/



































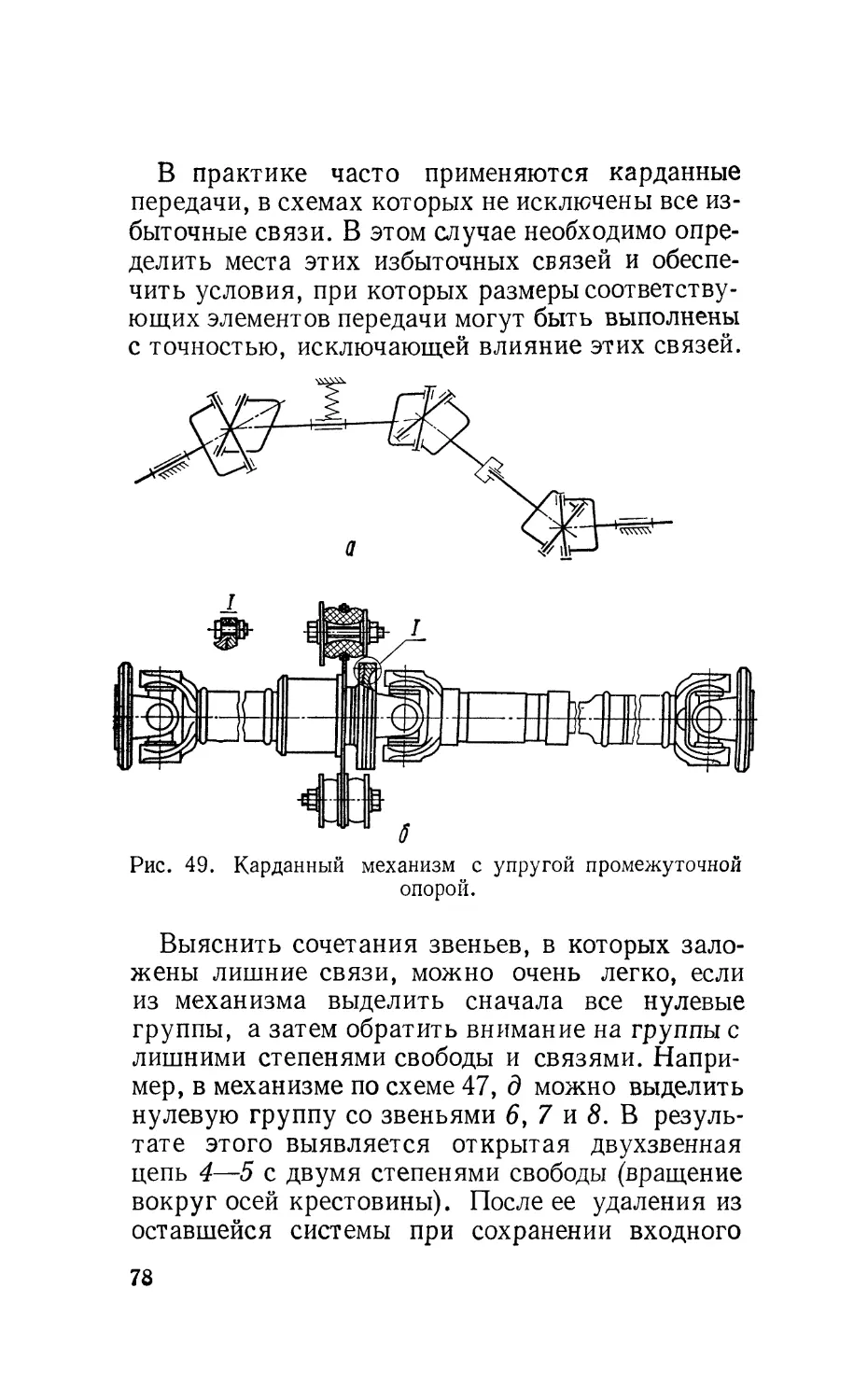







































































































Автор: Кожевников С.Н. Перфильев П.Д.
Теги: общее машиностроение технология машиностроения машиностроение детали автомобиля автомобили
Год: 1978


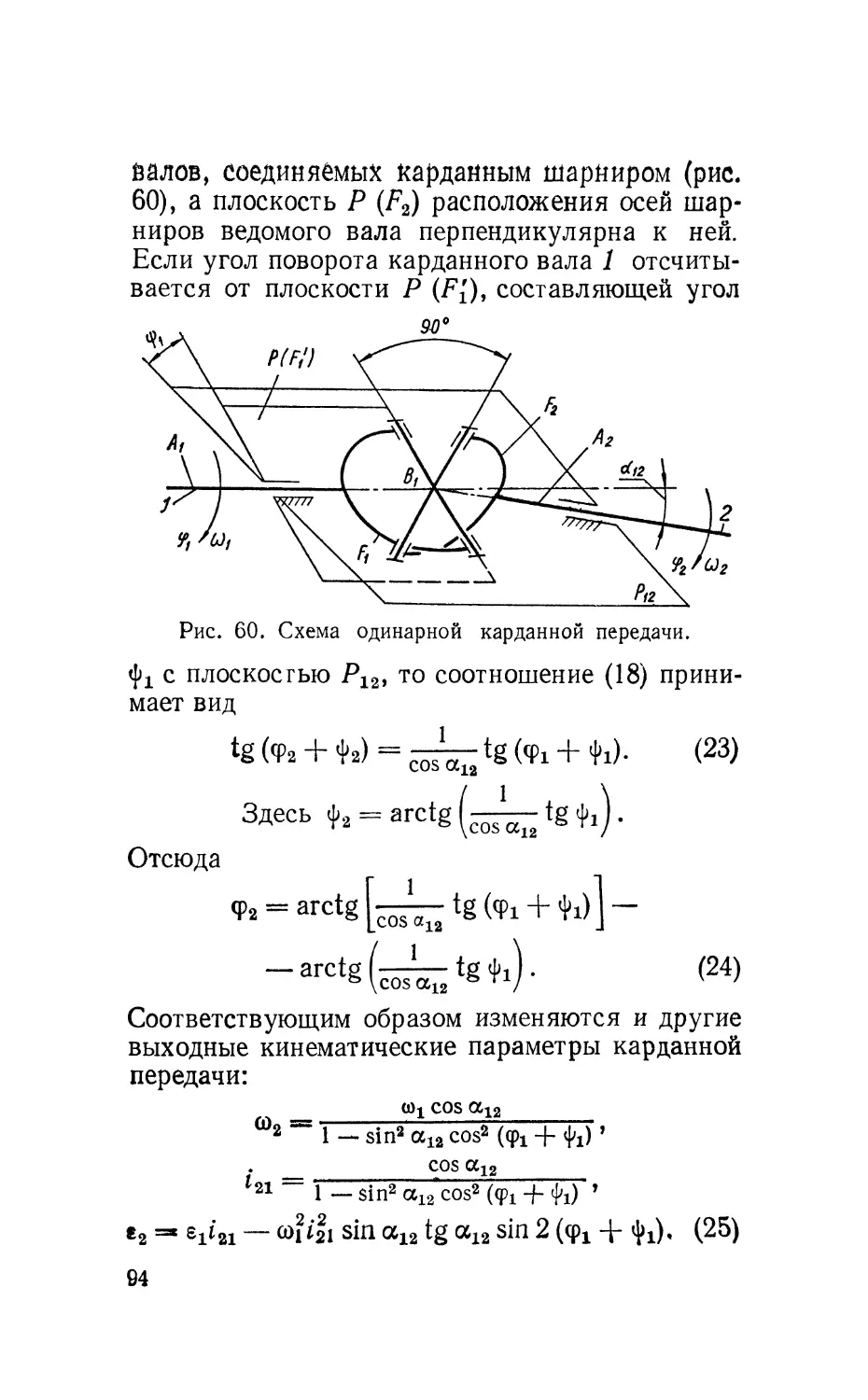
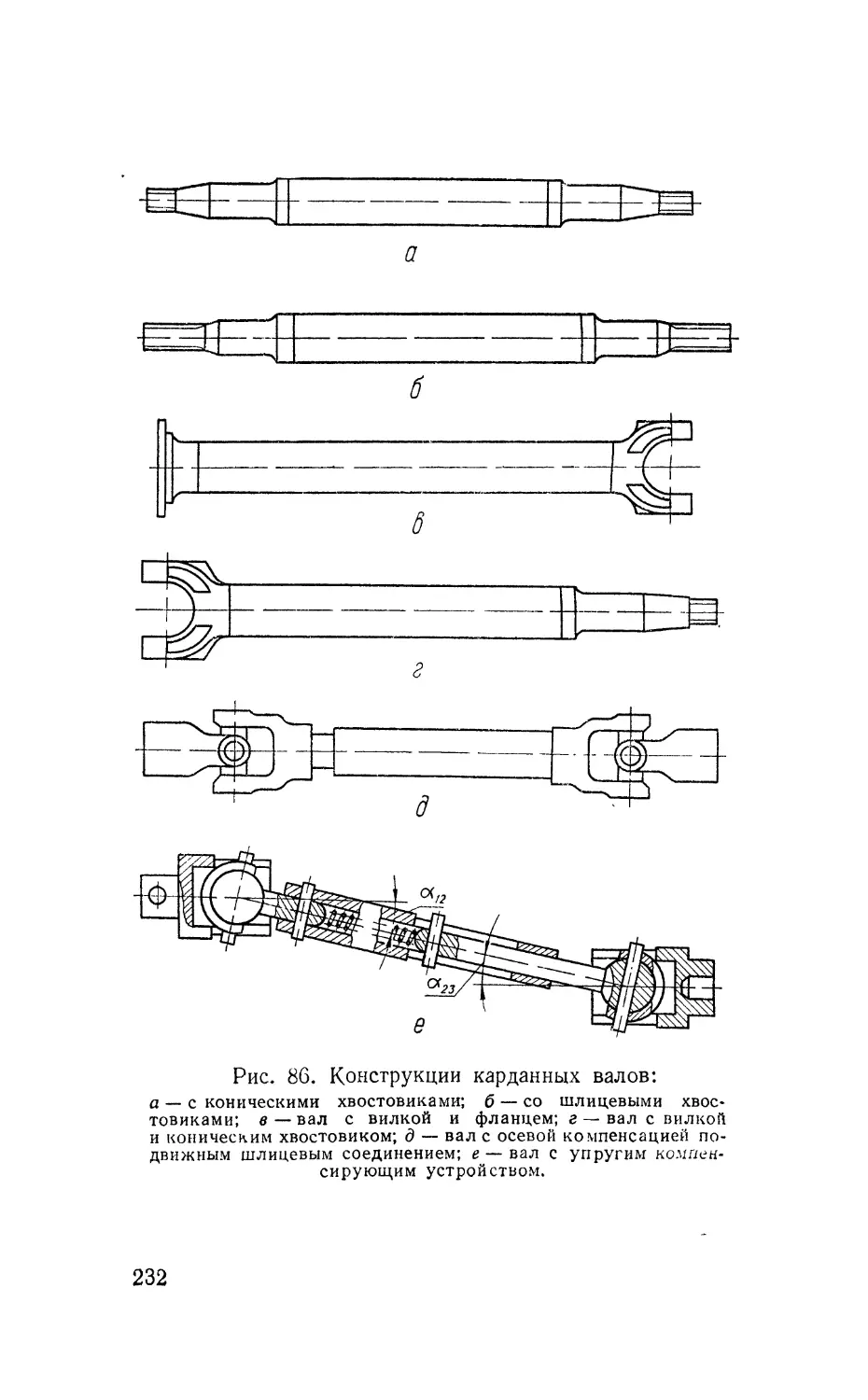
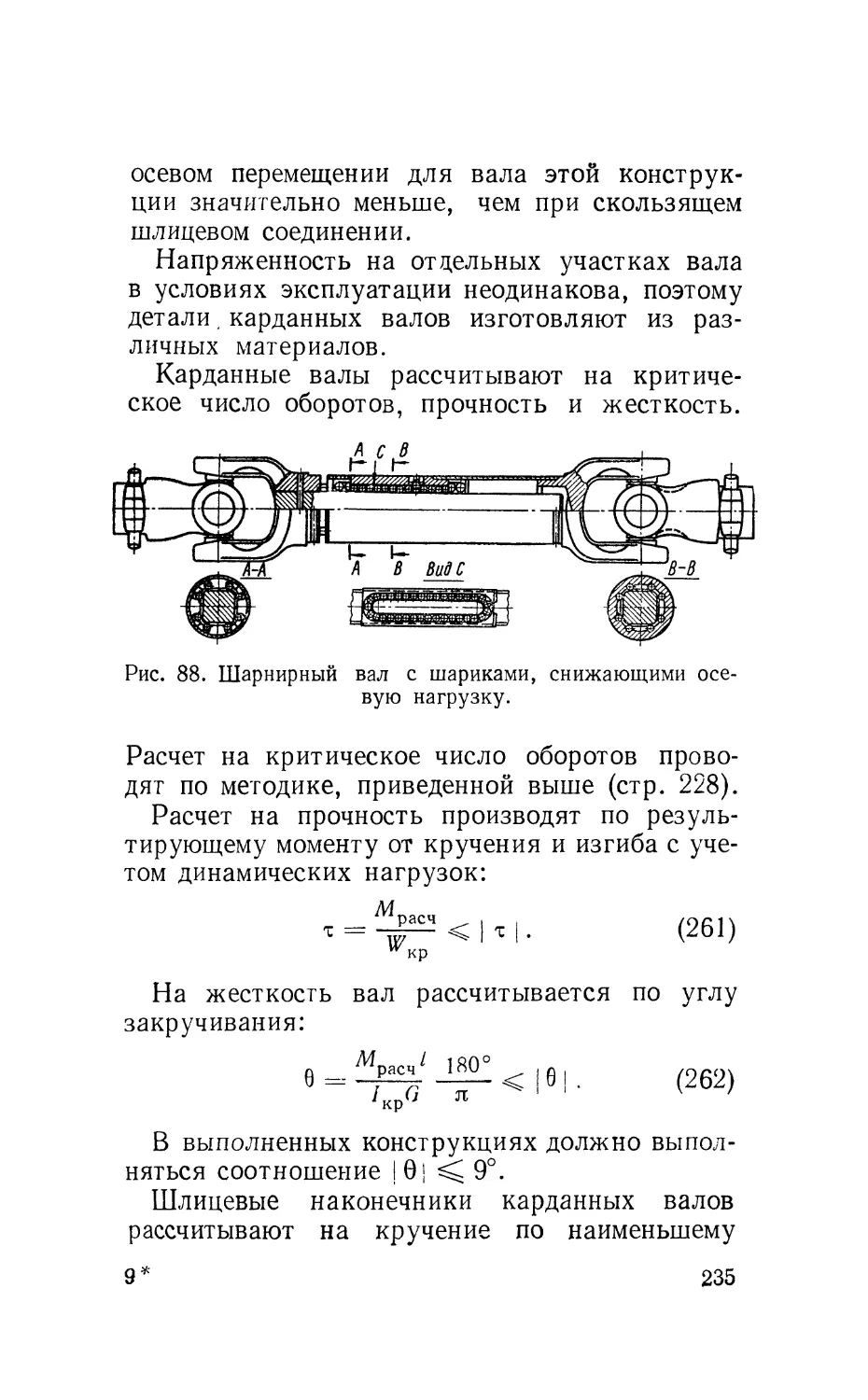
Текст
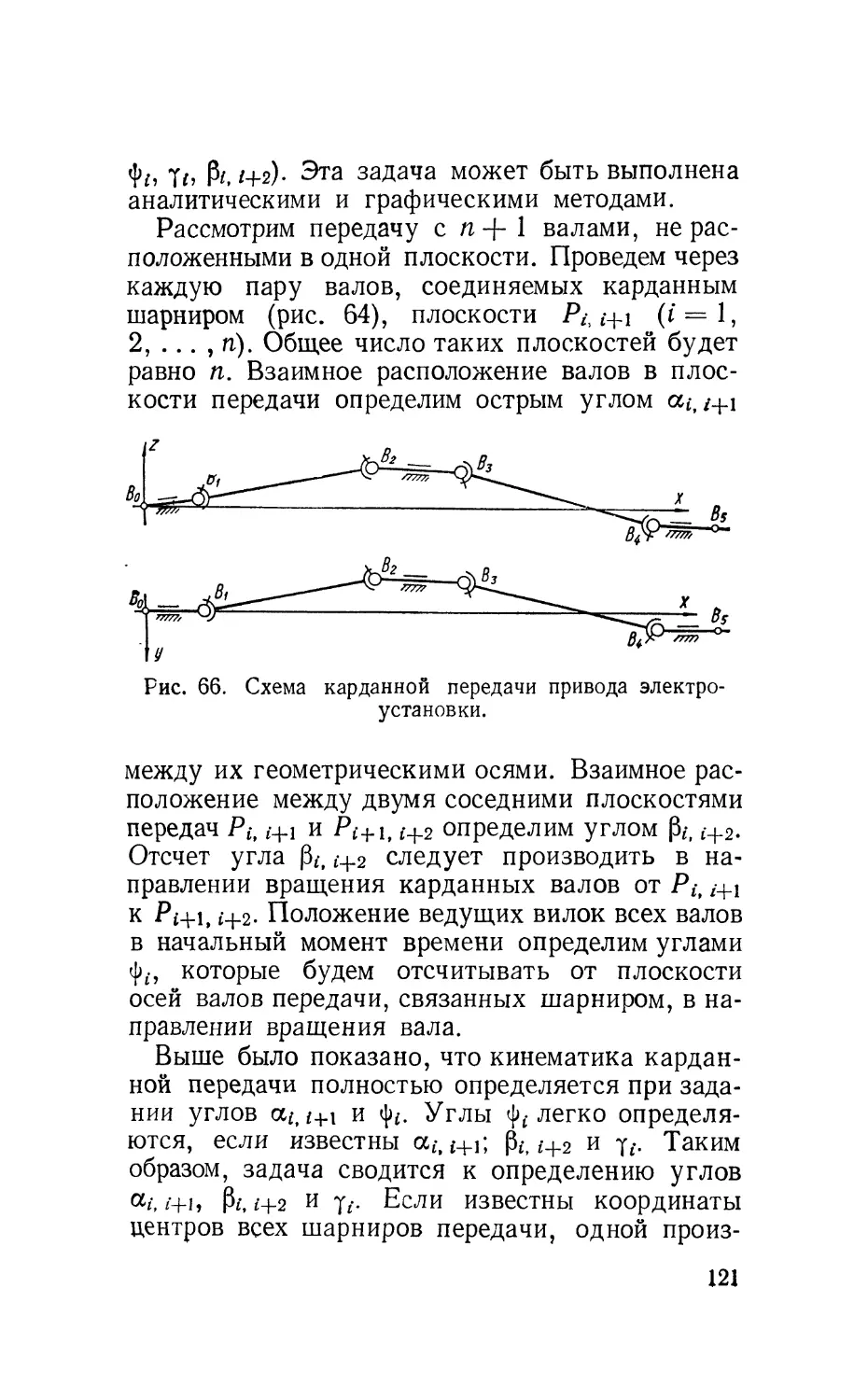
6П5.3
К58
УДК 621.01
Карданные передачи. Кожевникове. Н.,
Перфильев П. Д. Киев, «Техшка», 1978. 264 с.
В книге изложены основы кинематики и динамики машин с
карданными передачами, приведены основные данные для
инженерных расчетов машин с учетом упругости звеньев,
точности изготовления и монтажа карданных передач.
Изложение иллюстрировано чертежами конструкций
элементов карданных передач и примерами их практического
применения. От ранее вышедших изданий по этому вопросу
книга отличается тем, что в ней приведены анализ
структуры карданных механизмов, анализ динамических
процессов, рассмотрены вопросы точности карданных механизмов.
Монография предназначена для научных работников,
может быть полезна инженерно-техническим работникам,
занимающимся расчетом и проектированием машин с
карданными передачами, а также студентам и аспирантам высших
технических учебных заведений.
Табл. 7. Ил. 96. Список лит.: 112 назв.
Рецензент д-р техн. наук Л. П. Бессонов
Редакция литературы по машиностроению и транспорту
Зав. редакцией М. Л. Василенко
31302-045
*М202(04)-78
(С) Издательство «Техшка*, 1978
ПРЕДИСЛОВИЕ
В решениях XXV съезда КПСС
предусмотрено резкое повышение качества промышленной
продукции, в том числе и продукции
машиностроения. Уже на стадии конструирования новых
машин, работающих при больших скоростях
и нагрузках, путем расчета должны быть
обеспечены надежность и долговечность, исключено
влияние работы различного вида передаточных
механизмов, в том числе и карданных, на
технологический процесс.
Карданные механизмы широко используются
в машинах для соединения валов с
пересекающимися осями. Они входят как элемент ппивода
в большинство машин прокатного произьодства,
сельскохозяйственных машин, автомобилей,
тепловозов и др., используются в радиоэлектронных
устройствах, металлорежущих станках,
приводах буровых установок, насосов и тяжелого
нефтяного оборудования, в механизмах управления
и силовых передачах самолетов, вертолетов,
радиолокационных установок, в механизмах и
машинах лесной, текстильной промышленности и
во многих других. Карданные шарниры обычно
рассматривают как компактное кинематическое
соединение, заменяющее простую
кинематическую пару.
В опубликованных до последнего времени в
СССР и за рубежом исследованиях по структуре,
кинематике и динамике механизмов с
карданными шарнирами не все аспекты проблемы
надежности освещены настолько, чтобы считать
задачу о выборе рациональных параметров
приводов с карданными передачами решенной.
Непостоянство передаточного отношения
карданной передачи оказывает существенное влияние
на процесс возбуждения крутильных колебаний
3
в элементах привода. При определенных
параметрах карданной передачи и привода
динамические нагрузки могут быстро возрастать. Это
приводит к уменьшению долговечности, а часто
и к поломке деталей привода.
При наличии дефектов структуры подвижные
соединения передач выполняются с зазорами
с целью компенсации ошибок изготовления
деталей и монтажа опор. Однако при наличии
зазоров в сочленениях передача работает с ударами,
в результате чего быстро выходит из строя из-за
прогрессирующего износа.
В предлагаемой вниманию читателей книге
дан анализ известных методов исследования
динамики машин с карданными передачами и на
его основе предложены методы структурного,
кинематического и динамического синтеза машин
с такими передачами. В отличие от большинства
исследований карданных передач в книге
рассмотрены сложные пространственные карданные
механизмы с произвольным числом шарниров.
Для определения динамических нагрузок
карданные механизмы представлены в виде упругих
систем с учетом переменности масс, жесткостей
звеньев, движущих сил и сил сопротивления.
Показано, как в случае необходимости
учитывать влияние точности изготовления и монтажа
элементов приводных устройств, а также
деформации звеньев, установленных на подвижном
деформируемом основании. При рассмотрении
колебательных процессов авторы попытались
максимально приблизить к реальным условиям
выражения периодических нагрузок, учли
обратную связь двигателя (привода) и остальных
элементов машины.
Отзывы и пожелания просим направлять по
адресу : 252601, Киев, 1, ГСП, Пушкинская, 28,
издательство «Техшка».
ПРОСТРАНСТВЕННЫЕ МЕХАНИЗМЫ
ДЛЯ ПЕРЕДАЧИ
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
И ОБЛАСТИ ИХ ПРИМЕНЕНИЯ
ОБЩИЕ СВЕДЕНИЯ
Свое название карданные механизмы
получили по имени известного итальянского ученого
математика и механика Джеронимо Кардано
(1501—1576 гг.).
В 1664 г. английский механик Р. Гук
запатентовал устройство, предназначенное для
передачи вращения между двумя валами,
расположенными под углом. Механизм получил
название шарнира Гука. С точки зрения структуры
и кинематики, механизм Кардано и шарнир
Гука эквивалентны, различие их только
конструктивное.
С особой остротой необходимость передачи
движения между валами с пересекающимися
осями при помощи несложных приспособлений
встала в связи с развитием транспортного и
сельскохозяйственного машиностроения. Для
мобильных транспортных и сельскохозяйственных
машин, подвергающихся при движении сильной
тряске, требовались такие передаточные
механизмы, которые не реагировали бы на изменение
положения осей валов, сохраняя при этом
хорошие эксплуатационные качества.
В настоящее время карданные механизмы
используются для передачи движения и мощности
в рабочих и транспортных машинах между
входным и выходным валами при любом расположении
этих валов в пространстве.
Правильное построение карданных
механизмов, с точки зрения структуры, дает возможность
обеспечить большую свободу инженерных
решений относительно взаимного расположения
валов привода. Однако применение карданных
передач во многих случаях ведет к возникновению
больших динамических нагрузок в машинах,
поэтому в тех случаях, когда это возможно,
следует заменять их передачами, применение
которых исключает возникновение в машинах
динамических нагрузок (например, гидроприводы
и др.).
Так как область применения карданных
передач очень широка и распространяется
практически на все отрасли машиностроения, то
возникает необходимость их широкой унификации
и стандартизации. Эта задача частично
выполнена в СССР и за рубежом. В зависимости от
назначения и передаваемых мощностей разработаны
различные конструктивные ряды карданных
шарниров и валов. В СССР на многие типы
карданных шарниров разработаны или общесоюзные
стандарты, или отраслевые нормали.
Аналогичная работа выполнена многими зарубежными
фирмами.
Производство карданных передач в нашей
стране и за рубежом организовано на
специализированных заводах или в цехах.
СТРУКТУРА И ПРИНЦИПЫ ПОСТРОЕНИЯ
СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ
МЕХАНИЗМОВ
В основу теории структуры механизмов
положены понятия о степенях свободы и условиях
связи.
Твердое тело в пространстве может иметь
шесть степеней свободы (по числу движений —
три поступательных и три вращательных).
Каждое из геометрических, кинематических или
динамических ограничений, налагаемых на
свободное тело в абсолютном или относительном
движении, принято называть условиями связи.
В результате соединения двух звеньев в
кинематическую пару, при котором реализуются
определенного вида геометрические ограничения,
звенья не имеют возможности осуществлять все
движения свободного тела, т. е. теряют некоторые
из степеней свободы.
Каждому из ограниченных движений
соответствует реакция связи, возникающая под
действием приложенных к звеньям сил. Количество
потерянных звеном степеней свободы зависит от
типа кинематической пары. Для точной оценки
свойств кинематических пар их удобно разделять
по числу степеней свободы в относительном
движении звеньев.
Одноподвижная кинематическая пара (пара
I рода) имеет одну степень свободы в
относительном движении звеньев и пять наложенных
условий связи. К парам I рода относятся
вращательная, поступательная и винтовая пары. Двухпо-
движная пара (пара II рода) характеризуется
двумя степенями свободы в относительном
движении или четырьмя наложенными условиями
связи и т. д. (табл. 1).
Каждая из простых кинематических пар
может быть заменена кинематическим
соединением, вносящим такие же ограничения, как
и простая пара. Так, например, простые
кинематические пары вида 1 могут быть заменены
кинематическими соединениями вида 3.
Основой образования механизмов является
кинематическая цепь. Ее принято называть
открытой, если крайние звенья не соединены
друг с другом, или закрытой, если звенья цепи
НийшЫиштъ пары
Таблица f
Род
кинематической пары
Число
степеней
сбоооды
Число „
условии
связи 5
дид пинематической пары и ее аналог
1
2
f
97"
ш
образуют один или несколько замкнутых контуров.
Для преобразования кинематической цепи в
механизм одно из ее звеньев следует обратить
в сгойку.
Если в состав кинематической цепи входит
п звеньев, из которых одно сделано стойкой, то
общее число степеней свободы их равно 6 (я— 1),
из которых связями, наложенными
кинематическими парами, уничтожается Ърх + 4р2 +
+ Зр3 + 2р4 + рь (р — число кинематических
пар) степеней свободы. Некоторые из
кинематических пар налагают тождественные с ранее
введенными связями ограничения, поэтому они должны
быть отброшены как лишние. Кроме лишних
связей, в механизме могут быть лишние степени
свободы (например, вращение ролика вокруг
своей геометрической оси, вращение стержня
вокруг оси, проходящей через центры сфер трех-
подвижных кинематических пар). Лишние
степени свободы v не влияют на движение основной
цепи, поэтому могут быть исключены из общего
числа степеней свободы механизма.
В соответствии с изложенным число степеней
свободы W механизма можно определять по
формуле Сомова — Малышева
W = 6 (п - 1) — (5Pl + 4р2 + 3/?3 + 2/74 + рь) +
+ q-v, (1)
где q — общее число лишних или пассивных
связей.
Лишние связи обусловливают статическую
неопределенность системы, причем число
лишних неизвестных равно q. Наличие лишних
связей в механизме нежелательно еще и noi ому, что
при наличии ошибок изготовления и монтажа
в механизме появляется натяг контуров, и
элементы кинематических пар нагружаются
реакциями, зависящими от величин ошибок и
жесткости звеньев.
С целью уменьшения реакций детали
механизма следует изготовлять высокой точности.
Корпусные детали также должны обладать
высокой точносгью и, кроме того, большой
жесткостью.
При отсутствии лишних связей q требования
к точности соблюдения размеров и монтажа
могут быть снижены. Надежно работающие
механизмы должны быть статически определимыми
системами, в которых лишние или пассивные
связи отсутствуют.
В основу метода построения механизмов без
лишних связей положено представление о
строении механизма как суммы входных звеньев
и нуль групп, или групп с полным числом связей.
Если задана система входных звеньев,
обладающая числом степеней свободы W, то при
последовательном или параллельном присоединении
к ним групп звеньев с полным числом связей
в каждой общее число степеней свободы не
изменяется, потому что каждая из нуль-групп
обладает геометрической определимостью и
удовлетворяет условиям непринужденной сборки.
Нуль-группы, вводимые в состав механизма
должны удовлетворять условию
6т = Ърг + 4/72 + Зр3 + 2pt + ръ, (2)
где т — число звеньев нуль-группы; рг, . . . ,
р5 — число кинематических пар от I до V рода.
Так, если т = 1, т. е. нуль-группа
представляет собою статически определимую нуль-монаду,
то при двух кинематических парах величины ръ
Ръ, Рз> Л> Ръ могут принимать такие значения:
Рх = 1 и рь = 1; р2 = 1 и /?4 = 1; /?8 = 2-
Соответствующие схемы нуль-монад
приведены в первой строке табл. 2. В таблице для
каждой из нуль-групп приведены структурные
формулы, в которых черточка означает звено,
а цифра— число условий связи, вносимых
кинематической парой. Формулы даны для различных
вариантов присоединения минус-групп.
10
Статически определимые (нулевые) группы 'а^ица 2
-5-1-
-4-2-
-3-J-
.eg
■Q C3
V- ^ Р
5-5-5-J- Л ,—Z,
-5-4
-4-5-
-5-5-5-5-4-
-5-5-5-4-5-
-5-5-4-5-5-
Разновидности минус - групп
Таблица 3
Минус-монады
Минус- диады
Минус-триады
Минус-тетрада
-1
^—о)
-2
1
-з
-4
Ч
Построение более сложных групп можно
представить как процесс развития кинематической
пары. Например, кинематическая пара V рода,
вносящая одно условие связи, может быть
заменена открытой цепью, вносящей такое же число
условий связи s = 1. Кинематическая пара IV
рода может быть заменена открытой цепью с
двумя лишними условиями связи (s = 2) и т. д.
В табл. 3 приведены возможные виды минус-
групп, которые могут быть использованы для
замены кинематической пары соответствующего
рода (6 — s). Используя приведенные в табл. 3
структурные эквиваленты, нетрудно получить
из нуль-монад нуль-группы (например, нуль-
диаду путем замены кинематической пары V
рода одной из двух минус-монад). Все
возможные нуль-группы (статически определимые) в
виде простых рядных цепей приведены в табл.2.
Более сложные нуль-группы в форме
разветвленных цепей или цепей с замкнутыми
контурами можно получить из цепей, приведенных
в табл. 2, если воспользоваться возможностью
замены простой кинематической пары сложной.
Например, кинематическую пару IV рода,
вносящую два условия связи, можно представить
как двухточечную, т. е. представить в виде двух
точек одного звена, скользящих по поверхности
второго звена. На рис. 1, а показана нуль-диада,
в которой кинематическая пара IV рода заменена
двухточечной. Если теперь каждую из концевых
точечных пар заменять соответствующими
структурными эквивалентами, то легко получить
разветвленные нуль-группы, показанные на рис. 1.
Если в минус-диаде —5—2—5— внутреннюю
пару IV рода представить как двухточечную,
а затем каждую из точечных пар заменить минус-
группой, то получим нуль-группы в форме
замкнутых контуров с элементами конечных пар, ко-
12
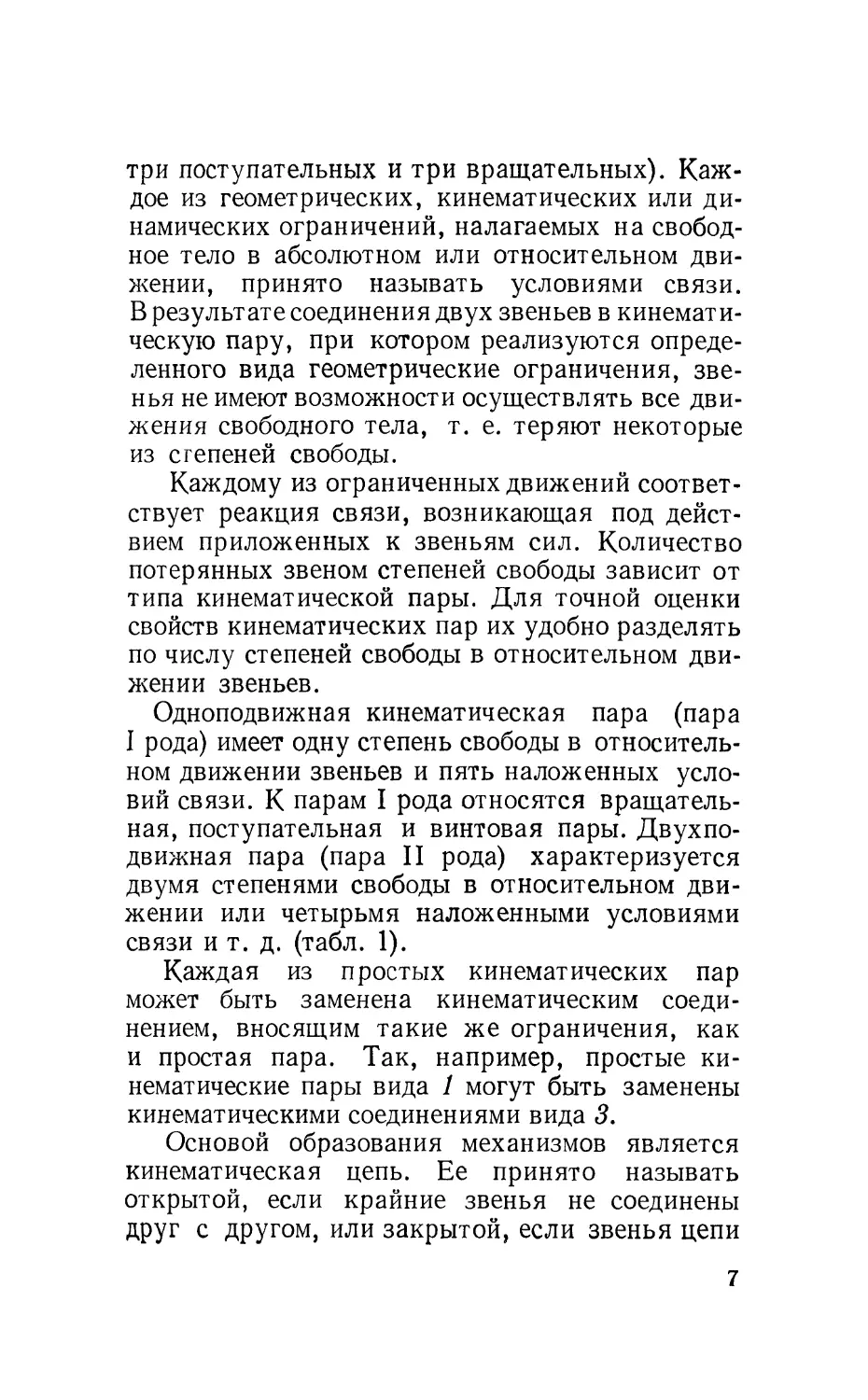
торые образуются при присоединении группы
к механизму. Таким образом можно получить
группы любой сложности без лишних связей,
т. е. пригодные для построения статически
определимых механизмов.
, ^5-5-5-5-5-
Рис. 1. Образование
разветвленной нуль-группы.
С помощью описанного метода структурного
синтеза механизмов [36] можно не только
построить статически определимые механизмы, но и
установить наличие лишних связей, а также
подвижное соединение, в котором эти связи
заложены. В качестве примера можно рассмотреть че-
тырехзвенный сферический механизм (рис. 2)
13
и его конструктивные модификации.
Особенностью сферического механизма является
пересечение четырех осей цилиндрических шарниров в
одной точке О(рис. 2, а). Модификациями четырех-
звенного сферического механизма являются
карданный подвес (рис. 2, а) и шарнир Гука (рис. 2, в).
Рис. 2. Схема
сферического механизма и его
конструктивные
модификации,
Карданный подвес состоит из трех колец: а, Ъ и с
(на рис. 2, а детали а и с имеют вид полуколец).
Внешние кольца а и с шарнирно соединены со
стойкой d. Оси шарниров на каждом из звеньев
взаимно перпендикулярны. В шарнире Гука
внутреннее кольцо Ь заменено крестовиной. При
одинаковых углах а скрещивания входного и
выходного валов механизм Кардано и шарнир Гука
14
имеют один и тот же закон изменения
передаточного отношения.
Если звено а (рис. 2, б) считать входным, то
группу звеньев Ь и с следует рассматривать как
присоединенную. Число степеней свободы
системы не изменилось бы, если бы группа была
нулевой. Однако при сопоставлении
присоединенной группы со схемами табл. 3 можно
установить, что эта группа является минус 3-диадой,
т. е. вносит три лишних связи. Сферический
механизм построен правильно с точки зрения
структуры, если вместо минус 3-диады присоединить
одну из нуль-диад, представленных в табл. 2.
Если необходимо, чтобы ось вращения звена с
не меняла положения относительно стойки, то
цилиндрический шарнир D следует заменить
трехподвижным сферическим шарниром, а
цилиндрический шарнир С — цилиндрической
парой, допускающей скольжение вдоль оси. В
случае необходимости сохранить шарниры В и С
цилиндрическими, входное звено со стойкой
должно образовать кинематическую пару IV рода.
Для этого выходное звено можно, например,
посадить на сферический шариковый подшипник,
свободно скользящий в осевом направлении.
Сферический механизм, построенный таким
образом, будет работать нормально и в том
случае, если оси не будут проходить через одну
точку О.
В шарнире Гука (рис. 2, в), кроме указанных
трех лишних связей, есть еще десять
повторяющихся связей, так как каждая из вилок имеет по
два цилиндрических шарнира. Во избежание
появления дополнительных реакций необходимо
либо вилки и цапфы крестовины выполнить с
высокой точностью, обеспечивающей совпадение
осей шарниров, либо исключить местную
статическую неопределимость путем замены одного
15
цилиндрического шарнира трехподвижной
сферической парой и второго — кинематической парой
IV рода. Система станет полностью статически
определимой, если, кроме того, выходное звено
посадить на сферический подшипник,
подвижный в осевом направлении.
Появление лишних связей в сферическом
механизме с четырьмя цилиндрическими
шарнирами можно легко объяснить, если представить,
что шарнир D (рис. 2, б) разрушен. Тогда
открытая цепь звеньев а,Ьис обладает тремя степенями
свободы, т. е. звено с может вращаться вокруг
трех осей: Л, В и С, проходящих через точку О,
следовательно, в абсолютном движении оно
вращается вокруг оси, проходящей через эту точку.
Для фиксации оси шарнира D достаточно задать
ее направление, которое можно рассматривать
как линию пересечения двух плоскостей (два
уравнения, определяющих пучок плоскостей).
Этим самым для внешней кинематической пары
D задаются два ограничения. Поскольку звено с
в открытой цепи не может совершать
поступательное движение относительно точки О, то из
пяти ограничений, вносимых цилиндрическим
шарниром D, три оказываются лишними,
повторяющимися, а именно — ограничения для трех
компонент поступательного перемещения звена
с относительно точки О.
Поскольку замыкающий шарнир D
кинематически вносит только два дополнительных
ограничения, то из трех степеней свободы открытой
цепи остается одна и, следовательно,
сферический механизм обладает одной степенью свободы.
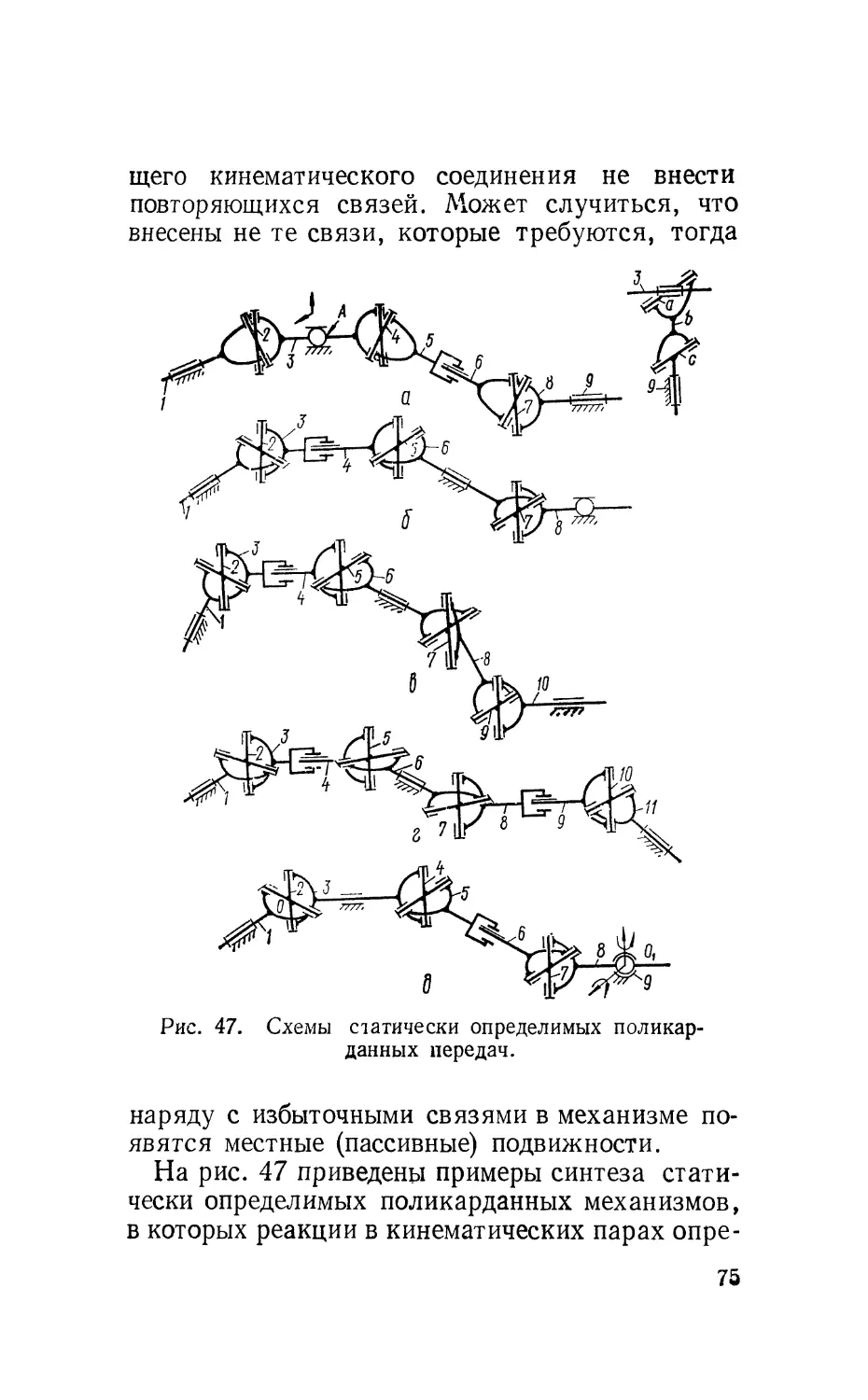
В качестве практического примера можно еще
рассмотреть поликарданную передачу
кукурузоуборочного комбайна, схема которой показана
на рис. 3, а. Втулка 10, поддерживающая вал 6,
шарнирко связана с серьгой 9, вращающейся
16
вокруг оси на лонжероне рамы машины. Вал /
входной, вал 8 выходной. Механизм с принятой
при проектировании структурной схемой (рис.
3, в) работал неудовлетворительно, наблюдался
усиленный износ трущихся поверхностей, имели
место поломки деталей.
Рис. 3. Схема поликарданной передачи
кукурузоуборочного комбайна.
Поскольку вал / входной, то присоединяемая
к нему группа звеньев 2—8 должна быть
статически определимой, или нулевой, т. е. в
результате ее присоединения к стойке должна
образоваться статически определимая ферма с числом
степеней свободы W = 0. Соответствующая
структурная схема показана на рис. 3, в. Поскольку
звено 6 трехпарное, т. е. соединяющееся с тремя
17
другими звеньями, оно изображено в виде
треугольника. Цепь разветвленная, ее можно
рассматривать как результат развития крайней од-
ноподвижной пары пятизвенной статически
определимой нуль-группы (нуль-пентада в табл. 2).
Поскольку от звена 6 отходят две ветви, то
конечную кинематическую пару с s = 5 можно
представить в виде сложной пары с
составляющими s = 2 и s = 3. Пару cs = 3 можно
заменить структурным эквивалентом типа минус 3-
диада, а пару с s = 2— структурным
эквивалентом типа минус 2-диада или минус 2-триада
(см. табл. 3). Поскольку крестовина 7 шарнира
Гука в сочетании с выходным валом составляют
минус 3-диаду, то второе ответвление должно
быть выполнено как минус 2-триада. Однако на
схеме принято ответвление типа минус 3-диада
(звенья 9 и 10), в результате чего появилась одна
лишняя связь, и движение может быть
реализовано лишь за счет зазоров и деформации звеньев.
В этом случае надежность механизма невысокая.
При добавлении одного звена 11, т. е. при замене
минус 3-диады минус 2-триадой,
присоединяемая к входному звену 1 группа превращается
в нулевую, а механизм — в статически
определимый без лишних связей. Надежность его резко
возрастает.
Исправление структурной схемы показано
на рис. 3, в пунктиром, а исправление
кинематической схемы — на рис. 3, б.
Проверку правильности структуры
присоединяемой группы можно произвести иначе. Отделив
звено 10 группы от стойки, можно найти число
степеней свободы группы звеньев 2—8:
W = 6т — 5р! = 6 • 7 — 5 8-2.
Повторяющиеся пары на крестовинах 2, 5, и 7
не учитываются.
18
Чтобы группу сделать статически
определимой (W = 0), к звену 6 необходимо присоединить
минус 2-группу, т. е. минус 2-диаду или минус
2-триаду.
Приведенные примеры показывают, насколько
важно при проектировании выбирать механизмы
с правильной структурой, особенно в тех
случаях, когда их монтируют на деформируемом
основании, или если практически не удается
реализовать ту точность изготовления, которую
необходимо обеспечить для механизма с
пассивными связями.
В дальнейшем каждому из рассматриваемых
механизмов будет дана оценка с точки зрения
структуры.
РАЗНОВИДНОСТИ КАРДАННЫХ ШАРНИРОВ
Совокупность деталей, закрепленных на
связываемых валах и промежуточных осях,
получила общее название карданных шарниров, или
просто карданов, хотя по принципу действия,
а также по сруктурным и кинематическим
свойствам они могут отличаться от механизма Кар-
дано. В ряде отраслей (например, в
металлургическом машиностроении) соединения подобного
типа называют универсальными шарнирами.
Сточки зрения структуры, кардан следут
рассматривать как кинематическое соединение,
эквивалентное двухподвижному сферическому
шарниру (см. табл. 1).
Область применения карданных механизмов,
их эксплуатационные качества, надежность и
долговечность в различных условиях
определяются свойствами используемых карданных
шарниров.
Карданные механизмы применяются во
многих отраслях машиностроения в качестве сило-
19
вой передачи, поэтому их делят, в первую
очередь, на конструктивные ряды по величине
передаваемого крутящего момента, определяющего
нагрузку на элементах кинематических пар.
Возможность применения того или иного типа
карданного шарнира зависит от величины угловой
скорости связываемых шарниром валов, потому
что не всегда представляется возможным
уравновесить центробежные силы инерции,
обусловливающие динамические процессы в механизме.
По кинематическим свойствам карданные
шарниры разделяются на карданы с постоянным
и с переменным передаточным отношением.
Карданные шарниры с постоянным передаточным
отношением, равным единице, называют
синхронными, потому что угловые скорости входного
и выходного валов при любом положении валов
равны друг другу. Асинхронные карданные
шарниры имеют среднее передаточное отношение,
равное единице, но характеризуются
периодическим изменением угловой скорости ведомого
вала.
По механическим свойствам карданы делятся
на жесткие и мягкие (упругие).
В зависимости от значения угла между осями
соединяемых валов различают полные карданы
и пол у карданы. Полный кардан имеет две оси
качания промежуточного звена и допускает
передачу вращения при значительных углах между
осями валов. Полу кардан не имеет
промежуточных осей качания и допускает взаимное
отклонение осей на небольшой угол.
Различают также карданы простые и
универсальные. При наличии в механизме простого
кардана возможно только относительное угловое
перемещение двух валов, а при наличии
универсального — возможно как угловое, так и осевое
относительное перемещение соединяемых валов,
20
причем осевое перемещение реализуется внутри
самого шарнира.
Синхронные карданы могут представлять
собой оригинальную конструкцию, но могут быть
выполнены и из двух последовательно
соединенных простых карданов. Промежуточный вал в
таком кардане может быть заменен промежуточным
звеном.
К синхронным карданам оригинальной
конструкции относятся карданы сухарного типа
(Тракта) и шариковые карданы (Рзеппа, Вейса),
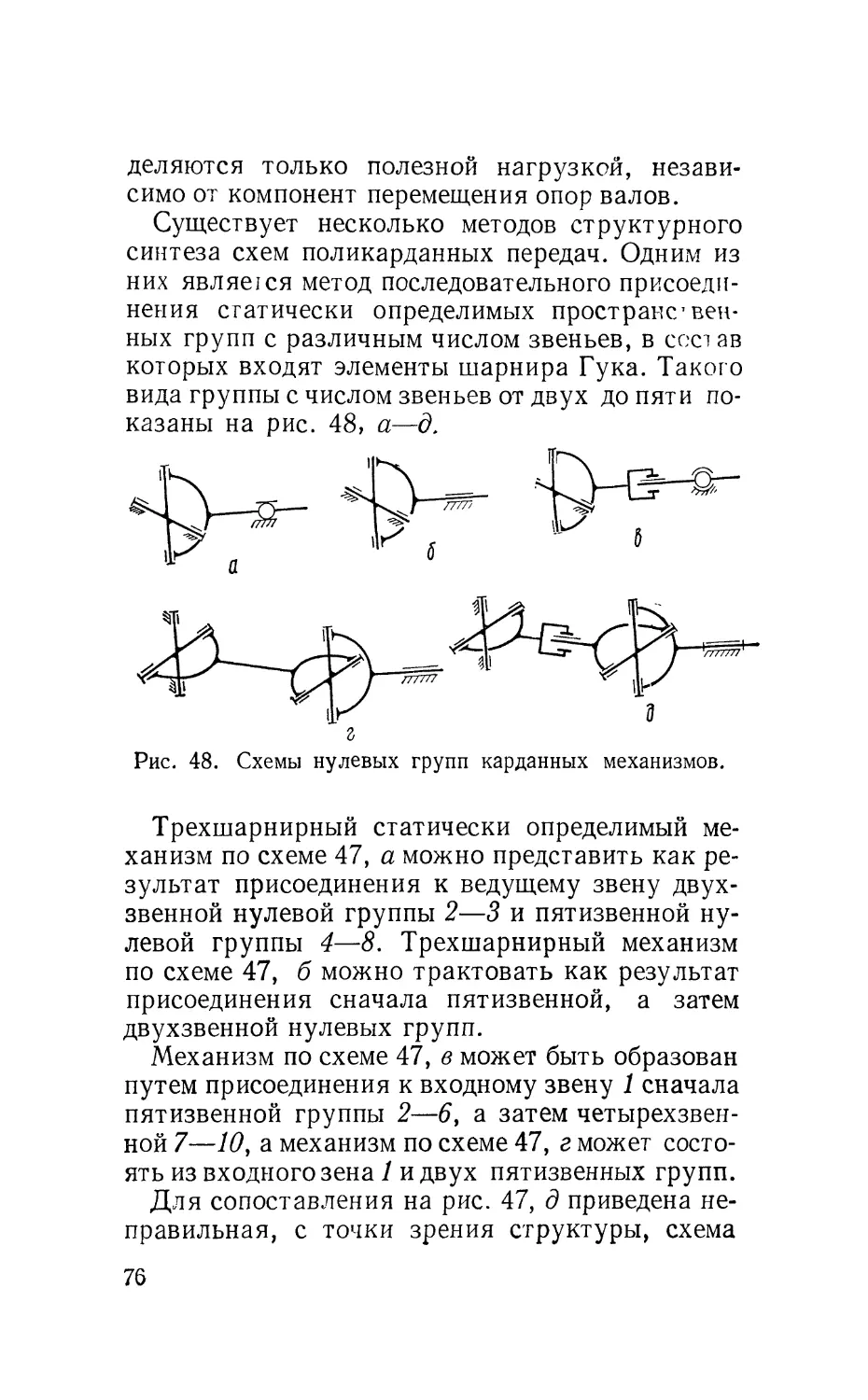
ТИПЫ ПОВОДКОВЫХ МЕХАНИЗМОВ
ДЛЯ ПЕРЕДАЧИ ДВИЖЕНИЯ МЕЖДУ ВАЛАМИ
С ПЕРЕСЕКАЮЩИМИСЯ ОСЯМИ
Для передачи вращательного движения
между валами с пересекающимися осями могут быть
использованы поводковые механизмы и их
модификации— сферические двухкривошипные
механизмы, зубчатые механизмы и др. Наиболее
простым механизмом, служащим для этой цели,
является трехзвенный механизм. Его можно построить
путем присоединения нуль-монады к двухзвенному
механизму,состоящему из входного вала и стойки.
