/





























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Автор: Алямовский А.А.
Теги: компьютерные технологии программное обеспечение компьютерное моделирование
ISBN: 978-5-94157-994-5
Год: 2008




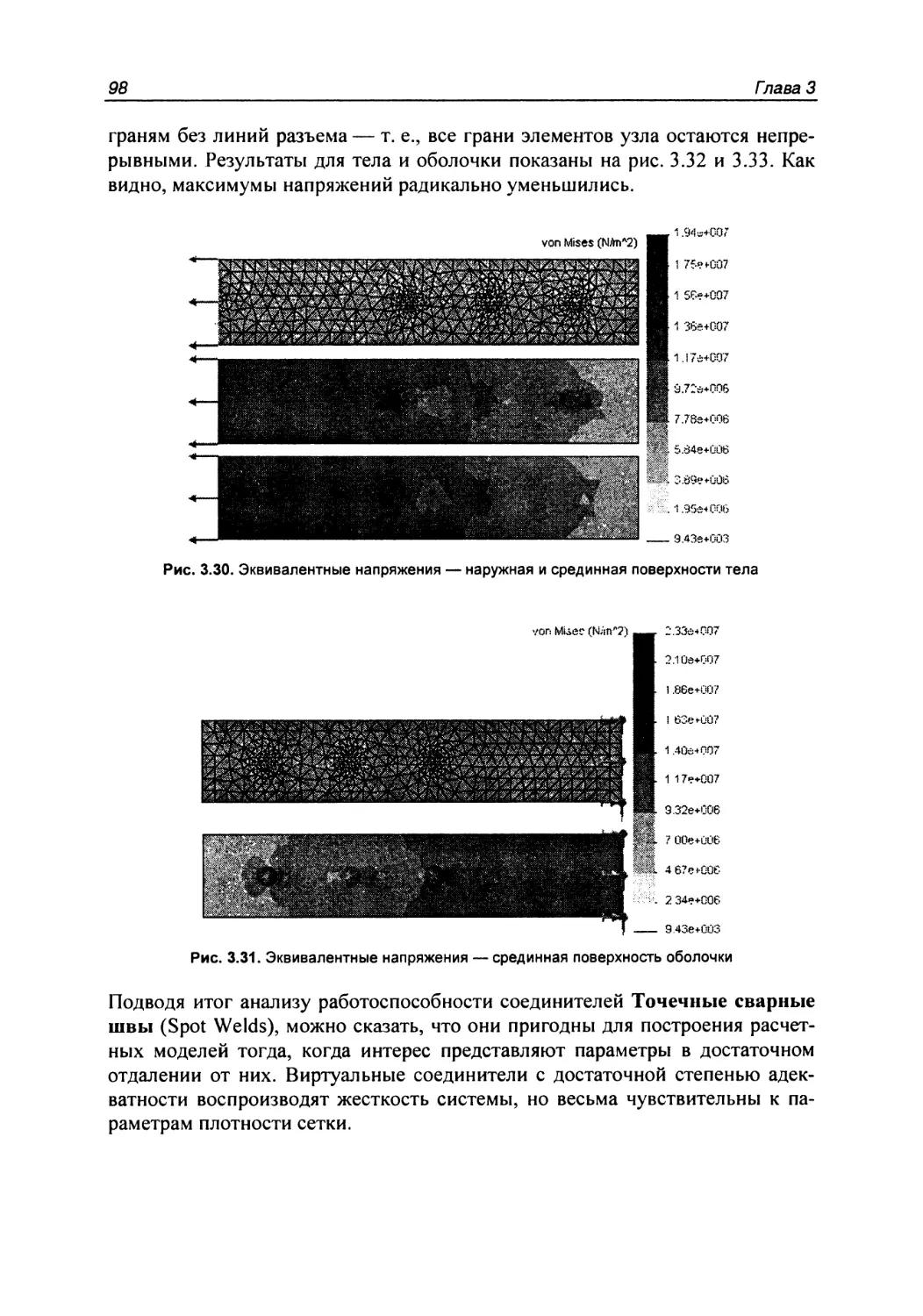
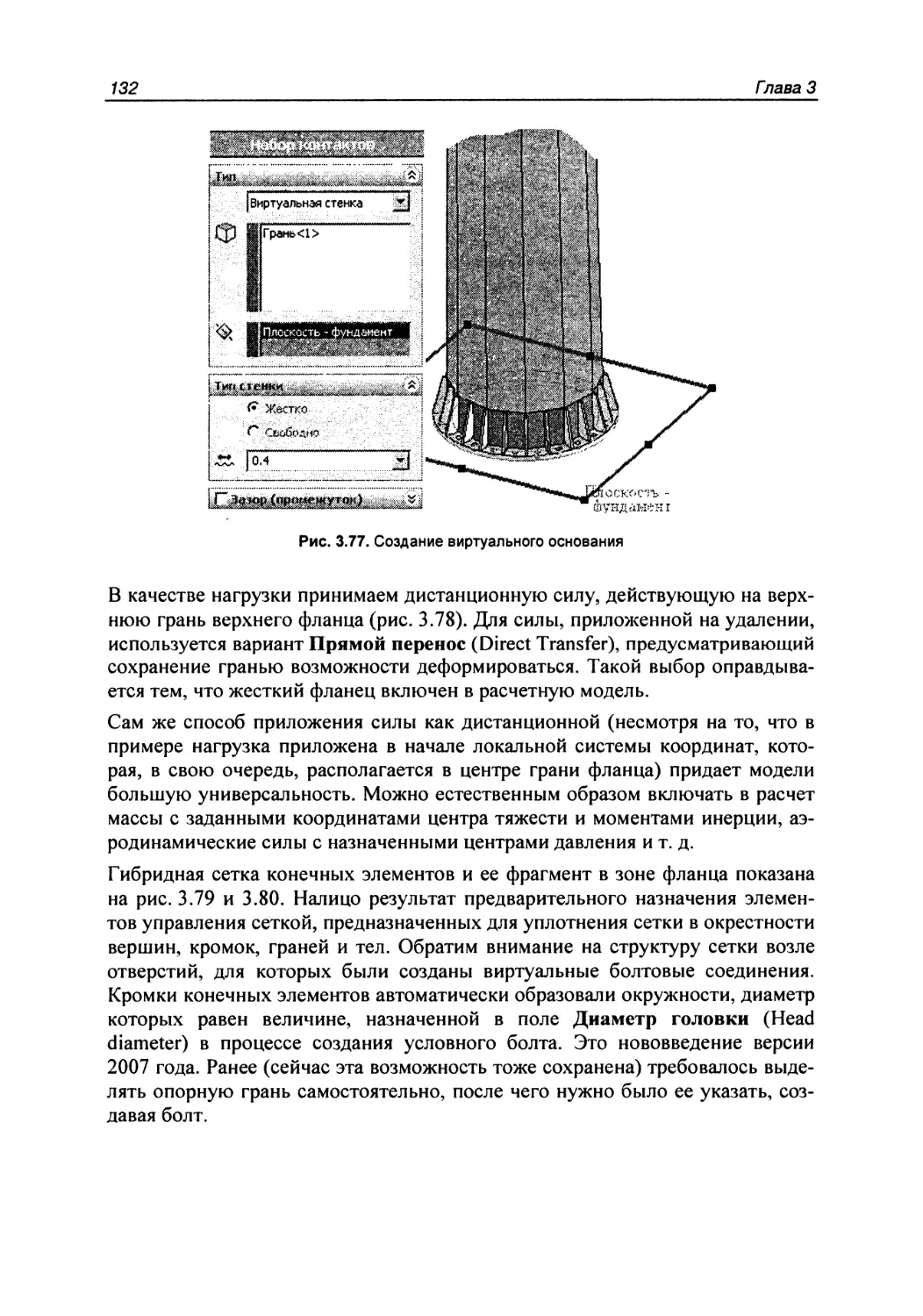
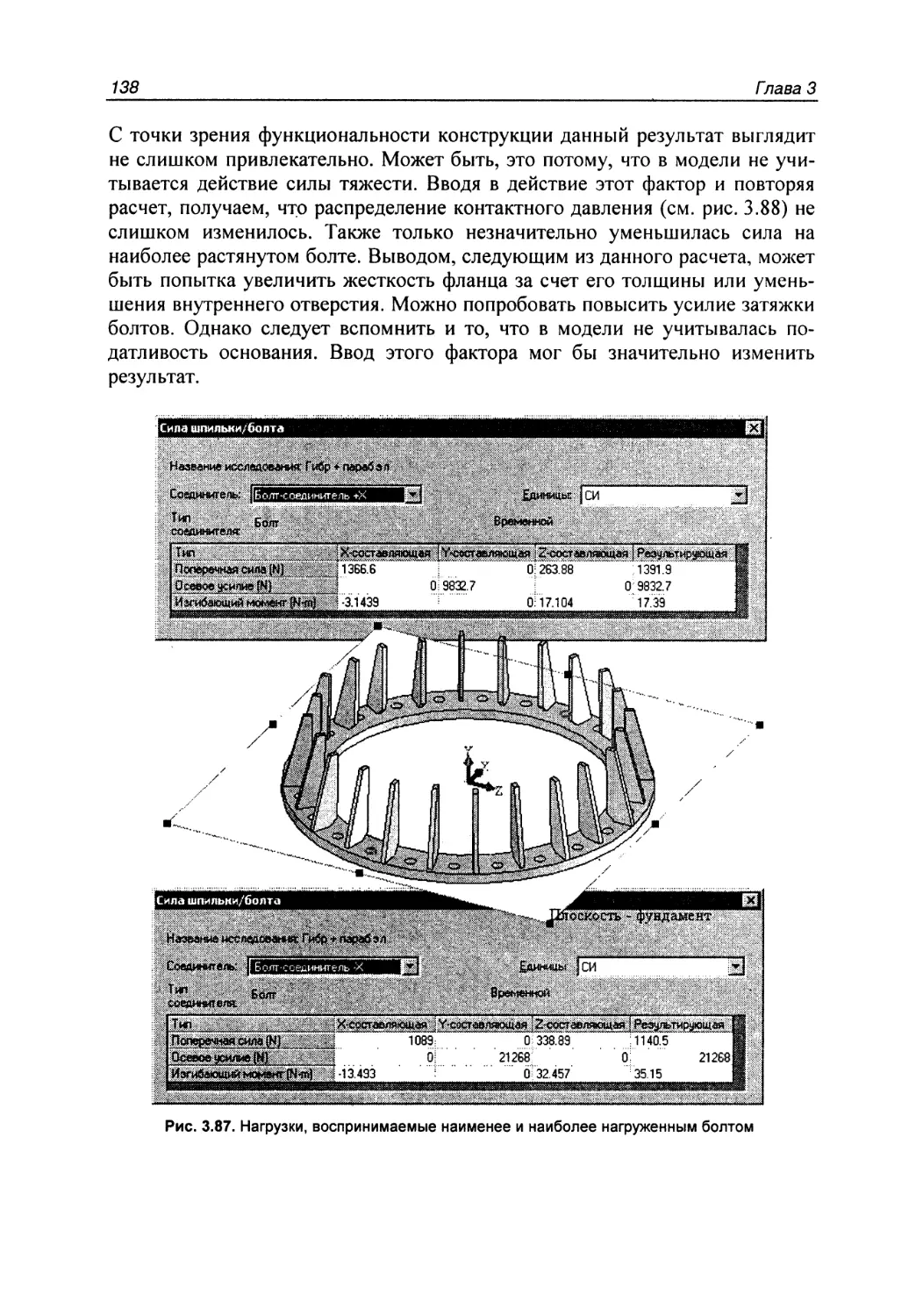
Текст
SolidWorks
2007/200*
компьютерное моделирование
в инженерной практике
Санкт-Петербург
«БХВ-Петербург»
2008
УДК 681.3.06
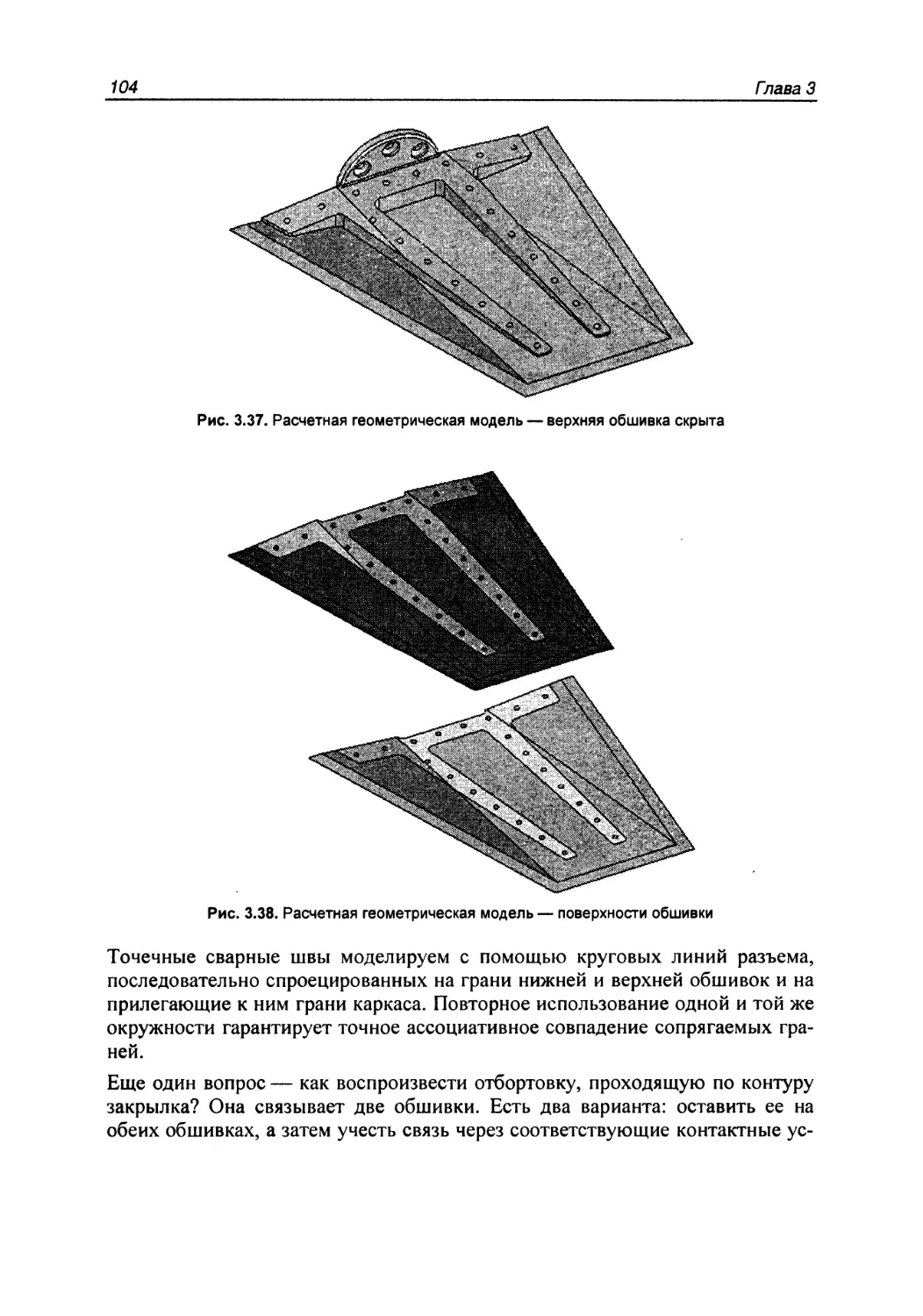
ББК 32.973.26-018.2
А60
Алямовский, А. А.
А60 SolidWorks 2007/2008. Компьютерное моделирование в инженерной
практике / А. А. Алямовский, А. А. Собачкин, Е. В. Одинцов,
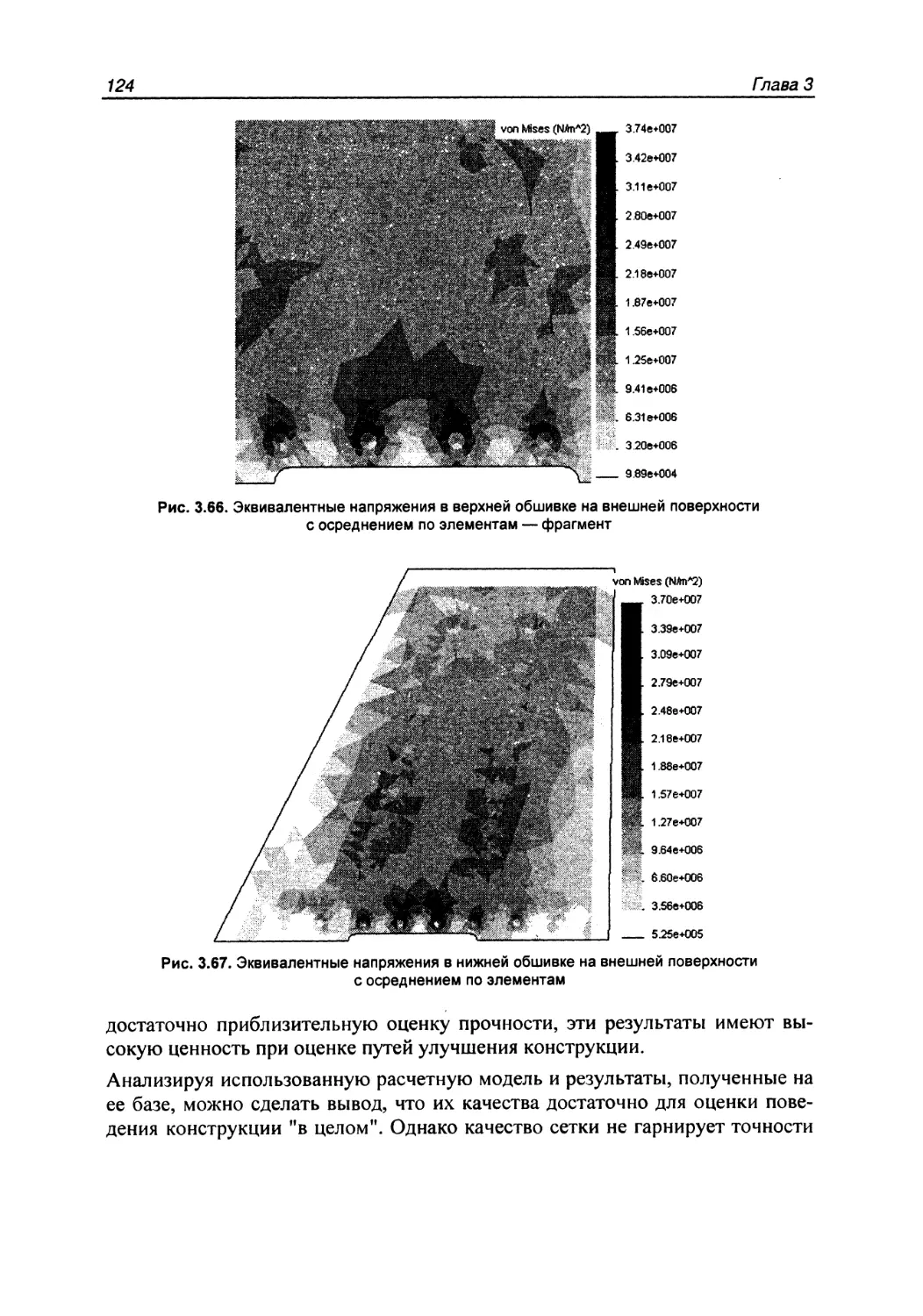
А. И. Харитонович, Н. Б. Пономарев. — СПб.: БХВ-Петербург, 2008. —
1040 с: ил. + DVD — (Мастер)
ISBN 978-5-94157-994-5
Рассматриваются программы для инженерного анализа в совокупности с
системой проектирования SolidWorks. Описываются методики расчетов на
прочность, устойчивость, колебания и динамику твердых тел в COSMOS Works;
газогидродинамики и теплопередачи в COSMOSFloWorks и EFD.Lab,
кинематики и динамики механических систем посредством COSMOSMotion.
Приведены примеры разработки изделий из листового металла с помощью
SolidWorks и BlankWorks. Уделено внимание проектированию типовых
элементов механических систем посредством модуля SolidWorks Toolbox
и приложения GearTrax. Приводится базовая информация о приложении
GearTeq для проектирования механических передач. Большинство примеров
проиллюстрированы реальными инженерными расчетами. На DVD
содержатся полноцветные иллюстрации к книге, геометрические и расчетные
модели, на базе которых строится материал.
Для инженеров, студентов, аспирантов и преподавателей вузов
УДК 681.3.06
ББК 32.973.26-018.2
Группа подготовки издания:
Главный редактор Екатерина Кондукова
Зам. главного редактора Наталья Таркова
Зав. редакцией Григорий Добин
Редактор Игорь Цырулышков
Компьютерная верстка Ольги Сергиенко
Корректор Зинаида Дмитриева
Дизайн серии Инны Тачиной
Оформление обложки Елены Беляевой
Зав. производством Николай Тверских
Лицензия ИД № 02429 от 24.07.00. Подписано в печать 31.10.07.
Формат 70x100Vie. Печать офсетная. Усл. печ. л. 83,85.
Тираж 2000 экз. Заказ No 4405
"БХВ-Петербургм, 194354, Санкт-Петербург, ул. Есенина, 5Б.
Санитарно-эпидемиологическое заключение на продукцию
На 77.99.02.953.Д.006421.11.04 от 11.11.2004 г. выдано Федеральной службой
по надзору в сфере защиты прав потребителей и благополучия человека.
Отпечатано с готовых диапозитивов
в ГУП Типография "Наука"
199034, Санкт-Петербург, 9 линия, 12
ISBN 978-5-94157-994-5 ® Алямовский А. А., Собачкин А. А., Одинцов Е. В.,
Харитонович А. И., Пономарев Н. Б., 2008
© Оформление, издательство "БХВ-Петербург", 2008
Оглавление
Об авторах 1
Введение 3
Предисловие 5
Аудитория 6
Предназначение 7
Соглашения 9
Благодарности 9
Контактная информация 10
Глава 1. SoIidWorks как база для инженерных приложений 11
1.1. Интегрированные CAD/CAE-системы 11
1.2. Твердотельное моделирование 14
1.3. Поверхностное и гибридное моделирование 15
1.4. Работа в сборке 17
1.5. Работа в режиме чертежа 18
1.6. Обмен графической информацией 19
Глава 2. Методы решения уравнений физики
в механических САПР 21
2.1. Основы метода конечных элементов 21
2.1.1. Понятие конечного элемента 22
2.1.2. Построение программы МКЭ 25
2.1.3. Учет нелинейности в процедурах МКЭ 27
2.2. Метод конечных объемов 31
2.3. Методы оптимизации в инженерном анализе 37
2.3.1. Параметрические системы проектирования как элемент систем
оптимизации 38
2.3.2. Базовые понятия нелинейного программирования 39
IV Оглавление
2.3.3. Алгоритм метода комплексов 45
2.3.4. Использование процедур оптимизации в САПР 48
2.4. Методы построения оптических моделей и расчета изображений 52
Глава 3. Структурная механика — линейная задача
(COSMOSWorks) 57
3.1. Назначение 58
3.2. Теоретическая база 59
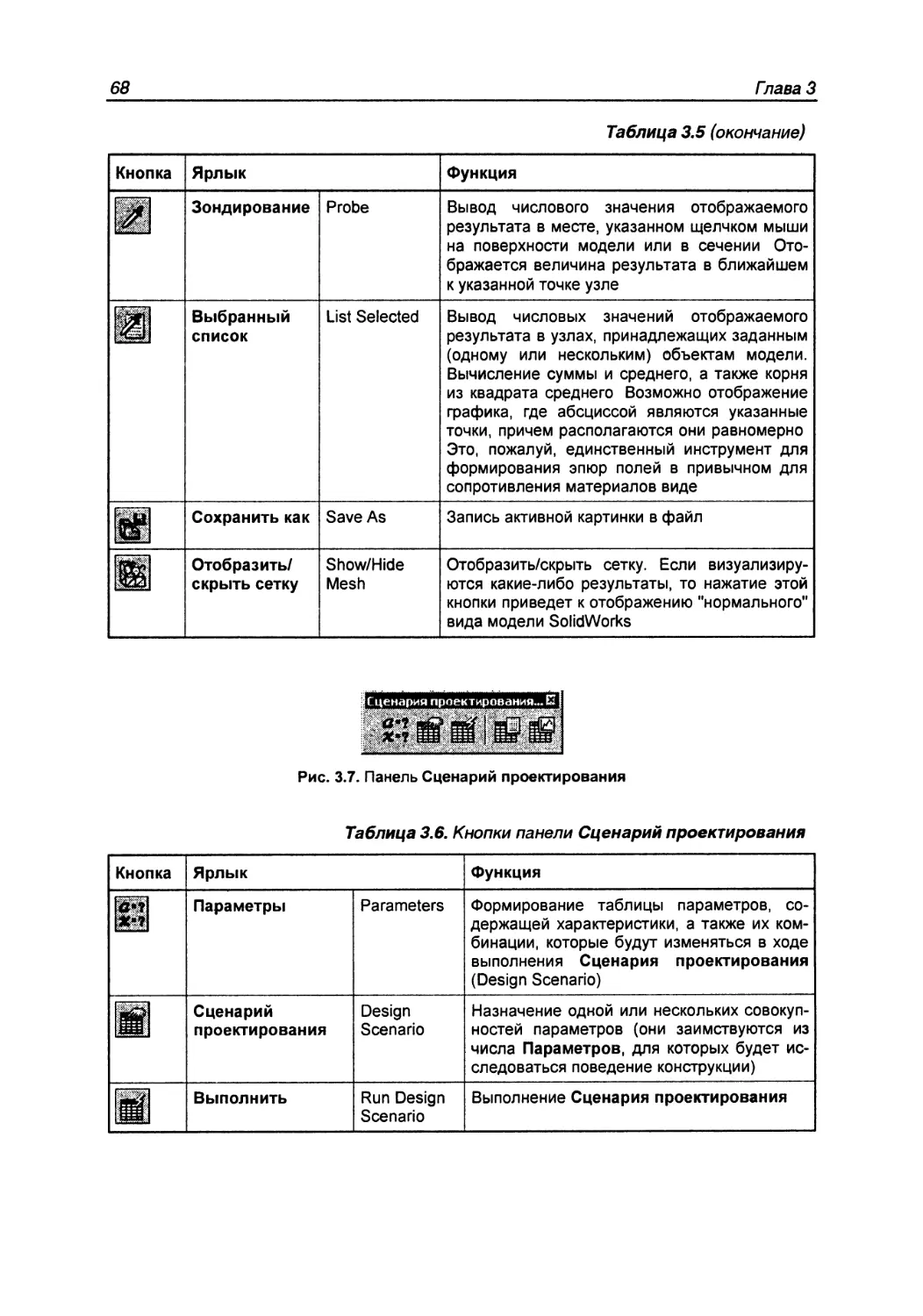
3.3. Интерфейс 61
3.4. Функциональные возможности 69
3.4.1. Базовые возможности анализа 70
3.4.2. Последовательность расчета 71
3.4.3. Свойства материалов 72
3.4.4. Граничные условия 72
3.4.5. Генерация сетки 72
3.4.6. Контактная задача 73
3.4.7. Решатели 77
3.4.8. Постпроцессор 77
3.4.9. Интерфейсы 77
3.4.10. Возможности версии 2007 года 78
3.5. Моделирование узлов посредством гибридных сеток конечных элементов 83
3.5.1. Постановка задачи 84
3.5.2. Подготовка геометрической модели 84
3.5.3. Анализ 86
3.5.4. Решение 88
3.5.5. Модель точечных швов с использованием виртуальных объектов 96
3.6. Моделирование конструкций посредством гибридных сеток конечных
элементов 101
3.6.1. Постановка задачи 101
3.6.2. Подготовка геометрической модели 102
3.6.3. Анализ 105
3.6.4. Решение 105
3.7. Расчет рам посредством гибридных, поверхностных и балочных моделей 128
3.7.1. Постановка задачи 128
3.7.2. Расчет опоры по гибридной модели с поверхностями и телами 128
3.7.3. Расчет ствола по оболочечной модели 140
3.7.4. Основы построения балочных моделей 141
3.7.5. Расчет ствола по балочной модели 157
3.7.6. Расчет мачты по балочной модели 161
3.8. Выводы 166
Глава 4. Структурная механика — нелинейная задача
(COSMOSWorks) 167
4.1. Назначение * 168
4.2. Теоретическая база 168
Оглавление
V
4.3. Интерфейс 169
4.4. Функциональные возможности 169
4.4.1. Базовые возможности анализа 169
4.4.2. Последовательность расчета 170
4.4.3. Свойства материалов 171
4.4.4. Генерация сетки 174
4.4.5. Граничные условия 174
4.4.6. Контактная задача 174
4.4.7. Решатели 175
4.4.8. Постпроцессор 176
4.5. Упругопластическая модель проушины амортизатора 176
4.5.1. Постановка задачи 176
4.5.2. Анализ 180
4.5.3. Решение 181
4.5.4. Анализ состояния узла с учетом физической нелинейности 197
4.6. Устойчивость квадратной пластины 203
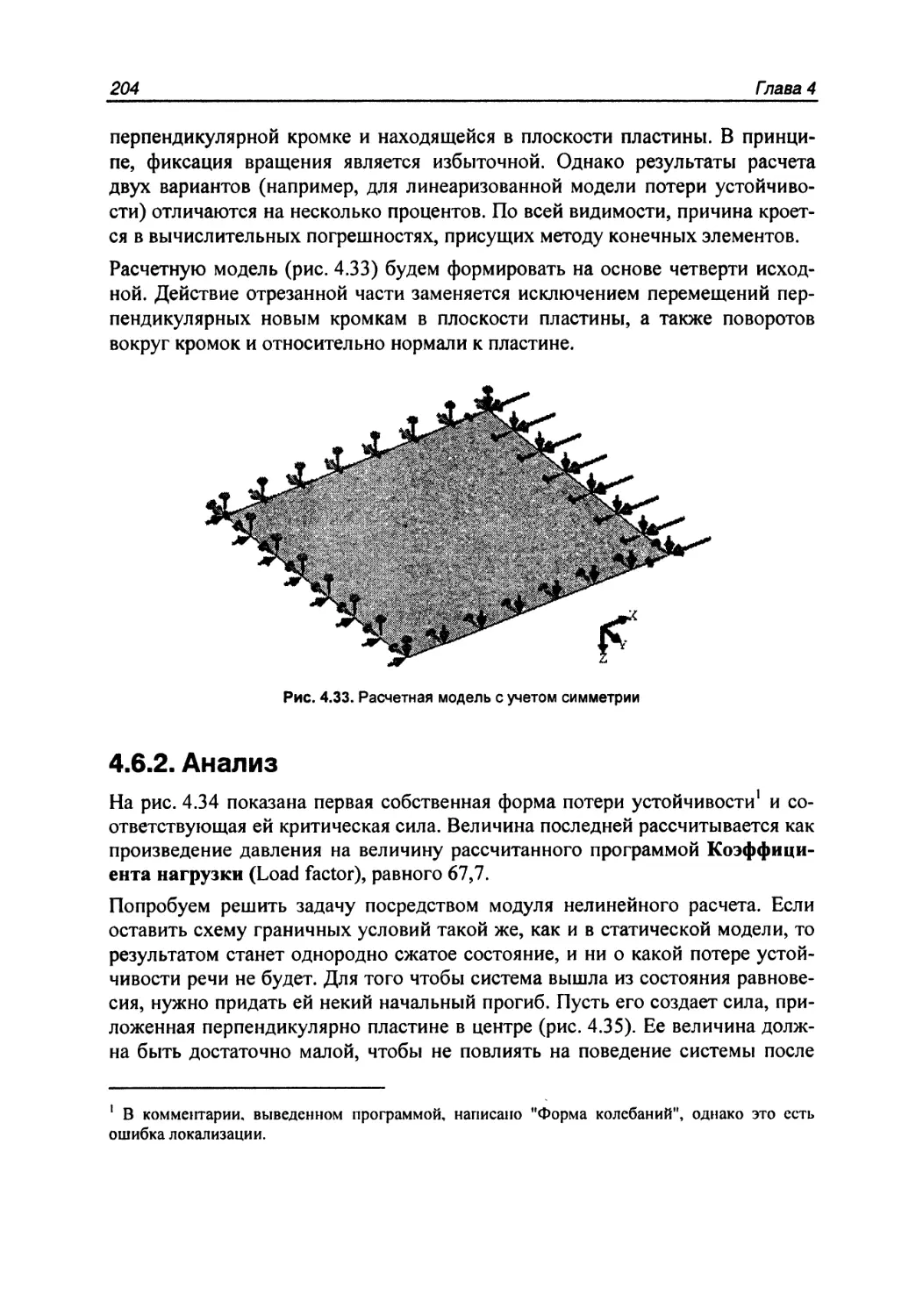
4.6.1. Постановка задачи 203
4.6.2. Анализ 204
4.6.3. Решение 205
4.7. Закритическое поведение цилиндрической оболочки 211
4.7.1. Постановка задачи 211
4.7.2. Анализ 212
4.7.3. Решение 213
4.8. Выводы 217
Глава 5. Аэрогидродинамика и теплопередача 219
5.1. COSMOSFloWorks, EFD.Lab, EFD.V5, EFD.Pro, FloXpress 219
5.2. Кому и зачем нужны эти расчеты? 222
5.3. Возможности COSMOSFloWorks 226
5.3.1. Математическое моделирование физических процессов 227
5.3.2. Решение поставленной математической задачи 245
5.4. Взаимодействие с SolidWorks 252
5.4.1. Твердое тело и область, занятая текучей средой 254
5.4.2. Проект и конфигурация , 267
5.4.3. Визуализация результатов в среде SolidWorks 269
5.4.4. Интерфейс COSMOSFloWorks > 276
5.5. Решение задачи 285
5.5.1. Возможность решения задачи 285
5.5.2. Модификация модели SolidWorks 286
5.5.3. Создание проекта COSMOSFloWorks 287
5.5.4. Физические особенности 321
5.5.5. Задание граничных и начальных условий 334
5.5.6. Постановка целей проекта 384
5.5.7. Регулирование расчетной сетки 385
5.5.8. Управление процессом расчета 397
VI Оглавление
5.5.9. Просмотр результатов 416
5.5.10. Инструменты COSMOSFloWorks 449
5.5.11. Определение точности полученного решения 452
5.6. Стратегия решения задачи 459
5.6.1. Рекомендации по просмотру результатов 460
5.6.2. Некоторые ошибки пользователей 463
5.7. Подводя итоги 467
Глава 6. Проектирование элементов механических систем 469
6.1. Кулачки 469
6.1.1. Функциональные возможности и ограничения 469
6.1.2. Интерфейс 471
6.1.3. Практика использования 471
6.2. Проектирование и расчет балок 493
6.2.1. Функциональные возможности и ограничения 493
6.2.2. Интерфейс 494
6.2.3. Практика использования 494
6.3. Расчет подшипника 511
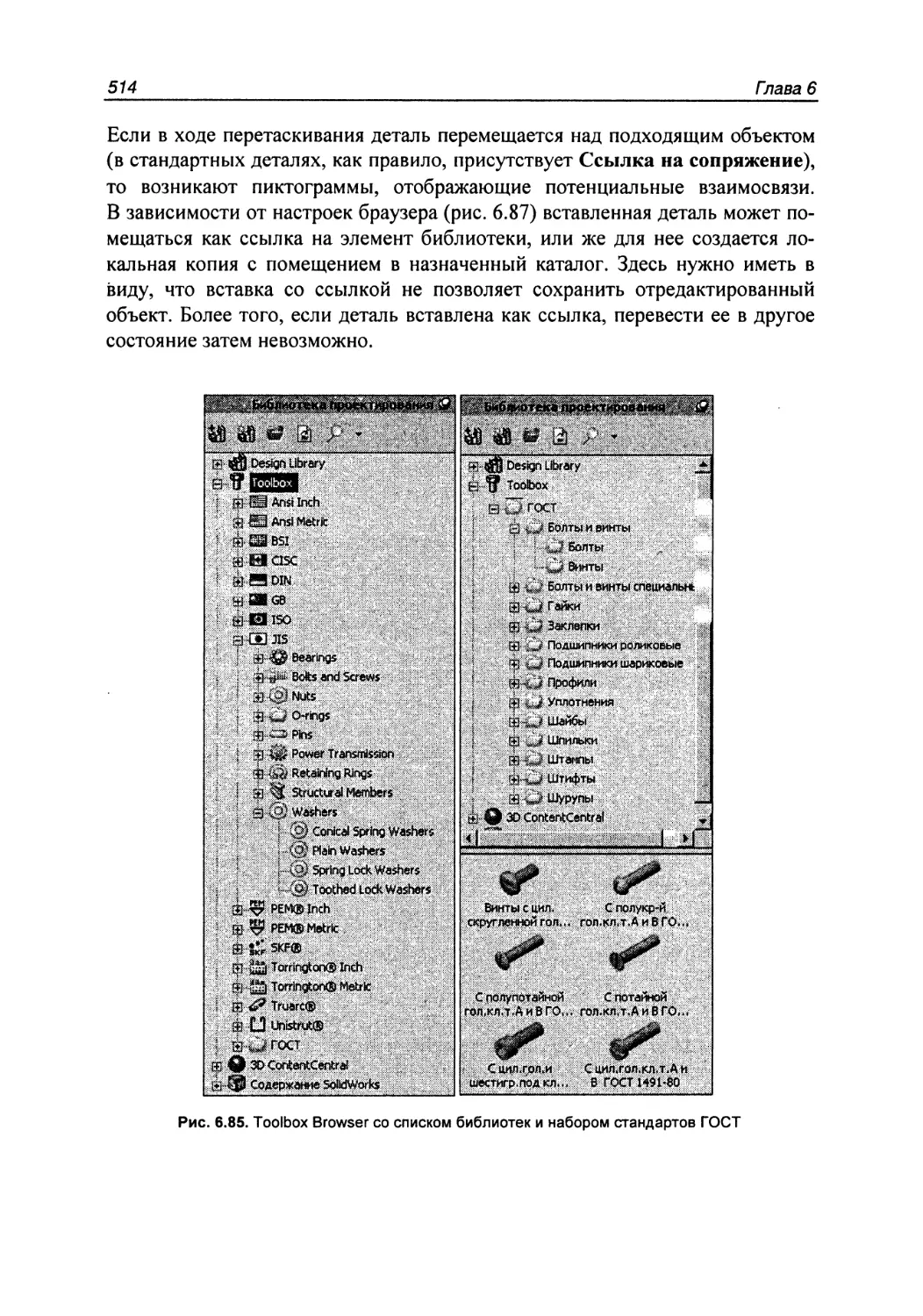
6.4. Toolbox Browser 513
6.4.1. Краткое описание 513
6.4.2. Автокрепежи 515
6.4.3. Трансмиссии 516
6.5. GearTrax 518
6.5.1. Функциональные возможности и ограничения 519
6.5.2. Интерфейс 523
6.5.3. Практика использования 535
6.6. Напряженно-деформированное состояние редуктора 553
6.6.1. Постановка задачи 553
6.6.2. Анализ 554
6.6.3. Решение 556
6.6.4. Выводы 568
6.7. Выводы 568
Глава 7. Кинематика и динамика (COSMOSMotion) 571
7.1. Назначение 571
7.2. Теоретическая база 572
7.3. Интерфейс 573
7.4. Функциональные возможности 577
7.4.1. Возможности версий 2006—2007 годов 578
7.4.2. Команды программы 580
7.4.3. Интерфейс с COSMOS Works 591
7.5. Моделирование косозубого зубчатого зацепления 597
7.5.1. Постановка задачи .v 598
7.5.2. Анализ 600
Оглавление
VII
7.5.3. Решение 601
7.5.4. Рассмотрение результатов 625
7.5.5. Модифицирование конструкции 634
7.5.6. Прочностной анализ элементов динамической системы 638
7.6. Выводы 642
Глава 8. Листовой металл — развертки и заготовки
(SolidWorks, BlankWorks) 645
8.1. Назначение 646
8.2. Теоретическая база 647
8.2.1. Развертки в SolidWorks 647
8.2.2. Развертки в BlankWorks 654
8.3. Функциональные возможности и ограничения 654
8.3.1. Листовой металл в SolidWorks 654
8.3.2. BlankWorks 684
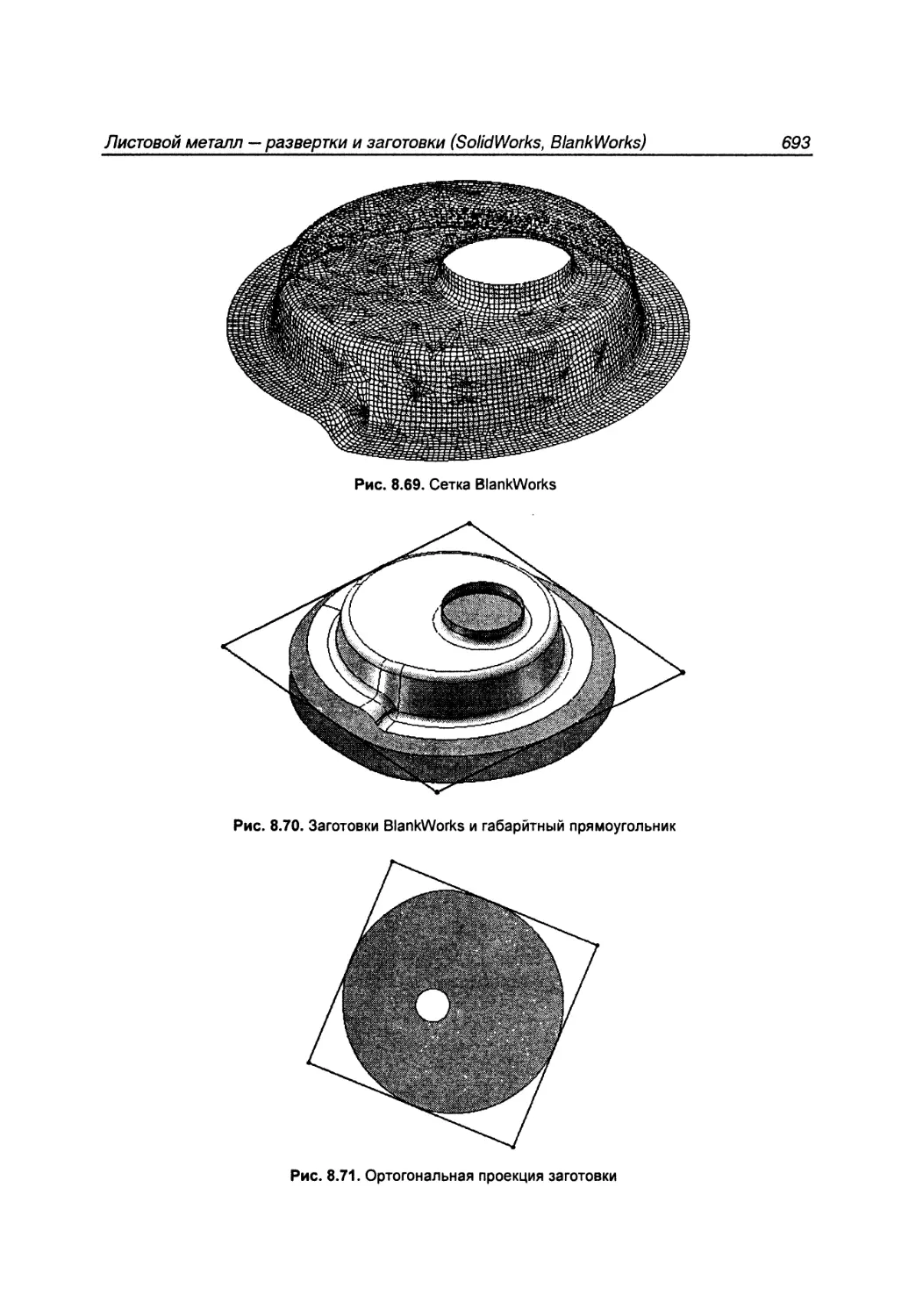
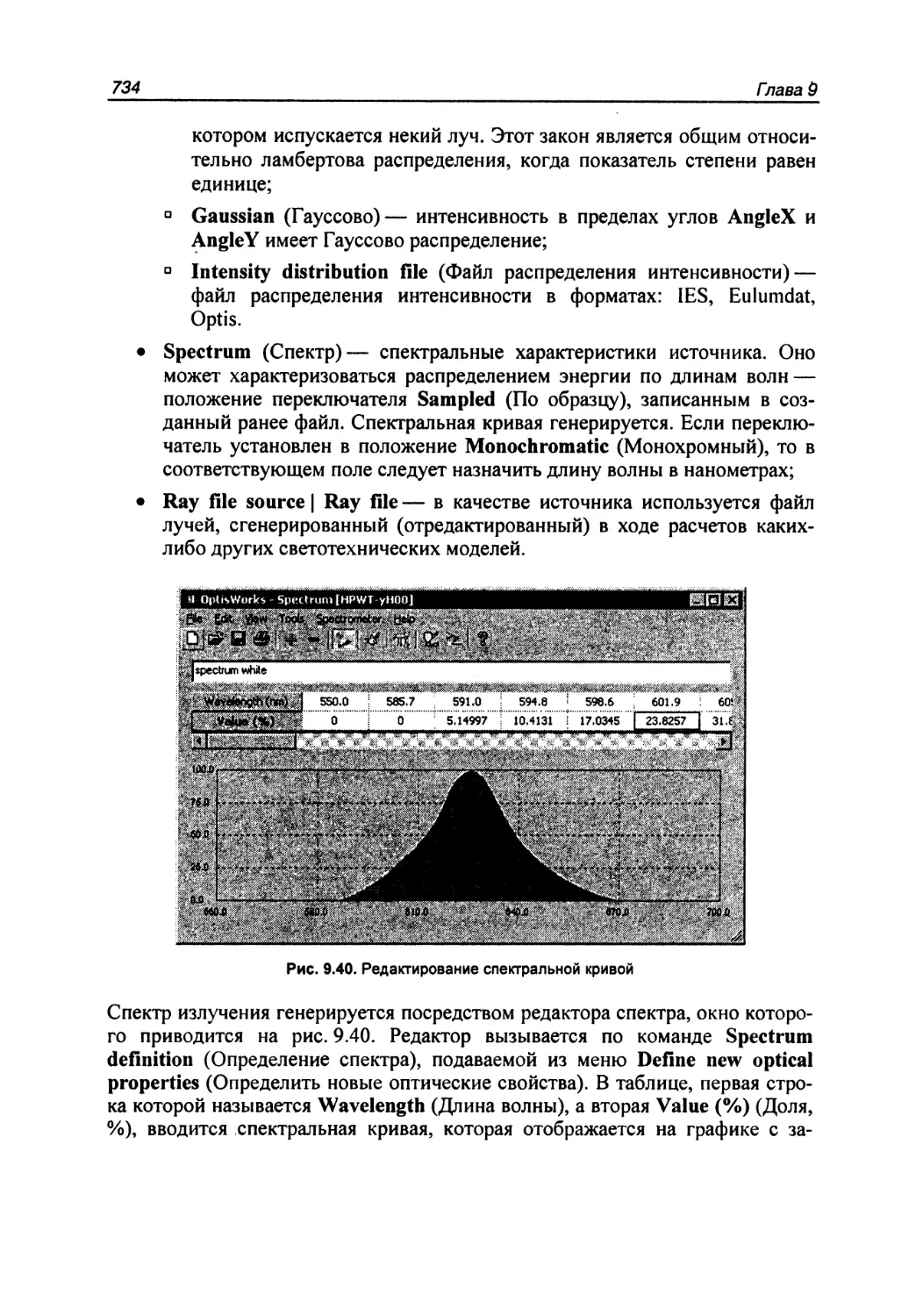
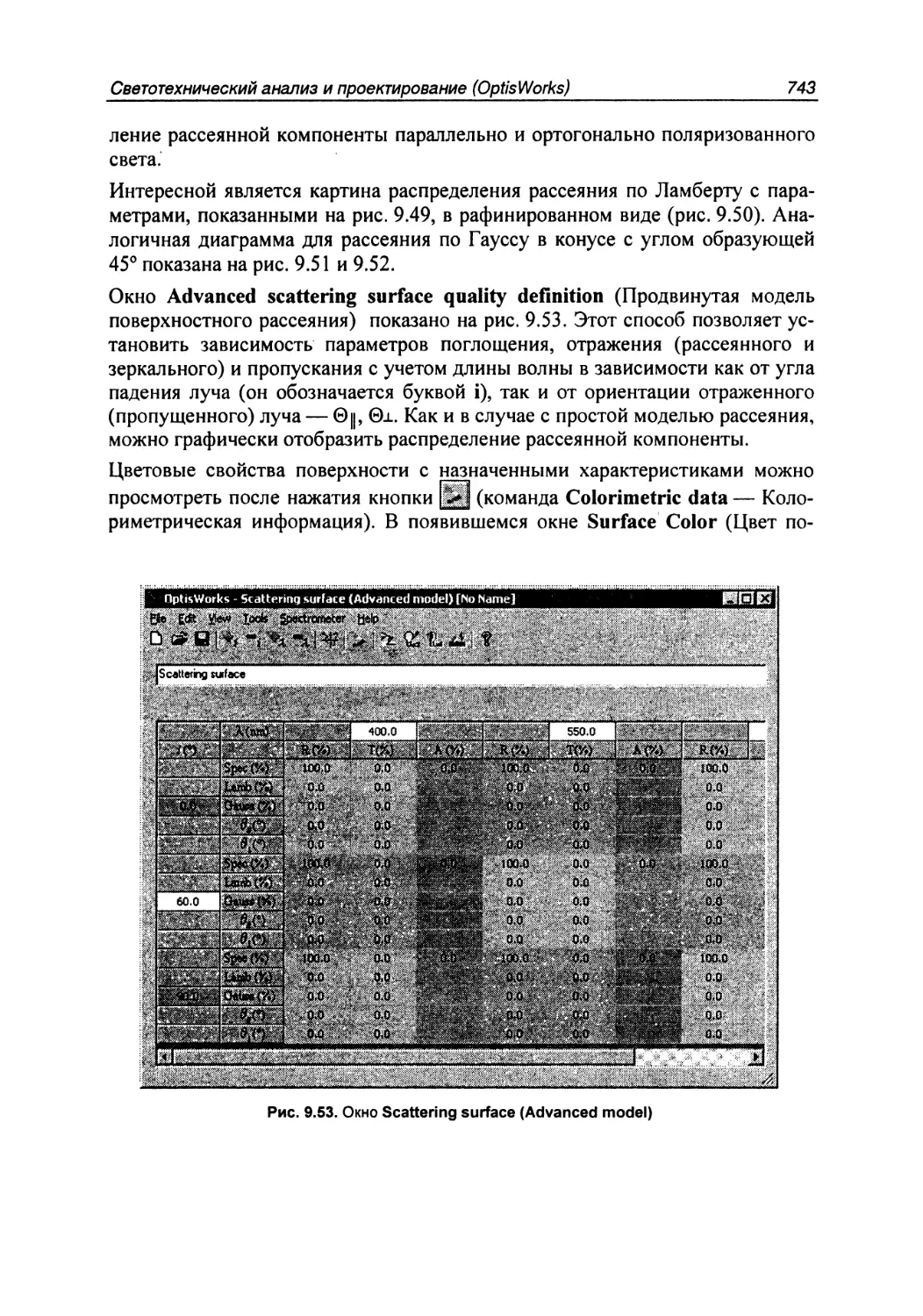
8.4. Получение заготовки чашки 689
8.4.1. Постановка задачи 689
8.4.2. Анализ 689
8.4.3. Подготовка поверхностной модели 690
8.4.4. Решение 691
8.4.5. Резюме 695
8.5. Выводы 696
Глава 9. Светотехнический анализ и проектирование (OptisWorks) 697
9.1. Назначение 698
9.2. Теоретическая база OptisWorks 699
9.3. Интерфейс 704
9.3.1. Дерево проекта 704
9.3.2. Меню 708
9.3.3. Панели инструментов 716
9.4. Настройки 723
9.4.1. Деталь 723
9.4.2. Сборка 728
9.5. Светотехнический анализ — базовая функциональность 731
9.5.1. Источники света 731
9.5.2. Поверхности 735
9.5.3. Материалы 746
9.5.4. Детекторы 754
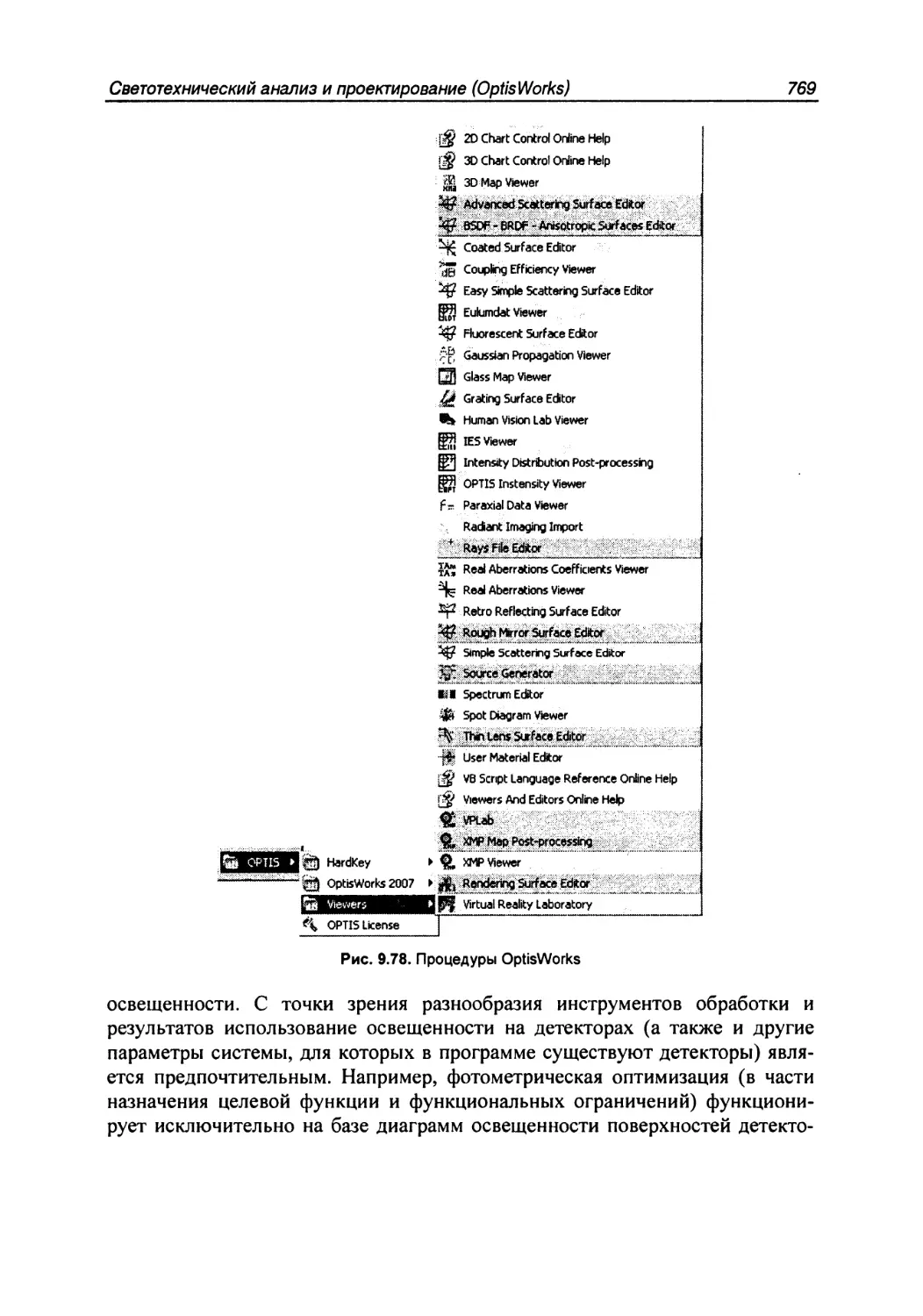
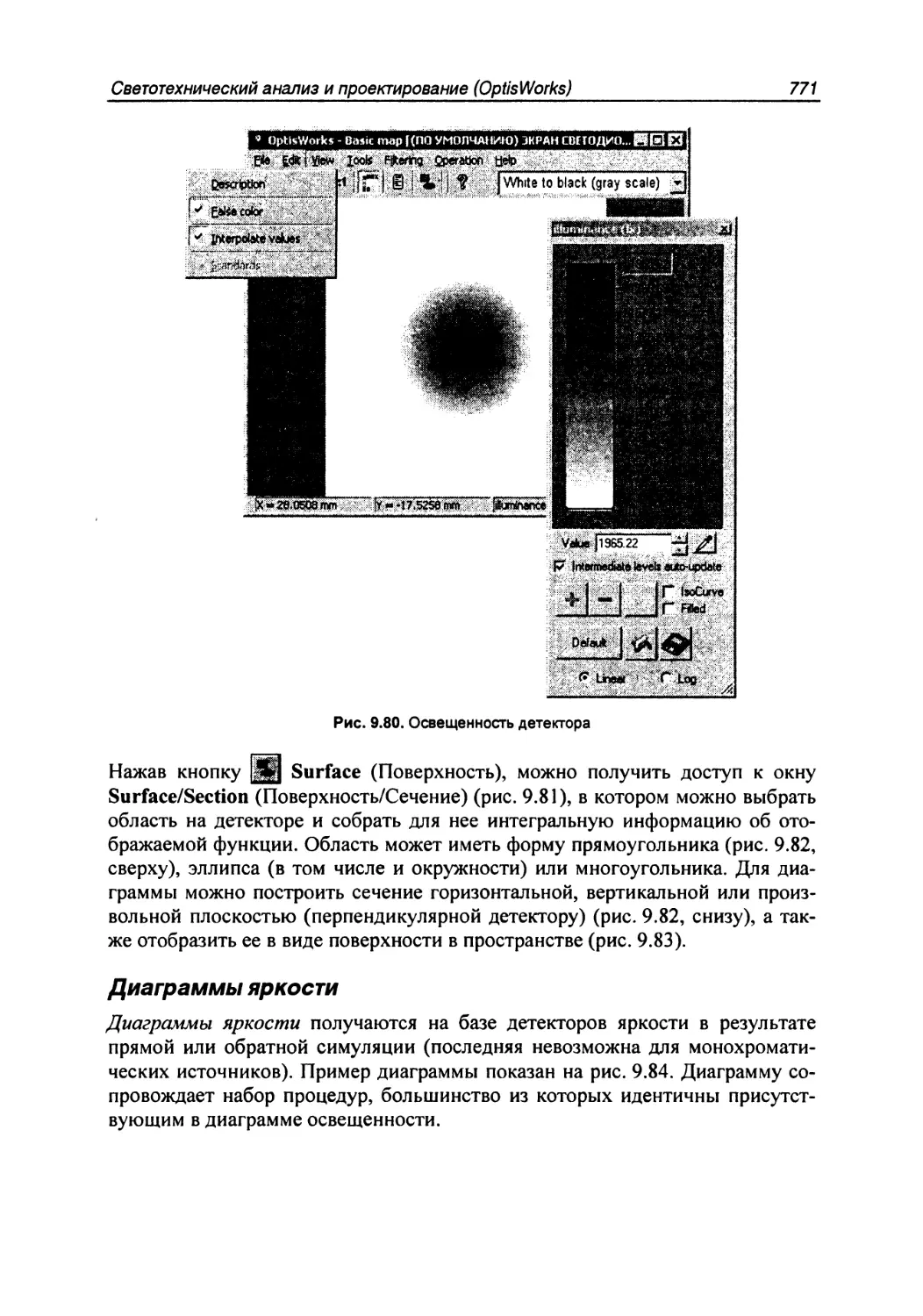
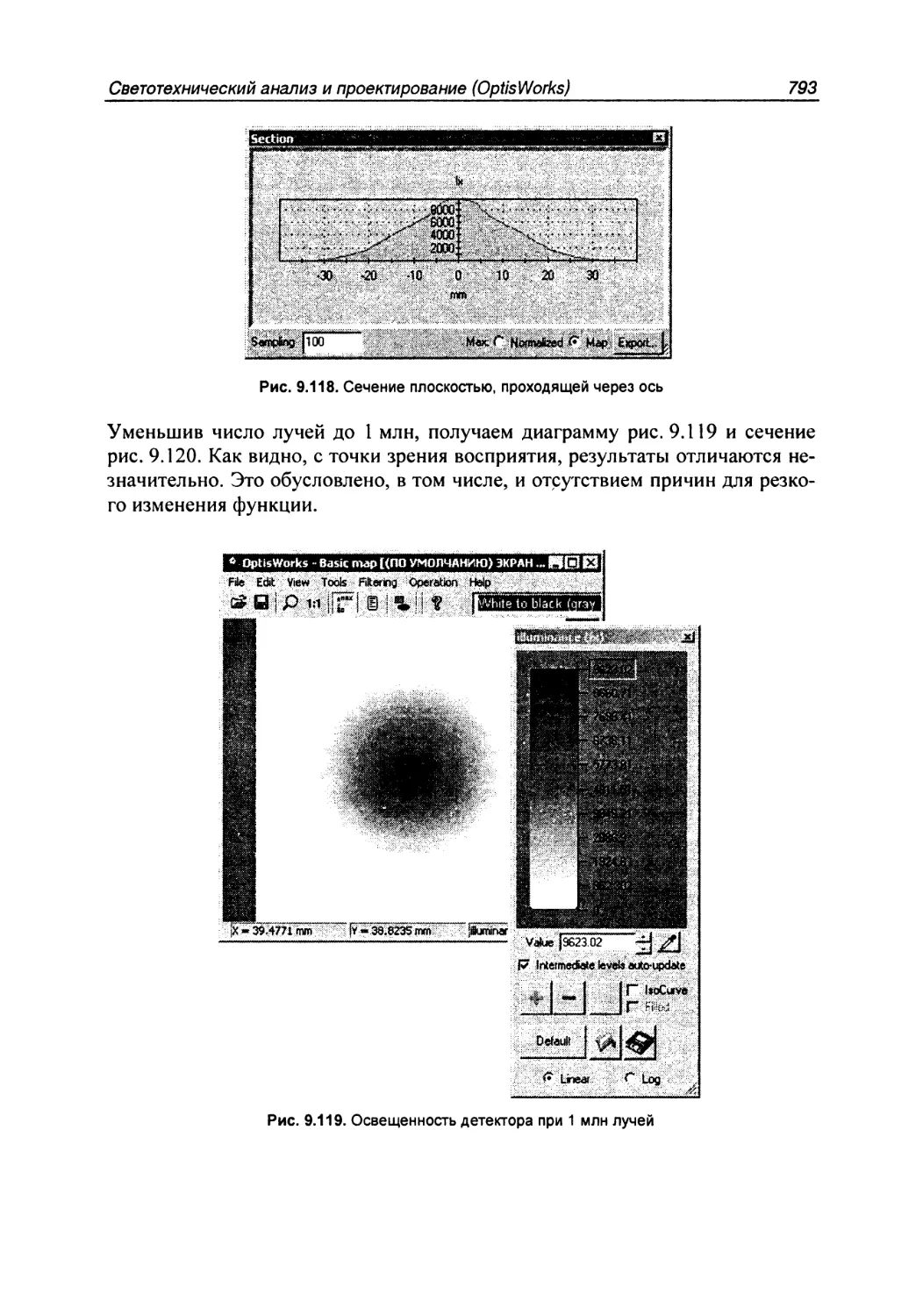
9.5.5. Фотометрическая симуляция 766
9.5.6. Результаты на базе детекторов 768
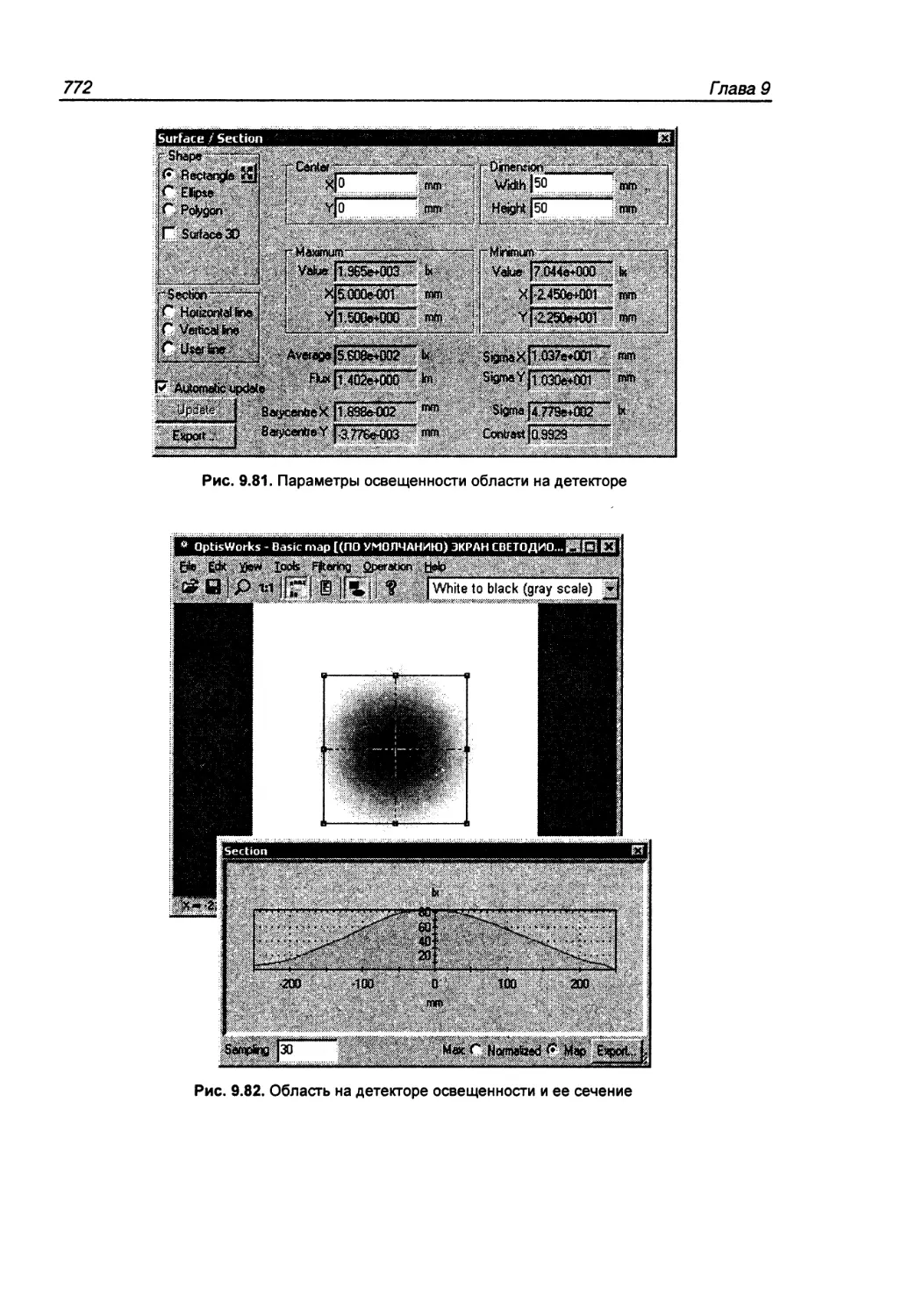
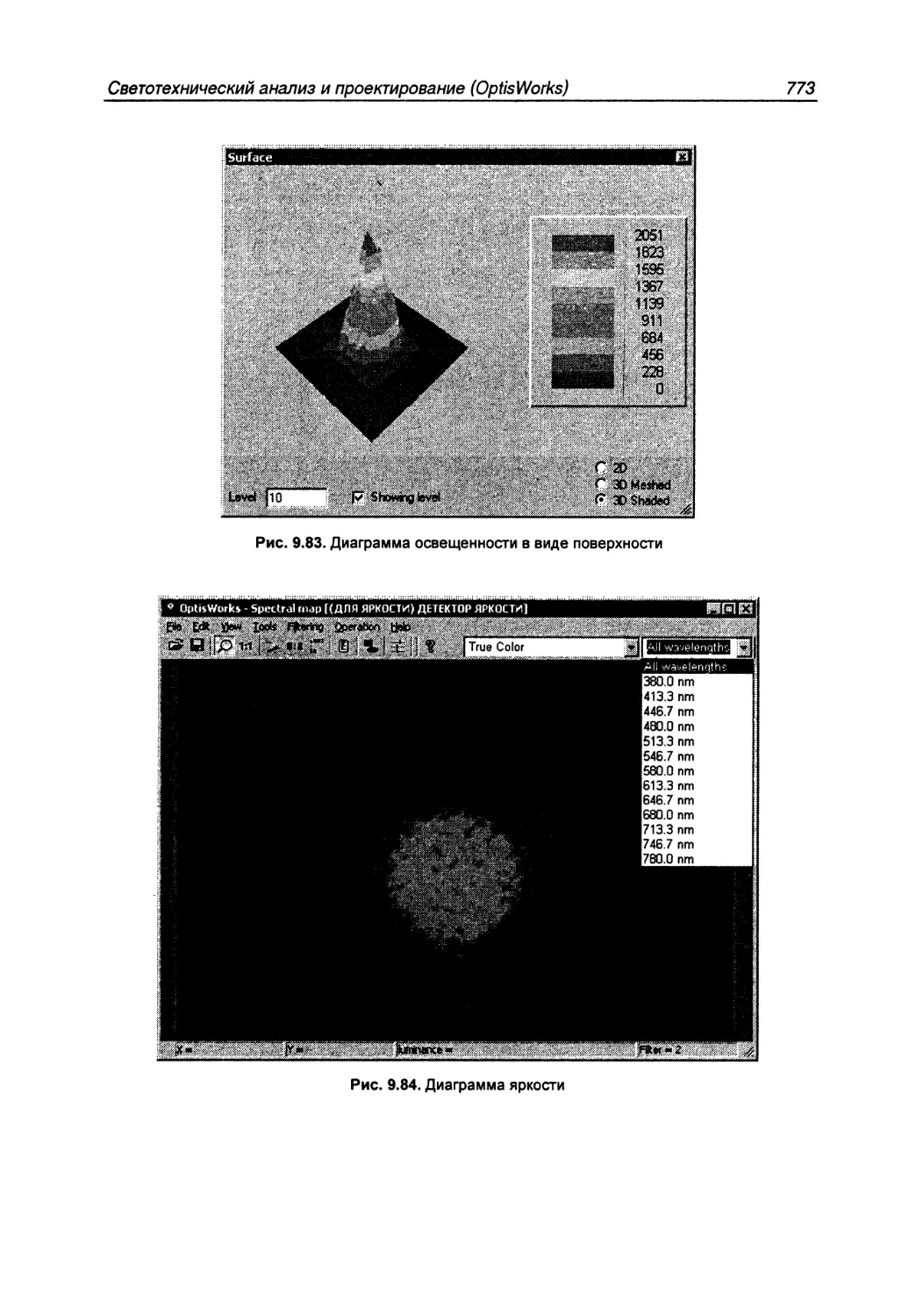
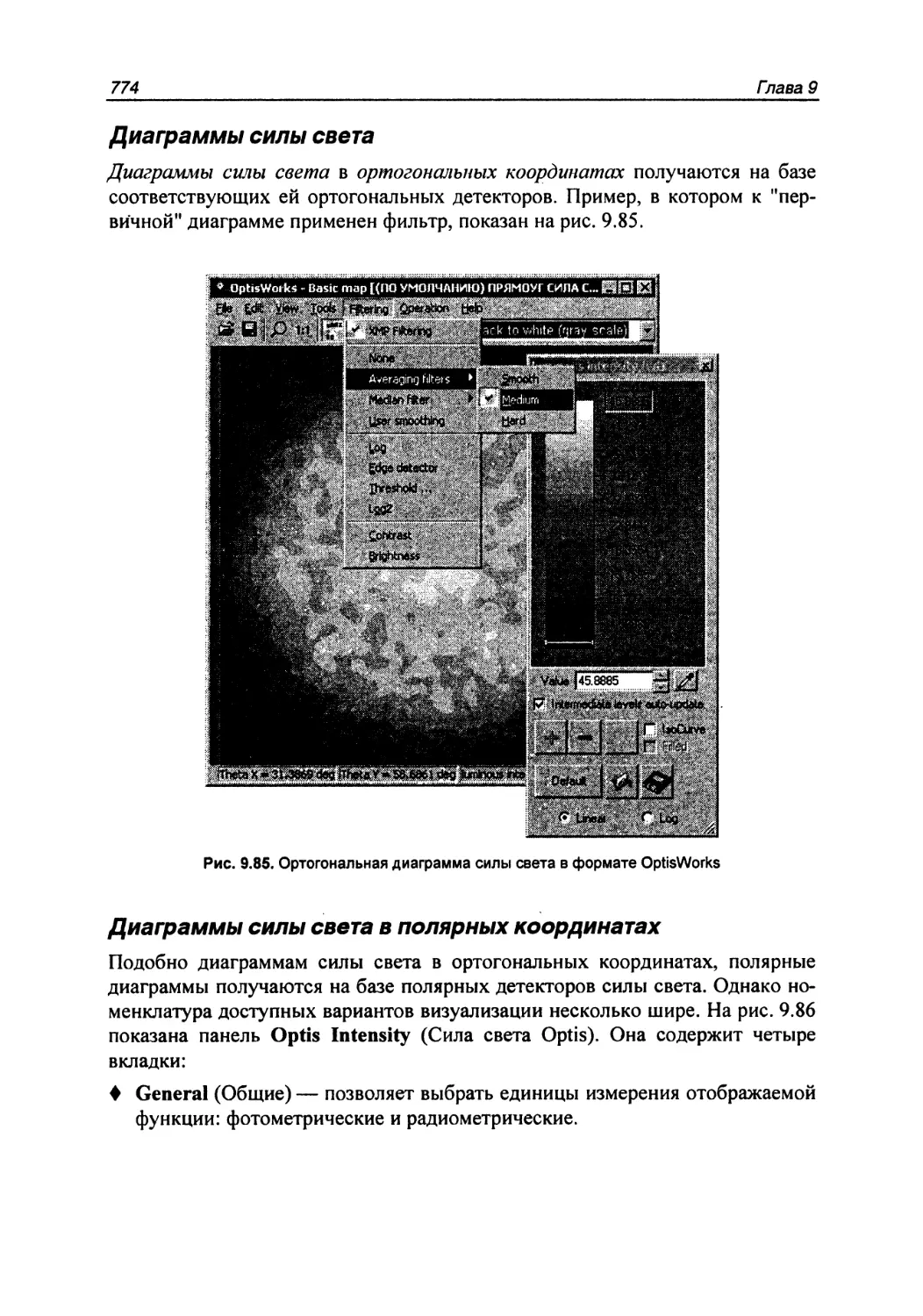
9.6. Светотехнический анализ — проектирование рассеивателя 779
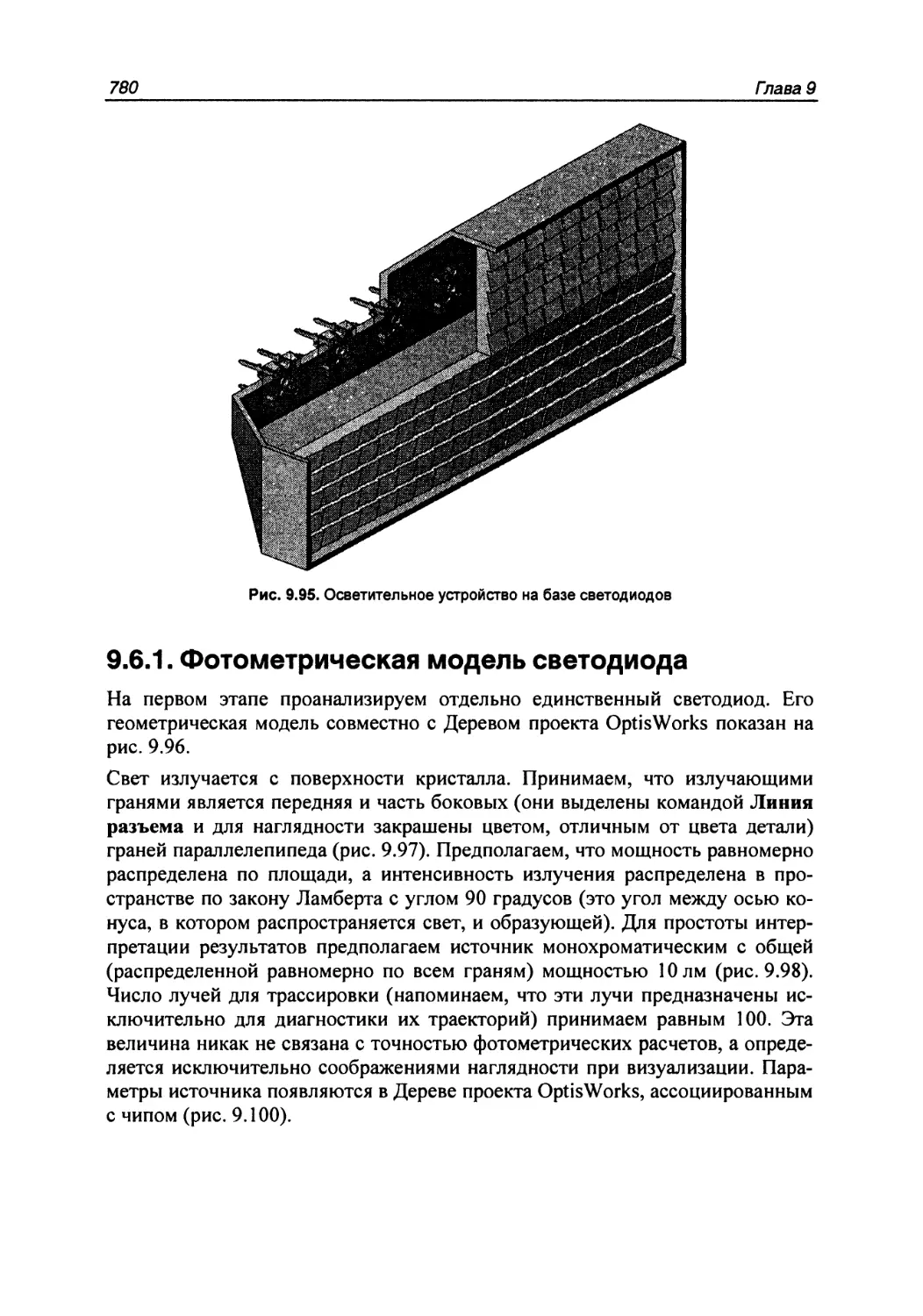
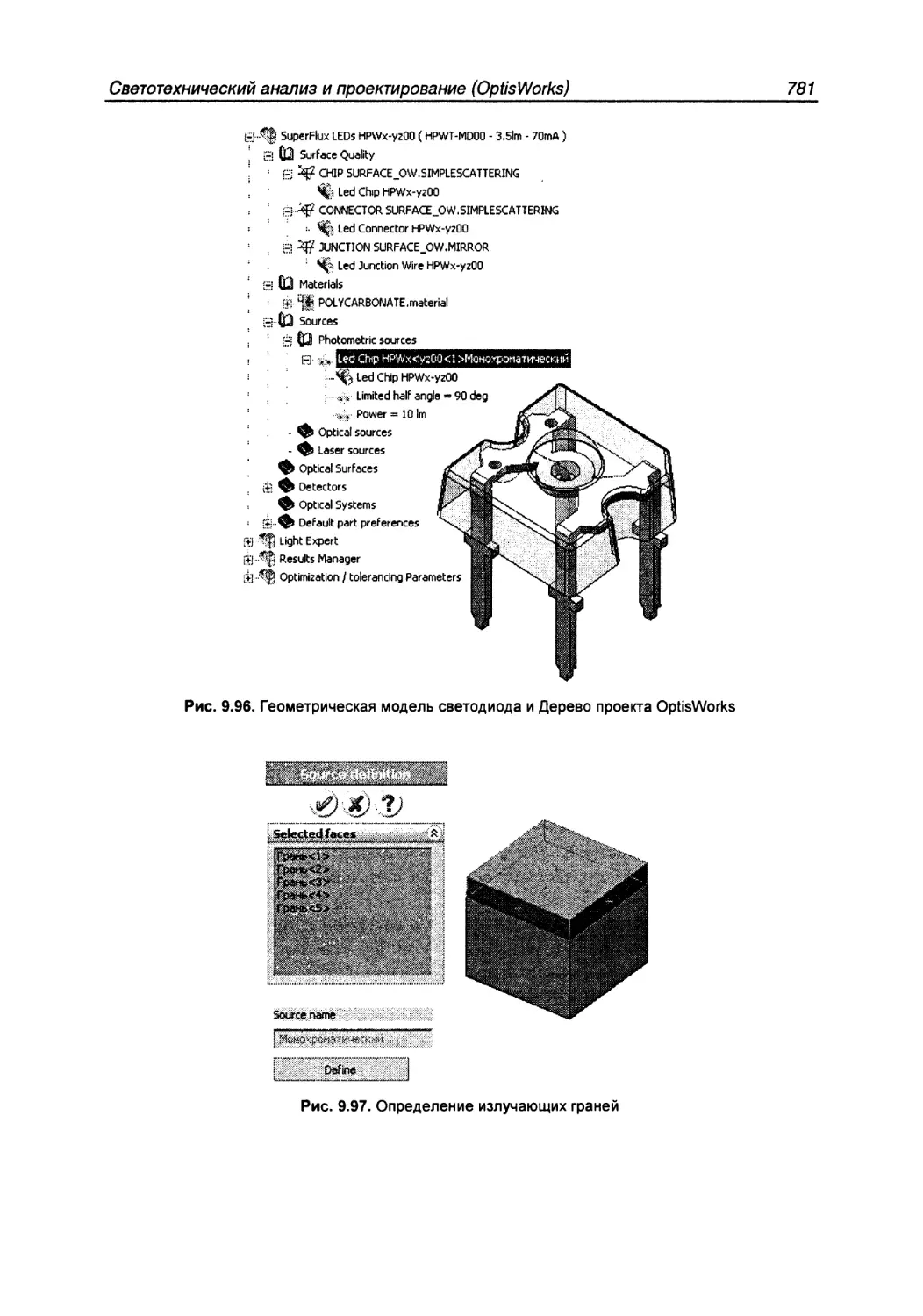
9.6.1. Фотометрическая модель светодиода 780
9.6.2. Подготовка модели корпуса ^ 798
9.6.3. Размещение виртуальных источников 799
VIII Оглавление
9.6.4. Формирование геометрической модели рассеивателя 800
9.6.5. Оптическая симуляция 804
9.6.6. Построение фотометрической модели 806
9.6.7. Фотометрическая симуляция 807
9.6.8. Оптимальное проектирование 814
9.6.9. Эксперт по свету 837
9.6.10. Заключение 845
9.7. Оптический анализ и проектирование — базовая функциональность 846
9.7.1. Подготовка геометрической модели 846
9.7.2. Подготовка оптической модели 847
9.7.3. Оптический анализ 857
9.7.4. Оптическая оптимизация 869
9.8. Заключение 870
Глава 10. Оптимизация работы механических САПР 871
10.1. Аппаратное обеспечение 871
10.2. Тип и настройки операционной системы 876
10.3. Настройки Solid Works 879
10.4. Специальные манипуляции 884
10.5. Использование сетевых дисков ...884
10.6. Одновременное функционирование нескольких приложений 885
10.7. Выводы 886
ПРИЛОЖЕНИЯ 887
Приложение 1. COSMOSWorks 2008 — новые возможности 889
П1.1. Общие усовершенствования 889
П1.2. Новые типы анализа 893
П1.2.1. Проектирование сосудов давления 893
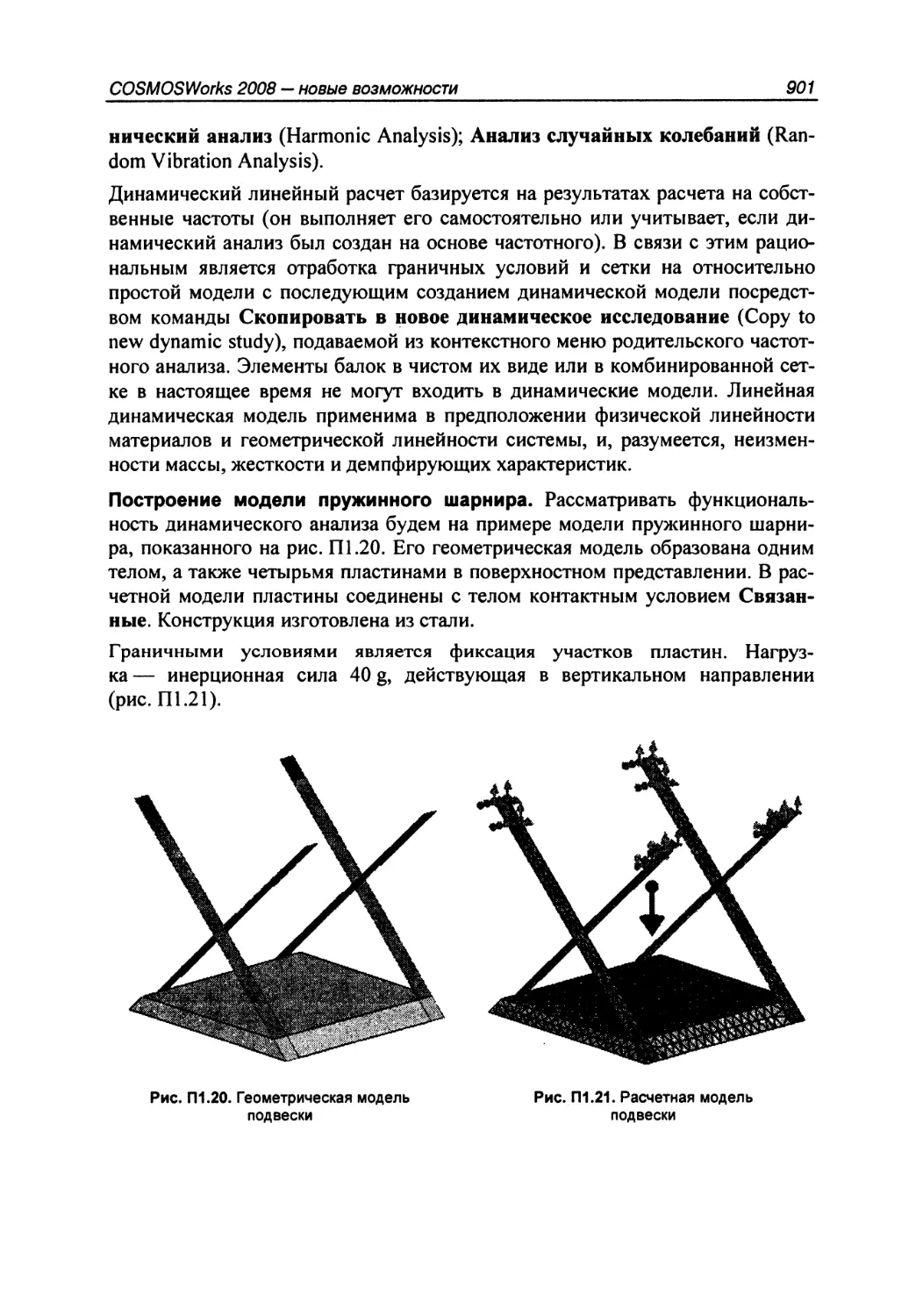
П1.2.2. Динамический линейный анализ 900
П1.2.3. Динамический нелинейный анализ 930
П1.3. Изменения в реализации анализов определенных типов 933
П1.3.1. Расчет коэффициентов видимости для оболочек 933
П1.3.2. Участие грани в теплообмене излучением одновременно
с внешней средой и с гранями 933
П1.3.3. Нелинейный анализ с учетом больших деформаций 936
П1.3.4. Процедуры экспорта результатов в другие программы МКЭ 936
П1.3.5. Функциональность балочных моделей 936
П1.3.6. Сценарии проектирования 947
П1.3.7. Поддержка больших перемещений 949
П1.3.8. Процедура Выявить тенденцию 949
П1.4. Граничные условия 951
П1.4.1. Справочные точки для управления сеткой и для приложения
нагрузок 951
Оглавление IX
П 1.4.2. Соединитель Болт 952
П 1.4.3. Соединитель Шпилька 954
П1.5. Сетка 954
П 1.5.1. Гибридные сетки 954
П 1.5.2. Использование справочных точек для управления сеткой 955
П 1.5.3. Сетка для контактов Узел к поверхности и Поверхность
с поверхностью 955
П 1.5.4. Модифицированный алгоритм создания сетки 955
П1.6. Контактные условия 957
П 1.6.1. Реализация контактных условий с несовместными сетками 957
П 1.6.2. Усовершенствованный контакт Поверхность с поверхностью 959
П1.6.3. Контактные условия в гибридных сетках 963
П1.7. Отображение и обработка результатов 974
П1.7.1. Сохранение деформированного вида модели 974
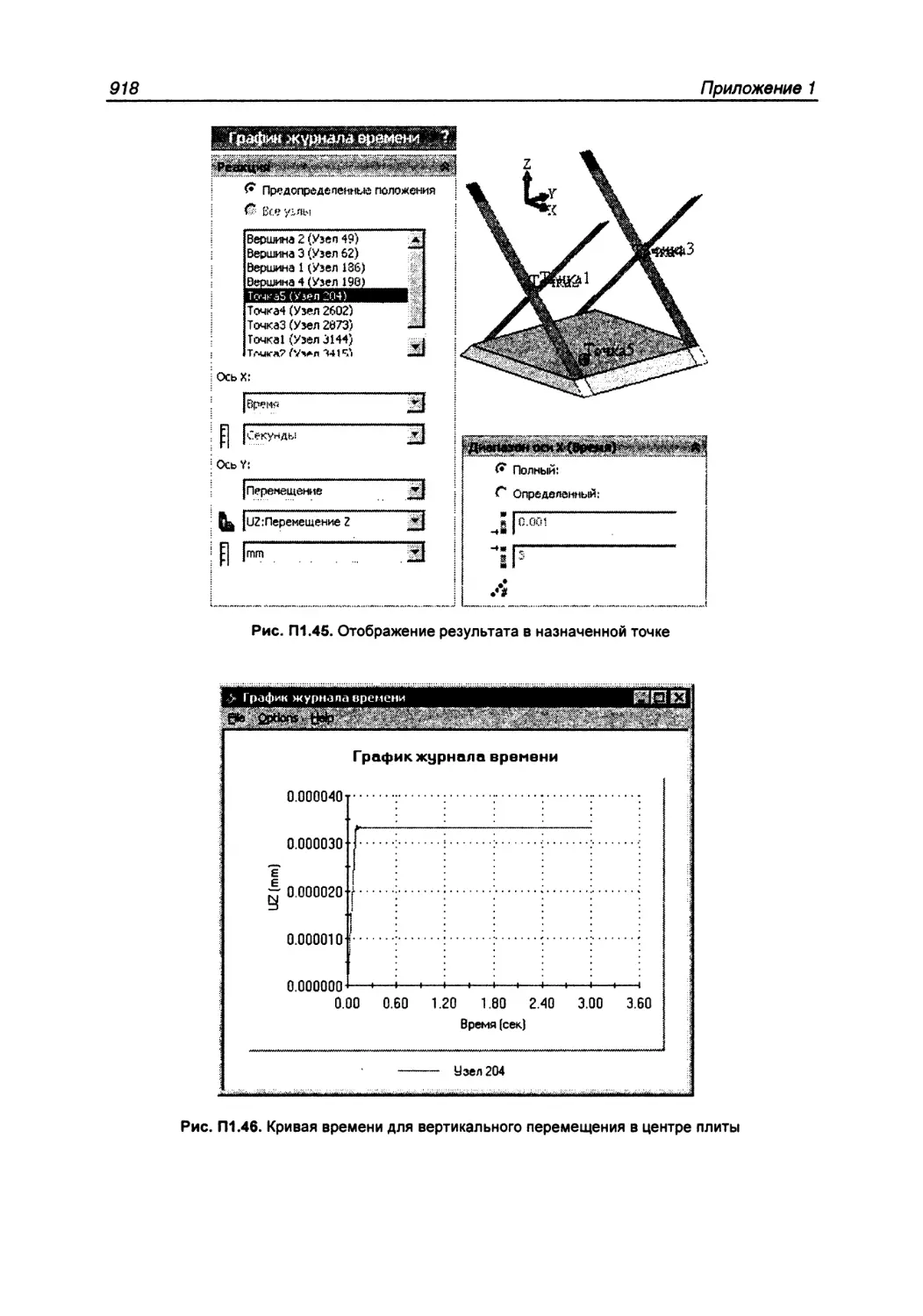
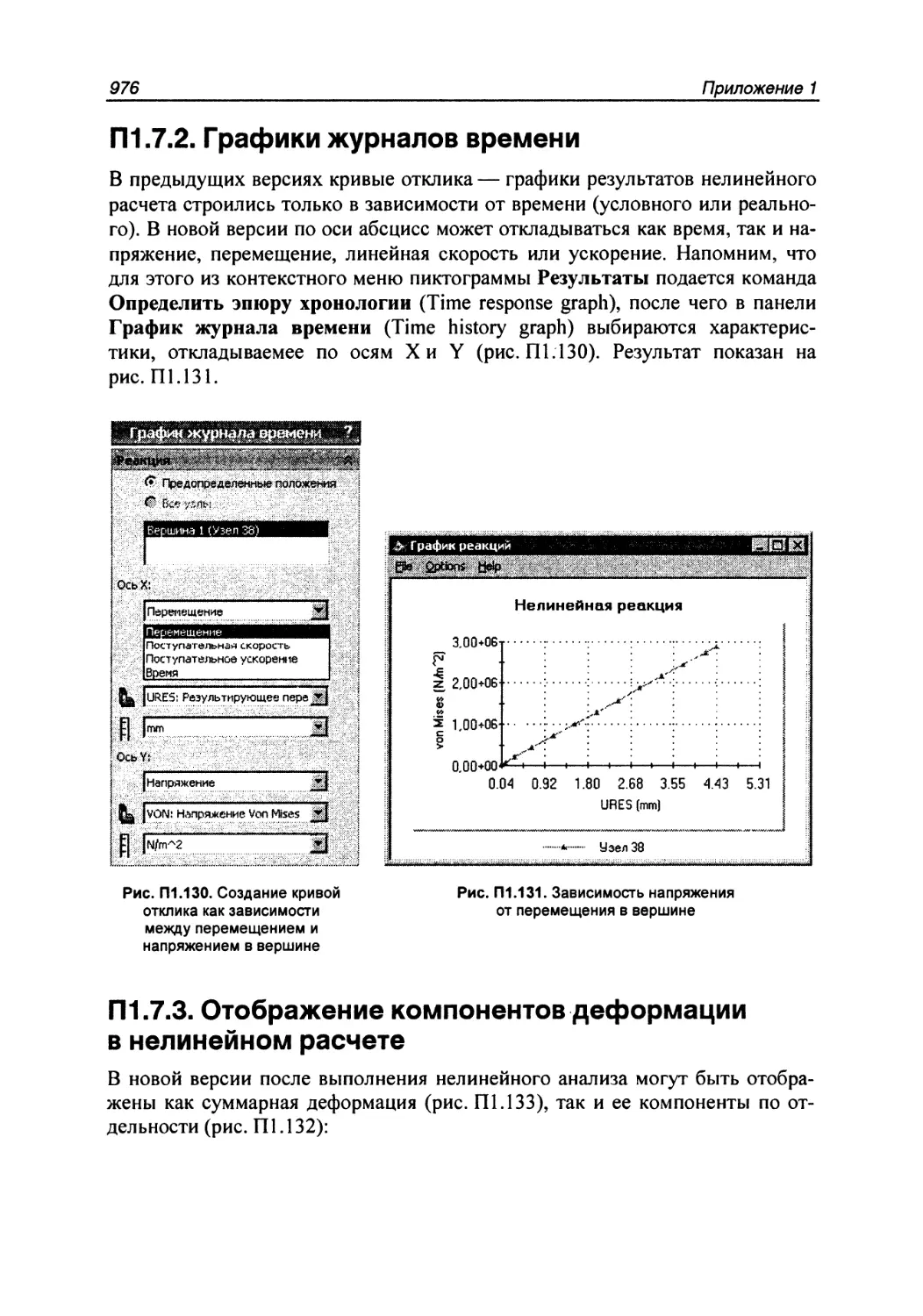
П1.7.2. Графики журналов времени 976
П1.7.3. Отображение компонентов деформации в нелинейном расчете 976
П 1.7.4. Эпюра Суть проекта 977
П1.7.5. Линеаризация напряжений 983
Приложение 2. COSMOSFloWorks 2008 — новые возможности 991
П2.1. Новые физические модели 991
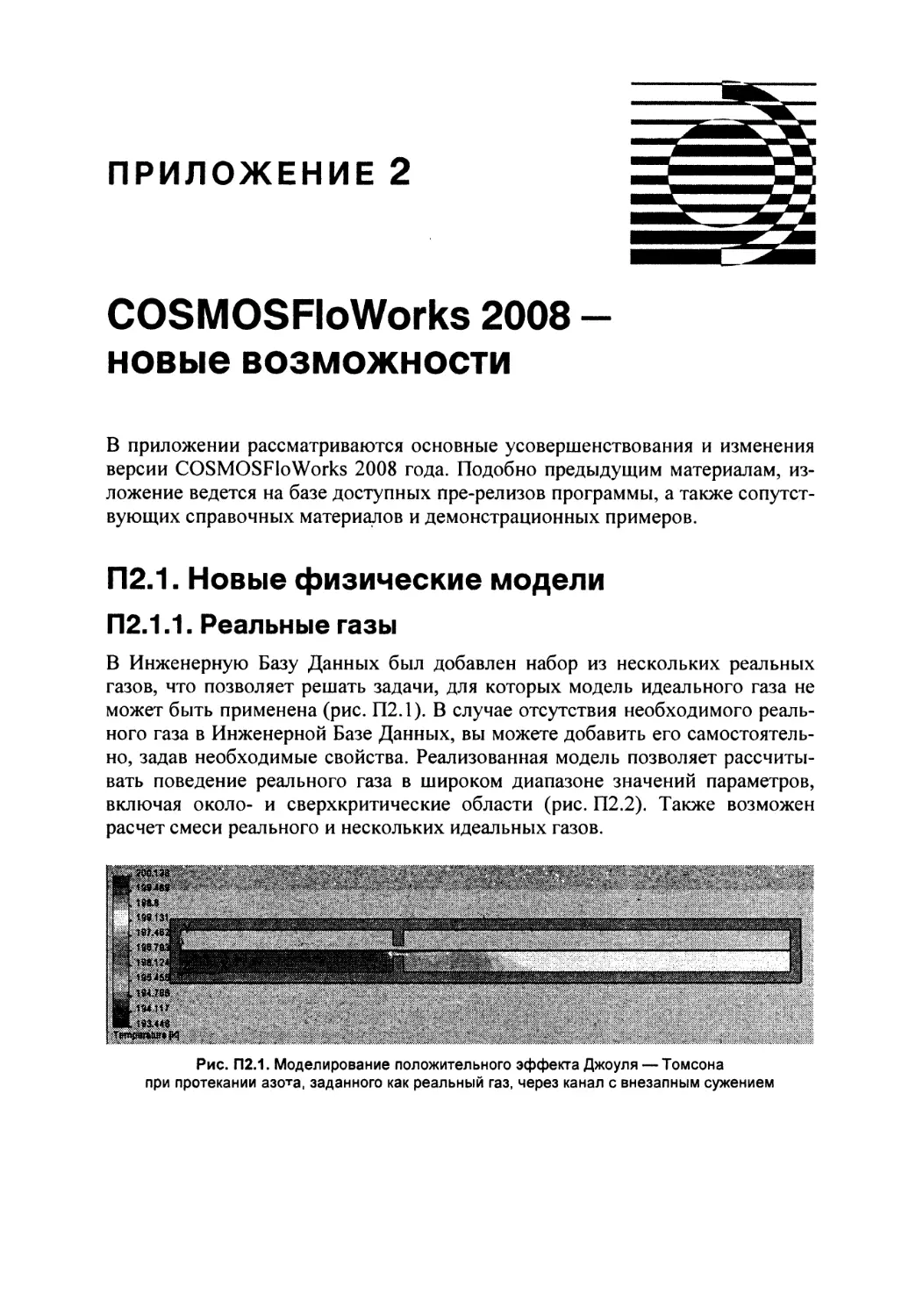
П2.1.1. Реальные газы 991
П2.1.2. Теплопередача в пористых телах 992
П2.2. Интеграция с SolidWorks 992
П2.2.1. Автоматическое исправление контактов 992
П2.2.2. Утилита для создания крышек 992
П2.2.3. Проект сохраняется в файл модели 994
П2.3. Интерфейс и удобство пользования 994
П2.3.1. Задание исходных данных 994
П2.3.2. Наблюдение за расчетом 996
П2.3.3. Просмотр результатов 997
Приложение 3. COSMOSMotion 2008 — новые возможности 1001
П3.1. Общие усовершенствования 1001
ПЗ.1.1. Русификация COSMOSMotion 1001
ПЗ. 1.2. COSMOSMotion как элемент Исследования движения 1001
ПЗ.1.3. Наличие нескольких моделей движения 1003
ПЗ.1.4. Подключение COSMOSMotion 1003
ПЗ.1.5. Интеграция с SolidWorks 1004
П3.2. Изменения в Менеджере движения 1006
ПЗ.2.1. Сворачиваемая панель 1006
ПЗ.2.2. Фильтры 1006
ПЗ.2.3. Ключевые точки 1006
ПЗ.2.4. Объекты процедуры Физическое моделирование 1006
X Оглавление
ПЗ.З. Функциональность COSMOSMotion 1006
ПЗ.3.1. Демпфирующие свойства у пружин 1007
ПЗ.3.2. Эпюры 1007
ПЗ.3.3. Обработка избыточных ограничений 1007
Приложение 4. GearTeq — развитие GearTrax для проектирования
механических передач 1009
П4.1. Общая информация 1009
П4.2. Интерфейс 1010
П4.3. Расширение функциональности 1011
Приложение 5. Описание диска 1015
Литература 1017
Предметный указатель 1019
06 авторах
Алямовскнй Андрей Александрович, кандидат технических
наук, доцент, работал в Московском авиационном
технологическом институте им. К. Э. Циолковского, специалист в области
численных методов в механике композитов и конструкций.
В настоящее время сотрудник фирмы SolidWorks Russia.
Одинцов Евгений Владимирович, руководитель отдела
разработки программных продуктов 000 "Ника Софтвер",
руководитель группы разработки генератора сетки.
Пономарев Николай Борисович, кандидат технических наук
по специальности "Механика жидкости, газа и плазмы".
Специалист в области прикладной математики, газовой
динамики и теплообмена. Начальник сектора в ФГУП
"Исследовательский центр им. М. В. Келдыша"
Федерального космического агентства.
Собачкин Александр Александрович, кандидат технических
наук по специальности "Механика жидкости, газа и плазмы",
руководитель разработки программных продуктов
000 "Ника Софтвер".
Харитонович Алексей Игоревич, менеджер программных
продуктов 000 "Ника Софтвер".
Для заметок
Введение
Эта книга является вторым изданием книги, вышедшей в 2005 году.
Основной его идеей было дать системное представление о модулях инженерного
анализа в среде проектирования SolidWorks. Рассматривались более
известные инструменты, такие как COSMOSWorks (структурный и тепловой
анализ), COSMOSMotion (кинематика и динамика), менее распространенные —
COSMOSFloWorks (аэрогидродинамика и теплоперенос) и весьма— для
России экзотические— ТгасеРго (светотехнический анализ), ReflectorCAD
(проектирование отражателей). Также описывались модули GearTrax
(моделирование элементов трансмиссий) и SolidWorks ToolBox (база данных по
элементам механических систем и стандартных объектов SolidWorks). Как
представляется, результат нашего труда нашел свою аудиторию. В нее вошли
как квалифицированные специалисты, так и те, кто начинает свою
деятельность в сфере компьютерного моделирования в инженерии. Этому, надеемся,
способствовала принятая установка на сочетание информационной,
теоретической и практической составляющих, когда сведения о программе
сопровождаются базовыми постулатами, лежащими в ее основе, а затем все это
иллюстрируется более и менее элементарными примерами решенных задач.
За более чем два года с момента выхода книги в сфере систем
автоматизированного проектирования в России произошли ощутимые изменения. Прежде
всего, продолжилось распространение собственно инструментов
геометрического моделирования. Подавляющая часть конкурентоспособных
организаций перешла или находится на этапе перехода на трехмерное моделирование.
Соответственно возросла база объектов, пригодных для расчета в
современных системах анализа. Внедрение систем анализа является логическим
развитием процесса автоматизации проектирования. За прошедшее время
произошли существенные изменения и в функциональности программных
продуктов, и в степени востребованности их у пользователей. Например,
COSMOSFloWorks приобрел немало новых пользователей, причем аудитория
4
Введение
расширилась и за счет специалистов-практиков, и за счет студентов и
аспирантов. Узнаваемыми стали и светотехнические модули. Надеемся, что
помимо объективных причин— роста потребностей аудитории, улучшения
функциональности, определенную роль сыграла и информация, которую мы
поместили в книгу.
Развивая удачную, как нам представляется, идею, мы предлагаем новое
издание книги. Здесь, следуя происшедшим событиям, существенно изменена и
дополнена информация о COSMOSFloWorks. Она касается как новых
возможностей, так и изрядно изменившегося интерфейса. Для других модулей
семейства COSMOS — COSMOSWorks и COSMOSMotion разработаны
новые примеры, иллюстрирующие возможности версий 2006 и 2007 года, а
также затрагивающие те аспекты функционирования программ, которые не
были в полной мере освещены в предыдущих изданиях под нашим
авторством.
Когда рукопись была практически готова, появились пре-релизы продуктов
семейства SolidWorks версии 2008 года. Базовые сведения о новых
возможностях модулей COSMOS приведены в приложениях. Поскольку
окончательные релизы могут отличаться от рабочих вариантов, то сделан акцент на
описание функциональности, и авторские материалы являются скорее
наблюдениями и соображениями, чем обоснованными суждениями и оценками.
Вместо рассмотренных в предыдущем издании светотехнической программы
ТгасеРго и ReflectorCAD в книгу помещена информация о модуле
светотехнического проектирования и анализа OptisWorks. Здесь мы
руководствовались тем, что этот инструмент, решая схожие с ТгасеРго и ReflectorCAD
задачи, имеет существенные различия в интерфейсе, функциональности и —
в определенной степени — в теоретической базе. Представляется, что
заинтересованному читателю будет интересно расширить свою эрудицию, а
потенциальному потребителю программ — сделать аргументированный выбор.
В информацию о программах GearTrax, ToolBox, BlankWorks внесены
относительно незначительные изменения, отражающие более и менее
существенные модификации последних версий. Мы сохранили соответствующие главы,
изменив при этом большую часть примеров, поскольку информация обладает
достаточной актуальностью и не имеет аналогов в русскоязычной литературе.
В разделы, в которых конспективно описана теоретическая база расчетных
приложений, внесены корректировки, отражающие изменения
функциональности.
Книга сопровождается диском, на котором находятся цветные варианты
иллюстраций — для анализа результатов работы расчетных процедур они
существенно более информативны, чем монохромные. Там же содержатся гео-
Введение
5
метрические и, если таковые есть, расчетные модели, на базе которых
строится материал книги.
Предисловие
Сейчас нет необходимости убеждать кого-либо в том, что компьютерное
моделирование является необходимым инструментом создания современных
технических объектов. Все более широкий круг предметов и явлений
становится объектом компьютерной симуляции. Она внедрилась практически во
все сферы инженерной деятельности. Другая тенденция — расширение круга
пользователей САЕ (Computer Aided Ег^теегт§)-продуктов. Практически до
конца 1990-х годов их эксплуатация была уделом узкого круга
профессионалов, своего рода "гуру" в соответствующих вопросах. Но расширение области
применения высокотехнологичных инструментов (бытовая техника,
электроника, индустрия автомобильных компонентов, товары для спорта и отдыха,
бытовая светотехника и т. д.) потребовало создания таких программ, которые
были бы доступны квалифицированному инженеру и стали атрибутом
стандартного рабочего места.
Несколько иная ситуация характерна для отечественной промышленности.
Несмотря на солидный "объем производства" инженеров,
квалифицированный персонал весьма непросто сначала подобрать, а потом обеспечить
работой, требующей специальных навыков и способствующей их развитию.
Технологический уровень российской промышленности, а также система
организации производства таковы, что почва для процветания продуктов high-end не
слишком подходящая. В то же время, налицо некоторое развитие (а точнее,
восстановление) интереса к САЕ-программам. База для этого— массовое
распространение геометрических CAD (Computer Aided Design)-cHCTeM.
Значительная доля предприятий использует технологию пространственного
моделирования, для некоторых она является основным инструментом
разработки конструкторской документации и — нередко — технологических
процессов (характерный пример— создание программ для УЧПУ). Естественным
является переход на следующий уровень — компьютерный анализ и
проектирование. Здесь существуют два источника развития: потребности
производства и нормальный человеческий интерес. Надо сказать, что второе в
некоторых является преобладающим. Наиболее логичный путь— освоение
интегрированных приложений, сопровождаемое (нередко) овладением
соответствующей теоретической базой.
Все программы, о которых пойдет речь в книге, являются так называемыми
партнерскими приложениями к системе SolidWorks. Подробнее об этом речь
пойдет ниже. Здесь же отметим, что это никоим образом не ограничивает
круг объектов, которые исследуются программами, и, соответственно, кон-
6
Введение
тингент возможных читателей. Для наиболее популярных геометрических
САПР разработаны соответствующие модификации расчетных модулей.
Среди авторов присутствуют разработчики программного обеспечения на
базе SoIidWorks, а также реселлеры упомянутых в книге продуктов. Ни та ни
другая сфера деятельности не существуют в отрыве от инженерной практики,
задач производства. Поэтому, декларируя определенную заинтересованность
в продвижении упомянутых систем, мы постараемся на примере конкретных
проблем показать их достоинства, не утаивая ограничений.
Аудитория
Прежде всего, авторы рассчитывают, что издание будет полезно инженерам-
практикам, которые, имея дело с геометрическими САПР, сталкиваются с
необходимостью выполнения анализа. В книге они найдут описание
апробированных инструментов, информацию о соответствующих расчетных
методиках.
Изрядная доля задач, иллюстрирующих программы, содержит элементы
поиска. Эти аспекты могут заинтересовать аспирантов, специализирующихся в
инженерных дисциплинах. Как сами по себе программы (в тех рамках, в
которых они будут описаны), так и процесс их эксплуатации, строго говоря, не
могут быть объектом исследования. Однако уровень их функциональности
более чем достаточен для проверки гипотез, сопровождающих научные
изыскания в технике. Более того, для рассмотрения выбраны продукты, ставшие
в некотором смысле стандартами в соответствующих сферах применения.
Соответственно, их изучение может стать своеобразным стимулом для
собственных разработок.
Авторы надеются, что, попав в руки студента, книга окажется источником
познавательной информации и средством расширить эрудицию. Тем более
что компания SoIidWorks Russia в рамках программы содействия вузам SWR-
Академия на специальных льготных условиях поставляет программное
обеспечение (SoIidWorks, COSMOSWorks, COSMOSFloWorks, COSMOSMotion и ряд
других приложений SoIidWorks) с целью поддержки процесса
профессиональной подготовки студентов с использованием САПР и PDM. Данная
программа охватывает учебные заведения России, стран СНГ и Средней Азии.
На момент сдачи рукописи в печать к программе SWR-Академия
присоединилось уже более 200 организаций. Начиная с 2007 года, доступны
коммерческие лицензии SoIidWorks и расчетных модулей для учебных организаций.
При существенно меньшей стоимости по сравнению с коммерческими
поставками, они обладают идентичной функциональностью.
Издание не претендует на роль источника фундаментальных знаний,
ограничиваясь прикладными целями. В то же время большинство описанных мето-
Введение
7
дик вполне доступно студентам старших курсов и могут быть применены для
выполнения дипломных работ. Польза возрастет многократно, если чтение
данного текста будет сопровождаться изучением литературы, содержащей
полноценную теоретическую базу.
Предназначение
Если непредвзято посмотреть на ситуацию с отечественной литературой в
области компьютерного моделирования и анализа, можно сделать несколько
выводов. Один из них связан с тем, что широкий пласт проблем в большей
или меньшей степени исключен из рассмотрения. Это, в частности, задачи
вычислительной аэрогидродинамики и теплопередачи, имитации
технологических процессов, проектирования светотехники и оптических устройств.
Данная тенденция в значительной степени противоречит тому, что
происходит в продвинутых сообществах— использование соответствующих
программных продуктов стало одной из составляющих технического прогресса.
В более же популярных сферах— геометрическом моделировании,
структурной механике, расчете механических систем — публикации группируются
возле двух полюсов: с одной стороны — фундаментальные теоретические
руководства, с другой — альтернатива в виде не слишком критических
описаний с выраженным рекламным подтекстом. Последним грешит периодика.
Более популярные журналы, имея бюджет, основанный на рекламе, не
слишком заинтересованы в аналитических материалах. Круг же читателей
специализированных изданий, по большей части ведомственных, вполне
соответствует их тиражу. Есть и другие источники информации. Документация,
сопровождающая программы, нередко содержит весьма показательные примеры.
Но, по очевидным причинам, они стопроцентно успешны. Редкий
разработчик адекватно опишет проблемы и ограничения. Кроме того, примеры
нечасто выходят за рамки канонических задач, что, в общем-то, и неплохо. Именно
они есть база для изучения явлений, не допускающих строгого решения.
В последнее время многие фирмы — как производители, так и реселлеры —
организовали соответствующие интернет-ресурсы, где помещена
информация о конкретных задачах. Несмотря на ясную цель — рекламу и поиск
заказчика, там можно найти заслуживающие внимания образцы исследований.
Не менее очевидно и то, что все, находящееся между двумя моментами:
формулировкой задачи и описанием решения удостаивается, в лучшем случае,
только краткого упоминания.
В данной книге авторы постарались сопроводить описание программ
примерами, иллюстрирующими вполне реальные инженерные задачи или этапы
этих задач. Помимо этого процесс решения сопровождается более или менее
8
Введение
подробным описанием методической стороны вопроса, что, надеемся, найдет
понимание заинтересованного читателя. Эти рассуждения могут показаться
тривиальными, однако моменты, очевидные при использовании
аналитических методов, не всегда так однозначны, применительно к алгоритмам
вычислительного анализа.
Описанные программы решают различные задачи, однако их рассмотрение в
одном издании (помимо того, что почти все они, как упоминалось, обладают
статусом партнерского приложения Sol id Works) оправдано рядом
аргументов. Большинство из них базируется на методах вычислительной математики.
Это порождает схожесть методик подготовки геометрических моделей,
назначения исходных данных и интерпретации результатов. Многие программы
имеют интерфейс между собой (минуя SolidWorks или другие
конструкторские пакеты), а множества типов задач для некоторых— пересекаются. Это,
например, расчет на прочность на базе аналитических и численных методов,
решение тепловой задачи посредством различных численных аппроксимаций.
Одним из принципов отбора программ был принцип ориентированности на
их использование конструктором. Инструменты технолога не
рассматривались. Несомненно, в реальном производстве имеют место различные схемы
организации труда, но вопросы сугубо технологического характера— они
касаются процессов обработки материала— можно вычленить и отделить
вполне уверенно.
Поскольку книга претендует на определенную системность описания
программ и методик их использования, несомненно, что степень подробности в
освещении функциональности продуктов не может быть равноценна. Здесь
авторы придерживались ориентации на тщательное изложение наиболее
актуальных аспектов, а менее популярные вопросы только формулируются и не
сопровождаются примерами. Например, среди задач аэрогидродинамики и
теплопередачи жизненность вопроса расчета тепловых режимов
электротехнических устройств относительно проблемы сверхзвукового течения
несопоставима (по крайней мере, для отечественной промышленности). Между
тем, обе они решаются одной и той же программой. Похожий пример —
проектирование светотехники и моделирование процессов волновой оптики.
Первая — предмет повседневной деятельности многих инженеров, вторая —
возникает только эпизодически. Инструмент же для них тождественен.
На отбор рассматриваемых вопросов наложили отпечаток личные
пристрастия авторов, наличие подходящих примеров, а также, не скроем, желание
посредством данной книги сформировать спрос на описанные программы.
В то же время, абсолютное большинство сведений являются вполне
инвариантными относительно сопоставимых программных решений.
Еще одно замечание касается объема и степени детализации теоретической
базы рассматриваемых методов. Руководствуясь названием книги и здравым
Введение
9
смыслом, изложение теории ограничивается основами, которые необходимы
для эксплуатации программ: формализации задачи, обеспечения
эффективного вычислительного процесса, интерпретации результатов. Фундаментальные
знания следует получать из специальных источников.
В книге также затронуты вопросы подбора компьютерной техники для
эксплуатации CAD/CAE-продуктов. Мы надеемся, что приведенные
рекомендации будут полезны в профессиональной деятельности читателей.
Соглашения
Для SolidWorks имеется русскоязычная версия. Поскольку именно ее
традиционно используют в России, то за редким исключением команды и меню
SolidWorks приводятся на русском языке.
Для COSMOSWorks также есть русскоязычная версия. Однако она содержит
ряд некорректно переведенных терминов. По этой причине в России иногда
используется также англоязычная версия программы. Поэтому практически
всегда мы будем сопровождать русские термины их оригинальным
вариантом, который дается в скобках. Кроме того, некоторые серьезные неточности
перевода будут исправлены в замечаниях, расположенных в тексте.
Другие программы пока не имеют русскоязычного интерфейса и фирменного
перевода технической документации. Поэтому команды, пункты меню и
термины, встречающиеся в них, приведены на английском языке, а русский
перевод дается в скобках при первом упоминании той или иной команды, а
впоследствии — в случаях, когда это облегчает понимание описываемых
процессов. При решении прикладных задач перевод иногда не приводится.
Некоторые технические термины, имеющие установившиеся аналоги в
русском языке, после перевода используются только в русскоязычном варианте.
Расчеты выполняются для геометрических моделей, построенных
посредством SolidWorks. Предполагая, что читатель, по крайней мере, в общих чертах,
знаком с этой программой (надо сказать, что для чтения вполне хватит
первичных познаний), мы не будем рассматривать элементарные построения.
Однако в ситуациях, когда геометрия "управляет" расчетом, является
результатом расчета или же получена посредством специфических приемов,
процесс ее формирования будет приведен достаточно подробно.
Благодарности
Авторы благодарны своим коллегам — сотрудникам фирм SolidWorks Russia
(Москва) и ООО "N1KA Software" (Москва)— за помощь в реализации
проекта.
10
Введение
Некоторые геометрические модели изделий, а также их расчеты,
рассматриваемые в книге, выполнены в процессе взаимодействия с фирмами и
предприятиями. Авторы выражают признательность сотрудникам этих
организаций за помощь. Если используется информация, представляющая
существенный интерес, мы упоминаем эти случаи.
Контактная информация
Авторы будут благодарны читателям за пожелания и замечания по данной
книге и по теме CAD/CAE. Направляйте ваши письма в адрес редакции
mail@bhv.ru. Информация об обновлениях программных продуктов,
примеры решения задач, другие вопросы, связанные с темой CAD/CAE, доступны
на Web-сайтах http://www.solidworks.ru, http://www.nika.biz.
ГЛАВА 1
SolidWorks как база
для инженерных приложений
В этой главе мы кратко рассмотрим особенности использования системы
SolidWorks как основы построения интегрированной среды моделирования и
анализа.
1.1. Интегрированные CAD/CAE-системы
В последнее время четко обозначилась тенденция группирования
инструментов геометрического моделирования и расчетных программ в
интегрированные системы. Одной из фирм, положивших начало этому процессу, была РТС
(Parametric Technology Corporation), внедрившая в продукт Pro/Engineer
модули расчета на прочность методом конечных элементов, процедуры
кинематического и динамического анализа. Однако поскольку РТС помещала
"внешние" продукты в базовую систему под своей торговой маркой (покупая
авторские права или на основе партнерских соглашений), ограничивая при
этом доступ к интерфейсу разработки приложений (API) для "свободных"
разработчиков, то номенклатура приложений практически не расширялась.
Фирма Dassault Systems также внедрила в Catia V4 модуль расчета на
прочность методом конечных элементов, причем его функциональность позволяла
решать широкий круг задач и была на момент начала девяностых годов
сравнима с той, которую имели универсальные пакеты конечно-элементного
анализа. Однако сторонние разработчики не могли получить доступ к
процедурам программирования без согласия владельца базового пакета, требовалось
также приобретение лицензий на работу с процедурами API. Кроме того,
развитие прикладных приложений сдерживалось дороговизной как самой CAD-
системы, так и аппаратных средств — графических рабочих станций на базе
RISC-процессоров!
12
Глава 1
Серийный номер: 0001000100010001 ' -
Copyright © I995-2006 Solid Works Corporation
Патенты США 5,Ш5,154; 6,219,049; 6,219,055; 6,603,486; 6,611,725; 6,844,877;
6>89$,5б0; и 6,906,712; а также некоторые другие международные патенты, I
включая ЕР I, U6,190 and Р 3,517,643.
I у,,,, пшштмт , „ш—..», ■ *ищкщтЛт.т^п».^л^ -. »>—■ „и..,..,.,, I
I I Части этого программного обеспечения охраняется аьторскли праеом и j*j j
I являются собственностью UGS Corp, ©2006, Т|\|
{Части этого программного обеспечения © 1997-2002 Macromedia, Inc. j j
j Части этого программного обеспечений © 1990-2006 0-Cubed limited, ^
Части этого программного обеспечения © 1998-2006 Seometrtc Software Solutions I
Ca.Umfted.
I Отдельные части этого программного обеспечения ©1995-2004 Spatial - |
| Corporation,
i Отдел^ые части этого программного обеспечен 1Я © 1996-2006 Microsoft
| Corporation, Все праеа защищены. jjj I
[ Дицен»!юнное соглашение. ♦. j Авторские права Adobe., Л I
Нажмите Соединить, чтобы посетить SohdWorks в Интернете и Соединить*.. I I
узнать дополнительную информацию о компании и программе. ,>„,>«,„^;Г1,».>Г.,1! ]
Рис. 1.1. Информационная панель SolidWorks
Ситуация изменилась с появлением системы SolidWorks (информационная
панель программы показана на рис. 1.1), которая практически с момента
рождения имела открытый API. На первом этапе это стимулировало
разработчиков, которые создавали новые продукты или развивали уже
существующие, но имеющие примитивный интерфейс пользователя. Функциональная
графическая среда и доступ к математическому аппарату для обработки
геометрии радикально ускоряли создание коммерческих программ. При этом
разработчики не были обязаны, по крайней мере, до этапа коммерческой
реализации, вступать в какие-либо официальные отношения с фирмой SolidWorks
(за исключением, разумеется, приобретения лицензии на программу). С
начала нового тысячелетия развитие интегрированных систем пошло "в режиме
самовозбуждения". SolidWorks стал крайне популярен, вовлекая в свою
орбиту тысячи новых пользователей. В то же время, "самостоятельные" САЕ-
системы подошли к некоему "порогу насыщения" рынка, когда практически
все профессиональные расчетчики уже обзавелись какой-либо программой.
Поэтому фирмы-производители стали рекрутировать новых потребителей из
среды инженеров-проектировщиков, внедряясь в массовые системы
проектирования через создание "сопутствующих" инструментов. Сейчас остались
считанные единицы расчетных программ, которые не имели бы в большей
или меньшей степени усеченного (или, если более корректно,
адаптированного) варианта, функционирующего как приложение SolidWorks или какой-
SolidWorks как база для инженерных приложений
13
либо другой CAD-системы. Последняя, очевидно, должна иметь достойную
внимания пользовательскую базу. Процесс зашел настолько глубоко, что
сначала в SolidWorks 2003 появились "бесплатные" модуль COSMOSXPress,
являющийся инструментом расчета на прочность начального уровня, и
процедура Физическая динамика, предназначенная для "оживления" сборок.
Версия 2005 года обогатилась процедурой MoldflowXpress. выполняющей
элементарную оценку проливаемости форм при изготовлении тонкостенных
деталей из термопластов.
Можно, конечно, дискутировать о степени адекватности результатов,
получаемых подобными фрагментами "больших" систем, однако маркетинговая
эффективность несомненна и взаимна: SolidWorks приобретает имидж
всеохватывающего орудия, а пользователь ненавязчиво втягивается в сферу
влияния производителей инженерных программ.
Следующей маркетинговой инициативой со стороны фирмы SolidWorks
стало появление конфигурации SolidWorks Office Premium, в которую за
относительно небольшую цену по сравнению с SolidWorks Office включены
COSMOSWorks Designer (он выполняет только статический анализ) и
COSMOSMotion.
Еще одной тенденцией стало поглощение производителями универсальных
систем проектирования фирм, специализирующихся на расчетных пакетах.
Если последние не смогли расширить пользовательскую базу, то коллективы
становятся объектом интереса тех, у кого есть свободные финансовые
ресурсы. Результат может быть двояким. С одной стороны, разработчики могут
получить дополнительное финансирование, доступ к математике, как
правило, более совершенной (с точки зрения геометрического моделирования и
интерфейсов) системе, и функциональность расчетных модулей или
приложений (после поглощения они выбывают из категории самостоятельных
программ) станет шире. С другой — не исключен вариант того, что развитие, по
крайней мере, в течение некоторого времени, ограничится отработкой
интерфейса с неким базовым пакетом, модификацией системы лицензирования,
разнообразными рекламными акциями в виде создания всевозможных
комбинаций (пакетов, конфигураций...) модулей CAD/CAE. Есть, кстати, и более
мягкая форма подчинения малых (иногда— относительно) коллективов
более крупным. Это покупка авторских прав на программный продукт. В любом
случае результат— лишение или ограничение возможности самостоятельно
определять техническую политику и переход на каналы дистрибуции нового
собственника.
Аналогичные процессы происходят и в сообществе разработчиков расчетных
пакетов. Те, кто имеет больший капитал (а это, как правило, производители
"универсальных" инструментов), поглощают (в разных формах) коллективы,
решающие "частные" задачи. Результатом являются пакеты так называемого
14
Глава 1
мультидисциплинарного анализа. Соотношение между маркетинговыми и
объективно целесообразными (с точки зрения пользователя) компонентами
может быть самым различным.
Тем не менее работа в интегрированной среде проектирования и расчета,
помимо потенциального улучшения результата, является весьма увлекательным
занятием. Это требует новых навыков, связанных с организацией
рационального взаимодействия нескольких инструментов. Рассмотрим некоторые
возможности Sol id Works, обеспечивающие эффективное использование
расчетных приложений.
1.2. Твердотельное моделирование
SolidWorks изначально создавался как система твердотельного
параметрического моделирования. Программа содержит всю необходимую номенклатуру
инструментов, причем некоторые возможности крайне эффективны для
разработки объектов, ориентированных на последующее использование
программ расчета. Это проектирование изделий из листового материала, сварные
детали. Они позволяют получить модели, весьма близкие к требованиям
данных инструментов. Подмножество функций, ориентированных на работу с
криволинейными объектами: инструменты сплайнов, команды создания тел,
имеющих криволинейные поверхности, процедуры обеспечения гладкости,
построения сопряжений, позволяют — в абсолютном большинстве случаев —
с приемлемой точностью готовить модели для аэрогидродинамического
анализа или светотехники (в задачах расчета на прочность качество
представления поверхности несколько менее принципиальный фактор).
Начиная с версии 2003 года, в SolidWorks появился многотельный режим. Он
существенно расширил возможности пользователя при создании
геометрических моделей. Однако далеко не все расчетные системы поддерживают эту
функциональность. Например, COSMOSMotion обрабатывает многотельные
детали, начиная с версии 2005 года. COSMOSWorks делает это, начиная с
2006 года. При этом функциональность при работе в многотельной детали, по
сути, эквивалентна той, которая предусмотрена для сборки.
SolidWorks позволяет создавать конфигурации объектов. Интегрированные
модули в абсолютном большинстве адекватно обрабатывают эту
функциональность, позволяя рассчитывать разнообразные исполнения расчетных
моделей, а, например, COSMOSWorks, начиная с версии 2005 года, способен
одновременно отображать результаты нескольких расчетов, выполненных в
том числе и в различных конфигурациях SolidWorks. Кроме того,
параметрическое представление геометрии в CAD-системе позволило органично включить
в COSMOSWorks модуль параметрической оптимизации, а также инструмент
сценариев проектирования. Последние предназначены для изучения того, как
SolidWorks как база для инженерных приложений
15
влияет изменение формы, граничных условий, типов материалов и т. д. на
свойства конструкции. Упомянув о материалах, отметим, что одно из
направлений развития SolidWorks, связанное с более полным учетом "визуальных"
свойств материалов, нашло логическое продолжение в интегральной базе
данных, включающей как информацию о цвете, прозрачности, текстуре, так и
плотности, характеристиках упругости и прочности. Начиная с версии
2006 года, тепловые характеристики твердых тел автоматически передаются в
COSMOSFIoWorks.
С Замечание ~^)
В COSMOSWorks общим с SolidWorks является подмножество механических
характеристик, описывающих-упругие свойства, прочность, плотность, а также
тепловые характеристики — удельная теплоемкость, теплопроводность и
термоупругие — коэффициент теплового расширения. Для редактирования свойств
анизотропных материалов SolidWorks следует использовать редактор материалов
COSMOSWorks. После этого данные свойства будут корректно отображаться
в редакторе SolidWorks.
В COSMOSMotion из SolidWorks передаются плотность и характеристики
упругости и прочности. Однако модулем реально может использоваться только
плотность.
COSMOSFIoWorks заимствует из SolidWorks только характеристики плотности, а
также удельную теплопроводность и теплоемкость. Зависимость данных
параметров от температуры в редакторе материалов SolidWorks назначить
невозможно.
( Замечание ^)
Передача свойств их геометрического редактора в расчетные модули является
однонаправленной. Будучи переназначены в ходе создания расчетных моделей,
они в SolidWorks не передаются.
Одним из радикальных нововведений версии является ввод конечных
элементов балок/стержней. Они генерируются исключительно на базе тел,
построенных посредством команд подмножества Сварные конструкции.
Даже перечислить все возможности SolidWorks, которые могут быть полезны
при создании расчетных моделей, очень трудно. Мы рекомендуем обратиться
к документации программы, поскольку квалифицированная работа с
приложениями требует уверенного владения базовой функциональностью.
1.3. Поверхностное и гибридное
моделирование
По сравнению с системами аналогичного уровня SolidWorks имеет наиболее
развитые возможности для создания и редактирования поверхностей, а также
16
Глава 1
совместной обработки поверхностей и твердых тел. Поверхностное
представление геометрии активно используется в COSMOSWorks для создания на
этой базе оболочечных расчетных моделей. Также присутствуют функции
для автоматизированного вычленения срединной поверхности для
твердотельных объектов, которые целесообразно рассчитывать по оболочечной
модели. SolidWorks обладает всеми необходимыми инструментами для доводки
получившихся результатов согласно условностям расчетных программ.
Кроме того, сам COSMOSWorks в состоянии генерировать сетку оболочечных
элементов на базе срединных поверхностей. Эта функция — плод совместной
деятельности фирм SRAC и SolidWorks. Разумеется, при создании исходного
проекта должны соблюдаться определенные условия для ее эффективного
функционирования. Также интеграция программ подразумевает передачу
части работы, связанной с подготовительными операциями при создании
сетки конечных элементов, на SolidWorks. Именно его функции следует
задействовать для модификации поверхностей с целью создания корректных сеток
из оболочечных элементов.
Появившиеся в версии 2007 года балочные и стержневые модели
COSMOSWorks функционируют на базе объектов, созданных посредством
команд группы Сварные детали SolidWorks. Результатом их работы
является деталь, состоящая из нескольких тел. Алгоритмы геометрического
моделирования и расчета достаточно тесно связаны, что предъявляет
специфические требования к качеству подготовки геометрии.
В детали SolidWorks может присутствовать как твердотельная, так и
поверхностная информация. Интегрированные расчетные модули естественным
образом учитывают это обстоятельство. Некоторые, например, COSMOSWorks
могут обрабатывать в одной расчетной модели оба типа информации. Однако
то, что для построения, например поверхности, использовались твердые тела,
для программы абсолютно безразлично.
То же можно сказать про приложение BlankWorks, где источником
информации может быть как совокупность поверхностей, так и грани тел. Весьма
простой интерфейс данной программы подразумевает активное использование
функциональности SolidWorks для подготовки подходящей исходной
информации. Если, например, в COSMOSWorks и COSMOSFloWorks для создания
сеток присутствует функциональность, позволяющая в той или иной степени
управлять этим процессом, то BlankWorks полностью "полагается" на
результат работы SolidWorks.
Гибридные геометрические модели активно используются в задачах
светотехнического анализа и проектирования. Здесь разделение функций
следующее. Если объект является отражателем, причем имеет при этом сложную
форму, как, например, сегментная фара, то как для оператора при ее проекти-
SolidWorks как база для инженерных приложений
17
ровании (с точки зрения светотехнических характеристик), так и для
программы расчета более рационально иметь поверхностное представление.
После удовлетворения функциональных требований на его базе можно
построить объемную модель, которая будет использоваться для компоновки,
разработки оснастки и т. д. При сохранении ассоциативной связи между разными
представлениями одного и того же изделия процесс модификации не
вызывает затруднений. Нередко возникает обратная задача: расчет готового изделия
с целью дальнейшего использования результатов (например, если создается
осветительная система с несколькими одинаковыми источниками света).
Тогда для упрощения анализа можно вычленить рабочие поверхности и именно
их передавать в расчетную программу.
1.4. Работа в сборке
SolidWorks обладает самыми разнообразными возможностями для создания и
модификации сборок. Расчетные приложения, соответственно, эту
функциональность учитывают. Как и для моделей твердотельных и поверхностных
деталей, ответственность за корректную подготовку исходных данных для
сборок в подавляющей части возлагается на CAD-систему. Это значит, что
взаимное положение деталей, как в смысле геометрии, так и в том, что
касается назначения параметров их взаимодействия в физической модели, должно
определяться посредством сопряжений. В явном виде они ни в одну
программу, за исключением COSMOSMotion, не транслируются. Расчетные
модули имеют дело исключительно с геометрией, но не с семантикой.
COSMOSMotion в данном ряду является исключением. Его математический
аппарат допускает отсутствие в модели сборки связи между деталями, но при
этом операции, по сути идентичные тем, которые выполняются в SolidWorks,
придется производить в процессе формирования механизма. После запуска
расчета программа должна будет "собрать" сборку в соответствии с логикой,
определенной в соединениях COSMOSMotion.
Визуализацию кинематики сборки можно получить в SolidWorks, не прибегая
к дополнительным инструментам. Приводить ее в движение можно мышью
или же посредством функции Физическая динамика. Доступны команды
для проверки интерференции как в статическом, так и в динамическом
состоянии, а также возможность визуализации движения, сопровождаемого
входом деталей в контакт и выходом из контакта. Поэтому рекомендуется
подвергнуть сборку проверке инструментами SolidWorks, а уже затем
использовать расчетные процедуры. Все они весьма чувствительны к
присутствию интерференции деталей. Начиная с версии 2006 года, модель движения,
определенная в SolidWorks, автоматически воспринимается в
COSMOSMotion, где созданные там движители и пружины можно модифицировать.
18
Глава 1
Последние версии SolidWorks обладают развитым набором команд для
преобразования детали в сборку. Оно может осуществляться в режиме
автоматизированного расчленения одного тела, а также базироваться на многотельном
представлении. Такая схема построения исходных данных позволяет строить
расчетную модель сборки, ассоциативно связанную с единственной деталью.
Это весьма удобно, когда расчетная механическая модель предполагает
контактное взаимодействие деталей с одинаковыми или различными
физическими свойствами или же выполняется тепловой расчет с различными теплофи-
зическими характеристиками материалов. Разумеется, можно изначально
строить и рассчитывать сборку из "самостоятельных" деталей, однако,
например, сварные конструкции иногда проектируются в режиме детали с
последующей трансформацией в сборку.
COSMOSWorks и COSMOSFloWorks имеют набор опций для визуализации
сборки в состоянии расчленения или в частично прозрачном состоянии с
одновременным наложением диаграмм результатов. Эти команды также
реализованы на базе возможностей SolidWorks.
Актуальным является вопрос о моделировании сборок, содержащих большое
число деталей. Здесь следует выделить два аспекта. Первый связан с базовой
функциональностью SolidWorks для построения геометрической модели.
Здесь возможности программы непрерывно наращиваются, и в настоящее
время большинство проблем в сборках с несколькими тысячами несложных
деталей вполне решаемы при наличии адекватного аппаратного обеспечения.
Кроме того, можно редактировать модели в режиме сокращенной сборки.
Второй аспект связан с расчетом конструкций, состоящих из большого числа
деталей. Здесь могут пригодиться возможности SolidWorks, позволяющие
создавать специальные расчетные конфигурации сборок, в которых
"нефункциональные" объекты отсутствуют (погашены), а оставшиеся специальным
образом модифицированы с целью упрощения их геометрии. Более
подробные рекомендации по увеличению производительности при использовании
CAD/CAE-систем приведены в главе 10.
1.5. Работа в режиме чертежа
Ни одна из рассматриваемых программ не работает с чертежами. Однако
некоторые технологические приложения, например, программы оптимального
раскроя, создания программ УЧПУ для резки листового металла, в качестве
исходной информации могут использовать как данные о развертке детали из
листа, так и непосредственно чертежи. Кстати говоря, в комплект поставки
SolidWorks входит прямой редактор DWGEditor для обработки DXF/DWG-
файлов. Подчеркнем, что SolidWorks обладает всеми возможностями для
оформления чертежей во многих системах стандартов, включая ЕСКД.
SolidWorks как база для инженерных приложений
19
1.6. Обмен графической информацией
Один из источников быстрого распространения SolidWorks среди
пользователей состоял в том, что программа имела широкий выбор трансляторов из
популярных CAD-систем, а таюке универсальных графических форматов.
Затем их число расширялось за счет новых интерфейсов, а для имеющихся
инструментов выполнялась актуализация. Полная номенклатура входных
форматов показана на рис. 1.2. Здесь обратим внимание, что возможность
считывания файлов, созданных прикладными программами, зависит от их
версии. Кроме того, файлы, созданные Catia V5 (они имеют расширение cgr),
несут исключительно иллюстративную информацию и непригодны для их
модификации или использования в составе сборки (трансляторы, которые
осуществляют подобный перенос информации, существуют, однако в данной
книге не рассматриваются). Для Autodesk Inventor, Mechanical Desktop и
Pro/Engineer возможно полное или частичное (в зависимости от того, какие
инструменты базовой системы были использованы) воссоздание дерева
построения модели. Отметим, что импорт с семантикой реализован, как
правило, для не слишком свежих версий программ-источников. В то же время
аппарат обработки нейтральных форматов построен на последних релизах
соответствующих продуктов, причем обновления версий графических файлов
отслеживаются в пакетах обновлений (Service Packs) SolidWorks.
Побочным, но, как оказалось, очень важным следствием наличия развитых
возможностей обмена графическими файлами, явилась простота (разумеется,
относительная) организации интерфейса между прикладными программами и
SolidWorks. Те из разработчиков программ, которые имеют достаточно
ресурсов или же не имеют собственной графической оболочки, идут по пути
интеграции своего математического аппарата и SolidWorks, используя,
разумеется, процедуры API. Другой вариант, когда организуется скрытый от
пользователя конвертер, позволяющий преобразовывать пространственную
модель из Parasolid в формат прикладной программы напрямую или же через
промежуточную модель, имеющую, например, формат STEP. В подавляющем
числе случаев эти преобразования осуществляются посредством математики,
имеющейся в SolidWorks.
Новым в версии 2007 года является встроенный механизм импорта данных
пространственного сканирования в виде облака точек или триангуляционной
сетки с автоматическим или полуавтоматическим созданием и сопряжением
ограничивающих поверхностей. Далее на базе поверхностей может быть
создано твердое тело, для которого работоспособны все команды работы с
твердотельной информацией SolidWorks.
Также введены возможности обработки файлов Rhino (*.3dm), которые
поддерживают NURBS и аналитические поверхности для элементов свободной
20
Глава 1
формы. SoIidWorks может читать такие файлы, а при наличии установленной
программы Rhino осуществлять редактирование файлов (при некоторых
ограничениях функциональности) с выходом в этот модуль. Надо сказать, что
этот тип графической информации используется не только при создании
изделий бытового назначения, но и в программе проектирования светотехники
LucidShape. В этом случае светотехнические поверхности, синтезированные
посредством специализированных программных продуктов, могут быть
переданы в SoIidWorks для создания "конечного" изделия, не привлекая
дополнительные инструменты.
Файлы SoIidWorks (x.$ldprt; x.sldasm; ".slddrw)
Деталь (x.prt;".sldprt)
Сборка (x.asm;x.sldasm)
Чертеж (x.drw;x. slddrw)
DXF r.dxf)
DWG (x.dwg)
Adobe Illustrator (x.ai)
Lib Feat Part {*. Ifp;x.sldlfp)
T emplate (x. prtdot;*. asmdot;x. dr wdot)
Parasolid (x. x_t;x. x_b;*. xmt_txt;x. xmt_bin)
IGES (x.igs;x.iges)
STEPAP203/214(x.step;x.stp)
ACIS r.sat)
VDAFS (x.vda)
VRML (x.wrl)
STL(x.stl)
Catia Graphics (x.cgr)
ProE Part (x.prt,x.prt.x;x.xpr)
ProE Assembly (x.asm;x.asm.x;x.xas)
UGII (x.prt)
Inventor Part (x.ipt)
Solid Edge Part (x.par)
Solid Edge Assembly (x.asm)
CADKEY(x.prt;x.ckd)
Add-lns (x.dll)
IDF(x.emn;x.brd;x.bdf;x.idb)
Файлы сетки (x.nxm;x.scn;x.3ds;x.obj;x.$tl;x.wrl;
Файлы PointCloud (x.xy2;x.txt;x.asc;x.vda/.igs)
Файлы Rhino(x.3dm)
Рис. 1.2. Форматы графических файлов, доступные для импортирования
Несколько уже круг возможностей для передачи результатов геометрии или
результатов расчета из прикладной программы в SoIidWorks. В числе
рассмотренных в данной книге продуктов этой функциональностью обладает
OptisWorks, который взаимодействует с геометрическим редактором
SoIidWorks в ходе оптической или светотехнической оптимизации, а также
может генерировать траектории лучей в виде трехмерных эскизов.
COSMOSMotion может создавать в SoIidWorks эскизы, являющиеся
траекториями движения заданных вершин геометрической модели. Эти траектории
используются как для их анализа в SoIidWorks, так и для генерации новых
объектов, например кулачков.
ГЛАВА 2
Методы решения
уравнений физики
в механических САПР
Физические процессы, характеризующие напряженно-деформированное
состояние твердых тел, движение и теплообмен текучей среды, моделируются
рассмотренными в данной книге программами с помощью уравнений,
описанных соответственно в главах 3, 4 и 5. В данной главе, с
общетеоретической точки зрения, т. е. без описания конкретного применения для решения
этих уравнений, рассмотрены используемые методы решения этих
уравнений: метод конечных элементов (см. разд. 2.1) и метод конечных объемов
(см. разд. 2.2). Эти методы используются достаточно широко для решения
различных уравнений при математическом моделировании различных
физических процессов. В рассматриваемых в данной книге программах эти
методы, после необходимой конкретизации, используются соответственно для
решения уравнений напряженно-деформированного состояния твердых
тел — в COSMOSWorks (см. главы 3, 4) и для решения уравнений движения и
теплообмена текучей среды — в COSMOSFIoWorks (см. главу 5).
Также будут приведены базовые сведения об алгоритмах параметрической
оптимизации и обзор понятий, касающихся светотехнического анализа.
2.1. Основы метода конечных элементов
Метод конечных элементов (МКЭ) в настоящее время является стандартом
при решении задач механики твердого тела посредством численных
алгоритмов. Популярный в свое время метод конечных разностей, а также
претендовавший на универсальность метод граничных элементов (граничных
интегральных уравнений) сейчас занимают достаточно узкие ниши, ограниченные
исследовательскими или специальными задачами. МКЭ занял лидирующее
22
Г пава 2
положение благодаря возможности моделировать широкий круг объектов и
явлений. Абсолютное большинство конструктивных элементов, узлов и
конструкций, изготовленных из самых разнообразных материалов, имеющих
различную природу, могут быть рассчитаны посредством МКЭ. При этом,
разумеется, нужно учитывать неизбежные при любой численной
аппроксимации условности и погрешности. Поэтому вопрос соответствия между
расчетной моделью и реальностью является, пожалуй, основным при
использовании программ анализа. Несмотря на то, что такие программы имеют более
или менее подробную документацию, они все равно остаются в определенной
степени черными ящиками. Это означает определенную непредсказуемость
результатов, а также некоторый произвол в их интерпретации.
Следовательно, качество заключении^ принимаемых на основе результатов, всецело
зависит от квалификации, а также, применительно к расчету на прочность,
принципиального знакомства с основами МКЭ. На эту тему опубликовано
немалое число книг, например [3], полезна также документация к программам [16,
18]. В данном разделе мы будем рассматривать этот метод применительно к
задачам механики деформируемого твердого тела.
2.1.1. Понятие конечного элемента
В основе метода лежит дискретизация объекта с целью решения уравнений
механики сплошной среды в предположении, что эти соотношения
выполняются в пределах каждой из элементарных областей. Эти области называются
конечными элементами. Они могут соответствовать реальной части
пространства, как, например, пространственные элементы (рис. 2.1 и 2.2), или же
быть математической абстракцией, как элементы стержней, балок, пластин
или оболочек (рис. 2.3). В пределах конечного элемента назначаются
свойства ограничиваемого им участка объекта (это могут быть, например,
характеристики жесткости и прочности материала, плотность и т. д.) и описываются
поля интересующих величин (применительно к механике твердого тела это
перемещения, деформации, напряжения и т. д.). Параметры из второй группы
назначаются в узлах элемента, а затем вводятся интерполирующие функции,
посредством которых соответствующие значения можно вычислить в любой
точке внутри элемента или на его границе. Задача математического описания
элемента сводится к тому, чтобы связать действующие в узлах факторы.
В механике сплошной среды это, как правило, перемещения и усилия.
Рассмотрим прямой метод построения уравнений, связывающих эти факторы в
пределах конечного элемента твердого тела, в предположении линейной
постановки.
1. Поле перемещений А в пределах элемента (для пространственной задачи
A = [w,v,w] ) посредством интерполяционных функций (в так называемых
изопараметрических конечных элементах, используемых, в частности,
Методы решения уравнений физики в механических САПР
23
в COSMOSWorks, они идентичны функциям формы), собранных в
матрицу [N], выражается через узловые перемещения [Л\. Смысл
интерполяционных функций состоит в том, чтобы, зная величины, например,
перемещений в узлах, получить их значения в любой точке элемента в
зависимости от координат. В матричном виде соотношения имеют вид:
Для пространственной задачи {zJ}=[i/I,v,,wI,w2,v2,w2,...,i/it,vit,wA] , где
к — число узлов конечного элемента.
2. Поле деформаций е выражается через степени свободы [А\ посредством
дифференцирования поля перемещений (а фактически интерполяционных
функций) согласно соотношениям, собранным в матрицу [D] и
связывающим деформации с перемещениями:
e = [D].{4
3. С учетом уравнений состояния, в основе которых лежит закон Гука и
коэффициенты которых образуют матрицу [Е], устанавливается связь
сначала между полем напряжений и полем деформаций:
g = [E]-s,
а затем и между напряжениями и степенями свободы в узлах:
* = [E].[D].(A}.
4. Формулируются выражения для сил {F}, действующих в вершинах
элемента, в зависимости от поля напряжений а, для чего используется
матрица преобразования напряжений в узловые силы [А]:
{F}=[A].{o}.
5. Связываются выражения для узловых сил и перемещений в узлах:
где [к] = [А] • [Е] • [£)] — матрица жесткости конечного элемента.
6. Для придания матрице [к] свойства симметрии добиваемся замены
матрицы преобразования жесткости матрицей, транспонированной к матрице
преобразования перемещений в деформации [/)]. Тогда:
2 Зак 4405
24
Глава 2
Перечисленные зависимости позволяют, зная перемещения в узлах, получить
величины сил, а также решить обратную задачу: по силам найти
перемещения, затем деформации и напряжения в пределах конечного элемента.
Прямая формулировка, как правило, используется для получения матриц
жесткости конечных элементов стержней, балок и пластин, а также для
описания процесса теплопроводности.
Для получения матриц жесткости пространственных элементов наиболее
часто используются вариационные принципы, например, принцип минимума
потенциальной энергии. Полученная таким образом матрица жесткости из
пункта 6 здесь будет вычисляться как:
[к} =
j[D]f[E][D]dxdydz
Проблема интегрирования по объему тела сложной формы или же, в случае
оболочечных элементов, — по криволинейной поверхности решается за счет
того, что выражения записываются в локальной системе координат,
связанной с элементом £,v|/,r|, причем координаты изменяются в интервале [-1, +1].
При этом выражение для элементарного объема приобретает вид:
dxdydz = \j\ d^dxydi],
где \j\ — определитель матрицы Якоби, или якобиан преобразования. Тогда:
\\№[E\[D]<to{j)dbl4dT\
[k} =
-1-1-1
Аналитический расчет интегралов в выражении для матрицы жесткости
невозможен даже для треугольников с криволинейными сторонами. Поэтому
прибегают к численному интегрированию. Оно заключается в замене
интеграла суммой произведений подынтегральных выражений, вычисленных в
точках Гаусса или в некоторой другой системе точек на соответствующие
весовые коэффициенты. Этот процесс сопровождается расчетом величины
определителя якобиана. Отрицательная величина является следствием
вырожденности данного конечного элемента. Как правило, информация о данном
обстоятельстве помещается в диагностические сообщения программ.
Примеры конечных элементов, присутствующих в COSMOSWorks,
приведены на иллюстрациях: объемный тетраэдральный с линейным полем
перемещений в пределах ограничиваемой им области (и, соответственно,
постоянной деформацией) и объемный тетраэдральный с параболическим полем
перемещений (линейным распределением деформаций)— на рис. 2.1,
треугольный элемент оболочки с параболическим полем перемещений и
углов поворота— на рис. 2.2, элементы балки/стержня — на рис. 2.3. На ри-
Методы решения уравнений физики в механических САПР 25
сунках также обозначены локальная система координат элемента £,у,г|,
глобальная система координат тела X,Y,Z, перемещения в локальной: i/,v,w,
для оболочечного также углы поворота относительно локальных осей в узле
0^,0ф,0п и в глобальной: U,V,W системах координат.
Рис. 2.1. Объемные конечные элементы
Рис. 2.2. Параболический конечный элемент Рис. 2.3. Конечные элементы
поверхности балки и стержня
2.1.2. Построение программы МКЭ
Имея математический аппарат для получения матриц жесткости конечных
элементов, приведения нагрузок, приложенных к поверхности или в объеме
26
Глава 2
элемента к усилиям в узлах, а также решения обратных задач: вычисления
полей деформаций и напряжений в объеме элемента на базе перемещений в
узлах, можно построить алгоритм МКЭ. Мы приведем один из его вариантов
для решения задач в линейной постановке. Конкретные реализации могут
существенно отличаться от данной схемы.
1. Производится дискретизация объема, занимаемого деталью или сборкой
на элементы, или, как говорят, строится сетка конечных элементов. Для
объемного тела область разбивается (в рамках функциональности COS-
MOSWorks) на тетраэдры с гранями, аппроксимируемыми линейными
(линейная зависимость от координат) или параболическими функциями
координат. Для поверхностных моделей— на плоские (линейная) или
криволинейные (параболическая зависимость) треугольники.
2. Для пространственных конечных элементов степенями свободы являются
перемещения в направлении осей локальной системы координат элемента.
Для конечных элементов оболочек к трем перемещениям в каждом узле
добавляются по три угла поворота нормали к срединной поверхности
области, аппроксимируемой элементом, относительно тех же осей.
3. Определяются зависимости для преобразования перемещений и углов
поворота в узлах к глобальной системе координат.
4. Вычисляются матрицы жесткости конечных элементов. В формулы для
расчета компонентов матриц жесткости конечных элементов помимо
координат узлов входят модули упругости и коэффициенты Пуассона
материалов. То есть если анализируется сборка, то в зависимости от
принадлежности элемента детали при расчете матриц жесткости элементов
используются соответствующие характеристики жесткости материала.
5. Полученные матрицы жесткости с использованием зависимостей для
перехода от локальных систем координат элемента в глобальные
преобразуются в глобальную систему координат.
6. Матрицы жесткости, представленные в глобальных координатах,
объединяются в глобальную матрицу жесткости [К].
7. Назначенные пользователем граничные условия, статические и
кинематические, приводятся к нагрузкам и перемещениям в узлах, выраженным в
глобальной системе координат, и включаются в столбец усилий [f].
8. Полученная линейная система уравнений вида [К] • [А] = [F] решается
относительно столбца перемещений. Это наиболее трудоемкий этап расчета.
Для решения используются итерационные или прямые методы. Матрица
жесткости, как правило, хранится в компактной форме, структура которой
определяется до этапа ее заполнения матрицами жесткости элементов.
Методы решения уравнений физики в механических САПР
27
9. Для каждого конечного элемента, имея перемещения (углы поворота)
в узлах и аппроксимирующие функции, рассчитываются деформации.
Если элементы линейные — деформации в пределах элементов постоянные,
если элементы параболические — деформации изменяются линейно. На
основе деформаций вычисляются напряжения в элементах. При
необходимости (функция программы) напряжения в узлах смежных элементов
осредняются (это также весьма ответственный этап, по-разному
решаемый в различных программах) с последующим пересчетом напряжений
в пределах каждого элемента.
10. На основе компонентов напряженно-деформированного состояния и
параметров прочности материала (материалов) производится вычисление
эквивалентных напряжений по какому-либо критерию прочности.
2.1.3. Учет нелинейности в процедурах МКЭ
Весьма часто модули нелинейного анализа в программах МКЭ являются
надстройкой над базовой частью, отвечающей за упругий статический расчет.
Рассмотрим некоторые аспекты реализации этих процедур в свете
информации, изложенной в [6, 8, 17].
Нелинейные задачи характеризуются нелинейной зависимостью между
действующими факторами и реакцией на них системы. Кроме того, нередко
граничные условия (приложенные нагрузки и перемещения) изменяются во
времени. Для учета этого явления вводится понятие кривая времени (в COS-
MOSWorks — Time curve). Смысл ее в том, что вводится параметр, имеющий
размерность времени и, в зависимости от его величины, назначаются
определяемые им условия. То есть фактически строятся графики, в которых
абсцисса— это время, а ордината— сила, напряжение, перемещение и т. д. Если
рассчитываемый объект содержит материал, характеристики которого могут
зависеть от времени, то параметр соответствует физическому времени.
В противном случае— это абстрактная величина, масштаб которой
выбирается из соображений удобства представления кривых (реальное время
фигурирует также в задачах динамики, однако функциональность COSMOSWorks
не предусматривает их решения). Главным требованием в ходе описания
внешних факторов является синхронность их действия. Например, если на
объект, изготовленный из материала, который обладает свойством
физической нелинейности, сначала действует одна сила, а затем, после того как ее
действие прекращается, другая, то первый фактор размещается в одном
интервале, а второй— в следующем. Длительность этих интервалов может
быть различна. И наоборот, если силы в реальности прикладываются
одновременно, то размещать их следует в одном и том же отрезке времени.
Следующая процедура, необходимая для модификации алгоритма МКЭ
применительно к решению нелинейных задач, — управление сохранением сие-
28
Глава 2
темой состояния равновесия. В большинстве прикладных программ
присутствуют три метода, используемых для различных классов задач.
♦ Метод сил (Force Control) (рис. 2.4), когда после увеличения нагрузок в
соответствии с кривой времени на величину некоторого шага
определяются перемещения, удовлетворяющие уравнениям равновесия. Как правило,
метод сил применяется для задач с физической нелинейностью
материалов. Алгоритм непригоден для моделирования разупрочняющихся систем
(т. е. когда на некотором этапе увеличение перемещений происходит без
прироста силовых факторов).
Рис. 2.4. Силовые факторы
как управляющий параметр
Рис. 2.5. Перемещения
как управляющие параметры
Метод перемещений (Displacement Control) (рис. 2.5), когда для
назначенного приращения перемещений (для этого нужно в явном виде назначить
контролируемые степени свободы в конкретных узлах) подбирается
параметр времени, определяющий действующие в этот момент силовые
факторы. Данный алгоритм следует использовать в ситуациях, когда возможна
геометрическая нелинейность поведения конструкции. Алгоритм
непригоден для расчетных схем, когда деформация конструкции под действием
приложенных в виде граничных условий перемещений на некотором этапе
сопровождается уменьшением порождаемых этими перемещениями сил.
Метод перемещений не допускает использования в качестве граничных
условий ненулевых перемещений.
Метод длины дуги (Arc Length Method) (рис. 2.6), известный в
отечественной литературе как метод продолжения по наилучшему параметру.
Программа автоматически вводит некоторый параметр, называемый
параметром продолжения, который входит в дополнительное уравнение,
включаемое в уравнения равновесия. Метод основан на идее продвижения вдоль
множества возможных решений с учетом на каждом шаге информации
о решениях, полученных на предыдущих шагах. Данный алгоритм следует
Методы решения уравнений физики в механических САПР
29
применять для анализа закритического поведения конструкций, когда
после потери устойчивости происходит прощелкивание, и система переходит
в новое состояние равновесия.
tFk
1 >
Рис. 2.6. Метод длины дуги
При решении задач, содержащих нелинейности, необходимо определить
итерационный алгоритм для решения системы нелинейных уравнений в
процессе приложения нагрузки. Его функция состоит в корректировке параметров,
описывающих состояние системы, после каждого шага увеличения нагрузки.
Если приложить дополнительную нагрузку и на основе параметров
жесткости, соответствующих уровню деформаций, диагностированных на
предыдущем шаге, рассчитать усилия в узлах, то можно вычислить невязку между
усилиями, приложенными и усилиями полученными. Далее нужно
предпринять действия для минимизации этой невязки. Наиболее популярны два
алгоритма.
♦ Ньютона— Рафсона (Newton— Raphson) (рис. 2.7), когда касательная
матрица жесткости строится на каждой итерации в пределах любого шага
приращения нагрузки. Сам по себе алгоритм имеет квадратичную
скорость сходимости и обладает высокой устойчивостью. Однако
необходимость строить и разлагать матрицу жесткости требует значительных
вычислительных ресурсов. Поэтому данный алгоритм следует использовать,
если альтернативные варианты потерпели неудачу.
♦ Модифицированный метод Ньютона— Рафсона (Modified Newton-Raph-
son) (рис. 2.8), в котором касательная матрица жесткости на каждом шаге
приращения нагрузки строится один раз, а затем используется на всех
субитерациях в пределах шага. Этот алгоритм требует большего числа
итераций, однако время экономится за счет сокращения операций с
матрицей жесткости.
Еще одна группа алгоритмов, отличающих нелинейный расчет от линейного —
те, которые определяют момент окончания итераций как в пределах шага
приращения нагрузки, так и в момент окончания этих приращений (поскольку
А Нагрузка
t+M
'U t+Aiu(i) i^u» ^4iuW i^iM перемещение
Рис. 2.7. Схема итерационного метода Ньютона — Рафсона в сочетании с методом сил
А Нагрузка
1+А1
К=*К
i + aipOJ
'F
! *
**
1 4 Д1р (2)
1и *+*и^1+*и(25'""д1и(3)
F(U)
\*&\
U Переиещение
Рис. 2.8. Схема модифицированного итерационного метода Ньютона — Рафсона
в сочетании с методом сил
Методы решения уравнений физики в механических САПР
31
этот шаг может адаптивно подбираться программой). Это весьма
специфический вопрос, и поэтому— на данном уровне изложения— можно
порекомендовать пользователю при определении соответствующих параметров
решить его опытным путем. Отметим, что в зависимости от применяемого
алгоритма управления итерационным процессом (метод сил, перемещений,
длины дуги) используются критерии сходимости по перемещениям, величине
неуравновешенных нагрузок, балансе энергии.
2.2. Метод конечных объемов
После того как составлена система дифференциальных и/или интегральных
уравнений, описывающая с математической точки зрения движение и
теплообмен текучей среды (в том числе с омываемыми этой средой твердыми
телами, и если решается сопряженная задача теплообмена, то теплопередача в
этих телах), следующий шаг — решение этой системы уравнений. Поскольку,
в общем случае, эти уравнения нелинейные и не имеют аналитического
решения, то решать их приходится численно, находя вместо непрерывного
решения дискретный набор его значений в определенных точках (или ячейках)
пространства в определенные моменты времени (если решаются
нестационарные уравнения, т. е. с временем, как одной из независимых переменных).
При этом выбирается обеспечивающий максимальную точность дискретного
решения способ преобразования уравнений с непрерывным решением в
аппроксимирующие их уравнения с дискретным решением'. В результате,
математическая задача решения системы дифференциальных и/или интегральных
уравнений сводится к математической задаче решения системы
алгебраических (обычно нелинейных) уравнений.
Соответственно, метод дискретизации непрерывного решения,
преобразования уравнений в алгебраические и решения полученной системы уравнений
позволяет решить математическую задачу, поставленную в математической
модели рассматриваемых физических процессов.
Рассматривая методы решения дифференциальных и/или интегральных
уравнений движения и теплообмена текучей среды, можно, следуя, например,
фундаментальной монографии [23], выделить три основных подхода к
решению этих уравнений:
♦ Метод конечных разностей для решения дифференциальных уравнений,
являющийся, по существу, прямым следствием определения производной
в используемой системе координат на координатно-ориентированной
расчетной сетке, впервые примененный Эйлером около 240 лет назад и
успешно используемый в некоторых приложениях до настоящего времени.
♦ Метод конечных элементов, разработанный в 40...60-х годах прошлого
века для решения интегродифференциальных уравнений напряженно-де-
32
Глава 2
формированного состояния твердых материалов в задачах структурной
механики, в частности при определении упругой и пластичной
деформаций и прочности конструкций, и впоследствии примененный также для
расчета различных течений, см., например, [23, 16]. Основной его
особенностью является дискретизация пространства (твердого тела или области,
занятой текучей средой) разбиением на неправильные (в общем случае)
многогранники (4-, 5-, 6-гранники), представление решения в этих много-
, гранниках набором интерполяционных функций, и, обычно,
использование метода Галеркина для нахождения такого решения.
♦ Метод конечных объемов, различные варианты которого были впервые
разработаны в России в 50...70-х годах (метод Годунова [2, 5], интегро-
интерполяционные методы [12]) и за рубежом в начале 70-х годов
прошлого века ([25, 27], см. также обзор в [23]), краткое описание которого,
необходимое для понимания главы 5, дано в настоящем разделе.
Метод конечных объемов имеет следующие особенности:
♦ Используется произвольная расчетная сетка, не обязательно связанная с
какой-либо (например, используемой) системой координат и не
обязательно регулярная, при этом возможны два варианта дискретизации решения:
• по узлам расчетной сетки;
• по ячейкам расчетной сетки, причем в пределах ячейки решение
считается постоянным, т. е. не привязанным к какой-либо конкретной точке.
♦ Записанные в интегральной форме законы сохранения массы, импульса,
энергии текучей среды дискретизируются по поверхности контрольного
объема, в качестве которого выбирается:
• поверхность, "натянутая" на узлы расчетной сетки, лежащие по
соседству с рассматриваемым узлом, если решение дискретизируется по
узлам расчетной сетки;
• поверхность рассматриваемой ячейки расчетной сетки, если решение
дискретизируется по ячейкам расчетной сетки.
Несложно показать [23], что метод конечных объемов является упрощенным,
а следовательно, более быстродействующим, вариантом метода конечных
элементов (хотя разработчики метода конечных объемов его таковым не
считали, он был разработан как альтернатива методу конечных разностей, а
применение метода конечных элементов для газогидродинамических расчетов
было разработано позднее), а консервативные схемы метода конечных
разностей являются вариантами метода конечных объемов на регулярной
расчетной сетке, связанной с используемой системой координат.
Именно упомянутые выше особенности метода конечных элементов лежали в
основе идей его разработки. Причем у отечественных разработчиков перво-
Методы решения уравнений физики в механических САПР
33
начальной идеей была разработка интегродифференциального метода,
основанного на дискретизации записанных в интегральной форме законов
сохранения массы, импульса, энергии текучей среды, который позволил бы
достаточно надежно и точно рассчитывать сверхзвуковые течения газа с
волнами разрежения и скачками сжатия (в связи с этим использовались
интегральные соотношения на этих неоднородностях со скачкообразным
изменением параметров). При этом расчетная сетка, в основном, по крайней мере в
практических приложениях, была координатной (т. е. структурированной по
терминологии [23]), хотя и не обязательно декартовой (при этом возможность
использования произвольной расчетной сетки не отрицалась). У зарубежных
разработчиков метода конечных объемов [25, 27] первоначальной идеей была
разработка интегродифференциального метода, основанного на
использовании расчетной сетки произвольной формы, с 3-, 4-гранными ячейками не
обязательно правильной формы (т. е. неструктурированной по терминологии
[23]), что позволяло рассчитывать течения в каналах очень сложной формы
без привязки расчетной сетки к используемой системе координат, что было
удобно, например, при расчете течений в газовых турбинах. Именно эти
разработчики, явно по аналогии с методом конечных элементов, в котором
также используется расчетная сетка произвольной формы, обычно с 3-,
4-гранными расчетными ячейками в трехмерном пространстве, и дали
разработанному ими методу используемое здесь название — метод конечных объемов.
После краткого исторического экскурса рассмотрим метод конечных объемов
подробнее.
Согласно этому методу, к способу дискретизации пространства расчетной
области никаких особенных требований, за исключением естественного
требования достаточного разрешения особенностей течения и геометрии
поверхностей твердых тел (особенно в областях их нелинейного изменения), не
предъявляется, т. е. расчетная сетка может быть любой:
♦ структурированной, т. е. образованной, как и в методе конечных
разностей, координатно-ориентированными линиями (при этом система
координат может быть любой: декартовой, криволинейной), так что узлы этой
сетки могут быть пронумерованы с помощью целочисленных векторов,
размерность которых соответствует размерности системы координат;
♦ неструктурированной, т. е. совершенно произвольной, как в методе
конечных элементов, например, состоящей из неправильных тетраэдров
(пирамид) и/или гексаэдров (6-гранников) в трехмерном случае, система
узлов граней которых никак не связана с системой координат, т. е. не
ориентирована каким-либо образом относительно координатных линий, так что
узлы этой сетки могут быть пронумерованы лишь с помощью сквозной
нумерации (т. е. одномерных целочисленных векторов).
34
Глава 2
Очевидно, что одно из преимуществ структурированных расчетных сеток
(о других их преимуществах см. далее) состоит в том, что с ними легче
работать при проведении расчетов, а преимущество неструктурированных
расчетных сеток состоит в том, что они позволяют лучше разрешать сложные
геометрии поверхностей твердых тел, проточных областей и областей
нелинейного изменения параметров течения.
После того как непрерывное пространство заменено дискретной расчетной
сеткой (или расчетными ячейками), следующий шаг — выбор точек (или
областей) на этой сетке, в которых будет определяться дискретное решение
задачи. В методе конечных разностей этими точками естественно являются
узлы расчетной сетки — это основа метода конечных разностей. В методе
конечных объемов возможны два варианта выбора местоположения этих точек:
♦ в узлах расчетной сетки, т. е. как в методе конечных разностей;
♦ в ячейках расчетной сетки, т. е. как среднее по ячейке, без строгого
определения той точки, к которой это решение может быть приписано (для
дальнейшего получения непрерывного решения из дискретного с
помощью интерполяции, т. е. аналогично тому, как это делается в случае
определения дискретного решения в узлах расчетной сетки, полученное
дискретное решение условно приписывают к центру ячейки) — этот способ
является частным вариантом используемого в методе конечных элементов
способа, согласно которому решение внутри ячейки представляется с
помощью набора базисных функций от решений в узлах.
Оба эти способа имеют свои преимущества и недостатки, о которых будет
сказано после рассмотрения вопроса о способе нахождения искомого
дискретного решения.
Как и в большинстве расчетных методов, в методе конечных объемов
используется подход Эйлера, т. е. рассматривается течение в выделенной области
пространства, — в отличие от подхода Лагранжа, по которому
рассматривается движение выделенной области (массы) текучей среды в пространстве
(этот подход обычно используется для расчета движения инородных частиц в
текучей среде). Если задача нестационарная, то соответственно
рассматривается также эволюция (т. е. изменение во времени) течения в выделенной
области пространства. Основные уравнения нестационарной
газогидродинамики, т. е. уравнения сохранения массы, импульса и энергии текучей среды в
некоторой выделенной области, имеющей объем Q и площадь поверхности
5, могут быть представлены в следующей интегродифференциальной форме:
YJUdoy = -j>F-dS + JQda>, (2.2.1)
Методы решения уравнений физики в механических САПР 35_
где / — время, U — вектор скалярных независимых переменных течения (по
числу уравнений) в данной области, F — вектор потоков физических
величин через поверхность S данной области, элементы которой в этом
уравнении представлены как векторы dS, направленные наружу области по
нормали к этой поверхности, Q — источники, расположенные внутри данной
области и влияющие на изменение физических параметров в ней. Уравнение
(2.2.1) (точнее, система уравнений, число которых равно числу законов
сохранения, т. е. 3, плюс число измерений пространства, учитываемых свыше
одного, т. е. 2, итого 5 в пространственном случае), показывает, что эволюция
независимых физических параметров с течением времени в данной
выделенной области пространства определяется физическими потоками,
проходящими внутрь этой области через ее поверхность, а также источниками,
находящимися внутри этой области. Рассматривая природу этих потоков и
источников, можно заметить, что потоки бывают конвективными и диффузионными,
а источники — объемными и поверхностными.
Для приведения системы уравнений (2.2.1) к дискретному, т. е.
алгебраическому, виду, она записывается для контрольных объемов, окружающих
местоположения точек или областей дискретного решения:
♦ если дискретное решение определяется в узлах расчетной сетки, то
контрольный объем "натягивается" на узлы расчетной сетки или на
расположенные между ними точки, окружающие рассматриваемый узел
(контрольный объем может быть определен достаточно произвольно, но он
обязательно должен окружать рассматриваемый узел расчетной сетки),
например, как показанные на рис. 2.9 в двумерном пространстве
контрольные объемы ABCDEFGHA (или BDFH) и ABCDEA для узла J;
♦ если дискретное решение определяется в ячейках расчетной сетки (как
среднее по ячейке), то контрольным объемом однозначно является сама
ячейка, т. е. как показанные на рис. 2.10 в трехмерном пространстве
контрольные объемы ABCDEFGH и EFGHKLMN для ячеек Qi и Q2,
совпадающие с ними.
В результате для дискретного решения Uj, определенного в узле или
ячейке у, система уравнений (2.2.1) приобретает следующий алгебраический вид
(здесь дискретизация по времени не показана, но, естественно,
предполагается):
f(^>-X(^)+e,<V (2-2-2)
где Qy — объем окружающего область определения Uj контрольного
объема, S, — площадь / -й грани данного контрольного объема, Fi — поток через
36
Глава 2
/-ю грань, N — число граней контрольного объема, Qf — величина
источника в данном контрольном объеме. При этом способ вычисления Ff должен
быть одинаковым для всех ячеек, так что величины Ft-Sl9 вычисленные на
гранях, разделяющих две соседние ячейки (например, грань EFGH,
являющаяся общей для ячеек Q, и Q2 на рис. 2.10 и, соответственно, разделяющая
их), будут с разными знаками, но одинаковыми по абсолютной величине. Как
видно, главной особенностью такой дискретизации является ее
консервативность, т. е. автоматическое выполнение законов сохранения, описываемых
интегродифференциальными уравнениями исходной системы (2.2.1). Так,
очевидно, если на рис. 2.10 вместо двух ячеек Q, и Q2 рассматривать одну,
их объединяющую, то сумма потоков в правой части уравнения (2.2.2) не
изменится, т. к. при суммировании по этим двум ячейкам их потоки ^gprj^
через грань EFGH взаимосократятся.
Рис. 2.9. Определение контрольных объемов (ABCDEFGHA или BDFH, и ABCDEA)
для узла J расчетной сетки
Рис. 2.10. Определение контрольных объемов (ABCDEFGH и EFGHKLMN)
для ячейки Hi и соседней с ней ячейки Q2
Как видно из системы уравнений (2.2.2), основная проблема в методе
конечных объемов состоит в определении потоков Ft через грани ячеек (при
определении Qj и S, также могут возникнуть проблемы, но они преодолеваются
Методы решения уравнений физики в механических САПР . 37
легче и однозначнее). Очевидно, что чем более "экзотическую" форму имеют
ячейки (например, неравномерно вытянутую), тем ниже точность
определения этих потоков, особенно в случае определения дискретного решения в
узлах расчетной сетки (несмотря на всевозможные ухищрения в оптимизации
формы контрольного объема), поэтому более предпочтительными для
обеспечения высокой точности определения Ft являются равномерные
структурированные сетки с дискретизацией решения по ячейкам (а не по узлам), что
и сделано в программе COSMOSFloWorks, рассматриваемой в главе 5 этой
книги.
2.3. Методы оптимизации
в инженерном анализе
Очевидной целью инженерной деятельности является создание "наилучших"
конструкций. Она достигается, вообще говоря, посредством нескольких
инструментов. Первый — следование определенным нормативам и стандартам,
в которых заложен опыт "предыдущих поколений". Эти источники
создавались различными путями: систематизацией опыта, экспериментальной
отработкой, не исключены и случаи, когда аргументы разработчиков стандартов
не слишком легко понять. Тем не менее в подавляющем большинстве
ситуаций соблюдение нормативов есть наиболее надежный путь. Также
конструкторы используют инженерную интуицию, практические навыки, опыт
предыдущих разработок. Иногда этот путь дает неплохие результаты, особенно
когда решаются концептуальные вопросы— алгоритмы генерации новых
знаний, несмотря на определенный прогресс в деталях, до сих пор
неизвестны. Еще один способ создания "лучших" изделий— использование
алгоритмов оптимального проектирования. Понятно, что наиболее подходящим
вариантом является совместное использование всех средств. В последующих
главах приведены две задачи, демонстрирующие эти возможности. Вопросы
оптимизации шлицевого соединения рассмотрены в разд. 6.5.3. Решение
выполнялось посредством модуля оптимизации COSMOS Works. В разд. 9.6.1
описан процесс поиска формы отражателя, обеспечивающего заданное
распределение света (если более конкретно— позволяющего приблизиться к
назначенному закону распределения). Для этого использовался один из
популярных алгоритмов оптимизации, который был реализован авторами. Мы
опишем его далее.
Оптимальное проектирование, возникнув как средство решения прикладных
задач, достаточно давно перестало быть схоластической наукой,
превратившись в повседневный инструмент, используемый на всех уровнях
проектирования: от концепции до, по сути, отдельной детали. Для тех, кто хочет
приобрести систематические знания в данной области, порекомендуем книги [4, 9].
38
Глава 2
Первая содержит лаконичное изложение теоретических постулатов, а также
алгоритмы решения задач нелинейного программирования. Второе издание
также включает ряд примеров.
2.3.1. Параметрические системы проектирования
как элемент систем оптимизации
Известно укрупненное деление алгоритмов оптимизации на параметрические
и те, которые связаны с анализом чувствительности. Цель первых — подбор
переменных, описывающих геометрию (это наиболее распространенный
случай), характеристик материалов, параметров армирования материалов и т. д.
Анализ чувствительности предполагает получение формы тела,
удовлетворяющей заданным требованиям. Одним из различий между методами
является то, что параметрическая оптимизация предполагает описание формы (или
изменяемых ее участков) тела через некоторые параметры. Затем эти
параметры учитываются при построении объекта. Далее строится геометрическая
модель, после чего для нее выполняются необходимые расчеты. При этом
информация о параметрах проектирования необходима только на этапах
поиска оптимума и формирования модели. В прикладных же расчетах она не
участвует (при этом использование для расчета МКЭ или другого численного
алгоритма совсем не обязательно). Методы анализа чувствительности
предполагают, что объектом поиска является форма объекта. Например, если
анализируется пластина при изгибе, то это толщины всех конечных элементов,
на которые она разбита. Если проектируется ферма, то это параметры
сечений всех (или большинства) стержней, образующих расчетную модель.
Алгоритмы анализа чувствительности встроены в специальные конечно-
элементные программы и являются достаточно сложными для эксплуатации.
С инженерной точки зрения параметрическая оптимизация более
естественна. Здесь поиск производится в ограниченном пространстве, границы для
параметров 1уюгут быть назначены исходя из практических соображений, да и
последующая подгонка размеров к нормальному ряду чисел, как правило,
только незначительно ухудшает проект. Основой для ее широкого
использования стали параметрические системы геометрического моделирования.
Например, SolidWorks, имея отработанные алгоритмы описания и изменения
формы, инструменты конфигураций (исполнений), аппарат уравнений,
процедуры контроля геометрической реализуемости, позволил естественным
образом связать с ним средства оптимизации COSMOSWorks и OptisWorks. При
этом размеры являются переменными проектирования.
Еще одно обстоятельство, оказавшееся принципиальным для объединения
методов численного анализа и оптимизации, — это развитие препроцессоров
в программах численного анализа. На препроцессор возлагается задача авто-
Методы решения уравнений физики в механических САПР
39
матизированного построения сетки, а также реализации граничных условий.
В оптических и светотехнических программах, в частности в OptisWorks,
результат работы препроцессора в значительной степени скрыт от
пользователя. Он преобразует геометрическую модель SolidWorks во внутренний
формат расчетного модуля, после чего собственная модель OptisWorks
используется для трассировки лучей. Как предполагается, это тело, ограниченное
поверхностью, образованной триангуляцией.
Кроме того, производительность как программных, так и аппаратных средств
сейчас такова, что методы численного анализа могут использоваться
совместно с алгоритмами оптимизации, в то время как раньше использовались,
в основном, аналитические решения.
2.3.2. Базовые понятия
нелинейного программирования
Сформулируем задачу нелинейного программирования следующего вида:
минимизировать целевую функцию /(х), где x = (x{,x2,x39...9xN)
—N-мерный вектор, компоненты которого являются действительными числами,
называются переменными проектирования и изменяются (варьируются) в
интервалах:
хУ'^х^х,™; / = 1,2,3 ЛГ.
при условии соблюдения ограничений-неравенств:
g,(x)>0;y=l,2,3,...,J
и ограничений-неравенств:
Л(х) = 0; * = 1,2,3,...,*.
Эта проблема также называется задачей условной оптимизации. Слово
"условная" обозначает, что на переменные проектирования наложены некие
ограничения. Если ограничений, в том числе и на диапазон изменения
переменных проектирования, нет, то оптимизация называется безусловной.
Соответствующая иллюстрация приведена на рис. 2.11. В задаче имеются две
степени свободы: х] и х2. Целевая функция — она показана поверхностью —
состоит из трех участков. Они образуют зону, в которой функция является
негладкой, а также имеет разрыв. Эти обстоятельства важны для дальнейшего
изложения. Там же показаны три типа ограничений-неравенств:
♦ первая группа — те, которые определяют интервалы изменения
переменных. На рис. 2.11 это вертикальные стенки, имеющие в основании
прямоугольник;
40
Глава 2
♦ вторая группа состоит из единственного линейного ограничения;
♦ третий вид также представлен единственным нелинейным ограничением,
причем оно привело к тому, что допустимая область стала невыпуклой.
Рис. 2.11. Постановка задачи минимизации
На иллюстрации, разумеется, невозможно отобразить ограничения,
наложенные на параметры, которые являются результатами численных расчетов.
Формально они выглядят так же, как и ограничения, связывающие
переменные проектирования, однако в явном виде зависимости для них отсутствуют.
Линии на поверхности, моделирующей целевую функцию, являются ее
сечениями. Они показаны исключительно для наглядности и функционального
значения не имеют.
В пределах допустимой области функция имеет несколько минимумов. Тот,
где функция имеет наименьшее значение, естественно, глобальный.
Остальные минимумы являются локальными. При этом один из них расположен на
границе допустимой области в месте пересечения двух ограничений.
На рис. 2.12 та же модель представлена с отображенными линиями уровня.
Видно, что в гладкой части функции имеется зона перегиба — это следствие
того, что функция является знакопеременной по второй производной, т. е.
имеет как выпуклые, так и вогнутые участки. Вид функции сверху показан на
рис. 2.13. Это "каноническая" картина для задачи оптимизации.
На данных иллюстрациях вполне преднамеренно не представлены
ограничения-равенства, фигурирующие в общей постановке задачи минимизации. По-
Методы решения уравнений физики в механических САПР
41
пытка задать их в программе существенно усложняет как сам алгоритм, так и
процесс его эксплуатации. Поэтому этот тип ограничений стараются
исключить через, например, преобразование задачи с уменьшением числа
независимых переменных проектирования.
Рис. 2.12. Линии уровня целевой функции
Известно большое число алгоритмов решения задачи нелинейного
программирования. Для нелинейной целевой функции с линейными или нелинейны-
42
Глава 2
ми ограничениями абсолютное большинство из них входит в две группы: это
методы прямого поиска (мы будем рассматривать'только эту разновидность
как наиболее актуальную для инженерных расчетов) и процедуры,
использующие производные. Несмотря на не слишком высокую по сравнению с
градиентными алгоритмами эффективность при решении модельных задач, они
оказываются наиболее практичными для использования совместно с
алгоритмами численного анализа, например, методом конечных элементов.
Дело в том, что порождаемые МКЭ и другими сеточными процедурами
результаты: напряжения, перемещения, собственные частоты, величины
критической силы и т. д. приводят к негладкости или, более того, разрывности как
целевой функции, так и ограничений. Ограничения могут накладываться не
только на геометрические параметры, но на компоненты напряжений,
перемещений или на критические силы, т. е. то, что прямо или косвенно связано с
результатами. Негладкость или разрывность могут быть результатом
особенностей формулировки задачи оптимизации или же являться следствием
свойств физической модели. Также при использовании численных методов
возникает проблема неоднозначности и локальной неустойчивости решения.
Это значит, что малое изменение параметров (геометрии модели, настроек
сетки, решателей и т. д.) приводит к результату, "существенно" отличному от
исходного варианта. В связи с этим процесс вычисления производных
целевой функции и ограничений по переменным проектирования является крайне
чувствительным к особенностям задачи и, более того, становится зависим от
пользовательских предпочтений (сколько пользователей, столько и вариантов
сетки конечных элементов, столько и результатов). Добиться сходимости в
таких обстоятельствах очень трудно и, как следствие, применение
градиентных методов в оптимизационных процедурах, как в смысле
программирования, так и при эксплуатации, является своего рода искусством.
Методы же прямого поиска в меньшей степени чувствительны к локальной
негладкости и разрывности целевой функции и ограничений. Поэтому вывод
следующий. "Продвинутые" алгоритмы, если использовать их для решения
строго очерченного круга задач, гипотетически более производительны, они
также основаны на строгих критериях оптимальности и позволяют получить
"точное" решение. Однако есть вероятность, что, в силу ряда обстоятельств,
процедура, если ее использовать совместно с МКЭ или родственным
решателем, просто не "заработает". В то же время методы, не требующие
вычисления производных, позволят получить, пусть и не оптимальный, но "лучший"
по сравнению с исходным вариант. Степень "улучшения" для одной и той же
задачи зависит как от математической основы алгоритма, так и от субъекта,
управляющего процессом.
В силу упомянутых причин в COSMOSWorks используется разновидность
прямого поиска, а в OptisWorks доступен как прямой, так и градиентный
алгоритм. Дело в том, что светотехнические характеристики систем в абсолют-
Методы решения уравнений физики в механических САПР
43
ном большинстве случаев являются гладкими, причем эта гладкость
сохраняется и тогда, когда результаты получены численными методами, в частности,
упомянутым ниже алгоритмом Монте-Карло. Как правило (в документации к
OptisWorks на этом акцентируется внимание), градиентные алгоритмы, как не
приспособленные (в стандартных их реализациях) для обработки функций,
имеющих несколько локальных оптимумов, для уточнения результата,
полученного прямыми методами, которые менее чувствительны к этой ситуации.
Изрядная часть алгоритмов условной оптимизации базируется на методах
оптимизации безусловной. Как правило, для этого используется замена
задачи. В целевую функцию вводится добавка, характеризующая "степень"
нарушения ограничений. Эти алгоритмы получили название методов барьерных и
штрафных функций. В первом случае увеличение функции происходит при
приближении к ограничению изнутри допустимой области, достигая на
активном ограничении бесконечной величины. Во втором варианте внутри и на
границе допустимой области "добавка" равна нулю, а затем, при выходе за
границу допустимой зоны, она начинает возрастать. Для задач с
потенциально негладкой целевой функцией и нелинейными ограничениями наиболее
эффективны недифференцируемые штрафные функции. Первый вариант:
постоянная штрафная функция, являющаяся, по сути, бесконечным барьером
(рис. 2.14). При попытке попадания пробной точки в недопустимую область
функция принимает "бесконечное" значение (в программных реализациях,
разумеется, для этого некоторой переменной присваивается
соответствующий признак), после чего принимается решение о том, как действовать
дальше. Недостатком этого алгоритма является невозможность "участия"
недопустимых точек в последующем анализе и, соответственно, склонность
алгоритмов к зацикливанию (это формальное описание, реальная ситуация более
сложна), если минимум лежит на границе.
Рис. 2.14. Постоянная штрафная функция — бесконечный барьер
44
Глава 2
Второй вариант— использование абсолютной функции штрафа— показан
на рис. 2.15, где поверхность, образованная участками пирамиды и конуса
общего вида и которая теоретически уходит в бесконечность, обрезана.
По сути, данный вид штрафа — это сумма абсолютных величин невязок
нарушенных ограничений. Выражение для результирующей функции
приобретает вид:
/(х,р) = /0(х) + р2>Дх)|.
/е/
Здесь:
f0 — исходное значение целевой функции;
/ — функция с учетом штрафа;
р — параметр штрафа;
с(х) — вектор нарушенных в точке jc ограничений;
/ — число нарушенных ограничений.
Рис. 2.15. Абсолютная штрафная функция
Естественным является вопрос, какой параметр штрафа нужно использовать.
Теоретически он должен зависеть от поведения исходной целевой функции.
Если, например, она "быстро" убывает в точке на линии ограничения, то
"малый" штраф не сможет компенсировать это убывание, и программа
продолжит поиск за пределами допустимой области. Если же штраф "слишком"
большой, то возникают проблемы, присущие абсолютным штрафам. Таким
образом, использование методов прямого поиска вкупе с внешними
штрафными функциями также связано с определенным субъективизмом, а
получаемые результаты не всегда соответствуют ожиданиям. Например, обнаружен-
Методы решения уравнений физики в механических САПР
45
ный программой условный оптимум иногда лежит на одном или нескольких
ограничениях, возможен "небольшой" выход за границы допустимой области.
2.3.3. Алгоритм метода комплексов
Договорившись, что задача оптимизации условной преобразована к
оптимизации безусловной посредством алгоритма абсолютной штрафной функции,
рассмотрим получившийся алгоритм. В качестве базы принят метод
комплексов (он еще известен как метод многогранника). Смысл его в том, что на базе
некоторой исходной точки, которая должна быть допустимой (комментарии
см. в разд. 2.3.4), методом случайного поиска строятся еще несколько, так,
чтобы их число было равно числу варьируемых параметров плюс один
(иногда число точек увеличивают на одну). В пространстве точки образуют
многогранник. Среди всех вершин выделяется наихудшая. Это точка, где
модифицированная (т. е. с учетом штрафа) целевая функция имеет максимальное
значение. После этого нойая пробная точка ищется отражением наихудшей
относительно центра тяжести остальных. Для этого используется
коэффициент отражения а, традиционно принимаемый равным 1,3. Если пробная
вершина нарушает ограничения, наложенные на интервалы изменения
переменных, то она выводится на ближайшее к центру тяжести остальных вершин
ограничение. Если и после этого она нарушает какое-либо другое
ограничение (в случае наличия таковых), то коэффициент отражения уменьшается в
два раза. Так же коэффициент отражения уменьшается, если новая пробная
точка остается хуже тех, которые остались от предыдущей итерации. В ходе
работы происходит уменьшение размеров комплекса, а также его
деформирование. В частности, длительное взаимодействие с ограничениями способно
приводить к потере комплексом размерности и, как следствие, к
невозможности продвигаться в "перспективных" направлениях после того, как
определенная часть пути вдоль активного ограничения пройдена, а ограничение
"искривилось". Некоторые этапы функционирования метода показаны на
рис. 2.16. Приведем формализованное описание алгоритма в соответствии
с [9]. В него внесены некоторые коррективы, которые, с одной стороны,
исправляют явные опечатки или неточности перевода, а с другой — делают его
бблее понятным.
Итак, имеем допустимую начальную точку х°, интервалы изменения
переменных \xfL\xl(U) 1, коэффициент отражения а и параметры окончания
вычислений 8 И 5.
Шаг 1. Построение начального комплекса, состоящего из Р допустимых
точек. Для каждой точки /? = 1,...,Р-1.
1. Случайным образом определить координаты */"в интервале между лг*Л)
и^;).
46
Глава 2
— наихудшая точка
*- остальные точки
□ - центр тяжести остальных точек
о —пробные точки
Рис. 2.16. Поиск лучшей точки внутри допустимой области и на ее границе
2. Если хя — недопустимая точка, найти центр тяжести X уже найденных
точек и положить
xp=xp+l/2-(X^xp),
повторять процедуру до тех пор, пока хр не станет допустимой.
3. Если хр — допустимая точка, повторять пункт 1 до тех пор, пока
р = Р-\.
4. Вычислить f(xp) для р = Р-\.
Шаг 2. Отражение комплекса.
1. Среди всех вершин комплекса выбрать наихудшую точку х7^, для
которой
Дх") = тах/(хО,
и присвоить переменной FAiaix = f(xR).
2. Найти центр тяжести X остальных точек и новую пробную точку:
хт =Х + а-(Х-х").
Далее возможны следующие варианты:
♦ если х'" — допустимая точка и f(xm)>FvaKC, то уменьшить в два раза
расстояние между хт и центром тяжести X и продолжать поиск, пока
Методы решения уравнений физики в механических САПР
47
♦ если х' — допустимая точка и f(xm)< FvaKC, перейти к шагу 4;
♦ если х'" — недопустимая точка, перейти к шагу 3.
Шаг 3. Корректировка комплекса для обеспечения попадания вершины в
допустимую область.
Если х"' <x\L), положить х"} =х/(Л), если х"1 >xf-J\ положить х1" =х(1и\
причем при уменьшении или увеличении одной из координат пробной точки
другие должны уменьшиться или увеличиться пропорционально.
Если х'" — недопустимая точка, уменьшить в два раза расстояние от
пробной точки до центра тяжести и продолжать так до тех пор, пока хт не попадет
в допустимую область.
Шаг 4. Проверка условий окончания вычислений.
1. Положить F =—^/(хр) и X =-£хя .
* р * р
2. Если ^(f(xp)-F) <е и Х(хЯ~^) -^' вычисления прекратить и
р р
считать, что оптимум найден; в противном случае перейти к пункту 1
шага 2.
Конец алгоритма.
В некоторых реализациях алгоритма пункт 2 шага 2 (это соответствует
ситуации, когда пробная точка оказалась лучше наихудшей) выглядит
следующим образом:
Если х"1 — допустимая точка и f(xm)< FvaKC, то:
♦ среди всех вершин комплекса выбрать наилучшую точку хж , для которой
/(x*) = min/(x"),
и присвоить переменной FWIII =/(хж);
♦ если f(xm)>FMUH, т.е. новая точка не стала лучшей, то перейти
к шагу 4;
♦ если f(xm)<F„un, т.е. х"7 оказалась новой лучшей точкой, то
направление признается "удачным", после чего следует дополнительно растянуть
многогранник;
♦ найти "улучшенную" пробную точку х6' =Х + р-(х/? -X), где Р(Р>1) —
коэффициент растяжения;
48
Глава 2
♦ если /(Xе') < f(xm), т.е. растяжение увенчалось успехом, присвоить
х'"=хе;
♦ перейти к пункту 1 шага 4.
( Замечание J
В приведенном алгоритме верхний индекс имеет смысл номера вершины
комплекса, а не показателя степени. Условие прекращения вычислений при
достижении предельного числа итераций не включено.
Подчеркнем, что мы привели только вариант одного из алгоритмов.
Конкретная его реализация в расчетном модуле может отличаться от него в большей
или меньшей степени.
2.3.4. Использование процедур оптимизации
в САПР
Остановимся на особенностях описанного алгоритма, которые являются
существенными при использовании его в расчетных программах. Это тем более
важно, что конкретные реализации являются, по сути, черными ящиками, а
документация не содержит никакой информации о методических вопросах,
сопровождающих данные алгоритмы.
В ходе формирования исходного комплекса точки "разбрасываются" в
пределах всей допустимой области. Это влечет за собой два следствия. Начнем с
позитивного. "Глобальный" охват допустимой области повышает вероятность
выделения глобального оптимума при наличии нескольких локальных
минимумов, в частности, сосредоточенных внутри области. Обратная сторона
медали состоит в том, что если вершины комплекса расположены по разные
стороны от седловой поверхности или, как на рис. 2.11, слева и справа от
вертикальной линии перегиба, то алгоритм, подобно человеку, у которого между
ног оказалась высокая стенка, будет не в состоянии через нее переместиться.
Схожие симптомы (однако на совсем другой почве) способен вызвать случай,
когда невыпуклое ограничение на некотором этапе оказывается внутри
комплекса. В этой ситуации попытки системы его уменьшить приведут к
остановке алгоритма.
Как видно из описания алгоритма, критерий достижения оптимума (условие
Куна^- Таккера) применить к методу комплексов невозможно. Встает вопрос
подбора параметров окончания вычислений, определяющих степень малости
изменения целевой функции и шага поиска. "Слишком" грубые параметры
приведут к тому, что алгоритм, выйдя на некое ограничение или попав в зону
оврага целевой функции, остановится раньше времени. При малом шаге
может случиться так, что составляющие, обусловленные упомянутыми выше
Методы решения уравнений физики в механических САПР
49
негладкостью или разрывностью целевой функции, окажутся сопоставимы с
разностью величин функции в вершинах комплекса. В этой ситуации
алгоритм может работать бесконечно (если, конечно, не ограничить число шагов
расчета) и, в общем, безрезультатно.
Иногда недостатки метода штрафных функций, связанные с возможностью
алгоритма выходить за границы допустимой области в область недопустимых
значений, бывают полезны. Например, при попытке стартовать из
недопустимой точки (существуют случаи, когда это вполне оправданно) решение
может быть получено. Комплекс "скатывается" в допустимую область, после
чего начинает перемещаться по ней вполне успешно.
Имея алгоритм условной оптимизации, а также расчетную программу,
приведем алгоритм их объединения в прикладном пакете. Пункты алгоритма будем
давать в расширенном виде, сопровождая операции программы информацией
о соответствующих им действиях пользователя. Описание построено на
примере COSMOSWorks, рассматриваемого в совокупности с имеющимся в нем
модулем оптимизации.
Шаг 1. Создать геометрическую модель SoIidWorks.
Убедиться, что система размеров сформирована так, чтобы те, которые будут
являться переменными проектирования, являлись управляющими. При
наличии уравнений проследить, чтобы не происходило уменьшения числа
независимых размеров, которые войдут в число переменных проектирования.
Проверить возможность перестроения модели при изменении каждого из этих
размеров.
Шаг 2. Создать расчетную модель COSMOSWorks, содержащую
необходимое число Упражнений. Одно из них будет "источником" целевой функции,
остальные предоставят информацию для ограничений (при этом ограничения
могут порождаться результатами и первого Упражнения).
Проверить возможность построения сетки для исходного варианта
геометрии, а также при изменении размеров, которые будут ассоциироваться с
переменными проектирования.
Шаг 3. Выполнить расчет всех Упражнений, которые будут задействованы
в оптимизационном расчете для геометрии, соответствующей исходному
проекту.
Отобразить результаты Упражнений, которые будут связаны с
ограничениями. Оценить гипотетические интервалы их изменения.
Шаг 4. Создать Упражнение с типом Оптимизация.
1. Определить целевую функцию.
2. Назначить переменные проектирования из числа параметризованных
размеров геометрической модели.
50
Глава 2
3. Определить интервалы изменения переменных проектирования.
Проследить, чтобы исходная точка находилась внутри соответствующих
интервалов. Не рекомендуется располагать исходную точку на границе
допустимой области.
4. Сформулировать ограничения, требующие выполнения Упражнений,
сделав это так, чтобы в исходной точке все они были неактивны. Как и в
предыдущем пункте, нежелательно, чтобы исходный проект лежал на одном
или нескольких ограничениях.
5. Задать параметры, определяющие процесс окончания вычислений.
В COSMOSWorks они неявно назначаются выбором значений
Стандартное (Standard) и Высокое (High) переключателя Качество (Quality) в окне
Оптимизация (Optimization).
Шаг 5. Выполнение оптимизационного цикла (происходит без участия
пользователя). .
1. Если цикл выполняется первый раз, то переход к пункту 7 данного шага.
2. Обновление геометрии и перестроение сетки.
3. Выполнение всех Упражнений, которые участвуют в формировании
ограничений и расчете целевой функции.
4. Выделение активных ограничений, расчет невязок активных ограничений.
5. Расчет целевой функции.
6. Если проект допустимый и сходимость достигнута, то переход к шагу 6.
7. Выполнение прогноза новых значений переменных проектирования.
8. Переход к пункту 2 данного шага.
Шаг 6. Улучшенный проект получен. Конец оптимизационного цикла.
Используя графики зависимости переменных проектирования, целевой
функции и ограничений от номера итерации, кривые тренда (графики зависимости
целевой функции от переменных проектирования), а также здравый смысл,
оценить, является ли вариант конструкции условно-оптимальным или же
останов алгоритма был вызван другими причинами.
Данный алгоритм является предельно схематичным относительно
конкретных программных реализаций. Например, вопрос об удовлетворении
ограничений рассматривается уже после того, как была построена сетка, выполнены
расчеты и получены необходимые результаты. В то же время часть
ограничений, наложенных на переменные проектирования или их комбинации, не
требует упомянутых действий. Время на выполнение этих операций ничтожно.
Поэтому выполнять дальнейшие операции, требующие в сотни и тысячи раз
больше ресурсов, нерационально и лучше сразу приступить к поиску лучшего
варианта. Можно пойти дальше. Неплохая особенность COSMOSWorks со-
Методы решения уравнений физики в механических САПР
51
стоит в том, что для формирования ограничений могут быть использованы
результаты нескольких анализов как одного типа, так и различных видов.
Например, минимизируя массу, можно ограничить сверху максимальное
эквивалентное напряжение, а снизу— минимальную критическую силу.
Возникает естественное предложение: зачем решать весьма трудоемкую задачу
собственных значений, если, допустим, статический расчет показал, что
предлагаемый на данном шаге оптимизации вариант не лучше уже
имеющихся?
В заключение не удержимся от искушения предоставить на обозрение
маленькую ложку дегтя. Дело в том, что в механике твердого тела, да и в
инженерной деятельности, задача оптимизации традиционно формулируется в
двух принципиальных вариантах. Первый — минимизировать массу при
ограничениях на максимальные напряжения (их компоненты или комбинации),
деформации, перемещения, минимальные собственные частоты или
минимальные нагрузки потери устойчивости и, разумеется, параметры геометрии.
Или, если использовать повседневную лексику, нужно получить максимально
легкую конструкцию, удовлетворяющую заданным требованиям. Есть,
однако, еще один фундаментальный класс проблем, где требуется
минимизировать максимальные напряжения (диагностируемые, разумеется, во всем
объеме модели) при ограничениях на потолок массы и на какие-либо размеры.
Под напряжениями, как правило, понимаются эквивалентные напряжения.
Аналогично формулируется задача, где критерием выступают деформации и,
весьма часто, — перемещения. В обыденном смысле это есть пожелание
создать "наипрочнейшее" или, допустим, "самое жесткое" изделие при наличии
конструктивных ограничений. Решение этой проблемы в COSMOSWorks,
если не прибегать к некоторым косвенным и не всегда воспроизводимым
приемам, невозможно. Это тем более странно, что программа предоставляет
возможность управлять резонансными характеристиками и нагрузками
потери устойчивости. Однако накладывать ограничения на массу или объем
нельзя ни при каких условиях.
В OptisWorks сделана попытка реализовать более универсальный, с точки
зрения назначения целевой функции, алгоритм. Она может включать в себя
не единственную расчетную характеристику, а некоторую их линейную
комбинацию, содержащую в качестве коэффициентов некие константы,
назначаемые пользователем. Это, однако, является следствием того, что
ограничения (а допускается только назначение интервалов) могут накладываться
исключительно на варьируемые размеры. Соответственно какие-либо
вычисляемые величины, которые нужно ограничить снизу или сверху, следует
включать в целевую функцию, подбирая соответствующие весовые
коэффициенты.
52
Глава 2
2.4. Методы построения оптических моделей
и расчета изображений
Ниже будет рассмотрена программа моделирования оптических процессов
OptisWorks. Для того чтобы правильно позиционировать описываемые
программные средства и, соответственно, выделить круг задач, для которых они
наиболее эффективны, кратко рассмотрим историю развития программ,
связанных с моделированием оптических явлений. Моделирование изображений
стало одним из наиболее востребованных приложений в компьютерном
моделировании. Первоначальная цель состояла в расчете освещенности
искусственных сцен. При этом главным критерием была визуальная достоверность
полученной сцены. Реальные оптические процессы тогда мало интересовали
разработчиков. Одной из первых стала локальная модель освещения, в
которой учитывались эффекты зеркального и — на примитивном уровне —
диффузного отражения. Кроме того, вводилось так называемое фоновое
освещение, учитывающее наличие излучения, порождаемого "неформализуемыми"
источниками. Следующим шагом было появление модели локального
затенения, одной из особенностей которого является интерполяция освещенности
по поверхности объектов, а также наличие ряда моделей характеристик
поверхности.
Важным этапом стало появление метода Ray tracing (Трассировка лучей),
который заключается в отслеживании траекторий лучей и моделировании того,
как каждый луч взаимодействует со встречающимися на его пути телами и
поверхностями. Этот подход позволяет ввести в рассмотрение эффекты
преломления, затенения, многократного зеркального отражения. Исторически
первым был метод Forward ray tracing (Прямая трассировка), когда лучи, как
это и происходит в реальности, испускаются источником света, а затем
последовательно взаимодействуют с объектами сцены. Именно этот алгоритм
стал базой для развития светотехнических программ, и именно тогда
произошло их выделение в самостоятельную ветвь программного обеспечения.
Программные продукты для "эстетической" визуализации (рендеринга) стали
развиваться отдельно. Взаимодействие между этими направлениями
происходило практически только на уровне идей, но предназначение программ и,
что немаловажно, клиентская база были различны.
( Замечание )
Далее мы будем писать сочетание Ray tracing и производные от него слитно —
так, как это происходит светотехнических пакетах.
Круг алгоритмов, которые используются в обеих группах программ,
включает в себя метод Distribute raytracing (Распределенная трассировка лучей) или,
Методы решения уравнений физики в механических САПР
53
в терминах рассматриваемых программ — Ray splitting (Расщепление луча).
Смысл его в том, что при взаимодействии с поверхностью или средой луч
может расщепляться на несколько, причем отдельные лучи несут зеркально
отраженные, рассеянные, преломленные и другие компоненты светового
потока. Этот является базой для корректного описания эффектов диффузного
отражения и рассеяния в материале.
Еще одной общей идеей стал алгоритм Backward ray tracing (Обратная
трассировка лучей) или, как его иногда называют, Reverse raytracing. Он
базируется на том, что лучи испускаются объектами, освещенность или яркость
которых (таким' образом в OptisWorks рассчитывается яркость) интересует
наблюдателя, после чего прослеживаются их пути к источнику.
Упомянем еще несколько особенностей алгоритмов, основанных на
трассировке лучей. Число трассируемых лучей является ключевым параметром,
влияющим на точность анализа. В методе прямой трассировки лучи
испускаются источниками света, которые в рассматриваемом программном
обеспечении могут быть поверхностными (для фотометрического источника) или
же назначаться на сетке (как для фотометрических, так и для оптических
источников). В первом случае, независимо от того, какой тип распределения
лучей в пространстве выбирается пользователем, координаты точек, из
которых испускается луч, выбираются программой случайным образом. Если
используется пространственное распределение, которое не является
равномерным, то направления также случайны (хотя, разумеется, подчиняются
некоторой функции распределения). Этими процессами управляет метод Монте-
Карло, функция которого в данной ситуации генерировать точки старта и
направления. Если же алгоритм трассировки имитирует рассеяние света при
взаимодействии с поверхностью или в объеме, то здесь также используется
генератор случайных чисел. В первой ситуации, в зависимости от
соотношения между долями отраженного, прошедшего и рассеянного света,
формируется луч, который может имитировать как отраженный, преломленный, так и
рассеянный свет. В последнем случае направление луча назначается
программой, исходя из заданного закона распределения рассеянной энергии,
сформулированного с позиции теории вероятности. При описании объемного
рассеяния используемые модели (она описаны в главе, посвященной
программам оптического анализа) подразумевают изменение направления луча
(направление выбирается статистически, исходя из назначенного закона
распределения) при прохождении им некоторого расстояния. Здесь также может
имитироваться расщепление луча на несколько других, причем направление
и доля энергии, несомой каждым из этих лучей, также недетерминирована.
В качестве источников света может назначаться совокупность лучей,
исходящих из вершин некоторой сетки. Она может быть равномерной
(прямоугольной или круговой), а может быть назначена статистически или с учетом
статистического отклонения от "правильной" формы. Возникает вопрос: для
54
Глава 2
чего введены эти усложнения. Во-первых, взаимодействие света со средой
имеет статистическую природу, поскольку оптические характеристики среды
также имеют вероятностный характер: параметры шероховатости
поверхности, а также отклонения ее формы, оптическая неоднородность прозрачной
среды, например, локальная анизотропия пластмасс, наличие включений
и т. д. Реальная атмосфера в силу различия температуры, запыленности,
движения потоков с отличающейся плотностью не является
оптически-однородной. Поэтому идеализацию оптических характеристик объектов
необходимо компенсировать вводом статистического компонента в законы
излучения и распространения света. Кроме того, вывод изображения на экран
монитора, представляющий собой совокупность пикселов, также порождает
Aliasing (Алиасинг) — зубчатый характер контуров, а также сопровождается
появлением повторяющихся структур на однородном или плавно
изменяющемся в действительности изображении.
В некоторых программах имеется алгоритм рекурсивной вокселизации,
предназначенный для ускоренной идентификации объектов, встречающихся на
пути луча, что также является общим для двух типов программ. Простейшим
приемом является простая вокселизация — разбиение пространства на
виртуальные параллелепипеды с установлением связи между объектами сцены и
параллелепипедами, в которые они могут входить.
Алгоритм, который не используется в программах светотехники, но является
вполне традиционным для процедур рендеринга— метод Radiosity (Метод
излучательности), предполагающий разбиение поверхностей на участки с
последующим анализом взаимодействия участков, описывающих все объекты
сцены, между собой. Многие идеи данного алгоритма перекликаются с
методом конечных элементов. Надо сказать, что теоретическая база для
моделирования теплопереноса излучением, использованная в МКЭ, имеет много
общего с данным алгоритмом. Последние реализации программ рендеринга
содержат опции, позволяющие в какой-то степени объединять два алгоритма:
радиосети и трассировки. Эти гибридные алгоритмы носят название Photon
Maps (Метод фотонных карт).
Для увеличения визуального правдоподобия в алгоритмах рендеринга,
основанных на трассировке лучей, в дополнение к используемым функциям BRDF
и BTDF, описывающим процесс рассеяния при отражении и прохождении
через поверхность (подробную информацию см. в главе 9), разработан метод
BSSRDF (Bidirectional Surface Scattering Reflection Distribution Function —
Двунаправленная функция распределения отражения рассеянного света). Эта
модель описывает поведение луча, попавшего на поверхность тела,
обладающего объемным рассеянием. При этом часть светового потока в силу
объемного рассеяния возвращается обратно к поверхности, а затем — в среду, из
которой этот луч вышел. То есть, по сути, объединяются эффекты, которые в
инженерных светотехнических программах обрабатываются принципиально
Методы решения уравнений физики в механических САПР 55
различными инструментами. Для имитации сцены, когда преследуется цель
повысить визуальное правдоподобие, объединение эффектов объемного и
поверхностного рассеяния более результативно, по крайней мере, с точки
зрения производительности вычислений (возможность прохождения света
через тело с такой поверхностью отсутствует в принципе).
Как видно из краткого обзора, имеется достаточное число точек
соприкосновения двух направлений компьютерного моделирования при визуализации.
Собственно, OptisWorks включает в себя модуль рендеринга (он поставляется
опционно и в данной книге не рассматривается). Его суть в том, что в
качестве исходной информации используются результаты расчета базовой
программы, после чего изображение формируется с учетом условностей,
которые порождают ощущение визуального правдоподобия. Степень
правдоподобия и, разумеется, полнота результатов с точки зрения оптического анализа
в программах рассматриваемого класса относительно инструментов
рендеринга выше за счет того, что расчеты выполняются с учетом зависимости
оптических свойств материалов и поверхностей от длины световой волны.
Для интересующихся историей вопроса можно предложить материал [13],
в котором история развития алгоритмов рендеринга описана достаточно
подробно.
И, кстати, самое важное отличие программ светотехнического анализа от
программ визуализации. OptisWorks и родственные продукты —
полноценные члены семейства CAD/CAE. В качестве геометрического ядра они имеют
одну из известных систем: Parasolid, ACIS, математику Catia V5 и т. д.
Соответственно доступны интерфейсы через форматы STEP и IGES, в то время
как организация взаимодействия программ "эстетического" рендеринга и
CAD-систем — весьма щекотливый вопрос.
Упомянем еще два типа программ, оперирующих с оптическими явлениями.
Первый — программы детерминированной оптики, т. е. не предполагающие
статистического характера распределения света. Эти продукты
предназначены для проектирования оптических приборов: объективов, телескопов и т. д.
Модуль оптического анализа OptisWorks позволяет выполнять базовые
операции оптического проектирования и анализа, рассчитывая оптические
траектории лучей, диаграмму пятна, фокусное расстояние, оптимизировать
положение линз, и т. д. Объединение двух инструментов — светотехнического
и оптического в одной оболочке крайне эффективно при проектировании
многих оптических устройств.
Второй тип программ— инструменты, предназначенные специально для
проектирования, но на сей раз в светотехнике. Одна из них— Reflec-
torCAD— была рассмотрена в предыдущем издании книги. Известен также
пакет LucidShape, предназначенный для синтеза светотехнических устройств,
в частности автомобильных.
3 Зак 4405
Для заметок
ГЛАВА 3
Структурная механика —
линейная задача (COSMOSWorks)
COSMOSWorks — это программное обеспечение для решения задач расчета
на статическую прочность и устойчивость в линейной и нелинейной
постановке, выделения собственных частот, оптимизации формы деталей и сборок
в линейной постановке, анализа усталости и поведения конструкции при
падении (рис. 3.1).
О программе COSMOSWorks
O)$MOSWorts$2O0?$P2>O Кшшк ШШЖ
Детские* гр$$ ® !$ШШ8 Ошэм* Зуйяш,
DCMksw0*v*iop^ - ,
. ртш^ь«^'Чвстм этого проф^|мног$ ейеспзчбни» Ф Согфмп«ЫОге, 1Щ 2СШ,
.. греаостде/!«нны«11рогр>шимным о&$«е*Ыи©н С0$М01 И waws$t«$tj(i информацию
фое^Шс COSMOS гюмога«т>««ьш.яь ере»ля продвижения на рыноидаем снижения, но
шупрлш«иия испытаний еус^^ ;..'-.
Рис. 3.1. Информационная панель COSMOSWorks
Замечание
d
Описание собственно программы будет достаточно кратким. Это связано с тем,
что имеется достаточно подробное руководство по данному продукту [1]. В этой
58
Глава 3
главе мы рассмотрим только ту часть функциональности, которая необходима
для решения задач в линейной постановке, снабдив описание характерными
примерами, решение которых требует владения специальными приемами.
Задачи, требующие нелинейного анализа, будут разобраны в следующей главе.
( Замечание J
Для построения геометрических моделей и численного анализа использованы
версии продуктов SolidWorks и COSMOSWorks 2007 года. Для описания
функциональности использованы версии продуктов 2006 и 2007 года.
3.1. Назначение
COSMOSWorks — приложение к SolidWorks, предназначенное для решения
задач механики деформируемого твердого тела методом конечных элементов.
Продукт разработан фирмой Structural Research and Analysis Corporation
(SRAC), США (http://www.cosmosm.com), которая в настоящий момент
является подразделением фирмы SolidWorks. Программа использует
геометрическую модель детали или сборки SolidWorks для формирования расчетной
модели. Интеграция с SolidWorks дает возможность минимизировать операции,
связанные со специфическими особенностями конечно-элементной
аппроксимации. Назначение граничных условий производится в привязке к
геометрической модели. Такими же особенностями обладают и процедуры
представления результатов. Развитие программы происходит как в направлении
увеличения вычислительных возможностей, так и, в значительной степени, за
счет расширения функциональности, связанной с имитацией расчетных
ситуаций, возникающих в повседневной инженерной практике. К
настоящему времени образовался "пакет" из трех продуктов: COSMOSWorks,
COSMOSFloWorks и COSMOSMotion, использующих в качестве ядра
геометрический моделировщик SolidWorks. В этой связи.COSMOSWorks
способен принимать результаты аэрогидродинамического или теплового расчетов,
выполненных в COSMOSFloWorks, а также нагрузки движения, полученные
в результате динамического анализа в COSMOSMotion.
COSMOSWorks позиционируется как инструмент "инженерного" анализа,
т. е. предполагается, что для специалиста-расчетчика нужны более
"серьезные" средства. Однако, как показывает практика использования программы,
подавляющая часть повседневных задач отечественного машиностроения
(в той их части, которая в принципе "подходит" для программ численного
анализа), может быть решена посредством данной программы. Более того,
рациональный интерфейс и разумно ограниченная функциональность дают
инженеру возможность сосредоточиться на проектировании, не отвлекаясь на
присущие "универсальным" пакетам подробности. Как правило, залогом соз-
Структурная механика — линейная задача (COSMOSWorks)
59
дания удачной конструкции является квалификация исполнителя, а
расчетные программы используются для проверки того, что получилось, а таюке
поставляют материал для дальнейших проб. В этом случае применение
инструментов, интегрированных в конструкторские программы, позволяет
перебирать варианты с минимальными потерями времени на выполнение
рутинных операций.
3.2. Теоретическая база
COSMOSWorks построен на базе метода конечных элементов. Теоретические
основы метода изложены в главе 2. Здесь мы отметим ряд особенностей его
реализации в данной программе. Они относятся к вопросам, которые весьма
часто возникают на практике.
