/











































































































































































































































































































































































































Текст
А. А. ЯБЛОНСКИЙ
КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
ЧАСТЬ И
ДИНАМИКА
ИЗДАНИЕ ТРЕТЬЕ, ИСПРАВЛЕННОЕ И ДОПОЛНЕННОЕ
Допущено Министерством высшего
а среднего специального образования СССР
в качестве учебника для студентов
машиностроительных, механических, электротехнических,
приборостроительных и строительных специальностей
высших технических учебных заведений
ИЗДАТЕЛЬСТВО «ВЫСШАЯ ШКОЛА»
МОСКВА-1966
УДК 531
Я—146
Рецензенты:
Кафедра теоретической механики
Московского авиационного института
Профессор И. М. Воронков
Александр Александрович Яблонский
КУРС ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Редактор 3. Г. Овсянникова
Технический редактор Л. М. Матюшина
Художник В. 3. Казакевич
Корректор М. И. Козлова
Т-00388. Сдано в набор 25/ХП 1965 г. Подписано к печати 5/Ш 1966 г.
Формат 60x90'/,,. Объем 25,75 печ. л. Уч.-изд. л. 21,51.
Изд. Mi ОТ-34/65. Тираж в переплете № 7—10 000 экз., в J* 5 —
90 000 экз. Цена в переплете № 7 —81 коп:, в переплете №5 — 70 коп.
Тематический план издательства
¦Высшая школа" (вузы и техникумы) на 1966 г.
Позиция МЬ 109.
Издательство «Высшая школа».
Москва, И-51, Неглинная ул., д. 29/14.
Заказ М 7.
Ленинградская типография № 2 имени Евгении Соколовой
Главполиграфпрома Комитета по печати при Совете Министров
СССР. Измайловский проспект, 29.
2-4-2
ПРЕДИСЛОВИЕ
Настоящий учебник «Курс теоретической
механики» часть II «Динамика», так же как и
часть I «Статика и кинематика», составлен
в полном соответствии с программой курса
теоретической механики для высших техниче-
технических учебных заведений.
Учебник рассчитан на студентов очной и
заочной систем обучения.
Наряду с изложением теоретического ма-
материала в учебнике имеется подробное реше-
решение задач основных типов и даны вопросы для
самоконтроля.
Решение всех примеров выполнено в еди-
единицах системы МКС.
При переиздании учебника учтены многие
пожелания и замечания читателей и рецензен-
рецензентов, которым автор выражает признательность.
Отзывы и пожелания, направленные на улуч-
улучшение этого издания, следует посылать в адрес
издательства «Высшая школа».
АВТОР
ГЛАВА I
ВВЕДЕНИЕ В ДИНАМИКУ
§ 1. Предмет динамики. Краткий исторический обзор
развития динамики
Динамикой называется раздел механики, в котором изучается дви-
движение материальных тел в зависимости от действующих на них сил.
Динамика представляет собой наиболее общий раздел механики,
имеющий особое значение для решения многих практических задач
в различных областях техники.
Основоположником динамики явился великий ученый Галилей
A564—1642). Он впервые ввел в механику понятие скорости
и ускорения движущейся точки при неравномерном прямолинейном
движении и установил законы падения тел в пустоте. Галилей сфор-
сформулировал первый закон динамики — закон инерции, установил, что
движение тела, брошенного под углом к горизонту в пустоте, со-
совершается по параболе. Голландский ученый Гюйгенс A629—1695)
ввел понятие момента инерции, создал теорию маятника, изрбрел
часы. Обобщив понятие ускорения на случай криволинейного движе-
движения точки, Гюйгенс установил понятие центробежной силы.
Начатая Галилеем работа по созданию динамики была завершена
великим английским ученым Ньютоном A643—1727), который в своем
знаменитом сочинении «Philosophiae naturalis principia mathematical
A686)* сформулировал основные законы классической механики и
на основе этих законов дал систематическое изложение динамики.
Ньютон открыл закон всемирного тяготения.
Особое значение имел установленный Ньютоном закон равенства
действия и противодействия, позволивший перейти от динамики мате-
материальной точки к динамике механической системы.
Развивая идею Декарта A596—1650) о сохраняемости количества
движения, Ньютон установил, что изменение количества движения
механической системы определяется лишь внешними силами.
* Сочинение Ньютона переведено на русский язык А. Н. Крыловым
под заглавием «Математические начала натуральной философии», «Известия
Морской академии», 1915—1916.
Область применения законов классической механики, созданной
Галилеем и Ньютоном, как показали новейшие открытия конца XIX и
первой четверти XX вв., ограничена. Эти законы не согласуются
с опытом при изучении движения тел, скорость которых одного по-
порядка со скоростью света. Новая релятивистская механика (теория
относительности), созданная в начале XX в. немецким физиком
Альбертом Эйнштейном A879—1955), коренным образом изменила
представления механики о пространстве, времени, массе и энергии.
Однако результаты, полученные на основе законов классической
и релятивистской механики для тел, скорость которых несоразме-
римо меньше скорости света, практически совпадают.
В свете теории относительности классическая механика Галилея —
Ньютона приобрела характер ее частного случая и сохраняет свое
значение и в настоящее время, являясь научно-теоретической базой
большинства отраслей техники.
На основе законов Галилея—Ньютона в дальнейшем доказывались
теоремы и устанавливались принципы механики, составляющие со-
содержание современного курса теоретической механики.
Теорема об изменении кинетической энергии или, как ее ранее
называли, теорема живых сил была сформулирована Иваном Бер-
нулли A667—1748) и Даниилом Бернулли A700—1782). Теорема
об изменении момента количества движения установлена почти одно-
одновременно A746) Эйлером и Даниилом Бернулли. В 1716 г. Я. Гер-
Германом A678—1733), академиком Петербургской Академии наук,
установлен принцип механики, дающий общий метод, с помощью
которого уравнениям динамики придается по форме вид уравнений
статики, получивший название петербургского принципа (метод кине-
кинетостатики)
В 1737 г. Эйлер обобщил этот принцип и применил его для изу-
изучения колебаний гибких тел.
В 1743 г. Даламбер высказал принцип, получивший название
начала Даламбера, послуживший базой построения механики систем,
подчиненных связям. Начало Даламбера позволило расширить при-
применение принципа Германа — Эйлера на случай сложных систем, со-
состоящих из значительного числа связанных между собой тел.
Лагранж A736—1813) связал принцип Германа — Эйлера — Далам-
Даламбера с общим принципом статики—принципом возможных переме-
перемещений и придал ему удобную для практического применения форму.
Впервые принцип возможных перемещений был установлен Сте-
вином A548—1620).
Галилей дополнил исследования Стевина рассуждением о наклон-
наклонной плоскости и дал знаменитую формулировку золотого правила
механики: что выигрывается в силе, то теряется в ско-
скорости.
Над строго научным доказательством принципа возможных пере-
перемещений работали Иван Бернулли, Фурье, Пуассон, Ампер и Ла-
Лагранж.
Академик М. В. Остроградский A801—1862) обобщил принцип
возможных перемещений и применил его к решению многих новых
задач механики.
Дифференциальные уравнения движения механической системы
в обобщенных координатах были получены Лагранжем и носят его имя.
Уравнения Лагранжа определяют движение механической системы
в наиболее общей форме. Эти уравнения Лагранж применил к иссле-
исследованию малых колебаний системы, имеющих большое практическое
значение.
В XIX и XX столетиях большое значение для развития динамики
приобретают работы отечественных ученых, к числу которых в пер-
первую очередь следует отнести А. М. Ляпунова, Н. Е. Жуковского,
С. А. Чаплыгина, И. В. Мещерского, К. Э. Циолковского, А. Н. Кры-
Крылова и ряда других.
А. М. Ляпунов A857—1918) — создатель современной теории
устойчивости движения. Ему принадлежит также исследование устой-
устойчивости форм равновесия вращающейся жидкости, имеющее огром-
огромное значение для научной космогонии.
Н. Е. Жуковский A847 —1921) является основателем одной из
важнейших областей механики — аэродинамики. Кроме того, он на-
написал большое число выдающихся работ по гидромеханике, гидра-
гидравлике и динамике твердого тела. Работа Н. Е. Жуковского «О при-
присоединенных вихрях» послужила теоретической основой для опреде-
определения подъемной силы крыла самолета.
В декрете Совета Народных Комиссаров РСФСР, подписанном
3 декабря 1920 года, В. И. Ленин назвал Н. Е. Жуковского «отцом
русской авиации».
—Академик С. А. Чаплыгин A869—1942) —ученик Н. Е. Жуков-
Жуковского также сыграл большую роль в развитии русской авиации. Он
вывел обобщенные уравнения движения, в которых ограничивающие
условия накладываются не только на положение точек, но и на их ско-
скорости Созданная Чаплыгиным теория неустановившегося движения
крыла самолета и аэродинамика больших скоростей является фун-
фундаментом расчетов самолета.
И. В. Мещерский A859—1935) —автор известного сборника за-
задач по теоретической механике, в работе «Динамика точки перемен-
переменной массы» A897) открыл новую отрасль механики — механику тел
переменной массы, одним из разделов которой является теория дви-
движения реактивных аппаратов.
Создание основ расчета реактивного движения принадлежит вы-
выдающемуся русскому ученому и изобретателю К. Э. Циолковскому
A857—1935), разработавшему конструкцию первой космической
ракеты.
Труды И. В. Мещерского и К. Э. Циолковского лежат в основе
теории движения современных многоступенчатых ракет, позволивших
Запустить искусственные спутники Земли, космические корабли-спут-
корабли-спутники, послать автоматические межпланетные станции к Луне и в сто-
рону Венеры. 12 апреля 1961 г. советские ученые и инженеры осу-
осуществили давнишнюю мечту человечества, запустив космический
корабль с первым космонавтом Ю. А. Гагариным, открыв этим эру
непосредственного проникновения человека в космическое про-
пространство.
Работы академика А. Н. Крылова A863 — 1945) по теории корабля,
теории гироскопов, теории колебаний, уравнениям математической
физики, внешней баллистике и теории упругости оказали большое
влияние на развитие механики в нашей стране и создали ему мировую
славу.
Передовые русские ученые в области механики, положившие
в основу своих работ тесную связь теории и практики, внесли
большой вклад в сокровищницу мировой науки.
§ 2. Основные законы механики
(законы Галилея — Ньютона)
В основе динамики лежат законы, впервые сформулированные
Ньютоном и названные им аксиомами, или законами движения (Axio-
mata sive leges motus).
1. Закон инерции
Материальная точка сохраняет состояние покоя или равно-
равномерного прямолинейного движения, пока воздействие других
тел не изменит это состояние.
2. Закон пропорциональности силы и ускорения
Ускорение материальной точки пропорционально приложен-
приложенной к ней силе и имеет одинаковое с ней направление.
3. Закон равенства действия и противодействия
Всякому действию соответствует равное и противоположно
направленное противодействие.
4. Закон независимости действия сил
Несколько одновременно действующих на материальную
точку сил сообщают точке такое ускорение, какое сообщила бы
ей одна сила, равная их геометрической сумме.
Законы классической механики подверждаются опытами и на-
наблюдениями, а потому являются объективными законами природы.
Первый закон — закон инерции, установленный Галилеем,
характеризует стремление тела сохранить неизменной скорость своего
движения или, иначе, сохранить приобретенное им ранее механическое
движение.
8
Это свойство тела называется его инертностью. Движение материи,
его вечность и несотворимость имеет как бы свою обратную сторону,
свое другое проявление — инертность, которая, как говорит Энгельс,
«есть не что иное как отрицательное выражение неуничтожаемости
движения» *.
Второй закон — закон пропорциональности силы Р и уско-
ускорения w устанавливает, как изменяется скорость движения материаль-
материальной точки под действием силы (рис. 1).
Этот закон выражается следующим обра-
образом:
B.1)
Соотношение B.1), устанавливающее связь
между силой Р, массой т и ускорением w, яв-
является важнейшим в классической механике и рис
называется основным уравнением динамики.
Такую форму второму закону придал Эйлер в своем трактате «Ме-
«Механика» A736).
У Ньютона этот закон выражался следующим соотношением:
Эйлер путем деления обеих частей равенства на lS.t = t —10 и пере-
перехода к пределу получил:
Р = т- lim —,—т-^- = mw.
At-Ю t — to
Масса есть мера инертности материальных тел при их
поступательном движении.
Современной физикой установлено, что масса тела увеличивается
с возрастанием скорости его движения, т. е. масса и энергия взаимно
связаны.
В классической же механике масса движущегося тела принимается
равной массе покоящегося тела, т. е. рассматривается как постоян-
постоянная величина.
Векторному равенству B.1) соответствует числовое равенство
P = mw. B.2)
Из этого равенства масса может быть определена по формуле:
» = ?. B-3)
Применяя уравнение B.3) к точке (телу) весом G и учитывая,
что ускорение свободного падения равно g, имеем:
т = Ц-, B4)
Энгельс. Диалектика природы, 1955, стр. 1.
т. е. масса материальной точки {тела) численно равна ее весу,
деленному на ускорение свободного падения.
О = mg. B.5)
Так как ускорение свободного падения в различных местах зем-
земной поверхности различно и зависит от географической широты
места и от его высоты над уровнем моря, то в отличие от массы
тела его вес не является постоянной величиной.
Системы механических единиц измерения
Для измерения механических величин применяются две системы
единиц: физическая и техническая.
В физической системе леханических единиц за основные
единицы приняты единицы длины, массы и времени, а сила
является величиной производной и имеет размерность:
В технической системе механических единиц за основные
единицы приняты единицы длины, силы и времени, а масса
является величиной производной и имеет размерность:
{m\=\L~lFln
В СССР в качестве государственного стандарта принята Между-
Международная система единиц измерения СИ (SI — от «Le systeme inter-
international d'unites ~^>)— в механике МКС, которая, так же как и си-
система СГС, является физической системой единиц.
Система единиц измерения МКГСС является технической системой
единиц.
За единицу массы в системе МКС принимается масса, равная
одному килограмму (кг) платинового эталона, хранящегося в архиве
Французской республики, а за единицу силы — ньютон (я) — сила,
сообщающая массе 1 кг ускорение 1 м/сек2.
1 ньютон =10 дециньютонов (д«)=100 сантиньютонов (сн) =
= 1000 миллиньютонов (мн).
1 килоньютон= 10 гектоньютонов (гн)— 10 деканьютонов (дан)=
=1000 ньютонов.
В системе СГС за единицу массы принимается грамм (г), а за
единицу силы — дина — сила, сообщающая массе 1 г ускорение
1 см/сек2.
В системе МГКСС за единицу силы принимается килограмм-
сила (кгс), сообщающая массе 1 кг ускорение 9,80665 м/сек2.
За единицу массы в этой системе принимается техническая
единица массы (т. е м.), т. е. масса, которой сила 1 кгс сообщает
ускорение 1 м/сек2.
1 ньютон = 105 дин = 0,102 кгс
1 кгс =9,81 ньютона = 981000 дин.
1 т. е. м. = 9,8] кг.
10
Из второго закона следует, что если сила, действующая на точку,
равна нулю, то и ускорение точки равно нулю, т. е. точка, не взаи-
взаимодействующая с другими телами, или движется равномерно прямо-
прямолинейно, или находится в покое.
Таким образом, первый закон динамики можно рассматривать как
следствие более общего второго закона.
Система отсчета, в которой проявляются первый и второй
законы, называется инерциальной системой отсчета. Для
большинства задач за такую систему отсчета можно принять систему
осей, связанных с Землей.
В случае, если необходимо учитывать суточное вращение Земли,
за инерциальную систему отсчета принимают геоцентрическую систему
осей координат с началом в центре Земли и осями, направленными
к трем выбранным «неподвижным» звездам.
При решении астрономических задач пользуются гелиоцентри-
гелиоцентрической системой осей координат с началом в центре Солнца и осями,
направленными к трем выбранным «неподвижным» звездам. Эту
систему с большей степенью точности можно принять за инерциальную
систему.
Третий закон — закон равенства
действия и противодействия двух тел
отражает двусторонность механических
процессов природы. Этот закон уста-
устанавливает, что при взаимодействии двух
тел, в каком бы кинематическом состоя-
состоянии они ни находились, силы, прило-
приложенные к каждому из них, равны по
модулю и направлены по одной прямой
в противоположные стороны. Будучи
приложенными к разным телам,
эти силы не уравновешиваются.
Если, например, в результате меха- рис. 2.
нического взаимодействия некоторого
тела А и материальной точки М массой т эта точка получает
ускорение w (рис. 2), то сила Р, выражающая действие тела А на
точку М, определяется вторым законом динамики:
Р = /raw.
По закону равенства действия и противодействия со стороны
материальной точки М на тело А действует сила Ф, равная по
модулю силе Р и направленная по той же прямой в противополож-
противоположную сторону, т. е.
ф == р_
или
ф = — mw. B.6)
Модуль силы:
B.7)
11
N
Сила Ф, равная по модулю произведению массы материальной
точки на модуль ее ускорения, направленная противоположно уско-
ускорению и приложенная к телу, сообщающему это ускорение, назы-
называется силой инерции материальной точки. При этом точка М
и тело А могут не соприкасаться,
б) тогда точка будет свободной (при
действии сил тяготения или элек-
электростатических сил) или соприка-
соприкасаться, тогда точка будет несво-
'///////////- бодной (наличие связи). Пусть,
например,тело М лежит на глад-
гладкой горизонтальной плоскости,
тогда вес его G уравновешивается
реакцией плоскости N.
Если телу сообщают ускоре-
ние w при помощи нити А
(рис. 3, а), действующей на тело
с силой P = mw (рис. 3, б), то
6)
Рис. 3.
(р
сила инерции Ф = — т\ы приложена к нити А (рис. 3, в). Эту
силу ощущает человек, который тянет нить.
Таким образом, сила инерции материальной точки является
реальной силой, представляющей собой противодействие мате-
материальной точки изменению ее скорости, и приложена к телу,
сообщающему этой точке ускорение.
При неравномерном криволинейном движении точки силу инер-
инерции Ф разлагают на две составляющие, направленные по касательной
к траектории и по главной нормали (рис. 4).
Ф
Полученные составляющие Фх и Ф
нормальной силами инерции. Эти
силы инерции направлены противо-
противоположно касательному и нормаль-
нормальному ускорениям.
Поэтому имеем:
называют касательной и
*х
= -
Из
-mwx, Ф„
кинематики
__ dv
Wi dt '
= —mw
известно
_ V2
Wn— p
«•
(§
*
B.8)
85):
Рис. 4.
где v — алгебраическая величина скорости точки*;
р — радиус кривизны траектории.
* Здесь и в дальнейшем, для упрощения заалгебраические величины
скорости, касательного ускорения, угловой скорости и углового ускорения
обозначаются буквами v, wx, ш и е без „змейки".
12
Пользуясь этими выражениями, получаем:
Фх = т
dv
dt
ф =.
B.9)
dv
Если точка М движется равномерно по кривой, то —тт = О,
фх = 0 и сила инерции Ф имеет лишь нормальную составляю-
составляющую, а ее модуль
mv*
Если точка М движется неравномерно по прямой, то wn = 0,
фп = 0 и сила инерции Ф имеет лишь касательную составляющую,
а ее модуль
ф = ФГ— m
dv
dt
В случае равномерного прямолинейного движения точки w = Q,
а потому и сила инерции равна нулю, т. е. ф = 0.
Если точка М принадлежит твердому телу, вращающемуся вокруг
неподвижной оси, то модули ее вращательного и центростремитель-
центростремительного ускорений вычисляются по формулам:
где со и е — алгебраические значения угловой скорости и углового
ускорения тела;
R — расстояние от точки М до оси вращения.
Тогда модули касательной и нормальной сил инерции, называемых
в этом случае вращательной и центробежной силами инерции,
определяются по формулам:
Фв=тР{\Е\, Ф«=тЯа2. B.10)
При равномерном вращении тела ? = ()•
Фв = 0, сила инерции
Сила инерции является одним из важ-
важнейших понятий динамики.
Действие сил инерции учитывается
при решении многих технических задач и,
в частности, при определении реакций
связей движущейся несвободной механи- рис 5.
ческой системы.
Четвертый зако н—закон независимости действия сил — не был
сформулирован Ньютоном как отдельный закон механики, но он
содержится в сделанном им обобщении правила параллелограмма сил.
Положим, что на материальную точку М действуют силы Р1#
1*2- Р3> ••¦> Ря (рис. 5). Каждая из этих сил, действуя на матери-
материальную точку отдельно, сообщает ей ускорения Wj, w2 \у„,
13
определяемые по второму закону:
P1 = mw1, Р2—
Согласно четвертому закону, ускорение материальной точки,
находящейся под действием сил Рц Р2 Р„, определяется урав-
уравнением:
Если принять ускорение w, получаемое материальной точкой
под действием всей системы одновременно действующих на нее сил,
равным геометрической сумме составляющих ускорений, т. е.
W = W1-fW2+ • • • +Wn,
то, умножив обе части этого равенства на т, получим:
mw — «W( -\- тщ-\- .-• + mwn
или
/ww=P1 + P2+ ... -f Р„.
Таким образом, закон независимости действия сил равносилен
утверждению, что ускорение w, получаемое материальной точкой
от одновременно действующей на нее системы сил, равно геомет-
геометрической сумме ускорений w;, w2, •••, wn, сообщаемых этой точке
каждой из сил в отдельности.
Четвертый закон, так же как и остальные законы классической
механики, подтверждается опытами и наблюдениями.
Вопросы для самоконтроля
1. Сформулируйте основные законы механики.
2. Какое уравнение называется основным уравнением динамики?
3. Какова мера инерции твердых тел при поступательном движении?
4. Зависит ли вес тела от местонахождения тела на Земле?
5. Какую систему отсчета называют инерциальной?
6. К какому телу приложена сила инерции материальной точки и каковы
ее модуль и направление?
7. Каковы модули и направления касательной и нормальной сил инер-
инерции материальной точки?
8. При каком движении материальной точки равна нулю ее касательная
сила инерции и при каком нормальная?
9. По каким формулам вычисляются модули вращательной и центробеж-
центробежной сил инерции точки, принадлежащей твердому телу, вращающемуся
вокруг неподвижной оси?
ГЛАВА 11
ДИНАМИКА СВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ
§ 3. Дифференциальные уравнения движения свободной
материальной точки в декартовых координатах
Рассмотрим движение материальной точки М массой т под дей-
действием приложенных к ней сил Pj, P2, .... Р„ (рис. 6). Выберем
прямоугольную систему осей координат х, у, г.
Основное уравнение динамики имеет вид:
mw_p1 + p2+ ... +рп. C.1)
14
Проектируя обе части векторного равенства C.1) на координат-
координатные оси, получаем:
mw cos (w, i) = Xl-\-X2-\- ... + Xn,
/no» cos (w. j)= Г, 4-
mw cos (w, k) = Z1 -f-
••• ~\-УЯ'
(a)
Zx;
F2, Z2;
где Arlt
P2 Р„ на оси х, у, z.
Из кинематики известно, что
проекция ускорения точки на каж-
каждую ось декартовых координат
равна второй производной по вре-
времени от соответствующей коор-
координаты точки, т. е.
\) = wx = х.
X n, Y n, Zn~ проекции сил Р1(
¦да cos (w, |) = wy = y,
ie>cos(w, k) = wz = z.
Подставляя эти значения в ра-
равенства (а), получаем:
Рис. 6.
C.2)
Уравнения C.2) называются дифференциальными уравнениями
движения материальной точки,
§ 4, Естественные уравнения движения материальной точки
Спроектируем обе части векторного равенства C.1) на естествен-
естественные координатные оси (подвижные) — касательную, главную нормаль
и бинормаль (рис. 7):
mwcos(w, -с) = 2 Pi cos (P/> <с)>
/яда cos(w, b) = 2^>iC0S(Pi- b).
Проекции ускорения на касательную и главную нормаль опре-
определяются по формулам из кинематики (см. § 85), т. е.
¦да cos (w, t) =
15
Подставляя значения этих проекций в два первых равенства (а),
получаем:
т —-ТТ- =
;, х).
D.1)
Из кинематики известно, что вектор ускорения w лежит в со-
соприкасающейся плоскости и его
проекция на бинормаль равна
нулю:
•k/cos(w, b) = 0.
Из третьего равенства (а) сле-
следует, что сумма проекций всех
TJ* сил, приложенных к точке, на
' бинормаль равна нулю:
2 Л cos (P,, Ь) = 0.
Уравнения D.1) называются
естественными уравнениями
движения материальной точки.
Рис. 7. Этими уравнениями удобно
пользоваться в случае, когда из-
известна траектория точки. Применение уравнений D.1) показано
в гл. IV.
§ б. Две основные задачи динамики точки
При помощи дифференциальных уравнений движения точки можно
решать две основные задачи динамики точки.
Первая задача динамики. Зная массу точки я и урав-
уравнения ее движения:
найти модуль и направление равнодействующей сил,
приложенных к точке.
Эта задача легко решается следующим путем:
Х=тх, Y = my, Z — mz,
х у Z
cos(P, i) — -^-, cos(P, j)=^-, cos(P, k) = -p-.
16
Пример I. Уравнения движения точки М массой т имеют вид:
х = г cos kt, y = rsinkt.
Определить равнодействующую приложенных к точке сил.
Решение. Исключая время t из уравнений движения, находим
уравнение траектории точки:
Траектория — окружность радиусом г (рис. 8).
Определяем проекции ускорения точки на оси координат:
kt,
у = — tfrsinkt.
Находим проекции равнодействующей силы;
X = тх = — mk2r cos kt,
Y = my = —r tnk2r sin kt.
Определяем модуль и направление силы:
Р = у^+К2 = mb?r Ycos2kt-\-sin2kt = mk2r,
X х
cos (P, i) = -р — — cos kt = = — cos ф,
Y у
cos (P, j) = -p- = — sin kt — — = — sin ф.
Углы, составленные направлением силы Р с направлением осей
координат, имеют значения:
/.(P. i)=180°-ф;
Рис. 8.
т. е. в любой момент сила Р направлена
к началу координат О.
Таким образом, установлено, что на точку
действует сила притяжения, модуль которой
пропорционален массе точки и ее расстоя-
расстоянию от центра притяжения О.
Вторая задача динамики. Зная силы,
действующие на материальную
точку, ее массу т, а также начальное положение
точки и ее начальную скорость, получить уравнения
движения точки.
Для решения этой задачи необходимо в левую часть уравне-
уравнений C.2) подставить значение массы т, а в правую часть — суммы
проекций приложенных сил и полученные уравнения дважды проин-
проинтегрировать по времени.
2 А. А. Яблонский
17
Эта задача имеет большое практическое значение и в общем слу-
случае является более сложной, чем первая.
При интегрировании каждого дифференциального уравнения дви-
движения точки появляются две постоянные, а потому при интегрировании
трех дифференциальных уравнений движения точки будет шесть
постоянных. Значения этих постоянных определяют по началь-
начальным условиям движения: значениям трех координат точки и про-
проекций ее скорости на три оси в некоторый момент времени, обычно
(но не обязательно) в начальный момент.
Пусть в начальный момент времени t — t0 известны координаты
точки и проекции ее скорости на оси, т. е.
E.1)
х = х0; у = у0; z= z0. )
Эти значения подставляют в уравнения, представляющие собой
общие решения дифференциальных уравнений движения точки.
Из этих уравнений определяют постоянные интегрирования
Cv C2, .... С6 в зависимости от начальных координат и проекций
начальной скорости. Подставляя найденные значения постоянных
интегрировиния в общее решение дифференциальных уравнений движе-
движения точки, получают уравнения движения точка в виде
= /1(t. х0, у0, z0, х0, у0, z0).
= f2{t, х0, у0, г0, х0, у0, г0),
= /3(t, х0, у0, z0, х0, у0, z0),
E.2)
Процесс интегрирования дифференциальных уравнений движения
точки разберем на конкретных примерах. При этом рассмотрим сле-
следующие случаи изменения силы, действующей на точку:
1) сила постоянна по модулю и направлению;
2) сила зависит от времени;
3) сила зависит от положения точки в пространстве;
4) сила зависит от скорости точки.
§ 6. Свободное падение тела без учета сопротивления воздуха
Рассмотрим движение тела М, падающего на поверхность земли
с высоты Н, полагая вес тела G постоянным (рис. 9).
Пренебрегая размерами тела, будем считать его материальной
точкой. Сначала рассмотрим падение тела в пустоте, т. е. без учета
сопротивления воздуха.
Направим ось у по траектории прямолинейного движения тела
в сторону его движения и примем за начало координат начальное
положение тела. Если начальная скорость тела равна нулю, то на-
начальные условия рассматриваемого движения будут иметь вид
t = 0, уо = О, уо = О.
18
Дифференциальное уравнение этого прямолинейного движения тела
под действием силы тяжести примет вид
У — 2 ^i — ° =
откуда
т. е. ускорение движения постоянно.
Интегрируя дважды по t, получаем
Постоянные Ct и С2 определим по начальным условиям. Подставив
О
в первое уравнение ? = 0, у0 —0, получим
Подставив во второе уравнение t = 0, уо = О, получим
Т
и
Уравнения, характеризующие свободное падение
тела при значениях С1 — О и С2 = 0, примут вид
y = gt. F.1)
У=М?~. F.2)
Законы свободного падения тела, выраженные этими
уравнениями, были впервые экспериментально уста- ? g
новлены Галилеем:
1. Скорость свободно падающего тела пропорциональна вре-
времени падения F.1).
2. Пути, проходимые свободно падающим телом, пропор-
пропорциональны квадрату времени падения F.2).
Пользуясь уравнением F.2), можно определить время свободного
падения тела с высоты Н:
F.3)
§ 7. Движение тела, брошенного под углом к горизонту,
без учета сопротивления воздуха
Определим движение тела М, брошенного под углом а к гори-
горизонту с начальной скоростью v0, пренебрегая сопротивлением воздуха
и принимая тело за материальную точку (рис. 10).
Совместим начало координат О с точкой вылета тела, направив
ось х по горизонтали вправо, а ось у — вверх по вертикали.
19
Тогда получим начальные условия движения:
= vox — vo c°s a.
Составим дифференциальные уравнения движения тела под дейст-
действием постоянной силы тяжести Q в декартовых координатах:
my = 2 К, — — G — — тВ-
Проекции ускорения точки из этих уравнений будут
х = 0, y = —g.
Сначала проинтегрируем дважды по t дифференциальное уравне-
уравнение движения тела вдоль оси х:
х:==:z c> p
Определим постоянные интегрирования. Подставив в первое урав-
уравнение проекцию начальной скорости jc0 = г/0 cos a, получим С1 =
— vQ cos a.
И
"• м2 щ
Рис. 10.
Подставив во второе уравнение ^ = 0, л;0 = 0, получим С2 = 0.
При найденных значениях Сх и С2
x = t»0cosa, G.1)
х = vot cos a. G.2)
Уравнения G.1) и G.2) показывают, что проекция скорости тела
на горизонтальную ось постоянна и горизонтальное перемещение тела
совершается по закону равномерного движения со скоростью vQ cos a,
т. е. по инерции.
20
Проинтегрировав дважды по t дифференциальное уравнение-
= — g, получим
Определим значения С3 и С4 по начальным условиям.
Подставив в первое уравнение t = 0, yo = t>osina, получим
3 o
Из второго уравнения при ^ = 0 и >>о = О получим С4 = 0. При
найденных значениях С3 и С4
— gt, G.3)
et2
^r. G.4)
Уравнения G.3) и G.4) показывают, что вертикальное движение
тела является равнопеременным. При подъеме оно замедленное,
так как направления вертикальной составляющей скорости и уско-
ускорения силы тяжести противоположны, а при спуске — ускоренное,
так как эти направления совпадают.
Исключим время t из уравнений движения тела G.2) и G.4):
et2
x = vot cos a, y = i>orsina — -^p-;
получим уравнение траектории:
y^xtga— gx\ . G.5>
2i>q cos a
Траектория представляет собой параболу с вертикальной осью
и вершиной в наивысшей точке. Форма траектории тела, движу-
движущего в пустоте под действием силы тяжести, была впервые уста-
установлена Галилеем.
Определим скорость движения тела по траектории способом
проекций (см. ч. I, «Кинематика», § 80):
v =
v\ = V(vo cos aJ -4- (v0 sin a — gif .
Эта формула показывает, что движение, полученное сложением
равномерного горизонтального и равнопеременного вертикального-
движений, не является равнопеременным.
Определим дальность и продолжительность полета тела.
В точке уМ4 падения тела на землю ^>4 —0-
Продолжительность полета определим из уравнения G.4) при
у = 0:
et2
vot sin a — -^g- = 0.
Отсюда получим момент вылета t = 0 и момент падения t4 — v°s n a .
21
Дальность полета определим, подставив значение t4 в уравне-
уравнение G.2):
2v0 sin a vl
= —-sin2a. G.6)
Формула G.6) показывает, что дальность полета тела при одной
и той же скорости вылета тела v0 зависит от угла а.
Очевидно, что наибольшая дальность полета наблюдается при
sin2a=l, т. е. при a = 45°.
Наибольшую высоту подъема тела при заданной начальной ско-
скорости v0 и угле а можно определить из условия, что в наивысшей
точке М2 проекция скорости на вертикальную ось равна нулю:
f 2у = У2 = ^о sin a — gt2 — 0.
откуда
, v0 sin a
2 g
Подставляя значение t2 в уравнение G.4), получаем:
vi sin2 a
Движение материальной точки под действием силы тяжести явля-
является примером движения под действием силы, постоянной по модулю
и направлению.
§ 8. Движение падающего тела с учетом сопротивления воздуха
Рассмотрим влияние сопротивления воздуха на движение тела,
падающего на землю (рис. 11).
Положим, что тело М весом О движется вниз без
начальной скорости из точки О, принятой за начало коор-
координат. Ось у направим вертикально вниз. Тогда начальные
условия движения будут иметь вид:
-1 * = 0; уо=О; уо = О.
R
М
Рассмотрим падение тела при сопротивлении воздуха,
пропорциональном скорости движения тела. Тогда силу
сопротивления можно представить в виде R — av, где а —
коэффициент пропорциональности. Обозначим — = k.
Коэффициент k равен модулю силы сопротивления
воздуха, приходящейся на единицу массы движущегося
тела при скорости его, равной единице, и имеет размер-
размерность (сек~х).
Составим дифференциальное уравнение движения тела под дейст-
действием силы тяжести G и силы сопротивления воздуха R:
ту = 0 — R = mg — mkv,
22
откуда
у = g — kv.
Можно понизить порядок уравнения, перейдя от переменной у
к переменной v = у. Для этого представим ускорение точки в виде
dv , _
yz=—rr, где v — алгебраическое значение скорости. Тогда
dv ,
— = g-kv,
или
dv = (g — kv) dt.
Разделив переменные, получим:
dv
-dt.
g — kv
Введем переменную
и — g — kv,
тогда
du = — k dv и dv = ~.
k
Заменив переменную, получим уравнение: —— =—kdt. Интегри-
Интегрируя, найдем:
In a — — kt-\-Cx,
или
In {g — kv) — — kt -f- Cj.
Определим значение С,, подставив в полученное уравнение
При найденном значении С1
In (g — kv) = — kt -\- In g,
или
,„(*=*.).=._„.
Потенцируя, получим:
g
или-
— —¦у— е
Из этого уравнения найдем значение v:
„ = ?A-,-«). (8.1)
23
При t->oo имеем е~ ->0, г>->-|-, т. е. скорость падения воз-
возрастает, стремясь к предельной скорости
v —?
Практически по истечении некоторого конечного промежутка
времени движение становится равномерным.
При скорости fnp = -4- сила сопротивления становится равной
весу тела, так как
R = mkvnp — mk j- = О.
Представим уравнение (8.1) в виде
v dt k ( e '•
или
dy = j-(l—e-kt)dt.
Проинтегрируем его:
Для определения значения С2 в полученное уравнение подставим
t — 0, yo = O, тогда
откуда
С2 = ~ "р- •
При найденном значении С2 получим уравнение движения падаю-
падающего тела с учетом сопротивления воздуха:
y=ft—§(l-e~l!l). (8.2)
В рассмотренном примере показано интегрирование дифференци-
дифференциального уравнения движения точки при наличии силы, зависящей от
скорости точки.
§ 9. Пример интегрирования дифференциальных уравнений
движения точки для случая силы, зависящей от времени
На точку М массой м = 2 г действует горизонтальная сила Р,
остающаяся параллельной некоторой прямой и имеющая величину
P = 2cos5t мн. Определить движение точки М в горизонтальной
плоскости, если в начальный момент скорость точки v0 была пер-
перпендикулярна к направлению силы Р и имела модуль ^0= 10 см/сек.
24
Решение. Примем начальное положение точки за начало коор-
координат (рис. 12). Направим ось х вдоль начальной скорости точки v0,-
а ось у — параллельно линии действия силы Р.
Тогда начальные условия движения будут следующими
t — 0, лго = О, уо = О, xo = vo = 10 см/сек, уо = О.
