/





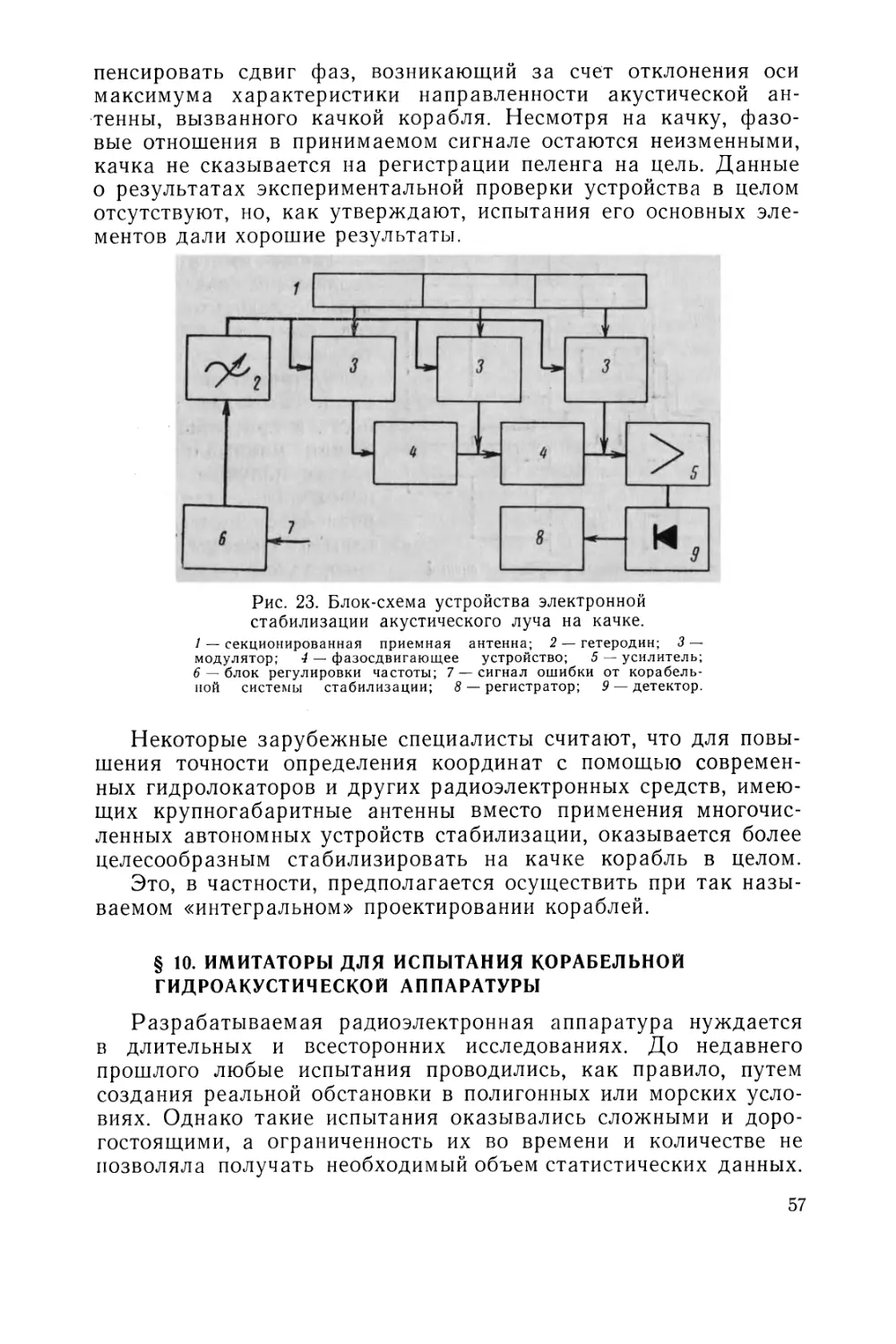



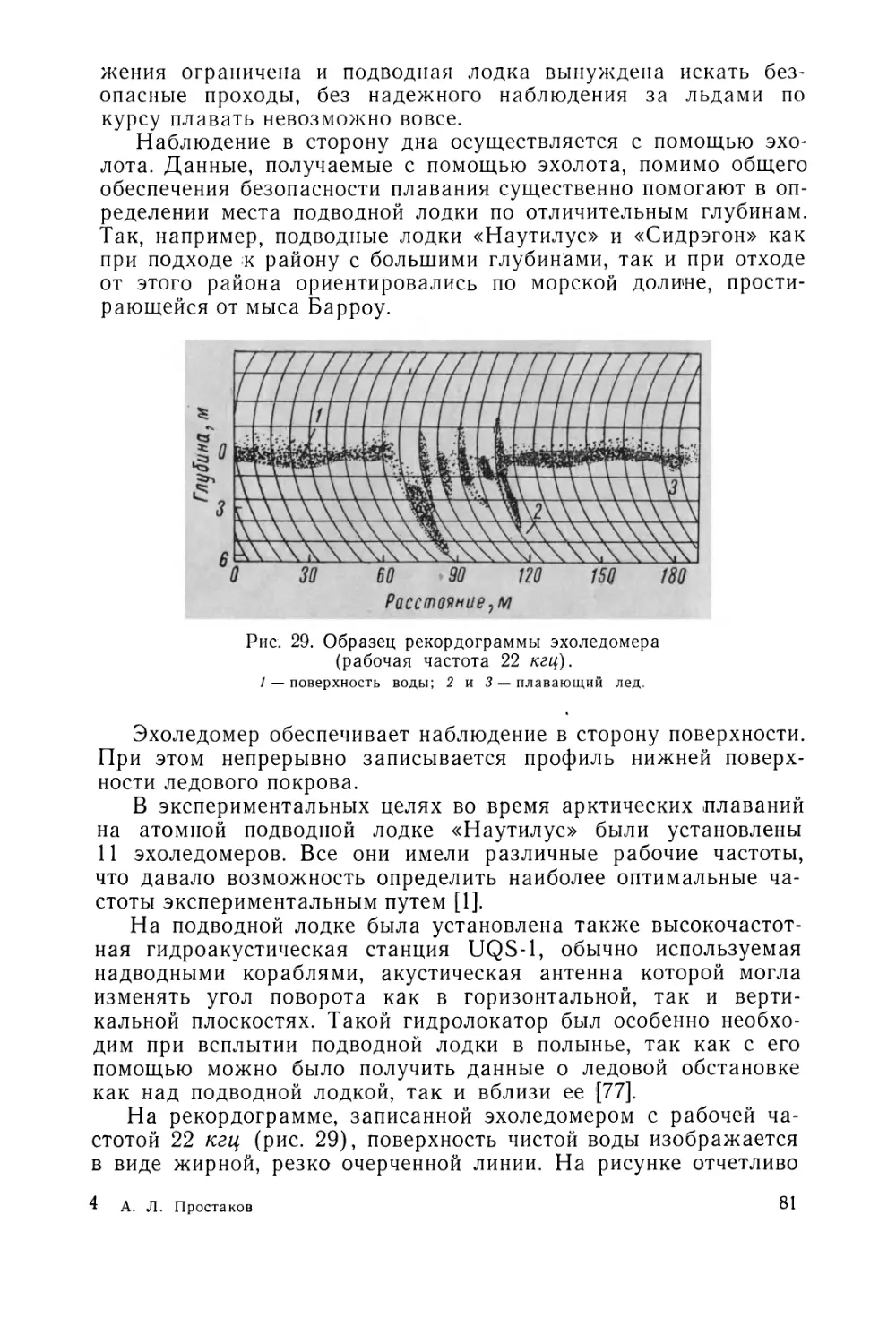
















Текст
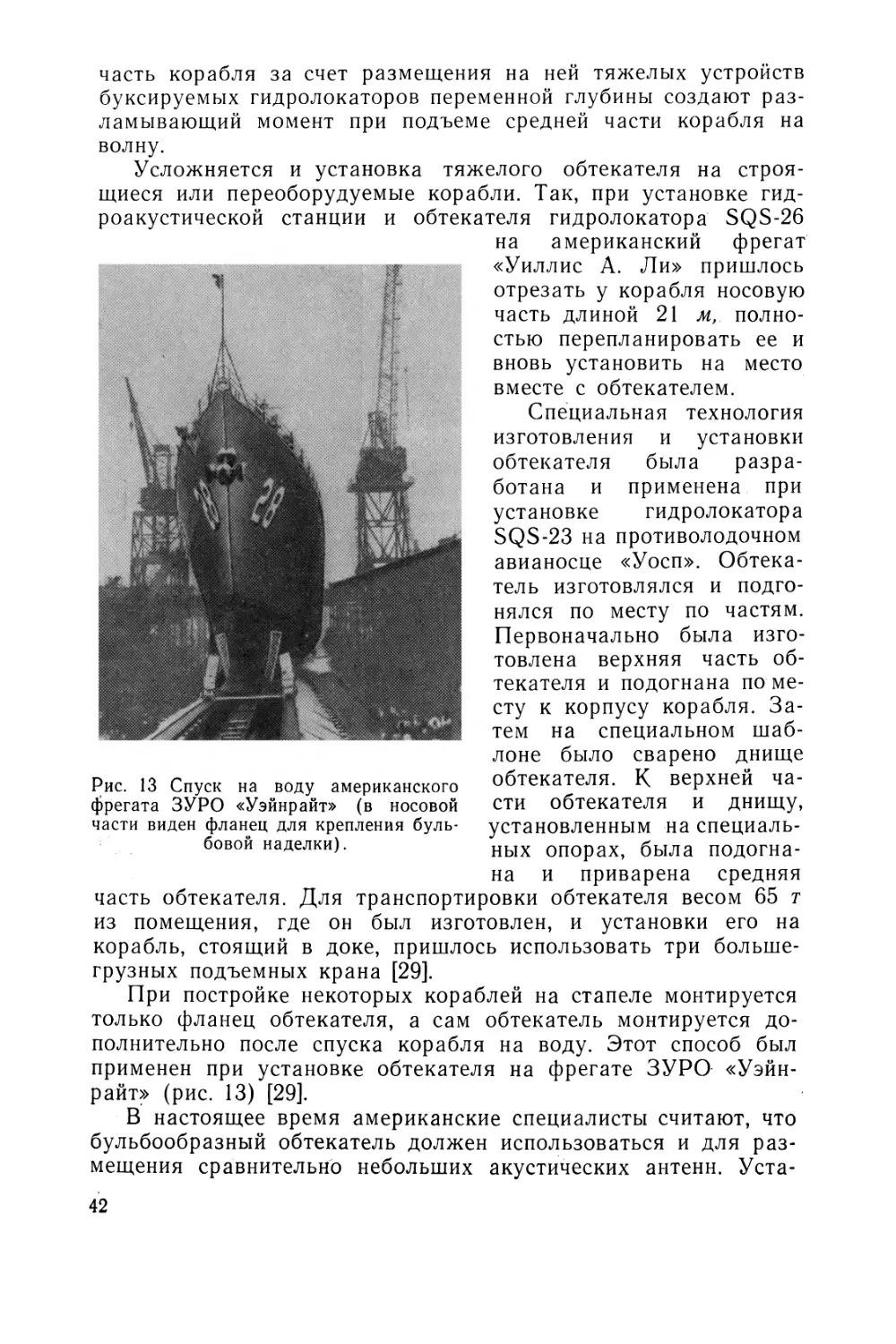
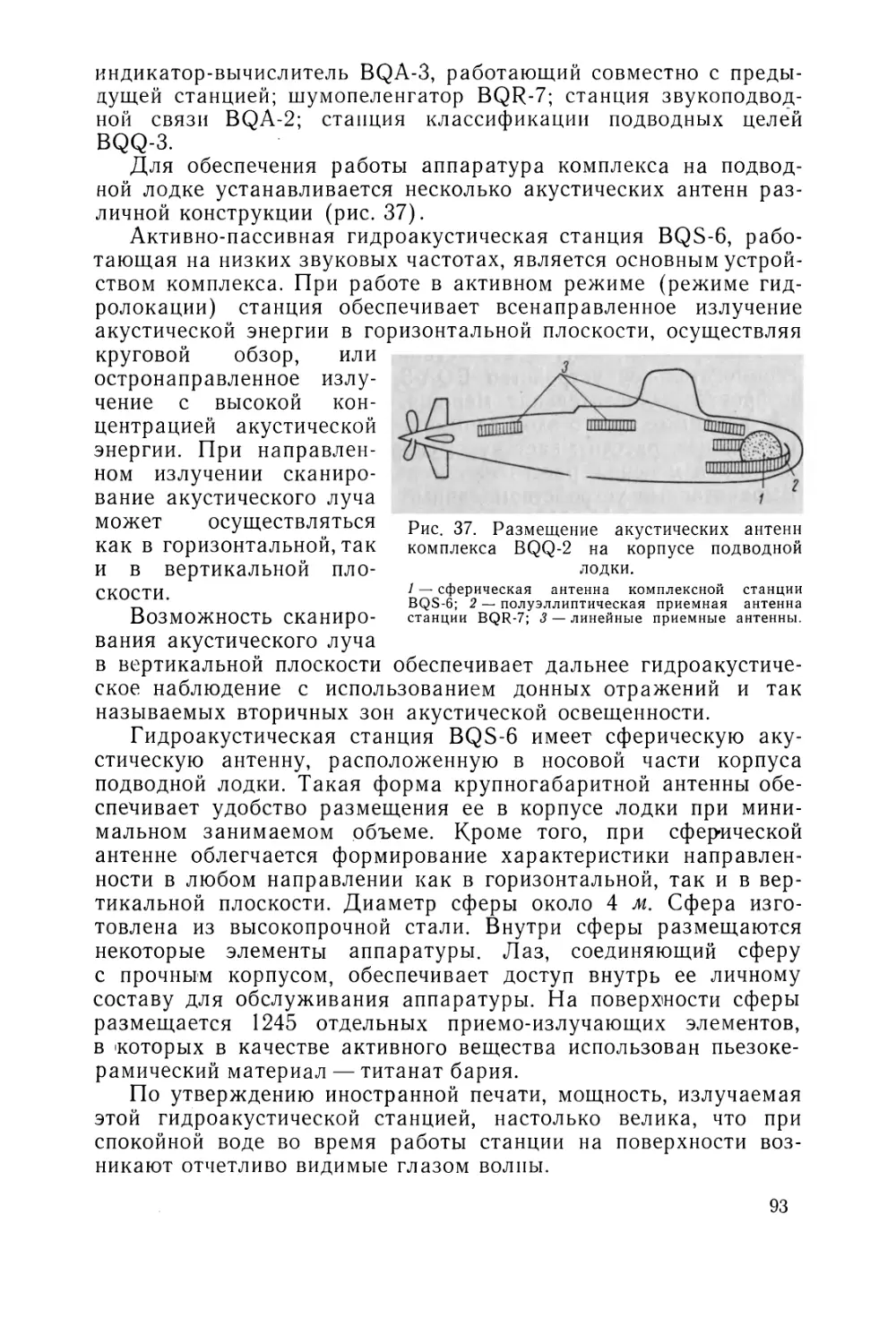
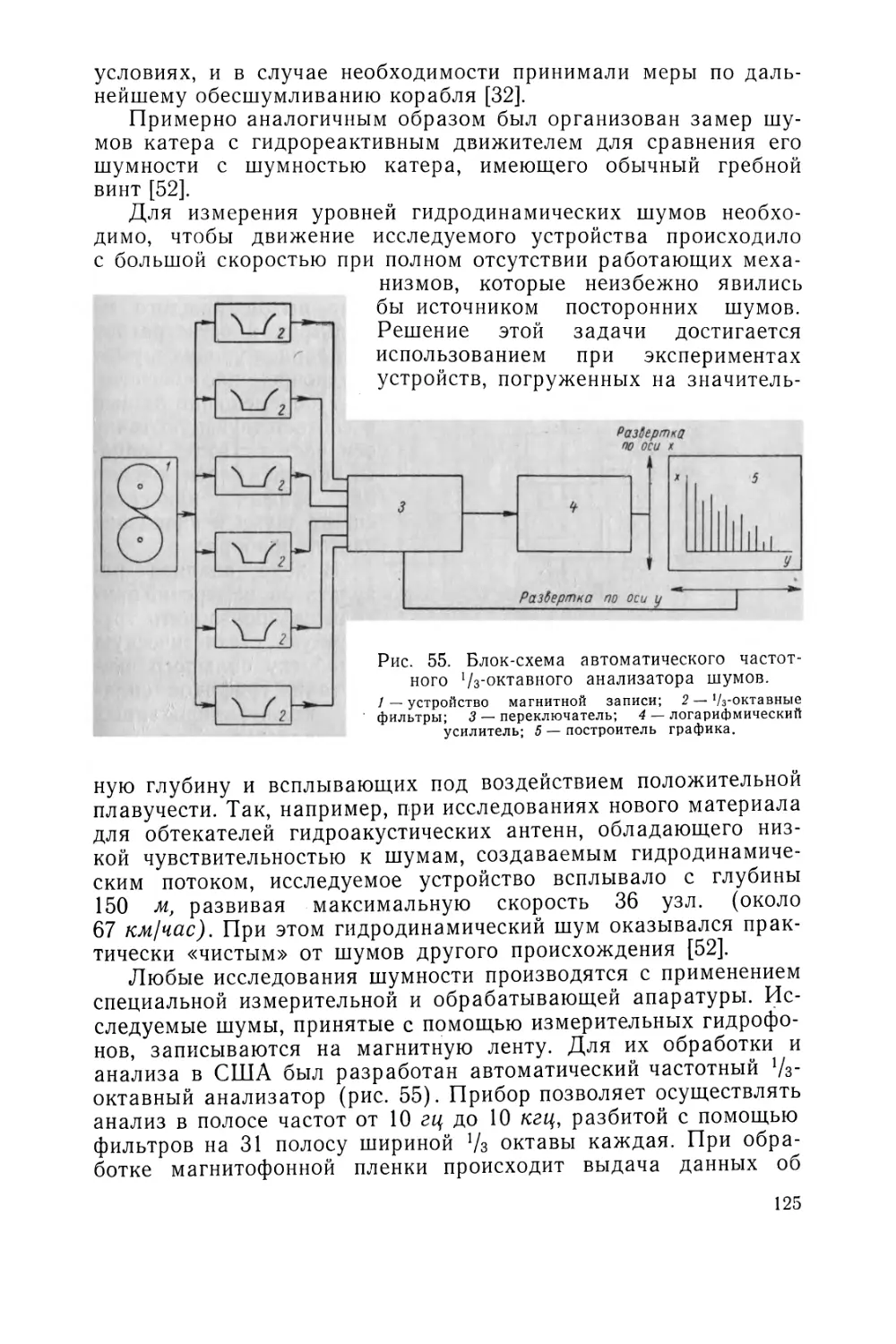
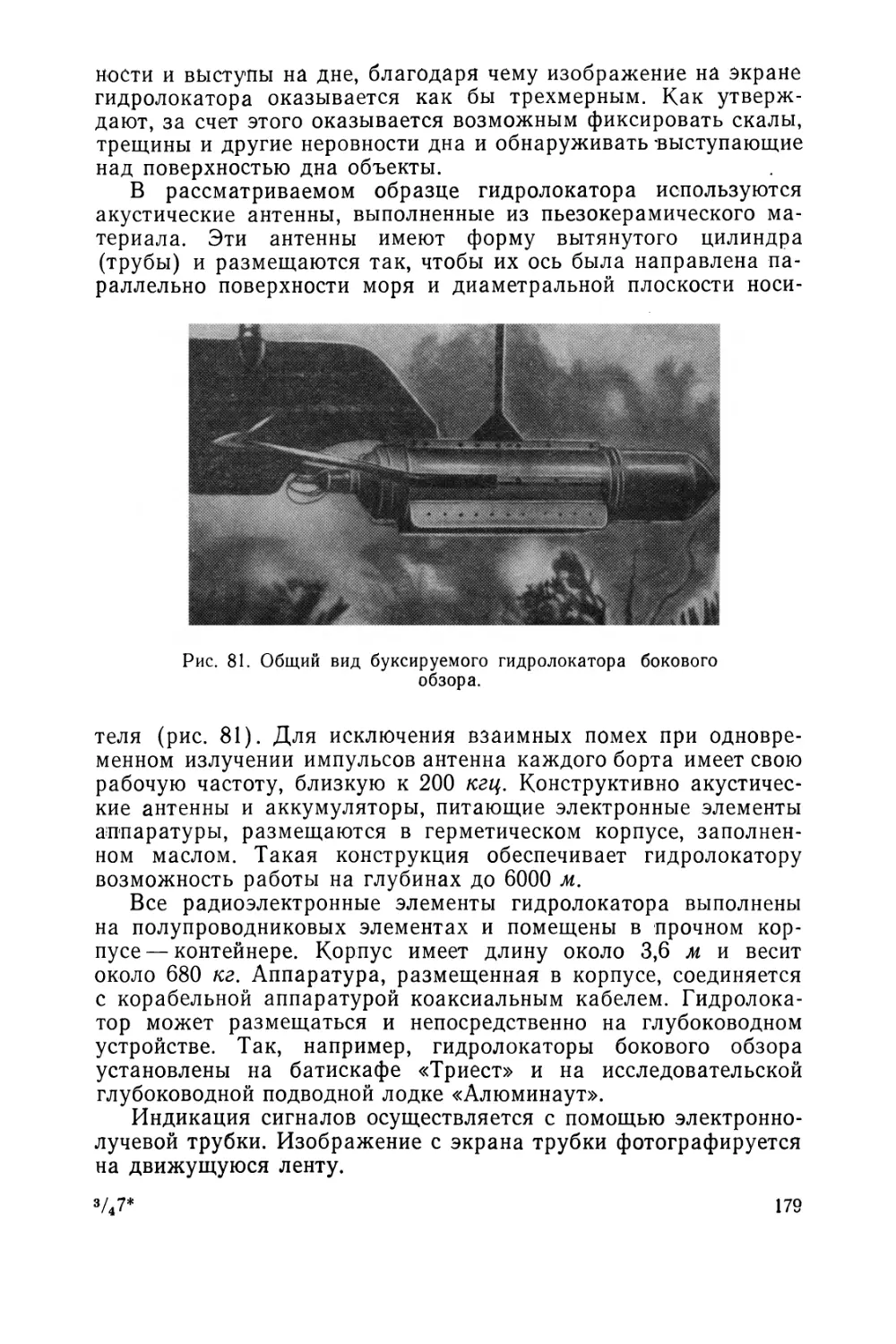
гидро -
а кус тика
и корабль
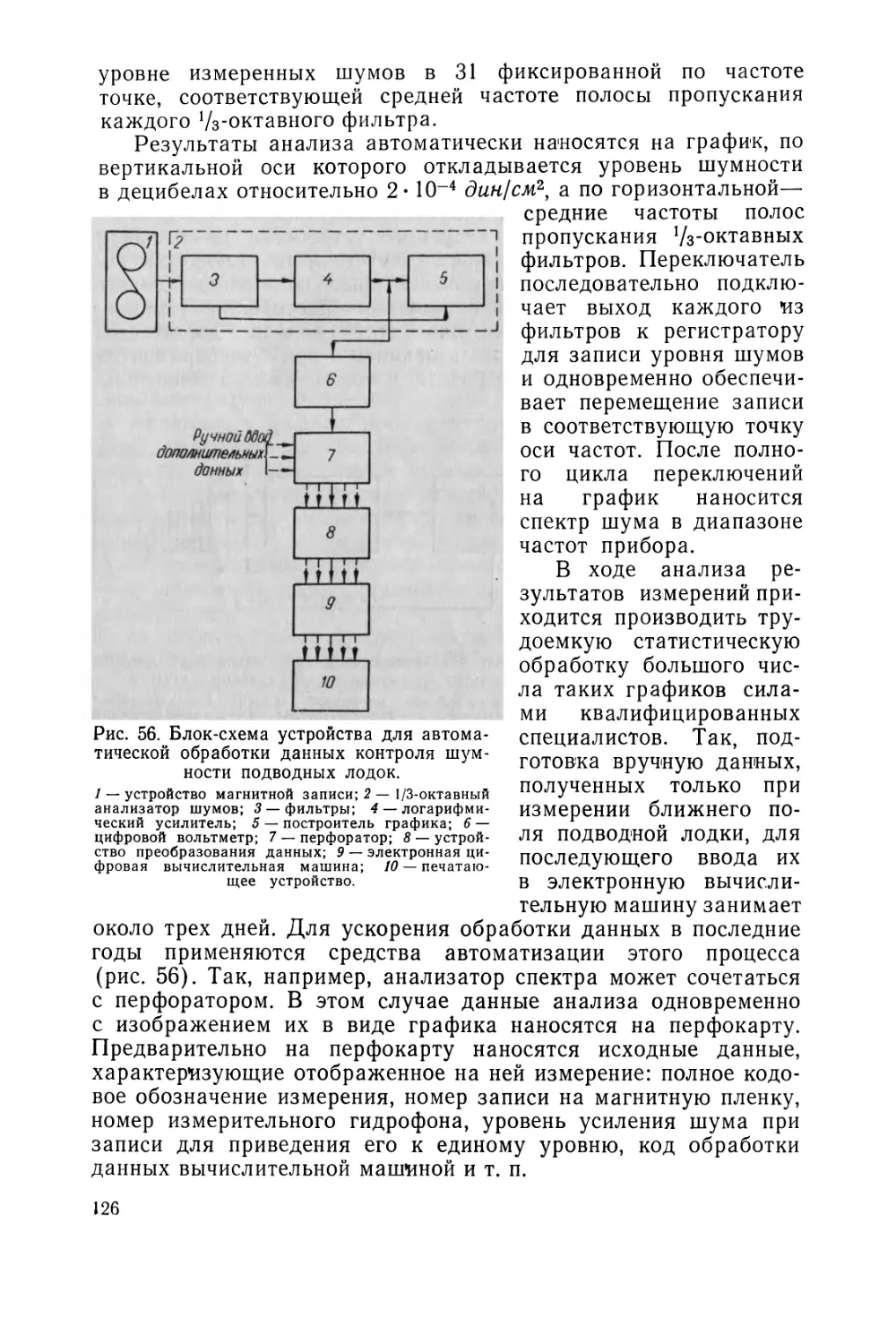
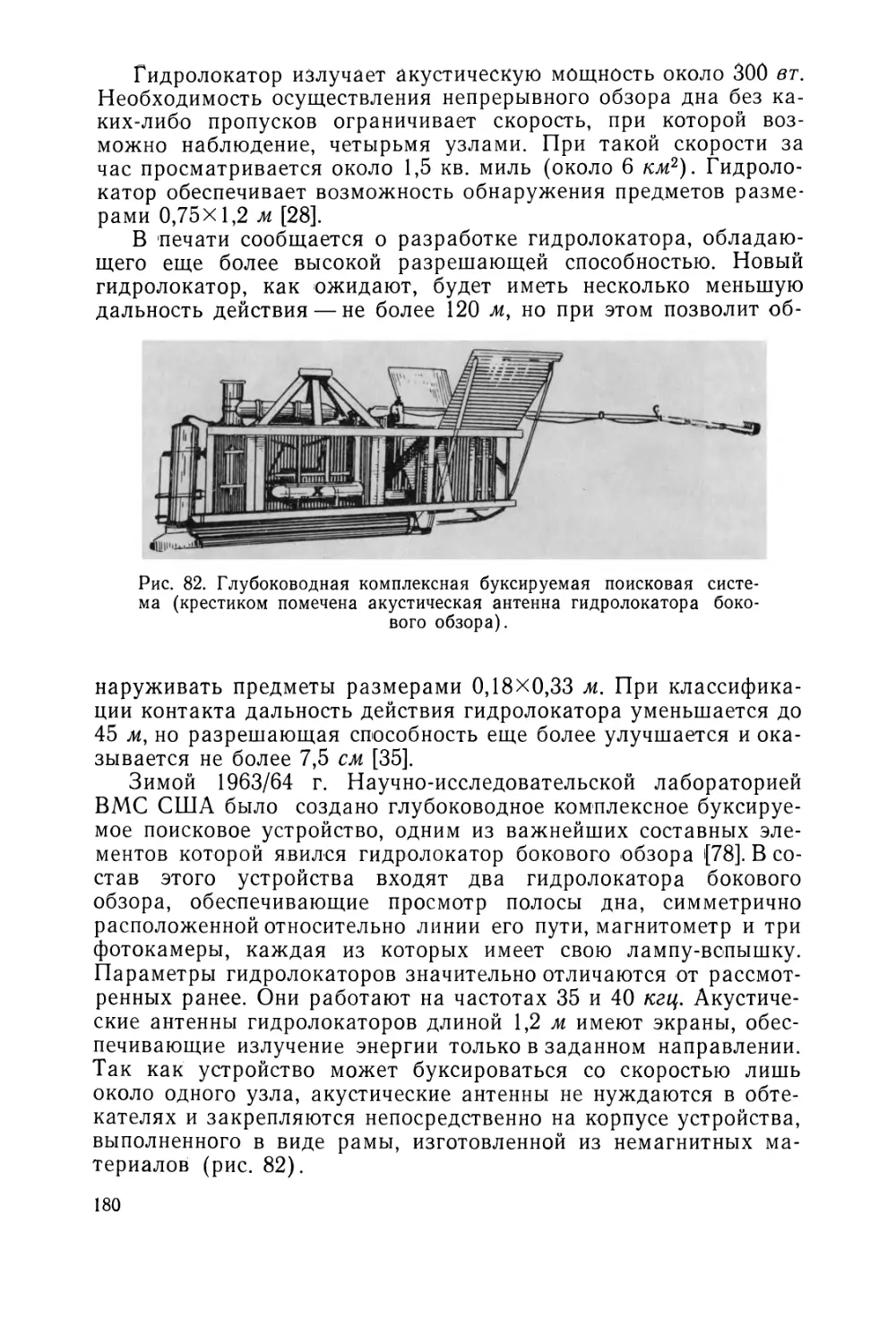
А. Л. ПРОСТАКОВ
ГИДРО-
АКУСТИКА
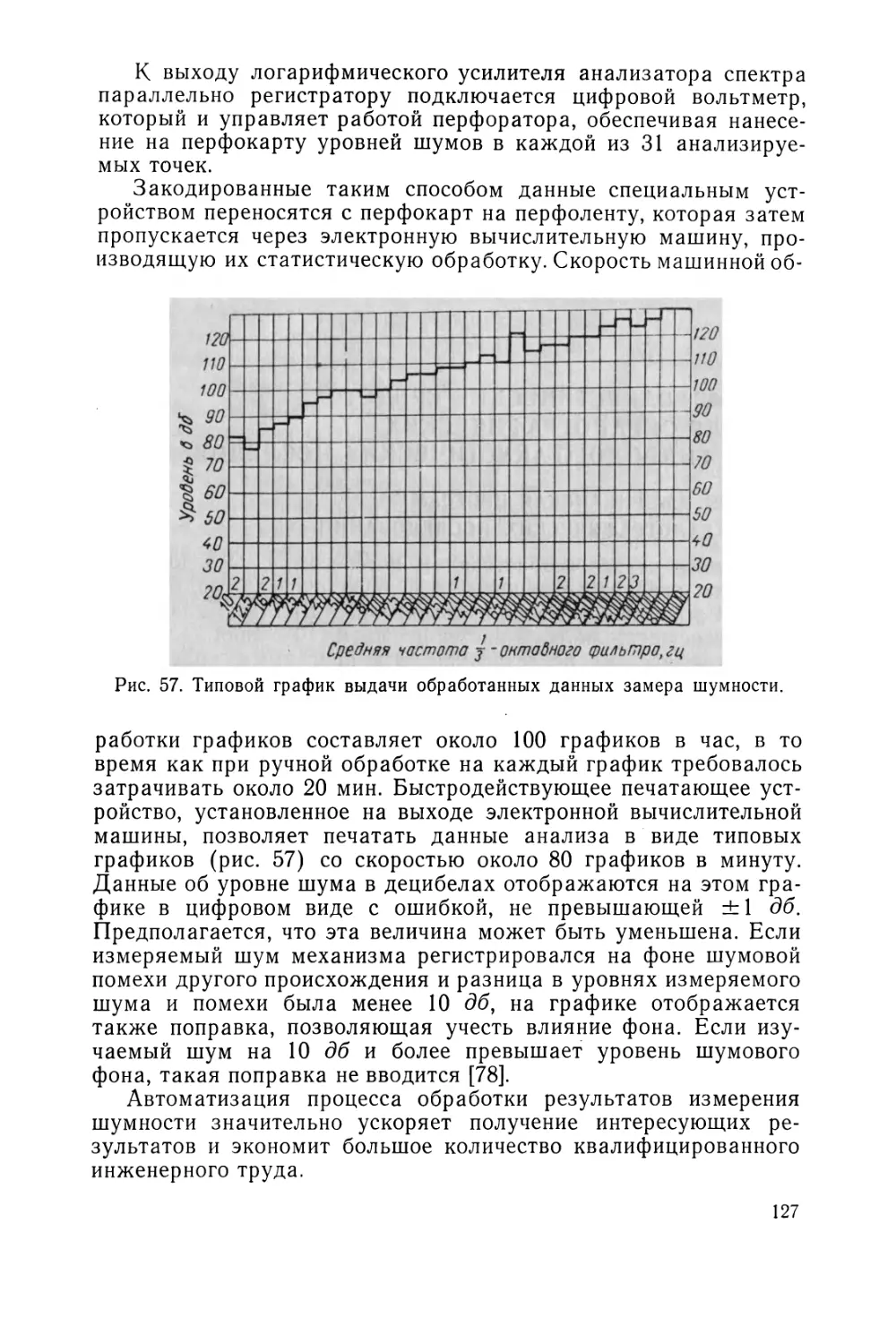
И КОРАБЛЬ
(по материалам
зарубежной
печати)
ИЗДАТЕЛЬСТВО
СУДОСТРОЕНИЕ"
Ленинград
1967
УДК. 681.88..62Э. 12
В книге обобщен обширный материал, помещенный
в последние годы на страницах зарубежной печати и
отражающий современное состояние и перспективы
развития корабельных гидроакустических средств.
В ней рассматриваются гидроакустические средства
наблюдения и связи и другая гидроакустическая аппа-
ратура, устанавливаемая на надводных кораблях и
подводных лодках, на специальных исследовательских
судах и устройствах для глубоководных исследований.
Значительное внимание уделяется вопросам снижения
шумности подводных лодок и кораблей, размещению
аппаратуры на кораблях, связи корабельных гидроаку-
стических средств с оружием и боевыми средствами.
Книга рассчитана на широкий круг читателей, зна-
комых с основами устройств гидроакустической аппара-
туры и занимающихся вопросами гидроакустики, на спе-
циалистов судостроительной промышленности, офице-
ров ВМФ, студентов вузов и курсантов военно-морских
училищ.
3-18-5
64-67
ОТ АВТОРА
На страницах зарубежной печати публикуется большое ко-
личество различных материалов, отражающих современное со-
стояние и направленность развития гидроакустических средств.
Книга автора «Гидроакустика в иностранных флотах», выпу-
щенная в 1964 г. издательством «Судостроение», явилась первой
попыткой обобщения этих материалов и охватывала публика-
ции за период 1955—1962 гг. За последние годы появились но-
вые данные, представляющие несомненный интерес для совет-
ского читателя. Возникла необходимость рассмотреть ряд во-
просов либо малооовещенных, либо совсем не затронутых
в предыдущей книге: снижение шумности подводных лодок и
кораблей, связь гидроакустики с проектированием корабля,
гидроакустическое оборудование устройств для глубоководных
исследований и некоторые другие. При этом автор ограничил
свою задачу только описанием устройства и условий работы
корабельных гидроакустических средств.
При отборе материала для настоящей книги автор стре-
мился исключить повторения сведений, приведенных в книге
«Гидроакустика в иностранных флотах». Некоторые вопросы,
аналогичные рассмотренным в первой книге, изложены заново
с использованием новых опубликованных материалов.
Отрывочные, разрозненные, иногда противоречивые данные
не давали возможности осуществить предлагаемый обзор с же-
лаемой полнотой. Очевидно, по этой причине в книге могут
быть отдельные неточности.
В целях однообразия, во всех случаях, когда это представля-
лось возможным, русская транскрипция названий иностранных
военных кораблей и подводных лодок, их тактико-технические
данные и оружие приводятся по «Справочнику по иностранным
флотам» (Воениздат, 1966). «
Все замечания читателей, которые с благодарностью будут
приняты автором, просьба направлять в издательство «Судо-
строение», Ленинград, Д-65, ул. Гоголя, 8.
1*
ВВЕДЕНИЕ
Послевоенные годы ознаменовались бурным развитием кора-
бельных радиоэлектронных средств. Достаточно сказать, что
в настоящее время стоимость радиоэлектронного оборудования
некоторых военных кораблей составляет почти 44% их общей
стоимости. Так, из суммы в 2 млрд. долл., ассигнованной США
в 1964 г. на постройку и переоборудование кораблей ВМФ,
827 млн. долл., около 40%, было предназначено для оснащения
кораблей сложными радиоэлектронными системами, в том числе
и гидроакустическими. По мнению зарубежных специалистов
стоимость радиоэлектронного оборудования кораблей будет
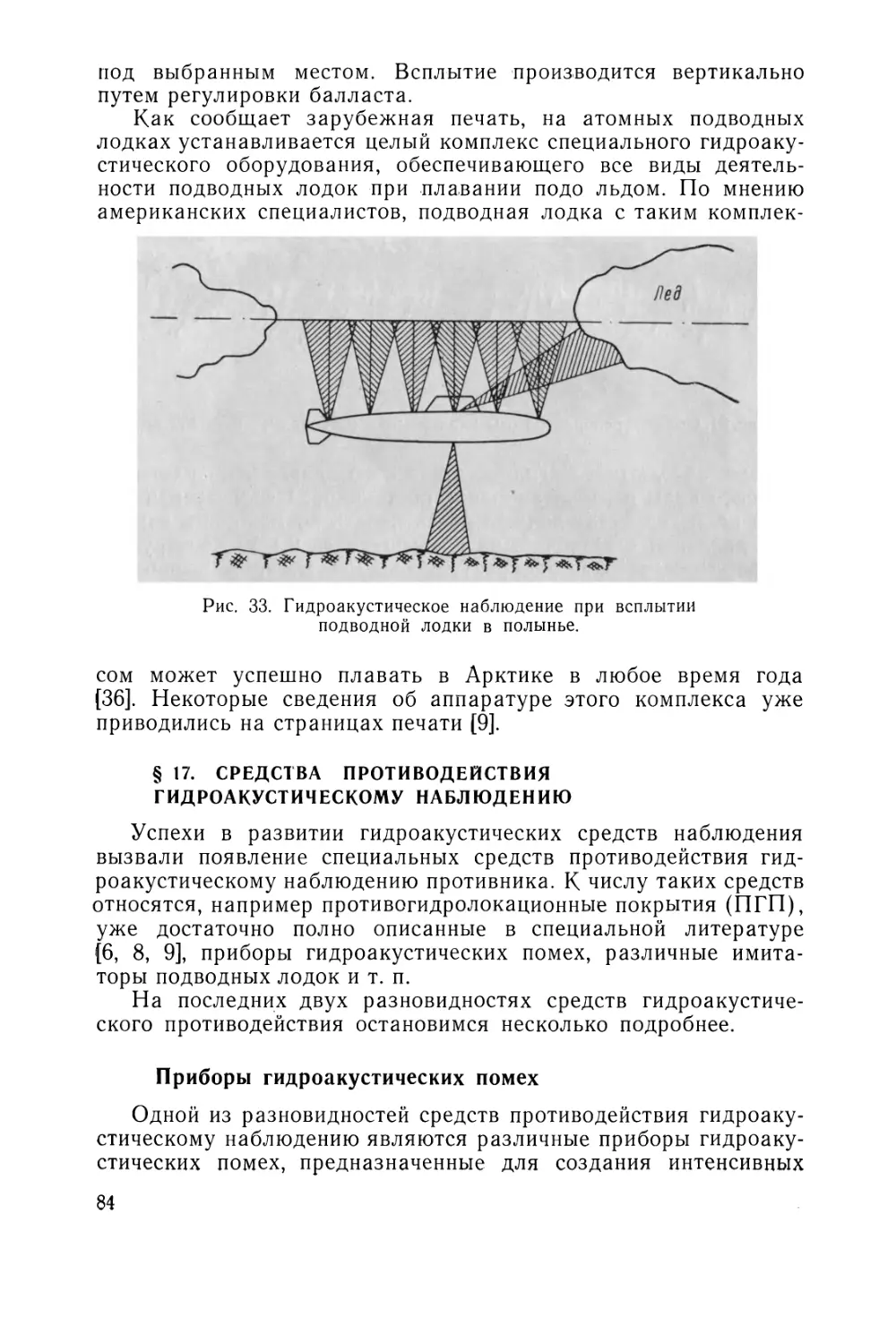
расти и впредь [75].
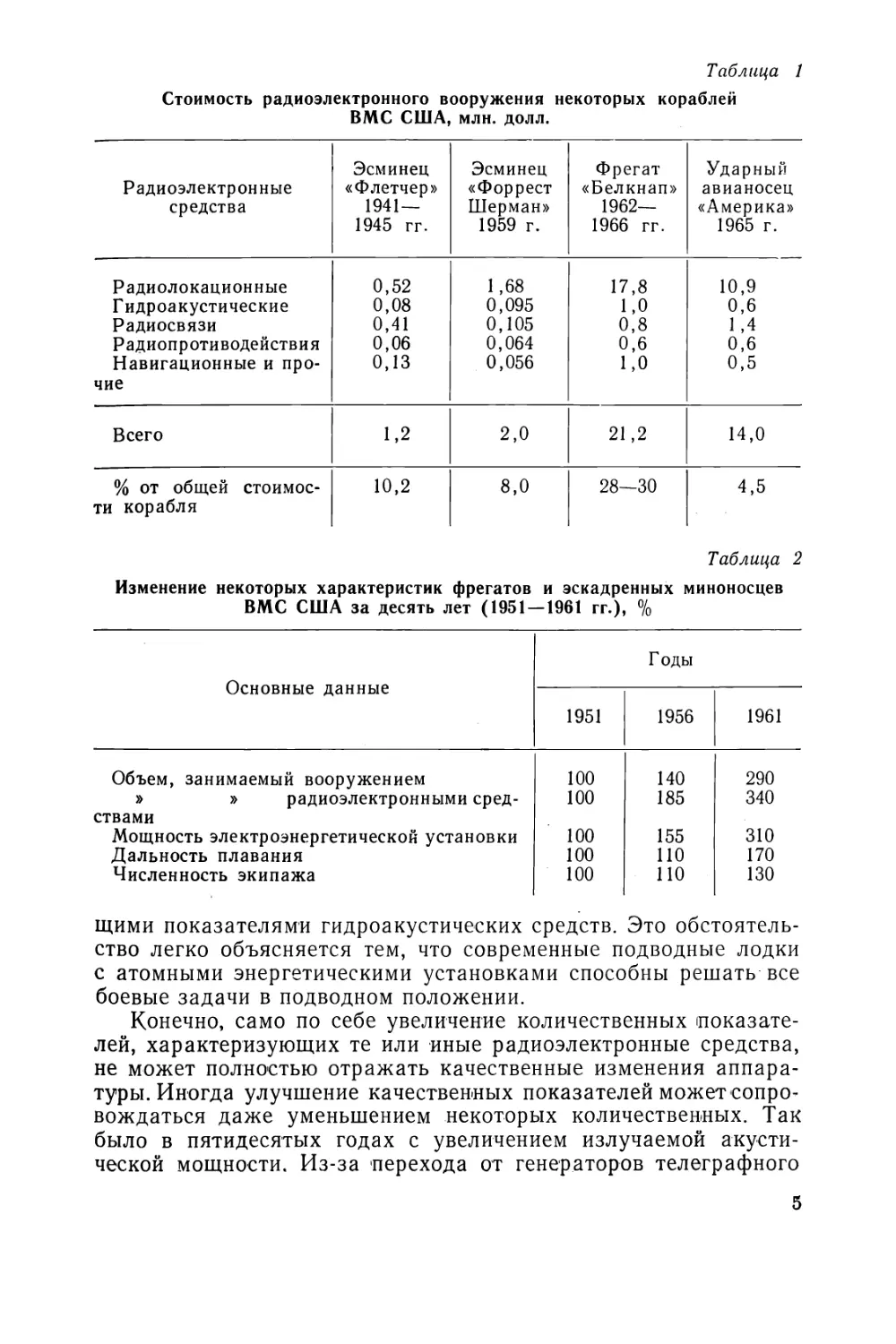
Сравнительные данные роста стоимости радиоэлектронного
вооружения некоторых видов кораблей ВМС США иллюстри-
руются табл. 1, а изменения объемных и некоторых других ха-
рактеристик противолодочных кораблей ВМС США за десять
лет — табл. 2 [75].
Наибольшим изменениям подвергся объем, занимаемый ра-
диоэлектронными средствами, который возрастал почти вдвое
каждые пять лет. На втором месте находится рост мощности
электроэнергетической установки, в значительной степени вы-
званный увеличением потребления электроэнергии.
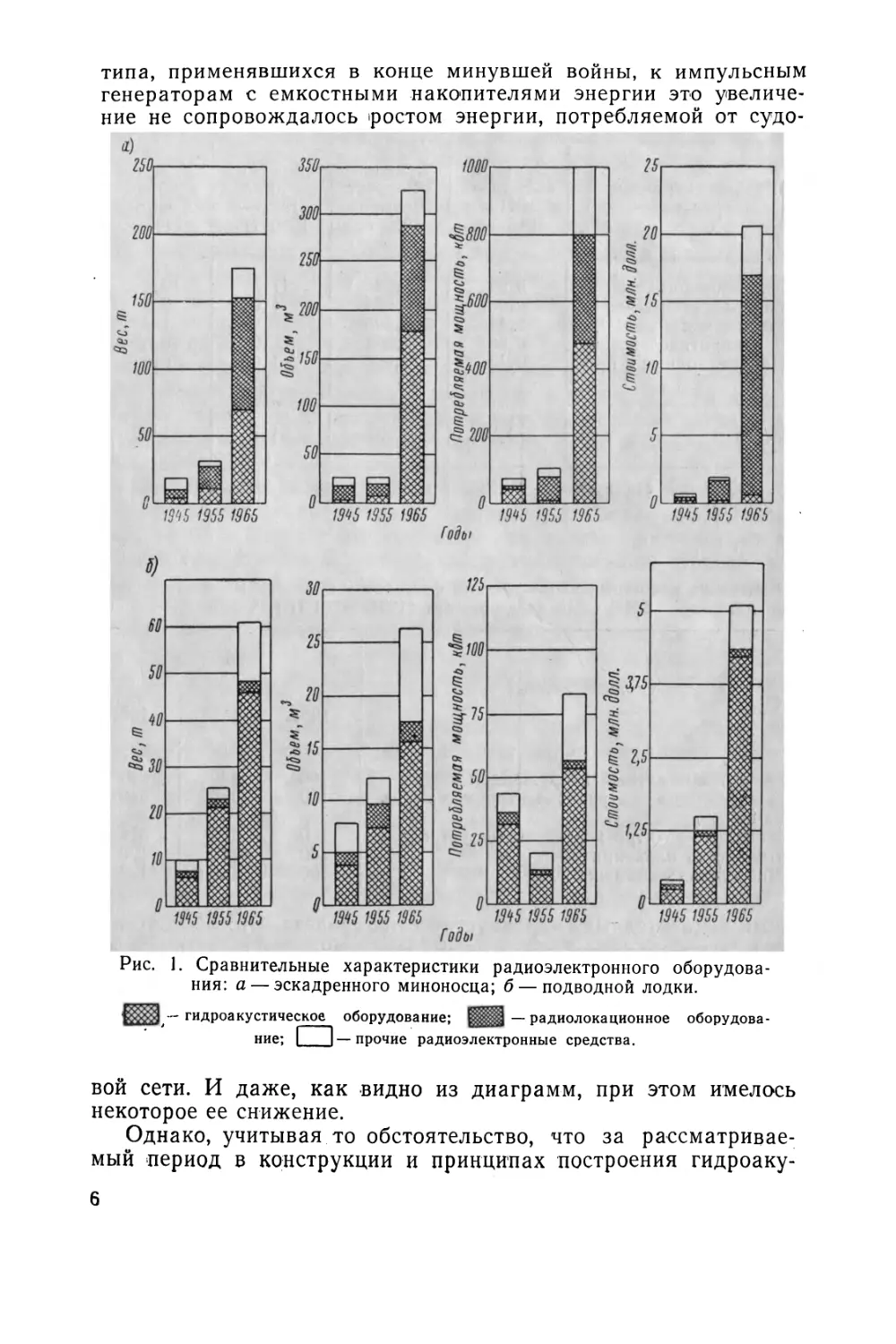
Как видно из диаграмм, приведенных на рис. 1 *, весьма по-
казательно значительное изменение за последнее десятилетие
радиоэлектронного вооружения кораблей, решающих задачи
противолодочной борьбы,— эскадренных миноносцев и противо-
лодочных подводных лодок.
Так, для эскадренного миноносца (рис. 1, а) характерно
весьма существенное увеличение веса, объема и мощности, по-
требляемой гидроакустическими средствами. По всем этим
показателям в настоящее время гидроакустические средства за-
нимают примерно одинаковое место с радиолокационными или
даже опережают их, в то 'время как в прошлом, наоборот, пер-
венство принадлежало радиолокации. Однако стоимость средств
радиолокации сейчас значительно превышает стоимость средств
гидроакустики.
На противолодочных подводных лодках (рис. 1, б) первен-
ство безраздельно принадлежало и принадлежит гидроакустике.
Показатели, характеризующие радиолокационные средства,
практически остались неизменными по своему абсолютному зна-
чению, но существенно снизились по сравнению с соответствую-
* Для сравнения приняты: эскадренные миноносцы «Хэррисон» (водоиз-
мещением 2100 г, 1945 г.), «Форрест Шерман» (водоизмещением 2860 т,
1955 г.) и фрегат-ракетоносец «Белкнап» (водоизмещением 6570 г, 1965 г.);
подводные лодки «Тенч» (водоизмещением 2500 т, 1945 г.), «Скейт» (водоиз-
мещением 2860 т, 1955 г.) и типа «Трешер» (водоизмещением 4300 т, 1965 г.).
4
Таблица 1
Стоимость радиоэлектронного вооружения некоторых кораблей
ВМС США, млн. долл.
Радиоэлектронные
средства
Радиолокационные
Гидроакустические
Радиосвязи
Радиопротиводействия
Навигационные и про-
чие
Всего
% от общей стоимос-
ти корабля
Эсминец
«Флетчер»
1941 —
1945 гг.
0,52
0,08
0,41
0,06
0,13
1,2
10,2
Эсминец
«Фор реет
Шерман»
1959 г.
1,68
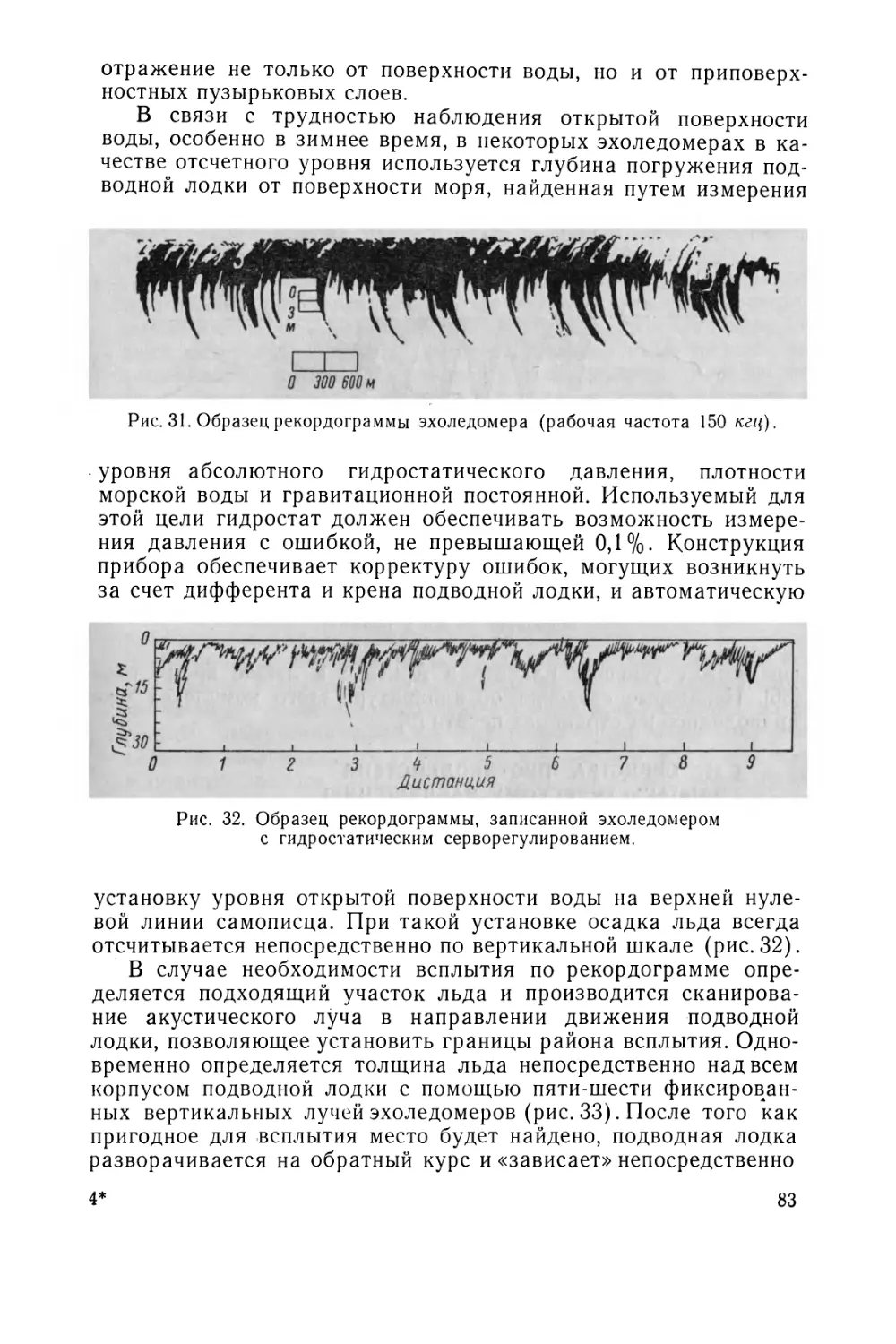
0,095
0,105
0,064
0,056
2,0
8,0
Фрегат
«Белкнап»
1962—
1966 гг.
17,8
1,0
0,8
0,6
1,0
21,2
28—30
Ударный
авианосец
«Америка»
1965 г.
10,9
0,6
1,4
0,6
0,5
14,0
4,5
Таблица 2
Изменение некоторых характеристик фрегатов и эскадренных миноносцев
ВМС США за десять лет (1951 — 1961 гг.), %
Основные данные
Объем, занимаемый вооружением
» » радиоэлектронными сред-
ствами
Мощность электроэнергетической установки
Дальность плавания
Численность экипажа
Годы
1951
о о о о о
о оо о о
1956
140
185
155
ПО
ПО
1961
290
340
310
170
130
щими показателями гидроакустических средств. Это обстоятель-
ство легко объясняется тем, что современные подводные лодки
с атомными энергетическими установками способны решать все
боевые задачи в подводном положении.
Конечно, само по себе увеличение количественных показате-
лей, характеризующих те или иные радиоэлектронные средства,
не может полностью отражать качественные изменения аппара-
туры. Иногда улучшение качественных показателей может сопро-
вождаться даже уменьшением некоторых количественных. Так
было в пятидесятых годах с увеличением излучаемой акусти-
ческой мощности. Из-за перехода от генераторов телеграфного
5
типа, применявшихся в конце минувшей войны, к импульсным
генераторам с емкостными накопителями энергии это увеличе-
ние не сопровождалось 'ростом энергии, потребляемой от судо-
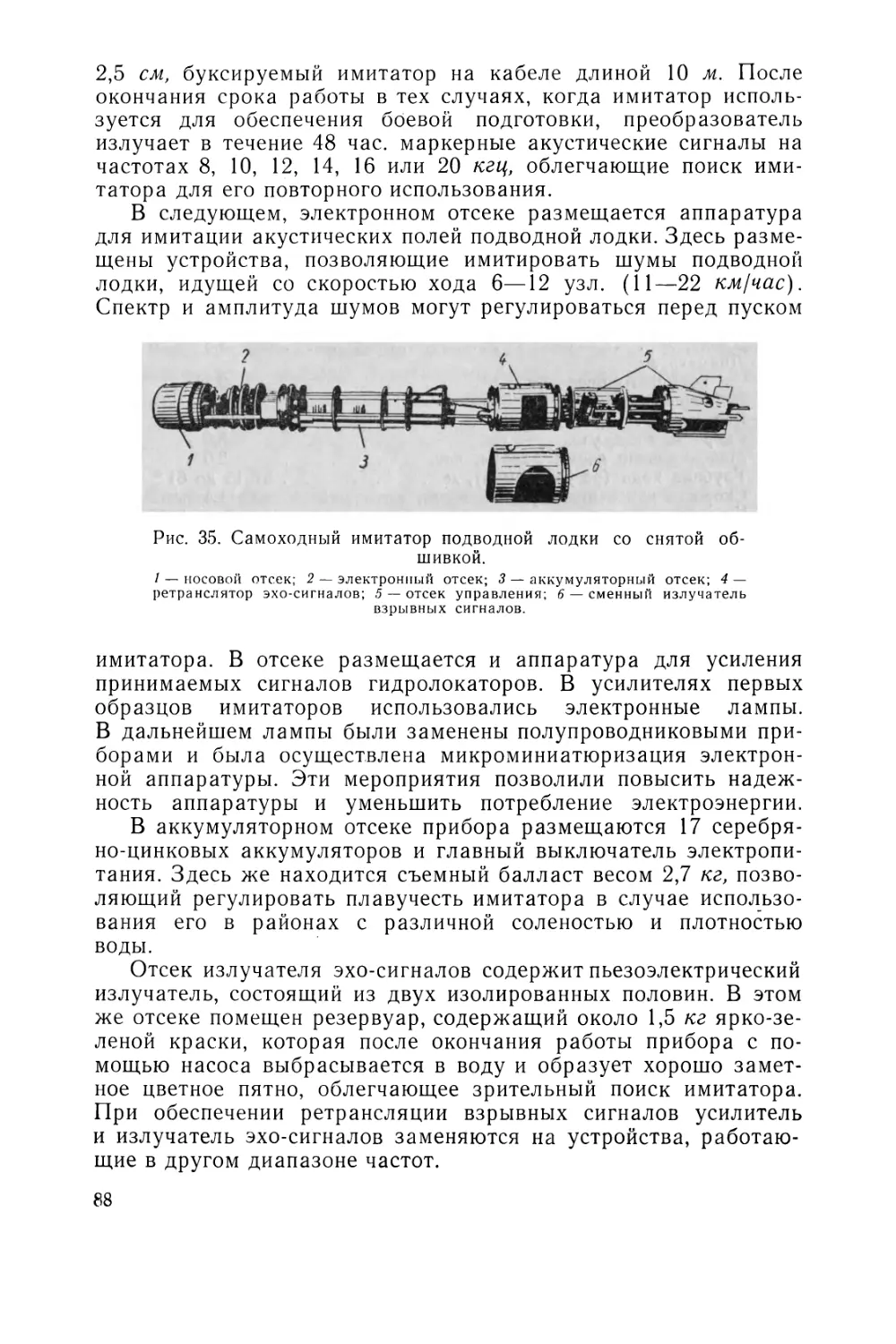
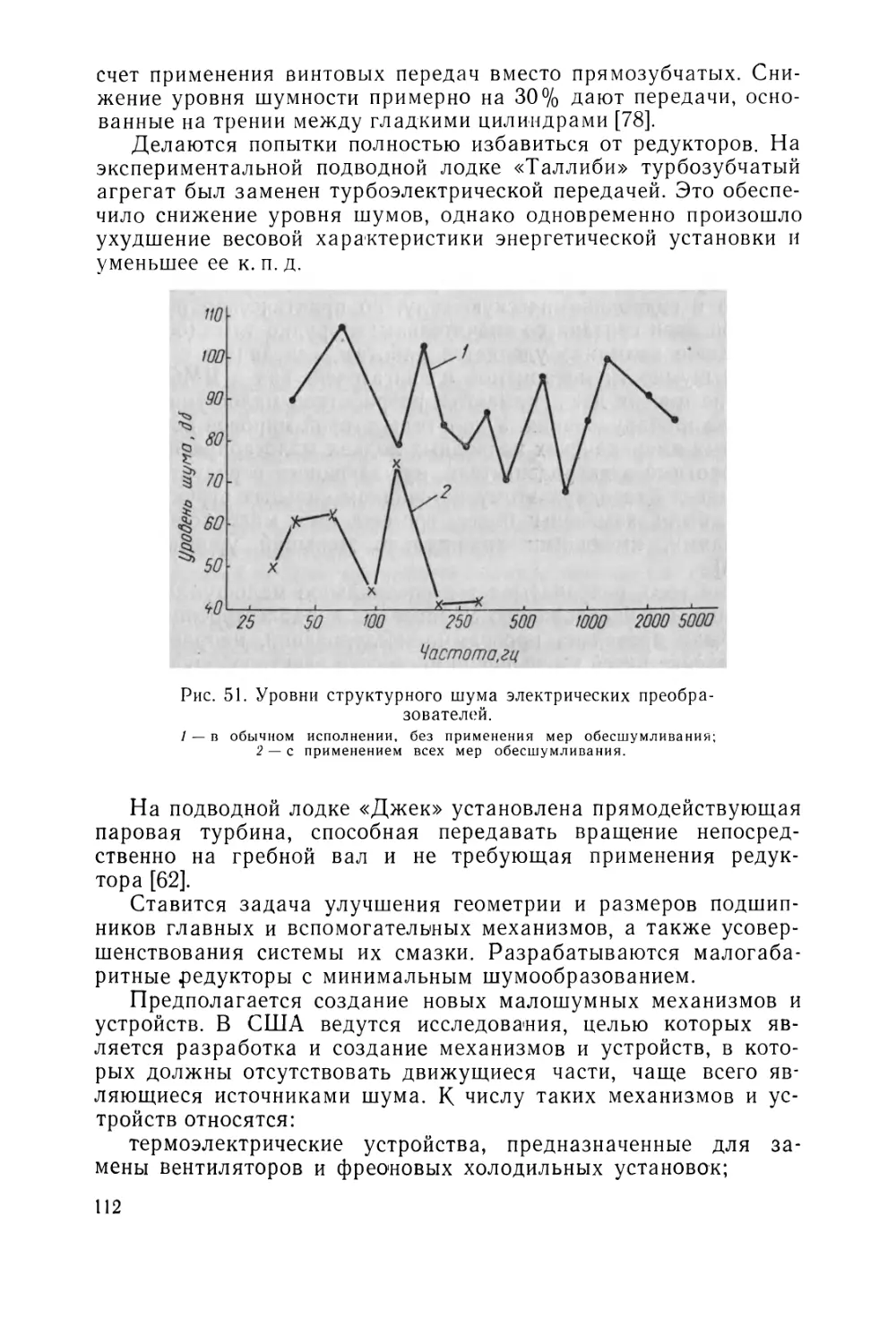
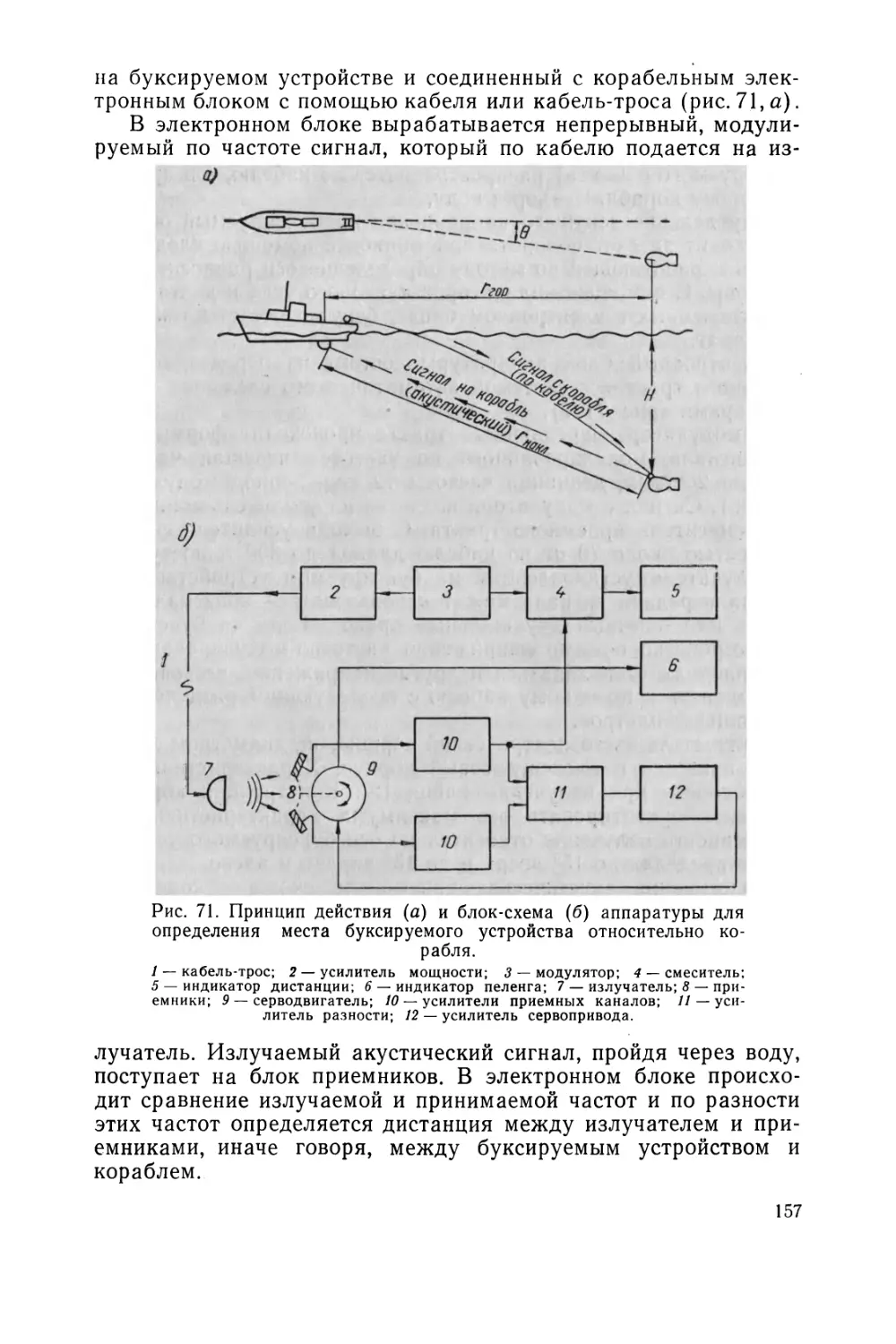
Рис. 1. Сравнительные характеристики радиоэлектронного оборудова-
ния: а — эскадренного миноносца; б — подводной лодки.
— гидроакустическое оборудование; — радиолокационное оборудова-
ние; | |—прочие радиоэлектронные средства.
вой сети. И даже, как видно из диаграмм, при этом имелось
некоторое ее снижение.
Однако, учитывая то обстоятельство, что за рассматривае-
мый период в конструкции и принципах построения гидроаку-
6
стической и другой корабельной радиоэлектронной аппаратуры
резких изменений не происходило, можно считать, что приве-
денные данные достаточно правильно характеризуют измене-
ния состава радиоэлектронного вооружения кораблей. Следует
также учитывать и то, что за рассматриваемый период были
достигнуты значительные успехи в снижении габаритов радио-
электронной аппаратуры и потребляемой ею мощности в связи
с широким внедрением полупроводниковых элементов. Если бы
удалось учесть эти изменения и производить сравнение объемов
и потребляемых мощностей в некоторых «сопоставимых» вели-
чинах, рост рассматриваемых показателей был бы еще более
значительным.
За последние годы пополнился перечень классов боевых ко-
раблей, на которых устанавливается гидроакустическая аппара-
тура. Так, например, установка гидролокаторов на авианосцах
оказалась целесообразной после того, как дальность действия
гидроакустической аппаратуры значительно возросла и стала
обеспечивать возможность самостоятельного решения авианос-
цем некоторых задач противолодочной -борьбы, главным обра-
зом самообороны с применением ракето-торпед.
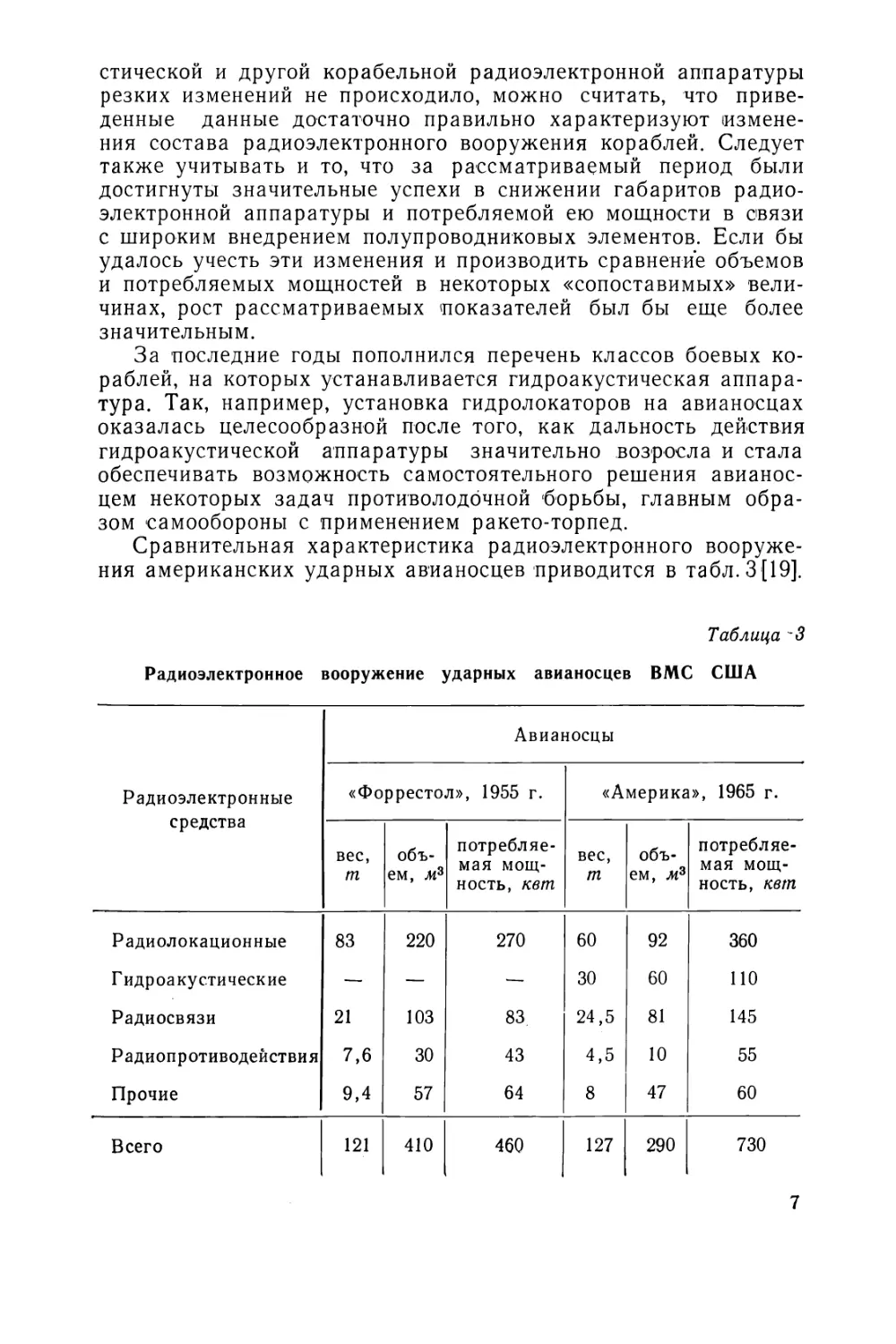
Сравнительная характеристика радиоэлектронного вооруже-
ния американских ударных авианосцев приводится в табл.3[19].
Таблица S
Радиоэлектронное вооружение ударных авианосцев ВМС США
Радиоэлектронные
средства
Радиолокационные
Гидроакустические
Радиосвязи
Радиопротиводействия
Прочие
Всего
Авианосцы
«Форрестол», 1955 г.
вес,
т
83
21
7,6
9,4
121
объ-
ем, м3
220
103
30
57
410
потребляе-
мая мощ-
ность, кет
270
83
43
64
460
«Америка», 1965 г.
вес,
т
60
30
24,5
4,5
8
127
объ-
ем, м3
92
60
81
10
47
290
потребляе-
мая мощ-
ность, кет
360
ПО
145
55
60
730
7
Гидроакустическая аппаратура различного назначения ши-
роко применяется и на американских кораблях других классов!:
тральщиках, кораблях на подводных крыльях, специальных
глубоководных исследовательских устройствах и т. д. Можно
предполагать, что подобные же тенденции роста удельного веса
гидроакустики наблюдаются и на флотах других капиталисти-
ческих государств.
Развитие гидроакустических средств потребовало в свою оче-
редь выполнения обширных гидролого-акустических исследова-
ний, которые осуществляются также с помощью специальной
гидроакустической аппаратуры. Наконец, активно проводимые
в настоящее время глубоководные исследования также невоз-
можны без использования средств гидроакустики.
Глава I
ГИДРОАКУСТИЧЕСКИЕ СРЕДСТВА
НАДВОДНЫХ КОРАБЛЕЙ
§1. ПРОТИВОЛОДОЧНЫЕ КОРАБЛИ-НОСИТЕЛИ
ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРЫ
Состав и основные тактико-технические данные гидроакусти-
ческого вооружения корабля определяются в первую очередь
классом корабля-носителя и возлагаемыми на него боевыми
задачами.