♦ В COSMOSWorks используются три базовых типа конечных элементов:
объемные изопараметрические тетраэдры, треугольные элементы
оболочек и элементы балок. Оба этих типа могут иметь линейное или
параболическое поле перемещений (постоянную деформацию или линейное поле
деформаций). Тетраэдры содержат, соответственно, 4 или 10 узлов,
оболочки 3 или 6, а балки/стержни — 2. Никаких других типов элементов
(в явном их представлении1) в программе нет.
♦ Программа, начиная с версии 2006 года, допускает сосуществование в
одной модели твердотельных и оболочечных конечных элементов, причем
гибридные сетки работоспособны как в линейных, так и в нелинейных
расчетных моделях. Однако элементы балок/стержней не сочетаются с
какими-либо другими типами конечных элементов.
♦ Контактные конечные элементы, по крайней мере, в явном виде, в
программе отсутствуют. На основе косвенных наблюдений можно
утверждать, что учет соответствующих граничных условий осуществляется
изменением глобальной матрицы жесткости системы. Виртуальные объекты
типа болтов, стержней/шпилек, пружин реализованы, как следует из
материалов фирмы-разработчика, на базе элементов балок/стержней.
♦ Некоторые другие типы кинематических граничных условий реализуются
непосредственным изменением матрицы жесткости системы (в ранних
версиях программы для этого использовались штрафные функции —
фактически "очень" жесткие вспомогательные элементы, что приводило к
ошибкам программы).
При моделировании виртуальных объектов, пружин, штифтов, болтов используются
специальные конечные элементы, однако доступа к ним пользователь не имеет.
60
Глава 3
♦ Обработка многотельных деталей и сборок производится по одному и
тому же алгоритму1. Каждое тело обрабатывается как самостоятельная
деталь.
♦ В пределах одной сборки допускается сосуществование произвольных
комбинаций контактных граничных условий типа входа в контакт и
выхода из контакта.
♦ Для расчета сборок/многотельных деталей в программе реализованы
граничные условия, объединенные в группу Соединения (Connectors).
Реализация этих условий (или некоторых их разновидностей) предполагает
такие изменения матрицы жесткости системы (для некоторых из них нам
неизвестно, осуществляются они через непосредственную ее
модификацию или же посредством ввода вспомогательных "жестких" конечных
элементов), которые фактически приводят к появлению в модели
абсолютно жесткого виртуального объекта. Как следствие, в месте, где этот
объект взаимодействует с "реальными" деталями сборки (фактически, в
зоне приложения описанных граничных условий), возможно появление
теоретически бесконечных деформаций (напряжений). На практике это
выражается в отсутствии сходимости решения при уплотнении сетки и,
скорее всего, некорректным результатам.
♦ В COSMOSWorks присутствует р-адоптивный метод построения сетки
конечных элементов. Это значит, что в зонах с высоким градиентом
энергии деформации программа увеличивает порядок полинома,
аппроксимирующего поле перемещений в конечном элементе. При некорректной
постановке кинематических граничных условий возможно появление
особенностей (теоретически бесконечных деформаций и напряжений).
Применение данной опции для таких расчетных моделей приводит к
абсурдным результатам.
♦ В COSMOSWorks присутствует h-адаптивный метод построения сетки
конечных элементов. Он заключается в уплотнении сетки в зонах, где
величина плотности энергии деформации относительно велика по
сравнению со средним ее значением.
♦ В рамках упругого анализа возможно использование ортотропных
материалов. Доступны ортогонально-ортотропные и, как частный их случай
(он не выделяется отдельно), трансверсально-изотропные материалы.
Возможно назначение цилиндрической ортотропии. Криволинейная орто-
тропия отсутствует. Эти свойства можно назначать как для твердых тел,
так и для оболочек.
♦ При оценке прочности сборок посредством функции COSMOSWorks
Проверка прочности (Design Check Wizard) для всех материалов исполь-
1 У этого тезиса есть незначительные исключения.
Структурная механика — линейная задача (COSMOSWorks)
61
зуется один и тот же тип критерия прочности. Таким образом, применение
этой функции для анализа сборок, содержащих детали из хрупких и вязких
материалов, проблематично, если требуется отобразить результаты сразу
для всех деталей.
Встроенный с COSMOSWorks модуль оптимизации, начиная с версии
2006 года, основан, как предполагается, на одном из методов — методе
прямого поиска с внешней штрафной функцией (более подробно он
описан в главе 2). При этом точки старта находятся на границах допустимой
области, соответствуя критическим (максимальным и минимальным)
значениям переменных. Число анализируемых точек внутри допустимой
области Оптимизация по критерию минимума/максимума эквивалентного
напряжения в COSMOSWorks невозможна. По причине, описанной выше
(невозможность одновременного использования различных критериев
прочности), оптимизация сборок, детали из которых изготовлены из
различных типов материалов, в присутствии ограничений на допустимые
эквивалентные напряжения проблематична.
3.3. Интерфейс
COSMOSWorks имеет стандартный интерфейс приложения SolidWorks.
После активизации COSMOSWorks в меню SolidWorks возникает
соответствующий пункт, за которым скрывается меню программы. Справа в окне
SolidWorks появляется Менеджер COSMOSWorks, представляющий собой
дерево. В нем присутствуют позиции, характеризующие проект в целом
(пиктограмма с названием детали или сборки и пиктограмма Параметры
(Parameters)), а также пиктограммы с Упражнениями (Studies),
появляющимися после их создания пользователем. Упражнения являются ветвями,
объединяющими информацию о некотором расчете: материалы, сетка,
граничные условия, результаты, отчеты. Каждой пиктограмме соответствует
контекстное меню, содержимое которого изменяется в зависимости от текущего
состояния расчетной модели.
Мы не будем подробно расшифровывать содержимое пунктов меню,
ограничившись рассмотрением панелей инструментов (табл. 3.1—3.7, рис. 3.2—3.8).
Те команды или возможности, которые появились в версиях после 2005 года,
будут описаны несколько более подробно.
COSMOSWorks - Основные функции
'яштш\р-шш%шш
Рис. 3.2. Панель Основные функции
62
Глава 3
Таблица 3,1, Кнопки панели Основные функции
Кнопка
Е
| ,3.ш..,
i&*—I
в
НИ!
в
l.w...^.;:.
гзЭЗЕа
Ярлык
Упражнение
Применить
материал
ко всем
Сетка
Выполнить
Оболочка
Применить
элемент
управления
Установить
глобальный
контакт
Study
Apply
Material
to All
Mesh
Run
Shell using
surfaces
Apply
Mesh
Control
Set Global
Contact
Функция
Создание нового Упражнения, изменение
параметров или удаление имеющегося
Назначение материала или изменение
характеристик уже назначенного для всех элементов папки
Твердотельные (Solids), Оболочки (Shells) или
Сетка из балок (Beam mesh)
Конечно-элементное разбиение модели
применительно к активному Упражнению (Study). Перед
построением сетки рекомендуется проверить
действующие Настройки (Mesh Preferences),
Элементы управления сеткой (Mesh Control),
Контакт/Зазоры (Contact Conditions) (последнее —
только для Упражнения с типом анализа
Статический или Нелинейный)
Расчет для активного Упражнения
Построение сетки на базе выделенных граней или
поверхностей. Допускается иметь в списке выбора
оба типа объектов, однако сетка будет, скорее
всего, несшитой
Назначение для объектов детали или сборки
параметров плотности сетки, связанных с
вершинами, кромками, гранями или — для сборки —
деталями. В сборке плотность можно назначать
изолированно для детали или привязывать ее к
плотности, которую программа использовала бы
для изолированной детали. Управление
плотностью сетки в зависимости от направления не
допускается
Назначение контактных граничных условий "по
умолчанию". Допускаются совместное
перемещение, независимое перемещение и контакт в
исходном состоянии с возможностью отрыва. Последний
тип граничных условий следует использовать, если
детали могут проскальзывать. Команда доступна
только при работе в сборке для линейного упругого
анализа или для решения задач с физической
нелинейностью материалов. Она также частично
функциональна при тепловом расчете. Для
расчетов на устойчивость, при выделении собственных
частот, при моделировании падения допускается
только совместное перемещение деталей
Структурная механика —линейная задача (COSMOSWorks)
63
Таблица 3.1 (окончание)
Кнопка
И
щ
■
Ярлык
Определить
набор
соприкасания
Настройка
испытания
на ударную
нагрузку
Параметры
результатов
Define
a Contact
Set
Drop Test
Setup
Result
Options
Функция
Назначение для пар взаимодействующих
объектов, а также для выделенных деталей контактных
граничных условий отличных от тех, которые
приняты по умолчанию В дополнение к граничным
условиям, названным в предыдущем пункте,
можно для пар граней назначать условие вхождения в
контакт
Назначение параметров моделирования процесса
падения Допускается выбор высоты падения или
скорости Назначается ориентация плоскости, на
которую падает объект и коэффициент трения
Полупространство, на которое "падает" модель,
считается абсолютно жестким или податливым
телом Анализ сопровождается решением
контактной задачи с переменной границей Падающее
тело является упругим или обладает свойством
пластичности по Мизесу
Настройка параметров отображения результатов
выбранного Упражнения. Команда доступна
только после его расчета
COSMOSWorks - Нагрузки
чс<ша»&сг-У-*-|
Рис. 3.3. Панель Нагрузки
Таблица 3.2. Кнопки панели Нагрузки
Кнопка
■
■
111
Ярлык
Ограничения
Давление
Сила
Restraints
Pressure
Force
Функция
Назначение граничных условий на выбранных
элементах модели для активного
механического (типы анализа Статический, Собственные
частоты, Устойчивость, Нелинейный)
Упражнения
Приложение давления к выбранным граням для
активного механического Упражнения
Приложение силы, крутящего или изгибающего
момента на выбранных объектах модели для
активного механического Упражнения
Заданное усилие прикладывается на каждом из
выбранных объектов
64
ГлаЁа 3
Таблица 3.2 (продолжение)
Кнопка
\ш
\ш
\ш
\ш
Ярлык
Сила
тяжести
Центробежная сила
Дистанционная нагрузка/
масса
Жесткая
связь
Gravity
Centrifugal
Force
Remote Load
Connectors
Функция
Задание гравитационных (шире —
инерционных) нагрузок для активного механического
Упражнения
Задание центробежной силы для активного
механического Упражнения
Приложение удаленных нагрузок для активного
механическрго Упражнения Если выполняется
анализ на резонанс, устойчивость или
статический, в том числе нелинейный, расчет, то
интерфейс данной команды позволяет создать
дистанционную массу
Ввод виртуальных объектов, имитирующих
соединительные элементы
•
I
Жестко (Rigid) — ввод абсолютно жест-
кого тела, соединяющего грани двух дета-1
лей 1
•
ЕГ
Пружина (Spring) — включение "распре-
деленной" пружины растяжения-сжатия или 1
сдвига, возможно предварительно
напряженной, между плоскими гранями двух
деталей
• [>^ ] Шпилька (Pin) — включение абсолютно
жесткого штифта, соединяющего
концентрические цилиндрические отверстия двух
деталей. Штифт может обеспечивать поворот
или осевое смещение деталей с
назначенной жесткостью
•
ш
Поддержка упругости (Elastic Sup-
port) — имитация податливого основания, 1
ограничивающего подвижность заданных
граней детали (деталей). Основание может
иметь нормальную и сдвиговую жесткость
• Щ Болт (Bolt) — ввод податливого объекта,
воспроизводящего действие болта с
предварительной затяжкой Последняя задается
осевой силой или крутящим моментом. В
последнем случае необходим коэффициент
трения для расчета силы Болт может
сопрягаться с соединяемой деталью через
виртуальную резьбу и (или) через имитацию гайки
• wU) Связать (Link) — связывание
абсолютно жестким виртуальным стержнем двух
вершин
Структурная механика —линейная задача (COSMOSWorks)
65
Таблица 3.2 (окончание)
Кнопка
Ярлык
Функция
csssa
Точечные сварные швы (Spot Weld) —
создание имитаторов точечных сварных
швов
4?! Подшипник (Bearing) — имитация
роликового (граничное условие
прикладывается к цилиндрической грани) или шарикового
(назначается на круговой кромке)
подшипника, который может быть абсолютно жестким
или обладать податливостью в осевом и
радиальном направлении
Контактная
сила
Bearing Load
Приложение контактных опорных нагрузок на
выбранных гранях для активного механического
Упражнения
Температура
Temperature
Назначение температуры (начальной или
действующей) на выбранных объектах для
активного Упражнения с типом анализа Тепловой,
Статический или Нелинейный
Замечание
:>
Здесь имеет место неправильный перевод термина Connectors— Элементы
соединений или Соединители.
Термические нагрузки СО„Ш
Рис. 3.4. Панель Термические нагрузки
Таблица 3.3. Кнопки панели Термические нагрузки
Кнопка
■
и
Ярлык
Температура
Конвекция
Тепловой
поток
Temperature
Convection
Heat Flux
Функция
Назначение температуры (начальной или
действующей) на выбранных объектах для активного
Упражнения с типом анализа Тепловой,
Статический или Нелинейный
Приложение конвекции на выбранных гранях
для активного Упражнения с типом анализа
Тепловой
Приложение теплового потока на выбранных
гранях для активного Упражнения с типом
анализа Тепловой
66
Глава 3
Таблица 3.3 (окончание)
Кнопка
Ир
■
Ярлык
Тепловая
мощность
Излучение
Heat Power
Radiation
Функция
Приложение тепловой мощности на выбранных
гранях для активного Упражнения с типом
анализа Тепловой. Эта величина назначается для
каждой из выбранных граней
Определение для активного Упражнения с
типом анализа Тепловой граней тел и
поверхностей как объектов, способных через излучение
взаимодействовать с другими объектами
модели и/или окружающей средой.
COSMOSWorks ~ Показатели..
jQ'W-
Рис. 3.5. Панель Показать инструменты результатов1
Таблица 3.4. Кнопки панели Показать инструменты результатов
Кнопка
■
ЕЙ
И
В
и
в
Ярлык
Сила реакции
Сила контакта
Сила
шпильки/
болта
Режимы
График
ответа
Интерфейс
ударной
нагрузки
Reaction Force
Contact Force
Pin/Bolt
Force
List Modes
Response
Graph
Time History
Graph
Функция
Вывод интегральной величины усилия,
приложенного к некоторому геометрическому
элементу детали, детали в сборке или
сборки в целом
Вывод численных характеристик контактного
усилия между деталями в сборке на
поверхности соприкосновения. Выводится также
величина силы, вызванной трением
Вывод осевого и сдвигового компонентов
усилия, возникающего в болтовом
соединении, а также крутящего момента
Компоненты, вызванные предварительным натягом,
также включаются в отображаемые значения
Отображение величин собственных частот
для расчета на резонанс
Формирование кривой отклика в
нелинейной задаче
Определение графиков зависимости
параметров в узле сетки конечных элементов от
времени для расчета на ударную нагрузку
Правильнее называть эту панель Инструменты результатов в численном виде. —Авт.
Структурная механика — линейная задача (COSMOSWorks)
67
COSMOSWorks - Инструменты результатов
firl? tftf #2#-j> В» tf 4? S Ш
Рис. З.б. Панель Инструменты результатов
Таблица 3,5, Кнопки панели Инструменты результатов
Кнопка
Ярлык
Функция
Ш
Проверка
прочности
Design Check
Wizard
Активизация Помощника для проверки
проектирования для активного статического
Упражнения. Он осуществляет сравнение
результатов расчета напряжений с выбранным
критерием прочности
Напряжение
Stress
Визуализация диаграмм напряжений:
компонентов относительно глобальной или
локальной системы координат, эквивалентных
напряжений по Мизесу, а также оценки ошибки
вычисления напряжений
Перемещение
Displacement
Визуализация диаграмм перемещений
относительно глобальной или локальной системы
координат, силы реакции и ее компонентов
Ж
Деформация
Strain
Визуализация диаграмм деформации
относительно глобальной или локальной системы
координат, эквивалентных деформаций, а
также плотности энергии деформирования
Термическая
Thermal
Визуализация диаграмм температур,
градиентов температуры относительно глобальной
или локальной системы координат, теплового
потока и его градиентов
Отчет
Report
Генерация отчета, содержащего результаты
текущего активного Упражнения
Анимировать
Animate
Анимация отображаемой картинки с
результатами
Ограничение
Clipping
Активизация панели Отсечение. Оно
предназначено для управления сечениями активного
вида или построения изоповерхностей
Ограничение
Iso
Iso Clipping
Активизация панели Изо-отсечение,
предназначенной для построения изоповерхностей
отображаемой функции
Параметры
Settings
Настройка параметров отображения активной
диаграммы с результатами: способа
визуализации сетки или границ, окружающих деталей
в сборке, масштаба деформированного вида
и т. д.
68
Глава 3
Таблица 3.5 (окончание)
Кнопка
щ
11%ш£
Ж
Е
Ярлык
Зондирование
Выбранный
список
Сохранить как
Отобразить/
скрыть сетку
Probe
List Selected
Save As
Show/Hide
Mesh
Функция
Вывод числового значения отображаемого
результата в месте, указанном щелчком мыши
на поверхности модели или в сечении
Отображается величина результата в ближайшем
к указанной точке узле
Вывод числовых значений отображаемого
результата в узлах, принадлежащих заданным
(одному или нескольким) объектам модели.
Вычисление суммы и среднего, а также корня
из квадрата среднего Возможно отображение
графика, где абсциссой являются указанные
точки, причем располагаются они равномерно
Это, пожалуй, единственный инструмент для
формирования эпюр полей в привычном для
сопротивления материалов виде
Запись активной картинки в файл
Отобразить/скрыть сетку. Если
визуализируются какие-либо результаты, то нажатие этой
кнопки приведет к отображению "нормального"
вида модели SolidWorks
Сценария проектирования... U
'*;**
<■*;#*;
Рис. 3.7. Панель Сценарий проектирования
Таблица 3.6. Кнопки панели Сценарий проектирования
Кнопка
ЙЁр
■
Ярлык
Параметры
Сценарий
проектирования
Выполнить
Parameters
Design
Scenario
Run Design
Scenario
Функция
Формирование таблицы параметров,
содержащей характеристики, а также их
комбинации, которые будут изменяться в ходе
выполнения Сценария проектирования
(Design Scenario)
Назначение одной или нескольких
совокупностей параметров (они заимствуются из
числа Параметров, для которых будет
исследоваться поведение конструкции)
Выполнение Сценария проектирования
Структурная механика — линейная задача (COSMOSWorks)
69
Таблица 3.6 (окончание)
Кнопка
В
Ярлык
Отобразить
сводку
Определить
график
Show
Summary
Define Graph
Функция
Вывод результатов выполнения Сценария
проектирования
Формирование графиков, отображающих
зависимости результатов от параметров,
включенных в Сценарий проектирования
Оптимизация COSMOS..
У^я
Рис. 3.8. Панель Оптимизация
Таблица 3.7. Кнопки панели Оптимизация
Кнопка
■
К
13
Ярлык
Цель
Расчетные
параметры
Ограничения
Результаты
этапов
проектирования
График этапов
проектирования
График локальной
тенденции
Objective
Design
Variable
Constraint
Design Cycle
Result
Design History
Graph
Local Trend
Graph
Функция
Назначение целевой функции для
активного Упражнения с типом анализа
Оптимизация
Задание переменных проектирования
для Упражнения с типом анализа
Оптимизация
Задание ограничений для Упражнения с
типом анализа Оптимизация
Отображение модели на заданном шаге
итерации после успешного
оптимизационного анализа
Отображение графиков зависимости
переменных проектирования, целевой
функции и ограничений от номера
итерации после успешного оптимизационного
анализа
Вывод Кривых тренда — графиков
зависимости переменных проектирования от
целевой функции и ограничений
3.4. Функциональные возможности
При создании COSMOSWorks разработчиками в качестве базы была взята
универсальная конечно-элементная программа COSMOSM, у которой были
70
Глава 3
заимствованы математика пре- и постпроцессора, алгоритмы формирования
матрицы жесткости и линейные решатели. Расчетная функциональность
изначально была ограничена рамками тетраэдральных конечных элементов
применительно к единственной детали или сборки с монолитной связью
деталей. Интерфейс (пользовательский и внутренняя его часть, касающаяся
взаимодействия с базовой CAD-программой) был переписан на базе
SolidWorks API. На определенном этапе изменилось используемое
геометрическое ядро. В настоящее время, подобно SolidWorks используется Parasolid.
Дальнейшее развитие программы происходило уже в связи с SolidWorks и
заключалось во внедрении функций, необходимых для типовых расчетных
ситуаций, постепенному расширению номенклатуры конечных элементов.
Некоторые из них — элементы тел, оболочек, балок/стержней присутствуют
в явном виде. Другие — пружины, контактные элементы, жесткие связи,
упругие основания реализованы через конструктивные объекты.
3.4.1. Базовые возможности анализа
COSMOSWorks позволяет выполнять следующие виды моделирования:
♦ статический анализ в упругой постановке с расчетом отдельных деталей
по пространственной или оболочечной модели, а также сборок в
трехмерной постановке с учетом взаимодействия деталей;
♦ расчет собственных частот и соответствующих им форм для деталей
твердотельном или оболочечном представлении, а также сборок с
неподвижными деталями;
♦ расчет величин критических нагрузок потери устойчивости и
соответствующих им форм для деталей в твердотельном или оболочечном
представлении, а также сборок с неподвижными деталями;
♦ тепловой расчет с учетом явлений теплопроводности, конвекции,
излучения, но без учета движения сред;
♦ термоупругий анализ на базе результатов теплового расчета;
♦ параметрическая оптимизация по критерию минимизации/максимизации
массы, объема, собственных частот и критической силы;
♦ имитация деформирования конструкции с учетом физической и
геометрической нелинейности, а также ввиду изменения нагрузок и температуры во
времени;
♦ моделирование эффекта падения конструкции на жесткую или упругую
поверхность;
♦ усталостный расчет с учетом кривых усталости, формы кривой нагрузки,
а также линейной гипотезы суммирования повреждений.
Структурная механика —линейная задача (COSMOSWorks)
71
Все эти типы анализа могут быть связаны с одним и тем же объектом
SolidWorks.
3.4.2. Последовательность расчета
COSMOSWorks требует соблюдения базовой канвы алгоритма метода
конечных элементов, предоставляя внутри каждого этапа определенную свободу в
последовательности шагов подготовки модели и рассмотрения результатов.
Для расчета в упругой постановке для моделей в твердотельном
представлении предполагаемая цепочка событий описана ниже.
1. Создание анализа определенного типа и определение его настроек.
Последние могут быть изменены в любой момент перед выполнением
расчета.
2. Заполнение, если необходимо, таблицы параметров, определяющей набор
величин, которые могут изменяться (конкретно — для которых могут
назначаться списки значений) в ходе расчета.
3. Подготовка исходных данных внутри заданного анализа:
• назначение материала детали или деталям;
• назначение кинематических граничных условий;
• назначение статических граничных условий;
• назначение контактных граничных условий, если рассчитывается
сборка или деталь из нескольких тел;
• создание сетки.
4. Связывание, в случае необходимости, параметров из таблицы параметров
с соответствующими анализами.
5. Выполнение расчета.
6. Обработка результатов:
• создание необходимых диаграмм;
• анализ диаграмм;
• экспорт результатов.
Процедура оптимизации базируется на результатах расчетов в линейной
постановке (статического анализа, расчета на собственные частоты и на
устойчивость). Усталостный анализ требует также выполнения как минимум
одного статического расчета.
72
Глава 3
3.4.3. Свойства материалов
Линейный расчет может выполняться с использованием изотропных и орто-
тропных (ортогонально и цилиндрически) материалов. Расчет на падение
может быть выполнен для деталей из пластичных материалов с изотропным
или анизотропным упрочнением по модели Мизеса. В пределах одной детали
в многотельном представлении для каждого из тел может быть назначен
произвольный материал, любой из деталей сборки, а также любому телу может
быть присвоен произвольный материал. В оболочечной модели при ее
создании на базе поверхностей или граней материал (равно как и толщина) назна-
. чается независимо для каждой из граней оболочки. Если сетка оболочечных
элементов строится на базе срединных поверхностей, то материал
присваивается детали в целом.
При создании нового Упражнения материал по умолчанию назначается
эквивалентным тому, который был присвоен детали при работе в SolidWorks.
Пользователь может создавать собственные материалы и группы материалов.
3.4.4. Граничные условия
COSMOSWorks поддерживает разнообразные типы граничных условий. Для
расчетов в упругой постановке граничные условия не изменяются во
времени.
В нестационарной тепловой задаче могут имитироваться тепловые датчики,
управляющие переключением источников тепла.
В программе предусмотрены имитаторы соединений, упругого основания,
связи между несоприкасающимися деталями сборки, а также граничные
условия, действующие на удалении.
Нагрузки и перемещения могут быть ориентированы относительно
глобальной системы координат, справочных систем координат, объектов справочной
геометрии: плоскостей, граней, кромок, осей, а также относительно
цилиндрических и сферических объектов.
3.4.5. Генерация сетки
Построение сетки осуществляется автоматически без возможности
последующей корректировки. В версии 2007 года можно, опять же в
автоматическом режиме, запустить повторную генерацию сетки для тел объектов,
которые не вошли в сетку. В этом случае сетка будет несовместной.
Начиная с версии 2006 года, появились несовместные сетки для граней,
сопряженных контактным условием Связанные (Bonded). Это предполагает
Структурная механика — линейная задача (COSMOSWorks)
73
возможность несовпадения узлов на гранях, которые деформируются
совместно.
Предусмотрены инструменты управления плотностью сетки, однако
назначение переменной плотности в зависимости от направления невозможно.
Р-адаптивная сетка предполагает изменение порядка конечных элементов в
зонах значительного градиента плотности энергии деформирования.
Возможно и h-адаптивное уплотнение (уплотнение/разуплотнение) сетки.
Создание сетки применительно к контактным задачам происходит
автоматически после назначения пользователем (по умолчанию или в явном виде)
типа контактных граничных условий.
Гибридные (комбинированные) сетки конечных элементов твердых тел и
оболочек, доступные, начиная с версии 2006 года, требуют назначения
условий сопряжения тел и оболочек в явном виде. Контактные условия по
умолчанию на модель контакта граней и кромок оболочек с гранями и кромками
тел не влияют.
3.4.6. Контактная задача
Расчетная модель сборки (многотельной детали), а также модели,
содержащей тела и оболочки, в статическом, нелинейном и тепловом анализе может
содержать контактные граничные условия следующих типов:
♦ совместное перемещение — Связанные (Bonded). В версиях до 2006 года
оно использовалось только для связывания граней и оболочек. В
последующих версиях в первое из множеств, обрабатываемых этим условием,
могут входить также кромки и вершины;
♦ независимое перемещение — Свободно (Free);
♦ проскальзывание и выход из контакта, реализуемое в вариантах:
• Узел к узлу (Node to node);
• Узел к поверхности (Node to surface);
• Поверхность с поверхностью (Surface to surface);
♦ вход в контакт, реализуемый через:
• Узел к поверхности;
• Поверхность с поверхностью;
♦ наличие начального контакта для малых зазоров;
♦ имитацию горячей посадки (Shrink Fit) для тел;
♦ взаимодействие с условным жестким или податливым основанием —
Виртуальная стенка (Virtual wall).
74
Глава 3
Никакие другие типы контактных условий, кроме совместного и
независимого перемещения, в расчетах на собственные значения (устойчивость и
резонанс), а также при анализе падения не реализуются.
Контактные условия могут назначаться для модели в целом, для отдельных
компонентов (тел и деталей, состоящих из единственного тела), а также для
двух множеств объектов. В последнем случае эти множества
классифицируются как Источник (Source) и Цель (Target). Подробная классификация того,
как система будет реагировать на содержимое полей Источник/Цель в
зависимости от взаимного положения взаимодействующих объектов, приведена
в табл. 3.8.
Таблица 3.8. Структура сетки в зависимости от содержания полей Источник/Цель
Тип источника/
тип цели
Вершина
оболочки
Кромка
оболочки
Грань
оболочки
Вершина тела
Кромка тела
Грань тела
Выбранный источник и цель
соприкасаются
Грань тела
При наличии
возможности,
узлы будут
совпадать.
Генерируется 6
уравнений на узел.
Связаны будут
шесть степеней
свободы — три
перемещения и
три поворота
Сетка будет
несовместной, и
связываться
будут три
перемещения
Сетка
совместная и узлы
слиты
Грань
оболочки
Если вершины
или кромки
совпадают, то
программа будет
стараться слить
узлы Если все-
таки сетка будет
несовместной,
то 6 уравнений
генерируется
для каждого
узла и
связываются 6 степеней
свободы
Выбранный источник и цель
не соприкасаются
Грань тела
Грань
оболочки
Сетка будет несовместной, и
6 уравнений связи будут
генерироваться для каждого узла
Сетка будет несовместной, и связываться будут три
перемещения
Использование контактных граничных условий с переменной границей
контакта требует индивидуального подхода в зависимости от конкретной задачи.
Наиболее общие рекомендации, сформулированные разработчиками, сведены
в табл. 3.9. Как видно, максимальная точность при решении контактной
задачи с гладкими криволинейными взаимодействующими гранями достигается
Структурная механика — линейная задача (COSMOSWorks)
75
при использовании условия Поверхность к поверхности. Оно, однако,
неработоспособно в нелинейных расчетах. Условие Узел к узлу формально
неприменимо для связывания граней поверхностей между собой или с
твердыми телами. В документации об этом не сообщается, однако—судя по виду
получившейся сетки, которая получается несовместной, — оно заменяется
связью Узел к поверхности. Одним из преимуществ контакта Узел к узлу
является то, что программа формирует совместную сетку, т. е. каждому узлу
на одной контактирующей грани соответствует узел на ответной грани. Это
особенно важно для тепловых задач, когда граница контакта не может
изменяться. В то же время, поскольку ориентация взаимодействующих объектов
(а в данном случае это узлы) определяется их начальным положением, то она
не может изменяться в процессе деформирования. То есть, деформационная
составляющая при изменении геометрии контактирующих граней не
учитывается, и взаимное смещение узлов (если, конечно, не произошел выход из
контакта) происходит в исходной плоскости. Таким образом, использование
условия Узел к узлу для описания контакта криволинейных граней
совместно с опцией Большие перемещения (Large displacement) нежелательно. В то
же время для описания контакта плоских поверхностей данный алгоритм дает
приемлемые результаты за относительно малое время.
Таблица 3.9. Функциональность контактных граничных условий
Узел
к узлу
Узел
к
поверхности
Поверхность
с
поверхностью
Расчетный случай
Начальный зазор
-
+
+
Несовместная сетка
-
+
+
Вершины или
кромки в качестве
взаимодействующих объектов
-
+
Большие
перемещения
в статическом
анализе
-
+
+
Имитация падения
-
+
Нелинейный
анализ
+
+
Скорость
+++
++
+
Точность
В целом
+
++
+++
В присутствие
скольжения и
больших
поворотов
++
+++
+++
Узкая линия
контакта или малое
пятно
+
+++
+
Обозначения:
- условие неработоспособно.
+ условие обеспечивает, как правило, удовлетворительный результат.
++ условие обеспечивает, как правило, хороший результат.
+++ условие обеспечивает, как правило, очень хороший результат.
76
Глава 3
С точки зрения функциональности множества Цель и Источник
неравнозначны не только по причине того, что кромки и вершины могут помещаться
только в поле Источник, но и потому, что определенное значение имеет
порядок, в котором взаимодействующие объекты распределяются между
полями. Здесь рекомендации, предлагаемые разработчиками программы, такие:
♦ при использовании условия типа Свободно и Связанные с Совместная
сетка (Compatible mesh) цель и источник могут использоваться в
произвольной последовательности. То же самое применимо для условия Нет
проникновения (No penetration) с Узел к узлу;
♦ для всех остальных контактных условий, включающих Посадка с
натягом (Shrink fit), Узел к поверхности и Поверхность к поверхности, а
также Связанные с несовместной сеткой порядок назначения объектов,
входящих в Цель и Источник, является значимым;
♦ если контактирующие тела имеют различные материалы, то грани более
жесткого тела желательно помещать в список Цель;
♦ в качестве Источника могут выступать объекты — грани, кромки и
вершины, в то время как в качестве Цели могут выступать исключительно
грани;
♦ начиная с версии 2006 года, объекты одного и того же тела могут входить
в оба множества;
♦ желательно, чтобы грани Цели были больше по размеру и более
плоскими, чем грани Источника;
♦ грани Цели могут быть аппроксимированы более редкой сеткой, чем
грани Источника;
♦ не имеет смысла разбивать грани Цели на меньшие посредством команды
Линия разъема с целью уменьшения объема вычислений;
♦ если множество граней, входящих в список Цель, содержит внутренний
угол, то желательно, чтобы он имел скругление достаточного радиуса.
В случае отсутствия скругления следует разделить одно контактное
условие на два;
♦ если в список Цель или Источник входят по нескольку объектов, то
желательно, чтобы каждое из множеств содержало элементы,
принадлежащие единственному компоненту (детали, телу или поверхности);
♦ допускается одновременное присутствие объекта в списках Источник
одного контактного условия и в списке Цель другого.
Примеры решения задач взаимодействия тел и поверхностей приведены в
данной главе.
Структурная механика — линейная задача (COSMOSWorks) 77
3.4.7. Решатели
Для решения разрешающей системы линейных уравнений, а также для задачи
собственных значений и теплового анализа, начиная с версии 2007 года,
предлагается два решателя: итерационный и прямой. В ранних релизах
присутствовал еще один итерационный решатель, который с точки зрения
устойчивости вычисления был, по сути, эквивалентен оставшемуся, но требовал
намного больше вычислительных ресурсов.
3.4.8. Постпроцессор
Программа предлагает разнообразные способы отображения диаграмм с
результатами: закраской, изолиниями, сечениями, в деформированном виде,
с наложением на исходную модель, в расчлененном состоянии для сборок,
получение результатов в численном виде в конкретной точке, расчету
интегральных величин в пределах выбранного объекта геометрии, построения
графиков и т. д.
3.4.9. Интерфейсы
COSMOSWorks может воспринимать нагрузки движения, полученные в
расчетах сборок посредством COSMOSMotion, и преобразовывать их в
инерционные нагрузки для отдельных деталей. Более подробно соответствующие
процедуры будут описаны в главе 7.
Также программа способна импортировать информацию о распределении
температуры и давления из COSMOSFloWorks. Если более конкретно, то,
начиная с версии 2006 года, состав транслируемой информации для
структурного анализа следующий:
♦ избыточное давление (статическое давление минус, атмосферное);
♦ сдвиговые напряжения на гранях тел, взаимодействующих с текучей
средой;
♦ температура текучей среды возле стенок тел на дальней от стенки
поверхности пограничного слоя;
♦ распределение температуры в телах.
Для теплового анализа передаются:
♦ распределение коэффициентов теплоотдачи;
♦ температура окружающей среды, назначенная в COSMOSFloWorks в поле
Environment temperature.
78
Глава 3
В документации программ при передаче результатов из COSMOSFIoWorks
в COSMOSWorks рекомендуется:
♦ погасить все граничные условия и ассоциированные с ними цели в Дереве
проектирования COSMOSFIoWorks;
♦ погасить в Дереве конструирования SolidWorks все искусственно
введенные заглушки, используемые во внутренней задаче для назначения
граничных условий;
♦ после передачи результатов отключить COSMOSFIoWorks как добавление
SolidWorks и сохранить модель.
При импорте информации из COSMOSFIoWorks в COSMOSWorks
рекомендации такие:
♦ погасить в геометрической модели неиспользуемые детали, удалить
ненужные тела;
♦ допускается создавать специальную конфигурацию, адаптированную для
прочностного расчета. В этом случае следует тщательно контролировать
процесс выбора файла *.fld с результатами аэрогидродинамического
анализа.
COSMOSWorks может экспортировать информацию о сетке и, в некоторых
случаях, о граничных условиях в универсальные конечно-элементные пакеты.
Посредством формата VRML1 можно сохранять деформированный вид
модели в фасетном представлении. Затем получившийся файл можно считать в
SolidWorks с одновременным воссозданием поверхностного или
твердотельного представления, опять же с плоской (независимо от порядка
использованной сетки конечных элементов) триангуляцией поверхностей.
3.4.10. Возможности версии 2007 года
В августе 2006 года выпущена версия COSMOSWorks 2007. Она содержит
ряд более и менее принципиальных новинок. К первым относится
возможность моделировать балочные/стержневые конструкции (в данном релизе
программы в "рафинированном виде" — без присутствия в модели конечных
элементов других типов); ввод циклической симметрии; следящие нагрузки;
трение в нелинейном анализе; дистанционные массы, ряд других функций.
♦ Изменения общей функциональности, не влияющие на сущность
расчетной модели:
• объекты справочной геометрии, созданные вне контекста сборки.
Сейчас можно определять ориентацию граничных условий как относитель-
1 Virtual Reality Modeling Language (Язык моделирования виртуальной реальности).
Структурная механика — линейная задача (COSMOSWorks) ; 79
но объектов сборки (осей, плоскостей, систем координат), так и
относительно объектов деталей, входящих в сборку;
• сообщения об ошибках при расчете запоминаются в папке Результаты
(Results) Менеджера COSMOSWorks;
• появились иконки в контекстных меню COSMOSWorks;
• поиск контактных пар может осуществляться не только для
соприкасающихся граней, но и граней, изначально имеющих некий, заданный
минимальным и максимальным значениями, зазор;
• структура диалогового окна Параметры (Options) приведена в
соответствие с традициями интерфейса SolidWorks. Настройки разделены
на те, которые действуют на все анализы во всех моделях и которые
нельзя изменить на уровне упражнения, и те, которые являются
локальными;
• управление панелями инструментов COSMOSWorks теперь возможно
только посредством соответствующих средств SolidWorks;
• вкладка Экспорт (Export) исключена из окна Параметры, а
соответствующие настройки перенесены в панели Параметры экспорта (Export
Options), доступную при экспорте результатов конкретного
упражнения. При этом одновременный экспорт как геометрической модели, так
и сетки с граничными условиями стал невозможен1. Это связано с тем,
что в COSMOSWorks изменилось геометрическое ядро;
• легенда на диаграмме результатов может быть приведена в движение
после двойного щелчка по ней мышью, после чего также возникает
соответствующая панель Менеджера свойств;
• диаграммы результатов в Менеджере COSMOSWorks могут быть
структурированы в папки в произвольной комбинации. Также можно
переупорядочивать пиктограммы с граничными условиями;
• для варьируемых параметров в Библиотеке анализов (Analysis Library)
можно назначить верхние и нижние границы;
• после двойного щелчка мышью по символам нагрузок, ограничений и
элементам управления сеткой появляются панели с настройками
данных факторов;
• опция Игнорировать зазор для поверхностного контакта (Ignore
clearance for surface contact) назначается индивидуально для каждого
контактного граничного условия;
Это изменение было внесено в версию программы 2006 года.
80
Глава 3
• в диалоговом окне Материал (Material) характеристики, необходимые
для данного типа анализа, выделяются цветом.
♦ Изменения функциональности для граничных условий, определяющие
возможности и структуру нагрузок, закреплений, соединителей:
• функциональность соединителей Пружина (Spring) расширена за счет
ввода односторонних пружин, пружин, соединяющих цилиндрические
концентрические грани, а также соединяющих вершины (точки) и
обладающих жесткостью при кручении;
• перед созданием виртуального болтового соединения не требуется
предварительно выделять посредством команды Линия разъема грани,
на которые опираются головка болта и гайка;
• введен соединитель Подшипник (Bearing), имитирующий
соответствующий объект механических систем. Он может воспроизводить
роликовый подшипник— тогда он ассоциируется с цилиндрической
гранью, или же шариковый — тогда он связывается с круговой
кромкой. Подшипник может быть абсолютно жестким при смещении в
осевом или радиальном направлении, или же иметь податливость,
назначаемую пользователем для каждого из этих направлений;
• соединитель Точечные сварные швы (Spot Weld) применим также
к гибридным сеткам — им можно связывать оболочки с телами;
• введено граничное условие Циклическая симметрия (Cyclic
Symmetry), связывающее два множества граней твердых тел. Грани не
обязаны быть плоскими.
♦ Изменения в процедурах формирования и обработки сетки конечных
элементов:
• в новой версии каждое упражнение обладает собственными
настройками сетки. После создания упражнения оно наследует настройки со
вкладки (Default Options) окна Параметры (Options), после чего в
панели Сетка появляется полный комплект настроек;
• на вкладке Настройки по умолчанию (Default Options) появилась
опция Заново создать сетку для неудавшихся деталей как
несовместную (Remesh failed parts with incompatible mesh), активизация которой
приводит к попытке системы разбить несовместной сеткой детали, для
которых совместную сетку построить не удалось;
• h-адаптивность при расчете сборок, содержащих исключительно
твердотельную информацию;
в оценка и динамическое отображение времени, оставшегося до
завершения построения сетки;
Структурная механика — линейная задача (COSMOSWorks)
81
• программа осуществляет расчет и визуализацию Якобиана для оболо-
чечных сеток;
• визуализация параметров, связанных с качеством сетки: Пропорции
(Aspect ratio) и Якобиан (Jacobian). Ранее эти величины были доступны
только в численном виде.
♦ Изменения функциональности в зависимости от типа анализа:
• следящие нагрузки в нелинейном анализе. В предыдущих версиях
направление действия граничных условий ни в каком анализе, включая
нелинейный, не изменялось. В версии 2007 года можно автоматически
отслеживать изменение направления действия граничных условий в
виде нормальной силы, нормального давления и крутящего момента.
Действие данной функции, которая активизируется в настройках
нелинейного анализа, носит глобальный характер;
• расчет равнодействующей силовых факторов (сил и моментов),
приложенных к объекту модели или совокупности объектов. В интерфейсе
COSMOSWorks для этого предназначена Сила свободного тела (Free
body force);
• дистанционные (удаленные) массы для анализов: статического,
резонансного, устойчивости. Для их назначения используется та же панель
инструментов, что и для дистанционных нагрузок;
• рестарт для нелинейного анализа. В ходе нелинейного расчета можно
запоминать состояние по завершении выполненного шага. После
остановки процедуры решения расчет можно продолжить;
• учет трения в нелинейном анализе. В версии 2007 года
функциональность нелинейного расчета, связанная с трением, формально
эквивалентна предоставляемой статическим расчетом. Однако, по крайней
мере, в релизах программы вплоть до SP 2.0 при использовании данной
опции в некоторых расчетных случаях в задачах возникали
определенные затруднения;
• соединители в нелинейном анализе. В версии 2007 года в нелинейных
моделях можно использовать следующие типы соединителей:
Пружина (Spring); Связать (Link); Жестко (Rigid);
• исключение решателя FFE. Решатель FFE исключен из программы в
связи с тем, что итерационный алгоритм FFEPIus, решая все доступные
для FFE задачи, обладает существенно лучшей эффективностью по
скорости и запросам к памяти;
• автоматический выбор решателя. В программу введена опция,
оставляющая выбор решателя (прямой или итерационный) на усмотрение
системы;
82
Глава 3
• прогноз оставшегося времени решения;
• локальное действие опции Игнорировать зазор для поверхностного
контакта (Ignore clearance for surface contact), которую можно
назначать применительно к каждому набору контактов;
• при расчете на собственные частоты опция Использовать
плоскостной эффект1 (Use inplane effect) исключена из настроек анализа
Частота (Frequency) — она действует по умолчанию. То есть, считается,
что растягивающие усилия увеличивают собственные частоты, а
сжимающие — уменьшают. Чтобы исследовать состояние системы без
нагрузок, необходимо их погасить или удалить;
• учет больших перемещений в моделях с виртуальными болтовыми
соединениями;
• в дополнение к изотропному упрочнению, при анализе падения
допускается назначение пластических материалов с кинематическим
упрочнением;
• расчет сварных конструкций (их геометрические модели должны
строиться при помощи подмножества команд SolidWorks Сварная деталь)
посредством балочных/стержневых моделей с автоматическим
формированием сетки и взаимосвязей (в терминах программы они
называются Соединения (Joints)). В настоящее время доступны типы анализа:
статический, резонансный и устойчивость;
• возможность управлять параметрами искомых частот в анализе
Частота (Frequency), что позволяет установить верхнюю границу
выделяемых частот, а также рассчитывать частоты, ближайшие к назначенной2.
♦ Изменения в представлении результатов:
• переключение между визуализацией результатов и геометрии
посредством кнопки Отобразить/скрыть результат (Show/Hide Result) на
панели инструментов Инструменты результатов (Result Tools);
• отображение расстояния между двумя узлами сетки в недеформиро-
ванном состоянии (в режиме отображения сетки) и на
деформированном виде (на диаграмме перемещений);
• автоматическое выделение предельных значений в результатах. Для
результатов расчетов, предусматривающих пошаговые алгоритмы
(нестационарный тепловой, нелинейный, имитация падения), можно выво-
1 Более корректным переводом термина Inplane effect является Эффект нагружсния в
плоскости.
2 Схожая функциональность присутствовала в ранних версиях программы.
Структурная механика — линейная задача (COSMOSWorks)
83
дить диаграммы, содержащие предельные значения с автоматическим
поиском шага, на котором эти значения получены;
• процедура Проверка проектирования (Design Check) позволяет
отображать диаграммы одновременно для нескольких деталей/тел, для
которых назначены различные материалы. Ранее для отображения была
доступна только выбранная деталь/тело. Однако для всех деталей/тел,
независимо от характеристик прочности, будет использоваться один и
тот же критерий прочности;
• в команде Зондирование (Probe) произошли следующие основные
изменения: можно получать информацию как относящуюся к узлам, так и
к элементам; в дополнение к собственно результатам доступно
расстояние между выбранными узлами; можно создавать и запоминать
объекты Датчики (Sensors), для которых будут выводиться
необходимые результаты;
• команда Сила реакции (Reaction Force), будучи примененной к кромке
оболочки, позволяет получить не только силу реакции и ее
компоненты, но и момент реакции вместе с его составляющими относительно
осей глобальной системы координат или выбранного объекта
справочной геометрии;
• расширен набор инструментов для управления диаграммами, в
частности: легенду на диаграмме можно перемещать посредством движения
мыши; после двойного щелчка мыши по заголовку диаграммы можно
изменить свойства диаграммы; после двойного щелчка мыши по
заголовку легенды можно изменить настройки диаграммы; можно
создавать анимации диаграмм, используя SolidWorks Animator;
• в файл eDrawings можно включить результаты расчета для
многотельных деталей и сборок и результаты в виде сечений, изоповерхностей,
линий, векторов и точек;
• изменять положение сечений на диаграммах можно не только
назначением числовых параметров, но и перетаскивая указатели;
• на диаграмме эквивалентных напряжений, вычисленных по критерию
Мизеса, можно закрасить области, напряжения в которых превышают
предел текучести.
3.5. Моделирование узлов посредством
гибридных сеток конечных элементов
Данный раздел посвящен анализу элементарной модели, состоящей из двух
полос, соединенных точечными сварными швами.
84
Глава 3
3.5.1. Постановка задачи
Рассмотрим две полосы одинаковой толщины, соединенных тремя сварными
точками. Они нагружены продольной растягивающей силой, условно
показанной на рис. 3.9. С той же степенью условности показаны сварные точки.
Мы не будем углубляться в подробности состояния материала в окрестности
сварной точки, как в свободном состоянии, так и после приложения силы.
Эта задача требует анализа на различных уровнях, в частности в зоне кромки
точки с учетом начальных пластических деформаций. Поэтому ограничимся
расчетом напряженного состояния в упругой постановке.
Рис. 3.9. Геометрическая модель узла
3.5.2. Подготовка геометрической модели
Для расчета будем использовать геометрическую модель, в которой,
несмотря на то, что они описывают идентичные объекты, одна пластина
воспроизводится твердым телом, а вторая— поверхностью. Это сделано для того,
чтобы можно было наглядно выявить отличия в результатах, поскольку в
практических расчетах и та и другая модель имеют право на существование.
Также, для того чтобы проанализировать различие между различными
моделями — полученной "штатными" инструментами COSMOSWorks и с
использованием виртуальных соединителей Точечные сварные швы (Spot Weld).
Соответствующие иллюстрации показаны на рис. 3.10—3.12. Первый вариант
характеризуется тем, что на обоих объектах— теле и оболочке линиями
разъема выделены по три круговых грани. Их диаметр равен диаметру
сварной точки. На торец тела нанесена вертикальная линия разъема. Это нужно
для получения вспомогательных элементов геометрии, на которых будут
ограничены перемещения, реализующие симметрию (мы не будем учитывать
ее, отрезая половину модели и накладывая соответствующие граничные
условия). В следующей модели дополнительно введены объекты справочной
Структурная механика — линейная задача (COSMOSWorks) 85
геометрии Точка (следует отличать данные элементы от точек плоских и
пространственных эскизов), на базе которых будут строиться виртуальные
сварные точки. Линии разъема и порожденные ими круговые грани
сохранены, чтобы обеспечить соответствие плотности сетки конечных элементов.
В третьем варианте линии разъема убраны, чтобы приблизить упрощенную
модель к тому, как рассчитываются типовые объекты.
Рис. 3.10. Геометрическая модель с линиями разъема для сварных точек
(собранное состояние и в разнесенном виде)
Рис. 3.11. Геометрическая модель с линиями разъема и точками SolidWorks
Рис. 3.12. Геометрическая модель с точками SolidWorks
86
Глава 3
3.5.3. Анализ
Переход от геометрической модели с двумя телами к модели с телом и
поверхностью внес определенную погрешность в схему нагружения. Она
искажается из-за того, что уменьшился эксцентриситет приложения сил — в теле
равнодействующая направлена вдоль срединной поверхности. А с заменой ее
на оболочку, лежащую на теле, точка приложения силы смещается на
половину толщины исключенного тела. В принципе, можно было бы попробовать
оставить оболочку на месте срединной поверхности, но тогда пришлось бы
решать проблему связывания поверхности и тела, имеющих начальны^ зазор.
Версия программы 2007 года обогатилась функцией, позволяющей для
контактных условий Нет проникновения | Узел к поверхности (No penetration |
Node to surface) и Нет проникновения | Поверхность с поверхностью (No
penetration | Surface to surface) назначать индивидуально величину зазора, при
котором соответствующие объекты считаются соприкасающимися. Этим
управляет опция Зазор (промежуток) (Gap (clearance)), в которой можно
указать, что зазор игнорируется всегда, или же указать верхнюю границу
расстояния, при котором это происходит (рис. 3.13). Данная функция имеет
приоритет перед опцией Игнорировать зазор для поверхностного контакта
(Ignore Clearance for Surface Contact), присутствующей в настройках
статического анализа. Однако для контактных условий Связанные (Bonded)
персональные настройки не предусмотрены. Поэтому если такое условие
назначено посредством условия Набор соприкасания (Contact Set), то оно
подействует на грани с зазором, только если последние сопоставим с размером
конечных элементов в зоне контакта или же меньше него. Это существенно
ограничивает возможности по управлению сеткой в "проблемных" зонах.
В то же время виртуальные точечные сварные швы вполне функциональны,
когда ими связывают грани с зазором.
Расчетная модель с начальным зазором показана на рис. 3.14, а результат в
виде эквивалентных напряжений с осреднением по элементам на фоне
деформированного вида— на рис. 3.15. Для оболочки показана мембранная
компонента напряжений, т. е. напряжения на срединной поверхности. Мы не
будем анализировать диаграммы, поскольку в моделях реальных объектов из-
за малой (по отношению к "массивным" конструктивным элементам)
толщины обшивки влияние смещения срединной поверхности незначительно.
Ограничимся констатацией факта, что модель контакта оболочки с твердым
телом и начальным "невыбираемым" зазором с использованием условий Узел к
поверхности и Поверхность с поверхностью позволяет получить вполне
реалистичные (по крайней мере, в первом приближении) результаты. Как
видно, зазор на некоторой длине не выбирается, а на каком-то участке
объекты выходят из виртуального контакта.
Структурная механика — линейная задача (COSMOSWorks)
87
С Узел г узлу
<•* Узеп < поверхности
^ По»ерлНостьс
поверхностью
Offlfc^
£> 6ш да игнорировать
зазор
С Игнорировать за?яр; «*с пи
Рис. 3.13. Назначение игнорируемого зазора
Рис. 3.14. Расчетная модель с зазором
В контексте задачи акцентируем внимание еще на одном моменте. В модели,
где сварная точка моделируется парой контактирующих граней, на кромке
поверхности контакта возникает особенность— теоретически бесконечные
(если придерживаться гипотезы об упругом деформировании) напряжения.
В расчете МКЭ это проявляется в зависимости результата от плотности сетки
в зоне сингулярности. Поэтому следует критично отнестись к абсолютным
4 Зак 4405
88
Глава 3
величинам параметров напряженно-деформированного состояния возле
сварных точек и попытаться идентифицировать характеристики,
малочувствительные к свойствам конечно-элементной модели.
* von Misw (МЛпЛ2) 5.S6e+004
Рис. 3.15. Эквивалентные напряжения для модели с зазором
3.5.4. Решение
Подготовка исходных данных о свойствах материалов. Материалом
деталей узла является алюминиевый сплав, а напряженно-деформированное
состояние определяется исключительно модулем упругости и
коэффициентом Пуассона, поэтому можно из библиотеки выбрать практически любую
марку алюминиевого сплава.
Подготовка расчетной модели. Сначала выполним расчет на базе
геометрической модели с линиями разъема без использования виртуальных сварных
точек (рис. 3.16). Как упоминалось, одна пластина в геометрической и,
соответственно, расчетной модели является телом — его толщина 3 мм, а вторая в
SolidWorks— поверхностью, а в COSMOSWorks— "толстой"1 оболочкой с
виртуальной толщиной — те же 3 мм.
Примем, что неподвижной (как при перемещении, так и при повороте)
является кромка оболочки. Единственной незафиксированной степенью свободы
является смещение вдоль кромки. Если мы его ограничим, то в углах
появятся сингулярности. Чтобы исключить движение сборки как жесткого целого в
направлении Y, ограничим соответствующее перемещение на линии разъема
1 В интерфейсе программы — "утолщенной" оболочкой.
Структурная механика — линейная задача (COSMOSWorks)
89
на торце тела пластины. Нагрузкой будет служить давление 1,0е+7 Па на
гранях торца тела.
Рис. 3.16. Расчетная модель с линиями разъема на месте сварных точек
В качестве контактных условий по умолчанию принимаем Связанные
(Bonded) (надо сказать, что для контакта между телами и оболочками условия
по умолчанию не действуют), для связи между круговыми гранями тела и
поверхности попарно применяем также условие Связанные, но назначенное
через команду Определить набор соприкасания (Define Contact Set). Эту же
команду используем для назначения условия непроникновения между
оболочкой и телом. В одноименной панели (рис. 3.17) выбираем разновидность
условия непроникновения — Узел к поверхности. В данной ситуации можно
было использовать и вариант Поверхность с поверхностью.
Результат назначения контактных условий отражается в Менеджере
COSMOSWorks (рис. 3.18).
Перед созданием сетки следует ввести Элементы управления (Mesh Controls),
позволяющие уменьшить размер конечных элементов в проблемных зонах.
В данном случае это круглые грани. Результат показан на рис. 3.19. Сверху
показана сетка с отображением всех объектов. Как видно, в зоне контакта она
несовместная, т. е. узлы на контактирующих гранях не обязательно
совпадают. Для наглядности снизу на иллюстрации показана сетка отдельно на
оболочке и отдельно на теле.
Статический анализ и интерпретация результатов. Распределение
эквивалентных напряжений в модели и в отдельных его элементах с осреднением
по узлам показано на рис. 3.20. Та же характеристика, но с осреднением по
элементам приведена на рис. 3.21. Для оболочки показана мембранная
й&*
^\-
С УЖЛКуЗЛУ
(* Узел к псвяриоюси
^ Поверхность с
позер> посты?
Рис. 3.17. Определение контакта между гранями
\;Г
'WStf
■&
ф Через линии разъема - три точки
5*5 Настройки
: ^Датчики
В <v С линиями разъема (-По умолчанию-)
Ш ^Твердотельные
Ш-^ЙР Оболочки
щ -ХА Нагрузка/Ограничение
Щ Сценарий проектирования
В ^Контакт/зазоры(-Глобальные: Связанные-)
•I^bmbss
11111№Шу.ШШ^^
L Набор соприкасания-4 (-Нет проникновениЖЧерез линии разъема - три точки >-)
Ш 4S Сетка
|-"jjj3 Отчет
[+3 |j£] Результаты
Рис. 3.18. Менеджер проекта с контактными условиями
Структурная механика — линейная задача (COSMOSWorks)
91
Рис. 3.19. Сетка конечных элементов на теле и на оболочке
6.65е+007
5.99е+007
5.32е+007
4.66е+007
3.99е+007
З.ЗЗе+007
2.66е+007
2 00е+007
1 ЗЗе+007
6.69е+006
4.34е+004
Рис. 3.20. Эквивалентные напряжения с осреднением по узлам
компонента. Как видно, различия в максимальных величинах превышают
разумные пределы. Для того чтобы иметь базу для заключений, увеличим
фрагмент картинки, одновременно настроив отображаемый диапазон
напряжений так, чтобы он точно соответствовал размаху функции в видимом
компоненте модели. Для этого скрываем неактуальные компоненты, отображаем
92
Глава 3
диаграмму, а затем из ее контекстного меню вызываем панель Параметры
графика (Chart Options). В ней есть опция Отобразить диапазон мин.—
макс, только на отображенных деталях (Show Min/Max range on shown parts
only). Ее активизация приводит к желаемому результату (рис. 3.22 и 3.23).
3.87е+007
3.48е+007
3.10е+007
2.71е+007
2.33е+007
1 94е+007
1.558+007
1.17е+007
7.82е+006
З.Эбе+006
9.948+004
Рис. 3.21. Эквивалентные напряжения с осреднением по элементам
von Mises (N/taA2)
3.87е+007
3.49е+007
3.10е+007
2.72е+007
2.34е+007
1.95е+007
1.57е+007
1.19е+007
8.05е+006
- 4.22е+006
— 3.90е+005
Рис. 3.22. Эквивалентные напряжения с осреднением по элементам — фрагмент тела
Структурная механика —линейная задача (COSMOSWorks) 93
1.76е+007
1.59е+007
1.41е+007
1 24е+007
1 06е+007
8.87е+006
7.11е*006
5.36е+006
3.61е+006
1 85е+006
9.94е+004
Рис. 3.23. Эквивалентные напряжения с осреднением по элементам — фрагмент оболочки
При анализе напряжений обращает на себя внимание различие в результатах
для тела и оболочки. И это несмотря на то, что объекты (формально) имеют
одинаковую толщину. Тому может быть несколько объяснений. Первое —
в оболочке не учтена изгибная составляющая — отображаются напряжения
на срединной поверхности. Второе— влияние различий в описании
напряженно-деформированного состояния в зоне контакта между
оболочечной и твердотельной моделями. Нас интересует именно эта
компонента. В принципе, можно было бы попытаться проанализировать
напряжения на "нижней" и "верхней" сторонах оболочки, однако обеспечить
строгое соответствие функционирования оболочечного и твердотельного
элементов трудно. Поэтому изменяем расчетную модель в целом.
На нижнюю грань тела ставим условие Симметрия (Symmetry) (обратите
внимание, что для комбинированных сеток система ограничила не только
перемещение в направлении нормали к грани, но и повороты относительно
осей, лежащих в ее плоскости), а на зафиксированной кромке оболочки
убираем заделку в направлении нормали (рис. 3.24). Таким образом, фактически
рассматривается геометрия, где нижняя (твердотельная) полоса имеет
удвоенную толщину, а верхней (оболочечной) полосе соответствует идентичная
симметричная относительно плоскости XY. В этой модели влияние изгибных
эффектов должно быть практически устранено.
Распределение эквивалентных напряжений на стороне тела, на которой
находятся сварные точки и в плоскости симметрии, показано на рис. 3.25.
Максимальная величина напряжений — 2,40е+7 Па. Напряжения на срединной
поверхности оболочки показано на рис. 3.26, причем их максимум равен
1,45е+7Па. Это намного меньше, чем у тела (рис. 3.27). Но здесь следует
94
Глава 3
Рис. 3.24. Модифицированные граничные условия
von Mises (NAnA2) ■
Рис. 3.25. Эквивалентные напряжения с осреднением по элементам —
наружная и срединная поверхности тела
von Mises (NAnA2) ^м
щшш^ш^ш Л
ЩШЦ^^К^Ш ';?<;
1 45е+007
1.31е+007
1.16е+007
1.02е+007
8.76е+006
7.33е+006
5.89е+006
4.46е+006
3.02е+006
159е+006
1.53е+005
Рис. 3.26. Эквивалентные напряжения с осреднением по элементам —
срединная поверхность оболочки
Структурная механика — линейная задача (COSMOSWorks)
95
учитывать, что конечно-элементная модель тела учитывает неоднородность
распределения напряжений по толщине — на стороне, на которой находится
сварная точка, они больше, на противоположной, соответственно, меньше (на
диаграмме поле напряжений по ширине полосы практически однородно).
Если уплотнить сетку, как показано на рис. 3.27 сверху, то распределение
напряжений на гранях тела будет выглядеть так, как отображено в нижней
части рисунка. Максимальные напряжения существенно возросли, а на грани
противоположной точке, наоборот, стали однороднее. В то же время в
оболочке изменения минимальны (рис. 3.28).
Рис. 3.27. Эквивалентные напряжения с осреднением по элементам —
наружная и срединная поверхности тела, плотная сетка
96
Глава 3
Выводы следующие. При анализе соединений сварными точками по модели
"тело + оболочка" результаты для оболочки в значительной степени
инвариантны относительно плотности сетки. Например, если сетку сделать более
редкой (относительно показанной на рис. 3.27), то максимальные
эквивалентные напряжения в теле (с осреднением по элементам) уменьшатся до
1,93е+7 Па, а в оболочке станут равными 1,41е+7 Па. Поэтому напряжения в
оболочке могут со значительной степенью уверенности использоваться для
принятия решения о прочности конструкции, если толщина соединяемых
листов относительно небольшая. Надо сказать, что "толщина" здесь
определяется как собственно размером, так и числом конечных элементов,
расположенных по толщине в теле — чем их больше, тем выше будут максимальные
напряжения.
Второе заключение касается ситуации, когда толщина тела достаточно велика
и сетка в зоне точки содержит несколько конечных элементов по толщине.
Здесь не стоит гнаться за максимально плотной сеткой, поскольку по кромке
сварной точки присутствует сингулярность, а сделать так, чтобы по диаметру
точки размещалось не более двух конечных элементов (для сетки с
параболическими элементами). Напряжения следует отображать с осреднением по
элементам. В этом случае картина напряжений вблизи сварной точки может
использоваться для принципиальной оценки прочности узла, например,
с целью сравнения различных вариантов конструкции. Точная же оценка
несущей способности соединения требует привлечения нелинейных моделей, а
также сопоставления результатов конечно-элементного анализа с
экспериментом.
3.5.5. Модель точечных швов
с использованием виртуальных объектов
Сравним результаты, полученные на модели, в которой швы представлялись
как связанные грани, с тем, что получится при использовании виртуальных
точечных сварных точек (Spot Welds) COSMOSWorks. На первом этапе
оставим геометрическую модель такой, какой она была в предыдущем случае,
т. е. с линиями разъема, формирующими области с контактом Связанные.
В центрах этих кругов создаем объекты Точка Sol id Works. Они, а также
вершины, в том числе и на линиях разъема могут использоваться для
назначения объектов Точечный сварной шов (Spot Weld) COSMOSWorks. Другие
примитивы, в частности, точки и концы линий плоских и трехмерных эскизов
в этом качестве непригодны. Панель Жесткая связь1 | Точечные сварные
1 В зависимости от версии и пакета обновления (SP) программы эта панель в русскоязычном
интерфейсе переведена более корректно: Соединители.
Структурная механика — линейная задача (COSMOSWorks) 97
швы (Connectors | Spot Welds) показана на рис. 3.29. Как видно, нужно
определить два множества граней, принадлежащих различным объектам,
связываемым создаваемым швом, одну или несколько точек (вершин), являющихся
центром швов (за один прием можно создавать несколько объектов), а также
диаметр сварной точки (он не должен быть меньше 3 и не больше 12,5 мм).
Рис. 3.29. Создание виртуальных точечных сварных швов
Не забудем преобразовать контактные граничные условия между круговыми
гранями точек из Связанных в Нет проникновения — связь между
элементами узла будет обеспечиваться исключительно посредством виртуальных
сущностей.
Результат расчета в виде эквивалентных напряжений на гранях тела с
виртуальными точками, а также на грани, расположенной в плоскости симметрии,
показан на рис. 3.30. Соответственно, напряжения на срединной поверхности
оболочки приведены на рис. 3.31.
Сравнивая — при идентичной сетке — данные результаты с полученными
для модели со связанными гранями (рис. 3.26), можно увидеть, что
максимальные эквивалентные напряжения для тела несколько уменьшились, а для
оболочки ощутимо увеличились, причем они превысили напряжения для
тела. Надо сказать, что это не вполне реалистичная картина, поскольку при
равномерном распределении напряжений по толщине тела (именно это
происходит при уменьшении его толщины) результаты для тела и оболочки
должны сближаться. Соответственно влияние конечной толщины выражается
в увеличении максимума возле наиболее нагруженной точки на теле.
Учитывая, что виртуальные сварные точки предназначены для создания
упрощенных моделей с минимальными усилиями, попробуем "прикрепить" их к
98
Глава 3
граням без линий разъема — т. е., все грани элементов узла остаются
непрерывными. Результаты для тела и оболочки показаны на рис. 3.32 и 3.33. Как
видно, максимумы напряжений радикально уменьшились.
. 9.43е+ШЗ
Рис. 3.30. Эквивалентные напряжения — наружная и срединная поверхности тела
von MUer (М;"т*2),
Рис. 3.31. Эквивалентные напряжения — срединная поверхность оболочки
Подводя итог анализу работоспособности соединителей Точечные сварные
швы (Spot Welds), можно сказать, что они пригодны для построения
расчетных моделей тогда, когда интерес представляют параметры в достаточном
отдалении от них. Виртуальные соединители с достаточной степенью
адекватности воспроизводят жесткость системы, но весьма чувствительны к
параметрам плотности сетки.
Структурная механика — линейная задача (COSMOSWorks)
99
von Mises (NAnA2)
1Шк&ШйШШШйа
1 22е+007
1.1 Ое+007
9 79е+006
8.57е+006
7.35е+006
6.12е+006
4.90е+006
:Л1 3.68е+006
<: \ 2 45е+006
. 1 23е+006
Рис. 3.32. Модель без линий разъема. Эквивалентные напряжения:
сверху — наружная и срединная поверхности тела; снизу — срединная поверхность оболочки
Упомянем и о еще одном, на первый взгляд неочевидном, затруднении при
интерпретации результатов расчета весьма простого узла. Как мы убедились,
весьма трудно найти параметры инвариантные к структуре модели и сетки.
В наибольшей степени этому пожеланию соответствуют напряжения в обо-
лочечной модели — напряжения и, соответственно, деформации в теле
подвержены влиянию сингулярностей на кромках. Диагноз виртуальным
сварным точкам был поставлен в предыдущем абзаце. Поэтому очевидным
решением было бы идентифицировать компоненты силы (нормальную и две в
плоскости), транслируемой каждой сварной точкой. Соответствующие
инструменты есть, например, у виртуальных болтов. Для контактных граничных
условий типа Нет проникновения (No penetration) можно установить
результирующую контактную силу. Однако объект Точечные сварные швы лишен
100
Глава 3
такой функциональности. Вопрос об установлении сил взаимодействия
граней, соединенных условием Связанные (в нашем случае это контакт в
точках между телами или между телом и оболочкой) решается только начиная с
версии 2007 года посредством инструмента Сила свободного тела (Free body
force). Соответствующая панель вызывается из панели инструментов
Инструменты результатов в численном виде (List Result Tools) командами Сила
реакции (Reaction Force) или Сила контакта (Contact Force). После чего
переключатель Параметры следует установить в положение Сила свободного
тела. Затем нужно выбрать объект геометрической модели, для которого
рассчитывается равнодействующая сил. Далее следует нажать кнопку Обновить
(Update). Результатами являются силы и моменты, действующие на
указанных объектах.
Рис. 3.33. Модель без линий разъема.
Эквивалентные напряжения — срединная поверхность оболочки
Структурная механика —линейная задача (COSMOSWorks)
101
В примере на рис. 3.33 усилия рассчитываются для двух сварных точек
тела— расположенной на краю вблизи оболочки и в середине. Если общая
передаваемая сила равна 600 Н, то первая точка воспринимает 251 Н, а
вторая— 98 Н. Третья точка передает, соответственно, 251 Н. Как видно,
несмотря на различные способы моделирования (поверхностью и твердым
телом) одной и той же сущности — пластины, результаты для
соответствующих точек практически эквивалентны.
( Замечание ^)
Результаты для Силы свободного тела доступны, только если в настройках
статического анализа активизирована опция Вычислить силы свободных тел
(Compute free body forces). К сожалению, нелинейный анализ на данном этапе
развития программы не предоставляет такой возможности.
Отметим, что возможность вычислять интегральные усилия, действующие в
контактных парах, связанных условием совместности перемещений, является
весьма важной для оценки прочности соединения сравнением численных
величин с экспериментальными. Дело в том, что на контуре таких площадок
зачастую присутствуют сингулярности, что затрудняет как расчет
напряженного состояния по границе поверхности контакта, так и интерпретацию
результатов.
3.6. Моделирование конструкций
посредством гибридных сеток
конечных элементов
Данный раздел посвящен комплексному рассмотрению вопросов,
возникающих в ходе проектирования и расчета систем, содержащих объекты, которые
могут классифицироваться как тела и тонкостенные элементы. Также —
в первом приближении — приводится пример моделирования условных
болтовых соединений.
3.6.1. Постановка задачи1
Рассмотрим задачу расчета закрылка, геометрическая модель которого
показана на рис. 3.34. Он состоит из каркаса, выполненного как твердое тело, а
таюке обшивки. Последняя хоть и изготавливается в реальности из листового
металла, но построена как твердое тело, поскольку команды подмножества
Листовой металл не позволяют моделировать объекты с вытяжкой. В версии
SolidWorks 2007 года модифицирована команда Ребро-кромка, и теперь она
Авторы благодарят сотрудников ОАО ГосМКБ "Вымпел" им. И. И. Торопова за
сотрудничество при решении данной задачи.
102
Глава 3
позволяет обрабатывать листовые модели с отгибами, базирующимися как на
прямых, так на касательных к ним криволинейных (допускаются, в том числе,
и сплайны) кромках.
Рис. 3.34. Геометрическая модель закрылка
Обшивка прикрепляется к каркасу при помощи точечных сварных швов. Ими
же соединяются листы обшивки по кромкам.
Характеризуя данную модель, акцентируем внимание на том, что обеспечить
независимое построение моделей каркаса и обшивки как твердотельных
объектов достаточно трудно (при условии, разумеется, обеспечения качества
сборки — отсутствия в ней зазоров и интерференции). В нашем примере вся
геометрия содержится в единственной детали, а обшивка построена на базе
поверхностей, заимствованных с твердого тела каркаса. То есть, по сути,
родительской является расчетная геометрическая модель или же компоновка.
В качестве нагрузки выступает распределение давления по граням,
полученное из аэродинамического расчета. Кинематические граничные условия —
прикрепление фланца каркаса к достаточно жесткому основанию (его
геометрическая модель отсутствует) посредством винтов с конической головкой.
3.6.2. Подготовка геометрической модели
Расчетная геометрическая модель показана на рис. 3.35—3.37. Для каркаса
используется твердое тело, а для обшивки — две поверхности. Эти
поверхности получены как эквидистанты для внутренних граней обшивки. Поскольку
Структурная механика — линейная задача (COSMOSWorks) 103
те примыкали к каркасу, то полученные поверхности также будут
контактировать с гранями каркаса. На каждой поверхности линиями разъема
выделены грани, соответствующие каркасу (рис. 3.38). В принципе, это не является
обязательным и сделано для того, чтобы обеспечить совпадение кромок
конечных элементов оболочки с кромками тела. Как представляется, это
минимизирует необоснованную концентрацию напряжений в элементах, которые
частично опираются на тело и частично вне контакта с ним.
Рис. 3.35. Расчетная геометрическая модель — аксонометрия
Рис. 3.36. Расчетная модель — ортогональные проекции
104
Глава 3
Рис. 3.37. Расчетная геометрическая модель — верхняя обшивка скрыта
Рис. 3.38. Расчетная геометрическая модель — поверхности обшивки
Точечные сварные швы моделируем с помощью круговых линий разъема,
последовательно спроецированных на грани нижней и верхней обшивок и на
прилегающие к ним грани каркаса. Повторное использование одной и той же
окружности гарантирует точное ассоциативное совпадение сопрягаемых
граней.
Еще один вопрос — как воспроизвести отбортовку, проходящую по контуру
закрылка? Она связывает две обшивки. Есть два варианта: оставить ее на
обеих обшивках, а затем учесть связь через соответствующие контактные ус-
Структурная механика — линейная задача (COSMOSWorks)
105
ловия. Второй способ — убрать отбортовку с одной обшивки, компенсировав
этот факт удвоением толщины соответствующей оболочки в расчетной
модели COSMOSWorks. Этот способ несколько сокращает размерность задачи за
счет того, что исчезают узлы на удаленных гранях. Однако рассмотреть
какие-либо другие варианты соединения между гранями, кроме связанных,
невозможно.
3.6.3. Анализ
При расчете данной конструкции требуют внимания два момента. Первый —
контактное взаимодействие между обшивками и каркасом. Здесь нужно
проанализировать применимость различных типов граничных условий из группы
Нет проникновения (No penetration), а также параметров плотности сетки,
обеспечивающих приемлемое соотношение между достоверностью
результатов и требуемыми вычислительными ресурсами.
Второй вопрос— моделирование места заделки фланца. Здесь нужно
подходящим образом описать резьбовое соединение с натягом. Эти две задачи не
слишком сильно влияют друг на друга, поэтому отработка моделей может
выполняться так, чтобы один фактор воспроизводился подробно, а другой —
так, чтобы воспроизвести его влияние на первый.
Также попытаемся оценить параметры резонанса и устойчивости системы.
Принимая во внимание то, что контактные граничные условия для
соответствующих типов анализа ограничиваются условиями Свободно и Связанные,
нужно оценить погрешность, обусловленную заменой контактов Нет
проникновения на одно из этих условий.
3.6.4. Решение
Подготовка исходных данных о свойствах материалов. Материалом для
всех элементов конструкции назначаем алюминий.
Подготовка расчетной модели. Руководствуясь соображениями,
высказанными при разборе элементарного примера, выполним расчет на базе
геометрической модели с линиями разъема без использования виртуальных сварных
точек. Геометрическая модель показана на рис. 3.35. На ее базе в Менеджере
COSMOSWorks создаем две оболочки, назначая ей виртуальную толщину и
материал. В качестве контактных граничных условий по умолчанию
(глобальный контакт) назначаем Связанные. В нашем случае они подействуют
не только на связи между оболочками по периметру закрылка. Прикрепление
оболочек к телу по граням сварных точках необходимо организовать
посредством условия Определить набор соприкасания | Связанные, а условие
непроникновения обшивки в каркас — Определить набор соприкасания |
Нет проникновения | Узел к поверхности.
106
Глава 3
Решаем вопрос о реализации связи между каркасом и неким жестким
полупространством. В расчетной модели они взаимодействуют через контактное
граничное условие Виртуальная стенка (Virtual Wall). Для его назначения
нужно иметь объект Плоскость SolidWorks, который может как совпадать с
плоской гранью, состоящей с ней в виртуальном контакте, так и иметь зазор.
Он может выбираться после приложения нагрузок, а также (начиная с версии
2007 года) считаться отсутствующим. За это отвечает опция Зазор
(промежуток) (Gap (clearance)).
Виртуальное полупространство (рис. 3.39) может быть как абсолютно
жестким — переключатель Тип стенки (Wall Type) находится в положении
Жестко (Rigid) или податливым— Свободно (Flexible)— тогда нужно
назначить удельную (то есть имеющую размерность "жесткость/площадь)
жесткость. Вводится Осевая жесткость (Axial Stiffness) и Касательная
жесткость (Shear Stiffness). Взаимодействие может происходить с трением —
следует ввести коэффициент трения — и без него. Мы не будем учитывать
трение, т. к. в этом случае расчет выполняется быстрее. В реальных проектах
с условиями, похожими на присутствующие в данном проекте, влияние
трения нужно принимать во внимание.
^т
•а
.$
J Виртуальная стенка
Л Щ
3
ШШйй
ЙЦстенка
11
йя&яана*.
ч~+
*? Ж«СКЗ
С Сьобыдмо
|0
4:
£мШтШ*^Ш
& б"ОГАГ*ИЪф W'V^h
С Ti^pv^a^ \T>Ah
< h< ън«^|™
*&*%
<r,t i
3
Рис. 3.39. Создание виртуальной стенки
Замечание
3
Функциональность объекта Виртуальная стенка ограничена присоединением
плоской грани (граней) тела к полупространству, ограниченному плоскостью.
Структурная механика —линейная задача (COSMOSWorks)
107
Если бы опираемая грань была, например, цилиндрической, то корректная
модель соединения могла бы (в зависимости от степени жесткости опоры,
величины натяга, коэффициента трения) заменить ее граничным условием с
фиксацией перемещений нормальной грани, во всех направлениях или же ввода в
расчет реальной модели опоры.
В конце процедуры подготовки модели осталось выполнить, на первый
взгляд, очевидный этап — создать модель винтового соединения каркаса с
плоской гранью виртуального тела. Затруднения связаны с тем, что головки
виртуальных болтов (а именно их хочется использовать в расчете) должны
опираться исключительно на плоские грани тел. Здесь же имеем конические
грани на дне цековок. Понятно, что можно было бы использовать "реальные"
болты с обеспечением натяга посредством термоупругости или через посадку
с натягом, когда головка изначально "внедряется" в присоединяемую
пластину. Отрицательной стороной этих вариантов является необходимость подбора
параметров, обеспечивающих назначенный натяг и, соответственно,
избыточная трудоемкость. Она, однако, компенсируется высокой степенью
достоверности модели, позволяющей, во-первых, вполне реалистически
воспроизвести деформации соединительных элементов (особенно если в модель
включена втулка со специальными свойствами, имитирующая резьбу)1, а также
получить распределение напряжений и деформаций.
Рассмотрим компромиссный вариант: виртуальный болт опирается на
"материальную" головку (рис. 3.40). Верхняя грань головки позволяет опереть на
нее условный болт. Между цилиндрическими гранями головки и пластины,
как и в реальных объектах, оставляем зазор. Коническая же грань головки
контактирует с соответствующей гранью цековки. Стержень болта будем
закреплять к участку цилиндрической грани отверстия в нижней детали.
Контактные условия для всех элементов узла — условие непроникновения Узел
к поверхности.
Рис. 3.40. Модель узла с конической цековкой
1 Эта процедура подробна описана в предыдущем издании книги.
108
Глава 3
Сетка конечных элементов с граничными условиями показана на рис. 3.41.
Как видно, на нижней грани поставлено условие свободного скольжения. На
две боковые грани нанесены линии разъема. На вершинах этих линий
поставлены закрепления, ликвидирующие движение сборки как жесткого целого.
Рис. 3.41. Сетка на узле с конической цековкой и граничные условия
Распределение эквивалентных напряжений на фоне деформированного вида
показано на рис. 3.42. Как видно, результат выглядит вполне правдоподобно,
хотя это заключение следовало бы обосновать.
Рис. 3.42. Эквивалентные напряжения на фоне деформированного вида сечения
Структурная механика —линейная задача (COSMOSWorks)
109
Договорившись о пригодности предложенной аппроксимации,
модифицируем геометрическую, а затем и расчетную модель закрылка. В углубления с
цековкой помещаем имитаторы головок, обеспечивая геометрический
контакт на конических гранях (рис. 3.43). В расчетной модели для этих пар
граней нужно поставить условие из группы Нет проникновения.
Рис. 3.43. Исходная и модифицированная модель каркаса
В завершение размещаем виртуальные винты, соединяющие плоские грани
головок с созданной ранее стенкой. Для этого в качестве типа болта
выбираем Заземляющий (Grounded)1 (рис. 3.44). В панели Соединители21 Болт
(Connectors | Bolt) назначаем диаметр винта, выбираем материал (или
назначаем его характеристики), усилие натяга или момент затяжки (в этом случае
нужно определить коэффициент преобразования крутящего момента в
осевую силу). Если болт ввинчен в виртуальное полупространство, то нужно
назначить объект Целевая плоскость (Target plane), ограничивающий это по-
1 Для термина Grounded применительно к рассматриваемому объекту программы трудно
подобрать адекватный краткий перевод, поскольку в реальности подобные сущности
отсутствуют.
2 Напоминаем о некорректном переводе термина Connectors.
110
Глава 3
лупространство. В дальнейшем программа проконтролирует наличие условия
контакта какой-либо грани тела, к которому прикреплен болт, с неким
полупространством, т. е. условия Набор контактов | Виртуальная стенка. В
нашей модели оно назначалось на рис. 3.39.
Для заземляющего болта требуется
определить контакт твердой
виртуальной стенки
Рис. 3.44. Создание виртуального болта
Как упоминалось, нагрузки, действующие на закрылок, имеют
аэродинамическое происхождение и получены в результате расчета в COSMOSFloWorks.
Этот модуль и процедура прочностного анализа обладают интерфейсом для
передачи избыточного давления. Однако эта функциональность
работоспособна только для геометрии, представленной телами. В нашем случае
обшивка аппроксимируется оболочками на базе поверхностей. Поэтому нужно в
Структурная механика —линейная задача (COSMOSWorks) 111
COSMOSFloWorks получить некие результаты, а затем приложить их к
объектам COSMOSWorks. Понятно, что смоделировать неравность избыточного
давления в пределах каждой грани крайне затруднительно, да, в общем, и не
нужно. Поэтому предполагаем, что избыточное давление в пределах грани
одинаково. COSMOSFloWorks не позволяет автоматически установить
среднюю по грани величину, однако дает возможность получить необходимые
для этого данные. Для этого используется функция Surface Parameters
(Параметры на поверхности). Назначение объектов исследования производится в
одноименном окне на вкладке Definition (Определение) (рис. 3.45), после
чего нужно нажать кнопку Evaluate (Вычислить) и перейти на вкладку Integral
(Интегральные) (рис. 3.46). В появившемся окне выводятся, в частности,
величины силы, нормальной силы, сдвиговой силы, а также их компонентов
относительно некоторой системы координат (в данном случае—
глобальной). В силу относительной незначительности (а также, кстати говоря, и
относительной трудоемкости ее назначения в COSMOSWorks) пренебрежем
сдвиговой силой на поверхности. Нормальные силы, действующие на гранях,
представляют самостоятельный интерес. Но получались они на
твердотельной геометрической модели без линий разъема и соответственно граней,
имитирующих сварные точки. Поэтому прикладывать их к граням оболочек,
подвергнутых членению, неправильно. Ввиду этого рассчитываем среднее
избыточное давление делением нормальной силы на площадь грани (она тоже
отображается в окне) и прикладываем его к соответствующим граням
оболочки COSMOSWorks, включая и грани сварных точек. Вносимая этим
алгоритмом погрешность определяется степенью неравномерности распределения
давления в пределах каждой грани. Поскольку каждая обшивка содержит
семь граней (не учитывая дополнительные круги для сварных точек), то в
целом неравномерность давления воспроизводится вполне удовлетворительно.
Понятно, что при назначении давления следует его прикладывать и к
дополнительным граням.
Рис. 3.45. Назначение объекта для определения численных значений параметров
на поверхности
112
Глава 3
Surface Parameters
i-
*
i
\J.
v0
' ■;
I*
A4SV4™^«^??Sw^V.rtVAV'AV*V.W. & V.
Force [N]
Shear Force (N]
Torque (N"mJ
Torque of Shear Fore.
Heat Transfer Rate [W]
Normal Force (N]
Torque of Normal For
Surface Area {mA2]
Uniformity Index [ 1
CAD Fluid Area [rrT2J
nuiirtiirtUiirtftiii^^ifrtii^torfnKw
0 956534
0 00502908
0131335
0 000173482
0
0 952489
0131187
0 000414411
1
0 000420068
1: ^1&£l i* л iL
•0 00342
0 002967.
0 0133869
613994e..
0
-0 0063886
0 0133255
•4 78598..
■■■■■■■«mJtom.jfa
■0913445
■000386
0 0324433
0 00010..
0
•0909585
0 0323339
•0 00033
iU>:
ЯЯ*»Й*ч
•0 283837 Л
-0 001258Я»
-0126559 *
-0 000119K'*
о h
•0 282578 "
-0126439 .
-8.90527e-0,
^
f
f': ,у^#^У: 1ШШ&&Я£&&&
Рис. 3.46. Интегральные значения параметров на поверхности
Еще один вопрос, как назначать давление к полосам по периметру закрылка.
В аэродинамической модели это были две несовпадающих грани, одна
принадлежала верхней обшивке, вторая — нижней. В модели COSMOSWorks их
воспроизводят две оболочки, находящиеся в одной плоскости. В принципе,
можно было бы сложить два давления с учетом направления (они
противоположны) и назначить результирующее. Можно приложить и два давления. При
этом, учитывая совместное деформирование оболочек, прикладывать его
можно к любой из двух полос (по той же причине, как упоминалось, можно
было в расчетную модель включить единственную оболочку суммарной
толщины).
Отдельный вопрос — учет давления (разрежения), распределенного по узким
граням обшивки на периметре. После замены тел обшивок поверхностями
эти грани исчезли. Поэтому, учитывая их непрерывность, можно к ним
приложить силы, взятые из результатов COSMOSFloWorks, не преобразуя их в
давления. Поскольку силы действуют перпендикулярно плоскостям граней
(сдвиговую компоненту, по упомянутым причинам, транслировать не будем),
то для идентификации направления создаем объект Ось SolidWorks.
Результат назначения граничных условий показан на рис. 3.47.
С
Замечание
:>
При назначении аэродинамического давления на обшивках предполагалось,
что, несмотря на имеющиеся в закрылке отверстия, через которые может
происходить воздухообмен между внешней средой и внутренним объемом,
давление в последнем предполагается неизменным.
Статический анализ и интерпретация результатов. Отработку конечно-
элементной модели: проверку контактных и граничных условий, подбор
плотности сетки и т. д. выполняем на редкой сетке линейных конечных эле-
Структурная механика —линейная задача (COSMOSWorks)
113
ментов. Окончательное решение получаем на более плотной сетке с
элементами второго порядка. Использованная сетка показана на иллюстрациях: на
рис. 3.48 и 3.49 — со скрытой верхней обшивкой, вся модель и фрагмент; на
рис. 3.50 и 3.51 —с обшивкой и ее фрагмент.
Рис. 3.47. Граничные условия
Общие характеристики сетки можно получить в окне Детализация (Mesh
Details), показанном на рис. 3.52. Оно вызывается одноименной командой из
контекстного меню пиктограммы сетки в Менеджере. Как видно, сказать, что
задача имеет "чересчур" большую размерность, нельзя. При числе узлов
56 703 число неизвестных соответственно равно 170 109. Однако с учетом
большого разнообразия контактов и наличия виртуальных болтов, а также
того, что для моделей с гибридными сетками применим только прямой
решатель, для решения задачи требуется оперативная память более чем 2 Гбайт.
Время решения на компьютерах с процессором порядка 3 ГГц составляет
несколько часов. Как мы убедимся прямо сейчас, сетка могла бы быть и более
плотной. Эти факты, прямо скажем, не внушают оптимизма. При наличии
114
Глава 3
Рис. 3.48. Сетка на модели без верхней обшивки
Рис. 3.49. Фрагмент сетки на модели без верхней обшивки
Рис. 3.50. Сетка на модели
Структурная механика — линейная задача (COSMOSWorks) 115
Рис. 3.51. Фрагмент сетки на модели
материальных ресурсов выход— использование двухпроцессорной/двухъ-
ядерной системы с 64-разрядной операционной системой в сочетании с
64-разрядной САПР. Это позволяет наращивать оперативную память до
размера, ограниченного только возможностью аппаратного обеспечения.
Паллиативный вариант— попытаться рассмотреть факторы, влияющие на
размерность, по отдельности, например, разделив болтовое соединение и
контакт оболочки с телом.
I Проема Яко(^ |
УПРЛЛ$^С«%0Й ч vX„ _- Определенные I
К*чв<ГГ0&<^« _^; , Л Высокая 1 I
8«r0jJWpe_^ ,_ ;; J 56703 I I
ШсеГ<>4^енК>»^ * ' ^ ч [42444 -J I
Ht \ , ;l " * jtT \
ч /
Рис. 3.52. Характеристики сетки
Воспользуемся функциональностью версии COSMOSWorks 2007 года по
визуализации качества сетки. Ранее параметры, ее характеризующие, — это
Пропорции (Aspect Ratio) и Якобиан (Jacobian), которые выводились только
в численном виде. Сейчас же посредством команды Создать эпюру сетки
(Create Mesh Plot) можно в панели Качество сетки (Mesh Quality) (рис. 3.53)
установить переключатель Отображение (Display) в желаемое положение.
116
Глава 3
ШШтШШШШ.
F Сежа
С Пропорции
С Якобиан
Г" ориентацией
г именованного wда
pS
&р*ди
"2
Рис. 3.53. Назначение отображаемой характеристики качества сетки
Распределение параметра Пропорции на сетке каркаса при скрытых
поверхностях обшивки показано на рис. 3.54. Как видно, максимальное отношение
между максимальным ребром и самой короткой нормалью, опущенной из
вершины на противолежащую грань, составляет 15,6. Фрагмент сетки,
содержащий один из таких элементов, показан на рис. 3.55.
3:Э?4*СЮ0
:: si в*ооо
I HSe*-000
Рис. 3.54. Пропорции конечных элементов, отображенные на поверхности тела
Распределение параметра Якобиан на фоне сетки показано на рис. 3.56.
В документации программы не упоминается о том, что конкретно понимается
под этим параметром. Судя по всему, это величина обратная
математическому якобиану, вычисляемому в назначенных точках (это, скорее всего, точки
интегрирования) внутри конечного элемента, после чего из всех величин
выбирается максимальная, которая и характеризует конечный элемент. Поэтому
Структурная механика —линейная задача (COSMOSWorks) 117
большая величина параметра соответствует худшему качеству элемента. Под
"худшим" качеством понимается значительная искривленность и отклонение
узлов, лежащих на ребрах от середин этих ребер. Параметр Якобиан
вычисляется только для сеток с параболическими конечными элементами.
Рис. 3.55. Фрагмент сетки, содержащий элемент с большим соотношением длин сторон
Яио5и?;н нм- | 04еИ301
Н- 9.44е+000
Н- 8.51**000
В 7S7e+000
HR- ббЗеКЮО
mm 4 75«*000
ffjj 3 81е*000
||| 2 88с*000
:';;::- 1.94*+000
1.00**000
Рис. 3.56. Величина якобиана, отображенная на поверхности тела совместно с сеткой
Эти сведения приводят к мысли о том, что сетка нуждается в улучшении. Что
касается несколько неудачных пропорций в отдельных областях, то в данном
случае они "лечатся" или глобальным уплотнением сетки на теле, что не
слишком приемлемо с точки зрения размерности (можно, однако, попытаться
изменить глобальный размер элемента только незначительно, и надеяться на
то, что малые возмущения приведут к серьезным изменениям), или же
созданием дополнительных линий разъема в тех местах, где присутствуют
"неудачные" элементы. Эти объекты могут улучшить ситуацию сами по себе, но
118
Глава 3
могут стать и опорными объектами для применения элементов управления
сеткой. В качестве первого приближения, эти линии разъема желательно
размещать так, чтобы они не нарушили структуру контактных граничных
условий, да и просто граничных условий, если таковые уже присутствуют (в этой
связи первичным при создании расчетной модели является отнюдь не
назначение граничных условий и, тем более, материалов, но прежде всего
определение контактных условий и создание сколь-нибудь адекватной сетки).
Попросту говоря, вспомогательные грани нужно пытаться создать там, где нет
контактных условий.
Что касается "плохого" якобиана, то, действительно, на скруглении между
гранями с углом 90° по дуге рекомендуется иметь не менее двух элементов.
Здесь же для острого угла мы имеем единственный элемент. Решение
банально — локально уплотнить сетку.
Распределение перемещений на фоне деформированного вида показано на
рис. 3.57. Как видно, из-за того, что закрылок в аэродинамической модели
имеет положительный угол атаки, то избыточное давление заставляет его
изогнуться вверх. В принципе, абсолютные величины перемещений
достаточно велики, и не лишним было бы повторить расчет, но с активизацией
опции Большие перемещения.
Х_/ 5.46е-005
Рис. 3.57. Распределение перемещений на фоне деформированного вида
Распределение эквивалентных напряжений на фоне деформированного вида
для каркаса показано на рис. 3.58. Верхняя граница отображаемой
характеристики снижена для повышения контрастности изображения. Как видно,
максимальные напряжения действуют в зоне контакта головок винтов, а также в
скруглении.
Весь диапазон напряжений в каркасе показан на рис. 3.59, где увеличена зона
с максимальными эквивалентными напряжениями. Они достигают критиче-
Структурная механика — линейная задача (COSMOSWorks)
119
ской величины на гранях отверстий с цековкой. Эти отверстия расположены
внизу фланца, т. е. на наиболее нагруженных винтах. Однако, ввиду
недостаточной плотности сетки, результат для напряжений в зоне болтов может
оцениваться только как приблизительный.
■^« л101е+007
LM2 js*>72e+006
Шкала деформации 30
3 40е+006
6.81е+004
Рис. 3.58. Распределение напряжений в каркасе
von Mises (ЫЛпЛ2)
7.37е+007
Рис. 3.59. Распределение напряжений в каркасе — весь диапазон напряжений
120
Глава 3
Более информативной является картина контактных напряжений на
конических поверхностях контакта между винтами и фланцем (рис. 3.60). На ней без
проблем можно различить наиболее нагруженный винт, причем локализация
максимальных контактных напряжений совпадает с местом действия
критических эквивалентных. Интересно, что из трех нижних винтов наиболее
нагружены два ближайших к срединной плоскости каркаса— податливость
фланца снижает нагрузку на самый нижний винт, несмотря на то, что плечо
действия силы у него самое большое.
Рис. 3.60. Контактные напряжения на головках винтов
Для оценки нагрузок, действующих в соединительных элементах, программа
предоставляет несколько инструментов. Первый из них— команда Сила
контакта/трения (Contact/Friction Force). Соответствующая панель показана
на рис. 3.61. В поля этой панели нужно поместить грань, для которой нужно
рассчитать силу контакта — здесь это коническая грань цековки. Такая же
сила должна восприниматься винтом. Информацию о ней, а также о других
силовых факторах можно получить по команде Сила шпильки/болта (List
Pin/Bolt Forces). Результат ее выполнения для наиболее нагруженного болта
показан на рис. 3.62. Как видно, осевая сила в болте практически идентична
контактной силе в направлении X. В панели Сила шпильки/болта также
присутствует информация о поперечных силах и изгибающих моментах. Как
видно, болт, помимо силы затяжки 1000 Н, воспринимает усилие 590 Н.
Интересно узнать величину силы, действующей на площадке контакта
между фланцем и вертикальной плоскостью. Она также узнается посредством
Структурная механика — линейная задача (COSMOSWorks)
121
Г Сила реакции
Г Сила интерфейса удаленной нагрузки
^ 1ч & :**<*«: «.*"» у «'J
?• Сила контакта/трения
Обновить
i&»SJ£!8£E£^ (ML
Тип силы? (нормальная
| Компонент I Выбор
|СукХ; | -1590.5
!Cy»Yj J 26.2
[СунгГ *' * ~! 50.647
d
всей модели Щ
5.8703Е-015Щ
-2.7756E-017JJ
-9.4369Е-016Щ
5.9457Е-015Д
Рис. 3.61. Сила контакта на головке винта
Сияв шлильки/болта
Название исследования: Статический
Соединитепь:
Тип Болт
UmmJ
Единицы: [си~
Временной
соединителя:
|Тип _ _ __
[Поперечной сила [Щ
I Изгибающийi момент (N-m)
• Х-составляющая ^-составляющая !2-составляющая j Результирующая |
' Т" ~~ О*"-26 2 :50 647 ~ 57.022 ' ' 1
j 1590.5 0 0 1590 5 I
Рис. 3.62. Усилия в наиболее нагруженном винте
122
Глава 3
команды Сила контакта/трения. В панели Результирующая сила
(Contact/Friction Force) (рис. 3.63) видно, что при сумме усилий затяжки
6000 Н полная сила контакта — 7068 Н, т. е. вклад внешних сил — 1068 Н.
Рис. 3.63. Сила контакта между фланцем и вертикальной плоскостью
Распределение напряжений в верхней обшивке (напомним, что она
моделировалась оболочкой) на ее условной наружной поверхности показано на
рис. 3.64. При построении диаграммы осреднение производилось по узлам.
Видно, что максимальные напряжения сосредоточены в очень малых зонах на
краю площадки контакта с каркасом. Возникает подозрение, что здесь имеет
место некорректное отображение результата вблизи края площадки контакта.
В самом деле, если те же напряжения показать с осреднением по элементам,
то картина становится более адекватной (рис. 3.65). Здесь максимумы
локализуются возле краев сварных точек ближайших к фланцу (фрагмент
диаграммы показан на рис. 3.66). Именно их, следуя заключениям, сделанным на
базе расчета элементарной модели, нужно использовать для оценки
прочности сварного соединения.
Распределение эквивалентных напряжений на внешней поверхности нижней
обшивки показано на рис. 3.67. Картина в принципе такая же, как и на
верхней обшивке — наиболее нагруженными являются две сварных точки возле
фланца, однако средний уровень напряжений несколько меньше. Источником
Структурная механика — линейная задача (COSMOSWorks)
123
концентрации напряжений является то, что здесь каркас обладает
наибольшей жесткостью при максимальной толщине. Последнее приводит к
увеличению деформаций, порождаемых изгибом, а жесткость препятствует
деформированию каркаса совместно с обшивкой. Надо сказать, чго, несмотря на
Рис. 3.64. Эквивалентные напряжения в верхней обшивке на внешней поверхности
с осреднением по узлам
У\ЛЛЛЛЛ,
(1МЛпл2) -
Рис. 3.65. Эквивалентные напряжения в верхней обшивке на внешней поверхности
с осреднением по элементам
124
Глава 3
Рис. 3.66. Эквивалентные напряжения в верхней обшивке на внешней поверхности
с осреднением по элементам — фрагмент
von Mises (NAn*2)
3.70е+007
Рис. 3.67. Эквивалентные напряжения в нижней обшивке на внешней поверхности
с осреднением по элементам
достаточно приблизительную оценку прочности, эти результаты имеют
высокую ценность при оценке путей улучшения конструкции.
Анализируя использованную расчетную модель и результаты, полученные на
ее базе, можно сделать вывод, что их качества достаточно для оценки
поведения конструкции "в целом". Однако качество сетки не гарнирует точности
Структурная механика — линейная задача (COSMOSWorks) 125
в деталях. Как упоминалось, для расчета потребовалась оперативная память
компьютера более 2 Гбайт. Причиной является то, что для комбинированной
сетки твердых тел и оболочек применим исключительно прямой решатель,
являющийся наиболее ресурсоемким. Определенные сложности внесли
контактные условия между оболочками и каркасом, между головками винтов
и рамой, а также виртуальные болты. Поэтому более скрупулезные
исследования следует выполнять на совокупности моделей, в которых, по
возможности, не сочетаются "проблемные" сущности. Чтобы оценить влияние
всевозможных нелинейностей на результат, продемонстрируем результаты расчета
еще двух моделей: в первой соединим все контактирующие грани всех
объектов — тел и оболочек — условием Связанные, а во второй — каркас и тела
головок— условием Связанные, а оболочки с каркасом (вне сварных
точек) — условием Свободно. Последнее допускает, в том числе, и свободное
проникновение их друг в друга. Картина перемещений для первой
аппроксимации показана на рис. 3.68, а для второй — на рис. 3.69.
Сравнивая эти диаграммы с картиной, полученной для наиболее
реалистичной модели (диаграмма перемещений показана на рис. 3.57), можно заметить,
что она ближе всего к модели с независимыми оболочками. Наличие же связи
там, где возможно проскальзывание и выход из контакта, увеличивает
жесткость на величину около 10 процентов. Это говорит о том, что глобальные
свойства данной конструкции не слишком чувствительны к частностям. При
должном внимании это позволяет моделировать различные факторы по
отдельности.
1.000е-030
Рис. 3.68. Распределение перемещений при связанных объектах
126
Глава 3
Расчет на собственные частоты. Замена контактных условий со
скольжением и выходом из соприкосновения на постоянно связанные или постоянно
же независимые объективно необходима при анализе резонанса. В COSMOS-
Works учесть скольжение можно только через ввод тонкого анизотропного
слоя с малой сдвиговой жесткостью. Смоделировать же выход из контакта в
процессе колебаний невозможно.
Первые две собственных формы, полученные посредством модели с
условием Связанные на всех изначально контактирующих гранях как тел с телами,
так и тел с оболочками, а затем с условием Свободно для тел с оболочками
при наличии контакта головок винтов с фланцем, показаны на рис. 3.70. Как
видно, в первом варианте первая собственная частота, как и следовало
ожидать для более жесткой системы, выше, чем во втором. Картины собственных
форм (с учетом поправки на различный масштаб деформированного вида)
очень похожи. Таким образом, по крайней мере, для подобного класса
конструкций в расчете на резонанс можно с успехом применять упрощенные
модели контакта.
Расчет на устойчивость. Как и в предыдущем типе анализа, модель расчета
устойчивости не допускает контактных условий в виде скольжения, входа в
контакт и отрыва. Результат расчета минимальной критической силы по двум
"крайним" вариантам контактных условий показан на рис. 3.71. Здесь, в
отличие от модели резонанса, радикально отличаются как критические силы,
так и, что еще менее приемлемо, вид формы потери устойчивости. Выводом
из этого расчета может быть то, что, используя модель взаимодействия Сво-
Структурная механика — линейная задача (COSMOSWorks)
127
бодно (без взаимосвязи), можно в первом приближении оценить нижнюю
границу критической силы потери устойчивости.
Форма колебаний 1 Значение = 328 08 Гц
Рис. 3.70. Первая собственная форма и резонансная частота для модели
со связанными и свободными контактными условиями
Коэффициент нагрузки = 7 9162
Коэффициент нагрузки = 4.9745
Рис. 3.71. Первая форма потери устойчивости для модели
со связанными и свободными контактными условиями
128
Глава 3
3.7. Расчет рам посредством гибридных,
поверхностных и балочных моделей
В версии COSMOSWorks 2007 года появились конечные элементы балок/
стержней. Они строятся исключительно на базе объектов геометрии,
полученных посредством подмножества команд SolidWorks Сварные детали.
С другими типами конечных элементов— на данном этапе развития
программы — балки/оболочки не сочетаются, поэтому, принимая решение об
использовании этой аппроксимации, следует предусмотреть все
потенциальные затруднения. Ситуация во многом напоминает ту, которая была в версиях
до 2006 года, когда в одной расчетной модели не сочетались конечные
элементы тел и оболочек, а номенклатура контактных условий для оболочек
была весьма скудной. Поэтому решение об идеологии подготовки модели
геометрической было, в каком то смысле, судьбоносным.
Алгоритм создания сетки элементов балок/стержней в COSMOSWorks
реализован весьма своеобразно— разработчики попытались совместить
возможность рассчитывать реальные "конструкторские" модели со всеми ее
незначимыми для расчета подробностями, а с другой стороны, сделать программу
удобной для тех, кто разрабатывает концепцию проекта. Как представляется,
и конструкторы, и расчетчики должны понимать особенности расчетного
модуля. Это поможет без лишних затрат времени и эмоций (когда готовый
проект нужно дорабатывать до состояния пригодного для расчета), в то время
как соблюдение простых правил позволяет в значительной степени
обеспечить идентичность (или большую степень близости) расчетной и
конструкторской конфигураций.
3.7.1. Постановка задачи
На рис. 3.72 приведена геометрическая модель мачты освещения,
адаптированная для расчета. Нужно определить напряженно-деформированное
состояние при действии статической силы и силы тяжести. Также хочется
определить собственные частоты и оценить возможность потери устойчивости.
Здесь мы не будем стремиться к законченности как конструкторской, так и
расчетной модели, ограничившись рассмотрением основных этапов
проектирования и анализа. Для расширения базы принятия решения сравним
результаты, полученные с использованием различных типов сеток.
3.7.2. Расчет опоры по гибридной модели
с поверхностями и телами
На первом этапе выполним расчет опоры. Она состоит из ствола, сваренного
из двух одинаковых половин. Эти детали получены гибкой листового метал-
Структурная механика —линейная задача (COSMOSWorks)
129
Рис. 3.72. Модель мачты освещения, адаптированная для расчета
ла. Поэтому желательно иметь геометрическую модель, которая была
пригодна как для расчета, так и для подготовки конструкторской документации.
Вариант геометрической модели опоры, пригодный для "традиционного"
расчета и показан на рис. 3.73, 3.74. Ствол в ней представлен поверхностью, а
фланец и косынки — телами.
Для экономии времени не будем организовывать на поверхностях
дополнительные грани, соответствующие граням косынок. А косынки, примыкающие
к меридиональным кромкам, в свою очередь, не вводим в контакт с
поверхностью—' их грани соприкасаются с кромками граней поверхности. На
поверхности ствола командой Линия разъема выделяем полосу по высоте
равную косынкам. Это поможет пользователю управлять сеткой, а системе —
идентифицировать контакты.
В расчетной модели для того, чтобы связать косынки с оболочкой ствола, а
сам ствол с поверхностью фланца, используем условие Связанные для
кромок ствола и грани фланца (рис. 3.75), граней косынок с гранями ствола и
кромок косынок с гранями ствола. Обращаем внимание, что в последнем
случае аппроксимацию можно считать корректной, поскольку по толщине
косынки будет располагаться единственный элемент, и перемещения и поворо-
130
Глава 3
ты кромки будут, по сути, связаны со всей толщиной грани косынки.
Потенциальным источником неоднозначности, в принципе, может стать и связь,
показанная на рис. 3.75. Контакт между кромкой объекта нулевой толщины и
телом порождает сингулярность, которой не было в предыдущей модели, где
грань оболочки связана с гранью же тела.
Рис. 3.73. Геометрическая модель опоры Рис. 3.74. Фрагмент геометрической модели
в зоне соединения с фланцем
Рис. 3.75. Назначение контакта между кромками
Структурная механика — линейная задача (COSMOSWorks)
131
В принципе, вполне адекватной была бы модель, полностью состоящая из
поверхностей/оболочек. Однако здесь встает вопрос описания поведения
опоры с болтами. Оболочечная модель может быть более-менее приемлемой,
если учитывается поведение объекта, к которому прикреплен фланец, а мы не
хотим иметь его в упрощенном представлении. Таким образом, схема
присоединения фланца к фундаменту во многом напоминает ту, которая
использовалась для закрылка. Использованы виртуальные болты, вставленные в
условную среду (их параметры показаны на рис. 3.76). Среда определяется
плоскостью Sol id Works и считается абсолютно жесткой (рис. 3.77). Однако
коэффициент трения между фланцем и виртуальным основанием в данном
примере учитывается — мы принимаем его равным 0,4.
V ^ "у хУЛ* V, Чу- I | Матерая
л ' С* Н* тр «и"*
Для заземляющего болта
требуется определить контакт
твердой виртуальной стенки
t
j 6» п
С 1е.«ай» и
Выбрать
материал
кЬтер**-п У)2j v.afi)ori 'Jgc\
<* 3
jcizmrwM^w
I!
<$^ SjПлоскость - фундамент
^ Tteocv»
С Вржйющ ий момент
3
Г* Туг*я посадка '.;,
$? Предв. лросмо
оскость
фундамент
Рис. 3.76. Создание виртуального болта
132
Глава 3
Рис. 3.77. Создание виртуального основания
В качестве нагрузки принимаем дистанционную силу, действующую на
верхнюю грань верхнего фланца (рис. 3.78). Для силы, приложенной на удалении,
используется вариант Прямой перенос (Direct Transfer), предусматривающий
сохранение гранью возможности деформироваться. Такой выбор
оправдывается тем, что жесткий фланец включен в расчетную модель.
Сам же способ приложения силы как дистанционной (несмотря на то, что в
примере нагрузка приложена в начале локальной системы координат,
которая, в свою очередь, располагается в центре грани фланца) придает модели
большую универсальность. Можно естественным образом включать в расчет
массы с заданными координатами центра тяжести и моментами инерции,
аэродинамические силы с назначенными центрами давления и т. д.
Гибридная сетка конечных элементов и ее фрагмент в зоне фланца показана
на рис. 3.79 и 3.80. Налицо результат предварительного назначения
элементов управления сеткой, предназначенных для уплотнения сетки в окрестности
вершин, кромок, граней и тел. Обратим внимание на структуру сетки возле
отверстий, для которых были созданы виртуальные болтовые соединения.
Кромки конечных элементов автоматически образовали окружности, диаметр
которых равен величине, назначенной в поле Диаметр головки (Head
diameter) в процессе создания условного болта. Это нововведение версии
2007 года. Ранее (сейчас эта возможность тоже сохранена) требовалось
выделять опорную грань самостоятельно, после чего нужно было ее указать,
создавая болт.
Структурная механика — линейная задача (COSMOSWorks)
133
Рис. 3.78. Назначение дистанционной силы
Результат расчета перемещений показан на рис. 3.81. Он пригодится для
сопоставления различных моделей ферменных конструкций. Эквивалентные
напряжения на фоне масштабированного деформированного вида показаны
на рис. 3.82. Для оболочек показаны напряжения на "нижней" грани. В
данном случае "нижняя" грань— это наружная грань ствола, где напряжения
максимальны. Слева на иллюстрации — вид с осреднением по узлам,
справа — по элементам. Обращает внимание значительная разница в
максимальных значениях. Как правило, это есть симптом наличия областей с сингуляр-
ностями, когда из-за теоретически бесконечных деформаций/напряжений
результат вблизи них критически зависит от плотности сетки и режима
осреднения.
Глава 3
Рис. 3.79. Сетка конечных элементов Рис. 3.80. Фрагмент сетки
в зоне фланца
мент конструкции в зоне максимальных напряжений показан на
— с осреднением по узлам и на рис. 3.84 — по элементам. Из перво-
сунка видно, что сингулярность возникла в точке касания верхней кром-
сынки с кромкой ствола. При определении контактных условий грань
яки связывалась с кромкой ствола. Отсюда следует, что "ускоренное"
-чение контакта без точного выделения поверхностей контакта (в реаль-
j — граней сварных швов) вносит определенные возмущения на косын-
л на стволе. Поэтому в данной ситуации осреднение по элементам, как
ставляется, приближает (на феноменологическом уровне) картину на-
_:ений к фактическому состоянию. Впрочем, это утверждение касается
эко зоны контакта косынки и ствола.
лределение контактного давления на площадке контакта между фланцем и
даментом показано на рис. 3.85. Картина не вполне тривиальная. Как
но, в зоне, где действие силы приводит к отрыву (они расположены на
хней части рисунка), напряжения на некоторых участках отсутствуют, но
л минимальной координате X они существенно увеличиваются, превышая
. которые действуют в зоне, где действие силы приводит к сжатию. Это вы-
Структурная механика —линейная задача (COSMOSWorks)
135
зывает подозрения о том, что распределение деформаций достаточно сложно,
чтобы предсказать его без результатов численного анализа.
Шкала деформации: 50
Шкала
деформации. 50
Рис. 3.81. Распределение
перемещений на фоне
деформированного вида
Макс: 6.95e+0Q7l
Рис. 3.82. Эквивалентные напряжения с осреднением
по узлам и по элементам
на фоне деформированного вида
На рис. 3.86 показан утрированный деформированный вид фланца с
распределением вертикальных перемещений. Как видно, его форма после
приложения нагрузки такова, что внешняя кромка в зоне отрыва опирается на
основание, а внутренняя вышла из контакта. Надо сказать, что при плотности
сетки — один элемент по толщине к этим результатам следует относиться с
достаточной осторожностью. В такой ситуации наиболее достоверной могла
бы стать полностью твердотельная модель, включающая отрезок ствола, к
концу которого приложены дистанционные нагрузки, имитирующие
действие оставшейся части конструкции.
136
Глава 3
;von Mises (1ЧЛпА2)
9.82e+007
Рис. 3.83. Эквивалентные напряжения с осреднением по узлам -
фрагмент в зоне фланца
Рис. 3.84. Эквивалентные напряжения с осреднением по элементам -
фрагмент в зоне фланца
Структурная механика — линейная задача (COSMOSWorks)
137
Усилия в виртуальных болтах получаем посредством команды Сила
шпильки/болта. Результаты для наиболее "разгруженного" (он имеет
максимальную координату X) и наиболее нагруженного (минимальная X) болта
показаны на рис. 3.87. Как видно, максимальная осевая сила после приложения
нагрузки к мачте выросла более чем двукратно, а минимальная стала только
незначительно меньше исходной.
СР (1ЧЛпА2)
1.52е+007
1111
fill 2.53е+006
; - 1.26е+Э06
0.00е+000
Рис. 3.85. Распределение контактного давления на опоре
Шкала деформации: 3000
UY (mm)
Рис. 3.86. Распределение вертикальных перемещений на фланце
138
Глава 3
С точки зрения функциональности конструкции данный результат выглядит
не слишком привлекательно. Может быть, это потому, что в модели не
учитывается действие силы тяжести. Вводя в действие этот фактор и повторяя
расчет, получаем, что распределение контактного давления (см. рис. 3.88) не
слишком изменилось. Таюке только незначительно уменьшилась сила на
наиболее растянутом болте. Выводом, следующим из данного расчета, может
быть попытка увеличить жесткость фланца за счет его толщины или
уменьшения внутреннего отверстия. Можно попробовать повысить усилие затяжки
болтов. Однако следует вспомнить и то, что в модели не учитывалась
податливость основания. Ввод этого фактора мог бы значительно изменить
результат.
Сипа шпильки;болта
Название исследования; Гибр *ф&ба#А,
Соединителе:
содимигеда
Ыт
^ 4 ||Э»НИЩэ£ |СИ
ЙШФ^^ 1366 Б
Осевое асилиаЙУ *.. * J
Йаги&иощйй момент ЩЫ - "* -3.1439
^'~~"ч"~ ~Л 0*263 88 w~"~w* 1391 9 " "
0 9832.7 0 9832.7
0 17.104 1739
Сила шпильки/болта
0 *' *\1, ^ <v':\* ^\*V;г*;*;^s^S>-^°> * ,• -v>:'^т^^^^^^^фундамент
- ^ •■ ■• Х^^Л.^-^.у'л.^у *^=^^ ^ !^....ь •■ \ч \. ч. " >* v
, ^ единицы |СИ
Врек^&нной -
1089 ~~ 0 33&394 ' 11405*"
0 21268 0 212681
0 32 457 3515
т№тжттжж#жштшёттттттштт.
%шШщ&\Ш^$Щ - \ -13.433
шшшшшшшшшштштшшттж
■Ллл Г..ЛД?; .^^жт^^.Ад
Рис. 3.87. Нагрузки, воспринимаемые наименее и наиболее нагруженным болтом
Структурная механика — линейная задача (COSMOSWorks)
139
Рис. 3.88. Распределение контактного давления на опоре с учетом силы тяжести
Сила шпильки/болта
-^^ sv- ,^, , - ^ '.^....^^.....^.<^..\у Д:Д Д..Д' "•>-Гч>-*Д '"-<.-JV Д ЧЧУ1Дл Д.;:::^" -У4...I. 1
fe?i^:'V-^>^^^^;sf;i^^;V\^ * * 0< у{^;УвшкШ:^Л*дьддч<< Д * /Г * -
Тип,
>&^^в*ш*а. .1 V'&^*M^*a, j Я^шщмк * Pmrnwimm щ
-31989
1400
0 9829 3
0 26816
0 17 519
1425 4
0 9829 3
17 809
Сила шпильки/болта
1048.8 0 33121 1099 8
0 20797 0 20797
•13105 0 31276 33 911
Рис. 3.89. Нагрузки, воспринимаемые наименее и наиболее нагруженным болтом
с учетом силы тяжести
140
Глава 3
3.7.3. Расчет ствола по оболочечной модели
Для сравнения выполненного расчета на базе комбинированной сетки с
последующим — по балочной, продемонстрируем результаты, полученные для
оболочки в чистом виде. Для адекватности моделей следует изменить способ
приложения дистанционной нагрузки. В панели Дистанционные нагрузки
переключатель Тип установлен в положение Нагрузка (Жесткая связь)
(рис. 3.90). Это сделано потому, что, во-первых, для кромок оболочек такое
Рис. 3.90. Параметры дистанционной силы и сетка конечных элементов с граничными условиями
Структурная механика — линейная задача (COSMOSWorks)
141
условие неприменимо (пришлось бы выделять дополнительные грани возле
вершины поверхности ствола), а, во-вторых, в реальности торец, к которому
прикреплен фланец, в значительной степени сохраняет форму.
Результат в виде перемещений на фоне деформированного вида показан на
рис. 3.91. Как видно, картина практически та же, что и для расчета с
комбинированной сеткой.
Шкала деформации: 50
Шкала
деформации: 50
URES (mm)
2.79е+001
Рис. 3.91. Распределение
перемещений на фоне
деформированного вида
Рис. 3.92. Распределение эквивалентных напряжений
и первого главного напряжения
на фоне деформированного вида
Результат в виде эквивалентных напряжений и первого главного напряжения
показан на рис. 3.92. Если в расчете с фланцем "снизить" верхнюю границу
напряжений (установив ее равной максимальным напряжениям в оболочке
ствола), то картина будет практически тождественна полученной для
оболочки без чего-либо еще. В принципе, это вполне ожидаемый результат.
3.7.4. Основы построения балочных моделей
Балочные и стержневые конечные элементы появились в версии
COSMOSWorks 2007 года. Соответствующая модель базируется
исключительно на объектах, созданных посредством команды Конструкция подмно-
142
Глава 3
жества команд Сварные детали. Никакие другие тела, созданные как
другими командами этой группы (косынки, сварные швы, пробки), так и любыми
другими, предназначенными для создания тел, а также поверхности не могут
входить в состав балочной модели. Это накладывает известные ограничения
на номенклатуру пригодных для расчета объектов. Тем не менее есть класс
задач, где эта функциональность может быть востребована. Это, прежде
всего, расчет ферменных/рамных конструкций на этапе компоновки, когда
нужно иметь эффективный инструмент перебора различных вариантов с
минимальной трудоемкостью изменения моделей. Дело в том, что наиболее
адекватные результаты для сварных рамных конструкций получаются, как
правило, посредством оболочечных моделей. Однако их подготовка и
модификация является весьма кропотливым занятием. Также не следует забывать,
что расчет конструкций со сферическими шарнирами и ползунами в
COSMOSWorks требует реалистичной имитации как геометрии, так и
функции (контакт "вершина— вершина", "вершина— кромка" невозможен), а
упрощенная реализация цилиндрических шарниров обеспечивается только
для твердых тел. Поэтому для расчета ферм с шарнирными соединениями
балочные сетки могут быть наилучшим (из доступных) инструментом.
Чтобы понять логику работы алгоритма, а заодно и идентифицировать
особенности его работы, рассмотрим элементарный пример: заделанная в опоре
и нагруженная на концах силами, параллельными оси Z конструкция. Она
построена на базе эскиза протягиванием двух прямоугольных профилей
(рис. 3.93). Сразу обращаем внимание на два факта: эскиз состоит из двух
отрезков, т. е. горизонтальный профиль протянут по траектории, состоящей
из единого сегмента; место стыка не обработано, т. е. рассматривается
"черновая" модель, в которой имеется интерференция тел.
*
!
Рис. 3.93. Базовый эскиз и модель рамы
Обобщая информацию, касающуюся эскизов, заметим, что допускаются как
плоские, так и пространственные эскизы. При этом допускается произвольная
Структурная механика —линейная задача (COSMOSWorks)
143
комбинация эскизов. В качестве базы для балочных сеток могут быть только
прямолинейные структурные элементы, создаваемые, в свою очередь, на базе
линейных сегментов эскизов.
Для ее расчета по балочной модели создаем Упражнение, в котором в списке
Тип сетки выбираем значение Структура балок (рис. 3.94). Как видно,
доступны следующие виды анализа:
♦ статический в предположении упругости материала;
♦ расчет на собственные частоты;
♦ линеаризованный расчет на потерю устойчивости.
] Упражнение
|Типс
Структура балок
|Сетка на твердом теле
Сетка оболочки с использованием поверхностей!
j |Ч¥ Частота
| iQJi Потеря устойчивости
\ Изучить напрйЖ£«ия и
! смещения для компонентов с
« линейным иатергзлом
Рис. 3.94. Создание анализа на базе балочной модели
После создания Упражнения Менеджер COSMOSWorks приобретает вид,
показанный на рис. 3.95. Как видно, система ожидает от пользователя
информации о том, какие структурные элементы будут входить в расчетную модель.
Эти операции доступны из контекстного меню пиктограммы Балки (Beams)
(рис. 3.96). В нем есть две команды: Рассматривать все структурные части
как балки (Treat all structural members as beams) и Добавить балку (Add
beam). Подача первой команды приводит к тому, что все объекты, созданные
командой SolidWorks Конструкция1, будут в расчетной модели
восприняты как элементы балок, т. е. будут воспринимать три силы, два изгибаю-
1 Это не слишком удачный перевод термина Structural Member (Конструктивный элемент).
144
Глава 3
щих и один крутящий момент. Результат выполнения команды показан на
рис. 3.97.
^ Т-стык
Л Настройки
^Датчики
В ^ Упражнение (-По умолчанию <Как обработанный >-)
В %> Балки
{ !. J^. Группа соединений 1
U Нагрузка/Ограничение
i- ^Сетка
Рис. 3.95. Менеджер COSMOSWorks после создания Упражнения
$ Т-стык
д*1 Настройки
; ^Датчики
В ^ Упражнение (-По умолчанию <Как обработанный >-)
;- ij Нагрузка/С^ jtyW^£"& г^У? '.'***У - Vfi '
S Сетка Ы"'Л1£^Н1
'$$ijp^
",>;вад§ф* * s*;''*/ 's "\ */' Vs' ***%
Рис. 3.96. Идентификация структурных элементов в расчетной модели
^Т-стык
r-Js? Настройки
. ^Датчики
S-dff Упражнение (-По умолчанию <Как обработанный >-)
В '%> Балки
!- Д£- Группа соединений 1
■Щ Балка-1 (Конструкция 1)
Щ Балка-2(Конструкция2)
: 4$ Нагрузка/Ограничение
^Сетка
Рис. 3.97. Менеджер после создания балок
Команда Добавить балку позволяет в панели Применить/редактировать
балку (Apply/Edit Beam) (рис. 3.98) детально сформировать множество
воспринимаемых каждым из концов структурного элемента силовых факторов.
Прежде всего, следует выбрать одно из положений переключателя Тип
(Туре):
♦ Балка (Beam) — доступ к управлению каждым из шести силовых
факторов на каждом из двух концов;
Структурная механика — линейная задача (COSMOSWorks)
145
♦ Стержень (Truss)— безмоментные (воспринимающие две
перерезывающие и осевую силу) закрепления на обоих концах.
'"ШШШШШШШШШМ
Ф С Жуткое
С Салазвеи
(• Вручную
V ДОгнфт* 1оешфа&пени9
Г* Штифт • Зек» и<хр&*лениз
Г* Штифт * fto 5ажо
Г" С&Ц&ки * ice направленно
Г** Салдаод * 2ое иапра&яем^
Г* Озяаэки - По балке
Рис. 3.98. Менеджер после создания балок
Решив определять силовые факторы более детально, нужно для каждого из
концов балки (на их месте появляются пиктограммы красного и синего цвета)
выбрать положение переключателя Конец# соединение (End# connection):
♦ Жесткое (Rigid)— взаимодействие с окружающими элементами с
передачей трех моментов и трех сил;
♦ Штифт (Pin) — безмоментное взаимодействие с окружающими
элементами с передачей в соединениях (узлах) трех сил;
♦ Салазки (Slide) — взаимодействие с окружающими элементами с
передачей трех моментов и свободными поступательными перемещениями;
♦ Вручную (Manual) — возникают шесть опций, при активизации которых
освобождаются соответствующие степени свободы при взаимодействии
с примыкающими структурными элементами:
146
Глава 3
• Штифт — 1е направление (Pin — 1st direction) — свободное вращение
относительно оси 1 сечения;
• Штифт — 2е направление (Pin — 2nd direction) — свободное вращение
относительно оси 2 сечения;
• Штифт — по балке (Along beam) — свободное вращение
относительно оси структурного элемента;
• Салазки— 1е направление (Slide 1st direction)— свободное
поступательное перемещение в направлении оси 1 сечения;
• Салазки — 2е направление (Slide 2nd direction) — свободное
поступательное перемещение в направлении оси 2 сечения;
• Салазки — по балке (Along beam) — свободное поступательное
перемещение вдоль структурного элемента.
В документации программы про термины 1е и 2е направление говорится,
что они определяются программой, исходя из ее внутренней логики. Первое
направление, скорее всего, будет располагаться вдоль самой длинной
прямолинейной кромки сечения, а второе — перпендикулярно ему. Если же
прямолинейных кромок нет, или они не идентифицируются, то программа
использует какой-либо другой алгоритм. В любом случае^ пользователь не имеет
возможности однозначно идентифицировать направления до выполнения
расчета.
После того как сформирована номенклатура балок, конкретизирующая,
кстати говоря, и взаимодействие между балками, нужно определить факт
наличия/отсутствия соединений между их концами. Для этого посредством
команды Редактировать (Edit) (рис. 3.99), подаваемой из контекстного меню
пиктограммы Группа соединений (Joint group), вызывается панель
Редактировать соединения (Edit Joints) (рис. 3.100).
% Т-стык
§*| Настройки
!•• ^Датчики
&,<$? Упражнение (-По умолчанию <Как обработанный >-)
В ^ Балки
а'- , v r<i*W - v * - I
^ Нагрузка/Ограничение -***■■**.—■*■ *я>*>»■*■ ™« ****
>•■ % Сетка
Рис. 3.99. Вызов редактора соединений
В этой панели нужно сначала выбрать балки, для которых будет
производиться поиск соединений, для чего предназначен переключатель Выбранные
Структурная механика —линейная задача (COSMOSWorks)
147
балки (Selected Beams). В его положении Все (АН) будут анализироваться все
концы всех балок на предмет наличия соединений между ними. Если
переключатель установлен в положение Выбрать (Select), то поле Выберите
структурные объекты (Select structural members) нужно заполнить какими-
либо балками из числа созданных на предыдущем этапе.
шШШШШШШШЁШ
С Выбрзть
IВыберите структурные объекты]
[Вычислить ,
Соединение 2
Соединение 3
Соединение 4
Г" модифицированное соединение
при обновлении
(Ьдометры индии* горе ,Л
р Радиус индог втора соединзнж
пс умопчанию
Р Ус гаяовлениыи spy чиу и pjAnyt
нндикатсра соединений
Радиус индикатора шарниров [
р- Чредв. просмотр индикатора
СССДИЮ1И»
Рис. 3.100. Создание соединений
После команды Вычислить (Calculate) в поле Результаты (Rezults)
появляются диагностированные соединения. На отображение и восприятие
системой результатов влияют опции:
♦ Использовать модифицированное соединение при обновлении (Keep
modified joint on update) — согласно документации, сохранение изменений
после нажатия кнопки Вычислить или после выхода из панели с
нажатием кнопки ОК происходит только если эта опция активна. Однако в
рассмотренных релизах программы (вплоть до SP 2.0) эта опция была не
функциональна;
148
Глава 3
♦ Отобразить только пути эскиза (Show sketch paths only) — если
поставить флажок, то тела будут автоматически скрыты, а на их месте
отобразятся эскизы, на базе которых построены соответствующие структурные
элементы.
На результат выполнения команды влияет размер условного объекта,
называемого Индикатор соединений (Pinball). Это условная сфера, которую
можно позиционировать мышью по алгоритму "drag and drop". Если конец
структурного элемента находится на расстоянии меньшем радиуса этой
сферы (собственно индикатор позиционируется в некоей точке только для того,
чтобы визуально сравнить это расстояние с величиной индикатора) от конца
другого структурного элемента, то в процессе вычислений концы будут
слиты в один узел. Неочевидным результатом работы алгоритма может быть
создание соединения там, где конец одной балки находится на расстоянии
меньше диаметра индикатора от сегмента эскиза, на базе которого построена
другая балка. Диаметр индикатора можно изменить, поставив переключатель
в положение Установленный вручную радиус индикатора соединений
(Manual pinball radius) и введя желаемую величину в поле Радиус
индикатора шарниров (Pinball radius).
( Замечание ^
При эксплуатации программы замечен парадоксальный факт: при относительно
небольшом зазоре между концами балок соединение формально создается, но
не функционирует. При увеличении зазора связь концами балок может быть
зафиксирована. В связи с этим, независимо от потребностей, диктуемых
реальной геометрией, рекомендуется выполнять эскизы для сварных конструкций
так, чтобы планируемым связям между балками соответствовали связи в эскизе
или между сегментами различных эскизов.
Для балок нужно назначить материалы. Подобно другим типам анализа,
материал можно назначить одинаковым для всех, в группе или персонально.
В качестве нагрузок могут выступать сосредоточенные силы и моменты, а
также гравитационные силы. Сосредоточенные нагрузки прикладываются
исключительно в соединениях (рис. 3.101). Практически так же назначаются
и закрепления (рис. 3.102).
Сетка конечных элементов создается аналогично другим типам анализа,
однако какие-либо инструменты "прямого" воздействия на сетку отсутствуют.
Ее плотность и структура регулируются исключительно внутри программы.
Сетка балочных элементов с граничными условиями показана на рис. 3.103.
Количество настроек как статического, так и при расчете резонанса и
устойчивости, минимально. Можно выбрать один из двух решателей: прямой и
итерационный, можно использовать Податливые пружины (Soft spring),
Инерционную разгрузку (Inertial relief), Эффект нагружения в плоскости
(Inplane effect). Для статического расчета формально доступны опции Вы-
Структурная механика --линейная задача (COSMOSWorks)
149
числять силы свободных тел (Compute free body forces) и Большие
перемещения (Large displacement), однако первая просто нерезультативна, а
включение второй приводит к аварийной остановке расчета.
W Реверс напр«вп*ния
"3**^
Рис. 3.101. Приложение сил
Ж1#ий*#-'
«**4F**^
Рис. 3.102. Приложение закреплений
| ^*Ч^
Рис. 3.103. Вид сетки
балочных элементов
150
Глава 3
Результат расчета в виде диаграммы перемещений на фоне
деформированного вида показан на рис. 3.104. В группе результатов Перемещения
(Displacement) можно отображать собственно линейное перемещение, а также его
составляющие относительно осей как глобальной системы координат, так и
относительно объектов справочной геометрии, в том числе и справочных
осей— это предполагает цилиндрическую систему координат. Также
доступны повороты, силы реакции и реактивные моменты (последние две
группы параметров в какой-то степени могут компенсировать невозможность
рассчитывать Силы свободных тел).
Шкала деформации: 300
1» 1.72е-002
ШШ. 8.61е-003
X 1 00е-030
Рис. 3.104. Распределение перемещений
На рис. 3.105 показана диаграмма напряжений. Как видно, доступны:
♦ нормальные напряжения на нейтральной оси балки — По оси (Axial);
♦ изгибные компоненты нормальных напряжений — Изгиб в местном
направлении 1, 2 (Bending in local direction 1,2), которые рассчитываются
относительно осей 1 и 2 сечения (как идентифицируются эти оси, было
сказано выше);
♦ наибольшие нормальные напряжения в пределах балки — Худший
сценарий (Worst case), являющиеся комбинацией осевых и изгибных
компонентов, имеющей максимальную по модулю величину.
Относительно последней величины в документации программы указано, что
этот параметр рассчитывается на двух концах каждого конечного элемента на
балке в четырех точках, наиболее удаленных от центра тяжести сечения. То
есть для элемента— всего в восьми точках. Затем из восьми величин берется
максимальная по модулю, которая и присваивается для элемента в целом —
Структурная механика — линейная задача (COSMOSWorks) 75£
как видно, величина Худший сценарий на границе между элементами
изменяется на диаграмме дискретно.
Рис. 3.105. Распределение результата Худший сценарий
Изменим схему нагружения. направив одну из сил в противоположную
сторону, и повторим расчет. Распределение характеристики Худший сценарий
показано на рис. З.Ю6. Как видно, на вертикальной балке ее величина равна
нулю. Дело в том, что как осевая сила, так и изгибающие моменты
отсутствуют. Касательные напряжения в Худшем сценарии не задействованы. И это
притом, что жесткость при кручении учитывается. Проводя ряд
экспериментов с тривиальными расчетными случаями, убеждаемся, что сдвиговые
деформации при кручении учитываются, при поперечном сдвиге — нет. В связи
с тем, что касательные напряжения, независимо от их природы, недоступны
для пользователя, можно утверждать, что результаты по перемещениям,
углам поворота, силам реакции наиболее достоверны. Что касается оценки
прочности, то она наиболее качественна для стержневых (то есть не
воспринимающих сдвиг и кручение) объектов. При интерпретации результатов для
балок следует, по крайней мере, приблизительно, оценить уровень
касательных напряжений. Если в соответствующих конечных элементах
прогнозируется кручение, то есть смысл подумать о более информативной модели —
в виде твердых тел и/или оболочек.
Вид сетки балочных конечных элементов вызывает закономерный вопрос:
почему для описания каждого тела используется несколько конечных
элементов? И это притом, что, если свойства объекта постоянны по длине и
нагрузки приложены к концам или равномерно распределены по длине
структурного элемента (как это имеет место в нашей модели), достаточно (при
152
Глава 3
адекватной математике) единственного элемента. Проведем, так сказать,
вычислительный эксперимент. Выполним в опоре прямоугольные вырезы со
скруглениями (рис. 3.107).
Шкала деформации: 300
^
Худший сценарий (N/mA2)
*<ш
Ж
4.34е+006
. 3.90е+006
3.47е*006
3.03е*006
2.60е+006
2.17е+006
173е*006
1 .ЗОе+006
8.67е*005
4.34е*005
1.28е-002
Рис. 3.106. Распределение результата Худший сценарий
при наличии компонента кручения
Рис. 3.107. Распределение
результата Худший сценарий
для балок с отверстиями
Картина перемещений показана на рис. 3.108, а напряжений — на рис. 3.109.
Максимальный прогиб увеличился почти в 70 раз, на "наихудшее"
напряжение— почти в 25 раз. Эти цифры вызывают определенное сомнение.
Попробуем рассчитать эту модель, используя более привычную оболочечную
модель.
Поверхностное представление узла с граничными условиями показано на
рис. ЗЛЮ. Как видно, по контуру основания поставлено условие фиксации
как перемещений, так и поворотов, а действие сил реализовано через
дистанционные нагрузки в варианте Жесткая связь. Это условие делает объект, его
воспринимающий, абсолютно жестким. Этими объектами являются кромки
на концах поперечины. Этот вариант максимально приближает оболочечную
модель к условностям балочной (в ее варианте, реализованном в
COSMOS Works), где сечения тоже не изменяют форму.
Сетка оболочечных конечных элементов показана на рис. 3.110. Как видно,
размер элементов подобран так, чтобы не слишком отличаться от созданного
программой (как говорилось, пользователь не может на это влиять, не
используя дополнительного членения самих тел) в балочной аппроксимации.
Структурная механика — линейная задача (COSMOSWorks)
153
URES (mm) _
«*& 1
г 5.39е*000
. 4.85е+000
. 4.31е*000
3.77е+000
3.23е+000
2.69е*000
2.15е*000
1.62е+000
1.08е+000
5.39е-001
1 .ООе-030
+>*
Худший сценарий (NAnA2)
3.14е+008
Рис. 3.108. Перемещения в балочной модели
с вырезами
Рис. 3.109. Напряжения в балочной модели
с вырезами
скостъЗ
стЭДа координат2
Рис. 3.110. Поверхностная модель с граничными условиями и сетка
154
Глава 3
Распределение перемещений показано на рис. 3.112, а напряжений— на
рис. 3.113. В качестве "напряжений" используется первое главное
напряжение для мембранной компоненты с осреднением по элементам (рис. 3.111).
Как представляется по физическому смыслу, оно ближе всего (для
растянутой зоны) к понятию Худший сценарий в балочной модели. Даже беглое
сравнение результатов для балок и оболочек наводит на мысль о том, что
вырезы в структурных элементах, на базе которых строятся балки/стержни,
обрабатываются некорректно.
:сВШ%ш^^м^^^:^^т^^^^^ 1
фшяштшшт
ш
gj£ |Р1; 1 главное напряжение JJJ
J:J lN/m"2
5f |краи
С Значения в узлах
*♦ Значения ш ыттхьъ
J0 [мембрана
чИринйИитьГ|
л!
jjj
"ia |
Рис. 3.111. Тип отображаемого
напряжения
Рис. 3.112. Перемещения на оболочечной модели
"*^ Ш^
^
в
Р1 (NAnA2)
1.59е+007
1.43е+007
1 27е+007
1.11е+007
9.45е+006
7.85е+006
6.24е+006
У*. 4.63е+006
|А 3.03е*006
lit 1.42е+006
-1.84е+005
Рис. 3.113. Первое главное напряжение — мембранная компонента
Структурная механика —линейная задача (COSMOSWorks)
155
Сделаем, наконец, то, с чего следовало начать — сравним элементарные
модели — балочную без вырезов с равносильным (в первом приближении) обо-
лочечным представлением (рис. 3.114).
Рис. 3.114. Поверхностная модель без вырезов с граничными условиями и сетка
Диаграмма перемещений показана на рис. 3.115. Сравнивая ее с рис. 3.104,
где максимальное перемещение составило 0,861 е-1 мм, можно заключить,
что результаты вполне сопоставимы. Более того, если обратить внимание на
то, что оболочечная модель "выше" балочной наполовину высоты
поперечины — в балочной модели перемещения рассчитываются для нейтральных
осей балок, то различие становится менее существенным. Если же учесть и
сдвиговую составляющую перемещений, присущую оболочкам
COSMOSWorks (в плоскости — как "толстым", так и "тонким", а "из плоскости" —
только "толстым"), то балочные результаты можно в данном случае признать
удовлетворительными.
Результаты же сравнения максимальных растягивающих напряжений на
срединных поверхностях оболочек (мембранная компонента) при поэлементном
осреднении и того, что понимается под "худшим сценарием" в балочной
модели, показывают их тождественность (рис. 3.116 и 3.105).
156
Глава 3
URES(mm)
1.02е-001
9.21е-002
8.18е-002
7.16е-002
6.14е-002
5.11е-002
4.09е-002
3.07е-002
2.05е-002
ШШ. 1.02е-002
_ ^ 1.00е-030
Рис. 3.115. Перемещения на оболочечной модели без вырезов
''""*»*»-*,
В
Р1 (NAn*2)
1 24е+007
1.11е*007
9.86е+006
8.61е+006
7.35е+006
6.10е+006
4.84е+006
3.58e+0Q6
2.33е+0ОВ
107е+006
-1.83е+005
Рис. 3.116. Напряжения на оболочечной модели без вырезов
Завершая рассмотрение элементарного (как всегда, только на первый взгляд)
примера, упомянем, что при работе с балочными моделями, а также из
анализа содержимого справочной системы программы были сделаны следующие
заключения:
♦ балочная модель в контексте сборки функционирует, только если
различные детали не имеют между собой соединителей. Это, по сути, делает —
с точки зрения расчета по балочной модели — бессмысленным формиро-
Структурная механика — линейная задача (COSMOSWorks)
157
вание сборок из деталей, содержащих сварные конструкции. Если же в
сборке содержатся две одинаковые детали, то происходит аварийный
останов расчета;
♦ если при построении геометрической модели сварной конструкции
использовалась команда Отсечь/Удлинить, то при отсечении внешним
объектом, например, искусственно созданной поверхностью, балка
воспринимается в конечно-элементной модели с учетом обрезки. Если же отсечение
происходит с использованием ссылок на тело, полученное командой
Конструкция, то в расчетной модели объект воспринимается в состоянии,
которое было до обрезки;
♦ балочная модель учитывает эксцентриситет расположения структурного
элемента относительно сегмента эскиза, на базе которого этот объект
построен. Это смещение появляется в результате применения команды
Поиск профиля, подаваемой из панели Конструкция. В связи с этим
документация COSMOSWorks рекомендует протягивать профили через
сегменты, проходящие через центр тяжести этих профилей. С практической
стороны это обозначает необходимость создавать "скелетные" эскизы так,
чтобы соответствующие сегменты проходили через центры планируемых
профилей. В свою же очередь, эскизы профилей в базе данных по сварным
деталям должны содержать точку, расположенную в центре тяжести.
3.7.5. Расчет ствола по балочной модели
Как упоминалось, балки/стержни в COSMOSWorks могут иметь только
постоянное сечение. Ствол же является тонкостенным телом переменного
сечения. Поэтому его расчетная модель должна состоять из нескольких балок
постоянного сечения. Эти балки, в свою очередь, будут получаться на базе
соответствующих структурных элементов, созданных командой Конструкция.
Понятно, что в базе данных SolidWorks нет соответствующего профиля,
поэтому его нужно создать. Библиотека профилей должна содержаться в папке
WELDMENT PROFILES, которая, в свою очередь находится в папке DATA
каталога установки SolidWorks. Можно изменить путь к библиотеке или
подключить новую в окне Настройки пользователя (рис. 3.117).
При помещении нового элемента в базу данных сечений нужно учитывать ее
структуру: собственно папка, например, WELDMENT PROFILES, которая
при создании профиля в панели Конструкция появляется в списке
Стандарт. Внутри последней должна быть одна или несколько папок с
произвольным названием (в нашем случае это СЕЧЕНИЯ ОПОР), которая фигурирует в
списке Тип, в которых, в конце концов, размещаются файлы с сечениями.
Каждый файл — его расширение sldlfp— представляет собой библиотечный
158
Глава 3
элемент SolidWorks. В общем случае эти элементы могут содержать
разнообразную информацию из модели детали или сборки SolidWorks и создаются
разнообразными способами. В нашей задаче в библиотеку нужно поместить
Настройки пользователя - Месторасположение файлов
JОбщие «&ОювЙ^^ \s' ' i
А Чеотежи **"""* " ff"''"ft '"' '"■ *""" Г
Чертежи
Тип отображения пс^' ^
Штриховка/Заполни $$£~
Цвета *^г1
Эскиз 4<4
Взаимосвязи/привяз ^
Отображение/выбор кр
Качество изображения
Сборки
Внешние
Шаблоны
FeatureManager ч;; j^; t\ * *^W^ ^ М'
'И
C:\Program Files\SolidWorks\data\weldmenc profiles ** Vi^Ww»*"/* I |
Q^i^ijiilfrulV.nrtilrfirfjM^iiniiirtiil I ..
Рис. 3.117. Управление адресами библиотек профилей сварных деталей
I Длоскость - П
ДлОСКОСТЬ - I
Рис. 3.118. Построение сечения для базы данных
Структурная механика —линейная задача (COSMOSWorks)
159
несколько эскизов. Получаем их как сечения тела командой Sol id Works Эскиз
вдоль линии пересечения тел (рис. 3.118). Обратим внимание, что сечения
строятся на базе тела, полученного приданием толщины поверхности,
использовавшейся для расчета. Плоскости сечений проходят через середины
отрезков, вдоль которых затем будут протягиваться профили.
Затем, активизировав в Дереве конструирования полученный эскиз (его
можно при необходимости дополнить, например, точками привязки), нужно
подать команду Сохранить как и в одноименном диалоговом окне выбрать тип
файла— *.sldlfp, придумав его название, и прописать путь к папке с типом
профилей. После этого система создаст в библиотеке файл стандартного
объекта, удалив из модели (после предупреждения) все объекты построения, не
влияющие— прямо или косвенно— на сечение. Эти манипуляции нужно
повторить столько раз, сколько сечений мы хотим получить. К сожалению,
достичь ассоциативности между родительской моделью и ее потомками —
библиотечными объектами невозможно.
Имея профили, можно воссоздать ствол как совокупность структурных
элементов (рис. 3.119), создать балочную модель (рис. 3.120), выполнить расчет
ШШШИИЁ!
Выберите сегменты эскиза
для определения пути. /
Можно вращать профиль по >
указанному углу. i /
Стандарт
Плоскость • V
L
__ДвОСКОС1Ъ •
IV
, ?
"3 г ■
3- I JK Плоское гъ - ПТ
Til О.ООградусов *&4 м
honos профиля!
.ЪхОСКОСТЬ - Я
.14 О СКОС ТЪ •■ i
Рис. 3.119. Создание элемента сварной конструкции
Рис. 3.120. Балочная модель
с соединениями
160
Глава 3
и получить диаграммы перемещений и нормальных напряжений в виде
характеристики Худший сценарий (рис. 3.121).
Сравнивая результаты для перемещений и напряжений с тем, что рассчитано
ранее на базе оболочечной модели (рис. 3.91 и 3.92), можно увидеть, что для
максимальных перемещений они очень близки. Что же касается сравнения
напряжений, то максимальная величина параметра Худший сценарий для
балок выше, чем Р1 (максимальное растягивающее напряжение) на
срединной поверхности оболочки. Это, вероятно, потому, что для балок величина
Худший сценарий локализуется вблизи верхней части первого отрезка
(в балочной модели он имеет такое же сечение, как и в основании).
Напряжения же в основании для балочной модели несколько выше, чем для
оболочечной, однако разница вполне приемлема.
Подводя итог еще одной попытке сравнительного анализа балочной и
поверхностной моделей, можно заключить, что воспроизвести конструктивные
объекты переменного сечения посредством балочных элементов, в принципе,
можно. При этом жесткость моделируется вполне адекватно, а напряжения —
только ориентировочно. Такая аппроксимация может быть полезна, когда во
вполне корректной модели есть места, где— из-за невозможности сочетать
элементы балок с чем-либо еще — нужно прибегать к всевозможным
ухищрениям. Задача расчета мачты — характерный пример этой ситуации.
* |РГ Г тптшифг 2 Шкала деформации: 30
(mm)
2.84е+001
2.60е+001
2.37е+001
2.13е+001
1 89е+001
1 66е+001
1.42в+001
1.18е+001
9.47е+000
7.10е+000
4.74е+000
2.37е+000
1.00е-030
| Худший сценарий (NAnA2}
! ш
1 ■
1 ■
11
! 1
1 ж
I III
щ
III
ш.
5.06*+00?
4.65е+007
4.25e+007
3 85e+0Q7
3 46e+007
3.05e+007
2.65e+007
2.24е«Ю7
1.84e+007
1 44e+007
1 Л46+007
6 36&+00S
2.34e+006
Рис. 3.121. Распределение перемещений и напряжений на фоне деформированного вида
Структурная механика —линейная задача (COSMOSWorks) 161
3.7.6. Расчет мачты по балочной модели
Рассмотренные элементарные примеры подготовили нас к анализу более
сложной системы. Модель мачты, как сварной конструкции, показана на
рис. 3.122 и 3.123. Как видно, она является, по сути, полуфабрикатом —
между отдельными профилями присутствуют зазоры или, наоборот, они
проникают друг в друга. Ствол, как и в его самостоятельной модели, представляет
собой совокупность профилей постоянного сечения, взятых из
модифицированной базы данных сварных профилей.
Рис. 3.122. Модель мачты как сварной Рис. 3.123. Фрагмент модели мачты
конструкции как сварной конструкции
Строим балочную модель, включая в нее все элементы. В принципе, с точки
зрения экономии времени, выгоднее— при несовпадении прочностной и
конструкторской конфигурации — удалить в последней "лишние" тела, а
оставшиеся использовать как "сырье" для балок. При создании соединений
нужно подобрать радиус индикатора так, чтобы, с одной стороны, были раз-
162
Глава 3
решены все структурные элементы (если его длина меньше радиуса, то узлы
на его концах могут быть слиты алгоритмом), а с другой стороны, чтобы
были проигнорированы "нефункциональные" зазоры. Эти зазоры могут
получиться как следствие особенностей конструкторской модели, как, например,
между вершиной ствола и горизонтальным профилем рамы. Здесь в модель
не вошло соединение между фланцем, приваренным к стволу, и фланцем,
связанным с поперечиной рамы.
Этот баланс не всегда можно соблюсти— иногда размер того, что нужно
проигнорировать больше, чем того, что хочется увидеть. Действие же
индикатора носит глобальный характер— невозможно настроить его
индивидуально для отдельно взятого набора структурных элементов. Поэтому лучшее
решение — использовать для построения сварных деталей эскизы, не
имеющие зазоров там, где соответствующие элементы должны быть связаны,
пусть и через неких посредников. Полученную геометрическую модель мож-
Рис. 3.124. Структура соединений, сегменты базовых эскизов и граничне условия
Структурная механика — линейная задача (COSMOSWorks)
163
но затем адаптировать применительно к состоянию, необходимому для
подготовки конструкторской документации.
Структура соединений, состояние эскизов, на базе которых алгоритм строит
балочную модель, а также граничные условия показаны на рис. 3.124.
Закрепление— ограничение всех перемещений, включая повороты, на нижнем
конце ствола. Нагрузки — сила тяжести и сосредоточенная сила (других
силовых факторов, кроме моментов система не допускает).
Диаграмма перемещений, а также нормальные напряжения по наихудшему
сценарию показаны на рис. 3.125 и 3.126. Как видно, максимальные
напряжения действуют в нижней поперечной балке, и это происходит потому, что ее
изгибает очень жесткий ствол.
Рис. 3.125. Перемещения и нормальные напряжения по наихудшему сценарию
на фоне деформированного вида
Напрашивается вариант усиления конструкции — нужно препятствовать
изгибу поперечины в горизонтальном направлении. Для этого вводим три рас-
164
Глава 3
порки, связывающие горизонтальные балки на каждом уровне рамы
(рис. 3.127). Результат расчета модифицированного варианта показан на
рис. 3.128. Как видно, максимальные напряжения существенно уменьшились.
Однако во всех случаях оценка прочности может носить только
сравнительный характер. Причина в том, что максимумы локализуются в стыках, где
идеальные балочные аппроксимации дают только приближенную оценку, не
учитывая особенности конструкции соединений.
Рис. 3.126. Нормальные напряжения по наихудшему сценарию — фрагмент
Подводя итог примерам, связанным с расчетом сварных конструкций,
которые, представляя собой, в целом или в частностях, совокупность балок и
стержней, можно сказать, что появившаяся в версии 2007 года специальная
модель вполне пригодна для многих ситуаций. Ее достоинством является
оперативность подготовки информации, в частности, в сравнении с
конкурирующими программами, где исходные данные готовятся в иной
последовательности: сегментам эскиза "присваиваются" свойства тех или иных
сечений, после чего выполняется расчет. Алгоритм Sol id Works/COSMOS Works
обладает высокой степенью наглядности. В принципе, он пригоден как для
проверки готовых проектов, так и для собственно проектирования. Как
показано, для расчетной модели нет необходимости доводить геометрическую
модель до состояния пригодного для оформления конструкторской
документации. Более того, "черновые" модели более пригодны для проектировочного
расчета, требующего просчета последовательности итераций.
Структурная механика — линейная задача (COSMOSWorks)
165
Рис. 3.127. Усиленный вариант Рис. 3.128. Нормальные напряжения по наихудшему
конструкции сценарию для усиленного варианта
Получив концептуальный проект, можно доработать модель объекта как
сварной конструкции, выполнив необходимые вырезы, сопряжения, добавив
косынки, другие конструктивные элементы, не воспринимаемые балочной
моделью из-за ее текущих ограничений. Затем следует принять
принципиальное решение о том, на какой базе выполнять проверочный расчет. Узлы, в
которых присутствуют болтовые, штифтовые соединения, сложные сварные
швы следует рассчитывать по твердотельной модели. Как правило,
существенных изменений геометрической модели здесь не требуется. Протяженные
тонкостенные элементы, места, поверхности большой площади, имеющие
малую толщину, типовые сварные соединения следует аппроксимировать
поверхностями в SolidWorks и, соответственно, оболочками в COSMOSWorks.
Геометрическая САПР имеет все необходимые инструменты для получения
срединных поверхностей с их доработкой до состояния, позволяющего
получить связанную сетку оболочечных конечных элементов.
166
Глава 3
3.8. Выводы
Совокупность рассмотренных задач является характерным примером
использования программы для комплексного расчета конструкций, требующих
различных способов аппроксимации: твердыми телами, оболочками,
балками/стержнями, а также использования разнообразных виртуальных
сущностей COSMOSWorks. Мы не предлагали заведомо однозначного решения,
поскольку, в зависимости от назначения расчета, имеющихся аппаратных
средств, опыта пользователя, модели одного и того же объекта могут
существенно различаться. Помимо информирования читателя о возможностях
программы, одной из основных целей данного материала было показать
разнообразие подходов к построению относительно сложных моделей. При решении
практических задач это даст свободу для выбора оптимального алгоритма
решения.
Если же говорить о программе в целом, то мы продемонстрировали только
малую часть ее возможностей. Как показывает практика, большая часть
затруднений возникает у пользователей не из-за недостатка функциональности
данного пакета, а в связи с методическими проблемами. Они связаны с
нехваткой навыков переноса аналитических или эмпирических методик в среду
численного моделирования. В данном случае — это COSMOSWorks,
возможности которого от версии к версии становятся все более многообразными.
Соответственно, для пользователя обостряется проблема выбора между
хорошим и еще лучшим.
Еще несколько примеров использования COSMOSWorks для решения
прикладных задач будут рассмотрены в главе 6. Часть функциональности,
связанной с расчетами в предположении нелинейности задач, будет рассмотрена
в главе 4.
ГЛАВА 4
Структурная механика —
нелинейная задача
(COSMOSWorks)
В данной главе рассмотрены возможности COSMOSWorks применительно к
задачам нелинейного анализа. До версии 2005 года способностью решать
задачи с физической нелинейностью обладал только COSMOSDesignSTAR
(в дальнейшем DesignSTAR) — также разработка фирмы SRAC.
Функциональность его версии 4.5, связанная с нелинейностью, была перенесена в
COSMOSWorks 2005. Затем самостоятельное развитие DesignSTAR
приостановилось, и в настоящий момент этот продукт является, по сути,
комбинацией COSMOSWorks и SolidWorks, где последний является интегрированным
на правах компонента OEM (Original Equipment Manufacturer)1 графическим
редактором для расчетной программы. В связи с этим выход новых версий
DesignSTAR происходит с некоторой задержкой относительно теперь уже
"родительских" вариантов. Выполняется отработка расчетной программы и
графического редактора как приложения к ней. В частности, версия
COSMOSWorks 2007 вышла в августе 2006 года. Спустя несколько месяцев начал
поставляться и DesignSTAR 2007.
(~ Замечание ^
Мы ограничимся кратким описанием функциональности, связанной с
нелинейностью и тремя примерами: первый посвящен физической нелинейности,
второй — альтернативному относительно линеаризованного подхода решению
задачи устойчивости и третий — моделированию закритического поведения
оболочки.
(~ Замечание ^
Для построения геометрической модели и численного анализа использованы
версии продуктов SolidWorks и COSMOSWorks 2007 года. Описание функцио-
1 Original Equipment Manufacturer — фирма-изготовитель комплектного оборудования.
168
Глава 4
нальности COSMOSWorks. связанное с нелинейностью, а также приведенные
элементы интерфейса, отвечающие за нелинейный анализ, соответствуют этой
версии. При этом упомянуты основные функциональные отличия от версий
2005 и 2006 года.
4.1. Назначение
Модуль нелинейного анализа COSMOSWorks предназначен для решения
задач механики с учетом физической нелинейности сред и геометрической
нелинейности объектов, в частности оболочечных.
4.2. Теоретическая база
В том, что касается упругой компоненты деформаций, практически все,
сказанное в одноименном разделе главы, посвященной COSMOSWorks,
справедливо и для нелинейного модуля. Ряд постулатов, лежащих в основе
алгоритмов, моделирующих нелинейность, рассмотрен в главе 2.
Большая часть решенных ранее задач (исключением являются те, которые
связаны с моделированием контактной задачи с переменной границей
контакта) базировались на постулатах линейности. Здесь рассматриваются
случаи, в которых некоторые из этих гипотез несправедливы. Типичные виды и
источники нелинейности в структурной механике следующие:
♦ геометрическая нелинейность, связанная с тем, что влияние перемещения
элементов механической системы на величину или направление действия
граничных условий (сил и заделок), а также на свойства самой
конструкции становится значительным по сравнению с тем, когда эти явления не
учитываются. Один из примеров— расчет прогиба опертой по краям
пластины под действием распределенного давления. Когда величина
прогиба превышает половину толщины пластинки, то линейное решение
приводит к значительной погрешности (в алгоритме, реализованном в
COSMOSWorks, учитывается та его компонента, которая обусловлена
изменением площади под нагрузкой). Другой пример связан с
моделированием потери устойчивости. Если для тонкой длинной пластины при
действии сжимающей силы линеаризованный подход дает приемлемое
решение, то нагружение дуговой арки нормальной к поверхности силой
приводит к прощелкиванию, которое сопровождается переходом системы
в новое равновесное состояние;
♦ физическая нелинейность материалов— она выражается в зависимости
характеристик упругости материала от истории нагружения. Например,
это нелинейность кривой "напряжение — деформация" (пластичность) или
зависимость деформации от времени (вязкоупругость, ползучесть);
Структурная механика — нелинейная задача (COSMOSWorks) 169
♦ контактная нелинейность— при анализе сборок может встречаться
несколько ситуаций, способных приводить к отклонению от линейной
реакции системы на воздействие. Во-первых, это эффекты, возникающие на
границе контакта тел при входе их в контакт, когда даже небольшая
нагрузка в начальный момент передается через относительно малую
площадь. Как следствие, в этой зоне возможно существенное изменение
формы. Во-вторых, встречаются модели, имеющие детали, способные
перемещаться "почти" как жесткое целое. Многие разъемные соединения,
будучи включены в некую сборку, порождают такие расчетные случаи.
Схожие последствия способны повлечь использование соединительных
элементов COSMOSWorks. Еще один потенциальный источник
нелинейности при расчете сборок— контактное трение. Начиная с версии
2007 года, в COSMOSWorks, позволяет одновременно учитывать
физическую нелинейность и трение.
4.3. Интерфейс
Интерфейс нелинейного модуля COSMOSWorks является логическим
продолжением модуля линейного анализа. В версии 2007 года в интерфейсе
произошли определенные изменения по сравнению с предыдущим релизом.
В частности, несколько сократилось число настроек нелинейного решателя.
( Замечание ^
Перевод интерфейса COSMOSWorks, связанного с нелинейным анализом,
дается в авторском варианте. Та транскрипция, которая присутствует в версии
2007 года, доступной на момент подготовки книги, в определенной части
является не вполне корректной. В то же время элементы интерфейса приведены в
состоянии, соответствующем локализованной версии. Поэтому рекомендуется
обращать внимание на англоязычные названия терминов, поскольку именно
они являются наиболее достоверными.
4.4. Функциональные возможности
Предполагая, что читатель уже познакомился с функциональностью
COSMOSWorks для расчетов в линейной постановке, рассмотрим его
возможности, предназначенные для нелинейного анализа.
4.4.1. Базовые возможности анализа
Нелинейные модели, независимо от типа нелинейности (физическая или
геометрическая), решаются посредством типа анализа Нелинейный (Nonlinear).
Исключением является Испытание на ударную нагрузку (Drop Test), где мате-
170
Глава 4
риал может обладать пластичностью по Мизесу с изотропным или
кинематическим (начиная с версии 2007 года) упрочнением. Появившийся в версии
2006 года расчет на усталость (Fatigue) реализован в линейном варианте.
Это значит, что процесс накопления повреждений только диагностируется,
но влияния на свойства материалов никак не оказывает.
В данной главе нелинейный расчет будет рассматриваться в "универсальной"
постановке, т. к. именно она обладает полным набором настроек. При расчете
удара пластического тела все настройки системой подбираются
автоматически.
Нелинейные модели могут быть построены на базе твердых тел, оболочек, а
также базироваться на гибридных сетках. Однако если в модели
присутствуют оболочки, то критерий пластичности Друкера — Прагера и вязкоупруго-
сти Блатца — Ко не могут использоваться. Также в оболочечных моделях
критерии нелинейности, за исключением нелинейно-упругого материала,
поддерживают только формулировку толстых оболочек.
Более подробную информацию о математическом аппарате нелинейного
расчета в зависимости от типа нелинейного материала можно почерпнуть в
файле справки COSMOSWorks Material.chm.
В нелинейных моделях допускаются все типы кинематических и статических
граничных условий присущих статическому расчету, за исключением
некоторых соединителей: в версии 2007 года в твердотельных моделях нельзя
использовать виртуальный болт, упругое основание, условный подшипник и
точечные сварные швы. В оболочечных моделях точечные сварные швы и
пружины, присутствующие в статическом анализе, в нелинейном расчете
нефункциональны. В COSMOSWorks версии 2006 года ограничения на
номенклатуру виртуальных соединителей в нелинейных моделях еще более жесткие.
4.4.2. Последовательность расчета
Большинство этапов нелинейного анализа совпадает с изложенным про
расчет линейный. В нелинейном анализе важное место занимает назначение
параметров вычислительного процесса. Для этого используется форма
Нелинейное (Nonlinear Analysis), ее содержимое приведено в разд. 4.5.3 данной
главы, а для задач геометрической нелинейности— в разд. 4.6.3, 4.7.3.
Основными моментами здесь являются: назначение рассматриваемого периода
времени, приращения шага и действий, сопровождающих это приращение, а
также допусков сходимости шагов итерационного процесса. Также на
вкладке Дополнительно (Advanced) нужно определить Метод управления
(Control) и Итерационный алгоритм (Iterative). Состав других необходимых
параметров зависит от того, как и по какой схеме будут осуществляться при-
Структурная механика — нелинейная задача (COSMOSWorks)
171
ращения. Применительно к конкретным задачам эти настройки описаны
в разд. 4.5.3, 4.6.3 и 4.7.3.
Процесс нелинейного деформирования может сопровождаться изменением^
времени граничных условий, свойств материала (если они зависят от
времени) или температуры. Эти процессы описываются посредством кривых,
например, граничные условия подчиняются параметру Кривая времени (Time
Curve). Время, фигурирующее в этих функциях, связано со временем,
присутствующим в окне Нелинейный (Nonlinear). Отметим, что время,
назначенное в условиях, является абстрактным параметром за исключением задач
с материалами, свойства которых зависят от времени, а также
нестационарного теплового расчета (его особенности применительно к COSMOSWorks
мы в данной книге не рассматриваем). При решении этих двух задач время
является "конкретной" величиной.
4.4.3. Свойства материалов
В COSMOSWorks и DesignSTAR доступны следующие модели материалов и
типы моделей деформирования.
♦ Упругие:
• линейно-упругие изотропные, трансверсально-изотропные,
ортогонально- и цилиндрически-ортотропные материалы;
• нелинейно-упругие с назначаемой пользователем кривой
"напряжение — деформация" (она должна описывать упрочняющийся материал,
т. е. не содержать ниспадающих участков). Допускаются материалы,
по-разному сопротивляющиеся растяжению и сжатию. Нелинейно-
упругие материалы могут использоваться для моделей с
пространственными и поверхностными конечными элементами.
♦ Гиперупругие:
• модель Муни — Ривлипа (Mooney — Rivlin). Допускается для моделей с
пространственными и "толстыми" оболочечными элементами. В
документации программы приведен ряд рекомендаций по настройке
вычислительного процесса для моделей с гиперупругими материалами.
Следует использовать итерационный алгоритм Ньютона — Рафсона (NR).
Приемлемым интервалом для коэффициента Пуассона считается от
0,48 до 0,5 (не включая 0,5). Если в качестве нагрузки используется
давление, то рекомендуются использовать величины в интервале от
0,499 до 0,4999. Поскольку резиноподобные материалы
деформируются при относительно малых нагрузках, то рекомендуется подбирать
начальный шаг так, чтобы нагрузки были невелики. По той же причине
следует автоматический подбор величины шага по времени. Если метод
сил в качестве алгоритма контроля состояния равновесия не привел к
172
Глава 4
сходимости, то следует попробовать метод длины дуги. При
использовании элементов толстых оболочек величина назначенного
коэффициента Пуассона не имеет значения, поскольку материал предполагается
абсолютно несжимаемым. Константы А и В, характеризующие
материал, должны удовлетворять соотношению А + В > 0. Программа
позволяет идентифицировать константы, используя набор
экспериментальных кривых деформирования при заданных различных
комбинациях нагрузок;
• модель Огдена (Ogden). Допускается для моделей с пространственными
и "толстыми" оболочечными элементами. Согласно справочной
системе программы, большинство рекомендаций для модели Муни — Рив-
лина применимы и к модели Огдена. Рекомендуется использовать
коэффициент Пуассона в интервале от 0,49 до 0,499. Также можно
определить константы по двум кривым деформирования. Две данных
модели используются для описания резиноподобных малосжимаемых
материалов;
• модель Блатца— Ко (Blatz— Ко). Используется исключительно с
пространственными конечными элементами. Предполагается, что
коэффициент Пуассона 0,25, поэтому единственной используемой
характеристикой является модуль Юнга. Из числа имеющихся в программе,
данная модель наилучшим образом описывает поведение высокосжи-
маемых сред типа пенополиуретана.
♦ Пластические'.
• модель Мизеса с изотропным и кинематическим упрочнением.
Допускается для моделей с пространственными и "толстыми" оболочечными
элементами. По умолчанию пластические деформации предполагаются
малыми независимо от того, используется ли гипотеза "больших
перемещений". Кривая деформирования материала может назначаться
пользователем в виде набора точек (необходим только участок упрочнения).
При этом первая точка на кривой должна соответствовать пределу
текучести (то есть линейный участок не вводится). Соответственно
модуль упругости при растяжении и предел текучести, присутствующие в
явном виде в окне Материал (Material) на вкладке Свойства
(Properties), система проигнорирует. Не допускаются кривые, содержащие
участки разупрочнения.
Материал с кривой деформирования не может фигурировать в модели
удара. При отсутствии кривой деформирования подразумевается, что
должны присутствовать значения предела текучести (SIGYLD) и
касательного модуля упругости (ETAN). Выбор между изотропным и
кинематическим упрочнением осуществляется назначением коэффициента
упрочнения (RK). Ноль соответствует изотропному, единица — кинема-
Структурная механика — нелинейная задача (COSMOSWorks) 173
тическому. По умолчанию система назначает 0,85. Для решения
рекомендуется использовать метод Ньютона— Рафсона. Допускается
назначать температурозависимые механические характеристики предела
текучести и касательного модуля, однако такие модели не могут
содержать оболочечные элементы. Активизация опции Использовать
гипотезу больших деформаций (Use large strain formulation) в окне
Нелинейный предполагает, что "большими" будут только
пластические деформации, а упругие останутся "малыми", т. е. резиноподобные
материалы с необратимыми деформациями описываются данной
моделью неадекватно. Рекомендуется использовать модель Мизеса для
описания объектов, изготовленных из вязких металлов. В документации
сообщается, что при использовании гипотезы больших деформаций в
пластическом анализе с кривой деформирования, заданной
пользователем, эта кривая должна назначаться в системе "логарифмические
деформации — истинные напряжения";
• модель Треска с изотропным и кинематическим упрочнением.
Рекомендации по использованию данного критерия аналогичны
приведенным для критерия Мизеса. По сравнению с ним, критерий Треска
предсказывает большие пластические деформации, чем критерий Мизеса и,
соответственно, при действии чистого сдвига течение материала
начинается при напряжении на уровне 87% от прогнозируемого по
критерию Мизеса. Таким образом, прогноз прочности конструкции по
критерию Треска является более консервативным (то есть запас прочности
получается меньше), чем по критерию Мизеса;
• модель Друкера— Прагера для упругоидеальнопластической среды.
Этот критерий используется для описания поведения сыпучих сред,
которые могут находиться только в двух состояниях— упругом и в
скольжении, обусловленном сдвигом. Тела, для которых назначается
критерий, могут описываться исключительно пространственными
конечными элементами. Упругое состояние материала описывается
модулем упругости и коэффициентом Пуассона, а момент начала
необратимых деформаций зависит от прочности сцепления (параметр
COHESN) и угла трения (FRCANG). Последний измеряется в градусах.
Документация рекомендует использовать алгоритм Ньютона — Рафсона.
Упругие деформации среды предполагаются малыми, даже если
перемещения и необратимые сдвиговые деформации являются большими.
Следует иметь в виду, что сыпучая среда не воспринимает
растягивающих нагрузок. Поэтому, за редким исключением, обязательным
является присутствие в модели гравитационных ускорений.
Назначение типа нелинейности для материала производится в окне
Материал (Material) базы данных по материалам, которое нужно вызвать из Менед-
174
Глава 4
жера программы. Для этого используется контекстное меню пиктограммы,
соответствующей телу.
( Замечание ~^
В COSMOSWorks, начиная с версии 2005, в поставляемую базу данных для
некоторых марок материалов включены экспериментальные диаграммы
деформирования в пластической зоне и кривые усталости. Их названия
сопровождаются постфиксами "SS" и "SIM".
4.4.4. Генерация сетки
Процесс генерации сетки в нелинейном анализе, по сути, мало отличается от
того, что происходит в других типах расчета. Однако требования к качеству
сетки существенно выше. Наличие конечных элементов, близких к
вырожденным, может существенно ухудшить сходимость итерационного процесса.
Учитывая, что в ходе итераций приращение нелинейных деформаций
приводит к изменению геометрии и, соответственно, требует модификации формы
конечных элементов и матриц жесткости, то "плохая" исходная сетка может
стать совсем неприемлемой. Также следует избегать появления областей с
сингулярностью (если, конечно, их наличие не обусловлено содержанием
задачи), т. к. в них наблюдаются необоснованно большие
деформации/напряжения.
4.4.5. Граничные условия
При нелинейном анализе кинематические граничные условия группы
Соединители (Connectors), а также усилия типа Дистанционная нагрузка (Remote
Load) появились, начиная с версии 2006 года. В релизе 2007 года доступны
соединители: Жестко (Rigid); Штифт (Pin); Пружина (Spring); Связать
(Link). Как видно, все они присущи только сборкам и многотельным деталям.
4.4.6. Контактная задача
В настройках статического анализа в обеих программах существует опция
Большие перемещения (Large displacement). После ее активизации
контактная задача будет решаться методом последовательных нагружений с
анализом на каждом шаге (величина приращения нагрузки определяется
программой) положения пар поверхностей, которые могут взаимодействовать между
собой, и ориентации нормалей к ним. В противном случае нагрузка
прикладывается полностью, а затем итерационная процедура рассчитывает
площадку контакта. Выбор способа расчета оставлен на усмотрение пользователя.
Документация рекомендует использовать данную возможность при упругих
деформациях более 4%, а также после визуального контроля деформирован-
Структурная механика — нелинейная задача (COSMOSWorks)
175
ного вида с отображением перемещений в натуральном масштабе. Также
данная опция имеет значение для задач, где давление действует на
тонкостенные объекте.
В COSMOSWorks, начиная с версии 2005 года, возможен нелинейный анализ
сопряженной задачи: физическая нелинейность материала плюс
неопределенная поверхность контакта. Однако трение на границе контакта
учитывается только в версии 2007 года1. Различием в определении контактных условий
для статического и нелинейного расчета является то, что контактное условие
Поверхность к поверхности (Surface to surface) в нелинейном расчете
неработоспособно. Также, по крайней мере в версии COSMOSWorks 2007 SP0,
контактная задача с трением в сочетании с физической нелинейностью
решается только с условием Узел к поверхности (Node to surface). Наличие в
модели хотя бы одной пары с условием Узел к узлу (Node to node) приводит
к аварийной остановке решателя.
4.4.7. Решатели
Для решения разрешающей линейной системы уравнений в нелинейном
расчете доступны две процедуры: Direct sparse (метод Холесского для разреженных
матриц) и FFEPIus (Итерационный компактный). Метод FFE
(Итерационный) для нелинейного расчета не предусмотрен. Кстати, в версии 2007 года
он был вообще исключен из программы. Как показала практика, в отличие от
линейных задач, прямой метод, несмотря на большую запрашиваемую память
и лучшие— в упругой постановке— показатели быстродействия, в
нелинейных задачах зачастую наиболее эффективен. В частности, для проблем с
большими деформациями и/или с "почти" подвижными деталями.
Начиная с версии 2007 года, нелинейный решатель может сохранять
промежуточные результаты не только для отображения после прерывания
программы, но и для продолжения расчета. Этим управляет опция Сохранить
данные для повторного запуска анализа (Save data for restarting the analysis)
вкладки Решение окна Нелинейное (см. рис. 4.18). Чтобы эта информация
была учтена при новом запуске решателя, следует активизировать опцию
Повторный запуск (Restart).
( Замечание ^
В некоторых ситуациях попытка выполнить расчет после изменения расчетной
модели при активной опции Повторный запуск не приводит к тому, что
программа автоматически "сбросит" информацию о пройденных ранее шагах.
Пользователь должен сделать это самостоятельно.
1 Отметим, что решение нелинейных задач с трением сопряжено с определенными
трудностями и требует тщательного подбора настроек решателя.
176
Глава 4
4.4.8. Постпроцессор
Процедура визуализации результатов, соответствующих нелинейному
анализу, отличается от применяемых для статического расчета наличием
возможности показывать расчетный параметр как функцию времени. Для этого
существует объект Кривая отклика (Response Plot), который строится по
команде Параметры результатов (Result Options). В одноименной панели
следует назначить вершины или справочные точки, для которых при
последующем расчете будут накапливаться результаты. После расчета создание
соответствующих кривых осуществляется по команде Определить эпюру
хронологии (Define Time History Plot). Визуализировать можно компоненты
напряжений, интенсивность напряжений, эквивалентные по Мизесу
напряжения, а также главные напряжения. При отображении "традиционных1'
диаграмм следует указывать номер шага времени, для которого выполняется
визуализация. Кстати говоря, при анимации диаграмм будет воспроизводиться
весь процесс, начиная с момента времени ноль и заканчивая временем
окончания (если, разумеется, вычисления не были принудительно прерваны, или
не произошел аварийный останов расчета).
4.5. Упругопластическая модель1
проушины амортизатора
Приведена задача расчета проушины амортизатора, содержащей сварное
соединение. Особенностью задачи является то, что задачу пластичности нужно
решать "на фоне" контактной задачи с изменяющейся границей, а также
наличия предварительного натяга, созданного резьбовым соединением. Также
нагрузка прикладывается циклически. Однако на этом этапе усталостные
эффекты оцениваться не будут.
4.5.1. Постановка задачи
На рис. 4.1 показана геометрическая модель проушины амортизатора,
состоящего из собственно проушины и дна, связанных сварным швом сложной
формы. Детали и шов показаны на рис. 4.2 и 4.3. Формально шов не может
быть описан каким-либо стандартом, а его форма определяется условиями
технологичности и прочности. При выполнении модели шва и,
соответственно, полостей в соединяемых деталях была взята установка на то, чтобы
наружные грани шва и деталей были касательными между собой. Это
способствует тому, что на границе контакта не будет возмущений поля деформаций,
порождаемых сингулярностями. Также грани шва, примыкающие к общим
1 Авторы благодарят сотрудников ОАО "СААЗ" (Скопинский автоагрегатный завод) за
сотрудничество при решении данной задачи.
Структурная механика — нелинейная задача (COSMOSWorks)
177
для шва и деталей кромкам, не должны образовывать "слишком" острые углы
с наружными гранями. Первое требование появилось из-за того, что целью
расчета является анализ "невозмущенных" напряжений, обусловленных, в
первую очередь, особенностями конструкции. В реальности сопряжение шва
и детали может быть негладким, однако моменты, связанные с сингулярно-
стями, требуют специальных приемов. Второе условие также способствует
повышению вычислительной устойчивости за счет лучшего качества сетки —
уменьшения числа элементов с малыми углами между гранями. Эти
мероприятия приводят к отклонению модели от реального объекта, однако их
оправдывает рост качества результатов, в частности, нелинейной компоненты,
за счет нивелирования локальных возмущений. Также должна наблюдаться
асимптотическая сходимость при уплотнении сетки.
Рис. 4.1. Геометрическая модель проушины с четвертью выреза
Расчет данного узла вне контекста весьма затруднен. Он имеет достаточно
высокую податливость, поэтому особенности взаимодействия с
окружающими деталями решающим образом скажутся на состоянии шва. Создать
виртуальную модель контекста за счет имеющийся номенклатуры граничных
условий, в принципе, можно, но вычислительные эксперименты потребуют
больше ресурсов, нежели чем расчет "подлинной" конструкции. В нашем случае
это будет фрагмент приспособления, связывающего испытательный стенд и
анализируемый узел. Также эта оснастка нивелирует локальные эффекты в
зонах приложения граничных условий. На рис. 4.4 показана проушина в
сборе с приспособлением, а на рис. 4.5 — она же, но с разрезами вертикальными
178
Глава 4
Рис. 4.2. Фрагмент проушины
Рис. 4.3. Шов с проушиной и проушина отдельно
Структурная механика — нелинейная задача (COSMOSWorks)
179
Рис. 4.4. Проушина в приспособлении
Рис. 4.5. Модель с разрезами
плоскостями, проходящими через горизонтальную и вертикальную оси труб.
Эти разрезы сделаны для повышения наглядности. Следует обратить
внимание на горизонтальный тонкий цилиндр, предназначенный для имитации
180
Глава 4
резьбы, а также вертикальную "прослойку", разделяющую вал на две части.
Данный объект предназначен для создания в модели натяга, в реальности
порождаемого резьбовым соединением. На рисунке также показана втулка,
вставленная в цилиндрический паз вала. Понятно, что фактически
конструкция несколько иная, однако взаимодействие деталей этой моделью
описывается вполне адекватно.
В реальности труба, приваренная к дну проушины, нагружена
перерезывающей силой, передаваемой через жесткие накладки, стянутые болтами.
Заделка — ограничение подвижности конца вала.
4.5.2. Анализ
Поставленная задача характеризуется взаимовлиянием нескольких факторов.
Выделим ключевые:
♦ геометрия сварного шва и окружающей зоны — как упоминалось, способ
ее описания является компромиссом между тем, что имеется в реальности,
и тем, что обеспечивает приемлемую расчетную модель. Здесь следует
учитывать, что форма и размеры имеют статистическую природу и
определяются в некоторых интервалах;
♦ материалы деталей проушины и сварного шва— в них могут возникать
пластические деформации. Они приводят к перераспределению
напряжений. Этот эффект усиливается тем, что характеристики пластичности шва
и деталей отличаются;
♦ контактное взаимодействие деталей — в процессе приложения силы
проушина может выходить из контакта с валом. Также может изменяться
площадка контакта между валом и втулкой. Отдельного рассмотрения
заслуживает анализ состояния кольцевых граней между гайкой и шайбой,
шайбой и проушиной, проушиной и валом. Они могут выходить из
контакта или сдвигаться. В этих зонах— из-за предварительного натяга —
значительную роль играет трение. Его учет в задаче с физической
нелинейностью— достаточно щекотливая проблема;
♦ предварительный натяг— он играет базовую роль, повышая жесткость
системы при деформировании. Рассматриваемая конструктивная схема не
дает возможности использовать виртуальные болтовые соединения
COSMOSWorks, поскольку "болт" (даже если бы эту разновидность
виртуальных соединителей можно было бы применять в нелинейном анализе)
занимает, по сути, половину объема узла;
♦ граничные условия прикладываются не одновременно, а по достаточно
сложной схеме, описывающей некоторое число циклов.
Структурная механика — нелинейная задача (COSMOSWorks)
181
( Замечание J
COSMOSWorks в версии 2005 года способен решать задачи с двумя типами
нелинейности: контактной, сопровождающейся входом объектов в контакт и
выходом из контакта, а также с физической нелинейностью материалов деталей
сборки. В версии 2007 года можно в дополнение к этим факторам вводить
трение. Однако злоупотреблять данными обстоятельствами не рекомендуется.
Наложение друг на друга нескольких итерационных процедур, обладающих
определенной независимостью, в разы увеличивает время счета.
Важной особенностью задачи является то, что нас также интересует
состояние объекта после снятия нагрузки. Учитывая, что имеет место упругопла-
стическое деформирование, система после снятия нагрузки не восстановит
исходное состояние. Этот момент также представляет интерес.
4.5.3. Решение
Подготовка исходных данных о свойствах материалов. Этот шаг не
ограничивается назначением собственно численных величин, но требует
принятия решения о том, какие базовые гипотезы будут использованы при
моделировании их поведения. В данной задаче материал со специальными
свойствами будет использоваться для имитации эффекта затяжки резьбы.
Итак, конструкция включает следующие материалы.
♦ Сталь, из которой изготовлены проушина и дно (рис. 4.6). Принимаем, что
упругие характеристики соответствуют малоуглеродистой стали.
Предварительный расчет, в котором все материалы обладали исключительно
упругими свойствами, показал, что в узле присутствуют зоны с
напряжениями выше предела текучести (см. рис. 4.21—4.23). Поэтому делаем так,
чтобы материал обладал способностью к пластическому деформированию.
В качестве модели пластического течения принимаем модель Мизеса с
кинематическим упрочнением — von Mises Plasticity с коэффициентом
упрочнения (Hardeningfactor), равным 0,85. Кривую "напряжение —
деформация" будем аппроксимировать билинейной зависимостью. Она требует
знания модуля на упругом участке — ЕХ, предела текучести S1GYLD и
касательного модуля на участке упрочнения — ETAN. Последний во
многом влияет на жесткость конструкции после достижения пластичности.
♦ Материалы трубы, приваренной к дну, большинства элементов вала, а
также втулки, надетой на канавку на вале, гайки и шайбы. В реальности
они эквивалентны использованным для проушины. Однако, в целях
экономии вычислительных ресурсов (алгоритм не должен анализировать на
предмет наличия пластичности большие геометрические объемы, в
которых она заведомо отсутствует), в расчетной модели лишаем эти материалы
пластических свойств. Характеристики упругости оставляем теми же са-
182
Глава 4
мыми. Принимая свойства данных объектов заведомо упругими, мы не
будем учитывать возможность пластических деформаций в таких зонах,
как канавки на вале. Однако, как предполагается, их наличие мало влияет
на процессы в проушине.
Рис. 4.6. Характеристики материала дна и проушины
♦ Материал сварного шва (рис. 4.7). Также обладает способностью к
пластическому деформированию. В качестве первого приближения
принимаем, что его характеристики эквивалентны основному материалу, за
исключением предела текучести. Пусть он будет нескольку меньше, причем
отношение предела текучести основного материала к пределу текучести шва
равно 1,4.
♦ Материал тела, имитирующего резьбу (рис. 4.8). В соответствии с
методикой имитации резьбы, описанной в [1], назначаем для цилиндра модули
упругости в 10 раз меньшие, чем у других тел, описывающих крепеж.
♦ Материал вставки, разделяющей вал на две части. Предварительный натяг
будет обеспечиваться за счет термоупругой деформации некоторого тела.
В данном случае это цилиндрическое тело, имеющее трансверсальную
изотропию термоупругих свойств. Модули упругости, а также
коэффициенты теплового расширения в плоскости перпендикулярной оси в 100 раз
меньше, чем в продольном направлении (рис. 4.9). Такая совокупность
характеристик обеспечивает отсутствие нереальной концентрации напряже-
Структурная механика — нелинейная задача (COSMOSWorks)
183
ний на границах контакта, а также минимизирует внесенные поперечные
компоненты тепловой деформации.
Рис. 4.7. Характеристики материала сварного шва
Рис. 4.8. Характеристики материала, имитирующего резьбу
Подготовка расчетной модели. На рис. 4.10 показана расчетная модель с
граничными условиями. Она является половиной исходной сборки,
поскольку учитывает свойство симметрии относительно вертикальной плоскости.
Отсутствующая часть "заменена" соответствующими граничными условиями,
которые на иллюстрации не показаны.
Второй заделкой является фиксация перемещений на поверхности втулки,
надетой на вал. Это условие порождает сингулярность вблизи круговых
7 Зак. 4405
184
Глава 4
Рис. 4.9. Характеристики материала, обеспечивающего натяг
:оордииат!
[Положение X(it«t$ •-
[ПрдСоквмиеУ(гот); *
|Лояож«нивХ(гптЗс
1Сила. Направление f№:
Рис. 4.10. Расчетная модель с фаничными условиями (за исключением симметрии)
Структурная механика — нелинейная задача (COSMOSWorks)
185
кромок цилиндра, однако, подбирая плотность сетки так, чтобы она была
достаточно редкой вблизи этих кромок, можно практически нивелировать
влияние этих особенностей на результат (также, как упоминалось, материал
втулки в любой ситуации может быть только упругим).
Имея в виду выполнение как упругого, так и пластического анализа, в
качестве контактных граничных условий принимаем Узел к узлу (Node to node)
для граней, находящихся в контакте в ненагруженном состоянии, и Узел к
поверхности (Node to surface) для граней, потенциально вступающих в
соприкосновение. Как показал вычислительный эксперимент, в данной задаче
(в ней контакт криволинейных граней сочетается с физической
нелинейностью) именно такая комбинация обеспечивает максимальную устойчивость
нелинейного расчета. Для плоских граней заведомо упругих тел можно
использовать также условие Узел к поверхности (Node to surface). Надо
сказать, что подобрать подходящее описание контакта можно только методом
проб и ошибок. Очевидно, что для граней, не скользящих и не выходящих из
контакта— по ним соприкасаются тела, образующие вал, а также шов с
проушиной и дном — действует (оно назначено по умолчанию) условие
Связанные (Bonded).
Сетка конечных элементов и ее фрагмент в зоне шва показана на рис. 4.11—
4.13. Как видно, в зоне максимальных деформаций, минимальное число
конечных элементов по толщине равно двум. Там, где потенциально возможно
наличие сингулярности, плотность сетки минимальна. Плотность сетки по
сечению шва отрегулирована так, чтобы там присутствовало три-четыре
элемента.
В реальности узел нагружен перерезывающей силой, приложенной к трубе,
приваренной к дну проушины. Сила к трубе приложена через весьма жесткие
накладки с цилиндрическими отверстиями, стянутые болтами. В модели для
этого используется условие Дистанционная нагрузка (Remote Load/Mass) в
варианте Жесткая связь (Rigid connection), действующее на торец трубы
(рис. 4.14). Делая грань абсолютно жесткой, оно, в свою очередь, порождает
сингулярность на границе, однако здесь была применена пониженная
плотность сетки.
Источником натяга, как упоминалось, является тепловая деформация вставки
в вале. В статическом и нелинейном расчете, используя команду
Температура (Temperature), назначаем ей температуру меньшую, чем та, которая
присутствует на вкладке Эффекты потока/Тепловые эффекты (Flow/Thermal
Effects) окон Статический (Static) и Нелинейный (Nonlinear)
соответствующих анализов (рис. 4.15). Интерес представляет только величина
разности температур. В нашем случае это 20 градусов. Разность подбирается из
условия получения требуемого натяга. Программа не позволяет после расчета
186
Глава 4
Рис. 4.11. Сетка конечных элементов
Рис. 4.12. Сетка конечных элементов — фрагмент
Структурная механика — нелинейная задача (COSMOSWorks)
187
Рис. 4.13. Сетка конечных элементов — сварной шов
ординат!
г у С Нуру>к«(ПрямвЙ11ер*ийс)/
^ Наруже (Жэсткалсряй*)
Г n<^M«ttef^{Xeaic9j*«jj^) i
перенос)
Р1ННН
| - Ф Пред*, просмотр
<** Глобальный
& Настроено оол»ао^т«леи , ]
! j^ Ркиаема координат!
|ЯШ1Я&ЯШ£^^
$\ |mm
** jo
р»]°
9** Jo
d j
d |
d
,d i
ПояЬж5енйвХ<тп^ ч'
Удаленна* Доб«|к0£
^ —
163
R Реэерс направления
Рис. 4.14. Приложение дистанционной силы
. ';wKt»#owTfcf график
Г линейный
& Кривая
188
Глава 4
установить величину контактного усилия для граней, для которых поставлено
условие Связанные (Bonded). В данном случае нельзя посредством
единственной команды оценить нормальную силу на границе "вставка— вал".
Обходной путь— отобразить нормальную компоненту напряжений и
применить команду Выбранный список (List Selected). Она даст величину
среднего напряжения на грани, которое следует умножить на площадь грани. Это и
будет оценка нормальной силы, порождаемой назначенной разностью
температур.
В линейной модели все граничные условия, как силовые факторы, так и
ненулевые перемещения, прикладываются одновременно. В задачах с
предварительным натягом и, тем более, при переменной по величине и направлению
нагрузкой "история вопроса" может быть критическим фактором.
Рис. 4.15. Назначение
температуры, создающей натяг Рис. 4.16. Закон изменения температуры (натяга)
На рис. 4.16 показан график температуры. Как видно, есть участок роста
нагрузки, постоянной величины и разгружения (гайка "свинчивается"). Для
создания этого графика следует нажать кнопку Использовать кривую времени
(Use time curve), после чего нажать кнопку Редактировать (Edit) (рис. 4.15) и
заполнить таблицу Данные кривой (Curve data) окна Кривая времени (Time
curve). Следует обратить внимание на значения ординат. Нулевое значение
обозначает не нулевую температуру, а отсутствие разницы между
параметром Справочная температура при нулевой деформации (Reference
temperature at zero strain) вкладки Эффекты потока/Тепловые эффекты.
Структурная механика — нелинейная задача (COSMOSWorks)
189
В принципе, промежуточные точки на горизонтальном отрезке
необязательны, однако для единообразия с кривой силы, эти точки сохранены.
На рис. 4.17 показан график изменения силы. Первые полсекунды (условных)
сила отсутствует, а затем периодически изменяется в интервале от -1 до 1. На
последнем шаге — подобно первому — сила не действует. В его начале узел
находится под действием натяга, в конце — внешние силовые факторы (за
исключением взаимодействия остаточных деформаций с заделкой на втулке,
по сути, не оказывающего влияния на результат) не действуют.
Кривая времени
(#*» ^>}|Нагрузка-разгрузка ^
I <у' ч^ ~ ^ $ .ч 4»»v+>>№*■«».wire.»»,>.if in» ».»iiinrtu '
Жфм* ,"| Настройки польз» ^J"
'Zi j^4' \Л 'v --'Ь ■. V'v« ' s * **. <* '''"-
:w.
ДДдЗД&яз jfspMgKff* ^
H04fc"
N^
•4s j- */
* ^«
$ 4*
b>
A'- J '
0
0.5
1
1.5
2
2.5
3
;\ ' jy* *
0
0
1
0
-1
0
1
*i
I* Время йфмания *i&MK
' Пол^1Ъ£ри%»а>.
Рис. 4.17. Закон изменения силы
Настройка вычислительного процесса. Данная задача, если решать ее с
достаточной степенью подробности, используя плотную сетку конечных
элементов второго порядка, обладает весьма высокой трудоемкостью. Поэтому
следует уделить внимание подбору оптимальных настроек нелинейного
решателя.
Рассмотрим содержимое окна Нелинейное (Nonlinear), ответственного за
управление нелинейными расчетами (рис. 4.18 и 4.19). Оно вызывается
командой Свойства (Properties) из контекстного меню пиктограммы,
соответствующей данному анализу.
На вкладке Решение (Solution) этого окна необходимо определить
следующие параметры:
♦ Время начала, Время окончания (Start time, End time). Кривая времени
была определена ранее. Поэтому расчет стартует при 0 единиц и
заканчивается при 5 единицах. Начальное приращение назначаем исходя из того,
190 Глава 4
при каком значении параметра времени начнутся пластические
деформации. Рекомендуется, чтобы этот шаг не был большим. Но поскольку
сначала происходят деформации упругие, то малый шаг приводит к
большому объему неэффективных вычислений. В данной задаче следует выбрать
приращение в интервале от 0,1 до 0,2.
Рис. 4.18. Окно Нелинейное, вкладка Решение
Группа параметров Приращение по времени (Time increment).
Одноименный переключатель может иметь два положения: Автоматически
(автоинтервал) (Automatic (autostepping)) и Fixed (Фиксированный).
Автоматический подбор приращения используется в большинстве случаев. Причина все
та же — на этапах упругого нагружения и упругой разгрузки шаг допускается
Структурная механика — нелинейная задача (COSMOSWorks)
191
большим. При больших пластических деформациях (как на этапе роста
нагрузки, так и при ее снятии) необходим малый шаг. Если выбран
автоматический подбор шага, то необходимо заполнить следующие поля:
♦ Время начала (Start time). Время начала процесса не корректируется.
В этом поле после активизации опции Повторный запуск отображается
номер шага, с которого продолжается расчет после рестарта;
♦ Время окончания (End time). Учитывая, что предыдущий параметр не
редактируется, это есть продолжительность процесса;
♦ Начальный шаг по времени (Initial time increment). Начальный шаг
должен быть достаточно малым, чтобы идентифицировать нелинейные
эффекты с достаточной точностью, и, с другой стороны, достаточно
большим, чтобы изменения в состоянии системы существенно превышали
погрешности, порождаемые дискретизацией объекта, ошибками округления
и т. д. Относительно большой шаг, скорее всего, потребует
непроизводительных затрат на пересчет с меньшими его значениями, а "слишком"
малый — увеличит время расчета или — что случается редко, но
диагностируется достаточно трудно — приведет к вычислительной неустойчивости.
Например, из-за малых нагрузок изменение поверхности контакта будет
на уровне "шума". В данной задаче назначаем 0,1;
♦ Мин (Min). Минимальный шаг по времени. Как правило, уменьшение
параметра относительно назначенного по умолчанию не помогает устранить
проблемы, связанные с плохой сходимостью. Последняя может быть
следствием некорректных условий задачи или — это тоже имеет место —
несовершенства алгоритма;
♦ Макс (Мах). Максимальный шаг по времени. С точки зрения здравого
смысла, его размер не должен быть больше продолжительности
некоторого события. В нашем случае — это время нагрузки/разгрузки, занимающее
0,5 условных секунд. Однако мы назначим 0,1. Дело в том, что одним из
результатов расчета должна быть качественная анимация
деформированного состояния в ходе изменения нагрузки по назначенным правилам.
Может оказаться, что нагрузка потребует значительно больше шагов, чем
разгрузка, и анимация получится непривлекательной.
♦ Число корректировок (No. of adjustments) — число попыток подбора
шага. Попытки заключаются в делении текущего шага времени пополам.
Если в ходе проб системе не удастся подобрать приемлемый шаг в заданном
диапазоне за определенное число попыток, то процесс будет прерван.
Группа настроек Параметры нелинейности геометрии (Geometry non-
linearity options):
♦ Использовать гипотезу больших перемещений (Use large displacement
formulation). Активизируем это опцию, поскольку изменение геометрии
192
Глава 4
предполагается значительным. В частности, форма контактирующих со
скольжением поверхностей претерпевает ощутимые искажения;
♦ Корректировать направление нагрузки в соответствии с деформацией
(Update load direction with deflection). Эта опция появилась в версии
2007 года и работоспособна только при обработке распределенных
нагрузок и нормальных сил. В нашей задаче таковые отсутствуют;
♦ Использовать гипотезу больших деформаций — только для моделей
материалов с пластичностью (Use large strain formulation (for plasticity
material models only)). Пластические деформации предполагаются
достаточно малыми, поэтому эту функцию не используем;
♦ Решающая программа (Solver). Рекомендации по выбору решателей
соответствуют линейной задаче: Direct sparse — как правило, более
устойчивый, в частности, для контактных задач и при больших деформациях.
FFEPlus требует меньше ресурсов и во многих ситуациях работает
быстрее. Относительно ряда других, данная задача не имеет большой
размерности. Поэтому, чтобы с наибольшей вероятностью получить результат,
используем прямой решатель.
Нажав на кнопку Дополнительные параметры (Advanced Options),
переходим на вкладку Дополнительно (рис. 4.19). Здесь присутствуют следующие
поля и опции:
♦ Управление (Control method). Определяется алгоритм управления
итерационным процессом, по которому назначаются приращения по кривой на-
гружения. Оставляем параметр Сила (Force), использующий приращение
силы для описания процесса как наиболее естественный в задаче, где
основной фактор — сила, причем диапазон сил таков, что до момента потери
несущей способности (когда рост перемещений происходит без
приращения нагрузки) дело не дойдет;
♦ Метод повторов (Iterative method). Для задач, в которых рост
перемещений требует роста нагрузки, при первых попытках следует попробовать
NR (алгоритм Ньютона — Рафсона), далее — в зависимости от типа
нелинейности.
Группа параметров Параметры управления перемещения (Displacement
control options). В нее входят опции, применяемые, если в качестве
итерационного метода выбрано Перемещение (Displacement):
♦ Выберите вершину или справочную точку для управления анализом
(Select a vertex or reference point to control the analysis). В это поле
помещается вершина, для которой назначается управляющее перемещение;
♦ Компонент перемещения для выбранного местоположения
(Displacement component for the selected location). Здесь выбирается компонент
перемещения, по которому контролируется состояние системы;
Структурная механика — нелинейная задача (COSMOSWorks)
193
Рис. 4.19. Окно Нелинейное (Nonlinear), вкладка Дополнительно (Advanced)
♦ Перемещения вариации со временем (Displacement variation with time).
Кривая времени для назначенного перемещения, по которой будут
контролироваться приращения нагрузок.
Группа параметров Параметры завершения длины дуги (Arc-length
completion). Содержит опции, используемые при выборе метода Длины дуги (Arc-
length) в качестве алгоритма управления процессом:
♦ Коэффициент максимального распределения нагрузок (Maximum load
pattern multiplier). Множитель нагрузки, при котором происходит
прерывание процесса;
♦ Максимальное смещение (для смещения DOF) (Maximum displacement
(for translational DOF)). Максимальное перемещение, при котором
происходит прерывание процесса;
♦ Максимальное число интервалов дуги (Maximum number of arc steps);
194
Глава 4
Остальные управляющие параметры собраны в группу Параметры
интервала/допуска (Step/Tolerance options):
♦ Выполнять повтор равновесия каждые (Do equilibrium iteration every ...
steps). Чем активнее в процессе деформирования системы изменяются
направление и величина усилий, тем меньше этот параметр. В нашем
примере 1 — на каждом шаге осуществляется проверка;
♦ Максимальное число повторов равновесия (Maximum equilibrium
iterations). Устанавливает предельное число итераций для удовлетворения
условий равновесия на каждом шаге решения (в нашем случае — при
каждом приращении нагрузки);
♦ Допуск сходимости (Convergence tolerance). Критерий сходимости
процесса по перемещениям. Назначаем его равным 0,001;
♦ Максимальный инкремент деформации (Maximum incremental strain
increment). Если моделируется физическая нелинейность, то здесь должно
быть указано максимально допустимое приращение пластических
деформаций на одном шаге. При плохой сходимости для задач с пластичностью
можно пытаться постепенно увеличивать данный параметр. В нашем
примере назначаем его равным 0,01;
♦ Коэффициент устранения особой точки функции (Singularity elimination
factor). Его начальная величина равна единице. При плохой сходимости
расчета при пластичности материала можно попробовать его уменьшить
вплоть до нуля.
В предыдущих версиях программы присутствовали настройки, управляющие
периодичностью перестроения матрицы жесткости системы и проверки
состояния равновесия. Начиная с 2006 года, они исключены из интерфейса.
В связи с этим следует предположить (и содержимое информационной
панели Нелинейный анализ (Nonlinear Analysis) в ходе расчета подтверждает эту
гипотезу), что каждый шаг итерационного алгоритма сопровождается
пересчетом матриц жесткости конечных элементов согласно новой геометрии и
формированием новой глобальной матрицы жесткости. Этот алгоритм
остается неизменным как для задач с физической нелинейностью, так и для
полностью упругих систем.
В панели Параметры результатов (Result Options), вызываемой из
контекстного меню одноименной пиктограммы Менеджера COSMOSWorks,
определяем объекты, для которых будут строиться графики зависимости
интересующего нас параметра от переменной, имитирующей время. В качестве
Точек отклика (Reference points) будем использовать вершины на торце трубы
в плоскости симметрии (рис. 4.20).
Структурная механика — нелинейная задача (COSMOSWorks)
195
Рис. 4.20. Назначение точек отклика
Вычисления и интерпретация результатов. Нелинейный анализ имеет
большую вычислительную трудоемкость. Отработку конечно-элементной
модели, назначение и проверку граничных условий следует выполнять на
упругой модели. На ее базе можно оценить, будет ли происходить пластическое
течение.
На первом этапе оценим состояние узла в упругой постановке со свободным
скольжением всех граней (за исключением изначально связанных) без
трения. Нагрузки— натяг и сила. Деформированное состояние с
масштабированными перемещениями показано на рис. 4.21. Как видно, помимо
нарушения контакта между валом и проушиной, наблюдается ощутимый сдвиг
между шайбой, гайкой и валом.
Назначим для контактирующих со скольжением пар коэффициент трения 0,2.
Для экономии вычислительных ресурсов трение будет учитывать только для
контактов между проушиной, валом, шайбой и гайкой1. Результат показан на
рис. 4.22. Как видно, натяг таков, что в совокупности с трением сдвиг по
контактирующим граням стал практически неощутим. Также существенно
изменилась картина напряжений. Таким образом, трение радикально изменяет
модель и не может игнорироваться.
Поскольку грани с трением, по сути, перестали смещаться, то можно
попробовать для них условие совместного деформирования — Bonded. В
последующем это уменьшит трудоемкость расчета нелинейной модели. Результат
показан на рис. 4.23.
Трение, назначаемое по умолчанию на вкладке Параметры окна Статический линейного
расчета, действует только на контактные нары с условием Узел к узлу. Для контактных
условий других типов трение следует назначать одновременно с определением этих пар. В
нелинейном анализе трение "по умолчанию" назначать нельзя.
Шкала деформации: 75
von Mises (N/hiA2)
5.24e+008
Рис. 4.21. Эквивалентные напряжения на фоне деформированного вида
для упругой модели без трения
Шкала деформации: 75
von Mises (NAt»a2)
4.99е+008
Рис. 4.22. Эквивалентные напряжения на фоне деформированного вида
для упругой модели с трением
Структурная механика — нелинейная задача (COSMOSWorks)
197
Шкала деформации: 75 / / ^^-^_
ses (N/taA2)
4.11е+008
3.70е+008
3.29е+008
2.88е+008
2.47е+008
2 06е+008
1 в5е+008
1 24е+008
8 25е+007
4.14е+007
2.46е+005
Рис. 4.23. Эквивалентные напряжения на фоне деформированного вида
для упругой модели со связанными гранями
Подводя итоги расчета нескольких вариантов модели в упругой постановке,
выберем наиболее подходящий для нелинейного анализа. Несмотря на то, что
модель с трением наиболее близка к реальности, в данной ситуации ее вполне
заменяет аппроксимация со связанными деталями в тех контактных парах,
где проскальзывание отсутствует или незначительно, а выхода из контакта не
происходит.
4.5.4. Анализ состояния узла
с учетом физической нелинейности
Выполнив расчет по нелинейной модели с приложением двух циклов
"нагрузка— разгрузка— нагрузка в противоположном направлении—
разгрузка", после чего следует снятие натяга, получим следующие результаты. На
рис. 4.24 показано распределение эквивалентных напряжений после
приложения натяга. На рис. 4.25 и 4.26 показаны эквивалентные напряжения после
первого шага приложения силы, а на рис. 4.27 — после изменения ее
направления. Как видно, результаты отличаются незначительно.
Очевидно, что некоторая зона в шве и в материале возле шва находится в
состоянии пластичности. Для диагностирования этой зоны отображаем
распределение интенсивности напряжений, а затем посредством команды Изосече-
ние (Iso Clipping) — объем, занимаемый пластическим материалом.
vonW
Plot step: 3 time: 0.5 Seconds
Deformation scale: 150
von Mises (N/mA2)
8.04e+007
7.37e+007
6.70e+007
6.03e+007
5.36e+007
4.69e+007
4.02e+007
3.35e+007
2.68e+007
•££& 2.01e+007
* 1.34e+007
. 6.71e+006
1.55e+004
Рис. 4.24. Эквивалентные напряжения на фоне деформированного вида
для упругопластическои модели после применения натяга
Plot step: 6 time: 1 Seconds
Deformation scale: 150
von Mises (N/mA2)
2.27e+008
Рис. 4.25. Эквивалентные напряжения на фоне деформированного вида
для упругопластическои модели после первого шага приложения нагрузки
Структурная механика — нелинейная задача (COSMOSWorks)
199
Plot step: 6 time: 1 Seconds
Deformation scale: 150
von Mises (1МЛпл2)
2.27e+008
Рис. 4.26. Эквивалентные напряжения на фоне деформированного вида
для упругопластическои модели после первого шага приложения нагрузки —
фрагмент в зоне шва
von Mises (NAnA2)
2 29е+008
Тип эпюрьс Нелинейное узловое напряжение 2-0
Шаг эпюры: 16 время: 2 Секунды
Рис. 4.27. Эквивалентные напряжения на фоне деформированного вида
для упругопластическои модели после приложения нагрузки в противоположном направлении
200
Глава 4
Соответствующая панель показана на рис. 4.28. В качестве нижней границы
напряжений устанавливаем величину предела текучести материала шва —
1.5е8 Па. В результате на диаграмме возникает объем материала, в котором
интенсивность напряжений превышает предел текучести. Как видно, эти
зоны имеют значительный объем и сосредоточены в сжатой и в растянутой
зонах шва. Установив границу 2.1е8 Па (это предел текучести основного
материала), получаем, что пластическая зона в проушине и дне практически
отсутствует.
Рис. 4.28. Назначение параметров изоповерхности и зона пластичности
после первого шага приложения нагрузки
Поскольку пластичность в шве наступила до того, как это случилось в
основном материале, то в результате произошло перераспределение напряжений, и
они стали более равномерными. Если бы шов, по сравнению с основным
материалом, имел больший предел текучести, то концентрация напряжений в
последнем была бы намного выше.
Из приведенных диаграмм следует, что при данном уровне нагрузок узел,
несмотря на наличие местных зон пластичности, сохранил несущую
способность с точки зрения статической прочности. Однако действие циклических
Структурная механика — нелинейная задача (COSMOSWorks) 201
нагрузок может привести к разрушению при достаточно небольшом числе
циклов. Поэтому оценка ресурса должна выполняться с позиции
малоцикловой усталости. Соответствующие соотношения используют информацию о
распределении эквивалентных деформаций. Диаграмма эквивалентных
деформаций для первого шага показана на рис. 4.29. Максимальная деформация
составляет около 0,3%. Если проанализировать последовательность
подобных диаграмм для нескольких циклов нагрузки, то можно сделать вывод, что
деформации становятся более однородными, а их максимум несколько
снижается. Это происходит за счет того, что после снятия всех нагрузок, включая
натяг, в материале присутствуют начальные деформации (они показаны на
рис. 4.30) со знаком противоположным знаку деформаций, появляющимся
после приложения силы. Максимальная величина остаточной эквивалентной
деформации составляет около 0,1%. Поэтому в процессе нагружения
некоторая доля силы "расходуется" на приведение системы в состояние с нулевыми
деформациями (это, разумеется, имеет место только в некоторых зонах), а
затем они растут по модулю, но с противоположным знаком.
ESTRN
|3.10е-003
2 84е-003
2.58е-003
2.33е-003
2.07е-003
1.81е-003
1 55е-003
1 29е-003
1.03е-003
\*!>
*-**. 7.75е-004
■ 5.17е-004
• 2.58е-004
О.ООе+000
Рис. 4.29. Эквивалентные деформации после первого шага приложения нагрузки
Возможности версии 2007 года позволяют оценить влияние модели
упрочнения пластического (по Мизесу или Треска) материла на результат. На рис. 4.31
приведены эквивалентные напряжения для двух вариантов: первый — когда
материалам пластических тел присвоен Коэффициент упрочнения
(Hardening factor) равный нулю— это изотропное упрочнение в чистом виде.
Шаг эпюры; 6 время: 1 Секунды
Шкала деформации: 50
202
Глава 4
ESTRN
1^4
&i*
.♦
г 1.06е-003
■ 9.54e.Q04
• 8.48e-004
7 42e-004
• 6.36e-004
- 5 30e-004
4.24e-004
• 318e-004
• 2.126-004
1.06e-004
1.12e-009
Рис. 4.30. Эквивалентные деформации на фоне деформированного вида
для упругопластической модели после всех циклов нагрузки в свободном состоянии
von Mises (NAnA2)
3.07е+008
von Mises (NAnA2)
2.26e+008
Рис. 4.31. Эквивалентные деформации на фоне деформированного вида
для моделей с изотропным и кинематическим упрочнением
Правая часть иллюстрации соответствует кинематическому упрочнению —
Коэффициент упрочнения равен единице. Как видно, результаты по
эквивалентным напряжениям, показанные для третьей условной секунды (это
соответствует второму шагу приложения нагрузки), имеют значимые отличия.
Следует отметить, что для кривой времени без разгрузки влияние модели уп-
Структурная механика — нелинейная задача (COSMOSWorks)
203
рочнения заметно меньше. Также существует определенная зависимость
между степенью различия результатов и схемой нагружения: нагрузки могут
назначаться посредством сил "мягкое" нагружение и перемещений —
"жесткое".
В заключение отметим, что задача решена только в аспекте анализа изделия
без попыток его изменить. Однако полученной информации вполне
достаточно для того, чтобы выработать рекомендации по улучшению проекта.
4.6. Устойчивость квадратной пластины
Рассмотрим задачу, в которой определяется критическая сила потери
устойчивости плоской квадратной пластины. Для решения используется
нелинейная модель. Выполняется сравнение с результатами, полученными на базе
линеаризованного подхода. В основу задачи положен модифицированный
пример из Online Tutorials (Функциональные инструкции) COSMOSWorks.
4.6.1. Постановка задачи
На рис. 4.32 показана поверхностная модель пластины, сжатой с двух сторон
равномерно распределенной нагрузкой (ее величина l psi1). В качестве
кинематических граничных условий на всех сторонах выступают безмоментные
опоры с возможностью свободного перемещения перпендикулярно кромке
в плоскости пластины. В модели они реализованы как ограничение
перемещения кромок перпендикулярно пластине и вращения относительно оси
Рис. 4.32. Постановка задачи устойчивости
1 psi — фунт на квадратный дюйм.
204
Глава 4
перпендикулярной кромке и находящейся в плоскости пластины. В
принципе, фиксация вращения является избыточной. Однако результаты расчета
двух вариантов (например, для линеаризованной модели потери
устойчивости) отличаются на несколько процентов. По всей видимости, причина
кроется в вычислительных погрешностях, присущих методу конечных элементов.
Расчетную модель (рис. 4.33) будем формировать на основе четверти
исходной. Действие отрезанной части заменяется исключением перемещений
перпендикулярных новым кромкам в плоскости пластины, а также поворотов
вокруг кромок и относительно нормали к пластине.
Рис. 4.33. Расчетная модель с учетом симметрии
4.6.2. Анализ
На рис. 4.34 показана первая собственная форма потери устойчивости1 и
соответствующая ей критическая сила. Величина последней рассчитывается как
произведение давления на величину рассчитанного программой
Коэффициента нагрузки (Load factor), равного 67,7.
Попробуем решить задачу посредством модуля нелинейного расчета. Если
оставить схему граничных условий такой же, как и в статической модели, то
результатом станет однородно сжатое состояние, и ни о какой потере
устойчивости речи не будет. Для того чтобы система вышла из состояния
равновесия, нужно придать ей некий начальный прогиб. Пусть его создает сила,
приложенная перпендикулярно пластине в центре (рис. 4.35). Ее величина
должна быть достаточно малой, чтобы не повлиять на поведение системы после
1 В комментарии, выведенном программой, написано "Форма колебаний", однако это есть
ошибка локализации.
Структурная механика — нелинейная задача (COSMOSWorks)
205
потери устойчивости, но достаточно большой, чтобы система преодолела
точку бифуркации. Пусть величина нормальной силы будет 0,01 фунта. В
отсутствие сжатия сила создает в центре пластины (то есть в углу модели с
учетом симметрии) прогиб, равный 2,73 е-4 дюйма. Учитывая, что размер
стороны квадрата 20 дюймов, а толщина пластины — 1 дюйм, сила весьма мала.
Рис. 4.34. Первая форма потери устойчивости и соответствующая ей критическая сила
4.6.3. Решение
Подготовка исходных данных о свойствах материалов. Характеристики
линейно-упругого материала следующие: Е = 30000 psi, v = 0,3.
Подготовка расчетной модели. Задача будет решаться посредством оболо-
чечных конечных элементов второго порядка. Использована гипотеза тонких
оболочек. Сетка с граничными условиями показана на рис. 4.35.
Рис. 4.35. Сетка, ограничения и нагрузки для нелинейного расчета
206
Глава 4
Поскольку сжатие должно прикладываться после нормальной силы, то нужно
определить Кривые времени (Time curve) для каждой из нагрузок (рис. 4.36
и 4.37).
,^ ^Ln^.r^.iift.M.
Рис. 4.36. Кривая времени для нормальной силы
Рис. 4.37. Кривая времени для сжимающей нагрузки
Настройка вычислительного процесса. Изменим некоторые параметры
настройки, чтобы обеспечить решение данной задачи. На вкладке Решение
(Solution) окна Нелинейное (Nonlinear) необходимо настроить следующие
параметры (рис. 4.38).
Структурная механика — нелинейная задача (COSMOSWorks)
207
♦ Время начала и конца процесса (Start time, End time). Ранее были
определены Кривые времени. Поэтому расчет стартует при 0 единиц и
заканчивается при 2 единицах. Последняя величина— это наибольшее
значение условного времени;
Нелинейное
р*"'Т'\>р.Г,ЯоэтанЫйзапуск, /
, ., . , , , , . \i* \ тгю^ррного9длуск*«надиад"
. w ^ifrWMft* *Ж*ИЙ0$> -/^ /V- \ |0.01
;~$деф&)6& ^wc^um or ^^т^шщ^р.ш^н^У
/ тоеадоер^йныа интервалы йС|Ь^<ог!сй^»п|^мейегш
*'*4#эа&^0$^^ Дли
дли ш&й с Harj^af^/orpaHif^rt^Mw, Вр«бмя начал* и Время
, олонча**ия не исподызуются методом элемента Длина дуги,
* /Определенном в диалоговом окм© Дополнителк?нь» параметры.