Единственной силой, действующей на точку в горизонтальной
плоскости, является заданная сила Р, параллельная оси у.
Составим два дифференциальных уравнения движения точки:
Из первого дифференциального уравнения
Проинтегрировав это уравнение дважды по t, получим:
X =^ С j, X ===
Подставив в первое уравнение проекцию начальной скорости
х0 — 10 см/сек, получим С1 = 10. Подставив во второе уравнение
? = 0, хо = О, получим С2 = 0. При этих значениях Сх и С2 для
движения точки вдоль оси х
л: = 10 см/сек;
х= 101 (см).
Получим второе дифференциальное уравнение, выражая массу
точки в граммах, а силу Р в динах:
2y = 200cos5f или у =100 cos Ы.
Проинтегрировав его дважды по /, получим
у = 20 sin Ы -\-С3,
у = — 4 cos Ы + Czt + С4.
25
Подставив в первое уравнение ? = 0, уо = О, найдем С3 = 0.
Подставив во второе уравнение ^ = 0, уо = О, получим: 0 = —4-f-C4,
откуда С4 = 4. При найденных значениях С3 и С4 для движения
¦точки вдоль оси у
у = 20 sin 5^ (см/сек),
у = 4 A — cos 5^) (см).
Чтобы получить уравнение траектории точки, исключим время
из уравнений ее движения:
На рис. 12 показана траектория точки при движении, полученном
сложением равномерного движения вдоль оси х и гармонического
колебательного движения вдоль оси у.
§ 10. Пример интегрирования дифференциального
уравнения движения точки для случая силы,
зависящей от положения точки
Материальная точка М массой т = 20 г отталкивается от неко-
некоторого центра О силой, обратно пропорциональной кубу расстоя-
расстояния ОМ.
В начальный момент известны: расстояние СШ0 = 5 см, скорость
точки г>0=10 см/сек, направленная по прямой ОМ от центра О, и
сила отталкивания /' = 0,4 мн.
Получить уравнение движения точки под действием силы отталки-
отталкивания, а также определить скорость, приобретенную точкой на рас-
расстоянии 20 см от центра О.
Решение. Центр отталкивания О примем за начало координат,
ось х направим по прямой, соединяющей этот центр с движущейся
точкой М (рис. 13). Установим
Mq у м Р начальные условия:
Л ш о — о » X
х0 = v0 = 10 см/сек.
Рис. 13. На точку действует сила от-
отталкивания Р, направленная по
оси л;, Модуль этой силы обратно пропорционален кубу расстоя-
расстояния ОМ, т. е.
Значение коэффициента k можно определить по условию, что при
=5 см сила отталкивания Р0 = 0,4 лн = 40 дин:
Л = Р.аЗ = 40 ^Щ- • 125 с.«3= 5000 г см^сек2.
и о сек1 '
26
Составим дифференциальное уравнение движения точки М:
— Р = ±
х3 '
Чтобы понизить порядок дифференциального уравнения, представим:
dv ,
ускорение в виде х — ~тг> гДе v—алгебраическое значение ско-
скорости.
Тогда
dv _ k
dt ~~ x3 '
Последнее уравнение содержит переменную величину х, кроме
переменных v и t.
Исключаем из уравнения переменную t, применив преобразование:
dt dx dt dx ' \ • У
Дифференциальное уравнение движения точки примет вид:
dv k
dx x3
Разделим переменные:
k
x3
При интегрировании уравнения воспользуемся определенными инте-
интегралами с переменным верхним пределом.
При изменении скорости от v0 до v координата точки изменяется;
от х0 до х. Тогда
т
I v dv — k I —3-;
dx mv2
k
или
откуда
mv2 mvl k I \ 1
0 m\xl x2j'
Подставив числовые значения k, m, v0, получим
5000
или
:o— -^ . (io.2)
27
Полученное выражение определяет скорость v точки в зависи-
зависимости от ее координаты х. Из этого уравнения можно найти искомое
значение скорости при х = 20 см:
— |g? =10,46 см/сек.
Чтобы получить уравнение движения точки x—f(t), воспользуемся
уравнением A0.2):
250
Разделим переменные:
ах
или ж =
Левую часть проинтегрируем в пределах от лг0 = 5 см до х,
а правую — в пределах от t0 — 0 до t:
тг
или
r2 _.
Подставим значения пределов:
ИЛИ
Возведем в квадрат обе части уравнения:
Отсюда получим уравнение движения точки:
х = 1/25-4- 100^4- 11Ы2 с'*-
Примечания:
1. Определенные интегралы с переменными верхними и нижними пре-
пределами, соответствующими начальным значениям переменных интегрирова-
интегрирования, могли быть использованы и при решении предыдущих примеров. При-
Применение их освобождает от определения постоянных интегрирования по
начальным условиям. Наоборот, при решении последнего примера можно
было бы применять неопределенные интегралы, определяя постоянные инте-
интегрирования по начальным условиям.
28
dv
2. Преобразование A0.1) mx=mv-z— иногда удобно применять и
в случае силы, зависящей от скорости. Тогда дифференциальное уравнение
с переменными v к t переходит в уравнение с переменными v и х.
Вопросы для самоконтроля
1. Какие уравнения динамики называются естественными уравнениями
движения материальной точки?
2. Каковы две основные задачи динамики точки, которые решаются при
помощи дифференциальных уравнений движения материальной точки?
3. Как определяются постоянные при интегрировании дифференциальных
уравнений движения материальной точки?
4. Каковы законы свободного падения тела?
5. По каким законам происходят горизонтальное и вертикальное пере-
перемещения тела, брошенного под углом к горизонту в пустоте; какова траек-
траектория его движения и при каком угле а тело имеет наибольшую дальность
полета?
ГЛАВА III
КОЛЕБАТЕЛЬНОЕ ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
§ 11. Виды колебательных движений материальной точки.
Свободные колебания материальной точки
Колебательное движение материальной точки происходит при
условии, если на точку М. отклоненную от положения покоя О
(рис. 14), действует сила Р,
стремящаяся вернуть точку
в это положение. Такая сила
называется восстанавли-
восстанавливающей.
0 Р М
м,
WWVWW! ¦-«W
Рис. 14.
Рассмотрим простейший, но имеющий большое практическое зна-
значение, случай, когда восстанавливающая сила пропорциональна откло-
отклонению точки от положения покоя, т. е. Р = с • ОМ, где с — постоян-
постоянный коэффициент пропорциональности.
Примером такой линейной восстанавливающей силы может слу-
служить сила упругости пружины.
Пусть, например, тело весом О, лежащее на гладкой горизон-
горизонтальной плоскости в положении О (рис. 15), соединено с недефор-
мированной пружиной, другой конец которой закреплен в точке А.
В этом положении приложенные к телу силы, его вес G и реакция
плоскости N взаимно уравновешиваются.
На тело, отклоненное в положение Mv будет действовать, кроме
сил G и N, сила упругости растянутой пружины Рц стремящаяся
29
вернуть тело в положение покоя О. Модуль этой силы пропорцио-
пропорционален удлинению пружины, т. е. Р1 = с-ОМ1.
В положении М2 сила упругости сжатой пружины Р2> имеющая
модуль Р2 = с- ОМ2, также стремится вернуть тело в положение О.
Таким образом, сила упругости деформированной пружины всегда
направлена к точке О — положению покоя тела и пропорциональна
отклонению тела от этого положения.
Колебания могут происходить и под действием восстанавливающих
сил, изменяющихся по другому закону.
Различают четыре основных случая колебательного движения мате-
материальной точки:
1) свободные колебания, совершающиеся под действием только
восстанавливающей силы,
2) затухающие колебания, совершающиеся под действием вос-
восстанавливающей силы и силы сопротивления движению,
3) вынужденные колебания, совершающиеся под действием вос-
восстанавливающей силы и силы периодического характера, называемой
возмущающей силой.
4) вынужденные колебания, совершающиеся под действием вос-
восстанавливающей силы, возмущающей силы и силы сопротивления
движению.
Изучим свободные колебания материальной точки. Примем прямо-
прямолинейную траекторию движения точки М за ось х и поместим начало
координат О в положение, в котором
0 Р М точка М могла бы находиться в покое
Х (рис. 16).
Если точка /И выведена из состояния
покоя, то на нее по оси х действует
только восстанавливающая сила Р.
Если в некоторый момент времени t точка М имеет координату х,
то модуль восстанавливающей силы
Р = с ¦ ОМ — с\х\,
где с — коэффициент жесткости пружины, численно равный силе
упругости ее при деформации, равной единице.
Так как восстанавливающая сила в любом положении направлена
к точке О, то ее проекция на ось х имеет всегда знак, противо-
противоположный знаку координаты х, т. е.
Составим дифференциальное уравнение прямолинейного движения
точки М под действием восстанавливающей силы Р:
Пользуясь выражением A1.1), получим:
тх = — сх, или jc-4 х =
т
30
Обозначая — = k2, имеем
т
A1.2)
Уравнение A1.2) называется дифференциальным уравнением
свободных колебаний материальной точки.
Для интегрирования этого однородного линейного уравнения
с постоянными коэффициентами составим характеристическое урав-
уравнение:
нение:
Его корни Zi = ~\-lk и z2 —— Ik.
Обшее решение уравнения A1.2) имеет вид
inW. A1.3)
Чтобы определить значения постоянных Сх и С2, найдем уравне-
уравнение, определяющее скорость точки, продифференцировав уравне-
уравнение A1.3):
x = — kClsmkt~{-kC2coskt. A1.4)
Пусть в начальный момент t — 0 точка имеет координату х0 и
проекцию скорости на ось х, равную х0. Тогда, подставив началь-
начальные условия в уравнения A1.3) и A1.4), найдем
С1 = х0, xo = kC2, откуда С2 = -^-.
Подставляя значения С, и С2 в уравнение A1.3), получаем урав-
уравнение движения точки М:
x = x0coskt-^-^-sinkt. A1.5)
Уравнению A1.3) можно придать и другой вид, введя вместо по-
постоянных С1 и С2 две новые постоянные аир, положив:
C2=acosp.
Подставив эти значения С1 и С2 в уравнение A1.3), получим
-p). A1.6)
Уравнение A1.6) является уравнением гармонического колеба-
колебательного движения точки (см. ч I, «Кинематика», § 89).
Таким образом, установлено, что свободные колебания мате-
материальной точки под действием линейной восстанавливающей
силы являются гармоническими, колебаниями.
Амплитуда а и начальная фаза р свободных колебаний материаль-
материальной точки как постоянные интегрирования, введенные вместо Cj
и С2, определяются по начальным условиям движения.
31
Уравнение, определяющее скорость точки, имеет вид:
x — akcos(kt-\-$). A1.7)
Подставив в уравнения A1.6) и A1.7) значения начальной коор-
координаты х0, проекции начальной скорости х0 и времени tu = (h получим:
xo = asinp; хо = akcosfi.
Из этих выражений найдем аир:
х0
A1.8)
A1.9a)
Так как каждому значению тангенса соответствуют два угла в пре-
пределах от 0 до 2я, то необходимо определить еще sinp или cosp:
a f х2
*! / 1 О
У Хо+-?Г
==т. (П.96)
ха Xq
Рис. 17.
Так как /г2 = —, то циклическая частота* и период свободных
колебаний определятся по формулам:
. A1.11)
Как видно, частота и период свободных колебаний точки
зависят лишь от массы этой точки и от коэффициента с,
характеризующего восстанавливающую силу, и не зависят от
начальных условий движения.
Период свободных колебаний Т увеличивается при увеличении
массы точки и уменьшается при увеличении коэффициента с.
График свободных колебаний показан на рис. 17.
* Ниже циклическая частота именуется «частотой».
32
§ 12. Свободные колебания груза, подвешенного к пружине
Рассмотрим груз весом О, подвешенный к пружине АВ, конец А
которой закреплен неподвижно (рис. 18). Когда груз находится
в покое, удлинение пружины равно /ст. Положим, что
в некоторый момент времени груз был смещен из поло-
жения покоя вниз по вертикали на величину у0 и отпу-
отпущен с начальной скоростью у0. Определим возникшее
движение груза, пренебрегая массой пружины.
Примем груз за материальную точку и направим по
его вертикальной прямолинейной траектории ось у
(рис. 19). Начало координат О совместим с положением
покоя груза, которому соответствует статическое удли-
удлинение пружины /ст.
Тогда начальному положению груза Мо будут соответствовать
координата у0 и проекция начальной скорости у0.
Начальные условия будут: ?0 = 0, у = у0, у = у0. На груз дей-
действуют силы: его вес G и сила упругости пружины Р, модуль кото-
которой пропорционален деформации пружины. В положении М, опре-
деляемом координатой у, деформация пружины равна
' а модуль силы упругости определяется:
Проекция силы Р на ось у:
О Ру=^ — с (/„ -f у),
р
м Когда груз находится в покое, то его вес урав-
уравновешивается силой упругости, равной по модулю
? РС1 = с/ст, т. е.
М, О = Рст = с/ст. A2.1)
Дифференциальное уравнение движения груза имеет
-У вид:
Подставив в дифференциальное уравнение значение коэффициента
жесткости пружины с, определяемое формулой A2.1), получим
/с
Так как G = mg, то
/с
A2.2)
Уравнение A2.2) является дифференциальным уравнением свобод-
свободных колебаний материальной точки A1.2):
3 А. А. Яблонский
где
# = -?-.
/ст
Частота свободных колебаний груза
/ст
Период его колебаний
T^=~ = 2nY1f- A2.4)
Формула A2.4) может быть получена и непосредственно из фор-
формулы A1.11).
Общее решение дифференциального уравнения A2.2) имеет вид
A1.3) и A1.6).
Представим уравнение движения груза в форме A1.6):
y = asin(«-f-p). A2.5)
Амплитуду а и начальную фазу р колебаний определим по фор-
формулам A1.8) и A1.9), пользуясь начальными условиями:
/2 . Уо
Уо
Уравнение движения груза A2.5) примет вид
A2.6)
Формула A2.4) является общей для определения периода свобод-
свободных колебаний груза, поддерживаемого упругой связью.
Она позволяет определить период свободных колебаний этого
груза около положения, в котором действующие на груз силы уравно-
уравновешиваются.
Для определения периода по формуле A2.4) нужно знать стати-
статическую деформацию, соответствующую этому положению. Так, напри-
например, период свободных колебаний груза, лежащего на упругой балке
и вызывающего статический прогиб балки, равный 5 мм, определится
(без учета массы балки):
^=2я |/"^- = 0.142 сек.
Если вес кузова вагона вызывает прогиб вагонных рессор
/ст = 4 см, то период свободных колебаний кузова на рессорах
,-r = U,4Ul сек,
34
§ 13. Примеры на свободные колебания
Пример 2. Тело весом G = 20 к, лежащее на гладкой горизон-
горизонтальной плоскости и прикрепленное к концу недеформированной пру-
пружины (рис. 20), отклоняют из положения покоя вправо, растягивая
пружину на 4 см, и отпускают, сообщая
начальную скорость 56 см/сек, направлен- |
ную влево (удлинение пружины на. I см %
вызывается силой 4 «). Определить даль-
дальvwvwwv
Рис. 20.
нейшее движение тела, пренебрегая массой ^
пружины (рис. 21).
Решение. Направим ось х гори-
горизонтально вправо, считая началом коор-
координат О положение покоя тела, принятого за материальную точку.
Тогда начальные условия будут следующими:
^ = 0, хо = А см, хо = —56 см/сек.
В произвольный момент времени t на тело М, имеющее коорди-
координату х, действуют силы: вес тела G, реакция плоскости N и сила
упругости деформированной пружины Р, направленная к точке О.
Модуль силы Р про-
пропорционален деформации
пружины, т. е.
Р = с ¦ ОМ,
WWWW
Рг-
К
Рис 21.
X
где с—коэффициент жест-
жесткости пружины. Проек-
Проекция силы Р на ось х:
!• у
X '
По условию задачи
с = 4 н/см.
Составив дифферен-
дифференциальное уравнение дви-
движения тела, получим диф-
дифференциальное уравнение
свободных колебаний:
kt
Рис. 22.
/КАТ-
/КАТИЛИ
т. е.
с
т
Решение дифференциального уравнения представим в форме A1.6):
je = asin(ftf + p).
3* 35
Вычислим частоту и период колебаний по формулам A1.10)
и A1.11):
Г = %. = -&? = 0,45 «к.
k 14
Амплитуду а и начальную фазу р свободных колебаний тела
вычислим по начальным условиям при помощи формул A1.8) и A1.9)
-^iil± = -l, si ^_
sp 56
Уравнение свободных колебаний груза имеет вид:
jn\ (см).
На рис. 22 построен график движения, соответствующего полу-
полученному уравнению. При этом по оси абсцисс отложены не значе-
значения t, а пропорциональные им произведения Ы. Тогда начальная
фаза (J изображается величиной смещения начала волны синусоиды
в направлении, противоположном направлению оси абсцисс.
Примечание. Амплитуда свободных колебаний зависит как от началь-
начального отклонения тела из положения покоя, так и от начальной скорости.
При этом направление начальной скорости не влияет на амплитуду. Так,
если начальную скорость направить вправо (х0 — 56 см/сек), амплитуда
будет иметь ту же величину. Если тело опустить без начальной
скорости (х0 = 0), то амплитуда
т. е. амплитуда будет равна начальному отклонению тела от положения
покоя.
Наличие начальной скорости увеличивает амплитуду.
Пример 3. Груз весом О подвешен на двух пружинах с различ-
различными коэффициентами жесткости ct и с2. Определить периоды сво-
свободных колебаний груза при последовательном и параллельном соеди-
соединении пружин при условии, что удлинения параллельно соединенных
пружин одинаковы (рис. 23 и рис. 24, а).
Решение. Периоды свободных колебаний груза определим по
формуле A2.4):
а) В случае последовательного соединения пружин общее стати-
статическое удлинение связи, поддерживающей груз, равно сумме удли-
•36
нений двух пружин. Определяем эти удлинения по формуле A2.1):
f —f -i- f — ° i G —
/ст —/1СТ-+-/2СТ— C( -T-77 —
C( T77 U Cl.C2 •
Таким образом, при последовательном соединении пружин при-
приведенный коэффициент жесткости:
Период колебаний груза
б) В случае параллельного соединения пружин (рис. 24, а) силы Sj
и S2. растягивающие пружины, определяются как параллельные соста-
составляющие силы О (рис. 24, б):
Cr Sl Ь-
• (а)
По условию задачи удлинения
обеих пружин должны быть оди-
одинаковы:
/icT == /2ст
Определяем удлинения по фор-
формуле A2.1):
с2
(б)
а)
'//////////////////////////////A
. I, . h
Условие, обеспечивающее оди-
одинаковые удлинения пружин, полу-
получается из пропорций (а) и (б):
с2
Рис. 23.
Q
Рис. 24.
Величина удлинения каждой пружины определяется отношением (б),
т. е.
Sj
Sx-\-S2
С2
Период колебаний груза
G
Пример 4. Груз весом 0=19,62 к падает с высоты Я—40 см
на середину твердой квадратной плиты, укрепленной на четырех сим-
симметрично расположенных пружинах. Коэффициент жесткости каждой
пружины равен 2 н\см. Соприкасаясь с плитой, груз заклинивается
37
на ней и движется вместе с ней. Определить колебательное движе-
движение г руза с плитой, пренебрегая массой плиты (рис. 25, а).
Решение. Направим ось у вертикально вниз по траектории
центра тяжести груза (рис. 25, б). Начало координат О поместим
а)
I
С" Г
о
!
I--- rs"
rriftf ;>
'//////////////////
G
/////////////////-у.
Рис. 25.
в той точке, где находился бы центр тяжести груза, лежащего на
плите и вызывающего статическое сжатие пружин, определяемое
формулой A2.1):
с '
Суммарный коэффициент жесткости четырех пружин, соединенных
параллельно и расположенных симметрично, определяется (см. при-
пример 3):
с = 4 • 2 = 8 н/см.
Статическое сжатие
, 19,62 _ ._
/ст = —7—~ ' СМ"
Колебательное движение груза начинается в момент соприкасания
с плитой, лежащей на недеформированных пружинах (если масса
плиты мала по сравнению с массой груза и не учитывается), т. е.
начальному положению груза Мо соответствует координата уо =
= —/сТ — — 2,45 см. В этот момент скорость груза равна скорости
свободного падения с высоты Н
vo=
vo= Y2gH= /2-981 • 40= 280 см/сек.
Так как v0 имеет направление оси у, то
уо = г>о=28О см/сек.
Начальные условия колебательного движения
/ = 0; Уо~ — 2,45 см, у0 = 280 см/сек.
38
На груз, движущийся вместе с плитой, действуют его вес G и
сила упругости пружин Р, проекция которой на ось у определяется
выражением
Ру = -С(/„+У).
Дифференциальное уравнение движения груза под действием сил Р
и G имеет вид
my = ^1Yl =— с (/ст -f- у) -4- О или ту = — су,
так как —c/CT-f-G = O согласно формуле A2.1).
Далее получаем дифференциальное уравнение A1.2) свободных
колебаний
*• С "
у-\ у — 0, или у -f- k2y = 0.
Частоту колебаний можно определить по формулам A1.10) или
A2.3).
Применим вторую формулу:
/ст V 2,45 —/
Период колебания
~, 2я 6,28 r\ n 1 *
Т = -j- = -ig- = 0,314 сек.
Уравнение движения груза напишем в виде A1.3):
у = Cj cos kt -j- C2 sin kt.
Продифференцировав это уравнение по времени, получим урав-
уравнение, определяющее скорость груза
у = — Cxk sin kt -\- C2k cos kt.
Подставив начальные условия и числовое значение k в эти два урав-
яения, найдем С1 и С2:
С1 = — 2,45,
С2-20 = 280 или С2=14.
Подставив найденные значения Сх и С2 в уравнение движения
груза, получим
у = — 2,45 cos 20^-f- 14 sin 20^ (см).
§ 14. Затухающие колебания материальной точки
Материальная точка, совершающая колебания в реальных усло-
условиях, испытывает сопротивление движению (трение, сопротивление
воздуха и т. п.). Это означает, что, кроме восстанавливающей силы,
направленной к центру колебаний, на точку действует сила сопро-
сопротивления, направленная всегда в сторону, противоположную напра-
направлению движения точки. Закон изменения модуля силы сопротивления
39
зависит от физической природы этой силы. Так, например, модуль
силы трения скольжения можно принять постоянным.
Сопротивление воздуха при малых скоростях движения тел считают
пропорциональным первой степени скорости, а при больших скоростях,
в довольно широких пределах,
О ft J* М его принимают пропорциональ-
j 1 .- ным квадрату скорости движу-
г- х —¦. V щегося тела.
рис 26 Рассмотрим колебания ма-
материальной точки М под дей-
действием линейной восстанавливающей силы Р и силы сопротивления
движению R (рис. 26), пропорциональной скорости точки.
Направим ось л; по траектории точки и совместим начало коор-
координат О с положением покоя точки.
Модуль восстанавливающей силы Р
Р = с- ОМ = с\х\.
Проекция силы Р на ось х
х ' ' ~— СХ•
Модуль силы сопротивления среды R пропорционален модулю
скорости точки, т. е.
R = av.
Если v=l, то /? = а, т. е. коэффициент пропорциональности а
численно равен силе сопротивления при скорости движения точки,
равной единице.
Сила сопротивления R направлена всегда противоположно ско-
скорости точки v, т. е. R= — av.
Проекции силы R и скорости v на ось х имеют противополож-
противоположные знаки:
Rx — — а'УЛ::= — ах- A4.1)
Составим дифференциальное уравнение движения материальной
точки под действием сил Р и R:
тх = 2 Xt = Рх ~\~ Rx == — сх — ах'
или
х-\ х-\ х = 0.
'от ' т
Вводя обозначения — = 2п и — = к2, получаем:
mm
х + 2п'х + К1х = 0. A4.2)
Уравнение A4.2) является дифференциальным уравнением движе-
движения материальной точки под действием восстанавливающей силы и
силы сопротивления, пропорциональной скорости движения точки.
40
Для интегрирования уравнения A4.2) составим характеристическое
уравнение и найдем его корни:
0, A4.3)
k2; z2 = — n — Yn2~k2.
f
Величина k = 1/ — является частотой свободных колебаний дан-
ной точки.
Коэффициент я = ¦=— характеризует сопротивление среды.
Рассмотрим случай колебаний материальной точки, который имеет
место при я < &. Так как п — -^— и k = ~l/ —, то в рассматривае-
рассматриваемом случае -^ < 1/ ~, или а < 2 У тс ¦
В этом случае корни характеристического уравнения A4.3) можно
представить в следующем виде:
—- n2, z2 = —n — l
Общее решение уравнения A4.2) имеет вид:
x = e-nt{C1 cos Yk2 — п2 t + С2 sin Y& — n2 t).
Вместо постоянных интегрирования С1 и С2 введем две новые
постоянные аир, положив:
Подставив эти значения Сх и С2, получим решение дифферен-
дифференциального уравнения A4.2), т. е. уравнения движения точки в виде:
x = ae-ntsm(Yk2 — n2 f + P)- A4.4)
Движение, определяемое уравнением A4.4), имеет колебательный
характер, так как координата х периодически изменяет свой знак
при изменении знака, входящего в уравнение синуса. Множитель e~nt
указывает на то, что амплитуда колебаний с течением времени умень-
уменьшается.
Колебания этого вида называются затухающими. График зату-
затухающих колебаний изображен на рис. 27.
Так как |sin(]/&2 — n2 / + р)|<^1, то абсолютная величина коор-
координаты х удовлетворяет условию:
| х | -^ | ae~nt \.
Следовательно, график затухающих колебаний заключен между
двумя симметричными относительно оси абсцисс кривыми, имеющими
уравнения:
: — ae~nt и х = — ae~nt.
41
Величины а и C как постоянные интегрирования определяются
по начальным условиям задачи. Чтобы найти аир, получим урав-
уравнение, определяющее скорость точки, продифференцировав уравне-
уравнение A4.4):
= — пае-"'si
а //г2—/г2 е-"'cos (У &2—п21-\-$)=
— п2 t-{-$). A4.5>
Пусть в начальный момент ^ = 0 точка имела координату л:0 и
проекцию скорости на ось х, равную х0.
х
Рис. 27.
Подставив в уравнения A4.4) и A4.5) эти начальные условия
получим:
х0— a sinp,
хо =— пхо-{- ay k2 — «2cosp или
Отсюда находим:
а — Л/ х2 4- (-У°+ пХ<}
• = a cos 6.
xQ -j- nx0
Частота затухающих колебаний
A4.6)
A4.7а)
(,14.7б>
A4.7в)
A4.8)
42
Период затухающих колебаний Т* представляет собой промежу-
промежуток времени между двумя последовательными прохождениями точки
в одном направлении через положение покоя (рис. 27):
A4.9)
Формулу A4.9) можно представить в следующем виде:
Г= /" _ = .-L^-. (НЛО)
где Т = -г период свободных колебаний этой же точки.
Формула A4.10) показывает, что период затухающих колебаний
больше периода свободных колебаний точки. Однако при небольшом
сопротивлении это увеличение незначительно. В случае небольшого
сопротивления период затухаю-
затухающих колебаний можно принимать •*
равным периоду свободных коле-
колебаний.
Амплитудой затухающих ко-
колебаний называют наибольшие от- Хп
клонения точки в ту и другую
сторону от положения покоя в те-
течение каждого колебания.
Из последовательных значений
переменной амплитуды можно со-
составить ряд (рис. 28):
а,, а.
Рис. 28.
Определим отношение последовательных членов ряда о;+1 и а,,
соответствующих моментам времени
j
= ^-j—^- и tt:
ае
ае
-nt,
¦ — е
A4.11)
Так как отношение а'+1 постоянно и по величине меньше еди-
ницы, то последовательные значения амплитуды составляют убываю-
пТ*
щую геометрическую прогрессию со знаменателем е 2 .
пТ*
Отвлеченное число е 2 называется декрементом затухающих
пТ*
колебаний; натуральный логарифм декремента, т. е. величина s—
43
называется логарифмическим декрементом *:
^ ^— . A4.12)
„2 V >
2
Коэффициент п называют коэффициентом затухания.
Затухание колебаний происходит очень быстро даже при малом
сопротивлении. Так, например, при я = 0,05&:
Г =1,001257',
е-я^ = 0,7301,
т. е. период затухающих колебаний Т* отличается от периода сво-
свободных колебаний Т лишь на 0,125%, а амплитуда колебаний за время
одного полного колебания уменьшается на 0,27 своей величины,
а после 10 полных колебаний становится равной лишь 0,04304
своего первоначального значения.
Таким образом, основное влияние сопротивления на свободные
колебания материальной точки выражается в уменьшении амплитуды
колебаний с течением времени, т. е. в затухании колебаний.
§ 15. Апериодическое движение точки
Движение материальной точки теряет колебательный характер и
становится апериодическим в случае большого сопротивления, т. е.
при n^>k или а^-2]/отс.
а) При я > k корни характеристического уравнения A4.3) веще-
вещественны, отрицательны и различны:
Общее решение уравнения A4.2) имеет вид
х = e-nt(Cle^":!-113' -x~C2e~}/n2~k'i). A5.1)
Введем вместо постоянных интегрирования Сх и С2 две новые
постоянные Вх и В2, положив
1~, В1-\-В2 у-, Bi — В2
Подставив эти значения С, и С2 в уравнение A5.1), получим
х = е-»< (в, ev»2-k*'+j~v»2-^ + в/^"*''-'"^"*1') .
Введем в полученное уравнение гиперболические функции:
* «Декремент» означает убывание.
44
Тогда получаем уравнение в следующем виде:
x = e~nt {Bxch Уп? — k2t + B2sh /n2 — k2 t).
Дальнейшее преобразование этого уравнения проведем путем
замены постоянных Вх и В2 двумя другими постоянными а и р по
условию:
В1 = ashfi, B2 = асЩ.
Тогда уравнение примет вид
х = ae-"'sh (п? — A2 t + р).
A5.2)
t
Рис. 29.
Уравнение движения точки A5.2) показывает, что рассматривае-
рассматриваемое движение точки не является колебательным, так как гиперболи-
гиперболический синус не является периодической функцией, В зависимости
от начальных условий материальная ._
точка может совершать одно из дви-
движений, графики которых показаны
на рис. 29—31.
Все три графика соответствуют
начальному отклонению точки от
положения покоя на величину х0 > 0.
На рис. 29 показан график движения
точки с начальной скоростью v0,
имеющей направление, совпадающее
с направлением оси х. Благодаря
этой скорости точка сначала уда-
удаляется от положения покоя, а затем
под действием восстанавливающей
силы постепенно приближается к
этому положению. Графики (рис. 30
и 31) соответствуют движению точки
с начальной скоростью v0, направлен-
направленной противоположно направлению
оси х. При достаточно большой на-
начальной скорости точка может совер-
совершить один переход через положение покоя и затем при обратном
движении приближаться к этому положению (рис. 30).
б) При n=-k корни характеристического уравнения A4.3) веще-
вещественны, равны и отрицательны:
Рис. 30.
0
Рис. 31.
Общее решение уравнения A4.2) в этом случае имеет вид
x = e-nt(Clt-\-C2). A5.3)
Движение точки, определяемое уравнением A5.3), является также
о периодическим.
У////////////////
Постоянные Сх и С2 определяются по начальным условиям t — 0,
х0, х0 из уравнения A5.3) и из уравнения, полученного его диф-
дифференцированием.
Пример 5. К пружине АВ с коэффициентом жесткости 10 сн/см,
закрепленной неподвижно концом А, прикреплена железная пластинка
массой т = 50 г, находящаяся между полюсами магнита (рис. 32).
Магнитный поток между его полюсами равен Ф = 2.10~5 вебер.
Появление токов Фуко вызывает сопротивление движению пластинки
в магнитном поле. Сила сопротивления R = nv<P2 ньютонов, где ц= 109,
v — скорость в м/сек, а Ф — магнитный поток между полюсами
магнита. Определить движение пла-
пластинки, которое возникает, если
пластинке, находящейся в поло-
положении покоя, сообщить начальную
скорость г;0 = 26,8 см/сек, на-
направленную вниз.
Решение. Положение посту-
поступательно движущейся пластинки
будем определять положением ее
центра тяжести. Направим ось у
вертикально вниз и за начало
координат О примем положение
центра тяжести пластинки, соот-
соответствующее статическому удли-
удлинению пружины (рис. 33). Тогда
начальные условия будут следую-
следующими: ^ = 0, уо = О, Уо — ^о-
На движущуюся пластинку
V
A i>
¦в
--Ч
L..J
И
Рис. 32.
Рис. 33.
в положении М действуют силы:
сила тяжести G, сила упругости пружины Р, проекция которой на ось у
определяется выражением Ру = — с (/CT-f- у), и сила сопротивления
R== — [хФ2у, имеющая проекцию на ось у: Rv — — цФ2у.
Дифференциальное уравнение движения пластинки под действием
сил Р, R и О имеет вид
или
ту = — с (/„ + у) -
О.
Согласно A2.1) имеем Яст = с/ст = О. Учитывая это, получаем
дифференциальное уравнение движения пластинки:
или
ту = — су — цФ2у
U-Ф2 ' i с п
-+- -— у Ч у = 0.
A5.4)
46
Уравнение A5.4) представляет собой дифференциальное уравне-
уравнение A4.2), где
т т
Определяем числовые значения пик, пользуясь системой еди-
единиц МКС. В этой системе
те = 0,05 кг, с =10 сн/см = 10 н/м,
ф=2- 10~5 вебер,
_ цФ2 __ 109-4-1(Г10 _л _<
п~ 2т — 2.0,05 —^ сек ,
Так как я < At, то движение пластинки представляет собой зату-
затухающие колебания. Уравнение движения пластинки имеет вид A4.4):
у = ae~nt sin (j/ k2 — «2 ^ -|- p).
Постоянные аир определяем по формулам A4.6) и A4.7), поль-
пользуясь начальными условиями.
При Уо—0 формула A4.6) принимает вид:
Определяем числовое значение а:
При \>о==^ по формулам A4.7)
tgp = O; cosp = -^=
tgp O; cosp ^== l; p 0.
SH ' аУК> — п* 2-13,4 V
Подставляя числовые значения, получаем уравнение движения
y = 2e-4<sinl3,4? (см).
§ 16. Вынужденные колебания материальной точки
Вынужденные колебания совершает материальная точка, на кото-
которую наряду с восстанавливающей силой действует периодически
изменяющаяся сила, называемая возмущающей силой.
Практически наиболее важным является случай, когда возмущаю-
возмущающая сила Q изменяется по гармоническому закону, т. е. проекция ее
на ось х, направленную по траектории точки, определяется:
Qx = Hsin(pt + b), A6.1)
47
где Н — максимальный модуль, или амплитуда возмущающей силы;
р — частота изменения возмущающей силы, равная числу пол-
полных циклов изменения возмущающей силы за 2я сек
(см. ч. I, «Кинематика», § 89);
pt-\-b — фаза изменения возмущающей силы;
б— начальная фаза изменения возмущающей силы.
Период изменения возмущающей силы т определяется по ее
частоте:
т = —. A6.2)
Изменение возмущающей силы по гармоническому закону можно
наблюдать в устройствах, имеющих схему, изображенную на рис. 34.
Положим, что стержень В А
с грузом А заклинен на валу,
вращающемся с постоянной
угловой скоростью со. Подшип-
Подшипники, в которых вращается вал,
укреплены на теле, прикреплен-
прикрепленном к горизонтальной пружине
и находящемся на гладкой го-
горизонтальной плоскости.
рис 34. Пренебрегая массой стержня
и рассматривая груз как мате-
материальную точку массой т, можно определить его центробежную силу
инерции Ф„. Эта сила направлена от центра вращения и приложена
к связи, т. е. к телу, несущему подшипники, и равна
Ф„ = mwn = т • В А • со2.
Пусть угол поворота стержня, отсчитанный от вертикали, в на-
начальный момент равен 6. Тогда в момент времени t этот угол равен
<o?-j~6. Проекция силы Фл на горизонтальную ось Ох, направленную
по оси пружины, определяется:
Фпх = Фп sin (®t -f- &)•
Таким образом, в горизонтальном направлении на тело действует
возмущающая сила Q, проекция которой на ось х имеет вид A6.1):
где Н = Фп, а р—а>, т. е. амплитуда возмущающей силы равна
модулю центробежной силы инерции груза, а частота изменения
возмущающей силы равна угловой скорости вращения стержня.
Возмущающая сила Q смещает тело то в одном, то в другом
направлении по горизонтали, вызывая деформацию пружины. При
этом появляется восстанавливающая сила Р, зависящая от деформации
пружины. Модуль и направление возмущающей силы Q нз зависят
от положения тела на оси х, а зависят только or положения стержня.
48
Рассмотрим прямолинейное движение материальной точки М
(рис. 35) под действием восстанавливающей силы Р и возмущающей
силы Q, изменяющейся по гармоническому закону.
Направим ось х по прямолинейной траектории точки М, а начало
координат поместим в положе-
положение покоя точки М, соответ- 0 Р М Q __
ствующее недеформированной ~Т ~ "" ' г
пружине. 1"~ x
Составим дифференциаль- рис 35
ное уравнение движения точки,
учитывая, что на точку М с координатой х в момент времени t
действуют силы Р и Q, имеющие проекции на ось х:
Рх = — сх и Qx = H sin (pt + 6).