Несмотря на то, что в настоящее время гидроакустические
средства устанавливаются на кораблях различных классов,
в том числе на авианосцах и крейсерах, наиболее типичными
носителями гидроакустической аппаратуры являются противо-
лодочные корабли. Решение задач противолодочной борьбы воз-
лагается в ВМС США на фрегаты (DL, DLG), являющиеся ко-
раблями многоцелевого назначения и предназначенные главным
образом для противолодочной и противовоздушной обороны
авианосных соединений, на эскадренные (DD, DDG) и эскорт-
ные (DE) миноносцы; в ВМС Англии, Канады, Австралии и
Франции — на фрегаты и эскадренные миноносцы; в итальянских
ВМС — на корветы; в ФРГ — на сторожевые корабли и т. д.
Современные противолодочные корабли существенно отли-
чаются от кораблей аналогичных классов периода второй ми-
ровой войны. Построенные, как правило, в последнее десятиле-
тие все они в известной степени отвечают требованию эффек-
тивной борьбы с атомными подводными лодками, отличаются
высокими мореходными качествами и достаточной скоростью
хода, способны длительное время и в любую 'погоду находиться
в море и осуществлять эффективный поиск, преследование и
атаку своим оружием подводных лодок любых классов.
Водоизмещение большинства кораблей превышает 2000 т,
а у отдельных типов оно даже более 6000 т. По мнению ино-
странных специалистов весьма затруднительно создание доста-
точно эффективного противолодочного корабля малого водоиз-
мещения. Это обусловлено прежде всего увеличением габаритов
и веса главных энергетических установок, оружия, в том числе
и противолодочного, а также радиоэлектронных средств и их
источников питания.
Вместе с ростом водоизмещения увеличиваются и главные
размерения кораблей. Необходимо подчеркнуть, что установка
гидроакустических антенн в подкильных обтекателях привела
к увеличению осадки противолодочных кораблей и вызвала до-
полнительные трудности при их ремонте и базировании.
Так как корабли должны иметь возможность бороться с бы-
строходными подводными лодками, максимальная скорость их
9
хода колеблется в пределах 30—35 узл. Однако крейсерская
скорость кораблей значительно меньше, так как она должна
обеспечивать возможность эффективного гидроакустического
наблюдения в условиях максимально допустимого уровня соб-
ственных шумовых помех. При выборе главной энергетической
установки корабля также учитывают необходимость предель-
ного уменьшения шумности.
Все корабли имеют мощное противолодочное оружие. Так,
на большинстве американских кораблей установлен комплекс
противолодочного оружия «Асрок». Шестиствольные реактивные
бомбометы «Бофорс» устанавливаются на французских, а четы-
рехствольные — на западногерманских кораблях. На большин-
стве кораблей установлены и другие бомбометы: один-два бом-
бомета «Сквид» или «Лимбо» — на английских кораблях, че-
тырехствольные 305 мм бомбометы, позволяющие осуществлять
стрельбу и по береговым целям,— на французских, одностволь-
ные бомбометы «Менон» на итальянских [71]. Почти все новей-
шие противолодочные корабли имеют один-два пилотируемых
или телеуправляемых вертолета.
Стандартным вооружением 'противолодочных кораблей всех
типов являются противолодочные торпеды. Торпедные аппараты
с общим числом труб от двух до двенадцати (чаще всего
шестью) могут быть неподвижными или поворотными.
Состав ракетного и артиллерийского оружия противолодоч-
ных кораблей может колебаться в широких пределах. Наиболее
мощным оно является на многоцелевых кораблях.
Управление корабля при ведении боевых действий осуществ-
ляется с боевых информационных постов, получающих данные
от радиоэлектронных средств корабля. Различные средства
связи обеспечивают связь с командованием и взаимодействую-
щими силами. На некоторых кораблях устанавливаются автома-
тические системы для сбора, обработки и отображения данных
обстановки.
В последние годы за рубежом большое внимание уделяется
изучению возможности создания противолодочных кораблей на
подводных крыльях и на воздушной подушке, так как эти ко-
рабли обладают значительным превосходством в скорости хода
по сравнению с любыми современными подводными лодками.
По мнению иностранных специалистов противолодочный ко-
рабль на воздушной подушке должен иметь [86]:
— возможность эффективного использования поисковых
средств;
— преимущества в скорости перед атакуемой подводной
лодкой, развивая скорость полного хода до 90 узл. (166км/час);
— значительную полезную нагрузку, позволяющую разме-
стить поисковые средства и противолодочное оружие;
— дальность плавания, обеспечивающую длительный поиск
Ю
и поддержание контакта с обнаруженной целью до завершения
атаки (дальность плавания не менее 3000 миль со скоростью
хода 12 узл., длительное плавание с экономической скоростью
25 узл.).
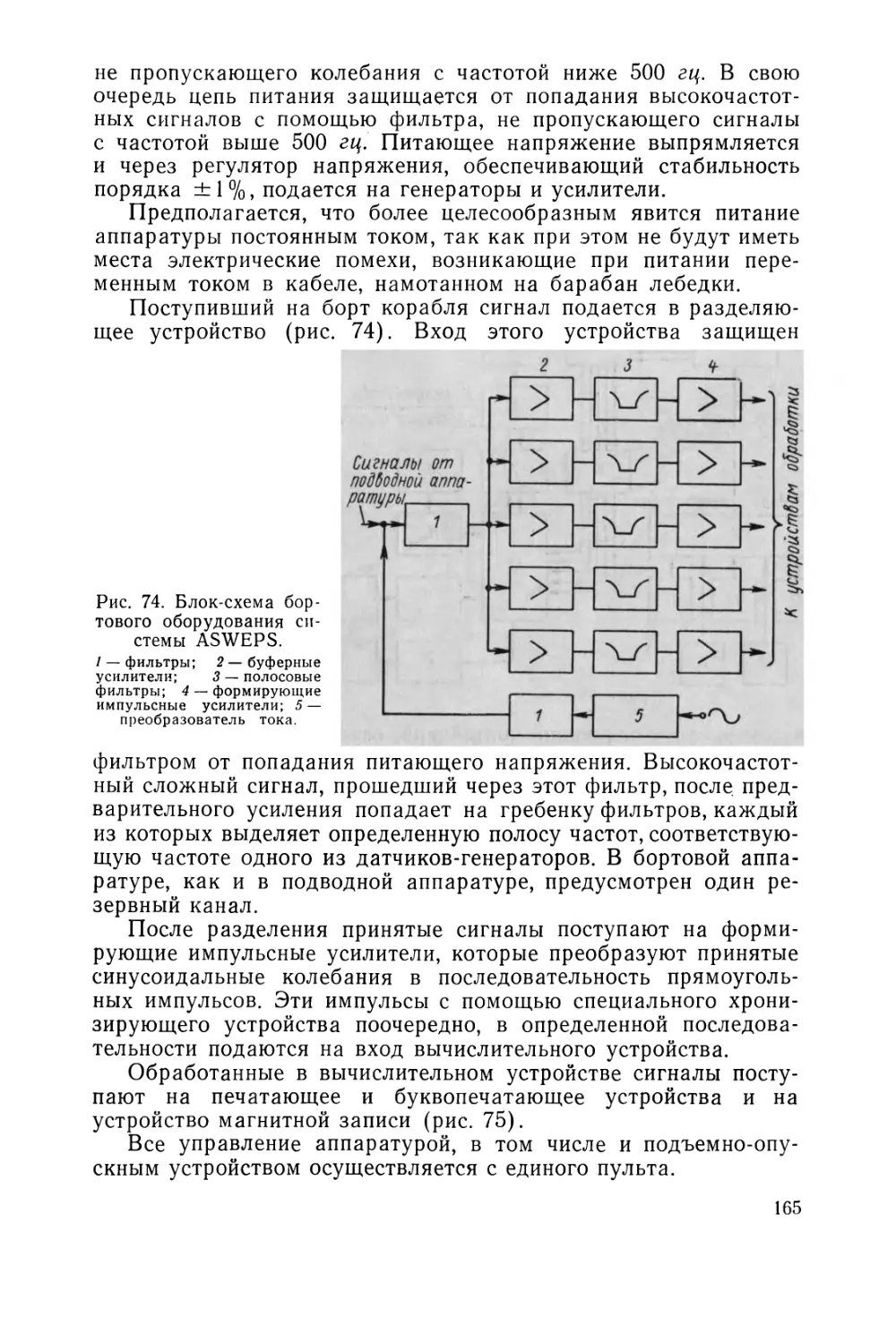
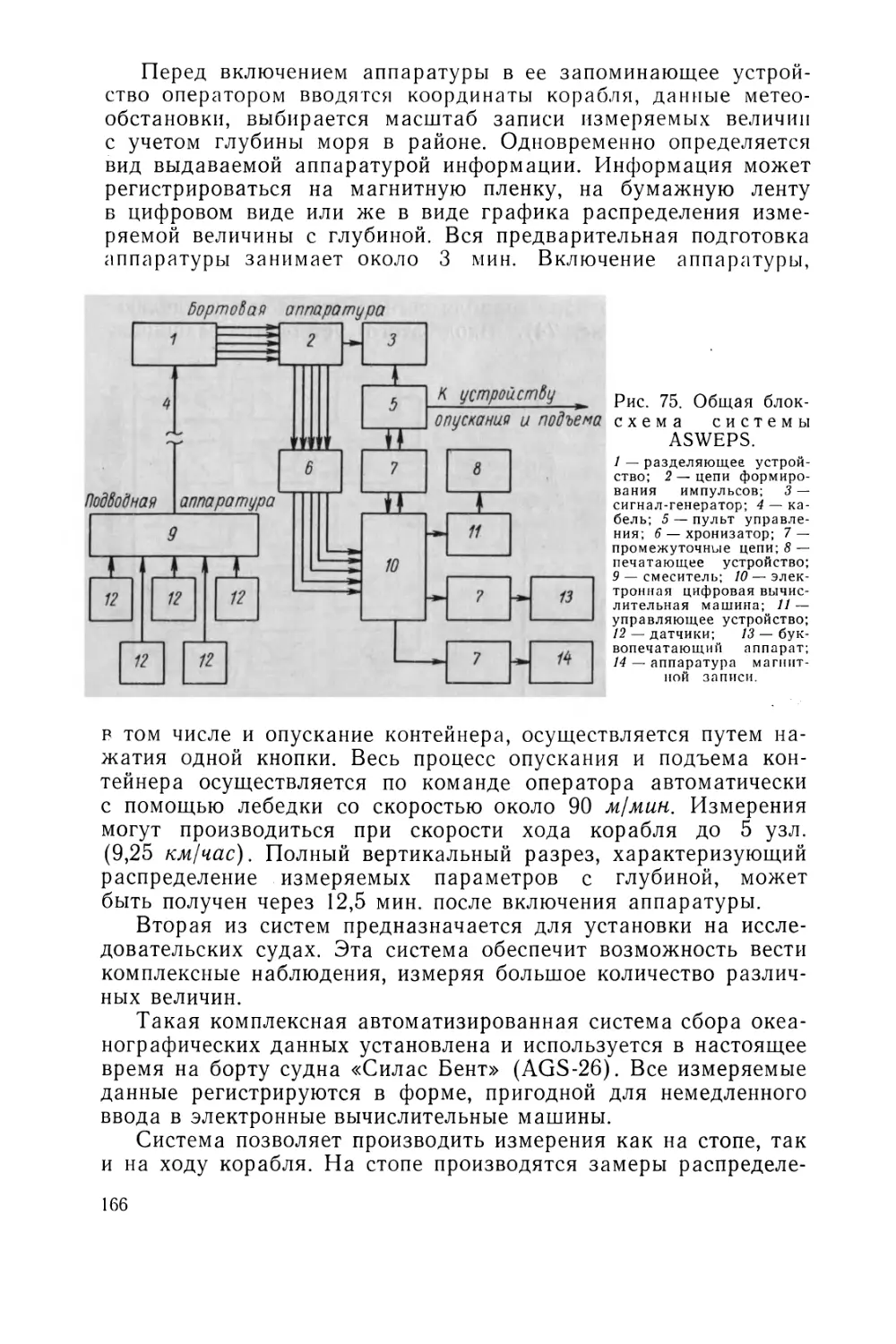
§ 2. КОМПЛЕКСНЫЕ КОРАБЕЛЬНЫЕ СИСТЕМЫ СБОРА
И ОБРАБОТКИ ИНФОРМАЦИИ, ИСПОЛЬЗУЮЩИЕ ДАННЫЕ
ГИДРОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ
За последние несколько лет на боевых кораблях флотов не-
которых иностранных государств появились комплексные си-
стемы связи, сбора, обработки и наглядного отображения ин-
формации, поступающей от различных источников, в том числе
и от гидроакустических средств наблюдения.
Необходимость создания таких систем была вызвана изме-
нением характера боевых действий на море — широким масси-
рованным использованием разнородных сил флота, ракетно-
ядерного оружия, быстротечностью боевых действий, наличием
большого числа разнообразных и весьма совершенных средств
добывания информации об окружающей обстановке.
В этих условиях на командные пункты кораблей поступает
огромный поток информации как непосредственно от средств
наблюдения корабля, так и но каналам связи от вышестоящих
штабов, взаимодействующих и обеспечивающих сил. В недав-
нем прошлом обработкой всей этой информации занимался
оператор, которому приходилось выполнять многочисленные и
трудоемкие действия, требующие значительных затрат времени.
Обработка информации выполнялась медленно и с большой
вероятностью получения ошибок.
При возросшем объеме информации и увеличении скорости
ее поступления оператор успевает использовать лишь часть
полученных сведений, а вероятность допущения различных оши-
бок становится еще большей.
Современный уровень развития техники позволил значитель-
ную часть этих операций выполнить с помощью вычислитель-
ных машин. На долю человека остаются лишь задачи, требую-
щие ответственного решения, причем используется уже быстро
и практически безошибочно обработанная и обобщенная маши-
ной информация.
Автоматизированные системы, являющиеся сложным ком-
плексом различных боевых средств и вычислительных устройств,
работающих при непосредственном участии человека (системы
«человек—машина»), как полагают, смогут выполнять следую-
щие основные задачи:
1) обнаружение целей, в том числе и /подводных, и отбор
поступающей информации, представляющей интерес для реше-
ния боевой задачи;
11
2) обработку первичной информации, поступающей от кора-
бельных источников, в том числе и гидроакустических, и ее
классификацию;
3) сбор информации, поступающей от внешних источников,
и передачу собственной информации внешним потребителям
в рамках данной тактической группы, в которую входит ко-
рабль;
4) согласование информации, относящейся к одной и той же
цели, полученной в разное время и от различных источников;
5) автоматическое наглядное отображение получаемой ин-
формации на планшетах, экранах индикаторов и в обобщенной
и синтезированной форме на специальных цифровых и буквен-
ных табло;
6) автоматическое решение (по требованию оператора) част-
ных тактических и навигационных задач;
7) выбор первоочередных целей для оружия, выполнение
необходимых расчетов и выработка соответствующих команд
для управления этим оружием [63].
За последние годы на кораблях ВМС США появилась авто-
матизированная система для управления боевыми действиями
кораблей, получившая сокращенное наименование NTDS (Naval
Tactical Data System — корабельная тактическая система обра-
ботки данных). Как утверждают, эта система должна обеспе-
чивать боевую деятельность кораблей различных классов и ти-
пов во всевозможных условиях тактической обстановки.
Предполагается создание трех типов таких систем: одна си-
стема устанавливается на противолодочных кораблях, системы
двух остальных типов обеспечивают боевые действия кораблей
других классов. Система NTDS установлена на нескольких
кораблях, в том числе на авианосце «Энтерпрайз», ракетном
крейсере «Лонг Бич» и фрегатах [50]. К 1969—1970 гг. наме-
чено оборудовать системой NTDS 13—14 авианосцев, около
10 крейсеров и 30—35 фрегатов.
Основные задачи, стоящие перед этой системой:
1) координация сбора данных от радиолокационных и гид-
роакустических станций, навигационных систем и других источ-
ников информации корабля;
2) корреляция этих данных в объеме, обеспечивающем полу-
чение ясной картины тактической обстановки;
3) подготовка данных, необходимых для принятия решения
командиром;
4) передача принятых решений на выбранные системы ору-
жия корабля.
Для выполнения указанных задач система включает различ-
ные радиоэлектронные средства: быстродействующие универ-
сальные цифровые машины, быстродействующие устройства для
автоматической передачи данных в цифровой форме, аналого-
12
цифровые индикаторные устройства, считывающие устройства,
устройства для записи информации на магнитную ленту и па
магнитные барабаны, устройства для ручного ввода данных,
преобразователи данных из непрерывной формы в цифро-
вую и т. п.
Главным элементом системы является цифровая универсаль-
ная машина «УНИВАК» USQ-20 (на фрегатах обычно устанав-
ливаются две машины, на авианосцах — четыре). Применение
универсальных вычислительных машин расширяет возможности
системы, позволяя осуществить решение любых новых задач,
связанных с изменением тактической обстановки.
В состав системы NTDS входят также различные типы инди-
каторных устройств. Основным индикатором служит большой
экран тактической обстановки, на котором с помощью проек-
ционных устройств отображается вся необходимая информация.
Данные, поступающие от радиотехнических средств, вво-
дятся в систему автоматически или вручную. Оператор гидро-
акустической или радиолокационной станции осуществляет
электронный съем координат цели и переходит на ее сопровож-
дение. Текущие координаты цели ib виде соответствующих на-
пряжений подаются на проекторы и обеспечивают перемещение
отметки цели по экрану.
После ввода первоначальных данных аппаратура работает
автоматически. Два полуавтоматических проектора хранят
в своей «памяти» различные справочные данные. С их помощью
на экране могут быть отображены гидрологические условия со-
стояние погоды и другие необходимые для оценки обстановки
и принятия решения сведения [72].
Английский вариант системы получил наименование ADA
(Action Data Automaton — автомат боевых данных). В состав
ее входят три электронные вычислительные машины, обеспечи-
вающие сбор и обработку информации, поступающей от раз-
личных источников, включая гидроакустические станции. Эта
система предназначена для решения следующих основных
задач:
1) автоматическая обработка информации об обстановке
с наглядным отображением на специальных планшетах;
2) представление информации вышестоящему командованию
и обмен информацией между взаимодействующими кораблями;
3) выработка оптимальных решений по использованию ору-
жия и технических средств корабля;
4) расчеты боевого маневрирования и автоматическое уп-
равление кораблем.
Система позволяет осуществлять автоматическое сопровож-
дение целей, показывая при этом, какие из целей представляют
в данный момент наибольшую опасность и какое оружие про-
тив них целесообразно применить. В случае, если командир
13
одобряет какой-либо вариант предложенного системой решения,
необходимая информация и команды для его осуществления
подаются на соответствующие органы управления оружием и
боевыми средствами корабля.
Система позволяет осуществлять управление кораблем, по-
давая необходимые команды на руль и энергетические уста-
новки. Программы для управления системой составляются за-
ранее с учетом опыта боевой подготовки. При этом в первую
очередь программируются действия, связанные с противолодоч-
ной борьбой и с уклонением корабля от бомб и торпед.
Предполагают, что к 1967 г. система будет установлена на
4-х новых эскадренных миноносцах, а к 1970 г.— на всех круп-
ных боевых кораблях [37, 69].
§ 3. КОРАБЕЛЬНОЕ ПРОТИВОЛОДОЧНОЕ ОРУЖИЕ,
ПОЛУЧАЮЩЕЕ ИНФОРМАЦИЮ ОТ ГИДРОАКУСТИЧЕСКИХ
СРЕДСТВ НАБЛЮДЕНИЯ
По мнению иностранных военно-морских специалистов
только гидроакустические средства обеспечивают получение
да'нных о подводной обстановке, необходимых для эффектив-
ного применения противолодочного оружия. С помощью гидро-
акустических средств осуществляется поиск подводных лодок,
определяются элементы их движения (курс, скорость, глубина
погружения), необходимые для выработки исходных данных
стрельбы, момент производства залпа, обеспечивается манев-
рирование для повторного выхода в атаку.
Успехи, достигнутые за последнее время в развитии гидро-
акустических средств и в первую очередь в увеличении даль-
ности гидроакустического наблюдения, обеспечили значительные
качественные изменения противолодочного оружия иностранных
флотов. Так, если в первые послевоенные годы основным про-
тиволодочным оружием кораблей оставались глубинные бомбы,
сбрасываемые с кормы, и глубинные бомбы, выстреливаемые
на небольшое расстояние с помощью простейших бомбометов,
то теперь основными средствами поражения подводных лодок
являются ракето-торпеды, торпеды с акустическими системами
самонаведения, обычные и реактивные глубинные бомбы.
Наиболее дальнобойным оружием являются ракето-торпеды.
На вооружении ВМС США состоит ракето-торпеда «Асрок».
Как сообщают, в конце 1965 г. комшлекс противолодочного ору-
жия «Асрок», в состав которого входят гидролокаторы дальнего
действия SQS-23 или SQS-26, был установлен более чем на
130 кораблях [57]. Сообщается и о предполагаемой установке
этого комплекса на кораблях флотов некоторых других стран.
В вооруженных силах США принята единая система обозна-
чения образцов радиоэлектронного оборудования, состоящая из
букв и цифр. В начале обозначения ставится буквенная группа
14
AN, показывающая, что последующее обозначение относится
к единой системе (для сокращения эта группа в книге везде
опущена), затем следуют три буквы. Первая из них обозначает
место установки оборудования (например, В — на подводных
лодках; F — стационарное; Р — портативное; S — на надводных
кораблях; U — общего назначения, для установки ,на двух и бо-
лее носителях; W — надводное и подводное). Вторая—тип обо-
рудования (например, L — противодействия; Р — радиолока-
ционное; Q — гидроакустическое; S — специальное или много-
целевое). Третья — назначение оборудования (например, А —
вспомогательное; С — связь; Q — специальное или многоцеле-
вое; R — пассивного действия; S — обнаружения; W — управле-
ния). Далее идут цифры, показывающие тип оборудования. Та-
ким образом AN/SQS-23 обозначает корабельную (S) гидро-
акустическую (Q) станцию обнаружения (S) типа 23.
Гидроакустическая станция, входящая в состав комплекса,
обеспечивает выдачу информации о цели в пост управления
стрельбой, в котором происходит обработка этих данных с по-
мощью системы управления Мк-38 и вырабатываются необ-
ходимые данные стрельбы и команды, подаваемые на пусковую
установку.
Пусковая установка комплекса состоит из 4-х кассет, на две
ракето-торпеды каждая. Она наводится по горизонту и по углу
возвышения, благодаря чему корабль может производить
стрельбу, не меняя курса и не выходя из строя для сближения
с целью, сразу же после получения необходимых исходных дан-
ных от гидроакустической станции комплекса.
Снаряд ракето-торпеды «Асрок» состоит из стартового ра-
кетного двигателя, работающего на твердом топливе, и боевой
части, в качестве которой могут использоваться самонаводя-
щаяся торпеда Мк-44 или глубинные бомбы с обычным или
ядерным зарядом.
Перед запуском снаряда по выработанным исходным дан-
ным задается длительность его полета на воздушном участке
траектории, которая может меняться в пределах от 1,6 до 15 км.
По истечении заданного времени стартовый двигатель отде-
ляется от торпеды и последняя с помощью тормозного пара-
шюта, смягчающего удар об воду, приводняется. Погрузившись
на заданную глубину, торпеда производит поиск цели с по-
мощью своей активной акустической системы самонаведения,
двигаясь по нисходящей и восходящей спирали. Самонаведение
на конечном участке траектории способствует обеспечению до-
статочной эффективности оружия, несмотря на наличие ошибок
в выработке данных стрельбы и на маневрирование цели после
момента залпа, которое не может быть учтено заблаговременно.
На 1965 г. планировалось начало разработки усовершенство-
ванного комплекса «Асрок», сопряженного с гидролокатором,
15
имеющим повышенную дальность действия. При этом дальность
стрельбы, как ожидают, должна возрасти до 45—55 км [55].
В печати отмечается, что хотя дальность стрельбы ракето-
торпедами может превышать дальность действия корабельного
гидролокатора за счет использования данных целеуказаний, по-
лучаемых от корабельных вертолетов, такая стрельба яви-
лась бы не эффективной [50].
Ракето-торпеда «Икара» разработана в Австралии и пред-
ставляет собой усовершенствованный вариант ракето-торпеды
«Аорок» с дальностью стрельбы до 28 км. Как и в американ-
ской системе, в снаряде «Икара» в качестве боевой части ис-
пользуется торпеда Мк-44. Предполагается, что система «Икара»
будет устанавливаться на фрегатах и эскадренных миноносцах
ВМС Англии и Австралии и в дальнейшем сможет стать стан-
дартным противолодочным оружием кораблей ВМС всех стран,
входящих в агрессивный блок НАТО [62].
Французская ракето-торпеда «Малафон» представляет со-
бой сочетание планера с торпедой и запускается с помощью
стартового ракетного двигателя на твердом топливе. Дальность
стрельбы составляет около 18 км. Запуск снаряда осуществ-
ляется по данным гидроакустического наблюдения. На началь-
ном участке воздушной траектории снаряд управляется по за-
данной перед запуском программе. После прохождения около
2/3 пути снаряд начинает управляться по радиокомандам с ко-
рабля. Команды управления вырабатываются в результате сопо-
ставления данных наблюдения, поступающих с гидролокацион-
ной станции управления стрельбой MCS-3B, поддерживающей
непрерывный контакт с целью, и данных наблюдения за снаря-
дом, поступающих с радиолокационной станции корабля.
В районе нахождения цели, в точке, также определяемой по
результатам наблюдения, планер отделяется от торпеды, кото-
рая опускается на воду с применением тормозящего парашюта.
После приводнения торпеда с помощью своей акустической си-
стемы самонаведения самостоятельно осуществляет поиск цели.
Противолодочные торпеды являются в настоящее время наи-
более распространенным противолодочным оружием. При выра-
ботке исходных данных торпедной стрельбы также используется
информация, поступающая от средств гидроакустического на-
блюдения. Как правило, все корабельные противолодочные тор-
педы имеют активные, пассивные или активно-пассивные аку-
стические системы самонаведения .и могут иметь неконтактные
акустические взрыватели.
Несмотря на то, что за последние годы дальность хода тор-
пед практически не возросла, объем водного пространства, об-
следуемого торпедой при поиске цели, являющийся одним из
важнейших критериев оценки эффективности оружия, из-за раз-
вития акустических систем самонаведения и неконтактных
16
взрывателей значительно увеличился. Благодаря этогому воз-
росла вероятность поражения цели.
Среди противолодочных торпед, состоящих на вооружении
надводных кораблей ВМС США, можно отметить следующие
основные типы.
Малогабаритная торпеда Мк-44 имеет активно-пассивную
акустическую систему самонаведения и может использоваться
как кораблями, так и самолетами. По утверждению иностран-
ной печати радиус реагирования акустической системы велик и
примерно равен дальности действия гидроакустических станций
периода минувшей войны. Так, система реагирует на шумы
атомной подводной лодки на расстоянии 2,2 км. Как уже указы-
валось, именно эта торпеда используется в настоящее время
в качестве боевой части ракето-торпеды «Асрок» [12].
Малогабаритная высокоскоростная торпеда с газотурбинной
силовой установкой и акустической системой самонаведения
Мк-46, как утверждают, имеет очень большие скорость и даль-
ность хода и может поражать цели, находящиеся на значитель-
ных глубинах. Предполагают, что эта торпеда заменит торпеду
Мк-44 в качестве боевой части оружия «Асрок».
Малогабаритные торпеды могут сбрасываться и с беспилот-
ных телеуправляемых противолодочных корабельных вертоле-
тов. Поэтому при использовании торпедного оружия надводными
кораблями большая роль отводится вертолетам, получив-
шим условное обозначение DASH (Drone Anti-Submarine Heli-
copter — беспилотный противолодочный вертолет). Предпола-
гается такими вертолетами вооружить около 300 кораблей ВМС
США, причем на каждом корабле будут размещены два дей-
ствующих и один запасной вертолет. Управление вертолетом
может осуществляться по радиолинии с корабля в радиусе до
46—56 км. Вертолеты имеют хорошую устойчивость и манев-
ренность и развивают скорость хода до 157 км/час, что позво-
ляет очень быстро направить вертолет в точку обнаружения
подводной лодки. Вертолет может нести одну-две противоло-
дочные торпеды или комплект глубинных бомб [3].
При управлении полетом вертолета и применении с верто-
лета противолодочного оружия широко используются корабель-
ные радиоэлектронные средства. Управление взлетом осуществ-
ляется с помощью палубного пульта, установленного на мостике
корабля. Взлетевший вертолет направляется приблизительно
в сторону обнаруженной цели. После этого управление верто-
летом передается на второй пульт, расположенный в боевом
информационном посту корабля. Данные о местоположении
вертолета определяются с помощью радиолокационной станции.
Одновременно в пост поступают данные о цели, получаемые
с помощью гидролокатора. Сопоставление координат цели
и вертолета позволяет выработать поправочные команды,
А. Л. Простаков
17
выдаваемые на вертолет. В результате этого вертолет выводится
в точку, находящуюся над подводной лодкой-целью. В момент
выхода в эту точку по команде с корабля производится сбрасы-
вание торпеды, которая, попав в воду, осуществляет поиск цели
и выводится на нее с помощью своей системы самонаведения.
Считается, что вертолеты смогут найти применение и для
уточнения сомнительных гидроакустических контактов, установ-
ленных с помощью корабельного гидролокатора.
Несмотря на то, что на современных противолодочных ко-
раблях имеется оружие, обладающее большой дальностью дей-
ствия, глубинные бомбы не потеряли своего значения и продол-
жают совершенствоваться. Некоторые современные глубинные
бомбы имеют реактивный двигатель твердого топлива, обеспе-
чивающий значительное увеличение дальности стрельбы; увели-
чилась скорость (погружения бомб.
Тем не менее, большинство бомбометов имеет сравнительно
небольшую дальность стрельбы, значительно меньше, чем даль-
ности действия новейших современных корабельных гидроло-
каторов.
Стрельба глубинными бомбами, которые не могут управ-
ляться и не имеют систем самонаведения, предъявляет повы-
шенные требования к точности определения координат цели
с помощью гидролокаторов. По этим же причинам для обеспе-
чения достаточно высокой эффективности поражения подвод-
ных лодок бомбами оказывается необходимым определить с до-
статочной точностью глубину погружения атакуемой цели. Для
этого в состав некоторых гидролокаторов вводятся специальные
устройства, обеспечивающие определение глубины.
§ 4. ГИДРОЛОКАТОРЫ КРУГОВОГО ОБЗОРА
В послевоенные годы гидролокаторы кругового обзора за-
няли первое место среди активных гидроакустических средств
обнаружения подводных лодок, оттеснив на задний план гидро-
локаторы шагового поиска. Причины такого успеха кроются
в неоспоримых преимуществах гидролокаторов кругового об-
зора, важнейшими из которых являются следующие: время
обследования всего водного горизонта во много раз меньше
времени обзора гидролокатора шагового поиска; за одну по-
сылку гидролокатор кругового обзора может обнаружить не-
сколько целей, находящихся в пределах зоны его действия, и
определяет координаты каждой из них; непрерывное наблюде-
ние за любой из обнаруженных целей и определение ее коорди-
нат не мешает получению информации обо всех изменениях
окружающей подводной обстановки.
В настоящее время существует несколько разновидностей
гидролокаторов кругового обзора, существенно отличающихся
18
друг от друга по принципам приема и изучения акустической
энергии. Так, но принципу приема акустической энергии и опре-
деления направления на 'пеленгуемый объект гидролокаторы
кругового обзора можно подразделить на гидролокаторы с бы-
стровращающеися в плоскости пеленгования характеристикой
направленности и гидролокаторы со статически сформирован-
ными (неподвижными в плоскости пеленгования) быстропере-
ключаемыми характеристиками направленности.
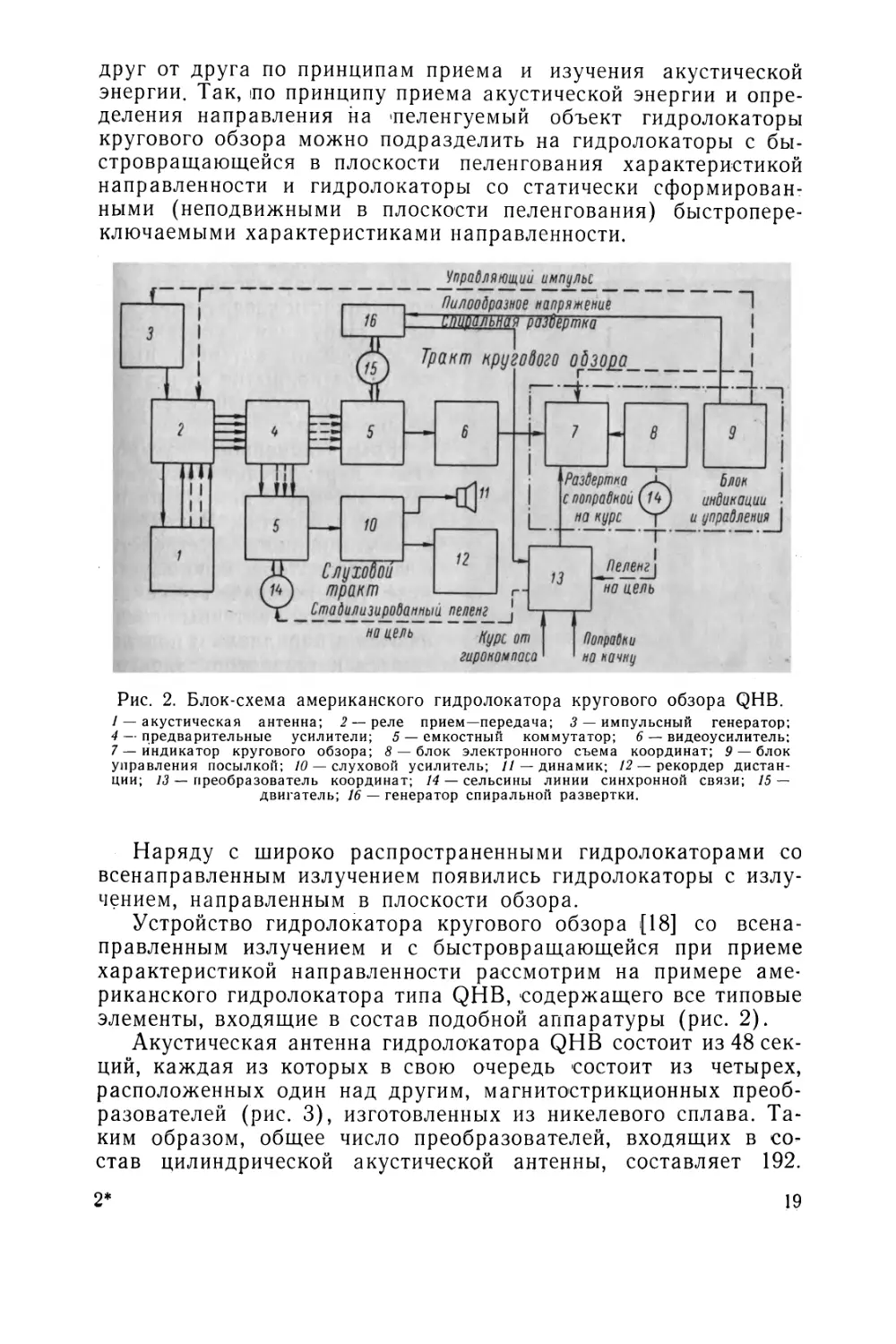
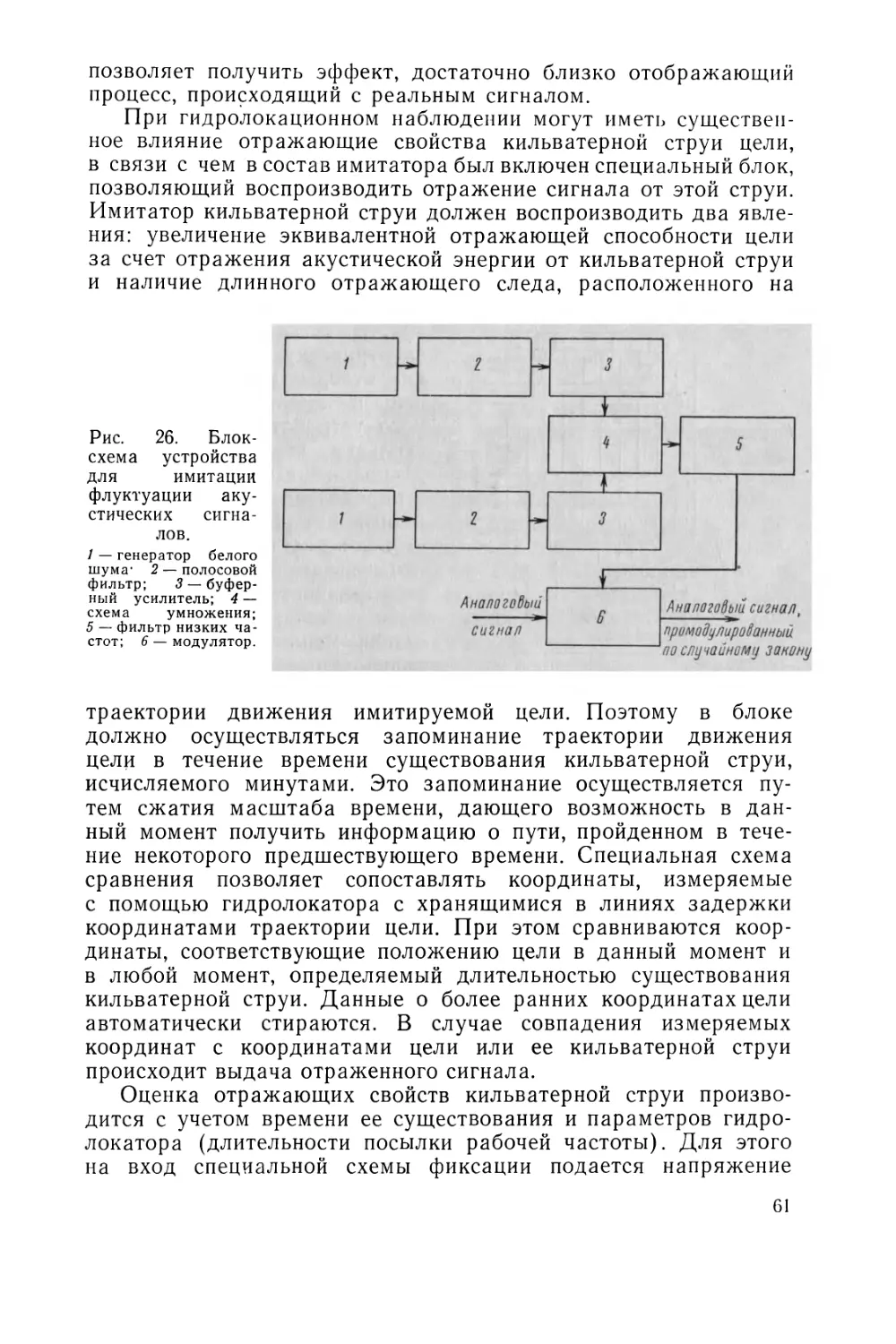
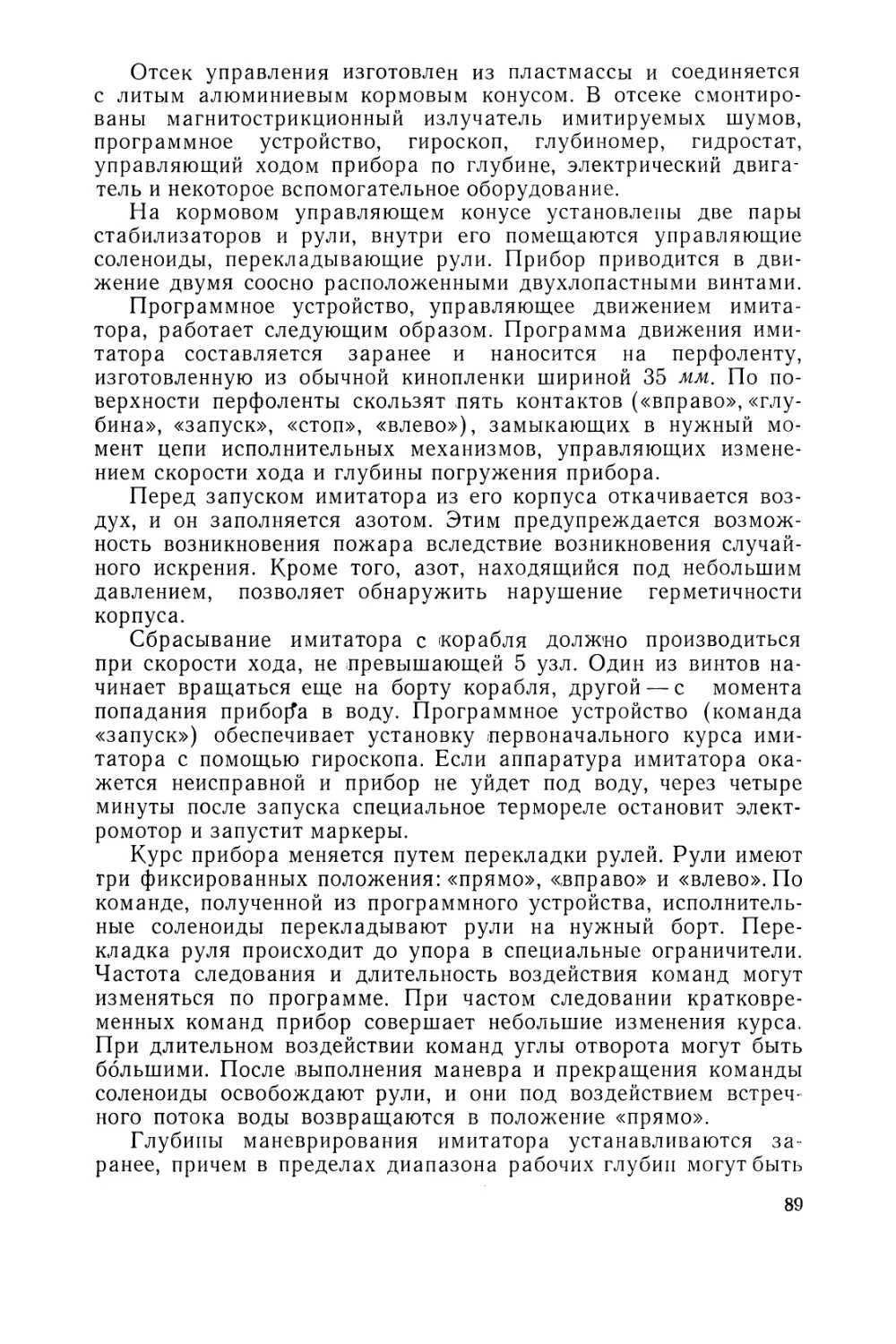
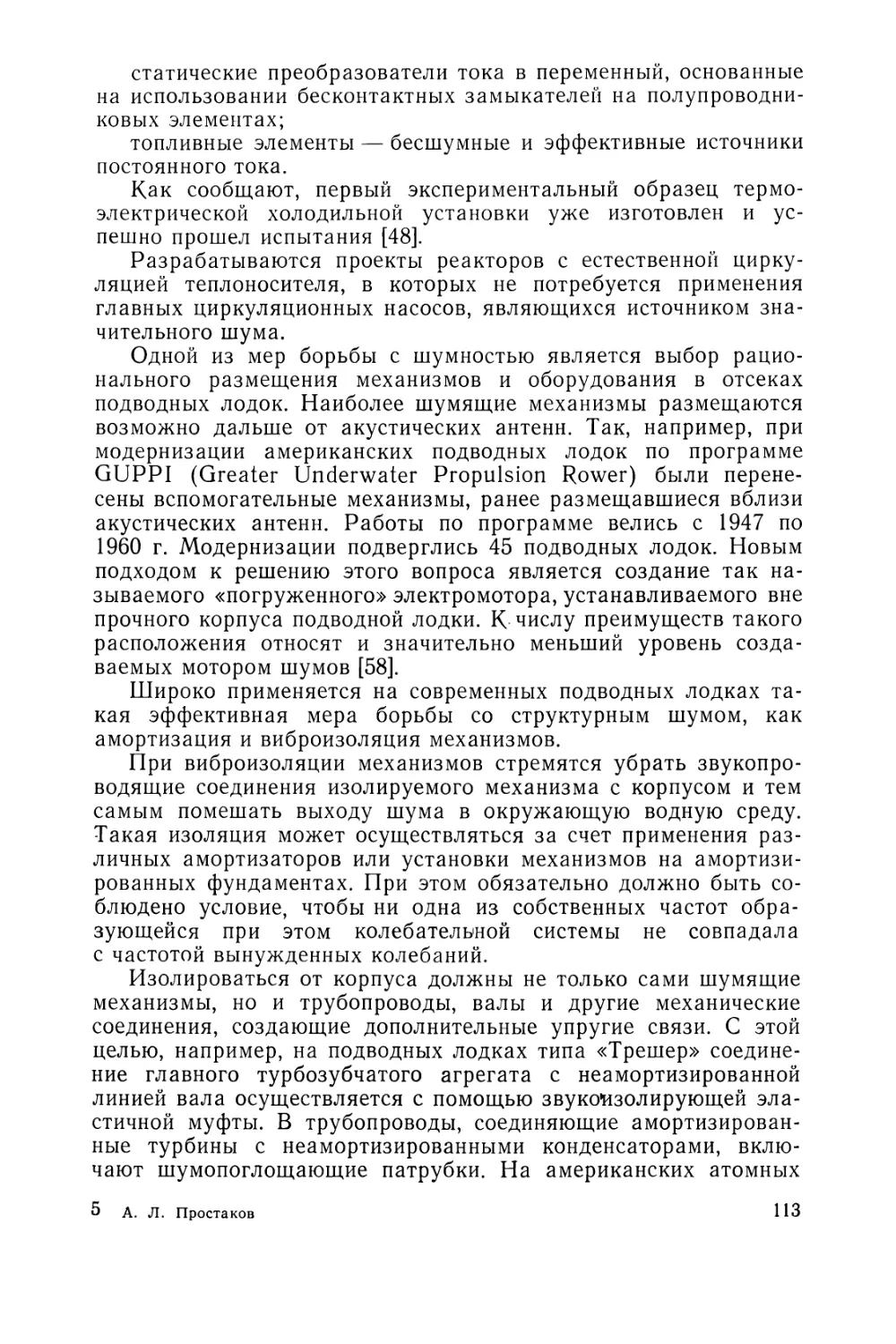
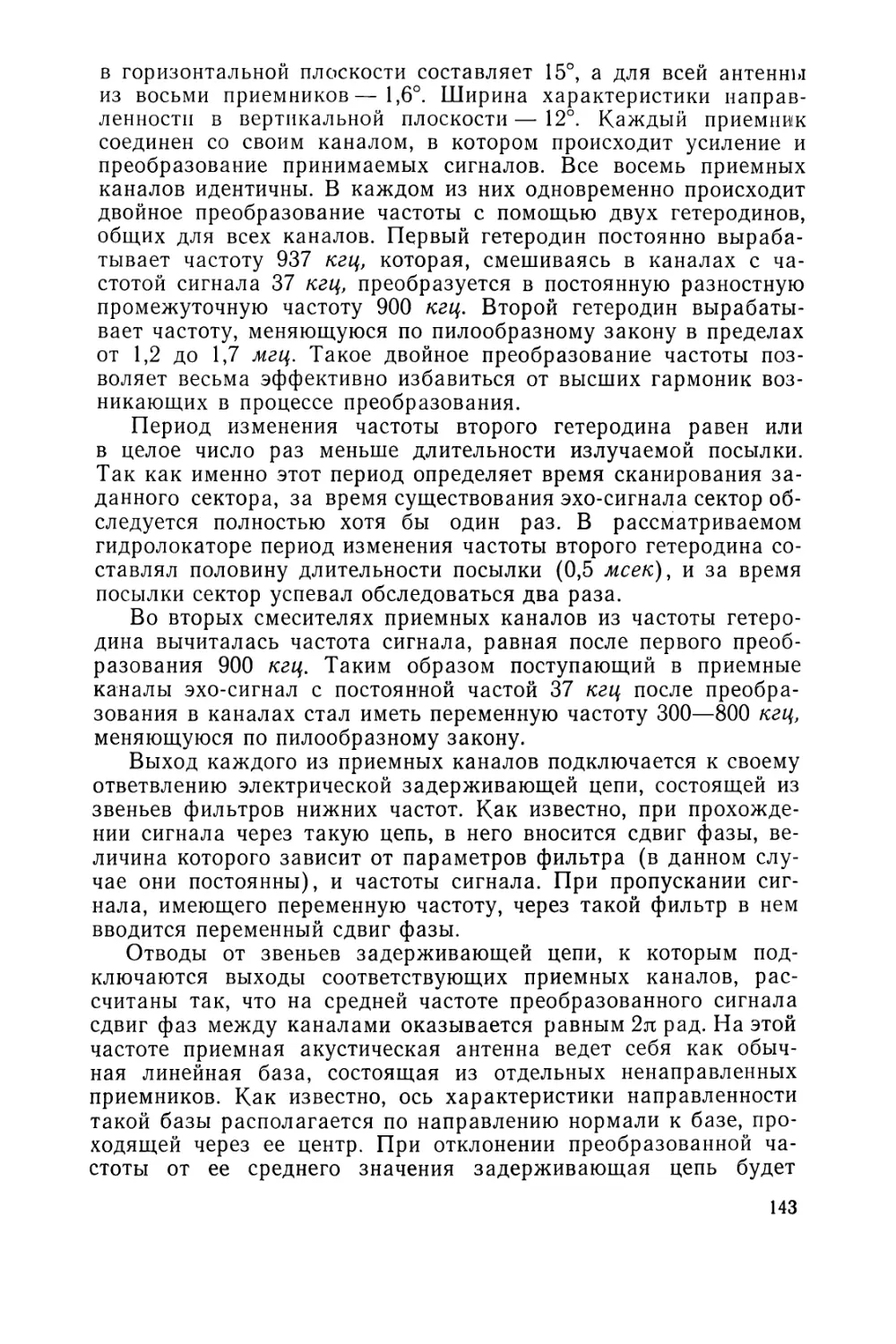
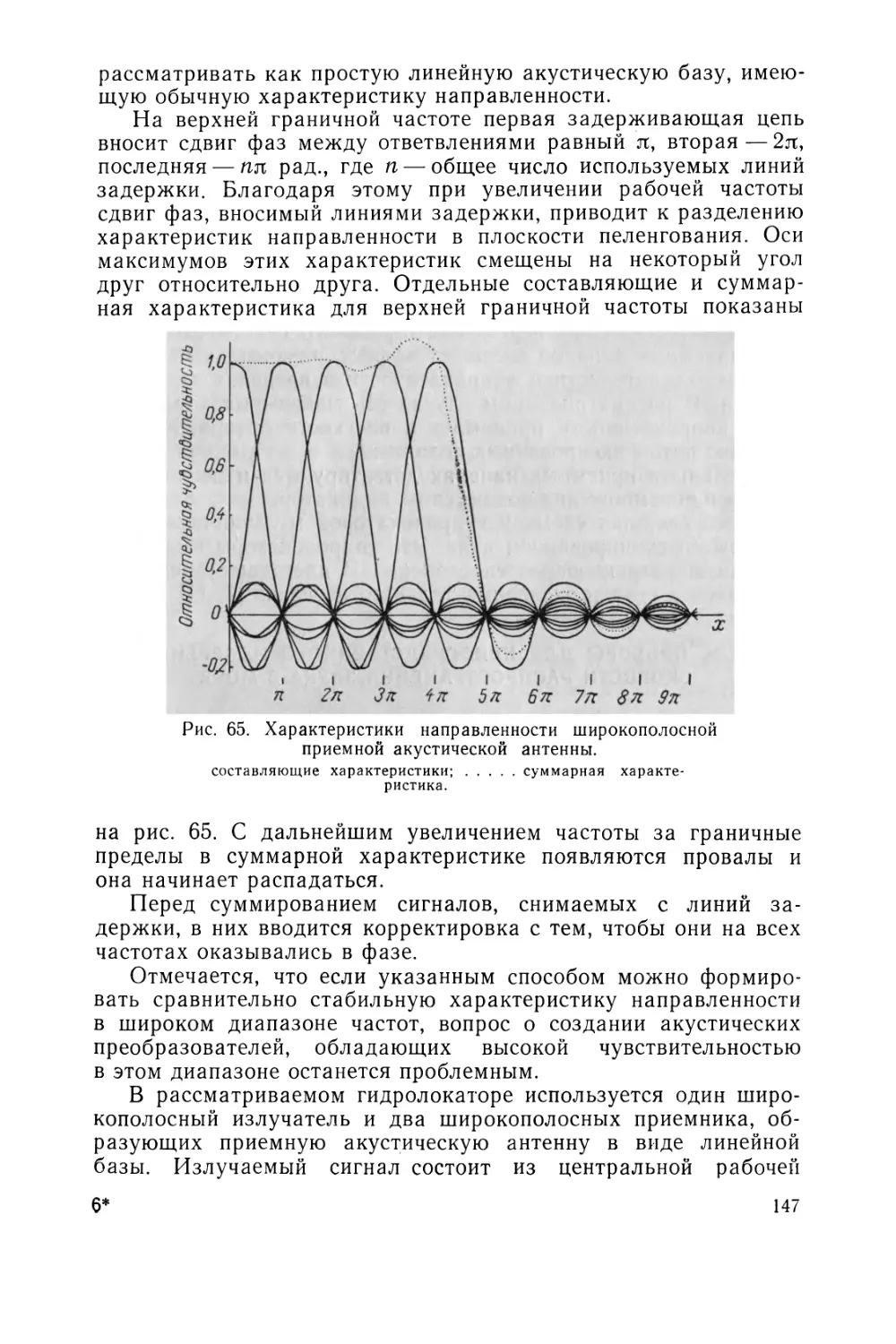
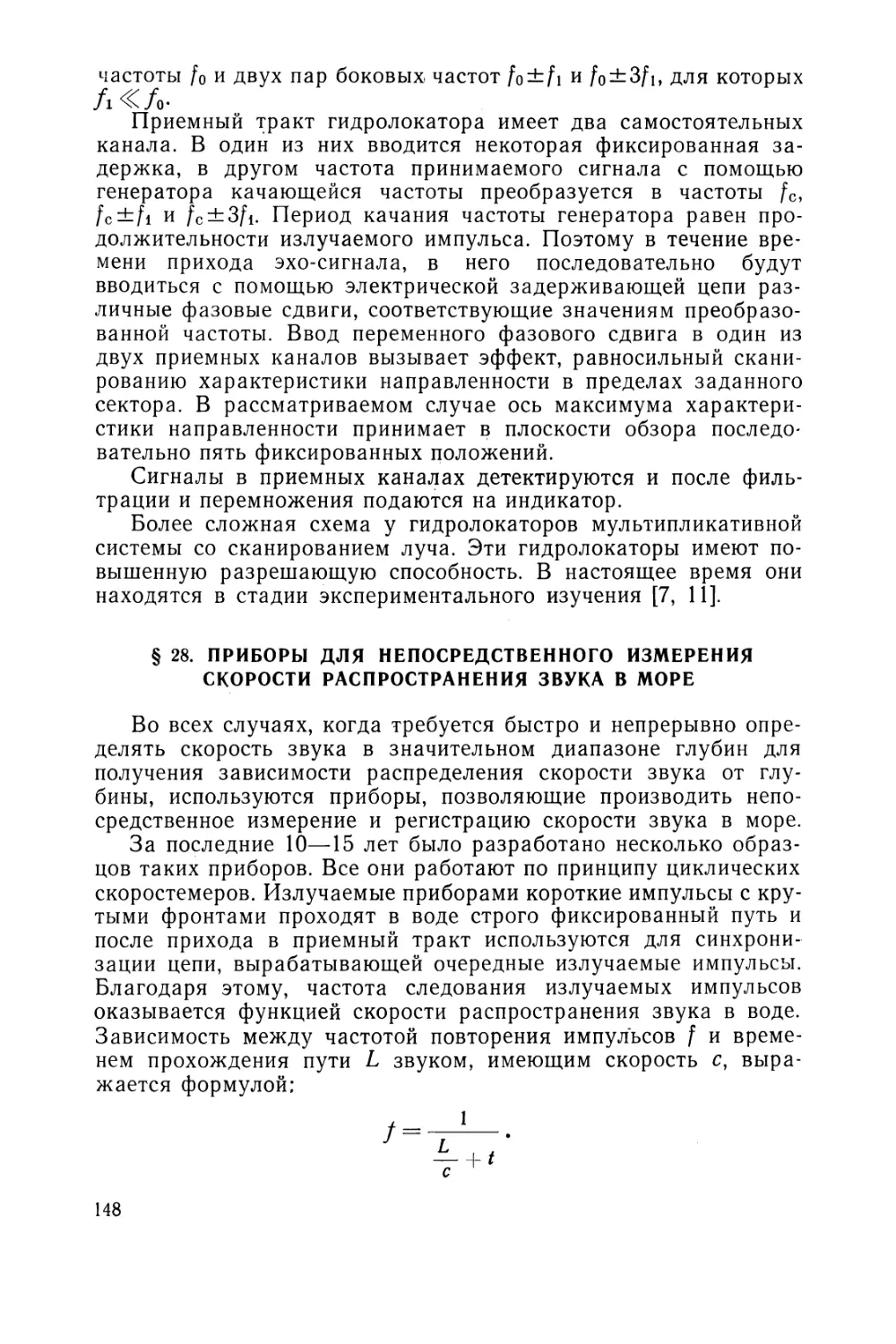
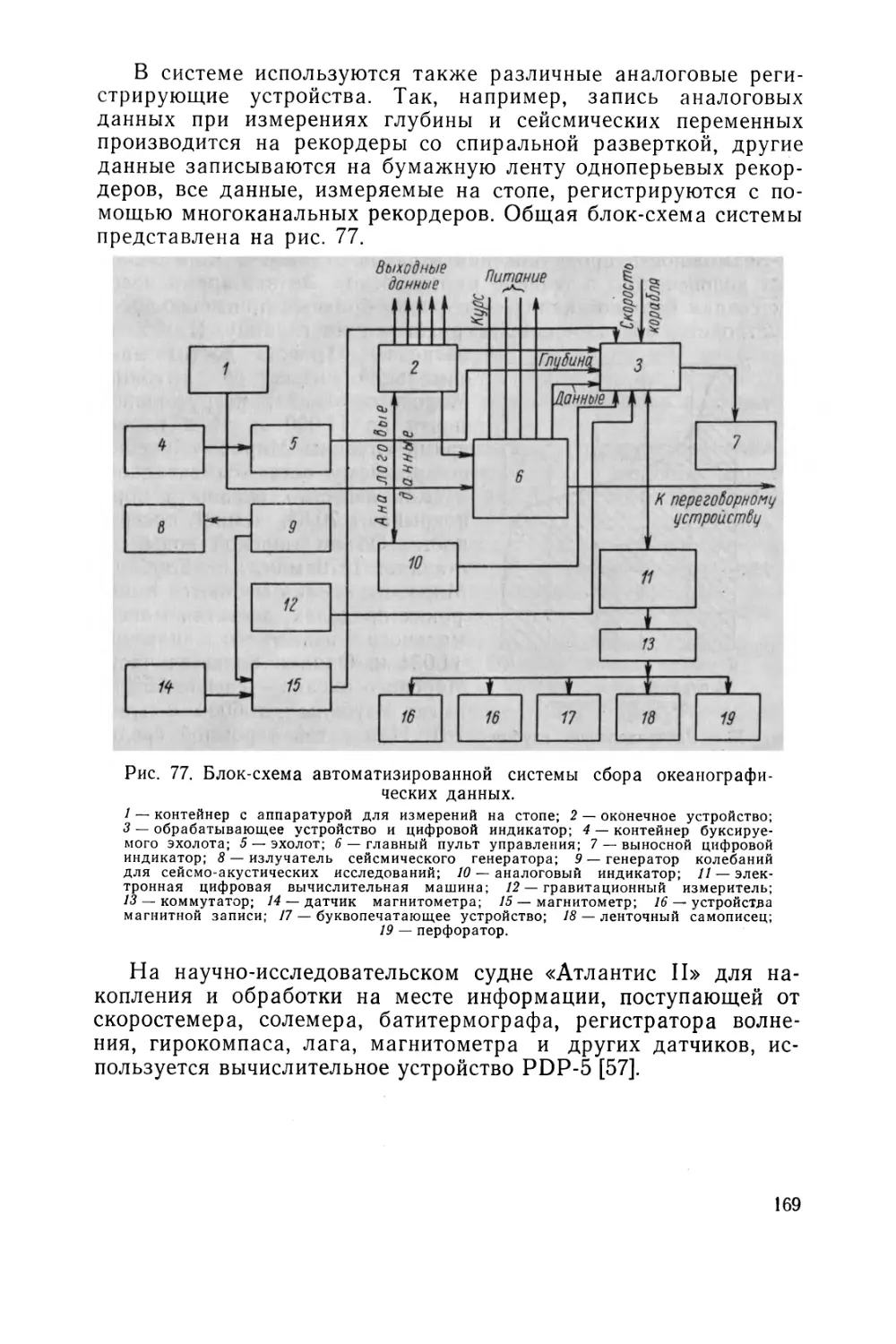
Рис. 2. Блок-схема американского гидролокатора кругового обзора QHB.
1 — акустическая антенна; 2 — реле прием—передача; 3 — импульсный генератор;
4 — предварительные усилители; 5 — емкостный коммутатор; 6 — видеоусилитель;
7 — индикатор кругового обзора; 8 — блок электронного съема координат; 9 — блок
управления посылкой; 10— слуховой усилитель; // — динамик; 12— рекордер дистан-
ции; 13 — преобразователь координат; 14 — сельсины линии синхронной связи; 15 —
двигатель; 16 — генератор спиральной развертки.
Наряду с широко распространенными гидролокаторами со
всенаправленным излучением появились гидролокаторы с излу-
чением, направленным в плоскости обзора.
Устройство гидролокатора кругового обзора [18] со всена-
правленным излучением и с быстровращающеися при приеме
характеристикой направленности рассмотрим на примере аме-
риканского гидролокатора типа QHB, содержащего все типовые
элементы, входящие в состав подобной аппаратуры (рис. 2).
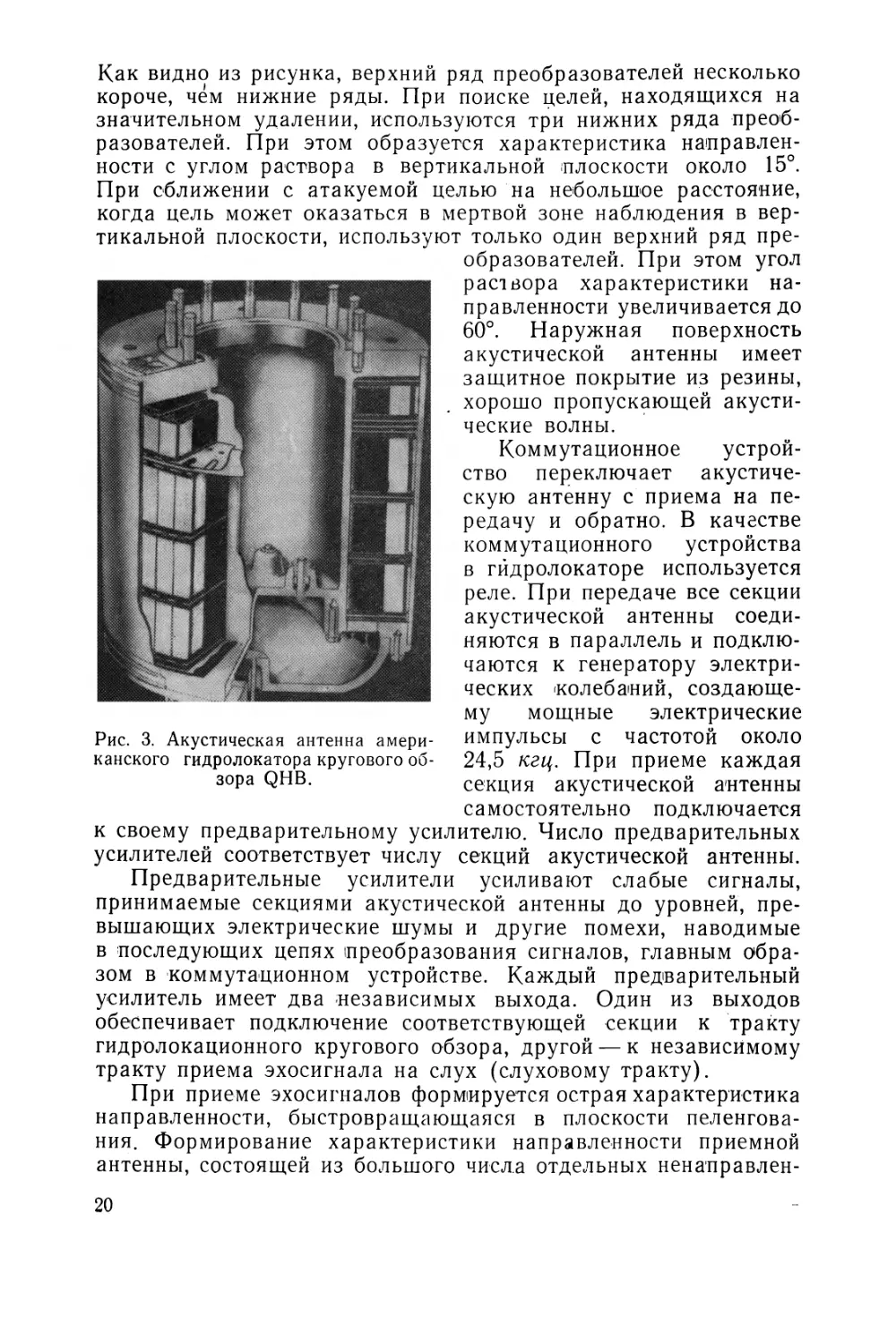
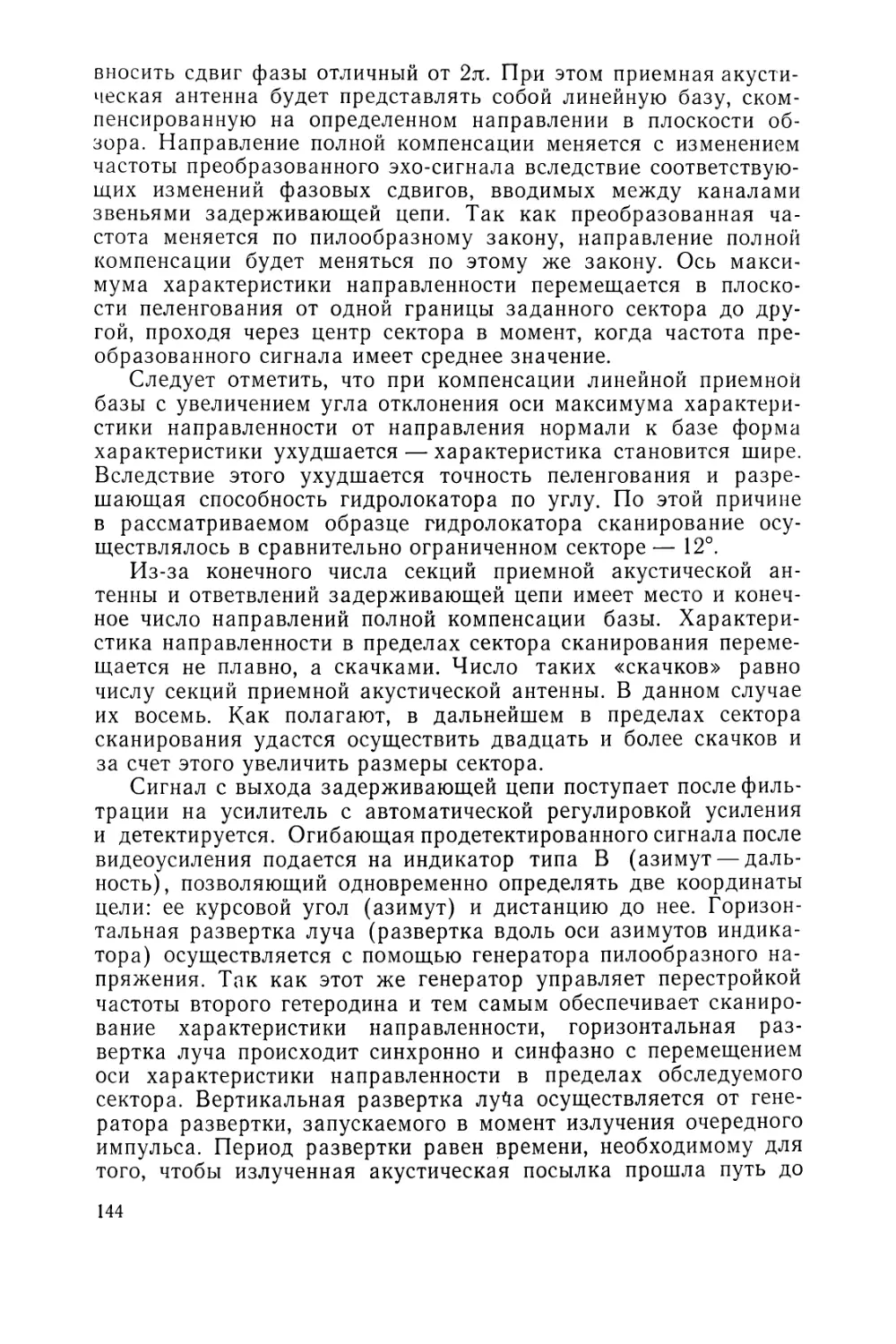
Акустическая антенна гидролокатора QHB состоит из 48 сек-
ций, каждая из которых в свою очередь состоит из четырех,
расположенных один над другим, магнитострикционных преоб-
разователей (рис. 3), изготовленных из никелевого сплава. Та-
ким образом, общее число преобразователей, входящих в со-
став цилиндрической акустической антенны, составляет 192.
2*
19
Как видно из рисунка, верхний ряд преобразователей несколько
короче, чем нижние ряды. При поиске целей, находящихся на
значительном удалении, используются три нижних ряда преоб-
разователей. При этом образуется характеристика направлен-
ности с углом раствора в вертикальной плоскости около 15°.
При сближении с атакуемой целью на небольшое расстояние,
когда цель может оказаться в мертвой зоне наблюдения в вер-
тикальной плоскости, используют только один верхний ряд пре-
образователей. При этом угол
раствора характеристики на-
правленности увеличивается до
60°. Наружная поверхность
акустической антенны имеет
защитное покрытие из резины,
хорошо пропускающей акусти-
ческие волны.
Коммутационное устрой-
ство переключает акустиче-
скую антенну с приема на пе-
редачу и обратно. В качестве
коммутационного устройства
в гидролокаторе используется
реле. При передаче все секции
акустической антенны соеди-
няются в параллель и подклю-
чаются к генератору электри-
ческих -колебаний, создающе-
му мощные электрические
Рис. 3. Акустическая антенна амери- импульсы С частотой ОКОЛО
канского гидролокатора кругового об- 24,5 кгц. При приеме каждая
зора QHB. секция акустической а'нтенны
самостоятельно подключается
к своему предварительному усилителю. Число предварительных
усилителей соответствует числу секций акустической антенны.
Предварительные усилители усиливают слабые сигналы,
принимаемые секциями акустической антенны до уровней, пре-
вышающих электрические шумы и другие помехи, наводимые
в последующих цепях преобразования сигналов, главным обра-
зом в коммутационном устройстве. Каждый предварительный
усилитель имеет два независимых выхода. Один из выходов
обеспечивает подключение соответствующей секции к тракту
гидролокационного кругового обзора, другой — к независимому
тракту приема эхосигнала на слух (слуховому тракту).
При приеме эхосигналов формируется острая характеристика
направленности, быстровращающаяся в плоскости пеленгова-
ния. Формирование характеристики направленности приемной
антенны, состоящей из большого числа отдельных ненаправлен-
20
ных секций — приемников, осуществляется путем подключения
к этим секциям звеньев электрической задерживающей цепи.
Поэтому и в тракте кругового обзора, и в слуховом тракте
сигналы с выходов предварительных усилителей поступают на
элементы формирования характеристик направленности — ем-
костные коммутаторы с задерживающими цепями.
В рассматриваемом гидролокаторе в формировании харак-
теристики направленности при приеме одновременно участвуют
18 из общего числа 48 секций, составляющих акустическую
антенну. Эти 18 секций в определенной последовательности под-
ключаются к звеньям электрической задерживающей цепи, ко-
торая обеспечивает компенсацию сдвига фаз колебаний, прихо-
дящих к отдельным секциям, и суммирование сфазированных.
колебаний на своем выходе.
Для вращения сформированной характеристики оказывается
необходимым к звеньям задерживающей цепи поочередно под-
ключать в определенной последовательности разные приемники.
Такое переключение осуществляется с помощью бесконтактного
устройства — емкостного коммутатора.
