициентом деления <ь Час*
рует управляющий сигнал, открывающий на заданное впе
схему «И», на выход которой будут поступать импульсы с ГГц
прекращающиеся на время существования «нулевого» п№
циала с выхода ДЧ.
Простейшие частотные модуляторы создаются на баз»
схем автогенераторов с перестраиваемой частотой (рис. 3.22)
a
11
-0 *ДТ
С\
,VD\
-0 и*
VTI
Рис. 3.22. Структурная электрическая схема
частотного модулятора на автогенераторе
В этой схеме колебательный контур генератора выполне
на элементах L, С\, которые через разделительный конденсат t
С2 включены параллельно с варикапом VDI, который запир
|Юшег°
что,
ся разностью напряжений (£/к-Цпр)- Изменение управля
напряжения приводит к изменению емкости варикапа,
свою очередь, изменяет резонансную частоту колебательй
контура и, следовательно, генерирующую частоту. Такой м"Д^
лятор может работать на частотах до нескольких гигагерц
его частота зависит как от амплитуды сигнала, так и от нал*
гармоник. р.
Импульсная частотная модуляция реализуется преббр
вателями «напряжение - частота» (ПНЧ) (см. рис. 3.4, б)- *
типы преобразователей широко используют при построе
Модуляторы 207
^^ово-Цифр°ВЬ1Х преобразователей, схемотехника построе-
a"f которых будет рассмотрена ниже.
Н" При построении фазовых модуляторов в качестве основ-
элементов могут применяться усилители, резонансная час-
а которых изменяется, например, при использовании варика-
причем один такой модулирующий каскад «хорошо
работает»^ пределах ±л/4. Для получения больших индексов
модуляции включают последовательно несколько таких каскадов.
В диапазоне сверхвысоких частот изменение сдвига фаз
осуществляют изменением длины проводов, через которые
проходят модулируемые колебания.
При работе с импульсными сигналами широкое
распространение получила так называемая широтно-импулъсная модуляция
(ШИМ), которая состоит в изменении широты (длительности)
импульсов, следующих друг за другом с постоянной частотой.
Базовая схема широтно-импульсного модулятора с
использованием генератора линейно изменяющегося напряжения
(ГЛИН) и компаратора напряжения (КН) приведена на рис. 3.23.
в а
Рис. 3.23. Базовая структура широтно-импульсного модулятора
В этой схеме линейно изменяющееся напряжение с ГЛИН
(^н) сравнивается компаратором КН с управляющим пороговым
НапРяжением (Цпр), которое управляет шириной выходного им-
пУльса. При этом чем ближе пороговое напряжение к основа-
НИ1о сигнала с ГЛИН тем больше длительность выходных им-
"Ульсов UM.
. В качестве ГЛИН используются генераторы пилообразного
РИс- 3-24, а) и треугольного (рис. 3.24, б) напряжений.
При использовании генератора пилообразного напряжения
г°ЦУлЯцИя осуществляется изменением положения только одно-
0 Фронта импульса, что называется односторонней ШИМ.
208
Генераторы сигналов
июи
Vnpl
упр2 .
ик
Vv,
uKi ♦
и*
*Й ^-4
■ I
д
^
я
_^ «Vynp2 |Х I |ХХн
tfi.lt
—I № I—I—I—
£/м2Т
■-X y<\
u
S^
ii
jnn_r
a) 6)
Рис. 3.24. Временные диаграммы ШИМ:
а - односторонняя; б - двухсторонняя
При использовании генератора треугольных импульсов
изменяется положение обоих фронтов, поэтому такую
модуляцию называют двухсторонней. Основное применение
модуляторов ШИМ - цифроаналоговые схемы.
3.7. Фазочувствительные детекторы
Электронные устройства, которые на своем выходе
вырабатывают сигналы, среднее значение которых пропорционально
сдвигу фаз между опорным (чаще всего прямоугольным) и
исследуемым сигналом, называют фазочувствительными
детекторами. Этот класс детекторов называют так же
фазочувствительными демодуляторами или синхронными детекторами.
Такие схемы используются: в реографии; для подавления поме&
вызываемых паразитными емкостями; для выпрямления
сигналов, получаемых с линейных дифференциальных трансформ3'
торов и т.д.
Принцип работы фазочувствительного детектора
быть проиллюстрирован с помощью схемы с управляемым кл!°'
чом (рис. 3.25, а). Здесь принята следующая логика управленИ •
при положительном импульсе С/упР ключ S находится в верхне
положении; при отсутствии импульса Цт,р - в нижнем.
Фазочувствительные детекторы
209
Тогда, если управляющий (£7^) и входной (t/BXi) сигналы
адают по фазе, то положительная полуволна входного сиг-
с0В поступает на выход (UBUxi) без изменения, а при отрица-
Н ной полуволне ключ S находится в нижнем положении, ме-
полярность выходного сигнала. Нетрудно убедиться, что
нулевом сдвиге фаз среднее выходное напряжение на выхо-
е схемы будет положительным и максимальным (рис. 3.25, б).
с)
_ '-'hi
б)
Цпр "
U„,|
<Ли,гх1 ik
t/„2|
t/«fl"
А
л!
|
л!
в
л!
VMM:
л/ЧлН/wx
f
У; Y j V ;У
!_/
у
(
и
/
V
/
и
/
и
(
J
/
[У
ис. 3.25. Схема простейшего фазочувствительного детектора (а)
и временные диаграммы его работы (б)
lj При сдвиге фаз UBX относительно С/упр среднее напряжение
щТ Начинает уменьшаться, и при сдвиге на 90° станет равным
ри ' Что демонстрируют временные диаграммы U^a и £/ВЫХ2 на
■25, б. При сдвиге до 180° на выходе получается макси-
210
Генераторы сигналов
мальное отрицательное среднее напряжение. Таким обра
среднее выходное напряжение в приведенной схеме пропорщ,'
нально сдвигу фаз между £/упР и £/вх.
В практических схемах в качестве ключа часто использущ
аналоговые коммутаторы. Пример использования такого kommv
татора в тетраполярном реографе показан на рис. 3.26.
сы
п п
у^я
Рис. 3.26. Структурная схема аналогового коммутатора (а)
и временные диаграммы его работы (б)
Зондирование биообъекта (БО) переменным током вЬ'
кой частоты, создаваемым генератором G (см. рис. 3.26, б), W ^
Фазочувствительные детекторы
211
ппится через токовые электроды ТЭ1 и ТЭ2. Пройдя через
о0бъект, ток, сдвинутый по фазе реактивными элементами
биообъекта, снимается измерительными электродами ИЭ1 и
ИЭ2 и через конденсаторы О и С2 и трансформатор Т
поступает на входы симметричных усилителей инверторов А1 и А2.
Усилители А\ и А2 служат для повышения входного
сопротивления усилительного канала, которое ограничивается
сопротивлением обмотки трансформатора и частотой работы
генератора зондирующего тока. На выходе ОУ формируется
модулированный внутренними структурами организма
высокочастотный сигнал. Временные диаграммы напряжений на
выходе одного из них (А\) при различных сдвигах фаз и
напряжения, снимаемого с измерительных элементов, приведены на
рис. 3.26, б, г, е.
Фазочувствительный демодулятор (синхронный детектор)
выполнен на аналоговых коммутаторах АК1 и АК2,
управляемых прямым С/ф и инверсивным СА, сигналами формирователя
импульсов (ФИ) зондирующего тока (см. рис. 3.26, в).
Если фаза сигнала с выхода операционных усилителей
совпадает с фазой зондирующего тока, что соответствует отсутствию
реактивной составляющей в измеряемом сопротивлении биообъекта,
то аналоговые коммутаторы пропускают на свой выход полуволны
входного сигнала без искажений (полностью) (см. рис. 3.26, д). При
Наличии реактивной составляющей в измеряемом сопротивлении
Между сигналами XJG и t/Ai появляется сдвиг фаз, и аналоговые
коммутаторы начинают «срезать» часть своего входного сигнала
1см. рис. 3.26, ж), причем чем больше реактивная составляющая,
ем меньшая часть входных сигналов пропускается на выход
^- Это приводит к тому, что амплитуда выходного сигнала по-
ле Детектора и фильтра низких частот (Дт и ФНЧ) будет зави-
ть не только от амплитуды сигнала, снимаемого с биообъекта,
о и от сдвига фаз между зондирующим и регистрируемым
наряжением, что соответствует логике работы реографа.
_ Современная электронная промышленность выпускает
льщое число элементов, которые могут быть использованы
я построения схем генераторов для различных типов элек-
212
Генераторы сигналов
тронных устройств, включая медицинские приборы, аппараты
системы и комплексы. '
Ряд фирм выпускают узкоспециализированные генерато
ры, предназначенные для решения конкретных задач, включая
медицинские. Известны и универсальные многофункциональ-
ные генераторы, выполняемые в одной микросхеме. Например
микросхема МАХ038 генерирует синусоидальные, треугольные
прямоугольные и импульсные сигналы в области частот
0,1 Гц...20 МГц, причем синусоидальные сигналы имеют
коэффициент гармоник не более 0,75 % [3, с. 137].
Тренировочные задания
1. Нарисуйте схему генератора гармонических колебаний на
операционном усилителе с мостом Вина и запишите формулу
расчета частоты его автоколебаний.
2. С какой целью в генераторах гармонических колебаний
используют нелинейные элементы? Нарисуйте вариант схемы
генератора с нелинейными элементами.
3. Нарисуйте схему генератора прямоугольных импульсов
на операционном усилителе и расскажите принципы его работы.
Для чего используют разделение цепей перезаряда емкостей в
мультивибраторах?
4. Нарисуйте схему интегрального таймера типа
КР1006ВИ1, расскажите о принципах его работы и приведите
пример практического использования.
5. За счет чего возникает погрешность в работе генераторе8
пилообразного напряжения? Запишите основные формулы расчета
этих погрешностей.
6. Дайте определение функционального генератора и приве'
дите пример его структурной схемы.
7. Дайте определение модуляции и приведите пример п°
строения модуляторов аналогового и дискретного токов.
8. Дайте определение фазочувствительного детектора и н
рисуйте вариант его принципиальной электрической схемы.
213
Тестовые задания
1. Генератор гармонических колебаний, описываемый
характеристическим уравнением типа a2p2+a\p+a0, работает на частоте,
определяемой выражением ш = ^ja0 /[ ].
2. Схема генератора гармонических колебаний на
операционном усилителе с лестничной потенциально-токовой частотоза-
дающей ЯС-цепью содержит операционный усилитель, два диода,
три сопротивления и конденсатора (укажите количество
конденсаторов частотозадающей цепи).
3. В схеме мультивибратора на операционном усилителе
отрицательная обратная связь:
а) стабилизирует амплитуду колебаний;
б) задает амплитуду колебаний;
в) обеспечивает режим автоколебаний;
г) задает время перехода из одного состояния в другое;
д) определяет нелинейность режима работы операционного
усилителя.
4. В типовой схеме реализации мультивибраторов,
формирующих импульсы с различной скважностью, используют
операционный усилитель, четыре сопротивления, конденсатор и два
(допишите название недостающих элементов).
5. Интегральный таймер типа КР1006ВИ1 содержит три
резистора, два операционных усилителя, три транзистора и
(Допишите название недостающего элемента).
6. Для повышения линейности работы генератора
пилообразного напряжения в цепь заряда конденсатора включают:
а) пассивные нелинейные элементы;
б) корректирующие RLC-цепи;
в) источник стабильного тока;
г) источник стабильного напряжения;
Д) аттенюатор.
7. Блок-схема функционального генератора прямоугольных,
..^ Угольных и синусоидальных сигналов включает в себя триггер
^итта, формирователь синусоидальных сигналов и
Пищите название недостающего блока).
214
Генераторы сигналов
8. Глубина модуляции определяется по отношению ма
мальной величины модулирующего сигнала к: Си'
а) минимальному значению модулируемого сигнала-
б) среднему значению модулируемого сигнала;
в) максимальному значению моделирующего сигнала-
г) среднему значению модулирующего сигнала.
9. Структурная схема простейшего цифрового модулятоп
содержит триггер, схему «И», делитель частоты и
(допишите название недостающего узла). "~
10. Простейшая схема широтно-импульсного модулятора
содержит генератор линейно изменяющегося напряжения и
(допишите название недостающего блока).
11. При двухсторонней широтно-импульсной модуляции в
качестве генератора используют:
а) генератор постоянного напряжения;
б) генератор постоянного тока;
в) генератор треугольных импульсов;
г) генератор пилообразных импульсов;
д) генератор прямоугольных импульсов.
12. Фазочувствительный детектор - это устройство, в
котором:
а) выходное напряжение отстает по фазе от входного
напряжения;
б) фаза вращения от нуля до 360°;
в) максимальное выходное напряжение пропорционально
сдвигу фаз между входными и управляющим сигналами;
г) среднее значение выходного напряжения
пропорционально сдвигу фаз между опорным и исследуемым сигналом;
д) входное двухполярное напряжение превращается в сигнал
одной полярности в зависимости от фазовых характеристик вХОД'
ного сигнала.
4 ВТОРИЧНЫЕ ИСТОЧНИКИ ЭЛЕКТРОПИТАНИЯ
Вторичные источники питания предназначены для получе-
напряжения, необходимого для работы электронных схем
«личных типов и назначения, а также других устройств, кото-
ie не могут непосредственно использовать первичные
источники, вырабатывающие электрическую энергию
(электростанции, подстанции, генераторы, аккумуляторы и т. д.).
Большинство вторичных источников работают от
промышленной сети с частотой 50 Гц и, как правило, используют
два типа преобразования электрического напряжения: без
преобразования частоты и с преобразованием частоты.
Структурная схема источника вторичного электропитания
без преобразования частоты приведена на рис. 4.1.
Сеть 50 Гц
Тр
в
СФ
Ст
— К нагрузке
Рис. 4.1. Структурная схема источника питания без преобразования частоты
На этой схеме трансформатор (Тр) обеспечивает
гальваническую развязку от первичного источника питания и задает величи-
НУ напряжения, необходимого для питания других устройств.
Выпрямитель (В) обеспечивает преобразование переменно-
Го Напряжения в пульсирующее напряжение одной полярности.
Заживающий фильтр (СФ) уменьшает пульсации, приближая
Годное напряжение к идеальному постоянному. Стабилизатор
т) обеспечивает фиксацию выходного напряжения на требуе-
м Уровне при изменении напряжения питания в источнике
Личного напряжения и тока, потребляемого нагрузкой.
К основным недостаткам такого источника питания отно-
то, что на частоте 50 Гц требуются достаточно большие по
j У и габариту трансформатор и элементы сглаживающего
Ультра.
216 Вторичные источники электропитания
Этот недостаток устраняется при использовании щ
— * 1(1 fir * л \
питания с преобразованием частоты, структурная схема к а сети Т~ ^ мс''
/it НО" ^лия> чнач(
Выпрямители 217
период напряжения сети (для российской промышлен-
го приведена на рис. 4.2.
Сеть 50 Гц -
В1
СФ1
- Ин
- Тр -
В2 -СФ2
~К
на.
Рис. 4.2. Структурная схема источника питания с преобразованием час*
спеднее значение выходного тока /вых:
L о
_ коэффициент пульсаций выходного напряжения
е = -
С/„
(4.2)
(4.3)
В этой схеме преобразование напряжения осуществ!
в два этапа. На первом этапе выпрямитель В1 и первый сг
вающий фильтр (СФ1) преобразуют переменное напряг № Ur - амплитуда основной гармоники выходного напряже
промышленной сети в соответствующее постоянное нал ния'
ние. На втором .этапе инвертор (Ин) формирует поток до пользуют формулу
сов с частотой в десятки килогерц. При этом инвертор фа
При измерении коэффициента пульсации в процентах ис-
е = -
£/,
U,
■100%;
ср
ски выполняет еще и роль стабилизатора напряжения. Дал
носительно высокочастотному импульсному сигналу с , „
, /-т-ч с- ™_ оеиствующее значение входного напряжения ит:
щью трансформатора (Тр) придается требуемая амплв ' ^ вх'
,-, л. с „„ ~ максимальное обратное напряжение на отдельном вы-
Сигнал с выхода трансформатора преобразуется в однопо; \ ^ м
напряжение вторым выпрямителем (В2) и сглаживается ш ^1 М ^^ UT№t ТИрИСТОре> ^ — Это напРя"
сглаживающим фильтром (СФ2). ^используют при выборе типа диода для выпрямительной
Так как в этой схеме трансформатор работает на гораз-
лее высокой частоте, чем в источниках питания без преобр^ Ма^имальное (амплитудное) значение тока через откры-
ния частоты, то его габариты и габариты соответствующегочДля™Рямительный элемент /д тах. Это значение используют
„«и выб°ра типа вентиля по TOKV-
ра значительно уменьшаются, следовательно, такие вторичн «- пшлл чи iu^,
точники питания обладают лучшими технико-экономическ» ^ебиее 3»те™е ™°™ отдельного вентиля /д ср.
рактеристиками. л0Мош:0стеишей выпрямительной схемой, использующей ма-
Рассмотрим теперь более подробно варианты реаЯ■■ етСя ;"Ые ист°чники питания (до нескольких сотен ватт), явля-
с- , АН°ПОЛУПепиопняя г.ур.мя fnur d 11
основных блоков вторичных источников питания.
олупериодная схема (рис. 4.3).
4.1. Выпрямители
Выпрямительные схемы характеризуются рядом св°'
раметров, среди которых в качестве основных используй
дующие:
— среднее значение выходного напряжения £/ВЬ1Х:
I T
U =—\U dt,
Ср гр J БЫХ '
VD
и*гипп
sin(cor)
RH
\Un
• 4.3. Структурная схема однополупериодного выпрямителя
218
Вторичные источники электропитания
В этой схеме ток через нагрузку будет протекать
%
при открытом диоде, когда к его аноду приложено положи"
ное напряжение, то есть в первый полупериод входного и ^
Временные диаграммы работы однополупериодного
жения.
прямителя приведены на рис. 4.4.
а) П
ВЦ.
б) U,
в) U,
Рис. 4.4. Временные диаграммы работы однополупериодного выпрями
ПС"3
Используя приведенные выше определения, можно
зать, что:
Ucp=j2/nUBX*0A5UBX; UBX=2,22Ucp; IV=UJK
6 = 71/2 = 1,57; Uo6prmx=j2UB^nUcp; /дср=/ср; /JM1^
Из этих соотношений видно, что обратное напряжен11
диоде более чем в три раза превышает его среднее знз4 т
Однополупериодная схема выпрямления в практических пР
Выпрямители
219
""""^ях используется достаточно редко, поскольку она работает
ясени**
]ПрЯмление только половину периода, что снижает ее ко-
, ,ицИент полезного действия. И кроме того, выпрямленное
агшяжение имеет высокий коэффициент пульсаций, что
усложняет процедуру сглаживания.
Лучшими технико-экономическими показателями обладает
лвухполупериодный выпрямитель со средней точкой, схема
которого приведена на рис. 4.5.
и„
'д!
U'
V
VU1
/д2
Рис. 4.5. Структурная схема двухполупериодного выпрямителя
«
Такая схема обеспечивает двухполупериодное
выпрямление при использовании трансформатора со средней точкой во
вторичной обмотке. Диоды проводят ток поочередно, каждый в
свой полупериод. Принцип работы двухполупериодного
выпрямителя иллюстрируется временными диаграммами,
приведенными на рис. 4.6.
Основные параметры этого выпрямителя описываются
ЛеДук>щей системой параметров:
t/cp*0,9t/BX; t/K*Ut/,p; 1ч=и^**\ s*°>67;
обр max - 2V2 -UK
11
°6pmax _ W^'Ubx ~ л^ср' ^д. ср _ ^cp ' ^' 'дтах ^ ''cp'
ГДр r,
vbX - действующее значение напряжения на каждой из вы-
^Ных обмоток трансформаторов (входное напряжение для
8ЫпРямителя).
Вь Из этих выражений следует, что блоки работают при
полном напряжении £/о6ртах
220
Вторичные источники электропитания
^вх*
Выпрямители
Рис. 4.6. Временные диаграммы работы двухполупериодного выпрямите^
Наиболее оптимальное использование диодов достигав
в так называемой мостовой схеме однофазного выпрями^
(рис. 4.7).
В этой схеме диоды работают на включение и выключи
парами: VD\ с VD2 и VD3 с VD4.
В первый полупериод напряжение в точке 1 положи^
ное, а в точке 2 отрицательное, поэтому диоды VD\ и VI?
крыты, a VD3 и VD4 закрыты. При этом ток течет по ""
1—3—Д„-4—2—1.
Во второй полупериод диоды VD\ и VD2 закрываю^
VD3 и VD4 открываются, и ток начинает протекать по "
2—3—Д„—4— 1— 2.
Рис. 4.7. Структурная схема однородного мостового выпрямителя
Таким образом, ток через нагрузку R„ течет и в
положительной, и в отрицательный полупериоды, то есть эта схема обеспечи-
вает Двухполупериодное выпрямление с временной диаграммой,
^алогичной диаграмме UBbK, приведенной на рис. 4.6, д.
Для мостовой схемы справедливы следующие соотношения
£V=0,9l/BX; t/„*l,llt/cp; /сР=£/ср/Д„; £=0,67;
обртах ~"^2^bx =^'cp71'^' 'д.ср=Т'ср; ^тах~^ср"Г"
Особенностью мостовой схемы является отсутствие сред-
°твода во вторичной обмотке трансформатора. Поэтому
него
Мог °лУЧения одного и того же выпрямленного напряжения в
w Во" схеме требуется обмотка с числом витков вдвое
рат "' Чем у схемы со средним выводом. Вследствие этого об-
^еи. Напряжение, действующее на каждый диод, в два раза
> чем у схемы с отводом от середины обмотки.
ГреН4 Я Раб°ты в мощных электрических цепях используют
с*еМь Ые Схемы выпрямления. Вариант мостовой трехфазной
\ ее Вь,пРямления показан на рис. 4.8, а временные диаграм-
Работы - на рис. 4.9.
222
Вторичные источники электропитания
2 - ". 1
Рис. 4.8. Структурная схема трехфазного мостового выпрямителя
Рис. 4.9. Временные диаграммы работы трехфазного мостового выпрями
В этой схеме шесть диодов образуют две группы - не
ную (VDl, VD3 и VD5) и четную (VD2, VDA и VD6). flJ
Все диоды включаются поочередно, когда напряжение
аноде становится более положительным, чем на катоде- ,
видно, что четная группа диодов поочередно пропускает т
нагрузку на положительных вершинах полуволн входного
Выпрямители
223
ения для фаз А, В и С соответственно, а нечетная группа
"Р в_ на отрицательных вершинах полуволн.
S проследив путь прохождения токов через все открываю-
еся диоды, можно легко убедиться, что ток через сопротив-
еНие нагрузки течет в одном направлении, формируя на
зажиме 1 этого сопротивления положительный потенциал.
Поскольку при работе этой схемы выпрямляются обе
полуволны переменных напряжений всех трех фаз, выпрямленное
напряжение будет изменяться по огибающей с двойной
частотой пульсации. Причем коэффициент пульсаций такой схемы
достаточно мал (е~0,057). Это позволяет иногда не использовать
выходной фильтр.
Среднее значение выпрямленного напряжения может быть
определено по формуле
С/ср=1,35£/л=2,34(Уф, (4.4)
где Un и Ц> - линейные и фазные входные напряжения
соответственно.
Максимальное обратное напряжение на диодах
определяется по формуле
£/обртах=1,045С/ср. (4.5)
В ряде практических приложений для выпрямления
переменного тока и плавного регулирования мощности,
передаваемой в нагрузку, используют тиристорные преобразователи. При
Этом малые токи управления позволяют управлять большими
т°ками нагрузки.
Пример простейшего управляемого по мощности
тарифного выпрямителя показан на рис. 4.10.
А";
я—
А 1
Рис. 4.10. Тиристорная схема выпрямителя
224
Вторичные источники электропитания
Временные диаграммы, поясняющие принцип регуЛИ13о^
ния среднего значения выпрямленного напряжения, привел?
на рис. 4.11.
а) и
б)и„Л
Рис. 4.11. Временные диаграммы работы тиристорного выпрямителя
В этой схеме предполагается, что входное напряжение UK
для регулируемого тиристорного выпрямителя формируется,
например, двухполупериодным выпрямителем. Если
управляющие импульсы (t/yup) достаточной амплитуды подаются в начале
каждого полупериода (см. рис. 4.11, в; участок 0-а), то выходное
напряжение будет повторять напряжение двухполупериодного
выпрямителя. Если сместить управляющие импульсы к середе
не каждого полупериода, то импульсы на выходе будут иметь
длительность, равную четверти полупериода (см. рис. 4.11,в-
участок Ь-с). Дальнейшее смещение управляющих импульс"
приведет к уменьшению средней амплитуды выходных импуль'
сов (см. рис. 4.11, в; участок d-e).
Таким образом, подавая на тиристор управляющие и-
пульсы, сдвигающиеся по фазе относительно входного напр
жения, можно превратить синусоидальное напряжение (ток'
последовательность импульсов любой длительности, амплитуд
и полярности, то есть можно изменять действующее значег
напряжения (тока) в широких пределах.
ЦП6
4.2. Сглаживающие фильтры
рассмотренные ранее схемы выпрямления позволяют по-
аТЬ однополярное пульсирующее напряжение, которое не
сегда применимо для питания сложных электронных приборов,
поскольку из-за больших пульсаций приводит к неустойчивости
их работы.
Для значительного уменьшения пульсации применяют
сглаживающие фильтры. Важнейшим параметром
сглаживающего фильтра является коэффициент сглаживания,
определяемый по формуле
S=s2/s,, (4.6)
где Ei и е2 - коэффициенты пульсаций на входе и выходе
фильтра соответственно.
Коэффициент пульсации показывает, во сколько раз
фильтр уменьшает пульсации. В практических схемах
коэффициент пульсаций на выходе фильтра может достигать
значений 3-10"5.
Основными элементами фильтров являются реактивные
элементы - емкости и индуктивности (дроссели). Рассмотрим
вначале принцип работы простейшего сглаживающего фильтра,
схема которого приведена на рис. 4.12.
-тЗН-
VD
£А.
с-
R.
Ц.
Рис. 4.12. Схема простейшего сглаживающего фильтра
с однополупериодным выпрямителем
В этой схеме сглаживание напряжения на нагрузке после
^нополупериодного диодного выпрямителя VD осуществляется
. п°Мощью конденсатора С, подключенного параллельно на-
^зкед
226
Вторичные источники электропитания
Временные диаграммы, поясняющие работу такого фИль
ра, приведены на рис. 4.13.
а)
б) и.
при большой емкости
в) 'А
Рис. 4.13. Временные диаграммы работы фильтра
с однополупериодным выпрямителем
На участке t\-t2 входным напряжением диод открывается, а
конденсатор заряжается. Когда входное напряжение начнет
уменьшаться (см. рис. 4.13, а), диод закрывается напряжением
Uc, накопленным на конденсаторе (участок t2-h). На этом
интервале источник входного напряжения отключается от конден'
сатора и нагрузки, и конденсатор разряжается через
сопротивление нагрузки RH.
Если ёмкость достаточно велика, то разряд емкости через
RH будет происходить с большой постоянной времени x~RvC, в
следовательно, уменьшение напряжения на конденсаторе буДе
небольшим, а эффект сглаживания - значительным. С дрУг0
стороны, чем больше емкость, тем короче отрезок t^-t2, в теч^
ние которого диод открыт и через него течет ток /д, возра^
стающий (при заданном среднем токе нагрузки) при уменыпе
нии
Сглаживающие фильтры
227
«ости tj-t\- Такой режим работы может привести к выходу из
>поя выпрямительного диода и, кроме того, является достаточ-
тяжелым и для трансформатора.
При использовании двухполупериодных выпрямителей ве-
ичина пульсаций на выходе емкостного фильтра уменьшается,
поскольку конденсатор за время между появлением импульсов
разряжается на меньшую величину (рис. 4.14).
без
фильтра
Рис. 4.14 Сглаживание пульсаций двухполупериодного выпрямителя
Для расчета величины пульсаций на выходе емкостного
фильтра произведем аппроксимацию пульсаций выходного
напряжения пилообразной кривой так, как это показано на рис. 4.15.
Д6
7=1//
гДе
Рис. 4.15. Аппроксимация напряжения пульсаций
Изменение заряда на конденсаторе определяется выражением
Д£=ДС/С=/НГЬ (4.7)
L-
период пульсаций;
к ~ среднее значение тока нагрузки.
*- Учетом того, что /н = Icp/ RH, получаем
228 Вторичные источники электропитания
AU~ С - CR- <Ч
Из рис. 4.15 следует, что
c.-c/.-^-^l.Ji-S-
р ' 2 2RC I 2RC
при этом двойная амплитуда пульсаций определяется
выражением
RC
Сглаживающими свойствами обладают и индуктивные
фильтры, причем лучшими свойствами обладают фильтры,
содержащие индуктивность и емкость (рис. 4.16).
L
0 ГУ
-гууу,_^
ff * #
Рис. 4.16. Схема сглаживающего фильтра с индуктивностью и емкостью
В этой схеме емкость конденсатора выбирается таким
образом, чтобы его реактивное сопротивление было значительно
меньше сопротивления нагрузки. Достоинством такого фильтра
является то, что он уменьшает величину входной пульсаций №
до величины MJ /(a>2LC), где со — частота пульсаций.
На практике широкое распространение получили
различные типы Т- и Г-образных фильтров, варианты построения
которых представлены на рис. 4.17.
При небольших токах нагрузки хорошо работает Г-обрззнЬ
выпрямитель, представленный на рис. 4.16.
В наиболее ответственных схемах, где необходимо обеС
чить минимальные пульсации, используют многозвенные схе
фильтрации (рис. 4.17, а, б).
Часто дроссель заменяют резисторами, что несколько с
жает качество фильтрации, но значительно удешевляет филЫ?
(рис. 4.17, в, г).
Сглаживающие фильтры
229
"" основной внешней характеристикой выпрямителей с
пьтром является зависимость среднего значения выходного
пряжения С/ср (напряжения на нагрузке) от среднего значения
выходного тока.
L LI 12
R..
V» с\
—1 *—
К и с\
_1 1 1—
a)
б)
R
0-
с _
я„
£/. с\
1^1
Г
С2-Г-
R»
в) г)
Рис. 4.17. Варианты построения фильтра
В рассмотренных схемах увеличение выходного тока
приводит к уменьшению [/ср из-за увеличения падения
напряжения на обмотках трансформатора, подводящих проводах,
элементах фильтра, диодах выпрямителя предыдущих каска-
Дев (см. рис. 4.3, 4.5, 4.7, 4.8).
Наклон внешней характеристики при заданном среднем
токе определяют через выходное сопротивление по формуле
Явь
dU.
ср
dl.
ср
(4.9)
где /,
ср задано.
Следовательно, чем меньше величина RBUX, тем меньше
'Дное напряжение зависит от выходного тока и лучше схема
,пРямителя с фильтром.
То, что при возрастании тока нагрузки происходит умень-
8ЫХо.
4ieH
пар;
го
Ие выходного напряжения, свидетельствует об ухудшении
аметров стабильности блока питания в целом. Избежать это-
с Негативного явления можно, используя специальные схемы
Типизации.
230
Вторичные источники электропитания
4.3. Линейные стабилизаторы напряжения
Как отмечалось выше, стабилизаторы предназначены дЛя
удержания напряжения питания в заданных пределах при
изменении входного напряжения и тока нагрузки. Стабилизаторы
характеризуются коэффициентом стабилизации КСТ, выходным
сопротивлением 11шх и коэффициентом полезного действия г|ст.
Коэффициент стабилизации определяется выражением
Кст ЧА ^вх/£/вх)/(Д£/вых/£/вых), (4.10)
где UbX и UBbK - постоянные напряжения на входе и выходе
стабилизатора;
Д1/вх и Дивых - изменение соответственно входного и
выходного напряжения стабилизатора.
Чем больше К„, тем меньше изменяется выходное
напряжение при изменении входного. В зависимости от
схемотехнических решений Кст изменяется от нескольких единиц до сотен и
тысяч.
Выходное сопротивление стабилизатора определяется
соотношением
^ы
Д^вых
^вых
(4.11)
где Д/цых - изменение постоянного выходного тока
стабилизации, которое вызвано изменением выходного напряжения AUeb№-
Чем меньше выходное сопротивление, тем меньше
изменяется выходное напряжение при изменении тока нагрузки. В
зависимости от схемотехнического исполнения /?вых лежит в
пределах от единиц до тысячных долей ом.
Коэффициент полезного действия стабилизатора
определяется соотношением
т1Я=-£ч (4Л2)
■^вх
где Р„ — мощность, отдаваемая стабилизатором в нагрузку;
Рвх - мощность, потребляемая от входного источника
напряжения.
Линейные стабилизаторы напряжения
231
В силу особенностей принципов работы стабилизаторы
обычно резко уменьшают коэффициент пульсации.
Выделяют два класса стабилизаторов: параметрические и
компенсационные. В параметрически^ стабилизаторах малые
измерения выходного напряжения достигаются за счет резко
выраженной нелинейности вольтамперных характеристик
стабилизирующих элементов. Широко распространены
стабилизаторы (рис. 4.18), построенные на стабилитронах с типовой
вольтамперной характеристикой (рис. 4.19).
+ • "~
и„
2\VD
К
Рис. 4.18. Схема простейшего параметрического стабилизатора напряжения
4Р, мА
80^
40--
-Ц*, в^
10 6 2
о, ^Г^>В
-20
"/обр, МА
ис- 4.19. Типовая вольтамперная характеристика стабилитрона типа Д814Г
Из рис. 4.18 видно, что при обратном включении стаби-
ИтРона VD (в режиме электрического пробоя) значительные
3Менения обратного тока приводят к незначительным изме-
ениям падения напряжения на нем. Это свойство стабили-
Р°на и положено в основу работы соответствующих схем
СТабилизации. ...,ы1„л,ч- • ,
232
Вторичные источники электропитания
Для анализа работы этой схемы, используя теорему 0к
Бивалентном генераторе, произведем ее преобразование та* *'
^> как
это показано на рис. 4.20.
RrKWK
+ 0-
7\
«/«=£/«.
Рис. 4.20. Преобразованная схема стабилизатора
Графический анализ преобразованной схемы будем
производить на вольтамперной характеристике рабочего участка
стабилитрона путем построения линий нагрузки для различных
значений эквивалентного напряжения, соответствующего
различным значениям входного напряжения (рис. 4.21).
и.
я
Д£/„.
и,
I /ст /ст U3l/R3 Vyl/R3 i„
Рис. 4.21. Графический анализ преобразованной схемы стабилизатора
Из графических построений видно, что при значительно
изменении эквивалентного напряжения Д£/Э=Ц,2 - l/3] (измен
ния входного напряжения Л£/Вх) выходное напряжение измени
ся на гораздо меньшую величину ДС/ВЬ1Х.
Для определения основных параметров такого стабили
тора построим его эквивалентную схему, введя во входную це
Линейные стабилизаторы напряжения 233
чнИк напряжения, соответствующий изменению входного
ИС пяжения Д£/вх, и заменяя стабилитрон его эквивалентной
сХеМОЙ (рис 4.22).
Ц.
Рис. 4.22. Эквивалентная схема параметрического стабилизатора
Для этой схемы ^blx = г^ « гс, поскольку R0»rc,
„ __ ^вых н
Пет
^вых'н
, (4.13)
UBJBX t/BX(/„+/cr)
K„=(MJJUbxy(AUBtJX/UBhDi). (4-14)
Задав величину AUBX, определим соответствующую
величину ДС/,
вых-
ДГ/ =£/ М^н ЯД(/
U"BI« WBV II _ _ ~'-1WB
rc|K + *o "4 + /^
(4.15)
поскольку гс«/?н. Отсюда
К„
Как правило, параметрические стабилизаторы используют-
Ся при токах нагрузки до десятков миллиампер или как
источники опорного напряжения в компенсационных стабилизаторах
Пряжения, которые выполняются как замкнутые схемы
автоматического регулирования.
Структурная схема типового последовательного
компенсационного стабилизатора приведена на рис. 4.23. В таком стаби-
Изаторе используются: источник спорного напряжения (ИОН),
Равнивающий и усиливающий элемент (СУЭ) и регулирующий
элем.
ент (РЭ).
234
Вторичные источники электропитания
и„
0
РЭ
i.
СУЭ
^ ,
ион
1
и
ВЫХ
ef
Рис. 4.23. Структурная схема последовательного
компенсационного преобразователя
Напряжение на выходе стабилизатора (или часть этого
напряжения) постоянно сравнивается с эталонным напряжением
вырабатываемым ИОН. В зависимости от результатов сравнения
СУЭ вырабатывает управляющий сигнал для РЭ, изменяя его
режим работы так, что 1/вых остается практически постоянным.
Базовая схема линейного (непрерывного) компенсационного
стабилизатора напряжения на операционном усилителе
приведена на рис. 4.24.
Рис. 4.24. Базовая схема линейного стабилизатора напряжения
В этой схеме напряжения от источника опорного напря*е'
ния t/ион подается на неинвертирующий вход операционного
усилителя А1, охваченного отрицательной обратной связью че
рез резистор R2. Регулирующий элемент выполнен на транзИ'
сторе VT, включенном последовательно с нагрузкой (сопроти
ление R3).
Работает схема следующим образом.
Пусть, например, из-за уменьшения сопротивления нагрУ
ки или входного нерегулируемого напряжения UBX выходное н
Линейные стабилизаторы напряжения 235
ние стабилизатора 1/вых уменьшилось. При этом на входе
пяиионного усилителя появится рассогласование (ошибка)
жду напряжением, задаваемым (7ион> и выходным напряже-
м, задаваемым делителем Rl,R2:
Ьи = иИШ-ивых-^-. (4.16)
При уменьшении выходного напряжения положительная
разность ДС/ усиливается усилителем, что приводит к
увеличению тока базы, а следовательно, и тока эмиттера
транзистора VT. При этом ток нагрузки /„ через Ki возрастает до
значения, задаваемого t/ион- Для идеального ОУ
(
^вых = ^ИОН
1+Л
Ч R2j
Аналогично схеме, приведенной на рис. 4.24, строятся
промышленные интегральные стабилизаторы типа MA77G1,
LM310, TRS70151 и др., предназначенные в основном для
стабилизации положительных напряжений относительно общей
точки («земли»). Для случаев, когда требуется два
симметричных напряжения питания относительно «земли», выпускаются
микросхемы, содержащие два стабилизатора, например,
NE5554 (отечественный аналог КР142ЕН6). Упрощенная схема
Двухполярного стабилизатора и типовая схема его включения
"Риведены на рис. 4.25.
Операционный усилитель А1 создает независимый накал
отрицательного питания, управляя транзистором VTZ так, что
цполняется соотношение
-II ^ - -Г/
ивых г, , г, _ иИОН-
Л| + Щ
Операционный усилитель А1 управляет транзистором VTX
■ что в точке А потенциал практически равен нулю. Тогда,
ли выбрать /?2=&ь положительное и отрицательное выходные
Ряжения будут равны. Подключая дополнительные резисто-
к клеммам «баланс» и «подстройка», можно скорректиро-
Абадан
с выходных напряжений и управлять их величиной.
236
Вторичные источники электропитания
+ию
VT1
-« +ип
R2
А\]
Общий в-
1\VD
1
JJvxm
-и. 0-
\R\
А2
«Баланс»
-и «Подстройка»
R3
R4
-в -иы
VT2
Рис. 4.25. Схема двухполярного стабилизатора и способ его подключения
Вариант подключения стабилизатора к выпрямителю
VDI...VD4 с понижающим трансформатором Т показан на
рис. 4.26. Емкости С1...С4 играют роль сглаживающих
фильтров.
VDl... VD4 | • 1 , • -в
„ I i I i I 14bi
220В? ]\\
Рис. 4.26. Вариант подключения стабилизатора к выпрямителю
Для нормальной работы стабилизаторов, построенных п
схеме рис. 4.26, необходимо, чтобы перепад между входным v
выходным напряжением выбирался около 3 В, что не всегД^
приемлемо, особенно для батарейных источников питания,
этих случаях рекомендуется использовать стабилизаторы с м
лым падением напряжения (МПН) (в западной литературе
LDO). Этот эффект достигается использованием в качестве с
ловых регуляторов МОП-транзисторов, включаемых по схеме
общим истоком.
Б
Линейные стабилизаторы напряжения
237
Некоторые стабилизаторы снабжаются дополнительным
уводом, через который осуществляется управление их
включением-выключением, что позволяет строить более экономичные
схемы питания.
Учитывая, что стабилизаторы содержат активные
элементы, охватываемые обратными связями, в некоторых условиях
создаются условия их самовозбуждения. Для устранения этого
явления используют корректирующие конденсаторы.
Рассмотрим несколько типовых схем включения
отечественных стабилизаторов напряжения (рис. 4.27). Вариант
стабилизатора с регулируемым выходным напряжением показан на
рис. 4.27, а. Конденсаторы О и С2 повышают устойчивость
работы схемы.
Для того чтобы стабилизатор сделать более мощным,
можно использовать дополнительный мощный транзистор, включив
его так, как показано на рис. 4.27, б. По существу, транзистор
VT\ вместе с внутренним транзистором стабилизатора образуют
составной транзистор. ,
Ряд фирм выпускает стабилизаторы с защитой от
перегрузки путем подключения внешнего резистора (например,
микросхема ADP3 310).
Защиту от короткого замыкания можно выполнить и с
помощью внешних элементов, например, как показано на
рис. 4.27, в. В этой схеме при чрезмерном токе через основной
транзистор VT\ открывается транзистор VT2, организуя отвод
т°ка из базы VT1, закрывая его.
Расчет данной схемы производится по следующим
формулам:
Я2=0,8//кз;
/?,=(0,8P)/[/crmax(P + l)-/BbIxmax],
гДе т
Лез - максимально допустимый ток короткого замыкания;
Р - коэффициент усиления тока транзистора VTI;
^сТ max - максимальный выходной ток микросхемы стабили-
Заг°ра;
^выхтах - максимальный выходной ток всей схемы.