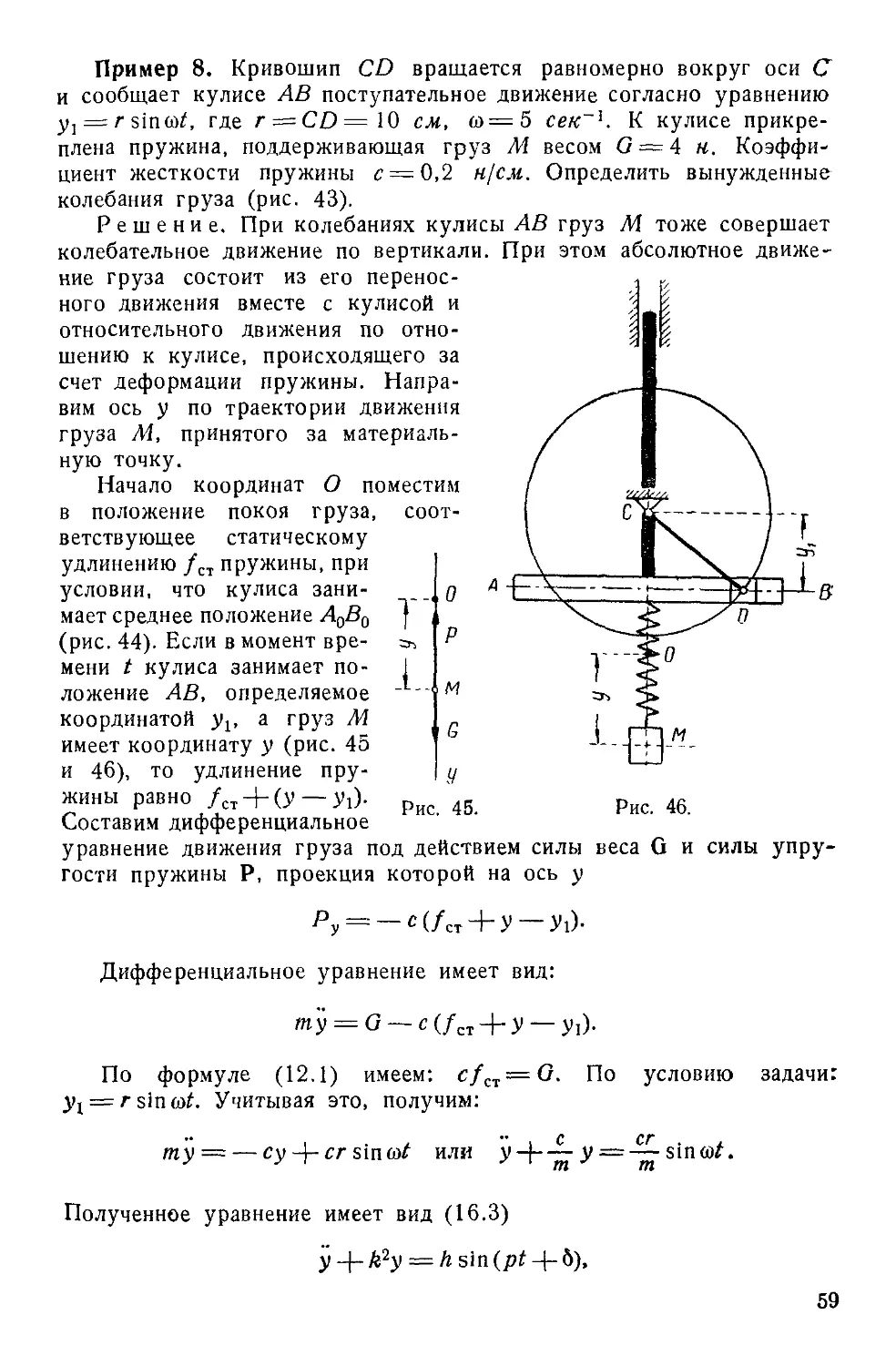
Получим:
/кх = — сх-\-Н sin (pt -\- 6),
или
* + ¦?¦* = —sin
Здесь — = fe2 — квадрат частоты свободных колебаний. Введя
т
обозначение — = й, получим:
т
x-\-k2x = hsin(pt-+-b). A6.3)
Уравнение A6.3) представляет собой дифференциальное уравне-
уравнение вынужденных колебаний материальной точки.
Общее решение уравнения A6.3) складывается из общего решения
однородного уравнения х-\- k2x — 0 и частного решения данного
уравнения A6.3):
* **
Однородное уравнение x-\-k2x = 0 имеет общее решение A1.3):
х* = Сх cos kt -j- C2 sin kt.
В соответствии с видом функции f (t) в правой части уравне-
уравнения A6.3) будем искать частное решение уравнения A6.3) в виде:
х** = A sin (pt-\-6). A6.4)
Определим постоянную А подстановкой функции A6.4) в уравне-
уравнение A6.3).
Так как х** — — Ар2 sin (pt -(-6), то после подстановки A6.4)
в уравнение A6.3) получим:
— Ар2 sin(pt + 6) -+- Ak2 sin (pt -f- 6) = h sin (pt + 6).
4 А. А. Яблонский 49
Полученное равенство должно быть справедливо при любом зна-
значении sin(jO^ + 6). Это выполняется лишь при равенстве коэффициен-
коэффициентов в левой и правой частях, т. е.
A(k2— p2) = h,
откуда
Подставляя значение А в выражение A6.4), находим искомое
частное решение уравнения A6.3):
^ A6.6)
Общее решение уравнения A6.3) получает вид
x=Cl coskt-\-C2sinkt-{- h- ¦ sin(p/-4-6)- A6.7)
« p
Если же решению однородного уравнения x^-k2x = 0 придать.
вид A1.6), то общее решение уравнения A6.3) примет вид
Уравнение A6.8) показывает, что точка М совершает сложное
колебательное движение, складывающееся из двух гармонических
колебаний.
Первый член правой части уравнения A6.8) определяет свободные
колебания, а второй — вынужденные колебания точки.
Таким образом, установлено, что при одновременном действии
восстанавливающей и возмущающей сил материальная точка
совершает сложное колебательное движение, представляющее
собой результат наложения свободных и вынужденных колеба-
колебаний точки.
Постоянные интегрирования С, и Сг в уравнении A6.7) или по-
постоянные а и р в уравнении A6.8) определяются по начальным
условиям движения.
Последний член правой части уравнения A6.7) и A6.8), опре-
определяющий вынужденные колебания точки, не содержит постоянных
интегрирования, следовательно, вынужденные колебания не зависят
от начальных условий движения точки.
Исследуем вынужденные колебания точки. Эти колебания опре-
определяются уравнением A6.6):
Частота р и период т — — вынужденных колебаний совпа-
совпадают с частотой и периодом изменения возмущающей силы.
50
Вынужденные колебания, частота р которых меньше частоты k
свободных колебаний точки, называют вынужденными колебаниями
малой частоты.
Вынужденные колебания, частота р которых больше частоты k
свободных колебаний, называют вынужденными колебаниями боль-
большой частоты.
1. Фаза вынужденных колебаний
Уравнение вынужденных колебаний малой частоты (при р < k)
имеет вид A6.6):
В этом случае фаза колебаний pt-\-b совпадает с фазой возму-
возмущающей силы и амплитуда вынужденных колебаний определяется
формулой A6.5):
А — h
k2 — p2 •
В случае вынужденных колебаний большой частоты (при р > k)
уравнению A6.6) придают такой вид, чтобы коэффициент при синусе
был положительным:
x** = j^s\n(pt + b-n). A6.9)
В этом случае амплитуда вынужденных колебаний
А = Р2 - к» ¦ A6.10)
Фаза вынужденных колебаний большой частоты (pt -f- 6 — я) отли-
отличается от фазы возмущающей силы (pt-{-b) на величину я, т. е.
фазы вынужденных колебаний и возмущающей силы противоположны.
Таким образом, в случае вынужденных колебаний малой частоты
точка М всегда отклонена от начала координат О в ту сторону,
в которую направлена в данный момент возмущающая сила Q.
В случае вынужденных колебаний большой частоты отклонение
точки М от начала координат О всегда противоположно направлению
возмущающей силы Q в данный момент. При этом в обоих случаях
максимальное отклонение точки от начала координат имеет место
в момент времени, когда модуль возмущающей силы достигает
максимума.
2. Амплитуда вынужденных колебаний
Исследуем зависимость амплитуды вынужденных колебаний А
от частоты р возмущающей силы. Для этого введем статическое
отклонение Ао точки М от начала координат О под действием по-
постоянной силы Н (рис. 36).
4* 51
Величина Ао определяется из условия равновесия сил Н и Р:
откуда
н_
с
т
с
т
Отношение i) амплитуды вынужденных колебаний А к вели-
величине Ао называется коэффициентом динамичности:
при р < к:
О _Р М h_ h
' " 1 "" _ _d_ — ^ — Р2 _
'- А° 1 ^ ~ AQ ~ h ~
Рис. 36.
1
3,0
го
)
\
V
...
к2 — Р2 ~
при р > k имеем:
h
А
-; A6.11)
А
Ч — ~~д~
А2
h
k2
О
t,D 2.P
Рис. 37.
A6.12)
Изменение амплитуды выну-
вынужденных колебаний Л в зависи-
зависимости от изменения частоты возму-
возмущающей силы р характеризуется
графиком коэффициента динамич-
динамичности (рис. 37).
На горизонтальной оси этого
графика отложены значения отно-
отношения ^-, а на вертикальной
оси — соответствующие значения
величины г1="Т". определенные по формуле A6.11) при р < k и
по формуле A6.12) при p~>k.
График показывает, что при увеличении частоты возмущающей
силы от р = 0 до p~k коэффициент динамичности возрастает от 1
до go, а при дальнейшем увеличении р до со коэффициент дина-
динамичности убывает от со до 0.
При р = k коэффициент динамичности равен бесконечности. Этот
случай вынужденных колебаний, называемый явлением резонанса,
рассмотрен в § 18.
52
Закончив исследование уравнения A6.6), определяющего вынужден-
вынужденные колебания точки, рассмотрим уравнение A6.7), которое опре-
определяет результирующее движение точки под действием возмущающей
и восстанавливающей сил:
х = С1 cos kt-\-C2 sin /г/ —}— 2 2 sin(pt-\-b).
Продифференцируем это уравнение по t:
x = — kCli,mkt-\-kC2 cos kt -\- k2^ 2 cos (pt -f- 6).
Определим значения постоянных Ct и C2, подставив в два послед-
последних уравнения начальные условия движения точки to = Q, х0, х0:
Хо = kC2 -f- Ь2_ 2 C0S °>
откуда
Подставив эти значения Сх к С2 в уравнение A6.7), получим:
х = х0 cos kt -\- ¦— sin kt — k2_p2 (sin ° cos kt -j- -^ cos 6 sin fef] -f-
Согласно уравнению A6.13), движение точки М можно рассма-
рассматривать как результат сложения трех ее движений:
1) свободных колебаний точки, которые возникли бы при
отсутствии возмущающей силы, отклонении точки из положения
покоя на расстояние х0 и сообщении ей начальной скорости г?0,
проекция которой на ось х равна х0:
х*ц ~ хъ cos ^ + -4-*- sin kt;
2) колебаний, имеющих тоже частоту k, но вызванных действием*
на точку возмущающей силы:
х*2) = — fl2__p2 (sin б cos kt -f- -j cos 6 sin kt);
3) вынужденных колебаний точки, частота которых равна
частоте возмущающей силы р:
§ 17. Явление биени*
При частоте возмущающей силы, близксй к частоте свободных
колебаний точки, наступает явление, называете биениями. Полагая
в уравнении A6.13) хо = О и хо — О, рассиотрим колебания мате-
материальной точки, вызываемые лишь действием возмущающей силы:
•* = *pi + Х1з) = — Jirzrfi- (siп 6 cos kt Ч- i c>s 6 sin
Принимая ?-^i\, приведем это уравнение к виду:
х= k*lp2 [sin Q^4-о) — sinifef
Используя формулу
sin a — sin p = 2 sin
p + ft
и имея в виду, что —^— я* />, получаем
cos ^
Уравнение A7.1) определяет движение точки, являющееся резуль-
результатом наложения дополнительных колебаний, вызванных действием
возмущающей силы, на собственно вынужденные колебания в случае
р ?zi k.
Обозначим
#(^^) A7.2)
Тогда уравнение A7.1) примет вид
х == A (t) cos Ort-И). A7.3)
Движение, определяемое уравнением A7.3), можно рассматривать
как колебания частоты р и периода т=—, амплитуда которых Л(^)
является периодической функ-
функцией A7.2).
Период изменения ампли-
туды
/ л =: г- = Г" . A7.4)
Рис. 38 —2—
Так как р ж k, то период ТА велик по сравнению с перио-
дом т = — .
График движения, определяемого уравнением A7.3) и называемого
биениями, показан на рис. 38.
54
§ 18. Явление резонанса
Явление резонанса возникает при совпадении частот вынужден-
вынужденных и свободных колебаний точки:
В этом случае амплитуда вынужденных колебаний точки, вычис-
вычисленная как по формуле A6.5), так и по формуле A6.10), равна
бесконечности и многие выражения из § 16 теряют смысл. Дифферен-
Дифференциальное уравнение вынужденных колебаний A6.3) при р = k при-
принимает вид
х-\- k2x = h s\n(kt-\- b). A8.1)
Уравнение A8.1) имеет общее решение:
Здесь общее решение однородного уравнения х-\- k2x = 0,
по-прежнему, можно представить в виде A1.3):
х* = С1 cos kt -\- C2 sin kt.
Частное решение х** уравнения A8.1) должно быть линейно-
независимым от х*. Поэтому вид A6.4) в этом случае непригоден и
частное решение л:** ищем в виде:
х** = Bt cos (kt-\-b). A8.2)
Находим производную х** как производную произведения функ-
функций Bt и cos (kt -f- 6):
х** = В cos (kt + 6) — Bkt sin (kt -\- 6).
Аналогично находим:
x** = ~Bk sin (W -\-b) — Bk sin (kt + 6) — BkH cos (kt + 6).
Для нахождения величины В подставляем значения х** и х**
в уравнение A8.1):
— Bksin(kt-\-b) — Bksin(kt~\-b)~ Bk2t cos (kt-\-b)-\-
+ k2Bt cos (kt 4- 6) = h sin (kt 4- 6)^
или
— 2Bk sin (kt 4- 6) = h sin (kt -\- b).
Приравнивая коэффициенты при синусе в обеих частях уравне-
уравнения, определяем:
В— —
Получаем общее решение дифференциального уравнения A8.1):
h
2k
X = Сг COS kt -\- С2 Sin kt — -яг- t COS (kt -f-
или
A8.3)-
Уравнение A8.3) показывает, что движение точки М при резо-
резонансе является результатом наложения свободных и вынужденных
колебаний точки, так же как и при p=f=k.
Свободные колебания определяются уравнением:
л:* = Cj cos kt -\- C2 sin kt.
Вынужденные колебания при резонансе определяются уравнением:
+ b~ |). A8.4)
Частота и период вынужденных колеба-
колебаний при резонансе равны частоте k и пе-
t риоду Г —— свободных колебаний точки.
Фаза вынужденных колебаний kt-\-b — -g-
отстает от фаз возмущающей силы kt-\-b на
л
величину -g-.
Уравнение A8.4) показывает, что ампли-
амплитуда вынужденных колебаний при резонансе
^возрастает пропорционально времени. График вынужденных колеба-
.ний точки при резонансе показан на рис. 39.
§ 19. Примеры на вынужденные колебания
Пример 6. Определить вынужденные колебания мотора весом
G=15 кн, помещенного посередине двух положенных рядом дву-
двутавровых балок № 30 с моментами инерции поперечного сечения
7=8881 ел4 и пролетом /=10 м (рис. 40), пренебрегая весом
балок и считая их свободно лежа-
лежащими, если эти колебания вызы-
вызываются равномерным вращением вала
мотора, на котором укреплен груз ве-
весом д1 = 4 и на расстоянии г — 5 см
от оси вращения, если угловая ско-
скорость вала со = 25 сек~х.
Решение. По известной фор-
формуле из курса сопротивления мате-
материалов определяем статический прогиб упругих балок, свободно
лежащих на двух опорах и нагруженных сосредоточенной силой G,
приложенной в середине пролета:
15 000 • 1 0003
Рис. 40.
__ 1 G13
/ст — ^s -gy" ~
48 • 2 • 107 • 2 • 8881
=0,88 см.
Здесь ? = 2-107 н/см2 — модуль упругости стали, 2У=
2-8881 см* — суммарный момент инерции поперечного сечения двух
балок, поддерживающих мотор.
.56
Частота свободных колебаний мотора на упругой балке опре-
определится по формуле A2.3):
:t
сек
~1
Направим ось у вниз по вертикальной траектории колебательного-
движения точки М мотора, лежащей на оси вращения вала. Начало-
координат О совместим с положением покоя
точки, соответствующим статическому про-
прогибу балки.
Как указывалось в § 16, центробежная
сила инерции Ф„ груза Мг приложена к связи,
т. е. к мотору. Ее проекция на ось у изме-
изменяется по гармоническому закону (рис. 41): \ 1___Ъ*(Л7,
Фпу — Фп sincp — Фп sin со/. >ч^ 1 ^/ ^s^ Ф,.
Таким образом, на мотор действует вер-
вертикальная возмущающая сила Q, проекция „|
которой на ось у равна:
Рис. 41.
Восстанавливающей силой является сила упругости балок Р, мо-
модуль которой пропорционален прогибу балок /ст + у. а проекция,
на ось у равна:
Составим дифференциальное уравнение движения мотора под дей-
действием сил Р, О и Q (рис. 42):
Преобразуем- правую часть уравнения, пользуясь фор-
q мулой A2.1) c/CT = G и определяя модуль центробежной;
силы инерции по формуле:
¦--Ьм
ф __ т гсй2>
где тх — масса груза.
Q Дифференциальное уравнение принимает вид
ту = — су -f- /я^сй2 sin at
у ИЛИ
•• . с тхгк>2 .
тучг- ао У — У — sin (or •
Рис. ^г. ¦> i т * т
Полученное уравнение имеет вид A6.3):
у + /г2у = h sin (pt -\- 6),
где 6 = 0, jo = со, h = —'-—— = —^—.
57
Так как р —со = 25 сек~х, a ft = 33,4 сек'1, то имеем выну-
вынужденные колебания малой частоты.
Амплитуда вынужденных колебаний мотора определяется по фор-
формуле A6.5):
h G,ruJ 4-5-625
А = ¦
-==0,0017 см.
a2) 15000A115 — 625)
Уравнение вынужденных колебаний мотора на упругих балках
имеет вид A6.4):
у** = A sin at, т. е. у** ==0,0017 sin 25/ (см).
Пример 7. По условию предыдущего примера найти угловую
скорость вала мотора, при которой возникает резонанс.
Рис. 43
Рис. 44.
Решение. Резонанс возникает в случае, когда частота выну-
вынужденных колебаний р равна частоте свободных колебаний точки k.
Эта частота называется критической:
Так как в рассмотренном примере 6 частота вынужденных коле-
колебаний мотора равна угловой скорости вращения его вала, то крити-
критическая угловая скорость вала определяется:
сокр = pKV = k = 33,4 сек
-К
Выразив угловую скорость в об/мин, получим
30о)кр 30 • 33,4
3,14
319 об/мин.
58
Пример 8. Кривошип CD вращается равномерно вокруг оси С
и сообщает кулисе АВ поступательное движение согласно уравнению
у, = г sin (of, где г = CD = 10 см, ю=5 сек~1. К кулисе прикре-
прикреплена пружина, поддерживающая груз М весом G = 4 «. Коэффи-
Коэффициент жесткости пружины с = 0,2 н/см. Определить вынужденные
колебания груза (рис. 43).
Решение. При колебаниях кулисы АВ груз М тоже совершает
колебательное движение по вертикали. При этом абсолютное движе-
движение груза состоит из его перенос-
переносного движения вместе с кулисой и
относительного движения по отно-
отношению к кулисе, происходящего за
счет деформации пружины. Напра-
Направим ось у по траектории движения
груза М, принятого за материаль-
материальную точку.
Начало координат О поместим
в положение покоя груза, соот-
соответствующее статическому
удлинению /ст пружины, при
условии, что кулиса зани-
занимает среднее положение А0В0 \
(рис. 44). Если в момент вре- э,
мени t кулиса занимает по- I
ложение АВ, определяемое
координатой ух, а груз М
имеет координату у (рис. 45
и 46), то удлинение пру-
жины равно /СТ + (У — У\)-
Составим дифференциальное
уравнение движения груза под действием силы веса G и силы упру
гости пружины Р, проекция которой на ось у
у
Рис. 45.
Рис. 46.
Дифференциальное уравнение имеет вид:
ту = G — с (/ст -4- у — уО-
По формуле A2.1) имеем: с/„ = О. По условию задачи:
yl = rsin(i)f. Учитывая это, получим:
my = — cy-j-crsinat или У-Ь^ ^ —-^-sin(B^
Полученное уравнение имеет вид A6.3)
59
где
,2 с 0,2-981 .„ _9 , _ ,
kz=— = -. «49 сек 2; k = 7 сек'1.
т 4
Л =-^- = 49- 10 = 490 см/сек'2; р = со = 5 сек'1, 6 = 0.
Уравнение вынужденных колебаний A6.4) принимает вид:
Так как р < k, то амплитуду А определяем по формуле A6.5):
Поэтому
. h 490 „„
?2_р2 — 49 — 25 ~" А
х** = 20,4 sin Ы (см).
В рассмотренном устройстве верхний конец пружины не является
неподвижным, и через пружину грузу передается возмущающее дей-
действие движущейся кулисы. Поэтому груз совершает вынужденные
колебания, хотя к нему приложены только вес и сила упругости
пружины.
Период и частота колебаний груза равны периоду и частоте
колебаний кулисы. Фаза колебаний груза в рассмотренном случае
совпадает с фазой колебаний кулисы, так как р < k. Если р > k,
то фазы колебаний груза и кулисы будут противоположны, т. е.
при крайнем нижнем положении кулисы груз займет крайнее верхнее
положение и наоборот. Амплитуда колебаний груза больше ампли-
амплитуды колебаний кулисы. При этом величина амплитуды колебаний
груза зависит от соотношения величин р и k. Меняя пружины, т. е.
частоту свободных колебаний груза &, можно получать при одной
и той же угловой скорости кривошипа © различные амплитуды
вынужденных колебаний груза А.
§ 20. Влияние сопротивления движению на вынужденные
колебания
Рассмотрим влияние сопротивления движению на вынужденные
колебания материальной точки, полагая модуль силы сопротивления
пропорциональным первой сте-
0 Р R М g пени скорости точки. Рассмо-
~~} ] * трим материальную точку М
\~. х —| (рис. 47), совершающую пря-
_ ., молинейное движение под
г И С 41
действием восстанавливающей
силы Р, возмущающей силы Q, изменяющейся по гармоническому
закону, и силы сопротивления R = —av.
Направим ось х по траектории точки М, поместив начало коор-
координат О в положение покоя точки, соответствующее недеформиро-
ванной пружине.
60
Определим проекции сил Р, Q и R на ось х в момент времени t,
когда движущаяся точка М имеет координату х. Проекция восста-
восстанавливающей силы Р, направленной к положению покоя О, опре-
определится формулой: Рх =—сх.
Проекция возмущающей силы Q, изменяющейся по гармоническому
закону, определяется формулой A6.1):
Qx = Я sin (pt + 6).
Проекция силы сопротивления R = —av, направленной противо-
противоположно скорости v и ей пропорциональной, определяется форму-
формулой A4.1):
Rx = —ах.
Дифференциальное уравнение движения точки под действием сил
Р, R, Q будет:
тх = —сх — алг-f-Hsin (pt~\-b).
Перенося члены сх и ах в левую часть равенства и разделив
уравнение на т, получим
Рассмотрим коэффициенты уравнения.
k2 — квадрат частоты свобод
2я, где п— коэффициент затухания (см. § 14),
Здесь — = k2 — квадрат частоты свободных колебаний;
т
— = h — отношение амплитуды возмущающей силы к массе
точки (см. § 16).
При этих обозначениях дифференциальное уравнение движения
точки примет вид
x-\-2nx-\-k'lx = hs[n(pt + b). B0.1)
Уравнение B0.1) представляет собой дифференциальное уравне-
уравнение вынужденных колебаний при наличии сопротивления движе-
движению, пропорционального скорости.
Общее решение уравнения B0.1) состоит из общего решения
уравнения A4.2) и частного решения данного уравнения B0.1):
Общее решение уравнения A4.2) х* в зависимости от соотноше-
соотношения величин k и п может иметь вид A4.4), A5.2) или A5.3).
Частное решение уравнения B0.1) будем искать в форме
е). B0.2)
€1
Постоянные Лс ие должны быть определены путем подстановки
функции х** и ее производных в уравнение B0.1),
Для этого найдем х** и х**:
х** = Аср cos (pt -\- б — е),
х** = — Acpi sin (р/ + 6 — е).
Подставим х**, х** и х** в уравнение B0.1):
— Аср2 sin (pt ~\-Ь — е) -f- 2пАс р cos (pt + 6 — е) -j-
-+Ack2 sin (pt-{-d — e) = Asin(/tf + fi). (a)
Преобразуем правую часть равенства:
Л sin (/^-f-6) = hsin(pt-\-b — e-|-e) = A sin (pt-\- 6 — e)cose-f-
-f- h cos (pt -f- б — e) sin e.
Подставим это выражение в правую часть равенства (а), перене-
перенесем все члены в левую часть и сгруппируем отдельно члены, содер-
содержащие s\n(pt~\-b— е) и cos(pt-\~b— е):
[Ac(k2 — jo2) — h cos e] sin (pt -\- 6 — е) +
-f- BnAcp — h sin e) cos (p/ + 6 — е) = 0.
Эго равенство будет справедливым при всех значениях аргумента
(pt-\~b — е) лишь при равенстве нулю коэффициентов при
sin(p^-j-6 — е) и при cos (pt-\- 6 — е). Приравнивая эти коэффи-
коэффициенты нулю, получаем:
Ac(k2 — p2) = ftcose, 2npAc = hsine. B0.3)
Из выражений B0.3) определяем значения Ас и е:
А = h B0.4)
B0.5а)
: B0.5б)
p —, B0.5b)
р2
Так как sine>0, то 0-^е^я.
Подставляя найденное значение Ас и учитывая, что величина е
тоже найдена, получаем частное решение уравнения B0.1) в виде:
**h sin (/»;-)-Л —р.); B0.6)
Общее решение уравнения B0.1) в зависимости от соотношения
величин k и п будет следующим:
62
1) при п < k
= ae-nl sin(Vfe2 —rt2
2) при п > k
sin(pf + 6 — e);
B0.7)
3) при n — k
— e);
B0.8)
¦sin(pt + 6 — e). B0.9)
Затухающие колебания
Величины а и C в уравнениях B0.7) и B0.8), а также вели-
величины С] и С2 в уравнении B0.9) являются постоянными интегриро-
интегрирования и определяются по на-
начальным условиям движения.
Движение материальной точ-
точки под действием восстанавли-
восстанавливающей и возмущающей сил и
силы сопротивления среды,
пропорциональной скорости
точки, представляет собой на-
наложение собственно вынужден-
вынужденных колебаний на затухающие
колебания при п < k или на-
наложение вынужденных колеба-
колебаний на апериодическое дви-
движение при n^k. Наличие
множителя е~"' в членах, соот-
соответствующих затухающим ко-
колебаниям или апериодическому
движению, обусловливает бы-
быстрое затухание этих движений.
Поэтому при установившемся режиме, т. е. через достаточно боль-
большой промежуток времени после начала движения, результирующее
движение точки практически состоит только из собственно вынужден-
вынужденных колебаний, определяемых уравнением B0.6):
х=х+х
Результирующее движение
Рис 48.
х =
e).
На рис. 48 показан график движения точки в случае, когда п < k.
1. Исследование вынужденных колебаний при наличии
сопротивления движению
Уравнение B0.6) показывает, что вынужденные колебания мате-
материальной точки при сопротивлении среды, пропорциональном ско-
скорости точки, являются гармоническими колебаниями, так как ампли-
туда их не изменяется с течением времени, т. е. вынужденные
колебания под влиянием сопротивления не затухают. Они не
затухают потому, что возмущающая сила все время поддерживает
колебательное движение точки.
Этим вынужденные колебания существенно отличаются от свобод-
свободных колебаний, которые затухают даже при самом незначительном
сопротивлении.
2. Частота и период вынужденных колебаний
Частота р и период t = — вынужденных колебаний точки при
наличии сопротивления равны частоте и периоду изменения возму-
возмущающей силы, т. е. сопротивление не влияет на частоту и
период вынужденных колебаний.
3. Фаза вынужденных колебаний
Фаза вынужденных колебаний точки при наличии сопротивления
(pt-\-b — е) отстает от фазы возмущающей силы (pt-\~b) на вели-
величину е, называемую сдвигом фазы и определяемую формулами B0.5).
Из формулы B0.56) следует, что 0<;е^я. В этих пределах
величина сдвига фазы е однозначно определяется формулой B0.5а):
среды. Поэтому, задавшись определенным значением отношения -т-,
можно построить кривую зависимости е от отношения —^. Такие
кривые построены на рис. 49 для различных значений -г-.
64
При отсутствии сопротивления я = 0 и tge = O. В этом случае
е=0 для вынужденных колебаний малой частоты (р<^к) и е = л
для вынужденных колебаний большой частоты (р > k).
Под влиянием сопротивления этот разрыв сглаживается.
Если /?=&, то при любом значении коэффициента затухания п
. 2пр п_
Зная k, p и п, можно определить сдвиг фазы е непосредственно
по графику.
4. Амплитуда вынужденных колебаний
Амплитуда вынужденных колебаний точки при наличии сопроти-
сопротивления определяется по формуле B0.4):
Ае = г *д 22-
Из этой формулы следует, что большей величине сопротивления
среды, т. е. большему значению коэффициента затухания п, соответ-
соответствует меньшая величина амплитуды вынужденных колебаний Ас.
Для установления зависимости амплитуды вынужденных коле-
колебаний Ас от частоты изменения возмущающей силы р воспользуемся
коэффициентом динамичности х\,
введенным в § 16.
Этот коэффициент предста-
представляет собой отношение амплитуды
вынужденных колебаний под дей-
действием возмущающей силы Q, мо- '
дуль которой Q = \Hsin(pt-\-6)\,
к статическому отклонению точки
от начала координат Л0 = -р под ^
действием постоянной силы Н:
h
Ас У {k2 ~ р2J -f- 4n2p2
= 7,0
с
\
11 Л
^—^
B0.10) Рис- 50-
Так как коэффициент динамичности зависит от двух величин ~-
п
и -г-, то на рис. 50 построены кривые, каждая из которых пред-
представляет собой зависимость т| от -~ при определенном значении -г-.
5 А. А. Яблонский 65
При отсутствии сопротивления явление резонанса выражается
в стремлении амплитуды вынужденных колебаний к бесконечности.
На рис. 37 кривая, соответствующая и —0, имеет разрыв при
p = k, т. е. при -?-=1. При наличии сопротивления ампли-
амплитуда, определенная по формуле B0.4), при p = k имеет конечную
величину
Найдем по правилам дифференциального исчисления то значе-
значение р, при котором Ас имеет максимум, а следовательно, подкорен-
подкоренное выражение знаменателя в B0.4) имеет минимум.
Для этого найдем производную этого выражения по р и при-
приравняем ее нулю:
l (Р)( /) + 4га2. 2р = 0.
Корни этого уравнения
Pl = 0; p2=yk2 — 2n2. B0.12)
При /»1 = 0
Подставляя значение р2 в формулу B0.4), получаем максимальное
значение амплитуды при данном сопротивлении:
B0.13)
При малом значении га величина Yk2 — 2«2 очень близка к вели-
величине k.
Так, например, при га —0.05&
Y — 2га2 = 0.9975Й.
В этом случае
Ас =10,0125-^-= 10,0125Л0.
max k2 ' и
Таким образом, при малых значениях га при р = у k2—2ге2 про-
происходит резкое увеличение амплитуды Ас. С увеличением коэффи-
коэффициента га величина Ас уменьшается. Максимум амплитуды выну-
вынужденных колебаний при наличии сопротивления существует только
при условии k2 — 2га2 > 0, т. е. при га <
kl^2
При га > —н— максимума Ас не существует, т. е. ординаты
кривых (рис. 50) только уменьшаются при увеличении —¦.
К
66
Так как Ас имеет максимум при р = \fk2 — 2га2, то по мере
увеличения п эти значения р уменьшаются, т. е. точки максимума
на линиях зависимости коэффициента динамичности т] от -?- (рис. 50)
смещаются влево от прямой
*-¦•
В
Таким образом, влияние сопротивления на вынужденные коле-
колебания материальной точки выражается в сдвиге фазы коле-
колебаний по отношению к фазе возмущающей силы и в уменьшении
амплитуды колебаний по мере увеличения сопротивления.
Пример 9. Прямоугольная пластинка весом G —0,5 к, помещен-
помещенная в сосуд с вязкой жидкостью, прикреплена к концу В упругой
пружины АВ с коэффициентом
жесткости 0,25 н/см. В некоторый
момент ползунок А, к которому
прикреплен верхний коней пру-
пружины, начинает совершать верти-
вертикальные колебания согласно урав-
уравнению у^ = bsinpt, где Ь = 2 см
и р = 15 сек~1. Сила сопроти-
сопротивления движению пластинки в жид-
жидкости пропорциональна скорости
пластинки, причем при скорости
1 см/сек сила сопротивления
равна 3,06 мн. Получить уравне-
уравнение установившихся вертикаль-
вертикальных вынужденных колебаний пла-
пластинки (рис. 51, а).
Решение. Поступательное
движение пластинки будем рассма-
рассматривать как движение материаль-
материальной точки М. Направим ось у
вертикально вниз по траектории
точки М. Совместим начало коор-
координат О с положением покоя точки М, соответствующим статическому
удлинению /ст пружины, при условии, что ползунок А, удерживающий
пружину, занимает свое среднее положение Ог (рис. Ъ\,б). На дви-
движущуюся пластинку М, имеющую координату у (рис. 51, в), действуют
три силы: вес G, сила упругости пружины Р и сила сопротивления
жидкости R.
Отклонение пластинки у от положения покоя О превышает откло-
отклонение ползунка ух от его среднего положения на величину динами-
динамического удлинения пружины. Это удлинение равно у — ух. Полное
удлинение пружины равно fCT-\-y— yt.
Проекция силы Р на ось у
Ру = — с (Лт -г- У — У0-
'л/777777777777777.
м
Рис. 51.
67
Проекция силы сопротивления R = —av на ось у равна:
Составляем дифференциальное уравнение движения пластинки под
действием сил Р, R и О:
ту = 2 Yi = — с (/„ + у — у,) — ay + О.
Подставляя значение y1 = ?>sin/?? и учитывая, что PCT = cfCT — O
(рис. 51, б), получаем:
ту = — су-\-cb sin pt — ay,
или
¦¦ . а • . с cb . ,
VH У Ч У = — sin pt.
Полученное уравнение представляет собой дифференциальное урав-
уравнение B0.1) вынужденных колебаний точки при наличии сопроти-
сопротивления среды, пропорционального скорости точки:
у + 2геу'+ k2y = h sin (/>* + 6).
Определяем числовые значения параметров:
a
Так как a = 3,06 мн • сек/см,
3,06 • 10 -980 . ,
то я = 2Т^5 = 3 сек •
т
так как с = 0,25 н/см, то
,, 0,25 • 980
=490
. ей 0,25-980-2 ПОГ1 , „
h = —• = —¦—fr-r = 980 см сек2,
т 0,5 '
р = 15 сел;, 6 = 0.
Уравнение установившихся вынужденных колебаний пластинки
имеет вид B0.6):
У
р2J -\- 4п2р2
Определяем сдвиг фазы колебаний по отношению к фазе возму-
возмущающей силы, пользуясь формулой B0.5а):
По таблице тангенсов находим:
е= 18° 45'32".
68
Выражая е в радианах для подстановки в уравнение движения,
получаем е = 0,3274.
Для определения амплитуды находим:
V (k2 — р2J + \п2р2 = у D90 — 225J + 4 • 9 • 225 » 280 сек~2.
Амплитуда вынужденных колебаний равна:
л * 980 о -
А. = , = «3,5 см.
° ]/(ft22Jj4V2 280
Уравнение вынужденных колебаний пластинки будет:
у = 3,5 sinA5f —0,3274) (см).
В рассмотренном примере пластинка совершает вынужденные
колебания в результате возмущающего действия колебаний верхнего
конца пружины, которое через пружину передается пластинке.
Частотой и фазой возмущающей силы является частота р и фаза pt
колебаний ползунка.
Вопроси для самоконтроля
1. Под действием какой силы совершаются свободные колебания мате-
материальной точки?
2. Какой вид имеет дифференциальное уравнение свободных колебаний
материальной точки?
3. От каких факторов зависят частота, период, амплитуда и начальная
фаза свободных колебаний материальной точки?
4. Каков вид графиков свободных и затухающих колебаний, а также
апериодического движения материальной точки?
5. Какой вид имеет дифференциальное уравнение вынужденных коле-
колебаний материальной точки и каково его общее решение?
6. Из каких составляющих движений складывается движение материаль-
материальной точки, находящейся под действием восстанавливающей и возмущаю-
возмущающей сил?
7. Каковы частота и период вынужденных колебаний материаль-
материальной точки?
8. Какие вынужденные колебания называются колебаниями малой
частоты и какие — колебаниями большой частоты? Чем характеризуются
тот и другой вид колебаний?
9. От каких факторов зависит амплитуда вынужденных колеба-
колебаний точки?
10. Что называют коэффициентом динамичности и каков график его
зависимости от отношения -4г ?
k
11. При каком условии возникает явление биений; каков график биений'5
12. При каких условиях возникает резонанс и каковы уравнение и гра-
график вынужденных колебаний материальной точки при резонансе?
13. Как влияет сопротивление, пропорциональное скорости, на ампли-
амплитуду, фазу, частоту и период вынужденных колебаний?
14. Как определить максимальное значение амплитуды вынужденных
колебаний при данном значении коэффициента затухания я?