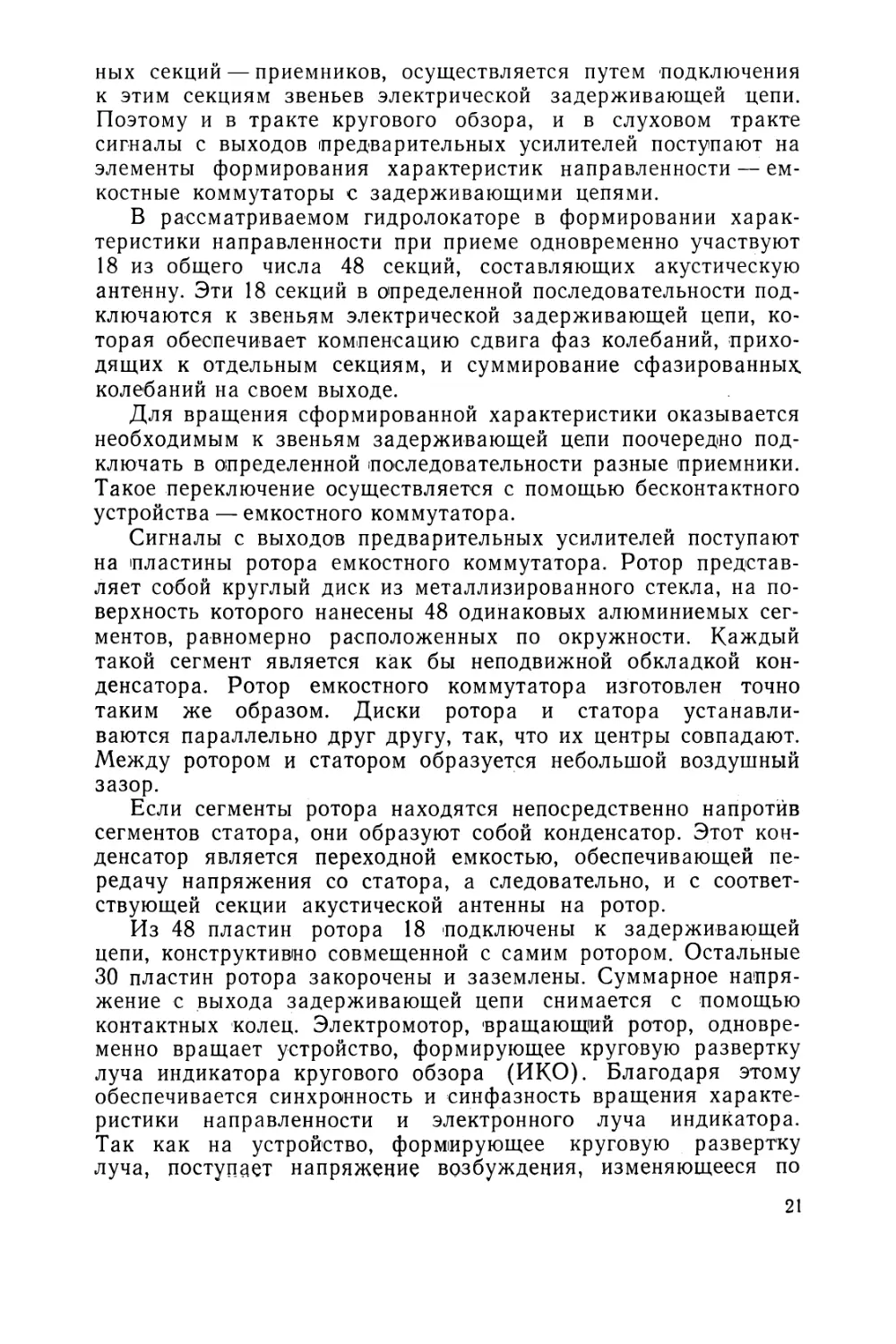
Сигналы с выходов предварительных усилителей поступают
на 'пластины ротора емкостного коммутатора. Ротор представ-
ляет собой круглый диск из металлизированного стекла, на по-
верхность которого нанесены 48 одинаковых алюминиемых сег-
ментов, равномерно расположенных по окружности. Каждый
такой сегмент является как бы неподвижной обкладкой кон-
денсатора. Ротор емкостного коммутатора изготовлен точно
таким же образом. Диски ротора и статора устанавли-
ваются параллельно друг другу, так, что их центры совпадают.
Между ротором и статором образуется небольшой воздушный
зазор.
Если сегменты ротора находятся непосредственно напротив
сегментов статора, они образуют собой конденсатор. Этот кон-
денсатор является переходной емкостью, обеспечивающей пе-
редачу напряжения со статора, а следовательно, и с соответ-
ствующей секции акустической антенны на ротор.
Из 48 пластин ротора 18 подключены к задерживающей
цепи, конструктивно совмещенной с самим ротором. Остальные
30 пластин ротора закорочены и заземлены. Суммарное напря-
жение с выхода задерживающей цепи снимается с помощью
контактных колец. Электромотор, вращающий ротор, одновре-
менно вращает устройство, формирующее круговую развертку
луча индикатора кругового обзора (ИКО). Благодаря этому
обеспечивается синхронность и синфазность вращения характе-
ристики направленности и электронного луча индикатора.
Так как на устройство, формирующее круговую развертку
луча, поступает напряжение возбуждения, изменяющееся по
21
пилообразному закону, с выхода устройства.снимается суммар-
ное напряжение спиральной развертки. Это напряжение по-
дается на отклоняющую систему ИКО.
Ротор емкостного коммутатора вращается непрерывно и по
мере его вращения к задерживающей цепи последовательно
подключаются и от нее отключаются все новые секции акусти-
ческой антенны. Вместе с ротором вращается и сформирован-
ная в плоскости пеленгования характеристика направленности.
Один полный оборот характеристики направленности должен
происходить за очень короткий промежуток времени, равный
или меньший длительности эхо-сигнала, т. е. за время, не пре-
вышающее несколько десятков миллисекунд. Число оборотов
характеристики направленности в минуту должно быть очень
большим. Так в гидролокаторе QHB скорость вращения харак-
теристики направленности при круговом обзоре составляет
750 об/мин.
Совершенно аналогично устроен и работает емкостной ком-
мутатор слухового тракта. Разница между обоими коммутато-
рами заключается в том, что ротор коммутатора слухового
тракта вместе с характеристикой направленности не вращается
непрерывно, а может быть повернут по желанию оператора
в любом нужном направлении. Вращение ротора происходит
при помощи дистанционного синхронного привода, связанного
с визиром пеленга ИКО. Таким образом, поворачивая визир
для взятия отсчета пеленга на цель, обнаруженную в режиме
эхопеленгования, оператор одновременно поворачивает в на-
правлении на цель характеристику направленности слухового
тракта.
Сигналы с выходов емкостных коммутаторов поступают со-
ответственно на видеоусилитель и усилитель слухового тракта.
Для регистрации эхосигналов используется ИКО со спиральной
разверткой электронного луча. В момент посылки очередного
импульса электронный луч находится в центре экрана трубки.
Центр экрана принимается за место своего корабля. Затем луч
начинает движение по спирали, совершая каждый виток син-
хронно с вращением характеристики направленности в пло-
скости пеленгования и удаляясь от центра со скоростью, про-
порциональной скорости распространения звука в воде.
Управляющий электрод электронно-лучевой трубки ИКО
подключается к выходу видеоусилителя. В момент прихода эхо-
сигнала на экране трубки появляется яркостная отметка, пока:
зывающая место цели относительно корабля в полярных коор:
динатах. Так 'как генератор развертки, связанный с емкостным
коммутатором кругового обзора, ориентирован относительно
диаметральной плоскости корабля, то и луч на экране трубки
должен показывать направление на. цель относительно диамет-
ральной плоскости, т. е. курсовой угол на цель. Для того чтобы
22
на экране трубки отображался не курсовой угол, а истинный
пеленг цели, в спиральную развертку перед подачей ее на от-
клоняющую систему ИКО вводится поправка на курс корабля.
После введения такой поправки направление на отметку от
цели на экране трубки всегда будет соответствовать истинному
пеленгу на цель и не будет меняться при изменениях курса
своего корабля. При желании 'поправку на курс можно не вво-
дить. В этом случае направление из центра трубки на отметку
на цель будет определять уже не
пеленг на цель, а курсовой угол
на нее.
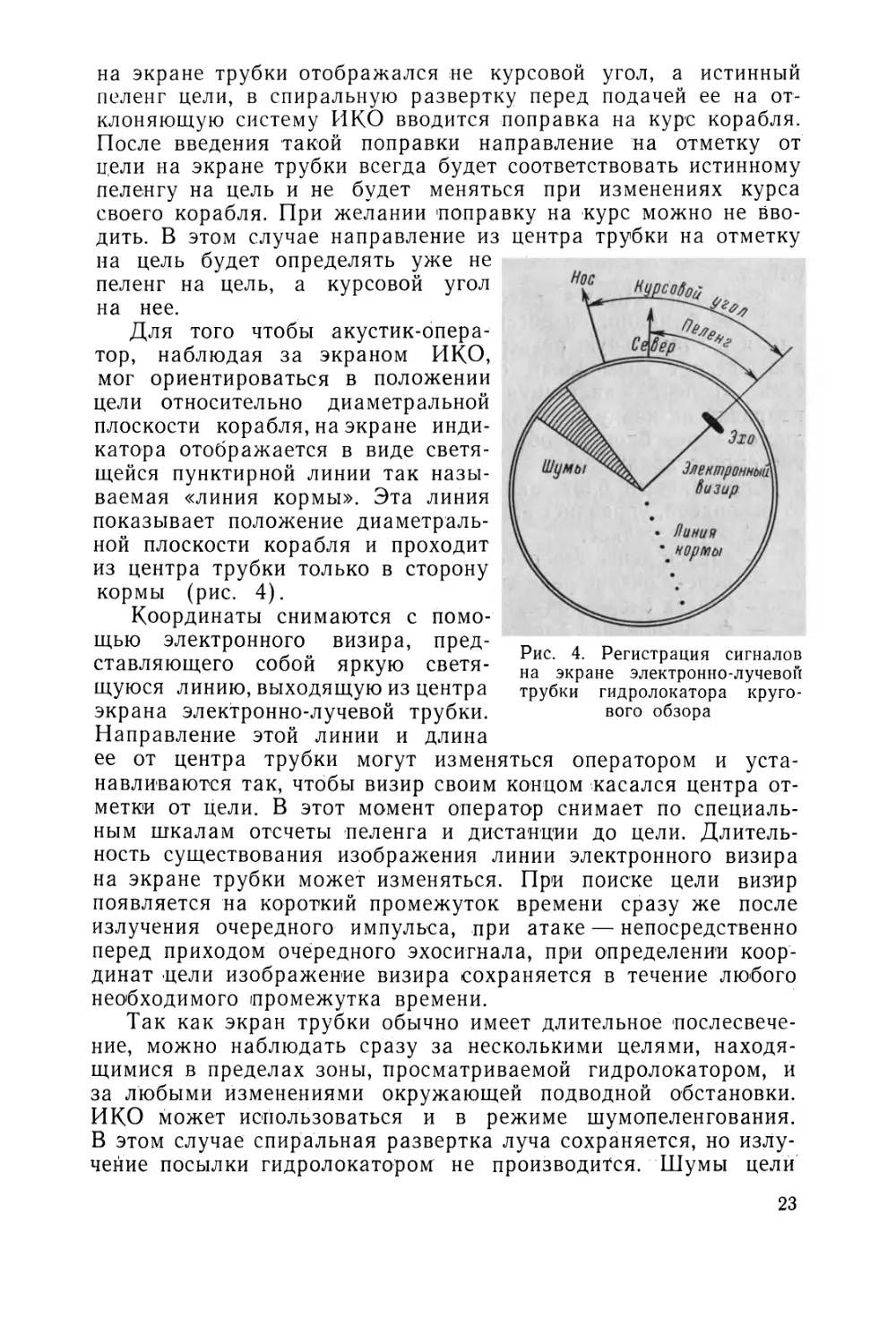
Для того чтобы акустик-опера-
тор, наблюдая за экраном ИКО,
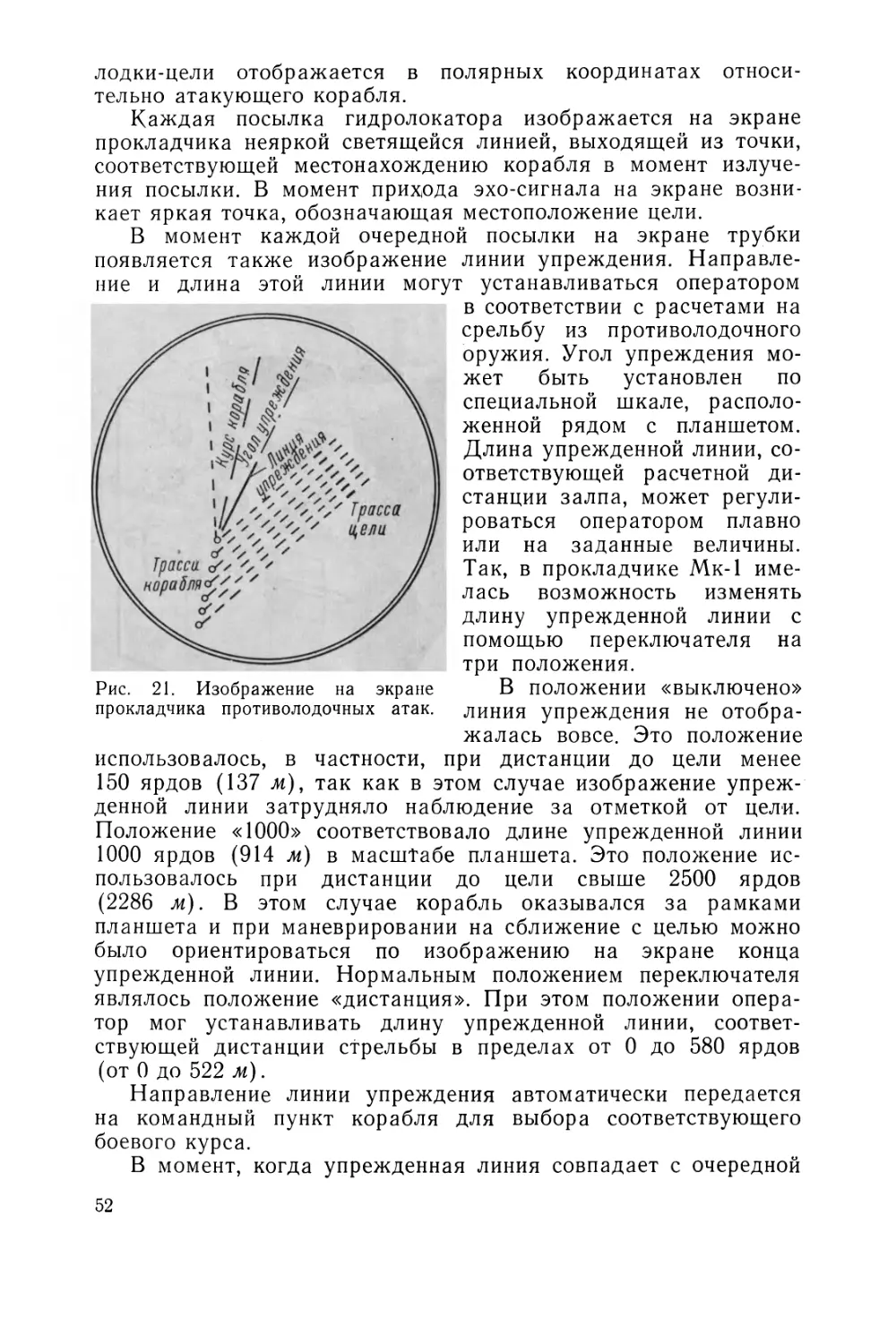
мог ориентироваться в положении
цели относительно диаметральной
плоскости корабля, на экране инди-
катора отображается в виде светя-
щейся пунктирной линии так назы-
ваемая «линия кормы». Эта линия
показывает положение диаметраль-
ной плоскости корабля и проходит
из центра трубки только в сторону
кормы (рис. 4).
Координаты снимаются с помо-
щью электронного визира, пред- „ . _
стявяяюшего гобой япкую гнетя- Рис' 4' РегистРа1*ия сигналов
ставляющего сооои яркую светя на экране электронно-лучевой
щуюся линию, выходящую из центра трубки гидролокатора круго-
экрана электронно-лучевой трубки. вого обзора
Направление этой линии и длина
ее от центра трубки могут изменяться оператором и уста-
навливаются так, чтобы визир своим концом касался центра от-
метки от цели. В этот момент оператор снимает по специаль-
ным шкалам отсчеты пеленга и дистанции до цели. Длитель-
ность существования изображения линии электронного визира
на экране трубки может изменяться. При поиске цели визир
появляется на короткий промежуток времени сразу же после
излучения очередного импульса, при атаке — непосредственно
перед приходом очередного эхосигнала, при определении коор-
динат цели изображение визира сохраняется в течение любого
необходимого промежутка времени.
Так как экран трубки обычно имеет длительное послесвече-
ние, можно наблюдать сразу за несколькими целями, находя-
щимися в пределах зоны, просматриваемой гидролокатором, и
за любыми изменениями окружающей подводной обстановки.
ИКО может использоваться и в режиме шумопеленгования.
В этом случае спиральная развертка луча сохраняется, но излу-
чение посылки гидролокатором не производится. Шумы цели
23
наблюдаются на экране трубки в виде яркого засвеченного
сектора.
Слуховой тракт гидролокатора обеспечивает возможность
прослушивать эхосигнал и определять наличие допплеровского
сдвига. Выпрямленный сигнал с выхода этого канала подается
также для записи на рекордер дистанции. Для более удобного
определения допплеровского сдвига, вызванного движением
цели, в гидролокаторе предусмотрено устройство для компенса-
ции допплеровского сдвига, вызванного движением своего ко-
рабля.
В станции имеется преобразователь координат, выполняю-
щий две функции: он обеспечивает ввод поправки на курс ко-
рабля в спиральную развертку луча, которая, как уже говори-
лось, делает возможным определять координаты цели в си-
стеме «пеленг — дистанция» и позволяет вводить необходимые
поправки на качку корабля. Ввод поправок на качку осуществ-
ляется через блок преобразователя, связанного с корабельной
системой стабилизации.
Специальный блок, запускаемый импульсами от ИКО или
от рекордера, управляет излучением гидролокатора. Блок управ-
ления осуществляет:
— запуск цепей генератора;
— переключение реле «прием—передача»;
— запуск очередной спиральной развертки;
— формирование электронного визира для съема координат
цели;
— запуск специального рекордера глубины.
В некоторых более новых гидролокаторах кругового обзора
прием сигналов осуществляется с помощью статических харак-
теристик направленности, формирующихся в плоскости пелен-
гования путем постоянного подключения звеньев электрической
задерживающей цепи к нескольким секциям акустической ан-
тенны. Каждая группа секций акустической антенны со своей
задерживающей цепью образует один приемный канал. При
этом секции акустической антенны и присоединенные к ним
звенья задерживающей цепи группируются так, чтобы макси-
мум каждой смежной характеристики направленности был сме-
щен относительно предыдущей на некоторый постоянный угол,
а все сформированные характеристики перекрывали полную
окружность.
Поочередное подключение приемных каналов ко входу уси-
лителя кругового обзора осуществляется с помощью бескон-
тактного электронного коммутатора. Скорость переключения
может быть большой, значительно превышающей скорость вра-
щения характеристики направленности с помощью емкостного
коммутатора. Так, например, в гидролокаторе BQS-2 вращение
характеристики осуществляется со скоростью 18 000 об/мин [36].
24
По мнению иностранных специалистов в настоящее время
существует возможность значительного увеличения числа стати-
чески формируемых характеристик направленности. Как утверж-
дают, в новейших гидролокаторах будет формироваться не-
сколько сот лучей, ширина каждого из которых составит доли
градуса. В последующие 5—10 лет ожидается создание систем,
формирующих в горизонтальной плоскости до 1000 лу-
чей [50].
Увеличение числа сформированных характеристик при
уменьшении их ширины повышает разрешающую способность
и точность пеленгования гидролокатора и увеличивает объем
получаемой информации. Однако при этом возникает проблема,
связанная с необходимостью восприятия оператором огромного
количества информации. Полагают, что для обработки этого
потока информации потребуется применение электронных вы-
числительных машин.
Быстрое поочередное переключение смежных характеристик
равноценно быстрому вращению одной характеристики. Однако
в гидролокаторах со статически сформированными характери-
стиками более эффективно, чем в гидролокаторах с быстровра-
щающейся характеристикой, используется энергия принимае-
мого сигнала. Так, в гидролокаторе с быстровращающейся ха-
рактеристикой сигнал принимается лишь в течение короткого
промежутка времени, когда характеристика оказывается 'повер-
нутой в сторону приходящего сигнала. Этот промежуток вре-
мени всегда значительно меньше полного времени существова-
ния сигнала. В результате этого большая часть энергии эхо-
сигнала остается неиспользованной. При приеме с помощью
статически сформированных характеристик сигнал накапли-
вается в соответствующем приемном канале в течение всего
времени своего существования и потерь энергии практически
не происходит. Таким образом, гидролокаторы со статически
сформированными характеристиками направленности оказы-
ваются более помехоустойчивыми, чем гидролокаторы с быстро-
вращающимися характеристиками. Этим и объясняется широ-
кое распространение в последние годы гидролокаторов со ста-
тически сформированными характеристиками.
В новейших гидролокаторах, использующих сигналы, при-
шедшие из вторичных-зон акустической освещенности и отра-
женные от дна, применяется формирование и сканирование ха-
рактеристик направленности не только в горизонтальной, но
и в вертикальной плоскости. Этим обеспечивается эффектив-
ный прием сигналов, приходящих к акустической антенне под
любым углом к горизонту.
На страницах иностранной печати сообщается, что в неко-
торых современных гидролокаторах кругового обзора осуще-
ствляется не всенаправленное излучение всей поверхностью
25
акустической антенны, а узконаправленное излучение лишь
частью излучающей поверхности. Так, например, в гидролока-
торе SQS-26 в излучении одновременно участвует лишь около
3/в поверхности антенны [50].
§ 5. ГИДРОЛОКАТОРЫ ПЕРЕМЕННОЙ ГЛУБИНЫ
(БУКСИРУЕМЫЕ ГИДРОЛОКАТОРЫ)
Гидролокатор переменной глубины VDS (Variable Derth
Sonar) представляет собой комбинацию радиоэлектронного
оборудования обычного корабельного гидролокатора и контей-
нера с помещенной в нем акустической антенной, соединенного
с бортовым оборудованием при помощи кабель-троса. Контей-
нер-обтекатель с акустической антенной и вспомогательным
оборудованием можно погрузить на глубину нескольких десят-
ков метров и буксировать кораблем-носителем гидроакустиче-
ской станции с большой скоростью. В настоящее время такие
гидролокаторы имеются на вооружении кораблей США, Анг-
лии, Франции, Канады и Италии.
В 1959 г. на вооружение ВМС США был принят гидролока-
тор переменной глубины SQA-10. Гидролокатор SQA-10 стал
устанавливаться на кораблях, проходящих модернизацию по
программе FRAM-2. Несколько позже в ВМС США был раз-
работан гидролокатор SQA-13, полный комплект оборудования
которого весил 75—80 т.
В настоящее время разрабатывается новый гидролокатор
переменной глубины SQS-35. Наиболее существенным преиму-
ществом этого гидролокатора, как ожидают, будет значитель-
ное уменьшение веса буксируемого контейнера, примерно вдвое
меньше веса гидролокатора SQA-10. Кроме того, в контейнере
нового гидролокатора помимо акустической антенны будут
размещаться некоторые радиоэлектронные элементы тракта из-
лучения [50].
Большое внимание разработке гидролокаторов переменной
глубины уделяется в Канаде. Гидролокатор переменной глу-
бины канадского производства прошел всесторонние испыта-
ния на одном из английских кораблей. Эти испытания показали
его значительные преимущества перед аналогичным гидроло-
катором английского производства. В результате испытаний
английское Адмиралтейство пришло к заключению, что целе-
сообразно принять на вооружение английских кораблей канад-
ский гидролокатор и прекратить работы над созданием своего
гидролокатора. Гидролокаторы переменной глубины канадской
конструкции устанавливаются на большинстве канадских про-
тиволодочных кораблей и на английских многоцелевых фрега-
тах типа «Линдер».
Одной из наиболее сложных технических задач, возникаю-
26
щих при создании гидролокаторов переменной глубины, яви-
лась разработка кабель-троса.
Большой вес контейнеров с акустической антенной, значи-
тельные тяговые усилия, развивающиеся во время буксировки,
потребовали создания кабель-троса исключительно высокой
прочности.
Во время буксировки кабель-трос вибрирует под воздей-
ствием встречного потока воды и создает турбулентные завих-
рения, что приводит к появлению интенсивной шумовой помехи.
Для уменьшения тяговых усилий и снижения уровня гидроди-
намических помех кабель-тросы снабжаются обтекателями.
Первоначально использовался резиновый обтекатель прицеп-
ного типа. Такой обтекатель, сплошной по всей длине, жестко
прикреплен к кабель-тросу. Использование его было связано
со значительными трудностями. Так, при наматывании кабель-
троса на лебедку обтекатель укладывался на барабан поверх
кабеля. При этом из-за разных радиусов кривизны в материале
обтекателя возникали значительные усилия. Во время букси-
ровки обтекатель мог закручиваться вокруг кабель-троса, что
иногда приводило к его запутыванию или обрыву. При букси-
ровке под воздействием собственного веса и встречных потоков
воды обтекатель стремился сдвинуться по кабелю в сторону
•контейнера. При этом создавались значительные осевые уси-
лия, особенно в месте сматывания обтекателя с барабана, ко-
торые могли привести к разрыву обтекателя.
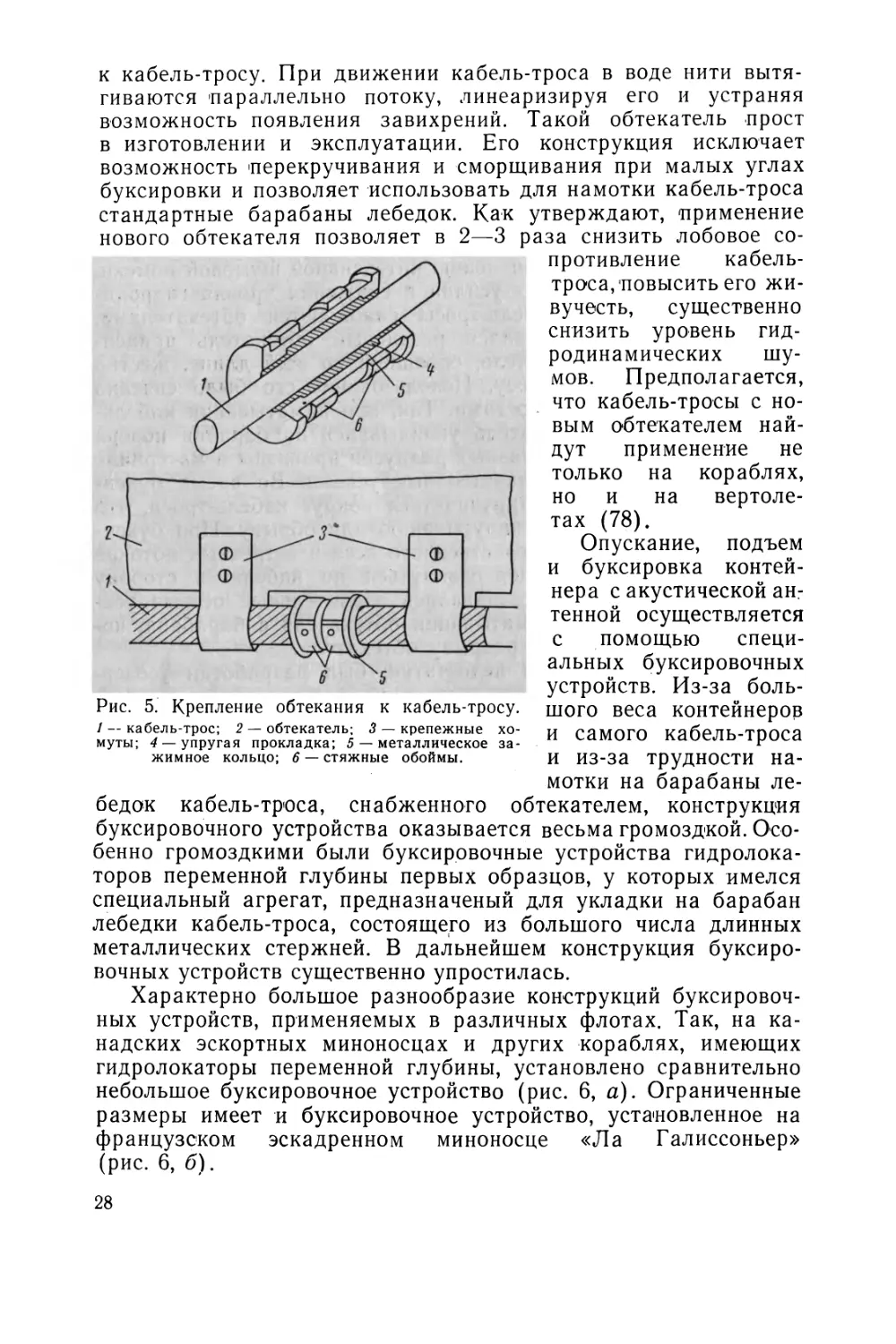
Чтобы устранить эти недостатки, был разработан усовер-
шенствованный обтекатель, состоящий из отдельных секций.
Каждая секция обтекателя длиной около 7,5 м прикрепляется
к кабель-тросу с помощью хомутов и зажимных колец.
Зажимные кольца, надежно предохраняющие секции обтека-
теля от продольного скольжения по кабелю, имеют конструк-
цию, показанную на рис. 5. Внутри зажимного кольца поме-
щается упругая прокладка, завулканизированная в месте соеди-
нения с кабель-тросом. Поверх этой прокладки накладывается
металлическое зажимное кольцо, состоящее из двух половин.
Обе 'половины зажимного кольца скрепляются между собой
с помощью двух стяжных обойм. Хомуты, крепящие секции
обтекателя, размещаются с обеих сторон зажимного кольца и
обеспечивают обтекателю возможность свободно вращаться
вокруг кабель-троса, не перемещаясь по его длине.
При наматывании такого кабеля на барабан лебедки ника-
ких разрывающих напряжений в обтекателе не возникает.
Обтекатель успешно прошел испытания при буксировке кон-
тейнера со скоростью 27 узл. [29].
В США разработан и другой образец обтекателя для ка-
бель-троса. Этот обтекатель состоит из отдельных нитей, изго-
товленных из эластичного материала и жестко прикрепленных
27
к кабель-тросу. При движении кабель-троса в воде нити вытя-
гиваются параллельно потоку, линеаризируя его и устраняя
возможность появления завихрений. Такой обтекатель прост
в изготовлении и эксплуатации. Его конструкция исключает
возможность 'перекручивания и сморщивания при малых углах
буксировки и позволяет использовать для намотки кабель-троса
стандартные барабаны лебедок. Как утверждают, 'применение
нового обтекателя позволяет в 2—3 раза снизить лобовое со-
противление кабель-
троса,повысить его жи-
вучесть, существенно
снизить уровень гид-
родинамических шу-
мов. Предполагается,
что кабель-тросы с но-
вым обтекателем най-
дут применение не
только на кораблях,
но и на вертоле-
тах (78).
Опускание, подъем
и буксировка контей-
нера с акустической анг
тенной осуществляется
с помощью специ-
альных буксировочных
устройств. Из-за боль-
шого веса контейнеров
и самого кабель-троса
и из-за трудности на-
мотки на барабаны ле-
бедок кабель-троса, снабженного обтекателем, конструкция
буксировочного устройства оказывается весьма громоздкой. Осо-
бенно громоздкими были буксировочные устройства гидролока-
торов переменной глубины первых образцов, у которых имелся
специальный агрегат, предназначеный для укладки на барабан
лебедки кабель-троса, состоящего из большого числа длинных
металлических стержней. В дальнейшем конструкция буксиро-
вочных устройств существенно упростилась.
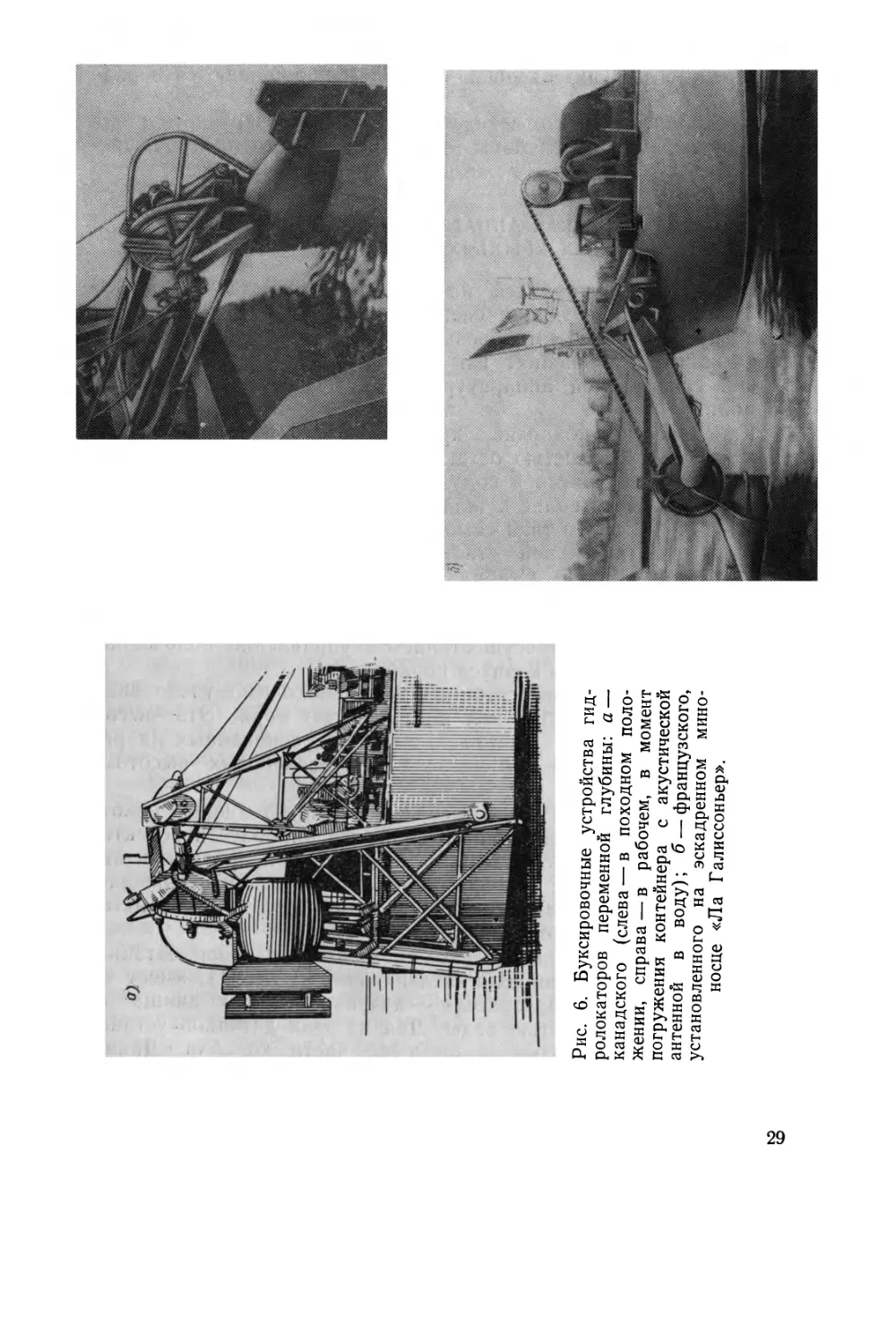
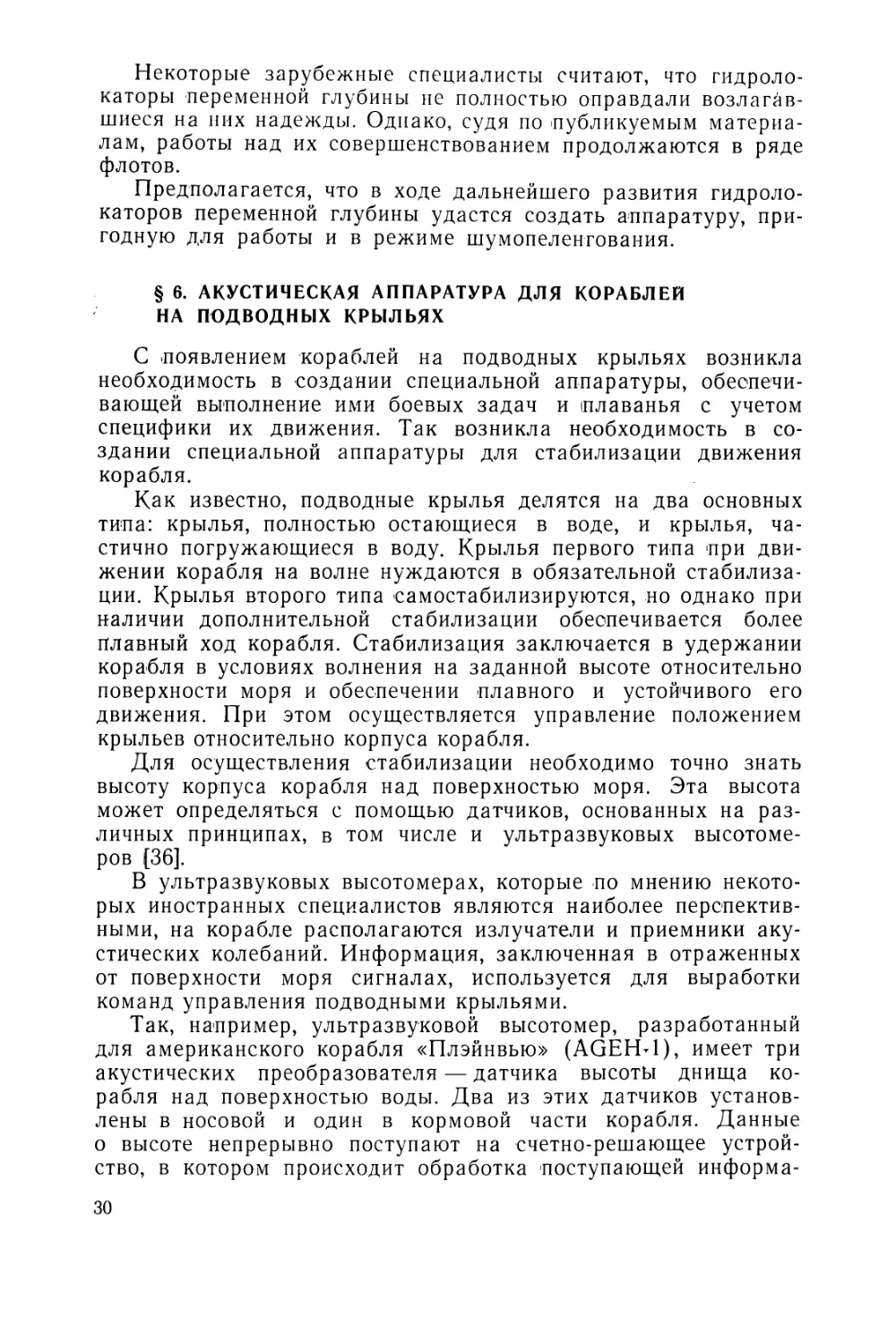
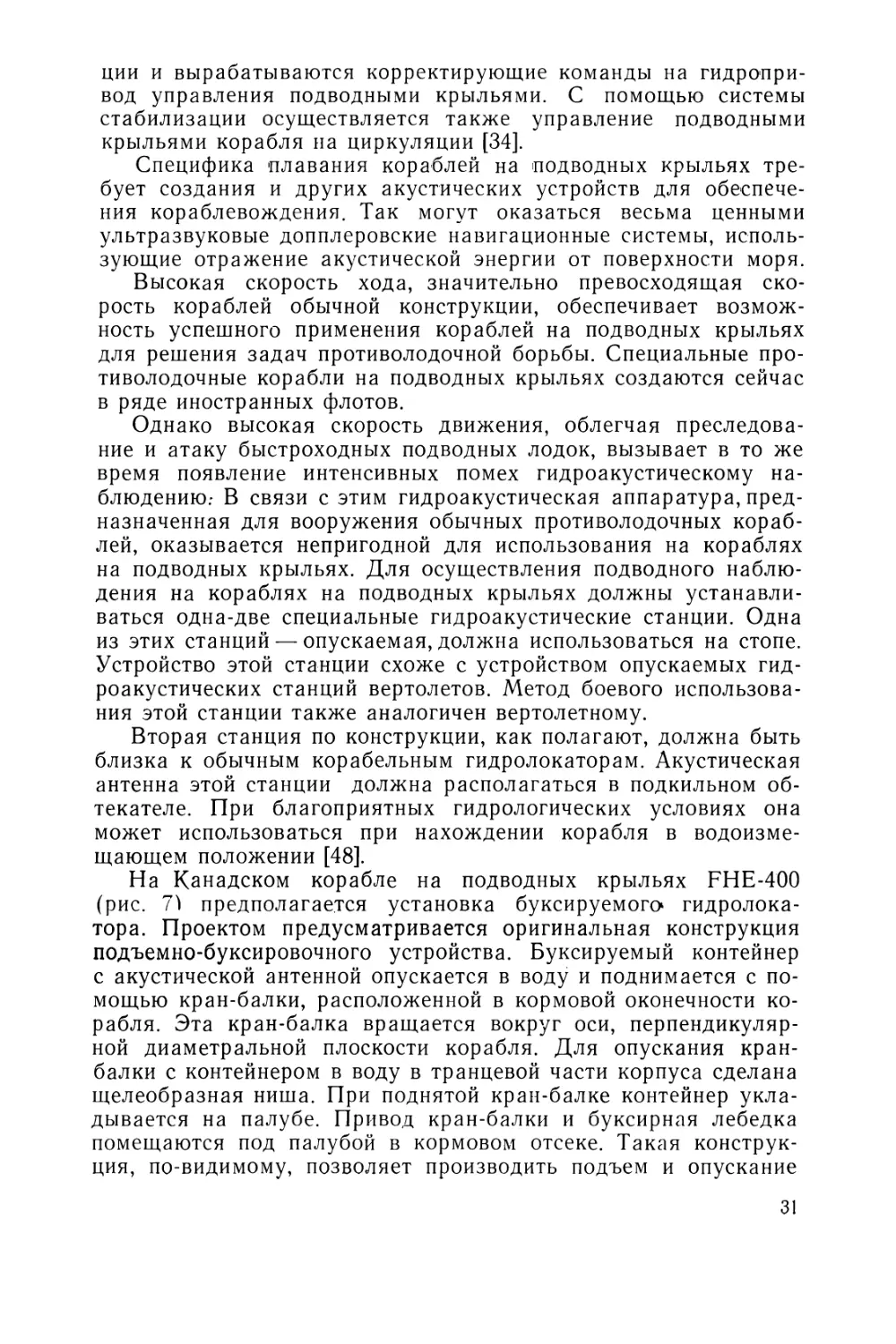
Характерно большое разнообразие конструкций буксировоч-
ных устройств, применяемых в различных флотах. Так, на ка-
надских эскортных миноносцах и других кораблях, имеющих
гидролокаторы переменной глубины, установлено сравнительно
небольшое буксировочное устройство (рис. 6, а). Ограниченные
размеры имеет и буксировочное устройство, установленное на
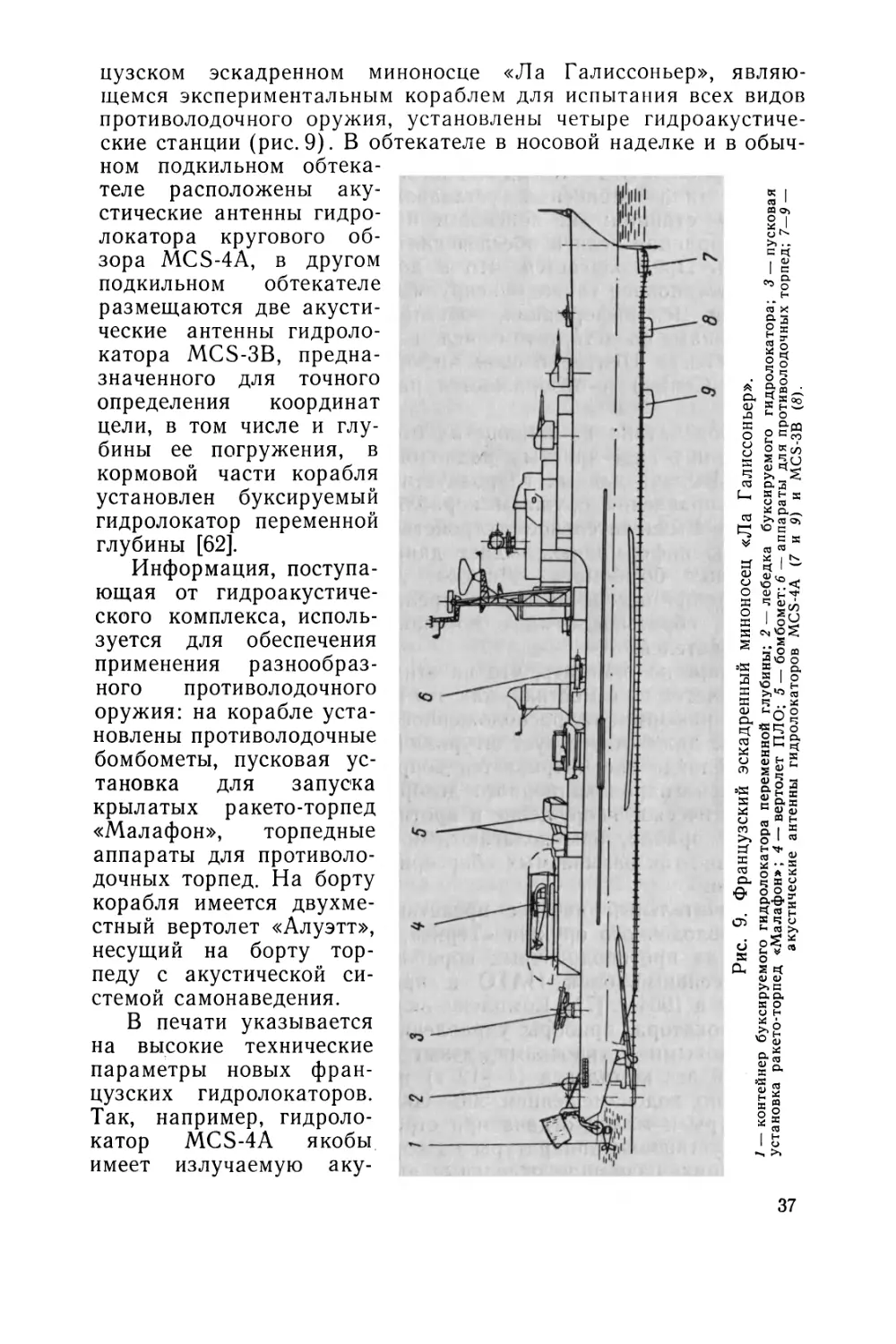
французском эскадренном миноносце «Ла Галиссоньер»
(рис. 6, б).
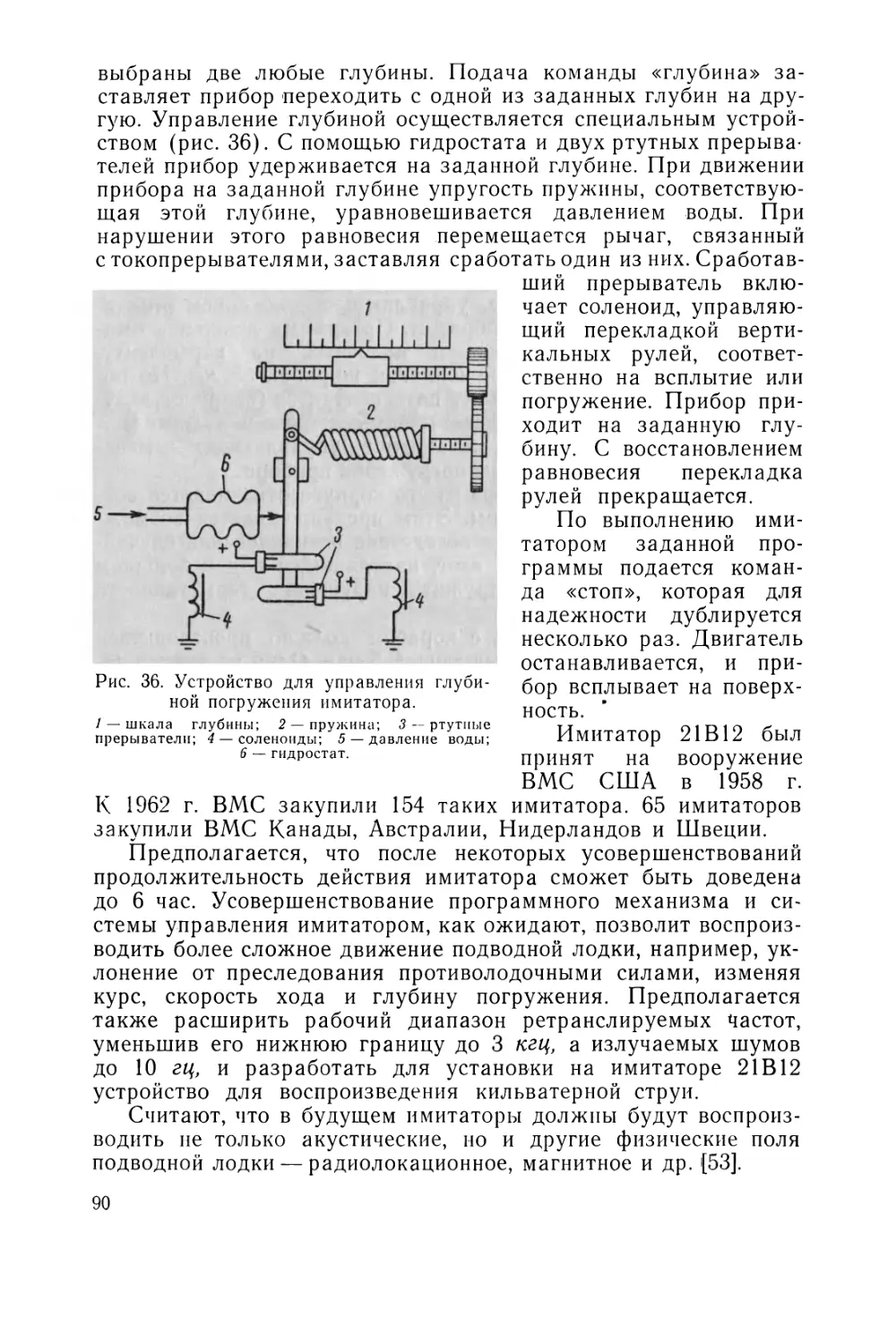
Рис. 5. Крепление обтекания к кабель-тросу.
/ — кабель-трос; 2 — обтекатель; 3 — крепежные хо-
муты; 4 — упругая прокладка; 5 — металлическое за-
жимное кольцо; 6 — стяжные обоймы.
28
ri
ir.td
>|.
rffll1
! v.<MBf: mtG*
л
Некоторые зарубежные специалисты считают, что гидроло-
каторы переменной глубины не полностью оправдали возлагав-
шиеся на них надежды. Однако, судя по публикуемым материа-
лам, работы над их совершенствованием продолжаются в ряде
флотов.
Предполагается, что в ходе дальнейшего развития гидроло-
каторов переменной глубины удастся создать аппаратуру, при-
годную для работы и в режиме шумопеленгования.
§ 6. АКУСТИЧЕСКАЯ АППАРАТУРА ДЛЯ КОРАБЛЕЙ
НА ПОДВОДНЫХ КРЫЛЬЯХ
С появлением кораблей на подводных крыльях возникла
необходимость в создании специальной аппаратуры, обеспечи-
вающей выполнение ими боевых задач и плаванья с учетом
специфики их движения. Так возникла необходимость в со-
здании специальной аппаратуры для стабилизации движения
корабля.
Как известно, подводные крылья делятся на два основных
типа: крылья, полностью остающиеся в воде, и крылья, ча-
стично погружающиеся в воду. Крылья первого типа при дви-
жении корабля на волне нуждаются в обязательной стабилиза-
ции. Крылья второго типа самостабилизируются, но однако при
наличии дополнительной стабилизации обеспечивается более
плавный ход корабля. Стабилизация заключается в удержании
корабля в условиях волнения на заданной высоте относительно
поверхности моря и обеспечении плавного и устойчивого его
движения. При этом осуществляется управление положением
крыльев относительно корпуса корабля.
Для осуществления стабилизации необходимо точно знать
высоту корпуса корабля над поверхностью моря. Эта высота
может определяться с помощью датчиков, основанных на раз-
личных принципах, в том числе и ультразвуковых высотоме-
ров [36].
В ультразвуковых высотомерах, которые по мнению некото-
рых иностранных специалистов являются наиболее перспектив-
ными, на корабле располагаются излучатели и приемники аку-
стических колебаний. Информация, заключенная в отраженных
от поверхности моря сигналах, используется для выработки
команд управления подводными крыльями.
Так, например, ультразвуковой высотомер, разработанный
для американского корабля «Плэйнвью» (AGEH-1), имеет три
акустических преобразователя — датчика высоты днища ко-
рабля над поверхностью воды. Два из этих датчиков установ-
лены в носовой и один в кормовой части корабля. Данные
о высоте непрерывно поступают на счетно-решающее устрой-
ство, в котором происходит обработка поступающей информа-
30
ции и вырабатываются корректирующие команды на гидропри-
вод управления подводными крыльями. С помощью системы
стабилизации осуществляется также управление подводными
крыльями корабля на циркуляции [34].
Специфика плавания кораблей на подводных крыльях тре-
бует создания и других акустических устройств для обеспече-
ния кораблевождения. Так могут оказаться весьма ценными
ультразвуковые допплеровские навигационные системы, исполь-
зующие отражение акустической энергии от поверхности моря.
Высокая скорость хода, значительно превосходящая ско-
рость кораблей обычной конструкции, обеспечивает возмож-
ность успешного применения кораблей на подводных крыльях
для решения задач противолодочной борьбы. Специальные про-
тиволодочные корабли на подводных крыльях создаются сейчас
в ряде иностранных флотов.
Однако высокая скорость движения, облегчая преследова-
ние и атаку быстроходных подводных лодок, вызывает в то же
время появление интенсивных помех гидроакустическому на-
блюдению: В связи с этим гидроакустическая аппаратура, пред-
назначенная для вооружения обычных противолодочных кораб-
лей, оказывается непригодной для использования на кораблях
на подводных крыльях. Для осуществления подводного наблю-
дения на кораблях на подводных крыльях должны устанавли-
ваться одна-две специальные гидроакустические станции. Одна
из этих станций — опускаемая, должна использоваться на стопе.
Устройство этой станции схоже с устройством опускаемых гид-
роакустических станций вертолетов. Метод боевого использова-
ния этой станции также аналогичен вертолетному.
Вторая станция по конструкции, как полагают, должна быть
близка к обычным корабельным гидролокаторам. Акустическая
антенна этой станции должна располагаться в подкильном об-
текателе. При благоприятных гидрологических условиях она
может использоваться при нахождении корабля в водоизме-
щающем положении [48].
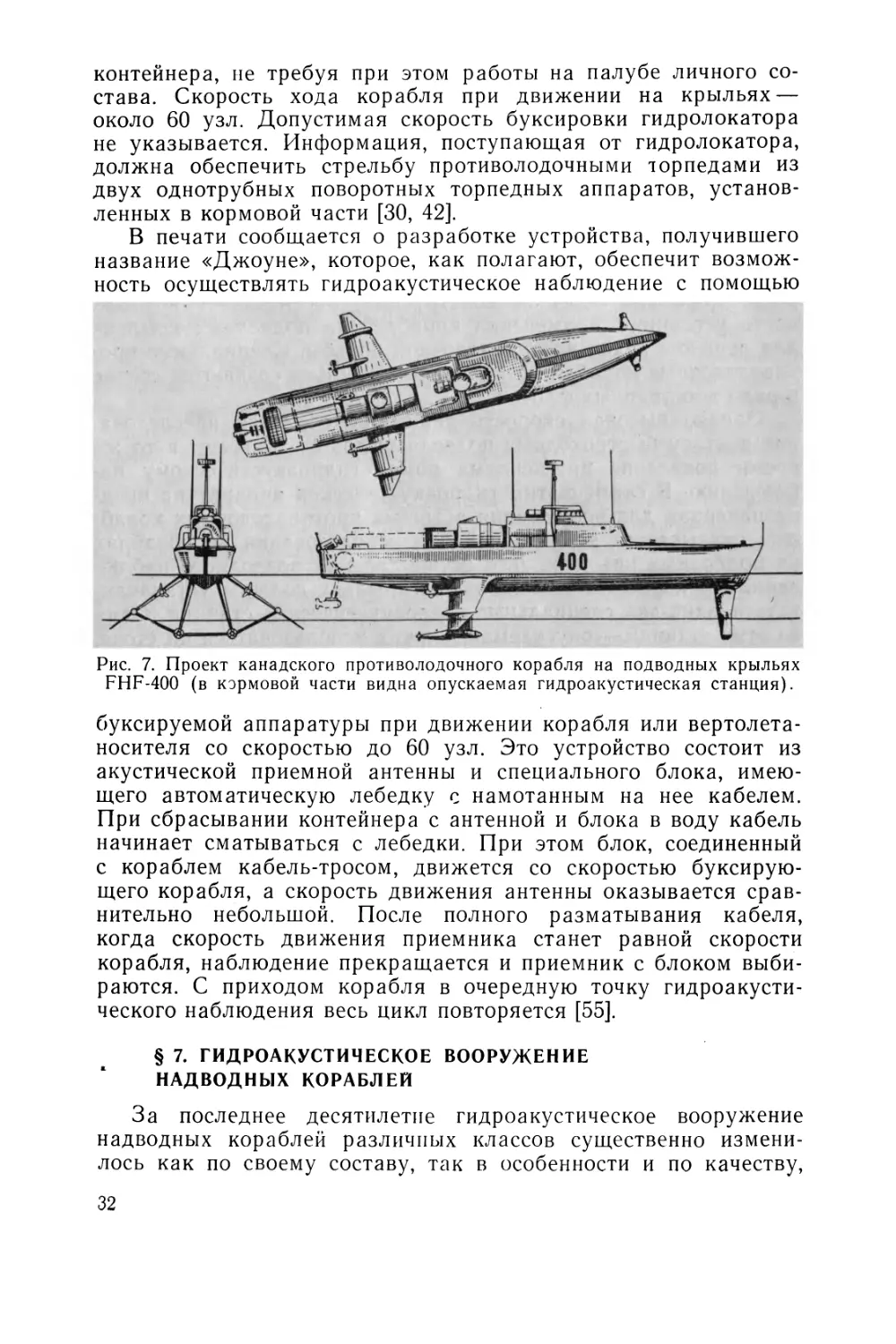
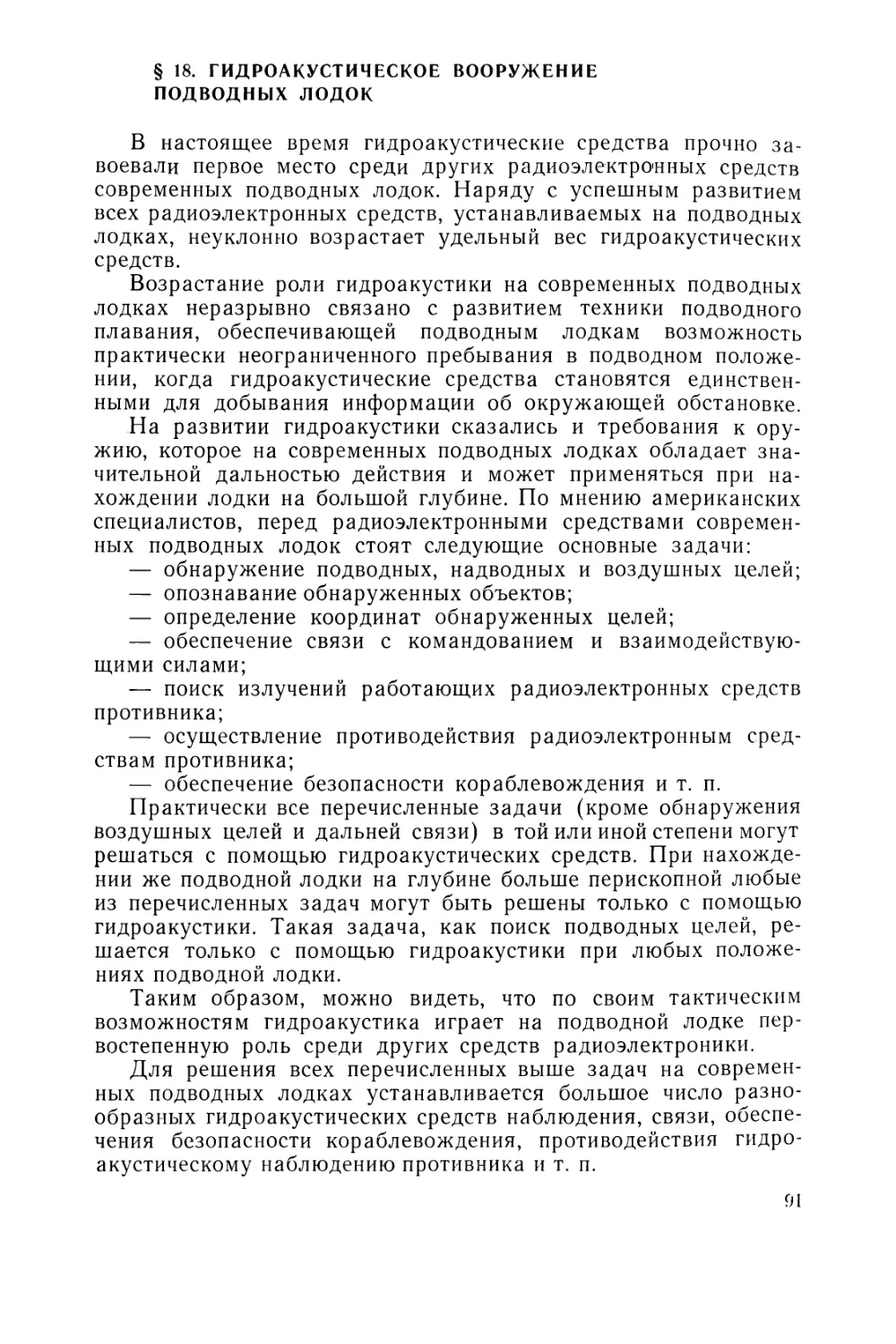
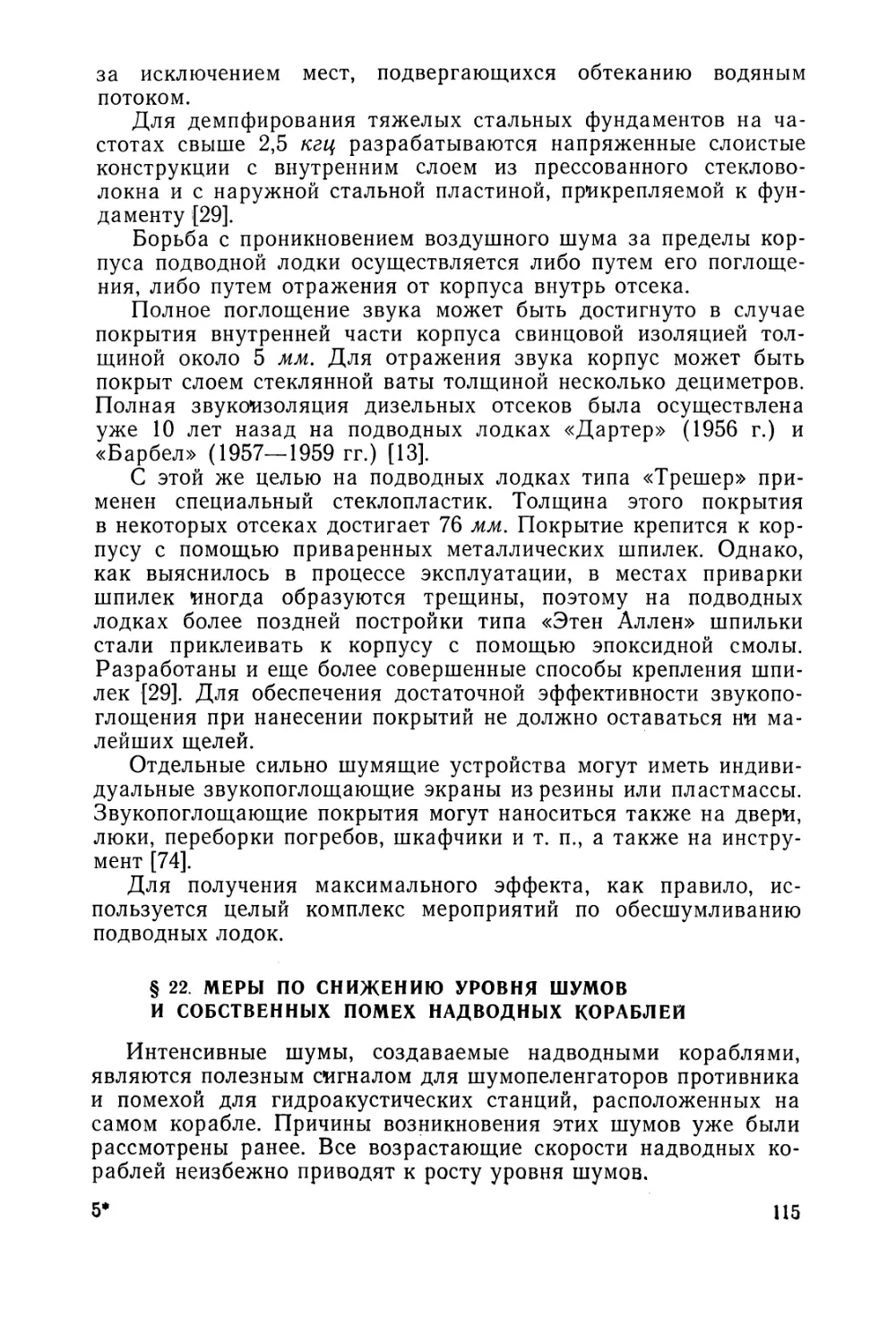
На Канадском корабле на подводных крыльях FHE-400
(рис. 7) предполагается установка буксируемого' гидролока-
тора. Проектом предусматривается оригинальная конструкция
подъемно-буксировочного устройства. Буксируемый контейнер
с акустической антенной опускается в воду и поднимается с по-
мощью кран-балки, расположенной в кормовой оконечности ко-
рабля. Эта кран-балка вращается вокруг оси, перпендикуляр-
ной диаметральной плоскости корабля. Для опускания кран-
балки с контейнером в воду в транцевой части корпуса сделана
щелеобразная ниша. При поднятой кран-балке контейнер укла-
дывается на палубе. Привод кран-балки и буксирная лебедка
помещаются под палубой в кормовом отсеке. Такая конструк-
ция, по-видимому, позволяет производить подъем и опускание
31
контейнера, не требуя при этом работы на палубе личного со-
става. Скорость хода корабля при движении на крыльях —
около 60 узл. Допустимая скорость буксировки гидролокатора
не указывается. Информация, поступающая от гидролокатора,
должна обеспечить стрельбу противолодочными торпедами из
двух однотрубных поворотных торпедных аппаратов, установ-
ленных в кормовой части [30, 42].
В печати сообщается о разработке устройства, получившего
название «Джоуне», которое, как полагают, обеспечит возмож-
ность осуществлять гидроакустическое наблюдение с помощью
Рис. 7. Проект канадского противолодочного корабля на подводных крыльях
FHF-400 (в кормовой части видна опускаемая гидроакустическая станция).
буксируемой аппаратуры при движении корабля или вертолета-
носителя со скоростью до 60 узл. Это устройство состоит из
акустической приемной антенны и специального блока, имею-
щего автоматическую лебедку с намотанным на нее кабелем.
При сбрасывании контейнера с антенной и блока в воду кабель
начинает сматываться с лебедки. При этом блок, соединенный
с кораблем кабель-тросом, движется со скоростью буксирую-
щего корабля, а скорость движения антенны оказывается срав-
нительно небольшой. После полного разматывания кабеля,
когда скорость движения приемника станет равной скорости
корабля, наблюдение прекращается и приемник с блоком выби-
раются. С приходом корабля в очередную точку гидроакусти-
ческого наблюдения весь цикл повторяется [55].
§ 7. ГИДРОАКУСТИЧЕСКОЕ ВООРУЖЕНИЕ
НАДВОДНЫХ КОРАБЛЕЙ
За последнее десятилетие гидроакустическое вооружение
надводных кораблей различных классов существенно измени-
лось как по своему составу, так в особенности и по качеству,
32
и по удельному весу среди прочих радиоэлектронных средств.
Вполне естественно, что наибольшим изменениям подверглось
гидроакустическое вооружение тех классов кораблей, основной
задачей которых является противолодочная борьба. Новейшая
гидроакустическая аппаратура стала устанавливаться на ко-
раблях, на которых до последнего времени она применялась
ограниченно, например на крейсерах, или же не применялась
вовсе, например на авианосцах. Появились гидроакустические
станции новой конструкции, предназначенные специально для
противолодочных кораблей на подводных крыльях. На кораб-
лях стала устанавливаться специализированная гидроакустиче-
ская аппаратура, например гидроакустические миноискатели на
тральщиках.
Нельзя не отметить то обстоятельство, что если в недавнем
прошлом на корабле устанавливалась одна гидроакустическая
станция, то теперь на кораблях, решающих задачи противоло-
дочной борьбы, их может быть две, три и даже четыре.
На надводных кораблях устанавливаются в основном актив-
ные средства гидроакустического наблюдения — гидролокаторы,
наиболее отвечающие требованиям к средствам наблюдения
надводных кораблей за современными, как правило хорошо
обесшумленными подводными лодками. Однако за последнее
время отмечается повышенный интерес и к корабельным сред-
ствам пассивного гидроакустического наблюдения.
Конкретный состав гидроакустического вооружения кораб-
лей иностранных флотов чрезвычайно разнообразен.
Эскадренные миноносцы и другие противолодочные ко-
рабли ВМС США старой постройки в послевоенные годы под-
верглись модернизации по программам FRAM. При этом мо-
дернизировалось и их гидроакустическое вооружение.
• Так, на эскадренных миноносцах типов «Гиринг» и «Фор-
рест Шерман», подвергшихся наиболее значительной модерни-
зации по программе FRAM-1, был установлен гидролокатор
SQS-23, являющийся составной частью противолодочного ору-
жия «Асрок».
Гидролокатор SQS-23 является гидролокатором кругового
обзора. Он имеет крупногабаритную цилиндрическую акустиче-
скую антенну. Использование в гидролокаторе низких рабочих
частот позволило получить дальность действия 15—18 км. Об-
щий вес гидролокатора составляет около 30 г, объем, занимае-
мый аппаратурой на корабле, 60 ж3, потребляемая электриче-
ская мощность 110 ква, стоимость около 600 тыс. долл. [19, 13].
По утверждениям зарубежной печати, переоборудованию по
этой программе подлежало в общей сложности 79 кораблей
[58, 13].
Эскадренные миноносцы типов «Аллеи М. Самнер» и «Флет-
чер» подверглись менее существенному и дорогостоящему
33
переоборудованию по программе FRAM-2. На этих кораблях
был установлен гидролокатор SQS-29, созданный в результате
модернизации весьма распространенного в недалеком прошлом
гидролокатора SQS-4. Гидролокатор SQS-29, свойства кото-
рого оказались близкими к свойствам гидролокатора SQS-23,
является в настоящее время ^стандартным для эскадренных ми-
ноносцев и других противолодочных кораблей, а также для
крейсеров [50].
На некоторых кораблях, например на эскортном корабле ра-
диолокационного дозора «Хейверфилд», дополнительно к гидро-
локатору устанавливается и шумопеленгатор SQR-8 [53].
На некоторых модернизированных кораблях, например на
эскадренном миноносце радиолокационного дозора «Тернер»,
установлен гидролокатор SQS-31 [23]. Помимо основного гидро-
локатора, установленного в корпусе корабля и имеющего аку-
стическую антенну, в подкильном обтекателе на кораблях, про-
шедших модернизацию по программе FRAM-2, установлен бук-
сируемый гидролокатор переменной глубины SQA-10 [50]. Всего
по этой программе подверглись модернизации 52 корабля.
На противолодочных кораблях более поздней постройки
устанавливается гидролокатор SQS-23 и комплекс противоло-
дочного оружия «Асрок».
Гидролокатор SQS-23 установлен также на нескольких про-
тиволодочных авианосцах: «Рэндолф», «Эссекс», «Уосп», а также
на ударном авианосце «Америка» и, предположительно, на
строящемся ударном авианосце «Джон Ф. Кеннеди».
Обработкой информации на противолодочных авианосцах
занимается специальное подразделение ASCAC (Antisubmarine
Classificacion and Analysis Center — противолодочный центр
классификации и анализа), входящее в состав боевой части
управления кораблем.
По-мнению некоторых зарубежных специалистов, в будущем
состав гидроакустического вооружения авианосцев должен
быть еще более расширен. В частности, считают, что на авиа-
носцах должен быть установлен буксируемый гидролокатор пе-
ременной глубины.
Согласно данных печати, к концу 1964 г. гидролокатор
SQS-23 был установлен на 110 кораблях, а в 1965 г. еще 26 ко-
раблей должны были быть вооружены этой станцией [55].
Следует отметить, что в настоящее время уже существует
программа модернизации гидролокатора SQS-23, получившая
наименование SPADE [36].
На новейших фрегатах устанавливается гидроакустическая
станция дальнего действия SQS-26. Судя по сообщениям пе-
чати, эта станция в настоящее время является наиболее совер-
шенной из числа существующих на вооружении надводных ко-
раблей иностранных флотов. Как утверждают, в этой станции
34
впервые использован прием акустической энергии, отраженной
от дна, и сигналов, приходящихся из вторичных зон акустиче-
ской освещенности. Использование этих принципов позволило
якобы увеличить дальность действия гидролокатора при благо-
приятных гидрологических условиях до 55 км [36].