-Решавшая лре^ра^;^™
*v
г Параметры нелимойшети^^ ** ** чл чл""svA "" "Т""л г**-1
г- Обновить правление нагрузки с отклони •
^ :л^|^аеноийрИо« ч •
р ,Иополь»01^т^ ««^^^^рлЦойдеФормации (только для j
1 моделейщяла^«ае<:&)\\Уч s\ V \ " ^
П алк& peiyirtbTiro»' 1C: V>AA\S oliaWor ks 2007 издание 2\Г лава ^ 1
Рис. 4.38. Окно Нелинейное, вкладка Решение
Приращение времени (Time increment). Выбираем положение
переключателя Автоматически (автоинтервал) (Автоматически (автоинтервал)),
а для минимального (Min) и максимального (Мах) значений шага
назначаем 1е-008 и 0,01 соответственно. С точки зрения обеспечения точности
расчета, максимальный шаг можно было бы назначить и больше. Однако
результаты будут интерпретироваться по кривым отклика. Последние же
208
Глава 4
строятся по точкам на концах интервалов. Поэтому, чтобы кривые были
достаточно гладкими, число шагов нужно увеличить. К этому приему
следует, разумеется, прибегать, если время расчета на каждом шаге
достаточно мало. Начальный шаг по времени (Initial time increment) принимаем
равным 0,01;
♦ Использовать состав для больших смещений (Use large displacement
formulation). Опция должна быть активна, поскольку — в данной задаче —
приложение давления будет осуществляться к пластине, деформированной
на предыдущем этапе.
Остальные параметры настройки оставляем такими, какими их предлагает
система. В частности, опцию Корректировать направление нагрузки
согласно прогибу (Update load direction with deflection) сохраняем неактивной.
На вкладке Дополнительно (Advanced) настройки оставляем неизменными.
Это, в частности:
♦ Метод управления процессом (Control method). Используем Сила
(Force), т. е. алгоритм будет назначать сначала приращения нормальной
силы, а затем — распределенной нагрузки;
♦ Алгоритм нелинейного решения (Iterative method). Используем метод
Ньютона — Рафсона (NR (Newton— Raphson)), поскольку он является
наиболее устойчивым.
Для того чтобы после расчета с минимальной трудоемкостью отобразить
Кривую отклика или, в данной ситуации, Кривую времени (Time history
graph), подаем команду Определить/Редактировать (Define/Edit) из
контекстного меню пиктограммы Параметры результатов (Result Options)
Менеджера COSMOSWorks (рис. 4.39). После чего в поле Вершины, справочные
точки для результатов эпюры на всех шагах решения (Vertices, Reference
Points to plot results for all solution steps) панели Параметры результатов
^JH Устойчивость прямоугольной пластины
• jj*| Настройки
!^f Датчики
Е! я|£ Поверхностная модель нелинейный
[jj- 4$ Оболочки
|ij JJf Нагрузка/Ограничение
'...Щ Сетка Копировать
'. Цц отчет JftTifrHTte -J
ЁНЙ Результаты
Рис. 4.39. Вызов команды для выбора объектов кривой отклика
Структурная механика — нелинейная задача (COSMOSWorks)
209
Параметры реъутхшгрв;
Рис. 4.40. Выбор вершин для кривой отклика
(Result Options) следует поместить вершину в центре пластины, указав на нее
мышью. В расчетной модели, учитывающей симметрию, данная вершина
находится в точке пересечения плоскостей симметрии.
Вычисления и интерпретация результатов. После выполнения расчета
получаем график зависимости перемещения в центре пластины. Для
этого из контекстного меню пиктограммы Результаты (Results) Менеджера
COSMOSWorks подаем команду Определить эпюру хронологии (Define
Time History Plot) (рис. 4.41). В панели График журнала времени (Time
History Graph) (рис. 4.42) выбираем отображаемую по оси ординат
характеристику — это перемещение, а также точку, для которой этот график строится.
£*| Настройки
1-*Л Датчики
GB<£ Sample (-Default-)
В <з£ Поверхностная модель нелинейный (-Поверхность-)
(£. Щ Оболочки
&| ^Нагрузка/Ограничение
| UJ Параметры результатов
: ^йКонтакт/3дз°Рь,("Глоо^льнь,е: Связанные-)
\--Щ£ Сетка
{jg Отчет
ff напряжен* ^' ^^обсоеи^|20ша^оЦ(!еЙлрограииь<...
ШШ^Ш^Ш^ пивной двфор^аш#м<
Рис. 4.41. Создание кривой отклика
Кривая Нелинейная реакция (Nonlinear Response)— график зависимости
перемещения (по сути, нормального) от параметра времени показан на
210
Глава 4
j Перемещение
у1ЯЕ5:Результирукнцее пе J j »*j^
Рис. 4.42. Определение функции для кривой отклика
График реакци
'ЕК &*ш^ W
50
40
Т 30
Е
20
10
0.00
Нелинейная реакция
0.40
I :
I
I
I
•I 1 i i > i <
1 4 ♦•■
s I
: /i
:../..;
.J ■
i
. •! ;
'1
0.80
1.19 1.59
Время (сек)
1.99
Узел 9
ЯКЗЕЗ
2.39
1.59
Время (сек)
Рис. 4.43. Зависимость прогиба в центре пластины от времени
(весь интервал и фрагмент, соответствующий моменту потери устойчивости)
рис. 4.43. Видно, что, начиная с некоторой величины распределенной
нагрузки (на диаграмме это — условное время), происходит ускоренный рост
прогиба. Проинтерполировав (приблизительно) восходящий участок кривой до
пересечения с осью абсцисс, получаем, что момент потери устойчивости на-
Структурная механика — нелинейная задача (COSMOSWorks) 21J_
ступает, когда условное время равно 1,67 секунд. Зная, что нагрузка с первой
секунды до второй возрастает от нуля до -100 psi, получаем, что потеря
устойчивости происходит примерно при -67 psi. Как видно, эта величина
весьма похожа на то, что было получено посредством линеаризованного подхода
и несколько ближе к аналитическому решению — 65.54 psi.
4.7. Закритическое поведение
цилиндрической оболочки
Рассмотрим еще один показательный пример из Online Tutorials
COSMOSWorks, демонстрирующий решение задачи прощелкивания цилиндрической
оболочки.
4.7.1. Постановка задачи
На рис. 4.44 показана расчетная модель цилиндрической оболочки в
утрированном виде (радиус уменьшен относительно других размеров). На двух
прямолинейных образующих закреплены все степени свободы — перемещения и
повороты за исключением вращения вокруг линий опирания. Сила
приложена в центре пластины перпендикулярно касательной плоскости.
Рис. 4.44. Утрированная форма цилиндрической оболочки и граничные условия
для модели без учета симметрии
Геометрическая модель, на базе которой будет строиться расчет, показана на
рис. 4.45. Это четверть исходной оболочки с реалистическими значениями
размеров: радиус 100 дюймов; длина 10 дюймов; угол 5,73 градуса,
толщина 0,25 дюймов. Величина силы 2,5 Н.
212
Глава 4
Исключенную геометрию заменяем условиями симметрии: фиксацией двух
поворотов (за исключением осевого) и осевого перемещения вдоль оси, а
также поворота относительно оси и тангенциального перемещения на
прямолинейной образующей.
Рис. 4.45. Геометрия модели с учетом симметрии и сама расчетная модель
4.7.2. Анализ
В принципе, момент потери устойчивости может быть идентифицирован
посредством линеаризованной модели, однако последующие после потери
устойчивости события — процесс прощелкивания и переход в новое
устойчивое состояние этот алгоритм не воспроизводит. Нелинейный расчет с
настройками по умолчанию также не даст результата. Дело в том, что они
подразумевают использование Метода сил (Force Control) (см. разд. 2.1.3) для
управления процессом приложения граничных условий, а также контролем
состояния равновесия. Нагрузки прикладываются в соответствии с кривой
времени, причем наличие критической точки никак не
идентифицируется.
Получить адекватное решение можно, если использовать для контроля
сохранения равновесия упругой системой метод длины дуги. В COSMOSWorks
только он позволяет идентифицировать момент перехода в новое состояние
равновесия. При этом нагрузки прикладываются пропорционально
некоторому параметру, который называется Коэффициентом нагрузки (Load factor или
Структурная механика — нелинейная задача (COSMOSWorks) 213
Load pattern multiplier). Поэтому в кривой времени нет необходимости. В
ходе решения возможно как уменьшение нагрузок, так и их уменьшение —
система управляет этим автоматически. В этой связи в процессе расчета
возможно превышение нагрузками величин, назначенных в граничных условиях.
Соответственно, если в методах сил и перемещений результаты определялись
как функция фиктивного или реального времени, то в методе длины дуги они
будут зависеть от коэффициента нагрузки.
4.7.3. Решение
Подготовка исходных данных о свойствах материалов.
Характеристики упругости линейно-yripyroro материала следующие: Е = 3.10275е9 Па,
v = 0,3.
Подготовка расчетной модели. Задача будет решаться посредством оболо-
чечных конечных элементов второго порядка. Использована гипотеза тонких
оболочек. Сетка с граничными условиями показана на рис. 4.46.
Рис. 4.46. Сетка, ограничения и нагрузки для нелинейного расчета
Настройка вычислительного процесса. На вкладке Решение (Solution)
этого окна Нелинейное (Nonlinear) необходимо настроить следующие
параметры:
♦ Приращение времени (Time increment). Выбираем положение
переключателя Автоматически (автоинтервал) (Автоматически (автоинтервал)),
а для минимального (Min) и максимального (Мах) значений шага
назначаем 1е-8 и 0,1 соответственно. Начальный шаг по времени (Initial time
increment) принимаем равным 0,01;
♦ Использовать гипотезу больших перемещений (Use large displacement
formulation). Опция должна быть активна, поскольку в данной задаче
приложение давления будет осуществляться к пластине, деформированной на
предыдущем этапе.
214
Глава 4
На вкладке Дополнительно (Advanced) (рис. 4.47) настройки меняем
следующим образом:
♦ Метод управления процессом (Control method). Назначаем Длина дуги
(Force);
♦ Алгоритм нелинейного решения* (Iterative method). Используем метод
Ньютона — Рафсона (NR (Newton— Raphson)), поскольку он является
наиболее устойчивым.
Рис. 4.47. Окно Нелинейное, вкладка Дополнительно
В группе Параметры завершения длины дуги (Arc-Length completion
options) следует обратить внимание на следующие поля:
♦ Коэффициент максимального распределения нагрузок (Maximum load-
pattern multiplier), присваивая ему 1е8;
Структурная механика — нелинейная задача (COSMOSWorks) 215
♦ Максимальное смещение (для смещения DOF) (Maximum displacement
(for translation DOF)), присваивая 1е8 м;
♦ Максимальное число интервалов дуги (Maximum number of arc steps),
назначая 45.
Как было сказано, именно эти величины (в совокупности с начальными
нагрузками) определяют момент окончания расчета. В нашем случае нагрузки и
смещения, по сути, бесконечны (потенциально), а процесс остановится после
того, как будет превышено заданное число шагов.
Содержимое полей в группе Параметры интервала/допуска (Step/Tolerance
Options) оставляем такими, как их предложила система.
Подобно задаче в предыдущем разделе, создаем Кривую отклика так, чтобы
она отображала состояние точки приложения силы в зависимости от
параметра, управляющего процессом. В предыдущем случае это было время,
здесь же абсциссой является Коэффициент нагрузки.
Вычисления и интерпретация результатов. Используем сетку линейных
конечных элементов. Надо сказать, что задача весьма чувствительна к
соотношению порядка конечных элементов и плотности сетки. После выполнения
расчета получаем график зависимости перемещения в центре пластины в
зависимости от Коэффициента нагрузки — по сути, величины нормальной
силы, показана на рис. 4.48. Как видно, система не смогла воспринимать
увеличивающуюся нагрузку, когда Коэффициент нагрузки достиг величины
57,7. Это значит, что фактическая величина силы равна 2,5 Н х 57,7 = 144 Н.
Как видно, после потери устойчивости нагрузка уменьшается вплоть до того,
что изменяет знак. Это значит, что после прощелкивания нужна сила с
противоположным направлением, чтобы удерживать оболочку в состоянии
равновесия. После достижения нового равновесного состояния — при нулевой
нагрузке — перемещение равно приблизительно 24,8 мм, требуется
прикладывать силу в том же направлении, что и сначала, чтобы продолжить
деформирование оболочки. Величина прогиба в равновесном состоянии весьма
близка к удвоенной величине подъема центральной точки относительно краев
цилиндра в исходном состоянии — 12,7 мм х 2 = 25,4 мм.
Для того чтобы отобразить деформированное состояние после
прощелкивания, нужно при построении соответствующей диаграммы найти такой шаг
расчета, когда коэффициент нагрузки ближе всего к нулю. Соответствующая
иллюстрация показана на рис. 4.49.
Интересно сравнить полученные результаты с оценкой наименьшей
критической силы по линеаризованной модели. На рис. 4.50 показан
деформированный вид модели, соответствующий минимальной критической силе. Там же
8 Зак. 4405
216
Глава 4
приведен соответствующий этой форме коэффициент нагрузки. Как видно,
линеаризованная оценка более чем вдвое превышает полученную
посредством нелинейной модели. Очевидно и различие в геометрии потерявших
устойчивость оболочек.
ИЁ График реакции
шшш
Нелинейная реакция
Коэффициент нагрузки
114.89т :•
86.16 +
57.44+
28.72+
-0.00
-28.72
-57.45}
-86.17
...у*. : *..
1С
10 / 20 у 30 40
URESPe'syinjmjpji&jiiife перемещение'(mm) !
Узел 52
Рис. 4.48. Зависимость прогиба в центре пластины от коэффициента нагрузки
UX (mm).
Шаг эпюры: 179 Коэффициент нагрузки ■ -1.0938
Шкала деформации-1
Рис. 4.49. Распределение вертикальных перемещений на фоне деформированного вида
в момент, близкий к новому равновесному состоянию
Структурная механика — нелинейная задача (COSMOSWorks) 217
Форма колебаний: 1 Коэффициент нагрузки = 122.69
Шкала деформации: 0.53497
Рис. 4.50. Первая форма потери устойчивости — расчет по линеаризованной модели
4.8. Выводы
Возможности нелинейного анализа COSMOSWorks позволяют решать
базовые задачи, возникающие в ходе проектирования изделий машиностроения,
в частности тех, которые изготовлены из металла и типовых пластмасс, и не
связаны с большими пластическими деформациями. Как правило, именно эти
состояния объектов соответствуют типовым условиям их эксплуатации или
же описывают поведение сразу после выхода за пределы номинальных
режимов. Характерный вопрос: будет ли разрушение катастрофическим или же,
несмотря на появление необратимых деформаций, несущая способность
сохранится?
В то же время такие процессы, как тонколистовая штамповка, ковка и т. д.,
поведение высоконелинейных сред, образующих изделия типа
автомобильных покрышек, пока недоступны для интегрированных программ семейства
COSMOS.
Также — после тщательного подбора настроек — можно получить
уточненную оценку нагрузок, приводящих к потере устойчивости, и оценить
несущую способность в закритическом состоянии.
Для заметок
ГЛАВА 5
Аэрогидродинамика
и теплопередача
Вплоть до 2000 года среди задач САЕ вычислительная аэро- и гидродинамика
(CFD) оставалась, пожалуй, одним из самых неприступных бастионов для
широкой аудитории практических инженеров. И только продукт
COSMOSFIoWorks (и последующие за ним EFD.Lab, EFD.V5 и EFD.Pro) сделали
прикладные расчеты в области аэрогидродинамики и теплопередачи достоянием
"трудящихся масс". Несмотря на то, что вышеупомянутые продукты от А
до Я были разработаны в России, они до сих пор не имеют русской
документации. Тем лучше для вас, уважаемый читатель, ведь чем пытаться найти
заветную тропу в лабиринтах документации, гораздо целесообразнее будет
прочесть настоящую главу.
5.1. COSMOSFIoWorks, EFD.Lab, EFD.V5,
EFD.Pro, FloXpress
Все четыре продукта (COSMOSFIoWorks, EFD.Lab, EFD.Pro и EFD.V5)
выполняют одну и ту же миссию— прежде всего, это удобный инструмент в
руках инженера для моделирования аэродинамических и тепловых
процессов. Первым на рынке (в 1999 году) появился COSMOSFIoWorks (до 2002 года
FloWorks). Полностью интегрированный в SolidWorks, он, в первую очередь,
предназначался для использования в отраслях промышленности с коротким
циклом разработки (радиоэлектронная, производство трубопроводной
арматуры, задачи вентиляции и теплообмена в жилых и производственных
помещениях и др.). По сравнению с традиционными пакетами CFD, этот продукт,
безусловно, имел принципиальные преимущества:
♦ задание исходных данных и просмотр результатов непосредственно в окне
графического проектирования;
220
Глава 5
♦ возможность использования инженером, а не CFD-специалистом;
♦ минимальное время на подготовку исходных данных и анализ полученных
результатов.
FloWorks обладал одним существенным недостатком — он являлся
приложением только SoIidWorks. После первых двух лет бурного продвижения на
рынок стало ясно, что необходимы аналогичные продукты, работающие в
интеграции с другими пакетами графического проектирования, а также продукт
для аэрогидродинамического моделирования, не связанный с конкретной
системой САПР. Появился и новый термин EFD (Engineering Fluid Dynamics),
означающий направление в CFD, ориентированное на
инженера-проектировщика. Как следствие, на сегодняшний день уже выпущено три новых
продукта: EFD.Lab (первая версия вышла в 2002), EFD.V5 (2004) и EFD.Pro
(2005):
♦ EFD.Lab— самостоятельный продукт, позволяющий импортировать
геометрию из подавляющего большинства систем графического
проектирования (Pro/ENGINEER®, IPT (Autodesk Inventor®), Mechanical Desktop®,
Unigraphics® PAR (Solid Edge®), CADKEY®, IGES, STEP, Parasoiid®, SAT
(ACIS®), VDA-FS, VRML, STL, DWG, DXF™, TIFF, JPG, Viewpoint,
RealityWave, HSF (Hoops)). Фактически EFD.Lab обладает всеми
возможностями SoIidWorks по пространственному моделированию и анализу за
исключением процедур оформления чертежей. Кроме того, EFD.Lab
обладает рядом дополнительных возможностей по сравнению с COSMOS-
FloWorks, что делает его более интересным для опытного пользователя.
Интересной является возможность проведения расчета на удаленном
компьютере. Это, с одной стороны, позволяет экономить оперативную память
(поскольку в данном случае не требуется память для препроцессора и
графической части продукта), с другой стороны, это чрезвычайно полезно
при проведении параметрических расчетов. Есть ряд и других
дополнительных возможностей;
♦ EFD.V5 — приложение, полностью интегрированное в CATIA V5.
Следует заметить, что EFD.V5 вообще является первым CFD-приложением
CATIA V5;
♦ EFD.Pro — приложение, полностью интегрированное в Pro/ENGINEER
Wildfire 2 и Wildfire 3.
С точки зрения технологии все четыре продукта (COSMOSFloWorks,
EFD.Lab, EFD.Pro и EFD.V5) базируются на одних и тех же технологических
принципах и де-факто имеют одно и то же технологическое ядро. Ключевым
элементом является использование прямоугольной сетки, пересекающей
произвольным образом поверхность модели, созданной в системе графического
Аэрогидродинамика и теплопередача
221
проектирования. Использование такого подхода и обеспечивает
преимущества технологии EFD (универсальность, надежность, простота использования).
А простота, как известно, хуже воровства. По-видимому, таким лозунгом и
руководствовались продукт-менеджеры COSMOSFIoWorks, предложив
облегченную версию данного продукта FloXpress, которая увидела свет в
2007 году (FloXpress является частью Sol id Works 2008). Очевидно, это будет
самый растиражированный продукт CFD нашего безумного времени.
На этом усилия окончательно вошедших в раж продукт-менеджеров и
разработчиков не закончились. Параллельно с FloXpress в том же 2007 году на
рынок был выпущен дополнительный модуль к EFD-продуктам, рассчитанный
на конкретную область: прикладные тепловые задачи в области электроники.
Что ни говори, идея CFD для инженеров (EFD) овладевает массами, а
развитие идет сразу по трем направлениям:
♦ интеграция в различные CAD-системы;
♦ упрощение продукта, граничащее с вульгаризацией;
♦ создание специализированных версий для конкретных индустриальных
применений.
Если с первым направлением все понятно, то последние два направления
диаметрально противоположны. Что нас ждет, сохранение двух тенденций,
победа одной или безумный симбиоз двух противоположностей (не надо
забывать, что разработчики — наши соотечественники, а продукт-менеджеры
уже окончательно уверовали в их способности хоть блоху подковать),
покажет время.
Первоначально, данные продукты создавались в московском отделении
немецкой фирмы N1KA GmbH. Процесс слияния софтверных фирм,
работающих в области CAD/CAE, не мог обойти стороной данную бурно
развивающуюся разработку. В середине 2006 года NIKA GmbH была поглощена
английской CFD компанией Flomerics. В результате возникла третья в мире по
величине оборота CFD компания, а вышеупомянутые продукты так и
продолжают разрабатываться в России, теперь уже под эгидой английской
фирмы Flomerics. Страна должна знать своих героев. Тем более что (независимо
от мотивов) пользователь может испытывать желание взглянуть в глаза
разработчиков. Посему ниже помещена фотография коллектива разработчиков
данных продуктов, сделанная в 2006 году (рис. 5.1).
В данной книге рассматривается продукт COSMOSFIoWorks 2007.
Авторы также пользуются возможностью выразить благодарность Исковских
Ольге, взявшей на себя труд компьютерного оформления материалов,
приведенных в данной главе.
222
Глава 5
Рис. 5.1. Фотография разработчиков COSMOSFIoWorks, EFD.Lab, EFD.Pro и EFD.V5
5.2. Кому и зачем нужны эти расчеты?
Поскольку у нашей Земли, в отличие, например, от Луны или Марса, имеется
довольно плотная атмосфера, а также свободная вода в виде водоемов
(океанов, морей, озер, речек, болот и др.) и различных (дождевых, снеговых,
градовых) осадков, и, кроме того, в технике и быту широко используются
разнообразные жидкие и газообразные продукты химической промышленности
(иногда с ними приходится даже бороться), так что, по крайней мере, в
пределах атмосферы Земли все пространство вне твердых или пористых тел
заполнено текучими средами, то в инженерной практике необходимость
расчета течений текучих сред (газов и жидкостей) возникает очень часто, если не
повсеместно. Например, в следующих случаях.
♦ Для расчета силового (стационарного или нестационарного) воздействия
текучей среды на обтекаемое ею тело или его элементы, например, в
следующих случаях.
• Тело неподвижно, а среда движется:
D ветровые нагрузки на сооружения, например, здания, телебашни,
трубы, мосты, рекламные щиты и т. п., — для определения
прочностной стойкости сооружений к воздействию таких нагрузок;
Аэрогидродинамика и теплопередача
223
D силы, приводящие в движение тела, например, паруса кораблей,
воздушные змеи, подвижные детали обратных клапанов, регуляторы
давления, ветроэнергетические установки, сопла двигателей и
т. п., — для определения движения тел под действием этих сил;
D силы и моменты, которые необходимо преодолевать при управлении
различными телами, например трубопроводной арматурой —
затворами, вентилями, клапанами. В случае больших размеров этой
арматуры (гидроэлектростанции, магистральные трубопроводы и т. п.)
эти силы и моменты могут быть значительными.
• Среда неподвижна, а тело движется:
D сила сопротивления, подъемная, боковая и другие силы воздействия
текучей среды на движущиеся в ней (например, движущиеся по
твердой или жидкой поверхности, летящие в атмосфере или
плывущие под водой) твердые тела (автомобили, поезда, бобслейные сани,
самолеты, планеры, дирижабли, ракеты, снаряды, подводные лодки
и т. п.).
• Движутся тело и среда:
D различные насосы, турбины, крыльчатки, шнеки, вентиляторы,
мешалки — необходимо, например, определить усилия (моменты),
которые к этим телам надо приложить, чтобы обеспечить заданную
скорость их вращения; или нагрузки (силы), действующие на
элементы этих устройств (например, на лопатки турбины), с целью
последующей оценки их прочностной стойкости к действию этих
нагрузок.
♦ Для расчета силового (стационарного или нестационарного) воздействия
твердого тела на текучую среду, например:
• Силового воздействия канала на протекающую через этот канал
текучую среду, т. е. силы гидравлического сопротивления канала:
D потерь полного давления потока при течении через трубопроводную
арматуру (клапаны, вентили, колена, сужения, расширения,
тройники и т. п.);
D расхода текучей среды через насосы, компрессоры, крыльчатки,
шнеки, вентиляторы в результате воздействия на эту среду
подвижных частей этих устройств.
• Перемешивающего воздействия твердого тела на состав текучей среды,
например:
° времени, за которое две ранее стратифицированные жидкости будут
полностью перемешаны друг с другом в сосуде до заданной
однородности с помощью вращающейся мешалки;
224
Глава 5
D расстояния, на котором две поступившие в канал текучие среды
перемешаются друг с другом до заданной однородности.
♦ Для расчета воздействия различных физических факторов на состав и
движение текучей среды.
• Гравитации (архимедовой силы):
D определение эффективности вытяжной и/или приточной вентиляции
(например, в химической лаборатории) с учетом сил плавучести.
• Подвода тепла к текучей среде или отвода его от нее:
D определение эффективности нагрева (охлаждения) воздушной среды
в помещении (комнате, хранилище) системой кондиционирования
(искусственного климата) и формируемых этой системой
воздушных потоков в этом помещении, распределения относительной
влажности по помещению;
D закипание жидкостей, влияние закипания на гидравлическое
сопротивление и теплообмен в каналах.
• Кавитации:
° изменение сопротивления каналов и тел;
D определение местоположения кавитационных областей.
♦ Для решения задач сопряженного теплообмена.
• Определение эффективности нагрева или охлаждения твердых тел
текучей средой:
° при наличии только свободной конвекции (приготовление пищи
в котелке над костром);
D в системах проточного наружного охлаждения (конвертерных печей
ч для плавки металлов, их фурм, плазмотронов, камер ракетных
двигателей);
D в системах завесного охлаждения (камер сгорания
воздушно-реактивных двигателей, камер сгорания и сопел ракетных двигателей);
D в системах вынужденного проточного и свободно-конвективного
охлаждения (например, процессоров и различных устройств в
компьютерах).
• Определение эффективности нагрева или охлаждения текучей среды
твердыми телами:
D в теплообменниках (химические производства, самогонные
аппараты и т. п.);
D в системах кондиционирования (искусственного климата) жилищ и
хранилищ.
Аэрогидродинамика и теплопередача
225
• Определение эффективности нагрева или охлаждения твердого тела
при радиационном теплообмене с учетом естественной или
вынужденной конвекции:
D в печах, печах-грилях, при сушке на солнце и т. п.
♦ Для расчета движения твердых и/или жидких частиц в потоке газа.
• Определение эффективности улавливания частиц различными
устройствами (циклонами и др.).
• Определение эффективности разгона частиц различными устройствами
(пескоструйками и др.).
• Определение эрозии твердых тел в результате выпадения на них частиц
(различной трубопроводной арматуры, используемой в нефтедобыче;
лопаток и других деталей компрессоров, работающих в запыленной
атмосфере; сопел ракетных двигателей, работающих на
металлизированных топливах и т. п.).
• Определение наноса (налипания) капель на твердые тела (в
металлургии на фурмах конвертеров, в порошковой металлургии при
производстве порошков металлов).
Параллельно с развитием техники развивались и инженерные, т. е. не
требующие решения дифференциальных уравнений, методы оценки нужных для
инженерной практики величин. В результате для решения некоторых из
вышеперечисленных задач можно обойтись без проведения сложных расчетов с
решением дифференциальных уравнений течения и теплообмена с помощью
соответствующих программ (например, уравнений Навье— Стокса с
помощью COSMOSFloWorks). Например, сопротивление труб течению
однородной среды определяется с помощью достаточно простых
полуэмпирических зависимостей.
Чтобы техника была конкурентоспособной на рынке, она должна не только
удовлетворять всем современным требованиям покупателей, но также
предлагать покупателям нечто большее в развитие этих требований. Это приводит
ко все большему усложнению техники и, как следствие, к усложнению
необходимых для ее разработки расчетов. Инженерная практика, по крайней мере
в России и других странах СНГ, традиционно опирается на проведение
экспериментальных исследований, что при их правильном выполнении обычно
обеспечивает высокую надежность техники. Однако высокая стоимость таких
. исследований, которая требует соответствующего финансирования, и время,
необходимое для подготовки и проведения таких исследований, существенно
снижают конкурентоспособность разрабатываемой техники из-за ее
дороговизны и отставания ее характеристик от развивающихся требований рынка.
Попытки снизить эти финансовые и временные затраты за счет сокращения
226
Глава 5
объема таких исследований (в современных условиях при существенно
ослабленном государственном контроле за качеством продукции это
происходит почти повсеместно) обычно также приводят к потере
конкурентоспособности разрабатываемой техники — теперь уже из-за снижения ее качества.
Поэтому оптимальный, а во многих случаях и единственный, путь создания
конкурентоспособной техники (продукции) — это сочетание расчетных
исследований (например, параметрических расчетов), которые достаточно
адекватно моделируют физические явления, определяющие интересующие
покупателя характеристики изделия, с экспериментальными исследованиями,
необходимыми для проверки этой адекватности. Естественно, расчеты
должны выполняться с помощью оптимальной для разработки данной продукции
программы, т. е. базирующейся на достаточно адекватных учитываемым
физическим явлениям математических моделях и достаточно
быстродействующей для выполнения расчетов за время, приемлемое для разработки данной
продукции.
Успешное развитие продаж программы COSMOSFIoWorks по всему миру
объективно свидетельствует о применимости этой программы для
проведения таких расчетов и расчетных исследований.
5.3. Возможности COSMOSFIoWorks
Чтобы рассчитать физический процесс, т. е. изменение физических
параметров в пространстве и времени, его надо сначала математически
смоделировать. Поскольку физические процессы — результат действия законов физики,
то наиболее адекватные физическим процессам математические модели
представляют собой систему отражающих законы физики дифференциальных
и/или интегральных уравнений (с привлечением, если надо,
полуэмпирических и эмпирических констант и зависимостей) с граничными и начальными
условиями, привязывающими данную математическую модель к
поставленной конкретной физической (инженерной) задаче, т. е. определяющими
данные физические процессы в этой задаче.
Поскольку используемые в математической модели системы
дифференциальных и/или интегральных уравнений обычно не имеют аналитического
решения, они приводятся к дискретному виду и решаются на некоторой
расчетной сетке. Естественно, решение математической задачи существенно
зависит как от способа дискретизации уравнений, так и от способа решения
полученных в результате уравнений. Очевидно, решение математической
задачи будет тем точнее, чем лучше расчетная сетка разрешает области
нелинейного поведения решения уравнений, что, как правило, достигается
использованием более мелкой расчетной сетки в этих областях.
Аэрогидродинамика и теплопередача
227
Таким образом, в основе COSMOSFloWorks, как и любой другой расчетной
методики (например, COSMOSWorks), лежит, во-первых, математическая
модель рассчитываемых физических процессов и, во-вторых, способ решения
поставленной математической задачи. Эти аспекты COSMOSFloWorks
описаны, соответственно, в разд. 5.3.1 и 5.3.2.
5.3.1. Математическое моделирование
физических процессов
COSMOSFloWorks базируется на последних достижениях вычислительной
газо- и гидродинамики и позволяет рассчитывать широкий круг различных
течений: двумерные и трехмерные, ламинарные, турбулентные и переходные,
несжимаемые, сжимаемые, с до-, транс- и сверхзвуковыми областями,
стационарные и нестационарные течения многокомпонентных текучих сред в
каналах и/или вокруг тел, с учетом гравитации, пограничного слоя, в том
числе с учетом шероховатости стенок, с конвективным теплообменом между
текучей средой и твердым телом, которое, в свою очередь, может состоять из
нескольких материалов; с одновременным расчетом теплопередачи в твердых
телах, т. е. с решением задачи сопряженного теплообмена, в том числе с
учетом радиационного теплообмена между поверхностями; течения газовых
смесей с равновесной конденсацией содержащегося в них водяного пара;
течения воды с равновесной кавитацией или равновесным кипением; течения
через пористые среды как через рассредоточенные сопротивления;
ламинарные течения неньютоновских жидкостей; течения сжимаемых жидкостей;
двухфазные течения как движение жидких или твердых частиц в потоке
текучей среды.
В качестве граничных условий, помимо обы^мых условий непротекания и
прилипания на стенке, тепловых условий на стенке, контактирующей с
текучей средой (температура поверхности или тепловой поток между стенкой и
текучей средой) — если не рассчитывается теплопередача внутри стенки,
или если теплопередача внутри стенки рассчитывается, то тепловых условий
на внешней поверхности тела на границе расчетной области, параметров
текучей среды на входных и выходных отверстиях модели (в том числе с
возможным моделированием приточных или вытяжных вентиляторов) во
внутренних и внешних задачах или на границах расчетной области во внешних
задачах, могут быть заданы также вращательные и/или поступательные
движения поверхности стенки, не меняющие геометрию стенки, или вращение
тела в выделенной осесимметричной подобласти расчетной области.
Возможно задание объемных источников тепла в текучей среде и/или в теле
(если рассчитывается теплопередача в твердых телах), поверхностных
источников тепла на поверхности твердого тела, в частности термоэлектрических
228
Глава 5
элементов Пельтье, радиационных потоков тепла от границ расчетной
области, в частности моделирующих солнечную радиацию.
Чтобы яснее очертить круг решаемых задач, отметим, что в настоящее время
в COSMOSFloWorks не рассматриваются: изменения геометрии проточного
тракта или внешней поверхности тела, которые не могут быть заданы
вращением тела в выделенной осесимметричной подобласти расчетной области;
течения смеси жидкости и газа с высокой объемной долей жидкости, не
позволяющей задать жидкость каплями, в частности свободные поверхности
жидкости; химические реакции; влияние частиц (капель) двухфазной среды
на движение газовой фазы.
Система уравнений Навье — Стокса
В COSMOSFloWorks движение и теплообмен текучей среды моделируется с
помощью уравнений Навье— Стокса, описывающих в нестационарной
постановке законы сохранения массы, импульса и энергии этой среды. Кроме
того, используются уравнения состояния компонентов текучей среды, а также
эмпирические зависимости вязкости и теплопроводности этих компонентов
среды от температуры. Кроме того, неньютоновские жидкости задаются
зависимостью их коэффициента вязкости от скорости сдвиговых деформаций и
температуры; сжимаемые жидкости задаются зависимостью их плотности от
давления. Этими уравнениями моделируются турбулентные, ламинарные и
переходные (между ламинарными и турбулентными переход определяется
критическим значением числа Рейнольдса) течения. Для моделирования
турбулентных течений (они встречаются в инженерной практике наиболее часто)
упомянутые уравнения Навье — Стокса осредняются по Рейнольдсу, т. е.
используется осредненное по малому масштабу времени влияние
турбулентности на параметры потока, а крупномасштабные временные изменения осред-
ненных по малому масштабу времени составляющих газодинамических
параметров потока (давления, скоростей, температуры) учитываются введением
соответствующих производных по времени. В результате уравнения имеют
дополнительные члены — напряжения по Рейнольдсу, а для замыкания этой
системы уравнений в COSMOSFloWorks используются уравнения переноса
кинетической энергии турбулентности и ее диссипации в рамках к - е
модели турбулентности.
Эта система уравнений сохранения массы, импульса и энергии
нестационарного пространственного течения имеет следующий вид в рамках подхода
Эйлера в декартовой системе координат (*,-,/= 1,2,3), вращающейся с угловой
скоростью Q вокруг оси, проходящей через ее начало:
&L+J-(p„k) = 0, (5.1)
ot oxk
Аэрогидродинамика и теплопередача
229
d(pu,) д дР
KW,,- +—(puluk-Tik) + — =S„ (5.2)
dt dxk dxt
^^■ + -£-((pE + P)vk+qt-xlkul) = Skuk+QH, (5.3)
где / — время, u — скорость текучей среды, р — плотность текучей среды,
Р— давление текучей среды, St — внешние массовые силы, действующие
на единичную массу текучей среды: Siporom — действие сопротивления
пористого тела, Simmlv — действие гравитации, Sirolanon — действие вращения
системы координат, т. е.
*^/ ~^iporou\ "* ^igravtty ~^ ^trotation W* v
E — полная энергия единичной массы текучей среды, QH — тепло,
выделяемое тепловым источником в единичном объеме текучей среды, х1к —
тензор вязких сдвиговых напряжений, qi — диффузионный тепловой поток,
нижние индексы означают суммирование по трем координатным
направлениям.
Для ньютоновских текучих сред тензор вязких сдвиговых напряжений
определяется следующим образом:
( ~ а ~ ~ Л
\
dut duf 2 ди, .
J
|р*5„> (5-5)
дх} дх, 3 их, ''
где ц = ц/+ \ih |i/ — коэффициент динамической вязкости, ц, — коэффициент
турбулентной вязкости, 5/у — дельта-функция Кронекера (5,7 = 1 при t=j\
6lf- = 0 при i*j\ к — кинетическая энергия турбулентности. В
соответствии с к-г моделью турбулентности, ^определяется через величины
кинетической энергии турбулентности к и диссипации этой энергии 8 :
Ц,=/м-*^-, (5.6)
I2 L 20,5
pyfky а _ рк2
расстояние от поверхности стенки, Cfl = 0,09.
Кинетическая энергия турбулентности к и диссипация этой энергии е
определяются в результате решения следующих двух уравнений:
230
Глава 5
дрк д
+—(рикк) = —
dt дхк
дог д , ч
дхк
_д_
дхь
((
\\
(С
W +
И»
Лы^
a
к J
dxi
+ S
к'
к J
W
а,
^
zj
dXi
+ &
(5.7)
(5.8)
*/
где:
OX:
s^tf^-ps+vA,
(
о» — С,.]
аху
■С f&-
к
% =Ц/
aw, дм, 2 дц
\
,дх/ dxi 3 дх, "
v
10кЬ ■ Р -~S-L^P
3 ав р их,
0,05 I
g, — составляющая гравитационного ускорения в координатном направле-
i
нии xi, ад = 0,9, Ся = 1 при Рв>0 и С8 = 0 при Рд < 0, fx = 1 + |
/2 = 1-ехр(-Я72), Се1 = 1,44, Се2 = 1,92, ае= 1,3, а, = 1.
V *v
Диффузионный тепловой поток моделируется с помощью уравнения
(.
Як =
Рг о
\
с J
с,|1,*-1АЗ,
(5.9)
где ас = 0,9, Рг — число Прандтля, ср — удельная теплоемкость при
постоянном давлении, Т — температура текучей среды.
Для моделирования ламинарных течений данная система уравнений
несколько модифицируется, а именно полагается ц, = 0 и к = 0. С помощью
функции f моделируется переход ламинарного течения в турбулентное и
турбулентного в ламинарное.
Ламинарные и турбулентные пограничные слои течения около поверхностей
твердого тела, а также переход ламинарного пограничного слоя в
турбулентный и, наоборот, турбулентного в ламинарный моделируются с высокой
точностью с помощью модифицированных универсальных пристеночных
функций.
Аэрогидродинамика и теплопередача
231
Многокомпонентные течения
Изменение концентраций компонентов смеси в пространстве вследствие
диффузии моделируется следующими уравнениями:
ФУ,
+£<«>>^ ♦*)!). <-".■•-*. (5'l0>
dt
где yi — концентрация /-го компонента смеси (^у, = 1), N — число ком-
понентов, Dtj и D\} — коэффициенты молекулярной и турбулентной
диффузии, которые подчиняются закону Фика, так что D = D8 ,; D1 -Ъ ■—L, где
• а
Z) — коэффициент диффузии, а — турбулентное число Шмидта.
Для определения теплофизических свойств текучей среды, т. е. зависимостей
плотности, вязкости, теплопроводности, удельных теплоемкостей,
коэффициентов диффузии компонентов текучей среды от давления, температуры и
концентрации компонентов текучей среды, используются уравнения
состояния, эмпирические и полуэмпирические зависимости.
Течение газов
Для сжимаемых текучих сред используется уравнение состояния следующего
вида:
р = р(Р9Т,у)9 (5.11)
где у-{У\,у2^-^Уы)— вектор концентраций компонентов текучей среды.
Для газов используется уравнение состояния идеального газа р = P/(RT), где
R — газовая постоянная моделируемого газа, которая для смеси газов опре-
N У
деляется как R = RyHUtl^d—'-, где А/,- — молекулярная масса /-го компонента
смеси.
Естественно, для несжимаемых жидкостей вместо уравнения (5.11) использу-
( N У V
Х~Н . Для учета
ется р = р(Т,у). Для многокомпонентных жидкостей р =
зависимости от температуры используется уравнение
-н
£jL(1 + Mr_ro))
i=\ Ро/
V
иР,
232
Глава 5
где Р7-, — коэффициент объемного теплового расширения / -го компонента,
р0/ — плотность i -го компонента при некоторой температуре Т0.
Сжимаемые жидкости
Для сжимаемых жидкостей пользователем выбирается одна из следующих
зависимостей их плотности от давления:
♦ логарифмическая зависимость: р = р0/
где р0 —
плотность жидкости при давлении Р0, С,В — коэффициенты, могут быть
заданы также зависимости р0,С,5 от температуры;
♦ степенная зависимость: р = р0
f В + РЛ
кв + ро;
где, кроме вышеупомянутых
параметров, используется также п — параметр степени, который тоже
может зависеть от температуры.
Неньютоновские жидкости
Моделируются также ламинарные течения неньютоновских текучих сред,
у которых коэффициент вязкости зависит от скорости сдвиговых
деформаций. Тензор вязких сдвиговых напряжений в этих средах определяется вместо
(5.5) следующим образом:
г,
^=ц(у)-
ди, диЛ
— + —
кдх, dXj)
(5.12)
г~1 ди ди
где скорость сдвиговых деформаций у = Л/^/" -dH -dh ; du =—L +—- . Поль-
v dxf дх,
зователь может выбрать одну из следующих трех моделей неньютоновских
жидкостей, отличающихся зависимостью коэффициента динамической
вязкости от скорости сдвиговых деформаций ц(у) :
♦ модель Herschel—Bulkley:
где К — коэффициент консистенции, п — коэффициент степенного
закона, х0 — предельное сдвиговое напряжение.
Аэрогидродинамика и теплопередача
233
Эта модель имеет следующие частные случаи:
• и = 1, т0 = 0— ньютоновские жидкости, в этом случае К —
динамическая вязкость жидкости;
• /1 = 1, т0>^— неньютоновские жидкости, описываемые моделью
Bingham, особенностью которой является ненулевая величина х0:
неньютоновская жидкость ведет себя как твердое тело при т < т0 и
может течь только при х > т0 (это изменение поведения жидкости
моделируется тем, что при т < т0 коэффициент консистенции К , который в
этой модели называется пластической вязкостью, автоматически
становится достаточно большим);
• 0<и<1, т0=0— так называемые "утончающиеся" неньютоновские
жидкости, поведение которых описывается степенным законом;
• п > 1, т0= 0 — так называемые "утолщающиеся" неньютоновские
жидкости, поведение которых описывается степенным законом;
модель со степенным законом:
ц(*) = *.(уГ\
в отличие от частного случая модели Herschel—Bulkley величина ц в этой
модели ограничена: \xmin <ц<цтах, эти минимальная и максимальная
динамические вязкости задаются в дополнение к коэффициенту
консистенции К и коэффициенту степенного закона п;
модель Carreau:
п(„-1)/2
Ц(у) = Ц«о +(И0 -Цоо){>+(*1 'У)2]
где ц^— динамическая вязкость жидкости при бесконечно большой
скорости сдвиговой деформации, т. е. минимальная динамическая вязкость,
ц0 — динамическая вязкость жидкости при нулевой скорости сдвиговой
деформации, т. е. максимальная динамическая вязкость, Кх — временная
постоянная, п — коэффициент степенного закона. Эта модель — вариант
сглаживания модели со степенным законом с ее ограничениями на
величину ц.
Все параметры этих моделей, за исключением п, в общем случае зависят от
температуры.
234
Глава 5
Если в задаче смешиваются несколько неньютоновских жидкостей, не
обязательно описываемых одной и той же моделью, то динамическая вязкость их
смеси определяется как
loglVv=ZU |оВЦ,)>
где у,, (I, — соответственно массовая концентрация и динамическая вязкость
/-го компонента смеси.
При рассмотрении взаимодействия неньютоновской жидкости со стенкой
вместо обычного условия прилипания жидкости к стенке может быть задано
условия скольжения неньютоновской жидкости относительно стенки: если
сдвиговое напряжение превышает предельное для прилипания сдвиговое
напряжение T0siip, то появляется скорость скольжения vslip =C, (т-т0slip)(2, где
С\ и С2, а также, если отсутствует в модели, т0)5пр задаются
пользователем.
Гравитация
Влияние гравитации моделируется с помощью члена Sigmvily, входящего в
составе суммарной массовой силы (5.4) в уравнения (5.2, 5.3):
Si gravity =~Pgi> (5ЛЗ)
где gt — / -я составляющая (вдоль / -й оси системы координат) вектора
гравитационного ускорения.
Теплопередача в твердых телах
и радиационный теплообмен
Наряду с моделированием диффузии тепла в текучей среде (с помощью
уравнений (5.3) и (5.9)), моделируется также теплопередача в твердых телах с
помощью уравнения
дре д
V1-'
&,,
+ бя, (5.14)
dt dxt
где е = сТ, с — удельная теплоемкость, Т — температура, X —
теплопроводность, QH — удельное (в единице объема) тепловыделение источника
тепла.
При расчете теплопередачи в твердом теле может учитываться, что это тело
состоит из нескольких слоев с контактными тепловыми сопротивлениями
между ними, которые задаются пользователем.
Аэрогидродинамика и теплопередача
235
Конвективный теплообмен между поверхностью твердых тел и текучей
средой моделируется при моделировании пограничного слоя потока текучей
среды.
Если теплопередача в твердых телах моделируется, то одновременно может
моделироваться также радиационный теплообмен между непрозрачными для
него поверхностями твердых тел. При этом рассматривается только
интегральное, т. е. суммарное по всем длинам волн, излучение. Излучающие
тепло поверхности задаются абсолютно черными, абсолютно белыми или
идеально серыми, так что, в соответствии с законом Ламберта, их излучение
предполагается диффузным, т. е. с независящей от направления излучения
яркостью. В результате, в соответствии с законом Стефана— Больцмана,
излучаемое с единицы поверхности тепло определяется как
QR=eo0T„\ (5.15)
где 8 — степень черноты поверхности, а0 — постоянная Стефана —
Больцмана, Tw — температура поверхности. Соответственно моделируется
поглощение и/или отражение радиационного тепла участвующими в радиационном
теплообмене поверхностями. Аналогично излучению от твердых
поверхностей моделируется излучение тепла в расчетную область от расположенных
в текучей среде границ расчетной области. Моделируется также приходящее
с этих границ солнечное излучение с заданными, зависящими в общем случае
от времени, интенсивностью и направлением. В результате для каждой
участвующей в радиационном теплообмене поверхности определяется (с учетом
рассчитываемого фактора видимости) разность между приходящими и
уходящими (т. е. отраженными и излучаемыми) радиационными тепловыми
потоками. Участие текучей среды в радиационном теплообмене не
моделируется. Некоторые стенки могут быть заданы прозрачными для теплового
излучения.
Равновесная конденсация водяного пара
Если рассматриваемая газовая смесь содержит водяной пар, то может быть
рассчитана его равновесная конденсация в объеме (конденсация на
поверхности не рассматривается), позволяющая учесть соответствующие изменения
температуры, плотности, энтальпии, удельной теплоемкости и скорости звука
пара с образовавшимся конденсатом. Поскольку используется равновесная
модель конденсации, то количество сконденсировавшегося пара зависит
только от температуры, давления, и, если кроме водяного пара присутствуют
и другие газы, массовой доли водяного пара в смеси газов в данной точке
пространства. Соответственно, образовавшийся конденсат не имеет истории,
так как определяется только местными параметрами потока, движение капель
конденсата не рассматривается.
236
Глава 5
Кроме того, предполагается, что
♦ конденсат имеет нулевой объем, что делает расчет корректным только при
относительных объемных долях конденсата не выше 5%;
♦ температура водяного пара лежит в диапазоне 283...610 К, а его давление
не выше 10 МПа.
При проведении расчетов возможно задание и расчет относительной
влажности газа вместо относительной доли водяного пара в этом газе.
Кавитация и/или кипение воды
В стационарном или медленноменяющемся потоке воды может быть
рассчитана равновесная кавитация и/или кипение воды. При этом предполагается,
что появление и исчезновение кавитационных (или образующихся при
кипении) пузырьков определяется только местной температурой и давлением и
они перемещаются только вместе с водой, другого движения не имеют.
Учитывается влияние фазовых переходов на температуру воды. Рассчитываются
массовые и объемные доли пузырьков в воде, их влияние на движение воды и
ее свойства как двухфазной среды. Расчеты корректны только при
температурах и давлениях воды в диапазонах 277,15...583,18 К и 800... 107 Па,
объемной доле пузырьков не более 0,9. Кроме того, необходимо отсутствие
кавитации (кипения) в граничных и начальных условиях задачи.
Если решение задачи не является стационарным или медленноменяющимся,
то возможен значительный дисбаланс между входным и выходным
массовыми расходами задачи. Кроме того, при проведении таких расчетов время
решения задачи (число необходимых итераций при решении стационарной
задачи) существенно увеличивается.
Пористые тела
Если текучая среда проходит через пористое тело, то влияние этого тела на
параметры течения моделируется как рассредоточенное гидравлическое
сопротивление, а именно Siporous в сумме (5.4) определяется как
Siponm*=-k&ijPuiJ> (5Л6)
где к — вектор силы сопротивления пористого тела, который определяется
свойствами пористого материала, а именно типом проницаемости и
гидравлическим сопротивлением по характерным направлениям проницаемости.
Моделируются пористые материалы со следующими типами проницаемости:
♦ изотропная— проницаемость материала одинакова по всем
направлениям;
♦ однонаправленная — материал проницаем только в одном направлении;
Аэрогидродинамика и теплопередача
237
♦ осесимметричная— проницаемость материала полностью определяется
продольной и поперечной составляющими относительно некоторого
направления;
♦ ортотропная — наиболее общий случай, когда проницаемость материала
зависит от направления и полностью определяется тремя составляющими,
определенными вдоль трех взаимно перпендикулярных направлений.
По определению k = -grad(P)/(p-V), где P,p,V — давление, плотность и
скорость текучей среды, grad берется по характерным направлениям
проницаемости. Моделируются пористые материалы, у которых составляющие к
по характерным направлениям проницаемости определяются одной
(выбирается пользователем) из следующих их зависимостей от параметров течения:
♦ k = AP-S/(m-L), где АР — перепад давления между противоположными
сторонами пористого тела в данном направлении, m — массовый расход
текучей среды в данном направлении, S и L — площадь поперечного
сечения и длина пористого тела в данном направлении. Величина к
задается зависимостью АР от m и константами S и L. Если вместо массового
расхода m задан объемный расход v, то определяется m = v • р, где р —
плотность текучей среды;
♦ к = (A-V + В)/р, где V — скорость текучей среды, р — плотность
текучей среды, А и В — константы. Величина к задается константами А
и 5, а V и р определяются при расчете течения;
♦ & = ц/(р-£>2), где ц и р — коэффициент динамической вязкости и
плотность текучей среды, D — характерный размер поры, обычно
определяемый из экспериментов. Величина к задается константой D, а ц и р
определяются при расчете течения;
♦ к = |ы/(р • D2) • /(Re), где /(Re) — функция от числа Рейнольдса.
Величина к задается константой D и функцией /(Re), а ц и р определяются
при расчете течения.
Скорость потока текучей среды в пористом материале определяется по
заданной эффективной пористости данного материала, которая представляет
собой объемную долю соединяющихся между собой пор в общем объеме
пористого материала.
Если материал пористого тела не изотропный, то пористое тело задается его
материалом и положением характерных направлений проницаемости этого
материала в данном теле.
238
Глава 5
Вращающаяся система координат
Если расчет выполняется во вращающейся системе координат, то для
суммы (5.4) определяется член SirotalUm с помощью следующей формулы:
s,rotation =-2eijkQjpuk +pQ2r,, (5.17)
где ej/k — функция Леви — Чевита, Q — угловая скорость вращения этой
системы координат, г — радиус-вектор, приходящий в данную точку
пространства от ближайшей к ней точки, лежащей на оси вращения данной
системы координат.
Задание вращения системы координат позволяет рассчитать течение во
вращающемся проточном тракте, который в модели неподвижен и также
неподвижен относительно этой системы координат (аналогично рассчитывается
обтекание вращающегося тела). Если эта вращающаяся система координат
является глобальной, т. е. действует во всей расчетной области, то некоторые
поверхности могут быть заданы неподвижными, т. е. не вращающимися с
этой системой координат, но в этом случае они должны быть симметричными
относительно оси вращения.
Вращающейся может быть также задана локальная система координат,
действующая только в выделенной осесимметричной подобласти расчетной
области (таких непересекающихся подобластей и, соответственно, локальных
систем координат может быть несколько, вне этих подобластей расчет
проводится в неподвижной глобальной системе координат). На границе каждой
из этих подобластей в качестве граничного условия относительно расчетной
области вне этой подобласти автоматически задается осесимметричность
(относительно оси вращения системы координат) получаемого решения (само
это решение получается в результате итераций до совпадения на этой границе
решений, полученных в этой подобласти и вне ее). Соответственно, такой
расчет будет корректным только в случае корректности такого условия в
решаемой задаче.
Течения с частицами
Двухфазные течения текучей среды с жидкими или твердыми частицами
моделируются как движение этих частиц в установившемся (рассматриваются
только стационарные двухфазные течения) потоке текучей среды, т. е.
предполагается, что силовое и тепловое воздействие частиц на течение газовой
фазы пренебрежимо мало. Это предположение верно в том случае, когда
массовая доля частиц в двухфазном потоке не превышает 30%. При определении
коэффициента сопротивления частиц предполагается, что они, как жидкие,
Аэрогидродинамика и теплопередача
239
так и твердые, имеют сферическую форму. Коэффициент сопротивления
частиц рассчитывается по формуле Хендерсона для неразреженных и
разреженных, до-, транс- и сверхзвуковых, ламинарных, переходных и турбулентных
условий обтекания частиц. Температура частицы определяется по формуле
теплообмена частицы с окружающей текучей средой. Так как учитывается
влияние температуры частицы на плотность ее материала, а масса частицы
считается неизменной, то соответственно изменяется размер частицы. Если
необходимо, то учитывается влияние гравитации на движение частиц.
Взаимодействие частиц с поверхностями твердых тел моделируется либо как
полное прилипание частиц к поверхности (свойственно каплям жидкости при не
очень высоких скоростях соударения), либо как идеальное или неидеальное
отражение (свойственно твердым частицам). Если составляющую скорости
частицы по нормали к поверхности непосредственно перед ее соударением
с этой поверхностью обозначить Vx , а составляющую скорости частицы по
касательной к этой поверхности непосредственно перед ее соударением
с этой поверхностью обозначить Vxд , а эти же составляющие скорости
частицы сразу после ее соударения со стенкой обозначить соответственно V2n
и V2 T и рассмотреть отношения
V2,„
V\»
V2r
е^-ГГ1, (518)
то при идеальном отражении еп =ет = 1, а при неидеальном отражении еп < 1
и ех < 1.
Исходя из континуальной модели двухфазного течения, т. е. течения
взаимопроникающих континуумов газовой фазы и частиц различных фракций (все
частицы разделяются на фракции по какому-либо признаку, позволяющему
однозначно задавать начальные условия движения частиц в сечении, от
которого это движение рассчитывается: например, если в некоторой точке
начального сечения могут находиться частицы разных размеров, то таким
параметром является размер частиц), при попадании частиц на стенку
определяется суммарная по всем поверхностям, на которые выпали частицы,
интенсивность налипания частиц на эти поверхности по формуле
N
I accretion ~~ / -. pi >
/=1
где N — число фракций частиц, Мр1 — расход частиц /-й фракции,
выпавших на эти поверхности; а также интенсивность уноса материала стенок, на
которые выпали частицы (решение о том, приведет ли выпадение частиц на
240
Глава 5
эти поверхности к налипанию частиц на этих поверхностях или к уносу
материала этих поверхностей, — остается за пользователем), по формуле
N
erosion = £ I КГ Vbpi • fu (%,) • /2/ (dp)dmpl,
/=1 мр1
где Kt — заданный пользователем коэффициент эрозии материала
поверхности, V, — скорость частиц непосредственно перед соударением, Ъ —
заданный пользователем показатель степени, fVl{oipl) — безразмерный
коэффициент, учитывающий влияние на эрозию угла а^ подлета частиц к
поверхности выпадения (относительно нормали к поверхности), f2i(dpi) —
безразмерный коэффициент, учитывающий влияние на эрозию диаметра dpl
частиц.
Термоэлектрические элементы Пельтье
Термоэлектрический элемент Пельтье состоит из двух пластинок с
многочисленными р и п полупроводниками между ними, соединенными в одну
электрическую цепь, которые за счет эффекта Пельтье позволяют перекачивать
тепло с одной пластинки на другую при подведении к ним постоянного тока
определенной полярности. Перекачиваемое с "холодной" на "горячую"
сторону элемента тепло определяется как
&=я-/-Гс-Л-12/2-*-Д7\
где a — коэффициент Зеебека, / — сила тока, Тс — температура "холодной"
поверхности элемента, R — электрическое сопротивление элемента, к —
коэффициент теплопроводности элемента, АГ= 7/, - Тс, где 7), — температура
"горячей" поверхности элемента. Соответственно, на горячей поверхности
элемента выделяется тепло
Qh=aiTh+Ri2/2-kAT.
В COSMOSFloWorks термоэлектрические элементы Пельтье моделируются
соответствующими граничными условиями на двух сторонах пластинки,
автоматически задаваемыми по исходным данным пользователя, обычно
сообщаемых производителем элементов (zmax — максимальный ток, Q.maK —
тепло, перекачиваемое при /тах и ДГ= 0, ДГтах — разница температур при Qc = О,
напряжение тока Fmax при /тах — значения всех этих параметров при двух
значениях 7}7).
Аэрогидродинамика и теплопередача
241
Начальные и граничные условия
Для привязки математической модели к конкретной физической
(инженерной) задаче и к области пространства, в которой она решается (так
называемая расчетная область, поскольку в COSMOSFIoWorks используется метод
фиктивных областей, то расчетная область может быть меньше той области, в
которой строится расчетная сетка), пользователь должен задать начальные и
граничные условия.
Необходимость задания начальных условий, т. е. значений физических
параметров среды (текучей и твердой, если рассчитывается теплопередача в
твердом теле) в расчетной области в начальный момент времени, вытекает из
нестационарности используемой математической модели, т. е. ее основных
уравнений (5.1—5.3, 5.10). Если задача нестационарная, и ее решение не
является периодическим, то начальные условия, наряду с граничными,
определяют решение задачи, т. е. не могут быть произвольными, а должны в
точности соответствовать поставленной задаче (в определенном смысле их можно
рассматривать как граничное условие во времени). Если задача стационарная
или нестационарная, но с периодическим решением, то ее решение считается
найденным после его установления во времени — в этом случае в задании
начальных условий имеется определенный произвол (степень этого
произвола зависит от задачи, но в любом случае начальные условия должны быть
физически корректными; некоторые задачи могут иметь несколько
стационарных решений, соответствующих разным областям значений начальных
условий), так что от начальных условий зависит не решение задачи, а скорость
нахождения этого решения (обычно чем ближе начальные условия к
решению, тем быстрее это решение будет найдено).
Задание граничных условий, т. е. условий на границах расчетной области,
обязательно для всех задач — как стационарных, так и нестационарных.
Фактически, граничные условия определяют связь физических процессов в
расчетной области с физическими процессами вне ее. В зависимости от способа
задания границ расчетной области и, соответственно, условий на них,
в COSMOSFIoWorks все задачи условно делятся на внутренние и внешние:
♦ во внутренних задачах заполненная текучей средой расчетная область
ограничена стенками модели (если рассчитывается теплопередача в
стенках, то эти стенки также включаются в эту расчетную область), при этом
некоторые поверхности стенок могут рассматриваться как отверстия,
через которые расчетная область соединяется с внешними полостями,
заполненными текучей средой; все заданные на этих границах условия точно
выполняются при решении задачи;
♦ во внешних задачах заполненная текучей средой расчетная область
ограничена плоскостями расчетной сетки, параллельными координатным
242
Глава 5
плоскостям и полностью лежащими в текучей среде, которая обтекает
модель (так называемые внешние границы), при этом возможно также
частичное прохождение этих границ через твердые тела, например,
пересечение ими стенок модели или использование поверхностей модели в
качестве границ (так называемые внутренние границы); при этом условия,
заданные на внешних границах, не обязательно точно выполняются при
решении задачи: например, при моделировании обтекания тела на всех
внешних границах задаются параметры невозмущенного набегающего
потока, но возмущения, образовавшиеся в расчетной области в результате
обтекания тела (например, скачки, волны сжатия или разрежения),
свободно пересекают внешние границы, т. е. выходят из расчетной области,
естественно, на этих участках границы параметры потока отличаются от
заданных граничных условий; что касается условий, заданных на
внутренних границах, т. е. на поверхностях модели, они выполняются при
решении задачи точно, аналогично тому, как при решении внутренних задач.
В COSMOSFloWorks могут быть заданы следующие граничные условия.
f Параметры текучей среды на входных и выходных отверстиях модели:
• массовый или объемный расход и, если отверстие входное, профиль
скорости, температура, параметры турбулентности и пограничного
слоя, а также концентрации компонентов многокомпонентной среды
(здесь и везде ниже имеется в виду, что концентрация водяного пара
может быть задана относительной влажностью газа, если она
рассчитывается в задаче, при этом указываются температура и давление, при
которых она определяется);
• скорость, ее профиль, и если отверстие входное, то температура,
параметры турбулентности и пограничного слоя, а также концентрации
компонентов многокомпонентной среды;
• полное или статическое давление и, на тот случай, если отверстие
окажется входным (в отличие от предыдущих двух вариантов, т. е. задания
расхода или скорости, при задании давления направление течения не
задается, а определяется при решении задачи), температура, параметры
турбулентности и пограничного слоя, а также концентрации
компонентов многокомпонентной среды;
• вытяжной или приточный вентилятор, т. е. зависимость объемного или
массового расхода от перепада давления на вентиляторе, при этом
давление на внешней, т. е. расположенной вне расчетной области, стороне
вентилятора задается пользователем, а давление на его внутренней, т. е.
являющейся границей расчетной области, стороне определяется при
решении задачи; кроме того, аналогично описанному случаю задания
расхода, при задании приточного вентилятора задаются профиль ско-
Аэрогидродинамика и теплопередача
243
рости (если необходимо, с закруткой потока), температура, параметры
турбулентности и пограничного слоя, а также концентрации
компонентов многокомпонентной среды;
• в частном случае так называемого внутреннего вентилятора обе
стороны вентилятора выходят в расчетную область, соответственно, для него
задается только зависимость объемного или массового расхода от
перепада давления на вентиляторе.
♦ Параметры поверхностей твердых тел, контактирующих с текучей средой
(условия непротекания и прилипания здесь не упомянуты — они задаются
автоматически всегда, за исключением идеальной поверхности, для
которой условие прилипания потока к поверхности не задается, и случая
задания скольжения неньютоновской жидкости), — их, за исключением
шероховатости поверхности и идеальной стенки, корректно задавать только в
том случае, если не рассчитывается теплопередача в твердых телах:
• шероховатость поверхности (строго говоря, это условие не является
граничным, а описывает свойство поверхности);
• температура поверхности;
• удельный (т. е. с единицы поверхности) или суммарный (по указанной
поверхности) тепловой поток;
• коэффициент теплоотдачи поверхности текучей среде — в этом случае
необходимо также указать способ определения температуры текучей
среды (т. к. рассчитывается пограничный слой, то соответствующая
этим заданиям температура стенки определяется при решении задачи);
• адиабатическая поверхность, т. е. отсутствие теплообмена текучей
среды с поверхностью;
• идеальная поверхность, т. е. отсутствие пограничного слоя на
поверхности и теплообмена текучей среды с поверхностью (если
теплопередача в твердых телах рассчитывается, то это условие означает
теплоизолированную относительно текучей среды поверхность стенки);
• движение поверхности стенки, не изменяющее геометрию проточного
тракта модели (вращение или поступательное движение).
♦ Тепловые условия на внешних поверхностях твердых тел, являющихся
граничными при расчете теплопередачи в твердых телах:
• температура поверхности;
• коэффициент теплоотдачи поверхности во внешнюю (относительно
расчетной области) текучую среду — в этом случае необходимо также
задать температуру этой внешней среды (т. к. рассчитывается теплопе-
244
Глава 5
редача в твердом теле, то соответствующая этим заданиям температура
стенки определяется при решении задачи).
На выбранной поверхности можно задать только одно из перечисленных
граничных условий (за исключением шероховатости, которая, как отмечено
выше, строго говоря, не является граничным условием). Кроме того, заданные
на разных поверхностях граничные условия не должны конфликтовать друг
с другом.
Поскольку начальные и граничные условия касаются параметров
определенных текучих сред и твердых тел, то к этим условиям можно отнести также
теплофизические свойства этих текучих сред и твердых тел:
♦ для газов: молекулярная масса, показатель адиабаты, удельная
теплоемкость при постоянном давлении, коэффициент динамической вязкости,
коэффициент теплопроводности;
♦ для жидкостей: плотность, удельная теплоемкость, коэффициент
динамической вязкости, коэффициент теплопроводности;
♦ для твердых тел: плотность, удельная теплоемкость, коэффициент
теплопроводности (если рассчитывается теплопередача в твердом теле).
Для неньютоновских жидкостей, сжимаемых жидкостей, пористых
материалов задаются их специфические свойства, описанные ранее.
Если моделируется радиационный теплообмен, то задается степень черноты
участвующих в нем поверхностей; если дополнительно моделируется
излучение с границ расчетной области, расположенных в текучей среде, то
задаются необходимые для определения этого излучения фиктивные температура
и степень черноты этих границ, а если дополнительно моделируется
солнечное излучение, — то его интенсивность и направление.
Тепловые источники (или стоки)
В расчетной области могут быть заданы также тепловые источники (стоки
при заданных отрицательных значениях соответствующих параметров):
♦ объемные тепловые источники (стоки) в выделенных твердых телах (если
в них рассчитывается теплопередача) или в выделенных областях текучей
среды — в виде выделяемого (поглощаемого) суммарно или в единице
объема количества тепла (в случае суммарного — равномерно по
выделенному телу или области);
♦ поверхностные тепловые источники (стоки) на выделенных поверхностях
твердых тел, контактирующих с текучей средой (если в этих телах
рассчитывается теплопередача), — в виде выделяемого (поглощаемого)
суммарно или на единице площади количества тепла (в случае суммарного —
равномерно по выделенной поверхности);
Аэрогидродинамика и теплопередача
245
♦ являющиеся тепловыми стоками и источниками поверхности
термоэлектрических элементов Пельтье.
5.3.2. Решение
поставленной математической задачи
Для нахождения искомого численного решения задачи непрерывная
нестационарная математическая модель физических процессов, используемая в
COSMOSFloWorks (см. разд. 5.3.1), дискретизируется как по пространству,
так и по времени (т. к. движение и теплообмен текучей среды, а также
теплопередача в твердом теле моделируются как нестационарные, то решение
стационарных задач определяется как установившееся по времени).
Чтобы выполнить дискретизацию по пространству, вся расчетная область
покрывается расчетной сеткой, грани ячеек которой параллельны
координатным плоскостям используемой в расчете декартовой Глобальной системы
координат модели в SolidWorks. Поскольку в COSMOSFlo Works
используется метод конечных объемов, так что значения независимых переменных
рассчитываются в центрах ячеек, а не в узлах расчетной сетки, то используемая в
COSMOSFIpWorks расчетная сетка описывается ее ячейками, а не узлами, как
в методах конечных разностей. Соответственно, ячейки расчетной сетки
имеют форму параллелепипедов. Область, в которой эта сетка строится, так
же имеет единообразную для всех задач форму параллелепипеда.
При решении внутренних задач, т. е. при расчете поведения текучей среды в
ограниченной стенками модели области (эта область может иметь или не
иметь входные и выходные отверстия, соединяющие ее с текучей средой вне
расчетной области), используется так называемый метод фиктивных
областей, т. е. формально расчетная сетка строится в параллелепипедообразной
области, покрывающей модель с текучей средой внутри. Но расчеты
проводятся только в ячейках, попавших в расчетную область, т. е. в пространство,
заполненное в соответствии с постановкой задачи текучей средой и твердым
телом (если в нем рассчитывается теплопередача). В ячейках вне расчетной
области расчеты не проводятся. Этот подход позволяет рассчитывать течения
в очень сложных каналах без усложнения алгоритма решения задачи.
При решении внешних задач, т. е. когда текучая среда обтекает твердое тело
(при этом среда может также течь или находиться внутри тела, с сообщением
или без сообщения с обтекающей тело средой), метод фиктивных областей не
используется — расчетная область автоматически строится в виде
параллелепипедообразной области, грани которой параллельны координатным
плоскостям декартовой Глобальной системы координат модели в SolidWorks и
расположены на определенном расстоянии от твердого тела. При необходимости
246
Глава 5
эти грани могут быть пользователем удалены от модели или приближены
к ней.
Процесс построения расчетной сетки начинается с построения так
называемой базовой сетки — она получается разбиением пространства построения
сетки на слои плоскостями, параллельными координатным плоскостям
используемой декартовой Глобальной системы координат модели. Число этих
плоскостей, определяющих базовую сетку, т. е. число ячеек базовой сетки
вдоль каждой из координатных осей, задается либо автоматически на
основании заданных пользователем установок, либо непосредственно самим
пользователем. При необходимости (например, для лучшего разрешения тонких
плоских тел), некоторые из этих плоскостей, а также расположение
остальных плоскостей между этими плоскостями и между этими и граничными
плоскостями, могут быть заданы пользователем.
Поскольку грани расчетных ячеек не аппроксимируют соприкасающиеся с
текучей средой поверхности твердых тел, то для разрешения расчетной
сеткой относительно небольших геометрических особенностей этих
поверхностей (участков повышенной криволинейности, выступов, впадин, отверстий,
поверхностей тонких тел, окруженных текучей средой, и т. п.) используются
процедуры соответствующего локального дробления ячеек сетки около этих
участков поверхностей до начала расчета. Так, каждая ячейка базовой сетки,
пересеченная поверхностью твердого тела на границе с текучей средой
(в COSMOSFIoWorks такие ячейки, причем не только базовой сетки, но также
всех последующих расчетных сеток, называются частичными), делится на 8
одинаковых, геометрически ей подобных ячеек меньшего размера (в
COSMOSFIoWorks они называются дочерними). Если используемый при построении
сетки критерий дробления ячеек еще не удовлетворен, то те из 8 ячеек,
которые пересечены этой поверхностью твердого тела, т. е. являются частичными,
в свою очередь, аналогичным образом делятся на 8 еще более мелких ячеек, и
т. д., до удовлетворения критерия дробления размером полученных ячеек, но
не более чем до достижения размера, в 7 раз меньшего базовой ячейки. Кроме
того, начиная с COSMOSFIoWorks-2007, работает процедура разрешения
расчетной сеткой омываемых текучей средой тонких стенок без дробления
ячеек сетки до меньшего толщины стенки размера, естественно с расчетом
около таких стенок и в них искомых физических параметров (пограничного
слоя, тепловых потоков, температуры). Кроме того, аналогичная процедура
используется для разрешения расчетной сеткой тонких слоев разнородных
(с разными свойствами) материалов в твердых телах.
Для разрешения областей с большими градиентами физических параметров
текучей среды или температуры твердого тела используются процедуры
дробления ячеек сетки как до начала расчета, так и во время расчета.
Аэрогидродинамика и теплопередача
247
Процедура, дробящая ячейки в текучей среде до начала расчета, для каждой
частичной ячейки автоматически определяет количество ячеек в текучей
среде от этой ячейки до противоположной, ограничивающей данную проточную
область, поверхности твердого тела по нормали к поверхности тела в этой
частичной ячейке. Если это количество меньше определенного числа
расчетных ячеек, то ячейки вдоль этой нормали дробятся до достижения этого
определенного числа ячеек. Аналогичным образом работает процедура,
дробящая ячейки в тонких твердых телах, с той лишь разницей, что подсчитывают-
ся ячейки расчетной сетки в твердом теле.
Процедура, дробящая ячейки расчетной сетки в областях с большими
градиентами физических параметров текучей среды или температуры твердого
тела, определенными во время расчета, анализирует рассчитанные значения
физических параметров в соседних ячейках и дробит эти ячейки до тех пор,
пока разница между этими значениями не станет меньше определенной
величины, зависящей от анализируемых параметров. Если разница между
значениями физических параметров в соседних ячейках больше определенной
величины, то эта же процедура работает в обратную сторону, т. е. сливает ранее
созданные этой процедурой 8 дочерних ячеек обратно в одну.
Описанные процедуры работают автоматически в соответствии с заданными
по умолчанию или пользователем характеристиками установок этих
процедур. Эти характеристики установок действуют во всей расчетной области,
кроме того, при необходимости пользователь может выделить (с помощью
Sol id Works) некоторые подобласти расчетной области и задать там другие
характеристики этих установок, а также характеристики ряда
дополнительных, используемых только для таких выделяемых подобластей, установок,
позволяющих выполнить дробление всех (или всех, расположенных в
текучей среде, или всех, расположенных в твердом теле, или всех частичных)
ячеек данной подобласти до заданного относительно базовой сетки уровня.
Естественно, полученное на сформированной таким образом некоторой
расчетной сетке дискретное (в COSMOSFloWorks в центрах ячеек) решение
поставленной непрерывной (дифференциальной) математической задачи в
общем случае зависит от размеров ячеек расчетной сетки, покрывающих
расчетную область. Поэтому, чтобы решить поставленную математическую
задачу достаточно точно, а также для оценки достигнутой точности,
необходимо проведение нескольких расчетов на разных, более редких и более
частых расчетных сетках с целью определить такую частоту расчетной сетки,
начиная с которой решение задачи перестает значимо зависеть от частоты
сетки, т. е. выходит на "полку", что указывает на достижение необходимой
точности решения математической задачи (так называемой сеточной
сходимости решения математической задачи).
9 Зак. 4405
248
Глава 5
Для дискретизации дифференциальных уравнений в COSMOSFloWorks
используется метод конечных объемов. Соответственно, собственно
дискретизация рассмотренной в разд. 5.3.1 непрерывной математической модели
состоит в том, что значения физических переменных рассчитываются (и
хранятся) только в центрах расчетных ячеек, а на гранях этих ячеек
рассчитываются потоки массы, импульса, энергии, необходимые для расчета этих
значений. При этом пространственные производные аппроксимируются с
помощью неявных разностных операторов второго порядка точности.
А именно, полученные из уравнений (5.1—5.3) интегрированием по
поверхности и объему ячейки расчетной сетки интегральные уравнения
— ]Udv + JFds = JQdv, (5.19)
Ot у S у
где U — вектор физических параметров (независимых переменных), V —
объем ячейки, F — потоки, S — площадь поверхности (граней) ячейки,
Q — массовые силы, преобразуются к дискретной форме:
Uu-V) + Y,Fs = Q-V (5-20)
Потоки F рассчитываются с использованием их аппроксимации вперед
второго порядка точности, основанной на модифицированных неявных QUICK-
аппроксимациях Леонарда [26] и методе минимизации полной вариации TVD
[21]. Специальные аппроксимации применяются для конвективных членов,
операторов div и grad.
В частичных, т. е. пересеченных поверхностью твердого тела на границе с
текучей средой, расчетных ячейках вводятся дополнительные внутренние
грани, аппроксимирующие попавшую в эти ячейки поверхность твердого
тела, и используется специальная процедура для расчета условий на этих
гранях.
Чтобы выполнить дискретизацию по времени, для каждой ячейки расчетной
сетки в расчетной области из условия Куранта определяется допустимый
максимальный шаг по времени, зависящий как от значений физических
величин, так и от шага дискретизации по пространству в этой ячейке. Если
решается нестационарная задача, то затем определяется минимальный из
определенных таким образом шагов по времени по всем ячейкам расчетной сетки в
расчетной области и с этим шагом, одинаковым для всех ячеек, выполняется
переход (т. е. расчет параметров) к следующему моменту времени. Если
решается стационарная задача, то для ускорения установления решения по
времени шаги по времени в разных ячейках расчетной сетки в расчетной области
разные, а именно определяются из условия Куранта в зависимости от
значений физических величин и шага дискретизации по пространству в ячейке.
Аэрогидродинамика и теплопередача 249
При дискретизации по времени используется метод расщепления операторов
для более эффективного расчета давления и скорости. В соответствии с
методом типа SIMPLE [24], давление рассчитывается в результате решения
дискретного эллиптического уравнения, полученного алгебраическими
преобразованиями дискретных уравнений сохранения массы и импульса с учетом
граничных условий для скорости. В результате, для расчета значений
параметров течения на очередном временном слое (п+\) по известным значениям
этих параметров на предыдущем временном слое (п) используется
следующая система алгебраических уравнений:
U-^- + Ah(U",p")U-=S"; (5.21)
At
At At At
р=/(р"+8р,Г,у');
(puTx=(puf-Atgradhbp-
p"+l=p"+8p;
(р7Г =(РТУ; (р*Г =(„*)•; (ре)'"' -(ре)'; (РуГ =Ы*>
р"+1=Л/>п+1,г+,,/'+|),
где C/ = (pw, рГ, pk, ps, py) — вектор всех независимых переменных, кроме
давления р, w = (w,,w2,w3) — вектор скорости, у = (у\9у29 — У^) — вектор
концентраций компонентов текучей среды, Ър = рп+] - р" — вспомогательная
переменная, поправка давления. Индексом * обозначены промежуточные
(между слоями п и п + \) значения переменных. Все значения переменных
относятся к центрам расчетных ячеек. Дискретные операторы Ah, divh,
gradh и Lh=divhgradh аппроксимируют соответствующие
дифференциальные операторы со вторым порядком точности.
Сначала решается система полностью неявных линейных дискретных
уравнений конвекции и диффузии (5.21) относительно промежуточных
(обозначенных индексом *) значений составляющих вектора U. Для решения этой
системы уравнений используется обобщенный метод сопряженных
градиентов [27] с привлечением метода неполной L[/-факторизации.
Затем решается эллиптическое уравнение (5.22) относительно поправки
давления Ър . Это уравнение составлено таким образом, что значения импульса
(5.22)
(5.23)
(5.24)
(5.25)
(5.26)
(5.27)
250
Глава 5
(pw) , рассчитанные по (5.24), удовлетворяют полностью неявному
дискретному уравнению неразрывности. Решение ищется с помощью специально
разработанного итерационного метода с использованием многосеточного
метода [20] для ускорения сходимости. Согласно многосеточному методу,
рассматриваются решения на вариационных подмножествах узлов используемой
расчетной сетки, для каждого определяется соответствующая невязка, далее
решение экстраполируется на нулевую величину невязки. Для повышения
устойчивости и ускорения сходимости используется также процедура
сглаживания получаемого решения.
Значения остальных составляющих вектора U находятся из (5.25—5.27).
Поскольку решение стационарных задач определяется в COSMOSFloWorks в
результате его установления по времени, очень важно правильно выбрать
момент для завершения расчета, т. е. вовремя определить, изменится ли
решение при выполнении очередного шага (итерации) по времени (как
упомянуто ранее, при решении стационарных задач используется локальный шаг по
времени, т. е. на одном и том же шаге по времени время в разных точках
пространства в общем случае разное) или нет, и если нет, то остановить расчет.
В случае преждевременного завершения расчета решение еще не будет
получено, например, значения физических параметров будут зависеть от заданных
начальных условий, тогда как у стационарного решения такая зависимость,
естественно, отсутствует, а при слишком позднем завершении расчета время
от установления решения до завершения расчета будет потрачено зря.
Поскольку задача решается численно на некоторой расчетной сетке, которая
может быть слишком грубой для данной задачи, и, кроме того, не исключены
ошибки пользователя в задании исходных данных, то не исключены и случаи
отсутствия установления вообще, — эти случаи тоже надо идентифицировать
в процессе расчета как можно раньше. Естественно, решение этой проблемы
проще, чем определение наличия установления, — аналогично тому, как
проще доказывать необходимость, чем достаточность.
В идеальном случае, т. е. при отсутствии осцилляции решения во всей
расчетной области при выполнении шагов по времени и при установлении
решения одновременно во всех ячейках расчетной области, особых проблем с
идентификацией достижения установления не возникает. Но в общем случае,
более того, как правило, в большинстве инженерных задач, это не так:
обычно присутствуют осцилляции решения при выполнении шагов по времени, и
решение устанавливается не одновременно во всех ячейках расчетной
области. В связи с этим возникают две проблемы, которые необходимо решить для
того, чтобы сделать вывод о возможности завершения расчета:
♦ что рассматривать в качестве решения, установление которого надо
идентифицировать;
Аэрогидродинамика и теплопередача
251
♦ по каким критериям идентифицировать установление решения (неважно, в
одной ячейке или во всей расчетной области, но по времени).
Практическое решение первой проблемы не столь однозначно, как может
показаться на первый взгляд. Оно имеет следующие возможные варианты.
♦ Значения каких физических параметров:
• всех независимых переменных;
• некоторых независимых переменных;
• некоторых комплексов независимых переменных.
♦ Локализация значений этих параметров:
• в каждой ячейке сетки расчетной области;
• некоторые интегральные характеристики, определяемые по значениям
физических параметров:
D во всей расчетной области;
° в некоторых ее подобластях;
• представительные значения физических параметров (максимумы,
минимумы, средние, среднемассовые значения и т. п.):
D во всей расчетной области;
а в некоторых ее подобластях.
Очевидно, что с теоретической точки зрения наиболее правильно
идентифицировать установление решения по изменению значений всех независимых
переменных во всех ячейках сетки расчетной области. Но, с одной стороны,
это потребует сохранения и обработки в оперативной памяти слишком
большого объема информации, а именно полей этих физических параметров,
рассчитанных на нескольких (может быть нескольких десятках или сотен) шагах
по времени (итерациях), что существенно сократит возможность проведения
расчетов на достаточно мелких расчетных сетках, обеспечивающих
необходимую точность расчета. С другой стороны, т. к. решение в общем случае
устанавливается не одновременно во всех ячейках расчетной области, а
целью решения инженерной задачи часто бывает некоторая интегральная по
некоторой подобласти расчетной области, т. е. по некоторой совокупности
расчетных ячеек, характеристика (например, сила, действующая на
некоторую поверхность, определяется по параметрам в частичных ячейках,
покрывающих эту поверхность, а значения параметров в ячейках, расположенных
на достаточном расстоянии ниже по течению от этой поверхности,
практически не влияют на эту силу), которая, к тому же, может слабо зависеть от
флуктуации значений физических параметров в одной или нескольких
расчетных ячейках этой подобласти (при условии небольшой относительной до-
252
Глава 5
ли этих ячеек в общем количестве ячеек, покрывающих эту подобласть), то
при решении поставленной инженерной задачи не имеет смысла дожидаться
установления решения во всей расчетной области (тем более, что это
установление может оказаться недостижимым при используемых критериях
установления), а лучше сразу определить, что именно интересует пользователя
при решении данной задачи, т. е. цель решения задачи, и рассматривать
установление только этой цели. Поэтому эта проблема и решается в
COSMOSFloWorks с помощью целей проекта, которые задает сам
пользователь. В качестве целей пользователь указывает интересующие его в данной
инженерной задаче физические параметры или их комплексы и способ их
глобализации: интегральные характеристики или представительные значения
(максимумы, минимумы, средние) и по какой области пространства (объем,
поверхность, кривая).
Вторая проблема решается в COSMOSFloWorks полуавтоматически, а
именно рассматривается изменение выбранных пользователем целей на некотором
временном (это название условно, в действительности вместо времени
рассматривается определенное количество шагов по времени, т. е. итераций)
интервале анализа, который отсчитывается назад, т. е. к началу расчета, от
последнего временного шага (итерации). Размер этого интервала анализа либо
определяется в COSMOSFloWorks автоматически на основании анализа
количества расчетных ячеек, либо задается пользователем. Далее, в качестве
критерия установления цели рассматривается дисперсия цели на этом
интервале анализа относительно ее среднего значения на этом интервале.
Пороговая величина этой дисперсии, ниже которой цель считается установившейся,
либо определяется в COSMOSFloWorks автоматически на основании анализа
изменения цели при выполнении шагов по времени, либо задается
пользователем.
Естественно, решение этих двух проблем также имеет свои погрешности,
которые увеличивают общую погрешность решения поставленной
математической задачи и инженерной задачи в конечном счете.
5.4. Взаимодействие с SolidWorks
Целью любого инженерного расчета в конечном итоге является либо поиск
оптимальной конфигурации (геометрии) создаваемой модели (устройства)
при заданных ее свойствах, либо определение ее .свойств при заданной
конфигурации (геометрии) модели. Поэтому немаловажную роль для
выполняющего такие расчеты инженера играет наличие связи между используемой
программой (системой) геометрического проектирования (моделирования)
устройств и используемыми программами расчета свойств этих устройств.
Аэрогидродинамика и теплопередача
253
По способу связи с программой геометрического проектирования
(моделирования) существующие программы расчета течений и теплопередачи могут
быть условно поделены на следующие классы:
♦ программы с собственными средствами моделирования геометрии;
♦ программы, использующие не связанную с ними программу
геометрического проектирования (моделирования), результат работы которой затем
конвертируется их или ее средствами в нужный формат;
♦ программы, полностью интегрированные с программой геометрического
проектирования (моделирования).
Программы с собственными средствами моделирования геометрии обычно
сильно уступают по возможностям моделирования специально
предназначенным для геометрического проектирования (моделирования) программам,
например, таким как SolidWorks. В результате, в этих программах задание
сложной, в общем случае пространственной, геометрии объекта не всегда
бывает адекватным. Это сильно осложняет, а зачастую делает невозможным
адекватный расчет свойств сложных моделей (устройств).
Программы, использующие не связанную с ними программу геометрического
проектирования (моделирования), результат работы которой затем
конвертируется их или ее средствами в нужный для этих программ формат,
отличаются от предыдущих программ большими возможностями геометрического
проектирования, однако при этом возникают проблемы корректного
конвертирования данных из одной программы в другую. Кроме того, поскольку при
любом изменении геометрии модели приходится импортировать данные
заново, это значительно усложняет работу программ расчета свойств модели
(устройства).
Поэтому все большее распространение в инженерной практике получают
программы расчета свойств модели, интегрированные с программами
геометрического проектирования (моделирования). Это, в частности, позволяет
оптимизировать геометрию модели (устройства) любой сложности в
максимально короткие сроки.
Полностью интегрированный в SolidWorks COSMOSFloWorks позволяет
проводить расчеты течений, теплообмена (и теплопередачи) любой
сложности без какой-либо дополнительной передачи данных между ним и
программой геометрического проектирования (моделирования) SolidWorks, более
того, задание исходных данных и визуализация результатов происходит
непосредственно в среде SolidWorks, что весьма удобно и экономит время
пользователя.
О том, что такое интеграция в SolidWorks, рассказывается в этом разделе.
254
Глава 5
5.4.1. Твердое тело
и область, занятая текучей средой
Задача, которую решает гидрогазодинамический анализ— каким образом
воздействует жидкость на тело или же, наоборот, как тело влияет на
жидкость. В любом случае, рассматривается система "жидкость — тело"
(исключение составляет расчет теплопроводности только в теле, который также
возможен в COSMOSFIoWorks). Постановка задачи предполагает задание
исходных данных, т. е. определение условий, в которых работает система, а
именно граничных и начальных условий.
( Примечание ^
Здесь и далее, если нет специального упоминания, жидкостью для краткости
называется любая текучая среда— жидкость, газ или неньютоновская
жидкость. В отличие от английского, в котором есть слова fluid (текучая среда),
liquid (жидкость) и gas (газ), в русском языке, к сожалению, нет слова,
обозначающего жидкость и газ одновременно. Сравните "fluid dynamics" и
"аэрогидродинамика".
В системе "жидкость— тело" вне зависимости от того, течет ли жидкость
внутри тела либо омывает его снаружи, границы тела определяют
поверхность, ограничивающую область распространения жидкости. Другими
словами, границы тела являются граничным условием для системы "жидкость —
тело". Этот тип условия в COSMOSFIoWorks называется Wall (Стенка).
Другими необходимыми условиями являются условия, в которых находится
взаимодействующая с телом жидкость. В случае внешнего обтекания — это
параметры набегающего потока, такие как скорость, давление, температура
и др. Такой тип условия называется Ambient Conditions (Внешние условия).
В случае, когда рассматривается протекание жидкости через тело (например,
расчет клапана) — таким условием являются параметры потока при входе и
выходе из модели. Этот тип условия называется Opening (Отверстие).
COSMOSFIoWorks автоматически интерпретирует пустое (не заполненное
телом) пространство модели как пространство, заполненное жидкостью.
В зависимости от взаиморасположения тела и жидкости (внутри тела или
снаружи) в COSMOSFIoWorks все задачи делятся на два типа— External
(Внешние) и Internal (Внутренние).
Внешние задачи
Внешними считаются задачи, в которых тело помещено в поток жидкости
или тело движется через жидкость. Типичные примеры — обтекание
здания, крыла, автомобиля, субмарины (рис. 5.2). Под жидкостным
пространством в COSMOSFIoWorks подразумевается пространство внутри и вокруг те-
Аэрогидродинамика и теплопередача
255
ла. Это пространство ограничено поверхностью тела с одной стороны
(условие Wall) и границами расчетной области с другой (условие Ambient
Conditions).
Рис. 5.2. Субмарина и профиль крыла — примеры внешних задач
Расчетная область
Расчетная область (Computational Domain) — прямоугольный
параллелепипед, ограничивающий область, в которой производится расчет, если эта
область не ограничена условиями типа Wall или Opening. Размер расчетной
области определяется автоматически и для внешних задач зависит от
параметров потока. При желании, размер расчетной области можно изменить,
например, уменьшить для экономии затрачиваемой памяти и уменьшения
времени счета.
Следует помнить, что для внешних задач условия, определяющие
характеристики набегающего потока (Ambient Conditions), выставляются программой
на границах расчетной области. Поэтому не рекомендуется слишком близко
приближать границы расчетной области к телу, т. к. область возмущения
потока может быть больше заданной области расчета, что в итоге приведет
к некорректным результатам (рис. 5.3).
Тем не менее в целях экономии компьютерных ресурсов размер расчетной
области может быть изменен, если имеется одна или несколько плоскостей
симметрии течения, или когда решается двумерная (2D) задача. В случае
наличия симметрии течения граница расчетной области выставляется в
плоскости симметрии, и на этой границе задается условие Symmetry (Симметрия).
Однако пользоваться условием симметрии нужно с осторожностью, т. к.
геометрическая симметрия не обязательно является условием симметрии
течения (рис. 5.4).
Размер расчетной области также имеет смысл уменьшить, если задача имеет
элементы, повторяющиеся с некоторой периодичностью в направлении
перпендикулярном плоскости расчетной области. В этом случае, расчетная
область может включать несколько элементов периодической структуры, при
256
Глава 5
этом на границах расчетной области необходимо поставить условие
Periodicity (Периодичность) (рис. 5.5). Следует отметить, что данное условие
применимо только для линейной периодичности (повторяемость элементов
вдоль одного из направлений глобальной системы координат),
периодичность по углу (например, лопатки ротора) не поддерживается.
Двумерные (2D) задачи довольно редко встречаются в инженерной практике.
Двумерные задачи подразумевают идентичность течения в плоскостях,
параллельных плоскости течения. Как правило, двумерные задачи
используются для проверочных расчетов простейших моделей и валидации в случае,
когда имеются теоретические оценки для плоского случая.
Расчетная область создается как для внешних, так и для внутренних задач.
Рис. 5.3. Расчетная область, построенная для внешней задачи
Рис. 5.4. Симметричное течение в круглой трубе и несимметричное течение
в симметричном плоском канале
Аэрогидродинамика и теплопередача
257
Рис. 5.5. Расчетная область для задачи с периодически повторяющимися элементами
Внутренние задачи
Для случая протекания жидкости внутри тела жидкостное пространство
ограничено входными и выходными отверстиями (условие Opening) и
стенками модели (условие Wall). Такой тип задач называется Internal
(Внутренние). Этот тип подходит для расчета трубопроводов, клапанов, кранов,
теплообменников, компьютеров и др. Внутренняя задача может и не иметь
входных и выходных условий, например, при расчете свободной конвекции
внутри комнаты. В этом случае жидкостное пространство ограничено только
стенками модели. Все же большинство внутренних задач имеют проточную
часть, т. е. вход и выход жидкости (рис. 5.6).
Поскольку SolidWorks является средством проектирования твердотельных
конструкций, в нем отсутствуют элементы, которые необходимы для анализа
системы "жидкость — тело", такие как объемы, заполненные жидкостью,
области втекания и вытекания жидкости с заданными параметрами. Изначально
в SolidWorks определена лишь та часть системы, которая связана
непосредственно с телом. Например, для задания условия шероховатости на
поверхности (шероховатость— свойство твердого тела) достаточно выделить эту по-
258
Глава 5
верхность и указать размер шероховатости. Но как выделить отверстие? Для
определения другой — жидкостной — части системы необходимо введение
дополнительных элементов и понятий.
Рис. 5.6. Примеры внутренних задач
Крышки для отверстий
Для задания входных и выходных граничных условий на отверстиях модели
необходимо модифицировать модель, закрыв эти отверстия твердым телом.
Поверхность такой крышки интерпретируется COSMOSFIoWorks как
отверстие, и потому не нарушает изначальной твердотельной конструкции
устройства. Так, для задания параметров жидкости, втекающей через отверстие,
достаточно выделить внутреннюю поверхность крышки и задать на ней
условия, которые имеет жидкость при входе в устройство. Соответственно, для
задания выходного условия необходимо закрыть выходное отверстие
крышкой, выделить ее внутреннюю поверхность и задать на ней условия среды, в
которую жидкость вытекает. На рис. 5.7 показано использование крышки для
моделирования течения жидкости через шаровой кран. На входе в кран
граничное условие Inlet Mass Flow (Втекание с заданным массовым расходом)
определяет расход жидкости, поступающей в кран. На выходе из крана
граничное условие Static Pressure (Статическое давление) определяет
статическое давление среды, в которую истекает жидкость.
Таким образом, для всех внутренних задач характерно наличие замкнутой
полости, ограниченной стенками модели и крышками, за исключением, когда
используется условие симметрии или считается двумерный расчет. По
умолчанию для внутренних задач реальная расчетная область ограничена
отверстиями и поверхностью модели (внутренними поверхностями при отсутствии
теплопередачи в теле или внешними при наличии теплопередачи в теле).
Однако при наличии плоскостей симметрии течения можно значительно сокра-
Аэрогидродинамика и теплопередача
259
тить затрачиваемые ресурсы компьютера путем задания граничного условия
Symmetry (неявно две плоскости симметрии всегда используются в
двумерном расчете на двух боковых гранях расчетной области, поскольку
двумерный расчет в COSMOSFlo Works выполняется как трехмерный с уменьшенной
до одной базовой ячейки толщиной расчетной области по одной из
координат) (рис. 5.8).
Крышка выходного отверстия
Крышка входного отверстия
Рис. 5.7. Моделирование втекания и вытекания жидкости с помощью вспомогательных крышек:
слева — оригинальная модель, в центре — модель с добавленными крышками,
справа — модель с визуализацией траекторий течения
Рис. 5.8. Использование условия симметрии позволяет уменьшить расчетную область вдвое
260
Глава 5
Замкнутая полость во внутренней задаче— это и есть ее жидкостное
пространство, а крышки являются теми элементами, которые, дополняя систему,
связанную с телом, делают из нее систему "жидкость — тело", в которой
уже возможно проведение гидрогазодинамического анализа с помощью
COSMOSFIoWorks.
Большинство отверстий, с которыми мы встречаемся, сделаны в плоскости.
В этом случае создание крышек не представляет труда. Если конструкция
модели предполагает отверстие сложной формы или отверстие вырезано не в
плоскости, к нему тоже можно приспособить крышку, это лишь отнимет чуть
больше усилий. В случае "неплоского" отверстия рекомендуется создавать
плоские крышки, т. к. по умолчанию поток жидкости направлен по нормали в
каждой точке крышки (тем не менее COSMOSFIoWorks позволяет
переопределить направление потока, задав желаемый вектор).
Рассмотрим пример создания крышки для сборки шарового крана.
1. В меню Вставка выберите команду Компонент | Новая деталь.
2. В открывшемся окне введите имя файла для создаваемой крышки,
например, Крышка-Вход.
3. SolidWorks предложит выбрать плоскость, на которой будет закреплена
новая деталь. Выберите торцевую плоскость трубы, как показано на
рис. 5.9. Эта плоскость совпадает с плоскостью входного отверстия.
Теперь вы находитесь в режиме создания эскиза детали Крышка-Вход.
Рис. 5.9. Выделение торцевой поверхности
4. Выделите контур отверстия, щелкнув на ребре.
5. На панели Эскиз щелкните кнопку Преобразование объектов. В
результате в детали создан эскиз, повторяющий контур отверстия.
Аэрогидродинамика и теплопередача
261
6. В меню Вставить выберите команду Бобышка | Основание | Вытянуть.
7. В качестве направления выберите От средней поверхности — это
позволит создать крышку, утопленную во внутреннюю область, и тем самым
избежать конфликтного сопряжения.
8. В качестве глубины задайте разумно небольшое значение и нажмите ОК.
Если крышки не полностью перекрывают отверстие или неплотно прилегают
к отверстию, так что внутреннее (жидкостное) пространство оказывается
незамкнутым, такая модель трактуется COSMOSFloWorks как модель без
жидкостного пространства, и при попытке задать граничное условие типа
Opening будет выдано сообщение об ошибке. Для того чтобы проверить,
имеет ли модель замкнутую полость, в COSMOSFloWorks предусмотрен
инструмент проверки геометрии модели — Check Geometry (Проверка
геометрии).
Проверка геометрии модели
Для вызова Check Geometry в меню FloWorks выберите Tools | Check
Geometry.
С помощью инструмента Check Geometry можно вычислить объем твердого
тела и внутренней замкнутой области. Когда полость не замкнута, выдается
сообщение, что жидкостной объем (fluid volume) равен нулю. Если
рассматриваемая задача — внутренняя, то это, скорее всего, означает, что полость не
замкнута вследствие неполного перекрывания крышками отверстий.
Существуют и другие причины, по которым модель, не имеющая конфликтов
в SolidWorks, является некондиционной для COSMOSFloWorks.
Возможные причины непригодности модели для COSMOSFloWorks:
♦ крышки не полностью закрывают отверстия в случае внутренней задачи.
Индикатором этой "неисправности" является нулевой жидкостный объем,
отображаемый в окне Check Geometry (рис. 5.10). Во избежание таких
проблем рекомендуется создавать крышки немного утопленными во
внутреннюю область или с размером, чуть перекрывающим размер отверстия;
♦ касание двух тел в одной точке или по линии, примеры — касание сферы
или цилиндра. Для анализа геометрии модели COSMOSFloWorks
использует булевы операции вычитания, сложения и пересечения тел. При
касании тел образуется область перекрытия нулевой толщины, что приводит к
ошибке булевых операций. Поэтому детали с таким сопряжением не могут
быть обработаны COSMOSFloWorks. Очевидно, что такие касания могут
встречаться как для внешних, так и для внутренних задач. Для разрешения
такого конфликта достаточно немного утопить одно тело в другое
(рис. 5.11);
262
Глава 5
Check Geometry
d Outlet Lid
Analysis type: Internal
The fluid volume is 0.00923541983 тл3
The solid volume is 0.0114383894 тл3
Рис. 5.10. Вычисление внутреннего объема модели с помощыр Check Geometry
Рис. 5.11. Колеса грузовика слегка "утоплены" в дорогу, чтобы избежать касания
Аэрогидродинамика и теплопередача
263
♦ сопряжение двух тел по ребру. Как и в предыдущем случае, использование
булевых операций невозможно вследствие контакта нулевой толщины.
Для разрешения такого конфликта достаточно немного утопить одно тело
в другое или сместить тела друг относительно друга, чтобы область
контакта имела ненулевую площадь (рис. 5.12).
Рис. 5.12. Сопряжение тел по ребру —
неразрешенная ситуация для COSMOSFIoWorks
Рис. 5.13. Дефекты
импортированной геометрии
Чтобы узнать, имеет ли модель какие-либо конфликтные сопряжения, можно
воспользоваться опцией Check for invalid contact (Проверить на наличие
непригодных контактов), которая доступна в окне Check Geometry. В случае
обнаружения такого контакта в поле Output (Результат) окна Check Geometry
выводится сообщение с именем детали или тела, породившего этот контакт:
Part-l may produce an invalid contact when it is used in a boolean
operation.
Создание замкнутой полости для внутренних задач может потребовать
дополнительных усилий, если рассматривается геометрия, импортированная в
SolidWorks из другой системы моделирования. Существующие трансляторы
не всегда могут идентично перевести геометрию из одного формата в другой.
Часто в импортированной геометрии появляются мельчайшие щели на
стыках поверхностей. Такие "дыры" являются несущественными для
твердотельной модели SolidWorks, но недопустимыми для системы "жидкость — тело".
В случае внутренней задачи такие дыры необходимо "латать", закрывая их
твердым телом (рис. 5.13). Поэтому при работе с импортированной геометри-
264
Глава 5
ей рекомендуется перед началом работы воспользоваться инструментом
проверки геометрии.
Исключение из расчета полостей
На практике модель изначально может содержать множество замкнутых
полостей. Любая замкнутая полость будет "заполнена" жидкостью и в ней будет
построена сетка и проведен расчет. Но не каждая замкнутая полость
интересна с точки зрения гидрогазодинамического расчета. Например, для
внутренней задачи это могут быть резьбовые отверстия, прикрытые болтом. В случае
внешнего обтекания тела— полости внутри тела. Чтобы не тратить
компьютерные ресурсы на расчет таких бесполезных областей, можно указать
COSMOSFloWorks исключить такие полости из расчета с помощью данных
опций:
♦ Exclude cavities without flow conditions (Исключить полости без
граничных условий). Полости, ограниченные только стенками (условие Wall),
в отсутствии внешнего возмущения (потока тепла через стенку, граничных
условий типа Opening) могут быть интересны лишь с точки зрения
анализа свободной конвекции внутри этих полостей. Если в задаче пренебрега-
ется гравитацией и не рассматривается теплопередача в твердом теле
(чисто проточная задача), то решение в таких полостях будет равно
заданному начальному распределению (очевидно, что при отсутствии
теплопередачи замкнутые области никаким образом не влияют друг на друга).
Поэтому для чисто проточной задачи расчет областей без входных/выходных
отверстий не представляет интереса. При включении этой опции такие
полости трактуются в COSMOSFloWorks как "заполненные" телом. Эта
опция включена в COSMOSFloWorks по умолчанию (рис. 5.14);
Эта полость будет заполнена жидкостью
Рис. 5.14. Если опция Exclude cavities without flow conditions выключена,
жидкостью будут заполнены и полости резьбового отверстия
♦ Exclude internal spaces (Исключить внутреннее пространство). Для
внешней задачи включение этой опции игнорирует все замкнутые полости
внутри тела, такие полости в COSMOSFloWorks трактуются как
"заполненные" телом (рис. 5.15).
Аэрогидродинамика и теплопередача 265
Рис. 5.15. Область в кабине грузовика по умолчанию заполнена газом,
но ее имеет смысл исключить из анализа внешнего обтекания
Использование этих опций никак не влияет на саму модель Sol id Works. Сама
модель не меняется, но ее пустые пространства по-иному трактуются внутри
COSMOSFloWorks. Замена жидкости телом происходит лишь в системе
координат COSMOSFloWorks, т. к. только в этой системе существует понятие
жидкости.
COSMOSFloWorks и твердые тела
COSMOSFloWorks способен анализировать как сборки, так и многотельные
детали (multibody parts).
Если компонент погашен (Suppressed), он полностью отсутствует для
COSMOSFloWorks. Скрытый компонент не игнорируется — в нем строится
расчетная сетка и происходит расчет. Поэтому, если дополнительные крышки
на отверстиях смущают, их можно просто скрыть (если крышки созданы как
отдельное тело) или сделать полностью прозрачными.
Наряду с погашением есть еще один способ исключить деталь из расчета
твердого тела. В COSMOSFloWorks можно трактовать компонент (в случае
сборки) или тело (в случае многотельной детали) как объем, занятый жидкой
средой. В системе координат COSMOSFloWorks такой компонент будет
рассматриваться не как твердое, а как жидкое тело. Это позволяет задавать
характеристики жидкой среды локально внутри жидкостного пространства,
например, начальные концентрации в объемах, изначально занятых разными
жидкостями. С помощью таких тел можно также задавать характеристики
расчетной сетки внутри отдельных подобластей. Очевидно, что в системе
моделирования твердотельных конструкций SolidWorks изначально не
предусмотрены никакие жидкостные объемы. Поэтому, чтобы локально опреде-
266
Глава 5
лить свойства жидкости, необходимо создать твердое тело по объему
интересуемой подобласти жидкости (что, возможно, потребует создания сборки или
многотельной детали) и указать COSMOSFloWorks трактовать его как
жидкостный объем.
Для того чтобы трактовать твердый компонент как жидкое пространство из
меню FloWorks, выберите Component Control (Управление компонентами).
Далее, в окне Component Control в списке компонентов щелкните на
необходимом компоненте и нажмите Disable (Отключить).
На рис. 5.16 показано задание начальной концентрации разных жидкостей,
поступающих через патрубки в смеситель. Области патрубков заполнены
телом, которое трактуется как жидкостный объем. Для каждого объема заданы
соответствующие параметры концентрации жидкости: 1 — для жидкости,
текущей в данном патрубке, 0— для другой жидкости. Такое задание
начальных концентраций позволяет сэкономить время, затрачиваемое на расчет
данной стационарной задачи.
Рис. 5.16. Задание начальной концентрации жидкостей в патрубках смесителя
с помощью дополнительных объемов
COSMOSFloWorks не поддерживает режим сокращенных компонентов
(lightweight components), т. к. такие компоненты не полностью разрешены в
составе сборки, и поэтому применение булевых операций к ним невозможно
(булевы операции необходимы для определения замкнутой жидкостной
области). Если сборка содержит сокращенные компоненты, то при открытии
такой модели COSMOSFloWorks автоматически переведет их в полностью
решенный (resolved) режим. Возможно, что после разрешения сокращенных
компонентов связь некоторых из этих компонентов или их поверхностей с
Аэрогидродинамика и теплопередача
267
условиями COSMOSFloWorks может быть разорвана. Как правило,
восстановить связь компонентов и прикрепленных к ним данных помогает
перестройка модели (опция Перестроить). При вызове перестройки модели
автоматически вызывается обновление всех связей с COSMOSFloWorks. Если
устранить поврежденную связь не удалось автоматически, COSMOSFloWorks
выдает сообщение об ошибке с указанием, какой элемент модели и для
какого условия был утерян. На основе этой информации связь можно
восстановить вручную, заново выделив необходимый компонент или его часть
(поверхность, ребро, вершина). Во избежание таких трудностей при работе с
COSMOSFloWorks рекомендуется отключить опцию Автоматически
загрузить делали как сокращенные на вкладках Качество изображения и
Режим для большой сборки окна Настройки Пользователя - Общие
вызываемого из меню Инструменты | Параметры.
Связь с моделью
Всякий раз, когда меняется геометрия модели, COSMOSFloWorks
отслеживает эти изменения и производит обновление связей модели с данными
COSMOSFloWorks, а также предлагает скорректировать расчетную область
модели в соответствии с новой геометрией. Если размер расчетной области
был задан пользователем отличным от размера по умолчанию, можно
отказаться от коррекции расчетной области, но в этом случае пользователь
должен сам определить, подходит ли заданная расчетная область для новой
геометрии.
Если вы находитесь в режиме частого редактирования модели, вы можете
отключить автоматическое обновление данных COSMOSFloWorks при
перестройке модели. Для этого в меню FloWorks | Project нужно снять флажок
Automatic Rebuild (Автоматическое обновление). В этом случае проверка
всех связей и проверка адекватности геометрии и расчетной области будут
выполнены только при запуске на счет. В случае ошибки COSMOSFloWorks
не запустит задачу и информирует о причинах сбоя.
5.4.2. Проект и конфигурация
Для создания нескольких исполнений изделия в едином файле модели
в SolidWorks предусмотрен менеджер конфигураций. Конфигурация
представляет собой вариант моделирования (геометрического исполнения)
детали. Каждый вариант модели требует проведения своего
гидрогазодинамического (или теплового) анализа за исключением случаев, когда очевидно, что
изменения никак не влияют на исследуемые свойства устройства (например,
изменение формы ручки в модели шарового крана при исследовании
адиабатического течения внутри крана).
268
Глава 5
Связь COSMOSFloWorks и SolidWorks
В COSMOSFloWorks возможно проведение анализа каждой из конфигураций
модели. Данные COSMOSFloWorks ассоциируются с каждой конкретной
конфигурацией модели. Такое "прикрепление" данных позволяет однозначно
связать геометрию модели с ее гидрогазодинамическими и тепловыми
характеристиками, полученными в результате анализа COSMOSFloWorks, и, как
следствие, легко проводить сравнение между различными вариантами как
геометрического исполнения, так и вариантами задания исходных данных
задачи.
Все данные о постановке задачи (граничные условия, начальные условия,
вещества и т. д.), особенностях ее моделирования (тип задачи, расчетная
область, настройки расчетной сетки, настройки сходимости и т. д.) и результаты
ее расчета хранятся в проекте COSMOSFloWorks. Проект всегда связан
с конкретной конфигурацией SolidWorks.
( Примечание ^
Исходные данные хранятся в файле *.fwp, а результаты в *.fld. Эти файлы, как
и другие файлы проекта, хранятся в папке проекта, которая именуется по
номеру создания проекта и расположена в той же папке, что и модель SolidWorks.
Для доступа к папке проекта необходимо в меню FloWorks выбрать FloWorks |
Project | Open Project Directory. Связи с моделью сохраняются
непосредственно в модели SolidWorks. Связь конфигурации и проекта прописывается в
окне свойств конфигурации в поле Комментарии в виде строки, начинающейся
со слов "NEVER EDIT THIS LINE". Никогда не редактируйте и не удаляйте эту
строку, иначе связь с проектом COSMOSFloWorks будет утеряна.
Работа в COSMOSFloWorks начинается с создания проекта. При создании
проекта определяется его связь с конфигурацией модели. При этом проект
можно связать с существующей конфигурацией, а можно создать новую
(рис. 5.17). Новая конфигурация будет точной копией текущей, но к ней уже
будет "прикреплен" проект COSMOSFloWorks. Создание новой
конфигурации используется, если необходимо исследовать ту же геометрию модели, но
с другой постановкой газодинамической или тепловой задачи (например,
Шаровой Кран Configuration^) (Объемный расход 1 л в сек)
Ь-т Default (Шаровой Кран ]
§=ф Объемный расход 1 л в сек [ Шаровой Кран ]
ееея
ks Объемный^схсд 2 л в сек [ Шаровой Кран ]
ks Объемный расход 2 л в сек, Т 80 С [ Шаровой Кран J
Рис. 5.17. Переключение между проектами COSMOSFloWorks осуществляется
переключением между соответствующими конфигурациями
Аэрогидродинамика и теплопередача
269
с другими граничными условиями). Таким образом, как только с
конфигурацией Sol id Works ассоциируется проект COSMOSFloWorks, конфигурация
перестает быть просто вариантом моделирования геометрии устройства, она
становится вариантом эксплуатации данного устройства.
При создании проекта происходят следующие действия — создание
необходимых файлов проекта, если не используется имеющаяся конфигурация, то
создание копии текущей конфигурации SolidWorks и создание связи файлов
проекта с анализируемой конфигурацией. Все это происходит автоматически,
пользователь лишь указывает имя новой или имеющейся конфигурации.
Подробную информацию о проекте и способах его создания см. в разд. 5.5.3.
Удаление данных COSMOSFloWorks
Удаление данных COSMOSFloWorks из модели происходит с удалением
проекта COSMOSFloWorks. Это можно сделать двумя способами: с удалением
связанной конфигурации и без удаления.
Первый способ — удаление конфигурации SolidWorks стандартными
средствами SolidWorks, а именно, щелкнув правой кнопкой мыши на имени
конфигурации и выбрав Удалить. COSMOSFloWorks сделает запрос на удаление
файлов проекта, связанных с данной конфигурацией: "do you also want to
delete the directory containing the COSMOSFloWorks files associated with
this configuration (Хотите ли Вы также удалить папку, содержащую
COSMOSFloWorks файлы, ассоциированные с удаляемой конфигурацией)?" При
нажатии Yes, все файлы проекта COSMOSFloWorks, в том числе и различные
файлы результатов, будут удалены. Будьте внимательны при удалении
проекта таким способом. Поскольку папка проекта является папкой, в которую по
умолчанию (если не определено пользователем другой папки) сохраняются
отчеты, графики, картинки и другие файлы результатов, то в этой папке
может находиться важная для вас информация.
Другой способ— очистка конфигурации SolidWorks от данных
COSMOSFloWorks. В этом случае удаление самой конфигурации не происходит, а
удаляются только связи проекта с конфигурацией и все файлы проекта, в том
числе и файлы результатов. Для удаления проекта таким способом выберите
Flo Works | Project | Clear Configuration (FloWorks | Проект | Очистить
конфигурацию).
5.4.3. Визуализация результатов
в среде SolidWorks
Одним из преимуществ средств анализа, интегрированных в САПР, является
визуализация результатов расчета непосредственно в графическом окне
системы моделирования.
270
Глава 5
Несомненно, это сильно облегчает обработку результатов, что в конечном
итоге приводит к экономии времени, необходимого инженеру для решения
задачи.
В этом разделе мы кратко рассмотрим взаимодействие пользователя с
Sol id Works при просмотре результатов. Подробную информацию о
просмотре результатов анализа см. в разд. 5.5.9.
Как представлены результаты
В COSMOSFloWorks результаты могут быть представлены различными
способами:
♦ картины распределения параметров поля течения и температуры в
сечениях (Cut Plots, 3D Profile Plots) и на поверхностях модели (Surface Plots),
отображение поверхностей уровня (Isosurfaces) визуализируются
непосредственно в окне SolidWorks;
♦ траектории частиц (Particle Study) и линии тока (Flow Trajectories) также
показываются непосредственно в окне SolidWorks;
♦ определение значений параметров в точке (Point Parameters),
интегральных и локальных (минимальное, максимальное, среднее) значений
параметров на поверхности (Surface Parameters) и в объеме (Volume
Parameters). Таблицы рассчитанных значений показываются в окне
COSMOSFloWorks или выводятся в файл Microsoft Excel;
♦ графики изменения параметров во время расчета (Goal Plots), графики
изменения параметров вдоль траекторий или любого заданного
пользователем направления (XY Plots) выводятся в файл Microsoft Excel (значения
параметров вдоль траекторий может также выводиться в текстовый файл);
♦ отчеты (Reports) выводятся в формате Microsoft Word;
♦ картины распределения параметров и траекторий, отображаемые в окне
SolidWorks, могут быть сохранены в форматах BMP, JPG, VRML;
♦ создание фильмов (в формате AVI) картин распределения параметров и
траекторий для более наглядной визуализации изменения параметров
течения в пространстве и во времени.
Отображение результатов возможно одновременно в каждой из четырех
секций графической области SolidWorks. Каждая из них имеет свои заданные
пользователем установки просмотра. В одной секции окна можно строить
различные распределения параметра (по поверхности, в плоскости), но
отображаемый параметр для секции — всегда один. Например, в одной секции
можно визуализировать распределение давления по поверхностям модели
или в сечениях, а в другой — распределение скорости в тех же или других
сечениях модели (рис. 5.18).
Аэрогидродинамика и теплопередача
271
IFMIIWttll'l^irHHH
Bs*
; Prniert I (original) ±
[- ^ Input Dnte
Q^ Computational Doma"v
.£„ Global Coordinate S>4
*в| Local Initial Mesh V
«♦ T ronsterrec! Bounder,
"$ Component Control M
-i b\ Boundary Conditions
*-'% Inlet Mess Flowl
M( Static Pressure 1
01 Fans
£i Heat Sources
*K Initial Conditions
Щ Porous Conditions
& Goals
ft SG Average Statu
$> Results
85 Mesh
■a '<& Cut Plots
4c ОЛ Rot 1
<fe Cut Plot 2
fc Cut Plot 3
■^ Cut Plot A
'♦ Cut Rot 5
- ф Surface Plots
ф Surface Plot 1
ф Surface Plot?
<^ Isosurfaces
- v«- Flow Trajectories
'<> Howlraieclorias
- **' XY Hots
*» XVPlot)
-3 * Suriare Parameters
Jf Surface Parameie^JJ
£ Point Parameters
ft» Goals
*1 Report *J|
•pZT~»
riCQSMOSFIoWorks analysis hi
Рис. 5.18. Визуализация результатов в различных секциях графической области
Для визуализации распределения параметров в сечении необходимо
выделить плоскую поверхность или плоскость. Плоскость может являться одной
из имеющихся координатных плоскостей или дополнительной плоскостью,
построенной с помощью опции Вставка | Справочная геометрия |
Плоскость. Для сборок допустимо выделение плоскостей, принадлежащих сборке.
Плоскости, созданные в деталях, не могут быть выделены. Плоскость сечения
может быть параллельно сдвинута на заданное расстояние от выделенной
плоской поверхности или плоскости.
Для отображения траекторий частиц или линий тока необходимо указать
точку, через которую проходит траектория. Можно явно определить эту точку,
задав ее координаты, но удобнее выделить поверхность (плоскость, эскиз или
кривую) и задать число точек, которые будут равномерно распределены на
выделенной поверхности (плоскости, эскизе или кривой соответственно).
При желании каждую траекторию можно сохранить как кривую (элемент
моделирования Кривая).
При определении значений параметров в точке интересующие точки могут
быть заданы посредством указания их координат или взяты с выделенной
272
Глава 5
плоской поверхности или плоскости: равномерно по поверхности при
задании общего числа точек или в произвольных точках поверхности при
указании их местоположения щелчком кнопки мыши.
Как и при отображении результатов в сечениях, плоскость определения точек
(в том числе и точек траекторий) может быть сдвинута на заданное
расстояние от выделенной плоской поверхности или плоскости (рис. 5.19).
Рис. 5.19. Траектории частиц различной массы. Точки траекторий взяты на поверхности,
определяющей входное отверстие
Для отображения картин распределения параметров или определения их
значений на поверхностях необходимо выделить интересующие поверхности
модели. Для отображения распределения параметров в объеме необходимо
выделить компонент, определяющий этот объем. Это можно сделать,
щелкнув либо на его имени в дереве конструирования (FeatureManager), либо на
любой его поверхности.
Во всех случаях выделенная поверхность может быть не только стенкой
модели, но и поверхностью крышки (т. е. поверхностью, определяющей
отверстие), а также поверхностью тела, рассматриваемого в COSMOSFIoWorks как
жидкостный объем, т. е. тела, отключенного в Component Control. Такое
тело может быть специально создано лишь для того, чтобы получить значения
параметров в сечении потока (при выделении поверхности тела) или в объеме
жидкости (при выделении целого тела). В этом случае тело должно быть
создано и помещено в расчетную область до начала расчета.
Как увидеть результаты
При визуализации результатов непосредственно в окне SolidWorks модель
может полностью или частично закрывать собой картины результатов, осо-
Аэрогидродинамика и теплопередача
273
бенно это касается внутренних задач, где интересующая область находится
внутри модели. Существует несколько способов, позволяющих добиться
того, чтобы модель не мешала восприятию результатов:
♦ отображение модели в режиме Каркасного представления — этот режим
сохраняет представление о геометрии модели и в то же время
максимально открывает ее для просмотра результатов;
♦ использование Разреза — разрез модели не "режет" картину результатов.
Использование разреза делает картину особенно наглядной при
отображении параметров в сечениях (Cut Plots, 3D Profile Plots) и на поверхностях
модели (рис. 5.20);
Рис. 5.20. Использование разреза при отображении картины в сечениях
♦ задание свойства прозрачности модели. Свойства прозрачности в SolidWorks
можно задавать как для отдельных поверхностей, так и для элементов
конструирования или целых тел. Для удобства задания прозрачности сразу
всей модели можно воспользоваться средством COSMOSFloWorks Model
Transparency (Прозрачность модели) (рис. 5.21). Для этого выберите
FloWorks | Results | Display | Transparency или нажмите кнопку Set
Model Transparency на панели инструментов COSMOSFloWorks Display
Results;
274
Глава 5
Рис. 5.21. Степень прозрачности задана одинаковой для всей модели
с помощью Model Transparency
♦ частичное или полное скрытие модели. В SolidWorks легко можно скрыть
компонент в составе сборки или тело в составе многотельной детали. Но
если необходимо скрыть целиком модель, сделать это быстро поможет
опция COSMOSFloWorks Display Geometry (Отображение геометрии).
Достаточно нажать кнопку Display Geometry на панели инструментов
COSMOSFloWorks Display Results и модель будет скрыта. Повторное
нажатие показывает модель.
Следует отметить, что перспективный вид модели (вид Перспектива) не
поддерживается COSMOSFloWorks. Для конфигураций SolidWorks,
связанных с проектом COSMOSFloWorks, попытка назначить вид перспективы
будет проигнорирована.
Для удобства навигации по сильно приближенной модели, когда видимая
область составляет небольшую часть модели, в COSMOSFloWorks существует
специальный режим— Map View (Обзорный вид). Когда включен режим
Map View, то, как только модель становится больше видимой области экрана,
в правом верхнем углу появляется уменьшенный вид модели, на котором
показана ее видимая часть (рис. 5.22).
Аэрогидродинамика и теплопередача 275
Рис. 5.22. Режим обзорного вида облегчает навигацию по модели
Несколько слов о производительности
Отображаемые картины результатов цельно связаны с моделью, они
вращаются, перемещаются и масштабируются одновременно вместе с моделью.
Картины результатов и геометрии модели находятся в едином пространстве
Open GL1. Отображение результатов, как и отображение модели, требует
соответствующих ресурсов памяти и процессора. Если отображается довольно
большое число картин результатов (например, визуализация распределения
поля температуры на всех поверхностях сложного теплообменника), на
слабых графических картах возможно видимое замедление при изменении
ориентации модели (аналогичное замедление может происходить и без
визуализации результатов для очень сложной модели на не очень мощной
графической карте). Избавиться от такого замедления можно, отключив прорисовку
результатов во время изменения ориентации модели. Для этого в меню
1 Open GL — система трехмерной графики, используемая в SolidWorks.
276
Глава 5
FloWorks выберите Results | View Settings (Результаты | Настройки
просмотра). В окне View Settings перейдите на вкладку Options (Опции) и измените
значение опции Display while dynamic (Отображать во время изменения
ориентации) на No для соответствующего типа отображаемых результатов
(картины в сечениях, картины на поверхностях, поверхности уровня или
траектории).
Если возникают проблемы с отображением результатов COSMOSFloWorks,
возможно установленная графическая карта не поддерживает набор
инструкций OpenGL, используемый в COSMOSFloWorks, или работает с ним
некорректно. Если включено аппаратное ускорение графики, попробуйте
использовать программное ускорение. Для этого в меню SolidWorks выберите
Инструменты | Параметры, щелкните на пункте Качество изображения и
выделите опцию Использовать программу OpenGL.
При визуализации большого числа траекторий отображаемых в виде шариков
(Spheres), трехмерных стрелок (Arrows) или трубок (Pipes) скорость
построения картины можно увеличить, уменьшая качество отрисовки таких
траекторий. Для этого в меню Инструменты выберите команду Параметры,
в появившемся окне нажмите кнопку Посторонняя фирма и на закладке
COSMOSFloWorks Options (Настройки COSMOSFloWorks) уменьшите
значение параметра Trajectory image quality (Качество отображения
траекторий). Данный параметр влияет на число примитивов, используемых для
отображения трехмерных объектов траекторий (сфер, цилиндров, конусов).
Существенного ускорения построения любой картины можно также
добиться, отключив построение по геометрии SolidWorks, используя при этом
сеточную геометрию. Для этого необходимо отключить опцию Use CAD
geometry (Использовать геометрию САПР), расположенную в
соответствующих окнах создания картин (см. разд. 5.5.9).
5.4.4. Интерфейс COSMOSFloWorks
COSMOSFloWorks выполнен по стандартам SolidWorks, предполагающим
высокую степень интеграции, интуитивно понятный интерфейс и легкость
в управлении.
COSMOSFloWorks имеет следующие элементы управления: меню, в том
числе и контекстное, Дерево анализа, панели инструментов.
Меню
После установки программы в списке приложений SolidWorks, вызываемом
из меню Инструменты | Добавления, появляется новый пункт —
COSMOSFloWorks.
Аэрогидродинамика и теплопередача
277
Рис. 5.23. Структура
меню COSMOSFIoWorks
278
Глава 5
Если COSMOSFIoWorks активизирован, то интерфейс SolidWorks меняется
следующим образом:
♦ в главное меню SolidWorks добавляется пункт FloWorks;
♦ в меню Справка добавляются пункты About COSMOSFIoWorks (О
COSMOSFIoWorks) и меню COSMOS, в котором можно обнаружить пункты
COSMOSFIoWorks Help Topics (Справка по COSMOSFIoWorks), COS-
MOSFIoWorks API Help Topics (Справка по использованию
программного интерфейса COSMOSFIoWorks) и COSMOSFIoWorks Online Tutorial
(Примеры использования COSMOSFIoWorks);
♦ в контекстное меню, вызываемое нажатием правой кнопки мыши на
любой панели инструментов, добавляются панели инструментов
COSMOSFIoWorks;
♦ в окне задания параметров SolidWorks, вызываемом из меню
Инструменты | Параметры, кнопка Посторонняя фирма вызывает окно
COSMOSFIoWorks Options (Настройки COSMOSFIoWorks).
Меню COSMOSFIoWorks показано на рис. 5.23.
Кроме того, после создания проекта COSMOSFIoWorks в контекстном меню,
вызываемом нажатием правой кнопки мыши на поверхности модели,
активизируются следующие пункты:
♦ Insert Boundary Condition (Вставить граничное условие);
♦ Insert Surface Goals (Вставить поверхностную цель).
В режиме загруженных результатов задачи в контекстном меню, вызываемом
нажатием правой кнопки мыши в любой точке графической области,
активизируется пункт View Settings (Параметры просмотра).
Дерево анализа
Дерево анализа (COSMOSFIoWorks Analysis Tree) появляется сразу после
создания проекта COSMOSFIoWorks в левой части окна SolidWorks рядом с
Менеджером конфигураций. Дерево анализа является наиболее удобным и
быстрым способом постановки задачи, запуска на счет и просмотра
результатов.
Функции, которые выполняет Дерево анализа для проведения анализа задачи
в COSMOSFIoWorks, сходны с функциями, которые выполняет Дерево
конструирования FeatureManager для создания детали в SolidWorks.
Объектом моделирования является форма. В SolidWorks форма определяется
набором базовых элементов конструирования (основание, вырез, скругление,
оболочка и т. д.), из которых, как из кирпичиков, строится та или иная
геометрическая конфигурация. Такая организация процесса моделирования по-
Аэрогидродинамика и теплопередача
279
зволяет легко вносить изменения в существующую конфигурацию формы и
делает сам процесс моделирования более наглядным. Работа с
элементами конструирования осуществляется с помощью Дерева конструирования
FeatureManager. Объектом исследования COSMOSFioWorks является
гидрогазодинамическая и/или тепловая задача, полностью определенная в проекте
COSMOSFioWorks. Проект, как и конфигурация модели, также определяется
^COSMOSFioWorks Project
© @ Input Data
JU Global Coordinate System
Q Computational Domain
°!§ Component Control
Ejgj Fluid Subdomains
Щ- Rotating Regions
^ Solid Materials
Ej Boundary Conditions
Transferred Boundary Conditions
Fans
i-ia
®f Heat Sources
■■• D$ Radiative Surf aces —
Q Contact Resistances —
;•• *3& Thermoelectric Coolers
!••■ 1*§Ц Heat Sink Simulations
4S|) Porous Media
^ Initial Conditions
JB Goals
^ Local Initial Meshes —
e Sg Results
fl$ Mesh
Ф Cut Plots
■® 3D-Profile Plots
ф Surface Plots
^ Isosurfaces -
Flow Trajectories
Particle Studies
XY Plots
Point Parameters -
Surface Parameters
Volume Parameters
Goals
Report
Animations
Reference Parameters
Название проекта
Исходные данные
Глобальная система координат
Расчетная область
Управление деталями
Подобласть текучей среды
Область вращения
Материалы твердых тел
Граничные условия
Перенесенные граничные условия
Вентиляторы
Тепловые источники
Поверхности радиационного теплообмена
Контактное тепловое сопротивление
Элемент Пельтье
Интегральная модель теплообменника
Пористые среды
Начальные условия
Цели
Локальная начальная сетка
Результаты
Сетка
Картины в сечении
Трехмерный график
Картины на поверхности
Поверхности уровня
Линии тока
Расчет частиц
График
Параметры в точке
Параметры на поверхности
Параметры в объеме
График изменения целей
Отчет
Анимация
Характерные параметры
Рис. 5.24. Дерево анализа COSMOSFioWorks
ЮЗак. 4405
280
Глава 5
составляющими элементами, такими как расчетная область, граничные
условия, начальные условия, материалы, источники тепла, настройки сетки,
элементы визуализации результатов (картины в плоскостях, картины на
поверхностях, картины траекторий и др.). Работа с элементами проекта
осуществляется с помощью Дерева анализа (рис. 5.24).
Для удобства пользования Деревом его элементы можно скрывать. Для этого
нажмите правой кнопкой на корневой папке Дерева (Название проекта) и из
появившегося меню выберите пункт Customize Tree (Настройка Дерева).
Часть функций Дерева анализа продублирована в меню и на панелях
инструментов. В частности, создание элемента возможно с помощью меню, Дерева
анализа или панели инструментов.
Следующие действия с элементами проекта возможны только в Дереве
анализа:
♦ редактирование определения (Edit Definition) элементов;
♦ удаление (Delete) элементов;
♦ погашение (Suppress) и высвечивание (Unsuppressed) элементов
исходных данных. Аналогично погашению элементов геометрии модели, при
погашении элемента проекта он остается в проекте, но игнорируется;
♦ скрытие (Hide) и отображение (Show) элементов исходных данных и
результатов;
♦ переименование элементов, которое можно выполнить, дважды нажав на
имя элемента с интервалом (нажатие, пауза, нажатие), затем необходимо
ввести новое имя и нажать клавишу <Enter> для изменения имени элемента;
♦ клонирование (Clone) элементов просмотра результатов;
♦ сохранение в файл картин в сечениях и на поверхностях модели без
визуализации в окне SolidWorks (Save as).
Панели инструментов
На панелях инструментов сосредоточены наиболее часто используемые
команды программы. Команды, вызываемые из панелей инструментов,
полностью эквивалентны командам, вызываемым из меню или Дерева анализа.
Отобразить или скрыть панели инструментов COSMOSFloWorks можно с
помощью контекстного меню, вызываемого нажатием правой кнопки мыши
на любой панели инструментов.
Назначение кнопок на панелях Main (Главная), Features (Элементы), Results
Main (Главная для результатов), Results Insert (Вставить элемент результатов),
Results Display (Отображение результатов) представлено в табл. 5.1—5.5.
Аэрогидродинамика и теплопередача
281
Таблица 5.1. Панель инструментов Main
Кнопка
р».
ч-
ц
ш
jtf
Ж
Ярлык
New Project
Wizard
Clone Project
General
Settings
Run Solver
Engineering
Database
Новый проект
Мастер проекта
Клонирование
проекта
Общие
установки
Запуск на счет
Инженерная база
данных
Функция
Создание нового проекта по шаблону
Инструмент пошагового создания
проекта
Создание точной копии (клона) проекта
Определение общих установок проекта
(тип задачи, физические модели, тип
жидкости, система единиц, общие
начальные условия и др.), задание
внешних условий (Ambient Conditions)
Запуск проекта на счет
Открытие базы данных, содержащей
материалы, системы единиц и др.
Таблица 5.2. Панель инструментов Features
Кнопка
Ж
S
ж
ж
м
щ
ш
1
1
Ярлык
Global Goal
Surface Goal
Volume Goal
Equation Goal
Boundary
Condition
Initial Condition
Porous
Medium
Solid
Material
Surface Source
Глобальная цель
Поверхностная
цель
Объемная цель
Функциональная
цель
Граничное
условие
Начальное
условие
Пористые тела
Материалы
твердых тел
Поверхностный
источник
Функция
Определение интересующего параметра
расчета
Определение интересующего
поверхностного параметра
Определение интересующего объемного
параметра
Определение интересующего параметра
как функции других параметров
Задание граничных условий втекания и
вытекания на отверстиях (массовый
расход, скорость, давление и др.) и стенках
(шероховатость, температура,
подвижность стенки и др.)
Задание локальных начальных условий
Задание пористых тел
Задание материалов твердых тел
Задание теплового источника на
поверхности
282
Глава 5
Таблица 5.2 (окончание)
Кнопка
\Щр
ш
Ш
ш
in
■ ц.......,..
я
в
<%•
Ярлык
Volume Source
Fan
Local Initial
Mesh
Transferred
Boundary
Condition
Radiative
Surface
Contact
Resistance
Fluid
Subdomain
Heat Sink
Simulation
Rotating
Region
Thermoelectric
Cooler
Объемный
источник
Вентиляторы
Локальная
начальная сетка
Перенесенные
граничные
условия
Поверхности
радиационного
теплообмена
Контактное
тепловое
сопротивление
Подобласть
текучей среды
Интегральная
модель
теплообменника
Область
вращения
Элемент Пельтье
Функция
Задание объемного теплового источника
Задание вентилятора как устройства,
задающего зависимость объемного
расхода от перепада статического давления
на данном устройстве
Установка настроек сетки в локальной
области
Позволяет в качестве граничных условий
использовать результаты расчета,
полученные ранее в данном или каком-либо
другом проекте
Задание свойств излучающих
поверхностей
Задание контактного теплового
сопротивления на границе твердых тел
Задание областей с текучими средами
разных типов (например, область с газом
и с жидкостью)
Задание интегральных свойств
(мощность, тепловое сопротивление,
параметры вентилятора) теплообменника с
установленным вентилятором
Определение области вращающегося
тела
Задание элементов Пельтье
Таблица 5.3. Панель инструментов Results Main
Кнопка
%3Q
i
Ярлык
Load/Unload
Results
View Settings
Загрузка/Выгрузка
результатов
Установки
просмотра
Функция
Включает/Отключает режим просмотра
результатов
Определяет установки просмотра
(отображаемый параметр, диапазон
значений, способ отображения, тип палитры
и др.)
Аэрогидродинамика и теплопередача
283
Таблица 5.3 (окончание)
Кнопка
ш
щ
Ш
s
5
Ж
Ш
Ярлык
Load Time
Moment
Generate Goals
Plot
BRP
(Batch Results
Processing)
Generate
Report
Copy Image
Save Bitmap
Image
Print Active
View
Загрузка
нестационарных
результатов
Построение
графика целей
Автоматическая
обработка
результатов
Создание отчета
Копирование
изображения
Сохранение
изображения
Печать текущего
изображения
Функция
Загружает результаты для
определенного момента времени в случае
нестационарной задачи
Построение графика изменения
интересующего параметра в процессе расчета
Построение графиков и создание отчетов
для нескольких проектов
Создание отчета о выполненном расчете
Копирование изображения в
графической области в буфер
Сохранение изображения в графической
области в файл формата BMP
Печать изображения в графической
области
Таблица 5.4. Панель инструментов Results insert
Кнопка
ш
о
Е£
vjjji'
Щ&
в
ш
Ярлык
Insert Cut Plot
Insert 3D-Profile
Plot
Insert Surface
Plot
Display
Isosurfaces
Insert Flow
Trajectories
Insert Particle
Study
Animation
Создание картины
в сечении
Создание картины
трехмерного
графика
Создание картины на
поверхности
Показать
поверхности уровня
Показать
линии тока
Расчет частиц
Анимация
Функция
Создание картины распределения
параметра в сечении
Создание картины трехмерного
графика распределения параметра в
сечении
Создание картины распределения
параметра на поверхности
Изображение поверхностей уровня
Изображение линий тока,
определение значений параметров вдоль
линий тока
Изображение траекторий частиц,
расчет взаимодействия со стенками,
определение значений параметров
вдоль траекторий частиц
Создание фильма картин
результатов
284
Глава 5
Таблица 5.4 (окончание)
Кнопка
ш
ш
ш
Jig.»"".".»'
ш
Ярлык
Insert XY Plot
Computation
of Surface
Parameters
Computation
of Volume
Parameters
Insert Point
Parameters
Построение
графика
Расчет параметров
на поверхности
Расчет параметров
в объеме
Расчет параметров
в точке
Функция
Построение графика изменения
параметров вдоль выбранного
направления
Просмотр минимальных,
максимальных и средних, а также интефальных
значений параметров на
поверхности
Просмотр минимальных,
максимальных и средних, а также интегральных
значений параметров в объеме
Просмотр значений параметров в
точке
Таблица 5.5. Панель инструментов Results Display
Кнопка
Щ
,..*». j
щ
Ш
Ш
ш
\$t
Щ\
Ярлык
Display Model
Geometry
Display
Color Bar
Display
3D-ruler
Display
Time Info
Display Global
Min Max
Set Model
Transparency
Apply Lighting
Display MapView
Display 2D-ruler
Отображение модели
Отображение
палитры
Отображение
трехмерной насечки
Отображение
момента времени
Отображение
минимума и
максимума
Установить
прозрачность модели
Применить
освещение
Отображение
обзорного вида
Отображение
двумерной насечки
Функция
Скрывает/Показывает модель
Скрывает/Показывает палитру
цветов
Скрывает/Показывает линии и
насечки на гранях расчетной области
Скрывает/Показывает информацию
о текущем загруженном моменте
времени нестационарной задачи
Скрывает/Показывает минимальное
и максимальное значение
отображаемого параметра
Задает степень прозрачности для
всей модели
Включает/Выключает светотени для
картин результатов
Включает/Выключает общий вид
модели с отмеченной областью
графического окна
Скрывает/Показывает линии и
насечки на экране
Аэрогидродинамика и теплопередача
285
Локализация
На сегодняшний день существует английская и японская версии
COSMOSFIoWorks. Компания-разработчик COSMOSFIoWorks планирует в будущем
расширить список локализаций, в том числе добавить и русскую. Тем не
менее, если наличие русской локализации является принципиальным вопросом
для принятия решения об использовании COSMOSFIoWorks уже сегодня,
создание ее возможно по запросу к разработчикам.
5.5. Решение задачи
При решении инженерной задачи с помощью COSMOSFIoWorks можно
выделить следующие этапы:
1. Возможность решения задачи с помощью COSMOSFIoWorks.
2. Создание или необходимая модификация модели Sol id Works.
3. Создание проекта.
4. Задание граничных и начальных условий.
5. Постановка целей проекта.
6. Регулирование расчетной сетки.
7. Управление процессом расчета.
8. Просмотр и интерпретация результатов.
9. Определение точности полученного решения.
В этом разделе подробно рассматривается каждый.
5.5.1. Возможность решения задачи
Прежде всего, необходимо выделить геометрические и физические
особенности рассматриваемой инженерной задачи, которые, по оценкам пользователя,
существенно влияют на ее решение. Это необходимо для оценки
возможности решения данной задачи с помощью COSMOSFIoWorks. Например:
♦ если в данной задаче имеются подвижные детали, изменяющие геометрию
проточного тракта, и эта геометрия не может быть фиксирована во
вращающейся системе координат, то необходимо оценить:
• существенно ли влияют подвижность этих деталей и изменение
геометрии проточного тракта во вращающейся системе координат на
решение задачи;
• если да, то можно ли задачу решить как квазистационарную, поскольку
геометрия проточного тракта в процессе расчета в COSMOSFIoWorks
286
Глава 5
изменяться не может (поверхности твердых тел могут быть
подвижными, но без изменения геометрии проточного тракта, в том числе во
вращающейся системе координат);
♦ если в данной задаче имеется многокомпонентная среда с реагирующими
между собой компонентами, то важен ли учет химических реакций для
решения данной задачи, или реагирующие компоненты смеси можно
заменить продуктами их реакции, или рассматривать их как нереагирующие
вследствие их слабого перемешивания и/или малых скоростей реакций
(химические реакции в COSMOSFIoWorks не рассматриваются);
♦ если в данной задаче имеется свободная поверхность жидкости, то важен
ли учет ее подвижности для решения данной задачи, или ее можно
заменить твердой поверхностью.
Можно привести и другие примеры явной невозможности использования
COSMOSFIoWorks для решения некоторых инженерных задач, а также
примеры упрощения инженерных задач с целью их решения с помощью
COSMOSFIoWorks, но предвидеть и описать все возможные ситуации
невозможно — пользователь сам должен принимать соответствующие решения по
каждой конкретной задаче, предварительно ознакомившись с возможностями
COSMOSFIoWorks. Может быть, для этого понадобится дополнительный
просмотр различных надежных литературных источников или привлечение
опыта других, более опытных разработчиков, но лучше это сделать как
можно раньше, чтобы потом не тратить время впустую. При этом не помешает
критический подход к чужому опыту, поскольку этот опыт может оказаться
не только бесполезным, но даже вредным, если ему слепо следовать. Не
исключено, что пользователю придется самому заняться исследованием
данного вопроса.
Если вы определили, что решить данную инженерную задачу с помощью
COSMOSFIoWorks возможно, или, несмотря на некоторые сомнения, вы
хотите попробовать это сделать, то следующий этап, — это создание Sol id Works-
модели (если она еще не была создана ранее) и проекта COSMOSFIoWorks
для решения данной задачи.
5.5.2. Модификация модели SolidWorks
Если модель SolidWorks уже создана в процессе проектирования изделия,
т. е. полностью адекватна изделию, то не исключено, что для решения
поставленной инженерной задачи с помощью COSMOSFIoWorks эту модель
необходимо модифицировать:
♦ упростить, убрав из рассмотрения (погасив) те ее детали, которые не
влияют на решение задачи, но увеличивают потребляемые
COSMOSFIoWorks компьютерные ресурсы — в первую очередь память — и,
возможно, затрачиваемое на решение задачи процессорное время (например,
Аэрогидродинамика и теплопередача
287
может быть нет необходимости задавать гофрированную поверхность
детали, на разрешение которой расчетной сеткой понадобится громадное
число ячеек, совершенно бесполезных с точки зрения решения задачи, а
целесообразнее задать вместо нее эквивалентную шероховатость стенки);
♦ дополнить модель необходимыми крышками, закрывающими входные и
выходные отверстия (в версии COSMOSFloWorks 2008 появилась
возможность быстрого задания таких крышек);
♦ изменить модель во избежание конфликтных сопряжений (касание,
сопряжение тел по ребру; в версии COSMOSFloWorks 2008 касание в точке
и по ребру автоматически разрешается, так что в этих случаях
необходимость модификации модели отпадает);
♦ создать фиктивные тела, например, для задания в локальном объеме
жидкости начальных условий, локальных настроек сетки или для получения
значений параметров в локальной области жидкости;
♦ дополнить вспомогательными деталями, например входными и
выходными трубками, необходимыми для обеспечения безвихревого течения на
входных и выходных отверстиях модели при решении задачи с помощью
COSMOSFloWorks. Очевидно, что присоединение к модели необходимых
для решения задачи дополнительных деталей неизбежно приведет к
увеличению числа ячеек расчетной сетки, соответственно к увеличению
требуемой памяти и процессорного времени, поэтому их размеры должны
быть адекватными поставленной задаче.
Эти действия при условии их правильного выполнения могут оказаться очень
существенными для решения задачи. Если не все последствия данных
действий ясны, то может оказаться целесообразным варьирование деталей модели
и/или их размеров в серии расчетов с целью определения их влияния на
результаты расчета.
В принципе модификацию модели можно производить в любой момент,
предшествующий запуску задачи на счет. Как уже отмечалось,
COSMOSFloWorks динамически отслеживает изменения модели. Поэтому, если
первоначально нет ясности в том, какие манипуляции с моделью нужно
произвести, чтобы адаптировать или оптимизировать ее к проведению анализа в
COSMOSFloWorks, можно переходить к следующему этапу — созданию
проекта COSMOSFloWorks.
5.5.3. Создание проекта COSMOSFloWorks
Проект выполняет две функции. Во-первых, проект связан с конкретной
геометрической конфигурацией модели и, таким образом, однозначно
определяет соответствие между геометрическим исполнением модели и его гидрога-
288
Глава 5
зодинамическими и тепловыми характеристиками, полученными в результате
расчета. Имя конфигурации, к которой присоединен проект, является
одновременно и именем этого проекта. Во-вторых, проект содержит все данные о
постановке задачи, особенностях ее моделирования и результатах расчета.
Часть исходных данных (так называемая базовая часть проекта) может быть
определена при создании проекта. Данные проекта, составляющие его
базовую часть, представлены в табл. 5.6. Подробное описание данных базовой
части проекта см. в разд. ''Мастер проекта" данной главы.
Таблица 5.6. Базовая часть проекта
Тип данных
Система единиц
Тип текучей среды
и особенности
течения
Физические
особенности
задачи
Тип задачи
Текучая среда
Условия на стенках
Твердые тела
Начальные
(внешние) условия
Описание
Система единиц измерения, используемая в проекте для задания
численных значений (СИ, СГС, и др.).
Выбранная система единиц не влияет на единицы измерения
SolidWorks
Один из пяти возможных типов текучей среды: жидкость
(несжимаемая), газ, неньютоновская жидкость, сжимаемая жидкость или
водяной пар.
В зависимости от выбранного типа задаются особенности
течения: течение газа при больших числах Маха, тип течения
(ламинарный, турбулентный, ламинарный и турбулентный), кавитаци-
онный режим течения
Учитываемые физические особенности, такие как теплопередача
в теле, радиационный теплообмен, нестационарность,
гравитация, наличие вращающихся элементов
Внешняя или внутренняя
Жидкости или газы, определенные условиями задачи
Значение шероховатости для всех стенок модели;
тепловое граничное условие на всех стенках модели (для расчета
конвективного теплообмена между поверхностью твердых тел и
текучей средой, задается при отсутствии учета теплопередачи в
теле);
тип поверхности радиационного теплообмена (задается только
при учете радиационного теплообмена);
тепловое граничное условие на всех внешних стенках модели
(для расчета конвективного теплообмена между поверхностью
твердых тел и внешней средой, задается только для внутренних
задач при учете теплопередачи в теле)
Материалы твердых тел, определенные условиями задачи
(задаются только при учете теплопередачи в теле)
Значения термодинамических параметров, параметров
турбулентности, скорости и концентрации в начальный момент
времени; для внешних задач — значения параметров невозмущенного
потока (параметры, заданные на границах расчетной области)
Аэрогидродинамика и теплопередача
289
Таблица 5.6 (окончание)
Тип данных
Уровень решения
и разрешения
геометрии
Описание
Критерии, определяющие точность решения поставленной задачи
с помощью установок расчетной сетки и критериев завершения
расчета
Проект может быть создан тремя способами:
♦ по шаблону — в шаблоне проекта определена его базовая часть.
Существует стандартный шаблон, поставляемый вместе с продуктом.
Пользователь может также создать свой собственный шаблон на основе текущего
проекта и использовать его в дальнейшем для создания новых проектов
с идентичной или схожей базовой частью;
♦ с помощью Мастера проекта. Wizard (Мастер проектов)— инструмент
пошагового создания базовой части проекта. Использование Мастера
проекта является наиболее наглядным путем создания проекта;
♦ клонированием имеющегося проекта — если вы собираетесь создать
проект, незначительно отличающийся от уже имеющегося (например,
исследуя поведение устройства, варьируя какой-нибудь из параметров течения),
то наиболее удобный путь создания нового проекта— клонировать
(копировать) текущий проект. Клонированный проект будет иметь все
установки текущего проекта, включая установки просмотра результатов.
Клонировать проект и затем изменить какую-нибудь из его установок, как
правило, быстрее, чем создавать его заново с помощью Мастера проекта.
Клонировать проекты возможно в рамках одной модели. Клонировать
проект из одной модели в другую невозможно, однако возможно
копирование отдельных элементов проекта между проектами разных моделей
с помощью опции Copy Features (Копирование элементов).
Базовая часть проекта содержит данные, являющиеся достаточными для
расчета внешних задач, т. к. в случае внешних задач заданные значения
термодинамических параметров, параметров турбулентности, скорости и
концентрации определяют начальные условия задачи и, одновременно, условия
невозмущенного потока, задающиеся на границах расчетной области, т. е.
граничные условия для внешней задачи. Для внутренних задач, как правило,
характерно наличие граничных условий втекания и вытекания, которые
задаются отдельно. Кроме того, независимо от типа задачи, может возникнуть
необходимость настройки установок расчетной сетки, критериев останова
задачи, задания целей исследования и др.
290
Глава 5
Создание проекта по шаблону
Для создания проекта на основе шаблона проекта из меню FloWorks
выберите Project | New (Проект | Новый) (рис. 5.25).
Новый проект COSMOSFIoWorks
Конфигурация
Создать новую
Использовать текущую -
Имя конфигурации
Базовая конфигурация
Шаблон COSMOSFIoWorks
Список шаблонов
New COSMOSFIoWorks Project
Рис. 5.25. Создание проекта по шаблону
При создании по шаблону проект можно привязать либо к любой
существующей конфигурации модели, либо скопировать текущую конфигурацию
под новым именем, связав данные COSMOSFIoWorks с этой новой
конфигурацией. В первом случае необходимо выбрать опцию Use current
(Использовать текущую) и выбрать конфигурацию из списка Basic configuration
(Базовая конфигурация). Во втором случае нужно выбрать опцию Create new
(Создать новую) и дать название создаваемой конфигурации в поле
Configuration name (Имя конфигурации).
Изначально пользователю доступен только стандартный шаблон New Project.
Параметры базовой части проекта, созданного по этому шаблону, приведены
в табл. 5.7. Пользователь может создавать свои собственные шаблоны и
использовать их для создания типовых проектов COSMOSFIoWorks.
Таблица 5.7. Стандартный шаблон COSMOSFIoWorks New Project
Тип данных
Система единиц
Тип текучей среды
Значение
SI (m-kg-s)
Liquid
СИ (метр-килограмм-секунда)
Жидкость
Аэрогидродинамика и теплопередача
291
Таблица 5.7 (окончание)
Тип данных
Физические
особенности
Система координат
Тип задачи
Шероховатость
Текучая среда
Тепловое условие
на стенках
Начальные условия
Уровень решения
и разрешения
геометрии
Значение
Flow type: Laminar and
Turbulent
Тип течения: ламинарный и
турбулентный, с автоматическим
определением переходного режима. Другие
физические особенности не
учитываются
Стационарная
Internal,
Exclude cavities without
flow conditions
Внутренняя, с исключением из
расчета замкнутых пустотелых объемов, не
имеющих граничных условий,
заданных на какой-либо внутренней
поверхности объема
0 микрометров
Water SP
Adiabatic
Pressure: 101325 Pa
Temperature: 293,2 К
Velocity: 0 m/s
Turbulence intensity: 2 %
Level of initial mesh: 3
Result Resolution level: 3
Вода
Адиабатическая стенка
Давление: 101325 Па
Температура: 293,2 К
Скорость: 0 м/с
Интенсивность турбулентности: 2%
(значение турбулентной длины
(Turbulence length) зависит
от характерного размера модели)
Уровень начальной сетки: 3
Уровень решения задачи: 3
Создание шаблона проекта
Процесс создания собственного шаблона проходит две стадии:
1. Если проект был создан на основе стандартного шаблона, то, прежде чем
переходить к непосредственному созданию шаблона, необходимо
произвести соответствующие изменения базовой части проекта. Если проект
был создан с помощью Мастера проекта или клонированием, проверьте,
что установки базовой части проекта соответствуют желаемым. После
создания проекта каким-либо способом просмотр и редактирование его
базовой части происходит в окнах General Settings (Общие установки),
Calculation Control Options (Опции управления расчетом), Initial Mesh
(Начальная сетка), а также Units System (Система единиц). Подробную
292
Глава 5
информацию о редактировании проекта см. в разд. "Редактирование
проекта" данной главы.
2. Сохранение данных новой базовой части проекта как шаблона проекта с
помощью опции Create Template (Создать шаблон). Для создания
собственного шаблона в меню FloWorks выберите Project | Create Template
(Проект | Создать шаблон). Далее в поле Template name (Имя шаблона)
необходимо ввести имя создаваемого шаблона. При нажатии кнопки ОК
данные базовой части текущего проекта будут сохранены как шаблон
проекта с заданным именем (рис. 5.26).
Рис. 5.26. Создание собственного шаблона и его использование при создании нового проекта
Шаблоны проекта сохраняются в папке template, которая находится в главной
папке продукта, определяемой пользователем при установке (по
умолчанию Program Files\COSMOS Applications\COSMOSFloWorks 2005). После этого
шаблон становится доступным для создания проекта в поле List of templates
(Список шаблонов) окна New COSMOSFloWorks Project (Новый проект
COSMOSFloWorks).
Когда удобнее использовать шаблон
Использование шаблона может быть очень удобным, если исследуются
однотипные (с одинаковой или схожей базовой частью проекта) задачи для разных
моделей. В таком случае базовая часть проекта, созданная для одной модели,
может быть сохранена как шаблон, а проекты оставшихся моделей создаются
из этого шаблона, автоматически наследуя ранее заданные установки задачи.
Если же однотипные задачи решаются в рамках одной модели с разными ее
конфигурациями, то удобнее пользоваться клонированием проекта. Если
характеристики задачи, определенные в базовой части проекта, заметно
отличаются от характеристик задач, для которых проект уже имеется, то следует
использовать Мастер проекта.
Аэрогидродинамика и теплопередача
293
Мастер проекта
Мастер проекта позволяет создать проект, шаг за шагом двигаясь от одного
типа данных базовой части проекта к другому. Для вызова Мастера проекта
из меню FloWorks выберите Project | Wizard (Проект | Мастер).
Шаг 1 — Project Name (Имя проекта)
Задание исходных данных для нового проекта с помощью Мастера проекта
начинается с определения конфигурации модели, к которой этот проект будет
присоединен. Можно либо использовать текущую конфигурацию, либо
создать копию текущей конфигурации с новым именем:
♦ Create new (Создать новую) — создает копию текущей конфигурации с
именем, заданным в поле Configuration name (Имя конфигурации), и
присоединяет к ней проект COSMOSFloWorks;
♦ Use current (Использовать текущую) — присоединяет проект к текущей
конфигурации модели;
♦ Comments (Комментарии) — в комментариях может быть задана любая
справочная информация. После создания проекта комментарии могут быть
просмотрены и, при желании, отредактированы в окне Comment
(Комментарий), вызываемом из меню Project | Edit Comment (Проект |
Изменить комментарий).
Для быстрой навигации между окнами Мастера проекта в правой части окна
предусмотрен Навигатор (рис. 5.27). Если при задании проекта нет
необходимости вносить изменения на каждом шаге Мастера, пользуясь навигатором
можно перескакивать через неинтересующие шаги.
Шаг 2 — Units (Система единиц)
На этом этапе выбирается наиболее удобная система единиц измерения для
ввода и вывода числовых данных.
Использование символов единиц измерения при вводе
Выбранная система единиц используется по умолчанию, так что при вводе
числовых данных нет необходимости вводить символы единиц измерения. Это не
исключает возможности введения данных и в любых других единицах
измерения, имеющихся в базе данных Units (Система единиц). Для этого в окошке
необходимо вместе с числовым значением ввести также символ единицы
измерения. После этого COSMOSFloWorks автоматически преобразует введенную
величину в систему единиц, используемую по умолчанию.
Выбранная система единиц никак не влияет на основную систему единиц
SolidWorks, используемую для создания детали.
294
Глава 5
■ ^}тЩЩШШШШ}ШШ^Ш.
рф' •
i - £
*
к:
U#
*?
^
#
V
N
^ *
*."
v*^"^^."'v' £' ss- '0^i$8
^^^^^^ляян^^^^ШШШ
.., Ъ?и7;$ШМяР^ ^ШШШ
!"!<ш$ииш"ЪЖНг 'иШШШШ
тй&шжщ
«. 2ЗДЯНР
-#1г»йЖй*^'
|jj| Computational Domai
*}§ Component Control
' Ц§| Fluid Subdomains
Щ} Rotating Regions
Щ Solid Matenals
g lE$ Boundary Conditions
feg Inlet Mass Flow
|g§ Static Pressure
|: Fans
Щ Heat Sources
Щ Contact Resistances
£| Heat Sink Simulations
Чф Porous Media
(*) Create ne*
О Use current
Confutation name
Current configuiation:
Comments:
-Мой первый проект
Nexl>
№
Рис. 5.27. Шаг 1 — задание конфигурации модели
Если не определены пользовательские системы единиц измерения, то выбор
осуществляется среди следующих заданных систем:
♦ CGS (СГС) — сантиметр-грамм-секунда;
♦ FPS — фут-фунт-секунда;
♦ IPS — дюйм-фунт-секунда;
♦ NMM (НМКС) — Ньютон-миллиметр-килограмм-секунда;
♦ SI (СИ) — Международная система единиц
(Ньютон-метр-килограмм-секунда);
♦ USA — фут-фунт-секунда (давление в pound/inch2 (фунт-сила/дюйм2), т. е.
psi, объемный расход в foot /min (фут3/мин), т. е. CFM).
В нижней части окна можно посмотреть, в каких единицах измеряются
параметры выбранной вами системы единиц (рис. 5.28). Если ни одна из
предлагаемых систем единиц не подходит, вы можете тут же сформировать свою
собственную систему единиц, не выходя из Мастера проекта. Для этого
просто щелкните на названии единиц в столбце Units (Единицы) и выберите из
списка желаемые единицы измерения параметра. При этом, если вы хотите,
чтобы ваша система единиц была добавлена в базу данных и впоследствии
была доступна в списке предлагаемых систем единиц при создании других
проектов, вам необходимо отметить флажок Create new (Создать новую) и
ввести имя системы в поле Name (Имя). В противном случае заданная новая
система единиц будет использована только для создаваемого проекта.
Аэрогидродинамика и теплопередача
295
уЬфШУШШШё
Цл* system:
System
C6S (cmg-s)
FPS (ft Ib-s)
IPS (m lb «J
NMM (mm-g-s)
Sl{nvkg-*)
USA
G3&e«teriew
Path
Pre-Defmed
Pre-Defmed
Pre-Defmed
Pie-Defined
Pre-Oehned
Pre-Defmed
Comment
C6S (cm-g-s)
FPS (ft-b-s)
IPS (mb-s)
NMM (mm-g-s)
SI |m-kg*]
USA
N$me:
SI (m-kg-s) (modified)
__ Pdj^meter
^Majtt "
Pressure b. stress
Velocity
Mass
Length
Tempeiature
Physical time
^ Seomefei^Cbeiractefijtic
■i*Uwd$*Mtfk» *
<£ Medw^Prdpedk*
Units Decmal Places LOUnKSJ-
(atrrT:'* 0
m/s
kg
986923267e-0C
1
1
1
0
1
Щ1 h^ject conf igui *-on
Ц^ Analysis type
j^j Fluids
у if
yfrffjf -'Она»
CO
i|L| Wsi: consent
4<c
<fiack | [ Next> j } Cancel j £
ЦФ
Рис. 5.28. Шаг 2 — задание системы единиц проекта
После того как базовая часть проекта создана, изменить выбранную систему
единиц можно в диалоговом окне Units Settings (Установки системы единиц),
для доступа к которому выберите FloWorks | Units (FloWorks | Система
единиц).
Шаг 3 — Analysis Type (Тип задачи)
На этом этапе определяется тип задачи (внешняя или внутренняя),
указывается, нужно ли исключать полости из расчета (подробную информацию о типе
задач и исключении полостей из расчета см. в разд. 5.4) и физические
особенности задачи (physical features). Здесь же определяется ось, используемая
для задания значений в цилиндрической или сферической системе координат
(рис. 5.29).
Физические особенности задачи, которые учитываются на этом шаге (для
задания значений параметра дважды щелкните ячейку Value (Значение) для
редактирования содержимого этой ячейки или выбора соответствующей
физической особенности):
♦ Heat conduction in solids (Теплопередача в твердых телах) — учитывает
теплопередачу в твердых телах. Heat conduction in solids only (Только
теплопередача в твердых телах)— используется, если в рассматриваемой
задаче рассчитываться будет только теплопередача в твердом теле,
т. е. текучая среда не задается;
296
Глава 5
Wizard ■;* Analysis Дур* \
АЦ.*У *S tUP*
Qfgerrwl
Constf « c>o?«d cfr/ttts
v j Exclude jgavitie* vrthout flow condtiorw
-C£ ^.« tj K*>
Physical Features
1 Heat conduction m solids only
j» Radiation
[ -a Environment radiation
Environment temperature
Solai radiation
\# Time-dependent
Total analysis time
| Output (met step
Гда Gravity
X component
Y component
j Z component
!••* Rotation
Type
VaHie ;
D
0
0
293 2 К
□
0
1s
Os
0
0m/sA2
-9 81 m/sA2
Qm/*A2
0
Local region(s)
ifro Project configurat-on
|йй Finds
1|
В; Inta' сомйк-п*
Result and jjeonetry
nyjoMaxi
£»f
Reference а#я!х >*'
\<*;e-vkh
■ *>«;
3 i <*** iGiO
Рис. 5.29. Шаг З — определение типа и физических особенностей задачи
Radiation (Излучательный теплообмен)— учитывает излучательный
теплообмен при решении задачи сопряженного теплообмена, т. е. при
включенной опции Heat conduction in solids (Теплопередача в твердых телах).
Если включить опцию Environment radiation (Излучение окружающей
среды), то с границ расчетной области внутрь ее излучается тепло Q = а 7*,
где Т есть заданная Environment temperature (Температура окружающей
среды). Опция Solar radiation (Солнечное излучение) позволяет задать
направленное тепловое излучение с границ расчетной области путем
задания направления этого излучения с помощью условных компонентов
вектора направления X, Y, Z и интенсивности (Intensity) этого излучения;
Time-dependent (Нестационарность)— необходимо выбрать эту опцию,
если рассматривается нестационарная задача. Для задания интервала
физического времени задайте значение времени в поле Total analysis time
(Длительность процесса). Кроме того, в поле Output time step (Шаг
сохранения результатов) отметьте шаг сохранения результатов решения
нестационарной задачи. После прохождения Мастера проектов установки
времени могут быть изменены в окне Calculation Control Options (Опции
управления расчетом);
Gravity (Гравитация) — выберите эту опцию, если в задаче необходимо
учитывать гравитационные эффекты (например, при расчете свободной
конвекции). Задайте компоненты X, Y, Z вектора гравитационного уско-
Аэрогидродинамика и теплопередача
297
рения. Если решается нестационарная задача, то вектор гравитационного
ускорения можно также задать зависящим от времени. Если в вашем
проекте рассматриваются жидкости, то проверьте наличие в инженерной базе
данных зависимости их плотности от температуры. Если рассматриваются
газы, то гравитационные эффекты могут быть учтены только в случае
отсутствия задания High Mach number flow (Течение с большим числом
Маха);
♦ Rotation (Вращение) — выберите эту опцию, если в задаче присутствуют
вращающиеся элементы. Если в задаче какое-нибудь твердое тело
вращается, то течение в такой задаче можно рассчитать в системе координат,
вращающейся вместе с этим телом, т. е. неподвижной относительно него.
Возможно задание вращения локальных систем координат (тип Local
region(s)) или глобальной системы координат (тип Global rotating). В
последнем случае, неподвижные части модели должны быть осесимметрич-
ны относительно оси вращения глобальной системы координат, которая
выбирается тут же в поле Reference axis (Ось вращения). Угловая
скорость вращения глобальной системы координат задается в поле Angular
velocity (Угловая скорость) по правилу "буравчика".
Подробную информацию о физических особенностях см. в разд. 5.5.4.
В COSMOSFloWorks, помимо константных значений можно задавать
зависимости от координат и времени (для нестационарных задач). Для этого
используется кнопка Dependency (Зависимость). Значения величин, задаваемых
в окнах Wizard (Мастер проектов), могут быть заданы зависимыми от
координат глобальной системы. Координатные плоскости этой системы
параллельны плоскостям по умолчанию (плоскости "Спереди", "Сверху", "Слева"),
а ее центр совпадает с началом координат модели. Чтобы показать
глобальную систему координат, в Дереве анализа COSMOSFloWorks щелкните
правой кнопкой мыши на названии проекта и в контекстном меню выберите
Show Coordinate System (Показать Глобальную систему координат).
Для задания данных в цилиндрической или в сферической системе координат
используются координаты г (радиус), phi (ф) и theta (0), определенные через
Reference axis (Ось задания), как показано на рис. 5.30.
Для величин, определенных в других окнах, ось задания (Reference Axis)
задается непосредственно в этих окнах.
( Совет )
Зависимость может быть задана в виде таблицы значений или формулы. Для
задания табличной зависимости вы можете импортировать двухколоночные
таблицы данных из Microsoft Excel. Для этого скопируйте нужную вам двухколо-
ночную таблицу из Microsoft Excel в буфер обмена, затем щелкните любую
ячейку в левом (т. е. там, где аргумент) столбце таблицы на вкладке Table of
298
Глава 5
values (Таблица значений) окна Dependency (Зависимость) и нажмите
комбинацию клавиш <Ctrl>+<V>. При задании формулы аргументы функций log, sin,
cos, tan, exp должны быть в круглых скобках. Символ "Л" означает возведение в
степень стоящей слева функции: например, sin2x вводится как sin(x)A2, a sin(x2)
вводится как sin(xA2).
fz- Reference axis
Y
У
Рис. 5.30. Ось Z выбрана как Reference axis
Шаг 4 — Default Fluid (Текучая среда по умолчанию)
На этом шаге выбираются текучие вещества, которые будут рассматриваться
в данном проекте, а также особенности течения задачи (flow characteristics).
COSMOSFloWorks позволяет рассчитывать в проекте течение текучих
веществ разных типов: Liquids (Жидкости), Gases (Газы), Steam (Водяной пар),
Non-Newtonian Liquids (Неньютоновские жидкости), Compressible Liquids
(Сжимаемые жидкости). При этом допускается перемешивание текучих
веществ одного типа. В диалоговом окне Default Fluid (Текучая среда по
умолчанию) указывается, какие текучие вещества и какой тип текучей среды
будут задаваться по умолчанию во всех заполненных текучей средой областях
(рис. 5.31). После создания проекта с помощью Мастера проектов в
выбранных локальных областях с помощью опции Fluid Subdomain (Подобласть
текучей среды) можно задать другие типы текучей среды. Области с разными
типами текучей среды должны разделяться стенками модели.
Если в списке Project fluids (Текучие вещества проекта) имеются текучие
вещества разных типов, то необходимо выбрать из них тот тип текучей
среды, который будет использоваться по умолчанию — Default fluid type (Тип
текучей среды по умолчанию). Соответственно, текучие вещества только
этого типа могут быть выбраны в качестве текучих веществ по умолчанию.
Выбранный тип текучей среды будет использоваться в данном проекте по
умолчанию во всех областях с текучей средой. После завершения прохождения
Мастера проектов можно в выбранных локальных областях задать другой тип
текучей среды с помощью опции Fluid Subdomain (Подобласть текучей
среды). Если в списке Project Fluids (Текучие вещества проекта) имеется
несколько текучих веществ одного типа, то можно выбрать те из них, которые
/>
R/S
у
--■ г
Аэрогидродинамика и теплопередача
299
будут задаваться по умолчанию во всех областях с текучей средой, — для
этого поставьте отметку справа от их имени.
Рис. 5.31. Шаг 4 — задание текучей среды и характеристик течения
Концентрации используемых по умолчанию текучих веществ задаются в
Мастере проекта на шаге Initial Conditions (Начальные условия) при
решении внутренних (Internal) задач или на шаге Initial and Ambient Conditions
(Начальные и внешние условия) при решении внешних (External) задач и по
умолчанию полагаются равными.
Здесь же указываются особенности течения для выбранной текучей среды по
умолчанию.
♦ По умолчанию течение считается или ламинарным, или турбулентным,
или переходным между этими состояниями, в зависимости от условий
течения. В графе Flow type (Тип течения) можно указать, чтобы во всей
расчетной области (Computational Domain) течение рассчитывалось как всюду
ламинарное течение (Laminar Only) или как всюду турбулентное течение
(Turbulent Only). Если в качестве текучей среды в проекте заданы
неньютоновские жидкости (Non-Newtonian liquids), то единственный
доступный тип течения— Laminar Only (Всюду ламинарное течение). После
завершения прохождения Мастера проектов можно для выбранных
локальных областей задать другой тип текучей среды и, соответственно,
другие текучие вещества, и другой тип течения с помощью опции Fluid
Subdomain (Подобласть текучей среды).
300
Глава 5
♦ Если будет рассчитываться высокоскоростное течение с числом Маха
больше 3 в случае нестационарной задачи и больше 1 в случае
стационарной задачи, то включите опцию High Mach number flow (Течение с
большим числом Маха). Эта опция будет действовать во всей расчетной
области и не может быть отменена локально, т. е. в каких-либо областях. Если
опция Humidity (Влажность) включена, т. е. предполагается расчет
относительной влажности, то опцию High Mach number flow (Течение с
большим числом Маха) включить нельзя.
♦ Включите опцию Humidity (Влажность), если в проекте надо
рассчитывать относительную влажность газообразной среды.
♦ Если в проекте предполагается рассчитывать кавитацию или локальное
кипение в потоке воды, то включите опцию Cavitation (Кавитация) и
задайте строчкой ниже массовую долю растворенного в воде газа (Dissolved
gas mass fraction). По умолчанию эта доля равна 0.00001. Это типичное
значение при нормальных условиях, оно применимо в большинстве
случаев. Если необходимо, можно задать другое значение массовой доли
растворенного в воде газа (Dissolved gas mass fraction) в диапазоне 10"4...10"8.
Шаг 5 — Default Solid (Материал по умолчанию)
В случае если учитывается теплопередача в твердых телах (на шаге Analysis
Туре включена опция Heat conduction in solids), на этом шаге выбирается
материал, используемый для всех твердых тел по умолчанию. Это позволяет
уменьшить объем исходных данных, задаваемых в проектах с моделями,
имеющими много деталей (тел). Если для некоторых деталей (тел) надо
задать другой материал, то дополнительно используется диалоговое окно Solid
Material (Материал). См. разд. 5.5.5.
Если в списке Solids (Материалы) нужного материала нет, то щелкните
кнопку New (Новый) и задайте этот материал в Engineering Database
(Инженерная база данных).
Кроме того, все заданные при конструировании модели материалы также
представлены в списке Solids in the model (Материалы модели) (рис. 5.32).
Если планируется использовать один из этих материалов в качестве
материала по умолчанию в данном проекте, то перед прохождением Мастера
проектов (Wizard) проверьте, что нужные свойства этого материала заданы в его
физических свойствах: плотность, удельная теплоемкость, теплопроводность.
В COSMOSFIoWorks есть возможность задавать материалы с неизотропной
теплопроводностью. Значения теплопроводности по направлениям задаются
в Engineering Database (Инженерная база данных), а само направление
анизотропии (в случае если материал, выбранный в качестве материала по
умолчанию, неизотропный) задается в диалоговом окне Anisotropic Thermal
Аэрогидродинамика и теплопередача
301
Conductivity (Анизотропная теплопроводность), который вызывается
нажатием на кнопку Anisotropy (Анизотропия).
[ <fiack"j j jjext>| [ Cancel j [ jjelp j
Рис. 5.32. Шаг 5 — задание материала по умолчанию
Шаг 6 — Wall Conditions (Условия на стенках)
На этом шаге задаются условия на всех стенках модели по умолчанию
(рис. 5.33).
В зависимости от типа решаемой задачи и учитываемых физических
особенностей, заданных на шаге Analysis Type (Тип задачи), на стенках модели
могут быть заданы следующие условия:
♦ Default outer wall thermal condition (Тепловое условие на внешних
стенках по умолчанию). Если решается внутренняя (internal) задача с
сопряженной задачей теплообмена (на шаге Analysis Type включена опция Heat
conduction in solids), то на внешней поверхности модели необходимо
задать тепловое условие (например, теплообмен с окружающей модель
внешней текучей средой), которое в дальнейшем будет действовать в
проекте по умолчанию. На внешней поверхности модели могут быть заданы
следующие тепловые условия:
• Adiabatic wall (Адиабатическая стенка) — теплоизолированная стенка;
• Heat transfer coefficient (Коэффициент теплоотдачи) — тепловой
поток через внешнюю поверхность модели Q задается с помощью коэф-
302
Глава 5
фициента теплоотдачи а и температуры внешней текучей среды
(Temperature of external fluid) Tf по формуле: Q = a(Tf -Ts)-S, где
S — площадь внешней поверхности модели. Необходимая
температура внешней стенки Ts рассчитывается при решении задачи;
:ШМ1Ш$МШШ1
~к:
Patdmetet Value
Heat transfer coefficient
Temperature of external fluid
Default wall radiative surface
Default outer wall radiative surface
Roughness
0W/mA2/K
293 2 К
Steel, polished
Steel, polished
0 micrometer
}V'.^ctcorifi^iat'On
j"*» Analysis type
% Fluids
, mit-a'condition *
\ Rc«u8s «!-!d y-ione-trY
'& Fim*h
Рис. 5.33. Шаг 6 — задание условий на стенках
• Surface heat generation rate (Удельная мощность поверхностного
тепловыделения через единицу площади, Вт/м2) — положительные
значения соответствуют тепловому потоку от окружающей среды к внешней
поверхности модели, а отрицательные — от внешней поверхности
модели к окружающей среде;
• Heat generation rate (Мощность тепловыделения через всю внешнюю
поверхность модели, Вт)— положительные значения соответствуют
тепловому потоку от окружающей среды к внешней поверхности
модели, а отрицательные — от внешней поверхности модели к окружающей
среде;
• Wall temperature (Температура стенки)— температура внешней
поверхности модели.
Если на некоторых внешних поверхностях модели необходимо задать другие
тепловые условия, т. е. отличающиеся от используемых по умолчанию, то
условия Heat generation rate (Мощность тепловыделения) и Surface heat
Аэрогидродинамика и теплопередача
303
generation rate (Удельная мощность поверхностного тепловыделения) на
этих поверхностях задаются с помощью диалогового окна Surface Source
(Поверхностный источник), a Heat transfer coefficient (Коэффициент
теплоотдачи) и Wall temperature (Температура стенки) — с помощью граничного
условия OuterWall (Внешняя поверхность) в окне Boundary Condition
(Граничное условие).
♦ Default wall thermal condition (Тепловое условие на стенках по
умолчанию). Если задача сопряженного теплообмена не решается, т. е.
теплопередача в твердых телах не рассчитывается, соответственно опция Heat
conduction in solids выключена, то на всех соприкасающихся с текучей
средой поверхностях модели необходимо задать одно из следующих
тепловых условий, которые будут использоваться в проекте для всех стенок
модели по умолчанию:
• Adiabatic wall (Адиабатическая стенка) — т. е. теплоизолированная
стенка. По умолчанию на всех стенках задается прилипание потока,
т. е. рассматривается трение потока на стенке. Если вы хотите задать
стенку не только теплоизолированной, но и не оказывающей
сопротивления трения потоку, то в диалоговом окне Boundary Condition
(Граничное условие) на этой стенке надо задать граничное условие Ideal
Wall (Идеальная стенка);
• Wall temperature (Температура стенки) — задает температуру стенок;
• Heat flux (Удельный тепловой поток)— поток тепла через единицу
площади поверхности в единицу времени. Положительные значения
соответствуют потоку тепла от стенки к текучей среде, отрицательные
значения — потоку тепла от текучей среды к стенке;
• Heat transfer rate (Тепловая мощность)— поток тепла через всю
выделенную поверхность в единицу времени. Положительные значения
соответствуют потоку тепла от стенки к текучей среде, отрицательные
значения — потоку тепла от текучей среды к стенке.
При необходимости на выбранных вами поверхностях модели,
соприкасающихся с текучей средой, можно задать другие тепловые условия,
отличающиеся от действующих по умолчанию. Так, температуру (Temperature) и
коэффициент теплоотдачи (Heat Transfer Coefficient) можно задать как
граничное условие Real Wall (Реальная стенка) в диалоговом окне Boundary
Condition (Граничное условие), а удельный тепловой поток (Heat flux) и
тепловую мощность (Heat transfer rate)— в диалоговом окне Surface Source
(Поверхностный источник).
Если в проекте учитывается радиационный (излучательный) теплообмен
между поверхностями — опция Radiation (Радиационный теплообмен) выбра-
304
Глава 5
на, — то необходимо задать радиационные свойства всех поверхностей
модели, контактирующих с текучей средой.
♦ В поле Default wall radiative surface (Радиационные свойства
поверхностей по умолчанию) выбирается радиационное свойство поверхностей,
которое будет задано по умолчанию на всех поверхностях модели,
контактирующих с текучей средой проекта, за исключением внешних поверхностей
в случае решения внутренней задачи.
♦ В поле Default outer wall radiative surface (Радиационные свойства
внешних поверхностей по умолчанию) выбирается задаваемое по умолчанию
радиационное свойство внешних поверхностей модели в случае решения
внутренней задачи.
Подробную информацию по типам радиационных поверхностей см. в разд. 5.5.4.
♦ Можно задать шероховатость стенки (Roughness), которая по умолчанию
будет использоваться для всех стенок модели, находящихся в контакте с
текучей средой, за исключением тех стенок, чья шероховатость задана в
граничном условии Real Wall (Реальная стенка) в диалоговом окне
Boundary Condition (Граничное условие). Величина шероховатости
определяется через высоты неровностей (выступов и впадин) шероховатой
поверхности, случайным образом распределенных по этой поверхности, и
представляет собой используемую в инженерной практике величину Rz.
Величина шероховатости может быть задана в микронах (микрометрах),
микродюймах или в производных единицах измерения (custom units).
♦ Slip condition (Условие скольжения). Если в задаче рассматривается
течение неньютоновской жидкости, то на всех стенках модели можно задать
условие скольжения Навье. Чтобы задать это условие, щелкните ячейку
Value (Значение) около этого условия. Затем задайте значения констант
CI, C2 и величину Yield stress (Предельное сдвиговое напряжение).
Согласно данному условию скольжения Навье, скорость жидкости на
поверхности стенки определяется следующим образом:
т < t0,gi: VGi = 0
t>To,gi:VGi = C1(t-To,gi)C2
где т — полученное в расчете сдвиговое напряжение потока, t0,gi —
заданное пользователем предельное сдвиговое напряжение (Yield stress), VGi —
скорость скольжения на стенке, С1 и С2 — заданные пользователем
константы.
Щаг 7 — Initial and Ambient Conditions
(Начальные и внешние условия)
Под заданием Начальных условий (Initial Conditions) для внутренних задач и
Начальных и внешних условий (Initial and Ambient Conditions) для внешних
Аэрогидродинамика и теплопередача
305
задач подразумевается задание значений термодинамических параметров
текучей среды (давление, температура, плотность, влажность), скорости потока,
параметров турбулентности, концентраций веществ (если текучая среда
состоит из нескольких веществ), а также значения начальной температуры
твердых веществ (рис. 5.34).
^г4Г^-)пШаГС<)П<1Ш^
! Parameter
Parameter Definition
JS Thermodynamic Parameters
Parameters:
j Pressure
Temperature
r* Velocity Parameters
i Parameter:
j Velocity in X direction
[ Velocity in Y direction
Velocity in Z direction
*. Turbulence Parameters
Value
User Defned
Pressure, temperature
101325 Pa
293.2 К
Velocity
Om/s
Om/s
Om/s
^fiackjj |***||g^7"^"| f^^r^^] P Це1р
'Рв! fr&tftf oofHi'3ur«at:on
Ц WW. см via wr*
fc-cotutlon
Рис. 5.34. Шаг 7 — задание начальных и внешних условий
В зависимости от типа задачи, заданные параметры имеют разный смысл:
♦ если вы решаете стационарную внутреннюю (Internal) задачу, то задание
параметров в этом окне означает задание начальных условий в расчетной
области. Если вы хотите решить такую задачу за более короткое время, то
задайте Initial Conditions, т. е. начальные значения независимых
параметров задачи, как можно ближе к предполагаемому решению по сравнению
с задаваемыми по умолчанию;
♦ если вы решаете стационарную внешнюю (External) задачу, то задание
параметров в этом окне означает задание начальных условий в расчетной
области и граничных условий на ее границах. Задаваемые
термодинамические параметры и скорость набегающего (т. е. внешнего) невозмущенного
потока характеризуют начальное состояние обтекающей тело среды;
♦ если вы решаете нестационарную (time-dependent) задачу, то, в общем
случае, необходимо задать точное начальное состояние среды за исключе-
306
Глава 5
нием тех случаев, когда задача имеет установившееся периодическое
решение (например, в случае задания периодических граничных условий),
которое не зависит от начальных условий и, следовательно, может быть
получено при любых начальных условиях, несмотря на то, что может быть
потребуется больше времени для исключения их влияния.
Начальные (внешние) условия могут быть заданы постоянными или
переменными в пространстве и времени. Можно также использовать результаты
других расчетов в качестве начальных (внешних) условий. Для этого в поле
Parameter Definition (Определение) отметьте Transferred (Перенесенные) и
в появившемся окне выберите расчет, результаты которого хотите
использовать в качестве начальных (внешних) условий.
Чтобы использовать предыдущие, полученные по этому же проекту
результаты в качестве начальных (внешних) условий, используйте опцию Take
previous results (Использовать предыдущие результаты) в окне Run
(Запустить).
Шаг 8 — Results and Geometry Resolution
(Уровень решения и разрешения геометрии)
На этом шаге задаются параметры, влияющие на расчетную сетку и критерии
завершения расчета, а значит, и на точность решения задачи. Очевидно, что
чем мельче расчетная сетка, тем точнее моделируется задача, и тем ближе ее
дискретное решение к реальному непрерывному распределению. Второй
составляющей, определяющей точность решения, является величина критериев
сходимости, по достижении которых задача считается сошедшейся. При этом
более жесткие критерии и более мелкая расчетная сетка, очевидно, требуют
большей оперативной памяти и процессорного времени. Поэтому задание
параметров, влияющих на расчетную сетку и критерии сходимости,— это
всегда компромисс между желаемой точностью и имеющимися ресурсами
компьютера.
♦ Result resolution (Уровень решения)— влияет на уровень начальной
сетки и критерии сходимости задачи. Можно выбрать любой из восьми
предлагаемых уровней решения задачи. Первый уровень позволяет получить
решение очень быстро, но оно будет иметь самую низкую точность.
Восьмой уровень позволяет получить наиболее точное решение, но для этого
потребуется много оперативной памяти и процессорного времени. Чем
выше требуемая точность решения, тем более высокий Result resolution
(Уровень решения) должен быть установлен. Очевидно, что для каждой
конкретной задачи достаточным будет тот Result resolution (Уровень
решения), превышение которого не приводит к заметному изменению
результатов.
Аэрогидродинамика и теплопередача
307
( Совет )
Начинайте с уровня Result resolution не более 5 (рекомендуемое значение 3).
При использовании уровней 6, 7 и 8 происходит дополнительная адаптация
расчетной сетки к полю течения в ходе расчета. Это может существенно
увеличить число ячеек, и, в общем случае, такая процедура не является оправданной
для первого расчета.
♦ Gap size (Зазор) — задав величину Minimum gap size (Минимальный
зазор), вы определяете минимальный размер проходного сечения задачи,
который будет разрешен расчетной сеткой. Фактически, заданная величина
минимального зазора используется COSMOSFloWorks при построении
расчетной сетки и непосредственно влияет на размер наименьшей ячейки,
такой, чтобы в любом зазоре оказалось не менее двух ячеек поперек
зазора. Автоматически определяемый минимальный зазор зависит от размеров
модели и расчетной области, а также от размеров отверстий и тел, на
которых заданы начальные и граничные условия. Если модель имеет
проходное сечение, минимальные размеры которого меньше заданного или
автоматически определенного минимального размера проходного сечения,
то эти проходные сечения могут оказаться (и, скорее всего, будут)
неразрешенными, т. е. при расчете будут иметь другие размеры (меньшие или
большие). Чтобы вручную задать минимальный зазор, отметьте опцию
. Manual specifications of the minimum gap size (Минимальный зазор
задается пользователем) и введите нужное значение в поле Minimum gap size
(Минимальный зазор).
Можно связать величину минимального зазора (Minimum gap size) с
некоторым размером модели, т. е. приравнять зазор этому размеру. В
результате при изменении этого размера будет автоматически изменяться
величина минимального зазора. Чтобы установить такую связь, отметьте
опцию Minimum gap size refers to the feature dimension (Связать
минимальный зазор с выбранным размером модели) и выберите
соответствующий размер в графическом окне (рис. 5.35).
♦ Wall thickness (Толщина стенки) — если модель имеет омываемые
текучей средой с обеих сторон стенки или выпирающие в поток уступы, чья
толщина меньше Minimum wall thickness (Минимальной толщины
стенки), то края этих особенностей могут оказаться (и, скорее всего, будут)
неразрешенными, т. е. при расчете будут заменены текучей средой.
В версии COSMOSFloWorks 2007 была внедрена уникальная технология
по разрешению тонких (относительно размеров ячеек) стенок, т. е.
особенностей, омываемых текучей средой с двух сторон, размеры которых
существенно меньше размера ячейки сетки, которая попадает на эту
особенность. Если раньше для разрешения такой особенности приходилось
дробить сетку до размеров толщины стенки (так, чтобы на толщину стенку
308
Глава 5
приходилось как минимум две ячейки), то, начиная с COSMOSFloWorks
2007, пользователь избавлен от такой нелегкой задачи (что существенно
уменьшает общее число ячеек задачи, а значит, время счета и требования к
памяти компьютера). Однако края особенностей пока еще требуют старого
подхода, т. е. дробления ячеек сетки до размеров особенностей (рис. 5.36).
Для этих целей служит параметр Wall thickness (Толщина стенки),
который определяет характерный размер особенностей, используемый
программой для дробления сетки на краях особенностей (рис. 5.37).
Wizard - Result* and Geometry ^solution
1 7
Щ Manual specification of the minimum gap «tee
Refererice pension name
Li Manual specification of the minimum waft thickness
jjSl! Project cor.ngui aton
$L i.-nte ?yni<?n
*£jfc Analysis «.yo»
%>Q Hud*
m
Minimum #ай thickness:
W&ii conditions
)nif-a: fiofiditic-n-s
$h Fh-»*h
О Advanced narrow channel refinement £3 Otfiwee thin walls resolution
4«*
<gack J [ finish j < Cancel j | Help
Рис. 5.35. Шаг 8 — величина минимального зазора связана с размером
Геометрия модели
Стенка
1
Разрешение геометрии в Разрешение геометри в
COSMOSFloWorks 2006 COSMOSFloWorks 2007
Жидкость по обе стороны Стенка полностью
от тонкой стенки не разрешена
Рис. 5.36. Края стенок оказались неразрешенными, но стенка разрешена
Стенка разрешена,
обрезан край
Чтобы вручную задать минимальную толщину стенки, отметьте Manual
specifications of the minimum wall thickness (Задание минимальной
толщины стенки вручную) и введите нужное значение в поле Minimum wall
thickness (Минимальная толщина стенки).
Аэрогидродинамика и теплопередача
309
Рис. 5.37. Края лопастей вентилятора разрешены дроблением ячеек расчетной сетки
Можно связать величину минимальной толщины стенки (Minimum wall
thickness) с некоторым размером модели, т. е. приравнять толщину этому
размеру. В результате при изменении этого размера будет автоматически
изменяться величина минимальной толщины стенки. Чтобы установить
такую связь, отметьте опцию Minimum wall thickness refers to the feature
dimension (Связать минимальную толщину стенки с выбранным размером
модели) и выберите соответствующий размер в графическом окне.
( Примечание )
В случае внутренней задачи стенки модели, омываемые текучей средой только
с одной стороны, разрешаются всегда правильно, независимо от заданной
Minimum wall thickness (Минимальной толщины стенки).
♦ Advanced narrow channel refinement (Дробление сетки в узких
каналах) — если эта опция выбрана, то COSMOSFloWorks сильнее обычного
мельчит сетку в узких каналах для обеспечения более высокой точности
расчета течения и теплообмена в этих каналах. Необходимо иметь в виду,
что это может привести к значительному увеличению числа ячеек
расчетной сетки.
♦ Optimize thin walls resolution (Оптимизировать разрешение тонких
стенок). В версиях до COSMOSFloWorks 2007 года расчетная сетка в тонких
стенках дробилась до достаточно мелких ячеек, что приводило к
увеличению числа ячеек сетки и в прилегающих к этим стенкам, особенно в узких
310
Глава 5
каналах. Если это дополнительное дробление расчетной сетки в областях
текучей среды необходимо в данной задаче или необходимо провести
расчет на такой же расчетной сетке, как в предыдущей версии
COSMOSFIoWorks, то уберите отметку с опции Optimize thin walls resolution
(Оптимизировать разрешение тонких стенок). В остальных случаях крайне
рекомендуется оставить включенной опцию во избежание избыточного
дробления сетки.
После создания проекта данные, определенные на шагах 3—7 (кроме
установок времени), можно изменить в окне General Settings (Общие установки),
вызываемом из меню FloWorks | General Settings (FloWorks | Общие
установки). Установки решения и разрешения геометрии (шаг 8) можно изменить
в окнах Initial Mesh (Начальная сетка) и Calculation Control Options (Опции
управления расчетом).
Клонирование проекта
Клонирование проекта может быть полезно для сравнения различных
вариантов модели, отличающихся небольшими изменениями геометрии, а также
вариантов проекта, отличающихся, например, граничными условиями или
компонентами текучей среды.
Чтобы клонировать проект, выберите команду FloWorks | Project | Clone
Project (FloWorks | Проект | Клонировать проект). Клонирование создает
точную копию текущего проекта COSMOSFIoWorks (рис. 5.38). Эту копию
можно присоединить либо к одной из существующих конфигураций модели,
либо к новой конфигурации модели, являющейся копией текущей:
♦ Create new (Создать новую) — создает копию текущей конфигурации с
именем, заданным в поле Configuration name (Имя конфигурации), и
присоединяет к ней проект COSMOSFIoWorks;
Рис. 5.38. Окно Clone Project
Аэрогидродинамика и теплопередача
311
♦ Add to existing (Добавить в существующую)— присоединяет проект к
конфигурации, выбранной в списке Existing configuration
(Существующая конфигурация).
Все проектные данные, а также установки просмотра результатов,
копируются в новый проект. Если копируемый проект содержит результаты расчета, то
их тоже можно скопировать в новый проект, так что новый проект будет
полностью идентичен копируемому (за исключением названия). Для
копирования результатов необходимо выбрать опцию Copy results (Копировать
результаты).
Папка проекта
После создания проекта в папке, содержащей модель, появляется папка, имя
которой соответствует порядковому номеру данного проекта в рамках
рассматриваемой модели. В папке проекта содержатся все необходимые файлы
проекта, туда же сохраняются и результаты расчеты. Файлы проекта
связываются с конфигурацией, к которой прикреплен проект, через номер проекта,
определенный в свойствах конфигурации, как показано на рис. 5.39. Поэтому
удаление или переименование папок, носящих имя проекта, приведет к
потере связи между COSMOSFIoWorks и моделью.
'V«/ Хч«^
Coaf Kjur stlon name*
' Мой проект
Description:
< Проект COSM^SHoWoTkT
Cofflfftenfo
'• to FloWorks project file
* I2\2.fwpi>
V'*"
| Display State;
|-Display State-1
Custom Properties...
№ D;\AM3nn3COSMOSFlpWorks
шве
^V^v^^l^a:'^^
■0^^ С *1
jVl&ftffi^iW ГНШ^>:^' *ffi! у
i AHanH3C05MOSFloWorks
"H;^
$*J2
Aeanbl.SLDPRT
Деталь2.5ЮР(*Т
Сборка. SLDASM
Рис. 5.39. Папка проекта прописана в свойствах конфигурации, к которой прикреплен проект
( Совет )
В связи с тем, что папки проектов сохраняются в папке модели, во избежание
путаницы с проектами следует избегать нахождения исследуемых моделей
11 Зак 4405
312
Глава 5
в одной папке. Например, если вы проводите анализ сборки, а потом захотели
исследовать деталь, входящую в состав этой сборки и расположенную в той же
папке, что и файл сборки, то, прежде чем создавать проект COSMOSFIoWorks,
лучше скопировать эту деталь в другую папку.
Для быстрого доступа к папке проекта выберите команду FloWorks | Project |
Open Project Directory (FloWorks | Проект | Открыть папку проекта).
Редактирование проекта
Редактирование данных проекта производится в следующих окнах:
♦ General Settings (Общие установки)— редактирование базовой части
проекта, задаваемой в Wizard (Мастере проектов), за исключением
настроек системы единиц измерения и настроек уровней решения и
разрешения геометрии сеткой;
♦ Unit System (Система единиц) — настройка системы единиц измерения;
♦ Computational Domain (Расчетная область)— редактирование размеров
расчетной области, задание плоскости симметрии течения, задание
двумерной задачи;
♦ Automatic Initial Mesh (Автоматическая начальная сетка), Initial Mesh
(Начальная сетка)— настройка параметров, определяющих расчетную
сетку задачи;
♦ Calculation Control Options (Опции управления расчетом)— настройка
опций управления расчётом, таких как уровень решения, критерии
сходимости, моменты сохранения результатов, адаптация расчетной сетки к
полю течения и др.
Общие установки
Для доступа к окну General Settings (Общие установки) выберите команду
FloWorks | General Settings (FloWorks | Общие установки).
Содержимое окна General Settings всегда отражает текущее состояние
проекта COSMOSFIoWorks. Наполнение и структура окна General Settings
практически полностью повторяют структуру данных Wizard (Мастера проектов).
Значение установок окна General Settings подробно рассматривается
в разд. "Мастер проекта" данной главы (шаги 3—8).
Существенным отличием от Мастера проектов является наличие кнопки
Replace (Заменить) на страницах Fluids (Текучие среды) и Solids (Твердые
тела), определяющих рассматриваемые в задаче вещества (рис. 5.40).
Если вы заменяете вещество (компонент текучей среды или твердое тело), то
все данные заменяемого вещества автоматически переносятся на заменяющее
Аэрогидродинамика и теплопередача
313
его новое вещество. Данная опция удобна, если в проекте рассматривается
многокомпонентная среда. Например, в диалоговом окне Boundary
Condition (Граничные условия) вы задали параметры смеси на входе в модель.
Затем, если хотите посмотреть, как замена одного компонента текучей смеси на
другой повлияет на результаты расчета, используйте кнопку Replace
(Заменить) для замены одного компонента другим. Если вместо этой кнопки
использовать кнопку Add (Добавить), то придется заново задавать все
исходные данные, связанные с новым компонентом.
Стандартная кнопка Apply (Применить) позволяет сохранять внесенные
изменения без выхода из окна.
i:6efiei|il^tl|^-;:;
I Fluids _
:+; Gases
•В Liquids
! Acetone
Amonia SL
iPath
Pre-Defined
Pre-Defined
' Га
I New..
:Ш>ам$Ш^
EthanolSL
Ethylene
Methane SL
Methanol
Propane
1 ШФШеШ
Pre-Defined
Pre-Defined
Pre-Defined
Pre-Defined
Pje-Defined
Ct, Non-Newtonian Liquids
vn r» xi. i :_..:j.
Add
J Bemove j
[ Repjace |
Flow Characteristic
Flow type
Cavitation
Value
Laminar and Turbulent
D
[ OK J [ Apply 1 [ЛЕапсеГ"] f t^p 1
Рис. 5.40. Кнопка Replace позволяет заменить во всем проекте
одно вещество на другое
Единицы измерения
COSMOSFIoWorks позволяет выбрать удобную для пользователя систему
единиц, в которой задаются исходные данные и просматриваются
полученные результаты. Для этого можно выбрать одну из стандартных систем
единиц, предлагаемых COSMOSFIoWorks, либо сформировать новую систему
314
Глава 5
единиц как произвольную комбинацию единиц— стандартных либо
созданных пользователем.
Чтобы изменить систему единиц текущего проекта, выберите команду
FloWorks | Units (FloWorks | Система единиц) (рис. 5.41).
Чтобы посмотреть используемые в проекте единицы измерения различных
физических величин или изменить используемую в проекте систему единиц,
откройте в дереве Parameter (Параметр) папку с интересующими вас
физическими величинами. Например, Main (Основные физические величины),
Geometrical Characteristics (Геометрические величины), Loads&Motion
(Нагрузки и движение) и т. д.
Система единиц
Система единиц—
Название—
Комментарий—
Цп* system.
Name
Comment
Paw»*»
Pressure & stress
Velocity
Mass
Length
Temperatue
Physical bme
& СефгаейЫСЪ*ас*е<Ы|С
Angle
Area
Volume
Roughness
$toadsW*toR
л Medwraftqped»*
$ TyitMef>c*
SI |m-kg-s)
SI (m-kg-s) %
Units PecimaiPtace* LOUnkSI-
0
v 1
Meter/second
Kilometer/hour
Mle/hour
Knot
FootAecond
Inch/second
Yard/second
Centvneter/second
MUmeter/second
Fpol/rirMnute
ok''''' J
1*1
• Загрузить
- Сохранить
- Производная
единица
измерения
Рис. 5.41. С помощью окна Unit System можно изменить стандартную систему единиц
С~ Примечание ^
Единица измерения шероховатости задается для величины Roughness
(Шероховатость), расположенной в списке Geometrical Characteristic.
Чтобы изменить используемую в проекте единицу измерения, щелкните
соответствующую ячейку в столбце Units (Система единиц) и выберите из
предлагаемого списка нужную единицу измерения. Последний элемент
списка называется Custom Unit (Производная единица измерения). Выберите
вариант Custom Unit, если хотите создать (с помощью арифметических
операций) новую единицу измерения, производную от соответствующей
единицы измерения системы СИ.
Производная единица измерения получается как результат арифметического
выражения от соответствующей единицы системы СИ. Например, можно ис-
Аэрогидродинамика и теплопередача
315
пользовать в проекте в качестве единицы измерения нанометр, если указать
его связь с метром. Для этого в окне Custom Unit необходимо задать
следующие параметры:
♦ Unit name (Имя единицы) — имя единицы, отображаемое в окнах задания
исходных данных и при просмотре результатов;
♦ Unit to SI formula (Формула пересчета единицы в систему СИ) —
функция, в которой параметром является значение, выраженное в создаваемой
единице измерения, а результатом — значение в системе СИ. Щелкните
кнопкой Unit для обозначения параметра функции. Например, Unit to SI
formula для нанометра имеет вид: {Unit}*E-9;
♦ SI to unit formula (Формула пересчета из системы СИ) — функция, в
которой параметром является значение, выраженное в единицах системы
СИ, а результатом — значение, выраженное в создаваемой единице
измерения. Щелкните кнопкой SI для обозначения параметра функции.
Например, SI to unit formula для нанометра имеет вид: {SI}*E+9.
Чтобы изменить число десятичных знаков при визуализации данной единицы
измерения, щелкните соответствующую ячейку в столбце Decimal places
(Число десятичных знаков) и используйте направленные вверх и вниз стрелки
в поле редактирования.
Если хотите использовать в проекте другую систему единиц, щелкните
кнопку Load (Загрузить) и выберите нужную систему в диалоговом окне Load
from Database (Загрузка из базы данных). Чтобы сохранить сформированную
вами систему единиц, щелкните кнопку Save (Сохранить) и в появившемся
диалоговом окне Save to Database (Сохранить в базе данных) введите ее
название в поле Unit system name (Название системы единиц). Укажите также
папку в Engineering Database (Инженерная база данных), где эта система
будет храниться.
Выбранная (или созданная) вами система единиц будет использоваться в
текущем проекте COSMOSFloWorks по умолчанию при задании исходных
данных проекта и при просмотре результатов расчета. Поэтому при вводе
исходных данных проекта в данной системе единиц нет необходимости вместе с
числами вводить символы единиц измерения. Однако если вы хотите ввести
данные в других единицах измерения, то можете это сделать, введя рядом с
числами символы этих единиц измерения. Эти символы должны быть такими
же, как в базе данных Units (Система единиц). Что касается числа
десятичных знаков у вводимых исходных данных, то оно может быть любым — все
десятичные знаки будут восприняты правильно.
Расчетная область
Все расчеты течения и теплопередачи в твердом теле выполняются в
пределах расчетной области. При создании нового проекта с помощью Wizard
316
Глава 5
(Мастер проектов) COSMOSFIoWorks автоматически создает расчетную
область вокруг модели.
Расчетная область представляет собой прямоугольный параллелепипед,
причем как в случае трехмерного расчета, так и в случае двумерного расчета.
В случае двумерного расчета расчетная область имеет границами в третьем
измерении две параллельные плоскости с одной ячейкой базовой сетки (basic
mesh) между ними.
Грани расчетной области параллельны трем плоскостям по умолчанию
(плоскости "Спереди", "Сверху", "Слева"). Граничные плоскости расчетной
области внешних задач (External problems) автоматически располагаются на
некотором расстоянии от модели. Граничные плоскости расчетной области
внутренних задач (Internal problems) автоматически проводятся по габаритам
модели, если опция Heat transfer in solids (Теплопередача в твердых телах)
включена, или по габаритам только проточного тракта, если эта опция не
включена.
Окно Computational Domain (Расчетная область) предназначено для
изменения размеров расчетной области. Здесь же можно задать особые условия на
границах расчетной области для уменьшения рассчитываемой области задачи
(а значит, требуемой для расчета памяти и времени расчета), а именно
условие симметрии задачи (Symmetry) или линейной периодичности
(Periodicity). Для вызова окна Computational Domain из меню выберите пункт
Computational Domain или щелкните правой кнопкой мыши на значке
Computational Domain в Дереве анализа и в появившемся контекстном меню
выберите пункт Edit Definition (Редактировать задание).
Размеры расчетной области зависят от типа и условий задачи и определяются
автоматически COSMOSFIoWorks. Тем не менее в некоторых случаях может
потребоваться изменить размеры расчетной области.
Размеры расчетной области могут стать неадекватными вследствие внесения
следующих изменений в уже созданный проект:
♦ изменение вектора скорости внешнего потока (по величине и/или по
направлению). Для задач внешнего типа оптимальной формой расчетной
области считается форма, размер которой в направлении вектора скорости
внешнего потока больше двух других размеров, т. к. именно в этом
направлении распространяется основное возмущение. Это учитывается при
создании проекта с помощью Wizard (Мастера проекта). Если же вы
поменяли направление или величину скорости внешнего потока в окне
General Settings, то вам необходимо соответствующим образом поменять
размеры расчетной области;
♦ переключение типа задачи (внешняя или внутренняя).
Аэрогидродинамика и теплопередача 317
fi
Во избежание этого необходимо переустановить размеры расчетной области
после внесения изменений. Это можно сделать на вкладке Size (Размеры)
либо в автоматическом режиме, либо заданием координат границ расчетной
области вручную. Чтобы переустановить границы расчетной области в
автоматическом режиме, щелкните кнопку Reset (Восстановить).
Если вы уверены, что решение рассматриваемой внутренней или внешней
задачи имеет одну или несколько плоскостей симметрии, параллельных
плоскостям расчетной области, то можете ограничить ими расчетную
область, уменьшив ее таким образом. При этом необходимо поставить условие
Symmetry (Симметрия) на этих границах. Поскольку расчетная область
уменьшается, то сокращаются требуемая память и время счета (рис. 5.42).
Расчетная область
Рис. 5.42. Дорожка Кармана при обтекании цилиндра
(двумерная нестационарная внешняя задача)
( Примечание )
При установке плоскостей симметрии имейте в виду, что симметричность
модели и симметричность набегающего потока не всегда гарантируют
симметричность остальных областей течения. В качестве примера можно привести
дорожку Кармана за цилиндром.
Если в качестве граничного условия на отверстии, поверхности или в объеме
задано интегральное граничное условие (например, массовый или объемный
расход, мощность тепловыделения) и это отверстие (поверхность, объем)
пересечено заданной плоскостью симметрии, то необходимо учитывать, что
заданное значение граничного условия будет отнесено к той части отверстия
(поверхности, объема), которое входит в расчетную область. Так, например,
если плоскость симметрии делит площадь отверстия пополам, то будет не-
318
Глава 5
верным задание в качестве граничного условия реального расхода через это
отверстие, а будет правильным задание половины от этого расхода
(рис. 5.43).
Если вы уверены, что течение является двумерным плоским, то можете
выполнить двумерный расчет (2D plane flow) вместо трехмерного, что позволит
сократить требуемую память и уменьшить время счета.
Периодическое граничное условие (Periodicity) позволяет сократить время
анализа для задачи, включающей в себя поток среды сквозь модель,
состоящую из геометрически идентичных частей, расположенных через одинаковые
промежутки. При использовании периодического граничного условия вам
требуется рассчитать поток лишь вокруг малой группы этих идентичных
частей, или даже вокруг одной части. Периодическое граничное условие
задается для пары границ Расчетной области (Computational Domain) в выбранном
направлении, в котором части модели повторяются периодически.
Количество ячеек базовой сетки вдоль данного направления для корректного расчета
условия периодичности должно быть не менее пяти.
Инженерная база данных
Если в процессе создания проекта вы обнаружили, что в списке веществ,
определенных COSMOSFloWorks, нет нужного вам вещества, необходимо
дополнить этот список, создав желаемое вещество в Engineering Database
(Инженерная база данных). Создание вещества подразумевает задание его
имени и свойств. Данные инженерной базы общие для всех проектов,
поэтому, однажды создав вещество, вы можете использовать его и в других
проектах.
Аэрогидродинамика и теплопередача
319
В Engineering Database (Инженерная база данных) хранится:
♦ информация по физическим свойствам различных газообразных (Gases) и
жидких (Liquids) веществ, в том числе водяного пара (Steam),
неньютоновских (Non-Newtonian Liquids) и сжимаемых жидкостей (Compressible
Liquids), а также твердых (Solids) веществ. Она включает постоянные
значения и табличные зависимости различных физических параметров от
температуры и давления (последнее — только для точек кипения и
отвердевания жидкостей);
♦ кривые зависимости объемного расхода от перепада статического
давления для ряда промышленных вентиляторов (Fan Curves);
♦ свойства пористых материалов (Porous Media);
♦ дополнительные визуализируемые параметры (Custom Visualization
Parameters) — определяются как функции (сформированные с помощью
стандартного набора математических операций) от физических параметров,
визуализируемых по умолчанию, в результате значения этих параметров
можно визуализировать так же, как все визуализируемые параметры;
♦ свойства поверхностей радиационного теплообмена (Radiative Surfaces);
♦ система единиц (Units), в которой вы хотите задавать исходные данные и
просматривать результаты расчета проекта;
♦ значения коэффициента контактной теплопроводности (Thermal Contact
Conductance) различных пар материалов, используемые для задания
контактных тепловых сопротивлений;
♦ кривые теплового сопротивления и перепада давления для интегрального
моделирования теплообменников (Heat Sinks);
♦ характеристики Элементов Пельтье (Thermoelectric Coolers).
В дополнение к тому, что имеется в Engineering Database (Инженерная база
данных) по умолчанию, пользователи могут ввести в эту базу данных свои
вещества, кривые, единицы, параметры (рис. 5.44).
Чтобы попасть в Engineering Database, выберите пункты FloWorks | Tools |
Engineering Database (FloWorks | Инструменты | Инженерная база данных).
Все данные Инженерной базы данных хранятся в файле CHEMBASE.xml, a
все данные, введенные пользователем, — в файле CHEMBASEUSER.xml. По
умолчанию вы используете файл CHEMBASEUSER.xml (расположен в папке
Documents and SettingsVAll Users\Application Data\COSMOS Applications
\COSMOSFloWorks 2007). Чтобы использовать файл CHEMBASEUSER.xml,
хранящийся в другой папке, необходимо указать его расположение в окне
общих установок COSMOSFloWorks (COSMOSFloWorks Options) в ячейке
Directory for the user Engineering Database (Папка пользователя Инженер-
320
Глава 5
ной базы данных). Для вызова окна COSMOSFloWorks Options выберите
Инструменты | Настройки и далее нажмите кнопку Посторонняя фирма.
На количество пользователей, имеющих доступ к одному и тому же файлу
CHEMBASEUSER.xml, ограничений нет, но когда один из пользователей
сохраняет свои данные в этой базе данных, другие пользователи будут
вынуждены ждать, пока завершится процесс сохранения.
М*№3&#!№$!$&Ф'-
File £dtt tfew ypits Help
Ш. 4 ►Ш X
Diabase tree:
I t#--Q Contact Conductances
$ & Щ> Custom • Visualization Para:
| r*> hz Fan Curves
> ® Heat Sinks
| r. St Materials
<J) Compressible Liquids
Gases
tffr Pre-Defmed
| С User Defined
j & 6 Liquids
| Ъ h Non-Newtonian Liquid
± =£ Solids
3t $3 Steam
•*• ?*c Pwous Media
■jtt <$> Radiative Surfaces
,-t <fr* Thermoelectric Coolers
<£ ^S Units
; Items ! Hem Properties j Tables and Curves
Property
a
Comments
Specific heat ratio (Cp/Cv)
Molecular mass
Dynamic viscosity
Specific heat (Cp)
Thermal conductivity
Value
The value of Specific heat ratio j;
1.399
0.02896 kg/mol
(Table)
[Table)
(Table)
Air
51 (m-kg-s)
Рис. 5.44. Окно Engineering Database
Можно также импортировать Инженерную базу данных от другого
пользователя. Для этого выберите команду File | Import (Файл | Импортировать) и
укажите CHEMBASEUSER.xml файл этого пользователя.
Вы можете корректировать и/или дополнять Инженерную базу данных
только в папках User Defined (Данные пользователя). Эти папки доступны в
дереве Database tree (Дерево базы данных).
Если элемент базы данных (вещество, вентилятор и т. д.), свойства которого
вы хотите подправить, находится в папке Pre-Defined (Поставляемые с
COSMOSFloWorks), то его необходимо скопировать в папку User Defined
(Данные пользователя) или в ее подкаталог. Вы можете скопировать элемент
путем его перетаскивания мышью из одной папки в другую в дереве
Database tree (Дерево базы данных) при нажатой клавише <Ctrl> или с по-
Аэрогидродинамика и теплопередача
321
мощью команд Сору (Копировать) и Paste (Вставить), доступных в меню
Edit (Редактировать).
Если хотите дополнить базу данных новым элементом (веществом,
вентилятором и т. д.), выберите команду File | New | New Item (Файл | Новый | Новый
элемент). Выбрав или создав элемент, подкорректируйте или задайте его
свойства на вкладках Item Properties (Свойства) и Tables and Curves
(Таблицы и графики).
Для сохранения внесенных изменений выберите File | Save (Файл |
Сохранить).
5.5.4. Физические особенности
Теплопередача в твердых телах
Теплопередача в текучей среде, а также теплообмен между текучей средой и
стенками модели (конвекция) рассчитываются в COSMOSFloWorks
автоматически.
Теплопередача в твердых телах по умолчанию не рассчитывается, но будет
включена в расчет при решении сопряженной задачи теплообмена при
выборе опции Heat conduction in solids (Теплопередача в твердых телах) в Wizard
(Мастер проектов) или в General Settings (Общие установки) на вкладке
Analysis type (Тип задачи). Для этого необходимо выбрать материалы
твердых тел из Инженерной базы данных. Один из этих материалов необходимо
также указать как заданный по умолчанию, а остальные материалы, если
таковые имеются и модель является сборкой или многотельной деталью,
выбираются для выбранных деталей или тел модели в диалоговом окне Solid
Materials (Материалы). Кроме того, в Wizard (Мастер проектов) или в General
Settings (Общие установки) на вкладке Initial Conditions (Начальные
условия) необходимо задать начальную температуру твердых тел,
используемую по умолчанию для всех тел.
В твердых телах можно задать поверхностные тепловые источники (Surface
Sources) на выбранных поверхностях твердых тел, либо соприкасающихся с
текучей средой, либо между твердыми телами, а таюке объемные тепловые
источники (Volume Sources) в выбранных деталях или телах модели (для
сборок или многотельных деталей).
При включении опции Heat conduction in solids only (Только теплопередача
в твердых телах) в рассматриваемой задаче рассчитывается только
теплопередача в твердом теле, т. е. текучая среда не рассматривается.
( Примечание }
COSMOSFloWorks может рассчитывать теплопередачу не только в материалах
с одинаковой по всем направлениям, т. е. изотропной (Isotropic), теплопровод-
322
Глава 5
ностью, но также в материалах с неизотропной теплопроводностью:
однонаправленной (Unidirectional), т. е. ненулевой только в одном заданном
(естественно, без определения знака) направлении, осесимметричной или двумерной
(Axisymmetrical/Biaxial), имеющей два значения — одно в заданном (без
определения знака) направлении (Axial), а другое в перпендикулярных к этому
направлению плоскостях, одинаковое по всем этим плоскостям и направлениям в
этих плоскостях (Radial), ортотропной (Orthotropic), имеющей три значения,
соответствующие без определения знака трем координатным направлениям
Глобальной системы координат (Global Coordinate System).
У всех материалов, представленных в Инженерной базе данных (Engineering
Database) в папке Pre-Defined (Поставляемые с COSMOSFIoWorks),
автоматически задана изотропная теплопроводность, материалы с любой из
вышеперечисленных теплопроводностей можно задать в папке User Defined (Заданные
пользователем).
Теплопередача может рассчитываться также в многослойном твердом теле,
каждый из слоев которого имеет свою теплопроводность. Более того, возможно
задание контактного теплового сопротивления (Contact Resistance) на
поверхностях раздела твердых тел, в том числе в виде условного (т. е. не
представленного деталью или телом модели) тонкого слоя материала заданной
толщины и теплопроводности.
Радиационный теплообмен между поверхностями
Если в задаче рассчитывается теплопередача в твердых телах, и температура
этих тел достаточно высока или окружающий их газ настолько разрежен, что
радиационный теплообмен между этими телами или между ними и внешним
пространством сопоставим по величине с конвективным теплообменом (т. е.
радиационный теплообмен играет заметную роль в данной задаче,
значительно влияя на температуру твердых тел), то нужно в Wizard (Мастер проектов)
или General Settings (Общие установки) на вкладке Analysis type (Тип
задачи) включить опцию Radiation (Радиационный теплообмен). Если
учитывается излучение окружающей среды, то нужно отметить также опцию
Environment radiation (Излучение окружающей среды) и задать
Environment temperature (Температура окружающей среды), а если
учитывается солнечное излучение, то отметить опцию Solar radiation (Солнечное
излучение) и задать направление этого излучения компонентами вектора X,
Y, Z и его интенсивность (Intensity).
Необходимо также указать используемые по умолчанию радиационные
свойства поверхностей твердых тел (Default wall radiative surface) и внешних
поверхностей модели (Default outer wall radiative surface), которые могут
быть заданы как:
♦ Non-radiating surface (Неизлучающая/непоглощающая поверхность) —
эта поверхность не участвует в радиационном теплообмене, т. е. не
излучает, не поглощает и не отражает радиационно передаваемое тепло;
Аэрогидродинамика и теплопередача
323
♦ Absorbent wall (Абсорбирующая стенка)— эта поверхность полностью
поглощает все радиационно передаваемое тепло, пришедшее на нее, т. е.