15. При каком значении коэффициента затухания максимум амплитуды
вынужденных колебаний не существует?
16. Какова зависимость сдвига фазы колебаний ? от частоты изменения
возмущающей силы р и от коэффициента затухания п?
69
ГЛАВА IV
ДИНАМИКА НЕСВОБОДНОЙ МАТЕРИАЛЬНОЙ ТОЧКИ
§ 21. Несвободная материальная точка.
Связи и динамические реакции связей
Несвободной материальной точкой называется точка, сво-
свобода движения которой ограничена. Тела, ограничивающие сво-
свободу движения точки, называются связями.
Пусть связь представляет собой поверхность некоторого тела,
по которой движется точка. Тогда координаты точки должны удо-
удовлетворять уравнению этой поверхности,
называемому уравнением связи:
f(x, у, z) = 0. B1.1)
Аналогично, если точка вынуждена дви-
двигаться по некоторой линии (движение ша-
-у рика внутри криволинейной трубки), то
уравнениями связи являются уравнения
этой линии:
/i(x, у, z) — Q, f2(x, у, z)~0. B1.2)
Рис. 52. Таким образом, движение несвободной
материальной точки зависит не только от
приложенных к точке сил и начальных условий, а также от имею-
имеющихся связей. При этом значения начальных условий не могут быть
независимыми друг от друга, а должны удовлетворять уравнениям
связей.
Связи, уравнения которых не содержат явно времени,
называются стационарными.
Примером такой связи может служить абсолютно жесткий стер-
стержень ОМ длиной I, соединяющий материальную точку с неподвиж-
неподвижной точкой О (рис. 52). Стержень ОМ огра-
ограничивает движение точки, допуская ее дви- и у ^ ^
жение лишь по сферической поверхности
радиусом /.
Уравнение связи имеет вид:
B1.3)
м(х,у)
Уравнение B1.3) связывает координаты
точки и не содержит времени.
Связи, уравнения которых содер-
содержат время t, называются нестационар-
нестационарными.
Рассмотрим пример такой связи — материальную точку М, при-
прикрепленную к концу нерастяжимой и невесомой нити КОМ, прохо-
проходящей через неподвижное кольцо О (рис. 53),
х
Рис. 53.
70
Если конец нити К перемещается с постоянной скорость» и, то
длина нити ОМ = 1 изменяется с течением времени согласно урав-
уравнению:
l = lo-ut,
где /0 — длина ОМ0 в начальный момент.
Если нить КОМ остается в одной и той же плоскости, то в си-
системе координат хОу получим
или
лг2 + у2 — (/<,— «О2 = 0. B1.4)
Для каждого момента времени уравнение связи определяет окруж-
окружность, но с течением времени радиус этой окружности уменьшается.
Таким образом, точка М должна находиться на окружности, стяги-
стягивающейся с течением времени в точку.
В этом случае уравнение связи
y.t) = Qt B1.5)
кроме координат точки х и у, содержит время t.
Связи, накладывающие ограничения не только на коорди-
координаты точки, но и на ее скорость, называются него лоно иными.
Уравнения неголономных связей имеют вид
f{x, у, г. х, у, z, 0 = 0. B1.fi)
причем соотношения B1.6) не интегрируемы, так как в противном
случае после интегрирования можно было бы получить уравнения,
связывающие только координаты точки.
Связи, не накладывающие ограничений на ско-
рость точки, называются голономными.
Примерами голономных связей являются связи, рас-
рассмотренные выше.
Кроме рассмотренных классификаций, существует
деление связей на двусторонние, или удерживающие,
и связи односторонние, или неудерживающие.
Примером односторонней связи может служить го-
горизонтальная плоскость (рис. 54, а), примером двусто-
двусторонней связи — совокупность двух горизонтальных пло-
скостей (рис. 54, б).
Горизонтальная плоскость препятствует перемеще- рис 54.
нию шарика только вертикально вниз. Две горизон-
горизонтальные плоскости препятствуют его перемещению как вниз, так и
вверх по вертикали.
Односторонней, или неудерживающей, к зывается связь,
препятствующая перемещению тела в некотором направлении
и допускающая его перемещение в противоположном направ-
направлении.
71
Двусторонней, или удерживающей, называется связь, пре-
препятствующая перемещению тела в двух противоположных
направлениях.
При наличии односторонней связи материальная точка может
в некоторый момент времени отделиться от связи и начать двигаться
^-—-^ свободно. В этот момент реакция связи становится
/ \ равной нулю. До этого момента реакция направ-
' JL, \ лена только в сторону возможного отделения точки
i ^Ч. ' от связи.
\ и Так, например, тяжелый шарик М, привязанный
\^ у'М к нити ОМ, закрепленной в точке О, может нахо-
"„ литься не только на поверхности сферы радиусом
' ' г = / =±= ОМ, но и внутри сферы (рис. 55).
Движение шарика внутри сферы должно происходить как сво-
свободное до тех пор, пока он не удалится от неподвижной точки на
расстояние, равное длине нити.
Рассмотренная связь имеет уравнение:
х2 + У2-М2 — /2<0. B1.7)
Если материальная точка движется по окружности радиусом I
с центром в начале координат и окружность расположена в пло-
плоскости yOz, то уравнение связи имеет вид:
V2 1 z^ — V1 и х — 0.
Неравенство, соответствующее неудерживающей нестационарной
связи, имеет общий вид:
fix, у, z, 0<0 B1.8)
или
fix, у, z, /)>0. B1.9)
Все силы, действующие на несвободную материальную точку, или
несвободное тело, делят на задаваемые силы и реакции связей.
Задаваемые силы выражают действие на материальную точку
некоторых тел, вызывающих или стремящихся вызвать определенное
ее движение.
Реакции связей выражают действие связей, ограничивающих дви-
движение материальной точки или препятствующих ему
При изучении движения несвободной материальной точки приме-
применяют принцип освобождаемости точки от связей, использованный
ранее в курсе статики (гл. I, § 3).
Принцип освобождаемости точки от связей позволяет рас-
рассматривать движение несвободной материальной точки как
движение свободной точки под действием задаваемых сил и
реакций связей.
72
§ 22. Дифференциальные уравнения движения материальной
точки по заданной неподвижной поверхности
Рассмотрим материальную точку М, движущуюся под действием
задаваемой силы Р по некоторой неподвижной поверхности, являю-
являющейся для точки связью (рис. 56). Пусть уравнение этой поверх-
поверхности имеет вид:
/(*, у, 2) = 0.
Рассмотрим сначала случай, когда эта поверхность абсолютно
гладкая. В этом случае реакция связи N направлена по нормали
к поверхности и называется нормальной реакцией.
Согласно принципу освобождаемости от связи отбросим связь,
заменив ее действие реакцией N. Тогда для несвободной материаль-
материальной точки М получим основ-
основное уравнение динамики
/kw = P + N. B2.1)
Спроектировав векторы обеих
частей этого равенства на оси
х, у, z, получим дифферен-
дифференциальные уравнения движения
несвободной материальной точ-
точки М:
mx = X-\-Nx,
my=Y +Ny,
B2.2)
Рис 56.
где X, Y, Z— проекции силы Р на оси х, у, z, a Nx, Ny, Nz —
проекции нормальной реакции N на те же оси, т. е.
. i); ZVy = iVcos(N, j); NZ = N cos (N, k).
При наличии удерживающей связи, т. е. двух параллельных по-
поверхностей, между которыми движется точка, реакция N может быть
направлена по нормали к поверхности как в одну, так и в другую
сторону. Условимся считать нормальную реакцию положительной,
когда она направлена в сторону внешней нормали к поверхности,
т. е. в сторону точек пространства, для которых f(x, у, z) > О,
и отрицательной—в противоположном случае.
Тогда косинусы углов, образованных направлением N с осями
координат, можно определить по формулам дифференциальной гео-
геометрии как направляющие косинусы внешней нормали к поверхности,
имеющей уравнение f(x, у, z) = 0:
EL ^L ^L
cos(N, i) =
EL
дх
... ,ч ду
cos(N, J) = -3Jr
cos(N, k) =
дг
B2.3)
73
где
Определив проекции Nx, Ny, Nz при помощи формулы B2.4) и
подставив найденные значения в дифференциальные уравнения B2.3),
получим:
N д/
тх=-Х-\-
Д/ дх '
N df
mz — Z -\--r-T -—.
' Д/ dz
B2.5)
N
Обозначив -j-j — X (множитель Лагранжа), будем иметь
m"y=Y
mz =
B2.6)
Уравнения B2.6) называются диффе ренциальными уравнениями
движения несвободной материальной точки в форме Лагранжа.
Из трех дифференциальных
уравнений B2.6) и уравнения
связи B1.1) можно определить
в зависимости от времени четыре
неизвестные величины: х, у, z, k.
Получив координаты точки
х, у, z как функции времени,
определим движение точки М.
Определив множитель Ла-
.„ гранжа К, можно найти алгебраи-
алгебраическое значение нормальной реак-
реакции поверхности по формуле:
N = kAf. B2.7)
Рис. 57.
При наличии неудерживающей связи (одной поверхности) напра-
направление реакции совпадает с определенным направлением нормали.
В этом случае обращение значения N в нуль с последующим изме-
изменением знака означает отрыв точки М от поверхности.
Рассмотрим теперь движение материальной точки по заданной не-
негладкой неподвижной поверхности, уравнение которой /(х, у, z) = 0,
В этом случае реакция связи R имеет две составляющие: нормальную
реакцию N и силу трения' F с модулем F — /N, направленную про-
противоположно скорости точки (рис. 57).
74
Основное уравнение динамики для несвободной материальной точки
в этом случае имеет вид
mw = P-hN + F. B2.8)
Ему соответствуют дифференциальные уравнения движения точки:
т"х = Х-\- Nx-\-Fx.
my = Y -\-Ny + Fy, B2.9)
m'z = Z -\-Nz -f-/%.
Проекции силы трения на оси координат можно представить так:
Fx = Fcos (F, i)= — Fcos(v, [) — —F ^JL =——ic.
Аналогично
Подставив в уравнения B2.9) значения проекций нормальной
реакции N и силы трения F, получим дифференциальные уравнения
движения точки в следующем виде:
<V F ¦
B2.10)
mz = Z -f-Я,-^- — — г.
1 дг v
Из трех дифференциальных уравнений B2.10), уравнения связи B1.1)
и уравнения F = fN можно определить пять неизвестных величин:
х, у, z, к и F. Алгебраическое значение нормальной реакции опре-
определится по формуле B2.7).
§ 23. Дифференциальные уравнения движения материальной
точки по заданной плоской неподвижкой линии
Рассмотрим движение материальной точки по заданной гладкой
неподвижной линии, лежащей в одной плоскости. Примером такого
движения может служить движение шарика в плоской криволинейной
трубке (рис. 58).
Положим, что уравнение заданной линии, отнесенное к осям хОу,
проведенным в ее плоскости, имеет вид
/(*, у) = 0. B3.1)
Пусть на точку действует задаваемая сила Р, расположенная
в плоскости хОу.
75
Согласно принципу освобождаемости от связей заменим действие
связи (заданной гладкой линии) нормальной реакцией N и для рас-
рассматриваемой материальной точки составим основное уравнение
динамики:
mw = P + N. B3.2)
Так как вектор ускорения w и сила Р лежат в -плоскости хОу,
то реакция N лежит в этой же плоскости, т. е. она направлена по
главной нормали к заданной линии.
Спроектировав векторы левой и правой частей уравнения B3.2)
на оси координат, получим:
тх = X-\-Ncos(fi, i);
my = Y +/Vcos(N, j).
Направляющие косинусы нормали к плоской кривой f(x, у)~0
определяются по формулам из дифференциальной геометрии:
cos(N, i) =
_
дх
-КГ
df_
/Х1 ,ч ду
COS(N' i) = T7"
дх) ^ \ду )
Подставляя эти значения в дифференциальные уравнения, получим
дифференциальные уравнения движения материальной точки по за-
заданной плоской линии в виде двух
первых уравнений B2.6):
1 дх
B3.3)
Из дифференциальных уравне-
уравнений B3.3) и уравнения связи B3.1)
можно определить три неизвестные
_ х, у и Я, в зависимости от t, т. е.
движение точки М, и найти алге-
алгебраическое значение реакции связи N
по формуле N = X Д/.
Однако при движении точки по заданной плоской линии удобнее
проектировать векторы уравнения B3.2) не на оси декартовых коор-
координат, а на естественные координатные оси, т. е. на направления
касательной и нормали траектории, лежащих в плоскости кри-
кривой хОу.
При этом касательную направляют в сторону возрастания дуговой
координаты s = OjAf, отсчитанной от произвольно выбранного начала
отсчета Ох, а нормаль направляют к центру кривизны траектории.
Рис. 58.
76
Спроектировав все векторы уравнения B3.2) на соответствующие
оси, получим следующие уравнения:
mwcos(w, t) = PT,
mw cos (w, п) = Рп-\- N,
где Рх и Рп — проекции силы Р на касательную и нормаль.
Из кинематики известно (см. § 85), что:
B3.4)
•И> COS
Подставляя эти значения проекций ускорения на касательную и
нормаль в уравнения B3.4), получаем
mV-
B3.5)
Полученные уравнения называются уравнениями движения не-
несвободной точки в форме Эйлера.
Интегрируя первое уравнение, можно определить сначала ско-
скорость v = f (t), а затем закон движения точки М по заданной
траектории s = f(t). Подставив скорость v = f'{t) во второе урав-
уравнение, можно найти алгебраическое значение нормальной реакции N.
Рассмотрим теперь случай, когда точка М, двигаясь по плоской
линии, испытывает сопротивление движению.
Положим, что на эту точку действует сила
трения F с модулем F = fN, направленная
противоположно скорости точки (рис. 59).
Основное уравнение динамики несвобод- 0t-
ной материальной точки
mw = P + N + F. B3.6)
Уравнения движения несвободной точки
в форме Эйлера
т
d2s
dt2
= р Р
mv*
B3.7)
Рис. 59.
Уравнения B3.7) и уравнение F==fN, где / — коэффициент тре-
трения, позволяют определить закон движения точки по заданной траек-
траектории s = / (/), алгебраическое значение нормальной реакции N и мо-
модуль силы трения F.
77
§ 24. Математический маятник и его малые колебания
Математическим маятником называется материальная
точка, подвешенная на нерастяжимой невесомой нити, совер-
совершающая движение в одной вертикаль-
вертикальной плоскости под действием силы тя-
тяжести.
Рассмотрим движение маятника массой
т и длиной ОМ — 1 (рис. 60).
На точку М действуют две силы: ее
вес G и реакция нити N. Уравнения дви-
движения точки М в форме Эйлера имеют
вид
d2s
т -37J- = Рх = — G sin ф = — mg sin ф,
Рис. 60.
- = Рп -\- N = — mg cos <p-\-N,
За начало отсчета дуговой координаты s примем наинизшее по-
положение О1.
Так как s=OlM = Uf, то
d2s
Подставляя значение -^ в первое уравнение, получаем
ml —щ- — — mg sin ф
или
-*. 81ПФ-0.
B4.1)
Проинтегрировать уравнение B4.1) по времени при помощи эле-
элементарных функций нельзя.
При малом угле ф можно принять зшфя^ф. Тогда дифферен-
дифференциальное уравнение движения математического маятника примет вид:
ф _|_-|1 ф = 0. B4.2)
Это дифференциальное уравнение имеет вид A1.2), т. е. соот-
соответствует гармоническому колебательному движению.
Обозначим
ft» = -f. т. е. к = ^Т- <24-3>
Получим дифференциальное уравнение
78
Решение этого уравнения имеет вид A1.3) или A1.6):
Ф == Cj cos kt-\-C2 sin kt, B4.4)
или
y = asm(kt + fi), B4.5)
где а — амплитуда угла ф при малых колебаниях маятника.
Величина амплитуды зависит от начальных условий движения
маятника. Период малых колебаний маятника определится по частоте
колебаний k:
Т = Ц-, т. е. Г = 2ят/—. B4.6)
Модуль реакции нити N определим из второго уравнения дви-
движения точки при р = /:
^ B4.7)
Чтобы найти N, необходимо иметь значение скорости v точки М.
Для определения v преобразуем уравнение B4.1) при помощи
зависимости:
d2q> dan da> u!q> da
Уравнение B4.1) примет вид
dan g
ИЛИ
© d® = — у- sin ф ^ф.
Проинтегрировав это уравнение, получим:
¦у-^у-соэф + С. B4.8)
Для определения постоянной С необходимы начальные условия
задачи.
Пусть в начальный момент tQ = 0 угловая скорость маятника
была <0О, а Угол равен ср0. Подставим эти значения в уравнение B4.8):
„2
отсюда
с=тг—t
Подставив найденное значение С в уравнение B4.8), получим:
со2 = 0J+2.Х (cos ф— совфо). B4.9)
Умножив обе части равенства B4.9) на Р, найдем:
B4.10)
79
Подставив значение B4.10) в формулу B4.7), найдем модуль
реакции нити:
Л/ = G (~ -f 3 cos ф — 2 cos фо) . B4.11)
Из формулы B4.11) следует, что модуль реакции нити в любом
положении маятника зависит от начальной скорости v0 и начального
отклонения маятника ф0. Формула B4.11) справедлива не только при
малых колебаниях, так как получена не из приближенного, а точного
дифференциального уравнения B4 1).
§ 25. Примеры на- движение несвободной материальной
точки
Пример 10. Груз подвешен на нити длиной 1 = 70 см. В наинизшем
положении грузу сообщена горизонтальная скорость г>0 —4,9 м/сек.
Определить:
1) в каком положении нить перестанет удерживать груз и он
начнет двигаться как свободная точка;
2) при какой наименьшей начальной горизонтальной скорости v™ia
груз опишет полную окружность?
Решение. Модуль реакции нити математического маятника в
любом его положении определяется по формуле B4.11):
(^2 \
-у + Зсоэф — 2созфо).
1. Положение груза Мх (рис. 61), в котором нить перестанет
его удерживать и он начнет двигаться как свободная точка, опреде-
д. лится из условия, что в этом положении реакция
нити равняется нулю:
27У '•
' откуда
2coscp0 — -7
Подставляя числовые значения всех заданных величин и начальное
значение угла поворота фо = О, получаем:
следовательно, искомое положение груза определяется углом ф= 120°.
2. Минимальная начальная скорость в наинизшем положении, при
которой груз опишет полную окружность, будет такой же, как и
80
для прохождения полуокружности, и определяется по формуле B4.11)
из условия
Л/>0 при ф=180й
т. е.
—2>0,
откуда
Пример 11. Шарику, находившемуся в вершине гладкой шаровой
поверхности радиусом /? = 0,5 м, сообщена скорость г>0 = 0,7 м/сек.
Определить, в какой точке шарик отделится от поверхности и нач-
начнет двигаться свободно.
Решение. Шарик движется по гладкой шаровой поверхности
под действием двух сил: силы тяжести О и реакции поверхности N
(рис. 62).
Основное уравнение динамики Для несвободной точки М в этом
случае имеет вид:
Уравнения движения шарика
в форме Эйлера будут:
d2s
mv
= G cos ф — N.
B5.1)
Рис. 62.
В момент отделения шарика от поверхности реакция ее рав-
равняется нулю.
Из второго уравнения B5.1) при N = 0
ч2 „г
в
или cosq) =
B5.2)
Для определения v2 используем первое уравнение B5.1) За начало
отсчета Ох дуговой координаты s примем начальное положение ша-
шарика Мо; тогда
5 = О1Ж = /?ф.
d2s n d2® г, d® r. da d® o da
d*s
Подставив значение —гр в первое уравнение B5.1), будем иметь
(а S или
6 А. А Яблонский
81
Проинтегрировав это уравнение, получим
(О2
Выразим угловую скорость через линейную скорость точки М
по формуле со = -5-:
щ — — ^coscp + C. B5.3)
Значение С определим из уравнения B5.3) по начальным условиям
движения:
фо = О; v = v0.
Тогда
откуда
Подставим значение С в уравнение B5.3):
или
v2 = vl + 2gR(l— cosy).
Подставив значение т/2 в формулу B5>2), найдем
v2
откуда
Подставим заданные числовые значения:
, 0,49 \ 2,1
+) = ^
В точке, которой соответствует угол <р== ?ОХСМ = 45°35',
шарик отделится от поверхности.
Вопросы для самоконтроля
1. В каких случаях материальную точку называют несвободной и каковы
дифференциальные уравнения движения этой точки''
2. Дайте определения стационарных и нестационарных, голономных. и
неголономных связей.
3. Какие связи называют двусторонними и односторонними?
4. В чем сущность принципа освобождаемое™ от связей?
5 Какой вид имеют дифференциальные уравнения движения несвобод-
несвободной материальной точки в форме Лагранжа? Что называют множителем
Лагранжа?
82
ГЛАВА V
ДИНАМИКА ОТНОСИТЕЛЬНОГО ДВИЖЕНИЯ
МАТЕРИАЛЬНОЙ ТОЧКИ
§ 26. Дифференциальные уравнения относительно
движения материальной точки.
Переносная и кориолисова силы инерции
Два первых закона классической механики и все полученные на
их основе уравнения справедливы для движения материальной точки
относительно инерциальной системы отсчета (см. § 2).
Изучим движение материальной точки относительно неинерциаль-
ной системы.
Положим, что система отсчета 2|т|? является инерциальной, а не
связанная с ней система Oxyz — неинерциальной (рис. 63). Примем
систему й?г|? за условно
неподвижную, а систему
Oxyz за подвижную си-
систему отсчета.
Рассмотрим движение
материальной точки М, не
связанной неизменно с по-
подвижной системой отсчета,
а движущейся по отноше-
отношению к ней Движение точ-
точки М относительно систе-
системы 2|т]? называется абсо-
абсолютным, а движение точки
относительно системе Oxyz
называется относитель-
относительным.
Установим основное
уравнение динамики отно-
относительного движения мате-
материальной точки, считая, что переносное движение системы Oxyz и
силы, действующие на точку, известны.
Основное уравнение динамики для абсолютного движения точки М
имеет вид:
гео-
геоРис. 63.
где w — абсолютное ускорение материальной точки, а 2]Р,
метрическая сумма приложенных к точке сил.
В разделе «Кинематика» (§ 125) установлено, что в случае непо-
непоступательного переносного движения абсолютное ускорение точки w,
6*
83
равно геометрической сумме трех ускорений: относительного w>,
переносного we и поворотного (кориолисового) v/c, т. е.
Подставив это значение w в уравнение B6 1), получим
mv/r-\- 2
Из полученного уравнения определим произведение массы точки
на ее относительное ускорение:
B6.2)
Введем два вектора:
численно равные произведениям mtwe и mwc и направленные противо-
противоположно ускорениям we и ч/с. Эти векторы назовем переносной а
кориолисовой силами инерции.
Подставим эти векторы в уравнение B6 2):
«г = ЦР,+ Фе + Фс B6 3>
Уравнение B6 3) представляет собой основное уравнение дина-
динамики относительного движения материальной тонки
Сопоставляя уравнения B6.1) и B6 3), заключаем- в случае не-
непоступательного переносного движения относительное движение
материальной точки можно рассматривать как абсолютное*
если к действующим на точку силам присоединить переносную
и кориолисову силы инерции
Разложив силу инерции материальной точки Ф = — mw на со-
составляющие, получим
Ф = — rnw = — mw, — fflwe — тч/с = Ф, -j- Фе + Фс.
Таким образом, переносная и кориолисовы силы инерции Фе и Фс>
так же как и вектор Фг = — tnwr являются составляющими силы
инерции Ф точки М.
При помощи уравнений относительного движения материальной
точки
можно выразить проекции относительного ускорения wr на оси дг, у, гг
84
Проектируя векторы уравнения B6.3) на оси подвижной системы
отсчета Oxyz, получаем дифференциальные уравнения относительного,
движения материальной точки:
>i= 2*i+*„ + *«.
B6.4>
Дифференциальные уравнения B6.4) отличаются от дифферен-
дифференциальных уравнений абсолютного движения материальной точки C.2)
наличием в правой части проекций на соответствующие координатные-
оси переносной и кориолисовой сил инерции.
Рассмотрим частные случаи относительного движения материаль-
материальной точки, соответствующие различным видам переносного движения..
1. Переносное движение —
неравномерное вращение тела
вокруг неподвижной оси (рис. 64).
В этом случае переносное уско-
ускорение vfe равно геометрической
сумме вращательного и центро-
центростремительного ускорений:
В соответствии с этим пере-
переносная сила инерции Фе имеет две
составляющие: вращательную силу
инерции Ф| = — /kw| и центро-
центробежную силу инерции ф« =
= — mw", т. е.
Тогда уравнение B6.3) при-
принимает вид
B6 5) Рис 64
Правая часть уравнения B6 5), кроме приложенных к точке сил,,
содержит переносную вращательную, переносную центробежную ш
кориолисову силы инерции
Модули переносного вращательного и переносного центростреми-
центростремительного ускорений определяются по формулам:
lei, w*=MK-vZ.
где (Ле и ее — алгебраические величины угловой скорости и углового
ускорения переносного вращения; МК— расстояние в данный момент
от точки М до оси вращения.
85-
Переносная вращательная сила инерции Ф^ направлена противо-
противоположно вращательному ускорению, а ее модуль
Фае = т\т1\ = т- МК -\ге\
Переносная центробежная сила инерции ф? направлена противо-
противоположно центростремительному ускорению, т е направлена по ра-
радиусу МК от оси вращения z, а ее модуль
Ф? = mwe = да • Ж/С • ©е
Поворотное, или кориолисово, ускорение wc, как известно (см.
«Кинематика», § 126), определяется векторным произведением w,.=
= 2(fi)eX vr) Его модуль та>с—2 |юе| • |г»г| -з1п(ые, vr) Кориоли-
сова сила инерции направлена противоположно кориолисову ускоре-
ускорению точки, а ее модуль
Фс = 2т- \о>е\ • \vr] -sm(tae, vr)
Направление кориолисойой силы инерции Фс, обратно направ-
направлению ускорения we, перпендикулярно к векторам ые и \г, т е.
перпендикулярно как к оси переносного вращения, так и к каса-
касательной к траектории относительного движения точки
2 Переносное движение — равномерное вращение вокруг не-
неподвижной оси
В этом случае fe = 0 и Фве — 0 и основное уравнение динамики
относительного движения точки B6 5) примет вид.
т\уг = 2Р( + Ф" + Ф, B6 6)
3 Переносное движение — поступательное неравномерное
криволинейное движение
В этом случае ч>е = 0 и Фс = 0, а потому уравнение B6 3) при-
принимает вид:
«*, = 2р, + Ф, B6 7)
Правая часть уравнения B6.7) кроме приложенных к точке сил,
содержит только переносную силу инерции Фе — — mwe, направлен-
направленную противоположно ускорению поступательного движения системы
Oxyz с модулем Фе = т. \ we \
В случае поступательного неравномерного криволинейного дви-
движения
где
dv,
dt
ivl
e
4 Переносное движение — поступательное прямолинейное и
равномерное движение
В этом случае we = О и Фе — 0, а потому уравнение B6 7) при-
принимает вид:
mwr = 2 Р( B6 8)
В правой части уравнения B6 8) имеется только геометрическая,
сумма приложенных к точке сил, как в основном уравнении абсо-
абсолютного движения точки B6 1), т. е подвижная систем отсчета Oxyz
является в этом случае тоже инерциальной системой
§ 27. Принцип относительности классической механики.
Инерциальные системы отсчета
Сопоставление уравнений B6 8) и B6 1) показывает, что при
равномерном прямолинейном поступательном переносном движении
уравнение B6 8), определяющее относительное ускорение материаль-
материальной точки wr, ничем не отличается от основного уравнения дина-
динамики B6 1), определяющего абсолютное ускорение точки w В этом
случае относительное движение с динамической точки зрения ничем
не отличается от абсолютного движения,
Таким образом, относительное движение материальной точки па
отношению к подвижной системе отсчета, движущейся прямолинейна
Рис 65
и равномерно, происходит так же, как и по отношению к неподвиж-
неподвижной системе отсчета (рис 65)
Все такие подвижные системы являются инерциальными системами
отсчета, и движение материальной точки относительно любой из
этих систем можно рассматривать как абсолютное движение Это
указывает ла инвариантность уравнений динамики при переходе от
одной инерциальной системы к другой.
87
Очевидно поэтому, что наблюдения над относительным движе-
движением материальной точки по отношению к любой из таких систем
не позволяют судить о том, совершает ли эта система равномерное
прямолинейное поступательное движение или находится в покое.
Это положение, называемое принципом относительности клас-
классической механики, можно сформулировать так:
Никакие механические явления, происходящие в среде, не
могут обнаружить ее прямолинейного и равномерного поступа-
тельного движения.
Этот принцип, распространенный не только на механические,
но и на все физические явления, лежит в основе теории относи-
относительности.
§ 28. Случай относительного покоя. Сила тяжести
Рассмотрим случай, когда материальная точка под действием
приложенных к ней сил находится в состоянии относительного покоя,
т. е. не совершает движения отно-
сительно подвижной системы отсчета
Oxyz.
При отсутствии относительного дви-
движения абсолютное ускорение точки
равно ее переносному ускорению, т. е.
N
Тогда уравнение B6.1) принимает
вид
или
t — т1Л/е — 0. откуда
B8
Таким образом, в случае, когда
материальная точка н'аходится
в состоянии относительного покоя,
геометрическая сумма приложенных к точке сил и переносной
силы инерции равна нулю.
В качестве примера рассмотрим относительный покой материаль-
материальной точки (тела) на поверхности Земли (рис. 66).
Условие относительного покоя точки М выражается равен-
равенством B8.1) в виде
•где Р-—сила притяжения Земли, направленная к ее центру, N—реак-
N—реакция опоры; Ф"—переносная сила инерции, которая вследствие равно-
равномерного вращения Земли представляет собой центробежную силу
инерции. Ее модуль
9тт
где юе— 25-3600 сек~1 — угловая скорость вращения Земли
Очевидно, что действие тела на опору выражается силой G = —N,
т. е. 1й = Р-|-Фе> причем сила G—равнодействующая сила притя-
притяжения Земли и переносной силы инерции — представляет собой силу
тяжести, т. е. вес тела. Направление силы тяжести G определяет
направление вертикали в данной точке земной поверхности, а пло-
плоскость, перпендикулярная к G, является горизонтальной плоскостью.
По модулю центробежная сила инерции Ф" всегда мала по сравне-
сравнению с весом тела G. Найдем отношение их модулей:
Ф* тМКа2е О Marcos <p Ra>2e cos ф
О mg g g
где R — радиус земного шара,
ср — широта, на которой находится точка М.
Отношение —Л- имеет максимальное значение на экваторе:
ф = 0, # = 6370 км, g = 9,78 м/сек2,
ф« фИ 1
-^ = 0,00346, или -4- = -тш.
G G 290
Из этого следует, что вес тела G по модулю мало отличается
от силы притяжения тела к Земле Р и направление вертикали соста-
составляет с направлением этой силы очень малый угол.
Наибольший вес тело имеет на полюсе, а наименьший — на эква-
экваторе по двум причинам:
1) сила притяжения Р на полюсе имеет наибольший модуль;
2) переносная сила инерции ф? на полюсе равна нулю.
Ускорение свободного падения тела g равно 983 см/сек2 на
полюсе и 978 см/сек2 на экваторе.
§ 29. Отклонение падающих тел к востоку
Наблюдения показывают, что все тела, падающие на Землю,
незначительно отклоняются от вертикали в восточном направлении.
Объяснение этого явления легко получить, рассмотрев относи-
относительное движение падающего тела без начальной скорости по отно-
отношению к подвижной системе отсчета, связанной с вращающимся
земным шаром.
Начало координат О этой системы совместим с точкой поверх-
поверхности Земли, лежащей на одной вертикали с начальным положением
89
падающего тела Мо (рис. 67 и 68). Ось г направим по вертикали
вверх через центр Земли, пренебрегая ее незначительным отклоне-
отклонением, ось х — по касательной к меридиану к югу, а ось у— пер-
апендикулярно к плоскости меридиана xOz к востоку.
Рис 67.
!~<«чю
Рис. 68.
Тогда начальные условия относительного движения материальной
точки будут:
*0 — 0, *0 = 0, уо = О. го = Н,
Если сопротивление воздуха не учитывается, ¦ то на точку дей-
действует только сила притяжения Земли Р.
Основное уравнение динамики относительного движения точки B6.6)
в случае, когда переносное движение—равномерное вращение —
имеет вид:
/я>у/. = Р + Ф^ + Фс. B9.1)
Но равнодействующая силы притяжения Р и переносной, центро-
центробежной силы инерции Ф^ равна силе тяжести (весу) тела Q и напра-
направлена по вертикали.
Тогда уравнение B9.1) получает вид:
тч/г = О-{-Фе. B9.2)
Кориолисово ускорение точки w,. = 2 (ые X vr) направлено на
запад перпендикулярно к плоскости меридиана, содержащей, векторы
tae и v,. Кориолисова сила инерции Фс противоположна ускоре-
ускорению wc, следовательно, она направлена на восток, т. е. в сторону
положительного направления оси у.
Ее модуль
Фс~2т ¦
I vr | cos ф,
где ф — широта, на которой находятся точка М.
SO
Составим дифференциальные уравнения движения точки М, соот-
соответствующие уравнению B9.2), в предположении, что направление
скорости vr во все время движения мало отклоняется от вертикали г.
Получим:
B9.3>
mz = 2^ = — 0 = — mg.
Интегрируем первое уравнение B9.3):
По начальным условиям t0 — О, х0 = 0, х0 = 0
Уравнение движения точки вдоль оси л: получает вид
B9.4)
Таким образом, точка М движется только в плоскости
Интегрируем третье уравнение B9.3):
z = 2
По начальным условиям tfo = O, zo = O и zo = H
С3 = 0, С4 = Я.
Для движения точки вдоль оси z
z = — gt,
?? B9.5>
Приступая к интегрированию второго уравнения B9.3), учтем^
что направление относительной скорости \т очень мало отличается1
от направления вертикали, а потому с достаточной степенью точности
можно принять:
Тогда второе уравнение B9.3) принимает вид
my = 2m(aegt cos <p.
91
Интегрируя, получаем:
У = a>egi2 cos ф Н- С5, y = j ®egtz cos ф + C5t -f- C6.
По начальным условиям t0 = О, у0 = 0, у0 = 0
С5 = 0, С6 = 0.
Для движения точки вдоль оси у
У = ®е?Р cos Ф>
у = j <s>egt3 cos ф. B9.6)
Определяем из уравнения B9.5) при 2 = 0 момент падения точки
на Землю
g
Подставляя значение tx в уравнение B9.6), получаем
Ушах = у «*?• У -р~ cos Ф
или
2 Г1Н
<P- B9.7)
По формуле B9.7) можно по высоте и широте места падения
тела найти величину его отклонения от вертикали к востоку. Так,
например, на широте Ленинграда (ф = 60°) тело, падающее с высоты
Л =100 м, без учета сопротивления воздуха отклоняется в восточ-
восточном направлении на утах=^^Л см.
Тело, брошенное вертикально вверх, отклоняется от вертикали
не на восток, а на запад, так как кориолисова сила инерции в этом
случае направлена перпендикулярно к плоскости меридиана к западу.
§ 30. Примеры на относительное движение
материальной точки
Пример 12. Определить периоды качаний математического маят-
маятника, точка привеса которого движется по вертикали:
1) вверх с ускорением чю;
2) вниз с ускорением w < g;
3) вниз с ускорением w = g и
4) вниз с ускорением w > g.
Решение. 1. Если точка привеса математического маятника
движется, то абсолютное движение мая^чика является сложным.
92
Свяжем подвижную систему отсчета хОу с ползунком О, движу-
движущимся поступательно вверх с ускорением w (рис. 69). Тогда это
движение будет переносным движением. Переносное ускорение we
будет равно заданному ускорению w. Отно-
Относительным движением маятника по отношению ^[
к этой системе будет качание маятника вокруг
точки привеса О. Чтобы определить это дви-
движение, применим основное уравнение относи- 0 \
тельного движения в случае, когда переносное
движение поступательное B6.7):
К маятнику М приложены: сила тяжести О
и реакция нити N. Условно приложим к точке М
переносную силу инерции Фе = — mwe, на-
направленную противоположно переносному уско-
ускорению we, т. е. вертикально вниз. Уравне-
Уравнение B6.7) примет вид:
C0.1)
Составим уравнения относительного движения, соответствующие
уравнению C0 1), в форме Эйлера B3.5):
т
d2sr
= — (О + Фе)sin Фг = — m(g-\-we) sin qv,
vr
е) cos <pr.
C0.2)
Так как
то
d2sr
= 1-
или
dt2 dt2 •
d2s
Подставим это значение .,/¦ в первое уравнение C0.2):
ml —щ- — — ffi i
»e) sin фг
sin9r = 0.
Полагая угол cpr малым по величине, принимаем
уравнение C0.3) принимает вид:
C0.3)
Тогда
C0 4)
93
Уравнение C0.4) аналогично дифференциальному уравнению B4.2)
качаний математического маятника.
Пользуясь этим, определим частоту и период качаний рассматри-
рассматриваемого маятника:
и г = :
I
C0.5)
Полученный результат показывает, что при увеличении ускорения
переносного движения <we маятник должен качаться быстрее.
Из второго уравнения C0.2) можно определить модуль реакции
нити N:
,.2
mv}
TV = (G + Фе) cos фг -) = mg cos фг -\- mwe cos фг -\-
mvz.
C0.6)
Относительную скорость vr в зависимости от угла фг можно
определить из первого уравнения C0.2), как это было сделано в § 24.
2 В случае, если точка привеса
маятника движется вниз с ускоре-
ускорением we < g, то период качаний
определится:
-х
).7а)
т. е. ускоренное движение точки
привеса вниз увеличивает период ка-
качаний маятника.