Нуль-монада и двухзвенный механизм образуют
при этом точечную пару в месте соединения
подвижных валов и цилиндрический шарнир в
соединении выходного вала со стойкой. В результате
получаются так называемые поводковые карданы
с прямолинейными или криволинейными (в
частности, круговыми) поводками.
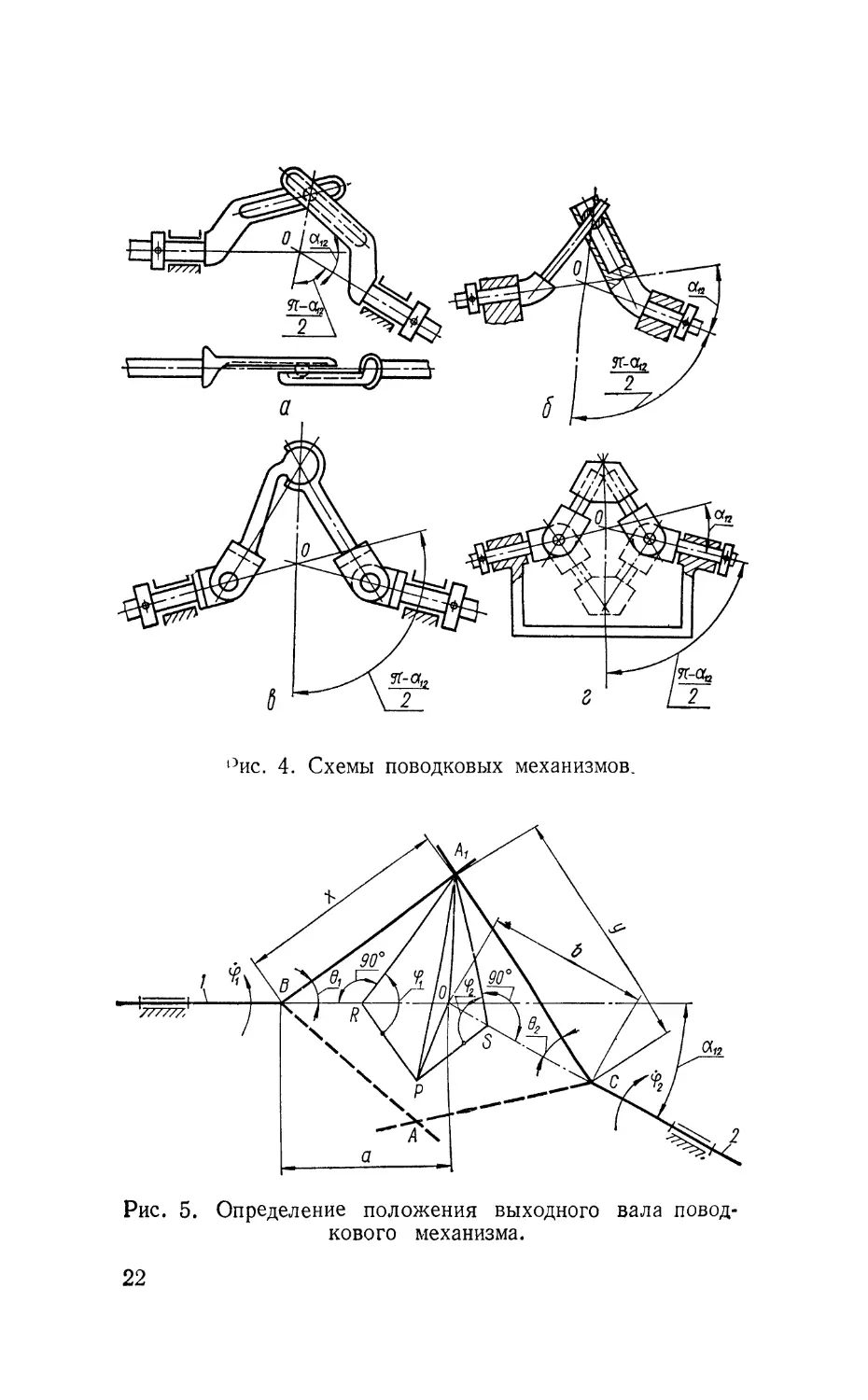
На рис. 4, а и б показаны конструктивные
схемы механизмов, которые могут быть заменены
идеальным с точки зрения кинематики
механизмом (рис. 5). В механизме, показанном на рис.
4, а, промежуточный шарик имеет три лишние
степени свободы (он может вращаться вокруг
21
Рис. 4. Схемы поводковых механизмов.
Рис. 5. Определение положения выходного вала
поводкового механизма.
22
трех собственных взаимно перпендикулярных
осей), а в механизме, представленном на рис
4, б, — одну лишнюю степень свободы, т. е.
возможность вращения шарика вокруг оси стержня.
С точки зрения структуры, рассмотренные
механизмы допускают передачу вращения также
и между скрещивающимися осями, так как в этих
механизмах лишние связи не заложены.
На рис. 4, в и а показаны схемы пятизвенного
и шестизвенного (соответственно механизм Кле-
менса и механизм Рело) механизмов для передачи
вращения между валами с осями, произвольно
расположенными в пространстве, в частности
с пересекающимися осями. В механизме,
представленном на рис. 4, в, между входным и
выходным валами размещена минус-диада, а в
механизме, показанном на рис. 4, г,— минус-триада,
вносящие по одному ограничению в относительном
движении входного и выходного звеньев.
Приведенные на рис. 4 схемы механизмов
пригодны для передачи усилий ограниченной
величины и могут быть использованы для реализации
периодического поворота или непрерывного
вращения с малой скоростью. Теоретически
наименее стойким против износа является механизм,
показанный на рис. 4, г, потому что реакции
в обеих цилиндрических парах приложены вне
опорной поверхности и, следовательно, элементы
пары работают с перекосом.
Достоинством поводковых механизмов, оси
которых пересекаются под любым углом,
является возможность воспроизведения постоянного
передаточного отношения, равного единице, при
котором выходной вал вращается синхронно
и синфазно с входным валом.
На рис. 5 показана схема механизма, у
которого оси входного и выходного валов
поводков 1 и 2 пересекаются в точке О. Вращение
23
передается посредством поводков, жестко
связанных с валами.
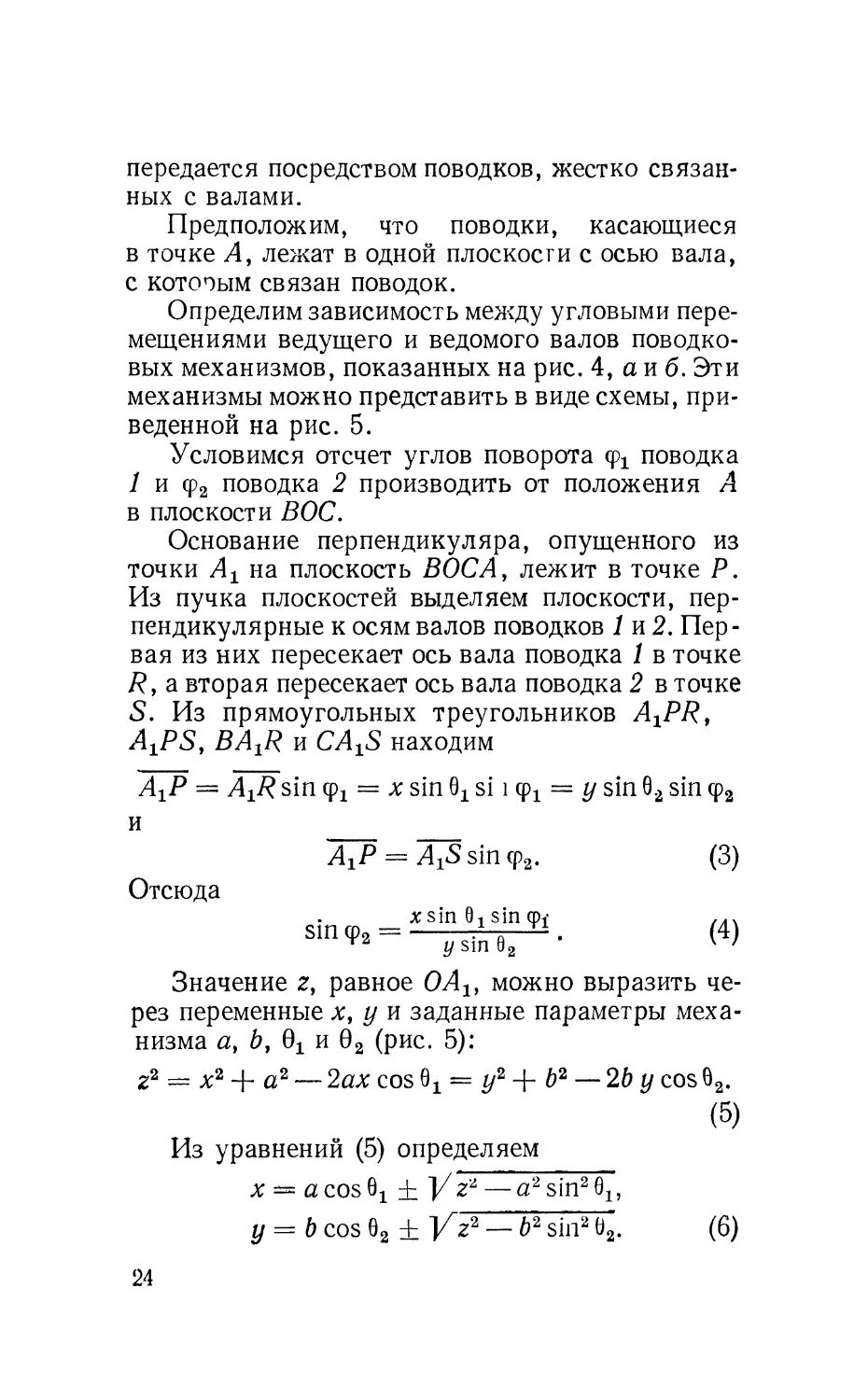
Предположим, что поводки, касающиеся
в точке Л, лежат в одной плоскости с осью вала,
с котооым связан поводок.
Определим зависимость между угловыми
перемещениями ведущего и ведомого валов
поводковых механизмов, показанных на рис. 4, а и б. Эти
механизмы можно представить в виде схемы,
приведенной на рис. 5.
Условимся отсчет углов поворота срх поводка
/ и ф2 поводка 2 производить от положения А
в плоскости ВОС.
Основание перпендикуляра, опущенного из
точки Ах на плоскость BOCA, лежит в точке Р.
Из пучка плоскостей выделяем плоскости,
перпендикулярные к осям валов поводков 1 и 2.
Первая из них пересекает ось вала поводка / в точке
/?, а вторая пересекает ось вала поводка 2 в точке
5. Из прямоугольных треугольников A±PR,
AXPS, ВАгЯ и CAXS находим
АХР = AXR sin фх = х sin вх si i фх = г/ sin б2 sin cp2
и
'AJP ==A^S sin у2. (3)
Отсюда
#sin 0i sin ©f //f4
Sin^= ysin62 • W
Значение z, равное ОАЪ можно выразить
через переменные х, у и заданные параметры
механизма а, Ьу Q± и 02 (рис. 5):
г2 = х2 + а2 — 2ах cos 0Х = у2 + Ь2 — 2& у cos62.
(5)
Из уравнений (5) определяем
х = a cos 0! ± Угг — a2sin261,
у = b cos 02 ± Vz2 — b2sm42. (6)
24
С помощью полученных значений хну
функцию искомого угла ф2 можно выразить через
заданный угол фх поворота входного вала,
параметры механизма и переменное расстояние г\
sin 6Х (a cos 05 ± Yz2 — a2 sin2
Sin фо = Sin Ф
sin б2 (b cos 82 ± /z2 — 62 sin2 62)
(7)
Если в± = G2 и a = b, то sin фх = sin ф2. В этом
случае углы поворота валов фх и ф2 равны,
следовательно, равны и угловые скорости сох и со2,
что и является необходимым условием
синхронности передачи.
Условия 6Х = 02 и а = Ь равносильны
требованию расположения точек касания поводков А
в плоскости, биссекторной по отношению к осям
ведущего и ведомого валов. Полученные
результаты справедливы для поводков произвольного
очертания, поскольку форма поводка на
передаточное отношение не влияет, если точки касания
поводков лежат в биссекторной по отношению
к осям валов плоскости, а это условие, в свою
очередь, соблюдается, если при одинаковой форме
поводков а = Ъ. Отрезки х и у в этом случае
необходимо рассматривать как хорды одинаковых
Дуг.
С технологической точки зрения наиболее
приемлемы для практических целей
прямолинейные поводки и поводки, представляющие собой
дугу окружности.
При использовании всех приведенных
конструкций карданов поводкового типа и
соответствующем выборе их параметров может быть
обеспечена синхронность вращения ведомого вала.
При дублировании поводков или
промежуточных тел, как это имеет место в шариковых
карданах Рзеппа (рис. 44) или Вейса (рис. 42),
появляются повторяющиеся связи, и система сгановится
25
статически неопределимой. Такого вида
карданные соединения требуют высокой точности
изготовления и монтажа.
ПОЛНЫЕ КАРДАНЫ
Большое число типов и конструкций полных
карданов (одношарнирных карданных
механизмов), т. е. карданов, оси валов которых
пересекаются в одной точке, обусловлено
разнообразием применения и большим разбросом
конструктивных и режимных ограничений, которым они
должны удовлетворять. Так, например,
карданный механизм прибора должен удовлетворять
требованиям точности, а карданный механизм
прокатного стана или вала отбора мощности
зерноуборочного комбайна должны обеспечить
передачу большой мощности при сохранении
достаточно высокой надежности.
К полным карданам относят механизмы,
являющиеся конструктивными модификациями
сферического четырехзвенного механизма, обычно
с промежуточным звеном в форме крестовины.
Преимущественное распространение в
трансмиссиях основных и вспомогательных
механизмов машин самого различного назначения
получили полные карданы с крестовиной.
Полные карданы могут быть с
пересекающимися и с непересекающимися осями крестовины.
Одинарный кардан с непересекающимися
осями крестовины, в основу которого положен
пространственный четырехзвенный механизм,
показан на рис. 6. На валах 1 я 5 укреплены
вилки 2 и 4> шарнирно связанные с крестовиной
3. Оси втулок крестовины смещены одна
относительно другой, т. е. скрещиваются. Выходной
вал 5 со стойкой должен образовать четырехпод-
вижную кинематическую пару или заменяющее
26
ее кинематическое соединение для того, чтобы
в шарнире не было лишних ограничений. На
рис. 6 указанное кинематическое соединение
представлено в виде цилиндрической пары (вал
5 — сферический вкладыш 6) и двухподвижного
сферического шарнира.
Рис. 6. Схема кардана с непересекающимися осями
крестовины.
Присоединенную к входному валу 1 группу
звеньев 3, 4, 5, 6 с точки зрения структуры
следует рассматривать как нуль-триаду. При
удалении пальца 7 механизм приобретает лишнюю
степень свободы (вращение сферического
вкладыша относительно оси вала 5), не влияющую на
характер движения выходного вала.
Оси валов 1 и 5 могут пересекаться или
скрещиваться под некоторым углом, поэтому
рассматриваемый тип кардана нечувствителен к
смещению опор при монтаже или в процессе работы
27
механизма вследствие деформации стойки. При
соединении выходного вала с последующими
звеньями следует учитывать, что его ось в процессе
движения описывает конус с вершиной в центре
сферического шарнира, и вал получает
перемещение вдоль оси. Такой кардан может применяться
как в простых машинах, не требующих особой
Рис. 7. Схема кардана с пересекающимися осями
крестовины.
точности передачи движения и имеющих малые
скорости движения, так и в более сложных
композициях.
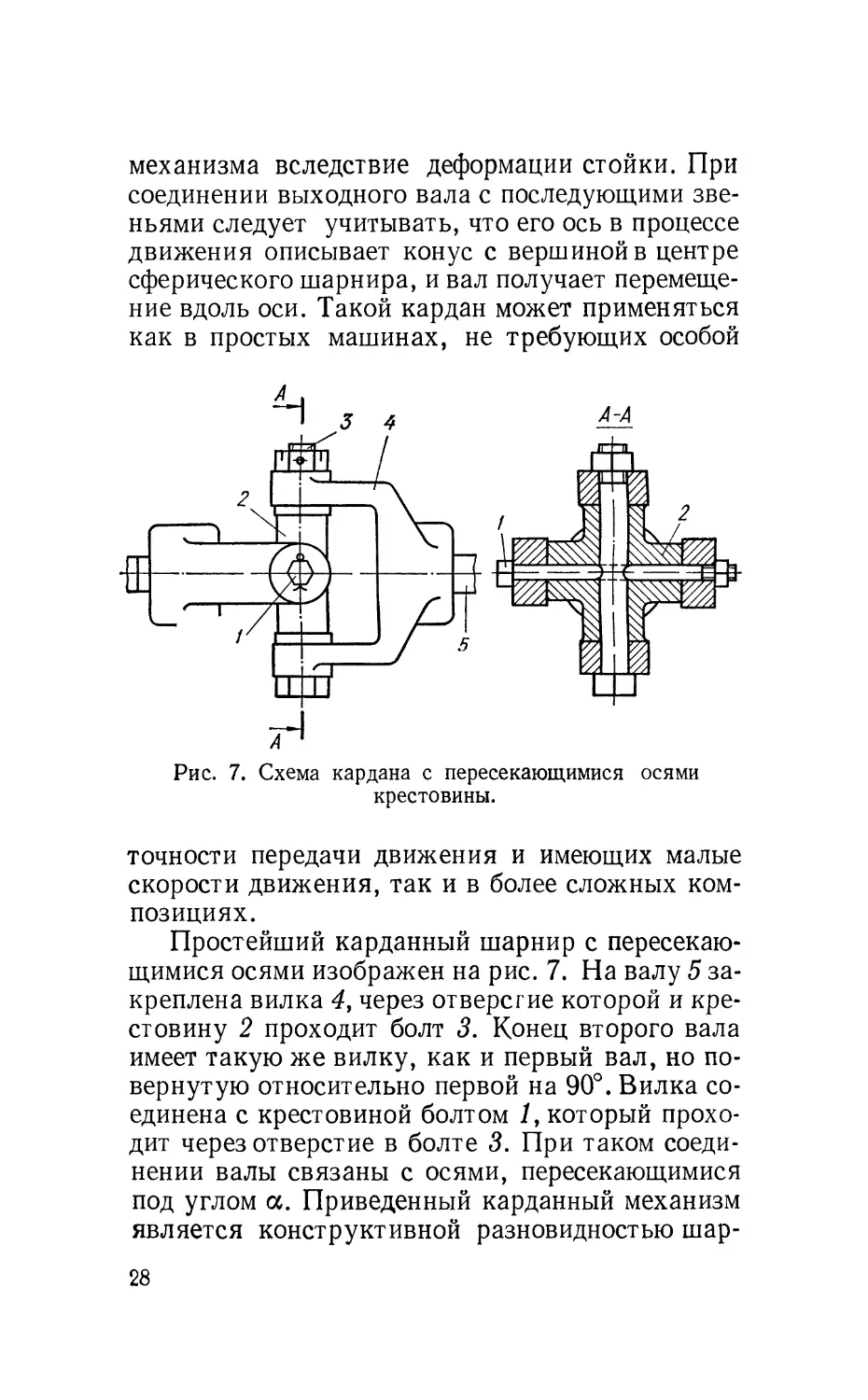
Простейший карданный шарнир с
пересекающимися осями изображен на рис. 7. На валу 5
закреплена вилка 4, через отверстие которой и
крестовину 2 проходит болт 3. Конец второго вала
имеет такую же вилку, как и первый вал, но
повернутую относительно первой на 90°. Вилка
соединена с крестовиной болтом 1У который
проходит через отверстие в болте 3. При таком
соединении валы связаны с осями, пересекающимися
под углом а. Приведенный карданный механизм
является конструктивной разновидностью шар-
28
нирного четырехзвенного механизма, имеющего,
как указано выше, три лишние связи, поэтому
при наличии неточностей изготовления или
монтажа (скрещивание осей) на элементах
кинематической пары появляются реакции, зависящие от
величины смещения осей и приведенной
жесткости системы.
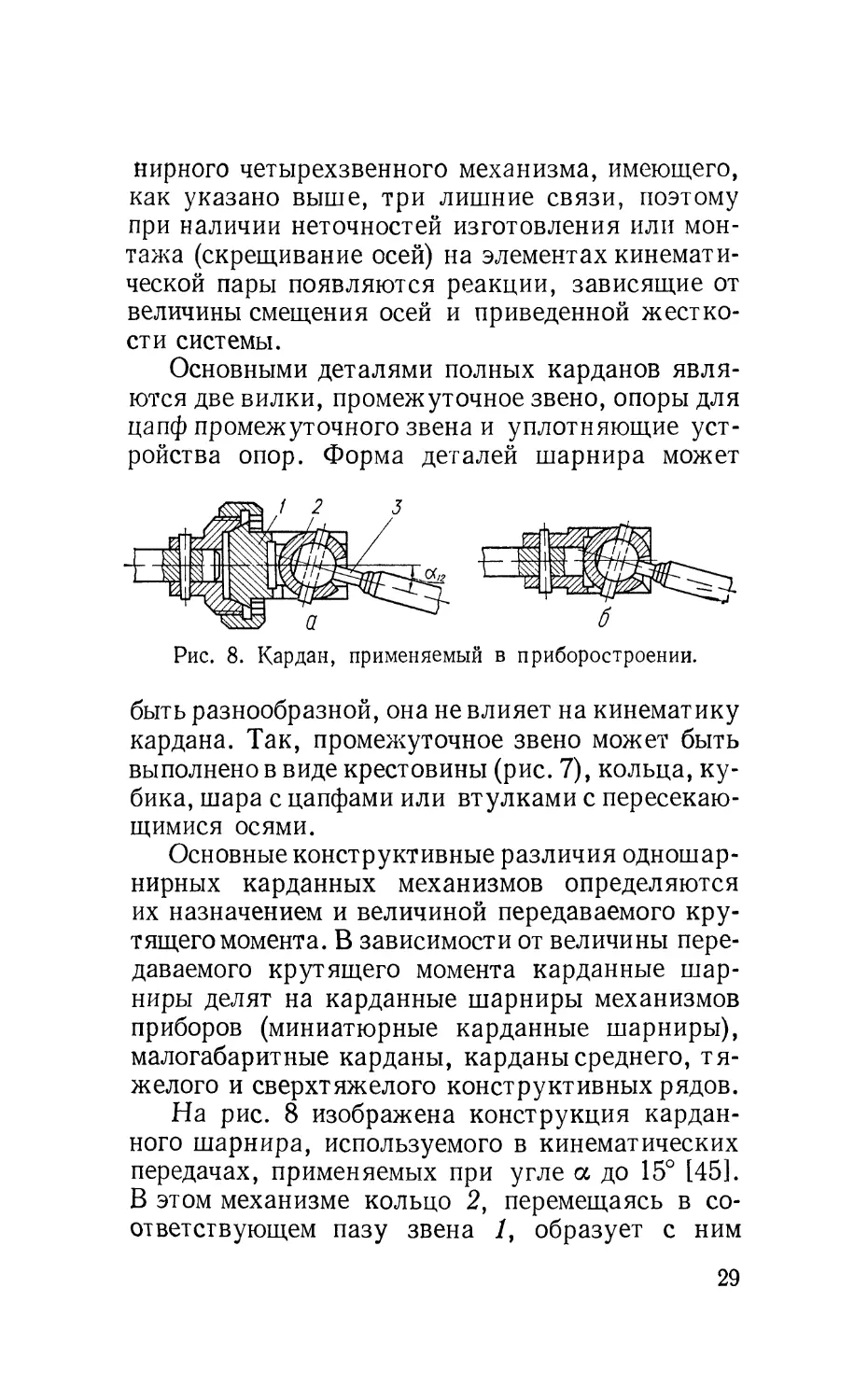
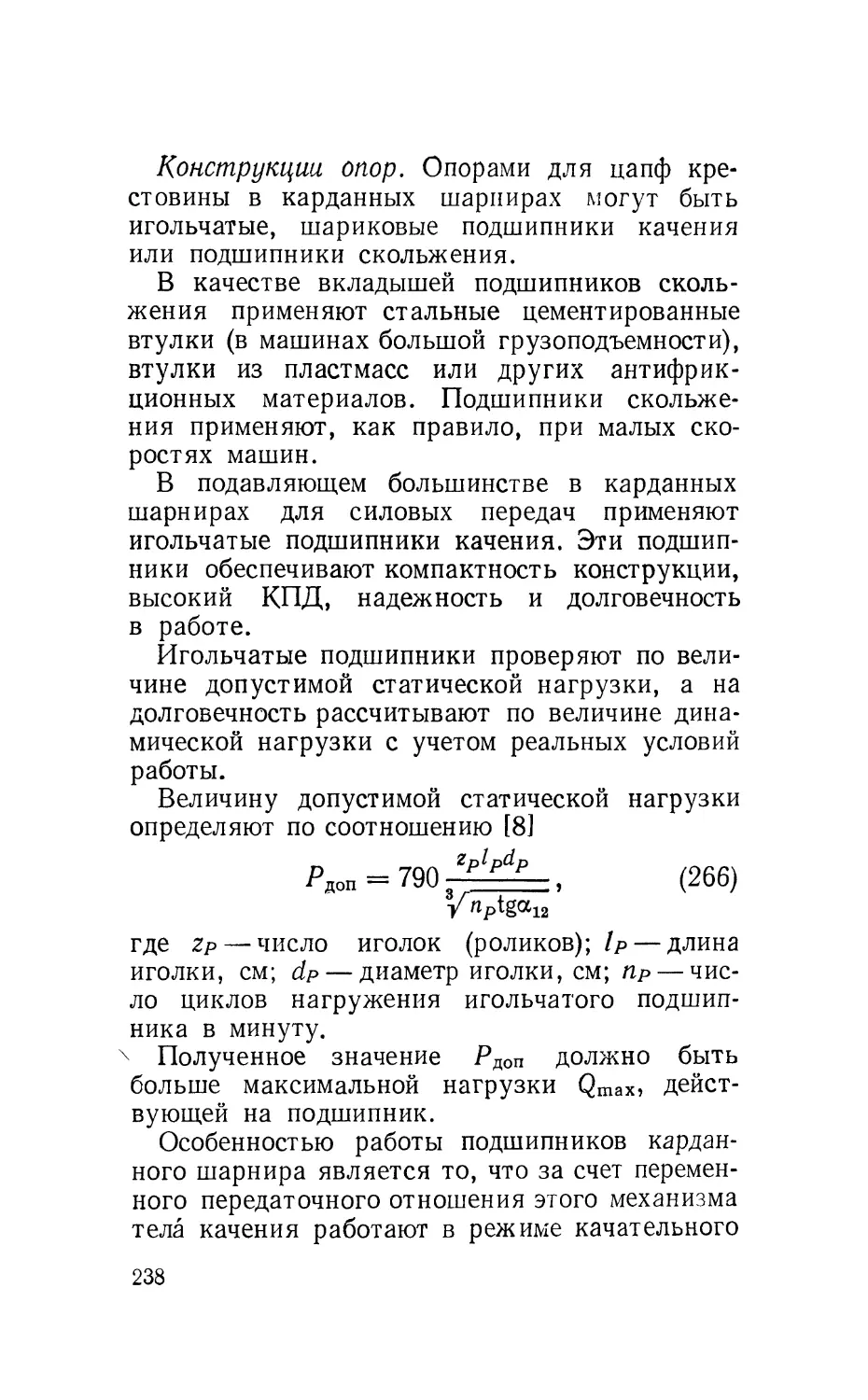
Основными деталями полных карданов
являются две вилки, промежуточное звено, опоры для
цапф промежуточного звена и уплотняющие
устройства опор. Форма деталей шарнира может
Рис. 8. Кардан, применяемый в приборостроении.
быть разнообразной, она не влияет на кинематику
кардана. Так, промежуточное звено может быть
выполнено в виде крестовины (рис. 7), кольца,
кубика, шара с цапфами или втулками с
пересекающимися осями.
Основные конструктивные различия одношар-
нирных карданных механизмов определяются
их назначением и величиной передаваемого
крутящего момента. В зависимости от величины
передаваемого крутящего момента карданные
шарниры делят на карданные шарниры механизмов
приборов (миниатюрные карданные шарниры),
малогабаритные карданы, карданы среднего,
тяжелого и сверхтяжелого конструктивных рядов.
На рис. 8 изображена конструкция
карданного шарнира, используемого в кинематических
передачах, применяемых при угле а до 15° [45].
В этом механизме кольцо 2, перемещаясь в
соответствующем пазу звена 1, образует с ним
29
плоскостную пару, а со звеном
3—цилиндрический шарнир. Шаровой наконечник звена 3
заключен в осевое отверстие звена 1, в результате чего
звено 3 может совершать два вращения вокруг
осей, пересекающихся с осью звена У, и двигаться
поступательно вдоль оси вала.При использовании
кардана такого вида для соединения валов,
вращающихся в подшипниках скольжения с осевым
ограничением, вносятся три лишних связи, из которых
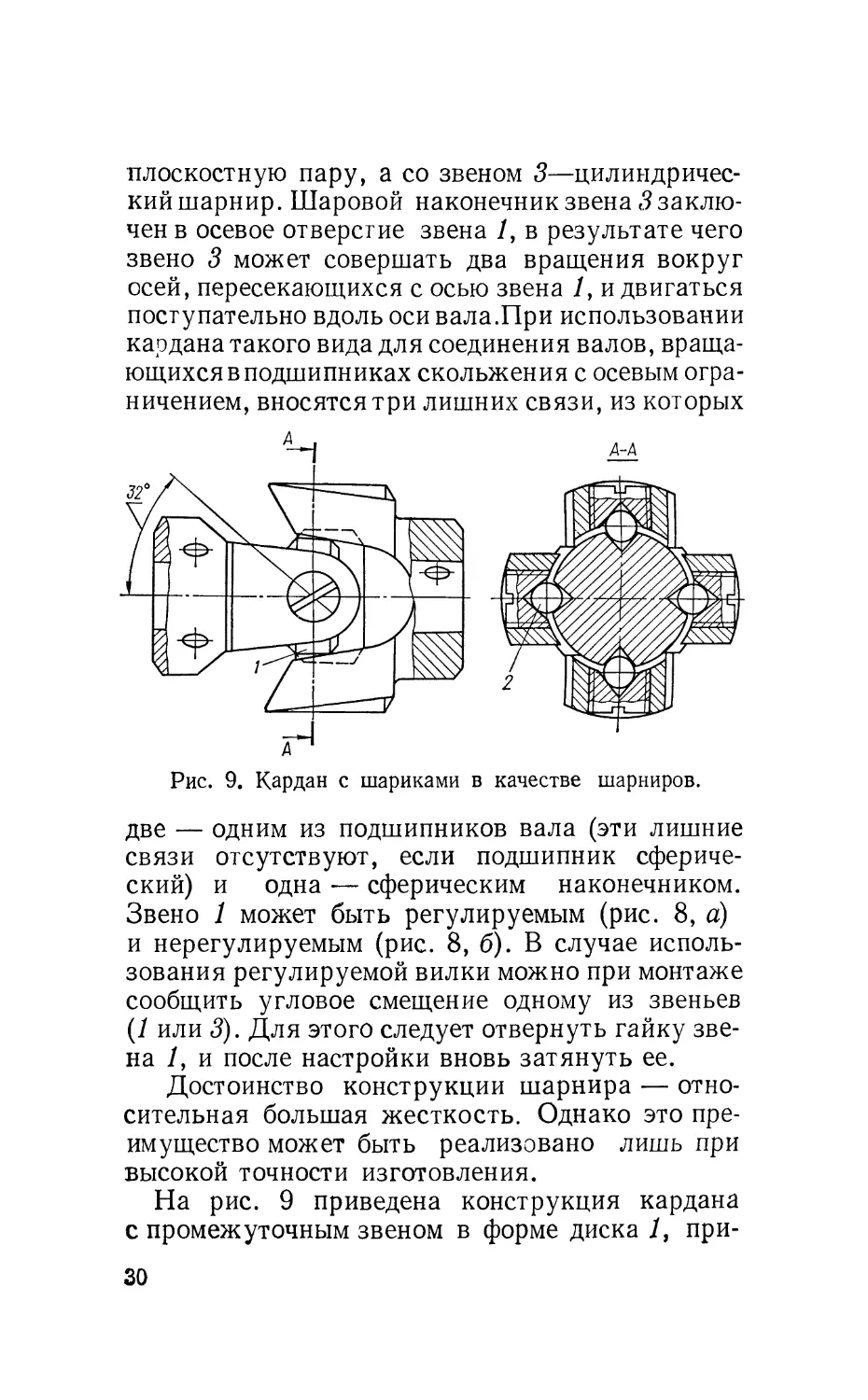
А
А-А
32'
Рис. 9. Кардан с шариками в качестве шарниров.
две — одним из подшипников вала (эти лишние
связи отсутствуют, если подшипник
сферический) и одна — сферическим наконечником.
Звено 1 может быть регулируемым (рис. 8, а)
и нерегулируемым (рис. 8, б). В случае
использования регулируемой вилки можно при монтаже
сообщить угловое смещение одному из звеньев
(/ или 3). Для этого следует отвернуть гайку
звена U и после настройки вновь затянуть ее.
Достоинство конструкции шарнира —
относительная большая жесткость. Однако это
преимущество может быть реализовано лишь при
высокой точности изготовления.
На рис. 9 приведена конструкция кардана
с промежуточным звеном в форме диска i, при-
30
меняемого для передачи крутящих моментов до
0,5 даН • м. В этом кардане вместо
цилиндрических шарниров использованы шарики 2. При
такой конструкции легко осуществляется монтаж
и демонтаж кардана.
Карданные шарниры могут быть легкого,
среднего и тяжелого конструктивного ряда.
Малогабаритные карданные шарниры легкого
конструктивного ряда предназначены для передачи
крутящих моментов до 1,25 — 1,28 даН • м.
Шарниры этого типа используются в станкостроении,
самолетостроении и ряде других отраслей
машиностроения. Крестовины, вилки, втулки и
другие элементы кинематических пар в этих
карданах изготовляются из легированных и
износостойких сталей, в качестве пар трения
используются преимущественно подшипники
скольжения.
Для уменьшения трения в некоторых
конструкциях шарниров применяют пластмассовые
покрытия или бронзовые вкладыши.
Карданные шарниры среднего
конструктивного ряда предназначены для передачи
крутящих моментов до 1000 даН • м при диаметре
фланца до 180 мм. Такие карданы применяются
в автомобилях, тракторах,
сельскохозяйственных машинах и т. п.
В настоящее время в приводах силовых
передач (автомобили, тракторы и др.)
преимущественно используют карданы с крестовиной на
подшипниках качения. Поскольку в случае
применения шариковых подшипников увеличиваются
габаритные размеры и масса карданов, в
универсальных шарнирах силовых трансмиссий
используют преимущественно игольчатые подшипники,
которые при малых габаритных размерах имеют
высокие КПД и нагрузочную способность,
требуют малого расхода смазки.
31
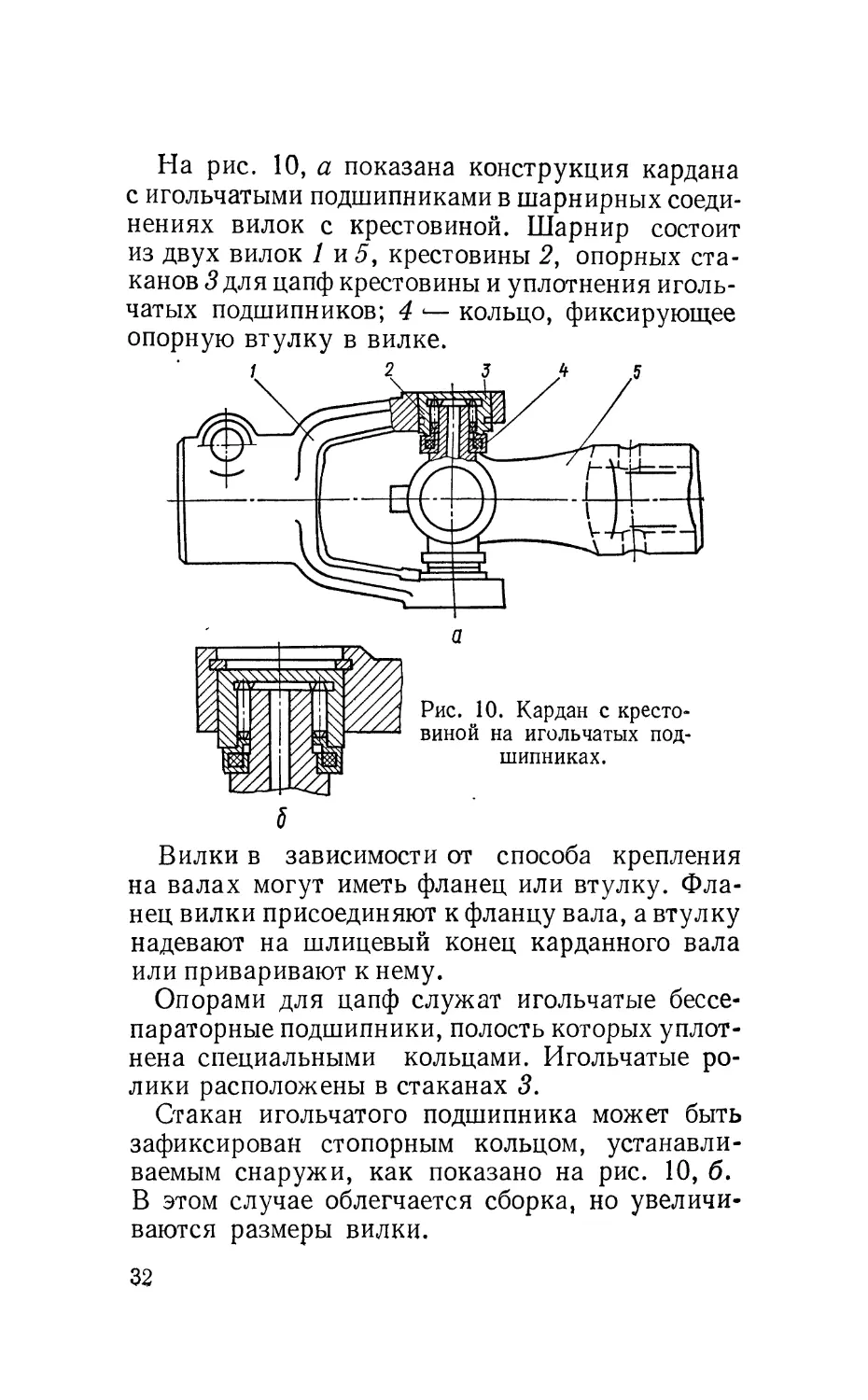
На рис. 10, а показана конструкция кардана
с игольчатыми подшипниками в шарнирных
соединениях вилок с крестовиной. Шарнир состоит
из двух вилок У и 5, крестовины 2, опорных
стаканов 3 для цапф крестовины и уплотнения
игольчатых подшипников; 4 <— кольцо, фиксирующее
опорную втулку в вилке.
/ 2 3 J* .5
Рис. 10. Кардан с
крестовиной на игольчатых
подшипниках.
Вилки в зависимости от способа крепления
на валах могут иметь фланец или втулку.
Фланец вилки присоединяют к фланцу вала, а втулку
надевают на шлицевый конец карданного вала
или приваривают к нему.
Опорами для цапф служат игольчатые
бессепараторные подшипники, полость которых
уплотнена специальными кольцами. Игольчатые
ролики расположены в стаканах 3.
Стакан игольчатого подшипника может быть
зафиксирован стопорным кольцом,
устанавливаемым снаружи, как показано на рис. 10, б.
В этом случае облегчается сборка, но
увеличиваются размеры вилки.
32
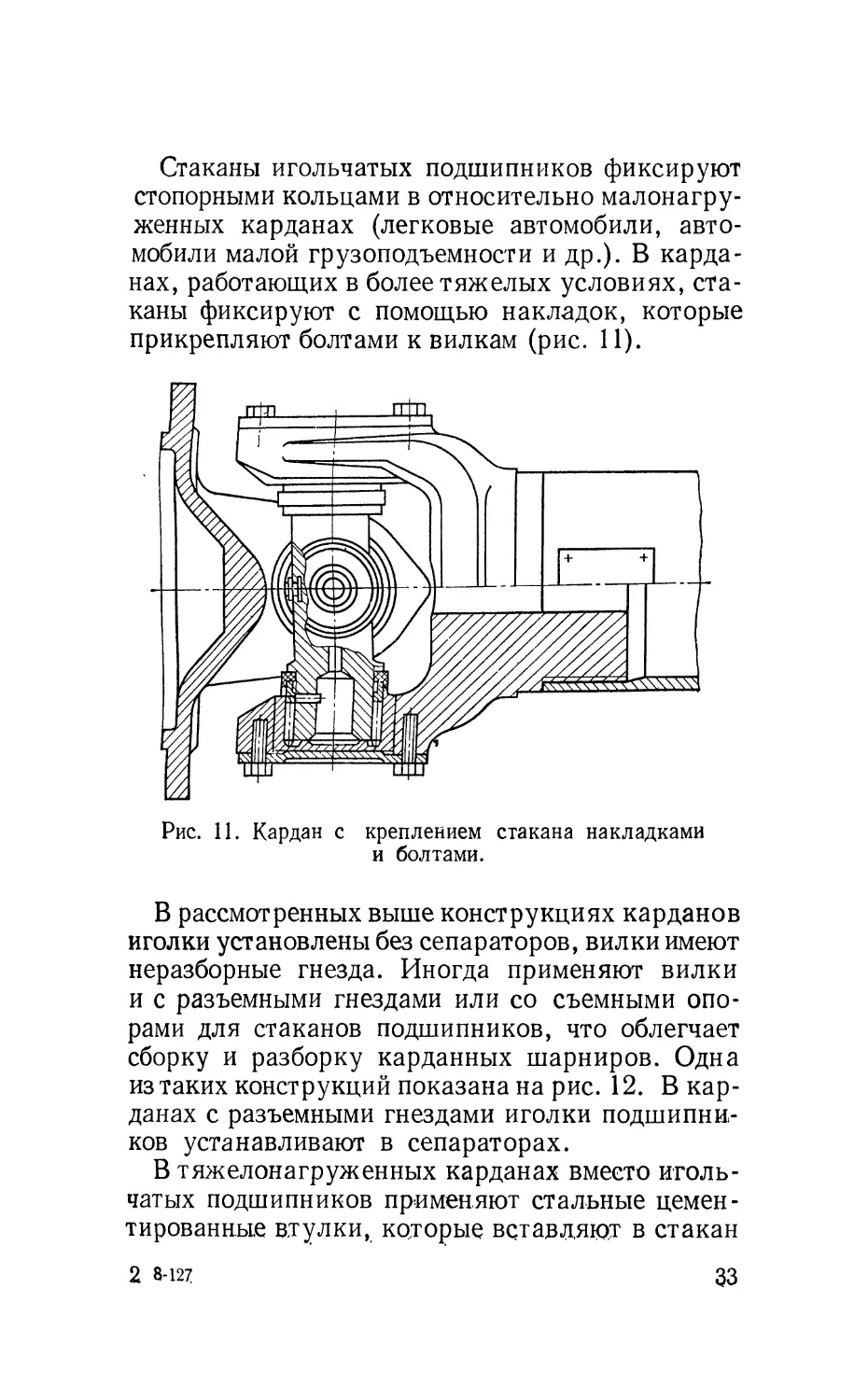
Стаканы игольчатых подшипников фиксируют
стопорными кольцами в относительно малонагру-
женных карданах (легковые автомобили,
автомобили малой грузоподъемности и др.)- В
карданах, работающих в более тяжелых условиях,
стаканы фиксируют с помощью накладок, которые
прикрепляют болтами к вилкам (рис. 11).
Рис. 11. Кардан с креплением стакана накладками
и болтами.
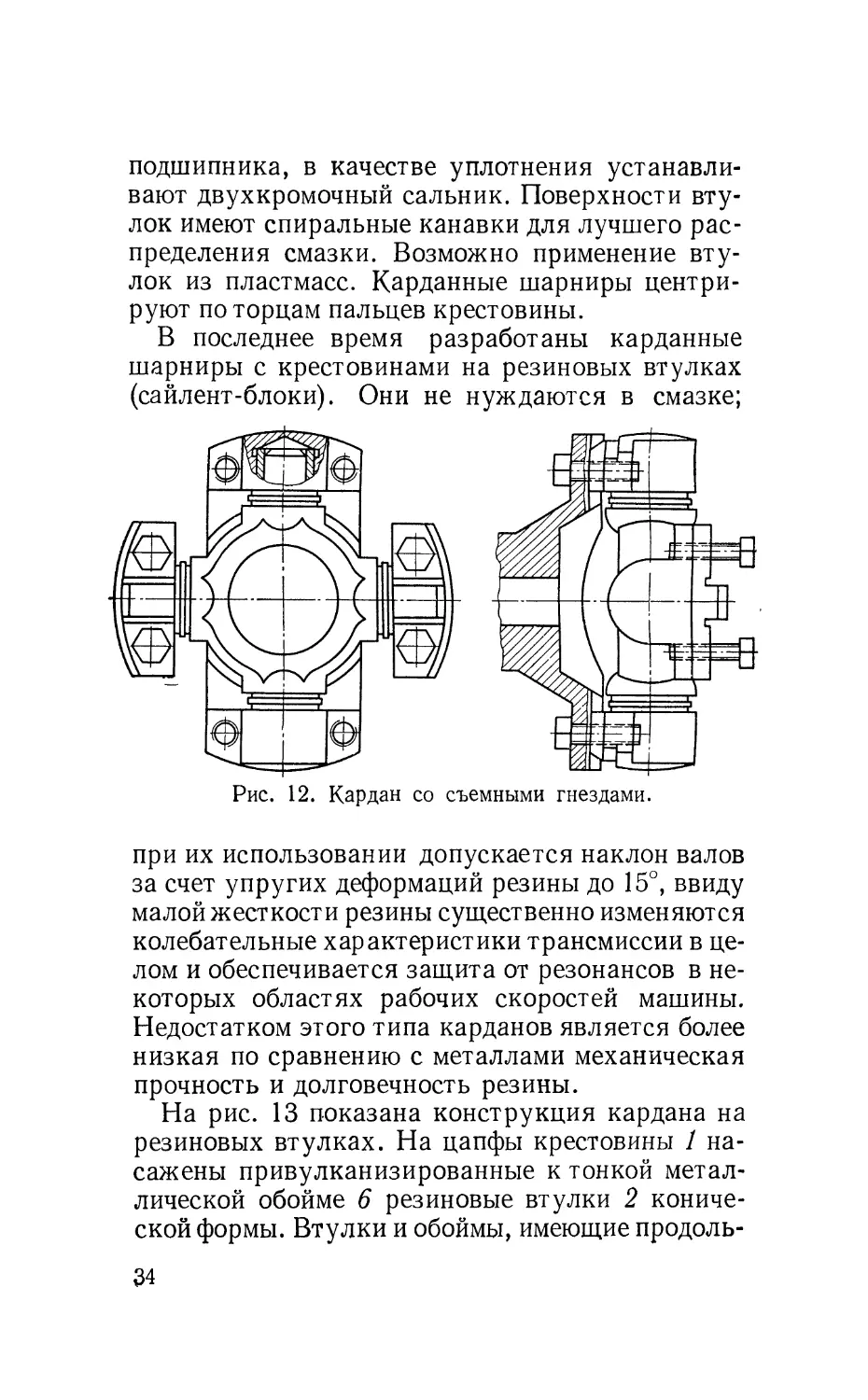
В рассмотренных выше конструкциях карданов
иголки установлены без сепараторов, вилки имеют
неразборные гнезда. Иногда применяют вилки
и с разъемными гнездами или со съемными
опорами для стаканов подшипников, что облегчает
сборку и разборку карданных шарниров. Одна
из таких конструкций показана на рис. 12. В
карданах с разъемными гнездами иголки
подшипников устанавливают в сепараторах.
В тяжелонагруженных карданах вместо
игольчатых подшипников применяют стальные
цементированные втулки, которые вставляют в стакан
2 8-127 33
подшипника, в качестве уплотнения
устанавливают двухкромочный сальник. Поверхности
втулок имеют спиральные канавки для лучшего
распределения смазки. Возможно применение
втулок из пластмасс. Карданные шарниры
центрируют по торцам пальцев крестовины.
В последнее время разработаны карданные
шарниры с крестовинами на резиновых втулках
(сайлент-блоки). Они не нуждаются в смазке;
Рис. 12. Кардан со съемными гнездами.
при их использовании допускается наклон валов
за счет упругих деформаций резины до 15°, ввиду
малой жесткости резины существенно изменяются
колебательные характеристики трансмиссии в
целом и обеспечивается защита от резонансов в
некоторых областях рабочих скоростей машины.
Недостатком этого типа карданов является более
низкая по сравнению с металлами механическая
прочность и долговечность резины.
На рис. 13 показана конструкция кардана на
резиновых втулках. На цапфы крестовины 1
насажены привулканизированные к тонкой
металлической обойме 6 резиновые втулки 2
конической формы. Втулки и обоймы, имеющие продоль-
34
ную прорезь шириной а, присоединены к вилкам
с помощью U-образных хомутов 5, проходящих
через отверстия вилок 3 и 4. При затяжке
хомутами втулки получают предварительный натяг,
который ограничивается величиной зазора,
и удерживаются от проскальзывания на цапфах
силами трения. В случае проскальзывания
резиновый элемент быстро изнашивается. Более
надежны металлорезиновые соединения, в которых
А-А
Рис. 13. Кардан с крестовиной на резиновых втулках.
резина привулканизирована к обоим
смещающимся друг относительно друга металлическим
деталям.
Карданные шарниры тяжелого
конструктивного ряда, предназначенные для передачи
крутящего момента до 28 000 даН • м, применяются
в трансмиссиях локомотивов и тяжелых
грузовых автомобилей, приводах буровых установок,
прокатных станов, а также в судовых приводах
и т. п.
Шарниры сверхтяжелого конструктивного
ряда используются в тяжелом
машиностроении для передачи крутящих моментов до
300 000 даН • м при максимальном угле между
осями валов до 15°.
2* 35
К надежности и долговечности карданных
шарниров этого типа предъявляют особенно высокие
требования, потому что восстановление
работоспособности шарниров после износа или
разрушения приводит к большим материальным
потерям из-за простоев оборудования.
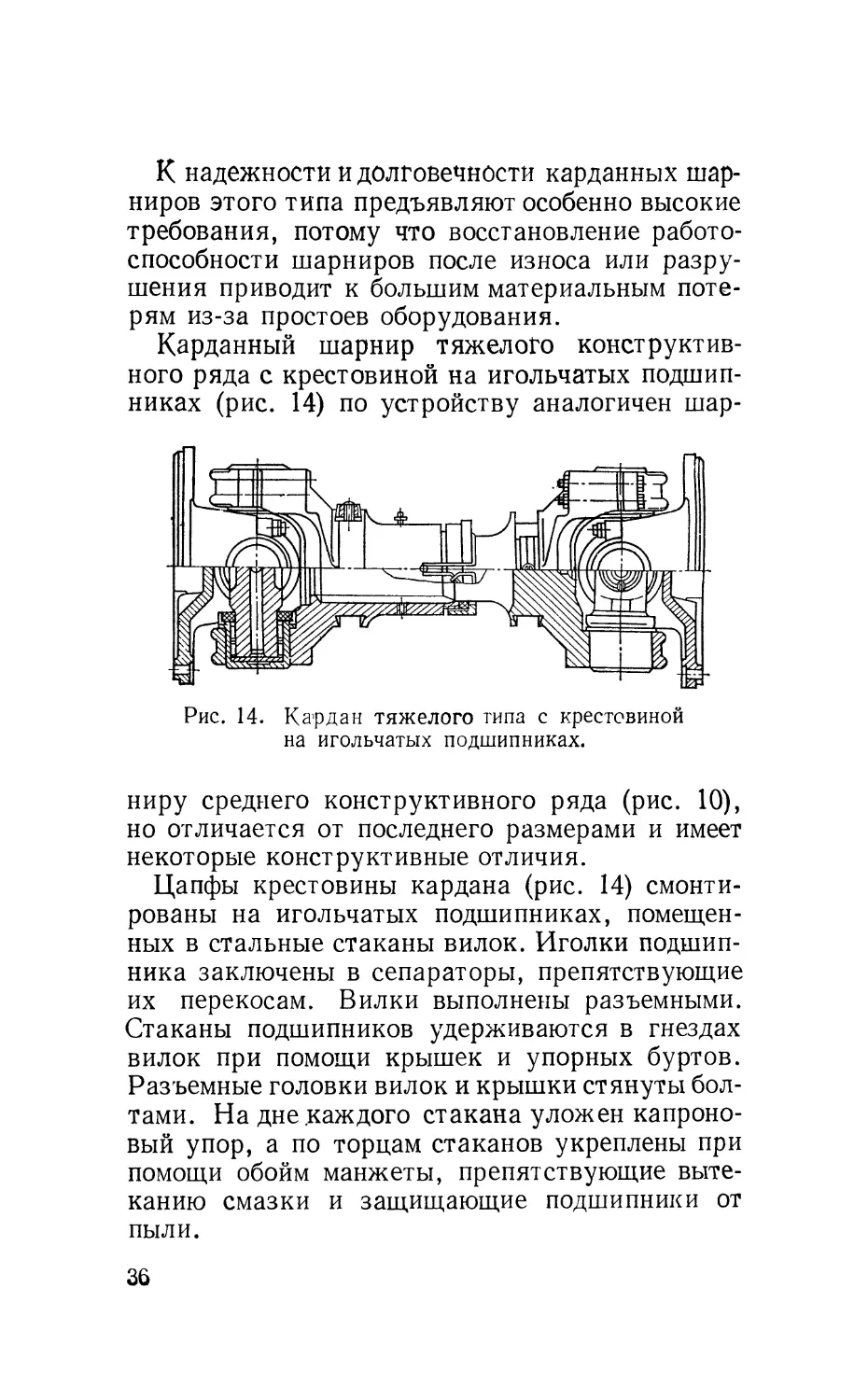
Карданный шарнир тяжелого
конструктивного ряда с крестовиной на игольчатых
подшипниках (рис. 14) по устройству аналогичен шар-
Рис. 14. Кардан тяжелого типа с крестовиной
на игольчатых подшипниках.