как абсолютно черное тело, но, в отличие от абсолютно черного тела,
совсем не излучает тепло;
♦ Blackbody wall (Абсолютно черная стенка) — эта поверхность имеет
степень черноты, равную 1 (абсолютно черная поверхность), т. е. полностью
поглощает все пришедшее на нее радиационно передаваемое тепло и
излучает тепло по закону Стефана — Больцмана;
♦ Whitebody wall (Абсолютно белая стенка) — эта поверхность имеет
степень черноты, равную 0 (абсолютно белая поверхность), т. е. полностью
отражает все пришедшее на нее радиационно передаваемое тепло (по
закону Ламберта), при этом свое тепло не излучает, т. е. температура этой
поверхности не влияет на радиационный теплообмен;
♦ Symmetry (Симметрия) — если на стенке задано граничное условие Ideal
Wall (Идеальная стенка) в качестве плоскости симметрии задачи и в
задаче рассчитывается радиационный теплообмен, то на этой стенке
необходимо также задать тип поверхности радиационного теплообмена
Symmetry (Симметрия);
♦ Blackbody opening/outer boundary (Абсолютно черное отверстие или
внешняя граница) — эта граница имеет степень черноты, равную 1
(абсолютно черная граница), т. е. излучает тепло внутрь расчетной области как
абсолютно черное тело, но ее температура задается пользователем на
границах расчетной области внешней задачи в поле Environment radiative
temperature (Температура излучения окружающей среды) в окне Wizard
(Мастер проектов) или General Settings (Общие установки), а на
отверстиях модели — в поле Radiative temperature (Температура излучения)
окна Radiative surface (Поверхность радиационного теплообмена);
♦ Solar opening (Солнечное излучение) — задается в окне Radiative surface
(Поверхность радиационного теплообмена) на некоторой поверхности
(отверстии модели или границе расчетной области, лежащей в текучей среде)
как излучение тепла от этой поверхности внутрь расчетной области или
внутрь модели в заданном направлении (Direction) и с заданной
интенсивностью (Intensity);
♦ Real surfaces (Поверхности материалов) — набор поверхностей типа Wall
(см. далее), степень черноты которых соответствует степени черноты
наиболее используемых материалов.
При задании проекта на выбранной поверхности радиационного теплообмена
задаются Emissivity coefficient (Степень черноты) и одно из следующих
свойств поверхности, участвующей в радиационном теплообмене:
324
Глава 5
♦ Wall (Стенка) — означает, что излучение тепла поверхностью будет
определяться заданной степенью черноты (Emissivity coefficient) в диапазоне
от 0 до 1 (т. е. можно задать поверхность как серое тело);
♦ Opening/outer boundary (Отверстие или внешняя граница)— означает,
что отверстие модели или граница расчетной области внешней задачи
будет излучать тепло внутрь расчетной области в соответствии с заданной
степенью черноты этой границы в диапазоне от 0 до 1. Температура этой
граничной поверхности не вычисляется, а задается пользователем;
♦ Wall to ambient (Излучение стенки во внешнюю среду) — означает, что
поверхность твердого тела излучает тепло во внешнюю среду в
соответствии с заданной степенью своей черноты в диапазоне от 0 до 1, но это
тепло не попадает на стенки модели, т. е. исчезает во внешней среде.
( Примечание )
Предполагается, что текучие среды не излучают и не поглощают радиационно
передаваемое тепло (т. е. они прозрачны для радиационной передачи тепла),
так что радиационный теплообмен рассматривается только для поверхностей
твердых тел.
Если излучающие тепло твердые поверхности не заданы как абсолютно черные
или абсолютно белые, то предполагается, что они серые, т. е. имеют
непрерывный спектр излучения, подобный спектру излучения абсолютно черного
тела, так что их тепловое излучение одинаково на всех длинах волн. Таким
образом, рассматривается только полное радиационное излучение,
проинтегрированное по всем длинам волн. Для конкретной поверхности конкретного
материала (некоторые из них имеются в Engineering Database) степень
черноты поверхности может зависеть только от ее температуры.
Предполагается, что излучение тепла с поверхностей твердых тел является
диффузным, т. е. подчиняющимся закону Ламберта, согласно которому яркость
излучения, т. е. плотность потока энергии в единичном телесном угле,
одинакова во всех направлениях.
Радиационный теплообмен рассчитывается одновременно с конвективным
теплообменом и теплопередачей в твердых телах.
При просмотре результатов расчета можно визуализировать следующие
характеристики радиационного теплообмена.
♦ Локальные характеристики (плотность потока энергии) в окне Surface
Plots (Картины на поверхности):
• Net radiant flux (Плотность суммарного радиационного теплового
потока) — разность между плотностью радиационного теплового потока,
уходящего с поверхности, и радиационного теплового потока,
приходящего на нее, положительная величина этой разности означает, что
плотность уходящего радиационного теплового потока больше
плотности приходящего радиационного теплового потока;
Аэрогидродинамика и теплопередача
325
• Leaving radiant flux (Плотность уходящего радиационного теплового
потока)— плотность радиационного теплового потока, уходящего с
поверхности.
♦ Интегральные характеристики (мощность) в окне Surface Parameters
(Параметры на поверхности):
• Net radiation rate (Суммарный радиационный тепловой поток)—
интеграл плотности суммарного радиационного теплового потока по
данной поверхности;
• Leaving radiation rate (Уходящий радиационный тепловой поток) —
интеграл плотности уходящего радиационного теплового потока по
данной поверхности.
Тела, прозрачные для теплового излучения
Помимо поверхностей, не участвующих в радиационном теплообмене (Non-
radiative surface), в COSMOSFIoWorks возможно указать, что тело (компонент
сборки или тело многотельной детали) является прозрачным для теплового
излучения, т. е. тепловое излучение проходит сквозь тело, не поглощаясь и не
отражаясь, а само тело тепло не излучает. Такое тело, тем не менее,
обменивается теплом с окружающей средой за счет теплопередачи в твердых телах и
конвективного теплообмена с текучей средой. Такие тела могут
использоваться, например, для моделирования границы, которая является
разделителем между объемами текучих сред, но при этом не препятствует теплообмену
между этими текучими средами за счет радиации (например, стеклянная
колба лампочки).
Чтобы указать, что тело является прозрачным для теплового излучения,
выберите команду FloWorks | Radiation transparent bodies (FloWorks |
Прозрачные для излучения тела). Далее в списке компонентов выделите нужный
компонент и нажмите Transparent (Прозрачный).
Турбулентность
В COSMOSFIoWorks по умолчанию течение в разных областях (в ядре
потока, в пограничном слое около стенок модели) рассчитывается либо как
турбулентное, либо как ламинарное, либо как переходное между этими
состояниями, в зависимости от значений соответствующих критериев.
Соответственно, в Wizard (Мастер проектов) или в диалоговом окне General Settings
(Общие установки) на вкладке Fluids (Текучие среды) в строке Fluid type
(Тип течения) по умолчанию указано Laminar and Turbulent (Ламинарное и
турбулентное). Если вы хотите, чтобы течение во всей расчетной области
рассчитывалось только как ламинарное, то в этой строке надо выбрать опцию
Laminar Only (Всюду ламинарное течение). Если вы хотите, чтобы течение
326
Глава 5
во всей расчетной области рассчитывалось только как турбулентное, то в
этой строке надо выбрать опцию Turbulent Only (Всюду турбулентное
течение).
По умолчанию параметры турбулентности (Turbulence parameters) в
качестве граничных и начальных условий задачи задаются автоматически. В случае
необходимости можно самим задать другие значения этих параметров, т. е.
интенсивности турбулентности и турбулентной длины (линейного масштаба
турбулентности) или энергии турбулентности и турбулентной диссипации.
Если у вас нет других данных по этим величинам, то лучше использовать те
значения, которые задаются по умолчанию. Естественно, если в качестве
граничного условия задано давление, то заданные параметры турбулентности
используются только в случае втекания текучей среды в расчетную область
через эту границу.
Тип пограничного слоя при задании граничного условия на входном
отверстии модели (через которое текучая среда втекает в модель) по умолчанию
определяется в зависимости от значения числа Реинольдса, определенного по
эквивалентному гидравлическому диаметру этого входного отверстия:
где А — площадь отверстия, Р — периметр отверстия.
При этом толщина пограничного слоя по умолчанию определяется по
эффективной длине стенки, зависящей от этого числа Реинольдса.
При расчете пограничного слоя на поверхностях модели, а также
теплообмена пограничного слоя с этими поверхностями учитывается шероховатость
этих поверхностей, которая для всех поверхностей модели (за исключением
выделенных пользователем на вкладке Wall (Стенка) диалогового окна
Boundary Conditions) задается в диалоговом окне Wizard (Мастер проектов)
или в окне General Settings (Общие установки) на вкладке Wall conditions
(Условия на стенках).
( Примечание ^
Если в Wizard (Мастер проекта) или General Settings (Общие установки) на
вкладке Fluids (Текучие среды) выбрана опция Laminar Only (Всюду
ламинарное течение), то поле течения не только в ядре потока, но и в пограничном слое
будет рассчитываться только как ламинарное.
Нестационарные задачи
В COSMOSFIoWorks задачи всех типов решаются с помощью решения
нестационарных уравнений Навье — Стокса. Стационарные задачи решаются
Аэрогидродинамика и теплопередача
327
методом установления решения во времени от заданных пользователем
начальных условий. Шаги по времени проводятся до тех пор, пока изменения
параметров во времени не станут достаточно малыми. Тогда решение
считается установившимся (сошедшимся). В общем случае, начальные условия для
таких задач могут быть заданы достаточно произвольно. Однако, задавая
начальные условия ближе к искомому решению, можно ускорить процесс
установления решения.
При решении нестационарных (time-dependent) задач шаги по времени
выполняются от начальных условий до тех пор, пока не будет пройден
заданный интервал физического времени задачи. В отличие от стационарных
задач, начальные условия для нестационарных задач, в общем случае, должны
быть достаточно точными, за исключением нестационарных задач с
установившимся периодическим решением (например, в случае задания
периодических граничных условий), начальные условия для которых могут быть
произвольными, но требуется дополнительное время для исключения их влияния
на решение.
Стационарные задачи решаются методом установления решения во времени с
использованием локальных шагов по времени, т. е. шаг по времени
определяется для каждой ячейки расчетной сетки индивидуально, а именно с учетом
параметров течения, рассчитанных в данной ячейке. При решении
нестационарных задач шаг по времени во всех ячейках одинаковый и по умолчанию
определяется COSMOSFloWorks автоматически на основании рассчитанных
параметров течения во всей расчетной области. Если нужно получить более
точное решение нестационарной задачи (с помощью задания более мелкого
шага по времени в сравнении с автоматически выбираемым, например, для
разрешения высокочастотного периодического решения) или быстрее
рассчитать теплопередачу в твердых телах (с помощью задания более крупного
шага по времени по сравнению с автоматически выбираемым, например, в том
случае, когда картина течения устанавливается существенно быстрее), в этих
случаях целесообразно задавать шаг по времени вручную. Если решается
нестационарная задача расчета только теплопередачи в твердых телах, т. е. без
расчета текучей среды, то лучше задать шаг по времени вручную.
Для решения нестационарной задачи требуется задание интервала
физического времени задачи. В Wizard (Мастере проектов) он задается как Total
analysis time (Длительность процесса) на вкладке Analysis type (Тип задачи).
Альтернативный способ его задания— в окне Calculation Control Options
(Опции управления расчетом) как Maximum physical time (Максимальное
физическое время задачи), определяющее момент завершения расчета.
Кроме того, при решении нестационарных задач можно задать моменты
физического времени задачи для сохранения результатов расчета в эти моменты
времени. В Wizard (Мастер проектов) они задаются с помощью Output time
328
Глава 5
step (Временной шаг выдачи результатов) — интервала времени между этими
моментами. Большие возможности для задания этих моментов предоставляет
диалоговое окно Calculation Control Options (Опции управления расчетом):
их можно задать не только как Periodic Saving (Периодическое сохранение),
но также в табличном виде (Tabular Saving).
Течение с большим числом Маха
Если плотность текучей среды зависит от давления, то, в случае
существенного влияния этой зависимости на характеристики течения, целесообразно
учитывать сжимаемость этой среды.
В COSMOSFIoWorks газы всегда рассматриваются как сжимаемые, а
жидкости обычно рассматриваются как несжимаемые, но при необходимости могут
быть заданы сжимаемыми (compressible liquids).
Если максимальная скорость течения газа в задаче превышает число Маха
(Mach number) M = 3 при решении стационарной задачи или 1 при решении
нестационарной задачи, то необходимо отметить опцию High Mach number
flow (Течение с большим числом Маха) в окне Wizard (Мастер проектов) или
General Settings (Общие установки). При этом не рекомендуется включать
опцию High Mach number flow (Течение с большим числом Маха) в тех
случаях, когда сверхзвуковое течение имеется только в относительно небольшой
области, а в большей части расчетной области течение дозвуковое. Если
область, занятая сверхзвуковым течением, занимает примерно половину (или
больше половины) расчетной области, то рекомендуется включить опцию
High Mach number flow.
Если эта опция не выбрана, а заданные начальные или граничные условия
указывают на максимальную скорость потока М > 3 в стационарной задаче
или М > 1 в нестационарной задаче, то COSMOSFIoWorks выдает
соответствующее предупреждение. В процессе решения задачи COSMOSFIoWorks
также будет информировать о том, превышает ли максимальная скорость
потока указанные выше значения числа Маха или нет. Имейте в виду, что
указание High Mach number flow (Течение с большим числом Маха) для
низкоскоростного течения газа (максимальное число Маха М < 1,5) может
привести к снижению точности расчета.
Гравитация
Для задач со свободной конвекцией необходимо при прохождении Wizard
(Мастер проектов) или в диалоговом окне General Settings (Общие
установки) на вкладке Analysis type (Тип задачи) отметить опцию Gravity
(Гравитация) и здесь же задать Х-, Y-, Z-компоненты (components) вектора
гравитационного ускорения в Глобальной системе координат.
Аэрогидродинамика и теплопередача
329
Если в задаче рассматриваются жидкости, то проверьте наличие зависимости
их плотности от температуры в Инженерной базе данных.
Если в задаче рассматриваются газы, то учет гравитации возможен только в
том случае, если выключена опция High Mach number flow (Течение с
большим числом Маха).
Если опция учета гравитации (gravity) включена, то по умолчанию
статическое давление в граничных и начальных условиях задачи задается с
включенной опцией Pressure potential (Давление в точке отсчета). То есть заданное
статическое давление P3a()amoe рассматривается как давление в точке начала
используемой в расчете Глобальной системы координат проекта (Global
Coordinate System), а необходимое для проведения расчета абсолютное
давление Рабсолютное определяется по этому давлению в точке с координатами
(jc, у, z) следующим образом:
^абсолютное ~~ ^заданное Р Долг"* &уУ "*" oz") '
где р — средняя по расчетной области плотность текучей среды, gi —
компоненты заданного вектора гравитационного ускорения. Если опция Pressure
potential (Давление в точке отсчета) отключена (т. е. не отмечена), то
задаваемое в качестве начальных и граничных условий статическое давление
рассматривается как абсолютное.
Вращение
Если в задаче есть вращающиеся тела, то течение в такой задаче можно
рассчитать путем задания вращения Глобальной или локальной системы
координат, в которой эти детали неподвижны.
Для этого, при прохождении Wizard (Мастер проектов) или в диалоговом
окне General Settings (Общие установки) на вкладке Analysis type (Тип
задачи) необходимо отметить опцию Rotation (Вращение) и здесь же выбрать тип
задания этого вращения (Туре):
♦ Local regions (Локальные области)— задание в некоторой части
расчетной области локальной вращающейся системы координат, или
несколько таких систем в разных областях. Это позволит рассчитать
обтекание вращающихся деталей модели (например, вращение пары
вентиляторов в модели, рис. 5.45). Чтобы задать локальную область вращения,
необходимо создать представляющую эту область деталь. Течение в
области вращения будет рассчитываться в заданной локальной вращающейся
системе координат. При этом параметры течения на границе этой области,
рассчитанные с учетом течения вне этой области, будут служить
граничными условиями для этой области. Задание локальной области вращения
330
Глава 5
осуществляется в диалоговом окне Rotating Region (Вращающаяся
область);
Рис. 5.45. Вращение вентилятора CPU задано через локальную область вращения
Global Rotating (Глобальное вращение) — задание вращения Глобальной
системы координат. При этом неподвижные части модели должны быть
осесимметричны относительно оси вращения системы координат
(например, вращение импеллера, рис. 5.46). Неподвижная (в абсолютной системе
координат) поверхность стенки задается с помощью граничного условия
Stator (Статор) в диалоговом окне Boundary Conditions (Граничные
условия). При этом по умолчанию скорость и давление задаются во
вращающейся системе координат:
Кг=^-а)хг;/»г=^-1/2.ра)2т2,
Аэрогидродинамика и теплопередача
331
где V. и Р.
скорость и давление в абсолютной, т. е. неподвижной
abs n Aabs
системе координат, со — угловая скорость вращения, р — плотность,
г — расстояние от оси вращения. Возможно также задание скорости и
давления в абсолютной системе координат. Для этого надо при задании
скорости в окне Boundary Conditions (Граничные условия) снять флажок
Relative to rotating frame (Во вращающейся системе координат), а при
задании давления снять флажок Pressure potential (Давление в точке
отсчета).
Рис. 5.46. Течение в импеллере рассчитывается
во вращающейся Глобальной системе координат
( Примечание )
При задании вращения локальной системы координат в подобласти расчетной
области необходимо учитывать, что это требует осесимметричности
(относительно оси вращения) не только этой подобласти, но и искомого решения
задачи на границе этой подобласти, поскольку именно с таким автоматически
задаваемым граничным условием решается задача. Естественно, из этого
требования следует невозможность пересечения границей этой подобласти деталей
или тел модели, т. е. граница подобласти должна целиком лежать в области,
занятой текучей средой.
332
Глава 5
При задании вращения Глобальной системы координат выбранные
поверхности модели могут быть заданы (в диалоговом окне Boundary Conditions)
неподвижными, т. е. не вращающимися вместе с этой системой координат, но при
этом они должны быть осесимметричными относительно оси этого вращения.
Конденсация водяного пара
Если в задаче присутствует водяной пар, то при расчете параметров текучей
среды можно учесть его равновесную конденсацию в объеме текучей среды в
соответствии с параметрами текучей среды (конденсация на поверхностях
твердых тел не учитывается), которые также от этой конденсации будут
зависеть. Для этого надо при задании текучей среды на вкладке Fluids (Текучие
среды) при прохождении Wizard (Мастер проектов) или в диалоговом окне
General Settings (Общие установки) задать этот пар либо выбором варианта
Steam (Водяной пар) из Инженерной базы данных (Engineering Database),
либо включить (отметить) опцию Humidity (Влажность). В последнем случае
при задании начальных и граничных условий задачи надо задавать
относительную влажность (Relative humidity) газообразной смеси или газа (если в
данном условии он один), т. е. отношение текущей плотности водяного пара к
плотности насыщенного водяного пара при текущих давлении и температуре.
При задании граничных условий наряду с относительной влажностью
задаются также давление и температура, при которых она определена и которые
могут отличаться от давления и температуры, заданных в качестве граничных
условий или получаемых на этой границе в процессе расчета.
В результате такого расчета, в соответствии с местной температурой и
давлением газообразной среды и, если рассматривается многокомпонентная
газовая смесь, локальной концентрацией водяного пара, рассчитывается
локальная массовая доля сконденсировавшегося водяного пара в смеси. Кроме того,
рассчитываются и учитываются при определении свойств газообразной
среды соответствующие изменения температуры, плотности, энтальпии,
удельной теплоемкости и скорости звука газообразной среды. Поскольку
конденсация водяного пара рассматривается только в равновесной постановке, она
не имеет истории и определяется только местными параметрами текучей
среды.
Соответственно, в качестве результатов расчета можно посмотреть
локальную влажность водяного пара (Moisture content), т. е. относительную долю
водяного конденсата в водяном паре, локальную массовую долю водяного
конденсата в суммарной массе газов, водяного пара и его конденсата
(Condensate mass fraction, рис. 5.47), относительную долю водяного пара в
текучей среде по массе (Steam mass fraction) или по объему (Steam volume
fraction), и если используется опция Humidity (Влажность), то
относительную влажность газовой смеси (Relative humidity).
Аэрогидродинамика и теплопередача
333
Рис. 5.47. Конденсация на крыльях самолета
(показаны изоповерхности параметра Condensate mass fraction)
Кавитация
Если в задаче рассматривается стационарное или медленноменяющееся
течение воды, то его можно рассчитать с учетом равновесной кавитации и/или
кипения воды, для этого при прохождении Wizard (Мастер проектов) или в
диалоговом окне General Settings (Общие установки) на вкладке Fluids
(Текучие среды) надо отметить (включить) опцию Cavitation (Кавитация) и,
поскольку кавитационные или образующиеся при кипении пузырьки вырастают
из растворенного в воде воздуха, здесь же указать массовую долю
растворенного в воде воздуха (Dissolved gas mass fraction) — если есть необходимость
заменить задаваемое по умолчанию, обычное для воды при атмосферном
давлении, значение 10~5. При расчете кавитации предполагается, что
появление и исчезновение кавитационных (или образующихся при кипении)
пузырьков определяется только местной температурой и давлением и они
перемещаются только вместе с водой, другого движения не имеют.
Учитывается влияние фазовых переходов на температуру воды. Расчеты
корректны только при температурах и давлениях воды в диапазонах
277.15...583,18 К и 800... 107 Па, объемной доле пузырьков не более 0,9.
В качестве результатов расчета кавитации можно посмотреть массовые и
объемные доли пара, т. е. пузырьков в воде (Vapour mass fraction и Vapour
volume fraction, рис. 5.48).
334
Глава 5
Рис. 5.48. Изоповерхности объемной доли пара (Vapor volume fraction)
указывают на кавитацию на лопатках импеллера
Если решение задачи не является стационарным или медленноменяющимся,
то возможен значительный дисбаланс между входным и выходным
массовыми расходами задачи.
Необходимо иметь в виду, что учет кавитации существенно увеличивает
число итераций, необходимых для установления решения стационарной задачи.
5.5.5. Задание граничных и начальных условий
Всякая решаемая с помощью COSMOSFIoWorks задача должна иметь
начальные и граничные условия. В случае решения стационарной задачи
начальные условия влияют на скорость установления, тогда как граничные
условия полностью определяют картину течения. В случае решения
нестационарной задачи картина течения зависит как от начальных, так и от граничных
условий.
Начальные условия
В COSMOSFIoWorks все, как стационарные, так и нестационарные, задачи
решаются в результате решения нестационарных уравнений Навье — Стокса,
сопровождающегося выполнением шагов по времени (называемых
итерациями) от некоторого заданного начального состояния среды, т. е. начальных
условий задачи (Initial conditions). Естественно, начальные условия, т. е. на-
Аэрогидродинамика и теплопередача
335
чальные значения независимых переменных задачи, должны быть заданы во
всей расчетной области.
Если задача стационарная, т. е. имеет стационарное решение, то начальные
условия задачи влияют только на скорость установления решения, т. е.
достижения искомого стационарного решения, которое от них не должно
зависеть. В общем случае, задание начальных условий ближе к искомому
решению (вместо заданных по умолчанию начальных условий) позволяет решить
стационарную задачу быстрее, т. е. с меньшим числом итераций.
( Совет )
Для ускорения поиска достаточно точного решения стационарной задачи, в
частности определения сеточной сходимости решения (см. разд. 5.5 и 5.6)}
возможно решение задачи сначала на грубой расчетной сетке, а затем на более
мелкой (частой) расчетной сетке с использованием в качестве начальных
условий задачи решения, полученного на более грубой (редкой) сетке. Это можно
сделать, выбрав Transferred вместо User Defined на вкладке Initial Conditions
при прохождении Wizard или в General Settings либо с помощью опции Take
previous results, см. разд. 5.5.8, подразд. "Запуск на счет".
Если решается нестационарная задача (т. е. опция Time-dependent включена,
см. разд. 5.5.4), то заданные начальные условия по определению должны в
точности отражать начальное состояние среды перед развитием
рассматриваемого процесса во времени. Исключением являются нестационарные
задачи, имеющие периодическое нестационарное решение, не зависящее от
начальных условий (например, если заданы периодические во времени
нестационарные граничные условия), — в этом случае начальные условия могут
быть любыми, но от них зависит время, необходимое для исключения их
влияния на искомое решение задачи.
Если решается внутренняя (Internal) задача, то начальные условия,
используемые во всей расчетной области, задаются на вкладке Initial Conditions
(Начальные условия) при прохождении Wizard (Мастер проектов) или в
диалоговом окне General Settings (Общие установки).
Если решается внешняя (External) задача, то начальные условия,
используемые во всей расчетной области, задаются при прохождении Wizard или в
диалоговом окне General Settings на этой же вкладке, которая в этом случае
называется Initial and Ambient Conditions (Начальные и внешние условия).
Причем эти начальные условия распространяются на границы расчетной
области, где становятся уже граничными условиями задачи, т. е. эти начальные
условия можно интерпретировать как параметры невозмущенного
набегающего потока.
Заданные в Wizard, General Settings значения распространяются на все поле
течения и все твердые тела, если не переопределены для отдельных тел и
336
Глава 5
объемов текучей среды. В выбранных локальных подобластях можно задать
начальные условия, отличающиеся от условий, используемых во всей
расчетной области. Для задания начальных термодинамических условий в
подобласти текучей среды, а также для задания начальной температуры твердого тела
используется диалоговое окно Initial Conditions (Начальные условия). Кроме
того, в окне Fluid Subdomain (Подобласть текучей среды) можно задать
начальные условия текучей среды в отдельной подобласти, окруженной со всех
сторон поверхностями модели, отделяющими эту область от областей с
другим типом текучей среды. В COSMOSFloWorks возможен расчет текучих
сред разного типа (например, воды и воздуха) при условии, что разнотипные
текучие среды не перемешиваются.
Обзор начальных условий, задаваемых в COSMOSFloWorks, представлен
в табл. 5.8.
Таблица 5.8. Начальные условия
Тип начального условия
Окно
1. Условия, задаваемые во всей расчетной области
• Thermodynamic Parameters: Temperature, Pressure,
Density— статические температура и давление (для
газов возможны также комбинации "температура и
плотность" или "давление и плотность");
• Velocity: Velocity in X (Y, Z) direction — компоненты
вектора скорости (для газов также возможно задание
числа Маха);
• Concentrations — концентрации (относительные, по
массе, Mass fraction, или по объему, Volume fraction)
компонентов для многокомпонентной среды;
• Turbulence Parameters — параметры турбулентности
(интенсивность и длина турбулентности или
турбулентная диссипация и энергия турбулентности);
• Humidity: Relative humidity— относительная
влажность газообразной текучей среды (если опция
Humidity включена);
• Solid Parameters: Initial solid temperature—
начальная температура твердых тел (если опция Heat
conduction in solids включена)
В качестве начальных условий могут быть использованы
результаты одного из предыдущих расчетов,
выполненного в данном или каком-либо другом проекте
Wizard, General Settings
(Initial and Ambient
Conditions)
Wizard, General Settings
(Initial and Ambient
Conditions);
Run, Batch Run (Только
для использования
предыдущих результатов
текущего проекта)
Аэрогидродинамика и теплопередача
337
Таблица 5.8 (окончание)
Тип начального условия
Окно
2. Условия, задаваемые в локальном объеме
Текучая среда (ее тип и вещества), отличающаяся от
заданной в остальной расчетной области
• Thermodynamic Parameters: Temperature, Pressure,
Density— статические температура и давление (для
газов также возможны комбинации "температура и
плотность" или "давление и плотность");
• Velocity: Velocity in X (Y, Z) direction—- компоненты
вектора скорости (для газов также возможно задание
числа Маха);
• Concentrations— концентрации (относительные, по
массе или по объему) компонентов для
многокомпонентной среды;
• Turbulence Parameters — параметры турбулентности
(интенсивность и длина турбулентности или
турбулентная диссипация и энергия турбулентности);
• Humidity: Relative humidity— относительная
влажность газообразной текучей среды (если опция Humidity
включена)
• Solid Parameters: Initial solid temperature—
начальная температура твердых тел (если опция Heat
conduction in solids включена)
Fluid Subdomain
(Подобласть текучей среды)
Initial Condition,
Fluid Subdomain
Initial Condition 1
( Примечание ^
Если тела, рассматриваемые как жидкостные объемы, частично заходят на
детали, представляющие твердые тела, то область перекрытия рассматривается
как твердое тело.
Граничные условия
Граничные условия для внешних (External) и внутренних (Internal) задач
задаются по-разному:
♦ при решении внешних задач вы задаете граничные условия на всех
границах расчетной области (computational domain) как внешние (относительно
модели, которая должна целиком лежать внутри расчетной области, не
касаясь ее границ, за исключением тех из них, на которых заданы условия
симметрии) условия (ambient) или условия симметрии (symmetry), а также,
если необходимо, на поверхностях модели, например, на ее отверстиях
(openings);
338
Глава 5
♦ при решении внутренних (Internal) задач вы задаете граничные условия на
поверхностях модели, т. е. на ее стенках (wall) и отверстиях (openings,
в некоторых случаях, например, при расчете естественной конвекции в
замкнутой полости модели, такие отверстия могут отсутствовать), а также,
если необходимо, условие симметрии (symmetry) на границах расчетной
области.
Обзор граничных условий представлен в табл. 5.9.
Таблица 5.9. Граничные условия
Тип граничного условия
Окно
1. Условия, задаваемые на границах расчетной области
Параметры внешней (относительно модели) текучей среды
(при решении внешней (External) задачи):
• Thermodynamic Parameters: Temperature, Pressure,
Density — статические температура и давление (для
газов также возможны комбинации "температура и
плотность" или "давление и плотность");
• Velocity: Velocity in X (Y, Z) direction— компоненты
вектора скорости (для газов также возможно задание
числа Маха);
• Concentrations — концентрации (относительные, по
массе или по объему) компонентов для
многокомпонентной среды;
• Turbulence Parameters — параметры турбулентности
(интенсивность и длина турбулентности или
турбулентная диссипация и энергия турбулентности);
• Humidity: Relative humidity— относительная
влажность газообразной текучей среды (если опция Humidity
включена)
• Если граница расчетной области является плоскостью
симметрии течения, то на ней задается условие
симметрии (Symmetry). Это может быть сделано как для
внешних, так и для внутренних задач;
• Если на двух границах расчетной области решение
задачи одинаково, то на этих плоскостях может быть
задано условие периодичности решения (Periodicity)
В качестве граничных условий можно использовать
результаты одного из предыдущих расчетов (причем не
обязательно из текущего проекта), при этом значения
физических параметров, полученные в ранее проводимом
расчете, будут использоваться в текущем проекте в качестве
граничного условия. Это может быть сделано как для
внешних, так и для внутренних задач
Wizard, General Settings
(Initial and Ambient
Conditions)
Computational Domain
(Расчетная область)
Transferred Boundary
Condition (Перенесенные
граничные условия)
Аэрогидродинамика и теплопередача 339
Таблица 5.9 (продолжение)
Тип граничного условия
Окно
2. Условия, задаваемые на отдельных (выделяемых пользователем) поверхностях
2.1. Условия на поверхностях, определяющих отверстия
• Inlet Velocity, Outlet Velocity — входная скорость,
выходная скорость (для газов также возможно задание
этих скоростей числами Маха— Inlet Mach number,
Outlet Mach number);
• Inlet Mass Flow, Outlet Mass Flow — входной массовый
расход, выходной массовый расход;
• Inlet Volume Flow, Outlet Volume Flow — входной
объемный расход, выходной объемный расход
• Static Pressure — статическое давление;
• Total Pressure — полное давление;
• Environment Pressure— давление внешней среды,
интерпретируемое как полное давление втекающей в
модель текучей среды и как статическое давление
вытекающей из модели текучей среды
• Fans — вентиляторы (идеальное устройство, задающее
зависимость объемного расхода от перепада
статического давления между их выходной и входной
поверхностями) могут стоять как на входном, так и на выходном
отверстии модели, а также внутри расчетной области)
Boundary Condition опция
Flow Opening (Отверстия
заданным течением)
Boundary Condition
опция Pressure Opening
(Отверстия заданным
давлением)
Fans (Вентиляторы)
Входные граничные условия включают также температуру текучей среды, концентрации
(относительные, по массе или по объему) компонентов многокомпонентной среды,
параметры относительной влажнбсти газов, параметры турбулентности и пограничного
слоя (Boundary Layer). Кроме того, при задании скорости возможно задание профиля
этой скорости по нормали к поверхности (Velocity normal to face, в том числе профиля
развитого потока в трубе— Fully developed flow), трехмерных векторов скорости
(3D Vector), закрутки потока (Swirl)
2.2. Условия на стенках
• Wall Temperature—температура стенки;
• Heat Transfer Coefficient— коэффициент теплоотдачи
стенки в текучую среду, при этом дополнительно
задаются:
о Wall Temperature — температура стенки;
° Fluid Temperature — температура текучей среды,
величина которой либо задана пользователем (User-
Defined), либо определяется по полю температуры
текучей среды интерполяцией (Interpolated) на
поверхность, отстоящую от стенок модели на заданную
пользователем толщину динамического пограничного
слоя (Dynamic Boundary Layer Thickness);
Boundary Condition
опция Real Wall (Реальная
стенка)
340
Глава
Таблица 5.9 (продолжение)
Тип граничного условия
• Wall Motion — движение поверхности без изменения ее
формы:
° Translation velocity — движение в направлении
выбранной координатной оси;
° Angular velocity— вращение вокруг выбранной
координатной оси (только для осесимметричных
относительно этой оси поверхностей);
• Stator — при расчете во вращающейся системе
координат (т. е. при включенной в Wizard или General Settings
опции Rotation, см. разд. 5.5.4, подразд. "Вращение')
данная поверхность, осесимметричная относительно оси
вращения этой системы координат, является неподвижной
в абсолютной, т. е. невращающейся системе координат;
• Roughness — шероховатость стенки
• Heat Transfer Rate (Heat Generation Rate в случае
расчета теплопередачи в теле) — количество тепла,
выделяющегося в единицу времени с выделенной
поверхности (Вт);
• Heat Flux (Surface Heat Generation Rate в случае
расчета теплопередачи в теле) — удельный тепловой поток
с единицы выделенной поверхности (Вт/м2)
• Значения физических параметров на поверхности,
перенесенные на данную поверхность из ранее
проведенного расчета (не обязательно в этом проекте)
Если решается внутренняя задача с учетом теплопередачи
в твердых телах, то на внешних поверхностях модели,
которые не контактируют с текучей средой проекта, но
расположены внутри расчетной области, можно задать
тепловые граничные условия, определяющие теплообмен
модели с внешней средой:
• Wall Temperature — температура внешней поверхности
стенки модели (как поверхностный тепловой источник,
поддерживающий постоянную температуру этой
поверхности);
• Heat Transfer Coefficient— коэффициент теплоотдачи
внешней поверхности стенки во внешнюю (т. е.
находящуюся вне расчетной области) текучую среду, при этом
температура этой поверхности рассчитывается при
решении задачи с учетом заданной
Если опция Radiation (Радиационный теплообмен)
включена (в Wizard или General Settings, см. разд. 5.5.4,
подразд. "Радиационный теплообмен между
поверхностями'), то радиационные свойства (степень черноты)
поверхности (можно указать неучастие в радиационном
теплообмене), выбираемые из Engineering Database
(Инженерная база данных)
Окно
Surface Source
(Поверхностный источник)
Transferred Boundary
Conditions
(Перенесенные граничные условия)
Boundary Condition
опция Outer Wall
(Внешняя стенка)
Radiative Surface
(Поверхности
радиационного теплообмена)
Аэрогидродинамика и теплопередача 341
Таблица 5.9 (продолжение)
Тип граничного условия
В случае расчета теплопередачи в теле возможно задать
контактное тепловое сопротивление на поверхности
контакта между двумя твердыми телами (деталями модели)
одним из двух способов:
• Conductance— контактное тепловое сопротивление
выбирается из соответствующей папки Инженерной
базы данных (Engineering Database);
• Material/thickness— контактное тепловое
сопротивление задается как тонкий слой материала, выбираемого в
окошке Solid Material из Инженерной базы данных
(Engineering Database), с толщиной, задаваемой в
окошке Thickness
Окно
Contact Resistances
(Контактные тепловые
сопротивления)
3. Условия, применяемые по умолчанию на всех стенках модели
см. разд. 5.5.3, подразд. "Мастер проекта (Шаг 6 — Wall Conditions)"
Шероховатость
Если теплопередача в твердых телах не рассчитывается,
то на поверхностях модели, контактирующих с текучей
средой, задается одно из тепловых граничных условий
(Default wall thermal condition):
• адиабатическая стенка (по умолчанию);
• температура стенки;
• поверхностные тепловые источники с заданной
тепловой мощностью;
• поверхностные тепловые источники с заданным
удельным тепловым потоком
Если решается внутренняя задача с учетом теплопередачи
в твердых телах, то на внешних поверхностях модели,
которые не контактируют с текучей средой проекта, но
расположены внутри расчетной области, задаются тепловые
граничные условия, определяющие теплообмен модели с
внешней средой (Default outer wall thermal condition):
• адиабатическая внешняя стенка (по умолчанию);
• температура внешних стенок;
• коэффициент теплоотдачи (а) на внешних стенках;
• тепловые источники на внешних поверхностях с
заданным удельным тепловым потоком;
• тепловые источники на внешних поверхностях с
заданной тепловой мощностью
Если решается задача с учетом радиоактивного
теплообмена (опция Radiation включена), то задается тип
радиационной поверхности. По умолчанию— Non-radiative
surface (Неизлучающая и непоглощающая поверхность)
Wizard, General Settings
(Roughness)
Wizard, General Settings
(Wall Conditions)
Wizard, General Settings
(Wall Conditions)
Wizard, General Settings
(Wall Conditions)
342
Глава 5
Таблица 5.9 (окончание)
Тип граничного условия
Если решается внутренняя задача (Internal) с учетом
радиоактивного теплообмена (опция Radiation включена), то
дополнительно задается тип радиационной поверхности
для внешних поверхностей внутренней задачи. По
умолчанию— Non-radiative surface (Неизлучающая и непогло-
щающая поверхность)
Окно
Wizard, General Settings
(Wall Conditions)
4. Условия, применяемые к объему
Объемный тепловой источник (Volume Source) может быть
задан в выделенной детали (теле) модели или в объеме
текучей среды с одной из следующих характеристик:
• Heat Generation Rate — мощность объемного
тепловыделения (Вт);
• Volumetric Heat Generation Rate— удельная (в
единице объема) мощность объемного тепловыделения
(Вт/м3);
• Temperature — температура
Default solid — материал всех твердых тел, за
исключением тех твердых тел, материал которых задан в диалоговом
окне Solid Material (Материал твердых тел), только при
включенной опции Heat conduction in solids
(Теплопередача в твердых телах)
Материалы твердых тел, только при включенной опции
Heat conduction in solids (Теплопередача в твердых
телах)
Материалы пористых тел
Volume Source
(Объемный источник)
Wizard или General
Settings, окно Solids
(Материалы твердых тел)
Solid Material (Материал
твердых тел)
Porous Media
(Пористые среды)
( Примечание J
При задании граничных условий для внутренних задач необходимо следить за
их непротиворечивостью. Например, стационарная внутренняя задача не может
быть решена, если вы задали только Flow openings (Отверстия с заданным
течением) с условием Velocity (Скорость) и ни одного Pressure opening
(Отверстие с заданным давлением) — в этом случае практически невозможно
обеспечить баланс массового расхода через отверстия модели. Чтобы этого избежать,
в проекте необходимо задать, по крайней мере, одно условие Pressure opening
(Отверстие с заданным давлением).
Для граничного условия, задаваемого на поверхности (в том числе и на
поверхности крышки, определяющей отверстие), эту поверхность необходимо
выделить в графической области. Для доступа к внутренним поверхностям
удобно пользоваться опцией Выбрать другой, которая появляется в контек-
Аэрогидродинамика и теплопередача
343
стном меню при нажатии правой кнопки мыши в области модели. Удобно
также включить опцию выделения сквозь прозрачные детали — Выбор с
помощью прозрачности. Наконец, все поверхности тела можно быстро
выделить, щелкнув на имени этого тела в Дереве проектирования (FeatureManager
tree). При этом быстро снять выделение лишних поверхностей можно с
помощью инструмента Filter (Фильтр). См. разд. "Окно Boundary Condition
(Граничное условие)".
Для задания теплового источника или прозрачного для теплового излучения
тела необходимо предварительно создать этот объем в виде детали или тела
модели и, если нужен объем текучей среды, дезактивировать его в
диалоговом окне Component Control (Управление деталями), а затем выделить этот
объем либо в Дереве проектирования, либо непосредственно в графической
области выделением его поверхности, ребра или вершины.
Значения начальных и граничных условий, а также тепловых источников
могут быть заданы в виде константы, табличной или формульной зависимости
от координат X, Y, Z, 0, ф, г и времени t (для нестационарных задач) с
помощью кнопки Dependency (Зависимость) и опции Reference axis (Ось
задания), имеющихся в соответствующих окнах задания условий (за
исключением значения шероховатости, которое может быть только константой). Здесь 0,
ф — координаты сферической системы координат, г — радиус в
цилиндрической системе координат, ось которой задается в поле Reference axis (Ось
задания) как одна из осей Глобальной или справочной системы координат.
Окно Initial Condition (Начальное условие)
Для вызова окна Initial Condition (Начальное условие) выберите команду
FloWorks | Insert | Initial Condition (FloWorks | Вставить | Начальное
условие).
Окно Initial Condition служит для задания начальных значений параметров
текучей среды или температуры твердого тела, отличающихся от
используемых по умолчанию (т. е. заданных в Wizard или General Settings) (рис. 5.49).
В зависимости от того, к какому объему применяется условие (к твердому
телу или телу, рассматриваемому как жидкостный объем), в окне Initial
Condition задаются либо начальные значения параметров текучей среды,
либо начальная температура твердых тел (последнее возможно при учете
теплопередачи в твердых телах).
Определить полость, в которой задаются начальные значения параметров
текучей среды, можно двумя способами:
♦ создать компонент (деталь сборки или тело многотельной детали) по
объему интересующей полости, а затем "отключить" компонент с помощью
12 3ак. 4405
344
Глава 5
окна Component Control (Управление деталями), в результате чего объем,
занимаемый компонентом, будет рассматриваться в COSMOSFloWorks
как полость, заполненная текучей средой проекта. Наконец, находясь
в окне Initial Condition, выделить компонент;
выделить любую поверхность (в том числе и поверхность крышки,
закрывающей отверстие), ограничивающую замкнутую полость.
Начальное условие
:* i ШшШШжШШ
'&-Ю&
Определение -
Компоненты/Поверхности для __ 'jp
задания начального t
условия
Система КООрДИНаТ [jfi Global Coordinate Systei
Ось задания —
Отключить твердое тело —
Параметры потока —
Термодинамические параметры —
Параметры турбулентности
Параметры твердого тела — ^ш^щ^^
Начальная температура — t * роэт
твердого тела :
¥шш;,Ш^шЫ
1£
"U3
Рис. 5.49. Окно Initial Condition
Выделить компонент можно, щелкнув на любой его поверхности, ребре,
вершине или на его имени в Дереве проектирования SolidWorks (Feature manager
tree). Чтобы убрать компонент из списка, отметьте его в списке и нажмите
клавишу <Delete>.
Если начальные условия задаются для текучей среды в объеме, заданном
деталью (телом) модели, и выбранный объем не был отключен (disabled) в
диалоговом окне Component Control (Управление деталями), то его можно
дезактивировать в описываемом здесь диалоговом окне, включив опцию
Disable solid components (Дезактивировать твердые тела).
Аэрогидродинамика и теплопередача
345
Управление деталями
Для вызова окна Component Control (Управление деталями) выберите
Flo Works | Component Control (FloWorks | Управление деталями) (рис. 5.50).
Управление деталями
Компоненты —
щшш*гшшш1ш
! Component:
| 1 Щ % Ш<2>
\\ Ш-% Lid<1>
! j $> % Handled >
| ! & % ВаУ<1>
I j Ш % Side<2>
-. & % Side<1>
1
'■ j
i
}
{
ГЖ11
, , „,..,.»
Г Е"*Ь1е ]
[ ЕдаЫеАИ ]
[ QgabbJ
[ DjsabJeAli ]
[ Cancel j
i Help ]
Включить
1 Включить все
Отключить
Отключить все
Рис. 5.50. Окно Component Control
Выделив компонент в списке компонентов (Components) и нажав кнопку
Disable (Отключить), вы указываете COSMOSFIoWorks рассматривать этот
компонент как объем, занятый текучей средой.
Далее этот объем можно использовать для задания начальных условий (в
окне Initial Condition), и/или объемного источника тепла (в окне Volume
Source), или задания локальной расчетной сетки (в окне Local Initial Mesh),
или задания пористой среды (в окне Porous Medium).
Окно Boundary Condition (Граничное условие)
В диалоговом окне Boundary Condition (Граничное условие), при решении
как внутренних, так и внешних задач, задаются входные (Inlet) и выходные
(Outlet) (относительно пространства, заполненного текучей средой)
граничные условия течения, а также условия на выбранных поверхностях модели,
соприкасающихся с текучей средой. Кроме того, тепловые граничные
условия могут быть заданы на выбранных внешних поверхностях модели при
решении внутренних задач с расчетом теплопередачи в твердых телах.
Для внутренних течений необходимо задавать граничные условия на входных
и выходных отверстиях модели, если таковые имеются (в этом нет
необходимости при их отсутствии, т. е. при расчете естественной конвекции в
замкнутой полости модели). В случае внешнего течения можно задать вдув (или
отсос) потока с поверхности модели во внешнее пространство (или из него).
346
Глава 5
Заданные граничные условия можно схематично визуализировать
непосредственно на модели в графическом окне с помощью окрашенных стрелок,
указывающих направление потока и вид граничного условия. Для этого
щелкните правой кнопкой мыши элемент Boundary Condition (Граничное условие) в
Дереве анализа COSMOSFloWorks и выберите вариант Show (Показать) или
Hide (Спрятать) в зависимости от того, хотите или не хотите показывать эти
стрелки.
Определение поверхности задания граничного условия
Для вызова окна Boundary Condition (Граничное условие) выберите команду
FloWorks | Insert | Boundary Condition (FloWorks | Вставить | Граничное
условие) (рис. 5.51).
Для задания граничного условия необходимо в графической области экрана
выделить поверхности, к которым будет применен тот или иной тип
граничного условия. Названия выделенных поверхностей появляются в списке Faces
to apply the boundary condition (Поверхности задания граничного условия).
Для исключения поверхности из списка выделите ее имя в списке и нажмите
клавишу <Delete>.
( Совет )
Удобно вызывать окно Boundary Condition следующим образом: в
графическом окне щелкните правой кнопкой мыши на поверхности модели, для которой
собираетесь задать граничное условие, и в появившемся контекстном меню
выберите опцию Insert Boundary Condition (Вставить граничное условие).
В этом случае выбранная поверхность сразу попадает в список Faces to apply
the boundary Condition (Поверхности задания граничного условия).
Кроме того, все поверхности детали (тела) можно быстро выделить, щелкнув
на имени этой детали (тела) в Дереве проектирования (FeatureManager tree).
Если нужно снять выделение лишних поверхностей определенного типа, то в
группе Selection щелкните значок Filter Faces [gfljj (Фильтровать
поверхности) и выберите нужную опцию, указывающую, какие поверхности надо
убрать из списка Selection:
♦ Remove faces out of computational domain (Убрать поверхности вне
расчетной области) — все поверхности, расположенные за пределами
расчетной области;
♦ Remove outer faces (Убрать внешние поверхности)— все внешние
поверхности модели — только при решении внутренней (Internal) задачи;
♦ Remove faces in contact with fluid (Убрать поверхности контакта с
текучей средой) — все поверхности, контактирующие с текучей средой;
♦ Leave outer faces and faces in contact with fluid (Оставить только внешние
поверхности и поверхности контакта с текучей средой) — все поверхно-
Аэрогидродинамика и теплопередача
347
сти, кроме внешних и поверхностей, контактирующих с текучей средой.
Этот способ, в частности, удобен при задании теплового условия на
внешних поверхностях модели (Outer Wall) при решении внутренней задачи.
Ю Ф-2)
Граничное условие
Определение —
Поверхности задания —
граничного условия
Фильтр — j 1(31
Система КООрДИНат — } Jjfr JFace Coordinate System
Ось задания —
Reference axis ПГ
"Э
Тип граничного условия — ^3№8^.^..fc^.^^..^ ^ .у^*«~. .~.^.* *.j
Отверстия с заданным течением ; f|Tj (g) Lm|
Отверстия с заданным давлением —, !■ a 1Z1JbL!L£L
Стенка —I \
Вид фаничного условия -
Inlet Volume Flow
Inlet Velocity
Outlet Mass Flow
lOutlet Volume Flow
! Outlet Velocity
Параметры потока •
"ill a i
j Uniform
Г~ fuly developed flow
&;
Термодинамические параметры- \1i^attea№iam^tLt
Параметры турбулентности — U^fe^aaM^
ПОфЭНИЧНЫЙ СЛОЙ— [Baund*i<iria(M!r - - v »I
*ui4Us«XC*A4AviS*4#!i«iW(w4v4w«:
Создать соответствующие цели •
£и,Шь&Люж&%*Х&^1&&>^£^^ *■■
Г* Crca:eos*?ocwfccdgoas
Рис. 5.51. Окно Boundary Condition
Если предполагается задание граничного условия в виде зависимости от
координат, например потока с закруткой или в виде произвольных векторов
скорости, или с какой-либо иной неравномерностью по поверхности
(поверхностям) задания данного граничного условия, то надо в поле Coordinate
System йУ (Система координат) указать систему координат, в которой это
348
Глава 5
будет сделано. Если выделенная для задания граничного условия
поверхность модели плоская, то COSMOSFlo Works автоматически по умолчанию
указывает в этом окошке систему координат, связанную с этой
поверхностью, с началом в центре поверхности и осью X по нормали к этой
поверхности. В этом поле она называется Face coordinate system (Координатная
система, привязанная к поверхности) и отображается в графическом окне.
Вместо нее в !этом окошке можно указать любую другую систему координат,
в частности Глобальную систему координат проекта (Global Coordinate
System), которая выбирается из Дерева анализа FW и автоматически
появляется в этом окошке при удалении из него другой системы координат. (Для
удаления системы координат выделите ее имя в поле Coordinate System и
нажмите клавишу <Delete>.) Если нужна другая система координат, то
создайте ее с помощью функции SolidWorks Вставка | Справочная геометрия |
Координатная система, а затем выделите ее в Дереве проектирования
SolidWorks. Для задания граничных условий в цилиндрической (или
сферической) системе координат выберите в списке Reference axis (Ось задания)
в качестве оси этой системы координат одну из осей системы координат,
указанной в поле Coordinate System (рис. 5.52).
В поле Туре (Тип) выберите тип задаваемого граничного условия (Flow
Opening, Pressure Opening, Wall) и один из вариантов граничного условия
этого типа.
Рис. 5.52. Координатная система, привязанная к поверхности,
используется для задания закрутки потока
Задание параметров потока
Опция Flow opening (Отверстие с заданным течением) Щ обеспечивает
задание граничного условия одного из следующих видов: Inlet Velocity (Вход-
Аэрогидродинамика и теплопередача
349
ная скорость), Outlet Velocity (Выходная скорость); если текучая среда
газообразная, то вместо абсолютной скорости может быть задано число Маха
(Mach number), Inlet Mass Flow (Входной массовый расход), Outlet Mass
Flow (Выходной массовый расход), Inlet Volume Flow (Входной объемный
расход), Outlet Volume Flow (Выходной объемный расход). Таким образом,
помимо типа основного параметра (скорость или расход), задается
направление потока через данную поверхность: "входной (inlet)" означает втекание в
модель, а "выходной (outlet)"— вытекание. Входные граничные условия
включают также температуру текучей среды, концентрации компонентов
многокомпонентной текучей среды, параметры турбулентности и
пограничного слоя.
Возможны следующие способы задания направления вектора скорости:
♦ Normal to face [jNJ (По нормали к поверхности) — вектор скорости
перпендикулярен поверхности;
Swirl [P| (Закрученный поток)— задается закрутка потока вокруг
Reference axis (Ось задания). Параметры закрутки задаются с помощью
следующих составляющих скорости:
• Angular velocity — угловая скорость, направление закрутки
определяется знаком этой скорости по правилу буравчика;
• Radial velocity — радиальная скорость;
3D vector UJ (Произвольный вектор) — направление потока задается Х-,
Y-, Z-составляющими вектора скорости (in X, Y, Z directions),
определенными в декартовой системе координат, заданной на вкладке Definition
(Определение) в поле Coordinate System (Система координат). При этом
если задана не скорость, а массовый или объемный расход, то абсолютные
значения составляющих вектора скорости могут быть произвольными, т. е.
они определяют только направление, но не величину скорости, которая в
этом случае определяется внутри COSMOSFIoWorks по заданному вами
расходу через данную поверхность;
Inlet profile |f|| (Входной профиль) — для интегральных граничных
условий потока, заданных на входе в модель, т. е. входного массового или
объемного расхода, можно задать входной профиль скорости (например,
параболический), причем используемые для его задания величины скорости
могут быть любыми, т. к. они будут автоматически пересчитаны в
соответствии с заданным расходом. По умолчанию задан равномерный
профиль (Uniform). Для задания зависимости в цилиндрической системе
координат используется Reference axis (Ось задания). Например, для
задания параболического профиля скорости течения в трубе, показанного на
рис. 5.41, нужно нажать Щ и ввести в окно Dependency следующую зави-
350
Глава 5
симость: (0.5*D— г)л2, где D — значение диаметра трубы, г—
переменная в формуле профиля (рис. 5.53);
<у / s / /„.
f/ s ///••'
Reference axis
^_
■ / J / S /"/"
Ш^щ(!Ш^Шк^Ш:ШШ^ж
ы:шш
1 dependency type: |
j j Formula Definition
1 Eofmula:
j [ backspace ]
BBB BBS
BBB BBB
BBB BBS
BBB BBB
1 1 « H c—i II
yil
,
ffear j 1
3H
z jithetaj 1
Help J
Рис. 5.53. Параболический профиль скорости, заданный в окне Dependency
Fully developed tube profile (Полностью развитый профиль трубы) — для
круглых входных отверстий (а также для плоских отверстий в расчете
двумерной — 2D — задачи) эта опция автоматически (в зависимости от
числа Рейнольдса входного течения) задает входные профили скорости и
параметров турбулентности (значений турбулентной энергии и
диссипации), соответствующих развитому профилю течения в цилиндрическом
или плоском канале;
Relative to rotating frame (Во вращающейся системе координат) — если
расчет будет проводиться во вращающейся системе координат, то в поле
Flow Parameters появляется дополнительная опция Relative to rotating
frame. Включение этой опции указывает, что скорость (число Маха)
задается в этой вращающейся системе координат, т. е. как Vr9 по которой
абсолютная скорость Vahs (т. е. в неподвижной системе координат)
определяется следующим образом:
Vahs=Vr+vr
где со — угловая скорость
вращения системы координат, г — радиус, отсчитываемый от оси
вращения этой системы координат. Если эта опция не включена, т. е.
используется по умолчанию опция Absolute (В неподвижной системе координат),
Аэрогидродинамика и теплопередача
351
то задается абсолютная скорость, т. е. определенная в неподвижной
системе координат Vabs.
( Примечание ^
Массовый или объемный расход, заданный во вращающейся системе
координат (т. е. при отмеченной опции Relative to rotating frame), не изменится при
переходе к абсолютной (неподвижной) системе координат в том случае, если
тангенциальная составляющая скорости, появляющаяся вследствие этого
вращения, является касательной к поверхности данного отверстия модели,
следовательно, не влияет на величину этого расхода (например, когда ось вращения
перпендикулярна поверхности этого отверстия).
Задание параметров давления
Щелкните кнопку Pressure openings [J|| (Отверстия с заданным давлением)
для задания на поверхности модели, которая рассматривается как отверстие
(opening), давление текучей среды в этом отверстии:
♦ Static Pressure — статическое давление;
♦ Total Pressure — полное давление;
♦ Environment Pressure — давление внешней среды, интерпретируемое как
полное давление втекающей в модель текучей среды и как статическое.
При этом направление потока не задается; но на тот случай, если поток будет
втекать через данное отверстие (заранее это неизвестно), дополнительно
задаются температура текучей среды и другие параметры текучей среды,
упомянутые выше при описании скоростных и расходных граничных условий, за
исключением давления и количественных параметров пограничного слоя.
Если расчет проводится во вращающейся системе координат (т. е. в Wizard
или General Settings отмечена опция Rotation) в варианте Global rotating
(Глобальное вращение), или же расчет проводится с учетом гравитации
(в Wizard или диалоговом окне General Settings отмечена опция Gravity), то
в поле Thermodynamic Parameters (Термодинамические параметры)
появляется опция Pressure potential (Давление в точке отсчета). Включение этой
опции означает, что статическое давление задается в первом случае на оси
вращения системы координат, а во втором случае— в точке начала
используемой в расчете Глобальной системы координат. В первом случае
абсолютное давление текучей среды на поверхности задания граничного условия
определяется по заданному статическому давлению, плотности текучей среды,
осредненной по всей расчетной области, угловой скорости вращения системы
координат и радиусу, отсчитываемому от оси вращения этой системы
координат: Pa6cavonwoc = ^)а,,„„с, +0,5pcoV. Определение абсолютного давления во
втором случае описано в разд. 5.5.4, подразд. "Гравитация". Если опция
352
Глава 5
Pressure potential не включена, то задаваемое статическое давление является
абсолютным давлением Рабсолютиое •
В случае втекания текучей среды задаются также:
♦ Thermodynamic Parameters— термодинамические параметры текучей
среды: Approximate pressure — примерное статическое давление —
только для газов (для случая, если в некотором проходном сечении будет
достигнута скорость звука), Temperature— статическая температура.
Подробную информацию о Approximate pressure см. е. разд. "Граничные
условия в задачах с газами" данной главы,
♦ Substance Concentrations— концентрации компонентов, если текучая
среда проекта многокомпонентная: Mass fraction— относительные по
массе, Volume fraction — относительные по объему;
♦ Turbulence Parameters — параметры турбулентности: Turbulence
intensity (It) и Turbulence length (L,) — интенсивность турбулентности и
турбулентная длина или Turbulence energy (k) и Turbulence dissipation (e) —
энергия турбулентности и турбулентная диссипация;
♦ Boundary Layer— параметры пограничного слоя: турбулентный
(Turbulent) или ламинарный (Laminar), с возможным, если отметить Set
parameters, заданием его параметров: толщины динамического
пограничного слоя 6 (Dynamic Boundary Layer Thickness), толщины теплового
пограничного слоя 6т (Heat Boundary Layer Thickness), а также скорости и
температуры на внешней границе пограничного слоя (Core Velocity и
Core Temperature);
♦ Humidity Parameters — параметры относительной влажности газов (если
в Wizard или General Settings была включена опция Humidity):
относительная влажность ф (Relative Humidity), давление Р и температура Т, при
которых она была определена (Humidity Reference Pressure и Humidity
Reference Temperature).
Задание параметров стенки
Щелкните кнопку Wall |g§j (Стенка) для задания следующих граничных
условий на стенке:
♦ Real Wall (Реальная стенка) — позволяет задать отличающиеся от
используемых по умолчанию (заданных в Wizard (Мастер проектов) или
диалоговом окне General Settings (Общие установки)) шероховатость
(Roughness), и/или коэффициент теплоотдачи (Heat transfer coefficient), и/или
температуру (Temperature) поверхности стенки, контактирующей с
текучей средой. Кроме того, граничное условие Real Wall (Реальная
стенка) позволяет задать тангенциальную скорость поверхности твердого тела
Аэрогидродинамика и теплопередача
353
на границе с текучей средой для моделирования
плоскопараллельного, тангенциального или вращательного движения этой поверхности
(см. в разд. "Задание подвижных стенок" данной главы). Следующие
параметры стенки доступны для задания в группе Wall Parameters
(Параметры стенки):
• Adjust Wall Temperature ЦЦ (Задать температуру стенки) — задается
температура поверхности стенки (Wall temperature). Заданная
температура стенки будет рассматриваться как источник (или сток) тепла
независимо от того, рассчитывается ли в данном проекте теплопередача в
твердых телах. Эта температура также необходима для определения
теплового потока от стенки к текучей среде при заданном коэффициенте
теплоотдачи в случае, если не рассматривается теплопередача в
твердых телах;
Adjust Wall Heat Transfer Coefficient [**~J (Задать коэффициент
теплоотдачи)— позволяет определить тепловой поток от стенки к
текучей среде при заданном коэффициенте теплоотдачи (Heat transfer
coefficient) и, если не рассматривается теплопередача в твердых телах,
заданной температуре стенки (Wall temperature). Температуру стенки
можно не задавать — тогда она будет взята из расчета, а если задана, то
поверхность будет рассматриваться как поверхностный тепловой
источник, поддерживающий постоянную температуру этой поверхности.
Температура текучей среды, которая также необходима для
определения теплового потока от стенки к текучей среде при заданном
коэффициенте теплоотдачи, может быть определена одним из следующих двух
способов:
D задана пользователем — для этого надо в строке Define fluid
temperature by (Определить температуру текучей среды как) выбрать
функцию User-defined (Температура задается пользователем) и
задать значение External Fluid Temperature (Температура внешней
текучей среды);
D получена интерполированием рассчитанной COSMOSFIoWorks
температуры текучей среды на заданное пользователем расстояние от
стенки модели: в строке Define fluid temperature by выберите
функцию Interpolated (Интерполировать температуру на заданное
расстояние) и укажите значение Dynamic Boundary Layer
Thickness (Толщина динамического пограничного слоя). В результате
необходимая для расчета теплового потока температура текучей среды
будет определена интерполяцией рассчитанной температуры
текучей среды на внешнюю границу динамического пограничного слоя;
354
Глава 5
Adjust Wall Roughness УЩ (Задать шероховатость)— задается
шероховатость (Rz) поверхности;
Outer Wall (Внешняя поверхность) — на внешней поверхности модели, не
контактирующей с текучей средой проекта (это граничное условие может
быть задано только при решении внутренних (Internal) задач с включенной
опцией Heat conduction in solids (Теплопередача в твердых телах)), со
следующими опциями, задаваемыми в поле Wall Parameters:
Wall Temperature [УУ|— температура внешней поверхности стенки
модели (как поверхностный тепловой источник, поддерживающий
постоянную температуру этой поверхности);
Heat Transfer Coefficient
a
коэффициент теплоотдачи внешней
поверхности стенки во внешнюю (т. е. находящуюся вне расчетной
области) текучую среду, при этом температура этой поверхности
рассчитывается при решении задачи с учетом заданной External Fluid
Temperature — температуры Tf текучей среды, находящейся вне
расчетной области и омывающей данную поверхность, так что мощность
теплового потока от этой поверхности к внешней среде будет
определяться по формуле: Q-a{Ts-Tf\S, где Ts — температура данной
поверхности модели, рассчитываемая COSMOSFIoWorks в результате
расчета теплопередачи в твердых телах, S — площадь этой
поверхности;
♦ Ideal Wall (Идеальная стенка) — указывает, что данная поверхность
модели, контактирующая с текучей средой проекта, является
адиабатической, без трения по ней текучей среды. Это условие может быть
использовано для задания плоскостей симметрии течения с целью уменьшения
расчетной области и, соответственно, сокращения требуемой памяти и
времени счета.
Как уже отмечалось, при выборе типа граничного условия Real Wall
(Реальная стенка) можно задать плоскопараллельное, тангенциальное или
вращательное движение поверхности этой стенки.
Задание подвижных стенок
Если отмечена опция Wall Motion (Движение стенки), то можно задать
движение цилиндрической поверхности стенки (без изменения ее геометрии в
системе координат расчета) путем задания направления и скорости этого
движения:
♦ Coordinate System, Axis, Curve [§Ц (Система координат, Ось, Кривая)
выбирается способ задания направления движения поверхности стенки:
Аэрогидродинамика и теплопередача 355
если в этом окошке выбирается система координат, то затем в окошке
Direction (Направление) надо будет выбрать одну из ее осей, которая
будет определять направление векторов Translation Velocity (Скорость
плоскопараллельного или тангенциального движения) и Angular Velocity
(Угловая скорость, ее направление определяется правилом "буравчика").
Вместо этого можно сразу выбрать ось (Axis), или кривую, вдоль которой
будет двигаться данная поверхность (эта кривая должна быть
направляющей этой поверхности, т. е. линией пересечения этой поверхности с
плоскостью, перпендикулярной ее образующим, см. рис. 5.54, и находиться в
Дереве проектирования FeatureManager tree);
Примечание """)
Система координат, выбранная в поле Selection при задании граничного
условия, и ее ось, выбранная в окошке Reference axis, используются только
для задания зависимостей задаваемых данных с помощью окна Dependency
(Зависимость), не надо их путать с системой координат и осью, выбранными
в поле Wall Motion для задания направления движения поверхности.
♦ Translation Velocity ЦЦ (Скорость плоскопараллельного или
тангенциального движения) — эта скорость может быть задана для любой
цилиндрической поверхности, т. е. поверхности, заданной параллельными
прямолинейными образующими (или плоскопараллельным движением
некоторой кривой вдоль прямолинейной образующей). Так, плоская поверхность,
являющаяся частным случаем цилиндрической поверхности, может
двигаться в любом направлении в ее плоскости, а неплоская поверхность мо-
С
356
Глава 5
жет двигаться либо вдоль ее прямолинейной образующей, либо вдоль ее
направляющей кривой, лежащей в плоскости, перпендикулярной этой
образующей (рис. 5.53);
♦ Angular Velocity ||§ (Угловая скорость)— угловая скорость вращения
может быть задана для любой поверхности вращения, т. е. поверхности,
образованной вращением некоторой кривой около заданной оси,
например, для цилиндра или конуса (рис. 5.55);
( Примечание ^
Задание подвижной стенки никак не влияет на расчет теплопередачи в этой
стенке, т. е. при этом расчете движение стенки не учитывается. Таким образом,
заданное движение стенки влияет только на движение текучей среды около
поверхности этой стенки.
Для поверхностей
конуса и цилиндра
задано вращение
Рис. 5.55. Пример вращательного движения
Кроме того, если расчет проводится во вращающейся системе координат,
то в качестве граничного условия Real Wall можно указать, что выбранная
поверхность модели, омываемая текучей средой, является неподвижной в
абсолютной (невращающейся) системе координат, т. е. вращающейся во
вращающейся системе координат в противоположную вращению системы
координат сторону с угловой скоростью вращения, равной по абсолютной
величине скорости вращения системы координат (рис. 5.56),— для этого
надо отметить опцию Stator (Статор).
Аэрогидродинамика и теплопередача
357
Рис. 5.56. Стенки импеллера, рассчитанного во вращающейся системе координат,
заданы как Stator
Автоматическое задание целей
Иногда необходимо задать цель, связанную каким-либо образом с граничным
условием задачи. Например, если задано граничное условие Отверстие с
заданным давлением (Pressure opening), то имеет смысл задать расход через
эту границу в качестве поверхностной цели. COSMOSFlo Works позволяет это
сделать автоматически — для этого нужно при задании граничного условия
отметить опцию Create associated goals (Создать соответствующие цели).
Если интересующая цель была предварительно связана с этим типом
граничного условия, она будет автоматически создана при его создании. Связь
различных задаваемых целей с типом граничного условия задается в диалоговом
окне COSMOSFIoWorks Options (Опции COSMOSFIoWorks), вызываемом
из меню SoIidWorks при выборе Инструменты | Параметры | Посторонняя
фирма.
Граничные условия в задачах с газами
При задании течения в качестве граничного условия на отверстиях модели
в случае расчета течений с газами необходимо учитывать следующие
обстоятельства.
♦ Approximate pressure (Примерное давление) — этот параметр наряду с
температурой используется для оценки числа Маха входного потока в том
случае, когда оно не задано пользователем. Если число Маха входного
потока больше 1 (т. е. входной поток является сверхзвуковым), то
Approximate pressure используется в качестве граничного условия, следователь-
358
Глава 5
но, должно быть задано достаточно точно. Если число Маха входного
потока меньше 1, то Approximate pressure используется только в качестве
вспомогательного параметра и не влияет на полученное решение задачи,
но его достаточно точная оценка позволяет ускорить получение этого
решения.
♦ Корректное задание в качестве граничного условия входного объемного
расхода, входной скорости, входного числа Маха. Если в качестве
граничного условия на входе в модель задан или объемный расход, или скорость,
или число Маха, а в некоторой области внутри модели течение становится
полностью сверхзвуковым (т. е. как в сопле), то расчет, скорее всего, будет
некорректным, т. к. скорость потока на входе в модель (в отличие от
массового расхода) будет полностью определяться показателем адиабаты газа
и геометрией проточного тракта модели. В результате такого неверного
задания входного граничного условия давление, плотность и массовый
расход газа в процессе расчета будут увеличиваться и уменьшаться без
сходимости к решению. Во время такого расчета появится
соответствующее предупреждение, что течение газа с заданным на входе в модель
объемным расходом или скоростью, или числом Маха стало
сверхзвуковым в некотором месте расчетной области.
В этом случае необходимо вместо этих граничных условий задать в
качестве граничного условия на входе в модель массовый расход или
давление.
Обратите внимание, что описанная проблема появляется только в том
случае, когда поверхность перехода через скорость звука (т. е. с числом
Маха = 1) полностью перекрывает проточный тракт модели.
♦ Если рассчитывается течение газа и на выходе из модели получен
сверхзвуковой поток, то граничное условие на выходе из модели (а также на
расположенной ниже по течению внешней границе расчетной области при
решении внешней задачи) игнорируется. Если хотите, чтобы граничные
условия на выходе из модели действительно были выполнены при
решении задачи, убедитесь, что соответствующее поставленной задаче число
Маха на выходе из модели меньше 1.
Окно Fan (Вентилятор)
Граничное условие Fan (Вентилятор) рассматривается как идеальное
устройство, создающее объемный (или массовый) расход (можно также задать
закрутку потока) в зависимости от разницы статических давлений на входе и
выходе из этого устройства, при этом давление со стороны расчетной области
осредняется по поверхности задания вентилятора. Зависимость объемного
(или массового) расхода через Fan от перепада статического давления берет-
Аэрогидродинамика и теплопередача
359
ся из Инженерной базы данных — так называемые fan curves (зависимости
вентиляторов).
Вы можете задать вентилятор на любой соприкасающейся с текучей средой
поверхности модели, например, на вспомогательных крышках, закрывающих
входные и выходные отверстия модели (рис. 5.57).
Diabase bee
Q Contact Conductances **;
' & Custom • Visualization Pararrw < -
<ba Fan Curves
Ы fc£ Pre-Defined
r- JPAPST -;
» '.;«ACA«at
л С* 8000А
;j850QA <•
'.J8506A
ч~3 855QA
! , J 855GA
~3 880QA
i 8830A
1J885QA
Л 88804
* .i 8000N
A Cs 8300
Ч '„a 8400N
; '* ^л DC-Axial
| -fc User DeJmed
4ffi Heat Sinks
g£ Mateials
f^i Porous Media *#
,^~„_ '„\„^^ >_ .
[Item* (uemftopettet] Tables and Cuves :
&6p«rty
Volume flow tate
0 001388889 тЛ3/«
0 002777778 ггГЗЛ
0003888889 ггГЗЛ
0 004722222 ггГЗЛ
0 005555556 ггГЗЛ
0 006944444 тЛ3/$
0008333333тЛ3/«
0009722222 ггГЗ/s
0011111111 ггГЗЛ
00125тЛЗЛ
0 013888889 ггГЗЛ
0 015694444 тЛ3/$
4 Pressure difference *
Щ 47 5 Ра
43 Ра
36 5 Ра
30 Ра
* 28 Ра
27 5 Ра
27 7 Ра
27 4 Ра
255Ра
23 Ра
18 Ра
12 Ра
ОРа
47 JBO
3058
23J5
15.W
782
ООО
Рш
ч.
Pr«»urt diff«i««vo«
\
ч.
*^
\
\
Jj
V»lgm* flew Mt*
SUrfr-kg-*}
Рис. 5.57. Кривая зависимости вентилятора (fan curve), заданная в Инженерной базе данных
Г
Примечание
Имеющиеся в Engineering Database (Инженерная база данных) зависимости
объемного расхода через различные вентиляторы от перепада статического
давления приведены там исключительно в качестве примеров, а не как
рекомендации использовать именно эти вентиляторы. Зависимости, заданные в
Инженерной базе данных, взяты из каталогов фирмы Papst. COSMOSFIoWorks
не гарантирует точность этих зависимостей и не обновляет их при обновлении
в каталогах. Если в решаемой задаче имеется вентилятор, то пользователь
должен сам задать именно те характеристики, которые этот вентилятор имеет.
При задании характеристик необходимо руководствоваться данными фирмы-
производителя этого вентилятора.
Для вызова окна Fan (Вентилятор) выберите команду FloWorks | Insert | Fan
(FloWorks | Вставить | Вентилятор) (рис. 5.58).
Для задания вентилятора первоначально необходимо определиться с типом
вентилятора, который в COSMOSFIoWorks может быть одним из следующих:
♦ External Inlet Fan (Входной внешний вентилятор) — вентилятор подает
текучую среду в расчетную область;
360
Глава 5
Вентилятор
Тип вентилятора —
£>&Ф
ЬШш^^
Входная поверхность
(из вентилятора в текучую среду) —
Поверхности —
задания вентилятора
Фильтр —
Система координат —
Ось задания —
Дерево зависимостей
вентиляторов
Зависимость вентилятора
Создать/Редактировать
ш
jExternal Outlet Fan
jlnternal Fan
J&t' | Face Coordinate System
,*ФЙчШш&
В Pre-Defmed
В PAPST
В DC-Axial
Ш Series 255N
8 Series 400
B-405
63 412
Щ 412H
Ш 414
i}405"
■a
*$>
Создать —h*^ Г* Тт^Ш^М^^'/ , ;' IS'* -Л *4;'* ]
соответствующие цели *—^^^li—ь—^—^~^—^jl.^—i^—.^j
Рис. 5.58. Окно Fan
♦ External Outlet Fan (Выходной внешний вентилятор) — вентилятор
отбирает текучую среду из расчетной области;
♦ Internal Fan (Внутренний вентилятор) — вентилятор расположен внутри
расчетной области, так что одна из поверхностей модели рассматривается
как подающая текучую среду из вентилятора в расчетную область (Inlet), a
другая — как отбирающая текучую среду из расчетной области (Outlet),
(рис. 5.59).
Аэрогидродинамика и теплопередача
361
Рис. 5.59. Внутренний вентилятор в модели компьютера
Объемный расход текучей среды через внешние вентиляторы (External Inlet
Fan и External Outlet Fan) определяется разностью между внешним
давлением, заданным как Ambient pressure |§gj (Внешнее давление) в группе
Thermodynamics Parameters (Термодинамические параметры), и
статическим давлением текучей среды на поверхности вентилятора со стороны
расчетной области, определенным в процессе расчета течения и осредненным по
этой поверхности. Объемный расход текучей среды через внутренний
вентилятор (Internal Fan) определяется разностью между статическими
давлениями текучей среды на его входной и выходной поверхностях, рассчитанными
при решении задачи и осредненными по этим поверхностям.
Затем для вентилятора External Inlet Fan в группе Inlet (from Fan to Fluid)
(Вход (из вентилятора в расчетную область)), для вентилятора External
Outlet Fan в группе Outlet (from Fluid to Fan) (Выход (из расчетной области
в вентилятор)), а для вентилятора Internal Fan в обоих полях выбираются
поверхности модели, на которых эти вентиляторы будут заданы. При этом
также можно использовать имеющуюся в этих полях опцию Filter Faces.
362
Глава 5
( Примечание J
При задании Internal Fan (Внутренний вентилятор) необходимо помнить, что
Inlet (Входная поверхность) — это поверхность, через которую текучая среда
выходит из вентилятора, a Outlet (Выходная поверхность) — это поверхность,
через которую текучая среда входит в вентилятор.
Аналогично диалоговому окну Boundary Conditions, если предполагается
задание зависимости от координат, например потока с закруткой, то надо в
поле Coordinate System (Система координат) указать систему координат и
ось задания (Reference axis) как одну из осей этой системы координат. Если
выделенная поверхность модели плоская, то COSMOSFloWorks
автоматически указывает в систему координат, связанную с этой поверхностью, с
началом в центре поверхности и осью X по нормали к этой поверхности — Face
Coordinate system (Координатная система, привязанная к поверхности).
Вместо нее можно указать любую другую систему координат, в частности
Глобальную систему координат проекта (Global Coordinate System), которая
выбирается из Дерева анализа COSMOSFloWorks (COSMOSFloWorks
Analysis Tree) или автоматически выбирается при удалении из него другой системы
координат. (Для удаления системы координат выделите ее имя в поле
Coordinate System и нажмите клавишу <Delete>.)
Далее в группе Fan Curve (Зависимость вентилятора) из Инженерной базы
данных выбирается зависимость объемного (или массового) расхода
вентилятора от разницы статических давлений.
Расход является интегральной характеристикой вентилятора. А основными
локальными характеристиками вентилятора являются профили
составляющих скорости потока на входе и выходе вентилятора со стороны расчетной
области. Для вентилятора External Inlet Fan они задаются в группе Inlet
Flow Parameters (Параметры втекающего потока), для вентилятора External
Outlet Fan— в группе Outlet Flow Parameters (Параметры вытекающего
потока), а для вентилятора Internal Fan — в обоих этих полях. При этом
возможны следующие варианты задания этих профилей скорости:
♦ Normal to Face (По нормали к поверхности)— вектор скорости потока
перпендикулярен граничной поверхности и одинаков во всех ее точках;
♦ Swirl (Закрутка) — векторы скорости соответствуют заданной в окошке со
(Angular velocity) угловой скорости вращения потока вокруг
вышеупомянутой оси Reference axis (знак угловой скорости — по правилу буравчика
с учетом направления этой оси) и радиальной скорости потока, заданной в
окошке Vr (Radial velocity);
♦ 3D Vector (Трехмерные векторы)— векторы скорости задаются их
составляющими Vx, Vy, Vz в системе координат, указанной в поле
Coordinate System.
Аэрогидродинамика и теплопередача
363
Дополнительно на поверхностях втекания текучей среды из вентилятора в
расчетную область также задаются:
♦ в группе Thermodynamic Parameters (Термодинамические параметры) —
температура (Temperature) текучей среды. При задании внутренних
вентиляторов температура на выходе из вентилятора равна температуре на
его входе, если отмечена опция Use outlet temperature (Использовать
температуру потока втекающего в вентилятор). Если отключить эту
опцию, то температура потока, вытекающего из вентилятора в расчетную
область, будет равна заданной пользователем;
♦ в группе Substance concentration— концентрации компонентов
многокомпонентной текучей среды, как это описано выше в разд. "Окно
Boundary Condition (Граничное условие) " данной главы;
♦ в группе Turbulence Parameters— параметры турбулентности,
описанные выше в разд. "Окно Boundary Condition (Граничное условие)" данной
главы;
♦ в поле Humidity Parameters— относительную влажность газообразной
среды, как это описано выше в разд. "Окно Boundary Condition (Граничное
условие) " данной главы.
Окно Surface Source (Поверхностный источник)
Здесь вы задаете поверхностный тепловой источник на поверхности твердого
тела, соприкасающейся с текучей средой.
Для вызова окна Surface Source (Поверхностный источник) выберите
FloWorks | Insert | Surface Source (FloWorks | Вставить | Поверхностный
источник) (рис. 5.60).
Если теплопередача в твердых телах не рассматривается (опция Heat
conduction in solids (Теплопередача в твердых телах) выключена),
поверхностный тепловой источник может быть задан либо в виде Heat Transfer Rate
(Тепловая мощность, Вт, тепло, выделяемое в единицу времени всей данной
поверхностью в текучую среду), либо как Heat Flux (Удельный тепловой
поток, Вт/м2). Такой источник является тепловым граничным условием для
текучей среды вместо условия на стенках по умолчанию, заданному в окне
Wizard или General Settings. Положительные значения соответствуют
лотосу тепла от твердого тела к текучей среде, а отрицательные — от текучей
;реды к твердому телу.
^сли теплопередача в твердых телах рассматривается (опция Heat conduction
n solids (Теплопередача в твердых телах) включена), то поверхностный теп-
ювой источник может быть задан на любой поверхности твердого тела
(модели), либо в виде Heat Generation Rate (Мощность тепловыделения, Вт,
364
Глава 5
тепло, выделяемое в единицу времени всей выделенной поверхностью), либо
как Surface Heat Generation Rate (Удельная мощность поверхностного
тепловыделения, Вт/м2). Тепло от такого источника распространяется во все
стороны, в соответствии с законами теплопередачи в твердых телах и
теплообмена твердых тел с текучей средой. Даже если поверхность задания данного
источника тепла омывается текучей средой, теплообмен между текучей
средой и этой поверхностью будет определяться параметрами течения среды и
температурой стенки, зависящей от заданного теплового источника,
теплопередачи внутри стенки и теплообмена между текучей средой и стенкой. При
этом положительные значения соответствуют тепловыделению в твердом
теле, отрицательные значения указывают на поглощение тепла телом.
Поверхностный источник
щшш&шшшш
Определение —
Поверхности задания — jfjj
поверхностного источника Г Н;
Фильтр —
Система координат —[^ JGIobal Coordinate System
Ось задания — | * ' J fc^V^axfcf ]£ '"
Параметр—^
т
тттттштт
^
Значение параметра — | ф |gw
^УЦмшД
Создать —^ %r r^«te«ss«l*9d^^
соответствующие цели
Рис. 5.60. Окно Surface Source
Можно задать зависимость любой из вышеупомянутых характеристик
поверхностного теплового источника от времени, а локальных характеристик —
и от координат.
( Примечание )
Если часть поверхности, на которой задана тепловая мощность (Heat Transfer
Rate) или мощность тепловыделения (Heat Generation Rate), лежит вне
расчетной области (Computational Domain), то в данном проекте вместо заданной
будет использоваться величина, пропорциональная площади той части
поверхности, которая лежит в расчетной области.
Аэрогидродинамика и теплопередача
365
Окно Volume Source (Объемный источник)
С помощью этого диалогового окна задается объемный те 1Ловой источник в
любом выделенном объеме твердого тела или текучей среды. Это может быть
сделано только в случае учета теплопередачи в твердом теле, т. е.
включенной опции Heat conduction in solids (Теплопередача в твердых телах).
Объемный тепловой источник в твердом теле может быть задан в любой
детали (теле многотельной детали) модели. Чтобы задать объемный тепловой
источник в текучей среде, необходимо пространство, занятое этим
источником, представить в виде детали модели, а затем дезактивировать (Disable) эту
деталь в диалоговом окне Component Control (Управление деталями). В этом
случае COSMOSFloWorks будет рассматривать ее как объем текучей среды.
Для вызова окна Volume Source (Объемный источник) в основном меню
FloWorks выберите Insert | Volume Source (Вставить | Объемный источник)
(рис. 5.61).
Объемный источник
Определение
Детали для задания
данного объемного источника
Система координат
Ось задания
Параметр
Значение параметра
Создать соответствующие цели
Рис. 5.61. Окно Volume Source
Выделите нужную деталь в Дереве проектирования (FeatureManager tree)
или щелкнув на его поверхности, ребре или вершине в Графической области
SolidWorks. В результате имена выбранных деталей (тел) появляются в поле
Selection (Выбор) в списке Components to Apply the Volume Source (Детали
для задания данного объемного источника). Чтобы убрать деталь (тело) из
списка, отметьте его в списке и нажмите клавишу <Delete>.
&ФУ
,Чу ^MiyVM^wA^^^i^^<^^}^iSy^^M^^%^i^^ Щ
i-i<3€nciosure Assembly
\ J&x I Global Coordinate System
366
Глава 5
Объемный тепловой источник может быть задан одним из следующих
параметров: Temperature (Температура), Heat generation rate (Мощность
тепловыделения, Вт, тепло, выделенное в данном объеме за единицу времени) или
Volumetric heat generation rate (Удельная мощность объемного
тепловыделения, Вт/м3). При этом положительные значения последних двух параметров
соответствуют выделению тепла в объеме, а отрицательные — поглощению
тепла в объеме.
( Примечание )
Если часть тела, в котором задана мощность тепловыделения (Heat Generation
Rate), лежит вне расчетной области (Computational Domain), то вместо
заданной будет использоваться величина, пропорциональная объему той части тела,
которая лежит в расчетной области.
Окно Radiative Surface
(Поверхность радиационного теплообмена)
Если рассчитывается теплопередача в твердых телах, причем с учетом
радиационного теплообмена (опция Radiation (Радиационный теплообмен)
включена), то в данном диалоговом окне можно задать радиационные свойства
контактирующей с текучей средой выбранной поверхности, отличающиеся от
заданных по умолчанию в Wizard или General Settings. Если в задаче
необходимо учесть поступление лучистого тепла в расчетную область через
проточную границу (Opening), то это также можно сделать с помощью данного
окна.
Для вызова окна Radiative Surface (Поверхность радиационного
теплообмена) выберите команду Flo Works | Insert | Radiative Surface (FloWorks |
Вставить | Поверхность радиационного теплообмена) (рис. 5.62).
Радиационные свойства поверхностей (тип поверхности — стенка,
излучающее отверстие, и др. — и степень черноты) задаются в Инженерной базе
данных. Для задания радиационных свойств той или иной поверхности
необходимо выделить поверхность и, нажав кнопку Browse (Просмотреть), выбрать
нужную поверхность (Radiative surfaces) из Инженерной базы данных.
Подробную информацию о типах радиационных поверхностей см. в разд. 5.5.4.
Если необходимо задать поступление радиационного тепла в расчетную
область через поверхность, на которой задано проточное граничное условие, то
нужно выбрать тип радиационной поверхности Blackbody opening/outer
boundary (Абсолютно черные отверстие или внешняя граница) и задать
Radiative temperature (Температура излучения) Т, необходимую для
расчета лучистого теплового потока Q = sgT4, излучаемого данной абсолютно
черной (т. е. 8 = 1) поверхностью внутрь расчетной области.
Аэрогидродинамика и теплопередача
367
Поверхность радиационного
теплообмена
Поверхности задания
радиационных свойств
Фильтр —
Дерево поверхностей
радиационного теплообмена
Ь Pre-Defined
Absorbent wall
G Real Surfaces
Alumina
■-• Aluminum, commercial sheet
: .щвшвпшвшт
l- Aluminum, polished
• Aluminum, rough
1 •• Asbestos
t\ ,;•,." ~_ I
J
Поверхность радиационного — [ [Aluminum, highly oxidized
теплообмена I r w ^ „«,
Создать/Редактировать —\ ——\ Crcate/£diU>
Создать соответствующие цели -
^^,Ш*$!ь£ш&шш1ш№&
7Г* Creste assocjafce^l goals
Рис. 5.62. Окно Radiative Surface
Можно также задать направленное излучение с поверхности. Для этого
необходимо выбрать тип поверхности Solar opening (Поверхность солнечного
излучения) и задать составляющие вектора направления Direction X, Y, Z
(Направление X, Y, Z) и интенсивность Intensity (Интенсивность) теплового
потока, излучаемого этой поверхностью внутрь расчетной области.
( Примечание ^
Если поверхность радиационного теплообмена является поверхностью тепло-
изолятора (материал с нулевой теплопроводностью, называемый в COSMOS-
FloWorks insulator), то, вне зависимости от типа радиационной поверхности,
задаваемого пользователем, COSMOSFIoWorks всегда будет считать такую
поверхность абсолютно белой стенкой (whitebody wall).
Окно Solid Material (Задание материала)
Если решается сопряженная задача теплообмена, то в этом окне для
выбранного компонента сборки (или тела многотельной детали) можно задать
материал, отличающийся от используемого для всех твердых тел данного проекта
368
Глава 5
по умолчанию в соответствии с установками Wizard (Мастер проектов) или
General Settings (Общие установки).
Для вызова окна Solid Material (Задание материала) выберите команду
FloWorks | Insert | Solid Material (FloWorks | Вставить | Задание материала)
(рис. 5.63).
Задание материала
Компоненты, которым ■
задается материал
•~**S >ч«4* ■****#
Дерево материалов •
Copper
Glass
Gold
Insulator
• Iron
PCB12-layer
PCB 4-layer
PCB 8-layer
Polystyrene
Выбранный материал — j (Silicon
Создать/Редактировать —{
Zl |
-_« Create/EdiL., I
Рис. 5.63. Окно Solid Material
Для задания материала твердого тела выберите нужные детали (тела), в
Дереве проектирования FeatureManager или в Графической области SolidWorks.
Далее в группе Solid (Твердое вещество) выберите нужный материал из
Инженерной базы данных, или, если нужный материал отсутствует, нажмите
кнопку Create/Edit (Создать/Редактировать) и создайте новый или
отредактируйте имеющийся материал.
Примечание ~"^
С помощью диалогового окна Solid Material материалы деталей модели
выбираются из числа заданных в Инженерной базе данных (Engineering Database),
входящей в состав COSMOSFIoWorks. Эти материалы никак не связаны с
материалами модели, заданными в SolidWorks. Однако при необходимости в
COSMOSFIoWorks можно использовать материалы модели, заданные в SolidWorks.
Для этого в основном меню FloWorks выберите команду Tools | Insert Material
Аэрогидродинамика и теплопередача
369
Insert Material from Model и затем в появившемся окне Insert Material from
Model отметьте в колонке Insert (Вставить) те материалы деталей SolidWorks,
которые будут использоваться в COSMOSFIoWorks. При выборе этих
материалов проверьте, чтобы у них в SolidWorks были заданы плотность, удельная
теплоемкость и теплопроводность. Если эти свойства материала в SolidWorks не
заданы, то эти свойства можно задать в Engineering Database, т. к. после
задания материалов из SolidWorks все отсутствующие в Инженерной базе данных
материалы заносятся в нее. Не забудьте только после их задания заменить
присваиваемый детали материал из SolidWorks на этот же материал из
Engineering Database, — для этого щелкните правой кнопкой соответствующую
иконку выбранного из SolidWorks материала в Дереве анализа, выберите Edit
Definition (Редактировать задание) и замените материал.
( Совет )
Во избежание некорректного перетекания тепла через необходимые для
расчета внутренних течений вспомогательные крышки на отверстиях модели, лучше
всего выполнить их в виде отдельных деталей и задать для них материал с
нулевой теплопроводностью (insulator).
Окно Porous Medium (Пористая среда)
Диалоговое окно Porous Medium (Пористая среда) позволяет задать деталь
(или тело многотельной детали) как пористое тело. Пористый материал для
этого тела берется из Инженерной базы данных (Engineering Database).
Поэтому, перед тем как задавать пористое тело, откройте Инженерную базу
данных (Engineering Database) и задайте там пористый материал, который
собираетесь использовать для пористого тела.
Деталь, задающая пористое тело, должна быть отключена (disabled в
диалоговом окне Component Control), т. е. интерпретироваться как объем,
заполненный текучей средой. Поэтому внесение детали в список пористых тел в
диалоговом окне Porous Medium (Пористая среда) автоматически отключает
эту деталь, на что указывает всегда включенная опция Disable solid
component (Отключить компоненты). Учтите, что удаление пористого тела из
проекта не приводит к автоматическому обратному включению детали, в
которой это тело было задано.
Для вызова окна Porous Medium (Пористая среда) выберите команду
FloWorks | Insert | Porous Medium (FloWorks | Вставить | Пористая среда)
(рис. 5.64).
Если выбранный вами пористый материал имеет анизотропную
проницаемость— Unidirectional (Однонаправленная), Axisymmetrical (Осесиммет-
ричная), Orthotropic (Ортотропная), — то в группе Direction (Направление)
задается система координат и направление проницаемости для привязки
свойств пористого материала к данному телу.
370
Глава 5
Пористая среда
Компоненты, которым
задается среда
Отключить компоненты
&&Ф
Дерево пористых материалов'
Выбранный пористый -
материал
Создать/Редактировать ■
Направление •
3 Pfe-Defmed
Isotropic
Screen Material
X User Defined
] Unidirectional
3
[_ Create/Edit...
Направление — ^^AmmmMM^bmujm^mmmMMmmm^
Система координат/кривая —
J* 1 Global Coordinate System
DfcectiffTi
~3
Рис. 5.64. Окно Porous Medium
Для анизотропных пористых тел с типом проницаемости Unidirectional
(Однонаправленная) или Axisymmetrical (Осесимметричная) направление
проницаемости задается одним из двух способов:
♦ выберите координатную систему (Coordinate system) и одну из ее осей —
направление проницаемости (Direction) совпадает с осью выбранной
системы координат (Coordinate system). По умолчанию используется Global
Coordinate System (Глобальная система координат проекта). При желании
вместо нее можно выбрать любую справочную систему координат,
выделив ее в Дереве проектирования (FeatureManager tree);
♦ выберите справочную кривую — в каждой точке пористого тела
направление проницаемости определяется по касательной к кривой (Curve).
Чтобы выбрать кривую, щелкните ее в Дереве проектирования
(FeatureManager tree).
Для анизотропных пористых тел с типом проницаемости Orthotropic (Орто-
тропная) проницаемость задается тремя взаимно перпендикулярными
направлениями, соответствующими осям выбранной системы координат
(Coordinate system).
Аэрогидродинамике и теплопередача
371
( Примечание ^
В COSMOSFIoWorks имеется ограничение на величину сопротивления
пористого материала: /с < 100 V/x, где V— скорость течения, х — максимальный размер
ячейки расчетной сетки в пористом теле, /с — проницаемость, задаваемая как
свойство пористой среды в Инженерной базе данных. Если /с превышает эту
величину, то можно получить неверное решение. Для уменьшения /с
рекомендуется уменьшить х за счет задания более мелкой расчетной сетки в пористом
теле, особенно на его границе с областью, заполненной текучей средой.
Окно Radiation Transparent Bodies
(Прозрачные для излучения тела)
Если в проекте включена опция Radiation (Радиационный теплообмен), то
окно Radiation Transparent Bodies (Прозрачные для излучения тела)
позволяет задать выделенные детали (или тела многотельной детали) модели
прозрачными для радиационного теплообмена, см. разд. 5.5.4, подразд. "Тела,
прозрачные для теплового излучения".
Для вызова окна Radiation transparent bodies (Прозрачные для излучения
тела) выберите FloWorks | Radiation transparent bodies (FloWorks |
Прозрачные для излучения тела).
Выделите в списке нужные детали (тела) и нажмите Transparent
(Прозрачный). Если детали, указанные таким образом как прозрачные для теплового
излучения, необходимо опять сделать непрозрачными для теплового
излучения, выделите их и нажмите кнопку Opaque (Непрозрачный) (рис. 5.65).
Прозрачные для
излучения тела
Компоненты —
ШШ1ШШ^ШШ^Ш111^^^ЯВ
I gorrrponentsr
<ч$ В all Valve
Ht % L.d<2>
t ^еш
<t; ЧЬ Handle<1>
&' ^ Ball<i>
£ % Side<2>
j* ^ Side<1>
| OK |
[ gpaque J
[ AllOgaque j j
|^Т/ап7рагепу j
[All Transpatenjj
I. Cancel j
I. НФ . j
-Непрозрачный
-Все непрозрачные
-Прозрачный
-Все прозрачные
Рис. 5.65. Окно Radiation Transparent Bodies
372
Глава 5
Окно Contact Resistance
(Контактное тепловое сопротивление)
Если рассчитывается теплопередача в твердых телах (опция Heat conduction
in solids (Теплопередача в твердых телах) включена), то с помощью окна
Contact Resistance (Контактное сопротивление) можно задать контактное
тепловое сопротивление между телами. Контактное тепловое сопротивление
задается коэффициентом контактной теплопроводности или толщиной и
материалом контактного слоя. В последнем случае тепловое сопротивление
контактного слоя рассчитывается по следующей формуле:
где dc — толщина слоя, Яс — теплопроводность материала слоя.
Для вызова окна Contact Resistance (Контактное тепловое сопротивление)
выберите команду Flo Works | Insert | Contact Resistance (FloWorks |
Вставить | Контактное тепловое сопротивление) (рис. 5.66).
Контактное тепловое
. сопротивление
Поверхности для задания —
контактного теплового
сопротивления
Фильтр —
Тип контактного теплового —
сопротивления
-^^Wxd)
1^^^шШ^шттшм^ш^,^тмттш^Ы
(* Conductance
С Mstenal/tNckness
Дерево коэффициентов •
контактного сопротивления
Коэффициент контактного
сопротивления
Создать/Редактировать
\
—
ШШШшШШШшм^шШтшттшш^
Гв Pre-Defined ]£
| 304 Stainless, ground, air /.
[^^^■4lb Stainless, mound an ^^^K
1 I ;• 416Stainless, ground, with 0.001 -in brass si*'
1 Aluminium, ground, air (Roughness 0,25 mic
I Aluminium, ground, air (Roughness 2,54 mic
1 . . Aluminium, ground, with 0 001-in brass shim,
I : • Copper, ground, air
I Copper, milled, air *
и I • : :.:..- :.Л..ьА >fr
J416 Stainless, ground, air j£
i . '%
[ Create/bdit,., j
.
Рис. 5.66. Окно Contact Resistance
Аэрогидродинамика и теплопередача
373
Для задания контактного теплового сопротивления выделите поверхности
между твердыми телами, на которых будет задано данное сопротивление.
Названия этих поверхностей появляются в группе Selection (Выбор) в списке
Faces to Apply the Contact Resistance (Поверхности для задания контактного
теплового сопротивления). Дая исключения поверхности из списка выделите
ее имя в списке и нажмите клавишу <Delete>.
Задайте величину теплового сопротивления одним из следующих способов:
♦ Conductance (Проводимость)— коэффициент контактного теплового
сопротивления (м2-°С/Вт) выбирается из Инженерной базы данных
(Engineering Database);
♦ Material/thickness (Материал/толщина) — коэффициент контактного
теплового сопротивления рассчитывается через выбранный твердый материал
Solid Material (Материал твердого тела) и заданную толщину Thickness
(Толщина).
Заданная толщина материала используется только для расчета значения
коэффициента контактного теплового сопротивления (Re). В результате
температура имеет разрыв на этом слое, аналогично тому, как на контактном
тепловом сопротивлении.
Окно Thermoelectric Cooler
(Термоэлектрический элемент Пельтье)
В реальности термоэлектрический элемент Пельтье (Thermoelectric Cooler,
ТЕС) состоит из двух пластинок, соединенных между собой большим числом
полупроводников с р-n переходом.
В зависимости от полярности подключения элемента Пельтье к источнику
постоянного тока, такой элемент "перекачивает" тепло с одной из этих
пластин ("холодной") на другую ("горячую"). При этом на каждой из этих
пластин выделяется также джоулево тепло, и часть "перекачанного" тепла
возвращается обратно на "холодную" пластину за счет теплопроводности
полупроводников, в результате величина тепла, снятого с "холодной" пластины,
составляет:
Qc=aiTc-Ri2/2-kAT,
где /— сила тока, a— коэффициент Зеебека, Тс — температура "холодной"
пластины, R— электрическое сопротивление элемента Пельтье, к—
коэффициент теплопроводности элемента Пельтье, ДГ= Th - Тс , Th— температура
"горячей" пластины. Таким образом a-i-Tc — тепло, "перекачанное" с
"холодной" пластины на "горячую" за счет эффекта Пельтье, R-i212 —
количество тепла, выделившегося на каждой из пластин из-за эффекта Джоуля,
374
Глава 5
к-AT —тепло, вернувшееся обратно с "горячей" пластины на "холодную" за
счет теплопроводности. Соответственно, величина тепла, выделившегося на
"горячей" пластине, составляет
Qh=aiTh+Ri2/2-k-AT.
В COSMOSFIoWorks элемент Пельтье задается в модели телом в форме
параллелепипеда или призмы с указанием, какая из ее поверхностей является
"горячей" и свойства какого из имеющихся в Инженерной базе данных
(Engineering Database) элементов Пельтье он будет иметь. В Инженерной
базе данных (Engineering Database) задаются следующие характеристики
элемента Пельтье:
♦ максимальная сила постоянного тока, /тах;
♦ максимальное количество тепла gmax, которое при /тах передается от
"холодной" поверхности теплообменника к "горячей" при нулевой разнице
температур между этими поверхностями;
♦ максимальная разница температур АГтах между "горячей" и "холодной"
поверхностями теплообменника при отсутствии теплоподвода к
"холодной" поверхности;
♦ соответствующее /тах напряжение Fmax.
Эти характеристики задаются при двух разных значениях температуры
"горячей" поверхности теплообменника— такие данные обычно сообщаются
изготовителями элементов Пельтье.
( Примечание ^
Температура внутри теплообменника, а также температуры его "холодной" и
"горячей" поверхностей рассчитываются в COSMOSFIoworks с помощью
специальной процедуры, отличающейся от использующейся процедуры расчета
теплопередачи в твердых телах. Поэтому тело элемента Пельтье, за исключением
его "холодной" и "горячей" поверхностей, визуализируется в постпроцессоре
как теплоизолятор.
Для вызова окна Thermoelectric Cooler (Термоэлектрический элемент
Пельтье) выберите команду FloWorks | Insert | Thermoelectric Cooler
(FloWorks | Вставить | Термоэлектрический элемент Пельтье) (рис. 5.67).
Для задания элемента Пельтье необходимо сначала в Графическом окне или в
Дереве проектирования FeatureManager выбрать деталь (тело) модели,
которая будет моделировать термоэлектрический элемент (Component to Apply
the Cooler). Далее нужно выделить "горячую" поверхность (Hot Face) этой
детали, соответственно, другая рассматривается как "холодная". Затем в поле
Current (Сила тока) необходимо задать силу тока, подаваемого на элемент, и
Аэрогидродинамика и теплопередача
375
выбрать характеристики термоэлектрического элемента из дерева элементов
Пельтье, доступных в Инженерной базе данных.
Для моделирования "перекачки" тепла, на "горячей" и "холодной"
поверхностях тела COSMOSFloWorks автоматически выставляет на этих поверхностях
нужные граничные тепловые условия, соответственно какие-либо другие
граничные условия на этих поверхностях задавать нельзя. Естественно, эти
поверхности должны быть разрешены расчетной сеткой.
Элемент Пельтье
Компонент и
"горячая" поверхность—
Компонент для задания—
элемента Пельтье
"Горячая" поверхность—
Параметры—
Сила тока—
Дерево элементов Пельтье—
&М)3)
Элемент Пельтье—
Создать/Редактировать—
Al jIAmp
В Pre-Defmed
тмтятя
•■•• Single Stage ТЕС
(+] User Defined
| Multistage TEC
Creat^Ecfct.^
"iil£
Рис. 5.67. Окно Thermoelectric Cooler
Чтобы алгоритм моделирования элемента Пельтье функционировал,
необходимо, чтобы как "холодная", так и "горячая" поверхности элемента
контактировали не с текучей средой проекта, а с другим твердым телом. Кроме того,
нужно, чтобы Ти и AT не выходили из диапазона функционирования
элемента, указанного фирмой-производителем элемента.
Окно Heat Sink Simulation
(Интегральное моделирование теплообменника)
Опция Heat sink simulation (Интегральное моделирование теплообменника)
позволяет интегрально моделировать теплообменник (газ/твердое тело)
любой сложной формы, задав его как параллелепипед. Это удобно при расчете
13 3ак. 4405
376
Глава 5
течений с теплообменом в электронных устройствах с большим количеством
деталей. Заменяя теплообменник сложной формы простым
параллелепипедом, можно сократить время решения таких задач.
Интегральная модель теплообменника объединяет в себе три устройства —
теплообменник, вентилятор, установленный на одной из его граней, и
источник тепла, установленный на противоположной от вентилятора грани
(рис. 5.68).
Рис. 5.68. Система вентилятор-теплообменник-нагревательный элемент заменяется телом
с интегральными характеристиками этой системы
В COSMOSFIoWorks такая модель задается как параллелепипед, через одну
из граней которого текучая среда втекает (Faces Fluid Enters the Heat Sink
(Поверхности, через которые среда втекает в теплообменник)), а через
другие — вытекает (Faces Fluid Exits the Heat Sink (Поверхности, через которые
среда вытекает из теплообменника)). При этом считается, что внутри этого
параллелепипеда в текучую среду выделяется тепло заданной мощности Heat
generation rate (Мощность тепловыделения). Поскольку полагается, что
текучая среда к теплообменнику подается вентилятором, то для такого
интегрального моделирования теплообменника необходимо задать параметры
вентилятора (Fan curve), а также гидравлическое (Pressure drop) и тепловое
сопротивления теплообменника (Thermal resistance) в виде зависимостей от
скорости течения среды через теплообменник (Heat Sink (Теплообменник))
(рис. 5.69):
♦ Pressure drop — перепад давления (P0i - Р02= fp(V)), где P0i полное
давление среды на выходе из вентилятора, т. е. на входе в теплообменник, Ро2 —
полное давление среды на выходе из теплообменника, т. е. на выходных
поверхностях интегрального теплообменника;
♦ Thermal resistance— тепловое сопротивления теплообменника ((Тт-
T|)/W), где Тт— температура теплообменника, Т] — температура среды
Аэрогидродинамика и теплопередача
377
на входе в интегральный теплообменник, W — мощность теплового
источника (Вт).
Интегральная модель
теплообменника
Компоненты для задания-
интегральной
модели теплообменника
Поверхности, через которые среда-
втекает в теплообменник
Поверхности, через которые среда-
вытекает из теплообменника
ФФФ
штАшШш^^тммА^,^ж^тШ^
Ф
Дерево зависимостей-
вентилятора
Зависимость вентилятора-
Создать/Редактировать-
;Face<l>@Power Supply-1
1
|Face<2><§>Power Supply-1
Face<3>@Power Supply-1
^&&ёйй&а^^
Pre-Defmed
S PAPST
P DC-Axial
. Ш Series 255N
В Series 400
R 405
ЕШ
,T. 412
!£ 412H
FE 414
Дерево теплообменников —
Теплообменник —
Создать/Редактировать —
Источник —
Мощность тепловыделения —
jHeatSink-l
Г
| Cr*3te/E<SkM
О [5\Г
Рис. 5.69. Окно Heat Sink Simulation
Для вызова окна Heat Sink Simulation (Интегральное моделирование
теплообменника) выберите команду FloWorks | Insert | Heat Sink Simulation
(FloWorks | Вставить | Интегральное моделирование теплообменника).
378
Глава 5
Окно Fluid Subdomain (Подобласть текучей среды)
В COSMOSFIoWorks возможен расчет течения текучих сред разного типа,
например, воздуха (тип газ) и воды (тип жидкость), в одном проекте. При
этом разнотипные текучие среды не должны перемешиваться, т. е. объемы, в
которых они протекают, должны быть отделены друг от друга твердым
материалом. Очевидно, что если теплопередача в твердых телах не
рассчитывается, то течение в одном объеме никак не влияет на течение в другом. В этом
случае, если расчет требует значительных ресурсов компьютера, замкнутые
подобласти разумнее считать по отдельности, в разных проектах. Если же
теплопередача в твердых телах рассчитывается, то разделять задачу на два
проекта, в общем случае, не корректно, т. к. замкнутые объемы с текучей
средой влияют друг на друга посредством теплопередачи в твердых телах их
разделяющих.
В диалоговом окне Fluid Subdomain (Подобласть текучей среды) задается
подобласть текучей среды как одна из замкнутых полостей модели, тип и
компоненты текучей среды, протекающей в этой подобласти.
Для вызова окна Fluid Subdomain (Подобласть текучей среды) выберите
команду FloWorks | Insert | Fluid Subdomain (FloWorks | Вставить |
Подобласть текучей среды) (рис. 5.70).
Для определения подобласти текучей среды достаточно выделить одну из
ограничивающих ее поверхностей. Это может стенка модели или
поверхность, определяющая отверстие (opening), но область должна быть
замкнутой, т. е. со всех сторон ограниченной поверхностями модели. Выделенная
поверхность попадает в список Faces to Apply the Fluid Subdomain
(Поверхности для задания подобласти текучей среды).
Далее в группе Fluids (Текучие среды) необходимо выбрать тип текучей
среды для данной подобласти и текучую среду (или несколько текучих сред,
если в подобласти протекает многокомпонентная смесь) этого типа. Все
текучие среды, рассматривающиеся в задаче, должны быть заранее добавлены в
список текучих сред проекта в окне Wizard (Мастер проектов) или General
settings (Общие установки). Текучие среды, не добавленные в проект, будут
не доступны для выбора в окне Fluid Subdomain, но вы можете добавить их,
не выходя из окна Fluid Subdomain, щелкнув кнопку Add (Добавить).
В группах Flow Parameters (Параметры потока) и Thermodynamic
parameters (Термодинамические параметры), Turbulence Parameters (Параметры
турбулентности) задаются начальные условия в выделенной подобласти.
Кроме того, для выбранной подобласти вы можете задать характеристики
потока (Flow Characteristics), такие как тип течения (ламинарный или
турбулентный), расчет кавитации (для жидкостей), влажность (для газов).
Аэрогидродинамика и теплопередача
379
Подобласть текучей среды
Определение ■
Поверхности для -
задания подобласти
текучей среды
Система координат -
Ось задания •
Текучие среды -
Тип текучей среды -
Компоненты текучей среды —
Добавить компонент
текучей среды
Параметры потока
Термодинамические
параметры
Параметры турбулентности —
Характеристики потока —
&ФЗ)
!Ю&*юа^
J\ (Global Coordinate System
Reference axs:
■3
P J101325 Pa
T 1500 К
Щ
Рис. 5.70. Окно Fluid Subdomain
Задание Rotating Region (Область вращения)
Если в задаче есть вращающиеся тела, то течение в такой задаче можно
рассчитать путем задания локальной области вращения, где расчет будет
осуществляться во вращающейся системе координат, в которой эти тела
неподвижны. Задание локальной области вращения осуществляется в окне Rotating
380
Глава 5
Region (Область вращения), которое становится доступным, если в
диалоговом окне Wizard (Мастер проекта) или General Settings (Общие установки)
включена опция Rotation (Вращение) и выбран тип вращения Local Regions
(Локальные области). Подробно опция Rotation рассмотрена б разд. 5.5.4.
Для вызова окна Rotating Region (Область вращения) выберите команду
FloWorks | Insert | Rotating Region (FloWorks | Вставить | Область вращения)
(рис. 5.71).
Rotate Kegion
Область вращения
Компоненты задания области вращения —
Параметр —
Угловая скорость —
Рис. 5.71. Окно Rotating Region
Чтобы задать локальную область вращения, необходимо создать деталь,
представляющую эту область (рис. 5.72).
Вращающееся Задание области
тело „ вращения
Компонент для задания г
области вращения
Рис. 5.72. Использование вспомогательного компонента
для задания вращающихся тел
Ниже приведены требования к заданию детали, определяющей область
вращения:
♦ деталь должна полностью покрывать вращающуюся деталь;
♦ деталь должна быть телом вращения и иметь ту же самую ось вращения,
что вращающееся тело;
Аэрогидродинамика и теплопередача
381
♦ границы пересечения этой детали и твердых тел должны быть также осе-
симметричны;
♦ тела, задающие разные области вращения, не должны пересекаться.
Кроме того, если у вращающегося компонента существует осесимметричный
статор (например, цилиндрический кожух вентилятора), то крайне
рекомендуется задавать границу вращающегося региона так, чтобы она проходила
внутри твердого тела статора. При этом на статор придется поставить
граничное условие Stator (задается в окне Boundary Condition), т. к. в
противном случае поверхность неподвижного статора (поверхность кожуха
вентилятора) будет "вращаться" вместе с ротором (вентилятором), поскольку
попадает внутрь области вращения (локальной вращающейся системы координат).
Если же статор не осесимметричный (например, улитка насоса), то проводить
границу вращающегося региона можно только между лопастями ротора и
статором (чтобы обеспечить требование осесимметричности границы
пересечения вращающегося региона с твердым телом). В этом случае необходимо
"положить" как минимум 4 ячейки на минимальный зазор между ротором и
статором (рис. 5.73).
Граница области Граница области
вращения задана в теле вращения задана в зазоре
Граница области вращения
Рис. 5.73. В случае осесимметричного статора рекомендуется проводить границу
вращающегося региона в твердом теле (слева), задавая границу твердого тела как статор
После создания детали, представляющей область вращения, откройте
диалоговое окно Rotating Region и выберите эту деталь в Графической области
или в Дереве проектирования FeatureManager.
Как и в случае пористых сред, деталь, задающая область вращения, должна
быть отключена (disabled в диалоговом окне Component Control), т. е.
интерпретироваться как объем, заполненный текучей средой. Поэтому при
создании Rotating Region деталь будет автоматически отключена. Учтите, что
удаление вращающейся области из проекта не приводит к автоматическому
обратному включению детали, в которой эта область была задана.
382
Глава 5
Наконец, задайте значения угловой скорости Д (Angular Velocity) вращения
детали. Знак вводимого значения угловой скорости влияет на направление
вращения.
Задание Transferred Boundary Conditions
(Перенесенные граничные условия)
Опция Transferred Boundary Conditions (Перенесенные граничные условия)
позволяет в качестве граничных условий использовать результаты расчета,
полученные ранее в данном или каком-либо другом проекте. Единственное
ограничение на используемые проекты: как текущий проект, так и проект,
результаты которого используются в качестве граничных условий, должны
иметь одну и ту же Global Coordinate System (Глобальную систему
координат).
Для вызова мастера Transferred Boundary Conditions (Перенесенные
граничные условия) выберите команду FloWorks | Insert | Transferred
Boundary Conditions (FloWorks | Вставить | Перенесенные граничные
условия). Далее мастер задания шаг за шагом проведет вас через задание
перенесенных граничных условий.
Шаг 1 — Selecting Boundaries (Выбор границ)
Здесь указываются границы текущего проекта, на которых будут заданы
граничные условия, перенесенные из другого проекта. В качестве них можно
выбрать границы расчетной области (Computational domain boundaries),
т.е. Xmax, ... Zmin, или поверхности модели (например, для задания
граничного условия на отверстии выделяется поверхность крышки его
закрывающего), выбрав последние в графическом окне.
( Примечание ^
Необходимо, чтобы хотя бы часть расчетной области лежала в текучей среде.
Шаг 2 — Selecting Results to Transfer
(Выбор переносимых результатов)
Здесь указывается проект, результаты которого будут использоваться в
качестве граничных условий:
♦ COSMOSFloWorks project (Проект COSMOSFloWorks) — позволяет
выбрать проект одной из открытых моделей;
♦ Results file (*.fld) (Файл с результатами) — результаты расчета хранятся в
папке проекта в файле с расширением fid. Если модель с нужным
проектом не открыта, вы можете использовать ее результаты в качестве
граничных условий, указав местоположение файла результатов.
Аэрогидродинамика и теплопередача
383
Шаг 3 — Specifying Type of Condition
(Задание типа граничного условия)
На последнем шаге задается тип перенесенного граничного условия, т. е.
набор физических параметров, значения которых будут использованы в
качестве граничного условия. Из списка Boundary condition type (Вид граничного
условия) можно выбрать один из следующих типов граничных условий:
♦ Ambient (Внешний поток) — те же параметры, которые задаются в
качестве граничного условия невозмущенного потока на границах расчетной
области при решении внешних (external) задач. Во время расчета это
условие используется точно так же, как условие невозмущенного потока для
внешних задач;
♦ Impulse (Импульс) — температура, плотность, концентрации компонентов
текучей среды, параметры турбулентности, импульс текучей среды (как и
скорость, импульс — векторная величина);
♦ Velocity (Скорость)— скорость, температура, плотность, концентрации
компонентов текучей среды, параметры турбулентности;
♦ Static Pressure (Статическое давление) — те же параметры, которые
задаются в качестве граничного условия Pressure openings (Отверстия с
заданным давлением) при указании типа этого граничного условия Static
Pressure (Статическое давление): статическое давление, температура,
концентрации компонентов текучей среды и параметры турбулентности;
♦ Total Pressure (Полное давление) — те же параметры, которые задаются в
качестве граничного условия Pressure openings (Отверстия с заданным
давлением) при указании типа этого граничного условия Total Pressure
(Полное давление): полное давление, температура, концентрации
компонентов текучей среды и параметры турбулентности.
Независимо от того, какой тип граничного условия из перечисленных
выбран, если в текущем проекте и в проекте, результаты которого используются
в качестве граничных условий, включена опция Heat conduction in solids
(Теплопередача в твердых телах), то там, где перенесенная граница попадает
в твердое тело, в качестве граничного условия будет задана температура
твердого тела. При этом удельный тепловой поток из одного проекта в
другой не переносится, а получается в результате расчета теплопередачи в
текущем проекте, при этом никаких ограничений на его значение не
накладывается.
При определении границ расчетной области, на которых будут заданы
перенесенные граничные условия, следует иметь в виду:
♦ распределение параметров потока и параметров состояния твердого тела
на этих границах, взятое из посчитанного расчета, должно быть
монотонным насколько возможно;
384
Глава 5
♦ границы расчетной области не должны быть расположены слишком
близко к телу;
♦ граничные условия, перенесенные или заданные на границах расчетной
области, должны соответствовать постановке задачи. Например, если в
решаемой задаче материнская плата выполнена из теплопроводящего
материала, то будет некорректно размещать границу расчетной области
внутри материнской платы, т. к. это приведет к неправильному
определению теплового потока, отводимого от чипа через материнскую плату.
5.5.6. Постановка целей проекта
Стационарные задачи, т. е. задачи, решение которых не зависит от времени,
решаются в COSMOSFIoWorks как нестационарные. Для этого проводятся
итерации по времени до тех пор, пока не будет получено установившееся,
т. е. не меняющееся во времени, решение задачи. Чтобы определить,
достигнуто ли установившееся решение или нет, и вовремя остановить расчет,
необходимо иметь соответствующий критерий.
В COSMOSFIoWorks имеются внутренние критерии для принятия решения
о завершении расчета, но пользователю лучше самому задать такие критерии,
называемые в COSMOSFIoWorks Goals (Цели). В качестве целей можно
задавать любые физические параметры, представляющие для вас интерес в
данном проекте.
Близкое к стационарному поведение целей в процессе расчета будет являться
в этом случае критерием завершения расчета, т. е. достижения
установившегося с инженерной точки зрения решения задачи. Задание целей, возможно,
не только снизит погрешности расчета интересующих вас параметров, но
также в большинстве случаев позволит раньше остановить расчет, т. е.
сократить время счета. Вы можете наблюдать поведение целей в процессе расчета
и остановить расчет досрочно, если решите, что нет необходимости его
продолжать.
При анализе сходимости цели вычисляется дисперсия этой цели — разница
между ее максимальным и минимальным значениями на отсчитываемом от
последней выполненной итерации интервале анализа (analysis interval),
которая сравнивается с критериальной (определяющей завершение расчета)
дисперсией этой цели, заданной вручную или автоматически. Наряду с
критерием сходимости целей есть и другие критерии завершения расчета, например,
выполнение заданного числа итераций, единицей измерения количества
которых является так называемая travel (продувка), длина которой в итерациях
определяется автоматически, так что, в зависимости от установок, расчет
может завершиться после выполнения заданного числа продувок, хотя сходи-
Аэрогидродинамика и теплопередача
385
мость целей еще не достигнута, или, наоборот, может завершиться сразу по
достижении сходимости целей до выполнения заданного числа итераций.
Для каждой из заданных целей можно указать, использовать ли ее в качестве
критерия завершения расчета. Если выбрана опция Use the goal for
convergence control (Использовать цель для завершения расчета), то цель
используется в качестве критерия завершения расчета по сходимости целей
(Goal Convergence Criteria). Если цель не используется как критерий
завершения расчета, то ее поведение не влияет на выбор момента завершения
расчета, так что расчет может быть завершен до сходимости данной цели. Такие
цели используются только для информации (for information only).
Вы можете задать Goals (Цели) следующих четырех типов:
♦ Global goal (Глобальная цель)— это физический параметр,
рассчитываемый для всей расчетной области. Для задания глобальной цели выберите
команду FloWorks | Insert | Global Goal (FloWorks | Вставить | Глобальная
цель);
♦ Surface goal (Поверхностная цель) — это физический параметр,
рассчитываемый на заданной пользователем поверхности модели. Для задания
поверхностной цели выберите FloWorks | Insert | Surface Goal (FloWorks |
Вставить | Поверхностная цель);
♦ Volume goal (Объемная цель) — это физический параметр, определяемый
только для сборок (или многотельных деталей) и рассчитываемый по
заданному пользователем объему внутри расчетной области либо в текучей
среде, либо в твердом теле. Для задания объемной цели выберите команду
FloWorks | Insert | Volume Goal (FloWorks | Вставить | Объемная цель);
♦ Equation Goal (Функциональная цель) — это цель, выраженная функцией,
составленной из простейших математических операций над ранее
заданными целями, граничными и начальными условиями. Для задания
функциональной цели выберите команду FloWorks | Insert | Equation Goal
(FloWorks | Вставить | Функциональная цель).
Для неинтегральных параметров можно задавать минимальное (Min), среднее
(Av), максимальное (Мах), а также среднерасходное/среднемассовое (для
поверхностных/объемных целей, Bulk Av) значения.
5.5.7. Регулирование расчетной сетки
Как отмечено в разд. 5.3.2, математическая задача, соответствующая
поставленной инженерной газогидродинамической и/или тепловой задаче, решается
на некоторой расчетной сетке с пространственными ячейками в форме
параллелепипедов, которая в COSMOSFloWorks строится автоматически, но на
386
Глава 5
основании характеризующих ее установок, заданных пользователем или
используемых по умолчанию.
Сетка, применяемая в COSMOSFloWorks, является прямоугольной и
адаптивной. Сетка состоит из базовых ячеек, некоторые из них могут быть
подроблены. Базовые ячейки задаются тремя наборами базовых плоскостей,
соответствующим трем осям декартовой системы координат. В общем случае
расстояние между плоскостями в этих наборах может быть различным. При
дроблении ячейка разбивается на 8 равных ячеек путем деления пополам по
осям X, Y и Z. Каждая из этих ячеек также может быть подроблена
аналогичным образом и т. д. (рис. 5.74). Число операций дробления, необходимое для
того, чтобы получить данную ячейку, называется уровнем ячейки или
уровнем дробления ячейки. Базовые ячейки имеют уровень— 0. Максимально
возможный уровень — 7.
Рис. 5.74. Адаптация сетки путем дробления — захват сеткой
коаксиальных цилиндров
Топология сетки описывает положение в пространстве некоей группы тел.
Пространство вне тел называется жидкостью. Ячейки делятся на 3 типа:
тельные ячейки (solid cells)— ячейки, целиком лежащие внутри этих тел;
жидкостные ячейки — целиком лежащие в жидкости (fluid cells) и частичные
ячейки (partial cells) — ячейки, часть которых лежит в теле, а часть — в
жидкости (рис. 5.75).
Аэрогидродинамика и теплопередача
387
Прямой-
угол
Жидкостная
ячейка
Частичная
ячейка
/
А
Тельная
ячейка
Рис. 5.75. Двумерное сеточное представление
прямого угла и типы ячеек
Аппроксимирующая
~ ПЛОСКОСТЬ ,
/ ;
г— 1
/
/
/
/
/
/\
~"~~/
/
/
У
Рис. 5.76. Частичная
ячейка
Всю информацию о поверхности раздела несут частичные ячейки. Граница
раздела аппроксимируется плоскостью и для каждой частичной ячейки
хранится информация о нормали к поверхности раздела в данной ячейке и об
открытых для протока жидкости долях граней (проточные площади).
Соответственно, в ячейке возможно наличие только одной границы раздела
жидкость/тело (рис. 5.76).
Как уже отмечалось ранее, адаптивность прямоугольной сетки достигается
путем дробления ячеек. Дробление ячейки инициируется в том случае, если
для этой ячейки не удовлетворен один из следующих критериев:
♦ критерий захвата малой особенности (Small solid feature refinement
criterion);
♦ критерий кривизны поверхности (Curvature refinement criterion);
♦ критерий захвата выступов поверхности (Tolerance refinement criterion);
♦ критерий дробления в каналах (Narrow channel refinement criterion);
♦ критерий дробления по типу ячейки.
Каждому из этих критериев соответствуют максимальные уровни дробления,
такие, что дробление происходит до тех пор, пока в получившихся ячейках не
будут выполнены все критерии, либо пока размер ячейки не достигнет
величины, соответствующей заданному максимальному уровню. Смысл
критериев подробно рассмотрен далее в разд. "Задание начальной расчетной сетки".
388
Глава 5
Процесс создания расчетной сетки осуществляется COSMOSFloWorks в
общем случае в три этапа.
1. Создание базовой расчетной сетки (basic mesh) — непосредственно сразу
после задания характеризующих ее параметров.
2. Создание начальной расчетной сетки (на основе базовой расчетной
сетки) — сразу после запуска задачи на счет. Данная сетка называется
начальной, потому что она строится до начала расчета и может быть
скорректирована во время расчета. Начальная сетка полностью определяется
базовой сеткой (basic mesh) и установками разрешения особенностей
модели сеткой. Каждая из установок разрешения особенностей модели
сеткой имеет свой критерий и уровень разрешения. Критерий разрешения
определяет подлежащие дроблению ячейки, а уровень разрешения
определяет минимальный допустимый размер ячейки, получившейся в результате
дробления. Независимо от того, какие особенности модели разрешаются,
минимальный допустимый размер ячейки всегда определяется
относительно ячейки базовой сетки, так что размер начальной расчетной сетки
зависит от размера базовой сетки. На начальной сетке осуществляется
решение задачи до того, как будет (если, конечно, будет) осуществлен 3-й
этап построения расчетной сетки.
3. Модификация расчетной сетки в процессе решения задачи для лучшего
разрешения областей расчетной области с сильным изменением решения
(т. е. с высокими градиентами параметров) — если пользователем заданы
соответствующие установки (при определенных установках этот этап
отсутствует).
Настройка параметров базовой расчетной сетки и начальной расчетной сетки
(initial mesh) осуществляется в диалоговом окне Initial Mesh (Начальная
сетка). Количество доступных пользователю (т. е. задаваемых им или
используемых по умолчанию) характеристик расчетных сеток зависит от того,
какую опцию выбрал пользователь.
Рассмотрим эти характеристики расчетной сетки более подробно.
Автоматическая расчетная сетка
Для вызова окна Initial Mesh выберите команду Flo Works | Initial Mesh
(FloWorks | Начальная сетка). Если опция Automatic settings
(Автоматические настройки) включена, то пользователь имеет доступ к следующим
управляющим параметром сетки:
♦ регулятор Level of initial mesh (Уровень начальной сетки) имеет 8
позиций, определяющих размер ячеек базовой расчетной сетки, и
автоматически задаваемые характеристики начальной расчетной сетки (см. далее):
Аэрогидродинамика и теплопередача
389
чем выше номер позиции, тем более густой будет начальная расчетная
сетка, т. е. с более мелкими ячейками, позволяющими лучше разрешить
особенности геометрии модели (поверхности стенок), а также картину
течения в проточных областях модели;
♦ опция Minimum gap size (Минимальный зазор) становится доступной
пользователю, если он отметит флажок Manual specification of the
minimum gap size (Минимальный зазор задается пользователем). В
результате пользователь может либо изменить значение этого параметра
(которое уже определено COSMOSFIoWorks автоматически на основании
заданных пользователем при создании проекта граничных условий и
тепловых источников) вручную в поле Minimum gap size (Минимальный
зазор), либо приравнять его к некоторому выбранному размеру модели,
отметив флажок Minimum gap size refers to the feature dimension (Связать
минимальный зазор с выбранным размером модели) и выбрав нужный
размер средствами SolidWorks. Уменьшение значения этого параметра
приводит к уменьшению размера ячеек расчетной сетки, что достигается,
в первую очередь, путем уменьшения размера ячеек базовой сетки так,
чтобы на длину, определенную значением этого параметра, приходилось в
текучей среде между двумя стенками не менее определенного количества
ячеек начальной сетки, зависящего от позиции бегунка Level of initial
mesh (Уровень начальной сетки);
♦ опция Minimum wall thickness (Минимальная толщина стенки)
становится доступной пользователю, если он отметит флажок Manual specification
of the minimum wall thickness (Минимальная толщина стенки задается
пользователем). В результате пользователь может либо изменить значение
этого параметра вручную в поле Minimum wall thickness (Минимальная
толщина стенки), либо приравнять его к некоторому выбранному размеру
модели, отметив флажок Minimum wall thickness refers to the feature
dimension (Связать минимальную толщину стенки с выбранным размером
модели) и выбрав нужный размер средствами SolidWorks. Влияние этого
параметра на расчетную сетку подробно рассматривается в разд. "Мастер
проекта" данной главы (шаг 8);
♦ опция Advanced narrow channel refinement (Дробление сетки в узких
каналах), если отмечена, позволяет "раздвинуть" ограничения на уровень
дробления ячеек для обеспечения соответствующего уровню Level of
initial mesh (Уровень начальной сетки) количества ячеек в текучей среде
между стенками канала;
♦ Optimize thin walls resolution (Оптимизировать разрешение тонких
стенок). В версиях до COSMOSFIoWorks 2007 года расчетная сетка в тонких
стенках модели дробилась до достаточно мелких для разрешения стенки
ячеек, что, естественно, приводило также к увеличению числа ячеек сетки
390
Глава 5
в прилегающих к этим стенкам областям текучей среды, особенно в узких
каналах. Если это дополнительное дробление расчетной сетки в областях
текучей среды необходимо в данной задаче или необходимо провести
расчет на такой же расчетной сетке, как в предыдущей версии COSMOS-
FloWorks, то сбросьте флажок Optimize thin walls resolution
(Оптимизировать разрешение тонких стенок). В остальных случаях крайне
рекомендуется оставить включенной опцию во избежание избыточного дробления
сетки.
Аналогичные характеристики расчетной сетки доступны пользователю при
создании базовой части проекта с помощью Wizard (Мастер проектов): в его
окне Result Resolution and Geometry Resolution (Уровень решения и
разрешение геометрии модели) пользователь с помощью бегунка задает значение
параметра Result Resolution (Уровень решения), определяющего базовую и
начальную расчетную сетки аналогично параметру Level of initial mesh
(Уровень начальной сетки), а остальные три параметра полностью идентичны
описанным ранее. В отличие от параметра Level of initial mesh, Result
Resolution определяет также критерии завершения расчета и модификацию
расчетной сетки в процессе расчета с целью ее адаптации к решению задачи.
( Совет )
Отношение максимального размера модели к минимальному значению из двух
величин Minimum gap size и Minimum wall thickness во многом определяет
стратегию поведения при построении сетки. Если это отношение меньше 100,
то использование автоматических настроек сетки (задаются в окне Automatic
Initial Mesh), скорее всего, оптимально. Если больше 300, но меньше 1000, то
использование ручных настроек (задаются в окне Initial Mesh) может
существенно уменьшить число ячеек и потому крайне желательно. Если больше 1000,
то использование ручных настроек абсолютно необходимо.
Задание базовой и начальной расчетной сетки
Если опция Automatic settings (Автоматические настройки) выключена, то
пользователь имеет доступ ко всему набору характеристик расчетной сетки.
♦ На вкладке Basic Mesh (Базовая сетка) задаются параметры базовой сетки,
которая образована пересечением трех семейств плоскостей,
перпендикулярных, соответственно, трем осям X, Y, Z декартовой Глобальной
системы координат (Global coordinate system), в которой осуществляется
расчет (рис. 5.77):
• число ячеек вдоль осей X, Y, Z этой Глобальной системы координат;
• сдвиг, сгущение или разрежение базовой сетки с помощью:
D положения управляющих плоскостей (Control planes), заданных
пользователем в дополнение к двум всегда присутствующим в этой
таблице управляющим плоскостям, которые являются границами
Аэрогидродинамика и теплопередача
391
расчетной области (для добавления управляющей плоскости
щелкните кнопку Add Plane (Добавить плоскость));
числа ячеек (Number of cells) в интервале между управляющими
плоскостями (Control Intervals);
отношения размеров ячеек на левой и правой границе интервала
(Ratio).
Basic Mesh [soltd/Ruid Interface jj Refining Ce«s| Narrow Channeis]
Ngrcber of edfe
, Number of cells pei &
Number of cells per ^:
Number of cells per £
22
e:
Conbol interval
! Mr.
[XI ;-0.034068 m
Yl :-0.01002 m
[21 ! -0.01002 m
|Z2 1-0.00214011532
iMax
0.034068 m
0.01002 m
•0.00214011532
0.01002 m
I Number of cellsI Ratio |
[
rD
2211 I
6 2 1
3 1 1
•i -1.32491911
( Qeset J П Automatic settbgs 0£h<w baste mesh
';*$?'■'?. Ra^s
OK
МФ
Рис. 5.77. Окно задания базовой сетки
По умолчанию при решении внутренних задач базовая сетка всегда
равномерная, с почти кубическими ячейками (для внешних задач
предусмотрено сгущение к обтекаемой модели последовательности образующих эту
сетку плоскостей и, соответственно, разрежение к границам расчетной
области).
Если отметить опцию Show basic mesh (Показать базовую сетку), то
базовая сетка тут же будет показана на модели.
На вкладке Solid/Fluid Interface (Поверхность раздела твердых тел с
текучей средой) задаются значения параметров, определяющих разрешение
392
Глава 5
геометрических особенностей поверхности модели, омываемой текучей
средой:
• с помощью регулятора Small solid feature refinement level (Уровень
разрешения сеткой мелких особенностей модели), принимающего
дискретные положения 0...7, задается допустимый максимальный уровень
дробления ячейки базовой сетки для удовлетворения критерия
разрешения начальной расчетной сеткой мелких особенностей модели,
который заключается в том, что максимальный угол между нормалями к
поверхности модели в расчетной ячейке не должен превышать 120°
(рис. 5.78): положение регулятора N, где N = 0...7, означает, что
допустимый минимальный размер ячейки начальной сетки при попытках
удовлетворить этот критерий в 2N раз меньше размера ячейки базовой
сетки по каждой из осей Глобальной системы координат (Global
Coordinate system) (рис. 5.78);
А
Д^И^А
Л
J^Z;
А
150*
-£.
L^ 60»
#£~
Рис. 5.78. Дробление по критерию 120°
с помощью регулятора Curvature refinement level (Уровень
разрешения сеткой кривизны поверхности), принимающего дискретные
положения 0...7, задается допустимый максимальный уровень дробления
ячейки базовой сетки для удовлетворения критерия разрешения
начальной расчетной сеткой кривизны поверхности модели (см. далее):
положение бегунка N, где N = 0...7, означает, что допустимый
минимальный размер ячейки начальной сетки при попытках удовлетворить
этот критерий в 2N раз меньше размера ячейки базовой сетки по каждой
из осей Глобальной системы координат;
Curvature refinement criterion (Критерий разрешения сеткой кривизны
поверхности) — задает допустимый максимальный угол а (в радианах)
между нормалями к поверхности модели в расчетной ячейке, который
используется в качестве критерия разрешения начальной расчетной
сеткой кривизны поверхности модели: очевидно, что чем меньше этот
угол, тем лучше разрешение кривизны поверхности (см. рис. 5.79).
Кроме того, при а= 120° этот критерий совпадает с критерием разре-
Аэрогидродинамика и теплопередача
393
шения сеткой мелких особенностей модели, а при а < 120° имеет перед
последним приоритет;
Рис. 5.79. Влияние уровня разрешения расчетной сеткой кривизны поверхности модели
на размер частичных ячеек расчетной сетки.
Слева: уровень разрешения = 0 — частичные ячейки не дробятся;
справа: уровень разрешения = 1 — частичные ячейки дробятся 1 раз
• с помощью регулятора Tolerance refinement level (Уровень разрешения
сеткой выступов поверхности), принимающего дискретные положения
0...7, задается допустимый максимальный уровень дробления ячейки
базовой сетки для удовлетворения критерия разрешения начальной
расчетной сеткой выступов поверхности модели: положение регулятора
N, где N = 0...7, означает, что допустимый минимальный размер
ячейки начальной сетки при попытках удовлетворить этот критерий в 2N раз
меньше размера ячейки базовой сетки по каждой из осей Глобальной
системы координат (рис. 5.80);
• Tolerance refinement criterion (Критерий разрешения сеткой выступов
поверхности) — задает допустимую максимальную выпуклость (т. е.
допустимое максимальное расстояние) It поверхности модели в ячейке
относительно плоского многоугольника, аппроксимирующего эту
поверхность в ячейке (см. рис. 5.80).
♦ На вкладке Refining Cells (Дробление ячеек) с помощью регуляторов,
принимающих дискретные положения 0...7, задается дробление всех
ячеек выбранного типа в заданное число раз относительно ячейки базовой
сетки: положение бегунка N, где N = 0...7, означает, что размер ячейки
начальной сетки будет в 2N раз меньше размера ячейки базовой сетки по
каждой из осей Глобальной системы координат:
394
Глава 5
• если отмечена опция Refine all cells (Дробить все ячейки), то с
помощью регулятора Level of refining all cells (Уровень дробления всех
ячеек) устанавливается уровень дробления всех ячеек расчетной сетки;
• если отмечена опция Refine fluid cells (Дробить все ячейки в текучей
среде), то с помощью регулятора Level of refining fluid cells (Уровень
дробления всех ячеек в текучей среде) устанавливается уровень
дробления всех ячеек расчетной сетки в текучей среде;
• если отмечена опция Refine solid cells (Дробить все ячейки в твердом
теле), то с помощью регулятора Level of refining solid cells (Уровень
дробления всех ячеек в твердом теле) устанавливается уровень
дробления всех ячеек расчетной сетки в твердом теле;
• если отмечена опция Refine partial cells (Дробить все частичные
ячейки), то с помощью регулятора Level of refining partial cells (Уровень
дробления всех частичных ячеек) устанавливается уровень дробления
всех частичных ячеек расчетной сетки (частичные ячейки— ячейки,
находящиеся частично в теле, частично в текучей среде), причем
ячейки этого типа будут дробиться до максимального уровня дробления
среди максимальных уровней дробления, заданных различными
характеристиками начальной расчетной сетки.
поверхность
ячейка
0.25
J^
1
1
а б в
Я
г д е
Рис. 5.80. Влияние уровня разрешения расчетной сеткой выступов поверхности модели
на разрешение расчетной сеткой выступов поверхности модели:
а) определение /?; 6—в) дробление ячеек при работе опции Small solid features refinement;
г—e) дробление ячеек при работе опции Tolerance refinement;
г—д) критерий разрешения сеткой выступов поверхности модели = 0,1; е) этот критерий = 0,08
♦ На вкладке Narrow Channels (Узкие каналы), если отмечена опция Enable
narrow channels refinement (Включить опцию дробления сетки в узких
Аэрогидродинамика и теплопередача
395
каналах), задаются значения параметров, определяющих дробление ячеек
начальной расчетной сетки для получения более точного решения задачи в
проточных частях модели:
• в окне Characteristic number of cells across a narrow channel
(Критическое число ячеек поперек узкого канала) задается минимальное число
ячеек начальной расчетной сетки в текучей среде по нормали к
поверхности модели до Противоположной поверхности модели: если этих
ячеек меньше, то они дробятся;
• с помощью регулятора Narrow channel refinement level (Уровень
дробления сетки в узких каналах), принимающего дискретные
положения 0...7, задается допустимый максимальный уровень дробления
ячейки базовой сетки для удовлетворения критерия Characteristic
number of cells across a narrow channel (Критическое число ячеек
поперек узкого канала): положение бегунка N, где N = 0...7, означает, что
допустимый минимальный размер ячейки начальной сетки при
попытках удовлетворить этот критерий в 2N раз меньше размера ячейки
базовой сетки по каждой из осей Глобальной системы координат;
• если опция Enable the minimum height of narrow channels (Задать
минимальную высоту узкого канала) и/или опция Enable the maximum
height of narrow channels (Задать максимальную высоту узкого канала)
отмечены и заданы значения этих величин, то вышеописанная
процедура дробления ячеек начальной расчетной сетки в узких каналах
будет работать не во всей расчетной области, а только там, где расстояние
в текучей среде по нормали к поверхности модели до противоположной
поверхности модели будет лежать в указанном с помощью этих
величин диапазоне.
Критерий дробления в тонких каналах среди прочих критериев стоит
особняком. Дело в том, что если остальные критерии базируются на свойствах по-,
верхности в данной ячейке (не считая критерия дробления по типу ячейки),
то критерий дробления в тонких каналах базируется на количестве ячеек
между поверхностями. Общая идея алгоритма состоит в трассировке лучей.
С аппроксимирующей плоскости в ячейке выпускается нормаль и
определяется, через сколько ячеек она прошла, прежде чем достигла другой
поверхности. Вычисляемым параметром является эффективное число ячеек на луче.
Это число сравнивается с заданным числом ячеек на канал. Если число ячеек
на луче меньше заданного, то происходит дробление сетки. Следует обратить
внимание, что при дроблении (в силу дискретности) число ячеек может
оказаться больше заданного. В этом случае часть ячеек в середине канала
объединяются. Действительно, исходя из специфики течений жидкости, вблизи
стенки канала необходимо иметь более густую сетку. Кроме того,
обеспечивается максимально возможная симметрия сетки (рис. 5.81).
396
Глава 5
Рис. 5.81. Пример адаптации сетки в тонком канале:
обеспечивается постоянное число ячеек на канал при его переменной толщине
При нажатии на кнопку Reset (Восстановить) в окне Initial Mesh (Начальная
сетка) появляется окно Automatic Initial Mesh (Автоматическая начальная
сетка), изменения в котором автоматических критериев сетки приведут к
соответствующим изменениям характеристик базовой и начальной сетки в окне
Initial Mesh.
Задание начальной расчетной сетки в локальных областях
Установки начальной сетки (initial mesh) относятся ко всей расчетной
области. Например, задавая дробление сетки в узких каналах (Narrow channel
refinement), нельзя указать, в каком месте расчетной области это будет
использовано, т. е. это дробление пройдет везде, где сработает
соответствующий критерий. Если в некоторых подобластях расчетной области необходимо
задать характеристики начальной расчетной сетки, отличающиеся от
заданных в диалоговом окне Initial Mesh (Начальная сетка), можно
воспользоваться диалоговым окном Local Initial Mesh (Локальная начальная сетка),
вызываемом при выборе команды FloWorks | Insert | Local Initial Mesh
(FloWorks | Вставка | Локальная начальная сетка).
Подобластями, в которых могут задаваться характеристики начальной
расчетной сетки, могут быть детали (компонент сборки или тело многотельной
детали), поверхности, кромки или углы деталей. Если интересующая область
является областью в жидкости, то эту область нужно задать как деталь и ука-
Аэрогидродинамика и теплопередача
397
зать COSMOSFIoWorks рассматривать ее как объем, занятый жидкостью,
отключив это тело в окне Component Control (Управление компонентами).
В окне Local Initial Mesh (Локальная начальная сетка) задаются значения тех
же параметров начальной расчетной сетки, что и в окне Initial Mesh
(Начальная сетка), за исключением параметров базовой сетки (они здесь изменяться
не могут). В результате в этих подобластях будут действовать только
заданные в этом диалоговом окне характеристики построения начальной расчетной
сетки.
Если изложение принципов действия критериев адаптации сетки к геометрии
модели показалось вам недостаточным для принятия решения о задании тех
или иных настроек сетки на практике, можете воспользоваться табл. 5.10.
Таблица 5.10. Использование настроек дробления ячеек начальной сетки
Тип дробления
Small solid features
refinement
Curvature
refinement
Tolerance
refinement
Narrow channel
refinement
Refining cells
Применяется к объектам
Поверхности раздела
жидкость/тело,
жидкость/пористая среда,
пористая среда/тело
Поверхности раздела
жидкость/тело,
жидкость/пористая среда,
пористая среда/тело, тело/тело
(разные материалы)
Поверхности раздела
жидкость/тело
Внутренние объемы
и проточные каналы,
заполненные жидкостью
Объемы, жидкости или тела,
поверхности раздела сред,
расчетная область
Результат
Выделяет мелкие
особенности геометрии
Выделяет поверхности
с кривизной, больше
заданной
Обеспечивает заданное
отклонение сеточного
представления геометрии
от реальной геометрии
Обеспечивает заданное
число ячеек поперек канала
Обеспечивает заданную
густоту сетки в области тела,
жидкости или на поверхности
раздела двух сред
5.5.8. Управление процессом расчета
Помимо задания в проекте COSMOSFIoWorks исходных данных для расчета,
т. е. типа задачи, учитываемых физических особенностей, материалов и
веществ, начальных и граничных условий, характеристик начальной расчетной
сетки, до начала расчета пользователь также задает (или оставляет заданными
398
Глава 5
по умолчанию) установки, касающиеся действий COSMOSFloWorks во время
решения задачи (при необходимости, их можно также изменить во время
расчета):
♦ критерии завершения расчета;
♦ изменение (дробление) расчетной сетки в областях с рассчитанными
высокими градиентами параметров;
♦ сохранение промежуточных результатов расчета;
♦ дополнительные опции, влияющие на время и точность решения задачи
("замораживание" параметров течения; изменение заданного по
умолчанию шага по времени для нестационарных задач; изменение заданного по
умолчанию числа лучей, выпускаемых с поверхности при расчете
радиационного теплообмена).
Рассмотрим все эти установки подробнее.
Опции управления расчетом
Критерии завершения задачи и другие установки, касающиеся действий
COSMOSFloWorks во время решения задачи, показаны и доступны для
изменения в окне Calculation Control Options (Опции управления расчетом),
которое вызывается при выборе команды FloWorks | Calculation Control
Options (FloWorks | Опции управления расчетом), или во время расчета из
меню Calculation (Расчет) диалогового окна Solver (Решатель) (рис. 5.82).
Адаптация Дополнительные
сетки Сохранение параметры
Аэрогидродинамика и теплопередача
399
Критерии завершения расчета
Если задача нестационарная и имеет нестационарное и непериодическое
решение, то расчет обычно проводится до заданного момента физического
времени задачи. Если, начиная с некоторого момента времени, решение
нестационарной задачи устанавливается, т. е. становится стационарным или
периодическим, и именно это решение интересует пользователя, то расчет
проводится до достижения этого момента времени, точнее, до определения
этого стационарного или периодического решения на основании выполнения
некоторого критерия, что позволяет утверждать, что такое решение
достигнуто. Поскольку задача решается численно, то осуществляется дискретизация
решения задачи не только по пространству, но и по времени, т. е. задача
решается сначала на некотором временном слое, затем выполняется очередной
шаг по времени, который, естественно, одинаков для всей расчетной области.
Эти шаги по времени в COSMOSFloWorks называются итерациями
(iterations); номер текущей итерации выводится в окно наблюдения за
расчетом (Solver), после каждой итерации в таблицу и на график целей (Goals)
выдаются текущие значения целей проекта, а также обновляются
визуализируемые картины полей физических параметров.
Если задача стационарная, то, в соответствии с подходом COSMOSFloWorks,
она решается как нестационарная, но для ускорения установления решения
шаги в физическом времени задачи осуществляются не с одинаковым для
всей расчетной области шагом, а с локальными, т. е. разными для различных
областей расчетной области, шагами по времени, так что физическое время
задачи в разных областях расчетной области после выполнения очередного
шага по времени разное. Каждый такой шаг по времени в COSMOSFloWorks
также называется итерацией (iteration), после каждой такой итерации
пользователю выдаются полученные в результате ее выполнения значения
физических параметров в той же форме, что и при решении нестационарных задач.
Как и при поиске стационарного или периодического решения
нестационарной задачи, возникает проблема идентификации достижения искомого
решения задачи, которая решается также на основании анализа выполнения
некоторого критерия, — как только он выполняется — можно утверждать, что
такое решение достигнуто, и, следовательно, завершить расчет после
очередной итерации по времени.
На вкладке Finish (Завершение) пользователю предлагается (на его выбор)
воспользоваться следующими критериями завершения расчета.
♦ Finish Conditions (Условия завершения) — в этом поле необходимо
указать, достаточно ли для завершения расчета выполнение хотя бы одного из
следующих используемых критериев (для этого надо выбрать If one is
satisfied), или для завершения расчета должны быть выполнены все
используемые критерии (для этого надо выбрать If all are satisfied):
400
Глава 5
• Minimum refinement number (Минимальное число дроблений) —
минимальное число уточнений расчетной сетки в процессе решения
задачи. Расчет будет продолжаться, как минимум, до тех пор, пока не будет
выполнено заданное число дроблений;
• Maximum iterations (Максимальное число итераций)— число
итераций, которое должно быть выполнено;
• Maximum physical time (Максимальное время задачи) — если
решается нестационарная задача, то указать длительность расчета по
физическому времени задачи;
• Maximum calculation time (Максимальное время расчета)—
процессорная длительность расчета;
• Maximum travels (Максимальное число продувок) — число итераций,
измеряемое в продувках (travels), которое должно быть выполнено.
Термин travel (продувка) означает выполнение определенного
количества итераций при решении задачи. Это количество итераций
определяется для каждой задачи индивидуально: для стационарной задачи —
в зависимости от расчетной сетки, для нестационарной задачи — в
зависимости от свойств текучей среды и течения, а именно, как такое
количество итераций, за которое возмущение течения пересечет
расчетную область;
• Goals Convergence (Сходимость целей) — в этом поле можно указать,
анализируется ли поведение заданных в проекте целей для принятия
решения о завершении расчета (если да, то флажок должен быть
отмечен). Если поведение целей анализируется, то:
D в строке Analysis interval (travels) (Интервал анализа (продувки))
можно задать длину (в продувках, т. е. travels) интервала анализа
целей, отличающуюся от заданной по умолчанию;
D в группе Goals Criteria (Критерии целей) можно задать дисперсии
целей, отличающиеся от используемых по умолчанию, по
достижении которых на заданном интервале анализа будет считаться, что по
данной цели достигнута сходимость решения задачи, так что расчет
можно завершить.
Адаптация расчетной сетки к решению задачи
Под адаптацией сетки к решению задачи понимается изменение расчетной
сетки в процессе расчета для учета особенностей получаемого решения. Для
этого ячейки сетки дробятся в тех высокоградиентных областях течения,
которые не были достаточно хорошо разрешены расчетной сеткой до начала
Аэрогидродинамика и теплопередача
401
расчета или во время предыдущих адаптации расчетной сетки к решению
задачи, и сливаются в более крупные в низкоградиентных областях течения.
На вкладке Refinement (Адаптация сетки) пользователь может изменить
используемые по умолчанию установки изменения расчетной сетки во время
решения задачи (т. е. адаптации расчетной сетки к решению задачи).
♦ Refinement (Адаптация сетки) — указывает на необходимость изменения
расчетной сетки во время решения задачи. Для этого вместо disabled
(отключено) выбрать допустимый уровень дополнительного дробления ячеек
расчетной сетки во время решения задачи: level = N, где N=1...7 означает,
что допустимый минимальный размер ячеек расчетной сетки после
дробления в 2N раз меньше размера ячейки начальной расчетной сетки по
каждой из осей Глобальной системы координат (Global Coordinate System);
♦ Refinement criterion (Критерий дробления сетки) — если обозначить его
как е ., то ячейка расчетной сетки при ее адаптации к решению задачи
будет дробиться (т. е. будет разделена пополам по каждому
координатному направлению, так что образуется 8 ячеек вдвое меньшего размера)
в том случае, когда за время, прошедшее после последней адаптации сетки
к решению задачи, хотя бы раз выполнилось условие а • Кср1 > гср1, где
а — коэффициент, определяемый тем, в какой среде лежат соседние
ячейки (а = 1, если ячейка лежит в твердом теле, или лежит в текучей
среде, но все ее соседние ячейки лежат либо только в текучей среде, либо
только в твердом теле), Kcpi — характеристика решения в данной ячейке,
определяемая следующим образом:
в жидкости:
/=i
\V -V\
v
(\K\m)
^r.4-
\Т -T\
max
АГ
global J
в газе в стационарной задаче:
(
"»/>
**=!
max
/=i
\V-V\
max
4 к i>i у, i)
в газе в нестационарной задаче:
,0,5
\Рр-Р\ . К-Р-1
• +
Л
тах(Р„,^) тах(р0,р,)
Kspl -
ли
= ]Гтах
/
Р V -oV\
таХ(1 Р о sound'о .sound Ы Pi sounds sound \)
,0,5
\р0-р,\ , 1р„-р,|
тах(^,^) тах(р„,р,)
402
Глава 5
• в твердом теле:
*/(+) ""*;(-)
где V — вектор скорости, Р — давление, р — плотность текучей среды,
Т — температура, х — координата, Nnh — число соседних ячеек (от 6
до 24), нижний индекс о обозначает параметры рассматриваемой ячейки,
нижний индекс / обозначает параметры /-й соседней ячейки, имеющей
общую грань с рассматриваемой ячейкой, нижний индекс sound
обозначает параметры при скорости звука,.ATgohal обозначает разницу
температур в расчетной области, нижний индекс J обозначает номер оси системы
координат, нижний индекс у(+) обозначает параметры в соседних
ячейках в направлении оси у системы координат, нижний индекс j (-)
обозначает параметры в соседних ячейках в направлении, противоположном
направлению оси j системы координат. Значения всех параметров берутся
в центрах ячеек;
♦ Unrefinement criterion (Критерий слияния ячеек сетки)— если
обозначить его как етеГ9 то 8 дочерних (т. е. образовавшихся ранее при дроблении
ячейки сетки) ячеек родительской (т. е. дроблением которой они
получены) ячейки расчетной сетки при адаптации расчетной сетки к решению
задачи будут слиты обратно в эту родительскую ячейку в том случае, когда
на каждой итерации после последней адаптации расчетной сетки к
решению задачи, или, если данная адаптация первая в расчете, то после
определяемого внутри COSMOSFIoWorks стартового момента для начала
выполнения таких сравнений, выполнялось условие Ктсг < Етег, где Ктег —
характеристика решения в рассматриваемых 8 дочерних ячейках,
определяемая точно так же, как Кср/ в Refinement criterion (Критерий дробления
сетки), за исключением того, что суммирование при определении Ктег
выполняется по всем 36 парам этих 8 дочерних ячеек;
♦ Adaptive Refinement in Fluid (Адаптация сетки в жидкости) — если
выбрана эта опция, сетка будет изменена в областях с текучей средой. При
этом по умолчанию характеристика решения в ячейке Kspi рассчитывается
по локальной, т. е. в данной ячейке относительно соседних ячеек,
вариации параметра. Это может вызвать ненужные дробления ячеек в не очень
важных для решения задачи местах расчетной области, т. е. там, где в этом
нет необходимости. Чтобы этого избежать, рекомендуется использовать
опцию Use global parameter variation (Использовать глобальную
вариацию параметра), указывающую, что при адаптации сетки к решению зада-
Kspl -
20
o\i\hn]
1=1
TJ(+) To
То TJ(~)
i Х.(.\ X... Х.п Х.(\ j
Аэрогидродинамика и теплопередача
403
чи будут использованы не локальные, а глобальная вариация параметра.
В результате изменения скорости, давления, плотности между итерациями
будут отнесены к максимальной разности значений данных параметров во
всей расчетной области:
Yo-Ч \р0-р\ Ь-р,|
V -V ' Р -Р ' р -р '
max r min max Л mm r max r min
где индексы max и min означают максимальные и минимальные во всей
расчетной области значения;
Adaptive Refinement in Solid (Адаптация сетки в твердом теле) — если
выбрана эта опция, сетка будет изменена в твердых телах;
Approximate Maximum Cells (Максимально допустимое число ячеек
расчетной сетки) — определяет максимально возможное число ячеек. В
результате адаптации расчетной сетки к решению задачи число ячеек этой
сетки может оказаться столь большим, что продолжение расчета будет
невозможно из-за переполнения оперативной памяти компьютера. Эта опция
позволяет ограничить число ячеек расчетной сетки, создаваемых при
адаптации расчетной сетки к решению задачи. Возможно, что заданное
максимально допустимое число ячеек будет несколько превышено из-за
особенностей построения сетки. Ячейки с более высокими значениями Ksp/
дробятся первыми, что обеспечивает оптимальную сетку в случае
достижения (или некоторого превышения) заданного максимально допустимого
числа ячеек;
Refinement Strategy (Стратегия адаптации сетки к решению задачи) —
определяет моменты времени проведения адаптации расчетной сетки к
решению задачи. Можно либо оставить используемую по умолчанию
Периодическую адаптацию сетки к решению задачи (Periodic refinement),
либо вместо нее выбрать Табличную адаптацию сетки к решению задачи
(Tabular refinement) или Адаптацию сетки к решению задачи только
вручную (Manual only):
• Units (Единицы) — единицы измерения (итерации (iterations) или
продувки (travels)), с помощью которых задаются моменты проведения
адаптации сетки к решению задачи;
• Relaxation interval (Интервал релаксации) — задается в выбранных в
Units (Единицы) единицах измерения и отсчитывается от момента
последней адаптации сетки к решению задачи; до его истечения расчет не
может быть завершен;
• если выбрана опция Periodic refinement (Периодическая адаптация
сетки к решению задачи), то задается момент выполнения первой адап-
404
Глава 5
тации — Start (Стартовый момент), а также периодичность проведения
адаптации — Period (Периодичность);
• если выбрана опция Tabular refinement (Табличная адаптация сетки к
решению задачи), то, дважды щелкнув в ячейке Refinement table
(Таблица адаптации сетки), можно открыть окно для задания (в выбранных
в Units (Единицы) единицах измерения) каждого момента выполнения
адаптации сетки к решению задачи;
• если выбрана опция Manual only (Адаптацию сетки к решению задачи
только вручную), то расчетная сетка будет адаптироваться к решению
задачи только при выборе команды Calculation | Refine (Расчет |
Адаптировать сетку) в окне Solver (Решатель); таким же способом можно
инициировать адаптацию сетки к решению задачи при использовании
опций Periodic refinement (Периодическая адаптация сетки к решению
задачи) и Tabular refinement (Табличная адаптация сетки к решению
задачи).
Сохранение промежуточных результатов
На вкладке Saving (Сохранение) задаются моменты (в выбранных единицах
измерения) сохранения промежуточных результатов во время решения
задачи.
♦ Если отмечена опция Save Before Refinement (Сохранить перед
адаптацией сетки к решению задачи), то промежуточные результаты решения
задачи будут автоматически сохраняться во время расчета перед каждым
изменением расчетной сетки (т. е. ее адаптации к решению задачи).
♦ Если отмечена опция Periodic Saving (Периодическое сохранение), то
промежуточные результаты решения задачи будут периодически
сохраняться во время расчета. Эта опция имеет два параметра:
• Units (Единицы) — единица измерения, с помощью которой будет
задан период сохранения промежуточных результатов решения задачи.
Предлагается выбрать Iterations (Итерации) или Physical time
(Физическое время задачи — только для нестационарных задач);
• Period (Период) — период (в выбранной единице измерения)
сохранения промежуточных результатов решения задачи.
♦ Если отмечена опция Tabular Saving (Табличное сохранение), то
промежуточные результаты решения задачи будут сохраняться в моменты
расчета, заданные пользователем таблично. Эта опция задается с помощью
Units (Единицы) и Saving Table (Таблица моментов сохранения
результатов):
• Units (Единицы) — выбирается единица измерения, с помощью
которой будут заданы моменты сохранения промежуточных результатов
Аэрогидродинамика и теплопередача
405
решения задачи. Предлагается выбрать Iterations (Итерации) или
Physical time (Физическое время задачи — только для нестационарных
задач);
• если дважды щелкнуть в ячейке Saving Table (Таблица моментов
сохранения результатов), то в появившемся в результате окне Table
(Таблица) можно задать таблицу моментов (в выбранных единицах
измерения) для сохранения промежуточных результатов решения задачи.
Если решается нестационарная задача, и в Wizard (Мастер проектов) в окне
Time Settings (Временные установки) заданы Output time step (Временной
шаг выдачи результатов), то значение Output time step (Временной шаг
выдачи результатов) становится значением параметра Period (Период) опции
Periodic Saving (Периодическое сохранение).
Дополнительные опции
При моделировании различных явлений нередко возникает ситуация, когда
на результат оказывают влияние процессы, идущие с разной скоростью. При
значительной (на порядок и более) разнице скоростей этих процессов
происходит чрезмерное повышение затрат машинного времени на моделирование.
Одним из средств ускорения расчета в таких случаях является "заморозка" —
постоянное или временное прекращение расчета наиболее быстрого процесса
(процессов).
На вкладке Advanced (Дополнительные параметры) пользователь может
задать некоторые опции, влияющие на время и точность решения задачи.
♦ С помощью опции Flow Freezing ("Замораживание" течения) задаются
параметры, управляющие процедурой "замораживания" значений всех
параметров течения (т. е. использования тех же значений этих параметров,
что и на предыдущей итерации), за исключением температур текучей
среды и твердых тел, а также концентраций компонентов многокомпонентной
текучей среды, которые рассчитываются на каждой итерации, поскольку
сходятся медленнее, чем остальные параметры течения. Эта опция
позволяет быстрее решить задачи, в которых существенную роль играют
процессы теплопередачи и теплообмена, а также распространения
компонентов текучей среды. Чтобы включить эту опцию, нужно вместо disabled
(отключено) выбрать стратегию этой опции: Periodic (Периодически) или
Permanent (Постоянно):
• стратегия Periodic (Периодически) означает, что "замораживание"
выполняется периодически. При этом задаются следующие параметры:
D Start (Старт)— момент расчета (задается в продувках (travels)),
с которого начинает работать процедура "замораживания" течения;
406
Глава 5
D Duration (Длительность "замораживания") — начиная с указанного
пользователем момента старта (Start), расчет выполняется с
"замораживанием", пока указанное в Freezing (iterations) число итераций
не будет выполнено. Затем "замораживание" отключается и в
течении указанного в No freezing (iterations) числа итераций расчет
выполняется без "замораживания". Затем "замораживание" включается
опять, и т. д., до завершения расчета;
стратегия Permanent (Постоянно) означает, что, начиная с заданного в
ячейке Start (Старт) начального момента (в продувках (travels)),
течение "замораживается" до конца расчета, т. е. во всех последующих
итерациях рассчитываются только температуры текучей среды и твердых
тел, а также концентрации компонентов многокомпонентной текучей
среды, а остальные параметры течения не изменяются. С момента
начала работы опции "замораживания" течения адаптации расчетной
сетки к решению задачи не проводятся, даже если они были заданы на
вкладке Refinement (Адаптация сетки) (рис. 5.83).
400
360
зво
340
320
300
280
с периодическим замораживанием
J \
обычный расчет
//
1 /
I!
и/
А 1 ; *~~ 1
200
400
600
800
CPU time, s
Рис. 5.83. Сравнение времени сходимости минимальной температуры жидкости
обычного расчета и расчета с использованием "замораживания" течения
С помощью опции Manual Time Step можно задать шаг по физическому
времени задачи, с которым будет определено ее искомое нестационарное
решение. По умолчанию нестационарные задачи решаются с шагом по
времени, который выбирается автоматически в зависимости от параметров
течения. Если нужно получить более точное решение нестационарной
задачи (с помощью задания более мелкого шага по времени по сравнению с
автоматически выбираемым, например, для разрешения высокочастотного
Аэрогидродинамика и теплопередача
407
периодического решения) или быстрее рассчитать теплопередачу в
твердых телах (с помощью задания более крупного шага по времени по
сравнению с автоматически выбираемым, например, в том случае, когда
картина течения устанавливается существенно быстрее)— в этих случаях
целесообразно задавать шаг по времени вручную. Если решается
нестационарная задача расчета только теплопередачи в твердых телах, т. е. без
расчета течения текучей среды (т. е. включена опция Heat conduction in
solids only (Только теплопередача в твердых телах)), то лучше задать шаг
по времени вручную. Чтобы задать шаг по времени вручную, надо
отметить опцию Manual time step (Задание шага по времени вручную) и задать
величину шага.
♦ Если решается задача с радиационным теплообменом, то с помощью
опции View factor resolution level (Уровень разрешения фактора видимости)
можно изменить заданное по умолчанию число лучей, испускаемых с
поверхности, участвующей в радиационном теплообмене. Так, если твердые
тела имеют низкую теплопроводность, то задаваемое значение параметра
этой опции рекомендуется увеличить.
Щелкнув кнопку Reset (Восстановить), вы можете выставить значения опций
окна Calculation Control Options в соответствии с выбранным уровнем
решения (Result Resolution), имеющим 8 позиций (1...8). Чем выше номер
позиции, тем жестче критерии завершения расчета и тем чаще осуществляется
адаптационное изменение расчетной сетки к решению задачи
(дополнительные опции не используются): при позициях 1...5 оно отсутствует, при
позиции 6 оно осуществляется 1 раз, при позиции 7 — три раза, при позиции 8 —
периодически.
( Примечание ^
Значения критериев завершения расчета и адаптации расчетной сетки
аналогичным образом определяются в окне Wizard (Мастер проектов) на шаге
Results and Geometry Resolution (Уровень решения и разрешение геометрии
модели) с той лишь разницей, что уровень решения, задаваемый в окне Wizard,
влияет также и на уровень начальной сетки (Level of initial mesh),
определяемый в окне Initial Mesh (Начальная сетка).
После того как заданы все исходные данные, а также установки, касающиеся
действий COSMOSFIoWorks во время решения задачи, можно запустить
проект на счет, т. е. начать решать поставленную задачу.
Запуск на счет
Запуск проекта на счет выполняется с помощью диалогового окна Run
(Запуск на счет), или если вслед за этим расчетом планируется последовательно
запустить на счет в автоматическом режиме еще несколько проектов
408 Глава 5
COSMOSFloWorks, то с помощью диалогового окна Batch Run (Запуск
пакета на счет). Диалоговое окно Batch Run позволяет запустить на счет сразу
несколько проектов в заданной очередности.
Окна Run (Запуск на счет) и Batch Run (Запуск пакета на счет) вызываются
из меню FloWorks | Solve (FloWorks | Решить) (рис. 5.84).
Использовать предыдущие результаты
Запуск на счет
Создать сетку
Новый расчет
Продолжить расчет
Решать
Запустить на
Запустить
автообработку
результатов
Загрузить результаты
Рис. 5.84. Окно Run
При запуске на счет пользователю предоставлена возможность управления
процессом расчета с помощью следующих опций:
♦ Create mesh (Создать расчетную сетку) — создает расчетную сетку. Если
эта опция выбрана, а опция Solver (Решение) не выбрана, то расчет
завершается сразу после построения начальной расчетной сетки, которую после
этого можно будет посмотреть с помощью постпроцессора. Если ранее
расчетная сетка не строилась, то эта опция отмечена автоматически. Если
ранее расчетная сетка строилась, то выбор этой опции означает, что
расчетная сетка будет построена заново (это необходимо при изменении
задаваемых характеристик сетки);
♦ Solver (Решение) — выбор этой опции означает, что будет осуществляться
решение задачи (первый раз, заново или в продолжение ранее
выполнявшегося, но не завершенного расчета);
♦ New calculation (Новый расчет) — выбор этой опции означает, что расчет
выполняется первый раз или заново (при этом, если опция Create mesh
(Создать расчетную сетку) не выбрана, то будет использована уже
построенная расчетная сетка);
Starts
•3^вте$
0tfewc*icufeU>rt
^>/?-Хп& zfo^Hw
£3So»vet
D 1&9 prervou* wait*
\r<fr.i.-.t. .-'^
V S
Rjjnon: | Curenl Sesaon v£
J№B«k Solver.,}~
OR<*batchre*ulUfi»oce»ir>g ffialch RwtAiT]
i£]L<wdre$ufc*
1 да» ]
1 a* 1
■ Запустить
Выбрать машину
" расчета в
локальной сети
Автоматическая
.обработка
результатов
Аэрогидродинамика и теплопередача
409
♦ Continue calculation (Продолжить расчет) — расчет будет выполнен как
продолжение ранее выполнявшегося, но не завершенного расчета;
♦ Take previous results (Использовать предыдущие результаты)— выбор
этой опции означает, что в качестве начальных условий нового расчета
будут использованы результаты предыдущего. Если решалась и решается
нестационарная задача, то для использования предыдущих результатов
необходимо в списке Start from time moment (Начать с момента времени)
указать тот момент физического времени задачи, при котором эти
результаты были сохранены, — расчет автоматически начнется с этого момента
физического времени задачи и будет продолжаться до выполнения
условия его завершения;
( Примечание ^)
Если вы выберете опцию Take previous results (Использовать предыдущие
результаты), то начальные условия, заданные в Wizard (Мастер проектов) или
General Settings (Общие установки), будут проигнорированы.
♦ Run batch results processing (Запустить автоматическую обработку
результатов расчета) — для каждого присоединенного к текущей модели
проекта можно указать, какие отчеты (Reports) графики целей (Goal
Plots), графики (XY Plots), таблицы параметров в точке (Point
Parameters), на поверхности (Surface Parameters) и в объеме (Volume
Parameters) будут автоматически созданы и сохранены в папке проекта
после завершения расчета (в том числе, если расчет будет остановлен
пользователем). Щелкните по кнопке Batch Results (Автоматическая
обработка результатов), чтобы указать, какие графики, таблицы параметров
и отчеты необходимо создавать. Отметьте флажок Run batch results
processing (Запустить автоматическую обработку результатов расчета),
чтобы указанные графики, таблицы параметров и отчеты' создавались
после завершения расчетов;
♦ Load results (Загрузить результаты) — при выборе этой опции результаты
будут автоматически загружены после завершения расчета. Подробную
информацию о загрузке результатов см. в разд. 5.5.9;
♦ В COSMOSFloWorks есть возможность запускать расчет на других
компьютерах локальной сети, на которых установлен COSMOSFloWorks.
Можно также запустить расчет на своем компьютере, но отдельным от
SolidWorks процессом, что рекомендуется при нехватке оперативной
памяти. В списке Run on (Запустить на) выберите способ осуществления
расчета:
• Current Session (Текущий сеанс) — расчет осуществляется на
компьютере, за которым работаете, как приложение к конструкторской про-
410
Глава 5
грамме. Этот способ целесообразно использовать в тех случаях, когда
оперативной памяти компьютера достаточно для расчета (требуется
около 1,2—1,5 байта на ячейку расчетной сетки). В этом случае
доступные 3 Гбайт (в Windows0 x32 на один процесс можно выделить не
более 2—3 Гбайт оперативной памяти; в Windows^ x64 теоретический
предел доступной памяти намного превышает возможности
сегодняшних компьютеров) оперативной памяти будут использоваться как для
решения задачи, так и для самого SolidWorks, так что, чем сложнее
геометрия модели, тем меньше памяти остается для расчета задачи;
• если в списке Run on выбрать имя своего компьютера, то расчет будет
осуществляться на нем как самостоятельный (standalone) процесс. Для
каждого процесса имеется по 3 Гбайт оперативной памяти. Если расчет
осуществляется в режиме Current Session (Текущий сеанс), то
доступные 3 Гбайт оперативной памяти будут использоваться совместно
COSMOSFloWorks и SolidWorks, так что, чем сложнее геометрия
модели, т. е. чем больше памяти требуется для SolidWorks, тем меньше
памяти остается для расчета задачи. Если расчет осуществляется как
самостоятельный, то все 3 Гбайт оперативной памяти будут доступны для
решения задачи, но полное процессорное время решения задачи
увеличится из-за необходимости более сложного обмена данными между
SolidWorks и COSMOSFloWorks. Поэтому этот путь рекомендуется
использовать только в тех случаях, когда данную задачу невозможно
решать в режиме Current Session;
• если вы выбрали имя компьютера из локальной сети (local network), то
расчет будет осуществляться на этом компьютере (для этого
необходимо, чтобы на компьютере был установлен COSMOSFloWorks). Это
позволит использовать процессорное время и память других
компьютеров, хотя и увеличит время счета вследствие необходимости обмена
данными по сети между вашим компьютером и компьютером, на
котором проводится расчет. Чтобы добавить доступные через сеть
компьютеры в список Run on, щелкните Network Solver (Машина расчета в
локальной сети).
v Примечание j
Для использования возможности расчета на удаленном компьютере
необходимо также правильно настроить firewall (брандмауэр) и установки DCOM на
обоих компьютерах. Подробнее с установками можно ознакомиться в документации
COSMOSFIoworks в разделе "DCOM and Firewall Settings for COSMOSFloWorks
Remote Solver".
Кроме того, в окне Batch Run (Запуск пакета на счет) представлена таблица
с проектами всех открытых в данный момент деталей (рис. 5.85). В этой
таблице для этих проектов имеются следующие опции:
Аэрогидродинамика и теплопередача
411
♦ в столбце Run (Запуск на счет) отмечаются те проекты, которые будут
запущены на счет в данном пакете;
ШвШйШй
Startup
0 Create mesh
<*) New calculation
E3 Solver
П Take previous result*
Eun
| Projects _ iQ*1*?
i& BaH Valve SLDASM
[de'fauli(i^ 0
:-> CPU Cooler SLDASM
J» CPU Cooler (1) Q
©ShutctownMonitor Calculation order1 Run on '0Rufi Batch Results
и 1 Current E
0 Current П
I £tose ]
I Help ]
risri
[ ^fiown j
Рис. 5.85. Окно Batch Run
♦ в столбце Shutdown Monitor (Закрыть окно наблюдения за расчетом)
отмечаются те из запускаемых на счет проектов, у которых после
завершения расчета будет закрыто окно наблюдения за расчетом (после
завершения расчета в нем сохраняется последняя информация о расчете, включая
выводимые графики и картины полей параметров);
♦ в столбце Calculation order (Очередность расчетов) задается
автоматически и с помощью кнопок Up (Вверх) и Down (Вниз) очередность запуска
на счет проектов из данного пакета;
♦ в столбце Run on (Запустить на);
♦ в столбце Run Batch Results processing (Автоматически обработать
результаты расчета) отмечены те проекты, результаты расчетов которых
будут автоматически обработаны после завершения расчета;
♦ в столбце Status (Статус) отображается статус расчета проекта.
( Примечание j
При запуске на счет происходит автоматическое обновление данных проекта
(rebuild). Если некоторые из выбранных проектов запускаемого пакета требуют
согласия пользователя на обновление данных, то эти проекты будут пропуще-
412
Глава 5
ны, чтобы не задерживать расчет всего пакета, и помечены статусом "Canceled"
(Отменен). Во избежание пропуска расчета, рекомендуется перед запуском
пакета расчетов открыть каждый проект и произвести обновление его данных,
вызвав команду FloWorks | Project | Rebuild (FloWorks | Проект | Обновление).
Запуск на счет осуществляется нажатием на кнопку Run (Запустить).
Наблюдение за расчетом
Сразу после запуска проекта на счет, т. е. сразу после начала расчета,
открывается и остается активным до завершения расчета диалоговое окно Solver
(Решатель)— во время построения расчетной сетки оно называется Mesh
Generation — Генерация сетки). Это окно (рис. 5.86) дает информацию о
ходе расчета; с его помощью можно посмотреть результаты расчета,
полученные на последней выполненной итерации (шаге по времени), изменить
настройки опций управления расчетом в диалоговом окне Calculation Control
Options (Опции управления расчетом), инициировать изменение расчетной
сетки в ходе расчета, т. е. ее адаптацию к решению задачи, приостановить
или остановить расчет.
Вы можете остановить расчет
или приостановить его
Панель инструментов
используется для быстрого
доступа к сущностям окна
Окно Info (Текущая информация)
показывает номер итерации,
оставшееся процессорное время,
число ячеек и текущий статус
расчета
Окно Log (События) показывает
время совершения событий
во время расчета, таких как
создание сетки, начало расчета,
адаптация сетки к решению'
задачи и т. д.
В части Warning
(Предупреждения) выводятся
сообщения, предупреждающие
о возможной неточности
решения вследствие
некорректной постановки задачи
Окно Goal Plot
(График целей)
отображает
процесс
сходимости
целей во время
расчета
Window Bar (Панель окна) -
используется для быстрого Строка
переключения между окнами прогресса
расчета
Рис. 5.86. Окно Solver
Окно Preview
(Картина промежуточных
результатов) показывает
картину в сечении для
текущих результатов
в выбранной плоскости
модели
С помощью основного меню окна Solver (Решатель) можно:
♦ остановить расчет, щелкнув по кнопке Calculation | Stop (Расчет |
Остановить) или по значку Stop (Остановить) на панели инструментов. Во всех
Аэрогидродинамика и теплопередача
413
этих случаях COSMOSFIoWorks спросит, хотите ли вы сохранить текущие
результаты (save the current results) или нет. Если текущие результаты
сохраняются, то расчет может быть продолжен;
♦ остановить расчет с сохранением текущих результатов, выбрав команду
File | Save and Close (Файл | Сохранить и остановить). Если хотите
остановить расчет без сохранения текущих результатов — выберите команду
File | Close (Файл | Остановить), а если выбрать команду File |
Save Current Results (Файл | Сохранить текущие результаты), то
результаты сохраняются без остановки расчета;
♦ приостановить расчет, выбрав команду Calculation | Suspend (Расчет |
Приостановить). Продолжительность приостановки расчета (в минутах)
может быть задана. Для этого надо выбрать команду Calculation | Suspend
Options (Расчет | Опции приостановки расчета). Приостановка расчета не
позволяет вам изменить модель или проект, но позволяет временно
освободить машинные ресурсы для использования других программ. Если до
этого расчет был приостановлен, то после повторного нажатия он
начинает идти дальше;
♦ посмотреть или изменить значения параметров Calculation Control
Options (Опции управления расчетом), выбрав команду Calculation |
Calculation Control Options (Расчет | Опции управления расчетом), т. е.
опций завершения расчета, адаптации сетки к решению задачи в процессе
расчета, сохранения результатов, "замораживания" параметров течения,
ручного задания шага по времени, ручного задания числа лучей,
испускаемых с поверхности радиационного теплообмена;
♦ инициировать адаптацию сетки к решению задачи, выбрав команду
Calculation | Refine (Расчет | Адаптировать сетку).
В процессе решения задачи можно также получить различную информацию о
ходе решения задачи. Выбрав меню Insert (Вставить) и одну из следующих
опций, можно получить нижеприведенную информацию.
♦ Log (События) — окно, содержащее запись всех основных событий
процесса решения задачи: название события (например, начало расчета, конец
расчета) и время, когда оно произошло.
♦ Information (Текущая информация) — окно, содержащее общую текущую
информацию о процессе решения задачи: информацию о ходе и
результатах построения сетки (данные о числе ячеек расчетной сетки), номер
текущей итерации, затраченное процессорное время (с момента начала
решения задачи), время на итерацию и др. Кроме того, в нижней части
этого окна выдаются Предупреждения (Warnings) пользователю в виде
сообщений о полученных специфических промежуточных результатах
414
Глава 5
решения, которые должны насторожить пользователя, т. к. указывают на
возможную некорректность решения.
♦ Goal plot (Таблица целей) — список всех заданных в проекте целей (List
of goals), для каждой из которых показано:
• текущее значение (Current value);
• среднее, минимальное и максимальное значения на интервале анализа
сходимости цели (Average value, Minimum value, Maximum value),
отмеряемом назад от последней выполненной итерации;
• разница между максимальным и минимальным значениями цели на
интервале анализа (Delta);
• критерий сходимости цели (Criterion)— допустимую разницу между
максимальным и минимальным значениями цели на интервале анализа;
• индикатор сходимости цели (Progress), показывающий в процентах
отношение заданного Criterion к разнице Delta, т. е. насколько величина
физического параметра, заданная в качестве цели, близка к сходимости
(по достижении 100% появляется сообщение "achieved" —
"достигнуто"). Если Delta осциллирует, то индикатор сходимости тоже
осциллирует вплоть до обратного движения, даже после достижения 100%.
Поскольку одним из заданных необходимых условий завершения расчета
может быть выполнение заданного числа продувок (travels), т. е.
соответствующего числа итераций, не говоря уже о том, что может быть
задано несколько целей, то очевидно, что по индикатору сходимости
цели не всегда можно оценить время завершения расчета. Если индикатор
сходимости у цели отсутствует, это означает, что сходимость этой цели
показана только для информации и не принимается во внимание при
принятии решения о завершении расчета.
♦ Goal Plot (График целей)— окно графика сходимости отдельных
(выбранных пользователем) целей. В верхней части окна: та же информация,
что и в таблице целей, в нижней части окна— графики изменения этих
целей в ходе расчета. Если щелкнуть правой кнопкой мыши по полю
графика, то в появившемся диалоговом окне Goal Plot Settings (Установки
графика целей) можно указать нужные установки построения графиков:
• по оси абсцисс могут быть отложены итерации (iterations), или, если
решается нестационарная задача, физическое время задачи, т. е. время
развития рассчитываемого процесса с момента его начала (physical
time), или процессорное время решения задачи (CPU time), или
длительность расчета в продувках (travels). Если отмечена опция Show
analysis interval (Показать интервал анализа), то на оси абсцисс
дополнительно прямоугольником показан интервал анализа целей.
Дополнительно, с помощью регулятора Plot length (Длина графика) можно
Аэрогидродинамика и теплопередача
415
сжимать, а с помощью движка в нижней части графика — передвигать
график по оси абсцисс;
• по оси ординат могут быть отложены: абсолютные (absolute scale) или
отнесенные к диапазону изменения (normalized scale), текущие (Current
value), средние (Average value), максимальные (Maximum value) или
минимальные (Maximum value) по интервалу анализа значения цели;
может быть применен логарифмический масштаб (Logarithmic scale).
Поскольку, по умолчанию, график абсолютных значений цели строится
во всем диапазоне изменения цели от ее абсолютного минимума до ее
абсолютного максимума с начала расчета до текущего момента, то в
полях Manual min (Заданный минимум) и Manual max (Заданный
максимум) можно ограничить диапазон показа значений цели, задав,
соответственно, нижнюю и верхнюю границы графика по оси ординат.
♦ Preview (Картина промежуточных результатов)— картина (текущих)
результатов решения задачи в заданной плоскости, полученная на последней
выполненной итерации (последнем шаге по времени). Если опция Auto
update (Автоматическое обновление) не отмечена в диалоговом окне
Preview Settings (Установки картины промежуточных результатов), то для
обновления картины выберите команду Calculation | Update Previews
(Расчет | Обновить картины). Картины могут быть представлены в виде
заливок (Contours), изолиний (Isolines), или векторов скорости (Velocity
vectors). Можно задать периодичность (в итерациях) сохранения
обновляемых картин в виде bmp-файлов, что позволит в дальнейшем, при
анализе сходимости решения, рассматривать поведение не только целей, но
также картин физических параметров во время расчета, что существенно
расширяет надежность полученных результатов.
♦ Refinement Table (Таблица адаптации сетки) — информация обо всех
изменениях расчетной сетки, выполненных во время расчета (ее адаптациях
к решению задачи): когда это было сделано, т. е. номер итерации,
физическое время задачи (только для нестационарных задач), количество ячеек
новой расчетной сетки: в текучей среде (Fluid cells), в твердом теле (Solid
cells), частичных (Partial cells), а также в течение какого периода
(измеряемого итерациями) перед изменением сетки собиралась информация о
градиентах физических параметров (History duration), на основании
которой изменена расчетная сетка.
♦ Min/Max Table (Таблица минимумов и максимумов)— таблица
минимальных и максимальных значений основных термодинамических
параметров на текущей итерации.
♦ Summary (Сводный отчет)— полная информация о постановке задачи.
При выборе Report (Отчет) та же информация сбрасывается в документ
формата Microsoft Worde.
416
Глава 5
Из приведенного здесь описания опций COSMOSFloWorks по управлению
расчетом видно, что они дают пользователю широкие возможности для
повышения и проверки надежности решения задачи, наблюдения за ходом
расчета и своевременного вмешательства в него, в частности, для принятия
своевременного решения о завершении расчета или о необходимости его
продолжения, что в некоторых случаях дает существенную экономию
затрачиваемого машинного времени.
5.5.9. Просмотр результатов
Краткое описание возможностей постпроцессора COSMOSFloWorks дано
в разд. 5.4. Здесь рассмотрим подробное описание этих возможностей.
Загрузка результатов
Просмотр результатов начинается с загрузки в постпроцессор
COSMOSFloWorks файла результатов. Результаты расчета сохраняются в файл с
расширением fid в папку проекта. Для нестационарной (time-dependent) задачи
сохраняются также файлы с результатами, полученными в моменты времени,
предварительно заданные пользователем при определении временных
установок нестационарной задачи (в окне Wizard) или при задании установок
сохранения результатов (в окне Calculation Control Options). Файл, в
котором содержатся конечные результаты расчета, называется п.fid, где п — имя
папки проекта. Промежуточные результаты решения задачи сохраняются в
файле rn.fld, где п — номер итерации, после которой промежуточные
результаты решения задачи были сохранены.
Результаты работы генератора начальной расчетной сетки сохраняются в
файл с расширением cpt. Этот файл содержит только информацию о
полученной начальной расчетной сетке (если в процессе расчета не происходит
адаптация сетки к полю течения (solution-adaptive refinement), то начальная
сетка не изменяется до конца расчета). Для начинающих пользователей или в
случае, когда нет уверенности в адекватном разрешении геометрии модели
расчетной сеткой, рекомендуется запускать только генерацию сетки (см.
разд. "Запуск на счет") и анализировать полученную сетку, перед тем как
запускать задачу на счет. Файл результатов также содержит информацию о
расчетной сетке. После загрузки файла результатов можно посмотреть
трехмерную расчетную сетку, на которой были получены результаты. Для этого
из меню FloWorks | Results | Mesh (FloWorks | Результаты | Сетка) выберите
Mesh 3D View (Трехмерный вид сетки). Если хотите вывести в Excel или
текстовый (ASCII) файл значения физических параметров, полученные в
ячейках сетки указанного типа, в этом же меню выберите Mesh Output to Excel
(Вывести в Excel) или Output to ASCII (Вывести в текстовый файл)
соответственно.
Аэрогидродинамика и теплопередача
417
Загрузка файла результатов (fid) или файла расчетной сетки (cpt)
осуществляется в окне Load Results (Загрузка результатов), вызываемом при выборе
команды FloWorks | Results | Load/Unload Results (FloWorks | Результаты |
Загрузить/Выгрузить результаты) (рис. 5.87).
Рис. 5.87. Окно Load Results
Чтобы определить, в каком из файлов содержатся интересующие вас
результаты, смотрите информацию о выбранном файле в списке Property/Value
(Свойство/Значение). В первую очередь смотрите строки Iteration (Итерация)
и Time (физическое время), — особенно в задачах, имеющих несколько
файлов с результатами, относящимися к разным итерациям или моментам
времени.
Можно осуществить быструю ограниченную загрузку результатов расчета
только для просмотра графиков сходимости целей (goal plots) и составления
отчета (report). Для этого выберите команду FloWorks | Results | Select
Results (FloWorks | Результаты | Выбрать результаты) и укажите нужный
fid-файл.
После загрузки результатов вам становятся доступны следующие средства
просмотра и анализа результатов:
♦ картины в сечении (Cut plots);
♦ трехмерный график (3D-Profile plots);
♦ картины на поверхности (Surface plots);
♦ картины поверхностей уровня (Isosurfaces);
418
Глава 5
♦ визуализация линий тока (Flow trajectories);
♦ расчет движения частиц (Particle study);
♦ просмотр значений параметров на поверхности (Surface parameters);
♦ просмотр значений параметров в объеме (Volume parameters);
♦ просмотр значений параметров в точке (Point parameters);
♦ графики (XY plots);
♦ графики изменения сходимости целей (Goals);
♦ отчет (Report);
♦ создание фильмов (Animation).
Можно копировать, сохранять, печатать текущую картину результатов. Для
этого из меню FloWorks | Results | Image (FloWorks | Результаты | Картина)
выберите одну из следующих опций:
♦ Copy Image (Копировать картину)— копировать текущую картину
результатов в буфер обмена информацией;
♦ Save Image (Сохранить картину) — сохранить текущую картину
результатов как bmp-файл заданного размера (в пикселах) и названия;
♦ Print Image (Печатать картину) — печатать текущую картину результатов.
Результаты можно смотреть одновременно во всех четвертях графического
окна. Каждая из этих четвертей имеет свои установки просмотра. Установки
просмотра и созданные элементы визуализации сохраняются в проекте
COSMOSFloWorks.
г
Совет ^)
При отображении картин результатов включите режим светотеней для них —
Apply Lighting [Щ (Применить освещение). Это особенно полезно для
визуализации изоповерхностей и трехмерных графиков.
Установки просмотра
В окне View Settings (Установки просмотра) задается визуализируемый
физический параметр, а также установки его показа для текущей четверти
графического окна. Активная четверть имеет серый контур по своей границе.
Чтобы открыть окно View Settings (Установки просмотра), выберите команду
FloWorks | Results | View Settings (FloWorks | Результаты | Установки
просмотра). Можно также вызвать это окно, дважды щелкнув на палитре в левом
верхнем углу графической области, или из контекстного меню, вызываемого
щелчком правой кнопки мыши в графической области.
Аэрогидродинамика и теплопередача
421
бражение картин результатов во время вращения, смещения,
увеличения/уменьшения изображения модели с целью увеличения скорости этих
операций (Display while dynamic), можно установить размер, цвет и
прозрачность уменьшенного вида модели с отмеченной видимой областью
(Map View), а также задать цвет, прозрачность и положение палитры
(Color Bar);
♦ Coordinate system (Система координат)— на этой вкладке выбирается
система координат, в которой будут определены Х-, Y-, Z-составляющие
скорости;
♦ 3D-Profile (Трехмерный график) — на этой вкладке задается физический
параметр (Parameter), изменение которого в выбранном пользователем
сечении показано в виде поверхности, каждая точка которой смещена на
расстояние, пропорциональное значению параметра в данной точке
сечения. При этом расстояние, на которое смещается максимум значений,
задается в поле Distance factor (Коэффициент удаления).
Вне зависимости от способа отображения физического параметра, в списке
Parameter (Параметр) изначально находятся не все из возможных
параметров визуализации, а только основные (например, полное давление (Total
pressure) изначально отсутствует в этом списке). Чтобы сделать доступными
и другие параметры, необходимо их включить в окне Display Parameters
(Параметры визуализации), вызываемом при нажатии кнопки Parameter List
(Список параметров). Кроме того, список визуализируемых параметров
можно расширить за счет добавления дополнительных параметров (Custom
visualization parameters), которые задаются в виде функций (на основе
стандартных математических операций) от стандартных единиц измерения в
Engineering Database (Инженерной базе данных).
Одним из параметров визуализации может быть коэффициент теплоотдачи
стенки (heat transfer coefficient), a . Если выбран этот параметр, то
необходимо также задать характерную температуру текучей среды, которая будет
использована исключительно для визуализации коэффициента теплоотдачи
стенки:
a = q/(Ts-Tf),
где q — рассчитанный COSMOSFloWorks удельный тепловой поток от
стенки к текучей среде, Тк — рассчитанная COSMOSFloWorks температура
поверхности стенки, соприкасающейся с текучей средой, 7}— заданная
пользователем характерная температура текучей среды. Чтобы задать характерную
температуру текучей среды, используемую для всех стенок, выберите
команду FloWorks | Results | Default Reference Parameters (FloWorks |
Результаты | Характерные параметры по умолчанию). Чтобы задать характерную тем-
420
Глава 5
Рис. 5.89. Изолинии температуры
Vector Plot. Velocity [m/s]
Рис. 5.90. Векторы скорости
♦ Flow trajectories (Траектории) — на этой вкладке задается способ окраски
линий тока и траекторий частиц: либо все траектории имеют один цвет
(который для линий тока задается в окне Flow trajectories (Траектории), а
для траекторий частиц— в окне Particle Study Results (Результаты
расчета частиц)), либо они окрашиваются в зависимости от значений на них
физического параметра, выбранного на вкладке Contours (Заливки), в
соответствии с палитрой, выбранной там же;
♦ Isosurfaces (Поверхности уровня) — на этой вкладке выбирается
физический параметр для просмотра его значений в виде поверхностей уровня,
собственно значения параметра (максимум 16 разных значений),
настройки отображения (область отображения, цвет и сетка для лучшей
визуализации формы этих поверхностей;
♦ Options (Опции) — на этой вкладке можно задать показ 2D-Ruler (Линеек
окна) и 3D-Ruler (Линеек расчетной области), а также отменить ото-
Аэрогидродинамика и теплопередача
419
Окно View Settings (Установки просмотра) имеет следующие установки:
♦ Contours (Заливки)— сплошная окраска любой поверхности в
зависимости от значейий на этой поверхности выбранного физического параметра
(Parameter) и выбранной палитры (Palette), равномерно разбивающей
интересующий вас диапазон изменения данного физического параметра на
интервалы, число которых равно заданному числу цветов палитры
(Number of colors), так что каждому интервалу значений физического
параметра соответствует определенный цвет палитры. Заливки
отображаются в Surface Plots (Картины на поверхности) и Cut Plots (Картины в
сечении). Кроме того, эти установки могут быть применены для создания
изолиний, а также для раскрашивания траекторий, векторов и поверхностей
уровня в соответствии со значениями на них (для векторов — в их точках)
физического параметра, выбранного для просмотра на вкладке Contours
(Заливки). Для этого на соответствующей вкладке необходимо выбрать
Use from contours (Установки от заливки) (рис. 5.88);
Рис. 5.88. Распределение температуры показано в виде заливок
♦ Isolines (Изолинии)— на этой вкладке выбирается физический параметр,
изолинии которого могут быть изображены на картинах в сечениях (Cut
Plots) и картинах на поверхности (Surface Plots). Уровни изолиний
определены равномерным разбиением рассматриваемого диапазона изменения
данного физического параметра на интервалы, число которых на 1 меньше
заданного количества уровней (Number of levels) (рис. 5.89);
♦ Vectors (Векторы)— на этой вкладке задаются общие параметры
построения картин векторов скорости отображаемых на картинах в сечениях
и на поверхности: размер стрелок (Arrow size), вид отображения
(Mode)— вектора в пространстве (3D Vectors) или их проекции на
поверхность картины (Projected Vectors), размер диапазона скорости, такой,
что при выходе абсолютного значения вектора скорости за заданный
диапазон длина вектора не изменяется (рис. 5.90);
422
Глава 5
пературу текучей среды, используемую для визуализации коэффициента
теплоотдачи какой-то конкретной стенки, выберите команду FloWorks | Results |
Insert | Reference Parameters (FloWorks | Результаты | Вставить |
Характерные параметры) — в этом окне можно задать характерную температуру для
выделенных поверхностей.
Если хотите сузить диапазон просматриваемых значений интересующего
физического параметра, то задайте желаемые минимальное и максимальное
значения в полях Min и Мах для соответствующего способа отображения
(заливки, изолинии, векторы, трехмерный график). Если хотите восстановить
полный диапазон просмотра, заключенный между автоматически
определяемыми минимальным и максимальным значениями данного физического
параметра во всей расчетной области (они всегда показаны слева от окошек
Min и Мах), то щелкните кнопку Reset Min/Max (Восстановить Min/Max).
Опция Reset Min/Max (Восстановить Min/Max) действует в определенном
смысле глобально: полный диапазон просмотра восстанавливается для всех
способов отображения.
При желании можно сохранить текущие установки просмотра (Save as) и
загрузить их впоследствии для данного проекта (Open).
Картины в сечении
С помощью команды Cut Plot (Картина в сечении) можно посмотреть
распределение значений интересующего физического параметра (задается в окне
View Settings) по выбранному сечению. Картины в сечении могут показывать
распределение параметра в виде заливок (Contours), изолиний (Isolines),
также могут быть показаны векторы скорости (Vectors) и расчетная сетка
(Mesh) (рис. 5.91).
( Примечание ^
Возможность просмотра расчетной сетки в картинах в сечении и картинах на
поверхности изначально отключена и появляется, если в окне COSMOSFIoWorks
Options (Опции COSMOSFIoWorks) выбрана опция Display Mesh (Показывать
сетку).
Векторы и изолинии могут быть раскрашены в соответствии с
распределением физического параметра на линии вектора или изолинии. Для этого в окне
View Settings на вкладке Contours (Заливки) задается физический параметр,
диапазон его изменения, число цветов и вид палитры, а на вкладке Vectors и
Isolines отмечается опция Use from contours (Установки от заливки).
Окно задания картины в сечении вызывается при выборе команды FloWorks |
Results | Insert | Cut Plot (FloWorks | Результаты | Вставить | Картина в
сечении).
Аэрогидродинамика и теплопередача
423
Рис. 5.91. Картины в сечении: показано распределение температуры и расчетная сетка
В некоторых случаях удобно создать Cut Plot редактированием копии уже
имеющегося Cut Plot — для создания такой копии щелкните правой кнопкой
мыши элемент ранее созданного Cut Plots в Дереве анализа COSMOSFIoWorks
и выберите Clone (Клонировать).
Плоскость сечения (Section plane definition) может быть определена одним
из следующих способов:
♦ Reference (Плоскость или плоская поверхность)— в корневом каталоге
Дерева проектирования Sol id Works (FeatureManager) выберите одну из
трех координатных плоскостей или там же — любую другую плоскость,
или выделите одну из плоских поверхностей модели. Для сборок
существует ограничение на выбор плоскости: для картин в сечениях необходимо
использовать только плоскости, принадлежащие верхнему уровню сборки.
При необходимости, если плоскость (сечение), в которой вы собираетесь
смотреть результаты, не совпадает с базовой, в поле Section position
(Положение сечения) можно задать положение (т. е. плоскопараллельный
сдвиг) плоскости относительно базовой с учетом стрелки, исходящей от
базовой плоскости в графическом окне и указывающей положительное
направление возможного сдвига;
♦ Normal to screen (По нормали к экрану) — для картины в сечении можно
выбрать плоскость, перпендикулярную к экрану. Эта плоскость задается
двумя точками. Чтобы задать их, щелкните кнопкой мыши в первой точке
и перетащите указатель во вторую точку, затем отпустите кнопку мыши.
424
Глава 5
Можно также задать координаты X и Y этих точек. Координаты
определяются в пикселах с учетом того, что начало координат находится в левом
нижнем углу графической области. При этом можно зафиксировать
положение плоскости относительно модели при вращении, перемещении,
изменении масштаба модели в любой момент, нажав на кнопку Fix
(Фиксировать), или в момент создания картины, выбрав опцию Fix at creation
time (Фиксировать во время создания);
♦ Normal to screen vertical (horizontal) (По нормали к экрану, вертикально
(горизонтально))— для картины в сечении можно выбрать плоскость,
перпендикулярную к экрану и при этом расположенную горизонтально
или вертикально. Такая плоскость определяется одной точкой. Для
определения этой точки щелкните ее в графической области или введите ее
координаты X и Y. Координаты определяются в пикселах с учетом того, что
начало координат находится в левом нижнем углу графической области.
Параметры картины в сечении задаются на вкладке Settings (Параметры).
♦ Для векторов:
• Vector spacing (Расстояние между векторами)— расстояние между
точками, в которых строятся векторы скорости на картине;
• Uniform plot (Равномерное распределение)— одинаковое расстояние
между точками, в которых строятся векторы скорости на картине;
• Gradient plot (Градиентное распределение)— расстояние между
точками, в которых строятся векторы скорости на картине, зависит от
градиента скорости: чем выше градиент скорости, т. е. сильнее изменяется
скорость, тем меньше расстояние между векторами (рис. 5.92);
Рис. 5.92. Равномерная (слева) и градиентная (справа) картина векторов
• Fixed color (Фиксированный цвет)— если в окне View Settings
(Установки просмотра) на вкладке Vectors (Векторы) отмечена опция Use
fixed color (Фиксированного цвета), то здесь задается цвет векторов.
Аэрогидродинамика и теплопередача
425
♦ Для изолиний:
• Fixed color (Фиксированный цвет) — если в окне View Settings
(Установки просмотра) на вкладке Isolines (Изолинии) отмечена опция Use
fixed color (Фиксированного цвета), то здесь задается цвет изолиний;
• Background color (Фоновый цвет) — для картины с изолиниями можно
задать цвет фона, если отмечена опция Draw background (Фон) и на
этой картине нет заливки (Contours);
• Display values (Показать значения) — если эта опция отмечена, то
около изолиний (не всех) будут показаны соответствующие значения
физического параметра;
• Display outlines (Показать контуры картины) — если эта опция
отмечена, то границы картины оттеняются черной линией;
• Interpolate results (Интерполировать результаты)— эта опция
позволяет при просмотре результатов расчета включить/отключить их
интерполяцию между центрами ячеек расчетной сетки. Если эта опция
включена (по умолчанию), то COSMOSFloWorks показывает
результаты расчета с применением их интерполяции между центрами ячеек
расчетной сетки. Если эта опция отключена (т. е. не отмечена), то при
просмотре результатов расчета их интерполяция между центрами ячеек
не осуществляется (это, в частности, ускоряет их просмотр), так что в
пределах каждой ячейки результаты расчета будут показаны
постоянными (рис. 5.93);
Рис. 5.93. Слева — интерполяция результатов включена, справа — отключена
• Use CAD geometry (Использовать геометрию САПР) — по умолчанию,
при просмотре результатов расчета будет показана геометрия САПР,
однако геометрия этой модели, разрешенная расчетной сеткой
426
Глава 5
COSMOSFIoWorks и, соответственно, использованная в расчете, может
несколько от нее отличаться (рис. 5.94). Если эта опция отключена (т. е.
не отмечена), то при просмотре результатов будет показано сеточное
представление геометрии модели. Отключение этой опции немного
ускоряет просмотр;
Рис. 5.94. Картина с геометрией САПР (слева ) и геометрией, полученной
в результате аппроксимации расчетной сеткой (справа)
• Display boundary layer (Показывать пограничный слой) — эта опция
определяет, показывать или не показывать влияние пограничного слоя
на параметры течения около стенок модели. Отключение этой опции
ускоряет просмотр.
Картина в сечении может быть ограничена прямоугольной областью,
координаты границ которой в Глобальной системе координат (Global coordinate
system) задаются на вкладке Region (Область).
Трехмерный график
Трехмерный график дает представление о распределении значений
физического параметра в сечении модели в виде поверхности, полученной
смещением точки сечения по нормали к плоскости сечения на расстояние,
пропорциональное значению физического параметра в этой точке (если рассечь такую
поверхность плоскостью, перпендикулярной плоскости сечения, то линия
пересечения рассекаемой и секущей поверхностей будет являться графиком
Аэрогидродинамика и теплопередача
427
изменения параметра вдоль линии проекции поверхности (трехмерного
графика) на плоскость сечения (рис. 5.95)).
Теплообменник.SLDASM Гфо*»нь 3]
„...„..
—~/~
/ m
f .,.
\
)
Рис. 5.95. Слева — трехмерной график показывает распределение температуры
по сечению трубы и кожуха теплообменника, справа — график изменения этого же параметра
вдоль эскиза, построенный с помощью инструмента XY plot
Физический параметр и коэффициент пропорциональности (Distance factor)
задаются в окне View Settings (Установки просмотра), а плоскость сечения
(Section plane/face), область визуализации (Region) и параметры
отображения (Display outlines, Use CAD geometry, Display boundary layer) — в окне
3D-Profile Plot (Трехмерный график), вызываемом при выборе команды
Flo Works | Results | Insert | 3D-Profile Plot (Flo Works | Результаты |
Вставить | Трехмерный график).
Поверхность трехмерного графика может быть раскрашена в соответствии с
распределением физического параметра в плоскости рассматриваемого
сечения. Для этого в окне View Settings на вкладке Contours (Заливки) задается
физический параметр, диапазон его изменения, число цветов и вид палитры, а
на вкладке 3D-Profile Plot (Трехмерный график) отмечается опция Use from
contours (Установки от заливки). Если же выбран единый цвет (Use fixed
color), то в окне 3D-Profile Plot можно установить необходимый шаг сетки
(Grid step), проецируемой на поверхность для лучшей визуализации формы
поверхности.
Картины на поверхности
С помощью команды Surface Plot (Картина на поверхности) можно
посмотреть распределение значений интересующего физического параметра
(задается в окне View Settings) по выбранной поверхности модели,
соприкасающейся с текучей средой. Значения параметра могут быть представлены в виде
заливок, изолиний, также может быть показан вектор скорости и расчетная
сетка.
428
Глава 5
Окно задания картины на поверхности вызывается при выборе команды
FloWorks | Results | Insert | Surface Plot (FloWorks | Результаты | Вставить |
Картина на поверхности).
Интересующая поверхность выбирается непосредственно выделением в
графической области. Если хотите выбрать сразу все поверхности модели,
соприкасающиеся с текучей средой, то отметьте опцию Use all faces (Включить
все поверхности). Если выделенная поверхность является границей раздела
разных сред (между твердым телом и жидкостью, между жидкостью и
пористой средой или между твердым телом и пористой средой), то необходимо
задать среду (Medium), в которой хотите увидеть данную картину на
поверхности. Для твердых сред в картине на поверхности может быть показана
только температура (рис. 5.96).
Рис. 5.96. Картины на поверхности
Параметры картин на поверхности и область ограничения задаются
аналогичным образом, как и для Cut Plot (Картины в сечении).
Картины поверхностей уровня
Поверхность уровня (Isosurfaces) какого-либо физического параметра
показывает поверхность, в каждой точке которой значение параметра равно опре-
Аэрогидродинамика и теплопередача 429
деленной величине. Физический параметр и его значение, а также настройки
отображения (цвет, область визуализации и др.) задаются в окне View
Settings (Установки просмотра) на вкладке Isosurfaces (Поверхности уровня).
Для того чтобы заданные таким образом поверхности уровня показать в
графической области, нужно в Дереве анализа щелкнуть правой кнопкой мыши
на элементе Isosurfaces и в появившемся контекстном меню выбрать пункт
Show (Показать) или FloWorks | Results | Insert | Isosurfaces (FloWorks |
Результаты | Вставить | Поверхности уровня) (рис. 5.97).
Рис. 5.97. Поверхности уровня давления раскрашены заливками
согласно значению скорости на этой поверхности
Поверхности уровня могут быть раскрашены в соответствии с
распределением физического параметра на линии вектора или изолинии. Для этого в окне
View Settings на вкладке Contours (Заливки) задается физический параметр,
диапазон его изменения, число цветов и вид палитры, а на вкладке
Isosurfaces отмечается опция Use from contours (Установки от заливки).
Если же выбран единый цвет (Use fixed color), то, щелкнув Grid (Сетка), можно
установить необходимый шаг сетки (Grid spacing), проецируемой на
поверхность для лучшей визуализации формы поверхности.
Для скрытия или удаления отображаемых поверхностей уровня щелкните
правой кнопкой мыши на элемент Isosurfaces в Дереве анализа и выберите
Hide (Скрыть) или Clear and Hide (Скрыть и очистить).
430
Глава 5
Траектории линий тока
Окно Flow Trajectories (Траектории течения) позволяет построить линии
тока текучей среды, т. е. линии, в каждой точке которых вектор скорости
направлен по касательной к ним. Чтобы построить линии тока в COSMOS-
FloWorks, необходимо на вкладке Definition (Определение) диалогового окна
Flow trajectories (Линии тока) задать точки, через которые линии тока будут
проходить. Кроме того, можно ограничить область построения линий тока,
указав направление построения линий тока Forward (Вниз по потоку) или
Backward (Вверх по потоку) относительно точек их задания. Если
указываете Both (Оба направления), то линии тока строятся как вверх, так и вниз по
потоку относительно точек их задания.
Окно задания траекторий течения вызывается при выборе команды
FloWorks | Results | Insert | Flow Trajectories (FloWorks | Результаты |
Вставить | Траектории течения) (рис. 5.98).
Рис. 5.98. Визуализация линий тока
Положение точек, через которые будут проходить построенные линии тока,
можно определить несколькими способами: ввести координаты точек,
непосредственно указать мышью положение точек в графической области на
выделенной плоскости или плоской поверхности или задать число точек,
равномерно распределенных на выделенной поверхности, плоскости, кривой или
на выделенном эскизе. Способ задания точек выбирается в списке Start
points from (Способ задания начальных точек):
♦ Table (Таблица)— точки задаются таблично. Это можно сделать двумя
способами: либо ввести координаты точек в Глобальной системе коорди-
Аэрогидродинамика и теплопередача
431
нат (Global Coordinate system), либо указать мышью нужные точки в
графической области на выбранной плоскости или плоской поверхности
модели (или на плоскости, смещенной от выбранной на заданный
плоскопараллельный сдвиг (Shift)). В любом случае, координаты всех заданных
точек будут показаны на вкладке Table (Таблица). Предварительно перед
выбором точек на заданной плоскости (плоской поверхности) необходимо
ее зафиксировать, нажав Fix (Закрепить). В противном случае, любые
нажатия в графической области не будут восприниматься COSMOSFloWorks
как указание местоположения точки. Чтобы точка попала в таблицу,
необходимо после ввода ее координат или указания ее положения в
графической области нажать Add (Добавить). При указании точек в области
можно также включить опцию Auto Add (Автоматическое добавление), для
автоматического ввода в таблицу координат указываемых точек;
( Совет ~")
Можно также скопировать координаты точек из Excel. Для этого создайте
таблицу координат точек в Excel в виде столбцов X, Y, Z (т. е. того же вида, как на
вкладке Table). Затем скопируйте эту таблицу в буфер обмена, откройте
вкладку Table (Таблица) и нажмите клавиши <Ctrl>+«>V>. В результате все
попадающие в текучую среду точки включаются в таблицу на вкладке Table (Таблица).
♦ Reference (Равномерно) — точки, число которых задается в поле Number
of trajectories (Число линий траекторий), автоматически распределяются
равномерно по выбранной плоскости или плоской или кривой
поверхности, либо вдоль кривой или эскиза.
( Совет )
Для быстрого выделения поверхности, на которой задано граничное условие
или поверхностная цель, щелкните на имени этого условия или цели в Дереве
анализа COSMOSFloWorks.
Параметры отображения линий тока задаются на вкладке Settings
(Установки):
♦ Cross size (Ширина)— ширина полосок или стрелок при показе линий
тока;
♦ Draw trajectories as (Показать линии тока как) — линии тока могут быть
показаны линиями (Line), полосками (Band), шариками (Spheres),
трехмерными стрелками (Arrows), трубками (Pipes) или линиями со стрелками
(Line with Arrow);
♦ Fixed color (Фиксированный цвет) — если на вкладке Flow Trajectories
(Линии тока) окна View Settings (Установки просмотра) отмечена опция
Use fixed color (Фиксированного цвета), то здесь выбирается цвет линий
тока;
432
Глава 5
♦ Maximum length (Максимальная длина) — эта опция ограничивает длину
линий тока заданием максимальной длины линии тока;
♦ Maximum time (Максимальное время)— эта опция ограничивает длину
линий тока заданием максимального времени, в течение которого частица
текучей среды может двигаться вдоль линии тока с учетом ее скорости,
рассчитанной на этой линии;
♦ Use CAD geometry (Использовать геометрию САПР)— при отключении
этой опции линии тока будут построены для сеточного представления
геометрии модели (см. разд. "Картины в сечении").
Опции Maximum length (Максимальная длина) и Maximum time
(Максимальное время) позволяют сэкономить процессорное время и память
компьютера, требующиеся для построения линий тока, особенно в вихревых
областях.
Чтобы посмотреть, как изменяются параметры вдоль линий тока, можно
экспортировать в Excel или текстовый файл результаты расчета, полученные на
этих линиях. Для этого на вкладке Export (Экспорт) необходимо задать
физические параметры, значения которых на линии тока вам интересны. Если
хотите построить графики изменения параметров в Excel, необходимо
выбрать абсциссу графика (Abscissa) из следующих вариантов: длина кривой
(Curve length), координата Глобальной системы координат (Model X, Y, Z)
или время движения по линии тока (Time). При выводе координаты в
текстовый файл текущая длина линии, время движения и значение параметра
выводятся построчно. Местоположение и имя файла можно задать, щелкнув в
поле Text file path (Имя текстового файла).
Кроме того, при нажатии Create Curves (Создание кривых) будут созданы
кривые, повторяющие форму линий тока. Эти кривые могут быть
впоследствии также использованы для построения графиков изменения значений
физического параметра вдоль этих кривых — см. далее разд. "Построение
графика".
Одним из эффектных способов визуализации результатов является создание
фильма линий тока. Такой фильм наглядно показывает распространение
текучей среды по объему расчетной области. Для стационарных задач (или для
выбранного момента времени нестационарной задачи) кадр фильма— это
картина распространения жидкости (или газа) вдоль линии тока в один из
моментов времени, на которые равномерно разбито максимальное (среди
всех отображаемых траекторий линий тока) время распространения жидкости
(или газа) по линиям тока. Для нестационарных задач число кадров фильма
соответствует количеству моментов времени, в которые сохранялись
результаты, т. к. в этом случае кадр фильма — картина распространения траекторий
в один из сохраненных моментов времени (см. также разд. "Фильмы для
просмотра результатов" данной главы).
Аэрогидродинамика и теплопередача
433
Расчет частиц
С помощью Particle Study возможно показать траектории движения твердых
или жидких частиц (например, пыль или капли) в текучей среде, а также
рассчитать следующие показатели взаимодействия частиц со стенками модели:
суммарную (для всей поверхности стенки) интенсивность уноса материала
стенки вследствие соударения частиц со стенкой (Total Erosion Mass Rate)
или суммарную интенсивность налипания частиц на стенку (Total
Accumulation Mass Rate). Посмотреть значения интенсивности уноса и
налипания на выбранной поверхности можно после проведения расчета частиц
в окне Surface Parameters (Параметры на поверхности).
( Примечание ^
Интенсивность налипания или эрозии не рассчитывается на поверхностях тела,
являющегося пористой средой.
Модель текучей среды с жидкими или твердыми частицами в COSMOS-
FloWorks предполагает сферические частицы постоянной массы, воздействие
которых на течение пренебрежимо мало, при этом течение влияет на
скорость и температуру (а значит, и плотность) частиц, что, в свою очередь,
влияет на размер частиц. Для расчета частиц необходимо задать точки входа
частиц в текучую среду, начальные параметры частиц (температура, диаметр,
скорость; а для расчета налипания или эрозии также интенсивность
появления частиц), материал частиц и условия взаимодействия частиц со стенками
(отражение или поглощение). Если необходимо, можно также учесть влияние
гравитации на движение частиц.
См. также разд. "Течения с частицами" данной главы.
Постановка задачи расчета частиц
Постановка задачи расчета частиц полностью определяется в окне Particle
Study, вызываемом при выборе команды FloWorks | Results | Insert |
Particle Study (FloWorks | Результаты | Вставить | Расчет частиц) (рис. 5.99).
На вкладке Injections (Фракции) определяются фракции частиц,
рассматриваемых в задаче. Фракция частиц (injection) — это набор частиц одного и
того же материала с одинаковыми начальными условиями, т. е. условиями,
которые имеют частицы при входе в текучую среду (скорость, диаметр,
температура). Также для фракции задается ее суммарный массовый расход
(количество массы частиц, вносимое данной фракцией в текучую среду в
единицу времени), который используется для расчета суммарной
интенсивности налипания частиц и эрозии стенки.