3. Если точка привеса маятника
свободно падает вниз, т. е. we = g,
то нить маятника не препятствует
свободному падению материальной
точки М, а потому колебаний маят-
маятника не происходит G = оо).
4. Если точка привеса маятника движется вниз с ускорением,
большим чем ускорение свободного падения, т. е. we > g (рис. 70),
то получается обратный маятник, так как Фе > О.
Период его качаний определяется:
C0.76)
Пример 13. Тело весом G — 2 н положено на гладкую грань
трехгранной призмы, другая грань которой лежит на горизонтальной
плоскости. Какое горизонтальное ускорение должна иметь призма,
чтобы тело не двигалось относительно призмы и какое давление
производит тело на призму в этом случае, если a = arctg-5-(pHc. 71).
Решение. Если тело находится в состоянии относительного
покоя по отношению к движущейся призме, то применимо уравне-
94
ние B8.1), т. е. геометрическая сумма приложенных к телу сил и
переносной силы инерции равна нулю.
К телу приложены: его вес О и реакция гладкой плоскости N
(рис. 72).
Условно приложим к телу переносную силу инерции Фе, напра-
направленную противоположно переносному ускорению v/e, представляю-
представляющему собой ускорение движения призмы. Модуль этой силы опре-
определится:
Фе = mwe,
где т — масса тела.
Составим для сил О, N и Фе урав-
уравнение B8.1):
O + N + Фв^О, C0.8)
Проектируя векторы этого равен-
равенства на оси х и у, связанные с дви-
движущейся призмой, получим уравнения:
О sin а — Фе cos а = 0,
N — G cos а — Ф, sina = 0.
Рис. 71.
C0.9)
Из первого уравнения C0.9) найдем
модуль ускорения we:
mg sina — mwe cos a = 0,
откуда
we = g tg a = -j- g = 7,35 м[сек2;
тогда
Фе — rrvwe = mg tg a = G tg a.
N
Рис. 72.
Определим модуль реакции призмы N из второго уравнения C0.9):
N — G cos a -}- Фе sin a = G cos a + G • tg a • sin a =
= G cos a A + tg2 a) = G 1 g (i -|- tg2 a) =
= О у 1 -f- tg2 a = 2 • j = 2,5 к.
Пример 14. Гладкий стержень длиной 2 = 0,5 м равномерно вра-
вращается в горизонтальной плоскости вокруг оси, проходящей через
его конец. Угловая скорость его вращения равна 2я сек~1. В неко-
некоторый момент времени кольцу, находящемуся посере^ше стержня,
представляют возможность скользить по нему. Через сколько секунд
кольцо сойдет со стержня?
95
Решение. Свяжем подвижную систему отсчета Oxyz с вра-
вращающимся стержнем. Направим ось х вдоль стержня, ось у — пер-
перпендикулярно к оси х в горизонтальной плоскости, ось z — верти-
вертикально вверх (рис. 73).
Вращение этой системы вокруг оси z будет переносным движением.
Относительным движением кольца по отношению к этой системе будет
его скольжение по стержню.
' х _, Когда переносное движение
является равномерным вра-
вращением, относительное дви-
движение точки определяется
уравнением B6.6):
РИС- '3 К кольцу приложены
силы: его вес Q и реакция
стержня, перпендикулярная
к его оси, имеющая две со-
ставляюшие: вертикальную
1Мг и горизонтальную N2.
Условно прикладываем
к кольцу переносную цен-
центробежную силу инерции Фе
и кориолисову силу инер-
инерции Фс (рис. 74, а и б), ко-
которые направлены противо-
противоположно ускорениям w^ и wc
(рис. 73). Направление уско-
ускорения w^, определено по
правилу Жуковского пово-
рис 74. ротом вектора \г на 90°
в плоскости, перпендикуляр-
перпендикулярной к оси переносного вращения, в сторону этого вращения. Модули
сил инерции
ф? = m-ш" —mx(i>2e,
Фс — mwc = 2ma>evr sin (ые, vr) = 2m<aevr,
так как a>eJ_vr. то sin(we, vr)=l.
Уравнение B6.6) в данном случае имеет вид:
?-|-Фс- C0.10)
Составим дифференциальное уравнение относительно движения
кольца вдоль оси х, соответствующее уравнению C0.10):
тх =
: тхщ.
96
откуда
x — (nlx = 0. C0.11)
Характеристическое уравнение будет:
Г2_(О2==О>
откуда
г\, 2 — —®-
Решение уравнения C0.11) имеет вид:
л: = Схсш + C2e- at. C0.12)
Скорость этого движения получим, дифференцируя по t уравне-
уравнение C0.12):
jc = <B(C1e°"— C2e-»0- C0.13)
Определим постоянные С1 и С2 по начальным условиям:
t = 0, Jt0 =-^ = 0,25 л, ха = 0.
Подставим эти значения в уравнения C0.12) и C0.13):
0.25 = ^4-^2,
0 = С j — С 2»
тогда
С, = С, = 0,125.
Подставляя значение угловой скорости оае = 2я сек~х и значение
постоянных Сх и С2 в уравнение C0.12), получаем уравнение относи-
относительного движения кольца:
х = 0,125(е2л'-|-е-2л0. C0.14)
Продолжительность Т движения кольца до конца стержня нахо-
находим из уравнения C0.14) при х = 0,5 м:
или
Для решения этого уравнения положим
е2пГ __ и е— 2лГ __ _
' и
тогда
и
или
И2 _ 4« 4- 1 = О,
7 А. А. Яблонский 97
Так как Т > 0, то
е2яГ> J
Поэтому
е2*г = и = 3,732, 2л7 = In 3,732,
откуда
_ In 3,732 л О1
г=-бж-=о-21 сек-
Чтобы определить модули реакций стержня Л^ и N2, спроекти-
спроектируем векторы уравнения C0 10) на оси у и гг.
Учитывая, что wr J_ Оу и wr J_ Oz, получаем:
0 = М2-Фс,
Из этих ураьнений найдем:
Л/2 = Фс = 2mcoevr = 2mwex = 2т2л • 0,25л (е2я' — е-2я') =
= /гея2 (е2л1 — е-2«'). C0.15)
^! = О. C0.16)
Вопросы для самоконтроля
1. Какой модуль и какое направление имеют переносная и кориолисова
силы инерции?
2 В чем заключается различие между дифференциальными уравнениями
относительного и абсолютного движений материальной точки?
3. Как определяются переносная и кориолисова силы инерции в различ-
различных случаях переносного движения?
4. В чем состоит сущность принципа относительности классической
механики?
5 Какие системы отсчета называются инерциальными?
6. Каково условие относительного покоя материальной точки?
7. В каких точках земной поверхности сила тяжесги имеет наибольшее
и наименьшее значения?
8. Чем объясняется отклонение падающих тел к востоку?
9. В каком направлении отклоняется тело, брошенное вертикально вверх?
ГЛАВА VI
СИСТЕМА МАТЕРИАЛЬНЫХ ТОЧЕК. ТВЕРДОЕ ТЕЛО.
МОМЕНТЫ ИНЕРЦИИ ТВЕРДОГО ТЕЛА
§ 31. Силы, действующие на точки механической системы
Системой материальных точек, или механической системой,
называют мысленно выделенную совокупность материальных точек,
взаимодействующих между собой.
Систему материальных точек, движение которых не ограничено
никакими связями, а определяется лишь действующими на эти точки
силами, называют системой свободных точек.
Примером системы свободных точек может служить солнечная
система, планеты которой рассматриваются в астрономии как мате-
материальные точки. Планеты свободно перемещаются по орбитам, зави-
зависящим от действующих на планеты сил.
Система материальных точек, движения которых ограничиваются на-
наложенными на точки связями, называется системой несвободных точек.
Примером системы несвободных точек может служить любой ме-
механизм или машина, у которых движения отдельных элементов огра-
ограничены связями.
Известно, что механическое действие связей на точки системы
выражается силами, называемыми реакциями связей. Таким образом,
все силы, действующие на систему несвободных точек, можно раз-
разделить на задаваемые силы и реакции связей.
Равнодействующую всех задаваемых сил, приложенных к точке М:
несвободной механической системы, условимся обозначать Р(, а равно-
равнодействующую реакций связей — R<
Все силы, действующие на точки любой механической системы
как свободной, так и несвободной, можно разделить и по другому
признаку: на внешние и внутренние силы.
Внешними называют силы, действующие на точки системы со сто-
стороны материальных точек, не входящих в состав данной системы.
Внутренними силами называют силы взаимодействия между
материальными точками данной механической системы.
Внешние силы условимся обозначать Р;, а внутренние силы — Р/.
Примером внутренних сил могут служить силы упругости, дей-
действующие между частицами упругого тела, принятого за механиче-
механическую систему.
Одна и та же сила может быть как внешней, так и внутренней,
в зависимости от того, какая механическая система рассматривается.
Так, например, реакции подшипников вала являются внешними силами
по отношению к самому валу. Эти же реакции относятся к внутрен-
внутренним силам, когда рассматривается вся установка вместе со станиной.
Таким образом, любая сила, действующая на точку механической
системы в соответствии с приведенным двумя классификациями сил.
является внешней или внутренней и в то же время она является
задаваемой силой или реакцией связи.
Движение точек механической системы зависит как от внешних,
так и от внутренних сил.
На основании закона равенства действия и противодействия каждой
внутренней силе соответствует другая внутренняя сила, равная ей
по модулю и противоположная по направлению.
Из этого следует:
1. Главный вектор всех внутренних сил системы и суммы
их проекций на координатные оси равны нулю:
R-/ = 2p» = o, C1.1)
2iXi = 0; 2vf = O; 2# = 0. С31-2)
7* 99
2. Главные моменты всех внутренних сил системы относи-
относительно любого центра и координатных осей равны нулю:
м^=2*Ч=о, C1.3)
2Л#, = 0; 2л#у = 0; 2л#г = 0. C1.4)
Хотя уравнения C1.2) и C1.4) имеют вид уравнений равновесия
сил, произвольно расположенных в пространстве, но внутренние силы
не уравновешиваются, так как они приложены к различным точкам
системы и могут вызывать перемещения этих точек относительно
друг друга.
§ 32. Центр масс системы материальных точек
и его координаты
Каждая точка Mt механической системы имеет определенную
массу mt, а ее положение по отношению к системе отсчета Oxyz
в каждый момент времени определяется радиусом-вектором ri или
тремя координатами xL, yt, zt.
Рис. 75.
Центром масс системы называется геометрическая точка С,
радиус-вектор которой гс определяется по формуле:
__ 2 miri
т
C2.1)
где /» = 2даг — масса системы (рис. 75).
Проектируя векторы обеих частей равенства C2.1) на оси х, у, z,
получаем формулы, определяющие координаты центра масс системы:
.._
/и
Ус = -
т
C2.2)
100
2
2
и
Gtzi
С,
,2
2
mg
migzi
ms
2
2
m
ЩУ1
m
m
Как видно из формул C2.1) или C2.2), положение центра масс
системы в каждый момент времени зависит только от положения и
массы каждой точки этой системы. Нетрудно убедиться в том, что
центр тяжести тела или системы тел является центром масс этой
системы. Для этого воспользуемся формулами, определяющими коор-
координаты центра тяжести тела (см. ч. I, «Статика», § 66):
2«л_2
хс — —
Ус
Действительно, центр тяжести системы тел совпадает с их цент-
центром масс. Понятие «центр масс системы» применимо для любой си-
системы материальных точек независимо от того, находится ли она
под действием каких-либо сил или нет, тогда как понятие «центр
тяжести» применяется лишь для твердого тела или системы твердых
тел, находящихся в однородном поле сил тяжести.
§ 33. Твердое тело
Рассмотрим систему п материальных точек, расстояния между
которыми остаются неизменными. Такая система называется неизме-
неизменяемой.
Для образования неизменяемой системы ^
из двух точек М1 и М2 их следует соединить ,^^
между собой абсолютно жестким и невесомым / л-——/"
(идеальным) стержнем (рис. 76). Чтобы обра-
образовать неизменяемую систему из трех точек
Mv М2 и М3, необходимы три стержня: М1М2,
М2М3 и MZMV Для образования неизменяе- ^?
мой системы из четырех точек, не лежащих рис, 76.
в одной плоскости, нужно присоединить точ-
точку М4 к трем первым точкам тремя стержнями МХМА, М2МА и М3М4.
Действительно, если присоединить точку М4 двумя стержнями MlMi
и М2М4, то система будет изменяемой, так как угол между треу-
треугольниками МХМ2М3 и МХМ2М4 может изменяться. Чтобы сделать
этот угол неизменяемым, необходим третий стержень Ж3Ж4.
Очевидно, что для образования неизменяемой системы каждую
последующую точку нужно соединять идеальными стержнями, по
крайней мере, с тремя точками, уже входящими в неизменяемую си-
систему.
Найдем минимальное число стержней, обеспечивающих неизменяе-
неизменяемость системы из п материальных точек.
191
Дл$г образования неизменяемой системы из трех точек нужно три
стержня, а для присоединения к ней каждой из остальных (п — 3)
точек необходимо также три стержня.
Таким образом, минимальное число стержней, необходимое для
образования неизменяемой системы из п точек, определится:
3-}-3(й — 3) = 3я — 6. C3.1)
Считая число точек неизменяемой системы бесконечно большим,
а длины соединяющих их идеальных стержней бесконечно малыми,
получаем модель так называемого абсолютно твердого тела.
§ 34. Моменты инерции твердого тела. Радиус инерции
При поступательном движении твердого тела, так же как и при
движении материальной точки, мерой его инертности является масса
тела. При вращательном движении
твердого тела мерой инертности является
момент инерции твердого тела отно-
относительно оси вращения.
Поэтому до исследования различ-
различных видов движения твердого тела
следует рассмотреть вычисление момен-
моментов инерции твердых тел и устанавить
основные теоремы о моментах инерции,
играющие существенную роль в дина-
динамике твердого тела.
Для установления понятий моментов
инерции твердого тела относительно
плоскости, оси и полюса проведем через
произвольную точку О три взаимно
перпендикулярные координатные оси
х, у, z и изобразим координатные
плоскости yOz, zOx и хОу (рис. 77).
заданное твердое тело как множество ма-
.... я).
Рис 77.
Будем рассматривать
териальных точек Ж,(/=1, 2, 3,
Моментом инерции твердого тела относительно плоскости
называется скалярная величина, равная сумме произвеёений
массы каждой точки тела на квадрат расстояния от этой
точки до плоскости.
Для определения моментов инерции тела относительно коорди-
координатных плоскостей опустим из каждой точки тела Mi перпендику-
перпендикуляры на плоскости yOz, zOx, хОу:
Обозначив моменты инерции твердого тела относительно коор-
коорJ
динатных плоскостей JyOz, JzOx и JxOy, получим:
Jy0z
„2.
zOx~
C4.1)
102
Моментом инерции твердого тела относительно оси назы-
называется скалярная величина, равная сумме произведений массы
каждой точки тела на квадрат расстояния от этой точки
до оси.
Для определения моментов инерции твердого тела относительно
координатных осей опустим из каждой точки тела Mt на оси х, у, z
перпендикуляры MtAt, MtBh Mfi^ Квадраты этих перпендикуляров
Обозначим моменты инерции твердого тела относительно коор-
координатных осей Jx, Jy, Jz;
Л=2 w. (*?+*<> Л=2 w< D+¦*]); Л=2 *«(*?+у?).
C4.2)
Моментом инерции твердого тела относительно полюса
{полярным моментом инерции) называется скалярная вели-
величина, равная сумме произведений массы каждой точка тела
на квадрат расстояния от точки до этого полюса.
Обозначим Jo — момент инерции твердого тела относительно по-
полюса О
Jo=2 тА=2 Mt И+у\+*?)• C4-3>
Между моментами инерции твердого тела относительно коорди-
координатных плоскостей, координатных осей и начала координат суще-
существуют следующие зависимости:
<34-4>
откуда
. C4.5)
Л= ЛогН" JzOx> C4.6)
Эти зависимости используются при вычислении моментов инерции
твердых тел,-
Момент инерции твердого тела относительно заданной оси, на-
например оси z, можно представить в виде произведения массы тела
на квадрат линейной величины, называемой радиусом инерции тела
относительно этой оси:
Jz = miiz, C4.7)
где т — масса тела;
/2 — радиус инерции тела относительно оси z.
Формула C4.7) показывает, что радиус инерции lz определяет
расстояние от оси z до точки, в которой нужно сосредоточить всю
массу т тела, чтобы момент инерции точки относительно этой оси
равнялся моменту инерции тела.
103
Момент инерции твердого тела относительно оси как сумма поло-
положительных слагаемых всегда положителен и не может равняться нулю.
Единицей момента инерции в системе МКС является 1 кг ¦ м2,
а в системе СГС — 1 г • см2. В технической системе единиц МКГСС
за единицу момента инерции принимается 1 кг • м ¦ сек2.
§ 35. Теорема о моментах инерции твердого тела
относительно параллельных осей (теорема Штейнера)
Момент инерции твердого тела относительно некоторой оси
равен моменту инерции тела относительно параллельной оси,
проходящей через его центр
тяжести, сложенному с произ-
произведением массы тела на ква-
квадрат расстояния между осями.
Положим, что задана ось Ozv
Для доказательства теоремы про-
проведем через центр тяжести тела С
три взаимно перпендикулярные
-у оси, из которых ось Cz парал-
параллельна заданной оси Ozb а ось Су
лежит в плоскости параллельных
осей Cz и Огг (рис. 78, а и б).
Обозначим d расстояние между
осями Cz и Ozv
Для вычисления моментов
инерции тела относительно осейСг
и Ozx опустим из каждой точки Mt
рассматриваемого тела перпенди-
перпендикуляры ri и Л; на оси Cz и Ozx.
, Выразим длины этих перпенди-
перпендикуляров через координаты этих
точек:
,2
Рис. 78. -±(p—2y.d = r\-\-d2~2yid. (a)
Определим моменты инерции тела относительно осей Cz и Oz-f.
Пользуясь зависимостью (а), получим
или
-2djl m,yt.
(б)
Здесь 2 mi — т — масса тела.
104
Из формулы C2.2), определяющей координату ус центра масс
тела имеем:
2 m.tyt = тус.
Так как ус = 0, то
Подставляя это значение в равенство (б), получаем зависимость,
установленную теоремой Штейнера:
JZl=Jcz+md2. C5.1)
Формула C5.1) показывает, что из совокупности параллельных
осей ось, проходящая через центр тяжести тела, характери-
характеризуется наименьшим моментом инерции.
Полярный момент инерции твердого тела относительно центра
тяжести согласно C4.5)
Л: == ~% (•'ex ~f" Л: у ~г~ /с*)*
Отсюда следует, что центр тяжести тела является полю-
полюсом, относительно которого полярный момент инерции тела
имеет наименьшее возможное значение.
Воспользуемся формулой C5.1) для установления зависимости
между радиусами инерции твердого тела icz и **, относительно осей
Сг и Ozv Согласно C4.7)
тогда
откуда
C5-2)
§ 36. Вычисление моментов инерции однородных тел
относительно осей, проходящих через их центры тяжести
и являющихся осями симметрии
Вычислим моменты инерции некоторых однородных симметричных
тел относительно осей, проходящих через центры тяжести тел и
являющихся осями симметрии.
Ось, проходящая через центр тежести тела, называется централь-
центральной осью.
1. Момент инерции однородного тонкого стержня
Определим момент инерции однородного тонкого стержня отно-
относительно оси Су, проходящей через центр тяжести стержня перпен-
перпендикулярно к его оси (рис. 79).
Положим, что стержень длиной / имеет постоянное весьма малое
сечение F и плотность р. Масса стержня равна произведению плот-
плотности стержня на его объем:
т — pFl.
105
Разобьем стержень по длине на малые элементы. Масса элемента
длиной Axi равна:
Вычислим момент инерции стержня относительно оси Су:
Перейдя к пределу суммы, получаем определенный интеграл:
У +7
JCy s=a j FpX2 dX —
с
I
4
Рис 79
Заменив в этом выражении произведение Flp массой стержня т,
окончательно получим
12
2. Момент инерции однородной круглой пластинки
малой толщины
Определим моменты инерции однородной тонкой круглой пла-
пластинки относительно осей Сх и Су, совпадающих с диаметрами круга
и оси Cz, проходящей через центр круга, перпендикулярно к его
плоскости (рис. 80).
Положим, что круглая пластинка ра- У
диусом R имеет весьма малую толщину Л и
плотность р.
Тогда масса пластинки
т==
Разобьем пластинку на множество эле-
элементарных колец радиусом г, и шириной Дг^.
Масса кольца
т1 = рА2яг, Агг. Рис- 80-
Так как толщина пластинки мала, то для всех точек пластинки
можно принять zt = 0. Тогда формулы C4.2) для моментов инерции
пластинки относительно осей координат примут вид:
¦'су=23
=21
106
отсюда следует, что
Так как
то
Вычислим JCz:
Jr. г = Jrv — ~^ •
(а)
Так как расстояния гг от всех точек каждого кольца до оси Cz
одинаковы, то величину mt в выражении (а) можно считать не мас-
массой точки, а массой всего кольца. Тогда выражение (а) примет вид:
или
R R
JCz = J 2рйлг3 rfr = 2рАя J r3 dr =_ i-
о о
После подстановки рЛя/?2=т получим:
/я/?2
4 •
C6.2)
C6.3)
3. Моменты инерции однородного круглого цилиндра
Определим моменты инерции однородного круглого цилиндра от-
относительно продольной оси цилиндра Cz и осей Сх и Cz, прове-
проведенных по диаметрам среднего попе-
поперечного сечения цилиндра (рис. 81).
Положим, что цилиндр радиу-
радиусом /? и высотой Н имеет плотность р.
Тогда масса цилиндра
т =
Разобьем цилиндр на множество
элементарных пластинок толщи-
толщиной Дг,, параллельных основанию
цилиндра.
Масса каждой пластинки
Рис. 81.
Момент инерции цилиндра относительно оси Cz определим как
сумму моментов инерции АУС2 элементарных пластинок относительно
107
этой же оси, пользуясь формулой C6.2):
C6.4)
Для вычисления момента инерции цилиндра относительно оси Сх
воспользуемся теоремой о моментах инерции тела относительно
параллельных осей (§ 35).
Момент инерции каждой элементарной пластинки относительно
оси Охр проведенной по ее диаметру, параллельному оси Сх, опре-
определится формулой C6.3):
Момент инерции этой пластинки относительно оси Сх, параллель-
параллельной оси OaTj и находящейся от нее на расстоянии zt, определится
по формуле C5.1):
Подставив значение тп1 и просуммировав моменты инерции пла-
пластинок, получим момент инерции цилиндра:
Р^Д4 л-
JCx
или
= 2 ДЛ* = 2
я
После подстановки pHnR2=m получим
C6.5)
Рис. 82
Так как оси Сх и Су расположены по от-
отношению к цилиндру одинаково, то
4. Момент инерции полого цилиндра
Момент инерции полого цилиндра с внеш-
внешним радиусом Rx и внутренним радиусом R2
(рис. 82) относительно его центральной продольной оси Cz можно
определить как разность моментов инерции сплошных цилиндров ра-
радиусами Rx и R2.
Пользуясь формулой C6.4), получаем:
JCz — о
m2R\
108
Массы сплошных цилиндров
Момент инерции полого цилиндра
t = i- ptfл (/?? - R$) =
JC2 = 1
Масса полого цилиндра
— m1 — m2 —
Пользуясь значением массы, окончательно получаем
5 C6.6)
5. Момент инерции однородного кругового конуса
Положим, что конус имеет высоту Н, радиус основания R и плот-
плотность р (рис. 83). Тогда масса конуса
Для определения момента инерции конуса относительно его
центральной продольной оси Cz разобьем
конус на множество элементарных пластинок
толщиной Д,гг. параллельных основанию.
Масса пластинки радиусом гь
О
Так как-^- —
то ri =
Момент инерции элементарной пластинки
относительно оси Cz определится по фор-
формуле C6.2):
™ -2 1 D4
Н*
Момент инерции конуса получим, суммируя моменты инерции
элементарных пластинок; переходя к пределу суммы, будем иметь:
н
JCz = 1 рл -g- J z4 dz = 0,1 pnR*H.
1
После подстановки -7rpnR2H = m получим:
C6.7)
109
6. Моменты инерции однородного шара
Масса шара радиусом R и плотностью р (рис. 84)
т = -д- рл/?3.
Для определения момента инерции шара относительно централь-
центральной оси Cz разобьем его на множество элементарных пластинок,
параллельных плоскости хСу, тол-
* щиной Azt. Масса пластинки ра-
радиусом rt
mi = pnr2l Azr
Момент инерции элементарной
пластинки относительно оси Cz
У определяем по формуле C6.2)
с последующей подстановкой:
j.2 __ Q2 g2-
I I*
\ ч \
Рис. 84.
Момент инерции шара относительно оси Cz получаем, суммируя
моменты инерции элементарных пластинок, и переходя к пределу
суммы:
+R +R +R
JCz= f ±pn(R2 — z2Jdz = jpnR* f dz—pnR2 f
-R
+R
-R
1 2
-R
После подстановки -~-pnR3=m получим
о
C6.8)
Так как оси Сх, Су, Cz проведены по диаметрам шара, то
/^ j /
Сх — Су ~~~" Cz'
Из формул C6.7), C6.8) и C6.4) следует, что моменты инерции
конуса, шара и цилиндра, имеющих равные массы и радиусы, отно-
относятся как 3:4:5.
ПО
§ 37. Формула для вычисления момента инерции твердого тела
относительно любой оси, проходящей через начало координат.
Центробежные моменты инерции
Проведем через некоторую точку О тела три взаимно перпенди-
перпендикулярные оси х, у. z и произвольно направленную ось v, соста-
составляющую с этими осями углы а, р и у (рис. 85).
Определим момент инерции Jv данного тела относительно оси v.
Разобьем все тело на множество материальных точек'Mt(t= 1,
2 п). Опустим из каждой точки М^х^ уг, zt) перпендикулярны
на ось v: МгА^ = Аг-и составим выражение момента инерции данного
тела относительно оси v:
Jv = '?mih2l. C7.1)
Соединив точку Mt с на-
началом координат О, получим
треугольник OMtKi, из кото-
которого найдем:
к] = ОМ\ — OK), (а)
где ОМ2. = х2 -j- у2 -j- z\, а от-
отрезок OKi есть проекция от-
отрезка OMt на ось v.
Заметим, что:
Рис. 85.
Проектируя векторы левой и правой частей этого равенства на
ось v, получаем
или
OKt — O^cosa-f- AlBl cos p + 5;/^ cos у
OKi — xl cos a -j- уi cos p -f- zt cos y-
Подставив значения OMi и О/С,- в выражение (а), найдем:
h\
cos a
cos
co
Умножив сумму (х\-\-У\-\-*и) в правой части равенства на вели-
величину (cos2 a -f- cos2 p -)- cos2 у), равную единице, получим
hi = [x] + y\ + zfj (cos2 a + cos2 p + cos2 y) —
— (xt cos a -|- yt cos p -|- zl cos yJ.
После преобразований будем иметь:
h\ — {у\ + z2) cos2 a + {z\ + x2) cos2 p + (x2. + y2) cos2 у —
— 2y(zt cos p cos y — 2^х, cos у cos a — 2x,y,- cos a cos p.
.lit
Подставив это значение й? в формулу C7.1), получим
-f- cos2 y 2 mi (xj + У?) — 2 cos P cos y S mi)>izi —
— 2 cos y cos a 2 "Ь-^Л — 2 cos a cos p 21
В первые три слагаемых правой части входят множителями выра-
выражения C4.2), определяющие моменты инерции данного тела относи-
относительно координатных осей.
Обозначим их следующим образом:
Кроме того, введем обозначения:
'% C7.2)
Величины D, E, F называются центробежными моментами
инерции твердого тела соответственно относительно осей у и г,
z и х, х и у. Центробежные моменты инерции могут быть поло-
положительными, отрицательными и равными нулю.
Пользуясь введенными обозначениями, получаем формулу для
вычисления момента инерции твердого тела относительно оси v в сле-
следующем виде:
Jv =s= A cos2 a + В cos2 p + С cos2 y — 2D cos p cos у —
— 2f cosy cos a —2F cos a cos p. C7.3)
¦Формула C7.3) позволяет вычислить момент инерции тела отно-
относительно любой оси v, проведенной через начало координат, если
известны моменты инерции тела относительно осей координат A = JX,
B*=xJy, C = JZ ,и центробежные моменты инерции тела относительно
каждой пары координатных осей D = Jyz, E = JZX, F = Jxr
§ 38. Эллипсоид инерции. Главные оси и главные
моменты инерции
Момент инерции твердого тела относительно оси v (рис. 86)
определяется по формуле C7.3):
yv =3= A cos2 a + В cos2 p + С cos2 y — 2D cos p cos у —
— 2? cos y cos a — 2F cos a cos p.
112
Рассмотрим изменение момента инерции /v, происходящее при
изменении направления оси v, т. е. при изменении углов а, р, у.
Для наглядного изображения этого изменения отложим по оси v
от точки О отрезок ON, длина
которого равна г
ON = -^==-, C8.1)
где Jv — момент инерции тела от-
относительно оси v.
Выразим направляющие коси-
косинусы оси v через координаты х, у, z
точки iV и длину отрезка ON:
cos 6 = -?^ —
cos у — ¦
Рис. 86.
Подставив значения cos a, cosp, cosy в выражение C7.3), будем
иметь:
Jv == А • 7vx2 -f В ¦ Jvy2 + С ¦ Jvz2-2D ¦ Jvyz-2E ¦ J^zx — 2F ¦ Jvxy.
Разделив на Jv, получим:
Ax1 + By2 + Cz2 — 2Dyz — 2Ezx — 2Fxy = 1. C8.2)
Уравнение C8.2) определяет поверхность, по которой переме-
перемещается точка N, при изменении направления оси v при условии:
ON = . Это уравнение представляет
собой уравнение поверхности второго по-
порядка. Эта поверхность является эллип-
эллипсоидом, так как расстояния от всех то-
точек N до точки О, определяемые форму-
формулой C8.1). всегда конечны (Jv Ф 0). Этот
эллипсоид называется эллипсоидом инер-
инерции. Центр эллипсоида находится в начале
координат, так как уравнение C8.2) не
содержит координат в первой степени.
Рис. 87. Три оси симметрии эллипсоида инерция
называются главными осями инерции
тела в точке О, а моменты инерции относительно этих осей назы-
называются главными моментами инерции.
Если за оси координат принять главные оси инерции (рис. 87)
то в уравнении эллипсоида инерции исчезают члены, содержащие
произведение координат, "и оно принимает вид:
= 1, C8.3)
8 А. А. Яблонский
113
где коэффициенты А, В, С имеют новые значения, равные моментам
инерции тела относительно главных осей инерции в данной точке,
а центробежные моменты инер-
инерции D, E, F относительно каждой
пары координатных осей рав-
равняются нулю.
Каждой точке тела соответ-
соответствует определенный эллипсоид
инерции, который характеризует
моменты инерции тела относи-
относительно всех осей, проходящих че-
через данную точку. Действительно,
имея эллипсоид инерции для не-
некоторой точки О (рис. 88), по
Рис. 88. расстоянию ONl от начала коор-
координат О до точки Nt, в которой
какая-либо ось Vj пересекает эллипсоид инерции, можно определить
момент инерции тела относительно этой оси по формуле C8.1):
1
Эллипсоид инерции, соответствующий центру тяжести тела, назы-
называется центральным эллипсоидом инерции, а его оси симметрии —
главными центральными осями инерции.
§ 39. Свойства главных и главных центральных осей инерции
Установим свойства главной оси инерции в некоторой точке.
Положим, что координатная ось Oz—главная ось инерции
в точке О, т. e. одна из осей симметрии эллипсоида инерции, а оси х
и у — произвольные оси (рис. 89).
Тогда каждой точке N(x, у, z) эллипсоида инерции соответствует
симметричная ей относительно оси Oz точка N' {—х, —у, z).
Подставив в уравнение C8.2) координаты той и другой точки,
получим:
для точки N
— 2Fxy = 1;
Ах2 + #у2 + Cz2 — 2Dy* —
для точки N'
Ах2 + By2
2 + 2Dy z -\- 2Ezx — 2Fxy = 1.
Вычитая из одного равенства другое, найдем:
ADyz -\- AEzx = О,
или
114
Так как координаты л\ у и z этих точек не равны нулю» то равен-
равенство выполняется лишь при условии:
т. е. при равенстве нулю центробежных моментов инерции относи-
относительно осей у, z и х, z: z
Таким образом, если какая-
либо из осей координат, про-
проведенных через заданную
точку, является главной осью
инерции в этой точке, то
центробежные моменты
инерции в которые входит
соответствующая этой оси
координата, равны нулю.
Установим разницу в свойствах главных и главных центральных
осей инерции.
Положим, например, что ось Cz (рис. 90) является главной цент-
центральной осью инерции, т. е. главвой осью инерции в центре тяжести,
а ось Ог(рис. 91) — главной осью инерции в произвольной точке О.
Рис. 89.
Рис. 90.
Рис. 91.
Так как эти оси являются главными осями инерции, то
D = '%lmtytzi = 0; E = ^imizlxt = Q.
Возьмем на этих осях произвольные точки O1(COl = OOl =d)
и проведем через них оси л1 и ух, соответственно параллельные
осям л; и у.
8*
Ц5
Вычислим центробежные моменты инерции тела Dx и Е1 относи-
относительно осей У], z и z, Х\\
, — d) = 2
Так как '^imiyizi = D = (i, а согласно C2.2) 2 miyl = тус, то
?, = 2 tnt (zt — d) л;,- = 2 "i^iXi — d 2 /»,**.
Так как '^imizlxi = E^=0, а согласно C2.2) y^imixi=^mxc, то
?\ = — dmxc.
В случае главной центральной оси (рис. 90) координаты центра
тяжести тела равны нулю: хс — 0 и ус = 0. Поэтому
Z?j = O и Е1 = 0,
т. е. ось Сг является главной осью инерции не только в точке С,
но и в точке Oj.
Таким образом, главная центральная ось инерции является
главной осью инерции для всех своих точек.
В случае главной оси, не проходящей через центр тяжести тела
(рис. 91), хс Ф 0 и ус Ф 0, а потому
D-^фО и ?х ф 0.
т. е. ось Oz не является главной осью инерции в точке Ог.
Таким образом, главная ось инерции, не проходящая через
центр тяжести твердого тела, является главной осью инер-
инерции лишь в одной своей точке.
Ори определении направлений главных центральных и главных
осей инерции однородных тел нужно иметь в виду следущее:
1. Если однородное тело имеет ось симметрии, то эта ось
является его главной центральной осью инерции.
2, Если однородное тело имеет плоскость симметрии, то
во всех точках этой плоскости одна из главных осей инерции
направлена по перпендикуляру к этой плоскости.
Эти положения легко обосновать.
1. Центр тяжести однородного тела, имеющего ось симметрии,
находится на этой оси. Направим ось Cz no оси симметрии тела>
а оси Сх и Су — произвольно в перпендикулярной к ней плоскости
(рис. 92). Тогда каждой точке Mt (xt, yt, zt) будет соответствовать,
симметричная точка М'А—х[г —у{, zS, а потому
^>==2 "tiyizi = O; ? = 2 nlzlxl = 0.
Из этого следует, что ось симметрии тела Cz является главной
центральной осью инерции тела.
116
2. На рис. 93 изображено твердое тело, имеющее плоскость сим-
симметрии. Через произвольную точку О этой плоскости проведены.
оси Ох и Оу в плоскости сим-
симметрии, а ось Oz — перпендику-
перпендикулярно к ней. Так как каждой.*
х
Рис. 92.
Рис. 93.
точке тела Mt (xt, yit zt) в этом случае соответствует симметричная*
ей точка М'^х^ у{, —z^, то
Поэтому ось Oz, перпендикулярная к плоскости симметрии тела,,
является главной осью инерции тела в точке О.
§ 40. Вычисление моментов инерции твердого тела
относительно произвольных осей
Момент инерции твердого тела относительно произвольной оси-
может быть легко определен, если известны направления его главных
центральных осей инерции и моменты
инерции тела относительно этих осей.
Рассмотрим два случая вычисления
момента инерции твердого тела отно-
относительно произвольной оси.
Случай 1. Ось проходит через центр
тяжести тела (рис. 94)
За оси координат принимают глав-
главные центральные оси инерции тела и
вычисляют моменты инерции твердого
тела А, В, С относительно этих осей.
Затем, пользуясь углами а, р, "у, составленными осью v с главными;
центральными осями инерции, вычисляют момент инерции тела отно-
относительно центральной оси С\ по формуле C7.3), которая в этом
случае принимает вид:
cos2v- D0.1)-
рис
И?'
Случай 2. Ось не проходит через центр тяжести тела (рис. 95)
Для вычисления момента инерции твердого тела относительно
-произвольной оси v сначала по формуле D0.1) определяют его момент
.инерции относительно оси С\и параллельной оси v и проходящей
Рис 95.
через центр тяжести тела. Затем к полученному результату приба-
прибавляют произведение массы тела на квадрат расстояния между осями:
yCVi = A cos2 a + В cos2 а -\- С cos2 у. \
= yCVi -j- md2.
D0.2)
§ 41. Примеры вычисления моментов инерции однородных
тел относительно произвольных осей
Пример 16. Определить моменты инерции однородного тонкого
стержня длиной / и массой т:
Hi
0
У
1
J 2
С
1
2 !
1
Рис. 96
1) относительно оси Оуи проходящий через конец стержня пер-
перпендикулярно к его оси (рис. 96,а) и
2) относительно оси v, проходящей через точку Ot ICO1 = -j
м составляющей с осью стержня угол 30° (рис. 96,6).