ниру среднего конструктивного ряда (рис. 10),
но отличается от последнего размерами и имеет
некоторые конструктивные отличия.
Цапфы крестовины кардана (рис. 14)
смонтированы на игольчатых подшипниках,
помещенных в стальные стаканы вилок. Иголки
подшипника заключены в сепараторы, препятствующие
их перекосам. Вилки выполнены разъемными.
Стаканы подшипников удерживаются в гнездах
вилок при помощи крышек и упорных буртов.
Разъемные головки вилок и крышки стянуты
болтами. На дне .каждого стакана уложен
капроновый упор, а по торцам стаканов укреплены при
помощи обойм манжеты, препятствующие
вытеканию смазки и защищающие подшипники от
пыли.
36
Такие достаточно надежные и
работоспособные карданные шарниры используются широко,
но из-за относительно больших габаритных
размеров (выпускаемые промышленностью карданы
имеют диаметры фланцев от 225 до 550 мм)
применяются при передаче мощности не выше
150 кВт — в трансмиссии тяжелых грузовиков,
тепловозов и т. п.
/ а
Л,
1
1
\
/
\
1
\
/
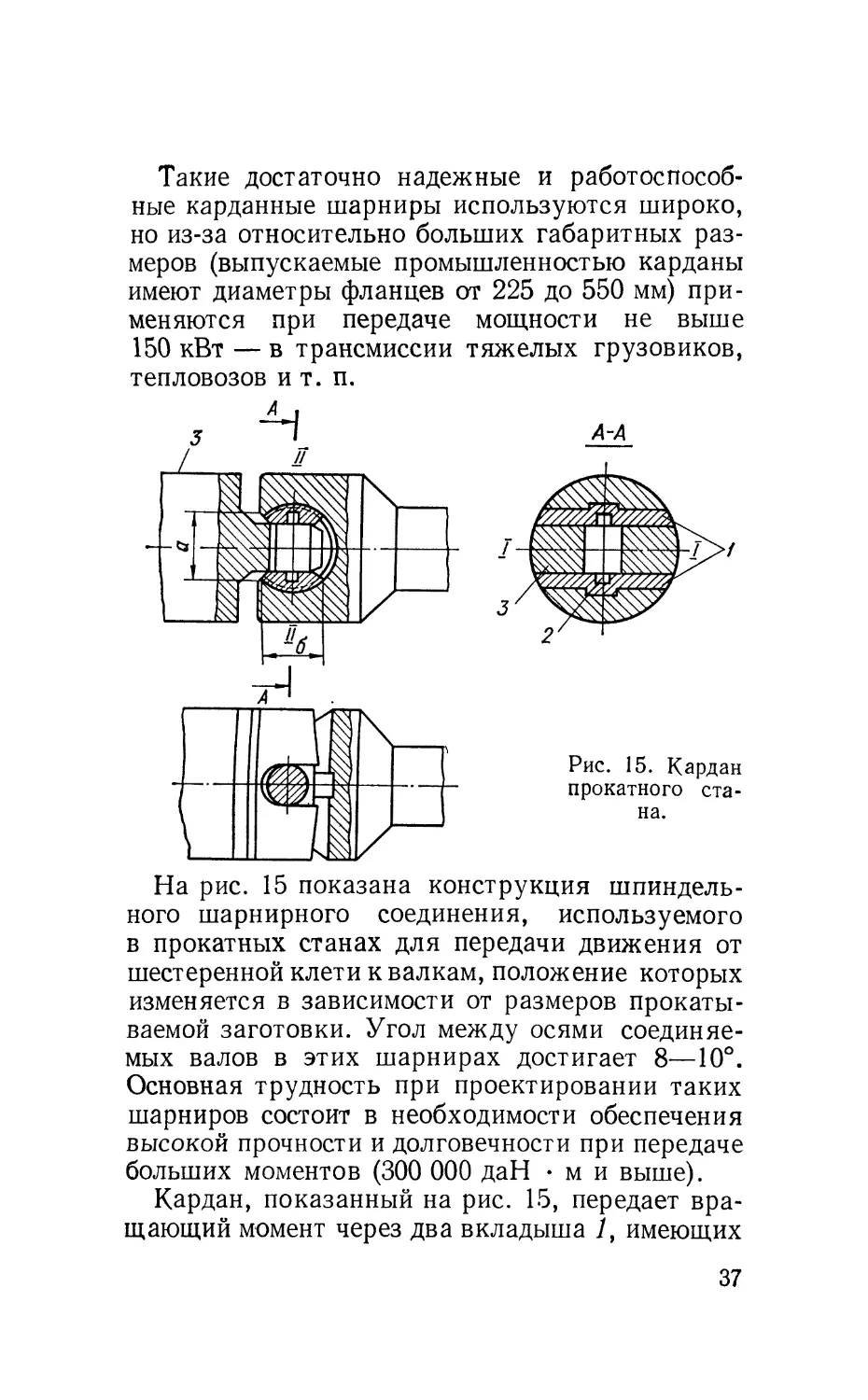
Рис. 15. Кардан
прокатного
стана.
На рис. 15 показана конструкция
шпиндельного шарнирного соединения, используемого
в прокатных станах для передачи движения от
шестеренной клети к валкам, положение которых
изменяется в зависимости от размеров
прокатываемой заготовки. Угол между осями
соединяемых валов в этих шарнирах достигает 8—10°.
Основная трудность при проектировании таких
шарниров состоит в необходимости обеспечения
высокой прочности и долговечности при передаче
больших моментов (300 000 даН • м и выше).
Кардан, показанный на рис. 15, передает
вращающий момент через два вкладыша 1, имеющих
37
возможность поворачиваться в пределах
ограниченного угла вокруг оси /—/,
перпендикулярной к оси вала. Поскольку вал 3 соединен с
вкладышами посредством пальца 2, размещенного
в прорези вилки, возможно относительное
вращение вокруг оси //—// и осевое смещение валов.
Для осуществления сборки шарнира
необходимо расстояние между щеками головки ведомого
вала сделать несколько больше ширины
вкладышей, т. е. следует принять а > б.
А-А
Рис. 16. Шарнирное соединение конструкции НКМЗ.
В шарнирном соединении конструкции НКМЗ
(Новокраматорского машиностроительного
завода) вместо пальца установлен длинный болт,
проходящий через щеки ведомого вала (рис. 16).
Если вынуть болт, то ведущий и ведомый валы
могут быть свободно разъединены без их осевого
смещения. При такой конструкции шарнира
значительно упрощается работа по демонтажу
главной линии прокатных станов. В тех случаях,
когда по условиям монтажа конец вала не может
быть изготовлен за одно целое с вилкой, вилку
выполняют отдельно от вала и насаживают на его
конец.
Шарниры относятся к наиболее изнашиваемым
узлам станов и нуждаются в частых ремонтах,
38
связанных с прекращением работы станов и де-
монтажом крупногабаритных деталей.
Повышение надежности и долговечности карданного
шарнира возможно в результате применения
подшипников качения. Универсальный шарнир с
подшипниками качения разработан во ВНИИ-
метмаше (рис. 17). Он состоит из вилок 2 и 9,
соединенных со ступицами ] болтами 10 и торцевым
замком, и крестовины, образованной четырьмя
'——■ г~
Ь2
10 9 8
Рис. 17. Универсальный шарнир конструкции
ВНИИметмаш.
втулками б, втулкой 4, гайкой 3, винтами 5,
наружной обоймой 7 и роликовыми коническими
подшипниками 8. Натяг подшипников 8
регулируется винтами 5, которые стопорятся крышками
с шестигранным отверстием, крепящимися
винтами к втулкам 6.
Основным недостатком всех конструкций одно-
шарнирных карданов является непостоянная
скорость вращения ведомого вала. Это в
значительной степени ограничивает их применение.
В большинстве случаев карданные шарниры
описанных конструкций применяют в двухшарнир-
ных и многошарнирных передачах, в которых
можно исключить указанный недостаток
одинарного карданного шарнира.
ЖЕСТКИЕ ПОЛУКАРДАНЫ
В тех случаях, когда оси валов пересекаются
под малым углом, их можно соединять при
помощи полукарданов, не имеющих конструктивно
выполненных осей качения, однако допускающих
поворот осей валов в пределах небольшого угла.
Промежуточного звена в полукардане либо нет,
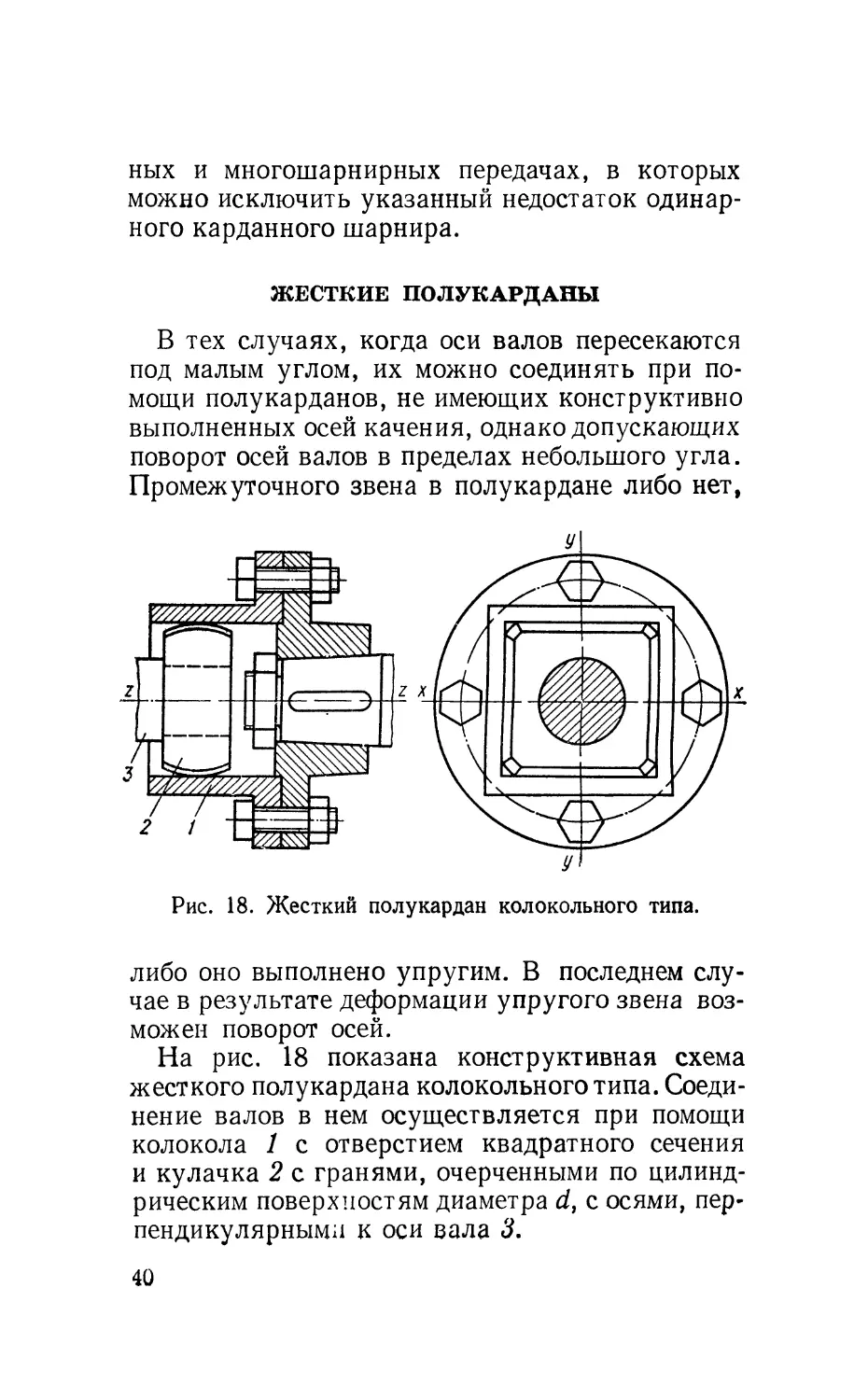
Рис. 18. Жесткий полукардан колокольного типа.
либо оно выполнено упругим. В последнем
случае в результате деформации упругого звена
возможен поворот осей.
На рис. 18 показана конструктивная схема
жесткого полукардана колокольного типа.
Соединение валов в нем осуществляется при помощи
колокола 1 с отверстием квадратного сечения
и кулачка 2 с гранями, очерченными по
цилиндрическим поверхностям диаметра d, с осями,
перпендикулярными к оси вала 3.
40
Полукардан как кинематическая пара вносит
три условия связи, что следует учитывать при
проектировании опор входного и выходного
валов. В рассматриваемом соединении есть
повторяющиеся связи. Действительно, одна пара
цилиндрических граней ограничивает
относительное движение звеньев вдоль оси у и вращение
вокруг оси z, а вторая — перемещение вдоль оси
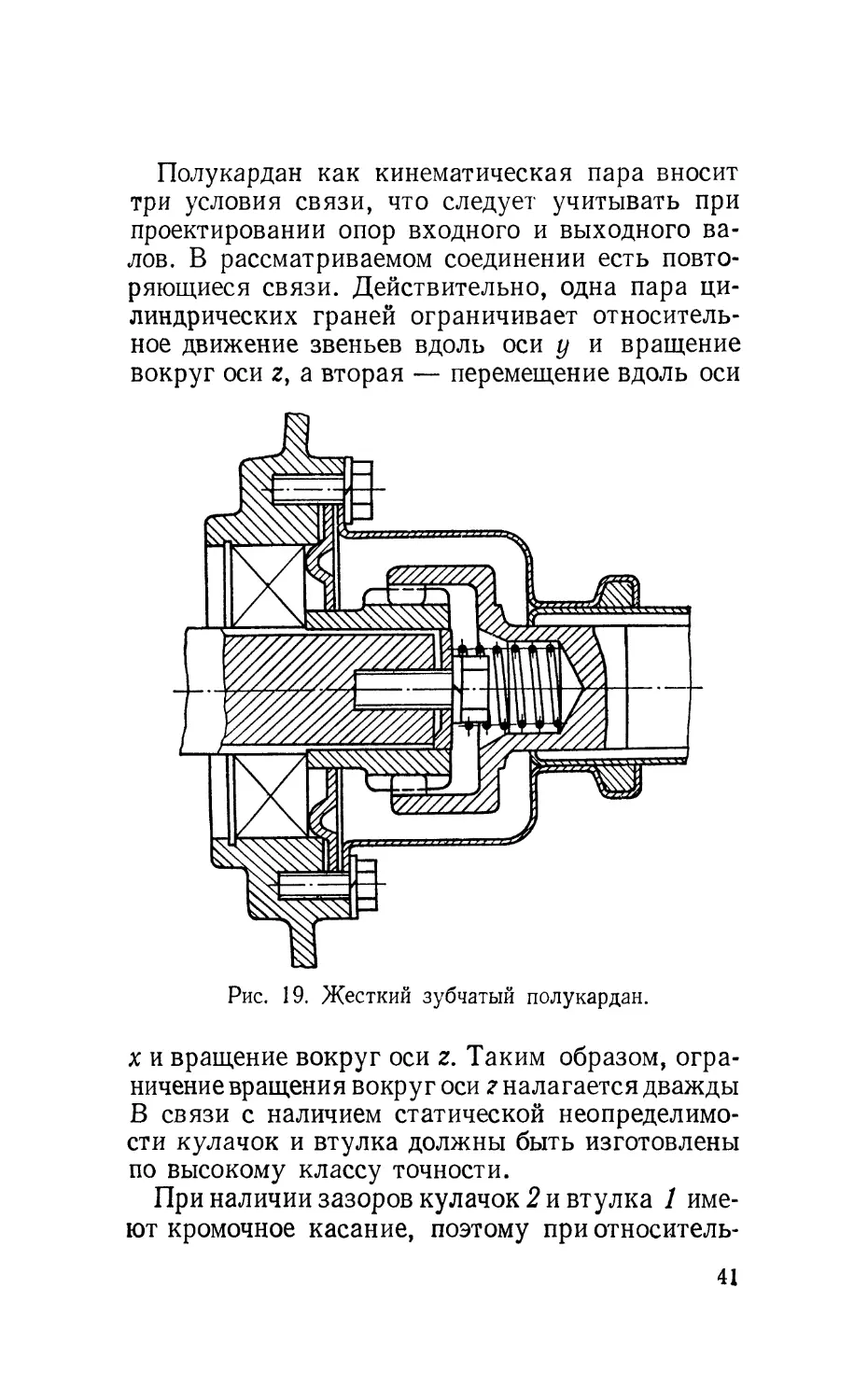
Рис. 19. Жесткий зубчатый полукардан.
х и вращение вокруг оси z. Таким образом,
ограничение вращения вокруг оси 2 налагается дважды
В связи с наличием статической
неопределимости кулачок и втулка должны быть изготовлены
по высокому классу точности.
При наличии зазоров кулачок 2 и втулка 1
имеют кромочное касание, поэтому при относитель-
41
ном скольжении поверхностей трения они быстро
изнашиваются. Попытки увеличить поверхности
соприкосновения путем увеличения числа граней
не способствовали снижению износа.
На рис. 19 изображен полукардан,
применяемый в автомобилях, выполненный в виде
зубчатой муфты. Предполагается, что поверхность
соприкосновения между звездочкой и втулкой в
таком полукардане больше за счет увеличения
числа закругленных зубцов. Основным
недостатком его является чрезмерный износ зубьев
звездочки и муфты вследствие неравномерности
распределения давления между зубцами из-за
статической неопределимости системы. В результате
Рис. 20. Жесткий полукардан автомобиля МАЗ
большой грузоподъемности.
износа жесткий кардан создает шум вследствие
ударов при закрытии зазоров.
В настоящее время жесткие полукарданы
применяются сравнительно редко, так как в
результате больших удельных давлений в зоне контакта
элементов жестких полукарданов происходит
быстрый износ их и, следовательно, снижается
долговечность при высокой стоимости
изготовления. Иногда карданные механизмы с зубчатыми
42
муфтами применяют для передачи больших
крутящих моментов. Одна из таких конструкций,
использованная в трансмиссии большегрузного
автомобиля МАЗ, показана на рис. 20.
УПРУГИЕ ПОЛУКАРДАНЫ
В последнее время большое распространение
получили упругие (мягкие) полукарданы. К ним
относится большое количество упругих муфт [67],
при помощи которых соединяют валы с осями,
пересекающимися под относительно небольшими
углами.
Муфты с упругими (преимущественно
резиновыми) элементами широко применяют в
современном машиностроении благодаря сравнительной
простоте конструкции, малой стоимости
изготовления, высоким компенсационным свойствам,
хорошим динамическим характеристикам,
возможности работы в абразивной среде без смазки и др.
Однако поскольку механическая прочность
резины и пластмассы, применяемых в качестве
упругих элементов, ниже по сравнению с
прочностью металлов, эти упругие соединения обычно
применяют для передачи малых и средних
крутящих моментов.
Упругие элементы муфт могут быть
композиционными (резина привулканизирована к
металлическим деталям). Нагрузочная способность
такого вида деталей значительно больше, а
работоспособность — выше по сравнению с муфтами,
в которых резиновые элементы контактируют
с металлическими деталями без вулканизации.
Резина для изготовления упругих элементов
должна обладать соответствующей твердостью,
диссипативными свойствами и другими
характеристиками в зависимости от назначения
упругого элемента. При конструировании необ-
43
ходимо также учитывать, что долговечность
резиновых элеменов ниже, чем стальных, так как
резина постепенно теряет свои упругие свойства
(стареет).
В процессе разработки конструкций упругих
карданов созданы муфты, допускающие передачу
вращения между валами с углом между осями
до 10°.
Обилие разновидностей упругих муфт,
рекламируемых иностранными фирмами, объясняется
не столько их необходимостью, сколько
конкуренцией и патентными ограничениями.
Ниже рассмотрены различные типы упругих
полукарданов.
Дисковые полукарданы. Упругим элементом,
осуществляющим передачу момента от ведущего
вала к ведомому в конструкциях этого типа,
является резиновый, резинотканевый или резино-
кордный диск. Благодаря гибкости диска при
изгибе обеспечивается его относительно малая
жесткость и, следовательно, исключается появление
больших давлений на опоры при несовпадении
осей связываемых муфтой валов. В то же время
ввиду достаточно большой жесткости в
плоскости диска обеспечивается передача полукарданом
значительных крутящих моментов.
-На рис. 21, а показана простейшая муфта с
резиновым диском, в отверстия которой входят
пальцы металлических полумуфг. Эти муфты
просты, технологичны, но не способны
передавать большие крутящие моменты, поскольку
из шести секторов нагрузку передают только
три. В результате этого отверстия в диске
приобретают овальную форму, в нем образуются
трещины.
Для увеличения нагрузочной способности
и долговечности резиновых дисков отверстия под
пальцы армируются металлическими втулками
44
Рис. 21. Пальцевые муфты с резиновым диском:
а — муфта с резиновым диском; б — армирование отверстий
под пальцы.
Рис. 22. Муфта с
упругими дисками
конструкции ЛПИ им.
М. И. Калинина.
ш
46
(рис. 21, б). Нагрузолная способность дисков
значительно увеличивается, если армирующие
детали привулканизированы. При этом
достигается более благоприятное распределение
напряжений в диске у отверстий и перераспределение
нагрузки между сжатыми и растянутыми
секторами.
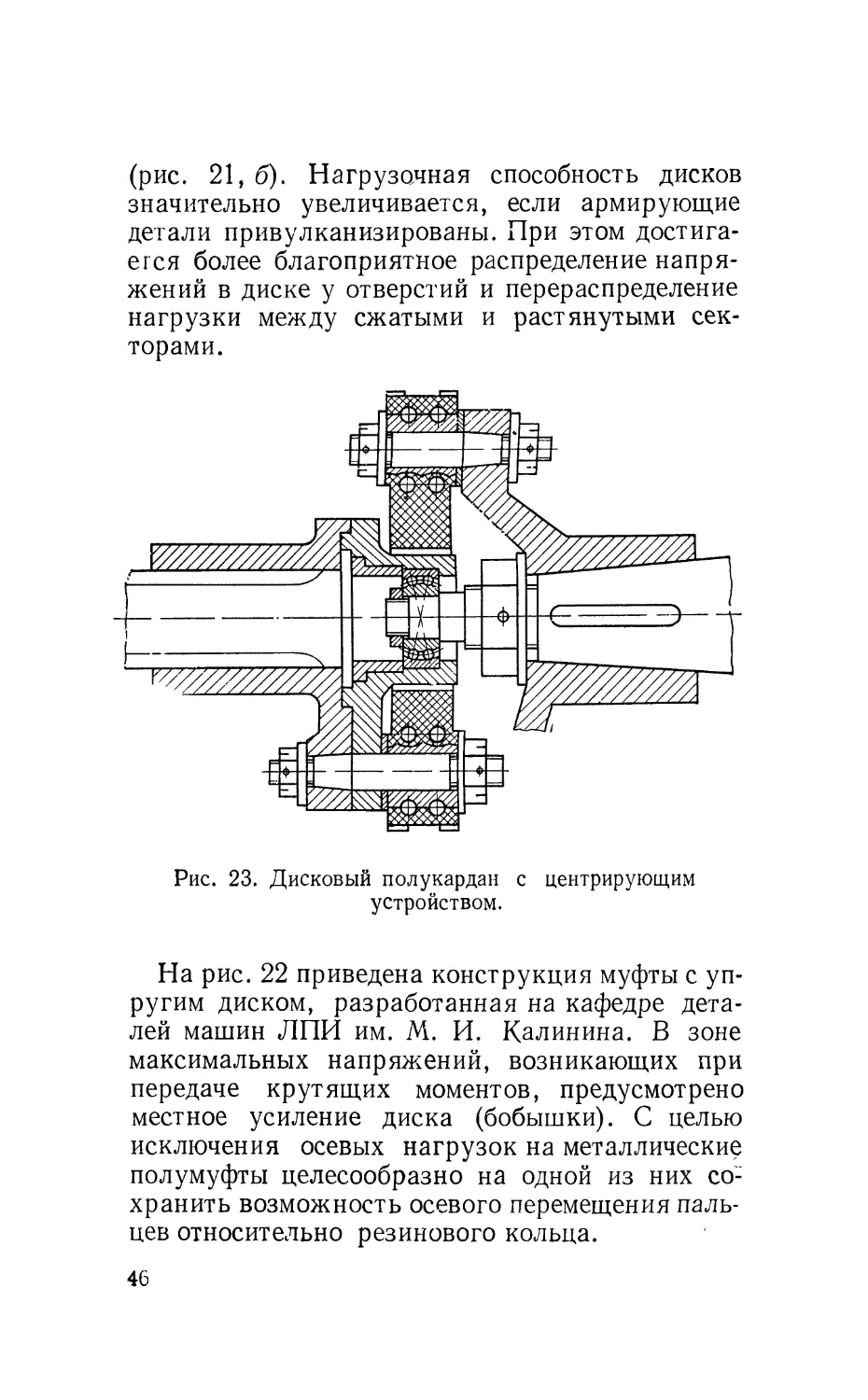
Рис. 23. Дисковый полукардан с центрирующим
устройством.
На рис. 22 приведена конструкция муфты с
упругим диском, разработанная на кафедре
деталей машин ЛПИ им. М. И. Калинина. В зоне
максимальных напряжений, возникающих при
передаче крутящих моментов, предусмотрено
местное усиление диска (бобышки). С целью
исключения осевых нагрузок на металлические
полумуфты целесообразно на одной из них
сохранить возможность осевого перемещения
пальцев относительно резинового кольца.
46
Для улучшения условий работы упругого
кардана, особенно при тяжелых и длинных, а также
вращающихся с высокими скоростями валах,
у которых оси смещаются под действием их
веса, рекомендуется применять центрирующие
устройства. На рис. 23 приведена конструкция
дискового
полукардана, у которого в
качестве
центрирующего устройства
применен сферический
шарикоподшипник,
установленный в гнезде
фланца,
прикрепленного к вилке. С целью
увеличения
крутильной жесткости диска
последний армирован
петлями,
охватывающими втулки под
пальцы.
Рис. 24. Звенчатый
полукардан с центрирующим
устройством.
Наборные полукарданы. Вилки, монтируемые
на валах наборного полукардана, соединяются
при помощи армированных стальным каркасом
упругих элементов (рис. 24, б).
Упругие звенья, обладая большой жесткостью
при работе на растяжение, легко деформируются
при изгибе, если оси валов не совпадают. В
полукардане предусмотрены специальные детали
для центрирования валов. Так, в полу кардане,
показанном на рис. 24, а, предусмотрен
сферический шарнир, образованный колпачком со сфе-
47
рическими вкладышамр на торце одного вала
и сферическим наконечником на торце другого.
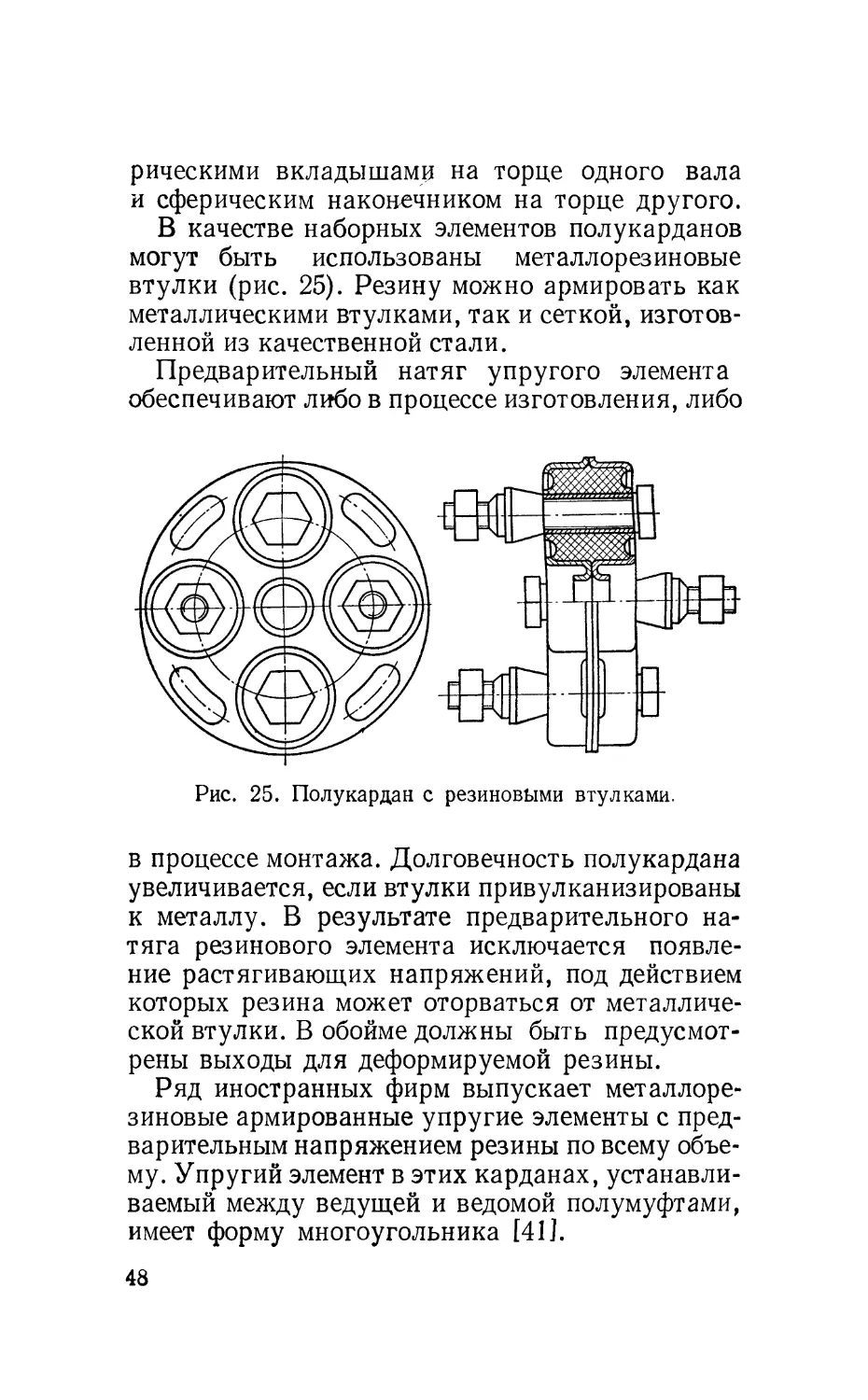
В качестве наборных элементов полукарданов
могут быть использованы металлорезиновые
втулки (рис. 25). Резину можно армировать как
металлическими втулками, так и сеткой,
изготовленной из качественной стали.
Предварительный натяг упругого элемента
обеспечивают либо в процессе изготовления, либо
Рис. 25. Полукардан с резиновыми втулками.
в процессе монтажа. Долговечность полукардана
увеличивается, если втулки привулканизированы
к металлу. В результате предварительного
натяга резинового элемента исключается
появление растягивающих напряжений, под действием
которых резина может оторваться от
металлической втулки. В обойме должны быть
предусмотрены выходы для деформируемой резины.
Ряд иностранных фирм выпускает
металлорезиновые армированные упругие элементы с
предварительным напряжением резины по всему
объему. Упругий элемент в этих карданах,
устанавливаемый между ведущей и ведомой полумуфтами,
имеет форму многоугольника [41].
43
На рис. 26 изображены конструкции
полукардана с упругим элементом шестиугольной формы.
Полу кардан под действием крутящего момента
закручивается на 7°. Угловое смещение валов
допускается до 5°. Резина упругого элемента в
таком полукардане предварительно сжата при
монтаже, в результате чего на всех участках
упругого элемента при работе возникают напряжения
одного знака (сжатия). Это способствует
повышению срока его службы.
А -А
А
Рис. 26. Муфта «Iusoflex» с шестиугольными упругими
элементами.
Полукарданы с торообразным упругим
элементом. В качестве упругого элемента полукардана
широко используют резиновую или резинокорд-
ную оболочку. Резинокордный упругий элемент
сложнее в изготовлении, чем резиновый, однако
срок его службы в несколько раз больше
резинового.
Полукарданы с торообразным упругим
элементом отличаются высокими компенсационными
свойствами и демпфирующей способностью. К
недостаткам их следует отнести большие размеры
по диаметру и высокую металлоемкость.
На рис. 27 показана муфта «Periflex»,
выпускаемая фирмой» «Stromag». Резинокордный
упругий элемент 2 зажат между одинаковыми
49
полумуфтами 1 и 5 с помощью нажимных колец
3 и винтов 4. Для удобства монтажа упругий
элемент имеет радиальный разрез.
Муфта отличается простотой конструкции
и легкостью монтажа упругого элемента. Однако
из-за того, что упругий элемент имеет разрез,
несущая способность муфты снижена. Такие
муфты применяют при
окружных скоростях до
30 м/с. Допускаемый
угол между осями
соединяемых валов 2—6°,
момент 15—
крутящий
10 000 даН • м.
При применении
упругого элемента без
разреза скорость вращения
может быть увеличена,
но в этом случае
усложняется конструкциямуф-
ты и ее монтаж.
Рис. 27. Муфта «Periflex» с
разрезным торообразным
упругим элементом.
На рис. 28 представлена муфта с цельным
упругим элементом (нормаль МН5809/65) [67]. Эту
муфту используют при более высоких окружных
скоростях по сравнению с муфтой с
разрезанным упругим элементом. Однако свободный
участок упругого элемента в этой муфте меньше,
вследствие чего компенсационные свойства ее
и срок службы ниже. Муфту такой конструкции
рекомендуется применять при углах между осями
валов до 2°. Для различных типоразмеров муфт
величина Мкр колеблется от 1,8 до 300 даН • м.
• На рис. 29 показана лепестковая муфта,
состоящая из двух одинаковых полумуфт 1 и 4 , к кото*
50
рым с помощью нажимных колец 3 и винтов 5
прикрепляют упругие элементы 2, выполненные
в виде лепестков из резины, армированной ни-
Рис. 28. Муфта с цельным торообразным упругим
элементом.
А-А
Рис...29. .Лепестковая; упругая .муфта.
тями корда, уложенными.в виде восьмерки, В
процессе монтажа лепестки изгибаются, при. этом
внутренние слои резины сжимаются, а
наружные — растягиваются, в результате чего они
51
могут начинать работать с момента действия
нагрузки.
Допускаемый угол между осями валов в этой
муфте зависит от числа лепестков и составляет,
например, при трех хомутах 6°, при восьми —
4,5°.
6-6
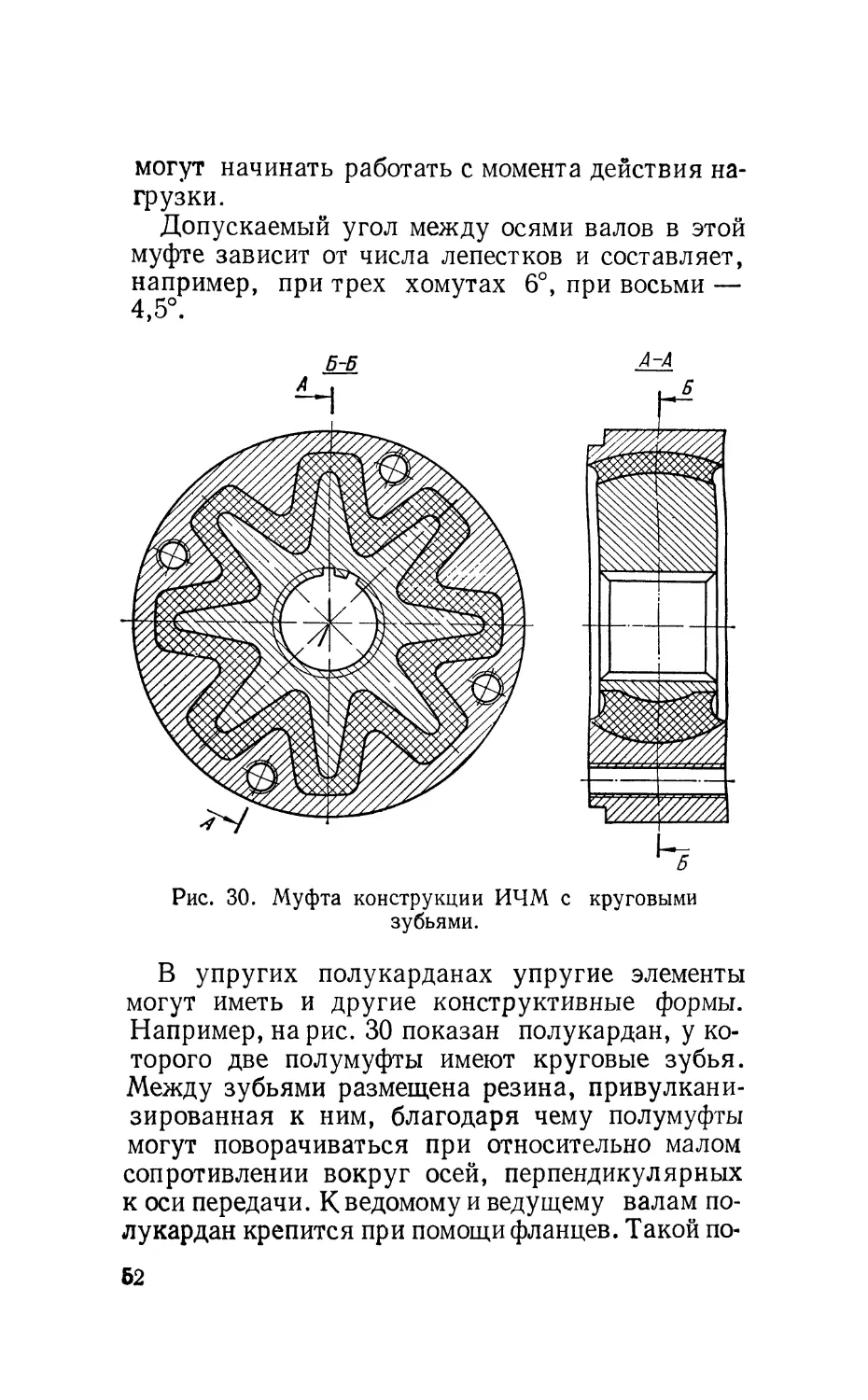
Рис. 30. Муфта конструкции ИЧМ с круговыми
зубьями.
В упругих полукарданах упругие элементы
могут иметь и другие конструктивные формы.
Например, на рис. 30 показан полукардан, у
которого две полумуфты имеют круговые зубья.
Между зубьями размещена резина, привулкани-
зированная к ним, благодаря чему полумуфты
могут поворачиваться при относительно малом
сопротивлении вокруг осей, перпендикулярных
к оси передачи. К ведомому и ведущему валам
полукардан крепится при помощи фланцев. Такой по-
62
лукардан более надежный и допускает передачу
больших моментов. Выполненный в форме
законченного конструктивного элемента, полукардан
легко монтируется и демонтируется. Испытания
на мелкосортном прокатном стане одного из
металлургических заводов показали значительно
большую стойкость этого типа полу кардана по
А-А
б-б
Рис. 31. Муфта с резиновыми шариками.
сравнению с шарнирами Гука, пальцы
крестовины которого монтированы на подшипниках
качения. Полукардан не требует ухода, смазки,
нормально работает в абразивной среде и в
присутствии влаги, фильтрует ударные нагрузки.
Конструкция полукардана разработана в
Институте черной металлургии АН УССР.
На рис. 31 показана муфта с закладными
упругими элементами. Полумуфты 1 и 3 имеют
диаметрально расположенные полые кулачки, между
которыми размещены упругие элементы 4>
выполненные в виде шариков или цилиндров. Резиною
вые упругие элементы удерживаются кожухом 2,
прикрепленным к полумуфте 3 винтами.
53
Муфта допускает угловое смещение валов до
16° и разогрев упругих элементов до 80° С,
применяется для передачи малых нагрузок.
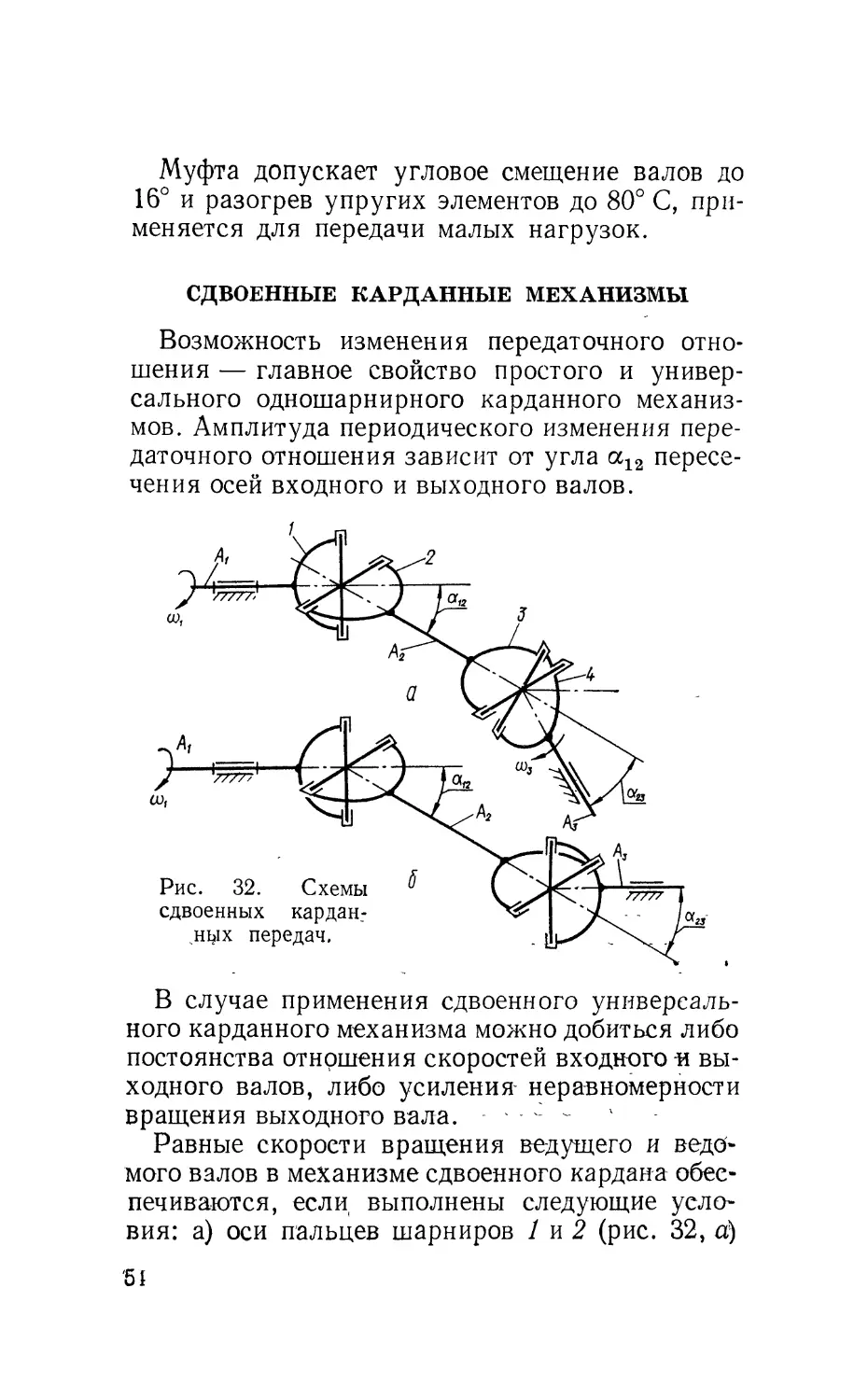
СДВОЕННЫЕ КАРДАННЫЕ МЕХАНИЗМЫ
Возможность изменения передаточного
отношения — главное свойство простого и
универсального одношарнирного карданного
механизмов. Амплитуда периодического изменения
передаточного отношения зависит от угла а12
пересечения осей входного и выходного валов.
Рис. 32. Схемы
сдвоенных
карданных передач.
В случае применения сдвоенного
универсального карданного механизма можно добиться либо
постоянства отношения скоростей входного и
выходного валов, либо усиления- неравномерности
вращения выходного вала. : -
Равные скорости вращения ведущего и
ведомого валов в механизме сдвоенного кардана
обеспечиваются, если выполнены следующие
условия: а) оси пальцев шарниров 1 и 2 (рис. 32, а)
Ы
расположены под углом 90° друг к другу, а вилки
промежуточного вала А2 лежат в одной
плоскости; б) оси валов Аъ Л2, А3 расположены в одной
плоскости; в) углы , образуемые осями входного
и выходного валов с осью промежуточного вала,
равны, т. е. а12 = ±ос23 (валы могут
располагаться z-образно (рис. 32, б) и W-образно (рис. 32,а).
Обычно первое условие выполняется уже при
изготовлении карданных валов, однако
необходимо, чтобы валы Ах и Л3, соединенные вместе,
были правильно закреплены.
Если вилки на промежуточном валу
закрепляются так, что оси втулок скрещиваются под
прямым углом, то неравномерность вращения
ведомого вала увеличивается по сравнению с одношар-
нирным карданным механизмом.
В случае соединения валов Ах и Л3,
показанном на рис. 32, при изменении положения одной
из осей не обеспечивается равенство углов а12
и а23, а следовательно, и синхронность
вращения. Для получения равных углов наклона при
любых отклонениях осей входного Аг и
выходного Л2 валов в механизм сдвоенного кардана
вводят различного вида уравнивающие
устройства.
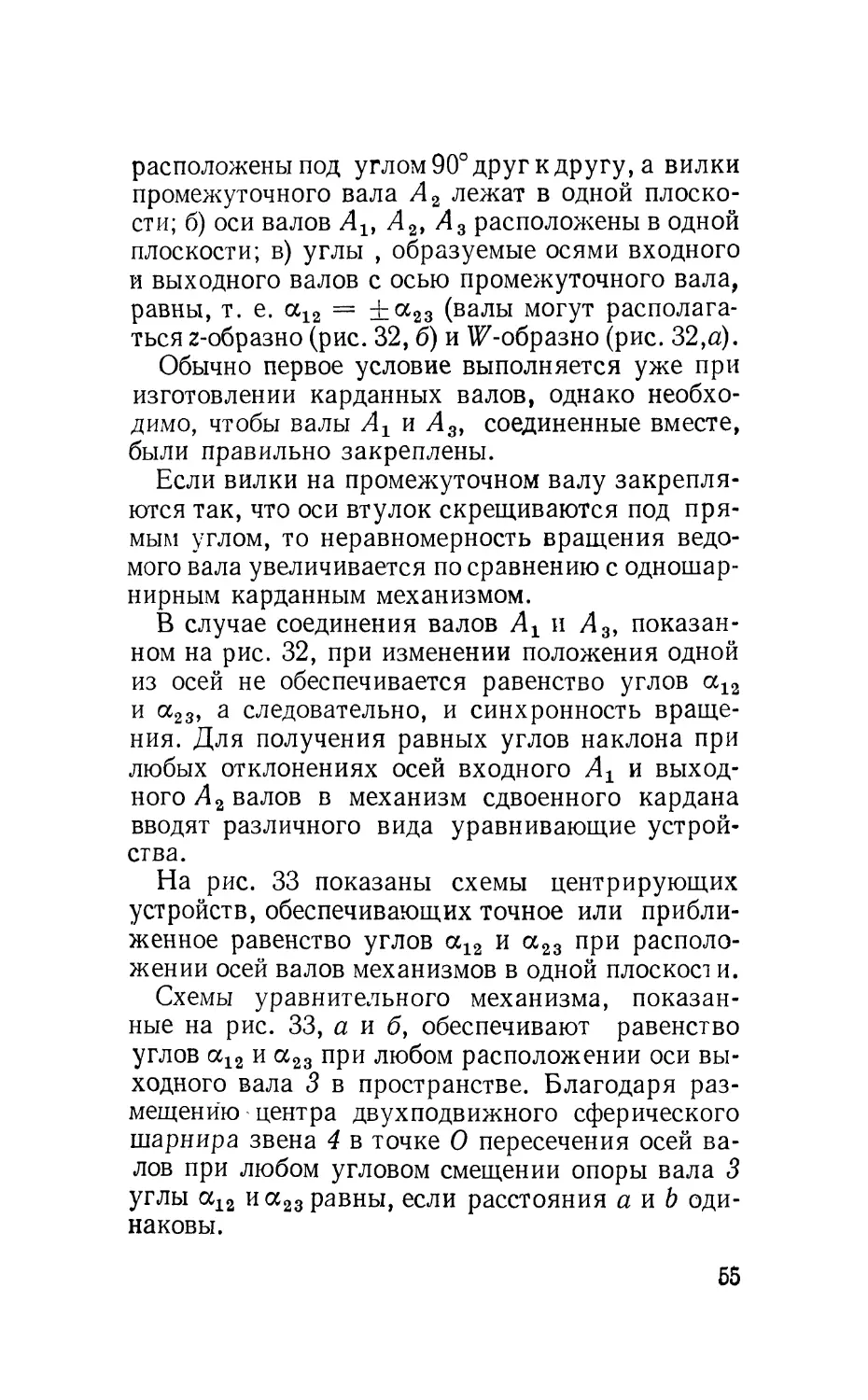
На рис. 33 показаны схемы центрирующих
устройств, обеспечивающих точное или
приближенное равенство углов а12 и ос23 при
расположении осей валов механизмов в одной плоскост и.
Схемы уравнительного механизма,
показанные на рис. 33, а и б, обеспечивают равенство
углов а12 и а23 при любом расположении оси
выходного вала 3 в пространстве. Благодаря
размещению центра двухподвижного сферического
шарнира звена 4 в точке О пересечения осей
валов при любом угловом смещении опоры вала 3
углы а12 иа23равны, если расстояния а и Ъ
одинаковы.
65
В схеме уравнительного механизма,
представленной на рис. 33, г, также обеспечивается
равенство углов а12 и а23 при любом расположении
оси выходного вала. Выравнивание углов а12
и а23 осуществляется при помощи рамки 4, имею-
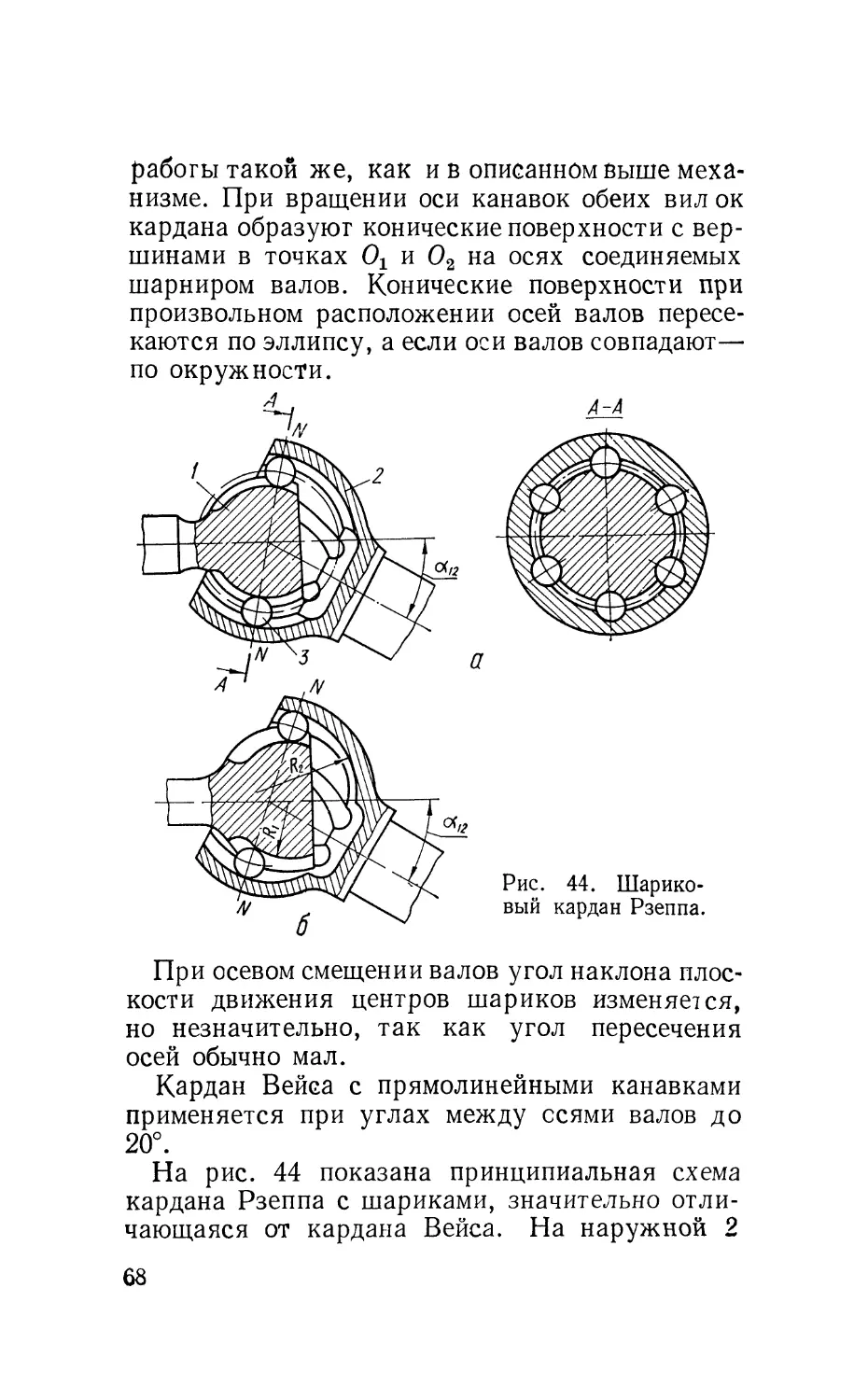
Рис. 33. Схемы уравнивающего устройства карданных
механизмов.