238
Вторичные источники электропитания
а)
и** a =to,i
б)
и„
VT\
R\
КР142ЕН8
«)
КР142ЕН8
—0
CI 4= 0,1
0
Vm
Рис. 4.27. Типовые схемы включения стабилизатора напряжения
Используя интегральные стабилизаторы, легко реализуй
ся схемы источников стабильного тока (рис. 4.28).
В этой схеме сопротивление резистора определяется
выражения
1 ~~ V ВЫХ. НОМ ВЫХ / "
из
Линейные стабилизаторы напряжения 239
и„
Рис. 4.28. Схема источника стабильного тока
Как было отмечено выше, источники вторичного
электропитания компенсационного тока требуют наличия в своем
составе источников опорного напряжения, которые широко
применяются также в пороговых устройствах цифроаналоговых и
аналогово-цифровых преобразователей, а также используются
как эталонные меры в других электронных устройствах.
Простейшее ИОН получают на стабилизаторах,
включаемых по схеме, приведенной на рис. 4.18. К существенным
недостаткам этой схемы относятся его высокое выходное
сопротивление и большой разброс напряжений стабилизации, даже у
высокоточных стабилитронов. '
Существенно увеличить коэффициент стабилизации
можно, заменив резистор источником стабильного тока,
выполненным, например, на полевом транзисторе (рис. 4.29).
Рис. 4.29. Структурная электрическая схема ИОН
с полевым транзистором
240
Вторичные источники электропитания
Хорошими характеристиками обладают ИОН, вьщолц
мые по компенсационным схемам на операционных усилитеп
(рис. 4.30). По такой схеме построен интегральный ИОН тип
AD586. Его выходное напряжение определяется из выражецр
UBh,x-UCT(l+R2/R3) и не может быть меньше напряжения на ста
билитроне. Путем подгонки соотношения R2IR^ можно достичь
высокой точности установки опорного напряжения. Коэффищ.
ент стабилизации этой схемы определяется в основном коэффц.
циентом подавления нестабильности питания операционного
усилителя.
Рис. 4.30. Схема ИОН, выполненного по компенсационной схеме
на операционном усилителе
Одним из основных недостатков приведенных схем
является то, что они имеют достаточно большие температурные
коэффициенты напряжения (ТКН). Для микросхем,
питающихся от низких напряжений (менее 3 В), ТКН составляет
порядка 10~3 К"1. Для ИОН, собираемых по схеме 4.30, такое
значение недопустимо велико.
Лучшими характеристиками обладают ИОН, в которы
транзисторы с отрицательным ТКН включают так, чтобы их на*
пряжение «база - эмиттер» суммировалось с напряжением
имеющим положительный температурный коэффициент. Пра
тически это выполняется при вычитании напряжений «база
эмиттер» двух транзисторов, которые работают при разных к°
Линейные стабилизаторы напряжения 241
""^тэных токах. ИОН такого типа относят к классу схем, рабо-
Л юших на напряжении запрещенной зоны.
Т в зависимости от того, как включен регулируемый элемент
нзистор) ОТНосительно нагрузки, различают
последовательные и параллельные ИОН.
В качестве примера на рис. 4.31, а приведена схема
параллельного ИОН типа 142ЕН19, в которой транзисторы VT\ и VT2
включены по схеме вычитания их напряжений «база - эмиттер»,
а транзистор VT3 - регулирующий элемент, управляемый со
стороны операционного усилителя А.
<?R
+£■00
ф 0R
А
чэ-£^(А)
а) б)
Рис. 4.31. Схема ИОН на напряжении запрещенной зоны
с параллельным регулирующим элементом
С помощью вывода R и резистора R6 осуществляется
регулировка выходного напряжения. Если вывод R соединить с
катодом (К), то на выходе микросхем типа TL431, 142ЕН19 будет
Лабильное напряжение 2,5 В. Если между выводом R и катодом
п°дключить дополнительный резистор, то на выходе получаем
б°лее высокое опорное напряжение. На рис. 4.31, б приведено
Условное обозначение трехвыводного ИОН.
Следует иметь в виду, что при некоторых режимах работы
^°Н может потерять устойчивость. Для этого в соответствии с
депортом к ИОН подключают корректирующие конденсаторы.
242
Вторичные источники электропитания
4.4. Схемотехника импульсных стабилизаторов
напряжения
Отличительной особенностью импульсных стабилизаторов
напряжения является то, что вместо управляющего элемента
работающего в непрерывном режиме, между входным
напряжением и нагрузкой включен аналоговый коммутатор, циклически
разрывающий коммутируемую цепь. В этом случае среднее
значение выходного напряжения на нагрузке будет определяться
отношением длительности открытого состояния ключа tm к
периоду повторения Т. Меняя это соотношение, легко управлять
выходным напряжением стабилизатора в широких пределах, а
использование фильтров позволяет отлаживать пульсации.
Коэффициент полезного действия (КПД) импульсных
стабилизаторов значительно превышает КПД линейных стабилизаторов,
поскольку при открытом ключе потери мощности на нем
незначительны.
Кроме того, важным для медицинского приборостроения
преимуществом импульсных стабилизаторов является то, что
его входное напряжение может быть гальванически развязано от
выходного напряжения.
Существует достаточно большая номенклатура источников
•импульсного питания, которые отличаются схемотехническими
и конструктивными номенклатурными решениями. На практике
используется два основных их типа: с промежуточным накоплю
нием энергии и без промежуточного накопления.
В импульсных стабилизаторах напряжения (ИСН) с пр0'
межуточным накоплением энергии процесс стабилизации реа'
лизуется в два этапа. На первом этапе на катушке индуктивно
сти (дросселе) или конденсаторе происходит накопление энер'
гии, а на втором этапе накопленная энергия переключается н
нагрузку. Вариант структурной схемы ИСН с накоплен^
энергии приведен на рис. 4.32. ^
Процессами открывания и закрывания транзистора
управляет схема, содержащая источник опорного напряжен
(ИОН), сумматор (См), усилитель ошибки (УО), модулятор (^
Схемотехнике импульсных стабилизаторов напряжения 243
драйвер (Дрв). В этих блоках происходит сравнение
напряжения с ИОН с £УВЫХ. Если выходное напряжение уменьшается по
сравнению с опорным, то модулятор формирует импульс
большей длительности (при фиксированном периоде их следования),
открывающий транзистор VT. Если выходное напряжение
увеличивается по сравнению с опорным, длительность открывающего
импульса уменьшается. Драйвер обеспечивает согласование
выхода модулятора с цепью управления мощным транзистором VT.
Таким образом, время открытия ключа зависит от
рассогласования между выходным и опорным напряжениями. В свою
очередь, открывающийся транзистор обеспечивает передачу тока от
источника входного напряжения через дроссель L в нагрузку, при
этом ток, протекающий через дроссель, растет, обеспечивая в
нем накопление энергии. Когда транзистор VT закрывается,
накопленная в дросселе энергия расходуется, создавая ток в цепи
диода VD и нагрузки. Величина выходного напряжения
определяется соотношением времени открытого и закрытого состояния
транзистора VT.
+
VT
с/.,
1\VD
ДРВ <:
Мд
<г
УО <е
См
Фс
ион
+
-0
С/в,
Рис. 4.32. Структурная схема ИСН с накоплением энергии на дросселе
В ИСН накопительного типа используется широтно- и
частно-импульсная модуляции. Очевидно, что в ИСН, построен-
HbIx по схеме рис. 4.32, выходное напряжение не может
превышать входного. По такому принципу построены промышленные
п°нижающие стабилизаторы типа TRS5211, в которых в качест-
е модулятора используют компаратор (КН) с петлей гистерези-
Са (Рис. 4.33).
244 Вторичные источники электропитания
Рис. 4.33. Структурная схема понижающего ИСН типа TRS5211
Частота работы модулятора этой схемы определяется из
соотношения
f _ ^вых
-/мл
(^вх-^вь,х)^э
и„ли„
(4.17)
где R3 — эквивалентное последовательное сопротивление цепи
конденсатора С;
U„ - ширина петли гистерезиса компаратора.
Одним из основных недостатков таких схем является
сильная зависимость частоты коммутации ключа от входного
напряжения.
При проектировании низковольтных ИСН при сохранении
больших мощностей применяют так называемые синхронные
выпрямители, в которых диод заменяется или шунтируется
параллельным ключом на МОП-транзисторе (рис. 4.34).
VTI
£/»
м
-jnmrv
т
VT2
тт
г
уу
°и„
Рис. 4.34. Функциональная схема понижающего синхронного ИСН
Схемотехника импульсных стабилизаторов напряжения
Как видно из рис. 4.34, транзисторы VT\ и VT2 открываются
закрываются в противофазе. Когда VT] открыт, ток в нагрузку от
г г течет через дроссель, обеспечивая накопление в ней
электрической энергии. Когда VT\ закрыт, a VT2 открыт, дроссель
подключается параллельно нагрузке и отдает- ей накопленную энергию.
Если по условию задачи требуется выходное напряжение
выше входного, применяют повышающие ИСН (рис. 4.35).
Эффект повышения выходного напряжения обеспечивается
использованием явления самоиндукции.
L
Рис. 4.35. Структурная схема повышающего ИСН
При подаче на вход схемы напряжения UBX ток через
дроссель L растет, обеспечивая в нем накопление электрической
энергии. Диод VD заперт, а ток нагрузки обеспечивается
разрядом конденсатора С. Когда устройством управления (УУ)
транзистор VT запирается, напряжение на его коллекторе
поднимается до величины, большей входного, за счет ЭДС
самоиндукции дросселя L. Большим, чем в нагрузке, положительным
напряжением со стороны дросселя диод VD открывается, и
энергия, накопленная дросселем вместе с энергией входного
источника, будет через открытый диод обеспечивать ток нагрузки и
3аРяд конденсатора, такой, что £/ВЬ1Х> t/Bx. Для этой схемы
праведливо соотношение
Г-г„
246
Вторичные источники электропитания
Следует иметь в виду, что приведенная пропорция сппа
ведлива, если ток в дросселе не достигает нулевых значений
без нагрузки выходное напряжение может значительно возрас
ти, вплоть до неприемлемых значений. По аналогичной схеме
построена микросхема типа МАХ856.
Для повышающих ИСН также используют синхронные
схемы, например, микросхема типа МАХ1703 (рис. 4.36),
аналогичная схеме, приведенной на рис. 4.34.
С/.,
■fcH
VTX
VT2
УУ
<г
4=с
+
-0
ит
Рис. 4.36. Функциональная схема повышающего синхронного ИСН
В этой схеме ток через дроссель L не прерывается. Когда
VT1 открыт, ток через дроссель снижается до нуля и даже
меняет свою полярность, протекая от нагрузки в источник С/вх,
поэтому такая схема не дает перенапряжения на холостом ходу.
Одной из составных частей ИСН (см. рис. 4.32) является
драйвер, который представляет собой усилитель мощности»
схемотехника которого определяется типом и способами
подключения силовых управляющих транзисторов. В качестве при'
мера на рис. 4.37 приведены схемы простейших драйверов ДлЯ
управления биполярными транзисторами VTX.
К собственно драйверам относятся элементы R\,R2u ^'
При подаче управляющего напряжения (рис. 4.37, а) траН'
зистор VT2 открывается, создавая отпирающий ток базы Д-"
VTI, переводя его в состояние насыщения. При запирании '*
падением напряжения на резисторе R\ VT\ запирается. Для П
Схемотехника импульсных стабилизаторов напряжения 247
ша10щего преобразователя (рис. 4.37, б) удобнее в качестве
йвера использовать эмиттерный повторитель.
_ L
VT\
1
а)
б)
Рис. 4.37. Структурные электрические схемы простейших драйверов
для управления биполярными транзисторами
Для управления сложными преобразователями собственно
драйвер обслуживается электронными схемами
вспомогательной логики, преобразователей уровня, задержки и т.д. Вся эта
схемотехника выпускается в виде специальных микросхем
№2121, IR2118, IR51HP420 и т.д.
Рассмотренные выше схемы импульсных стабилизаторов
напряжения обычно дополняются входными и выходными
фильтрами, обеспечивающими подавление помех, возникающих
пРи коммутации силовых ключей. В качестве фильтров исполь-
3УК)т катушки индуктивности и конденсаторы.
Одним из распространенных вариантов фильтрации явля-
Тся последовательное соединение повышающего и
понижающего преобразователей, которые содержат в своем составе тре-
Уемые фильтрующие элементы.
4.5. Инверторные схемы
Рассмотренные выше схемы элементов питания при их. ис-
■чьзовании в медицинском приборостроении обладают суще-
енным недостатком. У них нет гальванической развязки ме-
248
Вторичные источники электропитания
жду входным (питающим) и выходным напряжением. ДЛя v
ранения этого недостатка используют схемы, содержащие и
верторы, подключаемые через трансформатор к выпрямителю *
фильтрами (рис. 4.38).
Т
\
Вп
ФНЧ
и.
Рис. 4.38. Структурная схема вторичного источника
электропитания с инвертором
В этой схеме инвертор (Ин) преобразует постоянное
напряжение в переменное, которое трансформатором Т
повышается или понижается. Далее переменное напряжение
выпрямляется выпрямителем (Вп) и фильтруется фильтром низкой частоты
(ФНЧ). Кроме того, трансформатор Т обеспечивает
гальваническую развязку между Um и £/ВЬ1Х.
Рассмотрим более подробно схемотехнические решения,
используемые при построении инверторов - преобразователей
постоянного тока в переменный. Наиболее простыми являются
нерегулируемые инверторы, преобразующие постоянные
напряжения в прямоугольные импульсы.
Различают одно- и двухтактные инверторы. В однотактных
инверторах передача энергии через трансформатор
производится на одном такте, что снижает эффективность его
использования. Также преобразователи находят применение в маломощных
импульсных источниках питания.
Вариант схемы однотактного инвертора приведен на
рис. 4.39. В этой схеме транзисторный ключ VT управляется
генератором тактовых импульсов (ГТИ). Схема работает в два
такта. На первом такте транзистор VT открывается. К обмотке
W\ трансформатора Т прикладывается входное напряжение t^s-
Магнитный поток в этой обмотке нарастает, создавая ЭДС в°
вторичной обмотке трансформатора Е2= U^{W2IWX). Диод VD^
открывается, обеспечивая нарастание тока в дросселе L. ^°К
стока транзистора VT также растет за счет тока намагничивани"
Инверторные схемы
249
бмотки W\ и тока дросселя L. Таким образом, на этом такте
поисходит передача энергии во вторичную цепь транзистора.
. t^L_ T
-&
Рис. 4.39. Структурная схема однотактного инвертора
На втором такте VT запирается, отключая UBX от
трансформатора. Поток в сердечнике начинает убывать, создавая в
обмотке W3 ЭДС, превышающую по величине входное
напряжение. Диод VD\ открывается и через него энергия
трансформатора перекачивается в источник С/вх. После погашения
накопленной энергии VD\ закрывается. В этом такте VD2 закрыт, a VD3
открыт. Через VD3 ток дросселя замыкается и убывает. Энергия
во внутреннюю цепь трансформатора не передается, что
снижает коэффициент использования трансформатора.
Для увеличения устойчивости и быстродействия
однотактных инверторов используют устройства управления
(контроллеры), позволяющие организовать дополнительную обратную
Связь по току дросселя (ДОСТД). Для этого организуется цепь
Управления амплитудой тока дросселя по отклонению от
эталонного значения (дополнительный контур управления).
Основной контур управления обеспечивает стабилизацию выходного
Напряжения (рис. 4.40).
В этой схеме усилитель А вычитает из напряжения
источника опорного напряжения (ИОН) выходное напряжение, и
получаемая разность подается на инверсный вход компаратора
(КН). Генератор тактовых импульсов (ГТИ) устанавливает в со-
стояние «1» триггер (Тг), открывающий транзистор VT1.
250
Вторичные источники электропитания
Рис. 4.40. Функциональная схема однотактного инвертора
с управлением по ДОСТД
При увеличении входного напряжения (£/вх) при открытом
VT увеличивается скорость нарастания тока в цепи стока и
истока, переключая компаратор. В свою очередь, КН установит
триггер в нулевое состояние, тем самым уменьшив время
нахождения VT в открытом состоянии. При этом энергия,
передаваемая в нагрузку, остается неизменной.
По аналогичным схемам построены контроллеры типа
UC1842, UC3843, 1033EY10.
В двухтактных инверторах формируются симметричные
колебания при более полном использовании энергетических
возможностей передающих трансформаторов (рис. 4.41).
а) 51
Рис. 4.41. Функциональные схемы двухтактных инверторов
Инверторные схемы
251
Наиболее просто с точки зрения количества элементов
реализуется так называемая нулевая схема (см. рис. 4.41, а), в
которой одна из клемм входного источника питания
подключается к нулевой точке первичных обмоток трансформатора Т. В
этой схеме контроллер поочередно переключает ключи S\ и S2,
прикладывая к первичным обмоткам входное напряжение.
Намагничивающие силы этих обмоток направлены в магнитопро-
воде в противоположные стороны, что практически исключает
его подмагничивание. Трансформатор повышает или понижает
(в зависимости от коэффициента трансформации) переменное
напряжение первичных обмоток. При проектировании нулевой
схемы следует учитывать, что к ключам в закрытом состоянии
прикладывается двойное входное напряжение.
В полумостовой схеме (см. рис. 4.41, б) входное
напряжение конденсаторами С\ и С2 делится пополам. Ключи S\ и S2
переключаются поочередно. При замыкании ключей к
первичной обмотке прикладывается напряжение С/вх/2, поэтому для
обеспечения той же мощности, что и в предыдущей схеме, через
ключи должен протекать вдвое больший ток. Однако на
закрытых ключах напряжение равно t/BX.
В мостовой схеме (см. рис. 4.41, в) контроллер управляет
ключами по следующей схеме: SI и 54 - замкнуты, 52 и S3 -
разомкнуты и наоборот. Напряжение на замкнутых ключах и на
первичной обмотке Г равно входному напряжению.
В качестве примера рассмотрим схему управления
нерегулируемого инвертора микросхемой МАХ845 (рис. 4.42).
<?+5 В ут
Выбор
ЧаСТОТЫ!
«Вкл.
Рис. 4.42. Схема управления двухтактным инвертором -
контроллером типа МАХ845
252
Вторичные источники электропитания
Генератор тактовых импульсов в зависимости от цепей
управления, подключаемых ко входу «Выбор частоты», форми.
рует импульсы с частотой 400 или 700 кГц. Счетный триггер
(Тг) делит эту частоту пополам и через схемы «И» распределяет
их по ключам, реализованным на транзисторах VTX и VT1. дЛя
включения микросхемы задействуется вывод «Вкл».
Для регулирования выходного напряжения на выходах
инверторов выпускаются специальные контроллеры с широтно-
импульсной модуляцией с меняющейся длительностью
импульсов при постоянной частоте коммутации. Примерами таких
контроллеров являются микросхемы TL494, VCC3808A и т. д.
Для уменьшения потерь на переключение коммутаторов
проектируются и выпускаются резонансные инверторы, со
схемотехникой которых можно ознакомиться в работе [3, с. 295—303].
В настоящее время промышленностью выпускаются
импульсные источники питания, использующие непосредственно
энергию питающей сети. Однако при выигрыше по массогаба-
ритным характеристикам эти источники менее надежны и
создают значительные помехи как для нагрузки, так и для
питающей сети.
К микросхемам, работающим от силовой сети, относятся
такие, как TDA4605, AS2208, ТЕА1504 и т.д. В качестве
контроллеров в этих источниках питания могут использоваться
интегральные микросхемы на основе инверторов с управлением по
дополнительной обратной связи по току дросселя, например,
микросхема типа UC3844. Эта схема, помимо элементов схемы,
приведенной на рис. 4.40, содержит цепь защиты контроллера от
перенапряжения и дополнительный компаратор, выключающий
микросхему, если напряжение питающей сети подается ни«е
порогового значения.
В импульсных стабилизаторах напряжения, как и в
линейных, существуют многочисленные обратные связи, способные
приводить к потере устойчивости. Поэтому на этапе констрУи'
рования и эксплуатации этих стабилизаторов применяются
специальные корректирующие схемы, обеспечивающие качествен
ную работу соответствующих узлов и блоков.
Тренировочные задания
1. Нарисуйте структурные схемы источников питания без
преобразования и с преобразованием частоты. Расскажите о
достоинствах и недостатках каждой из этих схем.
2. Перечислите основные параметры выпрямителей и
приведите соответствующие формулы их расчета.
3. Нарисуйте типовые схемы сглаживающих фильтров и
расскажите об основных параметрах, характеризующих их.
4. Нарисуйте базовую схему линейного стабилизатора
напряжения на операционном усилителе и приведите основные
аналитические соотношения для нее.
5. Нарисуйте структурную схему импульсного стабилизатора
напряжения с накоплением энергии на дросселе и поясните
принцип его работы.
6. Нарисуйте функциональную схему однотактного
инвертора с управлением по дополнительной обратной связи по току
дросселя и расскажите о принципе его работы.
Тестовые задания
1. К недостаткам источника вторичного электропитания без
преобразования частоты относят:
а) большое число электронных компонентов;
б) невозможность питания мощных потребителей
электрической энергии;
в) большие габариты и вес трансформатора;
г) высокий коэффициент пульсации;
д) низкий коэффициент полезного действия.
2. Для схемы однополупериодного выпрямителя укажите
соответствие:
Параметры Формула расчета
1)£/сР; а)0,75С/вх;
2) /сР; б) UJR„;
3)е; в)0,45С/вх;
4) 1Л>бРтах; г) UCV/RK;
5)4тах; Д)3,4;
254
Вторичные источники электропитания
е) п/ср:
ж) 1,57;
з) Л L^p.
3. Для мостовой схемы диодного выпрямителя укажите
соответствие:
Параметры Формула расчета
1) С/СР; а) 2С/„х;
2)/ср; б)0,9С/„;
3) е; в) 0,9 /ср;
4)£/о6ргаах; г) 0,67;
5)/дтах; д)1,57;
е)л/^;
ж) Лр/2;
з) л/2/ср;
и) Ucv/R„.
4. Коэффициент сглаживания фильтра определяется
соотношением:
а) S=C/cp/C/BX;
б) S=eJU^
В J о~£вх/£выхэ
r)S=UJUcp;
д) S=Ucp/£BUK.
5. Фильтры в источниках вторичного электропитания
используются для:
а) стабилизации тока нагрузки;
б) стабилизации напряжения нагрузки;
в) сглаживания пульсаций напряжения после выпрямителя;
г) сглаживания пульсаций напряжения после трансформатора-
д) выпрямления переменного тока.
6. В параметрических стабилизаторах стабилитрон работа
в режиме электрического:
а) равновесия;
б)отпирания;
в) баланса;
г) пробоя;
д) разряда.
Тестовые задания
255
7. В базовой схеме линейного стабилизатора напряжение на
операционном усилителе определяется выражением
С/вьга=г7ион(1+/г,/[]).
8. Источник опорного напряжения компенсационного типа
содержит операционный усилитель, три резистора и
(допишите название недостающего элемента).
9. Функциональная схема понижающего синхронного
импульсного стабилизатора напряжения содержит устройство
управления, два транзистора, конденсатор и (допишите
название недостающего элемента).
10. В источниках вторичного электропитания инверторы
используются для:
а) изменения знака входного напряжения:
б) преобразования переменного тока в постоянный;
в) выпрямления переменного тока;
г) преобразования постоянного тока в переменный;
д) сглаживания входного напряжения.
11. Функциональная схема однотактного инвертора с
управлением по дополнительной обратной связи по току дросселя
содержит контроллер, транзистор, резистор, трансформатор,
дроссель и два (допишите название
недостающих элементов).
12. Функциональная схема двухтактного полумостового
инвертора содержит трансформатор, два ключа и два
(Допишите название недостающих элементов).
5. АНАЛОГОВЫЕ КОММУТАТОРЫ
Электронные схемы, предназначенные для управляемой
передачи входных аналоговых сигналов на выход в заданном
порядке, называются аналоговыми коммутаторами. Принято
считать, что если цепь коммутатора включена, то ее выходное
напряжение как можно точнее должно равняться входному
напряжению. Если цепь коммутатора находится в состоянии
«выключено», то ее выход отключается от входа и принимает
заранее оговоренное значение. Например, выходное
напряжение может устанавливаться как можно ближе к нулевому
напряжению.
Описанные условия работы коммутатора могут реализовы-
ваться различными схемами. Вариант одной из них с
использованием переключателя S приведен на рис 5.1.
0-
1 5
<? 2 иъм
* 0
Рис. 5.1. Электрическая схема простейшего коммутатора
Принцип действия этого ключа вытекает из его
электрической схемы. Ключ S может быть реализован в виде
механического переключателя или с помощью электронных элементов
управляемым сопротивлением. Для этих целей используют Дй
одные мосты или транзисторы. Ключи на диодных мостах и
полярных транзисторах имеют высокое быстродействие (пР^
использовании диодов Шотки время переключения достигает
не), но потребляют сравнительно большую мощность по uen ^
управления и имеют значительное остаточное напряжение, У
личивающее погрешность передачи выходного сигнала. Ком ^
таторы на полевых транзисторах имеют меньшие погрешно^
малое потребление электроэнергии, но обладают меньшим
стродействием.
Аналоговые коммутаторы
257
Разновидностью аналоговых коммутаторов являются оп-
тореле, в которых отсутствует электрическая связь между
управляющими и коммутируемыми цепями, что важно для
биомедицинских приложений. В ключах этого типа
напряжение электрической изоляции может достигать нескольких
киловольт. В них управляющие цепи выполняются на оптопарах,
которые управляют тиристорами, биполярными и полевыми
транзисторами.
5.1. Коммутаторы на полевых транзисторах
В коммутаторах этого типа используется свойство
полевых транзисторов менять свое сопротивление под
воздействием управляющего напряжения на переходе «затвор - исток»
(рис. 5.2).
р"с. 5.
2. Варианты схем аналоговых коммутаторов на полевых транзисторах
В варианте коммутатора, выполненного по схеме, приве-
нНой на рис. 5.2, а, используется транзистор с управляющим
"''-Переходом. Если в этой схеме управляющее напряжение
258
Аналоговые коммутаторы
Uyup меньше минимально возможного входного напряжени
£4xmin на величину порогового напряжения транзистора
Un((UBxm„-U„)>Uynp), то транзистор VT1 закрывается, и его
выходное напряжение становится равным нулю {UBUX=0).
Если в схеме путем подачи управляющего сигнала создать
напряжение «затвор - исток» больше нуля (изи>0), то
транзистор откроется, соединив UBX с £/вь,х. При этом следует иметь в
виду, что открытый переход транзистора подключает к выходу
и управляющее напряжение, а напряжение £/3и зависит от
величины входного напряжения. Это создает определенные
трудности в управлении схемами на транзисторах с управляющим
/>-и-переходом.
В схеме, приведенной на рис. 5.2, б, ключом являетсяр-ка-
нальный МДП-транзистор. Подложка транзистора подключена к
положительному полюсу источника питания lfn для того,
чтобы переходы между подложкой и истоком не открывались. При
малых значениях Uynp транзистор закрыт и ток от UBX в нагрузку
RH не проходит. Когда Uynp превышает величину порогового
напряжения С/'зи. транзистор открывается и R„ подключается к
UBX. Ключ может коммутировать как положительное, так и
отрицательное напряжение.
К недостаткам такого коммутатора относится
относительно большая величина его выходного сопротивления, которая
может быть уменьшена различными схемотехническими
решениями. На рис. 5.2, в показана схема двунаправленного
аналогового ключа на комплементарных транзисторах, используемого в
некоторых интегральных микросхемах.
Под комплементарностъю здесь понимается использоВ
ние параллельно включаемой пары п- и
^-МОП-транзисторов'
что позволяет получать практически постоянное сопротивлеН
открытого ключа вне зависимости от направления и значен
проходящего тока.
Ключ предназначен для передачи напряжения U\ с вЫ?
да 1 на вывод 2 или напряжения U2 с вывода 2 на 1.В эТ
схеме коммутируемые напряжения лежат в пределах от О Д° «
Транзисторы VT\ и VT1 представляют собой комплементарн
ключ. Двунаправленный ключ открыт, когда Uynp=Un. В э
Коммутаторы на полевых транзисторах
259
лучае один из транзисторов (VTb или VT4) открыт. Ключ
закрыт, когда £/упр=0.
Рассмотрим пример аналогового ключа, построенного на
микросхемах типа КР590КН8А,Б (рис. 5.3). Эти схемы содержат
п0 4 транзистора с и-каналом (на рисунке для упрощения
показано два). Транзисторы КР8А спроектированы как ключевые, а
КН8Б предназначены для построения управляющих каскадов
ключей. Стабилитроны VD\, VD2 и резисторы Rl, R2,
подключенные к затворам транзисторов, предназначены для
согласования напряжений.
+12 В^
КН8А
Рис. 5.3. Принципиальная электрическая схема аналогового ключа
на микросхемах типа КР590КН8А.Б
Предположим, что управляющие напряжения U\ и U2 могут
принимать два значения: 0 и +5 В. Если напряжения пробоя ста-
Члитронов VD\ и VD2 равны 13 В, то потенциалы затворов VTI
и ^3 будут равны -12 (О В на Uynp) или -8 В (+5 В на £7^). На
сТок этих транзисторов подается напряжение -12 В, поэтому в
еРвом случае напряжение «затвор - исток» равно нулю (тран-
истор закрыт), во втором случае +4 В (транзистор открыт). На-
260
Аналоговые коммутаторы
пряжения ±12 В, получаемые на истоках транзисторов VT\, VT)
подаются на затворы ключевых транзисторов VT3, VTA, замыкав
или размыкая связи между контактами 1-4 и 2-8.
Рассмотренные микросхемы предназначены для построения
быстродействующих ключей (время включения 3-5 не), поэтому
они выполнены на быстродействующих и-МОП-транзисторах.
В состав микросхем аналоговых ключей обычно вводят
формирователи управляющих сигналов, обеспечивая их
совместную работу с цифровыми микросхемами. Следует отметить, что
для своего управления такие ключи требуют входного сигнала
4 В и более, поэтому на управляющих выходах ТТЛ-микросхем
ставят сопротивления в несколько килоом, подключаемые к
источнику питания. Типичные представители интегральных
ключей имеются в сериях К590 и К591. Сопротивления открытых
аналоговых ключей и ток утечки закрытых достаточно сильно
зависят от температуры. Например, у открытого КМОП-ключа
его сопротивление практически линейно возрастает с
коэффициентом 2-5% на 10°С, а ток утечки закрытого ключа
увеличивается примерно в 2 раза при увеличении температуры на 10СС.
Промышленность выпускает различные типы микросхем,
содержащих не связанные между собой коммутируемые каналы,
управляемые блоком логики, в состав которого обычно входит
схема выбора кристалла и регистр хранения кода
коммутируемых ключей (рис. 5.4).
'0-
0-
ВК
ПК
АК
SL
SZ,
Sn^
£>| Логика
управления
j
j
л
КУ
Рис. 5.4. Структура многоканального аналогового коммутатора
Коммутаторы на полевых транзисторах 261
Коммутируемые цепи аналогового коммутатора (АК)
представлены однонаправленными (или двунаправленными)
ключами S^....!»,,, состояние которых определяется логикой управления.
Код управления ключами поступает в регистр логики
управления в параллельном (входы КУ) или последовательном
(ПК) виде. Выбор кристалла осуществляется по входам ВК При
необходимости по выходам АК можно организовать
объединения микросхем аналоговых коммутаторов для
расширения числа коммутируемых входов и выходов.
5.2. Аналоговые мультиплексоры
и матричные коммутаторы
Задачу подключения множества входов к одному выходу в
зависимости от комбинаций кодов управления решают так
называемые аналоговые мультиплексоры (рис. 5.5).
Разр. bs-
Код адреса
Рис. 5.5. Обобщенная структурная схема аналогового мультиплексора
Каждый из используемых ключей (Sl...Sn) может быть
Ь1Полнен на полевых транзисторах с КМОП-структурой. Для
•бора коммутируемой схемы на дешифратор адреса (DCA) по-
Упает соответствующий код, который преобразуется в сигнал
^ьгкания цепи <Увх1-<УВЬ1х.
262
Аналоговые коммутаторы
Для объединения мультиплексоров в более сложные струк
туры, например, если нужно задействовать большее число вхо-
дов, можно использовать сигнал разрешения («Разр.»).
В более сложных схемах вместо дешифратора адреса
используется блок логики, содержащий кроме дешифратора
адреса последовательный или параллельный регистр с логикой его
управления, позволяя подключаться к стандартным
интерфейсам и решать задачи наращивания разрядов.
Для сложных коммутаций, когда требуется соединить
несколько источников сигналов с несколькими приемниками
сигналов, используют матричные коммутаторы (рис. 5.6).
С/«2
51,1
52, Г
Ц»
\
Y
5и,
IF
\
51,2
Y
52,2
\
Sn
^
\
V
•51 ,т
\,
S2,m
\
5п,яг
\
<7 БУ
БЛ
<=1 К
V
иш
иы
иш
а
Рис. 5.6. Обобщенная структурная схема аналогового
матричного коммутатора
Из приведенной схемы видно, что задействованные клк>4
по команде с блока логики (БЛ) могут быть включены с любо
входа на любой выход, если в каждом узле матрицы находи
управляемый ключ. Логика управления ключами организовэ
так, что к любому входу могут быть подключены любые вы*
ды, но один выход не может быть подключен к нескольким в
дам. В качестве сигналов управления используются послед0
тельные или параллельные коды адресов подключения, сигн^
Аналоговые мультиплексоры и матричные коммутаторы 263
выбора кристаллов переключения, протоколов ввода сигналов
управления и т.д.
Для того чтобы выходы коммутатора согласовать с
нагрузкой на выходах микросхем, ставят буферные усилители
(БУ) с небольшим или единичным коэффициентом усиления.
Примерами матричных коммутаторов служат микросхемы
типа A D8108/09 (8x8), AD8110 (16x8) и др.
5.3. Характеристики и эксплуатационные параметры
аналоговых коммутаторов
Одной из важных статических характеристик аналогового
ключа, существенно влияющих на точность передачи
аналогового сигнала со входа на выход, является его сопротивление в
открытом состоянии (Rq). При оценке величины этого
сопротивления следует иметь в виду, что оно зависит как от напряжения
питания, так и от коммутируемого входного напряжения, что не
во всех расчетах и практических приложениях можно
игнорировать. Поэтому в хорошо составленных технических описаниях
микросхем можно найти графики зависимостей сопротивления
открытого ключа от напряжения входного сигнала для
различных питающих напряжений. Кроме того, сопротивление канала
открытого транзистора существенно зависит от температуры.
Для многоканальных коммутаторов и мультиплексоров, кроме
сопротивления открытого канала, вводят такую характеристику,
как значение максимальной разности сопротивления открытых
ключей (ДЯ0).
В закрытом состоянии сопротивление ключа хотя и очень
Велико (сотни гигоом), но конечно, что приводит к
возникновению токов утечки (Iy,). Направление протекания этого тока оп-
РеДеляется полярностью приложенного напряжения, а его вели-
ина сильно зависит от температуры кристалла.
На динамические характеристики аналоговых ключей, вы-
°лненных на полевых транзисторах, оказывают влияние емко-
Ти между стоком и истоком, каналом и общей точкой, затвором
Каналом, а также емкости между различными элементами
ХеМы внутри кристалла. Для борьбы с отрицательным влияни-
264
Аналоговые коммутаторы
ем емкостей при больших частотах переключения используютг
различные схемотехнические решения, но полностью проблемь
быстродействия и паразитного искажения сигналов на больших
скоростях переключения они не снимают. Причем искажения
возникают не только в процессе передачи входного напряжения
на выход, но и при подаче импульсов управления.
Эпюр выходного напряжения, которое может наблюдаться
при нулевом входном напряжении при появлении
управляющего импульса, показан на рис 5.7.
Рис. 5.7. Вариант «паразитного» изменения выходного напряжения
аналогового коммутатора от воздействия управляющего импульса
Эквивалентная схема аналогового коммутатора,
содержащая сопротивления и емкости, представляет собой фильтр
низких частот, параметры которого влияют на время его включения
и выключения и являются основными динамическими
эксплуатационными параметрами этого класса электронных приборов.
К основным техническим характеристикам и
эксплуатационным параметрам электронных схем аналоговой коммутации
относят: величины питающих напряжений (Un); ток
потребления (/„), максимально допустимое значение тока через
коммутатор (Апах); диапазон допустимых значений входного и выходное
напряжений; уровни управляющего напряжения; диапазон Д0'
пустимой температуры окружающей среды; время включения
(*вкл); время выключения (tBum); заряд переключения qn; т°к
утечки /ут; типовое значение сопротивления открытого клЮча
Характеристики и эксплуатационные параметры коммутаторов 265
р В таблице 5.1 приведены основные характеристики некото-
пых типов аналоговых коммутаторов и мультиплексоров.
Таблица 5.1
Основные характеристики аналоговых коммутаторных схем
Тип
590К.Н13
МАХ391
ADG715
591КНЗ
МАХ350
ADG608
итв
±15
±2,7...±8;
3...15
2,7...5,5
±15
±2,7...±8;
3...15
3,5...5
/п,
мкА
4000
<1
10
1000
7
0,05
'уТ5
нА
50
0,1
0,01
70
0,1
0,05
Ro,
Ом
50
35
2.5
270
100
30
'вклв
НС
50
130
95
300
275
50
'выкл>
НС
50
75
85
300
150
30
пКл
-
5
3
-
10
с
6
'max*
мА
20
30
30
2
30
20
Примечание
Счетверенный
коммутатор
Тоже
8-канальный
коммутатор с
последовательным
управлением
Мультиплексор
8x1
Сдвоенный
мультиплексор
4x1 с
последовательным
интерфейсом
Мультиплексор 8x1
Анализируя технические характеристики промышленных
коммутаторных схем, разработчики медицинской техники имеют
возможность проектировать многоканальную аппаратуру
различных типов и назначений с заданными медико-техническими
требованиями.
Отечественной и зарубежной промышленностью
выпускается большое количество типов коммутирующих микросхем,
которые могут использоваться для медицинских приложений. К ос-
н°вным производителям аналоговых коммутаторов относят
Российское НПО «Светлана» и западные фирмы Analog Devices и
Maxim.
В простых вариантах в одной микросхеме содержится либо
Несколько отдельных, не связанных между собой, каналов
(микросхемы МАХ391, 392, 395 и д.р.), либо несколько переключа-
266
Аналоговые коммутаторы
телей, каждый из которых коммутирует одну цепь с одной и
двух других цепей (ADG794, МАХ394). Аналоговые коммута
торы, предназначенные для работы в составе микропроцессор
ных систем, содержат элементы управления со стороны систем-
ной шины (ADG222, 590КН12).
В составе систем сбора и обработки биомедицинских дан.
ных используют мультиплексоры, которые выбирают один или
несколько входов по заданному цифровому коду (МАХ349).
Для сложных коммутаций аналоговых аудио- и
видеосигналов применяют микросхемы матричных коммутаторов
(AD8108, AD8016). Такие микросхемы позволяют соединять в
заданной конфигурации несколько источников сигналов с
несколькими приемниками.
Это необходимо для .видеосерверов, систем передачи
видеосигналов, устройств видеонаблюдения и т.д.
Тренировочные задания
1. Назовите электронные приборы, которые относятся к
классу аналоговых коммутаторов. Приведите пример их применения.
2. Нарисуйте схемы одноканальиых аналоговых
коммутаторов на полевом транзисторе с управляющим р-и-переходом на
^-канальном МДП-транзисторе. Сопоставьте эти схемы по их
характеристикам. Назовите достоинства и недостатки обеих схем.
3. Объясните, для чего в аналоговых коммутаторах
используют комплементарные транзисторы.
4. Нарисуйте обобщенные структурные схемы аналоговЫ'
мультиплексоров и матричных коммутаторов. Расскажите об о
бенностях их построения и примерах их работы.
Тестовые задания
эЛе*'
1 В состав аналоговых коммутаторов входят такие *
тронные приборы, как: коммутаторы, мультиплексоры, матри
коммутаторы и (допишите название
электронных приборов).
Тестовые задания
267
2. При использовании в качестве коммутатора полевого
транзистора с управляющим р-и-переходом при организации
управления необходимо учитывать:
а) сопротивление нагрузки;
б) величину выходного напряжения; ч
в) величину входного напряжения;
г) ток утечки;
д) напряжение между стоком и истоком.
3. При использовании в составе аналогового коммутатора
полевого р-канального транзистора его подложка подключается:
а) к общему проводу;
б) к положительному полюсу источника питания;
в) к отрицательному полюсу источника питания;
г) ко входной клемме ключа;
д) к выходной клемме ключа.
4. В схеме комплементарного ключа используется пара:
а) параллельного включения и-МОП-транзисторов;
б) параллельного включения р-МОП-транзисторов;
в) последовательного включения и-МОП-транзисторов;
г) последовательного включения р-МОП и и-МОП-транзисторов;
д) параллельного включения р-МОП и и-МОП-транзисторов.
5. В схеме аналогового ключа на микросхемах типа КР590
КН8А,Б пара стабилитронов используется для:
а) согласования управляющих напряжений;
б) для стабилизации питающих напряжений;
в) для организации нелинейной обратной связи;
г) для стабилизации сопротивления открытых ключей;
д) для обеспечения передачи как положительных, так и
отрицательных напряжений.
6. При увеличении температуры сопротивление открытого
ключа:
а) остается практически постоянным;
б) уменьшается в кубической зависимости;
в) увеличивается практически в линейной зависимости;
г) имеет два хорошо выраженных пика;
д) изменяется по гармоническому закону.
268
Аналоговые коммутаторы
7. Для многоканальных коммутаторов и мультиплексоров
кроме сопротивления открытого канала, вводят такую
характеристику, как:
а) взаимовлияние токов утечки;
б) значение максимальной разности сопротивления
открытых ключей;
в) межканальный коэффициент модуляции;
г) эквивалентная емкость межканальных соединений;
д) значение коэффициентов передачи по каждому каналу.
8. На динамические характеристики аналоговых ключей,
выполненных на полевых транзисторах, оказывают влияние: емкости
между элементами внутри кристалла; емкости между стоком и
истоком; емкости между каналом и общей точкой; емкости между
затвором и " (допишите предложение).