118
Решение. 1. Момент инерции стержня относительно централь-
центральной оси Су, перпендикулярной к оси стержня, определяется форму-
формулой C6.1):
Р
12
Момент инерции стержня относительно оси Оух, параллельной,
центральной оси Суи можно определить по формуле C5.1):
где
d~ '
тР
1 \2
Ы
тР
2. Определим момент инерции
стержня относительно оси Ох\ по
формуле D0.2).
За оси координат примем оси
симметрии стержня, т. е. его глав-
главные центральные оси инерции:
Сх — ось стержня, Су — ось, пер-
Рис 97
пендикулярную к оси стержня и лежащую в плоскости чертежа, и»
Cz — ось, перпендикулярную к плоскости чертежа.
Положим, что заданная ось v лежит в плоскости чертежа. Про-
Проведем через центр тяжести ось \{, параллельную оси v, и вычислим
момент инерции стержня относительно оси vt:
JCVi = A cos2 a ¦+- В cos2 p + С cos2 y.
Ось vl составляет с осями координат углы:
-, __ qq° о 60° v • 90°
Так как А = JCx =к О и cos у = 90° = 0, то:
Wj/2 1 Till
jcv, "*-"!» "" 12 2 48 '
Расстояние между осями С\ и Ох\ равно:
Момент инерции относительно оси v определится:
\2 7
Л = -
тР , II \2
192
ml2.
Пример 16. Определить момент инерции однородной круглой
пластинки массой т и радиусом R относительно оси v, проходящей.
через точку О 1СО = -^-| и составляющей с перпендикуляром к пла-
пластинке угол 30°. Проекция оси v на плоскость пластинки совпадаег
с диаметром пластинки (рис. 97),
Решение. Вычислим момент инерции пластинки относительно
•оси Ov по формуле D0.2). Для этого за оси координат примем
главные центральные оси инерции (оси симметрии пластинки): Сх, Су
,и Cz, из которых ось Су проходит через точку О.
По формулам C6.3) и C6.2) будем иметь:
mR2 r . mR2
4 '• *- — JCz — § '
Ось Cvv параллельная оси Ov, составляет с осями координат углы:
а = 90°, р=г60°, у = Ж.
Момент инерции пластинки относительно оси Cvf.
/Cvi = A cos2 a + В cos2 p + С cos2 у.
Так как cos a = cos 90° = 0, то
yCVi =
cos2 60°
cos2 30 =
г—У
Расстояние между осями Cvj и Ov:
Момент инерции относительно оси v:
Пример 17. Определить, при какой высоте Н главные моменты
инерции однородного круглого цилиндра радиусом R относительно
всех трех главных центральных осей инерции будут одинаковы
(рис. 93).
Решение. Моменты инерции однородного круглого цилиндра
-относительно его осей симметрии, т. е. относительно главных цент-
центральных осей инерции, вычислены в § 36:
R2
Н2
При равенстве всех трех моментов инерции имеем:
mR2
или
-откуда Н = У R.
Пример. 18. Определить моменты инерции однородного прямоуголь-
прямоугольного параллелепипеда, длины ребер которого равны а, Ь, с: 1) относи-
относительно его главных центральных осей инерции; 2) относительно оси ylt
120
совпадающей с одним из ребер параллелепипеда, и 3) относительно-
оси v, совпадающей с диагональю параллелепипеда (рис. 99,с).
Решение. 1. Главными центральными осями инерции прямоуголь-
прямоугольного параллелепипеда являются три его оси симметрии Сх, Су, Cz
(рис. 99,5). Для вычисления моментов инерции параллелепипеда относи-
относительно каждой из этих осей воспользуемся формулами C4.6), т. а.
г
а)
Рис. 99.
вычислим момент инерции относительно каждой оси как сумму мо-
моментов инерции параллелепипеда относительно двух координатных
плоскостей, пересекающихся на этой оси.
Чтобы определить момент инерции параллелепипеда JzCx относи-
относительно плоскости zCx, разобьем параллелепипед на множество эле-
элементарных прямоугольных пластинок, параллельных этой плоскости
и имеющих толщину Ду^.
Тогда масса каждой пластинки
где р — плотность параллелепипеда.
Момент инерции каждой пластинки:
121
Момент инерции параллелепипеда относительно плоскости zCx
¦определится как предел суммы моментов инерции элементарных пла-
пластинок:
ь ь
+ - +т
_ pacb3
4
Jzcx= j расу2 rfy = рас j
2 2
Так как масса параллелепипеда т = pabc, то:
тЬ2
Аналогично:
me2. . /naa
i2 * УСг 12 "
Моменты инерции параллелепипеда относительно главных централь-
центральных осей инерции определятся по формулам C4.6):
2. Момент инерции параллелепипеда относительно оси ylt отстоя-
отстоящей от оси Суг на расстоянии d — -<T ]/c2 + a2 (рис. 99,в), опреде
лим по формуле C5.1):
Момент инерции параллелепипеда относительно оси v, совпадаю-
совпадающей с его диагональю (рис. 99,8), определим по формуле D0.1):
yCv = A cos2 a-\-B cos2 р + С cos2 y;
12
Подставляя эти значения в формулу D0.1), получаем:
от
JCv~ 12
ИЛИ
122
Пример 19. Однородная тонкая пластинка имеет форму прямо-
прямоугольного треугольника, катеты которого равны а и Ь. Определить
ее центробежный момент инерции относительно осей, направленных
по катетам.
Решение. Положим, что пластинка имеет толщину h и плот-
плотность р. Тогда масса пластинки
т
— ph-^ab.
Для определения центробежного момента инерции пластинки отно-
относительно осей хну, направленных по катетам треугольника, разо-
разобьем пластинку на элементарные прямо-
прямоугольники, имеющие стороны Дх,- и Ayt
(рис. 100).
Масса каждого прямоугольника
mt —
Центробежный момент инерции пла-
пластинки относительно осей х и у будет
иметь вид
Jjcy = 2 Щх^1 — 2 PhXiVi • &xt • ЛУ/.
Рис. 100.
При переходе к пределу суммы полу-
получим двойной интеграл, вычисленный по
площади треугольника. Для определения
пределов интегрирования воспользуемся уравнением прямой АВ в от-
X V I X \
резках на осях: (-.?-= 1, откуда у = ?>М 1,
Пределы изменения х: 0, а.
Пределы изменения у: 0, b(l ——).
-*У*1 V")
~3~J
Г Г
~ J J
0 0
a
. Г Ь*х Л
0
Так как -^phab — m, то
mab
_
2'
phb2a2
24
12$
Вопроси для самоконтроля
1. Как классифицируют в динамике силы, действующие на точки меха-
механической системы?
2. Что называется центром масс системы точек и как определяют его
•координаты?
3. Что называют моментом инерции твердого тела относительно пло-
плоскости, оси и точки?
4. Какую величину называют радиусом инерции тела относительно оси?
5. Каковы размерности момента инерции в системах единиц МКС, СГС
и МКГСС?
6. Какова зависимость между моментами инерции, а также между ра-
радиусами инерции тела относительно параллельных осей?
7. Что представляет собой эллипсоид инерции и какие оси называют
главными осями инерции твердого тела в данной точке?
8. При каких условиях некоторая ось является главной осью инерции
з данной точке?
9. Что называется центробежным моментом инерции твердого тела?
10. Как определить по эллипсоиду инерции, относительно какой оси
>из всех осей, проходящих через данную точку, момент инерции твердого
тела имеет наибольшее значение?
11. Какими свойствами обладают главные и главные центральные оси
инерции?
12. Как вычисляется момент инерции твердого тела относительно про-
произвольной оси, проходящей или не проходящей через центр тяжести тела?
13. Относительно какого полюса момент инерции данного тела имеет
.наименьшее значение?
ГЛАВА VII
ТЕОРЕМА О ДВИЖЕНИИ ЦЕНТРА МАСС
МЕХАНИЧЕСКОЙ СИСТЕМЫ
§ 42. Дифференциальные уравнения движения
механической системы
Рассмотрим систему п материальных точек Мх, М2 Mi Мп
(рис. 101).
Массу каждой точки обозначим т1 и в каждую точку проведем
из начала координат радиус-вектор г(-. Приложенные к точкам сцлы
разделим на внешние и внутренние. Равнодействующие приложенных
к точке внешних и внутренних си'л обозначим соответственно
pf у Pi-
Составим основное уравнение динамики для каждой точки
Mt(i=l, 2 п):
Проектируя векторы обеих частей равенства D2.1) на оси х, у, z,
получаем:
f
= Yf
f
D2.2)
124
Для механической системы, имеющей п точек, получим Зя диф-
дифференциальных уравнений движения.
Так как внутренние силы, приложенные к точкам системы, в боль-
большинстве случаев остаются неизвестными, а число точек системы
обычно велико, то эти 3ft уравне-
уравнений могут быть проинтегрированы
лишь в исключительных случаях.
§ 43. Теорема о движении
центра масс
механической системы
Рассмотрим движущуюся си-
систему материальных точек Му, М2,
Mt, Mn, находящихся под дей-
действием системы внешних и вну-
внутренних сил (рис. 102). Поло-
Положение центра масс системы С
определяется равенством C.21):
У,
Уравнения движения то-
точек этой системы имеют
вид D2.1):
Рис. 101.
A=1. 2 п).
Суммируя эти уравнения,
находим
. -V
/x;
(a)
Рис. 102
Преобразуем левую часть равенства (а), учитывая C2.1):
/И: —Т75Г- =
IF
i = т-
Геометрическая сумма внутренних сил равна нулю (см. § 31).
Уравнение (а) приобретает вид
или
D3.1)
125
Уравнение D3.1) выражает теорему о движении центра масс
системы, которая формулируется следующим образом: центр масс
механической системы движется как материальная точка
с массой, равной массе всей системы, к которой приложены
все внешние силы, действующие на систему.
Проектируя обе части векторного равенства D3.1) на оси х,
у, z, получаем три уравнения в проекциях на оси координат:
D3.2)
где Xf, yf, zf—проекции силы pf, a
Xе, Ye, Ze — проекции главного вектора сил RE на оси координат.
Уравнения D3.2) представляют собой дифференциальные урав-
уравнения движения центра масс. Из уравнений D3.1) и D3.2) следует,
что внутренние силы непосредственно не влияют на движение
центра масс.
Отсутствие внутренних сил в уравнениях D3.1) и D3.2), выра-
выражающих теорему о движении центра масс, придает им большое
практическое значение.
Из кинематики известно, что поступательное движение твердого
тела полностью определяется движением одной из его точек. Следо-
Следовательно, решив задачу о движении центра масс тела как материаль-
материальной точки с массой, равной массе всего тела, можно определить
поступательное движение всего тела.
Во многих примерах, решенных в предыдущих главах курса,
поступательное движение тела и рассматривалось как движение мате-
материальной точки, обладающей массой данного тела.
Движение свободного твердого тела в общем случае можно раз-
разложить на поступательное движение вместе с центром масс и на сфе-
сферическое вокруг центра масс.
По теореме о движении центра масс системы в этом случае можно
определить только поступательное движение тела как движение
материальной точки, а сферическое движение приходится рассма-
рассматривать особо, пользуясь другими теоремами динамики. Таким обра-
образом, вопрос о том, можно ли рассматривать то или иное тело как
материальную точку, решается в зависимости от характера движения
тела, а не от его размеров.
Так, например, при исследовании поступательных движений планет
солнечной системы их можно рассматривать как материальные точки,
обладающие массами этих планет, но при изучении вращений планет
вокруг их осей рассматривать их как точки нельзя.
Следствия из теоремы.
1. Если главный вектор внешних сил все время остается
равным нулю, то центр масс механич-еской системы находится
в покое или движется прямолинейно и равномерно.
126
Из уравнения D3.1) следует, что если R? = 0, то wc = 0, т. е.
vc = const.
При этом, если начальная скорость vc центра масс равна нулю,
то центр масс находится в покое. Если же начальная скорость vc ФО,
то центр масс движется прямолинейно и равномерно с этой скоростью.
2. Если проекция главного вектора внешних сил на какую-
либо неподвижную ось все время остается равной нулю, то
проекция центра масс механической системы на эту ось или
неподвижна ила движется равномерно.
Из первого уравнения D3.2) следует, что если Xе = 0, то
хс = vCx = 0, т. е. vCx = const.
Если при этом в начальный момент vCx = 0, то хс = О,
хс = const, т. е. координата х центра масс остается постоянной;
а при vCx=fcQ проекция центра масс на ось х движется равномерно.
Следствия из теоремы о движении центра масс системы выражают
закон сохранения движения центра масс системы.
§ 44. Иллюстрация теоремы о движении центра масс
механической системы
Теорема о движении центра масс системы, одна из основных
теорем динамики, объясняет целый ряд явлений, которые приходится
наблюдать. Рассмотрим некоторые примеры, иллюстрирующие эту
теорему и ее следствия.
1. Движение человека по горизонтальной плоскости
Если человек начинает идти по горизонтальной плоскости, то
перемещение его центра тяжести происходит под действием сил
сцепления между подошвами его обуви и плоскостью. Эти силы
всегда направлены в сторону движения человека и являются по отно-
отношению к нему гнешними. Они возникают при соответствующем
напряжении мускулов человека, что создает иллюзию того, что
движущими силами являются напряжения мускулов, т. е. внутрен-
внутренние силы.
Если бы сцепление отсутствовало, т. е. плоскость была гладкой,
то человек не мог бы по ней идти.
2. Движение локомотива или автомобиля по горизонтальному пути
Внешними силами, вызывающими движение локомотива или авто-
автомобиля по горизонтальному пути, являются силы сцепления, прило-
приложенные к ведущим колесам в точках соприкасания их с рельсами
или поверхностью дороги. Эти силы направлены в сторону движения
локомотива или автомобиля.
Действительно, к ведущему колесу со стороны двигателя при-
приложен вращающий момент </И8р, стремящийся вращать колесо вокруг
127
его оси (рис. 103, а). Такому вращению препятствует действующая
со стороны пути сила сцепления Fca. Эта сила заставляет колесо
катиться, а локомотив или автомобиль двигаться в ту сторону, куда
направлена эта сила. Вращающий момент, действующий на колесо
со стороны двигателя, относится к внутренним силам и вызвать
движение центра тяжести локомотива (автомобиля) не может. Этот
момент только вызывает появление внешних сил — сил сцедления.
Локомотив, поставленный на абсолютно гладкие рельсы, под
действием вращающего момента не сдвинется с места, так как при
отсутствии сцепления ведущие
°! й) колеса будут только вращаться
дедутее колесо Ведомое колесо вокруг своих осей (буксовать).
Торможение поезда также
вызывается внешними силами,
приложенными к колесам со
стороны рельсов..
К ведомому колесу, не свя-
связанному с двигателем, прило-
приложена сила давления на ось Р,
параллельная пути (рис. 103, tf).
В точке касания с рельсом
к колесу приложена сила сцеп-
"""?„
Рис. 103.
ления F-
препятствующая
скольжению колеса под действием силы Р. При торможении модуль силы
сцепления Fcu, направленной противоположно движению, возрастает
и под действием этой силы поезд (автомобиль) получает замедление.
Силы взаимодействия между тормозными колодками и колесами
являются внутренними и не могут произвести торможение поезда (авто-
(автомобиля), но эти силы вызывают увеличение модуля внешней силы Fcn.
Если колеса начинают скользить, то сила сцепления превращается
в силу трения скольжения. При равномерном движении поезда все
действующие на него внешние силы уравновешиваются.
3. Действие пары сил на свободное твердое тело
Если приложить пару сил к свободному твердому телу, находя-
находящемуся в покое, то согласно первому следствию теоремы центр масс
тела сохранит состояние покоя. Под действием этой пары сил тело
начнет вращаться вокруг своего центра масс.
4. Откатывание орудия при выстреле
Внутренние силы взрыва, действующие в стволе орудия, при
выстреле не могут привести в движение центр масс системы ору-
орудие — снаряд.
Если снаряд вылетает в горизонтальном направлении, то свободно
стоящее орудие откатывается в противоположную сторону, так как
при отсутствии горизонтальных внешних сил центр масс системы
¦128
орудие — снаряд не может перемещаться по горизонтали. В действи-
действительности горизонтальная внешняя сила имеется (реакция шерохо-
шероховатой поверхности, на которой находится орудие), но величина ее
недостаточна, чтобы устранить это явление.
§ 45. Примеры применения теоремы о движении центра масс
механической системы
Пример 20. Человек весом Ох стоит на корме лодки весом О2
и длиной I, находящейся в покое в стоячей воде. Определить, пре-
пренебрегая сопротивлением воды, расстояние о, на которое переместится
лодка, если человек перейдет
на нос лодки. у
Решение. Система лод-
лодка — человек находится в покое
под действием трех внешних
вертикальных сил: веса лод- ^
ки О2, веса человека Gj и реак-
реакции воды R, линия действия
которой проходит через центр
масс системы (рис. 104). Про-
Проведем из произвольной точки О У
горизонтальную и вертикаль-
вертикальную оси координат. Обозна-
Обозначим ЛГ] и х2 горизонтальные 0
координаты центров тяжести
частей системы, находящейся
в покое, и вычислим координату
центра масс этой системы хс
по формуле C2.2):
Gtx, -4-G2x2
ХС— (
Рис. 104.
Так как проекция на ось х главного вектора внешних сил, дей-
действующих на рассматриваемую систему, равна нулю и начальная
скорость равна нулю, то согласно второму следствию из теоремы
(§ 43) координата хс центра масс не изменяется. Отсюда следует,
что при движении человека с кормы лодки на нос, т. е. вправо,
лодка должна переместиться влево, чтобы центр масс С системы
остался на той же вертикали. Новые координаты центров тяжести
человека и лодки станут равными (рис. 105):
— о;
х'2 = х2 — о.
Координата центра масс всей системы в этом положении опре-
определится:
9 А. А. Яблонский
129
Так как хс = const, то приравняем два ее значения: хс = х'с, т. е.
_ Gl(xl + l — o)-\-G:t(xi — a)
отсюда
или
тогда
Gixi
@,
G,
т. е. перемещение лодки о меньше относительного перемещения
У человека / во столько раз,
во сколько раз вес чело-
человека О, меньше суммы весов
Пример 21. Однородный
стержень длиной 21, опи-
опирающийся одним концом на
гладкую горизонтальную
плоскость, начинает падать
из состояния покоя, образуя
в начальный момент с пло-
плоскостью угол а Определить
траекторию верхнего конца в
стержня при падении.
Решение. Проведем
горизонтальную и вертикаль-
вертикальную оси координат в пло-
плоскости движения стержня,
приняв за начало координат О
начальное положение Ао его
нижнего конца (рис. 105, а).
Движение стержня совер-
совершается под действием двух
внешних сил: веса О и реак-
реакции гладкой горизонтальной
плоскости N. Так как обе
внешние силы вертикальны
и в начальный момент стер-
стержень находился в покое, то, по второму следствию теоремы (§ 43),
координата центра масс стержня не изменяется и во все время дви-
движения равна своему начальному значению:
xr~ xr =/cosa.
С. Со
Учитывая, что центр тяжести стержня АВ движется по вертикали,
определим координаты х и у верхнего конца стержня В в зависи-
Рис 105
130
мости от }гла ф, составленного стержнем с плоскостью в произволь-
произвольный момент времени t (рис. 105, б)
х = хс +1 cos ф = / cos a -f-1 cos ф;
у = 2/sin ф.
Исключая из этих уравнений параметр ф, найдем уравнение траек-
траектории точки В:
х — / cos a . у
j ; Бтф —-^-;
(х — 1 cos аJ . у2 _ .
12 "I" 4^ — *'
Полученное уравнение показывает, что конец В стержня движется
по эллипсу. Центр эллипса находится в точке O1(Zcosa, 0), а длины
полуосей равны / и 21.
Для любого положения стержня мгновенным центром скоростей Р
является точка пересечения перпендикуляров, восставленных в точ-
точках С и А к вертикальной скорости vc и горизонтальной скорости \А.
Скорость \в точки В перпендикулярна к отрезку РВ.
Пример 22. На гладком горизонтальном фундаменте установлен
электромотор весом Gx. На валу мотора под прямым углом к оси
вращения закреплен однородный стержень длиной 21 и весом О2,
на конце которого насажен точечный груз весом Gv Вал вращается
равномерно с угловой скоростью « (рис. 106, а). Определить:
1) уравнение горизонтального движения мотора, поставленного
на фундамент свободно;
2) наибольшее горизонтальное давление на болты, если электро-
электромотор прикреплен ими к фундаменту.
Решение. 1. Рассмотрим механическую систему, состоящую
из мотора (без стержня и груза) массой m1 = —-, стержня массой
G G ^
т2 — —- и точечного груза массой т3 — —-. Если мотор поставлен
б о
на гладкий фундамент свободно, то на систему действуют внешние
силы: веса частей Oj, G2, G3 и реакция опорной плоскости N.
Положим, что в начальный момент стержень был расположен
Вертикально и система находилась в покое (рис. 106, б), а по исте-
истечении некоторого промежутка времени установилась постоянная угло-
угловая скорость вращения вала ©.
Проведем оси координат, как указано на рис. 106, б.
Так как проекция Xе главного вектора внешних сил на ось х
равна нулю и в начальный момент система находилась в покое, то
ио второму следствию теоремы (§ 43) имеем хс — const. В началь-
начальный момент центр масс системы С, т. е. точка приложения равно-
равнодействующей трех сил тяжести G^ G2, G3 находилась на оси у, т. е.
хс =0.
8* 131
Так как координата хс остается постоянной, то при смещении
центров тяжести стержня и груза влево от оси у центр тяжести
мотора смещается вправо и наоборот.
Рис. 106
Определим координату центра масс системы С в любой момент
времени t по рис. 106, в, пользуясь формулой C2.2), и приравняем
ее начальному значению хс^ = 0:
G^Xi —|— G2-V2 —г- G$x3 G\Xy — G2 (/ sincp—x{) — G3 B1 sin ф — лг() а
Отсюда определим xx:
Q\X^ — G2l sin ф -f-«
Oz2l Sin ф+ ОдЛГ! = 0,
Подставив значение <p = a>t, получим уравнение горизонтального
движения мотора:-
1 Gj + G2+G3
Мотор совершает гармонические колебания амплитуды Q У? I, /
и периода — .
132
2. Если мотор прикреплен к фундаменту (рис. 106, г), то на
систему действует и горизонтальная внешняя сила—реакция болтов R.
В этом случае центр масс системы С перемещается по окружности
радиусом ОС и его координата хс изменяется.
Модуль реакции R можно найти из дифференциального уравнения
движения центра масс D3.2):
тхс = Xе.
Определим координату хс в любой момент времени t по рис. 106, г,
пользуясь формулой C2.2):
G|X, -\- G2x2 -\- G3x3 G] • О — G2l sin ф — Gfil sin ф
— d + Gi + G» — gTTgT+gI
= ;=—r~S—гЧ=5-1 sin at.
G + G+G
Вычислим хс:
c
Масса системы
Проекция главного вектора внешних сил на ось х: Xе = Rx
Подставим значения т, хс и Xе в уравнение D3.2):
(rl?r ^ sin a) = Rx,
g \Gi + G2 + G3 ) x
отсюда
Проекция силы R на ось х изменяется по гармоническому закону.
Наибольший модуль силы R получим при sinco?=± 1, т. е. при
горизонтальных положениях стержня:
Пример 23. Найти угловую скорость со вала электромотора, опи-
описанного в примере 20, при которой электромотор, не прикрепленный
болтами к фундаменту, отрывается от фундамента.
Решение. Составим дифференциальное уравнение D3.2) дви-
движения центра масс системы вдоль оси у:
Определим координату ус центра масс системы по формуле C2.2):
V — °|У1+°2У2 + °ЗУЗ
Ус~ G. + G. + G, '
133
Пользуясь рис. 106, в, найдем ординаты центров тяжести частей
системы:
у1 = 0; y2 = /cos<p = /cosutf; y3 == 2/cos ф = 2/cos шЛ
Подставив эти значения ординат, получим
(Ог + 2Оз)* cos at
Ус~ Gi + G2
Найдем ус:
Определим проекцию главного вектора внешних сил на ось у:
Подставим значения т, ус, YE в дифференциальное уравне-
уравнение D3.2):
+ Q ( O + ™ )=„-О,-О,-О»
откуда
Максимальное и минимальное значения Л^ будут следующими:
° to».
g
Неприкрепленный к фундаменту мотор начинает подпрыгивать,
когда реакция опорной плоскости равняется нулю. Наименьшую
угловую скорость, при которой мотор отрывается от фундамента,
найдем из условия:
откуда
Вопросы для самоконтроля
1. Сформулируйте теорему о движении центра масс системы.
2 Какое движение твердого тела можно рассматривать как движение
материальной точки, имеющей массу данного тела и почему?
3. При каких условиях центр масс системы находится в состоянии по-
покоя и при каких условиях он движется равномерно и прямолинейно?
4. При каких условиях центр масс системы не перемещается вдоль
некоторой оси?
5. Приведите примеры, иллюстрирующие теорему о движении центра
масс механической системы?
6. Какое действие на свободное твердое тело оказывает приложенная
к нему пара сил?
134
ГЛАВА VIII
ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КОЛИЧЕСТВА ДВИЖЕНИЯ
МАТЕРИАЛЬНОЙ ТОЧКИ И КОЛИЧЕСТВА ДВИЖЕНИЯ
МЕХАНИЧЕСКОЙ СИСТЕМЫ
§ 46. Импульс силы и его проекции на координатные оси
Если постоянная по модулю и направлению сила Р действует
в течение промежутка времени x = t2 — tx, то ее импульсом за этот
промежуток времени является вектор
S = Pt. D6.1)
Направление этого вектора совпадает с направлением силы, а его
модуль равен произведению модуля силы на время ее действия, т. е.
Импульс силы характеризует передачу материальной \почке
механического движения со стороны действующих на нее тел
за данный промежуток
времени.
Единицами импульса
являются: в системе МКС
импульс силы в один
ньютон за время в одну
секунду, т. е один нью-
ньютон секунда (кг • м/сек),
в системе СГС — одна
дина-секунда (г • см/сек),
а в системе МКГСС —
1 кгс ¦ сек.
Чтобы найти импульс
переменной силы Р = Р(^)
за промежуток времени
t2—tv этот промежуток
разбивают на п элементарных промежутков
ментарные импульсы силы за эти промежутки.
Рис. 107.
и определяют эле-
элеМодуль элементар-
элементарр у ру у р
ного импульса ASK равен произведению модуля силы в момент tK
на &?к, а направление совпадает с направлением силы в этот момент
(рис. 107):
D6.2)
Импульс силы Рк за промежуток t2 — tt определяется как предел
геометрической суммы элементарных импульсов при я—>оо и при
Д0
= htn
= Hm
135
Предел векторной суммы бесчисленного множества бесконечно
малых слагаемых PKAtK при Д^к—>0 называется векторным интегра-
лом от вектора Р по скалярному аргументу t и обозначается \Pdt.
t,
Таким образом,
'.
fdt. D6.3)
Модуль и направление импульса переменной силы можно опре-
определить по способу проекций.
Импульс S переменной силы Р за промежуток времени t2—tl пред-
представляет собой предел геометрической суммы элементарных импуль-
импульсов ASK. Поэтому проекция импульса S на каждую координатную
ось равна пределу алгебраической суммы проекций элементарных
импульсов ASK на эту ось.
Проекции элементарного импульса ASK = PKA? на оси координат
будут (рис. 107):
ASKX = ASKcos(AS, i) = PKAtKcos(PK, i) = XKAt;
аналогично
где XK, YK, ZK — проекции силы Рк на оси координат.
Просуммировав проекции элементарных импульсов и перейдя
к пределу, получим определенные интегралы по переменной t, пред-
представляющие собой проекции импульса S на оси координат:
D6.4)
t, . и t,
Здесь X = fx(t); Y = /2@'> Z —/з@ — проекции переменной
силы Р = Р(^) на оси координат.
Модуль и направление импульса S определяются по его проек-
проекциям:
S S 5
cos(S, i) = ~j-'> cos(S, D = -j-; cos(S. k) = -j-. D6.5)
Для постоянной по модулю и направлению силы Р, действующей
в течение промежутка времени т, формулы D6.4) имеют вид
где X, Y, Z — проекции силы Р на оси координат.
136
§ 47. Импульс равнодействующей
Если к точке М приложено несколько сил Pj, P2
равнодействующая этих сил
., Рп, то
Умножим обе части этого равенства на dt и проинтегрируем
в пределах от tx до t2
t, tt t, t,
Так как каждый из членов этого равенства представляет собой
импульс соответствующей силы, то
С С I С I 1 С /Л 1 \
т. е. импульс равнодействующей нескольких сил за некоторый
промежуток времени равен геометрической сумме импульсов
составляющих сил за этот оке промежуток времени.
В проекциях на координатные оси это равенство принимает вид
Sy = 51у -\- S2y +
лу>
D7.2)
Равенства D7 2) показывают, что проекция импульса равно-
равнодействующей на любую ось равна алгебраической сумме проек-
проекций импульсов составляющих сил на ту же ось.
§ 48. Теорема об изменении количества движения
материальной точки
Количеством движения материальной точки называется
вектор, имеющий направление скорости и модуль, равный про-
произведению массы т на скорость
ее движения v (рис 108).
Количество движения, зависящее
от массы точки и ее скорости,
является мерой механического дви-
движения.
Понятие количества движения
было введено в механику Декартом
и положено в основу механики
Ньютоном.
Единицей количества движения
является количество движения точки,
имеющей единицу массы и движу-
то
Рис 108.
щейся со скоростью, равной единице скорости, т. е. в системе МКС
1 кг Л м/сек= 1 кг-м/сек, в системе СГС 1 г • 1 см/сек— 1 г • см/сек
137
и в системе МКГСС 1 кгс • сек2/м • 1 м/сек = 1 кгс • сек. Единицы
количества движения совпадают с единицами импульса силы. Проекции
количества движения mv на оси х, у, z равны:
mvx, mvy, mvz, D8.1)
где vx, vy, vz — проекции скорости на оси координат.
Положим, что Р — равнодействующая сил, приложенных к мате-
материальной точке. Преобразуем основное уравнение динамики следую-
следующим образом:
= Р, или mvr = m-n-==-
ти,
Уравнение D8.2) выражает теорему об изменении количества
движения материальной точки в дифференциальной форме, которая
формулируется так: производная по времени от количества дви-
движения материальной точки геометрически равна равнодей-
равнодействующей сил, приложенных к этой
точке.
Установим зависимость между изме-
изменением количества движения и импуль-
импульсами действующих на точку сил.
Из уравнения D8.2)
?ти* d(m\) = Pdt. D8.3)
Проинтегрируем обе части равенства
в пределах, соответствующих моментам
времени tx и t2:
Рис. 109. V г
I d(m\)= I Pdt.
Так как правая часть этого равенства представляет собой
импульс S силы Р за промежуток времени t2 — tx D6.3), то
т\2 — mVi —
D8.4)
Из равенства D8.4)
т. е. вектор mv2 можно определить диагональю параллелограмма,
построенного на векторах mvx и S (рис. 109).
Заменив импульс S равнодействующей силы Р в уравнении D8.4)
импульсами Sj, S2, .... Sn составляющих сил Рх, Р2 Рл> по-
получим
mv2 — mvi =
или
т\2 — ffiVj = 2 Sf. D8.5)
138
Уравнение D8.5) выражает теорему об изменении количества
движения материальной точки в конечной форме: изменение коли-
количества движения материальной точки за некоторый проме-
промежуток времени равно геометрической сумме импульсов сил,
приложенных к точке за тот же промежуток времени.
Эту теорему называют также теоремой импульсов.
Векторному уравнению D8.5) соответствуют три уравнения
в проекциях на оси координат:
mv2x — mvljf = Slx -4- $2х -4- • • •
mv0
— mv\y —
mv
2z
mvu = Su -f S2
или mv
2y
— mvx = 2 -
D8.6)
Уравнения D8.6) показывают, что изменение проекции коли-
количества движения материальной точки на данную ось за неко-
некоторый промежуток времени равно сумме проекций на ту же
ось импульсов приложенных к точке сил за тот же промежу-
промежуток времени.
Большинство задач решается по уравнениям в проекциях на оси
координат.
§ 49. Примеры применения теоремы об изменении
количества движения материальной точки
Пример 24. Материальная точка массой т=Ю г движется по
окружности с постоянной скоростью 40 см/сек. Найти импульс сил,
действующих на точку за время прохождения точкой половины
окружности.
Решение. Определим импульс сил
по уравнению D8.4):
В рассмотренном случае (рис. НО)
т\х = — mv2,
поэтому
Модуль импульса
5 = 2mv2 — 2- 10 • 40 = 800 гсм/сек.
При изменении положения диа-
диаметра МХМ2 изменится направление рис jjq
импульса S, но сохранится его модуль.
Рассматриваемое равномерное движение точки по окружности
происходит под действием постоянной по модулю силы, направлен-
направленной к центру окружности.
139
Пример 25. Среднее показание динамометра, установленного
между тепловозом и вагонами грузового поезда за t сек, оказалось
равным Р. В течение этого времени поезд двигался на подъем
t=:tga (а — угол подъема) и скорость его увеличилась от v0
до v км/час. Коэффициент сум-
^ ^rfff//1'' маржи о сопротивления движе-
j*1" нию состава равен /. Опреде-
Определить вес состава.
Решение Рассма гриваем
поступательное движение со-
состава как движение материаль-
материальной точки Применяем к его
рис in движению теорему импульсов
в проекциях на ось х, направ-
направленную по траектории движения поезда в сторону его движения
(рис 111)
Согласно D8.6) для промежутка времени от t0 до t имеем
mvx — mvOx = ^Slx. (a)
Так как векторы количеств движения mvQ и mv направлены
в сторону направления оси х, то mvx = mv и mvOx = mv0
Уравнение (а) принимает вид
mv — mv0 = 2 StX' (б)
На состав действуют силы: движущая сила Р, приложенная со
стороны тепловоза, модуль которой показывает динамометр, вес
состава G, нормальная реакция пути N и сила сопротивления дви-
движению состава R с модулем /G cos а. Проекции импульсов этих сил
на ось х можно определить по первой формуле D6.6):
где X — проекция соответствующей силы на ось х, t — время ее
действия.
Проекции импульсов сил Р, G, R и N на ось х соответственно
будут.
Pt. —G-sma-t, —R-t, 0
Подставив эти значения в уравнение (б), получим
mv — mv0 = Pt — G sin a • t — Rt. (в)
Для малого угла а имеем: cosa«l, sina = tga = i.
Уравнение (в) примет вид
откуда
140
§ 50. Теорема об изменении количества движения
механической системы
Количеством движения механической системы называется
вектор, равный геометрической сумме {главному вектору) ко-
количеств движения всех материальных точек этой системы.
Если отдельная точка системы Mt A=1, 2 п) имеет
массу т, и скорость v,, то вектор количества движения системы К
K = 2««v(. E0 1)
Преобразуем выражение E0.1):
к Vmv — \ т ^IL — Vmr
•V — 2u m'Vi — Zl ' dt ~ At Lk l '"
Так как согласно C2.1) имеем ^imj[ = ттс, то
d . . drc
т. е.
K = mvc. E0.2)
Выражение E0 2) показывает, что вектор количества движения
механической системы имеет модуль, равный произведению
массы системы на скорость ее центра масс и направление
этой скорости.
Проектируя вектор К = 2 mtvi = wvc на оси координат, полу-
получаем
Кх = 2 mtvix — mvCx>
E0.3)
Проекция количества движения механической системы на
каждую координатную ось, равная сумме проекций количеств
движения всех точек системы на эту ось, определяется произ-
произведением массы системы на проекцию скорости центра масс
на эту же ось
Дифференцируя E0 2) по времени, получаем
dK dv
Согласно уравнению D3 1) движения центра масс системы
mwc = R?.
Следовательно,
¦^- = R?. E0.4)
141
Уравнение E0.4) выражает теорему об изменении количества дви-
движения механической системы в дифференциальной форме: производ-
производная по времена от количества движения механической системы
геометрически равна главному вектору внешних сил, действую-
действующих на эту систему.
Векторному уравнению E0 4) соответствуют три уравнения
с проекциях на оси координат:
dK dK Е <*Кг в
~V ' ~W~Z ' E0.5)
~dT
Уравнения E0 5) показывают, что производная по времени от
проекции количества движения механической системы на лю-
любую ось равна проекции главного вектора внешних сил, дей-
действующих на систему, на ту же ось.
Из уравнений E0 4) или E0.5) следует, что изменение коли-
количества движения механической системы вызывается только
внешними силами.
Следствия из теоремы:
1. Если главный вектор внешних сил все время равен нулю,
то количество движения механической системы остается по-
постоянным.
Из уравнения E0.4) следует, что если R? = 0, то -тт- = 0, т. е.
К = mvc = const. E0.6)
2. Если проекция главного вектора внешних сил на какую-
либо ось все время равна нулю, то проекция количества дви-
движения механической системы на эту ось постоянна.
Так, например, при Xе = 0 из первого уравнения E0.5)
= ХВ = 0.
dt
откуда
Кх = rnvCx — const E0.7)
Следствия из теорем об изменении количества движения механи-
механической системы выражают закон сохранения количества движения
системы.
Так как уравнения E0.4) и E0.5) тесно связаны с уравнениями
D3.1) и D3 2), определяющими движение центра масс системы, то
формулы E0 6) и E0 7) можно иллюстрировать некоторыми приме-
примерами из § 44. Так, например, пренебрегая внешними силами, дей-
действующими на солнечную систему, можно заключить, что количество
движения системы K = mvc остается постоянным и ее ценгр масс
движется прямолинейно и равномерно.
Откат орудия при выстреле по горизонтальному направлению
обусловлен тем, что проекция количества движения системы орудие—¦
142
снаряд на горизонтальную ось х не изменяется при отсутствии гори-
горизонтальных внешних сил, т. е. по формуле E0.7):
Кх = mvCx = const.