Бб
щей возможность совершать поступательное
движение относительно промежуточного звена 2
механизма. Сферические наконечники валов 1 и 3
в процессе передачи движения перемещаются
в плоском пазу звена 4, в результате чего при
любом угле а звено 2 устанавливается так, что
«12 = «23-
Передача имеет одну лишнюю
повторяющуюся связь. Теоретически достаточно одного
шарового наконечника в пазу звена 4> чтобы в этом
случае получить нуль-монаду. При введении
второго шарового наконечника исключается
перекос рамки под действием нормальной к
поверхности паза силы.
В случае использования схемы, показанной
на рис. 33, в, возможно некоторое нарушение
синхронности при изменении угла а, но эта схема
отличается простотой и применяется довольно
часто.
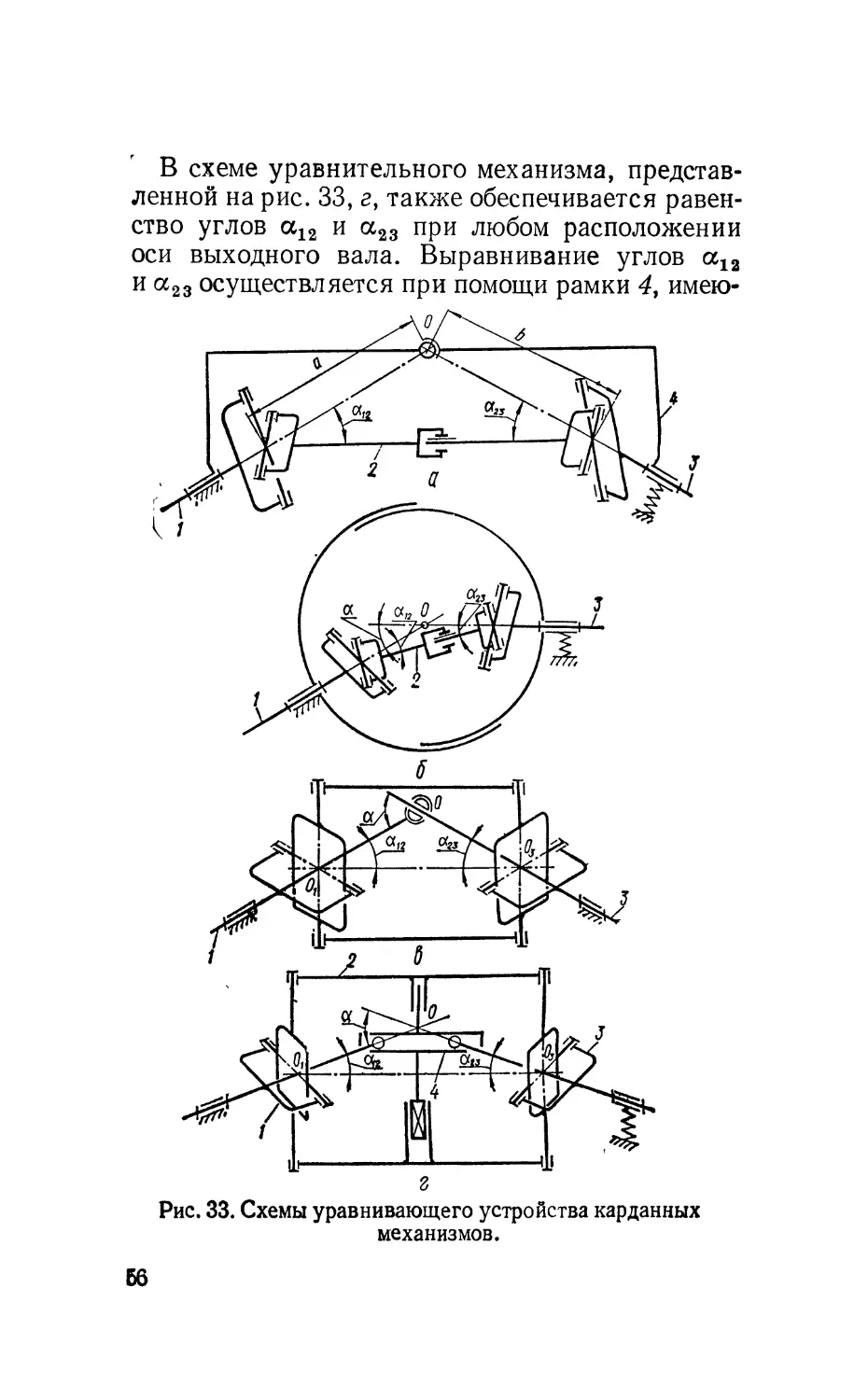
Для оценки механизма с точки зрения
нарушения синхронности и установления его
наиболее рациональных параметров выразим
изменение углов а12 и а23 через угол а и размеры
механизма, положив для общности lOlo = М, а12 =
= а/2 — Аи а23 = а/2 + А, где А —
неизвестная переменная, а а12 + а23 = а.
Из треугольника ОХО3О (рис. 34) следует, что
/2 = (х/)2 + х2 — 2llx cos (180° — а)
или
(^ + 2Х (-pj cos а + X2 - 1 = 0. (8)
Кроме этого,
/а А \
т —А
\2 / ,дх
sin
x sina12 _
XI sin a23
sin | ТГ -j-
57
Поскольку А мало, уравнение (9) после
преобразований можно привести к виду
(10)
Рис. 34. Схема центрирующего устройства.
После исключения xll из уравнения (8)
получается квадратное уравнение относительно
неизвестного А
Д2 (2х2 — 2Х2 cos а — 1) — 2А tg^- + tg2^ (2X2 -f
-f 2>,2cosa —1) — 0, (11)
корни которого после преобразования принимают
вид
Д =
[tgy(l
[2Х? (1 — cos a) — 1]
(12)
По геометрическому смыслу перед радикалом
следует принять знак минус.
Размеры уравнительного механизма будут
оптимальными, т. е. такими, при которых
выполняется условие синхронности, в том случае,
если Д = 0, т. е. 1 — 2Х|Л — X2sin2a - 0.
68
При изменяющихся значениях угла а
нарушение синхронности будет минимальным, если
определено I для среднего значения угла а = аср.
При изменении угла а от 0 до 10° и X = 0,5
сдвоенная карданная передача практически
является синхронной. При увеличении угла а
свыше 10° синхронность вращения валов нару-
Рис. 35. Карданная передача колесного трактора К-700.
шается, причем нарушение увеличивается с
возрастанием угла а. При варьировании величины
к изменяется и диапазон углов, при которых
обеспечивается синхронность вращения валов,
поэтому приведенный выше способ определения
Я приобретает практическую ценность, так как
с его помощью неравномерность вращения
выходного вала можно свести к минимуму.
Сдвоенные карданные механизмы, так же как
и одношарнирные, получили широкое
распространение в машиностроении. Большое
разнообразие конструкций сдвоенных карданов и их
размеров определяется областями их применения.
На рис. 35 приведена конструкция карданной
передачи, используемой в трансмиссиях
автомобилей, тракторов и многих других машин.
Компенсирующим элементом в ней, как и в
большинстве других карданных передач, является
подвижное шлицевое соединение трубчатого хвосто-
59
вика 2 с валом 1. Смазке и уплотнению этого
соединения следует уделять особое внимание.
При отсутствии смазки и попадании грязи в со-
Рис. 36. Схема
сдвоенного кардана без
промежуточного вала.
Рис. 37. Конструкция
сдвоенного кардана с
промежуточным звеном в виде кольца.
единение силы трения увеличиваются, что ведет
к появлению больших осевых усилий,
действующих на сопрягаемые карданной передачей
агрегаты, и к повышенному износу деталей.
Рис. 38. Сдвоенный кардан с центрирующим
устройством.
На рис. 36 приведена схема сдвоенного
кардана без промежуточного вала.
Сдвоенные карданы с промежуточным звеном
различаются по конструктивным особенностям
60
одинарных карданов, из которых они
скомплектованы, и по наличию или отсутствию
центрирующих устройств.
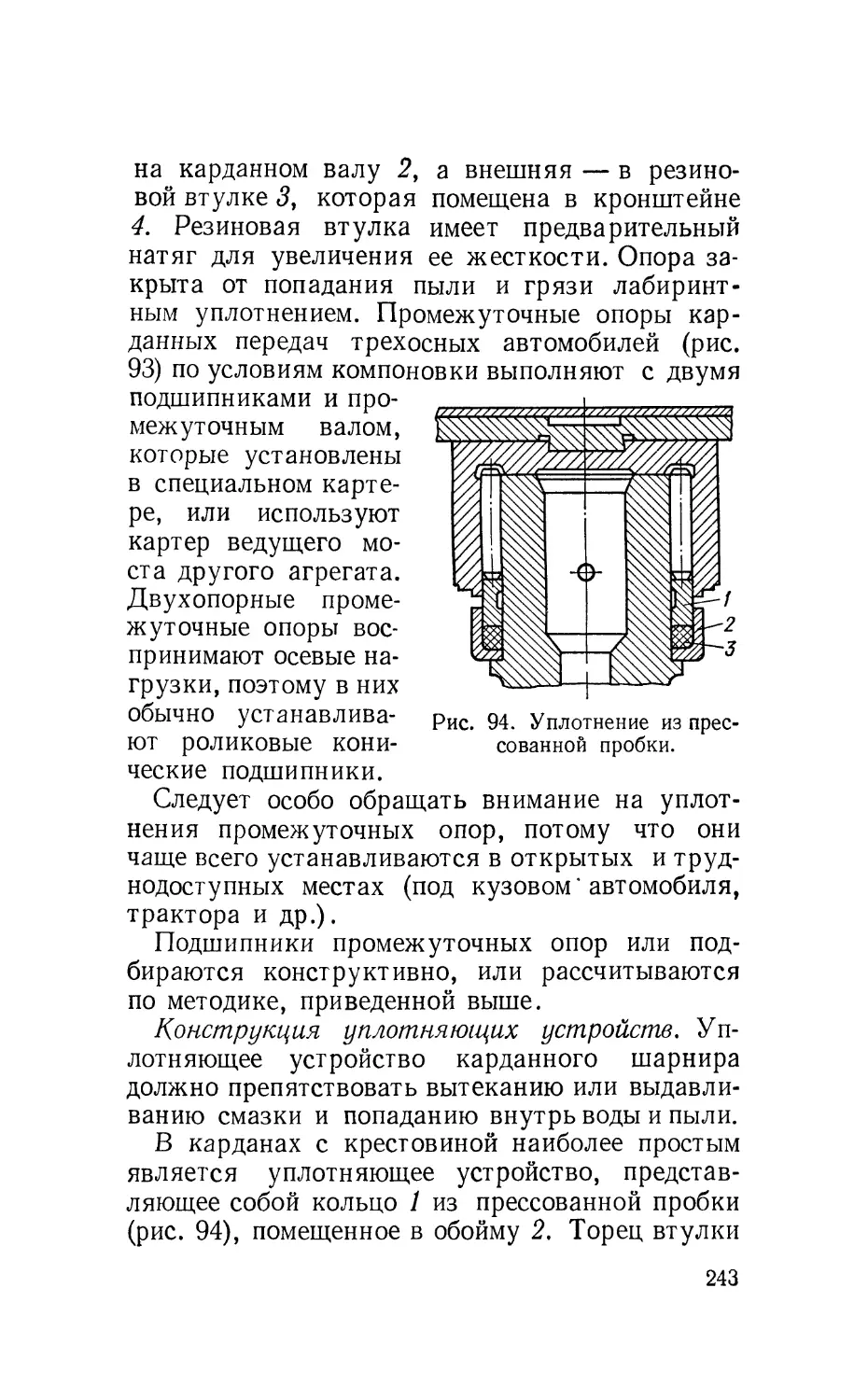
На рис. 37 показана конструкция сдвоенного
кардана с промежуточным звеном 2, представ*
Ляющим собой кольцо с боковыми фланцами,
в которых монтируются на игольчатых подшип*
никах цапфы крестовин 1 и 3.
В конструкцию сдвоенного кардана,
показанную на рис. 38, входит центрирующее
устройство (по схеме, приведенной на рис. 33, в), сое тоя-
щее из сферического сухаря ), установленного
на валу 4, и сферической обоймы 2, связанной
с валом 3. Устройство защищено резиновой
оболочкой (на рисунке не показана). Следует
заметить, что резиновая оболочка может быть
сравнительно легко повреждена. Это существенный
недостаток данной конструкции.
СУХАРНЫЕ КАРДАННЫЕ МЕХАНИЗМЫ
Сухарные карданные механизмы
представляют собой, как правило, компактную
конструктивную модификацию одинарного или сдвоенного»
вильчатого шарнира Гука. Их используют в
качестве синхронного механизма, передающего
вращение к ведущим передним колесам автомобилей.
В отличие от ранее рассмотренных карданных
механизмов в карданах сухарного типа в
качестве элементов вращательных кинематических
пар используют незамкнутые цилиндрические
поверхности.
Одна из принципиальных схем одинарного
сухарного (шарового) кардана приведена на рис.
39. Две вилки 2 и 4, укрепленные на валах /и 5,
входят в цилиндрические выточки центрального
шарового тела (сухаря) 3. Оси выточек
взаимно перпендикулярны и проходят через центр
61
шара. Вилки кардана могут иметь угловые
перемещения относительно шара вокруг двух
взаимно перпендикулярных осей и осевое перемещение
на величину, допускаемую длиной вилки.
Рис. 39. Схема шарового кардана.
На рис. 40, а приведена конструктивная схема
кардана Тракта, представляющего собой
сдвоенный шарнир Гука с длиной промежуточного
вала, равной нулю. Входной и выходной валы за-
Рис. 40. Кардан Тракта.
канчиваются вилками 1 и б, которые входят
в канавки сухарей 2 и 4. Сухари соединены между
собой при помощи шипа 3 на одном сухаре и паза
5 на другом. Плоскости шипа и паза перпендику-
62
лярны к плоскостям канавок и вилок. На рис.
40, б показаны детали кардана Тракта. Этот
кардан допускает угол между осями валов 50°.
Кардан Тракта обеспечивает синхронность
вращения ведомого вала. Сопряженные детали
этого кардана работают в условиях
скольжения. Для обеспечения регулярной смазки весь
шарнир должен быть заключен в кожух.
Карданный шарнир данного типа имеет более низкий
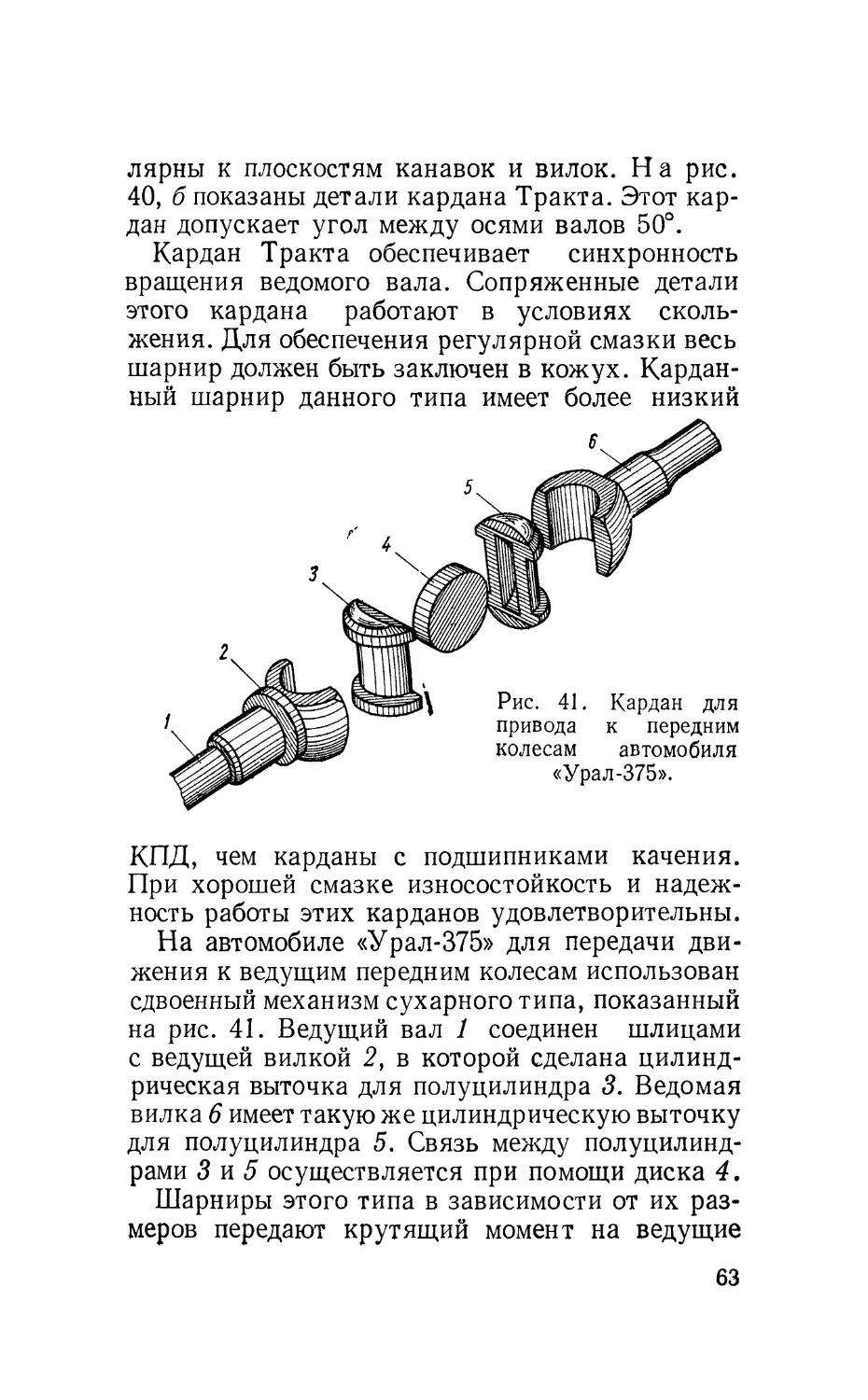
Рис. 41. Кардан для
привода к передним
колесам автомобиля
«Урал-375».
КПД, чем карданы с подшипниками качения.
При хорошей смазке износостойкость и
надежность работы этих карданов удовлетворительны.
На автомобиле «Урал-375» для передачи
движения к ведущим передним колесам использован
сдвоенный механизм сухарного типа, показанный
на рис. 41. Ведущий вал 1 соединен шлицами
с ведущей вилкой 2, в которой сделана
цилиндрическая выточка для полуцилиндра 3. Ведомая
вилка 6 имеет такую же цилиндрическую выточку
для полуцилиндра 5. Связь между
полуцилиндрами 3 и 5 осуществляется при помощи диска 4.
Шарниры этого типа в зависимости от их
размеров передают крутящий момент на ведущие
63
управляемые колеса от 800 до 3000 даН • м
(нормаль ОН 025 3115 — 68).
Преимущества сухарных карданов
заключаются в простоте их устройства и изготовления,
а также в наличии больших опорных
поверхностей, что дает возможность использовать для их
изготовления углеродистые стали.
К недостаткам этих карданов следует отнести
большие, чем у карданов других типов, потери
на трение, а следовательно, более низкий КПД
и повышенный нагрев карданов в процессе
работы. Кроме того, в результате износа кардана
появляется заметный шум. Наконец, из-за
необходимости установки кожуха для сохранения
смазки между трущимися поверхностями
звеньев кардана значительно усложняется
конструкция карданной передачи.
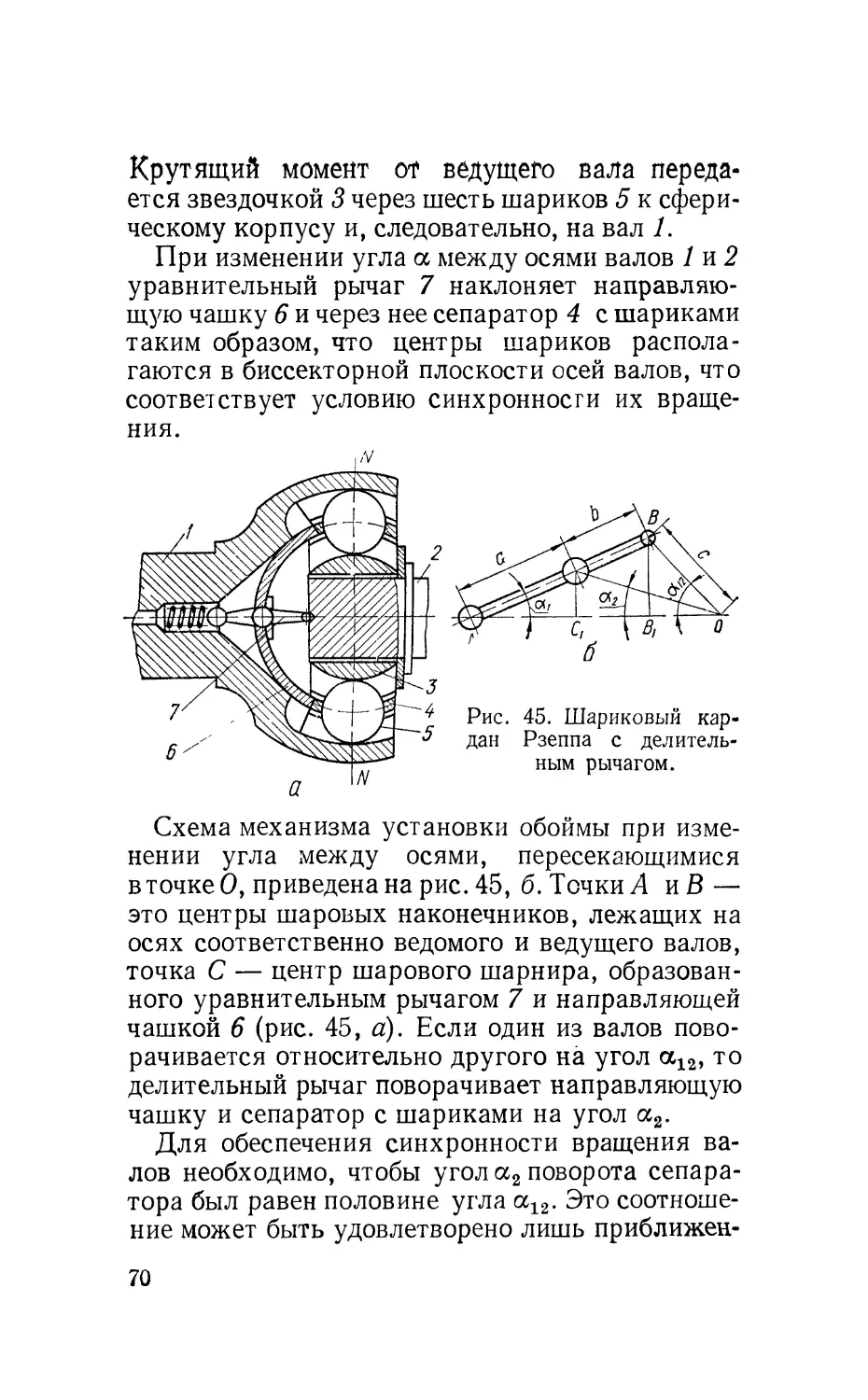
ШАРИКОВЫЕ КАРДАННЫЕ МЕХАНИЗМЫ
Шариковые карданные механизмы, несмотря
на более высокую стоимость по сравнению с
другими типами карданов, получили широкое
распространение в автомобилестроении и общем
машиностроении вследствие компактности
конструкции и возможности обеспечения
синхронности вращения ведущего и ведомого валов
независимо от угла между их осями. При условии
нормальной смазки тел качения (при работе
кардана в закрытом корпусе) уменьшается их износ,
значительно повышается долговечность и
обеспечивается высокий КПД механизма. Кардан
такого типа практически не требует ухода.
Шариковые карданы применяют при высоких
скоростях вращения, однако при длительном
режиме работы (по данным фирмы Lohr Bromkamp
G. М. В. Н.) необходимо, чтобы произведение
64
частоты вращения, об/мин, и угла между осями,
град, не превышало 30 000.
Различные модификации шариковых
карданов, с точки зрения геометрии движения,
реализуют одну и ту же схему, а именно —схему
пространственного поводкового механизма (см. рис.
4). Оси канавок для шариков могут быть
криволинейными или прямолинейными. Однако
различие их заключается не в этом, а в том, что при
г з
Рис. 42. Шариковый кардан с криволинейными
делительными канавками.
передаче усилия от ведущего вала к ведомому
силы, действующие на шарик, в одних
механизмах перпендикулярны к радиусу-вектору центра
шарика, а в других — составляют с ним
некоторый угол, отличный от 90°, поэтому дают
касательную и нормальную составляющие реакции,
действующие на поверхности канавки.
Схема одной из модификаций шарикового
кардана (кардана Вейса) с криволинейными
канавками изображена на рис. 42. На связываемых
валах / и 4 имеются вилки, в каждой из которых
для размещения шариков сделаны четыре
канавки с осями, расположенными во взаимно
перпендикулярных плоскостях, проходящих через
3 8-127 65
оси валов. Оси канавок описаны дугами
окружностей радиуса R с центрами в точках Аи В.
Так как канавки симметричны и центр шарика
2 должен лежать на пересечении их осей, то он
остается все время в биссекторной плоскости
валов. Это соответствует рассмотренному
выше условию синхронного вращения ведомого
вала.
В связи с тем, что даже небольшое
осевое смещение валов ведет к резкому
изменению положения центра шарика относительно
биссекторной плоскости, в кардане должно быть
исключено осевое перемещение вилок. Это
обеспечивается путем установки центрирующего
шарика 3, препятствующего смещению вилок
относительно точки пересечения осей валов. Для
облегчения сборки в центрирующем шарике
сделана лыска. Шарик фиксируется шпилькой,
засгопоренной штифтом. Посадочное отверстие
и отверстие для штифта, просверленные в
ведомой вилке, уменьшают ее прочность. Поэтому
в некоторых конструкциях карданов (например,
в автомобилях ЗИЛ, ГАЗ) центрирующий шарик
не зафиксирован. При сборке такого кардана
вилки поворачивают на больший угол, чем угол
пересечения осей валов, или подвергают их
необходимой упругой деформации, в результате чего
появляется возможность вставить последний
периферийный шарик в канавки. Кардан
вращается в закрытом кожухе, заполненном смазкой.
Угол пересечения осей валов допускается до 40°.
Преимуществами данного кардана являются
относительно малая стоимость и простота
изготовления. К недостаткам относится повышенный
износ вследствие высокого удельного давления,
обусловленного малым числом активно
работающих шариков и статической неопределенностью
механизма.
66
В рассмотренном кардане Вейса ведомая й fce*
дущая вилки соединяются при помощи четырех
шариков, из которых в передаче момента в
заданном направлении учасгвуют два шарика,
а два другие предназначены для передачи
момента в противоположном направлении. Если
учесть, что между элементами кинематических
пар имеется зазор, то кардан Вейса можно
рассматривать как сдвоенную синхронную повод-
Рис. 43. Кардан Вейса с прямолинейными
канавками.
ковую передачу (см. рис. 4), в которой
появляется одна лишняя связь при двух активно
работающих шариках. Центрирующий шарик вносит
еще три лишние связи. Из-за наличия лишних
связей возникает необходимосгь в изготовлении
шарнира Вейса с большой точностью во
избежание появления больших нагрузок на шарики
и упругие элементы передачи.
При работе шарнира появляются
значительные осевые нагрузки, а при ошибках монтажа
и изготовления —также и распорные силы, до-
сгигающие иногда значительной величины.
Шариковый кардан Вейса может выполняться
и с прямолинейными канавками. Конструкция
такого кардана показана на рис. 43. Принцип
3*
67
рабогытакой же, как ив описанном выше
механизме. При вращении оси канавок обеих вил ок
кардана образуют конические поверхности с
вершинами в точках Ог и О2 на осях соединяемых
шарниром валов. Конические поверхности при
произвольном расположении осей валов
пересекаются по эллипсу, а если оси валов совпадают—
по окружности.
А-А
Рис. 44.
Шариковый кардан Рзеппа.
При осевом смещении валов угол наклона
плоскости движения центров шариков изменяется,
но незначительно, так как угол пересечения
осей обычно мал.
Кардан Вейса с прямолинейными канавками
применяется при углах между ссями валов до
20°.
На рис. 44 показана принципиальная схема
кардана Рзеппа с шариками, значительно
отличающаяся от кардана Вейса. На наружной 2
68
и внутренней / обоймах кардана сделано по шесть
меридиональных канавок, ограниченных частью
поверхности тора, в которые входят шарики 3.
Шарики должны располагаться в плоскости
N—JV, проходящей через центр кардана.
Предполагается, что в этом кардане усилие от одной
обоймы к другой передается через все шесть
шариков независимо от направления вращения.
При тороидальных канавках на внешней
и внутренней обоймах одного радиуса их
центрирование возможно при трех шариках, причем
плоскость N—N, проведенная через их центры,
при отсутствии сепаратора может
расположиться произвольно, и передача становится
асинхронной. Увеличение числа шариков до шести
способствует повышению статической
неопределимости системы.
Этот недостаток в некоторой степени устранен
в кардане со смещенными центрами канавок
(рис. 44, б). Однако, как и при совпадающих
центрах осей канавок (рис. 44, а), так и при
смещенных центрах канавок центры шариков не
располагаются в одной плоскости.
Профили, образуемые каждыми двумя
канавками на обоймах, при смещении шариков имеют
различные сечения. Это может привести к
защемлению одних шариков и выпадению других.
Чтобы обеспечить размещение центров шариков
в одной плоскости, между сферами
устанавливают сепаратор с отверстиями для шариков.
Конструкция кардана, в котором обеспечено
расположение центров шариков в биссекторной
плоскости, показана на рис. 45. Кардан состоит
из сферического корпуса, изготовленного как
одно целое с ведомым валом 7, ведущей
звездочки 3, которая установлена на шлицах
ведущего вала 2, сепаратора 4, уравнительного
рычага?, направляющей чашки 6 и шести шариков 5.
69
Крутящий момент of ведущего вала
передается звездочкой 3 через шесть шариков 5 к
сферическому корпусу и, следовательно, на вал 1.
При изменении угла а между осями валов 1 и 2
уравнительный рычаг 7 наклоняет
направляющую чашку 6 и через нее сепаратор 4 с шариками
таким образом, что центры шариков
располагаются в биссекторной плоскости осей валов, что
соответствует условию синхронносги их
вращения.
Рис. 45. Шариковый кар-
дан Рзеппа с
делительным рычагом.
Схема механизма установки обоймы при
изменении угла между осями, пересекающимися
в точке О, приведена на рис. 45, б. Точки Л и В —
это центры шаровых наконечников, лежащих на
осях соответственно ведомого и ведущего валов,
точка С — центр шарового шарнира,
образованного уравнительным рычагом 7 и направляющей
чашкой 6 (рис. 45, а). Если один из валов
поворачивается относительно другого на угол а12, то
делительный рычаг поворачивает направляющую
чашку и сепаратор с шариками на угол а%.
Для обеспечения синхронности вращения
валов необходимо, чтобы угол а2 поворота
сепаратора был равен половине угла а12. Это
соотношение может быть удовлетворено лишь приближен-
70
но путем соответствующего выбора размеров а,
Ъ и с. Это вытекает из следующих рассуждений.
Из рис. 45, б следует, что
; BBi= с sin а^ cic=(Дщsin а^-
С помощью приведенных соотношений можно
выразить функции угла ос2, который
координирует нормаль к плоскости N — N расположения
центров шариков.
Согласно рис. 45, б и приведенным выше
соотношениям можно записать
При этом
0Сг = с cos a12 + Ь cos аг = с cos a12 + 6 X
В результате
ac
(a + b) sin ai2
С COS 0&12 + I
и/ |_v— i -/ j
(13)
Для синхронной передачи должно выполняться
такое условие:
Предполагая, что параметры а, си b переменные,
путем сравнения уравнений (13) и (14) можно
установить закон изменения этих переменных.
71
Приравнивая правые части уравнений (13)
и (14) и освобождаясь от радикала, получаем
с2 (а2 + Ь2) — Ь2(а + Ь)2 —
—c2ab cos a12 = 0, (15)
или
cosa12= 0.
ее lz
(16)
Из полученного выражеьия (16) следует, что
синхронность вращения при выбранных
значениях ale, blc обеспечивается только при одном
значении угла а12. Однако при достаточно
большом диапазоне изменения угла а12 условие
синхронности может быть весьма близко к
выполнению при соответствующем выборе параметров.
Рис. 46. Зависимость параметра с/а от угла
а12 между осями валов.
На рис. 46 приведен график [52],
показывающий изменение отношения с/а при заданном
отношении Ыа = 0,35 и выполнении условия
синхронности ах = а2.
Как видно из графика, для того, чтобы с
увеличением угла ос12 между осями валов выполнялось
условие синхронности, необходимо уменьшать
величину отношения с/а (а12 = 5°, с/а = 0,72;
а12 = 35°, с/а = 0,65).
Так как размеры а, Ь, с постоянны, то
синхронность вращения нарушается. Однако это наруше-
72
ние незначительно и мало влияет на работу
кардана.
Шариковые карданы Рзеппа (особенно с
уравнительным рычагом) по конструкции сложнее
карданов Вейса и дороже в изготовлении, однако
размеры их меньше, а долговечность при
соблюдении точности изготовления выше, так как
крутящий момент передается через все шесть
шариков. Осевые нагрузки практически отсутствуют.
Даже при износе уравнительный рычаг
обеспечивает достаточно точную кинематику кардана.
Карданы без уравнительного рычага
характеризуются менее точной кинематикой, но имеют
более простую конструкцию.
ПОЛИКАРДАННЫЕ МЕХАНИЗМЫ
Поликарданную передачу можно представить
как последовательное соединение одношарнир-
ных карданных механизмов. Многошарнирные
(поликарданные) передачи применяются в
машинах самого различного назначения. Поэтому
трудно установить единые требования для всех
карданных передач, тем более, что они могут
иметь различное число шарниров. Общие
требования, которые могут быть распространены на
большинство карданных передач, следующие:
синхронность вращения валов агрегатов,
связанных карданной передачей (если это
необходимо по условиям работы); обеспечение
минимально возможных углов между осями валов для
получения максимального КПД; рациональная
унификация карданов и отдельных деталей
передач (крестовин, вилок, фланцев и т. д.);
обеспечение минимального момента инерции,
минимального дисбаланса, т. е. максимальной
статической и динамической уравновешенности
звеньев, и определенной податливости; возможность
73
установки карданной передачи без демонтажа
или частичной разборки смежных агрегатов;
отсутствие избыточных связей в схеме механизма;
легкость смазки и обслуживания.
В конструкцию поликарданных передач
обязательно включают промежуточные валы и
опоры. При длинных валах или в том случае, когда
невозможно установить соосно опоры вала,
возникает необходимость в промежуточных опорах,
которые позволяют один карданный вал
заменить двумя. Кроме того, промежуточная опора
может быть использована для изменения величин
углов между осями валов. Расстояния между
центрами вилок при вращении карданной
передачи могут изменяться, поэтому при выборе схем
передачи должна быть предусмотрена осевая
компенсация. В необходимых случаях нужно
предусмотреть и угловые компенсации различных
элементов передачи.
При выборе схемы поликарданного механизма
особое внимание следует уделять вопросам
устранения избыточных связей. Для уменьшения числа
избыточных связей необходимо повышать
подвижность кинематических пар или увеличивать
число звеньев. Необходимую подвижность можно
получить при использовании подшипников
качения, так как на их основе можно построить
кинематические соединения, эквивалентные
кинематическим парам от 1 до 4-го рода (см. табл. 1).
При последовательном соединении звеньев их
степени свободы складываются. Это позволяет
получить кинематические соединения с пятью,
четырьмя, тремя и двумя степенями свободы.
При выборе типа кинематической пары или
кинематического соединения, замыкающего
открытую кинематическую цепь, необходимо
учитывать, какие возможные движения уже
устранены, с тем, чтобы при подсоединении замыкаю-
74
щего кинематического соединения не внести
повторяющихся связей. Может случиться, что
внесены не те связи, которые требуются, тогда
Рис. 47. Схемы саатически определимых
поликарданных передач.
наряду с избыточными связями в механизме
появятся местные (пассивные) подвижности.
На рис. 47 приведены примеры синтеза
статически определимых поликарданных механизмов,
в которых реакции в кинематических парах опре-
75
деляются только полезной нагрузкой,
независимо от компонент перемещения опор валов.
Существует несколько методов структурного
синтеза схем поликарданных передач. Одним из
них являеюя метод последовательного
присоединения сгатически определимых пространс
венных групп с различным числом звеньев, в ccci ав
которых входят элементы шарнира Гука. Такого
вида группы с числом звеньев от двух до пяти
показаны на рис. 48, а—д.
Рис. 48. Схемы нулевых групп карданных механизмов.
Трехшарнирный статически определимый
механизм по схеме 47, а можно представить как
результат присоединения к ведущему звену двух-
звенной нулевой группы 2—3 и пятизвенной
нулевой группы 4—8. Трехшарнирный механизм
по схеме 47, б можно трактовать как результат
присоединения сначала пятизвенной, а затем
двухзвенной нулевых групп.
Механизм по схеме 47, в может быть образован
путем присоединения к входному звену 1 сначала
пятизвенной группы 2—б, а затем четырехзвен-
ной 7—10, а механизм по схеме 47, г может
состоять из входного зена / и двух пятизвенных групп.
Для сопоставления на рис. 47, д приведена
неправильная, с точки зрения структуры, схема
76
трехшарнирного механизма. По формуле
Сомова — Малышева (1) число степеней свободы
равно единице. Однако группа звеньев 2—3
вносит две лишние связи, которые будут пассивными
в случае пересечения всех четырех осей в точке О,
в результате чего звено 3 приобретает
подвижность. Группа звеньев 4—8 обладает тремя
степенями свободы, и при неподвижном звене
3 возможно вращение звена 8 вокруг двух
отмеченных на схеме взаимно
перпендикулярных осей с началом в точке Ох. Таким
образом, система в общем будет обладать двумя
степенями свободы, имея в то же время две
лишние связи.
Другим методом синтеза является метод
наслоения минус-групп на систему, обладающую
лишними степенями свободы. Пусть дана
простая кинематическая цепь со звеньями 2—#,
присоединенная к звену U которое принято считать
неподвижным, и стойке 9 (рис. 47, а). Для того
чтобы группа удовлетворяла условиям
оптимального синтеза, она должна обладать полным
числом условий связи, т. е. ее число степеней
свободы W должно быть равно нулю. Без
кинематической пары А (рис. 47, а) при семи звеньях
и восьми одноподвижных кинематических парах
цепь обладает двумя степенями свободы.
Введение кинематической пары А вносит две связи,
в результате чего указанная кинематическая цепь
обращается в нулевую группу. Вместо
кинематической пары А можно ввести минус 2-группу.
Число ее звеньев т, образующих т -f- 1 одно-
подвижных пар между собою, стойкой и звеном 3,
можно определить из условия —2 = 6/п —
— 5 (т +1), откуда т = 3. Такого вида минус
2-группа звеньев a, b и с, присоединенная к звену
3 и стойке 9 однаподвижными кинематическими
парами, показана на рис. 47, а справа.
77
В практике часто применяются карданные
передачи, в схемах которых не исключены все
избыточные связи. В этом случае необходимо
определить места этих избыточных связей и
обеспечить условия, при которых размеры
соответствующих элементов передачи могут быть выполнены
с точностью, исключающей влияние этих связей.
Рис. 49. Карданный механизм с упругой промежуточной
опорой.
Выяснить сочетания звеньев, в которых
заложены лишние связи, можно очень легко, если
из механизма выделить сначала все нулевые
группы, а затем обратить внимание на группы с
лишними степенями свободы и связями.
Например, в механизме по схеме 47, д можно выделить
нулевую группу со звеньями 6, 7 и 8. В
результате этого выявляется открытая двухзвенная
цепь 4—5 с двумя степенями свободы (вращение
вокруг осей крестовины). После ее удаления из
оставшейся системы при сохранении входного
78
звена / можно выделить минус-группу 2—3 с
двумя лишними связями.
Для уменьшения влияния избыточных связей
во многих поликарданных передачах
промежуточные опоры устанавливают на упругом
основании, допускающем угловые и линейные
перемещения элементов конструкции за счет упругих
деформаций резины. Схема такого механизма
приведена на рис. 49, а. Конструкция промежуточной
опоры (рис. 49, б) будет подробно описана ниже
(см. с. 242).
Поликарданные передачи по своей
конструкции сложнее одно- и двухшарнирных,нопри
использовании их можно легче, по сравнению
с двухшарнирными, обеспечить синхронность
вращения валов, произвольно расположенных
в пространстве, или свести асинхронность их
вращения к минимуму.
ОБЛАСТИ ПРИМЕНЕНИЯ КАРДАННЫХ
ПЕРЕДАЧ
КАРДАННЫЕ ПЕРЕДАЧИ
ТРАНСПОРТНЫХ МАШИН
Карданные передачи автомобилей. В
современном автомобиле предусмотрено много приводов,
он имеет большое количество различных
карданных передач, которые обеспечивают передачу
силового потока от двигателя к коробке передач,
раздаточной коробке, ведущим мостам, ведущим
колесам при независимой подвеске, ведущим
и управляемым колесам.
Схемы трансмиссий у автомобилей различаются
по приводным основным механизмам, по числу
потоков мощности и по количеству шарниров,
используемых в схеме карданных передач.
79
На рис. 50 приведены некоторые из схем
механических трансмиссий автомобилей: для привода
задних ведущих колес через дифференциал D
(рис. 50,а), для привода передних и задних колес
80
Рис. 50. Схемы механических трансмиссий автомобилей:
Дв — двигатель; КП — коробка передач; РК — раздаточная
коробка; Д — дифференциал; / — двигатель; 2 — промежуточная
передача; 3—гидротрансформатор; 4— коробка передач; 5 —
раздаточная коробка; 6 — привод на лебедку; 7 — лебедка; 8 —
второй задний мост; 9 — межосевой самоблокирующийся
Дифференциал между задними мостами; 10 — первый задний мост; // —
второй передний мост; 12 — межосевой блокируемый
дифференциал между передними мостами; 13 — первый передний мост.
(рис. 50, б), для независимого привода
управляемых и задних колес (рис. 50, в). На рис. 50,
г, <3, е показаны различные схемы привода колес
трехосных автомобилей. Еще более сложная
трансмиссия (рис.50, ё) использована в
автомобиле большой грузоподъемности.
Примеры карданных передач для привода
ведущих и управляемых колес автомобиля с
независимой подвеской колес приведены на рис. 51.
Для этой цели широко применяют сдвоенные
синхронные карданы, шариковые карданы Вейса
и Рзеппа и сухарные сдвоенные карданы. В
некоторых случаях можно применять и одинарный
кардан с крестовиной.
Карданные передачи используются в
автомобилях также для привода вспомогательного и
специального оборудования: лебедок, винтов
водяного двигателя, компрессоров, вентиляторов
системы охлаждения, механизма рулевого
управления и др.
81
Силовые передачи тепловозов. Карданные
передачи являются одним из самых
распространенных элементов передаточных механизмов
тепловозов. Как правило, карданные приводы
тепловозов комплектуют из карданов, карданных
валов, раздаточных и осевых редукторов.
Рис. 51. Привод ведущих и управляемых колес
автомобиля с шариковым карданом Вейса.
Карданные приводы делятся на два основных
типа. Первый тип характеризуется тем, что все
движущие оси локомотивов связаны единой
цепью карданных валов без применения или с
применением раздаточных редукторов (рис. 52
соответственно а и б). Ко второму типу относятся
карданные приводы, рассчитанные на
обслуживание отдельной тележки (рис. 52, в). Они,
в свою очередь, делятся на приводы с установкой
коробки передач на раме тележки (рис. 52, г)
и на раме тепловоза. Карданные приводы тепло-
82
возов комплектуют из карданов тяжелого
конструктивного ряда (см. рис. 14).
По схеме, изображенной на рис. 52, б,
выполнена карданная передача тележек тепловоза
ТГМ-10, на рис. 52, б — тепловоза ТГП-50.
Рис. 52. Схемы карданных передач тепловозов:
а, б — схемы приводов тепловозов от одной коробки передач,
установленной на раме (/ — коробка передач; 2 — дизель; 3, 4 —.
соответственно осевой и раздаточный редукторы); в, г — схемы
карданных групповых приводов к отдельной тележке тепловоза.
При проектировании трансмиссий с
карданными передачами необходимо стремиться
обеспечить их минимальную нагрузку. Выше
указывалось, что частично этот вопрос может быть
разрешен путем выбора оптимальной структуры
механизма трансмиссии. В1 транспортных машинах,
83
в которых от одного двигателя приводится во
вращение несколько ведущих колес (например,
в автомобилях, тепловозах), а также в
грузоподъемных и перегрузочных машинах (например,
перегрузочных мостах, вагоноопрокидывателях),
в которых одно какое-либо звено имеет несколько
параллельных приводных линий, каждая из них
или группа должны приводиться через
уравнительные организмы типа дифференциальных
Рис. 53. Схема привода кораб/ i.
с числом степеней свободы, равным здслу
приводных линий. Необходимость в этом возникает
вследствие того, что, например, при замыкании
ведущих колесных пар тепловоза через
рельсовый путь образуются замкнутые контуры, в
которых будет возникать внутреннее натяжение
при неодинаковых диаметрах катящихся
окружностей. Если при этих условиях без
уравнительного механизма приводятся во вращение две
ведущие колесные пары, то одна из них будет
пробуксовывать и вместо ведущей станет ведомой.
Поэтому в схемах групповых приводов (рис.
52, в) в конструкцию двухскатной тележки
целесообразно включить один дифференциал с
передаточным отношением простой передачи, равным 1,
84
а в трехскатной тележке (рис. 52, г) — два
дифференциала, причем один — в распределительной
коробке с передаточным отношением 2 и второй—
между двумя колесными парами с передаточным
отношением 1.
Механизмы передачи судов. Карданные
передачи используются в силовых приводах морских
и речных судов, а также в механизмах
управления ими.
На рис. 53 показана схема силовой
трансмиссии ог двигателя к винту корабля, в которой
использована сдвоенная карданная передача с
компенсацией осевых перемещений на
промежуточном валу.
При больших расстояниях между винтом и
двигателем применяют поликарданные передачи.
В силовых передачах используют карданы
тяжелого, а в механизмах управления — карданы
легкого конструктивного ряда.
КАРДАННЫЕ ПЕРЕДАЧИ
СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН
Современные сельскохозяйственные машины,
как правило, многооперационные. Их отдельные
органы, осуществляющие различные рабочие
и транспортные операции, функционируют в
пространстве, а базовые опорные детали (например,
подшипники) смонтированы на элементах
рамной легко деформируемой конструкции. В этой
связи к передаточным механизмам
предъявляются условия индифферентности к деформации
основания. Наиболее выгодным было бы
использование гидравлического объемного привода,
так как в этом случае возможно получение
наиболее простого конструктивного решения. Однако
по ряду причин гидравлический привод не
получил широкого применения в сельскохозяйст-
85
венном машиностроении, а задачу передачи
вращения от двигателя к исполнительным
механизмам решают путем использования механических
передач — ременных, цепных и карданных.
Широкое применение карданных передач в
самоходных и прицепных сельскохозяйственных
машинах различного назначения обусловлено
тем, что в процессе работы взаимное
расположение валов в передаточных механизмах этих
машин может непрерывно
изменяться в
зависимости от рельефа местности
или характера
технологического процесса,
выполняемого машиной.
Однако в сложных
условиях работы (сильной
тряске при движении,
резком изменении
взаимного расположения
агрегатов и т. д.) карданные
передачи являются возбудителями динамических
нагрузок, резко снижающих надежность
сельскохозяйственных машин. Поэтому
рациональный выбор параметров карданных передач с
целью их уравновешивания и снижения
динамических нагрузок заслуживают самого
серьезного внимания.
Карданные передачи используют в механизмах
силовой передачи движения от вала отбора
мощности к рабочим звеньям прицепных
сельскохозяйственных машин различного назначения. Вал
отбора мощности соединяется с карданом при
помощи шлицевого или квадратного соединения
либо муфты. На рис. 54 приведена
конструктивная схема быстродействующего конического
приспособления (фирма Walterscheid GmbH) для
соединения карданного вала с валом огбора мощ-
Рис. 54. Коническое
приспособление для быстрого
соединения кардана с
валом отбора мощности.
ности. На рис. 55 показаны другие
быстродействующие устройства. В схеме, показанной на
рис. 55, а, разъединение шлицевого вала и вилки
кардана осуществляется путем смещения пальца
Рис. 55. Устройства для быстрого соединения
карданов с валом отбора мощности:
а — быстродействующие пальцы; б — муфты.
/ по стрелке, а в соединении, представленном на
рис. 55, б,— путем смещения втулки 1 вдоль оси
вала.
С целью обеспечения безопасности
обслуживания и предохранения механизма от грязи и пыли
карданные валы оснащены легко монтируемыми
раздвижными трубами и защитными щитками.
Для прицепных машин, работающих при
регулировании хода по рядкам и на поворотах без
87
выключения вала отбора мощности, важно, чтобы
угол между осями входного вала кардана отбора
мощности и выходного вала осью
промежуточного кардана делился пополам.
Рис. 56. Прицепное устройство сельскохозяйственной
машины, обеспечивающее приближенное равенство углов
между осями валов.
На рис. 56 приведена схема присоединения
карданных валов к валу отбора мощности, при
которой обеспечиваются равные углы между ося-
Рис. 57. Схема присоединения карданной передачи
сельскохозяйственной машины к валу отбора мощности.
ми промежуточного, входного и выходного
валов при условии равенства расстояний 00ги ООг,
На рис. 57 приведен вариант трехшарнирного
карданного механизма передачи движения от вала
отбора мощности к агрегатам, смонтированным
на прицепной машине. Промежуточная опора
88
здесь выполнена как модификация минус 2-мо-
нады (показана на рис. 47, а справа).
Рассматриваемая карданная передача
асинхронная, создающая неравномерность вращения
выходного вала, причем тем большую, чем больше
угол между осями второго промежуточного и
выходного валов передачи. Однако путем
соответствующего углового смещения вилок на втором
промежуточном валу степень неравномерности
может быть сведена до минимума. Ниже будет
приведена соответствующая методика расчета.
>. Большинство карданных шарниров,
применяемых в сельскохозяйственных машинах,
выполняют с крестовиной на игольчатых
подшипниках (ГОСТ 2752—74). Эти карданы используют
при мощности от 5 до 100 кВт и частоте
вращения от 540 до 1100 об/мин. При небольших
нагрузках и малых углах между осями валов можно
применять также карданы на подшипниках
скольжения.
В нормальных условиях эксплуатации
долговечность карданов сельскохозяйственных машин
доходит до 1000 ч (в зависимости от угла между
осями валов). В сложных условиях
эксплуатации (постоянно большие углы между осями
валов и непрерывная работа) рекомендуется
применять карданы увеличенных размеров по
сравнению с теми, которые требуются для номинальной
нагрузки.
КАРДАННЫЕ ПЕРЕДАЧИ
ПРИВОДОВ ПРОКАТНЫХ СТАНОВ
В приводах прокатных станов используются
карданы тяжелого и сверхтяжелого
конструктивных рядов, работающие как на подшипниках
скольжения, так и на подшипниках качения.
В карданах с подшипниками скольжения должна
быть предусмотрена надежная смазка.
89
При использовании антифрикционных
материалов для вкладышей и надежной смазке
трущихся поверхностей вилок и лопастей кардана,
изготовление которых значительно сложнее, чем
вкладышей, они в некоторой степени
предохраняются от преждевременного износа.
Некоторые конструкции универсальных
шарниров, используемых в главных линиях прокат-
Рис. 58. Привод валков горизонтального
прокатного стана.
ных станов, были рассмотрены выше (см. рис.
15—17). Как правило, в этих механизмах
применяются сдвоенные карданные механизмы. На
рис. 58 показана главная линия привода валков
горизонтального прокатного стана.
КИНЕМАТИКА
КАРДАННЫХ ПЕРЕДАЧ
КИНЕМАТИКА ОДИНАРНОЙ
И СДВОЕННОЙ КАРДАННЫХ ПЕРЕДАЧ
Углы поворота ведущего и ведомого валов
карданного шарнира связаны нелинейной
зависимостью, а отношение угловых скоростей этих
валов является переменной величиной. Для
установления связи между углами поворота
ведомого и ведущего валов примем за начальное
положение механизма то, при котором точка Ао
на оси шарнира крестовины на ведущей вилке
90
лежит в плоскости расположения осей валов,
а точка Во на оси шарнира на ведомой вилке
перпендикулярна к этой плоскости.
Принятые обозначения:
At — карданный вал; Аг и Ап+\ — ведущий и
ведомый карданные валы; i = 1, 2, ... , я;
Bt — карданный шарнир; Вг — шарнир,
соединяющий валы Лх и Л2;
F{, F\ — ведомая и ведущая карданные вилки
на промежуточном валу А£;
Pt> t-_|_i — плоскость, проходящая через оси валов
Ai и Л^-1 и называемая плоскостью передачи
данных валов;
ф. — уГ0Л поворота вала Ai карданной
передачи, отсчитываемый от выбранной системы
отсчета;
a/, t-i-i — угол между осями карданных валов
в плоскости передачи P{t i+u
7*— Угол между плоскостями карданных
вилок на валу At\
pt-_it f_|_i — угол между соседними плоскостями
передач Р,_м и Р/, {+х;
tyi — фазовый угол карданного шарнира Bt
(угол между плоскостью ведущей вилки Р(/7/)
и плоскостью передачи валов);
со, — угловая скорость вала Ah 1/с;
е£ — угловое ускорение вала Ah 1/с2.
Точки Л и В на осях крестовины, находящиеся
на равных расстояниях от точки О пересечения
осей валов (рис. 59, а), перемещаются по
окружностям больших кругов, каждый из которых
перпендикулярен к соответствующей оси вилки.