6. УСТРОЙСТВА НЕПРЕРЫВНО-ДИСКРЕТНОГО
ПРЕОБРАЗОВАНИЯ СИГНАЛОВ
При построении медицинских приборов различных типов и
назначений все шире используются средства цифровой техники,
в то время как сигналы, характеризующие состояние человека, и
сигналы управления биообъектами носят аналоговый характер.
Поэтому одним из важнейших узлов современных медицинских
приборов, аппаратов, систем и комплексов являются устройства
непрерывно-дискретного преобразования сигналов. С их
помощью осуществляется преобразование дискретных значений
аналогового сигнала в их цифровые эквиваленты (при кодировании
значения амплитуды в некоторой системе счисления) - аналого-
во-цифровые преобразователи (АЦП) - и цифровых значений в
аналоговые - цифроаналоговые преобразователи (ЦАП).
Простейшие аналогово-цифровые преобразователи
реализуются на базе схем сравнения - компараторов, варианты
схемных решений которых рассмотрены в п/п. 2.4.1. На вход этих
схем поступают аналоговые сигналы, а в качестве опорного
Уровня сравнения используется некоторый уровень напряжения,
па выходе компаратора можно получить сигнал, амплитуда
которого принимает только два значения - максимальное и
минимальное, что соответствует состоянию единицы и нуля.
Компараторы могут собираться с использованием операционных
усилителей или иметь специальное интегральное исполнение,
например, микросхемы типа: К554СА1, К554СА2 (/вх=75 мкА,
'»кл=135 не, Еп= +12 В; -6 В), К554САЗ (/вх=0,1 мкА, W=200 не,
^=±15 В), КМ597СА1 (гвх=0,13 мкА, tBKJI=6,5 не), КМ597СА2
JV=0,10 мкА, гвкл=12 не), КМ597САЗ (/вх=0,25 мкА, tBKS,=300 не,
ir=±15 В). Однако выполнение на их основе многоуровневых
налогово-цифровых преобразователей нецелесообразно. Для
их целей разработаны специальные схемы, образующие
Класс АЦП.
Известно несколько подходов к классификации типов
ЦП, например:
270 Устройства непрерывно-дискретного преобразования сигналов
- по методам преобразования различают:
развертывающие АЦП последовательного счета; следящего (в том числе
поразрядного) уравновешивания; параллельного преобразования-
двойного интегрирования и др.;
- по времени формирования разрядных коэффициентов:
параллельные (одновременное формирование всех разрядных
коэффициентов); последовательные (последовательное
формирование разрядных коэффициентов); параллельно-последовательные;
- по способу представления цифровых сигналов на выходе:
преобразователи «напряжение - цифровой код»;
преобразователи «напряжение - частота импульсов»; преобразователи
«напряжение - длительность импульса» и т.д.
Разнообразны по схемным решениям и цифроаналоговые
преобразователи.
По принципам действия ЦАП разделяют на три группы:
1) последовательного действия; 2) параллельного действия; 3) с
промежуточным преобразованием.
В ЦАП последовательного действия код поступает
последовательно, начиная с младшего разряда. В параллельных ЦАП
все разряды кода одновременно поступают на схему
суммирования, то есть происходит пространственное разделение
разрядов, а суммирование токов и напряжений осуществляется с
учетом весов разрядов. Параллельные ЦАП по способу
формирования сигнала делятся на сумматоры токов, делители напряжении
и сумматоры напряжений. ЦАП с промежуточным
преобразованием используют преобразование кода в какой-либо
промежуточный параметр (длительность импульса, число импульсов и
др.), который затем преобразуется в аналоговый сигнал. РаС"
смотрим подробнее принципы построения, расчета и
проектирования этих классов преобразователей сигналов.
6.1. Цифроаналоговые преобразователи
В медицинской практике значительное место занимав
методики и классы приборов, в которых обработанная цифр0
выми средствами информация должна быть переведена в анаЯ
говый сигнал для воздействия на биообъект или для управленИ^
элементами и узлами медицинского прибора. Как было показ
Цифроаналоговые преобразователи
271
но выше, эта задача решается цифроаналоговыми
преобразователями.
Наиболее широкое распространение из этого класса
приборов получили ЦАП параллельного тип£, построенные на
основе суммирования токов, сила каждого из которых
пропорциональна весу цифрового двоичного разряда, если разряд равен
единице.
6.1.1. Схемотехника параллельных ЦАП
В основе построения таких ЦАП используется токовый
сумматор, в котором резисторы для цифровых разрядов
выбираются из условия
Ki=2"-,-B0, (6.1)
где Rq - сопротивление резистора в цепи, управляемой
старшим разрядом цифрового кода с разрядностью и;
R, — сопротивление резистора, коммутируемого в цепи i
разряда этого кода.
Ключ S0 коммутирует старший разряд, S„.\ — младший
(рис. 6.1, а).
Если в соответствующих разрядах цифрового разряда а,
код единицы, то соответствующий ключ 5, подключается к
источнику эталонного (опорного) напряжения U0 и ток с
соответствующим весовым коэффициентом попадает на ОУ, где токи
°т всех разрядов суммируются и преобразуются в выходное
напряжение ОУ по соотношению
( «-1 >
^вых — Л;умАОС
/fecC/o2>/2' /(^2"-'), (6.2)
i=0 J/
гАе ^?oC-сопротивление резистора обратной связи ОУ;
("1, если ключ S, замкнут на £/0;
[0 в противном случае.
При большой разрядности ЦАП, построенных по такому
Ринципу, разница между сопротивлениями резисторов крайних
разРядов (младшего и старшего) велика, что трудно технически
Реализовать с требуемой точностью, особенно в интегральном
272 Устройства непрерывно-дискретного преобразования сигналов
исполнении. Поэтому при построении ЦАП с большим числом
разрядов обычно используют матрицы лестничного типа R-2R.
Roc
R0
r~i—I—г
RI
R1
Ш
Si
I
Rn-\
Sn-\\
Т.
1
a)
U„
X
I
в)
U*~=KNU«
K=Z"
/VBbK(So, S],..., S„. i)
Рис. 6.1. Структурные схемы ЦАП параллельного действия
В схемах лестничного типа номиналы резисторов относят
2:1, причем схемы соединений резисторов таковы, что
вклад **
Цифроаналоговые преобразователи
273
„(дого разряда пропорционален его двоичному весу (рис. 6.1, б).
В такой схеме 50 - ключ, замыкающий старший разряд, Sn-l -
младший. При поступлении единицы только в старшем разряде
ключ SO подключает опорное напряжение к резистору 2R,
подключенному к точке 1. Все остальные резисторы своими
ключами замкнуты на «землю». Их эквивалентное сопротивление
относительно точки 1 (все резисторы слева от 1) составляет 2R,
поэтому на неинвертирующий вход ОУ поступает сигнал Uo/2.
Такие же эквивалентные сопротивления 2R с левой стороны
имеют место и для точки 2 и т.д. Если к U0 подключен резистор
2R только через ключ 51, то в точке 2 будет напряжение U0/2, но
относительно ОУ это напряжение передается через резистор R,
таким образом на вход ОУ попадает сигнал £/0/4, что
соответствует весу второго разряда. Если подключен резистор только
через S2, то на ОУ попадет сигнал Ц/Я и т.д. Поскольку ОУ
работает в режиме повторителя с коэффициентом передачи равным 1,
то для него можно записать
^вь,х=^о2-"1>,-2'. ' (6.3)
1=0
Достоинством такого ЦАП является использование
сопротивлений только 2-х номиналов, что легко реализуется в
интегральном исполнении. В практических схемах
интегральных ЦАП часто используют сочетание токовых матриц со
взвешенными резисторами и матриц типа R-2R.
Аналоговые ключи преобразователей выполняются на базе
биполярных и униполярных транзисторов. Для униполярных
транзисторов характерно отсутствие остаточного напряжения во
включенном состоянии, кроме того, на их основе можно строить
^Ючи, коммутирующие напряжение произвольной полярности,
Используя источники опорного напряжения любой полярности и
^°бого уровня напряжения. Для получения лучших
соотношений сигнал - шум в ЦАП рекомендуется эталонное напряжение
о выбирать как можно большим. Такой ЦАП интерпретируют
^е и как схему аналогово-цифрового перемножения сигналов
*ис. 6.1, в), и как управляемый двоичным кодом коэффициент
еРедачи (цифровой потенциометр).
274 Устройства непрерывно-дискретного преобразования сигналов
При преобразовании кода в разнополярный аналоговый
сигнал обычно учитывают три способа представления чисел со
знаком: 1) использование в цифровом коде специального
знакового разряда; 2) использование смещенного кода; 3)
использование дополнительного кода.
о)
б)
■3o,..-Ai-r
#/Л
I o,5 г/о
■* иы
в) Uo Ч
"1»"Ч"И-1 1^
*-о—
#/л
I 0,5 г/о
"♦С/»
"" Рис. 6.2. Схемы получения разнополярных сигналов
В простейшем способе для обозначения знака
используется один двоичный разряд, например 5„. Тогда в зависимости от
значения этого разряда с помощью ключа SA организуют
инверсию выходного сигнала ЦАП (например, как на рис. 6.2, о)-
Здесь квадрат со значками #/А - одно из условных обозначении
ЦАП на структурных схемах.
При смещенном коде число 0 соответствует половине
шкалы обычного двоичного кода. Справа по шкале отсчитыва-
ются (по возрастанию модуля) положительные числа, слева п
шкале (также по возрастанию модуля) - отрицательные числа-
Смещенный код подается на ЦАП как обычный двоичный коД>
выходное напряжение ЦАП сдвигается на половину шкалы
область отрицательных значений напряжений (см. рис. 6.2, ^
При использовании дополнительного кода отрицательное чИс
образуется инверсией всех разрядов соответствующего по
дулю положительного числа, с последующим прибавлен^
Цифроаналогоеые преобразователи
275
единицы к младшему разряду. Схема, реализующая такое
преобразование, приведена на рис. 6.2, в. Отличие от ЦАП,
работающего со смещенным кодом, заключается в том, что старший
разряд перед подачей на ЦАП инвертируется.
Для повышения точности работы ЦАП формирование
весовых токов обеспечивается транзисторными источниками тока,
имеющими высокое динамическое сопротивление. По такому
принципу построен, например, ЦАП типа К594ПА1 с
биполярными транзисторными ключами (рис. 6.3). На этой схеме
приняты следующие обозначения: N - цифровой код; СР - старший
разряд; MP - младший разряд.
Рис. 6.3. Структурная электрическая схема ЦАП типа К594ПА1
Встроенный ОУ А\ используется для формирования дво-
ично-взвешенных токов, пропорциональных опорному
напряжению U0 (схема формирователя тока вместе с VT\, B2 и /?1).
коллекторные токи транзисторов V77...VT13 пропорциональны
Роводимостям резисторов, соответствующих старшим разря-
ам. Эти проводимости соотносятся по двоичному закону (2").
младших разрядах нужное соотношение поддерживается за
ет использования в эмиттерных цепях транзисторов рези-
т°рной сетки BunaR-2R. Переключатели 51...513 управляются
в*о
Дным кодом N (выводы 7-18 микросхемы) и пропускают на
276 Устройства непрерывно-дискретного преобразования сигналов
выход (вывод 3) токи, соответствующие ненулевым разрядам
этого кода. Переключатели 51...513 выполнены на биполярных
транзисторах. Выходной ток Д ЦАП преобразуется в выходное
напряжение с помощью дополнительного внешнего ОУ А2. ре_
зистор обратной связи для этого ОУ может быть взят из микро-
схемы R5. Величина Я5=5 кОм позволяет при изменении цифр0.
вого кода от нуля до максимума изменять выходное напряжение
от 0 до 10 В.
Если требуется получить знакопеременное выходное
напряжение, изменяющееся в диапазоне -10. ..+10 В, то в цепь
обратной связи ОУ А2 последовательно включаются резисторы
R5, R6, кроме того, инвертирующий вход ОУ через резистор Ri
соединяется с источником U0 (на схеме - пунктирная связь). В
этом случае при нулевом цифровом коде на выходе ОУ А2
напряжение составляет-10 В, и при максимальном коде +10 В.
Цифроаналоговые преобразователи, построенные с
использованием МОП-транзисторов, позволяют изменять опорное
напряжение как по величине, так и по знаку. В результате чего
ЦАП приобретает свойства перемножителя входного (опорного)
напряжения и входного (управляющего) кода. Такими
умножающими ЦАП являются микросхемы типов К572ПА1 и
К572ПА2. Схема ЦАП К572ПА2 показана на рис. 6.4. Здесь
используется сетка R-2R и ключи 51 ...510 на МОП-транзисторах.
N 1
Рис. 6.4. Структурная электрическая схема ЦАП типа К572ПА2
Цифроаналоговые преобразователи
277
Резистивная сетка в этой схеме питается не от источника
тока, а непосредственно от источника опорного напряжения £/0
и вырабатывает двоично-взвешенные токи, поступающие на
МОП-переключатели 51...510. С выводов ЦАП получаем два
тока: 1\ и 12. Ток 1\ изменяется пропорционально управляющему
коду М ток h (дополняющий) определяется соотношением
/2=/0-/|, где /0- максимальное значение тока 1\. У разных
экземпляров этот ток лежит в пределах 0,5...2 мА (номинальное
значение /о=1 мА).
Выходное напряжение ЦАП снимается с выхода
дополнительного усилителя А\ и определяется выражением
^Bux^WVWVmax- Поскольку U0 может принимать как
положительные, так и отрицательные значения, приведенная схема
осуществляет двухквадрантное умножение U0 на N. Для четы-
рехквадрантного умножения ЦАП дополняется еще одним
усилителем А2 и резисторами RI...R3 (Ri=R3=2R2). Напряжение на
выходе усилителя А2 можно определить как
г, = -^выхЛ ад = 2U0(N - Nmax 12)
ВЫХ2_ Щ " * " Nmax
Если один из сомножителей UX=U0, а второй Uy
представши смещенным двоичным кодом N=a-UyNtnax+NtnaJ2, где a -
постоянный коэффициент, то результат четырехквадрантного
перемножения равен UBboa=2a UxUy.
Цифроаналоговые преобразователи типа К572ПА1 могут
^равляться кодом с выводов дискретных интегральных схем
^Пов КМОП и ТТЛ. В последнем случае выходные уровни сле-
™ет поднять путем подключения к выходам этих микросхем
противлении 2... 10 кОм, которые своим вторым выводом
включаются к источнику питания +5 В. Можно произвести
Посредственное согласование ЦАП с ТТЛ-схемами, уменьшив
пРяжение питания ЦАП до 5 В, но при этом возрастают
ложности преобразования.
fciij
Умножающие ЦАП удобно использовать для построения
лителей с управляемым коэффициентом усиления (напри-
р> автоматизированное изменение масштабов преобразования
278 Устройства непрерывно-дискретного преобразования сигналов
аналоговых сигналов под управлением ЭВМ или специализиро.
ванных микропроцессоров). Действительно, если в схеме, при-
веденной на рис. 6.4, U0 рассматривать как входное напряжение
а £/ВЫХ1 - как выходное напряжение усилителя, то коэффициент
усиления этого усилителя определяется по формуле Ку= —N/Nm
то есть изменяется прямо пропорционально величине Л^.
На основе умножающего ЦАП может быть построен также
и неинвертирующий усилитель с управляемым коэффициентом
усиления. На рис. 6.5, а условно показана такая схема на основе
ЦАП К572ПА1, в которой схематично приведены управляемые
сопротивления от кода N и одно постоянное сопротивление
обратной связи Roc-
Рис. 6.5. Структурные схемы неинвертирующего усилителя (а) и делителя (И
В данном случае использовано обратное включение ЦА11-
опорное напряжение U0 подключено к выводу I, соответс^
вующему выходному току 1} (в таком включении это - входн0
ток), а выходное напряжение снимается с вывода 15, на кот°
рый подается обычно опорное напряжение. Такое включени
сетки R—2R обеспечивает напряжение на 15-м выводе, проп°Р
Цифроаналоговые преобразователи
279
циональное управляющему коду N. Причем при таком
включении пропорциональная зависимость сохраняется при любом
постоянном сопротивлении нагрузки. Токовые МОП-ключи не
рассчитаны на переключение больших напряжений, поэтому
рекомендуется выполнять соотношение -I В < U0< 1 В.
Если нужно получить знакопеременное выходное
напряжение для смешенного кода при постоянном U0, в схему
вводится дополнительный резистор RI. В результате справедливо
выражение
-U Л. (6.4)
U = U N И .Я,
В частности, если принять Ri=R, R2=l,25R, R3-5R, то
N-N /2
max
Умножающий ЦАП может быть использован для
реализации операции деления (см. рис. 6.5, б), для чего ЦАП включен в
цепь обратной связи усилителя.
Для этой схемы С/ВЬ1Х= -UBX Nmax/N, причем следует иметь в
виду, что относительная погрешность этой схемы возрастает
при малых значениях N.
В ряде задач ЦАП используют для восстановления
электрофизиологических сигналов из последовательности цифровых
Кодов, например, для подачи их на аналоговый регистратор, для
с°здания систем с обратными связями, управляемым и по этим
Сигналам, и т.д. В этом случае на выходе ЦАП формируются
^пеньки напряжений, величина которых определяется считы-
аемыми кодами. Убрать эти ступеньки можно, подключив к
ьпсоду ЦАП фильтры низких частот. Схема формирования
Лектрокардиосигнала из его цифровых кодов, применяемая в
аРДиоманиторах, приведена на рис. 6.6.
280 Устройства непрерывно-дискретного преобразования сигналов
К555ИР23
К572ПА1
0,1 мк
ЦАП
10 к
15 В
Рис. 6.6. Практическая схема ЦАП кардиомонитора
В этой схеме регистр RG служит для промежуточного
хранения цифровых данных. Схема работает с частотой выборки 250 Гц.
имеет разрядность 8 и полосу пропускания 0,1 ...30 Гц при
неравномерности АХЧ ±10%.
6.1.2. Последовательные ЦАП
Если по условию решаемой задачи не требуется высокого
быстродействия, то можно воспользоваться последовательной
схемой преобразования цифровых кодов в аналоговый сигнал.
Схемотехнику построения ЦАП такого типа рассмотрим на
примере преобразователя с применением двух схем устройств
выборки хранения (УВХ) с общей обратной связью (рис. 6./J-
Двоичная кодовая комбинация сигналов UK последовательно'
начиная с младшего разряда, поступает на управляющий вх
ключа К\. При поступлении на вход двоичного сигнала «
ключ К] замыкается и его опорное напряжение U0 подключи
ся ко входу первого УВХ (А1). Когда поступает кодовый разР т
«0», ключ /Л остается разомкнутым. Усилитель А\ выполН
операцию суммирования сигнала С/0 (когда К\ замкнут) с сиг ^
лом U2„ формируемым на выходе А2 с коэффициентом пер^Д
0,5. Для этого выполняется соотношение R:=R3=0,5R2.
Цифроаналоговыв преобразователи 281
R2
ив
г
RI
R5
П
К2
Г,,
R4
С1
Ulf
КЗ
у П/иъ
R2
/я
-С
№
(/_
иш
Рис. 6.7. Структурная схема ЦАП последовательного действия
Обработка каждого разряда кода длится в течение 2-х
тактов (/,] и ta)- В первом такте замыкается ключ К2, и на выходе
ОУ А1 устанавливается сигнал
[/„-O^tC/o+C/^,.,)], (6.5)
где C/2(,-i) - сигнал на выходе А2, соответствующий коду
разряда /'-1.
Во втором такте К1 размыкается и замыкается ключ КЗ.
При i?4=/?5 на выходе ОУ А1 устанавливается напряжение
Если на вход ЦАП поступает кодовый разряд со значением
О, то в первом такте на выходе ОУ А\ формируется сигнал
^ii~0,5[/2(M), который на втором такте запомнится на выходе
ОУ 42. После окончания цикла преобразования сигналом Un
отбывается ключ К4, с выхода которого снимается исходный
сигнал.
Механизм формирования аналогового сигнала на выходе
у А2 для трехразрядного двоичного кода рассмотрен в таб-
*ицеб.1.
Анализ первой строки таблицы показывает, что вес «деся-
Ичной единицы» (кода числа 1) падает с ростом разрядности п
Реобразуемого кода. Этот вес может быть подсчитан по фор-
Уле U(\)=U0/2", а напряжение на выходе ЦАП, в зависимости от
СтУпающего на вход двоичного кода, определяется как
U{K)= U(l)K = KUo/2", (6.6)
282 Устройства непрерывно-дискретного преобразования сигналов
где К - десятичное обозначение двоичного кода разрядности п
поступающего на вход ЦАП.
Таблица 6.)
Формирование аналогового сигнала ЦАП
последовательного действия
Десятичное
обозначение
1
2
3
4
5
6
Двоичный
код
001
010
011
100
101
ПО
Номер второго такта /а
1
А1
0,5 f/0
0
0,5 f/o
0
0,5 U0
0
А2
0,5 U0
0
0,5 U0
0
0,5 f/o
0
2
Al
0,25 U0
0,5 f/0
0,75 f/0
0
0,25 f/0
0,5 U0
A2
0,25 U0
0,5 U0
0,75 U0
0
0,25 U0
0,5U0
3
Al
0,125£/0
0,125t/0
0,375 U0
0,5 t/o
0,625 U0
0,75 £/0
A2
0,125£/„
0,125t/0
0,3756b
0,5t/0
0,6256b
0,751/0
К достоинствам последовательных ЦАП относят то, что
они не требуют дополнительных схемных решений при работе с
последовательными кодами, например, при работе с
последовательными портами ЭВМ.
К основным недостаткам ЦАП последовательного
действия относят их низкое быстродействие, поскольку на каждом
такте необходимо обеспечивать временную задержку,
связанную с требуемым временем заряда конденсатора. Например, для
схемы, приведенной на рис. 6.7, при постоянной времени заряд3
конденсаторов 1 мкс и 12-разрядном входном коде время
преобразования составляет не менее 0,3 мс. Поэтому наибольшее рас-
пространение получили параллельные схемы ЦАП.
К классу последовательных ЦАП относят и так
называемые сигма-дельта-ЦАП, характерной особенностью работы
которых является принципиальная возможность повышения
точности преобразований за счет применения эффективных
методов борьбы с помехами, связанными с механизмами квантова
ния сигналов. В состав таких ЦАП включают сигма-деЛьТ
модулятор, который спектр шума квантования «переносит»
высокочастотную область, где он легко отфильтровывается
полезного сигнала обычными фильтрами низких частот. Техв
Цифроаналоговые преобразователи 283
ка такого преобразования сложнее традиционно принятой при
построении ЦАП, но современные технологии позволяют
реализовать такие ЦАП за приемлемые цены, поэтому сигма-дельта-
ЦАП начинают находить все более широкое применение.
Подробнее со схемотехникой сигма-дельта-ЦАП можно
ознакомиться в специальной литературе, например в [3, с. 405—410].
Как последовательные, так и параллельные ЦАП удобно
использовать для так называемого прямого синтеза сигналов, в
результате которого на выходе ЦАП формируется сигнал
заранее заданной формы (например, эталонные
электрокардиограммы, электроэнцефалограммы и др.) в норме и патологии для
настройки систем, принимающих решение.
В простейшем случае коды генерируемых сигналов могут
находиться в памяти цифровой системы и последовательно
передаваться на входы ЦАП, на выходе которого может стоять
сглаживающий фильтр.
Широкое распространение в системах прямого синтеза
сигналов на основе ЦАП получила схема с генератором
фазового угла, выбирающая через определенные промежутки времени
коды из памяти для их преобразования (рис. 6.8).
/т
Дф
«=3
Рг1
П=5
См
Рг2
3mt=T
ПЗУ^^цап
иы
Рис. 6.8. Структурная схема генератора прямого синтеза сигналов
Требуемое приращение фазы генерируемого сигнала Дф
сигн "аеТ В° ВХОДНОЙ РегистР (Рг1). Текущее значение фазы
Комк^3 реализУется в накапливающем сумматоре, состоящем из
с оинационного сумматора (См) и регистра (Рг2), и сменяется
*РанСТ°ТОИ ^' В постоянном запоминающем устройстве (ПЗУ)
сЧгмаТСЯ последовательнос™ кодов, определяющих амплитуду
Г°ВЫ~ а" Адреса выб°Ра колов формируются Рг2. Цифроанало-
и преобразователь преобразует коды, выбираемые из ПЗУ,
284 Устройства непрерывно-дискретного преобразования сигналов
в аналоговый сигнал с точностью, определяемой разрядностью
регистров, тактовой частотой и величиной Лф.
6.1.3. Параметры ЦАП
При выборе конкретных схем ЦАП для построения
биотехнических систем ориентируются на их технические
характеристики. К основным характеристикам относят: разрешающую
способность, время преобразования (fnp), точность
преобразования и номинальный выходной ток (1ВЫХ). Разрешающая
способность определяется числом разрядов преобразуемого кода п.
Теоретически ЦАП должен обеспечивать 2" различных
значений выходного сигнала, различающихся друг от друга точно на
величину уровня разрешения U02~". Различного рода
погрешности, вызванные неидеальностью ключей, температурной
нестабильностью элементов, нелинейными явлениями, приводят к
отличию реального значения разрешающей способности от
теоретического.
В большинстве случаев разработчики ЦАП стремятся к
тому, чтобы все составляющие погрешностей в совокупности не
приводили к появлению абсолютной погрешности,
превышающей уровень разрешения преобразователя, или в пересчете на
цифровой код ±0,5 единицы младшего разряда.
12 3 4 5 6 7
Рис. 6.9. Характер погрешностей преобразователей
Цифроаналоговые преобразователи
285
Кривые, поясняющие характер погрешностей ЦАП,
представлены на рис. 6.9. Прямая lfBUX соединяет точки,
соответствующие идеальной зависимости выходного напряжения от
управляющего цифрового кода. Кусочно-линейная кривая C^,,,*
представляет аналогичную реальную зависимость. Разность
(febl>i-lf „ух Для максимального кода N называют погрешностью
полной шкалы (бпш). Наибольшее отклонение кривой LPbbK от
прямой, соединяющей две крайние точки этой кривой, называют
погрешностью линейности (6л). Дифференциальная
нелинейность определяется как наибольшая по модулю разность
единичного приращения (кванта) выходного напряжения qt и
среднего значения этого приращения дср.
Погрешности ЦАП могут быть выражены в процентах или
других относительных единицах, а также в долях кванта qcp.
Время преобразования (/пр), или время установления
выходного сигнала после изменения управляющего кода (tyCT),
определяется как интервал времени от момента начала преобразования
до появления окончательного результата с точностью,
определяемой разрешающей способностью преобразователя. С
временем преобразования тесно связана такая характеристика, как
частота преобразования (f„v), определяющая максимальную частоту
смены кода, при котором ЦАП сохраняет свои точностные
параметры.
В качестве примера рассмотрим параметры ряда
отечественных и зарубежных ЦАП (табл. 6.2).
Таблица 6.2
Основные параметры промышленных ЦАП
Тип ЦАП
572Г1А1
1
594ПА1
Разрядность,
бит
10
12
К
1
1
Тип
выхода
/
/
'уст*
МКС
5
3.5
Интерфейс
-
-
ИОН
-
-
(/п. В
5...17
+5,
-15
Р.
мВт
30
600
Примечание
Перемножающий
ЦАП широкого
применения
ЦАП широкого
применения на
токовых ключах
286 Устройства непрерывно-дискретного преобразования сигналов
Продолжение табл. 6 2
Тип ЦАП
МАХ527
DAC8512
AD7846
МАХ541
1П8ПА6
AD9720
DAC1220
Разрядность,
бит
12
12
16
16
10
10
20
К
4
1
1
1
1
1
1
Тип
выхода
и
и
и
и
I
I
и
'уст,
МКС
3
16
9
1
5 не
4,5 не
15 мс
Интерфейс
парал.
поел.
парал.
поел.
•
парал.
поел.
ИОН
-
+
-
-
+
+
-
и„в
±5
5
±15
5
-5,2
-5,2
5
Р,
мВт
ПО
5
100
1,5
340
1100
3
Примечание
ЦАП широкого ~~
применения с
загрузкой входных
слов по 8-разрядной
шине
ЦАП широкого ~~
применения
Прецизионный
ЦАП
То же
Быстродействующий ЦАП,
совместимый с ЭСЛ
логикой
Быстродействующий
перемножающий ЦАП;
Лвь,х=50 Ом
Промышленный
сигма-дельта-ЦАГ|
Примечание. Обозначения: К - число каналов; / - токовый выход;
U— выход по напряжению; ИОН - источник опорного напряжения; «+»-
есть; «-» - нет; £/„- напряжение питания; Р - потребляемая мощность.
В медицинской практике ЦАП используют для решения
задач отображения биомедицинских сигналов после их цифр0"
вой обработки, для формирования аналоговых сигналов
воздействия под управлением цифровыми системами, для организации
контуров биомедицинской обратной связи и т.д.
6.2. Аналогово-цифровые преобразователи
Популярность использования аналогово-цифровых преоб'
разователей в медицинской технике определяется тем, что в
большинстве случаев информацию о состоянии
биообъектов
Аналогово-цифровые преобразователи 287
первоначально получают в аналоговой форме, а средства
обработки в основном используют средства цифровой техники.
6.2.1. Процедура аналогово-цифрового преобразования
и основные параметры АЦП
Процедура преобразования сигналов, реализуемая с
помощью АЦП, осуществляется на основе сравнения амплитуды
входного сигнала с несколькими «разрешенными» уровнями.
Номер ближайшего разрешенного уровня принимается за
числовое значение амплитуды; оно фиксируется в форме
кодированного выходного сигнала. Оценка близости амплитуды
входного сигнала к одному из уровней осуществляется с помощью
одного из двух неравенств
иДх < jcbx < (n + \)Ь.х, или (л - 0,5)Лх < хвх <{п + 0,5)Ах, (6.7)
где Лх - уровень квантования по амплитуде;
п - номер ближайшего уровня.
Если выполняется условие неравенства (6.7), то хвх=пАх.
Уровень квантования определяет разрешающую
способность АЦП; его динамический диапазон задается разностью
амплитуд сигналов -C/min...+C/max. Этому диапазону соответствует
и диапазон изменения количества уровней A/min...7Vmax. Еще
одним важным параметром является время преобразования (fnp) —
интервал времени, за который формируется числовой
эквивалент преобразуемой амплитуды. Быстродействие АЦП задается
Шагом квантования входного сигнала по времени, At - интервал
вРемени между отдельными отсчетами сигнала.
Таким образом, ряд параметров АЦП аналогичен
соответствующим параметрам ЦАП.
Рассмотрим еще несколько специфических и важных
параметров, характеризующих работу АЦП.
При реализации процедуры дискретизации в общем случае
Мент окончания преобразования точно не определен и зави-
Ит от входного сигнала, что при больших претензиях на
точить, особенно при работе с быстро меняющимися сигналами,
Р°ждает неоднозначность соответствия между значениями
сЧетов и моментами времени, к которым они должны быть
288 Устройства непрерывно-дискретного преобразования сигналов
отнесены. Такой вид погрешностей, относящийся к классу ди_
намических погрешностей, принято характеризовать апертур.
ным временем (/Л).
Апертурным временем называют время, в течение
которого сохраняется неопределенность между значением выборки и
временем, к которому она относится. Это время зависит от
способа дискретизации.
При равномерной дискретизации апертурная
неопределенность приводит к возникновению амплитудных погрешностей,
определяемых приращением сигнала в течение апертурного
времени.
При работе АЦП фиксация входного сигнала
осуществляется в определенные промежутки времени, между которыми
входной аналоговый сигнал может изменить свою амплитуду. В
результате близкие по величине, но все-таки отличающиеся
значения непрерывного сигнала могут быть представлены одним и
тем же цифровым кодом на выходе АЦП. Таким образом,
возникает эффект потери части информации, который определяется
как ошибка (шум) квантования (рис. 6.10).
Цифровой
код (Щ
Рис. 6.10. Иллюстрация шума квантования
На этом рисунке «ступенькам» соответствует реальное
напряжение на выходе АЦП (цифровой код), а прямая линия
характеризует идеальный аналоговый сигнал, к которому должН
приближаться входное напряжение преобразователя.
Аналогово-цифровые преобразователи 289
Легко заметить, что ошибка нау-м шаге квантования
определяется выражением
е, =U,~UBX. (6.8)
Если предположить, что входной сигнал в рамках шага
квантования является случайной величиной с равномерным
распределением, то среднеквадратичная ошибка naj-м шаге
квантования определяется выражением
(6.9)
iJ2=A7l2.
Можно показать, что в идеальном случае отношение
сигнал-шум (дБ) определяется выражением
¥ = 6,02^+1,76, (6.10)
где N- разрядность АЦП.
Это означает, что увеличение разрядности АЦП на
единицу увеличивает отношение сигнал - шум примерно на 6 дБ.
6.2.2. Схемотехника АЦП
•
Рассмотрим наиболее распространенные традиционные
схемы построения АЦП, начиная со схем последовательного
типа, использующих в своем составе цифроаналоговые
преобразователи. Структурная схема АЦП, получившая название схемы
последовательного счета, приведена на рис. 6.11.
и„
I
ик
гти
Старт
Сброс
И
Сч
#/Л
Ьт^цап!
иа
£
j4iux(So. Si,. ■ -5 S„.|)
Рис. 6.11. Структурная схема АЦП последовательного счета
290 Устройства непрерывно-дискретного преобразования сигналов
Перед началом работы сигналом «Сброс» счетчик Сч уСТа_
навливается в исходное (нулевое) состояние. Компаратор (ja
находится в единичном состоянии, поскольку С/вх>£/вых из-за ну.
левого состояния счетчика. С момента поступления сигнала
«Старт» через схему «И» от генератора тактовых импульсов
ГТИ на счетчик (Сч) начинают поступать импульсы счета. На
выходе счетчика формируется двоичный код, который схемой
ЦАП преобразуется в аналоговый эквивалентный сигнал (/ВЬ1Х.
Когда UBtK становится больше UBX, компаратор (К)
устанавливается в состояние «0», закрывая схему «И». Счет прерывается, а
зафиксированный параллельный код может быть считан как
результат преобразования. После сброса счетчика в нуль и
появления разрешающего сигнала «Старт» процесс преобразования
возобновляется. Время преобразования такого АЦП является
переменным и зависит от уровня входного сигнала. Для
максимального входного сигнала время преобразования можно
определить как: tnp =2\, где г - разрядность счетчика, а тт - период
тактовых импульсов.
Аналогово-цифровой преобразователь следящего
уравновешивания имеет структуру, похожую на АЦП
последовательного счета, с той разницей, что счетчик является реверсивным-
Упрощенная функциональная схема такого преобразователя
приведена на рис. 6.12, а.
• При С/ВХ>С/ВЫХ на выходе компаратора (К) формируется
высокий уровень, открывающий верхнюю схему «И», и
реверсивный счетчик (РСч) суммирует тактовые импульсы, увеличивая
величину С/вых. При t/Bblx>C/BX на выходе компаратора
формируется напряжение С/к=0, закрывающее верхнюю схему «И» и
открывающее нижнюю. Реверсивный счетчик от тактовых
импульсов уменьшает свое содержимое, тем самым уменьшая в
личину С/вых. Таким образом схема будет следить за изменение-^
величины входного напряжения, переключая счетчик в ре*11
суммирования и вычитания. Код iVBbIX на выходе РСч являеТпЯ
эквивалентом преобразуемого сигнала. В этой схеме следует Д-
исключения эффекта «дрожания» кода при переходе от одн
значения к другому использовать компаратор с гистерезисом-
Аналогово-цифровые преобразователи
291
Такт»
AwCSo, Si,..., 5„.|)
б)
U и-
s:
и.
Старт
УУ
рр
ГТИ
=>
#/л
идп
и..
^>
NbmxCSo, Si,...,S„.i)
Рис. 6.12. Структура АЦП следящего (а) и поразрядного (б) уравновешивания
Следящие АЦП рекомендуется использовать для
преобразования медленно меняющихся сигналов. Наибольшее время
необходимо для первого преобразования. Оно такое же, как у
схемы последовательного счета. Поэтому иногда в начальный
момент устанавливают в счетчике значение кода,
соответствующее середине интервала преобразования.
Аналогово-цифровой преобразователь поразрядного
уравновешивания (см. рис. 6.12, 6) находит наибольшее применение
при практической реализации интегральных АЦП. В АЦП этого
типа код в регистре результата изменяется так, чтобы обеспечить
по возможности быстрое уравновешивание входного напряжения
или тока напряжением или током, получаемым с выхода ЦАП. В
исходном состоянии регистр результата (РР) содержит нулевой
К°Д Швк>ивых). Компаратор (К) поддерживает высокий уровень
Напряжения, включающий по сигналу «Старт» работу устройства
Управления (УУ). Уравновешивание начинается со старшего раз-
Ряда. В этом разряде УУ устанавливает вначале единицу и
оценивает знак разности (UBX-UBblx). Если UBX>UBb,x, то установленная
старшем разряде единица сохраняется, если C/BX<f/Bblx, то еди-
^а сбрасывается, то есть в дальнейшем в этом разряде
сохранен нуль. Далее таким же образом проверяется, нужна ли еди-
292 Устройства непрерывно-дискретного преобразования сигналов
ница в соседнем, младшем по отношению к уже проверенному
разряде. Уравновешивание продолжается до тех пор, пока не
будут опрошены все разряды регистра, включая самый младщи^
Время преобразования в таком АЦП всегда одинаково и опреде.
ляется разрядностью преобразования t„p=mr , где п - число
разрядов, тт - период следования тактовых импульсов. Точность
преобразования определяется в основном точностью работы
ЦАП. Отечественной промышленностью выпускается целый ряд
интегральных микросхем, работающих по принципу
последовательного приближения.
Схема АЦП на основе микросхемы К572ПВ1 показана на
рис. 6.13. Это 12-разрядный АЦП, который имеет выходные
каскады с тремя состояниями (0, 1 и высокоимпедансное),
благодаря чему он может выдавать информацию в системную шину
микропроцессоров, контроллеров и т.д. Этот АЦП имеет
двунаправленный кодовый канал, что позволяет использовать его и
как ЦАП.
Переключение кодового сигнала на ввод или вывод
производится сигналом V (режим): если V=0 - включен режим вывода
кода, если 1 - режим ввода. Перевод кодового сигнала в
высокоимпедансное состояние производится подачей нулевого
сигнала на вход LE (управление восемью младшими разрядами) и
НЕ (управление четырьмя старшими разрядами). Благодаря
этому информация с АЦП может выводиться побайтно на
восьмиразрядную шину данных. Работа преобразователя
синхронизируется тактовыми импульсами по входу С, частота которых не
должна превышать 250 кГц.
Для работы в режиме АЦП схема дополняется источником
опорного напряжения U0, операционным усилителем А\ и
компаратором А2. ОУ А\ используется для преобразования в и
пряжение выходного тока 1Х микросхемы ЦАП. Выходы допоя
няющего тока 12 ЦАП и вывод последнего резистора сетки UA
/3 подключаются к «земле». В качестве резистора обратной сВ
зи ОУ А2 используется один из резисторов, входящих в микР
схему (на рис. 6.13, а набор резисторов микросхемы, доступнь'
для внешних соединений, изображен отдельно от микросхем
Аналогово-цифровые преобразователи
293
о распоряжении пользователя имеются четыре таких резистора,
которые соотносятся по двоичному закону: 2R, R, RI2, R/4
(jpsl0 кОм).
Г32~^
мс
Рис. 6.13. Структурные схемы АЦП на основе микросхемы К572ПВ1
Компаратор А2 сравнивает выходное напряжение ЦАП,
^имаемое с выхода А\, с преобразуемым напряжением входа
вх- Результат сравнения подается на вход С/ (сравнение). При
"^Ючении АЦП по схеме, приведенной на рис. 6.13, о, обеспе-
Ивается преобразование напряжения UBX от 0 до -U0. Если в об-
атную СВЯзЬ ОУ А] включить сопротивление 2R или RI2, то
Сдельное значение U^ станет равным -2U0 или -Uq/2 соответ-
294 Устройства непрерывно-дискретного преобразования сигналов
ственно. Опорное напряжение С/0 может изменяться в пределах
-15...+15 В.
Аналогово-цифровой преобразователь на основе микро-
схемы К572ПВ1 можно построить и без операционного
усилителя А\, если его выход 1\ соединить непосредственно с неин-
вертирующим входом компаратора и на этот же вход через
резистор R подать преобразуемое напряжение С/вх.
Инвертирующий вход компаратора при этом заземляется. В этом варианте
происходит сравнение с нулем суммы токов UbK/R и 1\. В обоих
вариантах (с ОУ и без него) опорное напряжение С/0 должно
иметь полярность, противоположную полярности С/вх. В
приведенной схеме включения С/0 должно быть отрицательным. При
положительном С/о входы компаратора следует поменять
местами.
Два варианта двухполярного АЦП на основе микросхемы
К572ПВ1 приведены на рис. 6.13, б, в. В обоих случаях смещение
характеристики преобразователя производится путем соединения
опорного источника С/0 через резистор со входом компаратора А2.
Схеме, приведенной на рис. 6.13, 6, соответствует диапазон
изменения С/вх от -С/0 до +С/0, а на рис. 6.13, в - от -С/0 /3 до +С/0 /3.
Запуск АЦП производится положительным импульсом,
подаваемым на вход ST (старт) (см. рис. 6.13, а). Весь цикл
преобразования длится 28 периодов тактовых импульсов: 2
периода - сброс, 24 периода - реализация программы
последовательного приближения; 2 периода - формирование
положительного импульса на выходе DR (готовность данных). Цикл
преобразования АЦП может быть закончен досрочно путем
подачи повторного импульса запуска на вход ST. Таким образом
сокращается время преобразования и, соответственно, разряД'
ность АЦП. Если требуется организовать циклическую работу
АЦП, то соединяются между собой выход Z0 (выход цикла)'
вход Z1 (вход цикла).