Как до выстрела, так и после него, Кх = 0. Отсюда можно опре-
определить скорость отката орудия:
где ти Vj — масса и скорость вылета снаряда;
щ, v2 — масса и скорость отката орудия.
Скорость отката орудия определится ее проекцией
Установим теперь зависимость между изменением количества дви-
движения механической системы и импульсами действующих на эту
систему сил.
Разделим силы, приложенные к точкам механической системы,
на внешние силы Pf и внутренние силы Р/
Определим изменение количества движения каждой точки системы
за промежуток времени t2—t\ по уравнению D8 5):
(»*ЛJ ~ (m'v0i = Sf + S? ('=1.2 п).
где Sf и Sf — импульсы внешних и внутренних сил, действующих
на точку Mt в промежутке t2 — tx.
Суммируя левые и правые части составленных п равенств, по-
получим
Так как главный вектор внутренних сил, действующих на меха-
механическую систему, равен нулю, то и геометрическая сумма импуль-
импульсов внутренних сил равна нулю, т. е 2St —0. Тогда
или
Уравнение E0 8) выражает теорему об изменении количества дви-
движения механической системы в конечной форме, или теорему импуль-
импульсов: изменение количества движения механической системы за
некоторый промежуток времени равно геометрической сумме
импульсов внешних сил, приложенных к системе, за тот же
промежуток времени.
143
Векторному уравнению E0 8) соответствуют три уравнения
в проекциях на оси координат:
E0 9)
U =
Уравнения E0 9) показывают, что изменение проекции количе-
количества движения механической системы на любую ось равно
сумме проекций импульсов всех внешних сил, действующих на
систему, на ту оке ось
При решении задач обычно пользуются уравнениями E0 9) Эти
уравнения так же, как и уравнения E0 5), не содержат внутренних
сил, что имеет большое практическое значение
§ 51. Примеры применения теоремы об изменении
количества движения механической системы
Пример 26. Определить количество движения диска массой т и
радиусом R, вращающегося вокруг неподвижной оси, проходящей
через его центр тяжести, с угловой ско-
скоростью со
Решение. Так как центр масс диска
остается неподвижным, т. е vc = 0, то коли-
количество движения диска
К — mvc = 0.
Показав векторы количеств движения то-
Рис 112 чек диска, расположенных на одном из его
диаметров (рис 112), убедимся в том, что их
геометрическая сумма равна нулю Поэтому и геометрическая сумма
количеств движения всех точек диска оказывается равной нулю, т е.
Пример 27. Колесо весом О и радиусом R
катится без скольжения по рельсу, делая
п об/мин Определить количество движения
колеса.
Решение. Количество движения колеса
К ~mvc
Скорость vc центра масс колеса определяется как вращательная
скорость вокруг мгновенного центра скоростей, который находится
в точке Р соприкасания колеса с рельсом (рис 113):
144
Так как <о =
0"
Т0 Юс = -
Rnn
Подставляя значения т и vc в выражение, определяющее К, по-
получаем
к GRnn
Пример 28. Гимнаст весом О, оттолкнувшись от трамплина,
имеет скорость v0. направленную под углом а к горизонту, и дви-
движется в воздухе, держа в руках гирю весом Q В наивысшей точке
своей траектории он отбрасывает назад гирю с горизонтальной отно-
относительной скоростью и Определить,
1) скорость гимнаста после отбрасывания гири;
2) удлинение прыжка гимнаста с помощью гири и
3) место падения гири.
Решение 1 Будем рассматривать систему гимнаст — гиря как
систему двух материальных точек весом О и Q. Если сопротивление
воздуха не учитывается, то внешними силами, действующими на си-
систему во время прыжка, являются силы тяжести О и Q
У
0
к
и
^^
!
В и,
/Г, f f, Z? Д
Рис 114
Как известно из § 7, движение гимнаста вместе с гирей под
действием сил тяжести должно происходить по параболе OBD
(рис 114) согласно уравнениям:
х = vot cos a,
y==^sina — ^g-.
При этом горизонтальное движение происходит со скоростью
f0cosa, а продолжительность подъема по кривой ОВ и продолжи-
продолжительность падения по кривой BD одинаковы и равны:
, vа sin a
g
В рассматриваемой задаче движение гимнаста вместе с гирей имеет
место только на участке ОВ Так как в точке В гиря получает
горизонтальную относительную скорость и, т. е взаимодействие
между гимнастом и гирей происходит в горизонтальном направлении,
10 А А Яблонский
145
то на участке BDX законы, изложенные в § 7, сохраняются только
для вертикального движения.
Поэтому время падения как гимнаста, так и гири, сохраняет
значение
, Уд Sin а
~~ g '
Так как проекция главного вектора вертикальных внешних сил
Xе = 0, то согласно E0.7) проекция количества движения системы
Кх— const за все время движения.
В любой момент времени Кх имеет начальное значение, т. е.
В точке В гимнаст, отбросивший гирю со скоростью и, приобрел
скорость Vj. Абсолютная скорость гири в этот момент горизонтальна
и равна
©0 cos а — «.
Проекция количества движения системы, выраженная через ско-
скорость гимнаста и гири в точке В:
К'х = 2 mivix = -j vi + у(«о cos a - в).
.7) К'Х = КХ, т. е.
v\^(vcosa u)
Согласно E0.7) К'Х = КХ, т. е.
откуда
°-v = <LV cosa-4-'-^-a
g l g ° ~i~ g '
или
v1==v0cosa-\- -?r a. E1.1)
Формула E1.1) показывает, что отбрасывание назад гири со ско-
скоростью а увеличивает горизонтальную скорость гимнаста на вели-
велись
ЧИНУ -jrll.
2. Применяя E0.7) к движению гимнаста без гири на участке BDly
устанавливаем, что модуль его горизонтальной скорости v1 не ме-
меняется.
Длину прыжка гимнаста определяем из условия, что его гори-
горизонтальное движение на каждом из участков ОВ и BD1 происходит
равномерно:
i = v0 cos at -j- Vit =
v0 sin a
146
2x% sin a cos a Q vn sin a
__2 г-^-и-2 • E1.2)
Первое слагаемое правой части E1.2) определяет длину прыжка OD
без отбрасывания гири, а второе слагаемое — удлинение прыжка DDV
вызванное отбрасыванием гири.
3. Горизонтальное движение гири, брошенной гимнастом, про-
происходит равномерно со скоростью
x»0cosa — и.
Возможны три вида ее траектории:
1) «<t>0cosa — гиря продолжает двигаться вперед по пара-
параболе BEV Положение точки падения
ЕЕ1 = (f0 cos a — и) t = (v0 cos a — и) — ;
2) u=^v0cosa— гиря падает по вертикали BE;
3) и~> v0cosa — гиря движется назад по параболе ВЕ2. Поло-
Положение точки падения
v0 sin a
ЕЕ2 = (и — v0 cos a) ¦
g
Таким образом, приземление гимнаста вместе с гирей происходит
в точке D. Если же гимнаст отбрасывает гирю, то он движется
дальше, приземляясь в точке Dlt а гиря приземляется в одной из
точек Е, т. е. по другую сторону от точки D.
При сохранении горизонтальной проекции количества движения
системы происходит ее перераспределение между частями системы
в результате взаимодействия этих частей.
Пример 29. Струя жидкости плотностью р вытекает со скоро-
скоростью v из трубки с площадью поперечного сечения F и ударяется под
углом а о вертикальную стену. Опреде-
Определить давление, производимое струей на стену
(рис. 115).
Решение. Применим теорему импуль-
импульсов к движению объема жидкости, вытекаю-
вытекающей из трубки за некоторый промежуток
времени т. Этот объем заполняет участок
струи длиной vt с площадью поперечного
сечения F. Пренебрегая действием силы тя-
тяжести на форму струи, будем считать его
прямолинейным. Масса этого объема равна произведению плотности
жидкости р на объем:
т = pFvx.
На рассматриваемую механическую систему действуют следующие
внешние силы: сила тяжести, реакция стены R, направленная пер-
перпендикулярно к стене, и давление той части жидкости, которая со-
соприкасается с выделенным объемом; это давление вследствие его не-
незначительности учитывать не будем.
Рис 115
10*
147
Направим ось х, как указано на рис. 115, и воспользуемся урав-
уравнением E0.9):
Kix — K-ix = 2j Six-
Положим, что все частицы жидкости струи имеют одинаковую
скорость v. Тогда количество движения рассматриваемого объема
жидкости в момент tl = 0 будет вектором, имеющим направление
скорости v и модуль
/С) — mv — pFv2x.
Его проекция на ось х
Ки = К\ sin a = pFx»2T sin а.
К моменту t2 = т частицы струи без учета брызг приобретут ско-
скорости, направленные по стене.
Проекция количества движения рассматриваемого объема жидко-
жидкости на ось х в момент ?2 = т:
К2х = 0.
В правую часть уравнения E0.9) входит лишь проекция импульса
горизонтальной силы R, определенная по формуле D6.6):
Подставляя значения К^х< К\х и Sx в уравнение E0.9), получаем:
— pFvH sin a = — Rx.
Отсюда определяется модуль реакции стены, равной тому давле-
давлению, которое производит струя на стену:
R = pFv2 sin a.
Максимальное давление имеет место при а =90°:
§ 52. Понятие о теле переменной массы. Уравнение Мещерского.
Формула Циолковского
В классической механике Ньютона масса движущегося тела рас-
рассматривалась только как постоянная величина. Между тем встре-
встречаются случаи движения тел, масса которых за время движения изме-
изменяется.
Рассмотрим примеры такого движения, взятые из области техники.
Масса и момент инерции вращающегося веретена, на которое
навивается нить, изменяются в процессе движения. То же самое про-
происходит с рулоном газетной бумаги, когда он разматывается на валу
печатной машины.
Убывает также масса летящей ракеты вследствие сгорания топлива;
убывает масса аэростата при выбрасывании балласта; возрастает масса
148
привязного аэростата, поднимающего за собой канат при подъеме,,
и т. п.
Реактивный самолет представляет собой тело, масса которого
увеличивается за счет частиц воздуха, засасываемых в двигатель, и
уменьшается вследствие отбрасывания продуктов горения топлива.
В природе тоже имеется немало примеров движения тел, масса-
которых изменяется с течением времени. Так, например, масса Земли
возрастает вследствие падения на нее метеоритов. Масса метеорита,
движущегося в атмосфере, убывает вследствие отрыва и сгорания
его частиц. Масса плавающей льдины возрастает вследствие намер-
намерзания и убывает вследствие таяния. Масса Солнца возрастает от
присоединения космической пыли и уменьшается от излучения.
Создателями основ механики тела переменной массы являются
русские ученые И. В. Мещерский A859—1935) и К. Э. Циолков-
Циолковский A857 — 1935).
В работах «Динамика точки переменной массы» A897) и «Урав-
«Уравнения движения материальной точки переменной массы в общем слу-
случае» A904) И. В. Мещерский впервые вывел уравнение движения
точки переменной массы.
Работы К. Э. Циолковского были посвящены вопросам движения
ракет. Полученные им результаты заложили основу современной!
науки о движении реактивных аппаратов.
Телом переменной массы называют тело, масса которого
изменяется с течением времени.
Если размерами этого тела по сравнению с проходимыми им рас-
расстояниями можно пренебречь, то его можно рассматривать как точку
переменной массы.
Точка переменной массы определяется математически как точка
с массой, являющейся функцией времени m(t). Положив, что изме-
изменение массы точки происходит в результате непрерывного отбра-
отбрасывания или присоединения материальных частиц, массы которых
весьма малы, получим возможность считать функцию m(t) непрерыв-
непрерывной и дифференцируемой.
При отбрасывании элементарной материальной частицы возникает
элементарная реактивная сила, действующая как на основную, так
и на отделяемую точки.
Эти две силы, представляющие собой действие и противодейст-
противодействие, равны между собой по модулю и направлены в противополож-
противоположные стороны.
Если основная и отделяемые точки рассматриваются как единая
система, то силы взаимодействия между ними являются для этой си-
системы внутренними силами и масса этой системы не изменяется,
оставаясь за все время движения постоянной.
Из этого следует, что к такой системе можно применять теоремы
динамики системы постоянной массы. Положим, что в некоторый
момент времени t одна точка конечной массы m(t) движется с абсо-
абсолютной скоростью v, а другая — элементарной массы dm{t) движется
14»
с абсолютной скоростью и. В момент времени t-\-dt эти точки
образуют одну точку с массой m-\-dm, абсолютная скорость ко-
которой равна v-\-dv. При этом dm > 0 (в случае присоединения
элементарной массы) и dm < 0 (при отделении ее от массы основной
точки). Количество движения системы
в момент t:
mv-\-vidm,
в момент t-\-bt:
(т -\- dm) (v + dv).
Изменение количества движения системы за время dt:
dK = (/» + dm) (v + d\) — (mv -f- u dm) =
— mdv-\- dm (v — u) -f- dm ¦ dv.
По теореме об изменении количества движения механической си-
системы в дифференциальной форме E0.4) имеем:
где Р — равнодействующая сил, приложенных к точке с конечной
массой.
Подставляя в уравнение E0.4) полученное выше выражение dK
и пренебрегая членом dm • dv, получаем
^ + (v-u)^ = P. E2.1)
где и — v = ur — относительная скорость присоединенной массы.
Вводя относительную скорость ur, имеем
dv _ . dm
Обозначив ur -jj- = R, получим
d\
Здесь R — реактивная сила, равная произведению относительной
скорости ur присоединяющейся массы на секундное приращение
„ dm
массы основной точки —гг--
R = ur^. E2.3)
Уравнение E2.2) представляет собой основное уравнение дина-
динамики точки переменной массы и называется уравнением Ме-
Мещерского.
Из этого уравнения следует, что уравнение движения точки
переменной массы имеет вид основного уравнения динамики
150
точки постоянной массы, находящейся под действием прило-
приложенных к ней сил и реактивной силы.
В случае, если абсолютная скорость и присоединяющейся массы,
равна нулю, уравнение E2.1) принимает вид
dt
или
E2.4)
Если же равняется нулю относительная скорость ur присоеди-
присоединяющейся массы, то согласно E2.3) R = 0, и уравнение E2.2) при-
принимает вид основного уравнения динамики точки постоянной массы:
rfv _
т р
Применим уравнение Мещерского к свободному движению ракеты
без учета сил притяжения к Земле и сопротивления воздуха. В этом
случае
Р = 0.
Положим (рис. 116), что неизменная масса корпуса ракеты равна тк,
переменная масса горючего — тг, а масса газов, проходящих через
////////////77
V,\t V/
Рис. 116.
выхлопное
отверстие сопла в 1 сек, равна —гг-. Скорость движения'
гг
ракеты обозначим V, а относительную скорость выхлопа продуктов
горения ur.
Определим движение ракеты уравнением E2.2) при Р = 0 в про-
проекциях на ось х, направленную по оси ракеты в сторону ее дви-
движения:
nt —37— = i
или
mr)T = Hr
dt
E2.5>
Подставляя в полученное уравнение проекции скоростей vx = v
и иГЛ. = — иг, имеем
\ к~1~ г/ ^ ' dt ' \Р • }'
151
Умножив полученное уравнение на dt и разделив переменные,
-проинтегрируем его в пределах, соответствующих начальному мо-
моменту движения ракеты @ = 0 и некоторому моменту t во время ее
лвижения:
J "г тк + тг '
v I* = — ur In (отк + mr) | ml.
откуда
Когда весь запас взрывчатых веществ сгорает, то ракета имеет
наибольшую скорость. При тг = О
Vmtx = V0+ttrln[l+-^-j. E2.8)
Эта формула выведена К. Э. Циолковским и называется фор-
формулой Циолковского. Формула E2.8) показывает, что предельная
скорость ракеты зависит от ее начальной скорости v0, от относи-
относительной скорости вылета продуктов горения и, и от относительного
<
запаса топлива —.
тк
Из этой формулы следует, что предельная скорость ракеты не
зависит от времени полного сгорания топлива.
При помощи формулы E2.8) Циолковским составлена таблица
наибольших скоростей ракеты в зависимости от запаса топлива и от-
относительной скорости отброса*.
Из этой таблицы следует, что для достижения первой космической
скорости, равной 7,9 км/сек, при которой ракета становится спут-
пиком Земли, при отношении массы топлива к массе ракеты = 4
тк
скорость отброса должна быть равна 6 км(сек.
Получение столь значительных скоростей отброса трудно осу-
осуществить. Поэтому в настоящее время увеличение скорости ракеты
достигается применением составной (многоступенчатой) ракеты. Части
(ступени) такой ракеты, после израсходования содержащегося в них
топлива, автоматически отделяются от ракеты. При каждом таком
отделении ракета получает дополнительную скорость. Таким обра-
образом, последняя ступень ракеты получает скорость, обеспечивающую
ее движение в виде спутника Земли или ее полет в космическое
пространство (см. § 77).
* К Э Циолковский. Труды по ракетной технике. Оборонгиз,
1947, стр 349.
152
Вопросы для самоконтроля
1. Как определяется импульс переменной силы за конечный промежуток^
времени? Что характеризует импульс силы?
2. Чему равны проекции импульса постоянной и переменной силы на
оси координат?
3. Чему равен импульс равнодействующей?
4. Как изменяется количество движения точки, движущейся равномерно
по окружности?
5. Что называется количеством движения механической системы'
6. Чему равно количество движения маховика, вращающегося вокруг
неподвижной оси, проходящей через его центр тяжести?
7. Сформулируйте теоремы об изменении количества движения мате-
материальной точки и механической системы в дифференциальной и конечной
формах. Выразите каждую из этих четырех теорем векторным уравнением
и тремя уравнениями в проекциях на оси координат.
8. При каких условиях количество движения механической системы не
изменяется? При каких условиях не изменяется его проекция на некото-
некоторую ось?
9. Почему происходит откат орудия при выстреле?
10. Могут ли внутренние силы изменить количество движения системы
или количество движения ее части'
11. Что называют телом переменной массы?
12. Кем созданы основы механики тел переменной массы?
13. Какой вид имеет основное уравнение динамики точки переменной
массы? В каком случае оно имеет вид основного уравнения динамики точки-
постоянной массы'
14. От каких факторов зависит скорость свободного движения ракеты>
15. Зависит ли конечная скорость ракеты от времени сгорания топлива?'
ГЛАВА IX
ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ МОМЕНТА КОЛИЧЕСТВА ДВИЖЕНИЯ
МАТЕРИАЛЬНОЙ ТОЧКИ И ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОГО
МОМЕНТА МЕХАНИЧЕСКОЙ СИСТЕМЫ
§ 53. Моменты количества движения материальной точки
относительно центра и относительно оси
В разделе «Статика» (§ 44 и 45) введены и широко исполь-
использованы понятия моментов силы относительно точки и. относительно-
оси. Так как количество движения материальной точки т\ является
вектором, то можно определить его мо-
моменты относительно центра и относи- ^
тельно оси таким же путем, как опре-
определялись моменты силы.
Момент количества движения mv точ-
0
ки М относительно центра О (рис. 117) рис 117
представляет собой вектор Lo, направ-
направленный перпендикулярно плоскости, проходящей через вектор mv и
центр О в ту сторону, откуда вектор т\ по отношению к центру О
виден направленным против движения часовой стрелки. Модуль
15а.
¦вектора Lo равен произведению величины mv на плечо h вектора ту
относительно центра О:
L0 — mvh. E3.1)
Момент количества движения Lo можно определить векторным
¦произведением радиуса-вектора г, проведенного из центра О в точ-
точку М, на вектор количества движе-
i ния mv:
I = г V mv Г53 24
Момент Lz количества движе-
движения mv точки М относительно оси z
(рис. 118) равен взятому со знаком
плюс или минус произведению проек-
проекции вектора mv на плоскость /,
перпендикулярную к оси z, на плечо
этой проекции относительно точки О
пересечения оси z с плоскостью /:
Lz=±mvlhu E3.3)
Рис. 118
mv.
причем Lz > 0, если, смотря навстречу оси z, можно видеть проек-
проекцию mV\ по отношению к точке О, направленной против движения
часовой стрелки, и Lz < 0 — в об-
обратном случае.
Моменты количества движения
точки относительно центра О и отно-
относительно оси z, проходящей через
этот центр, связаны зависимостью
<ч. I, «Статика», § 46):
Lz = Lo cos (Lo, k), E3.4)
т. е. проекция момента коли-
количества движения материальной
точки относительно некоторого
центра на ось, проходящую че-
через этот центр, равна моменту
количества движения точки отно-
относительно этой оси.
Аналитические выражения моментов количества движения точки
относительно осей координат будут (ч. I, «Статика», § 47):
Рис 119
Lx = у • mv2 — z • mVy = m (yvz — zvy), 1
Ly = z • mvx — x • mvz = m (zvx • xvz), }
Lz = x • mvy — у • mvx = m(xvy — yvx),
E3.5)
где x, у, z — координаты движущейся точки М,
vx, vy, vz — проекции скорости точки М на оси координат (рис. 119).
154
§ 64. Теорема об изменении момента количества движения
материальной точки
Положим, что движение материальной точки М происходит под:
действием силы Р (рис. 120). Проведем из произвольного центра О
в точку М радиус-вектор г и опре-
определим момент силы Р относительно
этого центра по формуле из статики:
Определим также момент количества
движения точки М относительно цент-
центра О по формуле E3.2):
Рис. 120.
Чтобы установить зависимость между моментом количества дви-
движения точки Lo и моментом силы Мо, следует найти производную.-
по времени от момента количества движения:
dL0 _ dv
dv
dt
Здесь
dv
dt
dv
dt
= w.
Пользуясь этими выражениями, получим
dt
Так как угол (v, mv) = 0, то
тогда
или
dL
о
dt
dL
о
E4.
Если на материальную точку действуют несколько сил, то
следует рассматривать как момент их равнодействующей. Заменив
геометрической суммой моментов составляющих сил, получим
dL,
О ;
или
dt
dt
+ м„
E4.2>
15S
Соотношение E4.2) выражает теорему об изменении момента
-количества движения материальной точки относительно центра: произ-
производная по времени от момента количества движения мате-
материальной точки относительно некоторого центра равна гео-
геометрической сумме моментов сил, действующих на точку,
относительно того же центра.
Так как проекция векторной производной на любую ось равна
производной от ее проекции на эту ось (см. ч I, «Кинематика»,
§ 80), то, проектируя векторное равенство E4.2) на оси х, у, z,
получим три равенства:
dt
dLy
dLz
dt
или
dLx _
dt
dLy
E4.3)
Здесь согласно E3.4) Lx, Ly, Lz — моменты количества движения
точки М относительно осей координат, a Mix, Miy, Miz — моменты
силы Pt относительно этих же осей.
Равенства E4.3) выражают теорему об изменении момента коли-
количества движения точки относительно оси! производная по времени
от момента количества движения материальной точки отно-
относительно некоторой оси равна алгебраической сумме моментов
сил, действующих на точку, относительно этой же оси.
Следствия из теоремы: 1. Если линия действия равно-
равнодействующей приложенных к материальной точке сил все время
проходит через некоторый неподвижный центр, то момент коли-
количества движения материальной точки отно-
относительно этого центра остается постоян-
постоянным.
Из уравнения E4.2) следует, что если
2М/ =0, то
—2. = 0, и Lo = const. E4.4)
Примером, иллюстрирующим это следствие,
может служить движение материальной точки
под действием центральной силы.
Центральной силой называется сила, линия действия кото-
которой за все время движения проходит через некоторый центр,
м. модуль зависит от расстояния между этим центром и точ-
точкой приложения силы.
Положим,что линия действия центральной силы Р за все время
движения проходит через центр С (рис. 121). Тогда
Мс = 0 и Lc = const.
J56
Из этого следует, что плоскость, проходящая через вектор коли-
количества движения точки т\ и центр С, не изменяет своего положения,
т. е. траектория точки лежит в одной плоскости.
2. Если момент равнодействующей приложенных к мате-
материальной точке сил относительно некоторой оси все время
равен нулю, то момент количества движения материальной
точки относительно этой оси остается постоянным.
Из уравнения E4.3) следует, что если, например, ^j М[х=^0, то
" = 0 и Lx = const. E4.5)
Пример. 30. Шарик весом О находится на гладкой горизонталь-
горизонтальной плоскости. К шарику привязывают невесомую нерастяжимую
нить, которую пропускают через отверстие О на плоскости и тянут
вниз с постоянной скоростью с (рис. 122, а). В момент, когда рас-
расстояние шарика от отверстия OM0 — R, шарику сообщают скорость v0.
Si '
k H
/V
M jb/
/
G
Рис. 122
направленную перпендикулярно к нити ОМ0. Определить дальнейшее
движение шарика.
Решение. Положение шарика М на плоскости будем опреде-
определять двумя полярными координатами г и ф. Проведем ось Ох через
начальное положение шарика Мо. Тогда начальные условия будут:
to = Q, ro^R, Фо=О (рис. 122,6).
На шарик действуют три силы: сила веса G. реакция плоско-
плоскости N и реакция нити S. Так как момент каждой из этих сил отно-
относительно вертикальной оси Oz равен нулю, то
Согласно E4.5)
Lz = const.
Так как по условию задачи нить втягивается равномерно со ско-
скоростью с, то изменение координаты г определится уравнением
r~R — ct. E4.6)
157
Для определения координаты ф в зависимости от t воспользуемся
условием Lz = const. Абсолютная скорость шарика состоит из двух
скоростей, направленных вдоль осей полярных координат (см. ч. I.
«Кинематика», § 128): скорости с и перпендикулярной к ней ско-
скорости v, модуль которой
v — га = пр.
Вектор количества движения /ис не имеет момента относительно'
оси Oz, так как прямая, по которой он направлен, пересекает ось Oz.
Момент вектора количества движения mv относительно оси z
в любой момент времени определяется по формуле E3.3):
Lz — mvr = тг2у.
В начальный момент;
LZo = mvQR.
Так как Lz = const, то L4 — Lz, т. е.
mv0R = mr2(f,
откуда
или после подстановки значения г из формулы E4.6):
Проинтегрируем по времени:
Постоянную С определим подстановкой в уравнение начальных
условий to=Q; фо = О:
п
Подставив значение С, получим второе уравнение движения шарика:
Уравнение траектории шарика в полярных координатах, полу-
полученное исключением t из его уравнений движения E4.6) и E4.7),
имеет вид
ч^-Нт-1)- E4'8)
Следует отметить, как это вытекает из выражения
Lz = /иг2ф = const,
при уменьшении г возрастает угловая скорость ф вращения нити.
158
Пример 31. Определить малые колебания математического маят-
маятника длиной /, точка привеса которого начинает совершать горизон-
горизонтальные колебания, согласно уравнению х = a cos pt. В начальный
момент маятник находился в состоянии покоя и нить располагалась
вертикально.
Решение. Маятник совершает составное движение. Примем
поступательное движение вместе с осью привеса Оху, перпендику-
перпендикулярной к плоскости чертежа за переносное движение (рис. 123).
Тогда качание маятника вокруг этой оси будет его относительным
движением. Это движение требуется определить.
Чтобы применить к относительному движению точки какое-либо
положение динамики, необходимо, кроме действующих на точку сил,
учесть переносную силу инерции точки (см. § 26). Для определения
этой силы найдем проекцию пере-
переносного ускорения на ось х, поль- д( gr v '
зуясь заданным уравнением перенос-
переносного движения:
wex = л; = — ар2 cos pt.
Проекция переносной силы инер-
инерции, направленной противоположно
переносному ускорению, опреде-
определится:
Фех = — mwex = map2 cos pt.
G
Рис. 123.
Так как переносное движение
является гармоническим колебатель-
колебательным движением, то его ускорение we направлено всегда к центру
колебаний О, а переносная сила инерции в противоположную сторону.
Приложим к маятнику, нить которого отклонена от вертикальной
оси O^z на угол <pr, две действующие на него силы: силу тяжести G
и реакцию нити S, а также его переносную силу инерции Фе. При-
Применим к относительному движению маятника теорему об изменении
момента количества движения маятника относительно оси
Согласно E4.3)
dt ~~ у"ху~т" ^«2у+ Л43у. (а)
Момент количества движения маятника в относительном движении
Момент силы тяжести О относительно оси Oty
Mly — — 01 sin фг = —mgl sin <pr.
Момент реакции нити S относительно оси О,у равен М2 = О,
так как линия действия силы S пересекает ось "
159
Момент переносной силы инерции относительно оси
М3у = *хФех = I cos фг/иа/>2 cos pt.
Подставляем эти значения в уравнение (а):
—гг (mP(fr) — — mgl sin фг -\- тарЧ cos фг cos pt.
Рассматривая малые колебания маятника, принимаем
Тогда
ml\r = — mgl(pr -\- тарЧ cos pt
или
Полученное уравнение можно представить в виде
фг -f- k\r = h cos pt, F)
Уравнение (б) является дифференциальным уравнением вынужден-
вынужденных колебаний маятника, отличаясь от уравнения A6.3) наличием
cos pt вместо sin pt. В соответствии с этим его решение имеет вид
Фг = Ct cos kt -f C2 sin kt -f- t (^p_ ^ cos pt. (в)
Для определения постоянных Сх и С2 найдем производную:
фг = — feCjsin/tf + ftC2cos'^f — [{ktPlp2) sin(pt). (r)
Так как в начальный момент маятник находился в покое и нить
его располагалась вертикально, то начальные условия
г = 0; фОг = О; Фо, = 0.
Подставляем эти значения в уравнения (в) и (г):
откуда
0 = kC2,
где С2 = 0.
Подставляя найденные значения Cj и С2 в уравнение (в), полу-
получаем уравнение малых вынужденных колебаний маятника:
ар2 ., . ар2 ,
Фг = -цк*-Я cos М + 7^=7У cos P*
или
ф'= l(k*-p2)(cos ^ ~cos W- (д)
160
Уравнение (д) показывает, что вынужденным колебаниям час-
частоты р сопутствуют свободные колебания частоты k, которые вызы-
вызываются наличием возмущающей силы.
§ 55. Кинетический момент механической системы
относительно центра и оси
Кинетическим моментом или главным моментом количеств
движения механической системы относительно данного центра
называют вектор, равный геометрической сумме моментов
количеств движения всех материальных точек системы отно-
относительно этого центра.
Момент количества движения каждой материальной точки системы
(рис. 124) относительно центра О определяется по формуле E3.2):
Кинетический момент механической системы относительно центра О
L<, = SL/0=Sr/Xm,v/. E5.1)
Кинетическим моментом, ила главным моментом количеств
движения механической системы относительно оси, называется
алгебраическая сумма моментов количеств движения всех
материальных точек системы относительно этой оси.
М,
Рис. 124.
Рис 125
Момент количества движения Llz каждой точки системы (рис. 118)
относительно оси Oz определяется согласно E3.3).
Кинетический момент системы относительно оси (рис. 125)
Lz=HiLiz- E5-2)
Кинетические моменты механической системы относительно не-
некоторого центра О и какой-либо оси z, проходящей через этот
центр связаны такой же зависимостью, как и главные моменты си-
системы сил относительно центра и оси, т. е.
Ьг = Lo cos (Lo> k). E5.3)
11 А. А. Яблонский 161
Таким образом, проекция кинетического момента механи-
механической системы относительно некоторого центра О на ось,
проходящую через этот центр, равна кинетическому моменту
системы относительно этой оси.
§ 56. Теорема об изменении кинетического момента
механической системы
Положим, что система материальных точек Мх, М2 Мп дви-
движется под действием некоторой системы сил, которые разделим на
внешние силы Pf, Pf, ..., Pf и внутренние силы Р{, Рг, ..., Р«.
Выберем некоторый неподвижный центр О и определим измене-
изменение момента количества движения каждой точки Mt относительно
этого центра по уравнению E4.2):
Просуммируем полученные п уравнений:
2
Как указывалось в § 31, геометрическая сумма моментов всех
внутренних сил относительно любого центра равна нулю, т. е.
Преобразуем левую часть равенства (а), учитывая E5,1):
dt ~~ dt Ы lo ~~ dt
Тогда уравнение (а) принимает вид
О ^l АЛ АД /КС л \
~di~^ .Li п== °' (Оо.1)
Уравнение E6.1) выражает теорему об изменении кинетического
момента механической системы: производная по времени от кинети-
кинетического момента механической системы относительно некото-
некоторого центра геометрически равна главному моменту внешних
сил, действующих на эту систему относительно того же центра.
Векторному равенству E6.1) соответствуют три равенства в проек-
проекциях на оси координат:
dt
E6.2)
dLz
dt
162
Здесь согласно E5.3): Lx, Ly, Lz— кинетические моменты меха-
механической системы относительно осей координат, а Мх, Му, Mz —
главные моменты внешних сил относительно этих осей.
Уравнения E6.2) показывают, что производная по времени от
кинетического момента механической системы относительно
некоторой оси равна главному моменту внешних сил относи-
относительно этой оси.
Следствия из теоремы: 1. Если главный момент внеш-
внешних сил относительно некоторого центра все время равен
нулю, то кинетический момент механической системы относи-
относительно этого центра остается постоянным.
Из уравнения E6.1) следует, что если Мо = 0. то
rfL
-jf- = O и Lo = const. E6.3)
2. Если главный момент внешних сил относительно неко-
некоторой оси все время равен нулю, то кинетический момент
механической системы относительно этой оси остается по-
постоянным.
Из уравнений E6.2) следует, что если, например, Мх—0, то
dL.
dt
-=0 и
= const.
E6.4)
Следствия из теорем об изменении кинетического момента меха-
механической системы выражают закон сохранения кинетического мо-
момента механической системы
Пример 32. Колесо гидравлической турбины вращается вокруг
вертикальной оси с постоянной угловой скоростью <в (рис. 126, а).
б)
Рис. 126.
Абсолютная скорость частиц воды во входном сечении равна Vj и
составляет с касательной к внешней окружности обода колеса угол at.
В выходном сечении скорость частиц воды равна v2 и составляет
с касательной к внутренней окружности обода угол а,. Радиусы внеш-
внешней и внутренней окружностей обода соответственно равны гх и г2.
Определить вращающий момент, сообщаемый колесу протекающей
между лопатками водой.
11*
163
Решение. В качестве механической системы рассмотрим объем
воды, заполняющей все -каналы между лопатками колеса.
Определим изменение кинетического момента этой системы отно-
относительно вертикальной оси вращения турбины по уравнению E6.2):
dt г"
Внешними силами, действующими на систему, являются сила
тяжести Q, не имеющая момента относительно оси z, и реакции
стенок каналов.
Следовательно, главный момент внешних сил Mz представляет
собой главный момент реакций стенок.
Положим, что в некоторый момент времени / в одном из п кана-
каналов находится объем воды abed (рис. 127). В момент времени t-\-dt
этот же объем занимает положение аф^^х.
При этом элементарные объемы dcc^d^ и abbxax
равны, так как количество воды, втекшей в ка-
канал и вытекшей из него за время dt, оди-
одинаково. Масса каждого из этих объемов—это
масса воды, протекающей через один канал за
1
й, с, >v время dt:
Рис. 127. М1 = «2 = « = ^.Л.
где Q—вес жидкости, протекающей через все каналы в единицу
времени.
Определим изменение главного момента количества движения
объема abed относительно оси z за время dt, считая направление
вращения турбины положительным. Это изменение равно разности
моментов количеств движения объемов dcc1di и abbxax:
dLlz — mv2h2 — mv1hl,
где Л,— плечо вектора т\х и h2— плечо вектора т\2 относительно
точки О, принадлежащей оси z (рис. 126, б). Подставив
значения
zdt
получим
и m =
~ Tg dt Viri cos
Изменение кинетического момента всей рассматриваемой механи-
механической системы за время dt определяется суммированием величин Ll2,
относящихся к отдельному каналу:
п
164
z = ^ dllz — n~dt (y2r2 cos a2 — virl cos ax
Из уравнения E6.2) находим Mz.
Mz = —??- = — (v2r2 cos Oj — vxrx cos a;).
Силы давления воды на стенки каналов равны по модулю и противо-
противоположны по направлению реакциям стенок. Следовательно, к колесу
со стороны жидкости приложен вращающий момент Мвв, равный
Р
по величине и противоположный по знаку моменту Мг, т. е.
v^r2 cos a2).
в О
ЛТвр = — Мг = —
о
Твр
cos
Полученная формула показывает, что момент, вращающий колесо
гидравлической турбины, зависит от мбдулей и направлений абсо-
абсолютных скоростей воды во входном и выходном сечениях каналов.
§ 57. Кинематическая интерпретация теоремы
об изменении кинетического момента механической системы
относительно центра. Теорема Резаля
При движении механической системы ее кинетический момент
относительно некоторого центра изменяется как по модулю, так и по
направлению.
Пусть Lo — кинетический
момент системы точек Mv -тУ
М2 Мп относительно м
центра О (рис. 128). Система
движется под действием
внешних сил Pi, Р2 Рп
и внутренних сил Р{,
Р^...,РУ„.
При движении системы
точка А — конец вектора
Lo - описывает в простран-
пространстве некоторую линию, на-
называемую годографом кинетического момента механической
системы.
Скорость и движения точки А по годографу определяется вектор-
векторной производной радиуса-вектора Lo этой точки по времени:
Рис. 128.
E7.1)
С другой стороны, на основании E6.1)
Сопоставляя E7.1) и E6.1), устанавливаем:
u= Mg.
E7.2)
165
Уравнение, E7.2) показывает, что скорость конца вектора кине-
кинетического момента механической системы относительно не-
некоторого центра геометрически равна главному моменту внеш-
внешних сил, действующих на эту систему, относительно того же
центра.
Это положение выражает теорему об изменении кинетического
момента механической системы в другой форме и носит название
теоремы Резаля.
Нетрудно убедиться в том, что единицы измерения величин, стоя-
стоящих в обеих частях равенства E7,2), совпадают.
Действительно за единицу момента количества движения в си-
системе МКС принимается 1 кг • м2/сек. Единицей скорости его изме-
изменения с течением времени является 1 кг • м^/сек2, т. е. единица
момента силы.