Этот гидролокатор имеет наибольшие из известных габа-
риты, вес и потребляемую мощность: общий вес гидролокатора
достигает 62 г, в том числе около 30 т весит акустическая ан-
тенна, представляющая собой цилиндр диаметром около 4,9 ж,
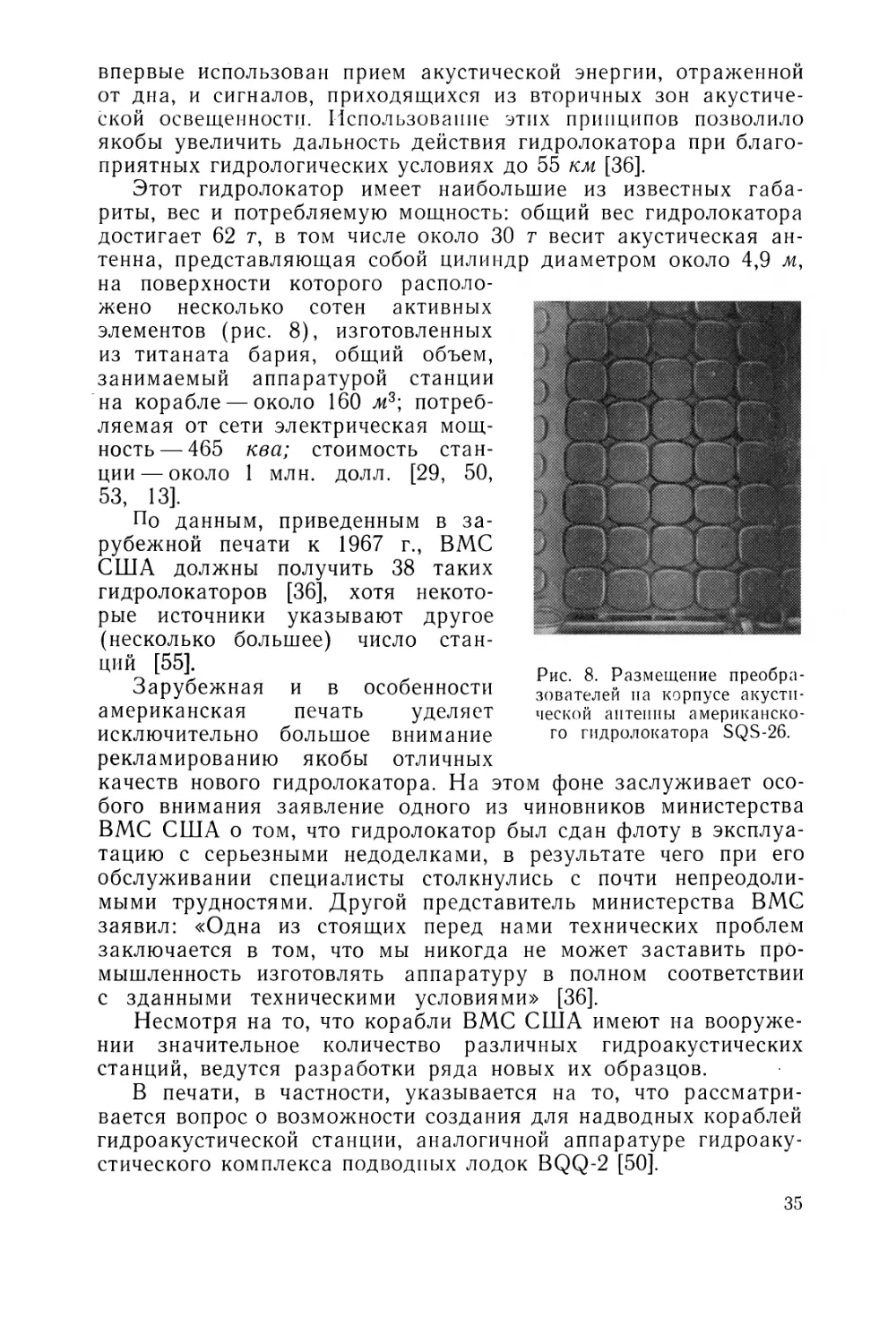
на поверхности которого располо-
жено несколько сотен активных
элементов (рис. 8), изготовленных
из титаната бария, общий объем,
занимаемый аппаратурой станции
на корабле — около 160 ж3; потреб-
ляемая от сети электрическая мощ-
ность— 465 ква; стоимость стан-
ции— около 1 млн. долл. [29, 50,
53, 13].
По данным, приведенным в за-
рубежной печати к 1967 г., ВМС
США должны получить 38 таких
гидролокаторов [36], хотя некото-
рые источники указывают другое
(несколько большее) число стан-
0 ^ К ^ Рис- 8. Размещение преобра-
Зарубежная И В особенности 3ователей па корпусе акустп-
американская печать уделяет ческой антенны америкаыско-
исключительно большое внимание г° гидролокатора SQS-26.
рекламированию якобы отличных
качеств нового гидролокатора. На этом фоне заслуживает осо-
бого внимания заявление одного из чиновников министерства
ВМС США о том, что гидролокатор был сдан флоту в эксплуа-
тацию с серьезными недоделками, в результате чего при его
обслуживании специалисты столкнулись с почти непреодоли-
мыми трудностями. Другой представитель министерства ВМС
заявил: «Одна из стоящих перед нами технических проблем
заключается в том, что мы никогда не может заставить про-
мышленность изготовлять аппаратуру в полном соответствии
с зданными техническими условиями» [36].
Несмотря на то, что корабли ВМС США имеют на вооруже-
нии значительное количество различных гидроакустических
станций, ведутся разработки ряда новых их образцов.
В печати, в частности, указывается на то, что рассматри-
вается вопрос о возможности создания для надводных кораблей
гидроакустической станции, аналогичной аппаратуре гидроаку-
стического комплекса подводных лодок BQQ-2 [50].
35
Большое внимание уделяется разработке аппаратуры для
пассивного обнаружения подводных лодок и измерения до них
дистанции пассивным способом без излучения акустической
энергии. Такая аппаратура получила шифр SQR-13 и условное
наименование PADLOCK (Passive Active Detection and Loca-
tion— пассивное и активное обнаружение и локация). Принцип
ее действия аналогичен принципу действия аппаратуры для под-
водных лодок PUFFS и заключается в определении расстояния
до цели по пересечению шумопеленгов, полученных одновре-
менно путем пеленгования шумящей цели несколькими прием-
ными антеннами, разнесенными по длине корпуса корабля. Для
повышения точности определения места цели пеленги могут
браться одновременно с двух кораблей, находящихся на неко-
тором удалении один от другого. В этом случае увеличивается
«база», а следовательно, возрастает и точность определения
места цели — точки пересечения пеленгов. Считают, что точ-
ность определения места этой аппаратурой достаточна для при-
цельного применения противолодочного оружия [50].
Среди разрабатываемых гидроакустических станций следует
отметить новый гидролокатор переменной глубины SQS-35.
Важнейшим преимуществом этой станции перед серийной стан-
цией SQA-10 является уменьшение вдвое веса аппаратуры [50].
Для малых противолодочных кораблей разрабатывается
станция SQS-36.
В связи с успешными испытаниями и благоприятной пер-
спективой создания противолодочных кораблей на подводных
крыльях, для этих кораблей разрабатывается специальная гид-
роакустическая станция SQS-33. Как полагают, важнейшей тех-
нической проблемой, возникающей при создании станции, яв-
ляется обеспечение возможности ее работы при буксировке
с большой скоростью [50].
Наряду с развитием гидроакустических средств наблюдения
ведутся работы по созданию некоторых обеспечивающих средств.
Так, большое внимание уделяется разработке средств, предна-
значенных для объективной, быстрой и точной классификации
полученного гидроакустического контакта и позволяющих из-
бежать затрат времени, порой весьма значительных, необходи-
мых для того, чтобы отделить действительную цель от много-
численных ложных. К числу таких средств относится корабель-
ная аппаратура классификации подводных целей SQQ-14 и
аппаратура классификации, разрабатываемая под шифром
«Аспект». Предполагается также использовать для уточнения
контактов аппаратуру, выстреливаемую с помощью бомбоме-
тов, известную под шифром «Скат» [50, 77].
Судя по многочисленным сообщениям печати, за последние
годы значительное внимание развитию гидроакустических
средств надводных кораблей уделяется во Франции. На фран-
36
стный вертолет «Алуэтт»,
несущий на борту тор-
\2
£2
цузском эскадренном миноносце «Ла Галиссоньер», являю-
щемся экспериментальным кораблем для испытания всех видов
противолодочного оружия, установлены четыре гидроакустиче-
ские станции (рис.9). В обтекателе в носовой наделке и в обыч-
ном подкильном обтека-
теле расположены аку- к I
стические антенны гидро- |^
локатора кругового об-
зора MCS-4A, в другом
подкильном обтекателе
размещаются две акусти-
ческие антенны гидроло-
катора MCS-3B, предна- ||
значенного для точного А- ||
определения координат & к£§
цели, в том числе и глу- g o&g
бины ее погружения, в a |*£
кормовой части корабля S |*:>
установлен буксируемый u S £ s
гидролокатор переменной ^ $«!*
глубины [62]. ¥ я V
Информация, поступа- Э *Ц~
О а» н ^
ющая от гидроакустиче-
ского комплекса, исполь- 1 i |u
зуется для обеспечения § ^.g^
применения разнообраз- « I^g.
ного противолодочного я >^й
оружия: на корабле уста- Ц s6'l
новлены противолодочные S 1с|
бомбометы, пусковая ус- 8 5н£
ч ,
тановка для запуска 9S gga
крылатых ракето-торпед § £§•*
«Малафон», торпедные S» 11 «
аппараты для противоло- я gT.g
дочных торпед. На борту S-1S «
корабля имеется двухме- ^ |f £
педу с акустической си- а 2S
стемой самонаведения. g-|
В печати указывается |б
на высокие технические ^£
параметры новых фран- я^
цузских гидролокаторов. g|
Так, например, гидроло- 1§
катор MCS-4A якобы j^o
имеет излучаемую аку-
37
стическую мощность в 20 раз, а дальность действия в 3 раза
больше, чем у серийных гидролокаторов, установленных на эска-
дренных миноносцах типа «Сюркуф».
Усиливается гидроакустическое вооружение противолодоч-
ных кораблей ВМФ Канады. Так, на новейших сторожевых ко-
раблях типа «Маккензи» устанавливаются по три гидролока-
ционные станции: две поисковые и одна для определения точ-
ных координат цели и обеспечения стрельбы противолодочного
оружия. Предполагается, что в дополнение к этим станциям
будет установлен также буксируемый гидролокатор переменной
глубины. Вся информация, поступающая от различных радио-
электронных средств, в том числе и гидроакустических, сосредо-
точивается в Центре боевой информации AIC, (Action Infor-
mation Center) и отображается на специальных столах-план-
шетах.
В ходе атаки на планшетах отображаются гидроакустиче-
ские цели в виде красных, радиолокационные — в виде зеленых
точек. Выдача данных гидроакустического наблюдения в при-
боры управления оружием корабля максимально автоматизи-
рована. Вычислительное устройство, обрабатывающее посту-
пающую информацию, выдает данные стрельбы на два трех-
ствольных бомбомета «Лимбо». Данные гидроакустического
наблюдения обеспечивают и стрельбу противолодочными тор-
педами, сбрасываемыми с помощью двух бортовых шточных
сбрасывателей.
Интересно отметить, что на этих кораблях управление осу-
ществляется не с мостика, как это принято обычно, а из центра
боевой информации, расположенного двумя палубами ниже. На
мостике даже отсутствует штурвал [36].
В Канаде рассматривается вопрос о создании специальных
кораблей гидролокационного дозора, имеющих усиленное гид-
роакустическое вооружение и противолодочные ракето-торпеды.
Такие корабли, как полагают, могли бы быть использованы
в составе так называемых «барьерных сил» американского кон-
тинента.
Значительный интерес представляет норвежский комплекс
противолодочного оружия «Терне», предназначенный для уста-
новки на противолодочных кораблях флотов стран, входящих
в агрессивный блок НАТО и принятый на вооружение этих
флотов в 1964 г. [77]. Комплекс, включающий в свой состав два
гидролокатора, приборы управления стрельбой и ракетобомбы
с пусковыми установками, имеет небольшие габариты и вес
(общий вес комплекса И —12 т) и может быть установлен на
кораблях водоизмещением 500—600 т и выше. Конструкция ап-
паратуры и малая отдача при стрельбе обеспечивают возмож-
ность установки аппаратуры на корабли без особых переделок
последних, размещая отдельные элементы комплекса в любом
38
удобном для этого месте [45]. Описание комплекса уже неодно-
кратно приводилось на страницах печати.
Комплекс «Терне» установлен, в частности, на новых нор-
вежских противолодочных кораблях типа «Осло» и «Слейпнер»
[49]. Интерес к комплексу проявляют и ВМС США. Так,
комплекс был установлен и испытан на американском эскорт-
ном миноносце «Черлз Бэрри». Однако, как сообщают, после
завершения испытаний он был снят с корабля [77].
На итальянских противолодочных кораблях типа «Де Кри-
стофаро» устанавливаются по две гидроакустические станции:
гидролокатор с акустической антенной, размещенной в опускае-
мом полкильном обтекателе, и буксируемый гидролокатор пере-
менной глубины, размещенный в кормовой части корабля [63].
На новом японском эскадренном миноносце «Амацукадзе»,
вооруженном зенитными ракетами, устанавливается одна гидро-
акустическая станция с антенной, помещенной в подкильный
обтекатель. На эскадренных миноносцах типов «Маракуме» и
«Мохизуки» предполагается установить противолодочный ком-
плекс «Асрок» с гидролокатором дальнего действия, акустиче-
ская антенна которого будет помещена в носовой бульбообраз-
ной наделке [16, 77].
Помимо гидроакустических средств обнаружения подводных
лодок на некоторых кораблях устанавливаются специализиро-
ванные станции. Так, по сообщениям печати [68], на английском
тральщике — искателе мин «Шоултон» установлен гидроакусти-
ческий миноискатель типа «193», предназначенный для поиска
донных мин. В настоящее время аналогичная аппаратура уста-
навливается и на базовые тральщики. На один из таких траль-
щиков— «Кирклистон» — миноискатель был установлен в 1963 г.
Как утверждают, к 1960 г. гидроакустическая аппаратура для
поиска донных мин будет установлена на большинстве англий-
ских тральщиков, так как высокая чувствительность этой аппа-
ратуры якобы позволяет обнаруживать даже малоразмерные
цели.
С обнаружением мины она обезвреживается и подрывается
специальным водолазом-подрывником, получающим целеуказа-
ние от миноискателя. Для этой цели на каждом корабле
имеется команда подрывников в составе 9 человек.
На американских кораблях устанавливается миноискатель
UQS-10 [77].
§ 8. РАЗМЕЩЕНИЕ ГИДРОАКУСТИЧЕСКИХ АНТЕНН
НА НАДВОДНЫХ КОРАБЛЯХ
За последние годы в размещении акустических антенн
на надводных кораблях произошли существенные изменения.
Просуществовавшее свыше двух десятилетий традиционное
39
размещение акустических антенн в опускаемых и поднимаемых
заподлицо с днищем корабля обтекателях, расположенных под
килем в первой четверти длины корпуса корабля, практически
потеряло свое значение. На
смену ему пришло разме-
щение стационарных аку-
стических антенн в бульбо-
образных наделках-обтека-
телях в районе форштевня
корабля. Причина этого
кроется, в первую очередь,
в значительном увеличении
размеров акустических ан-
тенн, вызванном переходом
гидролокаторов на низкие
рабочие частоты.
Рис. 10. Носовая часть обтекателя аку- Как уже говорилось,
стической антенны гидролокатора акустическая антенна со-
SQS-26. временного гидролокатора
представляет собой крупно-
габаритное устройство, имеющее большой вес. Соответствую-
щие размеры имеют и обтекатели для размещения таких антенн
(рис. 10). Так, обтекатель гидролокатора SQS-26, установлен-
ный на эскортном миноносце «Гарсиа», имеет длину 16,8 м,
ширину 6,1 м, высоту 3,0 м
и весит около 70 т [44]. Не-
сколько меньшие размеры
у акустической антенны и
обтекателя (ширина 3,6 м,
высота 2,5 м) гидролока-
тора SQS-23 [35]. Рис. И
наглядно иллюстрирует
рост размеров акустических
антенн и их обтекателей
серийных американских
гидролокаторов кругового
обзора, начиная от гидро-
локатора QHB постройки
конца минувшей ВОЙНЫ и Рис. 11. Сравнительные размеры акусти-
КОНЧая наиболее НОВЫМ ческих антенн американских гидролока-
гидролокатором SOS-26. Т0Р0В и их обтекателей (внизу для срав-
£ r ^ нения показан корабельный катер дли-
Совершенно очевидно, ной 12,2 м).
что с ростом размеров и веса
антенн и обтекателей стало невозможным делать последние опу-
скаемыми, а затем и размещать их под килем корабля. Это и
обусловило переход к размещению акустических антенн в но-
совой бульбообразной наделке (рис. 12). Так, например, первые
40
экземпляры гидролокаторов SQS-23 имели еще обтекатели, рас-
положенные под килем корабля, но уже начиная с 19-й станции,
акустические антенны этих гидролокаторов стали помещать
в носовой наделке.
Такое размещение обтекателя и антенны оказалось доста-
точно удобным, так как акустическая антенна стала более уда-
ленной от основного источника соб-
ственных помех, — винтов кораб-
ля,— и оказалась в значительной
степени заэкранированной от винто-
вых шумов корабельным корпусом.
Размещение акустической антенны
в носовом бульбе получило призна-
ние и со стороны кораблестроителей:
бульбовое образование носа приво-
дит к снижению сопротивления воды
на полном ходу корабля и в усло-
виях сильного волнения, а также
демпфирует килевую качку. Инте-
ресно отметить, что при строитель-
стве современных быстроходных
лайнеров, по этим же причинам
также стали делать бульбообраз-
ную наделку, но, конечно, не имею-
щую никакого отношения к гидро-
акустике.
Помещение акустических антенн
в бульбообразных наделках потре-
бовало некоторых изменений в раз-
мещении корабельного оборудова-
ния. Так, например, чтобы избе-
жать повреждения обтекателя яко-
рями, на американских кораблях
клюз якоря левого борта выносят
на форштевень, а клюз якоря пра-
вого борта относят далеко в сто-
рону кормы.
При бульбообразных обтекате-
лях возникают и другие дополни-
тельные трудности — увеличивается
осадка корабля. Выступающая
ниже киля часть обтекателя затрудняет движение в каналах,
швартовку в базах, постановку корабля в док. В некоторых
случаях в доках делаются специальные углубления для поме-
щения обтекателя при постановке корабля на кильблоки. Утя-
желение носовой части корабля за счет установки обтекателя
и антенны и одновременное увеличение нагрузки на кормовую
Рис. 12. Бульбовая наделка-
обтекатель акустической ан-
тенны на американском эс-
кортном корабле «Эдвард
Мак-Доннел».
41
часть корабля за счет размещения на ней тяжелых устройств
буксируемых гидролокаторов переменной глубины создают раз-
ламывающий момент при подъеме средней части корабля на
волну.
Усложняется и установка тяжелого обтекателя на строя-
щиеся или переоборудуемые корабли. Так, при установке гид-
роакустической станции и обтекателя гидролокатора SQS-26
на американский фрегат
«Уиллис А. Ли» пришлось
отрезать у корабля носовую
часть длиной 21 м, полно-
стью перепланировать ее и
вновь установить на место
вместе с обтекателем.
Специальная технология
изготовления и установки
обтекателя была разра-
ботана и применена при
установке гидролокатора
SQS-23 на противолодочном
авианосце «Уосп». Обтека-
тель изготовлялся и подго-
нялся по месту по частям.
Первоначально была изго-
товлена верхняя часть об-
текателя и подогнана по ме-
сту к корпусу корабля. За-
тем на специальном шаб-
лоне было сварено днище
обтекателя. К верхней ча-
сти обтекателя и днищу,
установленным на специаль-
ных опорах, была подогна-
на и приварена средняя
часть обтекателя. Для транспортировки обтекателя весом 65 т
из помещения, где он был изготовлен, и установки его на
корабль, стоящий в доке, пришлось использовать три больше-
грузных подъемных крана [29].
При постройке некоторых кораблей на стапеле монтируется
только фланец обтекателя, а сам обтекатель монтируется до-
полнительно после спуска корабля на воду. Этот способ был
применен при установке обтекателя на фрегате ЗУРО «Уэйн-
райт» (рис. 13) [29].
В настоящее время американские специалисты считают, что
бульбообразный обтекатель должен использоваться и для раз-
мещения сравнительно небольших акустических антенн. Уста-
Рис. 13 Спуск на воду американского
фрегата ЗУРО «Уэйнрайт» (в носовой
части виден фланец для крепления буль-
бовой наделки).
42
новка таких обтекателей предусмотрена даже на малых проти-
володочных кораблях (рис. 14) [52].
Бульбообразные обтекатели начинают применяться и на фло-
тах других государств, например, в японском флоте, где такое
размещение акустических антенн проектируется на новых эскад-
ренных миноносцах «Маракуме» и «Мохизуки» (рис. 15).
На ряде американских кораблей, снабженных гидроакусти-
ческими станциями более старой постройки с акустическими
антеннами меньших размеров, продолжают применяться и под-
кильные стационарные и опускаемые обтекатели. Стандартными
являются обтекатели длиной 254, 470 и 914 см. Вес конструкции
таких обтекателей достигает 20 т [29].
Установка подкильных обтекателей также сопряжена с оп-
ределенными трудностями. В целях упрощения процесса их
установки на судостроительных заводах США применяется спе-
Рис. 14. Размеще-
ние акустической
антенны в бульбо-
вой наделке-обте-
кателе на малом
противолодочном
корабле (проект).
циальное гидравлическое подъемное устройство, пригодное для
работы с обтекателями весом до 20 т и длиной до 9 м [29].
Коррозии и обрастание обтекателя ухудшают его акустиче-
ские свойства. Поэтому на поверхность обтекателей наносятся
специальные защитные покрытия.. Одно из таких покрытий, раз-
работанное по заказу Управления кораблестроения ВМС США,
успешно прошло испытания на эскадренном миноносце «Айтер-
вуд». В течение двух лет пробной эксплуатации не наблюдалось
обрастания обтекателя и некоторое повреждение окраски имело
место лишь за счет облучения поверхности обтекателя мощ-
ными акустическими импульсами [29].
Для защиты от коррозии внутренняя поверхность обтекателя
окрашивается. При этом краска должна наноситься на всю по-
верхность и элементы конструкции обтекателя несколькими
ровными слоями, так как в противном случае его акустические
свойства могут ухудшиться. Нанесение краски путем распыле-
ния оказалось недостаточно эффективным и потребовало боль-
ших затрат времени (нанесение каждого из пяти слоев краски
занимает около восьми часов). В настоящее время применяется
усовершенствованный метод окраски путем нагнетания краски
вдутрь полости обтекателя. Нанесение одного ровного слоя
в этом случае ускорилось в восемь раз. Слой краски не должен
43
также содержать в себе пузырьков воздуха, хорошо поглощаю-
щих акустическую энергию. Для устранения таких пузырьков
окрашенный обтекатель в течение 16 час. обдувается циркули-
рующим потоком воздуха.
Вибрация обтекателя, передающаяся ему через корпус, яв-
ляется одной из причин увеличения собственных акустических
помех. Поэтому применяется вибродемпфирование обтекателя,
Рис. 15. Размещение акустических антенн и противолодочного
оружия на японских эскадренных миноносцах «Амацу-
кадзе» (а), «Маракуме» (б) и «Мохизуки» (в).
1 — бомбометы «Хеджехог» ; 2 — торпедосбрасыватель; 3 — бомбометы
«Менон» ; 4 — пусковая установка «Асрок»; 5 — бомбометы «Бофорс»;
6 — антенный пост радиотехнической системы управления вертолетами;
7 — ангар для телеуправляемых вертолетов.
особенно в месте его соединения с корпусом. Способы вибро-
демпфирования обтекателей будут рассмотрены несколько
позже.
Предполагают, что дальность действия гидролокаторов и
впредь будет возрастать. Увеличение дальности действия неиз-
бежно потребует увеличения излучаемых акустических мощно-
стей и работы на более низких частотах. Это, в свою очередь,
приведет к дальнейшему увеличению размеров акустических
44
антенн. По мнению ряда зарубежных специалистов, при про-
стом увеличении размеров антенн с сохранением их существую-
щей конструкции неизбежно возникнут значительные трудности
с размещением таких антенн на кораблях, поэтому в настоящее
время ведутся поиски принципиально нового решения вопроса.
В качестве одного из вариантов такого решения предлагают
использовать акустические антенны, выполненные в виде так
называемых «планарных решеток». Планарная решетка пред-
ставляет собой комбинацию из большого числа отдельных аку-
стических преобразователей, расположенных ниже ватерлинии
на большой части корпуса корабля и заделанных заподлицо
с обшивкой. Такая конструкция позволяет существенно увели-
чить размеры акустической антенны, не усложняя при этом кон-
струкции корпуса корабля и не снижая мореходные качества
последнего.
Акустическую антенну подобного типа предполагалось испы-
тать в 1965 г. и гидролокатор, снабженный такой акустической
антенной установить на противолодочных кораблях нового типа,
разрабатываемых по проекту «Си Хоук».
Другим вариантом акустической антенны больших размеров
является антенна «CONTACT» (Conformal Tactical Array — со-
вмещенная тактическая решетка), состоящая из большого числа
отдельных преобразователей, размещенных вдоль киля корабля.
Одна из таких антенн будет, как утверждают, иметь длину
47,5 м [34].
§ 9. НЕКОТОРЫЕ СПЕЦИАЛЬНЫЕ ЭЛЕМЕНТЫ КОРАБЕЛЬНОЙ
ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРЫ
В современной корабельной гидроакустической аппаратуре
широко применяются различные элементы, носящие вспомога-
тельный характер, но в значительной степени определяющие
эффективность работы аппаратуры в целом. К числу таких
элементов относятся, в частности, различные регистрирующие
устройства, например рекордеры, устройства для измерения
глубины, прокладчики атак, источники питания, системы стаби-
лизации акустических антенн и т. п. Рассмотрим принцип дей-
ствия и устройство некоторых из этих элементов аппаратуры
более подробно.
Рекордеры дистанции
В состав многих современных гидролокаторов входят реги-
стрирующие устройства, предназначенные для определения и
автоматической записи дистанции до цели, называемые рекор-
дерами. Рекордеры могут отличаться по своему основному на-
значению и принципу действия. Поэтому в состав одного гидро-
локатора могут входить несколько различных рекордеров.
45
Наибольшее распространение получили рекордеры такти-
ческого расстояния (TRR — Tactical Range Recorder), которые
чаще всего называют просто рекордерами. Наряду с ними на-
ходят применение рекордеры для осуществления полуавтома-
тического сопровождения цели, рекордеры горизонтальной даль-
ности и др. Имеются специальные рекордеры глубины погруже-
ния цели [29].
В рекордерах дистанции всех разновидностей для регистра-
ции сигналов и определения дистанции до цели используется
автоматическая запись последовательно получаемых эхосигна-
лов на ленте из специ-
альной электрохимиче-
ской бумаги.
С помощью обычного
рекордера (рис. 16) мож-
но решать следующие ос-
новные задачи:
управлять посылками
гидролокаторов;
получать запись эхо-
сигналов на графике, что
облегчает их распознава-
ние и классификацию;
определять наклонную
дальность до цели и об-
щую величину изменения
расстояния (ОВИР);
определять момент
применения противоло-
Рис. 16. Рекордер дистанции. ДОЧНОГО Оружия.
/ — шкала ОВИР; 2 — шкала дистанции; 3 — при- ПрИНЦИПЫ ДеЙСТВИЯ И
цельная линейка; 4 — трасса записи эхо-сигналов; „ ^
5 — шкалы для ввода поправок; 6 — подвижная устройство обычного ре-
каретка- кордера несомненно уже
знакомы читателю.
Обычный рекордер позволяет получать дискретные замеры
дистанции. В ряде случаев требуется получение и выдача
в приборы управления стрельбой и другие устройства плавной
текущей дистанции до цели. Выработка текущей дистанции
и значений ОВИР может осуществляться с помощью спе-
циальных рекордеров полуавтоматического сопровождения цели
по дальности.
Один из рекордеров ОКА-1 (рис. 17), предназначенный для
выработки текущих значений дистанции и ОВИР, работает сле-
дующим образом [18]. В основу рекордера положен обычный
график записи изменения дистанции во времени на электрохи-
мической бумаге. В отличие от рекордера тактического расстоя-
ния, в котором скорость протяжки пера была постоянной и
46
пропорциональной некоторой средней скорости распространения
звука в воде, в этом рекордере оператор может менять скорость
движения пера, приводя ее в соответствие с фактической ско-
ростью звука в районе наблюдения, существенно повышая точ-
ность измерения дистанции.
Специальный оптический визир в виде светящегося луча
подводится оператором к очередной отметке от цели. Следящий
привод, управление которым происходит от вычислительного
устройства, перемещает визир вдоль шкалы дистанции. Поло-
Рис. 17. Рекордер для
полуавтоматического
сопровождения цели
по дальности ОКА-1.
1 — шкала дистанции;
2 — перо; 3 — оптический
визир; 4 — установка ди-
станции; 5 — изменение
дистанции; б — сокраще-
ние шкалы; 7 — шкала
ОВИР; S — установка
ОВИР.
жение визира отображается на цифровой шкале дистанций,
расположенной рядом с графиком.
Угол наклона оптического визира можно изменять, совме-
щая визир с трассой записи эхо-сигналов. Угол наклона при
этом определит значение ОВИР, считываемое с цифровой
шкалы. При переходе на сопровождение цели визир устанавли-
вается над последней отметкой эхо-сигнала.
Угол наклона устанавливается оператором так, чтобы визир
совпадал с трассой записи эхо-сигналов. Одновременно в соот-
ветствии с полученным значением ОВИР автоматически про-
исходит управление скоростью перемещения визира вдоль
шкалы дистанции. Визиру задается такая скорость перемещения,
чтобы в момент прихода очередного эхосигнала он оказывался
над новой отметкой. При необходимости скорость перемещения
визира корректируется оператором. Визир будет автоматически
сопровождать отметки от цели до тех пор, пока значение ОВИР
не изменится в результате взаимного маневрирования цели и
47
атакующего корабля. При изменении ОВИР оператор вводит
корректуру в угол наклона визира и соответственно в скорость
его перемещения.
В рекордере может осуществляться автоматическое пере-
ключение масштаба шкалы. Так, рассматриваемый рекордер
имеет три режима использования шкалы. При режиме «длин-
ная шкала» ширина графика соответствует 3750 ярдам
(3430 м) и перо постоянно перемещается на полную величину
шкалы. При режиме «полная шкала» ширина графика соответ-
ствует либо 3750, либо 1500 ярдам (1370 м), причем масштаб
шкалы определяется положением визира. Переключение масш-
таба шкалы с большого на малый происходит автоматически
при уменьшении дистанции до 1450 ярдов. При режиме «пере-
менная шкала» автоматически сокращается интервал между
посылками. Перо рекордера возвращается в исходное состояние
и управляет излучением очередной посылки каждый раз, когда,
проходя вдоль шкалы дистанций, оно переместится на расстоя-
ние, превышающее на 200 ярдов расстояние до цели, опреде-
ляемое с помощью визира. Для возврата пера в этом случае
используется подвижный контакт, связанный с визиром.
Специальное вычислительное устройство, входящее в состав
рекордера полуавтоматического сопровождения, обеспечивает
вычисление горизонтальной дальности до цели, необходимой для
производства расчетов, связанных с использованием противо-
лодочного оружия. Исходными данными для расчета служат
наклонная дальность до цели, получаемая с рекордера, и глу-
бина погружения цели, поступающая с рекордера глубины.
Рассчитанные вычислительным устройством значения гори-
зонтальной дальности до цели регистрируются с помощью спе-
циального рекордера.
Принцип действия и устройство рекордера горизонтальной
дальности в основном схожи с принципом действия и устрой-
ством рекордера тактической дистанции. Однако он имеет и
существенные отличия, которые заключаются в следующем:
в рекордере горизонтальной дальности для записи отметок от
цели используется не приходящий эхо-сигнал, а сигнал, посту-
пающий с выхода вычислительного устройства; перо рекордера
не совершает возвратно-поступательного движения при каж-
дой посылке, а движется прямолинейно по мере изменения
дистанции и не управляет излучением посылки.
Рекордер горизонтальной дальности используется для за-
писи значений рассчитанной горизонтальной дальности, опре-
деления ОВИР по замерам горизонтальной дальности и опреде-
ления моментов применения противолодочного оружия.
Работа рекордера глубины будет рассмотрена несколько
позже.
48
Устройства для определения глубины погружения
подводной лодки
В состав современных гидроакустических станций могут
входить специальные устройства, предназначенные для опреде-
ления глубины погружения подводной лодки-цели с учетом
влияния рефракции акустических лучей, которая может явиться
причиной возникновения значительных ошибок в определении
глубины погружения цели. В некоторых случаях оказывается
возможным существенно уменьшить величину этой ошибки,
вводя в измеряемую глубину погружения подводной лодки-цели
необходимую поправку.
Рис. 18. Принцип определения глубины погружения цели с учетом
влияния рефракции.
Принцип действия простейшего устройства для определения
глубины цели заключается в следующем [18]. Наклоняя непо-
средственно акустическую антенну или осуществляя сканиро-
вание характеристики направленности акустической антенны
в вертикальной плоскости электрическим путем при неподвиж-
ной акустической антенне, оператор определяет акустический
(кажущийся) угол места цели аак (рис. 18). Этот угол является
исходной величиной для последующих расчетов.
Другими исходными данными являются измеренная вели-
чина скорости звука в приповерхностном слое (С) и вертикаль-
ный градиент скорости звука (Ас). Эти величины периодически,
через каждые несколько часов, измеряются с помощью соответ-
ствующих приборов.
Пользуясь всеми этими исходными данными и измеряя на-
клонную дальность до цели с помощью рекордера или какого-
либо другого индикаторного устройства, определяют глубину
погружения цели. Для регистрации глубины погружения слу-
жит специальный рекордер глубины (рис. 19). В этом рекордере
так же, как и в обычном рекордере-регистраторе дистанции,
используется электрохимическая бумага, протягиваемая сверху
вниз с постоянной скоростью. Поперек бумажной ленты, как и
3 А. Л. Простаков
49
в обычном рекордере, перемещается перо. Скорость перемеще-
ния пера пропорциональна вертикальной составляющей ско-
рости распространения звука в воде. При такой скорости рас-
стояние, пройденное пером от момента посылки очередного им-
пульса до момента прихода эхо-сигнала от цели, будет равно
в масштабе шкалы рекордера глубине погружения цели. Так
как вертикальная составляющая скорость распространения
звука неодинакова для
разных слоев воды, то и
скорость движения пера
должна быть неравно-
мерна. В рассматривае-
мом случае учитывается
скорость звука в припо-
верхностном слое, под-
верженная максималь-
ным изменениям и прини-
маемая для всего слоя
постоянной, и поправка,
позволяющая учесть не-
которое среднее измене-
ние скорости звука в бо-
лее глубоких слоях воды.
Как известно, связь
между скоростью звука
в некотором слое и углом
входа акустических лучей
в iHero определяется зако-
ном Онеллиуса'
С~\с C0SaaK.,
Рис. 19. Принцип устройства рекордера
глубины погружения цели.
/ — гидролокатор; 2 — двигатель перемещения
пера; 3 — перо; 4 — подвижный контакт; 5—шкала
глубины; 6 — рекордограмма; 7 — реле; 8 — устрой-
ство ввода данных.
В этом выражении не-
известной величиной яв-
ляется только угол вхождения акустического луча в нижние
слои воды аак2- Однако эта величина без труда может быть вы-
числена по остальным известным величинам.
Определив значение угла ааК1 , можно обеспечить перемеще-
ние пера рекордера глубины на участке шкалы глубины, соот-
ветствующем приповерхностному слою, со скоростью, пропор-
циональной в этом случае вертикальной составляющей скорости
звука св и равной с sin аакР а на участке шкалы, соответствую-
щем более глубоким слоям воды, со скоростью, пропорциональ-
ной вертикальной составляющей скорости звука св' в этих слоях
и равной (с — Ac) sinocaK2. Переключение скорости перемещения
пера при переходе звука из одного слоя в другой осуще-
50
ствляется с помощью реле, управляемого путем замыкания пе-
ром рекордера подвижного контакта, устанавливаемого против
отсчета шкалы глубины, соответствующего нижней границе при-
поверхностного слоя.
Прокладчик противолодочных атак
Для повышения эффективности противолодочных атак уже
в конце минувшей войны на некоторых кораблях стали уста-
навливать устройства для наглядного отображения обстановки
Рис. 20. Прокладчик про-
тиволодочных атак Мк-1.
/ — шкала угла упреждения;
2 — планшет (экран элект-
ронно-лучевой трубки); 3 —
установка угла упреждения;
4 — установка дистанции
залпа; 5 — установка исход-
ной точки маневрирования
(«север — юг» и «запад —
восток»).
в ходе атаки, получившие название «прокладчика противоло-
дочных атак» (ASAP — Autisubmarine Attak Plotter) [18]. Про-
кладчик представляет собой электронное устройство, снабжен-
ное планшетом — электронно-лучевой трубкой с длительным
послесвечением экрана (рис. 20). На экране трубки отобра-
жается в географических координатах взаимное маневрирова-
ние атакующего корабля и подводной лодки-цели (рис. 21) —
курс корабля в виде линии, состоящей из ярких точек. Скорость
перемещения точек по экрану соответствует скорости движения
корабля в масштабе планшета. Исходные данные для выра-
ботки отметок курса и скорости автоматически поступают
в прокладчик от гирокомпаса и лага. Оператор может устано-
вить исходную точку маневрирования на экране, перемещая ее
в направлениях «север — юг» и «запад — восток». Исходная
точка выбирается с таким расчетом, чтобы вся атака по воз-
можности поместилась на экране прокладчика, без переносов
изображений в новые точки в ходе атаки. Положение подводной
3*
51
лодки-цели отображается в полярных координатах относи-
тельно атакующего корабля.
Каждая посылка гидролокатора изображается на экране
прокладчика неяркой светящейся линией, выходящей из точки,
соответствующей местонахождению корабля в момент излуче-
ния посылки. В момент привода эхо-сигнала на экране возни-
кает яркая точка, обозначающая местоположение цели.
В момент каждой очередной посылки на экране трубки
появляется также изображение линии упреждения. Направле-
ние и длина этой линии могут устанавливаться оператором
в соответствии с расчетами на
срельбу из противолодочного
оружия. Угол упреждения мо-
жет быть установлен по
специальной шкале, располо-
женной рядом с планшетом.
Длина упрежденной линии, со-
ответствующей расчетной ди-
станции залпа, может регули-
роваться оператором плавно
или на заданные величины.
Так, в прокладчике Мк-1 име-
лась возможность изменять
длину упрежденной линии с
помощью переключателя на
три положения.
Рис. 21. Изображение на экране В положении «выключено»
прокладчика противолодочных атак, линия упреждения не отобра-
жалась вовсе. Это положение
использовалось, в частности, при дистанции до цели менее
150 ярдов (137 ж), так как в этом случае изображение упреж-
денной линии затрудняло наблюдение за отметкой от цели.
Положение «1000» соответствовало длине упрежденной линии
1000 ярдов (914 м) в масштабе планшета. Это положение ис-
пользовалось при дистанции до цели свыше 2500 ярдов
(2286 м). В этом случае корабль оказывался за рамками
планшета и при маневрировании на сближение с целью можно
было ориентироваться по изображению на экране конца
упрежденной линии. Нормальным положением переключателя
являлось положение «дистанция». При этом положении опера-
тор мог устанавливать длину упрежденной линии, соответ-
ствующей дистанции стрельбы в пределах от 0 до 580 ярдов
(от 0 до 522 м).
Направление линии упреждения автоматически передается
на командный пункт корабля для выбора соответствующего
боевого курса.
В момент, когда упрежденная линия совпадает с очередной
52
отметкой, изображающей атакуемую цель, производится залп
из бомбомета.
Наблюдение за отметками от цели на экране прокладчика
позволяет определять ее курс и скорость. При любых измене-
ниях характера маневрирования цели оператор прокладчика
может внести необходимые корректуры в боевой курс корабля.
Точность определения боевого курса в значительной степени
зависит от умения оператора ориентироваться в относительном
перемещении своего корабля и цели.
При атаках подводной лодки глубинными бомбами, сбрасы-
ваемыми с кормы, маневрирование производится таким же об-
разом. Момент сбрасывания бомб определяется с помощью
рекордера.
Таким образом, применение прокладчиков значительно упро-
щает проведение атаки, позволяя командиру непрерывно на-
блюдать за подводной обстановкой и своевременно реагировать
на ее изменения. Это особенно важно в случае маневрирования
подводной лодки для уклонения от атаки. При применении про-
кладчика облегчается и восстановление гидроакустического
контакта с целью в случае его потери.
По сообщениям иностранной печати, на более поздних об-
разцах прокладчиков удалось получить отображение маневри-
рования еще одного противолодочного корабля, данные о кото-
ром поступают на прокладчик от корабельной радиолокацион-
ной станции. Это еще более упрощает оценку командиром
обстановки и повышает эффективность атак, проводимых груп-
пой противолодочных кораблей [61].
Одним из более новых прокладчиков является устройство
Мк-ХХП, получившее название Monster. На экране этого про-
кладчика отображается тактическая обстановка: положение
подводной лодки-цели и своих сил. Одновременно прокладчик
вырабатывает данные для стрельбы противолодочным оружием
и в момент прихода атакующего корабля в точку залпа может
автоматически выдавать команду на открытие огня.
С помощью этого прокладчика можно также получить дан-
ные для маневрирования при уклонении от торпед и других ви-
дов оружия контратакующей подводной лодки. Как сообщают,
опытный образец нового прокладчика должны были установить
на один из американских эскадренных миноносцев в конце
1965 г., а в случае положительных результатов испытаний его
предполагают установить еще на 100 кораблях [70].
Специальный планшет-прокладчик Мк-16, предназначенный
для повышения эффективности противолодочных атак, разра-
ботан в США для кораблей на подводных крыльях. Счетно-
решающее устройство, входящее в состав прокладчиков, выра-
батывает боевой курс корабля и выдает соответствующие
команды на руль. На планшете отображается маневрирование
53
корабля в течение длительного периода времени. Данные о цели
поступают на планшет от гидроакустической станции, работаю-
щей при переходе корабля в водоизмещающее положение [31].
Источники питания
К числу важных специальных элементов современных гидро-
акустических станций относятся источники питания.
В течение ряда лет для питания генераторов излучаемых
электрических колебаний в гидролокаторах широко использова-
лись емкостные накопительные устройства, которые заряжались
в период продолжительной паузы между излучениями и разря-
жались в течение кратковременной посылки.
Однако с увеличением излучаемой гидролокаторами элек-
трической мощности такие источники питания стали громозд-
кими и малопригодными. Для питания генераторов современ-
ных гидролокаторов, излучающих мощности в сотни киловатт,
потребовалось создание источников, работающих на иных прин-
ципах.
При разработке источников питания для современных мощ-
ных гидролокаторов к ним предъявляют следующие основные
специфические требования:
— несмотря на цикличность работы гидролокатора (кратко-
временное излучение чередуется с длительной паузой), на-
грузка на электроэнергетическую систему корабля должна быть
ограниченной и равномерной, должны отсутствовать нежела-
тельные переходные процессы;
— равномерно потребляемая от энергетической системы ко-
рабля энергия должна аккумулироваться в источнике питания,
обеспечивая при излучении получение необходимой импульсной
электрической мощности;
— напряжение импульса на выходе источника питания
должно быть постоянным в течение всего времени излучения
посылки гидролокатором.
Эти принципы были реализованы при создании агрегата
питания американского гидролокатора SQS-26. При разработке
гидролокатора был создан агрегат, потребляющий от корабель-
ной энергетической системы не более 70 ква переменного тока
частотой 60 гц и обеспечивающий выходную мощность при ра-
боте в импульсном режиме 240 кет. Агрегат представляет со-
бой комбинированную установку, состоящую из статических
преобразователей с управляемыми кремниевыми вентилями и
вращающихся преобразователей [13].
Входным устройством агрегата является статический преоб-
разователь частоты, осуществляющий разгон мотор-генератора
во время пауз между импульсами, излучаемыми гидролокато-
ром. При этом происходит накопление кинетической энергии во
54
вращающихся массах мотор-генератора. Во время излучения
импульса под воздействием приложенной нагрузки скорость
вращения мотор-генератора уменьшается и накопленная кине-
тическая энергия вращающейся массы преобразуется в элек-
трическую энергию, отдаваемую потребителю. Амплитуда на-
пряжения, снимаемого в период излучения импульса, умень-
шается по мере расхода накопленной кинетической энергии,
чтобы обеспечить ее постоянство используют выходной стати-
ческий преобразователь, являющийся стабилизированным вы-
прямителем.
Так как накопление энергии происходит непосредственно
в агрегате питания и отдача накопленной энергии гидролока-
тору осуществляется этим агрегатом, в энергетической системе
корабля не возникает при излучении посылок опасных резо-
нансных явлений. Конструкция агрегата обеспечивает выдачу
гидролокатору необходимой импульсной мощности, не требуя
увеличения мощности, потребляемой от энергетической системы
корабля, выше среднего значения. Агрегат представляет для
энергетической системы статическую нагрузку, не вызывающую
в системе появления нежелательных переходных процессов.
Системы стабилизации акустических антенн на качке
Важным вспомогательным элементом, обеспечивающим по-
вышение эффективности гидроакустического наблюдения, яв-
ляется система стабилизации акустической антенны на качке.
Конструкция устройств для стабилизации акустической ан-
тенны может быть различной, хотя принципы стабилизации
являются более или менее общими. В одном из английских
экспериментальных гидролокаторов используется устройство
стабилизации, блок-схема которого приведена на рис. 22 [39].
Управление устройством стабилизации осуществляется с при-
менением гироскопа от общей для корабля системы стабили-
зации, которая вырабатывает составляющие углов качки. Рас-
сматриваемое устройство стабилизирует акустическую антенну
только в одной плоскости, хотя общий принцип действия устрой-
ства пригоден и для стабилизации в двух плоскостях.
Корабельная система стабилизации выдает текущее значение
угла бортовой качки Эг. Этот угол, непрерывно изменяющийся
во времени, складывается с заданным оператором углом на-
клона оси антенны 9^ относительно горизонта. Суммарный угол
6rH-6d сравнивается с углом 6*, определяющим фактическое по-
ложение оси акустической антенны в данный момент (все углы
задаются аналоговыми электрическими сигналами). Если требуе-
мый и фактически имеющийся угол не равны, выделяется сиг-
нал рассогласования 9=9Г+0^—9,, который после усиления за-
ставляет отработать исполнительный двигатель, поворачивающий
55
ось акустической антенны в сторону уменьшения угла в.
Поворот акустической антенны будет происходить до тех пор,
пока ошибка рассогласования не станет равной нулю, т. е.
Or + Od = 0f и 6 = 0. На качке отработка двигателя будет про-
исходить непрерывно и ось максимума характеристики направ-
ленности акустической антенны будет сохранять заданное по-
ложение в плоскости пеленгования.
Рассмотренное устройство обеспечивает стабилизацию при
углах бортовой качки до 25°. При угле качки 10° ошибка
в удержании направления
не превышает 0,5°.
В гидроакустической
аппаратуре может ис-
пользоваться и косвенная
стабилизация, когда аку-
стическая антенна ка-
чается вместе с кораб-
лем, а поправка на качку
вводится в измеренные
координаты цели [46].
Косвенная стабилизация
не требует установки
на корабле громоздких и
сложных устройств. Это
Рис. 22. Блок-схема^устройства стабилиза- особенно важно в слу.
ции акустической антенны на качке J
(в одной плоскости). чаях> когДа ИСПОЛЬЗУЮТСЯ
/ — корабельная система стабилизации; 2 — сель- КруПНОГаОарИТНЫе ЗКу-
син; 3 — двигатель; 4 — акустическая антенна; г'ттлттрг'ь'тта qutpuuu ттпа
5-усилитель сигнала рассогласования; 6 - блок СТИЧеСКИе аНТеННЫ, ДЛЯ
выделения сигнала рассогласования. НеПОСреДСТВе.ННОЙ СТабИ-
лизации которых тре-
буется применение мощного силового привода, потребляющего
много электроэнергии.
Управление устройством косвенной стабилизации также осу-
ществляется от корабельной системы стабилизации. В этом
случае выдаваемый системой угол качки используется для уп-
равления частотой специального генератора (рис. 23). Частота,
вырабатываемая этим генератором, является функцией угла
качки. В модуляторах происходит смешивание частоты эхосиг-
нала, принимаемого секционированной акустической антенной,
и частоты, выработанной генератором. Таким образом, частоты
на выходах модуляторов являются функциями углов качки. Эти
частоты подаются на фазосдвигающие устройства, которые вво-
дят дополнительный сдвиг фаз в сдвиг фаз колебаний, прини-
маемых акустической антенной. При этом дополнительный сдвиг
фаз будет зависеть от значения частоты на выходах модуля-
торов и в конечном счете от значения угла качки. Следова-
тельно, сдвиг фаз, вводимый искусственным путем, будет ком-
56
пенсировать сдвиг фаз, возникающий за счет отклонения оси
максимума характеристики направленности акустической ан-
тенны, вызванного качкой корабля. Несмотря на качку, фазо-
вые отношения в принимаемом сигнале остаются неизменными,
качка не сказывается на регистрации пеленга на цель. Данные
о результатах экспериментальной проверки устройства в целом
отсутствуют, но, как утверждают, испытания его основных эле-
ментов дали хорошие результаты.
Рис. 23. Блок-схема устройства электронной
стабилизации акустического луча на качке.
/ — секционированная приемная антенна; 2 — гетеродин; 3 —
модулятор; 4 — фазосдвигающее устройство; 5 — усилитель;
6 — блок регулировки частоты; 7 — сигнал ошибки от корабель-
ной системы стабилизации; 8 — регистратор; 9 — детектор.
Некоторые зарубежные специалисты считают, что для повы-
шения точности определения координат с помощью современ-
ных гидролокаторов и других радиоэлектронных средств, имею-
щих крупногабаритные антенны вместо применения многочис-
ленных автономных устройств стабилизации, оказывается более
целесообразным стабилизировать на качке корабль в целом.
Это, в частности, предполагается осуществить при так назы-
ваемом «интегральном» проектировании кораблей.
§ 10. ИМИТАТОРЫ ДЛЯ ИСПЫТАНИЯ КОРАБЕЛЬНОЙ
ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРЫ
Разрабатываемая радиоэлектронная аппаратура нуждается
в длительных и всесторонних исследованиях. До недавнего
прошлого любые испытания проводились, как правило, путем
создания реальной обстановки в полигонных или морских усло-
виях. Однако такие испытания оказывались сложными и доро-
гостоящими, а ограниченность их во времени и количестве не
позволяла получать необходимый объем статистических данных.
57
В связи с этим были созданы электронные имитаторы, по-
зволяющие воспроизводить определенную тактическую обста-
новку, маневрирование корабля — носителя радиоэлектронной
аппаратуры и цели, воспроизводить входные сигналы, изменяю-
щиеся с учетом характера взаимного маневрирования и воздей-
ствия среды,-исследовать реакцию испытываемой системы и об-
служивающего ее личного
состава на эти сигмалы.
Такой имитатор, по-
зволяющий создать мо-
дель исследуемых процес-
сов, близкую к действи-
тельной, и управлять
целеустремленно этими
процессами, дает возмож-
ность в кратчайший срок
и при минимальных за-
тратах получить данные,
необходимые для всесто-
ронней оценки испыты-
ваемой системы. Кроме
того, такой имитатор мо-
жет использоваться и для
обучения личного соста-
ва, позволяя последова-
тельно усложнять и рас-
ширять отрабатываемые
задачи.
Так как законы рас-
пространения акустиче-
ской и электромагнитной
энергии во многом схожи
между собой, оказывается
возможным создать имитаторы для испытаний гидроакустиче-
ской и радиолокационной аппаратуры, в основу построения ко-
торых кладутся примерно одинаковые принципы [36].
Типовой имитатор (рис. 24) состоит из следующих основных
элементов. Блок управления имитируемой цели вырабатывает
в реальном масштабе времени аналоговый электрический сиг-
нал, соответствующий текущему положению цели в используе-
мой при решении задачи системе координат. Заданная траекто-
рия движения цели вырабатывается с помощью электронной
цифровой вычислительной машины. Исходные параметры дви-
жения цели, так же, как и данные, характеризующие среду,
в которой распространяется имитируемый сигнал и движение
своего корабля — носителя испытываемой аппаратуры, зада-
ются с пульта управления. Все эти данные могут вводиться
Рис. 24. Блок-схема типового имитатора
для испытания радиоэлектронной аппара-
туры.
/ — пульт управления (программное устройство);
2 — индикаторный блок; 3 — блок имитации
характеристики цели; 4 — блок имитации корабля-
носителя; 5 — ЭЦВМ системы слежения; 6 — гене-
ратор сигналов; 7 — блок имитации условий рас-
пространения; 8 — блок имитации характеристики
направленности; 9 — оператор; 10 — ЭЦВМ; // —
боевой расчет; 12 — испытываемая гидроакустиче-
ская станция.
58
оператором, руководящим испытаниями или обучением, вруч-
ную или автоматически по заранее составленной программе.
В результате сопоставления данных, поступающих из блоков
имитации характеристик цели и своей гидроакустической стан-
ции, а также от блока имитации условий распространения сиг-
нала в среде, вырабатывается электрический аналог гидроаку-
стического сигнала. При этом учитывается влияние на имити-
руемый сигнал характера цели, ее ориентации (курсового угла,
угла места) относительно испытываемой гидроакустической стан-
ции, и элементов ее движения (скорости хода, глубины по-
гружения и т. п.). Учитывается и влияние условий распростра-
нения сигнала в среде, таких как затухание акустической энер-
гии с расстоянием, случайные замирания (флуктуации) сиг-
нала, ослабление сигнала за счет расширения фронта волны
с расстоянием. При гидролокации учитываются также пара-
метры излучаемых импульсов. Специальный блок позволяет
учесть влияние на имитируемый сигнал характеристики направ-
ленности акустической антенны и изменений ее положения в лю-
бой момент времени.
Таким образом, в имитаторе вырабатывается аналоговый
электрический сигнал, весьма близкий по своим параметрам
к сигналу, поступающему на вход приемного тракта гидро-
акустической станции в реальных морских условиях.
Имитируемый сигнал подается на вход испытываемой гидро-
акустической станции. Оператор, работающий на этой станции,
будет наблюдать на ее индикаторах с допустимой степенью при-
ближения практически те же явления, которые имели бы место
при работе в реальных морских условиях. Данные, получаемые
оператором, используют для оценки эффективности работы стан-
ции. Изменяя условия работы аппаратуры, устанавливают ха-
рактер ее реагирования на эти изменения. Если нужно, то экс-
перимент повторяют любое число раз, обеспечивающее накоп-
ление необходимых статистических данных, или же исходные
данные меняют в любых, интересующих экспериментатора пре-
делах и комбинациях.
При обучении личного состава, обслуживающего гидроаку-
стическую станцию, условия работы аппаратуры могут ме-
няться в последовательности, обеспечивающей получение опера-
торами твердых навыков в работе на аппаратуре при любых
изменениях условий обстановки и распространения сигналов.
При обучении личного состава корабля — носителя гидро-
акустической аппаратуры в целом данные, поступающие от ап-
паратуры, после соответствующей их обработки используются
командиром для принятия необходимого решения, которое за-
тем реализуется личным составом.
Специальный индикаторный блок отображает введенные
в имитатор данные, общую обстановку, воспроизводимую
59
с помощью имитатора, а при обучении личного состава и
реакцию обучаемых на изменения этой обстановки.
При разработке имитаторов в основу конструкции отдельных
блоков могут быть положены самые различные принципы.
В журнале «Электроника» [36] приводятся некоторые сведе-
ния о принципах построения отдельных блоков имитатора, по-
зволяющего исследовать гидроакустиче-
ские и радиолокационные станции.
В этом имитаторе используется спе-
циальная схема, позволяющая учесть
ослабление интенсивности гидроакустиче-
ского сигнала с увеличением расстояния,
вызванное затуханием акустической энер-
гии и расширением фронта волны при
распространении в воде. Оба эти явле-
ния могут быть учтены с помощью схе-
мы, состоящей из линейного потенцио-
метра и группы последовательно вклю-
ченных фильтров нижних частот
(рис.25).
Известно, что при распространении в
воде акустический сигнал затухает с рас-
стоянием, причем величина этого затуха-
ния зависит от частоты сигнала, возра-
стая с ее увеличением. Поэтому элементы
фильтра рассчитываются таким образом,
чтобы на очень низких частотах шунтиру-
ющее действие емкостей было пренебре-
жимо мало и аналоговое напряжение,
характеризующее уровень акустического
сигнала от цели, определялось только
функцией сопротивлений плечей потен-
циометра. С увеличением частоты сигна-
ла начнет сказываться шунтирующее дей-
ствие звеньев фильтра и напряжение аналогового сигнала будет
ослабевать по закону увеличения затухания с частотой.
При распространении акустических сигналов в воде имеют
место значительные флуктуации их амплитуды, вызванные ин-
терференционными явлениями. Из-за неоднородности морской
среды сигнал в точке приема является результатом совокупного
воздействия прямой акустической волны, отраженной от поверх-
ности моря или ото дна, а также акустической волны, рассеян-
ной различными неоднородностями. Для имитации этого явле-
ния используется генератор низкочастотных случайных сигна-
лов (рис. 26). В результате взаимодействия случайного сигнала,
выработанного генератором с аналоговым сигналом, последний
оказывается промодулированным по случайному закону, что
Рис. 25. Схема имитации
ослабления сигнала
с расстоянием.
GO
позволяет получить эффект, достаточно близко отображающий
процесс, происходящий с реальным сигналом.
При гидролокационном наблюдении могут иметь существен-
ное влияние отражающие свойства кильватерной струи цели,
в связи с чем в состав имитатора был включен специальный блок,
позволяющий воспроизводить отражение сигнала от этой струи.
Имитатор кильватерной струи должен воспроизводить два явле-
ния: увеличение эквивалентной отражающей способности цели
за счет отражения акустической энергии от кильватерной струи
и наличие длинного отражающего следа, расположенного на
Рис. 26. Блок-
схема устройства
для имитации
флуктуации аку-
стических сигна-
лов.
/ — генератор белого
шума* 2 — полосовой
фильтр; 3 — буфер-
ный усилитель; 4 —
схема умножения;
5 — фильтр низких ча-
стот; 6 — модулятор.
траектории движения имитируемой цели. Поэтому в блоке
должно осуществляться запоминание траектории движения
цели в течение времени существования кильватерной струи,
исчисляемого минутами. Это запоминание осуществляется пу-
тем сжатия масштаба времени, дающего возможность в дан-
ный момент получить информацию о пути, пройденном в тече-
ние некоторого предшествующего времени. Специальная схема
сравнения позволяет сопоставлять координаты, измеряемые
с помощью гидролокатора с хранящимися в линиях задержки
координатами траектории цели. При этом сравниваются коор-
динаты, соответствующие положению цели в данный момент и
в любой момент, определяемый длительностью существования
кильватерной струи. Данные о более ранних координатах цели
автоматически стираются. В случае совпадения измеряемых
координат с координатами цели или ее кильватерной струи
происходит выдача отраженного сигнала.
Оценка отражающих свойств кильватерной струи произво-
дится с учетом времени ее существования и параметров гидро-
локатора (длительности посылки рабочей частоты). Для этого
на вход специальной схемы фиксации подается напряжение
61
с выхода синхронизированного генератора пилообразного на-
пряжения и формирующей схемы.
При имитации сигналов оказывается необходимым учиты-
вать направленное действие акустических антенн. Явление на-
правленности может быть воспроизведено за счет применения
в имитаторе специального блока. Устройство этого блока во
многом схоже с устройством обычного компенсатора, приме-
няемого для формирования характеристики направленности при
шумопеленговании. Принцип действия блока можно пояснить
следующим образом (рис.27).
Аналоговое напряжение зву-
кового сигнала подается на
электрическую линию задерж-
ки, отводы которой подклю-
чены к ламелям коммутацион-
ного устройства. По ламелям
скользят контактные щетки,
расположенные так, что они
в определенном масштабе вос-
производят расположение при-
емников акустической антенны
испытываемой станции. Если
разворачивать вокруг оси пла-
ту с ламелями или наоборот
одновременно разворачивать
скрепленные между собой
щетки относительно непод-
Рис. 27. Принцип действия блока ВИЖНОЙ ламели на щетки, СО-
имитации направления прихода ответствующие тому или ино-
сигнала. Му приемнику, будут ПОСТу-
пать сигналы, имеющие сдвиг
фаз, аналогичный сдвигу фаз, который имел бы место при при-
ходе на акустическую антенну реальных сигналов от цели, пред-
ставляющих собой плоскую волну. Разворот ламелей или ще-
ток вызывает появление сдвига фаз на отдельных приемниках,
соответствующего изменению направления прихода сигнала.
Этот разворот может осуществляться автоматически с учетом
относительного перемещения цели и корабля — носителя испы-
тываемой гидроакустической станции. В результате этого опе-
ратор будет видеть на экране гидроакустической станции изме-
нение пеленга на цель или с помощью соответствующих эле-
ментов станции будет определять этот пеленг, управляя
поворотом характеристики направленности станции.
Имитаторы применяются и при различных исследованиях,
связанных с разработкой систем оружия, использующих данные
гидроакустического наблюдения. Один из таких имитаторов раз-
работан в Центре испытания морского оружия ВМС США.
62
В имитаторе используются аналоговые -и цифровые вычисли-
тельные устройства, позволяющие моделировать различные ха-
рактеристики подводных лодок и оружия. Для моделирования
параметров акустических сигналов подводной лодки и усло-
вий распространения акустических сигналов в морской среде
используется электронная цифровая вычислительная машина
УНИВАК-490. Имитатор обеспечивает возможность обнаруже-
ния в процессе поиска имитируемой цели и наведения на нее
торпеды. Как утверждают, испытания имитатора дали хорошие
результаты. Иностранные специалисты считают, что использо-
вание имитатора позволяет значительно сократить объем испы-
таний систем управления оружием, проводимых непосредственно
в море [36].
§ И. НЕКОТОРЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ
К КОРАБЕЛЬНЫМ ГИДРОАКУСТИЧЕСКИМ И ДРУГИМ
РАДИОЭЛЕКТРОННЫМ СРЕДСТВАМ
При проектировании современных кораблей и, в частности,
при проектировании их радиоэлектронного вооружения, к ра-
диоэлектронным средствам предъявляются некоторые опреде-
ленные специфические требования. Ряд этих требований отно-
сится и к гидроакустическому вооружению кораблей. В свою
очередь и при проектировании радиоэлектронных средств воз-
никают определенные требования к кораблю.
Так, при общем проектировании современных боевых ко-
раблей считают необходимым учитывать следующие основные
положения, связанные с особенностями размещения радиоэлек-
тронного оборудования и эксплуатации его в корабельных
условиях:
1) место размещения аппаратуры на корабле, в особенности
размещение акустических антенн, и необходимые для этого раз-
мещения объемы;
2) вес аппаратуры;
3) электрическая мощность, потребляемая аппаратурой;
4) взаимодействие радиоэлектронной аппаратуры с другими
боевыми средствами и оружием корабля;
5) необходимость в принятии специальных мер по защите
от собственных помех и по исключению взаимных помех при
работе радиоэлектронных средств различного назначения;
6) возможность эффективной работы в условиях качки, уда-
ростойкость аппаратуры и допустимая при ее работе вибрация;
7) удобство эксплуатации и ремонтопригодность;
8) потребность аппаратуры в охлаждении, в подаче сухого
воздуха и т. п. [52].
Вопрос о размещении радиоэлектронных узлов гидроакусти-
ческой аппаратуры в основном не имеет специфических особен-
63
ностей. К этим узлам предъявляются те же требования, что
и к узлам любой другой аппаратуры. Радиоэлектронные узлы
должны оформляться в виде стандартных стоек, удобных к раз-
мещению на корабле. Так, например, аппаратура, предназна-
ченная для размещения на подводных лодках, должна иметь
такие размеры стоек, чтобы стойки свободно проходили через
входные люки, имеющие диаметр в свету 625 лш, или перебо-
рочные двери с размерами 750X500 мм2. Для корабельной ра-
диоэлектронной аппаратуры ВМС США используются стан-
дартные стойки с размером основания 457x457 мм2 и высотой
1700—1800 мм.
Значительные трудности возникают при размещении акусти-
ческих антенн. Обтекатели современных акустических антенн
искажают обводы корпуса корабля. В связи с этим за рубежом
всесторонне рассматриваются возможности создания акустиче-
ских антенн, совмещенных с корпусом корабля. При установке
на корабле буксируемого гидролокатора переменной глубины
его опускаемая аппаратура может быть размещена внутри кор-
пуса, в специальных шахтах. Однако при этом происходит
потеря большого полезного объема. При размещении опускае-
мого контейнера на корме корабля потерь в объеме помещений
не происходит, но приходится устанавливать на палубе тяже-
лое и громоздкое подъемно-опускное устройство.
При выборе места размещения акустической антенны прихо-
дится учитывать и влияние шумности, и распределение уровня
собственных помех по различным участкам корпуса корабля.
Так, например, с точки зрения уменьшения собственных помех
расположение акустических антенн в районе форштевня оказа-
лось более благоприятным, чем под килем в первой четверти
длины корпуса, как это практиковалось ранее [76]. При проек-
тировании гидроакустической аппаратуры и размещении ее на
кораблях всех классов особенно остро стоит вопрос о сниже-
нии уровня собственных помех. Ввиду важности этого вопроса
он рассматривается в специальной главе.
С вопросом уменьшения объема, занимаемого радиоэлек-
тронной аппаратурой, тесно связан вопрос об уменьшении ее
веса. Как полагают, уменьшение веса аппаратуры сможет быть
достигнуто за счет еще более широкого внедрения полупровод-
пиковых устройств и элементов микроэлектроники.
Потребляемая радиоэлектронной и, в частности, гидроаку-
стической аппаратурой электрическая мощность продолжает
расти. Наряду с мерами, направленными на максимальную эко-
номию потребляемой электроэнергии, при разработке гидроаку-
стической аппаратуры принимаются специальные меры к равно-
мерной нагрузке на корабельную электроэнергетическую си-
стему. Удовлетворение этого требования для гидроакустических
средств связано со значительными трудностями из-за циклич-
64
ности работы аппаратуры, когда в течение кратковременного
периода посылки излучается большая электрическая мощность,
с то время как во время пауз, длительность которых во много
раз превышает длительность посылок, аппаратура потребляет
незначительную мощность.
При разработке гидроакустических средств должно быть
предусмотрено взаимодействие их с другими боевыми сред-
ствами и оружием корабля. Это взаимодействие в настоящее
время решается, как правило, за счет органической связи от-
дельных элементов и блоков соответствующей аппаратуры, обе-
спечивающей быстрый обмен необходимой информацией. Так,
например, гидроакустическая аппаратура, приборы управления
стрельбой и пусковые устройства противолодочных комплексов
«Асрок» и «Тёрне» представляют собой единую конструктивно
и функционально взаимосвязанную систему. Гидроакустические
средства выдают данные в автоматизированные системы сбора,
обработки и отображения информации и т. д.
Качка корабля в значительной степени снижает эффектив-
ность гидроакустического наблюдения — точность пеленгования
и измерения других координат, ухудшает условия работы опе-
раторов. Для уменьшения влияния бортовой и килевой качки
приходится применять специальные меры для стабилизации
акустических антенн. Однако стабилизация крупных акусти-
ческих антенн современных гидролокаторов сопряжена с боль-
шими трудностями. Системы стабилизации неизбежно увеличи-
вают и без того большие габариты и вес аппаратуры. Считают,
что наиболее эффективно эта задача может быть решена за
счет стабилизации корабля в целом.
Однако стабилизация корабля не обеспечивает степень
успокоения качки, необходимую для работы таких высоко-
точных устройств, какими являются современные гидролока-
торы. Поэтому в гидролокаторах применяются и электронные
устройства стабилизации, а при обработке результатов наблю-
дения учитывается условие неустойчивости.
Корабельная гидроакустическая аппаратура должна быть
достаточно ударостойкой. Так в ВМС США считают, что аппа-
ратура должна выдерживать взрывные нагрузки при воздей-
ствии на подводную лодку современного противолодочного ору-
жия. С этой целью ударостойкость лодочной аппаратуры дости-
гает 15—50 g[13].
Колебательная система, образуемая аппаратурой, закреп-
ленной на амортизаторах, должна иметь частоту собственных
колебаний выше частоты колебаний прочного корпуса, что
исключит возможность возникновения резонанса и опасных пе-
регрузок при подводных взрывах.
Рассматривая вопросы удобства эксплуатации, большое
внимание за рубежом уделяют требованиям инженерной
65
психологии. Так, например, к пультам управления и индикации
радиоэлектронной аппаратуры предъявляется целый комплекс
специфических требований:
— командир или другое лицо, использующее получаемую от
аппаратуры информацию, должно иметь возможность наблю-
дать за приборными щитами и индикаторами и поддерживать
зрительную и голосовую связь с операторами. С этой целью
стремятся основные пульты управления размещать в одной
рубке, располагая их радиально;
— приборы управления и индикации должны располагаться
на пультах в логической последовательности;
— индикаторы, требующие постоянного контроля со сто-
роны оператора, размещаются на уровне его глаз или несколько
ниже в пределах угла зрения не больше 30°;
— индикаторы, которыми пользуются несколько лиц, должны
располагаться в верхней части пультов;
— светящиеся индикаторы различного назначения должны
отличаться своими размерами и цветом свечения;
— в приборах световой индикации контрастность между от-
метками и фоном должна быть не менее чем 1 : 5;
— индикаторы и связанные с ними ручки управления
должны быть ориентированы друг относительно друга едино-
образно;
— направление перемещаемых органов управления должно
быть логически связано с направлением движения управляе-
мого элемента или объекта;
— на пульте управления должна отображаться только ин-
формация, необходимая оператору; следует избегать выдачи
всякой избыточной и отвлекающей внимание оператора инфор-
мации;
— расположение органов управления должно быть удобным
для пользования оператором со средними физическими дан-
ными и т. п. [29].
Удобство эксплуатации гидроакустической аппаратуры не-
разрывно связано с необходимостью быстрой и правильной
классификации контакта. Это вызвано в первую очередь тем,
что гидролокаторы по сравнению с другими радиоэлектронными
средствами обнаруживают значительно больше целей, причем
преобладающая часть их являются ложными. Кроме того,
подводная цель, обнаруженная гидроакустической аппаратурой,
как правило, не может быть уточнена и классифицирована за
счет сопоставления с данными, получаемыми от других средств
наблюдения. Все это затрудняет классификацию контакта. В то
же время, в связи с быстрым развитием маневренных элементов
подводных лодок и увеличением скорости противолодочных сил,
боевые соприкосновения оказываются весьма быстротечными,
время, которое может быть выделено на классификацию кон-
66
такта и оценку подводной обстановки, непрерывно сокращается.
Все это выдвигает требование создания в составе гидроакусти-
ческой аппаратуры специальных устройств для классификации
контакта [52].
В настоящее время весьма важным является вопрос о бы-
стрейшем выявлении и устранении неисправностей в радиоэлек-
тронной аппаратуре. По мнению американских специалистов на
современных боевых кораблях должна иметься централизован-
ная система обнаружения неисправностей, единая для всех ра-
диоэлектронных средств, позволяющая быстро и точно обна-
ружить любую неисправность. Однако такая система может
оказаться очень сложной и громоздкой из-за большого числа
разнообразного радиоэлектронного оборудования и мест, в ко-
торых оно может быть повреждено. Поэтому в настоящее время
считают возможным осуществлять выборочный контроль за
исправностью ограниченного количества оборудования [52].
Для повышения ремонтопригодности и удобства эксплуата-
ции оборудования американские специалисты считают необхо-
димым осуществлять стандартизацию монтажа. Считается целе-
сообразным объединение различных однотипных устройств и
устройств одинакового назначения, применяемых в различной
радиоэлектронной аппаратуре. Так, например, выдвигается идея
о целесообразности создания на кораблях единого устройства
стабилизированной частоты или нескольких таких централизо-
ванных источников, которые могли бы обеспечить работу любых
радиоэлектронных средств. При этом нужные рабочие частоты
могли бы быть получены за счет умножения и деления частоты,
вырабатываемой централизованным источником. Высокая ста-
бильность частоты единого централизованного источника, как
полагают, обеспечит эффективную работу аппаратуры и умень-
шит ее габариты и вес за счет сокращения многочисленных
обособленных устройств стабилизации. Также единой для всего
корабля может быть система вентиляции, охлаждения, подачи
сухого воздуха и т. п. [52].
Как можно понять из многочисленных материалов, опубли-
кованных в зарубежной печати, некоторые из рассмотренных
требований уже нашли свою реализацию в гидроакустической и
другой радиоэлектронной аппаратуре, другие же высказыва-
ются пока еще в виде пожелания.
§ 12. РАЗВИТИЕ ГИДРОАКУСТИЧЕСКИХ И ДРУГИХ
РАДИОЭЛЕКТРОННЫХ СРЕДСТВ И «ИНТЕГРАЛЬНОЕ»
ПРОЕКТИРОВАНИЕ КОРАБЛЯ
Ранее уже были приведены данные, характеризующие уве-
личение габаритов и веса радиоэлектронного оборудования не-
которых классов современных кораблей за последние годы.
67
Известно также и то, что одновременно происходил значитель-
ный, хотя и не такой быстрый, как у радиоэлектронных средств,
рост габаритов, веса и стоимости других боевых средств, энерге-
тических установок и оружия кораблей. Все это в конечном
счете приводит к росту водоизмещения и стоимости постройки
в целом. Особенно заметен этот рост для противолодочных ко-
раблей и подводных лодок.