Схема ЦАП на основе микросхемы К572ПВ1 приведена и
рис. 6.14. В этом случае на вход Глодается сигнал «1», и чер
кодовый канал входной код //записывается в выходной регис г
управляющий работой ЦАП. Операционный усилитель А1 ПР
Аналогово-цифровые преобразователи 295
образует выходной ток 1Х ЦАП в напряжение С/Вых. Внешняя
кодовая информация в выходной регистр может быть записана
также и последовательно по входу DI. Записываемый код на
этот вход подается, начиная с младших разрядов, синхронно с
парами тактовых импульсов (запись 12 разрядов кода занимает
время, равное 24 периодам тактовых импульсов).
Преобразователь имеет вход RE, разрешающий смену кода в выходном
регистре. Этот код может изменяться только при RE=\\ если RE=Q,
то в регистре хранится ранее введенный в него код.
«О»
«i»_.
С/о
1В—
+5 В
-15 В
a—
«1»
DI
ZI
V
НЕ
LE
RE
ST
С
С/о
и,
a
п2
О
«—>
zo
DR
/,
h
h
CA
CD
N
2R
'C4,
1
Рис. 6.14. Структурная схема ЦАП на основе микросхемы К572ПВ1
При работе с ТТЛ-схемами С/п1=+5 В, при работе с
^ОП-схемами С/П| может быть повышено до + 15 В. «Анало-
0вУю землю» GA рекомендуется использовать в качестве низ-
°потенциальной точки для входного и опорного напряжений
ох, С/0). «Цифровую землю» GD рекомендуется использовать в
Честве общей точки для дискретных сигналов. Соединять эти
Мяи в общую точку следует в одном месте - на клемме источ-
Ика питания.
. Отечественная и зарубежная промышленность выпускает
Нкционально законченные АЦП, в состав которых входят все
ь,э необходимые для работы преобразователя по методу по-
296 Устройства напрерывно-дискретного преобразования сигналов
следовательных приближений. Примерами таких АЦП могут
служить микросхемы типа К1108ПВ1 и К1113ПВ1 (рис. 6.15).
Десятиразрядный АЦП К1108ПВ1 может работать как с
внутренним, так и с внешним тактовым генератором (см
рис. 6.15, о). Во втором случае на вход С подаются тактовые
импульсы с выхода ЭСЛ-инвертора (уровни -0,9; -1,7 В), а в
первом случае вход С соединяется через ёмкость С2 (25 пф) с
общим проводом. Эта ёмкость может быть увеличена, если
требуется снизить частоту преобразования. Вместо ёмкости С2
может быть подключен кварцевый резонатор на 13,6 МГц.
о)
0,47 мк
«-5,2 В
«+5В
1 мк~Г"
6) 14, «..13
1
, 14
11
1
15
о 16,
AI
GA
В/С
V
CD
К1113
ПВ1
N
DR
У а
1 „
!8 п
MP
17
10
12
" ~
>N
Рис. 6.15. Схемы включения АЦП К1108ПВ1 (а) и К1113ПВ1 (б)
Все цифровые входы, за исключением С и V, рассчитан
на работу с уровнем ТТЛ-схем Вход V управляет переключи
Аналогово-цифроеые преобразователи 297
ем разрядности АЦП. Для работы в десятиразрядном режиме
(время преобразования 0,9 мкс) вход V соединяется с «цифровой
землей». Для работы в восьмиразрядном режиме (время
преобразования 0,75 мкс) вход V соединяют, с источником питания
[/", (-5,2 В). Вывод 15 — вывод питания аналоговой части.
Вывод 12 - питание цифровой части.
В АЦП К1108ПВ1 имеется внутренний источник опорного
напряжения (2,5 ± 0,1) В. Для частотной коррекции этого
источника к выводу 19 подключается ёмкость С\ (0,47 мкФ). Опорное
напряжение U$ можно снять с вывода 18, например, для
смещения начального уровня входного усилителя (потребляемый
ток от Uq не должен превышать 1 мА). Температурный
коэффициент напряжения для этого источника ±(30...100)-10" . Если
точность внутреннего источника Uq недостаточна, к выводу 18
можно подключить внешний, более точный источник. Для
отключения внутреннего источника Uq надо вывод 19 через
резистор 0,1 кОм соединить с «землёй».
Кодовые выходы АЦП могут быть переведены в высоко-
импедансное состояние подачей единичного сигнала на вход
DE. Для частотной коррекции ОУ и снижения входного
сопротивления источников питания подсоединяют конденсаторы С4,
СЗ, С5 к выводам 12, 15, 16, 21. Для циклической работы
следует вход запуска ST соединить с «землей». Выход DR (готовность
Данных) используется для синхронизации системы считывания
выходного кода АЦП.
В процессе очередного преобразования на кодовом выходе
АЦП присутствует код предыдущего преобразования. Входное
напряжение АЦП может изменяться от 0 до SUq/7(~3 В).
Регулировки нуля и чувствительности АЦП лучше производить с
помощью дополнительной схемы на ОУ, включаемой между UBX
и аналоговым входом АЦП AI.
Рассмотрим схему подключения 10-разрядного АЦП
Kl 113ПВ1 (см. рис. 6.15, б). Переключение режима работы про-
298 Устройства непрерывно-дискретного преобразования сигналов
изводится по входу V. Если V=\, то 11ш может изменяться в дИа.
пазоне 0... 10,24 В, если V=0 - преобразователь работает в дИа.
пазоне входных напряжений -5,12...+5,12 В. Процесс
преобразования в этом АЦП осуществляется при нуле на входе В/с
(бланкирование - преобразование).
Для сброса текущего выходного кода необходимо подать
на вход В/С положительный сигнал длительностью не менее
2 мкс. После этого подача кода нуля на вход В/С инициирует
новый цикл преобразования. По окончании преобразования на
выходе DR (готовность) появится сигнал «0». В процессе
сброса и преобразования на этом выходе поддерживается сигнал «1»,
а кодовые выходы АЦП находятся в высокоимпедансном
состоянии. По окончании преобразования одновременно с
сигналом готовности данных (DR=0) на кодовых выходах
устанавливается искомая информация, согласующаяся с цифровыми ТТЛ-
схемами. Регулировку чувствительности можно производить с
помощью переменного резистора 100...500 Ом, включаемого
между источником сигнала UBX и аналоговым входом АЦП AI.
Для регулировки нуля можно включить переменный резистор
5...50 Ом между входом GA и внешней «аналоговой землей».
Практическая схема АЦП для цифровой обработки элек-
трокардиосигнала (ЭКС) в кардиомониторе приведена на
рис. 6.16. Тактовые импульсы с частотой квантования/и,
поступают на триггер Шмитта (ТгШ) для повышения крутизны
фронтов используют формирователь нормализованных импульсов
(ФНИ) для квантования аналогового сигнала в АЦП. Цифровые
сигналы через буферные инверторы (БИ) передаются на
дальнейшую цифровую обработку. Сигнал «конец преобразования»
(КП) формируется аналогично сигналам квантования. Обычно
перед подачей на АЦП ЭКС фильтруют, защищая
преобразователь от шумов, идущих с частотой выше, чем самая
высокочастотная информационная составляющая полезного сигнала.
Аналогово-цифровые преобразователи
299
ТгШ
К155ТЛ2
ФНИ
К155АГЗ
АЦП
К1113ПВ1А
БИ
К155ЛН1
Цифровой
выход
+5 В
КЛ522К
Рис. 6.16. Структурная схема АЦП кардиомонитора
Для работы с однобайтными цифровыми схемами
разработан ряд функционально законченных восьмиразрядных АЦП,
например, К572ПВЗ, К572ПВ4.
Аналогово-цифровые преобразователи параллельного пре-
°"Разования имеют самую простую логическую организацию,
°Днако сложность схемы резко возрастает с увеличением раз-
Рядности. На рис. 6.17, а приведена упрощенная схема АЦП
параллельного преобразования.
В этом устройстве компараторы Ki...Km_i преобразуют
°Дной сигнал в позиционный код. Каждый из компараторов
^вечает» за свой участок квантования входного напряжения
а* По уровню. Резистивный делитель R...R задает равномерную
ТкУ квантования по уровню. Приоритетный шифратор (Шф),
тируемый внешним сигналом, преобразует позиционный код
аРаллельный двоичный. Время преобразования такого АЦП
Оделяется лишь задержкой срабатывания компараторов и
ЮО Устройства непрерывно-дискретного преобразования сигналов
дифратора и обычно не превышает сотен наносекунд, однако
цш обеспечения и-разрядного двоичного кода необходимо ис-
юльзовать (2"-1) компаратор, поэтому более чем 8-разрядные
\ЦП такого типа практически не строят.
«) и: *
N
б)
Цвх .13,15,16,18,2
(10,13,15)
22(9)
11(16)
4,19(11,14:
,11(44)
,36(48)
30(4)
28,43(8,39)
+5 В,
47,48,49,50
"6В (24,37,38)
-1-29,42(5,43^
А1
Щ
U"
GA
VI
V2
С
и-*
GD
К1107
ПВ2
(ПВ1)
N
АС
40(45)С
39(46)
38(47)
37(1)
35(2)
34(3)
ЗЗ(МП)
32МП
17(12)
Рис. 6.17. Организация и схема подключения АЦП
параллельного преобразования
Аналогово-цифровые преобразователи
301
Принцип действия АЦП параллельного преобразования
рассмотрим на примере. Такой АЦП ставит в соответствие
входному напряжению UBK и-разрядный двоичный код, то есть с
выхода АЦП может быть получено т=2" различных
комбинаций, каждая из которых должна соответствовать т различным
поддиапазонам (квантам) входного сигнала. Пусть для примера
разрядность цифрового кода и=3, тогда АЦП должен различать
23=8 поддиапазонов входного сигнала. На один поддиапазон
входного напряжения будет приходиться [/(l)=f/max/2"=8/8=l В.
Пусть входной сигнал изменяется от 0 до 8 В. Тогда при
равномерных поддиапазонах входной шкалы будет существовать
соответствие:
Поддиапазон, В
0...0.5
0,5—1,5
1,5-2,5
2.5...3.5
3,5...4,5
•4,5...5,5
5,5...6,5
6,5...7,5
Для этого примера резистивный делитель должен быть
подобран так, чтобы в диапазоне входного сигнала 0...0,5 В не
сработал ни один компаратор, в диапазоне 0,5... 1,5 В
срабатывает первый компаратор, в диапазоне 1,5...2,5 В срабатывает
второй и т.д.
В общем случае в состав АЦП параллельного
преобразования входит делитель опорного напряжения Uq, задающий
границы соответствующих (т-1) поддиапазонов, и (т—1)
компаратор, устанавливающий соответствие между Um и этими
Уровнями.
Рассмотрим схему включения АЦП параллельного
преобразования типа К1107ПВ1 (шестиразрядный) и К1107ПВ2 (восьми-
Рззрядный) (см. рис. 6.17, б). Поскольку опорное напряжение на
Этих схемах отрицательное (-2 В), то входное напряжение £/вх то
>Ке Должно быть отрицательным (в пределах 0...-2 В). К средней
°чке делителя АЦП подсоединен корректирующий резистор RK,
Код
000
001
010
011
100
101
по
111
Средний уровень
0
1
2
3
4
5
6
7
302 Устройства непрерывно-дискретного преобразования сигналов
свободный вывод которого (АС) может быть соединен с одним ц->
конечных выводов делителя U~0 или lfR.
Таким путем в некоторых пределах компенсируется
нелинейность преобразователя. Если, например, исходно резисторы
нижней половины превышают по своему номиналу (из-за
технологического разброса) номиналы верхних резисторов, можно
резистор RK (вывод АС) соединить с нейтральным выводом (Д.
Тогда общее сопротивление нижней половины уменьшится
вследствие чего уменьшится по модулю и соответствующее
напряжение на делителях. В простейшем варианте включения
АЦП вход U~o соединяют с источником опорного напряжения -
2 В, а вход С°Л - с «аналоговой землей» GA. Допускается эти
входы соединять с выходами регулирующих усилителей и
регулировкой U~o и С°Л в пределах ±0,1 В корректировать
чувствительность и «нуль» АЦП. Можно выполнять 1Г0 зависимым от
£/вх и таким путем получать функциональную зависимость
выходного кода от сигнала £/вх. Ток, потребляемый
преобразователем от источника входного сигнала, близок к 0,5 мА, а входная
емкость превышает 300 пФ, поэтому при большой скорости
изменения входного сигнала рекомендуется между источником
входного сигнала и входом AI АЦП включать буферный
усилитель, обеспечивающий быстрый перезаряд входной емкости.
Работа АЦП синхронизируется тактовыми импульсами,
подаваемыми на вход С, частота следования которых не должна
превышать 30 МГц. Выходной код АЦП в данный момент
времени соответствует входному напряжению, присутствующему
на входе АЦП двумя периодами тактовых импульсов ранее. Вид
выходного двоичного кода АЦП определяется сигналами и
входах V\, V2:
Код
обратный
дополнительный
обратный дополнительный
прямой
Дискретные сигналы рассчитаны на работу с цифр°вЬ ^
ТТЛ-схемами. Для работы с ЭСЛ-схемами разработан А
К1107ПВЗ с временем преобразования 20 не.
VI
0
0
1
1
к
0
1
0
1
Аналогово-цифровые преобразователи
303
Интегрирующие АЦП относятся к классу
последовательных преобразователей и по своему быстродействию уступают
преобразователям последовательного приближения, но они
требуют небольшого числа компонентов, изготовляемых с
повышенной точностью, имеют высокую помехоустойчивость, у них
отсутствует дифференциальная нелинейность и они достаточно
дешевы. Эти свойства интегрирующих АЦП определили их
широкое применение в практике построения биомедицинских
систем, где не требуется высокого быстродействия (от одного до
нескольких тысяч измерений в секунду), но где в качестве
основных требований выступают требования высокой точности и
нечувствительности к помехам.
Интегрирующий АЦП, как правило, состоит из двух
преобразователей: 1) преобразователя напряжения или тока в
частоту или длительность импульсов; 2) преобразователя частоты
или длительности импульсов в код. Вторая часть
преобразования реализуется просто. Если первая часть преобразователя
вырабатывает частоту, пропорциональную величине
преобразуемого аналогового напряжения UBK, то переход частоты в код
осуществляется подсчетом импульсов счетчиком за
фиксированный промежуток времени. Очевидно, что чем больше £/вх,
тем выше частота преобразования и, следовательно, тем больше
количество импульсов подсчитает счетчик за фиксированное
вРемя, а на его выходе сформируется больший по величине
двоичный код N. Если первая часть вырабатывает импульс, дли-
Тельность которого пропорциональна величине входного сигна-
Ла ^вх) то задача его преобразования в цифровой код решается
ем, что в период существования этого импульса от генератора
фиксированной частоты производится заполнение счетчика.
Чевидно, что чем больше длительность импульса, отражающе-
величину £/вх, тем больший двоичный код фиксируется на
вЬ1Ходе
счетчика.
Структурная схема АЦП, работающего с преобразователем
Одного напряжения в частоту (ПНЧ) показана на рис. 6.18, а.
Жируется работа элементов схемы (установка в исходное по-
фСение, запуск, синхронизация) устройством управления (УУ).
Р^ирователь временных ворот (ФВВ) формирует импульс
304 Устройства непрерывно-дискретного преобразования сигналов
фиксированной длительности, разрешающей прохождение
импульсов счета ПНЧ через схему И на счетчик (Сч).
я) U,
ПНЧ
Mill
ФВВ
И
Сч
УУ
=>N
«> I/.,
ПНЧ
: *■
гти
IIIII
и
Сч
УУ
=>N
в)
ГТИ
гпн
»г^
v>-J
г-*
Тг
и*
и.
иъ
и„
Рис. 6.18. Структурные схемы преобразователей типа ПНЧ и ПНВ
Структурная схема АЦП, работающего с преобразователем
напряжения в длительность импульса, показана на рис. 6.18, о-
Иногда эти преобразователи называют широтно-импулъснъгМ11
преобразователями, схемами формирования широтнО"
импульсных сигналов (ШИС) или схемами преобразованй
«напряжение - время» (ПНВ). В этой схеме импульсами с гене
ратора тактовых импульсов (ГТИ) фиксированной частоты 3
полняется временной интервал, фиксируемый ПНВ. В осталь
ном принцип работы этой схемы аналогичен принципу работы
Аналогово-цифровые преобразователи
305
преобразователем типа ПНЧ. Цифровые и импульсные
элементы схемы практически не влияют на точность работы
интегрирующих АЦП. Основные их характеристики определяются
свойствами применяемых преобразователей (ПНЧ и ПНВ). В
простейших случаях при построении ПНВ или схем ШИС
используют схемы формирователей с одним управляемым
параметром, прямое изменение величины которого приводит к
изменению длительности генерируемого импульса.
Простейшая схема, реализующая развертывающий способ
формирования ШИС, и временная диаграмма ее работы
приведена на рис. 6.18, е. В этой схеме генератор тактовых
импульсов управляет работой генератора пилообразного напряжения
(ГПН) и триггера (Тг). Пилообразный сигнал с ГПН
сравнивается компаратором (К) со входным напряжением. В начальный
момент времени триггер (Тг) установлен в состояние «0» и
ГПН выключен. В момент t\ ГТИ запускает ГПН и
устанавливает Тг в состояние «1». Когда £/вх=£/гтш3 срабатывает
компаратор (К), устанавливая триггер в исходное состояние. Чем
больше UBX, тем позже наступает сравнение и тем больше будет
величина Тг=*2-*1. Наибольшая погрешность преобразователя
формируется из-за нелинейности UrYm, особенно на начальном
участке.
Преобразователи ПНВ и ПНЧ типов также могут строиться
на основе прямого управления одним параметром
функционально преобразователя (например, на основе управляемых генера-
торов или мультивибраторов). При построении интегрирующих
ЩЧ и ПНВ чаще всего используется принцип двухтактного
(Двойного) интегрирования. В соответствии с этим принципом в
Первом такте преобразования производится интегрирование дру-
г°го входного сигнала (обычно противоположного £/вх знака), то
есть производится как бы «разынтегрирование» входного сигна-
а До выполнения какого-либо условия.
Реализацию принципа двойного интегрирования
рассмотрим на примере схемы, приведенной на рис. 6.19, а. Одним из
сЧовных элементов этой схемы является интегратор (Инт), ко
*°Ду которого с помощью ключа (Кл) поочередно подключает-
я входной сигнал и опорный сигнал (£/<>), противоположной £/вх
306 Устройства непрерывно-дискретного преобразования сигналов
полярности. Работой АЦП управляет устройство управления
(УУ), которое путем подсчета тактовых импульсов формирует
интервал времени интегрирования входного сигнала (/„), затем
интегрируется опорный сигнал, уменьшающий выходной сигнал
интегратора U„ до нуля. Когда £/и=0, срабатывает нуль-орган
(НО), построенный, например, на компараторе с нулевым
уровнем сравнения, который дает УУ сигнал об окончании цикла
преобразования. В интервале времени от t„ до срабатывания
нуль-органа (НО) производится заполнение счетчика
импульсами от ГТИ. Временные диаграммы работы интегратора UkX (для
большего напряжения С/вх) и U„2 (для меньшей величины СУВХ)
показаны на рис. 6.19, б. Из диаграммы видно, что большему
значению £/вх соответствует больший интервал времени f,-...f„.
«)
u„ t
>
Uo
Кгт
,
i
—i
Инт
| гт
—»
УУ
но
г
Сч
в)
Рис. 6.19. Преобразователь двойного интегрирования
Если интегратор построен на базе ОУ по схеме,
приведенной на рис. 6.19, в, с постоянной времени интегрирования RC, то
определение величины N можно произвести следующим обр^'
зом. К моменту времени /, на выходе интегратора будет
напряжение
При подключении U0 интегратором формируется сигнал
Un(t-tu) = (U„tn)/RC-U0(t-lH)/RC.
Аналогово-цифровые преобразователи
307
Для момента времени срабатывания компаратора t,
выполняется условие
ад-о=о-
С учетом этого можно найти интервал времени
которому соответствует выходной код
N=Um(a/U0),
где a - постоянный коэффициент; a=fcllt„;
fM — частота следования счетных импульсов.
Структурная схема простейшего ПНЧ, в котором разряд
интегратора (разынтегрирование) осуществляется источником
постоянного тока -/0, показана на рис. 6.20, а. Ключ S
управляется компаратором (К) с гистерезисом (триггером Шмитта).
Последний имеет петлю гистерезиса U\—U2. Поскольку ключ S
управляется компаратором с петлей гистерезиса, напряжение
интегратора колеблется между U\ и U2 (рис. 6.20, б). На диаграммах
учтено, что интегратор собран по инвертирующей схеме.
Частота следования выходных импульсов компаратора
изменяется в зависимости от £/вх, так как /0=const. До момента
времени t\ компаратор в состоянии £/_, ключ S подключен к
источнику -/о =const, емкость заряжается по линейному закону
(интегратор инвертирующий, поэтому Ux растет). Когда £/и=£/|,
i^i), компаратор переключается в состояние U+, подключая
^•оч S к источнику положительного входного напряжения £/вх.
емкость интегратора начинает разряжаться, интегрируя входное
Спряжение С/вх, которое в общем случае не является постоян-
нЫм на периоде времени интегрирования. В момент време-
и *=*1 справедливо соотношение U(£tiy=U„(t{)r=Ui. Когда
<д0 достигнет величины U2 (момент времени t2), компаратор
Реключится в состояние £/_, подключив ключ S к источнику
. ^ На момент времени t2 за время At+=t2-t], выходное напря-
е«Ие интегратора определится как
U»(t2) = -]^')uBX№ + Ui J-^E^+U,, (6.11)
'l
308 Устройства непрерывно-дискретного преобразования сигналов
где Еср - среднее за время Af+ значение напряжения сигнала
а)
R
S^-A h
' 1
-1 R
if
II
'X ик
ь
и2
вых U+
t/_
К
и„
и,
t
иш
« t/.t
11и\
C/i
С7ВЫХ4
и+
и.
1
/ ' \ ■ / ■ \ *
/ :''\:7 \h \
к
'1
L*——■*]
// |<s Л
:'у
'2
«Д'">
'з
и
д*_
■» »1
'5
, А/+
—►
'б
г
г
г
Рис. 6.20. Структурная схема ПНЧ двойного интегрирования (а)
и временные диаграммы его работы (б)
Когда к интегратору подключается источник тока, на
его выходе формируется напряжение
uK{ty=u2+{t-h)yc,
которое в момент времени t=t3 достигнет напряжения U\. ДлИ"
тельность интервала определяется по формуле
д/_=гз-/2=(сл-едс//о.
Следовательно, период повторения импульсов
определяется выражением Т= At++ Д/_, а соответствующая частота опреДе
лится как
у = £ср7о (6.12)
СЫ-и^Шо + Е-)
Аналогово-цифровые преобразователи
309
Зависимость f{Ecp) является нелинейной, но если
обеспечить условие Ш^»Еср, эта нелинейность может быть достаточно
малой. При этом
f"Ea
^ср
(6.13)
cv {UX-U2)RCI0 {UX-U2)RC
Если UBX за период интегрирования «держится» достаточно
стабильно (Ecp=UBX), то можно записать:
f*UBJ({Ux-U2)RC).
Относительная погрешность преобразования, связанная с
нелинейностью выражения (6.12), может быть определена как
6/
(6.14)
где Ky=Af/Ecp ttKj -дифференциальные коэффициенты
передачи преобразователя.
В общем случае для метода двухтактного интегрирования
суммарное приращение интеграла за цикл интегрирования
равно нулю, поэтому можно записать (UiT,)/x = (U2T2)I% = 0, где Г]
и Т2 - длительность первого и второго тактов интегрирования,
£/| и U2 - имеющие различную полярность интегрируемые на
первом и втором такте напряжения. Соотношения
длительностей тактов удовлетворяют отношению Т21Ту= —U\/U2.
Различные способы построения ПНВ и ПНЧ могут
быть представлены четырьмя большими группами в
зависимости от того, как организован цикл двухтактного
интегрирования (рис. 6.21).
Рис. 6.21. Способы реализации ПНЧ и ПНВ
310 Устройства непрерывно-дискретного преобразования сигналов
В интегрирующих двухтактных ПНВ с заданной
длительностью цикла интегрирования (ЗЦ) фиксируется суммарная
длительность двух тактов Т=Т\+Т2. В простейшем случае
T^const, однако бывают ситуации, когда Т подстраивают под
сигнал помехи. В ПНВ ЗЦ обычно принимают для первого такта
интегрирования (Т{) напряжение интегрирования £/i=£/BX-t/0) a
для второго такта (Г2) - напряжение интегрирования U2=UBX+U0.
В этом случае справедливо соотношение
т;-г2 = т;-г2 = с/,+с/2 = с/.
т1+т2 т иг-иЛ и0'
Таким образом, разность длительностей тактов изменяется
пропорционально измеряемому напряжению UBX:
T,-T^={TIU0)UBX.
Принцип двухтактного интегрирования с заданной
длительностью одного, например первого такта, используется для
построения как ПНВ, так и ПНЧ.
В ПНВ с заданным тактом (ЗТ) принимают обычно f/i=C/BX,
£/2= -С/о- Тогда
Т21ТХ =-иу/иг*иЛ1о.
По такой схеме реализован преобразователь АЦП,
структура которого представлена на рис. 6.19, а. В ПНЧ ЗТ выбирают
напряжения U\= Ubx-Uq, U2=UBX, откуда можно получить
1= Ц2 1=С/, 1
Т U2-U,Tt U0T,'
В ПНВ и ПНЧ, реализующих принцип двухтактного
интегрирования с заданной амплитудой (ЗА), первый такт
интегрирования заканчивают тогда, когда напряжение на выходе
интегратора достигает некоторого заданного уровня, а втор0
такт - когда это напряжение возвратится в исходное состояли >
аналогично тому, как это делалось в ПНЧ (см. рис. 6.20, а)- ^
через иы обозначить размах пилообразного напряжения на в
ходе интегратора, то
Аналогово-цифровые преобразователи 311
В ПНВ ЗА обычно устанавливают U\ = Ukc-Uq, U2=Ubx+Uo,
поэтому характеристика преобразователя в них имеет
следующий вид:
(Т^Т2)Т= UJU0,
где Т- величина переменная, зависящая от £/вх.
Эти схемы сложнее, чем предыдущие, и поэтому как АЦП
они применяются редко, однако они хорошо работают там, где
нужно получить широтно-импульсную модуляцию (например, в
устройствах гальванического разделения, в аналоговых ШИМ-
АИМ-перемножителях). В ПНЧ ЗА чаще всего устанавливают
t/i=£/BX, U2= -Um. Тогда
1 = ЦхЦг = £/„
7;+?; иы(и2-и^ 2Uj-
В ПНЧ с заданным интегралом (ЗИ) компенсация
осуществляется не за счет компенсирующего импульса длиной Т2 и
величиной U0, а, например, путем перезаряда конденсатора.
Важно, чтобы интеграл входного напряжения компенсировался
другим компенсирующим интегралом. В общем случае, если
интеграл (площадь) компенсирующего импульса равен J, то
частота на выходе ПНЧ определяется выражением
При емкостном формировании компенсирующего
импульса
\ = CRUR. .
В качестве примера рассмотрим подробнее схемотехнику
Интегрирующих преобразователей «напряжение - время». На
Рис. 6.22 представлена функциональная схема аналоговой части
^ЦП КР572ПВ2, работающего с заданным тактом. АЦП
содержит буферный повторитель напряжения А\, интегратор на ОУ
^> компаратор A3, узел формирования общего потенциала,
Ключающий в себя ОУ А4, систему аналоговых ключей
■■•Si 1 и цифровую часть (на рис. 6.22 не показана).
312 Устройства непрерывно-дискретного преобразования сигналов
R3 1M ,,
+ о-Г-^—Д1
сз 100' ЮОк
Рис. 6.22. Структурная электрическая схема АЦП КР572ПВ2
■Постоянная времени интегратора определяется внешними
элементами RI, С\. Конденсатор С1 используется в цепи
коррекции напряжения смещения усилителей А\, А2, A3. На
конденсаторе СЗ запоминается опорное напряжение U0. Резистор R2
конденсатор С4 определяют частоту встроенного тактового ге-
нератора. На входе АЦП может быть установлен фильтр ниЖн
частот R3, С5, сглаживающий пульсации входного сигнала.
Этот АЦП имеет дифференциальные входы для преовР
зуемого (С/вх) и опорного (С/0) напряжений. Это значит, что
результат преобразования оказывает влияние разность напря
НИИ
между входными зажимами (выводы 31 и 30) и межДУ
жимами и0 (выводы 36 и 35). Синфазные же напряжения,
;уще-
ствующие на этих зажимах, практически не влияют на ра
боТ>
Аналогово-цифровые преобразователи
313
ПНВ- Отсчет синфазных напряжений ведется относительно
общего потенциала, присутствующего на выводе 32 (СОМ). Этот
потенциал задается стабилитроном VDX и делителем R4, R5 на
уровне примерно 2,8 В (более низком, чем положительное
напряжение питания lf„\). Повторитель, выполненный на ОУ АА,
имеет различную нагрузочную способность для втекающего и
вытекающего тока (примерно 20 мА и 10 мкА соответственно).
Это даёт возможность, при желании, присоединить вывод
общего потенциала к «земле» и таким путем устанавливать этот
потенциал равным нулю.
Разность напряжений между выводами lf„i и СОМ может
в принципе использоваться в качестве опорного напряжения
АЦП. Температурный коэффициент этой разности равен
примерно Ю"4 К. Однако при работе АЦП на световой индикатор
рассеиваемая в микросхеме мощность зависит от числа
светящихся сегментов индикатора, это вызывает значительные
изменения температуры кристалла и, следовательно, непостоянство
разности потенциалов между lfn\ и СОМ. Двум основным
тактам интегрирования в данном АЦП предшествует такт
автокоррекции (нулевой такт).
Обозначения ключей (см. рис. 6.22) снабжены вторыми
индексами, означающими номера тактов, в которых эти ключи
замкнуты. При автокоррекции замыкаются ключи S3...S6, Sll.
При этом входы буферного усилителя и интегратора
присоединяются к общему потенциалу, а выход компаратора A3
соединяли с инвертирующим входом интегратора А1. Усилители А2 и
^3 оказываются охваченными единичной обратной связью,
Следствие чего их суммарный коэффициент усиления стано-
Ится равным единице.
На обкладке конденсатора С2, подключенной к контакту 29
И1фосхемы, устанавливается напряжение, равное сумме напря-
ений смещения усилителя А2 и приведенного напряжения сме-
Г^Ьия A3. На противоположной обкладке этого конденсатора
УДет присутствовать напряжение смещения усилителя А\. Та-
м образом, на конденсаторе С2 на этапе автокоррекции
запевается напряжение ошибки, обусловленное напряжением
314 Устройства непрерывно-дискретного преобразования сигналов
смещения всех трех ОУ А1...АЗ. В последующих двух тактах
интегрирования ключ SH размыкается и запомненное на С2
напряжение вычитается из выходного сигнала ОУ А1. Такое
схемное решение позволяет уменьшить суммарное напряжение
смещения АЦП до значения, не превышающего 10 мкВ. В такте
автокоррекции осуществляется также заряд конденсатора СЪ
опорным напряжением С/0.
В первом такте преобразования замыкаются ключи S\, S2 и
производится интегрирование входного напряжения (С/вх) в
течение 1000 периодов тактовых импульсов. По окончании
первого такта по сигналу на выходе компаратора A3 устройство
управления, входящее в цифровую часть, оценивает знак
напряжения С/вх: если С/вх>0, то сигналы на выходе интегратора и
компаратора будут отрицательными, если же С/вх<0, то
положительными. В зависимости от знака С/вх замыкаются ключи £8, S9
(если С/вх>0) или S7, S10 (если С/вх<0), кроме того, замыкается
ключ £6. Таким образом на втором такте интегрируется
напряжение С/о, снимаемое с конденсатора СЪ, причём полярность
этого напряжения противоположна полярности входного
напряжения.
Длительность второго такта определяется временем, в
течение которого напряжение на выходе интегратора уменьшается
по модулю до нуля, что будет зафиксировано срабатыванием
компаратора A3. Эта длительность, измеренная числом тактовых
импульсов, может изменяться от 0 до 2000, и именно это число
представляет собой результат преобразования АЦП. Для этого
преобразователя справедливо соотношение
N=f r^-=f Nl U*x = NxU™ (6I4)
Jr 2 C/0 Ут /T U0 C/0 '
где N- выходной код АЦП;
fT - частота тактовых импульсов;
Ni - число тактовых импульсов, определяющих длитель'
ность первого такта интегрирования.
Тактовые импульсы в АЦП вырабатываются путем ДеЛ
ния на 4 частоты колебаний, получаемых с выхода встроенно
Анапогово-цифровые преобразователи
315
тактового генератора (/^=^74). Частота этого генератора
определяется соотношением fT ~0,45/(R2C4). Рекомендуемый диапазон
частот/г40.'..200кГц.
В АЦП предусмотрена кварцевая стабилизация частоты _£.
В этом случае вместо элементов С4, R2 используется
кварцевый резонатор, включаемый между выводами 39, 40.
Допускается использование внешнего, задающего тактовую частоту,
генератора. Тактовые импульсы с внешнего генератора
подаются на вывод 40 (выводы 38 и 39 остаются свободными).
Целесообразно устанавливать такое значение/^, при котором
длительность первого такта кратна периоду сетевого напряжения
(20 мс). В этом случае АЦП нечувствителен к сетевой помехе,
наложенной на полезный сигнал. Диапазон входного
напряжения АЦП от —2 С/о до +2С/0. Знаки «+» и «-» у входных зажимов
АЦП (С/вх и С/0) показывают неинвертирующий и
инвертирующий входы. Если полярность С/вх совпадает с этими знаками, то
результат преобразования будет положительным, в противном
случае - отрицательным. Рекомендуемые значения С/0: 1 или
0,1 В. В первом случае диапазон входных сигналов ±1,999 В, а
во втором ±0,199 В.
Входы АЦП для С/вх и для С/0 дифференциальные.
Напряжение на любом из входных 4-х зажимов должно находиться в
пределах от С/~п2 до £/"п1. Если возможно, рекомендуется низко-
Потенциальные зажимы входов С/вх и С/о соединять с общим
потенциалом (вывод СОМ).
Для системного использования предназначен АЦП типа
ПНВ ЗТ - КР1108ПП2. Эта схема выполнена по тому же
принципу, что и микросхема КР572ПВ2. Отличие заключается в том,
что его входы недифференциальные. Структура аналоговой
части такого АЦП приведена на рис. 6.23. Входной усилитель мо-
^ет использоваться как в режиме повторителя, так и в режиме
Усилителя. Компаратор A3 сравнивает выходное напряжение
иНтегратора с пороговым напряжением С/п. Резистивный трех-
"олюсник R2, R3 обеспечивает согласование компаратора с
ЧИфровой частью.
316 Устройства непрерывно-дискретного преобразования сигналов
GD
3|РГ
+5 В +15 В
Рис. 6.23. Структурная электрическая схема АЦП КР1108ПП2
Этот 16-разрядный АЦП работает с двухполярным
входным напряжением и имеет развитую интерфейсную часть. Она
может обеспечивать побайтную выдачу информации на
системную шину, осуществлять выдачу информации через синхронный
приемо-передатчик, может работать в комплекте с различным'
микропроцессорами.
Рассмотрим подробнее схемотехнику интегрирующих пр
образователен типа «напряжение - частота».
Отечественной промышленностью выпускается
ПНЧ с э»
данным тактом (ПНЧ ЗТ) типа КР1108ПП1 (рис. 6.24). Г№
включает в себя усилитель А\, два компаратора А2, A3,
триггер (Тг), два источника стабильных токов II, 12, два аН ,
говых переключателя SI, S2, источник опорного напряжения
логическую схему И и выходной транзистор VT. Дополни
Аналогово-цифровые преобразователи
317
ные элементы Rl, C1 вместе с А\ образуют интегратор;
компараторы А2, A3 с элементами S2, С2, 72 и триггером образуют од-
новибратор.'
Um
^
Rl
,С1
.11
-15 В
+15 В
Рис. 6.24. Структурная электрическая схема АЦП типа КР1108ПП1
Работает ПНЧ следующим образом. Под действием
положительного входного сигнала £/вх напряжение на выходе
интегратора уменьшается. Триггер (Тг) в начальный период времени
находится в состоянии «О», ключи SI, S2 в состоянии,
показанием на рис. 6.24. Ток 1\ нагружает А\, не влияя на его выходное
напряжение. Ток /2 через ключ S2 идет на «землю». Когда
напряжение на выходе А1 уменьшится до нуля, срабатывает ком-
Паратор А2, переводя триггер (Тг) в единицу, запуская тем са-
Ь1м одновибратор. При этом ключ S2 размыкается и под
влияем тока /2 начинает уменьшаться напряжение на конденсаторе
■'■ Когда это напряжение достигнет величины £/0, срабатывает
мпаратор A3 и триггер вновь возвращается в «О». Пока триг-
Р находился в состоянии «1», ток Ц поступал на вход интегра-
^ Ра, вследствие чего напряжение на выходе А1 снова возросло.
Лее процесс повторяется под воздействием UBX. Длительность
318 Устройства непрерывно-дискретного преобразования сигналов
импульса одновибратора, определяющего длительность такта
Ти в течение которого интегрируется ток 1\, находится как
TX=U0C2I12.
Импульсы тока /] уравновешиваются током, вызываемым
входным напряжением £/вх. Условие уравновешивания можно
определить соотношением
t4^l+Hoc2_j 0
откуда
/Л-^.кЛ
В схеме /, = /2 ~ 0,8 мА, U0 ~ -7 В.
Из последнего выражения следует, что стабильность
характеристик ПНЧ зависит от стабильности внешних элементов
RI, О и внутренних параметров U0, Л и /2.
Схема ПНЧ КР1108ПП1 содержит выходной каскад с
открытым коллектором, напряжение питания которого
подбирается из условия сопряжения с последующими каскадами. Элемент
И позволяет управлять работой выходного каскада, блокируя
его. Это позволяет, например, объединить выходы нескольких
ПНЧ одной сигнальной линией. Для преобразования
отрицательных напряжений £/вх можно подать на неинвертируюшии
вход усилителя АЛ, а вход резистора R\ заземлить, однако при
этом погрешность преобразования может возрасти в 1,5-2 раза.
Микросхему КР1108ПП1 можно использовать как
преобразователь «частота - напряжение» (ПЧН). В этом варианте
импульсы входной частоты подаются на запуск входящего в
микросхему одновибратора, а выходное напряжение получают пр°
порциально среднему току 1и поступающему на вход усилител
А\. Схема включения ПЧН показана на рис. 6.25. Для соглас
вания входа компаратора А2 с выходом цифровых ТТЛ-схем
инвертирующий вход компаратора А2 может быть подано
пряжение смещения элементами R2, VD\, VD2.
Аналогово-цифровые преобразователи 319
RI
-А \-
|С1
+15 В
Г"
I
±
R2
Jbx
L
Ли
VD2 \Z
CI
КР
1108
ПП1
АО
ДО
Со'
G
]3^
7__
4_
6
1
11
Рис. 6.25. Структурная электрическая схема ПЧН типа КР1108ПП1
Для получения хорошей линейности преобразования
рекомендуется скважность выбирать не менее 4. Выходное
напряжение ПЧН, собранного по схеме рис. 6.25, определяется
выражением
Сглаживание пульсаций этого напряжения производится
конденсатором О.
6.2.3. Особенности реализации
и использования сигма-дельта-АЦП
Успехи современной технологии в изготовлении аналого-
6°-Цифровых преобразователей позволили от традиционных
с*ем перейти к АЦП, реализующим принцип усреднения ре-
Ультатов за относительно большой интервал времени, что по-
воляет уменьшить погрешность преобразования, вносимую
щУмами, и увеличить разрешающую способность. Основными
Цементами приборов этого класса являются сумматор (£) и ин-
320 Устройства непрерывно-дискретного преобразования сигналов
тегратор (А), которые определили его название - сигма-дельта
АЦП (Е-Д-АЦП).
Сигма-дельта-АЦП обладают высоким разрешением (более
14 разрядов), в значительной мере базируются на принципах
цифровой фильтрации сигналов, что позволяет снизить
требования к аналоговой фильтрации сигналов и вместо
инструментальных усилителей использовать более простые усилители
постоянного тока.
Базовыми понятиями в работе £-Д-АЦП являются
передискретизация (цифровая интерполяция) и децимация
(прореживание). Цифровая интерполяция заключается в том, что
между двумя соседними кодами входного слова, полученного,
например, с помощью АЦП, выставляются промежуточные
кодовые слова, значения которых вычисляются по исходным
кодовым словам (рис. 6.26, а).
U{t)
Добавленные
данные
то
-+ t
б)
Рис. 6.26. Временные диаграммы, поясняющие работу цифровых
интерполяторов (а) и дециматоров (б)
Аналогово-цифровые преобрвзователи
321
Величины исходных цифровых кодов условно обозначены
вертикальными ступенями, а моменты их формирования -
отсчетами времени tg, 2tg, 3tg и т.д.
Как отмечалось выше, погрешность шума квантования,
являющаяся одной из погрешностей в работе АЦП,
определяется интервалом времени между цифровыми отсчетами. Если этот
интервал сделать меньше, то погрешность от шума квантования
уменьшается, а если говорить о ее спектре, то она переходит в
более высокочастотную область из-за уменьшения интервалов
времени между соседними преобразованиями. В £-Д-АЦП
проблему уменьшения погрешности от шума квантования решают
искусственным способом, создавая эквиваленты
дополнительных кодов между основными отсчетами путем усреднения их
значений (см. рис. 6.26, а).
После усреднения входных данных на большой частоте
квантования на выходе £-Д-АЦП организуют «прореживание»
(децимацию) усредненных сигналов с эквивалентной частотой
квантования усредненного сигнала (см. рис. 6.26, б). Таким
образом, в ходе всех преобразований полезный сигнал остается в
«своей» относительно низкочастотной области, а сигнал шума
квантования переносится в более высокочастотную область
(рис. 6.27).
S(t)
Спектральная область
полезного сигнала
АЧХ цифрового фильтра
«Перенесенный спектр»
шума квантования
Рис. 6.27. Спектры входного сигнала и шума квантования £-Д-АЦП
В таком варианте «шумовая составляющая» достаточно
°Рошо отделяется от полезного сигнала цифровым фильтром
^Чзких частот.