Для задания фракции на вкладке Injections (Фракции) окна Particle Study
(Расчет частиц) щелкните по кнопке Insert (Вставить). В появившемся окне
434
Глава 5
Injection (Фракция) на вкладке Definition (Задание) задаются точки входа
частиц, а на вкладке Settings (Параметры) — начальные условия (Initial
Conditions), материал (Particle material) и массовый расход фракции (Mass
flow rate).
Рис. 5.99. Окно Particle Study
Подходящий способ задания точек входа частиц выбирается в списке
Injection type (Тип фракции). Задание точек входа частиц через таблицу (Table)
или равномерно на выделенном элементе (Reference) аналогично заданию
точек, через которые проходят траектории линий тока (см. разд. "Траектории
линий тока" данной главы). Можно также выбрать текстовый файл (File), в
котором заданы координаты точки в Глобальной системе координат,
компоненты вектора скорости (или значение скорости, если задается относительная
скорость), значение температуры и интенсивность появления частиц (кг/с) в
точке с заданными координатами. Значения задаются в системе единиц
проекта в одну строку через пробел.
Начальная скорость и температура всех частиц фракции могут быть заданы в
абсолютных (тип Absolute) величинах либо относительно значений скорости
и температуры потока текучей среды в точках входа частиц (тип Relative).
Абсолютное значение скорости и направление движения частиц определяется
заданием компонентов вектора скорости. В случае задания относительной
скорости (Velocity condition type = Relative) указывается только значение
скорости, т. к. в этом случае направление движения частицы совпадает с на-
Аэрогидродинамика и теплопередача
435
правлением движения потока в точке входа частицы. Аналогично, при
задании относительной температуры (Temperature condition type = Relative)
указанное значение температуры есть разница между температурой частицы
и температурой потока в точке входа частицы.
На вкладке Boundary Conditions (Граничные условия) окна Particle Study
определяются условия взаимодействия частиц со стенками модели.
Возможные условия взаимодействия: полное прилипание (Absorption — свойственно
каплям жидкости при не очень высоких скоростях соударений), идеальное
(Ideal reflection — угол падения равен углу отражения) или неидеальное
отражение (Reflection). При неидеальном отражении задаются такие
коэффициенты изменения нормальной и тангенциальной скорости en и et, как показано
на рис. 5.100.
Рис. 5.100. Неидеальное отражение частицы от поверхности стенки модели
По умолчанию на всех поверхностях модели задано условие прилипания.
Чтобы изменить это условие для всех поверхностей, выделите строку
<Default> (<По умолчанию>) и нажмите Edit (Изменить). Чтобы задать
условие взаимодействия частицы со стенкой, отличное от используемого по
умолчанию, для какой-то конкретной стенки, нажмите Insert (Вставить)
(рис. 5.101).
На вкладке Computational Domain (Область расчета) задаются координаты,
ограничивающие область, в которой будет проведен расчет частиц. По
умолчанию расчет будет проведен во всей расчетной области.
На вкладке Settings (Параметры) определяются критерии, ограничивающие
длину траекторий частиц: Maximum iteration count (Максимальное число
переходов)— траектория частицы обрывается по достижению заданного
числа переходов между точками (траектория частицы определяется
последовательным переходом от одной точки к другой на расстояние, зависящее от
скорости в данной точке и шага по времени), критерии Maximum length и
Maximum time работают так же, как и для траекторий линий тока.
На вкладке Physical Models (Физические модели) вы можете учесть влияние
гравитации (Gravity), задав вектор гравитации, и включить расчет интенсив-
436
Глава 5
ности налипания частиц (Calculate Total Accumulation Mass Rate) или
интенсивности эрозии стенки (Calculate Total Erosion Mass Rate).
Формулы расчета интенсивности налипания и эрозии указаны в разд.
"Течения с частицами" данной главы.
1 Absorption
Рис. 5.101. Траектории частиц различной массы в коллекторе.
Вектор гравитации направлен вниз, на дне коллектора стоит условие налипания,
на остальных поверхностях — идеальное отражение
В случае расчета эрозии, если необходимо, можно задать зависимость
интенсивности эрозии от угла падения частиц (Function of impact angel),
относительной скорости падения частицы (Function of relative particle velocity) и
диаметра частицы (Function of particle diameter), в общем случае, скорость
стенки может быть не равна нулю (см. разд. "Задание подвиэюных стенок"
данной главы). Зависимости задаются в виде таблиц при нажатии на кнопку
Design (Задание). Если имеющиеся у пользователя зависимости приведены в
системе единиц, отличной от системы единиц, используемой в проекте,
можно задать коэффициент пропорциональности (Coefficient К).
На вкладке Save Options (Установки сохранения) выбираются физические
параметры частиц (координаты точек траекторий и значения в них скорости,
длина траектории, температура и др.), которые будут доступны для
просмотра после завершения расчета частиц. При желании значения выбранных
параметров частиц (Particle parameters) и параметров потока текучей среды
Аэрогидродинамика и теплопередача
437
(Fluid parameters) в точках траекторий частиц можно сохранить в текстовый
файл сразу после завершения расчета частиц.
Для запуска расчета частиц нажмите кнопку Run (Запустить). По окончании
расчета в Дереве анализа COSMOSFloWorks появится новый элемент —
Particle Study n, где n — порядковый номер задачи расчета частиц. Чтобы
посмотреть результаты расчета, щелкните правой кнопкой мыши на этом
элементе и выберите пункт View results (Просмотр результатов).
( Примечание )
В одном проекте может находиться сколь угодно много различных постановок
задач расчета частиц. Однако просмотр результатов возможен только для
активной задачи. Чтобы активизировать задачу, в Дереве анализа щелкните
правой кнопкой мыши на названии задачи и выберите пункт Activate Particle Study
(Активизировать задачу расчета частиц).
Просмотр результатов расчета частиц
В окне Particle Study Results (Результаты расчета частиц) задаются
параметры просмотра траекторий частиц в графической области, осуществляется
просмотр и вывод в Excel или текстовый файл значений физических
параметров частиц (выбранных для сохранения при постановке задачи) и потока
текучей среды взятых на линиях траекторий частиц, а также задаются
настройки фильма распространения частиц (рис. 5.102).
Для того чтобы показать траектории той или иной фракции частиц, на
вкладке Injections (Фракции) выделите имя фракции и нажмите кнопку Show
(Показать). Размер, цвет и форма (полоса, линия или линия со стрелками)
траекторий выбранной фракции задаются в окне 3D-View Options (Опции
просмотра). Для построения графика изменения параметров текучей среды и
параметров частиц вдоль линий траекторий нажмите кнопку Send to Excel
(Вывод в Excel). Физический параметр и параметр абсциссы графика
задаются на вкладке Excel. Для вывода таблицы значений параметров в текстовый
файл нажмите кнопку Send to TXT (Вывод в файл). При нажатии кнопки
Create Curves (Создание кривых) будут созданы кривые, повторяющие
форму линий траекторий частиц выбранной фракции.
Дополнительно в окне Summary (Сводный отчет) можно посмотреть
следующую информацию для всех фракций:
♦ Trajectories (Траектории) — координаты точек входа частиц;
♦ Length (Длина) — длина траектории;
♦ Residence time (Продолжительность жизни)— время распространения
траектории частицы внутри расчетной области до того момента, как она
исчезнет по одной из причин, показанных в столбце Fate (Причина завер-
438
Глава 5
Particle Study Result*
foV«J** }f^>v *щ?ж* ^
X4 * »$^0 ~ч&<^£
^fe*,?^ff?^ffi^
Л?/^ *^>*
ffi^fftfrg
*\**<К*г1з
*>ч> к'
3№*rit tttffr v о "4^4 ^Г>
^vffi.^J
«1 (-00399999991 m.O 004999999 0 242965
«2 (-00399999991 m.O 005400000 0 242995
83 (-00399999991 m;0 005799999 0 243024
• «4 (-0 0399999991 m;0 006199999 0 24316
«5 (-00399999991 m;0 006599999 0 242666
«6 (-0 0399999991 m;0 007000000^ 0 242G37
«7 (-0 0399999991 m;0 0074 m,0 rr 0 243123
«8 (-0.0399999991 m,0 007799999> 0 243277
«9 (-0 0399999991 m.O 008200000 0 243777
H10 (-0 0399999991 m.O 00860000 0 244131
811 1-0 0399999991 m.O 00899999 0 24505
812 (-0 0399999991 m.O 00939999 0 246449
813 (-0 0399999991 m.O 00980000 0 242385
814 (-0 0399999991 m.O 01020000 0 241956
d-lmm
81 (-0.0399999991 m.O 004999999 0 211273
82 (-0 0399999991 m.O 005400000 0 20582
83 (-0 0399999991 m.O 005799999 020836
84 (-0 0399999991 m;0 006199999 0 208052
85 (-0 0399999991 m;0.006599999 0209648
• 86 (-0 0399999991 m;0 007000000 0 208728
87 (-0 0399999991 m.0 0074 m;0 rr 0 209978
88 (-0 0399999991 m.O 007799999 0 21339
89 (-0 0399999991 m.O 008200000 0 212052
810 (-0.0399999991 m.O 00860000 0.214017
811 (-0 0399999991 m.O 00899999 0 213883
812 (-0 0399999991 m.O 00939999 0 217894
813 (-0 0399999991 m.O 00980000 0 217524
814 (-0 0399999991 m.O 01020000 0 232859
'£ d=2 5mm
0 305956
0 303166
0 300649
0 298653
0 296742
0 29584G
0 296346
0 297131
0 299351
0 301548
0 306391
0 332115
0 2987
0 295341
0 696611
0 616776
0 605042
0 59679
0 605666
0 584924
0 581234
0.593508
0 616881
0 62376
0 611255
0 625591
0 619604
0 671196
Opening
Opening
Opening
Opening
Opening
Opening
Opening
Opening
Opening
Opening
Opening
Opening
Opening
Opening
Absorbed
Absorbed
Absorbed
Absorbed
Absorbed
Absorbed
Absorbed
Absorbed
Absorbed
Absorbed
Absorbed
Absorbed
Absorbed
Absorbed
I s ч J- s ^ ^ V V ;..., Ч 0 P .. ,-,„КГм, ,t||- l»|ffil| if'W^' < « *■ % 0-.> ]
Рис. 5.102. Окна Particle Study Results и Summary
Аэрогидродинамика и теплопередача
439
шения): вылет за пределы расчетной области через отверстие (Opening),
налипание на стенку (Absorbed), ограничение длины траектории одним из
критериев (Maximum iteration count, Maximum length, Maximum time).
Построение графика
График (XY Plot) позволяет посмотреть изменение интересующих вас
физических параметров вдоль заданной линии. В качестве этой линии можно
использовать любую определенную графическими средствами линию,
например, двумерные или трехмерные эскизы, кривые. Как координаты линии, так
и значения физических параметров вдоль нее экспортируются в Excel-файл, в
котором на странице Plot Data (Таблицы) формируются соответствующие
таблицы, а на других страницах строятся графики.
Если заданная вами линия проходит через области, где интересующий вас
физический параметр не определен, то график будет построен только для тех
сегментов линии, на которых данный параметр определен. Например, это
будет сделано, если заданная линия частично выходит за пределы расчетной
области или проходит через твердое тело, тогда как в качестве параметров
выбраны параметры текучей среды. Каждый соответствующий сегмент
графика имеет свою таблицу на странице Excel-файла и имя вида
Sketch 1 @ArcI@Line3@Spline 1, т. е. начинающееся с имени линии (т. е.
эскиза или кривой).
( Примечание ^
Если заданная вами линия лежит на поверхности твердого тела,
соприкасающейся с текучей средой, то, вследствие незначительных колебаний координат
этой линии, часть этой линии может проходить по твердому телу, а часть — по
текучей среде. В результате графики параметров текучей среды (твердого
тела) будут построены только для тех участков линии, которые расположены в
текучей среде (твердом теле). Во избежание этого необходимо смещать линию на
незначительное расстояние внутрь текучей среды или внутрь твердого тела, —
в зависимости от того, какой физический параметр вас интересует.
Для создания графика выберите команду FloWorks | Results | Insert | XY Plot
(FloWorks | Результаты | Вставить | График) (рис. 5.103).
Эскизы или кривые, графики изменения значений выбранного физического
параметра вдоль которых хотите построить, выбираются в Дереве
проектирования (FeatureManager tree). Если модель — сборка, то необходимо, чтобы
эти эскизы или кривые лежали в корневой части Дерева проектирования.
Необходимо также задать следующие параметры графика:
♦ Abscissa (Абсцисса) — параметр, который откладывается по оси абсцисс
графика: Curve Length (Расстояние вдоль линии)— расстояние вдоль
линии, отсчитываемое от точки, с которой было начато построение этой ли-
15 Зак. 4405
440
Глава 5
нии; Model X, Y, Z (Оси X, Y, Z модели) — в качестве оси абсцисс
графика выбирается одна из осей Глобальной системы координат; Sketch X, Y,
Z (Оси X, Y, Z эскиза) — в качестве оси абсцисс графика выбирается одна
из осей системы координат эскиза;
Рис. 5.103. График изменения компонента скорости вдоль линии эскиза
показан в Excel с помощью XY Plot
♦ Template (Шаблон)— по умолчанию, график создается на основе
стандартного шаблона с именем xy-plots.xlt. Если вы имеете опыт VBA-npo-
граммирования в Excel, то можете изменить стандартный шаблон, чтобы
организовать вывод данных в Excel нужным вам образом. Чтобы
созданный шаблон использовался при построении графика, его необходимо
поместить в папку <install_dir> / Lang / english / Template / XY plot и
выбрать в списке Template (Шаблон);
♦ Geometry Resolution (Разрешение геометрии)— регулирует, насколько
хорошо эскиз (кривая) аппроксимируется линейными участками.
Установка более высокого разрешения приводит к замедленному созданию
графика, но создается более точная форма кривой. Для линии достаточно
установить минимальное разрешение геометрии (2 конечных точки). Для
сложных кривых рекомендуется задавать большее разрешение;
Аэрогидродинамика и теплопередача
441
♦ Parameter Resolution (Разрешение параметра)— контролирует
количество дочерних сегментов (определяемых Geometry Resolution (Разрешением
геометрии), расчетной сеткой, геометрией модели и полем течения),
принимая во внимание изменение параметра. Перед созданием графика
COSMOSFloWorks исключает ненужные точки, что позволяет ускорить
его создание. Если кривая параметра может быть линейно
аппроксимирована по числу дочерних сегментов (внутренний критерий зависит от
изменения параметра и заданного разрешения параметра так, что чем выше
разрешение, тем меньше критерий), то ненужные сегменты исключаются,
что позволяет уменьшить общее число точек графика. Установка более
высокого разрешения приводит к замедленному созданию графика
(обрабатывается большее количество точек), но создается более точный
профиль кривой;
♦ Coordinate system (Система координат)— для Х-, Y-, Z-составляющих
вектора скорости необходимо выбрать систему координат, в которой эти
составляющие определены. По умолчанию используется Global
Coordinate System (Глобальная система координат). При желании вместо
нее можно выбрать любую другую систему координат в Дереве
проектирования (FeatureManager tree);
♦ Equidistant points (Равноудаленные точки) — график строится по
значениям параметра в точках, равномерно распределенных на линии эскиза
или кривой.
Вы можете задать установки графиков и воспользоваться опцией Batch
Results Processing (Автоматическая обработка результатов расчета) для
автоматического построения графиков без вызова окна XY-Plot для каждого
графика. В этом случае Excel-файлы с графиками будут сохранены в папку
проекта.
Построение графика целей
График целей показывает изменение в процессе расчета физического
параметра, заданного как цель (goal). График строится в Excel на отдельной
странице. В этом же файле на странице Summary (Итог) показаны значения этих
целей в момент завершения расчета (или в момент физического времени
задачи, выбранный для просмотра результатов расчета нестационарной (time-
dependent) задачи).
Цели, для которых вы хотите построить график их изменения во время
расчета, задаются в окне Goals (Цели), вызываемом при выборе команды
FloWorks | Results | Goals (FloWorks J Результаты | Цели). В этом же окне
определяется параметр, откладываемый по оси абсцисс графика (Abscissa):
♦ CPU time (Процессорное время) — процессорное время решения задачи
(в секундах);
442
Глава 5
♦ Iterations (Итерации) — число выполненных итераций;
♦ Travels (Продувки) — число выполненных продувок;
♦ Physical time (Физическое время) — физическое время задачи (т. е.
развития рассчитываемого процесса с момента начала расчета), только для
нестационарных задач.
При желании можно изменить заданный COSMOSFloWorks вывод данных в
Excel, заменив стандартный шаблон (goals.xlt) своим собственным, выбрав
его в списке Template (Шаблон). Чтобы ваш шаблон стал доступен для
выбора, его необходимо поместить в папку <install_dir>/Lang/english/Template
/Goals/Template.
Задание установок окна Goals сохраняется в Дереве анализа как элемент Goal
Plots (График целей). Можно воспользоваться опцией Batch Results
Processing для автоматического создания графиков целей заданных ранее
(т. е. имеющихся элементов Goal Plots) без вызова окна Goals. В этом случае
Excel-файлы с графиками будут сохранены в папку проекта.
Просмотр параметров на поверхности и в объеме
С помощью диалогового окна Surface Parameters (Параметры на
поверхности) можно посмотреть минимальные, максимальные и средние значения
локальных (Local) физических параметров (давления, температуры, скорости,
и т. д.) и интегральных (Integral) физических параметров (расходы, силы,
и т. д.) на выбранной поверхности, а с помощью диалогового окна Volume
Parameters (Параметры в объеме) в выбранном объеме (интегральные
параметры для объема — масса и объем). Полученные значения могут быть также
экспортированы в Excel.
Окно просмотра параметров на поверхности вызывается при выборе
FloWorks | Results | Insert | Surface Parameters (FloWorks | Результаты |
Вставить | Параметры на поверхности), а окно просмотра параметров в
объеме при выборе FloWorks | Results | Insert | Volume Parameters (FloWorks |
Результаты | Вставить | Параметры в объеме).
Если решалась нестационарная (time-dependent) задача, то в данном
диалоговом окне используются дополнительные вкладки Transient (Моменты
времени) и Table (Таблица). На вкладке Transient (Моменты времени), открыв
дополнительное диалоговое окно Scenario (Моменты), можно из моментов
физического времени задачи, заданных для сохранения результатов, выбрать
интересующие вас для просмотра значений локальных и интегральных
параметров на вкладке Table. Кроме того, на вкладке Transient (Моменты
времени) в списке Current time (Текущий момент времени) выбирается момент
времени для просмотра значений физических параметров на вкладках Local
(Локальные) и Integral (Интегральные) данного диалогового окна.
Аэрогидродинамика и теплопередача
443
( Совет )
Если решалась нестационарная (time-dependent) задача, то, экспортировав
в Excel значения физических параметров, полученные в выбранные вами
моменты времени, можно в Excel построить графики изменения этих физических
параметров во времени.
Вы также можете задать шаблон (Template) представления результатов в
Excel и систему координат (Coordinate system) для расчета компонентов сил,
моментов (на поверхности) и скорости (в объеме).
Для просмотра значений параметров в объеме текучей среды этот объем
должен быть задан как отдельный компонент (деталь сборки или тело
многотельной детали) и отключен в окне Component Control (Управление
деталями). См. разд. "Управление деталями" данной главы.
Просмотр параметров в точках
С помощью диалогового окна Point Parameters (Параметры в точках) можно
посмотреть значения физических параметров в точках, заданных вами в
текучей среде или твердом теле в пределах расчетной области. Точки задаются
либо их координатами, либо щелканьем этих точек в графическом окне (One
by one) на выбранных плоскостях или плоских поверхностях модели
(Plane/planar surface) или в плоскости, отстоящей от выбранной на заданное
расстояние (Plane position), либо заданием некоторой сетки (Grid), узлы
которой будут этими точками. Значения параметров в заданных таким образом
точках будут показаны на вкладке Table (Таблица), кроме того, их можно
экспортировать в Excel-файл.
Окно просмотра параметров в точках вызывается при выборе FloWorks |
Results | Insert | Point Parameters (FloWorks | Результаты | Вставить |
Параметры в точках).
Если решалась нестационарная задача, выбор интересующих моментов
времени осуществляется аналогично просмотру параметров на поверхности или
в объеме. Аналогичным же образом можно задать шаблон представления
результатов, экспортируемых в Excel, и систему координат.
Создание отчета
В COSMOSFIoWorks предусмотрена возможность создания в Microsoft
Word® отчета (Report) о выполненном расчете. Для создания отчета
выберите команду FloWorks | Results | Report (FloWorks | Результаты | Отчет).
Информация отчета может быть включена в существующий документ Word,
либо может быть создан новый документ с этой информацией на базе
стандартного или заданного пользователем шаблона.
444
Глава 5
Шаблон определяет расположение информации в документе посредством
имеющихся в нем специальных идентификаторов — ID. В процессе создания
отчета COSMOSFloWorks заменяет ID информацией из активного проекта,
ассоциированной с данным ID. Для создания отчета на базе шаблона
щелкните по кнопке From Template (По шаблону) и выберите желаемый шаблон.
В COSMOSFloWorks имеются следующие стандартные шаблоны:
♦ idJFullreport.dot— позволяет создать текстовый отчет, включающий в
себя всю доступную информацию о текущем проекте в краткой форме
(с использованием всех short (краткие) ID);
♦ idfjiillreport.dot— позволяет создать текстовый отчет, включающий в
себя всю доступную информацию о текущем проекте в полной форме
(с использованием всех full (полные) ID; это самый полный отчет);
♦ id inputdata.dot — позволяет создать текстовый отчет об исходных
данных проекта в краткой форме;
♦ idfjnputdata.dot — позволяет создать текстовый отчет об исходных
данных проекта в полной форме;
♦ id_results.dot — позволяет создать текстовый отчет, включающий в себя
только краткую информацию о результатах расчетов.
В дополнение к стандартным шаблонам можно задать свой шаблон на базе
имеющихся ID. Для создания своего шаблона щелкните New Template
(Новый шаблон). Далее в появившийся пустой документ вставьте желаемые ID,
которые будут заменяться соответствующей информацией проекта при
создании отчета на основе этого шаблона. Возможные ID и их описание
представлены на вкладке IDs окна Report (Отчет). Некоторые ID имеют две
формы: полную (full) с префиксом IDF_ и краткую (short) с префиксом Ю_.
Полная форма дает максимум информации о свойстве проекта,
ассоциированным с ID.
Информация, закрепленная за ID, или сам ID (при включенной опции Insert
IDs only (Вставить идентификатор)) добавляется нажатием кнопки Add to
Report (Добавить в отчет) либо в конец документа (End of the document),
либо в то место, где находится курсор мыши (Current position).
Для включения информации в существующий документ его необходимо
предварительно открыть, щелкнув Open File (Открыть файл), и включить
возможность добавления данных COSMOSFloWorks в этот файл. Для этого в
списке Available target documents (Имеющиеся документы) необходимо
выделить имя документа и нажать кнопку Attach (Присоединить). Для
включения информации в новый пустой документ щелкните New Document (Новый
документ): появится новый документ Word с включенной возможностью
добавления данных (Attached).
Аэрогидродинамика и теплопередача
445
Помимо текстовой информации, определенной соответствующими ID, с
помощью вкладки Pictures and Charts (Рисунки и графики) можно также
добавить рисунки (текущий вид окна SolidWorks или рисунок из bmp-файла) и
Excel-графики. Необходимо заметить, что добавляется вся информация с
текущего листа выбранной книги Excel. Если в момент добавления Excel-файл
закрыт, то информация берется с листа, появляющегося при открытии этого
файла. Добавление текущего вида и выбор файла рисунка или книги Excel
осуществляются при нажатии кнопки Add to Report (Добавить в отчет).
( Примечание )
Каждый раз, когда вы щелкаете по кнопке Add to Report (Добавить в отчет),
информация добавляется во все файлы, для которых включена возможность
добавления данных COSMOSFIoWorks. У таких файлов в списке Available
target documents (Имеющиеся документы) в колонке Attached
(Присоединенный) указано Yes.
После добавления данных в документ или ID в шаблон необходимо
переключиться в Word и сохранить эти документы.
Вы можете воспользоваться опцией Batch Results Processing
(Автоматическая обработка результатов расчета) для автоматического создания отчетов
на базе шаблонов без вызова окна Report. В этом случае отчеты будут
сохранены в папку проекта.
Фильмы для просмотра результатов
В COSMOSFIoWorks существуют широкие возможности по созданию
фильмов (Animation) для визуализации картины изменения параметров в
пространстве и во времени.
Для создания фильма выберите команду Flo Works | Results | Insert |
Animation (FloWorks | Результаты | Вставить | Фильм) (рис. 5.104).
В фильме может быть задана одновременная анимация разных картин, а
также анимация модели целиком (вращение, перемещение, масштабирование)
или анимация вращения отдельных деталей модели.
Для задания анимации какой-либо картины, во-первых, необходимо задать
начало и конец анимации этой картины на временной шкале фильма. Все
имеющиеся в проекте картины отображаются в дереве фильма в левой части
окна. Для задания отрезка анимации на временной шкале в правой части окна
(в области задания длительности) щелкните правой кнопкой мыши в строке,
соответствующей картины на позиции, соответствующей времени начала
анимации, и выберите команду Insert Control point (Вставить контрольную
точку). Протащите мышью влево на позицию, соответствующую времени
завершения анимации картины, и щелкните левой кнопкой мыши для
фиксирования позиции.
446
Глава 5
Предыдущий Следующий
кадр кадр
На начало
Пауза
Пуск Стоп
В конец
Повторить
Запись/
Открыть папку проекта
/ Развернуть/Свернуть
Масштаб шкалы
времени —
Мастер создания
фильма
Definition SoUtQi
gggj^
Настройки
Animation 1 СОХраНвНИЯ
Ball Valve
Results
@ Ф Cut Plots
Ф CutPkrtl
Ф CutPtot2
^ Isosur faces
S- §Щ Flow Trajectories
$Ц Flow Trajectories 1
100:00
Wm
M:M
\
Длительность анимации
отдельной картины
Начало анимации картины
йШ%&А
Mode) \ Animation
LL
МЖ _ Шкала
* | времени
\ Общая
! продолжительность
\ фильма
-г
Конец анимации
/ картинУ|
> {
Рийу Defined £<te^jA$sembry $
Рис. 5.104. Окно задания фильма, в котором одновременно показаны линии тока
Контрольные точки определяют временной интервал в фильме, в котором
заданы определенные условия отображения той или иной картины.
Например, вы можете задать движение картины сечения (Cut plot) с начала фильма
до второй секунды. Для этого с помощью контрольных точек необходимо
задать отрезок на шкале времени длительностью от нуля до двух секунд (на
рис. 5.104 такой отрезок задан для Cut Plotl). Отрезок анимации готов. Далее
щелкните правой кнопкой мыши на отрезке и выберите пункт Properties
(рис. 5.105). В появившемся диалоге вы задаете условия отображения
картины Cut Plotl на интервале от 0 до 2 секунды.
Я %р Animation 1
Ш Ш Ball Valve
В 56 Results
е ф cut plots
Ф Cut Plot 2
^ Isosurfaces
!Ц Flow Trajectories
1Ц Flow Trajectories 1
<.*•*
> и
[00:01) i Ж:Ш
Ш0:04
:(Щ;С)б
Delete
Suppress
Select All
Insert Control Point
Рис. 5.105. Задание условий отображения картины Cut Plotl на временной шкале фильма
Для картины в сечении (Cut Plot) и трехмерного графика (3D Profile Plot)
можно задать либо ее движение (Move) между заданными положениями
Аэрогидродинамика и теплопередача
447
плоскости сечения на линии перпендикулярной этой плоскости (Start
position (Начальная позиция) и Finish position (Конечная позиция)), либо
статическое отображение (Display static) с заданным положением плоскости
сечения (Section position). Последний режим необходим при исследовании
изменения во времени результатов нестационарных задач.
Поверхности уровня (Isosurfaces) на отрезке можно отображать
статическими (Display static) с заданными значениями параметра визуализации (Isosur-
face values) либо варьировать значение параметра поверхности (Vary value) в
указанном диапазоне.
Картины на поверхности (Surface Plot) можно показывать только статически,
поэтому для них свойства отрезка не определены, т. е. на заданном отрезке
картина на поверхности будет визуализироваться всегда.
Траектории частиц и линии тока (Particle Studies, Flow Trajectories) можно
показывать либо статическими, либо показывать их развитие во времени
(Launch). При желании можно задать периодический старт траекторий
(Restart period), так что, дойдя до конца, траектории снова будут запущены.
В случае анимации развития траекторий можно регулировать скорость
распространения траекторий опцией Time scale mode (Масштаб времени),
которая определяет отношение времени распространения траектории ко времени
ролика анимации. Так, например, если Time scale mode равен единице, то за
одну секунду в фильме частица пройдет расстояние, которое она в
реальности проходит за секунду. При увеличении величины Time scale mode
траектории в фильме будут двигаться быстрее, т. е. за одну секунду фильма
траектории переместятся на расстояние, которое они в реальности проходят за время
большее секунды в пропорции, заданной в Time scale mode. Для задания
Time scale mode щелкните правой кнопкой мыши на отрезке общей
продолжительности фильма (см. рис. 5.106) и выберите Properties (Свойства).
► 8 ш ; N 4? к> и q> 9 , g* gLess... у> Ж И
Definition 1 Settings j
\fi P fe "
5 Si BaUValve
% Side-2
1 *% Ball-1
j ^ Handle-1
% Lid-2
6 Sfi Results
$-$ Cut Plots
Ф Cut Plot 1
[ ^ Cut Plot 2
Рис. 5.106. Вызов окна задания Time scale mode
uu:uu: \uu:uz
" Select All
4ii
Insert Control Point
448
Глава 5
Можно задавать несколько отрезков для одной и той же картины путем
добавления контрольных точек (Control Points). Для временного отключения
какого-то отрезка щелкните на нем правой кнопкой мыши и выберите пункт
Suppress (Погасить).
Одновременно с анимацией картин результатов можно задать вращение
отдельных деталей модели (например, вентилятора), а также изменение
ориентации модели целиком (вращение, перемещение, масштабирование). Для
задания вращения отдельных деталей создайте отрезок анимации для детали
(аналогично созданию отрезка анимации картин) и, щелкнув на нем правой
кнопкой мыши, выберите пункт Rotation (вращение). В появившемся
диалоговом окне задайте скорость вращения детали (Speed).
( Примечание ^
Некоторые детали могут отсутствовать в списке деталей, отображаемых в окне
задания фильма. Это значит, что при конструировании на них наложены связи,
фиксирующие их положение в пространстве и, следовательно, их вращение не
возможно. Для возможности вращения таких деталей необходимо перед
открытием окна Animation снять эти связи.
Для анимации всей модели (т. е. изменения ориентации модели в процессе
просмотра фильма) щелкните правой кнопкой мыши на названии модели в
дереве фильма в правой части окна анимации и снимите флажок Lock
Orientation (Блокировать ориентацию модели). Далее схватите черную
вертикальную линию в области шкалы времени (обратите внимание— курсор
поменяет свой вид на двустороннюю стрелку) и передвиньте ее на момент
времени, в котором будет задана новая ориентация модели (рис. 5.107).
> м ш во <а i> м
Definition ; Settings;
;-> %р Animation 1 -*
Ш "Ф Ball Valve
й So Results
g ^ Cut Plots
& Cut Pic
Ф Cut Pic
Э-© 3D-Profiles
Q • &
i=jLe*s.., ъ? Ж ¥
^ \№>Ж ;«S:04
i :
Рис. 5.107. Задание движения модели
После установки линии перейдите в графическую область и измените
положение модели — при этом появится контрольная точка, в которой будет
записана ориентация модели. При проигрывании фильма COSMOSFIoWorks
осуществит движение модели из одной ориентации в другую, автоматически
Аэрогидродинамика и теплопередача
449
интерполируя положения модели в кадрах, промежуточных между
контрольными точками.
( Совет )
Для удобства задания желаемой ориентации модели можно воспользоваться
опцией SolidWorks Камера. С помощью Камеры можно предварительно задать
желаемые положения модели, а потом просто выбирать их из Дерева
проектирования FeatureManager для контрольной точки ориентации модели.
После задания анимации модели можно обратно включить флажок Lock
Orientation (Блокировать ориентацию модели), чтобы случайно не изменить
заданную ориентацию.
Для нестационарных (time-dependent) задач можно создать фильм,
показывающий изменение во времени значений физических параметров,
представленных картиной в сечении, трехмерным графиком, картиной на
поверхности, линиями тока, траекториями частиц или поверхностями уровня. Для
этого необходимо выбрать интересующие моменты времени (Scenario) в
Animation Wizard (Мастер создания анимации) или в окне свойств
анимации, вызываемом, как показано на рис. 106.
Для удобства задания общего времени анимации, вращения модели или
моментов времени нестационарной задачи удобно использовать Animation
Wizard «И (Мастер создания анимации).
После задания анимации можно предварительно просмотреть, нажав на
Play (Пуск). Запись анимации в файл осуществляется нажатием
Record (Запись). Предварительно, необходимо зайти на вкладку
кнопку
кнопки
Setting (Настройки) и задать параметры сохранения, такие как тип файла
(AVI или набор BMP), имя файла, число кадров в секунду (Frames per
second), сжатие (используется Microsoft Video 1), если необходимо.
5.5.10. Инструменты COSMOSFIoWorks
В этом разделе дается краткое описание инструментов COSMOSFIoWorks,
доступных из меню Flo Works | Tools (FloWorks | Инструменты):
♦ Copy Features (Копирование элементов) — позволяет скопировать
элементы активного проекта (цели, граничные условия, источники,
вентиляторы и др.) в другие проекты открытых моделей;
♦ Parameter Editor (Редактор параметров) — позволяет одновременно (в
одном окне) менять значения параметров, общих для различных элементов
исходных данных, в том числе различных проектов;
♦ Engineering Database (Инженерная база данных) — база данных,
содержащая материалы, системы единиц, типы радиационных поверхностей
450
Глава 5
и др. Подробную информацию об Инженерной базе данных см. в разд.
"Редактирование проекта";
♦ Check Geometry (Проверка геометрии) — позволяет проверить геометрию
модели на наличие конфликтных сопряжений и определить пригодность
модели к расчету в COSMOSFloWorks. Подробную информацию о
проверке геометрии см. в разд. 5.4.1\
♦ Support Service (Сервис поддержки) — если при использовании
COSMOSFloWorks возникли проблемы, можно обратиться в службу поддержки с
помощью Мастера службы поддержки (Support Service), который
предназначен для сбора информации о проблеме, архивации нужных файлов и
отправки их по электронной почте:
♦ Calculator (Калькулятор)— специальный калькулятор позволяет
выполнять различные вспомогательные вычисления с помощью
газодинамических формул. Например, можно использовать калькулятор для анализа
опорожнения баков со сжатым газом через небольшое отверстие
(отверстия) в окружающую среду с заданным противодавлением. Такая задача
требует значительных затрат машинного времени, поскольку она
нестационарная, а в струе истекающего газа имеются волны сжатия и
разрежения, для расчета которых в COSMOSFloWorks приходится использовать
очень малые шаги по времени. Во многих случаях время опорожнения
бака существенно больше этих шагов, так что эта нестационарная задача
решается очень долго. С другой стороны, как при сверхзвуковом, так и
при дозвуковом истечении газа из бака изменение параметров газа в баке
во время его опорожнения может быть легко рассчитано простым
интегрированием обыкновенного дифференциального уравнения, что
осуществлено в газодинамическом калькуляторе;
♦ Parametric Study (Параметрическое исследование) — позволяет провести
серию расчетов с варьированием выбранного параметра (одного из
размеров модели или одного из параметров граничного условия) с целью
определения такого его значения, при котором выбранный в качестве цели
(goal) данного параметрического исследования результат расчета
становится равным (или достаточно близким) заданному пользователем
значению. Варианты модели с присоединенными проектами COSMOSFloWorks,
отличающимися друг от друга только значением варьируемого параметра
(т. е. размера модели или параметра граничного условия), дадут в
результате расчета различные значения цели данного параметрического
исследования. Полученные значения цели параметрического исследования
сравниваются с заданным целевым значением, которое может быть константой
или табличной или аналитической зависимостью от некоторых
параметров. Если разность между полученным значением цели и заданным целе-
Аэрогидродинамика и теплопередача
451
вым значением по абсолютной величине превышает заданное
критериальное значение, то с помощью метода секущих выбирается новое значение
варьируемого параметра, автоматически создается новая конфигурация
модели с соответствующим проектом COSMOSFloWorks и проводится
расчет. Эта серия расчетов будет остановлена, когда либо разность между
полученным значением цели и заданным целевым значением станет
меньше (по абсолютной величине), чем заданное критериальное значение,
либо будет выполнено максимально допустимое число расчетов, либо
COSMOSFloWorks определит, что данная параметрическая задача не
может быть решена в заданном диапазоне значений варьируемого параметра.
Такое параметрическое исследование может быть проведено, например,
для определения положения плунжера клапана, при котором сила,
действующая на этот плунжер со стороны текучей среды, уравновешивается
силой, действующей со стороны пружины этого клапана. Для этого сила,
действующая на плунжер со стороны текучей среды, задается в качестве
цели данного параметрического исследования (как surface goal), а сила
сопротивления пружины, зависящая от положения плунжера, задается (в
окне Parametric study) в качестве целевого значения данного
параметрического исследования;
♦ Simplify Model (Упрощение модели) — если в модели очень много скруг-
лений кромок (fillets), то на построение расчетной сетки и обработку
результатов при наличии пограничного слоя может потребоваться
существенно больше времени по сравнению со случаем отсутствия этих
особенностей у геометрии модели. Если вы уверены, что некоторые скругления
кромок не влияют на решение задачи, то для ускорения построения сетки
или обработки результатов расчета можно погасить (suppress) скругления.
При этом надо иметь в виду, что если эта опция используется, то при
визуализации результатов расчета вы видите не ту геометрию, которая была
использована во время решения задачи;
♦ Extract Mesh from Results File (Извлечение сетки из файла
результатов)— извлекает информацию о расчетной сетки из файла результатов
(файл с расширением fid) и сохраняет эту информацию как файл
расчетной сетки (файл с расширением cpt), который может быть использован для
проведения нового расчета. Если расчетная сетка была адаптирована к
решению задачи (solution-adaptive meshing) во время предыдущего
расчета, с помощью этого инструмента ее можно использовать в качестве
начальной сетки для последующего расчета;
♦ Convert Old Results (Конвертировать старые результаты) — данная опция
необходима для преобразования результатов, полученных по версиям
COSMOSFloWorks 2005, 2004 (файл с расширением fid) в формат текущей
версии;
452
Глава 5
♦ Export results to COSMOSWorks (Экспорт результатов в COSMOS-
Works)— позволяет передать в COSMOSWorks (начиная с версии 2004)
рассчитанные в COSMOSFIoWorks полное давление и статическую
температуру (давление и температуру текучей среды на поверхности модели и
температуру твердого тела), что позволяет рассчитать статическую и
динамическую прочность модели. Фактически, при выборе меню Export
results to COSMOSWorks маркируются поверхности модели, с которых
COSMOSWorks считывает значения передаваемых параметров. Поэтому
после каждой такой операции необходимо сохранить модель, прежде чем
начинать работу в COSMOSWorks.
5.5.11. Определение точности
полученного решения
Чтобы определить точность полученного решения, необходимо сначала
определить, что понимать под полученным решением и что понимать под его
точностью.
С теоретической точки зрения решение стационарной задачи — это значения
всех независимых переменных во всех ячейках сетки расчетной области,
а также интерполяция этих значений (и экстраполяция, если необходимо, в
частности, на поверхность твердых тел, поскольку дискретные значения
переменных определены в центрах расчетных ячеек) на всю расчетную область;
а решение нестационарных задач — это значения всех независимых
переменных во всех ячейках сетки расчетной области во все рассчитанные моменты
времени (т. е. на всех шагах по времени), интерполяция этих значений (и
экстраполяция, если необходимо) на всю расчетную область для каждого
рассчитанного момента времени, а также интерполяция этих значений с
рассчитанных моментов времени на любой момент времени в интервале
физического времени задачи (в котором проведен расчет).
Однако для практической реализации эти определения решения задачи не
годятся по нескольким причинам:
♦ для этого надо хранить в компьютере и обрабатывать в его оперативной
памяти слишком большой объем информации, а именно поля, т. е.
значения во всех ячейках расчетной сетки, нескольких физических параметров,
причем на всех шагах по времени (итерациях), что, в свою очередь,
существенно сокращает возможность проведения расчетов на достаточно
мелких расчетных сетках, обеспечивающих необходимую точность расчета
(решения математической задачи);
♦ если решается стационарная задача, то определенное таким образом
решение обычно, в общем случае, устанавливается не одновременно во всех
Аэрогидродинамика и теплопередача
453
ячейках расчетной сетки, более того, поскольку задача решается численно,
на не обязательно оптимальной расчетной сетке, то в некоторых ее
ячейках установление может вообще оказаться недостижимым при
используемом критерии установления;
♦ инженерные задачи отличаются от других задач, например
"академических", своей повышенной целенаправленностью, поскольку, по существу,
они всегда направлены на оптимизацию некоторого устройства
(конструкции и т. п.) с целью обеспечения максимальной эффективности его
работы, — поэтому в таких задачах обычно бывает необходимо рассчитать
большое количество различных вариантов, каждый из которых
характеризуется значением (или значениями) выбранной целевой функции,
анализируя которые стремятся достичь оптимума и доказать, что он
действительно достигнут, наиболее рациональными способами. Естественно, при этом
обычно не интересуются подробно всем рассчитанным полем значений
независимых переменных решения, а интересуются исключительно
полученным значением целевой функции. Тем более что в некоторых задачах
значительная часть расчетной области создается исключительно из-за
необходимости существенного расширения расчетной области, поскольку на
отодвигаемых границах неизвестны, или не могут быть заданы по
постановке задачи точные граничные условия (например, в большинстве
внешних задач).
В связи с последним обстоятельством в качестве решения инженерной задачи
обычно и рассматривают эту целевую функцию. Например, целевой
функцией может быть интеграл некоторой физической величины по некоторой
подобласти расчетной области, рассчитанный по соответствующей
совокупности расчетных ячеек (например, сила давления или сила трения,
действующая на некоторую поверхность, определяемая, соответственно, по
давлению или по скорости и плотности текучей среды в частичных ячейках,
покрывающих эту поверхность), или некоторой локальной характеристикой,
например, максимальной температурой твердого тела, омываемого текучей
средой. Очевидно, что такая целевая функция обычно слабо зависит от
флуктуации значений физических параметров в одной или нескольких расчетных
ячейках этой подобласти (естественно, при условии небольшой
относительной доли этих ячеек в общем количестве ячеек, покрывающих эту
подобласть, и при не очень высокой амплитуде осцилляции), что существенно
упрощает и делает более надежным решение задачи.
С теоретической точки зрения точность решения задачи — это отклонение
решения, также определенного с теоретической точки зрения, от
соответствующих значений, имеющихся или осуществимых в физической реальности в
тех же точках пространства и в те же моменты времени. Определенная таким
образом точность решения задачи всегда имеет две независимые составляю-
454
Глава 5
щие: точность решения математической задачи, поставленной в соответствие
физическому явлению с помощью используемой математической модели, и
точность моделирования физического процесса с помощью данной
математической модели (в эту точность входит также точность постановки задачи).
Принципиально, что эти две составляющие точности независимы друг от
друга. Кроме того, принципиально, что соответствующие им погрешности
решения каждой конкретной задачи в общем случае являются не
случайными, а систематическими, т. к. обусловлены используемой математической
моделью и применяемым методом решения математической задачи
(естественно, расчеты, проведенные на очень грубых расчетных сетках, дают скорее
случайную, чем систематическую погрешность). Но определить априори, т. е.
до проведения специальных систематических расчетов, в какую сторону
полученное решение отклоняется от точного решения, т. е. какой знак имеют
эти погрешности (для первой погрешности имеется в виду точное решение
математической задачи, а для второй — осуществимые в физической
реальности значения) в каждой точке расчетной области и в каждый рассчитанный
момент времени (при решении нестационарных задач), в общем случае
практически невозможно, более того, в разных подобластях расчетной области и в
разные моменты времени знак этого отклонения может быть разным.
Следовательно, в общем случае правильнее определить точность решения задачи
через сумму абсолютных значений этих погрешностей, не обращая внимания
на то, что в некоторых случаях эти погрешности могут иметь разный знак.
Если погрешности имеют разный знак, то при сравнении результатов
расчетов с имеющимися экспериментальными данными может создаться ложное
впечатление "высокой точности" решения задачи, но в действительности
такая "точность" не имеет ничего общего с реальной точностью решения
задачи, поскольку является следствием наложения одной ошибки на другую. Так,
при уменьшении размеров ячеек расчетной сетки или при незначительном
изменении параметров задачи, или при решении стационарной задачи как
нестационарной (без локальных шагов по времени) эта "точность" может
парадоксально сильно ухудшиться, что неудивительно, поскольку погрешность
решения математической задачи обычно существенно более неустойчива к
таким изменениям по сравнению с погрешностью математической модели
рассматриваемого физического явления.
Учитывая все эти обстоятельства, целесообразно при решении инженерных
задач, как, впрочем, и любых других, например "академических", стремиться
достичь максимальной (при имеющихся компьютерных и временных
ресурсах) точности решения математической задачи, чтобы точность решения
инженерной задачи была как можно более близка к точности математического
моделирования физического явления (естественно, оставшуюся погрешность
решения математической задачи практически невозможно будет при этом
отделить от погрешности математического моделирования).
Аэрогидродинамика и теплопередача
455
Поскольку, как отмечено выше, в качестве решения инженерной задачи
целесообразно рассматривать значения некоторых целевых функций (в COSMOS-
FloWorks они называются целями проекта и выбираются пользователем), то
естественно определить точность полученного решения (как с точки зрения
решения математической задачи, так и с точки зрения математического
моделирования) как точность именно этих значений.
Для обеспечения приемлемой точности решения математической задачи при
решении стационарных задач необходимо решить следующие три проблемы:
♦ своевременно идентифицировать установление решения (т. е.
установление цели или целей проекта) в каждом проводимом расчете;
♦ если задача решается как стационарная, т. е. с локальным выбором шага
по времени, то необходимо убедиться, что решение этой же задачи, но как
нестационарной, т. е. с одинаковыми для всей расчетной области шагами
по времени, дает те же или достаточно близкие результаты, поскольку в
некоторых задачах это может быть не так. Тогда придется решать данную
стационарную задачу исключительно как нестационарную, что потребует,
к сожалению, гораздо больше времени;
♦ провести серию расчетов на сетках с разным разрешением геометрических
особенностей модели и нелинейностей рассчитываемого поля физических
параметров, чтобы убедиться в наличии так называемой сеточной
сходимости решения задачи и получить окончательное решение задачи на
оптимальной (по точности решения математической задачи с учетом
ресурсов и быстродействия компьютера) расчетной сетке.
Естественно, при решении нестационарных задач с периодическими
решениями вторую из этих трех проблем решать не надо, а при решении
нестационарных задач с непериодическими решениями необходимо решить только
последнюю из них.
Очевидно, что решение каждой из этих трех проблем сопровождается
оценкой соответствующей погрешности решения данной проблемы и, как
следствие, оценкой общей погрешности решения математической задачи,
включающей и эти погрешности тоже (кроме этих в погрешность решения
математической задачи входят и другие погрешности, например, связанные с
расчетом физических параметров при соприкосновении более крупных ячеек
с более мелкими, т. е. когда, в результате работы алгоритма дробления ячеек,
к грани более крупной ячейки примыкают 4 грани более мелких ячеек).
Оценить погрешности решения этих трех проблем можно следующими
способами:
♦ считать, что погрешность идентификации установления решения близка к
заданному пользователем допустимому максимальному отклонению цели
456
Глава 5
от ее среднего значения на отсчитываемом назад от последней
выполненной итерации интервале анализа, длина которого (в "продувках",
измеряемых, в свою очередь, в итерациях) задается либо автоматически, либо
пользователем. В соответствии с алгоритмом COSMOSFloWorks, если
максимальное отклонение цели от ее среднего значения на этом интервале
стало меньше заданной величины, то считается, что установление данной
цели произошло. Если решение задачи имеет тенденцию к установлению,
т. е., начиная с некоторой итерации, с увеличением номера итерации
максимальное отклонение цели от ее среднего значения на интервале анализа
уменьшается, и этот интервал анализа достаточно большой (не менее
100 итераций), то можно считать, что максимальная погрешность
идентификации установления решения не выше заданного пользователем
допустимого максимального отклонения;
♦ погрешность из-за применения локального шага по времени определяется
просто как разница между решением задачи как стационарной, т. е.
полученным с локальным шагом по времени, и решением этой же задачи, но
как нестационарной, т. е. с одинаковым по всей расчетной области шагом
по времени;
♦ погрешность из-за ограниченного количества ячеек расчетной сетки, т. е.
незавершенной сеточной сходимости решения задачи, определяется
непосредственно в результате сравнения между собой решений задачи,
полученных на разных, более крупных (т. е. с меньшим количеством ячеек) и
более мелких (т. е. с большим количеством ячеек) расчетных сетках.
В идеальном случае желательно, чтобы эти сетки имели одинаковую
структуру, обеспечивающую разрешение особенностей геометрии модели,
т. е. чтобы каждая последующая сетка этого ряда, т. е. с большим
количеством ячеек, была бы получена из предыдущей путем деления каждой
ячейки сетки надвое по каждой координатной оси, т. е. на 8 более мелких
ячеек. В принципе, создание такого ряда сеток возможно с
использованием ручных настроек построения начальной расчетной сетки, задаваемых в
диалоговых окнах Initial Mesh и Local Initial Mesh, но при этом надо
учесть ограничение на размер сетки, накладываемое доступной памятью
компьютера, так что реально таких сеток, начиная с той, которая
разрешает все существенные особенности геометрии модели минимальным
количеством ячеек, может быть всего 2—3, что, естественно, затрудняет
выявление нелинейного изменения решения задачи при изменении количества
ячеек расчетной сетки. Поэтому при использовании COSMOSFloWorks
рекомендуется так подобрать настройки расчетных сеток этого ряда,
чтобы количество ячеек у сеток, соседних в этом ряду, отличалось бы в 1,5—
2 раза. Естественно, если заданные цели проекта касаются текучей среды,
то имеется в виду количество ячеек, лежащих в текучей среде и на ее гра-
Аэрогидродинамика и теплопередача
457
нице с твердым телом. Если решение задачи имеет тенденцию к сеточной
сходимости, т. е., начиная с некоторого количества ячеек сетки, с
увеличением количества ячеек сетки отличие значения цели (значений целей) от
ее значения (их значений) на предыдущей сетке заметно уменьшается, то
можно считать, что максимальная погрешность решения задачи из-за
ограниченного количества ячеек расчетной сетки не превышает полученную
разницу между значениями цели (целей) на двух соседних расчетных
сетках этого ряда. К сожалению, на практике при решении инженерных задач
ресурсы памяти и быстродействия компьютера накладывают
существенные ограничения на возможности исследования сеточной сходимости
решения задачи, так что, фактически, погрешность из-за недостигнутой
сеточной сходимости может оказаться существенно выше рассмотренной
выше погрешности идентификации установления решения, поэтому
окончательное решение данной задачи приходится получать на предельно
мелкой (т. е. с предельно большим количеством ячеек) расчетной сетке, а
решения, полученные на сетках с меньшим количеством ячеек, служат лишь
для оценки этой погрешности. Если же получено, что погрешность из-за
недостигнутой сеточной сходимости меньше погрешности идентификации
установления решения, то за окончательное решение данной задачи
можно принимать решение, полученное на той расчетной сетке, при которой
эти две погрешности примерно одинаковы.
После того как получено удовлетворительное по точности (или, по крайней
мере, с известной точностью) решение математической задачи, следующим
этапом является оценка точности математического моделирования
физического процесса. Для этого проводится сравнение полученного решения с
имеющимися экспериментальными данными (с учетом их погрешности,
складывающейся из погрешности изготовления материальной части,
погрешности измерений и погрешности постановки эксперимента, т. е. наличия
паразитных влияний). Естественно, ввиду ограниченности экспериментальных
данных, для такой проверки желательно подобрать максимально близкие к
решаемой инженерной задаче экспериментальные данные. Соответственно,
помимо стоящей перед вами инженерной задачи, придется дополнительно
(желательно до решения инженерной задачи) решать (с применением таких
же подходов и стратегии, как при решении инженерной задачи) некоторую
тестовую задачу, для которой имеются экспериментальные данные, с
которыми можно провести сравнение получаемых расчетных данных. Это
существенно повышает надежность оценки точности получаемого численного
решения стоящей перед вами инженерной задачи, так что эти дополнительные
затраты ресурсов и времени вполне окупятся в дальнейшем, в том числе при
решении других близких инженерных задач.
Если в результате решения тестовой задачи оказалось, что точность ее
решения с помощью COSMOSFloWorks вас не удовлетворяет, проверьте еще раз,
458
Глава 5
правильно ли вы все сделали при ее решении, не упустили ли вы каких-
нибудь существенных физических или геометрических особенностей при
создании проекта COSMOSFIoWorks, например:
♦ насколько созданная в SolidWorks модель соответствует реальному телу;
♦ корректно ли выбраны границы (размеры) расчетной области, так что на
них действительно известны граничные условия;
♦ правильно ли заданы граничные условия, например, параметры
пограничного слоя во входном отверстии, граничные условия на внешней
поверхности тела при решении внутренней задачи с сопряженным теплообменом
(учетом теплопроводности);
♦ корректно ли была выбрана внутренняя подобласть расчетной области для
применения вращающейся локальной системы координат — с учетом
автоматически задаваемого на ее границах условия осесимметричности
решения;
♦ корректно ли было решать 2Б-задачу вместо ЗБ-задачи;
♦ корректно ли было задавать плоскости симметрии, с учетом того, что из
симметрии модели и граничных условий вовсе не следует симметрия поля
течения;
♦ насколько точно были заданы начальные условия, если решалась
нестационарная задача с непериодическим решением;
♦ учитывалась ли гравитация в задачах с небольшими скоростями течения и
существенным теплообменом и/или смешением текучих сред разной
плотности.
И, наконец, позволяет ли COSMOSFIoWorks решать такие задачи вообще,
ввиду имеющихся в нем ограничений, например:
♦ при решении нестационарных задач используется модель стационарного
пограничного слоя;
♦ корректно ли применение модели равновесной кавитации (кипения) или
конденсации, выполняются ли накладываемые этими моделями
ограничения на параметры среды;
♦ существенна ли закрутка потока от вентилятора, заданного в качестве
граничного условия (не обязательно на границе области), поскольку ее
задание лежит целиком на пользователе (в COSMOSFIoWorks закрутка потока
на таком вентиляторе может быть задана различными способами, в том
числе с помощью ЗО-векторов, но для корректного задания значений
характеристик закрутки необходимо иметь соответствующие данные).
Аэрогидродинамика и теплопередача
459
5.6. Стратегия решения задачи
Как отмечено в разд. 5.5.11, чтобы оценить точность полученного решения
поставленной математической задачи, необходимо проведение нескольких
расчетов на разных расчетных сетках, отличающихся размером и,
соответственно, количеством ячеек. Если получено, что, начиная с некоторой частоты
сетки, решение задачи перестает значимо зависеть от частоты сетки, т. е.
выходит на "полку", то можно считать, что необходимая точность решения
математической задачи достигнута, т. к. получена так называемая сеточная
сходимость решения математической задачи. Естественно, возникает вопрос об
определении пороговой величины изменения решения задачи при заметном
(в 1,5—2 раза) изменении размера ячеек сетки и, соответственно, их
количества, меньше которой изменения решения можно считать незначимыми.
Очевидно, что определить этот порог безотносительно какого-либо физического
параметра невозможно, поэтому естественной при решении этого вопроса
является ориентация на те физические параметры, для определения значений
которых и решается данная задача, тем более что обычно уже при постановке
задачи известны допустимые погрешности определения этих значений. То есть,
для определения сеточной сходимости решения задачи используются те же
физические параметры, которые задаются в проекте в качестве целей и по
поведению которых в процессе решения стационарной задачи
идентифицируется установление решения задачи и, соответственно, принимается
решение о завершении расчета. Кроме того, наблюдение за поведением этих целей
в процессе установления решения задачи позволяет оценить погрешность их
определения в данном расчете. Эта погрешность уменьшается при
осреднении цели по интервалу анализа (в COSMOSFloWorks это выполняется
автоматически при анализе сходимости целей). Естественно, не имеет смысла
требовать меньшей, чем эта, погрешности при анализе сеточной сходимости.
Таким образом, стратегия решения инженерной задачи с помощью
COSMOSFloWorks заключается, прежде всего (это является ее ключевым пунктом!),
в проведении при фиксированной базовой части проекта (т. е. при
фиксированной модели, фиксированной расчетной области, фиксированных
граничных и начальных условиях) не одного расчета, а нескольких с варьированием
расчетной сетки. Поскольку процесс построения расчетной сетки в
COSMOSFloWorks автоматизирован, варьирование расчетной сетки
достигается варьированием параметров проекта, представляющих ее установки, т. е.
управляющих ее построением до расчета и изменением во время расчета.
Дополнительным пунктом стратегии решения инженерной задачи с помощью
COSMOSFloWorks является варьирование вспомогательных элементов
модели, добавленных к модели из-за их необходимости для решения задачи
(например, входные и выходные трубки для внутренних задач с протоком для
460
Глава 5
обеспечения отсутствия вихрей на входных и выходных отверстиях, которые
существенно увеличивают погрешность решения), в достаточности и
необходимости размеров которых можно сомневаться, а также тех физических
параметров проекта, которые, по вашему мнению, могут повлиять на решение
задачи, но величина которых вам точно не известна, так что они были заданы
в проекте весьма приблизительно (например, турбулентность набегающего
потока). Эти расчеты рекомендуется проводить после выявления сеточной
сходимости, так что при их проведении обычно нет необходимости по-
новому исследовать сеточную сходимость, достаточно лишь проводить эти
расчеты с теми настройками сетки, которые обеспечили удовлетворительную
точность решения при исследовании сеточной сходимости. Это может также
относиться и к параметрическим инженерным расчетам с изменением
отдельных деталей модели и/или параметров течения, но при этом не следует
забывать о потенциальной необходимости проверки сеточной сходимости,
которую рекомендуется выполнять во всех сомнительных случаях.
Несмотря на кажущуюся простоту предлагаемой стратегии, ее полная
реализация обычно сопряжена с существенными трудностями, заключающимися,
прежде всего, в возрастании запрашиваемой оперативной памяти и времени
расчета при увеличении числа ячеек расчетной сетки. При ограниченных
ресурсах компьютера и ограниченном времени, за которое задача должна быть
решена (вследствие простоты и удобства задания проекта COSMOSFloWorks,
проведения по нему расчета и анализа полученных результатов, вы потратите
в целом не более 1 часа вашего личного времени на реализацию данной
стратегии, так что время решения задачи определяется только затраченным
процессорным временем), выбор реализации стратегии для решения конкретной
задачи, в конечном счете, определяет, будет ли задача решена с
удовлетворяющей вас точностью. Не исключено, что для решения задачи понадобится
дальнейшее упрощение модели и/или уменьшение расчетной области.
5.6.1. Рекомендации по просмотру результатов
Приведем несколько рекомендаций по просмотру получаемых результатов
расчета. Это не менее важный, чем выбор стратегии, аспект правильного
решения задачи, т. к. неверная интерпретация полученных результатов может
свести на нет все усилия по разработке и выполнению стратегии решения
задачи.
После того как задача запущена на счет, целесообразно, если у вас, конечно,
есть на это время, периодически наблюдать за идущим расчетом, по крайней
мере, за изменением физических параметров, определенных вами в качестве
целей перед началом расчета (можно наблюдать также поля параметров в
виде картин в выбранных вами сечениях, причем не обязательно в режиме
Аэрогидродинамика и теплопередача
461
on-line, целесообразнее задать их автоматическое сохранение с заданным по
числу итераций интервалом, а затем их периодически просматривать) по
следующим причинам:
♦ можно вмешаться в процесс принятия решения о завершении расчета,
прервав расчет до его автоматического завершения, если он вас почему-
либо не устраивает, например, COSMOSFIoWorks выдал предупреждения,
из которых видно, что продолжение расчета бессмысленно, или, наоборот,
если решается стационарная задача (это относится и к некоторым
нестационарным задачам), и вы считаете, что решение задачи уже получено;
♦ если решается стационарная задача, то наблюдение в процессе
установления решения за поведением физических параметров, определенных вами в
COSMOSFIoWorks в качестве целей, позволяет, в случае их осцилляции в
процессе решения задачи, уже в ходе расчета определить погрешность их
установления по их максимальным, минимальным и средним значениям
на интервале анализа или любом другом выбранном интервале по числу
итераций;
♦ если интересующие вас физические параметры не очень сильно
изменяются, то можно уже в ходе расчета оценить значения, которые будут
получены по его завершении.
Особенно важна первая из этих причин, т. к. в ряде случаев это позволяет
существенно сократить время расчета. Например, COSMOSFIoWorks выдал
предупреждение, что на выходном отверстии модели находится вихрь, что
существенно снижает корректность расчета, поэтому необходимо удлинить
выходную трубку модели. Или, например, если при решении стационарной
задачи на уровне 7 или 8 видно, что выполняющиеся в процессе расчета
уточнения расчетной сетки не приводят к увеличению числа ячеек сетки и
заметному изменению результатов (например, целей), то расчет можно
остановить.
При просмотре и анализе результатов решения задачи после завершения
расчета в первую очередь рекомендуется посмотреть изменения заданных целей
в процессе расчета, если вы их не смотрели перед завершением расчета. Если
решается стационарная задача, и интересующие вас параметры заданы в
качестве целей задачи, то, в случае осцилляции этих параметров в процессе
расчета, их более точные расчетные значения целесообразно определять
осреднением по интервалу анализа или выбранному вами иному интервалу,
примыкающему к последней выполненной итерации. При этом можно
определить также отклонения значений данной цели относительно ее среднего
значения на данном интервале, характеризующие погрешность определения
данной цели при решении данной задачи.
Полезно проверить отсутствие вихря в выходном сечении модели, а также
посмотреть общую картину течения, и если рассчитывалась теплопередача в
462
Глава 5
твердых телах, то распределение температуры по модели. Естественно, в
первую очередь целесообразно посмотреть поле интересующего вас физического
параметра, причем в области, охватывающей интересующую вас область, —
с целью проверить отсутствие результатов, противоречащих физике.
Целесообразно посмотреть также поля физических параметров, связанных с
интересующим вас физическим параметром. Например, если вас интересуют
потери полного давления, то целесообразно посмотреть не только поле
полного давления, но и поле скорости потока; а если вас интересует температура
твердого тела, то — поле теплового потока между текучей средой и твердым
телом.
В соответствии с общим подходом к оценке надежности и точности решения
инженерной задачи, полученного с помощью любой расчетной методики, эта
оценка складывается из двух оценок: оценки точности решения
математической задачи, соответствующей используемой математической модели
физического явления, и оценки точности моделирования физического процесса
с помощью используемой в расчетной методике математической модели.
Точность решения математической задачи определяется математическими
методами вне зависимости от адекватности математической модели
рассчитываемому физическому явлению. В нашем случае оценка этой точности
базируется в основном на анализе сеточной сходимости решения задачи по
решениям, полученным на разных расчетных сетках. Кроме того, поскольку
стационарные задачи решаются в COSMOSFloWorks с помощью метода
установления с применением локального шага по времени, в некоторых
случаях, особенно при сомнениях относительно стационарности задачи,
небесполезной является дополнительная проверка точности полученного решения
путем решения задачи как нестационарной, т. е. без использования
локального шага по времени.
После того как получено удовлетворительное по точности решение
математической задачи, следующим этапом является оценка точности
моделирования физического процесса с помощью используемой в расчетной методике
математической модели. Для этого проводится сравнение полученного
решения с имеющимися экспериментальными данными (с учетом их погрешности,
складывающейся из погрешности измерений и погрешности постановки
эксперимента, т. е. наличия паразитных влияний). Естественно, ввиду
ограниченности экспериментальных данных, для такой проверки желательно
подобрать их максимально близкими к решаемой инженерной задаче.
Соответственно, помимо стоящей перед вами инженерной задачи, приходится
дополнительно (желательно до решения этой инженерной задачи) решать (с
применением вышеописанной стратегии) некоторую тестовую задачу, для
которой имеются экспериментальные данные, с которыми можно провести
сравнение получаемых расчетных данных. Это существенно повышает на-
Аэрогидродинамика и теплопередача
463
дежность оценки точности получаемого численного решения стоящей перед
вами инженерной задачи, так что дополнительные затраты ресурсов и
времени вполне окупятся в дальнейшем, в том числе при решении близких
инженерных задач.
5.6.2. Некоторые ошибки пользователей
Если в результате решения тестовой задачи оказалось, что точность ее
решения с помощью COSMOSFIoWorks вас не удовлетворяет, проверьте еще раз,
правильно ли вы все сделали при ее решении, не упустили ли каких-нибудь
существенных физических или геометрических особенностей при создании
проекта COSMOSFIoWorks и, наконец, позволяет ли COSMOSFIoWorks
решать такие задачи вообще, ввиду имеющихся в нем ограничений.
Рассмотрим некоторые ошибки и неверные действия, иногда совершаемые
пользователями при решении инженерных задач с помощью COSMOSFIoWorks.
♦ При задании исходных данных:
• неучет каких-либо физических особенностей, которые в задаче
необходимо учитывать: например, течения газа с большим числом Маха
(обязательно при числе Маха больше 3); гравитации (например, при расчете
перемешивания газов или жидкостей с разными плотностями и/или
теплообмена между стенкой и текучей средой при небольших
скоростях потока); нестационарности (например, при расчете течений с
умеренными числами Рейнольдса, при которых образуются
нестационарные вихри);
• при задании расчетной области — необоснованное задание плоскостей
симметрии (например, при расчете течений с умеренными числами
Рейнольдса, при которых образуются вихри, которые могут пересекать
предполагаемые плоскости симметрии);
• если были заданы плоскости симметрии, то при возврате к полной
расчетной области (например, при задании расчета теплопередачи в
телах)— либо автоматически после согласия на запрос
COSMOSFIoWorks о необходимости изменения расчетной области, либо после
нажатия кнопки Reset (Восстановить) на вкладке Size (Размер)
диалогового окна Computational Domain (Расчетная область), на вкладке
Boundary Condition (Граничные условия) этого диалогового окна
автоматически остаются настройки Symmetry (Симметрия), которые
пользователи должны не забыть заменить на Default (По умолчанию);
• если заданы плоскости симметрии, то при задании на входных или
выходных отверстиях массового или объемного расхода необходимо
задавать только ту часть расхода, которая попадает в расчетную область, а
не весь расход, проходящий через выделенную поверхность;
464
Глава 5
• если задаются интегральные граничные условия, объемные или
поверхностные тепловые источники (тепловые потоки, тепловыделение
или теплопоглощение и т. п.), то необходимо помнить, что их величина
в COSMOSFIoWorks относится ко всей поверхности или всему объему,
на которой или в котором они заданы, а к расчетной области относится
только та их часть, которая пропорциональна площади или объему,
попавшим в расчетную область;
• если вы задаете закрутку потока на входных или выходных отверстиях
(Fans, Boundary Conditions), то не забудьте правильно указать ось
закрутки и используемую систему координат на вкладке Definition
(Определение);
• если в проекте COSMOSFIoWorks используется пористое тело с
проницаемостью Unidirectional (Однонаправленная), Axisymmetrical (Oce-
симметричная) или Orthotropic (Ортотропная), то не забудьте указать
направление ее осей;
• не забывайте, что заданные граничные условия не должны
противоречить физике происходящих в расчетной области явлений: например,
если течение на входе в модель является дозвуковым, то при переходе
всего потока через скорость звука внутри модели некорректно в
качестве входного граничного условия задавать скорость потока или
объемный расход, поскольку они полностью определяются геометрией
канала и показателем адиабаты газа;
• если задаете подобласть с вращающейся системой координат, то не
забудьте, что граница этой подобласти должна быть осесимметричной и
решение на ней также должно быть осесимметричным, так что эта
граница должна по крайней мере целиком лежать в области текучей среды
и на достаточном для осесимметричности решения на этой границе
расстоянии от находящихся в этой подобласти тел;
• если вы указали нестационарность как одну из физических
особенностей задачи, а эта задача имеет циклически изменяющиеся граничные
условия и, соответственно, имеет установившееся циклическое
решение, для получения которого необходимо несколько раз повторить
расчет течения на протяжении одного цикла, каждый раз задавая в
качестве начальных данных решение, полученное в конце предыдущего
цикла, то нет необходимости задавать граничные условия сразу для
нескольких циклов, гораздо удобнее задать их для одного цикла и
провести серию расчетов, каждый раз начиная расчет течения с нулевого
момента времени с использованием результатов предыдущего расчета
в качестве начальных условий. Для этого при каждом следующем
расчете в диалоговом окне Run (Запуск) необходимо указывать Take
Аэрогидродинамика и теплопередача
465
previous results (Использовать предыдущие результаты) и задавать
время конца цикла в окне Start from the time moment (Начать с
момента времени);
• при задании целей типа Surface Goals (Поверхностные цели), Volume
Goals (Объемные цели), Equation Goals (Функциональные цели) лучше
сразу, т. е. до начала расчета, давать им такие имена, которые были бы
удобны для однозначной идентификации этих целей без привлечения
графического окна SolidWorks, которое недоступно для работы во
время решения задачи;
• если вы хотите смотреть в процессе решения задачи результаты в
определенных сечениях модели, то лучше заранее, т. е. до начала
расчета, определить положение этих плоскостей относительно точки
начала координат — во время расчета это можно будет сделать только
путем перебора положений, что может занять слишком много времени.
♦ При проведении расчета и наблюдении за ходом расчета (просмотре
промежуточных результатов во время расчета):
• если вы хотите остановить расчет на этапе построения расчетной сетки,
то после подтверждения нажатия Stop (Стоп) вам придется подождать,
пока это построение будет завершено. Если у вас на это нет времени, то
не имеет смысла указывать на то, что вы не хотите ждать, поскольку
единственный способ быстро остановить процесс — снять задачу с
помощью диспетчера задач операционной системы;
• если вы хотите остановить расчет в процессе решения задачи, то после
подтверждения нажатия Stop вам придется подождать, пока не будут
завершены все расчеты по текущей итерации. Если у вас на это нет
времени, то не имеет смысла указывать на то, что вы не хотите ждать,
поскольку единственный способ быстро остановить процесс— снять
задачу с помощью диспетчера задач операционной системы (при этом,
естественно, будут сохранены данные только тех итераций, которые
были сохранены ранее);
• при просмотре промежуточных результатов во время расчета не
забывайте о трехмерности решаемой задачи (если она не двумерная
плоская): для получения полной картины решения целесообразно смотреть
его в 2—3 пересекающихся плоскостях;
• останавливать расчет с намерением его потом продолжить (с помощью
опции Continue calculation (Продолжить расчет)) без особой
необходимости лучше не делать, т. к. в процессе расчета накапливается и
используется для улучшения решения информация о результатах
предыдущих итераций, которая при остановке расчета не сохраняется, так что
466
Глава 5
расчет с остановками не идентичен расчету без остановок и занимает
больше процессорного времени;
• если хотите сами, когда сочтете нужным, принять решение о
завершении расчета, то для предотвращения преждевременного
автоматического останова расчета необходимо заранее (это можно сделать и после
начала расчета через окно монитора) в диалоговом окне Calculation
Control Options (Опции управления расчетом) задать условие If all are
satisfied (Если все цели удовлетворены) и заведомо большое
максимальное число итераций (Maximum iterations).
♦ При просмотре результатов после завершения расчета:
• имейте в виду, что настройки диалогового окна View Settings
(Установки просмотра) относятся ко всем Cut Plots (Картины в сечении),
Surface Plots (Картины на поверхности), Flow Trajectories (Траектории
течения), Isosurfaces (Поверхности уровня), активным в данном
графическом поле SolidWorks, поэтому:
п если диалоговое окно Flow Trajectories не открывается, то это
означает, что в настройках View Settings на вкладке Flow Trajectories
указано Use from contours (Цвет от заливки), а на вкладке Contours
(Заливки) указан параметр, определенный только на поверхностях
модели;
п для одновременного просмотра разных параметров в сечениях и/или
на поверхностях, и/или вдоль траекторий необходимо разделить
графическое окно SolidWorks на 2 или 4 графических поля и
смотреть в каждом из них свой параметр;
• если в Surface Parameters вы просматриваете интегральные параметры
(площадь, расходы, тепловые потоки, силы и т. п.), то необходимо
помнить, что:
п их величина в COSMOSFloWorks относится только к той части
поверхности, которая попала в расчетную область;
D их величина определена с некоторой погрешностью, обусловленной
погрешностью представления этой поверхности в SolidWorks и
COSMOSFloWorks, причем последнее связано с частотой расчетной
сетки;
• если в Cut Plots или Surface Plots вы хотите посмотреть расчетную
сетку, то не забудьте отметить опцию Display mesh (Отобразить сетку)
в окне COSMOSFloWorks Options. Иначе в диалоговых окнах Cut
Plots и Surface Plots будет отсутствовать опция Mesh (Сетка),
соответственно, просмотр расчетной сетки в них будет недоступен.
Аэрогидродинамика и теплопередача
467
5.7. Подводя итоги
После 9 лет успешного присутствия на рынке, структура и облик CAD-
интегрированных приложений для решения задач газо- и
гидродинамического моделирования (COSMOSFloWorks, EFD.Lab, EFD.Pro, EFD.V5), скорее
всего, стоит на пороге новых перемен. С одной стороны, уже ни у кого не
осталось сомнений, что газо- и гидродинамическое моделирование возможно и
нужно проводить в процессе проектирования, не выходя из CAD-системы.
С другой стороны, открытым остается вопрос, в каком направлении это
развитие будет наиболее интенсивным. Пойдет ли оно по пути, проложенному
FloWorks'99 (где такой пустячок, как настройки сетки не были доступны для
пользователя) и FloXpress (по сути низвергающему CFD расчеты на уровень
домохозяйки со всеобщим, теперь высшем образованием), или нас ждет
эпоха специализированных EFD приложений (как, например, вышедший в
2007 году Electronics Cooling Module для EFD)— сказать на момент выхода
второго издания данной книги не представляется возможным.
Важно другое. Заложенные в рассмотренных продуктах технологические
решения позволяют идти по любому из этих путей. Так что пользователь и
решит.
Независимо от дальнейшего пути развития, точность моделирования не
должна быть ухудшена. В этой книге данные вопросы не затрагивались,
поскольку для профессионалов в области CFD это предмет, по крайней мере,
отдельной главы, и им мы рекомендуем обратиться к серии валидационных
примеров, подробно описанных в документации COSMOSFloWorks, EFD.Lab,
EFD.V5 и EFD.Pro, или к пока еще немногочисленным публикациям. Данные
примеры охватывают основные типы течений (обтекание пластины,
цилиндра, течения в трубах, каверне, течения за уступом, течения в каналах сложной
формы и др.) и физических моделей (сжимаемые, несжимаемые, пористые
среды, неньютоновские жидкости, подвижные стенки, частицы в потоке и
т. п.). Важно, что для большого числа примеров результаты приведены в
широком диапазоне определяющих параметров, так что пользователь может сам
попытаться оценить точность используемой технологии.
Заключая данное повествование, нельзя не отметить и создателей
вышеупомянутых пакетов программ. Увы, пока в России разработано не так много
программных продуктов, получивших признание во всем мире. Тем более что
момент выхода второго издания данной книги совпадает сразу с двумя
круглыми датами:
♦ двадцатилетием начала разработки технологии ТАПС (технологии
адаптивных прямоугольных сеток), лежащей в основе вычислительного ядра
EFD;
♦ десятилетием начала разработки FloWorks.
468
Глава 5
Владимир Гаврилюк, создатель технологии ТАПС, еще в 1991 году уверенно
убеждал автора этих строк в необходимости интерфейса между AeroShape-3D
(так тогда называлась данная разработка) и CAD. Roland Feldhinkel
(возглавлявший фирму NIKA GmbH с 2001 года, он же первый дистрибьютор
SoIidWorks в Германии) в марте 1996 года, на СеВ1Т'96 совершил
исторический "неосторожный" поступок, встретившись с разработчиками AeroShape-
3D. Не знала и Людмила Попова (руководившая российской делегацией на
СеВ1Т'96), и в то время заместитель начальника главка IT технологий
Миннауки Виталий Бойко, включивший AeroShape-3D в состав российской
экспозиции, что именно этим решением они дали зеленый свет для FloWorks.
А уже через месяц, в апреле 1996 года Frank Will, впоследствии первый
президент фирмы NIKA GmbH, выступая перед небольшим коллективом
разработчиков AeroShape-3D сказал, что раз уж грядет эпоха новых CAD-пакетов
(а имелся в виду SoIidWorks!), то пора интегрироваться. Как сказал классик,
"вчера было рано, а завтра будет поздно". Разработка FloWorks стартовала в
1998 году, а в начале 1999 на SoIidWorks World Conference уже
демонстрировался первый образец. В далекой Калифорнии никто и не подозревал, что это
чудо, прошедшее на ура, создавалось в Москве "зафанатевшими" ребятами,
работавшими по 12—14 часов в сутки, некоторым из которых на тот момент
не было и двадцати лет. Мало кто тогда понимал, в какое безумное дело они
ввязались. Еще были надежды, что эта безумная скачка продлится не более
нескольких месяцев, закончившись грандиозным крахом... Увы, этим
прогнозам не удалось сбыться. За месяц до первого релиза FloWorks'99 Iwo Wein-
hold (продукт-менеджер), смотря обезумевшими от паники глазами на
руководителей разработки, произнес исторические слова: "Этот продут ни
имеет ничего общего с тем, что я планировал получить, и с тем, что нужно
пользователю!" За последующие 8 лет (и соответственно 7 релизов) мнение
продукт-менеджера разработчикам удалось оставить неизменным. Крепкие
ребята: Алексей Андрианов, Леонид Аксенов, Максим Попов, пришедшие в
данную разработку со студенческой скамьи, Вячеслав Балакин, Антон
Хохлов, Андрей Павлов, Сергей Скабеев, Михаил Макаров, Татьяна Савина и
Геннадий Думнов, каждый из которых имел большой жизненный и
практический опыт. И многие, многие другие из более чем полсотни людей,
создающих и продолжающих создавать EFD.
Да, EFD-пакетам (COSMOSFIoWorks, EFD.Lab, EFD.Pro, EFD.V5, FloXpress)
есть куда развиваться. Теперь и основные фирмы-разработчики
традиционных CFD-пакетов все больше и больше обращают внимание на продвижение
CFD-приложений, интегрированных в CAD и предназначенных для
практического инженера. Это естественный процесс, продиктованный развитием
вычислительной техники и CAD/CAE-приложений. А нам не остается ничего
другого, как констатировать, что "лед тронулся" в конкретный момент
времени именно благодаря успешному опыту FloWorks и усилиям людей, его
создавших.
ГЛАВА 6
Проектирование элементов
механических систем
В данной главе мы рассмотрим специализированные приложения для
проектирования типовых элементов конструкций. Первое из них— SolidWorks
Toolbox, содержащее базу стандартных деталей, процедуры расчета балок и
подшипников. Здесь описано приложение GearTrax, предназначенное для
создания моделей зубчатых зацеплений, а также элементов зубчатых колес.
Более подробную информацию мы предоставим о тех функциях, которые
связаны с выполнением расчетов; другие возможности будут только
перечислены.
Подобно другим модулям группы SolidWorks Office, в частности, Animator,
FeatureWorks, PhotoWorks, данное приложение имеет фирменную
локализацию. Поэтому элементы интерфейса Toolbox приводятся только в
русскоязычном варианте.
( Замечание )
Для построения геометрических моделей и численного анализа использованы
версии продуктов SolidWorks и COSMOSWorks 2007. Описание интерфейса
соответствует этим версиям.
6.1. Кулачки
Один из пунктов меню Toolbox называется Кулачки. Эта команда служит
для создания линейных и угловых кулачков с назначенным законом
движения. Объект помещается в новую деталь, которая затем может быть
отредактирована средствами SolidWorks.
6.1.1. Функциональные возможности и ограничения
Посредством SolidWorks Toolbox можно создавать линейные или круговые
кулачки, для которых пользователь определяет как тип толкателя, так и тра-
470
Глава 6
екторию. Возможно назначение 14 типов движения, включая постоянный,
гармонический, циклоидный, постоянную скорость и ускорение, полиномы
различной степени. К сожалению, в документации и справочной системе не
все эти варианты описаны адекватно. Толкатель может совершать возвратно-
поступательное движение ортогонально направлению движения для
линейного кулачка, а для кругового — в радиальном направлении. Можно задать
направление движения под углом к нормали (радиусу), а также считать
толкатель качающимся.
Под траекторией толкателя понимается движение его точки, относительно
которой система строит виртуальный ролик (в диалоговых окнах он
определяется параметром Диаметр толкателя). Траектория, в общем случае,
является пазом постоянной ширины, причем его глубина может быть меньше
толщины заготовки — тогда получается глухой кулачок. Можно получить и
сквозной вырез. В этой ситуации допустимо оставить как одно, так и оба
тела, на которые траектория разделяет заготовку.
Существенно, что получившийся профиль аппроксимируется отрезками, т. е.
получается ломаная линия, которая порождает цилиндрическую поверхность.
Предусмотрен вариант аппроксимации траектории дугами окружностей,
которые связаны сопряжениями Касательность в эскизе, формирующем вырез.
Оба варианта способны создать проблемы как с точки зрения расчета
механизма на базе кулачка (об этом ниже), так и при изготовлении реального
объекта. В последнем случае перед формированием управляющей программы
для станка следует предпринять определенные действия по сглаживанию
профиля. Точность описания траектории определяется значением
Инкремента приращения для линейного кулачка и Хордовым отклонением или
Угловым инкрементом для кругового кулачка. Очевидно, что это инструменты
косвенного контроля, не гарантирующие соблюдения заданного отклонения
траектории фактической от теоретической.
Определенным ограничением модуля является отсутствие ассоциативности
построений. Это значит, что после создания детали внести в нее исправления
можно исключительно инструментами SolidWorks, а для получения
модифицированного объекта требуется создать новую деталь. Вывод здесь очевиден:
создавать проект, имеющий в качестве базы кулачок, можно, только если
существует уверенность в том, что кинематика построена правильно.
Большую часть этих проблем снимает программа CamTrax — разработка
фирмы Camnetics, США, которая может использоваться совместно с SolidWorks
или другими CAD-системами, в частности, SolidEdge и Inventor. Мы не будем
рассматривать этот продукт, поскольку кулачковые механизмы в
большинстве отраслей машиностроения вытеснены электронными управляющими
устройствами. Рассмотренный далее пример построения торцового кулачка
предназначен скорее для демонстрации возможностей SolidWorks и
расчетных программ.
Проектирование элементов механических систем
471
Примеры кругового и линейного кулачков, построенных посредством Toolbox,
показаны на рис. 6.1.
Рис. 6.1. Круговой и линейный кулачки, построенные посредством Toolbox
6.1.2. Интерфейс
Работа с кулачками осуществляется в одноименном окне, появляющемся
после команды в меню Toolbox. В окне присутствуют три вкладки:
♦ Настройка — выбор типа кулачка, а также общих параметров
кулачкового механизма, в контексте которого будет функционировать кулачок;
♦ Движение — создание участков траектории и назначение их параметров;
♦ Создание— определение характеристик заготовки и того, как кулачок
в ней располагается.
Существует возможность записи набора параметров в локальную базу
данных. Она хранится в файле SWBrowser.mdb, который, как правило,
располагается в папке по адресу: Common Files \ SolidWorks Data \ Lang \ English. Для
доступа к базе нужно нажать кнопку Часто используемые на вкладке
Настройка.
6.1.3. Практика использования
Поставим задачу создания торцового кулачка, обеспечивающего движение
по гармоническому (синусоидальному) закону на некотором участке. Как
упоминалось, в Toolbox присутствует функция создания линейных кулачков.
Воспользуемся ею, а после получения результата решим, что делать дальше.
Подключаем Toolbox как интегрированное приложение SolidWorks (рис. 6.2),
причем Toolbox Browser, в принципе, не нужен (он предназначен для
автоматизации процесса помещения детали в сборку). Затем создаем деталь, которая
16 3ак 4405
472
Глава 6
необходима для того, чтобы получить доступ к меню Toolbox, и в ходе
построений изменяться не будет.
Добавления
Й
Я
Ч
м
№т^уть*г*Ш ?Т^
BSolidWorks Office
<х. - V\&, I
Г COSMOSWorks 2007 Г
Г* <S(X Design Checker f"*
Г" eDrawmgs 2007 f*"
П 5canTo3D Г
Г" *® SohdWorks Animator Г
F ф SolidWorks Toolbox Г
p SotidWorks Toolbox Browser f~
Г|# SolidWorks Utilities Г
S Приложения SolidWorks
COSMOSFloWorks 2007
COSMOSMotion 2007
SolidWorks 2D Emulator
SohdWorks 3D Meeting
SolidWorks MTS
Г
г
г
г
г
В Другие приложения
OpteWorks 2006
Rhino to SolidWorks
>Л^* ^ч"^"4' "^ *' *?Л''.
г
Рис. 6.2. Активизация Toolbox в окне Добавления
Рис. 6.3. Вызов команды
построения кулачка
В меню Toolbox (рис. 6.3) вызываем команду построения кулачка. После
этого появляется окно с тремя вкладками, поля которых нужно заполнить.
Операции на вкладке Настройка (рис. 6.4) следующие:
♦ в выпадающем списке Тип кулачка выбираем Линейный. Как
упоминалось, доступен еще тип Круговой. Однако перенести замкнутую плоскую
кривую на цилиндрическую поверхность торцового кулачка было бы
крайне затруднительно;
♦ из списка Тип толкателя выбираем Преобразование. Это подразумевает
возвратно-поступательное движение толкателя в направлении,
перпендикулярном горизонтали на кулачке;
♦ в поле Диаметр толкателя назначаем диаметр окружности, образующей
поверхность контакта толкателя с кулачком. Это может быть любая
величина (соответствующая, разумеется, толкателю, который будет
использоваться в паре с кулачком), но при этом радиус цилиндра должен быть
меньше минимального радиуса кривизны кулачка на вогнутой его части.
Если это условие не будет выполнено (в некий момент толкатель коснется
Проектирование элементов механических систем
473
кулачка по двум линиям и решение, по сути, станет некорректно), то
последует предупреждение, после чего некая конфигурация кулачка будет
все-таки получена;
в поле Начальный подъем назначаем величину расстояния траектории от
верхней кромки прямоугольника, описывающего заготовку;
поле Начальный ход определяет расстояние от начала траектории до
стороны прямоугольника, находящейся в начале кулачка;
в выпадающем списке Движение кулачка выбираем, куда будет
двигаться кулачок. Если назначить Влево, то расстояние, определяемое
параметром Начальный ход, отсчитывается с левой стороны.
Кулачок - Линейное
^^^^^Bi^m^fkmm^l '4%4*V/-r r ' у.
1 к_>~
\-щ
'/У
?J Л\
.'h\ \.- i *. ' ' ...г.. .л ' V..' .Л. ^ . "-
\ <:V" Сэойспю * |' ' Значение
Единицы измерени я • Метрическа я
Тип кулачка \ Линейный
Тип толкател я . Преобразо в ание
Диаметр толкателя ;50
Начальный под ъем 1100
Начальный ход .0
Д ь ижение кулачка ' В ле ъ о
У^ s-fc^V', ', *■> ^s sv '■• У' {/■?>, s* ' '/< '" ^ •% -<» v > ' < х- ч ' ■"<
Чм^иопюлм^ьи^ \ ,TJ " u'~ ' Создать 1 v , Готово'
\S< ^
"
' •
▼ 1
H
t!
...:г:з
*' -1
*»<f> ч / /j
1 :/чй!ДН> J
Рис. 6.4. Параметры вкладки Настройка
Вкладка Движение показана на рис. 6.5 в уже заполненном состоянии.
Создание рабочей траектории сводится к созданию ее участков. Это можно
осуществить нажатием кнопок Добавить (новый участок будет последним) или
Вставить (новый участок будет помещен после текущего активного участка).
Смысл кнопок Редактировать, Удалить и Удалить все очевиден.
♦ Нажимая кнопку Добавить, последовательно наращиваем траекторию
(рис. 6.6). Пусть первый участок не будет приводить к перемещению
толкателя. Поэтому выбираем тип движения Задержка, а длину этого участка
принимаем 100 мм — эта величина вводится в поле Расстояние пробега.
474
Глава 6
Кулачок т Линейное
НдерОДк%;$
x^?;:<;^^'^^>Sfm;* :]' .?г -:ч М А*У'::;У;
Ьс,
г-
Г:
> Тип Деления
Задержка
Двойной гармонический
Двойной гармонический
ММИШЙШЧ W ИНН 11 ИМИ nilWWyiMlMft Wrt ЦЯММПИШМОШ» НИМ
Котчнът под*е| Расстояние проб]
"^ У*"уА Ч 100.000000
110.000000 :i 00.000000 ]
100.000000 i 100.000000 I
ч ч .-* V" ^ -v .. ^ *',ч-Х ,ч, л >,sf , , -■■' ,- , Л ,
'ч<«^о1лз1оль%$ря<&чГ^^|^ ? ""* Г£ЬШг£*ч|' Готово | ' Справки >
iWWWWIWWyЧ'V H'I'VWi"i'гдмММWW*jrtMWjjHуVIWP %'^ N wiiiyiiyiim дшнЛ-шщ *и*»шцры)* <i ц||>цщщ| ,li
Рис. 6.5. Содержание вкладки Движение
{Данные о создании движения |
<• ч ^ ч л-4 , , v
^Ч^~^*Ь'^
' ' ч 'ч'^' / %Ч/-\ч 'ч
; ;, -\ -<^' "^ ''•
''чч' С'
/'" ^' ч '%ч'Л'-- ' s ,4; /
' ''%%Ч/4 ч\ ' ' Чл'* / " ^ \"*
\ / "^ , \ ^1 , '>^ ,'ч
ч ^ V г •" 'ч "" f - ' s <
чЧ>%фШ>й i, С ii г* &
"чч s
' ■гммииинтииниш шпитншииптшини 1
шШШШШЯШШШШШШШШШШШШШШ
Циклоидный
Гармонический
Двойной гармонический полный подъем
Двойной гармонический полный возврат
Измененный синус
Измененнная трапеция
Постоянное ускорение
Единое перемещение
345 Polynomial
4567 Polynomial
56789 Polynomial
8th Order Full Rise
8th Order Full Return
Ш\
•ч
:\ ]
I
ft^i^^i>^M4W>HijjiM<jj^Hii<rt>rtiMiH№i^rt>,rtHi ,i^ii»,r<>y»*w»,>»>«»i' ^i
: %i^^e>!i»Q^kr ^i1 оо.оооооо / ]
Рис. 6.6. Создание участка с неподвижным толкателем
Еще раз нажав кнопку Добавить, добавляем половину периода
косинусоиды (Тип движения— Двойной гармонический полный подъем)
с амплитудой, равной 10 мм (величина равна разности значений
Конечный и Начальный подъем). Расстояние пробега (полупериод) равно
100 мм (рис. 6.7).
Следующий участок — возвращение траектории на прежний уровень. Его
также выполняем по косинусоиде (рис. 6.8).
Проектирование элементов механических систем
475
Данные о создании движения
Рис. 6.7. Участок подъема с косинусоидальной траекторией
Данные о создании движения
ВтШКШДИжз)'
~ |$ccf«^sfp&« * 'jlOO.OOOOOO
Рис. 6.8. Участок спуска с косинусоидальной траекторией
♦ Последний участок, как и первый, также горизонтальный. Длина его
1700 мм (рис. 6.9). В принципе, можно было получить два прямых участка
за один прием. Полная длина кулачка (имеется в виду проекция
траектории на основание, а не длина траектории) отображается в поле Общее
движение.
j Данные о создании движения
— 7'~T7-™-jra]
^ ^ ^ vs^ ч ГТ7Г ^~\- 1 гг~, ' : ; j
£yrJmw$*ff*b у- ЩЯШШШШШШ
■W"
W л>^ ^ ■"<*- '\ '"■* * „..«.......„.,..,.-...., -'■ "-• -■ '
ij^ymmt;^^^ 1700.оооооо
^w« a. .^rt>uttrt.«w>^^,.>nA.^,.^^.>iL>w.^w..iin.iniW*.rttiii.rt r<M....^....4i.<i,o.. m .... >...„.>.■■■■>,i
Рис. 6.9. Горизонтальный участок
♦ Определив все, что связано с рабочей поверхностью кулачка, переходим
на вкладку Создание (рис. 6.10). Здесь обращаем внимание на
перечисленные ниже поля.
• Метод создания — определение того, куда будет помещаться кулачок.
Это всегда новая деталь, которая будет создана после нажатия кнопки
Создать.
• Толщина заготовки — толщина пластины, которая будет превращена
в кулачок. В нашем случае это не имеет значения, тем более что сред-
476
Глава 6
ствами Sol id Works толщину готового кулачка можно изменить без
проблем.
Кулачок - Линейное
У-
^ry^r*- ^^T^r^^^n^f;t t^^^""- ^ w-г- r-yr- ^-
'^Mffi^V*
Метод создания
Толщина заготовки
Ширина заготовки
Длина заготовки
Тип и глубина направляющей
Тип и значение разрешения
Поверхности направляющих
Мттт*т*ШттттттттттШттттшттттттшг
V* kZ \ \ Течение ><,'-- i- ^ \ ',- 1*J
Создание новой детали с удаленной на '*{
10
1*50
2000 "
Сквозное
'шт^тт
Инкремент перемещу 10
Нижний
Дуги |рг
.fH
М *
Jr.
yftfygw
!***!
<«
Рис. 6.10. Параметры вкладки Создание
Ширина заготовки— высота прямоугольника. Ее желательно иметь
такой, чтобы паз, образованный толкателем, полностью помещался в
заготовке. Ширина зависит от диаметра толкателя, а также от
параметров траектории, назначенных на вкладке Движение. Для экономии
времени можно назначить достаточно большую величину, построить
кулачок, оценить "излишки" и повторить расчет. Как и в случае с
толщиной заготовки, результат может быть скорректирован штатными
инструментами Sol id Works.
Длина заготовки — длина прямоугольника, описывающего заготовку.
Желательно иметь ее не меньшей, чем суммарная длина всех
траекторий (она отображается в поле Общее движение).
Тип и глубина направляющей — определяет то, как будет выполнена
рабочая зона кулачка: в виде паза (Глухое) или как отверстие-полоса
(Сквозное).
Тип и значение разрешения — для линейного кулачка доступно
только Инкремент перемещения. Следующий параметр— величина
инкремента. Назначается верхняя его граница, т. е. система будет подби-
Проектирование элементов механических систем
477
рать такое число отрезков, формирующих траекторию, чтобы размер
каждого приближался к этой величине снизу.
• Поверхности направляющих — в ситуации, когда прорезь для
толкателя делит кулачок на два тела, определяет, какое из них (или оба)
нужно сохранить.
• Дуги — признак того, что траектория будет аппроксимирована
касательными дугами. В противном случае траектория будет ломаной, а
рабочая поверхность, соответственно, призматической.
♦ После нажатия кнопки Создать система открывает новый файл, в который
помещает модель кулачка, имеющий (при назначенных выше параметрах)
вид полосы (рис. 6.11). Важным для последующих построений является
то, что рабочая поверхность не является непрерывной, а состоит из
отдельных граней.
В окне присутствует кнопка Часто используемые. В меню, появляющемся
при нажатии этой кнопки, находится команда Создать, позволяющая
сохранить текущие настройки окна (всех его вкладок), а также команда Список,
открывающая доступ к библиотеке записанных в базу кулачков. В состоянии
поставки в базе данных присутствуют пять объектов.
***^
Рис. 6.11. Модель линейного кулачка
Приступаем к созданию торцового кулачка. Инструменты для сворачивания
полосы в трубу в SolidWorks отсутствуют. Поэтому из всего, что получилось,
пользу может принести только контур профиля. Для этого на одной из сторон
кулачка создаем эскиз и проецируем на него отрезки кромки командой
Преобразование объектов. Для выбора кромок указываем мышью одну из них, а
затем из контекстного меню подаем команду Выберите касательность.
Такой алгоритм выбора позволяет убедиться в факте наличия касательности
объектов (но не гладкости по второй производной). Результат показан на
рис. 6.12.
Пользы от существования линейного кулачка уже не будет, более того,
предполагая использование процедур SolidWorks для работы с листовым
материалом, необходимо избавиться от существующей в файле твердотельной ин-
478
Глава 6
формации. Уничтожать объект мы не имеем права, т. к. вслед за ним
последует и его потомок — необходимый для дальнейших построений эскиз.
Поэтому удаляем твердое тело. Для этого вызываем контекстное меню
пиктограммы, соответствующей построенному твердому телу, а затем подаем
команду Удалить тело (рис. 6.13).
Рис. 6.12. Эскиз рабочего профиля линейного кулачка
Чф Кулачок гладкий
••■••уЩ Примечания
г+] ^ Связь проектов
\.... j«j Материал <не указан>
(+] Ш Освещение
Й ||| Уравнения
В Й Твердые тела(1)
<$> Спереди Tew
<& Сверху Скрыть твердое тело
<$> Справа Ш) Щ^^^^^В^ЦЩ^Н!
• !♦ Исходная то». Добавить в новую палку
Щ Вытянуть 1 Вставит* в новую деталь«♦*
|g) Вырез-Вытян ен«1*ийвид
^Эскиз4 ^Свойства...
►
Рис. 6.13. Удаление твердотельной информации
Замечание
j
Информацию, имеющуюся в этой детали, можно было бы использовать для
проектирования другой, работая в контексте сборки. Тогда не пришлось бы ни
уничтожать твердое тело, ни создавать вспомогательный эскиз. Это, однако,
породило бы несколько более сложную структуру данных.
Создаем заготовку кулачка (см. рис. 6.15). Это будет цилиндр, длина
срединной окружности которого должна в точности равняться длине траектории
кулачка (правильнее— длине проекции этой траектории на горизонтальную
плоскость). Для этого в горизонтальной плоскости создаем эскиз и чертим в
нем дугу произвольного (на первом этапе) диаметра. Здесь отметим пару за-
Проектирование элементов механических систем
479
служивающих внимания обстоятельств. Первое: почему дуга, а не
окружность? Ответ: предстоит получение развертки, а замкнутый цилиндр
развернуть невозможно. Второй момент— один из концов дуги должен находиться
на одной вертикали с концом эскиза-траектории. Это достигается
наложением соответствующих взаимосвязей в эскизе.
Гарантировать равенство длин дуги и профиля можно посредством
уравнения. Для этого подаем команду Инструменты | Уравнения | Добавить и в
появившемся окне Добавить уравнение (рис. 6.14) связываем размеры (их
предварительно следует отобразить командой Отобразить размеры
элемента из контекстного меню пиктограммы Примечания Дерева
конструирования). В процессе создания уравнения используем команды Калькулятора.
После создания эскиза вытягиваем тонкостенную бобышку на некоторое
расстояние (рис. 6.15). При этом для тонкостенного элемента выбираем параметр
От средней поверхности. Это нужно для обеспечения равенства длины
развертки и траектории кулачка при последующих построениях.
Добавить уравнение
| "02@>Эскиз8" - ТО1@>Примечания7й
Г ■'■"■■■ищи mil ' 'i » !!■■"■" V* ■ ■'■■»
J- v$OftS& u^'J&t%Cfb \
-wmtt
:'&m&
i ")""и";"7';"
-V\ W;;
: 2ML J
s% Эанетка
4
-1
JLll-L
-'OK " v
OtWtfo
0*фть Л
Рис. 6.14. Создание уравнения, связывающего дугу и траекторию
Рис. 6.15. Создание тонкостенной бобышки
480
Глава 6
Следующий этап — получение развертки. Выводим на экран панель
инструментов Листовой металл и подаем команду Сгибы (рис. 6.16). В панели
Листовой металл окна Sol id Works выполняем необходимые настройки
(рис. 6.17).
♦ Поле Зафиксированная грань или кромка заполняем, указывая на
внутреннюю кромку цилиндра.
♦ Следим за тем, чтобы в опции Допуск сгиба присутствовал флажок;
в списке Допуск сгиба — тип был выбран Коэффициент К (смещение
срединной поверхности) и величина К была равна 0,5. Это нужно для того,
чтобы срединная поверхность цилиндра (длина ее развертки должна быть
равна длине траектории кулачка) не претерпела изменения длины в ходе
преобразования "объект <=> развертка".
ьш\ушт
ш
Wife 'И >-® S *&? .Ей ''&
'}mi Jk
fv
Сгибы
Создание детапи из листового
металла т существующей детали,
Рис. 6.16. Команда для получения развертки
Ч& Кулачок гладкий'*
%;ад&}>
ШВ|^в1й1ИМШ1Ш
г
*у*Уь
. Л?; '^Коэффициент К 2jA
' $;< j 0,5000000 ' ***4
-21
*И$К;
•/Я-№. rfrj/w-rt
ШШШ
W.,^~L
Рис. 6.17. Параметры формирования развертки
В результате должна получиться развертка цилиндра, причем "развернуться"
(для этого вызываем команду Плоский) он должен так, чтобы одна из плос-
Проектирование элементов механических систем
481
костей оказалась параллельна плоскости эскиза (рис. 6.18). Если развертка
сориентировалась иначе, то следует изменить эскиз, формирующий цилиндр.
Рис. 6.18. Развертка цилиндра на фоне эскиза профиля
Имеем цилиндр в развернутом виде и эскиз, плоскость которого параллельна
одной из граней развертки. Создаем эскиз на грани, проецируем на него
содержимое предыдущего эскиза и подаем команду Вставка | Вырез |
Поверхностью, отсекая верхнюю часть заготовки (рис. 6.19). Результат операции
показан на рис. 6.20.
Рис. 6.19. Отсечение Рис. 6.20. Результат отсечения
верхней части развертки
Если отобразить модель в режиме Закрасить, то увидим, что криволинейная
поверхность кулачка имеет набор кромок — это линии сопряжения участков
поверхностей. Вспоминаем, что при создании кулачка программа предлагала
выбор между дугами и отрезками. Поэтому результирующая поверхность
оказалась набором цилиндрических граней, касающихся друг друга по общим
кромкам. С точки зрения функционирования и решения задачи кинематики/
динамики (в некотором смысле эти понятия взаимосвязаны), это весьма
неудобный факт. Отсутствие непрерывности по второй производной приводит к
ударным эффектам, имитация которых в расчете сопровождается определен-
482
Глава 6
ными затруднениями. Попробуем избежать этих проблем, заменив
совокупность дуг сплайном. Для этого выбираем заменяемые участки (рис. 6.21), а
затем подаем команду Разместить сплайн, кнопка для которой находится на
панели Инструменты сплайна (рис. 6.22). В появившейся панели (рис. 6.23)
назначаем параметры, определяющие факт удаления исходных объектов, а
также точность аппроксимации.
L^^
Рис. 6.21. Выбор объектов, аппроксимируемых сплайном
Инструменты сплайна
'/•fc/^fElfcH-Ai
Разместить омшйн
Добавлен**? сплайна на основе
1м&:&рань»!* объектов эскиза и кромок,
Рис. 6.22. Команда Разместить сплайн
Параметры ' *, * * ;жч1
4 р Заййнут1ый\' л\*
ч' * # сплайн , s \ _""{* -
Щ j 0,0010мм jM|
Рис. 6.23. Параметры команды
Разместить сплайн
Результат аппроксимации совокупности дуг сплайном показан на рис. 6.24.
На первый взгляд, картина удовлетворительна. Однако, не
удовольствовавшись внешними проявлениями, проанализируем то, что получилось. Указав
на сплайн и подав команду Инструменты | Инструменты сплайна |
Отобразить кривизну, получаем результат (рис. 6.25). После выполнения
команды вид кривизны может отличаться от ожидаемого, тогда подаем
команду Изменить масштаб кривизны (эта и другие команды,
обрабатывающие сплайны, находятся в панели Инструменты сплайна).
Получившаяся картина не слишком хороша: кривизна изменяется не плавно. Попытки
изменить параметр Допуск в настройках команды Разместить сплайн
ровным счетом ни к чему не приводят.
В SolidWorks отсутствуют качественные инструменты для выглаживания
сплайнов и, соответственно, поверхностей. Неким паллиативом является
команда Упрощенное изображение сплайна, где, задав допуск, можно
получить сплайн, имеющий меньшее количество точек и, по этой причине,
обладающий (возможно) "большей" гладкостью. Результат преобразования с
Проектирование элементов механических систем
483
параметрами, показанными на рис. 6.26,, приведен в верхней части рис. 6.27.
Визуальная оценка дает положительный результат. Памятуя о том, что
удаление точек может привести к качественным изменениям на концах сплайна,
увеличим картинку в этой зоне (рис. 6.27, внизу). Налицо разрыв в кривизне,
что означает присутствие угла в месте сопряжения сплайна и прямой. Более
того, кривизна на незначительном удалении от точки сопряжения меняет
знак. Это свидетельствует о наличии своего рода бугорка на сплайне возле
стыка.
Рис. 6.24. Результат команды Рис. 6.25. Кривизна сплайна,
Разместить сплайн построенного на базе дуг
Рис. 6.26. Получение Рис. 6.27. Упрощенное изображение сплайна
более гладкого сплайна и фрагмент в зоне перехода
в прямолинейный участок
Для сравнения отобразим то же место, но до модификации сплайна. Вид
кривизны на рис. 6.28 свидетельствует о наличии проблем с гладкостью
сопряжения, но они здесь менее выражены. Поскольку полученный полуфабрикат
будет использоваться далее, не будем забывать о выявленных изъянах.
Рис. 6.28. Фрагмент в зоне перехода до изменения сплайна
484
Глава 6
Предпримем, впрочем, еще одну попытку добиться желаемого. Построим
сплайн через точки исходной кривой (она показана на рис. 6.21) и назначим
ему сопряжения Касательность на обоих концах. Результат показан на
рис. 6.29. Как видим, картина вполне удовлетворительная и, что ценно, не
содержащая неявных последствий. Это, кстати, подходящий пример того, что
некоторые инструменты автоматизации построений могут порождать
серьезные побочные эффекты.
Рис. 6.29. Кривизна сплайна, проходящего через концы дуг
Начиная с версии 2006 года, в число сопряжений в эскизах вошло
сопряжение Одинаковая кривизна. Результат его применения к сплайну,
показанному на рис. 6.27, показан на рис. 6.30.
1 1 I 1 1 1 1 1 1 1 1 J I i« » , , , rt
Рис. 6.30. Кривизна сплайна с сопряжением Одинаковая кривизна
с прямолинейными отрезками
Считая выполненной задачу построения кулачка линейного (он существует
на развертке цилиндрического тела), вернемся, однако, к главной цели
раздела— построению торцового кулачка. Для более "гладкого" сплайна результат
обрезки развертки поверхностью, построенной на базе этого сплайна, показан
на рис. 6.31. Как видим, сегментная структура, которая не устроила нас на
рис. 6.20, ликвидирована, рабочая поверхность кулачка состоит из трех
граней: двух плоских и одной криволинейной цилиндрической.
Рис. 6.31. Результат отсечения с использованием "гладкого" сплайна
Возвращаем обрезанный цилиндр в исходное состояние, отжимая кнопку
Плоский на панели Листовой металл. Если все сделано правильно (не на-
Проектирование элементов механических систем
485
рушена структура данных, позволяющая системе идентифицировать объект
как "деталь из листового металла"), то полоса свернется и примет вид
рис. 6.31. На модели сохранена топология рабочей поверхности: она состоит
из двух плоских и одной криволинейной грани. Заполняем разрыв, вставляя
объект SolidWorks Бобышка, контуры которой сформированы на базе
объектов окружения (рис. 6.32). В качестве условия вытягивания бобышки
выбираем До поверхности (используется плоская грань) и констатируем
образование непрерывной плоской грани.
Рис. 6.32. Результат отсечения Рис. 6.33. Замыкание цилиндра
с использованием "гладкого" сплайна
Рис. 6.34. Сечение плоскостью, проходящей через ось, и результат удлинения сечения
Получив кольцо с криволинейным выступом, убедимся, что построенная
поверхность подходит для использования в торцовом кулачке. Для этого она
должна быть линейчатой, т. е. любое сечение этой поверхности плоскостью,
проходящей через ось, должно давать прямую линию (это строгое
требование). Для проверки создаем одну из таких плоскостей (так, чтобы она
пересекала криволинейный участок), на ней открываем эскиз; в эскизе подаем
команду Эскиз вдоль линии пересечения тел и указываем на выступ. Если
указать получившуюся линию (рис. 6.33, слева), то высвечивается
пиктограмма прямой (на иллюстрации она не показана). Затем убедимся в том, что
прямая пересекает ось. Попытаемся назначить взаимосвязь Совпадение меж-
486
Глава 6
ду одним из концов отрезка и осью кулачка (она должна быть для этого
создана). Факт того, что операция выполнена системой (рис. 6.33, справа),
свидетельствует о корректности построений.
Опишем альтернативные способы построения подобных объектов,
позволяющие не прибегать к разверткам. Последние, надо сказать, не всегда
доступны, в частности, для объектов, имеющих двойную кривизну. Эти
алгоритмы не связаны с Toolbox, но весьма часто используются в процессе
поверхностного моделирования, например, при разработке формообразующих
литьевых пресс-форм. Один способ будет предполагать наличие профиля
линейного кулачка. Второй — будет являться попыткой непосредственной
обработки цилиндрической поверхности.
Предположим, имеется каким-то способом полученная траектория в
плоскости, например, результат команды Разместить сплайн (см. рис. 6.24).
Цель — получить эту кривую на поверхности цилиндра без искажений (с
сохранением линейных и угловых размеров). Команды Линия разъема и
Проекционная кривая бесполезны, поскольку выполняют параллельное
проецирование. Более подходит команда Перенос панели Элементы (рис. 6.35),
однако непосредственное применение ее к эскизу успеха не имеет. Причина в
том, что функция обрабатывает только замкнутые эскизы (прямое ее
назначение — перенос текста на криволинейную грань). Модифицируем эскиз так,
чтобы он содержал замкнутый контур (рис. 6.36). При этом во избежание
неоднозначности, желательно, чтобы горизонтальный размер контура был
меньше длины окружности наружной грани цилиндра. Подавая команду и
заполняя необходимые поля (рис. 6.37), получим цилиндр с разделенной
цилиндрической гранью, показанный на рис. 6.38 (для наглядности она
закрашена более темным оттенком). Здесь нелишней является проверка
соответствия длины линий на развертке и на поверхности. Различие наблюдается в
пятом знаке — это вполне удовлетворительный результат.
шшшщшшшшшяшшшщяя
ИГВДЙ!
Перенос.
Перенос контуров замкнутого эскиза
на грань.
Переместить грань
Перемещение граней твердотел*>нсго
злачен т*.
Рис. 6.35. Команды для работы с проекциями линий
Еще один вариант создания на цилиндрической грани кривой— команда
Сплайн на поверхности, принадлежащая группе команд Объекты эскиза.
К нему применимы все команды, присущие сплайнам. По сути, результат вы-
Проектирование элементов механических систем
487
полнения команды — пространственный сплайн, поэтому создать его на
основе информации, описывающей плоские объекты, — не вполне элементарная
задача. Также придется преодолевать затруднения, связанные с достижением
касательности между сплайном на поверхности и горизонтальными
участками траектории, которые, будучи расположены на цилиндре, являются дугами.
Появившаяся в версии 2007 года функциональность, заключающаяся в
переносе эскиза с плоской грани согнутого тела на развертку, в данной ситуации
неприменима, поскольку обеспечивает только движение от согнутого
состояния к плоскому. ,
Рис. 6.36. Подготовка контура для наложения на поверхность
[■Щ^^ШЩШ^Щщ
Г"/*)ГЬ
Рис. 6.37. Параметры команды Перенос
Рис. 6.38. Результат выполнения
переноса контура на поверхность
Можно пойти и более изощренным путем. Получив некую траекторию на
плоскости (в том числе и на базе функции Кулачок), нужно образмерить ее
точки, а затем через инструмент Уравнений связать размеры, определяющие
сплайн на поверхности, с размерами на плоскости. Это весьма трудоемкая
операция, однако, если по каким-то причинам невозможно (или
нерационально) наложить кривую на поверхность, она способна дать некий
результат. При этом придется преодолевать затруднения, связанные с достижением
488
Глава 6
касательное™ между сплайном на поверхности и горизонтальными
участками траектории, которые, будучи расположены на цилиндре, являются дугами.
Поэтому, несмотря на неочевидность алгоритма, связанного с разверткой,
он — при всех усовершенствованиях Sol id Works — остается одним из
наиболее универсальных. В частности, с его помощью можно естественным
образом решать задачи, когда, например, некие объекты строятся на базе кривых
на цилиндрах или гранях конусов, причем в качестве абсциссы используется
величина угла в цилиндрической системе координат. Здесь, конечно, можно
было бы обойтись инструментом уравнений, автоматически преобразующих
координаты угловые в линейные. Однако максимальная точность при
минимальной же трудоемкости достигается при использовании следующей
последовательности:
1. Строится модель тонкостенного открытого цилиндра, на торце которого
командой Вырез формируются засечки с размерами, поставленными в
цилиндрической системе координат. При этом боковые границы засечек
направлены вдоль радиусов (рис. 6.39).
Рис. 6.39. Создание "засечек" на заготовке открытого цилиндра
2. Посредством команды Сгибы выполняется математическая развертка
цилиндра.
3. Командой Разогнуть с опцией Найти все сгибы цилиндр отображается
в плоском состоянии (рис. 6.40).
4. На развертке наносится заданный профиль, дополненный — при
необходимости — линиями, позволяющими сформировать сквозной вырез,
профиль которого выполняется согласно требуемому закону (рис. 6.41).
Проектирование элементов механических систем
489
Детальб
|&'| Примечания
^ Связь проектов
Mg] Твердые тела(1)
.*}«•• Материал <не указан >
Qjl Источники света и камеры
Щ{ Уравнения
<$> Спереди
<$> Сверху
<$> Справа
1+ Исходная точка
Щ Вытянуть-Тонкостенный1
(ja) Вырез-Вытянуть1
•^ Листовой металл 1
Qj| Плоское состояние 1
|20 Согнутое состояние 1
jkP_ Разогнуть!
Рис. 6.40. Разгибание цилиндра
Рис. 6.41. Создание профилированного выреза на развертке
5. Командой Согнуть с опцией Найти все сгибы цилиндр возвращается
в согнутое состояние (рис. 6.42).
В зависимости от конкретной ситуации, цилиндр может с самого начала
строиться как объект, изготовленный из листового металла. В этом случае
первые два пункта заменяются единственной операцией с командой Базовая
кромка/выступ.
Итак, имеем базу для дальнейших построений. Необходимо отсечь часть
цилиндра, лежащую "выше" верхнего контура грани. Для этого нужно
построить искомую рабочую поверхность. Используем команду Линейчатая
490
Глава 6
поверхность из группы Поверхности (рис. 6.43). Убеждаемся, что она
позволяет получить линейчатую поверхность, основанную на некоторой
совокупности направляющих (их нужно поместить в поле Выбор кромки),
причем образующие этой поверхности будут перпендикулярны заданной
поверхности (поэтому выбираем для поверхности Тип — Перпенд. поверхности).
Длину образующей (поле Расстояние/направление) назначаем несколько
больше толщины цилиндра. Поскольку дальнейшие построения
предполагают манипуляции с поверхностью как с единым объектом, активизируем
опцию Отсечь и сшить. Предварительный просмотр дает картину рис. 6.44,
а результат (при скрытом цилиндре) имеет вид рис. 6.45.
^ Детальб
£*] Щ| Примечания
Ш ф' Связь проектов
Ш-Й! Твердые тела(1)
3~ Материал <не указан:
Ш Й Источники света и каг
ffi Щ Уравнения
|... <$> Спереди
<$> Сверху
L <$> Справа
• 1+ Исходная точка
Ш Щ Вытянуть-Тонкостенн
Ш 1Щ) Вырез-Вытянуть1
^ Листовой металл 1
{+]. Q*| Плоское состояние1
{+] Ц*Ц Согнутое состояние 1
|. J^ Разогнуть 1
S © Вырез-Вытянуть2
\ ^Эскизб
• TJ^ Согнуты
Рис. 6.42. Восстановление согнутого состояния цилиндра
Из-за того, что профиль был укорочен (за счет линейной части), кольцо
получилось разомкнутым. Заполнить его можно, построив поверхность По
сечениям на базе свободных кромок. Она, однако, не будет примыкать вплотную
к наружной цилиндрической поверхности (наружная кромка будет прямой
линией). Поэтому заплатку строим с достаточной тщательностью. На плоской
поверхности заготовки создаем эскиз, а на эскизе формируем контур,
состоящий из двух отрезков — это проекции свободных кромок — и двух дуг,
центры которых лежат на оси цилиндра (эти взаимосвязи нужно назначать
вручную), а концы — на концах отрезков. Посредством команды Вставка |
Поверхность | Плоская поверхность создаем заплатку, которую затем
сшиваем (используется одноименная команда) с исходной поверхностью
(рис. 6.46 и 6.47).
Проектирование элементов механических систем
491
-a vmmdrmm»n & ч*-
ЧК.вм W<r»(brfr.^.».iVrt.Uo.p.ln..Tl.r.nll.i(..niriIM..><y
Рис. 6.43. Построение отсекающей поверхности
Рис. 6.44. Предварительный просмотр
результата
Рис. 6.45. Заготовка
отсекающей поверхности
Ось:
Ось2
Рис. 6.46. Доработка отсекающей поверхности: эскиз и новая грань
Рис. 6.47. Заготовка кулачка совместно с отсекающей поверхностью
492
Глава 6
Казалось бы, все в порядке. Есть твердое тело, есть поверхность, которая
внутри цилиндра выступает за его пределы, а снаружи ее край "точно" лежит
на внешней поверхности цилиндра (см. рис. 6.47, где скрытый ранее цилиндр
вновь отображен). Однако попытка применить команду Вставка | Вырез |
Поверхностью сопровождается сообщением об ошибке. Вероятной
причиной неудачи является зазор (визуально он не диагностируется, поскольку его
размер находится на уровне математической погрешности программы) между
краем поверхности и гранью цилиндра. Попытка удлинить отсекающую
поверхность в наружном направлении может не удаться. Поэтому уменьшаем
толщину цилиндра, применяя команду Вырез. Для выреза используем
окружность, эквидистантную кромке цилиндра (рис. 6.48). В современных
версиях SolidWorks тот же результат можно получить посредством команды
Переместить грань с опцией Сместить, позволяющей обрабатывать грани
достаточно сложной формы.
Рис. 6.48. Смещение наружной грани цилиндра за счет выреза:
выполнение команды и результат
После этого еще.раз подаем команду Вырез | Поверхностью, которая
выполняется без проблем. Толщину цилиндра "наращиваем" до исходного ее
состояния посредством команды Переместить грань (рис. 6.49).
Получившийся результат, в принципе, эквивалентен показанному на рис. 6.32.
Однако попытка проверить, является ли сечение выступа плоскостью,
проходящей через ось (аналогично рис. 6.34) прямой, приводит к тому, что
диагностируется наличие сплайна. Тем не менее, если этой же плоскостью пересечь
отсекающую поверхность (которая показана на рис. 6.47), результатом будет
прямая. Таким образом, погрешности внутренней математики программы
приводят к определенной неоднозначности. Как представляется,
получившаяся деталь пригодна для последующего анализа.
Проектирование элементов механических систем
493
Рис. 6.49. Выполнение команды Переместить грань
6.2. Проектирование и расчет балок
В SolidWorks Toolbox включена процедура расчета балок. Она связана с
базой данных Конструкционная сталь, из которой черпает информацию
о геометрических параметрах сечений.
6.2.1. Функциональные возможности
и ограничения
Возможности Toolbox, связанные с балками, базируются на двух функциях:
базе данных по стандартным профилям и процедуре расчета балок. База
содержит стандарты ANSI, ISO, DIN и т. д. В каждый из каталогов включены
несколько типов профилей, которые, в свою очередь, содержат номенклатуру
размеров. Для профилей доступны массово-инерционные характеристики.
Создание профиля подразумевает создание эскиза на текущей активной
плоскости редактируемой детали и помещение на этот эскиз контура профиля.
Дальнейшие действия всецело зависят от пользователя.
Расчет балок основан на применении зависимостей Сопротивления
материалов, подразумевающих недеформируемость поперечного сечения, линейное
распределение напряжений по высоте сечения, отсутствие поперечного
сдвига. Причем эти гипотезы действуют независимо от соотношения размеров
конкретного объекта. Доступны шесть типов расчетных схем (рис. 6.50). Две
из них— консольная балка с сосредоточенной силой на конце и
распределенной по длине нагрузкой. Остальные— балка на двух опорах с одной или
двумя сосредоточенными силами и под действием распределенной нагрузки.
Вычислять можно как прогиб, так и максимальное нормальное напряжение.
Нагрузка относительно сечения балки может быть сориентирована только в
двух направлениях.
494
Глава 6
О I rrrrrrrrrrn.
(ЬГГССГГГГГГПЪ
ж
п.
ж ж
-ж
&
ж
ф ф
ж ж
-ж
Рис. 6.50. Виды статических схем
Пример создания и расчета балки, сопровождающийся сравнением с
анализом МКЭ, приведен ниже.
6.2.2. Интерфейс
Выбор профиля осуществляется через окно Конструкционная сталь (см.
рис. 6.52), которое можно вызвать непосредственно из меню Toolbox или же
из окна Расчет балки (см. рис. 6.51). Созданный эскиз, подобно другим
объектам, формируемым посредством Toolbox, не имеет ассоциативной связи с
базой данных. При соответствующих настройках модуля изменения,
внесенные в объект пользователем, теряются после перезагрузки модели. Однако
изменить имеющуюся деталь или профиль редактированием через базу
данных невозможно.
6.2.3. Практика использования
Спроектируем балку, рассчитаем ее посредством инструментов Toolbox, a
затем сравним расчет с результатами МКЭ.
Применение Toolbox
Создаем деталь, активизируем одну из имеющихся плоскостей и подаем
команду Toolbox | Конструкционная сталь (рис. 6.51). В появившемся окне
выбираем стандарт, тип профиля, а затем — размер (рис. 6.52). К сожалению,
элементы, относящиеся к ГОСТ, рассчитываться не могут — объекты
пользователя не допускают их сопровождения расчетными зависимостями. По
мере выбора параметров из выпадающих списков в окне появляется чертеж
профиля (его условный вид), а также геометрические и массово-инерционные
характеристики. Последние представляют интерес с точки зрения сравнения
с теми, которые определяет SolidWorks.
Проектирование элементов механических систем
495
... ^&Ш^%^Щ
4^v/r
Ш$^|Н*НК*
£'0''^YvV^
Рис. 6.51. Вызов команды
для работы с профилями
Конструкционная сталь
[Балка SB
|SB80x6
[SB 120x1^^
SB 140x15
SB 160x18
SB 180x23
SB 200x27
SB 220x32
I SB 240x36
7ГЗ
^j
[Назначение
Массовые
m лошадь
[Глубина
Толщина листа (TW)
Ширина кромки (BF)
[Толщина кромки (TF)
~ ' " * I - < Зн*ч$ии*
SB 100x8
8 570000
10 900000
,100 000000
4 500000
50 000000
^6 800000
*j
L»J
i
ы
*,' Fww fa$w J'; С**1(Нвйгьч:
Сярааки
Рис. 6.52. Выбор стандарта, типа профиля и размера
L
Рис. 6.53. Профиль балки в эскизе
Определившись с тем, какой профиль будет использован, можно выполнить
расчет и/или поместить профиль в модель. В принципе, эти операции никак
не связаны. Нас не интересует подбор профиля под конкретную задачу,
поэтому, выбрав произвольный размер, нажимаем кнопку Создать. На
активной плоскости создается эскиз профиля данного стандарта, выполненный в
соответствии с показанными в окне размерами (рис. 6.53). Поскольку
привязки объектов эскиза к его системе координат отсутствуют, то назначаем их. На
основе эскиза вытягиваем бобышку длиной 750 мм (рис. 6.54).
496
Глава 6
Рис. 6.54. Половина балки
В окне Конструкционная сталь нажимаем кнопку Расчет балки, после чего
появляется одноименное окно (рис. 6.55). Перемещая ползунковый
переключатель, присутствующий в группе Тип нагрузки, выбираем расчетную
схему: балка на двух шарнирных опорах с сосредоточенной силой посередине.
На первом этапе будем рассчитывать прогиб в центре, поэтому для
переключателя Тип расчета выбираем Отклонение. Сечение двутавра ориентируем
вертикально, выбрав для переключателя Ось значение Локальная ось X.
Заполняем поля:
♦ Модуль — модуль упругости материала балки;
♦ Длина — расстояние между опорами;
♦ Нагрузка — действующая посередине вертикальная сила.
Величина Момент— момент инерции сечения относительно оси X профиля
(в данном случае это горизонтальная ось) вычисляется программой.
Рис. 6.55. Окно Расчет балки с информацией для расчета прогиба
Проектирование элементов механических систем
497
После нажатия кнопки Решить программа вычисляет величину Отклонение
(прогиб в центре). В нашем случае оно равно 2,01 мм.
Если переключить Тип расчета в положение Напряжение, то система
рассчитает момент сопротивления сечения, а после нажатия кнопки Решить
вычислит максимальное напряжение, поместив его в одноименное поле
(рис. 6.56). Отметим, что если в вычисляемых полях Отклонение или
Напряжение присутствует какая-либо информация, то кнопка Решить
нефункциональна.
Рис. 6.56. Окно Расчет балки с результатом расчета напряжений
Численный анализ
Имея для балки результаты, полученные посредством зависимостей
Сопротивления материалов, выполним ее расчет с использованием метода
конечных элементов. Как и ранее, будем применять программу COSMOSWorks. На
первом этапе не будем делать анализ постановки задачи, а предпримем
"лобовое" решение, посмотрев, к чему оно приведет (вычислительные
подробности, необходимые для получения достоверной картины напряжений, мы пока
опустим).
Берем модель, показанную на рис. 6.58, в которой учтена симметрия в
продольном направлении, и отрезаем от нее половину вертикальной
плоскостью— она же является плоскостью симметрии геометрии и граничных
условий. Ставим кинематические граничные условия: Нагрузки |
Ограничения | Симметрия на гранях, лежащих в плоскостях симметрии, и равенство
нулю перемещения нижней кромки правого торца балки в направлении,
перпендикулярном нижней грани (рис. 6.57). Для верхней кромки левого торца
498
Глава 6
назначаем силу, действующую перпендикулярно верхней грани: Нагрузки |
Ограничения | Сила | Приложить нормальную силу. Величина силы —
2500 Н, что составляет V4 от нагрузки, действовавшей на "целую" балку.
Результат наложения граничных условий показан на рис. 6.59.
Рис. 6.57. Граничное Рис. 6.58. Четверть балки — граничные условия
условие на конце балки
Строим сетку с качеством Высокое (конечные элементы второго порядка).
Фрагмент дискретизации показан на рис. 6.59. Отметим, что плотность сетки
недостаточна для достоверной оценки распределения напряжений по
толщине стенок и во внутренних углах.
Рис. 6.59. Фрагмент сетки конечных элементов
Проектирование элементов механических систем
499
Выполнив расчет, получаем картины перемещений в вертикальном
направлении UY (рис. 6.60) и нормальных напряжений от изгиба SZ (рис. 6.61). Мы
будем анализировать только те компоненты напряженно-деформированного
состояния, которые фигурируют в расчете посредством Toolbox. Как видно,
максимальный прогиб по оценке МКЭ несколько больше, чем решение по
"Сопромату", а наибольшие изгибные напряжения — существенно выше.
Рис. 6.60. Прогиб балки
Рис. 6.61. Изгибные напряжения
Причин того, что величина прогиба оказалась больше, чем в расчете по
балочной модели, несколько:
1. МКЭ учитывает деформацию поперечного сдвига (в нашем случае —
в плоскости YZ), а балочная аппроксимация — нет.
2. В отличие от балочной модели, МКЭ моделирует локальную деформацию
в зоне опертой кромки.
3. Поскольку нагрузка равномерно распределена по кромке, то в реальности
возникает изгибная деформация полки швеллера, которая в балочной
аппроксимации игнорируется.
500
Глава 6
Пункты 2 и 3 описывают эффекты, влияющие на картину изгибных
напряжений, причем в последнем случае изгиб полки относительно продольной оси,
взаимодействуя с заделкой, за счет эффекта Пуассона порождает
составляющую вдоль продольной оси. Фрагмент диаграммы нормальных напряжений
с увеличением масштаба в районе плоскости симметрии показан на рис. 6.62.
Рис. 6.62. Изгибные напряжения — фрагмент в сечении
возле плоскости симметрии
Постараемся подогнать численное решение под "Сопромат". Борьбу ведем с
поперечным сдвигом балки и изгибом полки. Первый и самый простой
подход — использовать линейные конечные элементы, а также выполнять расчет
на более редкой сетке. Если по толщине полки будет размещен только один
слой таких элементов, то, в силу того, что в пределах элемента деформация
постоянна, изгибные моды созданы не будут. По той же причине будет
ослаблено влияние деформаций поперечного сдвига. Соответствующая сетка
конечных элементов показана на рис. 6.63.
Рис. 6.63. Редкая сетка линейных элементов и граничные условия
Проектирование элементов механических систем 501
Картина перемещений (рис. 6.64) приблизилась к ожидаемой, но на этот раз
максимальные перемещения несколько меньше требуемых (как
представляется, балка приобрела избыточную жесткость за счет менее точной
аппроксимации геометрии сечения). Распределение изгибных напряжений (рис. 6.65)
также приблизилось к балочной модели— отличие составляет около десяти
процентов.
UY(mm)
0 ООе+000
. -1.89е-001
, . -3.77е-001
Ъ~ -5.66е-001
Ш-7.54е-001
И| -9.43е-001
ЦЦ -1 13е+000
В .1 .32е+000
И-1.51е+000
Н .1.70е>000
■I -1 .89е+000
Рис. 6.64. Прогиб балки при аппроксимации линейными элементами
SZ (N/taA2)
9.95е+007
7.84е+007
5.74е+007
3.64е+007
1.53е+007
-5.71е+006
-2.67е+007
-4.78е+007
-6.88е+007
-8.99е+007
-1.11в+008
Рис. 6.65. Изгибные напряжения при аппроксимации линейными элементами
Данный подход обладает неприятной побочной особенностью: если балка
входит в состав некоей конструкции, то в силу условностей COSMOSWorks
все остальные объекты также должны аппроксимироваться линейными
элементами. Попытаемся модернизировать расчетную схему так, чтобы
получить ожидаемый результат для параболических элементов. Вставим балку в
сборку, а затем к торцам присоединим две пластины, сечение которых
тождественно профилю балки (рис. 6.66). Пластины введены для того, чтобы
препятствовать изгибу полки. Граничные условия, действовавшие на концах
балки, сохраняют свое положение, однако теперь они приложены к кромкам
Wk*#'
502
Глава 6
стыка и по поверхности сопряжения левого конца с пластиной. Для пластин
назначаем жесткость материала в 1000 раз больше, чем для материала балки.
Рис. 6.66. Балка в сборке
Диаграммы перемещений и напряжений после расчета с сеткой элементов
второго порядка, плотность которой идентична показанной на рис. 6.59,
приведены на рис. 6.67 и 6.68. Результат по перемещениям удовлетворительный,
по напряжениям— отрицательный. В последнем случае жесткие пластины
стесняют поперечные деформации, что приводит к концентрации
напряжений.
UY(mm) .
Рис. 6.67. Прогиб балки в сборке
Прибегнем к еще более экзотическим инструментам. Придадим материалу
балки свойства анизотропии, сделав его жесткость в направлениях, отличных
от того, которое будет совпадать с осью балки, в 100 раз большей, чем
реальная. Увеличим в 100 раз модули сдвига во всех плоскостях и изменим
коэффициенты Пуассона так, чтобы они соответствовали базовым соотношениям
теории упругости (в противном случае решение невозможно). Фактически
получаем трансверсально-изотропную среду с плоскостью изотропии YZ.
Повысив жесткость, мы сводим на нет изгиб полок относительно продольной
Проектирование элементов механических систем 503
оси балки и локальные деформации в зоне опоры. Кроме того, должна
уменьшиться концентрация напряжений в плоскости симметрии. Для того
чтобы такой материал получить, в окне Материал выбираем опцию
Определенный пользователем, а затем для параметра Тип модели выбираем
Линейный Упругий Ортотропный, после чего вводим соответствующие
числа (рис. 6.69). Перед подачей команды Применить/Редактировать
материал, после которой и возникает данное окно, следует создать систему
координат, связанную с балкой (рис. 6.70), относительно которой и подбирать
характеристики упругости. Чтобы она появилась в поле Справочная
геометрия, необходимо перед вызовом окна Материал эту систему координат
указать.
SZ (NM>A2)
1.86е+008
.1 29е+008
|Щ. 7.27е+007
11 61е+007
-4 05е*007
-9.72е+0Э7
-1 54е+008
-210е+008
-2 67е+008
Рис. 6.68. Изгибные напряжения для балки в сборке
Рис. 6.69. Жесткость ортотропного материала
504
Глава 6
Как по перемещениям (рис. 6.70), так и по напряжениям (рис. 6.71 и 6.72)
результаты близки к "Сопромату". Нормальные напряжения по высоте
изменяются практически линейно. Отметим, что получены они на плотной сетке
элементов второго порядка.
Система
координат2|
Рис. 6.70. Справочная система координат для связи с ортотропным материалом
У t 7
Рис. 6.71. Прогиб анизотропной балки
■ Рис. 6.72. Изгибные напряжения анизотропной балки
Проверим этот алгоритм "доработки" решения точного до уровня
приближенного на балке с распределенной нагрузкой (рис. 6.73 и 6.74). "Балочные"
изгибные напряжения равны 53,6 МПа.
Проектирование элементов механических систем
505
Расчет балки
т Tw нагряади~
amxmxuxfl)
ж
■ж
■: -Л вйорой п^шкмт, S»Wk«
г/? Отклони***/ '^ Напряженна ''
Ввод—
г Ось**
— ~ г Единицы измерения"
| С Локальная ось Y • | С Дюйм*»!
[^^Яокадьнуо^Х , J \f Метрически* , ^
Отклонение
Мтут *
Нотю * \
Длине»
1 255580
200000000000 Рь
1500
175 000000 стА4
mm /
10000
Ргши5«.
\'5ад«*
Готово
Спраек*
Рис. 6.73. Расчет балки с распределенной нагрузкой
Рис. 6.74. Геометрическая модель и граничные условия для МКЭ
Численный результат по перемещениям (UY макс. = -1,33 мм) для элементов
второго порядка на относительно плотной сетке вполне удовлетворителен.
А вот изгибные напряжения имеют зону концентрации, которая на сей раз
локализована у опоры (рис. 6.75). Решая задачу для анизотропной балки,
получаем диаграмму напряжений в виде рис. 6.76. И здесь результат "подогнан"
к балочной модели с высокой точностью.
Несмотря на то, что при "подгонке" численной аппроксимации под
зависимости "Сопротивления материалов" получены удовлетворительные результаты,
нужно признать, что модель является достаточно искусственной. Попробуем
использовать инструмент Дистанционные нагрузки (Remote Loads).
Напомним, что всевозможные вспомогательные объекты и свойства пришлось
вводить, чтобы обеспечить деформирование торцов балки как жесткого целого.
При этом сечение, попавшее в плоскость симметрии, сохраняя форму, не
506
Глава 6
должно поворачиваться относительно горизонтальной оси, а конец, также, не
меняя формы, наоборот, поворачивался бы свободно. Эти требования
реализуются в условиях Дистанционные нагрузки с опцией Перемещение
(Жесткая связь) (Displacement (Rigid Connection)). Перед использованием
данной команды желательно (но не обязательно) создать системы координат,
связанные с обрабатываемыми объектами — в нашем случае это сечения
балки (рис. 6.77, сверху).
Рис. 6.75. Изгибные напряжения изотропной балки с распределенной нагрузкой
Рис. 6.76. Изгибные напряжения анизотропной балки с распределенной нагрузкой
Затем назначаются нагрузки (в нашем случае это перемещения) на удалении.
В сечении, попавшем в плоскость симметрии, это отсутствие смещения вдоль
балки и поворота относительно поперечной оси (понятно, что фактическим
ориентиром является локальная система координат), а в свободном
сечении — равенство нулю вертикального перемещения (панели Дистанционные
нагрузки показаны на рис. 6.78, слева и справа соответственно).
Вертикальная сила прикладывается к верхней кромке (хотя в силу
абсолютной жесткости сечения можно приложить его к любому объекту в сечении),
кромке сечения в поперечной плоскости симметрии (рис. 6.77).
Проектирование элементов механических систем
507
Рис. 6.77. Локальные системы координат и граничные условия на модели балки
Результат расчета в виде вертикальных перемещений показан на рис. 6.79 и в
виде продольных напряжений—рис. 6.80. Как видно, результат по
перемещениям соответствует ожиданиям, а по напряжениям — далек от
аналитического решения. Источник проблем — отсутствие поперечных деформаций в
нагруженном сечении в плоскости симметрии — на его краях возникает
концентрация напряжений. На достаточно малом удалении от сечения
распределение напряжений приобретает вполне "традиционный" вид. Отметим, что
для нагружения изгибающим моментом или перерезывающей силой,
распределенной по всей площади сечения, команда Дистанционные нагрузки с
опцией Нагрузка (Прямой перенос) (Load (Direct Transfer)), сохраняющей
податливость сечения — наиболее подходящий инструмент.
Еще один характерный пример, когда построение моделей, имитирующих
аналитический расчет, сопряжено с некоторыми проблемами — кручение
тонкостенных стержней. Если это стержень открытого профиля, то имеет
место депланация поперечного сечения, поэтому на торце нельзя ставить
условие фиксации перемещений, ибо оно препятствует продольным смещениям.
Поэтому приходится к торцам прикладывать два противоположных крутящих
момента в виде Нагрузка (Прямой перенос). Кинематические граничные
условия — фиксация трех вершин, расположенных в среднем сечении
так, чтобы заделки не внесли возмущений в деформированное состояние
(рис. 6.81). Эти вершины получаются после построения соответствующих
линий разъема.
Распределение перемещений на фоне деформированного вида показано на
рис. 6.82, а эквивалентные напряжения на недеформированной модели —
Дистанцишн&ш нагрузки НДисташ4И0ННЬ,е нагРУзки
Ш&Ш
i^Ji&*a&&&&£.s;
^^йД^^ШЙдггД^Ж^ь^я
^ Нагрузка (Прямой
перенос)
^ Нагрузка (Жесткая
сеязь)
^ Перемещение
(Жесткая сеязь)
I? Преде, просмотр
Г Глобальный
#. Настроено
пользователей
'МШШШШШШШмтшМ&<
%\ |-
£* jo
jL (о
£* f°
3:
J
з 1
з
ёШжттш^
fl F™
Г" Реверс
^Mjo
;&>
etitefeMy&Si
направления
3
£Jj
R J^ 3
Ш
Ф
штттш«ттш£«
P Нагрузка (Пряной
. перенос)
г Нагрузка (Жесткая
связь)
д» Перемещение
(Жесткая сеязь)
■НИ
I? Пред»* просмотр
"ж *
Г Глобальный
0 Настроено
пользователе»
Система координат!
ЙИЖЖЖИА^^
:Й 1»
$+ Jo
JU|0
^ |о
3
*****■-.
ZJ
з
8&меяшш^
В F«>
&jl°
;^Л°
Шг
яШМл**
~~3
'«'I
' 3
j^ 1° 3
Г* Реверс направления
^а^^^^йй^it-!4
Рис. 6.78. Дистанционные нагрузки в плоскости симметрии и на свободном торце
Проектирование элементов механических систем
509
Шкала деформации: 40
UY (mm)
Рис. 6.79. Прогиб балки с дистанционной нагрузкой
Шкала деформации: 40
SZ (1ЧЛпЛ2) I
Рис. 6.80. Изгибные напряжения балки с дистанционной нагрузкой
#—.
'L»+
ЖНистема
Рис. 6.81. Граничные условия на балке при кручении
510
Глава 6
URES (mm) _ 1 -57e-002
1.34e-002
1.12e-002
8.96e-003
6.72e-003
4.48e-003
. 2.24e-003
1.00e-030
Рис. 6.82. Перемещения на балке при кручении
Шкала деформации: 3000
на рис. 6.83. Как видно, внешне модель выглядит вполне адекватно. Однако
на диаграмме напряжений присутствует зона концентрации вблизи
вертикальной стенки. В то же время полки практически не воспринимают
нагрузку. При этом результат (в качественном его виде) мало зависит от плотности
сетки. Это является признаком того, что передача крутящего момента на
торцы осуществляется не так, как это происходит вдали от них. Устранение
этого обстоятельства также требует определенных ухищрений. Поэтому будем
считать, что влияние краевого эффекта не слишком значительно.
von Mises (NAnA2)
. 2.36е+005
. 1.18e+005
9.67e+002
Рис. 6.83. Эквивалентные напряжения в балке при кручении
Однако, даже допуская корректность модели, приходится столкнуться с еще
одной проблемой — нельзя непосредственно получить величины углов
поворота сечений. Пользователь должен рассчитывать их на базе информации
Проектирование элементов механических систем
511
о перемещениях в характерных точках. Эта проблема снимается при
аппроксимации профиля конечными элементами оболочек— здесь углы поворота
доступны в явном виде. Однако в этом случае придется усложнить
геометрическую модель, поскольку дистанционные нагрузки в виде Нагрузка
(Прямой перенос) не могут прикладываться к кромкам или вершинам. Нужно
будет вблизи краев выделять на поверхностях узкие полосы, которые и будут
нагружаться крутящим моментом.
Выводы
Модули Конструкционная сталь и Расчет балки предназначены для
доступа к базе данных по профилям металлопроката и процедурам их расчета по
методикам Сопротивления материалов. Надо сказать, что эти приложения
появились до того, как в SolidWorks была введена функция Сварные
конструкции, способная обрабатывать совокупность профилей, присутствующих в
детали, и тем более балочные/стержневые конечно-элементные модели,
построенные на базе этих объектов. Тем не менее рассмотренные здесь
процедуры также сохраняют актуальность, в частности, благодаря обширной
базе данных и возможности редактировать профиль после вставки в модель
SolidWorks. Использование же базы Элементы конструкций из Toolbox
Browser позволяет вставлять детали, являющиеся профилями,
непосредственно в сборку. В ряде ситуаций эта функция бывает полезна.
Мы уделили повышенное внимание анализу расчетных моделей для того,
чтобы ясно очертить пределы применимости упрощенных методик, а также
показать источники расхождений с результатами численного анализа
(научившись заодно манипулировать достаточно "тонкими" настройками
моделей МКЭ). Из тестов следует, что встроенный анализ позволяет на стадии
проектирования оценить работоспособность конструктивного элемента вне
контекста. Что же касается зон взаимодействия балок с окружающими
объектами, имеющими, в частности, высокую жесткость, то здесь возможности
МКЭ трудно чем-либо заменить. Мы еще раз убедились, что изолированный
расчет объекта не является исчерпывающим для оценки конструкции или узла.
6.3. Расчет подшипника
Одна функция Toolbox предназначена для расчета несущей способности
и долговечности подшипников, присутствующих в стандартной поставке
(объекты пользователя и те, которые соответствуют локальным стандартам,
в частности ГОСТ, в эту категорию не попадают). Окно, возникающее после
подачи команды Расчет подшипника из меню Toolbox, показано на рис. 6.84.
Как видно, далеко не все коэффициенты, присутствующие в зависимостях
512
Глава 6
курса Детали машин, имеют аналоги среди параметров программы.
Отличаются, соответственно, и результаты, причем, как правило, в сторону
завышения характеристик (прогнозируемых!). Определенную пользу можно извлечь
из того, что, например, для шариковых подшипников можно назначать число
и диаметр шариков (независимо от того, как реализуется проект), получая
оценку Работоспособности (в отечественной терминологии —
грузоподъемности). Этот факт в определенной степени снимает ограничение на работу
с отсутствующими стандартами. Кроме того, если не удалось подобрать объект
с подходящей грузоподъемностью, можно, выбрав для переключателя пункт
Предназначение, сделать поле Работоспособность редактируемым и ввести
нужную величину. Затем, зная Эквивалентную нагрузку (в отечественной
терминологии — эквивалентная динамическая нагрузка), можно определить
Срок службы (ресурс) в часах.
Расчет подшипников - 00 17 Радиальный шариковый подшипник
г Надежность-;
|Ц10)-90*
< | Ansi M етрический JJJJ
. [ Радиальный шариковый nc Vj
137-17
18-17
28-17
38-17
19-17
182-17
[29-17
48-17
10-17
39-17
183-17
J
**Л
~
zi
йцщжхт ';'
• ]Шнтр шарило»
* подшипник*—
^ .
J5400000
^Ык^ктоЫ^шь ЩШш$уГ
~\ ''*'>*-"'-. Л "' '
flttft' \ -
7-N ^Р^Ц>а<ощдй нЗГй#ка|
3 гЙ*гру$<«
^Ю^адв^н^шэдз*;* 2000
-Гс? ово"
Спрд»с«
Рис. 6.84. Окно Расчет подшипников
Заключение по поводу использования функции Расчет подшипника таково.
На этапе предварительного проекта ее использовать можно. Оценка
грузоподъемности более-менее соответствует справочным значениям. Что касается
ресурса, то здесь лучше использовать общепринятые методики.
Проектирование элементов механических систем
513
6.4. Toolbox Browser
SolidWorks включает в себя разнообразные инструменты для работы с
типовыми объектами: конфигурации; стандартные элементы, детали, сборки из
Библиотеки проектирования. Наиболее универсальным средством с точки
зрения организации корпоративной деятельности является Toolbox — модуль
SolidWorks, предназначенный для управления базами стандартных
элементов.
6.4.1. Краткое описание
Toolbox содержит базу данных типовых элементов деталей — канавок,
профилей проката, а также базу стандартных деталей: крепежа, проката,
подшипников, штампов и уплотнений, элементов трансмиссий и т. д.,
сгруппированных в соответствии со стандартами: ISO, DIN, JIS и т. д. База содержит
возможности пополнения. Поэтому в официальную поставку входит
библиотека деталей ГОСТ, разработанная фирмой SolidWorks Russia.
Доступ к стандартным объектам осуществляется через Toolbox Browser,
подключаемый как приложение к SolidWorks в меню Добавления. Toolbox
также должен быть активен. Затем создается новая или открывается имеющаяся
сборка. Начиная с версии 2006 года, Toolbox Browser размещается в
Библиотеке проектирования, расположенной в Панели задач. После ее
активизации посредством команды Вид | Панель задач она располагается справа от
окна с моделью и имеет вид, как показано на рис. 6.85. Щелкнув по
пиктограмме Toolbox, получаем доступ к древовидной структуре, содержащей
набор стандартов. После выбора стандарта появляется список библиотек. На
иллюстрации видны названия всех доступных на момент выхода книги
стандартов и, в частности, библиотек ГОСТ.
Помещение детали в сборку осуществляется перетаскиванием, в процессе
которого возникает Менеджер свойств SolidWorks с типоразмерами, из
которых следует выбрать необходимый (рис. 6.86). Как видно, компонент
определяется не только геометрической информацией, но и полями,
описывающими, например, материал, поле допуска резьбы и т. д. На основе этой
информации генерируется наименование детали, которое затем используется при
оформлении конструкторской документации и, в частности, спецификации
согласно требованиям ЕСКД. Эти данные также доступны в системе PDM1
фирмы SolidWorks Russia при описании структуры изделия.
1 Product Data Management — управление данными об изделии.
514
Глава 6
Если в ходе перетаскивания деталь перемещается над подходящим объектом
(в стандартных деталях, как правило, присутствует Ссылка на сопряжение),
то возникают пиктограммы, отображающие потенциальные взаимосвязи.
В зависимости от настроек браузера (рис. 6.87) вставленная деталь может
помещаться как ссылка на элемент библиотеки, или же для нее создается
локальная копия с помещением в назначенный каталог. Здесь нужно иметь в
виду, что вставка со ссылкой не позволяет сохранить отредактированный
объект. Более того, если деталь вставлена как ссылка, перевести ее в другое
состояние затем невозможно.
[41; »У^
Щ>^й Design library
в-И* S3SS9'
\ 1 $'eAnstInch
,' iSAnsJMetrfc
* -ш>Шв$1
1, 4аа5с -
ШШ<ЗВ
j ф»^ Bearings *
1 j Ш# Botes and Screws
; f $'^0*?ings
: J ф^С^Р1п5
,-i 1 i^PoworTransmissjun -
4 ^4$ReteHftg Rings
; [ щЩ Structural Member
; l йШ washersч
\ I 1гШ Conical Spring ushers \
r ' ! \~ф Plain Washes
-• \ h@ Spring Lock Washers
j i Ц§> Toothed lock Washers
\ i^? РЕМ® Inch
? Щ-Ф РЕМ®Metric,
fr|£ SKF® ,
* Ф"ШT orrlngton® Inch
ФНЭ TorrlngSon® Metric
1 Щ^Тгиаге® J •
| . ф CJ3 Unkttut® v
[ \ вн^гост , -
$ # 3DCor*er*Centrat'
Ф-® Содержание SoiidWork$ J
|2ГшЭД
\щ'ЩDesignLibrary * ±\
£bflf Toolbox
; .iiJrocT
j ф^ Болты и винты
J \ Svl Болты
1 | Ц^ВИНТЫ •
1 фОБолтыивмтыспециальнь
( ' Ш-ii Гайки
\ * f & Заклепки J
\ 1 Ш*■£*£ Подшипники роликовые 1
\ \ |У Подшипники шариковые ..' 1
1 ф'4^ Профили 1
| ф iJ Уплотнений
; * ф-^j Шайбы
[ ф^ Шпильки ;
1 * ф-О Штампы
| ф>^ Штифты
\ s Ш О ШУРУПЫ Л
4#3DContentCentral J
4|^;;;.,,.,,.^T-^,.,;,..-J »Г
Iff" ^ •
Винтысцил. Слолукр-Й, i
скругленной гол*.* тол.кл,т>Аи8ГО.., i
СполупотайноЙ ' С потайной j
гоя,кл.т.А и В ГО„. гоа*кя,т*А и В Г0М,
< Сд^л«гол,и Сцил*пжкд.т,Аи
1 шестигр.под кл.м В ГОСТ И$Ь60
Рис. 6.85. Toolbox Browser со списком библиотек и набором стандартов ГОСТ
Проектирование элементов механических систем
515
В версии SolidWorks 2007 года существенно расширен набор инструментов
для управления содержимым базы данных стандартных деталей, а также
усовершенствованы инструменты управления базой. В частности, с конкретным
пользователем можно ассоциировать права доступа к процедурам
редактирования, добавления и т. д.
•Ш :
(• Список
*»**&£&
по обозначению детали
С Список по описаниям
I
Описание;
d
\ Size:
Исполнение:
Ler«gthj
1«
Размер под ключ:
Доп, параметры:
] Отобразить
Шаг рл^ьбъс
|>.5
***Ш
d
d
ii;
d j
d
d
1 Нйинзно&анде; Болт
3Ml*KJgtf»S,66.-*S.Qa
| <S16) ГОСТ 7305-70
| Comment;
|l
p ДИНй»1ИЧеСКИП Пр6Л»арИ18ЛЬНЫЙ
i' просмотр
|Правая
Поле допуска резьбы:
||вд
! Групп* материала:
[Сталь углеродистая
Материал:
|<5
Класс прочности:
(Класс 6.6
Пдорьюю:
| Хим. Оке. при
Толщина покрытия:
]Без указания
d
d
d
d
d
^
d
Рис. 6.86. Менеджер свойств при вставке стандартной детали
6.4.2. Автокрепежи
Еще один способ позиционирования стандартных деталей — команда
Автокрепежи, присутствующая в панели инструментов Сборка (рис. 6.88) или в
меню Вставка. Если детали сборки содержат отверстия, созданные командой
Отверстие под крепеж, то после подачи этой команды система предлагает
начать поиск подходящих отверстий и, найдя их, вставляет (взаимодействуя с
оператором) крепежные изделия. Структура крепежа, параметры допуска на
соответствие размерам, а также возможность автоматической корректировки
размеров стандартных деталей назначается применительно к стандарту на
вкладке Автокрепежи окна Настроить данные браузера ToolBox.
516
Глава 6
Настроить данные
£\С^ф*ю*о* 'Ндотрой^й|Св^йсгйед| Авпго^«1ежи); ' ^ 7/ / s'^- ] I/ * л *'\ \ ^ :Л % :' -ч".V:7 V^J&:
щ:
г;-л
Удаление доетуион дедевын**
г Пароль
^:;//,:>ч<^ г**
издать/Изменит^;, j*v \ Удвюкя>х*
::& Разрешить редактирование
-* - * ^Toolbox * V\ -^,{-^'s f,f £Jf £/Д' v^"' >q
'^й*Ф$шнтьрйд4кЦ»^й»9ии^Ц€^; ; j
, *л< иегюльзуеш* ияпгрр/^x ;,v \ гф- <\ j
l« s s ,♦ каждого тояьзоватеш л \ ЧГ - * ■
';"X i\ # вносить нэкенейия^;;^ /\
*^:;г У^*^ит$ Wih*^^ *
\ s j. -гюлыюввтйпей <, 0"v> ч\ л
* Ato^^**tfi ^ % <^' > '-''Y{* %" J* ;
;> ^к*жд<^яо/ч>;к^г^^ Д-<, ^
ФейлЫ
^* £йдЫив KiHWWm
Ноезя щф)Гуршод&д*? добяйен&гяаййьйфайя s{ ;-ГЧi I
" дет#№^:квждониспа^ <*
у\ крепежа/ , :j , - 7^ ; ', >?*kU -syV v^s
%C Созданиедегашй -,s % ^ ^ ч oA * V f, / j\ г ^
0 ч' Отдельный файл детали $удст яаздвн г$и " ? % s i: \ *\ V'- ч
, ч; и^Ф»01*«ннии^ог^Ш^Р*«фйое^ v * *чл\^ л
ч^Т'Ътдель^фз^дета^ * **
', \ *$ёщш с^шйьзшвниен клавиши СЖ H^flpoecMtHma - , ^ чг
о ■ ^Тос^мж^Новаякшфи^р^ия^детдобж^^
j С:\ААА\Детали ToolBox
рЗалив» в дшумен^тольк» дйя 4^^-—^-^:-^ -^—v
Г'Омаибк»яри йписнA^cy«efrai w^&Www^4 , ^s ♦'
•J'U
г^о^трнйески равных конпонвитое
%
xfmUl^>rr&&fry*?**{yi^ V--'} ±':"У> :л^'^^^:^^>Ш^^
Рис. 6.87. Окно для настройки браузера ToolBox
Аат<жр«?п*»жи
До6ав.пенид крепеж*»? в сборку,
используя 6'ибпиотеку станд^ртнь:.<
деталей SoliclVVorkv Toolbox.
шзззж
*L
щщшшшшШЯШЯЯШШ
Рис. 6.88. Панель инструментов Сборка с командой Автокрепежи
6.4.3. Трансмиссии
Один из каталогов в нескольких стандартах называется Трансмиссия. Он
содержит элементы зубчатых зацеплений: прямозубые и косозубые колеса,
рейки и конические колеса. Диалоговое окно для подбора типоразмера пока-
Проектирование элементов механических систем
517
зано на рис. 6.89. Как видно, номенклатура варьируемых параметров весьма
ограничена.
:ШШШ1.
& i
& Список по обозначению да**л»1 j
С Список, го списании* I
Описание;
Module:
jio
Number d Teethj
J20
Pressure An$e;
J20
Face Width:
3 i
""j*!,
dl:
I30
HubStyse?
JTypeB
Nub Dimeter i
J75
Cver#i length;
I50
Nominal Shaft Diameter;
j 50
JNone
Show Teethj
>«;
AmmJ,
I20
CortftCjMrafcionName:
) JIS - Spur gear ЮМ 20Т 20PA 12F\
Comment;*.
\
»у Динамический
1 преде^рнтепьный просмотр
a a « si p •
ф-ф Toolbox
; {£ Ш Ansi Inch
I шШАп51 Metric
! шШ bsi
\ mmasc
I ffi-BDN
I ф-Ш gb ,
l Ш El iso
| sod»
; j $-1^ Bearings
| ? & 6® Bote aral Screws*
Ш-CgiNuts
ф^ O-ring»
В Щг Power Transmission
0 Chain Sprockets
S Gears
Retaining Rings
&Щ Structural Members
ШЧ2) Washers
W РЕМ® Inch
* 1
4ШШ
Spur Gear
±1
Internal Spur Gear
^Ц| fp
Rack (spur
Rectangular)
Helical Gear
Straight Miter Gear
Straight Bevel
(Pinion)
Straight Bevel (Gear)
Рис. 6.89. Выбор элемента зубчатого зацепления и назначение параметров
На рис. 6.90 (слева) показано прямозубое колесо, созданное в соответствии с
приведенными параметрами. Программа строит модель в следующей после-
518
Глава 6
довательности: цилиндр; вырез между двумя зубьями; размножение выреза;
формирование ступицы. Эскиз, на базе которого формируется впадина между
зубьями, показан на рис. 6.90, справа. Как видно, вместо ожидаемого эволъ-
вентного профиля, в эскизе начерчена окружность. Это значит, что зуб будет
иметь цилиндрическую рабочую поверхность.
Рис. 6.90. Модель зубчатого колеса и эскиз выреза, формирующего впадину
В справочной системе Toolbox написано: "Зубчатые колеса предназначены
только для проектирования. Это не зубчатые колеса с эвольвентным
зацеплением, которые можно использовать для производства".
В свете сказанного, модели элементов трансмиссий, присутствующие в
Toolbox, можно использовать в иллюстративных целях или на этапе
компоновки сборок, включая также имитацию кинематики (если выполнять ее на
уровне возможностей SolidWorks). Описанная далее программа GearTrax
в значительной степени снимает эти ограничения.
6.5. GearTrax
Продукт GearTrax — разработка фирмы Camnetics Inc., США предназначена
для построения моделей деталей трансмиссий. GearTrax является
независимой программой, функционирующей "параллельно" с CAD-системой, но
обладающей при этом возможностью обновлять (по команде пользователя)
геометрическую модель и считывать из нее параметры, относящиеся к
изделию. GearTrax может взаимодействовать с SolidWorks, Inventor и SolidEdge,
причем для каждой из этих систем выпускается оригинальная версия кода.
Информационная панель программы показана на рис. 6.91. Следует обратить
Проектирование элементов механических систем
519
внимание на то, что диагностирован серийный номер SolidWorks— это
свидетельство (косвенное) того, что официальная поставка привязана к лицензии
CAD-системы.
*!? About Camnetics
<0 Camnetics
GearTrax M
Drive Component Development Software
Buikt 2007.152557
email: $upport@camneti«.com
hup: //www. camnetics.com
WARNING: This program k protected by copyright
law and international treaties. Unauthorized
reproduction and distribution of this program, or any
portion of it may result in severe civil and criminal
penalties, and will be prosecuted to the maximun
extent possible under law.
GearTrax ™ is a Trademark of Camnetics, Inc.
Copyright 1998 Camnetics, Inc.
Click Connect to visit the Camnetics web site and learn
more about the Company and Product.
Serial number: 9000 9000 9000 9000
ШЕ
. CojjnecC
Рис. 6.91. Информационная панель GearTrax
6.5.1. Функциональные возможности и ограничения
GearTrax предназначен для создания моделей деталей трансмиссий, при этом
объект, параметры которого определены в программе, затем формируется в
CAD-системе. Контуры зубьев описываются сплайном или совокупностью
окружностей, имитирующих — если необходимо — эвольвентный профиль.
Полученная кинематическая пара визуализируется в окне программы с
имитацией движения (только для цилиндрических колес). При изменении
управляющих параметров происходит пересчет управляемых, причем можно,
базируясь на выбранном стандартном объекте, сформировать отличающуюся от
стандарта деталь. Система обрабатывает следующие объекты.
♦ Цилиндрические прямозубые и косозубые зубчатые колеса. Зацепление
может быть внешним и внутренним.
520
Глава 6
Базовыми характеристиками для них являются:
• модуль;
• диаметральный шаг;
• набор параметров с произвольным доступом.
Система допускает:
• изменение межцентрового расстояния;
• назначение смещения;
• назначение окружного зазора;
• назначение толщины зуба;
• изменение большинства остальных геометрических параметров
относительно стандартных значений.
Геометрическая модель прямозубого колеса получается на базе эскиза,
формирующего впадину между зубьями, которая затем размножается как
круговой массив. Если формируется косозубое колесо, то эскиз, лежащий
на плоскости, перпендикулярной оси, протягивается вдоль спирали,
образуя вырез (рис. 6.92). После этого вырез размножается поворотом
относительно оси колеса.
Конические зубчатые колеса с прямыми и круговыми зубьями. Прямозубое
колесо получается размножением относительно оси выреза, полученного
как элемент По сечениям. Одно из сечений — точка, находящаяся в месте
пересечения осей пары, а другое — эскиз, построенный в плоскости,
касательной к конусу, ограничивающему заднюю часть колеса (рис. 6.93).
^VAxisl
Aajs2
PlaneAtAngU
Рис. 6.92. Цилиндрическое косозубое колесо
и эскизы, формирующие вырез
Рис. 6.93. Коническое прямозубое колесо
и эскизы, формирующие вырез
Колесо с круговыми зубьями строится на базе сечения выреза и
направляющих кривых, которые система строит в углах сечения (рис. 6.94). От-
Проектирование элементов механических систем
521
метим, что автоматически этот вырез не получается. Программа выдает
эскиз сечения и направляющие кривые. Остальные действия пользователь
должен сделать самостоятельно.
AxisZ^-1
Рис. 6.94. Коническое колесо с круговыми
зубьями, эскиз сечения выреза
и направляющие кривые
MYiSI
Рис. 6.95. Архимедов червяк
и эскизы, формирующие вырез
Элементы архимедова червячного зацепления. Программа строит червяк
вырезом цилиндра. Профиль выреза формируется в плоскости,
проходящей через ось цилиндра, а направляющая — винтовая линия, ось которой
совпадает с осью цилиндра (рис. 6.95).
Червячное колесо получается размножением выреза вращением
относительно оси. Сечение выреза, являясь симметричным относительно линии,
параллельной оси колеса, находится в плоскости, которая параллельна оси
и проходит через ось червяка (виртуального). Траектория выреза является
участком винтовой линии, формирующей червяк (рис. 6.96).
'; -ipj^-^^AxIs-Worm
Plane]
Рис. 6.96. Колесо, соответствующее архимедову червяку,
и эскизы, формирующие вырез
522
Глава 6
Рис. 6.97. Шкив зубчато-ременной передачи со сделанным в SolidWorks вырезом
♦ Шкивы клиновых и поликлиновых передач, а также передач с зубчатыми
ремнями (рис. 6.97).
♦ Звездочки цепных передач (рис. 6.98).
♦ Элементы гилицевых соединений с эвольвентными зубьями (рис. 6.99).
Рис. 6.98. Звездочка цепной передачи Рис. 6.99. Вал с эвольвентными шлицами
Большая часть других возможностей программы будет проанализирована
одновременно с рассмотрением интерфейса.
Важно знать, что GearTrax корректно функционирует совместно с SolidWorks,
только если CAD-система работает с английским меню. В противном случае
следует напоминание, и программа может завершить работу или
сформировать некорректную геометрическую модель. Для переключения языка в
SolidWorks подается команда Инструменты | Настройка | Использовать
меню на английском языке, после чего нужно перезагрузить программу.
В стандартной поставке GearTrax имеет два, по сути, независимых канала
обмена данными с SolidWorks. Первый — создание в SolidWorks файла
детали, формирование в нем объекта и, при необходимости, построения сечения
детали и таблицы аннотаций. Второй шлюз предназначен для считывания
специфических параметров зацепления из активной детали SolidWorks в
Проектирование элементов механических систем
523
GearTrax. В документации программы декларируется возможность встроить
команду вызова GearTrax в меню SolidWorks. Для этого нужно установить
программу, а затем открыть файл GearTrax####.dlI (здесь символом ####
обозначается номер версии), после чего в меню SolidWorks появляется пункт
GearTrax. Однако попытки проделать эти манипуляции не привели к успеху.
Возможно, это объясняется особенностями русскоязычного варианта Solid-
Works.
6.5.2. Интерфейс
После запуска программы возникает окно формы, показанное на рис. 6.100.
Оно содержит падающее меню, набор вкладок, два рисунка, первый из
которых отображает объект, соответствующий активной вкладке, второй рисунок
имеет два состояния — статическое и анимированное. Если картинка
изменяется, это значит, что идет процесс построения модели в SolidWorks. В правом
нижнем углу присутствует кнопка Show/Hide (Показать/Скрыть),
управляющая видимостью чертежа, который в пропорциональном (для
цилиндрических) или схематическом (для всех остальных объектов) масштабе
отображает кинематическую пару или другие объекты (в зависимости от того, с чем
мы имеем дело).
Рассмотрим содержимое меню, обращая внимание, в целях экономии места,
только на те функции, которые являются специфическими для данного типа
программ.
♦ File (Файл) — содержит команды:
• Print Form (Печать формы);
• Capture GearTrax screen to a file (Захват содержимого экрана в файл);
• Capture GearTrax screen to the clip board (Захват содержимого экрана
в буфер обмена);
• Capture and paste to MS Paint (Захват и вставка в MS Paint);
• Empty Clipboard (Очистка буфера обмена).
♦ View (Вид) — содержит команду:
• Keep on Top (Держать впереди) — сохраняет окно программы поверх
остальных окон.
♦ Insert (Вставить) — содержит команды:
• Tooth Profile Cut (Сечение профиля зуба);
• Insert Annotations (Вставить примечания) — вставляет в текущий
активный документ таблицу с параметрами детали. Таблица может иметь
внутренний формат SolidWorks или формат MS Excel.
524
Глава 6
Рис. 6.100. Окно формы, вкладка Spur/Helical
♦ Tools (Инструменты) — содержит команды:
• Link to Active Part (Связать с активной деталью)— восстановление
параметров из загруженной в Sol id Works детали в GearTrax;
• Update Linked Part (Обновить деталь, с которой связана программа) —
приведение детали в соответствие с информацией в GearTrax;
• Create a Data Sheet (Excel format) (Создать спецификацию) — создает
файл MS Excel, в который помещает таблицу с информацией об узле,
каждой из его деталей, а также планируемые результаты измерений;
Проектирование элементов механических систем
525
• Read a Data Sheet (Excel format) (Считывание спецификации) —
считывание информации из таблицы MS Excel с последующим созданием
модели SolidWorks;
• Units (Системы единиц);
• Options (Настройки) — характеристики, определяющие способ
образования колес, режимы измерений на реальных объектах — колесах.
♦ Help (Помощь) — содержит команды:
• GearTrax Help Topics (Справочная система GearTrax);
• Tutorial (Учебное пособие)— включает несколько примеров работы
с программой;
• Tip of the Day (Совет дня) — некоторые рекомендации по
использованию GearTrax;
• Registration (Регистрация) — форма для регистрации программы;
• License (Лицензия) — лицензионное соглашение;
• About GearTrax (О GearTrax) — информационная панель программы.
Из числа вкладок окна Options рассмотрим те, которые актуальны для
большинства деталей, а также вкладку с настройками для цилиндрических колес.
Вкладка General (Общие) содержит следующие поля (рис. 6.101).
♦ Involute Options (Параметры эвольвенты)— назначается признак Fix
Involute Sketch (Фиксация эвольвенты в эскизе). Если опция активна, то
элементы эскиза будут зафиксированы.
♦ Tooth Pattern (Массив зубьев) — признак того, как система
взаимодействует с пользователем при создании массива зубьев:
• Never inquire before creating tooth pattern (Никогда не спрашивать
перед созданием массива зубьев);
• Always inquire before creating tooth pattern (Всегда спрашивать перед
созданием массива зубьев);
• Inquire only when tooth number exceeds (Спрашивать, если число
зубьев превышает...).
♦ Группа опций Auxiliary Sketches (Вспомогательные эскизы). Содержит
опции, определяющие номенклатуру создаваемых вспомогательных
эскизов:
• Draw Auxiliary Sketches (Чертить вспомогательные эскизы);
• Pitch Diameter (Диаметр делительной окружности);
• Addendum Diameter (Высота головки зуба);
526
Глава 6
BftltM^j WumHawfcs] Mea$**wfl&i$| S$№ | Menufabtwr^ j ,
cmatfogtoofo pattern
' F $ -
*W<fcH*# Щфгг-^—-
Р^НеЬюЫ» (рек'
r _
Л? I
Use SolidWorks 2005
£ancat
4Й***'>|
Рис. 6.101. Вкладка General
• Dedendum Diameter (Высота ножки зуба);
• Base Diameter (Диаметр основной окружности);
• Hide sketch on creation (Скрыть эскизы после создания).
Involute Precision (Точность эвольвенты) — фактически, точность
сплайна (число точек на нем), ее описывающего, или число дуг окружности,
аппроксимирующих профиль:
• High (Высокая);
• Medium (Средняя);
• Low (Низкая).
NetHASP Check — проверка ключа.
Version Check (Проверка версии) — если флажок установлен, то проверка
версии после старта программы не производится. Кнопка Check Now
(Проверить сейчас) предназначена для обращения к Web-сайту фирмы для
проверки появления новой версии и ее загрузки.
Проектирование элементов механических систем
527
♦ Группа Other Options (Остальные настройки) содержит поля:
• Part template file (Шаблон файла детали) — файл шаблона детали,
который будет использоваться при создании новой детали. Если поле не
заполнено, то будет использоваться шаблон детали по умолчанию
Sol id Works, который находится по адресу: Инструменты |
Параметры | Шаблоны по умолчанию;
• Automatically over ride the creation of 2d splines with arcs
(Автоматически заменять создание плоских сплайнов дугами окружностей);
• Use SolidWorks ... (Использовать версию SolidWorks ...).
Вкладка Manufacturing (Изготовление) (рис. 6.102) позволяет имитировать
предполагаемую технологию изготовления цилиндрических прямозубых и
косозубых колес.
♦ Hobbing (Нарезание червячной фрезой или рейкой). В результате
получается удлиненная в направлении ножки эвольвента, и при малом числе
зубьев проявляется эффект подрезки зубьев.
г $№Мф&№Шйк№&# Ц*Ш-
ЩШЬ//
involute тШ $*Ш$ щы
МШ radium (hcfcb^j. ' - s
flat *аШ& <Ы*0вгй avfc( Ы,
:\'Ч'«" •<
Qm&
j
до?*
Рис. 6.102. Вкладка Manufacturing
528
Глава 6
♦ Full involute (Полная эвольвента)— имитация изготовления пальцевой
фрезой, эвольвента продолжается до основной окружности. Подрезки
зубьев, имеющей место в предыдущем случае, не происходит.
♦ Full fillet radius (hobbing) (Полное скругление впадины, ковка) —
имитация изготовления ковкой, что порождает отсутствие окружности на
впадине, которая заменяется полным скруглением. Эта опция применима
только для стандартов Coarse Pitch и Fine Pitch (Крупный и мелкий шаг).
Вкладка Spur Gears (Цилиндрические колеса) (рис. 6.103) позволяет
назначить следующие параметры.
♦ Spur Gear Data Annotations (Примечания для цилиндрических колес) —
номенклатура отображаемых примечаний, касающихся геометрии
зацепления.
♦ Miscellaneous Annotations (Прочие примечания) — прочие данные о
колесе.
♦ Inspection Data Annotations (Примечания об измерениях) —
номенклатура выводимых на чертеж или модель результатов измерений.
* $wx>M 13Ш®$ЩЩ ЩШШ*#*\ 8*v*l8tear*| $pf<ickftk| $е#8е!&| " ' -
~ Spur $wifel« ArwwtBfonr
Р Ш&НтШ415&№,
Г ЫШтНф? ^ :
Р й«т«е'Апд^ ч, ' ччЛ;i
,Р Ыш&&т$т - , \„
Р-ЪшХ$т&&': л> \;
Р f&mUmtiw-.'< \/
'Г p*<fer«Ju№ -О Я lJt'\
''<■£&&*<,
■;»,
?айпэ*
Рис. 6.103. Вкладка Spur Gears
Проектирование элементов механических систем
529
♦ Tooth Creation (Создание зуба) — способ формирования профиля зуба:
• Spline (Сплайн) — профиль зуба описывается сплайном;
• Arcs (Дуги) — профиль зуба формируется набором дуг окружностей.
( Замечание )
В документации к программе акцентируется внимание на том, что при
использовании модели для создания программы станка с ЧПУ следует выяснить,
каким образом интерполируется траектория инструмента. На некоторых
устройствах она состоит из набора дуг, поэтому использование опции Arcs более
рационально.
♦ Class (Класс) — класс точности колеса и шестерни. Этот параметр имеет
исключительно иллюстративный смысл.
♦ Keyway Position (Расположение шпонки) — если колесо будет
проектироваться со ступицей, содержащей шпоночный паз, то это поле определяет
положение паза относительно зуба.
♦ Addedum Modification (Смещение)— управляет тем, как будет
выполняться смещение:
• Manual only (Только вручную) — пользователь должен вводить
значение в соответствующее поле;
• Automatic only (Только автоматически)— система автоматически
подбирает смещение так, чтобы избежать подрезки зубьев.
Значимой функциональностью обладает вкладка Measurements (Измерения)
(рис. 6.104). Она содержит поля, в которых отображаются предполагаемые
результаты измерений "по штифтам" для прямозубых колес, "по шарам" —
для косозубых, а также длину хорды между противоположными сторонами
двух или более зубьев.
♦ Группа полей Gear — between pins (Колесо — между штифтами) —
содержит поля:
• Measurement over pins (Измерения по штифтам) — величина
расстояния "по штифтам", расположенным во впадинах колеса на
диаметральной линии;
• Pin diameter (Диаметр штифта)— диаметр штифтов, используемых
для измерения.
♦ Группа Pinion — over pins (Шестерня — между штифтами) — содержит
поля, аналогичные тем, которые характеризуют колесо.
♦ Recalculation — признак необходимости запомнить параметры при
создании модели.
530
Глава 6
Рис. 6.104. Вкладка Measurements
♦ Группа полей Gear — Chordal over teeth (Колесо — хорда по зубьям) —
содержит поля:
• Number of teeth to gage over (Число зубьев, охватываемых калибром);
• Chordal measurement (Длина хорды).
♦ Группа полей Pinion — Chordal over teeth (Колесо — хорда по зубьям) —
содержит поля аналогичные полям для колеса.
♦ Кнопка Calculate Van Keuren Pin Diameter (Диаметр штифтов по Van
Keuren)— предназначена для назначения диаметра штифтов
применительно к параметрам кинематической пары. Предполагается
использование стандартного инструмента. Появившаяся в полях Pin diameter
величина может быть изменена пользователем.
Завершим описание интерфейса разбором вкладки Spur/Helical (Прямозу-
бое/Косозубое), определяющей параметры соответствующих кинематических
пар (рис. 6.105). Возле некоторых числовых полей присутствуют кнопочки.
Они могут быть серыми (поле не подлежит редактированию) и светло-
зелеными (поле можно изменить). После их нажатия появляются окна редак-
Проектирование элементов механических систем
531
Рис. 6.105. Вкладка Spur/Helical
тирования соответствующих параметров (пример показан далее на рис. 6.107).
В этих окнах присутствует кнопка Help, после активизации которой
возникает панель с информацией о том, на какие параметры повлияет изменение
данной величины.
♦ Группа Pitch Data (Данные о шаге) определяет тип стандарта, на базе
которого будут формироваться объекты, а также, в рамках выбранного
стандарта — типоразмер колес. Доступны три варианта определения размеров:
• Diametral pitches (Шаг на основе диаметра) — этот стандарт
базируется на дюймовой системе и в России практически не используется;
532
Глава 6
• Module pitches (Шаг на основе модуля);
• Non-standard pitches (Нестандартный шаг) — этот вариант
предполагает возможность корректировки практически всех полей. При
изменении некоторого параметра зависимые размеры также меняются.
В рамках выбранной системы размеров в выпадающем списке доступен
набор стандартных значений. В нашем случае это модуль.
Также в группе Pitch Data присутствуют следующие поля:
• Standards (Стандарты)— выбор базового стандарта. ГОСТ 13755—81
"Параметры исходного профиля" отсутствует, однако стандарты DIN-867
и JIS, в принципе, аналогичны ему, по крайней мере, в части, связанной
с цилиндрическими колесами. Незначительное отличие присутствует в
величине скругления ножки зуба, однако эта величина может быть
отредактирована после подбора базовых параметров. Большинство
стандартов подразумевают угол зацепления 20°. Стандарты Coarse Pitch
(Крупный шаг) и Fine Pitch (Мелкий шаг) также генерируют пары с
углами 14,5 и 25°. Кроме того, присутствует группа стандартов фирмы
ABA-PGT Inc. (http://www.abapgt.com), отличающихся измененной (за
счет смещения) высотой зуба и изменением профиля вблизи вершины
(рис. 6.106). Эти стандарты предназначены для проектирования
пластмассовых колес, позволяя снизить шум, повысить прочность и ресурс;
К эвольвентному профилю ■• U U
добавлен зазор PGT
Стандартный
эвольвентный профиль
Рис. 6.106. Профиль зуба PGT
• Module, normal (Нормальный модуль)— при выборе опции
Nonstandard pitches позволяет ввести произвольную величину
нормального модуля;
• Enlarged pinion-standard gear (Корригированная шестерня)— при
установке флажка пользователь получает доступ к полям Center distan-
Проектирование элементов механических систем
533
се (1/2 межцентрового расстояния) и Addendum modification
(Смещение) для шестерни и колеса — панель для редактирования этого
параметра показана на рис. 6Л 07.
♦ Группа параметров Number of Teeth (Число зубьев) содержит поля,
связанные с числом зубьев:
• Pinion (Шестерня) — число зубьев шестерни;
• Gear (Колесо) — число зубьев колеса;
• Gear ratio 1 (Передаточное число);
• Center distance (1/2 межцентрового расстояния).
♦ Группа параметров Gear Type (Тип колеса) управляет типом
цилиндрического колеса:
• Spur (Прямозубое);
• Helical R.H. (Косозубое правое);
• Helical L.H. (Косозубое левое);
• Helix angle (Угол наклона линий зубьев).
♦ Группа параметров Internal Gear (Внутреннее зацепление) управляет
свойствами пары с внутренним зацеплением:
• Internal gear set (Установка внутреннего зацепления);
• O.D. (Наружный диаметр).
♦ Группа Tooth Pattern (Массив зубьев) включает параметры, влияющие на
вид модели SolidWorks:
• Create tooth pattern (Создать массив зубьев);
• Teeth to draw (Число создаваемых зубьев).
♦ Кнопка Pinion/Gear Active (Активна шестеренка/колесо) является
переключателем, управляющим, какая информация отображается справа:
относящаяся к шестеренке или к колесу.
♦ Группа Pinion/Gear Data (Параметры шестеренки/колеса) включает поля,
характеризующие размеры детали. Доступ к ним зависит от того,
разрешена ли ручная модификация смещения Spur Gears | Addendum
Modification | Manual only и активна ли опция Non-standard pitches:
• Pitch diameter (Диаметр делительной окружности);
• Major diameter (Диаметр окружности вершин);
• Minor diameter (Диаметр окружности впадин);
• Addendum (Высота головки зуба);
534
Глава 6
Dedendum (Высота ножки зуба);
Add. Mod. coef. (Коэффициент смещения);
Addendum modification (Смещение). При нажатии на кнопку,
расположенную справа от поля, появляется окно (рис. 6.107), в котором
присутствуют поля:
° Addendum Modification, Gear (Смещение для колеса);
D Addendum Modification, Pinion (Смещение для шестерни);
D Approach Length (Длина подъема);
° Recess Length (Длина спада);
а Contact Ratio (Коэффициент перекрытия);
Base diameter (Диаметр основной окружности);
Whole depth (Высота зуба);
Circular pitch (Окружной делительный шаг);
Fillet radius (Радиус скругления у корня зуба);
Backlash (Окружной зазор);
Tooth thickness (Толщина зуба);
Face width (Ширина венца).
Coarse Pitch Involute 20 deg - 10,0 Diametral Pitch
■'\Щф^<^^^ ^Sytflfrqf*
, s ,0.0000mm
1? « f w* s.-^V.
„&*£&&:%< \ *?%$:£
;R^^r#1^4i'; V^ 157354mm , _ . . , , .
Рис. 6.107. Окно Addendum modification
♦ Группа параметров Animation (Анимация), управляющих содержимым
графического окна:
• Show mesh (Показать зацепление)— управляет тем, будет ли показана
кинематическая пара в пропорциональном масштабе (флажок стоит)
или единичная деталь в условном виде;
Проектирование элементов механических систем
535
• Size (Размер);
• Speed (Скорость);
• Show line of action (Показать линию зацепления).
6.5.3. Практика использования
Рассмотрим два примера. Первый — построение элементарной модели
шестерни, второй — проектирование сплайнового шлицевого соединения.
Построение модели шестерни
Если в окне рис. 6.105 нажать кнопку Finish при условии, что настройки
описанных выше окон сохранены, то в SolidWorks появится модель шестерни
рис. 6.108. Поскольку имитировалась технология изготовления рейкой:
Options | Worm Gears | Hobbing, то налицо подрезка зубьев. Если в
SolidWorks открыть эскиз, на базе которого построена модель, то получим
картину рис. 6.109. Как видно, впадина зуба описывается двумя
симметричными сплайнами.
Рис. 6.108. Модель
прямозубой шестерни Рис. 6.109. Эскиз, на базе которого построена шестерня
Если возникнет задача создания сборки, состоящей из двух или более
зубчатых колес, то пригодится входящий в поставку программы файл сборки
с именем AssemblySketch. Он содержит параметрический эскиз и две оси.
Меняя размеры на эскизе в соответствии с данными GearTrax, можно
получить компоновку кинематической пары, а затем при помощи сопряжений
SolidWorks привязать к ней детали.
Построение моделей косозубого колеса и шестерни
На рис. 6.100 показано окно, в котором определены параметры косозубого
колеса с углом наклона винтовой линии 60 градусов. При этом в качестве
18 3ак. 4405
536
Глава 6
Module» normal
mfapvsmt* : < J\;": *, '-18-4667 / * **; };. - :
3,0000
^шыыщш^:>\\'Х]1б,9зз4 ^ +у; ш%;л^£.
'tfd^WoM, <\ у -:"> '>'VJ1'5000
7 ,<7^нф;-' l^-:j^?l^;^:: JlCEl- ч
~ \ V!r<^# >/ ^ #*"**\
Рис. 6.110. Редактирование нормального модуля
I : Face width
Fao*Wfcitl% Gear ,
$te*VifakFWdr> '
c' ^ - ИФ- I
' s , ; : ]16,0000mm
; -- " Jl4,0000mm *
'r^T:irr^r^
p—pppr-^
£1
Рис. 6.111. Назначение ширины венца
Рис. 6.112. Модель косозубого колеса
Рис. 6.113. Модель косозубой шестерни
Проектирование элементов механических систем
537
модуля назначен нормальный модуль. Для ввода его величины нажатием
кнопки возле поля Module, normal (Нормальный модуль) получаем доступ к
одноименному окну (рис. 6.110), в котором заполняем поле Module, normal.
Остальные величины система рассчитывает автоматически. Аналогичными
действиями назначаем ширину венца зуба для колеса и шестерни —
рис. 6.111. Параметры шестерни с углом 30 градусов определяем согласно
рис. 6.105. Получившиеся модели колеса и шестерни приведены на рис. 6.112
и 6.113 соответственно. Там же показаны эскизы, формирующие контуры
впадин. Как видно, несмотря на то, что управляющей характеристикой
являлся нормальный модуль, эскиз выреза построен в плоскости
перпендикулярной оси.
Проектирование шлицевого соединения
Рассмотрим процесс создания и анализа шлицевого соединения. Сначала
получим геометрическую модель, модифицируем ее применительно к
прочностному расчету и выполним анализ.
GearTrax не осуществляет прочностного проектирования, поэтому
предположим, что необходимая информация была получена из постороннего
источника. Заполним необходимые поля формы Splines (Шлицы) (рис. 6.114). С
точки зрения расчета, интересными являются поля группы Root and Fit (Ножка
и посадка), для которой выбираем значение Fillet root, side fit (Скругленная
впадина, выравнивание по стороне), а также класса точности (по сути,
окружной зазор между сторонами шлица и канавки). Здесь выбираем 7h —
максимальный из имеющихся (на самом деле пользователь может в поле
Clearance (Зазор) назначить произвольную величину). И то и другое сделано
для облегчения работы генератора сетки в COSMOSWorks, хотя в
зависимости от формы впадины результат может существенно изменяться.
После нажатия кнопки Finish Sol id Works генерирует модель, которая
показана на рис. 6.115, вверху. Дорабатываем ее перед вставкой в сборку
(рис. 6.115, внизу).
Аналогичные операции выполняем со ступицей, получая сначала
"полуфабрикат", а затем и готовый конструктивный элемент (рис. 6.116).
Объединяем детали в сборку (рис. 6.117). Назначаем очевидные сопряжения:
фиксацию ступицы, совпадение осей двух цилиндров, а также совпадение
торцовых граней ступицы и вала. Менее прозрачен вопрос о том, как
"скреплять" объекты в окружном направлении. Детали имеют зазор между
рабочими поверхностями, поэтому нужно расположить их так, чтобы обеспечить
наименьшую вычислительную трудоемкость: в процессе приложения
нагрузки должно происходить минимальное изменение топологии. Поэтому
желательно ввести детали в соприкосновение в ненагруженном состоянии,
538
Глава 6
штт
Рис. 6.114. Параметры шлицевого соединения
Рис. 6.115. Исходная модель вала и ее доработка
Проектирование элементов механических систем
539
Рис. 6.116. Исходная модель ступицы Рис. 6.117. Модель сборки
и ее доработка
причем, при выборе из двух возможных вариантов, сделать это так, чтобы
после приложения нагрузки у вала не было участка свободного поворота.
Попытка назначить сопряжение Касательность для одной из пар граней
(одна принадлежит шлицу на валу, а другая — впадине в ступице) заканчивается
неудачей. Чуть позже мы выявим ее причину.
Единственный выход — выполнить сопряжение одной из вершин,
принадлежащих сопрягаемой поверхности подвижной детали (в нашем случае —
вала), с ответной поверхностью неподвижного объекта. Результат показан на
рис. 6.118. На первый взгляд, результат достигнут. Однако, как всегда, имея
Рис. 6.118. Определение исходного состояния модели (вид со стороны ступицы)
540
Глава 6
.шШшШМ
*fy Вал-1 (По умолчанию) - Top Le .
^5> Втулка-1 (По умолчанию) - Тор '
, Пропустите
Г* Вид компонентов
Считать совпадение \
яитерфзр^шией \
Отобразить проигнорированные '■
конфликты .
Усматривать у$яы сборки как
<#мпс-ненты
Зключи.ть конфликт»!
нноготеяьнь»: деталей \
Сделать <инфян*ггукяц«® детали !
прозрачней \
Создать гшгку крепежей
С Каркасное представление
С Скрытые
С Прозрачная
(• Иггюль?ов«ть текущие
Рис. 6.119. Результат проверки интерференции деталей
дело со сплайновыми поверхностями, попытаемся более тщательно оценить
ситуацию. Если подать команду SolidWorks Проверить интерференцию
компонентов, то результат на экране будет иметь вид, как на рис. 6.119. Это
значит, что детали находятся в состоянии пространственного конфликта,
причем зоны пересечения присутствуют в каждой паре "шлиц-впадина". Если
отобразить в сборке два сплайна, формирующих контур вырезов (и,
соответственно, зубьев) на валу и на ступице, то выясняется, что точки сплайнов не
совпадают. Это значит, что мы имеем дело с двумя различными сплайнами,
которые, по сути, ни при каких обстоятельствах не будут совпадать.
Отреагировать на возникшую проблему можно, как водится, двумя
способами. Первый — оставить все как есть, понадеявшись на то, что в силу малой
Проектирование элементов механических систем
541
"толщины" области интерференции она не будет замечена расчетной
программой. Если же это не получится, то следует перестроить модели деталей,
подобрав вместо сплайна (или того участка, который формирует область,
принадлежащую одновременно обоим деталям) окружность подходящего
радиуса и положения (например, построив дугу по трем точкам, являющимся
вершинами сплайна). При этом в качестве базы нужно взять только один из
сплайнов, например, образующий зуб на валу, а профиль впадины следует
получить проецированием этой окружности с последующим дополнением
оставшейся части. С точки зрения расчета на прочность, можно
предположить, что отличие от исходной модели будет незначительным.
( Замечание ^
Очевидно, что если необходимо оформить конструкторскую документацию, то
следует создать конфигурацию, в которой вал фиксируется в сборке
относительно ступицы по условию симметрии. Это значит, что зазор между шлицами и
впадинами разделяется поровну между двумя сторонами (рис. 6.120).
Рис. 6.120. Профиль зубьев в расчетном положении
Однако попытка выполнить расчет для модели, находящейся в положении,
когда вершина шлица расположена на поверхности впадины, в версии
2007 года оказывается неудачной — система не "видит" контактов,
назначенных для близко расположенных граней, находящихся в состоянии частичного
перекрытия. Эта неудача повторяется при попытке использовать любое из
условий непроникновения: Узел к узлу (Node to node), Узел к поверхности
(Node to surface), Поверхность с поверхностью (Surface to surface). Это тем
более интересно, что в COSMOSWorks 2005 ответ, в целом адекватный, был
получен.
Опишем ход расчета для модели с выровненными зазорами между зубьями и
впадинами. Создаем Упражнение (Study) с Типом анализа (Analysis Type)
542
Глава 6
Статический (Static). Задача, если не принимать во внимание подробности,
связанные с креплением вала и ступицы, обладает циклической симметрией
(сочетание геометрии и граничных условий). Данный тип симметрии может
быть смоделирован в COSMOSWorks, начиная с версии 2007 года, однако
определенный интерес представляет расчет первичной модели. Например,
если узел воспринимает перерезывающую силу или изгибающий момент, то
свойство циклической симметрии теряется.
Назначаем граничные условия. Усилия и заделки следующие.
♦ Конструкция будет нагружена крутящим моментом. В современных
версиях COSMOSWorks как крутящие, так и изгибающие моменты
наилучшим образом моделируются посредством дистанционных сил. Поэтому,
создав локальную систему координат с осью Z на оси цилиндра,
прикладываем дистанционную нагрузку к полосе на конце вала (рис. 6.121).
Вспомогательная грань получается командой Линия разъема SolidWorks.
:: :Дк¥^Йй^
<•* Н$груж*<Лрякой перенос)
С нагрузка (Жестка» связь)
^ Пзре*10Шение (Жесткая
акт»)
Г? Прядя, просидтр
Г* Глобальный
(• Настроено яшьзя&ателвм
JP\ ЩМСистема координат 1
£♦ F
** F
$*F
~Э
"3
:а координат!
[Емжжш,
£Шш^
|] JnhyT
\Щ\*
ш\ь ,и
ш^шшммттмС^
!£♦ 12°
Г~ Реверс направления
~3
" ^
'd
zl
Рис. 6.121. Граничные условия и параметры крутящего момента
♦ На цилиндрической поверхности большего цилиндра ступицы ставим
условие Зафиксированная (Fixed). Оно, за редким исключением, порождает
Проектирование элементов механических систем
543
особенности в виде бесконечных напряжений на границах зоны, к которой
оно приложено. В "инженерных" расчетах МКЭ борьба с этим явлением
сводится к двум приемам: простому игнорированию и назначению
заведомо редкой сетки на границе или по области в целом (качество
результатов там почти всегда будет весьма неоднозначным).
♦ Смещение вала в осевом направлении предотвращаем фиксацией
перемещения нормально торцу, который противоположен втулке.
♦ Поскольку в процессе нагружения может изменяться граница контакта, то
особое внимание уделяем назначению контактных граничных условий.
В присутствии начального зазора можно использовать только условия
Узел к поверхности и Поверхность с поверхностью. Используем
первый из них, создавая наборы потенциально контактирующих граней,
причем в эти наборы входят не только те пары, которые движутся навстречу
друг другу, но— в начальный момент времени— удаляющиеся
(рис. 6.122). Дело в том, что изгиб после контакта может заставить их
встретиться.
Сетка конечных элементов показана на рис. 6.123 и 6.124. Относительно
"средней" плотности назначены Элементы управления (Mesh controls),
сгущающие сетку на поверхностях шлицов, на цилиндрических гранях шлицов,
на скруглениях, а также в зоне перехода от шлицов к месту приложения
момента (эта зона выделена командой Линия разъема. Как представляется,
данная плотность сетки является минимально достаточной для оценки
поведения соединения "в целом" (т. е. его жесткости, распределения напряжений
по длине шлицов, интегральной оценки контактных напряжений). При этом
сетка состоит из 127 392 элементов и 170 878 узлов, порождая,
соответственно, систему из 512 634 уравнений. Если бы нас интересовала более точная
картина в отдельных местах, то дальнейшее уплотнение можно было бы
осуществлять не для всех зубьев. Его, вероятно, можно было бы выполнить
только в некоторой области, включающей по одному зубу и по одной
впадине (они, разумеется, должны быть смежными) каждой детали и некоторое
пространство, к ним примыкающее.
Настройка вычислительного процесса. Учитывая потенциальную
неустойчивость вычислений из-за наличия моды движения как жесткого целого,
будем использовать прямой метод решения системы уравнений, а также
гипотезу малых перемещений. Трение вряд ли может существенно повлиять на
результат, поскольку здесь движение всех объектов однозначно определяется
граничными условиями в отличие, например, от задач, когда оно
предотвращает смещение деталей.
Вычисления и интерпретация результатов. Как для отладки расчетной
модели, так и для получения окончательных результатов будем использовать
544
Глава 6
| Соединение
д!| Настройки
■•j£ Датчики
: <^ с дистанционной нагрузкой параб (-По умолчанию-)
Itl ^Твердотельные
& 41! Нагрузка/Ограничение
Щ Сценарий проектирования
£) ^Контакт/зазоры (-Глобальные: Свободные-)
^ Набор соприкасания-2 (-Нет проникновения<Вал-1, Втулка-1 >-)
^ Набор соприкасания-4 (-Нет проникновения<Вал-1, Втулка-1 >-)
JB» Набор соприкасания-5 (-Нет проникновения<Вал-1, Втулка-1 >-)
jQ^Набор соприкасания-6 (-Нет проникновения<Вал-1, Втулка-1 >-)
jaL, Набор соприкасания-7 (-Нет проникновения<Вал-1, Втулка-1 >-)
•• §jНабор соприкасания-9 (-Нет проникновения<Вал-1, Втулка-1>-)
;•• §jНабор соприкасания-11 (-НетпроникновенижВал-1, Втулка-1>-)
:•••-^Набор соприкасания-12 (-Нет проникновения<Вал-1, Втулка-1 >-)
^ Набор соприкасания- 1^М[р^Ь^1^аэоникновения <Вал-1, Втулка-1 >-)
JB» Набор соприкасаи^--^ ' « '\. "^енижВтулка-1, Вал-1 >-)
JbL, Набор соприг ^«**^~ ^%^я <Вал-1, Втулка-1 >-)
^ Набор cor jf *****~ ^n. >Вал-1, Втулка-1 >-)
IbL,Набор/ >r f^yfagT' ~^*n\ \л-Ь Втулка-1>-)
!■•• Ц» Набо/ / // 4V\%4 => ^ \\ \Х' Втулка" *>_)
г^Наб(/ / // ^ч'*^* ^ И, Втулка-1>-)
!-Ц>Наб{^ / // ^''Ж-^-^а-^Х И, Втулка-1>-)
;••• ^ Наб1;: J [ jf y^2l*s><fc\' Втулка-1 >-)
Ш*% Сетка
•1Й0тчет
I {^Результаты \^ ^"^^Щ ч^'Ч4
&1
Рис. 6.122. Контактные условия
сетку с параболическими конечными элементами. Для этого переключатель
Качество (Mesh Quality) в группе Параметры (Options) панели Сетка (Mesh)
следует установить в положение Высокое (High). Картина эквивалентных
напряжений на фоне деформированного состояния (в натуральном масштабе)
показана на рис. 6.125. При этом напряжения отображены в режиме поузло-
вого осреднения, для чего соответствующий переключатель в панели
Построение напряжения (Stress Plot), определяющий параметры диаграммы,
следует установить в положение Значения в узлах (Node values). Также
отключена опция Средние результаты по границе для деталей (Average
results across boundary for parts), отвечающая за осреднение напряжений на
границе контакта (рис. 6.127). Для контактов с совместным деформированием
Проектирование элементов механических систем
545
Рис. 6.123. Сетка конечных элементов для сборки
Рис. 6.124. Сетка конечных элементов — вид с торца
546
Глава 6
осреднение имеет физический смысл, только если детали изготовлены из
одинаковых материалов. Для условий с переменной границей контакта или со
скольжением осреднения не происходит ни при каком состоянии опции.
Шкале деформации. 1
Рис. 6.125. Эквивалентные напряжения с осреднением по узлам
Рис. 6.126. Эквивалентные напряжения — фрагмент в зоне максимума
Фрагмент диаграммы в месте максимальных эквивалентных напряжений
показан на рис. 6.126. Как видно, критическая величина локализуется в
некоторой точке вблизи поверхности впадины втулки, причем напряжения в осталь-
Проектирование элементов механических систем
547
ных впадинах не содержат аналогичных экстремумов. Это весьма
примечательный факт на фоне того, что сетка обладает свойством симметрии. Не
будем фиксироваться на этой проблеме, хотя она и заслуживает внимания
(причина, скорее всего, в том, что, несмотря на весьма удовлетворительное
соблюдение условий симметрии, какая-то же точка должна первой вступить в
контакт?). Отобразим эквивалентные напряжения, выбрав осреднение по
элементам. Результат для узла в целом показан на рис. 6.128, как видно,
симметрия восстановлена. При этом максимальные напряжения действуют во
впадине вала.
'1ШШШВШ^^Шй
fa JVON; Напряжение Von Wses J^j
J] |Np2
J^ [край
<* 1нгн«нИй ь уэмк '' -
Г Знаний *£и^внта# - ,-
шш
ш
*и*я
С, AuTOi
|д I домял
<• Точная щкзлз
/1 о F55"5
|ШЙШ^^
Г" ВКЛЮЧИТЬ Х«КСТЗЙГОЛ0««в1\
р Связать эпюру t ориввтадией;' -
р Средина р«*ул**г*Wfti да*йа*ч
Рис. 6.127. Выбор осреднения
напряжений по узлам
ШкаПа деформации
Рис. 6.128. Эквивалентные напряжения с осреднением
по элементам
Скрыв втулку и подобрав диапазон функции, обеспечивающий
максимальную наглядность, получаем диаграмму эквивалентных напряжений в вале на
фоне деформированного вида с утрированным масштабом перемещений
(рис. 6.129). Как видно, наиболее нагруженная часть впадин канавок распро-
548
Глава 6
страняется только до зоны контакта со ступицей. В зоне торца ступицы
наблюдается определенная зона концентрации напряжений. Она, в силу
относительно редкой сетки, не слишком выражена, но, сгустив сетку, можно
получить иные результаты.
Рис. 6.129. Эквивалентные напряжения в вале с осреднением по узлам
Диаграмма перемещений (рис. 6.130), а также анализ распределения
эквивалентных напряжений в ступице подтверждают предположение о том, что
передача крутящего момента осуществляется на относительно малом участке
ступицы (рис. 6.131).
Дополнительную информацию можно извлечь из анализа картины
контактных напряжений: на рис. 6.132 они показаны в аксонометрии, а на рис. 6.133 —
в ортогональной проекции. Как видно, в начале площадок контакта
контактное давление максимально, а его выравнивание до некоторой достаточно
стабильной величины происходит на относительно малом отрезке.
В ряде рассмотренных примеров для визуализации результатов
использовался эффективный инструмент— сечения COSMOSWorks. На рис. 6.134
приведена панель Сечение (Section), в которой настраиваются их параметры. Как
видно, система предоставляет широкий выбор инструментов. Можно
создавать несколько сечений разнообразной формы, отображать сечения
самостоятельно или на фоне модели, совмещать сечения с разнесенными видами.
В версии 2007 года можно управлять положением секущей плоскости,
перемещая указатель в графической области.
Проектирование элементов механических систем
549
Шкала деформации* 500
■ЖЛУА* 1 0Ое+00Г
• 5.01е-00б
б.ЗГе+ООЗ von Wises (Nmv*2)
Рис. 6.131. Эквивалентные напряжения
в ступице — сечение вертикальной плоскостью
Рис. 6.132. Контактные напряжения — аксонометрия
550
Глава 6
Рис. 6.133. Контактные напряжения — Рис. 6.134. Настройка
ортогональная проекция параметров сечения
Например, интенсивность напряжений (разность между первым и третьим
главным напряжениями), равная удвоенной величине максимальных
касательных напряжений в данной точке, на рис. 6.135 и 6.136 показана в сечении
вертикальной плоскостью. Как видно, на свободном от втулке участке вала
касательные напряжения вносят решающий вклад в критические величины
эквивалентных напряжений. Это, впрочем, очевидный факт, как и то, что на
участке, где происходит передача крутящего момента с вала на ступицу,
появляется еще набор зон с концентрацией эквивалентных напряжений, в
которых они обусловлены контактными напряжениями.
Анализируя результаты моделирования, можно предположить, что улучшить
конструкцию узла можно за счет уменьшения ее веса — в частности,
уменьшив и перераспределив жесткость ступицы так, чтобы включение ее в работу
происходило на большем по длине участке. Для снижения жесткости следует
уменьшить наружный диаметр вала, а перераспределение жесткости
обеспечивается подбором профиля внешней его образующей.
Расчет, выполненный в предыдущих версиях COSMOSWorks, показал, что
наилучшие (по крайней мере, с точки зрения внешнего правдоподобия)
результаты получаются при использовании линейных конечных элементов
Проектирование элементов механических систем
551
Интенсивность
(NAnA2)
7.00е+007
Рис. 6.136. Касательные напряжения в вале в сечении продольной плоскостью
lika/ia деформации 1
■^Х
von Msec (N*n*2.i
4 СЮе+007
3.67е+£Ю7
Э.ЭЗе+007
3 00е+007
2.33с Ю07
2 00*-» 00?
1 67e«0ff7
! ЗЭе*007
1.00е>007
6.87е*00&
*v • 3/54е*0О6
5.Эбе+003
Рис. 6.136. Эквивалентные напряжения в сечении поперечной плоскостью
552
Глава 6
с контактами (как об этом упоминалось выше) типа Узел к узлу. В версии же
2007 года вполне адекватный результат получен на сетке элементов второго
порядка с контактами Узел к поверхности. Результат для сетки линейных
элементов показан на рис. 6.137. Как видно, налицо определенные проблемы
со сходимостью процедуры решения контактной задачи. Надо сказать, что
это достаточно парадоксальный результат, поскольку в большинстве ранее
рассмотренных примеров решение на сетке линейных элементов получалось
без выраженных затруднений. Попытка использовать модель контакта
Поверхность с поверхностью приводит к другому результату, который, однако,
является столь же неприемлемым. Эти факты свидетельствуют о том, что при
решении контактных задач следует проанализировать разнообразные
варианты.
Рис. 6.137. Эквивалентные напряжения в вале на фоне деформированного вида
для ветки линейных элементов
Как представляется, источником проблем в расчетной модели являются два
связанных между собой фактора. Первый— наличие участка перемещения
вала как жесткого целого перед вступлением в контакт, а вторая —
возможность одновременного (или, с учетом дискретной аппроксимации, почти
одновременного) вступления в контакт нескольких пар граней. Оба этих
обстоятельства затрудняют работу алгоритма. Первый из них можно было бы
устранить тщательным поиском сопряжений SolidWorks, обеспечивающих
начальное соприкосновение вала со ступицей, как минимум, в одной точке
или по линии.
Проектирование элементов механических систем
553
Перечисленные особенности модели также привели к тому, что попытки
решить задачу с использованием гипотезы больших перемещений
(активизировав одноименную опцию в окне Статический (Static)), а также посредством
нелинейного анализа терпят неудачу. Эти алгоритмы роднит то, что нагрузки
прикладываются последовательно. Только в первом случае этим управляет
система, и все силы или ненулевые перемещения растут одновременно и
пропорционально, причем их шаг назначается автоматически как
максимально возможный в данной ситуации. Нелинейный решатель допускает асин-
хронность действия граничных условий и более совершенные инструменты
управления шагом. Разумеется, этим (применительно к упругой задаче)
отличия нелинейного решателя и действия опции Большие перемещения в
статическом анализе не исчерпываются.
Завершая раздел, посвященный моделированию шлицевого соединения,
напомним, что мы не упоминали традиционные методы Деталей машин,
которые используются для подобных объектов. Сравнительный анализ численных
методов и эмпирических схем, по сути, тема специального разбора.
Заинтересованные читатели могут сделать это самостоятельно на примере данной
конструкции.
6.6. Напряженно-деформированное
состояние редуктора
Как известно, для прочностного расчета редукторов существуют
отработанные расчетные методики. Однако они, как правило, рассматривают детали
изолированно, вне контекста. Такой подход позволяет вполне адекватно
описать состояние объектов канонической формы: зубчатых колес, валов,
элементов крепежа, однако для деталей со сложной схемой нагружения,
например, корпусов, аналитические модели дают только поверхностную оценку
прочности. В этом разделе проанализированы некоторые аспекты
прочностного расчета редуктора методом конечных элементов.
6.6.1. Постановка задачи
В главе 7 рассматривается задача кинематического и динамического анализа
зубчатого зацепления, подобного показанному на рис. 6.138. Косозубые
зубчатые колеса получены посредством модуля GearTrax в соответствии с
параметрами, показанными на рис. 6.105 и 6.114, за тем исключением, что
величина в поле Backlash (Зазор) равна нулю. Будем считать, что целью расчета
является анализ напряженно-деформированного состояния шестерни при
действии крутящего момента на один из концов ведущего вала.
554
Глава 6
Рис. 6.138. Геометрическая модель трансмиссии
6.6.2. Анализ
Поскольку интерес представляет в основном шестерня, то упрощения
выполняем так, чтобы изменения в ее геометрии минимально исказили картину ее
напряженно-деформированного состояния, а для ведущего колеса—
максимально сохранили жесткость. Поэтому с колеса убираем все зубья, за
исключением тех, которые в некий момент времени участвуют в передаче
крутящего момента, а также соседних. Последние нужны, чтобы изменения не
повлияли на напряженно-деформированное состояние шестерни. Результат
модификации геометрической модели при скрытом корпусе показан на
рис. 6.139, а сечение вертикальной плоскостью, проходящей через ось
колеса, — на рис. 6.140. Как видно, с вала удалены всескругления.
Также (и это более наглядно показано на рис. 6.141) на шестерне командой
Линия разъема выделена прямоугольная зона, вытянутая вдоль проекции
линии зацепления. Аналогичная область создана и на колесе. Функция этих
объектов двояка, но цель едина — уменьшить вычислительные затраты и
повысить точность. С одной стороны, на площадках будет назначена
повышенная плотность сетки, а с другой — при назначении контактных условий
желательно сократить площадь потенциального взаимодействия, уменьшив
вычислительные затраты на перебор вступающих в контакт узлов и граней.
Очень важным вопросом является начальное позиционирование деталей.
С точки зрения экономии ресурсов, да и точности расчета крайне желательно,
чтобы в геометрической модели сборки шестерня и колесо соприкасались по
рабочим поверхностям зубьев. Однако функциональность Sol id Works не
Проектирование элементов механических систем
555
Рис. 6.139. Зубчатое зацепление
Рис. 6.140. Зубчатое зацепление
в разрезе
Рис. 6.141. Шестерня с выделенной площадкой контакта
позволяет сопрячь две сплайновых поверхности. Существующая
возможность перемещения деталей с остановкой при возникновении конфликта
также неработоспособна в этой ситуации. В принципе, можно было бы поискать
некое приближенное решение, позволяющее максимально "сблизить"
контактирующие грани. Как правило, эти алгоритмы базируются на связывании
объектов эскиза, принадлежащих одной детали с характерными конструктив-
556
Глава 6
ными элементами другой. Однако в данной ситуации и этот подход, судя по
всему, не предлагает тривиального решения. Поэтому, как описано в разд. 7.5.1,
при закрепленном вале вручную позиционируем шестерню так, чтобы,
получить более-менее близкие зазоры, не допуская интерференцию.
6.6.3. Решение
Подготовка исходных данных о свойствах материалов. Для всех деталей
назначаем одинаковый материал с упругими характеристиками стали.
Подготовка расчетной модели. На рис. 6.142 показана расчетная модель с
граничными условиями. Как видно, "главной заделкой" является
неподвижность узлов на нижней грани корпуса. Вопрос о том, как зафиксировать конец
ведомого вала, не является однозначным. Нужно предотвратить поворот
торца относительно оси вала. На первый взгляд, вполне применимо граничное
условие в виде фиксации поворота относительно некоторой оси (к слову
сказать, в версии 2007 года в сборке могут использоваться как оси, созданные в
контексте сборки, так и оси любой детали). Соответствующая панель, а также
пиктограммы граничных условий показаны на рис. 6.142. Однако, как
выясняется, реализация этих условий приводит к фиксации перемещения
центральной точки торца в его плоскости (по сути, это плоскость
перпендикулярная справочной оси). Надо сказать, что это не вполне очевидный и не
слишком приятный артефакт.
Ж.
И
^У^^^^ш^^ЖШй^^,??^,?^^^^^^^^^
Использовать справочную геометрию jjjj
/• Р|Ах151@А_Шестерня без зазора- 1@Пере, '
R Предв. просмотр
,к^^:^^^^^
"3
Г" Ре&ерс направления
?1рад
Рис. 6.142. Фиксация поворота относительно оси
Проектирование элементов механических систем
557
На помощь приходит инструмент Дистанционные нагрузки (Remote Loads /
Mass), применяемый в варианте Перемещение (Жесткая связь)
(Displacement (Rigid Connection)) (рис. 6.143). Реализовать его можно после
предварительного создания локальной системы координат, относительно которой
определяется положение и ориентация граничных условий на удалении.
Отметим, что вариант Жесткая связь приводит к тому, что объект, к которому
оно приложено, становится абсолютно жестким.
У4?/.<: «&&&;#&'м*»\ v&^ffi
%><^&^^<JM^&M«i<,;<.
С Нагрузка (Прямой перенес*
Г* Нагружа (Жесткая связь)
** Перемещение (Жесткая шяз»)
Г/ Пр*дй< просмотр
&&&
ш2!а££&до^£си&^^
(• Нагрузка ^Прямой геренос) <
С Нагрузка >Же:тгзя связь) j
С Перемещение (Жесткая связь; j
f? Преде, просмотр
; С Глобалыьй
<•* Настрое, я: гшшзеватеязд
^ П| Система координат4
|о^Ш€Моема^^РЖ^^, £
Г Гтбальиы?
<•" Настроено по iLOODaTcie-м
„£♦, | |Система координат!©Колесо-1@
ЯШш^мт&,.^,^,.....^.,Л.Л,
R 1™ 3
=М5 3
^ [3 3
^iWsS^iiSs^^lmiA. i^JgSlSh^S^t£^^tiii^^^i^d
', М^сто^яаже^ие: ,
**Р
3.
3,
>^^a^m^^..>^;jK^^^>^d
"3
>v4j
рРежрс^аотшия
HP
Г" Pesepc направления
Рис. 6.143. Фиксация поворота относительно оси и приложение крутящего момента
Аналогичным образом реализуется крутящий момент на ведущем вале,
только здесь используется вариант Нагрузка (Прямой перенос), не изменяющий
558
Глава 6
жесткость объекта воздействия. Модель с граничными условиями показана
на рис. 6.144.
Рис. 6.144. Граничные условия на модели редуктора
Эта задача имеет общие черты с рассмотренной в предыдущем разделе.
И там и здесь в модели присутствует возможность перемещения одного из
тел как жесткого целого, что обусловлено наличием малого зазора между
нагруженной и закрепленной деталями. По этой причине подбор контактных
условий требует повышенного внимания. В данном случае потенциальное
взаимодействие между зубьями и имеющиеся до приложения нагрузок
контактные пары в местах посадки валов в корпус реализованы посредством
условия Узел к поверхности. Как и в задаче со шлицевым соединением,
возможными контактными парами являются не только те множества граней,
которые, с точки зрения здравого смысла, должны сомкнуться из-за того, что
сближаются, но и пары граней, удаляющиеся при движении объектов в
процессе выбора зазора. Это удаление может— в определенных зонах—
смениться сближением после входа в контакт каких-либо граней. Вид
Менеджера с активизированными контактами, управляющими взаимодействием
зубьев, показан на рис. 6.145. Там же приведен соответствующий участок модели.
Как видно, при назначении контактов в полной мере реализована структура
геометрической модели — зона переменного контакта выделена новыми
гранями. Они же используются для локального уплотнения сетки (см. рис. 6.147).
Проектирование элементов механических систем
559
Первая операция позволяет существенно сократить объем вычислений,
вторая — при разумных затратах ресурсов повысить точность. В принципе,
после расчета можно было бы выполнить оценку формы и размера контактной
зоны и адаптировать форму дополнительных граней, уменьшив их площадь, а
затем окружить набором концентрических граней (образованных, в свою
очередь, концентрическими кромками), чтобы более тщательно управлять
плотностью сетки.
j9| Контакт/зазоры (-Глобальные: Связанные-)
• ^ Набор
-..& Набор
& Набор
^Набор
Ц, Набор
^Набор
gНабор
£ Набор
соприкасания-4 (-Нет проникновенижКолесо-lj Корпус-1>-)
соприкасания-5 (-Нет проникновения<Колесо-1, Корпус-1>-)
соприкасания-6 (-Нет проникновения<Колесо-1, Корпус-1>-)
соприкасания-7 (-Нет проникновенижКолесо-lj Корпус-1>-)
соприкасания-8 (-Нет проникновения<А_Шестерня без зазора-1, Корпус-1 >-)
соприкасания-9 (-Нет проникновения<А_Шестерня без зазора-1, Корпус-1 >-)
соприкасания-10 (-Нет проникновения<А_Шестерня без зазора-1, Корпус-1 >-)
соприкасания-И (-Нет проникновения<А_Шестерня без зазора-1, Корпус-1 >-)
Рис. 6.145. Контактные условия в зубчатом зацеплении
Сетка конечных элементов для модели в целом показана на рис. 6.146, а для
вала-шестерни — на рис. 6.147. Поскольку наибольший интерес представляет
именно эта деталь, то сетка на ней выполнена с достаточной плотностью, а на
других деталях так, чтобы адекватно воспроизвести их жесткость, а также
состояние в месте контакта с валом-шестерней (рис. 6.148 и 6.149).