Так, если эскадренный миноносец «Бейнбридж», спущенный
на воду в 1901 г., имел водоизмещение около 400 г, то од-
ноименный атомный фрегат, спущенный на воду через 60 лет,
имеет водоизмещение почти в 22 раза больше (8430 г). Только
за десять лет, с 1952 по 1961 г., стоимость постройки каждой
тонны водоизмещения противолодочного корабля возросла
в три раза [76]. Можно ожидать, что тенденция роста водоиз-
мещения, стоимости противолодочных кораблей и количества
личного состава при современных методах проектирования са-
мих кораблей, их вооружения и боевых средств неизбежно со-
хранится и впредь. Однако, по мнению иностранных специали-
стов, при таких темпах роста всех этих показателей может
сложиться такое положение, при котором они превысят разумно
допустимые пределы.
В связи с этим в ВМС США было выдвинуто предложение
о целесообразности перехода к так называемому «интеграль-
ному», или комплексному, проектированию кораблей.
Как можно судить из сообщений зарубежной печати, до на-
стоящего времени проектирование боевых кораблей сводилось
в первую очередь к разработе корпуса, способного вместить
в себя определенную весовую нагрузку, определяемую составом
вооружения и боевых средств и обслуживающего их личного
состава. Все оружие и боевые средства кораблей разрабатыва-
лись независимо друг от друга и в отрыве от корабля, на ко-
тором они должны были устанавливаться. Проектировщики ко-
рабля должны были разместить весь этот разнородный, уже
существующий, комплекс оружия и боевых средств на созда-
ваемом корабле.
Все это неизбежно приводило к перегрузке корабля, к раз-
мещению на нем ряда дублирующих. устройств и элементов.
Особенно характерным было дублирование для радиоэлектрон-
ных средств. На кораблях стало появляться большое количе-
ство однородных источников питания, индикаторов, разнооб-
разных специализированных вычислительных устройств, систем
охлаждения и вентиляции аппаратуры, большое количество
взаимонезаменяемых запасных частей и инструмента. Все это
усугублялось огромным количеством кабеля, соединяющего
каждое радиоэлектронное устройство со своими источниками
питания, индикаторами, пультами управления и т. п. Сходная
картина имела место и для других боевых средств.
68
Новый принцип проектирования корабля, рассматривающий
корабль как единую комплексную систему «корабль — оружие»,
должен, по мнению его авторов и сторонников, привести
к устранению отмеченных недостатков. При таком подходе си-
стема, которой является корабль, рассматривается как комп-
лекс, состоящий из нескольких сложных подсистем, объединяе-
мых в единое целое корпусом. Этот принцип заложен, в част-
ности, в разработку проекта противолодочного корабля «Си
Хоук», осуществляемую в настоящее время [36].
Весь процесс проектирования корабля подразделяется на
три основных этапа: на первом этапе анализируются общие
требования, предъявляемые к кораблю, корабль расчленяется
на необходимое число подсистем: происходит одновременное и
взаимосвязанное проектирование подсистем и корпуса корабля.
На втором этапе создается прототип каждой из спроектирован-
ных подсистем. На третьем этапе осуществляется постройка
самого корабля.
По мнению иностранных специалистов проектируемый пер-
спективный противолодочный корабль должен отвечать ряду
специфических требований. Так, например:
— боевая эффективность корабля должна быть значительно
повышена по сравнению с боевой эффективностью современных
противолодочных кораблей;
— размеры корабля не должны превышать размеры совре-
менных противолодочных кораблей;
— стоимость корабля не должна быть выше стоимости са-
мого дешевого современного эскадренного миноносца;
— численность личного состава должна быть уменьшена по
сравнению с современными аналогичными кораблями;
— тактические возможности и эффективность гидроакусти-
ческого вооружения корабля, систем управления противолодоч-
ным оружием и самого оружия должны быть значительно рас-
ширены;
— корабль должен быть насыщен комплексными системами,
способными обрабатывать информацию, обобщать и выдавать
командованию в удобном для использования виде все данные,
необходимые для принятия правильного и быстрого решения
в сложившейся боевой обстановке [52].
Основные качества корабля обеспечиваются за счет наличия
на нем определенного комплекса оружия и технических средств.
При этом оружие и технические средства могут быть подразде-
лены на несколько подсистем, каждая из которых должна иметь
свое определенное функциональное назначение в обеспечении
основных тактических качеств корабля в целом. Вся система
должна быть спроектирована так, чтобы она обеспечивала наи-
более благоприятные условия для управления кораблем в бое-
вой обстановке.
69
Считают, что эффективный перспективный противолодочный
корабль будет состоять из следующих одиннадцати основных
подсистем [52, 77]:
1) энергетической установки;
2) противолодочного оружия;
3) оружия для поражения надводных и воздушных целей;
4) средств обнаружения подводных лодок (гидроакустиче-
ских средств);
5) средств обнаружения надводных и воздушных целей;
6) средств связи;
7) навигационных средств;
8) контроля и управления кораблем;
9) командования;
10) сбора информации от подсистем и обмена информацией
между подсистемами;
11) личного состава.
Каждая из этих основных подсистем может быть в свою оче-
редь подразделена на более мелкие.
Девять первых подсистем, каждая из которых является пол-
ностью самостоятельной в выполнении возложенных на нее
функциональных обязанностей, с помощью десятой подсистемы
объединяются в единую логически завершенную систему «ко-
рабль— оружие». Механически все подсистемы объединены кор-
пусом корабля. Личный состав, хотя и входит в состав подси-
стем, являющихся сочетанием «человек — машина», по специ-
фике и ответственности выполняемых им функций образует
как бы обособленную подсистему.
На первый взгляд может показаться, что лишь небольшое
число из перечисленных подсистем в той или иной степени свя-
зано с радиоэлектронной и, в частности, с гидроакустикой. Од-
нако на самом деле это не так. Судя по материалам, публи-
куемым на страницах зарубежной печати, гидроакустические
средства влияют в той или иной степени на проектирование
почти всех подсистем.
Так, при выборе энергетической установки приходится учи-
тывать необходимость обеспечения сравнительно небольшой
максимальной и относительно высокой экономической скорости
хода. Эти требования к скорости прямого вытекают из особен-
ностей работы гидроакустической аппаратуры. Как известно,
при большой скорости противолодочного корабля имеет место
высокий уровень собственных помех и на этой скорости корабль
не может вести гидроакустическое наблюдение, а следова-
тельно, и выполнять возложенные на него задачи. В то же
время корабль должен обладать достаточно высокой экономи-
ческой скоростью, чтобы иметь возможность в течение дли-
тельного времени осуществлять эффективный гидроакустиче-
ский поиск целей. На выбор энергетической установки влияет
70
и необходимость снижения уровня создаваемых ею собствен-
ных шумов. С учетом этих требований, по мнению американ-
ских специалистов, на ближайшие годы наибольший интерес
представляют регенеративные газотурбинные установки с не-
замкнутым циклом и мощностью на валу 10—15 тыс. л. с. Опыт
использования таких установок показал их невысокую шум-
ность. Так как газотурбинные установки имеют сравнительно
небольшой вес, дополнительные меры по их амортизации и зву-
коизоляции будут связаны с меньшими затратами средств [52].
Подсистема противолодочного оружия, основная подсистема,
обеспечивающая боевые задачи, решаемые кораблем, самым
тесным образом связана с гидроакустическим вооружением.
Судя по уже существующим комплексам противолодочного ору-
жия, связь между подсистемами противолодочного оружия и
средствами обнаружения подводных лодок уже сейчас является
максимальной и ряд элементов, составляющих обе подсистемы,
является общим для них обеих.
/ Подсистема обнаружения подводных лодок включает в себя
в настоящее время главным образом гидроакустические сред-
ства. Как неоднократно подчеркивалось в зарубежной печати,
корабль в настоящее время не располагает какими-либо иными
эффективными средствами наблюдения за подводной обстанов-
кой. Новые требования, предъявляемые к этой подсистеме при
«интегральном» проектировании корабля, определяются в пер-
вую очередь необходимостью более тесной связи с другими
подсистемами корабля. Возникает необходимость выдачи ин-
формации в цифровом виде для подачи на электронные цифро-
вые вычислительные машины, выдачи информации на обобщен-
ные пульты и индикаторы, создания устройств, позволяющих
использовать единую корабельную систему отыскания неисправ-
ностей, системы вентиляции и охлаждения и т. п.
Подсистема средств обнаружения надводных и воздушных
целей определенным образом связана с гидроакустической ап-
паратурой как за счет наличия ряда общих единых вспомога-
тельных устройств, так и за счет взаимного обмена информа-
цией. Так, например, радиолокационные и другие средства4
могут выдавать целеуказание гидроакустическим средствам
в случае обнаружения на поверхности выдвижных устройств
подводных лодок, обеспечивать наведение телеуправляемых вер-
толетов ПЛО и т. п. Тесная связь между гидроакустическими и
радиолокационными средствами осуществляется при стрельбе
противолодочными ракето-торпедами (например, французской
ракето-торпедой «Малафон»).
Подсистема связи соприкасается с гидроакустической аппа-
ратурой по нескольким направлениям. Она вместе с другими
радиоэлектронными средствами использует единые вспомо-
гательные устройства и обеспечивает обмен информацией
71
с различными внешними источниками (например, с корабель-
ными вертолетами, ведущими гидроакустическое наблюдение и
уточняющими контакт, полученный корабельной аппаратурой).
Навигационная подсистема выдает гидроакустической аппа-
ратуре ряд данных, необходимых для ее нормального функцио-
нирования, например, данные о скорости хода корабля, о ки-
левой и бортовой качке и т. п.
Подсистема контроля и управления кораблем включает
в себя аппаратуру управления маневрированием корабля, си-
стему внутрикорабельной связи и контрольную аппаратуру,
сигнализирующую об исправности боевых средств корабля.
С помощью этой подсистемы, как полагают, будет осуще-
ствляться и дистанционное управление энергетическими уста-
новками.
Подсистема командования должна включать в себя комп-
лекс электронных вычислительных машин и соответствующих
индикаторов. В ней предполагается осуществлять быструю об-
работку всей информации, поступающей от гидроакустических,
радиолокационных и других радиоэлектронных средств, произ-
водить оценку поступающей информации, воспроизводить окру-
жающую обстановку на специальных планшетах и индикаторах
в наглядном виде, вырабатывать рекомендации по оптималь-
ному использованию всех видов оружия корабля в условиях
сложившейся тактической обстановки. После утверждения того
или иного варианта решения командованием подсистема должна
выдавать соответствующие данные и команды [52, 77]. Аппара-
тура подсистемы командования должна заменить собой все
многочисленные вычислительные устройства различного назна-
чения, имеющиеся на современных кораблях. Отображение на
пультах и планшетах разнообразной информации, поступающей
от нескольких различных источников, как полагают, упростит
управление кораблем в бою и приведет к сокращению личного
состава, обслуживающего радиоэлектронные средства.
Подсистема сбора информации от других подсистем и об-
мена информацией между ними играет большую роль в согла-
сованности действий всех боевых средств и оружия корабля.
При создании ее, как полагают, могут возникнуть большие труд-
ности, связанные с необходимостью передачи и регистрации
большого объема разнообразной информации, поступающей
в самых различных видах.
Наряду с преимуществами «интегральное» проектирование
имеет и свои специфические недостатки. Известно, что мораль-
ное устаревание и износ корпуса, оружия, энергетических уста-
новок и различных боевых средств происходит крайне нерав-
номерно. Так, например, в настоящее время более длительно
используется корпус корабля, в то время как радиоэлектронные
средства подвержены количественному и качественному изме-
72
нению и сравнительно быстро после установки нуждаются в мо-
дернизации или замене.
По этой причине большое внимание уделяется максимальной
стандартизации радиоэлектронного оборудования и модульной
концепции его конструирования. Считают, что при таком под-
ходе к конструированию аппаратуры можно значительно сни-
зить ее стоимость, добиться возможности универсального
использования отдельных элементов и блоков и без существен-
ных затрат осуществлять необходимую модернизацию обору-
дования.
Стандартизация элементов радиоэлектронного оборудования
позволяет также упростить монтаж аппаратуры, облегчить и
удешевить подготовку обслуживающего личного состава. Од-
нако высказывается опасение, что стандартизация в то же
время может привести к неоптимальным решениям в проекти-
ровании аппаратуры.
Требования гидроакустики играют определенную роль и при
проектировании корпуса корабля. Ранее уже неоднократно го-
ворилось о трудностях, связанных с необходимостью оптималь-
ного размещения на корабле все возрастающих по габаритам и
весу акустических антенн. Серьезные требования предъявля-
ются и к гидродинамическим свойствам корпуса, к размещению
внутри корпуса наиболее шумящих механизмов и машин, к ста-
билизации корабля на качке для улучшения условий работы
радиоэлектронных средств и т. п.
Первым этапом в реализации комплексного проектирования
кораблей в ВМС США явилось создание единой корабельной
электрической энергетической системы SIPS (Ships Integrated
Power System). Ведутся работы по созданию комплексной ко-
рабельной электронной системы SIES (Ships Integrated Elect-
ronic System) для кораблей трех классов — фрегата, эскортного
миноносца и противолодочной подводной лодки. В ходе разра-
ботки систем делается попытка практически реализовать сле-
дующие основные идеи:
— создать единый пост контроля исправности всех радио-
электронных средств;
— объединить антенны, в том числе и гидроакустические, и
и по возможности совместить их с другим оборудованием и
конструкциями корабля;
— создать единый корабельный вычислительный центр для
решения задач, связанных с управлением кораблем, анализом
обстановки и использованием радиоэлектронных средств;
— создать замкнутые системы вентиляции и охлаждения ра-
диоэлектронного оборудования и стандартизации его элемен-
тов и т. п. [13].
По мнению американских специалистов создание комплекс-
ной корабельной электронной системы облегчается тем, что
73
способы обнаружения различных целей, выдачи целеуказания,
ввода полученных данных, наведения ракет, ракето-торпед, бес-
пилотных противолодочных вертолетов на цель и т. п. в прин-
ципе несущественно отличаются друг от друга при решении ко-
раблями боевых задач. Различие, связанное со спецификой тех
или иных средств, может быть легко устранено за счет приме-
нения дополнительных специализированных блоков. Это обстоя-
тельство позволяет создать единую универсальную систему,
имеющую в своем составе электронную цифровую вычислитель-
ную машину и обеспечивающую работу гидроакустических, ра-
диолокационных средств и средств радиосвязи. Ряд перечис-
ленных принципов частично уже реализован в состоящих на
вооружении кораблей ВМС США и рассмотренной ранее авто-
матизированной системе NTDS.
Как ожидают, противолодочный корабль, построенный
с учетом требований, предъявляемых «интегральным» проекти-
рованием, будет иметь неоспоримые преимущества перед суще-
ствующими в настоящее время кораблями. Он сможет осуще-
ствлять более быстрый поиск целей, более быструю и точную
обработку гидроакустической информации, будет иметь более
совершенную и наглядную индикацию этой информации. Все
это должно повысить боевую эффективность корабля в целом.
Однако, как утверждают американские специалисты, проек-
тирование корабля как единой системы связано со значитель-
ными трудностями и требует решения ряда сложных проблем.
Глава II
ГИДРОАКУСТИЧЕСКИЕ СРЕДСТВА
ПОДВОДНЫХ ЛОДОК
§ 13. КРАТКАЯ ХАРАКТЕРИСТИКА
СОВРЕМЕННЫХ ПОДВОДНЫХ ЛОДОК
Прежде чем рассмотреть состав гидроакустического воору-
жения современных подводных лодок, целесообразно дать крат-
кую характеристику этих лодок как носителей гидроакустиче-
ской аппаратуры. По данным справочника «Джен», в настоя-
щее время в состав флотов стран мира входит несколько сотен
подводных лодок различного типа, в том числе несколько де-
сятков— с атомными энергетическими установками. Однако, не
прибегая к излишней детализации, можно выделить основные
классы, каждый из которых обладает специфическими особен-
ностями и, в свою очередь, может делиться на подклассы.
В наиболее общем виде все существующие подводные лодки
74
можно разделить на три основных класса*: атомные ракетные,
атомные многоцелевые (торпедные) и дизельные подводные
лодки.
Каждый из этих классов подводных лодок имеет свои спе-
цифические особенности вооружения гидроакустической аппара-
турой. Так, наиболее совершенные и высокоэффективные гидро-
акустические средства устанавливают на атомных торпедных
подводных лодках, предназначенных в первую очередь для про-
тиволодочной борьбы.
Перед ракетными атомными подводными лодками не ста-
вится задача борьбы с подводными лодками противника.
Их основное оружие — ракеты «Поларис» — не использует дан-
ных гидроакустического наблюдения, и поэтому к гидроакусти-
ческому вооружению подводных лодок предъявляются менее
жесткие требования: оно должно обеспечить главным образом
самооборону от подводных лодок противника и своевременное
обнаружение надводных кораблей.
Дизельные подводные лодки, имеющие в качестве основного
оружия торпеды, нуждаются в высокоэффективных гидроакусти-
ческих средствах наблюдения. Однако из-за ограниченных воз-
можностей размещения аппаратуры на борту лодки, а также
из-за того, что большинство лодок построено сравнительно
давно (в США после 1959 г. их вообще перестали строить), их
гидроакустические средства значительно отстают по своим так-
тико-техническим данным от гидроакустических средств атом-
ных торпедных подводных лодок.
Подводное водоизмещение современных подводных лодок ле-
жит в пределах от 1500—2500 т (дизельные лодки) до 6700—
8200 т (атомные ракетные лодки). Водоизмещение атомных тор-
педных подводных лодок, основных носителей гидроакустиче-
ской аппаратуры, составляет 2800—4300 т.
Существенно отличаются и главные размерения подводных
лодок, наиболее значительны они у атомных ракетоносцев. Тор-
педные атомные подводные лодки имеют меньшую длину кор-
пуса, чем дизельные, но большую ширину и осадку. Форма
корпуса атомных торпедных подводных лодок, как правило,
осесимметричная — «каплевидная». Такая форма корпуса об-
ладает хорошими гидродинамическими свойствами. Она же
способствует уменьшению отражения акустической энергии и,
следовательно, уменьшению гидролокационной заметности под-
водной лодки. Для уменьшения гидролокационной заметности
на корпус подводной лодки могут также наноситься специальные
звукопоглощающие покрытия.
* Необходимо отметить условность предлагаемой классификации. В ряде
справочников и книг различных авторов можно встретить иную, не совпадаю-
щую с этой классификацию.
75
Большие водоизмещение и главные размерения современных
атомных подводных лодок обеспечивают возможность установки
на них мощных энергетических установок, размещения эффек-
тивного оружия и боевых средств. Данные по некоторым харак-
теристикам радиоэлектронного вооружения подводных лодок
были приведены ранее.
Атомные подводные лодки имеют скорость подводного хода
до 30—35 узл. Такая скорость хода существенно повышает бое-
вые возможности подводных лодок и обеспечивает им высокую
эффективность уклонения от противолодочных надводных ко-
раблей. Как известно, увеличение скорости хода сопровождается
резким ростом уровня собственных акустических помех, сни-
жающих эффективность гидроакустического наблюдения. По-
этому на подводных лодках применяется целый комплекс меро-
приятий по снижению шумности, подробно рассматриваемый
в специальной главе.
Все классы и типы подводных лодок имеют торпедное ору-
жие. На ракетных подводных лодках устанавливают 4 торпед-
ных аппарата, на торпедных атомных — 4—б, на дизельных —
6, 8 или 10. Из этих аппаратов могут выстреливаться как обыч-
ные торпеды, так и противолодочные ракеты «Саброк». Далее
будет дана более полная характеристика торпедного оружия.
Ракетные атомные подводные лодки помимо торпед имеют
по 16 ракет «Поларис» различных модификаций.
Атомные подводные лодки являются подводными кораблями
в полном смысле этого слова. Они могут практически в тече-
ние всего времени своего пребывания в море действовать в под-
водном положении, используя из глубины свое оружие. Благо-
даря этому исключительно повысилась роль гидроакустических
средств, которые в этих условиях становятся единственными
средствами наблюдения за окружающей обстановкой. В связи
с тенденцией дальнейшего увеличения глубины погружения под-
водных лодок роль гидроакустических средств еще более возра-
стает, так как неизбежно расширится круг задач, решаемых
с применением этих средств.
Возможность менять в широких пределах глубину погруже-
ния подводной лодки позволяет использовать особенности
гидролого-акустических условий в районе, выбирая ту глубину,
на которой гидроакустические наблюдения оказываются наи-
более благоприятными, или же такую глубину, которая будет
неблагоприятной для наблюдения противолодочными силами
противника. При этом можно использовать явление подводного
звукового канала, слоя скачка и т. п.
По мнению ряда иностранных военно-морских специалистов,
неизбежно возрастает и роль гидроакустических средств, как
основных средств наблюдения за окружающей подводной об-
становкой.
76
§ 14. ОРУЖИЕ ПОДВОДНЫХ ЛОДОК И ПРИБОРЫ
УПРАВЛЕНИЯ СТРЕЛЬБОЙ, ПОЛУЧАЮЩИЕ ИНФОРМАЦИЮ
ОТ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ НАБЛЮДЕНИЯ
В современных условиях, когда подводные лодки могут дли-
тельное время оставаться на значительной глубине и оружие
лодки — торпеды и ракеты можно использовать из-под воды,
роль гидроакустических средств наблюдения, обеспечивающих
стрельбу этим оружием, значительно возросла. С помощью гид-
роакустических средств без всплытия подводной лодки на по-
верхность можно осуществлять поиск морских целей, опреде-
лять координаты и элементы движения этих целей и момент
залпа. При наблюдении за шумящими морскими целями в ре-
жиме шумопеленгования гидроакустические средства совер-
шенно не демаскируют лодку, т. е. соблюдается ее основное
тактическое преимущество — скрытность действия.
Возросшая за последние годы дальность действия гидроаку-
стических средств способствует эффективному применению со-
временного торпедного оружия и противолодочных ракет. Все
это объясняет то исключительное внимание, которое уделяется
в настоящее время в иностранных флотах развитию гидроаку-
стического вооружения торпедных подводных лодок. Значитель-
ное внимание уделяется и гидроакустическому вооружению под-
водных ракетоносцев, торпедное оружие которых имеет вспо-
могательное значение.
В ходе торпедной атаки данные о цели, поступающие от
гидроакустических или других средств наблюдения, и данные
о маневрировании стреляющей лодки, поступающие от навига-
ционной аппаратуры, обрабатываются системой управления тор-
педной стрельбой. На американских атомных подводных лод-
ках, в том числе и подводных ракетоносцах, установлена си-
стема управления стрельбой Мк-112. Эта система определяет
координаты и элементы движения цели: скорость хода, кур-
совой угол и вырабатывает исходные данные для стрельбы. Все
расчеты производятся автоматически. Решение задачи торпед-
ной стрельбы отображается на специальных планшетах-инди-
каторах. Система Мк-112 выполнена с применением полупро-
водниковых элементов, что позволило уменьшить вдвое ее га-
бариты и вес по сравнению с приборами управления стрельбой
старых типов [3].
Для уничтожения подводных лодок противника атомными
противолодочными подводными лодками предполагается исполь-
зовать новый вид оружия — противолодочные ракеты «Саброк».
Это оружие может выстреливаться из штатных торпедных ап-
паратов подводных лодок, поэтому предполагается, что противо-
лодочные подводные лодки будут иметь на борту как обычные
торпеды, так и ракеты, причем на каждой лодке будет не менее
77
4—6 ракет из общего числа боекомплекта, имеющего 24 тор-
педы.
Оружие «Саброк» представляет собой ракету на твердом
топливе с боевой частью, несущей ядерный заряд или заряд
обычного взрывчатого вещества. Стрельба ракетами произво-
дится из-под воды. На безопасном удалении от подводной лодки
включается двигатель ракеты, ракета выходит из воды и летит
в воздухе в сторону цели по заранее заданной траектории.
Управление ракетой на воздушном участке траектории осуществ-
ляется с помощью бортовой инерциальной системы наведения.
Наличие такой системы позволяет подводной лодке производить
стрельбу по цели, находящейся на направлении, не совпадаю-
щем с курсом подводной лодки. После того как скорость ракеты
достигает заданной, двигатель отделяется от боевой части, по-
следняя, управляемая аэродинамическими рулями, продолжает
полет. Баллистический наконечник смягчает силу удара боевой
части о воду. Взрыв заряда происходит на заранее установлен-
ной глубине.
Как утверждают, применение противолодочных ракет дает
стреляющей подводной лодке определенные преимущества:
дальность стрельбы ракетами значительно превосходит даль-
ность стрельбы торпедами и может доходить до 50 км;
высокая (сверхзвуковая) скорость полета ракеты значи-
тельно превосходит скорость хода торпеды, что уменьшает про-
межуток времени между моментом залпа и моментом поражения
цели. Благодаря этому вероятность уклонения цепи существенно
снижается;
полет ракеты на воздушном участке траектории, составляю-
щем большую часть ее пути, не может быть обнаружен с подвод-
ной лодки-цели, что также снижает вероятность ее уклонения.
Эффективность стрельбы противолодочной ракетой «Саброк»
зависит в первую очередь от точности выработки исходных дан-
ных стрельбы. Для выработки этих данных на подводных лодках
ВМС США устанавливается система управления Мк-113. Эта
система получает и обрабатывает исходные данные, поступаю-
щие от различных источников. Информация о цели поступает
от гидроакустической или радиолокационной аппаратуры, или же
от перископа, данные о маневрировании стреляющей подводной
лодки поступают от навигационного инерциального комплекса,
лага, автоматического прокладчика курса, глубиномера. Осно-
вой системы управления является быстродействующая электрон-
ная цифровая вычислительная машина Мк-130, имеющая маг-
нитное запоминающее устройство с произвольной выборкой
данных. Кроме этой машины для решения специальных задач,
связанных с выработкой данных стрельбы по движущейся цели
и управлением стрельбой, применяются пять других счетно-
решающих устройств непрерывного действия.
78
Помимо выработки данных стрельбы система Мк-113 обеспе-
чивает наглядное отображение хода атаки в системе геогра-
фических координат, информации о цели и о состоянии своего
оружия. В рассчитанный системой момент командир подает
на ракету сигнал пуска. Система управления Мк-113 может
осуществлять расчеты и для стрельбы обычными торпедами
[27, 50].
В настоящее время ведутся разработки системы, обеспечива-
ющей определение данных стрельбы пассивным методом с при-
менением специальной аппаратуры. Этот вопрос более подробно
будет рассмотрен несколько позже.
§ 15. АППАРАТУРА ЗВУКОПОДВОДНОЙ СВЯЗИ
По сообщениям иностранной печати, в настоящее время уде-
ляется очень большое внимание звукоподводной связи, так как
она необходима для обеспечения совместных действий современ-
ных подводных лодок, а также для связи подводных лодок
с надводными кораблями. Звукоподводная связь широко исполь-
зуется и при решении специальных задач, например, при глубо-
ководных исследованиях, проведении спасательных работ и т. п.
Сведения о некоторых образцах аппаратуры связи уже при-
водились [8, 9] и повторять их в данной книге нецелесообразно.
Напомним лишь о том, что во всей современной аппаратуре
звукоподводной связи используется, как наиболее помехоустой-
чивая, однополосная телефония с подавлением несущей и одной
боковой полосы частот.
Необходимость повысить скрытность звукоподводной части,
т. е. затруднить противнику возможность обнаружения работы
аппаратуры связи, вызвала разработку скрытного метода связи
между подводными лодками SESCO (Secure Submarine Com-
munication).
На американских атомных торпедных подводных лодках
установлена станция звукоподводной связи BQA-2, входящая
в состав гидроакустического комплекса BQQ-2.
На других подводных лодках и надводных кораблях в тече-
ние многих лет устанавливается станция звукоподводной теле-
фонной связи UQC-1 («Гертруда»), являющаяся стандартной
станцией связи ВМС США. Она имеет излучаемую мощность
около 100 вт и дальность действия около 9 км. Эта же станция
устанавливается и на некоторых исследовательских глубоко-
водных устройствах [55].
§ 16. ГИДРОАКУСТИЧЕСКАЯ АППАРАТУРА ДЛЯ ОБЕСПЕЧЕНИЯ
ПОДЛЕДНОГО ПЛАВАНИЯ ПОДВОДНЫХ ЛОДОК
Повышенный интерес к арктическим районам, проявляемый
за последние годы командованием ВМС США, потребовал
создания специальной аппаратуры, предназначенной для обес-
79
печения подледного плавания подводных лодок. Эта аппара-
тура должна обеспечивать возможность уклонения подводной
лодки от столкновения со льдами, определять толщину ледового
покрова, позволять находить во льдах полыньи и разводья и т. п.
В настоящее время все эти задачи решаются с помощью спе-
циальных гидроакустических устройств — эхоледомеров и эхо-
айсбергомеров.
По мнению иностранных специалистов, эти приборы оказы-
ваются незаменимыми в Арктике в тех случаях, когда подвод-
ным лодкам приходится действовать в сложных условиях:
Рис. 28. Гидроакустическое наблюдение при подледном
плавании подводной лодки.
при плавании под сплошным ледяным покровом, когда под-
водные лодки должны в течение длительного времени форси-
ровать льды на большой глубине погружения;
при плавании в период полярной ночи, когда визуальные ме-
тоды наблюдения за льдом имеют ничтожное значение;
при плавании на мелководье, когда между дном и льдом,
имеющим значительную осадку, остается лишь незначительный
просвет;
при плавании в районах с большим количеством айсбергов,
когда отдельные ледяные массы могут оказаться на глубине,
превышающей глубину погружения лодки;
при плавании в каналах, проливах между островами и т. п.
При плавании во льдах гидроакустическое наблюдение ве-
дется в трех направлениях (рис. 28).
Наблюдение вперед по курсу служит для обнаружения льдов,
осадка которых достигает или даже превышает глубину погру-
жения подводной лодки, например айсбергов, торосов с глубо-
кой осадкой и т. п. О важности такого наблюдения можно судить
хотя бы по тому, что в центральной части Арктики возможна
встреча с айсбергами и ледяными островами, имеющими осадку
почти до 50 м. В тех же районах, где возможная глубина погру-
80
жения ограничена и подводная лодка вынуждена искать без-
опасные проходы, без надежного наблюдения за льдами по
курсу плавать невозможно вовсе.
Наблюдение в сторону дна осуществляется с помощью эхо-
лота. Данные, получаемые с помощью эхолота, помимо общего
обеспечения безопасности плавания существенно помогают в оп-
ределении места подводной лодки по отличительным глубинам.
Так, например, подводные лодки «Наутилус» и «Сидрэгон» как
при подходе к району с большими глубинами, так и при отходе
от этого района ориентировались по морской долине, прости-
рающейся от мыса Барроу.
Рис. 29. Образец рекор до граммы эхоледомера
(рабочая частота 22 кгц).
1 — поверхность воды; 2 и 3 — плавающий лед.
Эхоледомер обеспечивает наблюдение в сторону поверхности.
При этом непрерывно записывается профиль нижней поверх-
ности ледового покрова.
В экспериментальных целях во время арктических плаваний
на атомной подводной лодке «Наутилус» были установлены
11 эхоледомеров. Все они имели различные рабочие частоты,
что давало возможность определить наиболее оптимальные ча-
стоты экспериментальным путем [1].
На подводной лодке была установлена также высокочастот-
ная гидроакустическая станция UQS-1, обычно используемая
надводными кораблями, акустическая антенна которой могла
изменять угол поворота как в горизонтальной, так и верти-
кальной плоскостях. Такой гидролокатор был особенно необхо-
дим при всплытии подводной лодки в полынье, так как с его
помощью можно было получить данные о ледовой обстановке
как над подводной лодкой, так и вблизи ее [77].
На рекордограмме, записанной эхоледомером с рабочей ча-
стотой 22 кгц (рис. 29), поверхность чистой воды изображается
в виде жирной, резко очерченной линии. На рисунке отчетливо
4 А. Л. Простаков
81
видны даже поверхностные волны. Осадка льда определяется
по такой рекордограмме путем сравнения отсчетов расстояний
до поверхности моря и нижней кромки льда.
Толщина льда может быть непосредственно определена по
электронному индикатору эхоледомера (рис. 30). На экране
четко отображается эхо-сигнал от поверхности чистой воды
в виде импульса с большой крутизной фронта и вытянутым
шлейфом (рис. 30, а). По видимой крутой части фронта им-
пульса устанавливается ноль отсчета шкалы. Тогда по верти-
Рис. 30. Изображение эхо-сигналов на электронном индикаторе
эхоледомера: а — от поверхности чистой воды; б — от льда и
поверхности воды; в — от льда (эхо от поверхности воды
четко не наблюдается).
кальной шкале может быть отсчитано расстояние от излуча-
теля до поверхности моря. По горизонтальной шкале опреде-
ляется относительная амплитуда эхо-сигнала.
В случае наличия льда характер изображения изменяется.
На экране будет регистрироваться эхо-сигнал почти неизмен-
ной амплитуды, полученный при прохождении импульса по всей
толщине льда. При этом может быть либо получено четкое отра-
жение от поверхности (рис. 30, б), либо поверхность отдельно не
просматривается (рис. 30, в).
Эхоледомеры со сравнительно низкой рабочей частотой и
широкой характеристикой направленности непригодны при пла-
вании подо льдом с большой скоростью, поэтому на «Наутилусе»
были установлены и эхоледомеры с рабочей частотой 150 кгц.
На рекордограмме, полученной с помощью такого прибора
(рис. 31), запись участков чистой воды труднее отличить от
записи льдов, так как на более высоких частотах имеет место
82
отражение не только от поверхности воды, но и от приповерх-
ностных пузырьковых слоев.
В связи с трудностью наблюдения открытой поверхности
воды, особенно в зимнее время, в некоторых эхоледомерах в ка-
честве отсчетного уровня используется глубина погружения под-
водной лодки от поверхности моря, найденная путем измерения
Рис. 31. Образец рекордограммы эхоледомера (рабочая частота 150 кгц).
уровня абсолютного гидростатического давления, плотности
морской воды и гравитационной постоянной. Используемый для
этой цели гидростат должен обеспечивать возможность измере-
ния давления с ошибкой, не превышающей 0,1%. Конструкция
прибора обеспечивает корректуру ошибок, могущих возникнуть
за счет дифферента и крена подводной лодки, и автоматическую
Рис. 32. Образец рекордограммы, записанной эхоледомером
с гидростатическим серворегулированием.
установку уровня открытой поверхности воды на верхней нуле-
вой линии самописца. При такой установке осадка льда всегда
отсчитывается непосредственно по вертикальной шкале (рис.32).
В случае необходимости всплытия по рекордограмме опре-
деляется подходящий участок льда и производится сканирова-
ние акустического луча в направлении движения подводной
лодки, позволяющее установить границы района всплытия. Одно-
временно определяется толщина льда непосредственно над всем
корпусом подводной лодки с помощью пяти-шести фиксирован-
ных вертикальных лучей эхоледомеров (рис. 33). После того как
пригодное для всплытия место будет найдено, подводная лодка
разворачивается на обратный курс и «зависает» непосредственно
4*
83
мод выбранным местом. Всплытие производится вертикально
путем регулировки балласта.
Как сообщает зарубежная печать, на атомных подводных
лодках устанавливается целый комплекс специального гидроаку-
стического оборудования, обеспечивающего все виды деятель-
ности подводных лодок при плавании подо льдом. По мнению
американских специалистов, подводная лодка с таким комплек-
Рис. 33. Гидроакустическое наблюдение при всплытии
подводной лодки в полынье.
сом может успешно плавать в Арктике в любое время года
[36]. Некоторые сведения об аппаратуре этого комплекса уже
приводились на страницах печати [9].
§ 17. СРЕДСТВА ПРОТИВОДЕЙСТВИЯ
ГИДРОАКУСТИЧЕСКОМУ НАБЛЮДЕНИЮ
Успехи в развитии гидроакустических средств наблюдения
вызвали появление специальных средств противодействия гид-
роакустическому наблюдению противника. К числу таких средств
относятся, например противогидролокационные покрытия (ПГП),
уже достаточно полно описанные в специальной литературе
(6, 8, 9], приборы гидроакустических помех, различные имита-
торы подводных лодок и т. п.
На последних двух разновидностях средств гидроакустиче-
ского противодействия остановимся несколько подробнее.
Приборы гидроакустических помех
Одной из разновидностей средств противодействия гидроаку-
стическому наблюдению являются различные приборы гидроаку-
стических помех, предназначенные для создания интенсивных
84
помех на рабочей частоте гидролокатора противника. Эти по-
мехи делают невозможным наблюдение эхо-сигналов от маски-
рующейся ими подводной лодки.
В 50-х годах в ВМС США была разработана и испытана
целая серия приборов, получивших условное наименование
NAH [15]. Эти приборы являлись узкополосными устройствами,
создающими ответную помеху, в результате многократных пере-
излучений принятых и усиленных посылок гидролокатора про-
тивника.
Принятая приемной частью прибора посылка гидролокатора
противника записывалась на магнитный диск, вращающийся
со скоростью около 6000 об/мин. При такой скорости вращения
диск совершал оборот за 10 мсек. Тогда запись посылки гид-
ролокатора, длившейся более 10 мсек, происходила по всей
окружности диска. Записанный на диске сигнал непрерывно
излучался в течение заданного промежутка времени.
В печати приводятся сведения о трех вариантах таких при-
боров: дрейфующем, корабельном (лодочном) и самоходном.
Дрейфующий прибор попадал в воду из устройства для уда-
ления мусора или из специального выбрасывающего устройства
подводной лодки. По форме он представлял собой цилиндр со
сферическими донышками диаметром 235 мм, длиной 762 мм
и весом около 45 кг. Прибор мог выставляться при нахождении
подводной лодки на глубине до 275 м, удерживался с помощью
небольшого поплавка на глубине 12,2 м.
Прибор, принявший посылку длительностью свыше 5 мсек,
излучал в течение 25 сек. помеху на частоте гидролокатора
противника, после чего излучение помехи прекращалось до оче-
редного облучения прибора гидролокатором. При отсутствии
посылок облучающего гидролокатора прибор излучает шумы
в широкой полосе частот (10—70 кгц) также в течение 25 сек.
Если в период очередной паузы между излучением шумов при-
нимается посылка, прибор начинает излучать помеху, если по-
сылка не принимается,— излучается шум и т. д. Таким образом
прибор работает около 15 мин. В качестве источника питания
использовались батареи, активируемые морской водой.
Приемо-излучающая аппаратура корабельного варианта
прибора помех устанавливалась на обтекателе или на тумбе
перископа, электронная часть — в центральном посту или в бое-
вой рубке подводной лодки. Весь цикл работы, описанный выше,
многократно повторяется до тех пор, пока прибор не приводится
оператором вручную в исходное состояние. Время работы при-
бора, питающегося от бортовой сети, не ограничивается.
Самоходный прибор помех выпускается из торпедного anna-
рата подводной лодки на глубинах до 90 м. Корпус прибора
напоминает по форме торпеду диаметром 254 мм, длиной
2565 мм. Прибор весит 111 кг. После выпуска он может идти
85
со скоростью б—7 узл. (11 —13 км/час) на глубине 27 м в тече-
ние 15 мин. Прибор, так же как и предыдущие, работает в диа-
пазоне частот 10—70° кгц и излучает помехи после облучения
гидролокатором противника в той же последовательности; курс
его меняется автоматически в заданное время.
Для того чтобы иметь возможность многократно использо-
вать прибор в условиях боевой подготовки, он снабжен устрой-
ством всплытия, сбрасывающим в конце работы прибора бал-
ласт, и запасом флюоресцирующей краски, образующей на по-
верхности воды яркое, хорошо заметное пятно.
Как утверждают, испытания показали достаточно высокую
надежность и эффективность приборов помех, особенно самоход-
ных. Выставленные приборы затрудняли гидроакустическое на-
блюдение при выходе противолодочных кораблей в атаку,
а после атаки затрудняли восстановление контакта, необходи-
мого для обеспечения повторного выхода в атаку на подводную
лодку.
Самоходные имитаторы подводных лодок
Самоходные имитаторы подводных лодок являются слож-
ными и весьма совершенными техническими устройствами. Такие
устройства могут воспроизводить как первичное — шумовое, так
Рис. 34. Общий вид самоходного имитатора подводной
лодки.
/ — носовой отсек; 2 — подъемные скобы; 3 — электронный отсек;
4 — аккумуляторный отсек; 5 — скобы для подвески к вертолету;
6 — гак для подъема прибора из воды; 7 — отсек излучателя эхо-
сигналов; 5 — отсек управления и излучатель шумов; 9 — управля-
ющий конус с оперением; 10 — кожух защиты винта
и вторичное — отраженное акустическое поле подводной лодки,
имитировать наличие отражающей акустические волны кильва-
терной струи. Современные имитаторы могут осуществлять дли-
тельное маневрирование по заранее заданной программе. Все
это делает самоходные имитаторы весьма ценным и эффектив-
ным средством гидроакустического противодействия. Эти же
свойства обеспечивают возможность успешного применения
имитаторов в качестве гидроакустических мишеней при обуче-
нии личного состава, и в первую очередь акустиков-операторов
противолодочных сил.
О ценности использования имитаторов для этой цели можно
судить хотя бы по тому, что стоимость эксплуатации дизель-
86
электрической подводной лодки для обеспечения боевой подго-
товки составляет сколо 20 000 долл. в сутки, в то время как
стоимость эксплуатации имитатора не превышает 50 долл.
На страницах зарубежной печати приводится подробное опи-
сание одного из таких имитаторов 21В12 [50, 53, 74]. Имитатор
21В12 имеет форму торпеды (рис. 34) и предназначается для вы-
ставления с кораблей, вертолетов и подводных лодок (как сооб-
щают, в настоящее время имитатор может выставляться с под-
водных лодок лишь при нахождении их в крейсерском поло-
жении).
Прибор имеет следующие основные технические данные:
Длина, м 3,3
Диаметр, м:
кормового оперения 0,35
корпуса 0,25
Вес, кг 155,6
Скорость хода, узл 8,0
Максимальное время работы, час 2,0
Глубина хода (регулируемая), м от 15 до 61 *
Скорость изменения глубины, м/сек 1,4
Установка курса от 0 до 360°
Скорость изменения курса, град/сек 5
Диапазон рабочих частот, кгц:
имитация шумов от 0,1 до 10
ретрансляция посылок гидролокаторов ... от 8 до 30
ретрансляция взрывных сигналов от 3 до 7
Мощность двигателя, л. с 0,85
Источники питания:
серебряно-цинковые аккумуляторы, 25 в, 60 а.
* По другим данным [53] от 0 до 122 м.
Шумы, создаваемые прибором, могут пеленговаться кораб-
лями на дистанции до 25 каб. Дальность действия прибора в ре-
жиме эха будет зависеть от мощности облучающего гидроло-
катора.
Корпус имитатора делится на несколько изолированных отсе-
ков (рис. 35). В носовом отсеке, изготовленном из стали, раз-
мещается пьезоэлектрический преобразователь, защищенный ре-
зиновой звукопрозрачной оболочкой. Этот преобразователь во
время работы имитатора принимает сигналы гидролокаторов,
облучающих прибор.
В ходе эксплуатации имитатора выяснилось, что при облуче-
нии его корабельным гидролокатором с кормовых курсовых
углов посылка гидролокатора не принималась преобразовате-
лем, находящимся в носовом отсеке, и не ретранслировалась.
Это в ряде случаев приводило к потере гидроакустического кон-
такта. Чтобы устранить этот недостаток, в дальнейшем для
приема сигналов вместо носового преобразователя стали ис-
пользовать сферический ненаправленный приемник диаметром
87
2,5 см, буксируемый имитатор на кабеле длиной 10 м. После
окончания срока работы в тех случаях, когда имитатор исполь-
зуется для обеспечения боевой подготовки, преобразователь
излучает в течение 48 час. маркерные акустические сигналы на
частотах 8, 10, 12, 14, 16 или 20 кгц, облегчающие поиск ими-
татора для его повторного использования.
В следующем, электронном отсеке размещается аппаратура
для имитации акустических полей подводной лодки. Здесь разме-
щены устройства, позволяющие имитировать шумы подводной
лодки, идущей со скоростью хода 6—12 узл. (11—22 км/час).
Спектр и амплитуда шумов могут регулироваться перед пуском
Рис. 35. Самоходный имитатор подводной лодки со снятой об-
шивкой.
/ — носовой отсек; 2 — электронный отсек; 3 — аккумуляторный отсек; 4 —
ретранслятор эхо-сигналов; 5 — отсек управления; в — сменный излучатель
взрывных сигналов.
имитатора. В отсеке размещается и аппаратура для усиления
принимаемых сигналов гидролокаторов. В усилителях первых
образцов имитаторов использовались электронные лампы.
В дальнейшем лампы были заменены полупроводниковыми при-
борами и была осуществлена микроминиатюризация электрон-
ной аппаратуры. Эти мероприятия позволили повысить надеж-
ность аппаратуры и уменьшить потребление электроэнергии.
В аккумуляторном отсеке прибора размещаются 17 серебря-
но-цинковых аккумуляторов и главный выключатель электропи-
тания. Здесь же находится съемный балласт весом 2,7 кг, позво-
ляющий регулировать плавучесть имитатора в случае использо-
вания его в районах с различной соленостью и плотностью
воды.
Отсек излучателя эхо-сигналов содержит пьезоэлектрический
излучатель, состоящий из двух изолированных половин. В этом
же отсеке помещен резервуар, содержащий около 1,5 кг ярко-зе-
леной краски, которая после окончания работы прибора с по-
мощью насоса выбрасывается в воду и образует хорошо замет-
ное цветное пятно, облегчающее зрительный поиск имитатора.
При обеспечении ретрансляции взрывных сигналов усилитель
и излучатель эхо-сигналов заменяются на устройства, работаю-
щие в другом диапазоне частот.
88
Отсек управления изготовлен из пластмассы и соединяется
с литым алюминиевым кормовым конусом. В отсеке смонтиро-
ваны магнитострикционный излучатель имитируемых шумов,
программное устройство, гироскоп, глубиномер, гидростат,
управляющий ходом прибора по глубине, электрический двига-
тель и некоторое вспомогательное оборудование.
На кормовом управляющем конусе установлены две пары
стабилизаторов и рули, внутри его помещаются управляющие
соленоиды, перекладывающие рули. Прибор приводится в дви-
жение двумя соосно расположенными двухлопастными винтами.
Программное устройство, управляющее движением имита-
тора, работает следующим образом. Программа движения ими-
татора составляется заранее и наносится на перфоленту,
изготовленную из обычной кинопленки шириной 35 мм. По по-
верхности перфоленты скользят пять контактов («вправо», «глу-
бина», «запуск», «стоп», «влево»), замыкающих в нужный мо-
мент цепи исполнительных механизмов, управляющих измене-
нием скорости хода и глубины погружения прибора.
Перед запуском имитатора из его корпуса откачивается воз-
дух, и он заполняется азотом. Этим предупреждается возмож-
ность возникновения пожара вследствие возникновения случай-
ного искрения. Кроме того, азот, находящийся под небольшим
давлением, позволяет обнаружить нарушение герметичности
корпуса.
Сбрасывание имитатора с корабля должно производиться
при скорости хода, не превышающей 5 узл. Один из винтов на-
чинает вращаться еще на борту корабля, другой — с момента
попадания прибора в воду. Программное устройство (команда
«запуск») обеспечивает установку первоначального курса ими-
татора с помощью гироскопа. Если аппаратура имитатора ока-
жется неисправной и прибор не уйдет под воду, через четыре
минуты после запуска специальное термореле остановит элект-
ромотор и запустит маркеры.
Курс прибора меняется путем перекладки рулей. Рули имеют
три фиксированных положения: «прямо», «вправо» и «влево». По
команде, полученной из программного устройства, исполнитель-
ные соленоиды перекладывают рули на нужный борт. Пере-
кладка руля происходит до упора в специальные ограничители.
Частота следования и длительность воздействия команд могут
изменяться по программе. При частом следовании кратковре-
менных команд прибор совершает небольшие изменения курса.
При длительном воздействии команд углы отворота могут быть
большими. После выполнения маневра и прекращения команды
соленоиды освобождают рули, и они под воздействием встреч-
ного потока воды возвращаются в положение «прямо».
Глубины маневрирования имитатора устанавливаются за-
ранее, причем в пределах диапазона рабочих глубин могут быть
89
выбраны две любые глубины. Подача команды «глубина» за-
ставляет прибор переходить с одной из заданных глубин на дру-
гую. Управление глубиной осуществляется специальным устрой-
ством (рис. 36). С помощью гидростата и двух ртутных прерыва-
телей прибор удерживается на заданной глубине. При движении
прибора на заданной глубине упругость пружины, соответствую-
щая этой глубине, уравновешивается давлением воды. При
нарушении этого равновесия перемещается рычаг, связанный
с токопрерывателями, заставляя сработать один из них. Сработав-
ший прерыватель вклю-
чает соленоид, управляю-
щий перекладкой верти-
кальных рулей, соответ-
ственно на всплытие или
погружение. Прибор при-
ходит на заданную глу-
бину. С восстановлением
равновесия перекладка
рулей прекращается.
По выполнению ими-
татором заданной про-
граммы подается коман-
да «стоп», которая для
надежности дублируется
несколько раз. Двигатель
останавливается, и при-
Рис. 36. Устройство для управления глуби- бор всплывает на поверх-
ной погружения имитатора. ил.т,
HUL 1 Ь.
/ — шкала глубины; 2 — пружина; 3 — ртутные тх О 1 R 1 О << т
прерыватели; 4 — соленоиды; 5 — давление воды; АТМИТЗТОр ZlDlZ ОЫЛ
6 -гидростат. принят на вооружение
ВМС США в 1958 г.
К 1962 г. ВМС закупили 154 таких имитатора. 65 имитаторов
закупили ВМС Канады, Австралии, Нидерландов и Швеции.
Предполагается, что после некоторых усовершенствований
продолжительность действия имитатора сможет быть доведена
до 6 час. Усовершенствование программного механизма и си-
стемы управления имитатором, как ожидают, позволит воспроиз-
водить более сложное движение подводной лодки, например, ук-
лонение от преследования противолодочными силами, изменяя
курс, скорость хода и глубину погружения. Предполагается
также расширить рабочий диапазон ретранслируемых Частот,
уменьшив его нижнюю границу до 3 кгц, а излучаемых шумов
до 10 гц, и разработать для установки на имитаторе 21В12
устройство для воспроизведения кильватерной струи.
Считают, что в будущем имитаторы должны будут воспроиз-
водить не только акустические, но и другие физические поля
подводной лодки — радиолокационное, магнитное и др. [53].
90
§ 18. ГИДРОАКУСТИЧЕСКОЕ ВООРУЖЕНИЕ
ПОДВОДНЫХ ЛОДОК
В настоящее время гидроакустические средства прочно за-
воевали первое место среди других радиоэлектронных средств
современных подводных лодок. Наряду с успешным развитием
всех радиоэлектронных средств, устанавливаемых на подводных
лодках, неуклонно возрастает удельный вес гидроакустических
средств.
Возрастание роли гидроакустики на современных подводных
лодках неразрывно связано с развитием техники подводного
плавания, обеспечивающей подводным лодкам возможность
практически неограниченного пребывания в подводном положе-
нии, когда гидроакустические средства становятся единствен-
ными для добывания информации об окружающей обстановке.
На развитии гидроакустики сказались и требования к ору-
жию, которое на современных подводных лодках обладает зна-
чительной дальностью действия и может применяться при на-
хождении лодки на большой глубине. По мнению американских
специалистов, перед радиоэлектронными средствами современ-
ных подводных лодок стоят следующие основные задачи:
— обнаружение подводных, надводных и воздушных целей;
— опознавание обнаруженных объектов;
— определение координат обнаруженных целей;
— обеспечение связи с командованием и взаимодействую-
щими силами;
— поиск излучений работающих радиоэлектронных средств
противника;
— осуществление противодействия радиоэлектронным сред-
ствам противника;
— обеспечение безопасности кораблевождения и т. п.
Практически все перечисленные задачи (кроме обнаружения
воздушных целей и дальней связи) в той или иной степени могут
решаться с помощью гидроакустических средств. При нахожде-
нии же подводной лодки на глубине больше перископной любые
из перечисленных задач могут быть решены только с помощью
гидроакустики. Такая задача, как поиск подводных целей, ре-
шается только с помощью гидроакустики при любых положе-
ниях подводной лодки.
Таким образом, можно видеть, что по своим тактическим
возможностям гидроакустика играет на подводной лодке пер-
востепенную роль среди других средств радиоэлектроники.
Для решения всех перечисленных выше задач на современ-
ных подводных лодках устанавливается большое число разно-
образных гидроакустических средств наблюдения, связи, обеспе-
чения безопасности кораблевождения, противодействия гидро-
акустическому наблюдению противника и т. п.
91
Среди средств наблюдения подводных лодок основное значе-
ние имеют шумопеленгаторы, работа которых не демаскирует
подводную лодку и обеспечивает сохранение ею основного так-
тического преимущества — скрытности действия. Кроме того, хо-
рошие условия работы, низкий уровень собственных помех обес-
печивают возможность обнаружения сильно шумящих надвод-
ных кораблей на очень больших расстояниях, доходящих до
185 км и более и превосходящих дальность действия любых
других средств наблюдения подводной лодки.
Наряду с шумопеленгаторами находят довольно широкое при-
менение и гидролокаторы, которые остаются незаменимым сред-
ством обнаружения нешумящих или хорошо обесшумленных
объектов. Возрастает роль средств звукоподводной связи и
средств гидроакустического противодействия. Появляются но-
вые разновидности гидроакустической аппаратуры.
Необходимость установки на современных подводных лодках
большого количества аппаратуры, широкий круг задач, решае-
мых гидроакустическими средствами, и стремление обеспечить
максимальную экономию средств, габаритов и веса привели
к появлению на атомных подводных лодках сложных гидроаку-
стических многоцелевых комплексов, состоящих из большого
числа разнообразных гидроакустических средств, конструктивно
связанных между собой.
Судя по многочисленным сообщениям иностранной печати,
одним из наиболее совершенных гидроакустических комплексов
является комплекс BQQ-2, устанавливаемый на противолодоч-
ных атомных подводных лодках типов «Трешер» и «Стерджен».
Этот комплекс способен обеспечивать решение следующих основ-
ных задач: вести поиск акустических целей, классифицировать
полученный контакт, определять координаты целей, выдавать
данные, необходимые для обеспечения применения оружия, в си-
стемы управления огнем, обеспечивать звукоподводную связь.
Дальность действия комплекса в режиме шумопеленгования
составляет 55—130 км (34], а на малых ходах подводной лодки
при низком уровне собственных помех она при наблюдении за
надводными целями достигает 220 км [50]. Такая дальность
обеспечивает эффективное применение наиболее дальнобойного
оружия, имеющегося на борту этих лодок — противолодочных
ракет «Саброк».
Стоимость комплекса составляет около 4 млн. долл., его
вес порядка 49 т, занимаемый аппаратурой объем 15 ж3, потреб-
ляемая от сети мощность свыше 50 кет [41]. Предполагается,
что аппаратура комплекса будет установлена на 31-й противо-
лодочной атомной подводной лодке [55].
Как можно судить по сообщениям печати [36], в состав комп-
лекса входит следующая аппаратура: гидроакустическая стан-
ция BQS-6, работающая в активном и пассивном режимах;
92
индикатор-вычислитель BQA-З, работающий совместно с преды-
дущей станцией; шумопеленгатор BQR-7; станция звукоподвод-
ной связи BQA-2; станция классификации подводных целей
BQQ-3.
Для обеспечения работы аппаратура комплекса на подвод-
ной лодке устанавливается несколько акустических антенн раз-
личной конструкции (рис. 37).
Активно-пассивная гидроакустическая станция BQS-6, рабо-
тающая на низких звуковых частотах, является основным устрой-
ством комплекса. При работе в активном режиме (режиме гид-
ролокации) станция обеспечивает всенаправленное излучение
акустической энергии в горизонтальной плоскости, осуществляя
круговой обзор, или
остронаправленное излу-
чение с высокой кон-
центрацией акустической
энергии. При направлен-
ном излучении сканиро-
вание акустического луча
может осуществляться Рис 37 размещение акустических антенн
как В горизонтальной, так комплекса BQQ-2 на корпусе подводной
и в вертикальной пло- лодки.
СКОСТИ ^ ~~ сферическая антенна комплексной станции
' BQS-6; 2 — полуэллиптическая приемная антенна
ВОЗМОЖНОСТЬ СКаНИрО- станции BQR-7; 3 — линейные приемные антенны.
вания акустического луча
в вертикальной плоскости обеспечивает дальнее гидроакустиче-
ское наблюдение с использованием донных отражений и так
называемых вторичных зон акустической освещенности.
Гидроакустическая станция BQS-6 имеет сферическую аку-
стическую антенну, расположенную в носовой части корпуса
подводной лодки. Такая форма крупногабаритной антенны обе-
спечивает удобство размещения ее в корпусе лодки при мини-
мальном занимаемом объеме. Кроме того, при сферической
антенне облегчается формирование характеристики направлен-
ности в любом направлении как в горизонтальной, так и в вер-
тикальной плоскости. Диаметр сферы около 4 м. Сфера изго-
товлена из высокопрочной стали. Внутри сферы размещаются
некоторые элементы аппаратуры. Лаз, соединяющий сферу
с прочным корпусом, обеспечивает доступ внутрь ее личному
составу для обслуживания аппаратуры. На поверхности сферы
размещается 1245 отдельных приемо-излучающих элементов,
в которых в качестве активного вещества использован пьезоке-
рамический материал — титанат бария.
По утверждению иностранной печати, мощность, излучаемая
этой гидроакустической станцией, настолько велика, что при
спокойной воде во время работы станции на поверхности воз-
никают отчетливо видимые глазом волны.
93
При работе станции в режиме активного кругового обзора
регистрация целей и определение их координат происходит на
экране электронно-лучевой трубки индикатора кругового об-
зора. При направленном излучении на экране этого индикатора
отображается только сектор сканирования.
При шумопеленговании вращение сформированной электри-
ческим путем характеристики направленности в плоскости об-
зора осуществляется оператором вручную. Наблюдаемая цель
регистрируется на экране электронно-лучевой трубки в виде
яркостной отметки. Специальное записывающее устройство ото-
бражает изменение пеленга во времени на графике, иначе го-
воря, это устройство является рекордером пеленга.
Информация, получаемая станцией BQS-6, поступает на
вспомогательное устройство BQA-3, в состав которого входит
цифровая вычислительная машина. Это устройство, обрабаты-
вая вводимые на его вход данные о пеленге на цель и о дистан-
ции до нее, рассчитывает курс, скорость хода цели, общую ве-
личину изменения расстояния и величину изменения пеленга.
Выработанные устройством данные выдаются в систему управ-
ления стрельбой Мк-113.
Шумопеленгование может осуществляться не только станцией
BQS-6, но и специальным шумопеленгатором BQR-7. Этот шумо-
пеленгатор имеет подковообразную акустическую антенну,
охватывающую носовую часть подводной лодки. Антенна со-
стоит из 156 отдельных приемников, расположенных в три па-
раллельные линии. Протяженность антенны по каждому борту
составляет около 15 м. Сигналы, принимаемые шумопеленгато-
ром, регистрируются с помощью самописца.
Станция BQA-2 обеспечивает звукоподводную связь.
Аппаратура классификации подводных целей BQQ-3 яв-
ляется, как утверждают, первым образцом аппаратуры подоб-
ного назначения. С ее помощью осуществляется анализ спектра
принимаемых шумов цели. Принятые сигналы записываются на
магнитную ленту и анализируются с помощью системы филь-
тров. Так как спектральный состав шумов различных целей
неодинаков, по характерным особенностям спектральной харак-
теристики в некоторых случаях оказывается возможным осу-
ществлять объективную классификацию цели. В печати не при-
водятся данные, характеризующие эффективность применения
этого устройства, однако указывается, что флотские специа-
листы, несмотря на его наличие, предпочитают при классифи-
кации контакта прежде всего опираться на опыт акустиков-
операторов.
Все пульты управления аппаратурой комплекса, индикатора
и другие элементы, требующие обслуживания со стороны опера-
торов в процессе работы, размещены в общей гидроакустиче-
ской рубке (рис. 38).
94
Информация, поступающая от комплекса BQQ-2, исполь-
зуется в системе управления стрельбой противолодочными ра-
кето-торпедами и обычными торпедами Мк-113. Как утверждают,
данные, поступающие от гидроакустического комплекса, обеспе-
чивают достаточно высокую точность стрельбы на большие ди-
станции по подвижным подводным и надводным целям [62].
Разработка комплекса BQQ-2 началась фирмой «Рейтеон»
еще в 1959 г. Несмотря на сравнительно большой срок, прошед-
ший с момента начала разработки комплекса, техническая до-
кументация на его изго-
товление длительное вре-
мя не была отработана и
предполагается, что она
была утверждена не ра-
нее начала 1966 г.
В ходе эксплуатации
комплекса на подводных
лодках специалисты вы-
явили в нем более двух-
сот недостатков, которые
якобы должны были быть
устранены к началу 1966 г.
Очевидно, спешка, вы-
званная безудержной гон-
кой вооружения, которая
привела к трагической ги-
бели «Трешера», не ми-
нула и предприятий, изготовляющих гидроакустическое воору-
жение.
В целях повышения скрытности гидроакустического наблю-
дения подводных лодок была разработана специальная система
пассивного измерения дистанции до шумящих целей, получив-
шая название PUFFS (Passive Underwater Fire Control Feasi-
bility Studi — система управления стрельбой по расчетным дан-
ным с использованием пассивного метода обнаружения). В со-
став системы входит гидроакустическая станция BQG:4 [77]. Эта
станция использует три приемные акустические антенны, раз-
несенные по корпусу подводной лодки (рис. 39). Приемные ан-
тенны станции состоят из большого числа отдельных преобразо-
вателей, изготовленных из пьезоэлектрического материала — де-
гидрогена фосфата аммония. Колебания, создаваемые целью,
удаленной от подводной лодки на значительное расстояние, при-
ходят к каждому из трех приемников с некоторым сдвигом по
времени. Разница момента прихода колебаний к приемникам
регистрируется и является исходным параметром для расчетов,
производимых электронной вычислительной машиной. Машина
рассчитывает координаты цели и выдает их в систему управления
Рис. 38. Размещение аппаратуры комплекса
BQQ-2 в гидроакустической рубке.
/ — пульт станции звукоподводной связи BQA-2;
2 — дверь; 3 — пульт шумопеленгования станции
BQS-6; 4 — анализатор собственных шумов под-
водной лодки; 5 — пульт активного режима стан-
ции BQS-6; 6 — звукозаписывающее устройство,
перестраиваемый фильтр; 7 — вычислитель-инди-
катор BQA-3; 8 — пульт шумопеленгатора BQR-7;
9 — аппаратура классификации шумящих целей
BQQ-3.
95
стрельбой. Как утверждает печать, все действия системы про-
изводятся автоматически и функция операторов заключается
лишь в выборе цели, координаты которой должны опреде-
ляться [55].
Важным преимуществом системы является то, что она позво-
ляет определять координаты цели при произвольном маневри-
ровании своей подводной лодки.
Высказывается предположение, что для повышения точности
определяемых координат будет целесообразно осуществлять од-
Рис. 39. Размещение гидроакустических антенн пассивной
системы PUFFS (BQG-4) на американской подводной лод-
ке «Пикерел».
повременное пеленгование цели с двух подводных лодок, удален-
ных на некоторое расстояние одна от другой и поддерживающих
между собой звукоподводную связь для обмена получаемой ин-
формацией. Повышение точности замеров при этом происходит
за счет увеличения в пространстве «базы», на которую разне-
сены приемники.
На атомных противолодочных подводных лодках более ран-
ней постройки типа «Скипджек» установлена гидроакустическая
станция BQS-2, мощность излучения которой при работе в ак-
тивном режиме в пять раз меньше мощности, излучаемой гидро-
акустической станцией BQS-6, входящей в комплекс BQQ-2.
Акустическая антенна станции представляет собой цилиндр,
состоящий из 60 отдельных преобразователей, активным матери-
алом в которых является титанат бария.
На ракетных атомных подводных лодках, на которых роль
гидроакустики несколько меньше, чем на лодках противолодоч-
ных, устанавливается гидроакустическая станция BQS-4. На
96
новых атомных ракетоносцах типа «Джеймс Медисон» помимо
этой станции устанавливается и станция классификации подвод-
ных целей BQQ-3 [13].
На некоторых подводных лодках устанавливается также шу-
мопеленгаторная станция BQR-2B и аппаратура звукоподводной
связи UQC-1, имеющая излучаемую мощность 100 вт и даль-
ность действия около 9 км [55].
Помимо основной перечисленной аппаратуры на атомных
подводных лодках ВМС США устанавливается различная гидро-
акустическая аппаратура вспомогательного назначения.
Так, на подводных лодках типа «Трешер» устанавливается
аппаратура, предназначенная для контроля в морских условиях
за уровнем собственных шумов. В состав аппаратуры входят
несколько акустических приемников, размещенных в различных
точках корпуса подводной лодки. Индикаторное устройство, ра-
ботающее по принципу индикатора перемодуляции, используе-
мого в звукозаписывающих устройствах, позволяет судить об
уровне шумов и характере их изменения. Специальный анализа-
тор шумов и вибрации обеспечивает контроль отсека вспомога-
тельных механизмов.
На подводных лодках устанавливаются также гидроакусти-
ческие эхоледомеры, обеспечивающие подледное плавание в арк-
тических районах, и другие гидроакустические средства корабле-
вождения.
Обязательной составной частью гидроакустического вооруже-
ния всех подводных лодок является аппаратура гидроакустиче-
ской разведки WLR-2, предназначенная для обнаружения сигна-
лов гидролокаторов и приборов связи противника и излучений
активных систем самонаведения торпед и ракето-торпед [55].
Для того чтобы обеспечить возможность длительного хране-
ния информации, получаемой от гидроакустических средств, на
подводных лодках устанавливаются двухканальные магнито-
фоны UNQ-7. Для этой же цели разрабатывается семиканаль-
ный магнитофон UNQ-8. Этот магнитофон позволит записывать
всю информацию, поступающую от гидроакустических станций.
В настоящее время в США уделяется большое внимание ра-
ботам, направленным на дальнейшее развитие гидроакустиче-
ских средств подводных лодок. В частности, создается крупнога-
баритная акустическая антенна, полностью совмещенная с кор-
пусом подводной лодки [77]; разрабатывается гидроакустический
комплекс для атомных ракетных подводных лодок, получивший
название SISS * [50]; усовершенствуются гидроакустические
устройства в целом и их отдельные элементы; разрабатывается
гидроакустическая аппаратура для подводных лодок, которые
будут построены в 70-х гг.
Submarine Integrated Sonar System.
97
§ 19. РАЗМЕЩЕНИЕ ГИДРОАКУСТИЧЕСКИХ АНТЕНН
НА ПОДВОДНЫХ ЛОДКАХ
К размещению акустических антенн на подводных лодках
предъявляют определенные требования:
акустическая антенна должна быть возможно дальше отне-
сена от основного источника собственных шумов — винтов и
от других источников шума —
рулей, вспомогательных меха-
низмов и т. п.;
акустическая антенна должна
помещаться в обтекатель, защи-
щающий ее от встречных пото-
ков воды;
Рис. 40. Размещение акустической Рис. 41. Размещение акустической
антенны на голландской подводной антенны на французской подводной
лодке «Потвиз». лодке «Дорис».
акустическая антенна по возможности не должна экраниро-
ваться корпусом и элементами конструкции подводной лодки;
на современных быстроходных подводных лодках размеще-
ние акустической антенны не должно искажать обводы корпуса
и антенна не должна выступать за его обводы.
Выполнение первых трех требований привело к существовав-
шему длительное время своего рода «классическому» размеще-
нию акустических антенн. Такое размещение встречается на
большинстве современных подводных лодок флотов различных
стран.
Требование максимального удаления акустических антенн
от винтов привело к размещению этих антенн в носовой части
98
подводных лодок. На некоторых подводных лодках антенны
помещаются в носовой части подводной лодки в. районе киля
(рис. 40). Однако при таком расположении антенны она неиз-
Рис. 42. Схема общего расположения американской подводной лодки
«Тэнг» и размещение акустических антенн (заштрихованы).
бежно экранируется с кормовых курсовых углов корпусом
лодки (67].
Поэтому во многих флотах предпочитают размещать аку-
стические антенны в носовой части, на надстройке. Такое
расположение принято на
некоторых английских,
американских и фран-
цузских подводных лод-
ках (рис. 41). Иногда на
палубе устанавливаются
две или несколько аку-
стуческих антенн в обте-
кателях.
В ряде случаев не
удается разместить аку-
стические антенны только
в одном из перечислен-
ных мест. Поэтому аку-
стические антенны раз-
мещаются как на палубе,
так и в районе киля. Так,
например, сделано на
американской подводной
ЛОДКе «Тэ'НГ» (рис. 42) И Рис. 43. Противоледовое ограждение об-
На НОВОЙ ЯПОНСКОЙ ПОД- текателя акустической антенны англий-
ВОДНОЙ ЛОДКе «Оясио». ской подводной лодки «Нарвал».
В некоторых случаях,
например при плавании во льдах, акустические антенны, распо-
ложенные на надстройке, оказываются недостаточно живучими.
Обтекатели таких антенн приходится прикрывать специальными
защитными конструкциями (рис. 43).
Размещение акустических антенн в обтекателях, возвы-
шающихся над корпусом подводной лодки или искажающих
форму корпуса в районе киля, оказалось неприемлемым для
99
быстроходных атомных подводных лодок. На этих подводных
лодках акустические антенны стали устанавливаться в носовой
части внутри легкого корпуса. Обтекатель гидроакустической
антенны выполняется заподлицо с обшивкой и сам является
элементом легкого корпуса, не искажающим его форму и не на-
рушающим плавности обтекания носовой части лодки встреч-
ными потоками воды.
На торпедных атомных подводных лодках более ранней по-
стройки и на ракетных атомных подводных лодках акустическая
антенна занимает лишь сравни-
тельно небольшую часть объема
носовой оконечности. На новых
торпедных подводных лодках, на
которых устанавливается гидро-
акустический комплекс BQQ-2 с
крупной сферической акустиче-
ской антенной, практически вся
носовая часть является сплош-
ным обтекателем. Акустическая
антенна сферической формы наи-
более удобна для размещения на
современных подводных лодках,
корпус которых имеет каплеоб-
разную форму. Рис. 44 иллюстри-
рует особенности размещения
акустических антенн на некото-
рых американских атомных под-
водных лодках.
На английской атомной под-
водной лодке «Дредноут» принят
тот же принцип размещения
акустических антенн, что и на
американских лодках. Обтека-
тель выполнен заподлицо с кор-
пусом.
Необходимость установки акустических антенн в местах
с наиболее низким уровнем шумов в условиях, наиболее благо-
приятствующих собственному гидроакустическому наблюдению,
потребовала внести некоторые изменения в традиционное разме-
щение вооружения и оборудования подводных лодок. По этой
причине носовые горизонтальные рули перенесли на ограждение
выдвижных устройств (так называемые рубочные рули).
Увеличение размеров акустических антенн повлияло на раз-
мещение торпедных аппаратов. Если на первой атомной подвод-
ной лодке «Наутилус» торпедные аппараты располагались тра-
диционно в два ряда по вертикали, то на дизельной подводной
лодке «Барбел», имеющей каплеобразный корпус, акустические
Рис. 44. Размещение акустических
антенн и торпедных аппаратов на
американских подводных лодках:
а — «Наутилус»; б — «Барбел»;
в — «Скипджек»; г — «Таллиби» и
«Трешер».
100
антенны удалось вписать в гаоариты корпуса лишь при условии
кольцеобразного размещения торпедных аппаратов. На подвод-
ных лодках типа «Скипджек» торпедные аппараты расположили
в два горизонтальных ряда, что позволило разместить в носо-
вой части лодки более крупную акустическую антенну. На под-
водных лодках, имеющих гидроакустический комплекс BQQ-2
с акустической антенной, занимающей всю носовую часть, тор-
педные аппараты пришлось отнести на 9 ж от носовой оконеч-
ности прочного корпуса и расположить побортно под углом 10°
(подводная лодка «Тал-
либи»)и даже 20° («Тре-
йдер»).
По мнению иностран-
ных специалистов, в
связи с тем, что разме-
ры акустических антенн,
предназначенных для ра-
боты на низких частотах,
имеют тенденцию к даль-
нейшему увеличению,
перспективными являют-
ся антенны, конфигура-
ция которых будет мак-
симально приближена к
форме обводов корпуса.
Прототипами таких ан- Рис 45 Обтекатель акустической антенны
тенн, уже нашедшими из армированного стеклопластика,
применение в настоящее
время, являются подковообразные антенны, размещаемые в но-
совой части подводных лодок (см. рис. 39), а также бортовые
приемные антенны. Так, на американской подводной лодке
«Флайнг Фиш» установлена бортовая акустическая антенна
общей протяженностью 61 м, состоящая из приемников длиной
по 0,6 м каждый.
Для изготовления обтекателей акустических антенн широко
применяется металл. Однако за последнее десятилетие на под-
водных лодках ВМС США для изготовления обтекателей стали
использовать пластмассы (рис. 45). Как утверждают зарубеж-
ные специалисты, обтекатели из пластмасс имеют серьезные
преимущества перед металлическими обтекателями. Применение
пластмассы снизило шумовые помехи, решило проблему корро-
зийной стойкости, упростило технологию изготовления обтекате-
лей сложной формы, уменьшило их вес и стоимость. Кроме
того, оказалось, что пластмассы обладают хорошей звукопровод-
ностью в широком диапазоне частот. Эти положительные свой-
ства обтекателей из армированных пластиков завоевали им проч-
ное место на американских подводных лодках [51].
101
Глава III
ШУМЫ НАДВОДНЫХ КОРАБЛЕЙ
И ПОДВОДНЫХ ЛОДОК. ПОМЕХИ РАБОТЕ
ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ
И МЕРЫ ПО ИХ СНИЖЕНИЮ
§ 20. ШУМЫ КОРАБЛЕЙ И ПОДВОДНЫХ ЛОДОК
Любой надводный корабль или подводная лодка, движу-
щиеся в воде, являются источниками подводных шумов. Источ-
ником шумов может явиться и неподвижный корабль, на борту
которого работают меха-
низмы и о корпус которого
бьются волны. Работаю-
щие вспомогательные меха-
низмы делают источником
шума и подводную лодку,
лежащую на грунте без
хода. Таким образом, ко-
рабли и подводные лодки
практически всегда создают
в воде первичное (шумо-
вое) акустическое поле.