322 Устройства непрерывно-дискретного преобразования сигналов
Идею технической реализации £-Д-АЦП разберем на
примере упрощенной схемы, приведенной на рис. 6.28.
Uoc +£/„
£4.
о
Рис. 6.28. Упрощенная схема £-Д-АЦП первого порядка
Основная часть этой схемы работает по принципу
преобразования входного напряжения (£/вх) в частоту, которая
преобразуется затем в последовательность усредненных
цифровых кодов. На вход интегратора (J) подается напряжение Щ,
которое представляет собой разность между входным
напряжением и напряжением обратной связи (£/0с)> формируемым
цифроаналоговым преобразователем (ЦАП), состоящим из 1>
триггера (Тг) и аналогового коммутатора SA, подключающее
вход обратной связи сумматора (£) к одному из входов двух
полярного источника постоянного напряжения (±£/п) в завис
мости от состояния .D-триггера. Напомним, что D-триггер 3
держивает сигнал со входа D на один такт, переключаясь ^
переднему фронту сигнала fT входа С, если вход D измен ^
свое состояние. Компаратор (К) сравнивает напряжение на в
ходе интегратора с нулем, поскольку его инверсный вход п ^
ключей к «земле». Частота опроса состояния компаратора ч V
Аналогово-цифровые преобразователи 323
/^-триггер выбирается в k раз большей, чем частота/s
формирования выходного кода X цифровым фильтром (ЦФ).
Принцип преобразования аналогового сигнала в цифровой
код с помощью £-Д-АЦП поясняют временные диаграммы,
приведенные на рис. 6.29.
о)
б) ^
. foe
в)
+1 В
-IB
г) и%
1.5 В
1,0 В
05В
0
•0,5 В
д) О..
1,5 В
1,0 В
0,5 В
0
0,5 В
, > 0
0
0
\
<
1
—
-
1п1
-■ - -
—
-
-]—
,72.Л.Г4,75 75,77,78 79 ПО.,711, Л2.713 Л4 715 Л6.Л7
1111111111111111
i-l
—
1
■«
-1
i
+1
___.
1^^
+1
-
-~
+ 1
_-
►
+1
_
<
-
j
"
—
-
._
....
-
1
j
j
Li.
«——
"^H
-
-
— *
■V
J—
1 ,,
J
i ,,
- № 1
ЦиклЛЦП Цикл АЦП Цнкд АЦП
"с. 6.29. Временные диаграммы, поясняющие принцип работы Z-A-АЦП
(см.
Пусть входное напряжение постоянно и составляет 0,6 В
рис. 6.29, б), а работа схемы тактируется с частотой fT (см.
324 Устройства непрерывно-дискретного преобразования сигналов
рис. 6.29, а). Выберем постоянную времени интегратора,
численно равную периоду тактовых импульсов, а напряжения
+Un=l В и -[/„—1 В. В нулевой период (см. рис. 6.29, а, такт 0)
выходное напряжение интегратора £/и (см. рис. 6.29, д)
сбрасывается в нуль. Нулевое напряжение £/0с формируется на выходе
ключа SA (см. рис. 6.29, в).
Таким образом, в нулевом цикле на входе интегратора [/т
находится напряжение £/вх=0,6 В, поскольку £/Ос~0- После
снятия сигнала нулевого периода интегратор интегрирует
положительное напряжение t/j. На его выходе формируется
пилообразное положительное напряжение, переводящее компаратор в
состояние логической единицы (С/к=1) (см. рис. 6.29, е).
Первым тактовым импульсом Гь являющимся счетным для
триггера, последний передает единичное состояние компаратора на
свой выход (см. рис. 6.29, ж): В результате управляемый от
триггера ключ SA переводится в верхнее положение и
напряжение [/„=+1 В вычитается из £/вх. Таким образом напряжение
на входе интегратора (L^=t/BX-f/n= -0,4 В) скачком переходит в
отрицательную область (см. рис. 6.29, г), что приводит к
линейному уменьшению напряжения на выходе интегратора (см.
рис. 6.29, д).
Когда напряжение на выходе интегратора перейдет в
отрицательную область, компаратор переключается в состояние «0»
(см. рис. 6.29, е), которое тактовым импульсом Тъ передается на
выход триггера (см. рис. 6.29, ж). Переход триггера в состояние
«0» переключит SA в положение «-Ц,» (см. рис. 6.29, в), поэтому
на входе интегратора формируется скачок положительного
напряжения ([/£=0,6+1=1,6 В), которое интегратором преобразует-
ся в линейно нарастающее напряжение (см. рис. 6.29, д). K°rfl
напряжение на выходе интегратора перейдет в положительну
область, компаратор перейдет в состояние «1» (см. рис. 6.29, е>-
которое будет передано на выход Тг тактовым импульсом 74 (с '
рис. 6.29, ж). Ключ SA переводится в верхнее положение, -<
становится равным -0,4 В (см. рис. 6.28, в-г), интегратор Ф°Р
рует линейно спадающий участок (см. рис. 6.29, д). Когда напр
жение U„ перейдет в отрицательную область, последователь
как и ранее, переключается компаратор, триггер и ключ SA,
Аналогово-цифровые преобразователи
325
вторяя цикл преобразований до тех пор, пока АЦП не будет
выключен или не изменится £/вх.
На рис: 6.29 повторяющиеся циклы выделены четырьмя
вертикальными линиями. Нетрудно заметить, что цикл работы
занимает пять тактовых периодов, а усредненный подсчет
сигналов за цикл с выхода ЦАП (сигнал £/0с), (см. рис. 6.29, в) дает
усредненное число:
^сРцап=( + 1-1 + 1 + 1 + 1)/5 = 0,6.
Анализируя приведенные временные диаграммы, можно
увидеть, что при увеличении £/вх в положительную сторону
амплитуда сигнала £/„ будет расти, что будет «затягивать» время
нахождения компаратора и триггера в положительной области;
если UBK=l,0 В, триггер всегда будет оставаться в единичном
состоянии, и наоборот, уменьшение £/вх будет приводить к
увеличению доли нахождения триггера в нулевом состоянии, и при
(/„х—1,0 В он будет оставаться в состоянии «0». Если £/„=0, то
триггер «генерирует» меандровые импульсы, а на выходе ЦАП
будет нулевое среднее значение.
Таким образом, по выходу UT приведенная схема работает
как преобразователь «напряжение - длительность». По
идеологии построения АЦП сигнал на выходе триггера,
представляющий собой униполярный код, необходимо преобразовать в
последовательный или параллельный двоичный позиционный код.
Эта задача может быть решена при использовании двоичных
Цифровых счетчиков с фиксированным циклом преобразования.
После окончания цикла счета информация из него передается в
Регистр-защелку, откуда она считывается, а счетчик обнуляется.
В специальной литературе показывается, что с точки
зрения помехоподавляющих свойств в £-Д-АЦП вместо счетчиков
Целесообразно использовать цифровые фильтры с конечной им-
пУльсной характеристикой (КИХ-фильтры) [3, с. 450-458].
Шумоподавляющие свойства £-Д-АЦП удобно исследо-
ать с помощью линейных непрерывных моделей этого класса
^ЦП, как это делается в теории управления. С этой точки зре-
Ия схема £-Д-модулятора первого порядка (см. рис. 6.28) имеет
тРуктуру, представленную на рис. 6.30, а.
326 Устройства непрерывно-дискретного преобразования сигналов
Полезный сигнал
АЧХЦФ
^&-
£? порядок
1-й порядок
о) q
Рис. 6.30. Подавление шума квантования в £-Д-АЦП
Используя преобразование Лапласа, с учетом передаточной
функции интегратора для входного сигнала относительно
выходного сигнала Х(Р) и шума квантования Q(P) можно записать:
r(P)=TTpX(P)+i77e(P)- (615)
Учитывая представимость оператора Р частотой f, из
последнего выражения следует, что с уменьшением частоты
влияние шумовой составляющей на выходной сигнал снижается,
поскольку ./—►О, а входной составляющей увеличивается,
поскольку составляющая 1(1+Р)—Л при/->0. В области высоких частот,
наоборот, 1/(1+Р)—>0, аР/(1+Р) возрастает (см. рис. 6.30, б).
Используя в £-Д-АЦП несколько интеграторов и
сумматоров (переходя к схемам более высокого порядка), добиваются
большего подавления шумовой составляющей. На рис. 6.31
приведена структура Х-Д-АЦП второго порядка, амплитудно-
частотная характеристика которого показана на рис. 6.30, б.
ЦифР°в0Й
. 1 коД
Цифровой \^з
фильтр и
дециматор_
Рис. 6.31. Структура J-Л-АЦП второго порядка
Аналогово-цифровые преобразователи 327
Еще более хорошие характеристики по широте
динамического диапазона и полосы частот дают £-Д-АЦП более
высокого порядка. Для биомедицинских приложений рекомендован че-
тырехканальный 22-разрядный £-Д-АЦП AD7716 со
встроенным ФНЧ с напряжением питания ±5 В. Структурная схема
этого £-Д-АЦП представлена на рис. 6.32.
AVDD
О—
DVU
Ainl'
Ain3(r
Ain4<
DVSS
—о
RESET
—о
АО Al A2 CLKIN CLKOUT
-o—о—о о Q
ТГ
АМд
ФНЧ
Ain2( i—» АМд
ФНЧ
АМд
ФНЧ
АМд
ФНЧ
УЛ
ВСР
РУ
VrefAGNDDGND
*-*■
*YDRDY
MODE
CASCIN
CASCOUT
RFS
SDATA
SCLK
TFS
Dinl Doutl Dout2
Рис. 6.32. Структурная схема четырехканального J-Д-АЦП типа AD7716
Выводы CLCIN и CLKOUT предназначены для
подключения кварцевого резонатора (для внешнего генератора - CLCIN).
Вьшоды MODE, CASCIN и CASCOUT применяются при необ-
ХоДимости каскадировать несколько АЦП типа AD7716.
Комбинацией уровней на входах А0...А2 задается порядковый номер
АЦП при каскадировании. RFS, SDATA, SCLC, DRDY
предназначены для организации двунаправленного последовательного
Канала связи с управляющим контроллером. Подача высокого
Уровня на RESET приводит к инициализации АЦП. Входы
Inl—Ain4 являются аналоговыми входами АЦП, вход Dinl и
Doutl и Dout2 предоставляют разработчику возмож-
^ть работы с внешними дискретными устройствами.
328 Устройства непрерывно-дискретного преобразования сигнале*
Использование в схемотехнике электрофизиологическ
приборов £-Д-АЦП позволяет решить проблему входного ди
пазона и относительно высокой постоянной неинформативнп"
составляющей электрофизиологических сигналов (ЭФС), котп
рая может компенсироваться за счет не используемых для ана
лиза младших битов. Например, для ЭКГ рекомендовано не
использовать младшие 5-6 бит. Тогда 17-18 значащих разрядов в
требуемой полосе частот перекрывают динамический диапазон
входного сигнала как минимум в 105 дБ.
При использовании £-Д-АЦП появляется возможность
отказаться от ФВЧ, с его крупногабаритными высокостабильными
конденсаторами. Программным способом реализуется набор
качественных цифровых ФВЧ или, вообще, работа ведется с
нулевой нижней частотой, что свойственно приборам для научных
исследований. Также возможны программные решения
интеллектуальной привязки изолинии раздельно по каждому из
каналов на основе избирательного изменения постоянной времени
цифрового ФВЧ для обеспечения минимального искажения
низкочастотных составляющих ЭФС и в то же время удержания его
в середине диапазона устройства отображения.
6.2.4. Технические характеристики и применение АЦП
Для грамотного использования АЦП в средствах
медицинской техники необходимо учитывать их технические
характеристики. Промышленностью выпускаются различные типы АЦП.
характеристики некоторых из них приведены в таблице 6.3.
Таблица 6.3
Основные технические характеристики промышленных АШ^
Тип АЦП
рядность,
бит
ренний
УВХ
Время
преобразования,
мке
Интер
фейс I
Внут
рен-
ний
ИОН
Питание, В
Примечание
572ПВ1
1108ПВ2
12
12
АЦП широкого применения
ПО
Па-
рал.
Тоже
+5...15
5;-6
Требуются внешне
Последовательно^
приближения,^-^
Аналогово-цифровые преобразователи 329
Окончание табл. 6.3
Тип АЦП
МАХП4
AD7893
1
Разряд-'
ность,
бит
8
12
к
4
1
ренний
УВХ
+
+
Время
преобразования,
МКС
0,66
6
Интер
фейс
-//-
Посл.
Внут
рен-
ний
ИОН
-
-
Питание, В
+5
+5
Примечание
Двухступенчатый;
цежур. режим -5 мкВт
8-выводной корпус;
ПП
Г~ Микромощные АЦП
572ПВЗ
AD7888
МАХ 195
МАХ1299
8
12
16
12
1
8
1
6
-
+
+
+
7,5
5
9,4
1000
Па-
рал.
Поел.
Тоже
-II-
-
+
-
+
5
2,7...5
±5
2,7...3,6
-
ПП; дежур. режим
-3 мкВт
Автокалибровка;
дежур. режим -0,1 мкВт
Встроен, темпер,
датчик
Быстродействующие АЦП
1107ПВ4
AD9054
МАХ 108
AD9070
8
8
8
10
1
1
1
1
-
+
+
+
0,03
200**
1500**
100**
Па-
рад.
Тоже
-II-
-II-
-
+
-
+
+5; -5.2
5
±5
-5
Параллельный
Параллельный, ТТЛ-
уровни выхода
Параллельный, ЭСЛ-
уровни выхода
Двухступенчатый,
ЭСЛ-уровни выхода
. Интегрирующие АЦП
мах 132
AD7715
AD7714
ДЕ>9260
18
16
24
16
1
1
3
1
-
-
-
-
100*
20... 500*
10... 1000*
2,5*
Посл.
Тоже
-II-
-II-
-
-
-
+
5
3 или 5
3 или 5
2,7...5,5
Многотактного
интегрирования
Сигма-дельта,
автокалибровка
Тоже
Многобитный сигма-
дельта
* Частота преобразований в секунду.
^-_J^ Частота преобразований в секундухШ6
Примечания: 1. Дежурный режим - режим, в котором обеспечивается
"иум потребления энергии, если нет необходимости в преобразованиях.
2. Знаки «+» и «-» обозначают соответственно есть или нет.
330 Устройства непрерывно-дискретного преобразования сигналов
Одним из основных применений АЦП является их
использование для преобразования аналоговых сигналов,
характеризующих жизнедеятельность организма, в цифровой код для
последующей обработки и предоставления информации
специалистам в удобной для них форме.
Рассмотрим пример использования £-Д-АЦП типа AD7716
для электрокардиографа, обеспечивающего синхронную работу
с 12 отведениями (рис. 6.33). Девять полностью идентичных
аналоговых каналов представляют собой операционные
усилители с высоким входным сопротивлением, коэффициентом
усиления 4 и включенными последовательно с ними /?-С-ФНЧ [2].
Усилители
постоянного тока фНЧ Е-Д-АЦП
Б>—[
R
L
F
С\
С2
СЪ
СА
С5
С6
N
т
-t>—г=>2Г
-£>-
-£>-
л/#
-£-
-&-
^Г
-f>-
-£*—с=ъ
л/#
-t>-
л/#
На шину
МК
Рис. 6.33. Структурная схема цифрового 12-канального элект|
на основе J-Д-АЦП
Имитация дифференциальных отведений с одновременн •
вычитанием синфазной помехи производится полностью п"
Аналогово-цифровые преобразователи
331
граммным способом. Из этого следует, что существует
возможность при достаточном числе входных каналов сформировать
практически'любую схему отведений или набор схем отведений.
Для этого не требуется прецизионных делителей и малошумя-
щих коммутирующих элементов. Кроме того, достаточно легко
реализуется модульная реализация электрокардиографов и
электрофизиологических полиграфов, добавляя требуемое
количество каналов и модифицируя соответствующее программное
обеспечение.
Рассмотрим вариант схемы усилителя постоянного тока
для структуры, приведенной на рис. 6.33 (рис. 6.34).
100 М
100 к
Ъ\ 1 d>i
R2
VD\ VD2
Z\VD317fds
l\VDAy_}
'VD6
ОР482
2к
ИЗ
R5
10к
П-в
_ж_
2,2 к
R6
AVSS
-0
2,2 к
-5 В
AVdd
0
R7
+5 В
рис. 6.34. Структурная электрическая схема усилителя постоянного
напряжения для электрокардиографа на J-A-АЦП
Диоды VD\ и VD1 обеспечивают защиту усилителя от раз-
Рядов статического электричества и разрядов кардиодефибрил-
^ятора. На высоковольтном резисторе R\ рассеивается основная
НеРгия импульса кардиодефибриллятора. Последовательно
8,слюченные диоды VD3, VDA и VD5, VD6 обеспечивают обрат-
0е смещение на защитных диодах VD\ и VD2. Резисторы R6 и
задают ток, протекаемый через пары диодов VD5, VD6 и
332 Устройства непрерывно-дискретного преобразования сигналов
VD3, VDA соответственно. Резистор R2 определяет входное
сопротивление усилителя.
Делитель из резисторов R3 и /?4 задает коэффициент
усиления неинвертирующего усилителя Ky=l+R4/R3. В схеме
использован счетверенный усилитель типа ОР482.
При отрыве входных электродов (отключение входов ОУ)
на вход АЦП AD7716 поступает сигнал ~1,1 В, образуемый
падением напряжения на открытых диодах VD3, VDA, которое
трактуется как превышение уровня входного динамического
диапазона и используется для сигнализации о плохих
электродных контактах.
Успехи современной микроэлектроники позволяют в одном
корпусе создавать не только АЦП с простой конфигурацией
мультиплексоров, но и однокристальные модули систем сбора данных,
обеспечивающих хранение и преобразование в цифровой код
аналоговых сигналов со многих датчиков с передачей их в микро-
ЭВМ или ПЭВМ.
Вариант структурной схемы системы сбора данных
приведен на рис. 6.35.
Управление
Рис. 6.35. Структурная схема однокристальной системы сбора данных
Основу построения таких систем составляют обычно А1Д'
последовательного приближения. Многоканальность ввода ДаН'
ных обеспечивается аналоговым мультиплексором (AM), поел
которого, при необходимости, ставят усилитель с программ
Аналогово-цифровые преобразователи 333
руемым коэффициентом усиления (УПК), что позволяет
выравнивать диапазоны сигналов с различных входов.
В некоторых системах АЦП обслуживается устройством
выборки хранения (УВХ) и источником опорного напряжения
(ИОН), что позволяет сократить число корпусов микросхем.
При высоких требованиях на скорость обработки и при
использовании низкоскоростных процессоров обработки данных в
корпус системы встраивают промежуточные оперативные
запоминающие устройства (ОЗУ), работающие по принципу
«первый вошел, первый вышел» (FIFO). Устройство управления
(УУ) работает по программам, загружаемым из внешних
микроконтроллеров. Оно управляет настройкой аналогового
мультиплексора (формируя различные схемы коммутации),
коэффициентами усиления УПК и работой других узлов системы.
Встроенный таймер (Тм) задает темп работы АЦП.
Некоторые промышленные образцы имеют встроенные
контроллеры, позволяющие реализовать протоколы обмена по
стандартным интерфейсам, например: R.S232, USB и др. Ряд
микросхем систем сбора данных снабжаются портами ввода-
вывода ЦАП и температурными датчиками, позволяющими
отслеживать температуру окружающей среды и т.д.
Характерным примером системы сбора данных является
отечественная микросхема 572ПВ4 (аналог AD7581) с 8-
входовым аналоговым мультиплексором, 8-разрядным АЦП
последовательного приближения, ОЗУ типа FIFO 8x8 бит.
Таким образом, основное назначение АЦП в медицинских
приборах - преобразование аналоговых биосигналов в
цифровой код для дальнейшей их обработки средствами
вычислительной техникики.
Отечественная и зарубежная промышленность выпускает
большое число устройств непрерывно-дискретного
преобразования сигналов различных типов и назначений, что позволяет
строить высокоэффективные медицинские системы и комплек-
СЬ1, позволяющие обеспечивать поддержку различных техноло-
гических этапов ведения пациентов, начиная с простейших
операций по измерению температуры тела и кончая
интеллектуальным обеспечением процедур принятия врачебных решений.
334 Устройства непрерывно-дискретного преобразования сигналов
Тренировочные задания
1. Нарисуйте схемы параллельных ЦАП с суммированием
токов и лестничного типа. Определите достоинства и недостатки
этих схем.
2. Нарисуйте схему последовательного ЦАП. Расскажите о
принципе его работы. Приведите основные аналитические
соотношения.
3. Перечислите основные типы погрешностей работы ЦАП.
Дайте их определение.
4. Перечислите основные параметры АЦП. Дайте их
определение.
5. Нарисуйте структурные схемы АЦП последовательного
счета, поразрядного уравновешивания. Определите их
достоинства и недостатки.
6. Нарисуйте схему АЦП параллельного преобразования.
Расскажите о назначении его элементов. Определите его
достоинства и недостатки.
7. Нарисуйте схемы ПНЧ и ПНВ. Как работает ПНЧ
двойного интегрирования?
8. В чем состоит основное отличие £-Д-АЦП? Нарисуйте
схему этого типа АЦП первого порядка и объясните принцип его
работы. В чем преимущество этой схемы?
Тестовые задания
1. Основным недостатком ЦАП с суммированием токов
является:
а) большое число элементов резистивной цепи;
б) необходимость сложной схемы управления переключени
ем разрядов;
в) требование к высокой стабильности работы времязада10
щих цепей;
г) трудность выполнения резисторов с большим разбро°
номиналов;
д) низкое быстродействие.
Тестовые задания
335
2. Последовательные ЦАП с двумя схемами УВХ содержат два
операционных усилителя, набор резисторов, два конденсатора и:
а) три диода;
б) четыре стабилитрона;
в) четыре ключа;
г) амплитудный детектор;
д) дифференциатор.
3. Погрешность полной шкалы ЦАП определяется для
максимального кода в соответствии с выражением:
а) &п.ш = С/вых - С/"ых;
б)5п.ш=у^-100%;
вых
в) 5п.ш=-^-100%;
вых
г) 8П ,„ = вых вых • 100%;
П.Ш jjH
вых
д) g = ^ 100%.
и" +ир
^ ni.IV ' ^ DL1
вых вых
4. Дифференциальная нелинейность ЦАП определяется как:
а) наибольшее отклонение кривой £/^ых от прямой,
соединяющей две крайние точки этой кривой;
б) наименьшее отклонение кривой £/^1Х от прямой,
соединяющей две крайние точки этой кривой;
в) наибольшая разность между реальной и идеальной кри-
вЬ1ми преобразования;
г) наибольшая по модулю разность единичного приращения
входного напряжения и среднего значения этого приращения;
д) отношение единичного приращения выходного напряже-
Ния к приращению входного напряжения.
5. Структурная схема генератора прямого синтеза аналого-
ь,х сигналов на основе ЦАП содержит следующие основные уз-
ЛЫ: Два регистра, ПЗУ, ЦАП и (допишите
Звание недостающего узла).
336 Устройства непрерывно-дискретного преобразования сигналов
6. Апертурным временем АЦП называется время, в течение
которого:
а) реализуется преобразование входного кода в аналоговый
сигнал;
б) сохраняется неопределенность между значением выборки
и временем, к которому она относится;
в) выходной код изменяет свое состояние при изменении
входного напряжения;
г) устанавливаются переходные процессы;
д) вырабатывается сигнал готовности передачи кодов.
7. Структура АЦП последовательного счета содержит в
своем составе генератор тактовых импульсов, счетчик, элемент «И»
ЦАП и (допишите название недостающего блока).
8. АЦП следящего уравновешивания отличается от АЦП
последовательного счета введением вместо счетчика
(допишите элемент замены).
9. АЦП параллельного преобразования содержит набор
резисторов, компараторы и (допишите
название недостающего элемента).
10. Преобразователь «напряжение - частота» двойного
интегрирования содержит источник тока, управляемый ключ,
интегратор и:
а) компаратор;
б) дифференциатор;
в) второй интегратор;
г) компаратор с петлей гистерезиса;
д) устройство выборки хранения.
11. Дециматор _-Д-АЦП реализует функцию:
а) интерполяции входного сигнала;
б) «прореживания» выходного сигнала;
в) логарифмирования выходного сигнала;
г) умножения выходного кода на число, кратное десяти;
д) усреднения входного сигнала
12. Структурная схема _-А-АЦП первого порядка содер*иТ'
сумматор, интегратор, компаратор, триггер, делитель частоть-
цифровой фильтр и , подключенный к uerI
обратной связи (допишите название недостающего элемента).
7. ПРИБОРЫ С ЗАРЯДОВОЙ СВЯЗЬЮ
Значительной информативной ценностью обладают
изображения биообъектов и его частей, получаемые в ходе
эндоскопических, рентгеновских и других видов визуальных и ин-
троскопических исследований.
Для регистрации, фиксации и передачи на дальнейшую
цифровую обработку различных типов изображений все чаще
используют матрицы, содержащие множество схемочувстви-
тельных элементов, построенных на основе приборов с
зарядовой связью - ПЗС-матрицы (в англ. варианте charge-coupeed
devices - CCD).
7.1. Устройство ПЗС
Структуры ПЗС - это интегральные полупроводниковые
приборы, в основе работы которых лежит принцип создания,
передачи и хранения локализованного зарядового пакета в
потенциальных ямах, образуемых в полупроводнике под
действием внешнего электрического поля. Приборы с зарядовой связью
представляют собой линейки или матрицы близко
расположенных друг к другу МОП-конденсаторов. Соответствующие
последовательности тактовых импульсов на затворах такой
матрицы смещают ее отдельные МОП-конденсаторы в режим
глубокого обеднения, так что зарядовые пакеты могут храниться под
электродами матрицы и контролируемым образом
перемещаться вдоль поверхности кристалла, перетекая из-под одних
электродов матрицы к соседним электродам.
Типовая конструкция ячейки матрицы ПЗС представлена
на рис. 7.1.
Базой для конструкции является полупроводниковая
кремниевая подложка р-типа, на которой располагается тонкий
№Л...0,15 мкм) слой диэлектрика, например, на основе оксида
кРемния. На диэлектрике располагаются полоски проводящих
электродов (металл, поликристаллический кремний). Электроды
°бразуют линейную или матричную регулярную систему с ма-
Лыми расстояниями между ними, такими, что существенными
338
Приборы с зарядовой связью
являются эффекты взаимного влияния соседних электрод0в
Электроды с подложкой образуют конденсаторы (CI, C2 и СЗ)
МОП-типа (металл-окисел-полупроводник).
Падающий свет
1 i 1 1 1 1
Электрод
Оксид
кремния
Потенциальная
яма
Заряд
электронов
' Кремниевая
подложка /)-типа
Рис. 7.1. Типовая конструкция элемента ПЗС-матрицы
Если к какому-либо электроду, например С2, приложить
положительное напряжение +U, то в МДП-структуре возникает
электрическое поле, под действием которого основные носители
(дырки) очень быстро (за единицы пикосекунд) уходят от
поверхности полупроводника. В результате у поверхности
образуется обедненный слой, толщина которого составляет доли или
единицы микрометра.
Фотон, проникающий в кремний, приводит к генерации
электронов (не основных носителей), которые под действием
поля будут перемещаться к границе раздела полупроводник -
диэлектрик и локализоваться в узком инверсном слое. Таким
образом, у поверхности возникает потенциальная яма для
электронов, в которую они «скатываются» из обедненного слоя под
действием электрического поля. Генерированные в обедненом
слое основные носители (дырки) под действием поля
выбрасываются в нейтральную часть полупроводника.
В течение заданного интервала времени каждый пиксел
постоянно заполняется электронами пропорционально колич
ству попавшего в него света. Здесь они могут храниться Д°сТ
точно длительное время, поскольку дырок в обедненной облас
нет и электроны не рекомбинируют. Носители, сгенерируй3
Устройство ПЗС
339
ные за обедненной областью, медленно движутся
(диффундируют) и обычно рекомбинируют с решеткой прежде, чем
попадут под действие градиента поля обедненной области.
Носители, сгенерированные вблизи обедненной области, могут
диффундировать в стороны и могут попасть под соседний электрод.
В красном и инфракрасном диапазонах длин волн ПЗС имеют
разрешение хуже, чем в видимом диапазоне, так как красные
фотоны проникают глубже в кристалл кремния и зарядовый
пакет размывается, что может привести к искажению
изображений. Заряд, накопленный под одним электродом, может быть
перенесен под соседний электрод, если его потенциал будет
увеличен, в то время как потенциал первого электрода будет
уменьшен. Перемещая таким образом заряды по
Госструктурам, можно их передавать на дальнейшую обработку с
целью синтеза соответствующих изображений.
Известно, что для передачи зарядовых пакетов вдоль их
линейки достаточно иметь три управляющих электрода: одного
передающего, одного принимающего и одного изолирующего.
Изолирующий электрод разделяет пары передающих и
принимающих электродов различных пикселей (рис. 7.2, а).
При повышении потенциала на последующей шине Ф;
0-1, 2, 3) и его понижении на предыдущей шине происходит
одновременная передача всех зарядовых пакетов под соседние
затворы. В варианте временных диаграмм (рис. 7.2, б) передача
(сдвиг) зарядов происходит следующим образом. Пусть,
например, заряды в ПЗС в некоторый момент времени расположились
так, как это показано на рис. 7.2, а (различный заряд в каждой
Потенциальной яме, сформированный различным освещением
элементов ПЗС, условно обозначен различным количеством
знаков «-»). Отсутствие на первых двух электродах
положительных напряжений (Уф1 и Цм и присутствие положительного
Спряжения на электроде [/ф3 переместит заряд из-под
электрода 2 под электрод 3, то есть произойдет сдвиг заряда на один
элемент ПЗС вправо. Далее появляется сигнал <УФ1, а сигнал (7ФЗ
снимается, что приведет к перемещению зарядов из-под элек-
тРодов 3 под электрод 1 пикселов, расположенных справа от со-
Седнего пиксела. При появлении сигнала С/ф2, снятии сигнала
340
Приборы с зарядовой связью
С/ф1 и отсутствии сигнала <7ФЗ заряды переместятся из-под
электрода 1 под электрод 2 и т.д. Таким образом, все заряды
одновременно перемещаются слева направо.
а) Ф. ф2 ф.
.Пиксел 1,
ч Пиксел 2»
1
< Пиксел 3„
, Пиксел п%
б) иФ
С/Ф
иФ
Л_
к
/
/
"А
/
.
/
►
Рис. 7.2. Схема перемещения зарядов в ПЗС с трехфазным управлением (а)
и временные диаграммы управления ПЗС (б)
Для организации передачи зарядов между элементами ПЗС
формируют так называемые электроды переноса (transfer date).
Последовательность элементов ПЗС с электродами
переноса, объединенных шинами управления переносом зарядов, на-
зывают регистром, а тройки электродов одного пиксела -
элементом регистра.
Нетрудно заметить, что за полный цикл управления (одни
такт, прошедший по всем фазным шинам) заряды перемещаются
на один элемент регистра. По своей организации такой регистр
соответствует последовательному регистру сдвига. Для считы
вания информации с регистра на его выходе ставят усилитель,
Устройство ПЗС
341
которого снимают последовательность сигналов, формируемых
в результате перемещения накопленных в ПЗС зарядов и
соответствующих" «картинке», зафиксированной линейкой пикселов
на ПЗС.
На практике, кроме трехфазного управления, используется
также двухфазное и четырехфазное управление.
7.2. Принцип организации ПЗС-матриц
На практике для получения двумерных изображений
Госструктуры (фотосенсоры) объединяют в матрицы различных
конфигураций.
Наиболее простую конструкцию имеют так называемые
полнокадровые ПЗС-матрицы (full-frame CCD-matrix) (рис. 7.3).
Столбцы последовательных регистров сдвига
Стоп-каналы
о
и.
о
Вход горизонтального
,последовательного
регистра сдвига
Выходной последовательный Выходной
регистр сдвига усилитель
Рис. 7.3. Структурная схема полнокадровой матрицы
В ПЗС-матрицах такого типа столбцы образованы набором
Одинаковых регистров сдвига, расположенных на одной
подожке (см. рис. 7.2, а). Для того чтобы зарядовые пакеты не
перемещались, между регистрами формируются так называемые
Сгпоп-каналы - узкие полоски с повышенной концентрацией ос-
342
Приборы с зарядовой связью
новной легирующей примеси, идущие вдоль канала переноса
зарядов.
Полнокадровая матрица снабжена механическим
затвором, который открывается на момент экспонирования. В это
время в потенциальных ямах потенциальных регистров
сдвига столбцов формируются заряды, соответствующие
освещенности ПЗС-матрицы. По завершении экспонирования
затвор закрывается и организуется такт сдвига зарядов во всех
регистрах столбцов на один разряд вниз. Заряды из крайних
нижних разрядов вертикальных регистров «перетекают»
параллельно в выходной последовательный регистр сдвига,
который может быть построен по той же структуре, что и на
рис. 7.2, а. Далее организуется последовательный сдвиг
зарядов горизонтального регистра слева направо, которые
преобразуются выходным усилителем в последовательность
электрических сигналов. После освобождения всех элементов
горизонтального регистра вновь организуется сдвиг на один
разряд вниз зарядов вертикальных регистров и т.д.
В конце цикла считывания всего кадра на выход усилителя
поступят электрические сигналы, анализ которых позволяет
полностью восстановить картинку «засветки» всей ПЗС-матрицы.
Очевидно, что при последовательном считывании
информации из горизонтального регистра вертикальные регистры
простаивают, что снижает быстродействие работы
полнокадровой ПЗС-матрицы.
Существует усовершенствованный вариант
полнокадровой матрицы, в которой заряды вертикальных регистров
(секция накопления) не поступают построчно на вход
последовательного регистра, а «складируются» в буферных регистрах
(секция хранения). Данная секция расположена под
основными вертикальными регистрами сдвига, фототоки построчно
перемещаются в буферные регистры и уже из него поступаю7
на вход последовательного регистра сдвига. Поверхность
буферных регистров покрыта непрозрачной (чаще металле
ской) панелью, а вся система получила название матрицы
буферизацией кадра (frame-transfer CCD) (рис. 7.4). МатрЯцЬ
такого типа удобно использовать в телевизионных система
Принцип организации ПЗС-матриц 343
где применяется построчная развертка кадра и есть время,
свободное от формирования телевизионной «картинки»
(обратный ход строчной и кадровой разверток).
VSl.
VS2-
VS3
'К
VM\-
VMI-
УМУ
УГ€/
Выход ^-|
Вькодной
усилитель
€
7\
_£
топ каналы
I
т
~-нг
т
Горизонтальный регистр считывания
Рис. 7.4. Структурная схема ПЗС-матрицы с буферизацией кадра
На рис. 7.4 каждая строка секции образована тройкой элек-
тРодов (аналогично рис. 7.2, а). В течение времени прямого хода
по кадру секция накопления стоит, то есть на нее подаются
неизменные напряжения, формирующие потенциальные ямы
т°лько под одним электродом каждой тройки, скажем, под элек-
"Фодом первой фазы (VSI), причем потенциальные ямы
образуется во всех элементах всех строк секции. По горизонтали
отельные ячейки накопления отделены стоп-каналами.
Изображение, проецируемое на секцию накопления, вызы-
/*ет фотогенерацию - образование электронно-дырочных пар.
Фи этом фотогенерированные электроды остаются в потенци-
344
Приборы с зарядовой связью
альной яме, дырки же, соответственно, уйдут в подложку или
вдоль поверхности в стоп-каналы. Таким образом, под
действием света в ячейках накапливается зарядовый рельеф, то есть в
каждой ячейке собирается заряд, пропорциональный ее
освещенности и времени накопления.
По окончании прямого хода по кадру на обе секции
подаются тактовые импульсы, вызывающие синхронный перенос
заряда как внутри секции, так и между ними. После числа тактов,
равного числу строк в каждой секции, весь накопленный
зарядовый рельеф целиком переместится в секцию памяти,
закрытую от света, а секция накопления будет очищена от заряда.
Этот перенос секции в секцию происходит достаточно быстро
(фактически он занимает малую часть времени обратного хода
по кадру). Теперь во время следующего цикла накопления (это
следующее поле кадровой развертки) секция накопления
накапливает следующий кадр изображения, а из секции памяти
заряды построчно (во время обратного хода по строке) передаются в
горизонтальный регистр. Каждый элемент регистра имеет
зарядовую связь с соответствующим столбцом секции памяти, и за
один раз передается одна строка. Затем заряды выводятся в
выходное устройство регистра за время прямого хода по строке,
формируя видеосигнал.
Перспективной конструкцией, позволяющей организовать
непрерывный поток видеоинформации, являются ПЗС-мотрицы
с буферизацией столбцов (interline CCD-matrix), в которых
используются наборы буферных регистров, закрытых от
источников света. В отличие от буферизации кадра, здесь буфер не
располагается единым блоком под основным параллельным
регистром, его столбцы «перетасованы» между столбцами основного
регистра. В результате рядом с каждым столбцом основного ре-
гистра находится столбец буфера, а сразу же после
экспонирования фототоки перемещаются не «сверху вниз», а «слева
направо» (или «справа налево») и всего за один рабочий цикл
попадают в буферный регистр, целиком и полностью освобожДаЯ
потенциальные ямы для следующего экспонирования.
Попавшие в буферный регистр заряды в обычном поряДке
считываются через последовательный регистр сдвига, то есть
Принцип организации ПЗС-матриц
345
«сверху вниз». Поскольку сброс фототоков в буферный регистр
происходит всего за один цикл, то время экспонирования для
каждого кадра в большинстве случаев по продолжительности
соответствует интервалу, затрачиваемому на полное считывание
буферного параллельного регистра. Благодаря всему этому
появляется возможность создать видеосигнал с высокой частотой
кадров - не менее 30 кадров в секунду.
По такой схеме построена микросхема ICX409AL фирмы
SONY с диагональю матрицы 6 мм (рис. 7.5). В этой схеме
пакеты зарядов из фотосенсоров передаются в закрытые от света
вертикальные регистры, откуда четырьмя фазами (VX...V4)
сдвигаются в горизонтальный регистр, из которого на выход
заряды передаются в двухфазном режиме (фазы Н\, Н2).
ПЗС-ячейки
(фотосенсоры)
Вертикальные регистры
Стоп-ка
т о
Горизонтальный
регистр
Рис. 7.5. Структурная схема ПЗС-матрицы с буферизацией столбцов
ICX409AL
346
Приборы с зарядовой связью
В ПЗС-матрицах с буферизацией столбцов (в силу боль
шой скорости их работы) вместо механических использую-,,
электронные затворы, обеспечивающие выдержку да 10000 с"1
Следует отметить, что значительную долю поверхности
матриц с буферизацией (до 70%) составляют буферные
регистры, поэтому в современных ПЗС-матрицах над каждым
пикселем ставят микролинзу, позволяющую собирать световые
потоки на всю матрицу фоточувствительных элементов.
Конструктивно матрицы микролинз создаются следующим образом. На
поверхность пластины (с уже сформированными структурами
матрицы) наносится слой оптической легкоплавкой пластмассы,
из которого методом фотолитографии вырезаются
изолированные квадратики, лежащие над каждым элементом. Зазор между
отдельными квадратиками невелик. Затем пластина нагревается,
пластмасса подплавляется и поверхность отдельных
квадратиков приобретает близкую к сферической форму (рис. 7.6).
Свет
Микролинза
Цветной фильтр
Оксид кремния
Рис. 7.6. Типовая конструкция фоточувствительной ячейки
Проблема фиксации и восстановления цветных изображу
ний решается путем использования цветных фильтров с
различными рабочими длинами волн или путем использования кри'
сталлов, чувствительных к различным оптическим диапазонам-
7.3. Параметры и характеристики ПЗС
К основным характеристикам приборов для регистре
изображений, построенных с использованием ПЗС-матриИ;
Параметры и характеристики ПЗС
347
носятся: чувствительность, динамический диапазон, блюминг и
размер по диагонали. Кроме этого ПЗС характеризуется
спектральными характеристиками, током и шумами.
Чувствительность ПЗС-матриц складывается из
чувствительности всех ее пикселов и определяется двумя параметрами:
1) интегральная чувствительность - отношение величины
фототока (мА) к световому потоку (лм) от источника излучения,
спектральный состав которого соответствует вольфрамовой
лампе накаливания. Этот параметр позволяет оценить
чувствительность сенсора в целом;
2) монохроматическая чувствительность - отношение
величины фототока (мА) к величине световой энергии излучения,
соответствующей определенной длине волны. Набор всех
значений монохроматической чувствительности для интересующей
части спектра составляет спектральную чувствительность -
зависимость чувствительности от длины волны света. Таким
образом, спектральная чувствительность показывает возможности
сенсора по регистрации оттенков определенного цвета.
Чувствительность матрицы является интегральной
величиной, зависящей от чувствительности каждого ПЗС-элемента.
Чувствительность пиксела матрицы зависит, во-первых, от
площади светочувствительной области, а во-вторых, от квантовой
эффективности, то есть отношения числа зарегистрированных
электронов к числу упавших на поверхность сенсора фотонов.
В свою очередь, на квантовую эффективность влияет ряд
Других параметров. К одному из таких параметров относят
коэффициент отражения - величину, отображающую долю тех
фотонов, которые «отрикошетируют» от поверхности сенсора.
Не
отраженные от поверхности сенсора фотоны поглощаются,
пРичем часть из них «застрянет» у поверхности, а часть проник-
Нет слишком глубоко в материал ПЗС-элемента. Очевидно, что в
°боих случаях они не примут никакого участия в процессе
формирования фототока. «Проникающая способность» фотонов в
п°лупроводник, именуемая коэффициентом поглощения, зави-
Сит как от материала полупроводника, так и от длины волны
паяющего света («длинноволновые» частицы проникают гораздо
ГлУбже «коротковолновых»).
348 Приборы с зарядовой связью
Важной характеристикой ПЗС-матрицы является пор0г
чувствительности, характеризующий минимальную величину
светового сигнала, который может быть зарегистрирован. Чем
меньше этот сигнал, тем выше порог чувствительности.