Например, по толщине и ширине опор корпуса располагается минимум два, а в
среднем три конечных элемента. На вале-шестерне сетка сгущена также на
внутренних скруглениях, а все зубья на ней, кроме трех, взаимодействующих
(потенциально с колесом), имеют достаточно редкую сетку.
560
Глава 6
Рис. 6.146. Сетка конечных элементов
Рис. 6.147. Сетка конечных элементов на вале-шестерне
Настройка вычислительного процесса. Рассматриваемая задача, подобно
предыдущей, обладает значительной вычислительной трудоемкостью. Это
обусловлено наличием разнообразных контактных условий с большой
площадью взаимодействующих криволинейных граней. Решение осложняет
наличие свободного перемещения (поворота) ведущего вала без
деформирования системы. Поэтому отработку модели выполняем на сетке линейных
конечных элементов, а практический расчет — с использованием параболи-
Проектирование элементов механических систем
561
ческих. Как при расчете закрылка, в качестве решателя лучше, несмотря на
большую потребную память, использовать прямой метод. Однако в этой
задаче сопоставимые по времени результаты (при более чем в два раза
меньших запросах к оперативной памяти) показывает итерационный,метод. К
сожалению, не удается получить результат с активной опцией Большие
перемещения. Выполнить нелинейный анализ с целью установить реакцию
системы на рост нагрузки, а также оценить эффект больших перемещений
невозможно. Трение не учитываем, т. к. в данном механизме его вклад не
должен быть значимым.
Рис. 6.148. Фрагмент сетки на шестерне
Рис. 6.149. Фрагмент сетки на взаимодействующих зубьях колеса
562
Глава 6
Вычисления и интерпретация результатов. Отработку
конечно-элементной модели выполняем на сетке линейных элементов. Результат в виде
распределения перемещений показан на рис. 6.150. Не будем углубляться в
анализ того, что получилось, удовлетворившись адекватной, на первый взгляд,
картиной. Диаграмма напряжений также не вызывает подозрений.
Единственным замечанием может быть то, что максимальные перемещения (они, как
и следовало ожидать, локализуются на окружности вершин зубьев колеса)
достаточно велики. Их, в принципе, можно отнести на счет выборки зазора в
начальный момент времени.
Рис. 6.150. Распределение перемещений на фоне деформированного вида —
линейные конечные элементы
Распределение перемещений для модели с параболическими элементами
показано на рис. 6.151. Как видно, перемещения уменьшились более чем в два
раза. Как предполагается, это можно отнести на счет не только более точного
описания жесткости, но и более качественной аппроксимации сложной
криволинейной геометрии контактирующих поверхностей. Как и в предыдущем
расчете, наибольшие перемещения сосредоточены на поверхности колеса,
причем из-за большой его жесткости они практически не изменяются в
окружном направлении. Это значит, что они обусловлены поворотом колеса.
Фрагмент диаграммы перемещений в зоне взаимодействия зубьев показан на
рис. 6.152. Судя по визуальной оценке, в контакт вошли две пары зубьев,
Проектирование элементов механических систем
563
причем из-за большой их жесткости (относительно нагрузки)
идентифицировать компоненту перемещений, связанную с их прогибом, при масштабе
диаграммы по умолчанию, затруднительно.
URES(mm)
3.31в-001
Шкала деформации: 1
Рис. 6.151. Распределение перемещений на фоне деформированного вида -
параболические конечные элементы
UR£S (mm)
3.31е-001
Шкапа деформация: 1
Рис. 6.152. Распределение перемещений — фрагмент
564
Глава 6
Распределение контактных напряжений, действующих между зубьями,
показано на рис. 6.154. Как видно, область контакта представляет собой пятно,
существенно вытянутое вдоль спиральной траектории на зубьях.
Максимальная величина контактного напряжения превышает предел текучести
материала, однако закономерности, которыми описывается состояние упругой среды
в зоне контакта, не являются тривиальными.
Собственно контактные усилия в каждой из контактирующих пар можно
получить посредством команды Сила контакта/трения (Contact/Friction Force)
(рис. 6.153). Эти усилия составляют 761 Н в одной паре и 753 Н в другой. Как
видно, силы весьма близки. В принципе, несмотря на видимые отличия,
сопоставимы и контактные напряжения. Однако, поскольку напряжения
вообще и контактные, в частности, являются "вторичным" продуктом в методе
конечных элементов, то имеющаяся разница (даже с учетом использованного
осреднения — при создании диаграммы активизирована опция Средние
результаты по границе для деталей (Average results across boundary for parts))
вполне приемлема.
Эквивалентные напряжения в сечении шестерни, проходящем через
плоскость перпендикулярную (с некоторым приближением) линии контакта в
С Силе интерфейс* утътй щ#р?ът
< ' <•* й«яаконтакггфрения ' '
Рис. 6.153. Определение Рис. 6.154. Контактные напряжения
контактной силы
Проектирование элементов механических систем
565
месте, где эквивалентные напряжения максимальны, показаны на рис. 6.155.
Как видно, их максимум находится внутри материала вблизи площадки
контакта. Если отобразить их в режиме поэлементного осреднения, то
максимумы также локализуются в первом слое элементов, примыкающих к
поверхности (рис. 6.156). Однако, как представляется, плотность сетки конечных
von Mises (N/taA2)
9.61е+008
Рис. 6.155. Эквивалентные напряжения в сечении в зоне контакта
von Mises (NAnA2)
7.99е+008
Рис. 6.156. Эквивалентные напряжения в зоне контакта с осреднением по элементам
566
Глава 6
элементов в зоне контакта недостаточна для принятия аргументированных
заключений.
Для повышения наглядности диаграмм эквивалентных напряжений в вале-
шестерне уменьшаем диапазон отображаемых эквивалентных напряжений —
для этого используются элементы управления в группе Параметры экрана
(Display Options) панели Параметры графика (Chart Options). Кстати говоря,
в версии 2007 года эта панель, а также другие параметры настройки доступны
по двойному щелчку мыши по соответствующим графическим объектам
COSMOSWorks в графической зоне экрана. Также панели доступны из
контекстного меню интерфейсного элемента COSMOSWorks в графической
области. Как видно, концентрация напряжений происходит во впадинах,
окружающих взаимодействующие зубья, а также на скруглении в месте
изменения толщины вала (рис. 6.157). Последнее, судя по всему, в большей степени
обусловлено крутящим моментом, приложенным на конце вала, чем изгибом.
von Mises (N/taA2)
|2.50е+008
2.25e+008
2.00е+008
175е+008
1 SOe+008
1.25е+008
1 .ООе+008
7.50е+007
&£ S.OOe+007
. 2.50е*007
1.36е+004
Рис. 6.157. Эквивалентные напряжения в вале-шестерне
Интересно оценить влияние учета податливости корпуса на состояние
элементов передачи. Увеличив модуль упругости корпуса в 10 раз, получаем
диаграмму перемещений, показанную на рис. 6.158. Как видно,
максимальные перемещения уменьшились не слишком значительно — это
свидетельствует о том, что подавляющий вклад вносят деформации зубчатых колес и
валов.
Распределение эквивалентных напряжений с осреднением по элементам
показано на рис. 6.159. Как видно, критические значения несколько возросли.
Шкала деформации 1
Проектирование элементов механических систем
567
Это, как предполагается, есть следствие возросшей жесткости — это снизило
способность конструкции перераспределять напряжения. Однако эти
изменения нельзя назвать критическими.
URES (mm)
2.91е-001
Шкала деформации: 1
Рис. 6.158. Распределение перемещений
в конструкции с жестким корпусом
vor: Mises СМЛг>'ч2)
8.20е+00&
Рис. 6.159. Эквивалентные напряжения с осреднением по элементам
в конструкции с жестким корпусом
19 3ак. 4405
568
Глава 6
6.6.4. Выводы
COSMOSWorks продемонстрировал возможность решать задачи расчета на
прочность зубчатых зацеплений, по крайней мере, в виде одноступенчатых
передач, с учетом деформаций колес, валов и корпуса. При этом в рамках
статического анализа не возникло проблем из-за наличия у шестерни моды
поворота как жесткого целого. Однако, в первом приближении, влияние
податливости корпуса (в реалистическом диапазоне ее значений) на результат
не является определяющим. С другой стороны, плотность сетки в зоне
контакта зубьев является недостаточной для получения достоверных
результатов. Поэтому было бы рациональным использовать модель без корпуса. Его
можно, в частности, имитировать посредством появившегося в версии
программы 2007 года соединителя Подшипник (Bearing). Он позволяет
воспроизвести действие на цилиндрическую грань или кромку роликового и
шарикового подшипника соответственно. Однако их использование требует
тщательного подбора параметров радиальной и осевой жесткости. Их, в свою
очередь, можно получить в результате анализа конструктивных элементов,
удерживающих валы.
6.7. Выводы
На этом мы закончим рассмотрение приложений SoIidWorks для работы с
элементами конструкций. Подробности, касающиеся взаимодействия с
Toolbox, как-то: создание новых стандартов, библиотек и типоразмеров, приемы,
касающиеся модификации крепежа, придания ему свойств, и т. д., мало
связаны с расчетной проблематикой и поэтому опущены. Использование
GearTrax требует внимательного подбора настроек применительно к
требованиям нормативных документов. Вообще говоря, в мире и в России
существует достаточное число коммерческих и свободно распространяемых баз
конструктивных элементов. Однако абсолютное их большинство не
сопровождаются расчетными процедурами. Исключением является приложение MechSoft
чешской фирмы Mechsoft, включающее разнообразную номенклатуру
объектов машиностроения, а также методик их расчета как в изолированном виде,
так и в составе узлов. Имеется также модуль оптимизации. Однако из-за
перераспределения сфер влияния, происходящего среди производителей CAD-
систем (весной 2004 года разработчики были поглощены фирмой Autodesk),
этот продукт демонстрирует тенденцию более тесной интеграции с Autodesk
Inventor, практически прекратив развитие функциональности, связанной с
SoIidWorks. Кроме того, использование MechSoft в отечественной
промышленности лимитировано отсутствием гарантии соответствия ведомственных
методик проектирования и алгоритмов, задействованных в программе (и это
Проектирование элементов механических систем
569
несмотря на то, что ее теоретическая база подробно описана в документации,
а различие, как правило, сводится к терминологическим расхождениям).
Еще одно замечание касается того, какие модели зубчатых колес, полученные
посредством SolidWorks Toolbox или GearTrax, предпочтительно
использовать в моделях изделий. Здесь рекомендации такие. Если модель
предназначена только для выполнения конструкторской документации, то разницы нет.
Если на ее базе будет выполняться анализ кинематики средствами SolidWorks,
то из-за простоты поверхностей модели зубчатых колес из Toolbox более
приемлемы. Однако их использование в программах реального
кинематического анализа, например COSMOSMotion, приведет к неравномерной
передаче движения (поскольку профили зубьев неэвольвентные). Поэтому итог
работы GearTrax со сплайновой аппроксимацией эвольвенты даст вполне
достоверный результат. Если же модель колеса станет источником для программ
механической обработки, то применение GearTrax или аналогов однозначно
необходимо.
Для заметок
ГЛАВА 7
Кинематика и динамика
(COSMOSMotion)
В этой главе будет рассмотрено приложение COSMOSMotion,
предназначенное для моделирования динамических систем в среде SolidWorks. Поскольку
продукт построен на базе разработок фирмы ADAMS, используемых, в
частности, в программах линии visualNastran и Dynamic Designer фирмы MSC, то
приведенная информация будет интересна и пользователям данных
продуктов (рис. 7.1).
Рис. 7.1. Информационная панель COSMOSMotion
7.1. Назначение
COSMOSMotion предназначен для имитации движения механизмов с учетом
кинематических и силовых факторов. Программа полностью интегрирована
572
Глава 7
в SolidWorks, функционирует на геометрической модели SolidWorks, запись
расчетных параметров и результатов также осуществляется в модель
SolidWorks.
Мы не будем детально разбирать возможности программы, ограничившись
общим описанием функциональности и интерфейса. Причина здесь такова.
Программа, в общем, не скрывает большого числа "подводных камней".
В отличие от рассмотренных ранее задач прочности и аэрогидродинамики,
здесь видимый результат и фактическое состояние вещей отличаются, как
правило, незначительно. Достаточно подобрать разумные параметры,
определяющие точность и качество отображения результатов. Это утверждение,
конечно, справедливо по отношению к тем задачам, которые в принципе
"подходят" для программы. Ошибки и погрешности, как правило, достаточно
просто идентифицируются после анимации результата. Кроме того, несмотря
на кажущуюся актуальность программных продуктов для анализа
кинематики и динамики, фактическая их востребованность сейчас невелика. Дело в
том, что если пару десятков лет назад применение сложных механизмов было
повсеместным, то теперь функции управления взяла на себя
микропроцессорная техника, а приводы начали строиться на базе контроллеров. В итоге
самые сложные движения могут быть реализованы системами, вполне
элементарными с точки зрения кинематики. Поэтому проектирование движения
свелось к программированию в той или иной его форме. Область же
применения программ сузилась до расчета силовых факторов, действующих в
механизмах. Не следует также забывать и о собственных возможностях
SolidWorks по симуляции кинематики.
Начиная с версии 2007 года, созданная посредством группы команд
Симуляция SolidWorks упрощенная модель движения автоматически передается
в проект COSMOSMotion.
7.2. Теоретическая база
COSMOSMotion есть, по сути, усеченный вариант программы MSC.ADAMS.
Это один из наиболее популярных продуктов, предназначенных для расчета
кинематики и динамики. В COSMOSMotion включена та часть
функциональности ADAMS, которая не требует данных о податливости деталей
механизма (и, естественно, не учитывает ее). Программа анализирует сборку SolidWorks,
транслируя ее в условную модель механизма с учетом массово-инерционных
характеристик деталей. При этом инерционные параметры заимствуются из
геометрии деталей SolidWorks, а плотность (масса) может быть назначена
независимо от геометрической оболочки. Далее, уже для математической
модели строится система дифференциальных уравнений движения, которая
затем решается посредством разностных (в настоящий момент в программе
Кинематика и динамика (COSMOSMotion)
573
имеется три типа решателя) схем. После этого программа преобразует
численные результаты в вид, пригодный для отображения. На этом шаге система
вновь взаимодействует с реальной геометрией. Отображение расчетной
кинематической модели (в виде пиктограмм), а также результатов производится
в графическом окне SolidWorks непосредственно на фоне модели сборки
SolidWorks.
Это, к сожалению, вся информация, связанная с теоретической базой
COSMOSMotion, которой располагают авторы. Ни в учебных пособиях, ни
в справочной системе нет никаких сведений об использованном
математическом аппарате. На вполне естественный вопрос о том, почему пользователь
может доверять результатам, полученным с помощью COSMOSMotion, сайт
фирмы SRAC дает ответ, смысл которого следующий: "Вы не должны
сомневаться потому, что это разработка фирмы ADAMS, а вера в их опыт и
квалификацию не подлежит обсуждению". Поэтому, как и для всех программ
численного анализа, рекомендуется расчленять проблему на элементарные
составляющие, решать эти задачи, сравнивать с экспериментом или
апробированным расчетом, настраивая при этом соответствующие параметры
вычислительного процесса. И только убедившись в адекватности "тривиальных"
моделей, рассчитывать объект с учетом всех эффектов.
Об этом напоминает и текст на панели About COSMOSMotion (см. рис. 7.1): "Не
принимайте решений по поводу вашей конструкции исключительно на базе
результатов COSMOSMotion. Используйте их совместно с экспериментальными
данными и вашим практическим опытом. Для оценки конечного проекта
приоритетны натурные испытания. COSMOSMotion поможет сократить время выхода
изделия на рынок за счет сокращения испытаний, но не за счет полного их
исключения". Отметим, что эта фраза появилась только в версии 2005 года.
7.3. Интерфейс
COSMOSMotion имеет стандартный интерфейс приложения SolidWorks.
У него есть падающее меню, появляющееся после щелчка по позиции Motion
(Движение) меню SolidWorks (его команды рассмотрены далее). Также
присутствует IntelliMotion Browser (Браузер COSMOSMotion), который
находится рядом с вкладкой Менеджер конфигурации SolidWorks и обозначен
пиктограммой с зубчатым зацеплением (рис. 7.2).
Браузер является деревом, которое растет из корня Motion Model (Модель
движения). В нем присутствуют элементы: Assembly Components
(Компоненты сборок); Parts (Детали); Constraints (Связи); Forces (Силы); Results
(Результаты). Каждый из них может содержать вложенные объекты, те, в
574
Глава 7
свою очередь, иметь потомков, и т. д. В дереве доступны манипуляции в
стиле drag-and-drop. Они, однако, ограничены перемещением деталей между
группами подвижных и неподвижных. Подобно программам типа COSMOS-
Works и COSMOSFloWorks, весь процесс расчета можно осуществить,
работая исключительно с контекстными меню объектов в браузере. Для
неопытных (по отношению, разумеется, к программной среде) пользователей
рекомендуем, начиная с корня, последовательно вызывать команды этих меню и
изучать их функции, решая, что необходимо сделать на данном этапе. Эти
манипуляции следует продолжить до самого низа дерева. Затем нужно
выполнить расчет и снова повторить путь, начиная с корня. Содержимое
контекстных меню или список доступных команд изменятся применительно к
состоянию системы, получившемуся после расчета.
Рис. 7.2. Окно SolidWorks с активным приложением COSMOSMotion
Как и в других современных программах, например, в рассмотренном ранее
COSMOSFloWorks, имеется Мастер проекта (здесь он фигурирует под
названием IntelliMotion Builder). Он воспроизводит последовательность
выполнения анализа, начиная от настройки процесса до экспорта результатов. Далее
он будет описан несколько более подробно.
Панель COSMOSMotion (она появляется сразу после подключения модуля и
"встраивается" среди панелей SolidWorks) показана на рис. 7.3, а
расшифровка команд, которым соответствуют кнопки панели, приведена в табл. 7.1.
Рис. 7.3. Панель COSMOSMotion
Кинематика и динамика (COSMOSMotion)
575
Таблица 7,1, Кнопки панели COSMOSMotion
Кнопка
I ш
ш
д|>
ш
ш
J5B
>%ж
:
ш
ш
ш
ш
Ш
ш
ш
'Wb
«К*
,fi|
Ярлык
Options
IntelliMotion
Builder
Simulate
Delete Results
Reset Model
Fast Reverse
Reverse
Stop Replay
Play
Fast Forward
Find
Interferences
Export AVI
Export VRML
Export Plots
Export FEA
Export
MSC.ADAMS
Simulation
Controls
Message
Window
Настройки
Мастер проекта
Симулировать
Удалить
результаты
Сброс модели
Быстро назад
Назад
Приостановить
воспроизведение
Проигрывать
Быстро вперед
Проверить
коллизии
Экспорт AVI
Экспорт VRML
Экспорт диаграмм
Экспорт в МКЭ
Экспорт
в MSC.ADAMS
Управление
симуляцией
Окно сообщений
Функция
Назначение общих параметров задачи и
настроек вычислительного процесса
Инструмент пошагового моделирования,
решения, отображения и экспорта
результатов
Выполнение расчета
Удаление результатов с получением
доступа к командам изменения модели
Возвращение механизма в исходное
состояние
Ускоренная анимация в направлении
уменьшения времени
Анимация в направлении уменьшения
времени
Приостановка проигрывания анимации
Выполнение анимации
Ускоренная анимация
Проверка интерференции деталей
с одновременной анимацией
Создание файла в формате AVI
по результатам расчета
Создание файла в формате VRML
по результатам расчета
Экспорт графиков результатов и
соответствующих им таблиц в MS Excel
Передача силовых факторов в
программу метода конечных элементов
Передача модели и результатов
в MSC.ADAMS |
Вызов панели инструментов
Симуляция
Вывод окна сообщений с протоколом
хода вычислительного процесса
576
Глава 7
Рис. 7.4. Панель Simulation
На рис. 7.4 показана Simulation Panel (Панель симуляции). Она содержит
кнопку Delete Simulation Results (Удалить результаты симуляции), кнопку
Simulation Settings (Настройки симуляции), инструменты управления
анимацией, а также несколько полей:
♦ Mode (Режим) — управление тем, в каком направлении будет
выполняться анимация;
♦ Time (Время) — демонстрация времени, соответствующего
отображаемому кадру, а также — при вводе величины пользователя — отображение
механизма в момент времени, ближайший к назначенному (точное
соответствие возможно только в случае присутствия кадра, соответствующего
назначенному времени);
♦ DOF (Степеней свободы) — число степеней свободы механизма,
рассчитанное системой в ходе симуляции. Тот же расчет, но без полного анализа
можно выполнить, нажав кнопку Calculate (Вычислить);
♦ Frame (Кадр) — номер отображаемого кадра, а также, аналогично полю
Time, поле для ввода номера кадра, который требуется показать.
Внизу панели находится ползунковый регулятор, передвигая который можно
переводить механизм в заданное состояние.
В заключение рассмотрим содержимое типового окна, предназначенного для
создания соединений. Окна для работы с другими объектами
принципиальных отличий не имеют. На этом этапе мы ограничимся рассмотрением
единственной вкладки Definition (Определение), показанной на рис. 7.5. В ней
присутствуют поля:
♦ Joint Type (Тип соединения);
♦ Select 1st Component (Выберите 1-й компонент) — это первый компонент,
участвующий в соединении;
♦ Select 2nd Component (Выберите 2-й компонент)— второй компонент,
участвующий в соединении;
♦ Select Location (Выберите место приложения) — место, где будет
показана пиктограмма движения, а также располагаться само соединение.
Например, для соединения, определяющего поворот относительно оси, — его
виртуальная ось. В данное поле могут помещаться следующие объекты
Кинематика и динамика (COSMOSMotion)
577
модели: вершина, линейная или круговая кромка, плоская,
цилиндрическая, сферическая или торовая грань, точка эскиза;
♦ Select Direction (Выберите направление)— объект, определяющий
направление действия связи. Таким объектом может быть линейная или
круговая кромка, плоская или цилиндрическая грань.
Edit User-Defined Joint
W/s*\? .>^ ;"л/-L^:х /-', <с<и,1'.г* ч ц ';"""i """"f
v|<fellhoK.1
1Й»Ш&1^';
^4 4 U>TOKT/DDMFace9
3
";'j £> U)T0K-1/DDMFaee9
..'.? .л|/.'..а'Л.'.л.
■->'
Рис. 7.5. Типовое окно для создания связи
Также доступны две пиктограммы. Первая помечена знаком заземления
(Ground). После ее нажатия в соответствующем поле появляется
пиктограмма сборки— она является неподвижным объектом. Вторая пиктограмма —
на ней изображена стрелка [/] (Flip)— предназначена для изменения
направления действия фактора на противоположное. Содержимое и
функциональность остальных вкладок и других окон будут рассмотрены далее
применительно к решаемой задаче.
Предупреждение
В отличие от большинства модулей SolidWorks, а также самого SolidWorks, при
наличии заполненного поля в типовом окне COSMOSMotion, указание на другой
геометрический объект COSMOSWorks (притом, что данное поле активно) не
приведет к его появлению в поле. Предварительно следует очистить
содержимое поля командой Delete, подаваемой с клавиатуры.
7.4. Функциональные возможности
Программа включает следующие возможности:
♦ создавать расчетные модели на базе сборок SolidWorks с чтением из нее
геометрии, массово-инерционных характеристик деталей и взаимосвязей
в сборке;
578
Глава 7
♦ поддерживать актуальность расчетных моделей относительно структуры
сборки SoIidWorks;
♦ создавать соединения различных типов с предопределенной границей,
используя в качестве опорных объектов элементы модели SoIidWorks —
грани, кромки и точки эскиза;
♦ имитировать контактные соединения с возможностью входа и выхода из
контакта с учетом контактной податливости и демпфирования;
♦ создавать виртуальные пружины, амортизаторы и податливые втулки;
♦ назначать движения и двигатели различных типов с использованием
библиотеки функций MSC.ADAMS;
♦ выполнять настройку вычислительных параметров и решать задачу с
использованием различных типов решателей;
♦ осуществлять визуализацию кинематики механизма с одновременным
отображением результатов в виде графиков, векторов, пиктограмм;
♦ записывать результаты в разнообразных графических форматах, а также
импортировать результаты динамического расчета в COSMOSWorks;
♦ создавать процедуры пользователя с использованием функций
API-программы.
7.4.1. Возможности версий 2006—2007 годов
Основные усовершенствования версии 2006 года:
♦ распознавание модели движения, созданной в SoIidWorks посредством
команд Физическая симуляция;
♦ наличие нелинейных пружин и демпферов;
♦ построение кривых в модели SoIidWorks, являющихся траекториями точек
в модели COSMOSMotion;
♦ фиксация графиков с результатами с целью отображения совместно с
результатами последующих расчетов модифицированной модели;
♦ идентификация численных параметров в точках графиков;
♦ податливые соединения в глобальном масштабе. По сути, все соединения
приобретают свойства податливых втулок. При этом податливость и
вязкость назначаются отдельно для перемещений и отдельно для поворотов.
Эти характеристики являются одинаковыми для всех соединений. Данная
опция является одним из инструментов для компенсации действия
избыточных (Redundant) соединений. В справочной системе COSMOSMotion
содержится информация о том, какие степени свободы для каких типов
Кинематика и динамика (COSMOSMotion)
579
соединений/примитивов соединений приобретают виртуальную
податливость и вязкость;
♦ обработка сопряжений Ограничение SolidWorks, контролирующих
максимальное и минимальное расстояние между объектами. В
COSMOSMotion они транслируются с именем Граничное расстояние. Попытка
выхода за границы интервала в ходе расчета приводит к остановке
алгоритма;
♦ возможность использовать точки плоских и пространственных эскизов
при создании соединений, пружин, демпферов, при назначении сил и
моментов. Это дает возможность использовать детали, не содержащие тел, а
только эскизы;
♦ редактирование названий элементов в браузере COSMOSMotion.
♦ поддержка сопряжений SolidWorks Кулачок, Редуктор, Ограничение;
♦ визуализация графиков, соответствующих законам, принятым для
движений и сил. В частности: Step (Ступенчатый), Harmonic (Гармонический),
Spline (Сплайн);
♦ автоматическое предупреждение об изменении модели COSMOSMotion
после модификации модели сборки SolidWorks или изменения настроек
режима Симуляция.
Основные усовершенствования версии 2007 года:
♦ возможность назначать грани, несущие нагрузку (Load-bearing faces) (они
используются для назначения граничных условий в COSMOSWorks),
непосредственно в SolidWorks. Для этого используется команда Вставить
ссылку для нагрузки из контекстного меню соответствующего
сопряжения SolidWorks. Для объективности отметим, что, несмотря на наличие
соответствующей панели в SolidWorks, информация из нее в
COSMOSMotion не передается;
♦ специальные соединения для имитации зубчатых зацеплений с
цилиндрическими и коническими колесами с расчетом сил взаимодействия. В
реальности это выражается в том, что COSMOSMotion в состоянии
транслировать сопряжение SolidWorks Редуктор в свою расчетную модель;
♦ поддержка множественных расчетных моделей в одном файле сборки
SolidWorks. Множественные расчетные модели поддерживаются только
в связи с конфигурациями SolidWorks. Это значит, что COSMOSMotion
воспринимает состояние погашения /решения детали, переводя
ассоциированные с ней элементы расчетной модели (движения, соединители,
контакты, демпферы и т. д.) в состояние Supressed/Unsupressed. Также
самостоятельные элементы расчетной модели могут быть в некоторой кон-
580
Глава 7
фигурации Sol id Works переведены в состояние Supressed. В расчетных
моделях, соответствующих другим конфигурациям, они сохранят прежнее
состояние. Однако если в соединении назначено движение, то оно
действует одинаково во всех конфигурацих. То же самое можно сказать про
связь между деталями и их локализацией в группах Moving Parts и
Ground Parts. Здесь плюрализм также не допускается;
♦ более эстетичная цветовая палитра пиктограмм на панелях инструментов.
Для еще большей объективности следует упомянуть, что, будучи никак не
декларированным, в свежей версии наблюдается радикальное ускорение
расчетов при решении задач с трехмерным контактом.
7.4.2. Команды программы
Общую информацию о возможностях программы можно получить на основе
содержания падающего меню. Полная его структура показана на рис. 7.6.
В него входят практически все команды программы. Мы ограничимся их
перечислением с краткими комментариями1. Более информативные сведения
о некоторых из них будут приведены применительно к конкретной задаче.
Описание остальных доступно в Руководстве пользователя (COSMOSMotion
User's Guide), а также в справочной системе программы.
Меню Motion
В меню Motion (Движение) присутствуют следующие команды.
♦ Options (Настройки)— назначение общих параметров задачи. Содержит
вкладки:
• World (Окружение)— определение единиц измерения,
гравитационных нагрузок, параметров взаимодействия с SolidWorks при вставке
новых деталей;
• Display (Отображение)— назначение режимов вывода обозначений
в графическом окне со сборкой;
• Simulation (Симуляция)— задание времени действия механизма, а
также настройки вычислительного процесса;
• Animation (Анимация) — параметры анимации;
• Results (Результаты) — параметры пиктограмм и символов, которыми
отображаются результаты в графическом окне.
1 Некоторые команды сопровождаются пиктограммами. Эти пиктограммы обозначают
соответствующие объекты в Браузере COSMOSMotion.
Кинематика и динамика (COSMOSMotion)
581
| Motion
.Options.*,
IntelllMotfonBuikbf,,,
Joint*
Forces
Contacts
Motion..,
Coupfer^
Result Object
Siffldate
Detete Result*
Reset
Animate
Check Interferences*.«
ExpprtResufcs >
Export to ^.AI>AMS/View>«
f* StawSitogfa*^ Panel
Show Message Window
Welcome., /
, Action ОЫу Force*,.
Action Only Moment,,
Actton/Reaetlon Force**»
Actfon^eactfon tmmt*,
Spring*.
Torsion Spring*, ,< ,
Damper...
Torsion Damper.,
lushing.*.
Impacts
Re volute..,
Transitional. <
Cylindrical,,.
Universe!.,,
SpteHcaU
Planar^
Screw...
Fixed..
JnUne„.
In Plane,,.
Orientation^
ftsraikU
Perpendicular..
TracePattb*,
tineerOfeptacement.,.
Anguter DfSplecementM.
Vetoed
Acceleration..,
Point-Curve.«
G^ve-Curve..,
3D Contacts
To^eadsheet,.
Та Textile-,,
ToVftMU- , ^
Та AVI Movie.,,
To eOrawings ArtfoMfcton..
ToF&U,
Forward
Fast Forward
Reverse
FestPeverse
Рис. 7.6. Структура падающего меню
IntelliMotion Builder (Мастер проекта) — окно с набором вкладок,
соответствующих основным этапам моделирования и расчета:
• Units (Системы единиц);
• Gravity (Гравитация);
• Parts (Детали);
• Joints (Соединения);
• Springs (Пружины);
• Motion (Движение) — приложение движения к соединениям;
• Simulation (Симуляция)— определение режима симуляции работы
механизма;
• Animation (Анимация) — параметры анимации, а также ее создание;
• Interferences (Интерференции)— диагностика коллизий на базе
результатов расчета;
582
Глава 7
• VRML (Virtual reality modeling language)— создание файла анимации
в формате VRML.
Отметим, что на вкладках IntelliMotion Builder присутствует только
минимум функциональности, позволяющий решать базовые задачи.
Определенным достоинством является наличие подсказок, правда, достаточно
элементарных. Подобно другим программам, после использования
Мастера расчетную модель можно изменять произвольным образом (если,
конечно, не запускалась процедура решения).
♦ "НВ Joints (Соединения) — вызов меню, в котором находятся команды
создания кинематических пар.
♦ 3 Forces (Силы) — вызов меню, содержащего команды для создания
силовых факторов и объектов (пружин, втулок, демпферов) их
порождающих.
♦ О Contacts (Контакты) — вызов меню, в котором находятся команды для
назначения условий контакта криволинейных (неплоских и некруговых)
объектов.
♦ ^ Motion (Движение) — назначение движения одному объекту
относительно другого. Доступен выбор из числа заранее определенных
движений:
• Free (Свободное);
• Displacement (Перемещение);
• Velocity (Скорость);
• Acceleration (Ускорение).
Любое из этих движений, за исключением свободного, может подчиняться
следующим законам:
• Constant (Постоянный);
• Step (Ступенчатый);
• Harmonic (Гармонический);
• Spline (Сплайновый);
• Expression (Выражение) — использование подмножества функций
MSC.ADAMS для описания движения.
♦ Г* Coupler (Сцепка) — назначение связи между движением двух
кинематических пар (поворотом и/или поступательным движением). При этом
одно соединение является родителем, а другое — потомком.
Кинематика и динамика (COSMOSMotion)
583
♦ Result Object (Объекты результатов) — вызов меню, в котором находятся
команды отображения результатов выполненного расчета.
♦ Simulate (Симулировать) — выполнение расчета.
♦ Delete Results (Удалить результаты) — уничтожение результатов расчета,
независимо оттого, был ли он выполнен полностью или прерван.
♦ Reset (Сброс) — возвращение механизма в исходное состояние без
удаления результатов.
♦ Animate (Анимировать)— вызов меню, в котором находятся команды
анимации механизма по результатам расчета.
♦ Check Interferences (Проверить коллизии) — вызов окна, в котором
осуществляется визуализация механизма с покадровой проверкой
интерференции назначенных деталей.
♦ Export Results (Экспорт результатов) — вызов меню, в котором находятся
команды записи результатов в разнообразных форматах, в том числе
анимации в документ eDrawings.
♦ Export to MSC.ADAMS (Экспорт в MSC.ADAMS)— экспорт данных
и/или результатов в программу MSC.ADAMS.
♦ Show Simulation Panel (Отобразить панель симуляции).
♦ Show Message Window (Отобразить окно сообщений) — отображение
окна с диагностикой вычислительного процесса. Выводимая в него
информация полезна, если расчет прерывается в связи с ошибкой пользователя.
♦ Welcome (Приветствие)— вывод окна, из которого можно получить
доступ к Tutorials (Учебным пособиям), представляющим собой набор
примеров, а также к информации о новых возможностях программы.
В меню Motion, равно как и в других меню, все команды делятся на две
группы: доступные в данный момент и недоступные. Первая соответствует
состоянию модели, когда расчет не выполнялся (а правильнее, отсутствуют
результаты), вторая — когда расчет, пусть и не полностью (не весь интервал
времени рассмотрен, или же вычисления были прерваны) сделан. Как
правило, в первую группу входят команды создания кинематической модели,
назначения настроек вычислительного процесса и, естественно, запуска
расчета; во вторую — команды создания результатов, их визуализации и экспорта,
анимации и, разумеется, их уничтожения. Поэтому если некий расчет
выполнен, то для получения доступа к процедурам корректировки модели,
настройки вычислительных параметров необходимо уничтожить "следы" этого
расчета. В отличие, например, от COSMOSWorks, множественные анализы
в COSMOSMotion (в версии до 2007 года) неосуществимы.
584
Глава 7
Меню Joints
Меню Joints (Соединения) содержит команды, предназначенные для
создания кинематических пар. При создании соединений нужно указывать детали,
место приложения соединения и направление. Смысл двух последних
параметров изменяется в зависимости от типа соединения. В кинематической паре
допускается трение. Важной особенностью данной группы связей является
то, что они активны в течение всего периода работы механизма.
Соединения в меню Joints разделены на две группы. Та, которая расположена
сверху, объединяет физически реализуемые объекты. Снизу—
идеализированные явления, именуемые JPrim (Joint Primitives). Их функция —
дополнять "реальные" соединения в случае недостатка их функциональности.
Однако без видимой и обоснованной причины использовать эти опции не
рекомендуется. Однако в некоторых ситуациях без примитивов обойтись
достаточно трудно. Характерный пример — вал на двух опорах, когда только
"реалистичными" соединениями (например, двумя цилиндрическим
шарнирами) его смоделировать невозможно. Причина здесь в том, что эти
соединения приведут к кинематической переопределенности механизма. Неким
аналогом этих соединений в COSMOSWorks являются граничные условия типа
Закрепление в точке или по линии, а также контакт деталей в точке или по
линии.
Перечислим реализованные в COSMOSMotion соединения:
"® Revolute Joint (Шарнир поворота) — детали могут совершать
взаимный поворот относительно некоторой оси;
^ Translational Joint (Поступательное движение) — детали могут
перемещаться относительно некоторого направления без поворота;
^ Cylindrical Joint (Цилиндрический шарнир) — детали могут
вращаться и перемещаться относительно некоторой оси;
® Spherical Joint (Сферический шарнир) — детали могут поворачиваться
относительно трех осей;
Я» Universal Joint (Универсальный шарнир) — кардан;
^ Screw Joint (Винтовое соединение) — вращательно-поступательное
движение, определяемое шагом;
чЭк Planar Joint (Плоское соединение) — пара скольжения, когда
присутствуют два взаимных перемещения и один угол поворота;
в Fixed Joint (Фиксация) — совместное перемещение двух жестких тел
как одного целого.
Кинематика и динамика (COSMOSMotion)
585
Joint Primitives (Примитивы соединений) могут быть такими:
♦ X Inline Primitive (Перемещение по линии) — перемещение некоторой
точки одной детали по линии относительно другой, состоящее из одной
поступательной и трех поворотных степеней свободы;
♦ ^L Inplane Primitive (Перемещение по плоскости) — перемещение
некоторой точки одной детали по некоторой плоскости относительно другой,
состоящее из двух поступательных и трех поворотных степеней свободы;
♦ 31 Orientation Primitive (Примитив ориентация) — разрешено взаимное
поступательное движение деталей во всех направлениях. Взаимные
повороты невозможны;
Parallel Axis Primitive (Примитив параллельных осей)— разрешено
взаимное смещение деталей так, что две прямые, связанные с каждой из
деталей, остаются параллельны, а три линейных перемещения — не
ограничены;
Perpendicular Primitive (Примитив перпендикулярность)—
сохранение перпендикулярности двух направлений, связанных (по одному) с
деталями (при этом два взаимных поворота свободны). Три линейных
перемещения разрешены.
Также доступны примитивы, которые являются производными от
сопряжений SolidWorks и не могут генерироваться в COSMOSMotion:
Касательный:
♦ от Сопряжение редуктора;
♦ v Расстояние;
♦ v* Граничное расстояние.
Соединения предполагаются абсолютно жесткими. Если нужно учесть
эффекты локальной податливости и демпфирования, то объекты,
присутствующие в данном меню, неприменимы, и нужно обратиться к понятиям Bushing
(Втулка) и Impact (Проникновение) из меню Forces (Силы). Кроме того, если
форма взаимодействующих объектов неканоническая, а также если связь
зависит от состояния механизма, то следует применить команды из группы
Contacts (Контакты).
Меню Forces
Меню Forces (Силы) содержит команды, предназначенные для имитации
силовых факторов. Это могут быть как силы и моменты в явном виде, так и
объекты, которые их порождают: пружины, амортизаторы, вязко-упругие
586
Глава 7
втулки, а также имитаторы контактного взаимодействия. Из меню можно
получить доступ к следующим объектам:
♦ \ Action Only Force (Только активная сила) — назначение силы,
направление которой остается постоянным в ходе работы механизма. В
зависимости от времени сила может быть постоянной, дискретно изменяющейся,
гармонической, описываться сплайнами или подчиняться зависимости,
сформулированной пользователем и реализованной на базе встроенных
математических функций;
♦ я Action Only Moment (Только активный момент) — назначение
момента, направление которого не меняется в ходе работы механизма;
♦ % Action/Reaction Force (Активно/реактивная сила) — назначение силы,
направление которой определяется двумя точками, положение которых
может изменяться в ходе работы механизма (если точки принадлежат
подвижным деталям). Соответственно изменяется и направление силы;
♦ ж Action/Reaction Moment (Активно/реактивный момент) — назначение
момента, направление которого может изменяться в ходе работы
механизма;
♦ » Spring (Пружина) — создание виртуальной (хотя на экране она
отображается вполне реалистически) пружины растяжения-сжатия;
Torsion Spring (Пружина кручения) — создание виртуальной пружины
кручения;
♦ % Damper (Демпфер) — создание линейного амортизатора1;
♦ ** Torsion Damper (Демпфер кручения) — создание амортизатора
кручения;
♦ ^Bushing (Втулка)— создание виртуального соединительного объекта,
связывающего две детали четырьмя виртуальными же соединительными
элементами: одной линейной пружиной и одной пружиной кручения, а
также линейным демпфером и демпфером поворота. Можно также
приложить начальную силу и момент. В COSMOSMotion 2005 декларирована
возможность создания втулок с различной жесткостью при
поступательном смещении и при кручении. Пользователю следует иметь в виду, что
объект Втулка является заменителем (а не дополнением) кинематических
пар;
1 В некоторых Пакетах обновления (Service packs) программы имеются проблемы при
моделировании амортизаторов. Они или не функционируют совсем, или же воспринимаемая
алгоритмом величина вязкого сопротивления отличается от назначаемой.
Кинематика и динамика (COSMOSMotion)
587
♦ *W Impact (Проникновение) — назначение условия взаимодействия
деталей: при сокращении расстояния между некими объектами этих деталей
больше некоторого предела возникает сила, которая экспоненциально
зависит от расстояния, а также включается в работу демпфера.
Меню Contacts
Меню Contacts (Контакты) содержит команды, предназначенные для
имитации контактного взаимодействия. Из меню можно получить доступ к
следующим объектам:
♦ w Point-Curve (Точка-кривая) — движение точки по плоской кривой без
отрыва. В случае незамкнутой крийой при достижении ее конца точка не
останавливается;
♦ Ш Curve-Curve (Кривая-кривая) — движение двух жестких тел с
сохранением касательности двух кривых, лежащих (в общем случае
потенциально) в одной плоскости. Если активна опция Intermittent Contact
(Прерывистый контакт), то возможен выход из контакта и вступление в контакт;
♦ >^3D Contact (ЗО-контакт)— контакт двух тел с учетом всех
поверхностей обоих тел.
В процессе расчета и интерпретации результатов следует иметь в виду, что
расчет производится не с подлинной геометрией, а описанием тел
многогранниками. Исключением является имитация взаимодействия посредством
функции 3D Contact, где типом аппроксимации управляется опция Use
Precise Geometry for 3D Contact (Использовать точную геометрию для 3D-
контакта) в окне Simulation (Симуляция). Точность определяется
параметрами Points Per Curve (Число вершин на кривой) или Tolerance (Допуск).
Меню Result Object
Меню Result Object (Объекты результатов) содержит команды для
отображения результатов как в форме пиктограмм, размещенных на фоне модели,
так и графиков зависимости величин от времени:
♦ vrs TracePath (Траектория) — визуализация траектории вершины
подвижной детали;
♦ v Linear Displacement (Линейное перемещение)— визуализация
перемещения точки подвижной детали относительно точки неподвижной
детали;
Angular Displacement (Линейное перемещение)— визуализация
углового перемещения точки подвижной детали относительно неподвижной
детали;
588
Глава 7
♦ Лг Velocity (Скорость) — визуализация скорости точки подвижной детали
относительно неподвижной системы координат;
♦ 'A Acceleration (Ускорение) — визуализация ускорения точки подвижной
детали относительно неподвижной системы координат.
Все команды меню Result Object продублированы в Браузере COSMOS-
Motion и находятся "за" пиктограммой Results (Результаты). В
дополнение к перечисленным, в нем присутствуют пиктограммы (и, соответственно,
команды):
♦ FT Reaction Forces (Силы реакции) — визуализация сил реакции,
порождаемых соединениями, ассоциированными с конкретными деталями;
♦ х XY Plots (Диаграммы XY) — визуализация диаграмм, созданных для
объектов расчетной модели.
Меню Animate
Меню Animate (Анимировать) содержит команды для анимации работы
механизма:
♦ Forward (Вперед) — анимация в направлении увеличения времени с
приращением один кадр;
♦ Fast Forward (Быстро вперед)— анимация в направлении
увеличения времени с приращением Fast Increment, назначаемым на вкладке
Options | Animation;
♦ Reverse (Назад) — анимация в направлении уменьшения времени с
приращением один кадр;
♦ Fast Reverse (Быстро назад) — анимация в направлении уменьшения
времени с приращением Fast Increment.
Меню Export Results
Меню Export Results (Экспорт результатов) содержит команды для экспорта
результатов расчета в другие программы:
♦ То Spreadsheet (В электронную таблицу) — вывод результатов в формате
Microsoft Excel. Транслируются как графики, так и, естественно, источник
для их построения в виде таблицы. С учетом того, что непосредственный
доступ к численным величинам результатов в COSMOSMotion
невозможен, данная функция компенсирует этот недостаток;
♦ То Text File (В текстовый файл)— вывод результатов в текстовый файл.
Подобно предыдущей функции предоставляет доступ к численным
величинам;
Кинематика и динамика (COSMOSMotion)
589
♦ То VRML (В VRML) — вывод картинки в формате Virtual reality modeling
language (Язык моделирования виртуальной реальности);
♦ То AVI (В AVI) — создание анимации в формате Audio-Video Interleaved;
♦ То FEA (В МКЭ) — экспорт нагрузок движения для расчета в программах
метода конечных элементов, в частности, в COSMOS Works.
Контекстные меню COSMOSMotion Browser
В браузере COSMOSMotion практически всем элементам дерева поставлены
в соответствие контекстные меню. Доступ к ним и/или их наполнение
зависит от состояния системы: был выполнен расчет в данный момент или нет.
Содержание этих меню в целом соответствует командам, которые есть в
меню падающем. Оригинальной является единственная команда — это Material
(Материал), присутствующая в меню корневого объекта дерева Motion
Model. После ее вызова появляется меню, в котором присутствуют две
команды: Add (Добавить) и Edit (Редактировать). После подачи первой
появляется последовательность окон, в которую нужно ввести следующие
параметры:
♦ Шаг 1 (рис. 7.7):
• название материала.
IDefine Material Properties
' \< Sprite Nao*tf the Materia*
Name (Новый материал
-£imh" | ей** | Ме*>
1
Cancel j.
mm
Иф |
Рис. 7.7. Новый материал — шаг 1
♦ Шаг 2 (рис. 7.8):
• плотность;
• модуль упругости;
• коэффициент Пуассона;
• предел текучести.
♦ Шаг 3 (рис. 7.9):
• контактная жесткость;
• коэффициент экспоненты контактной силы;
590
Глава 7
• проникновение при полном демпфировании;
• коэффициент восстановления.
Define Material Properties
с-^ '* Ч'%>,^$$**] 0.001175 ^^^ii-ff v'^. ">>/>;' *S: -\
**»>4'Ф '*»*«»•*!205,939 i&jmttH*AA>\^:*r*ri V
>;,^ч^уУ...г>^./..;.г....а.г.1у.^у^-Ж
'.*ч«ч!« * J
{№■■<>■■»^Ц*тт* у it i.J, fLI ■ ^ г iVmfj .■^■■■■■m.ita..m.ml.t jj;^*-*^4;
.Т.Д шТ.ш.п f. ■■ ■ ftnmhnn.^.n.bu ^fr.mifM.MM.mri. ...n f■ м■,■,fiи■ м■ Л Гт^мД
Рис. 7.8. Новый материал — шаг 2
Define Material Properties
,\ ;#$^*1Ырр^р^^ ",'*♦ - "}:а'^
4 s ^-%-; '-' Л ч''-' -^\-'j ft ^s t Af !■ - %- \ > '* "' /-" - ""A
Cwff»oen* 4 B«sMar»
0,1 ,-
.^■iiMliillrtiYii^.iWWn.il; ^ .WrtiiMiiiWiirtiHiW 1|и|||*Ш11Ш1М*ШШШ>Ш1» - .iiWiftrriHrtWMiiHhlirint <rtiWi<rtnrti*iWrtrtrtW»yf I
Рис. 7.9. Новый материал — шаг 3
♦ Шаг 4 (рис. 7.10):
• скорость, ниже которой действует только статическое трение;
• скорость, выше которой действует только динамическое трение. Если
скорость находится в промежутке между этими величинами, то
программа интерполирует коэффициент трения между динамическим и
статическим;
• коэффициент статического трения;
• коэффициент динамического трения.
После заполнения окон с информацией о взаимодействии деталей из одного и
того же материала появляются окна, в которых находятся те же характери-
Кинематика и динамика (COSMOSMotion)
591
стики, но описывающие контактные пары между новым материалом и теми,
которые уже присутствуют в базе.
Рис. 7.10. Новый материал — шаг 4
Редактирование материала осуществляется по команде Edit. Далее
появляются, по сути, те же самые окна, что и при создании материала. Изменять можно
любое из определенных в момент создания свойств, за исключением названия
материала.
В заключение отметим, что материалы в COSMOSMotion, начиная <: версии
2005 года, могут заимствоваться из Sol id Works подобно COSMOS Works.
Однако характеристики, требуемые для динамического расчета, весьма
специфические и, более того, методика их определения достаточно субъективна.
Поэтому из COSMOSWorks может заимствоваться (помимо, разумеется,
названия), по сути, только плотность, коэффициент Пуассона и модуль
упругости (последние две характеристики, в принципе, в COSMOSMotion и не
используются). В связи с этим включать и, тем более, использовать новые
материалы следует только после проведения адекватных экспериментов,
сопровождаемых, по возможности, аналитическим или численным
моделированием контактных эффектов.
7.4.3. Интерфейс с COSMOSWorks
COSMOSMotion обладает возможностью передачи динамических нагрузок в
COSMOSWorks (в терминах COSMOSWorks они называются нагрузками
движения). Для этого в окне Edit Joint/Bushing (Редактировать соединение /
Втулку), которое вызывается по команде Properties из контекстного меню
592
Глава 7
соответствующего соединения, нужно определить грани или кромки, которые
воспринимают эти нагрузки на первом и на втором компоненте (рис. 7.11).
Обратим внимание на то, что манипуляции производятся не с деталями, а с
кинематическими парами, т. е. нужно проконтролировать все эти объекты. То
же самое следует проделать и с кинематическими и силовыми граничными
условиями (Constraints). Это, в частности, Forces (Силы) как назначенные
пользователем, так и возникающие при взаимодействии с пружинами
(Springs), демпферами (Dampers) и втулками (Bushings). Возникает
естественный вопрос: почему программа не отслеживает эти факторы
автоматически? Дело в том, что при создании кинематических пар можно указывать не
только объекты, образующие соединения, но и те, которые определяют
необходимые направления. Именно они, а не реальные кромки или грани
учитываются программой при формировании соединения.
I -О Шестерня__-1ЛЮМРасеЗ
Рис. 7.11. Назначение граней, воспринимающих нагрузки движения
Ограничения при передаче динамических нагрузок из COSMOSMotion в
COSMOSWorks следующие:
♦ не передаются нагрузки, порождаемые контактными соединениями: Point-
Curve, Curve-Curve, 3D Contact;
♦ не передаются нагрузки, возникающие в соединениях между деталями
подсборок, даже если эти узлы сделаны подвижными.
Для того чтобы иметь информацию для экспорта, необходимо выполнить
расчет. В версиях программы до 2005 года в качестве агента для передачи
использовался текстовый файл. В свежих релизах данные воспринимаются
непосредственно в интерфейсе COSMOSWorks. Более того, импорт в него
текстового файла, являющегося "продуктом" COSMOSMotion, несмотря на
наличие в списке программ-приемников пункта COSMOSWorks (рис. 7.14),
Кинематика и динамика (COSMOSMotion)
593
невозможен . Тем не менее, данная функция не является совсем уж
бесполезной. После подачи команды Export Results | To FEA (Экспорт результатов в
МКЭ) на экране возникает окно Unassigned Load Entities (Объекты, которым
не присвоены нагрузки) (рис. 7.12). Из сообщения в окне следует, что
некоторые соединения порождают силовые факторы, не ассоциированные с
гранями или кромками деталей. Они будут пропущены при экспорте данных.
В окне присутствует кнопка Derive Joint Load Entities from Mates
(Получить информацию о нагруженных компонентах из сопряжений). После ее
подачи информация о несущих гранях в соединениях присоединяется к
данным о соединении. Эта команда, однако, не всегда дает ожидаемые
результаты, а если соединение создано непосредственно в COSMOSMotion,
то их не будет вовсе. Так что оптимальным является назначение несущих
объектов в диалоговом режиме. Здесь следует отметить, что заботу нужно
проявлять о тех деталях, для которых планируется расчет. Анализ в
COSMOSWorks на базе нагрузок движения выполняется индивидуально для
каждой детали, т. е. сборка в целом не рассматривается и, следовательно, нет
необходимости в полноте исходных данных.
Рис. 7.12. Сообщение об ограничениях, порождающих нагрузки,
для которых не назначены воспринимающие их объекты
1 Вероятно, таким образом разработчики обеспечивают совместимость версий COSMOSMotion
2006, 2007 года с версиями COSMOSWorks предыдущих лет.
594
Глава 7
Начиная с версии 2007 года, грани, несущие нагрузку, можно назначать
одновременно с созданием сопряжений в SolidWorks. Для этого из контекстного
меню соответствующего сопряжения следует подать команду Вставить
ссылку для загрузки, а затем в Менеджере свойств для каждой детали
сопряжения указать грани, воспринимающие силы в соединении (рис. 7.13).
*-* Отобразить ко»понеяг2
1 прозрачный
& Скрытый
Г* Лрсзрййная
Рис. 7.13. Назначение граней с нагрузкой для сопряжений SolidWorks
Замечание
э
Даже при формально правильном назначении граней, несущих нагрузки,
локализация мест их приложения может восприниматься (с точки зрения
адекватности расчетной и реальной модели) некорректно. Дело в том, что в
COSMOSMotion усилия (активные и реактивные, т. е. возникающие в
соединениях) фактически прикладываются (воспринимаются) в неких виртуальных
точках, которые являются производными от граней, кромок, вершин и точек
плоских и пространственных эскизов. С точки зрения условностей COSMOSMotion
разницы между локализацией усилий, как правило, нет. Например, вал в
соединении Revolute может "опираться" на произвольный объект с центром на его
оси. Однако при прочностном анализе положение точки на оси становится
значимым. Поэтому, предусматривая межпрограммный обмен, нужно в расчетной
модели тщательно определять положение соединений, используя для этого,
например, точки вспомогательных эскизов.
Кинематика и динамика (COSMOSMotion)
595
После того как определены несущие объекты или принято решение о том, что
можно ограничиться неполными данными, возникает окно FEA (МКЭ)
(рис. 7.14), в котором нужно определить следующие параметры:
♦ каталог, в который будет записан текстовый файл с информацией о
нагрузках;
♦ FEA System (Программа МКЭ)— тип конечно-элементной программы,
в формате которой будут готовиться данные;
♦ группа параметров Frame (Кадр), где нужно выбрать интервал кадров, для
которого экспортируются результаты;
♦ Save Current Frame (Сохранить текущий кадр)— кнопка, при нажатии
которой записывается информация о текущем активном кадре;
♦ Save Frame Range (Сохранить диапазон кадров) — кнопка, при нажатии
которой записывается информация, содержащая сведения о диапазоне
кадров.
*^$ЙМ?./л 3J/I0JM... .ДЛ"•-
■м
LW ^'^"^ ^i-s*t%ч,#ч<'■'->' j"*'i >t <f<«*»--^ \ "'".'" - - J
-ZTy^W^i^
к & X '4 ' -•* <- J ^ * ', t- ^ ' * ^ j У ч ''
; *5r-'s?-, i '<- -s\* * •*'>- арф v '* 11 wo$*
Рис. 7.14. Назначение кадров для экспорта в процедуры конечно-элементного анализа
Импорт данных в COSMOSWorks производится по команде Import Motion
Loads (Импортировать нагрузки движения). В версиях до 2005 года
программа запросит файл, в который были записаны результаты динамического
анализа. В свежих версиях программы появится окно, показанное на рис. 7.15.
596
Глава 7
В нем нужно определить список интересующих пользователя деталей, а
также кадр (кадры), соответствующий некоторому физическому времени, для
которого будут взяты нагрузки. Эти нагрузки будут записаны в файлы
деталей, где автоматически создадутся соответствующие Study (Упражнения). Из
этого следует важное наблюдение. Статический расчет на базе результатов
динамического анализа программа выполняет исключительно на уровне
отдельной детали. Это порождает большое количество условностей и
допущений, которые могут радикально изменить расчетную модель. В частности, все
внешние силы, за исключением возникающих в соединениях (для которых
импорт возможен), алгоритм заменяет инерционными нагрузками. Это
линейное и угловое ускорение.
Импортировать нагрузки движения
Маховик-1
Шестерня -1
м.
Колесо-1
*• Упражнение <5<&мни ф^ймом s ^
4 \ лЛч < Номпркэдмг ' 8рем» - !
^ д?1ДОн^ор<да|
- Номер кэдра
Рис. 7.15. Назначение кадров для импорта в COSMOSWorks
При формировании расчетных моделей в COSMOSWorks программа не
создает никаких кинематических граничных условий, заменяя опоры силами
реакции порождающих эти опоры объектов. В качестве сущностей для ввода в
модель сил реакции алгоритм использует дистанционные нагрузки (Remote
Loads). В реальных же системах опоры не только порождают силы реакции,
но зачастую изменяют жесткость деталей. Характерный пример— вал,
опирающийся на однорядные подшипники качения, изменяющие его изгибную
жесткость только в малой степени, и вал, заделанный в двухрядные
роликовые подшипники, порождающие весьма жесткую моментную заделку.
Кинематика и динамика (COSMOSMotion)
597
Поскольку кинематические граничные условия в явном виде отсутствуют, то
точный баланс сил невозможен. Поэтому в настройках соответствующего
статического упражнения COSMOSWorks автоматически активизирует
опцию Использовать инерционное снятие (Use Inertial relief),
предназначенную для уравновешивания динамических нагрузок. Понятно, что ни о какой
применимости результатов вычисления перемещений в этой ситуации
говорить не приходится.
Один из выводов, сделанных по результатам практических расчетов,
следующий: при анализе сборок наиболее достоверные результаты получаются
при расчете полноценной модели узла, включающей все необходимые
детали. Граничные же условия следует переносить в модель сборки
COSMOSWorks, идентифицируя необходимые (с точки зрения пользователя) усилия и
используя наиболее подходящие элементы COSMOSWorks. Пример
использования автоматического интерфейса будет приведен ъразд. 7.5.6.
7.5. Моделирование
косозубого зубчатого зацепления
В данном разделе описан процесс построения динамической1 модели
зубчатой косозубой пары. Колесо и шестерня синтезированы посредством модуля
SolidWorks GearTrax (см. разд. 6.5). Напомним, что при генерации деталей
был назначен окружной зазор 0,1 мм, что намного больше присутствующего
в реальности. Сделано это было для наглядности при выводе
соответствующих иллюстраций. Однако была проверена пригодность для расчета в
COSMOSMotion геометрической модели с нулевым зазором2.
Соотношение диаметров шестерен и углов наклона зубьев таково, что
передаточное отношение равно 1 : 1. В принципе, для создания визуальной
имитации редукторов достаточно сопряжений SolidWorks Редуктор,
транслируемых в одноименные соединения COSMOSMotion. Если бы шестерни были
прямозубыми, то проиллюстрировать функционирование зацепления можно
было бы посредством команды SolidWorks Переместить компонент с
активной опцией Физическая динамика.
Не слишком полезен будет и такой инструмент, как SolidWorks Animator.
В его основе лежит интерполяция вариантов сцены на базе некоторого числа
В COSMOSMotion строго различаются два типа систем: кинематическая — та, состояние
которой однозначно определено в любой момент времени, и динамическая — ее состояние
определяется в процессе движения.
2 Оценка влияния зазора на динамические свойства зубчатых зацеплений заслуживает
отдельного рассмотрения. Очевидно, что при уменьшении зазора некоторые результаты и сделанные
на их основе заключения могут существенно измениться.
598
Глава 7
опорных положений. При этом никаких инструментов для воздействия на
ситуацию между этими положениями нет. Естественно, что ни один из
перечисленных алгоритмов не способен даже приблизиться к оценке динамики
конструкции.
7.5.1. Постановка задачи
На рис. 7.16 показана геометрическая модель зубчатой пары, состоящей из
двух косозубых колес с ортогональными осями. Они закреплены в некоторой
детали, имитирующей корпус. Форма последней с точки зрения динамики не
имеет принципиального значения, т. к. она неподвижна. К концу более
толстого вала приложен крутящий момент 6,12 кгхм. При этом скорость
вращения — 7000 об/мин. Необходимо определить нагрузки, действующие на
элементы конструкции, а также смоделировать ее динамику. Для понимания
дальнейших действий обратим внимание на вид фрагмента сечения системы
плоскостью перпендикулярной оси колеса (рис. 7.17).
Рис. 7.16. Геометрическая модель Рис. 7.17. Сечение модели плоскостью
зубчатого зацепления перпендикулярной оси колеса
Идеология, по которой назначены сопряжения в сборке (рис. 7.18),
воспроизводит установки конструктора: все цилиндрические концы обоих валов
связаны с отверстиями корпуса сопряжением Концентричность, а по одному из
торцов каждого вала с соответствующей ей гранью корпуса назначено
Совпадение. С точки зрения конструктора эта схема вполне разумна. Несколько
Кинематика и динамика (COSMOSMotion)
599
большие сложности возникают при определении взаимного положения в
зубчатой паре. Как упоминалось, иллюстративно движение можно
воспроизвести посредством сопряжения Редуктор, однако возникает проблема
идентификации начального положения — в идеале, это касание в одной из пар
граней при условии, что в других нет проникания. Даже для цилиндрических
колес, в которых профиль зуба описан сплайном, SolidWorks не позволяет
построить точное сопряжение. Однако в той ситуации паллиативным
решением может быть инструмент Физическая динамика, который, не гарантируя
абсолютной точности позиционирования, предоставляет хорошее начальное
приближение. Однако для сопряжения сплайновых поверхностей двойной
кривизны, вращающихся относительно скрещивающихся осей,
неработоспособен и он. Единственный выход— приближенный поиск начального
состояния, гарантирующего, в первую очередь, отсутствие интерференции. Для
этого, устанавливая совпадение (или параллельность) одной из плоскостей
колеса, проходящей через его ось, с вертикальной плоскостью корпуса,
ликвидируем подвижность колеса. Затем вводим сопряжение Угол между одной
из плоскостей шестерни, проходящей через ее ось, и подходящей плоскостью
корпуса. Изменяя величину этого угла с неким (например, 0,1°) шагом и
проверяя на каждом этапе наличие интерференции в сборке, находим положение,
при котором детали не проникают друг в друга.
^ Передача зубчатая
Ш- Ш Примечания
;+] (ф Связь проектов
Щ■•<£) Источники света и камеры
<$> Спереди
<$> Сверху
: <$> Справа
1^ Исходная точка
£}.^Колесо<1>
ИЗ ^ Шестерня__<1>
Ш^(ФЖорпус<1>
В§§ Сопряжения
■ ...^ КонцентрическийЗ (Колесо<1>,Корпус<1>)
^ Совпадение27(Колесо<1>,Корпус<1>)
; ^ КонцентрическийЧ (Шестерня < 1>,Корпус <1>)
^ Совпадение28 (Шестерня < 1>,Корпус <1>)
^ Концентрический^ (Колесо<1 >,Корлус<1>)
•^ Концентрический^ (Шестерня__<1 >,Корлус<1 >)
^ СовпадениеЗО (Колесо < 1 >, Корпус < 1 >)
...^ УголЗ(Шестерня__<1>,Корлус<1>)
: % Со5П*демиоЗi (Корпус*'•>.Спереди)
:....% Охж.дони'»Э2 (Корпус i 1; .Ct«»pvy)
■ ^ СовпалемиоЗ? i Корпус < I >. Сггрл»л)
Рис. 7.18. Взаимосвязи в сборке SolidWorks
20 Зак. 4405
600
Глава 7
Таким образом, убеждаемся, что возможностей Sol id Works недостаточно для
описания взаимодействия косозубых колес. Поэтому для решения следует
использовать инструменты COSMOSMotion.
7.5.2. Анализ
Сложности с описанием взаимодействия шестеренок в COSMOSMotion
являются преодолимыми. Для этого придется использовать контактное
соединение 3D Contact (ЗВ-контакт)— наиболее общий случай взаимодействия
деталей, когда анализируется возможность контакта всех граней одной
детали со всеми гранями другой. Контакт типа Point-Curve (Точка-кривая) или
Curve-Curve (Кривая-кривая) в данной ситуации неприменимы. В версии
2007 декларирована функция Соединения редуктора, позволяющая
моделировать взаимодействие между парами прямозубых цилиндрических и
конических зубчатых колес, а также рассчитывать контактные усилия. Ее
планировалось ввести в COSMOSMotion, начиная с SP 2.0. Однако при выходе
релиза данной функции в ней не оказалось. В любом случае рассматриваемая
модель содержит косозубые колеса, и эта функция здесь была бы
неактуальна.
В COSMOSMotion автоматически интерпретируются сопряжения Касатель-
ность SolidWorks. Однако, во-первых, для столь сложных поверхностей их не
удается реализовать, а во-вторых, даже будучи перенесенными в
COSMOSMotion, они бы не сработали, поскольку в ходе движения происходит смена
пар контактирующих граней (прерывистый контакт).
Один из неоднозначных моментов — как учесть в модели исходные данные:
мощность, приложенную к ведущему валу, и заданную скорость вращения
ведомого. В принципе, эти факторы можно поменять местами, поскольку
передаточное число — в данном случае это 1:1 — детерминировано, а потери
мощности (если, конечно, в соединениях учитывается трение или вязкость в
соединениях) также прогнозируемы. Проблема в том, что мощность и
скорость, в определенном смысле, взаимовлияющие факторы. На входе в
систему подается мощность, а скорость является производным фактором. Однако
если в данной модели приложить к ведущему валу мощность, то окажется,
что скорость вращения на порядки превышает ожидаемую. Если поступить
наоборот, то ведомый вал одновременно с вращением будет совершать
высокочастотные колебательные движения относительно оси. Паллиативным
решением является одновременное приложение и момента, и скорости. Только
эти факторы должны действовать "навстречу" друг другу. В этой ситуации
управляющим фактором является скорость, а предназначение момента —
стабилизировать систему и сделать возможным расчет усилий, действующих
в зацеплении. И здесь — в этом есть определенный парадокс — ближе к ре-
Кинематика и динамика (COSMOSMotion)
601
альности модель, когда к ведущему валу приложена скорость, порождаемая
двигателем, а к ведомому— момент сопротивления, создаваемый
окружением.
Как представляется, наиболее реалистичной является следующая
аппроксимация. К ведущему валу прикладывается назначенный момент, а на ведомом
создается сопротивление, величина которого подбирается так, чтобы угловая
скорость стала равна заданной. В терминах COSMOSMotion сопротивление
имитируется объектом, содержащим вязкость. Для линейно зависящей от
скорости вязкости ее величина определяется элементарными вычислениями
или же подбором в программе. Для линейной вязкости требуется расчет с
произвольным значением, после чего определяется поправочный
коэффициент. Если пренебречь трением и вязкостью в соединениях, эти манипуляции
можно выполнять на модели сборки, состоящей из единственной детали.
К ней с одной стороны прикладывается момент, а с другой (так будет
нагляднее) или с той же самой (так будет "физичнее")— сопротивление.
Результаты, по причине того, что деталь податливостью не обладает, будут
идентичны.
7.5.3. Решение
Имея дело с интегрированным приложением SolidWorks, активизируем его в
окне Добавления (рис. 7.19). После нажатия кнопки ОК программа
проверяет наличие лицензии (она, как правило, располагается в виде строки в файле
лицензии COSMOSWorks) и при благоприятном исходе появляется другое
окно COSMOSMotion— Add New Parts (Добавить новые детали)1,
показанное на рис. 7.20. В нем нужно согласиться с предложением программы
распределить все детали сборки между двумя множествами: одно объединяет
объекты подвижные (Moving), второе— зафиксированные (Ground), или
отказаться от него. Развивая мысль, отметим, что переход объекта в ходе
расчета из одной категории в другую невозможен. Поэтому если деталь
совершает или способна совершать движение, то ее следует квалифицировать как
Moving.
Иногда при открытии файла сборки с уже имеющимся проектом COSMOSMotion
на фоне активизированного модуля COSMOSMotion его браузер недоступен.
В этой ситуации нужно деактивизировать приложение, а затем подключить его
снова.
1 Это окно возникает при первом запуске COSMOSMotion для данной сборки или при
изменении ее состава при установке переключателя Parts (Детали) из окна Options (Параметры)
в положение Ask Before Mapping New Parts (Запрашивать перед размещением новых деталей).
602
Глава 7
Еще одной погрешностью интерфейса может быть случай, когда изменение
структуры сборки SolidWorks (добавление, высвечивание, удаление, погашение
деталей или взаимосвязей) не приводит к автоматической обработке этих
действий в COSMOSMotion. Здесь следует подать команду SolidWorks Перестроить.
Добавления
Г. OSMOSMotam 2007
Motion simulation program by SoiidWorks.
C:\Prograrn Nes\3oiklWofk?
zgotkosmos
^Motion For Sc4idWcffks\crnotionsw.dll
^
МшШ* Др^ряун^:
]Эшуск Щ
В Приложения SolidWorks Office Premium
Г ^ 3D Instant Website Г
Г COSMOSMotion 2006 Г
Р COS^SMotton2007 , Г ■
Г COSMOSWorks 2006 Г
Г COSMOSWorks 2007 Г
Г б£ Design Checker Г"
JT eDrawings 2007 f~
Г JS FeatureWorks Г
Г POMWorks Workgroup 2007 Г
rUPhotoWorks Г
Г ScanTo3D Г
Г Я? SolidWorks Animator Г
Г Ц SolidWorks Routing Г
Г IF SolidWorks Toolbox Г
Р SolidWorks Toolbox Browser P
Г l%1 SolidWorks Utilities Г
El Приложения SolidWorks
COSMOSFloWorks 2007
SolidWorks 2D Emulator
SolidWorks 30 Meeting
Г
г
г
<ar
^ От*»©***,
Рис. 7.19. Активизация COSMOSMotion
2i
COSMOSMotion - Add hew Parts
ршШШШШШШ#а
4J j Колесо-1
|;jKopnyc-1
'ДШестермя^.-!
Рис. 7.20. Предложение автоматически разделить детали на неподвижные и движущиеся
На данном шаге влиять на решение, принимаемое программой, невозможно.
Если деталь зафиксирована в сборке, то программа идентифицирует ее как
неподвижную. Даже если совокупность сопряжений с другими деталями, в
частности с фиксированными, приводит к неподвижности детали, эта деталь
Кинематика и динамика (COSMOSMotion)
603
все равно будет помещена в категорию подвижных. При этом будет создано
ограничение Fixed (Зафиксированный).
Результат обработки взаимосвязей SolidWorks процедурой COSMOSMotion
отображается в окне сообщений (рис. 7.21), а сам проект— на рис. 7.22.
Браузер COSMOSMotion в развернутом виде находится в окне справа.
CGSMOSMotiun Me**
Рис. 7.21. Результат интерпретации взаимосвязей исходной модели
$ Motion Model
■ ^ Assembly Components
В-% Parts
В ?& Moving Parts
• га ^ Колесо-1
S3- ^ Шестерня_-1
. в Sb Ground Parts
Щ §§Ь Корпус-1
Ё! 4§> Constraints
ф-^| Joints
= Ш -$ Revdute
• Е ^l\ Translational
" " ^ Совпадение27
; ^ СовладениеЗО
, <% Колесо-1
• : 5&Корпус-1
В ^ КомцентрическийЗ
. ^ КонцентрическийЗ
i ^Колесо-1
■• ; ; : -Л корпус-1
В ^ Концентрический5
i : <% Концентрический^
; ' *% Колесо-
%Ь Корпус-
• Ш Ч^ Концентри'
Й- Г> УголЗ
^ Contact
^ Couplers
'♦ Motion
Ш ^ Forces
Ш-ЦГ Results
Рис. 7.22. Результат интерпретации исходной модели
604
Глава 7
В зависимости от последовательности назначения взаимосвязей SolidWorks
результаты их интерпретации COSMOSMotion могут отличаться.
Система установила наличие трех деталей, из которых одну (Корпус) она
квалифицировала как неподвижную, поместив ее в группу Ground Parts
(Неподвижные детали), а остальные— при соответствующих условиях —
могут перемещаться. Это категория Moving Parts (Подвижные детали). И те
и другие объединены в ветвь дерева Parts (Детали). Тире и номер после
названия детали подразумевают наличие в сборке нескольких одинаковых
деталей (конкретно, соответствующих одному и тому же файлу детали).
Поскольку у нас каждая деталь присутствует в единичном экземпляре, то в тексте
будет дано только ее название. Так как в системе нет узлов (подсборок), то
ветвь Assembly Components (Компоненты сборок) листьев не имеет.
"Нематериальные" объекты системы разместились в ветвях Constraints
(Связи), Forces (Силы) и Results (Результаты). Листья, по понятным причинам
(усилия не были назначены в SolidWorks1, а результатам взяться неоткуда),
выросли только на первой ветви. Раскрыв дочернюю ветвь Joints
(Соединения) ветви Constraints, увидим множество листьев — соединений, которые
диагностировала программа (рис. 7.23). Все их нужно досконально проверить
на предмет соответствия потребностям пользователя.
Не вникая в физическую сущность полученной кинематической модели,
проверим формально ее кинематическую схему посредством инструментов
COSMOSMotion. Для этого из панели Simulation (см. рис. 7.4) подаем
команду Calculate (Вычислить). Протокол ее работы выводится в окно
COSMOSMotion Messages (Сообщения COSMOSMotion) (рис. 7.23). Проанализируем
содержание протокола.
Система обнаружила, что две подвижных детали изначально имели 12
степеней свободы (по шесть на деталь). Одно соединение типа Translational
(Поступательное движение), одно соединение Revolute (Шарнир поворота) и три
соединения Cylindrical (Цилиндрический шарнир) "сняли" 22 степени
свободы. После этого у системы осталось -10 степеней свободы (estimated DOF).
Понятно, что отрицательного числа степеней свободы реальный механизм
иметь не может, поэтому система сообщает, что фактическое число степеней
свободы (actual DOF) равно нулю, а разница — 11 степеней свободы
классифицирована как избыточные (redundant), или переопределенные,
ограничения. Далее система предлагает свой вариант модификации кинематической
1 Назначать в среде SolidWorks усилия, используя команды группы Симуляция, с
последующей автоматической передачей в COSMOSMotion можно, начиная с версии 2007 года.
Кинематика и динамика (COSMOSMotlon)
605
схемы. Модификация заключается в том, что из соединений исключаются
некоторые из ограничиваемых ими степеней свободы. Например, из
соединения Revolute убирается степень свободы Rotation about Y (Поворот
относительно Y).
COSMOSMotion Messages
Gruebler Count (approximate OOF);
Z nouing parts 12 OOF
1 translation** joint(s) -$ DuF
1 involute joint(s) -S DOF
3 c^Uniricai joiiit(s) -12 OOF
Total <estirtated> DOF - -1ft
Total CactoaX) DOF « &
Total number of redundant constraints
11
?li<* following reaundant joint constraints
will be removed;
Beuoluti?/Rotation about" Y
IReoolute, Rotation about -X '-.."", '
Transactional» Rotation about У
jTranslationai, Rotation about 2
[Концентрическиtf3. Translation along V
ж~ notation about У
Rotation about X
Rotation about V.
Rotation about X
Rotation about У
|Кониентрическ1**3,
[КовцентрическмйЗ,
|»Сонцентрический5,
|кони,ентрический&,
[Концентрическийб, _„ „ ,
]Кониектрический6, Rotation about X
ш ■'. ч ' , " '.• •
„Д*** |\ &Jsmte
"3'
Рис. 7.23. Анализ кинематической схемы модели
Надо сказать, что в изрядном числе случаев алгоритм COSMOSMotion вполне
корректно обрабатывает избыточные закрепления. Однако в данной задаче
попытаемся преобразовать систему самостоятельно.
В принципе, система достаточно проста, поскольку валы между собой никак
не связаны, а соединены только с корпусом. Проанализируем соединения,
ассоциированные с ведущим валом. Для этого развернем содержимое
пиктограммы, соответствующей колесу (рис. 7.24). Там содержатся соединения
Translational и два соединения Концентрический1. Последние два
соединения, с точки зрения COSMOSMotion (в предположении абсолютной жестко-
Причина, по которой одни соединения названы посредством кириллицы, а другие —
латиницы, следующие: первые порождены непосредственно из взаимосвязей SolidWorks,
обозначенных по-русски, а вторые сгенерированы также из взаимосвязей, но их при этом учтено более
чем одна.
606
Глава 7
сти детали и соединений на ней), дублируют друг друга. Поэтому одно из них
можно, не колеблясь, погасить1 (рис. 7.25).
$ ЙЙоп Model]
г *Щ Assembly Components
Й-Чк Parts
! El ^ Moving Parts
• ^ Translatlonal
:--4fc, КонцентричвскийЗ
l ^ КонцентрическийБ^
$)•••<% Шестерня_-1
I й §j|j Ground Parts
&-flb Kopnyc-1
Ё--ф Constraints
[±] J^ Forces
I+j Ш Res^s
Рис. 7.24. Соединения, ассоциированные с колесом
$ Motion Model
-*5$J Assembly Components
«& <% Parts
E ^& Constraints
! Б ^Joints
щ ^ Revolute
{+)-^ Translational
; ffi ^ КонцентричвскийЗ
'' ^ Концентричвск,
. l-f% Колесо-1
i ; ' ЯЬ корпус-1
Й-Ч^ Концентрическийб *
j й |> УголЗ
).- j§} Contact
1 ^§f Couplers
• :ф Motion
r+j-Jt Forces
Ш- JJ Results
Properties
Рис. 7.25. Погашение соединения Концентрический
1 Соединения не удаляются, а переводятся в состояние погашения для того, чтобы в случае
ошибки в рассуждениях их можно было восстановить с минимальными усилиями.
Кинематика и динамика (COSMOSMotion)
607
Предупреждение
На данном этапе подготовка расчетной модели будет выполняться исходя из
условий ее пригодности для динамического анализа. Если бы
предусматривался последующий прочностной анализ, то нужна была бы другая структура
соединений.
Оставшиеся соединения Концентрический и Translational тоже требуют
модификации. Во-первых, они дублируют фиксацию поворотов вала
относительно осей перпендикулярных оси вала и, во-вторых, соединение
препятствует вращению вала относительно его оси. Попытаемся решить проблему с
минимальными затратами усилий. Система допускает расчленение
соединений на элементарные составляющие. Для этого используется команда
Explode (Расчленить). Процесс ее запуска и результат выполнения показаны
на рис. 7.26 и 7.27.
ff Motion Model
^ Assembly Components
m-% Parts
В ^ Constraints
: в н& Joints
: Ф ^ Revolute
■•" ^/^ Rename
В--Ч Концентра ^ ^^
ЭКонцент| &**
4$ Колесо-1—> *
g§> Kopnyc-i; ШСмфг
. ffi ^ Концентрич<|
1 ЙВ-|>УголЗ
j§ Contact
^ Couplers
^Motion
fig § Forces
&-JU Results
Рис. 7.26. Расчленение соединения Translational
Как видно, получилось два соединения Совпадение, связывающих некие
плоскости (которые, кстати говоря, никак не идентифицируются в
программе). Тем не менее, судя по символам на модели, одно из них связывает
плоскости параллельные торцу вала, второе— вертикальную плоскость,
проходящую через ось вала, с вертикальной же плоскостью на корпусе. Последнее
соединение является производным соответствующей взаимосвязи из модели
SolidWorks. Оно стопорит поворот вала и в кинематической схеме излишне.
Переводим его в состояние погашения (рис. 7.28).
Соединение, связывающее плоскости перпендикулярные оси вала, фиксирует
две избыточных степени свободы — это повороты относительно осей парал-
608
Глава 7
лельных плоскости торца, которые уже зафиксированы соединением
Концентричность, и смещение вала вдоль оси. К сожалению, вычленить какой-
либо компонент из данного соединения невозможно. Поэтому это соединение
также гасим. Заодно гасим сопряжение Концентрический, удерживающее
один из концов ведомого вала. С точки зрения кинематики оно дублирует
соединение Revolute, создавая проблемы для алгоритма. Движению ведомого
вала мешает соединение Угол, являющееся потомком одноименного
соединения в SolidWorks. Результат показан на рис. 7.28.
9
| Assembly Components
) Parts
I Constraints
Чб Joints
\B ^ Revolute
Ш ^ КонцентрическийЗ
Й •^ Концентрическийб (suppressed)
•+] ^ Концентрическийб
$ -^ Совпадение27
Ш f> УголЗ
^ Contact
^ Couplers
м> Motion
Forces
Results
Properties
Rename
Delete
Рис. 7.27. Модель после расчленения соединения
^ Motion Model
i ^f) Assembly Components
(±1 % Parts
ij $|) Constraints
l+i -^ Revolute
[£ ^ КонцентрическийЗ
Ш -^ КонцентрическийЗ (suppressed)
{♦)■ ^, Концентрическийб (suppressed)
S3 5ь Соепадение27 (suppressed)
CtS-2! СовпадениеЗО (suppressed)
S+j fy УголЗ (suppressed)
_■■■§ Contact
^ Couplers
'C- Motion
Ш ■$ Forces
f+] Ш Results
Рис. 7.28. Модель без избыточных соединений
Кинематика и динамика (COSMOSMotion)
609
В полученной кинематической модели ведущее колесо приобрело
возможность свободно перемещаться вдоль оси. Для фиксации этой степени свободы
применяем соединение In Plane (В плоскости) (рис. 7.29). Анализом системы
(рис. 7.30) подтверждаем корректность модели: она не имеет избыточных
соединений, но при этом обладает двумя степенями свободы. Это повороты
валов относительно осей.
Рис. 7.29. Устранение осевой степени свободы ведущего вала
Рис. 7.30. Анализ кинематической модели
Одна из оставшихся степеней свободы в реальности подавляется
взаимодействием в зубчатом зацеплении, которое, однако, из-за имеющегося зазора не
является кинематической парой, оставляя степень неопределенности в
движении механизма. Назначаем трехмерный контакт посредством команды Add
610
Глава 7
3D Contact (Назначить ЗО-контакт). Она находится в контекстном меню
пиктограммы Contact (Контакт) (рис. 7.31). После подачи команды
появляется панель, на вкладке Definition (Определение) которой нужно заполнить
поле Select Parts that can contact each other (Выберите детали, которые
будут контактировать между собой). Последовательно указываем на валы
(рис. 7.32). Здесь нужно обратить внимание, что программа не предлагает
назначить конкретные объекты (грани или кромки) деталей для контакта. То
есть она анализирует взаимное положение деталей относительно друг друга
"в целом". В этой связи модель весьма нерациональна: потенциально любой
зуб одной шестерни потенциально может взаимодействовать с произвольной
гранью другой.
Рис. 7.31. Назначение ЗО-контакга Рис. 7.32. Выбор объектов для ЗО-контакга
Переходим на вкладку Contact (рис. 7.33). Она состоит из двух частей:
первая определяет податливость объектов в ходе контакта, вторая —
характеристики трения. Характеризуя податливость, можно выбрать пару материалов
(это работает, если активна опция Use Materials), ввести свои собственные
характеристики (флажок снят) или назначить параметр Coefficient of
Restriction (Коэффициент восстановления формы). Здесь, в первом
приближении, суждения такие. Подмножество команд ADAMS, включенное в
COSMOSMotion, податливость деталей, если иметь в виду реальную
конструкцию, не учитывает. Описанные параметры (в полном соответствии с
термином Materials) характеризуют абстрактные объекты, изготовленные из
неких идеальных материалов и имеющие каноническую форму (сфера + сфера
или цилиндр + цилиндр). Податливость же, например, зубчатого колеса
может быть обусловлена "в большей" степени его деформациями как детали, а
не деформацией локальной зоны в месте соприкосновения зубьев. Если отно-
Кинематика и динамика (COSMOSMotion)
611
ситься к вопросу серьезно, то рекомендуется исследовать податливость
конкретной пары посредством, например, COSMOSWorks, после чего нужно
интерпретировать результаты так, чтобы заполнить поля Stiffness (Жесткость) и
Exponent (Экспонента), характеризующие упругое взаимодействие деталей.
Что касается полей Max. Damping (Максимальное демпфирование) и
Penetration (Проникновение), то для прогноза величин, которыми нужно
заполнить эти поля, необходим неупругий анализ. Он позволит построить
кривую зависимости перемещений (в данном случае углов поворота) в
зависимости от крутящего момента. Из этого результата следует вычленить вклад,
обусловленный упругой деформацией зубьев и валов, после чего останутся
составляющие контактного взаимодействия. Их, в свою очередь, следует
разделить на упругие (Stiffness), нелинейно упругие (Exponent) и нелинейные
(Damping). Сделать это было бы непросто. Следует учитывать, что
руководство пользователя сообщает, что контактное демпфирование описывается как
кубическая функция проникновения.
Характеристики контактной жесткости и вязкости, использованные в расчете,
показаны на рис. 7.33.
Рис. 7.33. Параметры взаимодействия материалов контактной пары
Параметры, характеризующие трение (статическое и динамическое), также
могут быть привязаны к материалам или назначаются независимо от них.
612
Глава 7
В нашей задаче трение, с точки зрения собственно динамики, не играет
большой роли. Его учет позволит получить информацию о потерях
крутящего момента (надо сказать, что в коэффициент полезного действия в явном
виде программа не вычисляет). В данном примере трение не учитывается.
Как договаривались, источником движения будет крутящий момент,
действующий "извне" механизма один из концов ведущего вала. Такая нагрузка
имитируется как Action-Only Moment (Только активный момент) и создается
посредством соответствующей команды из контекстного меню пиктограммы
Forces | Action-Only (Силы | Только активные) (рис. 7.34).
I- ^ Assembly Components
(+) % Parts
ji; ^§j Constraints
ф# Forces
] j§ Springs
; ^\ Dampers
В % Bushings^
Рис. 7.34. Создание крутящего момента
Торец вала будет являться объектом приложения момента и —
одновременно— определять направление его действия. Эти объекты назначаются на
вкладке Definition (Определение) (рис. 7.35).
Рис, 7.35. Объекты, несущие крутящий момент
Кинематика и динамика (COSMOSMotion)
613
Рис. 7.36. Закон приложения момента
На вкладке Function (Функция) определяется закон приложения нагрузки
(рис. 7.36). В данном случае это будет Step (Ступенчатый) с конечным
значением 61200 Н*мм. Момент растет до этой величины за время 0,05 сек. Этими
величинами заполняются соответствующие поля:
♦ Initial Value (Начальное значение)— величина функции в начальный
момент времени;
♦ Final Value (Конечное значение) — величина функции в конечный момент
времени;
♦ Start Step Time (Время начала шага)— начальный момент времени для
данного шага;
♦ End Step Time (Время окончания шага) — конечный момент времени для
данного шага.
Если нажать на кнопку Plot (Чертить), то можно получить график функции
(рис. 7.37).
Как было условлено ранее (см. разд. 7.5.2), регулятором скорости вращения
валов должно быть сопротивление вращению — демпфер вращения или же
объект, обладающий вязкостью вращения. Таковым является Bushing
(Втулка). Она обладает регулируемой жесткостью и вязкостью, а также может быть
нагружена в шести направлениях. Если втулка изотропная, то жесткость,
демпфирование и предварительная нагрузка одинаковы для каждого из трех
поступательных движений и для каждого из трех поворотов. Подбираем
величину Torsional Properties | Damping (Свойства при кручении |
Демпфирование) так, чтобы система вращалась с заданной угловой скоростью
(рис. 7.38). Никакой жесткостью и вязкостью в других направлениях объект
не обладает. Втулкой связываем круговую кромку на торце ведомого вала и
неподвижные объекты (в данном случае сборку в целом). Вид браузера после
создания втулки показан на рис. 7.39.
614
Глава 7
Moment .vs. Time
-76500,00
-0,05-0.04-0.02-0.01 0.01 0.03 0.04 0.06 0.07 0.09 0.10
Time (sec)
Рис. 7.37. График изменения момента
Edit Bushing
ч Передача зубчатая
^|....^.1г.-.т..-.^......й..мТймм им,.»
%Ц ФШестерня__-1/00К^деЗ
Щ"О Шестерня_-1ЛЮМЕ(1деЗ ^Ж^Г^?*?
f£I rrKopnyc-1/DDMFace19 ЖСЧ* ^ iг№$
Рис. 7.38. Свойства податливой втулки
Кинематика и динамика (COSMOSMotion)
615
^Motion Model
<s|j Assembly Components
|i] % Parts
"^ Constraints
Й jf Forces
= J§ Springs
\^ Dampers
; В % Bushings
<% Шестерня_-1
«-^ Передача зубчатая
i [if \ Action Only
\ Action/Reaction
iij j¥f Results
Рис. 7.39. Браузер с податливой втулкой
Когда подготавливалась геометрическая модель, мы стремились в первую
очередь реализовать кинематическую схему механизма. Поэтому массовые
характеристики деталей могут отличаться от реальных. В частности, модель
COSMOSMotion наследует массово-инерционные характеристики их
Sol id Works. Проверяем, что же она взяла. Для этого из контекстного меню
пиктограммы, обозначающей одну из деталей, подаем команду Properties
(Свойства) (рис. 7.40). После этого в окне Edit Part (Редактировать деталь)
можем увидеть, что ее характеристики рассчитаны исходя из плотности
1 г/см3 (рис. 7.41). То есть материал попросту не был назначен. В принципе
можно было бы вернуться в SolidWorks и выполнить необходимые операции
&
^ Assembly Components
Parts
5§Ь Moving Parts
ЙЗ-Ф Шестерне
58^ Ground Parts
ffl $Ь Kopnyc-1
Constraints
Forces
Results
: В
Suppress
Delete
Ground Part
Attach To
Add Constraint ►
Add Force *
Add Motion ►
Рис. 7.40. Доступ к свойствам детали
616
Глава 7
-■..?•• , ' ,s' - - /- / .iiiwiihim «■■» imimhmiWM ■*
j Steel (Dry) ' 3 ^C \
*гМллр»ар«Ш»г^™
, 1,, , 'Source: <?J% % <^С&й«вг,/ л< Ч~^> t>^j/j
"I' ;'s * 'л^ ч^ s> гш-д-^а^;^;^*™
V J 1:\, ; Шг\шт&ШЩJtt#im* **/ '" ^
**
if'- , MlttniWiittiiViutlVfrirtiWiWiittttiWft iWrtliWrtiniVtrtlW *;;■& «V^Wy»!
* * цммум UW'tllllini: 1НЦ ,,. v > - Л%« Л"T
\ fMomrtetflfl^^gtm*^^
u**^
r#a
ijmnjiHHn M I wiiliiiiA)Wliliii,iiim1ijiiiN п цц|11>>11ЩЛ1М'1И1МЦ111/<11Ц111и1>|уЦ|"
Рис. 7.41. Массово-инерционные характеристики, унаследованные из модели SolidWorks
(они, кстати, пригодились бы при анализе прочности детали в COSMOSWorks),
однако воспользуемся базой данных COSMOSMotion. Дело здесь в том, что в
последующем будут определяться параметры контакта, которые будут
определяться на основе выбранной сейчас (или назначенной непосредственно в
соединении) пары материалов. Поэтому, исходя из соображений
единообразия источников, будем использовать материалы из базы COSMOSMotion.
В появившемся окне Edit Part (Редактировать деталь) переводим
переключатель Density | Source (Плотность | Источник) в позицию Material (Материал)
и в одноименном списке выбираем подходящий, например, Steel (Greasy)
(Смазанная сталь) (рис. 7.42).
В принципе можно для детали назначить произвольные величины для
плотности, массы, а также моментов инерции. Для этого соответствующие
переключатели следует перевести в положение Custom (Значение пользователя).
В окне Edit Part присутствует вкладка IC's (Initial Conditions — Начальные
условия), содержащая шесть полей — компоненты линейной и угловой
скорости (рис. 7.43). Мы не будем менять исходные значения — нули, поскольку
будет анализироваться состояние системы в процессе роста нагрузки от
нулевого значения.
Кинематика и динамика (COSMOSMotion)
617
шшзяшшшшяшш
ш
"- jrjvf&K
М?ШЖ j Steel (Greasy)
"3-'
* „ Заме* Г £**',/' - ^ М^юУ ^ ,C'£
rtim $№*$**:
ЦвК*
,jjt*n <
}0 V ^.ф" <4\;X ^
It
»wl(Aikg[v|b« P(
• ZA^|o-'Tv]
W ;;/J|1*; :
«itaJ^i-Л*
;/й^йн»; ^#0|&Ш v; /£. [5ЩГ
Рис. 7.42. Массово-инерционные характеристики
после назначения материала в COSMOSMotion
ШбВЗЭ
v Г
'i;%"»*; -* - ^ <
ОйнМо
^^^*
^Л^Л\*Л*ж.*:иЛч
*W щчН1щуицц1^щ ЩЦ»"! циД» цщщвдпищщ» М"Ш
Рис. 7.43. Вкладка для назначения исходных скоростей
618
Глава 7
Модель полностью определена. В браузере отображаются все объекты, связи
между ними, назначенные движения и силы. В окне с моделью (рис. 7.44)
также показаны пиктограммы, символизирующие соединения, силы,
движения (если бы таковые были в модели), а также контактные пары и втулки.
Рис. 7.44. Модель с отображением исходных данных
Определяем параметры вычислительного процесса, другие настройки
программы, состав которых инвариантен относительно модели, но величины
зависят от условий задачи. Они сосредоточены в окне COSMOSMotion Options,
которое активизируется из контекстного меню пиктограммы Motion Model
(Модель движения) в браузере или из падающего меню. Рассмотрим
параметры, влияющие на результат. Первая вкладка— World (Окружение)
(рис. 7.45).
♦ Группа Simulation Units (Единицы для симуляции) содержит поля:
• Force (Сила) — единицы для силы;
• Time (Время) — единицы для времени.
♦ Группа Gravity Parameters (Параметры гравитации) включает параметры:
• Gravity On (Гравитация действует) — параметр, определяющий
необходимость учета гравитации или, в общем случае, линейное ускорение
в произвольном направлении. Отключим этот фактор, чтобы иметь
рафинированную картину функционирования системы;
• Acceleration (Ускорение)— величина ускорения, действующего на
систему в целом;
Кинематика и динамика (COSMOSMotion) 619
• X, Y, Z — поля, объединенные в подгруппу Direction (Направление) и
содержащие компоненты вектора, определяющего направление
гравитационного ускорения. Нажимая кнопки +1, -1, можно вставлять в
соответствующие поля единичные значения.
Рис. 7.45. Вкладка World
♦ Свойство Parts управляет реакцией COSMOSMotion при изменении
Геометрической модели и может принять одно из трех значений:
• Exclude New Parts from Moving and Ground Parts (Исключить новые
детали из числа подвижных или неподвижных деталей);
• Map New Parts to Moving and Ground Parts (Включать новые детали
в число подвижных или неподвижных деталей);
• Ask Before Mapping New Parts (Запрашивать перед размещением
новых деталей).
Следующая вкладка — Display (Отображение) влияет исключительно на
параметры визуализации, определяя размер пиктограмм, обозначающих
элементы кинематической модели, их видимость, цвет и т. д. Мы рассматривать
ее содержание не будем.
Третья вкладка — Simulation (Симуляция) (рис. 7.46) предназначена для
настройки вычислительного процесса, а также определения глобальной
податливости механической системы.
620
Глава 7
COSMOSMot Ion Options
|buriion: ''"""'2 [JIT
\f J3000
X -< "''
^&*&ЫаЫ?
*7J?u^';i<AFt$^'v/
. "* X
; $$k*m. |ioooooo , f \/6«врш hoooo
ж
*&%»
Рис. 7.46. Вкладка Simulation
♦ Группа Simulation parameters (Параметры симуляции) содержит
параметры, характеризующие расчетную модель, но не связанные с ее
объектами:
• выпадающий список, определяющий, как назначается временной
интервал. Можно выбрать Duration (Продолжительность) или Time
Increment (Шаг приращения). Слева находится поле, в которое нужно
ввести необходимое значение. Мы определяем продолжительность
расчета как 0,15 сек. Оно больше, чем время нарастания силы 0,05 сек.
Оставшийся отрезок предназначен для того, чтобы процесс вышел на
стабильный режим;
• Number of Frames (Число кадров) — число кадров, для которых
запоминаются результаты. На точность анализа этот параметр не влияет. От
него зависит, в скольких точках по ходу процесса запоминаются
рассчитанные величины. Если процесс развивается "рывками", т. е. в нем
наличествуют малые интервалы времени, когда происходят
относительно большие изменения. Например, если на гладком пути длиной
1 м существует неровность длиной 1 мм, или возникла пульсация
нагрузки с продолжительностью меньше, чем промежуток между
фиксируемыми состояниями, то, будучи правильно обработаны решателем,
Кинематика и динамика (COSMOSMotion)
621
результат действия соответствующих событий не будет запомнен и
адекватно отображен на диаграммах. Отображены они, соответственно,
также будут неправильно. Визуально это проявляется в том, что на
графиках существуют разрывы (в решении, понятное дело, разрывов
быть не может). В нашей задаче факторы, стимулирующие увеличение
данного параметра, — предположение о том, что контакт между
зубьями может быть прерывистым, а также некоторая неопределенность в
том, что будет происходить в момент вступления зуба в контакт с
другим и при расхождении зубьев;
• Animate during simulation (Анимировать в ходе симуляции);
• Use mass properties stored with Parts if available (Использовать
массовые характеристики, если возможно, ассоциированные с деталями) —
ранее мы договорились, что сборка во многом схематична, поэтому
опцию делаем неактивной;
• Use Precise Geometry for 3D Contacts (Применять точную геометрию
при моделировании ЗО-контактов). Если опция активна, то расчет
будет выполняться на базе реальных поверхностей SolidWorks. В
противном случае посредством ползункового регулятора Scaling factor можно
устанавливать соответствующую величину в интервале от 1 до 100. Эта
модель подразумевает аппроксимацию решателем криволинейных
граней фасетными поверхностями, причем плотность разбиения зависит от
положения регулятора.
Начиная с версии 2006 года, в COSMOSMotion появилась возможность
придавать всем соединениям свойство податливости. Для этого на вкладке
Simulation появилась опция Make Joints Flexible (Сделать соединения
податливыми). Ее включение позволяет получить доступ к полям:
♦ Translational | Stiffness (Линейная | Жесткость) — жесткость при попытке
линейного смещения одной детали относительно другой;
♦ Translational | Damping (Линейное | Демпфирование) — вязкость при
попытке линейного смещения одной детали относительно другой;
♦ Rotational | Stiffness (Осевая | Жесткость) — жесткость при попытке
взаимного поворота деталей;
♦ Rotational | Damping (Осевое | Демпфирование) — вязкость при попытке
взаимного поворота деталей.
Реализация данной опции осуществляется в алгоритме за счет того, что всем
соединениям в направлениях, которые фиксируются этими соединениями,
присваиваются свойства изотропных податливых втулок. Они, как было
упомянуто, обладают жесткостью и вязкостью при смещении и повороте. После
622
Глава 7
активизации режима податливых соединений пиктограммы всех соединений
меняются на изображения податливых втулок, однако назначенные движения
и силы трения в направлениях, не "подверженных" действию втулок,
сохранятся.
Предупреждение
Действие Make Joints Flexible носит глобальный характер. Она применима
только к базовым соединениям COSMOSMotion1. Другие соединения при этом
становятся нефункциональны. Также в документации упоминается, что при
наличии податливых втулок не рекомендуется назначать для деталей начальные
скорости, поскольку системе придется какое-то время приходить в равновесное
состояние ("жесткие" соединения находятся в равновесии в любой момент). Это
будет сопровождаться скачками в кинематических характеристиках.
Смысл замены абсолютно жестких в заданных направлениях соединений
податливыми втулками состоит в том, что, как было упомянуто,
кинематические модели сборок Sol id Works в смысле кинематики являются
переопределенными. И— это самое главное— "переопределенными" являются
реальные механизмы. Например, вал на двух роликовых подшипниках имеет, по
сути, одну "лишнюю" опору, т. е. три переопределенных смещения и два
поворота. Это, в определенном смысле, изменяет модель движения
динамических (а таковыми в реальности являются все объекты) систем.
Замена совокупности соединений податливыми втулками является
универсальным (но имеющим, как водится, не всегда предсказуемые побочные
действия) лекарством для кинематически переопределенных моделей. Если
пользователю не хватает энтузиазма доводить их "до ума", то, сделав
соединения податливыми, можно — с высокой степенью вероятности — получить
более-менее симпатичную картинку.
Предупреждение
В документации к программе подчеркивается, что податливые соединения
только условно имитируют деформационные характеристики деталей, а также
фактическую податливость соединений в сборках.
Вторым следствием придания виртуальной податливости соединениям
является то, что оно, хоть и условно (степень условности, впрочем, зависит от
качества подбора характеристик) воспроизводя деформируемость деталей,
делает намного более адекватными результаты расчета нагрузки в соединениях
и, соответственно, приближает к реальности последующий прочностной
расчет детали в COSMOS Works на базе перенесенных туда нагрузок.
1 Результат воздействия опции на соединения различных типов описан в справочной системе
COSMOSMotion.
Кинематика и динамика (COSMOSMotion)
623
Завершая комментарии, отметим, что опция Make Joints Flexible является
полезным инструментом. Однако максимально корректные с точки зрения
динамического анализа, связанного со структурным, желательно получать на
базе индивидуально подобранных характеристик жесткости и вязкости
анизотропных, по большей части, втулок.
♦ Группа Solver parameters (Настройки решателя) (рис. 7.47) содержит
параметры, влияющие на процесс вычислений:
• Integrator Type (Тип интегратора)— тип алгоритма интегрирования
дифференциальных уравнений движения. Доступны три процедуры.
В документации указано, что решатель GSTIFF самый быстрый,
решатель WSTIFF несколько медленнее, но лучше обрабатывает модели,
порождающие осцилляции скоростей и ускорений. Третий решатель
SI2 учитывает производные ограничений и наиболее адекватно
учитывает явления, проявляющиеся в малые интервалы времени. В любом
случае наилучшим подходом является сравнение результатов,
полученных посредством каждого из трех решателей;
• Maximum Iteration (Максимальное число итераций)— максимальное
число итераций для каждого шага времени;
Рис. 7.47. Вкладка Solver
• Initial Time Step (Начальный шаг по времени) — шаг по времени,
который программа устанавливает в момент начала вычислений. Его ве-
624
Глава 7
личина должна быть достаточно малой, чтобы уловить эффекты,
появляющиеся в начальный момент времени. В данной модели, например,
этот шаг должен быть меньше, чем отрезок времени до вступления
зубьев в контакт;
• Minimum Time Step (Минимальный шаг по времени) — эта величина
определенным образом связана с точностью вычислений. Наиболее
очевидным критерием его назначения является то, чтобы он позволял
описать наиболее быстротекущие явления. Прерывистый контакт
трехмерных тел — явление из этой номенклатуры. Отметим, что
"чрезмерное" уменьшение шага иногда приводит не только к уменьшению
соотношения "сигнал/шум", когда на диаграммах, например, усилий
начинают преобладать осцилляции, затрудняя анализ значимых факторов,
но и может привести к "заклиниванию" механизма;
• Maximum Time Step (Максимальный шаг по времени) — эта величина
назначается исходя из требования того, чтобы система не пропустила
некое "короткое" событие. Наличие (или вероятность) ударов служит
основанием для уменьшения шага;
• Accuracy (Точность)— параметр, определяющий точность решения.
Он участвует в критерии сходимости на каждом шаге времени. Чем он
меньше, тем более точным будет расчет. Величина параметра
ограничена снизу значением 1е-6. Для последующего уточнения можно
уменьшить Maximum Time Step;
• Jacobian Pattern (Схема якобиана)— параметр, от которого зависит
частота обновления Якобиана. Если величина равна 100%, то матрица
пересчитывается на каждом шаге. Данная опция функциональна при
наличии кинематических пар "curve-curve" с возможностью выхода из
контакта;
• Adaptivity (Адаптивность) — параметр, участвующий в решении задач
с контактной парой "curve-curve". Руководство пользователя
рекомендует использовать величину порядка 10е-6 и менее;
• Solver Messages (Сообщения решателя)— номенклатура сообщений,
выводимых в ходе решения.
Еще одна функциональная вкладка — это Animation (рис. 7.48). Она
определяет состав картинки, отображаемой в режиме анимации, а также качество
этого процесса. Мы не будем расшифровывать все параметры, поскольку на
результаты они непосредственно не влияют. Отметим, что величина End
Frame (Завершающий кадр) ограничена величиной Number of Frames из
вкладки Simulation плюс единица.
Кинематика и динамика (COSMOSMotion)
625
^ lH^)W»HnlHlrt>rtWlllW^^ .>rt»>w^*i»wi>i-rtrti44iiW IWfriiMftE ••]
Рис. 7.48. Вкладка Animation
Подготовив исходные данные и определив настройки процедуры решения,
запускаем вычислительный процесс. Для этого на панели Simulation Panel
(она появляется по соответствующей команде из падающего меню) нажимаем
кнопку Simulate (при этом отображаются временные параметры расчета)
(рис. 7.49) или подаем одноименную команду из падающего меню или из
панели COSMOSMotion.
Рис. 7.49. Запуск симуляции из панели Simulation
В процессе расчета, если была активна опция Animate during simulation,
можно наблюдать ход симуляции— он, при соответствующих настройках,
сопровождается движением механизма.
7.5.4. Рассмотрение результатов
После выполнения расчета можно отобразить диаграммы зависимости
результатов от времени. Сначала просмотрим наиболее очевидные графики,
например, зависимость угловой скорости и углового ускорения от времени.
Выберем для этого деталь Колесо, щелкнув по соответствующей ему
пиктограмме в Браузере. Вызвав затем контекстное меню, выполняем
последовательность команд: Plot | Angular Velocity | X Component (Чертить | Угловую
скорость | Составляющую относительно X) (рис. 7.50). Кстати говоря, идеи-
626
Глава 7
тичную реакцию системы можно получить, подав аналогичную команду, но
только с компонентой вращения относительно оси Z из контекстного меню
пиктограммы, обозначающей соединение Revolute. Это соединение
определяет положение колеса относительно корпуса. При этом вращение, в отличие
от предыдущего способа, где оно определялось относительно оси X
глобальной системы координат, происходит относительно локальной оси Z
соединения.
J^.°* Add Result pbfect '►
AnoularAceofer&lGn
Artyubr*Trietjc Energy
АгнМагЙоюзгёиго about CM *
Bryyk Angles!
, ОЬШф&Ы t ss, ,
Oltatiori
- СНШ*у
s guterAngtes
ОД**Ы Energy №
■ Rodriguez Parameter*
'Total Kinetic Energy
TransJatiOriaJ Acceleration
Transitional Kinetic Energy
Transiatipna} Mfcntfitam
Tr^nSlutionalVefodty -
ymim&im.
m\
^^«w^^^^H|j
>. tomtowk
s*;- £С<щю&еп*; >
^
»
- *
*
*,
,¥
*\
>
Magnitude -4 4 |
Рис. 7.50. Последовательность команд для отображения угловой скорости колеса
График угловой скорости ведущего вала показан на рис. 7.51. Как видно, на
фоне гладкой основы присутствует пульсационная составляющая. Для того
чтобы разобраться в сущности явления, сделаем картинку более контрастной.
Для этого, щелкнув левой кнопкой мыши по оси абсцисс, выделяем ее, а
затем из контекстного меню (оно, как обычно, появляется после нажатия
правой кнопки) подаем команду Axis Properties (Свойства оси). После этого в
окне Format Axis (Разметка оси) настраиваем отображаемый интервал
времени (рис. 7.52).
Фрагмент графика угловой скорости колеса показан на рис. 7.53.
Аналогичным образом подготавливаем график для шестерни (рис. 7.54). Как видно, на
кривых присутствует пульсационная составляющая. У ведущего колеса она
менее выражена, а на шестерне ее амплитуда больше. Источником пульсаций
является взаимодействие зубьев. На колесо действует крутящий момент,
поэтому его скорость более стабильна.
Кинематика и динамика (COSMOSMotion)
627
Angular Vel - Х-Колесо-i
-10439
-20878
; -31317
-41757
0,00 а
J.07 0,09 0,11 0,12 0,14 0,15
Time (sec)
Рис. 7.51. Угловая скорость ведущего колеса
Jiiini^J'["yi''WWW'4j'J!j'%'"W'WW^'y'^^ М М'
Рис. 7.52. Выделение отрезка на оси абсцисс
Рис. 7.53. Фрагмент кривой угловой скорости колеса
628
Глава 7
Annular Vet - Y-Шестерня -1
Я
0,04
Time (sec)
Рис. 7.54. Фрагмент кривой угловой скорости шестерни
Некоторые из силовых факторов, например контактная сила, без
дополнительных манипуляций недоступны. Для их отображения нужно из
контекстных меню деталей подать последовательность команд Add Result Object |
Reaction Forces (Включить результаты для объекта | Силы реакции)
(рис. 7.55). После подачи команды раскрываем в Менеджере COSMOSWorks
ветвь Results (Результаты), а в ней— ветвь Reaction Force (Сила реакции)
(рис. 7.56). На этой ветви "растут" листья, каждое из которых "скрывает"
группу результатов, относящуюся к силе реакции одной из кинематических
пар. Нас интересуют явления в паре между зубьями, поэтому вызываем
контекстное меню соответствующей пиктограммы, в котором, в свою очередь,
выбираем команду Plot, а затем— Magnitude (Абсолютное значение).
Поскольку трение не учитывается, то это должна быть величина нормальной
контактной силы.
$ Motion Model
^ Assembly Components
&■% Parts
В ^ Moving Parts
: 1*1 % Колесо-1
в Щ>Grou ***
Ш §jjp Constraii
&■••$ Forces
It) Jff Results
Trace Path -
Unear Displacement
Angular Displacement
Vefocty
Acceleration
Рис. 7.55. Получение доступа к силам реакции
Кинематика и динамика (COSMOSMotion)
629
$ Motion Model
I- 4j| Assembly Components
Ш *% Parts
ffl Щь Constraints
ffi $ Forces
g JJ Results
; ^s Trace Path
ty Linear Disp
}f\ Angular Disp
Jfy Velocity
vj^ Acceleration
В f^F Reaction Force
ES \ ReactionForceJJushing
Ш-\ ReactionForce_Revolute2
$ *4 ReactJonForce..KoHueMTp|
{±)\ ReactionForce_yron3 (sl"
Й- |jjf ReactionMomentJJushinc :
: i+] Ц* ReactionMoment_Revolut
Ш Q ReactionMoment _Концек
Ш fjf ReactionMoment_yron3 (
&VEJXY Plots
Properties
Rename
Export CSV
Add Trace Path
Add Acceleration
Add Velocity
X Component
Y Component
Z Component
Рис. 7.56. Отображение контактной силы
Forte - Mao-Contact Колесо-1 Шестер
7309
iZ 1827
3,00 0,01 0,03 0,04 0,06 0,07 0,09 0,11 0,12 0,14 0,15
Time (sec)
Рис. 7.57. График контактной силы
Диаграмма изменения контактной силы приведена на рис. 7.57. По
сравнению с графиками для скоростей, осцилляции еще более выражены. Источник
пульсационной составляющий тот же — периодический контакт зубьев.
Выделяя на оси абсцисс фрагмент, соответствующий некоторому интервалу
времени, и подбирая на оси значений интервал, близкий к тому, в котором
630
Глава 7
изменяется функция, получаем графики рис. 7.58 и 7.59. На них также
показан фрагмент механизма в некий момент времени (это время отображается
вертикальной чертой). Как видно, выброс на кривой возникает в момент
входа очередной пары зубьев в контакт.
Рис. 7.58. Фрагмент графика контактной силы — момент перед входом в контакт
Рис. 7.59. Фрагмент графика контактной силы — момент после входа в контакт
Уточнить модель системы можно, увеличив точность расчета. Для этого
следует уменьшить параметр Accuracy, уменьшая, если необходимо,
максимальный шаг по времени (Maximum Time Step), а также подбирая
подходящий решатель. К слову сказать, иногда этот подбор необходим, поскольку
возможно прекращение расчета. В критическом варианте возможно
аварийное завершение SolidWorks. Напомним, что, увеличение точности математи-
Кинематика и динамика (COSMOSMotion)
631
ческой модели следует сопровождать подбором адекватного числа
запоминаемых кадров на вкладке Options | Simulation.
Типовая задача определения компонентов силы, действующей на элементы
системы, решается следующим образом. Например, осевая сила действует в
соединении Revolute в направлении Y глобальной системы координат.
Соответствующая последовательность команд показана на рис. 7.60, а
результат— на рис. 7.61. Сила без учета пульсаций рассчитывается по простым
аналитическим зависимостям, а вот ее "переменную" составляющую,
зависящую от многих факторов, легче оценивать посредством COSMOSMotion
(рис. 7.62). В принципе, компоненты силы в соединении должны быть равны
компонентам контактных сил. Дело в том, что идеализированная модель
содержит только по одному цилиндрическому шарниру для каждого вала.
<f? MDtion Model
.^ A-wftmhly С птрпп*пг<;
В % Parts
Ё1 $£ Constraints
; В ^ Joints
[ ш ^ Resolute
: в
Атди(аг Acceleration >
AvjirUr V«lnrifry >
ftQjfrtfctartAnges > \
ДДЗДДД1 x Component
Reaction Moment ДНЭ8ВВД
t Оли^лл tcAiC
Ma^ttxte
• $g Kopnyc-l
Рис. 7.60. Отображение осевой силы на шестерне
Force - Y-Revolute2
Г-1559
-2339
-3118
0,00 0,01 0,03 0,04 0,06 0,07 0,09 0,11 0,12 0,14 0,15
Time (sec)
Рис. 7.61. Осевая сила на шестерне
632
Глава 7
iForce - Y-Revoiute2 {
ewton)
J «S-2339 ||||||Ш
1 >- ^^^^^^H
Force-
I -3118 iMiHiMi
I 0,14
1
| u
Time (sec)
^^^^^^ш
III
flflii
0,15 |
Рис. 7.62. Фрагмент осевой силы на шестерне без маховика
Еще одной интересной разновидностью результатов является факт и
величина интерференции деталей в процессе движения. Для этого используется
команда Check Interferences (Проверить интерференцию) (рис. 7.63), которая
подается из падающего меню. Затем от пользователя требуется выбрать
анализируемые детали, после чего, определив интересующий диапазон кадров и
выполнив анализ по команде Find Now (Искать сейчас), получить список
кадров (и, соответственно, время), при которых произошло взаимопроникно-
i find Interferences Over Time
61
63
65
67
69
71
0,0018 Шестерня. Колесо-1 0,00014..
0,00186
0,00192
0,00198
0,00204
0,0021
Q.Q0216
Шестерня_...
Шестерня.....
Шестерня.....
Шестерня^.
Шестерня..
Шестеоня ,.,
Колесо-1
Колесо-1
Колесо-1
Колесо-1
Колесо-1
Колесо-1
0,00021...
0,00024...
0,00028..
0,00032..
0,00035.
0,00039...
я
Рис. 7.63. Проверка интерференции
Кинематика и динамика (COSMOSMotion) 633
вение деталей. Выделив некий кадр, можно получить параметры,
характеризующие интерференцию (рис. 7.64).
Рис. 7.64. Параметры интерференции
В данной задаче интерференция сопровождает практически каждый кадр
(в списке кадры нумеруются через один, поскольку для анализа назначалась
именно такая последовательность). Причина того, что интерференция
присутствует— использованная в программе модель трехмерного контакта,
изначально предполагающая взаимопроникновение. Этот процесс имитирует
контактную податливость через виртуальную интерференцию.
От интерференции, в принципе, можно избавиться, использовав команду Add
Impact Force (Создать силу проникновения). Параметры этой сущности
Рис. 7.65. Параметры силы проникновения
634
Глава 7
показаны на рис. 7.65. По сути, она тождественна трехмерному контакту за
исключением того, что контакт начинает функционировать, когда детали
сближаются на расстояние не больше заданного— оно назначается в поле
Length. Однако ложная интерференция есть атрибут расчетной схемы, в
которой модель локальной податливости не сопровождается реальным
деформированием.
7.5.5. Модифицирование конструкции
Попытаемся еще больше приблизить условия функционирования модели
к реальному контексту. Он характеризуется тем, что механизм приводит в
движение некий объект, который обладает инерцией, а сам привод —
податливостью. Для имитации этих свойств вставляем новую деталь— маховик
(форма его, в принципе, может быть любой — здесь определяющими
являются инерционные характеристики, которые можно назначить произвольными),
соединенный с валом-шестерней через податливую втулку (рис. 7.66). Она
обладает линейной вязкостью и упругостью в окружном направлении
(рис. 7.67). Виртуальная втулка COSMOSMotion является неким аналогом
муфты в реальном механизме. Втулку же, создающую сопротивление (ее
свойства приводились на рис. 7.38), переносим на маховик.
Рис. 7.66. Модифицированный механизм
После расчета отображаем графики угловой скорости и контактной силы для
шестерни. Угловая скорость для всего расчетного интервала показана на
рис. 7.68. Отображаемые интервалы параметра (времени) и функции
подбираем близкими к тем, которые использовались для модели без маховика.
Сравнивая ранее полученный график (рис. 7.54) с тем, который характеризует
Кинематика и динамика (COSMOSMotion)
635
конструкцию с маховиком (рис. 7.69), приходим к выводу, что шестерня
стала вращаться значительно более равномерно. Можно также заметить, что
ввод маховика привел не только к росту стабильности в "малом" масштабе,
но и увеличил инерционность системы в целом. Стабилизация скорости
достигается за период времени почти в три раза больший.
Рис. 7.67. Параметры втулки между маховиком и механизмом
Интересно сравнить данный график с аналогичным, но построенным для
маховика (если более конкретно — для шарнира, соединяющего маховик с
неподвижными (Ground) объектами) (рис. 7.70). Как видно, на вращении
маховика, как инерционного тела, осцилляции практически не ощущаются.
В контрасте с изменением скорости вращения находится трансформация
контактной силы под действием маховика. Как видно (рис. 7.71), амплитуда
выбросов увеличилась практически в два раза. Это следствие того, что,
несмотря на наличие податливости связи между шестерней и маховиком,
сопротивление изменению скорости вращения шестерни значительно возросло.
636
Глава 7
Angular Vel - 2-Revolute2
-10445
Q)
N
•20926
' -31406
-41887
0,00 0,01 0,03 0,04 0,06 0,07 0,09 0,11 0,12 0,14 0,15
Time (sec)
Рис. 7.68. Угловая скорость шестерни
Angular Vel - £-Revolute2
I ^1 nnn .__
(d eg/sec)
| м ||pig||i||
Vel-
5 ■■■
J .44276 РтмМвш
1 0,07
Time (sec)
0,09
Рис. 7.69. Фрагмент графика угловой скорости шестерни
Интересно оценить влияние дополнительного инерционного объекта,
связанного с шестерней на осевую силу. Если в отсутствие маховика пульсации не
превышали 20%, то после ввода маховика разница в величине силы
превышает два раза (рис. 7.72). Следует учесть, что в модели присутствуют несколько
факторов. Одна группа — увеличивает расчетные силы относительно
реальных. Это, например, конечная жесткость объектов, в отличие от абсолютной
их жесткости в осевом направлении как соединения, так и деталей в расчете.
Кинематика и динамика (COSMOSMotion)
637
Противоположное действие оказывает наличие податливой втулки между
валом-шестерней и маховиком. Она обладает податливостью при кручении.
Angular Vet - Z-Revolute3
;-10210
-20420
?-30630
-40840
0,00 0,01 0,03 0,04 0,06 0,07 0,09 0,11 0,12 0,14 0,15
Time (sec)
Рис. 7.70. Угловая скорость маховика
Force - Mag~Contact_Koneco~l Шестерня -1
7000
£
4500
■F*>4
0,04
0,04
Time (sec)
Рис. 7.71. Фрагмент графика контактной силы
Завершая динамический анализ зубчатой передачи, можно сделать вывод,
что, несмотря на относительную простоту объекта, его динамическая модель
неоднозначна. В ней требуется учитывать инерционные характеристики
присоединяемых деталей и узлов, а также податливость и сопротивление деталей
механизма и окружения.
638
Глава 7
0,14 0,15
Time (sec)
Рис. 7.72. Фрагмент осевой силы на шестерне с маховиком
7.5.6. Прочностной анализ элементов
динамической системы
Попытаемся проанализировать деформированное состояние элементов
механизма. Как подчеркивалось, COSMOSMotion может служить источником
граничных условий только для деталей, составляющих сборку. При этом для
каждой детали формируется набор анализов, каждый из которых
соответствует некоторому моменту времени. Граничными условиями будут усилия в
соединениях и силы инерции.
Структура соединений в механической системе далека от той, которая
существует в динамической модели. В ходе формирования последней были
удалены избыточные соединения или их компоненты. Поэтому, например, каждый
вал оказался оперт только одним концом. Более адекватную модель можно
было бы получить, назначая, например, для одного конца вала сферический
шарнир, а для второго — нулевые перемещения в направлениях
перпендикулярных оси — для этого можно использовать Inline Primitive (Перемещение
по линии). Эта комбинация соединений не порождает переопределенных
степеней свободы и, в принципе, соответствует канонической расчетной схеме
из Деталей машин.
Мы же построим иную расчетную схему. Она базируется на представлении
опор податливыми втулками. Это наиболее подходящий объект для
моделирования таких объектов, как опоры валов в цилиндрических подшипниках
скольжения или роликовых— качения. В них избыточность кинематических
Кинематика и динамика (COSMOSMotion)
639
связей компенсируется наличием зазоров и деформацией элементов реальной
конструкции.
На рис. 7.73 показан вариант модели, в которой все соединения между
валами и корпусом заменены податливыми втулками. Параметры последних
приведены на рис. 7.74. Как видно, втулка имеет высокую жесткость при
перемещении, а также при вращении, за исключением поворота относительно
продольной оси Z.
Рис. 7.73. Механизм, в котором соединения с корпусом заменены втулками
После расчета и анализа результатов начинаем подготовку к экспорту
нагрузок в COSMOSWorks. Для этого на вкладке FEA окна Edit Bushing
(рис. 7.11— см. выше) в поля Select load-bearing Faces/Edges on #
Component (Выберите грани/кромки, несущие нагрузку) следует поместить
подходящие объекты модели. Как упоминалось, выбор элементов детали
может быть произвольным (то есть определяться пользователем на основе
субъективных соображений).
После активизации COSMOSWorks, подачи команды на импорт нагрузок
движения, определения анализируемых компонентов и номера/номеров кадра
времени (рис. 7.15), открываем детали, включенные в список. На вкладке
COSMOSWorks констатируем факт создания анализа с некоторым
именем — в нашем случае это ALT-Frame-ЗООО (рис. 7.75). Число в конце —
номер кадра, состояние которого рассматривается в анализе.
Как видно, в качестве граничных условий выступают дистанционные
нагрузки — они имитируют действие валов на опоры, а также инерционные силы —
они воспроизводят ускорения детали в механизме. Расчетная модель показана
на рис. 7.76. Она приведена в деформированном состоянии на фоне
диаграммы напряжений.
Edit Bushing
' J^Kopnyc-1
ч--' <••■• 4%'^V ?, J ' ■=**
£Шестерня_-1
*v| &Kopnyc-1/DDMEdge7
; |3b;Kopnyc-1/DDMFace4 #jC"/^„ *ч\
I 4
^p>Kopnyc-1/DDMFace4
10
,po
' тШ^$Ш(т:"-
. t&fob"\^yj:
< 'ZZ& '&ЩШ* |50000 J50000 j° :fu**mw$ l y>;. II
Рис. 7.74. Свойства втулок, имитирующих цилиндрические подшипники скольжения
^Корпус
•J"; Настройки
;•• "^Датчики
1Э ^Твердотельные
В U Нагрузка/Ограничение
, qaf ALT-RemoteLoads-3
I <$ty ALT-RemoteLoads-2
<$^- ALT-RemoteLoads-4
^ ALT-RemoteLoads-1
• .§|ALT-Gravity
<$g ALT-CentriFugal
Ш Сценарий проектирования
!■■ Щ Контакт/зазоры
■ ■!% Сетка
i ЦЗ Отчет
*^*у
^й
Рис. 7.75. Менеджер COSMOSWorks и модель с обозначением граничных условий
Кинематика и динамика (COSMOSMotion)
641
Предупреждение
В программе имеется ошибка — при отключении гравитации на вкладке World
окна Options в динамическом расчете гравитация не учитывается, однако если
в полях X, Y, Z и Acceleration присутствуют ненулевые величины, то в
COSMOSWorks будет передано соответствующее ускорение.
На рис. 7.76 показана деформированная модель с диаграммой напряжений.
Если судить только на основе внешних признаков, то результаты выглядят
вполне правдоподобно. Тем не менее некоторое сомнение вызывает факт
отсутствия кинематических граничных условий. Деталь функционирует, по
сути, вне контекста. Уравновешивание нагрузок осуществляется (виртуально)
за счет автоматической активизации функции Использовать инерционное
снятие (Use Inertial relief).
Имя модели: Корпус
Имя упражнения: ALT-Frame-3000
Тип эпюры: Статический узловое напряжение Напряжение1
Шкала деформации 19.0556
von Mises (NAnA2)
• 1.44е*008
- 7.24е+007
7.06е+005
Рис. 7.76. Расчетная модель корпуса с результатами расчета
Не менее правдоподобно выглядит деформированный вид вала,
геометрическая и расчетная модель которого показана на рис. 7.77. Распределение
напряжений на фоне деформированного вида приведено на рис. 7.79. Как
упоминалось, усилия, порождаемые контактными соединениями, алгоритм
переносит не вполне корректно. Они заменяются инерционными нагрузками —
линейным и центробежным ускорением. В нашем случае это вступает в
противоречие с тем, что контактные силы действуют на вполне определенные
зубья шестерни.
Более того, при попытке выполнить расчет появляется сообщение,
показанное на рис. 7.78: "Предупреждение: обнаружена значительная несбалансиро-
642
Глава 7
ванная внешняя сила, действующая в направлении X. Она будет
компенсироваться приложением сил инерции в противоположном направлении.
Поскольку данная модель находится под действием подобной силы или слегка
неуравновешенных нагрузок, то применение опции Use Inertial relief может
повлиять на свойства модели".
Рис. 7.77. Геометрическая и расчетная модели
вала-шестерни
&„,{»i„.M,(l ■^.■■■..ri.,..;i..l,,rt.1. ..■■^..„■■ri.l,.*n.W.-,.,W.,M.Mt.A. M.^.tti ПшЙЙЛтшиПаийт ll
Рис. 7.78. Диагностика неуравновешенности
системы
Л-
\ \ 1
von Mises (NAnA2) _
^^}^"Л $
им.
2.04e+008
1. 1.78e+008
Я 1.53e+008
1. 1.27e+008
Ц 1 02e+008
p. 7.65e+007
Й. 5.11e+007
, 2.57e+007
— 2.55e+005
Рис. 7.79. Результаты расчета вала-шестерни
7.6. Выводы
Выше был рассмотрен пример использования COSMOSMotion для не
слишком типичного механизма. Однако в задаче описывается ряд характерных
Кинематика и динамика (COSMOSMotion)
643
приемов, полезных и в более распространенных проблемах. Программа
позволяет выполнять динамический анализ широкой номенклатуры
механизмов. Продукт также полезен при синтезе разнообразных объектов, например
кулачков. Здесь, правда, ответственность за создание методики применения
программы всецело возлагается на пользователя. В простейшей ситуации эта
методика сводится к перебору вариантов, а затем оператор принимает
решение о направлении дальнейшего поиска или же о том, что на некотором этапе
результат удовлетворяет требованиям.
Как и в большинстве расчетных программ, главная задача — это построение
модели, которая с приемлемой погрешностью описывает принципиальные
характеристики динамической системы. С точки зрения трудности анализа,
наиболее ответственным этапом является оценка соотношения реальной
податливости деталей и возможности ее имитировать посредством
инструментов программы. Это Impact Force (Усилие проникновения), 3D Contact (3D-
контакт) и Bushings (Втулки). Последние две функции, по сути, включают в
себя функциональность Impact Force. Только втулка создает силу реакции,
действующую как при "сближении", так и при "удалении" тел, в трехмерном
контакте тела начинают взаимодействовать с момента соприкосновения
(диагностируемого — в зависимости от настроек программы — с различной
степенью точности, а Усилие проникновения проявляет себя при достижении
некоторого зазора между телами. Когда зазор восстанавливается, то
взаимодействие тел прекращается. Если жесткость объектов такова, что
податливостью деталей ("в целом" и локальной ее составляющей) можно пренебречь,
то неопределенность исчезает, и единственной проблемой, требующей
неформального подхода, является подбор параметров: вычислительных и
физических, которые обеспечивают приемлемую точность решения.
В свете предыдущих рассуждений заключаем, что канонические задачи
теории механизмов и машин, связанные с расчетом рычажных и кулачковых
механизмов, могут быть решены практически "в лоб", поскольку не требуют
специальных навыков. Единственным минусом здесь является небогатый
выбор инструментов для построения эпюр скоростей, ускорений, усилий.
"Штатные" средства COSMOSMotion, по сути, сводятся к диаграммам в
ортогональных координатах, а также отображением кинематических и
динамических свойств соединений в виде векторов на фоне модели. Поэтому
приведение их к требованиям ТММ требует некоторых усилий. Однако программа
является очень эффективным инструментом для проверки результатов,
полученных графоаналитическим расчетом.
При использовании программы совместно с SolidWorks определенное
творчество необходимо при переходе от сборки SolidWorks к модели "реального"
механизма. Элементарные модели можно построить посредством команд
644
Глава 7
SolidWorks Физическая симуляция с доработкой того, что получилось в
COSMOSMotion. Несмотря на то, что все операции по назначению
соединений можно выполнить в COSMOSMotion, весьма желательно корректные
взаимосвязи назначить именно в SolidWorks. Интерференцию компонентов
также рекомендуется проверить в геометрической САПР. Пересечение
деталей, в принципе, допускается при расчете кинематики, но для
кинематических пар, где фигурируют контактные эффекты, наличие пространственных
конфликтов нежелательно.
ГЛАВА 8
Листовой металл —
развертки и заготовки
(SolidWorks, BlankWorks)
Задача проектирования изделий из листового металла в практике
конструктора встречается достаточно часто. Ее особенность в том, что она теснейшим
образом связана с вопросом технологической реализуемости.
Функциональность, имеющаяся в SolidWorks, позволяет моделировать формы,
допускающие получение точных в геометрическом смысле разверток, а также
некоторых типов приближенных и условных разверток. Достаточно подробно
рассмотрено приложение к SolidWorks— BlankWorks, способное оперировать
с поверхностями двойной кривизны, сопровождая получение разверток
первичной оценкой технологичности (рис. 8.1).
С
Замечание
:>
Для построения геометрических моделей использована версия SolidWorks
2007 года. Описание интерфейса соответствует этой версии.
About BlankWorks
В LA MKWORKS
Btenk Prediction Software
Version 3.0
I ■> > > '\ '',< -. ■- ^ -' s s ' / • \- *•■,'
Рис. 8.1. Информационная панель BlankWorks
646
Глава 8
8.1. Назначение
Проектирование изделий, классифицируемых как изделия из листового
металла, включает этапы моделирования изделия, получения заготовки и
разработки технологического процесса. Рассмотрим их подробнее.
Создание геометрической модели. Наиболее продвинутым является подход,
когда модель является пространственным объектом. Этот объект может
формироваться как твердое тело или описываться поверхностями. В первом
случае применяются специальные функции, имеющиеся в современных
геометрических САПР. Второй подход — использование аппарата поверхностного
моделирования. Это неизбежно для изделий, имеющих форму, которая не
может быть реализована посредством процедур первого типа. Мы не
затрагиваем ситуацию, когда изделие моделируется как пространственный
гибридный объект. Этот подход имеет место на практике, но для решения
специальных задач необходимо привести его к одной из предыдущих разновидностей.
И, разумеется, речь не идет о случае, когда проектирование выполняется
посредством чертежей. Они, за редкими исключениями, имевшими место до
появления пространственных САПР, не могут быть источником информации
для автоматизированного построения разверток.
Получение заготовки. Нередко этот этап — сознательно или нет—
подменяют понятием получения развертки (именно этот термин мы, в силу его
употребительности, будем, как правило, использовать далее). Безусловно, есть
ситуации, когда эти предметы тождественны, но, в общем случае, это
различные понятия. Процедуры, имитирующие эту операцию, интегрированы в
геометрические САПР (они, по сути, сопровождают построение самой модели),
а также могут быть оформлены как самостоятельные программы. В обоих
случаях процесс построения заготовки может сопровождаться более или
менее адекватной имитацией этапов технологического процесса.
Разработка технологии. Данный этап тесно связан с фазой проектирования.
С одной стороны, это касается технологической реализуемости изделия.
С другой стороны, на базе проекта могут быть определены некоторые
параметры техпроцесса. Мы ограничимся рассмотрением тех аспектов, которые
предполагают первичность конструкторской проработки. Программное
обеспечение, предназначенное для симуляции процесса воздействия на материал,
останется за рамками данной книги. Его эксплуатация требует специальных
познаний, а также солидного объема достоверных экспериментальных данных.
Предметом данной главы являются две процедуры. Первая — подмножество
функций SolidWorks, предназначенных для работы с листовым металлом.
Они позволяют спроектировать изделие как совокупность геометрических
элементов, присущих тонколистовым изделиям. На любом этапе формирова-
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 647
ния модели пользователь имеет доступ к заготовке объекта. При ее расчете
программа может учитывать поправки на изменение длины заготовки в ходе
ее гибки. Возможно также получение заготовки на базе твердотельной
модели SolidWorks, сформированной посредством "универсальных" команд. Эти
функции мы рассмотрим достаточно бегло, т. к. они не сопровождаются
какими-либо расчетами и, в общем, хорошо документированы. Второй
инструмент— приложение BlankWorks— разработка фирмы FTI— Forming
Technology Incorporated, Канада (http://www.forming.com). Информационная
панель программы показана на рис. 8.1. Будучи приложением SolidWorks, она
использует специальным образом подготовленную поверхностную модель.
Результатом его работы также является заготовка. Расчет сопровождается
первичной оценкой технологической реализуемости проекта. BlankWorks
имеет предка— независимую программу FastBlank, которая обменивается
информацией с геометрическими САПР через формат IGES. Несмотря на то,
что рассматриваемые продукты объединяет только цель, их совместное
рассмотрение даст пользователю весьма содержательную информацию.
8.2. Теоретическая база
Программы, описанные в данной главе, имеют в своей основе принципиально
различный математический аппарат. Процедуры SolidWorks построены на
базе аналитических методов, BlankWorks имеет базой метод конечных
элементов.
8.2.1. Развертки в SolidWorks
Как известно, классификация разверток криволинейных поверхностей в
начертательной геометрии делит их на точные, приближенные и условные.
Первые подразумевают сохранение всех линейных и угловых размеров, т. е.
деформирование материала без растяжения/сжатия (при условии, что
толщина стремится к нулю). Точные развертки могут быть получены только для
определенного класса объектов. Если пользоваться понятиями аналитической
геометрии, то к ним относятся поверхности, у которых в любой точке одна
главная кривизна равна нулю. Начертательная геометрия требует для
развертывающейся поверхности существования в любой точке плоскости,
касающейся поверхности по прямой. Разумеется, физический смысл этих
определений эквивалентен. Примерами точно развертывающихся поверхностей
являются цилиндрические и конические поверхности общего вида, а также
линейчатые поверхности с двумя направляющими и плоскостью
параллелизма. На рис. 8.2 приведен пример точной развертки объекта (твердого тела),
имитирующего линейчатую поверхность. Она представляет собой сочетание
648
Глава 8
плоских и конических поверхностей. Очевидно, что все гранные
поверхности, у которых любая вершина принадлежит максимум одной линии сгиба,
также имеют точную развертку.
( Замечание ^
Здесь и далее на рисунках приводятся реальные модели SolidWorks, а не
условные изображения. Последние, возможно, иллюстрировали бы абстрактные
понятия более точно, однако мы отдаем приоритет формированию у читателя
практических навыков работы с программой.
Рис. 8.2. Пример точно развертывающегося объекта
Если же точно развертывающая поверхность аппроксимируется гранной
(грани могут быть, например, треугольниками, плоскими
четырехугольниками и т. д.), то полученная развертка называется приближенной. При
уменьшении размеров описывающих ее объектов погрешность аппроксимации
(в смысле площади, линейных и угловых размеров) стремится к нулю.
Получение приближенной развертки не сопровождается разрывом на гладких
гранях. На рис. 8.3 —8.5 показан наклонный конус, для которого построена
условная развертка методом замены его шестигранной пирамидой,
образованной командой Бобышка по сечениям с опцией Тонкостенный элемент. Как
и в предыдущей модели, прямолинейный разрез одной из плоских граней
выполнен для того, чтобы обеспечить построение развертки.
Последняя группа — условно развертываемые поверхности. Здесь
приходится прибегать к аппроксимации исходной поверхности теми поверхностями,
которые развертываются точно. Сфера, например, описывается
совокупностью усеченных конусов вращения или же цилиндрами, обрезанными в
виде долек. На рис. 8.6—8.8 приведен пример построения одного из
сегментов сферы. Две непересекающихся дуги были получены как сечения
сферической поверхности плоскостью, проходящей через ось (наличие самой
поверхности необязательно, каждую дугу можно было бы получить как самостоя-
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks)
649
тельный эскиз). Затем была применена команда Элемент по сечениям сгиба,
в качестве объектов которой выступили эти эскизы. Полученный сегмент
является, по сути, разверткой участка цилиндрического тонкостенного тела.
Рис. 8.3. Пример.приближенно развертывающегося объекта
Рис. 8.4. Ход построения пространственной модели
Рис. 8.5. Преобразование объекта программой после ввода развертки и сама развертка
650
Глава 8
Заканчивая разговор об условных развертках, развернем ту же самую сферу,
но по другой схеме. В ней исходный объект заменяется совокупностью
усеченных конусов вращения. На рис. 8.9—8.11 проиллюстрирован процесс
получения развертки половины одного из таких объектов. Для этого, как и в
предыдущем случае, использован Элемент по сечениям сгиба, хотя можно
было бы построить "точную" развертку", применив для этого (после
построения подходящей модели) команду Сгибы (этот подход иллюстрирован
Рис. 8.6. Выделение на сфере участка для развертывания
iz f^N Поверхность-Повернуть1
..^(-)Эскиз1
. <$► Плоскость1
: ^ Листовой металл2
& Ш Элемент по сечениям сгиба
, ^ (-) ЭскизЗ
:• {£ (-) Эскиэ2
1-^ Свободный изгибЗ
Рис. 8.7. Результат построения развертываемого сегмента
g £Щ Поверхность-Повернуть1
! ! ^(-)Эскиз1
!•.-•$$► Плоскость 1
; ^ Листовой металл2
Б--А Элемент по сечениям сгиба
' ^ (-) ЭскизЗ
J ;...^(-)Эскиз2
^ Свободный изгибЗ
Й-в РазвеРтка1
Рис. 8.8. Условная развертка сегмента тонкостенной сферы
(поверхность сферы скрыта)
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks)
651
±j ^ Повер:
. .<$> Плоскость 1
j... ^ ЭскиэЗ
.<$> Плоскость2
I. ^ ЭскизЧ
Рис. 8.9. Отрезки сечений сферы горизонтальными плоскостями
(+} £Щ Поверхность-Повернуть1
!•<$> Плоскость 1
<^ Плоскость2
! gffi Листовой металл!
S3 & Элемент по сечениям сгиба
Ш Щ>Р*ч?ертка!
Рис. 8.10. Результат построения развертываемого сегмента
(fef^ Поверхность-Повернуть1
:.. <$> Плоскость 1
<§> Плоскость2
| Листовой металл 1
Ш ^ Элемент по сечениям с
li'i Ш Развертка!
Рис. 8.11. Условная развертка кругового сегмента тонкостенной сферы
(поверхность сферы скрыта)
рис. 8.12—8.15). Напомним, что сферическая поверхность присутствует в
модели исключительно как средство привязки элементов эскиза,
формирующих развертываемое тело. Все построения, в принципе, могут быть
выполнены без ее использования. '
rjg. ^ Поверхность-Повернуть1
1 <§> Плоскость 1
i. Ig^ ЭСКИЗЗ £ ч ;
. <$> Плоскость2 /
...|jj^ Эскиз4 /\
Рис. 8.12. Эскиз для построения усеченного конуса
1шшш
Параметру
элемекта^гювериуть
!£ЗН jB одном направлен?\
ц 1180.00градусов «~|
-о,—j^^,^,,»^ .... ..~,~„,„л
^ JB одном направлен yj
чй'{з.00им' j*j
Рис. 8.13. Построение конического тела
Настройки сгиба
{Коэффициент К jjj
Г* Авто^нйтие^ ^
Напряжения ' , '
Рис. 8.14. Развертывание конического тела
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 653
Рис. 8.15. Развертка усеченного конуса вращения
Независимо от размеров граней, описывающих сферу, на условной развертке
всегда появляются разрывы. В наших примерах они отсутствуют по причине
того, что мы имели дело с единичной деталью. Для построения комплекта
разверток, аппроксимирующих, например, сферу, нужно было бы иметь
множество деталей, каждая из которых содержит единственный сегмент.
Сферическую же поверхность, к которой следовало бы привязать эти
развертки, было бы лучше поместить в отдельную деталь, обеспечив
ассоциативность деталей (сегментов) через взаимосвязи, назначенные в контексте
сборки. Можно пойти и другим путем — в одной детали создать несколько
тел, находящихся в ассоциативной связи друг с другом и/или с
компоновочным объектом, а затем сохранить эти тела в различные детали, где и
развернуть их.
Возвращаясь к теме раздела, отметим, что авторы не обладают
исчерпывающими данными об алгоритмах, использованных в SolidWorks. По всей
видимости, соответствующие возможности интегрированы в геометрическое ядро
Parasolid, лежащее в основе геометрической САПР. Можно утверждать, что
для формирования развертки в нем используются аналитические
зависимости. Они позволяют получить однозначное решение (точную развертку) при
достаточно скромном объеме вычислений. Одним из исключений является
функция Элемент по сечениям сгиба. Она предназначена для построения
разверток пространственных объектов, полученных на базе двух сечений.
Для этого, по всей видимости, на плоскости воспроизводится аппроксимация
срединной поверхности полосами, каждая из которых, в свою очередь,
разбита на треугольники. Полученную таким способом развертку можно отнести к
классу приближенных. В пользу предположения о первичности
поверхностной аппроксимации свидетельствует то, что результат работы данной
команды, в отличие от других, предназначенных для разверток, никоим образом не
зависит от толщины листа или параметров сгиба.
Еще один класс приближенных разверток получается на базе объекта Ребро-
кромка, который, начиная с версии 2007 года, допускает протягивание кро-
654
Глава 8
мок вдоль совокупности прямолинейных и криволинейных кромок при
условии соблюдения ими касательности. Соответствующий пример будет
приведен ниже.
8.2.2. Развертки в BlankWorks
В основе BlankWorks лежит метод конечных элементов. Программа
накладывает на поверхность (перед этим она, по всей видимости, автоматически
преобразуется в формат IGES) сетку конечных элементов. Элементы могут быть
четырех- и треугольными. Как можно предположить, используются безмо-
ментные элементы. Это значит, что они не сопротивляются деформации
изгиба и сдвига "из" плоскости. Далее производится совмещение сетки с
некоторой плоскостью, перпендикулярной направлению движения виртуального
штампа. При этом учитывается возможность упругого и пластического
деформирования. Понятно, что так можно решить только прямую задачу —
преобразовать криволинейную поверхность в плоскую. Программа, однако,
воспроизводит заготовку, что требует решения проблемы проектирования.
Для этого, скорее всего, применяется итерационное приближение: модель —►
заготовка —► модель с поправками —► заготовка —►... Надо отметить, что
данный цикл выполняется с использованием программы достаточно быстро.
8.3. Функциональные возможности
и ограничения
По функциональности программы дополняют друг друга. Возможности
Sol id Works оптимальны для проектирования точно развертывающихся
объектов, имеющих твердотельное представление, а также некоторых
приближенных разверток и оформления рабочих чертежей. При построении разверток
можно учесть эмпирические закономерности, учитывающие изменение
длины заготовки в процессе сгиба.
BlankWorks следует использовать для объектов, содержащих поверхности
двойной кривизны. Эта программа не обладает возможностями
проектирования и предназначена исключительно для обработки готовых поверхностных
моделей SolidWorks.
Поскольку обзор будет достаточно кратким, то совместим рассмотрение
функциональности с расшифровкой предназначения элементов интерфейса.
8.3.1. Листовой металл в SolidWorks
Команды для работы с листовым металлом собраны в одноименную панель
инструментов. Она показана на рис. 8.16. На ней также присутствуют коман-
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks)
655
ды Вытянутый вырез и Простое отверстие. Они не являются
специфическими для листового металла, а помещены на панель для удобства
использования. В SolidWorks имеется два принципиально различных алгоритма
формирования объекта, для которого будет получена развертка.
[Сгибы
Создание детали из листового
Создание детали из листового
металла или добавление материала s
сущестьунзшую деталь из листового
металла.
I Плоский |
Отображение плоского массива для I
существующей детали из листового I
I металла. I
^mmmmmmmmmmmmmmmmmmmmmmmKimmmmmmmm
Рис. 8.16. Панель инструментов Листовой металл
Построение развертки из пространственной модели
Первый — проектирование детали как твердотельного объекта с
последующим получением развертки. Для этого используется команда Сгибы. При
этом деталь должна быть построена так, чтобы процедуры SolidWorks смогли
эту развертку построить. Заведомо неприемлемые для обработки объекты
следующие:
♦ деталь, состоящая из нескольких тел;
♦ разнотолщинная деталь;
♦ деталь с телом, имеющим поверхность двойной кривизны (за
исключением углов, которые будут являться конечными точками разрывов,
назначенных пользователем);
♦ деталь, у которой эскиз, формирующий профиль, содержит сопряжение
прямой и дуги, не связанные сопряжением Касательность;
♦ деталь, у которой эскиз, формирующий профиль, содержит линии,
отличные от прямой и дуги (за исключением случая, когда профиль замкнутый
и предназначен для создания базовой кромки в виде плоского тела);
656
Глава 8
♦ деталь, содержащая пересекающиеся изгибы (если только на этих изгибах
не планируется выполнять разрывы).
Соответственно и приемы, которые позволяют получить развертываемый
объект, таковы:
♦ при построении деталей рекомендуется использовать элементы,
содержащие опцию Тонкостенный;
♦ элемент Оболочка следует применять с одинаковой толщиной элементов
оболочки;
♦ желательно использовать минимальное число шагов для построения
исходного тела;
♦ при обработке тел вращения: цилиндров или конусов рекомендуется
формировать их так, чтобы система однозначно "понимала" их как
тонкостенные тела вращения.
Как упоминалось, базовая функциональность SolidWorks подразумевает
работу только с объектами в твердотельном представлении, однако способ
построения объекта, вообще говоря, для команды Сгибы безразличен. Это
может быть, в частности, результат придания толщины поверхности
подходящей формы.
После прдачи команды возникает панель Сгибы рис. 8.17, слева.
Пользователь должен заполнить следующие поля.
♦ Зафиксированная грань или кромка— объект, который остается
неподвижным в процессе построения системой развертки. Это может быть
плоская грань или линейная кромка. От того, какой объект выбран,
зависит расположение развертки относительно исходной модели, а также —
иногда— сама осуществимость операции. Например, в модели половины
усеченного конуса (см. рис. 8.14) присутствуют две плоских грани и
четыре линейных кромки, однако только последние могут быть базой для
развертки.
♦ Радиус сгиба — внутренний радиус, который будет использован системой
при построении скругления мест стыка плоских участков. Если в процессе
построения радиус окажется настолько велик, что поглотит одну из
смежных граней, то развертка построена не будет. Впоследствии для каждого
из сгибов может быть назначено индивидуальное значение радиуса.
♦ Толщина — поле в данном контексте не используется.
♦ Допуск сгиба— группа параметров, определяющих, как система будет
обрабатывать изменение длины листа в процессе перехода от заготовки к
модели. Как известно, в процессе сгиба из-за особенностей распределения
пластических деформаций (они, как правило, более активно развиваются в
зоне внешнего радиуса) происходит изменение (почти всегда — увеличе-
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 657
ние) длины детали. Этим, собственно, и отличаются термины "развертка"
и "заготовка". Если изменения длины срединной поверхности в процессе
изготовления детали (в компьютерной модели — при превращении
заготовки в деталь) не происходит, то эти понятия тождественны. Система
обрабатывает эту ситуацию тремя способами:
• посредством использования параметра Коэффициент К,
определяющего местоположение срединной (недеформируемой) поверхности
относительно толщины листа. Параметр отсчитывается от внутреннего
радиуса сгиба. Если К равен 1/2, то изменения длины не происходит;
Рис. 8.17. Параметры команд Сгибы и Базовая кромка/выступ
658
Глава 8
• через Допуск сгиба — длину, которую будет иметь круговой участок
заданного радиуса и толщины;
• посредством Вычисление сгиба — размера, на который уменьшается
совокупная длина наружной ломаной кромки объекта после появления
в нем сгиба.
Кроме того, возможно использование созданных пользователем Таблиц
сгибов, в которых для любого из указанных способов можно определить
величины в зависимости от толщины листа, радиуса и угла сгиба. Таблицы
могут быть созданы в текстовом файле с расширением btl, а также — этот
способ наиболее популярен — в формате MS Excel. В поставку SolidWorks
входят образцы таблиц, находящиеся в каталоге, путь к которому
прописывается на вкладке Инструменты | Настройки пользователя |
Месторасположение файлов. Далее следует в выпадающем списке Отобразить
папки для выбрать элемент Таблицы сгибов листового металла. Как
правило, различные таблицы соответствуют определенным материалам
или классам материалов. Более подробную информацию о том, как эти
таблицы заполняются и используются, можно получить в справочной
системе SolidWorks.
♦ Авто-снятие напряжений — способ обработки углов в месте
примыкания трех граней или двух граней с несовпадающими торцами.
♦ Настройки разрыва — множество кромок, присутствующих в
призматических телах, которые должны быть разделены в процессе построения
развертки.
♦ Изменить направление— кнопка, после нажатия на которую меняется
направление разделения в угле.
♦ Зазор по умолчанию— опция, управляющая необходимостью
назначения величины зазора в разрывах, отличного от того, который принят по
умолчанию.
Модификация модели как объекта из листового материала
Второй подход к созданию объектов из листового материала —
использование специальных команд, которые предназначены исключительно для этих
целей. Построение начинается с формирования эскиза, после чего подается
команда Базовая кромка/выступ, которая "сообщает" системе, что объект
должен будет подчиняться соответствующим правилам. Панель, содержащая
поля, которые определяют исходные параметры детали, показана на рис. 8.17,
справа. Оригинальными, относительно команды Сгибы, являются поля
Толщина и Использовать таблицу размеров. Последняя опция (она
появилась в версии 2007 года) ограничивает выбор толщин предварительно
созданной номенклатурой, а доступный радиус сгиба становится зависимым от
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 659
толщины. Эти совокупности размещаются в таблицах, находящихся в папке
Sheet Metal Gauge Tables.
После создания объекта из листового металла становятся доступны команды
добавления специальных элементов в модель. Некоторые из них описаны в
примерах настоящей главы.
Последний из алгоритмов — построения на базе Элемента по сечениям
сгиба. Оно применяется к двум, в общем случае, пространственным эскизам,
содержащим незамкнутые гладкие кривые. В результате получается тело,
аналогичное тому, как если бы поверхности, натянутой на эти два сечения,
придали бы толщину. Такая поверхность, будь она построена, являлась бы
линейчатой поверхностью с двумя направляющими. Примеры использования
данной команды приведены в разд. 8.2.1.
Рис. 8.18. Построение винтового тела и его развертка
Актуальной задачей, решаемой посредством Элемента по сечениям сгиба,
является построение заготовки для винтовой поверхности (реализованной,
разумеется, в виде тела). Модель, построенная на базе двух эскизов, один из
которых винтовая линия в трехмерном эскизе (она перенесена туда с кривой,
которая получена командой Спираль), а второй — отрезок на оси, совместно
с разверткой показана на рис. 8.18. Винтовое тело реализовано в виде
сегмента, описывающего четверть полного оборота. Из соображений симметрии
следует, что контурами развертки должны быть две дуги. Полученный же
результат демонстрирует некоторое отклонение от идеализации. Оно усугуб-
660
Глава 8
ляется, если за один прием попытаться описать половину оборота. Можно
сделать вывод, что используемое на практике упрощенное описание
заготовки как сектора с отверстием не является существенно худшим вариантом по
сравнению с моделью SolidWorks. Интересным фактом является то, что
различие между длиной наружной спиральной кромки и наружным контуром
развертки минимально, в то время как отклонение в длине внутренней кривой
на развертки и линии на оси в модели более значимо.
При установке SolidWorks в Библиотеке проектирования, в библиотеке
стандартных деталей, в папке Sheetmetal, в подпапке Lofted bends размещается
набор переходных элементов между сечениями различной формы,
построенных посредством команды Элемент по сечениям сгиба.
Независимо от того, как была построена деталь из листового металла, для
отображения ее в плоском состоянии можно использовать команду Плоский.
Для этого есть и другие способы, например, команда Разогнуть позволяет
выпрямить выбранные сгибы.
В качестве примера получения развертки на базе тела рассмотрим объект,
показанный на рис. 8.19. Построения начинаются с призмы, к которой
добавляется усеченная пирамида — бобышка с уклоном (рис. 8.20, слева). На
основании командой Линия разъема выделяем полосу (рис. 8.20, справа). Затем
применяем команду Оболочка с удалением полученной ранее грани в
основании (рис. 8.21). Этот способ формирования заготовки дает шанс на то, что
твердотельную модель можно будет превратить в деталь из листового
металла.
Рис. 8.19. Модель детали из листового металла, полученная на базе тела
Подаем команду Сгибы (рис. 8.22), определяя радиус сгиба по умолчанию,
алгоритм расчета удлинения заготовки в процессе сгиба (в данном случае это
коэффициент смещения нейтрального слоя)— он определяется в поле
Допуск сгиба, способ обработки углов — поле Авто-снятие напряжения.
Поскольку в исходном ее состоянии деталь не может быть изготовлена из листа
без деформации вытяжки, то следует выполнить разрывы, заполняя поле
металл — развертки и заготовки (SolidWorks, BlankWorks)
661
Рис. 8.20. Твердое тело до и после выполнения линии разъема
Рис. 8.21. Оболочка на базе тела — вид и разрез
_
I Iм"'
4!
вменить направление
0.50мм -J"
!
Рис. 8.22. Вставка сгибов с указанием линий разрыва
662
Глава 8
Настройки разрыва, а также назначая величину Зазор — это расстояние
между внутренними кромками граней, получившимися после разрыва.
Одновременно с выбором кромок, по которым будет разделяться тело, можно выбрать
способ формирования угла — для этого предназначена кнопка Изменить
направление.
Результат превращения тела в объект из листового металла показан на
рис. 8.23. Позитивной особенностью алгоритма обработки объектов данного
Рис. 8.23. Деталь из листового металла со сгибами и разрывами
Рис. 8.24. Вставка объекта Ребро-кромка и результат этой операции
Листовой металл — развертки и заготовки (SoIidWorks, BlankWorks) 663
класса в SoIidWorks является возможность сочетать два типа команд— "от
модели", как это делалось до сих пор, и "от развертки". Команду Сгибы
применять можно только один раз. Поэтому дополнять модель можно только
с использованием команд группы Листовой металл.
Отгибы вдоль внутренних контуров отверстия получаем командой Ребро-
кромка. Параметры, определяемые в одноименной панели, модель в режиме
предварительного просмотра, а также результат выполнения команды
показаны на рис. 8.24. При создании подобных элементов модели следует уделять
пристальное внимание на опции Отсечь боковые сгибы и Тип снятия
напряжения, управляющие тем, как обрабатываются углы.
Объект Ребро-кромка строится на базе эскиза (эскизов, если одновременно
указывается несколько кромок). Этот эскиз (эскизы) размещается в Дереве
конструирования SoIidWorks "за" пиктограммой Ребро-кромка# и допускает
редактирование (рис. 8.25). Что ценно, вид кромки в плане можно изменять
существенно, обращая особое внимание на геометрическую реализуемость в
зоне углов. В данном примере мы изменим отгиб, имеющий изначально
прямоугольную форму на трапецию (рис. 8.26).
g-fc Ребро-кромка 1
;....£* (-) эск^Де»«кУ(Эскиз2г> / J
;.. g; (-)эсю .Отобразит*» ' -" - \
Рис. 8.25. Редактирование базового эскиза Рис. 8.26. Модель
объекта Ребро-кромка с измененным отгибом
664
Глава 8
Инструменты формы
Предположим, что на детали нужно создать выштамповку с фигурным
отверстием. Оптимальным средством для реализации подобных объектов в
Sol id Works является объект Инструмент формы. Для создания
нестандартного элемента нужно получить тело, имеющее вид, показанный на рис. 8.27,
внизу. Заготовка для результирующего тела показана сверху. Она
необходима для того, чтобы с наименьшими усилиями построить скругления по
контуру.
Рис. 8.27. Последовательность состояний модели
при построении заготовки инструмента формы
Затем подается команда Инструмент формы, в панели которой (рис. 8.28)
нужно заполнить поле Ограничивающая грань, поместив в него основание,
и поля Удалить грани — на месте этих граней в выштамповке будут
выполнены отверстия.
Факт наличия в Дереве конструирования детали элемента построения
Инструмент формы не означает возможности использовать деталь в этом
качестве. Для этого нужно поместить деталь в Библиотеку проектирования
SolidWorks. Для этого деталь, "взятую" указателем мыши, можно методом
"drag-and-drop" перетащить в папку forming tools, находящуюся в
Библиотеке проектирования, или в любую из папок (в том числе и созданную
пользователем посредством команд контекстного меню) этого каталога. Кстати
говоря, если возникнет необходимость размещать собственные инструменты
формы в папке вне forming tools, то эту папку нужно зарегистрировать в
системе в этом качестве, подав команду Папка инструментов формы из
контекстного меню соответствующей пиктограммы.
Поместить деталь в библиотеку проектирования в качестве библиотечного
элемента можно посредством команды Добавить в библиотеку (рис. 8.29).
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks)
665
В окне Добавить в библиотеку (рис. 8.30) следует указать местоположение
библиотечного элемента.
ШШШШШШш
Рис. 8.28. Выполнение команды
Инструмент формы
in *э а /> •
В <Й Design Library
• Ё? annotations
$-С) features
В w forming tools
г- © embosses
: &2 extruded flanges
S? lances
'•-& louvers
! © ribs
'•••■© новые фориы
ИЗ Ё? parts
Ф-С^ routing
&/ smart components
l+j fe Канавки и проточки
Sj-Й Оформление
:■■ g Toolbox
$ ®3D ContentCentral
ii] © Содержание SolidWorks
^&
Опора
Рис. 8.29. Подача команды
Добавить в библиотеку
Размещение инструмента формы на детали происходит посредством
операции drag-and-drop перетаскиванием требуемого элемента из библиотеки
проектирования на плоскую грань. Для изменения ориентации "внутрь-наружу"
следует нажать клавишу <ТаЬ> на клавиатуре. В пределах же грани, на
которой размещен инструмент формы, его положение изменяется посредством
привязывания ассоциированного с ним эскиза. Это можно сделать в процессе
вставки элемента (рис. 8.31) или в готовой модели посредством команды
Редактировать эскиз.
Отображение детали из листового металла в плоском состоянии
осуществляется по команде Плоский— после ее подачи разгибаются все сгибы
(рис. 8.32). Если есть желание разогнуть их выборочно, то используется одна
или несколько команд Разогнуть с указанием выпрямляемых объектов. Для
возврата в согнутое состояние в этом случае нужно использовать одну или
несколько команд Согнуть.
666
Глава 8
Рис. 8.30. Помещение Рис. 8.32. Результат выполнения команды Плоский
инструмента формы
в Библиотеку проектирования
( Замечание )
Если вырез выполняется на модели в согнутом состоянии, то сквозной вырез
(а в версии SolidWorks 2007 года и эскиз совместно с его размерами на плоской
грани), построенный на модели в согнутом состоянии, автоматически
транслируется и на развертку. Для получения в согнутой модели выреза, созданного в
контексте развертки, последнюю нужно получить командой Разогнуть, после
чего можно выполнить вырез и вернуть модель в исходное состояние, подав
команду Согнуть.
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 667
Команда Плоский, будучи применена к детали из листового металла, не
позволяет сразу увидеть на развертке границы сгибов и линии сгиба. Эти
объекты можно отобразить, отключив опцию Объединить грани панели
Развертка (она появляется по команде Редактировать определение, которая
находится в контекстном меню пиктограммы Развертка# в Дереве
конструирования) (рис. 8.33) и отобразив эскиз Сгиб-линии#, находящийся "за"
пиктограммой развертки. В панели Развертка также присутствует опция
Упрощение сгибов, после активизации которой система пытается упростить
форму сложных кромок, ограничивающих зоны сгибов, а также опция
Обработка углов, управляющая геометрической реализуемостью развертки в
местах пересечения сгибов.
Рис. 8.33. Настройка вида развертки с отображением сгибов их эскизов
Создание модели как объекта из листового материала
Посредством команд группы Листовой металл модель можно создавать и с
самого начала. Допустим, нужно спроектировать деталь, показанную на
рис. 8.34. Первым этапом является создание объекта Базовая
кромка/Выступ, который базируется на некотором эскизе. Если эскиз замкнут,
как в данном случае (рис. 8.35), то получается плоское тело. Если разомкнут,
то создается призматический профиль, причем скругления в местах сгибов
выполняются автоматически в соответствии с настройками,
присутствующими в панели Базовая кромка/Выступ (в данном случае поля Радиус сгиба в
панели нет, поскольку эскиз порождает плоское тело).
668
Глава 8
Рис. 8.34. Модель детали из листового металла,
полученная посредством специальных команд
Чтобы продемонстрировать функциональность алгоритмов работы с
листовым металлом, сначала создадим четверть модели, поэтому эскиз основания
также описывает четверть результирующего объекта.
Ч& |Ь50им jtf]
Ф Реверс направления
Рис. 8.35. Начальная операция при построении детали из листового металла
Боковые стенки (рис. 8.36) получаем командой Ребро-кромка, уже
использованной в предыдущей модели. Она содержит значительное число настроек,
позволяющих удовлетворить абсолютное большинство потребностей
инженера.
Наклонные отгибы (рис. 8.37) также синтезируются этой командой, но с
заполнением полей, определяющих угол наклона отгибов. Для этого в группе
полей Угол панели Ребро-кромка заполняем поле Угол кромки. К слову
сказать, соседнее поле Выбрать грань, а также переключатель с
положениями Перпендикулярно к грани/Параллельно грани позволяют
устанавливать ассоциативные привязки к уже имеющимся граням (ими могут быть
грани тела в детали, грани поверхностей в детали или соответствующие объекты
в сборке, если деталь редактируется в ее контексте). Обратим внимание на то,
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks)
669
что профили кромок смежных граней генерируются программой
автоматически, образуя зазор, величина которого назначается в поле Расстояние зазора.
гр l'"cnc»%?o&a"ft> радиус по
умолчанию
/^ | Ъ 0*>м
, ^ j 0.25мм
"±1 \
Ш&ШМШ&А^<£Шыь,
Охсеч» боковые
сгибы
Г" Ответить
^ | од.ООградусов ~Н i
ГГТГ"":"77777*77777..."* .777""! ■ Г"Допуск егкба
?Ш,&&£&тх£*£ж^
: ^ 1 [ На заданное расстоя^) [ }J?J до снято»
^0 J 12.00мм
Рис. 8.36. Создание отгибов перпендикулярных к основанию
Верхние замыкающие грани (рис. 8.38) также создаются командой Ребро-
кромка с назначением угла, определяющего наклон, или же привязкой
направления вытягивания кромки к имеющимся объектам модели. Расстояние
вытяжки (поле Длина) может определяться пользователем вручную, а может
и идентифицироваться системой при попытке вытянуть кромку на
расстояние, превышение которого приводит к нереализуемости проекта.
Эффективной функцией является команда Изгиб. Порождаемый ею элемент
построения базируется на линии эскиза (рис. 8.39). При активной опции
Зафиксировать длину проецирования система автоматически подбирает
размер вставляемого материала так, чтобы сохранить габариты изменяемой
грани в плане.
Функциональность команды Зеркальное отражение (рис. 8.40)
распространяется в том числе и на тела, полученные командами Листовой металл.
Например, последовательно копируя четверть и половину модели (фактически
тела) относительно вертикальных плоскостей или граней, можно получить
тело, сохраняющее атрибуты, присущие родительским объектам, в частности,
способность разворачиваться на плоскость и быть дополненными другими
элементами листового металла.
'дак. профиль кроме
р 1^псяьзо#агьрздмусяо
; [jj 152.00градусов "*rj I
: .
Рис. 8.37. Создание наклонных отгибов
ШШИВШИШ!!
t дек, профиль кром*
' 1
у Использовать радиус г»
УИОПЧЯИНЮ
г, , , ■ иг, г-||--м».м -■-■■■' ■
! ^ |з.00н*
^ |1.00мм
^ш^^^%^#^
[^ | Зв.ООградусов
\ , , ,.„..
«&$ i
«S3 j
"""' .-»г„1
„iy„jl
щттт^<*¥^
Шйк^^1
^ [на заданное расстоя ^| j
#£ |44.00ии
Ж*
L
э|
Рис. 8.38. Создание горизонтальных отгибов
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks)
671
Зафиксированная граны
р Ислользоеагь радиус
по умолчанию
^ ] 1.00мм
\ ^ |на заданное расстоя!^|
^ j Ю.ООмм ~*j|
Расположение раэм&ра?
р- Зафиксировать длину
1 проецирования
Q |90.00градусов -jj
Рис. 8.39. Модификация плоской фани посредством изгибов
^Щ^Мшт:ЬфеЬнт^:
Г" Сшить поверхности
Р Распространить
свойства
ьидимскти
Рис. 8.40. Построение симметричного тела
672
Глава 8
Вентиляционные отверстия
В панели Листовой металл присутствует команда Входное отверстие
(в справочной системе программы она фигурирует под названием
Вентиляционное отверстие). Эта команда применяется к эскизу, который должен
содержать несколько семейств линий. По терминологии программы это:
♦ Граница— замкнутый профиль, образованный прямыми, дугами и
сплайнами;
^ 110.00мм
Рис. 8.41. Создание вентиляционного отверстия
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 673
♦ Ребра — сегменты эскиза, расположенные, как минимум, одним из концов
на границе или на перекладине;
♦ Перекладины — сегменты эскиза, опирающиеся, как минимум, одним из
концов, на ребро;
♦ Границы заполнения— замкнутый контур, который будет заполнен
материалом.
Глобальным требованием к структуре эскиза является то, что при его
вытягивании, сопровождающемся приданием сегментам толщины, не должно
появляться новое тело.
Вентиляционное отверстие может применяться не только к телу,
идентифицируемому системой как листовой металл, но и к произвольному телу,
имеющему плоскую грань. Применительно к разрабатываемой детали
вентиляционное отверстие может быть создано с параметрами, показанными на
рис. 8.41.
Нестандартные выштамповки
Базовая функциональность SolidWorks не позволяет, применяя инструменты
формы, выполнять выштамповки на неплоских гранях и, в частности, в
местах сгибов. Тем самым для построения, например, угловых выштамповок
требуются команды, не входящие в группу Листовой металл. Их
использование лишает модель свойства разворачиваемости. Поэтому
продемонстрированные ниже операции следует выполнять на специально созданной
конфигурации модели, не влияющей на структуру листового металла.
Одним из рациональных приемов может быть применение команды Отступ,
которую можно трактовать как некий виртуальный штамп, вытесняющий
материал детали. В отличие от команды Деформировать, порождающей
поверхности свободной формы, результатом действия процедуры Отступ
является точное повторение формы штампа или же эквидистантой к нему
поверхности. Виртуальный штамп может состоять из одного или нескольких тел.
В данном случае пусть это будут цилиндры, проникающие в тело модели,
Рис. 8.42. Вспомогательные тела
674
Глава 8
с осями, расположенными под назначенным углом к горизонтальной грани
(рис. 8.42).
Панель Отступ с заполненными полями показана на рис. 8.43. Интересным
моментом является то, что команда позволяет не только смещать
выдавливаемые грани по эквидистанте относительно формообразующих тел, но и
'ШШЫ
Конечное телек
тело<1>
@ II ерАое
С Сохранить выбор
<• Удалить выбор
Область телдинструиентд:
Щ
Г Вь^ез
штштштшшт
'^шшштшш^,
: S^I 1.50мм
[^ 10.00мм
^ШШй^^
' ^J :
и;
Рис. 8.43. Создание угловых выштамповок
Рис. 8.44. Модель с угловыми выштамповками
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 675
придавать телу в деформируемой зоне толщину, отличную от исходной. Дело
здесь в том, что объектом действия команды Отступ может быть не только
тело в детали из листового металла, но и произвольное тело, а также
поверхность.
Результат выполнения команды показан на рис. 8.44. В целом он
удовлетворителен, за исключением того, что по контуру выштамповок отсутствуют
скругления, строить которые приходится отдельно, соблюдая соотношение
между толщиной листа и радиусами наружного и внутреннего скруглений на
соответствующих кромках.
Выводы по алгоритмам построения моделей
из листового металла
Заканчивая сравнение двух алгоритмов построения моделей деталей из
листового металла, коснемся вопроса об удобстве их применимости для
расчетов. То, что получено в последнем примере, ни для каких методов анализа не
пригодно. В зависимости от расчетной модели, придется или достраивать
тело, заполняя разрывы в углах, или же генерировать поверхность, скорее
всего, срединную, ликвидировать разрывы, а потом или использовать
поверхность для расчета непосредственно, или создавать тело на ее основе.
Разумеется, можно комбинировать два типа операций: с поверхностью и с телом.
В контексте этих затруднений, путь модель -> развертка может, несмотря на
необходимость соблюдать определенные правила построения,
обеспечивающие пригодность модели для разворачивания, быть более рациональным.
Иногда, несмотря на относительно высокую трудоемкость первых этапов,
начинать построения можно с поверхностного представления.
Соответствующая модель используется для расчета, затем на ее основе строится тело,
которое тоже может быть подвергнуто расчету, а затем упрощено до
состояния пригодного для развертки — здесь возможности так называемого
прямого редактирования SolidWorks весьма обширны.
Объекты двойной кривизны
в моделях из листового металла
Одним из значимых нововведений SolidWorks 2007 в функциональности,
связанной с обработкой листового металла, стала возможность генерировать
модели с отбортовками без выполнения разрывов вдоль смежных кромок отбор-
товок. Характерный пример показан на рис. 8.45. Рассмотрим процедуру
построения таких объектов. Программа не в состоянии получать развертки уже
готовых моделей с отбортовками, однако предоставляет последовательность
676
Глава 8
команд, реализующих требуемую геометрию, заведомо обладающую
свойством разворачиваемости.
Рис. 8.45. Модель из листового металла с отбортовкой
Первым шагом является создание объекта из листового металла посредством
команды Базовая кромка/Выступ (рис. 8.46). Этот элемент должен
базироваться на замкнутом эскизе. Те углы эскиза, вдоль которых будет
протягиваться отбортовка, должны быть скруглены.
Р" Реверс направления
Рис. 8.46. Создание основания
Отбортовка создается посредством команды Ребро-кромка, в диалоговом
окне которой (рис. 8.47) можно указывать как прямолинейные, так и
криволинейные (в том числе и описанные сплайнами) кромки, являющиеся
касательными по отношению друг к другу. Как и в случае, когда кромки, вдоль
которых протягивается отбортовка, являются прямолинейными, можно
указывать угол кромки (по сути, уклон), радиус сгиба, другие параметры.
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks)
677
Полученную модель можно дополнить посредством выреза, выполненного
для модели в согнутом состоянии. Если в соответствующей панели
активизировать опцию Перпендикулярный вырез (рис. 8.48), то результатом будет
то, что на модели в согнутом состоянии (предыдущий рис. 8.47) грань,
ограничивающая контур, будет скорректирована системой так, что она станет
ортогональна боковым поверхностям. Развертка полученной модели будет
генерироваться системой автоматически, а отобразить ее можно в
произвольный момент посредством команды Плоский (рис. 8.49).
«да*?, профиль крот»
^ Испогн?!ю&гг|? радиус №
уноячвчию
\^\ рТБГ
I 0Ы\
! Q | ТЭ.ООгрвдусов
*j
h ^Ь [На заданное расстояние ^|
l-FLft
Г" Отсе-sb 6оковь« сгибы
Р Сместить
Рис. 8.47. Создание отбортовки по контуру основания
Надо сказать, что для того чтобы решить обратную задачу — в согнутом
состоянии получить вырезы, сделанные в плоском состоянии, приходится
использовать обходные приемы. Сначала нужно, используя команду
Разогнуть | Найти все сгибы, получить плоское состояние, выполнить вырез, а
затем вернуть модель в согнутое состояние командой Согнуть | Найти все
сгибы.
678
Глава 8
ШШШШШШШ§ШшШ
[dйШ!fШfЯШ!Ш&шtt«&ь!>. ^ а а«, ... &&■
, ^'(насквозь J*j
'1
ГОк
Г" Связан с толщиной
«— Переставить Сторону для
1 выреза
F
ГЪрпвндик, ei>fp$^ !
{Насквозь
2}
Рис. 8.48. Выполнение перпендикулярного выреза
Рис. 8.49. Вид плоской заготовки
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 679
Оригами
На первый взгляд, точная развертка существует и для объектов типа
"оригами", когда, например, некая грань четырьмя сгибами разделяется на четыре
грани, причем все сгибы должны выполняться одновременно, а сама
процедура изготовления сопровождается деформацией (как правило, обратимой)
материала вне линий сгиба. Однако в этом случае существуют вершины,
разделяемые одновременно тремя гранями. Соответственно в зоне возле этих
вершин происходит деформация материала с вытяжкой/сжатием, которые
условностями, лежащими в основе листового металла SolidWorks, не
воспроизводятся — стандартная процедура подразумевает выполнение разрывов.
Паллиативным средством для создания твердотельных моделей с
обеспечением возможности проектировочного геометрического расчета (с
определенными ограничениями) является следующий алгоритм.
Предположим, что нужно спроектировать объект, подобный показанному на
рис. 8.50. Обязательным условием является получение его из единственного
листа без склеек и разрывов и, естественно (в рамках темы построения
разверток), с возможностью быть совмещенным с плоскостью с минимальной
деформацией.
Рис. 8.50. Готовая модель
Проектирование начнем с развертки. Причина в том, что в данной модели
углы между гранями связаны определенными соотношениями — углы между
двумя парами граней должны быть одинаковыми (рис. 8.51). Если же строить
модель "от развертки", то ее геометрическая реализуемость обеспечивается
автоматически.
Развертку (правильнее сказать, ее аналог) выполняем в виде плоской
поверхности, на которой затем линиями разъема наносим разметку, получая члене-
680
Глава 8
ние в виде совокупности граней. Затем деталь помещаем в контекст сборки, в
которой можно создавать новые детали, а в них— копии поверхностей. Из
получившихся деталей можно воссоздать сборку (рис. 8.52 и 8.53), которая —
при корректно подобранных сопряжениях— может иметь кинематическую
подвижность.
Рис. 8.51. Заготовка с линиями разъема
Рис. 8.52. Сборка из поверхностей — разнесенный вид
Чтобы ликвидировать кинематическую подвижность, назначаем
дополнительные сопряжения в виде величины одного из углов, определяющих
состояние сборки. Затем в контексте же сборки создается деталь, в которую
командой Эквидистанта копируются грани деталей сборки (рис. 8.54). Эти
грани можно сшить, обрезать, а затем скруглить кромки (рис. 8.55).
Схожими манипуляциями можно получить кинематически подвижную
сборку, состоящую из вновь созданных деталей, которую можно привести в
плоское состояние. Это и будет заготовка детали — ее аксонометрическая
проекция на фоне согнутой детали показана на рис. 8.56, а ортогональная
проекция — на рис. 8.57, сверху. Разумеется, данный алгоритм является только
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks)
681
Рис. 8.53. Сборка из поверхностей
Рис. 8.54. Деталь в поверхностном представлении — с обрезкой плоскостью
Рис. 8.55. Поверхность со округлениями
682
Глава 8
первым приближением, которое не учитывает как собственно геометрические
элементы — скругления, так и технологические особенности. В данном
случае это изменение длины материала при сгибе и упомянутая вытяжка в
вершинах, в которых сходятся три кромки — там присутствует грань, имеющая
сферическую или какую-либо другую поверхность двойной кривизны.
Описанный алгоритм, базирующийся на манипуляциях в контексте сборки,
выглядит достаточно трудоемким. Однако он обеспечивает ассоциативность
между объектами различных типов, а также кинематику сборки,
предоставляющую известную свободу при проектировании. Понятно, что SolidWorks
предоставляет и более очевидные способы для получения аналогичных
результатов.
Рис. 8.56. Сборка из поверхностей на базе детали с обрезкой —
исходное и плоское состояние
В принципе, можно было бы модель с рис. 8.50 или ее вариант без скругле-
ний развернуть посредством "штатных" команд группы Листовой металл.
Для этого пришлось бы выполнить необходимый набор вырезов на модели со
скруглениями (как это показано на рис. 8.58). Модель в виде тела без скруг-
лений можно было бы скорректировать посредством команды Разрыв. Далее
можно было бы использовать команду Сгибы, а затем получить плоское
представление посредством команды Плоский (рис. 8.57, снизу).
На рисунке приведены две заготовки— полученная раскрытием сборки, и
как плоское состояние детали из листового материала. Существенное, на
первый взгляд, отличие — присутствие "фиктивных" вырезов, проблемой не
является, т. к. их всегда можно скорректировать инструментами SolidWorks.
Большей проблемой является несовпадение размеров, например, ширины.
Источник этого в том, что твердотельная модель содержит скругления, а
сборка из поверхностей— нет. Проверить данную гипотезу можно,
уменьшая толщину тела. С учетом того, что оно получалось приданием толщины
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 683
симметрично относительно срединной поверхности, а сгибы формировались
на базе коэффициента К, определяющего положение нейтрального слоя и
равного 0,5, это должно привести к уменьшению разницы. В данном случае
отклик соответствует ожиданиям.
Рис. 8.57. Плоский вид сборки и развертка детали из листового металла
Рис. 8.58. Деталь в исходном состоянии и после применения команды Сгибы
684
Глава 8
Разумеется, получить некоторое приближение для развертки можно получить
посредством BlankWorks, однако лежащий в его основе математический
аппарат предполагает, что деформироваться смогут все грани, в то время как в
реальности изгиб будет сосредоточен в пределах сгибов, а вытяжка — возле
вершин.
Завершая раздел, еще раз отметим, что мы рассмотрели весьма ограниченную
часть возможностей SolidWorks для работы с листовым металлом. Эта
функциональность вполне адекватно описана в документации.
8.3.2. BlankWorks
После подключения BlankWorks как Добавления SolidWorks в меню
SolidWorks появляется одноименный пункт. При его раскрытии возникают
четыре команды (рис. 8.59, слева). Первые три из них продублированы в
панели инструментов BlankWorks (рис. 8.59, справа). Рассмотрим назначение
команд меню.
Г Results | [Report
I Show the thinning results. J I Create BlankWorks report.
[BlartkWOtti
Analyze s •
. fcesUt*.
Report % *
ШОВ e
Настройка
Рис. 8.59. Меню и панель инструментов BlankWorks
♦ Analyze (Анализировать)— после подачи этой команды появляется
панель BlankWorks, в которой присутствуют следующие поля:
• Surface Selection (Выбор поверхности)— назначение поверхностей,
для которых будет строиться развертка. Это могут быть как грани
собственно поверхностей, так и грани твердого тела. Если в детали
необходимо учесть все имеющиеся грани некоторой поверхности, то можно
оставить поле пустым. Последнее справедливо, если другие
присутствующие в детали поверхности погашены или удалены командой
SolidWorks Удалить тело. Программа может воспринимать и
несшитые поверхности, однако для контроля отсутствия зазоров и
перекрытия желательно иметь их сшитыми;
BlankWorks
Shows the BlankWorks property manager
page.
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks)
685
• Material type (Тип материала)— выбор марки материала из числа
имеющихся в базе данных программы;
• Material Thickness (Толщина материала) — назначение толщины листа
материала. Эта величина никак не связана с той информацией, которая
может присутствовать в геометрической модели (если, например,
деталь была построена как тонкостенная или "из листового металла");
• Forming Direction | Auto Tipping (Направление формования |
Автоматическое выравнивание)— программа попытается найти направление
действия штампа автоматически;
• Forming Direction | Coordinate system (Направление формования |
Система координат)— назначение системы координат, ось Z которой
определяет направление штамповки. Если таковая не указана, в этом
качестве будет использоваться ось Z системы координат модели.
Перед выводом панели BlankWorks (рис. 8.60) программа анализирует, была
ли записана модель SolidWorks на диск — именно файл детали будет служить
источником геометрической информации для BlankWorks (скорее всего,
необходимые объекты будут преобразованы в формат IGES, после чего
программа начнет их обрабатывать). В связи с этим необходимо после внесения
изменений в модель SolidWorks сохранить ее на диске.
♦ Results (Результаты) — вывод развертки модели, прямоугольного листа ее
описывающего, а также детали с распределением прогнозируемого
утолщения/утонения.
Material Type;
|l60ACR
Materia! Thickness;
12.50мм
Л$РР№^Ш!^М^
zl
Jtl_
k2&£2b&&J&&
Г Auto Taping
[Система координат 1
zi
Рис. 8.60. Панель BlankWorks
686
Глава 8
Report (Отчет) — построение отчета в формате HTML. В него выводится
картинка, идентичная отображаемой в качестве результатов, площадь
заготовки, ее периметр и размеры минимального описывающего
прямоугольника.
Edit DB (Редактировать базу данных) — изменение базы данных по
свойствам материалов. Окно базы данных показано на рис. 8.61. В окне
присутствует множество характеристик. Реально в данной программе
используются только две: п — коэффициент деформационного упрочнения
(показатель степени полинома, аппроксимирующего кривую
"напряжение— деформация", определяемый, например, по стандарту ISO 10275, и
г— коэффициент перпендикулярной анизотропии (Lankford coefficient),
получающийся в результате испытаний по ISO 10113. Остальные
параметры необходимы для программы FastForm, также разрабатываемой фирмой
FTI и имеющей более развитую функциональность.
Current Materials in D8
Material Property Values
180 A EG
180A EG Alloy
180AHDGA
180AHDGI
210ACR
210AEG
210A EG Alloy
210AHDGA
210AHDGI
250ACR
280ACR
|AI 3003-0
Al 3004-0
! Al 5052-0
JAI5052-0 HF
Al 5052-H32
Al 5182-0
AI6009-T4
AI6010-T4
Al ВП13-Т4
Nam* /
я .•. \ \
x
К
UTS
180ACR
0.701
10.22
1612
352
UrttormBonsHO
YieW Stre$* J195
RD0 \ fo
MPft
MPa
%
MPa
J210000 мЛ
Рис. 8.61. Окно Materials DB
После нажатия кнопки ОК панели BlankWorks появляется окно Mesh
Generation (Создание сетки), в котором пользователь должен назначить
параметры, управляющие сеткой конечных элементов (рис. 8.62):
♦ Minimum Size (Минимальный размер) — наименьший размер конечного
элемента;
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 687
♦ Maximum Size (Максимальный размер) — наибольший размер конечного
элемента.
Рис. 8.62. Окно Mesh Generation
На фоне условностей и упрощений, присущих программе, проблема
оптимизации сетки не является первостепенной. Как следует из анализа
состава меню, управление сеткой осуществляется только "в целом", локальное
уплотнение/разуплотнение не допускается. Поэтому минимальный размер
следует подбирать, во-первых, из условия реализуемости сетки (если
программе не удается ее построить, то эту величину рекомендуется
уменьшить), а во-вторых, исходя из потребностей получения
удовлетворительной точности расчета. Здесь можно руководствоваться только здравым
смыслом. Минимальный размер должен обеспечивать аппроксимацию
наименьших дуг, как минимум, двумя-тремя элементами. Наибольший же
размер следует назначать не более чем 1/3... 1/4 максимального размера
плоской грани. Как и во всех других программах, базирующихся на
сеточных аппроксимациях, эмпирическую оценку точности можно получить,
сравнивая результаты расчетов с различной плотностью сетки.
♦ Offset (Смещение) — эта опция позволяет системе строить сетку
эквидистантную выбранным граням.
♦ Fill all holes (Заполнить все отверстия)— в случае активизации данной
опции программа пытается заполнить все имеющиеся в модели отверстия.
Эти действия осуществляются только на уровне сетки, не затрагивая
базовые поверхности. Следует отметить, что функция работает достаточно
корректно. Заполнение программа, разумеется, выполняет по своей
собственной логике, создавая аппроксимацию, близкую к поверхности
минимальной площади. Если этот вариант пользователя не устраивает, то он
должен "зашить" отверстия посредством инструментов SolidWorks. Функ-
688
Глава 8
ция Fill all holes имеет важное побочное действие. Иногда генератор сетки
испытывает затруднения в построениях и допускает ошибки в виде щелей.
Ручная корректировка сетки невозможна, поэтому активизация данной
опции, даже при отсутствии отверстий в явном виде, помогает получить
удовлетворительный результат.
Помимо картины пластических деформаций на фоне геометрической модели,
программа создает две плоские поверхности. Первая имитирует заготовку,
вторая— описывающий ее прямоугольный лист. Чертеж заготовки можно
получить стандартными средствами SolidWorks, для чего нужно деталь
"перенести" на лист, а затем на получившемся виде скрыть остальные объекты и
поставить размеры. Можно поступить проще: удалить ненужные объекты.
Какая-либо связь между исходной моделью и результатами работы Blank-
Works отсутствует. Более того, при повторении расчета рекомендуется (но не
обязательно) уничтожить "последствия" предыдущего анализа в виде двух
поверхностей. Если необходимо учесть влияние технологических припусков,
то их следует включить в поверхностную модель детали.
Поскольку в документации программы какие-либо сведения о теоретическом
базисе, равно как и о пределах применимости, отсутствуют, то суждения
можно выносить только на основе интерфейса и результатов расчета.
Поскольку программа не требует никакой информации об устройстве
формообразующих деталей штампа (пуансон, матрица), его вспомогательных
элементов, а также параметров техпроцесса, то предел ее применимости — оценка
размеров заготовки и первичный прогноз технологичности. Причем
последнее применимо, скорее всего, к технологическим процессам типа формовки,
вытяжки, обжима. Если же предполагается обтяжка, ротационная
гибка/формовка или вытяжка, какие-либо операции, связанные с локальным
приложением давления, или же деталь получается более чем за один переход, то здесь
программа может быть использована только для оценки формы заготовки.
Когда техпроцесс предполагает наличие технологических припусков, то их
следует включать в модель детали. Заготовка, разумеется, будет получена
с учетом этих припусков.
Разрыв металла можно предсказать исключительно по величине
прогнозируемого утонения, а появление гофров— только по величине утолщения,
безотносительно того, что происходит в зоне сжатия. Более того, если
посредством BlankWorks получить заготовку для детали с поверхностью
одинарной кривизны, то ее длина— а также все остальные линейные и угловые
размеры— будут равны соответствующим размерам на "готовой" детали.
Этот свидетельствует о том, что программа использует безмоментные
конечные элементы, которые не воспринимают изгиб.
Данные ограничения в значительной степени снимают программы FastForm и
FastForm Advanced, также разработанные фирмой FTI. Они учитывают осо-
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 689
бенности конкретных технологических процессов в значительно большей
степени.
8.4. Получение заготовки чашки
Рассмотрим задачу получения заготовки для детали, которая имеет
твердотельное представление. При ее построении первоначально использовалась
поверхностная модель SolidWorks, которая была преобразована в тело
командой Придать толщину, а затем незначительно отредактирована.
8.4.1. Постановка задачи
Геометрическая модель чашки стойки амортизатора показана на рис. 8.63.
Это вполне типовая деталь, получаемая штамповкой. Нужно получить как
можно более точную форму заготовки, позволяющую свести к минимуму
операции механической обработки после выполнения штамповки, и, в идеале,
отказаться от них.
Рис. 8.63. Твердотельная модель чашки
8.4.2. Анализ
Данная модель практически не содержит проблемных мест, которые
затруднят использование каких-либо процедур анализа, требующих твердотельного
или поверхностного представления геометрии. При необходимости можно
выполнить дополнительное членение граней тела или поверхностей,
позволяющее реализовать дискретизацию конечными элементами.
( Замечание )
При нанесении линий разъема на тонкое твердое тело желательно получать их
одновременно на противоположных гранях.
690
Глава 8
8.4.3. Подготовка поверхностной модели
Рассмотрим процедуру подготовки ее модели для анализа в предположении,
что информация об истории построения (в данном случае срединная
поверхность) отсутствует.
Из-за относительной сложности формы ее не удается получить командой
Sol id Works Промежуточная поверхность. Поэтому используем команду
Эквидистантная поверхность со смещением внутренних или внешних
граней наполовину толщины. Результат показан на рис. 8.64.
Рис. 8.64. Поверхностная модель чашки
Отверстия, выполняемые на отштампованной заготовке, необходимо
заполнить до применения Blank Works, поскольку использование его процедур
заполнения завершится исключением всех отверстий, в том числе и того,
которое должно присутствовать на заготовке. Поэтому выделяем кромки и подаем
команду Delete с клавиатуры. В появившемся окне Выберите параметр
(рис. 8.65) устанавливаем переключатель Параметры в положение Удалить
отверстие (я). Результат применения команды показан на рис. 8.68.
Рис. 8.65. Удаление отверстий
В процессе подготовки поверхностной модели для анализа следует
проанализировать ее на наличие малых граней, имеющих тождественное
математическое представление (осиновым критерием здесь является здравый смысл
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 691
пользователя) с какими-либо из соседних и, если таковые выявлены,
попытаться использовать команду SolidWorks Грань | Удалить с опцией Удалить
и исправить, позволяющей сохранить исходную математику (рис. 8.66).
Невозможность применить команду в данном варианте свидетельствует о том,
что обрабатываемая грань является уникальной (относительно соседних).
Если мы имеем дело с импортированной геометрией, то, при невозможности
"исправления", можно попробовать упрощение с заполнением. Качество
сетки может улучшиться, если удастся удалить (правильнее сказать, объединить
с соседними) "слишком" малые грани. Кстати говоря, эта манипуляция
полезна и для других расчетных моделей.
Следует признать, что иногда упрощение модели приводит к ухудшению ее
пригодности для процедур конечно-элементного разбиения.
^ ШШШШШ
jM
С Уд&ЯИТ4* % '
# Уазяит^и
' МСПДОИТЬ
ys Удашть и А ч
заполнить
Г" гъ>«ж npecwrp
&&S
________
Доруас длины кромки:
ВД2_£_!__^~-а
Сведения » крогасах
До; Поело$
Рис. 8.66. Упрощение геометрии
посредством исправления граней
Рис. 3.67. Упрощение геометрии
посредством исправления кромок
Еще одной полезной процедурой, повышающей качество поверхностей,
является команда Грань | Исправлять кромки (рис. 8.67). Она уменьшает число
коротких кромок на контурах. Надо сказать, что в современных версиях
SolidWorks эта команда содержит несколько достаточно тонких настроек и
требует определенного внимания. Наибольшую пользу процедура
исправления кромок приносит при обработке импортированных поверхностей.
8.4.4. Решение
Имея поверхностную модель, удостоверимся, что деталь аппроксимирована
единственным объектом. Для облегчения работы все остальные поверхности
удаляем: наилучший инструмент для этого — команда Удалить тело, вызы-
692
Глава 8
ваемая из контекстного меню папки Тела поверхности в Дереве
конструирования SoIidWorks.
Рис. 8.68. Поверхностная модель чашки без отверстий
Как упоминалось, направление действия пуансона по умолчанию совпадает с
направлением оси Z системы координат модели. В нашем случае приходится
строить справочную систему координат, у которой ocbZ перпендикулярна
плоскости верхней грани чашки (рис. 8.68), и указывать ее перед
активизацией панели BlankWorks (см. рис. 8.60). Материал и виртуальная толщина
листа, использованные в анализе, также приведены на этой иллюстрации.
Сетка конечных элементов оболочек, сгенерированная BlankWorks, показана
на рис. 8.69. Как видно, алгоритм старается обеспечить однородную
плотность сетки, отдавая предпочтение четырехугольным элементам и используя
треугольники в местах, в которых, как можно предположить, происходит
стыковка неких участков. В подобных зонах наблюдается необоснованно
малый размер элементов— это есть плата за использование эффективных
(с точки зрения объема вычислений), на первый взгляд, четырехугольников.
Как и в случае с COSMOSWorks, определенную пользу с точки зрения
качества сетки, да и вообще возможности ее создания (кстати говоря, при
прочностном анализе это оказалось необходимым), можно ввести дополнительное
членение граней линиями разъема. Цель— получить преимущественно
четырехугольные грани (для BlankWorks, который "стремится" использовать
четырехугольные элементы) или трех и четырехугольники (для
COSMOSWorks, который базируется исключительно на треугольниках).
Результат работы программы в виде двух заготовок: "первичной" и
сглаженной, а также габаритного прямоугольника показан на рис. 8.70. Вид развертки
в ортогональной проекции приведен на рис. 8.71. Как видно, результат, если
основываться на визуальной оценке, вполне приемлемый. Отметим, что
некоторые программы-аналоги грешат тем, что генерируют в подобных ситуациях
необоснованно негладкие контуры.
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks)
693
Рис. 8.69. Сетка BlankWorks
Рис. 8.70. Заготовки BlankWorks и габаритный прямоугольник
Рис. 8.71. Ортогональная проекция заготовки
694
Глава 8
Результаты деятельности BlankWorks помещаются в Дерево конструирования
SolidWorks в раздел Тела поверхности, как показано на рис. 8.72. Нажав
кнопку Results (Результаты) в панели инструментов BlankWorks или подав
^ Чашка (С заполненными отверстиями)
Щ Ш Примечания
jij ^ Связь проектов
В Ш Тела поверхности(3)
1 чф Удалить отверстие 1
!■••-^ Blank-Surface
..ф Smoothed Blank
Рис. 8.72. Дерево конструирования SolidWorks с результатами BlankWorks
Рис. 8.73. Распределение изменения толщины
Листовой металл — развертки и заготовки (SolidWorks, BlankWorks) 695
одноименную команду из меню, получаем оценку утонения (Thinning)
материала в процессе формования (рис. 8.73). Из-за того, что в программе нельзя
настраивать палитру цветов на диаграмме, зоны утолщения и утонения на
монохромной иллюстрации показаны одинаково темным цветом.
Область отрицательных значений соответствует собственно утонению, а
положительных — утолщению. За неимением более совершенных
инструментов документация рекомендует пользователю проанализировать зоны с
большим утолщением на возможность образования гофров, а места с
утонением — на разрывы.
Подача команды Report (Отчет) приведет к генерации отчета в HTML-
формате, содержащего таблицу, показанную на рис. 8.74. В ней содержатся
как исходные данные: толщина заготовки и название материала, так и
результаты: площадь заготовки, ее периметр и масса.
Area:
[Perimeter:
| Weight:
24104.08 mm2
—
627.250 mm
0.470 kg
[Materia!; \ ■> \;; .
[Name:
[Thickness:
180A CR
2.500 mm
Рис. 8.74. Содержимое отчета BlankWorks
8.4.5. Резюме
Рассмотренная задача относится к категории тех, которые демонстрируют
эффективность программ класса BlankWorks. Эта эффективность становится
еще выше, если первичным представлением геометрической модели в
SolidWorks является поверхность. Тогда отработка технологичности и
оптимизация геометрии выполняется перед оформлением конструкторской
документации. Также наличие срединной поверхности существенно упрощает
прочностной анализ. Получение твердого тела именно из поверхности
гарантирует его качество (в смысле постоянства толщины) и радикально облегчает
последующие модификации.
Такой алгоритм, однако, требует решения организационных вопросов,
поскольку конечная цель конструктора— чертежи, а поверхностная модель
только промежуточный и не всегда обязательный этап.
696
Глава 8
8.5. Выводы
Мы проанализировали два подхода к построению заготовок деталей из
листового металла. Первый— использование базовых инструментов SolidWorks
для обработки объектов, имеющих точные или приближенные развертки. Это
призматические детали, объекты на базе поверхностей одинарной кривизны,
а также с отбортовками, выполненными вдоль касательных кромок плоского
тела. Здесь функциональности SolidWorks вполне достаточно для решения
абсолютного большинства реальных задач. Более того, если оказывается, что
развертку построить невозможно, то причиной является технологическая
нереализуемость детали. Инструменты моделирования сборок с кинематикой —
в первом приближении— помогут получить модели объектов, подобных
"оригами", а также их заготовки.
Для работы с поверхностями двойной кривизны следует применять
программу BlankWorks или одну из родственных ей, но имеющую более продвинутые
возможности. И тот и другой варианты требуют знания адекватных
характеристик материала. Это позволит получить прогноз размеров заготовки с
наибольшей точностью.
Известны также программы, позволяющие реализовать обе из этих методик.
Одним из примеров является приложение для SolidWorks — Logopress
(http://www.Iogopress3.com). Основное его предназначение—
проектирование штамповой оснастки, однако в нем также присутствуют функции
построения точных и условных разверток. Причем исходная модель может
иметь как твердотельное, так и поверхностное представление. Допускается
использовать функциональность, предназначенную для обработки точно
развертываемых объектов, для обработки деталей, образованных совокупностью
плоских элементов листа, но содержащих выштамповки, ребра, другие
элементы, делающие неприменимыми стандартные функции SolidWorks. В
такой ситуации пользователь должен выделить такие конструктивные
элементы, а затем указать системе, что они исключаются из рассмотрения. Важной
особенностью программы является способность обрабатывать объекты,
импортированные в SolidWorks без сохранения семантики (дерева построения)
из других программ пространственного моделирования. Имеющаяся
функциональность позволяет восстановить заготовку с минимальной
трудоемкостью.
ГЛАВА 9
Светотехнический анализ
и проектирование
(OptisWorks)
В главе рассматривается программный продукт для светотехнического и
оптического анализа и проектирования — OptisWorks. Акцент сделан на анализе
возможностей, наиболее востребованных в инженерной практике.
Информационное окно программы показано на рис. 9.1.
Рис. 9.1. Информационная панель OptisWorks
698
Глава 9
9.1. Назначение
Программное обеспечение для моделирования оптических явлений и
объектов не слишком часто фигурирует в технических и компьютерных изданиях.
С одной стороны, это объясняется недостаточной востребованностью
соответствующих инструментов— оптическая и светотехническая
промышленность практически не развиваются. Кроме того, в отличие от требований,
например, к механическим или тепловым характеристикам, которые
определяют функциональность объектов, запросы к светотехническим параметрам не
всегда формулируются строго, а, будучи сформулированы, нередко
нарушаются. Например, если приглядеться внимательно к бытовым осветительным
приборам, можно обнаружить примеры весьма неудачных проектов: низкий
КПД, неравномерность светового потока, локальный перегрев. В качестве
компенсации потребителю предлагается причудливый дизайн, который и
служит основным критерием для выбора. После установки прибора возникает
ощущение неудобства, формализовать которое очень трудно. Аналогичная
ситуация в автомобилестроении: динамика, тормозной путь— объективные
востребованные характеристики, качество же подсветки панели приборов —
то, на что внимание обращают только после покупки. То же, кстати, касается
системы отопления и вентиляции. Базовые технические требования в
принципе соблюдены, но чувство комфорта отсутствует. В автомобильной
промышленности у ведущих производителей программное обеспечение для
светотехники по значимости стоит на том же уровне, как для динамики и
прочности.
Еще один фактор, сдерживающий "потребление" данного типа программ, —
банальная неосведомленность об их наличии и функциональности.
Разработки последних десяти лет, они практически не осваиваются в высшей
школе — их не было тогда, когда училось и активно работало поколение
современных преподавателей.
По функциональности оптические программы можно разделить на несколько
групп:
♦ инструменты для проектирования и расчета детерминированных
оптических систем (Straight ray analysis — анализ методом прямых лучей). К ним
относятся объективы фотоаппаратов, телескопы, бинокли и т. д. Здесь
может быть предсказана траектория каждого светового луча. Одновременно
осуществляется управление любым световым лучом. Несколько иными по
математическому аппарату, но схожими по интерфейсу могут быть
инструменты для моделирования прохождения лазерных пучков;
♦ программы для расчета оптических систем, где предсказать ход луча
невозможно. В английской Терминологии этот процесс называется
Nonsequential ray tracing — непоследовательная трассировка лучей;
Светотехнический анализ и проектирование (OptisWorks)
699
♦ программы для проектирования светотехники, понимаемой как
недетерминированная оптическая система (светильники, автомобильные фары и
фонари). Свежей тенденцией в развитии программ анализа является ввод в
них модулей оптимального проектирования. В разд. 9.6.8 приведены
примеры использования как собственно инструментов проектирования, так и
оптимизационных процедур в расчетных программах;
♦ средства для обработки результатов оптических измерений, подготовки
математических моделей источников света.
Последний пункт лежит вне пределов данной книги. Эта задача интересует
весьма узкий круг специалистов, требуя сугубо специальных знаний. Однако
упомянем, что фирма Optis также поставляет измерительное оборудование,
предназначенное для определения цветовых свойств поверхностей и, что
особенно важно, параметров отражения, в том числе рассеянного.
Работа с детерминированными оптическими системами будет рассмотрена
без подробностей — в объеме, требуемом для того, чтобы использовать для
расчета оптики ту же программную среду, что и для светотехники.
В книге описана программа OptisWorks — разработка фирмы Optis, Франция
(http://www.optis—vvorld.com) — универсальный инструмент оптического и
светотехнического анализа, а также светотехнического проектирования.
OptisWorks содержит модуль для расчета прохождения лазерного излучения.
Процессы, происходящие внутри генератора, программа не рассматривает.
Ввиду специфики вопросов, связанных с лазерами, в книге они затронуты не
будут. Однако упомянем, что многие интерфейсные элементы программы для
различных моделей являются общими.
Теоретические постулаты, относящиеся к светотехнике, мы также будем
излагать на примере OptisWorks. Программная реализация подавляющей части
соответствующих эффектов (по крайней мере, с точки зрения пользователя)
является вполне универсальной и — в той или иной мере — имеет аналоги во
многих продуктах для работы со светотехникой.
9.2. Теоретическая база OptisWorks
OptisWorks— универсальная программа, способная моделировать крайне
широкий круг явлений и объектов. Исчерпывающее теоретическое описание,
сопровождаемое адекватным набором примеров, потребовало бы
специальной монографии. И это при отсутствии примеров реальных задач. Поэтому
ограничимся изложением того материала, который позволит осознанно
ставить и — на инженерном уровне — решать актуальные проблемы, не требуя
навыков научного исследования. Граница, которая разделяет эти уровни —
700
Глава 9
то, чем отличаются задачи геометрической и волновой оптики. Последняя
исследует явления интерференции, дифракции, поляризации, других видов
зависимости оптических параметров от длины волны. Мы полностью
исключим эти моменты из рассмотрения, ограничившись перечислением
соответствующих функций программы. Принципиальные вопросы функционирования
светотехнических программ были изложены ъразд. 2.4.
Материал будет излагаться на основе версии программы 2007 года релиза 0.1.
Изложим базовые понятия светотехники, необходимые для оценки
функциональности программы. Конкретные факты, связанные с работой процедур,
будут сопровождать описание элементов интерфейса.
Сила света в заданном направлении — это световой поток от источника,
заключенный в малом телесном угле. Единица измерения — кандела (кд или
cd). Также для измерения силы света используется свеча — 1 свеча =
1,0005 кд.
Световой поток — это энергия, излучаемая источником в видимом
диапазоне длин волн. Единица измерения светового потока— люмен (лм или Im).
Это поток, который излучается источником с силой света 1 кд в телесном
угле 1 стерадиан (далее — ср). Световой поток — основная характеристика
источника света.
Освещенность — отношение суммарного потока, упавшего на некоторую
поверхность, к площади этой поверхности. Единица измерения
освещенности — люкс (лк или lux). Это освещенность такой поверхности, на каждый
квадратный метр которой равномерно падает поток в 1 лм.
Яркость — это отношение силы света элемента поверхности в заданном
направлении к площади его проекции на плоскость, перпендикулярную этому
направлению. Единица измерения яркости — кд/м2. Это яркость поверхности,
которая в перпендикулярном направлении излучает силу света 1 кд с 1 м2.
Также для измерения яркости используется нит— 1 нит= 1,0005 кд/м2.
Светимость — это отношение потока источника к площади источника.
Единица измерения — лм/м2. Это светимость такой поверхности, которая
излучает с 1 м2 световой поток равный 1 лм.
Иногда для описания оптических процессов используются энергетические
величины. Перечислим некоторые из них.
Поток излучения — величина энергии, переносимой полем в единицу
времени через заданную площадку. Единица измерения — Вт.
Поверхностная плотность потока энергии (Энергетическая освещенность
при освещении поверхности потоком) — величина потока, приходящегося на
единицу площади. Единица измерения — Вт/м2.
Светотехнический анализ и проектирование (Optis Works)
701
Энергетическая яркость — величина потока, излучаемого единицей
площади в единицу телесного угла. Единица измерения энергетической яркости —
Вт/(срм2).
Плоский ламбертов излучатель — источник, диаграмма распределения силы
света которого имеет вид окружности (рис. 9.2). Этот тип излучения, как
правило, используется для моделирования излучения нитью накаливания,
поверхностью люминесцентных ламп и т. д.
,
Л'
^
kN
г7^
0 \
ч
Рис. 9.2. Плоский ламбертов излучатель
Рис. 9.3. Сферический
ламбертов излучатель
Сферический ламбертов излучатель — источник, распределение силы света
которого одинаково во всех направлениях (рис. 9.3). Этот тип излучения, как
правило, используется для моделирования излучения, порождаемого нитью
накаливания, поверхностью люминесцентной лампы и т. д.
Угол падения— это угол между лучом, падающим на преломляющую или
отражающую поверхность, и нормалью к поверхности в точке падения.
Угол преломления — это угол между преломленным лучом и нормалью к
поверхности в точке преломления.
Угол отражения— это угол между отраженным лучом и нормалью к
поверхности в точке отражения.
Закон преломления — падающий луч, преломленный луч и нормаль к
поверхности лежат в одной плоскости; произведение показателя преломления на
синус угла между лучом и нормалью сохраняет свое значение при переходе
в следующую среду.
Полное внутреннее отражение— при переходе луча из одной прозрачной
среды в другую часть энергии пропускается, а другая— отражается; если
свет переходит из оптически более плотной среды в менее плотную, и если
синус угла падения больше или равен отношению коэффициента
преломления среды, в которую луч попадает, к коэффициенту преломления среды, из
которой он идет, то весь световой поток отражается.
Рассеяние ламбертово — рассеяние при взаимодействии с поверхностью,
когда распределение интенсивности определяется законом Ламберта.
702
Глава 9
Рассеяние гауссово — рассеяние при взаимодействии с поверхностью, когда
распределение интенсивности определяется законом Гаусса и происходит
внутри назначенного гауссова угла.
Оптическая длина луча — произведение показателя преломления на
геометрическую длину пути.
Световой поток, падающий на тело, можно разделить на три составные части:
отраженный, поглощенный и прошедший.
Коэффициент отражения— отношение отраженного светового потока
к падающему.
Коэффициент поглощения— отношение поглощенного светового потока
к падающему.
Коэффициент пропускания— отношение прошедшего светового потока
к падающему.
OptisWorks моделирует не только эффекты зеркального отражения,
преломления и пропускания, но и рассеяние при взаимодействии света с
поверхностью. На рис. 9.4 показана геометрическая модель, соответствующая
самому общему случаю. Падающий на поверхность прозрачного тела световой
поток разделяется на пять составляющих:
♦ поглощенную (она на рисунке не показана);
♦ зеркально отраженную;
♦ преломленную;
♦ отраженную в рассеянном виде;
♦ прошедшую внутрь тела в рассеянном виде.
Рис. 9.4. Взаимодействие светового потока с поверхностью прозрачного тела
(аксонометрическая и ортогональная проекции)
Распределением рассеянного света управляет BSDF— Bidirectional Scattering
Distribution Function (Двунаправленная функция распределения рассеяния).
Светотехнический анализ и проектирование (OptisWorks)
703
Это отношение величины энергетической яркости L, излучаемой
поверхностью в некоторый телесный угол, к величине энергетической
освещенности Е, породившей эту яркость. При этом как направление потока энергии,
создающего освещенность, так и направление, относительно которого
измеряется яркость, определяются двумя углами в сферических координатах:
<да,(е„\|/,)
Единица измерения BSDF — 1/ср.
Поскольку явлений рассеяния при взаимодействии с поверхностью может
быть три: при отражении от поверхности, при прохождении через
поверхность и при дифракции (это явление мы рассматривать не будем), то
фактически необходимо иметь дело с тремя типами распределений:
♦ BRDF (Bidirectional Reflectance Distribution Function)— двунаправленная
функция распределения рассеяния при отражении;
♦ BTDF (Bidirectional Transmittance Distribution Function) —
двунаправленная функция распределения рассеяния при пропускании;
♦ BDDF (Bidirectional Diffraction Distribution Function)— двунаправленная
функция распределения рассеяния при дифракции.
BSDF может быть реализовано посредством моделей изотропного и
анизотропного рассеяния. Последняя подразумевает зависимость характеристик от
взаимной ориентации падающего луча и поверхности.
Однако большинство реальных материалов, за исключением имеющих
ориентированную структуру поверхности, с достаточной точностью описывается
совокупностью двух составляющих рассеяния: по Ламберту и по Гауссу.
Еще одно явление, имеющее место при распространении света в
неметаллических материалах, — объемное рассеяние. Суть его в том, что в процессе
прохождения через материал происходит "размазывание" луча относительно
исходного направления. В программе это моделируется анализом
вероятности отклонения луча при прохождении некоторого пути. Если предусмотрена
возможность расщепления луча в этот момент, то он разделяется, как
минимум, на две составляющих, причем первая — прямолинейный луч
(потерявший, естественно, часть энергии), а другие лучи начинают нести рассеянную
составляющую. Объемное рассеяние формализуется в программе
посредством функции SDF— Scattering Distribution Function (Функция распределения
рассеяния), представляющей собой отношение рассеянного светового потока
в некотором направлении относительно входящего светового потока. Одна из
наиболее употребительных моделей основана на функции Henyey-Greenstein
(Хэни-Гринштейна):
704
Глава 9
SDF= 2 —.
47t(l + g2-2gcos(»))'
Здесь:
♦ $ — угол между исходным лучом и направлением, в котором
вычисляется плотность рассеянной энергии;
♦ g — коэффициент анизотропии, который находится в интервале [-1, +1].
Если g положителен, то рассеянный свет идет преимущественно в
направлении падающего луча, если отрицателен — в обратном направлении.
9.3. Интерфейс
OptisWorks имеет Windows-интерфейс. В приложении предусмотрены
выпадающее меню, Toolbars (Панели инструментов) и Construction tree (Дерево
проекта). Все интерфейсные элементы интегрированы в графический
интерфейс SolidWorks. Например, управление панелями инструментов OptisWorks
производится посредством команды Панели инструментов SolidWorks.
Большинству объектов поставлены в соответствие контекстные меню,
вызываемые щелчком правой кнопки мыши при нахождении над объектом или
после его активизации. Разумеется, программа имеет контекстно-зависимый
Help. Для некоторых окон справка доступна после нажатия клавиши <F1> на
клавиатуре.
9.3.1. Дерево проекта
Дерево проект (аналог SolidWorks— дерево конструирования) OptisWorks
функционально схоже с Проводником Windows. Подобно SolidWorks, оно
располагается слева. Размеры областей, занимаемых Деревом и графическим
окном модели, можно изменять перемещением разделительной полосы.
Для OptisWorks принципиальной является дифференциация объектов на
детали и сборки. Собственно расчет, как оптический, так и фотометрический,
может выполняться только в режиме сборки. Оптические же свойства, а
также фотометрические источники назначаются на уровне детали. Поэтому
Дерево для сборки и для детали имеет различный вид.
На уровне сборки Дерево содержит объекты, присутствующие в расчетной
модели, образуя иерархическую структуру, в том смысле, что объекты
делятся на родителей и потомков (рис. 9.5 я, б). Структура содержит несколько
уровней. На верхнем уровне находятся четыре объекта — собственно оптиче-
Светотехнический анализ и проектирование (OptisWorks)
705
ская/светотехническая система; Light Expert (Эксперт по свету); Results
Manager (Менеджер результатов), Optimization/tolerancing Parameters
(Результаты оптимизации/анализа чувствительности). За соответствующими
пиктограммами размещены объекты более низкого уровня, и так вплоть до
элементарных сущностей. К последним относятся, например,
фотометрические источники, базовые свойства которых также отображаются в Дереве.