Окружность, описываемая точкой Л, проектируется
на плоскость, перпендикулярную к оси вилки Flf
в натуральную величину, а проекция траектории
точки В представляет собой эллипс (рис. 59, б).
При любом угле поворота фх вилки Fx (рис. 59, б)
угол между проекциями крестовины равен 90°,
91
поэтому если в точке О восстановить
перпендикуляр к ОАг до пересечения его с эллипсом, 7 о
найдем положение Вг точки В в выбранной
плоскости проекции.
Для определения угла ср2 поворота ведомой
вилки необходимо совместить плоскость, в
которой лежит ось вилки F2, с плоскостью проекций,
вращая ее вокруг большой оси эллипса (рис.
59, б). При совпадении указанных плоскостей
Рис. 59.
Одинарный карданный
механизм.
точка Вг перейдет в В/, а радиус ОВ[ с
горизонталью будет составлять угол, равный искомому
углу ф2 поворота ведомой вилки.
Из рис. 59, б следует, что
МВ[ - ОМ tg ф2; МВг = ОМ tg
МВг = МВ[ cos a12,
откуда
ф2 = -
1
cos a12
tg<Pi,
(17)
(18)
(19)
Для определения угловой скорости со2 ведомого
вала и передаточного отношения карданной
передачи продифференцируем уравнение (18) по вре-
92
мени. После дифференцирования и
преобразований получим
1 — sin2 a12 cos2 фх cos а12 (1 + tg2 а12 sin2 фх) '
(20)
2
Из выражения (21) следует, что отношение
угловых скоростей ведомого и ведущего валов
карданного шарнира переменное, т.е. ведомый вал
вращается неравномерно. Наибольшее значение
отношения — соответствует наименьшему значе-
нию знаменателя, т.е. фх = 0, я, 2я и т. д.
Таким образом,
121 max — 1 ,v / — „„о „ •
Vto/max COS a12
Наименьшее значение ~ получаем при (р± = у
3
~^тс и т. д.:
l . 12.
wl/min
Дифференцируя выражение (21) по времени,
получаем выражение для углового ускорения
ведомого вала при неравномерном вращении
ведущего:
2 •'
hi = —их sin a12 tg a12 sin 2фх. (22)
Соотношения (18), (20), (21) и (22) справедливы
для случая, когда угол поворота ведущего вала
отсчитывается от положения, в котором ось
шарниров его вилки находится в плоскости Р12 осей
93
ёйлов, соединяемых кардайным шарйиром (рис.
60), а плоскость Р (F2) расположения осей
шарниров ведомого вала перпендикулярна к ней.
Если угол поворота карданного вала / отсчиты-
вается от плоскости Р (F^), составляющей угол
Рис. 60. Схема одинарной карданной передачи.
х с плоскостью Р12, то соотношение (18)
принимает вид
(23)
Здесь ф2 = arctg
1
cos a12
Отсюда
(24)
Соответствующим образом изменяются и другие
выходные кинематические параметры карданной
передачи:
Щ COS 0&12
г), (25)
cos a12
t21 ^ 1 — sin2 a12 cos2 (ф
t2« £lf21 — coi/21 sin a12 tg a12 sin
94
Уравнения (18), (20), (21), (22), (24) и (25)
полностью характеризуют кинематику карданного
шарнира как передаточного механизма. Свойства
этого механизма хорошо иллюстрируются
графиками, приведенными на рис. 61, на которых
J
2
1
0
-1
-2
-3
-4
/
V
"">
l\
|\\
\
. \
JO"
-i
/
1
Рис. 61. Зависимость
углового смещения
ф2—(plt относительного
изменения скорости
COn — 0)i
—= и отношения
—^- при различных
значениях угла
поворота ведущего вала.
изображены разность углов поворота выходного
0)2 — (Of £o
и входного валов <ра —<Pi, ——— и — ПРИ
щ = const для различных а12. А значения
минимальных и максимальных передаточных
отношений валов карданного шарнира, а также
максимальной разности между их угловыми
перемещениями в зависимости от угла между осями
валов приведены в табл. 4.
95
Зависимость предельных значений передаточного
Предельные
значения
l2\ max
h\ min
(Ф2—ф1)таХ
5
1,0038
0,9^62
7'
10
1,0154
0,9848
26'
15
1,0352
0,9659
1°
20
1,0642
0,9397
1°47'
Наибольшее распространение в машинах
получили двухшарнирные карданные передачи
благодаря тому, что в случае их использования
возможно постоянство передаточного отношения.
Рассмотрим механизм (рис. 62, а), ведущие
вилки которого лежат в плоскости карданных
валов (фх = 0,ф2 = 0), т.е. угол разворота между
плоскостями карданных вилок на
промежуточном валу равен 90° (у2 = 90°). Тогда на
основании уравнения (18)
1
cos a12
■tc
i
1
cos a12 cos a23
cos a23
tgфl.
tg ф2;
(26)
Если ось ведущей вилки F2' второго шарнира
расположена в произвольной плоскости Р (F'2),
составляющей угол ф2 с плоскостью Р12, то,
использовав уравнение (18), получим зависимость
между угловыми перемещениями ведомого и
ведущего валов карданной передачи (рис. 62, б),
96
Таблица 4
отношения и угла опережения от угла а12
25
1,1034
0,9063
2°49'
30
1,1547
0,8660
4°7'
35
1,2208
0,8119
5°42'
40
1,3054
0,7660
7°36'
45
1,4142
0,7070,
9°50'
положив фх = 0. В качестве исходных
необходимо воспользоваться соотношениями
1
tg ф« =
COS 7.12
(Фз + Фз) =
cos a23
cos а23
tg<Pi,
tg (ф2
tg фо.
Исключая из этих уравнений ф2 и ф3> получаем
уравнение для определения ф3 при известном фх:
10 = COS Ct23 (1 + tg2 ф2) tg ф!
* Ч'3 cos a12 (cos2 а23 + tg2 ф2) + sin* a2S tg ф2 tg ф1'
(27)
Передача равномерного вращения
(синхронная передача) на валу А3 (ф3^ Фх, со3 = (ох)
возможна при использовании такого двухшар-
нирного механизма, у которого карданные вилки
на валу 2 лежат в одной плоскости (фх = 0; ф2 =
— 90° или у2 = 0) и углы между осями валов
равны (а12 = а23).
4 8-127
97
Рис. 62. Схемы сдвоенных карданных передач
с различным расположением плоскостей ведущей
вилки.
При ф2 = ~ = 90° выражение (27) превра-
оо
щается в неопределенность вида —. Придадим
уравнению (27) другой вид, умножив числитель
и знаменатель на ctg2 ф2:
tgcp3 =
= COS «23 (Ctg2 ф2 + 1) tgq>i
cos ai2 (cos2 a23 ctg2 ф2 + 1) + sin2a23 ctg ф2 tg tpx '
(28)
Если теперь положить t|>2 = у , то получим
Если а1а = ±ааз, то tg ф3 = tg фх и ср3 = ф1э
т. е. при расположении осей шарниров вилок на
промежуточном валу в одной плоскости передача
становится синхронной.
Необходимо отметить, что при а12 Ф а23
синхронную карданную передачу осуществить нельзя,
но если карданные вилки на валу Л2 лежат в
одной плоскости, неравномерность вращения
ведомого вала будет минимальной.
На графиках, изображенных на рис. 63, а,
приведены кривые разности ф3 — фх в функции
угла фх при различных значениях ф2 и р13 (рис.
63, б).
Зависимость (28) может быть использована
и при определении соогношений между угловыми
перемещениями ведущего и ведомого валов
карданной передачи при любом расположении их
осей в пространстве и любом угле разворота
карданных вилок промежуточного вала.
Поскольку угол (313 между плоскостями Р12
и Р23 расположения осей валов А1 — А2 и Л2—
— А3 и угол -[2 между плоскостями расположе-
4* &
ния осей вилок промежуточного вала
определяют угол ф2 = л/2 — (у2 + |313), то
ta id =
cos a12 [cos2 а23 + ctg2 (7я + р13)] +
+ sin2 а23 ctg (72 + Pis) tg q>i
Пространственная двухшарнирная передача
всегда может быть кинематически приведена
к плоской. Для этого необходимо, чтобы
фазовые углы соответствующих карданных шарниров
приводимой пространственной и плоской передач
были равны.
Рассмотрим определение фазового углаф2 для
вариантов соединения карданных валов,
изображенных на рис. 62. Во всех вариантах полагаем
исходный угол поворота ведущего вала равным
нулю: фх = 0.
Вариант 1 (рис. 62, а, Я12 = Р2з)- Все валы
расположены в одной плоскости (плоская
карданная передача), т. е. |313 = 0; угол между
P(F2) и P(F[) равен 90°, т. е. Т2 - я/2 = 90°.
В этом случае
Вариант 2 (рис. 61, б). Рп — Р23; f2
Pl8 = О-
Я о Я , / г\
Ф2 = у — Т2 — Pl3 = у — Т2>* ^2 =^ О.
Вариант 3 (рис. 61,в). Р^фРы ft
я
Фг = Y — Ъ — Pis
кю
Вариант 4 (рис. 62, г). Р12ФР2^
Я О
= T~T2 — Pis-
/
1
/
/
/
/
/
/
/
\]
15°
\
\
\
\
\
\
\
\
\
1°40'
1°20'
1°00'
40'
20'
О
-25-20-15-10 -5 0 5 10 15 20a23i°..
,. В
Рис. 63. Графики угловых смещений валов
сдвоенной карданной передачи в зависимости от углов.
101
При произвольном фазовом угле первого
карданного шарнира (фх Ф 0) фазовый угол второго
определится соотношением
(31)
На рис. 63, бив приведен закон изменения
разности углов ф3—фх поворота выходного и
входного валов в функции фх и максимальное значение
этой разности при а12 Ф а23. Из последней
зависимости следует, что пространственная двух-
шарнирная карданная передача будет
кинематически эквивалентна плоской, если ведущую
вилку FI второго шарнира относительно плоскости
вилки F2 повернуть совместно с ведомым валом
А3 на угол, равный углу между плоскостями
передач карданных валов.
Таким образом, в двухшарнирной передаче
с плоским расположением валов синхронность
вращения ведомого вала обеспечивается не
только при расположении вилок промежуточного
вала в одной плоскости, но и в случае
пространственного расположения валов при повороте
вилок промежуточного вала относительно друг
друга на угол, равный углу между плоскостями
передач карданных валов, и одновременном
выполнении равенства углов а12 и а23.
КИНЕМАТИКА ПОЛИКАРДАННЫХ ПЕРЕДАЧ
Поликарданную передачу можно представить
как последовательное соединение простых
карданов.
Угловое перемещение и другие
кинематические зависимости для ведомого вала передачи
определяют путем решения рекуррентных
соотношений для каждой из одношарнирных пере-
102
дач, составляющих многошарнирный карданный
механизм:
ф2 = arctg
фп+1 = arctg [cosa^+] tg (Ф„
Передаточное отношение этой передачи равно
произведению передаточных отношений одно-
шарнирных карданных передач, составляющих
многошарнирную:
__ ^+1 == ^Фз ^Ф? ^1 d(Pn+\ __
- О)! - £*ф1 ^ф2 £/фя ' ' # ^ф/г (33)
Передаточное отношение одношарнирной
передачи— величина переменная, формула (33)
выражает его мгновенное значение. Передаточное
отношение для каждой ступени зависит от
фазового угла соответствующего карданного
шарнира и для общего случая пространственной
поликарданной передачи при фх Ф 0, ф2 Ф 0? Фз Ф
#0, ... , ^„=^=0 выражается функцией
Фз, . • . , <№• (34)
Таким образом, определение величины
передаточного отношения и закономерности его
103
изменения для поликарданной передачи
является достаточно сложной задачей.
Зависимость между угловыми перемещениями
ведущего и ведомого валов поликарданной
передачи определяется по методике,
изложенной выше (стр. 103), а в работе 3. Ш. Блоха [11]
выражается формулой
где а = a±a2 ... ап\ b = ага2 .. . ап-\Ьп + ага%...
ф
хфъ^ь п + ф^* п + хгъ
... сп\ с = сгс2 ... cn\ at = cos at, t-+i (1 + tg^t-);
6/ = sin2at, t+i tg ф,; ^ = cos2 at-, <+1 + tg2^£.
Зависимость (35) дает возможность
установить связь между параметрами выходного и
входного валов сложных пространственных
карданных передач в самом общем виде. Однако
существенным недостатком приведенной методики
является громоздкость расчетов и
невозможность применения результатов его при
динамических расчетах системы.
Угловая скорость и угловое ускорение
определяются путем последовательного
дифференцирования уравнения (35). В результате
первого дифференцирования получаем
00/1+1 ~~ a2 sin2 фх + (b sin фх + с cos фх)2 *
Полагая % = const, в результате второго
дифференцирования получаем
aco)J(a2 + b2— с2) sin 2фх + 26с cos 2ф* 1
£л+1 == [a2 sin2 ф! + (b sin срх + с cos ф^2]2 * ' ^
Из уравнений (36) и (37) следует, что как
угловая скорость выходного вала, так и угловое
ускорение — функции периодические,
104
< ПРИМЕНЕНИЕ ТРИГОНОМЕТРИЧЕСКИХ РЯДОВ
ДЛЯ АНАЛИЗА КИНЕМАТИКИ
КАРДАННЫХ МЕХАНИЗМОВ
И ВЛИЯНИЕ ПАРАМЕТРОВ СИСТЕМЫ
НА СТЕПЕНЬ НЕРАВНОМЕРНОСТИ
Как указывалось выше, сложные зависимости
(32) и (35) между кинематическими параметрами
ведущего и ведомого валов многошарнирной
карданной передачи делают практически трудно
осуществимым аналитическое исследование
кинематики и динамики механизмов с такими
передачами. Поэтому задача получения более
удобных для анализа зависимостей очень актуальна.
Связь между угловыми перемещениями валов
карданной передачи в общем случае выражается
соотношениями (32) при фх ф О, ^2Ф 0> 'Фз Ф
Ф 0, . . . , я|>„ Ф 0.
Фазовый угол для произвольного карданного
шарнира на основании уравнения (31)
определяется равенством (см. рис. 62)
Ь = т - Ь - P«-i. i+i + arctg (555-5^7 tg <W-
(38)
Использование формул (32) для
кинематического и динамического исследования карданных
механизмов, как уже указывалось, ведет к
сложным расчетам. Если воспользоваться
разложением функций в ряды, то можно получить
более простые и удобные для использования
соотношения.
В дальнейшем будет рассмотрен случай
стационарного расположения осей валов
карданной передачи, т. е. случай, когда а12 = const;
а23 = const; . . .; аПг л+1 = const.
Исследуем в первую очередь одношарнир-
ную карданную передачу, приняв в качестве
105
исходного условия -фх = 0 (рис. 60). В таком
случае зависимость между угловыми
перемещениями валов Ах и А2 выразится уравнением
(39)
Кинематическая передаточная функция,
полученная из уравнения (39) путем
дифференцирования ф2 ПО фх
"Ф° ' гг, (40)
dcp! cos a12 (1 + tg2a12 sin^) '
может быть разложена в ряд по х = tg2a12sin291 <^
<^ 1, так как большинство применяемых в
практике карданных передач имеют а12 < 20°.
Раскладывая выражение (40) в степенной ряд,
получаем
— tg6a12sin69i+ ••• +un). (41)
Степени sin фх можно заменить косинусами
кратных углов. Выполняя эту операцию, собирая
члены с косинусами одного аргумента и
интегрируя, получаем
5
Тб'
15.
-Tr;tgeai2 +
in 6ф2 + • • • + ип . (42)
106
Можно показать, что постоянный коэффициент
при фх
cosa12\ 2 s 12 ' 8 s 12
-т^§6а12+ •••) = coi (43)
id /
мало отличается от единицы. Действительно,
воспользовавшись разложением tg a12 в ряд и
ограничившись несколькими первыми членами
разложения, получим
tg «12 = I а12 +. у а12 + yg а12 +
, 2 4 . 4 в . 1 6
■ ОС-in " I' —? ОСч —г~ "~~ОС^л ~
Хв • I к 12 ' О 12
4-i- 3 j-— 5 -4-
4- -1 а3 4- — а5 4- • •
Для углов а12 < я/9 члены со степенями
порядка выше <%12 не учитываются ввиду их
малости.
Подставляя разложения tga12 в уравнение
(43), получаем
__fl +
cos a12 \ 2 ^ 24
^ 4- il — il
21 ^ 4! 6!
потому что выражения в скобках представляют
собой сумму первых членов разложения cosa12.
Если обозначить в уравнении (42) постоянные
107
коэффициенты при sin2/гфг (п = 1, 2, 3,
через
cosa12V4 ^^12 4
= С
11»
cosa12\32 ^ ai2 64 ^ 12 i * # # / 12? \ )
1 / i
^tg6a12-..
то получим
ф2 = 9i + cn sin 2фх + c12 sin 4фх +
+ c13 sin 6фх + • • • . (45)
При уменьшении угла a12 амплитуды высших
гармоник ряда (45) быстро уменьшаются.
Так как в подавляющем большинстве случаев
применяются карданные передачи с углом а12 <
< 20°, то cos a12 > 0,9397; tg a12 < 0,3640;
tg2cc12 < 0,1325; tg4 a18 < 0,0175; tg6a12 <
< 0,000232.
В соответствии с этим с1Л— f-rtg2a12 —
11 cos а12 \ 4 s 12
< 0,031 24; c12<
< 0,000 56; c13 < 0,000 001 2.
Таким образом, при практических расчетах
можно пользоваться усеченной формулой ф2 =
= Ф1 + ^ц5т2ф1, где
1 / 1 , о 1 , ± , \ ^4^
хх cos a12
a2
Приближенное значение сп = -1.
Уравнения (45), (46) могут быть
использованы для построения рекуррентных соотноше-
108
нии поликарданнои передачи в случае, если
а2
«2
Фз ~ Фг + £21 sift 2ф3; с21 = -~
= фя + сп\ sin 2ф„, сЛ1
Если в общем случае поликарданной
передачи^/ Ф О (рис. 64), то для вала А2
Ф, = arctg [35^; tg (Фж
Применив разложения (41), (42) для
уравнения (47), запишем
ф2 = (Ф1 + <Ы + ^11 sin
— сп sin 2фх= 9i — cusin 2фх+ cncos 2фх sin 2фх+
+ cn sin 2фх cos 2фх. (48)
Обозначая cn sin 2фх = 61? cn cos 2фг = а1Ъ
получаем сп sin 2фх = Ь1г и подставляя эти
обозначения в уравнение (48), получаем
Ф2 = 9i — ei + «п sin 29i + 6ц cos 2фх. (49)
Таким образом, при наличии фазового угла
появляется дополнительная гармоника второго
порядка.
Аналогично угол поворота вала А3 можно
выразить равенством
Фз = ?2 + ^2i sin 2ф2 + с21 cos 2ф2 sin 2ф2 +
+ c2l sin 2ф2 cos 2 ф2. (50)
109
Функции sin 2ф2 и cos 2ф2 можно выразить
через q>l9 воспользовавшись соотношением (48):
sin 2ср2 = sin 2 [фх — 6Х + си sin 2 (фх + фх)] «
= sin 2cpx cos 29j_ cos [2cu sin 2 (cp2 + фх)] —
— cos 2фг sin 20t cos [2cn sin (cpx + фх)] +
+ cos 2cpx cos 26X sin [2cnsin 2 (фх + фх)] +
+ sin 2фх sin 202 sin [2cn sin 2 (фг + фх)]; (51)
cos 2cp2 = cos 2 [ф2 — 0! + £n sin 2 (ф2 + ф^] =
= cos 2фх cos 2дг cos [2си sin 2 (фх + фх)] +
+ sin 2фх sin 20X cos [2cu sin 2 (фх + <K)] —
— sin 2фх cos 20X sin [2cn sin 2 (фх + Ф1)] +
+ cos 2фх sin 20X sin [2cu sin 2 (фх + ф^]. (52)
Имея в виду, что значения
тригонометрических функций не превышают единицу при
любом значении фх, а сп — малая величина, для
упрощения полученных выражений можно
воспользоваться разложениями
sin [2cn sin 2 (фх + фх)1 = 2сг1 sin 2 (фх + фх) —
ЗГ sin3 2 (ф1 + фх) + ^i1 sin5 2 (ф1 + фх) -
— ... = 2сп (cos 2фх sin 2фх +
+ sin 2фх cos 2фх) — • • • ;
22с2
1
1. (53)
Члены с коэффициентами с2п и более высоких
степеней не учитываются, так как являются
величинами второго порядка малости по
сравнению с коэффициентами первого члена ряда (49)
и становятся величинами третьего порядка
малости при их умножении на с21 в уравнении (50).
111
Подставляя выражение (53) в соотношения
(51) и (52), получаем
sin 2ф2 = cos 20Х sin 2фх — sin 2бх cos 2фх -f-
+ сп cos 2фх cos 291 sin 4ф! + си sin 2фх cos 26X +
+ cn sin 2фх cos 20Х cos 4фх + cn cos 2^ sin 20Х —
— cn cos 2фх sin 20Х cos 4фх +
+ сп sin 2фх sin 20X sin 4фх; (54)
cos 2ф2 = cos 20X cos 2<p! + sin 202 sin 2ф2 —
— си cos 2фх cos 20X + cn cos 2фх cos 20JCOS 4фх —
— clx sin 2фх cos 20X sin 4фх -f- cu sin 2фх sin 26a +
+ cn sin 2фх sin 20X cos 4фх +
+ cn cos 2д]>1 sin 20i sin 4фх. (55)
Подставляя выражения (49), (54) и (55) в
уравнение (50) и ограничиваясь величинами первого
порядка, получаем
Фз = 9i — foi sin 2ф2 + с21 sin 2ф2) + [сп cos 2фх +
+ с21 cos 2 (фа — 0J] sin 2фх + [сп sin 2фх +
+ с21 sin 2 (фа — 0Х)] cos 2фх. (56)
Обозначая постоянные коэффициенты ряда
через
62 = сп sin 2фх + ^21 sin 2ф2;
«21 = сп cos 2<|>! + с21 cos 2 (ф2 — 0t);
621 = cn sin 2<|>! + с21 sin 2 (фа — 0Х)
и подставляя их в уравнение (56), имеем
Фз = Ф1 — 02 + «21sin 2фх + b21 cos 2фх. (57)
Аналогичными соотношениями выразятся и
углы поворота других валов поликарданной
передачи:
Ф4 = Ф1 — ез + «4i sin 2ф2 + bu cos 2фд (58)
Фя+i = Ф1 — 0Л + ««Isin 2ф1 + bnl cos 2cpx. (59)
112
Постоянные коэффициенты уравнений (49),
(50), (51), (52) определяются соотношениями
= cn sin 2фх + с21 sin
(60)
flu = c11cos2(^1 — 0O)
02i = *iicos 2 («К — ео) + с21 cos 2 (ф2 — 6Х)
аЛ1 = ам-1,1 + ся cos 2 (фЛ — e^i) х
X ^[^008 2^-8^)]; (61)
feu = cn sin 2 (фх — 60)
b21 = cn sin 2 (^ — 60) + c21 sin 2 (фа — вх)
Ья1 = ft/i-i, i + ^i sin 2 (фя — в^ X
х.Е^зшг^-у], (62)
В случае, когда при определении углового
перемещения ведомого вала поликардакной
передачи необходимо учесть и третий член ряда (45),
соотношение для определения этого
перемещения примет вид
Фп+1 = <Pi — 6/г + ani sin 2фх + Ьп1 cos 2фх +
+ ал2 sin 4фх + bn2 cos 4фх. (63)
Авторами проведена работа по разложению
в тригонометрический ряд соотношений между
угловыми перемещениями ведущего и ведомого
валов поликарданной передачи с учетом третье-
113
го члена ряда (45). В этом случае постоянные
коэффициенты ряда (63) определяются
выражениями
п
6л = J] [сa sin 2<W + сп ыпЦ{ +
+ caai-i,i sin 2 (<]>, — 6^) +
+ ^A-i.i cos 2(^-6^)]; (64)
л cos 2 (ф,- — в/-!)]; (65)
fl sin 2 (ф, — 6^)]; (66)
5cos4(<j/t— в^ х) +
1 -С')]; (67)
^2 .|1К2 (ф,/_1
+ ctlbt-l. 1cos (ф< — e/-l)
— Wi-i. isin 2 (Ф/ — e^i
Пользуясь рассмотренной методикой, можно
разложить в тригонометрический ряд
выражения, устанавливающие связь между угловыми
перемещениями валов поликарданной передачи
с любой необходимой степенью точности.
Выражение (59) может быть преобразовано
и представлено в виде
Фл+i = Ф1 — е« + sm sin 2 (ф! + Ьп). (69)
Здесь
1 = g. (70)
114
Аналогично ряд (63) можно привести к виду
= ?i — ®п + sm sin 2 (срх + 8Л1) +
(71)
где
Sn2 = Van2 + Kv tg 4Ьп2 = I™ . (72)
Полученные соотношения между угловыми
перемещениями валов более удобны для
кинематического и динамического исследования
механизмов с карданными передачами, так как
выражения (59), (63), (69) и (71) легко
дифференцируются и интегрируются.
Угловая скорость и угловое ускорение
ведомого вала определяются путем
дифференцирования выражения (69) по времени:
°Vi = ^r1 = ^i + 2(*isni c°s 2 (фх + 8л); (73)
— 4a>Js/I1sin2fa1 + 8Л),
или
£л+1 = вх -\- 2s1snl cos 2 (cpt + Sn) —
— 4<o2s/asin2(<p1 + 8,l) (74)
при ©х = const; srt+1 — — 4a>lsnl sin 2 (cpx + 8Л).
Анализ уравнения (73) показывает, что
переменную составляющую угловой скорости
ведомого вала карданной передачи при заданной
угловой скорости ведущего (<% = const) можно
уменьшить только за счет амплитуды snt
гармоники. Рассмотрим условия, в случае
выполнения которых постоянный коэффициент sni
принимает экстремальные значения при заданных
1-15
ст С2и • • - > ^/11» т. е. для заданных а12, а23,
аз4, • • • , ал, л+1- Если принять фх == 0; ф2 = 0; ...;
% = 0 или <]>! - 90°; ф2 = 90°, ... , фл = 90°, то
из уравнений (60) и (61) вх = 0; 62 = 0; ... ;
вл = 0; 6U = 0; Ь21 = 0; ... ; 6Я1 = 0. Тогда
««I = c«i = ^iicos 2^1 + с21 cos 2фх +
+ • •. + сп cos 2фЛ == ^ ctl cos 2ф£. (75)
Максимальное значение snl будет, если фх=0;
cos2^ = 1; ф2 = 0; cos2^2 = 1; . . . ; фЛ = 0;
cos2^n- 1:
п
Sni = СП + С21+ ... + Сп1 = J] СД. (76)
Если значения фазовых углов будут чередоваться:
<К = 0; ф2 = 90°; ф3 - 0; ф4 = 90°; . . . ; ф„_х = 0;
ф„ = 90°, то cos 2^- соответствующих углов будут
принимать следующие значения: со5 2фг = 1;
cos2^2 = —1; cos2^3 = l; cos2^4 = —1; ... ;
cos 2ф„__1 = 1; cos 2tyn = — 1. Подставляя значения
2^- в уравнение (75), получаем
sm = сп — с21+с31 — С41Н +сп-ъ 1 — ст- (77)
Значение sn\ в соотношении (77) меньше, чем
в уравнении (76), но из этого не следует, что оно
минимальное. Минимальным значение sn\ будет
только в том случае, если фазовые углы Ф;
подобраны таким образом, что разность между суммой
положительных и суммой отрицательных членов
уравнения (77) будет минимальной по
абсолютной величине.
Таким образом, при изменении фазовых углов
карданных шарниров ф/ величина коэффициента
snl будет колебаться от его минимального
значения S,ilmin ДО МаКСИМаЛЬНОГО S'nlmax'-
Snlmin < Snl < Salman (78)
116
Степень неравномерности вращения ведомого
вала при соср = сог = const определяется
коэффициентом неравномерности
= 12\тах—
Подставляя полученные из уравнения (73) (отах
и cDmin в формулу (79), получаем
8 = (Щ1 + 2<*>iSni) — (o>i
Таким образом, степень неравномерности
вращения определяется величиной коэффициента
sn\ и, следовательно, является функцией углов
Щл+и Ш = 1, 2, . . ., /i).
Для одинарного карданного механизма
коэффициент неравномерности зависит только от
значений угла а12. Фазовый угол в данном случае
на значение коэффициента 6 влияния не
оказывает.
В сдвоенных и поликарданных механизмах
фазовые углы карданных шарниров оказывают
существенное влияние на коэффициент
неравномерности б и передаточное отношение in] max.
При их неудачном выборе неравномерность
вращения будет возрастать, а при правильном
выборе фазовых углов можно значительно снизить
неравномерность вращения и даже полностью
ее исключить.
СИСТЕМА ПАРАМЕТРОВ
СИНХРОННОЙ ПОЛИКАРДАННОЙ ПЕРЕДАЧИ
Одним из практически важных приложений
теории является синтез кинематически
синхронной карданной передачи. Поэтому на этом
вопросе остановимся подробнее.
Угловую скорость ведомого вала можно
представить как сумму угловой скорости ведущего
117
вала <»! и относительной угловой скорости (оп+\,\*
Для одинарной карданной передачи со2 =
— <% + со21 и co2i = <о2 — со1# Для поликарданной
передачи
.X
(81)
Для одинарной
карданной передачи графики
со21 при фх = 0 и 6Х ^ О,
полученные на основании
уравнения (46),
представлены на рис. 65, а. Как
видно из графиков,
наличие фазового угла фх
не влияет на величины
CDmax, C0min И В (об ЭТОМ
уже говорилось выше), а
приводит только к сдвигу
экстремальных значений
О)тах И COmin-
Иная картина
возникает, если карданная
передача многошарнирная.
В такой передаче
фазовые углы могут либо
увеличивать, либо
уменьшать суммарную
относительную СКОРОСТЬ (Оп+1,1.
Это можно
проиллюстрировать на примере
синтеза синхронной
передачи с тремя
карданами.
На рис. 65, б приведены графики
относительных скоростей со21, со32, ю43 и со41 = со21 + со32 +
+ (о43 при произвольных фазовых углах. Если
Рис. 65. Графики
угловых скоростей при
различных фазовых углах
для одношарнирной и
трехшарнирной карданных
передач.
118
принять фазовые углы карданов равными нулю
(г^ = 0, я^2 = 0; г|)3 = 0), то суммарная
относительная скорость со41 станет максимальной (рис.
65, в). Амплитуда со41 равна сумме амплитуд
®2ъ ^зг» ^з-
Синхронная карданная передача может быть
выполнена, если обеспечить фазовые углы
карданов, при которых суммарная угловая скорость
co4i равна нулю (рис. 65, г).
Рассмотрим теперь условия, при которых
может быть осуществлена карданная передача с
малой степенью неравномерности выходного вала,
т. е. передача равномерного вращения (sn\ = 0).
На основании соотношений (61), (62), (70)
ат = ал-.1,1 + сп1 cos 2 (фл — б,^),
Ьщ = Ьл-1,1 + сп1 sin 2 (фл — B^J,
^ - [ая-1,1 + сп1 cos 2 (фя - б..!)]2 +
+ [6л-1 1 + Спг sin 2 (ф - ур,
sin 2 (фл - вя_1 + Хл), (82)
Минимальное значение s^imm будет обеспечено,
если в соотношении (82) выполняется условие
2( в+Хя) = —1, т. е.
—вя-1 + Хя) = —J, или
Тогда выражение (82) принимает вид
о2 _ ^2 I Г2 о
sni — (5/г—1, 1 cnl) ?
S«l == I 5л—l, 1 Cnl I-
119
Если sn_lt x = сП1, то snl = 0, и карданная
передача будет синхронной.
По аналогии с выражением (82) для
коэффициента srt_1( х запишем формулу при
произвольном значении фл_х:
Sn—1, 1 — s/i—2, 1 "Ь Сл—1, 1 ~Н
+ 2s._2, lCn_lt г sin 2 (ф^ - 0Л_2 + ХЛ^) (85)
или
Sn—1, lmin ^ Sn—1, I ^ Sn—l, lmax*
Так как предельные значения sn—it \т{П и
sn~i,imax известны, то осуществление передачи
с малой степенью неравномерности выходного
вала возможно при выполнении условия
Sn—I, lmin < Cni < Sn—l, lmax, (86)
которое всегда можно реализовать путем
соответствующего выбора угла фл—1 в формуле (85)
для выполнения sn—it \ = cni.
ЕСЛИ Cm >S/i_i,imaxf ИЛИ Ci < S/i-1, lmim TO СИН-
хронную передачу осуществить нельзя. В этом
случае для обеспечения минимальной
неравномерности вращения ведомого вала карданной
передачи значения фазовых углов должны
чередоваться (^ = 0; ф2 = 90°; ф3 = 0 и т. д.) и быть
подобраны таким образом, чтобы разность между
суммой положительных и суммой отрицательных
членов в уравнении (77) по абсолютной величине
была минимальной, как об этом говорилось выше.
ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ
КАРДАННОЙ ПЕРЕДАЧИ
ЧЕРЕЗ КООРДИНАТЫ ШАРНИРОВ
АНАЛИТИЧЕСКИМ И ГРАФИЧЕСКИМ
МЕТОДАМИ
Для проведения кинематического анализа
карданной передачи необходимо в первую очередь
определить ее исходные параметры (углы ос*,
120
Фь Т*> Р/, /+г). Эта задача может быть выполнена
аналитическими и графическими методами.
Рассмотрим передачу с п + 1 валами, не
расположенными в одной плоскости. Проведем через
каждую пару валов, соединяемых карданным
шарниром (рис. 64), плоскости Р/, t-+i ^(i = 1,
2, ... , /i). Общее число таких плоскостей будет
равно п. Взаимное расположение валов в
плоскости передачи определим острым углом а*,/+1
Рис. 66. Схема карданной передачи привода
электроустановки.
между их геометрическими осями. Взаимное
расположение между двумя соседними плоскостями
передач Pit ;+i и Pi+\t i+2 определим углом |$/, i+2.
Отсчет угла pt-, i+2 следует производить в
направлении вращения карданных валов от Pit ,+i
к Pt4-i, i+2. Положение ведущих вилок всех валов
в начальный момент времени определим углами
ф,., которые будем отсчитывать от плоскости
осей валов передачи, связанных шарниром, в
направлении вращения вала.
Выше было показано, что кинематика
карданной передачи полностью определяется при
задании углов at, /+i и tyi. Углы ф; легко
определяются, если известны а^+г, Р*,/+2 и Tt- Таким
образом, задача сводится к определению углов
a/,/+I, Pt, i+2 и j£. Если известны координаты
центров всех шарниров передачи, одной произ-
121
вольной точки первого вала и одной
произвольной точки последнего вала (эти точки не должны
совпадать с центрами шарниров), то
поставленная задача решается по общим формулам
аналитической геометрии.
Выберем систему координат с осью х,
направленной горизонтально, осью г, направленной
вертикально, и осью у, перпендикулярной к осям
х и г (рис. 66).
Пусть точки Bt имеют координаты х£, yif zt
(i = 0, 1, 2, . . . , п -f 1), тогда углы a/. £-+i
между осями валов в плоскостях передачи можно
определить по формуле
cos ait г-н ==
+1) + (y;+i — yt) (y,+a
— Zj) (Z;+2 — г/+1)
- г/)2] X
(87)
Углы между плоскостями передач смежных
пар карданных валов можно найти по формуле,
используемой в аналитической геометрии для
определения углов между плоскостями в
пространстве:
cosPf c*cig
(88)
Ch Diy Eh Ci+1,Dl+1, Ei+1 —коэффициенты
уравнений соответствующих плоскостей передачи.
Уравнение Pit i+\ плоскости как проходящей
через три заданные точки (Bl_1, Bt, Bf+1) может
быть представлено определителем
У —У i~i
yt-yU */-*/-! =0.(89)
122
Раскрывая определитель (89), получаем
уравнение плоскости, коэффициенты Сь Dti Et и Ft
которого выражаются через координаты
выбранных точек Ctx + Dty + E{z + Ft = 0.
Для получения коэффициентов С£+1, Di+1,
^i+i» ^i+i необходимо написать уравнение
плоскости P£+i, t+2 в форме определителя (89)
и раскрыть этот определитель.
Постоянные коэффициенты плоскостей
передачи карданных валов подставляем в формулу
(88) и определяем угол между смежными
плоскостями передач фц+2).
Углы между плоскостями карданных вилок
на промежуточных валах карданной передачи
Y; определяются на основании изучения
рабочих чертежей деталей передачи или задаются
конструктором при проектировании передачи.
Фазовые углы карданных шарниров \|э*
определяются на основании зависимости (38):
Ь = i - Ъ - Р.'-., ч-i
В качестве исходного условия целесообразно
принять фх= 0.
Методика точного определения углов между
осями карданных валов в плоскости передачи
ajtf+i, углов между плоскостями передач (3*, f+2
и фазовых углов карданных шарниров ф^
несложна. Однако расчеты по формулам (87), (88)
и (89) трудоемки. При инженерном
проектировании карданных передач их геометрические
параметры с достаточной для большинства
практических случаев точностью могут быть
определены графическими методами начертательной
геометрии. Геометрические параметры карданной
передачи определяются в этом случае
приближенно и трудоемкие аналитические расчеты
исключаются.
12а
ВЫБОР РАЦИОНАЛЬНЫХ ПАРАМЕТРОВ
КАРДАННОЙ ПЕРЕДАЧИ
ПО СТЕПЕНИ НЕРАВНОМЕРНОСТИ
При неравномерном вращении ведомого вала
карданной передачи в элементах машин
возникают большие динамические нагрузки,
снижающие прочность и надежность работы машин. По-
эгому рациональными параметрами карданной
передачи следует считать такие, при которых
неравномерность вращения ведомого вала
минимальна.
Пример. Рассмотрим пример расчета четырехшар-
нирной синхронной карданной передачи, схема которой
приведена на рис. 66 [65]. Координаты точек осей
карданных валов приведены в табл. 5.
Таблица 5
Координаты точек осей карданных валов, мм
Коорди-
наты
X
У
г
Значения координат для точек
в0
ооо
вх
100
0
7
Вг
498
—72
34
в9
707
—57
27
в.
1064
31
-68
в,
1164
31
—86
Подставляя координаты точек карданных валов
передачи в формулы (87), (88), (89) и (38), получаем значения
углов: а12 = 11°30'; a23==15°20/; a34=15°; a45 =
= 16° 30х; р13 = 1°54/; |324 = —22° 56'; рЯ6 = 49°59';
ъ = 0; 7з = 0; 74 = 0; <к = 0; ф2 = 88° 06'; L = 20° 05';
ф4 = 16° 23'.
Степень неравномерности вращения ведомого вала
карданной передачи определится соотношением (80)
5 = 4s41 = 4 Va\x + b\x = 0,1317.
(90)
Здесь
= СП + С21 COS
+ С81 COS
0,022789;
+ Са COS 2^4 =
124
Ь4] = c2i sin 2ф2 + c31 sin 2ф3 -f c*i sin 2^4 = 0,023370;
2 2 2 2
a12 a23 a34 a45
cn = --j-; C2i = -j-; ^3i = -j-; c41 = -j-;
5% = 13,17%; £6 = 1055 1/c2.
Для того, чтобы осуществить синхронную карданную
передачу, необходимо выполнить условия (86), т. е.
подобрать фазовые углы <]>/ карданных шарниров и углы
между осями валов ai i_^_l таким образом, чтобы sni =0.
Для рассматриваемого варианта карданной передачи
эта задача будет выполнена, если принять -уг == 90°, 7з —
= 0, 74 = 0 и подобрать фазовые углы карданных
шарниров так, чтобы коэффициенты s31 и c4i были равны.
Фазовые углы карданных шарниров и углы 7 между
плоскостями карданных вилок на валах Л3 и Л4 на
основании уравнения (82) определяются соотношениями
4 = 4 + с\х + 2s31c41 sin 2 (ф4 + Я4), (91)
six = 4 + 4 + 2s21c31 sin 2 (+з + *з)- (92)
Приняв s3J = с41, определим при этом условии
фазовые углы i|/3 и "ta-
c21 cos 2ф2; 621 = c21 sin
sin 2ф8.
Из условия равенства s31 = с41 следует
4 + 4 + 2s21c3i sin 2 (фа + h) = 4- (93)
Из уравнения (93) определяем угол ф3:
2 2 2
' M. (94)
Угол с^4 определяем, использовав условие (83),
X4) = —1. (95)
Подставляя в уравнения (93) и (94) значения величин
с учетом принятого ^2 = 90°, получаем величины фазовых
125
углов карданных шарниров и углов между плоскостями
карданных вилок на валах Л3 и Л4.
При реализации полученных значений углов <fv =
= | - Ъ - ?с-1, ,-+. + arctg ^cos ' t tg ф,_, j
обеспечивается синхронность карданной передачи, а
динамические нагрузки в элементах машин сводятся к
минимуму. Фазовые углы ty и углы ^ между плоскостями
карданных вилок на промежуточных валах для
рассматриваемого варианта передачи имеют следующие значения:
<h = 0; ф2 = -1°54'; Х3 = -67°1Г; +4 = 70°10'; ч2 =
= 90°; Тз = 87°16'; Т4 = -53°47'.
Приведенная выше методика может быть
использована при расчете любой синхронной
карданной передачи с произвольным числом
шарниров.
КИНЕМАТИКА КАРДАННЫХ ПЕРЕДАЧ
С ПЕРЕМЕННЫМ УГЛОМ
МЕЖДУ ОСЯМИ ЕЕ ВАЛОВ
Во многих машинах используются карданные
передачи, взаимное расположение осей которых
непрерывно меняется в процессе работы
машины (например, в сельскохозяйственных
прицепных машинах, в транспортных машинах с
упругой подвеской — автомобилях, тепловозах,
в металлургических машинах при изменении
расгвора прокатных валков на ходу и др.). В этом
случае кинематические параметры ведомого ва-
.ла являются функциями двух переменных —
угла фх поворота ведущего вала и углов а между
юсями валов при передаче одинарным или
сдвоенным карданными механизмами. Несмотря на
то, что одинарная карданная передача
используется редко, ее кинематика как системы с двумя
степенями свободы представляет интерес для
расчета синхронной и асинхронной сдвоенных
■передач с массивным промежуточным валом, мо-
1126
мент сил инерции которого нагружает элементы
кинематических пар шарнира. В этой связи
рассмотрим сначала кинематику одинарного
шарнира. Пусть фх = /х (t), <*12 = /2 (*). Тогда,
дифференцируя уравнение (18) по времени,
получаем
iiSi _ «j ^l (96)
Проведя необходимые преобразования
уравнения (96), получим формулу для угловой
скорости ведомого вала:
0)2 =
cosa12(l+tg2a12sin29l) •
Продифференцировав выражение (97) по
времени и отбросив в последнем слагаемом малые
величины с коэффициентами tg4 a12 и g2gl2 , no-
COS 0^12
лучим формулу для определения углового
ускорения
cos a12 (I + tg2 a12 sin?
tg2 aia sin
cos a12 (1 + tg2 a12sin2 ф1)2 Ш1 ~т~
I tgaiasin2yi ..
^ 2cos a12 (1 + tg2a12 sin2 ф1) ^12 ^
, sin 2ф1 (a)2
' cos5 a12 (1 + tg2 a12 sin2 фх)
^g2 0^12 + tg «i2 sin 2фх — tg a12 cos2 a12 cos 2щ
cos3a12(l+tg2a12sin291)2 x
X (0±a12. (98)
Как видно из полученных уравнений, учет
переменности угла а12 между осями валов .очень
127
усложняет анализ кинематики карданной
передачи, даже одинарной.
Необходимо однако отметить, что абсолютная
величина изменения угла а12 в карданных
передачах, применяемых в большинстве машин,
сравнительно небольшая. В большинстве
применяемых передач а12 ^ 20°, а колебания этого
угла в процессе работы значительно меньше.
Анализ уравнений (97) и (98) показывает, что
при малых а12 и скоростях изменения этого угла,
(da12 \
меньших (ох I -~ < о)х I, в кинематическом
анализе карданной передачи можно ограничиться
расчетами по средним значениям а12 и конечным
изменениям -^ ? a При -^ < (0, 1 ... 0, 2) о^
влиянием переменности угла а12 можно
пренебречь.
Только при больших скоростях изменения
(da-,9 \
-~ > %1 кинематический анализ карданной
передачи следует проводить по формулам (97)
и (98).
Особенно важен кинематический анализ
такой передачи, если высокие скорости а12
являются периодическими функциями. Однако такой
вариант карданной передачи встречается в
машинах очень редко.
Следует еще иметь в виду, что для ряда машин
закон изменения угла а12 носит статистический
характер, характеризуемый математическим
ожиданием и дисперсией.
Еще более сложен анализ кинематики
сдвоенного кардана. Рассмотрим кинематику
плоской сдвоенной карданной передачи, у которой
угол между плоскостями карданных вилок на
промежуточном валу у2 = 0.
Для этого случая фх = fx (t)\ al2 = /2 (/) и а23=
128
= /3(/). Продифференцировав уравнение (29) по
времени, получим
cos a23
3 ~
3 ~ (cos2 а12 cos2 фх + cos2 а23 sin2 фх)
sina23tg91cosa12
(cos2 а12 + cos2 а23 tg2 ф1) "23 "1"
4 sing12cosa2зtgфi .
4-
"Г (COS2 а12 + cos2 a23 tg2 ф1) "12*
Формула (99) универсальна. Для синхронной
передачи при а12 = а23 из этой формулы
получается равенство со3 = сох.
Динамические нагрузки в механизме
определяются угловым ускорением о)3 выходного вала,
которое можно определить путем
дифференцирования выражения (99). В различных
механизмах а12 и а23 могут быть независимыми или
связанными определенным соотношением. В этой
связи в формуле для углового ускорения со3
выходного вала получаем различное число
слагаемых.
СИЛЫ, ДЕЙСТВУЮЩИЕ
В КАРДАННОЙ ПЕРЕДАЧЕ
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ В ЭЛЕМЕНТАХ
ПРОСТОГО КАРДАННОГО МЕХАНИЗМА
Примем, что на валы А1 и А2 (рис. 67)
действуют моменты Мх и М2. Момент М2 на выходном
валу кардана следует рассматривать как
результат суммирования приведенного к нему момента
сил сопротивления на выходном валу
механизма и моментов сил инерции всех расположенных
за шарниром звеньев привода.
Принимаем следующие обозначения:
лг — плоскость, перпендикулярная к оси вала Аг\
Ь ии 129
Рис. 67. Схемы для определения реакций, действующих в кинематических парах одинарного
карданного шарнира.
я2 — плоскость, перпендикулярная к оси вала Л2;
я3 — плоскость крестовины 3\
6Х — угол между плоскостями пг и я3;
б2 — угол между плоскостями д2 и я3;
Rb — реакция в шарнире В;
Re— реакция в шарнире С;
Rb — сила, действующая в шарнире В
перпендикулярно к плоскости карданной вилки /y>
Re — сила, действующая в шарнире С
перпендикулярно к плоскости вилки F2;
Rb — сила, действующая в шарнире В и
находящаяся в плоскости карданной вилки Fx;
Re — сила, действующая в шарнире С и
находящаяся в плоскости вилки F2;
d — расстояние между средними сечениями опор
крестовины;
ах — расстояние между опорами на валу А{,
а2 — расстояние между опорами на валу Л2;
Rb — сила, действующая со стороны крестовины
на вилку Fx перпендикулярно к оси ВВ'\
Re — сила, действующая со стороны вилки F2
на крестовину вдоль оси СС'\
Ь2 — расстояние от оси крестовины до опоры
вала Л2 (рис. 67, б).
Рассмотрим кинетостатику статически
определимого трехзвенного карданного механизма,
звенья которого входят в состав одной
вращательной и трех цилиндрических пар (рис. 67).
Для каждого подвижного звена можно
составить шесть условий равновесия статики. В одно-
подвижной кинематической паре имеется пять
неизвестных компонент реакций, а в каждой
двухподвижной паре — четыре компоненты.
В число неизвестных нужно также включить
один из двух внешних моментов (Мг или М2).
Сопоставление числа неизвестных и числа
уравнений статики показывает, что механизм
132
является статически определимым, и задача по
определению реакций в кинематических парах
решается методами статики.
Если пренебречь трением в опорах, то
зависимость между движущим моментом Мг и
моментом сил сопротивления М2 для
стационарного режима сох = const определяется
соотношением
М^х = —М2Щ',
М2 = —Мг112 = —Mi cos a12 (1 + tg2 a12 sin2 ф2).
(100)
При нестационарном движении выражение (100)
должно быть записано в форме уравнения
движения агрегата.
Для определения реакций в кинематических
парах В, В' и С, С рассмотрим условия
равновесия крестовины 3. Так как на крестовину не
действуют внешние силы, то она должна
находиться в равновесии под действием реакций Rb,
Rb' и Rc, Rc, главный вектор которых равен
нулю, т. е. каждая из пар реакций сводится
к паре сил.
Если предположить, что реакции Rb, Rb- и
Rc, Rc не лежат в плоскости осей крестовин,
то вектор момента М (Rb) может быть разложен
на составляющие: нормальную к указанной
плоскости и параллельную оси СС. Вектор момента
М (Rc) в свою очередь может быть разложен
на составляющую, нормальную к плоскости осей
крестовин, и составляющую, параллельную оси
ВВ'. Поскольку составляющие векторов
моментов, лежащие в плоскости осей крестовины,
взаимно перпендикулярны, то условия
равновесия крестовины удовлетворяются только в том
случае, если каждая из них в отдельности равна
нулю. Этим доказывается, что реакции Rb, Rb'
и Rc, Rc лежат в плоскости осей крестовины,
133
а поскольку плечи пар сил одинаковы, то Rb =
= Re. Реакции Re и RC' можно спроектировать
на плоскость, перпендикулярную к оси
выходного вала 2, а реакции Rb и Rb> — на
плоскость, перпендикулярную к оси входного вала /.
Каждая из указанных проекций реакций по
модулю определяется из условия равновесия
соответствующей вилки:
м2
~ d ~~
= ^ поп
dcosa12 (1 -f- tg2 a12 sin фх) ' v '
Вторые составляющие реакций, лежащие в
плоскостях, проходящих через оси
соответствующего вала, определяются из выражений
= /?л sin 6Х = ^ cQs ai2 0^ 1У;12 sin2 ф1). (102)
Значения функций углов 62 и 62 определяются
соотношениями [102]
cos tii =
1 1/1 +tg2a12sina<p1'
tg е2 = _^^^_^; (1 оз)
sin 62 = sin a12 cos фх;
cos 02 = cos a12 У1 + tg2 a12 sin2 фх.
Подставляя в выражение (102) значения tg 6X
и tg 02, получаем
пп М2 tg a12 sin cpi
в ~ d cos a12 (1 + tg2 «i2 sin2 <px) '
134
„П ^ М2 tg «12 COS
C d
1/ 1 + tg2 a12 sin2
COS 0j COS 62
ЛЛ
(105)
d cos a12 У1 + tg2 a12 sin2 (pt
Из условия равновесия валов А1 и Л2 (рис. 67, а)
получаем значения реакций в опорах входного
и выходного валов. Реакции RD, RD<
возбуждаются парой сил Rid, действующей в плоскости^
проходящей через ось входного вала и соответ-'
ствующую ось крестовины. Поэтому можно
записать
Rdui == Rid.
Отсюда
п d
CLi
М-2 tg cc12 sin ф]1
аг cosa12 (I + tg2 a12 sin2 <рх) *
Аналогично находим /?£a2 = /?cd, откуда
О„ _ n nn d _М2 tga12C0S91
Как видно из полученных выражений, реакции
в кинематических парах карданного механизма
при М2 = const периодически изменяются. На
рис. 68 показан характер изменения предельных
M(RE)
о Mt {D) (E
значении ~ , —-г— и —тт— в зависимости от
М2' М2 М2
угла сс12.
Несколько иначе будут определяться
реакции в кинематических парах в случае, если
карданный механизм выполнен по схеме,
представленной на рис. 67, б. Звенья этого трехзвенного
механизма образуют три одноподвижные (вра-
135
щательные) и одну четырехподвижную
кинематические пары. Как и в предыдущем случае,
механизм статически определимый. Реакции,
действующие на валы Лхи Л2 карданного
механизма, показаны на рис. 67, б.
На крестовину 3 действуют реакции Rb и Rc
со стороны вилок входного и выходного валов.
Реакции в парах В1 В' и
С, С крестовины лежат
в плоскости я3 осей
крестовины, причем реакция
в паре С, кроме
нормальной к оси СС, будет
иметь еще и осевую со-
ставляющую Rc, потому
о 5 ю 15 20 25 зо 35 cdz чт0 реактивный момент
Рис. 68. Графики измене- в шарнире Е не возбуж-
ния безразмерных ампли- дается.Зависимость
между моментами Мх и М2
М2 /max' \М2/тт и в этом случае может
М (RD) M (RD) быть записана в виде
1,0
0,8
0,6
0,4
0,2
туд
(-)
,—-^
- —
7МХ
.
К
1—-.
пах
\
рл
ЩтЬу
1
ix (M2)min уравнения (100), г
в зависимости от угла а12. £>£ могут быть
определены по формулам (104).
Значение осевой составляющей Rc реакции
Rc можно определить из условия равновесия
вала А%\ /?е&2 = Rcd = Rcb2. Реакция RE = RC
в точке Е лежит в плоскости осей вилки F2
и представляет собой вращающийся со скоростью
со2 вектор. Таким образом,
М2
tg ot12 cos 9j
02 Н у 1 + tg2 a12 sin2 ф!' ^ '
Компоненты Rb реакций Rb и Rb' в кинема-
тическах парах В и В' крестовины 3
уравновешивают осевую компоненту Rc. Поскольку
угол между осями крестовины равен 90°, то
136
компоненты реакций в парах В к В' равны между
собой и вычисляются по формулам
2 2b2 у
(109)
Так как Re лежит в плоскости зх2, а силы Rh
параллельны ей, то эти силы составляют с
плоскостью пх угол а12.
Разложив Rb на составляющие, лежащие
в плоскости ях и перпендикулярные к ней,
получим силы R'£, которые будут изгибать
карданный вал в плоскости, перпендикулярной к Р
и силы Rb, создающие осевое давление на
опоры вала Аг.