Главным фактором, ограничивающим порог чувствительности,
является темновой ток. Он является следствием термоэлектронной
эмиссии и возникает в ПЗС-элементе при подаче потенциала на
электрод, под которым формируется потенциальная' яма.
Существует достаточно сильная зависимость темнового тока от
температуры сенсора: при нагревании матрицы на 9°С ее темновой
ток возрастает в два раза. Для охлаждения матрицы
используются различные системы теплоотвода (охлаждения). В
простейшем случае отвод тепла может осуществляться корпусом
прибора и радиаторами. В более сложной аппаратуре,
требующей высокого качества регистрации изображений, особенно в
различных неблагоприятных условиях, используют активные
системы охлаждения в виде системы Пельтье и др.
Возможность сенсора формировать изображения хорошего
качества при разной освещенности и высокой контрастности
определяется его динамическим диапазоном, характеризующим
способность матрицы различать в изображении, проецируемом
на ее регистрирующую поверхность, самые темные тона от
самых светлых. При расширении динамического диапазона
количество оттенков снимка будет увеличиваться, а переходы между
ними будут максимально соответствовать изображению,
формируемому объективом.
Динамический диапазон ПЗС-матрицы определяется
прежде всего глубиной потенциальной ямы. Кроме того, в условиях
слабого освещения на динамический диапазон влияет также
порог чувствительности, который, в свою очередь, определяется
величиной темнового тока.
Очевидно, что потери электронов, составляющих фототок,
происходят не только в процессе накопления заряда потении
альной ямы, но и при его транспортировке к выходу матрииь-
Потери эти вызваны дрейфом электронов, «оторвавшихся»
основного заряда при его перетекании под следующий электр
переноса. Чем меньше количество «оторвавшихся» электроН
Параметры и характеристики ПЗС
349
тем выше эффективность переноса заряда. Данный параметр
измеряется в процентах и показывает долю заряда,
сохранившуюся при «переправе» между ПЗС-элементами.
В тех случаях, когда внутренний фотоэффект приводит к
избыточному количеству электронов, превышающему глубину
потенциальной ямы, заряд ПЗС-элемента начинает
«растекаться» по соседним пикселам. На снимках это явление, именуемое
блюмингом (от англ. blooming - размывание), отображается в
виде пятен белого цвета и правильной формы, и чем больше
избыточных электронов, тем крупнее пятна.
Подавление блюминга осуществляется посредством
системы электронного дренажа, основная задача которого - отвод
избыточных электронов из потенциальной ямы. Наиболее
известны варианты вертикального и бокового дренажа.
В системе с вертикальным дренажом на подложку матрицы
подается потенциал, значение которого подбирается так, чтобы
при переполнении глубины потенциальной ямы избыточные
электроны вытекали из нее на подложку и там рассеивались.
Недостатком такого варианта является уменьшение глубины
потенциальной ямы и, соответственно, сужение динамического
диапазона ПЗС-элемента.
Система с боковым дренажом использует электроды,
препятствующие проникновению электронов потенциальной ямы в
«дренажные канавки», из которых происходит рассеивание
избыточного заряда. Потенциал на этих электродах подбирается в
соответствии с барьером переполнения потенциальной ямы, при
этом ее глубина не меняется. Однако за счет электродов
дренажа сокращается светочувствительная площадь ПЗС-элемента,
поэтому приходится использовать микролинзы.
При использовании ПЗС-матриц разработчики
медицинской аппаратуры испытывают ряд проблем, среди которых
самыми серьезными являются чрезвычайно жесткие требования к
однородности исходного кремния и степени совершенства
технологического процесса. Если при производстве цифровых
приборов разброс параметров по пластине может достигать
нескольких крат без заметного влияния на параметры получаемых
приборов (поскольку работа идет с дискретными уровнями на-
350
Приборы с зарядовой связью
пряжения), то в ПЗС применение, скажем, концентрации
легирующей примеси на 10% уже заметно на изображении. Свои
проблемы добавляет и размер кристалла, и невозможность
резервирования, как в БИС памяти, так что дефектные участки
приводят к негодности всего кристалла. Специфическим
ограничением является и присущий им по принципу действия
последовательный вывод информации, тогда как в ряде
применений удобнее иметь датчики с произвольным опросом.
В качестве примера в таблице 7.1 представлены основные
технические характеристики ПЗС-матрицы ICX409AL.
Таблица 7.1
Основные характеристики микросхемы ICX409AL
Характеристика
Размер изображения
Количество эффективных
пикселов - всего
В том числе:
по горизонтали
по вертикали
■ Общее количество пикселов
В том числе:
по горизонтали
по вертикали
Размер одного пиксела:
по горизонтали
по вертикали
Разрешение
Объектив
Чу в ствительность
Светопропускание
Видеосигнал
Отношение С/Ш
Электронный затвор
Электропитание
Температурный режим
Габариты
Вес
Значение
Диагональ 6 мм
440000
752
596 (приблизительно)
470000
795
596
6,5 мкм
6,25 мкм
420 ТВ-линий
.^2,84/3,6 мм (28, 44, 53, 120, 130,
150 град) .
0,1 люкс
F2.0
1 В; 75 Ом ,
50 дБ ,
50... 100000 с"' ___^
12 В; 0,1 А -
-Ю...+50°С
30x30x26 мм
0,03 кг _J
Параметры и характеристики ПЗС
351
Основное применение матриц ПЗС в медицине связывают
с их использованием в эндоскопии при получении изображений
внутренних органов. Основной проблемой здесь является
получение высококачественных объемных изображений при малых
габаритах матриц, которые необходимо вводить внутрь
организма через естественные полые структуры, например через
гортань.
Тренировочные задания
1. Расскажите, как работает ячейка ПЗС и как организуется
перенос зарядов по регистрам матриц ПЗС.
2. Нарисуйте структурную схему ПЗС-матрицы с
буферизацией столбцов и расскажите о принципе ее работы.
3. Перечислите основные параметры, характеризующие
ПЗС-матрицы.
Тестовые задания
«
1. Основным элементом ПЗС-матрицы является:
а) МДП-транзистор;
б) фотодиод;
в) МОП-конденсатор;
г) фототранзистор;
д) оптрон.
2. Для формирования потенциальной ямы на электрод ПЗС-
ЗДемента необходимо:
а) направить поток световой энергии;
б) подать отрицательный потенциал;
в) подать нулевой потенциал;
г) подать положительный потенциал;
д) закрыть элемент ПЗС от света.
3. Для создания эффекта перемещения зарядов по регистру
из ПЗС-ячеек необходимо:
а) на соседние электроды, находящиеся над двумя ПЗС-
"Чейками, подать положительный потенциал;
352
Приборы с зарядовой связью
б) на электрод, под которым находится передаваемый заряд
подать нулевой потенциал, а на соседний электрод -
положительный потенциал;
в) на счетный вход регистра подать серию сдвигающих
импульсов от однофазного генератора;
г) на электрод, под которым находится передаваемый заряд,
подать положительный потенциал, а на соседний электрод -
нулевой потенциал;
д) на передающий и принимающий электроды подать
отрицательный потенциал.
4. Полнокадровая ПЗС-матрица содержит электроды
переноса, стоп-каналы, вертикальные и горизонтальные регистры
сдвига с ПЗС-ячейками и (допишите название
недостающего узла).
5. В ПЗС-матрице с буферизацией кадра выделяются:
горизонтальный регистр считывания, выходной усилитель с
управляющим транзистором и диодом на входе, секция накопления и
(допишите название недостающего узла).
6. ПЗС-матрица с буферизацией столбцов отличается тем,
что:
а) информация с фотосенсоров переписывается
последовательно в горизонтальный регистр;
б) вертикальные регистры не закрываются затвором на
момент считывания информации с фотосенсоров;
в) фотосенсоры на время передачи информации в
горизонтальный регистр закрываются механическим затвором;
г) информация с фотосенсоров переписывается в
вертикальные регистры, закрываемые электронным затвором;
д) во время перекачивания зарядов нет необходимости
использования стоп-каналов.
7. Интегральная чувствительность ПЗС-матрицы - это:
а) отношение величины фототока к световому потоку от
источника излучения, спектральный состав которой соответствует
вольфрамовой лампе накаливания;
б) отношение величины фототока к световому потоку в
инфракрасной области;
Тестовые задания
353
в) отношение величины фототока к величине темнового тока;
г) параметр, определяемый глубиной потенциальной ямы;
д) способность различать свет в заданном диапазоне.
8. Блюминг-это:
а) потеря информации из-за низкой чувствительности
матрицы ПЗС;
б) эффект «растекания» электронов из-за переполнения
потенциальной ямы;
в) зависимость темнового тока от температуры;
г) искажение изображений от «рикошета» фотонов от
поверхности сенсора;
д) дрейф фототока из-за старения элементов матрицы.
8. ИНТЕРФЕЙСЫ ДЛЯ ПОДКЛЮЧЕНИЯ УЗЛОВ
МЕДИЦИНСКОЙ ТЕХНИКИ К МИКРОПРОЦЕССОРАМ
МИКРОКОНТРОЛЛЕРАМ И ПЭВМ
При подключении медицинского оборудования к
микропроцессорам, микроконтроллерам и ПЭВМ следует иметь в
виду, что для успешной работы получаемого комплекса
разработчики устройств сопряжения (УС) должны строго соблюдать
стандарты обмена, предписываемые разработчиками
используемых средств вычислительной техники. Другими словами,
свобода разработчика строго ограничена особенностями
внешних интерфейсов вычислительных средств, которые надо знать
и максимально использовать..
Напомним, что в соответствии со стандартной
терминологией интерфейс — это совокупность унифицированных
аппаратных, программных и конструктивных средств, необходимых для
реализации взаимодействия различных функциональных
элементов в системах, при условиях, предписанных стандартом и
направленных на обеспечение информационной, электрической
и конструктивной совместимости указанных элементов.
8.1. Интерфейсы магистралей ПЭВМ
Для подключения нестандартного оборудования, в
частности электронной медицинской аппаратуры, к персональным
ЭВМ можно использовать как системную магистраль ПЭВМ,
так и интерфейсы периферийных устройств.
Развитие системных интерфейсов (СИ) ПЭВМ вызвано
необходимостью существенного увеличения операций ввода-
вывода и периферийных устройств. В связи с ростом объема
интерфейсного оборудования в составе ПЭВМ появилась
необходимость ужесточения требований к стандартизации интерфейсов-
При организации СИ ПЭВМ стремятся к минимизации
числа шин за счет использования мультиплексирования (разделени
во времени). Наиболее часто совмещаются шины адреса и ДаВ
ных. Системные интерфейсы совершенствуются в направлени
увеличения шин адреса, числа шин запросов на прерывание
Интерфейсы магистралей ПЭВМ
355
прямого доступа к памяти (ПДП), дополнительных
возможностей для расширения номенклатуры периферийных устройств.
В настоящее время одними из самых распространенных в
медицинской практике являются ПЭВМ типа IBM PC, в которых
используется несколько типов интерфейсов (например, VLB,
EISA, PCMCIA и др.). В предлагаемой работе будут рассмотрены
принципы построения таких интерфейсов, как ISA (Industrial
Standard), быстродействующей локальной шины периферийных
устройств PCI (Peripheroe Component Interconnect bus),
последовательного интерфейса USB, интерфейсов АЦП и др.
8.1.1. Организация системной магистрали типа ISA
Структура персонального компьютера с точки зрения
разработчика устройств сопряжения (УС), ориентированного на
ISA, может иметь вид, представленный на рис. 8.1.
Компьютер IBM PC имеет систему шин с полностью буфе-
ризированными (для защиты) выходными линиями данных и
адресов. Шины IBM PC включают шину данных, шину адреса и
шину управления, с помощью которых центральный процессор
(ЦП) через печатные проводники и разъемы на генплате может
связываться с периферийными устройствами нестандартного
оборудования.
Шина данных - двунаправленная (информация может идти
к ЦП или от него).
Управление работой шин осуществляется посредством
контроллера шины, который от центрального процессора принимает
Управляющие сигналы состояния, декодирует их, определяя тем
самым тип цикла шины.
Через адресные буферы микропроцессор выставляет адрес
йа системную шину, которые под управлением контроллера
шины защелкиваются на первом такте цикла шины.
Через буфер данных микропроцессор либо считывает, либо
выставляет данные на шину данных. Направлением и
размещением передачи управляет контроллер шины.
Сопроцессор выполняет ряд арифметических операций в
Ускоренном темпе.
Интерфейсы для подключения узлов медицинской техники
Микропроцессор при своей работе на адресной шине вы-
ставляет адреса для себя и для сопроцессора. Команды считыва-
ются с шины данных и поступают и в центральный процессор, и
в сопроцессор. Последний, анализируя коды команд, выбирает
те, которые предназначаются ему.
Центральный процессор
Буферные регистры с тремя состояниями
Тактовый
генератор
5
Контроллер шины Адресный буфер Буфер данных
о
Г гс
S-
а
I
СО
<=
^>
^>
Сопроцессе) it
ОЗУ
Системное
ПЗУ
с
Контроллер
регенерации
S
Переста-
новщик
байтов
Контроллер
прямого
доступа
Контроллере
прерываний С:
С
Чг-
Таймер
^|Блок связи cl^
периферией <£
\z
^^> Параллельны^
интерфейс
Последова-
тельный
интерфейс
7Х
=>
о
о
^>
=о
=>
^>
\Z
Слоты расширения
(Каналы ввода-вывода)
Т
П
Внешние устройства
Рис. 8.1. Структура системного блока ПЭВМ типа IBM PC
Интерфейсы магистралей ПЭВМ
357
Системное постоянное запоминающее устройство (ПЗУ)
выполняет различные функции, в частности хранит различные
управляющие программы (например, систему BIOS - базовую
систему ввода-вывода). *
Кроме центрального процессора, памяти и стандартных
устройств ввода-вывода, разработчиками УС могут
использоваться контроллеры прерываний и прямого доступа к памяти
(ПДП), перестановщик байтов, программируемый таймер и
контроллер регенерации динамической памяти (ОЗУ).
Задатчиками (хозяевами) шины могут выступать:
центральный процессор (самая обычная ситуация), контроллер
ПДП, контроллер регенерации и некоторые внешние платы. В
каждом цикле обмена задатчиком всегда является только одно
устройство. Контроллер ПДП захватывает магистраль
(запрещает работу центрального процессора) на время прямой передачи
информации между устройством ввода-вывода и памятью (по
запросу устройства ввода-вывода). Контроллер регенерации
периодически становится задатчиком магистрали для проведения
циклов регенерации системной динамической памяти через
заданные интервалы времени. Для 32-разрядных компьютеров
(386DX, 486, Pentium и т.д.) обмен процессора с памятью (а
иногда и с другими устройствами) осуществляется через
быстродействующую локальную шину VLB или через PCI.
Характерное отличие ISA от ранних конструкций
магистралей состоит в том, что её тактовый сигнал не совпадает с
тактовым сигналом процессора, как это было в XT, поэтому
скорость обмена по ней не пропорциональна тактовой частоте
процессора.
Магистраль ISA относится к демультиплексированным
(имеющим раздельные шины адреса и данных) 16-разрядным
системным магистралям среднего быстродействия. Обмен
осуществляется 8- или 16-разрядными данными.
На магистрали реализован раздельный доступ к памяти
компьютера и к устройствам ввода-вывода (для этого имеются
специальные сигналы). Максимальный объем адресуемой
памяти составляет 16 Мбайт (24 адресные линии). Максимальное
адресное пространство для устройств ввода-вывода составляет
358 Интерфейсы для подключения узлов медицинской техники
64 Кбайта (16 адресных линий), хотя практически все
выпускаемые платы расширения используют только 10 адресных
линий (1 Кбайт). Магистраль поддерживает регенерацию
динамической памяти, радиальные прерывания и прямой доступ к
памяти. Допускается также захват магистрали.
Наиболее распространенное конструктивное исполнение
магистрали - разъемы (слоты), установленные на материнской
плате компьютера, все одноименные контакты которых
соединены между собой. То есть все разъемы абсолютно
равноправны. Особенностью конструктивного решения магистрали
является то, что платы расширения, подключаемые к её разъемам,
могут иметь самые различные размеры (длина платы ограничена
снизу размером разъема, а сверху - длиной корпуса
компьютера). Платы расширения имеют интерфейсные разъемы
магистрали, выполненные печатными проводниками.
В магистрали ISA используется положительная логика на
шинах адресов и данных (единице соответствует высокий
уровень напряжения (+5 В), а нулю низкий (0). На ней
присутствуют четыре напряжения питания, В: +5; -5; +12; -12.
Расположение контактов разъемов, используемых на
магистрали ISA, приведено на рис. 8.2.
Сторона
установки
элементов
Сторона
монтажа
В1...В31
D1...D18
Рис. 8.2. Нумерация контактов разъема ISA
(для IBM PC XT-только А1...А31 и В1...В31)
Назначение контактов разъема и функции соответствуй'
щих сигналов приведены в таблице 8.1.
ИнтердЪейсы магистралей ПЭВМ 359
Таблица 8.1
Контакты разъемов, соответствующие им сигналы
и их назначение
Контакт
разъема
[А1]
[А2...А9]
[А10]
[АН]
I/O
I/O
I/O
I
О
Назначение
Channel Check (СН СК) - проверка канала ввода-
вывода. Сигнал вырабатывается любым исполнителем
(устройство ввода-вывода или памятью) для
информирования задатчика о фатальной ошибке (например,
четности при доступе к памяти). Сигнал вызывает
немаскируемое прерывание. Тип выходного каскада -
открытый коллектор
Разряды данных. Обмен данными с 8-разрядными
платами расширения осуществляется по линиям SD0...SU7, по
линиям SD&..SD15 - старший байт. Устройство может
активизировать шину данных, если к нему идет
обращение с циклом чтения или если оно захватило магистраль
(в режиме MASTER). Логика сигналов положительная.
Тип выходных каскадов -три состояния
Channel Ready (СН PDY) - готовность канала ввода-
вывода. Сигнал снимается (делается низким)
исполнителем (устройством ввода-вывода или памятью) по
переднему фронту сигналов -IOR и -IOW в случае, если
он не успевает выполнить требуемую операцию в темпе
задатчика. При этом реализуется асинхронный обмен.
Если исполнитель успевает работать в темпе задатчика,
сигнал не снимается (фактически не устанавливается в
низкий уровень). Цикл обмена в ответ на снятие этого
сигнала продлевается на целое число периодов сигнала
SYSCLK. Сигнал не должен сниматься на время,
большее заданного в данном компьютере (по стандарту
15 мкс), иначе компьютер переходит к обработке
немаскируемого прерывания. Тип выходного каскада —
открытый коллектор
Address Enable (AEN) - разрешение адреса. Сигнал
используется в режиме ПДП для сообщения всем платам
расширения, что производится цикл ПДП;
устанавливается и снимается параллельно с адресом. При его
переходе в активное состояние все платы расширения, не
участвующие в данном ПДП, должны отключаться от
магистрали (переходить в пассивное состояние). Тип
выходного каскада — ТТЛ
360 Интерфейсы для подключения узлов медицинской техники
Продолжение табл^
Контакт
разъема
[А12...А31]
[В1]
[В2]
[ВЗ]
[В4]
I/O
I/O
-
О
—
I
Назначение
Фиксируемые адресные разряды. Они действительны в
течение всего цикла обмена. Используются для пере-
дачи 20 младших разрядов адреса памяти и для адресов
устройств ввода-вывода. При обращении к
устройствам ввода-вывода действительны только сигналы
SA0...SA15 (но практически все платы расширения
работают только с SA0...SA9). При регенерации памяти
действительны только сигналы SA0...SA7, состояния
старших разрядов не определены. Логика всех сигналов
SA0...SA19 положительная. В режиме MASTER эти
сигналы вырабатывает устройство, захватившее
магистраль. Тип выходных каскадов - три состояния
Шина земли
Reset of Driver (RESET DRV) - сброс устройства.
Сигнал сброса в начальное состояние всех устройств на
магистрали вырабатывается центральным процессором
при включении или сбое питания, а также при нажатии
на кнопку RESET компьютера. Внешние платы должны
в ответ на этот сигнал (длительностью не менее 1 мс)
перевести все свои выходы в высокоимпедансное
состояние. Тип выходного каскада— ТТЛ .
Шина питания +5 В .
Interrupt Request (IRQ) — запрос прерывания. Запросом
является положительный переход на соответствующей
линии IRQ. Сигнал должен удерживаться до начала
обработки процессором запрошенного прерывания. Тип
выходного каскада - ТТЛ. На каждой линии IRQ Дол*е
быть один выход. Иногда в литературе можно встрети
рекомендацию применять выходы с тремя состояния ■
но все равно больше одного выхода на линию быть
должно во избежание конфликтов сигналов. Сиги
IRQ0...IRQ2, IRQ8 и IRQ13 задействованы на системн
плате и недоступны платам расширения. В компью
используются два 8-разрядных контроллера прерь'ва
Сигналы IRQ0...IRQ7 относятся к первому и3 оГ0
IRQ8...IRQ15 - ко второму. Для каскадирования в^вЯ-
контроллера прерываний задействован вход IRQ2- р().
зи с этим запросы прерывания имеют следующие ПР „q4,
теты в порядке возрастания: IRQ7, IRQ6, IRQ*'
IRQ3, IRQ15, IRQ14, IRQ12, IRQ11, IRQ10, IRQjL—-"^
Интерфейсы магистралей ПЭВМ 361
Продолжение табл. 8.1
Контакт
разъема
[В5]
[В6]
[В7]
[В8]
_[В9]
-JB10]
[В11]
[В12]
I/O
-
1
-
I
-
-
О
О
Назначение
Шина питания -5 В
DMA Request (DRQ) - запрос прямого доступа к памяти
(ПДП). Запросом является положительный переход на
соответствующей линии DRQ. Сигнал должен
удерживаться до получения ответного сигнала -DACK с тем же
номером. Тип выходного каскада — ТТЛ. На каждой линии
DRQ должен быть один выход. В компьютере
используются два контролера ПДП. Каналы ПДП первого
контроллера (сигналы DRQO...DRQ3) предназначены для 8-
битного обмена, а второго котроллера (DRQ5...DRQ7) —
для 16-битного. Канал DRQ4 используется для
каскадирования контроллеров и недоступен пользователям.
DRQ0 имеет наивысший приоритет, DRQ7 - наинизший.
В IBM PC XT канал DRQ0 использовался для
регенерации динамической памяти. Канал DRQ1 зарезервирован
для контроллера бисинхронного обмена SDLC, а канал
DRQ2 — для контроллера гибкого диска
Шина питания -12 В
OWait States (OWS) — 0 тактов ожидания. Сигнал
выставляется исполнителем для информирования задатчика о
необходимости проведения цикла обмена без вставки
такта ожидания, если длительность стандартного цикла
обмена велика для него. Вырабатывается поле перехода
сигнала BALE в низкий уровень. Должен быть
синхронизован с сигналом SYSCLK. Используется редко. Тип
выходного каскада — открытый коллектор
Шина питания +12 В
Шина земли
Строб записи в память по положительному (заднему)
фронту (-SMEMW). Вырабатывается только при
обращении к адресам, не превышающим FFFFF (в пределах
1 Мбайта). В режиме MASTER этот сигнал
вырабатывает устройство, захватившее магистраль. Тип выходного
каскада — три состояния
Строб чтения данных из памяти (—SMEMR). Память
должна выставлять данные при активизации этого
сигнала. Вырабатывается только при обращении к адресам
в пределах FFFFF. В режиме MASTER этот сигнал
вырабатывает устройство, захватившее магистраль. Тип
выходного каскада - три состояния
362
Интерфейсы для подключения узлов медицинской техники
Контакт
разъема
I/O
[В 13]
[В14]
[В15]
[В16]
[В17]
[В18]
[В19]
I/O
Продолжение табл g 1
Назначение
I/O
О
О
Строб записи данных в устройства ввода-вывода (I/q
Write). Устройство ввода-вывода должно принимать
данные по положительному (заднему) фронту сигнала
-IOW. В режиме MASTER этот сигнал вырабатывает
устройство, захватившее магистраль. Тип выходного
каскада - три состояния
Строб чтения данных из устройств ввода-вывода (I/O
Read). Устройство ввода-вывода должно выставлять
свои данные при активизации сигнала -IOR и снимать
их при снятии -IOR. В режиме MASTER этот сигнал
вырабатывает устройство, захватившее магистраль. Тип
выходного каскада — три состояния
DMA Acknowledge (-DACK) — подтверждение ПДП.
Сигналы подтверждения прямого доступа
вырабатываются в ответ на соответствующий сигнал DRQ в случае,
если прямой доступ предоставлен данному каналу.
Удерживаются до окончания прямого доступа. Тип
выходного каскада- ТТЛ
См. пояснение к сигналу DRQ 2 (контакт В6)
См. пояснение к сигналу —PACK 3 (О) (контакт В15)
I/O
См. пояснение к сигналу DRQ 2 (контакт В6)
Refresh — регенерация. Сигнал выставляется
контроллером регенерации для информирования всех устройств
на магистрали о выполнении циклов регенерации
динамического ОЗУ компьютера (каждые 15 мкс). При
регенерации выполняется псевдочтение из одного из 256
адресов ОЗУ (активизируются только разряды адреса
SA0...SA7). Полный цикл регенерации - около 4 мс
Тип выходного каскада - открытый коллектор
[В20]
О
\System Clock (SYSCLK) - сигнал системного тактового
генератора со скважностью 2 (меандр). В большинстве
компьютеров его частота равна 8 МГц независимо °т
тактовой частоты процессора. Если в программе SETUr
предусмотрена возможность изменения тактовой часто
ты магистрали, пользователь может задавать ее в шир0^
ких пределах, но не рекомендуется поднимать эту ча ^
тоту выше 8 МГц, к тому же на производительность н
вых компьютеров в целом она влияет незначительно-
компьютерах XT сигнал SYSCLK - это тактовый сигн
процессора. Тип выходного каскада - три состояния^--'
Интерфейсы магистралей ПЭВМ 363
Продолжение табл. 8.1
Контакт
разъема
[В21...В25]
[В26]
[В27]
[В28]
[В29]
[ВЗО]
[В31]
[О]
I/O
I
О
о
о
-
о
-
I/O
Назначение
*>
См. пояснение к сигналу IRQ 9 (контакт В4)
См. пояснение к сигналу -DACK 3 (контакт В15)
Terminal Count (Т/С) — окончание счета. Сигнал
устанавливается в режиме ПДП тогда, когда по текущему
каналу ПДП закончен счет циклов пересылок данных.
Тип выходного каскада — ТТЛ
Bus Address Latch Enable (BALE) - разрешение
защелкивания адреса (сигнал стробирования адресных
разрядов). Его отрицательный фронт соответствует
действительности адреса на линиях SA0...SA19 и LA17...LA23.
Может использоваться устройствами ввода-вывода для
заблаговременной подготовки к предстоящему обмену
информацией (применяется редко). Тип выходного
каскада-ТТЛ
Шина питания +5 В
Не синхронизированный с SYSCLK сигнал кварцевого
генератора (OSC) с частотой 14,31818 МГц и
скважностью 2. Может использоваться платами расширения в
качестве тактового сигнала, так как его частота
одинакова для всех компьютеров с магистралью ISA. Тип
выходного каскада- ТТЛ
Шина земли
System Bus High Enable (-SBHE) - разрешение
старшего байта. Сигнал определяет тип цикла передачи
данных (8- или 16-разрядный); вырабатывается
параллельно с сигналами SA0...SA19 и может
рассматриваться как дополнительный разряд адреса.
Становится активным при передаче старшего байта или 16-
разрядного слова (определяется сигналом SAO),
пассивен при передаче младшего байта. В режиме
MASTER источником этого сигнала является
устройство, которое захватило магистраль. Тип выходного
каскада - три состояния
364 Интерфейсы для подключения узлов медицинской техники
Продолжение табл.8.1
Контакт
разъема
[С2...С8]
[С9]
[СЮ]
[С11...С18]
[D1]
I/O
I/O
I/O
I/O
I/O
I
Назначение
Нефиксируемые адресные разряды (LA17...LA23).
Используются для адресации памяти и выработки сигнала
—MEM CS 16. Действительны только в начале цикла
обмена. Исполнитель должен фиксировать их по
отрицательному фронту сигнала BALE. При обращении к
устройствам ввода-вывода эти сигналы имеют уровень
логического нуля. Логика положительная. Тип выходного
каскада — три состояния. Для фиксации необходимо
использовать регистр типа «защелка» (с записью по
уровню), стробируемый сигналом BALE. При прямом
доступе к памяти эти сигналы действительны в течение всего
цикла обмена, как и SA0...SA19. В режиме MASTER эти
сигналы вырабатывает устройство, захватившее
магистраль. Тип выходных каскадов -три состояния
Memory Read (—MEMR) - чтение памяти (строб чтения
данных из памяти). Память должна выставлять данные
при активизации этих сигналов. Сигнал -MEMR
вырабатывается при обращении ко всем адресам. В режиме
MASTER этот сигнал вырабатывает устройство,
захватившее магистраль. Тип выходного каскада - три
состояния
Memory Write (—MEMW) — запись памяти (строб записи
данных в память). Память должна принимать данные по
положительному (заднему) фронту этого сигнала.
Сигнал -MEMW вырабатывается при обращении ко всем
адресам. В режиме MASTER этот сигнал вырабатывает
устройство, захватившее магистраль. Тип выходных
каскадов — три состояния
См. пояснение к сигналам SD7...SD0 (контакты
А2...А9) ,
Memory Cycle Select (-MEM CS16) - выбор цикла ДЛЯ
памяти. Сигнал выставляется памятью для сообщения
задатчику о том, что она имеет 16-разрядную
организацию. При отсутствии этого сигнала выполняется
8-разрядный обмен. Сигнал вырабатывается при
распознавании памятью своего адреса на линиях LA17..LA- -
Процессор фиксирует его по заднему фронту сигнал
BALE. Тип выходного каскада - открытый коллектор^^
Интерфейсы магистралей ПЭВМ
365
Окончание табл. 8.1
Контакт
разъема
[D2]
[D3...D7]
[D8]
[D9]
[D10]
[D11]
[D12]
[D13]
[D14]
[D15]
[D16]
[D17]
[D18]
I/O
I/O
I
О
I
О
I
о
I
о
I
-
I
-
Назначение
I/O Cycle Select (I/O CS16) - выбор цикла для
устройства ввода-вывода. Сигнал выставляется устройством
ввода-вывода для сообщения задатчику о том, что оно
имеет 16-разрядную организацию. При отсутствии
этого сигнала выполняется 8-разрядный обмен. Сигнал
вырабатывается при распознавании устройством ввода-
вывода своего адреса на линиях SA0...SA15. Тип
выходного каскада - открытый коллектор
См. пояснение к IRQ 9 (контакт В4)
См. пояснение к сигналу —DACK 3 (контакт В15)
См. пояснение к сигналу DRQ 2 (контакт В6)
См. пояснение к сигналу -DACK 3 (контакт В15)
См. пояснение к сигналу DRQ 2 (контакт В6)
См. пояснение к сигналу -DACK 3 (контакт В15)
См. пояснение к сигналу -DRQ 2 (контакт В6)
См. пояснение к сигналу -DACK 3 (контакт В15)
См. пояснение к сигналу -DRQ 2 (контакт В6)
Шина питания + 5 В
Master — хозяин, задатчик. Используется платой
расширения, желающей стать задатчиком магистрали. В этом
случае надо выставить сигнал DRQ и, получив в ответ
сигнал -DACK, установить сигнал -MASTER, а затем
не менее чем через один период SYSCLK можно
выставлять адрес и не менее чем через два периода
вырабатывать стробы обмена. Если -MASTER удерживается
более 15 мкс, то динамическое ОЗУ компьютера
требует регенерации (разрешения сигнала -REFRESH). Тип
выходного каскада - открытый коллектор
Шина земли
Примечания: 1. Знак «-» перед названием сигнала говорит о том,
что активным уровнем этого сигнала является уровень логического
нуля, в противном случае активным уровнем является уровень логической
единицы.
2. Символом I обозначен входной сигнал, О - выходной сигнал,
I/O - двунаправленный сигнал.
366 Интерфейсы для подключения узлов медицинской техники
Обмен данными между ПЭВМ и периферийными
устройствами может быть программно-управляемым, по прерыванию
или с использованием механизмов прямого доступа к памяти
(ПДП).
При программно-управляемом обмене осуществляется
синхронная и асинхронная передача данных.
Синхронная передача данных предполагает, что при
выполнении команд ввода и вывода, встречающихся в программе
процессора, периферийное устройство готово к выдаче на шину
данных информации, запрашиваемой микропроцессором, или готово
принять с шины данных информацию, выставляемую
микропроцессором.
На рис. 8.3 представлена схема, с помощью которой могут
быть реализованы различные способы обмена.
Шина адреса
Ф
Шина данных
А
IOR
IOW
^D
DC
&
ы>
D
RG1
&
1С
Тг
D
УВ
V
II г*
RG2
К ПУ От ПУ
Рис. 8.3. Схема обмена внешних устройств с ПЭВМ
При синхронном выводе информации дешифратор на св°-
ём входе получает адрес выбираемого периферийного устройсТ'
ва (ПУ) и на соответствующем выходе (в нашем случае 3) выра'
батывает сигнал разрешения записи в регистр RGI. По сигналу
Интерфейсы магистралей ПЭВМ
367
IOW в регистр RG\ производится запись информации с шины
данных. Содержимое регистра RG\ постоянно передается
периферийному устройству.
При синхронном вводе перед выполнением процессором
команды «Ввод» необходимо, чтобы ПУ по сигналу строб
приема записало в регистр RG2 информацию, подготовленную для
ввода. Регистр RG1 имеет три состояния и в основном находится
в высокоимпедансном состоянии, не влияющем на обменные
процессы в шине данных.
Когда центральный процессор своей командой запрашивает
искомые данные от ПУ, он на адресной шине выставляет код
адреса запрашиваемого источника информации, который
расшифровывается дешифратором (вывод 1) и при появлении сигнала
IOR производится перевод второго регистра из высокоимпеданс-
ного состояния в состояние передачи хранимой информации на
выход Q и, следовательно, на шину данных.
Триггер (Тг) и соответствующий управляемый вентиль
(УВ) используются при асинхронном способе обмена данными.
Прежде чем произвести обмен данными с ПУ, микропроцессор
проверяет готовность ПУ к обмену. Блок-схема алгоритма,
иллюстрирующая этот процесс, приведена на рис. 8.4.
Г Начало
Прием состояний
<-— ПУ готово
^^^^-^кобмену^-^-
>
ПУ
Обмен
1
(^ Остановка
}
Нет
Рис. 8.4. Блок-схема алгоритма асинхронного обмена
В соответствии с этим алгоритмом микропроцессор
принижет код состояний ПУ и анализирует готовность к обмену Если
368 Интерфейсы для подключения узлов медицинской техники
ПУ готово, то реализуется обмен, после которого цикл работы
алгоритма заканчивается.
При асинхронном обмене ПУ должно располагать
устройством, в котором фиксируется его готовность к обмену. На
рис. 8.3 таким устройством является триггер готовности ПУ (Тг),
который конструктивно является составной частью
периферийного устройства.
Если на дешифратор поступает код адреса,
соответствующего триггеру готовности (команда чтения содержимого
триггера готовности), то на втором выходе дешифратора формируется
сигнал логической единицы, который совместно с сигналом IOR
выводит управляемый вентиль (УВ) из третьего состояния и
подключает выход Тг к одному из разрядов шины данных.
Микропроцессор анализирует это состояние и либо повторяет опрос
состояния триггера (ПУ не готово), либо выбирает для чтения
регистр RG2, используя соответствующую адресацию и сигнал
[OR, управляя входом &Е второго регистра.
В обоих рассмотренных режимах обмен данными
осуществляется по командам от процессора. В задачах, когда управление
обменом инициируется ПУ, используется режим передачи
данных с прерыванием. В этом случае ПУ формирует для
процессора специальный сигнал прерывания, по которому процессор
приостанавливает выполнение основной программы и
автоматически переходит к программе обслуживания прерывания, после
выполнения которой он может вернуться к выполнению
основной программы.
8.1.2. Организация обмена по шине ISA
В режиме программного обмена информацией на
магистрали ISA выполняются четыре типа циклов:
1) цикл записи в память;
2) цикл чтения из памяти;
3) цикл записи в устройство ввода-вывода;
4) цикл чтения из устройства ввода-вывода.
Наиболее часто УС проектируются как устройства ввод3"
вывода, оформляемые как совокупность средств, унифицируй'
щих и упрощающих способ взаимодействия микропроцессора с
Интерфейсы магистралей ПЭВМ
369
внешней средой. Эти совокупности технических средств
называются портами.
Всем внутренним ресурсам ПЭВМ, кроме памяти, и
внешним устройствам (клавиатура, дисковод, контроллеры
различных назначений и др.) выделяют свои порты (логические адреса
ввода-вывода). Каждый порт имеет свой уникальный адрес, по
которому передаются данные между микропроцессором (МП) и
программно-доступными регистрами устройств окружения МП
(внутренние ресурсы) и окружения ПЭВМ (внешние ресурсы).
Таким образом, чтобы обратиться к портам IBM PC нужно
просто адресоваться к определенной ячейке памяти. Для передачи
данных со стороны МП в порт используется команда OUT (в
ней задаётся номер адреса и данные). Команда IN применяется
для считывания данных из порта. Так, прием кодов с
клавиатуры осуществляется через порт 96(6016), управление динамиком -
через порт 97(61^) и т.д. В некоторых моделях для пересылки
данных используется обычная МП команда MOV. В таблице 8.2
приведены адреса портов для различных ресурсов, доступных
через шину ISA. Порты с номерами O...FFi6 используются
только системной платой, 100i6...3FF16- декодируются на шине
ввода-вывода для использования различными адаптерами.
Таблица 8.2
Распределение портов с устройств ввода-вывода
(адреса даны в шестнадцатеричном коде)
Адрес
000...01F
020... 03F
040...05F
060...06F
070...07F
080... 09F
OA0...09F
0CO...ODF
ОТО...OFF
.170"-177
iTO...lF8
1^00.. .207
Описание
Порты первого контроллера прямого доступа к памяти (ПДП)
Порты первого контроллера прерываний
Порты таймера
Порты контроллера клавиатуры
Порты часов реального времени
Порты режима страниц контроллера ПДП
Порты второго контроллера прерываний
Порты второго контроллера ПДП
Порты математического сопроцессора
Порты второго жесткого диска (винчестера)
Порты первого жесткого диска (винчестера)
Порты игрового адаптера (джойстика)
370
Интерфейсы для подключения узлов медицинской техники
Адрес
278...27F
2C0...2DF
2F8...2FF
300...31F
320... 32F
360...36F
370...377
378.. .37F
380...38F
3A0...3AF
3B0...3DF
3B0...3BF
3D0...3DF
3F0...3F7
3F8...3FF
Описание
Окончание табл. х т
Порты второго параллельного принтера LPT2
Порты второго адаптера EGA (EGA#2)
Порты второго последовательного адаптера COM2
Плата прототипа
Накопитель на жестком диске XT
Резерв
Порты второго контроллера дискет
Порты первого параллельного принтера LPT1
Порты контроллера синхронной связи (SDLC2)
Порты первого синхронизированного канала (SDLC1)
|Адаптер VGA
Адаптер монохромного дисплея MDA и принтера
Порты адаптера CGA
Порты первого контроллера дискет
Порты первого последовательного адаптера СОМ1
Организуя взаимодействие с портами ввода-вывода,
процессор ЮМ PC организует специальные циклы считывания из
порта ввода-вывода и записи в порт ввода-вывода.
Временные диаграммы обмена с портами ввода-вывода
приведены на рис 8.5 (все временные параметры приведены для
частоты SYSCLK равной 8 МГц). Циклы начинаются с
выставления задатчиком адреса на линиях SA0...SA15 и сигнала
SBHE. Отметим, что, несмотря на потенциальную возможность
адресации по 16 линиям адреса, чаще всего используются
только 10 младших линий - SA0...SA9, так как большинство
разработанных ранее плат расширения используют только их, и,
следовательно, за исключением особых случаев, нет смысла
обрабатывать старшие разряды SA10...SA15.
В ответ на получение адреса исполнитель, распознавший
свой адрес, должен сформировать сигнал -I/O CS16 в случае,
если обмен должен быть 16-разрядным.
Далее следует собственно команда чтения или записи. При
цикле чтения задатчик выставляет сигнал -IOR, в ответ на
который исполнитель (УС) должен выдать данные на шину данны*-
Интерфейсы магистралей ПЭВМ
371
Эти данные должны быть сняты исполнителем после окончания
сигнала -IOR.
SYSCL1
BALE
SAO... SA 15,
для 16-разрядного
УЧтение
-I/O СН RDY
лЗапись
К ___/ •*— для удлиненного цикла
Рис. 8.5. Временные диаграммы циклов программного обмена
с устройствами ввода-вывода (временные интервалы в наносекундах)
В цикле записи задатчик выставляет записываемые данные
и сопровождает их стробом записи -IOW. В соответствии со
стандартом установка записываемых данных предшествует
выставлению -IOW, однако в некоторых компьютерах реализуется
обратный порядок: сначала выставляется -IOW, а затем
появляются данные. Поэтому при проектировании УС
рекомендуется использовать как момент действительности данных только
положительный фронт сигнала -IOW. В случае, когда УС не
успевает выполнить требуемую от него команду в темпе
магистрали, оно может приостановить на целое число периодов
сигнала SYSCLK завершение цикла чтения или записи с помощью
снятия (перевода в низкий уровень) сигнала I/O СН RDY (так
372 Интерфейсы для подключения узлов медицинской техники
называемый удлиненный цикл). Это производится в ответ на
получение сигнала -IOR или -IOW. Сигнал I/O CH RDY может
удерживаться низким не более 15,6 мкс, в противном случае
процессор переходит в режим обработки немаскируемого
прерывания. Некоторые изготовители персональных компьютеров
указывают в сопроводительной документации другие
допустимые величины этого временного интервала (например, 25 мкс).