Операции в Дереве являются вполне традиционными: можно
переименовывать и удалять объекты. В некоторых ситуациях применима операция drag-
Щ AAA (Для расчета)
:-; fij Surface Quafity
. :-} 'Щ Прозрачная jDW.simplescattering
% Линэа_0_4_5
■Ц§, 7S6174119
В (Р Materials
= в-18 PMMA.material
• % Лимза_0_5_5
^,756113107
В {Ц Sources
• ij (jQ Photometric sources
й »;, Источник <1>Источник
i Ц^. Источник
'• ф Limited half angle«
• *;* Power- 10000 Im
■ Й-СР Optical sources
Ccflmated source
Infinite object source
Pt-to-pt source
^ Laser sources
'. ф Optical Surfaces
В (j3 Detectors
:-j yj Illuminance / Irradiance detectors
EiCP 20 maps
8 & Детектор<1>
' -Щ>. Детектор
ф 3D maps
* ^ Luminance / Radiance detectors
i*j ^ Intensity detectors
^ Ray maps
(Q Optical Systems —
E Ш System 1
В (Q Sources
Collimated source
#3 ф» Optical Surfaces
i-i (U Detectors
'• §э Детектор <1>
frr] (P Default part preferences -
-Свойства поверхностей
- Материалы
Источники
Фотометрические источники
Половина ограничивающего угла
Световой поток
Оптические источники
Коллимированный источник
Безграничный объектный источник
Источник от точки к точке
Лазерные источники
Оптические поверхности
•• % 711243160 (Deflection 0.10000 mmb
i+- 3$ ИДЕАЛЬНЫЙ ПОГЛОТИТЕЛЬ
№-Щ PMMA.MATERIAL
®-Щ AIR.MATERIAL
•• Я^. 713362112 (Deflection 0.10000 mm)
- Детекторы
Освещенности / облученности
2D диаграммы
3D диаграммы
Датчики яркости / энергетической яркости
Датчики силы света
Таблица лучей
Оптические системы
Система 1
Источники
Коллимированный источник
Оптические поверхности
Детекторы
Свойства детали по умолчанию
Отклонение
Рис. 9.5. Дерево проекта OptisWorks в режиме сборки (см. продолжение)
706
Глава 9
В-Щ Light Expert
: ♦light Path Finder
• В (Q Ray facing filtering
! в Ы Included
■-Щ} Призме l_Face<l>
'•♦ Excluded
♦ Surfaces contribution analyzer
&-*Щ Results Manager
В (U Photometric results
В-Ш Illuminance/Irradianceresults
■ E-ftJ 20maps
■ &ф (ДЛЯ РАСЧЕТА) ДЕТЕКТОР
в. Total flux -49.31281m
ft, Max value »3.56057e+2
•• -ft MJn value - 0 be
9, Average value - 54792
ft Contrast - 1
Ei(P 30 maps
• jjj (ДЛЯ РАСЧЕТА)
9 QJ Luminance / Radiance results
♦ 20 maps
В (U Intensity results
♦ 20 cartesian intensity maps
ф IES
^Eulumdat
•♦ Optis Intensity distribution
I ♦ Ray files
• ф Simulation report f tes
В (Q Optical results
:-j Q2 Aberrations
£•• (Q Aberrations
i.ij ф (ДЛЯ РАСЧЕТА) (SYSTEMI)
♦ Aberrations coefficients
; ^ Paraxial
ff 5 (0 Spot diagram
! E #» (ДЛЯ РАСЧЕТА) (5YSTEM1)
<^i Diameter - 2.92639 mm
• $» Radius X- 0.997695 mm
■Hfr Radius Y - 0.997565 mm
< ^2DMTF
^ Wave front /MTF/PSF —
E!-(P Laser results
ф Irradiance laser propagation
. ^ Intensity laser propagation
4& Gaussian propagation
!-! (P Toterancmg / Optimization results -
^ Tolerancing
^ Optimization
•^| Optimization / tolerancing Parameters -
Й (ft Optimization / tolerancing Variables
ф Optical variables
ф Mechanical variables
[i (P Optimization / tolerancing Targets -
■ ф Photometric targets
♦ Optical targets
Эксперт по свету
Сортировка траекторий лучей
Фильтрация лучей
Учитываемые
Исключенные
Анализатор вклада поверхностей
Менеджер результатов
Фотометрические результаты
Результаты для освещенности / облученности
2D диаграммы
Суммарный поток
Максимальное значение
Минимальное значение
Среднее значение
Контрастность
3D диаграммы
Результаты яркости / энергетической яркости
Результаты для силы света
Ортогональные диаграммы силы света
Диаграммы IES
Диаграммы Eulumdat
Диаграммы силы света Optis
Файл с лучами
Файл отчета о симуляции
Результаты оптического анализа
Аберрации
Коэффициенты аберраций
Параксиальность
Диаграмма пятна
Диаметр
Радиус X
Радиус Y
- 2D ФПМ
Волновой фронт/ ФПМ / ФРТ
Результаты анализа лазерного излучения
Распространение лазерной облученности
- Распределение лазерной силы света
Распространение гауссова пучка
Результаты оптимизации / анализа чувствительности
- Анализ чувствительности
.Оптимизация
- Параметры оптимизации / анализа чувствительности
- Переменные при оптимизации/анализа чувствительности
Оптические переменные
Механические переменные
- Цели при оптимизации / чувствительности
- Фотометрические цели
> Оптические цели
Рис. 9.5. Окончание
Светотехнический анализ и проектирование (OptisWorks)
707
and-drop. Она выполняется, в частности, при определении источников и
детекторов в оптической системе путем выбора из числа потенциально
возможных, присутствующих в разделах Sources | Optical sources (Источники |
Оптические источники) и Detectors | Illumanance/Irradiance detectors
(Детекторы | Датчики освещенности/энергетической освещенности).
Двойным щелчком мыши по некоторым пиктограммам, обозначающим
элементарные сущности, например, оптические свойства, детали Sol id Works,
диаграммы с результатами, можно вызвать процедуры редактирования этих
объектов. К тем же последствиям приводит подача команды Open (Открыть)
из контекстного меню пиктограммы. Изменение параметров оптической
модели приводит к потере актуальности предыдущих результатов. В этом
случае на пиктограммах, обозначающих эти результаты, появляется символ "!".
Вид Дерева проекта OptisWorks для детали показан на рис. 9.6. Как видно,
деталь характеризуется свойствами поверхностей, материалами, наличием
поверхностных источников и оптических поверхностей. Здесь следует иметь
в виду, что свойства поверхностей и материалов, скрывающиеся за
соответствующими пиктограммами описывают характеристики, отличные от
назначенных для детали по умолчанию. Раздел Optical Surfaces (Оптические
поверхности) содержит поверхности, ассоциированные с деталями,
сформированными посредством OptisWorks, — это линзы, диски, сферические и
асферические поверхности или импортированные из стандартных баз данных
фирмы Optis — они имеют расширение ode.
IB % Led Chip HPWx-yzOO (HPWT-yOOO - 3.5lm - 70mA)
« (Q Surface Quality —— —"— Свойства поверхности
3§f? CHIP SURFACE OW.SIMPLESCATTERING
a 03 Materials Материалы
41 POLYCARBONATE OW.material A
^ m ~ ——— Фотометрические источники
&UJ Photometric sources """^
** HPWT-yOOO - 3.51m - 70mA _—Оптические поверхности
fl^ Optical Surfaces
Рис. 9.6. Дерево проекта OptisWorks в режиме детали
Использование Дерева проекта оптимально для выбора объектов, назначения
им оптических свойств, а также контроля наличия свойств.
( Замечание )
В OptisWorks, в отличие от модулей семейства COSMOS, "чувствительным"
элементом интерфейса к двойному щелчку мыши и ее правой кнопке является
только ярлык, но не пиктограмма в Дереве.
708
Глава 9
9.3.2. Меню
OptisWorks имеет стандартное выпадающее меню, а также предоставляет
контекстные меню. Как и большинство Windows-программ, выпадающее
меню содержит полное множество команд. Максимальная степень вложенности
выпадающего меню — три. Расшифровка команд будет приведена ниже.
Контекстных меню, по сути, два. Первое появляется после щелчка правой
кнопкой мыши над полем для Дерева проекта, второе — над окном, где
находится модель. Последнее в режиме сборки включает в себя команды
SolidWorks и единственную команду OptisWorks— View optical properties
(Отобразить оптические свойства), показывающую окно с названиями
оптических свойств, присвоенных объекту, над которым находится курсор.
В режиме детали доступны также команды назначения оптических свойств:
Set surface quality (Назначить граням детали характеристики поверхности);
Set internal material (Назначить граням детали характеристики внутреннего
материала); Set external material (Назначить граням детали характеристики
окружающего материала); Define geometry as source (Определить геометрию
как источник). Поэтому посредством контекстного меню наиболее
рационально назначать и контролировать свойства объектов. Для этого нужно
выделить их мышью и подать команду Properties (Свойства). Все команды
контекстных меню имеются в выпадающем меню и также дублируются
в панелях инструментов. Поэтому мы не будем их рассматривать в данном
разделе.
OptisWorks
Корневое меню программы. Содержит пункты (рис. 9.7):
♦ Define new optical properties (Определить новые оптические свойства) —
создание новых оптических свойств: поверхностей, материалов, спектров
источников.
♦ Optical design (Оптическое проектирование) — создание или определение
объектов оптической системы: линз, оптических источников;
идентификация оптической системы, а также расчет оптических характеристик после
трассировки лучей.
♦ Detectors definition (Определение детектора)— создание детектора:
освещенности, яркости, интенсивности в ортогональных и полярных
координатах; датчика лучей.
♦ Simulation (Симуляция) — запуск процедуры прямой и обратной
симуляции на основе фотометрических источников, управление приоритетом
расчета.
Светотехнический анализ и проектирование (OptisWorks)
709
Ray tracing (Трассировка лучей)— назначение интерактивного
оптического источника, обновление траекторий оптических лучей, управление
видимостью оптических лучей.
Tesselation (Триангуляция)— визуализация триангуляризации
геометрической модели, на базе которой выполняется трассировка лучей.
Optimization (Оптимизация) — доступ к процедурам оптимизации и
анализа чувствительности.
Laser (Лазер) — создание источника лазерного излучения и
моделирование прохождения лазерного пучка.
Export to Speos (Экспорт в Speos)— экспорт
светотехнической/оптической модели в универсальную программу анализа Speos.
Preferences (Настройки) — базовые настройки анализа в сборке и
оптические характеристики, действующие по умолчанию, — для детали.
1 Optisworks
ОеЫ new optical properties
Optical design -
Detectors defafctan t
SWetten
Rey tracing \
- Tessetetion' ^,, ;;,/vv
. Utfos \ * \>:]\ \- < \'
J*p<tftpSpe#^ v,^
/, Preference*,,.-, if ^ *
Рис. 9.7. Меню OptisWorks
Define new optical properties
(Определить новые оптические свойства)
Создание новых оптических свойств: поверхностей различного уровня
сложности, материалов, спектров источников. Процедуры могут использоваться
как на уровне детали, так и в сборке. Создание свойства объекта не приводит
автоматически к назначению его каким-либо объектам модели. Процедуру
создания свойств можно выполнять на фоне операций по назначению
оптических свойств объектам модели.
710
Глава 9
Меню содержит пункты (рис. 9.8):
♦ Surface (Поверхность) — создание новых оптических свойств
поверхностей различной степени сложности.
♦ Material definition (Определение материала) — создание оптически
прозрачного материала с возможностью учета зависимости коэффициента
преломления от длины волны, с эффектом двойного лучепреломления,
объемного рассеяния, наполнения частицами, колориметрических
характеристик, ряда других эффектов.
♦ Spectrum definition (Определение спектра) — создание спектральной
кривой для последующего использования в качестве спектра источника света.
Рис. 9.8. Меню Define new optical properties
Surface (Поверхность)
Создание новых оптических свойств поверхности различного уровня
сложности (рис. 9.9). Следует учесть, что свойства, определенные в одной модели и
сохраненные в файле, не могут быть прочитаны в редакторе свойств,
ассоциированном с какой-либо другой моделью.
Меню содержит пункты:
♦ Easy simple scattering surface quality definition (Элементарная модель
поверхностного рассеяния) — определение оптических характеристик
поверхности без использования численных характеристик (окно редактора
свойств показано на рис. 9.43).
♦ Simple scattering surface quality definition (Простая модель
поверхностного рассеяния)— определение оптических характеристик поверхности
без учета зависимости свойств от длины волны света й взаимного
положения луча падающего, отраженного и нормали к поверхности (окно
редактора свойств показано на рис. 9.46).
♦ Advanced scattering surface quality definition (Продвинутая модель
поверхностного рассеяния)— определение оптических характеристик
поверхности в зависимости от длины волны, а также взаимной ориентации
луча падающего, отраженного и нормали к поверхности (окно редактора
свойств показано на рис. 9.49).
Светотехнический анализ и проектирование (OptisWorks)
711
шЩШВшЗшШ^/ВШш Easy simple scattering surface quality definition.,.
Simple scattering surface quality definition»,.
Advanced scattering surface quality definition,. ,
,. :. в. J
Настройка меню ]
Рис. 9.9. Меню Surface
Optical design (Оптическое проектирование)
Создание или определение объектов оптической системы: линз, оптических
источников; идентификация оптической системы, а также расчет оптических
характеристик после трассировки лучей. Этот пункт, за исключением
команды Create new lens, функционирует исключительно в контексте сборки и не
имеет никакого отношения к светотехническим объектам, сформированным
на уровне детали.
Меню содержит пункты (рис. 9.10):
♦ Create new lens (Создать новую линзу) — создание или редактирование
линзы с назначенной пользователем геометрией, в частности,
асферической (окно редактора свойств показано на рис. 9.209). Также может быть
создана плоская круглая поверхность, сферическая или асферическая
поверхность. В принципе, эти элементы можно создавать самостоятельно
посредством команд SolidWorks, однако использование стандартных
объектов OptisWorks облегчает работу алгоритма оптического анализа, в
частности при расчете систем, содержащих контактирующие линзы, т. е.
дублеты и триплеты, а также позволяет включать параметры таких
объектов в оптимизационный оптический расчет.
JESSEffiiBl Create new lens... I
Oefine0p8eal Source-. I
Automatic sequence detection... |
. Optical calculation ►
Рис. 9.10. Меню Optical design
♦ Define Optical Source (Определить оптический источник)— создание в
контексте сборки источника света для оптического анализа (окно
редактора свойств показано на рис. 9.213).
♦ Automatic sequence detection (Автоматическая идентификация
оптической последовательности)— автоматическое формирование
оптической системы посредством расчета прохождения характерного луча через
модель сборки.
712
Глава 9
Optical calculation (Оптические вычисления)— выполнение оптических
расчетов на основе результатов трассировки лучей, исходящих из
оптического источника. Подача этой команды приводит к появлению меню
рис. 9.11. Оно содержит пункты:
• Paraxial (Параксиальная оптика) — анализ модели как параксиальной
оптической системы;
• Spot diagram (Диаграмма пятна) — расчет пятна рассеяния выбранного
оптического источника;
• Real aberrations (Вещественные аберрации)— построение графиков
аберраций;
• Aberration coefficients (Коэффициенты аберраций) — построение
коэффициентов аберраций из различных групп;
• 2D MTF (2D ФПМ) — построение сечений функции передачи моду-
ляцищ
• Wavefront, PSF, MTF— построение диаграммы волнового фронта,
функции передачи модуляции и функции рассеяния точки для
выбранной оптической системы;
• 3D sketch from the ray tracing (Пространственный эскиз по
результатам трассировки) — построение пространственного эскиза SolidWorks
на базе луча, назначаемого пользователем.
Рис. 9.11. Меню Optical calculation
Detectors definition (Определение детектора)
Создание светотехнических и оптических датчиков. Этот пункт
функционирует исключительно в контексте сборки и не имеет никакого отношения
к светотехническим объектам, сформированным на уровне детали.
Меню содержит пункты (рис. 9.12):
♦ Illuminance (Детектор освещенности) — создание детектора
освещенности на основе плоской поверхности или объектов эскиза в сборке.
Светотехнический анализ и проектирование (OptisWorks)
713
НШЙЯН^^^^П Ilumfoance...
Rays map.,,
lunwance.M
Intensity... I
Polar fr*erttjtyM.
Настройка меню I
Рис. 9.12. Меню Detectors definition
♦ Rays map (Детектор для лучей)— создание детектора лучей для сбора
информации о прошедших через него лучах с целью использования в
дальнейшем как виртуального источника.
♦ Luminance (Яркость) — создание детектора яркости для заданного
положения наблюдателя и объекта.
♦ Intensity (Сила света) — создание детектора силы света в ортогональных
координатах.
♦ Polar intensity (Сила света в полярных координатах) — создание
детектора силы света в ортогональных координатах.
Simulation (Симуляция)
Создание светотехнических и оптических датчиков. Этот пункт
функционирует исключительно в контексте сборки и не имеет никакого отношения
к светотехническим объектам, сформированным на уровне детали.
Меню содержит пункты (рис. 9.13):
♦ Direct simulation (Прямая симуляция) — вызов окна с настройками
процедуры расчета освещенности и силы света: учитываемых конфигураций,
числа лучей, а также определение формируемых диаграмм.
♦ Inverse simulation (Обратная симуляция)— вызов окна с учитываемых
конфигураций и последующий расчет яркости.
♦ Show/Hide Simulation progress bar (Показать/скрыть индикатор
выполнения)— отображение индикатора выполнения расчета освещенности или
яркости.
Рис. 9.13. Меню Simulation
714
Глава 9
♦ Stop simulation (Остановить симуляцию) — прерывание процесса расчета
с сохранением результатов.
♦ Priority (Приоритет)— изменение приоритета процедуры трассировки
в ходе вычислений. Подача этой команды приводит к появлению меню
рис. 9.14. Оно содержит пункты:
• Above normal (Выше стандартного) — процедура трассировки
выполняется с приоритетом выше среднего, установленного для приложений
Windows.
• Below normal (Ниже стандартного) — процедура трассировки
выполняется с приоритетом ниже среднего, установленного для приложений
Windows.
Рис. 9.14. Меню Priority
Ray tracing (Трассировка лучей)
Управление оптической трассировкой лучей. Команды применимы как к
оптическим моделям — в этом случае на базе трассировки формируются
оптические результаты, так и к фотометрической — здесь лучи остаются, по сути,
самодовлеющей сущностью.
Меню содержит пункты (рис. 9.15):
♦ Define Interactive Source (Создать интерактивный источник)— создать
интерактивный источник для трассировки лучей. Данная команда
появилась в версии 2007 года и не описана в документации.
ИИЯЯП '''^ХЫШпк^т Soured... ]
, Show ;,■'/. j
, Complete update > j
Рис. 9.15. Меню Ray tracing
♦ Show (Отобразить)— отображение/скрытие траекторий оптических
лучей.
♦ Update (Обновить) — повторный расчет оптических траекторий без
построения новой расчетной модели.
♦ Complete update (Полностью обновить) — Трассировка лучей с
актуализацией расчетной модели. Расчет выполняется для выбранного в Дереве
Светотехнический анализ и проектирование (OptisWorks)
715
OptisWorks оптического источника с анализом геометрии и оптических
свойств. Если в модели присутствуют фотометрические источники, то
трассировка выполняется для всех.
Tesselation (Триангуляция)
Выполнение триангуляции геометрии и управление ее видимостью.
Меню содержит пункты (рис. 9.16):
♦ Update (Обновить) — построение расчетной геометрической модели в
виде триангуляции модели SolidWorks с последующим отображением
поверхностной сетки.
♦ Display (Показать) — изменение состояния видимости триангуляционного
представления OptisWorks.
I.W iftif I и Л
Рис. 9.16. Меню Tesselation
Optimization (Оптимизация)
Выполнение оптимизационного расчета или анализа чувствительности.
Меню содержит пункты (рис. 9.17):
♦ Optimization (Оптимизация) — выполнение оптимизационного анализа на
основе информации об определенных ранее переменных проектирования,
целевой функции и настройках.
♦ Tolerancing (Анализ чувствительности)— выполнение анализа
чувствительности — влияния параметров оптической системы на ее свойства на
основе информации об определенных ранее переменных проектирования,
целевой функции и настройках.
«..»».» и ним i. .<*»« читки, м. 1ми \
Рис. 9.17. Меню Optimization
Laser propagation (Распространение лазерного излучения)
Синтез источников лазерного излучения и трассировка/расчет процесса
распространения энергии.
716
Глава 9
Меню содержит пункты (рис. 9.18):
♦ Laser source (Лазерный источник) — создание источника лазерного
излучения в виде плоской волны или как Гауссова пучка с параметрами,
номенклатура которых зависит от типа источника.
♦ Laser Propagation (Распространение лазерного излучения) — определение
числа лучей и запуск процедуры трассировки лучей для плоского
источника с последующим формированием результирующих диаграмм
интенсивности, облученности и разности фаз.
♦ Gaussian Propagation (Распространение Гауссова пучка)— расчет
прохождения Гауссова пучка с получением численных характеристик.
НМЯИ laser source J
laser Propagation I
Gaussian Pr o0agatjbrt -' \
Рис. 9.18. Меню Laser
9.3.3. Панели инструментов
Панели инструментов OptisWorks содержат большинство команд. Их
содержание не может настраиваться: допускается только включать и отключать
отдельные панели, для чего, кстати говоря, есть единственная
возможность — команда Вид | Панели инструментов. Панели показаны на
рис. 9.19—9.27, а их содержимое расшифровано в табл. 9.1—9.9.
Рис. 9.19. Панель Library
Кнопка Ярлык
\*&?\ Easy simple Элементарная
LffiJ scattering модель рассеи-
surface вающей
поверхности
ш
Таблица 9.1. Содержимое панели Library
Создание рассеивающей поверхности по
модели, не требующей ввода численных
характеристик
Simple Простая модель Создание рассеивающей поверхности по мо-
scattering рассеивающей дели, предусматривающей разделение света
surface поверхности на отраженную и пропущенную часть с учетом
расщепления энергии на поглощенную,
рассеянную по Ламберту и рассеянную по Гауссу
Функция
Светотехнический анализ и проектирование (OptisWorks)
717
Таблица 9.1 (окончание)
Кнопка
||"''|Ш"'
it
in
— .-
Ярлык
Advanced
scattering
surface
Coated
surface
Material
definition
Spectrum
definition
Продвинутая
модель
рассеивающей
поверхности
Поверхность
с покрытием
Определение
материала
Определение
спектра
Объект применения команд
Функция
Создание рассеивающей поверхности по
модели, предусматривающей разделение света
на отраженную и пропущенную часть с учетом
расщепления энергии на поглощенную,
рассеянную по Ламберту и рассеянную по Гауссу
в зависимости от длины волны, угла падения
и углов, определяющих направление
рассеяния
Создание рассеивающей поверхности по
модели, предусматривающей разделение света
на отраженную, пропущенную и поглощенную
часть в зависимости от угла падения и
направления поляризации
Создание модели материала, учитывающей
диффузию, зависимость коэффициента
преломления и поглощения от длины волны,
переменный коэффициент преломления и
эффект двоякопреломления
Создания спектра излучения
Деталь и сборка
штшвшшщ
Рис. 9.20. Панель Optical Properties
Таблица 9.2. Содержимое панели Optical Properties
Кнопка
ш
Ж
mm\
Ярлык
Set surface
quality
Set internal
material
Set external
material
Назначить граням
детали
характеристики поверхности
Назначить граням
детали
характеристики внутреннего
материала
Назначить граням
детали
характеристики окружающего
материала
Функция
Присвоение выбранным граням детали
оптических характеристик
поверхностей из числа ранее созданных
Присвоение выбранным граням детали
оптических характеристик внутреннего
материала из числа ранее созданных
Присвоение выбранным граням детали
оптических характеристик наружного
материала из числа ранее созданных
718
Глава 9
Таблица 9.2 (окончание)
Кнопка
0
rtinrtnttn
ш
ж
Ярлык
Define geometry
as source
Sources
management
Define the
preferences for
this part
Определить
геометрию как
источник
Управление
источниками
Определить ,
настройки для
детали
Объект применения команд
Функция
Использование выбранных граней
детали как поверхностных источников
света
Доступ ко всем поверхностным
источникам в детали
Назначение для детали в целом
внешнего и внутреннего материала, а
также поверхности
Деталь
Таблица 9.3. Содержимое панели Detectors
Кнопка
Ж
Щ'
ш
***«►
ш
Ярлык
Define an
illuminance
detector
Define a rays map
detector
Define a
luminance
detector
Define an
intensity detector
Define a polar
intensity detector
Создать детектор
освещенности
Создать детектор
для лучей
Создать детектор
яркости
Создать детектор
силы света
Создать детектор
силы света в
полярных
координатах
Объект применения команд
Функция
Создание детектора освещенности на
основе плоской поверхности или
объектов эскиза в сборке
Создание детектора для сбора лучей
на основе плоской поверхности или
объектов эскиза в сборке
Создание детектора яркости для
заданного положения наблюдателя и
объекта
Создание детектора силы света в
ортогональных координатах
Создание детектора силы света в
полярных координатах
Сборка
Рис. 9.21. Панель Detectors
DptisWorks Simulation
ШШЩЙ^йШзд
Рис. 9.22. Панель Simulation
Кнопка
Ш
Таблица 9.4. Содержимое панели Simulation
Ярлык
Direct simulation
Прямая симуляция
Функция
Запуск анализа освещенности,
силы света и яркости
Светотехнический анализ и проектирование (OptisWorks)
719
Таблица 9.4 (окончание)
Кнопка
liiuiirthiil
' ■■■■--■■J
ы
L iwniiii
.■■■^■■■■i
Ж
ш
Ш
Л\
ш
Ярлык
Inverse
simulation
Edit faces
involved in SCA
Edit faces
included in 3D
maps
Show/Hide
progress bar
Stop simulation
Set priority
below normal
Set priority
above normal
Export to Speos
Define the
preferences for
this assembly
Обратная симуляция
Редактировать грани,
вовлеченные в анализ
вклада поверхностей
Редактировать грани,
вовлеченные в
пространственные
диаграммы
Показать/скрыть
индикатор выполнения
Остановить
симуляцию
Установить приоритет
ниже стандартного
Установить приоритет
выше стандартного
Экспортировать
в Speos
Определить настройки
для сборки
Объект применения команд
Функция
Запуск анализа яркости
Определение списка граней, для
которых анализируется их вклад в
рассчитываемые параметры
Определение списка граней, на
которых будут строиться
диаграммы распределения параметров
Отображение индикатора
выполнения расчета освещенности или
яркости
Прерывание процесса расчета
Понижение приоритета процедуры
расчета
Повышение приоритета процедуры
расчета
Экспорт светотехнической модели,
состоящей из геометрии и
характеристик, в программу Speos
Назначение для сборки настроек
вычислительного процесса
Сборка
OptisV/огкч Ray tracing!!!
'ммтй. ,и ;„,;,;,;<$ fa, ш„г I
Рис. 9.23. Панель Ray tracing
Таблица 9.5. Содержимое панели Ray tracing
Кнопка
■мнН^шш
'<:/- ?
Ярлык
Define Interactive
source for the ray
tracing
Ray tracing
(Show/Hide)
Создать интерактивный
источник для трассировки
лучей
Отобразить/Скрыть
результаты трассировки
Функция
Создать интерактивный
источник для трассировки лучей
Изменение состояния
видимости лучей
720
Глава 9
Таблица 9.5 (окончание)
Кнопка
-*ч
*►*
&
ш
Ярлык
Update the ray
tracing
Complete update
of the ray tracing
Edit the ray
tracing filtering:
required faces
Edit the ray
tracing filtering:
rejected faces
Обновить трассировку
лучей
Полностью обновить
трассировку лучей
Редактировать фильтр
при трассировке лучей:
задействованные грани
Редактировать фильтр
при трассировке лучей:
игнорируемые грани
Объект применения команд
Функция
Повторная трассировка лучей
на имеющейся расчетной
модели
Трассировка лучей с
актуализацией расчетной модели
Редактирование списка граней,
задействованных при
трассировке лучей
Редактирование списка граней,
заведомо не участвующих в
трассировке лучей
Сборка
Рис. 9.24. Панель Tessellation
Таблица 9.6. Содержимое панели Tessellation
Кнопка
*
л
Ярлык
Update
tessellation
Display
tessellation
Обновить
триангуляцию
Показать
триангуляцию
Объект применения команд
Функция
Приведение в соответствие расчетной
геометрической модели OptisWorks с моделью SolidWorks и
отображает результат
Изменение состояния видимости
триангуляционного представления OptisWorks
Деталь и сборка
Рис. 9.25. Панель Optimization
Таблица 9.7. Содержимое панели Optimization
Кнопка
"'■&%
■У^**
Ярлык
Optimization
Оптимизировать
Функция
Выполнение условной оптимизации
Светотехнический анализ и проектирование (OptisWorks) 721
Таблица 9.7 (окончание)
Кнопка
Ярлык
Tolerancing
Анализировать
чувствительность
Объект применения команд
Функция
Анализ чувствительности проекта на
изменение переменных проектирования
Сборка
Рис. 9.26. Панель Optical design
Таблица 9.8. Содержимое панели Optical design
Кнопка
ш
ш
Ж
ш
£2%ц
ш
Ярлык
Create new lens
Import optical
system file
Define Optical
source for ray
tracing and
calculation
Automatic
detection of an
optical sequence
Paraxial
calculation of
current optical
system
Spot diagram of
the current
optical system
Real aberrations
with object
source
Создать линзу
Импортировать
файл с оптической
системой
Создать оптический
источник для
трассировки лучей и
расчетов
Автоматически
диагностировать
оптическую
последовательность
Расчет
параксиальных характеристик
активной оптической
системы
Диаграмма пятна
для активной
оптической системы
Геометрические
аберрации для
объектного источника
Функция
Создание детали и помещение в нее
модели линзы
Импорт файла с оптической
системой в формате Odyssey фирмы Optis
Создание источника лучей для
выполнения оптической трассировки
лучей и выполнения оптических
расчетов
Автоматическое создание
оптической последовательности на основе
результатов трассировки луча
Рассчитывает параксиальные
характеристики для активного множества
лучей
Расчет диаграммы пятна, лучшего
фокуса, энергии в пятне и размеров
пятна в зависимости от положения
детектора для выбранной
оптической системы
Расчет геометрических аберраций
для объектного источника
выбранной оптической системы с выводом
результатов в виде графиков, а
также с записью в текстовый файл
722
Глава 9
Таблица 9.8 (окончание)
Кнопка
ш
iiiilrtiiiini
ш
ш
Ярлык
Aberration
coefficients
2DMTF
Wavefront, PSF,
MTF with object
source
3D sketch from
the ray of tracing
of a manual
source
Расчет
коэффициентов аберрации
Сечение функции
передачи модуляции
Волновой фронт,
ФПМ и ФРТ
на базе объектного
источника
Пространственный
эскиз на базе
трассируемого луча
Объект применения команд
Функция
Расчет коэффициентов аберрации
выбранной оптической системы
Построение сечений функции
передачи модуляции выбранной
оптической системы и запись результатов в
текстовый файл
Построение диаграммы волнового
фронта, функции передачи
модуляции и функции рассеяния точки для
выбранной оптической системы,
построенных с помощью объектного
источника
Построение пространственного
эскиза SolidWorks на базе луча,
назначаемого пользователем
Деталь и сборка
ЕДШ1Н1
Рис. 9.27. Панель Laser propagation
Таблица 9.9. Содержимое панели Laser propagation
Кнопка
ш
т
щ
[■■■...; л
Ярлык
Laser
source
Laser
propagation
Gaussian
propagation
Лазерный
источник
Распространение
лазерного
излучения
Распространение
Гауссова пучка
Объект применения команд
Функция
Создание источника лазерного излучения в
виде плоской волны или как Гауссов пучок
Определение числа лучей и запуск
процедуры трассировки лучей для плоского источника
Расчет прохождения Гауссова пучка
Деталь и сборка
Здесь, как и при описании меню, мы не будем конкретизировать
функциональность команд. Соответствующие описания применительно к
светотехническому и, в первом приближении, к оптическому анализу будут даны при
рассмотрении элементов интерфейса и анализе примеров.
Светотехнический анализ и проектирование (Optis Works)
723
9.4. Настройки
Под настройками будем понимать свойства оптической системы в целом, ее
объектов, а также параметры процедур анализа. В OptisWorks доступ к
настройкам достаточно жестко регламентирован в зависимости от типа объекта:
деталь это или сборка.
9.4.1, Деталь
Глобальные настройки для оптических характеристик детали определяются
по команде Preferences (Настройки). Окно Part Preferences (Настройки
детали) имеет две вкладки. Первая— Default optical properties (Оптические
свойства по умолчанию) (рис. 9.28) содержит поля:
♦ Surface quality (Характеристики поверхности)— оптические свойства
поверхностей в виде файла одного из ранее определенных типов
поверхностного рассеяния (scattering). Соответствующие интерфейсные
элементы для генерации свойств поверхностей приведены в разд. 9.5.2;
♦ Intern material (Внутренний материал) — свойства материала детали,
определенные посредством инструментов из разд. 9.5.3;
♦ Extern material (Окружающий материал)— свойства материала среды,
в которую помещена данная деталь. Источником для этих материалов
является та же самая база данных, что и для материалов внутренних.
Данная характеристика имеет больший приоритет относительно параметра
Ambient material (Материал окружающей среды), назначаемого для
сборки. Например, применительно к детали, одна из граней которой
контактирует с другой деталью, со стороны которой приходит световой луч, для
соответствующей грани следует назначить Extern material таким же, как
и материал контактирующей детали. Продолжая мысль, скажем о том, что
для ответной грани — грань детали, из которой выходит луч, нужно
назначить характеристики идеального пропускания. Они берутся из базы
данных OptisWorks, как показано на рис. 9.29. Для поверхности нужно
назначить свойства из файла Transparent_ow.transparent. Характеристики в
нем соответствуют показанным на рис. 9.30, однако назначать
соответствующие свойства нужно именно из базы Optis. Если этого не сделать, то
будет появляться не имеющее аналогов в действительности преломление.
Соответствующий пример приведен на рис. 9.31, где приведена модель,
состоящая из двух линз, которым назначен один и тот же материал.
В верхней части рисунка траектории соответствуют исходным оптическим
характеристикам объектов, в нижней — модифицированным.
724
Глава 9
Part Preferences
i,. iv... ■, .„i-.-^.ri.,,,,., J-,, ■■■ ,w;;;,,,-,;,, ,v.i;:;, iwu: .w, ■,■;•., ,-;j
Рис. 9.28. Вкладка Part Preferences | Default optical properties
absorption 100_ow. slmplescatter ng
^f^^ YS^f^^ WCONNECTOR SURFACEJDW. simpiescattering
4^^^^>^^^'??^AWGREEN PCB SURFACE OW.simplescattering
'fe^>4^\i^ ^\i^W Junction Surface_OW.mirror
Щ?Щ Щ^Л'£*£TOMyJransparent OW.slmplesc
-Sj/Идеальный отражатель_СА'
■^'Идеальный поглотитель./
^Прозрачная рассеивающее
■^npo3pa4Hafl_OW.$imple$catч
simpiescattering
Opt ical_Polished. opt
>v * * 4 -<-\>, ^-*,«=• Optical J>oished._OW.opt
'&Г&\ ->Ч*>, Ч ^уЬ^рсв SIDE SURF ACE.OW. simpiescattering
1 < ^^V^^^^'^I^PERFECT ABSORBING OW.simplescattering
#I^St^^yTr^^rent-QW,transpafent I
." ^k«^ * ..^' Vvi*.-?.» .r^f Внутренняя поверхность^^, simpiescattering
^Идеальный отражатель, simpiescattering
~ J 1<Щ||| Hl|lljl||l1lll|| «' ■
.,;4Ш^к,у
Рис. 9.29. Назначение идеально пропускающей поверхности из базы данных OptisWorks
Предупреждение
При назначении оптических характеристик следует учитывать, что один и тот же
файл со свойствами, будучи продублирован в различных каталогах и затем
назначен двум объектам, таким как тело и примыкающая к нему поверхность
другого тела, не будет воспринять как один и тот же материал. Это приведет к
неявной труднодиагностируемой ошибке. В этой связи рекомендуется все
оптические свойства содержать и назначать из одной и той же структуры каталогов,
имеющей корнем папку свойств OptisWorks, а не хранить, например, эти
свойства совместно с файлами моделей. Помимо прочего, данный подход
облегчает перенос расчетных моделей на другие компьютеры.
Светотехнический анализ и проектирование (OptisWorks)
725
OptisWorks - Scattering surface [ПР03РАЧНАЯ_О\¥]
mmm
??<s^>
:&>Ч
\
4
W$'4 *'?Г*??Л Л ^ДюГиЮ&^9*иЦвП «Г$0 |0 * ;,
£■■■■■£ M.hfn.r.M.f M..;,.f.^..„..„. f Ш...И Ш X. 1L-
Рис. 9.30. Идеально пропускающая поверхность
Рис. 9.31. Некорректная и адекватная схема прохождения лучей
726
Глава 9
Нажав на кнопку Glass (Стекло), можно получить доступ к библиотекам
стекол, а после выбора конкретного стекла— к его характеристикам:
зависимости коэффициентов преломления и пропускания от длины волны (рис. 9.32),
диаграммам Аббе для средней и относительной дисперсии (рис. 9.33 и 9.34).
Absorption (men-1)
1,55i
1,50-
hv
\
•••!•••••
\
i i t i
wmnmnmnwr |ndeX
•.nnmnwnnr-nn Absorption
i i * i > > < > i i i i i i—i * » i 1
т1,0E*00
t1 «0E-01
|l .OE-02
il .OE-03
200 400 600 800 1000 12001400 16001800 2000 2200 2400
Wavelength (nm)
1 .OE-04
шттшш
Рис. 9.32. Зависимость коэффициентов преломления и поглощения от длины волны
Рис. 9.33. Диаграмма Аббе — средняя дисперсия
Светотехнический анализ и проектирование (OptisWorks)
727
___^
;$т", йэдгад»" ШГ^ х У ,~ —;—7 Л~~ —yf; ~- у-; -рт\ /"-- ;^ г--■■■■---?•.
!Шх
■
ж»ж1
х**Т
fe'&
S3
Иг'2%,
13
J"!''"v
i'U
Ш
ш
щ
ЙЙ
11
li
li
If!
us
fo?
a
«%$&
ЗШ
!«&&
II
Jfl
m
mm
111
|$.§M
I
Ш
Ш
ill
ill
mm
ll
#4?
;£*>$!X
|щ
ill
H
18
Ш
at
fl
ll
ш
HI
IP
i
&
11
Щ
life
S
II
ШВЗ
ill
Ш
Щ+t-
щш
ш
щ
ч
ifl
ШШ1
'хщлХллШ
ШШ$Ш%,
Щ
ш
tifi
SI
I
щ$
гщ
Щ
Щт
щ
щ
ж
ш&
ж
ш£
к
Ж
11
Ж
гШ
ffe
fill
Щ
iffiU
Ж
ZJJL
mi-mtrt
■Y-v...,
1 li.
LM^^urett"].,,!. ,y „ ч
® ARCHER 0 1
♦ HOYA 2Г
CORNING 0Г
SUMITA И
Ф OHARA 0
# SCHOTT СГ
^,г11гт.р.т1;,гт1.
-os И
^ 'ш* I /1
C*r»d J , j
1"]1^"'!1"1,!1,",I!!!T-. fff.T .^1
Рис. 9.34. Диаграмма Аббе — относительная дисперсия
Вторая вкладка — Tesselation (Триангуляция) — содержит параметры,
определяющие точность, с которой геометрическая модель Sol id Works
транслируется в расчетную геометрию OptisWorks. Вкладка (рис. 9.35) содержит поля:
♦ Max. facet width (mm) (Максимальный размер фасетки) — максимальная
длина ребра треугольной грани, которыми аппроксимируются грани тел;
♦ Deflection (mm) (Отклонение) — наибольшее расстояние между истинной
(взятой из SolidWorks) геометрией и триангулированной поверхностью.
[Part Preferences
Рис. 9.35. Диалоговое окно Part Preferences, вкладка Tesselation
24 3ак 4405
728
Глава 9
Пользователь может выбрать только одно положение переключателя.
Триангуляция линзы с различными параметрами Tesselation показана на рис. 9.36.
В документации программы упоминается, что для построения
пространственных диаграмм, содержащих результаты, "наложенные" на модель, следует
использовать первый способ. Также необходимо иметь в виду, что чем
больше точность аппроксимации геометрии триангуляцией, тем больше требуется
вычислительных ресурсов — памяти и времени счета.
Важным моментом является то, что для оптического анализа аппроксимация
линз треугольниками приводит к значительной и непредсказуемой
погрешности. Поэтому рекомендуется использовать для создания линз, дисков,
сферических и асферических поверхностей. Для этого используется команда Create
new lens (Создать линзу). Модели деталей SolidWorks при оптической
трассировке лучей будут восприниматься в их математическом представлении, а
не как совокупность плоских граней. Это, с одной стороны, радикально
увеличит точность, а с другой — ускорит расчет.
Рис. 9.36. Триангуляция линзы с различными параметрами
9.4.2. Сборка
Глобальные настройки вычислительного процесса ассоциируются со
сборкой. Как и для детали, доступ к ним осуществляется по команде Preferences
(Настройки). Базовые настройки сосредоточены на вкладке General (Общие)
(рис. 9.37), которая содержит следующие управляющие элементы.
♦ Группа Luminance preferences | Ambient source (Настройки яркости |
Источник окружающего света), описывающая состояние окружающей среды
при расчете яркости, включает поля:
• Luminance (Яркость)— яркость распределенного источника,
окружающего анализируемую сцену;
Светотехнический анализ и проектирование (OptlsWorks)
729
• On/Off (Включить/Выключить)— управление тем, учитывается ли
влияние окружающего света;
• Color (Цвет) — спектр излучения окружающего источника.
Ambient material (Материал окружающей среды) — оптические
характеристики материала внешней среды. Этот параметр определенным образом
пересекается с полем External material (Окружающий материал), причем
последний имеет больший приоритет, чем материал, "заполняющий"
сборку.
Save and update maps during calculation every ... mn (Сохранять и
обновлять диаграммы в процессе расчета каждые ... мин)— позволяет
сохранять промежуточные результаты в ходе светотехнической трассировки;
Propagation epsilon ... mm (Малая величина расстояния при
распространении) — в пределах этой величины система игнорирует возможность
пересечения луча с той же поверхностью, с которой он только что провзаи-
модействовал;
Maximum impact (Предельное число взаимодействий) — если
столкновение луча с оптическими поверхностями превысит указанное, то луч будет
считаться поглощенным;
- Iwwnanee preference* -
"AmbenUowce
Lumirtanc*:- jaw ШЫ2 Г ШУЩ
Color: jDWaeSMRESW Эъ«
Ambrent material; jcSffioS^^
-Qptinakafiair"- -
' Saye^&fttf tjpdate map* during ?аЫа*ш every; ]30
> Propao^fonepsian: , -
Ma^irrtumirflpact:
6(0)3 propagation if photon ener$H$ <
Smail Engirt» parameter;
To^nqrig step nufftber: „ - ,
Г Qradief4eihd«rte
Op<ifr«afwrit*me^houl{mpfoverner«t * j60
1e-005
Bay tracing —
P Ra^vAhout errors
P Rays with errors
Рис. 9.37. Диалоговое окно Preferences, вкладка General
730
Глава 9
♦ Stop propagation if photon energy is < (Остановить распространение, если
энергия фотона <) — если из-за поглощения при прохождении луча в
материалах или при взаимодействии с поверхностями энергия условного
фотона уменьшится с единицы (это ее начальное значение) до назначенной
величины, то считается, что фотон поглотился;
♦ Smart Engine parameter (Параметр интеллектуального решателя) —
в программе реализован сложный алгоритм трассировки лучей в сценах,
описанных сеточной геометрией. Значение параметра по умолчанию
обеспечивает оптимальную эффективность. В некоторых ситуациях
увеличение параметра может ускорить симуляцию;
♦ Tolerancing step number (Число шагов при анализе чувствительности) —
число шагов, используемое в алгоритме анализа чувствительности.
♦ Группа Optimization (Оптимизация), содержащая базовые настройки
оптимизационной процедуры:
• Evolutionary engine (Эволюционный метод) — так называемый
"генетический" алгоритм, который, по всей видимости, является
разновидностью метода прямого поиска и рекомендуется для поиска
приближения к глобальному оптимуму;
• Gradient engine (Градиентный метод) — метод, использующий
производные, который рекомендуется для уточнения приближения к
некоторому локальному оптимуму. Допускается одновременный выбор двух
методов. В этом случае система использует результаты начального
поиска в качестве стартовой точки для градиентного алгоритма;
• Optimization time without improvement... s (Время оптимизации без
улучшения ... сек)— критерий остановки оптимизационного процесса.
Если расчет не дает улучшения целевой функции за назначенный
период, то поиск лучшего варианта завершается. Следует отметить, что для
расчетов с большим временем трассировки процесс, если судить по
имеющемуся в программе описанию, может завершиться без получения
сколь-нибудь лучшего проекта.
♦ Группа Ray tracing (Трассировка лучей), управляющая визуализацией
лучей различного типа:
• Rays without errors (Лучи без ошибок) — будут визуализироваться
лучи, корректно взаимодействующие с поверхностью;
• Rays with errors (Лучи с ошибками) — будут визуализироваться
только лучи, некорректно взаимодействующие с поверхностью. В
документации подчеркивается, что главным источником ошибок является
некорректное определение внутренних и внешних материалов на гранях
соприкасающихся объектов.
Светотехнический анализ и проектирование (OptisWorks)
731
Вкладка Result file (Файл результатов), которая не приводится на
иллюстрации, содержит единственное поле Directory (Каталог), определяющее
каталог, в который будут записываться результаты (если пользователь хочет,
чтобы они сохранялись в папке отличной от той, в которой находится файл
рассчитываемой сборки).
9.5. Светотехнический анализ —
базовая функциональность
В этом разделе рассмотрена функциональность, связанная с
фотометрическим анализом. Приводится описание объектов OptisWorks применительно
к решению типовых задач светотехники.
9.5.1. Источники света
Присвоение характеристик фотометрического источника осуществляется в
панели Source definition (Определение источника) (рис. 9.38), вызываемой
командой Define geometry as source (Определить геометрию как источник).
Фотометрический источник создается только в режиме детали. Панель
содержит следующие управляющие элементы.
♦ Selected faces (Выбранные грани) — грани тела, которые будут испускать
лучи, порождаемые источником. Поскольку с единственным источником
допускается выбирать несколько граней, то световой поток, мощность или
энергия, несомая набором лучей, распределяется между гранями
пропорционально площади;
Рис. 9.38. Назначение граням свойств фотометрического источника
♦ Source name (Имя источника) — метка, в которой отображается название
выбранного источника;
732
Глава 9
♦ Define (Определить)— кнопка, по нажатии которой появляется окно
Source definition for geometry (Определение источника для объекта
геометрии).
Создание и редактирование фотометрических источников осуществляется в
окне Source definition for geometry (Определение источника для объекта
геометрии). Содержимое окна (рис. 9.39) следующее:
♦ Type of source (Тип источника)— переключатель, определяющий, будет
ли источник поверхностным — положение Surfacic (Поверхностный) или
с ним будет ассоциирован файл с лучами (положение Ray file (Файл
лучей)), сгенерированный и записанный в ходе предыдущих расчетов —
посредством сбора в созданный пользователем детектор лучей, как результат
фотометрической симуляции для модели в целом (см. рис 9.76 — окно
Direct simulation), или же импортированный из других программ.
Например, версия 2007 года позволила использовать модели источников фирмы
Radiant Imaging;
♦ Select a source (Выбор источника) — список источников, присутствующих
в модели, которые можно ассоциировать с выбранными гранями. Очевид-
Рис. 9.39. Редактирование свойств фотометрического источника
Светотехнический анализ и проектирование (OptisWorks) 733
но, что факт наличия определения источника не означает того, что он
физически существует.
♦ Группа Ray tracing (Трассировка лучей)— в нее собраны параметры,
в соответствии с которыми будет выполняться фотометрическая
трассировка в оптическом режиме — т. е. с генерацией траекторий без
получения численных результатов:
• Number of ray (Число лучей) — число оптических лучей;
• Color (Цвет) — переключатель, управляющий спектром света,
связанного с лучами. Положение True color (Истинный цвет) принуждает
алгоритм выполнять трассировку в соответствии с выбранным в поле
Spectrum спектром. При этом каждый луч будет нести фиксированную
длину волны, выбранную случайным образом в соответствии со
спектральной кривой. При выборе положения False color (Условный цвет)
лучи имеют постоянную длину волны, соответствующую цвету,
выбранному посредством кнопки Choose (Выбрать).
♦ Source name (Название источника) — название источника, присваиваемое
пользователем.
♦ Invert axis (Обратить оси) — разворачивает нормаль к поверхности (она
обозначается KaKZ). Лучи испускаются в положительном направлении
оси.
♦ Группа Surfacic source (Поверхностный источник) с полями,
определяющими характеристики источника:
• Power (Мощность)— энергетическая (Watt) или фотометрическая
(Lumen) мощность источника;
• Emittance (Излучательная способность)— распределение плотности
энергии излучения в пределах поверхности. Принимает значения:
Uniform (Однородная); Surfacic variable (XMP) (Переменная по
поверхности (ХМР))— неоднородная, управляемая информацией в
файле формата ХМР;
• Intensity distribution (Распределение интенсивности)— особенности
распределения энергии по направлениям в пространстве.
Переключатель имеет положения:
D Lambertian (Ламбертово) — сила света подчиняется ламбертову
закону с ограничением в конусе с осью перпендикулярной нормали к
поверхности и углом между осью и образующей равному Limited
half angle (Половина ограниченного угла), измеряемым в градусах;
° Cos n theta (Косинус в степени п)— интенсивность
пропорциональна степени п косинуса угла между нормалью и направлением, в
734
Глава д
котором испускается некий луч. Этот закон является общим
относительно ламбертова распределения, когда показатель степени равен
единице;
D Gaussian (Гауссово)— интенсивность в пределах углов AngleX и
AngleY имеет Гауссово распределение;
D Intensity distribution file (Файл распределения интенсивности) —
файл распределения интенсивности в форматах: IES, Eulumdat,
Optis.
• Spectrum (Спектр)— спектральные характеристики источника. Оно
может характеризоваться распределением энергии по длинам волн —
положение переключателя Sampled (По образцу), записанным в
созданный ранее файл. Спектральная кривая генерируется. Если
переключатель установлен в положение Monochromatic (Монохромный), то в
соответствующем поле следует назначить длину волны в нанометрах;
• Ray file source | Ray file — в качестве источника используется файл
лучей, сгенерированный (отредактированный) в ходе расчетов каких-
либо других светотехнических моделей.
Рис. 9.40. Редактирование спектральной кривой
Спектр излучения генерируется посредством редактора спектра, окно
которого приводится на рис. 9.40. Редактор вызывается по команде Spectrum
definition (Определение спектра), подаваемой из меню Define new optical
properties (Определить новые оптические свойства). В таблице, первая
строка которой называется Wavelength (Длина волны), а вторая Value (%) (Доля,
%), вводится спектральная кривая, которая отображается на графике с за-
Светотехнический анализ и проектирование (OptisWorks)
735
краской, соответствующей видимой части спектра. Колориметрическую
диаграмму можно получить, подав команду View | Colorimetric data (Вид |
Колориметрические данные) или нажав на одноименную кнопку.
Соответствующее окно показано на рис. 9.41. Можно также узнать световую отдачу
источника, подав команду Lumen-Watt ratio (рис. 9.42).
щ Colorimetric data
LlXYZ
^■^4^?/PP
Рис. 9.41. Редактирование спектральной кривой
От
> £doritneWcdalja„, ',,
f\ , turner*perщтгф.« Ш,2108$7 Ы<Н
OK
Рис. 9.42. Световая отдача
9.5.2. Поверхности
Для создания и редактирования оптических свойств поверхностей в
OptisWorks используется ряд интерфейсных элементов. В зависимости от
полноты исходных данных, базовые характеристики: прозрачность,
отражение, рассеяние можно определять в одном из трех окон, после чего сохранять
в файле, расширение которого соответствует использованному редактору.
С
Замечание
_)
Свойства, сгенерированные в редакторе одного типа, не могут быть прочитаны
в другом. Это касается как движения "от простого к сложному", так и в обратном
направлении.
736
Глава 9
Для вызова окон редактора свойств используются команды меню Surface
(Поверхность) (см. разд. 9.3.2) или из панели инструментов Optical
Properties (Оптические свойства) (см. разд. 9.3.3).
Окно Easy simple scattering surface quality definition (Элементарная модель
поверхностного рассеяния) показано на рис. 9.43. Как видно, здесь не
предполагается знания численных величин оптических свойств, а для описания
поверхности используется вполне субъективная оценка.
O^aiptldtt [Поверхность пользователя
Рис. 9.43. Окно Scattering surface
Окно содержит следующие управляющие элементы:
♦ Description (Обозначение) — текстовая информация.
♦ Группа Reflectivity (Отражательная способность), содержащая объекты:
• Pre-defined reflectivity (Предопределенная отражательная
способность)— четыре варианта отражающей поверхности: Gloss
(Глянцевая); Mat (Матовая); Brilliant (Блестящая); Metal (Металлизированная).
• Ползунковые переключатели Specular (Отражение); Shininess (Блеск);
Transparency (Прозрачность), определяющие субъективную оценку
вклада этих факторов в оптические свойства;
♦ Группа Surface color (Цвет поверхности):
• Color collection (Каталоги цвета) — список с каталогами цветов.
Светотехнический анализ и проектирование (OptisWorks)
737
• Select (Выбрать) — кнопка вызова окна с содержимым
соответствующего каталога (для каталога RAL его содержимое показано на рис. 9.44).
При выборе каталога Gray scale (Оттенок серого) появляется окно,
показанное на рис. 9.45. Степень черноты ассоциирована с величиной
поглощения: белый — поглощения нет, черный — полное поглощение.
• L (Lightness), С (Chroma), h (Hue) — справочные метки, в которых
отображаются яркость, цветность, цвет выбранного объекта.
Группа Texture (Текстура), посредством которой можно на поверхность
наложить маску из графического файла:
• Filename (Название файла)— допускаются файлы с расширениями
bmp, gifjpg, png, rgb;
• Scale factor (Масштаб) — масштабные коэффициенты для текстуры по
осям: Horizontal (Горизонтальный); Vertical (Вертикальный).
5 Color sefecUoii
к<*чт- лм
ЩШШШ ШШЦШ МЮЙШ jEJEEHMt ПНИЩ" ЯШШШ ШШЙ ЯМШИШ'
йНШШ jWiiiHi шйяш §ЗШШШ зШЗшШ «шшш ШШши мниинин
ШШШ Шшш 1111111 ШШ1ШШ ШШШ шШШ ШНЁ
IH ЯВ шш iBl ИН1HIШВ ЯШ
1увЕ-40
detected color; Hue-180 lfcthne$$«*60 Chroma*3U
Рис. 9.44. Выбор цвета в каталоге RAL
Color selection
USE!
h-4
' - з
Ш
т
Щ
Ш
1
ш
Selected «йог^ Hue-0 Идг*пе$*»$5 <Лгшни&
шиш
Рис. 9.45. Выбор цвета как оттенка серого
738
Глава 9
♦ Preview (Предварительный просмотр) — вид сферы (Spherical) или
плоскости (Flat) с назначенными характеристиками.
Окно Simple scattering surface quality definition (Простая модель
поверхностного рассеяния) показано на рис. 9.46. Этот способ позволяет описать
поверхность, обладающую свойствами поглощения, отражения и пропускания.
Окно содержит следующие управляющие элементы:
♦ Безымянное окно с текстовой информацией.
♦ Non absorption (Без поглощения)/ЬатЬегйап reflection (Ламбертово
отражение) — после активизации данной опции (текст метки зависит от
состава выбранных опций Reflection и Transmission) становится доступным
поле, в котором можно выбрать цвет тела или поверхности при ламберто-
вом отражении. Также доля поглощенной энергии становится равной
нулю.
♦ Absorption (Поглощение) — доля поглощенной энергии при
взаимодействии луча с поверхностью, %.
♦ Non absorption (Без поглощения) — доля энергии, не подвергшейся
поглощению, %. Она рассчитывается автоматически и равна 100% —
Absorption.
♦ Reflection (Отражение)— признак наличия отражения. Если отражение
происходит, то открывается доступ к следующим полям:
• Reflection gaussian angle (Угол гауссового отражения) — угол наклона
образующей конуса, внутри которого происходит рассеяние по Гауссу;
• Lambertian (Ламбертово) — доля рассеяния по Ламберту в
отраженном световом потоке, %;
• Gaussian (Гауссово) — доля рассеяния по Гауссу в отраженном
световом потоке, %;
• Specular (Зеркальное) — рассчитанная автоматически доля идеального
отражения в отраженном световом потоке, %.
♦ Transmission (Пропускание) — признак наличия пропускания. Если
пропускание происходит, то открывается доступ к следующим полям:
• Lambertian (Ламбертово) — доля рассеяния по Ламберту в
пропущенном световом потоке, %;
• Gaussian (Гауссово) — доля рассеяния по Гауссу в пропущенном
световом потоке, %;
• Specular (Зеркальное) — рассчитанная автоматически доля идеального
пропускания в пропущенном световом потоке, %.
Светотехнический анализ и проектирование (OptisWorks)
739
OptisWorks - Scattering surface [No Name*!
,D4# ШЧ0Й t ?V^ - к -л* ^ V~ * /^>\> *> ;r> < - -
^.WHJWIII 11,4 II li|ili|l».l<Wtli
'JScattermg surface
;„„:„.rfX.A? ;,-,
Рис. 9.46. Окно Scattering surface
Рис. 9.47. Распределение параллельно поляризованного рассеянного света
740
Глава 9
♦ Use Fresnel/User (Использовать закон Френеля! соотношения
пользователя) — если одновременно учитываются пропускание и отражение, то
соотношение между пропущенной и отраженной энергией подчиняется
правилам Френеля — переключатель установлен в положение Use Fresnel или
следует самостоятельно определить доли пропущенного и отраженного
света в процентах. Если луч падает перпендикулярно идеально прозрачной
поверхности, то доля отраженного света в зависимости от коэффициента
преломления вычисляется по формуле:
R = (/7-l)2/(w+l)2.
После нажатия кнопки |3l0j— команда Scattering surface curve (Диаграмма
рассеяния поверхности) появляется окно (безымянное), на котором можно в
графическом виде наблюдать расщепление падающего на поверхность луча
на компоненты. Отображаются только рассеянные (при отражении и при
прохождении) компоненты светового потока. Визуализируются также
эффекты поляризации. На двух иллюстрациях (рис. 9.47 и 9.48) показано распреде-
Рис. 9.48. Распределение ортогонально поляризованного рассеянного света
Светотехнический анализ и проектирование (Optis Works)
741
OptisWorks - Scattering surface [No Name*}
■й*в£у!*т?'
1 Scattering surface
;Д
ш|
s ч ;Г" ;АЬ*огр1|ОГ4 ]0
X -I ;
V*"- V;^^fte*r*}
.' Bpecutef.}^ к
Umbettian
'/' ^ , : y« ; 'Г - > : v:,'....... - /^V^V</^\ лЛ*'''„ -г ■■■■ ■■ , ■■ ч '
Рис. 9.49. Параметры поверхности с ламбертовым рассеянием
S ттт
•V
■•'';
1
£
;-,"■
4,*
if ■.
a
<:<X
.„.....„.........._ ^ ^ Т7 ^ ._.... ^ "-■■■•■;■"■- ;"~;~"т 7'7"'.~~.'"""»'".'""".'""."'."." "" "."".""
; **/, - ^"^ < ', s г* » * , ^ - -] -/ - ^
^^ж^^^^^^ -:: ч :,.;':i ;'i: £ . ■': .s»::;;:: ■■..■■■ >£&■::. ^ : -^ ^Щ^^^^к
ь. \rv.' V. v*. "ул^"'^/..'г..".г.?''*' 'л'й.л',*!'^""ri;^ * л -.
,^iZIIIZ^E:5^ ^
,,xW*Ww>j^b'',"'"if*'^"' t^'v--^ "-*~4 —«—^ __ ^x, v ^T'^^^'T^'J ^ 0^<>qOrtal
:^ы|юо - ;уф»1 _:, '«» -мж^кию it-'./:."-" '•''
ЛР^:\<'^" '%v^ ''* -%* * vs ч- v " -> ' '- *'« '•'^ *
1
V
^ч:1'-'. •:.^> .•:.;.•• и -. V- т-« •• •.
lZli^'....V< •Л.}/?1:&.:.:.?..*Л* :.^'1..*„< ':. :... '. S}.X')J :... \\
^Orsplay*4' ^ч~~—^r;
1 SP* Incident Section [,
* 'v~ N ^ ' %' ' J' 1
'j г ввЬгл ; '' * jV
"^ ftbba|$tydemit)>; \ -
£r-":}:\ 'MA
i •:'.'<! P'""-T' ' '1
j -. ^Z**Lm- I-
:^!'/-.М
,j . гг|Г—"--j,.,
S. ^ ь :_^ J
-. чЛ !•.»«-•!
: ' ' 4]
Рис. 9.50. Распределение отраженного и пропущенного света по закону Ламберта
QutisWurks - ScaUerina surface [No Na
Рис. 9.51. Параметры поверхности с гауссовым рассеянием
шш®шшшш^^штшшшшшш
Рис. 9.52. Распределение отраженного и пропущенного света по закону Гаусса
Светотехнический анализ и проектирование (OptisWorks)
743
ление рассеянной компоненты параллельно и ортогонально поляризованного
света.
Интересной является картина распределения рассеяния по Ламберту с
параметрами, показанными на рис. 9.49, в рафинированном виде (рис. 9.50).
Аналогичная диаграмма для рассеяния по Гауссу в конусе с углом образующей
45° показана на рис. 9.51 и 9.52.
Окно Advanced scattering surface quality definition (Продвинутая модель
поверхностного рассеяния) показано на рис. 9.53. Этот способ позволяет
установить зависимость параметров поглощения, отражения (рассеянного и
зеркального) и пропускания с учетом длины волны в зависимости как от угла
падения луча (он обозначается буквой i), так и от ориентации отраженного
(пропущенного) луча — 0ц, 0±. Как и в случае с простой моделью рассеяния,
можно графически отобразить распределение рассеянной компоненты.
Цветовые свойства поверхности с назначенными характеристиками можно
просмотреть после нажатия кнопки Ц| (команда Colorimetric data —
Колориметрическая информация). В появившемся окне Surface Color (Цвет по-
Рис. 9.53. Окно Scattering surface (Advanced model)
744
Глава 9
Рис. 9.54. Окно Surface Color
верхности) (рис. 9.54) можно загрузить спектр освещения и оценить
колориметрические характеристики в различных координатах цветности в
зависимости от положения наблюдателя и ориентации падающего света.
В OptisWorks доступна модель поверхности с покрытием. Надо сказать, что
здесь нет генератора свойств в зависимости от состава слоев, а свойства
следует назначать в феноменологическом смысле — для совокупности объектов.
Окно редактора Coated surface (Поверхность с покрытием) показано на
рис. 9.55.
Диаграммы зависимости коэффициентов отражения (рис. 9.56) и пропускания
(рис. 9.57) в зависимости от длины волны и угла падения, а также как
функцию направления поляризации можно вывести в окне Coated surface curve
(Диаграмма для поверхности с покрытием) после нажатия кнопки ИД.
Светотехнический анализ и проектирование (OptisWorks)
745
OptisWorks - Coated surface {beamsplitter]
'81» tyt SSev* SoBeosia*. \ -
liO
JCoalmg surface
Рис. 9.55. Окно Coated surface
Coated surface curve
i!lil5i?J W$
Рис. 9.56. Диаграмма коэффициента отражения
746
Глава 9
Рис. 9.57. Диаграмма коэффициента пропускания
В дополнение к описанным типам поверхностей OptisWorks (в зависимости
от вида поставки) в состоянии моделировать следующие объекты:
♦ тонкие линзы и дифракционные оптические элементы;
♦ флуоресцентные поверхности;
♦ поверхности жидкокристаллических экранов;
♦ поверхности идеальных поляризаторов;
♦ поверхности световозвращателей;
♦ поверхности шероховатых отражателей.
9.5.3. Материалы
Определение материалов в OptisWorks производится через выбор стекла из
каталогов стекол с отображением оптических характеристик—
соответствующие интерфейсные элементы рассмотрены в разд. 9.4.1 или через
создание материалов пользователя с последующим выбором их в Ka4ecfBe
материалов деталей.
OptisWorks позволяет смоделировать различные типы оптически прозрачных
материалов. Создание материалов производится в окне User Material
(Advanced Model) (Материал пользователя (Расширенная модель)). В окне
присутствует несколько вкладок, состав которых зависит от типа материала.
Светотехнический анализ и проектирование (OptisWorks)
747
Опишем базовые параметры, характеризующие основные типы материалов,
используемых в оптике и светотехнике.
Вкладка General (Общие) показана на рис. 9.58. В ней присутствует
выпадающий список Material Type (Тип материала), содержащий позиции:
♦ Isotropic (Изотропный) — материалы с оптическими свойствами
одинаковыми во всех направлениях, причем коэффициент преломления может
зависеть от длины волны.
♦ Birefringent (Двоякопреломляющий) — материалы, коэффициент
преломления которых зависит от кристаллографического направления.
♦ Gradient Index (Переменный коэффициент преломления)— материалы,
у которых коэффициент преломления зависит от координаты.
♦ Fluorescent (Флуоресцентный) — материал, содержащий светящийся
краситель.
Содержимое полей Additional properties (Дополнительные свойства) зависит
от типа материала. Для изотропных материалов эти свойства отсутствуют.
Рис. 9.58. Определение типа материала
Вкладка Index variation (Зависимость для коэффициента преломления)
показана на рис. 9.59. В выпадающем списке, определяющем способ описания
функции, можно выбрать следующие алгоритмы:
♦ Define dispersion curve by giving index in function of wavelength
(Определить кривую дисперсии назначением зависимости коэффициента
преломления в зависимости от длины волны). Пример использования этого
способа приведен на рис. 9.59.
748
Глава 9
Рис. 9.59. Кривая дисперсии, определенная посредством таблицы
♦ Define dispersion curve by using SellMeier formula (glasses only)
(Определить кривую дисперсии посредством формулы Зелъмейера).
♦ Define dispersion curve by using the KettlerHelmotz formula (glasses only)
(Определить кривую дисперсии посредством формулы Кеттлера— Гель-
мгольца). Пример использования этого способа приведен на рис. 9.60.
♦ Define dispersion curve by index and constringence (Определить кривую
дисперсии назначением зависимости коэффициента преломления от
относительной дисперсии).
Вкладка Absorption variation (Зависимость для коэффициента поглощения)
показана на рис. 9.61. Как видно, предусматривается возможность описывать
изменение коэффициента поглощения от длины волны. Также предусмотрен
инструмент для моделирования (в первом приближении) эффекта изменения
поглощающих свойств в зависимости от объемной доли красящего пигмента.
Здесь гипотезы следующие. Предполагая, что поглощение обусловлено
наличием красящего пигмента, причем эксперимент проводился при некоторой
объемной доле, указанной в поле Measured concentration (Концентрация при
измерении), можно в поле User concentration (Концентрация пользователя)
Светотехнический анализ и проектирование (OptisWorks)
749
ввести отличное от предыдущего значение. Тогда система пересчитает
характеристики поглощения согласно реализованному в ней алгоритму
(подробности в документации не разглашаются).
IjppUsWorks * User Material (Advanced Model) [No Name]
£te. £<ft Took Spectrometer Цф
Q б* И! + - | •> | Ъ OS Q. * '• f
Generd Index variation J Absorption vacation J Scattering properties |
шшк\
\тш\пмшм\тятшмшшшшшшшт1Ы
Р£ I A3
АО
. At
АЛ
AS
Ш$Х 2.72020е+000 -1.01404е-002 1.95329е-002 6.21569е-004 -3.17016е-005 3.31545е-00<
Рис. 9.60. Кривая дисперсии,
определенная посредством формулы Кеттлера — Гельмгольца
Поглощение в материале определяется законом Ламберта, который
выражается формулой:
ФТ = Феш,
где Фт — пропущенный световой поток; / — толщина, мм. Поглощенный
поток ФА определяется по формуле:
ФА=Ф0(1-е-ш),
где Ф0 — исходный световой поток; а — коэффициент поглощения;
Например, для толщин 1 и 2 мм пропущенный световой поток в зависимости
от коэффициента поглощения будет принимать значения, показанные в
табл. 9.10.
750
Глава 9
gOptisWorks - User Material (Advanced Model) [No Name]
№i
a^A^flaaft.
;^,^^;^^^^>м^^у^^
Рис. 9.61. Зависимость коэффициента поглощения от длины волны
Таблица 9.10. Зависимость доли пропущенного света
от длины пути луча в поглощающей среде
Коэффициент
поглощения
0,0001
0,001
0,01
0,1
1
Пропускание
через 1 мм
0,9999
0,9990
0,9901
0,9048
0,3679
через 2 мм
0,9998
0,9980
0,9802
0,8187
0,1353
Из таблицы видно, что даже при коэффициенте поглощения, равном единице
(на расстоянии 1 мм), более 30% светового потока проникает через материал.
Базовые параметры объемного рассеяния определяются на вкладке Scattering
properties (Свойства рассеяния) (рис. 9.62).
Светотехнический анализ и проектирование (OptisWorks)
751
Ш OptisWorks -User Material (Advanced Model) [No Name*}
ШМ
A* ,Ab*fcplion ч*Шйпу ^ftafo^popwtf» J РзйЙе* t$^bgy*&ioa | •$$#&*# pfa^wfcfon ]
jlUJ
"$«№**-
,=•
з"фе<
V/I'liyiiiini МШИ ¥1И1МЧЛ"у1"¥1 fiHiiiKftifi^'jiwiMMliirfiiiMHniiMlrtliUM ушЛ^ЩМицищ щЦц^иц? .Wi.,!.*. шцнщ
^ Л&
Рис. 9.62. Выбор модели рассеяния
Переключатель General (Общие) имеет три положения:
♦ Unscattering material (Материал без рассеяния) — материал не обладает
свойствами объемного рассеяния.
♦ Give particles specifications (MIE theory) (Частицы с назначенными
параметрами (гипотеза Ми))— среда, рассеивающие свойства которой
обусловлены наличием частиц с отличными от основного материала
оптическими характеристиками. При включенной опции Phase function changes
according to the wavelength (Фазовая функция зависит от длины волны)
можно учесть зависимость распределения рассеяния по направлениям в
зависимости от длины волны.
♦ Give scattering coefficient and phase function of the medium (Определение
коэффициента рассеяния и фазовой функции среды. Данная модель
рассеяния может реализоваться в двух вариантах:
• Define phase function by giving scattering efficiency according to the
scattering angle (Определить фазовую функцию через назначение
зависимости между интенсивностью рассеяния и направлением);
• Define phase function using Henyey-Greenstein formula (Определить
фазовую функцию посредством формулы Хэни-Гринштейна).
Выбор частиц-наполнителей, а также определение структуры наполнения
производится на вкладке Particles (Частицы) (рис. 9.63). Как видно,
допускается присутствие нескольких материалов, причем каждый тип частиц имеет
собственную функцию распределения размеров. Это распределение может
назначаться пользователем — в списке Particle size distribution выбрано
положение User defined distribution (Распределение, назначенное пользовате-
752
Глава 9
лем), или же приниматься логарифмическим нормальным — Log normal
distribution. При использовании модели Ми зависимости для коэффициента
рассеяния и фазовая функция рассчитываются системой автоматически.
ЩOptisWorks ■*: User Material (Advanced ModeO ДОо Name*J
£jfe £dft Tools Spectrometer' tJefa-
D a & \ ~h «* !-> | ^ К u Is I
Uiwljsalw^jj
Abtttfptior» variation j Seething properties P^rticte* J Scaling vatiatfon j Scattering phase furtdtor* |
- Particle ззге distrfcufion—— -
. J User defined distribution jjj
, R^Hft) j Qftrmy(Part/tf>m3)
20
50
30
50i
40-
0<
msMPartAnnid)
t
■- + <>* >t
5.0
* '- / 'Л
ao
;<♦ '<-*■
^
s
•
!
1
Рис. 9.63. Назначение параметров рассеивающих частиц
В противном случае — переключатель General установлен в положение Give
scattering coefficient and phase function of the medium — нужно назначить
зависимость коэффициента объемного рассеяния (Diffusion coefficient) от
длины волны — вкладка Scattering variation (Зависимость рассеяния)
(рис. 9.64). Этот коэффициент имеет размерность 1/мм. Фактически это число
"актов" рассеяния при прохождении лучом длины 1 мм в материале
(величина, обратная этому коэффициенту— длина прямолинейного участка на траг
ектории луча).
Относительная интенсивность рассеянного света в зависимости от угла
между исходным направлением луча и рассеянным лучом определяется на
вкладке Scattering phase function (Фазовая функция рассеяния) (рис. 9.65). Там же
можно увидеть построенную системой пространственную диаграмму.
Модель Хэни-Гринштейна для фазовой функции требует назначения
единственного коэффициента— Anisotropy factor (Коэффициент анизотропии)
Светотехнический анализ и проектирование (Optis Works)
753
Ш Opti*Works - User Material (Advanced Model) [No Name*]
:.ф ;gd* . То!&.;ШШ*Ш fc#fr , .
S"A""":' ''ЩЩШ^ШЬь&г'Ч 486.00 532.00 643.00
%i*t "~ '
f?;^)'^,,?: - >. r.-; ' .v'i-!.'--''-'. -"
^!
Рис. 9.64. Назначение зависимости коэффициента рассеяния от длины волны
Ш/ГШШВД! I I I Hill !!!■■
,5ц
1.50 2.00 2.50 3.00
;.^ | Я^Шуе jptw^fey- 100 74.701 28.5599 3.7537 1.03767 |-В0^3 0-986006
3
OeptaJ" *
Vfftw shading
s-U\ M%i '■'""■-
^A^-b^^^JL^^
A
Рис. 9.65. Определение фазовой функции
754
Глава 9
Рис. 9.66. Определение фазовой функции по модели Хэни — Гринштейна
(рис. 9.66). Он изменяется в интервале [-1, 1], причем положительная
величина соответствует продвижению луча вперед, отрицательная — назад,
равенство нулю — равномерное рассеяние.
Воспринимаемый цвет материала в зависимости от определенных в
предыдущих окнах оптических свойств, спектральных характеристик источника, а
также толщины материала можно увидеть в окне Material Color (Цвет
материала) (рис. 9.67). Среди инструментов управления в данном окне
присутствуют, в частности, выбор типа колориметрической диаграммы,
колориметрического стандарта и т. д. (рис. 9.68).
9.5.4. Детекторы
Основным инструментом для накопления и визуализации фотометрических
результатов являются детекторы. В их качестве могут, в зависимости от
типа детектора, выступать реальные объекты— плоские прямоугольные
поверхности или виртуальные сущности, базирующиеся на объектах плоских
или пространственных эскизов Sol id Works.
Размерность функции, собираемой детектором: Lux (Люкс)— освещенность
или Watt/m2 (Вт/м2).
Светотехнический анализ и проектирование (OptisWorks)
755
Ш Material Color
rLigft'$OUfcr-
~С UiwrSpfectowB»:4?
- "'" >,
~\л$^&\
'|лЛ- '>/; th'e/y.
-;'7Л .Ъ''Л'*> ;4's
"' //л, V л ;ч/"\ ч; -/'"^У % " ч
*-«>.. ^-" ^ ;*.'#>! .«*•• |
,, ' у " - Л'*'1 _-■ '""5 '
— I
Т«л»|Н«-'»Ж<->ЗЧ«->>>»Й<*»МЧ->у)*■ s s -
] -'V * 1Л,^иЙНи«Н1 * 3200.0 •, ,Шп С ^ ,
Ш& °-° i^^^^~^;^r^1*^ r" 7' »<, Mfc j Ю.0 ■
'й u '"''c ^ ^^^V*1*-** <£- \>* +&* ?'<'< *: 'V^
з
\> '-, о * ■
Рис. 9.67. Визуализация цвета материала
ч/ Draw njode fo y)C!E 193 i
Draw mocfeitu, V) CIE 197&UC5
Dr*wCKW76 , ' ' ►
• Draw level ' - *
Drawllu/nlnaTit
v* Draw wavelength
Drew btakfcbody curve
Draw rooretor gamut ^
v» Draw mentor whit* point
у Draw toter
Praw&NNmt lambda
* Initial Size ,
ColoHmetric Standard Files (*.cls) | *.el$ |
{..^1 Colorimetfic Standard Files fx.clsllx.clsl
Б О Colorimetry
frj C3 Automotive
: -^SAEJ578JUN95.cls
B-D Traffic signals
В- СЗ Avionic
* -^ MIL-S-22885J01C.cls
Cancel s
Рис. 9.68. Контекстное меню колориметрической диаграммы
756
Глава 9
Все детекторы отображаются в Дереве проекта сборки "за" пиктограммой
Detectors OptisWorks, а ассоциированные с ними результаты "за"
пиктограммой Photometric results (Фотометрические результаты).
Детектор освещенности
Детектор освещенности базируется на плоской прямоугольной поверхности
или на точке и двух линиях, определяющих, соответственно, центр и оси X
и Y. Направление нормали Z к детектору имеет значение — он будет
воспринимать только лучи, попадающие на детектор со стороны положительного
направления Z.
Следует иметь в виду, что фотометрический детектор освещенности
используется (формально) для накопления результатов оптического анализа. В этой
ситуации, за исключением направления нормали, собственно размеров
детектора и местоположения файла с результатами, другие его характеристики
нефункциональны.
Панель управления детектором освещенности Illuminance detector definition
(Определение детектора освещенности) показана на рис. 9.69. Она содержит
следующие позиции:
♦ Geometry (Геометрия)— переключатель, две позиции которого
определяют тип объектов модели, на базе которых будет создаваться детектор:
• Rectangular surface (Прямоугольная поверхность)— прямоугольная
поверхность, содержащаяся в качестве единственного объекта в детали.
Никакие другие тела или поверхности в модели детали не допускаются;
• 3 points (3 точки) — три точки, определяющие плоскость детектора и
направление осей X и Y этой плоскости.
♦ Selected component (Выбранный компонент) — геометрические элементы,
тип которых зависит от положения переключателя Geometry.
♦ Type of detector (Тип детектора) — переключатель, определяющий тип
детектора освещенности. При выборе позиций Photometric
(Фотометрический) и Radiometric (Радиометрический) после трассировки лучей
генерируется диаграмма для ХМР1 — средства отображения с интеграцией
энергии по всему спектру излучения. Действие этих опций подразумевает,
что уровни излучения визуализируются в мнимом цвете, что делает
невозможным какой-либо спектральный или колориметрический анализ
посредством этой диаграммы. Позиция Colorimetric (Колориметрический)
подразумевает синтез спектральной диаграммы для просмотрщика ХМР.
1 ХМР (Extendable Metadata Platform) расширяемая платформа метаданных.
Светотехнический анализ и проектирование (OptisWorks)
757
Поскольку эта диаграмма несет больше информации, то накопление для
нее информации и отображение занимает больше времени.
Ш±Мж£й
14ЩШ
Рис. 9.69. Детектор освещенности
Sampling (Дискретизация) — число элементов осреднения на диаграмме
по координатам X и Y детектора. Алгоритм накопления и обработки
результатов OptisWorks, подобно родственным программам устроен
следующим образом. Программа разбивает детектор на совокупность
прямоугольных областей (в OptisWorks они именуются пикселами — нельзя
путать их с пикселами на мониторе). В ходе трассировки лучей
идентифицируются те, которые пересекают каждый пиксел, с накоплением энергии,
758
Глава 9
попадающей на него. Далее может выполняться интерполяция функции,
однако исходной информацией для сглаживания являются именно
результаты, взятые с пикселов. В этой связи, с учетом случайного характера
траекторий и энергии, обеспечить корректность результатов можно, соотнося
число лучей, попадающих на детектор, и степень подробности
дискретизации. Бессмысленно (за исключением случая, когда интерес
представляют координаты точек пересечения лучей с детектором) создавать при
малом числе лучей настолько густую сетку, что в ней найдется большое
число ячеек, в которые не попадают лучи— здесь "шум" будет преобладать
над "сигналом". С другой стороны, если сетка относительно числа лучей,
достигающих детектора, редкая, то можно упустить ряд эффектов, таких
как, например, наличие строгой светотеневой границы или
дифракционные искажения. С учетом сказанного, рекомендуется сравнивать
результаты, полученные для моделей с детекторами различной плотности
дискретизации с вычленением значимых эффектов. Для модификации уже
полученных результатов можно использовать процедуры интерполяции —
Interpolate values и фильтрации — Filtering, присутствующие в окне
синтезируемой детектором диаграммы.
♦ Axis (Оси) — посредством опций Invert X, Y, Z axis (Обратить оси X, Y,
Z) управляет знаком осей. Значимую функциональность несет
направление оси Z — нормали к детектору. Восприниматься будут только лучи,
которые падают на детектор со стороны положительного направления оси.
♦ Группа Parameters (Параметры) содержит элементы управления,
управляющие расширенной функциональностью:
• Data separated by layer (Выделение результатов по слоям) — если
опция активна, то после расчета и формирования диаграммы можно будет
вычленять вклад каждого источника света (группы источников) —
переключатель установлен в положение By source (По источнику) или
отсортирован по поверхностям— положение By surface (SCA1) (По
поверхности);
• Generate LPF2 file (Генерировать файл поиска лучей)— в процессе
трассировки лучей программа накапливает информацию о связи между
траекториями лучей и детекторами, позволяя для выделенной зоны на
поверхности детектора показать только те лучи, которые на этот
участок попадают.
♦ Result path name (Путь к результатам)— местоположение файла с
информацией для диаграммы.
SCA (Surface Contribution Analyzer) — анализатор вклада поверхностей.
2 LPF (Light Path Finder) — сортировка траекторий лучей.
Светотехнический анализ и проектирование (OptisWorks)
759
Результаты, полученные посредством этих инструментов, в Дереве
проекта OptisWorks размещаются в группе Light expert (Эксперт по свету).
Детектор лучей
Детектор лучей предназначен для сбора попавших на него лучей:
запоминается их начало, направление, несомая ими энергия и длина волны.
Полученная информация запоминается в файле с расширением *.гау, может быть
просмотрена и отредактирована посредством Редактора файла лучей (Ray file
editor) (рис. 9.70), а также использована в качестве источника света в других
светотехнических моделях без детальной имитации собственно источника.
Этот подход наиболее эффективен при анализе сцен, содержащих большое
количество источников.
Рис. 9.70. Детектор лучей
Объекты, предназначенные для сбора лучей, идентичны присутствующим в
детекторе освещенности. Другие интерфейсные элементы панели Rays map
definition (Определение схемы лучей) также являются подмножеством полей
предыдущего детектора (рис. 9.71).
Детектор яркости
Детектор яркости является прямоугольным основанием пирамиды,
вершина которой совпадает с наблюдателем.
Размерность функции, собираемой детектором: Cd/m2 (Кд/м2) — яркость или
Watt/in2/sr (Вт/м2/ ср).
760
Глава 9
Рис. 9.71. Редактор лучей
Панель управления детектором освещенности Luminance detector definition
(Определение детектора яркости) показана на рис. 9.72. Перечислим позиции,
оригинальные для данного объекта относительно описанных выше
детекторов:
♦ Geometry (Геометрия)— переключатель, две позиции которого
определяют тип объектов модели, на базе которых будет создаваться детектор:
• Current view point (Текущая точка зрения) — эта позиция
переключателя заставляет систему заполнить большинство полей, исходя из
положения наблюдателя, диагностируемого на основе информации о
месте и ориентации модели на экране;
• 3 points (3 точки) — три точки, определяющие плоскость детектора (по
сути, плоскость, через которую проходят лучи, соединяющие глаз
наблюдателя и объекты) и направление осей X и Y этой плоскости.
♦ View point (Точка зрения) — положение глаза наблюдателя, определяемое
ортогональными координатами.
♦ Orientation (Ориентация) — сферические координаты, определяющие
ориентацию плоскости с диаграммой относительно наблюдателя.
Светотехнический анализ и проектирование (OptisWorks)
761
Рис. 9.72. Определение детектора яркости
♦ Parameters— настройки, определяющие точность расчета и
интерпретации:
• Precision (%) (Точность, %) — параметр, определяющий число лучей,
проходящих через каждый пиксел (напоминаем, что это ячейка
прямоугольной сетки, натянутой на детектор) в ходе симуляции. Число лучей
равно единице, деленной на квадрат Precision, например, 10%
соответствуют 100 лучам;
• Direct integration angle (Угол непосредственного интегрирования) —
пространственный угол с вершиной в точке зрения, в пределах
которого будет производиться осреднение светового потока;
• Data separated by layer, Generate LPF file — параметры для Эксперта
по свету, смысл которых идентичен использованным в диаграмме
освещенности.
♦ Spectral data (Спектральная информация) — поля, определяющие способ
обработки спектральной информации:
• Lambda min, Lambda max — границы анализируемого спектра;
762
Глава 9
• Sampling (Дискретизация) — число интервалов осреднения, на которые
делится спектр.
В процессе работы с панелью Luminance detector, как, кстати, и с
некоторыми другими детекторами, на экране возникает наглядное изображение
соответствующего объекта (рис. 9.73). Параметры детектора на иллюстрации не
являются наилучшими, т. к. пространственный угол, занимаемый моделью,
составляет только малую долю от угла, ограничиваемого пирамидой.
Рекомендуется определять параметры пирамиды так, чтобы "зазоры" были
достаточно малыми.
Рис. 9.73. Условное изображение детектора яркости
Следует учитывать, что расчет яркости можно производить также и методом
Inverse simulation (Обратная симуляция). Подача одноименной команды
приведет к тому, что лучи будут испускаться из глаза наблюдателя и
достигать объект, испускающий (фактически) свет (разумеется, потом — в неявном
виде — результат будет получен на основе обработки обратных к исходным
путей). В этом состоит фундаментальное отличие этого способа
моделирования от Direct simulation (Прямая симуляция), где лучи испускаются
объектами и попадают на детектор.
Детектор силы света
Детектор силы света предназначается для отображения пространственного
распределения силы света в виде преобразования его на плоскость экрана
в ортогональных координатах.
Размерность функции, собираемой детектором: Cd (Кд)— сила света или
Watt/sr (Вт/ср)— энергетическая сила света, или угловая плотность
мощности излучения.
Светотехнический анализ и проектирование (OptisWorks)
763
Панель управления детектором силы света Intensity detector definition
(Определение детектора силы света) показана на рис. 9.74. Перечислим позиции,
оригинальные для данного объекта:
♦ Detector definition (Определение детектора) — группа полей,
устанавливающих ориентацию детектора в пространстве. Фактически это три точки,
порождающие два вектора, векторное произведение которых дает вектор Z
оси — нормали к плоскости преобразования (ее положительное
направление должно ориентироваться "от" источника):
• Center of the map (Центр диаграммы);
• Direction of the X axis (point) (Направление оси Х (точка));
• Direction of the Y axis (point) (Направление оси Y (точка)).
♦ Type of detector (Тип детектора) — переключатель, позволяющий выбрать:
• Photometric detector (Фотометрический детектор)— он работает со
светотехническими характеристиками, измеряемыми в канделах;
Рис. 9.74. Детектор силы света в ортогональных координатах
764
Глава 9
• Radiometric detector (Радиометрический детектор)— он формирует
результаты с размерностью Вт/ср.
♦ Type of intensity detector (Тип детектора силы света) — переключатель,
позволяющий выбрать:
• SAE1 A type, SAE В type;
• Optis intensity (Интенсивность Optis);
• Conoscopic2 (Коноскопический).
Основным отличием между типами детекторов является соотношение
между направлениями X, Y на детекторе и угловыми координатами в
пространстве. Подробности изложены в справочной системе.
♦ Map size (Размах диаграммы)— половина пространственного угла при
вершине пирамиды относительно которой рассчитывается сила света.
Детектор силы света в полярных координатах
Полярный детектор силы света предназначается для отображения
пространственного распределения силы света в виде кривых силы света или
поверхностей силы света.
Размерность функции, собираемой детектором: Cd (Кд)— сила света или
Watt/sr (Вт/ср) — энергетическая сила света, или угловая плотность
мощности излучения.
Панель управления детектором силы света Polar intensity detector definition
(Определение полярного детектора яркости) показана на рис. 9.75.
Перечислим позиции, оригинальные для данного объекта относительно детектора
освещенности:
♦ Type of polar intensity detector (Тип детектора силы света) —
переключатель, позволяющий выбрать:
• IES В, IES С — американские стандарты представления информации
об осветительных устройствах;
• Eulumdat— американские стандарты представления информации об
осветительных устройствах;
• Optis intensity radiometric (Интенсивность Optis радиометрическая);
• Optis intensity photometric (Интенсивность Optis фотометрическая).
1 American Society of Automotive Engineers — Американское общество инженеров
автомобильной промышленности и транспорта.
2 Формат, используемый в системах сканирования на базе Conoscopic Holography.
Светотехнический анализ и проектирование (OptisWorks)
765
Г! ' i
ОМыт*
Ым$жМШштМ&£й
72
шш^шшт
I Center <kfaobjjir'<.*iU ."- tK'v 'V \ * :J2'' * \
\ ;, 1""' * '' ' * j
ь J
Ф0а«в/
j 2.00градусов
;- , ^ 37 *~]^
tf\ 12.00градусов *<m 1
,#^^^1^^ш^^ш^^^а
Г invert Z «ft
1ДД8ЙУМ1ШЮ8^
[ D^5g^^A\^^^m^gr^:or^4X^
BrOw$e .
Рис. 9.75. Детектор силы света в полярных координатах
♦ Sampling (Выборка) — число направлений, для которых вычисляются
интенсивности. Можно выбрать:
• Uniform sampling (Однородная дискретизация)— пространственный
угол делится на секторы, число которых в плоскости XOY
определяется полем С—Plane, а в плоскости XOZ — полем G—Plane,
• Adaptive sampling— расчет выполняется для направлений,
содержащимся в текстовом файле. Соответствующий пример приведен в
справочной системе.
• Integration angle (Угол интегрирования)— пространственный угол
с вершиной в точке зрения, в пределах которого будет производиться
осреднение светового потока.
• Automatic calculation (Автоматические вычисления)— в
документации опция не описана.
766
Глава 9
Как и в случае с детектором в ортогональных координатах, положительное
направление оси Z подразумевает направление выхода лучей из системы.
9.5.5. Фотометрическая симуляция
Фотометрическая симуляция OptisWorks отделена от фотометрической
трассировки лучей и от оптической симуляции. Последняя есть трассировка
лучей в наиболее вероятном (с точки зрения величины сохраняемой энергии)
направлении без возможности анализа, во-перзых, энергетической
компоненты и эффектов рассеяния при взаимодействии с поверхностью и в объеме.
Фотометрическая трассировка учитывает вероятностный характер
распространения луча, однако не отслеживает энергетическую составляющую и не
учитывает наличие детекторов, лишая по этой причине пользователя
фотометрических диаграмм на детекторах и на гранях тел. Однако траектории
лучей визуализируются только в этом режиме. Фотометрическая же симуляция
дает максимальную информацию о численных параметрах. Она существует
в двух вариантах: прямая симуляция и обратная.
Фотометрическая симуляция, равно как все другие расчеты, в OptisWorks
выполняется исключительно в режиме сборки.
Прямая симуляция
Прямая симуляция заключается в генерации траекторий лучей, испускаемых
источниками света и распространяющихся в оптической системе.
Посредством прямой симуляции рассчитывается освещенность; генерируется, с целью
последующего использования, файл лучей, выходящих из оптической
системы; строятся диаграммы силы света в ортогональных и полярных
координатах; рассчитывается яркость.
Окно Direct simulation (Прямая симуляция) показано на рис. 9.76. Оно
содержит следующие элементы:
♦ Configuration (Конфигурация) — список доступных конфигураций сборки
SolidWorks. Допускается одновременное выделение нескольких
конфигураций с последующим расчетом. Результаты будут формироваться
персонально для каждой рассчитанной конфигурации.
♦ Number of emitted rays (Число испускаемых лучей) — полное число
лучей, испускаемых источниками. Следует помнить, что при
фотометрической трассировке игнорируется информация о лучах, назначаемых на
уровне деталей. Последние предназначаются для расчета траекторий и
визуализации. Фотометрические же лучи не могут быть отображены, однако
именно на их базе строятся фотометрические диаграммы. Для файла с
отчетом, равно как и для других файлов, упомянутых в окне, можно
назначать индивидуальный путь.
Светотехнический анализ и проектирование (OptisWorks) 767_
♦ Generate report file (Создать файл отчета)— создание файла отчета в
формате HTML1, включающий информацию об излученной, поглощенной
(с точностью до детали) и вышедшей из системы энергии, в
фотометрических или радиометрических единицах.
♦ Generate ray file (Создать файл лучей) — создание файла с лучами,
выходящими из оптической системы.
♦ Generate 3D map file (Создать файл ЗО-диаграмм)— создание файла с
информацией, позволяющей визуализировать светотехнические
результаты непосредственно на гранях тел.
Рис. 9.76. Настройки прямой симуляции
Обратная симуляция
Обратная симуляция подразумевает испускание лучей из точки наблюдения,
далее эти лучи распространяются через систему. Окно Inverse simulation с
настройками обратной симуляции показано на рис. 9.77. Фактически нужно
выбрать только конфигурации сборки, для которых будет выполняться
симуляция. Разумеется, предварительно должен быть определен как минимум
один детектор яркости. Именно он собирает информацию о числе лучей,
которые будут направлены из точки наблюдения через детектор в модель.
Рис. 9.77. Настройки обратной симуляции
1 HTML (HyperText Markup Language) — язык разметки гипертекста.
768
Глава 9
9.5.6. Результаты на базе детекторов
OptisWorks предоставляет самые разнообразные возможности для просмотра
и обработки результатов фотометрического анализа. Здесь будут
рассмотрены наиболее востребованные функции.
Все результаты, независимо от способа трассировки, размещаются в Дереве
проекта "за" пиктограммой Results Manager (Менеджер результатов),
группируясь внутри нее согласно типу (см. рис. 9.5, я, б). Например: Photometric
results (Фотометрические результаты), Luminance/Radiance results
(Результаты яркости/энергетической яркости), Intensity results (Результаты для силы
света) и т. д. "Внутри" этих пиктограмм содержатся пиктограммы,
соответствующие типам детекторов. "За" пиктограммами, обозначающими
детекторы, находятся пиктограммы конкретных диаграмм. Визуализация
диаграмм осуществляется двойным щелчком мыши по соответствующей
пиктограмме.
Следует учитывать, что каждая следующая попытка симуляции (независимо
от того, закончилась ли она "естественным" образом, или же была
остановлена пользователем) сопровождается появлением новых пиктограмм, а
уничтожение предыдущих возможно только по команде пользователя (например,
нажатием клавиши <Del> на клавиатуре после установки указателя мыши на
некотором объекте). Диаграммы, соответствующие предыдущим расчетам,
помечаются в Дереве проекта восклицательным знаком. Не следует
накапливать диаграммы, поскольку некоторые из них, в частности 3D maps (3D-
диаграммы), занимают на диске десятки и сотни мегабайт.
OptisWorks содержит ряд инструментов для обработки уже имеющихся
диаграмм. Некоторые из них вызываются не из интерфейса SolidWorks/Optis-
Works, а как приложения Windows (рис. 9.78). Например, инструмент,
позволяющий комбинировать и модифицировать диаграммы в формате ХМР —
VP Lab показан на рис. 9.79.
В данном разделе мы рассмотрим только диаграммы, получающиеся на базе
детекторов. Другие типы результатов будут описаны при анализе примеров
решения задач.
Диаграммы освещенности
на базе детекторов освещенности
Результаты расчета освещенности могут отображаться разнообразными
способами: непосредственно на гранях тел, участвующих в симуляции —
3D тар (ЗО-диаграммы) (см.разд. 9.6.7); диаграммы изолюксов, доступные
из окна для диаграмм силы света (см. разд. 9.5.6), и, собственно, диаграммы
освещенности, получаемые на основе результатов, "собранных" детекторами
Светотехнический анализ и проектирование (Optis Works)
769
ф 2D Chart Control Online Help
jj§> 3D Chart Control Online Help
Ж 3D Map Viewer
Ц£ Advanced Scattering Surface Editor
Щ BSDP - BRDF - ArfcotrppicSurfaces Editor
^j£ Coated Surface Editor
°3& Coupling Efficiency Viewer
^? Easy Simple Scattering Surface Editor
$j§] Eulumdat Viewer
Щ Fluorescent Surface Editor
Щ Gaussian Propagation Viewer
Щ Glass Map Viewer
J£ Grating Surface Editor
•> Human Vision Lab Viewer
^j IES Viewer
&\ Intensity Distribution Post-processing
|§j OPTIS Instensity Viewer
F- Paraxial Data Viewer
Radiant Imaging Import
'* Ray*Fife Editor
$Й Real Aberrations Coefficients Viewer
^= Real Aberrations Viewer
Щ2 Retro Reflecting Surface Editor
^?, ftowgh MrrorSurface Editor
^f? Simple Scattering Surf ace Editor
?$: Source Generator
ill Spectrum Editor
3fe Spot Diagram Viewer
^ Thin ten$ Surface Editor
■j* User Material Editor
[^ VB Script Language Reference Online Help
[^ Viewers And Editors Online Help
HfcVPlab
'£§} HardKey ► & XMP Viewer
gf| OptisWorks 2007 ► g$j ЛвгкЬтпд Surf ace Editor
jj Virtual Reality Laboratory
*j OPTIS License |
Рис. 9.78. Процедуры OptisWorks
освещенности. С точки зрения разнообразия инструментов обработки и
результатов использование освещенности на детекторах (а также и другие
параметры системы, для которых в программе существуют детекторы)
является предпочтительным. Например, фотометрическая оптимизация (в части
назначения целевой функции и функциональных ограничений)
функционирует исключительно на базе диаграмм освещенности поверхностей детекто-
770
Глава 9
» OptisWarks - VIHab
Map subtraction
Value multiplication
Map multiplication
Map division
Vertical axis symmetry
Horizontal axis symmetry
Vertical axis mirror
Horizontal axis mirror
Rotation
Merge results
Map union (combine two maps m one.)
Spectrum m^iplication
ДООД
Рис. 9.79. Обработка ХМР-диаграмм
ров. В этой связи для подробного анализа освещенности сцен, содержащих
плоские объекты, рекомендуется создавать соответствующие детекторы.
Диаграммы фотометрической освещенности находятся в Дереве проекта "за"
пиктограммой 2D maps (20-диаграммы), при этом отображаются также
численные значения интегральных параметров освещенности:
♦ Total flux (Суммарный поток);
♦ Max value (Максимальное значение);
♦ Min value (Минимальное значение);
♦ Average value (Среднее значение);
♦ Contrast (Контрастность).
Образец диаграммы освещенности показан на рис. 9.80. Как видно, можно
выбирать цвет визуализации — с учетом спектра или мйимый цвет,
интерполировать значения, выполнять фильтрацию (фактически сглаживание),
учитывать наличие осей симметрии и, естественно, отображать шкалу— для
этого предназначена кнопка |§|| Level (Уровень). Кстати говоря, допускается
логарифмический масштаб шкалы освещенности. Согласно документации,
именно он соответствует особенностям визуального восприятия человеком
различных уровней освещенности и яркости.
Светотехнический анализ и проектирование (OptisWorks)
771
OptteWorks - Basic map Г(ПО УМОЛЧАНИЮ) ЭКРАН CBf ТОДИО... Мш Ш
I White to black (gray scale) j*J
V*kj*j196522
JP IsoCurve
ГЯВвсГ
Delayfe
Ш
>s' <? LiMMf *\РСйяв,'\
A
Рис. 9.80. Освещенность детектора
Нажав кнопку уД Surface (Поверхность), можно получить доступ к окну
Surface/Section (Поверхность/Сечение) (рис. 9.81), в котором можно выбрать
область на детекторе и собрать для нее интегральную информацию об
отображаемой функции. Область может иметь форму прямоугольника (рис. 9.82,
сверху), эллипса (в том числе и окружности) или многоугольника. Для
диаграммы можно построить сечение горизонтальной, вертикальной или
произвольной плоскостью (перпендикулярной детектору) (рис. 9.82, снизу), а
также отобразить ее в виде поверхности в пространстве (рис. 9.83).
Диаграммы яркости
Диаграммы яркости получаются на базе детекторов яркости в результате
прямой или обратной симуляции (последняя невозможна для
монохроматических источников). Пример диаграммы показан на рис. 9.84. Диаграмму
сопровождает набор процедур, большинство из которых идентичны
присутствующим в диаграмме освещенности.
772
Глава 9
ттт
ш
Г,Ройегг
Ч>-к:Ж
РК»'"Л- »J
ШЬ 50
-ДО* 50
Wb
Рис. 9.81. Параметры освещенности области на детекторе
* OptisWorks - Basic map Г (ПО УМОЛЧАНИЮ) ЭКРАН СВЕТОДИО... НЙЙ
5^ЙЁ^1Й#'ША ^j White to black'(gray scale) Vjj
>»»>Иу»^^
wm
Рис. 9.82. Область на детекторе освещенности и ее сечение
Светотехнический анализ и проектирование (OptisWorks)
773
*Л$№. , ;■ ,'—«,£у акал*
ъ nm'
f «яг
Ш
a:*
Рис. 9.83. Диаграмма освещенности в виде поверхности
OptisWorks - Spectral map [(ДЛЯ ЯРКОСТИ) ДЕТЕКТОР ЯРКОСТИ]
**?*fe|r&wt:
W^
•ЩЩЩ ?™ ^
1
).0nm
■413.3 nm
■446.7 nm
1480.0 nm
■513.3 nm
1546.7 nm
■560.0 nm
■613.3 nm
■646.7 nm
1680.0 nm
■713.3 nm
■746.7 nm
■780.0 nm
a
Рис. 9.84. Диаграмма яркости
774
Глава 9
Диаграммы силы света
Диаграммы силы света в ортогональных координатах получаются на базе
соответствующих ей ортогональных детекторов. Пример, в котором к
"первичной" диаграмме применен фильтр, показан на рис. 9.85.
Рис. 9.85. Ортогональная диаграмма силы света в формате OptisWorks
Диаграммы силы света в полярных координатах
Подобно диаграммам силы света в ортогональных координатах, полярные
диаграммы получаются на базе полярных детекторов силы света. Однако
номенклатура доступных вариантов визуализации несколько шире. На рис. 9.86
показана панель Optis Intensity (Сила света Optis). Она содержит четыре
вкладки:
♦ General (Общие) — позволяет выбрать единицы измерения отображаемой
функции: фотометрические и радиометрические.
Светотехнический анализ и проектирование (OptisWorks)
775
ЩOptisWorks - Optis Intensity [(ПО УМОЛЧАНИЮ) ДЕТЕКТОР ДЛЯ СВЕТОДИОДА]
ИШШ1
Щ&ЙФ *$$&*'* ^,
ОВт^Ыаг homily fitevlO'
\гфЩ1^к^А
г »>J^y,„:a A........M H^.h.,..hh.
< tSv%4 \®№ intensity file
Рис. 9.86. Панель Optis Intensity, вкладка General
♦ Symmetry (Симметрия) — объект, относительно которого может быть
учтено свойство симметрии: вертикальная ось; горизонтальная, вертикальная
плоскость или их совокупность (рис. 9.87).
мOptisWorks - Optis Intensity [(ПО УМОЛЧАНИЮ) ДЕТЕКТОР ДЛЯ СВЕТОДИОДА]
ннв
Рис. 9.87. Панель Optis Intensity, вкладка Symmetry
♦ Data (Данные) — численные величины силы света в зависимости от
направления в сферических координатах (рис. 9.88).
♦ Edition (Публикация) — содержит настройки для отчета о результата
анализа силы света, а также команду— она подается нажатием кнопки ИГ
по которой этот отчет создается (рис. 9.89).
Рассмотрим диаграммы, доступные из окна Optis Intensity. Первая — это
Isolux curve (Кривая изолюкс), вызываемая посредством одноименной
команды или нажатием кнопки цЗу. Окно показано на рис. 9.90. Как видно.
ми OpUsWorks - Optis Intensity [(ПО УМОЛЧАНИЮ) ДЕТЕКТОР ДЛЯ ГВЕТОДИОДА]
ВШЕЗИ
'*л/-., 1г. . X А л ft Г -РИЛ! й?' *л»0.,ЧУ?Ч..л. л л „ х V/
*«8
Рис. 9.88. Панель Optis Intensity, вкладка Data
^OptisWorks - Optis Intensity [(ПО УМОЛЧАНИЮ) ПОЛЯРНАЯ СИЛА СВЕТА]
\±Ш1л-£ ъ<,7г
iOpbs • ВР 275 - 83078 TOULON cedex 9 •
1FRANCE TeU33(0) 494 08 66 90 - Fax: ♦ (0)
Ж494 08 66 94
Рис. 9.89. Панель Optis Intensity, вкладка Edition
Светотехнический анализ и проектирование (OptisWorks)
777
результатом является освещенность плоской прямоугольной поверхности
заданного размера, отстоящей от детектора на расстоянии, назначаемом
пользователем. Диаграмму можно отобразить и в виде поверхности в
пространстве (рис. 9.91).
1 Jsolu* Curve
№Ш
murta
^^iT^33^
^vi
VV
f'JMap along. Z
"3;
zi^.ir^'', >^;'П^> "^1
Рис. 9.90. Диаграмма Isolux — плоское состояние
ШШкаг
■ ' Л V' </> ■• •• i' >'х * ■>■'■''• «-Ч % 'Л< I
J* /л /к 'S -Jj* u*j£gtfj&: Ля
,Д V& %'5Ю?АА'я
fi i>i мп.'ими ftuft и
' '•:v.y.aJfc«i*»ww«»<wfcrfH'iiiii^ iiiimiiMiioniiiir
/ jMapalong: Z Jgj^
.fLff .7.':^'.
Рис. 9.91. Диаграмма Isolux — пространственное представление
778
Глава 9
Кривые силы света в их. классическом виде доступны по команде Polar
curves (Полярные кривые) или после нажатия кнопки |1|| (рис. 9.92). Ползун-
ковый переключатель сверху управляет ориентацией (углом поворота
относительно оси системы) плоскости, для которой строится кривая сила света.
ШPolar Curves
■ ",<? Й^'ЛЙЙ
Рис. 9.92. Кривая силы света
nsity distribution Curve
mmrni
! ;>:
*' V
Рис. 9.93. Пространственное распределение интенсивности
Светотехнический анализ и проектирование (OptisWorks)
779
Распределение силы света в пространственном представлении доступно по
команде 3D Curve (ЗО-диаграмма) (рис. 9.93) или после кнопки jfj§|.
Отображаемый объект можно, по аналогии с кривой силы света, назвать
поверхностью силы света. Установив переключатель Shape/Color (Фигура/Цвет)
в положение Color, можно получить распределение интенсивности на сфере,
показанное посредством распределения цвета (рис. 9.94).
Рис. 9.94. Распределение интенсивности на сфере
9.6. Светотехнический анализ —
проектирование рассеивателя
В качестве примера последовательного использования возможностей OptisWorks
рассмотрим светотехнический анализ и проектирование рассеивателя
осветительного устройства (фонаря) на базе светодиодов (рис. 9.95). Он содержит
линейку из пяти светодиодов и рассеиватель. Все детали вставлены в корпус,
который представлен в упрощенном виде.
Для проектирования будут использоваться оптимизационные процедуры
OptisWorks. Критерием качества проекта (в первом приближении) является
равномерность освещенности некоторой плоской прямоугольной области,
отстоящей на определенное расстояние от рассеивателя.
780
Глава 9
Рис. 9.95. Осветительное устройство на базе светодиодов
9.6.1. Фотометрическая модель светодиода
На первом этапе проанализируем отдельно единственный светодиод. Его
геометрическая модель совместно с Деревом проекта OptisWorks показан на
рис. 9.96.
Свет излучается с поверхности кристалла. Принимаем, что излучающими
гранями является передняя и часть боковых (они выделены командой Линия
разъема и для наглядности закрашены цветом, отличным от цвета детали)
граней параллелепипеда (рис. 9.97). Предполагаем, что мощность равномерно
распределена по площади, а интенсивность излучения распределена в
пространстве по закону Ламберта с углом 90 градусов (это угол между осью
конуса, в котором распространяется свет, и образующей). Для простоты
интерпретации результатов предполагаем источник монохроматическим с общей
(распределенной равномерно по всем граням) мощностью Юлм (рис. 9.98).
Число лучей для трассировки (напоминаем, что эти лучи предназначены
исключительно для диагностики их траекторий) принимаем равным 100. Эта
величина никак не связана с точностью фотометрических расчетов, а
определяется исключительно соображениями наглядности при визуализации.
Параметры источника появляются в Дереве проекта OptisWorks, ассоциированным
с чипом (рис. 9.100).
Светотехнический анализ и проектирование (OptisWorks)
781
В-Щ SuperFlux LEDs HPWx-yzOO (HPWT-MDOO - 3.5lm - 70mA)
S \Q Surface Quality
: В ^f? CHIP SURFACE_OW.SIMPLESCATTERING
% Led Chip HPWx-yzOO
: Э-%& CONNECTOR SURFACE_OW.SIMPLESCATTERING
■■ Щ Led Connector HPWx-yzOO
El Щ JUNCTION SURFACE_OW.MIRROR
■ % Led Junction Wire HPWx-yzOO
" В (Р Materials
= Щ-Щ POLYCARBONATE.material
В чР Sources
: г-j to Photometric sources
\ •••% Led Chip HPWx-yzOO
. фг Limited half angle = 90 deg
■<щ: Power = 10 Im
• ф Optical sources
•• ф Laser sources
ф Optical Surfaces
&. ф Detectors
ф Optical Systems
•±1-• v Default part preferences
$ Щ Light Expert
lk-Щ Results Manager
EJS-^jj Optimization / tolerancing Parameters
Рис. 9.96. Геометрическая модель светодиода и Дерево проекта OptisWorks
Define
Рис. 9.97. Определение излучающих граней
782
Глава 9
Рис. 9.98. Параметры излучения
Характеристики по умолчанию: свойства поверхности, материал и наружную
среду оставляем теми, которые предлагаются программой (рис. 9.99), а затем
назначаем для выбранных поверхностей (по сути, это все поверхности
кристалла) (рис. 9.100) свойства в соответствии с окном Scattering surface
(Рассеивающая поверхность), показанным на рис. 9.101. Как видно, это
поверхность с коэффициентом отражений 20%, причем все отражение — это
рассеяние по закону Ламберта. Диаграмма рассеяния на поверхности показана на
рис. 9.102.
Рис. 9.99. Свойства чипа по умолчанию
Светотехнический анализ и проектирование (OptisWorks)
783
В ^ Led Chip HPWx-yzOO (HPWT-yDOO - 3.51m - 70mA)
(=j"(Q Surf ace Quality
" Щ CHIP SURFACE_0W.SIMPLE5CATTERING
ВШ Materials
■••• Щ POLYCARBONATE.materk
Q \Q Photometric sources
; ••*;*• Монохроматический
■■■■■■Ъ Optical Surfaces
Рис. 9.100. Дерево проекта детали
OptisWorks - Scattering surface [CHIP SURrACE_OW]
-$***;? ttflfj4:
1№
&шт*'»л"-
И Scattering surface
'%St
i',< ''"Чо*'°\£ *>"' ,-' '*" '" 'X 1%,'.* ■.-^'"V У - -V\^' 'I V'" • "<■ ' 1ЦЦ||»,и-Ц111ЩШП' ,
Рис. 9.101. Свойства поверхности чипа
При создании оптической модели важно договориться о том, как будет
описываться поведение света на границе раздела двух сред. В нашем случае
предлагается следующее решение проблемы. В прозрачном корпусе свето-
диода (предположим, что он изготовлен из поликарбоната, свойства которого
взяты из базы данных программы) не выполняем полость для внутреннего
содержимого. При этом для граней чипа, соприкасающихся с
поликарбонатом, назначаем последний в качестве External material (Окружающий
материал) (рис. 9. ЮЗ).
- И ' У-■■■•:■ ,..-.;,-У^-^'-^.^-...^-^ * -v^A- .a;.:....^>^ у
* ГWr Jioo '' - V- Ji'fiorb;''' ^ < Mw; [10000
ЕЗЩЩ
F Pyre larnbertidr* шv«i
F TanpentptaW
'■■ ■*". - s ■■ *,
Yj'la-
■ttrtHyiin.WftH.rt»
Л<^|<Г:' T\J
r..,. ^1
Рис. 9.102. Диаграмма рассеяния поверхности чипа
Extern materia!
Рис. 9.103. Наружный материал для граней чипа
Светотехнический анализ и проектирование (OptisWorks)
785
Для контактов назначаем поверхность с лучшей, чем у чипа отражательной
способностью (рис. 9.105 и 9.106), причем рассеяние описывается
совокупностью зеркального (10%), Ламбертова (20%) и Гауссова (70%) отражения.
Так же, как и для чипа, не предусматриваем в корпусе полости под контакты,
поэтому в качестве внешнего материала на выбранных поверхностях (в это
множество включаются только те грани, которые контактируют с
пластмассой) назначаем поликарбонат.
В % Led Connector HPWx-yzOO (Def aut)
ВШ Surface Quality
I '■■ 3f? CONNECTOR SURFACE_OW.SIMPLESCATTERING
В-4Э Materials
.; • ^ Photometric sources
^ Optical Surfaces
Рис. 9.104. Дерево проекта детали с контактами
Рис. 9.105. Свойства поверхности контактов
786
Глава 9
Рис. 9.106. Диаграмма рассеяния поверхности контактов
Аналогичные манипуляции проделываем с контактным проводом, назначая
его внешним граням характеристики зеркальной поверхности и принимая для
них в качестве окружающего материала материал корпуса.
Материалом для корпуса по умолчанию назначаем поликарбонат (рис. 9.107),
больше никакие настройки не меняем.
Фотометрическую трассировку лучей с отображением траекторий без
необходимости получить фотометрические результаты можно выполнить, не
привлекая дополнительные сущности. Для этого нужно нажать кнопку 11111 или
подать команду Complete update of the ray tracing (Полностью обновить
трассировку лучей). Результат показан на рис. 9.108. Следует пронаблюдать
поведение лучей в различных проекциях (один из стандартных видов показан
на рис. 9.109) и масштабах, чтобы убедиться в корректности перехода через
границу раздела сред с различными коэффициентами преломления (если луч
не перпендикулярен поверхности, траектория должна измениться) и с
одинаковыми индексами — должна быть прямая.
Светотехнический анализ и проектирование (OptisWorks)
787
Part Preferences
Default optical properties j T$$$©&ion!
Surfrnquafe jC;SPR0&^FiLB^ | Browse |
frtemmateriel: |C:\fTO(^tKsW^^^ Browse j Glass
Browse
Extern material: jC; OTOGRAM FILBWTISUBRAF^Ara
OK
Рис. 9.107. Материалы для корпуса
Отмене Справка
» * !
•' I
■V
Рис. 9.108. Трассировка лучей
788
Глава 9
чЧ^чч\\ЛШ*\ ft ;*Й А' /i ^ V
, ¥ * г*
b А'4////
Рис. 9.109. Трассировка лучей — ортогональная проекция
Полезно разделить отображаемые лучи по принципу: без ошибок и с
ошибками — соответствующие опции присутствуют в окне Preferences
(Настройки). Лучи "с ошибками", как правило, заканчиваются там, где есть
неточности в геометрической модели или ошибки в модели оптической (большинство
таких ситуаций связано с некорректным определением состояния границы
раздела).
|Поверхность-Плоскость! от Экран светодиода<1>|
Рис. 9.110. Модель со вспомогательной
деталью — ортогональная проекция
Рис. 9.111. Модель со вспомогательной
деталью — аксонометрическая проекция
Светотехнический анализ и проектирование (OptisWorks)
789
Как упоминалось, наиболее функциональными инструментами для сбора и
отображения фотометрических результатов являются детекторы.
Фотометрический детектор создаем на базе плоской прямоугольной поверхности,
содержащейся в отдельной детали SolidWorks (рис. 9.110 и 9.111). Настройки
детектора освещенности показаны на рис. 9.112.
■ттт^штштф£
i* fioo -Ч "
5V
100
|JM^W&^^
lrwerfcX£X*
Invert Zaxfe
Г
^ft^M^^^i^ti^^
Рис. 9.112. Настройки детектора освещенности
Для детекторов силы света в ортогональных (рис. 9.ИЗ) и полярных
(рис. 9.114) координатах нужно иметь вспомогательные эскизы (эскиз),
позволяющие назначить ориентацию осей X и Y, определяющих сферическую,
по сути, систему координат. Центр диаграммы располагаем в центре линзы
корпуса. Ортогональный детектор требует определения ширины диаграммы,
т. е. углов при вершине пирамиды между ее осью — она направлена вдоль
оси Z и гранями.
790
Глава 9
* j Прямоуг сила света
, Center of the mep
Direction of the x exis (pomfc)
|Точка2@ЭскюЗ
Direction of the Y axis (point)
}Точка4@Эскиз2
lY Axis |
[Center!
"bx
JXAxisJq
t* Photometric detector
Г* Reolometric detector
С SAEAtype
lC SAEBfcype
ffOp**»*» | IP ******
Tconbscopic^ jjrinvertY***
jjiiu—-ir-Vv--r1-vn-TV--- iKlnn-riniinl .1 I *■ ^ I к.ЛлЛ«М>
^r^J.90:00rpeAycoB ~j j {f~ 0*a ^^ by foyer
& Cty stores
Г* ву яя^г (ЬСА)
ИГ Generated file
'Хтех|9о.о0градусое
. Y Mln Г-дабЙграХугав
YMd^igo.OOrpaAycoB
Рис. 9.113. Настройки детектора силы света в ортогональных координатах
Получение численных результатов в виде освещенности и силы света требует
выполнения прямой фотометрической симуляции. После подачи команды
Direct simulation в одноименной панели определяем число трассируемых
лучей и номенклатуру фиксируемых результатов (рис. 9.115). Если
самодовлеющим интересом является поведение светодиода, то число лучей может
быть относительно большим (в данном случае их было 10 млн). Когда расчет
является неким промежуточным этапом, и информация о лучах (траектории,
энергетические и спектральные характеристики) будет собрана в файл с
целью использования в качестве виртуального источника, то следует
оптимизировать затраты. Мы продублируем расчет с числом лучей 1 млн. Сбор
лучей требует активизации опции Generate ray file (Создать файл лучей).
Напомним также, что результаты непосредственно на модели можно будет про-
Светотехнический анализ и проектирование (OptisWorks) 791
смотреть только при активной опции Generate 3D map file (Создать файл
ЗЭ-диаграмм).
4 & Uniform sampling < P tovert tf axfe
Г AdapbvbsampNj(fite) * Г* Invert Zaxfc
Рис. 9.114. Настройки детектора силы света в полярных координатах
Рис. 9.115. Настройки прямой симуляции
792
Глава 9
Диаграмма освещенности детектора при 10 млн лучей показана на рис. 9.116.
На рис. 9.117 приведено окно Surface/Section (Поверхность/Сечение) с
интегральными параметрами диаграммы (рис. 9.118). Как видно, из испущенных
10 лм, на диаграмму попал 1 лм.
♦ OptisWorks - Basic map [(ПО УМОЛЧАНИЮ) ЭКРАН С...НМВ
Рис. 9.116. Освещенность детектора при 10 млн лучей
Surface / Section
'^if'-''tb<yyy "Л* ?£\СКУ «£Ч >"^
>'4>д^'^
(ffi&i
80
Рис. 9.117. Интегральные параметры диаграммы
Светотехнический анализ и проектирование (Optis Works)
793
■фиСГ!
♦30 -20
■ ■■iH.n...«..'...MJM.n...>
10 ^ 2^
30
$*i&pj^;jioo
«., \,Д \ Чм** Г;н^Ы'^ м^йрос.^
Рис. 9.118. Сечение плоскостью, проходящей через ось
Уменьшив число лучей до 1 млн, получаем диаграмму рис. 9.119 и сечение
рис. 9.120. Как видно, с точки зрения восприятия, результаты отличаются
незначительно. Это обусловлено, в том числе, и отсутствием причин для
резкого изменения функции.
* OptieWorks - Basic map [(ПО УМОЛЧАНИЮ) ЭКРАН... КГй ЕЗ
File Edit View Tools filterftg Operation Help
e*B|Pirt|frl В !!>!!?
Value [962302 ~J £^
p" trterme^e level* autoupdate
Г" ItoCurve
Default
j*t§!l
& Linear Г* Log
Рис. 9.119. Освещенность детектора при 1 млн лучей
794
Глава 9
т\
|f^ ъЩ1$:?Л ;.^;V^\ >Л<^4^Л^ * iC '\ ; ;
Рис. 9.120. Сечение диаграммы освещенности плоскостью, проходящей через ось
OptisWorks - Basic map [(ПО УМОЛЧАНИЮ) П... ШШ Ш
File Е« View Tools. Ffctrflg Operation Help
*и|р*»1[?Ч§|чМ|т, II
&Ж$£ >Д#
' Value (3.54273 jj ^1
(C? Jnt«me^ate bvefe auto-upddte
' % Defalt 1 §*1^Ы
С Urwa» f tog
Рис. 9.121. Сила света в ортогональных координатах
Диаграмма силы света в ортогональных координатах и ее сечение показаны
на рис. 9.121 и 9.122. Более привычным названием такого сечения является
кривая силы света (рис. 9.123 и 9.124). Наиболее наглядно оценить
распределение силы света в пространстве можно на основе трехмерных диаграмм
Светотехнический анализ и проектирование (OptisWorks) 795_
(рис. 9.125 и 9.126). Различие между результатами, полученными при
различном числе лучей на полярных диаграммах, несколько более наглядно, однако
оно (в данном случае) не является критическим.
Рис. 9.122. Сечение плоскостью, проходящей через ось
Рис. 9.123. Кривая силы света при 10 млн лучей
Высокой степенью наглядности и информативности обладают объекты
3D map file (ЗО-диаграмма). Фактически это распределение функции
непосредственно на поверхности модели. Распределение параметра Transmission
(Пропускание), понимаемое в данном случае как освещенность поверхности,
отстоящей на очень малое расстояние (наружу) от внешней поверхности мо-
796
Глава 9
дели лучами, вышедшими изнутри, показано на рис. 9.127. Если уменьшить
верхнюю границу диапазона функции, то результат будет выглядеть так, как
показано на рис. 9.128. Как видно, через плоскую лицевую поверхность и
rif Polar Curve»
шввд
": -: Лм1Йи.,,^мГмм1.^Уг.^.1лУ.^.„1^.и1;пГ..1м nfu, „nffih & „X ,7, * J
Рис. 9.124. Кривая силы света при 1 млн лучей
^Intensity distribution Curve
ише
Рис. 9.125. Поверхность силы света при 10 млн лучей
Светотехнический анализ и проектирование (OptisWorks)
797
?' Intensity distribution Curve
шмш
Рис. 9.126. Поверхность силы света при 1 млн лучей
^OptisWorks -* Virtual 3D Photometric Lab [(ПО УМОЛЧАНИЮ) ТОЛЬКО С6ЕТ0ДИОД]
1?§1ш1«3
фь Ро&Фосдб&Ъ, ;£&Ыг$ fefslp " ^ - --г"'- -'[' - -' ,
Щ Ш 4BJ 1С 15;М1>^|Щ1'f'| Black to white (gray scale) jr||Transmission (Lux) jjj j
1д - \^И11
" HHHHBI^^^^^^^^HHiHIl
>.iijm
г ШШ^щ^№^^ШШМ^ШШШш
В
B^^B -'.,
вГд'
-tftdgH-—
4 V 0*<а>гайог«
i . :J
j Contouring J^j
] 10 Levels jj'
Um: (757908
МИО|о
/
jx*»0iKwax - -1 Ч |У"«*0uif» , , , J£*»8'j*to ' ; -'; ' ^ jVeiue^DUix' 1 -'^\
Рис. 9.127. Освещенность пропущенным светом
798
Глава 9
'GptisWqrk*VVirtual 3D Photometric lab [(ПО УМОПЧАН/Ю) ТОЛЬКО СВЕТОДИОД] Щш Ш
Л&
£&* QjE j ^|?ф^^; ^| Black to white (gray scale) 3
'Transmission (Watt/ml) j*j
Absorption (Watt/ml)
Irradiance (Watt/ml)
Reflect
Рис. 9.128. Освещенность пропущенным светом — суженный диапазон функции
через боковые грани проходит существенно меньше световой энергии, чем
через линзу.
9.6.2. Подготовка модели корпуса
Назначаем оптические характеристики для корпуса, упрощенная модель
которого показана рис. 9.129. Чтобы оценить влияние формы рассеивателя на
Рис. 0.129. Корпус осветительного устройства
Светотехнический анализ и проектирование (OptisWorks)
799
светотехнические свойства более выпукло, нивелируем влияние корпуса. Он
не должен отражать лучи, на него попавшие. Для этого создаем поверхность
со свойствами абсолютного поглощения (рис. 9.130) и назначаем ее для
корпуса в качестве поверхности по умолчанию (рис. 9.131).
Рис. 9.130. Поглощающая поверхность
Рис. 9.131. Изменение поверхности по умолчанию
9.6.3. Размещение виртуальных источников
В качестве источников света в фотометрической модели будем использовать
не реальные модели светодиодов, а их имитаторы в виде множества лучей.
Для этого помещаем в геометрическую модель сборки деталь, содержащую
плоскую прямоугольную поверхность. При этом плоскость, на которой рас-
800
Глава 9
полагается эта поверхность, должна совпадать с базовой плоскостью XOY
сборки, в которой существовал светодиод в момент фотометрического
расчета. Так мы, в сущности, позиционируем виртуальное множество лучей, ось
которого была направлена вдоль оси Z узла, относительно новой сборки.
Размеры прямоугольников могут быть (в рамках здравого смысла)
произвольными. В нашем случае оказалось, что плоскость поверхности совпадает
со стенкой корпуса. Поэтому, во избежание неоднозначности, смещаем ее
в пространство на некоторую малую (десятая доля миллиметра) величину.
Интересно, что если назначить поверхности в детали свойства виртуального
источника, связав его с файлом лучей (рис. 9.132), а затем размножить деталь
командой Массив, то источники также размножаются.
Source definition for geometry «.
New souce
Щ
a
ЗбМ№$ n^lrt* : |Виртуальный светодиод 2007
tАйШт "~ ™H ; r ^ • Г -
Г* Invert btis
*J? twacofct
1йГ^#* color s
^Ийгй^д^пЬйЙ^'^'-1'
ЫГ, 1&$г$?tfswb&af* $e\ |",vrt:,,,,^,"l,^,,,,n,",,,,,,,","",,",li"",,,",,,",",,,",",,,,-;
'i £* М-эЫ5Ы1ю»р*ич ч |§Ш sr,4 чЧ
Lifted htff ^'e
> 1Г
di;
B^fifeeowrcflf 7~
J &*> ta ;{ад$6Й5\АМ^ЙЦЙКП0Л£Ш Ш1^Шк ШЪ Ш1&РМХ& timmj]
Рис. 9.132. Связывание поверхности с файлом лучей
9.6.4. Формирование геометрической модели
рассеивателя
На рис. 9.95 была показана модель фонаря. Нужно добиться того, чтобы
параметры освещенности прямоугольного экрана заданных размеров на неко-
Светотехнический анализ и проектирование (OptisWorks)
801
тором расстоянии от фонаря удовлетворяли определенным критериям.
Сделать это разрешено подбором формы наружной поверхности рассеивателя1.
В задачах оптимального проектирования (в противоположность
моделированию) алгоритм построения модели является критическим фактором. Он
принципиально зависим от типа оптимизирующей процедуры. Пусть
функциональные характеристики рассеивателя обеспечивают совокупность призм
с наклонными торцевыми гранями. Ориентация этих граней и есть предмет
поиска. Традиционная методика подразумевает индивидуальную, по сути,
работу с каждой призмой— ей "выделяется" определенный участок
освещаемой поверхности (или назначается сектор, в который должен быть
направлен преломляемый световой поток). Это достаточно трудоемкий
процесс, поскольку удовлетворение локальных критериев не гарантирует
достижения глобального. Если же, сохранив в качестве степеней свободы
ориентацию каждой грани, стремиться к удовлетворению глобального
критерия, можно получить, во-первых, неприемлемое для большинства алгоритмов
число степеней свободы, а во-вторых, целевая функция будет содержать, по
сути, неограниченный набор локальных оптимумов.
Второй подход состоит во вводе функции с разумным числом переменных,
гарантирующей конечное число локальных оптимумов. В качестве таковой
выбираем поверхность, построенную по набору сечений. На базе этой
поверхности будет получена линза свободной формы, модифицируемая затем в
своего рода линзу Френеля. Процесс получения модели иллюстрируется
рис. 9.133—9.136. Сначала строится набор сечений, затем вытягивается
бобышка с прямоугольным сечением (рис. 9.133). Эта бобышка размножается в
виде прямоугольного массива, после чего все тела обрезаются поверхностью.
Получается линза свободной формы, состоящая из параллелепипедов. Затем
тела перемещаются так, чтобы одна из вершин (на первой итерации —
имеющая наименьшую высоту) оказалась на некоторой плоскости
(рис. 9.134). Результирующая совокупность тел обрезается снизу, а тела
соединяются в одно и симметрично отображаются относительно вертикальных
плоскостей (рис. 9.136). Отметим, что функциональность Solid Works
позволяет все эти манипуляции осуществить в режиме детали с минимальным
числом операций и, соответственно, высокой эффективностью и достаточной
надежностью при перестроении.
Критическим фактором является тип кривой в сечении, число сечений и их
взаимное положение. Вариант на рис. 9.133 предполагает, что все сечения
Сразу оговоримся, что в некоторых ситуациях наиболее рационально подбирать форму линзы
светодиода. Не исключен вариант того, что можно будет обойтись вообще без рассеивателя
или же использовать плоское стекло в качестве конструктивного элемента.
802 Глава 9
Рис. 9.133. Определяющие параметры поверхности Рис. 9.134. Создание аналога
на базе парабол и исходная призма линзы Френеля
являются параболами со смещенным относительно оптической оси
конструкции фокусом. При этом плоскости сечений пересекаются на этой оси, а
параболы имеют общую точку. В этой ситуации имеем (в явном виде) шесть
степеней свободы: три фокусных расстояния и три смещения. В неявном виде
назначаются граничные условия для поверхности на крайних сечениях. Это
может быть, например, перпендикулярность поверхности плоскости эскиза с
соответствующими коэффициентами жесткости поверхности. Второй вариант
показан на рис. 9.135. Это три сплайна, расположенные в параллельных
плоскостях. Каждый сплайн проходит через три точки, лежащие на равных
Светотехнический анализ и проектирование (OptisWorks)
803
расстояниях друг от друга. Степенями свободы тут являются вертикальные
ординаты точек. Здесь число явных степеней свободы уменьшено до пяти —
это высоты всех точек за исключением центральной, которая зафиксирована.
Неявные условия — свободный поворот конечных точек сплайна. Как можно
понять, кривые и их параметры подобраны из условия постоянства знака
кривизны. Наличие перегибов способно увеличить число локальных оптиму-
мов и существенно осложнить поиск наилучшего варианта без значимого
улучшения проекта, как на данном этапе это представляется.
Рис. 9.135. Определяющие параметры поверхности на базе сечений,
образованных сплайнами
804
Глава 9
Рис. 9.136. Модель рассеивателя
9.6.5. Оптическая симуляция
На полученной модели, состоящей из виртуальных источников на базе
поверхностей, корпуса и рассеивателя, можно выполнить фотометрическую
s ,'
t
У/
У 't ' /У
Рис. 9.137. Трассировка лучей — аксонометрия
Светотехнический анализ и проектирование (OptisWorks)
805
трассировку (для этого используется та же команда, что и для оптической
трассировки), получив результат в виде траекторий лучей, показанный в
различных проекциях на рис. 9.137—9.139. Надо сказать, что траектории лучей
сами по себе обладают определенной ценностью, помогая генерировать идеи
по улучшению конструкции, однако связь между этими идеями и
имеющимися результатами весьма опосредованная.
Рис. 9.138. Трассировка лучей — вид сбоку
Рис. 9.139. Трассировка лучей — вид сверху
806
Глава 9
9.6.6. Построение фотометрической модели
Создадим два детектора освещенности на базе двух деталей с
прямоугольными поверхностями (рис. 9.140). Один, с большей поверхностью, будем
использовать для оценки освещенности "в целом". Второй определяет
прямоугольник, для которого нужно добиться равномерной освещенности. Эту
Рис. 9.140. Модель с поверхностями для детекторов освещенности
Рис. 9.141. Прямоугольный детектор
интенсивности
Рис. 9.142. Полярный детектор интенсивности
Светотехнический анализ и проектирование (OptisWorks)
807
деталь располагаем в назначенном месте. Присутствие двух детекторов не
является обязательным, однако на меньшем легче собирать требуемую
информацию в численном виде.
Для получения дополнительных результатов помимо детекторов
освещенности создаем прямоугольный детектор интенсивности (рис. 9.141) и полярный
детектор интенсивности (рис. 9.142). На иллюстрациях они
отображаются сеткой — чтобы она была видима, нужно для фона графического окна
SolidWorks назначить цвет, отличный от белого.
9.6.7. Фотометрическая симуляция
Фотометрическую симуляцию выполняем с 5 млн лучей с активной опцией
Generate 3D map file (Создать файл ЗЭ-диаграмм), позволяющей собрать
информацию о фотометрических параметрах на поверхностях тел.
Диаграмма освещенности большего детектора показана на рис. 9.143, а
меньшего — на рис. 9.144. На иллюстрациях также приведен фрагмент
Дерева проекта OptisWorks с интегральной информацией о состоянии детектора.
Как видно, из 50 лм, испущенных пятью чипами, до детектора дошла только
половина. По понятным причинам, еще меньше энергии попало на меньший
детектор.
Iй bptisWorks-
аь &fo tfe^
extended map ((источники виртуальные) э... Ш[-1£3|
lool$^er*AQ operation tielp ^
СЯЯ)Р t**||Cl 8|%j36i| ? (White to black (gray seal.]
;
^*23S"'363mmJ
Ш^М 'ШёШШ^^Шк
>'ii2Smm ' !iufrtfwce«bbai)i4J)ck ж
V*»p276 <$£\
р" Intetmecbte levels auto-update
i ф (ИСТОЧНИКИ ВИРТУАЛЬНЫЕ) ЭКРАН-1
§, Total flux -25.7311 lm
\ % Max value - 1392.76 be
% Mm value - 0.221004 be
Ф, Average value = 171.541 Ix
Й. Contrast - 0.999683
Default | ^
If l?oCuiv«
Г F^J
4
4 P tin** Г tog
A
Рис. 9.143. Освещенность большего детектора
808
Глава 9
Рис. 9.144. Освещенность меньшего детектора
На первый взгляд, однородность освещенности оставляет желать лучшего,
однако в качестве первого приближения проект рассеивателя вполне
пригоден. Оказывается, что большая часть все-таки концентрируется в пределах
требуемой зоны. Об этом говорит относительно малое увеличение
уловленного светового потока при росте площади приемника. Поэтому приоритетной
задачей является перераспределение энергии с целью добиться равномерной
освещенности меньшего детектора.
Интегральные характеристики освещенности большего детектора в
численном виде показаны на рис. 9.145, а сечения диаграммы освещенности
горизонтальной и вертикальной плоскостями — на рис. 9.146 и 9.147.
Для большинства светотехнических задач ведущим инструментом оценки
свойств являются кривые силы света. Исторически именно используются для
описания светотехнической арматуры. Однако современные программные
продукты и экспериментальное оборудование позволяют получить
пространственное описание распределения интенсивности — поверхности силы
света. Так, кривые силы света, показанные на рис. 9.148, являются
горизонтальным и вертикальным сечением поверхности с рис. 9.149.
Некоторые классы задач, например решаемые в автомобильной
промышленности при проектировании внешней светотехники, имеют в качестве
Светотехнический анализ и проектирование (OptisWorks)
809
Surface / Section
rDtooisiunii;
Рис. 9.145. Интегральные характеристики освещенности
чо V ч-
шшшшшшшшт
J>V:V> х ' ** Л I? " *♦ ч;х£ %: >**^ / «': 'У'"'^ s ; ч v "< - "
v "J
- % ^fr^^,,^f,uffl^ j -
0
"mm
..-:A..-:.^... .-:>» v.. *ь.?>Шх.'.л..ъ£1.. Гу.^.х-.у.у-у.-.'у. >.? ^.ЛУ..:.^$«™й!ии1^
Рис. 9.146. Сечение диаграммы освещенности горизонтальной плоскостью
*зЭ32ЯЯ
/>-\ч : ^ V, *-ч^ <*<^ШР*'Х^: Ч» <- *<<Л^ V с-
'йДй^З^Дй-^
^
ffi* ifi^y^^s^^ f.h'iM
Рис. 9.147. Сечение диаграммы освещенности вертикальной плоскостью
810
Глава 9
jjjtf Polar Curves
«£Щ
, 1 1 .мим. ПМ11П1МММПИ1. >i^Ml.iMii.r.iN.iil.ir.iilimiJlllili;il<;/ J *ф*? »**^»*«-»Х««Г** ~, } f ч
Рис. 9.148. Горизонтальная и вертикальная кривые силы света
l Intensity distribution Curve
№ТО
*.*■
*
>
*л.
->
w
,4"-
j^44
's
-'Щ
v v* г Ч
f" ^ ''), '£*C,s*' Ф
}'-%*'&]Ш
\i;< >-'-^'^^Ш7
'' ^-^>^Ш
w^^^-^e^
v/'W; 7<#k
Рис. 9.149. Поверхность силы света
Светотехнический анализ и проектирование (OptisWorks)
811
критериев заданные интервалы или односторонние ограничения для силы
света вдоль требуемых направлений. Стандартным средством для подобных
расчетов являются диаграммы силы света в прямоугольных координатах.
В OptisWorks данный инструмент позволяет собрать и отобразить
информацию в произвольном виде. Предусмотрено несколько стандартов для
настройки вида отображения, в том числе и по спецификациям SAE. Диаграмма
силы света для фонаря в формате Optis intensity (Интенсивность Optis)
приведена на рис. 9.150. Она позволяет (как, кстати, и все другие плоские
диаграммы), например, наведя указатель мыши в некоторую точку в
графическом окне, получить величину функции — в данном случае это сила света.
Разумеется, доступны сечения, возможен расчет интегральных параметров в
пределах области, пространственный вид диаграммы и т. д.
Рис. 9.150. Прямоугольная диаграмма силы света
Интересным результатом является картина яркости призматуры рассеивателя
для наблюдателя, находящегося на оси на некотором расстоянии, показанная
на рис. 9.151. Как видно, ожидаемая корреляция между диаграммами яркости
и освещенности, по сути, неощутима. Надо сказать, что это примечательный
факт. Весьма широкий класс задач связан с анализом и/или проектированием
систем по критерию яркости. Не все светотехнические программы адекватно
*■■ OptisWorks,- Spectral map [(ИСТОЧНИКИ ВИРТУАЛЬНЫЕ) ДЛЯ ЯРКОСТИ]
шшш\
• »д Щ|Щу ^:'i-l^i^ l;-*-V.;i
White to black (gray scale) jj|
u.Wirfd8friiri>wii'n..ttaaYf.
All wave-.
ЗДЖЩЩЖ^
Рис. 9.151. Картина яркости фонаря
-'OptisWorks - Virtual 3D Photometric lab [(ИСТОЧНИКИ ВИРТУАЛЬНЫЕ) ЛИМИКА СНШШ/и mm 831
-0^^<Щ
Black to white (gray scale) *jl Transmission (Lux) jjjj
* L
j| Contouring Jj$js%
irifaii^ihffiflrtfryP'
110 Levels
*^f-ч J139539 *Й
■ - Ж»-
ЯИШ|^$8ж$ф^
Рис. 9.152. Диаграмма пропускания на поверхности фонаря
Светотехнический анализ и проектирование (OptisWorks)
813
обрабатывают соответствующие эффекты. Поэтому требования по яркости
(например, достижение ее однородности в пределах некоторого объекта)
подменяются, в силу отсутствия адекватных инструментов, например,
критерием однородности освещенности поверхности (самой или близко к ней
расположенной), для которой должна рассчитываться яркость.
В некоторых задачах значительной информативностью обладает
распределение параметров на поверхностях объектов сцены. Диаграмма пропускания
(по сути, освещенность поверхности, отстоящей от тела на малое расстояние)
показана на рис. 9.152. Как видно, наименьшим "сопротивлением" для света
является центральная часть рассеивателя, а к периферии пропускание
уменьшается. В углах оно практически отсутствует. Пропускания может не быть по
нескольким причинам: первая— на эту часть поверхности рассеивателя свет
не попадает, и пропускать, собственно, и нечего. Второй вариант — свет
поглощается на поверхности. Однако в нашем случае коэффициент поглощения
поверхности равен нулю. Поэтому возможен третий вариант...
Дополнением к распределению пропущенного света— в некотором
смысле— является диаграмма отражения (рис. 9.153). Здесь, наоборот, наиболее
fe.^JPft L ! TV ^"'.'.""' "'Уж?.*™'.'.". . "''.... fe^e*!** ".Г,...- '. -"^ !&&»«*& tux
Рис. 9.153. Диаграмма отражения на поверхности фонаря
814
Глава 9
активно со светом взаимодействуют края рассеивателя. Из этого
сопоставления напрашивается вывод: световой поток все-таки попадает изнутри на
наружную поверхность на периферии, однако из-за эффекта внутреннего
отражения возвращается назад в материал рассеивателя.
9.6.8. Оптимальное проектирование
Отличительной чертой фотометрического модуля OptisWorks относительно
схожих по назначению программ является наличие интегрированных
процедур оптимизации. Традиционно они присутствуют в инструментах
оптического проектирования. OptisWorks использует общий математический
аппарат нелинейного программирования для оптики и фотометрии. Версия
2007 года предоставляет выбор между двумя алгоритмами: Evolutionary
engine (Эволюционный метод) и Gradient engine (Градиентный метод).
Первый, судя по косвенным признакам, есть вариант метода прямого поиска
(в обзорном виде подобные алгоритмы описаны в разд. 2.3), который
предназначен для просмотра допустимой области "в целом". Алгоритм, связанный с
вычислением производных, используется затем для уточнения одного или
нескольких (если они существенно отличаются по топологии) приближений.
Базовые настройки оптимизационного алгоритма сосредоточены в окне
Preferences (Настройки) на вкладке General (Общие). Собственно
параметров настройки всего два: упомянутый тип оптимизационного алгоритма и
условие остановки поиска — Optimization time without improvement... s
(Время оптимизации без улучшения ... сек). Надо сказать, что критерий
завершения является вполне "инженерным", т. е. никак не использует
известный математический аппарат нелинейного программирования. Дело здесь в
том, что, как правило, инженерные проекты связаны с большим числом неоп-
ределенностейГ в точности изготовления, свойствах материалов, условиях
эксплуатации, адекватности формулировки критериев качества и собственно
точности расчета по численным моделям. Поэтому влияние факторов,
которые, в определенном смысле, можно отнести к случайным, может подавить
выигрыш, который мог бы быть с изрядными затратами времени получен при
строгом удовлетворении критериев оптимальности. Собственно, упомянутые
факторы могут сделать целевую функцию вблизи точек локальных оптиму-
мов "настолько" негладкой и, более того, разрывной (из-за численной
природы расчетных алгоритмов), что используемые в критериях оптимальности
первые и вторые производные целевой функции и ограничений не могут быть
вычислены. Поэтому подход разработчиков модуля оптимизации OptisWorks
представляется вполне здравым: на базе нескольких последовательных
приближений, полученных одним или двумя алгоритмами, сформировать
протокол поиска, проанализировать предлагаемые системой варианты с точки зре-
Светотехнический анализ и проектирование (OptisWorks)
815
ния соответствия конструктивным и технологическим критериям, а затем
попробовать улучшить проект, стартуя из наилучшей (по целевой функции или
по иным соображениям) точки. Критерием же остановки является
достижение приемлемого результата с разумными затратами ресурсов (в широком
смысле этого слова).
Переменными проектирования в фотометрической оптимизации могут быть
как размеры геометрической модели SolidWorks, в терминологии OptisWorks —
Mechanical variables (Механические переменные) (эти размеры, естественно,
должны быть управляющими), так и размеры оптических элементов,
построенных командами OptisWorks — Optical variables (Оптические переменные).
В это понятие Mechanical variables включаются как размеры в эскизах, так и
те, которые определяют пространственные элементы, а также объекты
справочной геометрии и сопряжения в сборке. Для алгоритма безразлично,
определен ли размер в контексте сборки или детали. Важно, чтобы геометрия
была реализуема во всем интервале изменения переменных при любых их
комбинациях. В принципе, алгоритм обрабатывает подобную ситуацию, не
останавливаясь, однако отсутствие результата в пределах допустимой
области плохо сочетается с особенностями оптимизационных алгоритмов.
Особенно к этому чувствительны градиентные методы.
Для ввода новой переменной проектирования нужно из контекстного меню
пиктограммы Mechanical variables подать команду Add parameter
(Добавить параметр) (рис. 9.154), после чего в графическом окне SolidWorks
указать на предварительно отображенный размер. Этот размер должен появиться
в поле Optimization \ Tolerancing parameters (Параметры оптимизации \
анализа чувствительности) | Parameters selected (Выбранные параметры)
панели SolidWorks variable definition (Определение переменных SolidWorks)
(рис. 9.155). Раздел Оптические переменные заполняется посредством
перетаскивания геометрической характеристики из раздела Optical surfaces.
Е Щ< Optimization / tolerancing Parameters
id Ш Optimization / tolerancing Variables
. ф Optical variables
Ш ■♦ BffllFHiTf imffl ' m parameter
[+j ф Optimization / toleranCn*<g'rwv»«» *
Рис. 9.154. Добавление новой переменной Рис. 9.155. Определение переменной
проектирования проектирования
После создания переменной проектирования на базе размеров объектов, не
входящих в категорию Оптические поверхности, она появляется в Дереве
*64)Ф
[ Р& antetars sefecbed ••
i/ ''-1
816
Глава 9
проекта OptisWorks в разделе Mechanical variables. Уточнить ее свойства
можно по команде Edit parameter (Редактировать параметр), подаваемой из
контекстного меню пиктограммы, соответствующей данной переменной
(рис. 9.156). После этого в панели Variable definition (Определение
переменной) можно увидеть ее текущее (для алгоритма оптимизации — начальное)
значение и назначить интервал изменения переменной — Min value
(Минимальное значение) и Max value (Минимальное значение) (рис. 9.157).
I ^Щ Optimization / tolerancing Parameters
В (fl Optimization / tolerancing Variables
: ^ Optical variables
В (D Mechanical variables
a вВВЯВ
$ ф Optimization / tolerancing Target!
Remove this item
Рис. 9.156. Редактирование переменной
Cwwtvfk»
:, i15.5
: , - Jl9.5
&&3)
iwwff^
' *• , ' * "
lyj^
"'•"';3--
.M-:
г-|Д|| '\
Рис. 9.157. Интервал
изменения переменной
Несмотря на то, что проектируемая поверхность описывается девятью
размерами — тремя сечениями, в каждое из которых определяется тремя точками.
Мы будем варьировать только восемь переменных, оставив фиксированной
центральную точку. Это предотвратит смещение поверхности как жесткого
целого. Понятно, что такое смещение не влияет на результат, но — это менее
очевидно — радикально ухудшает сходимость оптимизационного процесса.
Практика показывает, что не всегда наилучшим вариантом является
назначение очень широкого интервала варьирования. Дело в том, что если
переменных проектирования много, а допустимые интервалы изменения достаточно
широкие, то проблематично гарантировать реализуемость проекта при
произвольных комбинациях переменных. Поэтому следует идентифицировать
локальный оптимум в некотором ограниченном подпространстве, которое затем
можно расширить (или сместить интервал поиска) так, чтобы полученная
точка оказалась примерно в центре нового подпространства. Затем следует
провести новый поиск, стартуя из только что полученной лучшей точки. Этот
подход может увеличить вычислительные затраты, но при этом способствует
осознанному анализу вариантов, а также определенным образом расширяет
пространство поиска за счет того, что оно "просматривается" более чем один
раз (это соображение в большей степени применимо к алгоритмам прямого
поиска).
Светотехнический анализ и проектирование (OptisWorks)
817
Целевая функция в фотометрическом анализе OptisWorks строится на базе
интегральных или локальных характеристик, взятых с диаграмм
освещенности или силы света в ортогональных координатах (фактически эти
характеристики заимствуются не с диаграммы, а с их "образов" в Дереве, как показано
на рис. 9.158):
♦ Total flux (Суммарный поток);
♦ Max value (Максимальное значение);
♦ Min value (Минимальное значение);
♦ Average value (Среднее значение);
♦ Contrast (Контрастность).
& *Щ Results Manager
g Щ| Photometric results
l-j (Q Illuminance / Irradiance results
! Й &j 2D maps
Й ф (ИСТОЧНИКИ ВИРТУАЛЬНЫЕ) ЭКРАН ДЛЯ ОПТИМИЗАЦИИ-1_002
i •• -ft Total flux - 19.8384 Im
j- ft Max value - 1406.49 Ix
;•• ft Min value - 144.614 Ix
; ft Average value - 529.023 Ix
1 ft Contrast - 0.813534
ffi ^ Luminance / Radiance results
В (D Intensity results
'• В &J 2D cartesian intensity maps
' B-% (ИСТОЧНИКИ ВИРТУАЛЬНЫЕ) XXX
ft Total flux-23.59821m
1 ft Max value - 303.915 cd
i ft Min value - 0 cd
! ft Average value - 50.7956 cd
ft Contrast -1
f-ф IES
. ♦Eiiumdat
■ ^ Optis intensity dstrfcution
: ф Ray files
: -ф Simulation report files
Рис. 9.158. Параметры для использования в выражении для целевой функции
В общем случае целевая функция является квадратным корнем из суммы
квадратов разностей между желаемыми величинами характеристики и их
расчетными значениями. При этом разности входят в формулу с
назначаемыми пользователями весовыми коэффициентами. То есть, мы имеем дело с
некоторым (упрощенным) вариантом многокритериальной оптимизации.
Помещение характеристики "в" целевую функцию осуществляется
перетаскиванием ее мышью из соответствующего раздела в результатах, например,
818
Глава 9
из Illuminance/Irradiance results | 2D maps (Результаты
освещенности/энергетической освещенности | 20-диаграммы), в раздел Optimization/tolerancing
targets | Photometric targets (Цели оптимизации | Фотометрические цели).
Настройка компонента целевой функции осуществляется в окне Target
definition (Определение цели). Здесь присутствуют следующие управляющие
элементы:
♦ Группа полей Optimization \ Tolerancing parameters (Параметры
оптимизации \ анализа чувствительности):
• Target value (Значение цели)— желаемая величина данной
составляющей целевой функции;
• Define the maximum value used in tolerancing (Определить
максимальное значение, используемое в анализе чувствительности) — в
оптимизационном расчете это и следующее поле не используются;
• Define the minimum value used in tolerancing (Определить
минимальное значение, используемое в анализе чувствительности);
• Target weight (Весовой коэффициент цели).
♦ Target parameters (Параметры цели)— кнопка предоставляет доступ к
окну ХМР map parameters (Параметры диаграммы ХМР), в котором
конкретизируется информация об области сбора информации на детекторе.
Величина целевой функции — желаемое ее значение. Если используется
несколько целей, то данный параметр должен принимать реалистическое
значение. Исходя из определения целевой функции, вклад в нее параметра будет
зависеть от квадрата разницы между желаемым и действительным. Когда в
целевой функции учитываются еще какие-либо составляющие, где эта
разница существенно меньше (в силу того, что желаемая величина ближе к
исходной), то алгоритм будет стремиться удовлетворить в первую очередь цель
с максимальной невязкой.
Окно, появляющееся после нажатия кнопки Target parameters (Параметры
цели) (рис. 9.159), содержит информацию об области на детекторе, с которой
снимаются данные для расчета целевой функции. Дело в том, что, несмотря
на привязку цели к детектору, область, для которой она вычисляется, в
общем случае не совпадает с размерами детектора. Воспринимаемые системой
размеры и форма (ее тоже можно выбирать) назначаются в окне, показанном
на рис. 9.160. Чтобы область сбора результатов совпадала с детектором,
соответствующие параметры нужно сделать идентичными назначенным для
детектора. Эта функциональность позволяет учитывать в целевой функции как
характеристики неких областей, так и совокупность локальных
характеристик в неких точках.
Светотехнический анализ и проектирование (OptisWorks)
819
Рис. 9.159. Определение цели
Формирование целевой функции и, в данном случае, ее составляющих
достаточно ответственное мероприятие. Одно из основных требований здесь —
достаточная гладкость. При использовании численных методов понятие
гладкости весьма условно. В случае с OptisWorks на ее ухудшение работает факт
непрерывного изменения геометрии и, соответственно, светотехнической
модели на базе сетки, натянутой на геометрию SolidWorks. Лучи испускаются
случайным образом и случайным же образом взаимодействуют с телами и
поверхностями. Здесь, несмотря на то что этих лучей достаточно много,
может проявляться фактор "шума". Следующий момент — интерпретация
программой результатов взаимодействия лучей с детекторами. Алгоритм, как
упоминалось, выполняет осреднение результатов по так называемым
пикселам, число которых определяется параметрами Sampling (Дискретизация)
соответствующего детектора. А затем, в зависимости от желания
пользователя, может выполняться фильтрация (в данном случае своего рода
сглаживание).
В этой связи наилучшими свойствами обладают компоненты, связанные с
интегральными характеристиками — величиной светового потока и средней
освещенностью/интенсивностью. Чтобы добиться меньшей чувствительности
характеристик локальных— минимального и максимального значений —
лучше сделать ячейки сетки Sampling детектора, используемого для съема
результатов, достаточно крупными. Это нивелирует эффекты, связанные с
шумом. Если же нас интересуют параметры в какой-то точке, то следует уве-
820
Глава 9
личить размеры Dimension Rx/Ry до разумного предела и использовать
для формирования цели не локальные (критические), а средние значения
(рис. 9.160).
Результаты всех манипуляций, как всегда, фиксируются в Дереве OptisWorks —
в данном случае в разделе Optimization/tolerancing Parameters (Результаты
оптимизации/анализа чувствительности).
ХМР map parameters
«^ iff nini i ii * t ' \ •>' 2г -S' «"• '•■ У ■"< '
Фяимммтмюиит» " ■■ «ужмщи^ит «win r
Рис. 9.160. Определение области для расчета составляющей целевой функции
I *Щ Optimization / tolerancing Parameters
Е! CU Optimization / tolerancing Variables
^ Optical variables
В (Р Mechanical variables
|G) Сечение 1 середина =17.5
Q Сечение 1 снаружи = 15
I- Q Сечение 2 внутри « 18
@ Сечение 2 середина =15.5
i Q Сечение2снаружи» 13
@ Сечение 3 внутри =16
I- б Сечение 3 середина = 13.5
б Сечение 3 снаружи - 11
В Ш Optimization / tolerancing Targets
S (О Photometric targets
1 й ft (источники виртуальные) экран для оптимизации-l
Remove this item
§, Max value - 750 Ix
: f>, Min value « 500 Ix
^ Optical targets
Рис. 9.161. Фрагмент дерева проекта, связанного с оптимизацией
Запуск оптимизации осуществляется командой Optimization (Оптимизация).
Появившееся окно идентично окну для фотометрической симуляции (см.
рис. 9.76), в нем нужно выбрать анализируемую конфигурацию сборки,
назначить число трассируемых лучей и определить рассчитываемые диаграммы.
После начала расчета система последовательно генерирует пробные проекты,
выполняет фотометрический анализ, рассчитывает результаты для детекторов
Светотехнический анализ и проектирование (Optis Works)
821
(в этой связи, чтобы избежать накопления ненужных файлов, занимающих
большой объем памяти на диске, рекомендуется отключить не формирующие
целевую функцию детекторы). Информация обо всех проанализированных
проектах накапливается в текстовом файле с именем # Optimization^ который
помещается в папке со сборкой. Фрагмент его содержимого (после
незначительного переформатирования) приведен ниже.
Сечение 1
середина
17.5
19.0
17.9
19.1
16.0
17.7
15.9
16.3
15.9
Сечение 1
снаружи
15
17.7
15.3
15.
17.1
14.9075
13.4
15.3
13.2
Сечение 2
внутри
18
16.6
18.3
16.3
19.3
20.8
14.5
21.0
18.5
Сечение 2
середина
15.5
16.7
18.0
13.4
13.8
15.4
13.7
15.2
14.2
Сечение 2
снаружи
13
11.7
15.1
10.4
15.2
13.3
12.9
11.5
12.7
Сечение 3
внутри
16
18.5
16.2
15.8
16.0
15.9
16.8
16.3
17.2
Сечение 3
середина
13.5
14.3
15.0
12.5
14.2
12.8
13.2
14.4
15.4
Сечение 3
снаружи
11
9.3
12.7
10.2
10.4
11.4
8.8
11.7
11.3
Target
756.2
652.2
339.2
697.3
410.2
422.9
616.4
395.0
476.5
Мах
value
1406
1195
881.8
1327
737.6
987.9
1245
923.1
1055
Min
value
144.6
30.2
206.2
129.1
171.0
176.4
186.3
168.9
171.1
Average
value
529.0
568.1
543.1
526.7
405.2 j
517.1
459.6
521.7
489.4
Error computing target
Cancel
Best solution
Сечение 1 середина
Сечение 1
Сечение 2
Сечение 2
Сечение 2
Сечение 3
Сечение 3
Сечение 3
Target
снаружи =
внутри =
середина
снаружи =
внутри =
середина
снаружи =
315.15
= 16.3357
■• 15.4238
17.3862
= 17.9519
■• 15.0069
13.0088
= 15.0757
- 11.3074
Интересно пронаблюдать диаграмму с точками поиска (рис. 9.162). По оси
абсцисс отображена первая переменная проектирования, а по оси ординат —
вторая. Как видно, в расположении точек не наблюдается выраженной
системы, и точки заполняют всю допустимую область. Таким образом,
используемый в программе так называемый "генетический" алгоритм — Evolutionary
822
Глава 9
engine (Эволюционный метод) содержит в своей основе метод прямого
поиска и ориентирован на получение хорошего приближения для последующего
уточнения градиентным методом.
18,0
17,0
15,0 4
13,0
12,0
-,v :<\W'V » t.
,' ^\1
|-A '^ #" *'v* ч v -' -\ \ »>- A
-. ■: '■ ♦ ♦ *.. - . ' -•-
, ,' -„ ♦ « ^ # ,
rifiiiin, fnfuiltiiiinuM f mi.
15,5 16,5 17,5 18,5 19,5
Рис. 9.162. Точки поиска в подпространстве, определяемом первыми двумя переменными
Попытка использовать градиентный метод в данной задаче (по крайней мере,
используя в качестве стартовой точки исходный вариант конструкции) успеха
не имела— после нескольких итераций процесс сходился вблизи точки
старта. Дело, по всей видимости, в том, что из-за достаточной сложности системы
и малого (относительно сложности) числа лучей фактор "шума" не позволяет
с требуемой точностью рассчитывать производные целевой функции и
ограничений.
Как упоминалось, критерий завершения процесса носит в значительной
степени эмпирический характер. Более того, в реализации программы есть
дефект, проявляющийся в том, что после каждого шага расчета,
сопровождающегося трассировкой лучей, оперативная память не освобождается
полностью, в результате чего происходит аварийное завершение SolidWorks.
В этой связи рекомендуется в процессе работы оптимизатора отобразить
Диспетчер задач Windows (см. рис. ЮЛ) и контролировать размер остатка
свободной оперативной памяти. Перед ее израсходованием следует прервать
процесс оптимизации.
Даже в случае аварийного завершения протокол оптимизации в значительной
степени сохраняется— частично теряется только строка с информацией
о последнем шаге и информация о лучшем проекте. Анализируя колонку
Светотехнический анализ и проектирование (OptisWorks)
823
Target (Цель), можно идентифицировать наилучший (из числа
проанализированных) проект.
После естественного завершения процесса оптимизации или его прерывания
появляется окно, в котором предлагается заменить имеющийся проект
наилучшим из числа проанализированных (рис. 9.163). Положительный ответ
приведет к тому, что в текущей активной конфигурации варьируемые
размеры примут значения, соответствующие наилучшему проекту, и модель,
соответственно, будет автоматически перестроена.
Рис. 9.163. Запрос на замену исходного проекта
наилучшим Рис. 9.164. Заготовка призматуры
Как правило, после первой попытки получить проект близкий к
оптимальному (локально оптимальному) не удается. Здесь следует или удовлетвориться
достигнутым, или же начать новый поиск из лучшей на данный момент
точки. При этом можно изменить интервалы для переменных проектирования —
в первом приближении, например, так, чтобы новая стартовая точка
оказалась вблизи центра (это, конечно, не отменяет требования реализуемости
проекта во всей области и не противоречит другим требованиям).
Выполнив несколько попыток возобновления оптимизационного расчета со
стартом из лучшей из полученных на предыдущем этапе точек
(использовался только эволюционный алгоритм), генерируем улучшенный проект. На
иллюстрации показана заготовка четверти модели до совмещения вершин
призм с плоскостью (рис. 9.164). Результирующая геометрическая модель
показана на рис. 9.165. Распределение освещенности большего детектора
показано на рис. 9.166. На диаграмме выделена область, соответствующая
меньшему детектору, а на рис. 9.167 показаны интегральные характеристики
этой области. Сечения диаграммы показаны на рис. 9.168 и 9.169.
Как видно, несмотря на улучшение целевой функции, а также обретение
пятном освещенности формы близкой к прямоугольнику меньшего детектора,
результат нельзя признать идеальным. Причина кроется в том, что прогресс
достигнут за счет существенно уменьшения максимума освещенности (это
Ы «41
Рис. 9.165. Вариант улучшенного проекта
OptisWorks - EKtended map [(УЛУЧШЕННАЯ ШАГ в) ЭКРАН-1 ] iiR Ш
fig В 1 Р у j[g* 1 jP Jf% 1 SfelJ ft ;1 [White to black (gray s"c1£
#Ж* J765.956 '-Jj ^j
-*4 1.:^ rrrfed-
DeteJt
1*ЬЙ-
0" y*e* •- Г tig
J
Рис. 9.166. Распределение освещенности большего детектора
для улучшенного фонаря
Светотехнический анализ и проектирование (OptisWorks)
825
Surface / Section
rrD^emiOrt^;
|/Width (250
4W
; ,* *,**"'- *
■UpcNsr''
Export,..
Рис. 9.167. Интегральные характеристики освещенности зоны меньшего детектора
на поверхности большего
m
$т&щ
:■ М**-С Nowata Г* fti*' ёадми.у
Рис. 9.168. Сечение диаграммы освещенности горизонтальной плоскостью
$тф$ р(Г
Щ
Мак С НткШ ^Мйо Export... |,|
Рис. 9.169. Сечение диаграммы освещенности вертикальной плоскостью
826
Глава 9
нехорошо) и определенного увеличения минимума (это позитивный
результат). При этом средняя освещенность снизилась с 529 до 440 лк. Попытаемся
разобраться в причинах и определить мероприятия по улучшению системы.
Рис. 9.170. Диаграмма пропускания на поверхности улучшенного фонаря
Если отобразить на наружной поверхности рассеивателя распределение
освещенности, порождаемой пропущенным светом, то получается весьма
противоречивая картина (рис. 9.170, где шкала занимает весь интервал, и
рис. 9.171, где верхняя граница шкалы снижена для лучшей наглядности).
Возникает ощущение, что по сравнению с оптимизированным вариантом
размер пропускающей области несколько уменьшился, причем
"сопротивление" световому потоку начала создавать центральная часть рассеивателя!
Дело, по всей видимости, в том (это утверждение можно подтвердить или
опровергнуть, рассматривая траектории лучей, а также пользуясь инструментом
Light expert (Эксперт по свету), что центральная часть имеет слишком
большие углы наклона нормали призматур к оптической оси. Поэтому
значительная часть светового потока претерпевает внутреннее отражение и возвраща-
Светотехнический анализ и проектирование (Optis Works)
827
ется внутрь пластины рассеивателя— на рис. 9.172 отчетливо видно, что
пропускание в центре модели практически отсутствует.
Рис. 9.171. Диаграмма пропускания на поверхности улучшенного фонаря —
уменьшенный диапазон шкалы
Исправить ситуацию, когда потенциально наиболее эффективная зона
препятствует световому потоку, можно, увеличив с трех до четырех число точек
в каждом сечении, формирующих базовую поверхность. Эта операция
существенно расширит пространство поиска за счет возможности менять знак
кривизны вдоль сечения. Это, однако, произойдет за счет усложнения
оптимизационной задачи, т. к. появятся новые локальные оптимумы,
идентификация которых потребует значительного объема расчетов. Паллиативным
вариантом является локальная оптимизация проблемной зоны. Для этого
вырезаем прямоугольное отверстие в центральной части, а затем заполняем его
призматурой, построенной на базе поверхности. Эта поверхность
формируется на основе двух прямолинейных сечений. С точки зрения оптимизации
элемент управляется тремя размерами— переменными проектирования.
Базовый размер — координата центральной (с учетом последующих построений
симметричных элементов) точки'не варьируется.
828
Глава 9
OptisWorks - Virtual 30 Photometric tab ((УЛУЧШЕННАЯ ШАГ 8) Л/НЕЙКА СВЕТОДИОДОВ ... №В
yl Reflection (Lux)
V3/>v|
Рис. 9.172. Диаграмма отражения на поверхности улучшенного фонаря
Рис. 9.173. Исходный проект с местным изменением формы
В качестве стартовой точки принимаем равенство всех размеров —
получается плоская поверхность (рис. 9.173). Варьировать будем только три новых
переменных, зафиксировав окружение. Результат, достаточно неожиданный,
Светотехнический анализ и проектирование (OptisWorks)
829
показан на рис. 9.174. С точки зрения алгоритма оказалось более выгодным
изменить направление наклона призм в пределах прямоугольника.
Рис. 9.174. Параметры проекта с подбором формы внутренней области
; OptisWorks - Virtual 30 Photometric Lab [(ИЗМЕНЕНИЯ В ЦЕНТРЕ - УЛУЧШЕННАЯ) ЛИНЕШ... ШШ Ш
Щ Н *Ш '■■ Ы Ш Ж t'&l Щ•%filack to white (gray scale) "^jTransmission (Lux) Tj
$тЪ1ж'>
1у'~1хШ.
Рис. 9.175. Диаграмма пропускания на поверхности фонаря с местными изменениями
830
Глава 9
Распределение "пропущенной" освещенности для модифицированной модели
показано на рис. 9.175. Как видно, проблема с непропусканием в центре
решена, по крайней мере, формально: куда попадает и как распределяется
пропущенный световой поток — тема для отдельного рассмотрения.
С точки зрения наличия потенциала для улучшения, информативной является
диаграмма освещенности, порожденной отраженным светом — она показана
на рис. 9.176. Как видно, источником потенциальных усовершенствований
может стать изменение формы на краях средней части и в призма*,
примыкающих к модифицированному прямоугольнику. Также велика доля
отражения на боковых гранях призм. С последним бороться достаточно трудно, тем
более что это отражение в значительной степени обусловливается световым
потоком, уже вышедшим из рассеивателя.
Рис. 9.176. Диаграмма отражения на поверхности фонаря с местными изменениями
Собрать в "полезное" место свет с краев рассеивателя может быть
невозможно в принципе — из-за того, что при увеличении угла наклона лицевых
граней преломление будет уменьшаться вплоть до полного внутреннего отраже-
Светотехнический анализ и проектирование (OptisWorks) 831
ния. Здесь нужно или увеличивать расстояние между светодиодами, или
уменьшать соответствующие габариты.
Распределение освещенности детектора, совпадающего с искомой областью
равномерной освещенности, показано на рис. 9.177. Как видно, по сравнению
с промежуточным вариантом результаты улучшились — интегральные
параметры показаны на рис. 9.178. В частности, увеличился коэффициент
полезного действия — возрос попавший на детектор световой поток, а также
появились локальные максимумы освещенности по обе стороны от
горизонтальной оси симметрии, которые весьма наглядно идентифицируются на
сечениях (рис. 9.180 и 9.181). С учетом условностей и упрощений, допущенных
при постановке задачи, например отсутствия рассеяния на поверхностях и в
объеме, ввод их в задачу приведет к более подходящему результату по
сравнению с проектом, показанным на рис. 9.165 — учет рассеяния сгладит
картину освещенности.
Рис. 9.177. Диаграмма освещенности меньшего детектора
832
Глава 9
Рис. 9.178. Интегральные параметры освещенности меньшего детектора
Диаграмма освещенности большего детектора приведена на рис. 9.179.
Налицо весьма высокий градиент функции на границах назначенной области в
вертикальном направлении. Это отчетливо видно на кривой — сечении
вертикальной плоскостью. В горизонтальном сечении результат несколько менее
утешителен— кривая достаточно гладкая. Причина, как представляется, в
том, что системе не хватило степеней свободы в горизонтальном
направлении, грубо говоря, нужно было бы добавить еще одно сечение с тремя
новыми переменными проектирования. Компромиссом могло бы стать выделение,
подобно центральной области, зон на рассеивателе вблизи боковых сторон,
создание для них новых переменных проектирования и локальная
оптимизация на базе получившегося проекта.
Здесь уместно еще раз вспомнить о том, как повлияли бы более детальные
модели материалов и поверхностей: пятно бы расплылось, и эффект
оптимизации был бы в значительной степени нивелирован. Поэтому следовало бы
проводить оптимизацию, базируясь на адекватной модели (это потребовало
бы несколько больших затрат вычислительных ресурсов), или же,
прогнозируя эффекты уточнений, несколько уменьшить размер цели.
В полном соответствии с диаграммой освещенности находится поверхность
силы света (рис. 9.182). Собственно, сила света является родительским
объектом для освещенности. Как видно, в вертикальном сечении поверхности
есть три выраженных максимума, соответствующих максимумам
освещенности.
Сечения диаграммы освещенности вертикальной и горизонтальной
плоскостями — кривые силы света в полярных координатах показаны на рис. 9.183.
Светотехнический анализ и проектирование (OptisWorks)
833
С точки зрения функциональности, точность их представления вполне
удовлетворительна, но для отчетов следовало бы увеличить число трассируемых
лучей.
OptisWork* - Bask map [(ИЗМЕНЕНИЯ В ЦЕНТРЕ - УПУЧШЕННА... Щ\ш\ Ш
Bfe*gdfc да?** look f§Mhg UPtftet t$p
*HiP*»1fr!Bi*.|jt •'
3
УЛЖ jl757701 ^ g^
p \d&№&dte leveb auto-uptiaie
Рис. 9.179. Диаграмма освещенности большего детектора
A. A. V.1 ... ^.. .n-I.^.j—. ^...^Л...— w-J.»-^J-J.-.i-NJ-->-JjJj;>_.-J.-^^^bLU.J.AJ ..■^ц.^.У ....■■ -^ -. ..^_._ |—ш-±- -^--
.'V \, ^ >■" < * .:< (^ .«;^>;V ' Д f>7V'; >\* \"%
Рис. 9.180. Сечение диаграммы освещенности горизонтальной плоскостью
834
Глава 9
Рис. 9.181. Сечение диаграммы освещенности вертикальной плоскостью
Рис. 9.182. Поверхность силы света оптимизированной конструкции
Если диаграммы освещенности и силы света являются носителями
информации, регламентируемой нормативами, то картина яркости есть имитация того,
как объект воспринимается человеческим глазом1. Распределение яркости
поверхности модифицированного рассеивателя показано на рис. 9.184.
Первое наблюдение — она существенно отличается от полученной для исходного
проекта (рис. 9.151). Подтверждается заключение,, сделанное выше—
яркость и освещенность коррелируют между собой весьма опосредованно.
1 В OptisWorks существует специальный модуль Human Vision Lab (Лаборатория
человеческого зрительного восприятия).
Светотехнический анализ и проектирование (OptisWorks)
835
Щ Polar Curves
ШтШ
/-0K
3
w.a.rw™;
Рис. 9.183. Кривые силы света оптимизированной конструкции
* OpbsWorks - Spectral map [(ИЗМЕНЕНИЯ В ЦЕНТРЕ - УЛУЧШЕННА... ЩЩ Ш
Рис. 9.184. Диаграмма яркости
Для диаграммы яркости можно применить один из имеющихся фильтров.
Результат показан на рис. 9.185. Можно предположить, что результат действия
фильтра в каком-то смысле сопоставим с учетом в модели рассеивающих
свойств материалов и поверхностей.
836
Глава 9
Рис. 9.185. Диаграмма яркости после применения фильтра
Процедура Tolerancing (Анализ чувствительности) функционирует на базе
тех же исходных данных, что и оптимизационный расчет. По сути, она
автоматически совершает перебор всевозможных комбинаций переменных
проектирования (интервалы их изменения делятся на десять отрезков) с генерацией
протокола (Tolerancing report), показанного с незначительным
форматированием ниже по тексту. Как видно, система делает заключение о том,
соответствуют ли все характеристики назначенным для них критериям — по сути,
она проверяет их на предмет попадания в интервал, определенный в панели
Target definition (Определение цели), показанной на рис. 9.159 полями
Define the maximum value used in tolerancing (Определить максимальное
значение, используемое в анализе чувствительности) и Define the minimum
value used in tolerancing (Определить минимальное значение, используемое
в анализе чувствительности).
Сечение 1
снаружи
18
18.3
18.67
19
19.33
19.67
Сечение 2
внутри
18
18
18
18
18
18
Сечение 2
середина
18
18
18
18
18
18
Average
value
487.54
487.08
486.71
485.66
485.32
484.12
Min
value
179.44
174.61
178.79
176.27
174.70
177.47
Max value
1428.75
1498.37
1549.96
1605.62
1581.74
1435.46
Status
Fail
Fail
Fail
Fail
Fail
Fail
Светотехнический анализ и проектирование (OptisWorks)
837
(окончание)
Сечение 1
снаружи
20
20.33
20.67
21
18
18.33
18
Сечение 2
внутри
18
18
18
18
18.33
18.33
18
Сечение 2
середина
18
18
18
18
18
18
18
Average
value
482.86
480.95
477.43
473.73
486.19
487.31
487.55
Min
value
178.85
174.14
165.87
176.31
184.30
178.55
179.44
Max value
1228.6
1117.12
1049.94
957.519
1414.88
1527.87
1428.75
Status
Fail
Fail
Fail
Fail
Fail
Fail
Fail
Анализ чувствительности может быть полезен только при ограниченном
числе переменных проектирования — максимум три. Дело здесь как в
продолжительности расчета, так и в том, что результаты с большей размерностью
трудны для интерпретации без использования специальных графических
инструментов.
9.6.9. Эксперт по свету
Инструмент OptisWorks Light Expert (Эксперт по свету) предназначен для
автоматизированного анализа светотехнических свойств и включает
процедуры:
♦ Light path finder (Сортировка траекторий лучей);
♦ Surface contribution analyzer (Анализатор вклада поверхностей);
♦ Ray tracing filtering (Фильтрация лучей).
Данная функциональность не включается в работу автоматически— перед
трассировкой лучей следует активизировать соответствующие опции в
настройках.
Результаты, связанные с Экспертом, сосредотачиваются в Дереве проекта
OptisWorks в разделе Light Expert.
Сортировка траекторий лучей
Инструмент Light path finder (Сортировка траекторий лучей) предназначен
для визуализации лучей, попавших в выбранное место детектора. Эти лучи
отображаются после выполнения фотометрической трассировки. Чтобы
система собрала информацию о связи между объектами геометрии и
траекториями лучей, нужно для детектора освещенности или прямоугольного силы
света (только эти характеристики подвержены действию процедуры поиска
838
Глава 9
лучей) активизировать опцию Generate LPF file (Генерировать файл поиска
лучей) (рис. 9.186).
Рис. 9.186. Управляющие параметры Эксперта по свету в детекторе
После фотометрической симуляции в Дереве OptisWorks "за" пиктограммой
Light Path Finder появляется пиктограмма, содержащая диаграмму силы
света или освещенности, по сути, идентичную имеющимся в разделе
Photometric results (Фотометрические результаты). Перед ее активизацией
рекомендуется настроить число отображаемых лучей— это можно сделать, подав
команду LPF parameters (Параметры LPF) из контекстного меню (рис. 9.187).
Поле LPF parameters в одноименной панели (рис. 9.188) и предназначено
для ввода числа визуализируемых лучей. Не следует злоупотреблять этой
величиной, поскольку трассировка выполняется в режиме реального времени.
Переключатель Ray color (Цвет луча) определяет, будут ли запоминаться
спектральные характеристики лучей — True color (Истинный цвет) или False
color (Условный цвет).
S3 *$$ Линейка светодиодов (Изменения в центре - улучшенная)
В Щ Light Expert
Г£ ф (ИЗМЕНЕНАШ1Щ1ШЩЯ^Ш\НЬЯ) ЭКРАН ДЛЯ ОПТИМИЗАЦИИ-1
а Ш К«У tracing filtering
: ф Included
■ ^Excluded
^ Surfaces contribution analyzer
Рис. 9.187. Результаты трассировки Рис. 9.188. Настройка режима
в Дереве проекта отображения лучей
Сразу же после отображения диаграммы (в данном случае — освещенности)
на фоне модели появляются лучи (поскольку траектории рассчитываются в
реальном времени, то при изменении ориентации модели возможна
некоторая задержка). Выделение области на диаграмме осуществляется посредством
знакомого окна Surface/Section (Поверхность/Сечение), которое в данном
v!d£>vi)
■^^■^^J^&^Al - /
Светотехнический анализ и проектирование (OptisWorks) 839
контексте приобрело смысл не только сбора информации, но и определения
области для входящих лучей. Настройка области может выполняться как
посредством полей Center (Центр) и Dimension (Размер), так и
перетаскиванием рамки (в целом или ее элементов) по полю диаграммы (рис. 9.190)—
допускается непрямоугольная область. Во время настройки рамки
рекомендуется отключить опцию Automatic update (Автоматическое обновление),
которая действует не только на численные параметры, но и на процесс
синтеза траекторий (рис. 9.189).
Рис. 9.189. Выделение области цели для лучей
Рис. 9.190. Выделение области цели в окне диаграммы
840
Глава 9
Траектории лучей, попавших в выделенный прямоугольник на диаграмме,
показаны на рис. 9.191. Лучи, кстати говоря, могут отображаться как в
реальном, так и в условном цвете.
Рис. 9.191. Траектории лучей, попавших на назначенный участок детектора
Анализатор вклада поверхностей
Surface contribution analyzer (Анализатор вклада поверхностей) позволяет
установить связь между одной или несколькими поверхностями, а также
одним или несколькими источниками и их вкладом в диаграмме на детекторе.
Перед выполнением фотометрической симуляции следует настроить детектор
так, чтобы он сортировал данные в зависимости от того, через какую
поверхность прошли лучи (опция Data separated by layer | By surface) или какими
источниками они порождены (Data separated by layer | By source). Также
следует определить поверхности, для которых будет собираться
персональная информация. Для этого командой Edit faces involved in SCA
(Редактировать грани, вовлеченные в анализ вклада поверхностей) нужно вызвать
панель Select SCA faces (Выбрать грани для SCA) (рис. 9.192), после чего
указать желаемые грани (рис. 9.193). Результат выполнения команды
фиксируется в Дереве OptisWorks в разделе Surfaces contribution analyzer
(рис. 9.194).
Светотехнический анализ и проектирование (OptisWorks)
841
&&Ф
Рис. 9.192. Управляющие
параметры для процедуры
SCA в детекторе
Рис. 9.193. Назначение граней, участвующих
в анализе вклада поверхностей
В Щ Light Expert
ffi-ф Light Path Finder
3?:-^ Ray tracing filtering
В (О Surfaces contribution analyzer
*Щ) Рассеиватель-4_Расе<469>
^3 Рассеиеатель-4_Расе<471>
Ц^ Рассеиватель-4_Расе<478>
^ Рассеиватель-4_Расе<525>
^ Рассвиватвлъ-4_расв<526>
^ Рассеиватель-4_Расе<527>
Щ$ Рассеиватель-4_Расе<529>
*Щ) Рассеиватель-4_Расе<533>
Щ, Рассеиватель-4_Расе<553>
Рис. 9.194. Объекты, участвующие в анализе
вклада поверхностей
Диаграммы освещенности/интенсивности, размещаемые "за" пиктограммой
Surfaces contribution analyzer (рис. 9.195), содержат выпадающий список, в
котором можно выбрать номенклатуру объектов, участвующих в
формировании диаграммы, а также задействовать своего рода конструктор,
позволяющий сформировать произвольную комбинацию этих объектов (рис. 9.196).
Функциональность SCA позволяет визуализировать диаграммы с учетом
состояния включения/отключения назначенных источников света.
Освещенность детектора при условии освещения одним из светодиодов показана на
рис. 9.197. Для этого при определении детектора нужно активизировать
опцию Data separated by layer | By source. Также для диаграмм предусмотрена
возможность комбинирования активных источников.
842
Глава 9
* OptisWorlcf - £х*еА<Ы map {(ИЗМЕНЕНИЯ В ЦЕНТРС'- УЛУЧШЕННАЯ) ЭКРАН ДЛЯ ОПТИМИЗАЦИ... ШШ Ш
BJ& £cflt #ew tools Peering gperakton ДО
fi£ В ! P 1:1 Г. i ' 1J, Э& ' | t | Black to white (gray scale)
Рис. 9.195. Освещенность в зависимости от вклада поверхностей
Layers operations
*$№ ,,?5 **£ MOO >Д^>;W°° $V:'
Рис. 9.196. Формирование номенклатуры управляющих объектов
Светотехнический анализ и проектирование (OptisWorks)
843
OpNsWof к* - Extended map {(ИЗМЕНЕНИЯ В ЦЕНТРЕ - УЛУЧШЕННАЯ) ЭКРАН ДЛЯ ОПТИМИЗАЦИИ». ЙИ Ef
Е*е &* tfew looU Peering Operation tNP _____ ;.... _
«^ В I P 1:1 \\t*\ В [ 11 $ | j f , j Black to white (gray scale) ^[ШВВ
Value jfcOO
17 irtwfiwfiatetevdsatfo-updute
+ -
1Г IsoCurye
1Г F-*scf
Jiite
<♦* 1Ы* Г tog
Рис. 9.197. Освещенность в зависимости от вклада источников
Фильтрация лучей
Процедура Ray tracing filtering (Фильтрация лучей) по функциональности
является дополнением Light path finder, которая предназначена для отбора
лучей, проходящих через определенный участок на детекторе. RTF позволяет
выделить лучи, взаимодействующие (пропущенные или отраженные) с
выбранными гранями модели.
Назначение граней, участвующих в фильтрации, производится в панелях
Select required faces (Выбрать задействованные грани) (рис. 9.198) и Select
rejected faces (Выбрать непригодные грани). Эти панели вызываются
командами Edit the ray tracing filtering: required faces (Редактировать фильтр при
трассировке лучей: задействованные грани) и Edit the ray tracing filtering:
rejected faces (Редактировать фильтр при трассировке лучей: игнорируемые
грани) соответственно.
844
Глава 9
Рис. 9.198. Назначение граней, задействованных в фильтрации лучей
Затем нужно уточнить схему взаимодействия граней. В контекстном меню
пиктограмм Included/Excluded (Учитываемые/Не учитываемые)
присутствуют две позиции (рис. 9.199):
♦ Or filtering option (Фильтрация в режиме "или")— будут
визуализироваться лучи, провзаимодействовавшие, как минимум, с одной из
выбранных граней;
Q Щ Light Expert
|--^ Light Path Finder
E} Ш Ray tracing filtering
Б ^ШЕт ^ orfilterihgopaofi j
^Pac AndfilterlriOQpUori
^1 Рассеиватель-4_Расе<563>
;■ Щ* Рассеиватель-4_расе<564>
■ ^ Рассеиватель-4_расе<565>
■■■■Щь Рассеиватель-4_Расе<566>
\-Щ>. Рассеиватель-4_Расе<567>
=:- Щ$ Рассеиватель-4_Расе<568>
:--^ Рассеиватель-4_Расе<569>
'[■-^ Рассеиватель-4_Расе<570>
!•■■■^| Рассеиватель-4-Расе<571>
. Щ$ Рассеиватель-4_Расе<572>
^ Рассеиватель-4_расе<573>
I- Щъ Рассеиватель-4_Расе<574>
!••■ Щ} Рассеиватель-4_расе<575>
•*Ц Рассеиватель-4_Расе<576>
. -Щ Рассеиватель-4_расе<577>
| Щ. Рассеиватель-4_[=асе<578>
I- Nf| Рассеиватель-4 _Face<579>
Щ} Рассеиватель-4_Расе<580>
: ^ Excluded
ф Surfaces contribution analyzer
Рис. 9.199. Настройка процедуры фильтрации
Светотехнический анализ и проектирование (OptisWorks)
845
♦ And filtering option (Фильтрация в режиме "или") — будут
визуализироваться лучи, провзаимодействовавшие со всеми выбранными гранями.
Визуализация лучей будет осуществляться после команды Update the ray
tracing (Обновить трассировку лучей). Результат для выбранных граней
показан на рис. 9.200. Как видно, в процессе оптимизации система расположила
их так, чтобы направить световой поток на периферию детектора — в
исходном проекте там наблюдался дефицит освещенности.
Рис. 9.200. Траектории лучей с учетом фильтрации
9.6.10. Заключение
Подводя итоги анализу возможностей OptisWorks для светотехнического
анализа и проектирования, можно сказать, что модуль обладает
исчерпывающей функциональностью и позволяет создавать конструкции с
планируемыми свойствами. Основным затруднением является доступность адекватных
светотехнических характеристик для материалов и поверхностей. Наличие
интеграции с SolidWorks, позволяющей полноценно использовать их
параметрическую структуру, манипулировать с конфигурациями.
Что же касается описанной задачи, то современной тенденцией является
проектирование источников света с заданными светотехническими
характеристиками, а рассеиватель заменяется прозрачным гладким объектом,
выполняющим исключительно защитные и эстетические функции. OptisWorks
позволяет проектировать практически любые источники света, включая
светодиоды. В рамках принятых конструктивных решений можно автомати-
зированно или управляемым перебором получать желаемое распределение
силы света, в частности кривые силы света.
846
Глава 9
9.7. Оптический анализ и проектирование —
базовая функциональность
В данном разделе обзорно рассмотрены базовые возможности программы,
связанные с анализом и проектированием оптических систем OptisWorks.
9.7.1. Подготовка геометрической модели
Процедуры оптического анализа OptisWorks функционируют на
геометрических моделях, подготовленных пользователем посредством команд
SolidWorks, на типовых проектах, взятых из библиотек OptisWorks, на
комбинированных моделях, когда часть деталей синтезирована командой Create
new lens (Создать линзу), позволяющей создавать типовые элементы
оптической системы.
В нашем примере мы воспользуемся командой Import optical system file
(Импортировать файл с оптической системой), подаваемой из панели Optical
design (Оптическое проектирование) (рис. 9.201). В левой части
появившегося окна Открыть указываем мышью на пиктограмму Library (Библиотека),
Г Import optical system files
I Import optical sy&erti fib
\L
OptisWorks Optical design
& *N t? v* m :% is * e a
Рис. 9.201. Команда импорта оптической системы в панели Optical design
Ц«жк -.
; JQ Mete* Grid"
1£q #>>W
pGBFOOl.odc
P|GBF003.odc
MGLCOOl.odc
?^GlC002.odc
GLC004.odc
||MlGLC005.odc
GLC006.odc
LAI009.odc
LAIOll.odc
LAI013.odc
LAI015.odc
pLALOOl.odc
|g]LAL003.odc
LALOOS.odc
LAL007.odc
4 \ \<C jj&*t~ *''--ч'\ [Odyssey Files (".ode)
Рис. 9.202. Импорт оптической системы из библиотеки
Светотехнический анализ и проектирование (OptisWorks)
847
после чего открывается каталог с библиотеками OptisWorks, в которой
следует выбрать нужную библиотеку, а в ней файл, содержащий требуемый объект
(рис. 9.202). Элементы библиотек объектов имеют расширение ode.
После нажатия кнопки Open (Открыть) система выполняет синтез
геометрической модели SoIidWorks — деталей с твердыми телами, содержащими
линзы, а также двух деталей с круглой поверхностью и с квадратной
поверхностью (рис. 9.203).
^ Пример OPTIS
Г43 \Ш Примечания
f+j-ф Связь проектов
Ш У£) Источники света и камеры
<$> Спереди
<$> Сверху
: ^ Справа
!_> Исходная точка
Ей % (Ф) Пример OPTIS_Йап1<1 >
Ш ^ (-) Пример OPTIS_Lensl <1 >
(В ^ (") Пример OPTIS J.ens2<l >
№■% (О Пример OPTIS_Lens3<l >
ffl ^ (-) Пример OPTIS_Plan2<l >
Цй1 Сопряжения
Рис. 9.203. Геометрическая модель импортированной оптической системы
9.7.2. Подготовка оптической модели
Затем OptisWorks автоматически наполняет модель оптическими
сущностями. На базе круглой поверхности создается фотометрический источник
мощностью ЮООлм с нормально исходящими лучами, а прямоугольная
поверхность приобретает свойства детектора силы света/освещенности. Дерево
проекта OptisWorks в раскрытом состоянии показано на рис. 9.204.
Оптические свойства объектам модели присваиваются исключительно на
уровне детали. Поэтому откроем одну из линз, используя для этого команды
OptisWorks, подаваемые из Дерева проекта (рис. 9.205). Обращает на себя
внимание, что линзы сразу воспринимаются системой как Optical Surfaces
(Оптические поверхности).
Фрагмент Дерева проекта для первой линзы показан на рис. 9.206. Как видно,
линза имеет две оптические поверхности, параметры которых расшифрованы
детально.
848
Глава 9
El-Щ Пример OPTIS (По умолчанию)
Е (О Surface Quality
Ei-^P transparent.transparent
Щ Пример OPTIS_Lensl
! й-б! Materials
S ^Ц SKI 1.material
1 % Пример OPTIS_Lens2
l G (P Sources
й Ш Photometric sources
: В -т Пример OPTISJ>lanl<l>Source
■Щ Пример OPTIS_Planl
i- щ Limited half angle - 0 deg
-<ф Power» 1000 Im
ф Optical sources
ф Laser sources
''•■ fb-6l Optical Surf aces
Пример OPTIS_Lensl <1 >Lensl
•i]-ft Face<l>
! [ij- Щ Face<2>
В #& Пример OPTISJ.ens2<l >Lensl
$ % Face<l>
®.f|Face<2>
В ^ Пример OPTIS_Lens3<l>Lensl
rp-||Face<l>
&Щ расе<2>
: B-fil Detectors
В (P Illuminance / Irredience detectors
::±j dQ 2D maps
В ®р Пример OPTIS_Plan2<l>
Щ Пример OPTIS_Plan2
ф 3D maps
Ш -ф Luminance / Radiance detectors
: Ш ^ Intensity detectors
ф Ray maps
!••• ф Optical Systems
(+} ^ Default part preferences
&-Щ Light Expert
Ш Щ Results Manager
if
|o
ptimization / tolerancing Parameters
Рис. 9.204. Дерево проекта оптической системы
после ее синтеза
EI *Щ Пример OPTIS (По умолчанию)
Ш ^ Surface Quality
;+] ф Materials
Ш v Sources
В СР Optical Surf aces
Ш-ЯЬ Пример OPTI5J.ens2<l >Len<_
|+] Ф Пример OPTIS_Lens3<l>Lensl
SlCQ Detectors
El -«ф Light Expert
[i] ^ Results Manager
Ш-^Й Optimization / tolerancing Parameters
Рис. 9.205. Открытие файла с элементом
оптической системы
В принципе OptisWorks создает типовые элементы посредством стандартных
команд Sol id Works. В частности, линза без асферических поверхностей
получена на базе эскиза, состоящего из прямых и дуг, как показано на рис. 9.207.
Документация программы не рекомендует редактировать без явной
необходимости такого рода объекты, а создавать их следует исключительно
инструментами OptisWorks. Для редактирования из контекстного меню объекта,
формирующего тело линзы, подается команда Edit (Редактировать) (рис. 9.208).
Светотехнический анализ и проектирование (Optis Works)
849
N5 Пример OPTIS_Len$l (По умолчанию)
!-] U3 Surface Quality
. ф Materials
;••• ^ Photometric sources
В (Р Optical Surfaces
В tfb Lensl
$ ЦРасе<1>
' »l!| Curvature radius - 16.213 mm
•||| Conic constant ■ 0 mm
i| Diameter - 10 mm
, % Cylinder -0
, f|Rl-0mm
■■■■ Ц R2 - 0 mm
: Ц R3 - 0 mm
' Щ R4 - 0 mm
■ Ц^ R5 - 0 mm
" •-^ R6 - 0 mm
' llj; R7 - 0 mm
H| R8 = 0 mm
.-■ Щ R9 « 0 mm
■... Щ^ RIO -0 mm
*• Щ RH "0 mm
: -Ц^ R12=»0mm
' ^R13 = 0mm
" %R14-0mm
^|R15-0mm
f|R16 = 0mm
:•• f|R17 = 0mm
••■ Ц| R18-0mm
=• f^R19-0mm
tR20 - 0 mm
R21 =0mm
• % R22 - 0 mm
Hk R23 - 0 mm
. f|R24-0rnm
:■ %R25*0mm
••■ ft R26 - 0 mm
;.. f| R27 - 0 mm
tR28 - 0 mm
R29 « 0 mm
: Ȥ| R30 - 0 mm
Ш-Щ Face<2>
Рис. 9.206. Дерево проекта первой линзы
^ Пример OPTISJ.ensl
Ш-Ш Примечания
Ш-О Связь проектов
Ш 1Й Твердые тела(1)
§~ Материал <не указан >
Ш ЕЙ Источники света и камеры
<$> Спереди
г- <$> Сверху
. <$> Справа
1+ Исходная точка
{-)-&Ъ Lensl
Рис. 9.207. Эскиз базового элемента линзы
Е- *% Пример OPTISJ.ensl (По умолчанию )
В (О Surface Quality
^f? transparent.transparent
| ф Materials
^ Photometric sources
В Ш Optical Surfaces
aSF off
Рис. 9.208. Редактирование линзы
как объекта OptisWorks
В появившемся окне Lens definition (Определение линзы) присутствуют все
необходимые параметры, позволяющие построить геометрическую модель
линзы применительно к процедуре оптического анализа. Если типовой
объект: линзу, диск, сферическую и асферическую поверхность требуется
построить "с нуля", то для этого используется команда Create new lens (Создать
линзу) (рис. 9.209).
850
Глава 9
to i) *D
i«i*w>^ySM»ij*S*ft*A»vif чхО^лч/Ь:
[Т^гГ
Ф lens
Г Disk
Г spherical surface
С AspherjcaJ surface
.W&» >&««&«<<*
Radius
[Тб,21мм
Conic constant
1°
1 Aspher icd values j
'
«Jwj ■*
±l.
™^LjDefine the asphencal values |
( 10,OOmm
! f~ Cylinder
Ratfu*
1 -10; 49mm
conic constant
1°
j A$pherM values J
Diameter
m
ч ->Л
й-
й
10,00мм
Г Cyfcder
R
RA3
R~3
R^4
RA5
R-4
R"X7
R^8
R*9
R^IO
R^ll
R^t2
RAH
Rft.1S
0
о i
0
о
0 |
о
0
0 ]
о i
0 j
0 j
0
0 j
a i
r—'
Cancel
6мм -М
Рис. 9.209. Параметры геометрии линзы как объекта OptisWorks
Как упоминалось, оптические свойства для библиотечных оптических
объектов программа назначает автоматически. При желании можно их просмотреть
или изменить. Материал самого объекта и внешней среды, а также тип
поверхности, действующие по умолчанию, назначаются в окне Part Preferences
(Настройки детали) (рис. 9.210).
Поскольку в модели присутствует дублет из линз, то с целью корректного
описания процесса прохождения луча через границу контакта для
соответствующей грани первой линзы нужно параметру Surface quality (Качество
поверхности) первой линзы назначить свойство Transparent_ow.transparent.
Оно берется из библиотеки OptisWorks (рис. 9.29). Для грани второй линзы,
Светотехнический анализ и проектирование (Optis Works)
851
контактирующей с первой, нужно придать наружному материалу
характеристики материала первой линзы (рис. 9.211).
Part Preferences
-s Extent ШШ i 'jEp^
l¥^iM^rt»i>ii^i^rti^i*Mrtii»i>'^HnMrtiii|iiH>iiiiiiV>MiU(inii> >
*""*"*""liwrewftt-* ; -0, '- stow»
.^ОУ^> "<'y^ -*" .^.^^УТ^Й"iJ'l:
1,11111,11 иплпмчщ umimmu mwi^mjlW'MHH-niiMiwmniHUiiAiiH'.Miiii HiWM|rtiiiWiiiMW!ii*Wi*fMWiiC»'Wii'iW!WMirti»>iiiiwmj»i»i» W Цнццши ■ i
Справка
Рис. 9.210. Оптические свойства материалов и поверхностей линзы,
назначенные по умолчанию
В Я& Пример OPTIS_Lens2
^ Surface Quality
В-(Р Materials
i.-ф Photometric sources
В-(О Optical Surf aces
В 6fc Lensl
£l||Face<l>
[j)-AFace<2>
Рис. 9.211. Материал внешней среды для первой поверхности второй линзы в дублете
Для фотометрического анализа этих данных вполне достаточно — его можно
было бы выполнить, вернувшись в модель сборки. В том же контексте можно
произвести трассировку лучей, порождаемых фотометрическим источником.
При этом, как упоминалось, траектории лучей рассчитываются системой
динамически с учетом вероятностных эффектов. Последовательность
взаимодействия с поверхностями тел также не является детерминированной, а
вполне оригинальна для каждого луча. Более того, один и тот же луч, будучи
дважды испущен, может при фотометрической трассировке иметь различные
траектории.
Оптический же анализ и проектирование выполняется на базе оптических
источников, которые создаются посредством специальных команд. При этом
последовательность прохождения лучами объектов системы не является
произвольной, а фиксируется автоматически или действиями пользователя.
Оптический источник создается командой Define Optical source for ray tracing
852
Глава 9
and calculation (Создать оптический источник для трассировки лучей и
расчетов) (рис. 9.212).
OptisWorks Optical design
ш # кit? f* ф % & #sa
/Defii
(Defin
Define Optical Source for ray tracing arid oplkal calculation
Define Optica! Source- for ray tracing and optical calculation
Рис. 9.212. Команда создания оптического источника
После подачи команды появляется панель User source definition
(Определение источника пользователем) (рис. 9.213). Источники позиционируются на
основе точек эскизов SolidWorks (этими точками могут быть и концы линий),
которые могут быть созданы как в деталях, так и в контексте сборки. Точки
помещаются в поля:
♦ Position of the source point (Точка, в которой располагается источник) —
точка, из которой стартует луч или точка, определяющая объект, из
которого испускаются лучи;
♦ Position of the target point (Точка, в которой располагается цель) — точка,
определяющая направление луча.
•&ЮЗ)
гцтэд
J&fcjW^foUtofftfoffr^&aa
I Pt-to-pt source
| Position of the source point
|точка2@Эскиз1@Пример ОРТ -
; Position of thetargefcpoinfc
ШШЙШЙ *<№Шш*мт<Щ
IГ Со1таЫ#»мге*
I
j Г рыт* source
; Г Ш*е object source
= Г infinite object $ourc*
*ш&Ж1Ш1*2>£ш4Ш^шш*
Wavelength
1550
Рис. 9.213. Создание точечного оптического источника
Светотехнический анализ и проектирование (Optis Works)
853
♦ Position of the orientation point Точка, определяющая ориентацию) —
если в формулировке источника фигурирует локальная ось X, то эта точка
определяет ее ориентацию.
Доступны следующие оптические источники:
♦ Point-to-point (От точки к точке) — испускается единственный луч,
который используется для автоматического построения оптической
последовательности или для проверки уже существующей оптической системы.
Этот тип источника применяется как база для построения
пространственного эскиза на базе траектории луча— эта операция осуществляется
командой 3D sketch fronf the ray of tracing of a manual source
(Пространственный эскиз на базе трассируемого луча). В отличие от остальных
источников, где свет может обладать спектральными характеристиками,
данный характеризуется только длиной волны.
♦ Collimated source (Коллимированный источник) — множество
параллельных лучей, базирующихся на виртуальной прямоугольной сетке
назначенного размера и направленных под назначенными углами относительно
осей X и Y системы координат источника (см. рис. 9.217).
♦ Point source (Точечный источник) — совокупность лучей, исходящих из
точки-источника и распространяющихся в пределах пирамиды с
назначенными углами при вершине.
♦ Finite object source (Источник объектного пучка конечного размера) —
совокупность лучей, базирующихся на сетке, состоящей из
концентрических окружностей, ограниченных назначенным радиусом. Источники
этого и следующего типа используются для расчета параксиальных
характеристик, вещественных аберраций, построения диаграмм волнового
фронта, функции рассеяния точки и функции передачи модуляции.
В OptisWorks они называются Real source (Физический источник).
♦ Infinite object source (Источник объектного пучка безграничный) —
совокупность лучей, базирующихся на сетке, состоящей из концентрических
окружностей. Размер пучка автоматически адаптируется к габаритам
первой оптической поверхности. Этот источник характеризуется также полем
Size of half field (Половина раствора), регламентирующим максимальный
угол отклонения луча от оптической оси. Распределение лучей внутри
конуса, определяемого этим углом, описывается распределением, которое
назначается в окне Filed (Поле) (см. рис. 9.229). Это поле вызывается
нажатием кнопки Field.
Для создания оптической системы создаем источник Point-to-point, как
показано на рис. 9.213. После этого из панели Optical design (Оптическое
проектирование) подается команда Automatic detection of an optical sequence (Ав-
854
Глава 9
томатически диагностировать оптическую последовательность) (рис. 9.214).
Программа испускает луч, направленный в точку цели из исходной точки.
Луч взаимодействует со встретившимися на его пути оптическими
поверхностями, руководствуясь принципом наибольшей вероятности. Так
продолжается до тех пор, пока он не встретит предварительно определенный детектор
или не выйдет из геометрической модели.
f Automatic detection of an optica) sequence
I Automatic detection of an optical sequence
V
OptisWorks Optical design
»к t? f« m% as$gs и
Рис. 9.214. Команда автоматического диагностирования оптической системы
Результат отображается в панели Optical system definition (Определение
оптической системы) (рис. 9.215). Далее в поле с оптической
последовательностью Selected face (Выбранная грань) можно ввести новые грани и удалить
присутствующие. Также можно уточнить имя системы, а из числа
потенциально возможных оптических источников в поле Selected surface
(Выбранный источник) выбрать (указывая на него мышью) тот, который будет
функционировать в системе. Понятно, что в оптической системе может быть
только единственный источник.
Selected face
Грань <1 >@Пример OPTI5_Lensl-l
Грань <2>@Пример OPTISJ.ens2-l
Грань <3>@Пример OPTIS_Lens2-l
Грань <4>@Пример OPTIS_Lens3-l
Грань <5>@Пример OPTISJ.ens3-l
1 Selected detector
Рис. 9.215. Автоматическая диагностика оптической последовательности
Светотехнический анализ и проектирование (OptisWorks)
855
Предупреждение
Программа, в принципе, допускает автоматическую диагностику в отсутствие
детектора освещенности, однако в ряде случаев пробный луч останавливается,
не дойдя до последней (ожидаемой) оптической поверхности. Поэтому
присутствие детектора в диагностируемой модели является весьма желательным.
С другой стороны (это тоже своего рода неточность алгоритма), луч может не
дойти до детектора, остановившись на последней (ожидаемой) грани. В этой
ситуации следует "согласиться" с результатами работы процедуры, а затем
посредством операции drag-and-drop поместить в сформированную оптическую
систему желаемый детектор. При подобном развитии событий следует с
максимальной тщательностью контролировать результаты оптического анализа, в
частности, используя коллимированный пучок лучей и манипулируя опциями
окна Preferences (см. разд. U.7.3).
& Щ Принер OPTIS (По умолчанию)
; ffi Ф Surface Quality
ffi ♦ Materials
i [+} ф Sources
Щ-ф Optical Surfaces
j ffl ♦ Detectors
: (3 (p Optical Systems
: Ei U3 Systeml
[-] {P Sources
i i: Pt-to-pt source
M и tO Optical Surfaces
U Ц Пример OPTISJ.ensl <1 >Face<l >
! rf^ Пример OPTISJ.ens2<l>Face<l>
t Пример OPTIS J.ens2<l>Face<2>
Пример OPTIS Jens3<l >Face<l >
; • §| Пример OPTIS Jens3< 1 >Face<2>
Ej-{P Detectors
& Пример OPTISJ>lan2<l >
i+j -^ Default part preferences
ffl flight Expert
ffi ^Ш Results Manager
ffi $$ Optimization / tolerancing Parameters
Рис. 9.216. Оптическая система в Дереве проекта OptisWorks
Построенная (в первом приближении) оптическая система появляется в
Дереве проекта (рис. 9.216), где она может быть модифицирована. В ней может
быть заменен оптический источник или детектор (для этого используется
процедура drag-and-drop), добавлены или удалены оптические поверхности.
Соответствующие команды подаются из контекстных меню пиктограмм
Sources (Источники), Optical surfaces (Оптические поверхности) и Detectors
(Детекторы), а также из меню дочерних объектов. В принципе, произвольная
оптическая система может быть сформирована без процедуры
автоматической диагностики. Однако без реальной необходимости делать это не реко-
28 Зак. 4405
856
Глава 9
мендуется, т. к. неадекватный (с точки зрения пользователя) результат
автоматической диагностики вполне может быть следствием ошибок геометрии
(взаимопроникновение тел или непредусмотренные зазоры), а также
некорректных оптических свойств, в частности, у соприкасающихся тел.
В одной расчетной модели могут существовать несколько независимых
оптических систем. Оптические системы могут быть получены копированием.
После этого какая-либо связь между ними теряется.
Рис. 9.217. Создание коллимированного источника
Для последующих расчетов создаем соответствующий источник, в данном
случае — коллимированный с лучами, направленными вдоль оптической оси
(рис. 9.217). Помещение его в имеющуюся систему осуществляется
перетаскиванием соответствующей ему пиктограммы из группы Sources, где
источник появляется после создания, "на" пиктограмму, соответствующую
модифицируемой оптической системе (рис. 9.219). Источник характеризуется
спектром излучения — он модифицируется в окне Wavelength definition
(Определение длины волны) (рис. 9.218), где его можно назначать как
величиной длины волны (ввод числа в одноименном поле), так и выбором
цвета — щелчок мыши по прямоугольнику с цветом. Нажатие кнопки True
приводит к тому, что на базе численной величины рассчитывается и визуализи-
Светотехнический анализ и проектирование (OptisWorks)
857
руется соответствующий цвет. Спектр излучения является дискретным с
однородным распределением энергии по каждой длине волны.
Wavelenqht definition
^^^ШЯЕШ5?
"»ИМ.11ММ11>|||П111й<1111|1|ИЙ1.| f -1
0И
tMillUKIHHIMllJIIIIIHIll) (if ^ и«МЦ ■■[»■' Ц|| - \ <- ,}
Рис. 9.218. Определение спектра источника
*Щ Пример OPTIS (По умолчанию)
Ш ^ Surface Quality
r+j ^ Materials
В- (Q Sources
Ш ^ Photometric sources
& (U Optical sources
Pt-to-pt source
^ Laser sources
l ^^ Optical Surfaces
j ^ Detectors
I (P Optical Systems
Й-(Д System 1
В UJ Sources
Pt-to-pt source
И ф Optical Surfaces
Г+] ■■■♦ Detectors
I ^ Default part preferences
% Light Expert
) Results Manager
<P
4^
Would you Ike to replace ?
г
a»*
:+j ^J Optimization / tolerancing Parameters
Рис. 9.219. Замещение источника в оптической системе
9.7.3. Оптический анализ
Оптическая трассировка для выбранной оптической системы выполняется по
команде Complete update of the ray tracing (Полностью обновить
трассировку лучей) (рис. 9.220). Перед подачей команды следует указать мышью на
источник внутри модели. Сначала система преобразует геометрическую
модель SolidWorks в расчетную для OptisWorks, а затем трассирует лучи. Если
858
Глава 9
геометрия модели и источники не изменялись, то трассировку можно
выполнить посредством команды Update the ray tracing (Обновить трассировку
лучей). Рекомендуется выполнить эту операцию с различными комбинациями
опций Rays without errors (Лучи без ошибок) и Rays with errors (Лучи с
ошибками), присутствующими в окне Preferences (Настройки) OptisWorks
(рис. 9.37). Это поможет диагностировать наличие и локализовать ошибки
в геометрии и в расчетной модели. При анализе результатов — траекторий
лучей (рис. 9.221) следует обратить внимание на их поведение на
поверхностях и, в частности, на границе контакта в дублетах.
В-Щ Пример OPTIS (По умолчанию)
(#• ф Surface Quality
• ffi ф Materials
: Cfl-Ф Sources
(£}. ф Optical Surfaces
; Ш"Ф Detectors
В Ш Optical Systems
i ! i-lQ Systeml
gj %J Sources
(В ф Optical Surf aces
• $-ф Detectors
j £{--ф Default part preferences
&Щ Light Expert
Й-^ ***&* Manager
ffl Щ Optimization / tolerancing Parameters
ШВВШВШ!
Is
Complete update of the ray tracing
Complete update of ths глу tracing.
Рис. 9.220. Команда трассировки с обновлением модели
Рис. 9.221. Результат оптической трассировки
Светотехнический анализ и проектирование (OptisWorks)
859
Предупреждение
Следует учитывать, что наличие в оптической системе относительно большого
числа лучей с ошибками, побу>кдает усомниться не только в точности
оптического расчета, но и в корректности фотометрического анализа, будь он
выполнен для этой расчетной модели. В принципе, для контроля оптической модели
полезна фотометрическая трассировка лучей, исходящих от плоского
фотометрического источника вдоль оптической оси системы. Такой фотометрический
источник будет своего рода имитатором оптического. Если же произвести
фотометрический анализ, то для корректно спроектированной конструкции, при
наличии в ней до нескольких десятков деталей типа линз, призм, зеркал, до
фотометрического детектора должна дойти значительная часть светового
потока.
После трассировки лучей от коллимированного источника доступен
объект Spot diagram (Диаграмма пятна). Подав соответствующую команду
(рис. 9.222), можно получить окно, показанное на рис. 9.223. Фактически,
| Spot diagram of the current optical system
[ Spot- dlagi am of r.h& current optical system
Г
OptisWorks Optical design
* * н' хь fe mWmb й '& 1
Рис. 9.222. Команда построения диаграммы пятна
OptisWorks - Spot Diagram [D:\USERS\AAA\HHUHKnonr ДИЯ 2007-ГЛАВА О ПРО OP.
Рис. 9.223. Диаграмма пятна
860
Глава 9
в его графической зоне показаны точки пересечения лучей с плоскостью
детектора.
Нажав на кнопку Best Focus (Наилучший фокус), можно получить оценку
положения детектора, минимизирующего пятно, и, соответственно,
модифицированную диаграмму пятна (рис. 9.224).
Рис. 9.224. Диаграмма пятна для детектора в наилучшем фокусе
Указав на кнопки \Щ\ и lljjyj можно получить графики зависимости радиуса
пятна в зависимости от положения детектора (рис. 9.225) доли энергии,
прошедшей через пятно в зависимости от его радиуса (рис. 9.226).
Для расчета других оптических характеристик следует создать источник типа
Real source (Физический источник). В данном случае синтезируем источник
типа Infinite object source (Источник объектного пучка бесконечного
размера) (рис. 9.227) на базе точек эскизов, присутствующих в модели (рис. 9.228).
Объектный пучок характеризуется, в частности, полем Field (Поле),
определяющим максимальный угол пучка (фактически половину угла) относительно
оси X, а также "спектром" направлений в пределах этого угла — эта
номенклатура определяется в окне Field (рис. 9.229), появляющемся после нажатия
одноименной кнопки.
Также определяем спектральные характеристики излучения (рис. 9.230).
Светотехнический анализ и проектирование (OptisWorks)
861
\\Ш№Щ
*<ЪИ
Ш\
Н а-; -*M''if'h-v~ <i$:h*&>/;f: *:р;Ж, ;:7:?л: :V£:\': \
2f
I X
L..
V+A
4.
I 1 I 1 I
; : : :
■ ! ! ! ! v
;!!!!!!;
"7ТГ: \'\"xT
; : : ; \y( : :
"Г"Г"Г";/г"гт*г"
MM Xi.M i i i !
i i 1 i 1 i 1 i 1 » 1 i I i Si i i 1 i 1 i 1 i 1 i 1 i 1
1 I ' "Л
/!'!
i i i i i i 1
•10 -9 -8 -7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 8 9 10
**»2mm; Z: -'V-*;;, 'xtfi*su«Haw» Vv
Рис. 9.225. Радиус пятна в зависимости от положения детектора
Encercled Energy
,Q<3 ">'-"..- Х'! -'. •<»' 'X-"X; X'X: ' 'X . <. '';■'.
Рис. 9.226. Доля прошедшей энергии в зависимости от диаметра пятна
:Ш^<МтгШШШЩй\
Рис. 9.227. Объектный пучок бесконечного размера
Рис. 9.228. Опорные точки для пучка
Рис. 9.229. Структура направлений в пучке
Рис. 9.230. Спектр излучения
Светотехнический анализ и проектирование (OptisWorks)
863
Выполнив оптическую трассировку, получаем траектории лучей, показанные
на рис. 9.231.
Рис. 9.231. Оптическая трассировка реального пучка
Параксиальные характеристики рассчитываются по команде Paraxial
calculation of current optical system (Расчет параксиальных характеристик
активной оптической системы) (рис. 9.232). Результат выполнения
команды— окно Paraxial data (Параксиальные характеристики) показано на
рис. 9.233. В нем находится кнопка ML нажав которую можно получить ко-
эффициенты Зейделя (рис. 9.234).
Paraxial calculation of current optical *ystem
Paraxial calculation of current optical system
/
Рис. 9.232. Команда параксиальных расчетов
OptisWorks - Роган
1567.00
геш
44.9662
66.3347~
25.5347~
1 :
О 1 СО
5
~т~" 5
4.60437
• 4.41277
"*! '™~47йгЙ2Г
^2.90992
-0.0595034
0
Т ^6.37098
Т-4.з7вбУ~
; -11.2192
; -20.0631
1-|!|!
0.767249
Ь"974539
2.52316
10
[ 6.39441
Г 6.11938
! 9.63094
; 2.96921
V 10.4634
44.9662
] " бГ.0859
2275357
; 12.3865
8.31007
Рис. 9.233. Результат параксиальных расчетов
864
Глава 9
Iseidei Sum Ol
£&}*:'*" *.;:>^s#sii~*<\t>*
*V'?W <'«\'Ш№*' ^z\"i
ъЫи^№*¥&: ^/v
t^$*«vC' V>: S**Wfc ♦; >1- , *;
Ш> ?.&>лШв ??$&
W:<£,::Akm**..:V,-
ш.н&лШШ$1^
VK>^4*totf* -v,
<Я/> < ;\ Defeat*^ s ^
My *:. :<.$Ф*ж ;..< -
**1 *\'* /, ч"*$*ой$и,;<С'I:
1 ,1 i .мим. .lii
' , ' ' ' \* ' <
0.000498274 . -
-0.000425666 Г'
0.0160915
0.0311467
0.638553
-0.00569183 *
-0.0162546
0.0012156
-0.245562
-0.770496
-0.508029
s*
-1.82356 * 2 1
Рис. 9.234. Коэффициенты Зейделя
Wavefront, PSF, MTF with object: source
Waverronfc, PSF, MTF with object «puree
M
OptisWorks Optical design
> К I? F* • *fe Bs rffr J3]«
Рис. 9.235. Команда расчета волнового фронта, ФПМ и ФРТ на базе объектного источника
Команда Wavefront, PSF1, MTF2 with object source (Волновой фронт, ФПМ3
и ФРТ4) (рис. 9.235) позволяет получить диаграммы соответствующих
объектов. После ее подачи следует в окне MTF parameters (Параметры ФПМ)
(рис. 9.236) определить метод расчета функции передачи модуляции и
функции рассеяния точки. Если выбрано положение Diffraction
(Дифракционный), то ФПМ и ФРТ рассчитываются на основе волнового фронта
посредством преобразования Фурье. Если выбрано положение Geometry (Геометрия),
то ФРТ рассчитывается по аналогии с диаграммой пятна, а ФПМ получается
на основе функции рассеяния посредством преобразования Фурье. В
документации рекомендуется использовать дифракционный метод для систем.
1 PSF —Point spread function.
2 MTF — Modulation transfer function.
3 ФПМ — Функция передачи модуляции.
4 ФРТ — Функция рассеяния точки.