Силы Rb и Rb определяются соотношениями
Wt Wt n' M2 sin a12 cos фх
^2 ]/ 1 + tg2 a12 sin2 (pi
= Rb> = Rb sin a12
УИз. sin a12 tg ot12 cos q)j
2b9
1/ 1 + tg2 o12 sin2
(110)
Если в шарнире кардана, показанного на рис.
67, а реакции в кинематических парах равны
и противоположны, то в рассматриваемом
случае тангенциальные составляющие будут
отличаться на величину 2R4B.
Реакции в опорах вала Аъ определяемые
силами Кв> выражаются уравнениями
sin a12 cos фх
137
M2Ci sin a12 cos cp{
D' ~ ai ~ aA /l + tg2a
#£=2/?£ (III)
Составляющие реакции в опорах вала Аи
появляющиеся вследствие действия сил RnB и R",,
определяются так же, как и реакции RD и RD>
в механизме, схема которого приведена на
рис. 67, а:
ПП ПП ^2 tg a12 Sin У1
D D' «i cos «12 ]/l + tg2- a12 sin2 фг-'
Суммарные радиальные реакции в опорах вала
Ах найдем по уравнениям
р _М2
X
V ^-^
6?cos2a12 (l + t
I cos2 a12 sin2 al2 cos2 tyi-\-b\ tg2 a12 sin2 \
Осевые составляющие реакции в опорах вала Аг
определяются соотношением (111). Эти реакции,
в зависимости от направления, попеременно
будут действовать то на опору D, то на опору D',
Статический расчет карданных механизмов
допустим только при малых углах а12 и
сравнительно невысоких скоростях сох ведущего вала
Аг. В этом случае силы инерции сравнительно
невелики и ими можно пренебречь.
Если к звеньям карданного механизма наряду
с внешними силами приложить еще и силы
инерции, то на основании принципа Даламбера
механизм в целом, так же как и отдельные звенья,
138
его составляющие, можно рассматривать в
состоянии равновесия, а неизвестные силы и
реакции в кинематических парах можно определить
теми же методами, что и при статистическом
расчете, приведенном выше.
На ведущем валу Ах карданного механизма
будет приложен момент Мур, который
уравновешивает момент М2, приложенный на валу Л2,
и моменты сил инерции Ми. Моменты сил
инерции определяют по угловым ускорениям
звеньев механизма при условии, что coj = const.
Полученный из кинетостатического расчета
уравновешивающий момент Мур может
отличаться от момента Мх двигателя, однако их
средние значения при постоянной скорости сох вала
Аг будут одинаковы.
Разность между вычисленным
уравновешивающим моментом Мур и приложенным
внешним моментом Мг определяет добавочные силы,
действующие на ведущее звено механизма и
вызывающие его неравномерное вращение.
Определение действительного закона движения
ведущего вала по заданным внешним силам и силам
инерции представляет собой основную задачу
динамики карданных механизмов, которая будет
рассмотрена ниже (с. ISO).
ОПРЕДЕЛЕНИЕ РЕАКЦИЙ В ЭЛЕМЕНТАХ
СДВОЕННОЙ КАРДАННОЙ ПЕРЕДАЧИ
Схема для определения реакций в
кинематических парах сдвоенной карданной передачи
с произвольным расположением валов и
карданных вилок приведена на рис. 69. Связь между
крутящими моментами на валах при малых
моментах инерции деталей карданной передачи
может быть найдена из соотношения М1со1 =
Л4 М
139
Рис. 69. Определение реакций в кинематических парах сдвоенной карданной передачи.
Так как крутящие моменты валов передачи
определяются нагрузкой на выходном валу, то
т-т too too
Передаточные отношения — и — определяются
toj tort
из кинематики.
Изгибающие моменты Мп21, М"2, M23 и М£2 пар
сил, действующих в плоскостях карданных
вилок, определяемые величиной нормальных
составляющих реакций в парах вилок Сг и С2,
могут быть записаны следующим образом:
Щх = Mi tg ai2sin Ф-i;
MJ2 = Мх sin oc12 cos фх]/"l + tg2a12sin2 фх;
M^ - M3 tg a23 sin ф3;
Mn32 = M3 sin a23 cos ф3 ]/l 4-tg2a23sin^3. (114)
Так как векторы моментов М\% и М32 пар сил,
действующих на противоположно расположенные
вилки промежуточного вала, перпендикулярны
к различным плоскостям, то на промежуточном
валу А2 будет возникать дополнительный
изгибающий момент М2, который определится из
условия равновесия промежуточного вала.
Векторы моментов MJ2 и Л132 лежат в
плоскости, перпендикулярной к оси промежуточного
вала, и замыкаются вектором М% пары сил,
составляющие Nx и N2 которой приложены в точках
0х и 02. Плоскость действия пары сил с моментом
М2 проходит через ось вала Л2 и
перпендикулярна к М%.
Из векторного многоугольника моментов
fl2M«2 cos ъ . (115)
141
Необходимые для дальнейших расчетов углы Хх
и Х2 между плоскостями осей вилок и плоскостью
действия пары сил с моментом М% определяются
из соотношений
2sin72 .
; sinX2 =
Реакции, действующие в точках Ох и Ог
крестовин Сх и С2, составляют углы Хх и Х2
с плоскостями осей вилок и вычисляются по
формуле А\ = —7V2 = -у- .
Проектируя Л^ и N2 на плоскость вилок и
на нормаль к ней, получаем
cos Хх
K(<)a-(<asinT2)« Mi2sinT2
7V2 = j ; A/2 = j . (11/)
Силы N1 и Nn2, действуя на карданные вилки
валов Д и Л3, изгибают эти валы в плоскостях
соответственно P(F[) и P(F3), а силы TV^ и Л/^,
действуя на валы Аг и Л3, изгибают эти валы
в плоскостях, перпендикулярных соответственно
к P^i) и P(F3). Кроме того, осевые
составляющие реакций, создаваемые компонентами N^
и А^2, возбуждают осевые компоненты реакций
опор валов Ах и Л2.
Радиальные составляющие реакций в
кинематических парах валов Ах и Л3 выражаются
следующими соотношениями:
142
+ (Rd)2; R'd' = У (Rl'f +
^8; -Rh' = |^-^. (118)
Осевые составляющие реакций в опорах
валов Ах и А3 определяются соотношениями
^
Rb = A^i sin a12; /?^ = ^sin a23. (119)
Осевые составляющие реакций в зависимости
от их направления будут действовать на опору
D либо D' и соответственно на опору Е либо £".
Ниже рассмотрены некоторые частные
случаи сдвоенных карданных передач.
В случае сдвоенной карданной передачи, для
которой выполнены условия синхронности, т. е.
«12 = «23, Т2 = Pl3 =^ 0> Ф1 = Фз,
М21 = М32; Мг = — М3; % = со3.
Подставляя значения углов и моментов в
уравнения (115) и (116), получаем
М" = M3V~2sin a12cos ф2 ]/"(l + tg>12sin2cp1)X "
" (120)
Для плоской сдвоенной синхронной
карданной передачи (а12 = а23, у2 = 0» Pis = 0)»
выполненной по 1/-образной схеме (рис. 70, а),
дополнительный изгибающий момент на
промежуточном валу
М2 = 2М3 sin a12 cos фх V1 + tg2a12 sin2 ф1#"
Таким образом,
= Ш[г = 2Af! sin a12.
143
Для плоской синхронной сдвоенной
карданной передачи, выполненной по Z-образной
схеме, показанной на рис. 32, б (а12 = а23, у2 =■•
= 180°, р13 = 180°), дополнительный изгибающий
момент на промежуточном валу равен нулю
(М% = 0), а реакции на опорах валов Ах и Л2
Рис. 70. Схема сдвоенной карданной передачи с
переменным углом а 12 и подвижным соединением на
промежуточном валу.
при одинаковом расстоянии аг~а2 = а между
подшипниками
м
RD = — RD>=:RE = — R=---j-tg a12 sin ф1в
С точки зрения кинетостатики, Z-образная
схема карданной передачи, как это следует из
приведенного анализа, более выгодна, чем V-
образная.
Во всех вышеприведенных расчетах
сдвоенных карданных передач силы инерции звеньев
не учитывались. Однако в реальных машинах
пренебрежение силами инерции допустимо
только при малых массах звеньев, когда силы инер-
144
ции во много раз меньше движущих сил и сил
сопротивления.
В быстроходном карданном механизме при
постоянной скорости ведущего вала ведомый вал
движется с периодически изменяющейся
угловой скоростью. Поэтому при определении
нагрузок на звенья этого механизма необходимо к
моменту внешних сил сопротивления добавить
момент сил инерции массы ведомого звена Mi =
= — £3/3-
В синхронной сдвоенной карданной передаче
промежуточный вал двигается с переменной
угловой скоростью, и его угловые ускорения
определяются соотношением (22), а момент сил
инерции массы промежуточного вала —
соотношением (щ = const, а12 = а23, р13 = 0, у2 = 0)
М „2/ cos g12 sin2 а12 sin 2cpt mn
Знакопеременный момент сил инерции может
вызвать раскрытие зазоров в кинематических
парах.
Для того, чтобы при работе карданного
механизма избежать ударных нагрузок,
возникающих при раскрытии зазоров, должно быть
выполнено условие
М2 — гтах</2>0, (122)
т. е. система во всех случаях должна быть
замкнута.
СИЛЫ, ДЕЙСТВУЮЩИЕ НА ПРОМЕЖУТОЧНЫЕ
ВАЛЫ КАРДАННОЙ ПЕРЕДАЧИ
ПРИ ПЕРЕМЕННЫХ УГЛАХ
МЕЖДУ ОСЯМИ ВАЛОВ
(a/, i+\ Ф const)
Во многих машинах (автомобилях, тракторах,
сельскохозяйственных машинах, прокатных
станах и др.) углы между осями карданных
145
валов непрерывно изменяются в процессе
работы карданного механизма. При этом, кроме
сил, возникающих за счет рабочих нагрузок,
будут действовать дополнительные силы,
определяемые величиной угла а12 и его первой и
второй производными.
В этом случае на звенья механизма будут
дополнительно действовать осевые,
гироскопические и инерционные силы.
Осевые силы. На рис. 70 показана сдвоенная
синхронная карданная передача с одной
подвижной опорой. В этом случае расстояние между
центрами карданных шарниров ОХО^ изменяется
в процессе работы трансмиссии, и для
обеспечения нормальной работы механизма возникает
необходимость введения поступательной пары
на промежуточном валу, способный передавать
крутящие моменты (шлицевые соединения).
Сила трения Т в шлицевом соединении вала
Л2, которая через карданные шарниры
передается на опоры, вычисляется по формуле
71=±2/^-, (123)
"ш
где / — приведенный коэффициент трения в
шлицевом соединении; dm — средний диаметр
шлицевой пары.
Сила Т создает осевую нагрузку на
подшипники вала Аг и подшипники крестовины.
Перенеся Т в точку Ог и раскладывая ее на
составляющие
Тг = Т cos а12 = 2/ j± cos2 а12 (1 + tg2 а12 sin291),
Т2 = Т sin а12 = / j1 sin 2а12 (1 + tg2 an sin2 фх),
нетрудно заметить, что Т2 нагружает
подшипники вала Ах.
146
Проектируя Т2 на направления осей
крестовины, находим осевые нагрузки на подшипники
карданной вилки Fx и F2, возбуждаемые силой
трения в шлицевом соединении:
TF2 = T2 cos фх = / f1- cos фх sin 2а12 (1 +
+ tg2cc12sin29l), (124)
Ti^f-т1- sin фх sin 2a12 (1 + tg2 a12 sin2 фх).
"ш
Таким образом, в дополнение к ранее
определенным компонентам реакции в карданном
механизме должны быть учтены компоненты,
определяемые силой трения в шлицевом соединении.
Аналогично определяются и силы,
действующие в кинематических парах второго
карданного шарнира В2 (рис. 70).
Гироскопические силы. В случае, когда одна
из опор сдвоенной карданной передачи
подвижна (рис. 70), промежуточный вал вращается
вокруг двух взаимно перпендикулярных осей:
с угловой скоростью со2 относительно
продольной оси, которая, в свою очередь, вращается
с угловой скоростью a = Q2 около центра
карданного шарнира Ог. На звенья механизма
действует дополнительный гироскопический момент
Мг-Уа(52хЙа). (125)
Здесь /2 — момент инерции массы
промежуточного вала; со2 — угловая скорость вала Л2; Й2 —■
угловая скорость вращения оси вала
относительно центра карданного шарнира Ог\ со2 х
X О2 — векторное произведение со2 и £22.
Иначе гироскопический момент можно
выразить формулой
Мг = Ppl = /2со2 22 sin (о)2&2).
147
В рассматриваемом случае sin ((O2Q2) = 1 (со2 _L
Так как в большинстве машин с переменными
углами a,it ,_|_i перемещение оси вала Л2
происходит в одной плоскости (как правило,
вертикальной), то для определения реакций в
кинематических парах целесообразно раскладывать Рг
на составляющие, действующие в плоскостях
карданных вилок и перпендикулярно к этим
плоскостям.
Необходимо отметить, что гироскопический
момент Мг часто может достигать значительных
величин (даже при малых У2), так как скорости
со2 и Q2 во многих случаях велики.
КИНЕТОСТАТИКА
ПОЛИКАРДАННОГО МЕХАНИЗМА
Перед тем, как производить непосредственно
кинетостатический расчет, необходимо
определить угловые ускорения звеньев механизма в
зависимости от угла поворота фх ведущего вала,
моменты сил, возникающие от рабочих
нагрузок, силы и моменты сил трения в
кинематических парах, другие силы, действующие на звенья
карданного механизма.
С целью экономии времени, затрачиваемого
на расчет, рекомендуется применять табличный
метод, при котором вычисления необходимых
для силового расчета величин производят
одновременно для всех положений механизма и
найденные значения заносят в таблицу.
Последовательность кинетостатического
расчета поликарданных механизмов, как и любых
других механизмов, определяется структурой
механизма, т. е. последовательностью разделе-
148
ния механизма на простейшие статически
определимые группы при заданном начальном звене,
к которому прикладывается
уравновешивающий момент, подлежащий определению.
В качестве простейших статически
определимых групп в карданных механизмах могут быть
выделены группы, состоящие из двух звеньев,
входящих в состав трех кинематических пар
различных классов, четырех звеньев,
образующих пять кинематических пар, и пяти звеньев,
входящих в состав шести кинематических пар.
Карданные механизмы с такими простейшими
группами изображены соответственно на рис.
67, а; 67, б; 69.
Простейшая группа с тремя звеньями и
четырьмя (рис. 48, в) кинематическими парами
различного класса не получила практического
применения, хотя и может быть осуществлена.
Последовательность кинетостатического
расчета механизма, т. е. последовательный
переход от одной простейшей статически
определимой группы, входящей в механизм, к другой,
совпадает с последовательностью разделения
механизма на статически определимые группы.
Таким образом, кинетостатический расчет
поликарданного механизма начинается с последней
из присоединенных при синтезе статически
определимой группы (при анализе отделяется от
механизма в первую очередь), далее
рассматривается предпоследняя группа и т. д. В последнюю
очередь рассматривается начальное звено
карданного механизма, для которого определяется
уравновешивающий момент и реакции в
кинематических парах этого звена.
Методы определения реакций в
кинематических парах простейших статически определимых
групп различного типа были рассмотрены при
анализе вышеприведенных механизмов. Путем
149
последовательного определения реакций в
кинематических парах статически определимых
групп, составляющих поликарданный механизм,
решается задача определения реакций для всего
карданного механизма с произвольным числом
шарниров.
КПД КАРДАННОЙ ПЕРЕДАЧИ
КПД карданной передачи к\ является
показателем совершенства карданного механизма и
зависит от потери механической энергии,
определяемой работой сил вредного сопротивления.
КПД механизма зависит от многих факторов:
условий работы, конструктивного выполнения
и схемы механизма, типа кинематических пар,
смазки и т. д.
Так как силами вредного сопротивления
являются преимущественно силы трения в
кинематических парах, то КПД механизма можно
оценить, зная потери на трение в кинематических
парах.
В карданном механизме силы трения
переменны по значению, следовательно и КПД
карданного механизма, определяемого как
отношение мощностей (полезно использованной и
полной), также величина переменная.
Работа вредных сопротивлений Ат
карданного механизма за цикл определится суммой
Ат — A-ri -р ЛТ2 "т~ <Дтз> (1^Ч)
где Ат1 — мощность, затрачиваемая на трение
в опорах вала Лх; ЛТ2 — мощность,
затрачиваемая на преодоление трения между элементами
кинематических пар крестовины и карданных
вилок; Лтз — мощность, затрачиваемая на
трение в опорах вала Л2.
Вследствие того, что в случае выражения КПД
через мощности при учете сил инерции можно
150
получить значение его больше единицы, что не
соответствует самому определению КПД,
выразим его через работу сил в пределах цикла,
т. е. в пределах одного оборота.
Определим работу сил, затрачиваемую на
преодоление трения в кинематических парах
карданного механизма, схема которого приведена
на рис. 67, а.
Относительные угловые скорости элементов
кинематических пар рассматриваемого
механизма определяются выражениями [49, 50]
сох = const,
sin gi2 cos ?i
i -
cos a12 (1 + tg2 a12 sin*
V= tga^sincpi
2 V 1 + tg2 a12 sin2 cpx
2 cos a12 (1 + tg2 a12 sin <px) *
Здесь ©i и со2' — угловые скорости цапф
крестовины относительно вилок Fx и F2 шарнира.
Реакции в кинематических парах механизма
определяются соотношениями (105), (106), (107),
(J08) и (112). Элементарную работу сил трения
в кинематических парах механизма (рис. 67, а)
можно выразить уравнениями
tga*2 sin
al2 sin
cos a12 (1 + tg* a12 sin? J
151
tgg12cos9f
Здесь /ь /2, / — приведенные коэффициенты
трения соответственно в подшипниках валов /, 2
и цапфах В и С крестовины; dly d2 — диаметры
подшипников валов соответственно 1 и 2; йв =
= dc —диаметры цапф крестовины; аг (см. рис.
69) и Ь2 — расстояния между центрами опор
валов; d — расстояние между центрами опор
крестовины.
Для определения КПД механизма необходимо
определить работу сил трения за один оборот
ведущего вала. Эта работа может быть
определена по формуле
Лт = J (dA± + dA2 + dA3). (131)
о
Подставляя в уравнение(131) значения dA( из
выражений (128), (129) и (130), интегрируя
и проводя необходимые преобразования,
получаем при /х = /у, ах = b2; dx = d2
КПД механизма получаем из соотношения
71 - 2пМ2+Ат -1 2пМ2'
Здесь М22к — полезно затраченная работа за
один оборот ведущего вала механизма.
Подставляя значение Ат из уравнения (132)
в уравнение (133), получаем
152
Пренебрегая потерями на трение Атх и Ат
в подшипниках валов 1 я 2 ввиду их малости
по сравнению с Ат2, определяем
b = ^L *u (136)
па ч '
При малых углах а< 10° tga12^a12; sina12^
^а12; cosa12^l; In (1 + а12)^а12. Тогда
(.37)
Формула для определения -ц в таком виде
приведена во многих литературных источниках
[12, 50, 103, 108 и др.].
В поступательной паре карданного
механизма (рис. 70) потери на трение возникают в
результате относительных линейных перемещений
в шлицевом соединении.
КПД поступательной кинематической пары
принято определять по формуле
где 7]ш- — КПД поступательной пары; А/ —
относительное среднее смещение в
поступательной паре; fm- — коэффициент трения между
элементами поступательной пары; Di — средний
диаметр шлицев; Nt — число относительных
смещений в кинематической паре; N — частота
вращения карданного вала за рассматриваемый
интервал времени.
Соотношение NdN оценивается статистически
в зависимости от среднего числа относительных
смещений (например, в автомобиле — в
зависимости от состояния пути и средней скорости
движения).
153
Общий КПД поликарданной передачи с
последовательно соединенными карданами
где п, т, р — число карданных шарниров,
поступательных кинематических пар и
подшипников; ч]к- — КПД карданного шарнира,
определяемый по формуле (137); т]п. — КПД
поступательной пары, определяемый по формуле (138);
y\Ri—КПД подшипника.
Приведенный коэффициент трения
принимается для новой цапфы fx = ~fQi а для прира-
ботавшейся [г = —[0; /0 — коэффициент трения
материалов звеньев, образующих вращательную
кинематическую пару.
КПД поликарданных передач со смешанным
параллельным и последовательным соединением
механизмов определяется из общего выражения
для КПД машины данного типа:
М — Л — А А А »
где ArtJ Ar2, ..., Arn — работа параллельных
ветвей передачи; п — число параллельных вет-
вей; T]i, ъ, • •• » Ип — общие КПД
параллельных ветвей, определяемые по формуле (139);
4дв — работа движущих сил механизма за цикл.
154
ВЛИЯНИЕ НЕТОЧНОСТЕЙ
ИЗГОТОВЛЕНИЯ И МОНТАЖА
НА РАБОТУ КАРДАННЫХ ПЕРЕДАЧ
МАТРИЧНЫЙ МЕТОД ИССЛЕДОВАНИЯ
КИНЕМАТИКИ ПРОСТРАНСТВЕННЫХ
МЕХАНИЗМОВ
Выше была рассмотрена общая теория
идеальных карданных передач, т. е. передач с
теоретически точными параметрами. В идеальном
карданном шарнире оси кинематических пар
пересекаются в одной точке, кроме того, они
перпендикулярны друг к другу. Однако в реальном
механизме эти геометрические условия за счет
неточности изготовления и монтажа
выполняются с некоторыми отклонениями, вследствие
чего характер движения звеньев изменяется
по сравнению с теоретически точной карданной
передачей. Поэтому задача исследования
отклонений размеров карданного шарнира от
идеальных является весьма важной для практики.
Особенно большое значение исследование
влияния отклонения параметров на работу
карданной передачи имеет для статически
неопределимых систем, нагрузка на элементы
кинематических пар в которых зависит от сочетания
отклонений линейных и угловых параметров
передачи и жесткости ее звеньев.
Решение задачи исследования влияния
отклонений от идеальных размеров в карданной
передаче на соотношения между перемещениями,
скоростями и ускорениями звеньев механизма
может быть выполнено различными методами
[32, 89, 90, 26, 66]. В самом общем виде эта
задача хорошо решается с помошью матричных
м тодов. Именно эти методы использованы
авторами в предлагаемой читателям книге.
155
Матричный метод исследования механизмов
рассмотрен в работах ряда авторов: Ф. М. Ди-
ментберга [26], Д. Айкера, Д. Денавита и Р. Хар-
тенберга [1], Д. Манжерона и К. Дрегана
[54], Г. С. Кислицина [31], Ф. Л. Литвина 148],
П. А. Лебедева [47], Л. П. Рифтина [78] и др.
Для определения
функции положения используем
матричное уравнение
замкнутости контура [48].
В этом случае механизм
рассматривают как
замкнутую кинематическую цепь
с одним или несколькими
изменяемыми контурами.
Положения звеньев следует
определять раздельно в
каждом замкнутом контуре.
На рис. 71 схематически изображен
подвижный замкнутый контур, содержащий звенья У,
2, 3, ...,£,..., я, соединенные между собой
кинематическими парами. С каждым звеном kc
жестко связана система координат Sj. Пусть
в системе координат s& заданы координаты
радиуса-вектора ги звена k. Координаты этого же
вектора в системе sn получим, используя
матричное равенство
Хп = МП(п-1)М(п-1)(п-2) • • • M(k+\)kXk (141)
ИЛИ
хп = МП1М12М23 . . . M{k-\)kXk. (142)
Радиусы-векторы гп и /^ в системах
координат sn и Sk выражают столбцовыми матрицами
Рис.71. Схема
кинематической цепи с
замкнутым контуром.
Хп
Уп
Zn
1
Tk =
Xk
Ук
zk
1
156
Матричные равенства (141) и (142) соответствуют
двум способам обхода замкнутого контура от
звена k к звену п (по часовой и против часовой
стрелки).
Так как равенства (141) и (142) определяют
одну и ту же величину, то приравняв их друг
к другу, получим
МП(п—1)М(П-\)(п—2) • • • M(k+\)k =
МП1М12М23 . . . M(k-i)k. (143)
Уравнение (143) представляет собой матричное
уравнение замкнутости контура. Это уравнение
можно записать и в другой форме, если
представить, что совершается полный обход звеньев
контура, начиная с любого звена, например k:
rk = Mk{k-\)Mik-iHk-2) . . . М32М21М1ПМП(п-1) • •.
. . . M{k+2){k+\)M{k+\)krk\ (144)
k-i)(k-2) . • . М32М21М1ПМП(п-1) . . .
где Е — единичная матрица (Е = 1).
При обходе звеньев замкнутого контура по
часовой стрелке получаем
)
. . . M{k-l)k = E. (145)
При определении положений звеньев механизма
предпочтительнее пользоваться уравнением (143).
Матрицы М1Ъ М23, ... , М(„_1)Л, Мп\ в
соотношениях (141) — (145) представляют собой
матрицы преобразования координат четвертого
порядка с однородными координатами.
Если рассматривать механизмы с низшими
кинематическими парами, то их положение в
некоторой координатной системе Oxyz, связанной
со звеном, определяется их продольной осью
157
симметрии, т. е. положением прямой линии
в системе координат.
Существуют различные способы определения
прямой линии относительно системы координат.
Например, может быть задана точка М (х, у, г)
Рис. 72. Схема расположения осей
координат при соединении звеньев вращательными
кинематическими пярами.
на прямой L и углы аир, составленные прямой
L с плоскостью хОу и проекцией прямой L на
плоскость хОу с осью х. В этом случае
положение прямой определяется пятью параметрами
[48]. Понятно, что могли бы быть выбраны
другие координатные плоскости и оси в
соответствии с особенностями конкретной задачи.
Прямая аналитически может быть задана
и уравнениями ее проекций на координатные
плоскости (х = Az + В; у = Cz + D), причем
число параметров, определяющих прямую,
сокращается при этом до четырех: Л, В, С, D.
Размеры механизма можно определить по схемам,
приведенным на рис. 72, а геометрию любого
(i + 1)-го звена и его положение относительно
1-го звена можно полностью описать четырьмя
параметрами (щ, а,-, ф/, S;), как это показано
на рис. 72, а и б.
Эти четыре параметра для каждой
кинематической пары, входящей в механизм,
обозначаются и измеряются в следующем порядке:
i — номер конкретной кинематической пары.
Входная (начальная) кинематическая пара
обозначается номером i, а остальные пары
нумеруются последовательно вдоль замкнутого контура;
Zi—характерная ось движения
соответствующей кинематической пары. Все оси z должны
быть четко определены с указанием их
ориентации, которую можно выбрать произвольно;
Xi — ось, образованная общим
перпендикуляром, направленным от z/_i к z{. Если эти оси
пересекаются, то ориентацию оси xi можно
выбрать произвольно;
yi — ось, которая вместе с осями xi и Zi
образует правую декартову систему координат
х, У, *'>
at—длина кратчайшего общего
перпендикуляра, проведенного от Zt к Zi+\ (всегда
положительна);
at — угол между положительным
направлением zi и положительным направлением zf-+i,
измеряемый против часовой стрелки
относительно положительного направления оси xi+\\
(pt — угол между положительным
направлением хс и положительным направлением
159
измеряемый против часовой стрелки
относительно положительного направления zc\
si — расстояние от хс до xc+i вдоль оси zc.
Знак этой величины зависит от ориентации
ОСИ Zi.
Если определены параметры (ц, а*, ср< и S(
для каждой кинематической пары, входящей
в механизм, то геометрия механизма полностью
задана и ее можно описать [1] простым
символическим уравнением вида
а,
«1
<Pi
Si
Я2
а2
а2
Ф2
s2
... Rt
CLi
Si
... Rn
an
an
Sn
(146)
где символ Re указывает на вращательную
кинематическую пару с переменной <р*, символ Рс
вместо Ri указывает, что кинематическая пара
является поступательной с переменной sc и т. д.
В правой части равенства (146) находится
единичная матрица £, которая показывает, что
кинематическая цепь замкнута.
Хотя уравнение (146) представляет собой лишь
символическое уравнение для описания
геометрии механизма, оно позволяет получить удобное
матричное уравнение.
Оси хсу ус, Zi определяют правую декартову
систему координат, жестко связанную с 1-м
звеном. Четыре параметра ас, ас, ф/, sc
фиксируют положение системы координат (/+ 1)-го
звена по отношению к системе координат,
связанной с i-м. звеном. Относительное
положение этих двух координатных систем можно
выразить аналитически с помощью матрицы
преобразования четвертого порядка, зависящей
только от четырех параметров — ас, ас, ус, s$:
160
1
at cos
at sin
Si
0
СО8ф/
sin q>i
0
0
—cos ac sin opt
cos a/ cos ф/
sin at-
0
sin a* sin ф*
-sin a* cos ф*
cos щ
(147)
При вычислениях часто необходимо иметь
обратную матрицу преобразования координат,
которая для матрицы (147) имеет следующий вид:
1
0
0
0
0
—at
—Si sin щ —cos a1 sin ф* cos a* cos ф* sin at-
—Si cos at sin ш sin ф* —sin at cos ф/ cos at-
(148)
Рассмотрим определение положения звеньев
с помощью матричного уравнения замкнутости
контура. После перемножения матриц,
содержащихся в левой и правой частях равенства
(143), получим матрицы со следующими
элементами:
10 0 0
#21 022 023 024
031 032 033 034
041 042 043 044
(149)
(150)
Так как левые части в полученных
выражениях равны, то и элементы матриц (149) и (150)
должны быть равны. Это означает, что из матрич-
МтМлМ
Я1Л11аЛ1аз
1
^2
0
[ "22
1 "32
L ^42
0
^23
^33
^43
0
^24
&34
&44
6 8-127
161
ного уравнения (143) можно получить
двенадцать уравнений связи между параметрами,
определяющими положения звеньев контура. Из этих
двенадцати уравнений независимыми являются
шесть. Остальные можно использовать для
контроля решений.
ОТНОСИТЕЛЬНЫЕ ПЕРЕМЕЩЕНИЯ ЗВЕНЬЕВ
ЧЕТЫРЕХЗВЕННОГО ПРОСТРАНСТВЕННОГО
МЕХАНИЗМА С НИЗШИМИ ПАРАМИ
Выше отмечалось, что одношарнирный
карданный механизм при определенных условиях
является одним из вариантов сферического че-
тырехзвенного механизма. Кинематические и
силовые зависимости в карданном механизме,
приведенные выше, получены при допущении, что
параметры этого механизма выполнены
теоретически точно и тем самым обеспечены условия
существования сферического механизма.
В реальных механизмах ошибки изготовления
(включающие допуски на изготовление) и
монтажа, а также деформации звеньев
обусловливают изменение выходной координаты
механизма. Оценка таких изменений движения
представляет задачу, которая существенно отличается
от задач анализа сферических механизмов. Она
может быть решена методами, применяемыми
при анализе пространственных механизмов
общего вида.
Если на размеры звеньев и расположение
кинематических пар не накладывать каких-либо
ограничений, то одинарный карданный
механизм превратится в четырехзвенный
пространственный с низшими парами.
Схема такого механизма приведена на рис. 73.
В механизме одна вращательная и три
цилиндрические кинематические пары.
162
Введены следующие основные обозначения,
аналогичные обозначениям, принятым на рис.72:
zL (/=1, 2, 3, 4)—оси координат
произвольной ориентации, совпадающие с осями
вращения кинематических пар;
Рис. 73. Схема пространственного механизма с
произвольным расположением вращательной и
цилиндрических кинематических пар.
щ — длина кратчайшего расстояния O/O;_j-i
между осями zi и Zt+\ (всегда положительна);
Zi — ось координат, совпадающая по
направлению с длиной перпендикуляра сц\
Фг —угол между xi и Xi-fi, измеряемый
против часовой стрелки относительно
положительного направления zt-;
а/ —угол между осями zi и Zi_j_i, измеряемый
против часовой стрелки относительно
положительного направления оси xi+\\
6* 163
Si — расстояние 0i0\ от xt до xi+\ вдоль оси
Zi. Знак этой величины совпадет с ориентацией
ОСИ Zi.
Анализ механизма будем проводить для
некоторого конечного числа положений. Для
любого из положений механизма величина срх
известна, так как это входная координата.
Каждая из величин щ, щ (i = 1, 2, 3, 4) и s± также
известны, поскольку эти величины
характеризуют определенные размеры механизма.
Найдем неизвестные величины ф2, <р3, Ф4»
s2, s3 и s4. Для этого опишем геометрию
механизма символическим уравнением
01
а1
Ф1
Si
Г)
0
0
ъ
0
Г)
^2
а2
а2
0
s2
0
0
Фз
0
а3
«з
0
s3
0
0
Ф4
0
а4
а4
0
S4
(151)
Отметим, что в символическом уравнении (151)
цилиндрические пары, имеющие две степени
свободы, заменены кинематическим соединением,
т. е. комбинациями соосных вращательных и
поступательных пар. Сферические пары
аналогичным образом могут быть сведены к комбинации
вращательных пар. В матричном уравнении
относительное положение координатных систем
звеньев, соединяемых цилиндрическими парами,
выражается одной матрицей (4x4) с
переменными параметрами ср, и st-.
Используя символическое уравнение (151),
запишем матричное уравнение замкнутого
контура
fj\ fy^ j^ fy^ —— p —— j 1152^
На основании равенства (143) для
уменьшения объема вычислений преобразуем матричное
164
уравнение (152):
Ml2M23 = Af14M43.
(153)
Используя выражения (147) и (J48), выражаем
матрицы уравнения (153)через пара метры а*,«;, ф<
и si механизма:
X
1 О
1г COS ф2 COS ф2
гг sin фх sin <р2
0
М12М23 =
о о
—cos aL s in фх sin at sin cp^
cos ax cos фх —sin aj cos срг
sin ax cos a2
0 0
«2 cos ф2 cos ф2 —cos a2 8Шф2 sin a2 sin ф2
a2 sin ф2 sin ф2 cos a2 cos ф2 —sin a2 cos ф2
0 i
s2
0
sma2
0 0
«99 «,
cosa2
X
"21 "22 "23 "24
«31 «32 «33 «34
«41 «Д9 «ЛЭ «,
^42 "43
143
(154)
м14м4Я =
1
—«
0
СО5ф4
О
О
а
о
sin ф4
—s4 sin a4 —cos a4 sin ф4 cos a4
—s4 cos a4 sin a4 sin ф4 —sin a4
1 0 0
—«3 COS фз 8Шф3
—s3 sin a3—cos a3 sin ф3 cos a3 cos ф3 sina3
—s3 cos a3 sin a3 sin ф3—sin a3 cos ф3 cosa3
0 0 0
622
632
0
О
623
b
33
^24
&34
641
(155)
здесь
a2l — a± cos фх + «2cos Ф1cos Ф2 —
• «2 cos ax sin ф! sin ф2 + s2 sin ax sin ф1;
165
а22 = cos ф1 cos ф2 — cos aL sin фх sin ф2;
a23 — —cos a2 cos ф! sin ф2 —
— cos ax cos a2 sin cpL cos ф2 + sin ax sin a2 sin ф1;
a24 = sin a2 cos фх sin ф2 +
+ cos at sin a2 sin ф1 cos ф2 + sin at cos a2 sin ф г;
a31 = ax sin фх + a2 sin ф2 cos ф2 +
+ a2 cos ax cos фх sin ф2 — s2 sin a2 cos фх;
#32 = sin фх cos ф2 + cos ax cos ф1 sin ф2;
a33 = — cos a2 sin уг sin ф2 -f
+ cos ai cos a2 cos фх cos ф2 — sin a2 sin a2 cos фх;
a34r = sin a2 sin фх sin ф2 —
— cos аг sin a2 cos щ cos ф2 — sin at cos ф2 cos фх;
a41 ^ Sl + a2 Sm ai Sin a2 + 52 C0S al»
a42 = sin ax sin ф2;
a43 = sin a! cos a2 cos ф2 + cos аг sin a2;
a44 = —sin аг sin a2 cos ф2 + cos ax cos a2;
b21 = — a4 — a3 cos ф4 — s3 sin a3 sin ф4;
fc22 = cos ф3 cos ф4 — cos a3 sin ф3 sin ф4;
b23 = sin ф3 cos ф4 + cos a3 cos ф3 sin ф4;
b24 = sinaзsinф4;
b3l — —s4 sin a4 + a3 cos a4 sin ф4 —
— s3 sin a3 cos a4 cos ф4 — s3 cos a3 sin a4;
b32 = —cos a4 cos ф3 sin ф4 —
—cos a3 cos a4 sin ф3 cos ф4 + sin a3 sin a4 sin ф3;
b33 = — cos a4 sin ф3 sin ф4 +
+ cos a3 cos a4 со5ф3 cos ф4 — sin a3 sin a4 cos ф3;
b34 = sin a3 cos a4 cos ф4 + cos a3 sin a4;
641 = —s4 cos a4 — a3 sin a4 sin ф4 +
+ s3 sin a3 sin a4 cos ф4 — s3 cos a3 cos a4;
^42 == sin a4 cos ф3 sin ф4 +
+ cos a3 sin a4 sin ф3 cos ф4 + sin a3 cos a4 sin ф3;
166
b43 = sin a4 sin cp3 sin ф4 —
— cos a3 sin a4 cos ф3 cos ф4 — sin a3 cos a4 cos ф3;
bu = — sin a3 sin a4 cos ф4 + cos a3 cos a4
Матричное равенство (153) будет соблюдено
при равенстве соответствующих элементов
матриц (154) и (155). Из матричного равенства (153)
можно получить двенадцать уравнений,
связывающих параметры перемещения звеньев
механизма.
Шесть независимых уравнений из двенадцати
получим, приравняв друг другу элементы
первых и вторых столбцов матриц (154) и (155) (а21=
— ^21» #31 = &з1» #41 ~ ^41> #22 = ^22» #32 == ^32»
#42 = Ь42).
Используя шесть независимых уравнений
связи, получаем функции переменных
параметров механизма <р2, Ф3, Ф4, s2, s3, s4 в зависимости
от угла поворота ф2 ведущего вала:
1 + ^41#1 + ^42#2
Лх = sina4sin91;
Bx = sin ах cos a4 + cos ax sin a4 cos фх;
C2 = cos a3 — cos аг cos a2 cos a4 +
+ sin аг cos a2 sin a4 cos фх;
Dx = sina2sina3;
167
Ех = cos a2 cos а3 — cos ах cos a4 —
— sin ах sin а4 cos ф2;
Л2 = sin ах sin фх;
В2 = cos ax sin а4 + sin ax cos а4 cos ф^,
С2 = cos а2 — cos ах cos а3 cos а4 +
+ sin ах cos а3 sin а4 cos фх;
£ = sin ах sin фх cos ф4 + cos ах sin а4 sin ф4 +
+ sin ах cos а4 cos фх sin ф4;
/^з = -gr sin а4 sin ф4; Гд = ~ sin ах sin фх sm а4;
f 4 = — ~ (sin аг sin ф,_ cos а3 sin а4 +
+ sin ax sin фх sin а3 cos а3 cos ф4 +
+ sin ах cos фх sin а3 sin ф4);
^21 = g" (Sin Ф1 Sin аЗ C0S а4 Sin Ф4 —
— cos фх sin a3 со ф4 + cos фх cos а3 cos а4 sin а4);
/^з! = — у (sin ах cos а4 + cos ах cos фх sin а4);
F41 = тг (sin ccj cos а3 cos а4 —
— cos ах sin a3 sin ф2 sin ф4 —
— sin ах sin а3 sin а4 cos ф4 +
+ cos ах sin а3 cos а4 cos q>4);
^22 = £- (sin а3 cos фх cos ф2 cos ф4 —
— cos ах sin а3 cos а4 cos ф2 sin ф2 sin ф4 —
— cos ах sin а3 sin фх sin ф2 cos ф4 —
— sin ах sin а3 sin а4 sin ф2 sin ф4);
F32 = ^- (sin a4 sin ф4 sin ф2 — sin ax cos a4 cos ф2 -
— cos ax sin a4 cos q>x cos ф2);
, = -p- (cos ax cos a3 sin a4 cos фх cos ф2
168
4- cos ai cos a3 cos a4 cos q>t cos ф2 cos ф4 —
— cos ax sin a3 sin фх cos ф2 sin ф4 —
— cos a3 sin a4 sin фх sin ф2 — sin a3 cos a4 sin фх X
X sin ф2 cos ф4 — sin a3 cos % sin ф2 sin ф4);
P sin a3 #
F33 — -p (sin ax sin фх sin ф4 — cos a2 sin ct4 cos ф4 —
— sin ax cos фх cos a4 cos ф4);
F43 = -£- (cos ax sin a3 cos a4 + cos ax cos a3 X
X cos a4cos ф4 — sin ax cos a3 sin фх sin ф4 +
+ sin o&! cos фх cos a3 cos a4 cos ф4 +
+ sin ax cos фх sin a3 sin a4);
P sin cc3 cos <p4 #
F34 = — у (cos a2 sin a4 + sin ax cos <px cos a4);
I
^44 = p- (sin ai c°s 0C3 cos a4 cos фх — sin ax cos фх X
с
X sin a3 sin a4 cos ф4 + cos ax cos a3 sin a4 —
— cos аг sin a3 cos a4 cos ф4). (156)
МАТРИЧНЫЙ МЕТОД АНАЛИЗА
ВЛИЯНИЯ ПОГРЕШНОСТЕЙ МЕХАНИЗМА
НА ОТНОСИТЕЛЬНЫЕ ПЕРЕМЕЩЕНИЯ
ЕГО ЗВЕНЬЕВ
По уравнениям (156), полученным
матричными методами, можно определить все параметры
механизма, необходимые для кинематического
анализа. Однако ввиду сложности вычислений
по уравнениям (156) анализ влияния точности
на кинематику механизма целесообразно
выполнять на быстродействующих вычислительных
машинах.
В результате анализа полученных уравнений
(156), можно сделать следующие выводы:
169
1. Закономерности изменения относительных
углов перемещений не зависят от линейных
отклонений.
2. Совместное влияние всех линейных
отклонений на закономерности относительных
линейных перемещений равно алгебраической сумме
влияния отдельных отклонений параметров.
3. При отсутствии всех линейных отклонений
цилиндрические пары превращаются во
вращательные. Наличие только угловых погрешностей
в элементах механизма не ведет к линейным
относительным перемещениям. Угловые
погрешности оказывают влияние на линейные
относительные перемещения только при наличии
линейных отклонений.
Символическое уравнение для одинарного
карданного шарнира в самом общем виде также
запишется в виде выражения (151), где
учитываются как линейные, так и угловые
отклонения размеров от теоретически точных. Для
идеального карданного шарнира, когда
удовлетворяются условия ах = а2 = а3 = а4 = 0, s± =
== s2 = s3 = s4 = и, (х,г = <х2 — о&з = ~~2 и а4 — а»
символическое уравнение имеет вид
X
(157)
Составляя с помощью символического
уравнения (157) с использованием матриц вида (154)
и (155) соотношения между параметрами
теоретически точного карданного механизма при оди-
0
90
«Pi
0
K2
0
0
ф2
0
Ръ
01
90
0
0
У Р
^\з
0
а
0
0
0
0
Фз
0
0
90
0
0
Ri
0
0
Ф4
0
= 1-
170
наковом выборе начала отсчета углов, получаем
равенства, совпадающие с приведенными выше
(с. 92—93).
Отклонения от теоретически точных размеров
вызывают изменения относительного движения
звеньев, которые в самом общем виде
определяются весьма громоздкими соотношениями (156).
Однако для малых отклонений задачу можно
решить с помощью уравнения (157), рассматривая
каждый параметр как сумму его идеального
значения, удовлетворяющего уравнению (157), и
малого приращения.
Таким образом,
Ла2
90 + Асс2
Ф2 + Аф2
As2
90 + ^al
X
Ф4
Аа3
90
Ф3 +
As3
R.x
= 1.
(158)
В уравнении (158) R2, R3, R* —
цилиндрические пары, полученные путем объединения
вращательной и поступательной
кинематических пар. Приращения Ащ, Act;, Ast
представляют собой отклонения от теоретически точных
размеров механизма, причем Ащ, Да/ и As*
(рис. 73) представляют собой ошибки, к
которым могут быть приведены погрешности
изготовления и монтажа механизма. фх — входная
координата механизма. На ее значение не
влияют ошибки параметров сц, щ и St. На
другие переменные угловые и линейные
перемещения ошибки параметров механизма
оказывают влияние.
Фактические значения угловых перемещений
получаются путем добавления к каждой перемен-
171
ной ф2, фз и ф4, полученных по соотношениям
для теоретически точных механизмов,
соответственно переменных приращений Аф2, Аф3 и Лф4,
определенных с учетом погрешностей
механизма. При этом, как показано выше, на величины
Дф2, Афз и Аф4 оказывают влияние только
погрешности углов Дось Аа2, Аа3 и Аа4.
Переменные относительные линейные
перемещения As2, As3 и As4 возникают при наличии
линейных погрешностей Ащ и As/ и зависят как
от погрешностей углов Да1? так и от
погрешностей линейных размеров Да,- и As/.
Символическое уравнение (158) для
одинарного карданного шарнира составлено для
ошибок в параметрах длины Ащ и As/ так же,
как и для ошибок в углах Да/.
Вместо одновременного рассмотрения всех
этих ошибок будем рассматривать каждую из
них отдельно и выводить формулы для
изменений углов Дф2, Дфз и Дф4 так же, как и для
линейных перемещений As2i As3 и As4 звеньев,
соответствующих каждой ошибке.
Так как все виды ошибок заданных
параметров, а также вызываемые ими изменения
переменных являютс я малыми величинами, то
применим принцип суперпозиции и одновременное
влияние нескольких ошибок можно представить
суммой индивидуальных влияний каждой
ошибки.
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ОШИБОК
ВСЛЕДСТВИЕ ПОГРЕШНОСТЕЙ
В ПАРАМЕТРАХ at И s,: НА ЗАКОН
ДВИЖЕНИЯ ЗВЕНЬЕВ
Проведем анализ влияния ошибок на
изменение законов относительных движений звеньев.
При анализе будем рассматривать три вида
ошибок в параметрах щ, S/, а, (I = 1, 2, 3, 4).
172
Исследование влияния ошибок вследствие
погрешностей в параметрах at (i = /, 2,3,4).
В случае отсутствия ошибок символическое
уравнение замкнутого контура имеет тот же вид, что
и уравнение (157). Матричное уравнение (153)
для механизма с теоретически точными
параметрами (осх = а2 = а3 = ■£-; аг = а2 = а3 =
= а4 = 0; sx = 0; а4 = а) имеет вид М12М23 ==
= М14М43, т. е.
1
0
0
0
0
COS
sin
0
0
Pi 0 -
1
0
8Шф!
—COS ф2
0
v
1
0
0
0
0
cos
sin
0
Ф2
Ф2
0
0
0
1
0
sin
—cos
0
Ф2
Ф2
10 0 0
0 СО8ф4 8Шф4 0
0 —cos а sin ф4 cos а cos ф4 sin а
0 sin а sin ф4 —sin а cos ф4 cos а
X
10
0 СО
0 0
0 81
0
0
X
(159)
Рассмотрим теперь ошибку в параметре а\ =
= ас + Да*, где 1=1, 2, 3, 4; щ —
теоретически точное значение параметра (в
рассматриваемом случае щ = 0)\ Да4- — ошибка в параметре.
Ошибка в параметре Дя,- будет вызывать
изменения относительных перемещений Asc (i = 2,
3, 4). На величины Дер*, как указано выше,
ошибка в параметре Aai влияния не оказывает.
Матричное уравнение с ошибками в параметре
ас и теоретически точными остальными
параметрами механизма будет иметь вид
(160)
173
X
1 0 0 0
a^costyi соэфх 0 sin (р2
a'1s'm(p1 sin фх 0 —сояфх
О 0 10
1 0 0 0
а'2со5ф2 со5ф2 0 sin ф2
a2s\nq)2 sin ф2 0 —cos ф2
As,
X
—As4 sin a4
—As4 cos a4
X
0
0
COS ф4
—cos a sin ф4
sin a sin ф4
1
—а3
— As3
0
0
СОЭфз
0
sin ф3 -
1 0
0
sin
cos а с
os(pl
sin асо5ф4
0
sin ср3
0
— COS фз
0
0
1
0
o
0
sin a
cos a
X
(161)
В уравнении (161) малое, но переменное,
приращение Asi вводится как следствие ошибок Ащ.
Применяя принцип суперпозиции,
последовательно исследуем влияние ошибок Ащ (i =
= 1, 2, 3, 4) на величины Asa Д% = 0.
Входная координата фх остается фиксированной. Так
как ошибки малы, то матрицы, соответствующие
каждой кинематической паре, принимают вид
Ks = M23 + d-^-As2-
ам2Я Дд.
М;4 = Мы + ^11 д5 -|- ^Яи. Аа,; (162)
14 14 I ^4 4 1 ^а^ I' V v /
43 — 4з -г дн s3 + да^ at.
Заметим, что в выражениях (162) только од-
дМ-,9 дМоч дМлл дМл->
на из производных а , -^-^, -^ и —г-^-
174
будет отлична от нуля, так как рассматривается
влияние только одной из ошибок Аа{ (/= 1, 2,
3, 4).
Подставляя значения из выражения (162)
в уравнение (160) и учитывая равенство (159),
исключая члены второго порядка малости и
проводя необходимые преобразования, получаем
*12
dNk
ds2
■ As2 — М
14 ds»
-А1
12"
Дао
м
14
Дао
(163)
В правой части выражения (163) получаем
множество из четырех возможных выражений,
каждое из которых является результатом
индивидуальной ошибки Даь Аа2, Да3 или Аа4.
Частные производные матриц, входящих в
выражение (163), получаем путем
дифференцирования выражения (161) по соответствующему
параметру:
дМ12
даг
дми
да4
0
COSфJ
Sinq)]
0
0
]
0
0
0 0 (
J
,00 0
L 0 0 0
0 0 0
0 0 0
0 0 0
0 0 0
0 0 0,
да2
dMi3
да3
0
COS ф2
ЭШфг
0
j
0
0
0
0
0
0
0
0
0
0
0
0
0
0(
0
0
0
0
0
0
0
э
0
0
0
0
0
175
дМ
14
дМ„
ds2
0
0
— sin a4
— cos a.
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
д
0
0
0
0
Mi3
ds3
(164)
0
0
—1
0
0
0
0
0
0
0
0
0
0
0
0
0
Подставляя значения величин из выражений
(159) и (164) в соотношение (163) и проводя
необходимые преобразования, получаем в левой
части уравнения матрицу
О
sin фх As2 + sin <p4 As3
—cos фх As2 + cos a cos ф4 As3 -f sin a As4
sin a cos ф4 As3 + cos a As4
0 0 0
0 0 0
0 0 0
0 0 0
(165)
В правой части равенства (163) в зависимости
от рассматриваемой ошибки Да; получим
следующие четыре матрицы:
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0 0 0
— со8ф1со5ф2Аа2 0 0 0
— sin фх cos ф2Аа2 0 0 0
— sin ф2Да2 0 0 0
176
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
о
— со5ф4Дя3 и и и аа4 и и и ,,fi~
-cosasin94Aa3 - - - ; " а п л • < )
— sin а5Шф4Да3
Приравнивая соответствующие элементы
матрицы (165) и каждой из матриц (166), получаем
три линейных уравнения, в правой части
которых находится множество из четырех возможных
выражений, соответствующих влиянию ошибок
Да*(1 = 1, 2, 3, 4), взятых последовательно.
Эти уравнения устанавливают зависимость
между переменными относительными перемещениями
и величинами индивидуальных ошибок:
sin cp1As2 + sin
— cosq)4Aa3
— cos фхAs2 + cos a cos ф4Дя3 + sin a As4 =
— sin фхДах
— sin фх cos ф2Да2 e ,J6~
0
sin a cos ф4 As3 + cos a Дя4 =
0
— sin ф2А#2
— sina cos ф4Да
0
Решив уравнения (167), найдем отклонения
Asi(i = 21 3, 4), являющиеся следствием
индивидуальных ошибок Да*.
Исследование влияния ошибок вследствие по-
грешностей в параметре Ast на относитель-
177
ные перемещения Ast (i = 2, 5, 4). Исследование
влияния отклонений As{ в этом случае
проводится аналогично исследованию влияния ошибок
в параметре Aat.
Матричное уравнение с ошибкой в параметре
Ast Ф 0 и теоретически точными остальными
параметрами механизма будет иметь вид
о
о
о
Asx О
1
О
0
О
О—
10
о
МиМ'„, (168)
10 0 0
0 cos f2 0 sin <p2
О sincp2 0—coscp2
As2 0 10
О О
sin cp О
О
cos<p4
—As4sina —cos a sin 94 cos a cos 94 sin а
—As4cosoc sin a sin <p4 —sin a cos <p4 cos а
1 0 0 0
0 cos<p3 sin«p3 0
— As3 0 0 1
0 sin<p3 — cos<p3 0
X
X
(169)
Произведя аналогичные приведенным выше
преобразования, получим уравнения, связывающие
переменные отклонения и ошибки в параметре
As, (a4 = а):
М
дМ
12
2S
— M
14
sin <PiAs2 + sin 94As3 = 0;
— cos<pxAs2 + cosacos<y4As3 + sinaAs4=-- 0; (170)
— sin a cos <p4As3 + cos aAs4 = —Asv
178
Как уже отмечалось выше, ошибки в углах щ
не влияют на относительные перемещения, если
отсутствуют погрешности линейных размеров
механизма. При одновременном наличии
ошибок как в углах Да*, так и в линейных размерах
Да* и Asi карданного механизма, погрешности
в углах щ оказывают влияние на величины
перемещений As*.
Следует заметить, что малые погрешности
углов Да; будут вызывать отклонения в
перемещениях As; на величины второго порядка
малости по сравнению с отклонениями As{,
рассмотренными выше. Такой вывод позволяет
сделать анализ матричных уравнений,
приведенных выше.