По своему значению для
гидроакустического наблю-
дения шумовое поле ко-
рабля подразделяется на
дальнее (внешнее) акусти-
ческое поле, характеризую-
щее шумящий объект как
источник акустического сиг-
нала для шумопеленгова-
ния противника, и на ближ-
нее (собственное) акусти-
ческое поле, характеризующее уровень помех собственному
гидроакустическому наблюдению.
Между дальним и ближним акустическими полями суще-
ствует определенная взаимосвязь, так как источники происхо-
ждения обоих полей идентичны. Однако эта зависимость не
поддается точному учету, так как помехи попадают на акустиче-
скую антенну не только через воду, но и непосредственно через
корпус корабля, крепление антенны и т. п., шумы же во внеш-
нее поле попадают только через воду. Кроме того, уровень соб-
ственных помех зависит от экранирования акустической ан-
тенны корпусом корабля, от направленности акустической ан-
тены и т. п.
Рис. 46. Спектральные характеристики
уровня шумов крейсера при различных
значениях скорости его хода.
102
Основными причинами возникновения шумового поля кораб-
лей являются: воздействие на корпус корабля потоков обтека-
ния и гидравлических сил; возникновение на лопастях гребных
винтов и корпусе явления кавитации; работа двигателей и ме-
ханизмов [14].
Акустическое поле, создаваемое кораблем, возникает в ре-
зультате совокупного влияния всех перечисленных причин.
Шумы кораблей различных классов и типов имеют ярко вы-
раженный индивидуальный характер, проявляющийся в разли-
Рис. 47. Относительное изменение уровня шума па частоте 5 кгц
в зависимости от скорости хода для корабля водоизмещением 400 т
(а) и от водоизмещения корабля (б).
чии спектрального состава шума (рис. 46). Это позволяет осу-
ществлять классификацию полученного гидроакустического кон-
такта как субъективно — на слух, так и объективно — с помощью
специальной анализирующей аппаратуры. Натренированный аку-
стик при благоприятных условиях может почти безошибочно оп-
ределить на слух класс обнаруженного корабля. По образному
выражению американского специалиста У. Хортона «спутать
шумы торпедного катера и подводной лодки так же трудно, как
спутать шум самолета с шумом извозчика. Опытные операторы,
прослушивая шумы кораблей в данном районе, умеют по харак-
теру шума узнавать проходящие корабли, часто бывающие
в этом районе, точно так же, как они узнают своих знакомых
по голосу» [10].
Изучению и классификации шумов кораблей различных клас-
сов и типов и созданию специальной аппаратуры для такой
классификации уделяется за рубежом большое внимание.
103
По данным Хортона [10], в результате обработки большого
числа измерений были получены усредненные зависимости *
уровней шумов кораблей от скорости хода (рис. 47, а) и водоиз-
мещения корабля (рис. 47,6), а также изменение уровня шума
с частотой (рис. 48). Как можно видеть, уровень шума возра:
стает с увеличением скорости хода и водоизмещения корабля и
уменьшается с увеличением частоты. Благодаря этому уровень
энергии акустических шумов, прослушиваемых в широкой по-
лосе частот, определяется почти исключительно энергией низко-
частотных составляющих. Это
обстоятельство является одной
из причин осуществляемого в на-
стоящее время перехода на низ-
кие частоты при шумопеленго-
вании.
Рассмотрим несколько подроб-
нее основные источники возник-
новения шумов.
Шум, возникающий в резуль-
тате обтекания корпуса движу-
щегося корабля потоками воды,
связан с турбулентностью потока
Рис. 48. Спектральная характера в пограничном слое, С ВОЗНИКНО-
стика уровня шумов дизельной вением вихрей из-за шерохова-
подводной лодки, идущей в над- тости поверхности обтекаемого
водном положении со скоростью тела? с вихрямИ) срывающимися
1 Zj LjjJL.
с киля и руля движущегося ко-
рабля, с резонансом полостей и
колебаниями листов обшивки корпуса. Возрастанию шумов
способствует также наличие выступающих элементов корпуса.
Шум обтекания резко возрастает с увеличением скорости хода
корабля.
При движении какого-либо тела в воде с большой скоростью
может оказаться, что в какой-то точке или в точках на поверх-
ности тела давление воды падает до величины давления водя-
ного пара при данных окружающих условиях. При дальнейшем
увеличении скорости давление, продолжает падать и на движу-
щейся поверхности образуются пузырьки, заполненные водяным
паром. Возникает явление, называемое кавитацией. Скорость
хода, при которой возникает это явление, называется критиче-
ской скоростью.
Отделяясь от движущейся поверхности, кавитационные по-
лости— пузырьки, заполненные парами воды, попадают в ок-
* Приведенные в данной главе графики (рис. 40—50) характеризуют рас-
сматриваемые зависимости только качественно.
104
ружающую среду, имеющую более высокое давление. Под воз-
действием окружающего давления происходит разрушение («за-
хлопывание») кавитационных полостей, сопровождающееся ин-
тенсивным шумообразованием. Возникают быстрозатухающие
колебания, уровень шума возрастает на десятки децибел и в ряде
случаев превышает суммарный уровень шумов, вызванных всеми
остальными причинами.
С увеличением давления в окружающей среде явление кави-
тации наступает при более высокой скорости хода. Это обстоя-
тельство имеет большое практическое значение для подводных
лодок. С увеличением глубины
погружения подводной лодки и
ростом гидростатического давле-
ния критическая скорость возра-
стает, подводная лодка может
двигаться с большой скоростью,
не создавая интенсивного шума
(рис. 49) [6, 14].
Явление кавитации обычно
возникает на лопастях гребного
винта, совершающих быстрое
перемещение относительно не-
подвижной воды. При этом мо-
гут возникнуть три разновидно-
сти кавитации: кавитация на по-
верхностях лопастей, кавитация
краевых вихрей и кавитация вих- п ЛГк 0 „ „
г„ г ^ Рис. 49. Зависимость критической
реи ступицы. скорости (числа оборотов винтов)
Для предотвращения ВОЗНИК- подводной лодки от глубины по-
новения кавитации на поверх- гружения.
ностях лопастей нужно так рас-
пределить нагрузку, чтобы ни в одной точке поверхности давле-
ние не было ниже давления водяного пара. При несоблюдении
этого условия на поверхности лопасти появлятся кавитирую-
щие точки, возникнет интенсивный шум. Уменьшение нагрузки
на поверхности лопастей может быть достигнуто, например, за
счет увеличения их числа.
'Так как концы лопастей винта движутся с максимальной ско-
ростью относительно воды, на них может возникнуть кавитация.
При этом кавитационные полости будут распространяться в воде
в виде спирали. Борьба с возникновением этой кавитации ведется
путем уменьшения нагрузки на края лопастей или за счет работы
винта при небольшой скорости вращения. Кавитация вихрей сту-
пицы может быть предотвращена путем установки за ступицей
специальной насадки. Все перечисленные способы борьбы с ка-
витацией винта применяются в современном зарубежном кораб-
лестроении.
105
Кавитация может возникнуть не только на винте, но и на
корпусе подводной лодки или надводного корабля. При этом
явление кавитации реже наблюдается на гладких движущихся
поверхностях и чаще на неровных или имеющих выступающие
части. Поэтому обшивку современных кораблей и подводных ло-
док стремятся делать по возможности гладкой, имеющей мини-
мальное число отверстий и выступающих элементов.
Воздействие гидравлических сил на гребные винты при опре-
деленных условиях может вызвать появление характерного мо-
дулированного шума, получившего название «пение» винта. Пе-
ние, как правило, наступает
при определенном сочетании
скорости хода корабля и дав-
ления в окружающей среде.
Спектр шума пения является
сложным и в нем может на-
блюдаться несколько тонов од-
новременно (рис. 50), природа
пения в настоящее время еще
не выяснена. Пение может
возникнуть и на выступающих
частях корпуса корабля [6, 14].
Интенсивный шум возни-
кает в результате работы дви-
гателей и различных механиз-
мов. По своему влиянию на
Рис. 50. Зависимость интенсивности совокупное гидроакустическое
шума «поющего» винта от частоты поле корабля шум механизмов
при различном числе оборотов. делится на воздушный и струк-
турный.
Воздушный шум распространяется в основном внутри отсека,
в котором расположен работающий механизм, и влияет главным
образом на условия обитаемости в этом отсеке. Лишь некоторая
часть его проникает за пределы корпуса и участвует в создании
акустического поля корабля.
Структурный шум, наоборот, интенсивно распространяется
в водной среде. Возникая в процессе работы механизмов, струк-
турный шум через их фундаменты и конструктивные элементы:
валы, трубопроводы и т. п., имеющие жесткие связи с корпу-
сом, передается корпусу, а от него в окружающую среду. По-
этому борьба со структурными шумами механизмов имеет пер-
востепенное значение.
Причины возникновения структурных шумов разнообразны.
Так, для поршневых двигателей характерны низкочастотные
шумы, вызванные взрывами смеси в цилиндрах, и шумы клапа-
нов. Газовые турбины создают шум в моменты прохождения
лопатками сопел. Этот шум обычно лежит в ультразвуковом
106
диапазоне частот. Частота шумов, создаваемых шестернями ре-
дукторов, обычно значительно ниже частот шумов, создаваемых
самими турбинами. В атомных энергетических установках источ-
ником шумов, помимо турбин и редукторов, является система
циркуляции теплоносителя. Для любых механизмов источником
шумов могут служить недостаточно тщательно обработанные и
установленные подшипники, плохо сбалансированные вращаю-
щиеся детали, недостаточно жесткая конструкция корпуса и фун-
дамента и т. п. [14].
При работе электродвигателей основными причинами возник-
новения структурного шума являются воздействия магнитных и
механических сил. Так, пульсация магнитного поля в воздушных
зазорах при вращении ротора и изменении силы тока вызывает
вибрацию элементов конструкции двигателя. Система вентиляции
двигателя создает сильный воздушный шум, наибольший уровень
которого имеют высокооборотные электродвигатели закрытого
типа с воздушным охлаждением. У этих электродвигателей вен-
тилятор расположен снаружи корпуса. Низкий уровень шума
имеют брызгозащищенные двигатели и водоохлаждаемые пре-
образователи [52].
Как можно судить по многочисленным материалам, опубли-
кованным в зарубежной печати, борьба с корабельными шумами
любого происхождения находится в настоящее время в центре
внимания. Некоторые направления и результаты этой борьбы
рассматриваются ниже.
§ 21. БОРЬБА С ШУМНОСТЬЮ ПОДВОДНЫХ ЛОДОК
По мнению многих зарубежных специалистов, задача сниже-
ния шумности подводных лодок является одной из наиболее ак-
туальных и сложных задач современного кораблестроения. Судя
по многочисленным сообщениям зарубежной печати, решению
этой задачи уделяется в настоящее время исключительное вни-
мание.
Необходимость борьбы с шумами подводных лодок объяс-
няется двумя причинами. Во-первых, с уменьшением шумности
повышается скрытность действий подводных лодок и уменьшается
эффективность применения различных пассивных гидроакустиче-
ских средств противника — шумопеленгаторов, систем самонаве-
дения торпед и ракето-торпед, акустических взрывателей мин и
т. п. Во-вторых, снижение шумности, уменьшающее уровень соб-
ственных акустических помех, способствует повышению эффек-
тивности гидроакустического наблюдения подводной лодки, так
как при этом оказывается возможным регистрировать более сла-
бые сигналы.
Исследования в области снижения шумов подводных ло-
док ведутся за рубежом параллельно по многим направлениям.
107
Теоретические исследования подкрепляются экспериментальной
проверкой на моделях в лабораторных условиях и непосредст-
венно на экспериментальных и серийных подводных лодках. Так,
например, в ВМС США большие работы пообесшумливанию про-
водятся на экспериментальной подводной лодке «Таллиби»,
в ВМС Англии — на экспериментальной подводной лодке «Эксп-
лорер».
Для снижения шумов обтекания и предотвращения возмож-
ности возникновения кавитации на корпусе быстроходных под-
водных лодок потребовалось придать корпусу лодки обтекаемую
форму, сгладив его обшивку и убрав выступающие части, в том
числе и обтекатели гидроакустических антенн. Для этой же цели
стремятся уменьшить число забортных отверстий и люков, а на
оставшихся отверстиях и люках устанавливают плотно пригнан-
ные к корпусу обтекатели. Традиционное горизонтальное распо-
ложение шпигатов и прорезей в корпусе заменяется на верти-
кальное. Во время хода лодки шпигаты закрываются балан-
сирными крышками, оставшиеся незакрытыми мелкие отверстия
в корпусе по возможности удаляются от участков с перепадами
давления [13].
Для уменьшения шумов, вызываемых воздействием потоков
обтекания на рули, считают целесообразным изменить их разме-
щение на корпусе подводной лодки. Ранее кормовые вертикаль-
ные и горизонтальные рули располагались возможно ближе
к кормовой оконечности корпуса с тем, чтобы их плоскости ока-
зывались в кильватерной струе. При этом увеличивалась эффек-
тивность рулей и улучшались маневренные качества подводной
лодки, но одновременно возрастала и шумность лодки из-за на-
рушения обтекающего потока во время перекладки рулей, повы-
шалась шумность винтов, обтекаемых неоднородным потоком.
На современных подводных лодках стремятся отнести рули
от винтов на возможно большее расстояние, поместив их перед
винтами. Эта мера, способствуя снижению шумности, неизбежно
приводит к ухудшению условий работы руля, особенно при дви-
жении с малой скоростью. По этой причине стремятся найти ком-
промиссное решение. Так, например, высказывается предположе-
ние о целесообразности размещения рулей вокруг винта. Такие
рули, как полагают, будут достаточно эффективными и в то же
время будут экранировать шумы винта. Однако считают, что по-
добная конструкция может оказаться громоздкой и труднопри-
менимой на практике [74].
Для уменьшения гидродинамических шумов, а также помех,
создаваемых механизмами перекладки, потребовался перенос и
носовых горизонтальных рулей, ранее располагавшихся в непо-
средственном соседстве с акустическими антеннами. На совре-
менных подводных лодках эти рули относят дальше в сторону
кормы или располагают на фальшивой рубке. В этом случае
108
также снижается эффективность рулей: рубочные рули вызывают
некоторые дополнительные трудности в удерживании подводной
лодки на заданной глубине, но, как утверждают, этот недостаток
с успехом компенсируется существенным снижением уровня соб-
ственных гидроакустических помех [54].
Основным и самым мощным источником подводного шума яв-
ляются гребные винты. По этой причине борьбе с винтовым
шумом уделяется особое внимание.
Одной из причин возникновения шума винтов является сте-
кание воды с их лопастей, а также попадание на лопасти нерав-
номерного турбулентного потока, обтекающего корпус подводной
лодки. Для устранения этой причины шумообразования прини-
мают специальные меры: относят рули, создающие при своей
перекладке завихрения, возможно дальше от винтов; для упоря-
дочения потока стремятся обеспечить в конструкции корпуса
плавный переход от миделя и надстроек к кормовой оконечности.
По некоторым взглядам, в целях уменьшения шумообразова-
ния кормовая оконечность корпуса подводной лодки должна
быть вытянута так, чтобы угол сходимости был порядка 10°.
Однако при этом будет иметься значительная потеря полезного
объема, поэтому обводы кормы делают более полными.
Интересно отметить, что каплеобразная форма корпуса, обес-
печивающая уменьшение шумообразования, одновременно яв-
ляется весьма благоприятной и для уменьшения гидролокацион-
ной заметности, так как при этом рассеиваются падающие на
корпус акустические волны.
Шумность винта зависит и от его конструкции. Если в тече-
ние долгого времени наиболее широкое применение находили
трехлопастные винты, то в последние годы на подводных лодках
устанавливаются четырехлопастные («Наутилус») и пятилопаст-
ные («Скипеджек» и другие). С увеличением числа лопастей
давление на них распределяется более равномерно, благодаря
чему явление кавитации возникает при большей скорости хода.
По утверждению иностранной печати, если у двухвальных
подводых лодок с четырехлопастными винтами при движении на
глубине 120ж явление кавитации наступало при скорости '5узл.,
то у подводных лодок более поздней постройки, находящихся
при движении на этой же глубине, кавитация не наступала при
движении полным ходом [30].
Увеличение размеров винта уменьшает опасность возникно-
вения кавитации на концах лопастей. Медленно вращающийся
винт большого диаметра с малой периферийной скоростью вы-
зывает меньшую турбулентность потока воды. Однако винты
большого диаметра имеют значительный вес, дорого стоят, за-
мена их затруднительна. С уменьшением числа оборотов винтов
возрастает вес главной энергетической установки. Поэтому стре-
мятся найти компромиссное решение между малошумными
109
винтами большого диаметра и сильно шумящими легкими вин-
тами малого диаметра, вращающимися с большой скоростью.
Интенсивность винтовых шумов возрастает с увеличением
числа валов. По этой причине американские атомные подводные
лодки, построенные после 1959 г., имеют только одновальные
силовые установки. Один вал имеют и английские атомные под-
водные лодки.
В качестве эксперимента исследуется целесообразность при-
менения двух соосно расположенных винтов, вращающихся
в разные стороны. Уменьшение шумности при соосном располо-
жении винтов объясняется тем, что вода, отбрасываемая вин-
тами, не приходит во вращательное движение. Такие винты
были установлены при модернизации подводной лодки «Альба-
кор» в 1962—1963 гг. Сальник внутреннего вала был помещен
на внутренней поверхности внешнего вала. Во время работы
внутренний вал и его сальник вращаются в противоположные
стороны. Оптимальное расстояние между винтами было уста-
новлено путем подбора: первоначально винты были удалены на
максимальное расстояние, а затем сближались до получения
наилучших результатов [58]. Соосные винты установлены и на
атомной подводной лодке «Джек» [62].
Проводятся и другие работы, направленные на снижение
шумности винтов. Так, ведутся исследования возможности со-
здания винтов с лопастями из резины и с поворотными лопа-
стями из пластмассы. Полагают, что такие винты будут иметь
улучшенные акустические свойства.
Принимаются меры к полному устранению такого нежела-
тельного явления, как «пение» винта. Из-за недостаточной изу-
ченности природы происхождения этого явления борьба с ним
ведется главным образом экспериментальным путем. В некото-
рых случаях пение удается устранить путем простой смены
винта. Однако чаще при решении этой задачи приходится пре-
одолевать значительные трудности.
Наряду с мероприятиями, направленными на снижение
уровня винтовых шумов, интенсивно ведутся работы по изыска-
нию новых, малошумных движителей для подводных лодок.
В качестве таких движителей, в частности, предлагают исполь-
зовать водометные, роторные и магнитные водометные дви-
жители.
Принцип действия гидрореактивных движителей широко из-
вестен. Роторные движители предполагается выполнять в виде
вращающихся кольцевых барабанов, охватывающих корпус под-
водной лодки в районах носовой и кормовой оконечностей. По-
воротные лопасти с переменным шагом, закрепленные внутри
роторов, позволят изменять скорость и направление движения.
Таким образом удастся устранить не только винты, но и опере-
ние подводной лодки [53].
110
Вследствие невысокой скорости вращения роторов уровень
создаваемых ими шумов должен быть невелик. Уменьшению
шумности должно способствовать и отсутствие оперения. В сво-
бодной от винтов и оперения кормовой части, как предполагают,
можно будет располагать акустические антенны, что невозможно
сделать при существующей конструкции подводных лодок. Бла-
годаря этому, видимо, можно будет уменьшить или устранить
мертвую зону акустического наблюдения в сторону кормы.
В магнитном водометном движителе предположительно
можно будет непосредственно преобразовывать электрическую
энергию в гидродинамическую силу, но практическая реализа-
ция этой идеи связана со значительными трудностями [56].
Большое внимание уделяется работам, связанным с умень-
шением шумности механизмов и двигателей. Так в ВМС США
в течение многих лет занимаются разработкой малошумных ме-
ханизмов и оборудования. Уже в годы второй мировой войны на
некоторых американских подводных лодках малогабаритные вы-
сокооборотные электродвигатели, нуждающиеся в редукторах и
являющиеся благодаря этому источником сильных структурных
шумов, были заменены более громоздкими малооборотными
двигателями, имеющими значительно меньший уровень шу-
мов [13].
Кроме того, разрабатывается специальное малошумное обо-
рудование. По предложению Управления кораблестроения ВМС
США была проведена программа исследований, направленная
на выявление путей уменьшения шумности электрооборудования
подводных лодок. В ходе выполнения программы были вырабо-
таны рекомендации, реализация которых, как утверждают, по-
зволит снизить шумность электрооборудования до уровня, при-
емлемого для атомных подводных лодок. Так, например, шум-
ность электрогенераторов может быть снижена на 30—40 дб
(рис. 51) [50].
На подводных лодках для снижения шумности широко при-
меняют гидравлический привод. В системах гидропривода ис-
пользуются винтовые насосы вместо более дешевых и эконо-
мичных, но и более шумных поршневых и лопастных насосов.
Разрабатываются бесшумные насосы регулируемой производи-
тельности [29].
Для снижения шумности усовершенствуются существующие
механизмы, улучшается технология их изготовления. Например
обработку вращающихся частей энергетических установок осу-
ществляют по высокому классу точности, зубчатые колеса редук-
торов обрабатывают с точностью до десятых и даже сотых долей
микрона [13]. Кроме того, зубцы передаточных колес редукторов
покрывают специальным звукопоглощающим материалом. Как
показали исследования, проведенные на торпедах, уменьшение
шумности зубчатых передач может быть достигнуто также за
111
счет применения винтовых передач вместо прямозубчатых. Сни-
жение уровня шумности примерно на 30% дают передачи, осно-
ванные на трении между гладкими цилиндрами [78].
Делаются попытки полностью избавиться от редукторов. На
экспериментальной подводной лодке «Таллиби» турбозубчатый
агрегат был заменен турбоэлектрической передачей. Это обеспе-
чило снижение уровня шумов, однако одновременно произошло
ухудшение весовой характеристики энергетической установки и
уменьшее ее к. п. д.
Рис. 51. Уровни структурного шума электрических преобра-
зователей.
/ — в обычном исполнении, без применения мер обесшумливания;
2-е применением всех мер обесшумливания.
На подводной лодке «Джек» установлена прямодействующая
паровая турбина, способная передавать вращение непосред-
ственно на гребной вал и не требующая применения редук-
тора [62].
Ставится задача улучшения геометрии и размеров подшип-
ников главных и вспомогательных механизмов, а также усовер-
шенствования системы их смазки. Разрабатываются малогаба-
ритные редукторы с минимальным шумообразованием.
Предполагается создание новых малошумных механизмов и
устройств. В США ведутся исследования, целью которых яв-
ляется разработка и создание механизмов и устройств, в кото-
рых должны отсутствовать движущиеся части, чаще всего яв-
ляющиеся источниками шума. К числу таких механизмов и ус-
тройств относятся:
термоэлектрические устройства, предназначенные для за-
мены вентиляторов и фреоновых холодильных установок;
112
статические преобразователи тока в переменный, основанные
на использовании бесконтактных замыкателей на полупроводни-
ковых элементах;
топливные элементы — бесшумные и эффективные источники
постоянного тока.
Как сообщают, первый экспериментальный образец термо-
электрической холодильной установки уже изготовлен и ус-
пешно прошел испытания [48].
Разрабатываются проекты реакторов с естественной цирку-
ляцией теплоносителя, в которых не потребуется применения
главных циркуляционных насосов, являющихся источником зна-
чительного шума.
Одной из мер борьбы с шумностью является выбор рацио-
нального размещения механизмов и оборудования в отсеках
подводных лодок. Наиболее шумящие механизмы размещаются
возможно дальше от акустических антенн. Так, например, при
модернизации американских подводных лодок по программе
GUPPI (Greater Underwater Propulsion Rower) были перене-
сены вспомогательные механизмы, ранее размещавшиеся вблизи
акустических антенн. Работы по программе велись с 1947 по
1960 г. Модернизации подверглись 45 подводных лодок. Новым
подходом к решению этого вопроса является создание так на-
зываемого «погруженного» электромотора, устанавливаемого вне
прочного корпуса подводной лодки. К числу преимуществ такого
расположения относят и значительно меньший уровень созда-
ваемых мотором шумов [58].
Широко применяется на современных подводных лодках та-
кая эффективная мера борьбы со структурным шумом, как
амортизация и виброизоляция механизмов.
При виброизоляции механизмов стремятся убрать звукопро-
водящие соединения изолируемого механизма с корпусом и тем
самым помешать выходу шума в окружающую водную среду.
Такая изоляция может осуществляться за счет применения раз-
личных амортизаторов или установки механизмов на амортизи-
рованных фундаментах. При этом обязательно должно быть со-
блюдено условие, чтобы ни одна из собственных частот обра-
зующейся при этом колебательной системы не совпадала
с частотой вынужденных колебаний.
Изолироваться от корпуса должны не только сами шумящие
механизмы, но и трубопроводы, валы и другие механические
соединения, создающие дополнительные упругие связи. С этой
целью, например, на подводных лодках типа «Трешер» соедине-
ние главного турбозубчатого агрегата с неамортизированной
линией вала осуществляется с помощью звукоизолирующей эла-
стичной муфты. В трубопроводы, соединяющие амортизирован-
ные турбины с неамортизированными конденсаторами, вклю-
чают шумопоглощающие патрубки. На американских атомных
5 А. Л. Простаков
ИЗ
подводных лодках используется до 800 таких патрубков. Па-
трубки могут изготавливаться из металла, резины или синтети-
ческих материалов. Одна из американских фирм разработала
патрубки из неопрена, армированного витоном. Специальные
глушители, включенные в циркуляционные трассы, ограничи-
вают распространение структурного шума через систему охлаж-
дения [13].
В печати отмечается, что установка механизмов на аморти-
заторах не только способствует снижению уровня структурных
шумов, но и повышает взрывозащищенность механизмов. Для
повышения взрывостойкости механизмов приходится применять
более упругие амортизаторы, чем для уменьшения шумности.
Поэтому упругость амортизаторов обычно выбирают, руковод-
ствуясь компромиссными соображениями. В случае применения
малоупругих звукоизолирующих амортизаторов взрывостойкость
обеспечивают за счет применения специальных амплитудных
ограничителей.
В качестве вибродемпфирующих материалов широко приме-
няются резина и различные синтетические вещества. Выбор виб-
родемпфирующего материала сопряжен с определенными труд-
ностями. Демпфирующие свойства материалов зависят от ча-
стоты колебаний и от температуры окружающей среды, при
этом в настоящее время практически не существует материалов,
одинаково эффективных во всех нужных диапазонах частот и
в широком диапазоне температур. Поэтому при выборе системы
демпфирования приходится идти на компромиссные решения, не
являющиеся оптимальными. Так, в некоторых случаях приме-
няют демпфирующие устройства, состоящие из двух или не-
скольких материалов, каждый из которых оказывается наиболее
эффективным в своем ограниченном диапазоне частот. Это,
в свою очередь, неизбежно приводит к увеличению веса демпфи-
рующего устройства.
Таким образом, демпфирующие свойства устройства возра-
стают с увеличением его веса; в то же время желательно, чтобы
вес устройства был минимальным. В настоящее время в ино-
странных флотах считают допустимым иметь вес демпфирую-
щего устройства доходящим до 25—33% от веса амортизируе-
мой конструкции.
На американских атомных подводных лодках «Барб» и
«Пермит» для демпфирования легких стальных фундаментов на
частотах ниже 3 кгц используется сополимер поливинилхлорид-
повинилацетата на графитовой основе PVC-PVA. Этот мате-
риал, не реагирующий с водой, изготавливается в виде плиток
размером 300x300x12 мм и наносится на фундамент демпфи-
руемого механизма с помощью эпоксидного клея. Материал
наиболее эффективен при температуре 15—24° С. Он может на-
носиться даже на наружные поверхности, обращенные к воде,
114
за исключением мест, подвергающихся обтеканию водяным
потоком.
Для демпфирования тяжелых стальных фундаментов на ча-
стотах свыше 2,5 кгц разрабатываются напряженные слоистые
конструкции с внутренним слоем из прессованного стеклово-
локна и с наружной стальной пластиной, прикрепляемой к фун-
даменту [29].
Борьба с проникновением воздушного шума за пределы кор-
пуса подводной лодки осуществляется либо путем его поглоще-
ния, либо путем отражения от корпуса внутрь отсека.
Полное поглощение звука может быть достигнуто в случае
покрытия внутренней части корпуса свинцовой изоляцией тол-
щиной около 5 мм. Для отражения звука корпус может быть
покрыт слоем стеклянной ваты толщиной несколько дециметров.
Полная звукоизоляция дизельных отсеков была осуществлена
уже 10 лет назад на подводных лодках «Дартер» (1956 г.) и
«Барбел» (1957—1959 гг.) [13].
С этой же целью на подводных лодках типа «Трешер» при-
менен специальный стеклопластик. Толщина этого покрытия
в некоторых отсеках достигает 76 мм. Покрытие крепится к кор-
пусу с помощью приваренных металлических шпилек. Однако,
как выяснилось в процессе эксплуатации, в местах приварки
шпилек иногда образуются трещины, поэтому на подводных
лодках более поздней постройки типа «Этен Аллен» шпильки
стали приклеивать к корпусу с помощью эпоксидной смолы.
Разработаны и еще более совершенные способы крепления шпи-
лек [29]. Для обеспечения достаточной эффективности звукопо-
глощения при нанесении покрытий не должно оставаться ни ма-
лейших щелей.
Отдельные сильно шумящие устройства могут иметь индиви-
дуальные звукопоглощающие экраны из резины или пластмассы.
Звукопоглощающие покрытия могут наноситься также на двери,
люки, переборки погребов, шкафчики и т. п., а также на инстру-
мент [74].
Для получения максимального эффекта, как правило, ис-
пользуется целый комплекс мероприятий по обесшумливанию
подводных лодок.
§ 22 МЕРЫ ПО СНИЖЕНИЮ УРОВНЯ ШУМОВ
И СОБСТВЕННЫХ ПОМЕХ НАДВОДНЫХ КОРАБЛЕЙ
Интенсивные шумы, создаваемые надводными кораблями,
являются полезным сигналом для шумопеленгаторов противника
и помехой для гидроакустических станций, расположенных на
самом корабле. Причины возникновения этих шумов уже были
рассмотрены ранее. Все возрастающие скорости надводных ко-
раблей неизбежно приводят к росту уровня шумов.
5*
115
Развитие подводных лодок, объектов наблюдения противо-
лодочных кораблей, требует повышения эффективности действия
гидроакустических средств надводного корабля: увеличения
дальности их действия и возможности вести наблюдения при
движении корабля с большей скоростью, т. е. снижения уровня
собственных помех. Эти два противоречивых обстоятельства тре-
буют осуществления эффективных мероприятий по снижению
шумности кораблей, о некоторых из которых сообщается на
страницах зарубежной печати.
За последние годы высказывается ряд предложений о созда-
нии специальных экспериментальных кораблей, предназначен-
ных для изучения возможностей снижения уровня шумов. Один
из таких кораблей — «Гловер», строившийся по заказу ВМС
США, спущен на воду в 1965 г. и получил условное обозначение
AGDE-1. Этот корабль водоизмещением 3426 г, длиной 124 ж и
шириной 13,4 м предназначается для проведения исследований
в области противолодочной обороны [29]. К числу таких иссле-
дований относят исследования по разработке оптимальной
формы и конструкции обтекателей гидроакустических антенн и
по выбору места их размещения. Так, на корабле предпола-
гается установить акустическую антенну гидролокатора даль-
него действия у форштевня, поместив ее в обтекатель, изготов-
ленный из пластмассы, а также буксируемую гидроакустиче-
скую станцию, контейнер с акустической антенной, который бу-
дет убираться в шахту и днище корабля, а не опускаться
с кормы. Корпус корабля спроектирован и изготовлен с учетом
новейших достижений гидродинамики, проведено тщательное
изучение шумности корабля и его механизмов. В ходе •исследо-
вания на корабле могут заменять оружие, технические средства
и механизмы, вплоть до главных двигателей. Все это, как ожи-
дают, позволит определить наиболее оптимальный состав воору-
жения, оборудования и механизмов, наиболее приемлемый
с точки зрения снижения шумности. В первоначальном варианте
на корабле предполагают разместить унифицированную уста-
новку для запуска зенитных ракет «Тартар» и противолодочных
ракето-торпед «Асрок», противолодочных торпед и телеуправ-
ляемых противолодочных вертолетов [23].
Одновременно исследуются возможности создания противо-
лодочных кораблей необычной формы, преимуществом которых,
как предполагают, будет значительно меньший уровень шумов.
Снижение шумности ожидается также за счет удаления винта
от поверхности и расположения его в зоне, в которой возмуще-
ние потока, вызванное движением корпуса, будет невелико. Не-
значительные размеры выступающей над водой части корпуса
будут способствовать снижению уровня шумов обтекания.
По утверждениям зарубежной печати, в настоящее время
разрабатываются варианты кораблей необычной формы [73]:
116
Опытовый эскортный корабль, у которого погруженная часть
представляет комбинацию двух тел вращения, соединенных
между собой, а над поверхностью воды выступает легкая и уз-
кая надстройка, изображен на рис. 52, а. В носовом теле вра-
щения предполагается разместить гидроакустическую аппара-
туру, в кормовом — главные механизмы. Объем обоих этих тел
составляет около 2/з полного водоизмещения корабля.
Корабль акулообразной формы (рис. 52, б) представляет со-
бой полностью погруженное в воду акулообразное тело, увен-
чанное узкой надстройкой, частично выступающей над водой.
Рис. 52. Предполагаемый
вид корпуса кораблей не-
обычной формы: а — опы-
товый эскортный корабль;
б — корабль акулообразной
формы; в — полупогружен-
ная подводная лодка.
Этот тип корабля является переходным между надводным ко-
раблем и подводной лодкой и по своим гидродинамическим
свойствам и внешнему виду мало отличается от подводной
лодки, всплывшей «под рубку» (рис. 53).
Дальнейшим развитием этой идеи может служить проект по-
лупогруженной подводной лодки (рис. 52, в). У этого корабля
корпус имеет форму тела вращения и заглубляется от поверх-
ности воды примерно на два диаметра корпуса. Надстройка
отсутствует и заменяется специальной трубой, выведенной на по-
верхность и служащей для приема воздуха и удаления выхлоп-
ных газов, а также для установки телевизионной и радиолока-
ционных головок. У такого корабля при движении практически
полностью отсутствует шум, возникающий на границе раздела
воздух — вода.
Принимаются специальные меры для снижения уровня шу-
мов, создаваемых гребными винтами. С этой целью на некото-
рых кораблях устанавливаются специальные обесшумливающие
устройства. Например, на французском противолодочном катере
117
«Ла Комбаттант» установка этого устройства, как считают,
обеспечит катеру защиту от подрыва на минах с акустическими
взрывателями, а также существенно улучшит условия работы
гидроакустических средств [64].
За последние годы появляется значительный интерес к водо-
метным движителям для надводных кораблей, которые в неко-
торых случаях могут прийти на смену винтам. Так, в экспери-
ментальных целях водометный движитель был установлен на
американском эскадренном миноносце «Уитек». Установка но-
вого движителя привела к некоторому снижению скорости хода
Рис. 53. Предполагаемый внешний вид корабля ПЛО ВМС США акулооб-
разной формы: а — надводная часть; б — подводная часть.
корабля, которое, как утверждают, компенсируется существен-
ным уменьшением уровня собственных помех. В результате
этого эффективное гидроакустическое наблюдение оказалось
возможным при скорости, превышающей скорость, при которой
возможно наблюдение с кораблей, имеющих винты [58].
Водометный движитель установлен и на экспериментальном
корабле «Гловер».
Детальные исследования шумности катера с винтовым и ги-
дрореактивным движителями были проведены в США [117]. Ре-
зультаты исследования показали, что в области низких частот
(25—250 гц) основным источником шума катера с гидрореак-
тивным движителем являлись механизмы. В этом диапазоне на-
блюдался пик на частоте, совпадающей с частотой вращения
двигателя и ее гармониками и с частотой вращения ротора
помпы движителя. Источником шумов катера с винтовым дви-
жителем в этом же диапазоне был также двигатель и вспомога-
тельные механизмы (шум взрывов в цилиндрах, вращение дета-
лей машин, водяной помпы, генераторов, привода и т. п.). На
более высоких частотах для обоих катеров характерен гидроди-
намический и кавитационный шум.
ИЗ
Для определения уровня шумов, создаваемых во время дви-
жения катера гидродинамическим возбуждением, кавитацией и
другими причинами, не связанными с работой механизмов и
двигателей, катер с винтовым движителем был поставлен на
якорь, винт разобщен с валом и замерялась шумность при ра-
боте двигателя со скоростями, соответствующими скоростям, на
которых производились измерения на ходу (4, 8, 17 и 26 узл.).
Результаты измерений показали, что подводный шум при этом
в большей части спектра
частот уменьшился на
10—30 дб.
Графики, полученные в
результате измерений (рис.
54), показывают, что при
средней 'и большой ско-
рости хода катер с гидро-
реактивным движителем
имел уровень шумов при-
мерно на 20 дб ниже, чем
катер с винтовым движите-
лем. Для обоих катеров
наблюдается типичный рез-
кий спад уровня шумов
в высокочастотной части
спектра примерно 12 дб на
ОКТаву. Как показывают Рис. 54. Нормализованные кривые уров-
расчеты, при такой раз- ней ШУМ0В для катера с винтовым (/) и
r r r с гидрореактивным (2) движителями.
нице в шумности катер F F v ;
с винтовым движителем мо-
жет быть обнаружен с помощью шумопеленгатора на расстоя-
нии в несколько раз большем, чем катер с гидрореактивным
движителем.
Предполагают, что гидрореактивные движители смогут найти
дальнейшее применение на надводных кораблях, в том числе и
на кораблях на подводных крыльях и на воздушной подушке,
а может быть смогут использоваться на подводных лодках.
Работающие корабельные силовые установки (дизели и глав-
ные турбины) представляют собой колебательные системы,
совершающие вынужденные и собственные колебания,— вибра-
цию с определенными частотами. Эта вибрация делится на «низ-
кочастотную» (до 12 гц), связанную с крутильными и продоль-
ными колебаниями гребного вала и дизелей и колебаниями пер-
вой и второй гармоник по отношению к числу оборотов гребного
вала турборедукторных агрегатов, и «высокочастотную» (от 30
до 50 гц), связанную с колебаниями деталей турбин и редукто-
ров с частотами, соответствующими третьей и более высоким
гармоникам [75].
119
Режим вынужденных колебаний определяется интенсивностью
сил внешнего возбуждения и степенью совпадения частоты воз-
буждающих сил с частотой собственных колебаний системы. Как
известно, каждая колебательная система имеет одну или не-
сколько частот собственных колебаний, наличие которых харак-
теризуется так называемой «отзывчивостью» системы на эти
внешние колебания.
Одной из разновидностей собственных помех, существенно
влияющих на эффективность своего гидроакустического наблю-
дения, является вибрация корпуса корабля в результате взаимо-
действия на корпус основных сил, возникающих:
из-за недостаточной балансировки машин и передающихся на
корпус корабля через различные конструктивные элементы;
в результате работы вспомогательных механизмов и вызы-
вающих возникновение структурного шума корпуса;
в результате работы винтов и распространяющихся непосред-
ственно через корпус, а также через воду;
при обтекании корпуса потоками воды;
в результате совокупного воздействия ветра и волн и вызы-
вающих вибрацию корпуса на низких частотах.
Борьба с помехами, вызванными вибрацией, может вестись
следующими путями:
1) устранением источников сил, возбуждающих вибрацию,
например, тщательной балансировкой вращающихся деталей
механизмов и машин, выбором места расположения механизмов,
наиболее благоприятным с точки зрения уменьшения шумообра-
зования, виброизоляцией механизмов;
2) изменением массы и упругости колебательной системы.
При этом стремятся сделать резонансную частоту колебательной
системы не совпадающей с частотой возбуждающих колебаний;
3) использованием сил трения. При этом осуществляется ча-
стичный переход кинетической энергиии в тепловую. Примером
использования сил трения является применение вибродемпфи-
рующих покрытий, в которых происходит поглощение колеба-
тельной энергии вследствие внутреннего смещения частиц [29].
Для вибродемпфирования механизмов широко применяются
различные синтетические материалы. Так как в настоящее время
не существует вибродемпфирующих материалов, эффективно ра-
ботающих в широком диапазоне частот, демпфирование меха-
низмов может осуществляться путем комбинации нескольких ма-
териалов, каждый из которых достаточно эффективен в некото-
ром ограниченном диапазоне частот. Так, с целью устранения
вибрации легких стальных плит (толщиной до 32 мм)у являю-
щихся фундаментами некоторых механизмов, могут применяться
два различных материала, один из которых обеспечивает гаше-
ние колебаний с частотами до 3 кгц, другой — гашение колеба-
ний с более высокими частотами.
120
На кораблях ВМС США для демпфирования частот выше
3 кгц применяют ML-D-2, полиамидно-эпоксидный материал с пе-
ском в качестве основы. Этот материал, изготавливаемый в виде
плиток размером 300x300x16 мм, наклеивается на заглушае-
мый фундамент с помощью эпоксидного клея. Материал обла-
дает весьма существенным недостатком: он не стоек к воде и
маслам. Поэтому при применении в корабельных условиях
приходится защищать его специальным синтетическим покры-
тием.
Для демпфирования легких стальных фундаментов на часто-
тах ниже 3 кгц применяют уже упомянутый материал PVC-PVA.
В настоящее время ведутся исследования, направленные на
смещение рабочего диапазона в область более низких темпера-
тур, а также на создание более дешевого материала [29].
Для борьбы с воздушным шумом в некоторых случаях при-
меняют так называемое «капсулирование» двигателей и механиз-
мов, т. е. заключение их в индивидуальный кожух с возможно
большим шумопоглощением. По сообщениям печати, некоторые
фирмы уже поставляют дизели, помещенные в звукоизолирую-
щие капсулы. В машинных отделениях наносятся звукопогло-
щающие покрытия из распыляемого асбеста. Осуществляется
амортизация механизмов и связанных с ними трубопро-
водов.
Для уменьшения шума в судовых системах вентиляции сото-
вые глушители обклеивают войлоком. Применяются и другие
меры борьбы с воздушным шумом [66].
Существенную помеху работе корабельной гидроакустической
аппаратуры оказывает вибрация обтекателя акустической ан-
тенны, возникающая под воздействием гидродинамических сил,
вызванных встречными потоками воды. Для борьбы с такой виб-
рацией приходится применять специальные меры.
Так, в ВМС США обтекатели гидроакустических антенн не-
которых гидролокаторов демпфируются с помощью слоя из песка,
покрытого полиуретановой пленкой, защищающей его от размы-
вания (материал ML-D-2), толщиной 12—15 см, расположен-
ного в нижней части обтекателя. Однако опыт эксплуатации та-
кого материала показал, что вода проникает сквозь защитный
слой и разрушает демпфирующий материал, одновременно вызы-
вая коррозию, а из-за перемещения песка водой — эрозию мате-
риала обтекателя. Для устранения этого нежелательного явления
в США был разработан более эффективный вибродемпфирую-
щий материал для обтекателей ML-SD-15. Этот материал на-
носится на внутреннюю поверхность обтекателя слоем толщиной
около 13 мм путем распыления и имеет следующие преимущества
перед материалом с наполнителем в виде песка:
лучшую эффективность демпфирования;
меньшую стоимость;
121
меньший вес (применение нового покрытия дает экономию
в весе примерно на 1800 кг при демпфировании обтекателя дли-
ной 9 м);
удобство нанесения на обтекатель, особенно на криволиней-
ные поверхности и в промежутки между тесно расположенными
элементами конструкции;
лучшее сцепление с металлическими поверхностями, на кото-
рые наносится материал.
В порядке эксперимента новый материал был применен для
демпфирования обтекателей гидролокаторов SQS-32, установ-
ленных на американских эскадренных миноносцах «Рич» и «Мэк-
кензи» в районе форштевня. Как утверждают, опыт эксплуата-
ции этих обтекателей подтвердил высокие демпфирующие каче-
ства ML-SD-15[29].
§ 23. КОНТРОЛЬ ШУМНОСТИ И ИЗМЕРЕНИЕ УРОВНЯ
СОБСТВЕННЫХ ПОМЕХ
В связи с важностью проблемы контроля уровня собственных
акустических помех этому вопросу в иностранных флотах уде-
ляется значительное внимание.
Контроль шумности и ее прогнозирование начинается, как
правило, с момента проектирования и постройки кораблей и под-
водных лодок. Для этой цели во многих зарубежных научно-ис-
следовательских организациях и фирмах существуют специаль-
ные отделы и лаборатории. Так, в лаборатории гидродинамики
крупнейшего американского опытового бассейна Тейлора имеется
отдел акустики с секцией шумов, изучающий шумы лодок и над-
водных кораблей, разрабатывающий специальную аппаратуру и
измерительные приборы и т. д. В этом же бассейне секция шу-
мов имеется и в отделе гидродинамики.
В бассейне, в частности, производится экспериментальное
исследование обтекателей гидроакустических антенн. Модели
обтекателей, установленные на специальные буксировочные те-
лежки, рассчитанные на скорость 40 и 60 узл. (74 и 111 км/час)^
протягиваются в бассейне. В ходе испытаний определяются про-
пульсивные характеристики, измеряются силы и моменты, дей-
ствующие на модель, измеряются гидродинамические шумы, воз-
никающие на поверхности движущегося обтекателя [29].
В состав лаборатории корабельных механизмов ВМС США
(ранее называвшейся испытательной станцией корабельных ме-
ханизмов) также входит специальная лаборатория обесшумлива-
ния кораблей.
Большие работы по исследованию методов обесшумливания
кораблей проводятся в Государственном опытовом бассейне
Швеции в Гетеборге, в том числе и исследования шумности, соз-
даваемой соосно расположенными гребными винтами, винтами,
122
помещенными в насадки, и специальными малошумными вин-
тами. В бассейне осуществляются также всесторонние теоретиче-
ские и экспериментальные исследования явления «пение» греб-
ных винтов. Изучается масштабный эффект при различных гид-
роакустических испытаниях [41].
Для измерения уровней шумов уже построенных кораблей и
подводных лодок используются многочисленные гидроакустиче-
ские контрольные станции. Так, например, при бассейне Тейлора
имеется специальная плавучая гидроакустическая контрольная
станция, получившая название MONOB-1 (Mobile Noise Barge —
подвижная шумовая баржа). Эта станция переоборудована из
водолея и имеет следующие размерения: длину 65,4 м, ширину
10,7 м, осадку 3,4 м. На станции оборудованы три лаборатории
и жилые помещения, предназначенные для 11 человек команды
и 19 научных работников.
Станция доставляется в район проведения исследований на
буксире. Небольшой подвесной двигатель мощностью 220 л. с.
(160 кет) обеспечивает самостоятельное перемещение станции
в этом районе со скоростью, не превышающей 4 узл. (7,5 км/час).
Специальный обесшумленный дизель-генератор мощностью
60 кет обеспечивает освещение судна и питание лабораторного
и вспомогательного оборудования. В состав лабораторного обо-
рудования входят: 3 семиканальных и 2 четырнадцатиканальных
магнитофона; 48 самописцев для записи уровней шумов; 40 филь-
тров с полосой в 7з октавы каждый; 112 семиканальных вычис-
лительных и печатающих установок; различные калибраторы,
усилители, осциллографы, а также гидроакустические дальномер
и телефон.
Лаборатория должна использоваться в достаточно обширных
глубоководных районах, не имеющих сильных течений и удален-
ных от обычных судоходных путей и других возможных источ-
ников посторонних шумов [29].
Для контроля шумности подводных лодок, находящихся
в строю, в состав каждого соединения американских подводных
лодок включается специально оборудованное гидроакустическое
контрольное судно малого водоизмещения.
Применяются и стационарные гидроакустические контроль-
ные станции. Так, на верфи в Портсмуте (США) измерительной
аппаратурой оборудован специальный пирс длиной 122 м, выне-
сенный за пределы военно-морской базы в район с незначитель-
ными посторонними шумами. Вблизи пирса были проведены спе-
циальные дноуглубительные работы [55].
Вокруг подводной лодки, ошвартовавшейся у пирса, разме-
щаются пять измерительных гидрофонов. Затем поочередно
включаются различные механизмы подводной лодки и реги-
стрируются уровн'и шумов, создаваемых при их работе. Весь
цикл измерений шумов дизель-электрической подводной лодки
123
занимает один день. При измерении шумов атомных подводных
лодок исследуют до 150 различных механизмов и производят до
2000 различных замеров. Полный цикл измерений может занять
несколько дней.
В ходе контроля шумности подлежат измерениям:
уровни воздушных шумов внутри отсеков подводной лодки;
амплитуды вибрации фундаментов машин, механизмов и кор-
пусных конструкций;
интенсивность ближнего акустического поля около каждого
механизма вне корпуса подводной лодки;
интенсивность дальнего акустического поля на удалении не-
скольких сот метров от подводной лодки во время ее маневри-
рования на ходу;
уровень собственных шумов, воспринимаемых гидроакустиче-
ской аппаратурой подводной лодки.
Анализируя и сопоставляя результаты измерений, делают вы-
воды, позволяющие судить о следующих важных показателях,
характеризующих состояние шумности подводной лодки:
1) соответствия уровней замеренных шумов определенным
нормативным требованиям (при шумности, превышающей 72 до,
выход подводной лодки в море не допускается [4]);
2) степень демаскирования подводной лодки шумами;
3) изменение уровня шумности по сравнению с предыдущими
измерениями;
4) различия в шумности с аналогичными механизмами, уста-
новленными на других подводных лодках;
5) наличие в спектре шумов подводной лодки отдельных ха-
рактерных резких выбросов и т. д. [78].
Работы по замерам и анализу уровней шумов производятся
и с надводными кораблями. Так, например, было произведено
тщательное исследование шумности канадского эскортного ми-
ноносца «Нипигон». Мероприятия по изучению уровня шумов
осуществлялись в ходе так называемой операции «Малый шум».
Для проведения испытаний в нижнем течении реки Св. Лаврен-
тия был оборудован специальный полигон: выставлены два буя,
обозначающие начало и конец пути корабля, на котором произ-
водились измерения, и на определенном месте относительно этого
пути был выставлен третий буй с прикрепленным к нему нена-
правленным измерительным гидрофоном. Таким образом, в ходе
измерений корабль всегда проходил на заданных расстояниях
от измерительного гидрофона. Результаты измерения записыва-
лись на магнитную ленту на специально оборудованном катере,
стоящем на якоре в 30 м от измерительного буя.
После проведения и анализа первой серии замеров корабль
вернулся на верфь в г. Сорел, где была произведена регулировка
его машин, обеспечивающая максимальную степень обесшумли-
вания. После этого весь цикл измерений повторяли в однородных
124
условиях, и в случае необходимости принимали меры по даль-
нейшему обесшумливанию корабля [32].
Примерно аналогичным образом был организован замер шу-
мов катера с гидрореактивным движителем для сравнения его
шумности с шумностью катера, имеющего обычный гребной
винт [52].
Для измерения уровней гидродинамических шумов необхо-
димо, чтобы движение исследуемого устройства происходило
с большой скоростью при полном отсутствии работающих меха-
низмов, которые неизбежно явились
бы источником посторонних шумов.
Решение этой задачи достигается
использованием при экспериментах
устройств, погруженных на значитель-
Рис. 55. Блок-схема автоматического частот-
ного 7з-сжтавного анализатора шумов,
/—устройство магнитной записи; 2 — '/з-октавные
' фильтры; 3 — переключатель; 4 — логарифмический
усилитель; 5 — построитель графика.
ную глубину и всплывающих под воздействием положительной
плавучести. Так, например, при исследованиях нового материала
для обтекателей гидроакустических антенн, обладающего низ-
кой чувствительностью к шумам, создаваемым гидродинамиче-
ским потоком, исследуемое устройство всплывало с глубины
150 м, развивая максимальную скорость 36 узл. (около
67 км/час). При этом гидродинамический шум оказывался прак-
тически «чистым» от шумов другого происхождения [52].
Любые исследования шумности производятся с применением
специальной измерительной и обрабатывающей апаратуры. Ис-
следуемые шумы, принятые с помощью измерительных гидрофо-
нов, записываются на магнитную ленту. Для их обработки и
анализа в США был разработан автоматический частотный Уз-
октавный анализатор (рис. 55). Прибор позволяет осуществлять
анализ в полосе частот от 10 гц до 10 кгц, разбитой с помощью
фильтров на 31 полосу шириной Уз октавы каждая. При обра-
ботке магнитофонной пленки происходит выдача данных об
125
уровне измеренных шумов в 31 фиксированной по частоте
точке, соответствующей средней частоте полосы пропускания
каждого 7з-сжтавного фильтра.
Результаты анализа автоматически наносятся на график, по
вертикальной оси которого откладывается уровень шумности
в децибелах относительно 2- Ю-4 дин/см2, а по горизонтальной—
средние частоты полос
пропускания 7з-октавных
фильтров. Переключатель
последовательно подклю-
чает выход каждого из
фильтров к регистратору
для записи уровня шумов
и одновременно обеспечи-
вает перемещение записи
в соответствующую точку
оси частот. После полно-
го цикла переключений
на график наносится
спектр шума в диапазоне
частот прибора.
В ходе анализа ре-
зультатов измерений при-
ходится производить тру-
доемкую статистическую
обработку большого чис-
ла таких графиков сила-
ми квалифицированных
специалистов. Так, под-
готовка вручную данных,
полученных только при
измерении ближнего по-
ля подводной лодки, для
последующего ввода их
в электронную вычисли-
тельную машину занимает
около трех дней. Для ускорения обработки данных в последние
годы применяются средства автоматизации этого процесса
(рис. 56). Так, например, анализатор спектра может сочетаться
с перфоратором. В этом случае данные анализа одновременно
с изображением их в виде графика наносятся на перфокарту.
Предварительно на перфокарту наносятся исходные данные,
характеризующие отображенное на ней измерение: полное кодо-
вое обозначение измерения, номер записи на магнитную пленку,
номер измерительного гидрофона, уровень усиления шума при
записи для приведения его к единому уровню, код обработки
данных вычислительной машиной и т. п.
Рис. 56. Блок-схема устройства для автома-
тической обработки данных контроля шум-
ности подводных лодок.
1 — устройство магнитной записи; 2 — 1/3-октавный
анализатор шумов; 3 — фильтры; 4 — логарифми-
ческий усилитель; 5 — построитель графика; 6 —
цифровой вольтметр; 7 — перфоратор; 8 — устрой-
ство преобразования данных; 9 — электронная ци-
фровая вычислительная машина; 10 — печатаю-
щее устройство.
126
К выходу логарифмического усилителя анализатора спектра
параллельно регистратору подключается цифровой вольтметр,
который и управляет работой перфоратора, обеспечивая нанесе-
ние на перфокарту уровней шумов в каждой из 31 анализируе-
мых точек.
Закодированные таким способом данные специальным уст-
ройством переносятся с перфокарт на перфоленту, которая затем
пропускается через электронную вычислительную машину, про-
изводящую их статистическую обработку. Скорость машинной об-
Рис. 57. Типовой график выдачи обработанных данных замера шумности.
работки графиков составляет около 100 графиков в час, в то
время как при ручной обработке на каждый график требовалось
затрачивать около 20 мин. Быстродействующее печатающее уст-
ройство, установленное на выходе электронной вычислительной
машины, позволяет печатать данные анализа в виде типовых
графиков (рис. 57) со скоростью около 80 графиков в минуту.
Данные об уровне шума в децибелах отображаются на этом гра-
фике в цифровом виде с ошибкой, не превышающей ±1 дб.
Предполагается, что эта величина может быть уменьшена. Если
измеряемый шум механизма регистрировался на фоне шумовой
помехи другого происхождения и разница в уровнях измеряемого
шума и помехи была менее 10 дб, на графике отображается
также поправка, позволяющая учесть влияние фона. Если изу-
чаемый шум на 10 дб и более превышает уровень шумового
фона, такая поправка не вводится [78].
Автоматизация процесса обработки результатов измерения
шумности значительно ускоряет получение интересующих ре-
зультатов и экономит большое количество квалифицированного
инженерного труда.
127
При измерении уровня собственных помех, воспринимаемых
корабельными гидроакустическими станциями кругового обзора,
в ВМС США применяются специальные рекордеры кругового
обзора типа PR-2, позволяющие отобразить на графике в поляр-
ных координатах характеристику направленности шумов [29].
Приведенные в настоящей главе данные свидетельствуют
о значительном внимании, уделяемом в настоящее время за ру-
бежом вопросам изучения происхождения шумности кораблей
и подводных лодок, снижения уров'ня шумов и контроля этого
уровня.
Глава IV
ГИДРОАКУСТИЧЕСКИЕ СРЕДСТВА
ДЛЯ ОКЕАНОГРАФИЧЕСКИХ
И ГИДРОЛОГО-АКУСТИЧЕСКИХ ИССЛЕДОВАНИЙ
§ 24. АМЕРИКАНСКАЯ ПРОГРАММА
ОКЕАНОГРАФИЧЕСКИХ ИССЛЕДОВАНИЙ
В связи со все возрастающим интересом к исследованиям
мирового океана, вызванным, в первую очередь, подготовкой
к новой агрессивной войне, в Соединенных Штатах была разра-
ботана и осуществляется в настоящее время 10-летняя программа
океанографических исследований. Эта программа, получившая
условное наименование TENOC-61 (Ten years ot Concentrated
Oceanographic Research — десять лет концентрированных оке-
анографических исследований), в своем первоначальном виде
была принята в 1961 г. и должна была проводиться в течение
1961 —1970 гг. О направленности этой программы достаточно
убедительно свидетельствует следующая цитата, в которой про-
водятся аргументы Комитета по океанографии в пользу приня-
тия плана: «Круг вопросов, связанных с боевыми действиями на
море, огромен. Мы не сможем плавать под водой с достаточной
точностью до тех пор, пока значительно не расширится круг на-
ших знаний об океанах. В равной степени мы не будем в состоя-
нии эффективно обнаруживать подводные лодки до тех пор, пока
мы не будем знать об океанских глубинах гораздо больше, чем
мы знаем в настоящее время» [77].
Для руководства исследованиями в области океанографии
был создан Межведомственный комитет из представителей 15
учреждений, занимающихся океанографическими исследовани-
ями, возглавляемый помощником военно-морского министра.
В составе военно-морского министерства организован комитет
планирования океанографических исследований, возглавляемый
начальником океанографического управления ВМС.
128
С принятием программы резко возросли ассигнования на оке-
анографические исследования. Так, например, если до принятия
программы, в 1959 г., на эти цели было выделено 32 млн. долл.,
то в 1965 г. ассигнования возросли до 138 млн. долл. В целом
только в 1963—1970 гг. предполагается израсходовать около
2,3 млрд. долл. [50].
Все исследования, предусмотренные десятилетней програм-
мой, делятся на пять основных проблемных областей, каждая из
которых интересует ВМС с точки зрения обеспечения действий
подводных лодок и противолодочной борьбы,— физические свой-
ства и движение моря, взаимодействие океана и атмосферы,
биологические свойства моря, происхождение и структура океан-
ского дна, видоизменения моря.
Исследования этих вопросов должны способствовать разви-
тию военно-морской техники и способов ее использования в сле-
дующих основных областях: кораблевождение и морская прак-
тика; ведение боевых действий на море; морское инженерное дело.
Большая часть вопросов, подлежащих изучению в ходе осу-
ществления программы, относится прямо или косвенно к гидро-
акустике, например: распространение акустических волн в воде,
распределение температуры и солености воды с глубиной для
различных районов Мирового океана, изучение слоев скачка и
нанесение их границ на карты, характер морского дна, некоторые
биологические вопросы, характеристики кильватерных струй, со-
здаваемых подводными лодками, изучение физики льда и др.
Исключительно большое внимание уделяется вопросу прогнози-
рования дальности распространения звука в воде. Этот вопрос
изучается в ускоренном темпе. Предполагается, что только на
вопросы, связанные с океанографическим прогнозированием,
к 1968 г. будет израсходовано свыше 2 млн. долл. в год.
В настоящее время уже разработана система прогнозирова-
ния гидролого-акустических и других данных, представляющих
интерес для ведения противолодочной борьбы, получившая на-
именование ASWEPS (ASW Environmental Prediction System —
система предсказания окружающих условий для противолодоч-
ной борьбы). Эта система была создана вне рамок 10-летней
программы и финансировалась по другим статьям бюджета. Бо-
лее подробно эта система будет рассмотрена далее.
Для проведения исследований по программе предполагается
построить исследовательские корабли, плавучие и береговые
лаборатории, разработать новые измерительные приборы, со-
здать большое количество различных глубоководных аппаратов.
Интересно отметить, что колоссальный объем работ, заплани-
рованных программой, и связанные с ее осуществлением боль-
шие затраты, встретили определенное противодействие со стороны
конгресса. Как заявил один из руководителей программы, «кон-
гресс дает разрешение на финансирование океанографических
129
исследований по отдельным частям и от случая к случаю».
Запрашиваемые ежегодные ассигнования существенно сокра-
щаются, что приводит к изменению первоначальных планов. Так,
например, сокращены по сравнению с первоначально планируе-
мыми ассигнования на строительство исследовательских судов.
Чтобы «оживить» интерес конгрессменов к программе, амери-
канская военщина прибегла к своему испытанному козырю —
к ссылке на угрозу со стороны подводных лодок.
В 1963 г. был разработан новый вариант десятилетней про-
граммы. Этот вариант не опубликован, но, по утверждению
печати, в нем значительно больше, чем в первоначальном вари-
анте, уделяется внимания чисто военно-прикладным вопросам и,
в первую очередь, исследованиям, связанным с созданием гидро-
акустических систем дальнего обнаружения подводных лодок [50].
Изучение мирового океана требует накопления, обработки и
анализа большого объема текущей информации. Для выполне-
ния этой работы в рамках осуществления программы был создан
Национальный центр по сбору океанографических данных NODC
(National Oceanographic Data Center), руководство которым
осуществляет начальник гидрографического управления ВМС.
Первоначальная задача центра — в течение пяти лет закончить
оформление всех накопленных исходных океанографических дан-
ных для последующей их машинной обработки. Эти данные по-
зволят разработать программу исследований в интересах ВМС.
Центр должен был полностью развернуть свою работу уже
в 1966 г. [77].
Работы по изучению океанов и морей осуществляют 21 граж-
данские и военно-морские научно-исследовательские лаборато-
рии. Кроме того, ряд промышленных фирм, выполняющих заказы
ВМС, имеет свои собственные океанографические исследователь-
ские учреждения. Иследования в области океанографии ведут
также некоторые университеты.
§ 25. СУДА ДЛЯ ОКЕАНОГРАФИЧЕСКИХ
И ГИДРОЛОГО-АКУСТИЧЕСКИХ ИССЛЕДОВАНИЙ
Обширные гидролого-акустические исследования, проводя-
щиеся в настоящее время в ряде иностранных государств, потре-
бовали создания новых специализированных судов, предназна-
ченных для таких исследований, отвечающих определенным тре-
бованиям и имеющих необходимое оборудование.
Основные требования к современным океанографическим су-
дам были выработаны еще на проходившей в 1952 г. в США
Конференции по океанографическому оборудованию. Конферен-
ция определила основные характеристики «идеального» океано-
графического судна (табл.4) и специфические требования к нему.
В частности, такое судно должно обладать хорошей маневрен-
130
Таблица 4
Основные характеристики судов для океанографических
и гидролого-акустических исследований
Характеристика
Длина, м
Ширина, м
Осадка, м
Водоизмещение, т
Мощность силовой установ-
ки, л. с.
Скорость хода, узлы
Дальность плавания, мили
1 ^-»ч
AGOR-5
«Джеймс
М. Джил
лис» (1961
64,0
11,4
4,6
1370
1000
15,0
8000
о ^
ЯсО
н со
«Атлан
II» (19
64,0
13,4
4,1
ИЗО
1400
12,0
8000
_, Л
г^ о.
~ о
AGOR-
«Индэв
(1964)
72,0
11,8
1560
2x2900
12,0
10 000
CS Tf
О* СО
(^ СП
«OyiHHl
фер» (1
92,3
3800
о
■ я
43 t=*
«Идеал
ное» су
42—49
8,5—10,5
4,5
12—15
10 000
ностью; при лежании в дрейфе в течение длительного времени
оно должно иметь возможность сохранять свое место и поддер-
живать неизменным положение диаметральной плоскости отно-
сительно меридиана; механизмы и машины должны быть пре-
дельно обесшумлены; должна предусматриваться возможность
полного отключения вспомогательных механизмов и кратковре-
менного использования аккумуляторных батарей и т. п. [77].
В соответствии с этими требованиями в США одновременно
с принятием десятилетней программы океанографических иссле-
дований была разработана программа строительства океаногра-
фических судов. Из 45 научно-исследовательских судов, имев-
шихся в США в 1960 г., 30 были признаны устаревшими и под-
лежащими замене. Всего в 1960—1970 гг. намечалось построить
70 различных судов водоизмещением от 200 до 1500 т. Общая
стоимость постройки этих судов достигнет 213 млн. долл. Как
утверждают, переоборудование и модернизация старых судов
оказываются экономически нецелесообразными. Таким образом,
к 1970 г. число научно-исследовательских судов должно быть
доведено до 85 единиц. Строительство 38 судов из этого числа
финансируется ВМС [77].
Предполагается, что наиболее пригодными для ведения
исследований, в том числе и гидроакустических, должны явиться
суда специальной постройки, получившие по американской клас-
сификации обозначение AGOR (всего предполагалось по-
строить одиннадцать таких судов). Характеристики одного из
первых судов этого типа AGOR-5 «Джеймс М. Джиллис» при-
ведены в табл. 4.
В число организаций, осуществляющих исследования на
борту судна, входят: Морская исследовательская лаборатория,
Морская лаборатория электроники, Морская лаборатория гид-
роакустики и др.
131
Судно имеет ряд особенностей, представляющих известный
интерес. Так, например, предусмотрена возможность получения
электроэнергии для питания вспомогательного и лабораторного
оборудования от вспомогательного газотурбинного генератора
при выключенной главной дизель-электрической силовой уста-
новке. Этим обеспечивается снижение уровня собственных шу-
мов при ведении гидроакустических исследований, когда интен-
сивные шумы работающих дизелей могут затруднить ведение
наблюдений. Хотя и газовая турбина является источником шу-
мов, но интенсивность их ниже, чем у дизелей, а основное шумо-
излучение имеет место на более высоких частотах, в результате
чего эти шумы относительно плохо передаются через корпус
судна. В случае необходимости может быть выключена газовая
турбина и тогда освещение и питание исследовательского обору-
дования будут осуществляться от мощной батареи аккумулято-
ров. В целях снижения общего уровня шумов предусмотрена
амортизация и звукоизоляция всех механизмов судна.
Так как океанографические и гидролого-акустические иссле-
дования связаны с опусканием за борт различных измеритель-
ных приборов, судно оборудовано лебедками для двух батитер-
мографов— обычного и электронного, двумя гидрографическими
лебедками и лебедкой для взятия глубоководных проб грунта и
постановки на якорь. Чтобы избежать провисания и перекручи-
вания тросов с оборудованием при лежании судна в дрейфе,
предусмотрено носовое подруливающее устройство, которое по-
зволяет судну во время многочасового лежания в дрейфе удер-
живать свое положение относительно магнитного меридиана.
Судно имеет успокоительные цистерны, которые, как пола-
гают, позволят уменьшить амплитуду качки на 50—60% при
лежании судна в дрейфе. Во время движения судна влияние
качки уменьшается с помощью боковых килей. Эти устройства
значительно повышают мореходность судна и обеспечивают воз-
можность проведения исследований при таком состоянии моря,
при котором исследовательские суда старой постройки работать
не могут.
Для проведения некоторых исследований может использо-
ваться 10-метровая мореходная шлюпка. На борту шлюпки,
в частности, имеется небольшой запас взрывчатых веществ,
предназначенных для проведения исследований, связанных
с изучением условий распространения звука в море.
На борту судна помимо команды из 24 человек могут рас-
полагаться 15 научных работников [77].
Интересно отметить, что по сообщениям американской пе-
чати разработанные проекты постройки судов AGOR признаны
не отвечающими предъявляемым к ним требованиям, и в на-
стоящее время ведется разработка новых проектов таких судов
[57]. Следует также отметить и то, что ассигнования на строи-
132
тельство океанографических судов в 1964 г. были значительно
сокращены [50].
Особое внимание при проектировании и постройке судна
«Атлантис II» было уделено снижению шумности и вибрации.
Для .этого в качестве главной энергетической установки была
выбрана паровая машина. Все главные и вспомогательные ме-
ханизмы установлены на амортизаторах, улучшена звукоизоля-
ция судовых помещений, установлена специальная малошумная
система кондиционирования воздуха.
На судне установлен ряд лебедок для забортной исследова-
тельской аппаратуры. Оборудован погреб для хранения запаса
взрывчатых веществ, используемых при акустических измере-
ниях. Для удержания положения судна во время дрейфа
имеется специальное подруливающее устройство.
Крупное океанографическое судно «Оушнграфер» и однотип-
ное с ним судно «Дискаверер», как утверждают, будут наиболее
совершенными из предусмотренных кораблестроительной про-
граммой, так как предполагается их высокая автоматизация.
Для спуска и подъема исследовательского оборудования, осо-
бенно в условиях бурного моря, в центре корпуса предусмотрен
колодец. Большая площадь отведена под лаборатории [55].
Океанографическое судно «Сервейер» может использоваться
и для производства гидролого-акустических исследований.
С этой целью на нем установлено совершенное гидроакустиче-
ское оборудование. Стыки и пазы обшивки корпуса ниже гру-
зовой ватерлинии сглажены для того, чтобы не вызывать допол-
нительного шумообразования при производстве гидроакустиче-
ских измерений. Судно имеет батитермографическую лебедку и
стрелу для опускания различной измерительной аппаратуры.
Канадское судно AGOR-171 «Индевор» предназначено для
проведения акустических исследований в интересах ведения
противолодочной войны. На нем оборудован погреб для хране-
ния взрывчатых веществ для акустических исследований [30].
Наряду с судами специальной постройки, предназначенными
для проведения гидролого-акустических исследований и других
исследований Мирового океана, в иностранных флотах для раз-
нообразных исследований гидроакустической аппаратуры исполь-
зуются различные переоборудованные корабли и суда.
Несколькими такими судами располагает Лаборатория элек-
троники ВМС США. Для исследований, связанных с изуче-
нием гидроакустической аппаратуры и с условиями работы этой
аппаратуры, лаборатория использует парусную 25-метровую
шхуну «Сельюда», на которой возможно обеспечить макси-
мальный режим тишины, исследовательские суда «Мэрисвилл»
и «Рексбург».
Управление научных исследований и усовершенствований
ВМС США располагает также несколькими подводными
133
лодками, переоборудованными для испытаний гидроакустической
аппаратуры. Одной из таких подводных лодок является «Байа».
На этой подводной лодке установлена экспериментальная гид-
роакустическая аппаратура LORAD (Long Range Antisubma-
rine Detection System — система дальнего обнаружения подвод-
ных лодок), предназначенная для дальнего обнаружения под-
водных лодок. Акустическая антенна этой аппаратуры, имеющая
очень большие габариты, занимает всю носовую часть подвод-
ной лодки.
Одна из старейших подводных лодок, входящих в состав
ВМС США, «Группер» (AGSS-214) водоизмещением 1520 т и
Рис. 58. Подводная лодка «Группер» — плавучая гидроакустическая лабо-
ратория.
длиной 95 м, полностью переоборудована в гидроакустическую
плавучую лабораторию [29]. Уже с 50-х годов она стала исполь-
зоваться для различных испытаний гидроакустической аппара-
туры, которая по мере надобности устанавливалась на нее,
а после проведения испытаний снималась.
В 1958 г. подводная лодка была выведена из числа боевых
кораблей и подверглась коренному переоборудованию, которое
было завершено в 1960 г. Носовой торпедный отсек лодки пере-
оборудовали в лабораторный, удалив торпедные аппараты и
другие боевые средства и разместив вместо них лабораторное
оборудование. В отсеке установили звукоизолированную гидро-
акустическую рубку, оборудовали мастерскую, сделали каюты
для размещения шести научных работников. На месте, прежде
занимаемом одной из главных балластных цистерн, был установ-
лен дополнительный мотор-генератор, необходимый для питания
нового мощного гидроакустического оборудования. Некоторые
изменения внесли и в конструкцию корпуса. Так были переме-
щены или удалены устройства, расположенные в области днища,
что обеспечило подводной лодке возможность покладки на
грунт.
Все регистрирующее и анализирующее лабораторное обо-
рудование, предназначенное для записи и обработки гидроаку-
134
стических сигналов, было выполнено так, что оно присоединя-
лось к любой гидроакустической станции, расположенной на
подводной лодке. В случае необходимости его легко можно
было заменить.
В различных местах корпуса подводной лодки установлено
большое количество гидроакустических антенн (рис. 58). В но-
совой части размещена излучающая антенна направленного
действия, вдоль палубы — три антенны в обтекателях, получив-
шие за свой вид название «плавники акулы». С одного из бор-
тов, вдоль ограждения рубки, установлен длинный ряд частично
экранированных линейных приемников. Наконец, в кормовой ча-
сти палубы расположена крупногабаритная плоская акустиче-
ская антенна, называемая «щитом для афиш».
Помимо этого оборудования на подводной лодке установ-
лены еще две специальные приемные антенны, эхолот и аппара-
тура звукоподводной телефонной связи.
Как утверждают, некоторые из экспериментальных гидроаку-
стических станций, установленных на подводной лодке, явля-
ются настолько мощными, что возникла необходимость в созда-
нии специальной акустической защиты личного состава с тем,
чтобы уровень акустической энергии в жилых отсеках во время
работы станций не превышал допустимого.