На рис. 8.6 приведены временные диаграммы циклов
обмена с памятью (указаны только временные интервалы,
отличающиеся от аналогичных на рис. 8.5). Для асинхронного
режима обмена (удлиненного цикла) здесь также используется
сигнал I/O CH RDY. Устройство сопряжения, работающее как
память, должно обрабатывать все адресные разряды LA17...LA23.
SYSCL L
LA17...LA2 •>'
BALE
SA0...SA1
-MEN CS
-MEMR
SD0...SD1
SD0...SD1
-MEMW
-I/O CH RDY-
:>c
^o>u>50,i
|< >15 >l
"^k.
<66
:>c
>c
X)
г28.
N^.
>109
>40
>239
для 16-разрядного
^
< <187 >
<
"^ч.
jr
* Чтение
► Запись
v
для удлиненного
цикла
Рис. 8.6. Временные диаграммы циклов программного обмена
с памятью (временные интервалы в наносекундах)
Интерфейсы магистралей ПЭВМ 373
Помимо циклов программного обмена, на магистрали
ISA могут выполняться также циклы прямого доступа к
памяти (ПДП). Временная диаграмма для этого случая показана на
рис. 8.7. *
DRQ
-DACK-
AEN-
SA0...SA19.
LA17...LA23,
SBHE
-IOR(-MEMR)
Y
>91
ж:
-MF.MW(IOW)
>235(30)
<241
>39
*—«
>689(439
>389(639}
~X
SD0...SDI5
-I/O CH RDY
>39
УС
>39
<90
^zzr/
>T
Рис. 8.7. Временные диаграммы циклов ПДП (временные интервалы
в наносекундах): f- время предоставления ПДП; Т- период сигнала SYSCLK
Так как магистраль ISA имеет раздельные стробы чтения
и записи для устройств ввода-вывода и для памяти, пересылка
данных в режиме ПДП производится за один машинный цикл.
Если данные надо переслать из устройства ввода-вывода в
память, то одновременно производится чтение данных из
устройства ввода-вывода (по сигналу -IOR) и их запись в память (по
сигналу -MEMR). Аналогично производится пересылка данных
из памяти в устройство ввода-вывода (по сигналам -MEMW
или -IOW).
3 74 Интерфейсы для подключения узлов медицинской техники
Цикл ПДП начинается с запроса ПДП от исполнителя
желающего произвести обмен, с помощью одного из сигналов
DRQ (см. рис. 8.7) После освобождения магистрали текущим
задатчиком (например, процессором) контроллер ПДП
формирует соответствующий сигнал -DACK, говорящий о
предоставлении ПДП запросившему его устройству. Затем
контроллер ПДП вырабатывает адрес ячейки памяти, с которой будет
производиться обмен в текущем цикле, и сигнал AEN,
который говорит устройству ввода-вывода о том, что к нему идет
обращение в режиме ПДП. После этого выставляется строб
чтения (-IOR или -MEMR), в ответ на который источник
передаваемых данных выставляет свою информацию на шину
данных или строб записи (-MEMW или -IOW), по которому
данные записываются в приемник данных. Здесь так же, как и
в обычном цикле, возможен асинхронный обмен (удлиненный
цикл) с использованием сигнала I/O CH RDY.
При проектировании УС помимо протоколов обмена по
магистрали надо учитывать также электрические
характеристики сигналов. Стандарт магистрали определяет требования к
входным и выходным токам приемников и источников сигнала
каждой из плат расширения. Несоблюдение этих требований
может нарушить функционирование всего компьютера, и даже
вывести его из строя.
Выходные каскады передатчиков магистральных
сигналов УС должны выдавать ток низкого уровня не меньше 24 мА
(это относится ко всем типам выходных каскадов), а ток
высокого уровня - не меньше 3 мА (для выходов с тремя
состояниями и ТТЛ).
Входные каскады приемников магистральных сигналов
должны потреблять входной ток низкого уровня не больше
0,8 мА, а входной ток высокого уровня - не больше 0,04 мА-
Кроме этого необходимо учитывать, что максимальная длина
печатного проводника от контакта магистрального разъема Д°
вывода микросхемы не должна превышать 65 мм, а
максимальная емкость относительно «земли» по каждому контакту
магистрального разъема не должна быть больше 20 пФ.
Интерфейсы магистралей ПЭВМ 375
К некоторым линиям магистрали подключены
нагрузочные резисторы, идущие на шину питания +5 В. К линиям -IOR,
-IOW, -MEMW, -SMEMR, SMEMW, -I/O CH CK подключены
резисторы 4,7 кОм, к линиям -I/O CS 16, -MEM CS 16,
-REFREH, -MASTER, -OWS - 300 Ом, а к линии I/O CH RDY -
1 кОм. Кроме того, к некоторым линиям магистрали
подключены последовательные резисторы: к линиям -IOR, -IOW,
-MEMR, -SMEMR, -SMEMW и OSC - резисторы номиналом 22
Ом, а к линии SYSCLK - 27 Ом.
8.1.3. Обмен с внешними устройствами по шине PCI
Шина PCI разрабатывалась специально для скоростного
обмена ПЭВМ с периферийными устройствами. Отличительной
особенностью этой шины является то, что она не привязывается
к архитектуре ЮМ PC, являясь процессорно независимой.
Слот PCI самодостаточен, для подключения любого
контроллера и на системной шине может сосуществовать с любой из
других шин ввода-вывода. Частота шины от 20 до 33 МГц,
теоретически максимальная скорость 132/264 Мбайт/с для 32/64
бит. В современных материнских платах частота на шине PCI
задается как 1/2 входной частоты процессора, то есть при частоте
66 МГц на PCI будет 33 МГц, при 75 МГц - 37,3 МГц.
Шина имеет версии с питанием 5 В; 3,3 В и универсальную
(с переключением линий +VI/0 с 5 В на 3,3 В). Ключами
являются пропущенные ряды контактов 12, 13 и 50, 51; 32-битный
слот заканчивается контактами А62/В62, 64-битный - А94/В94.
Процессор через так называемые мосты (PCI Bridge) может
быть подключен к нескольким каналам PCI (возможно только в
спецификации 2.1). Автоконфигурирование устройств (выбор
запросов прерывания, каналов DMA) поддерживается средствами
BIOS материнской платы.
Стандарт PCI определяет для каждого слота
конфигурационное пространство размером до 256 8-битных регистров, не
приписанных ни к пространству памяти, ни к пространству вво-
Да-вывода. Доступ к ним осуществляется по специальным
циклам шины Configuration Read и Configuration Write, вырабаты-
376 Интерфейсы для подключения узлов медицинской техники
ваемым контроллером при обращении процессора к регистрам
контроллера шины PCI, расположенным в его пространстве
ввода-вывода.
На PCI определены два основных вида устройств:
1) инициатор (по ГОСТ - задатчик), то есть устройство,
получившее от арбитра шины разрешение на захват ее ;
2) устройство назначения, цель (target), с которым
инициатор выполняет цикл обмена данными.
В таблице 8.3 приведен перечень сигналов шины PCI.
Таблица 8.3
Сигналы шины PCI
Ряд В
-12 В
Test Clock
GND
Test DO
+5 В
+5 В
-INTRB
' -INTRD
-PRSNT 1
Reserved
-PRSNT 2
GND/Ключ
GND/Ключ
Reserved
GND
Clock
GND
-REQ
+VI/O
AD 31
AD 29
GND
AD 27
Номер
1
2
3
4
5
6
7
8
9
10
11
12*
13*
14
15
16
17
18
19
20
21
22
23
РядА
-TSTRES
+ 12 В
Ряд В
AD 19
+3,3 В
TSTMSLCT 1 AD 17
Test DO J -C/BE
+5 В GND
-INTR A -IRDY
-INTRC
+5 В
Reserved
+VI/O
Reserved
GND/Ключ
GND/Ключ
Reserved
-RST
+VI/O
-GNT
GND
Reserved
+3,3 В
-DEVSEL
GND
-Lock
ParityER
+3,3 В
SysERR
+3,3 В
-C/BE
AD 14
GND
AD 12
AD 10
AD 30 GND
+3,3 В GND/Ключ
AD 28 GND/Ключ
AD 26 | AD 8
Номер
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50**
51**
52
РядА
GND
AD 18
AD 16
+3,3 В
-FRAME
GND
-TRDY
GND
-STOP
+3,3 В
SDONE
-SBOFF
GND
PAR
AD 15
+3,3 В
AD 13
AD 11
GND
AD9__
GND/KnK>4__
GND/Ключ^
-c/biTJ
ИнтердЪейсы магистралей ПЭВМ
Окончание табл. 8.3
Ряд В
AD25
+3,3 В
-С/ВЕ
AD23
GND
AD21
+VI/0
■ -АСК64
+5 В
+5 В
Номер
24
25
26
27
28
29
59
60
61
62
РядА
GND
AD24
IDSEL
+3,3 В
AD22
AD20
+VI/0
-REQ64
+5 В
+5 В
Конец 32-битного разъема
Reserved
GND
-С/ЕЕ
-С/ЕЕ
GND
AD63
AD61
+VI/0
AD59
AD57
GND
AD55
AD53
GND
63
64
65
66
67
68
69
70
71
72
73
74
75
76
GND
-С/ВЕ 7
-С/ЕЕ 5
+VI/0
PAR
AD 62
GND
AD 60
AD 58
GND
AD 56
AD 54
+VVO
AD 52
Ряд В
AD 7
+3,3 В
AD 5
AD3
GND
ADI
AD51
AD 49
+VI/O
AD 47
AD 45
GND
AD 43
AD 41
GND
AD 39
AD 37
+VI/O
AD 35
AD 33
GND
Reserved
Reserved
GND
Номер
53
54
55
56
57
58
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
РядА
+3,3 В
AD6
AD4
GND
AD2
ADO
AD 50
GND
AD 48
AD 46
GND
AD 44
AD 42
+VI/0
AD 40
AD 38
GND
AD 36
AD 34
GND
AD 32
Reserved
GND
Reserved
Конец 64-битного разъема
* Ключ для 3,3 В.
** Ключ для 5 В
Примечание. Знак «-» перед названием сигнала означает, что
активный уровень этого сигнала - «логический нуль»; {ХХ:0} - группа
сигналов с номерами от 0 до XX.
Рассмотрим подробнее назначение каждого из сигналов:
378
Интерфейсы для подключения узлов медицинской техники
AD {31:0} - мультиплексированная шина адреса-данных
Адрес передается по сигналу -FRAME, в последующих тактах
передаются данные;
-С/ВЕ {3:0} - команда/разрешение обращения к байтам.
Эта команда определяет тип очередного цикла шины (чтение-
запись памяти, ввода-вывода или чтение-запись конфигурации,
подтверждение прерывания и др.); задается 4-битным кодом в
фазе адреса по сигналу -FRAME;
-FRAME - индикатор фазы адреса (иначе - передача
данных);
-DEVSEL - выбор инициатором устройства назначения;
-IRDY - готовность инициатора к обмену данными;
-TRDY - готовность устройства назначения к обмену
данными;
-STOP - запрос устройства назначения к инициатору на
останов текущей транзакции;
-LOCK используется для установки, обслуживания и
освобождения захвата ресурса на PCI;
-REQ {3:0} - запрос от PCI -устройства на захват шины
(для слотов 3:0);
-GNT {3:0} - разрешение мастеру на использование шины;
PAR - общий бит четности для линий AD {31:0} и С/ЕЕ
{3:0};
-ParityER - сигнал об ошибке по четности (от устройства,
ее обнаружившего);
-RST - сброс всех устройств;
IDSEL - выбор устройства назначения в циклах считывания
и записи конфигурации;
-SERR - системная ошибка, активизируется любым
устройством PCI и вызывает немаскируемое прерывание процессора
(NMI);
-REQ 64 - запрос на 64-битный обмен;
-ASK 64 - подтверждение 64-битного обмена;
-INTR А, В, С, D - линии запросов прерывания;
направляются на доступные линии IRQ BIOS компьютера. Запрос по
низкому уровню допускает разделяемое использование линий
прерывания;
Интерфейсы магистралей ПЭВМ
379
Clock - сигнал синхронизации на тактовой частоте шины;
Test Clock, -TSTRES, Test DO, Nest DI - сигналы для
тестирования адаптеров по интерфейсу JTAG (на системной плате
обычно не задействованы);
TSTMLCT - перевод в режим тестирования.
При организации цикла передачи данных по шине PCI тип
циклов во время фазы передачи адреса определяется кодом
сигнала С/ВЕ, значение которого приведено в таблице 8.4.
Таблица 8.4
Определения типа цикла передачи данных по коду С/ВЕ
С/ВЕ
0000
0001
0010
ООП
0100
0101
оно
0111
1000
1001
1010
1011
1100
1101
1110
1111
Команда
Interrupt Acknowledge (подтверждение прерывания)
Special CycCe (специальный цикл)
I/O Read (чтение порта)
I/O Write (запись в порт)
Reserved (резервировано)
Reserved (резервировано)
Memory Read (чтение порта)
Memory Write (запись в порт)
Reserved (резервировано)
Reserved (резервировано)
Configuration Read (чтение конфигурации)
Configuration Write (запись конфигурации)
Multiple Memory Read (множественное чтение памяти)
Dual Address Cycle (двойной цикл адреса)
Memory Read Line (чтение памяти)
Memory Write and Invalidate (запись в память и проверка)
В цикле подтверждения прерывания (С/ВЕ=0000)
контроллер прерываний автоматически распознает сигнал INTA и
реагирует на него передачей вектора прерывания по шине AD. При
обращении к картам ввода-вывода цикл чтения
инициализируется кодом 0010, а цикл записи - кодом 0011, при их разрядности 8
или 16.
380 Интерфейсы для подключения узлов медицинской техники
При передаче данных без тактов ожидания на шине PQ
реализуются временные диаграммы, приведенные на рис. 8.8, с
тактом ожидания - на рис. 8.9.
CLK -
FRAME.
AD
С/ВЕ
IRDY
TRDY
DEVSEL
<Z
:х:
zxz
ZXZ
zx:
z>-
Адрес Данные 1 Данные 2 Данные 3 Данные 4
< X J>
Команда Сигнал разрешения передачи байта
Рис. 8.8. Временные диаграммы шины PCI без тактов ожидания
CLK
FRAME
AD
IRDY
TRDY —
DEVSEL
>-
<C
>c
>c
>-
Адрес Данные 1 Данные 2 Данные 3
С/ВЕ < х
Команда Сигнал разрешения передачи байта
Ожидание
:>-
Ожидание Ожидание
Рис. 8.9. Временные диаграммы шины PCI с тактами ожидания
Как видно из рис. 8.8 и 8.9, цикл передачи данных на PCI
без тактов ожидания включает 4 фазы передачи данных, а с
тактами ожидания — 3 фазы.
Приведенная информация по шине PCI позволяет
проектировать модули сопряжения медицинского оборудования с
ПЭВМ, имеющими эту шину.
Интерфейсы магистралей ПЭВМ
381
8.1.4. Взаимодействие медицинского оборудования
с ПЭВМ через последовательный порт типа RS-232
Интерфейс RS-232C предназначен для подключения к
компьютеру стандартных внешних устройств (принтера, сканера,
модема, мыши и др.), а также для связи компьютеров между
собой. Основными преимуществами использования RS-232C, по
сравнению с параллельным портом типа Centronics, являются
возможность передачи на значительно большие расстояния и
гораздо более простой соединительный кабель. В то же время
работать с ним несколько сложнее. Данные в RS-232C передаются
в последовательном коде побайтно. Каждый байт обрамляется
стартовым и стоповыми битами. Данные могут передаваться как
в одну, так и в другую сторону (дуплексный режим).
Компьютер имеет 25-контактный (DB25P) или 9-контактный
(DB9P) разъем для подключения RS-232C. Назначение контактов
разъема приведено в таблице 8.5.
Таблица 8.5
Шины сопряжения интерфейса RS-232C
Тип разъема
9
контактов
—
3
2
7
8
6
5
1
4
9
25
контактов
1
2
3
4
5
6
7
8
20
22
Направление
передачи
-
О
I
О
I
I
-
1
О
I
Имя
сигнала
GND
-TXD
-RXD
RTS
CTS
DSR
SG
DCR
DTR
R1
Назначение
Защитное заземление (экран)
Передаваемые данные
Принимаемые данные
Запрос на передачу
Готовность приемника к передаче
Готовность передатчика (компьютера)
Сигнальное заземление (нулевой
провод)
Контроль приема (обнаружение
несущей частоты передаваемых данных)
Готовность приемника (готовность
выходных данных)
Кольцевой индикатор вызова (говорит
о приеме модемом сигнала вызова
телефонной сети)
Примечание. I - входной сигнал компьютера; О — выходной.
382 Интерфейсы для подключения узлов медицинской техники
Регистровая структура типового последовательного канала
показана на рис. 8.10, а.
а)
Регистр статуса
Регистр управления
обменом
Буферный регистр
входных данных
Регистр сдвига
входных данных
Регистр сдвига
выходных данных
Буферный регистр
выходных данных
Управление
модемом
Последовательный
вход
Последовательный
выход
Контрольный бит
б)
Т
Биты данных
Z
Стартовый бит
Ч£
Стоп-битГы)
" Рис. 8.10. Регистровая структура (а) и циклы обмена
через последовательный интерфейс (б)
В регистре статуса обычно отображается информация о
состоянии внешнего устройства; регистр управления инициирует
адаптер, в него МП по соответствующей команде программ
засылает данные о режиме работы канала. Буферный и сдвиговый
регистры обеспечивают преобразование параллельного кода в
последовательный и наоборот. При вводе биты по одному
передаются в регистр сдвига входных данных. После того, как их
число достигает заданного значения (от 5 до 8),
соответствующий параллельный код передается вначале в буферный регистр
входных данных и далее через системную шину в МП. При вы-
Интерфейсы магистралей ПЭВМ
383
воде реализуются обратные действия через буферный регистр и
регистр сдвига выходных данных.
Интерфейс RS-232 реализует дуплексную связь (раздельные
линии связей для входных и выходных сигналов) с асинхронным
режимом обмена данными. На рис. 8.10, б приведена диаграмма
работы последовательного канала в режиме асинхронной связи.
Временные интервалы между символами не важны, однако
расположение битов в символе строго регламентировано по
времени. В исходном состоянии сигнал в линии имеет высокой
уровень. В момент начала передачи он переходит в состояние «0»,
обозначая своим задним фронтом начало стартового бита и
начало передачи символа. Далее идет последовательность заданного
числа битов символа (совокупность сигналов высокого и низкого
уровня). За последним битом данных может идти контрольный
бит с проверкой на четкость (этот бит не обязателен) и
последними идут один или два стоповых бита. Стоп-биты определяют
минимальное время ожидания передачи следующего символа.
Для согласованной работы приемника и источника информации
в них должны быть установлены одинаковые параметры обмена
(расхождение тактовых частот в приемнике и передатчике не
должно превышать 10%). Скорость передачи по RS-232C может
выбираться из ряда: НО, 150, 300, 600, 1200, 2400, 4800, 9600,
19200, 38400, 57600, 115200 бит/с.
Все сигналы RS-232C передаются специально выбранными
Уровнями, обеспечивающими высокую помехоустойчивость связи
(рис. 8.11). Данные передаются в инверсном коде (логической
единице соответствует низкий уровень, логическому нулю -
высокий уровень).
На практике для ЭВМ типа IBM PC широко применяют три
вида подключений интерфейсов типа RS-232C.
Схема соединений с подключением только линий данных и
питания показана на рис. 8.12, а.
При этом способе связи запрос на передачу RTS сразу
возвращается как ответ готовности приемника CTS путем
соединения выхода на вход в самом разъеме. На сигнал готовности
передатчика DSR через связи разъема возвращаются сигналы
готовности приемника DTR и контроля приема DCR.
384 Интерфейсы для подключения узлов медицинской техники
+15
В
+5 В
О
-5 В
а)
~ *>
Высокий
уровень
.. Зона
неопределенности
- Низкий
уровень
+25
В
+ЗВ
о
-ЗВ
Передатчик
^Высокий
I уровень
^i Зона неопре-
А деленное™
. Низкий
уровень
Приемник
Рис. 8.11. Уровни сигналов RS-232C на передающем
и принимающем концах линии связи
(l)GND
(7)SG
(2) TxD
(3)RxD
(4) RTS
(5) CTS
(6) DSR
(20) DTR
(8)DCR
GND
SG
TxD
RxD
RTS
CTS
DSR
DTR
DCR
e) GND
SG
TxD
RxD
RTS
CTS
DSR
DTR
(l)GND
(7)SG
(2) TxD
(3) RxD
(4) RTS
(5) CTS
(6) DSR
(20) DTR
(8) DCR
GND
SG
TxD
RxD
RTS
CTS
DSR
DTR
DCR
GND
SG
TxD
RxD
RTS
CTR
DSR
DTR
Рис. 8.12. Схемы подключений аппаратуры к последовательному интерфейсу
Интерфейсы магистралей ПЭВМ 385
Рассмотрим пример временной диаграммы работы
последовательного интерфейса с учетом различных тактов реализации
(рис. 8.13). •
TxD
ьооооосш
$-~
2_
ю
3FDI6 ,
(2FDI6)
разряд 5
Рис. 8.13. Вариант временной диаграммы последовательного обмена
В этом примере реализуются следующие такты работы:
1) начало программы обслуживания канала; подготовка
регистров;
2) чтение регистра статуса;
3) анализ битов ошибки (при таком способе соединений
можно не проводить, поскольку все подтверждения заранее
скоммутированы перемычками разъема);
4) проверка 5-го разряда регистра статуса;
5) передача данных в регистр выходных данных адаптера;
6) передача данных в регистр сдвига выходных данных и
инициализация обмена;
7) стартовый бит передаваемого символа;
8) передаваемые символы;
9) стоповый бит;
10) работа ПЭВМ по выполнению других программ.
Работа на прием осуществляется аналогично, но
анализируется нулевой бит регистра статуса обмена, имеющего адрес
3FD16(2FDI6).
386 Интерфейсы для подключения узлов медицинской техники
Схема соединений с подключением питания, линий данных
и сигналов запроса на передачу (RTS), готовность приемника к
передаче CTS приведена на рис. 8.12, б.
Временные диаграммы передачи данных при таком
соединении похожи на временные диаграммы (см. рис. 8.13).
Дополнительно источник, подготовивший данные, перед их передачей
выставляет сигнал RTS и ждет ответа CTS. Полученный ответ
участвует в формировании содержимого регистра статуса,
которое может быть проанализировано программой, определяющей
дальнейшие взаимодействия с каналом и (или) с другим
устройством. Если программа принимает решение о передаче данных
они передаются, как и в предыдущем случае, на линию связи.
Сигнал запроса на передачу RTS может быть использован в
режиме работы по прерыванию. По этому сигналу приемник
(при соответствующей настройке регистров адаптера,
отвечающих за прерывание) перейдет в режим прерывания, и далее будут
выполняться действия, предписанные программой прерывания.
На рис. 8.12, в показана более полная схема соединений, при
которой у программистов имеются более широкие возможности по
анализу и управлению ситуациями, возникающими при обмене
(анализ регистров статуса и прерываний). Формирование и
передача данных производится путем записи и чтения выделенных
для него портов (ввода-вывода).
Базовые адреса портов последовательного вывода хранятся
в начале области переменных системы BIOS (программы
начального ввода-вывода, хранимой в системном ПЗУ). Это
двухбайтовые слова, причем адрес первого канала (СОМ1) хранится
по адресу 0:0400 ПЗУ, адрес второго канала (COM2) - по адресу
0:0402, адрес третьего канала (COM3) - по адресу 0:0404, адрес
четвертого канала - 0:0406 ПЗУ. Практически для всех ПЭВМ
рассматриваемого класса последовательный порт СОМ1 имеет
базовый адрес 3F816, а COM2 - 2F816.
Более подробную информацию, необходимую для
программирования медицинского оборудования с ПЭВМ через
интерфейс RS-232, можно получить в специальной литературе, на'
пример в [I], и в соответствующей технической документации на
ПЭВМ.
Интерфейсы магистралей ПЭВМ
387
8.1.5. Подключение оборудования к ПЭВМ
через интерфейс USB
Интерфейс USB (Universal Serial Bus) - высокоскоростная
(до 480 Мбит/с) универсальная последовательная шина,
позволяющая подключать к шине ПЭВМ множество (до 127)
устройств.
Скоростные характеристики USB позволяют передавать
большие потоки данных, включая аудио- и видеосигналы.
Обычная архитектура USB подразумевает подключение
одного или нескольких USB-устройств к компьютеру (рис. 8.14). В
такой конфигурации компьютер является главным управляющим
устройством и называется хостом. Подключение USB-устройств
к компьютеру осуществляется через аппаратный блок,
называемый хабом, посредством системы кабелей. Компьютер имеет
встроенный контроллер (хаб), называемый корневым хабом.
Компьютер
(хост)
V — .Л«Л" Ir.ff
USB-кабель
Хаб
»
1
■
'
USB-устройства
Рис. 8.14. Обычная архитектура USB
Конструктивно главный контроллер (хост-контроллер)
входит в состав системного блока компьютера и управляет
работой всех устройств на шине USB (допускается наличие только
одного хоста - главного контроллера). Системная шина
персонального компьютера может иметь несколько хостов, каждый из
которых управляет отдельной шиной USB. Хаб представляет
собой устройство, которое обеспечивает создание
дополнительных портов на шине USB. Другими словами, хаб преобразует
один порт (восходящий порт) во множество портов (низходящие
порты). Физическая архитектура USB-шины допускает
соединение нескольких хабов, но не более 5 (рис. 8.15).
388 Интерфейсы для подключения узлов медицинской техники
Рис. 8.15. Физическая архитектура USB
На этом рисунке функции соответствуют периферийным
устройствам, способным передавать и принимать информацию
по шине USB. Каждая функция предоставляет информацию,
описывающую возможности периферийного устройства и
требования к ресурсам. Перед использованием функция должна
быть сконфигурирована хостом. Ей должна быть выделена
полоса частот и выбраны опции конфигурации. USB-устройства
представляют собой хабы, функции или их конфигурации. В
качестве USB-устройств могут выступать мыши, мониторы,
сканеры, переходники между USB-шиной и портами RS-232,
CENTRONIX, модемы, звуковые колонки, флеш-диски,
измерительные приборы, сетевые конверторы, специальная
медицинская аппаратура и т.д. Порты в архитектуре USB
рассматриваются как точки подключения.
При составлении прикладных программ следует иметь в
виду, что физическая архитектура USB от них скрыта. Поэтому
логическая архитектура USB выглядит как звезда, центром
которой является прикладное программное обеспечение, а
вершинами - набор конечных точек (логических устройств с
соответствующими адресами).
При проектировании собственных USB-устройств следует
учитывать набор свойств, которые предусматривает
спецификация USB:
- устройство должно отзываться только на свой
уникальный адрес;
ИнтердЪеОсы магистралей ПЭВМ
389
- после включения или сброса устройство должно
предоставлять нулевой адрес для возможности конфигурирования его
портов;
- устройство имеет набор конечных точек для обмена
данными с хостом. Для конечных точек, допускающих разные типы
передач, после конфигурирования доступен только один из них;
- любое устройство при подключении не должно
потреблять от шины ток, превышающий 100 мА. При
конфигурировании устройство заявляет свои потребности тока, но не более
500 мА. Если хаб не может обеспечить устройству заявленный
ток, устройство не будет обслуживаться;
- устройство USB должно поддерживать приостановку,
при которой его потребляемый ток не превышает 500 мкА.
Устройство должно автоматически приостанавливаться при
прекращении активности шины;
- устройство, находящееся в приостановленном состоянии
может подать сигнал хосту, находящемуся в приостановленном
состоянии (возможность удаленного пробуждения).
Рассмотрим некоторые важные свойства хабов.
Хаб выполняет коммутацию сигналов и выдачу питающего
напряжения, а также отслеживает состояние подключенных к
нему устройств, уведомляя хост об изменениях.
Хаб состоит из двух частей - контроллера и повторителя.
Контроллер содержит регистры для взаимодействия с хостом.
Доступ к регистрам осуществляется по специфическим
командам обращения к хабу. Команды позволяют конфигурировать
хаб, управлять нисходящими портами и опрашивать их
состояние. Повторитель представляет собой управляемый ключ,
соединяющий выходной порт со входным. Он имеет средства
сброса и передачи данных.
Нисходящие порты хабов могут находиться в следующих
состояниях:
1) питание отключено. На порт не подается питание.
Выходные буферы переводятся в высокоимпедансное состояние,
входные сигналы игнорируются;
2) отсоединен. Порт не передает сигналы ни в одном
направлении, но способен обнаружить подключение устройства;
390 Интерфейсы для подключения узлое медицинской техники
3) запрещен. Порт передает только сигнал сброса по
команде контроллера. Сигналы от порта (кроме обнаружения
отключения) не воспринимаются;
4) разрешен. Порт передает сигналы в обоих направлениях.
По команде контроллера или при обнаружении ошибки
передачи данных порт переходит в состояние «запрещен», а при
обнаружении отключения - в состояние «отсоединен»;
5) приостановлен. Порт передает сигнал перевода в
состояние «остановка». Если хаб находится в активном состоянии,
сигналы через порт не пропускаются ни в одном направлении.
Состояние каждого порта идентифицируется контроллером
хаба с помощью отдельных регистров. Имеется общий регистр,
биты которого отражают факт изменения состояния каждого
порта. Это позволяет хосту быстро узнавать состояние хаба.
В USB хост выполняет следующие обязанности:
обнаружение подключения и отключения устройств USB; управление
потоками данных; сбор статистики; обеспечение
энергосбережения подключенных устройств.
Для коммутации внешних устройств интерфейс USB
использует три типа кабелей:
1) стандартный съемный кабель с 5-контактными
разъемами на обоих концах;
2) высокоскоростной несъемный кабель, один конец
которого жестко подключен к устройству, другой имеет разъем на
шесть контактов. Этот кабель имеет импеданс 90 Ом ±15% и
полную задержку распространения сигнала 26 не. Сигнальные
провода выполнены по типу «витая пара» (данные D~ и D+),
которая помещена в экранирующую оплетку;
3) несъемный низкоскоростной кабель работает на скоростях
до 1,5 Мбайт/с. Он не имеет витой пары и экранирующей оплетки.
В среднем длина соединительной линии составляет 2...5 м
и сильно зависит от качества кабеля. Передача данных
осуществляется дифференциальным способом по двум проводам.
Сигналы синхронизации и данные кодируются по методу NRZI- В
этой кодировке логический «0» определяется изменением
напряжения на битовом интервале, а логическая «1» - отсутствием
изменения напряжения на протяжении битового интервала. ДлЯ
Интерфейсы магистралей ПЭВМ
391
подключаемых к шине USB устройств USB-контроллеры
производят кодирование и декодирование автоматически.
При подключении USB-устройства к хосту или хабу
производится подтяжка линии связи £)+или D~ к напряжению 3,3 В
путем подключения дополнительного сопротивления 1,5 кОм,
причем способ этого подключения определяется скоростью
обмена данными.
Скорость, используемая USB-устройством, определяется
хабом по способу подключения дополнительного резистора ко
входам приемо-передатчика этого устройства. В устройствах с
низкой скоростью (LS-устройств) к высокому уровню
подтягивается вход D~ (рис. 8.16).
Высокоскоростной
или
низкоскоростной
трансивер
т
R\
ЕГ
I
Порт хоста
или хаба
R\
Линия связи
и
ГГ
т
R2
Низкоскоростной
трансивер
Т+3,3 В Порт
USB-устройства
Рис. 8.16. Подключение низкоскоростного устройства
В высокоскоростных (FS) устройствах к уровню
логической «1» подтягивается линия £>+ (рис. 8.17). Линии со стороны
хоста подтягиваются к «Земле» сопротивлениями /?г=15 кОм.
Высокоскоростной
или
низкоскоростной
трансивер
ЕГ
т
Я1
I
и
Т
Порт хоста
или хаба
/?1
I
Витая пара
D+
X
\R2
т
+3,3 В
Высокоскоростной
трансивер
П
Порт USB-устройства
Рис. 8.17. Подключение высокоскоростного устройства
392 Интерфейсы для подключения узлов медицинской техники
Кроме дифференциального приемника сигналов D+, D~,
каждое устройство имеет линейные приемники сигналов D* и ГГ, а
передатчики этих линий управляются индивидуально. Это
позволяет различать более двух состояний портов: состояния
передаваемых битов, состояние паузы на шине, сигнал вывода из
спящего режима, начало пакета, конец пакета, устройство
отключено от порта, устройство подключено к порту, сброс
устройства.
Сопротивления R2 в зависимости от типа микросхем
контроллера могут быть внешними и внутренними,
устанавливаемыми программно. Но во всех случаях, пока сопротивления не
установлены, хост или хаб не могут обнаружить внешнее
устройство. Все операции по передаче данных по шине USB
инициируются хостом. Периферийные устройства (ПУ) сами начать
обмен данными не могут. Они могут только реагировать на
команды хоста.
Передача данных осуществляется по логическим адресам
независимых конечных точек. В терминологии описания шины
USB под конечной точкой понимают часть USB-устройства,
которая имеет уникальный идентификатор и является
получателем или отравителем информации, передаваемой по шине
USB. Обычно это блок данных в памяти или регистр
микроконтроллера. Каждое логическое устройство (хаб и функция)
имеет свой адрес (от 1 до 127). Каждая конечная точка логического
устройства имеет свой идентификационный номер (от 0 до 15)
и для нее определяется направление передачи (IN - передача к
хосту, OUT - от хоста).
Спецификация шины определяет четыре различных типа
передачи данных до конечных точек:
I)управляющие передачи используются хостом для
конфигурирования устройства во время подключения, для управления
устройством и получения статусной информации в процессе
работы;
2) передачи массивов данных применяются при
необходимости обеспечения гарантированной доставки данных до хоста и
наоборот. Время доставки не ограничивается. Передаваемые
пакеты данных имеют поля данных размером 8, 16, 32 или 64 байта.
Интерфейсы магистралей ПЭВМ
393
Приоритет у таких передач самый низкий. Они могут быть
приостановлены при большой загрузке шины;
3) передачи по прерываниям используются, когда
требуется передавать одиночные пакеты данных небольшого размера.
Операции передачи носят случайный характер и должны
обсуживаться не медленнее, чем того требует устройство;
4) изохронные передачи применяются для обмена данными
в «реальном времени», когда на каждом временном интервале
передается строго определенное количество данных, но при
этом сохранность передаваемых данных не гарантируется.
Более подробно с протоколами обмена данных и
вопросами программирования процессов обмена по шине USB можно
ознакомиться в специальной литературе, например в [13]. Для
организации USB-интерфейсов промышленностью выпускается
значительное количество микросхем, которые условно
разделяют на несколько групп:
- преобразователь интерфейса (СОМ в USB, LPT в USB,
конверторы других интерфейсов);
- микроконтроллеры с USB-интерфейсом
(микроконтроллеры на основе ядра 8051, другие микроконтроллеры);
- микросхемы хабов;
- микросхемы OTG для обмена данными без
персонального компьютера.
Следует отметить, что микроконтроллеры с
USB-интерфейсом обладают мощными вычислительными ресурсами.
Например, микропроцессор C8051F320 фирмы Cegnal,
поддерживающий протокол USB 2.0, характеризуется следующими
основными техническими характеристиками:
- 16 Кбайт флэш памяти программ секторами по 512 байт,
каждый из которых может конфигурироваться как память
программ и данных;
- 25 цифровых входов выхода, конфигурируемых через
встроенную коммутационную матрицу;
- расширенный обработчик до шестнадцати источников
прерываний;
- четыре 16-битных таймера общего применения;
3 94 Интерфейсы для подключения узлов медицинской техники
- программируемую 16-битную счетную матрицу с пятью
моделями захвата-сравнения и возможностью организации
ШИМ-генератора;
- встроенный интерфейс последовательного
программирования флэш-памяти и внутрисхемный отладчик программ в
пошаговом режиме или с заданием точек останова;
- два встроенных компаратора напряжения с
программируемым гистерезисом, конфигурируемые как источник
прерывания или сброса;
- встроенный датчик температуры;
- быстродействующий АЦП с разрешением 10 бит и
производительностью 200 тысяч преобразований в секунду;
- АЦП имеет функцию программируемого «оконного»
детектора. В регистрах микроконтроллера программируется
нижнее и верхнее значение напряжения, которое необходимо
отслеживать.
Для программирования микропроцессоров разработаны
специальные отладочные средства. Компания FTDI выпускает
микросхемы типа FT232 и FT245, которые представляют собой
преобразователи USB в последовательный и параллельный
интерфейсы соответственно. Использование этих микросхем
позволяет разработчику практически не разбираться с тонкостями
управления по шине USB за счет использования специальных
драйверов, организующих в системе обычный
последовательный порт. Различные варианты подключения этой микросхемы
к периферийным устройствам можно найти на сайте компании
FTDI (документ FT232 ВМ Designers Guide). Материалы
данного учебного пособия не позволяют подробно рассмотреть
вопросы проектирования устройств медицинского назначения с
использованием шины USB и её аппаратной поддержки. Для
этого необходимо обратиться к специальной литературе
(например, [13]). Однако знакомство с приведенным материалом
позволит разработчику принять решение о предпочтительных
схемотехнических решениях при проектировании схем
сопряжения медицинского оборудования с ПЭВМ.
8.2. Интерфейсы АЦП
Современные микросхемы, ориентированные на передачу
данных в цифровые системы, часто снабжаются элементами,
обеспечивающими стандартные протоколы обмена, что
значительно упрощает как технические вопросы взаимодействия, так
и соответствующую программную часть (драйверы обмена).
Развитой системой интерфейсов обладают различные типы
АЦП, которые могут подключаться как к ПЭВМ, так и к
микропроцессорам и микроконтроллерам. Наиболее часто интерфейсы
аналогово-цифровых преобразователей строят так, что АЦП для
процессора является одной из ячеек памяти. При такой
идеологии обмена данными АЦП должен иметь необходимое число
адресных кодов и дешифратор адреса. Адресная часть АЦП
подключается к шине адреса процессора, шина данных которого
подключается к выходу данных АЦП. При этом необходимо,
чтобы на выходе данных АЦП имелись выходные каскады с
управляемым третьим состоянием.
При взаимодействии АЦП с процессорами возможны
различные режимы обмена, задаваемые программно с
использованием соответствующих схемотехнических решений: проверка
сигнала преобразования, простое прерывание, векторное
прерывание, прямой доступ к памяти.
Способ обмена, называемый «проверка сигнала
преобразования» (ПСП), реализуется следующим образом. Если
процессор загружен так, что может ожидать данные с АЦП, то можно
организовать независимый циклический запуск АЦП (например,
от таймера) сигналом «Пуск» и ожидать, когда АЦП подготовит
цифровые данные и выдаст команду «Готов». В этом варианте
программно в процессоре реализуется цикл опроса команды
«Готов». При ее появлении процессор выходит из цикла,
считывает данные с АЦП и вновь переходит в цикл ожидания или
выполняет фрагмент основной программы и переходит в цикл
ожидания. Другими словами, АЦП выступает в роли ведущего
устройства (master), а процессор - в роли ведомого (slave).
В другом варианте, когда время обработки данных
значительно превышает время преобразования АЦП, сигнал «Пуск»
3 96 Интерфейсы для подключения узлов медицинской техники
формируют программно от процессора. Здесь он выступает в
роли ведущего устройства. Далее процессор выполняет
основную программу обработки данных, а затем считывает данные с
АЦП и вновь запускает его.
В режиме простого прерывания процессор выдает команду
«Пуск» и продолжает работу по основной программе. После
окончания преобразования сигнал «Готов» АЦП преобразуется в
сигнал «Прерывание»для процессора, который прерывает
основную программу и приступает к выполнению программы
прерывания, составными частями которой является поиск прервавшего
устройства, прием данных от него и обработки этих данных.
Режим векторного прерывания отличается от простого
прерывания тем, что вместе с сигналом прерывания в процессор
посылается адрес прерывающего устройства, в данном случае
адрес АЦП.
В режиме прямого доступа к памяти (ПДП) формируется
код запроса ПДП, аналогичный коду прерывания, но, в отличие
от режимов прерывания, в режиме ПДП обмен АЦП с
процессором реализуется в укороченном цикле, минуя регистры общего
назначения.
** Промышленностью выпускаются АЦП как с
параллельным, так и с последовательным интерфейсом.
В простейшем случае интерфейсы АЦП с параллельным
выходом, кроме собственного АЦП, содержат регистр-защелку с
тремя состояниями (рис. 8.18).
£/.х
Пуск
RD
CS
—►
—►
АЦП
N,
\
С
Рг
> i
N
/ >
Готов
Данные
Рис. 8.18. Структурная схема АЦП с параллельным интерфейсом
Интерфейсы АЦП
397
I Временные диаграммы работы параллельного АЦП
приведены на рис. 8.19.
Пуск
f
Готов
К.
*пр
RD
CS
К.
Данные
3-е состояние
N
Рис. 8.19. Временные диаграммы работы АЦП с параллельным интерфейсом
В исходном состоянии при отсутствии низкого уровня
сигнала CS (выбор кристалла) выходной регистр Рг находится в
третьем состоянии, не мешая работе тех электронных узлов,
которые подключены к шине данных (см. рис. 8.18). По сигналу
«Пуск» АЦП преобразует аналоговый входной сигнал U^ в
цифровой код и по окончании преобразования вырабатывает
сигнал «Готов», после которого процессор может выставить
сигнал RD, по заднему фронту которого данные из АЦП
перепишутся в регистр, а по сигналу CS регистр из третьего
состояния переводится в состояние готовности данных, передавая их в
процессор или другой приемник информации.
В АЦП с последовательным интерфейсом на выходе ставят
устройство (например, сдвиговый регистр) для преобразования
данных внутреннего АЦП в последовательность сигналов, со-
398 Интерфейсы для подключения узлое медицинской техники
держащих данные и служебные импульсы, реализующие вы
бранные протоколы обмена (например, протокол RS-232).
В качестве примера рассмотрим структуру АЦП
последовательного приближения на основе ЦАП с последовательным
интерфейсом типа TLC 548 (рис. 8.20).