Таким образом, линейные относительные
отклонения Ast (i = 2, 3, 4) в карданном шарнире
при одновременном наличии ошибок в
линейных размерах Аа{ и Asx можно представить как
сумму индивидуальных влияний каждой ошибки:
As2 = C2Asx + С21Ааг + С22Аа2 +
+ С23Аа3 + С24Да4;
As3 = C3As1 + С31Ааг + С32Аа2 +
+ С33Аа3 + С3,Аа^ (171)
As4 = C4Asx + C^Aax + С42Да2 +
+ С43Да3 + С44Да4,
где С,, СЛ, Сй, Сй, Си (1 = 2, 3,
^-коэффициенты влияния на относительные
перемещения As; (I •— 2, 3, 4) каждой из
индивидуальных ошибок Ааь и As1.
Коэффициенты влияния Ch Cix, Ci2, Ci3, CH
определяются на основе решений линейных
уравнений (167) и (169):
Со= с
sin 2occosqpi
2 (sin2 фх -f- cos2 a cos2 фх) '
179
sin2 a sin 2фх
22
ся =
2 (sin'
/sin5
1 Ф1 + cos2 a
sin a cos фх
1 9i + cos2 a
COS2 фх) '
COS2 фх '
sin фх
24 sin2 фх + cos2
sin
a sin фх
a cos2 фх
cos2 a cos2
j—^»r ^ !
2Ti
Рис. 74. Графики зависимости линейных и угловых
относительных перемещений ведомого звена
карданного шарнира от погрешностей изготовления.
31
3
зз
cos a
C42 —
C43 =
]/ sin2 фх + cos2 a соБ2фх
sin 2a sin yx
]/sin2 фх + cos2 a cos2 ф2
cos a sin 2фх
sin2 фх + cos2 a cos2 фх'
cos a cos фх
|/sin2 фх + cos2 a cos? ф^
cos a cos 2фх
sin2 фх + cos2 a cos2 ф^ •
sin a sin фх #
+ cos2 a cos2 9i '
cos2 a co
(172)
sin? фх + cos2 a cos2 фх'
sin a sin 2фх .
" 2 (sin? фх + cos? a cos? фх) *
180
Слл —
sin asin2(pf
2 (sin2 фх -f- cos2 a cos2
Графики изменения коэффициентов Ct при
угле а = 30° приведены на рис. 74, а.
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ОШИБОК
ВСЛЕДСТВИЕ ПОГРЕШНОСТЕЙ
В ПАРАМЕТРЕ о/ НА ЗАКОН
ДВИЖЕНИЯ ЗВЕНЬЕВ
Как было отмечено выше, ошибки в
параметре а( (i = 1, 2, 3, 4), практически не влияют
на значения относительных линейных
перемещений Asj(i = 2, 3, 4). Это значит, что ошибки
Aat- будут вызывать отклонения только в углах
Аф2, Аф3 и Аф4.
Отклонения величин Asb определяемые
уравнениями (171), зависят только от погрешностей
линейных размеров.
Матрицы уравнения (153) с учетом
погрешностей Aat- (величинами второго порядка
малости пренебрегаем) и при линейных
погрешностях А я,- = 0 и Ast = 0 будут иметь вид
yVl' Л1 ' = А4.' N\. ' (173)
J12
1
0
0
0
1
0
0
0
costpj
0
0
0
0
Aa1sin^]
—Aajcos?
1
0
Aax sin с
—Aax cos <
1
0
h sin?!
Аах
0
Aa2
181
1 О
О cos ф4
О —cosa4sin<p4
О sina4sin<p4 -
О О
COS фз
sin
sincp'4
0
0
sin a4
cosa4
(174)
где фз = cp2 + Аф2;
+ Аф4; a;-90°+
= 90° + Aa3; a[ = a4
0
0
1
a2-90°+Aa2; az -
Aa4- a + Aa4.
cos фз
3 [
*' = 2, 3, 4)—теоретически точные значения
углов поворота звеньев механизма при
погрешностях, равных нулю; Дф, (/ = 2, 3, 4) — ошибка
в параметрах за счет погрешностей механизма;
Да, — погрешности в параметрах aj(i=l, 2,
3, 4).
Применив принцип суперпозиции,
последовательно исследуем влияние ошибок Да, на
величины Дф;. Так как ошибки являются малыми,
то матрицы, соответствующие каждой
кинематической паре, принимают вид
Лф4; (175)
В уравнении (175) только одна из производи
дМ-19 дМоо дМ-1Л дМл-> *
ных -з-ii, -^-52, -з-1± и -^ будет отличной
от нуля, так как рассматривается влияние од-
182
ной из ошибок Аа((1=], 2, 3, 4), которые
учитываются последовательно.
Подставляя соответствующие значения из
выражения (175) в равенство (173), учитывая
соотношение (159), исключая члены второго
порядка малости и проводя необходимые
преобразования, получаем
дМ.
дМ1
—М.
?Дсс,
М
дМ.
14
дМ,
Да,
(176)
Таким образом, в первой части равенства
(176) получаются четыре возможные выражения,
которые последовательно являются результатом
ошибок Даь Аа2, Аа3, Да4.
Частные производные матриц, входящих в
соотношение (176), получаем путем
дифференцирования выражений (174) по соответствующему
параметру:
дМ
12
О О
О О
О О
о о
о
sin а,' sin <
О
cos а,' sin
sin a[ cos фх —cos a[ cos ц>г
cos a'±
0 0 О
О 0 sin
0 0—:
О 0 —
—sin <Zj
О
cos фх
183
дМ2
да»
О
О
О sin ф2
О cos ф2
О —Да2
О
—Да2 sin
0
0
—1
о
о
—sin a4 cos ft
О
О
cosa'4
О cos а4 sin ф4 —cosa4 cosф4 —sin a'4
да.
дМ,
0
0
О
О
— cos ф3
Да3 cos ф3
О
О
—Да3
1
СОЭф2
О
О
О
о
о
о
СОЭф2
О
о
о
о
дМ,
дер.
О
—sin ф4
—cos a4 cos cp4
sin a4 cos ф4
О О
О —sin ф3
О О
О cos ф3
О
О
СОЭф4
—cos а4 sin ф4
sin а4 sin ф4
О О
cos фз О
о о
s in фо О
(177)
Подставляя соответствующие значения из
уравнений (159) и (177) в выражение (176),
отбрасывая величины второго порядка малости (Лаь
Аа2, Да2Да3; AaxAa3 и т. д.) и проводя
необходимые преобразования, получаем
матричное уравнение
184
0
0
0
0
0
«22
«32
«42
0
«23
«33
«43
0
«24
«34
«44,
0
0
0
0
0
^32
^42
0
&23
^33
^43
^44
(178)
= —C0S 4>1 Sin Ф2ДФ2 — Sin Фз C0S Ф4ДФз —
а23 = cos фз cos ср4 Афз — sin ф3 sin ф4 Аф4;
«24 = cos ф! cos ср2 Дф2 + cos ф4Аф4;
«32 = — S1*n Ф1 Sin Ф2ДФ2 +
+ (cos a sin фз sin ф4 + sin а cos ф3) Аф3 —
— cos а cos фз cos ф4Аср4;
а33 = (sin а sin ф3 — cos а cos ф3 sin ф4) Аф3 —
— cos а sin фз cos ф4 Аф4;
а34 = sin фх cos ф2Аф2 — cos a sin ф4Аф4;
а42 = cos ф2 Аф2 -f- (cos а cos ф3 —
— sin а sin ф3 sin ф4) Аф3 + sin a cos ф3 cos ф4Аф4;
«43 = (sin а cos Фз s^n Ф4 + cos а s*n Фз) Дфз +
-+- sin а sin ф3 cos ф4 Аф4;
а44 = sin ф2Аф2 + sin а sin ф4Аф4.
В правой части выражения (178) в
зависимости от рассматриваемой ошибки Acct(/=1,
2, 3, 4) получим следующие четыре матрицы
(величины второго порядка малости отбро-
шены):
0
0
0
0
0
0
0
0
0
—sin ф
i sin ф2
cos ф1 sin ф2
0
0
0
0
0
0
—COS фх
—sin фх
COS ф.
0
0
0
si
sir
0
sin ф! cos ф2
—COS фх COS ф2
0
0
0ф2 ЭШф!
1 ф2 —COS фх
0
Да
i>
*2>
185
0 0 0 0
0 sin фз sin ф4 —cos фз sin ф4 0 *
0 cos a sin фз cos ф4 —cosa со5ф3со5ф4 —sina 3>
0 —sina sincpgcoscp4 sin a cos ф3 cos cp4 —cos a
oo oo
0 0 0 0
0 5тасо8<рз5Шф4-|- sin a sin фз sin ф4 sina cos ф4 X
-f- cos a sin фз —cos a cos ф3
0 cos a cos фз 5Шф4— cos a sin ф3 sincp^ -j cos a cos ф,
—sin a sin ф3 -f-sin a cos (jp3
Приравнивая соответствующие элементы
матриц уравнения (178), получаем четыре группы
уравнений, показывающих зависимость ошибок
в углах поворота Дф4- звеньев механизма от
индивидуальных погрешностей Да/. В каждой
группе уравнений может быть составлено девять
уравнений, из которых только три являются
независимыми, а остальные шесть могут быть
использованы для контроля. Эти уравнения
получаем, приравнивая элементы матриц
уравнения (178): а23 = Ь23; ам = 624; аи = Ьи. В
правой части уравнения будут иметь четыре
варианта данных в зависимости от рассматриваемой
ошибки Да; (i = 1, 2, 3, 4):
cos фз cos ф4Дфз — sin Фзsin Ф4Дф4 =
0
—cos фх sin ф2Да2
—cos фз sin ф4 Да3
0
186
cos ф2 cos ф2Дф2 -f- cos ф4Аф4
5Шф2Дф2 +
—COS
0
0
sin a sin
0
0
aAa3
acoscp^
>
Ф4А(р4 =
•
Решив уравнения (179), найдем отклонения Дф,
вследствие индивидуальных ошибок Даг.
Влияние одновременного наличия ошибок в
нескольких параметрах Да,- учитывается простой
суперпозицией; суммарную ошибку в углах поворота
звеньев Дф, (/ = 2, 3, 4) можно представить
как сумму индивидуальных влияний каждой
ошибки:
Дф2 =
з = ^31
Дф4 =
d32Aa2
2 + d23Aa3
d33Aa3 +
(180)
где d£1, df2, d£3, du(i == 2, 3, 4) —коэффициенты
влияния на ошибки Дер, (i = 2, 3, 4) каждой
из индивидуальных ошибок Да,-. Эти
коэффициенты определяются на основе решения
линейных уравнений (179):
21
sin2 a sin 2
2 (sin2 фх + cos2 a cos2 фх) '
sin a cos ф!
У sin2 фх + cos2 a cos2 фх '
sin? фх -j- cos2 а cos2
187
A Sin (
фх -j- cos2 a cos2
« COS a
]/sin2 фх + cos2 a cos? Ф
^32 = ^зз = 0;
, cos a cos фх
34
]/sin2 фх + cos2 a cos2 фх
sin а sin фх
sin2 фх + cos2 а cos2 фх- '
(181)
j/ sin2 фх -(- cos2 a cos2
, sin a cos ф!
a43 — —
У sin2 ф!+ cos2 a cos2 фх
j sin a sin 2ф!
44 2 (sin2 фх + cos2 a cos2 фх) #
Графики изменения коэффициентов d4t- при
угле a = 30° приведены на рис. 74, б.
Приведенный выше анализ влияния
неточностей изготовления и монтажа на
кинематические параметры карданной передачи имеет
большое практическое значение. Полученные
результаты могут быть использованы
непосредственно при проектировании передач высокой
точности для механизмов приборов. Кроме того,
при выборе допусков на изготовление элементов
карданных шарниров важно знать
относительные перемещения звеньев, возникающие за счет
отклонений от идеальной схемы механизма. Если
при выбранной схеме карданного шарнира не
обеспечивается статическая определимость
системы, то для обеспечения непринужденной сборки
механизма необходимо, чтобы в соединениях
кинематических пар были зазоры, определяемые
допусками на изготовление, при наличии
которых звенья могли бы перемещаться в пределах,
обусловленных соотношениями (171) и (180),
188
При назначении допусков на изготовление
необходимо также учитывать значения
коэффициентов влияния на относительные
перемещения звеньев, которые определяются уравнениями
(172) и (181). Анализ этих коэффициентов
показывает, что отклонения размеров в различной
степени влияют на относительные перемещения
звеньев. Так, ошибки в размерах Asx и Да2 в
значительно большей степени влияют на
относительное перемещение s4, чем ошибки других
размеров, а ошибка Аа2 оказывает большее
влияние на изменение угла ф4 по сравнению с
ошибками Дах, Аа3 и Аа4. Таким образом, задавая
отклонения размеров элементов
кинематических пар, необходимо иметь в виду влияние
погрешности этого размера на относительные
перемещения звеньев механизма. Более жесткие
допуски должны быть назначены на те размеры,
которые наибольшим образом влияют на
выходные параметры механизма, и наоборот.
При выборе допуска на размер необходимо
также учитывать, имеется ли возможность
компенсации относительного перемещения звеньев,
которое вызывается погрешностью данного
размера. Если в направлении рассматриваемого
относительного перемещения возможна
компенсация, предусмотренная конструкцией
шарнира, то и допуск на размер может быть менее
жестким.
Наличие предварительных натягов за счет
принужденной сборки в статически
неопределимых системах отрицательно сказывается на
их работе (ухудшаются эксплуатационные
качества и снижается долговечность механизма).
Поэтому, как говорилось ранее, необходимо
схему механизма выбирать статически
определимой. Если выполнить условия непринужденной
сборки по каким-либо причинам не представляет-
189
ся возможным, то с помощью уравнений (171)
и (180) можно оценить уровень дополнительных
напряжений, возникающих как при сборке
механизма, так и в процессе его работы. Для этого
присоединенная к начальному звену
структурная группа должна быть рассчитана как
статически неопределимая пространственная рама.
В статически неопределимых карданных
шарнирах ошибки в размерах определяют
деформации звеньев контура, а следовательно, и
нагрузки на элементах кинематических пар, а также
момент на входном звене, который должен быть
приложен к входному звену, чтобы привести
в движение механизм.
ДИНАМИКА МЕХАНИЗМОВ
С КАРДАННЫМИ ПЕРЕДАЧАМИ
УРАВНЕНИЕ ДВИЖЕНИЯ ПРИВОДА
С ОДНОШАРНИРНОЙ
КАРДАННОЙ ПЕРЕДАЧЕЙ
Кинематический анализ карданной передачи
показывает, что ведомый вал передачи вращается
с периодически изменяющейся угловой
скоростью, определяемой соотношением (46).
Если считать систему абсолютно жесткой, то
определяемые силами инерции динамические
нагрузки будут зависеть от моментов инерции
масс вращающихся звеньев и их угловых
ускорений. При наличии в передаче упругих звеньев
неравномерность вращения ведомого вала
карданной передачи и динамическая нагрузка в
приводе существенно зависят от параметров
механизма и его режима работы. Для того, чтобы
определить действительное значение
динамической нагрузки в приводе с карданной передачей,
190
необходимо составить дифференциальные
уравнения движения привода с учетом параметров
карданной передачи и упругости звеньев.
Рассмотрим идеализированную
эквивалентную схему привода (рис. 75). На ведущем и
ведомом валах привода сосредоточены дискретные
массы с постоянными моментами инерции (Ух, J2).
К звеньям 1 и2 приложены внешние моменты УИДВ
Рис. 75. Динамическая схема
одношарнирной карданной
передачи.
и Мс. Рассматривается ) становившееся
движение. Положение карданных валов стационарно
(а12 = const). сх и с2 — коэффициенты жесткости
соответствующих звеньев привода; фь фп, ф21,
Ф2 — угловые перемещения соответс вующих
сечений привода. При решении задачи в первом
приближении силами трения пренебрегаем.
Жесткость самого карданного шарнира очень большая
по сравнению с жесткостью валов (сг <С ск,
с2<ск, cKzzco).
Уравнения движения получаем из уравнений
Лагранжа 2-го рода:
d (дТ\ дТ дП __ 0
За обобщенные координаты принимаем qx =
= Фь Яг = Фа, <7з = Фг- Кинетическая энергия
191
Потенциальная энергия
гт _ сх (уц - <pi)2 , с2 (у2 -у21)2
// g + 2 '
Обобщенные силы Qx = Мдв, Q2 = 0, Q3 = Me.
Подставляя Q^ и значения производных Т
и Я в выражение (182), получаем
дифференциальные уравнения движения привода:
(183)
>n — 4)i)—c2(cp2 — cp21)^=0. (184)
+ С2 (ф2 — Ф21) = Мо (185)
Подставляя значение ^(фц—фА) из
выражения (184) в соотношение (183), получаем
с2 (ф2 - ф21) fig = Мдв. (186)
Обозначим ф2 — ф21 = х, ф2 — фх = у.
Разделив выражение (185) на /2, а (186) —
на Jx и записав разность преображенных
равенств, получим
Выражение для у можно записать в виде суммы:
У = (Фи — Ф|) + (Ф21 — Фи) + (Фг — Ф21) =
= фя—Ч>1- (188)
Кроме того, на основании соотношения (46) имеем
(ф21 — Фи) = сп sin 2ф11э
|2. (189)
Из соотношения (184) получаем
192
Подставляя соответствующие значения из
выражений (189) и (190) в уравнение (188), имеем
/ 1 1 \ 2с -
= С2 [ — + —) х + с2х -~ cos 2фп + сп sin 2фи,
откуда
Здесь — =s —1 приведенная жесткость
С Cf С2
последовательно соединенных валов.
Теперь уравнение (187) для разности углов
поворота ведомого (ф2) и ведущего (фх) валов
карданной передачи может быть представлено
в виде
Г 1
(1 + 2cn cos 2фи) + -j-
y — c11sin2(p11 __ Мс А
Коэффициент си определяется из соотношения
(46). Раскладывая второе слагаемое левой части
уравнения (192) в функциональный степенной
ряд и имея в виду, что с < сг и сп < 0,0134 при
а < 20°, можно отбросить величины второго
порядка малости. Тогда
М. М с
= 77~7Г+77Л51п2фи> (193)
7 8-W 193
Здесь
1 _ 1 , 1 п 2ciiu А
В уравнении (193) независимую переменную
t можно заменить на фи, приняв dcpn = coud/.
Если, кроме того, ввести обозначения
'ошц
то уравнение (193) приводится к виду
м
% A2 (194)
Таким образом, система дифференциальных
уравнений (183) — (185) приведена к линейному
неоднородному дифференциальному уравнению
второго порядка с периодическим
коэффициентом в стандартной форме неоднородного
уравнения Матье.
Использование этого уравнения значительно
облегчает исследование динамики привода с
карданной передачей и упрощает инженерные
методы определения динамических нагрузок,
действующих в его элементах.
УРАВНЕНИЯ ДВИЖЕНИЯ МАСС
ПОЛИКАРДАННОЙ ПЕРЕДАЧИ
С УПРУГИМИ ЗВЕНЬЯМИ
Рассмотрим методику составления
дифференциальных уравнений движения привода с
учетом параметров карданной передачи и
упругости звеньев. Поставленную задачу решим
применительно к системе с четырехшарнирной кар-
№
данной передачей (рис. 76), причем метод'состав-
ления дифференциальных уравнений может быть
распространен на систему с любым числом
шарниров.
На ведущем и ведомом валах рассматриваемой
схемы (рис. 76) приложены дискретные массы
по концам с постоянными моментами инерции
)
Рис. 76. Динамическая схема привода
электроустановки с четырехшарнирной карданной передачей.
Массы промежуточных карданных валов
считаются пренебрежимо малыми (/2 =^0, J3 =
= 0, /4 = 0). К звеньям 1 и 5 приложены
внешние моменты Мдв и Мс, причем рассматривается
установившееся движение. Положения
карданных валов стационарно (а12 = const, а23 =
= const, а34 = const, а45 = const). съ с2, с3) с4,
сь — коэффициенты жесткости соответствующих
звеньев привода; фь фи, ф21, . . ., ф54, ф5—
угловые перемещения соответствующих сечений
привода. При решении задачи в первом
приближении силами трения пренебрегаем.
Уравнения движения получаем из уравнений
Лагранжа 2-го рода вида (182). За обобщенные
координаты принимаем q = ц>ъ д2 = фп, q3 =
= Ф22, ^4 = Фзз> Яь ■= Ф*4» Яа в Ф5-
Кинетическая энергия
7^-Лу + Лу,
7* 195
потенциальная энергия
/т _ ci (Фи — Ф1)2 г ^(Ф22—Ф21)2 , 4* (Фзз — Фзг)2 i
11 ~ ,2 "^ 2 "1 2 h
Обобщенные силы
Qi = Мд6, Q2 = Q3 = $4 = Q5 = О, Q6 - Afc.
Подставляя ^, 71, Я, Q в соотношение (182),
получаем дифференциальные уравнения
движения масс привода.
Вводя обозначения ср5 — ф54 = JC, ф5 — 4>i =
= (/ и проводя необходимые преобразования,
аналогичные преобразованиям, выполненным
в предыдущем параграфе (подробно эти
преобразования сделаны в ряде работ [40, 38]), получаем
дифференциальное уравнение движения привода
с поликарданной передачей
у + с [-1 (1 + 2Л cos 2фи — 25 sin 2срп) + -i] x
J/ — A sin 2фп + В cos 2фц мс ^дв
* l-f «Фсо8 2фц —с/^тгфц у5 /х •
с (j/ — Л sin 2фд 1 — В cos 2фп)
сь (1 + ^^ cos 2фц — cF sin 2фп) '
Выполнив необходимые упрощения и
отбросив величины второго порядка малости,
дифференциальное уравнение движения запишем в виде
+ B2- 8ш2(ф1 + Ч), (196)
где # = Ф6 —q>i; Ф1 = Фи; ©i«cdu; г
196
ЛЛ .
tg28]=-|;
L + J5) cF—2BJb]2 + [(Jx+Jb) cD - 2AJb\\
4 4
i=i J i=i
2 i=2 3 t=3
момент инерции; с — приведенный коэффициент
жесткости; a^ ^+i — острый угол между осями
карданных валов; ф — фазовый угол карданного
шарнира; коэффициенты сп определяются
соотношениями (46).
Анализ уравнения (196) показывает, что и в
системе с поликарданной передачей система
дифференциальных уравнений приводится к
неоднородному уравнению Матье.
Описание динамических процессов в поликар-
данной передаче уравнениями Матье
значительно облегчает их анализ, поскольку уравнения
Матье широко изучены и освещены в литературе
[15, 34, 51, 58, 69, 85, 88, 96 и др.].
ОПРЕДЕЛЕНИЕ НЕРЕЗОНАНСНЫХ РЕЖИМОВ
РАБОТЫ КАРДАННОГО ПРИВОДА
Рассмотрим причины возбуждения колебаний
в приводе с четырехшарнирной карданной
передачей, схема которого представлена на рис. 76.
Необходимо отметить, что методика исследования
может быть распространена на систему с любым
числом шарниров карданной передачи.
Исследование дифференциального уравнения
проведем применительно к системе с двигателем
внутреннего сгорания, у которого движущий
момент меняется по полигармоническому закону.
В этом случае полученные результаты могут
быть распространены на любую систему с
периодическим движением.
Принимаем фп = фх, (оп = со1? момент сил
сопротивления Мс = const, £ = — , содв —
угловая скорость коленчатого вала двигателя-
МДв = MQ + Мо,5 sin (0,5$фх + 6О,5)+ Мх sin (£фх+
+ ^i) + * *' + Mk sin (&£фх + 6^) + • • • +
+ Мп sin (r&q-L + 6„) (k = 0,5; 1; 1,5; 2; ...; ri) —
момент движущих сил.
Выразив правую часть уравнения (196) через
показательные функции, запишем
2/
п
Mk
где (Л = 0,5; 1; 1,5; 2; ...; я), /
Используя то обстоятельство, что для
линейных уравнений с периодическими
коэффициентами действует принцип суперпозиции, общее
решение уравнения (197)
находим как сумму общего а
решения однородного
дифференциального уравнения,
полученного из соотноше- 8
ния (196) и частного
решения неоднородного урав- в
нения.
Общее решение однород- 4
ного уравнения Матье
представим в следующем виде
151, 921:
а) точка (a, q) на
диаграмме устойчивости ре-
шений уравнений Матье р^ 77> Диа ма
(рис. 77) находится между устойчивости решений
( М
кривыми а52п,
= 1,2,...)-
2"+1
(п =
р
уравнения Матье.
=£i S
>i; (198)
б) точка (a, q) находится между кривыми
= Ег
(199)
где £"!, ^2 — произвольные постоянные; [г —
характеристический показатель, значение
которого зависит от постоянных коэффициентов а
199
и q уравнения Матье и не зависит от начальных
условий; г ==..., —2, —1, 0, 1, 2, . . .— любое
целое число.
Зная общее решение однородного уравнения
с периодическими коэффициентами, всегда можно
найти частное решение этого уравнения
произвольной возмущающей функции. Воспользуемся
для этого методом вариации постоянных [51, 85]:
у* (ф) = ~У2 (ф) J аШМ d(f - ух (ф) х
)^ф (200)
Величина d, содержащаяся в решении (200),
представляет собой определитель Вронского:
d = l/i (ф) Уа (Ф) — У2(?)Р1 (ф) = const ф 0;
оо
У1(ф)= S с^^+^Лв^ОЧ-агД».; (201)
^2 (ф) = £ с2,
гДе У1(ф)» Уг(ф) — частные решения однородного
уравнения Матье. В дальнейшем
рассматривается решение для зоны, лежащей между кривыми
аЧп' пс2п+1 (Рис* ^)- Возмущающие функции
соответственно равны:
/i (Ф) = Д-тЦ = const =Qi;
(ф) = а
/з (ф) =
""' 2J1*'1J
200
fn+2 (Ф) = тА- (е-п*печ^ _ е)
2/1% /
(202)
Подставляя выражения ^(ф), */2(ф) и /(ф) в
решение (200), после интегрирования находим
х
+ У]
Г=—оо
Wj J
Г=—оо
00
+ \ Г P (\x ~}-2rf) Ь о o-
/•=—oo
00
SCa i 1 °e 1 LI1].
201
CO
+ У]
[
1 r=—o
X
U U -L I'
X
2rj + 2/
X
+ 2r/ - 2/
х
(х + 2rj ■
X
0,5; 1; 1,5; 2; ...; л),
-. -2, -1, 0, 1, 2, ...}. (203)
202
Общее решение уравнения (197) запишется
в виде
У (Ф) = Уг (ф) + У* (Ф) + </* (Ф). (204)
Исследуем устойчивость общего решения
дифференциального уравнения (197). Решение
считается неустойчивым, если оно неограниченно
возрастает при фх —> оо, и решение считается
устойчивым, если оно остается ограниченным
при фх ->- оо.
Устойчивость общего решения однородного
дифференциального уравнения, полученного
отбрасыванием правой части уравнения (197),
зависит от значения характеристического
показателя \л. Из анализа выражений (198), (199),
представляющих общие решения однородного
уравнения Матье для различных зон
устойчивости, видно, что величина у (ср) будет
нарастающей при деГствительном (положительном или
отрицательном) или комплексном значении
характеристического показателя ji. Решение у (ф) будет
устойчивым, если \х — число мнимое. При \i = О
или [я = / решение считается нейтральным, но
его можно рассматривать как частный случай
устойчивого решения:
ц = /Р, 0<р<1, ] = V~l. (205)
Решение у (ф) будет устойчивым и
периодическим, если |3 = ~ — рациональная дробь. Пе-
риод этого решения — 2ns. Решение
устойчивое, но непериодическое, если р —
иррациональное число.
Из анализа выражения (203),
представляющего частное решение неоднородного уравнения
Матье, видно, что величина у* (ср) будет
нарастающей, если знаменатели при членах этого
выражения будут стремиться к нулю. Частное
203
решение уравнения (203) является
действительным и остается ограниченным при фх -»- оо,
если знаменатели этого решения не равны нулю,
а характеристический показатель \х остается
числом мнимым, т. е. выполняются следующие
условия;
р. + 2rj ф 0;
р + 2г/ ± 2/ ^fe 0;
fx + 2rj ± Щ ф 0;
Р- = /Р. 0<Р<1. (206)
Аналогичные результаты получим, если
рассмотрим решение дифференциального уравнения
(197) для зоны, лежащей между кривыми а$2п+1,
аС2п (рис. 77). В этом случае условия
устойчивости частного решения неоднородного
уравнения Матье будут иметь следующий вид:
\i+(2r+ 1)1 ФО;
ц + (2г+1)/±2/=£0; (207)
^ + (2г + \)}±ЩФО\
Р = /Р, 0<р<1.
При q -*■ 0 в уравнении (197) условие
резонанса частного решения неоднородного
уравнения Матье вырождается в условие резонанса
линейного неоднородного дифференциального
уравнения с постоянными коэффициентами.
Таким образом, устойчивость решения
линейного неоднородного уравнения (197) может быть
исследована путем подсчета величины
характеристического показателя fi. Методы Хилла [51J,
Уиттикера [96] и другие позволяют определить
[х, но путем сложного анализа. Приближенное
значение показателя \i определится из
соотношения [51]
/• \ i/~* i Щг sin (я Vа) /оло\
cos (л*я) = cos л У а + ] ; . (208)
4 у а (а — 1)
204
Устойчивость решений (198), (199) уравнения
Матье можно также определить с помощью
диаграммы устойчивости (рис. 77).
Характеристические кривые, показывающие зависимость
между а и q функций Матье целого порядка,
делят плоскость a, q на области устойчивости и
неустойчивости. Области неустойчивости
заштрихованы.
Так как а и q зависят от параметров
карданной передачи, элементов привода и режима его
работы, то на ссновании выражений (205), (206),
(207) параметры привода и режим его работы
могут быть подобраны таким образом, что
опасные параметрические колебания
(параметрический резонанс) будут исключены, а амплитуда
вынужденных колебаний сведена к минимуму.
ВЛИЯНИЕ ТРЕНИЯ
НА КОЛЕБАНИЯ В ПРИВОДЕ
С ПОЛИКАРДАННОЙ ПЕРЕДАЧЕЙ
При составлении уравнений (196), (197) силы
трения и другие диссипативные потери в системе
не учитывались. Если предположить, что в
системе преобладает вязкое трение, то,
воспользовавшись методикой составления уравнения
(196), получим дифференциальное уравнение
движения вида
у + (2/г + y\i sin 2фх — т}2 cos 2фх) у +
~ + qx sin 2Фг — q2 cos 2ф1 j у = f (<p),
(209)
где п—-^у-у Ь — приведенный коэффициент вяз-
кости,
205
J l«/5
J±Jb
Обозначая
(2л + -цг sin 2фх — т]2 cos 2фх) = Д (ф),
y~ + Qism 2ф1 — #2cos Ф1/ = /2 (ф)>
записываем
У ~\~ fi (ф) У + /г (ф) У =z f (ф)« (2Ю)
В данном случае интерес представляет общее
решение однородного дифференциального
уравнения, полученного из уравнения (210)
= 0. (211)
Уравнение (211) может быть приведено к виду
g+(a-2<7cos2*)y = 0, (212)
если воспользоваться подстановкой
(213)
Определяя из выражения (213) у, у к
подставляя эти величины в уравнение (211),
получаем
и + [/, (Ф) —j /i (Ф) - Т Л (Ф)] « = 0, (214)
ИЛИ
w + Ф (ф) и = 0.
206
Подставляя в Ф(ср) значения /х(ф), /i(<p),
/2 (ф) и отбрасывая величины второго порядка
малости, получаем
\т - п* -
cos 2
=?7T?;- (2i5)
Полученное уравнение в виде выражения
(215) представляет в основном только
теоретический интерес. Практически, так как для
приводов с карданными передачами ^ <^ qly т)2 <^С
< q2y достаточно ограничиться }г (ф) = 2п =
= const. Тогда уравнение (210) примет вид
y + 2ny + f2(<p)y = 0. (216)
Заменив в уравнении (216) переменную t на
ф2 = сох/, как это выполнено при получении
уравнения (194), и воспользовавшись подставкой
= ue J =ие~п^, получим
или
— + (а* — 2^7 cos 2г) и = 0. (217)
it! 1 О 1 П Ь
Здесь
При наличии в системе трения возможны
также установившиеся периодические движения,
получающиеся на границах устойчивости и
неустойчивости. Найдем граничные кривые для
207
уравнения (216) при т = 1 (рлс. 77). Будем
искать его решение в виде ряда
у = Ах sin z + Вг cos z + А3 sin Зг +
+ 53cos3z+ •♦•,
или
# = £ (Л* sin far + В* cos fo). (2i6)
fe=l,3,5, ...
Подставив разложение (218) вместо у в
дифференциальное уравнение (216) и приравняв
нулю коэффициенты при одинаковых
тригонометрических функциях, получим бесконечную
систему линейных уравнений относительно At
и Bt.
Сгруппировав члены, запишем эти уравнения
в следующем виде:
{a + q—\)A1 — 2nB1 — qA3 = 0,
2nA1 + (a-q-\)B1-qB3 = 0, (219)
щАх — (а — 9) А з + 6пВ3 + qA5 = О,
qBx — 6пА3 — (а — 9) В3 + qBb = О,
Полагая коэффициенты q малой величиной
и отбрасывая в первых двух уравнениях системы
(219) последние члены, как несущественные,
получаем однородные уравнения относительно
Аъ Вг. Эти уравнения имеют отличные от нуля
решения, если их определитель равен нулю:
a — l + q —2n
2а a-l-
Раскрывая определитель (220), получаем
уравнение граничной кривой при т — 1:
203
Нетрудно установить, что при п -*- 0
получается распадающаяся кривая а — 1 = ± q,
соответствующая случаю системы без учета
трения, т. е. при тех же допущениях, при которых
получено соотношение (221).
При малых значениях п граничные кривые
пасполагаются вблизи границ, соответствующих
а = О (внутри области
неустойчивости, показанной п
на рис. 78). Аналогичным \г
образом строятся
граничные кривые и для других
зон (т = 2, 3, . . .). Диа- *
грамма устойчивости ре- 6
шений уравнения Матье с
учетом линейного трения *
приведена на рис. 78.
Проведенный анализ
решения уравнения (211)
показывает, ЧТО ДЛЯ ВОЗНИК- -2f
новения параметрического
резонанса необходима боль- Рис- 78- Диаграмма
шая глубина пульсации, устойчивости решений
уравнения Матье при
учете линейного
трения.
чем в системе без трения.
В целом трение оказывает
стабилизирующее действие
и приводит к некоторому сужению областей
неустойчивости.
Точное определение коэффициента п в
уравнении (209) представляет собой достаточно
сложную вычислительную задачу и имеет смысл
только в том случае, если ведется для режимов
вблизи зон резонанса. В практических расчетах
можно ограничиться решением задачи без учета
трения и других диссипативных потерь, так как
трение в целом оказывает стабилизирующее
действие на систему, а в большинстве случаев
инженерной практики параметры выбираются
209
таким образом, чтобы работа системы
проходила вдали от зон резонанса.
ИНЖЕНЕРНЫЕ МЕТОДЫ РАСЧЕТА
ДИНАМИЧЕСКИХ НАГРУЗОК В ПРИВОДЕ
С ПОЛИКАРДАННОЙ ПЕРЕДАЧЕЙ
Для определения динамических нагрузок в
элементах привода необходимо в первую очередь
подготовить расчетную схему, т. е. вычислить
моменты инерции вращающихся деталей
привода, жесткость (податливость) упругих звеньев,
а также динамически привести эти элементы
Рис. 79.
Кинематическая
схема привода
электроустановки.
к цепной или разветвленной
схеме. Определение моментов
инерции и податливости звеньев
привода может быть выполнено
расчетными или экспериментальными способами
по методике, изложенной во многих работах
[35, 77 и др.]
Рассмотрим решение этой задачи на примере
привода электроустановки, работающей от
двигателя внутреннего сгорания автомобиля.
Кинематическая схема привода представлена на рис.
79. Упрощение расчетной схемы, в результате
которого снижено число степеней свободы си-
210
стемы, произведено по методике, изложенной
в ряде работ [5, 76, 77]. Приведенная расчетная
схема сведена к системе, показанной на рис. 76.
Подставляя значения моментов инерции,
коэффициенты жесткости и другие величины,
полученные из кинематического расчета
карданной передачи, получаем численные значения
коэффициентов дифференциального уравнения
(196):
а = 0,774; ? = 0,0066; Q2 = а]/~А2 + В2 =
= 0,0397.
г-^ = — 0,00705; ^\ = 0,00225.
^С
■ ^- = —0,0093; /^ = 860 об/мин;
^^2
со^ = 8110,7 1/с2.
Для восьмицилиндрового двигателя
автомобиля, учитывая передаточное отношение от
коленчатого вала двигателя к ведущему валу
карданной передачи (гармониками, кроме Mk = М4,
пренебрегаем), записываем [7]
п
V J^ sin («Ф1 + 8*) ~ °-у^-° sin (6,8ф1 + 64) =
fe=0,5 l(I)l l(°l
- 0,00108 sin (6,8ф! + 64) = Q3 sin (kl(pt + 64);
(222)
k==4> * = 2f =1»7'' ^о-/Иср.дв; 64^25°.
Дифференциальное уравнение движения масс
привода (196) после подстановки в него
численных значений коэффициентов будет иметь вид
0 + (0,774 - 2 • 0,0066 cos г)у =
=QX + Q2 sin 2 (ф1 + 8J — Q3 sin (6,8Ф1 + 6). (223)
211
Точка (a, q) находится между кривыми ас0
и asi, в зоне устойчивости диаграммы функций
Матье целого порядка (рис. 76).
Общее решение однородного уравнения Матье
для этой зоны представим в виде
У (Ф) = Ух (ф) + Уг (Ф) = Е1 _£
£ 5»>. (224)
Определяем величину характеристического
показателя \i:
где р — действительное число, так как точка
(a, q) лежит в зоне устойчивости.
Приближенная величина Р определяется по
формуле Н. В. Мак-Лахлана [51]:
*£^-«• <225»
Для рассматриваемой зоны устойчивости т =
- О и р = 0,879827.
Определяем коэффициенты с2г общего решения
однородного уравнения и уточняем величину
характеристического показателя р.
Запишем рекуррентное соотношение для
коэффициентов с2г [51 ]:
с2г [а — (2г — р)2] - q (c2r+2 + с2г-2) = О
(г«... , -2, -1, О, 1, 2, ...). (226)
Начиная с некоторого значения г, значения
\с2г\ очень быстро убывают. В данном случае
(в связи с мадым значением q) уже при г == 2
=» св ^^ 0 (в дальнейшем это подтвердится
212
расчетом), поэтому определим значения
коэффициентов с21 при г = — 2, —1,0, 1,2:
П г а""(4~~
и, с2 =
—"»■
а — (2 + В)2
^ С-2
г
Решая уравнения (227) и используя
соответствующую методику [51], уточняем значение
характеристического показателя р и получаем
окончательные значения коэффициентов:
Р = 0,879857; с4 = 0,00001011;
с0 = 1; с_4 = 0,00000025;
с2 = — 0,01373; с6-—0,26- 10-8^0;
с_2 = —0,00878; с^ = 0,7 • 10~9^0. (228)
Члены с коэффициентами с4, с_4, с6, с_6 в
решении (224) отбрасываем как величины
второго порядка малости и в связи с тем, что
рассматривается решение вдали от зон
резонанса. По этим же соображениям не
учитываются в дальнейших расчетах члены с
коэффи2 2
циентами порядка с2., с2_2, с2 • с_2.
213
Таким образом, общее решение однородного
дифференциального уравнения, полученного из
выражения (223), принимает вид
уг (ф) = Е
+ c^2e(P-2)/8oe(P-2)/?1] ? (229)
Используя то обстоятельство, что для
линейных уравнений с периодическими
коэффициентами действует принцип наложения решений,
находим частное решение уравнения (223),
применяя метод вариации постоянных:
d = Vi (ф) У2 (ф) — #2 (Ф) Ух (ф) =
= Ух (0) ^ (0) - у2 (0)у[(0) - const;
. (231)
Подставляя в выражение (231) полученные
из соотношения численные значения (228),
находим d *= — 2/ • 0,88614.
Далее приводим возмущающие функции Д. (ф)
уравнения (223) с помощью показательных
функций к виду:
/i(9)=-^r-7^ = 01-const,
/2 (ф) = |
f (ф) =, -%- (6-/0g-6,8/9l __ ^6.8/f,)ш (232)
214
Подставляя ^(ф), г/2(ф), d, Мф), Мф) и
/з(ф) в выражение (230) и интегрируя,
получаем частное решение дифференциального
уравнения (223):
с° \F +
£2
£
р —6,8 р — 2 — 6,8
- pro)sin (2ф1 + 6'8ф1 + 28°+9) ~
р + 2+6,8
6,8ф1 + 280 - 9)] . (233)
Подставляя в выражение (233) численные
значения соотношений (228), (231), получаем
у* до = —0,012319 —0,00024 cos 2 (фх + 80) —
— 0,0122 sin 2 (срх + bx) + 0,000016 +
+ 0,00021 sin (4<px + 280 + 2b±) —
— 0,00098 sin (6,8ф! + в) — 0,000002 sin (8,8фх +
4- 8e + e) + 0,000012 sin (4^ + 25O + 6). (234)
215
Анализ полученного решения (234)
показывает, что при малых значениях q могут быть
отброшены члены решения (233) и члены с
коэффициентами с2. С—2 , c0c2t с0С—2. Точность
решения при этом существенно не пострадает. В
рассматриваемом случае погрешность
приближенного решения по сравнению с точным составит
всего лишь 0,02%:
#*(<р) = _ 0,012 321— 0,0123 sin
— 0,000 98 sin (6^ + 9). (235)
Приближенное решение может быть получено
и другим, более простым, способом. Если в
уравнении (223) пренебречь влиянием члена с
периодическим коэффициентом, т. е. принять q = 0,
то решение такого уравнения будет
практически совпадать с приближенным решением (235).
Таким образом, при малых значениях q и если
точка (a, q) лежит вдали от зон
неустойчивости, точное решение уравнения (223) мало
отличается от решения уравнения (236):
г + ву = Л(ф) + /(ф) + /(ф). (236)
Анализ параметров карданных приводов
различных машин показывает, что замена
уравнений (196), (223) уравнением (236) допустима,
если численное значение коэффициента q не
будет превышать 0,1, а знаменатели
коэффициентов частного решения (233) по абсолютной
величине не будут меньше 0,1, т. е. если будут
выполняться следующие условия:
|Р + 2г|>0,1; |р + 2г+1|>0,1; (237)
|Р+2г±2|>0,1; \Р + 2г±Щ>0,\;
216
«I>O,1; r = ... , —2, — 1,
О, 1, 2, ... ;
£ = 0,5; 1; 1,5; 2; ... ; п; ", = — .
Максимальная погрешность решений при
выполнении условий (237) будет составлять не
более 1—2%.
По аналогии с получением частного решения
уравнения находим и общее решение
однородного уравнения, полученного из выражения
(223) путем отбрасывания его правой части.
Общее решение этого уравнения ищем в виде (229).
Для малых значений q членами с коэффициентами
c2ri кроме с0 = 1, пренебрегаем. При этих
допущениях общее решение однородного
уравнения запишется в виде
у (у) = E^oe^i -f Etfr-v-b*erw*. (238)
Преобразуя показательные функции
уравнения (198) через гармонические функции [51] для
зоны устойчивых решений, получаем
у (Ф) = Fx cos рф1 + F2 sin p Фь (239)
где Fl9 F2 — произвольные постоянные
интегрирования, зависящие от начальных условий;
Р — характеристический показатель (\i = /Р).
Постоянные интегрирования определяем из
начальных условий. Принимаем при t = 0 ф1 =
= 0, у = Уо> У — Уо- Подставляя начальные
условия в выражение (239), получаем/7! = у0 и
уо= — FxP sin рфх + F2 p cos Рфх.
Таким образом, общее решение однородного
уравнения, полученного из выражения (223),
записываем в виде
У (Ф) = У о cos рф1 + ^° sin рф1. (240)
217
Для определения уровня параметрических
колебаний в системе рассматриваем движение,
описываемое однородным дифференциальным
уравнением, полученным из выражения (223).
Приближенную амплитуду колебаний
относительно равномерного вращения определяем
по соответствующей методике [48]. Для этого
уравнение движения запишем в виде
d^2 + ay = 2qycos2z. (241)
Принимая при t = 0; уо= —- = const и
подставляя это выражение в правую часть
соотношения (241), получаем линейное неоднородное
уравнение с постоянными коэффициентами.
Амплитуда колебательного движения для
рассматриваемой задачи в первом приближении
2дМс • _ п
у о - с (а _4); у о - и-
Общее решение однородного уравнения при
принятых допущениях запишется в виде
со8рф1. (242)
Общее же решение уравнения (223),
определяемое суммой общего решения однородного
и частного решения неоднородного, запишется
в виде
У (Ф) = Г$Г^) c°s РФ! + 1 + 5^4 Sin 2(»> +
п
+ -^-т cos 2ф1 + У — , sin («ФХ + 9J.
(243)
После получения общего решения (243)
дифференциального уравнения с помощью несложных
218
вычислительных операций определяются
динамические нагрузки в элементах приводов.
Рассмотрим определение динамических
нагрузок в приводе при произвольных
периодических значениях Мдв и Мс-
При произвольном периодическом законе
изменения Мдв и Мс их можно представить в виде
полигармонических рядов:
п
М№ = М0+ 2 Mk sin (#ф1 + h)
k=kt
и (244)
Для участка расчетной схемы (рис. 76) с
коэффициентом жесткости сь динамический момент
определяется соотношением, полученным из
выражения (195),
МЬ дин = МЪ = Сь (ф5 — ф64) =
= с (У "" л sin 2cPi ~" Б cos 2 ?i) /245)
1 -f- cD cos 2cpx — cF sin 2cpx ' ^ '
Подставляя выражение (244) в (223),
получаем решение уравнения (223), из которого,
принимая во внимание соотношение (245), после
необходимых преобразований и отбрасывания
несущественных величин, получаем выражения
для динамического момента:
мл .;/+
1 —<
X sin 2 (фх + 82) +
219
В правой части уравнения (246) первое
слагаемое учитывает нагрузки от постоянных
составляющих Мдв и Мс, второе — нагрузки за
счет карданной передачи, третье и четвертое
слагаемые — нагрузки за счет переменных
составляющих МдВ и Мс.
Для привода электроустановки, работающей
от двигателя автомобиля (рис. 79), учитывая
передаточное отношение от коленчатого вала
двигателя к ведущему валу карданной передачи
(гармониками, кроме Mk = М4, пренебрегаем),
записываем Мдв = Мо + M^sin (6,8фх + В4)»
Мс = Мс0.
Динамический момент Мь на участке
расчетной схемы с коэффициентом жесткости съ
определится соотношением
(а —
sin(6,89l+94).
Анализ численного значения динамических
моментов в элементах привода электроустановки
показывает, что основная причина появления
динамических нагрузок в приводе — это
неравномерность вращения ведомого вала
создаваемой карданной передачи. Динамические
нагрузки в приводе, возникающие за счет
неравномерного вращения двигателя, для различных
вариантов привода в 50—60 раз меньше, чем
за счет карданной передачи, и поэтому этими
нагрузками можно пренебречь.
220
На основании выражения (246) определяем
значения максимальных амплитудных
значений М5дин для различных значений
параметров привода с карданной передачей (рис. 76).
Сложность анализа механизма с карданной
передачей, динамические процессы в которой
описываются дифференциальными уравнения-
МлкГм
-6,936
47,872
0,3
0,4
tfi
Рис. 80. Графики общих решений
дифференциальных уравнений на машине МН-14 (варианты).
ми с периодическими коэффициентами, еще
более увеличивается при переменных параметрах
передачи — значениях жесткости и моментов
инерции. В то же время при создании надежно
работающих конструкций необходимо
определить оптимальное сочетание параметров, при
котором можно снизить динамические нагрузки
до приемлемого уровня.
Современная вычислительная техника, в
частности электронные моделирующие установки,
позволяет установить связь между
динамическими нагрузками и внешними возмущениями
при заданном сочетании параметров механизма.
В связи с этим задача оптимального синтеза
может быть сведена к исследованию системы на
221
аналоговых моделирующих установках,
снабженных нелинейными блоками, легко
реализуемым методом перебора параметров.
На рис. 80 приведена одна из серии
осциллограмм, полученных авторами при исследовании
на аналоговой установке МН-14 карданной
передачи, отображающей динамические процессы
в системе при наличии на входе периодических
возмущающих гармоник. Имея серию
осциллограмм такого типа, нетрудно установить
функциональную связь динамического явления
в упругих связях и параметров системы и
выбрать такое их сочетание, при котором
динамическое усиление будет наименьшим.
ГАШЕНИЕ КРУТИЛЬНЫХ КОЛЕБАНИЙ
В КАРДАННОМ ПРИВОДЕ
Во время работы машин, в состав которых
входят карданные передачи, в их элементах
практически всегда возникают крутильные
колебания (параметрические и вынужденные).
Эти колебания вызывают нежелательные
дополнительные динамические напряжения во всех
звеньях машин. При определенных условиях
могут возникнуть критические или
резонансные режимы работы машины с резким
возрастанием амплитуд колебаний; динамические
напряжения в таких случаях, как правило,
превышают допустимые. Если при этом резонансные
режимы лежат в диапазоне рабочих скоростей
машины, то возникает задача о разработке мер
по устранению опасных крутильных колебаний
при работе машины с любой рабочей скоростью.
Такую задачу можно решить различными
методами. Применительно к приводам машин с
карданными передачами снижение уровня
крутильных колебаний, а следовательно и динамиче-
222
MpSlnut
Mo si nut щ I—I
ских нагрузок, может быть выполнено
следующими путями:
1) выбором и варьированием динамических
параметров привода (/0, с и со^);
2) соответствующим выбором геометрических
параметров карданной передачи,
определяющих степень неравномерности вращения ее
ведомого вала;
3) установкой
дополнительных
динамических устройств, не
входящих в основную
конструктивную цепь,
которые служат для гашения
колебаний.
Устранение
крутильных колебаний следует
начинать с помощью
первых двух способов.
Если геометрические и
динамические параметры
привода рассчитаны
правильно, то уровень
крутильных колебаний может быть сведен к
минимуму без дополнительных материальных
затрат.
Если с помощью первых двух способов
гашение вредных крутильных колебаний
невозможного целесообразно применить динамические
гасители или поглотители колебаний (рис. 81).
Рассмотрим действие динамического гасителя
колебаний, представляющего собой массу,
присоединенную к основной механической системе
при помощи упругого элемента (рис. 81, а).
Собственные частоты колебаний <о* системы
с динамическим гасителем определяем по
формуле [9]
И/Wl
FVW\J
MoSinut
б
MoSinut
Рис. 81. Схемы устройств
для гашения колебаний.
223
£+ fe)2,(248)
где (оо — собственная частота колебаний
основной механической системы (при отсутствии
гасителя); со* — собственная частота колебаний
динамического гасителя (при неподвижности
массы основной механической системы); а =
= у — отношение массы динамического
гасителя к массе основной механической системы.
При действии на основную массу
возмущающего момента Мо sin Ш динамический
коэффициент для основной массы
(249)
.1
1
't/
У/
V
\У
\
\
>
1
/
/
\
\
S V
0.6 0,7 0,8 0,9 1,0 1,1 1,2 Л
Здесь [х — отношение
максимального
динамического перемещения
фтах основной массы к ее
статическому ф0
перемещению, вызываемому
моментом Мо; р = —;
о (о
<о0
Рис. 82.
Амплитудно-частотные характеристики
различных вариантов
гасителей колебаний.
На рис. 82
приведены кривые изменения коэффициента
динамического усилия для системы без гасителя
колебаний по схеме рис. 81, а (кривая /) в
зависимости от р*, с динамическим гасителем по
схеме рис. 81, б (кривая 2) и, наконец, для
системы с линейным демпфером по схеме рис. 81, б
(кривая 3) при а = 0,05.
Для полного гашения колебаний
(антирезонанс) основной массы собственная частота ко-
224
лебаний гасителя должна быть равна со0
(условие антирезонанса): со* = соо, так как
со* и со* мало отличаются друг от друга при
малых а = -? . Следовательно, уже при сравни-
j
0,2
0,1
0
■——
— —
10 12 14 16 18 1/Ы
Рис. 83. График выбора оптимального значения
безразмерного коэффициента.
тельно незначительном изменении частоты
возмущения со система может попасть в резонанс.
Этот недостаток значительно уменьшает
область применения гасителя колебаний данного
типа. Он устраняется путем введения вязкого
сопротивления в конструкцию рассмотренного
гасителя колебаний.
Амплитуды колебаний при резонансных
режимах значительно снижаются и становятся
неопасными для основной механической
системы.
Рациональное решение состоит в назначении
таких параметров системы, при которых уровни
обоих максимумов (рис. 82, кривая 3)
становятся одинаковыми. Для этого необходимо,
*/а » 8"127 225
чтобы частоты гасителя и основной системы
находились в соотношении [9]
-о*
(250)
Безразмерный коэффициент вязкости £
определяется по графику, изображенному на рис. 83.
При этом наибольший коэффициент
динамичности
+ ~.' (251)
Демпферы, или поглотители колебаний,
представляют собой устройства, предназначенные
для рассеивания энергии, сообщаемой системе
возмущающими
моментами. Одна из схем
поглотителя колебаний приведена
на рис. 84.
0
0,6 0J ОМ 0,9 1,0 1,1 1,2
Рис. 85.
Амплитудно-частотная характеристика
системы с поглотителем
колебаний.
I
1
/
\\
\ \
1 \
f \
1 \
1
1
1
/
Ч„
1
\
V
\
\
•1-0
Рис, 84. Схема
поглотителя
колебаний с вязким
трением.
Динамический коэффициент для основной
массы определяется по формуле [9]
— У §« (1 — [
а)]? '
(252)
, значения а, (3, соо см. на с. 224;
где 5 = 5
Ъ — коэффициент вязкости поглотителя.
226
На рис. 85 показано изменение
динамического коэффициента ц в зависимости от отношения
J3 == ~ при оптимальном значении коэффициен-
та 6; штриховыми линиями показаны кривые
изменения динамического коэффициента |х в
двух предельных случаях — при отсутствии
вязкой связи (£ = 0) и при жесткой связи (£ = оо).