Все оборудование плавучей гидроакустической лаборатории
разработано по единому замыслу и используется для выполне-
ния задачи обеспечения исследований гидроакустической аппа-
ратуры. Исследования на подводной лодке осуществляют по
единому плану две организации: Морская исследовательская
лаборатория и Лаборатория гидроакустики ВМС.
Предполагают, что создание такой подводной лодки-лабора-
тории должно не только повысить качество проводимых исследо-
ваний, но и обеспечить некоторую экономию средств за счет
того, что для выполнения подобных задач будут меньше привле-
каться боевые подводные лодки.
§ 26. СУДА ПЛАТФОРМЫ ДЛЯ ГИДРОЛОГО-АКУСТИЧЕСКИХ
ИССЛЕДОВАНИЙ
Для обеспечения исследований, проводимых в соответствии
с десятилетней программой, в США построены специальные
суда-платформы необычной конструкции. Конструкция этих су-
дов позволяет избежать недостатков, свойственных обычным ис-
следовательским судам и затрудняющих проведение гидролого-
акустических исследований. Так, суда обычной постройки в зна-
чительной степени подвержены воздействию качки. При этом
измерительная аппаратура, подвешенная к корпусу судна на
кабель-тросе, подвергается рывкам, которые не позволяют
удерживать аппаратуру строго на заданной глубине, вносят
135
искажения в результате измерении, являются причиной появле-
ния дополнительных акустических помех, приводят к обрыву
троса и к утере аппаратуры. Из-за раскручивания аппаратуры,
Рис. 59. Исследователь-
ское судно - платформа
FLIP: a — в положении
для буксировки; б — при
переходе в рабочее по-
ложение; в — в рабочем
положении.
подвешенной на кабель-тросе, трудно осуществлять направлен-
ное излучение и прием акустических сигналов. Ветровой дрейф
судна и вызванное им и подводными течениями перемещение за-
136
глубленной акустической аппаратуры также приводят к появ-
лению помех и искажают результаты наблюдений. Поэтому воз-
никла необходимость постройки судов, которые были бы прак-
тически не подвержены качке и позволяли бы размещать глубо-
ководную аппаратуру непосредственно на корпусе самого судна.
Еще в 1947 г. в США предлагали использовать для этой цели
подводную лодку, удифферентовав ее так, чтобы она занимала
почти вертикальное положение и над поверхностью оставалась
бы лишь незначительная часть носовой оконечности. Позднее
для этой цели решили создать специальные суда.
Одним из таких судов явилось судно-платформа FLIP (Float-
ing Instruments Platform — плавучая инструментальная плат-
форма), разработанное Научно-исследовательским управлением
ВМС США совместно с Морской физической лабораторией
океанографического института Крипса (рис. 59). Это судно
было спущено на воду в июне 1962 г. [48, 50]. Особенности его
достаточно полно были рассмотрены на страницах печати.
Это судно ведет исследования в Тихом океане. Помимо
основных исследований, оно будет использовано также для
испытания некоторых образцов оборудования для подводных
лодок, для океанографических, биологических исследований и
изучения волнообразования. Стоимость постройки судна соста-
вила около 500 тыс. долл.
Другое специальное судно — SPAR (Seagoing Platform for
Acoustic Research — мореходная платформа для акустических
исследований) разработано Морской физической лабораторией
Океанографического института и Военно-Морской лабораторией
вооружения ВМС США [50, 53]. Это судно также имеет цилин-
дрический корпус диаметром 4,8 м и длиной 108 м. Головная
(верхняя) часть судна имеет сигарообразную форму. Вес конст-
рукции корпуса около 500 т, водоизмещение судна во время бук-
сировки в горизонтальном положении — 1370 т, в рабочем (вер-
тикальном) положении с полностью заполненными балластными
цистернами— 1720 т.
Обшивка корпуса подкреплена Т-образными бимсами и
шпангоутами. Весь корпус разделен водонепроницаемыми пере-
борками на ряд отсеков: балластный, плавучести, дифферент-
ный и стабилизации, свободно заполняемый, аппаратный.
Положение судна изменяется путем заполнения или осуше-
ния цистерны, расположенной в нижней части корпуса. Остой-
чивость судна обеспечивается перекачиванием балласта — мор-
ской воды — между двумя цистернами. Восемь малых цистерн
позволяют обеспечивать стабилизацию в вертикальном положе-
нии. В дополнение к ним имеются шесть свободно заполняемых
цистерн, постоянно сообщающихся с забортной водой.
В носовой оконечности судна, имеющей длину около 21 м,
из которых около 15 м при нахождени судна в рабочем
137
вертикальном положении возвышаются над уровнем воды
(рис. 60), размещено все необходимое оборудование. Эта часть
судна делится на четыре палубы. В первой палубе на стабили-
зированной платформе, всегда сохраняющей горизонтальное
положение и обеспечивающей возможность работы при нахож-
дении судна в любом положении, помещены дизель-генератор,
аккумуляторы и компрессор. Генератор имеет вспомогательное
значение и используется
лишь в случае отсутствия
питания с корабля-обеспе-
чителя.
Во второй палубе нахо-
дятся устройства, обеспечи-
вающие возможность уп-
равления поворотом судна
вокруг вертикальной оси
при нахождении его в ра-
бочем положении, и две
антенны радиопеленгатора,
работающего в диапазоне
300—3000 Мгц (100—10см).
Здесь же размещен анали-
затор оптического устрой-
ства для контроля за вра-
щением корпуса судна.
В следующей, электронной
палубе помещаются гиро-
компас и радиоэлектронное
Рис. 60. Исследовательское судно-плат- оборудование. Стойки всех
форма SPAR в рабочем положении приборов имеют стабилизи-
рованное крепление.
Четвертая палуба рас-
полагается ниже ватерлинии судна, находящегося в рабочем
положении. В палубе установлены насосы и клапаны управле-
ния балластной системой. Специальная система воздуха высо-
кого давления обеспечивает аварийное продувание балластных
цистерн.
Автоматическая система обеспечивает вентиляцию генера-
торного, электронного и насосного отсеков. Электронный отсек
имеет также систему охлаждения оборудования.
В состав оборудования судна входят: вертикальная и гори-
зонтальная решетки гидрофонов, точный высокочастотный ра-
диопеленгатор, гирокомпас, акселерометры, цепочка термисто-
ров, оборудование для измерения волнения.
Оборудование, размещенное вне корпуса, уменьшает возмож-
ность вращения судна вокруг вертикальной оси под воздейст-
вием ветра и волны. Так, кронштейны для гидрофонов, распо-
138
ложенные в нижней оконечности судна, симметрично высту-
пают на 7,5 м от осевой линии в стороны, образуя как бы стаби-
лизирующие лопасти.
Направляющий рельс для установки гидрофонов тянется
вдоль корпуса на протяжении 60 м от его нижней оконечности.
Для разворачивания в случае надобности корпуса судна, на-
ходящегося в вертикальном положении, служит подруливающее
устройство, состоящее из электромотора мощностью 5 л. с. и ре-
версивного гребного винта небольшого диаметра.
В отличие от судна FLIP на борту судна SPAR обслуживаю-
щий и научный персонал не размещается. Управление всеми ме-
ханизмами и приборами судна, а также подача необходимого
электропитания осуществляются с обеспечивающего судна, при-
буксировавшего судно SPAR в районе исследований. Сигналы
управления и электроэнергия с судна-обеспечителя и получае-
мая информация передаются по плавучему кабелю длиной около
900 м. Второе обеспечивающее исследовательское судно-цель
(вероятно класса AGOR) располагается на удалении от 10 до
185 км и излучает гидроакустические и радиосигналы.
Сопоставление результатов приема радио- и гидроакусти-
ческих сигналов позволяет получить данные, характеризующие
условия распространения звука в воде, а также оценить влия-
ние распределения температуры, солености воды и гидростати-
ческого давления на направление распространения акустических
волн и на их затухание.
Информация, поступающая по кабелю на судно-обеспечитель,
записывается в запоминающем устройстве с большим объемом
памяти. Здесь же происходит предварительная обработка полу-
ченных данных.. (Окончательная обработка и статистический ана-
лиз информации осуществляются в Военно-морской лаборато-
рии вооружения.
Стоимость постройки судна составила свыше 747 тыс. долл.
Стоимость оборудования системы дистанционного управления
и судов-обеспечителей увеличила эту сумму почти до миллиона
долларов.
Судно-платформа SPAR предназначается для проведения ис-
следований в Атлантическом океане. Испытания судна, прове-
денные в 1964 г., подтвердили его высокую устойчивость при
волнении. Так, при состоянии моря 4 балла скорость его верти-
кального перемещения не превышала 3 м/сек, а при состоянии
моря 5 баллов амплитуда вертикальной качки была менее 0,3 м.
Начиная с 1957 г. Военно-морская исследовательская лабо-
ратория ВМС США ведет исследовательское проектирование
еще одного судна необычной конструкции — плавучей океанской
станции FORDS (Floating Ocean Research and Development)
[53]. Основным назначением этой станции является всестороннее
исследование на различных глубинах низкочастотных гидроаку-
стических антенн, имеющих большие габариты и вес.
139
К разрабатываемой станции предъявляются следующие ос-
новные требования:
1) минимальная подверженность воздействию волнения моря
в том числе и при штормовых условиях;
2) длительная (до четырех недель) автономная работа;
3) наличие оборудования для подъема и опускания на глу-
бину до 2000 м испытываемого оборудования весом до 450 т;
4) наличие лабораторных помещений и помещений для хра-
нения большого количества электрического кабеля, тросов и
другого вспомогательного оборудова-
ния для глубоководных исследований;
5) низкий уровень собственных шу-
мов;
6) наличие сосредоточенного бал-
ласта, который может быть быстро
отделен без нарушения остойчивости
станции в целом.
Станция состоит из основной водо-
измещающей части, установленной на
ней 90-метровой вышки и выдвижных
стоек с балластом (рис. 61).
Водоизмещающая часть станции
представляет собой рамы — прочный
корпус из отрезков цилиндров диамет-
ром около 6 ж и прочные цистерны.
Внутри корпуса длиной 73 м разме-
щаются жилые помещения, лаборато-
рии, склады, механизмы, источники
питания и т. п. Внутри рамы в колодце
для испытываемого преобразователя
размером 23X45 м размещается подъ-
емно-опускное оборудование. Водоиз-
мещение станции 6500 т, в том числе
около 500 т являются резервной пла-
вучестью для компенсации возвышающейся над поверхностью
моря оконечности вышки.
На прочном корпусе установлена вышка высотой 90 м. Так
как глубина погружения корпуса выбрана равной 75 м (с уче-
том состояния волнения в районе предполагаемого использова-
ния станции — субтропический островной район Антлантиче-
ского океана), в рабочем положении часть вышки около 15 м
будет возвышаться над уровнем воды. На выступающей части
вышки размещаются антенны радиолокационных станций, ра-
диосвязи и другое оборудование.
По углам рамы-корпуса размещаются выдвижные стойки —
трубы диаметром 2—3,5 м и длиной около 50 м. В нижней ча-
сти трубы заполнены балластом. При полностью выдвинутых
Рис. 61. Общий вид плаву-
чей океанской станции
FORDS.
/ — вышка; 2 — подвижные стой-
ки; 3 — подъемно-опускные ус-
тройства; 4 — жилые помеще-
ния; 5 — прочный корпус.
140
трубах высота всего сооружения достигает 137 м. Опускание
труб обеспечивает понижение центра тяжести станции и спо-
собствует сохранению устойчивого равновесия в условиях качки.
Так, по данным испытаний, проведенных на модели в опытовом
бассейне Д. Тейлора, при нахождении корпуса на глубине 75 м
и полностью опущенных трубах, амплитуда вертикальной качки
не должна превышать 0,15—0,30 м, а горизонтальной 0,13—0,50°
на метр высоты волны. Тогда, при наиболее характерном волне-
нии для района: высоте волны 6 ж и длине 150 м, амплитуда
вертикальной качки не должна превышать 0,9, а горизонталь-
ной— 0,8°. Даже при корпусе, находящемся на поверхности, и
полностью опущенных трубах, при тех же условиях, амплитуда
вертикальной качки будет не более 2,4 м, а горизонтальной —
около 5°.
При поднятых трубах и корпусе, находящемся на поверхно-
сти, осадка станции может быть уменьшена до 9 м, что обеспе-
чивает возможность осмотра и ремонта станции в базе.
Иностранные специалисты ожидают, что постройка станции
FORDS и проводимые с ее помощью испытания позволят полу-
чить новые ценные данные о гидролого-акустических свойствах
морской среды.
§ 27. ГИДРОЛОКАТОР С ЭЛЕКТРИЧЕСКИМ СКАНИРОВАНИЕМ
ЛУЧА В ОГРАНИЧЕННОМ СЕКТОРЕ
В некоторых случаях, например при океанографических ис-
следованиях, поиске рыб или других малоразмерных объектов,
оказывается необходимым осуществлять обследование некото-
рого ограниченного по величине сектора. Для этой цели в Анг-
лии был разработан гидролокатор, позволяющий обследовать
заданный сектор путем его одновременного импульсного облуче-
ния и последовательного просмотра при приеме быстро скани-
рующей (качающейся) узкой характеристикой направленности.
Сканирование луча при приеме осуществляется электрическим
путем, без поворота акустической антенны [7, 11, 39].
Опытный образец такого гидролокатора был установлен и
испытан на английском исследовательском судне «Дискавери-2»
в 1958—1959 гг. Он устроен и работает следующим образом
(рис. 62).
Передающий тракт гидролокатора излучает импульсы дли-
тельностью 1 мсек, с частотой заполнения 37 кгц и мощностью
100 вт.
Магнитострикционная приемная акустическая антенна, изго-
товленная из пермендюра, состоит из восьми одинаковых сек-
ционированных приемников. Общие размеры акустической ан-
тенны 156X21,5 см, вес 180 кг. Ширина характеристики направ-
ленности каждого отдельного приемника акустической антенны
141
ьэ
Рис. 62. Блок-схема гидролокатора с электрическим сканированием луча в заданном секторе.
/ — излучатель; 2 —усилитель мощности; 3 — схема формнромния импульса; 4 — гетеродин 37 кгц; 5 — ждущий мультиви-
братор; 5 —индикатор; 7 — генератор 937 кгц; 8 — генератор пилообразной частоты 1,2—1,7 Мгц; 9 — генератор пилообразного
напряжения; 10 — секционированный приемник; // — усилители; /2 — смесители; 13 — фильтры; 14 — задерживающая цепь; 15 —
детекторы.
в горизонтальной плоскости составляет 15°, а для всей антенны
из восьми приемников—1,6°. Ширина характеристики направ-
ленности в вертикальной плоскости—12°. Каждый приемник
соединен со своим каналом, в котором происходит усиление и
преобразование принимаемых сигналов. Все восемь приемных
каналов идентичны. В каждом из них одновременно происходит
двойное преобразование частоты с помощью двух гетеродинов,
общих для всех каналов. Первый гетеродин постоянно выраба-
тывает частоту 937 кгц, которая, смешиваясь в каналах с ча-
стотой сигнала 37 кгц, преобразуется в постоянную разностную
промежуточную частоту 900 кгц. Второй гетеродин вырабаты-
вает частоту, меняющуюся по пилообразному закону в пределах
от 1,2 до 1,7 мгц. Такое двойное преобразование частоты поз-
воляет весьма эффективно избавиться от высших гармоник воз-
никающих в процессе преобразования.
Период изменения частоты второго гетеродина равен или
в целое число раз меньше длительности излучаемой посылки.
Так как именно этот период определяет время сканирования за-
данного сектора, за время существования эхо-сигнала сектор об-
следуется полностью хотя бы один раз. В рассматриваемом
гидролокаторе период изменения частоты второго гетеродина со-
ставлял половину длительности посылки (0,5 мсек), и за время
посылки сектор успевал обследоваться два раза.
Во вторых смесителях приемных каналов из частоты гетеро-
дина вычиталась частота сигнала, равная после первого преоб-
разования 900 кгц. Таким образом поступающий в приемные
каналы эхо-сигнал с постоянной частой 37 кгц после преобра-
зования в каналах стал иметь переменную частоту 300—800 кгц,
меняющуюся по пилообразному закону.
Выход каждого из приемных каналов подключается к своему
ответвлению электрической задерживающей цепи, состоящей из
звеньев фильтров нижних частот. Как известно, при прохожде-
нии сигнала через такую цепь, в него вносится сдвиг фазы, ве-
личина которого зависит от параметров фильтра (в данном слу-
чае они постоянны), и частоты сигнала. При пропускании сиг-
нала, имеющего переменную частоту, через такой фильтр в нем
вводится переменный сдвиг фазы.
Отводы от звеньев задерживающей цепи, к которым под-
ключаются выходы соответствующих приемных каналов, рас-
считаны так, что на средней частоте преобразованного сигнала
сдвиг фаз между каналами оказывается равным 2я рад. На этой
частоте приемная акустическая антенна ведет себя как обыч-
ная линейная база, состоящая из отдельных ненаправленных
приемников. Как известно, ось характеристики направленности
такой базы располагается по направлению нормали к базе, про-
ходящей через ее центр. При отклонении преобразованной ча-
стоты от ее среднего значения задерживающая цепь будет
143
вносить сдвиг фазы отличный от 2я. При этом приемная акусти-
ческая антенна будет представлять собой линейную базу, ском-
пенсированную на определенном направлении в плоскости об-
зора. Направление полной компенсации меняется с изменением
частоты преобразованного эхо-сигнала вследствие соответствую-
щих изменений фазовых сдвигов, вводимых между каналами
звеньями задерживающей цепи. Так как преобразованная ча-
стота меняется по пилообразному закону, направление полной
компенсации будет меняться по этому же закону. Ось макси-
мума характеристики направленности перемещается в плоско-
сти пеленгования от одной границы заданного сектора до дру-
гой, проходя через центр сектора в момент, когда частота пре-
образованного сигнала имеет среднее значение.
Следует отметить, что при компенсации линейной приемной
базы с увеличением угла отклонения оси максимума характери-
стики направленности от направления нормали к базе форма
характеристики ухудшается — характеристика становится шире.
Вследствие этого ухудшается точность пеленгования и разре-
шающая способность гидролокатора по углу. По этой причине
в рассматриваемом образце гидролокатора сканирование осу-
ществлялось в сравнительно ограниченном секторе— 12°.
Из-за конечного числа секций приемной акустической ан-
тенны и ответвлений задерживающей цепи имеет место и конеч-
ное число направлений полной компенсации базы. Характери-
стика направленности в пределах сектора сканирования переме-
щается не плавно, а скачками. Число таких «скачков» равно
числу секций приемной акустической антенны. В данном случае
их восемь. Как полагают, в дальнейшем в пределах сектора
сканирования удастся осуществить двадцать и более скачков и
за счет этого увеличить размеры сектора.
Сигнал с выхода задерживающей цепи поступает после филь-
трации на усилитель с автоматической регулировкой усиления
и детектируется. Огибающая продетектированного сигнала после
видеоусиления подается на индикатор типа В (азимут — даль-
ность), позволяющий одновременно определять две координаты
цели: ее курсовой угол (азимут) и дистанцию до нее. Горизон-
тальная развертка луча (развертка вдоль оси азимутов индика-
тора) осуществляется с помощью генератора пилообразного на-
пряжения. Так как этот же генератор управляет перестройкой
частоты второго гетеродина и тем самым обеспечивает сканиро-
вание характеристики направленности, горизонтальная раз-
вертка луча происходит синхронно и синфазно с перемещением
оси характеристики направленности в пределах обследуемого
сектора. Вертикальная развертка лу^а осуществляется от гене-
ратора развертки, запускаемого в момент излучения очередного
импульса. Период развертки равен времени, необходимому для
того, чтобы излученная акустическая посылка прошла путь до
144
цели, удаленной на расстояние, равное максимальной дальности
действия гидролокатора и вернулась в точку излучения —
приема. Скорость развертки пропорциональна скорости распро-
странения звука в воде. Таким образом луч перемещается по
экрану трубки зигзагообразно — справа налево и снизу вверх.
В момент прихода эхо-сигнала происходит яркостная подсветка
луча. Положение отметки на экране трубки определяет коорди-
наты обнаруженной цели.
Как утверждают, испытания гидролокатора прошли вполне
успешно. С его помощью удалось обнаруживать на фоне ревер-
Рис. 63. Изображение на индикаторе типа В: а — при по-
иске рыбы (обзор в вертикальной плоскости); б — при оп-
ределении профиля морского дна (обзор в горизонтальной
плоскости).
берации малоразмерные цели, например, металлическую сферу
диаметром 18" (457 мм), небольшие косяки рыб и т. п. (рис.
63,а), а также за одну посылку определить профиль дна в районе
наблюдения (рис. 63, б). Дальность действия гидролокатора
составляла 730—910 м.
Как сообщают, в настоящее время ведутся работы по созда-
нию аналогичного гидролокатора, обладающего исключительно
высокой разрешающей способностью. Предполагают, это этот
гидролокатор, работая на частоте 400 кгц и используя прием-
ную акустическую антенну, состоящую из 35 секций, сможет
обеспечить наблюдение в секторе 17°, при разрешающей спо-
собности по углу 0,5° и дальности 15 см. Ожидаемая дальность
действия гидролокатора будет около 100 м [7].
6 Л. Л. Простаков
145
Разновидностью гидролокатора с электрическим сканирова-
нием луча в заданном секторе является гидролокатор с так на-
зываемой многочастотной антенной. Как утверждают, такой
гидролокатор, использующий двухэлементную приемную антенну
и переменную задержку в одном из приемных каналов, ока-
зывается более простым по своей конструкции, чем рассмотрен-
ный выше. Принцип его дейст-
вия заключается в следую-
щем [17].
В гидролокаторе использу-
ются широкополосные преоб-
разователи (отношение верх-
ней границы рабочей частоты
к нижней равно шести). При
этом приемная акустическая
антенна имеет одинаковую
ширину характеристики на-
правленности при работе на
любой частоте, лежащей в
пределах этого диапазона.
Для формирования харак-
теристик направленности по-
стоянной ширины, практически
не меняющейся в широком
диапазоне частот, был предло-
жен следующий метод.
Для линейной приемной
секционированной антенны с
помощью задерживающих це-
пей формируются характери-
стики направленности. На
нижней граничной рабочей ча-
стоте формируется одна ха-
рактеристика. С увеличением
формируемых характеристик и
в плоскости обзора, ширина же
каждой отдельной характеристики сужается. Однако на каж-
дой частоте ширина суммарной характеристики, являющейся
результатом синтеза отдельных ее составляющих, остается при-
мерно постоянной. Направленность на верхней и нижней гра-
ничных частотах отличается при этом не более чем на 10%.
Для этого секционированная приемная антенна соединяется
с несколькими фазовращающими ячейками или линиями за-
держки (рис. 64). Каждая линия задержки вносит соответст-
венно увеличенный фазовый сдвиг. Для нижней граничной
частоты рабочего диапазона сдвиг, вносимый задерживаю-
щими цепями, мал и приемную акустическую антенну можно
Рис. 64. Принцип формирования ха-
рактеристики направленности посто-
янной формы при работе в широком
диапозоне частот.
/ — секционированный приемник; 2 — со-
противления развязки; 3 — линии задержки;
4 — сумматор.
частоты увеличивается число
смещаются оси их максимумов
146
рассматривать как простую линейную акустическую базу, имею-
щую обычную характеристику направленности.
На верхней граничной частоте первая задерживающая цепь
вносит сдвиг фаз между ответвлениями равный я, вторая—2я,
последняя — пп рад., где п — общее число используемых линий
задержки. Благодаря этому при увеличении рабочей частоты
сдвиг фаз, вносимый линиями задержки, приводит к разделению
характеристик направленности в плоскости пеленгования. Оси
максимумов этих характеристик смещены на некоторый угол
друг относительно друга. Отдельные составляющие и суммар-
ная характеристика для верхней граничной частоты показаны
Рис. 65. Характеристики направленности широкополосной
приемной акустической антенны.
составляющие характеристики; суммарная характе-
ристика.
на рис. 65. С дальнейшим увеличением частоты за граничные
пределы в суммарной характеристике появляются провалы и
она начинает распадаться.
Перед суммированием сигналов, снимаемых с линий за-
держки, в них вводится корректировка с тем, чтобы они на всех
частотах оказывались в фазе.
Отмечается, что если указанным способом можно формиро-
вать сравнительно стабильную характеристику направленности
в широком диапазоне частот, вопрос о создании акустических
преобразователей, обладающих высокой чувствительностью
в этом диапазоне останется проблемным.
В рассматриваемом гидролокаторе используется один широ-
кополосный излучатель и два широкополосных приемника, об-
разующих приемную акустическую антенну в виде линейной
базы. Излучаемый сигнал состоит из центральной рабочей
6*
147
частоты /о и двух пар боковых частот fo±fi и f0±3f\, для которых
Л «/о-
Приемный тракт гидролокатора имеет два самостоятельных
канала. В один из них вводится некоторая фиксированная за-
держка, в другом частота принимаемого сигнала с помощью
генератора качающейся частоты преобразуется в частоты fc,
fc±/i и fc±3fi. Период качания частоты генератора равен про-
должительности излучаемого импульса. Поэтому в течение вре-
мени прихода эхо-сигнала, в него последовательно будут
вводиться с помощью электрической задерживающей цепи раз-
личные фазовые сдвиги, соответствующие значениям преобразо-
ванной частоты. Ввод переменного фазового сдвига в один из
двух приемных каналов вызывает эффект, равносильный скани-
рованию характеристики направленности в пределах заданного
сектора. В рассматриваемом случае ось максимума характери-
стики направленности принимает в плоскости обзора последо-
вательно пять фиксированных положений.
Сигналы в приемных каналах детектируются и после филь-
трации и перемножения подаются на индикатор.
Более сложная схема у гидролокаторов мультипликативной
системы со сканированием луча. Эти гидролокаторы имеют по-
вышенную разрешающую способность. В настоящее время они
находятся в стадии экспериментального изучения [7, 11].
§ 28. ПРИБОРЫ ДЛЯ НЕПОСРЕДСТВЕННОГО ИЗМЕРЕНИЯ
СКОРОСТИ РАСПРОСТРАНЕНИЯ ЗВУКА В МОРЕ
Во всех случаях, когда требуется быстро и непрерывно опре-
делять скорость звука в значительном диапазоне глубин для
получения зависимости распределения скорости звука от глу-
бины, используются приборы, позволяющие производить непо-
средственное измерение и регистрацию скорости звука в море.
За последние 10—15 лет было разработано несколько образ-
цов таких приборов. Все они работают по принципу циклических
скоростемеров. Излучаемые приборами короткие импульсы с кру-
тыми фронтами проходят в воде строго фиксированный путь и
после прихода в приемный тракт используются для синхрони-
зации цепи, вырабатывающей очередные излучаемые импульсы.
Благодаря этому, частота следования излучаемых импульсов
оказывается функцией скорости распространения звука в воде.
Зависимость между частотой повторения импульсов f и време-
нем прохождения пути L звуком, имеющим скорость с, выра-
жается формулой;
148
Входящий в формулу член t характеризует задержки им-
пульса во времени, вносимые электронными цепями и электро-
акустическими преобразователями. Эти задержки приводят
к появлению нелинейной поправки, которая определяется при
калибровке прибора и учи-
тывается при измерениях.
Широкое распростране-
ние за рубежом получили
скоростемеры, основанные
на рассмотренном принципе
и разработанные американ-
ским бюро стандартов NBS
(рис. 66). Помимо США эти
У " тт У тт Рис. 66. Скоростемер NBS в собранном
Англии, Норвегии и Ита- ВИде
лии. Сообщается о разра-
ботке аналогичного прибора, но якобы обладающего более вы-
сокой точностью, в Южно-Африканской Республике [7].
Скоростемер излучает импульсы, которые после приема и
восстановления возвращаются на передатчик и прибор начинает
регенерировать их с ча-
стотой следования, которая
определяется измеряемой
скоростью звука. Для устра-
нения многократных отра-
жений используется так на-
зываемый коленчатый или
V-образный путь прохож-
дения импульса от излуча-
теля к приемнику. Исполь-
зование сложного пути про-
хождения импульса, кроме
того, обеспечивает умень-
шение ошибки, которая мо-
жет возникнуть в результа-
те движения воды между
излучателем и приемником.
Коленчатая база имеет два
отражателя (рис. 67). В ка-
честве материала для изго-
Рис. 67. Головка скоростемера NBS. товления отражателя может
/ — приемник; 2 — отражатели; 3 — излуча- ИСПОЛЬЗОВаТЬСЯ ЖеСТКаЯ ре-
тель" зина, тефлон, перфориро-
ванный металл.
В наиболее совершенном скоростемере NBS импульс прохо-
дит зигзагообразный путь протяженностью около 20 см. В дру-
гих образцах приборов этот путь составляет лишь 10 см.
!49
Излучатель и приемник, изготовленные из титаната бария
с присадками кальция и свинца, делающими материал малочув-
ствительным к изменениям окружающей температуры, представ-
ляют собой диски диаметром 1,25 см и толщиной 0,66 мм. Пре-
образователи помещаются в держатели и крепятся в строго фик-
сированном положении. Держатели выдерживают без затекания
давления до 1500 атм.
Электронные элементы схемы (рис. 68), помещаемые в кор-
пус скоростемера, собраны на 8 полупроводниковых триодах.
Рис. 68. Блок-схема скоростемера NBS.
/-■получатель; 2 — отражатели; 3 — приемник; 4 — усилитель и повто-
ритель импульсов; 5 — блокинг-генератор; 6 — делитель частоты и пов-
торитель импульсов: 7 — глубоководный кабель; 8 — усилитель и удво-
итель частоты; 9 — частотомер.
Как показал опыт эксплуатации, приборы, выполненные на лам-
пах, являются более точными. Однако ламповые приборы из-за
значительных габаритов оказываются мало пригодными для
глубоководных измерений. Блокинг-генератор вырабатывает
импульсы длительностью несколько меньше 1 мксек и частотой
следования 6 кгц, что несколько меньше той частоты, которая
получается в результате измерения скорости звука. Эти
импульсы заполняются несущей частотой 3,6 Мгц. Принятые
импульсы усиливаются, детектируются и форма их улучшается.
В результате формируются прямоугольные импульсы длитель-
ностью 8 мксек, которые и подаются на усилитель мощности.
Импульсы с выхода усилителя мощности используются для по-
вторного запуска блокинг-генератора, обеспечивая тем самым
получение частоты следования импульсов, соответствующей из-
меряемой скорости звука.
Узкие прямоугольные импульсы с выхода блокинг-генера-
тора, имеющие после синхронизации частоту следования около
7 кгц, могут подаваться непосредственно на вход прибора, из-
меряющего частоту. Однако при измерениях на больших глуби-
150
нах импульсы такой частоты подвергаются сильному затуханию
в кабеле. Поэтому они предварительно преобразуются в прямо-
угольные импульсы, имеющие вдвое меньшую частоту следова-
ния, т. е. около 3,5 кгц. Эти импульсы подаются на борт ко-
рабля, ведущего измерения, по одножильному кабелю, на вы-
ходе которого образуются импульсы почти синусоидальной
формы, испытавшие значительное затухание. Эти импульсы уси-
ливаются и удваиваются по частоте. Затем, с помощью любого
подходящего прибора, измеряется отклонение частоты от сред-
него значения 7 кгц, вызванное измеряемой скоростью звука.
При необходимости реги-
страции значений изме-
ряемой скорости звука
может использоваться
частотомер, имеющий вы-
ход на постоянном токе,
обеспечивающий работу
самописца.
Глубоководная часть
аппаратуры потребляет
ток всего 8 ма при напря-
жении 6,5 в. Обычно в ка-
честве источников пита-
ния глубоководных при-
боров используются две
ртутные батареи Рис- 69- Скоростемер фирмы «Локхид».
Как сообщалось, уже
в 1961 г. было изготовлено 65 таких скоростемеров и имелись
заказы еще на 61 прибор [7].
Один из скоростемеров системы NBS был установлен на ба-
тискафе «Триест» и успешно использовался при глубоководных
погружениях. Скоростемеры NBS устанавливаются и на некото-
рых подводных лодках, например, на подводной лодке «Ред-
фиш», предназначенной для проведения океанографических
исследований [36].
Одна из американских фирм («Локхид») разработала свой
скоростемер (рис. 69), также основанный на циклическом прин-
ципе, но отличающийся от скоростемера NBS схемой, которая
позволила существенно уменьшить число элементов, входящих
в состав прибора, и конструкцией, что способствовало значи-
тельному уменьшению его размеров [17].
В этом приборе используется импульсный генератор, подаю-
щий на пьезоэлектрический излучатель импульсы с несущей ча-
стотой 3 Мгц. Поступивший на пьезоэлектрический приемник
импульс усиливается и используется для стабилизации частоты
повторения импульсов генератора. Излучатель и приемник
закреплены на прямоугольных платах из инвара. Платы
151
разделяются, удерживаются на заданном расстоянии друг от
друга и предохраняются от повреждения с помощью трех стерж-
ней, также изготовленных из инвара. Применение инвара обес-
печивает поддержание высокой стабильности расстояния (до
1/25 000) при любых возможных изменениях окружающей тем-
пературы. Электронные элементы прибора содержат всего пять
полупроводниковых триодов и требуют для питания ток менее
5 ма при напряжении 1,5 в. Источник питания с такими пара-
метрами также был специально разработан фирмой. Этот при-
бор, залитый в оболочку из эпоксидной смолы, может работать
при гидростатическом давлении до 1400 атм.
§ 29. БУКСИРУЕМОЕ УСТРОЙСТВО
ДЛЯ ОПРЕДЕЛЕНИЯ ПРОФИЛЯ ТЕМПЕРАТУРНОЙ
СТРУКТУРЫ МОРЯ (ТЕРМИСТОРНАЯ ЦЕПЬ)
За последнее время усилился интерес к исследованию так
называемых «внутренних волн», влияющих, в частности, на ха-
рактер распространения акустической энергии в море. Внут-
ренние волны искажают нижнюю границу приповерхностного
изотермического слоя, изменяя при этом расстояние до зоны аку-
стической тени, вызывают некоторую фокусировку и дефокуси-
ровку звуковых лучей и т. п. [7]. Для экспериментального иссле-
дования этих волн потребовалось создание специальной аппа-
ратуры— буксируемых устройств для определения профиля
температурной структуры моря или, как их обычно называют,
термисторных цепей.
Одна из первых термисторных цепей была разработана
в Вудсхоллском океанографическом институте и позволяла бы-
стро получать температурный разрез на глубинах от 0 до 130 м.
Позднее Лаборатория электроники ВМС США разработала
термисторную цепь, позволяющую получать температурный раз-
рез на глубинах от 0 до 244 м [22, 33]. Эта цепь, буксируемая
исследовательским судном-лабораторией «Мэрисвилл», исполь-
зовалась в течение длительного времени при исследованиях
в Тихом океане.
Термисторная цепь устроена и работает следующим обра-
зом. Вдоль цепи, имеющей общую длину 274 м и состоящей из
плоских звеньев длиной около 30 см и толщиной 2,5 см, снаб-
женных плоскими обтекателями из пластмассы, расположены на
удалении 18,3 м друг от друга 34 высокочувствительных датчика
температуры — термистора. Сопротивление этих датчиков изме-
няется как функция температуры окружающей среды. Терми-
сторы с помощью водонепроницаемых штепсельных разъемов,
обеспечивающих возможность их быстрой замены в случае вы-
хода из строя, соединяются с двумя жилами кабеля. С помощью
этого кабеля напряжение с выхода термисторов подается на
152
вход радиоэлектронной аппаратуры, расположенной на борту
корабля.
К концу цепи подвешивается груз обтекаемой формы весом
свыше 1 т, обеспечивающий вертикальное положение цепи во
время движения корабля. Несмотря на наличие груза и значи-
тельный вес самой цепи, она сохраняет примерно вертикальное
положение лишь при очень малой скорости буксировки. При
скорости хода буксирующего судна 13 узлов (24 км/час) из-за
относа цепи встречным потоком воды и подповерхностными
течениями ею просматривается глубина всего около 165 м. Фак-
тическое заглубление конца цепи определяется с помощью
датчика глубины, представляющего собой трубку Бурдона, сое-
диненную с потенциометром. Сигнал постоянного тока, пропор-
циональный глубине датчика, снимаемый с потенциометра, по-
дается на сервомеханизм глубины, связанный с регистратором
измеряемых величин.
Цепь опускается и поднимается с помощью лебедки, которая
вместе с подъемным устройством весит около 15 т.
Для регистрации температуры на разных глубинах исполь-
зуется оригинальный самописец, называемый регистратором изо-
терм. С помощью этого прибора на бумажной ленте шириной
48,3 см регистрируется распределение температуры с глубиной
на пути движения судна в виде сплошных линий — изотерм.
Лента протягивается в самописце с заданной скоростью, лежа-
щей в пределах от 5 до 30 см/час, слева направо. Вдоль верти-
кальной оси образующегося при этом графика будет распо-
лагаться шкала глубин, а вдоль горизонтальной оси — шкаля
времени или расстояния, пройденного судном. Длина бумажной
ленты (122 м) при скорости протяжки 15 см/час обеспечивает
возможность непрерывной записи в течение 33 суток.
В качестве записывающего устройства в регистраторе ис-
пользуется барабан, на поверхность которого нанесен виток ме-
таллической спирали, являющийся своеобразным «пером».
Вдоль одной из образующих барабана располагается контакт-
ная пластина, соприкасающаяся со спиралью лишь в одной
точке. При вращении барабана точка соприкосновения спирали
с пластиной будет перемещаться, и за один полный оборот ба-
рабана эта точка переместится сверху вниз и с началом нового
оборота вновь начнет движение сверху. Если вращать барабан
синхронно с переключением термисторов так, чтобы полному
циклу переключения термисторов соответствовал один оборот
барабана, перемещение точки соприкосновения спирали с пла-
той будет характеризовать изменение глубины от поверхности
до конца цепи.
Чтобы записать на бумажной ленте изотермы, используется
профильный регистратор, принцип действия которого иллюстри-
руется рис. 70.
153
Коммутатор, переключающий термисторы, поочередно под-
ключает выход каждого из них к интерполирующему потенцио-
метру. Движок потенциометра перемещается по реохорду, сни-
мая при этом напряжение, равномерно распределенное между
точками подключения двух соседних термисторов и пропорцио-
нальное температуре воды на соответствующем горизонте. Тем-
пература воды на горизонтах, на которых расположены терми-
сторы, в общем случае не будет равна целым градусам или их
Рис. 70. Блок-схема профильного регистратора термистор-
ной цепи.
/ — коммутатор и интерполирующий потенциометр; 2 —лампа; 3 —
сервоусилитель; 4 — серводвигатель; 5 — щелевой диск; 6 — фото-
элемент; 7 — усилитель записи; 8 — потенциометр обратной связи;
9 — лента рекордограммы; 10 — перо-спираль; 11 — двигатель; 12 —
контактная пластина; /3 — барабан самописца; 14 — датчик глуби-
ны; 15 — термисторы.
десятым долям. В то же время на регистраторе должны запи-
сываться изотермы, соответствующие целым градусам или их
долям. Поэтому оказывается необходимым использовать устрой-
ство, позволяющее регистрировать не случайные промежуточ-
ные значения температуры, снимаемые с термисторов, а лишь
такие величины, которые должны отображаться на регистра-
торе.
С этой целью непрерывные, плавно меняющиеся напряжения,
снимаемые с интерполирующего потенциометра, подаются на
специальный сервоусилитель. С помощью серводвигателя это на-
пряжение преобразуется во вращение вала, которое в резуль-
тате устранения нелинейности выходного напряжения терми-
сторов с помощью цепи обратной связи является линейным
относительно температуры. На валу закрепляется щелевой или
154
цифровой диск. При этом передаточное число подбирается та-
ким, чтобы одному обороту мотора соответствовало угловое пе-
ремещение диска на величину, позволяющую регистрировать
изменение температуры на 1°. Диск может иметь щели, позво-
ляющие также регистрировать изменения температуры на 0,1°
и 0,05°. Он помещается между источником света и фотоэлемен-
том. В моменты, когда щель диска, разворачиваемого с по-
мощью серводвигателя, оказывается против источника света,
ток, выработанный фотоэлементом, включает печатающее
устройство, и отметка, соответствующая определенной темпера-
туре, регистрируется на ленте самописца. Так как сам барабан
самописца в это время совершает вращение, запись темпера-
туры произойдет в соответствующей точке шкалы глубин.
Если температура на какой-либо глубине при каждом цикле
измерения остается неизменной, то и запись ее будет происхо-
дить на ленте самописца на одном и том же уровне. Если же
распределение температуры с глубиной будет изменяться по
мере продвижения корабля, на ленте самописца отобразится
это изменение.
В устройстве предусмотрена возможность регистрации тем-
пературы воды в пределах от —2 до +32° с отображением изо-
терм во всем этом диапазоне через 1°. Скорость переключения
термисторов при измерениях во всем диапазоне глубин может
меняться, однако считают, что каждый цикл должен длиться
не более 8 сек. При такой скорости развертки по вертикали и
принятой скорости протяжки бумажной ленты можно считать,
что отметки всех изотерм лежат на одной вертикальной пря-
мой. При более медленном переключении отметки, записанные
для разных глубин, смещались бы по вертикали, что неизбежно
усложнило бы их анализ.
Фактически каждый полный цикл записи на ленту само-
писца длится 12 сек. Из этого времени 8 сек. уходят на запись
температурного разреза, а оставшиеся 4 сек. идут на запись на
ленту вспомогательных данных. Такими данными являются от-
метки о глубине погружения цепи и запись температуры на
определенном горизонте.
Датчик глубины, находящийся на конце цепи, подключается
через сервомеханизм глубины к самописцу, который и реги-
стрирует глубину его погружения при данной скорости хода и
воздействии на цепь течения, в виде сплошной линии в нижней
части общей ленты. Каждые 6 мин. запись глубины прекра-
щается и на ленте отпечатывается шкала глубины в виде верти-
кального ряда из 16 точек. Расстояние между соседними точ-
ками равно расстоянию в масштабе записи между вертикально
подвешенными термисторами.
Отметка температуры на определенном горизонте также за-
писывается на общей ленте самописца и располагается между
155
записями изотерм и глубины. Для записи температуры к само-
писцу подключается один, выбранный заранее, датчик. Запись
происходит в виде непрерывной линии. Для взятия отсчета на
ленте в пределах границ записи отбивается шкала температур
в виде вертикального ряда из 16 точек, расстояние между ко-
торыми соответствует изменению температуры на 2°. Вся шкала
перекрывает диапазон температур от 0 до +30°. Регистрация
температуры на заданном горизонте позволяет «привязать» за-
писанные изотермы к значениям температуры и облегчает ана-
лиз графика.
Вдоль горизонтальной шкалы графика могут наноситься от-
метки времени либо расстояния. Обычно такие отметки нано-
сятся соответственно через 4 часа или 24 мили.
Как утверждают, опыт эксплуатации подтвердил удовлетво-
рительные качества термисторной цепи. С ее помощью была
зарегистрирована подробная термическая структура Тихого
океана, что позволило получить данные о внутренних волнах,
которые не могли быть получены с помощью каких-либо других
средств, существующих в настоящее время.
§ 30. ГИДРОАКУСТИЧЕСКАЯ АППАРАТУРА
ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТА БУКСИРУЕМЫХ УСТРОЙСТВ
ОТНОСИТЕЛЬНО КОРАБЛЯ
За последние годы, особенно после гибели «Трешера», по-
лучили распространение различные гидроакустические и неаку-
стические буксируемые устройства, предназначенные для поиска
малоразмерных объектов на больших глубинах океанографиче-
ских исследований и т. п.
Обычно принято определять место буксируемого устройства
относительно корабля по длине выпущенного кабель-троса и
глубине движения устройства. При этом вводятся поправки
на скорость буксировки, на воздействие течения на буксируе-
мое устройство и т. п. Однако под воздействием различных фак-
торов взаимное положение корабля и буксируемого устройства
может меняться. По этой причине даже при высокой точности
определения места корабля оказывается невозможным опреде-
лить точные координаты буксируемого устройства, а следова-
тельно, и обнаруженного .с его помощью объекта, что в ряде
случаев может привести к невозможности установления с ним
повторного контакта и к его потере. Чтобы избежать этого,
в США разработана гидроакустическая следящая аппаратура,
позволяющая определять координаты буксируемого устройства
относительно корабля с высокой точностью [43].
Основными элементами аппаратуры является электронный
блок и блок акустических приемников с сервомотором, разме-
щаемые на корабле-буксировщике, и излучатель, установленный
156
на буксируемом устройстве и соединенный с корабельным элек-
тронным блоком с помощью кабеля или кабель-троса (рис. 71, а).
В электронном блоке вырабатывается непрерывный, модули-
руемый по частоте сигнал, который по кабелю подается на из-
Рис. 71. Принцип действия (а) и блок-схема (б) аппаратуры для
определения места буксируемого устройства относительно ко-
рабля.
1 — кабель-трос; 2 — усилитель мощности; 3 — модулятор; 4 — смеситель;
5 — индикатор дистанции; 6 — индикатор пеленга; 7 — излучатель; 8 — при-
емники; 9 — серводвигатель; 10 — усилители приемных каналов; // — уси-
литель разности; 12 — усилитель сервопривода.
лучатель. Излучаемый акустический сигнал, пройдя через воду,
поступает на блок приемников. В электронном блоке происхо-
дит сравнение излучаемой и принимаемой частот и по разности
этих частот определяется дистанция между излучателем и при-
емниками, иначе говоря, между буксируемым устройством и
кораблем.
157
Принцип измерения дистанции аналогичен принципу измере-
ния дистанции в гидролокаторе с непрерывным излучением и
частотной модуляцией сигнала. Разница в данном случае за-
ключается в том, что сигнал в одном направлении (в сторону
буксируемого объекта) распространяется по кабелю, а в другом
(в сторону корабля) —через воду.
Определение текущего направления на буксируемый объект
происходит за счет поворота приемников с помощью следящей
системы, работающей по методу определения оси равносигналь-
ной зоны. С помощью индикаторов курсового угла и дистанции,
расположенных в электронном блоке, берутся отсчеты текущих
координат.
Электронный блок аппаратуры состоит из передающего и
приемного трактов с системой автоматического слежения и ин-
дикаторами (рис. 71,6).
В модуляторе передающего тракта происходит формирова-
ние сигнала, модулированного по частоте (несущая частота
184 или 208 кгц, девиация частоты 12 кгц, период модуляции
0,5 сек.). Сигнал с модулятора подается на усилитель мощности
и на смеситель приемного тракта. С выхода усилителя сигнал
мощностью около 70 вт по кабелю длиной до 300 м поступает
на излучатель, установленный на буксируемом устройстве.
Для передачи сигнала может использоваться коаксиальный
кабель или обычный двухжильный провод. Если на буксируе-
мое устройство помимо напряжения частотно-модулированного
сигнала должны подаваться и другие напряжения, все они мо-
гут подаваться по одному кабелю с последующим разделением
с помощью фильтров.
Излучатель пьезоэлектрический поршневой, диаметром около
4 см, помещен в плексигласовый корпус. Характеристика на-
правленности при излучении равна 12°. Конструкция корпуса
позволяет ориентировать ось максимума характеристики на-
правленности излучения относительно оси буксируемого устрой-
ства в пределах до 15° вверх и до 15° вправо и влево.
Конструкция акустических приемников схожа с конструк-
цией излучателя. Но ширина характеристики направленности
несколько больше и составляет 16°. Приемников два. Они рас-
положены друг над другом по вертикали и оси их характери-
стик направленности смещены относительно друг друга на 15°
в горизонтальной плоскости. Оба приемника находятся на валу
серводвигателя, который может разворачивать их на угол 22°
вправо и влево от диаметральной плоскости корабля. Угол раз-
ворота ограничивается с помощью концевых переключателей.
Каждый приемник соединен со своим предварительным уси-
лителем, образуя правый и левый приемные каналы. Сигналы
с выходов предварительных усилителей детектируются, причем
в одном из каналов происходит детектирование положительных
158
полупериодов, а в другом — отрицательных. После детектирова-
ния оба выходных напряжения алгебраически складываются
в усилителе разности. Тогда при равенстве амплитуд напряже-
ний на входах предварительных усилителей, которое будет
иметь место при одинаковых положениях максимумов харак-
теристик направленности обоих приемников относительно на-
правления на излучатель, напряжение на выходе усилителя раз-
ности будет равно нулю.
Если бы на вход усилителя разности подавались не про-
детектированные предварительно напряжения, то напряжение
на его выходе было бы равно нулю лишь в том случае, если
буксируемое устройство находилось точно на равносигнальном
направлении и на одном горизонте с приемниками. При неоди-
наковых уровнях, как это и имеет место на самом деле, резуль-
тирующее напряжение на выходе усилителя разности было бы
минимальным, но не нулевым, что привело бы к появлению
некоторого угла нечувствительности, в пределах которого нельзя
было бы определить направление на буксируемое устройство
с нужной точностью.
Если в результате взаимного перемещения буксирующего
корабля и буксируемого устройства, последнее выйдет из рав-
носигнальной зоны, на выходе усилителя разности появится
постоянное напряжение, амплитуда которого будет пропорцио-
нальна углу отклонения направления на буксируемое устрой-
ство от направления равносигнальной зоны, а знак соответ-
ствовать стороне отклонения. Это напряжение поступает на
усилитель автоматической следящей системы, в котором оно
усиливается до величины, необходимой для обеспечения работы
серводвигателя. Двигатель начинает разворачивать приемники
в сторону уменьшения угла рассогласования. С приведением
буксируемого устройства на равносигнальное направление по-
дача напряжения на двигатель и разворачивание приемников
прекращается. Фактическое угловое положение приемников
с помощью линии синхронной связи передается на индикатор
пеленга. Точность определения направления составляет 1°.
Для определения дистанции до буксируемого устройства
сигнал, пришедший на один из приемников, подается на сме-
ситель. Одновременно на смеситель поступает излучаемый сиг-
нал с модулятора передающего тракта. Разность частот излу-
чаемого и принятого сигналов пропорциональна наклонной ди-
станции дальности до буксируемого устройства. При принятых
параметрах излучаемого сигнала и скорости распространения
звука в воде 1500 м/сек разница в частоте излучаемого и при-
нимаемого сигналов в 5 гц соответствует изменению измеряе-
мой дистанции на 30 см.
Дистанция может быть считана со специального индикатора.
При определении горизонтальной дистанции до буксируемого
159
устройства учитывается его глубина хода, а если это необхо-
димо, то и влияние рефракции.
Как утверждают, аппаратура успешно прошла испытания
в морских условиях и обеспечила получение разрешающей спо-
собности по дистанции около 30 см по углу около 0,2—0,5°.
Аппаратура потребляет около 400 вт от судовой сети перемен-
ного тока и весит около 45 кг.
Предполагают, что подобная аппаратура может найти приме-
нение при решении любых задач, требующих высокой точности
определения координат буксируемого устройства.
. .".'. . ■. _/
§ 31. КОРАБЕЛЬНЫЕ КОМПЛЕКСНЫЕ СИСТЕМЫ
ДЛЯ ОКЕАНОГРАФИЧЕСКИХ
И ГИДРОЛОГО-АКУСТИЧЕСКИХ ИЗМЕРЕНИЙ
По мнению многих зарубежных военно-морских специали-
стов успешная боевая деятельность противолодочных сил не
может вестись в настоящее время без учета конкретных гидро-
лого-акустических условий в районе.
В связи с этим в последние годы за рубежом значительное
внимание уделяется созданию разнообразных комплексных си-
стем, обеспечивающих возможность проведения необходимых
измерений непосредственно в корабельных условиях, а также
систем, обеспечивающих накопление необходимых статистиче-
ских данных для последующего использования этих данных
в интересах противолодочной борьбы.
Экспериментальный комплекс специальной исследователь-
ской аппаратуры был установлен на американской атомной
подводной лодке «Тритон» и использовался во время соверше-
ния ею кругосветного плавания в 1960 г. [53]. Среди различной
аппаратуры, входившей в состав этого комплекса, имелась и
разнообразная аппаратура для гидролого-акустических исследо-
ваний. Так, например, в течение всего похода производились
измерения температуры и солености воды. Датчики темпера-
туры были установлены в носовой части ограждения рубки и
в районе киля. Таким образом, измерения велись одновременно
на двух горизонтах. Регистрация температуры осуществля-
лась путем непрерывной записи результатов измерений на
ленте. Помимо этих непрерывных замеров, периодически опре-
делялось распределение температуры с глубиной, для чего
подводная лодка изменяла глубину погружения в нужных пре-
делах.
На подводной лодке производились и непосредственные изме-
рения скорости распространения звука. Сведения о температуре,
скорости звука, глубине, на которой производились измерения
этих величин, координаты подводной лодки и время измерения
регистрировались в цифровой форме на ленте, которая исполь-
160
зовалась для анализа получаемой информации с помощью
электронной цифровой вычислительной машины.
Взаимосвязь элементов системы иллюстрируется блок-схе-
мой (рис. 72). Датчики глубины погружения лодки, скорости
звука, температуры воды и глубины моря выдают информацию
в различной форме. Так, например, термистор выдает напряже-
ние, изменяющееся в зависимости от температуры воды, вибро-
трон— напряжение, частота которого изменяется с измене-
нием глубины погружения подводной лодки, скоростемер —
Рис. 72. Блок-схема аппаратуры для океанографических и гидро-
лого-акустических исследований, установленной на американской
атомной подводной лодке «Тритон».
/ — датчик глубины погружения; 2 — усилитель; 3 — гетеродин и смеситель;
4 — блок преобразования вводимых данных в цифровой вид; 5 — цифровые
часы; 6 — календарь и ручной ввод; 7 — датчик скорости звука; 8 — пере-
ключатель; 9 — устройство цифровой записи; 10 — датчики температуры
воды; // — мостиковая схема; 12 — преобразователь напряжения в частоту;
13 — перфоратор; 14 — блок связи; 15 — эхолот; 16 — регистратор глубины;
17 — элементы съема данных с перфоленты.
напряжение переменной частоты. Поэтому все сигналы, выдавае-
мые датчикам, подвергаются преобразованию для отображения
их в цифровом виде. В цифровом виде выдаются также время
и дата наблюдения. Все эти данные поочередно подаются для
регистрации на бумажной ленте и нанесения на перфоленту.
На подводной лодке был установлен также гидроакустиче-
ский прибор для измерения высоты волн. В качестве такого при-
бора использовался эхолот с излучателем, повернутым в сто-
рону поверхности моря, установленный на ограждении рубки.
Опыт эксплуатации показал, что такой прибор позволил полу-
чать достаточно точные статистические данные о высоте волн
в океане.
Одно из комплексных устройств, позволяющих осуществлять
непрерывное и одновременное измерение скорости распростра-
нения звука, температуры воды и гидростатического давления
161
непосредственно в корабельных условиях, было разработано
в Центре испытаний морского оружия ВМС США [72].
В данном устройстве измерение скорости звука осуще-
ствляется с помощью скоростемера NBS. Для измерения тем-
пературы воды используется термистор, включенный в одно из
плечей мостиковой схемы Вина, управляющей частотой гене£а-
тора. При этом частота генератора может изменяться с измене-
нием температуры воды в пределах от 0 до 30° С в диапазоне
от 5000 до 8000 гц. Точность измерения температуры с помощью
такого прибора составляет ±0,01°С.
Для измерения гидростатического давления в приборе при-
менен вибротрон. Здесь давление, приложенное к мембране,
вызывает изменение натяжения колеблющейся струны. С изме-
нением натяжения меняется и частота колебаний струны, в свою
очередь преобразуемых в электрические колебания.
Сигналы, вырабатываемые всеми тремя датчиками, преобра-
зуются в суммирующем усилителе в сложное колебание, кото-
рое и поступает по одножильному кабелю на борт ведущего на-
блюдение корабля.
Все электронные элементы устройства выполнены на полу-
проводниковых приборах в виде герметизированных съемных
модулей, легко поддающихся замене в случае выхода из строя.
Такая конструкция устройства обладает высокой надежностью
и позволяет сделать его компактным и легким. Питание подвод-
ных элементов устройства осуществляется от никель-кадмиевых
аккумуляторов со сроком службы до 24 час, размещенных на
внешней стороне корпуса опускаемого контейнера. Применение
аккумуляторов несколько упрощает схему питания по сравне-
нию с вариантом питания приборов с борта корабля.
В настоящее время по заказу ВМС США разрабатываются
три сложных комплекса, два из которых являются корабель-
ными [34].
Комплекс аппаратуры, предназначенный для измерения фак-
торов, влияющих на эффективность гидроакустического наблю-
дения противолодочных кораблей, получил сокращенное наиме-
нование. ASWEPS (ASW Environmental Prediction System —
система прогнозирования окружающих условий для противо-
лодочной войны). Этот комплекс должен устанавливаться не-
посредственно на противолодочных кораблях и обеспечивает
измерение основных гидролого-акустических характеристик
в пределах от поверхности моря до глубины 1460 ж.* Измере-
ния с помощью комплекса должны проводиться периодически,
несколько раз в сутки, в среднем каждые шесть часов.
Комплекс ASWEPS включает в себя подводную измеритель-
ную аппаратуру, устройства для опускания и подъема этой
По другим данным [57], до глубин 760 м.
162
аппаратуры в пределах рабочего диапазона глубин, устанавли-
ваемое на борту корабля, и корабельную регистрирующую и
анализирующую аппаратуру.
Подводная измерительная аппаратура, включающая в свой
состав датчики давления (глубины), температуры, проводи-
мости (солености) и скорости звука, а также вспомогательные
электронные устройства, помещается в общем контейнере-обте-
кателе. Этот контейнер имеет форму цилиндра диаметром
450 мм и весит со всем оборудованием около 80 кг.
В системе ASWEPS используются следующие датчики из-
меряемых величин.
Датчик температуры — термистор — представляет собой
электрический термометр с платиновым сопротивлением, вели-
чина которого изменяется с изменением температуры воды.
Датчик глубины имеет также платиновое сопротивление,
соединенное с мембраной, величина которого изменяется с из-
менением механического напряжения, вызванного гидростати-
ческим давлением.
Датчик проводимости, являющейся функцией солености, по-
мимо измерительных элементов, имеет элементы компенсации
влияния температуры воды и давления.
Принцип действия датчика скорости звука аналогичен рас-
смотренным ранее. В нем измеряется промежуток времени, в те-
чение которого звук проходит строго фиксированный путь. С из-
менением этого промежутка времени изменяется частота по-
вторения импульсов, вырабатываемых блокинг-генератором.
Конструкция датчика исключает влияние скорости перемещения
воды на точность измерения. Акустические преобразователи,
используемые в датчике скорости звука, изготовлены из тита-
ната бария. Применение в электронных цепях датчика крем-
ниевых полупроводниковых элементов обеспечивает высокую
Таблица 5
Основные параметры датчиков, используемых в системе ASWEPS
Параметры
Температура
Давление
Соленость
Проводимость
Скорость звука
Пределы
измерений
от —2 до +40°
0—105 кг/см2
32,5—37,5%
25—65 ммо
1372—1674 м/сек
Точность
+ 0,01°
0,25%
±0,02%
0,03 м/сек
Диапазон
частот, гц
2 127—4 193
9 712—11 283
4 995—7 901
4 995—7 901
13 412—15 588
Номера
частотных
каналов
7, 8, 9
12
10, 11
10, 11
13
Примечание. Соленость и проводимость определяются с помо-
щью одного датчика. При регистрации солености по измеренной проводи-
мости вводятся необходимые поправки на влияние температуры воды и
гидростатического давления.
163
стабильность работы схемы при значительных изменениях окру-
жающей температуры.
Параметры датчиков, используемых в системе ASWEPS при-
ведены в табл. 5.
Каждый из датчиков связан с генератором Paraloc, несущая
частота которого изменяется по линейному закону под воздей-
ствием сигналов, поступающих с датчика. Генераторы пред-
ставляют собой усилители с положительной обратной связью,
изменение частоты кото-
рых происходит с по-
мощью фазосдвигающей
цепочки. Такая схема
обеспечивает получение
высокой (до ±0,1%) ли-
нейности сигнала и высо-
кой (до ±0,2%) ста-
бильности частоты при
значительном изменении
окружающей температу-
ры. В состав оборудова-
ния размещаемого в опу-
скаемом контейнере, вхо-
дят пять таких генерато-
ров, имеющих различные
частоты. Четыре генера-
тора связаны с датчиками
давления, температуры,
проводимости и скорости
звука, пятый является ре-
зервным и обеспечивает
повышение надежности
аппаратуры. Генераторы
выполнены на полупро-
водниковых элементах.
Для одновременной передачи сигналов от всех датчиков по
общему кабелю используется аппаратура уплотнения с частот-
ным разделением каналов. Сигналы, вырабатываемые датчи-
ками-генераторами и имеющие различные частоты, подаются
параллельно к входу общего усилителя (рис. 73). Образовав-
шийся на выходе усилителя сложный комбинированный сигнал
поступает по одножильному кабель-тросу на бортовую кора-
бельную аппаратуру.
При питании подводной аппаратуры переменным током пи-
тающее напряжение поступает к аппаратуре по тому же ка-
белю, по которому на борт корабля подается сигнал. Защита
измерительных элементов аппаратуры от питающего напряже-
ния 115 в с частотой 60 гц осуществляется с помощью фильтра,
Рис. 73. Блок-схема подводного оборудова-
ния системы ASWEPS.
/ — преобразователи сигналов датчиков; 2 — уси-
литель; 3 — фильтры; 4 — регулятор напряжения;
5 — выпрямитель; 6 — трансформатор.
164
не пропускающего колебания с частотой ниже 500 гц. В свою
очередь цепь питания защищается от попадания высокочастот-
ных сигналов с помощью фильтра, не пропускающего сигналы
с частотой выше 500 гц. Питающее напряжение выпрямляется
и через регулятор напряжения, обеспечивающий стабильность
порядка ±1%, подается на генераторы и усилители.
Предполагается, что более целесообразным явится питание
аппаратуры постоянным током, так как при этом не будут иметь
места электрические помехи, возникающие при питании пере-
менным током в кабеле, намотанном на барабан лебедки.
Поступивший на борт корабля сигнал подается в разделяю-
щее устройство (рис. 74). Вход этого устройства защищен
Рис. 74. Блок-схема бор-
тового оборудования си-
стемы ASWEPS.
/ — фильтры; 2 — буферные
усилители; 3 — полосовые
фильтры; 4 — формирующие
импульсные усилители; 5 —
преобразователь тока.
фильтром от попадания питающего напряжения. Высокочастот-
ный сложный сигнал, прошедший через этот фильтр, после пред-
варительного усиления попадает на гребенку фильтров, каждый
из которых выделяет определенную полосу частот, соответствую-
щую частоте одного из датчиков-генераторов. В бортовой аппа-
ратуре, как и в подводной аппаратуре, предусмотрен один ре-
зервный канал.
После разделения принятые сигналы поступают на форми-
рующие импульсные усилители, которые преобразуют принятые
синусоидальные колебания в последовательность прямоуголь-
ных импульсов. Эти импульсы с помощью специального хрони-
зирующего устройства поочередно, в определенной последова-
тельности подаются на вход вычислительного устройства.
Обработанные в вычислительном устройстве сигналы посту-
пают на печатающее и буквопечатающее устройства и на
устройство магнитной записи (рис. 75).
Все управление аппаратурой, в том числе и подъемно-опу-
скным устройством осуществляется с единого пульта.
165
Перед включением аппаратуры в ее запоминающее устрой-
ство оператором вводятся координаты корабля, данные метео-
обстановки, выбирается масштаб записи измеряемых величин
с учетом глубины моря в районе. Одновременно определяется
вид выдаваемой аппаратурой информации. Информация может
регистрироваться на магнитную пленку, на бумажную ленту
в цифровом виде или же в виде графика распределения изме-
ряемой величины с глубиной. Вся предварительная подготовка
аппаратуры занимает около 3 мин. Включение аппаратуры,
Рис. 75. Общая блок-
схема системы
ASWEPS.
/ — разделяющее устрой-
ство; 2 — цепи формиро-
вания импульсов; 3 —
сигнал-генератор; 4 — ка-
бель; 5 — пульт управле-
ния; 6 — хронизатор; 7 —
промежуточные цепи; 8 —
печатающее устройство;
9 — смеситель; 10— элек-
тронная цифровая вычис-
лительная машина; // —
управляющее устройство;
12 — датчики; 13 — бук-
вопечатающий аппарат;
14 — аппаратура магнит-
ной записи.
в том числе и опускание контейнера, осуществляется путем на-
жатия одной кнопки. Весь процесс опускания и подъема кон-
тейнера осуществляется по команде оператора автоматически
с помощью лебедки со скоростью около 90 м/мин. Измерения
могут производиться при скорости хода корабля до 5 узл.
(9,25 км/час). Полный вертикальный разрез, характеризующий
распределение измеряемых параметров с глубиной, может
быть получен через 12,5 мин. после включения аппаратуры.
Вторая из систем предназначается для установки на иссле-
довательских судах. Эта система обеспечит возможность вести
комплексные наблюдения, измеряя большое количество различ-
ных величин.
Такая комплексная автоматизированная система сбора океа-
нографических данных установлена и используется в настоящее
время на борту судна «Силас Бент» (AGS-26). Все измеряемые
данные регистрируются в форме, пригодной для немедленного
ввода в электронные вычислительные машины.
Система позволяет производить измерения как на стопе, так
и на ходу корабля. На стопе производятся замеры распределе-
166
ния температуры воды с глубиной, скорости распределения
звука, солености и освещенности. На ходу измеряются: напря-
женность магнитного поля, напряженность гравитационного
поля, сейсмографические данные, температура воды у поверх-
ности и глубина. Глубина измеряется с помощью трех устройств:
эхолотом с узким акустическим лучом, стабилизированным на
качке, эхолотом с широким лучом и буксируемым эхолотом.
Все эти измерения могут производиться при скорости хода ко-
рабля до 15 узлов (около 28 км/час) [50].
Характеристики, получаемые системой, приведены в табл. 6.
Рис. 76. Размещение
аппаратуры автомати-
зированной системы
сбора океанографиче-
ских данных на судне.
/ — магнитометр; 2 — са-
мописцы глубины; 3 —
датчики температуры во-
ды на поверхности; 4 —
эхолоты с широким лу-
чом; 5 — узко направлен-
ный эхолот; 5 —гравита-
ционный датчик; 7— бук-
сируемый эхолот; 5— сей-
смический генератор; 9 —
контейнер с датчиками
солености, скорости рас-
пространения звука и
температуры; 10 — гидро-
фоны.
Для опускания, подъема и буксировки измерительных
устройств на судне устанавливается целый комплекс вспомога-
тельного оборудования. Размещение на судне измерительных и
вспомогательных устройств и аппаратуры для обработки резуль-
татов измерений показано на рис. 76. Так как к аппаратуре,
предназначенной к установке на исследовательских судах, не
предъявляются столь жесткие требования по габаритам и весу,
как к аппаратуре, устанавливаемой на боевых кораблях, соеди-
нение измерительных устройств с бортовой аппаратурой произ-
водится в данном случае с помощью двужильного, а не одно-
жильного кабеля, что несколько упрощает конструкцию аппа-
ратуры.
Принцип действия и конструкция измерительной аппаратуры
в основном схожи с аппаратурой системы ASWEPS.
В системе используется электронная вычислительная машина
UYK-1, записывающая и отображающая получаемую инфор-
мацию на ленточном самописце и в цифровой форме, а также
записывающая данные в цифровой форме на магнитную ленту
для последующего исследования и анализа.
167
Таблица 6
Характеристики, получаемые автоматизированной комплексной системой
сбора океанографических данных
Измеряемый параметр
Глубина
Напряженность маг-
нитного поля
Температура воды у
поверхности
Сейсмические отра-
жения
Температура воды
Скорость звука
Освещенность (под-
водная и надводная)
Глубина
Соленость
Условия
измерений
на ходу
(0—15 узл.)
то же
» »
на ходу
(от 4 до
6 узл)
на стопе
то же
» »
» »
» »
Диапазон измерений
до 11 км
от 20 000 до 100 000
гамма
от —2 до +40° С
проникновение на
1200 м при глубине
моря до 4500 м
от —2 до +40° С
от 1400 до 1600 м/сек
0—10 000 лм
0—500 м
0—6100 м
30-40Voo
Точность измерений
аналоговых
цифровых
1/3000
+1 гамма
0,05°С
1/2 длины волны при
скорости звука 1500 м/сек
+ 0,1°С 0,05°С
+ 0,3 м/сек
3%
+ 0,4% от измеряе-
мого диапазона
+ 0,02Voo
Период измерений
аналоговых
1 измер/сек.
цифровых
По программе, от
2 сек. до 1 мин.
по программе, через 2, 10,
30 сек., 1 или 5 мин.
непрерывно
то же
» »
» »
» »
» »
» »
по программе, от
2 сек. до 5 мин.
по программе, от
2 сек. до 5 мин.
по программе, от
2 сек. до 1 мин.
то же
» »
по программе,
2 сек.
Примечание. Аналоговые данные записываются в виде графика, цифровые—цифрами.
В системе используются также различные аналоговые реги-
стрирующие устройства. Так, например, запись аналоговых
данных при измерениях глубины и сейсмических переменных
производится на рекордеры со спиральной разверткой, другие
данные записываются на бумажную ленту одноперьевых рекор-
деров, все данные, измеряемые на стопе, регистрируются с по-
мощью многоканальных рекордеров. Общая блок-схема системы
представлена на рис. 77.
Рис. 77. Блок-схема автоматизированной системы сбора океанографи-
ческих данных.
/ — контейнер с аппаратурой для измерений на стопе; 2 — оконечное устройство;
3 — обрабатывающее устройство и цифровой индикатор; 4 — контейнер буксируе-
мого эхолота; 5 — эхолот; 6 — главный пульт управления; 7 — выносной цифровой
индикатор; 8 — излучатель сейсмического генератора; 9— генератор колебаний
для сейсмо-акустических исследований; 10 — аналоговый индикатор; // — элек-
тронная цифровая вычислительная машина; 12 — гравитационный измеритель;
13 — коммутатор; 14 — датчик магнитометра; 15 — магнитометр; 16 — устройства
магнитной записи; 17 — буквопечатающее устройство; 18 — ленточный самописец;
19 — перфоратор.
На научно-исследовательском судне «Атлантис II» для на-
копления и обработки на месте информации, поступающей от
скоростемера, солемера, батитермографа, регистратора волне-
ния, гирокомпаса, лага, магнитометра и других датчиков, ис-
пользуется вычислительное устройство PDP-5 [57].
169
Глава V
ГИДРОАКУСТИЧЕСКАЯ АППАРАТУРА
ДЛЯ ГЛУБОКОВОДНЫХ ИССЛЕДОВАНИЙ
§ 32. ПРОБЛЕМЫ ИССЛЕДОВАНИЯ ГЛУБИН ОКЕАНА
Возможность проникновения в глубь океанов и морей вол-
нует человечество в течение многих веков. За это время чело-
век создал большое количество разнообразных приспособлений
и устройств, позволяющих погружаться на глубину. В 1960 г.
батискаф «Триест» достиг мак-
симальной известной глубины
Мирового океана, погрузившись
почти на 11 000 м. И в то же
время глубины Мирового океана
по-прежнему остаются загадкой.
Как известно, океаны и моря
покрывают 70,8% земной поверх-
ности. Объем морской воды со-
ставляет 1370 млн. км3. Глубины
Мирового океана меняются в ши-
роких пределах, достигая макси-
мального известного значения
11 034 ж. Однако большая часть
Мирового океана — свыше 95% —
имеет глубины до 6000 м (рис.
Рис. 78. Распределение глубин 78). И из этой огромной среды,
Мирового океана. лежащей непосредственно рядом
с нами, человек может практи-
чески использовать, проникая в глубь ее, лишь очень незначи-
тельную часть.
В связи с огромным народнохозяйственным и военным значе-
нием Мирового океана, проблеме изучения его глубин уделяется
в настоящее время за рубежом исключительно большое внима-
ние. Особенно большое внимание уделяется вопросам изучения
глубин Мирового океана американскими милитаристами, кото-
рые из многих аспектов изучения глубин первоочередное значе-
ние уделяют вопросам использования океанов и морей в чисто
военных целях.
На страницах зарубежной печати неоднократно подчерки-
валось значение глубоководных исследований. По мнению ино-
странных специалистов эти исследования в ближайшем буду-
щем должны охватывать глубины до 6000 м. Глубина 6000 м
взята в качестве граничной на ближайший период, так как
в пределах этого диапазона глубин, как уже указывалось,
170
лежит преобладающая часть площади Мирового океана. Районы
Мирового океана с большими глубинами, как предполагают,
в ближайшие годы должны явиться объектом лишь выбороч-
ного исследования.
Таким образом, ограничение исследуемых глубин пределами
в 6000 м должно сделать доступной для человека преобладаю-
щую часть Мирового океана. В то же время такое ограничение
значительно облегчает и упрощает технические решения, свя-
занные с созданием и использованием специальной исследова-
тельской аппаратуры.
Для осуществления глубоководных исследований в настоя-
щее время в США и некоторых других странах (Франция, ФРГ,
Япония) уже созданы и разрабатываются различные глубоко-
водные устройства. Некоторые из этих глубоководных устройств,
например батискаф «Триест», уже длительное время находятся
в эксплуатации.
По мнению американских специалистов, с помощью много-
целевых глубоководных океанографических устройств может
решаться весьма широкий круг задач, в том числе сле-
дующие:
при проведении океанографических работ — биологические
исследования, изучение геологии моря, геофизические исследо-
вания, химические и физические исследования, изучение дви-
жения масс воды;
при аварийно-спасательных работах — спасение личного со-
става с затонувших подводных лодок и обеспечение судо-
подъема;
при установке различной глубоководной аппаратуры: обсле-
дование грунта, размещение приборов на грунте, систематиче-
ский осмотр и обслуживание установленной аппаратуры;
при проведении гидрологоакустических исследований —из-
мерение окружающих шумов, калибровка акустических преоб-
разователей, изучение влияния морских организмов на распро-
странение звука в воде, использование устройства в качестве
глубоководной цели для испытываемых гидролокаторов;
решение разнообразных задач, связанных с исследова-
ниями, проводимыми в интересах рыболовства и морских про-
мыслов;
при решении различных вспомогательных задач — наблюде-
ние за ракетными и торпедными стрельбами, исследования
новых материалов для глубоководных конструкций, изучение
влияния морской среды на различные конструкции и материалы,
изучение влияния подводных взрывов, изучение работоспособ-
ности всевозможной аппаратуры при различных изменениях
морской среды и т. п. [29].