*■ D
'GND
Рис. 8.20. Структурная схема микросхемы TLC 548
Для нормальной работы АЦП на его входы подается
опорное напряжение U*n и С/~п, иногда £/~п соединяют с
отрицательным полюсом источника питания GND. Аналоговый сигнал
Um подается на устройство выборки хранения (УВХ),
управляемое встроенным устройством управления (УУ). Тактируется
микросхема от внутреннего генератора тактовых импульсов
(ГТИ) и внешнего сигнала по ТТЛ-совместимому входу CLK.
Выбор кристалла осуществляется потенциалом CS. Устройство
управления обеспечивает согласованную работу УВХ, ЦАП,
регистра выходных данных (РВД) и преобразователя кодов (ПК),
формирующего выходную последовательность данных D. При
отсутствии низкого потенциала на входе CS (кристалл не
выбран) выход D находится в высокоимпедансном состоянии и
сигнал CLK блокирован.
Временные диаграммы, поясняющие работу этой микр0"
схемы, приведены на рис. 8.21.
Интерфейсы АЦП
399
12 3 4 5 6 7 8 //
Рис. 8.21. Временные диаграммы АЦП
с последовательным интерфейсом типа TLC 548
При подаче низкого уровня сигнала CS включается цикл
преобразования и на первом же такте работы АЦП на его
выходе появляется старший (восьмой) разряд предыдущего
преобразования D7. Далее отрицательные фронты импульсов CLK
последовательно передают еще четыре разряда данных на выход
схемы, после чего УВХ начинает процесс дискретизации, а на
выход передаются оставшиеся три разряда предыдущего
преобразования. Отрицательный фронт восьмого импульса CLK
переводит УВХ из режима выборки в режим хранения, которое
продолжается в течение четырех внутренних тактовых импульсов
(от ГТИ). Полный процесс преобразования занимает 36
тактовых импульсов ГТИ, в течение которых на вход CS должен
подаваться высокий потенциал.
Рассмотрим схему подключения 24-разрядного трехканаль-
ного L-Д-АЦП типа AD7714 с микроконтроллером 80С51
семейства MCS51 с использованием двух линий интерфейса типа I С
(рис. 8.22). Выбранный тип АЦП управляется с использованием
встроенных регистров обмена, регистра режима, трех регистров
калибровки нуля шкалы, трех регистров калибровки полной
шкалы, двух регистров фильтра и регистра данных. Данные в эти
регистры записываются через последовательный интерфейс.
Этот же интерфейс используется для считывания данных.
Архитектура АЦП реализована таким образом, что любое
обращение к управляющим регистрам производится через
регистр обмена, в который записывается тип следующей операции
400
Интерфейсы для подключения узлов медицинской техники
(запись, чтение), а также адрес регистра, к которому
организуется обращение.
80С51
РЗ.О
Р3.1
U
_1_
AD7714
Data Out
Data In
CLC
CS
Рис. 8.22. Схема подключения АЦП типа AD7714
к микроконтроллеру семейства MCS51
При составлении программ обмена между
микроконтроллером и АЦП реализуется следующая последовательность операций:
1) запись в регистр обмена с заданием входного канала;
2) запись в верхний регистр фильтра (устанавливаются
4 старших бита слова фильтра, его режим и длина выходного
слова);
3) запись в нижний регистр фильтра (устанавливаются
8 младших битов слова фильтра);
4) запись в регистр режима (коэффициент усиления,
инициализация автокалибровки);
5) опрос сигнала, указывающего на наличие в регистре
данных нового результата преобразования;
6) чтение результата из регистра данных;
7) цикл для двух последних пунктов действий, пока не
будет считано заданное число отсчетов.
Таким образом, современные АЦП имеют механизмы
прямого подключения к ПЭВМ без специальных модулей
сопряжения.
8.3. Цифровые интерфейсы узлов
медицинской техники
Современная технология позволяет предлагать различным
потребителям, включая проектировщиков и производителей
медицинской техники, законченные узлы, снабженные цифровыми
интерфейсами. К таким узлам относятся аналогово-цифровые
Цифровые интерфейсы узлов медицинской техники 401
преобразователи (см. гл. 6), однокристальные системы сбора
данных, цифроаналоговые преобразователи, цифровые и
графические дисплеи, схемы управления двигателями и др. Например,
большинство современных ЦАП, кроме цепей приема и
преобразования данных, снабжаются цепями адресации, коммутации,
хранения и др. Изготавливают ЦАП, как и АЦП, с
последовательными и параллельными интерфейсами.
Вариант структуры ЦАП с последовательным
интерфейсом типа AD7233 и временные диаграммы его работы
представлены на рис. 8.23.
ит
LD .
CS
CLK -
1
"
—►
D
С
РгС
N
—v
С
РгХ
п
ЦАП
* DO
а)
CS
CLK.
D1
LD
10|ШДГи1Г11 Щ
1 | ; : ; ! ; .
-> /
-> i
->i
U~
->i
6)
Рис.8.23. Обобщенная структурная схема ЦАП с последовательным
интерфейсом и временные диаграммы его работы
При появлении активного низкого уровня сигнала CS
(выбор кристалла) входное слово D0...D11 со входа D1
загружается в регистр сдвига (РгС), в котором поразрядно сдвигается под
воздействием тактовых импульсов CLK.
402
Интерфейсы для подключения узлов медицинской техники
После того как двенадцатиразрядное слово принято в РгС
вырабатывается активный (нулевой) уровень сигнала LD, по
которому слово из РгС переписывается в регистр хранения РгХ,
выходы которого управляют ключами ЦАП (см. рис. 8.23, а).
Для обеспечения возможности наращивания длины кодовых
слов выход DO подключают ко входам последующих ЦАП, с
такими же типами интерфейсов. Вариант структуры ЦАП с
параллельным интерфейсом приведен на рис. 8.24.
Рис. 8.24. Вариант структуры ЦАП с параллельным интерфейсом
*"" Два регистра хранения (РгХ1 и РгХ2) с управляющей
логикой (УЛ) ставят для того, чтобы обеспечить разделение во
времени установку входного кода и съем выходного
аналогового сигнала. Подача на установочный вход РгХ1 низкого уровня
сигнала CLR обеспечивает обнуление ЦАП.
Intel
8086
Щ&
ALE
С
РгА
tfDCA
CS
/;,
WR
_wr_
LD
И
MAX
507
■с/.
Рис. 8.25. Вариант схемы подключения 16-разрядного микропроцессора
к 12-разрядному ЦАП
Цифровые интерфейсы узлое медицинской техники
403
Если разрядности ЦАП и цифровых устройств не
совпадают, применяют различные схемотехнические решения [3,
с. 410-414].'На рис. 8.25 приведен вариант подключения 16-
разрядного микропроцессора Intel 8086 к 12-разрядному ЦАП
МАХ507.
Микропроцессор посылает входной код в ЦАП, как в
ячейку памяти данных. Вначале с шины адреса-данных (ШАД)
поступает 16-разрядный адрес ЦАП, который фиксируется
регистром по команде с выхода ALE микропроцессора и после
дешифрации (DCA) активизирует вход CS ЦАП. Вслед за этим
микропроцессор (МП) подает на шину адреса-данных 12-разрядный
входной код данных, и затем сигнал записи на вход WR .
Вариант подключения многоразрядного ЦАП к 8-разрядному
микропроцессору Z80 показан на рис. 8.26. Этот вариант
предусматривает наличие двух параллельных загрузочных регистров для
приема младшего байта входного слова (МБ) - РГМР и
старшего байта (СБ) - РГСР.
Z80
=V DSA г •
WR
WR
щ
D0...D7 8
■г-
й**И
А|
12
ш
ЦАП
■ит
Рис 8.26. Вариант схемы подключения 8-разрядного МП Z80
к 12-разрядному ЦАП
Пересылка байтов входного слова может происходить по
программе МП в любой последовательности.
Хорошо развитыми последовательными и параллельными
интерфейсами обладают цифровые и графические светодиодные
(точечные и матричные) и жидкокристаллические (ЖК)
дисплеи. В них структура управления и используемые
управляющие сигналы сходны с управлением ЦАП.
404
Интерфейсы для подключения узлов медицинской техники
В качестве примера рассмотрим структуру
многоразрядного светодиодного дисплея типа TSM6234 со схемой его
подключения к контактам последовательного порта ПЭВМ при условии
согласования уровня сигналов (рис. 8.27).
Для того чтобы обеспечить постоянный прием данных
через элемент ИЛИ по входу данных D\ регистра сдвига (РгС),
контакт выбора кристалла CS соединен с «землей». Сдвиг
данных осуществляется сигналом CLK, подключенным к выходу
DTR интерфейса RS-232. При передаче данных установлен
формат входного слова, содержащий стартовый бит и 35 бит
данных. Временная диаграмма передачи данных сходна с
диаграммой, приведенной на рис. 8.23 (без сигнала LD ).
IRS-232
RST
DTR
D\
-СЗ.
CLK
TSM623
или
'D;
~R
РгС
Сб
ВЛУ
Зп
С
РгХ
=01вБ
01 CD
РЯ
Рис. 8.27. Структурная схема светодиодного дисплея TSM6234 и его связь
с последовательным интерфейсом типа RS-232
По передним фронтам тактовых сигналов CLK биты данных
последовательно записываются в регистр сдвига. Через 36 тактов
CLK схема внутренней логики управления (ВЛУ) формирует
сигнал записи (Зп), по которому содержимое РгС переписывается в
регистр хранения (РгХ). Во время прохождения следующего
импульса CLK ВЛУ вырабатывает сигнал сброс (Сб),
устанавливающий РгС в исходное (нулевое) состояние.
Встроенные интерфейсы имеют и однокристальные
системы сбора данных. Например, микросхема ADuC812 достаточно
легко организует связь с интерфейсами типа RS-232 и SPI.
Цифровые интерфейсы узлов медицинской техники 405
Подробнее с организацией интерфейсов связи
медицинских узлов с цифровыми устройствами можно ознакомиться в
специальной литературе (например, в [1, 3, 13]), причем
предпочтение следует отдавать техническому описанию
соответствующих микросхем.
В заключение следует отметить, что современные
медицинские приборы, аппараты, системы и комплексы широко
используют микропроцессоры, микроконтроллеры и ПЭВМ,
обменивающиеся с остальной частью медицинских изделий в
режиме программного обмена, прерывания и прямого доступа к
памяти через свою системную шину, через параллельные и
последовательные порты. Вид обмена и структура устройства
сопряжения определяются разработчиками исходя из
особенностей решаемой медицинской задачи.
Тренировочные задания
1. Нарисуйте структуру персонального компьютера с точки
зрения возможностей его сопряжения с внешними устройствами и
расскажите об особенностях ее организации и функционирования.
2. Расскажите, как организован обмен с внешними
устройствами по шине ISA. Приведите вариант обобщенной структурной
схемы устройства обмена с шиной ISA.
3. Расскажите, как организован протокол обмена по шине
типа PCI.
4. Объясните, как организован обмен через
последовательный интерфейс типа RS-232.
5. Расскажите, как организован обмен через
последовательный интерфейс типа USB и какие технические средства при этом
используются?
6. Объясните, как организованы интерфейсы АЦП.
Приведите примеры структур интерфейсов этого типа.
7. Расскажите, как организованы интерфейсы ЦАП и
интегральных дисплеев. Приведите примеры структуры интерфейсов
этого типа.
406 Интерфейсы для подключения узлов медицинской техники
Тестовые задания
1. Если при работе ПЭВМ с устройством сопряжения
последнее не успевает завершить выполнение работы, оно для шины
типа ISA выставляет сигнал (запишите сокращенное
обозначение этого сигнала).
2. При организации режима прерывания по шине FSA ПЭВМ
сообщает внешним устройствам о своей готовности выполнить
этот режим сигналом:
а) OWS;
б) IOW;
в) DACK;
г) DRQ;
Д) IRQ-
3. Сигнал IOR вырабатывается системной шиной типа ISA,
когда:
а) ПЭВМ должна принять информацию с внешних устройств;
б) ПЭВМ должна передать информацию внешним
устройствам;
в) внешнее устройство запрашивает прерывание;
*"* г) ПЭВМ сообщает внешнему устройству о предоставлении
режима прерывания.
4. Для сообщений о наличии на шине ISA кода адреса
используется сигнал
а) 10R;
б) IOW;
в) BALE;
г) IRQ;
Д) DRQ.
5. При подключении внешних устройств к шине ISA они
должны иметь выходной каскад:
а) с низким сопротивлением;
б) с повышенной нагрузочной способностью;
в) с согласованной логикой управления;
г) с возможностью перевода в высокоимпедансное состояние;
д) с согласованным быстродействием.
6. Шину типа PCI применяют:
а) как усовершенствованную шину ISA;
Тестовые задания
407
б) вместо шины ISA;
в) для обмена со стандартным периферийным
оборудованием по последовательному каналу;
г) как шину расширения возможностей ISA с сохранением ее
скоростных свойств; fc
д) как процессорно независимую скоростную шину обмена с
внешними устройствами.
7. При обмене данными через порт типа RS-232C готовность
ПЭВМ к обмену сопровождается сигналом:
a) TXD;
6)RXD;
в) RTS;
г) CTS;
д) DSR.
8. При работе с интерфейсом типа RS-232C передатчик
реализует следующие уровни напряжения:
Низкий уровень Высокий уровень
а) 0...+2,5В; а) +4...5 В;
б)-5...-10 В; 6)0...+5 В;
в)-5...-15 В; в)+5...+15 В;
г) -5... 0 В; г) 0...+2,5 В.
Укажите верную пару «низкий уровень - высокий уровень».
9. В терминологии протоколов обмена по шине USB главное
управляющее устройство называют:
а) хостом;
б) хабом;
в) корневым хабом;
г) контроллером;
д) микроконтроллером.
10. При взаимодействии процессора с интерфейсом АЦП
реализуются следующие режимы обмена, задаваемые
программно: проверка сигнала преобразования; простое прерывание;
прямой доступ к памяти и (допишите
название недостающего режима).
11. Простейшая структура АЦП с параллельным
интерфейсом содержит собственно АЦП и (допишите
название недостающего узла).
9. КОМПЬЮТЕРНЫЕ ТЕХНОЛОГИИ РАСЧЕТА
И ПРОЕКТИРОВАНИЯ УЗЛОВ
МЕДИЦИНСКОЙ ТЕХНИКИ
Основу компьютерного расчета и проектирования узлов и
элементов медицинской техники составляют системы
автоматизированного проектирования (САПР) электронных систем,
позволяющие синтезировать и рассчитывать электрические схемы
принципиальные аналоговых и цифровых элементов, узлов и
систем, проектировать соответствующие печатные платы и
другие конструктивные элементы медицинских приборов, систем и
комплексов.
Подробно принципы построения и использования САПР в
медицинском приборостроении изучаются в курсе
«Конструирование и технология производства приборов и аппаратов».
Здесь же остановимся на некоторых особенностях
использования САПР для проектирования узлов медицинской техники и
тенденциях развития этой области медицинских технологий.
9.1. Особенности технологического процесса
проектирования средств медицинской техники
с использованием САПР
Общим вопросам автоматизированного проектирования
биомедицинских электронных схем посвящена работа [16].
Основываясь на материалах этой статьи, рассмотрим особенности
проектирования и разработки медицинских электронных
систем с общих позиций развития автоматизированного
проектирования.
Процесс проектирования принято подразделять на
несколько последовательных стадий:
1) формулировка концепции системы, технических
спецификаций;
2) выбор архитектуры, разделение на подсистемы, выбор
базовых технологий;
3) проектирование аппаратных и программных
электронных систем, схем коммутации;
Особенности процесса проектирования средств медицинской техники 409
4) проектирование неэлектронных подсистем, в том числе
механических подсистем, корпусов;
5) интеграция, сборка, верификация;
6) создание прототипа производства.
Исходя из концепции системы и соответствующих
спецификаций системный проектировщик принимает решение о том,
какие функции системы будут реализованы в аппаратных
электронных подсистемах, а какие - в программных подсистемах, в
том числе во встроенных программах. Среда проектирования
должна обеспечивать автоматизированную симуляцию
аналоговых, цифровых, радиочастотных трактов, их электромагнитной
совместимости на всех этапах проектирования. Кроме того, эта
среда должна обеспечивать возможностями разработки
интерфейсов как на аппаратном, так и на информационном уровне.
Дополнительно среда проектирования должна позволять
разрабатывать неэлектронные подсистемы, в том числе
механические, в соответствии с принятыми техническими стандартами.
Основными позициями в разработке типичных
электронных систем являются: проектирование печатных плат на основе
коммерчески доступной элементной базы; использование
электрически программируемых логических интегральных схем
(field programmable gate array - FPGA) и микроконтроллеров;
проектирование заказных (специализированных) интегральных
схем (application specific integrated circuit - ASIC);
проектирование интегрированных микросхем (mechano-electrical
microsystem - MEMS); проектирование систем на чипе (system-on-a-
chip - SoC).
На каждой позиции ключевым этапом проектирования
является моделирование и симуляция отдельных частей, блоков,
подсистем и системы в целом на системном уровне. Результатом
такого моделирования являются спецификации для
проектирования на более низких уровнях абстракции описания
разрабатываемой системы. Таким образом, современные средства
автоматизированного проектирования позволяют реализовать процесс
проектирования сверху вниз, что особенно важно при
проектировании биомедицинских электронных систем.
410 Компьютерные технологии расчета и проектирования узлов
9.2. Основные объекты медицинских изделий,
проектируемых с помощью САПР
С учетом специфики медицинских изделий одним из
первых объектов проектирования может стать биомедицинский
датчик, являющийся интерфейсом между биологической и
электронной системами.
Технология изготовления биомедицинских датчиков,
биосенсоров, биоэлектродов в значительной мере базируется на
технологиях микроэлектроники, поэтому для проектирования
биомедицинских датчиков нужны такие же средства, как и для
проектирования биомедицинских микросистем.
Традиционной сферой, использующей
специализированные интегральные схемы (ИС), являются имплантируемые
электростимуляторы: слуховые аппараты,
электрокардиостимуляторы, дефибрилляторы-кардиовертеры, осуществляющие
диагностику сердечной мышцы, обработку и интерпретацию
электрофизиологических данных и организующие при необходимости
достаточно мощные электрические разряды и др.
Проектирование таких систем опирается на использование современной базы
микроэлектроники, например, биполярных транзисторов с
изолированным затвором, сигма-дельта-аналогово-цифровых
преобразователей, цифровых сигнальных процессоров на одном
кристалле при ультрамалом энергетическом потреблении и др.
Для проектирования специализированных ИС разработаны
САПР с использованием языков высокого уровня (Hardware
description language - HDLs) и создаваемых системных языков,
объединяющих проектирование аппаратных и программных
средств (System level decign language - SLDL).
В соответствии с общими тенденциями развития
интеграции изделий микроэлектроники развивается и биомедицинская
электроника: механоэлектрические микросистемы,
интегрированные микросистемы (Mechanoelectrical micrisystems - MEMS),
биомедицинские микросистемы (System-on-a-chip - SoC);
биомедицинские лаборатории на чипе (Lab-on-a-chip). При этом по-
Основные объекты медицинских изделий, проектируемых с помощью САПР 411
нятие микросистемы определяется через две основные идеи:
технологию создания микроструктур и системный подход к их
проектированию. В настоящее время среди микросистем
массово выпускаются датчики физиологического давления,
представляющие собой сложную биомедицинскую микросистему,
состоящую из самих датчиков, с различными типами компенсаций
и калибровок, микроконтроллера и канала коммуникаций.
Продолжает наращиваться выпуск таких микросистем, как:
микрочипы-таблетки, предназначенные для доставки лекарств в
локализованные области человека, причем микрочип может
содержать электронную подсистему, управляющую механической
подсистемой, с резервуарами фармацевтических препаратов;
электрохимические микросистемы; миниатюрные системы
комплексного анализа (miniaturized total analysis system - mTAS),
которые могут оперировать с микропотоками жидкостей и газа.
Дальнейшим развитием идеологии биомедицинских
микросистем являются биомедицинские лаборатории на чипе (Lab-
on-a-chip). Это направление бурно развивается на основе
прогресса в генетических микротехнологиях.
В качестве инструментария для проектирования
микросистем используют так называемые САПР микросистем.
Отличительной особенностью таких САПР является то, что при
проектировании биомедицинских микросистем необходимо
моделировать большое число разнообразных физических явлений, в
том числе из взаимосвязанных величин:
- электроника, электромеханика, электроакустика,
электрооптика, магнитооптика, магнитоэлектроника, оптоакусто-
электроника, электрогидродинамика, биоэлектроника,
биосенсорика, биофотоника и др.;
- материаловедение разнородных, в том числе пористых,
Материалов на микро- и наноуровне.
В САПР микросистемы выделяют три взаимосвязанных
Уровня моделирования и проектирования:
1) системный уровень (системы связанных обыкновенных
Дифференциальных урвнений);
2) уровень энергетических макромоделей;
412
Компьютерные технологии расчета и проектирования узлов
3) физический уровень (30-системы связанных
дифференциальных уравнений частных производных).
В качестве примера рассмотрим структуру пакетов
программного обеспечения фирмы Coventor Inc - одного из
мировых лидеров в разработке САПР для микросистем (табл. 9.1).
Таблица 9.1
Пакеты порограммного обеспечения САПР микросистем
Название пакета
1. Дизайнер
2. Анализатор с
III версией
3. Flume CAD
Solvers
4. Архитектор
Описание пакета
20-конструирование топологии; автоматическое
построение ЗО-твердотельных моделей; база данных
свойств материалов; эмуляция моделей; интерфейс
GDS2, DXD, CIF, SAT, интерфейс к пакетам 2,3,4
Моделирование связанной электромеханики,
термомеханики структур, демпфирования, джоулева
нагрева, распространения оптических лучей; экстракция
параметров
Моделирование формирования капелек, пузырьков,
их транспорта; моделирование связанных физических
полей: температурных, гидродинамических,
диффузионных, концентрационных с учетом химических
реакций; моделирование электрофоретических,
электроосмотических и электрокинетических явлений
Системное моделирование, библиотека моделей
связанных оптических, механических, жидкостных
систем; генератор топологии для пакета 2
Технологические процессы изготовления биомедицинских
микросистем существенно разнообразней по сравнению со
стандартным набором технологических процессов изготовления
обычных ИС. Поэтому наиболее эффективно параллельно с
проектированием непосредственно микросистемы
проектировать процесс ее производства, используя технологические
САПР.
В настоящее время значительное внимание уделяется
научно-исследовательским работам в области геночипов
(биочипов, ДНК-микроматриц), для проектирования которых
требуется создание специализированных САПР.
9.3. Автоматизация проектирования печатных плат
и биомедицинских лабораторий на их основе
Проектирование биомедицинских электронных систем на
основе печатных плат является наиболее распространенным
видом деятельности для множества коллективов разработчиков
медицинской техники во всем мире. Подавляющее большинство
портативных приборов и аппаратов спроектированы и
производятся по этой технологии, например электрокардиографы,
спирометры, холтеровские мониторы, мониторы давления и т.д. В
настоящее время такого рода приборы основываются на
одноплатных компьютерах со встроенным программным
обеспечением.
В процессе проектирования биомедицинской электронной
системы (подсистемы) на базе печатной платы выделяют два
основных вида работ:
1) проектирование непосредственно самой печатной
платы, как аппаратной части;
2) разработка встраиваемого программного обеспечения.
Существует достаточно большое количество качественных
программных пакетов для проектирования электронных систем
на печатных платах по доступным ценам. Идеология и
технология печатных плат позволяют создавать разнообразные
миниатюрные системы для контроля и управления потоками жидкости
и газа, измерители физиологического давления,
биомедицинские электрохимические системы, биохимические анализаторы
и т.д. Автоматизация биохимических манипуляций со слайдами
стала ключевой идеей для технической реализации проекта
генома человека.
Использование программно-управляемых компонентов в
проектировании биомедицинских электронных систем на
печатных платах непрерывно увеличивается, причем разработка
специального встраиваемого программного обеспечения является
одним из ключевых видов работ. Она осуществляется
посредством использования интерфейса прикладного программирования
(ИПП). Последний позволяет разработать программу, которая
414
Компьютерные технологии расчета и проектирования узлов
будет функционировать под управлением выбранной
операционной системы (ОС). Выбор ИПП и ОС принято называть
платформой разработки (ПР). Оптимальный выбор ПР,
инвестиции для приобретения качественных программных и
аппаратных средств для данного вида автоматизированного
проектирования является одним из стратегических решений,
определяющих успех разработки системы в целом.
В заключение следует отметить, что в отраслях
промышленности с сильной конкуренцией качественное обновление
продукции происходит в среднем за два года. К этому же
параметру приближаются и медицинские технологии. Поэтому
возникают жесткие требования к качеству и срокам разработок
биомедицинских электронных систем. Для принятия решения о
начале разработки новой биомедицинской электронной системы
можно воспользоваться существующими методами управления
проектами.
В зависимости от своих ресурсов компании по-разному
могут относиться к приобретению необходимых САПР для
проектирования. Безусловно, стоимость такого рода программных
продуктов достаточно высока, особенно для отечественных раз-
*- работников. Однако, как показывает мировой опыт развития,
постановка на производство новых изделий в современных
условиях немыслима без глобальных инвестиций в существующие
средства автоматизированного проектирования.
ЗАКЛЮЧЕНИЕ
В пособии изложены вопросы выбора электронных
элементов и узлов, используемых при проектировании изделий
медицинского назначения. Анализ тенденций, происходящих в
современном медицинском приборостроении, позволяет сделать
выводы о том, что происходит стремительный переход от
дискретных электронных компонентов к интегральным схемам,
являющихся многофункциональными блоками, позволяющими в
одном корпусе сосредоточить электронные схемы, решающие
задачи сбора, обработки, а иногда и интеграции многоканальной
медицинской информации. Значительно возрастает роль
микропроцессоров, микроконтроллеров с соответствующими
средствами сопряжения со средствами медицинской техники.
Сам процесс проектирования различных элементов и узлов
медицинской техники, как и всего медицинского изделия,
осуществляют при активном использовании систем
автоматизированного проектирования.
В пособии рассматриваются «чисто» цифровые элементы и
узлы, поскольку они, в соответствии с образовательным
стандартом, читаются в специальном курсе «Электроника и
микропроцессорная техника». И кроме того, этот тип элементной базы
широко освящен в многочисленной литературе. Это же касается
и интегральных датчиков, которые изучаются в курсе
«Измерительные преобразователи и электроды».
В рамках учебного пособия невозможно рассмотреть весь
арсенал электронных средств, привлекаемых к проектированию
и использованию в изделиях медицинского назначения, однако
авторы надеются, что предоставленные материалы будут
полезны как студентам, так и специалистам, использующим и
проектирующим медицинскую электронную технику.
ИТОГОВЫЙ ТЕСТ
1. При включении живой биоткани в электрическую цепь в
установившемся режиме ток определяется выражением
/ = (к-Фп(0)/[].
2. Для типовой двухтранзисторной схемы входного каскада
усилителя биопотенциалов коэффициент ослабления синфазного
сигнала определяется выражением
^осс ~[ Уге-
3. Основными источниками шумов операционного усилителя
являются: тепловой шум, фликкерный шум и
(дополните предложение).
4. Выходное сопротивление инвертирующего усилителя
определяется формулой
Кы*=гвых/(К[] + 1).
5. Для типового дифференциального усилителя на одном
операционном усилителе при выполнении соотношений
R2/R3 = /?, / R0 выходное напряжение вычисляется по формуле
6. Для типового дифференциального усилителя на одном
операционном усилителе дифференциальное входное
сопротивление определяется выражением
7. Суммарная емкость биоусилителя с емкостной обратной
связью, подключенного к микроэлектроду, будет равна нулю
(условие компенсации большой емкости микроэлектрода) при
выполнении условия
См=(Ку-[])С0.
8. В изолирующих усилителях используются
трансформаторная, оптронная и развязки (определите
недостающий тип развязок).
Итоговый тест
417
9. Значение выходного напряжения на выходе аналогового
сумматора на операционном усилителе с учетом его
коэффициента усиления определяется по формуле
" тг
тт (=1 ^вх /
1 + -1-
i+Ul
/=1 ^ВХ I J
10. С учетом большого коэффициента усиления
операционного усилителя выходное напряжение на выходе простейшего
интегратора определяется выражением
w rcj
ивьа=-^КЛ0Л.
11. Частота среза фильтра — это частота, при которой
напряжение на его выходе падает до уровня от
напряжения в полосе пропускания (вставьте нужное число).
12. В настраиваемых биквадратных фильтрах добротность:
а) падает с ростом частоты; '
б) не зависит от частоты;
в) растет с ростом чистоты;
г) растет до средней частоты, а затем падает;
д) до средней частоты падает, а затем растет.
13. Петля гистерезиса в схемах компараторов реализуется за
счет введения:
а) запоминающей емкости во входной цепи;
б) запоминающей емкости в цепи обратной связи;
в) отрицательной обратной связи;
г) положительной обратной связи;
д) ограничивающего стабилитрона в цепи обратной связи.
14. В экспоненциальных преобразователях, строящихся на
операционных усилителях, для получения требуемой
функциональной зависимости используют:
а) диоды, включаемые в цепь отрицательной обратной связи;
б) биполярные транзисторы, подключаемые ко входу
усилителя по схеме с заземленной базой;
418
Итоговый тест
в) биполярные транзисторы, включаемые в цепь обратной
связи с заземленной базой;
г) биполярные транзисторы, включаемые в цепь обратной
связи по схеме диодного включения;
д) переходные процессы на емкости, включенной на входе
усилителя.
15. Структурная схема устройства выборки-хранения типа
1100СК2 содержит: три операционных усилителя, ключ, два
резистора, конденсатор, подключаемый между шестым выводом
микросхемы и «землей», и два (допишите
название недостающих элементов).
16. Использование инерционно-нелинейных цепей
отрицательной обратной связи в схемах генераторов гармонических
колебаний позволяет:
а) обеспечить условие возбуждения схемы;
б) удерживать операционный усилитель в активной области;
в) стабилизировать амплитуду колебаний;
г) стабилизировать частоту колебаний;
д) исключить выход операционного усилителя в режим
насыщения.
17. В схеме мультивибратора на операционном усилителе
положительная обратная связь.
а) обеспечивает стабилизацию частоты автоколебаний;
б) обеспечивает лавинообразный переход из одного
состояния в другое;
в) ограничивает амплитуду автоколебаний;
г) стабилизирует амплитуду автоколебаний;
д) удерживает операционный усилитель на активном участке
его характеристики.
18. В многотактных таймерах для получения больших
длительностей импульсов используют:
а) высокостабильные конденсаторы большой емкости;
б) элементы аналоговой памяти;
в) триггер;
г) счетчик;
д) интегратор.
Итоговый тест
419
19. Структурная схема генератора треугольных импульсов
содержит генератор прямоугольных импульсов, две цепи
обратной связи и _; (допишите название
недостающего блока).
20. Операция изменения параметров более высокочастотных
сигналов более низкочастотными управляющими сигналами
называется (допишите название операции).
21. При односторонней широтно-импульсной модуляции в
качестве генератора используют:
а) генератор прямоугольных импульсов;
б) генератор синусоидальных сигналов;
в) генератор треугольных импульсов;
г) генератор пилообразных импульсов;
д) генератор постоянного тока.
22. Основными элементами источника вторичного
электропитания с преобразователем частоты являются два выпрямителя,
два сглаживающих фильтра, инвертор и
(допишите название недостающего узла).
23. Для схемы двухполупериодного выпрямителя со средней
точкой укажите соответствие между параметрами и их
расчетными формулами:
Параметры Формулы расчета
1) С/ср; а) 0,45 С/„;
2) /ср; б) я£/ср;
3) е; в) 2л/2 -/ср;
4) С/обРтах; г)(п/2)/ср;
5)/дтах; д)0,67;
е) 2я£/ср;
ж) 0,9С/ВХ;
з) 1,57;
и) Ucp/RH.
24. Амплитуда пульсаций после сглаживающего емкостного
фильтра уменьшается при:
а) увеличении сопротивления нагрузки;
б) увеличении С/вх;
в) уменьшении емкости фильтра;
г) увеличении емкости фильтра;
420
Итоговый тест
д) замене двухполупериодного выпрямителя однополупериод-
ным.
25. В схеме включения стабилизатора типа 142ЕН8,
обеспечивающей повышенный выходной ток и защиту от короткого
замыкания, используют два сопротивления, два конденсатора и два
(допишите название недостающего элемента).
26. Функциональная схема повышающего импульсного
синхронного стабилизатора напряжения содержит: два транзистора,
дроссель, устройство управления, конденсатор и
(допишите название недостающего элемента).
27. Функциональная схема простейшего однотактного
инвертора содержит: генератор тактовых импульсов, транзистор, три
диода, дроссель, конденсатор и (допишите
название недостающего узла).
28. Для решения задач развязки входной линии от выходной
в классе аналоговых коммутаторов используются:
а) трансформаторы;
б) конденсаторы;
в) индуктивная связь;
». г) оптореле;
д) тиристоры.
29. Практически постоянное сопротивление открытого
ключа, вне зависимости от направления и значения проходящего тока,
в аналоговых коммутаторах получают путем использования:
а) генератора постоянного тока;
б) автоматического смещения;
в) комплементарной пары транзисторов;
г) автоматического регулятора усиления;
д) нелинейной цепи обратной связи.
30. При увеличении температуры ток утечки аналогового
коммутатора:
а) увеличивается;
б) практически не зависит от температуры;
в) изменяет свое направление;
г) приводит к приоткрыванию транзисторного перехода;
д) уменьшается.
31. В схеме ЦАП лестничного типа номиналы резисторов:
Итоговый тест
421
а) относятся как 4:1;
б) определяются разрядом преобразуемого кода;
в) относятся как 2:1;
г) возрастают по мере роста веса разрядов;
д) относятся как 1:1. *
32. В последовательном ЦАП с двумя УВХ выходное
напряжение определяется по формуле:
a)U(K) = KU0/2";
6)U(K) = U0/(K2");
в)ЩК) = 2К/(\-2");
r)U(K) = K2"+n;
n)U(K) = n + U0/2.
33. Погрешность линейности ЦАП определяется как:
а) отношение выходного реального напряжения к выходному
идеальному напряжению;
б) отношение выходного идеального напряжения к
выходному реальному напряжению;
в) наибольшее отклонение кривой Ц9^ от прямой,
соединяющей две соседние точки этой кривой;
г) наибольшая разность между реальной и идеальной
кривыми преобразования;
д) наибольшее отклонение кривой LP^ от прямой,
соединяющей две крайние точки этой кривой.
34. Ошибка (шум) квантования АЦП определяется:
а) шумом внутренних элементов АЦП;
б) величиной шага квантования;
в) погрешностью работы внутреннего генератора тактовых
импульсов;
г) динамическим диапазоном;
д) погрешностью работы встроенного ЦАП.
35. В структуру АЦП поразрядного уравновешивания входят
следующие основные узлы: генератор тактовых импульсов, ЦАП,
устройство управления, компаратор и:
а) регистр результатов;
б)реверсивный счетчик;
в) делитель напряжения;
422
Итоговый тест
г) вычитатель кодов;
д) устройство выборки хранения.
36. Преобразователь двойного интегрирования в своем
составе содержит: ключ, нуль-орган, устройство управления,
генератор тактовых импульсов и:
а) два последовательно включенных интегратора;
б) последовательно включенные дифференциатор и
интегратор;
в) сумматор и интегратор;
г) интегратор, работающий на компаратор;
д) интегратор, работающий на УВХ.
37. Для сообщения внешним устройствам о том, что ПЭВМ
выставила на своих портах адрес, используется сигнал
(допишите сокращенное английское имя сигнала).
38. При организации режимов прерывания по шине типа ISA
используется два типа сигналов-IRQ и (допишите
имя второго сигнала).
39. Сигнал IOW вырабатывается системой шиной типа ISA,
когда:
а) ПЭВМ должна принять информацию с внешних
устройств;
б) ПЭВМ должна передать информацию внешним
устройствам;
в) внешнее устройство запрашивает прерывание;
г) внешнее устройство просит приостановить обмен;
д) ПЭВМ сообщает внешнему устройству о предоставлении
режима прерывания.
40. При обмене данными через стандартный параллельный
порт внешнее устройство сообщает ПЭВМ о готовности принять
данные сигналом:
а) ASK;
б) SLCT;
в) STROBE;
г) INIT;
д) SLCTIN.
Итоговый тест
423
41. При обмене данными через стандартный
последовательный интерфейс готовность внешних устройств к обмену
сопровождается сигналом:
а) TXD;
б) RXD;
в) RTS;
г) CTS;
д) DSR.
42. При работе с интерфейсом типа RS-232C для приемника
приняты следующие уровни напряжений:
Низкий уровень Высокий уровень
а) 0...+2.5 В; а) +4...+5 В;
б)-5...-15В; б)+5... 15 В;
в)-3...-25В; в)+3...+25В;
г) 0...+2,5 В; г) +3...+25 В;
д)0...+2,5В; д)+10...+15В.
Укажите верную пару «низкий уровень - высокий уровень».
43. При работе с шиной USB скорость обмена определяется:
а) передачей специального управляющего кода;
б) набором соответствующего кода микропереключателями;
в) подключением к порту хоста или хаба дополнительных
сопротивлений;
г) подключением к обеим линиям данных порта USB-устрой-
ства дополнительных сопротивлений;
д) подключением сопротивления только к одному из входов
USB-устройства дополнительного сопротивления.
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Аи, П. Сопряжение ПК с внешними устройствами [Текст] /
Пей Аи; пер. с англ. П.В. Меращука. 2-е изд., стер. М.: ДМК пресс;
СПб.: Питер, 2004. 320 с.
2. Аксенов, Е.В. Системы сбора и обработки электрофизио:
логической информации на основе сигма-дельта-аналогово-
цифрового преобразования [Текст] / Е.В. Аксенов, СВ. Селищев //
Биомедицинские технологии и радиоэлектроника. 2001. №12.
С. 47-55.
3. Волович, Г.И. Схемотехника аналоговых и аналого-
цифровых электронных устройств [Текст] / Г.И. Волович. М.: До-
дэка-ХХ1, 2005. 528 с.
4. Гусев, В.Г. Получение информации о параметрах и
характеристиках организма и физические методы воздействия на него
[Текст]: учеб. пособие / В.Г. Гусев. М.: Машиностроение, 2004.
597 с.
5. Гутников, B.C. Интегральная электроника в
измерительных устройствах [Текст] / B.C. Гутников. П.: Энергоатомиздат,
1986. 304 с.
""" 6. Кореневский, Н.А. Проектирование электронной
медицинской аппаратуры для диагностики и лечебных воздействий
[Текст]: монография / Н.А. Кореневский, Е.П. Попечителев,
С.А. Филист; Курск, гос. тех. ун-т. Курск, 1999. 537 с.
7. Кореневский, Н.А. Приборы и технические средства
функциональной диагностики [Текст]: учеб. пособие: в 2 ч. Ч. 1 /
Н.А. Кореневский, Е.П. Попечителев, С.А. Филист; Курск, гос.
техн. ун-т. Курск, 2004. 230 с.
8. Кореневский, Н.А. Приборы и технические средства
функциональной диагностики [Текст]: учеб. пособие: в 2 ч. 4.2 /
Н.А. Кореневский, Е.П. Попечителев, С.А.Филист; Курск, гос.
техн. ун-т. Курск, 2004. 252 с.
9. Кореневский, Н.А. Приборы и технические средства для
терапии [Текст]: учеб. пособие: в 2 ч. Ч. 1/ Н.А. Кореневский,
Е.П. Попечителев, С.А. Филист; Курск, гос. техн. ун-т. Курск,
2005. 120 с.
Библиографический список
425
10. Кореневский, Н.А. Приборы и технические средства для
терапии [Текст]: учеб. пособие: в 2 ч. Ч. 2 / Н.А. Кореневский,
Е.П. Попечителев, С.А. Филист; Курск, гос. техн. ун-т. Курск,
2005. 240 с.
11. Медицинские приборы. Разработка и применение [Текст]
/ под ред. И.А. Камышко и Y.G. Webster. M.: Медицинская книга,
2004. 720 с.
12. Микросхемы для линейных источников питания и их
применение [Текст]. М.: Доджа, 1996. 288 с.
13 Огуров, П. Интерфейс USB. Практика использования и
программирования [Текст] / П. Огуров. СПб.: БХВ - Петербург,
2004. 576 с.
14. Попечителев, Е.П. Электрофизиологическая и
фотометрическая медицинская техника [Текст] / Е.П. Попечителев,
Н.А. Кореневский М.: Высш. шк., 2002. 470 с.
15. Попечителев, Е.П. Электрофизиологическая и
фотометрическая медицинская техника. Теория и проектирование [Текст]:
учеб. пособие: в 3 ч. Ч. 3 / Е.П. Попечителев, Н.А. Кореневский;
Курск, гос. техн. ун-т. Курск, 2000. 206 с.
16. Селищев, СВ. Автоматизированное проектирование
биомедицинских электронных систем [Текст] / СВ. Селищев //
Биомедицинские технологии и радиоэлектроника. 2001. №12. С 5-17.
17. Титце, У. Полупроводниковая схемотехника [Текст]:
справ, руководство / У. Титце, К. Шенк. М.: Мир, 1982. 512 с.
18. Хоровиц, Ц. Искусство схемотехники [Текст]: в 3 т. Т.1 /
Ц. Хоровиц, У. Хилл. М.: Мир, 1993. 413 с.
Учебное издание
Кореневский Николай Алексеевич
Попечителев Евгений Порфирович
УЗЛЫ И ЭЛЕМЕНТЫ МЕДИЦИНСКОЙ ТЕХНИКИ
Учебное пособие
Редактор Н.В. Комардина
Компьютерная верстка О.А. Леоновой
Макет подготовлен Н.В. Комардиной
Позиция плана №27.2009
Подписано в печать 10.08.09. Формат 60x84 1/16. Бумага офсетная.
Усл. печ. л. 24,8. Уч.- изд. л. 23,9. Тираж 250 экз. Заказ**
Курский государственный технический университет.
Издательско-полиграфическии центр Курского государственного
технического университета. 305040, г. Курск, ул. 50 лет Октября. 94.
i
ISBN 978-5-7681-0471-9
911785768111047 19