КРИТИЧЕСКИЕ СКОРОСТИ ВАЛОВ
Карданный вал — это сравнительно тонкий
и длинный стержень. В результате
эксцентричности, неравномерности распределения массы
материала и переменных изгибающих моментов,
действующих на карданные вилки, при
вращении вала возникают изгибные колебания.
При определенных скоростях вращения
вследствие резонанса карданные валы становятся
динамически неустойчивыми. Угловая скорость,
при которой частота вращения карданного
вала равна собственной частоте поперечных
колебаний, называется критической. Она
зависит от размеров карданного вала, его
конструкции и способов закрепления.
При определении критической угловой
скорости вала его поведение в динамике
описывается дифференциальным уравнением [2, 5, 60,
61], которое приводится к виду
J4 Г k У = О, {2Ь6)
где
Общее решение дифференциального
уравнения (253) может быть представлено так:
у = Сг sin kx + С2 cos kx +
+ C3sh kx + C±chkx, (254)
V2 8* 227
где С*!, С2, С3, С4 — постоянные
интегрирования, определяемые граничными условиями.
Для вала со свободными концами все
постоянные, кроме Cv равны нулю. Это приводит
к частотному уравнению
sin kl = 0, (255)
или kl = я, 2я, . . ., пп (л = 1, 2, . . .).
Таким образом, полученные значения
определяют собственные частоты, причем первая
из них определяет наиболее опасную первую
критическую скорость сокр. Ее значение
получим из соотношения
gEJ
или
T' (256)
Отсюда критическая частота вращения
1кр
_30я л/"ГЕ
Для сплошного круглого вала диаметра d
момент инерции J = ~ см4, площадь сечения
р = 5L- СМ2? модуль упругости £^=2,ЫО6 кг/см2
удельный вес -у = 7,7г/см3 и ускорение силы
тяжести g = 981 см/с2.
Окончательно получаем расчетную формулу
для якр:
икр-12,Ы04!-Л^. (258)
Для полного карданного вала
/2кр= 12А • 1U* I/ "„, ~, (259)
£28
где dH и dB -— соответственно наружный и
внутренний диаметры вала.
В случае изготовления вала из тонкостенной
трубы наружного диаметра d с толщиной стенки
8 ^ ОД d при определении пкр можно
пользоваться формулой [60]
/1КР =12,1- 104КЦ. (260)
Значения коэффициентов А в уравнении (258)
меняются в зависимости от способа
закрепления концов [60]. Действительные значения
критической частоты вращения /?к'р рекомендуется
принимать [17] меньше расчетных.
Соответствующий поправочный коэффициент для новой
карданной передачи kn = 0,9. . .0,95 и /?к'р =
= knnKp. По мере износа подвижных
соединений вала, прежде всего шлицевых,
коэффициент kn уменьшается до kn = 0,7. . .0,8.
КОНСТРУКЦИЯ ЭЛЕМЕНТОВ,
ТЕХНОЛОГИЯ ИЗГОТОВЛЕНИЯ
И ЭКСПЛУАТАЦИЯ
КАРДАННЫХ ПЕРЕДАЧ
МАТЕРИАЛЫ ДЕТАЛЕЙ КАРДАННЫХ
ПЕРЕДАЧ
Долговечность работы и эксплуатационные
качества карданных шарниров зависят от
выбранных для изготовления деталей передачи
материалов, от термической обработки их,
точности изготовления и сборки деталей, а также
от смазки подвижных соединений.
В большинстве случаев детали карданных
механизмов изготовляют из конструкционных
229
и легированных сталей. Вилки карданных
шарниров штампуют из среднеуглеродистых и
легированных сталей 35, 40, 45, 40ХНМА и др.
После механической обработки производят
закалку с отпуском до твердости НВ 210. . .280.
Применяют также и малоуглеродистые стали
(сгаль 20Х), которые после цементации также
подвергают закалке и отпуску до твердости
HRC 58. . .65.
Крестовины изготовляют из
малоуглеродистых легированных сталей 20Х, 12ХНЗА,
18ХГТ и др. Цапфы цементируют с
последующей закалкой и отпуском до твердости HRC
58. . .65. Кроме указанных материалов,
применяют также стали ШХ12 и ШХ15.
Сплошные карданные валы и трубчатую часть
полого карданного вала обычно изготовляют
из хорошо сваривающейся малоуглеродистой
стали 10, 15 или 20. Наконечники выполняют
из стали с последующей цементацией и
закалкой токами высокой частоты.
Шлицевые наконечники подвижных
соединений карданных валов изготовляют из стали
40Х или из других износостойких хорошо
свариваемых сталей.
Детали тяжело нагруженных карданных
шарниров, как правило, выполняют из
высоколегированных сталей. Так, например, из
высоколегированных сталей изготовлены детали
карданного узла тепловоза ТГМ-10. Карданный
вал состоит из вилки с внутренними шлицами
(сталь ЗОХС), надеваемой на хвостовик (сталь
45Г2). Трубчатая часть карданного вала,
выполненная из трубы 196 X 14 мм (сталь
12ХМФ), присоединяется к вилке (сталь 40Х).
Фланцы с разъемными проушинами выполнены
из стали 12ХНЗА, крестовины карданного
узла — из стали 18ХГМ.
230
Вилки универсального шарнира ВНИИмет-
маш (см. рис.17) изготовлены из стали 34ХНЗМ,
промежуточный вал — из стали 45, оси — из
стали 40ХМ.
Элементы несиловых карданных передач
могут быть изготовлены из менее прочных
материалов (сталь 35, алюминиевый сплав Д1Т ГОСТ
4783—68). Они могут быть также изготовлены
из бронзы в случае применения механизма
в магнитных приборах, а также для снижения
трения в подшипниках скольжения.
Пластиковые трущиеся поверхности применяются в
машинах с подшипниками скольжения без
смазывания. В механизмах управления самолетов
(США) для снижения их веса применяются
карданы, изготовленные из алюминиевых сплавов.
КОНСТРУКЦИЯ ЭЛЕМЕНТОВ КАРДАННЫХ
ПЕРЕДАЧ
Конструкция карданных валов. Форма
карданного вала зависит от конструкции
шарниров, с которыми вал соединяется, и
нагрузочного режима. Обычно вал состоит из
центральной части и приваренных к ней
наконечников, предназначенных для присоединения вала
к карданным вилкам или механизмам передач
машины. Центральная часть карданного вала
может быть сплошной или трубчатой.
Сплошные карданные валы применяют в основном
для приводов вспомогательных механизмов
машины в случае, когда не требуется осевой
компенсации перемещений в механизме передачи.
Более широко применяют трубчатые валы,
поскольку они при меньшем весе, чем сплошные,
допускают передачу того же крутящего
момент а.
231
Рис. 86. Конструкции карданных валов:
а — с коническими хвостовиками; б — со шлицевыми
хвостовиками; в — вал с вилкой и фланцем; г — вал с вилкой
и коническим хвостовиком; д — вал с осевой компенсацией
подвижным шлицевым соединением; е — вал с упругим
компенсирующим устройством.
232
На рис. 86 показаны трубчатые валы с
различными наконечниками, к которым крепятся
вилки или крестовины шарниров.
При открытых карданных передачах
компенсирующие устройства подвержены
значительному загрязнению, поэтому шлицевые
соединения должны быть защищены от попадания
пыли, воды и грязи. Наиболее простой способ
защиты компенсирующего устройства от пыли
Рис. 87. Защитное устройство с металлическим
кожухом.
и влаги — применение уплотнений с
войлочными и фетровыми кольцами (рис. 87). В тех
случаях, когда возможно значительное
загрязнение шлицевого соединения, а следовательно
и повышенный износ его, рекомендуется
ставить дополнительные резиновые
гофрированные манжеты или металлические защитные
устройства. Металлическое защитное
устройство состоит из трубчатой металлической
обоймы 5, уплотнительного кольца У, заложенного
в обойму и надетого на вилку 7, и
удерживающего резинового кольца 6, надетого с
предварительным натягом на хвостовик карданного
вала. Кроме того, на конец вилки надета и
закольцована гильза 4, в которую заложено уплот-
нительное кольцо 5 для защиты шлицев. Для
связи с атмосферой предусмотрено отверстие 2.
9 8-127
233
По сравнению с гофрированными манжетами
из резины или кожи металлическое защитное
устройство обладает тем преимуществом, что
в случае его использования смазка под
влиянием центробежных сил не скапливается в
одном месте, благодаря чему не нарушается
балансировка вала. Кроме того, оно обладает
более высокой прочностью.
Величина осевой силы Г, действующей на
карданный вал (см. рис. 70), при изменении
углов между осями карданных валов
определяется уравнением (123).
Коэффициент трения / стали по стали в шли-
цевом соединении карданного вала зависит от
качества смазки и составляет при хорошей
смазке / = 0,06. . .0,10. В случае недостаточной
смазки или загрязнения абразивом коэффициент
трения сильно возрастает, достигая при
заедании 0,35...0,40. Осевая сила при этом
достигает больших значений. Так, для автомобиля
ГАЗ-66 (МР = М2 = 200 даН • м, dm = 40 мм)
Ттах = 2000 даН.
Значительные дополнительные осевые
нагрузки, возникающие при плохом техническом
обслуживании, действуют на вал карданной
передачи и нагружают подшипники шарниров,
коробки передач и другие звенья механизма.
Поэтому необходимо систематически смазывать
шлицевое соединение карданной передачи.
Осевая нагрузка существенно снижается при
наличии соединения, в котором трение
скольжения при осевом перемещении заменено трением
качения (шлицевое соединение с шариками или
роликами).
Конструкция карданного вала с шариками,
снижающими величину осевой силы Т, фирмы
Waltersched (ФРГ) приведена на рис. 88.
Величина приведенного коэффициента трения при
234
осевом перемещении для вала этой
конструкции значительно меньше, чем при скользящем
шлицевом соединении.
Напряженность на отдельных участках вала
в условиях эксплуатации неодинакова, поэтому
детали, карданных валов изготовляют из
различных материалов.
Карданные валы рассчитывают на
критическое число оборотов, прочность и жесткость.
Л с в
Рис. 88. Шарнирный вал с шариками, снижающими
осевую нагрузку.
Расчет на критическое число оборотов
проводят по методике, приведенной выше (стр. 228).
Расчет на прочность производят по
результирующему моменту от кручения и изгиба с
учетом динамических нагрузок:
расч
W
(261)
кр
На жесткость вал рассчитывается по углу
закручивания:
м
расч
1 180°
(262)
В выполненных конструкциях должно
выполняться соотношение | 0| ^9°.
Шлицевые наконечники карданных валов
рассчитывают на кручение по наименьшему
235
диаметру шлицев. Шлицы, как обычно,
рассчитывают на срез и смятие.
Конструкция вилок карданов. Вилки
карданов в зависимости от способа крепления к
соседним валам могут иметь втулку или фланец.
Фланцем вилку
прикрепляют к муфте другого
вала, а втулкой —
одевают на конец вала и
крепят на нем с помощью
шлицевого соединения,
сварки или другого
способа. На рис. 89
показаны применяемые на
практике конструкции
вилок карданов,
устанавливаемых на валах
и соединяемых между
собой крестовинами.
Различие конструкций
вилок заключается в
способе закрепления их на
валу и форме отверстия
под подшипники
крестовины (рис. 89, а, е).
На рис. 90 показана
одна из конструктивных
схем карданной вилки.
Вилка шарнира под
действием силы Qmax испытывает изгиб и кручение.
В сечении, показанном на рис. 90,
Рис. 89. Конструкции
карданных вилок:
а — со шлицевым отверстием
во втулке для крепления ее
на валу фиксатором; б, в —
с цилиндрическим
наконечником, фиксируемым
шпилькой или привариваемым к
валу; г — о цилиндрической
втулкой, привариваемой к
валу; д — с квадратным
отверстием во втулке; е —
фланцевая карданная вилка.
^■maxu
~W
w кр
(263)
236
Конструкция крестовин карданов. На рис. 91
представлены варианты конструкций крестовин
карданных шарниров.
Цапфы крестовин
шарнира рассчитывают на
изгиб и срез.
Напряжение изгиба в сечении
Б—Б (рис. 91, а)
^ИЗ === oily ? \^в V
_ Рис. 90. Вилка кардана
ГДе Qmax — максима ЛЬ- (расчетная схема),
ная нагрузка на цапфу;
/ш — длина цапфы; Wn3 — момент сопротивле-
ния сечения, WU3 = ~р , dm
Напряжение среза
х = ■
•диаметр цапфы.
(265)
Рис 91. Конструкции крестовин
карданных шарниров:
а — кревтовина обычногэ вида; б — крестовина
в виде кольца; в — крестовина о шариками;
г — крестовина с болтами.
237
Конструкции опор. Опорами для цапф
крестовины в карданных шарнирах могут быть
игольчатые, шариковые подшипники качения
или подшипники скольжения.
В качестве вкладышей подшипников
скольжения применяют стальные цементированные
втулки (в машинах большой грузоподъемности),
втулки из пластмасс или других
антифрикционных материалов. Подшипники
скольжения применяют, как правило, при малых
скоростях машин.
В подавляющем большинстве в карданных
шарнирах для силовых передач применяют
игольчатые подшипники качения. Эти
подшипники обеспечивают компактность конструкции,
высокий КПД, надежность и долговечность
в работе.
Игольчатые подшипники проверяют по
величине допустимой статической нагрузки, а на
долговечность рассчитывают по величине
динамической нагрузки с учетом реальных условий
работы.
Величину допустимой статической нагрузки
определяют по соотношению [8]
^„ = 790-5^:, (266)
где zp — число иголок (роликов); 1р — длина
иголки, см; dp — диаметр иголки, см; tip —
число циклов нагружения игольчатого
подшипника в минуту.
х Полученное значение Рдоп должно быть
больше максимальной нагрузки Qmax,
действующей на подшипник.
Особенностью работы подшипников
карданного шарнира является то, что за счет
переменного передаточного отношения этого механизма
тела качения работают в режиме качательного
238
движения с малой амплитудой, в результате
чего возникают специфические условия смазки
нагруженного контакта тел и дорожек качения,
поэтому расчет долговечности производят с
учетом этих условий.
Для расчета подшипников карданных
шарниров с учетом динамических факторов
рекомендуются формулы [8], приведенные ниже.
Номинальный крутящий момент МнотЛдаН х
X см), передаваемый шарниром при частоте
вращения вала /г = 33,3 об/мин, долговечности
подшипников Ln = 5000 ч, угле между осями
карданных валов а12 = 3°, определяется
соотношением УИНом = 2,6 cR, где с —
динамическая грузоподъемность подшипника, даН,
определяемая в зависимости от его типа и размера
(ГОСТ 4657—71); R — расстояние от оси
шарнира до среднего сечения подшипника, мм
(рис. 90).
Максимальный крутящий момент Мтах (даН х
X см), передаваемый шарниром при фактических
условиях работы, определяется по формуле
М = = (2Ь7)
= ,
/d/h/na
где fd — динамический коэффициент (при
умеренных толчках и ударах fd = 1; при сильных
толчках и ударах fd = 1,38); fh — коэффициент
долговечности, определяемый из табл. 6 по
заданной долговечности подшипника L&, ч; fna—•
коэффициент, учитывающий величину па (табл.
7). При а12<3° следует принимать а]2 = 3°.
Если карданный шарнир в разные отрезки
времени его работы передает крутящие
моменты Ми М2,..., Мп при соответствующей
частоте вращения пг, я2,..., пп и углах между
осями карданных валов ab a2,..., а„, причем
239
Таблица 6
Значение коэффициента fh в зависимости от
долговечности Lft (для роликоподшипников)
Долговечность
н-ч
100
200
300
400
500
750
1000
0.617
0,76
0,854
0,935
1,000
1.130
1,230
Долговечность
Lh> ч
1500
2000
2500
3000
4000
5000
7500
1,39
1,515
1.650
1,710
1,865
2,00
2,25
Долговечность
10 000
15 000
20 000
30 000
40 000
50 000
100000
fh
2,46
2,77
3,02
3,42
л 3,72
3,98
4,90
Таблица 7
Значения коэффициента fna в зависимости
от произведения па
П(Х
10
50
100
200
400
600
800
1000
fna
0,501
0,812
1,00
1,231
1,52
1J1
1,87
2,00
па
1500
2000
2500
3000
4000
5000
7500
10000
fna
2,26
2,46
2,63
2,73
3,03
3,24
3,66
3,99
Па
15 000
20 000
24 000
28 000
30 000
32 000
35 000
fna
4,50
4,91
5,19
5,43
5,54
5,65
5,82
продолжительность работы в каждом режиме
относительно общего срока работы шарнира
в процентах составляет Nu N2. ... , Nn, то
эквивалентная долговечность подшипника Lh. экв
определяется соотношением
г юо /9дЯч
Lh. экв = -Т7 г? л7~ » (Zb°)
240
где Ьъ L2, ... , Ln — расчетные долговечности
подшипников при каждом режиме работы,
^определяют по табл. 6 в зависимости от
значения /ft/, которое, в свою очередь,
определяют по формуле
^-ттаг*'-1'2'•••»«>•- (269)
Подшипники для опор коротких карданных
валов и конструкции опор выбирают из тех же
соображений, что и для валов другого
назначения, однако расчет подшипников качения
должен производиться с учетом их работы в режиме
качательного движения с малой амплитудой
по методике, изложенной выше. Необходимо
также отметить, что типы подшипников следует
выбирать, учитывая условия статически
определимого механизма, как это указано выше
(стр. 15).
Промежуточные опоры карданных передач
устанавливаются по разным причинам,
например, когда вал слишком длинный и его
критическая частота вращения меньше максимальной
частоты вращения вала, а увеличение диаметра
недопустимо или нежелательно.
Промежуточные опоры используют часто, так как агрегаты
силовой передачи машины не могут быть
соединены одним валом.
Особенность работы карданных передач
определяет необходимость применения
самоустанавливающихся подшипников. В современных
машинах подшипники качения промежуточных
опор монтируют в резиновых обоймах, которые
обеспечивают самоустановку подшипника за
счет упругих свойств резины.
На рис. 92 показана промежуточная опора
карданного вала с одним шарикоподшипником.
Внутренняя обойма подшипника 1 установлена
241
Рис 92. Промежуточная опора карданного вала.
Рис. 93. Промежуточная опора карданного вала о
двумя подшипниками.
на карданном валу 2, а внешняя — в
резиновой втулке 3, которая помещена в кронштейне
4. Резиновая втулка имеет предварительный
натяг для увеличения ее жесткости. Опора
закрыта от попадания пыли и грязи
лабиринтным уплотнением. Промежуточные опоры
карданных передач трехосных автомобилей (рис.
93) по условиям компоновки выполняют с двумя
подшипниками и
промежуточным валом,
которые установлены
в специальном
картере, или используют
картер ведущего
моста другого агрегата.
Двухопорные
промежуточные опоры
воспринимают осевые
нагрузки, поэтому в них
обычно
устанавливают роликовые
конические подшипники.
Следует особо обращать внимание на
уплотнения промежуточных опор, потому что они
чаще всего устанавливаются в открытых и
труднодоступных местах (под кузовом'автомобиля,
трактора и др.).
Подшипники промежуточных опор или
подбираются конструктивно, или рассчитываются
по методике, приведенной выше.
Конструкция уплотняющих устройств.
Уплотняющее устройство карданного шарнира
должно препятствовать вытеканию или
выдавливанию смазки и попаданию внутрь воды и пыли.
В карданах с крестовиной наиболее простым
является уплотняющее устройство,
представляющее собой кольцо / из прессованной пробки
(рис. 94), помещенное в обойму 2. Торец втулки
243
Рис. 94. Уплотнение из
прессованной пробки.
3 упирается в пробковое кольцо, чем и
достигается герметичность. Такое же уплотняющее
устройство применяют для крестовин на
игольчатых подшипниках (например, в
отечественных автомобилях).
В последнее время применяют
уплотняющие устройства с резиновыми манжетами
вместо пробковых колец.
Конструкция такого
уплотняющего устройства с двух-
воротниковой резиновой
манжетой приведена на
рис. 95, а. Тарелка 4 с
зазором надета на цапфу
крестовины U Манжета 3,
установленная в обойму 5, рас-
Рио. 95. Уплотняющие устройства с резиновыми
манжетами.
положена под тарелкой. Для удержания обоймы
в определенном положении края ее заваль-
цованы в проточку чашки подшипников.
Пылезащитный металлический колпак 2 напрессован
на нижний бортик цапфы большого диаметра.
Верхний воротник манжеты 3 препятствует
вытеканию смазки, а нижний защищает
поверхности трения от попадания пыли и влаги
извне.
Для выпуска воздуха в процессе смазки
предусмотрены специальные радиальные каналы,
244
по которым воздух попадает в кольцевое
пространство между воротниками, отжимает
нижний край воротника и через пылезащитный
колпак выходит наружу. Через эти же каналы
удаляется лишняя смазка, причем как воздух,
так и смазка выжимаются наружу после
полного заполнения смазкой свободного
пространства подшипника.
Манжеты изготовляют из синтетической
резины, противостоящей действию низких
(—35° С) и высоких (+85° С) температур и
обладающей маслостойкостью. В
запатентованных конструкциях резиновых манжет
предусматриваются масляные карманы различной
формы (рис. 95, б). Карман заполняется маслом,
которое защищает игольчатый подшипник от
коррозии.
Вследствие капиллярности между
воротником манжеты и стаканом в месте, где манжета
с ним соприкасается, образуется масляная
пленка, препятствующая проникновению извне пыли
и воды.
Манжету надевают с предварительным
натягом. Карданы с таким уплотнительным
устройством хорошо работают в тяжелых
эксплуатационных условиях.
Резиновые армированные манжеты
изготовляют в соответствии с ГОСТ 8752—70 с
различными габаритными размерами.
Шлицевые соединения на промежуточных
карданных валах смазывают при сборке или
через специальную масленку во время
эксплуатации. Чтобы смазка не вытекала,
предусмотрены уплотнения, состоящие из войлочного
сальника и резинового кольца. Кроме того,
в большинстве конструкций применяют
гофрированные или металлические чехлы 3 (см. рис.
87). Как показывает опыт эксплуатации, при
245
использовании таких чехлов значительно
повышается надежность работы шлицевого
соединения.
ТРЕБОВАНИЯ
К ТОЧНОСТИ ИЗГОТОВЛЕНИЯ
ДЕТАЛЕЙ КАРДАННЫХ ПЕРЕДАЧ
Неточности изготовления элементов деталей
карданных передач, как показано выше (см.
стр. 162), оказывают существенное влияние на
относительные перемещения звеньев
механизмов. Погрешности изготовления становятся
недопустимыми, если они приводят к образованию
статически неопределимых механизмов, в
которых возникают дополнительные нагрузки,
снижающие прочность их звеньев, надежность
и долговечность машин. Этими соображениями
и руководствуются при назначении норм
точности на изготовление элементов деталей
карданных передач.
Цапфы крестовины и отверстия карданных
вилок изготовляют с одной установки на станке,
в результате чего обеспечивается точное
совпадение их осей. Поэтому соединение вилки с
крестовиной рассматривается как одна
вращательная или цилиндрическая пара. Несовпадение
осей крестовины или осей отверстий вилки
не допускается в карданных шарнирах любого
типа.
В карданных вилках всех типов шарниров
(ГОСТ 2752—74) оси отверстий под подшипники
и ступицы должны пересекаться, отклонение
не должно превышать 0,2 мм;
неперпендикулярность этих осей не должна быть более 0,2 на
длине 100 мм; разность размеров от торцов
отверстий под подшипники и центром вала
ступицы не должна превышать 0,2 мм.
246
Основные размеры крестовины показаны на
рис. 91, а. Разность размеров Я/2 не должна быть
более 0,15 мм, неперпендикулярность осей более
0,1 мм на 100 мм. Оси цапф должны лежать в
одной плоскости, отклонение не должно
превышать 0,15 мм, а отклонение от соосности
наружного диаметра цапф — 0,05 мм.
БАЛАНСИРОВКА КАРДАННЫХ ПЕРЕДАЧ
Дисбаланс оказывает вредное влияние на
детали карданной передачи, вызывает
повышенный уровень вибраций, ускоренный износ и
дополнительные нагрузки на сопряженные с
карданной передачей детали трансмиссии.
Имеются две основные причины
возникновения дисбаланса. Первая — неточность
изготовления отдельных деталей, вторая — зазоры
в кинематических парах механизмов и
несоосность деталей из-за неточности монтажа.
Дисбаланс, вызванный наличием рабочих
зазоров в кинематических парах механизмов,
не может быть устранен путем балансировки.
Единственным способом уменьшения этого
дисбаланса является повышение точности изготов-.
ления деталей передачи, сведение рабочих
зазоров в соединениях до допустимого минимума,
применение селективной сборки. Такой метод
уменьшения дисбаланса существенно
сказывается на стоимости изготовления карданных
передач и применяется только для
быстроходных передач. В последнее время карданные
передачи подвергают динамической
балансировке на специальных стендах. Дисбаланс
устраняют путем приваривания к деталям
промежуточного вала балансировочных пластин,
а в некоторых случаях — путем снятия металла
247
со специальных бобышек на вилках и фланцах
карданного шарнира.
На точность балансировки карданных
передач основное влияние оказывает скорость их
вращения. Чем выше скорость, тем точнее
должна быть балансировка. Она производится обычно
в сборе с карданами. Точность балансировки
карданных передач зависит от зазоров,
которые имеются в сочленениях крестовины и вилок,
а также в шлицевом соединении.
Для оценки точности балансировки
карданных передач ниже приведены данные,
относящиеся к карданам с крестовиной на игольчатых
подшипниках при общепринятых нормах
точности изготовления шлицевых соединений и
зазоров в сочленениях крестовин с вилками:
Особенности динамической
машина балансировки карданного вала
Газ-66 .... Выполняется в сборе с
шарнирами. Дисбаланс
устраняют пугем приварки
пластин к концам трубы.
Допускается дисбаланс
0,5 Н см
Урал-375 . . . Допустимый дисбаланс
1,5 Н см при повторной
установке и проверке
карданного вала
Автомобили гру- Дисбаланс 0,15...0,25 Нем
зоподъемно стью
до 5 т ....
Автомобили гру- Дисбаланс 1 Нем. Вели-
зоподъемностью чина биения вала в сборе
5 т и выше не более 0,5...0,8 мм
Тепловоз ТГМ- Осуществляют при помощи
10 разъемных грузов.
Допустимый дисбаланс 0,75 Нем
248
СМАЗКА КАРДАННЫХ МЕХАНИЗМОВ
Поверхности карданного механизма,
участвующие в скольжении или качении, необходимо
смазывать и предохранять от утечки масла,
а также попадания пыли и абразивных частиц.
В карданах с крестовиной смазывать следует
Рис. 96. Расположение каналов для смазки
подшипников.
торцовые и наружные поверхности цапф,
опирающиеся на втулки или игольчатые
подшипники. Смазка подается к этим местам по осевым
и радиальным каналам, просверленным в
крестовине 1 (рис. 96). Заливают ее через пресс-
масленку 2, установленную в крестовине
(в наиболее доступном месте). Затем она
подается в полость 3, закрытую заглушкой 4, Чтобы
избежать выдавливания смазки воздухом или
парами масла, устанавливают специальный
клапан-сапун.
Для карданов с игольчатыми подшипниками
смазка необходима с целью предупреждения
быстрого износа подшипников и цапф крестовины.
Полость скользящих шлицевых соединений
валов герметически закрыта. Шлицевое
соединение смазывают или только при сборке, или
249
через специальную масленку (см. рис. 35) во
время эксплуатации.
Для подшипников карданов как летом, так
и зимой рекомендуется применять жидкую
смазку типа нигрол (применение солидола или
консистентных смазок запрещается) или не очень
вязкое трансмиссионное автотракторное масло
(ГОСТ 542—50), так как вязкое масло может
закупорить узкие и длинные каналы. Для
карданов лебедки автомобиля ГАЗ-66 летом
применяется масло ТАп-15, зимой—ТАп-10
(ГОСТ 8412—57). Карданы ведущих колес этого
автомобиля смазывают смазкой № 158 (МРТУ
12Н №139—64), заменитель—ЦИАТИМ-201
(ГОСТ 6267—74). Смазка осуществляется не
реже одного раза в два года. Применяемое для
смазки масло должно быть нейтральным и не
вызывать коррозии.
\ Фирма GWB (ФРГ) рекомендует производить
смазку карданов через 500 часов работы или
через 10 000 км пробега автомобиля. При
работе карданов в тяжелых условиях, особенно
когда возможно попадание в них воды и
абразива, смазку рекомендуется производить чаще.
Шлицевые соединения карданных валов
смазывают густой смазкой, которой эти соединения
заполняют обычно при сборке. После
определенного времени эксплуатации карданной передачи
старую смазку заменяют новой. Так, в
автомобиле ГАЗ-66 смазку заменяют через 25 000 км
пробега. Для шлицевых соединений карданов
автомобилей применяют смазку 1-ЛЗ (ГОСТ
12811—67) или жировую 1-13 (ГОСТ 1631—61),
либо ЯНЗ-2 (ГОСТ 9432—60).
Шлицы кардана тепловоза ТГМ-10 смазывают
маслом УС-2 (ГОСТ 1033—73). При замене
смазки вынимают шлицевую вилку, удаляют старую
смазку и закладывают новую.
250
СПИСОК ЛИТЕРАТУРЫ
1. Ликер Д., Денавит Д, Хартенберг Р.
Итерационный метод анализа пространственных
механизмов.— «Труды американского общества
инженеров-механиков», 1964. Сер. Прикладная механика,
№ 2, с. 169—182.
2. Аналитическое исследование резонансных
режимов в системах с карданными передачами.— «Изв.
вузов», 1975. Сер. Машиностроение, № 5, с. 48—52.
Авт.: М. С. Эйдинов, В. А. Нырко, Р. М. Эйдинов,
С. Н. Махаев.
3. Антонов А. С. Силовые передачи колесных и
гусеничных машин. Л., «Машиностроение», 1975.
480 с. с ил.
4. Армейские автомобили. Ч.1.М., Воениздат МО СССР,
1970. 543с. с ил. Авт.: А. С. Антонов, В. К- Голяк,
М. М. Запрягаев, Л. К- Крылов, Е. И. Магидович,
И. С. Новохатько.
5. Артемьев М. И. Методика упрощения сложных
крутильных схем для тракторных трансмиссий.—
«Научные труды ИПИ», 1969, № 74, с. 12—16.
6. Артоболевский Н. И. Теория пространственных
механизмов. М., Гостехиздат, 1937. 235с. с. ил.
7. Архангельский В. М. Автомобильные двигатели. М.,
«Машиностроение», 1967. 399 с. с ил.
8. Бейзельман Р. Д., Цыпкин Б. В. Подшипники
качения. М., «Машиностроение», 1975. 574 с. с ил.
9. Биргер И. А.} Пановко Я. Г. Прочность.
Устойчивость. Колебания. Справочник. Т. 3. М.,
«Машиностроение», 1968. 547 с. с ил.
10. Блох 3. Ш. Крутильные колебания валов
карданной передачи.— «Сельскохозяйственная машина»,
1936, № 10, с. 6—11.
И. Блох 3. Ш. Общий метод кинематического
исследования карданных передач.—
«Сельскохозяйственная машина», 1936, № 6, с. 8—12.
251
12. Блох 3. Ш. Теория и расчет карданных передач.
М., ГОНТИ, 1938. 218 с. с ил.
13. Боголюбов Н. Н.у Митропольский Ю. А.
Асимптотические методы теории нелинейных колебаний.
М., Физматгиз, 1958. 410 с. с ил.
14. Болотин В. В. Динамическая устойчивость
упругих систем. М., Гостехиздат, 1956. 600 с. с ил.
15. Бондаренко Г. В. Уравнение Хилла и его
приложение в области технических колебаний. М., Изд-во
АН СССР, 1936. 50 с. с ил.
16. Бруевич Н. Г. Точность механизмов. М.,
Гостехиздат, 1946. 332 с. с ил.
17. Бухарин Н. А., Прозоров В. С, Щукин М. М.
Автомобили. «Д., «Машиностроение», 1973. 500 с. с ил.
18. Быстрое Г. М. К вопросу дальнейшего
улучшения работы карданного привода автомобиля.— «Изв.
вузов», 1959. Сер. Машиностроение, № 3, с. 85—89.
19. Верховский А. В. Кинематическое и динамическое
исследование шарнира Гука.— «Теория,
конструкция и производство сельхозмашин». [Сборник
статей]. Т. 1. М., Сельхозгиз, 1935. 690 с. с ил.
20. Гафановичи А. А. Карданные передачи
сельхозмашин.— «Тракторы и сельхозмашины», 1960, № 11,
с 21—24.
21. Гафановичи А. А. Новые карданные передачи.—
«Техника в сельском хозяйстве», 1958, № 9, с. 9—13.
22. Гольд Б. В. Конструирование и расчет автомобиля.
М., Машгиз, 1962. 463с. с ил.
23. Грудинин Г. В. Автомобильные электроустановки
и некоторые вопросы динамики приводов.—
«Механика и процессы управления», 1975, вып. 2, с.
162—172.
24. Двайт Г. Б. Таблицы интегралов и другие
математические формулы М., «Наука», 1973. 228 с.
25. Диментберг Ф. М. Изгибные колебания валов.
М., Изд-во АН СССР, 1959. 247 с. с ил.
26. Диментберг Ф. М. Метод винтов в прикладной
механике. М., «Машиностроение», 1971.264 с. с ил.
27. Добровольский В. В. Теория сферических
механизмов. М., Машгиз, 1947. 231 с. с ил.
28. Жеваго К. А., Портной Г. 3., Школьников Б. М.
Приводы буровых установок. М., «Недра», 1964.
367 с. с ил.
29. Злотник М. Н., Кавьяров Я. С. Трансмиссии
современных промышленных тракторов. М.,
«Машиностроение», 1971. 290 с. с ил.
30. Истомин П. А. Крутильные колебания в судовых
Д. В. С. Л., «Судостроение», 1968. 303 с. с ил.
252
31. Кислицин Л С. О некоторых применениях
матричного исчисления в теории механизмов.— В кн.:
Труды по основным проблемам ТММ. Анализ
и синтез механизмов. [Сборник]. М., 1960 с 77—
84.
32. Касманян А. А. Определение относительных
перемещений звеньев одинарного шарнира с большими
линейными отклонениями.— «Изв. вузов», 1966.
Сер. Машиностроение, № 10, с. 11-—16.
33. К вопросу о динамике тяжелонагруженных
карданных передач. — «Труды УГЛИ», 1966, № 146,
g 5—11. Авт.: М. С. Эйдинов, Б. Р. Гальчун,
А. П. Перекрестов, С. К. Шестаков.
34. Кобринский А. Е. Механизмы с упругими связями.
М., «Наука», 1964. 392 с. с ил.
35. Кожевников С. Н. Динамика машин с упругими
звеньями. Киев, Изд-во АН УССР, 1961. 159 с.
с ил.
36. Кожевников С. Н. Оптимальный структурный
синтез механизмов.— «Машиностроение», 1977, № 6,
с. 15—20.
37. Кожевников С. Н. Теория механизмов и машин. М.,
«Машиностроение», 1974. 580 с. с ил.
38. Кожевников С. Н. , Перфильев П. Д. Исследование
крутильных колебаний в приводе с
поликарданной передачей. — «Теория механизмов и машин»,
1974, вып. 16, с. 32—39.
39. Кожевников С. Н., Перфильев П. Д. Применение
тригонометрических рядов к анализу карданных
механизмов.— «Теория механизмов и машин»,
1973, вып. 15, с. 71—78.
40. Кожевников С. Н., Перфильев П. Д. Уравнения
динамики привода с упругой поликарданной
передачей.— «Теория механизмов и машин», 1974, вып.
16, с. 26—32.
41. Кожевников С. Н., Есипенко Я. И., Раскин Я. М.
Механизмы. М., «Машиностроение», 1976. 784 с*
с ил.
42. Колчин Н. И., Мовнин М. С. Теория механизмов
и машин. Л., Судпромгиз, 1962. 616 с. с ил.
43. Колядин Г. И. Вынужденные колебания в системе
с периодически меняющимся моментом инерции.—
«Изв. вузов», 1962. Сер. Машиностроение, № 6,
с. 78-83.
44. Кононенко В. О. Колебательные системы с
ограниченным возбуждением. М., «Наука», 1964. 254 с. с ил.
45. Конструкция, расчет и проектирование
тепловозов. М., «Машиностроение», 1969. 386 с. с ил. Авт:
253
Н. Г. Алнович, В. Н. Евенко, В. В. Иванов,
А. А. Камаев.
46 Котлевский В. Ю., Полу хин Е. Д. К вопросу
устойчивости движения вращающихся звеньев о
переменным моментом инерции.— «Изв. вузов»,
1970. Сер. Машиностроение, № 6, с. 29—33.
47. Лебедев Я. А. Кинематика пространственных
механизмов. М.— Л., «Машиностроение», 1966.
280 с. с ил.
48. Литвин Ф. Л. Проектирование механизмов и
деталей приборов Л., «Машиностроение», 1973.690 с.
с ил.
49. Лойцянский Л. Г., Лурье А. И. Курс
теоретической механики. Т. I. M., Гостехиздат, 1955. 380 с.
с ил.
50. Лысое М. И. Карданные механизмы. М., ОНТИ,
1945. 157 с. с ил.
51. Мак-Лахлан И. В. Теория и приложения функций
Матье. М., ИЛ, 1953. 476 с. с ил.
52. Малаховский Я. Е. , Лапин А. А., Веденев Н. /(.
Карданные передачи. М., Машгиз, 1952. 155 с. с ил.
53. Малышев А. П. Кинематика механизмов. М.,
ГИЛП, 1933 467 с. с ил.
54. Манжерон Д., Дрэган Н. Кинематическое
исследование новым тензорно-матричным методом четы-
рехзвенных пространственных механизмов.—
«Revue de Mecanique appliquee», РАН, 1962,
т. VII, № 3 с. 539—552.
55. Маслов Г. С. Расчеты колебаний валов. М.,
«Машиностроение», 1968. 267 с. с ил.
56. Мельников Г. И. Динамика нелинейных
механических и электромеханических систем. М.,
«Машиностроение», 1975, 200 с. с ил.
57. Милонов Ю. Н. Этюды по истории кинематики
механизмов. М., ОНТИ НКТПСССР. 1936, с. 132-135.
58. Моровое Б. Я., Пчелин И. /(., Хачатурое А. А.
Задача о крутильных колебаниях трансмиссии,
содержащей карданные передачи неравных
скоростей.— «Труды НАМИ», 1965, вып. 74, с. 19—31.
59. Никулина R. А. Параметрическое возбуждение
колебаний карданного вала.— «Изв. вузов», 1971.
Сер. Машиностроение, № 9, с. 118—124.
60. Оболенский Е. П. Критические скорости
карданных валов.— «Научные труды' ВЗМИ», 1968, вып. 6,
с. 155-161.
61. Пановко Я. Г. Устойчивость и колебания упругих
систем. М., «Наука», 1967. 336 с. с ил.
254
62. Писарев А. М. Динамика одинарной карданной
передачи с упругими звеньями и двигателем.-—
«Цоклады Болгарской АН», 1969, т. 22., № 3,
с. 241—244.
63. Перфильев П. Д. Крутильные колебания в приводе
с карданной передачей.— «Труды ИПИ», 1972,
вып. 75, с. 265—273.
64. Перфильев П. Д. Некоторые вопросы кинематики
поликарданных передач.— «Труды ИПИ», 1972, вып.
75, с. 333—340.
65 Перфильев П. Д. , Грудинин Г. В. Кинематический
анализ карданной передачи электроустановки,
работающей от двигателя автомобиля ГАЗ-66.—
«Механика и процессы управления», 1975, вып. 2,с. 212—
219.
66. Полу хин П. И., Потапов И. //., Финагин П. М.
Установка трубопрокатных станов>
обеспечивающая равномерное вращение прокатных валков.—
«Вестник машиностроения», 1963, № 9, с. 18—23.
67.- Поляков В. С, Барбаш И. Д., Ряховский О. А.
Справочник по муфтам. Л., «Машиностроение», 1974.
350 с. с ил.
68. Попык Н. Г. Динамика автомобильных и
тракторных двигателей М., «Высшая школа», 1970. 327 с. с ил.
69. Потапенко А. А. Элементы теории устойчивости
и ее применение к уравнению Матье. Л.,
Северозападный ЗПИ, 1962. 51 с. с ил.
70. Применение асимптотических методов к
исследованию крутильных колебаний систем с карданными
передачами.— «Изв вузов», 1975. Сер.
Машиностроение, № 4, с. 22—26. Авт.: М. С. Эйдинов,
В. А. Нырков, Р. М. Эйдинов, С. Н. Махаев.
71. Просвирин А. Д. Автомобиль ГАЗ-66. М.,
«Машиностроение», 1974. 430с. с ил.
72. Родионов В. Ф. Проектирование карданной
передачи и тенденция к снижению высоты легковых
автомобилей.— «Автомобильная промышленность»,
1961, № 1, с, 21—24.
73. Раевский И. П. Методы экспериментального
исследования механических параметров машин. М.,
Изд-во АН СССР, 1952. 235с. с ил.
74. Решетов Л. Н. Конструирование рациональных
механизмов. М., «Машиностроение», 1972. 256 с.
с ил.
75. Решетов Л. И. Теория карданного шарнира без
применения сферической тригонометрии.—
«Вестник машиностроения», 1951, № 10, с. 19—20.
255
76. Ривин Е. И. Динамика приводов станков. М.,
«Машиностроение», 1966. 204 с. с ил.
77. Ривин Е. И. Метод уменьшения степеней свободы
в расчетных схемах цепных и разветвленных
систем.— «Вестник машиностроения», 1966, № 5,
с. 39—41.
78. Рифтин Л. /7. Матричный метод в задачах
анализа и синтеза механизмов.— «Изв. вузов», 1958.
Сер. Приборостроение, № 5, с. 124—133.
79. Селиванов Н. Н. Автомобили и транспортные
гусеничные машины высокой проходимости. М.,
«Наука», 1967. 272 с. с ил.
80. Семенов В. С, Армадеров Р. И. Динамические
нагрузки в трансмиссии автомобиля.—
«Автомобильная промышленность», 1959, № 1, с. 15—19.
81. Серебренников М. Г. Гармонический анализ. М.,
Гостехиздат, 1948. 383 с. с ил.
82. Симаков Ф. Ф. Исследование колебаний
крутильной системы автомобиля.— «Изв. вузов», 1963,
Сер. Машиностроение, № 3, с. 59—63. ^
83. Слюдиков М. Н. Проектирование деталей, узлов
и механизмов летательных аппаратов. М.,
«Машиностроение», 1967. с. 288—291.
84. Сомов П. О. О степенях свободы кинематической
цепи.— «Журнал русского физико-химического
общества при Императорском С.-Петербургском
университете», т. XIX, отдел I, 1883, с. 443—475.
85. Степанов В. В. О решениях линейного уравнения
с периодическими коэффициентами при наличии
периодической возмущающей силы.—
«Прикладная математика и механика», 1950, т. XIV, № 3,
с. 23—27.
86. Стефанович Ю. Г. К определению динамических
нагрузок в трансмиссии автомобиля.— «Труды
НАМИ», 1962, № 45 с. 54—59.
87. Стокер Д. Нелинейные колебания в механических
и электрических системах. М., ИЛ, 1952. 256 с.
с ил.
88. Таблицы для вычисления функций Матье. М.,
Вычислительный центр АН СССР, вып. 42, 1967.
160 с.
89 Тартаковский И. Н. Некоторые вопросы
кинематики пространственного двойного универсального
шарнира.— «Вестник машиностроения», 1965,
№ 5, с. 25—28.
90. Тарханов /С. С. Исследование кинематики общего
случая механизма универсального шарнира.—
«Труды МВТУ», 1955, вып. 65, с. 59—64.
256
91. Тимошенко С. П. Колебания в инженерном деле.
М., Физматгиз, 1959. 439 с. с ил.
92. Уиттикер Э. 7\, Ватсон Д. Н. Курс современного
анализа. Т. II. М., Физматгиз, 1963. 515 с. с ил.
93. Успенский И. Н., Савинов Б. В. Крутильные
колебания в трансмиссии грузовых автомобилей Горь-
ковского автозавода.— «Автомобильная
промышленность», 1970, № 9, с. 19—22.
94. Утехин И. Ф. О крутильных колебаниях валов
карданных передач.— «Труды ЛПИ», 1970, № 314,
с. 28—33.
95. Фахриев М. А. Кинематика универсального
шарнира со сферическими парами.— «Изв. вузов»,
1966. Сер. Машиностроение, № 1, с. 16—21.
96. Хаяси Т. Нелинейные колебания физических
систем. М., «Мир», 1968. 204 с. с ил.
97. Чжан-Цы-сянь. Кинематический анализ
механизмов с низкими парами методом матриц.— «Изв.
вузов», 1961. Сер. Машиностроение, № 1, с. 14—30.
98. Чудаков Е. А. Расчет автомобиля. М., Машгиз,
1947. 432 с. с ил.
99. Шрейтер И. Статика, кинематика и динамика
шарнира Гука.— Всесоюз. совещание по основным
проблемам ТММ. Тезисы докл. М., 1960. 211 с. с ил.
100. Эйдинов М. С, Нырко В. А. Динамический
синтез систем с карданными передачами.—«Изв
вузов», 1975. Сер. Машиностроение, № 7, с. 62—66.
101. Austria 7\, Denavit J.t Hartenberg R. Analysis of
errors in the double Hooke's joints.— «Trans.
ASME», B—87, 1965, no. 2, p. 251—257.
102. Duditza F. Kardangelenkgetriebe und ihre Anwen-
dungen. Dusseldorf, VDI — Verlag GmbH, 1973.
169 S.
103. Duditza F. Transmissii cardanice. Bucuresti, edit
tehnika, 1966. 301 S.
104. Fransis A. S. Survey of universal joints.—
«Engineering Materials and Design», 1962, 5, no. 11,
p. 47—51.
105. Jullen M. A. Evolution des joins et lisons de
transmission.—«Ingenieurs de l'automobile», 1964,
no. 10, p. 98-102.
106. Писарев А. М. Динамика на машины с карданни
предавки. Дъержавно издателство «Техника»,
София, 1974. 370 с.
107. Podgieter F. M. Univesral joints.— «Machine
Design», 34, 1962, no. 29, p. 65—68.
257
108. Porter. В.,ДЪе efficiencies of, transmission
incorporating' Hooke's joints.— «The Engineer», 213, 1962,
no. 5553, p. 1126—1128.
109. Porter В., Gregory R. Non—linear torsionai
oscillation of system incorporating a Hooke's joints.—
«Journal of mechanical engineering science», 5,
1963, no. 2, p. 191—200.
110. Universal joints.— «Machine Design», 1965 June
17, p. 165—168.
Ill Wachter A. Diehfestigkeit der Gelenkwellen.—
«Maschinenbautechnib, 13, 1964, no. 5, s. 271—276.
112. Wanzke E. Zur Kinematik des Kreuzgelenkes und
der einfachen Gelenkwellenanordnung.—
«Maschinenbautechnib, 12, 1963, no. 4,5.217—224.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Кардан
— асинхронный — 20
— жсеткий — 20
— мягкий (упругий) — 20
— полный — 20, 26
с непересекающимися осями крестовины — 26—28
с пересекающимися » » — 26—28
— простой — 20
— синхронный — 20
— сухарный —21, 61—64, 81
Тракта — 62—63
— универсальный — 20, 39
— шариковый—21, 64—73
Вейса —21, 65—68, 81
Рзеппа — 68—70, 73, 81
Карданная передача
— балансировка — 247—248
— конструкция — 231—246
вал —231—236
вилка — 236
крестовина — 237
опора —238—243
уплотняющее устройство — 243—246
— коэффициент полезного действия— 150—154
— материал деталей — 229—231
передаточное отношение — 103
— смазка — 249—250
— силы, действующие в передаче— 129—145
— точность изготовления — 246—247
Карданный механизм
— динамика— 190—194
— кинематика — 90—102
кинематическая пара — 7
» цепь — 7—8
закрытая — 7, 8
открытая — 7
кинематический расчет — 90—126
кинематическое соединение — 7
— кинетостатика— 148—150
— поводковый — 21—26
Клеменса — 22—23
Рело — 22—23
— поликарданный — 73—79
259
— сдвоенный — 54—61, 81
Карданный шарнир конструктивного ряда
— легкого — 29, 31
—- сверхтяжелого — 29, 36
— среднего— 29, 31—35
— тяжелого — 29, 35
Контур замкнутый — 8, 12
Коэффициент влияния — 179—181, 189
Метод
— вариации постоянных — 200
— матричный—155, 169
— наслоения групп — 77
— определения параметров
— — аналитический — 121—123
— — графический —120—123
— последовательного присоединения групп — 76
— структурного синтеза механизмов — 12—13
— Уиттикера — 204
— Хилла —204
Механизм
— Кардано — 5, 14
— поводковый — 21—26
Клеменса —- 22—23
Рело — 22—23
— поликарданный — 73—79
— сдвоенный — 54—61, 81
— статически определимый — 10
— сферический— 13—16
— уравнительный — 69, 70
Минус-группа—10, 11
Монада — 10, 11
Нуль-группа —10
Определитель Вронского — 200
Передача поликарданная синхронная — 117
Полукардан
— жесткий — 40—43
— — колокольного типа —40—41
зубчатый — 41—43
— упругий — 43—51
дисковый — 44—47
наборный — 47—49
с торообразным упругим элементом — 49—51
с разрезом — 49—50
цельный — 50
Реакция связи — 7
Рекуррентные соотношения — 102, 108, 212
Связь
лишняя — 9, 10
260
пассивная — 9
Скорость вала критическая — 227—229
Степень
— неравномерности — 117, 124
— свободы — 6—9
лишняя — 9
Структура механизмов — 6 — 19
Структурная схема — 10—19
Уравнение
— движения масс— 190—194
— » привода —190
— Лагранжа—191, 195
— Матье-194, 197
устойчивость решений — 199, 205, 209
— символическое
Условия связи — 7
Фазовый угол — 105
Формула
— Сомова-Малышева — 9, 77
— Мак-Лахлана — 212
Шарнир
— Гука —5, 14, 15
— сферический — 8, 15
— цилиндрический — 8, 15
Элемент упругий композиционный — 43
СОДЕРЖАНИЕ
Стр.
Предисловие ... . . 3
Пространственные механизмы для передачи
вращательного движения и области их применения 5
Общие сведения 5
Структура и принципы построения статически
определимых механизмов 6
Разновидности карданных шарниров 19
Типы поводковых механизмов для передачи
движения между валами с пересекающимися осями 21
Полные карданы 26
Жесткие полукарданы 40
Упругие полукарданы 43
Сдвоенные карданные механизмы 54
Сухарные карданные механизмы 61
Шариковые карданные механизмы 64
Поликарданные механизмы 73
Области применения карданных передач .... 79
Карданные передачи транспортных машин 79
Карданные передачи сельскохозяйственных
машин 85
Карданные передачи приводов прокатных
станов 89
Кинематика карданных передач 90
Кинематика одинарной и сдвоенной карданных
передач 90
Кинематика поликарданных передач 102
Применение тригонометрических рядов для
анализа кинематики карданных механизмов и
влияние параметров системы на степень
неравномерности 105
Система параметров синхронной поликарданной
передачи 117
Определение параметров карданной передачи через
координаты шарниров аналитическим и
графическим методами 120
Выбор рациональных параметров карданной
передачи по степени неравномерности 124
Кинематика карданных передач с переменным
углом между осями ее валов . . . . . . .126
Силы, действующие в карданной передаче . . 129
Определение реакций в элементах простого
карданного механизма 129
Определение реакций в элементах сдвоенной
карданной передачи . ♦ 139
262
Силы, действующие на промежуточные валы
карданной передачи при переменных углах между
осями валов (а^ ^ Ф const) ... 145
Кинетостатика поликарданного механизма . 148
КПД карданной передачи 150
Влияние неточностей изготовления и монтажа на
работу карданных передач . 155
Матричный метод исследования кинематики
пространственных механизмов 155
Относительные перемещения звеньев четырех-
звенного пространственного механизма с
низшими парами . . 162
Матричный методанализа влияния погрешностей
механизма на относительные перемещения его звеньев 169
Исследование влияния ошибок вследствие
погрешностей в параметрах щ и s/ на закон движения
звеньев 172
Исследование влияния ошибок вследствие
погрешностей в параметре а; на закон движения
звеньев 181
Динамика механизмов с карданными передачами 190
Уравнение движения привода с одношарнирной
карданной передачей 190
Уравнения движения масс поликарданной передачи
с упругими звеньями 194
Определение нерезонансных режимов работы
карданного привода . . . 198
Влияние трения на колебания в приводе с
поликарданной передачей 205
Инженерные методы расчета динамических
нагрузок в приводе с поликарданной передачей . . . 210
Гашение крутильных колебаний в карданном
приводе ... 222
Критические скорости валов 227
Конструкция элементов, технология изготовления
и эксплуатация карданных передач 229
Материалы деталей карданных передач .... 229
Конструкция элементов карданных передач 231
Требования к точности изготовления деталей
карданных передач 246
Балансировка карданных передач 247
Смазка карданных механизмов 249
Список литературы 251
Предметный указатель 259
Сергей Николаевич Кожевников,
д-р техн. наук
Петр Дмитриевич Перфильев,
канд. техн. наук
Карданные передачи
Редактор В. С. Козаченко
Оформление художника В. И. Романенкова
Художественные редакторы Е. А. Ильницкий,
В. С. Шапошников
Технический редактор С. В. Ивану с
Корректоры Н. Г. Петрик, Л. В. Астистова
ИБ № 331
Сдано в набор 24.VI.1977 г. Подписан^ в печать 1&.XLJ977 {>.
БФ 06312. Формат 75x90VaV Бумага типогр. № 1. Усл. печ. л.
10,31. Уч.-изд. л. 9,88. Тираж 4000 экз. Зак. 8-127.
Цена 1 руб. 70 коп.
Издательство «Техника», 252601, Киев, 1, ГСП.
Пушкинская, 28.
Книжная фабрика «Коммунист» РПО «Полиграфкнига»
Госкомиздата УССР. 310012, Харьков-12. ул. Энгельса, 11.