Наряду с решением общих исследовательских задач, по
мнению американских специалистов, глубоководные исследова-
171
ния будут играть исключительно важную роль при решении
чисто военных вопросов [52]. Так считают, что с освоением
больших глубин окажется возможным создать скрытые под
водой практически неуязвимые установки для запуска ракет.
Возможность контроля за подводным пространством облегчит
борьбу с подводными лодками противника. Высказывается
предположение о возможности создания подводных транспорт-
ных судов, обеспечивающих необходимую устойчивость до-
ставки жизненно необходимых грузов. Подводные транспортные
суда практически не подвержены влиянию штормов. Для их
плавания нет недосягаемых районов океана. Они могут обеспе-
чить доставку грузов кратчайшим путем через районы, контро-
лируемые противником, и по маршрутам, пролегающим подо
льдами Арктики. Уже сейчас, как полагают, существуют пред-
посылки к созданию подводных лодок, которые по своим ком-
мерческим показателям смогут конкурировать с надводными
судами.
Глубоководные подводные лодки смогут обладать большой
свободой маневра в трехмерном пространстве. Имея возмож-
ность погружаться на глубину в несколько тысяч метров, под-
водная лодка сможет осуществлять любые маневры, обеспечи-
вая возможность уклонения от обнаружения противника и отрыв
от преследования.
Глубоководные подводные лодки, корпус которых рассчитан
на исключительно большое гидростатическое давление, при
боевых действиях на малых глубинах окажутся менее уязви-
мыми от воздействия противолодочного оружия.
Лежащая среди неровностей дна на большой глубине под-
водная лодка может стать практически недосягаемой для гид-
роакустических средств обнаружения противника, имея при
этом исключительно благоприятные условия для работы своих
пассивных гидроакустических средств. Маневрируя глубиной
в широких пределах, подводные лодки смогут максимально
использовать гидролого-акустические особенности района дей-
ствия в интересах повышения эффективности своего гидроаку-
стического наблюдения или снижения эффективности гидроаку-
стического наблюдения противника.
Эти и другие военные и хозяйственные аспекты освоения
больших глубин и привели к разработке и постройке различных
глубоководных устройств. В свою очередь, для таких устройств
оказалось необходимым создать разнообразные гидроакустиче-
ские средства. Поэтому представляет определенный интерес
ознакомиться с основными направлениями в развитии глубоко-
водных устройств и гидроакустических средств, предназначен-
ных для установки на этих устройствах и проведения глубоко-
водных исследований.
172
§ 33. АМЕРИКАНСКАЯ ПРОГРАММА ОСВОЕНИЯ
ОКЕАНСКИХ ГЛУБИН
Значительный интерес, проявляемый в США в течение дли-
тельного времени к вопросу изучения морских глубин, еще
больше возрос после гибели «Трешера». Для решения разно-
образных задач военного и невоенного характера потребовалось
создание новых эффективных средств, способных осуществлять
разнообразные глубоководные исследования и работы, в том
числе обеспечивать проведение работ по спасению личного со-
става подводных лодок, затонувших на недоступной современ-
ным спасательным средствам глубине.
Этот повышенный интерес к глубоководным исследованиям и
работам нашел свое отражение в повестке дня конференции,
проведенной в Вашингтоне в 1964 г., в которой приняли участие
представители более чем 450 организаций и учреждений ВМС,
научно-исследовательских учреждений и частных фирм.
В ходе конференции была предложена и обсуждена пяти-
летняя программа освоения больших глубин (1966—1971 гг.),
получившая сокращенное наименование DSSP (Deep Submer-
gense System Projects — проект системы глубоководных погру-
жений). В основу этой программы был положен доклад группы
по изучению проблем создания глубоководных систем (DSSRG —
Deep Submergence System Reviev Group), созданной при
Управлении специальных проектов ВМС США [26, 78].
Среди основных проблем, подлежащих исследованию в ходе
осуществления программы, большая часть в той или иной сте-
пени связана с применением разнообразной гидроакустической
аппаратуры. К числу таких проблем, помимо уже перечислен-
ных ранее, можно отнести в первую очередь следующие:
— обнаружение затонувших подводных лодок и оказание
помощи их экипажам;
— исследование океанского дна на глубинах от 1800 до
6000 м и обеспечение подъема небольших предметов с этих
глубин;
— обеспечение подъема на поверхность затонувших подвод-
ных лодок с глубин, соответствующих их предельной глубине
погружения.
Гидроакустические средства несомненно должны найти ши-
рокое применение и при решении любых других задач, связан-
ных с глубоководными исследованиями и работами.
Первоначально предполагалось, что для реализации предло-
женной программы потребуется 325 млн. долл. Однако эта
программа была существенно сокращена и в окончательном ва-
рианте были утверждены расходы в сумме около 183 млн. долл.
Интересно отметить, что при общем сокращении ассигнований
почти по всем статьям плана, по одной из статей эти ассигнова-
173
ния были значительно увеличены. Это увеличение коснулось
работ по исследованию океанского дна, поиску и подъему на
поверхность небольших предметов с глубин от 1800 до 6000 м.
При первоначально проектируемых затратах на эти работы
в сумме 61 млн. долл. было признано целесообразным увели-
чить расходы почти до 93 млн. долл.
Предполагается, что в ходе реализации программы будут
построены 13 глубоководных устройств: три экспериментальных,
четыре — для проведения поисковых операций и шесть — для
спасения экипажей затонувших подводных лодок. Согласно плану
первое из глубоководных поисковых устройств, разработанных
по программе, должно быть построено к концу 1967 г., а в по-
следующие годы ВМС США должны получать по одному
устройству. Некоторые из этих устройств будут иметь возмож-
ность погружаться на глубину до 6000 ж, имея на борту раз-
личное специальное оборудование, в том числе и разнообраз-
ную гидроакустическую аппаратуру.
§ 34. ГИДРОЛОКАТОРЫ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ
И ЧАСТОТНОЙ МОДУЛЯЦИЕЙ СИГНАЛА
За последние годы находят все более широкое распростране-
ние гидролокаторы с непрерывным излучением и частотной
модуляцией сигнала. По мнению некоторых иностранных специа-
листов, такие гидролокаторы имеют ряд существенных преиму-
ществ перед широко распространенными гидролокаторами с им-
пульсным излучением. Основными из этих преимуществ считают:
возможность уменьшения излучаемой мощности без ухудшения
распознаваемости сигнала, меньшее влияние реверберационной
помехи, возможность увеличения скорости обследования при
поиске целей, отсутствие мертвых зон наблюдения, высокую раз-
решающую способность [39]. Все это важно при создании мало-
габаритной и маломощной аппаратуры, не требующей большой
дальности действия и предназначенной для глубоководных иссле-
довательских аппаратов. Так, станция, построенная по этому
принципу, была установлена на батискафе «Триест» и прини-
мала успешное участие в поисках обломков подводной лодки
«Трешер», усовершенствованная станция установлена на глубо-
ководной исследовательской подводной лодке «Элвин» и т. д.
Блок-схема гидролокатора с непрерывным излучением и ча-
стотной модуляцией сигнала, установленного на батискафе
«Триест» представлена на рис. 79 [36]. В гидролокаторе исполь-
зуются две раздельные акустические антенны — излучающая и
приемная (наличие раздельных антенн обязательно для такого
гидролокатора). На излучающую антенну поступают колебания
с частотой 70—90 кгц, модулированные по частоте с девиацией
около 5,5 кгц. Эти же колебания одновременно подаются на сме-
ситель приемного тракта.
174
Принятые, отраженные от цели колебания поступают на при-
емную акустическую антенну, а с нее на смеситель. В смесителе
происходит выделение разностной частоты между излучаемыми
и принимаемыми колебаниями. Разностная частота, пропорцио-
нальная дистанции до цели, фильтруется и усиливается. Так как
затухание сигнала, распространяющегося в воде, зависит от его
частоты, уровень принимаемого сигнала будет меняться с часто-
той. Чтобы компенсировать неравномерность затухания различ-
Рис. 79. Блок-схема гидролокатора с непрерывным излучением и час-
тотной модуляцией сигнала.
/ — приемник; 2 — смеситель; 3 — усилитель с фильтром; 4 — выходной усилитель;
5 — индикатор кругового обзора; 6 — видеоусилитель; 7 — многоканальный анали-
затор спектра; 8 — двигатель; 9 — сельсин-датчик; 10 — принимающий сельсин;
// — излучатель; 12 — генератор частотно-модулированных колебаний.
ных частот, частотная характеристика усилителя подбирается
так, чтобы высокие частоты, испытавшие большее затухание,
усиливались больше, чем низкие частоты. Окончательное вырав-
нивание амлитуды сигнала независимо от его частоты может
осуществляться с помощью ограничителя.
После усиления сигнал подается на динамик,— для его про-
слушивания оператором и классификации,— и на многоканаль-
ный анализатор спектра. В анализаторе спектра сигнал посту-
пает на гребенку из ста полосовых фильтров, с полосой пропус-
кания каждого 50 гц. Характеристики фильтров рассчитаны так,
что для смежных фильтров они пересекаются на уровне 0,7 от
максимума. Все сто фильтров перекрывают диапазон частот от
525 до 5475 гц. Каждый из фильтров соответствует определенной
разностной частоте, а следовательно, и дистанции до цели.
175
Выходы фильтров поочередно через общий видеоусилитель
подключаются к индикатору кругового обзора. Синхронно с под-
ключением фильтров подается напряжение развертки, осущест-
вляющее радиальное отклонение луча. Благодаря этому оказы-
вается возможным регистрировать дистанцию до цели. Акусти-
ческие антенны связаны синхронным приводом с отклоняющей
системой индикатора, что позволяет определять направление на
отражающий объект.
В аналогичном гидролокаторе, разработанном для исследо-
вательской подводной лодки «Элвин», введен ряд существенных
усовершенствований [36]. Так стробирование по дальности —
«электронная лупа»— обеспечивает увеличение масштаба шкалы,
а следовательно, и увеличение изображения рассматриваемого
объекта на экране индикатора в десять раз. С применением
«электронной лупы» разрешающая способность гидролокатора
увеличивается и оказывается не более 0,34 м. Стробирование
осуществляется путем увеличения периода развертки генератора
пилообразной частоты. При этом разностные частоты, отвечаю-
щие рассматриваемому отрезку дистанции, оказываются лежа-
щими в пределах полной полосы пропускания фильтров анали-
затора.
Недостатком первоначальной конструкции гидролокатора
являлось и то, что в нем имели место потери сигнала в периоды
времени, соответствующие обратному ходу пилообразно изме-
няющейся частоты. При этом происходил «скачок»— разност-
ная частота резко возрастала и оказывалась за пределами
полосы пропускания фильтров. В новом гидролокаторе введен
специальный вспомогательный генератор, частота которого сме-
шивается с разностной частотой во время «скачка», и результи-
рующая частота приводится в пределы полосы пропускания
фильтров.
Важным усовершенствованием является введение в гидроло-
катор устройства для компенсации допплеровского сдвига, воз-
никающего за счет движения носителя гидролокатора (так как
наблюдение ведется за неподвижными объектами, допплеров-
ский сдвиг за счет движения цели в этом случае отсутствует).
Компенсация допплеровского сдвига осуществляется путем ввода
определенной поправки в разностную частоту на выходе преоб-
разователя.
В Англии предложена [7] разновидность гидролокатора с не-
прерывным излучением и частотной модуляцией сигнала, обла-
дающая высокой разрешающей способностью (рис. 80). В этом
гидролокаторе предполагается использовать два одинаковых
приемных тракта, акустические антенны которых находятся
в плоскости наблюдения на некотором удалении одна от другой.
Если с помощью тракта такого гидролокатора облучать ка-
кую-либо цель, расположенную на линии, проходящей перпен-
176
дикулярно середине базы, образованной обоими приемниками,
то к обоим приемникам будут приходить отраженные колебания,
имеющие одинаковую разностную частоту. Значение этой раз-
ностной частоты, как известно, зависит от дистанции до цели.
Если цель будет находиться на любом направлении, отлич-
ном от направления, перпендикулярного базе приемника, то из-
за разницы в расстояниях от цели до каждого из приемников
разностные частоты в приемных каналах окажутся неодинако-
выми. Различие в величинах разностных частот будет опреде-
Рис. 80. Блок-схема гидролокатора с непрерывным излучением и частотной
модуляцией сигнала с двумя приемными каналами.
/—приемники; 2 — усилители; 3 — смесители; 4 — фильтры; 5 — усилители-ограничи-
тели; 6 — фильтр суммарной частоты; 7 — коммутаторы; 8 — излучатель; 9 — усили-
тель мощности; 10 — генератор пилообразной частоты; 11 — генератор пилообразного
напряжения; 12 — фильтр разностной частоты.
ляться разницей расстояний, возрастая с увеличением этой раз-
ницы, т. е. с увеличением угла между направлением на цель и
перпендикуляром к центру базы приемников. Следовательно,
различие в величинах разностных частот будет являться функ-
цией расстояния от цели до приемников и направления на цель.
Для регистрации этих величин может использоваться система
индикации с применением гребенки фильтров. Одна из таких
индикаторных систем, на которую подается сумма разностных
частот, приходящих в оба канала, служит для определения ди-
станции до цели, другая, на которую подается разность разност-
ных частот, служит для определения направления на цель. Таким
образом, гидролокатор позволяет обследовать заданный сектор
и определять координаты находящихся в нем целей. При опре-
делении направления на цель может иметь место неопределен-
ность. Для ее устранения предполагают использовать фазочув-
ствительную схему выделения разности разностных частот.
Предлагаемая схема, по мнению ее автора, по принципу по-
строения схожа со слуховым аппаратом летучих мышей, позво-
ляющим определять направления с большой точностью.
'Л' А. Л. Простаков
177
§ 35. ГИДРОЛОКАТОРЫ БОКОВОГО ОБЗОРА
В ходе проведения работ по поискам обломков затонувшей
атомной подводной лодки «Трешер» в США была разработана
новая специфическая разновидность гидроакустической аппара-
туры, получившая название «гидролокатор бокового обзора».
Это название связано с особенностью обзора нового гидролока-
тора: гидролокатор имеет острую в горизонтальной плоскости
характеристику направленности, расположенную перпендику-
лярно диаметральной плоскости носителя; обзор поверхности
дна моря происходит по мере продвижения носителя вперед.
Обычно гидролокатор имеет две акустические антенны, характе-
ристика направленности одной из которых направлена в сторону
правого борта, а другой — левого. Благодаря этому, по мере про-
движения носителя просматривается сплошная полоса, симмет-
ричная относительно линии пути.
Важнейшей отличительной чертой гидролокатора бокового
обзора является его исключительно высокая разрешающая спо-
собность, значительно превышающая разрешающие способности
гидролокаторов, выполненных по обычным принципам. Увеличе-
ние разрешающей способности достигается за счет некоторых
специфических особенностей конструкции аппаратуры. Так, кон-
струкция акустических антенн в сочетании с высокой рабочей
частотой обеспечивает получение исключительно острого акусти-
ческого луча. Так, например, в одном из образцов гидролока-
тора, имеющего рабочую частоту около 200 кгц (длина волны
0,75 см) и акустическую антенну, выполненную в виде длинной
трубы, обеспечивался просмотр полосы длиной 730 м и шириной
1,5 м. Угол раствора характеристики направленности для преоб-
разователя каждого борта при этом составлял около 15—20 уг-
ловых минут. Малая длина волны излучаемых колебаний обес-
печивает также хорошее отражение акустической энергии даже
от очень малых предметов.
Высокая разрешающая способность по дальности обеспечи-
вается главным образом за счет излучения очень коротких им-
пульсов акустической энергии. Так, при принятой в гидролока-
торе длительности импульса 0,1 мсек, разрешающая способность
по дальности, определяемая этой длительностью, составляет
всего 7,5 см.
При используемой в гидролокаторе высокой рабочей частоте
имеет место очень сильное затухание акустической энергии. По-
этому дальность действия гидролокатора оказывается ограни-
ченной. Для увеличения ширины обследуемой полосы гидроло-
катор буксируют или используют на носителе, движущемся на
удалении не более 60—120 м от дна. При этом луч гидролока-
тора оказывается скользящим вдоль поверхности дна. Такое
скольжение луча позволяет фиксировать даже малейшие неров-
178
ности и выступы на дне, благодаря чему изображение на экране
гидролокатора оказывается как бы трехмерным. Как утверж-
дают, за счет этого оказывается возможным фиксировать скалы,
трещины и другие неровности дна и обнаруживать -выступающие
над поверхностью дна объекты.
В рассматриваемом образце гидролокатора используются
акустические антенны, выполненные из пьезокерамического ма-
териала. Эти антенны имеют форму вытянутого цилиндра
(трубы) и размещаются так, чтобы их ось была направлена па-
раллельно поверхности моря и диаметральной плоскости носи-
Рис. 81. Общий вид буксируемого гидролокатора бокового
обзора.
теля (рис. 81). Для исключения взаимных помех при одновре-
менном излучении импульсов антенна каждого борта имеет свою
рабочую частоту, близкую к 200 кгц. Конструктивно акустичес-
кие антенны и аккумуляторы, питающие электронные элементы
аппаратуры, размещаются в герметическом корпусе, заполнен-
ном маслом. Такая конструкция обеспечивает гидролокатору
возможность работы на глубинах до 6000 м.
Все радиоэлектронные элементы гидролокатора выполнены
на полупроводниковых элементах и помещены в прочном кор-
пусе— контейнере. Корпус имеет длину около 3,6 м и весит
около 680 кг. Аппаратура, размещенная в корпусе, соединяется
с корабельной аппаратурой коаксиальным кабелем. Гидролока-
тор может размещаться и непосредственно на глубоководном
устройстве. Так, например, гидролокаторы бокового обзора
установлены на батискафе «Триест» и на исследовательской
глубоководной подводной лодке «Алюминаут».
Индикация сигналов осуществляется с помощью электронно-
лучевой трубки. Изображение с экрана трубки фотографируется
на движущуюся ленту.
3/47*
179
Гидролокатор излучает акустическую мощность около 300 вт.
Необходимость осуществления непрерывного обзора дна без ка-
ких-либо пропусков ограничивает скорость, при которой воз-
можно наблюдение, четырьмя узлами. При такой скорости за
час просматривается около 1,5 кв. миль (около 6 км2). Гидроло-
катор обеспечивает возможность обнаружения предметов разме-
рами 0,75X1,2 м [28].
В печати сообщается о разработке гидролокатора, обладаю-
щего еще более высокой разрешающей способностью. Новый
гидролокатор, как ожидают, будет иметь несколько меньшую
дальность действия — не более 120 м, но при этом позволит об-
Рис. 82. Глубоководная комплексная буксируемая поисковая систе-
ма (крестиком помечена акустическая антенна гидролокатора боко-
вого обзора).
наруживать предметы размерами 0,18x0,33 м. При классифика-
ции контакта дальность действия гидролокатора уменьшается до
45 ж, но разрешающая способность еще более улучшается и ока-
зывается не более 7,5 см [35].
Зимой 1963/64 г. Научно-исследовательской лабораторией
ВМС США было создано глубоководное комплексное буксируе-
мое поисковое устройство, одним из важнейших составных эле-
ментов которой явился гидролокатор бокового обзора (78]. В со-
став этого устройства входят два гидролокатора бокового
обзора, обеспечивающие просмотр полосы дна, симметрично
расположенной относительно линии его пути, магнитометр и три
фотокамеры, каждая из которых имеет свою лампу-вспышку.
Параметры гидролокаторов значительно отличаются от рассмот-
ренных ранее. Они работают на частотах 35 и 40 кгц. Акустиче-
ские антенны гидролокаторов длиной 1,2 м имеют экраны, обес-
печивающие излучение энергии только в заданном направлении.
Так как устройство может буксироваться со скоростью лишь
около одного узла, акустические антенны не нуждаются в обте-
кателях и закрепляются непосредственно на корпусе устройства,
выполненного в виде рамы, изготовленной из немагнитных ма-
териалов (рис. 82).
180
Блок-схема буксируемого устройства приведена на рис. 83.
Непосредственно на буксируемом устройстве помимо перечис-
ленной ранее аппаратуры размещаются аккумуляторная батарея
емкостью 28 а-ч с напряжением 28 в, преобразователь электри-
ческой энергии и трансформатор, обеспечивающие подачу нуж-
ных напряжений питания потребителям.
Буксируемое устройство соединяется с корабельной аппара-
турой при помощи коаксиального кабель-троса. Этот кабель
Рис. 83. Блок-схема глубоководного поискового буксируемого устройства.
/ — преобразователи информации; 2 — фильтры; 3 — разделительный фильтр; 4 — коакси-
альный кабель-трос; 5 — аккумуляторная батарея; 6 — регулятор напряжения; 7 — транс-
форматор; 8 — приемное устройство; 9 — сетевой фильтр; 10 — накопительное устройство.
длиной 6,7 км и диаметром 19 мм выдерживает усилие на раз-
рыв до 13,6 т. Из шести независимых каналов, имеющихся
в кабеле, два обеспечивают работу гидролокаторов. По кабелю
также подается с борта корабля напряжение питания, которое
не может быть получено от аккумуляторов.
Командная информация, поступающая с корабля на букси-
руемое устройство, и информация, поступающая от датчиков,
установленных на буксируемом устройстве, кодируется по ча-
стоте и разделяется с помощью системы фильтров.
Общий вес конструкции буксируемого устройства составляет
около 500 кг и, кроме того, для обеспечения устойчивости дви-
жения на глубине устройство имеет около тонны свинцового бал-
ласта. Глубина хода устройства относительно дна регулируется
с помощью автоматической лебедки путем изменения длины
вытравленного кабель-троса.
181
Рассматриваемое грубоководное устройство успешно исполь-
зовалось летом 1964 г. при поисках обломков «Трешера». Оно
буксировалось военным транспортом «Майзер» (Т-АК 272), ко-
торый был переведен в класс научно-исследовательских судов и
получил обозначение AGOR-11.
В связи с трудностью определения точного места поискового
устройства относительно корабля была разработана и исполь-
зовалась специальная гидроакустическая аппаратура слежения.
Эта аппаратура состояла из ответчика-ретранслятора акустиче-
ских сигналов, установленного на борту буксируемого устрой-
ства, и трех акустических приемников, расположенных в обтека-
телях на кронштейнах, укрепленных на корабле в точках, обра-
зующих равнобедренный треугольник со сторонами 15,2 м.
Акустические сигналы, излучаемые с корабля, ретранслиро-
вались буксируемым устройством. Эти ретранслированные сиг-
налы, поступая на приемники, разнесенные в пространстве, имели
сдвиги фаз, величина которых определялась разницей в отстоя-
ниях ретранслятора от точек приема. Сигналы, поступающие на
приемник, обрабатывались с помощью электронной вычисли-
тельной машины, которая и определяла положение буксируе-
мого устройства с учетом необходимых поправок на качку, крен,
дифферент и рыскание корабля.
Имея точные координаты буксируемого устройства относи-
тельно корабля и зная точное место самого корабля, при опреде-
лении которого использовались, в частности, и специальные на-
вигационные гидроакустические буи-маяки, не представляло
труда определить географические координаты обнаруживаемых
объектов.
§ 36. ДОППЛЕРОВСКИЕ НАВИГАЦИОННЫЕ СИСТЕМЫ
Допплеровские навигационные системы (ДНС), получившие
за последние годы широкое распространение в авиации и ракет-
ной технике, в настоящее время начинают успешно применяться
на кораблях. В корабельных ДНС применяются колебания "уль-
тразвукового диапазона, что дало основание назвать такие си-
стемы «гидролокационным лагом».
ДНС обладают рядом весьма важных положительных
свойств, важнейшими из которых являются следующие.
ДНС обеспечивают измерение скорости корабля относительно
дна моря, а не движущейся воды, как это делают обычные лаги,
и не требуют введения специальных поправок на течение. Таким
образом, они являются устройством, которое можно считать «аб-
солютным лагом». Они обеспечивают также определение угла
сноса, если он имеется.
ДНС обычно конструктивно совмещаются с вычислительными
устройствами и индикаторами скорости и пройденного расстоя-
182
ния и угла сноса. Высокая точность измеряемых величин и на-
глядность их отображения существенно облегчают пользование
приборами, упрощают ведение навигационной прокладки и по*
вышают тем самым точность .и безопасность кораблевождения.
При использовании ДНС не требуется затрат времени на
определение места корабля, необходимых при использовании
радионавигационных, радиолокационных, навигационных и ас-
трономических способов определения и на производство связан-
ных с этими определениями вычислений.
В некоторых условиях обстановки — при подходах к побе-
режью, не оборудованному в навигационном отношении, а также
в случаях, когда невозможно использовать другие средства ко-
раблевождения из-за отсутствия зрительной видимости или из-за
подавления радионавигационных систем радиопомехами и т. п.,
ДНС могут оказаться единственно пригодными средствами кора-
блевождения. ДНС практически не подвержены воздействию
преднамеренно создаваемых противником помех.
ДНС автономны, имеют небольшие габариты и вес и невысо-
кую стоимость.
Поясним кратко принцип действия к корабельной ДНС.
Если с корабля или подводной лодки осуществлять излуче-
ние узкого луча акустических колебаний с частотой /0 в направ-
лении диаметральной плоскости под углом ¥ к горизонту, отра-
женные от дна принимаемые колебания будут иметь допплеров-
ский сдвиг Д/д. Поскольку значения величин fo и Ч? известны, а
допплеровский сдвиг может быть измерен, легко найти скорость,
с которой корабль движется относительно отражающей поверх-
ности— дна моря.
Однако при наличии угла сноса допплеровский сдвиг будет
определяться не только значением известного угла 4е, но и зна-
чением угла сноса, величина которого неизвестна. В этом слу-
чае и по измеренному значению скорость не может быть опреде-
лена однозначно. Для устранения этой неоднозначности в ДНС
используется одновременно несколько лучей, системы являются
многолучевыми. Так известные образцы ДНС имеют по две пары
лучей: «вперед — назад» и «вправо — влево». В этом случае при
возможности определения допплеровского сдвига по каждому из
четырех лучей при отсутствии сноса сдвиг будет иметь место
только для лучей «вперед» и «назад», а для лучей «вправо» и
«влево» он будет равен нулю.
При наличии сноса допплеровский сдвиг будет иметь место
для всех четырех лучей.
Зная величины допплеровских сдвигов для каждого из лучей,
можно определить продольную и поперечную составляющие ско-
рости корабля и найти величину угла сноса.
Эти основные зависимости и реализуются в корабель-
ных ДНС.
183
В иностранной печати сообщается об устройстве одной ДНС
JN-400, обеспечивающей определение скорости, пройденного
пути и угла сноса и предназначенной для подводных лодок и
надводных кораблей [34].
В состав ДНС входят раздельные приемный и передающий
тракты (рис. 84). В передающий тракт входит генератор элек-
трических колебаний на полупроводниковых элементах и че-
тыре излучателя из титаната бария. Передающий тракт обеспе-
чивает непрерывное излучение ультразвуковых колебаний с ча-
Рис. 84, Блок-схема допплеровской навигационной системы.
/ — генератор; 2 — излучатели; 3 — приемники; 4 — усилители; 5 — дискриминатор
продольной составляющей; 6 — дискриминатор поперечной составляющей; 7 — генера-
тор частоты 10 кгц; 8 — преобразователи частоты; 9 — фазосдвигающая ячейка; 10 —
сумматор; // — интегрирующая схема; 12— блок сравнения фазы; 13— индикатор
скорости; 14 — индикатор пройденного расстояния; 15 — индикатор угла сноса.
стотой 1 Мгц в сторону дна в виде четырех лучей с углом
наклона 30° к вертикали и с шириной диаграммы направлен-
ности 3°.
Отраженные от дна колебания поступают на приемники.
Пары приемников и излучателей «передняя» и «задняя» служат
для определения продольной составляющей, «правая» и «ле-
вая»— поперечной составляющей скорости корабля. Каждый
приемник имеет свой усилитель, выполненный на полупровод-
никовых элементах и вместе с этим усилителем образует отдель-
ный канал. Каналы передний и задний соединяются со своим
частотным дискриминатором. На выходе дискриминатора выра-
батывается управляющее напряжение, амплитуда которого £/пр.с
будет пропорциональна разности допплеровских частот Д/д —
—Д/л =А/Пр.с. Знак управляющего напряжения зависит от
знака частотного рассогласования.
Свой частотный дискриминатор имеют и каналы правый и
левый. Таким образом, допплеровские сдвиги частот, имевшие
место на входах приемных каналов, оказываются преобразован-
ными в два напряжения, одно из которых £/пр.с оказывается
184
пропорциональным разности частот на входах приемников вы-
деления продольной составляющей, другое Unomc— разности ча-
стот на входах приемников выделения поперечной составляю-
щей. Знаки напряжений соответствуют знакам частотных рассо-
гласований. Эти напряжения поступают каждое на свой
преобразователь частоты, на которые одновременно подается
напряжение частотой 10 кгц от общего местного гетеродина. При
этом в фазу напряжения гетеродина, подаваемого в смеситель
канала выделения поперечной составляющей, вводится дополни-
тельный сдвиг на 90°. В преобразователях частоты происходит
модуляция колебаний с частотой 10 кгц по закону изменения
амплитуды огибающих частотных дискриминаторов.
Дополнительный сдвиг, вводимый в колебания, подаваемые
на преобразователь частоты канала выделения поперечной со-
ставляющей, обеспечивает получение постоянного сдвига фаз,
равного 90°, между векторами напряжений в каналах продоль-
ной и поперечной составляющих, соответствующего сдвигу фаз
между составляющими векторами скорости. Напряжения, ото-
бражающие по амплитуде и направлению (фазе) векторы состав-
ляющих скорости, суммируются в специальном сумматоре, к вы-
ходу которого подключен индикатор, регистрирующий скорость
корабля относительно земли. В интегрирующей схеме происхо-
дит интегрирование скорости за все время движения корабля,
что позволяет получить на выходе схемы на специальном инди-
каторе, представляющем собой электромеханический счетчик
на соленоидах, пройденное расстояние. Индикатор позволяет
регистрировать расстояние до 1800 км. В блоке сравнения фазы
происходит сравнение фазы вектора суммарного напряжения,
соответствующего скорости хода корабля и постоянного по на-
правлению вектора напряжения местного гетеродина. В резуль-
тате сравнения фаз этих векторов определяется угол сноса.
Из-за очень высокой рабочей частоты (1 Мгц)у подверженной
сильному пространственному затуханию, рассмотренная ДНС
может работать при глубине под килем корабля не более чем
75 м. Вес комплекта аппаратуры не превышает 6,5 кг.
Первоначально эта ДНС предназначалась для использова-
ния на прогулочных судах, чем и объясняются ее невысокие
параметры.
Опыт эксплуатации ДНС подтвердил ее высокие качества.
Это позволило принять решение об установке ДНС на амери-
канской исследовательской грубоководной лодке «Элвин». Как
утверждают, эта ДНС в сочетании с гирокомпасом и аналого-
вым счетно-решающим устройством позволит определять истин-
ную скорость лодки относительно дна с точностью около 1,5% и
угол сноса с точностью до 0,3°. Передающий тракт ДНС будет
работать также на частоте 1 Мгц и излучать электрическую
мощность 1 вт. Ограниченная дальность действия системы (также
185
не более 75 м под килем) в данном случае не имеет значения,
так как система будет использоваться для обеспечения корабле-
вождения подводной лодки, ведущей обследование морского дна
и имеющей небольшую дальность плавания в районе погруже-
ния. Весь комплект аппаратуры весит 13,6 кг и потребляет элек-
трическую мощность 15 вт от 12-вольтовой аккумуляторной
батареи [36].
Другая корабельная ДНС успешно прошла испытания
в 1963 г. Как сообщается, эта ДНС связана с вычислительным
устройством на полупроводниковых элементах и автоматическим
прокладчиком курса. Данные о полученных в ходе испытаний
точностях не опубликованы. Однако указывается, что система
обеспечила высокую точность швартовки корабля после оконча-
ния испытаний. Испытания подтвердили, что ДНС могут успешно
применяться при решении ряда задач кораблевождения и так-
тических задач. Так, считают, что ДНС смогут найти применение
при выполнении тактического маневрирования ночью и в тумане,
для привязки места и управления огнем по береговым целям,
при проводке кораблей по фарватерам в известных минных за-
граждениях, при рыбной ловле, при поиске выставленных буев,
определении мест повреждения кабеля и т. п. [36].
Полагают, что диапазон глубин, на которых могут использо-
ваться ДНС, может быть расширен за счет понижения рабочих
частот. Однако это неизбежно приведет к увеличению габаритов
аппаратуры, ее веса и потребляемой ею электрической мощности.
Одна из американских фирм разработала автопрокладчик,
работающий с использованием данных, поступающих от ДНС.
С помощью автопрокладчика осуществляется вычерчивание на
морской карте пути корабля из исходной точки, привязанной
к какому-либо навигационному ориентиру, расположенному
вблизи выхода из базы (бую, маяку и т. п.). Масштабное уст-
ройство обеспечивает возможность использования в автопро-
кладчике различных навигационных карт. Предусмотрена воз-
можность выключения автопрокладчика для корректировки
места корабля, смены, карт, изменения масштаба прокладки
и т. п. [60].
В печати соообщается о разработке своеобразной ДНС для
кораблей на подводных крыльях. В этой системе используются
ультразвуковые колебания с частотой 40—160 кгц. Излучение
акустических колебаний производится в воздухе в сторону от-
ражающей поверхности — поверхности моря. Хотя и в этом слу-
чае ДНС имеет определенные преимущества, в частности, не
требуют погружения датчика лага в воду, она не обеспечивает
определения скорости корабля относительно дна и в ее показа-
ния необходимо вводить поправку, учитывающую влияние те-
чения. Однако ДНС позволяет учесть снос корабля относительно
поверхности воды, вызванный действием ветра [34].
186
§ 37. ГИДРОАКУСТИЧЕСКОЕ ВООРУЖЕНИЕ УСТРОЙСТВ
ДЛЯ ГЛУБОКОВОДНЫХ ИССЛЕДОВАНИЙ
На существующих в настоящее время устройствах для глу-
боководных исследований установлена и используется разнооб-
разная гидроакустическая аппаратура. Состав этой аппаратуры
меняется в зависимости от того, какая аппаратура существо-
вала или была специально разработана к моменту создания
данного глубоководного устройства и от того, какие задачи ста-
вились в процессе эксплуатации. Известно, например, что гид-
роакустическое вооружение батискафа «Триест» было сущест-
венно усилено при проведении поисков обломков затонувшей
подводной лодки «Трешер». Изменения в составе гидроакусти-
ческого вооружения вызывались и другими причинами.
Устанавливаемая на глубоководных устройствах аппаратура
должна работать в специфических весьма тяжелых условиях.
Так, акустические преобразователи должны эффективно рабо-
тать при изменении окружающего гидростатического давления
в огромном диапазоне (в некоторых случаях до 1100 атм).
Электронные элементы аппаратуры должны иметь небольшие
габариты и вес и потреблять возможно малую энергию от ис-
точников питания. Конструкция аппаратуры и система индика-
ции должны быть достаточно удобными для использования опе-
раторами, которые вынуждены одновременно выполнять в труд-
ных и стесненных условиях много разнообразных и сложных
функций. Среди других требований к конструкции аппарату-
ры — необходимость широкого применения микроэлектроники,
высокая влагостойкость, вибропрочность и ударопрочность, мно-
гофункциональность отдельных элементов и блоков, в особен-
ности индикаторов. Как полагают, максимальное удовлетворе-
ние всех этих требований может быть достигнуто лишь в ре-
зультате разработки специальной аппаратуры.
Необходимость в разработке специальной аппаратуры вызы-
вается также и широким кругом разнообразных задач, решать
которые должна гидроакустика, устанавливаемая на глубоко-
водных устройствах.
Одним из старейших из числа действующих глубоководных
устройств является батискаф «Триест», построенный в 1953 г.
и с 1957 г. входящий в состав ВМС США. При модернизации
батискафа в 1961 г. на его борту было установлено следующее
гидроакустическое оборудование:
малогабаритный гидролокатор с небольшой дальностью дей-
ствия, позволяющий осуществлять наблюдение по курсу бати-
скафа и обнаруживать подводные препятствия на расстоянии
порядка 40—50 м\
ненаправленный акустический приемник, позволяющий
изучать шумы моря в диапазоне частот от 10 гц до 30 кгц.
187
Принимаемые этим приемником шумы регистрируются с по-
мощью самописца;
аппаратура звукоподводной связи, выполненная на полу-
проводниковых элементах [53].
В дальнейшем это вооружение должно было усилиться за
счет установки более мощного гидролокатора и направленного
акустического приемника.
На батискафе было установлено также оборудование для
проведения гидролого-акустических исследований, в частности
скоростемер типа NBS.
Установленная на батискафе гидроакустическая и исследо-
вательская аппаратура обеспечила проведение эффективных
исследований по программам «Нектон» и «Нектон-2» (1959-—
1960 гг.). В ходе проведения этих программ велись и гидролого-
акустические исследования, в частности:
определение скорости распространения звука в осадочных
породах;
усовершенствование методов измерения вертикального рас-
пределения скорости распространения звука в море;
измерение интенсивности звукового поля на различных глу-
бинах, создаваемого источником звука, расположенным вблизи
поверхности;
изучение шумов моря;
исследование глубоководных звукорассеивающих слоев;
исследование условий распространения звука в подводном
звуковом канале;
исследование рассеяния и отражения звука от дна океа-
на [53].
Кроме того, батискаф использовался в качестве глубоковод-
ной мишени при исследованиях эффективности новых корабель-
ных гидроакустических средств.
После очередной модернизации батискафа в 1963—1964 гг.
на нем были установлены новые, более совершенные гидроаку-
стические средства:
гидролокатор, работающий на частоте 35—45 кгц, в режиме
непрерывного излучения и частотной модуляции сигнала, обес-
печивающий обзор в секторе 100° правого и левого борта и
имеющий дальность действия около 900 м;
гидролокатор, работающий на частоте 12 кгц, имеющий три
преобразователя направленного действия, обеспечивающие воз-
можность обзора вниз, вверх и по направлению движения ба-
тискафа; сигналы, поступающие на два любых преобразователя,
одновременно могут регистрироваться на ленте самописца;
ультразвуковой подводный телефон, позволяющий поддер-
живать связь с кораблем-обеспечителем, при погружении бати-
скафа на глубину до 11 000 м\
шумопеленгаторная станция [52].
188
Кроме того, на батискафе были установлены эхолот, рабо-
тающий на частоте 50 кгц и обеспечивающий точные измере-
ния на удалении до 300 м от дна, и различная исследователь-
ская аппаратура.
При последующих переоборудованиях на батискафе был
установлен также гидролокатор бокового обзора. Этот гидро-
локатор имеет две акустические антенны в виде панелей, вытя-
нутых в линию, с активными элементами, изготовленными из
пьезокерамики. Антенны размещены по обеим сторонам над-
стройки. Для регистрации принимаемых эхосигналов исполь-
зуются два записывающих устройства [78].
При использовании батискафа при поисках затонувшей под-
водной лодки «Трешер» на нем была установлена также аппа-
ратура, позволяющая ориентироваться по специально выстав-
ленным гидроакустическим маякам, и аппаратура, служащая
для ретрансляции сигналов системы точного определения места
батискафа относительно корабля-обеспечителя.
Исследовательская подводная лодка «Элвин», построенная
по заказу Вудсхоллского института океанографии и являю-
щаяся по существу «подвижной платформой» для различного
научного оборудования, также имеет разнообразное гидроаку-
стическое вооружение. Так, на ней установлен усовершенство-
ванный гидролокатор с непрерывным излучением и частот-
ной модуляцией сигнала, работающий на частоте 70—90 кгц,
более подробно описанный ранее. Этот гидролокатор имеет
дальность действия 800 м и разрешающую способность по ди-
станции 0,35 см. Вес гидролокатора 90,6 кг, потребляемая им
электрическая мощность около 2000 вт. Кроме того, на борту
подводной лодки «Элвин» установлен звукоподводный теле-
фон, обеспечивающий двухстороннюю связь с кораблем-обе-
спечителем на расстояние до 13 км. Вес этой аппара-
туры около 21 кг, потребляемая электрическая мощность
200 вт.
Для обеспечения кораблевождения используется допплеров-
ская навигационная система. Установка, излучающая мощные
ответные импульсы, позволяет определять место лодки относи-
тельно корабля-обеспечителя [36].
Среди задач, возлагаемых на подводную лодку при прове-
дении гидролого-акустических исследований, можно отметить
следующие:
изучение глубоководных звукорассеивающих слоев;
изучение особенностей распространения звука на различных
глубинах;
наблюдение с помощью гидроакустической аппаратуры за
жизнью рыб и морских животных;
глубоководные исследования новых узлов и образцов аппа-
ратуры [77].
8 А. Л. Простаков
189
На экспериментальной глубоководной подводной лодке
«Долфин», предназначенной в числе прочих задач и для иссле-
дований гидроакустического оборудования, и для гидролого-
акустических исследований, предполагается установка специ-
ально разработанных активной и пассивной гидроакустических
станций [55].
Эта подводная лодка должна использоваться и как средне-
скоростная глубоководная цель при тренировке противолодоч-
ных сил [29].
На глубоководной подводной лодке «Алюминаут», способной
погружаться на глубину до 4570 м, среди прочего специального
оборудования имеется не-
сколько гидроакустических
станций. Так, для обзора в
секторе 180° по направле-
нию движения подводной
лодки служит гидролокатор
SM-502A, имеющий даль-
ность действия до 700 м.
Осмотр поверхности мор-
ского дна и поиск малораз-
мерных затонувших предме-
тов могут осуществляться с
помощью гидролокатора бо-
кового обзора, аналогичного
гидролокатору, установлен-
ному на батискафе «Три-
ест». Перед установкой на
подводную лодку этот гид-
ролокатор был модернизи-
рован, для него изготовили электронный индикатор с диамет-
ром экрана около 48 см и повысили разрешающую способ-
ность станции.
Контроль за глубиной хода подводной лодки и отстоянием
ее от дна моря осуществляется с помощью двух эхолотов, пре-
образователь одного из которых направлен в сторону поверх-
ности, а другого — в сторону дна моря.
Для обеспечения уверенной связи с кораблем-обеспечителем
при нахождении подводной лодки на любой глубине и горизон-
тальном отстоянии до 1,5—2 км служит звукоподводный теле-
фон АТМ-502 [78].
Зоны действия гидроакустической аппаратуры, установлен-
ной на подводной лодке, показаны на рис. 85.
Гидролокатор оригинальной конструкции установлен на
французской научно-исследовательской подводной лодке «Ны-
ряющее блюдце» («Дениза»). Этот гидролокатор имеет три на-
Рис. 85. Зоны действия гидроакустиче-
ской аппаратуры, установленной на аме-
риканской глубоководной подводной лод.
ке «Алюминаут».
/ — носовая гидроакустическая станция; 2 —
звукоподводный телефон; 3 — гидролокатор
бокового обзора.
190
правленных преобразователя, к каждому из которых может
быть подключена электронная часть аппаратуры. Один из пре-
образователей обеспечивает возможность обзора по направле-
нию движения подводной лодки, другой позволяет определять
глубину погружения лодки, а третий — отстояние подводной
лодки от дна [25].
Гидролокаторы являются обязательным элементом оборудо-
вания и автономных глубоководных устройств, не имеющих на
борту личного состава,— так называемых «подводных роботов».
Роль гидроакустических средств наблюдения на таких устрой-
ствах особенно ответственна, так как они являются одним из
основных средств добывания информации о подводной обста-
новке. Личный состав, осуществляющий дистанционное управ-
ление «подводными роботами» сам непосредственно не может
наблюдать обстановку в районе действия устройства и вынуж-
ден всецело руководствоваться данными, поступающими от
средств наблюдения, установленных на устройстве.
Из всех устанавливаемых на «подводных роботах» средств
наблюдения, гидроакустические средства обладают максималь-
ной дальностью действия, и их возможности практически не за-
висят от освещенности, наличия в воде ила и других взвешен-
ных частиц и т. п.
Гидролокатор является важной составной частью комплекса
средств наблюдения американской телеуправляемой системы
«Солярис», предназначенной для поиска и подъема затонувших
торпед и ракет, прокладки подводного кабеля, обнаружения
затонувших подводных лодок и т. п. Хотя на этом устройстве
имеются и другие средства наблюдения, например телевизион-
ная камера, но дальность действия их значительно меньше
дальности действия гидролокатора.
На другом телеуправляемом устройстве — самоходной уста-
новке РУМ устанавливается гидролокатор.
Гидролокатор устанавливается и на подводном роботе «Мо-
бот», предназначенном для производства работ при подводной
добыче нефти. Используя информацию, поступающую от раз-
личных средств наблюдения, в том числе и от гидроакустиче-
ских, этот робот может обнаруживать трубы, лежащие на грун-
те, соединять ИХ) перекрывать заслонки на трубопроводах и т. п.
Дальность действия гидролокатора составляет 427 м. Информа-
ция с робота и команды на него с судна управления поступают
по 52-жильному кабелю [65].
Подводный робот «Пегас», как утверждают, сможет дистан-
ционно управляться не только с кораблей или подводных лодок,
но и с вертолетов и береговых постов. На нем должны быть
установлены гидролокатор, гидроакустический глубиномер и
телевизионная камера. Индикаторы всех этих устройств, ука-
зателя местоположения, лага и т. п. будут установлены на
8*
191
общем пульте управления, размещенном на объекте-обеспечи-
теле [36].
Предполагают, что гидроакустическая аппаратура найдет
более широкое применение в перспективных устройствах для
подводных исследований. Так, одно из разрабатываемых само-
ходных устройств, как сообщают [52], будет иметь на борту
пассивную и активную гидроакустические станции, специаль-
ные буи-ориентиры для обеспечения выхода в заданные точки
и сможет управляться по акустическому каналу телеуправления.
§ 38. ГИДРОАКУСТИЧЕСКОЕ ВООРУЖЕНИЕ
РАЗРАБАТЫВАЕМЫХ ГЛУБОКОВОДНЫХ УСТРОЙСТВ
ДЛЯ СПАСЕНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК
Сложные задачи, которые придется решать при спасении
подводных лодок, затонувших на больших глубинах, и их лич-
ного состава требуют установки на спасательных устройствах
целого комплекса специально разработанной гидроакустической
аппаратуры.
Наряду с решением многочисленных задач, общих для всех
глубоководных устройств, эта гидроакустическая аппаратура
должна обеспечивать и выполнение некоторых специфических
задач. Основными задачами, стоящими перед гидроакустиче-
ской аппаратурой спасательных устройств, являются:
всенаправленный обзор пространства, позволяющий получить
общую картину окружающей подводной обстановки;
секторный обзор в носовой полусфере, обеспечивающий
вождение глубоководного устройства и предохранение его от
столкновения с подводными препятствиями;
наблюдение за подводными целями, находящимися на очень
малых (порядка 1 м) расстояниях от глубоководного устрой-
ства;
поиск малоразмерных подводных целей, находящихся на
дне, и отображение их формы;
обеспечение стыковки спасательного устройства с аварийной
подводной лодкой;
звукоподводная связь с кораблями-обеспечителями и дру-
гими подводными устройствами;
обнаружение сигналов аварийных подводных лодок и под-
держание с ними двухсторонней слуховой связи;
обеспечение кораблевождения с помощью автономных на-
вигационных систем;
обеспечение определения места глубоководного устройства
с корабля-обеспечителя или судна-матки и др.
Для решения всех этих задач предполагается создать целый
комплекс специальной гидроакустической аппаратуры. По со-
192
общению американского журнала «Электронике» [36] предпо-
ложительно будет разработана следующая аппаратура.
Для обеспечения секторного обзора в носовой полусфере
должен быть создан гидролокатор, позволяющий осуществлять
обзор в горизонтальной плоскости и сканирование луча в вер-
тикальной плоскости, что позволит не только обнаруживать
препятствия, но и определять профиль дна. Горизонтальный об-
зор может осуществляться с помощью гидролокатора с непре-
рывным излучением и частотной модуляцией сигналов, рабо-
тающего в заданном секторе и имеющего частоту 70—80 кгц.
Такой гидролокатор позволит обнаруживать препятствия на
расстоянии порядка 300 м, что обеспечит возможность своевре-
менного уклонения глубоководного устройства от столкновения.
Сканирование луча в вертикальной плоскости может осуществ-
ляться любым используемым в гидроакустике способом. При-
менение в гидролокаторе высокой рабочей частоты позволит
использовать акустические преобразователи, имеющие неболь-
шие 50x100x50 мм3 габариты и вес около 450 г.
Для наблюдения за целями на очень малых расстояниях, что
необходимо при сближении с целью в замутненной воде, когда
полностью исключается зрительное и телевизионное наблюде-
ние, при возвращении глубоководного устройства на судно-матку,
при поиске люка аварийной подводной лодки и в других анало-
гичных случаях, должны использоваться высокочувствительные
гидролокаторы с малой дальностью действия. Эти гидролока-
торы должны обеспечивать по возможности индикацию целей
в наглядной форме.
Как полагают, в качестве таких гидролокаторов смогут быть
использованы ультразвуковые зонды с импульсным или непре-
рывным излучением сигналов, обеспечивающие формирование
изображения на индикаторе или позволяющие получать стерео-
скопическое изображение цели. По мнению иностранных спе-
циалистов, создать такие гидролокаторы достаточно эффектив-
ными и имеющими небольшие габариты и вес будет весьма
трудно. В случае использования гидролокаторов с непрерывным
излучением эти гидролокаторы, как предполагают, будут иметь
рабочую частоту порядка 1,5 Мгц и должны работать в трех
диапазонах дальностей: 30, 9 .и 4,5 м. Разрешающая способность
гидролокаторов должна быть не более 1 % от соответствующей
максимальной дальности, а по углу —не более Г.
Гидролокаторы, определяющие расстояние до поверхности
моря и глубину, должны позволять измерять эти расстояния
с точностью до 30 см. Хотя подобные гидролокаторы уже суще-
ствуют в настоящее время и установлены на некоторых образцах
глубоководных устройств, они должны быть существенно пере-
работаны для уменьшения габаритов и веса.
Для поиска малоразмерных целей предполагается исполь-
193
зовать уже хорошо зарекомендовавшие себя гидролокаторы бо-
кового обзора.
Для поддержания звукоподводной связи также предпола-
гается использовать широко распространенную аппаратуру
UQC-1E. Для голосовой связи с личным составом аварийной
подводной лодки предполагается создать специальную аппа-
ратуру.
О насыщенности гидроакустической аппаратурой предпола-
гаемого глубоководного устройства, предназначенного для про-
изводства работ по снижению затонувших подводных лодок
дает наглядное представление рис. 86.
Рис. 86. Гидроакустическое вооружение разрабатываемого американ-
ского спасательного глубоководного устройства
/ — звукоподводный телефон; 2 — гидролокатор глубины; 3 — гидролокатор
кругового обзора; 4 — основной гидролокатор с обзором носовой полусферы;
5 — выдвижной обтекатель гидролокатора; 6 — гидролокатор для обзора в вер-
тикальной плоскости; 7 — гидролокатор малого радиуса действия; 8 — гидро-
фоны; 9 — ультразвуковой зонд; /0 — затонувшая подводная лодка; 11 — доп-
плеровская навигационная система; 12 — гидролокатор положения; 13 — гидро-
локатор бокового обзора; 14 — подводный телефон для связи с подводной
лодкой.
На глубоководных устройствах для обеспечения точного ко-
раблевождения предполагается широко использовать доппле-
ровские навигационные системы.
Допплеровские навигационные системы, как полагают, най-
дут применение и для управления самоходными глубоковод-
ными устройствами без личного состава. Так, в одном из уст-
ройств предполагается с помощью допплеровской навигаци-
онной системы управлять тягой двигателей, что позволит
устройству поддерживать постоянную скорость перемещения
относительно дна.
Кроме того, на глубоководных устройствах могут устанав-
ливаться различная аппаратура для ориентирования относи-
тельно гидроакустических маяков, для выдачи импульсных сиг-
налов, позволяющих определять место устройства с корабля-
обеспечителя, и некоторые другие приборы.
194
ЗАКЛЮЧЕНИЕ
В ходе развития гидроакустических средств происходит как
бы некоторое негласное соревнование между гидроакустикой и
обеспечиваемым ею оружием.
К концу минувшей войны, когда основным видом используе-
мого оружия по данным гидроакустического наблюдения явля-
лись глубинные бомбы, даже весьма ограниченные возможности
средств обнаружения превосходили возможности оружия.
Появление противолодочного ракетного оружия и дально-
ходных торпед привело к перевесу в сторону оружия. В свою
очередь, создание гидролокаторов, использующих вторичные
зоны акустической освещенности и донные отражения, привело
к установлению временного равновесия в развитии средств об-
наружения и оружия. По мнению некоторых зарубежных спе-
циалистов, это равновесие вскоре будет вновь нарушено, но
уже в пользу гидроакустической аппаратуры [77].
По существующим за рубежом взглядам, борьба с подвод-
ными лодками имеет четыре последовательные и взаимосвязан-
ные фазы. Недостаточная эффективность действий при выпол-
нении любой фазы может сделать неэффективным решение за-
дачи в целом. Такими фазами считают: обнаружение цели;
классификацию контакта; слежение за целью и определение ее
координат; уничтожение цели.
Примерно такие же фазы имеют место и при применении
оружия подводными лодками по подводным лодкам и надвод-
ным кораблям.
Практически на всех этих фазах главенствующая роль при-
надлежит гидроакустическим средствам.
Однако, подводя итоги современному состоянию гидроаку-
стики, иностранные специалисты делают вынужденное призна-
ние о том, что несмотря на определенные успехи, состояние
гидроакустических средств еще далеко не соответствует предъ-
являемым к ним требованиям.
Так, отмечается, что возможности обнаружения современных
скоростных глубоководных подводных лодок, оснащенных ору-
жием дальнего действия, все еще очень ограничены и в значи-
тельной степени зависят от гидролого-акустических условий.
В области классификации контакта сделано пока еще очень
немного. При слежении с увеличением дальности действия ап-
паратуры растут ошибки в определении координат цели. Так,
при ошибке пеленгования 0,5°, допускаемой современными гид-
ролокаторами, на дистанции 50 км линейная ошибка в направ-
лении, перпендикулярном пеленгу на цель, составляет около
±400 м. При относительной ошибке в измеряемой дальности,
равной 1%, абсолютное значение этой ошибки составит 500 м.
Запаздывание в приходе эхосигнала доходит до 1 минуты.
195
Стремление уменьшить эти недостатки и повысить эффектив-
ность наблюдения и определяет основные направления разви-
тия гидроакустических средств.
Американский журнал «Миссайлз энд Рокетс» [50] следую-
щим образом определяет возможные пути дальнейшего развития
гидроакустической аппаратуры.
Ожидается дальнейшее усовершенствование уже существую-
щей аппаратуры, устранение многочисленных недостатков,
имеющихся в ее конструкции, уменьшение габаритов и веса.
Несмотря на успехи в области обесшумливания подводных
лодок и надводных кораблей предполагается дальнейшее раз-
витие пассивных систем обнаружения и определения координат
целей.
Ожидается переход аппаратуры на работу в области еще
более низких, чем применяются сейчас, рабочих частот. Зна-
чительно повысится излучаемая гидролокаторами мощность.
В связи с этим потребуется создание акустических антенн но-
вых типов. Вместо громоздких сплошных акустических антенн,
применявшихся до последнего времени, будут использоваться
многоэлементные групповые неподвижные акустические ан-
тенны. Формирование и сканирование характеристики направ-
ленности таких антенн должно осуществляться электрическим
путем. Должно быть" значительно увеличено число статически
формируемых характеристик направленности при приеме. Это,
как ожидают, позволит существенно повысить помехоустойчи-
вость и разрешающую способность гидролокаторов, но создаст
дополнительные трудности в связи с резким увеличением объ-
ема информации, поступающей к оператору. Отсюда, в свою оче-
редь, требуется создание индикаторов новых типов.
Предполагается более широкое применение новых видов из-
лучения сигналов — непрерывного излучения с частотной моду-
ляцией, многоимпульсного, двухчастотного излучения.
Особое внимание уделяется проблеме классификации кон-
такта и разработке способов выделения слабых полезных сигна-
лов на фоне интенсивных акустических помех. Этому должно спо-
собствовать применение электронных вычислительных машин,
позволяющих сопоставлять принимаемые сигналы с типовыми
сигналами, зафиксированными в устройствах «памяти» машин.
Исключительно большое значение приобретают гидролого-
акустические исследования, являющиеся основой для дальней-
шего повышения эффективности средств обнаружения. Так,
в частности, в связи с увеличением дальности действия оказы-
вается необходимым изучать влияние горизонтальной рефрак-
ции, вносящей искажения в определение направления на цель.
Для обеспечения этих исследований предполагается создание
специальной аппаратуры, исследовательских судов, судов-плат-
форм и других устройств.
196
Все данные об условиях распространения звука в морской
среде будут подвергаться машинной обработке, накапливаться
и широко использоваться в интересах гидроакустического на-
блюдения при решении задач противолодочной борьбы.
Стремление проникнуть в глубь океана вызвало появление
различных устройств для глубоководных исследований. Важной
составной частью их оборудования является гидроакустическая
аппаратура. Предполагается, что на базе таких устройств
в дальнейшем смогут быть созданы подвижные глубоководные
системы обнаружения, обладающие высокой боевой устойчи-
востью. На большой глубине, с помощью этих устройств можно
будет максимально использовать благоприятные гидрологиче-
ские условия, в частности явление распространения звука
в подводном звуковом канале.
В печати приводятся и другие данные об ожидаемой направ-
ленности развития гидроакустических средств.
Сообщается и о предполагаемых изменениях в конструкции
корпуса корабля, его механизмов, оружия и боевых средств,
связанных с дальнейшим развитием гидроакустической техники.
Одновременно, как можно судить по сообщениям печати,
продолжаются интенсивные работы по созданию различных
средств подводного обнаружения, основанных на неакустиче-
ских принципах. Эти средства, как ожидают, должны будут
компенсировать принципиальные недостатки, свойственные гид-
роакустике— зависимость от гидрологических условий, запаз-
дывание информации, вызываемое малой скоростью распро-
странения звука в воде, невысокую точность определения коор-
динат и т. п.
Насколько реальны приводимые в печати прогнозы о на-
правлениях развития гидроакустики покажет время.
ЛИТЕРАТУРА
1. Бич Э., Стил Д. и др. Вокруг света под водой. Перевод с англий-
ского. Воениздат, М., 1965.
2. Букалов В. М., Нарусбаев А. А. Проектирование атомных
подводных лодок. «Судостроение», Л., 1964.
3. Военно-морское оружие. Сборник переводных статей. Воениздат, М.,
1965.
4. Герасимов В. Н., Дробленков В. Ф. Подводные лодки импе-
риалистических государств. Воениздат, М., 1962.
5. К л ю к и н И. И. Борьба с шумом и звуковой вибрацией на судах.
Судпромгиз, Л., 1961.
6. Некоторые вопросы прикладной акустики. Перевод с английского.
Воениздат, М., 1962.
7. Подводная акустика. Перевод с английского. «Мир», М., 1965.
8. Простаков А. Л. Гидроакустика в военно-морском флоте. Воен-
издат, М.' 1961.
9. Простаков А. Л. Гидроакустика в иностранных флотах. «Судо-
строение», Л., 1964.
10. Хор тон Д. У. Основы гидролокации. Судпромгиз, Л., 1961.
11. Зарубежная радиоэлектроника. Журнал, 1960—1965.
12. Морской сборник. Журнал, 1960—1965.
13. Сборник статей по иностранному судостроению. «Судостроение», Л.,
1963—1965, № 101 — 136.
14. А 1 be r s. Underwater Acoustics Handbook. Pennsylv. State Univers,
1960.
15. Hu is veld, Papineau, Routh, Sauer. Evalution of Perfor-
mance of Sonar Countermeasures Systems. San Diego, 1958.
16. Janes Fighting Ships. London.
17. Marine Sciences Instrumentation. Vol. 1, 2. San Diego, 1962.
18. Nawal Ordnance and Gunnery, Vol. 2. Wash., 1958.
19. Naval Review, 1965.
20. Waldo. Ocean and Sea-ice Research in the Arctic Ocean via Submarine.
San Diego.
21. Aerospace Engineering. 1962, Apr.
22. Acustica. 1958, Bd. 2, No 3.
23. Armi-Navy-Air Force Journal. 1961, Vol. 98, No 46.
24. A.S.H.R.A.E. Journal. 1965, Vol. 7, No 2.
25. L'auto Journal. 1960, Dec.
26. Automatic Industries. 1964, Vol. 31, No 11.
27. Aviation Week, 1963, Vol. 79, No 24.
28. British Communications and Electronics. 1964, Vol. 11, No 3.
29. Bureau of Ships Journal. 1959, Vol. 8, No 9; 1960, Vol. 9, No 5, 8;
1961, Vol. 10, No 5, 7, 8, 10, 11; 1962, Vol. 11, No 3, 7; 1963, Vol. 12, No 3, 4, 6,
7, 10; 1964, Vol. 13, No 3, 4, 7, 10; 1965, Vol. 14, No 4, 8.
30. Canadian Shipping and Marine Engineering News. 1962, Vol. 33, No 6;
1964, Vol. 35, No 6.
31. Computers and Automation. 1962, Vol. 11, No 9.
32. The Crowntest. 1964, Vol. 16, No 3—4.
33. Deep Sea Research. 1960, Vol. 6, No 3; 1960, Vol. 7, No 2.
34. Electronic Design. 1960, Vol. 8, No 24; 1961, Vol. 9, No 12; 1964,
Vol. 12, No 4, 13, 26; 1965, Vol. 13, No 2.
35. Electronic News. 1961, Vol. 6, No 254; 1962, Vol. 7, No 350.
198
36 Electronics. 1958, Vol. 31, No 1; 1960, Vol. 33, No 24; 1961, Vol. 34,
No 22, 26; 1962, Vol. 35, No 2, 20, 31; 1963, Vol. 36, No 5, 23, 27, 34, 37, 40, 47,
50; 1964, Vol. 37, No 5, 12, 18, 20, 32; 1965, Vol. 38, No 4.
37. Electronics Weekly, 1964, No 201.
38. Flight. 1963, Vol. 84, No 2854.
39. Journal of the Britisch Institution of Radio Engineers. 1956, Vol. 16,
No 5; 1959, Vol. 19, No 11.
40. Journal of Scientific Instruments. 1958, Vol. 35, No 12.
41. Hansa. 1963, bd. 100, No 6; 1964, bd. 101, No 10.
42. Hovering Craft and Hydrofoil. 1964, Vol. 4, No 2.
43. I.E.E.E. Transactions of Sonics and Ultrasonics. 1965, Vol. SV—12, No 2.
44. Illustrated London News. 1963, No 6489.
45. Interavia. 1960, Vol. XV, No 10.
46. The International Hydrographic Review. 1960, Vol. XXXVII, No 1.
47. IRE Transactions on Communications Systems. 1959, CS-7, No 4.
48. Marine Engineering/Log. 1959, Vol. 64, No 7, 12; 1962, Vol. 67, No 11.
49. Marine Rundbchau. 1963, bd. 60, No 6.
50. Missiles and Rockets. 1960, Vol. 7, No 8; 1961, Vol. 8, No 11, Vol. 9,
No 1, 1963, Vol. 13, No 24; 1964, Vol. 14, No 13, Vol. 15, No 5, 12; 1965, Vol. 16,
No 13, Vol. 17, No 10.
51. Modern Plastics. 1962, Vol. 39, No 11.
52. Naval Engineering Journal. 1962, Vol. 74, No 2; 1963, Vol. 75, No 1—4;
1964, Vol. 76, No 1, 4, 6; 1965, Vol. 77, No 2.
53. Naval Research Reviews, 1961, Vol. 14, No 9; 1962, Vol. 15, No 4, 11,
12; 1963, Vol. 16, No 2, 8; 1964, Vol. 17, No 8, 10, 11; 1965, Vol. 18, No 6.
54. The Navy. 1963, No 10.
55. Navy Times. 1961, Vol. 10, No 29; 1964, Vol. 13, No 6, 23, 29, 50; 1965,
Vol. 14, No 14, 24.
56. New Scientist. 1963, Vol. 20, No 371.
57. Ordnance. 1964, Vol. 48, No 262; 1965, Vol. 49, No 268.
58. Our Navy. 1959, Vol. 54, No 3; 1961, Vol. 56, No 10; 1963, Vol. 58,
No3, 7; 1964, Vol. 59, No 11.
59. Proceedings of Instrument Society of America. 1960, Vol. 15, pt. 1,
No 49.
60. Product Engineering. 1963, Vol. 34, No 25.
61. Revista General de la Marina. 1958, Vol. 155, Nov.
62. Revue Maritime. 1962, No 192, 193; 1965, No 222.
63. Rivista Marittima. 1964, t. 97, No 11, 12.
64. La Revue Nautique. 1963, No 260.
65. Science and Mechanics. 1963, Vol. 34, No 8.
66. Schiffbautechnik. 1960, No 10.
67. Ship en Werf. 1960, bd. 27, No 6.
68. Shipbuilding and Shipping Record. 1963, Vol. 101, No 11; Vol. 102,
No 12.
69. Shipping World and Shipbuilder. 1965, Vol. 154, No 3739.
70. Scientific News Letter. 1965, Vol. 87, No 12.
71. Soldat und Technik. 1963, Sept.
72. T.S.A. Transaction. 1963, Vol. 2, No 3.
73. Technica Italiana. 1962, Vol. 27, No 4.
74. Tidskrift Sjovasendet. 1962, No 1; 1964, No 1.
75. Transactions of the Institution of Engineers and Shipbuilders in Scot-
land. 1959—1960, Vol. 103, No 5.
76. Transactions of the Society of Naval Architects and Marine Engineers.
1962, XI.
77. United States Naval Institute Proceedings. 1959, Vol. 85, No 9; 1961,
Vol. 87, No 9; 1962, Vol. 88, No 11; 1963, Vol. 89, No 1, 7, 12; 1964, Vol. 90,
No 2, 4, 12; 1965, Vol. 91, No 7, 8.
78. Undersea Technology. 1964, Vol. 5, No 5, 6, 9, 10; 1965, Vol. 6, No 2.
ОГЛАВЛЕНИЕ
От автора 3
Введение 4
Глава I. Гидроакустические средства надводных кораблей 9
§ 1. Противолодочные корабли — носители гидроакустической ап-
паратуры —
§ 2. Комплексные корабельные системы сбора и обработки инфор-
мации, использующие данные гидроакустического наблюдения 11
§ 3. Корабельное противолодочное оружие, получающее информа-
цию от гидроакустических средств наблюдения 14
§ 4. Гидролокаторы кругового обзора 18
§ 5. Гидролокаторы переменной глубины (буксируемые гидроло-
каторы) 26
§ 6. Акустическая аппаратура для кораблей на подводных крыльях 30
§ 7. Гидроакустическое вооружение надводных кораблей .... 32
§ 8. Размещение гидроакустических антенн на надводных кораблях 39
§ 9. Некоторые специальные элементы корабельной гидроакустиче-
ской аппаратуры . . 45
§ 10. Имитаторы для испытания корабельной гидроакустической
аппаратуры 57
§ 11. Некоторые требования, предъявляемые к корабельным гидро-
акустическим и другим радиоэлектронным средствам ... 63
§ 12. Развитие гидроакустических и других радиоэлектронных
средств и «интегральное» проектирование корабля .... 67
Глава II. Гидроакустические средства подводных лодок 74
§ 13. Краткая характеристика современных подводных лодок . . —
§ 14. Оружие подводных лодок и приборы управления стрельбой,
получающие информацию от гидроакустических средств
наблюдения 77
§ 15. Аппаратура звукоподводной связи 79
§ 16. Гидроакустическая аппаратура для обеспечения подледного
плавания подводных лодок —
§ 17. Средства противодействия гидроакустическому наблюдению 84
§ 18. Гидроакустическое вооружение подводных лодок 91
§ 19. Размещение гидроакустических антенн на подводных лодках 98
Глава III. Шумы надводных кораблей и подводных лодок. Помехи работе
гидроакустических средств и меры по их снижению . . . .102
§ 20. Шумы кораблей и подводных лодок —
§ 21. Борьба с шумностью подводных лодок 107
§ 22. Меры по снижению уровня шумов и собственных помех над-
водных кораблей 115
§ 23. Контроль шумности и измерение уровня собственных помех 122
200
Глава IV. Гидроакустические средства для океанографических и гидро-
лого-акустических исследований 128
§ 24. Американская программа океанографических исследований —
§ 25. Суда для океанографических и гидролого-акустических иссле-
дований 130
§ 26. Суда-платформы для гидролого-акустических исследований 135
§ 27. Гидролокатор с электрическим сканированием луча в ограни-
ченном секторе 141
§ 28. Приборы для непосредственного измерения скорости распро-
странения звука в море 148
§ 29. Буксируемое устройство для определения профиля темпера-
турной структуры моря (термисторная цепь) 152
§ 30. Гидроакустическая аппаратура для определения места букси-
руемых устройств относительно корабля 156
§ 31. Корабельные комплексные системы для океанографических
и гидролого-акустических измерений 160
Глава V* Гидроакустическая аппаратура для глубоководных исследований 170
§ 32. Проблемы исследования глубин океана —
§ 33. Американская программа освоения океанских глубин . . . 173
§ 34. Гидролокаторы с непрерывным излучением и частотной моду-
ляцией сигнала 174
§ 35. Гидролокаторы бокового обзора 178
§ 36. Допплеровские навигационные системы 182
§ 37. Гидроакустическое вооружение устройств для глубоководных
исследований 187
§ 38. Гидроакустическое вооружение разрабатываемых глубоковод-
ных устройств для спасения затонувших подводных лодок 192
Заключение 195
Литература
198
НОВАЯ НАУЧНО-ПОПУЛЯРНАЯ ЛИТЕРАТУРА
ГОТОВЯТСЯ К ИЗДАНИЮ В 1968 г.
БОРОВИНОВ П. А., БРОВНО В. П., Человен живет под водой
10 л., ця 45 ня
В книге живо и увлекательно рассказано о шагах
человека на пути к покорению океанских глубин.
В доступной широкому читателю форме изло-
жены физиологические основы пребывания человека
под водой и возможные пути преодоления глубин-
ного барьера.
Кратко описаны достоинства и недостатки суще-
ствующих подводных аппаратов с прочным корпу-
сом, выяснена возможность непосредственного пре-
бывания человека под водой.
В книге рассказано о штурме глубин, предприня-
том швейцарским ученым Гансом Келлером, его ре-
кордном погружении на глубину 1000 футов.
Описаны подводные эксперименты американских
и французских исследователей, подводные дома,
деятельность их обитателей.
Большое внимание уделено новым физиологиче-
ским и психологическим проблемам, возникшим в
процессе проведения экспериментов.
Книга рассчитана на широкий круг читателей,
в первую очередь на молодежь.
ДМИТРИЕВ А. Нв, ДИОМИДОВ М. Ни, Разведчини онеансних глубин.
10 ля, ц. 50 н.
В доступной и занимательной форме рассказы-
вается о глубоководных кораблях-батискафах. Опи-
сывается устройство батискафа, физические законы,
знание которых необходимо при постройке глубоко-
водных аппаратов и пользовании ими. Рассказывается
о жизни и деятельности выдающегося ученого О. Пи-
кара, о создании им первого батискафа и его глубо-
ководных погружениях.
В главе «Батискафы за работой» рассказывается
об их использовании для изучения рельефа дна, те-
чений, подводной фауны, при разведке полезных ис-
копаемых на дне океана и других исследовательских
работах. Описывается участие «Триеста» в поисках
затонувшей американской атомной подводной лодки
«Трешер».
Заключительная глава посвящена перспективам
развития батискафов, их постепенному превращению
в разнообразные корабли, подводные станции и ма-
шины, работающие в океанских глубинах.
Книга предназначена для широкого круга чита-
телей.
Реномендуем делать предварительные заказы на готовящиеся
н изданию нниги. При заназе не требуется вносить задатон. Пону-
патель о выходе нниги извещается отнрытнои, а, если заназ сделан
в магазин, имеющий отдел „книга-почтой", литература высылается
наложенным платежом.
Предварительные заказы принимают все магазины технической
книги. При отказе на месте шлите запросы в наши специализиро-
ванные магазины по адресам:
Ленинград, Ф-31, Садовая, 40, маг. № 2;
Москва, А-319, Нрасноармейсная, 43, маг. № 88.
Издательство ,,Судостроение"
ПРОСТАКОВ АНАТОЛИИ ЛЕОНИДОВИЧ
ГИДРОАКУСТИКА И КОРАБЛЬ
Рецензент Н. Г. Мукалов
Редактор С. Ю. Курашева
Технический редактор А. П. Ширяева
Корректоры: Л. Н. Степнова и И. М. Федорова
Переплет художника В. Б. Стрельчук
Сдано в набор 26/VI 1967 г. М-15 516.
Подписано к печати 16/VIII 1967 г.
Формат издания 60X90Vie. Печ. л. 12,75. Уч.-изд. л. 12,8.
Изд. № 1913—66. Тираж 5900 экз.
Бумага для глубокой печати
Цена 78 коп. Заказ № 1645
Издательство «Судостроение», Ленинград, Д-65,
ул. Гоголя, 8
Ленинградская типография № 4 Главполиграфпрома
Комитета по печати при Совете Министров СССР,
Социалистическая, 14.
Цена 78 коп.