Светотехнический анализ и проектирование (OptisWorks)
865
MTF Parameters
Рис. 9.236. Настройка параметров расчета ФПМ
OptisWorks - WaveFront / MTF / PSF [(ПО УМОЛЧАНИЮ) (SYSTEM 1) WAVEFRONT_001 ] ШШ Ы
0* В» yjew loots Ffcerfrig аФ
*BiP «Irlilllzjlt
Black to white (gray scale) j*jj|
"3
Value ||0.00916803 -~j ^
f/ trtemetftfe levels awto-upctete
>H
Default I
<** limn
|Г* IwCuive |
_Jrr*d !
gjfil .!
rt°° .i
Рис. 9.237. Диафамма волнового фронта
866
Глава 9
лимитированных по дифракции, и геометрический — для систем, не
предназначенных для обработки изображений, или же когда в оптической системе
присутствуют аберрации. В соответствии с выбранным способом расчета
назначаются остальные параметры диаграмм.
Пример диаграммы волнового фронта показан на рис. 9.237, а ФПМ— на
рис. 9.238.
Рис. 9.238. Диаграмма ФПМ
Геометрические аберрации оптической системы для выбранного объектного
источника рассчитываются по команде Real aberrations with object source
(Геометрические аберрации для объектного источника) (рис. 9.239). Пример
получающихся диаграмм показан на рис. 9.240.
Заменив фотометрический детектор на колориметрический или создав новый
(панель колориметрического детектора показана на рис. 9.241), можно
выполнить фотометрическую трассировку с учетом спектральных
характеристик. При этом спектр источника показан на рис. 9.242.
Светотехнический анализ и проектирование (OptisWorks)
867
OptisWorks Optical tk'si
¥1#|^ЭД#,
[ Real aberrations with object source
I Real aberration* wth object source
Рис. 9.239. Команда расчета геометрических аберраций
Рис. 9.240. Кривые геометрических аберраций
ШпШш1С*> И*»*#£*ог ЩШ№?п
0®Ф
Рис. 9.241. Параметры колориметрического детектора
868
Глава 9
«OptisWorks - Spectrum [Bleckbody 5500KJ
ИшЕз
&шЛ&
,те.жл-.;
* jBlackbody spectrum at 5500.0 Kelvin
250.0 270.4 290.8
16.9
'**V*x/
311.2
44.3
331.6
54.1
o-^-r- ->*<'* ^
352.0 37h
63.4 71 ^
4Aflg**»fiWi3 16-9 25-2 • 34,s 44>3 < 54Л i 63-4 7lT!
.. .i.jiii«iiMiiiiiii<MiMi'niw^<J.^^<!:?. ,,Хуй^ „ , ,yy „r Л V^«JV *W \ ,\ f i У',-*>*-"?* ' s - ' - - " .. 4s '''- ''- ' * v '^^ ■*':
Рис. 9.242. Спектр фотометрического источника
Диаграмма освещенности детектора в реальном цвете показана на рис. 9.243.
Результат применения фильтрации меняет картину, делая ее более
контрастной и изменяя воспринимаемый цвет пятна (рис. 9.244). Следует учитывать,
что фотометрическая трассировка в реальном цвете требует относительно
большого числа лучей.
- Spectral map [(ПО УМОЛЧАНИЮ) ПРИМЕР OPTIS PLAN2-2 002* J
тшш\
ьт"
"Sv??£*2& S^"\ ЯГ%х &ъ$?*»,ibm&4 MMMMA,4.^aiА*1йй»1ий.»й..,..ш,ц^,^^1,
JSb'o
^иш$
I True Color
3
All wa>
Щ^С¥СШШ*Щ^Ш'*
Рис. 9.243. Освещенность детектора в реальном цвете
Светотехнический анализ и проектирование (Optis Works)
869
Рис. 9.244. Освещенность детектора в реальном цвете с фильтрацией
9.7.4. Оптическая оптимизация
Как упоминалось, оптимизационные процедуры могут применяться как к
светотехническим системам, так и к оптическим. Переменными
проектирования в оптической оптимизации могут быть как размеры геометрической
модели SolidWorks — они входят в группу Mechanical variables (Механические
переменные), так и параметры геометрии оптических поверхностей,
помещаемых в Optical variables (Оптические переменные).
Целевая функция может включать в себя в качестве составляющих любые
величины, появляющиеся в разделе Optical results (Оптические результаты).
Включение их в целевую функцию осуществляется, подобно
фотометрической оптимизации, перетаскиванием в Дереве проекта. Затем следует
уточнить параметры компонента в появившейся панели, состав которой зависит
от типа результата. Например, для диаметра диаграммы пятна панель
выглядит, как показано на рис. 9.245, а фокусное расстояние — на рис. 9.246.
Дальнейшие действия по оптимальному проектированию оптической
системы схожи с теми, которые выполнялись в ходе фотометрической
оптимизации.
870
Глава 9
Рис. 9.245. Диаметр пятна как составляющая Рис. 9.246. Фокусное расстояние как
целевой функции составляющая целевой функции
9.8. Заключение
В этой главе достаточно кратко (относительно существующего объема
информации) рассмотрена функциональность OptisWorks применительно к
задачам светотехнического и оптического анализа и проектирования. Мы
совершенно не касались вопросов, связанных с расчетом систем с лазерным
излучением, построением фотореалистических изображений на базе
результатов фотометрической трассировки, а также имитации человеческого
восприятия. OptisWorks поставляется в различных конфигурациях,
предназначенных для определенных сфер инженерной деятельности. Причем эти
конфигурации, применительно к конкретным задачам, дополняются
опциональными модулями. То есть структура пакета является своего рода деревом
с несколькими корнями. Это отличает OptisWorks от рассмотренных
инструментов, таких как COSMOSWorks и, тем более, COSMOSFloWorks, структура
конфигураций которых является строго линейной.
Однако, руководствуясь приведенной информацией, можно уверенно
утверждать, что OptisWorks является универсальным инструментом для решения
абсолютного большинства задач, объединенных понятием "свет". Эту оценку
можно значительно повысить, поскольку взаимодействие его с SolidWorks на
уровне единой, по сути, модели ускоряет как собственно расчеты готовых
изделий, так и — в значительно большей степени — их проектирование.
ГЛАВА 10
Оптимизация работы
механических САПР
Системы автоматизированного проектирования, в которые включены модули
численного анализа, являются одними из наиболее ресурсоемких
программных комплексов. Исторически именно они направляли развитие
вычислительной техники. Сложность проблем (иногда не слишком обоснованных),
которые хочется решить, почти всегда превосходит возможности
компьютеров. Действия пользователя должны быть направлены на достижение
компромисса между рациональной эксплуатацией доступных программ и
своевременным обновлением технических средств.
Производительность при работе с CAD/CAE-системой зависит от
аппаратного и от программного обеспечения. Важным фактором является правильная
настройка операционной системы и программ, а также корректная реализация
моделей и чертежей. Мы будем рассматривать этот вопрос на примере
Sol id Works совместно с модулями семейства COSMOS, однако, с учетом
поправок на реализацию интерфейса, эти рекомендации в значительной степени
применимы для систем "среднего" уровня типа SolidEdge, Autodesk Inventor,
T-Flex. Для таких систем, как Catia, Pro/ENGINEER и Unigraphics,
изложенные сведения также весьма актуальны.
10.1. Аппаратное обеспечение
Сформулируем запросы к аппаратным средствам, необходимым для
комфортной эксплуатации геометрических моделировщиков совместно с
расчетными модулями, а также действия по созданию подходящей программной
среды.
♦ Оперативная память. Критическим фактором при работе с большими
сборками и/или их чертежами, а также при анализе численными методами
является объем оперативной памяти. Фирма SolidWorks рекомендует ис-
872
Глава 10
пользовать компьютеры с оперативной памятью не менее 1 Гбайт, а при
использовании расчетных модулей — не менее 2 Гбайт. Адресное
пространство Windows 2000 составляет 2 Гбайт оперативной памяти, Windows
ХР — 4 Гбайт, причем при стандартных настройках только три из них
могут использоваться прикладными программами. 1 Гбайт резервируется
системой для ядра Windows. Идентифицировать нехватку оперативной
памяти достаточно просто, если открыть окно Диспетчера задач Windows
(рис. 10.1). Ключевыми пунктами в нем являются позиции Физическая
память | Всего (это физический объем имеющейся в системе оперативной
памяти) и Выделение памяти | Всего (используемый в данный момент
объем оперативной памяти). Последняя величина одновременно
отображается в окне Файл подкачки. Если используемая память превышает
оперативную, то происходит резкое замедление обработки информации,
из-за чего падает загрузка центрального процессора. Визуально это
отображается на кривой загрузки процессора, которая выводится в
соответствующем окне. Отметим, что при недостатке оперативной памяти (из-за
физической ее нехватки или некорректной настройки программ) никакие
усилия по увеличению производительности процессора значимых
результатов не принесут. В частности, этапы генерации сетки в COSMOSWorks,
решения задач теплопроводности с радиацией выполняются только с
использованием оперативной памяти. Если ее не хватает— программа за-
Рис. 10.1. Окно с информацией о ресурсах системы
Оптимизация работы механических САПР
873
вершается аварийно. В значительной степени это актуально и для
COSMOSFIoWorks— при недостатке оперативной памяти получить
результаты за приемлемое время практически невозможно.
Замечание )
Еще одно немаловажное ограничение состоит в том, что память, используемая
одним приложением в Windows XP, не может (при стандартных настройках)
превышать 2 Гбайт. Чтобы преодолеть этот лимит, следует в последнюю строку
системного файла Boot.ini включить текст подобный следующему: /3GB
/USERVA=2900. Число обозначает максимальный размер памяти,
резервируемый для одного приложения. Разумеется, эта величина не должна превышать
физический размер памяти. При неустойчивой работе системы следует
уменьшать параметр до тех пор, пока сбои не исчезнут.
( Замечание ^
Следует упомянуть о не вполне очевидном, но достаточно неприятном
явлении. Оно заключается в том, что после завершения расчета оперативная
память может освободиться не полностью или же остаться фрагментированной.
Как правило, большие задачи при решении требуют наличия свободных блоков
памяти соответствующего размера. Если программа (или операционная
система) их не находит, то расчет заканчивается с диагностикой, сообщающей о
нехватке памяти "в целом". Рекомендации в подобных ситуациях следующие.
Анализ (в COSMOSWorks) или проект (в COSMOSFIoWorks) следует запускать
на расчет после перезагрузки операционной системы. В критических ситуациях
следует построить сетку, сохранить модель на диск, перезагрузить ОС, а затем
выполнить расчет.
♦ Процессор. Следующим критическим параметром является
производительность процессора. Главной здесь является даже не тактовая частота
(чем она выше, тем, разумеется, лучше), а производительность для
математики с плавающей запятой. С этой точки зрения использование
процессоров Intel Celeron весьма нежелательно. Кроме того, важно обеспечить
соответствие тактовой частоты процессора и частоты системной шины.
Начиная с 2006 года, массовое распространение получили двухъядерные
процессоры. У фирмы Intel — это Pentium D, Pentium Centrino Duo,
Pentium Core Duo, Pentium Core 2 Duo и Dual-Core Xeon, а у AMD — Athlon
Dual-Core, Opteron Dual-Core и Turion Dual-Core. Результаты тестирования
показывают два факта. Во-первых, при решении задач численного анализа
эффективность систем на их основе (при условии сопоставимости
остальных компонентов) не уступает характеристикам двухпроцессорных
компьютеров. Во-вторых, сокращение времени расчета при переходе с
однопроцессорной/одноядерной системы на двухпроцессорную/двухъ-
ядерную составляет 30—50%. Некоторые соображения по поводу
64-разрядных процессоров и соответствующей ОС приведены в следующем
разделе.
874
Глава 10
♦ Винчестер. Работа с большими сборками и расчеты сопровождаются
обменом с дисковой памятью. Эти процессы могут порождаться как
Sol id Works и приложениями, так и операционной системой. Разумеется,
следует использовать диски и интерфейсы, обеспечивающие наибольшую
скорость передачи данных. Наиболее грубым показателем является
скорость вращения диска винчестера. Чем она больше, тем лучше.
Операционная система использует виртуальную память, локализация и размер
которой назначаются в одноименном окне (рис. 10.2), вызываемом из окна
Параметры быстродействия. Рекомендуется, во-первых, назначить
достаточный объем памяти (фирма SolidWorks рекомендует назначить для нее
размер не менее 2-х размеров оперативной), а во-вторых, использовать для
нее самостоятельный жесткий диск, на который следует также направить
временные файлы SolidWorks (путь настраивается на вкладке
Месторасположение файлов | Файл событий) и расчетных модулей — COSMOS-
Works, COSMOSFloWorks. Перед применением этих настроек крайне
желательно дефрагментировать диск, а также не использовать его для
других приложений. Что же касается дефрагментации диска, на котором
хранятся исходные данные, то она может дать определенный эффект,
однако не приводит к дефрагментации памяти виртуальной. Для этого
применяются специальные программы.
Рис. 10.2. Настройка адреса и размера файла подкачки
♦ Видеокарта. Помимо объема оперативной памяти, критическое снижение
быстродействия может произойти при несоответствии параметров аппа-
Оптимизация работы механических САПР
875
ратного ускорения устройства и установленных программ. Это, в
частности, касается аппаратной поддержки графического языка OpenGL.
В SolidWorks она активизируется опцией Настройки пользователя |
Качество изображения | Использовать программу OpenGL. Изменение
состояния опции возможно только при отсутствии загруженных в
SolidWorks объектов. Аппаратное ускорение используется, если флажок
снят. Если при отсутствии открытых файлов снять флажок не удается, то
причин может быть три:
• SolidWorks в принципе несовместим с видеокартой по режимам
аппаратного ускорения OpenGL;
• драйвер видеокарты не может взаимодействовать с программой;
• настройки видеокарты таковы, что они не реализуют аппаратной
поддержки OpenGL совместно с SolidWorks. В последнем случае следует
установить в максимальное значение ползунковый переключатель
Аппаратное ускорение на вкладке Диагностика окна, отвечающего за
состояние видеокарты (рис. 10.3), после чего попытаться снять флажок
переключателя Использовать программу OpenGL. Отметим, что
некоторые другие настройки видеокарты также делают невозможным
аппаратное ускорение графики в SolidWorks, а возврат их в состояние "по
умолчанию" не приводит систему в исходное состояние. Здесь может
помочь только переустановка драйвера карты.
Рис. 10.3. Управление аппаратным ускорением при обработке графики
876
Глава 10
( Замечание J
Распространенным дефектом, связанным с некорректным взаимодействием
программ и графической системы, является отсутствие текстовой информации
при отображении диаграмм COSMOSWorks. Манипуляции настройками и
перебор драйверов устройств, как правило, не помогают. Единственным решением
является отключение (по крайней мере, на этапе работы с расчетным модулем)
аппаратного ускорения.
В спорных ситуациях, связанных с расстановкой приоритетов, в вопросе:
"Кто виноват в медленной работе: процессор или графическая система?"
выводы можно сделать на основе анализа загрузки процессора. Если
оперативной памяти достаточно, то следует выполнить какие-либо манипуляции с
моделью или чертежом (перемещение, вращение, масштабирование), и если
процессор не загружен полностью, а операции выполняются без
существенного замедления, то графическая система имеет достаточную
производительность. Если процессор загружен на 100%, а отклик происходит с
запаздыванием, то, скорее всего, процессор выполняет ту работу, которую должна
делать видеокарта. Здесь следует учесть, что в режиме закраски большую часть
операций должна, как правило, выполнять видеокарта, а в режиме каркасного
представления, скрытия невидимых линий, при манипуляциях с
чертежами — процессор.
Определенную гарантию корректного функционирования видеосистемы дает
использование видеокарт, рекомендованных фирмой Sol id Works. Результаты
тестирования некоторых устройств опубликованы на Web-сайте фирмы
http://www.solidworks.com. Они не содержат информации о
производительности, а ограничены перечислением устройств, прошедших и не прошедших
тесты, а также рекомендации по использованию драйверов. Вообще говоря,
запросы к видеосистеме расчетных приложений могут не совпадать с
требованиями базовой графической системы, и факт пригодности устройства для
отображения моделей и чертежей недостаточен для того, чтобы оно могло
корректно воспроизводить графику, сопровождающую расчеты.
Настоятельно не рекомендуется использовать компьютеры, в которых для
видеосистемы используется фрагмент оперативной памяти. Такие
конфигурации (они, как правило, используются в переносных и портативных
компьютерах) имеют меньшее быстродействие. Кроме того, существенно
уменьшается объем доступной оперативной памяти.
10.2. Тип и настройки
операционной системы
SolidWorks, начиная с версии 2007 года, функционирует только в среде
Windows XP Professional. Рекомендуется устанавливать Service Pack 2
операционной системы.
Оптимизация работы механических САПР
877
Для оптимизации работы механических САПР следует максимально
исключить использование всевозможных визуальных эффектов в Windows.
Ответственной за это является вкладка Визуальные эффекты окна Параметры
быстродействия Windows (рис. 10.4). Тем не менее революционного
эффекта изменение этих настроек не дает.
Параметры быстродействия
&и^*льаы* эффекты | Дополнительно I
ffc ум&№*$нию визуальные эффект** ^|бир«к>г«я «# ъсшъ
возможностей компыотера, но вы может» изменить их. •
С восстановит* аначвннато ymmamo
% ,С 0$бшеЯ|итъйаийум1иий»ид
<? 0б$стчкгь*^лучшеей^тр^Ае^1Ш1е
Г Qso&te эффект
□ Анимация окон при свертывании и развертывании j*
□ Гладкое прокручивание списков
□ Затухание меню после вызова команды
□ Использование стилей отображения для окон и кнопо
□ Использование типичных задач для папок
□ Отбрасывание теней значками на рабочем столе J*~
□ Отображать содержимое окна при перетаскивании
□ Отображать тени, отбрасываемые меню
П Отображать фоновые рисунки для различных типов г
П Отображение прозрачного прямоугольника выделение!
<]_, :_; I ЛГ
ОК
1
0tW»M*
Применить
Рис. 10.4. Настройка вкладки Визуальные эффекты
для повышения быстродействия CAD-систем
Соображения, связанные с виртуальной памятью, приведены выше. Еще один
фактор, который может оказаться значимым, — влияние технологии
многопотоковой обработки (Hyper-threading) на производительность. Сущность
данной опции состоит в том, что физический процессор пытается
функционировать как два виртуальных. Некоторое ускорение может достигаться
только если одновременно функционируют два приложения, задействующие
различные ресурсы процессора. Если же одновременно должны выполняться
схожие команды, в частности операции с плавающей точкой, то
распараллеливание на единственном физическом процессоре нереально. Поэтому вместо
ускорения расчета достигается исключительно замедление, притом довольно
существенное— до 30—50%. Меньшая величина соответствует этапам,
которые — в силу особенностей математического аппарата — не
распараллеливаются. Это, например, этап формирования системы уравнений с учетом
граничных условий, операции обмена с диском, подготовка диаграмм на основе
результатов расчета. Еще более очевидной является ситуация, когда режим
Hyper-threading активизирован на двухъядерных/двухпроцессорных системах.
878
Глава 10
Ни один из рассматриваемых пакетов не поддерживает четырехпроцессорную
обработку. Поэтому скорость расчета уменьшится практически в два раза.
Учитывая вышесказанное, а также то, что SolidWorks и другие модули, за
исключением COSMOSWorks и COSMOSFloWorks, практически не
распараллеливаемы, режим многопотоковости следует отключить.
Начиная с 2006 года, массовое распространение получила 64-разрядная
операционная система Windows XP 64 bit'. В лицензионную поставку SolidWorks
и модулей семейства COSMOS входят два варианта: для 32- и 64-разрядных
ОС. Обеспечивается полная и двунаправленная совместимость как
геометрической, так и расчетной информации. Исключением являются модели
"полуфабрикаты" в COSMOSWorks и COSMOSFloWorks: сетка построена, а расчет
не выполнен. В этой ситуации сетку придется перестраивать. С точки зрения
эффективности, переход на 64-разрядную модель сокращает время счета на
10—20 процентов и уменьшает запросы к оперативной памяти на 5—10
процентов. Учитывая, что разница в цене между процессорами различной
разрядности невелика, обновлять аппаратное обеспечение желательно на
64-разрядные системы. Однако одним из ограничений является то, что фирма
SolidWorks гарантирует функционирование 64-разрядных версий продуктов
только для процессоров Intel Xeon и AMD Opteron.
С 2007 года начинает использоваться операционная система Windows Vista.
В данной среде должны устанавливаться специальные релизы SolidWorks и
приложений. Версия SolidWorks и расчетных модулей 2008 будет выпущена
как для WinXP, так и для Vista.
В завершение упомянем о нескольких выявленных осложнениях,
порожденных особенностями взаимодействия прикладных программ и операционной
системы.
( Замечание ^
Характерной проблемой, возникающей при эксплуатации SolidWorks и
дополнительных модулей, является отсутствие у пользователя прав доступа на
изменение и удаление файлов, содержащихся в папках установки. В связи с этим
рекомендуется для пользователя создавать учетную запись, позволяющую
свободно манипулировать с содержимым упомянутых папок.
( Замечание )
В процессе эксплуатации программ семейства SolidWorks было выявлено
неочевидное затруднение. Если пользователь, зарегистрированный в сети с
несколькими доменами на одном из них использует свою учетную запись в другом
домене, то работа как SolidWorks, так и расчетных модулей критически
замедляется.
1 В связи с отсутствием русской версии 64-разрядной Windows XP, SolidWorks 2007 и его
модули не имеют пакетов обновления выше SP0. Поэтому рекомендуется использовать, по
крайней мере для расчетов, англоязычные версии программ.
Оптимизация работы механических САПР
879
В некоторых случаях при использовании функции Что неверно? (What's
wrong?) COSMOSWorks сообщения, возникающие в одноименном окне,
отображаются посредством некириллического шрифта. Это связано с
некорректными настройками шрифтов в некоторых кодовых страницах. Проблема
устраняется запуском файла редактирования реестра со следующим
содержимым1:
Windows Registry Editor Version 5.00
[HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Control\Nls\CodePage]
,,1252,,=,,c_1251.nls"
[HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Control\Nls\CodePage]
"1250"=,,c_1251.nls,,
[HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\Windows
NT\CurrentVersion\FontMapper]
"DEFAULT"=dword:OOOOOOcc
@=»204"
Однако корректность воспроизведения шрифтов во всех остальных
программах, за исключением SolidWorks и расчетных модулей, не гарантируется.
10.3. Настройки SolidWorks
Настройки, определяющие быстродействие SolidWorks, могут быть
универсальными, а также влиять на функционирование программы в отдельных
режимах. Они сосредоточены в окне Настройки пользователя. Рассмотрим их
подробнее.
♦ Общие настройки, Поля, влияющие на производительность во всех
режимах, обведены, им присвоены значения, обеспечивающие максимальное
быстродействие (рис. 10.5—10.8). Если активен какой-либо расчетный
модуль, то настоятельно рекомендуется отключить опцию Сохранить инфо
авто-восстановления... на вкладке Резервные копии во избежание ее
активизации в ходе выполняемого процесса. Это может привести к его
аварийному завершению. В абсолютном большинстве случаев действие
настроек группы Качество изображения ограничивается SolidWorks и не
влияет на визуализацию в расчетных приложениях. Используемые в них
графические инструменты могут не иметь никакого отношения к оболочке
и, более того, требовать отличных от нее настроек для графических карт.
1 Данная информация получена от специалистов фирмы SolidWorks Russia
880
Глава 10
Настройки пользователя -Общие
H0crpo§<HrwAbSO9et0Aft ICeofiaeiдокумента!
Обшив
Чертежи
Тип отображения пс
Штриховка/Заполнк
Цвета
Эскиз
Взаигюсвязи/приеяз
Отображение/выбор кр
Качество изображения
Сборки
Внешние ссылки
Шаблоны по умолчаник
Месторасположение фа
FeacureManager
Инкременты счетчика
Вращение вида
Резервные копии/Восст.
Hole Wizard/Toolbox
Проводник файлов
Поиск
Взаимодействие
;От|фы9ъпо^джЙшш^ {никогда jj %
Г" 01<зф^ш«аинв^ажлрашвров, д ^
'ПОто#>««тьод^1тр*^ , #
1^ 0РМУпре#Мт*1*^
шооражения в проводнике |
Г" Ислользсеать сист^ййь»и разделитель для ва wepoe J,
.С
±L
J ■■>}
$б&еит**юИ
. Р ^^^ьщф'^^В/ш^ ] . - ^'.- г<-'" -<": ' "- ^ Т "/ / ''"* v:"
V А»тт>от$6р<йи1пь ^epertyl^fwjc^r (Менеджер шойет»)А' -'' s'/s Л'
фи е^^й^вае^'дШИ^^nipettpoiHHMJ j Спросить jrj:' ,';
О>с%1^тльжв4Т0п»««к^г»«»нив кя*к*#йгде -1 ctescnption j£js, ч
Рис. 10.5. Назначение опций на вкладке Настройки пользователя в разделе Общие
для повышения быстродействия SolidWorks
Настройки для режима деталей. Для деталей применимы универсальные
настройки, которые показаны в предыдущем пункте. Специальные же
рекомендации таковы:
• при создании массивов использовать опцию Геометрический массив;
• создавать скругления одинакового радиуса одновременно;
• локализовать и устранять ошибки перестроения и ошибки в
импортированной геометрии;
• использовать инструмент Статистика элемента для выявления
наиболее трудоемких для перестроения элементов, которые затем
модернизируются, переводятся (временно) в состояние погашения или
перемещаются вниз по дереву, обеспечивая легкость модернизации
предыдущих элементов;
• блокировать или разрывать внешние ссылки (команда Список
внешних ссылок1 контекстного меню корневой пиктограммы в Дереве
конструирования) на сложные объекты.
1 Эта команда присутствует в меню, только если модель содержит внешние ссылки.
Оптимизация работы механических САПР
881
Настройки пользователя - Качество изображения
;.:;Нг»стр^т^^гйля |сй©#ст*алокуиент*1
Общие
Чертежи
Тип отображения пс
Штриховка/Заполнк .
• Цвета
Эскиз
Взаиноевязи/привяз
• Отображение/выбор кр'
Сборки •
Внешние ссылки
Шаблоны по умолчании:
Месторасположение фа v
FeatureManager
14нк-ременты счетчика
Вращение вида
Резервные копии/Восст*
Hole Wizard/Toolbox
Проводник файлов
Поиск
Взаимодействие
U*' Итерировать проверку сагчоперес^чемий для некоторые
'' ?дамвитов деталей из листового иеталла
'Прозрачность
,Г* #teo» кач&ст&о Am нормального вида
Г высокое mmtm дай динамнайскогр вид*
Создать Кривизну: - {Только при просьбе
Урл#Н*' u ♦
детализацию '
)АЧ**
йеньшв (быстрее)
Сборки"
W ^ГЯ^юаски загрузить детзди как сокрШвнны»
[Р всегда решать уапь* сборки л
проверить *уи*<кт»о*анив Старых
сокращенных компонентов! -
1^ШитьсокрйШ#ины>детали; ,•,
перестроиться ',; J ч
- , / Откгвыстро'
ОсороЗть'шя-щии:
if
Медленно
iL
F Обновить массовые характеристики при сохранении
iflUt ^идши цнуи'К tiiinjui i Кмщ
р Преде ; просмотр»реж#м закрасить
;Г* ^иЛифйгь nj^jawy $ррл&
Качество изображение
Рис. 10.6. Назначение опций на вкладке Настройки пользователя в разделе Качество
изображения для повышения быстродействия SolidWorks
Настройки для реэюима сборки. Несколько уменьшить запросы к
производительности компьютера можно работая в режиме Большая сборка
(рис. 10.9). При этом, с одной стороны, в оперативную память не
загружается часть информации, касающейся сборки, а с другой, активизируются
опции, определяющие упрощенное изображение при манипуляциях с
моделью. Кроме того, можно порекомендовать:
• разделять сборку на узлы;
• устранять ошибки перестроения для деталей и сопряжений.
Обратим внимание на то, что работа в режиме легковесной сборки может
привести к некорректной работе расчетных приложений. Поэтому перед
активизацией соответствующих модулей следует загрузить все
подлежащие анализу детали. Отметим, что данная проблема в большей степени
характерна для ранних версий программ. Тем не менее достаточно трудно
882
Глава 10
Настройки пользоеагеля - Резервные копии;Восстаноьлемие
Рис. 10.7. Назначение опций на вкладке Настройки пользователя в разделе Резервные копии
для повышения быстродействия SolidWorks
Свойства документа - Качество изображе
v $|
1^
щ
Оформление
Размеры
Заметки
Позиции
Стрелки
Виртуальная резкое^'
Отображение приме ''Д]
• шрифт для примеча
Масштабная сетка/Прие
Единицы измерения
Цвета
Свойства материала
К«^СТе^ШОбрШ|ИЙ. s^T?
• Отображение плоскости
* .тГ. v..-.v..v.T.-.j...v. -..-.-.и.'. ,-w-.i 4/tv ,^'vv"''-'" <*- о ~ -• ■•' х > _ ?iintoi(i't*ti\kiлшлштг-9лл *^^^*ч i'
':",.'", '. "и:™""... *т -> "•^;,"""^г>" "угг'""^"?;^. -;^, ••;, -л ^ - - -' -- -: • < г, ...,-;-,-->. Л, ■>>/ 'A»» фу.
ц» i^yiiiWj^Vri'wrtii^Vi frjfflhrt iWMIW|ltHH
Рис. 10.8. Назначение опций на вкладке Свойства документа в разделе Качество
изображения,для повышения быстродействия SolidWorks
Оптимизация работы механических САПР 883
Рис. 10.9. Окно для настройки режима Большая сборка
представить себе сборку, которая, требуя из-за проблем с размерностью
использования специальных приемов работы в SolidWorks, в то же время
доступна для расчета в специальных модулях!
♦ Настройки для реэ/сима чертежа. В SolidWorks доступен ряд
инструментов для управления соотношением "качество/производительность":
• создание Отсоединенных чертежей (в версиях до 2004 года — режим
RapidDraft), которое позволяет работать в чертеже (с определенными
ограничениями в выборе инструментов) без загрузки файлов детали.
Запись в отсоединенном виде не требует параллельной передачи
стороннему пользователю модели объекта. Применение данного режима
может привести к увеличению размеров файла чертежа;
• работа в режиме Сокращенного чертежа— активизация
соответствующей опции при открытии чертежа сборки приводит к тому, что
модели деталей будут загружаться в память по мере необходимости.
Соответственно чертеж большой сборки будет открываться намного
быстрее;
• использование параметра Черновое качество для отображения видов
на чертежах — активизировав опцию Инструменты | Параметры |
Настройки пользователя | Тип отображения | Качество отображе-
884
Глава 10
ния для новых видов | Черновое качество, можно сократить время на
создание и модификацию создаваемых видов. При этом, однако,
некоторые команды, предназначенные для оформления чертежей,
функционируют некорректно. Поэтому в черновом качестве лучше отображать
уже готовые объекты.
Как можно видеть, здесь упомянуты средства повышения
производительности как работы в Sol id Works без подключения расчетных модулей, так и те,
которые прямо или косвенно влияют и на них.
10.4. Специальные манипуляции
Если в сборке используется много деталей из листового материала, а также
детали, являющиеся импортированными геометрическими объектами (или
содержащими таковые), то можно рекомендовать следующую
последовательность операций:
1. Поместить проблемные детали в какую-либо сборку (без всяких привязок).
2. Для каждой детали создать Деталь производного компонента, подавая
одноименную команду из меню Файл.
3. Необходимую сборку создавать из полученных деталей, которые будут
точными ассоциативными копиями исходной.
4. В силу предыдущего пункта, необходимо сохранять исходные детали и
изменения вносить именно в них.
Если модель содержит объекты импортированной геометрии с ошибками, то
настоятельно рекомендуется эти ошибки исправить. Это, во-первых, сократит
время на проверку модели при загрузке в SolidWorks и на перестроение и, во-
вторых, существенно уменьшит трудоемкость при генерации сеток, снизит
вероятность ошибок. Если импортированная геометрия является
поверхностным представлением неких объектов, то настоятельно рекомендуется сшить
соответствующие поверхности. Если это закончится неудачей там, где это
должно получиться (за исключением, например, Т-образных стыков), т. е.
смысл скорректировать геометрию, т. к. весьма вероятно появление
несшитых сеток.
10.5. Использование сетевых дисков
Настоятельно не рекомендуется хранить элементы сборок, а также рабочие
файлы и результаты расчетных программ на сетевых дисках. Скорость
обмена с ними намного меньше, чем с локальными устройствами. Если же такая
необходимость присутствует, то следует использовать системы PDM, причем
режим взаимодействия с ними настраивать так, чтобы создавать локальные
копии всех компонентов сборки на индивидуальном рабочем месте.
Оптимизация работы механических САПР
885
( Замечание ^
Размещение рабочих файлов и файлов с результатами COSMOSWorks на
сетевом диске может привести к аварийному завершению приложения.
10.6. Одновременное функционирование
нескольких приложений
Даже при использовании однопроцессорной/одноядерной системы можно
организовать работу так, чтобы одновременно с выполнением ресурсоемких
расчетов можно было бы заниматься полезной деятельностью: работать в
Интернет, в текстовом редакторе и — даже — обрабатывать геометрическую
модель в SolidWorks. Естественно, чтобы еще одно приложение
функционировало, необходимо его, во-первых, запустить и, во-вторых, обеспечить
взаимодействие с фоновой задачей так, чтобы последняя не забирала себе все
ресурсы процессора. Первая задача, на первый взгляд, решается просто:
программа запускается. Есть, однако, одно затруднение: в процессе работы
COSMOSWorks на этапе решения системы уравнений или итерационного
нелинейного анализа "дополнительный" сеанс SolidWorks не активизируется до
тех пор, пока не завершится процедура решения. Поэтому следует сначала
запустить нужные программы, а затем задействовать процедуры анализа.
( Замечание ^
Система лицензирования SolidWorks, равно как и продуктов семейства
COSMOS, допускает одновременное функционирование на одной рабочей
станции произвольного числа сеансов в том случае, если лицензия локальная.
Если она сетевая, то каждый дополнительный сеанс задействует еще одну
лицензию.
Оперировать с какой-либо другой информацией на фоне решателя любого из
модулей COSMOS может быть достаточно некомфортно. Дело в том, что, в
первом приближении, логика многозадачности в системе Windows такова,
что при равенстве приоритетов более активно выполняется та задача, которая
меньше использует операции обмена с внешними устройствами: дисками,
клавиатурой, графической подсистемой. Поэтому замедления в интерфейсе
неизбежны. Ситуация исправляется уменьшением приоритета
ресурсоемкого приложения. При работе COSMOSFloWorks, COSMOSMotion на
этапах численного счета (а в COSMOSFloWorks и построения сетки)— это
SLDWORKS.exe; в COSMOSWorks при построении сетки — это ghs3dV3.exe;
при работе линейного, нелинейного и теплового решателя — это STAR.exe,
NSTAR.exe и HSTAR.exe соответственно. Изменение приоритета
производится в окне Диспетчер задач Windows на вкладке Процессы (рис. 10.10).
Для скорейшего поиска наиболее активного приложения следует, отсортиро-
886
Глава 10
вав их по приоритету (для этого нужно указать мышью на столбец ЦП),
выбрать подходящее, а затем в контекстных меню подать соответствующие
команды. В исходном состоянии большинство процедур имеют приоритет
"Средний". После завершения расчета можно вернуть приоритет SolidWorks
(если изменялся именно он) к исходному состоянию.
Отметим, что для двухпроцессорных/двухъядерных систем
распараллеливание ресурсов процессора между приложениями осуществляется более
эффективно.
Рис. 10.10. Изменение приоритета приложения
10.7. Выводы
Практически все CAD/CAE-системы при решении конкретных задач требуют
тщательной настройки аппаратного обеспечения, операционной системы, а
также — при эксплуатации сетевых лицензий или совместно используемых
баз данных (как по геометрическим объектам, так и, например, по
материалам) многопользовательской среды. Причем требования, выдвигаемые на
этапах работы с моделью, чертежом и в ходе расчетов, могут быть различны.
Определенные отличия существуют и в запросах, предъявляемых
разнообразными расчетными модулями. Поскольку программное обеспечение, как
правило, обновляется достаточно регулярно, то и аппаратные средства
должны быть адекватны. Здесь существует некая область, где соотношение
"цена/производительность" имеет разумную величину, доступную даже для
индивидуального пользователя.
ПРИЛОЖЕНИЯ
Для заметок
ПРИЛОЖЕНИЕ 1
COSMOSWorks 2008 -
новые возможности
В приложении 1 рассматриваются основные усовершенствования и
изменения версии COSMOSWorks 2008 года. Изложение ведется на базе доступных
авторам пре-релизов программы, а также сопутствующих справочных
материалов и демонстрационных примеров. Учитывая высокую вероятность
последующих изменений, мы не будем сосредотачиваться на выявленных
недочетах, а акцентируем внимание на освещении наиболее важных сущностей,
доступных пользователю в версии 2008 года. Акцент сделан на
усовершенствованиях в функциональности. Изменения в интерфейсе, не влияющие на
"физику" процесса, могут быть проигнорированы.
COSMOSWorks, равно как и другие расчетные модули — COSMOSFloWorks
и COSMOSMotion версии 2008 года, функционируют исключительно в среде
SolidWorks 2008. Эта версия в целом сохраняет правила установки и
лицензирования предыдущей версии. Основным системным изменением является
наличие вариантов как для операционной системы Windows XP Professional,
так и для Windows Vista (на момент подготовки рукописи этот вариант не
был опубликован). С точки зрения функциональности варианты расчетных
модулей должны быть идентичны. Все рассмотренные примеры и сам
материал основаны на расчетах, выполненных в среде WinXP. Как
представляется, в течение 2008 года именно эта конфигурация будет наиболее надежной.
П1.1. Общие усовершенствования
Здесь перечислены наиболее значимые изменения версии 2008 года,
влияющие на общую функциональность:
♦ при выборе в графической области грани тела или оболочки в Менеджере
COSMOSWorks для последнего упражнения будут раскрыты папки Бал-
890
Приложение 1
ки, Оболочки или Твердые тела, соответствующие данному объекту, а
сам он будет выделен в Менеджере;
♦ в нелинейном анализе для оболочек можно назначать материал с
эффектом памяти формы типа Нитинол;
♦ при использовании в базе данных по материалам кривых "напряжение-
деформация" в качестве источника для констант по моделям гиперупругих
материалов Муни — Ривлина и Огдена полученные константы
сохраняются в текстовый файл с расширением log в папке результатов, используемой
для данного анализа;
♦ введены панели инструментов COSMOSWorks Dynamics (Динамика)
и COSMOSWorks Trend Tracking (Выявление тенденции);
♦ возможен поиск ключевых свойств, присутствующих в анализах,
посредством инструментов поиска Sol id Works, присутствующих в Панели задач;
♦ в процедуру Проверка проектирования (Design Check) в дополнение к
присутствовавшим ранее критериям прочности добавлен критерий, пред-
Рис. П1.1. Консультант по анализам —
определение типа проблемы и информационная панель
COSMOSWorks 2008 - новые возможности
891
ложенный NAFEMS1 (в доступных пре-релизах программы данная опция
отсутствовала);
♦ Консультант по анализам (Analysis Advisor) включает следующие новые
объекты:
• информацию о нагрузках, ограничениях и контактных условиях.
Последовательность панелей при получении совета относительно посадки
с натягом показан на рис. П1.1, П1.2;
Рис. П1.2. Консультант по анализам — конкретизация фаничного условия и описание модели
1 NAFEMS (National Agency for Finite Element Methods and Standards) — Национальное
агентство по методам конечных элементов и стандартизации.
892
Приложение 1
• базу данных с примерами нагрузок, ограничений и условий контакта.
База данных может быть отредактирована.
Для оболочечных моделей в графическом окне посредством закраски
различными цветами можно отобразить толщину и материал. Также
информация выводится в текстовом виде посредством ярлычков с выносками.
Для этого из контекстного меню пиктограммы Оболочки (Shells) нужно
подать соответствующую команду (рис. П1.3—П1.5). Ту же информацию
можно получить из панели Качество сетки (Mesh Quality) (рис. П 1.6
иП1.7).
^ Деталь1
J"{ Настройки
: # Датчики
В <$* Упражнение 1 (-По умолчанию-)
' • Ф ОболДр l*fo^ ;
••41 Нагрузке У^
■ Сценари1*р#»1»»йу»«»1»в<>'
' tMrVjSSS [У-'.
~^L
•jj^ Контакт/зазоры (-Глобальные: Связанные-)
"Ф Сетка
•ЙЙ Отчет
Рис. П1.3. Запрос на отображение толщины или материала
''ШШШшш&^я*
V К
Рис. П1.4. Распределение толщины на фоне модели
COSMOSWorks 2008 — новые возможности
893
j^jMemmi
+ п
С* Толщина
f* Материал
1023 Carbon Sted Sheet (SS)J
A286 Iron Base Super alloy
Cast Carbon Steel (SN)
He определен
11023 Carbon Steel Sheet (SS)1
ШШШШ1А286 Iron Base SuperaJJoyl
Рис. П1.5. Информация о материале на фоне модели
^■ШЙШйЙ'ШТКи:;:;
<Р Сетка
Г Пропорция
С Якобиан
р Одинаковый цвет для нилнеи части
оболочки
^ Цвет е заеисиности от материал»
оболочки
^ Цвет в зависимости от толщины
оболочки
Рис. П1.6. Параметры, доступные
из панели Качество сетки
Материал
Не определен
Не определен
Cast Carbon Sted (SN)
A286 Iron Base SuperaJloy
1023 Carbon Steel Sheet (SS)
Толщина (mm)
Рис. П1.7. Информация о материале и распределение
толщины на фоне сетки
П1.2. Новые типы анализа
П1.2.1. Проектирование сосудов давления
На основе результатов двух и более линейных статических расчетов система
позволяет получить результат для их комбинации. Статические анализы
могут отличаться только по нагрузкам. Материалы, кинематические и
контактные граничные условия, сетки должны быть идентичны (в этой связи реко-
894
Приложение 1
мендуется, создав и отладив один из вариантов расчетной модели, получить
остальные копированием с последующим редактированием нагрузок). Опция
Большие перемещения во всех расчетах должна быть отключена. Данный
анализ ассоциирован с конкретной конфигурацией модели Sol id Works.
После создания анализа с типом Проектирование сосудов давления
(Pressure Vessel: Design) нужно подать команду Определить/редактировать
из контекстного меню пиктограммы Настройка (Setup) (рис. П1.8).
В появившейся панели Набор комбинаций результатов (Result Combination
Setup) (рис. П1.9) следует из числа статических расчетов, связанных с
активной конфигурацией, выбрать нужную комбинацию, а также определить тип
комбинации. Доступна линейная комбинация и комбинация по методу SRSS
(Square root of sum of squares) — среднеквадратичная оценка. В линейную
зависимость входят коэффициенты — множители при результатах
соответствующих упражнений. Собственно расчет, подобно другим типам
упражнений, запускается командой Выполнить.
^ Деталь 1
; ^'| Настройки
;$f Датчики
9-4§i Сумма арифметическая (-По умолчанию-)
т-Ш Рсзуяьт/^ЭФ^
!±! <%? X «• О Y ■ 1 (-По унолчанию-)
Й"<^** ш 1 Y ш 0 (-По умолчанию-)
Рис. П1.8. Вызов процедуры редактирования комбинации расчетных случаев
Набор комбинаций результата
1 *<*д«мтьХ*0 вдоль Y*4)+ 1 *фдоь х-1 вдоль Y«.*Jl
(*, Линейная комбинации
1; вдоль Х«-0 вдоль Y-1
1 вдоль Х-1 вдоль Y-1
Х-0 Y-1
Х-1Y-0
Х-1Y-1
вдоль Х-0 вдоль Y-1
вдольХ-1вдольУ-1
Рис. П1.9. Определение комбинации расчетных случаев
COSMOSWorks 2008 — новые возможности
895
Рассмотрим простейший пример: квадратная пластина с круглым отверстием
(оболочечная модель) под действием растяжения вдоль сторон. Диаграммы
эквивалентных напряжений (мембранная компонента) для каждой из
нагрузок приведены на рис. Ш.ЮиШ.П. Результат для одновременного действия
нагрузок (нагрузки приложены фактически) показан на рис. П1.12. Результат
для виртуальной суммы в варианте Линейная комбинация показан на
рис. П1.13. Как видно, получившиеся диаграммы эквивалентны.
von Mises (NAn*2)
2.94е*000
2.62е*000
2.296*000
1.97e*000
1.65е*000
1.32е*000
1.00е*000
6.79е-001
-| 1 1 1 *|г—' 3.56е-001
Рис. П1.10. Растяжение в горизонтальном направлении
t М М f
т
von Mises (N/toA2)
2.96е+000
2.64е*000
2.316*000
1.996*000
1.66е*000
1.336*000
1.016*000
. 6.826-001
|~~ 3.57е-001
Рис. П1.11. Растяжение в вертикальном направлении
Из документации, а также данного примера можно сделать вывод, что
алгоритм рассчитывает назначенную комбинацию результатов для аддитивных
величин — при условии соблюдения упомянутых выше ограничений по ли-
896
Приложение 1
нейности модели — это перемещения в направлении осей, а также
компоненты напряжений и деформаций — вдоль осей и сдвиговые. Затем на основе
этих величин рассчитываются результаты, требующие нелинейных
комбинаций: эквивалентные напряжения и деформации, главные напряжения и т. д.
! t t I t П
von Mises (NAnA2)
2.01e+000
1.88e+000
1.75e+000
1.63e+000
1.50e+000
1.37e+000
L 1.24e+000
. 1.11e+000
9.87e-001
Г' —
Рис. П1.12. Результат при одновременном действии нагрузок
von Mises (NAnA2)
_. 2.016+000
Н. 1.886+000
Н. 1.75е+000
Bj. 1.636+000
Д. 1.506+000
Щ 1.37е+000
™ 1.24е+000
Щ. 1.11 е+000
9.866-001
Рис. П1.13. Виртуальная сумма
Рассмотрим демонстрационный пример COSMOSWorks — это сосуд
давления, в число расчетных случаев для которого, помимо собственно давления,
входят также те, когда он дополнительно нагружен усилиями, действующими
со стороны присоединяемой арматуры. Это два анализа, в каждом из которых
в качестве статических граничных условий выступает единственная сила,
приложенная к кромке в месте ее соединения с отсутствующей трубой.
COSMOSWorks 2008 — новые возможности
897
Граничные условия на фоне модели при нагружении давлением, а также
картина эквивалентных напряжений на фоне деформированного вида показаны
на рис. П1.14. Для расчета и отображения доступно большинство диаграмм,
если таковые построены в анализах, на базе которых формируется
комбинация. Второй расчетный случай — нагружение горизонтальной силой,
приложенной к отверстию в цилиндрической части (рис. П1.15), а третий —
вертикальной, действующей на верхнее отверстие (рис. П1.16).
Рис. П1.14. Расчетная модель и результаты при действии давления
Один из интересующих расчетных случаев подразумевает сочетание
давления, удвоенной горизонтальной силы и вертикальной силы (рис. П1.17).
Эквивалентные напряжения при совместном действии нагрузок (виртуальная
модель) показаны на рис. П1.18.
В этой задаче следует обратить внимание на два обстоятельства. Первое —
то, как организована расчетная модель бака с отверстиями. Как видно, в
модели действие давления на "удаленную" вырезами площадь никак не
компенсируется. Следствием является эффект реактивной силы, действие которого
визуально проявляется в перекашивании опор (рис. П1.19). Это противоречит
тому, что присутствует в реальности — не может бак с отверстиями
удерживать давление. Если же присоединить трубы с заглушками, то суммарная
величина силы, порожденной давлением, будет равна нулю. Еще один
898
Приложение 1
Шкала деформации: 4000
von Mises (NAn*2)
7.22е+006
6.628+006
6.026+006
5.42е+006
4.81е+006
4.216*006
3.616+006
3.016+006
2.416+006
1.816+006
1.206+006
6.026+005
6.866+001
Рис. П1.15. Расчетная модель и результаты при действии силы,
приложенной к отверстию в цилиндрической части
Шкала деформации: 60000
О
О
Ш
-*х
О
von Mises (NAnA2)
1.65е+006
1.51е+006
1.37е+006
1.24е+006
1.10е+006
9.62е+005
8.24е+005
6.87е+005
5.508+005
4.126+005
2.75в+005
1378+005
8288+000
Рис. П1.16. Расчетная модель и результаты при действии силы,
приложенной к отверстию в сферической части
COSMOSWorks 2008 — новые возможности
899
МшШййттзмжштшЛ.
<? Линейная комбинаций
T5RS5
Рис. П1.17. Комбинация давления
Рис. П1.18. Расчетная модель
и результаты при действии силы,
приложенной к отверстию
в сферической оболочке
"неучтенный" эффект состоит в том, что отверстие ослабляет конструкцию.
В модели же силы приложены к кромкам отверстий, что, в совокупности с
эффектом ослабления, приводит к продавливанию кромки (см. рис. П 1.16).
В реальности же силы приложены к патрубкам, приваренным по контуру.
Эти патрубки существенно увеличивают жесткость вблизи отверстия. Вывод
из этих рассуждений такой: использовать описанную модель граничных
условий в практических задачах нужно с большой долей осторожности.
Вторая особенность расчетной модели состоит в том, что двутавровые балки
опор не контактируют с наружной поверхностью цилиндра. В расчетной
модели грани, соединенные сварными швами, сопряжены условием Связанные
(Bonded). В результате генерируется несовместная сетка— это можно
увидеть на конечно-элементной модели, показанной на фоне деформированного
состояния (рис. П1.19). Это упрощает модель геометрическую, но не
позволяет достоверно оценить состояние соединения. Однако на некотором
удалении от виртуальных зон контакта результат (с точностью до приемлемости
элементов твердых тел для тонкостенных систем) вполне адекватен.
900
Приложение 1
Рис. П1.19. Фрагмент модели в месте соединения опор с баком
П1.2.2. Динамический линейный анализ
Динамический анализ упругих и неупругих систем необходим тогда, когда
скорость изменения нагрузки, которая определяется пользователем,
сопоставима с минимальной собственной частотой системы, а иногда и меньше ее в
несколько раз. В этом случае приобретают значение инерционные силы,
возникающие в системе.
Возможность выполнять динамический анализ присутствовала и в
предыдущих версиях продуктов семейства COSMOS, однако для этого нужно было
частотную расчетную модель (сетку и граничные условия), созданную в
COSMOSWorks, транслировать в COSMOSM со всеми вытекающими
последствиями, связанными с не слишком удобным интерфейсом.
В новой версии модули динамического линейного и динамического
нелинейного анализа реализованы в стандартном интерфейсе COSMOSWorks.
В настоящее время линейный динамический анализ возможен в трех
вариантах: Модальный переходной анализ (Modal Time History Analysis); Гармо-
COSMOSWorks 2008 — новые возможности
901
нический анализ (Harmonic Analysis); Анализ случайных колебаний
(Random Vibration Analysis).
Динамический линейный расчет базируется на результатах расчета на
собственные частоты (он выполняет его самостоятельно или учитывает, если
динамический анализ был создан на основе частотного). В связи с этим
рациональным является отработка граничных условий и сетки на относительно
простой модели с последующим созданием динамической модели
посредством команды Скопировать в новое динамическое исследование (Copy to
new dynamic study), подаваемой из контекстного меню родительского
частотного анализа. Элементы балок в чистом их виде или в комбинированной
сетке в настоящее время не могут входить в динамические модели. Линейная
динамическая модель применима в предположении физической линейности
материалов и геометрической линейности системы, и, разумеется,
неизменности массы, жесткости и демпфирующих характеристик.
Построение модели пружинного шарнира. Рассматривать
функциональность динамического анализа будем на примере модели пружинного
шарнира, показанного на рис. П1.20. Его геометрическая модель образована одним
телом, а также четырьмя пластинами в поверхностном представлении. В
расчетной модели пластины соединены с телом контактным условием
Связанные. Конструкция изготовлена из стали.
Граничными условиями является фиксация участков пластин.
Нагрузка — инерционная сила 40 g, действующая в вертикальном направлении
(рис. П 1.21).
Рис. П1.20. Геометрическая модель Рис. П1.21. Расчетная модель
подвески подвески
902
Приложение 1
Первые три собственных формы и соответствующие им частоты показаны на
рис. П1.22—П 1.24.
Рис. П1.22. Первая собственная форма Рис. П1.23. Вторая собственная форма
Форма колебаний: 3 Значение ■ 434.61 Гц
Рис. П1.24. Третья собственная форма
В модели без действия ускорения собственные частоты существенно
изменяются — они показаны на рис. П1.25.
Если проанализировать коэффициенты массового участия для модели без
ускорения, то окажется, что в вертикальном направлении коэффициент
массового участия имеет значимую величину только для 15 и 16 мод (рис. П1.26,
COSMOSWorks 2008 - новые возможности
903
П1.27). Документация к программе рекомендует выполнять динамический
анализ с использованием числа мод, для которых суммарный коэффициент
массового участия превышает 80% в направлении возбуждения. Поскольку
возбуждающий фактор в одном из вариантов анализа будет действовать в
вертикальном направлении, то рассматривать будем 20 мод.
Рис. П1.25. Собственные частоты для модели без
Рис. П1.26. Собственные частоты и коэффициенты массового участия
для модели без ускорения
К слову сказать, если проанализировать модель с нагрузкой, влияющей на
резонансные характеристики, то выяснится, что моды, соответствующие
ненулевому массовому участию в направлении вертикали, сдвинулись к 7-й и
8-й частоте, причем сами частоты мало отличаются от тех, которые получены
для системы с нагрузкой. Возникает вопрос, на какой результат
ориентироваться при назначении числа частот в модальном анализе, ведь там нагрузкой
904
Приложение 1
также является ускорение, но приложенное не к объектам, а к опорам.
Поэтому, поскольку в начальный момент ускорения нет, а исследуется
переходное состояние, то следует использовать модель без нагрузок. Вот если бы
модальный анализ выполнялся для модели, в которой присутствовали бы
Исходные условия1 (Initial conditions) в виде действовавшего до момента
начала анализа ускорения, то базой служил бы частотный анализ с учетом
нагрузок.
Форма колебаний: 15 Форма колебаний: 16
Значение ■ 693.79 Гц Значение * 704.94 Гц
Рис. П1.27. Собственные частоты с ненулевыми коэффициентами массового участия
в вертикальном направлении
Модальный анализ. Модальный переходной анализ (Modal time history
analysis) выполняется, когда закон изменения каждой из действующих
нагрузок (в виде силовых факторов или назначенных перемещений) однозначно
определен. Целью расчета является определение состояния системы в
произвольный момент времени. Характерные нагрузки, фигурирующие в
модальном анализе:
♦ ударные или импульсные нагрузки;
♦ нагрузки, изменяющиеся во времени по произвольному закону, в том
числе периодические;
♦ движение основания как жесткого целого с назначением смещений,
скоростей или ускорений одинаковых для всех заделок;
♦ начальные условия— назначенные перемещения, скорости или
ускорения, приложенные к выбранным деталям или модели в целом и
действующие при времени равном нулю.
1 Корректный перевод Initial conditions — Начальные условия.
COSMOSWorks 2008 — новые возможности
905
Модальный анализ создается как разновидность линейного динамического
(рис. Ш.28) или из контекстного меню выполненного резонансного
анализа— Создать новое динамическое исследование (Copy to new dynamic
sudy). В последнем случае нужно удалить нагрузки, если таковые
присутствуют.
Рис. П1.28. Создание линейного динамического анализа в варианте Модальный анализ
(фрагмент панели)
Следующий шаг— уточнение настроек динамического анализа. Окно
Модальная временная история (Modal Time History), вкладка Параметры
частоты (Frequency Options) показаны на рис. П1.29. Она идентична вкладке
анализа типа Частота (Frequency). В данной ситуации не рекомендуется
ограничивать границы частот, а ограничиться назначением числа
учитываемых.
Вкладка Динамические параметры (Dynamics Options) показана на рис. П1.30.
В ней назначаются:
♦ Группа полей Диапазон времени:
• время начала (Start time) — физическое время начала процесса;
• время конца (End time) — физическое время окончания процесса;
• временной шаг (Time increment) — шаг по времени. Следует назначать
его равным части периода, соответствующего высшей собственной
частоте из числа учитываемых и, в идеале, сопровождать расчет анализом
сходимости при уменьшении шага. Величина шага в совокупности с
906
Приложение 1
Модальная временная история
р\
Рис. П1.29. Настройка числа учитываемых частот
Модальная временная история
Рис. П1.30. Вкладка Динамические параметры
COSMOSWorks 2008 - новые возможности
907
размером интервала времени определяют число шагов. Оно не должно
превышать 15 000.
♦ Раздел Замороженная нагрузка1 (Dead load) позволяет присовокупить
результаты некоего статического анализа к результатам динамического
(без учета их взаимного влияния— исключительно в арифметическом
смысле):
• Замороженная нагрузка из статического упражнения (Dead loads
from static study) — выбор имеющегося (и выполненного) статического
расчета;
• Множитель (Multiplication factor) — величина, на которую будут
умножены все численные результаты статического упражнения.
Вкладка Дополнительно (Advanced) (рис. П1.31) появляется после нажатия
кнопки Дополнительные параметры (Advanced options). В ней присутствует
переключатель Метод временной интеграции (Time integration method),
который может принимать значения:
♦ Newmark— несвязанные уравнения движения решаются посредством
метода Ньюмарка путем интегрирования по времени. Для линейного
динамического анализа нужно определить два коэффициента. Если
предполагается линейное изменение ускорения в зависимости от времени, то:
• Первый параметр (First integration parameter) a = 0,5;
• Второй параметр (Second integration parameter) beta = 1/6.
Рис. П1.31. Определение алгоритма интегрирования уравнений динамики
Корректный перевод Dead load в данном контексте — Постоянная нагрузка.
908
Приложение 1
Если ускорение между шагами по времени постоянно, то:
• Первый параметр (First integration parameter) a = 0,5;
• Второй параметр (Second integration parameter) beta = 0,25.
♦ Wilson-Theta — интегрирование несвязанных уравнений движения
методом Вильсона. В этом случае нужно назначить коэффициент Theta,
управляющий устойчивостью решения. При Theta = 1 процедура аналогична
методу Ньюмарка. При Theta > 1,37 метод Вильсона становится безусловно
устойчивым.
Подобно частотному анализу назначаем граничные и начальные условия.
Контекстное меню пиктограммы Нагрузки/ограничения показано на
рис. П1.32. С его помощью можно вызывать описанные ниже панели:
Рис. П1.32. Граничные условия, доступные при модальном анализе
♦ Ограничение (Restraints) — традиционная для большинства видов
анализа панель для всевозможных заделок. Следует учитывать, что в отличие от
других моделей, а также нелинейного динамического анализа, в ней не
могут назначаться ненулевые перемещения.
♦ Давление (Pressure)— создание распределенной нагрузки. Она может
быть нестационарной и управляться кривой времени, для которой в
панели есть настройки, идентичные варианту для нелинейного анализа.
♦ Сила (Force) — создание силы. Она также может быть нестационарной.
♦ Распределенная масса (Distributed Mass) — наложение массы на
выбранные грани (рис. П1.33)— эта функция присутствует также и в частотном
анализе. Она предназначена для имитации действия отсутствующих
объектов. В каком-то смысле этот виртуальный объект заменяет имеющуюся
COSMOSWorks 2008 — новые возможности
909
в частотном, но отсутствующую в динамическом расчете, сущность
Удаленная (дистанционная) масса (Remote mass). Здесь следует иметь в
виду, что последняя опция учитывает влияние инерционной характеристики,
обусловленное несовпадением массы и грани.
Рис. П1.33. Создание распределенной Рис. П1.34. Линейная пружина
по грани массы с демпфером
♦ Соединитель пружины-демпфера (Spring-Damper Connector) — пружина
растяжения-сжатия, обладающая свойством линейного вязкого
демпфирования (рис. П1.34). Пружина соединяет две точки или вершины и по
остальным свойствам идентична имеющимся в других типах анализа,
например, в статическом.
♦ Возбуждение однородного основания (Uniform Base Excitation)—
имитация прикрепления объекта к абсолютно жесткому основанию
бесконечной массы, совершающему движение с назначенными пользователем
параметрами. Подразумевается, что данное условие применяется ко всем
имеющимся закреплениям (как упоминалось, в линейном модальном
анализе для них нельзя назначать закон движения). В зависимости от типа
анализа особенности приложения движения следующие:
• для модального анализа можно назначать перемещения, скорости и
ускорения как функции времени;
• для гармонического анализа те же самые параметры, но в зависимости
от частоты возбуждения;
910
Приложение 1
• для расчета состояния системы при случайных колебаниях условия те
же, что и в предыдущем случае, но движение определяется только
в глобальной системе координат;
• для нелинейного динамического анализа назначаются только ускорения
относительно глобальной системы координат.
Панель Возбуждение однородного основания в контексте модального
анализа показана на рис. П1.35. Если в модели присутствует однородное
основание, то при последующем определении параметров отклика,
которые накапливаются после расчета, следует обратить внимание на то, будут
ли рассчитываться абсолютные величины этих параметров или же они
будут определяться относительно подвижного основания.
В панели присутствует раздел Вариация со временем (Variation with
time), предназначенного для построения кривой времени (для данной
задачи ее параметры показаны на рис. П1.36). Название и содержание этой
группы параметров зависит от типа анализа.
Возбуждение будет применено ко всем
месторасположениям, ограниченным в
определенных направлениях.
Z
к
*$9
С Перемещение
С Скорость
(• Ускорение
Ф рГо^ред^""
Г? Предо, просмотр
J] |т/5Л2
№1
MF
||| 392,4
ф Реверс направления
Рис. П1.35. Панель Возбуждение однородного основания
♦ Возбуждение выбранного основания (Selected Base Excitation) — по
сути, приложение граничных условий, управляемых некоторым законом.
Если граничное условие определено более чем в одном направлении, то
COSMOSWorks 2008 — новые возможности
911
нужно создавать несколько оснований, каждое из которых определяет
движение в одном из направлений.
В зависимости от типа анализа движения могут быть следующими:
• для модального анализа можно назначать перемещения, скорости и
ускорения как функции времени;
• для гармонического анализа или расчета при случайных воздействиях
те же самые параметры, но в зависимости от частоты возбуждения.
Рис. П1.36. Закон движения основания
Следующие типы закреплений не могут служить основой для создания
Возбуждения выбранного основания: Симметрия (Symmetry); Шарнир
(Hinge); На цилиндрической грани (On cylindrical face) и На сферической
грани (On spherical face).
Панель Возбуждение выбранного основания применительно к модальному
анализу показана на рис. П1.37.
♦ Начальные условия (Initial conditions)— панель для определения
начального состояния (оно соответствует моменту времени 0) выбранных
объектов модели: тел, граней, кромок и вершин. Начальные условия могут
назначаться для модального и нелинейного динамического анализа. В
качестве начальных условий могут выступать:
• Перемещение (Displacement);
• Скорость (Velocity);
• Ускорение (Acceleration).
912
Приложение 1
М^жт*жШжшвж^шт$»Х.
<♦* Перемещение
<~ Скорость
С Ускорение
I sf [ограничение-1
i г-
. R Предв. просмотр
ill F
№1°
}^}|?
[
JSJni
ii*
Zlm
1 Использовать кривую времени 1
i 1» лилейный f '
С*4 Кривая
Рис. П1.37. Панель Возбуждение выбранного основания
Эти величины могут назначаться в ортогональной и цилиндрической
системе координат.
Панель Исходные условия применительно к модальному анализу
показана на рис. П1.38.
Помимо демпферов локальных, система может обладать глобальным
демпфированием. Оно назначается в панели Глобальное демпфирование (Global
Damping) (рис. П 1.39), вызываемой из контекстного меню пиктограммы
Демпфирование (Damping). Программа представляет следующие варианты
для описания глобального демпфирования:
♦ Модальное демпфирование (Modal damping), когда для каждой
резонансной формы назначается коэффициент демпфирования. Его
физический смысл — отношение коэффициента вязкого демпфирования системы
к его критическому значению. В COSMOSWorks используется только
линейный демпфер, предполагающий линейную связь между силой
сопротивления и скоростью. Критическое демпфирование — наименьшая
величина демпфирования, при которой система возвращается в исходное
состояние без осцилляции. Величина коэффициента демпфирования
варьируется от 0,01 для систем слабо демпфированных до 0,15 для хорошо
демпфированных. В справочной системе программы приводятся величины
COSMOSWorks 2008 — новые возможности
913
коэффициентов демпфирования для различных типов конструкций,
изготовленных из различных материалов. Следует учитывать, что при
увеличении числа мод, задействованных в модальном анализе, информацию
в таблице Коэффициенты демпфирования нужно обновить вручную.
В противном случае программа прекращает расчет с выдачей
соответствующего предупреждения.
жшадшшшк
4? Перемещение
С Скорость
С* Ускорение
|[
[Компоненты, тела, грани, кромки или вершимы в качестве исходного условия. |
TL
Ф Предв, просмотр
Н |»
ISJI°
№..
№
i}
zS*
zim
....... л*
Рис. П1.38. Панель Исходные условия
Разновидностью модального демпфирования является композитное
модальное демпфирование, когда демпфирующие свойства системы
определяются на основе коэффициента вязкого демпфирования материала. Он
назначается в поле MDAMP в окне Материал (Material) (рис. П 1.41).
Примеры этих коэффициентов также имеются в справочной системе.
Программа автоматически рассчитывает коэффициенты демпфирования, если
активизирована опция Расчет материального демпфирования1 (Compute
from material damping).
Рэлеевское демпфирование2 (Rayleigh damping), когда матрица
демпфирования рассчитывается как линейная комбинация матрицы масс и матри-
1 Корректный перевод Compute from material damping — Рассчитать на базе демпфирующих
свойств материала.
2 Иногда Рэлеевское демпфирование называют пропорциональным демпфированием.
914
Приложение 1
цы жесткости системы. Коэффициенты при матрице масс Alpha
Coefficient и жесткости— Beta Coefficient назначаются в панели рис. П1.40.
Отметим, что в нелинейном динамическом анализе глобальное
демпфирование реализовано только в варианте рэлеевского демпфирования.
'ШтМ^МШ.ШШ^Ш^ШВ,
<? Морально* демпфирование
Г" Расчет матвриая»ного демпфирования
С Демпфирование по Релею
Рис. П1.39. Панель Глобальное демпфирование
в варианте модального демпфирования
ХШ^^М^.ШШФШШЩЩ:,
Матрица демпфирований**
- Альфа [М] +Бета [К]
IJ-матриц* массы
матрица жесткости/' .
С Модальное демпфирование
<? Демпфирование ловлею
а
0.02
0.04
Рис. П1.40. Панель Глобальное демпфирование
в варианте демпфирования по Рэлею
Следующий шаг — определение объектов, для которых будут фиксироваться
результаты и номенклатура этих результатов. Для этого предназначена
панель Параметры результатов (Result Options) (рис. П1.42), вызываемая из
контекстного меню одноименной пиктограммы. Как видно, можно строить
графики для перемещений и скоростей, напряжений и сил реакции. Что
касается перемещений и скоростей, то они могут рассчитываться как относитель-
COSMOSWorks 2008 — новые возможности
915
но неподвижной системы координат, так и относительно движущегося
однородного основания.
GXY [Модуль сдвига 7.7О0000Ше+010;Н/г;::
DENS J кассовая плотность 8000000133 "] kg ||
SIGXT I Предел прочности при растяжении : 654999998.5 \МШ
SIGXC [Предел прочности при сжатии ;..^/rilll
SIGYLD [Пределтекучести '__" ■^^00000.9^ (jN/r| j
ALPX I Коэффициент теплового расширения j,3 J^Q8!L». ««Jt^ll
КХ Теплопроводность ; 16.3 ;.У^||1
С ? Удельная теплоемкость 499.999993 ;МЙВ1
MDAMP Коз ФФициент^материального демпфирования 0.0005 N А Щ
lilfll
Рис. П1.41. Фрагмент окна редактора свойств материала в динамическом анализе
Шшштшшшят,
С Для всех шагов решения
(* Для указанных шагое решения
Р* Смещения и скорости
& Относительный
С Абсолют
Р Напряжения
Р* £еакцяя
Щ|Щ8^^^^^^^^^^Я
ШагШ
Начало; j i
Конец; j 3000
Инкрементj 5
. Ш
•J%J
№
рдояЗ
ftOMfcW
|T04K«ll '^
||Точкв2
Ьбершина<1>
<•" Все режимы
Г" .Выбранные рвжиг^ы
Рис. П1.42. Панель Параметры результатов в варианте модального демпфирования
Для расчета на случайные колебания можно получить Диаграмму
вероятностей состояния напряжения1 (PSD Stresses).
Результаты могут запоминаться для выбранных точек и вершин. Если
таковые отсутствуют в списке Расположение графиков (Locations for graphs), то
1 Корректный перевод Power spectral density — Спектральная плотность мощности.
2 Корректный перевод Locations for graphs в данном контексте — Объекты для графиков.
916
Приложение 1
графики будут строиться для всех узлов (что радикально увеличит объем
хранимой информации). В любом случае число сохраняемых шагов не может
превысить 10 000.
В этой панели можно также уточнить, какие собственные формы будут
участвовать в модальном анализе — другие виды линейного динамического
анализа учитывают все назначенные моды. Для этого переключатель Выбор
режима1 (Mode selection) устанавливается в положение Выбранные режимы
(Selected modes), а затем в окне Фильтр выбора режима (Mode Selection
Filter) выполняются очевидные манипуляции (рис. П1.43).
Если анализ создавался не на базе частотного, а самостоятельно, то нужно
определить контактные условия. Во всех типах линейного динамического
анализа поддерживаются только условия типа Связанные (Bonded) и
Свободно (Free). Контакт с переменной границей, несмотря на его формальную
доступность для модального анализа, не моделируется. Однако эта модель
практически в полном объеме доступна в нелинейном динамическом анализе.
После запуска на расчет программа сначала рассчитывает собственные
частоты (если таковые не доступны из предыдущих вычислений), а затем
пошагово отслеживает историю функционирования модели.
Фильтр выбора режима
^ "'
/_, >
>: '-
*♦ ч
Д' v
V <
У"
.;-4
4*'*
г -\
v *
';*
$'?'
, *
*,
>
; *
->,
'' ^ у
:^'±^iS
МДОЙ*?|$ш^ОД
:Й
В
W-
R
К
R
И
Щ
гу[
Wj
Рй
'Я
а
к
е
е
и
88 *
Е
jb
1118584
2 72.418
3 10233
4 102.33
5 10233
6.102.36
7 282.08
8 282.08
3 282.09
10 282.15
11 553 24
12 553.28
13 553.31
14 553 4
15 699.68
16 708.76
17 857.6
18 857.61
19 857 61
V.Y* пГ/п^п
vч<1:^^::^#ЖУ^ Ы&Шт";''
щ4;\мты^у;
10 74199
1 2669*009
: 2.7553е-009
! 2.4729*009
8.344*011
0.0011092
;9.6183в-010
12.102*009
; 1.2597*010
: 0.00027901
: 1.462*010
15.8384*010
: 1.9118*010
; 0.00010823
3.1248*010
; 1.1505*005
: 6.0423*009
1.4064*009
2.7721е-010
nf^rrnfe.iUi^Ul
l.vl *»»ЙЙ» . ..
1 5656*009
0 99598
3.3718е-007
6.3022в-009
1.0947е-007
5.5178в-011
: 3.9372в-008
; 5.6414е-011
1.9017*008
: 2.5381 е-012
: 4.9357е-008
: 5.588*012
12.0165*008
; 1.0253*012
;1.7621е-005
: 3.9329*011
: 3.3875*009
15214*012
2.7438е-013
<n&,„iL»u, .■■■i.i.f.M,rt..;...M...f...
f*c&fl*j '', - +\
^ ' - . Z#*ec*№' - \
3 5623*013
2 5238*010
3.9207*005
0.0029462
5.3331*007
8.9225е-009
9.1919*009 <
1.0005*005
9.0202*012 г
3.706в-010 Д
7.2577*008 ":
0.0017836 ''
4.2093е-009
1.9335*008 J
5.1866*006
0.99177
1.4029*009 -J
5.4757*008
71453е-009 jH
^ -г \* ±р
Рис. П1.43. Назначение собственных форм, участвующих в модальном анализе
1 В данном контексте корректный перевод термина Mode — мода, или собственная форма.
COSMOSWorks 2008 — новые возможности
917
Наиболее показательными для модального и гармонического анализа
являются кривые отклика для выбранных (в явном виде — в панели Параметры
результатов или в неявном — если эта процедура проигнорирована) узлов
и/или точек. Для этого из контекстного меню пиктограммы Результаты
(Results) (рис. П 1.44) подаем команду Определить график реакций (Define
response graph). Затем в панели График журнала времени (Time History
Graph) выбираем интересующий нас объект, желаемый результат и
определяем режим его отображения (рис. Ш.45).
.^ Ог*^^
РОНМЯ+tt . \ "■ ',, '','
^ эпюры ка* файлы JP£S,"
Рис. П1.44. Контекстное меню пиктограммы Результаты
применительно к модальному анализу
Вертикальное перемещение точки в центре подвешенной плиты (она
имитирует некий прибор с достаточно жестким корпусом) в зависимости от
времени показано на рис. П1.46. Эквивалентные напряжения в той же точке, но с
уменьшенным диапазоном времени— он также настраивается в панели —
показан на рис. Ш.47, график скорости— на рис. П 1.48, ускорения— на
рис. П1.49. На последнем графике видно, что даже при установленном
параметре Разрешение промежуточных точек (Resolution of intermediate points)
равным единице (то есть график строится на основе всех шагов времени)
кривая не является гладкой. Это говорит о том, что следовало бы назначить
меньший шаг по времени для расчета.
Как видно, динамическая составляющая функций весьма невелика— это
следствие значительной жесткости подвески в вертикальном направлении.
918
Приложение 1
■Шшййш*1ш^
(• Предопределенные положения
Ш Всл»у-,яы
Вершина 2 (Узеп 49)
Вершина 3 (Узел 62)
Вершина 1 (Узел J
{Вершина 4 (Узел 196)
Точка4 (Узел 2602)
ТочкаЗ (Узел 2673)
Точка 1 (Узел 3144) л
Тли»0А? Л/ч* л ^41СЛ «Л
;ОсьХ:
(Йр»М<ч
; Ё| (секунды
! Ось V:
[Перемещение
• |^ [иг:Пере«ещение Z
| р| Н
3
d
.. *|
J
zl
Ш1ШШШШШШШШШ1Шй!
ШШШШШ^Ш^^ШШшШ?
<•" Полный:
Г" Определенный:
шшшшшшш
ШшШШсШШЁ
Л com
-•* г;' "'"
II-
А
Рис. П1.45. Отображение результата в назначенной точке
> График журнала времени
№Ш
штттт^^жжт£ршт
График журнала времени
0.000040
0.000030 +
- 0.000020ff
0.0000101
0.000000
_Н |__н 1—| 1 »—| Н—I ( 1
0.00 0.60 1.20 1.80 2.40 3.00
Время (сек.)
Узел 204
3.60
iiiirii С С i]iiim*,Mam,i,M
Рис. П1.46. Кривая времени для вертикального перемещения в центре плиты
COSMOSWorks 2008 — новые возможности
919
& График журнала времени
Шмш
»ЧflpifrtoPfty-'d,-'-К,Vv:- ул^*'л::-i'<*:-'" *>:\'0:^ч:-
График журнала времени
5000.00т
_ 4000.00+
Г1
z 3000.00+
2000.00}
1000.00
0.00
1 1 1
0.00 0.04 0.08 0.12 0.16 0.20 0.24
Время (сек)
Узел 204
Рис. П1.47. Кривая времени для эквивалентного напряжения в центре плиты
А График журнала времен*
«МБ
Hug тми., i fiA f jfiffltiftn ififthmft, ■■iiifiB^iim^rtirtii1iMihfliiiiMMi1h^rtnirtinf-^liininiirMiiliim'
График журнала времени
0.00080
0.000601c
43
I 0ЛЯМ° ШлЛл"]
0.00000 +
-0.00020 +
к
flrVVV*vw^
-0.00040-*—■—'—'—►—'—'—'—'—'—'—'—'
0.00 0.06 0.12 0.18 0.24 0.30 0.36
Время (сек)
Узел 204
Рис. П1.48. Кривая времени вертикальной скорости
920
Приложение 1
> График журнале} времени
№ OP*»* №>
С Пспный:
<• Определенный:
График журнала врс| |
0.098
-384.00т
-386.00
£ -388.00+
N -390.00}
-392.00 +
-394.00
\ЛЛ/^ллл
3;
0.15
[Разрешение промежуточных точек |
t i i—> i t—►——♦—i—i
0.09 0.10 0.11 0.12 0.13 0.14 0.15 0.16 [
Время (сек) J
Рис. П1.49. Кривая времени вертикального ускорения
Кривая времени для перемещения в направлении X показана на рис. П1.50.
В отличие от графиков функции для вертикального перемещения, этот график
является также и абсолютной скоростью, поскольку основание, приводящее в
движение систему, перемещается только в вертикальном направлении.
> График журнала времени
ВЕЯ £31
График журнала времени
0.0030т
_ 0.0020 +
Е
Е
0.00101
0.0000
:/""V : :
> I I I t I I
I > I
0 00 0.60 1.20 1.80 2.40 3.00 3.60
Время (сек)
Узел 204
Рис. П1.50. Кривая времени продольного перемещения
COSMOSWorks 2008 — новые возможности
921
Подобно нелинейному анализу, кривые отклика можно построить и другим
способом. Отобразить диаграмму интересующей функции, затем подать
команду Зондирование (Probe) и в соответствующей панели нажать кнопку
График ответа (Response).
В номенклатуру результатов входят не только графики, но и диаграммы
функций, соответствующие произвольному шагу расчета. Например,
эквивалентные напряжения на "верхней" стороне пластин и на поверхности плиты
на фоне деформированного состояния показаны на рис. П1.51 в некий момент
времени.
Шкала деформации: 10
Шаг эпюры: 21 время: 0.101 Секунды Щ/f
4.21е+007
3.74е+007
3.27е+007
2.81е+007
2.34е+007
1.87е+007
1.40е+007
9.35е+006
4.68е+006
0.00е+000
Рис. П1.51. Эквивалентные напряжения для выбранного шага расчета
Гармонический анализ. Гармонический анализ (Harmonic Analysis)
выполняется, когда модель подвергается действию гармонических нагрузок,
изменяющихся по закону:
Р = A sin (со t + ф),
где А — амплитуда; со — частота; /— время, а ф— фазовый угол. По сути,
это есть расчет конструкции под действием вынужденных колебаний.
В принципе, подобная задача может быть решена посредством процедуры
модального анализа, поскольку результаты также обладают свойством
периодичности.
Оригинальные (по отношению к модальному анализу) настройки
вычислительной процедуры собраны в две вкладки окна Гармонический (Harmonic).
Первая вкладка— Гармонические параметры (Harmonic Options)
(рис. П1.52). В ней присутствует единственный раздел Пределы рабочей
922
Приложение 1
частоты (Operating frequency limits), в которой присутствуют два поля:
Нижний предел (Lower limit) и Верхний предел (Upper limit), определяющие
границы анализируемого диапазона частот. Этот диапазон желательно
устанавливать таким, чтобы он покрывался диапазоном учитываемых
собственных частот системы.
Рис. П1.52. Анализируемый диапазон частот
Вторая группа настроек собрана на вкладке Дополнительно (Advanced)
(рис. П1.53):
♦ Количество точек для каждой частоты (No. of points for each
frequency) — число точек, определяющих частоты, при которых будет
рассчитываться отклик для каждой моды.
♦ Ширина полосы для каждой частоты (Bandwidth around each
frequency) — доля интервала от анализируемой собственной частоты до
соседних (предыдущей и последующей), в котором будут располагаться
точки для расчета.
В документации сообщается, что если соседние моды слишком близки, то
система может автоматически уменьшить число промежуточных точек. Для
первой моды дополнительные точки слева от нее отсутствуют. Для высшей
(из анализируемых) моды интервал расчета предполагается симметричным.
Если окажется, что анализируемый интервал шире, чем высшая собственная
частота, включенная в анализ, то указанное число точек используется для
определения дополнительных частот для анализа.
♦ Интерполяция (Interpolation) — закон, определяющий расположение
точек расчета частоты относительно собственных частот. Предлагается
Логарифмический (Logarithmic), когда плотность точек повышается по мере
приближения к собственной частоте, и Линейный (Linear).
COSMOSWorks 2008 — новые возможности
923
Рис. П1.53. Структура частот, используемых для расчета отклика
Функциональность при описании демпфирующих свойств для
гармонического анализа идентична доступным для модального расчета.
В качестве нагрузки (а в гармоническом анализе в этом качестве могут
выступать амплитудные значения сил и давлений в зависимости от частоты, а
также амплитуды перемещений, скоростей и ускорений для выбранного или
однородного основания) назначаем, как и в предыдущем примере, ускорение
однородного основания (рис. Ш.54).
В отличие от такой же панели в модальном анализе (рис. П1.35), здесь
Кривая времени заменена на Кривую частот1 (Frequency Curve). В
одноименном окне присутствует таблица частот, содержащая частоты, с которыми
действует нагрузка, а также коэффициенты, являющиеся множителями для
назначенной в родительской панели величины нагрузки.
Однако если оставить в группе Изменение частоты2 (Variation with
frequency) активным значение Linear3 (Линейный), предполагая возбуждение
во всем диапазоне частот одинаковым, то, используя команду График
реакций, можно получить, например, зависимости для максимального
перемещения и скорости в вертикальном направлении для точки из числа ранее
определенных (рис. П1.55 и П1.56). Как видно, это стандартный вид амплитудно-
частотных характеристик (АЧХ) системы.
Как и для случая модального анализа, можно получать диаграммы
распределения функций: перемещения, скорости, деформаций, напряжений и т. д. для
1 В отечественной литературе аналогом для Frequency Curve является Частотная функция.
2 Корректный перевод Variation with frequency в данном контексте — Изменение в
зависимости от частоты.
3 В справочной системе программы это положение переключателя называется Постоянное
(Constant).
924
Приложение 1
l Возбуждение будет применено т есен
I гасТораотоложенияи, ограниченным в
? определенных направлениях.
С Перемещение
Г* Скорость
{* Ускорение
Рис. П1.54. Панель Возбуждение однородного основания для гармонического анализа
выбранной частоты или их минимумов/максимумов/абсолютных максимумов
для рассматриваемого диапазона частот.
Анализ случайных колебаний. Анализ случайных колебаний (Random
Vibration Analysis) используется для изучения реакции системы на
недетерминированные нагрузки. В этой модели нагрузки имеют статистический характер и
описываются функциями спектральной плотности воздействия (их
размерность — отношение квадрата величины, деленное на размерность частоты)
в зависимости от частоты. Решение задачи выполняется для выбранного
числа частот (рис. П1.57) в назначенном диапазоне (рис. П1.58).
COSMOSWorks 2008 — новые возможности
925
> График реакции
mmm\
*»яа^,^^
График реакций
0.25т
I 0.20+
| 0.15+
| 01°
У 0.05т
0.00
i ! №
: : У Г
-•—i \ \ i > i i i—н——•—i
0.00 150.00 300.00 450.00 599.99 749.99
Частотный (Гц)
Узел 204
Рис. П1.55. АЧХ для вертикального перемещения в центре плиты
График реакций
нее
^т^Щ^^^ЖМ^^МЖШ:.^:;^ Ш'Ш
График реакций
1000.00
800.00
600.00
400.00
200.00
ft
у
0.00 * ' '<' '«' '—i—i—'—■—<—•—►-
0.00 150.00 300.00 450.00 599.99 749.99
Частотный (Гц)
Узел 204
Рис. П1.56. АЧХ для вертикальной скорости в центре плиты
При расчете случайных колебаний к рекомендации учитывать такое
количество собственных частот, которые покрывают 80% коэффициента массового
участия, подбирать параметры так, чтобы рассматриваемый диапазон частот
покрывал весь спектр возбуждающих нагрузок.
926
Приложение 1
' I jfc'E^jEftfr^ 2007УЛРИЛ '^Qj >^{j
VHrtmnW/rtn.n^.KHV.Wn.Y.WlW^^ %,тШ}<,.**Ш,,,т rt...,...,riHrtlWljr,!M.,Wlf I
т . «ШШ.М.... .,1 .i.fiir Г.!' ,i ГЖ птмУиит.^п... nn.ninmnininfiiMirnf.i ■■ Ги.мГ,! и .i.ini ih.mi. .if. I
Рис. П1.57. Назначение числа частот, участвующих в расчете на случайные колебания
Одновременно с определением диапазона анализируемых частот на вкладке
Параметры случайного колебания (Random Vibration Options) окна
Случайное колебание (Random Vibration) нужно определить Число частотных
точек (Number of frequency points) — число промежуточных точек,
используемых для решения между двумя соседними частотами, тип и параметры
Корреляции (Correlation), определяющей связь между нагрузками, включая
Возбуждение основания. Возможные варианты:
♦ Полностью коррелированные (Fully correlated)— все нагрузки
полностью коррелированны;
♦ Полностью некоррелированные (Fully uncorrected) — все нагрузки
полностью некоррелированны;
♦ Частично коррелированные (Partially correlated) — степень корреляции
определяется соотношением между расстоянием между узлами и
назначаемыми Внутренним радиусом (Inside radius), где они полностью
коррелированны, и Внешним радиусом (Outside radius), за пределами которого
они полностью некоррелированны. В промежутке между радиусами
степень корреляции изменяется линейно.
На вкладке Дополнительно (Advanced) (рис. П1.59) назначаются:
♦ Метод (Method) — метод интегрирования, который может принять
значения: Стандартный (Standard)— более точной, но требующий больших
COSMOSWorks 2008 — новые возможности
927
ресурсов, и Приблизительный (Approximate) — требующий меньше
времени, но игнорирующий взаимное влияние мод и предполагающий
постоянство спектральной плотности энергии возбуждения в окрестности
каждой моды.
Рис. П1.58. Параметры диапазона анализируемых частот
♦ Порядок интегрирования методом Гаусса (Gauss integration order) —
число точек Гаусса при расчете спектрального отклика.
♦ Параметр (Biasing parameter)— определяет расположение
вспомогательных точек относительно собственных частот. Если величина больше
единицы, то точки смещаются к собственной частоте. Если величина равна
единице — они располагаются равномерно между частотами. Если его
величина, а также Число частотных точек (Number of frequency points)
равны нулю, то система автоматически генерирует число точек и параметр
смещения в зависимости от коэффициента демпфирования для первой
частоты.
♦ Коэффициент отсечения между частотами (Cross-mode cut-off ratio) —
определяет, при каком соотношении частот будет игнорироваться
корреляция между ними.
928
Приложение 1
Случайное колебание
ДО
%; f|Стандартный JjjjJ ^ »>s ~£ ^j
/?iv-^—^' "ип^м,:/ - лx,;;V-4 ^
10000000000 м& Л# #'
^'^^t К У г-.'
Рис. П1.59. Расширенные настройки анализа случайных колебаний
Возбуждение однородного основания
РврШШШШ
Г* Переиещенио
Г", Скорость
I? Ускорение
- F Пред», просиотр
Рис. П1.60. Назначение параметров возбуждения
применительно к анализу случайных колебаний
COSMOSWorks 2008 — новые возможности
929
В качестве возбуждающей нагрузки можно использовать спектральную
плотность перемещения, скорости и ускорения. Эти параметры назначаются в
панели Возбуждение однородного основания, вид которой применительно к
данному типу анализа показан на рис. П1.60. Кривая спектральной плотности
имеет постоянные компоненты вдоль направлений — они помещаются в
поля, присутствующие в группе PSD#, а также переменную — в виде кривой,
определяемой таблицей. Если для параметра Изменение в зависимости от
частоты (Variation with frequency) выбрать значение Линейный1, то
возбуждение будет предполагаться однородным во всем диапазоне анализируемых
частот. Положение Кривая (Curve) позволит выбрать библиотечную кривую
или создать собственную таблицу для кривой спектральной плотности (с
учетом определенных ранее множителей).
В качестве результатов выступают кривые отклика— пример для квадрата
вертикального и горизонтального перемещения центральной точки плиты
показан на рис. П1.61 и Ш .62, а также диаграммы среднеквадратичных
перемещений, напряжений, деформаций и вероятностные оценки для каждой
частоты.
График реакций
0.00060-
0.00050-
£ 0.00040-
Г»
| 0.00030-
^ 0.00020-
о.ооою-
о.ооооо-
0.I
Узел 204
Рис. П1.61. Кривая отклика вертикального перемещения на возбуждение основания
1 Здесь, как и в гармоническом анализе, это положение переключателя должно называться
Постоянное (Constant).
ц.
....!.[
ill
: ; 1
!/.').
..!..
Р^н 1 1 1 Г—I > »
30 200.00 400.00 599.99 799.99 999.99
Частотный (Гц)
930
Приложение 1
График реакций
№Ш
^^^^j^^^^f^^h^^^ \
График реакций
0.0000040т
0.0000030+
| 0.0000020 +
0 0000010 +
0.0000000
+ ~*Н« О ФЛ—<Н—<И 4 I I
0.01 1.91 3.80 5.70 7.60 9.50 11.39
Частотный (Гц)
Узел 204
Рис. П1.62. Кривая отклика горизонтального перемещения на возбуждение основания
П1.2.3. Динамический нелинейный анализ
Нелинейный динамический анализ (Nonlinear Dynamic Analysis)
выполняется, когда зависящие от времени нагрузки сочетаются с нелинейными
эффектами — как геометрической, так и физической нелинейностью. Метод
основан на прямом интегрировании уравнений движения, который не
сопровождается разложением по собственным частотам.
Нелинейный динамический анализ создается посредством той же команды,
что и нелинейный, но с последующим выбором варианта Динамический
(Dynamic) (рис. П1.63).
В качестве управляющей процедуры для данного анализа доступен только
Метод сил (Force control), поэтому такие объекты, как, например, разупроч-
няющиеся пластические системы или прошедшие через точку потери
устойчивости конструкции, не могут быть смоделированы.
Абсолютно большинство других настроек нелинейного динамического
анализа схожи с действующими в расчете линейном. Прямой связи с частотными
расчетами нет, однако параметры временного шага (здесь время является
физическим) следует назначать так, чтобы они позволили описать все
динамические эффекты. То есть минимальный шаг должен быть в несколько раз
меньше минимального учитываемого периода собственных колебаний. На-
COSMOSWorks 2008 — новые возможности
931
чальный шаг желательно назначать так, чтобы он коррелировал с частотными
характеристиками.
Jim^Sim
ё* График реакций
Исследовать напряжения,
смещения, нагрузки для
компонентов без нелинейного
материала (например, резина)
^;;^6тЧйФ;д;; '7 *: ^<,
ШШШ
-,-''- - -\ '-' <■&
| Упражнение 1
SB
II
Нелинейное
Ш
,инамическии
Рис. П1.63. Создание
нелинейного динамического
анализа
Нелинейная реакция
100.00т
_ 80.00}
I 60.00
0.00
0.00 0.20 0.40 0.60 0.80 1.00 1.20
Время (сек)
Узел 204
0.820232,110.317
Рис. П1.64. Отклик средней точки
для нелинейного анализа
Функциональными отличиями нелинейного динамического анализа от
линейного в варианте Модальный анализ является возможность учитывать
контактные граничные условия с переменной (как уменьшающейся, так и
увеличивающейся) границей контакта. Как упоминалось, в данном типе
анализа возможно только Рэлеевское демпфирование (и, разумеется, отсутствие
демпфирования), а возбуждение однородного основания функционирует
только в глобальной системе координат.
В качестве примера рассмотрим поведение модели подвески, но при действии
однородного возбуждения на зафиксированных объектах в продольном
направлении с величиной 0,5 g. Демпфирование отсутствует. Зависимость
перемещения средней точки плиты как функция времени показана на
рис. Ш .64, а распределение перемещений — на рис. П1.65.
Интересно сравнить этот результат с полученным посредством процедуры
модального анализа, где предполагается независимость жесткости от
деформаций, а также отсутствие влияния изменения формы на величину и
направление нагрузки (рис. Ш.67). Как видно, нелинейный расчет дает несколько
932
Приложение 1
больший период колебаний при большей же амплитуде (рис. П 1.66). При
этом нейтральное положение шарнира при установившихся колебаниях в
нелинейном расчете соответствует почти в два раза большему перемещению.
URES (mm)
Шаг эпюры: 400 время: 0.4 Секунды
Шкала деформации: 1
Рис. П1.65. Распределение перемещений для линейного анализа
График журнала времени
шж
-ш%
ШЫШ\
^х&Щ
График журнала времени
60.00т
| 40.00
§5 20.00+
0.00
/
f:
l\
У
; ■ V , ; , ;
0.00 0.20 0.40 0.60 0.80 1.00 1.20
Время (сек)
Узел 204
Рис. П1.66. Отклик средней точки для линейного анализа
Выводом из данного, весьма лаконичного, примера является то, что при
подозрениях на наличие у динамической системы геометрической
нелинейности следует попробовать применить нелинейную процедуру. Эти
рекомендации вполне аналогичны сделанным для расчета на устойчивость.
COSMOSWorks 2008 — новые возможности
933
Шаг эпюры: 65 время: 0.321 Секунды
Шкала деформации: 1 URES (mm)
7.29е*001
. 6.48е+001
, А. 5.67е+001
|4.86е+001
4.05е+001
3.24е+001
2.43е+001
1 62е+001
8.10е*000
1 00е-030
Рис. П1.67. Распределение перемещений для линейного анализа
П1.3. Изменения в реализации анализов
определенных типов
П1.3.1. Расчет коэффициентов видимости
для оболочек
В тепловом анализе с учетом излучения усовершенствован алгоритм
расчета Коэффициентов видимости (или коэффициентов проецирования) (View
Factors) для оболочек. В предыдущей версии рекомендовалось избегать
тепловых расчетов с учетом излучения для поверхностных/гибридных
моделей. Тому было две причины. Первая — непропорционально большое (более
90 процентов от общих затрат) время, требуемое для этапа определения
коэффициентов проецирования. Вторая, не решенная и в последней версии —
неучет изменения температуры по толщине. В данный момент она
предполагается постоянной. Это ограничение может оказать, в частности, серьезное
влияние на результат термоупругого расчета относительно толстых оболочек
с малым коэффициентом теплопроводности.
П1.3.2. Участие грани в теплообмене излучением
одновременно с внешней средой и с гранями
В более ранних версиях1 грань, несмотря на наличие в панели Излучение
(Radiaton) опций Поверхность с поверхностью (Surface to surface) и От-
1 Например, в COSMOSWorks 2007 SP 4 новая функциональность также доступна.
934
Приложение 1
крыть систему (Open system), могла участвовать в теплообмене излучением
или с другими гранями, или с окружающей средой. То есть, если грань с
типом взаимодействия Поверхность с поверхностью "видит" какие-либо грани
с таким же условием, то оно работоспособно, а с внешней средой грань не
взаимодействует. В противном случае она обменивается энергией только
с окружением.
В версии 2008 года грани могут обмениваться энергией как со средой, так и
с гранями, для которых назначено соответствующее условие.
Элементарный пример для понимания данной сущности приведен на
рис. П1.68. Это два параллелепипеда, к верхней грани одного из них прило-
;^(Ш*Ш$ШШ!Ш№Ш?-
• ж
ШШШШШШ
** ш
• п
' г* у *•■
Р Открыть систему
П 3
С* Поверхность с
окружением
Ф Поверхность с
поверхностью
«
Грань<!>
F? Преде, просмотр
3
Ш
р
I»
h
If.
Открыть сист*к/
*JIK
v«-v^>'-/"J г„*$фи>
d
)
Рис. П1.68. Граничные условия в модели теплообмена излучением
COSMOSWorks 2008 — новые возможности
935
жена некоторая мощность. Одна из его боковых граней обладает свойством
Поверхность с поверхностью, при этом опция Открыть систему
отключена. Параллельная грань другого параллелепипеда может обмениваться
теплом как с гранями, так и с окружающей средой, имеющей температуру О К.
Получается, что съем тепла с системы может происходить только через эту
грань. Если бы она не могла одновременно обмениваться теплом с гранью
нагреваемого извне тела, то температура второго параллелепипеда должна
была бы стать равной температуре среды, а первое тело— разогреться до
бесконечности, вызвав тем самым остановку расчета.
Temp (Celsius)
4.17е+003
3.74е+003
3.31е+003
2.88е+003
2.46е+003
2.03е+003
1.60е+003
1 17е+003
7 40е+002
3.12е+002
If3!
п
п
Ь
Рис. П1.69. Поле температур — полный диапазон температуры
Temp (Celsius)
_ 3.90е+002
. 3.81е+002
,. 3.73е+002
3.64е+002
3.55е+002
3.46е+002
3.38е+002
3.29е+002
3.20е+002
3.12е+002
v^4
Рис. П1.70. Поле температур — усеченный диапазон температуры
936
Приложение 1
Действительный результат показан на рис. П1.69, где температурная шкала
содержит весь имеющийся в системе диапазон температуры, и на рис. П1.70,
где верхняя граница уменьшена, чтобы повысить контрастность диаграммы
на принимающем тепло теле. Получающиеся градиенты температуры весьма
велики, поскольку тепловые характеристики тел соответствуют
поликарбонату.
П1.3.3. Нелинейный анализ
с учетом больших деформаций
Декларируется повышение точности и улучшение сходимости для
нелинейного анализа с учетом больших деформаций.
П1.3.4. Процедуры экспорта результатов
в другие программы МКЭ
Расширена номенклатура граничных условий, условий контакта,
виртуальных соединительных объектов, транслируемых в NASTRAN и ABAQUS.
Подробности описаны в справочной системе программы.
П1.3.5. Функциональность балочных моделей
Распознавание твердотельных объектов как балок. Программа
распознает в качестве балок/стержней тела, построенные командами:
Вытянутая бобышка, Зеркальное отражение, Массив, Импортированная
геометрия. Программа не распознает тела, в истории построения которых
присутствуют булевы операции. Если объект имеет уклоны, или тело является
ступенчатым, то при идентификации балок или соединений возможны
неоднозначности.
Отображение нейтральных осей. Интерфейс программы позволяет
отображать нейтральные оси балок/стержней, которые она рассчитывает
автоматически. Соответствующая опция— Отобразить нейтральную ось (Display
neutral axis) добавлена в панель Редактировать соединения (Edit joints)
(рис. П 1.71).
Отображение направлений, используемых для расчета и отображения
результатов. Отображение компонентов нормальных напряжений для балок
выполняется относительно некоторых направлений в сечениях. В версии
2008 года их можно отображать для каждой балки. Для этого в панели
Настройка (Settings) интересующей нас диаграммы, вызываемой командой
Параметры (Settings), нужно активизировать опцию Отобразить направления
COSMOSWorks 2008 — новые возможности
937
балок (Show beam directions). На каждой балке система рисует триаду, где
красная стрелка направлена вдоль оси, зеленая — вдоль положительного
направления 1, а синяя — вдоль 2 (рис. П1.72).
ШШшШжШётЖ-
Соединение 1
Соединение 2
Использовать
Г* модифицированное соединение
при обновлении
R Отобразить нейтральную ось
р Радиус индикатора шарниров по
умолчанию
р Установленный вручную радиус
индикатора шарниров
е
р Преде, просмотр индикатора
соединений
Рис. П1.71. Отображение нейтральных осей
Приложение сил по длине балки или в справочных точках. В
предыдущей версии силы прикладывались только в соединениях. Теперь их можно
прикладывать в справочных точках, которые должны лежать в пределах
балки (подробности см. в разд. П1.4.1) (рис. П1.73), а также в виде силы,
приложенной к балке или распределенной (относительно единицы длины)
нагрузки.
Вывод списка сил, действующих на балку, и напряжений, в ней. Для
отображения этих характеристик нужно из контекстного меню папки
Результаты (Results) подать команду Список сил балки (List beam forces and stresses).
^.ш^ишвш
*— Поместить модель на
1 деформированную форму
{полупрозрачный (aw;;* деШ
t
»у Отобразить направления
балок
Изгиб Ms/Ss(NAnA2)
2.001е+006
2.001 е+006
2.001 е+006
2.001 е+006
2.002е+006
2.002е+006
2.002е+006
2.002е+006
2.002е+006
2.002е+006
2.003е+006
2.003е+006
2.003е+006
Рис. П1.72. Отображение направлений сечений
11000 ЯМ*»
V Реьерс направления
Рис. П1.73. Назначение силы в точке балки
COSMOSWorks 2008 - новые возможности
939
Затем в одноименной панели в переключателе Список (List) (рис. П1.74)
нужно выбрать отображаемые характеристики: Силы (Forces) или
Напряжения (Stresses). Результаты отображаются в окнах Список сил (List beam
forces and stresses) (рис. П1.75) и Список напряжений (List beam stresses).
Рис. П1.74. Определение состава результатов для балки
Рис. П1.75. Силы, действующие в балке
Построение эпюр усилий в балках/стержнях. Строятся эпюры крутящего и
изгибающих (рис. П1.77) и моментов, перерезывающих сил для балок, а
также осевой силы для стержней. Выполняется по команде Определить
диаграмму балки (Beam diagrams), которая вызывает панель Диаграмма балки
(Beam Diagram) (рис. П1.76).
При отображенной диаграмме доступна команда Зондирование (Probe),
после подачи которой можно указывать на структурные элементы и получать
численные значения силовых факторов во всех узлах конечных элементов,
аппроксимирующих указанную балку/стержень, а также строить график
изменения силового фактора по длине объекта.
940
Приложение 1
Ш [Момент в Направлении 1 JJJ *
j Осевое усилие
Сипа сдвига ь Направлении 2
Момент в Направлении i
Момент в Направпении 2
Вращающий момент
П F
"3
^^^^ШШ^Ш^ЩШ-ШШ^^^^
<?Все
С Выбрать
I
Рис. П1.76. Определение отображаемой диаграммы усилий
Рис. П1.77. Эпюра изгибающего момента
Поддержка криволинейных балок. Допускаются криволинейные балки/
стержни, состоящие из сегментов дуг. Разрешается сосуществование
прямолинейных и дуговых сегментов.
В качестве примера рассмотрим шайбу, показанную на рис. Ш.78. Она
построена несколько искусственным приемом — две дуги окружности
опираются на сегмент цилиндрической спирали. Это сделано потому, что объект
COSMOSWorks 2008 — новые возможности
941
Конструкция может опираться исключительно на сегменты плоских и
пространственных эскизов, состоящие из прямых и дуг. Как видно, с точки
зрения качества геометрии результат получился не вполне
удовлетворительным — при построении двух сегментов произошло закручивание профиля.
Если бы шайба строилась протягиванием прямоугольного сечения по
спирали, то геометрическая модель была бы адекватной. Однако для сопоставления
вычислительных моделей эти заготовки использовать можно.
Рис. П1.78. Шайба и эскиз для построения объекта Конструкция
Расчетная балочная модель строится вполне традиционно. Подается команда
Рассматривать все структурные части как балки (Treate all structural
members as beams), а затем создаются соединения — панель Редактировать
соединения (Edit Joints) показана на рис. ГЛ.79. При сочетании
криволинейных сегментов эскизов между собой, а также криволинейных и линейных
отрезков следует тщательно контролировать величину Индикатора шарниров
(Pinball radius), т. к. при достаточно больших его размерах в месте сочленения
сегментов могут безосновательно генерироваться конечные элементы. С
другой стороны, малый радиус требует более точного примыкания структурных
элементов друг к другу, не позволяя конструктору оставлять между ними
требуемые зазоры.
В результате алгоритм аппроксимирует каждую из дуг совокупностью балок,
расположенных вдоль хорд. Их число система определяет автоматически.
Программа также показывает узлы, которые можно использовать для
приложения нагрузок и закреплений. Результирующая сетка показана на
рис. П1.79.
942
Приложение 1
f Радиус индикатора шарниров no j
умолчанию j
| *^ Установленный вручную радиус I
индикатора шарниров |
|® j0.0001 |
| р Предв. просмотр индикатора !
| соединений j
Рис. П1.79. Формирование соединений и соответствующая сетка конечных элементов
Диаграмма напряжений, рассчитанных по Худшему сценарию (Worst case),
показана на рис. Ш .80, а диаграмма перемещений — на рис. П1.81.
Сетка конечных элементов твердотельной модели показана на рис. П1.82,
диаграмма эквивалентных напряжений — на рис. П1.83, а перемещения — на
рис. П1.84. Как видно, перемещения близки к полученным по балочной
модели, а напряжения отличаются как по максимальной величине (здесь они
больше), так и распределены по-иному. Источник отличий в том, что
балочная модель, учитывая сдвиговую податливость (и соответственно, кручение),
не содержит оценки сдвиговых напряжений, не включая их в так называемый
Худший сценарий. В него входят только нормальные компоненты, в то
время как в шайбе, особенно на удалении от концов, большую роль играют
касательные напряжения.
COSMOSWorks 2008 — новые возможности
943
Худший сценарий (1МЛпл2)
4.68е+007
4.16е+007
3.65е+007
3.13е+007
2.61е+007
2.09е+007
1.57е+007
1 OSe+007
5.35е+006
Рис. П1.80. Напряжения по балочной модели — Худший сценарий
URES(mm) 1.13e+000
9.85е-001
*• ...» г- >
8.45е-001
7.04е-001
5.63е-001
4.22е-001
2.82е-001
1.41 е-001
1.00е-030
Рис. П1.81. Перемещения по балочной модели
Рис. П1.82. Сетка конечных элементов твердотельной модели
944
Приложение 1
von Mises (N/mA2)
1.1 Зе+007
1.02е+006
Рис. П1.83. Эквивалентные напряжения по твердотельной модели
URES (mm)
Рис. П1.84. Перемещения по твердотельной модели
Впрочем, и распределение касательных напряжений на сетке с одним
конечным элементом, даже второго порядка, воспроизводится довольно адекватно.
Например, на винтовых кромках тела с прямоугольным профилем они
должны равняться нулю. Понятно, что единственный элемент в сечении, пусть и с
линейным полем напряжений, такое распределение обеспечить не сможет, а
касательные напряжения будут расти пропорционально расстоянию от центра
сечения или оставаться постоянными. Если сделать сетку более плотной, как
показано на рис. П1.85, то, как и следовало ожидать, максимальные
эквивалентные напряжения будут сосредоточены на средней линии в зоне
противоположной граням с нагрузкой и закреплением (рис. П1.86). Перемещения
несколько увеличатся (рис. П 1.87) из-за более плотной сетки, позволяющей
учесть подробности распределения деформаций в сечении.
COSMOSWorks 2008 — новые возможности
945
Рис. П1.85. Твердотельная модель — плотная сетка
von Mises (NAnA2)
1.14е+007
3.06е*005
Рис. П1.86. Эквивалентные напряжения для плотной сетки
URES(mm)
W ш.
1.36е+000
1.19е+000
1.02е+000
8.488-001
6.79е-001
5.09е-001
3.39е-001
1 70е-001
1 .ООе-030
Рис. П1.87. Перемещения для плотной сетки
946
Приложение 1
Эти наблюдения позволяют подтвердить заключения, сделанные в разд. 3.7,
о том, что, когда в балочной системе велика доля деформаций, вызываемых
кручением и поперечным сдвигом, оценка напряжений на базе диаграмм
Худший сценарий является заниженной. Данное суждение, разумеется,
никак не относятся к ферменным системам, в которых соединения являются
шарнирами, не воспринимающими кручение и перерезывающие силы.
В заключение рассмотрим раму, геометрическая модель которой показана на
рис. П 1.88. Она образована трубами и сочетает прямые и криволинейные
участки. Сетка конечных элементов с граничными условиями показана на
рис. П1.89.
Рис. П1.88. Рамная конструкция
Рис. П1.89. Сетка конечных элементов и граничные условия
Распределение напряжений на фоне деформированного вида показано на
рис. Ш.90, а перемещений— на рис. Ш.91. Отчетливо видны узлы,
нуждающиеся в усилении, причем мероприятия по увеличению прочности
должны, скорее всего, повысить и жесткость.
COSMOSWorks 2008 — новые возможности
947
Худший сценарий
Шкала деформации: 150
Рис. П1.90. Деформированное состояние и напряжения — Худший сценарий
Шкала деформации: 200
Рис. П1.91. Деформированное состояние и перемещения
П1.3.6. Сценарии проектирования
Процедура Сценарии проектирования (Design scenario) обладает
следующей новой функциональностью.
♦ Варьируемые параметры в панели Сценарий проектирования (рис. П1.92)
можно определять одним из трех способов: Линейный (Linear)— каж-
948
Приложение 1
дая следующая величина равна предыдущей плюс назначенный шаг;
Увеличение (Growth)— геометрическая прогрессия (рис. П1.93);
Распределение (Distribute) — равномерное распределение в назначенном
интервале.
Ш Сценарий проектирования - Упражнение 2
тшт
Определить сценарий проектирования -
Количество |~ {^-
сценариев. I „й
ШШЯШШЕЕ^твШШШШШШ
198 198
198'
Параметры запуска
(* Все сценарии
С Один сценарий |ч станов» al f\
ф При сбое сценария остановить и выдать сообщение об ошибке.
Рис. П1.92. Выбор параметра и команда определения его содержимого
** *<у 4''^V,#£ С ч,,^, ^Cv'i'r :-.Г *v.x ^ xV..."/- <\ ' */*£.:**>*' у Н
Рис. П1.93. Автоматическое определение содержания варьируемого параметра
♦ Можно сбросить значения выбранного параметра или установить
значения, взятые с текущей модели. Эта операция осуществляется по команде
Сбросить (Reset).
♦ Возможен обмен информацией между таблицей в Сценариях
проектирования и таблицами MS Excel и Word. Для этого используются стандарт-
COSMOSWorks 2008 — новые возможности
949
ные команды Windows Копировать и Вставить, применяемые к
выделенным фрагментам.
♦ Выбрать систему координат для отображения результатов. Эта операция
осуществляется на вкладке Местонахождение результатов (Result
locations) после включения опции Выбрать систему координат (Choose
coordinate system).
♦ Для сценариев проектирования можно, помимо прочих, отображать
следующие параметры: перемещения и нормальные напряжения в
направлении осей выбранной при создании конкретного сценария системы
координат.
П1.3.7. Поддержка больших перемещений
Опция Большие перемещения (Large displacement) работоспособна, в том
числе и в анализах, в которых присутствуют следующие объекты и условия:
♦ циклическая симметрия;
♦ односторонние пружины (в предыдущей версии поддерживались только
двусторонние пружины);
♦ соединители болты.
П1.3.8. Процедура Выявить тенденцию
Процедура Выявить тенденцию (Trend tracker) предназначена для
сохранения обработки результатов нескольких расчетов, выполненных на базе
одного и того же статического анализа. Последовательность действий
следующая:
1. Создать и выполнить статический расчет. Сформировать необходимые
диаграммы с результатами.
2. Из контекстного меню соответствующего анализа подать команду
Выявить тенденцию1 (Trend tracker).
3. Из контекстного меню пиктограммы Выявить тенденцию подать
команду Установить базу (Set baseline). После этого программа сформирует
набор графиков, отображающих изменение максимальных величин
характеристик из числа отображенных на диаграммах, а также массы системы в
зависимости от номера расчета.
4. Выполнить несколько расчетов данной модели с различными граничными
условиями, материалами или размерами. Допускается расчет посредством
Более точный перевод Trend tracker — Выявление тренда.
950
Приложение 1
Сценариев проектирования. В зависимости от настроек, алгоритм
автоматически обрабатывает результаты новых итераций или их требуется
учитывать вручную.
В контекстном меню пиктограммы Выявить тенденцию# (рис. П 1.94)
можно изменить настройки процесса или просмотреть дополнительные
результаты:
• Добавлять итерации вручную/автоматически
(Automatically/manually add iterations) — при автоматическом добавлении результаты
каждого следующего расчета автоматически учитываются в графиках тренда.
В противном случае после анализа следует использовать команду
Добавить итерацию (Add iteration);
<фг_002
J"» Настройки
yf Датчики
cjf Вертикальная_сила (-По умолчанию<Как обработанный >-)
Й ^ Твердотельные
[*}• 1$ Нагрузка/Ограничение
: Щ Сценарий проектирования
'■® Журнал тен Добавлять итерации вручную
Ё£Общий вес _ J»^!^
С# Перемещен» . Удалить итерацию...
Контакт/зазорь восстановить модель до итерации...
Добавить график отслеженных данны?. ,;
;Э
: Ч( Сетка
Щ Отчет
й||Результаты
^ Напряжение 1 (-vonMises-)
jjf Перемещение 1 (-Расположение результата-)
^ Напряжение2 (-1-е главное-)
Рис. П1.94. Контекстное меню пиктограммы Выявить тенденцию
Просмотр Галереи (View gallery)— просмотр диаграмм выполненных
расчетов посредством программы Microsoft Picture Viewer;
Удалить итерацию (Delete trend tracker iterations) — удаление
назначенной итерации;
Восстановить модель до итерации (Restore model to iteration) —
восстановление модели к состоянию, соответствующему назначенной
итерации;
Добавить график отслеженных данных (Add tracked data graph) —
включает в число отслеживаемых новую характеристику (рис. Ш.95).
В панели можно выбрать не только характеристики, но и способ их об-
COSMOSWorks 2008 — новые возможности
951
работки: накапливаются ли глобальные или локальные их функции.
Очевидно, что график будет формироваться начиная с текущего
расчета.
Хш^^^фШ]щШ§Шмшшщ
£££5Ж& »£j5*S$?*3rS>3f"'^' £-s£ '№*7-£!&0%£3&иХ У i^^i^T^^M
[ j ГрафикЗ
ЕЙ* [напряжение
И
'*Щк JVON: Напряжение Von Mises JjJ
N/m^2
"3
Макс выбранных объектов -Т
Макс модели
Мин модели
Среднее модели
Мин выбранных объектов
Среднее выбранных объектов
RMS выбранных объектов
Рис. П1.95. Включение
новых графиков в число
отслеживаемых
.& Перемещение Графике
№Ш1
Рис. П1.96. Зависимость максимального перемещения
от номера расчета
Визуализация накопленных результатов осуществляется двойным щелчком
по пиктограмме. Результат выглядит так, как показано на рис. П1.96.
Также информация о расчетах накапливается в Журнале тенденций (Trend
Journal), который в виде документа MS Word размещается "за" пиктограммой
Выявить тенденцию.
П1.4. Граничные условия
П1.4.1. Справочные точки для управления сеткой
и для приложения нагрузок
Можно создавать справочные точки для управления сеткой и/или назначения
нагрузок. Для этого используется SolidWorks Точка (ее можно подать, в
частности, из панели инструментов Справочная геометрия). Используя
команду Применить элемент управления сеткой (Apply mesh control) и по-
952
Приложение 1
местив в поле Выбранные объекты (Selected Entities) предварительно
созданные точки, можно гарантировать наличие в сетке узлов в каждой из них.
Если подобные справочные точки используются для приложения нагрузок
(закрепления в них организовывать невозможно), то граничные условия
будут фактически прикладываться в узлах. В противном случае будут
использоваться узлы, ближайшие к справочным точкам.
В предыдущих версиях программы реализовать нагрузку в точке (надо
сказать, что вопрос об уместности этого типа граничных условий является
весьма щекотливым) можно было только используя вершины.
П1.4.2. Соединитель Болт
В соединительный элемент Болт (Bolt) внесен ряд изменений и
усовершенствований.
♦ Виртуальные болты можно использовать в нелинейном анализе.
♦ Расширена номенклатура болтов/винтов, допускающих виртуальное
моделирование. Введена следующая классификация:
• Стандартный или цековка с гайкой (Standard or counterbore with
Nut);
• Зенковка с гайкой (Countersink with Nut);
• Стандартный винт или винт с цековкой (Standard or counterbore
screw);
• Винт с зенковкой (Countersink screw);
• Болт основания (Foundation bolt) — в предыдущих версиях этот тип
болта назывался Заземляющий (Grounded).
Панель для создания виртуального болта показана на рис. ГЛ.97. Как и в
предыдущей версии, номенклатура и содержание полей зависит от типа
болта.
♦ С помощью болта можно соединить как два, так и более компонентов
сборки. При соединении более чем двух деталей нужно в группе
Дополнительный параметр (Advanced) включить опцию Серия болтов (Bolt
series) и в одноименное поле поместить цилиндрические грани деталей,
располагающихся между теми, на которые опираются головка болта и/или
гайка. В документации смысл данной опции отражен достаточно
невнятно. Как представляется, она в каком-то смысле напоминает действие
опции Тугая посадка (Tight fit), которая жестко связывает стержень болта с
гранью отверстия, размещенной в соответствующее поле. Опция же
Серия болтов, как показывает предварительная оценка, является "мягким"
COSMOSWorks 2008 — новые возможности
953
соединителем между виртуальным болтом и гранью тела, находящегося
между соединяемыми пластинами. Следует отметить, что эта опция
является достаточно важной с точки зрения экономии вычислительных
ресурсов. В действительности роль стабилизатора выполняет трение, однако его
учет, по крайней мере, на стадии отработки модели, есть весьма
трудоемкое занятие.
Для предотвращения интерференции
| необходимо определить контакт '
f [soTT
•Предварит^«ь»шй зйГруэ»ш ":
"И "|«"
С" По оси
& Вращающий момент
__ _^
■ >-.\ -S.S- -tffi,*
~з
! ил^^^**^^.
| <? Библиотека (Нет.)
| С Настройка
Выбрать
| материал...
Г~ Включить массу
Дополнительный «йраметр ■
Г" Серия бсптов
Л И
Г? Симметричный болт
(* 1/2 симметрии
Г 1/4 симметрии
$ Г
Рис. П1.97. Панель Болт
В анализе можно учесть массу болта, которая будет влиять на результаты
расчетов, где в число граничных условий входят инерционные нагрузки.
Для этого в группе Материал (Material) активизировать опцию Включить
массу (Include mass), после чего система будет автоматически
рассчитывать массу болта на основе плотности материала. Подобно другим
характеристикам, воспринимаемая плотность не связана ассоциативно с базой
954
Приложение 1
данных. То есть, при изменении последней свойства в модели не
обновляются.
♦ Если плоскость симметрии проходит через болт, то этот факт можно
учесть в модели. Для этого следует в группе Дополнительный параметр
(Advanced) активизировать опцию Симметричный болт (Symmetrical
bolt). Если через болт проходит одна плоскость симметрии, то нужно
указать ее в поле Справочная геометрия (Reference Geometry). Для
симметричных болтов следует назначать половину или четверть нагрузки.
Соответственно результаты для сил и моментов в них следует увеличивать в
два или четыре раза.
♦ Если болт связывается с одним отверстием из группы отверстий, то
программа позволяет автоматически назначить болты для остальных
отверстий в группе.
П1.4.3. Соединитель Шпилька
Введены следующие изменения в интерфейсе и функциональности объекта
Шпилька (Штифт) (Pin):
♦ Изменена терминология в панели Шпилька (Pin): тип Нет
проникновения (No translation) назван С удерживающим кольцом (With retainer
ring), а тип Нет вращения (No rotation) — С ключом1 (With key).
♦ Для соединителей шпилек, по аналогии с болтом, в анализе можно
учитывать массу. Действия по ее включению в анализ аналогичны выполняемым
для виртуальных болтов. Значение массы, подобно болтам, используется в
расчетах с граничными условиями типа "центробежная или
гравитационная нагрузка". Также масса актуальна в расчете на устойчивость и
резонанс.
( Замечание J
В версии 2007 года соединитель Шпилька работоспособен только в режиме
сборки. Два и более тела в детали шпилькой соединить нельзя. В версии
2008 года этот пробел исправлен.
П1.5. Сетка
П1.5.1. Гибридные сетки
В новой версии возможно создание комбинированных сеток, включающих
как тела и оболочки, так и балки. Подробности рассмотрены в разд. П1.6.
Корректный перевод термина With key в данном случае — Со шпонкой.
COSMOSWorks 2008 — новые возможности
955
П1.5.2. Использование справочных точек
для управления сеткой
Справочные точки SoIidWorks могут быть использованы для управления
сеткой. Подробности описаны в разд. П 1.4.1. Так можно получить сетку, в
которой узлы/узел гарантированно располагаются в точках/точке, созданных в
SoIidWorks.
П1.5.3. Сетка для контактов Узел к поверхности
и Поверхность с поверхностью
В предыдущих версиях изменение условий контакта с Узел к поверхности
(Node to surface) на Поверхность с поверхностью (Surface to surface) и
наоборот требовало перестроения сетки. В COSMOSWorks 2008 сетка остается
в рабочем состоянии.
П1.5.4. Модифицированный алгоритм
создания сетки
В предыдущих версиях, помимо стандартного алгоритма дискретизации,
присутствовал так называемый альтернативный. В абсолютном большинстве
ситуаций он не позволял получить сетку лучшего качества. В новой версии
под тем же названием размещен вариант дискретизатора, учитывающий
значение кривизны — там, где система считает, что она большая, сетка
автоматически уплотняется. Степень уплотнения определяется полем Мин число
элементов в окружности (Min number of elements in a circle), изменяющимся
от 4 до 36, смысл которого в том, сколько бы конечных элементов было
построено по дуге, если бы она являлась полной окружностью. Чем эта
величина больше, тем сетка, соответственно, плотнее. В случае сборок и
многотельных деталей данная опция работоспособна, только если глобальное
контактное условие (оно настраивается в панели Глобальный контакт— Global
Contact) порождает несовместную сетку.
Сетка, полученная стандартным алгоритмом, а также при различных
(увеличивающихся) значениях управляющего параметра показана на рис. Ш.98.
Подобно опции Автоматический переход (Automatic transition), данная
опция имеет глобальное действие. Кстати говоря, функция Автоматический
переход в альтернативном дискретизаторе недоступна.
956
Приложение 1
Рис. П1.98. Сетка, полученная стандартным и модифицированным алгоритмами
COSMOSWorks 2008 — новые возможности
957
П1.6. Контактные условия
П1.6.1. Реализация контактных условий
с несовместными сетками
В предыдущей версии контактные условия, связывающие грани или ребра с
гранями при активной опции Несовместная сетка (Incompatible mesh), pea-
лизовывались посредством алгоритма Узел к поверхности (Node to surface).
Это может привести к необоснованным осцилляциям полей перемещений и,
соответственно, деформаций и напряжений, в зоне контакта. В новой версии
реализация контактных условий типа Связанные (Bonded) в несовместной
сетке может производиться в режиме Использовать строительный раствор
для несовместной сетки (Use Mortar bonding for incompatible mesh). Эта
опция находится в окнах Static (Статический), Frequency (Частотный) и
Buckling (Устойчивость) и имеет глобальное действие в рамках
соответствующих анализов.
Реализация контакта посредством алгоритма Mortar bonding подразумевает
формирование таких связей между узлами двух множеств граней, когда
уравнения формируются на основе координат и перемещений сразу нескольких
смежных узлов. Это позволяет обеспечить достаточную гладкость функций
на границе, в то время как контакт без использования этой опции
подразумевает "персональное" взаимодействие узлов, принадлежащих объектам из
группы Источник (Source), с узлами объектов, помещенных в поле Цель
(Target).
В документации сообщается, что функциональность Mortar bonding
замедляет расчет, но ускоряет сходимость h-адаптивного алгоритма. Также
подчеркивается, что максимальная точность для моделей с граничными условиями
типа Связанные достигается на моделях с совместными сетками. Опция
Использовать строительный раствор не может использоваться совместно с
моделью больших перемещений.
На рис. П1.99 показана элементарная модель— две пластины, для которых
назначен один и тот же материал и которые имеют общую грань. Поставлены
условия симметрии, соответствующие исключенной части модели —
фактически рассчитывается четверть блока, лежащего на абсолютно жестком
основании без трения. Сверху приложено единичное давление. Это значит, что
независимо от того, "склеены" ли пластины или могут скользить по общей
поверхности, все напряжения в них, кроме вертикальной компоненты, равны
нулю, а вертикальное нормальное напряжение равно единице.
Соответственно эквивалентные напряжения также однородны и равны единице.
958 Приложение 1
На рис. П 1.100 показано распределение эквивалентных напряжений в модели,
где пластины соединены условием Связанные, а сетка является совместной.
Как видно, погрешность не превышает 0,5%.
Рис. П1.99. Расчетная модель Рис. П1.100. Условие Связанные,
для проверки контактных условий совместная сетка
Показанные на рис. П1.101 эквивалентные напряжения рассчитаны для
случая, когда сетка является несовместной. Погрешность существенно
увеличилась. Локализована она при этом на границе контакта. На рис. П1.102
приведен результат, полученный при действии опции Использовать
строительный раствор. Очевидно, что качество модели улучшилось.
Рис. П1.101. Условие Связанные, несовместная сетка
COSMOSWorks 2008 — новые возможности
959
von Mises (NAnA2) ^_ 1.03e+000
Рис. П1.102. Условие Связанные, несовместная сетка с опцией Mortar bonding
П1.6.2. Усовершенствованный контакт
Поверхность с поверхностью
При решении контактных задач с типами Нет проникновения (No
penetration) и Горячая посадка (Shrink fit) в варианте Поверхность с
поверхностью (Surface to surface) используется усовершенствованный алгоритм,
позволяющий получить более "гладкие" результаты в зоне контакта, а также
улучшить сходимость h-адаптивного метода изменения плотности сетки.
В предыдущей версии, несмотря на декларации о том, что именно реализация
Поверхность с поверхностью позволяет получить наиболее точные
результаты, в ряде ситуаций функция, например, контактного давления имеет
немотивированные осцилляции.
Продолжим рассмотрение примера о сжатии двух пластин. Изменим условие
Связанные на Поверхность с поверхностью. На рис. П 1.103 и П 1.104
приведены диаграммы эквивалентных напряжений для случая совместной и
несовместной сетки. Расчет выполнен в версии 2007 года. Как видно, во второй
модели результат неприемлем.
Те же самые модели пересчитаны в версии 2008 года. Как видно, качество
решения для совместной сетки (рис. П 1.105) несколько ухудшилось, что
компенсируется ощутимым улучшением конфигурации с несовместной сеткой
(рис. П 1.106). Обращает на себя внимание факт взаимопроникновения тел на
границе контакта. На первый взгляд, это косвенное следствие изменения
алгоритма. Данное проникновение вносит относительно незначительную
погрешность в распределение перемещений. Тем не менее рекомендуется и для
контактов со скольжением использовать совместные сетки, как
обеспечивающие наибольшую точность вблизи границы контакта. Это тем более акту-
960
Приложение 1
ально для моделей с физической нелинейностью, где возмущения в поле
напряжений могут повлиять на сходимость итерационного алгоритма.
Рис. П1.103. Условие Поверхность с поверхностью, совместная сетка — версия 2007
von Mises (NrtnA2)
Рис. П1.104. Условие Поверхность с поверхностью, несовместная сетка — версия 2007
Для улучшения результатов полезно вспомнить о рекомендации,
утверждающей, что порядок, в котором контактирующие объекты размещаются в
полях Источник (Target) и Цель (Source) панели Набор контактов (Contact
Set), имеет значение. На первый взгляд, детали одинаковые, как по
геометрии, так и по назначенному материалу. Единственное, что их отличает, — это
плотность сетки. В использованной модели деталь (правильнее сказать,
COSMOSWorks 2008 — новые возможности
961
грань) с редкой сеткой располагалась в верхнем поле — оно
классифицируется как Источник, грань же с плотной сеткой попала в Цель. Если поменять
их местами, как показано на рис. П 1.107, где Цель имеет редкую сетку, а
Источник— плотную, то можно получить результат, показанный на
рис. Ш.108.
Шкала деформации: 1 75254е+010
von Mises (N/taA2)
1.04е+000
Рис. П1.105. Условие Поверхность с поверхностью, совместная сетка — версия 2008
Шкала деформации: 1 75254е+010
von Mises (N/hA2)
1.27е+000
\ 9.63е-001
. 9.18е-001
__ 8.746-001
Рис. П1.106. Условие Поверхность с поверхностью, несовместная сетка — версия 2008
Как видно, не только напряжения приблизились к ожидаемым, но и
интерференция радикально уменьшилась. Причина неточностей, как представляется,
в том, что в первом случае узлы редкой сетки "опирались" на достаточно
малую площадь, ограниченную одним или двумя элементами. В это время
962
Приложение 1
остальные узлы плотной сетки, не задействованные в контакте, внедрялись
в тело ответной детали.
Выводом из данного (во многом интуитивного) анализа является то, что в
дополнение к сформулированным в разд. 3.4.6 рекомендациям о распределе-
J Нет проникновения jy
Рис. П1.107. Изменение распределения контактных граней
Шкала деформации: 1.75е+010
17171
von Mises (N/hA2)
106е+000
1OSe+000
1 ОЗе+000
1.02е+000
9.19е-001
Рис. П1.108. Условие Поверхность с поверхностью, несовместная сетка
с измененной последовательностью "источник — цель"
COSMOSWorks 2008 — новые возможности
963
нии объектов между Источником и Целью (вкратце, они сводятся к тому,
что грани, принадлежащие "более" малым жестким и криволинейным
объектам, следует помещать в поле Источник) можно посоветовать грани с более
плотной сеткой помещать в Источник, а менее плотной — в Цель.
П1.6.3. Контактные условия в гибридных сетках
Построение геометрической модели. Изрядная часть сварных конструкций
состоит из двух типов объектов: каркаса (усилений) и элементов из листа.
Подготовка геометрических моделей таких систем применительно к расчету
в SolidWorks наталкивалась на одно затруднение: объекты из листового
металла, построенные посредством соответствующих команд, содержали
разрывы вдоль угловых (а иногда и неугловых) кромок. Эти несплошности в
абсолютном большинстве не нужны в расчетной модели, поскольку в
реальности они заполняются сварными швами. Создание твердотельных моделей
сварных швов возможно в контексте сборки, а также для деталей,
сформированных подмножеством команд Сварные детали. Для деталей из листового
металла ни те ни другие не подходят. Поэтому приходится использовать
общеупотребительные команды SolidWorks. Другой путь — когда
предполагается построить оболочечную конечно-элементную модель. Тогда
рациональнее получить поверхностное представление, а затем заполнить разрывы.
В версии SolidWorks 2008 года эти проблемы элементарно решаются
посредством команды Сварной угол. Рассмотрим* деталь, показанную на
рис. П1.109. Она содержит ряд углов, являющихся следствием алгоритма
построения модели. Фрагмент детали в месте одного из разрывов показан на
рис. П 1.110, сверху. Результат выполнения команды Сварной угол показан
на рис. П 1.110, снизу, а сама панель команды — на рис. ШЛИ. Как видно,
достаточно указать единственную грань, и система автоматически находит
все объекты, необходимые для заполнения угла.
Рис. П1.109. Модель детали из листового металла
964
Приложение 1
Рис. П1.110. Фрагмент детали из листового металла в месте разрыва
шзяшвж
V П
элемента
Cj- :Грань<1>
f&&*№P>4
Г" Добавить скругление
?\ j J OGmm
Г" Добавить текстуру
l| Добавить
- Г" обозначение
сварного шва
Рис. П1.111. Панель команды Сварной угол
COSMOSWorks 2008 — новые возможности
965
Поскольку предполагается тестировать возможности программы, связанные с
комбинированной сеткой, состоящей из балок и оболочек, то строим
срединную поверхность (рис. П1.112), а затем вдоль сегментов предварительно
созданных эскизов посредством команды Сварная деталь протягиваем профиль
уголка и окружности. В результате получается квадратная рама и четыре
проушины. При этом элементы модели в твердотельном представлении не
содержат зазоров, а после замены тела поверхностью образуются зазоры, как
показано на рис. Ш .113, где поверхность скрыта.
Рис. П1.112. Поверхностная модель
Рис. П1.113. Модель каркаса
Построение расчетной модели. Создаем статическое Упражнение с
комбинированной сеткой, а затем из контекстного меню пиктограммы Beam
(Балка) Менеджера COSMOSWorks подаем команду Рассматривать все
структурные части как балки (Treate all structural members as beams). После этого
все тела, расположенные "за" пиктограммой, обозначающей деталь (на
рис. П1.114 это Листовой металл — ...) "погаснут", а их копии
воссоздадутся в разделе Балки (Beams). Также создаем оболочку на базе поверхности,
назначая ей толщину и присваивая материал. Также материал назначаем для
балок.
Над пиктограммой Группа соединений (Joint group) подаем команду
Редактировать, а затем в панели Редактировать соединения (Edit Joints)
(рис. П1.115), подбирая радиус Индикатора шарниров (Pinball radius) так,
чтобы система, с одной стороны, диагностировала все ожидаемые соединения
(не создав "лишние" и слив "нужные"), нажимаем кнопку Вычислить
(Calculate). В результате система создает набор соединений. Поскольку балки
создавались с параметрами по умолчанию, то это будет именно рамная
система, характеризующаяся непрерывностью, как перемещений, так и углов
поворота, т. е. балки связаны соединениями, несущими как силы, так и
моменты.
Следующий шаг— назначение контактных условий. По умолчанию,
независимо от настроек контактных условий, объекты различных типов: тела,
966
Приложение 1
^Листовой металл - проушины вытянутые
I >£| Настройки
• ^Датчики
Ej-^ Упражнение 4 (-С ручкой <Как обработанный >-)
Р 4$ Твердотельные
В-^$ Листовой металл - проушины вытянутые
■Щ Body 1 (Круговой массив 1 [2])
<Ц Body 2(Конструкция4)
Щ Body 3(Круговой массив 1[3])
Щ Body 4(Круговой массив 1 [4])
• <$j| Body 5(Круговой массив 1 [5])
■Щ Body 6(Конструкция1[3])
Щ Body 7(Круговой массив 1 [6])
' Щ Body 8(Конструкция1[2])
: *| Body 9(Конструкция1[4])
Щ Body 10(Круговой массив 1 [ 1 ])
! Щ Body 11(Конструкция1[1])
= Щ Body 12(КонструкцияЗ)
В $$ Оболочки
$ Оболочка-1 (-1023 Carbon Steel Sheet (S5)-)
Й-^Sfe Балки
: Щ Балка-1 (Конструкция4) (-1023 Carbon Steel Sheet (55)-)
^Балка-2(Конструкция1[3]) (-1023 Carbon Steel Sheet (SS)-)
• ^Балка-3(Конструкция1[2]) (-1023 Carbon Steel Sheet (SS)-)
Щ Балка-4(Конструкция1[4]) (-1023 Carbon Steel Sheet (SS)-)
■-ЩБалка-5(Конструкция1[1]) (-1023 Carbon Steel Sheet (SS)-)
-Щ Балка-б(КонструкцияЗ) (-1023 Carbon Steel Sheet (SS)-)
^Балка-7(Круговой массив 1 [2]) (-1023 Carbon Steel Sheet (SS)-)
Щ Балка-8(Круговой массив 1[3]) (-1023 Carbon Steel Sheet (SS)-)
^Балка-9(Круговой массив 1 [4]) (-1023 Carbon Steel Sheet (SS)-)
Щ Балка- 10(Круговой массив 1 [5]) (-1023 Carbon Steel Sheet (SS)-)
Щ Балка-11 (Круговой массив 1 [6]) (-1023 Carbon Steel Sheet (SS)-)
^Балка-12(Круговой массив1[1]) (-1023 Carbon Steel Sheet (SS)-)
В-1Ш Шарниры балок
'■ Д£- Группа соединений 1
Й 41 Нагрузка/Ограничение
!■■• Щ Сценарий проектирования
Ш Щ Контакт/зазоры (-Глобальные: Связанные-)
Яф Сетка
\-Щ\ Отчет
ffi |j|D Результаты
Рис. П1.114. Менеджер COSMOSWorks для гибридной модели,
состоящей из оболочек и балок
балки и поверхности никак не связаны между собой. Подобно сопряжению
тел и поверхностей, балки с телами и поверхностями связываются командой
Define contact set (Определить набор соприкасания). В версии 2008 года при
работе с моделями, содержащими тела, поверхности и балки,
соответствующая панель выглядит так, как показано на рис. П 1.116. В зависимости от типа
контактов, возле первого из полей, в которое можно поместить первый из
COSMOSWorks 2008 — новые возможности
967
объектов, образующих контактное множество, возникают три кнопки:
Грани... (Faces...), Соединения (Joints) и Балки (Beams). Выбирая тип
Соединения, указываем на появившиеся в модели точки, обозначающие соединения
на концах проушин. Во второе поле помещаем грань, к которой эти
проушины "приварены". Это значит, что в гибридной сетке COSMOSWorks есть
возможность связывать посредством моментного/безмоментного (это зависит от
типа соединения на конце структурного элемента) соединения концы
балок/стержней с гранями тел/оболочек. В этой ситуации предпочтительно
соединять концы балок именно с оболочками, поскольку это не приводит к
появлению сингулярностей.
ШййШШМШН
1 Соединение 1
Соединение 2
Соединение 3
Соединение 4
Соединение 5
Соединение 6
| Соединение 7
£1
-
*/*
К А
Л
Г)
Использовать
Г* модифицированное
соединение при обновлении
Ф Отобразить нейтральную ось
-у Радиус индикатора шарниров
ло умолчанию
*- Установленный вручную
радиус индикатора шарниров
В
0<015"?
р< Преде, просмотр индикатора
1 соединений
Рис. П1.115. Создание соединений в раме
32 Зак 4405
968
Приложение 1
Также возможно соединять балки "в целом" с гранями тел/оболочек. Для
этого в панели Набор контактов следует нажать кнопку Балки (Beams),
получив возможность помещать в первое из полей элементы сварной конструкции
(вошедшие, разумеется, в конечно-элементную модель) (рис. П1.117).
Рис. П1.116. Связывание концов проушин с поверхностью
Рис. П1.117. Связывание балок рамы с поверхностью
Панель Ограничение (Restraints) (рис. П1.118), равно как и Сила (Force),
будучи вызвана одноименными командами в контексте анализа с
комбинированной сеткой, предоставляет в новой версии возможность выбирать не
только грани, кромки и вершины, но и упомянутые выше справочные точки,
балки (при назначении сил) и, как в данной ситуации, соединения. В этом
примере мы создаем в самых верхних соединениях на балочных моделях
проушин (напоминаем, что криволинейные структурные элементы
описываются совокупностью коротких прямых балок, причем связи между ними
также являются Соединениями) закрепления типа Неподвижная (нет
перемещений) (Immovable (No translation)), фиксирующие перемещения, но не
препятствующие поворотам.
Нагрузкой в данном расчетном случае является сила тяжести.
COSMOSWorks 2008 — новые возможности
969
■■шшшж
[неподвижная (мет перемещен!^]
1
[Соединения}
Соединёниё<б8$1357^ 1>|
Соединение <6881363,1 >|
|Соединенйе<б88136$, 1> |
Ф Предв. просмотр
Рис. П1.118. Создание заделок в соединениях
Вид сетки конечных элементов со стороны рамы показан на рис. П1.119, а со
стороны проушин — на рис. Ш .120. Как видно, в обоих случаях система
сгенерировала несовместные сетки. Если с несовместностью сетки при
сопряжении соединений и вершин балок с гранями, в принципе, можно (и весьма
желательно) бороться — для этого в соответствующих местах нужно
располагать вершины или (в версии 2008 года) справочные точки, то для более
корректного связывания балок с гранями желательно выделять на
последних (командой Линия разъема) полосы, которые повторяют примыкающие
балки.
Результаты расчета. Выполнив расчет, подаем команду Определить эпюру
напряжения (Define stress plot). Панель Эпюра напряжений (Stress Plot), в
зависимости от положения переключателя Отображение — это Твердые
тела и оболочки (Solid and shells) и Балки (Beams) может принимать вид,
адаптированный для каждого из этих объектов (рис. П1.121).
Диаграмма эквивалентных напряжений в оболочках на фоне
деформированного вида показана на рис. П 1.122. Если изменить диапазон отображаемых
напряжений, уменьшив ее верхнюю границу, то результат будет выглядеть,
как показано на рис. П1.123. Если присмотреться, то напряжения вдоль
направления балки распределены неравномерно, образуя немотивированные
970
Приложение 1
локальные максимумы. Причина, как представляется, в том, что балка
связывается с оболочкой только в узлах балки. Поскольку по длине балки система
автоматически расположила девять элементов (и, соответственно, десять
узлов), а сетка на оболочке является существенно более плотной, то не все узлы
оболочки, контактирующие с балкой геометрически, связываются с ней
физически.
Рис. П1.119. Сетка конечных элементов — вид со стороны рамы
Рис. П1.120. Сетка конечных элементов — вид со стороны проушин
COSMOSWorks 2008 — новые возможности
971
(• Твердые г ела и оболочки
<~ Балки
\1?ш^^:'ШЩЖШ$ж^щ^<жщжу
С" Твердые тела и оболочки
<♦* балки
И. Шю*
Изгиб в местном направ пении 1
Изгиб в местном направлении 2
Худший сценарии
|3 | ш. ж
(• Точная шкала
С Настроенный пользователем
№ П
to Щл&
(* Точная шкала
С Настроенный пользователем
ш п
Рис. П1.121. Панель Эпюра напряжений в зависимости от типа объекта
Несмотря на то, что визуально этот эффект не вносит значительных
искажений, следует подбирать на оболочке плотность сетки в месте контакта с
балкой так, чтобы она была сопоставима с числом конечных элементов на балке.
Шкала деформации: 300
von Mises (NAnA2)
Рис. П1.122. Эквивалентные напряжения в оболочке
972
Приложение 1
von Mises (NAnA2)
Шкала деформации. 300
Рис. П1.123. Эквивалентные напряжения в оболочке — обрезанная шкала
Напряжения в балках в виде Худшего сценария (Worst case) показаны на
рис. П1.124. Здесь следует упомянуть, что в доступной на момент подготовки
рукописи пробной версии программы их численные значения на диаграмме
визуализировались неправильно1.
Икала деформации: 250
сценарий (ГМЛпЛ2)
6.62е+002
5.88е+002
5.15е+002
4.41е+002
3.686+002
2.946+002
221е+002
1.47е+002
7.35е+001
0.00е+000
Рис. П1.124. Напряжения в балке по Худшему сценарию
Как и в рафинированных балочных моделях, в номенклатуру результатов
входят диаграммы силовых факторов. Они доступны по команде Определить
1 В релизе SP0 процедура функционирует корректно.
COSMOSWorks 2008 — новые возможности
973
диаграмму балки (Beam Diagrams). Результат ее выполнения в виде
диаграммы крутящего момента показан на рис. П1.125.
мент(N-m)
1.31 е+001
1.05е+001
7.86е+000
5.25е+000
2.64е+000
3.12е-002
-2.58е+000
-5.19е+000
-7.80е+000
-1.04е+001
^" -1.30е+001
Рис. П1.125. Эпюра крутящего момента в раме
Сопряжение балок в торцах. В предыдущем примере мы анализировали
модель контакта типа Связанные (Bonded) между гранью оболочки и балкой
в целом. Рассмотрим более простой, на первый взгляд, пример — как связать
концевое Соединение виртуальной балки с торцом реальной. Исходная
геометрическая модель показана на рис. П1.126. В целях демонстрации
возможностей программы она представляет собой два идентичных тела, полученных
командой Вытянутая бобышка. При построении комбинированной сетки
одна бобышка "воспринята" как балка, а вторая— как тело (рис. П1.27).
Затем между объектом Соединение на балке и гранью на торце бобышки
создаем условие Связанные. Параметры сетки конечных элементов (разумеется,
на теле, поскольку для балок оно полностью управляется системой)
подобраны так, чтобы вдоль кромки сечения располагался единственный конечный
элемент. Для торца, который связывается с концом виртуальной балки, это
условие является, по сути, необходимым. В противном случае соединение
будет обладать избыточной податливостью — зона контакта уменьшится до
размеров элементов, примыкающих к объекту Соединение.
Заделки модели — шарниры на концах. Только на балке реальной это шарнир
цилиндрический, а в соединении — шарнир сферический. Сосредоточенная
сила приложена в центре системы (фактически — в соединении).
Диаграмма перемещений показана на рис. П 1.128.
Врашдаюиум мс
974
Приложение 1
Рис. П1.126. Геометрическая модель системы из двух балок
Рис. П1.127. Конечно-элементная модель системы из двух балок
URES (m)
<&&$£*
Рис. П1.128. Распределение перемещений
П1.7. Отображение
и обработка результатов
П1.7.1. Сохранение
деформированного вида модели
В предыдущих версиях создание модели деформированного тела или
поверхности осуществлялось только посредством формата VRML1, при воспроизве-
' VRML (Virtual Reality Modeling Language) — язык моделирования виртуальной реальности.
COSMOSWorks 2008 — новые возможности
975
дении из которого в виде тела или поверхности получается триангуляция.
С точки зрения выполнения измерений или последующего структурного
анализа факт потери гладкости не является большой проблемой. Однако
попытка построить на базе такой геометрии модель (корректную)
аэрогидродинамическую или, например, оптическую, весьма проблематична.
В новой версии можно сохранить деформированное состояние как
твердотельных, так и оболочечных моделей посредством процедуры Создать тело
из деформированной формы (Create body from deformed shape). Эта команда
подается из контекстного меню пиктограммы Результаты (Results).
Соответствующая панель показана на рис. П1.129. Как видно, в панели Твердое тело
из деформированной формы (Create Body from Deformed Shape) можно
создать конфигурацию детали/сборки, в которую будет входить
тело/совокупность деталей, в которой "фиксируется" деформированный вид. Этим
управляет переключатель, который имеет положения: Сохранить в качестве
конфигурации (Save as configuration) и Сохранить в качестве новой
детали/сборки (Save as new part/assembly).
I Имя конфигурации!
i j Деформированный вид
Рис. П1.129. Создание тела из деформированной модели
Данная опция применима только для статического и нелинейного анализа,
причем допускаются как твердотельные и оболочечные, так и
комбинированные сетки.
Надо сказать, что на уровне пробных версий программы1 выработать
аргументированное суждение о качестве реализации данной функции оказалось
достаточно трудно. Однако сделанные наблюдения показывают, что
результат существенно зависит от соотношения между порядком конечных
элементов, величиной перемещений по отношению к размерам тела и степенью
сложности геометрии. Поэтому пользователю настоятельно рекомендуется
проверять полученный объект, сравнивая, например, расстояния между
характерными точками, измеренными на этом теле/поверхности и на
"традиционной" деформированной модели.
1 В релизе SP0 команда исключена из интерфейса.
976
Приложение 1
П1.7.2. Графики журналов времени
В предыдущих версиях кривые отклика— графики результатов нелинейного
расчета строились только в зависимости от времени (условного или
реального). В новой версии по оси абсцисс может откладываться как время, так и
напряжение, перемещение, линейная скорость или ускорение. Напомним, что
для этого из контекстного меню пиктограммы Результаты подается команда
Определить эпюру хронологии (Time response graph), после чего в панели
График журнала времени (Time history graph) выбираются
характеристики, откладываемее по осям Хи Y (рис. П1.130). Результат показан на
рис. П1.131.
ШШШШШШШ11ШШШ
<•" Предопределенные положения
ОсьХ:
[Перемещение
(Поступигельнйи скорост ь
Поступательное ускорение
! Время
|^ JURES: Результирующее пере^
ОсьУ:
3 '
[Напряжение
Як [VON: Напряжение Von Mises Д[
Рис. П1.130. Создание кривой
отклика как зависимости
между перемещением и
напряжением в вершине
^График реакций
ч llfte- /Qpfcfoo^ fcjeJp
ттш
Нелинейная реакция
3.00+06т
Г1
i 2,00+06+
: ^
^ 1,00+06+-
с
?
0,0 0+00 №—*—|—<—|—I—•—|—•—|—•—|—"
0.04 0.92 1.80 2.68 3.55 ААЗ 5.31
URES (mm)
•■*— Узел 38
Рис. П1.131. Зависимость напряжения
от перемещения в вершине
П1.7.3. Отображение компонентов деформации
в нелинейном расчете
В новой версии после выполнения нелинейного анализа могут быть
отображены как суммарная деформация (рис. П1.133), так и ее компоненты по
отдельности (рис. П 1.132):
COSMOSWorks 2008 — новые возможности
977
♦ упругая (обратимая);
♦ пластическая (необратимая) (рис. Ш .134);
♦ температурная;
♦ деформация ползучести.
П1.7.4. Эпюра Суть проекта
Процедура Суть проекта (Design Insight) позволяет отобразить области
модели, которые, по мнению алгоритма, несут нагрузки.
Рассмотрим пример, сопровождающий программу. На рис. П1.135 показана
геометрическая модель ручки — это сборка, состоящая из рукоятки с отвер-
978
Приложение 1
стаями и фрагмента корпуса — двух деталей, имеющих цилиндрические
выступы — штифты, которые вставлены в отверстия, имея возможность
поворачиваться и смещаться. На рис. П1.136 показаны закрепления и нагрузка. На
модели рукоятки выполнены линии разъема, образующие объекты, к
которым приложены граничные условия, реализующие симметрию.
Рис. П1.135. Геометрическая модель ручки
Рис. П1.136. Граничные условия
Распределение эквивалентных напряжений на деформированной модели
показано на рис. П1.137. В принципе, определенное представление о том, какие
элементы и области участвуют в работе конструкции, можно получить и из
этой диаграммы, однако эпюра Design Insight является более наглядным
инструментом.
/* рШщяи
—JMakc:
vonM
ses (NAnA2)
1.23e+007
1,09e+007
9.55e+006
8.19e+006
6.83e+006
1.23e+007|
Щ. 5.46е+006
111 4.10e+006
2.73e+006
1 37e+006
7.14e+003
Рис. П1.137. Эквивалентные напряжения
COSMOSWorks 2008 — новые возможности
979
Для ее получения следует из контекстного меню пиктограммы Результаты
подать команду Определить эпюру Design Insight. В Менеджере свойств
SolidWorks появляется одноименная панель, а в графическом окне — вид
модели, поделенный на две зоны — прозрачную, обозначающую часть тела, не
несущую нагрузок, и закрашенную, соответствующую области, которая
участвует в передаче нагрузок от мест, где они приложены, к закреплениям.
Текст в панели рекомендует настроить ползунковый переключатель так,
чтобы закрашенная область была непрерывной. Перемещение ползунка
влево уменьшает объем закрашенной области, а вправо— увеличивает ее
(рис. П1.138). Одновременно с движением ползунка в графической области
отображается объем "эффективной" области (рис. П1.139 и П 1.140).
шшшшшж.
+ *
Скорректируйте бегунок дли одддний эпюры
непрерывного пути между нагрузками и
ограниченияии, Полупрозрачные чести эпюры
Design Insight отображают приложенные
нагрузки йене* эффективно, цен непрозрачные.
Т«^тйупроэрачнь»е области ногут быть
удалены для большей уверенности ь
легковесном проекте. Рекомендуется проверить
ваш новый проект с помощью последующего
-исследования* *
Наиболее нагруженные
Рис. П1.138. Панель Design Insight в исходном состоянии
Документация рекомендует проанализировать возможность исключения
материала (модификации геометрии) там, где осталась прозрачной область
после соединения фрагментов, участвующих в передаче нагрузок.
Модифицированная деталь показана на рис. П1.141 совместно с диаграммой
эквивалентных напряжений. Как видно, после удаления достаточного
количества материала они возросли весьма незначительно. Если повторить расчет
диаграммы Суть проекта, то можно увидеть результат, показанный на
рис. П1.142. Как видно, система продолжает "настаивать" на дальнейшем
удалении материала в середине рукоятки.
Рассмотрим еще один пример— это пластина, нагруженная сверху
равномерным давлением и опертая на два участка основания (рис. П1.143).
Для имитации опоры используется соединитель Упругое основание (Elastic
980
Приложение 1
support), обладающий достаточно высокой нормальной жесткостью и малой
сдвиговой.
Наиболее нагруженные Вех-, j
■ У \
Рис. П1.139. Несущая нагрузку область
модели в исходном состоянии
Рис. П1.140. Панель Design Insight
и диаграмма после увеличения
эффективного объема
Шкала деформации: 3
Рис. П1.141. Эквивалентные напряжения в модифицированной конструкции
Диаграмма эквивалентных напряжений показана на рис. П 1.144, а диаграмма
Design Insight— на рис. П 1.145. Если повысить плотность сетки, то
результат будет выглядеть, как показано на рис. П 1.146. Как видно, рекомендации
COSMOSWorks 2008 — новые возможности
981
стали несколько менее наглядными. Промежуточный вывод таков: не следует
завышать плотность сетки, чтобы не ухудшить видение тенденций "в целом".
Объем элемента - 74.18 %
Рис. П1.142. Диаграмма Design Insight
модифицированной конструкции
Рис. П1.143. Модель пластины
на двух податливых опорах
Очевидно, что алгоритм рекомендует организовать в детали отверстие
достаточно сложной формы. Интересно, что внизу оставлена перемычка— она
предотвращает раздвигание опор, которые, как упоминалось, воспринимают
в основном вертикальные силы.
11 von Mises (NAnA2)
"* 3.55е+003
Объем элемента ■ 82.59 %
Рис. П1.144. Эквивалентные напряжения
в исходном проекте
Рис. П1.145. Диаграмма Design Insight
982
Приложение 1
Рис. П1.146. Диаграмма Design Insight для модели с более плотной сеткой
Для его описания отверстия используем объект Сплайн SolidWorks
(рис. П1.147). Для описания объектов "свободной формы" он, в данной
ситуации, наиболее пригоден. Не следует злоупотреблять числом точек —
наличие изгибов вряд ли улучшит проект.
Рис. П1.147. Сплайн и отверстие, полученное на его основе
Эквивалентные напряжения в модифицированной модели показаны на
рис. П 1.148. Плотность сетки, разумеется, была сохранена. Как видно,
несущая способность (относительно приложенного давления) практически не
уменьшилась, несмотря на удаление значительной доли материала.
COSMOSWorks 2008 — новые возможности
983
Рис. П1.148. Эквивалентные напряжения Рис. П1.149. Диаграмма Design Insight
в модифицированном проекте для модифицированной модели
Эпюра Design Insight для модифицированной модели показана на рис. П1.149.
Магистральный путь улучшения объекта лежит в увеличении отверстия в
высоту.
Резюмируя беглый анализ процедуры Суть проекта, можно сказать, что она
не подменяет функцию параметрической оптимизации в части решения
задачи минимизации массы/объема. Последняя более подходит для улучшения
объектов, описываемых детерминированной геометрией (попросту говоря,
совокупностью размеров и взаимосвязей), а новая функциональность
ориентируется на предоставлении пользователю неформализованной информации
о путях улучшения проекта. То есть она должна предварять параметрическую
оптимизацию, определяя топологию модели.
П1.7.5. Линеаризация напряжений
Процедура Линеаризация напряжений (Linearize Stress) предназначена для
расчета и отображения графиков распределения напряжений и других
доступных функций вдоль произвольного отрезка, заданного пользователем в
выбранном сечении твердотельной модели, а также линеаризации этих
зависимостей. Эта форма представления результатов соответствует требованиям
ASME1, касающихся проектирования котлоагрегатов и сосудов давления.
1 ASME (American Society of Mechanical Engineers) — Американское общество инженеров-
механиков.
984
Приложение 1
Знакомить с функцией будем на примере симметричного сосуда давления с
двумя торосферическими днищами, подвергнутого внутреннему давлению
ЗЕ6 Па. На рис. П1.150 показана его расчетная модель, выполненная с учетом
симметрии относительно трех плоскостей, а на рис. П1.151 — распределение
эквивалентных напряжений.
Рис. П1.150. Расчетная модель Рис. П1.151. Распределение эквивалентных
сосуда давления напряжений
Для получения графиков нужно выполнить один или несколько статических
расчетов по твердотельной модели (при использовании оболочек
напряжения получаются линеаризованными в силу самой природы примененных
гипотез теории оболочек). Затем на базе этих результатов следует создать и
выполнить анализ типа Проектирование сосудов давления (Pressure Vessel
Design), создать и отобразить диаграмму эквивалентных напряжений и
построить сечение диаграммы. Затем из контекстного меню пиктограммы,
соответствующей диаграмме, нужно подать команду Линеаризовать
(Linearize). В появившейся панели Линеаризовать напряжение (Linearize Stress)
(рис. П 1.152) в поле Местоположение (Locations) следует поместить две
точки, указывая мышью в желаемые точки сечения. Поле Число
промежуточных точек (Number of intermediate points) предназначено для назначения
числа точек, через которые будет проходить сечение. Его желательно
выбирать несколько большим, чем число узлов сетки по толщине тела. Преду-
COSMOS Works 2008 — новые возможности
985
сматриваются следующие правила расположения линии, вдоль которой
строятся графики. Линия должна проходит через материал, а не через отверстия
или полость сосуда, где результаты в сечении отсутствуют. С точки зрения
информативности рекомендуется располагать линии перпендикулярно
образующей. После нажатия кнопки Вычислить (Calculate) система рассчитывает
интегральные компоненты функции, а также ее значения в начальной и
конечной точках.
^ШШШ^^ШШШ^^^^ШШшшШ<ШтШШ
I выберите 2 расположения сечения соде ли и нажмите на Расчитать. Ось X проходит от первого расположения до второго.
, Ось Z располагается по нормали к плоскости во внешнем направлении. Ось Y располагается по правилу правосторонней
системы координат.
Мембранное напряжение 7.1937Е+006 :1.577Е+007
Изгиб (Точка 1) ;2^6326Е+005 Th5387E+006
Мембранное напряжение + Изгиб ("; 7.457Е+006 :1.7309Е+007
Изгиб (Точка 2) Г-2.6326Е+рр5{-1.5387Е+006
Мембранное напряжение + Изгиб (": 6.9305Е+006 11.4231Е+007
Пик(Точка1) >313.5 Л.2515Е+005
Пик (Точка 2) 3947.7 . 1Л809Е+005
-1.3547Е+006 -440.46
-1.4643Е+006 626.18
-2.819Е+006
1.4643Е+006
L0962E+005
-1.1642Е+005 -2064.2
-1.0701Е+005 ,372.45
185.71
-626.18
-1066.6
2269.8
:-738.14
:1531.7
] 738.14
3008-5860.7
1-86.093 -13560
-1089.5 795.26
-7438.9
-1578.1
-9017
1578.1
Рис. П1.152. Панель Линеаризовать напряжение
После нажатия кнопки Эпюра (Plot) система автоматически строит графики
зависимости компонентов #Х, #Y, #Z, #XY, #YZ, #XZ от расстояния между
точками (рис. П1.154—П 1.159).
На графиках отображаются:
♦
рассчитанная функция;
значение функции посере-
Результирующее напряжение (Stress results)
Мембранное напряжение (Membrane stress) -
дине между точками;
Мембранное напряжение + Изгиб (Membrane stress + Bending)
ная аппроксимация первой функции.
линей-
986
Приложение 1
В нашем примере в качестве линии, вдоль которой производится
линеаризация, взят отрезок, близкий к кромке в среднем сечении цилиндра (рис. Ш .153).
von Mises (1МЛпЛ2)
lt04«|Q^h8.1Q.1.25Qmm| — 3.29е+007
Рис. П1.153. Создание базы для линеаризации
^Результирующие напряжения
'<Ш ОрШгаГ Иф
!№да
Имя упражнения: Упражнение 2
[Тип эпюры: Статический узловое напряжение Напряжение
7,60+06
Г4
•€ 7.40+06+
6,80+06
i > i i i i—i >■ > > t i i i i—i—> ii—i i i
0 3.7 7.5 11 15 19 22 26 30 34 37
Расстояние(тт)
Результирующие напряжения
Мембранное напряжение
Мембранное напряжение + Изгиб
Рис. П1.154. Линеаризованное нормальное напряжение вдоль X
COSMOSWorks 2008 — новые возможности
987
Л, Результирующие напряжения
*;&ИО*,''М*г
ВЙВ
Имя упражнения: Упражнение 2
[Тип эпюры: Статический узловое напряжение Напряжение
1,40+07
0 3.7 7.5 11 15 19 22 26 30 34 37
Расстояние(тт)
Результирующие напряжения
Мембранное напряжение
Мембранное напряжение + Изгиб
Рис. П1.155. Линеаризованное нормальное напряжение вдоль Y
Л Результирующие напряжения
г^'ОрВоп* Мф'-
та в
Имя упражнения: Упражнение 2
ГГип эпюры: Статический узловое напряжение Напряжение
1,00+06т
F
■€ аоо+оо
^ -1.00+06
-2.00+06}
-3.00+06
< i > i I—i i i <—i—»—i—i i i i—•-
0 3.7 7.5 11 15 19 22 26 30 34 37
Расстояние(тт)
—*— Результирующие напряжения
—■— Мембранное напряжение
—<•— Мембранное напряжение ♦ Изгиб
Рис. П1.156. Линеаризованное нормальное напряжение вдоль Z
В документации сообщается, что ось X направлена вдоль линии,
соединяющей указанные точки, ось Z направлена перпендикулярно сечению в сторону
удаленного материала, а ось Y образует правостороннюю систему координат.
Однако достаточно сравнить результаты, во-первых, со здравым смыслом —
988
Приложение 1
он требует, чтобы на внутренней поверхности цилиндра нормальные
напряжения были равны давлению, а на наружной — нулю, а во-вторых, и с
графиками нормальных напряжений, построенными вдоль кромки в
цилиндрической системе координат (рис. П1.160—П 1.162). В ней направление X являет-
IД Результирующие напряжения
Fife Option® Нф
Имя упражнения: Упражнение 2
[Тип эпюры: Статический узловое напряжение Напряжение
2000 00т
Г4
J 1000.00т:' . 4
0.00 }^*"
тИ*!
■»«»»<
и- *Ч1—ш—ягт-w—v—т—41—ш—щ>—»т^р—*">^->1^Д~"—*—■—*—"—*—■ ?
3 \/ \ \ \ \ \ \ \: [ '■ |
-2000.00 '* ' ' i i i i i i i i i i i i i ■! ii i i i i
0 3.7 7.5 11 15 19 22 26 30 34 37 j
Расстояние(тт) I
Результирующие напряжения
Мембранное напряжение
Мембранное напряжение + Изгиб
Рис. П1.157. Линеаризованное касательное в плоскости XY
^Результирующие напряжения
Fife Options Нф
■вв
Имя упражнения: Упражнение 2
[Тип эпюры: Статический узловое напряжение Напряжение
1,00+04т
-€ 0,00+00
У -1,00+04
о
с
I -2,00+04
О
-3,00+04
|:
1 ■ *
' i i—i
• ■ • •: >^.-;^ ■ ■ ■ ■
/ : : :
i—•—i—t > i—i—н—i
i—i—»—i—i—i—i
i i i
h-H 1 1
0 3.7 7.5 11 15 19 22 26 30 34 37
Расстояние(тт)
Результирующие напряжения
Мембранное напряжение
Мембранное напряжение + Изгиб
Рис. П1.158. Линеаризованное касательное в плоскости YZ
COSMOSWorks 2008 — новые возможности
989
#> Результирующие напряжения
Rle ОрЙоп$ Нф ;'
ни и
Имя упражнения: Упражнение 2
[Тип эпюры: Статический узловое напряжение Напряжение
_ 3000.00т
J 2500.00
й 2000.00т
§ 1500.00ft:- :;^-:
1000.00
t > I I I 1 1 > I K—I 1—I 1 1 1 I I 1 t I t
0 37 7.5 11 15 19 22 26 30 34 37
Расстояние(тт)
•-*• Результирующие напряжения
-•»— Мембранное напряжение
-♦— Мембранное напряжение + Изгиб
11.9747,613.208
Рис. П1.159. Линеаризованное касательное в плоскости XZ
> График для кромки
№ jOptiohs'Help
ЯмО
Имя упражнения: Упражнение 2
]Тип эпюры: Статический узловое напряжение Напряжен
Г4
0,00+00
-1,00+06
■2,00+06|
-3,00+06f
400+06
I
т **^* '
\ *s \ '.
\ 1 i i i • 1
_-*''
i 1 1
,^"~""
i 1 1
0.000 0.200 0.400 0.600 0.800
Параметрическое расстояние
1.000 j
i
SX (N/rrT2)
Рис. П1.160. Радиальное нормальное напряжение вдоль кромки
990
Приложение 1
ся радиальным, Y — окружным, a Z— осевым. Поэтому в реальности на
линеаризованных диаграммах Z— направление вдоль отрезка, соединяющего
точки, Y — перпендикулярно плоскости сечения, а X образует упомянутую
правостороннюю систему координат.
^ График для кромки
,щ > Од1йп$ ИеЬ
1Ш1Ш1 &<$ i
Имя упражнения: Упражнение 2
ТГип эпюры: Статический узловое напряжение Напряжен
1,80+07у
Р
1,70+07+- ^;ч-
1,60+07+
1.50*07+
1,40*07-
^
i i 1 1 1 1 1 \
0.000 0.200 0.400 0.600 0.800 1.000
Параметрическое расстояние
SY(N/m"2)
Рис. П1.161. Окружное нормальное напряжение — изменение вдоль кромки
! ^ График дли кромки
ОД Option* -Hdpw
№Ш
Имя упражнения: Упражнение 2
[Тип эпюры: Статический узловое напряжение Напряжет
7,60+06
7,40+06|
7,20+06-
7,00+06
6,80+06'
ik.c • •; • ; • • • •
: ~^»<. :
• • • •: •: • • •^ • • •: : —
: : %""^., :
• • • '~~-ъ. •
:~'-Л
0.000 0.200 0.400 0.600 0.800 1.000 |
Параметрическое расстояние {
SZ(N/mA2)
Рис. П1.162. Осевое нормальное напряжение — изменение вдоль кромки
ПРИЛОЖЕНИЕ 2
COSMOSFIoWorks 2008
новые возможности
В приложении рассматриваются основные усовершенствования и изменения
версии COSMOSFIoWorks 2008 года. Подобно предыдущим материалам,
изложение ведется на базе доступных пре-релизов программы, а также
сопутствующих справочных материалов и демонстрационных примеров.
П2.1. Новые физические модели
П2.1.1. Реальные газы
В Инженерную Базу Данных был добавлен набор из нескольких реальных
газов, что позволяет решать задачи, для которых модель идеального газа не
может быть применена (рис. П2.1). В случае отсутствия необходимого
реального газа в Инженерной Базе Данных, вы можете добавить его
самостоятельно, задав необходимые свойства. Реализованная модель позволяет
рассчитывать поведение реального газа в широком диапазоне значений параметров,
включая около- и сверхкритические области (рис. П2.2). Также возможен
расчет смеси реального и нескольких идеальных газов.
Рис. П2.1. Моделирование положительного эффекта Джоуля — Томсона
при протекании азота, заданного как реальный газ, через канал с внезапным сужением
992
Приложение 2
Р
2 * Р критическое
Р критическое
Р мин
T мин T критическое 2*Т критическое
Рис. П2.2. Диаграмма применения реальных газов: в обасти газа и пара
сверхкритической области возможен расчет реального газа
П2.1.2. Теплопередача в пористых телах
Теперь вы можете учитывать теплопроводность пористого каркаса при
расчете задач с пористыми телами, задавая теплопроводность и другие теплофизи-
ческие свойства пористой среды. Возможно использование изотропной,
однонаправленной, осесимметричной/двухосевой или ортотропной моделей
теплопроводности.
П2.2. Интеграция с SolidWorks
П2.2.1. Автоматическое исправление контактов
Модель с геометрией нулевой толщины, возникающей при касании твердых
тел (например, касание колеса автомобиля и дороги по линии), не пригодна
для расчета в предыдущих версиях COSMOSFlo Works и требует устранения
данных касаний (см. разд. 5.4.1). Теперь в местах касания двух тел
автоматически создаются тела малого объема, и модель становится пригодной для
расчета без приложения каких-либо дополнительных усилий за исключением
случаев, когда линией соприкосновения является кривая (рис. П2.3).
П2.2.2. Утилита для создания крышек
Эта утилита автоматически создает крышки (заглушки) для всех отверстий в
выбранной плоской поверхности модели, освобождая вас от необходимости
ШМё Газ и пар Сверхкритическая область
ШШ Жидкость ШВШ Область, где расчет невозможен
COSMOSFIoWorks 2008 — новые возможности
993
Ж
• •>m
Рис. П2.3. Автоматическое исправление контактов касания в точке и по прямой линии
создавать крышки самостоятельно. Крышки, закрывающие все внешние
отверстия модели, необходимы при расчете любой внутренней задачи
(например, такой как течение в шаровом кране). Для задания заглушек необходимо
выделить плоскую поверхность, в которой имеется одно или несколько
отверстий, и выбрать команду Create Lids (Создание крышек) из меню
FloWorks | Tools (FloWorks | Инструменты) — крышки будут созданы для
всех отверстий в выделенной плоской поверхности (рис. П2.4). При
необходимости можно регулировать толщину создаваемых крышек.
%\а ft
Задание толщины
крышек
Выделенная
поверхность
Отверстия и крышки
Рис. П2.4. Задание вспомогательных заглушек к отверстиям с помощью утилиты Create Lids
994
Приложение 2
П2.2.3. Проект сохраняется в файл модели
Теперь созданный проект сохраняется непосредственно в файле модели
SoIidWorks, что устраняет потребность в отдельном файле проекта. Вам
больше не надо беспокоиться о файле проекта при копировании или
перемещении файлов модели.
П2.3. Интерфейс и удобство пользования
П2.3.1. Задание исходных данных
♦ Точечные цели (Point Goals). Этот новый тип целей позволяет
отслеживать значения параметра в заданной точке. Вы можете задать сразу
несколько точечных целей для набора точек, заданных координатами или
выбранных непосредственно в графической области. Как и цели других
типов, точечные цели могут быть использованы для отслеживания
значений наиболее важных параметров и для задания условий завершения
расчета.
♦ Солнечное излучение, зависящее от географического положения,
времени и погоды. Теперь для того, чтобы задать параметры солнечного
излучения, вам достаточно выбрать в Инженерной Базе Данных один из
городов (Location) и указать число (Data), время (Time), облачность
(Cloudiness), а также ориентацию модели (рис. П2.5). Для задания
ориентации модели относительно положения неба необходимо указать
направление на зенит (Zenith direction) как одну из осей выбранной системы
координат. Для задания ориентации модели относительно сторон света
необходимо указать направление на север, которое задается через одну из
осей выбранной системы координат (Angle measured from North to) и
угол между данной осью и направлением на север (Angle). Дополнительно
также возможно добавлять новые населенные пункты и любые другие
точки на поверхности Земли в Инженерную Базу Данных, задавая их
широту. В случае нестационарной задачи параметры солнечного излучения
будут меняться с течением времени, отражая изменение положения
Солнца в течение дня.
♦ Включение/Выключение вентиляторов и тепловых источников, в
зависимости от времени или значения цели. В нестационарной задаче
вентиляторы и тепловые источники могут включаться или выключаться
при достижении заданного значения цели или в зависимости от времени.
Вы также можете указать гистерезис (Dead band), т. е. задержку
обратного включения/выключения. Принцип работы зависимости от цели показан
(рис. П2.6) на примере варианта Switch ON when goal > control value
COSMOSFIoWorks 2008 — новые возможности
995
;ШШшШШрШ
Analysis type
® Internal
0£xtemal
Consider dosed caviKgs
0 Exclude cavities without flew conditions
I Pi^$icajJFee|ues
it; Heat conduction in solids
\i£ Radiation
Izl Environment radiation
Environment temperature
Ы Solar radiation
! Defined by
1 Location
! Date
Time
Zenith direction
Angle measured from North to
Angle
Cloudiness
Time-dependent
Gravity
Rotation
, Value
E
0
m
293.2 К
№
Location and Time
Moscow
30/06
12:00:00
Y axis of Global Coordinate
X axis of Global Coordinate
Orad
0
□
D
□
1
Щ
111
Reference agis: 1 x Щ
Qop*»tf!onci'
t OK , j
{ Cancel ) ( Help j
СЗЙ
Wall conditioner
Initial condition';
Рис. П2.5. Задание солнечной радиации через широту, время, облачность
и ориентацию модели
Температура
Вентилятор включен
Control value
(Значение срабатывания)
Control value - Dead band
График изменения
температурной цели
■► Время
Вентилятор выключен
Рис. П2.6. Работа опции Switch ON when goal > control value
на примере вентилятора
(включить, если значение цели превышает значение срабатывания) для
работы вентилятора. Данный вариант применим для задания работы
устройства, которое включается при превышении какого-то термодинамического
параметра заданного значения (например, включение вентилятора при
996
Приложение 2
достижении температуры чипа критического значения). Видно, что
вентилятор включается при достижении выбранной цели значения
срабатывания (Control value), а выключается не сразу после падения температуры
ниже значения срабатывания, а в тот момент, когда значение станет
равным Control value — Dead band.
Данная возможность позволяет моделировать широкий ряд устройств,
имеющих механизмы срабатывания по типу термостата. При этом
контролируемым параметром может быть не только температура, но и любой
другой термодинамический параметр, заданный как цель (Goal).
♦ Улучшенная и расширенная Инженерная База Данных. Инженерная
База Данных была переработана и дополнена. Свойства некоторых
текучих сред и материалов были уточнены. Добавлены новые неньютоновские
жидкости, такие как клей и кровь. База данных обычных жидкостей также
была дополнена такими веществами, как жидкий кислород, жидкий азот и
другими.
П2.3.2. Наблюдение за расчетом
♦ Уведомление о завершении расчета по электронной почте. Вы можете
выбрать опцию Notify when calculation is finished (Уведомить о
завершении расчета) на закладке Advanced Settings (Дополнительные опции) в
окне Calculation Control Options (Опции управления расчетом) и по
завершении расчета на указанные адреса электронной почты будет выслано
сообщение о завершении расчета и его статусе. Для корректной работы
уведомления по e-mail необходимо перед расчетом указать параметры
электронной почты в окне общих свойств COSMOSFIoWorks
(Инструменты | Параметры | Посторонняя фирма).
♦ История сходимости. Теперь монитор сохраняет для каждой цели
историю сходимости, т. е. номер итерации, на которой данная цель сошлась.
Этот номер отображается на зеленой строке индикатора выполнения
(Progress) в списке целей в окне Goal Plot (График целей), а
соответствующая точка на графике сходимости помечается зеленым (рис. П2.7).
Если далее в ходе расчета значение цели изменяется и перестает
удовлетворять критерию сходимости, номер итерации, на которой цель потеряла
статус "сошедшейся", также записывается в историю сходимости. Такие
точки на графике сходимости помечаются красным.
♦ Подсветка выделенной цели. График цели, выделенной в списке целей в
окне Goal Plot (График целей), подсвечивается на графике сходимости.
COSMOSFIoWorks 2008 — новые возможности
997
Ж PG Velocity I
!||GG Mn Static Pressure 1
.S8*!fc!!ft...
...f^fs^.^f**?.!
0.00H1556m/s
101325 P*
O.OOHllm/s
101325 Pa
0.0013897 m/s
101325 Pa
.. „/!l5***ff..$**i ?!%?$**
0.00Ht562m/s &D,
Ю1325 Pa ЕДДЕЕД
Normalized Scale(from 0 to 1)
_5fi_
1.1 .U» IfPl^Pton""
Рис. П2.7. Моменты сходимости целей показаны зелеными точками (1 и 2),
номер итерации выводится в колонке Progress
П2.3.3. Просмотр результатов
♦ Обрезка графиков и изображений результатов по минимальным и
максимальным значениям. Путем выбора опции Clip by Min/Max в
окнах Cut Plot (Изображение в сечении), 3D-Profile Plot (Трехмерное
изображение) или Surface Plot (Изображение на поверхности) вы можете
"отрезать" те области этих графиков, где значения отображаемого параметра
выходят за пределы минимального и максимального значений, заданных в
окне View Settings (Установки просмотра) (рис. П2.8).
♦ Прозрачные графики и изображения. При помощи бегунка Plot
transparency (Прозрачность изображения) вы можете установить
необходимую вам прозрачность Cut Plot (Изображений в сечении), 3D-ProfiIe
Plot (Трехмерных изображений) и Surface Plot (Изображений на
поверхности).
♦ Отображение расположения минимумов и максимумов. При
выделении параметра в окне Min/Max Table (Таблица min/max) точки, в которых
значение отображаемого параметра достигает своих минимальных и
максимальных значений, теперь подсвечиваются в графической области,
соответственно, синим и красным. Таким же образом эти точки
подсвечиваются, если включено отображение глобальных минимумов и максимумов
(Global (Min, Max)) (рис. П2.9).
♦ Относительное давление как параметр для отображения. В список
отображаемых параметров добавлен параметр Relative pressure (Относи-
998
Приложение 2
Relative Humidity [%]
Рис. П2.8. В картине сечения кухонной комнаты показано,
где значение относительной влажности превышает 50%
?*тФ*
Pwt«ue(lb|/r>^?l
ОегйЦуРЬЛГЗ)
Vetoc4y]ltA]
Xveteaty|ftA)
Yvdoaty|rVt)
Zvdoa«y|rVs]
Mech Numbe» [ ]
He* Trantta Codlce.il [b/»/fl/*F]
Shew Stress [bf/inA2]
Smlace Heat Flux [WAn"2)
A»Me»FiacUonIl
A» Volume Flection 11
FkidTenperetuielTl
SoWTompeietuerF]
Mewun
146601
00587474
0
184419
-8 57649
31 4112
0
869713e-006
235328e-012
1837 64
1
1
680902
680884
Mpttpum
146965
0.0751447
314318
81974
52951
a0B397
00276091
17 0327
000180919
15642 9
1
1
215 386
215863
...go» 1
Temperature |'F| [68 0884 215 8631
Максимум
температуры
Минимум
температуры
Рис. П2.9. Значения минимума и максимума параметра, выделенного
в диалоговом окне Min/Max Table, показаны соответственно синей и красной точкой
COSMOSFIoWorks 2008 - новые возможности 999
тельное давление), рассчитываемый как разница давления в потоке и
характерного давления задачи (Reference Pressure). Значение Reference
Pressure определяется как начальное условие в окне Wizard (Мастер
проектов) или General Settings (Общие установки).
♦ Настраиваемый список поверхностных и объемных параметров.
Теперь вы можете выбирать какие локальные и интегральные параметры вы
желаете отображать в окнах Surface Parameters (Параметры на
поверхности) и Volume Parameters (Объемные параметры).
33 Зак. 4405
Для заметок
ПРИЛОЖЕНИЕ 3
COSMOSMotion 2008
новые возможности
В данном приложении рассматриваются основные усовершенствования и
изменения версии COSMOSMotion 2008 года. Подобно предыдущим
материалам, изложение ведется на базе доступных пре-релизов программы, а также
сопутствующих справочных материалов и демонстрационных примеров.
П3.1. Общие усовершенствования
Основным изменением в COSMOSMotion является еще более тесная
интеграция в SolidWorks. С точки зрения пользователя он выполнен не на уровне
расчетного модуля, характеризующегося собственным Менеджером, набором
окон, независимой структурой результатов. Сейчас все функции
COSMOSMotion присутствуют непосредственно в интерфейсе SolidWorks.
ПЗ.1.1. Русификация COSMOSMotion
COSMOSMotion, как часть SolidWorks, русифицирован полностью. Это
значит, что локализован как интерфейс, так и справочная система, которая
функционирует в контексте справки SolidWorks.
ПЗ.1.2. COSMOSMotion как элемент
Исследования движения
В SolidWorks 2008 внизу графического окна присутствуют, как минимум, две
вкладки: Модель и Исследование движения (Motion Study). Доступ к
функциональности, связанной с моделированием движения, осуществляется после
активизации вкладки Motion Study. В выпадающем списке, расположенном
1002
Приложение 3
справа под окном SolidWorks. в верхней части панели Менеджер движения
(Motion Manager) доступны три уровня моделирования движения (рис. П3.1):
♦ Движение сборки позволяет:
• фиксировать несколько последовательных положений детали;
• создавать двигатель, приводящий в движение сборку;
• варьировать размеры сопряжений Расстояние или Угол, а также
взаимосвязи между кривыми выбранного объекта;
• динамически изменять свойства компонента. Можно скрыть или
отобразить компоненты и выбрать режим их отображения (каркасное
представление, Скрыть невидимые линии, закрасить и т. д.);
• изменять ориентацию вида и выбор вида;
• изменять цвет или текстуру компонента;
Рис. П3.1. SolidWorks 2008 в режиме Исследование движения
COSMOSMotion 2008 — новые возможности
1003
• изменять свойства освещения и камеры;
• изменять расположение элементов эскиза.
♦ Физическое моделирование позволяет:
• вводить двигатели;
• моделировать линейные и торсионные пружины и демпферы (в том
числе с нелинейными характеристиками), трехмерные контакты для
выбранных деталей, учитывать действие линейных и круговых
двигателей с различными законами движения, в том числе определяемыми
формулами, а также и силу тяжести. В процессе физического
моделирования учитывается масса конструкции.
Физическое моделирование включает функциональность процедуры
Физическая динамика, которая сохранена в SolidWorks 2008.
♦ COSMOSMotion позволяет:
• выполнять полноценный кинематический и динамический анализ
сборки с учетом разнообразных соединений, локальной податливости
деталей, наличия податливых втулок с выводом результатов в
произвольной форме, передавать нагрузки движения в COSMOSWorks для
статического и нелинейного расчета;
• получать доступ к объектам, созданным в расчетной модели "нижнего"
уровня, в "верхних" уровнях в новой функциональности. Например,
трехмерный контакт, сгенерированный в Типе исследования
Физическое моделирование, где не учитывается трение и податливость при
контакте, может быть дополнен этими свойствами при переходе к
COSMOSMotion.
Как и в предыдущей версии, COSMOSMotion входит в конфигурацию Solid-
Works Office Premium и в COSMOSWorks Professional.
ПЗ.1.3. Наличие нескольких моделей движения
В SolidWorks 2008 и, соответственно, COSMOSMotion в одной модели
сборки можно создавать несколько независимых моделей движения. Для этого
используется кнопка ШШ — Новое исследование движения, относящаяся к
панели Сборка. Ее нажатие приводит к появлению новой вкладки
Исследование движения #. Отметим, что множественность моделей доступна и для
расчетов в режимах Движение сборки и Физическое моделирование.
ПЗ.1.4. Подключение COSMOSMotion
В новой версии активизация COSMOSMotion как Добавления SolidWorks не
приводит к появлению вкладки COSMOSMotion рядом с Деревом конструи-
1004
Приложение 3
рования SolidWorks, а весь эффект этого действия состоит в том, что в
выпадающем списке Тип исследования появляется позиция COSMOSMotion, ну
и, естественно, в доступности соответствующей функциональности.
ПЗ.1.5. Интеграция с SolidWorks
Абсолютное большинство соединений COSMOSMotion имеют аналоги в
SolidWorks. Более того, развитие SolidWorks в части кинематического и
динамического анализа происходит за счет переноса функциональности из
•ЖойсйИЙ
|*Тор@Ро5 arml-i©Posit с
«*Тор
|ГГор@>Ро4 arml-l@Posit ass*j
JTop j
^4^Ши^
il l^piPosarTnniipSS j
| ^ j Параллепьность
i i JL | Перпендикулярность
{ *y* Концентричность
i (5 5a6riOK}-pc;saTs/
• j j*-»| 110,0000 дюймов
I ^])^00градусо8 "
: Выровнять сопряжения1
,0 j Симметричность
$Щ Ширина
J '' С.опг>т?ние пут; \
yjjt \ Линейный/Линейная мус
jH]|ofoaooA^Hv«
Выровнять сопряжения:
PI l*ftl
£? J Кулэчок
$^ Редуктор
^ ~иит
<$»> УниверсальиьнТшзрнир
Выровнять сопряжения:
/С СсйпсЙегёб <Pof «rmi <1>>
iJ
Рис. П3.2. Классификация сопряжений SolidWorks
COSMOSMotion 2008 — новые возможности
1005
COSMOSMotion. В частности, в версии 2008 года в COSMOSWorks
добавлены сопряжения: Блокировка; Линейный/Линейная муфта; Сопряжение
пути (нахождение точки детали на некоторой траектории); Винт;
Универсальный шарнир (Шарнир Кардана).
При этом сопряжения в соответствии с их "физическим смыслом" собраны в
три группы: Стандартные, Дополнительные и Механические (рис. П3.2).
Также в SolidWorks, независимо от наличия COSMOSMotion, можно для
сопряжений определять грани, несущие нагрузку (с целью трансляции в
COSMOSWorks для синтеза граничных условий на базе динамических нагрузок),
определять параметры трения, формировать на базе сопряжений податливые
Втулки, предназначенные для имитации податливости (рис. ПЗ.З). Эти
объекты и настройки будут учитываться в расчете динамики в COSMOSMotion.
Ь<тШ*Шг
Анализ
!..._
' Определите свойства вопряжения для j
использования в COSMOSMotion. j
\ i и
i Отображение компонента
< изолировать компоненты ,
' Пзрзметы
(* Ук^агоМслерисзпы
С Указать коэффициент
I 11,9685 дюймов
Г
Л.
v>* **. ' $fs
Jl^rn
*|
Размеры соединений:
Г 10,393?дюймо&
zl
zl
\ ! Поступательный
I ■ Г" Изотропный
1 Жесткость
; Демпфирование
[Сиги
— х | v
25,4000 Н/дк»! 25,4000 Н
0,0254 Нс/дю|0,0254Не
ОН 'ОН
<1_
Кручение
J* Изотропное
2J
■ i
1 ! Жесткость
| 1 Демпфирование
■ &рьшрм*уй момент
xu j
0,0039 Ндюймое/гр
0,0000 Н дюймов с/
0,00 H дюймов
! л! _ Г 21
Рис. ПЗ.З. Определение свойств сопряжения SolidWorks
применительно к динамическому анализу
1006
Приложение 3
Доступна также новая функция Sol id Works Изолировать компоненты,
управляющая состоянием отображения не используемых в диалоге деталей.
П3.2. Изменения
в Менеджере движения
Менеджер движения (Motion Manager) стал неотъемлемой составляющей
системы SolidWorks/COSMOSMotion. Теперь, помимо имитации движения
сборки и анимации, Менеджер движения выполняет управляющие функции
и для COSMOSMotion.
ПЗ.2.1. Сворачиваемая панель
Панель Менеджера движения может быть свернута/развернута нажатием
соответствующей кнопки.
ПЗ.2.2. Фильтры
В Менеджере движения присутствует фильтр, позволяющий выбрать для
визуализации: Все объекты; Анимированные объекты (детали,
перемещающиеся или изменяющиеся в процессе анимации); Управляющие
объекты (объекты, являющиеся причиной движения или других изменений);
Фильтр результатов (отображение сущностей, появившихся в результате
моделирования).
ПЗ.2.3. Ключевые точки
В ключевых точках можно: изменить параметры двигателя; изменить
величину силы (только в COSMOSMotion); погасить или высветить сопряжения.
ПЗ.2.4. Объекты процедуры
Физическое моделирование
Двигатели и пружины присутствуют и в Менеджере движения.
ПЗ.З. Функциональность COSMOSMotion
Собственно функциональность COSMOSMotion изменилась достаточно
незначительно. Мы коснемся только улучшений, не связанных с изменением
терминологии и интерфейса.
COSMOSMotion 2008 — новые возможности
1007
ПЗ.3.1. Демпфирующие свойства у пружин
Демпферы можно создавать не только как самостоятельные сущности, но и
ассоциировать демпфирующие свойства с пружинами в панели Пружина.
ПЗ.3.2. Эпюры
При создании эпюры результатов для компонента или сопряжения
отображается система координат. Эпюру можно скрыть и отобразить.
ПЗ.3.3. Обработка избыточных ограничений
Несмотря на то, что до расчета желательно удалить избыточные ограничения,
в новой версии можно прибегнуть к двум способам автоматической
модификации модели с такими свойствами. Для этого в диалоговом окне
Дополнительные настройки моделирования (рис. П3.4) можно для переключателя
Обработка повторяющихся ограничений выбрать одно из двух положений:
♦ Автоматически удалять повторяющиеся ограничения. Алгоритм
удалит все повторяющиеся ограничения, оставив сборку полностью
определенной.
♦ Заменять повторяющиеся ограничения втулками. Заменяет все
сопряжения, порождающие избыточные связи податливыми втулками.
Рис. П3.4. Управление обработкой избыточных ограничений
Для заметок
ПРИЛОЖЕНИЕ 4
GearTeq — развитие GearTrax
для проектирования
механических передач
При подготовке книги к печати вышел тестовый вариант приложения к
SolidWorks для проектирования механических передач GearTeq. Оно является
развитием описанного в разд. 6.5 инструмента GearTrax фирмы Camnetics,
Inc., США. Здесь предоставляются базовые сведения о данном инструменте.
П4.1. Общая информация
Поскольку программа GearTrax за последние несколько лет претерпела
только эволюционные изменения, то разработчики приняли принципиальное
решение о полном обновлении интерфейса и существенном расширении
функциональности. Ее новое название— GearTeq. GearTeq, как и GearTrax
является, по сути, независимой программой для формирования элементов
передач. Взаимодействие SolidWorks заключается в передаче
сформированных моделей, их обновлении в SolidWorks, а также в восстановлении
информации в GearTeq после ее считывания из SolidWorks.
Более того, новый инструмент приобрел признаки своего рода
узкопрофильной системы геометрического проектирования элементов трансмиссий.
Теперь в контексте программы можно создавать не только отдельные элементы
(детали), но и получать сборку узлов (в зависимости от типа зацепления)
"в целом" или последовательным добавлением новых элементов. При этом
создание деталей сопровождается их автоматическим позиционированием в
модели. Параметры, определяющие относительное положение, назначаются
пользователем, и в любой момент могут быть модифицированы.
GearTeq функционирует с SolidWorks, начиная с версии 2007 года. Как и в
предыдущей версии, локальная лицензия программы привязана к серийному
номеру SolidWorks.
1010
Приложение 4
П4.2. Интерфейс
Окно GearTeq со сформированным цилиндрическим прямозубым
зацеплением показано на рис. П4.1. Оно приобрело:
♦ измененное падающее меню;
♦ традиционные для современных программ панели инструментов;
♦ своего рода Дерево конструирования, отображающее структуру модели
с учетом соотношения "Родитель —► Потомок ... " и позволяющее
активизировать (двойным щелчком) объекты в системы;
♦ селектор компонентов, содержащий список компонентов с возможностью
выбора активного— именно он будет являться предком новой детали
с точки зрения подбора геометрии зацепления, а также ее
позиционирования;
♦ таблицу свойств элементов зацепления, заменившую совокупность окон и
вкладок, присутствовавшую в GearTrax;
Рис. П4.1. Окно GearTeq с синтезированным цилиндрическим зацеплением
GearTeq — развитие GearTrax для проектирования механических передач 1011
♦ возможность вывода в текстовом виде базовой информации об элементах
системы;
♦ список сообщений об ошибках в модели.
Используя команды панели инструментов, можно отображать модель в
произвольной ортогональной проекции и в аксонометрии с ориентацией,
определяемой пользователем.
Предусмотрен режим анимации, которая осуществляется, в том числе, и для
аксонометрической проекции.
При взаимодействии с SolidWorks можно генерировать профили зубьев,
которые размещаются в активном эскизе SolidWorks, создавать все или
выбранные детали, а также формировать сборку из них. Кстати говоря, это действие
было одной из наиболее трудоемких и не автоматизированных в GearTrax
операций. Однако позиционирование осуществляется только частично — без
учета взаимного положения зубьев (рис. П4.2) и, более того, детали в сборке
остаются свободными, т. е. окончательное размещение выполняется
пользователем на основе полученной заготовки.
При формировании колес со ступицами доступна операция drag-and-drop для
перемещения и копирования ступиц.
Рис. П4.2. Модель сборки SolidWorks без сопряжений
П4.3. Расширение функциональности
Перечислим наиболее важные изменения функциональности (помимо
упомянутых выше) в GearTeq относительно GearTrax 2007:
♦ синтез планетарных передач различных типов (рис. П4.3), в том числе
циклоидной (рис. П4.4);
1012
Приложение 4
ШШш
rT«efo~
'" \%т --
'-Ft»»t1—
1 -< ■
)*'*«**
J ffingpto*
f5T
b?
m::
i«®.
|o
~3(r-
_ a,r
зИг
j*j|i?
эг
Aufc> adjust
Auto adjust
V/ben ratio Is negative the
opposfcedtoctiortof the,
drive*..
rPWb~
. ^
.:.|" :;:..Nww©5t«yenplarwtpo$Sion*fetterfees
23 л'ч%/ s\ " * >
-a-* -.
i s > •• "
■j
v ^ * :'
] " ' ' , \
i \ %v ■•'.'
Ь .-".г -v
/- ' - \
t&wi Г , s>* '
;- ч \ ;- , ^;
[ jS%Apept 1;*
„.. \..!^*. ,.. ■*-,.,,.,.;'* ,.л ...*,
'* ' ' * :
^ л
.s' *1
Рис. П4.3. Синтез планетарной передачи
♦ профиль зуба можно сохранить в виде таблицы точек в текстовом файле
или в формате MS Excel;
♦ помимо обычных настроек геометрии конических пар, допускающих
управление большинством параметров, предусмотрено формирование
зацепления по спецификации фирмы Gleason, одного из ведущих
производителей зубошлифовальных станков;
♦ при синтезе колес, для которых предполагается использование
пластмассы, можно учитывать корректировку профиля с учетом усадки;
♦ помимо измерений "по штифтам" по наружному и внутреннему размерам,
доступно измерение "по хорде" с выбором базы для измерений в виде
числа зубьев;
♦ информация геометрии контакта и линии контакта, в частности, более
детализирована;
♦ скругления в основании зуба могут строиться на базе трохоидальной
кривой, получающейся при обработке колеса фрезой со скруглением.
GearTeq — развитие веагТгахдля проектирования механических передач 1013
Ый*&*жм &в*г*ммм*& * -,Ц~^-<~л—■—tr^tr^J&z*.^^
шшш
p^^k^h^^;:^
Рис. П4.4. Синтез циклоидной передачи
Для заметок
ПРИЛОЖЕНИЕ 5
Описание диска
DVD-диск содержит полноцветные иллюстрации к книге, геометрические и
расчетные модели, на базе которых строится материал.
Для главы 5, посвященной COSMOSFIoWorks, помимо геометрических и
расчетных моделей, на диск также помещены результаты расчетов.
Иллюстрации и модели собраны в одноименные папки, структура которых
соответствует структуре книги.
Для работы с моделями требуется SolidWorks и расчетные модули
версии 2007 года за исключением главы 5 и приложений, где используются
программные продукты 2008 года.
Для заметок
Литература
1. Алямовский A. A. Sol id Works / COSMOS Works 2006/2007. Инженерный
анализ методом конечных элементов. — М.: ДМК-Пресс, 2007.
2. Багриновский К. А., Годунов С. К. Разностные схемы для многомерных
задач. ДАН СССР, 1957, т. 115, №3, 431—433.
3. Галлагер Р. Метод конечных элементов. Основы: Пер. с англ. — М.: Мир,
1984.
4. Гилл Ф., Мюррей У., Райт М. Практическая оптимизация: Пер. с англ. —
М.: Мир, 1985.
5. Годунов С. К., Забродин А. В., Иванов М. Я., Крайко А. Н.,
Прокопов Г. П. Численное решение многомерных задач газовой динамики. —
М.: Наука, 1976.
6. Григолюк Э. И., Шалашилин В. И. Проблемы нелинейного
деформирования. — М.: Наука, 1988.
7. Марчук Г. И. Методы вычислительной математики. — М.: Наука, 1989.
8. Оден Дж. Конечные элементы в нелинейной механике сплошных сред:
Пер. с англ. — М.: Мир, 1976.
9. Реклейтис Г., Рейвиндран А., Рэгдел К. Оптимизация в технике: В 2-х кн.
Пер. с англ. — М.: Мир, 1986.
10. Родионов С. А. Основы оптики. Конспект лекций. — СПб.: СПб ГИТМО
(ТУ), 2000.
11. Самарский А. А. Теория разностных схем. — М.: Наука, 1983.
12. Самарский А. А., Попов Ю. П. Разностные схемы газовой динамики. —
М.: Наука, 1975.
13. Сиванов И. Как компьютер рассчитывает изображения. Технологии
программного рендеринга. — http://www.fcenter.ru.
1018
Литература
14. CAD/CAM/CAE Observer.— CAD/CAM Media Publishing, Латвия,
2007.N 1-3.
15. Chung T. J. Finite element analysis in fluid dynamics. NY, McGraw-Hill,
1977.
16. COSMOS Getting Started. Structural Research and Analysis Corporation,
USA, 2006.
17. COSMOS Nonlinear Tutorials. Structural Research and Analysis Corporation,
USA, 2006.
18. COSMOSWorks Online User's Guide. Structural Research and Analysis
Corporation, USA, 2006.
19. Glowinski R., P. Le Tallec. Augmented Lagrangian methods and operator-
splitting methods in non-linear mechanics. SIAM, Philadelphia. 1989.
20. Hackbush W. Multi-grid methods and applications. Springer-Verlag, NY,
1985.
21. Hirsch C. Numerical computation of internal and external flows. John Wiley &
Sons, Chichester, 1988.
22. Introducing COSMOSWorks. Structural Research and Analysis Corporation,
USA, 2004.
23. McDonald P. W. The computation of transonic flow through two-dimensional
gas turbine cascades. ASME Paper 71-GT-89, 1971.
24. Patankar S. V. Numerical heat transfer and fluid flow. Hemisphere,
Washington, 1980.
25. Rizzi A. W., Inouye M. Time split finite volume method for three-dimensional
blunt-body flows. AIAA Journal, v.l 1, pp. 1478—1485, 1973.
26. Roache P. J. Fundamentals of computational fluid dynamics. Hermosa
Publishers, Albuquerque, New Mexico, USA, 1998.
27. Saad Y. Iterative methods for sparse linear systems. PWS Publishing
Company, Boston, 1996.
28. OptisWorks Manual 2007 — Optis, France, 2007.
Предметный указатель
2D maps 770
2D-диаграммы 770
BSDF 702
BTDF 54, 703
3D Contact 610
3D Curve 779
3D map 767, 795
ЗО-диаграмма 767, 779
Advanced scattering surface 743
Aliasing 54
Ambient material 723, 729
Ambient source 728
Analysis:
0 Harmonic 901, 921
0 Modal Time History 900
0 Nonlinear Dynamic 930
0 Random Vibration 901, 924
Anisotropy factor 752
в
L caring 65
Best focus 860
Birefringent 747
BRDF 54, 703
CamTrax 470
Coated surface 744
0 curve 744
Coefficient of Restriction 610
Colorimetric data 735, 743
Conditions Initial 616
Connector:
0 Bearing 80
0 Bolt 82
0 Link 81
0 Rigid 81
0 Spring 81
Connectors 60
Conoscopic 764
Contrast 770
COSMOSMotion 571
Damping 611
Design:
0 Insight 977
0 scenario 947
Design Check Wizard 60
Direct simulation 762, 766
1020
Предметный указатель
Dispersion curve 747
Dynamic Designer 571
E
Easy simple scattering surface 736
Emittance 733
Eulumdat 764
Evolutionary engine 730, 814, 822
Export Results 593
External material 708, 723, 729
F
Fluorescent 747
Frequency Curve 923
Fresnel 740
G
GearTrax518
Gradient engine 730, 814
Gradient Index 747
H
Hardening factor 181
Henyey-Greenstein formula 751
Hyper-threading 877
I
IES 764
IGES 685
Illuminance detector 756
Impact Force 643
Import Motion Loads 595
Initial Conditions 904, 911
Inplane effect 82
IntelliMotion:
0 Browser 573
0 Builder 574
Intensity results 768
Intensity detector 763
Intensity distribution 733
Internal material 708, 723
Inventor 518 ,
Inverse simulation 762, 767
Isolux curve 775
Isotropic 747
j
Joint:
0 Cylindrical 584
0 Fixed 584
0 Planar 584
0 Primitives 584
0 Revolute584
0 Screw 584
0 Spherical 584
0 Translational 584
0 Universal 584
Joints 82
JPrim 584
К
Kettler-Helmotz formula 748
L
Light Expert 704, 759, 826, 837
Light path finder 837
Linearize Stress 983
LPF 758
Luminance 728
Luminance/Radiance results 768
Luminance detector 760
Luminance preferences 728
M
Material Color 754
Mechanical variables 815, 869
MechSoft 568
MIE theory 751
Mortar bonding 957
Motion 573
0 Model 573
MTF712, 864
Предметный указатель
1021
О
Optical:
О sequence 853
О surfaces 707, 847
Optical results 869
Optical variables 815, 869
Optimization 730
Optimization/tolerancing parameters
705, 820
Optimization parameters 815
p
Paraxial data 863
Parts:
0 Ground 604
0 Moving 604
Penetration 611
Phase function 751
Photometric results 756, 768
Polar curves 778
Polar Intensity detector 764
Power 733
Pressure Vessel Design 894, 984
PSF712,864
R
Ray:
0 splitting 53
0 tracing 52, 730
° filtering 837
° nonsequential 698
° reverse 53
Ray file editor 759
Rays map 759
Rays tracing 733
Reaction force 83
Real aberrations 866
Real source 853, 860
Reflection 738
0 gaussian angle 738
Reflectivity 736
Results Manager 705
s
SAE 764
Sampling 762, 765, 819
SCA 758, 840
Scattering:
0 coefficient 751
0 properties 750
0 surface curve 740
SDF 703
SellMeier formula 748
Simple scattering surface 738
SolidEdge518
SolidWorks:
0 Animator 597
0 Toolbox 469
Source:
0 collimated 853
0 finite object 853
0 infinite object 853
0 Point-to-point 853
Spectral data 761
Spectrum 734
0 definition 734
Spot diagram 859
Study 62
Surface:
0 color 736
0 contribution analyzer 837
0 contribution analyzer 840
Surface/Section 771
Surface quality 708, 723
Surfacic source 733
т
Target weight 818
Tesselation 727
Texture 737
Tolerancing 836
Tolerancing parameters 815
Toolbox 513
0 Browser 513
Transmission 738, 795
Trend tracker 949
1022
Предметный указатель
v
visualNastran 571
А
Автокрепежи 515
Алгоритм:
О вокселизации 54
О Ньютона — Рафсона 192
Амплитудно-частотные
характеристики 923
Анализ:
О гармонический 901, 921
0 динамический 900
О модальный переходной 900, 904
0 нелинейный динамический 930
О случайных колебаний 901, 924
О чувствительности 836
Анализатор вклада поверхностей 837,
840
Б
Балка 493
Библиотека проектирования 513, 664
Библиотечный элемент 664
Болт 64
Браузер COSMOSMotion 573
В
Весовой коэффициент цели 818
Вещественные аберрации 712
Вкладка:
0 Animation 624
0 Contact 610
0 Simulation 619
W
Wavefront712,864
Wavelength 734
Windows XP 64 bit 878
Внутренний материал 723
Волновой фронт 864
Втулка 586
Выборка 765
г
Геометрические аберрации 866
Гипотеза:
0 больших деформаций 192
0 больших перемещений 191, 208,
213
0 Ми 751
Градиентный метод 730, 814
Граничные условия, контактные 73
Грузоподъемность 512
Д
Датчик 83
Демпфирование модальное 912
Дерево проекта OptisWorks 704
Детектор 754
0 лучей 759
0 освещенности 756, 769
0 радиометрический 764
0 силы света 762
0 силы света полярный 764
0 фотометрический 763
0 яркости 759
Детектор силы света:
0 ортогональный 774
0 полярный 774
Предметный указатель
1023
Деформация 67
Диаграмма:
О 3D 795
О Аббе726
О балки 939
О волнового фронта 712
О для поверхности с покрытием 744
О колориметрическая 735
О освещенности 768
О пятна 712, 859
О рассеяния поверхности 740
0 силы света:
° в ортогональных координатах
774
° в полярных координатах 774
0 яркости 771
Дискретизация 762
Дисперсия:
0 относительная 726, 748
0 средняя 726
Дистанционные нагрузки 140
Длина волны 734
Длина луча оптическая 702
ж
Жесткая связь 64
Журнал тенденций 951
з
Зазор малый 73
Закон:
0 Ламберта 749
0 преломления 701
0 Френеля 740
Зацепление:
0 внутреннее 533
0 червячное архимедово 521
Звездочка 522
Зондирование 68
Зубья:
0 круговые 520
0 эвольвентные 522
и
Изгиб в местном направлении 150
Излучательная способность 733
Излучатель ламбертов:
0 плоский 701
0 сферический 701
Излучение 66
Индикатор:
0 соединений 148
0 шарниров 941
Инструмент формы 664
Источник:
0 коллимированный 853
0 объектного пучка безфаничный
853
0 объектного пучка конечного
размера 853
0 окружающего света 728
0 оптический 851
0 от точки к точке 853
0 поверхностный 733
О точечный 853
0 физический 853, 860
К
Каталог:
0 RAL737
0 Трансмиссия 516
Колесо:
0 коническое 520
0 прямозубое 517
0 цилиндрическое косозубое 519
0 цилиндрическое прямозубое 519
0 червячное 521
Колориметрическая информация
743
Команда Зондирование 83
Конвекция 65
Коноскопический 764
Конструкции сварные 511
Конструкционная сталь 493
Консультант по анализам 891
1024
Предметный указатель
Контакт:
О Виртуальная стенка 73
О Поверхность с поверхностью 73
О Связанные 73
О Узел к поверхности 73
О Узел к узлу 73
Контрастность 770
Коэффициент:
0 анизотропии 704, 752
0 вязкого демпфирования 912
0 демпфирования 912
0 деформационного упрочнения 686
0 нагрузки 213
0 объемного рассеяния 752
0 отражения 702
0 перпендикулярной анизотропии
686
0 поглощения 702
0 преломления, переменный 747
0 пропускания 702
0 рассеяния 751
0 упрочнения 172, 181
Коэффициенты:
0 аберраций 712
0 Зейделя 863
Кривая:
0 времени 27, 171
0 дисперсии 747
О изолюкс 775
О отклика 66
О силы света 778, 794
О тренда 69
О частот 923
Кривизна главная 647
Критерий прочности 27
Кулачки 469
Кулачок:
О круговой 469, 471
0 линейный 469, 471
0 торцовый 471
л
Линеаризация напряжений 983
Линза Френеля 801
Листовой металл 654
м
Материал:
0 гиперупругий 171
0 двоякопреломляющий 747
0 изотропный 72, 747
0 окружающей среды 723, 729
0 ортотропный 60, 72
0 пластичный 172
0 трансверсально-изотропный 60, 502
0 упругий 171
0 флуоресцентный 747
Матрица:
0 жесткости 23
° глобальная 26
а элемента 26
0 Якоби24
Менеджер:
0 COSMOSWorks61,628
0 конфигурации 573
0 результатов 705
Меню:
0 Animate 588
0 Contacts 587
0 Export Results 588
0 Forces 585
0 Joints 584
0. Motion 580
0 Result Object 587
Метод:
0 h-адаптивный 60
0 р-адаптивный 60
0 длины дуги 28, 193
0 излучательности 54
0 комплексов 45
0 конечных объемов 31
0 конечных элементов 21
0 многогранника 45
0 Монте-Карло 53
0 Ньютона — Рафсона 29
0 перемещений 28, 192
Предметный указатель
1025
О последовательных нагружений 174
О прямого поиска 42, 61
О прямых лучей 698
О сил 28
Механические переменные 815, 869
Минимум глобальный 40
МКЭ21
Модель:
0 Блатца — Ко 172
0 Друкера — Прагера 173
О Мизеса 172
О Огдена 172
О Треска 173
Модель поверхностного рассеяния:
0 продвинутая 743
0 простая 738
0 элементарная 736
Момент инерции сечения 496
Мощность 733
0 тепловая 66
0 фотометрическая 733
0 энергетическая 733
н
Набор соприкасания 63
Нагрузка:
0 дистанционная 64
0 ударная 63, 169
О эквивалентная динамическая 512
Наилучший фокус 860
Напряжения 67
О эквивалентные 27
Настройки яркости 728
Начальные условия 904
Нелинейность:
0 геометрическая 168
0 контактная 169
0 физическая 168
о
Область:
0 допустимая 40
0 невыпуклая 40
Оболочка 62
0 толстая 170
Ограничения 69
0 неравенства 39
0 равенства 39
Окружающий материал 723, 729
Определение спектра 734
Оптимизация 730
0 безусловная 39
0 оптическая 869
0 параметрическая 38, 70
0 условная 39
Оптическая последовательность 711
Оптические переменные 815, 869
Оптические поверхности 707
Оптические результаты 869
Ортотропия цилиндическая 60
Освещенность 700
0 энергетическая 700
Основание:
0 выбранное 910
0 однородное 909
0 податливое 64
Особенность 60
Отражательная способность 736
Отражение 738
0 полное внутреннее 701
Отчет 67
п
Панель:
0 COSMOSMotion 574
0 Simulation 576, 625
Параксиальная оптика 712
Параксиальные характеристики 863
Параметр:
0 Пропорции 81
0 Якобиан 81
Параметры:
0 анализа чувствительности 815
0 оптимизации 815
Передача:
0 клиновая 522
0 поликлиновая 522
0 цепная 522
1026
Предметный указатель
Переменные проектирования 39,69, 815
Перемещение 67
Плоскостной эффект 82
Плотность потока энергии
поверхностная 700
Поверхность:
0 оптическая 847
0 с покрытием 744
0 силы света 808
Поддержка упругости 64
Подход:
0 Лагранжа34
0 Эйлера 34
Подшипник 65
Посадка горячая 73
Последовательность оптическая 854
Поток:
0 излучения 700
0 световой 700
0 тепловой 65
Проверка прочности 60, 67
Программа:
0 BlankWorks 645
0 COSMOSWorks 58
0 DesignSTAR 167
0 FastBlank647
0 FastForm 686, 688
0 Logopress 696
0 OptisWorks 697
Программирование нелинейное 39
Проектирование:
0 оптимальное 37, 814
0 сосудов давления 894, 984
Пропорции 115
Пропускание 738, 795
Профиль эвольвентный 518, 519
Пружина 64
Пружина-демпфер 909
р
Работоспособность 512
Развертка 479, 645
0 приближенная 648
0 точная 647
0 условная 648
Распределение:
0 гауссово 734
0 интенсивности 733
0 косинус в степени п 733
0 ламбертово 733
Рассеяние:
0 гауссово 702
0 ламбертово 701
Расчет:
0 подшипника 512
0 усталостный 70
Ребро-кромка 663
Редактор файла лучей 759
Результаты:
0 для силы света 768
0 фотометрические 756, 768
0 яркости/энергетической яркости 768
Ремень зубчатый 522
Рестарт 81
Ресурс 512
с
Сварная деталь 82
Светимость 700
Свойства рассеяния 750
Связать 64
Сетка 62
0 гибридная 73
0 комбинированная 73
0 несовместная 72, 80
Сечение 771
Сила:
0 дистанционная 132
0 контакта 66
0 контакта/трения 122
0 контактная 65, 628
0 реакции 66, 83
0 свободного тела 81, 100
0 света 700
0 тяжести 64
0 центробежная 64
0 Шпильки/Болта 137
Симметрия циклическая 80
Предметный указатель
1027
Симуляция:
О обратная 762, 767
О прямая 762, 766
О фотометрическая 766
Соединение шлицевое 522, 537
Соединения 60, 82
Соединитель Connector:
0 Болт 80, 82, 952
0 Жестко 81
0 Подшипник 80
0 Пружина 80, 81
0 Связать 81
0 Точечные сварные швы 80
0 Шпилька 954
Сортировка траекторий лучей 837
Спектр 734
Спектральная информация 761
Сплайн 482
Срок службы 512
Стандарт:
0 ABA-PGT532
0 ANSI 493
0 DIN 493, 5 13, 532
0 ISO 493
0 JIS513, 532
0 ГОСТ 513
Строительный раствор 957
Суть проекта 977
Сценарий проектирования 68, 947
т
Таблица сгибов 658
Текстура 737
Температура 65
Тенденция 949
Толкатель 472
Точечные сварные швы 65, 84
Трансмиссия 519
Трассировка:
0 лучей 52, 730, 733
0 непоследовательная 698
0 обратная 53
0 распределенная 52
Триангуляция 727
у
Угол:
0 гауссового отражения 738
0 отражения 701
0 падения 701
0 преломления 701
Упражнение 61, 62
Упрочнение:
0 изотропное 172
0 кинематическое 172, 181
Условие Куна — Таккера 48
Условия начальные 911
Усталость 170
ф
Фазовая функции 751
Фильтрация лучей 837, 843
Фирма:
0 ADAMS 571
0 Autodesk 568
0 Camnetics 470, 518
О FTI647
0 MSC571
0 Radiant Imaging 732
0 SRAC58
Форма собственная 70
Формат VRML 78
Формула:
0 Гельмгольца — Кеттлера 748
0 Зельмейера 748
0 Хэни-Гринштейна751
ФПМ 864
ФРТ 864
Функция:
0 барьерная 43
0 негладкая 39
0 передачи модуляции 712
0 разрывная 39
0 рассеяния точки 712
0 целевая 39, 69
0 штрафа 43
0 штрафная 43
Функция частотная 923
1028
Предметный указатель
X
Характеристики поверхности 723
Худший сценарий 150, 942
Ц
Цвет:
0 материала 754
0 поверхности 736
Целевая функция 817, 869
ч
Частота собственная 70
Червяк 521
ш
Шестерня корригированная 532
Шкив 522
Шпилька 64
Штрафная функция внешняя 61
э
Эволюционный метод 730, 814, 822
Эксперт по свету 704, 759, 826, 837
Элемент:
0 балочный 141
0 по сечениям сгиба 649
0 стержневой 141
0 управления 62
Элементы конструкций 511
Я
Якобиан 24, 115
Яркость 700, 728
0 энергетическая 701
Лицензирование
Softltne работает на рынке программного обеспечения с
1993 года и обладает высшими статусами партнерства таких
компаний, как Microsoft, Oracle, SAP, Symantec, Citrix,
Adobe и многих других.
Обучение
Учебный центр Softltne, лидирующий на рынке IT-об разов а
ния, предоставляет профессиональные услуги по обучению,
тестированию и сертификации 1Т~специалистов«
sOftline'
Консалтинг
Консалтинговое подразделение Softiine Solutions обладает
уникальным опытом по внедрению и развертыванию
инфраструктурных решений и систем управления бизнесом для
компаний любого масштаба,
119991 Москва, ул. Губкина, 8. Тел./факс: +7 (495) 232 00 23
Е mail: info@softline.ru http://www.softline.ru
mm Москва, Санкт-Петербург, Екатеринбург, Казань, Красноярск, Нижний Новгород,
Новосибирск, Омск, Ростов, Самара, Уфа, Хабаровск Ш Минск ***" Киев -** Ташкент
ВШ Астана, Алматы ШИ Бишкек WI Баку ГТ* Душанбе
Магазин-салон
«НОВАЯ ТЕХНИЧЕСКАЯ КНИГА»
190005, Санкт-Петербург, Измайловский пр., 29
В МАГАЗИНЕ ПРЕДСТАВЛЕНА
ЛИТЕРАТУРА
ПО
компьютерным технологиям
радиотехнике и электронике
физике и математике
строительству и архитектуре
транспорту
машиностроению
и другим
естественно-научным
и техническим направлениям
ч/ Низкие цены
к/ Прямые поставки
от издательств
Ежедневное пополнение
ассортимента
Подарки и скидки
покупателям
Тел.: (812) 251-41-10, e-mail: trade@techkniga.com