Вопросы, изложенные в данной главе, имеют широкое практи-
практическое приложение. Примеры их применения показаны в главах XII,
XIII, XIV и XV.
Вопросы для самоконтроля
1. Как определяются моменты количества движения материальной точки
относительно центра и относительно оси? Какова зависимость между ними?
2. При каком расположении вектора количества движения материальной
точки его момент относительно оси равен нулю?
3. Сформулируйте теорему об изменении момента количества движения
материальной точки относительно центра и относительно оси.
4. Почему траектория материальной точки, движущейся под действием
центральной силы, лежит в одной плоскости?
5. Что называют кинетическим моментом механической системы относи-
относительно центра или оси?
6. Сформулируйте теорему об изменении кинетического момента меха-
механической системы относительно центра и относительно оси.
7. При каких условиях остается постоянным кинетический момент меха-
механической системы относительно центра и при каких — кинетический момент
относительно оси?
8. Какова кинематическая интерпретация теоремы об изменении кинети-
кинетического момента механической системы относительно центра?
ГЛАВА X
РАБОТА. ТЕОРЕМА ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ
§ 58. Две меры механического движения
В динамике рассматриваются два случая преобразования механи-
механического движения материальной точки или системы точек:
1) механическое движение переносится с одной механической
системы на другую в качестве механического движения;
2) механическое движение превращается в другую форму движе-
движения материи (в форму потенциальной энергии, теплоты, электричества
и т. д.).
166
Каждый из этих случаев преобразования механического движения
имеет свои измерители как механического движения, так и действия
силы. Когда рассматривается преобразование механического движения
без перехода его в другую форму движения, мерой механического
движения является вектор количества движения материальной точки
K = mv или механической системы К,~т\с.
Мерой действия силы в этом случае является вектор импульса
силы S (см. § 46).
Когда механическое движение превращается в другую форму дви-
движения материи, в качестве меры механического движения выступает
кинетическая энергия материальной точки или механической си-
системы.
Из элементарного курса физики известно, что кинетическая энер-
энергия материальной точки массой т, движущейся со скоростью v, равна
половине произведения массы этой точки на квадраг скорости ее
движения:
mv2
Мерой действия силы при превращении механического движения
в другую форму движения является работа силы, которая также
рассматривается в элементарном курсе физики.
В дайной главе рассмотрены различные случаи вычисления работы
сил и установлена теорема об изменении кинетической энергии как
материальной точки, так и механической системы.
Итак, существуют две различные меры механического движе-
движения: mv и —р— и две различные меры действия силы: импульс силы S
и работа силы А.
Следует отметить, что измерителями механического движения и
действия силы в первом случае являются векторные величины mv
и S, а во втором случае — скалярные величины —^— и А. Вопрос
о выборе меры механического движения был предметом многолетней
полемики между сторонниками Декарта и сторонниками Лейбница.
Декарт считал, что мерой механического движения является коли-
количество движения mv, и Лейбниц утверждал, что динамические свой-
свойства тел характеризуются величиной mv2.
Этот спор был разрешен Ф. Энгельсом, который в своей работе
«Диалектика природы» * показал существование двух мер механи-
механического движения.
Так каь изменение величины —н— связано с работой приложен-
приложенных к телу сил, то работа является количественной мерой
превращения механического движения в какую-либо другую
форму движения.
* Ф. Энгельс. Диалектика природы. Госполитиздат, 1955, стр. 69.
167
«При всех явлениях форма движения, начинающая процесс и
превращающаяся благодаря ему в другую форму движения, совершает
работу и притом такое ее количество, которое соответствует ее
собственному количеству...
Механическое движение нигде и никогда не может произвести
работу, если оно не будет по видимости уничтожено как таковое,
если оно не превратится в какую-нибудь другую форму движения»*.
Так, например, работа сил трения, тормозящих движение тела,
работа сил тяжести поднимаемого груза, работа сил упругости пру-
пружины, останавливающей движущееся тело, являются мерами уничто-
уничтожаемого механического движения, которое превращается в теплоту,
потенциальную энергию, энергию упругого тела.
§ 59. Работа постоянной силы
Рассмотрим в первую очередь вычисление работы постоянной
по модулю и направлению силы на прямолинейном перемещении ее
точки приложения.
Положим, что точка приложения постоянной силы Р перемещается
по прямой из М в М1 (рис. 129), а вектор силы Р составляет с век-
вектором перемещения и угол а.
Работа силы в этом случае равна произведению модуля силы
на длину пути, пройденного точкой приложения силы, и на косинус
угла между направлениями вектора силы
Р j/ и вектора перемещения точки ее прило-
приложения:
А = Pa cos a = Pa cos (P, и). E9.1)
Рис 129 Если угол а острый, то работа силы по-
положительна, если тупой — то отрицательна.
Из векторной алгебры известно, что скалярное произведение
двух векторов равно:
Р -u = P«cos(P, и).
Следовательно, работа силы Р на перемещении и
Л = Ри, E9.2)
т. е. работа постоянной по модулю и направлению силы на
прямолинейном перемещении определяется скалярным произве-
произведением вектора силы на вектор перемещения точки ее прило-
приложения.
Если направления силы и перемещения совпадают, т. е. а = 0, то
А = Ри.
*Ф. Энгельс. Диалектика природы Госполитиздат, 1955, стр. 60—73.
168
Если направление силы перпендикулярно к направлению переме-
перемещения, т. е. а = 90°, то
А = 0.
Если направление силы противоположно направлению перемеще-
перемещения, т. е. а= 180°, то
А = ~ Ри.
§ 60. Элементарная работа. Работа силы на конечном пути.
Теоремы о работе силы. Изображение работы в виде площади
Положим, что точка приложения переменной по модулю и напра-
направлению силы Р перемещается по криволинейной траектории из Мх
в М2 (рис. 130). Чтобы вычислить работу силы Р
на этом перемещении, нужно разбить это пере-
перемещение на элементарные участки, вычислить ра-
работу силы на каждом элементарном участке как
работу постоянной силы и определить предел
суммы элементарных работ при стремлении числа
участков к бесконечности и длине каждого из
них к нулю.
Элементарная работа силы Р на участке ММ'
определяется по формуле E9.1):
bA = Pda cos{P, v). F0 1)
Здесь Р — модуль силы, соответствующей точке М;
da — длина пути ММ', т. е. пройденный точкой элементарный
путь;
? Р, v — угол, составленный направлением силы Р и скоростью v
в точке М.
Элементарная работа обозначается 6А, а не dA, так как в общем
случае она не является дифференциалом функции. Знак работы в вы-
выражении F0.1) определяется только знаком косинуса угла /.P. v.
Рис. 130
Рис. 131
Рис 132.
Будем определять положение точки М на траектории дуговой
координатой s — OM (рис. 131 и 132) и орт t — касательной
169
к траектории — направим в сторону возрастания дуговой коорди-
координаты (см. ч I, «Кинематика» § 79 и 84).
Тогда при движении точки М в сторону возрастания 5 (рис. 131)
имеем:
1) ds>0, do = | ds | == ds;
2) cos(P, v) = cos(P, т), так как направления v и т совпадают.
Тогда элементарная работа силы Р
6A = Pdacos(P, v) = Р ds cos (P, t).
При движении точки М в сторону уменьшения 5 (рис. 132) имеем:
1) ds < 0; do = \ds\ — — ds;
2) cos(P, v) = — cos(P, t), так как направления v и t проти-
противоположны
Тогда элементарная работа силы Р
ЬА = Pdocos(P, v) = Pdscos(P, т).
Таким образом, при движении точки в любом направлении по
траектории элементарная работа силы определяется:
6A=Pdscos(P, -с), F0.2)
где Р — модуль силы, соответствующей точке М;
ds — приращение дуговой координаты точки (алгебраическая вели-
величина);
/.Р. г — угол между направлением силы Р и орта т, направленного
всегда по касательной в сторону увеличения дуговой коор-
координаты.
В выражении F0 2) знак работы определяется как знаком ds,
так и знаком косинуса угла /_Р, т.
Обычно работа силы вычисляется отдельно для участков с дви-
движением в одном направлении. Тогда это направление принимается
за положительное и формула F0 2) приобретает смысл формулы
F0 1), т. е ds обозначает элементарный путь da, а угол ?J?, т
является углом /,Р, v (рис. 131).
Раэложим силу Р на составляющие, направленные по касательной
и главной нормали к траектории в точке М.
Проекции силы Р на касательную и главную нормаль определятся:
х), }
} F03>
Пользуясь первой формулой F0.3), выражению F0 2) можно
придать вид
6A = Pxds. F0.4)
Формула F0.4) показывает, что работу на перемещении ds со-
совершает только касательная составляющая силы Рт, работа же нор-
нормальной составляющей Ря, перпендикулярной к направлению скорости
точки v, равна нулю. Согласно E9.2) представим элементарную
170
работу силы Р (рис. 133) как скалярное произведение:
6Л = Р-<*г, F0 5)
где dt — вектор элементарного перемещения точки М.
Обозначив проекции силы Р на координатные оси X, Y, Z, а
проекции вектора элементарного перемещения dt на оси dx, dy, dz,
получим скалярное произведение векто-
векторов Р и dt в виде
bA — Xdx+Ydy + Zdz. F0.6)
Формула F0.6) дает выражение эле-
элементарной работы через проекции силы на
оси координат.
Работа силы Р на конечном переме-
перемещении равна сумме ее работ на элемен-
элементарных участках
л_2бЛ. Рис 133
Пользуясь выражениями элементарной работы F0.1), F0.2), F0 4),
F0.5) или F0.6) и переходя к пределу при стремлении числа участ-
участков к бесконечности, получаем следующие выражения работы силы Р
на конечном перемещении МХМ2:
Аи2— Г Pda cos (P, v),
/И,
Ah2= J Prfscos(P, т),
Л 2= / P*dS>
м,
F0.7)
F0.8)
F0.9)
F0.10)
Рис. 134.
м.
Л1J= J (X dx + Yd\> + Z dz). F0.11)
ж,
Теоремы о работе силы
Теорема 1. Работа равнодействующей силы на некотором
перемещении равна алгебраической сумме работ составляю-
составляющих сил на том же перемещении.
Положим, что на точку М действуют силы Рх, Р2, ..., Р„
(рис. 134). Равнодействующая этих сил
171
Если точка М получает элементарное перемещение dt, то эле-
элементарная работа равнодействующей силы Р на этом перемещении
равна
Для вычисления работы равнодействующей силы на конечном
участке пути М1М2 воспользуемся формулой F0.10)
М2 Мг М2 М2
А= f Pdr= f P{-dr + / P2-^r+...+ f Pn-dr.
M,
M,
Af,
Mt
Полученная сумма криволинейных интегралов представляет собой
сумму работ отдельных сил на конечном участке пути МХМ2.
Таким образом,
Теорема 2. Работа постоянной силы на результирующем
перемещении равна алгебраической сумме работ этой силы на
составляющих перемещениях.
Положим, что точка приложения постоянной силы Р получает
совокупность последовательных перемеще-
перемещений U], и2, ...,\хп (рис. 135, выполнен
для п = 3).
Результирующее перемещение точки М
м,
Работа силы Р на этом перемещении
определяется по формуле E9 2)
Рис 135.
Полученная сумма представляет собой сумму работ силы на со-
составляющих перемещениях.
Таким образом,
А = А1 + А2+...+Ая.
На основании этой теоремы при вычислении работы постоянной
силы на криволинейном перемещении криволинейное перемещение
можно заменить прямолинейным. При и = 0, т. е. в случае замкну-
замкнутого контура, работа постоянной силы равна нулю.
Изображение работы в виде площади
Установлено, что работа переменной силы на конечном перемеще-
перемещении МгМ2 определяется криволинейным интегралом, взятым вдоль
дуги МХМ2 траектории, которую описывает точка приложения силы.
Криволинейный интеграл, определяющий работу силы, вычисляется
172
обычно аналитически при помощи формулы F0.11) или графически —
на основе формулы F0.9).
Для графического определения работы силы Р на перемещении
МХМ2 (рис. 131) используется график (рис. 136). По оси абсцисс
этого графика отложены значения дуговой координаты точки s, а по
оси ординат—соответствующие значения
проекции силы на касательную Рх. По-
Построенная кривая изображает зависи-
зависимость Рх от s
Элементарная работа силы Р соглас-
согласно F0.4) равна:
6A = Pxds.
На рис. 136 эта величина изображается
площадью элементарного прямоугольника,
имеющего основание ds и высоту Рх.
Работа силы Р на перемещении МгМ2 Рис 136
изобразится площадью фигуры acdb, огра-
ограниченной осью абсцисс, кривой Px = f(s) и ординатами ас и Ьй,
соответствующими точкам Мх и М2-
А = пл. acdb.
Если проекция силы на касательную Рх отрицательна, то соот-
соответствующая площадь расположится ниже оси абсцисс и работа силы Р
будет отрицательна. В качестве примера рассмотрим проводимое
в механических лабораториях графическое вычисление работы,
затрачиваемой на разрыв образца.
На рис. 137 изображена полученная опытным путем диаграмма
растяжения образца. По оси ординат отложена величина растягиваю-
растягивающей силы, а по оси абсцисс — производимое ею абсолютное удли-
удлинение образца, т. е. перемещение точки при-
приложения силы Точка В обозначает предел
пропорциональности, С — предел текучести*
D — наибольшую величину нагрузки, воспри-
воспринимаемой образцом, К — нагрузку в момент-
разрыва образца.
Работа, затрачиваемая на растяжение об-
образца до предела пропорциональности, опре-
определяется площадью Tpeyi ольника ОВО1.
Площадь OBCDKO3 определяет всю ра-
работу, затрачиваемую на разрыв испытуемого
образца. Величину этой площади находят обычно при помощи плани-
планиметра или путем вычислений.
За единицу работы в системе МКС принимается 1 джоуль (дж),
т. е. работа силы в 1 ньютон на перемещении по направлению силы
в 1 л, а в системе СГС — 1 эрг, т. е. работа силы в 1 дину на
перемещении по направлению силы в 1 см. В системе МКГСС за
173.
единицу работы принимается 1 кгс ¦ м, т. е. работа силы в 1 кгс
на перемещении по направлению силы в 1 м.
1 джоуль—107 эргов = 0,102 кгс • м.
1 кгс • м = 9,81 дж.
Изменение работы силы, отнесенное к единице времени, назы-
называется мощностью силы.
Если в течение малого промежутка времени dt сила Р совершает
работу ЬА = Р ¦ dr. то мощность N этой силы
Таким образом, мощность силы равна скалярному произве-
произведению векторов силы и скорости ее точки приложения.
Аналитическое выражение мощности силы имеет вид
, F0.13)
где vx, vy, vz — проекции скорости точки приложения силы на оси
координат.
Из формулы F0.12) следует:
N = Pv cos (P, v). F0.14)
Если направления силы Р и скорости v совпадают, то
N = Pv. F0.15)
За единицу мощности в системе МКС принимается 1 ватт
(в/я)=1 дж/сек = 0,102 кгс • м/сек, а в системе СГС—1 эре/сек.
В системе МКГСС за единицу мощности принимается 1 кгс • м/ • сек.
Кроме того, применяются следующие единицы мощности:
1 киловатт (квт)= 103 вт — 102 кгс ¦ м/сек= 1,36 лошадиной силы.
1 лошадиная сила (ИР) = 75 кгс ¦ м/сек = 0,736 кеда =736 вт.
В технике часто за единицу работы принимается 1 киловатт-час.
(квт-ч), т. е. работа, совершаемая в течение одного часа движущей
силой машины, мощность которой равна 1 киловатту:
1 киловатт-час = 1000 ¦ 3600 ватт-секунд = 36 • 105 джоулей.
§ 61. Работа силы тяжести, силы упругости и силы тяготения
1. Работа силы тяжести
Положим, что на материальную точку М действует сила тяжести G
(рис. 138). Вычислим работу этой силы на перемещении М^М2,
величина которого мала по сравнению с радиусом Земли. В этом
случае модуль и направление силы тяжести постоянны. Проведем
оси координат, направив ось г вверх по вертикали, и воспользуемся
аналитическим выражением работы F0.6):
174
Проекции силы G на оси координат будут:
Х = 0; К=0; Z = — G.
Подставив эти значения в F0.6), получим
6Л = — Gdz.
Суммируя элементарные работы и переходя к пределу, имеем
Аь 2 = — Г Gdz~ — G(z2—zl) — G(zl — z2).
Здесь Zi—Z2 = H—величина вертикального перемещения точки М.
Если Zi > z2, т. е. точка Му расположена выше точки М2, ра-
работа силы тяжести положительна.
Если Zi < z2, т. е. точка Мг рас-
расположена ниже точки М2, работа силы
тяжести отрицательна.
Таким образом, окончательно
F1.1)
где знак плюс соответствует перемеще- / У\ ' 'X
нию точки вниз, а знак минус — пере- /fill 1 I/
мещению точки вверх. й
Выражение F1.1) показывает, что
работа силы тяжести равна взя- рис, i38.
тому со знаком плюс или минус
произведению силы тяжести на вертикальное перемещение точки
ее приложения.
Работа силы тяжести не зависит от вида траектории,
по которой перемещается точка ее приложения, а зависит
лишь от расстояния между горизонтальными плоскостями,
проходящими через начальное а конечное положения точки.
2. Работа силы упругости
Рассмотрим пружину АВг, конец А которой закреплен неподвижно
(рис. 139, а). При растяжении пружины в ней возникают силы
упругости и на тело, вызывающее растяжение, действует реакция
пружины Р. Эта сила направлена противоположно перемещению сво-
свободного конца пружины, а ее модуль пропорционален удлинению
пружины:
Р = с • BXD,
где с — коэффициент жесткости пружины.
Направим ось х по оси пружины, приняв за начало координат
конец недеформированной пружины В^
175
Проекция силы упругости Р на ось х:
Рх = -сх.
Вычислим работу силы упругости на перемещении ВхВ2 ~ h при
помощи формулы F0.6):
ЪА?=Х dx-\-Y dy + Zdz.
Проекции силы упругости, направленной по оси х — на оси
координат:
Х = — сх; Г = 0; Z = Q.
Элементарная работа силы упругости
ЬА = — cxdx.
Работа силы упругости на перемещении ВуВ2 — 1
h.
А
О
1г2 = — с Г х dx —
--^-.F1.2)
Наибольшей деформации пружины
BiB2 соответствует наибольшее значение
силы упругости Ртл% — ск, а потому
1,2 — §—' F1-3)
Работа силы упругости отрицательна
в том случае, когда деформация увели-
увеличивается, т. е. когда сила упругости
направлена противоположно перемеще-
перемещению ее точки приложения, и положи-
положительна, когда деформация уменьшается.
Работа силы Р на перемещении B2Bi
Рис. 139.
_
2, 1—
F1.4)
На рис. 139, б показан график изменения проекции силы упру-
упругости Рх в зависимости от перемещения конца пружины х. Так как
Рх = — сх, то линия графика Ob' — прямая.
Работа силы упругости определяется площадью треугольника Obb':
Л — Ch? _ ЛпахЛ
,2 —¦ 2 —' 2 '
т. е. имеем тот же результат, который был получен аналитически.
Формулы F1.2), F1.3), F1.4) имеют большое применение в тех-
технических расчетах. Эти формулы используются для вычисления работы
сил упругости во всех случаях, когда имеется пропорциональность
между силами и деформацией, т. е. когда справедлив закон Гука.
176
3. Работа силы тяготения
Допустим, что на материальную точку М массой т, расположен-
расположенную в пространстве на расстоянии г от неподвижного притягиваю-
притягивающего центра С массой т0, действует ньютонова сила тяготения
Определим работу этой силы на перемещении точки из положе-
положения Мх в положение М2 (рис. 140).
Проведем через неподвижный центр С оси декартовых координат.
Элементарную работу силы Р вычислим при помощи фор-
формулы F0.6):
ЬА = X dx -\- Y dy -\- Z dг..
Здесь
ft* F
Аналогично
' — jmm0 rS--,
Поэтому
. . , х dx 4- у dy 4- г dz
ЬА fmm0 i •
Так как
*
с,
/
/
/
X
р,1
V
j
У
Рис.
м,
р /
/
140
Vм
м
1
1 4
х dx +• у dy -+- z dz = j d (x2 -j- f -(- z1) = j d (r2) = r dr,
то
ЬА = ~
rdr
dr
Работа силы тяготения Р ^Гри перемещении точки из Мх в М2
м2 п
Jdr С dr /1 1 \
Г2 w J Г2 У \ /*2 Г[ /
Как видно из F1.5), работа силы ньютонова притяжения
не зависит от формы траектории точки.
§ 62. Теорема об изменении кинетической энергии
материальной точки
Рассмотрим материальную точку М массой т, движущуюся под
действием сил Pt, Р2, • .., Р„. Установим зависимость между работой,
совершаемой приложенными к точке силами на перемещении МХМ2,
12 А.. А. Яблонсккй
177
и изменением кинетической энергии точки на этом перемещении
(рис. 140).
Выберем начало и направление отсчета дуговой координаты 5 = ОМ.
Укажем в точке М орт касательной т, направленный всегда в сторону
увеличения дуговой координаты. Проекция скорости точки на каса-
касательную определяется (см. ч. I, «Кинематика», § 79):
ds
"«- v = 4i-
Проекция ускорения точки на каса-
касательную равна (см. ч. I, «Кинематика»,
§ 85):
_ dv
W* dt '
или
dv ds dv
T ds dt ds
Воспользуемся основным уравнением
Рис. 141. динамики:
Спроектируем векторы, входящие в это уравнение, на касатель-
касательную, имеющую направление орта т:
Подставляя в это уравнение значение wx и умножая обе части
равенства на ds, получаем:
/wyckf = 2?\rfscos(pe *)¦ F2.1)
Левая часть полученного равенства представляет собой дифферен-
дифференциал кинетической энергии точки, а правая часть является суммой
элементарных работ, приложенных к точке сил.
Таким образом, имеем:
Равенство F2.2) показывает, что дифференциал кинетической
энергии материальной точки равен сумме элементарных работ сил,
приложенных к точке.
Проинтегрируем обе части равенства F2.1) в пределах, соответ-
соответствующих начальному и конечному положениям точки М± и М2:
v2 M2
т f vdv=2j \ Pi ds cos(Pj, x),
откуда
F2.3)
178
Уравнение F2.3) выражает теорему об изменении кинетической
энергии материальной точки: изменение кинетической энергии
материальной точки на некотором ее перемещении равно алге-
алгебраической \сумме работ всех действующих на эту точку сил
на этом оке перемещении.
Если сумма работ сил положительна, то v2 > vv т. е. кинетическая
энергия точки возрастает, если же эта сумма отрицательна, то v2 < v^,
т. е. кинетическая энергия точки убывает. Применяя эту теорему
к движению несвободной материальной точки, следует освободить эту
точку от связей, заменив их действие соответствующими реакциями.
При движении точки по неподвижной гладкой поверхности реакция
этой поверхности направлена по нормали к этой поверхности, а по-
потому ее работа при перемещении точки по поверхности равна нулю.
Следовательно, изменение кинетической энергии материальной
точки в этом случае равно сумме работ на соответствующем пере-
перемещении всех задаваемых сил, приложенных к точке. При движении
материальной точки по неподвижной шероховатой поверхности дей-
действует сила трения F, направленная противоположно скорости точки.
Работу этой силы можно определить по формуле F0.7):
м, м%
ATp = jFdacos(P, v) = — ГFdo.
M, M,
Здесь cos(P, v) = — 1, так как направления силы трения F и ско-
скорости точки v противоположны. В правой части уравнения F2.3)
в этом случае, кроме работ задаваемых сил, содержится и работа
силы трения F.
§ 63. Теорема об изменении кинетической энергии материальной
точки в относительном движении
В § 26 установлено, что относительное движение материальной
точки можно рассматривать как абсолютное, если к приложенным
к точке силам присоединить переносную и кориолисову силы инер-
инерции. Из этого следует, что применяя к относительному движению
материальной точки теорему об изменении кинетической энергии,
необходимо к работе действующих сил добавить работу переносной
и кориолисовой сил инерции Фе и Фс.
Однако поворотное ускорение wc, а следовательно, и кориоли-
сова сила инерции Фс всегда перпендикулярны к относительной
скорости точки \Г Следовательно, работа кориолисовой силы инер-
инерции на относительном перемещении точки равна нулю и не
входит в уравнение изменения кинетической энергии.
Поэтому это уравнение для относительного движения точки
имеет вид
о 9 Ml М*
?2 p dorcos(P,,vr) + )фе^г cos(Ф#. vr). F3.1)
Mi
12* 179
§ 64. Примеры применения теоремы об изменении
кинетической энергии материальной точки
Пример 33. Состав из 50 вагонов весом в 800 кп каждый дви-
движется по подъему / = tga = 0,002. Сопротивление его движению
составляет 3 м на кн веса. На протяжении 750'м скорость поезда
изменяется от 18 км/час до 36 км/час Определить силу тяги
тепловоза.
Решение. Рассматриваем поступательное движение состава как
движение материальной точки Применяем к его движению теорему
об изменении кинетической,
энергии на перемещении М0М1
(рис. 142). Скорость поезда на
этом перемещении изменяется
от ¦уа=18 км/час = 5 м/сек
до vl = 36 км/час — 10 м/сек.
На состав действуют по-
постоянные по модулю и направ-
Рис J42 лению силы: сила тяги тепло-
тепловоза Р, вес состава G, нормаль-
нормальная реакция рельсов N и сила сопротивления движению F, модуль,
которой равен 0.003G. Составляем уравнение F2.3):
tnv\
определяем по фор-
форРаботу силы тяги Р на перемещении Мо.
муле E9.1):
Ар = Ps cos 0 = Ps.
Работа силы тяжести G зависит только от вертикального пере-
перемещения Н и согласно F1.1)
Аа = — GH = — Gs sin a.
Так как угол а мал, то sina«tga = i и
Аа = — Gsi = — 0,002Os.
Работа силы N, перпендикулярной к перемещению, равна нулю.
Работа силы сопротивления F определяется по формуле E9.1)г
AF = Fs cos 180° = — Fs = — 0,003Gs.
Подставляя в уравнение F2 3) значение массы состава т = —
и значения работы всех приложенных к нему сил, получаем
~ (v\ — vl) = Ps — 0,002Gs — 0,003Gs,
откуда
180
Подставляя числовые
тепловоза:
Я==Т^^A02~52) + 01(H50000 = 2(L + 200==404 ш-
О
Пример 34. Нить длиной 1 = 2 м отклонена на угол a0 = arccos —
от вертикали и привязанному к ней грузу сообщена начальная ско-
скорость г»0=3,13 м/сек (рис. 143, а). Определить наибольший угол
отклонения нити в другую сторону от вертикали.
Решение. Груз М будет двигаться по окружности до точки Ми
в которой его скорость vx обратится в нуль (рис. 143,6). Изменение
значения, находим модуль силы тяги
Рис 143
кинетической энергии груза на участке М§М.Х определяется уравне-
уравнением F2.3):
mv.
mv'o
Реакция нити S направлена перпендикулярно к вектору скорости
груза v и работа этой силы равна нулю.
Работа силы тяжести определяется по формуле F1.1):
где перемещение груза по вертикали И = / cos а0
= /(cosa0 — cos a).
Уравнение F2.3) принимает вид
— / cos а
mv.
2
~GH = ~Gl (cos a0 — cos a).
Так как v{ = 0, то -^- = Gl (cos а0 — cos а),
v2
cos а = cos а0 — -^~,
Подставляя числовые значения, находим:
— 3
cosa— 4
3,132
2 "
1811
м.
Следовательно, наибольший угол отклонения нити от вертикали
-а = 60°.
Пример 35. Шарик весом О = 50 сн вложен в вертикально
поставленный самострел, пружина которого сжата на А = 10 см.
Коэффициент жесткости пружины с — 4 н/см. Определить,
г(?>---г с какой скоростью шарик вылетит из самострела и на
какую высоту он поднимется при отсутствии сопротивле-
сопротивления воздуха.
Решение. 1. Для определения скорости вылета ша-
шарика из самострела vx применяем к его движению на
участке Af0Afj = й (рис. 144) теорему об изменении кине-
кинетической энергии.
^^--.J. На этом участке к шарику приложены сила тяже-
тяжести G и реакция упругой пружины Р. Работа силы тя-
тяжести при вертикальном перемещении вверх согласно F1.1)
равна:
Рис. 144. Сила згпРУГ0СТИ пружины, восстанавливающей свою
форму, направлена в сторону движения шарика. Работа
переменной силы упругости на перемещении M0Ml = h определяется
по формуле F1.4):
Ар = — .
Уравнение F2.3) для движения шарика на участке M0Mt имеет вид
mv\
mv20
ch2
Так как начальная скорость шарика vo = O, то
Gv\
ch2
¦откуда
Подставляя числовые значения, получаем скорость вылета шарика
из самострела:
__ /4 • 100 ¦ 980_2 . 980 . 10 _ у764 400 =
= 874 см/сек = 8,74 м/сек,
2. Чтобы определить высоту Я, на которую поднимается шарик,
воспользуемся уравнением F2.3) для перемещения шарика М0М2.
Начальная скорость г/0 и конечная скорость v равны нулю. Тогда
уравнение F2.3) принимает вид
182
Эта сумма состоит из работы силы упругости Р на перемещении
M0M1 = h и работы силы тяжести Q на перемещении M H
т. е.
откуда
Подставляя числовые значения, получаем высоту подъема шарика:
4 • 100
h 4- Н =
7ГГ
— 40° СМ = 4 М.
§ 65. Работа сил, приложенных к твердому телу
1. Работа внутренних сил
Твердое тело представляет собой механическую систему, расстоя-
расстояния между точками которой остаются неизменными.
Рассмотрим две произвольные точки твердого тела М1 и М2
(рис. 145).
Обозначим Pi силу, действующую на точку Мг со стороны
точки М2, а Рг — силу, действующую на точку М2 со стороны
точки Mj. Эти внутренние ,
силы на основании закона - '
равенства действия и про-
противодействия равны по мо- • ''7**v^ "^ —~rs"'
дулю и противоположны по
направлению, т. е.
Р{ = — Р{- F5.1)
Положим, что твердое
тело получило элементарное
перемещение, при котором
отрезок МгМ2 переместился в положение м[м'ч. Проведем из произ-
рис
вольного неподвижного центра О в точки
и М2 радиусы-
векторы тх и г2. Тогда элементарные перемещения точек Мх и Мг
Вычислим сумму работ сил Р{ и Рг на этих перемещениях. Для
этого примем точку Мх за полюс и разложим перемещение твердого
тела на поступательное перемещение с полюсом Мх и сферическое
перемещение по отношению к этому полюсу (см. ч. I, «Кинематика»,
§ 119). Тогда перемещение точки М2 разложится:
dT2 = dri + dr, F5.2)
183-
•где dr1 — элементарное поступательное перемещение с полюсом Мх,
a dr — элементарное сферическое перемещение по отношению к по-
полюсу Mv перпендикулярное к отрезку М1М2, соединяющему точку М2
с полюсом УИ].
Сумма элементарных
основе формулы F0.5):
работ двух сил Р/ и Рг определится на
Пользуясь выражениями F5.1) и F5.2), получаем
ЬА{
— Р{ (dn + dr) = — Pi- dr.
Так как
dr
то
Тогда cos(p{, rfr) = 0 и скалярное произведение векторов, опре-
определяющее работу, равняется нулю:
6Л{= — P{drcos(p{, rfr) = 0, F5.3)
Так как каждой внутренней _ силе соответствует другая, равная
«й по модулю и противоположная по направлению, то сумма эле-
элементарных рабэт всех внутренних сил тоже равна нулю:
2
1=1
Конечное перемещение является сово-
совокупностью элементарных перемещений,
а потому
Лу = 0, F5.4)
т. е. сумма работ внутренних сил
твердого тела на любом его переме-
перемещении равна нулю.
2. Поступательное движение твердого тела
Выше установлено, что сумма работ
внутренних сил твердого тела на любом
его перемещении равна нулю.
Поэтому следует вычислить лишь работу внешних сил, прило-
приложенных к телу. Положим, что к твердому телу, движущемуся посту-
поступательно, приложены внешние силы Pf, Pf, .. ., Pf, ..., Pf (рис. 146).
При поступательном движении твердого тела траектории всех его
точек тождественны и параллельны. Следовательно, векторы элемен-
элементарных перемещений всех точек геометрически равны между собой, т. е.
rffj = dr.
184
Элементарная работа силы
Элементарная работа всех сил, приложенных к телу, равна эле-
элементарной работе внешних сил
но
где R? — главный вектор всех внешних сил.
Следовательно,
F5.5>
Выражение F5.5) показывает, что элементарная работа сил,
приложенных к твердому телу, движущемуся поступательно,
равна элементарной работе глав- г
ного вектора внешних сил, прило- |
женного в любой точке тела.
Работа на конечном перемещении
п
F5.6)
3. Вращение твердого тела
вокруг неподвижной оси
Положим, что к твердому телу, вра-
вращающемуся вокруг неподвижной оси z,
приложены внешние силы Pf, Pf, . . ., Pf
(рис. 147). Вычислим сначала элемен-
элементарную работу отдельной силы pf, ко-
которая приложена в точке Ж(, описываю-
описывающей окружность радиусом MlKi = Rl.
Разложим эту силу на три составляю-
составляющие, направленные по естественным
осям траектории точки Mt:
К
-j-rij. Рис 147
Определим момент силы Pj относительно оси z как сумму мо-
моментов ее составляющих относительно этой оси. Составляющая
по главной нормали Р^я пересекает ось z, составляющая по бинор-
бинормали Pfu параллельна оси z, следовательно, моменты этих сил равны
нулю. Таким образом, момент силы Р; относительно оси z равен
моменту силы Pft, которая лежит в плоскости, перпендикулярной
к оси z:
185
При элементарном перемещении тела его угол поворота <р полу-
получает приращение йц>, а дуговая координата точки Ж, — приращение
ds, = R, й?ф. Вычислим работу силы Pf на этом перемещении как
сумму работ трех ее составляющих (см. § 60). Работа сил Р;„ и P(ft,
перпендикулярных к вектору скорости точки Mt, равна нулю. Поэтому
элементарная работа силы Р,
bAEi = Р?х dst = PfxRi dq> = М?, dip.
Элементарная работа всех сил, приложенных к твердому телу,
6Л = 2 ЬА? = 2 MBtz d<$ = ^ф 2 Mf*.
где 2^"=Mf — главный момент внешних сил относительно оси
вращения 2.
Таким образом,
6A = '2lbA?=M*dq, F5.7)
т. е. элементарная работа сил, приложенных к твердому телу,
вращающемуся вокруг неподвижной оси, равна произведению
главного момента внешних сил относительно оси вращения на
приращение угла поворота.
Если при вращении тела значение его угла поворота изменяется
от ф[ до ф2, сумма работ сил на этом конечном перемещении будет:
Ф2
Wfdq). F5.8)
В случае, если главный момент внешних сил относительно оси
вращения тела постоянен, имеем
MBZ — const,
Ж!(ф2 — ф1), F5.9)
т. е. в этом случае сумма работ сил на конечном перемещении равна
произведению главного момента внешних сил относительно оси вра-
вращения на конечное изменение угла поворота тела.
В формуле F5.9) угол поворота выражен в радианах, т. е. пред-
представляет собой отвлеченную величину, а размерность работы совпа-
совпадает с размерностью момента.
Пользуясь формулой F5.8), можно определить мощность сил,
приложенных к твердому телу, вращающемуся вокруг неподвижной
оси с угловой скоростью ©.
Щ^ 2Г F5.10)
186
4. Общий случай движения свободного твердого тела
Положим, что к свободному твердому телу, движущемуся как
угодно в пространстве, приложены внешние силы Pf, Pf, ...,
Pi, .... Р„ (рис. 148). Элементарное перемещение свободного твер-
твердого тела можно разложить на поступательное перемещение с неко-
некоторым полюсом О, определяемое приращением дуговой координаты ds0,
и поворот на элементарный угол 6а вокруг мгновенной оси Q, про-
проходящей через полюс (см. ч. 1, «Кинематика», § 119).
Сумма элементарных работ всех сил на поступательном переме-
перемещении определится по формуле F5.5) как элементарная работа главного
вектора внешних сил R?, приложенного
в полюсе О.
Сумма элементарных работ всех сил
на перемещении при повороте вокруг
мгновенной оси Q определится по фор-
формуле F5^7) как произведение глав-
главного момента внешних сил относительно
мгновенной оси Mq на элементарный
угол ба.
Тогда элементарная работа всех сил,
приложенных к свободному твердому
телу, движущемуся как угодно, опре-
определяется:
F5.11)
Рис. 148.
Таким образом, элементарная ра-
работа внешних сил, приложенных
к свободному твердому телу в общем случае его движения*
равна сумме элементарных работ их главного вектора на пе-
перемещении точки его приложения — полюса и главного момента
этих сил относительно мгновенной оси, проходящей через полюс*
на перемещении при повороте вокруг этой оси.
§ 66. Сопротивление качению
Рассмотрим цилиндрический каток, находящийся на горизонталь-
горизонтальной плоскости в состоянии покоя (рис. 149,а). На каток действуют
две взаимно уравновешивающиеся силы: вес катка Q и нормальная"
реакция плоскости N, где N = —G. Если под действием горизонталь-
горизонтальной силы Р, приложенной в центре катка С, он катится по плоскости
без скольжения, то силы G и N образуют пару сил, препятствующую
качению катка по плоскости (рис. 149, б).
Возникновение этой пары сил обусловлено неабсолютной твер-
твердостью материалов катка и опорной плоскости. Под действием давления
187
катка происходит деформация соприкасающихся поверхностей и со-
соприкасание катка с плоскостью происходит не по линии, а по неко-
некоторой малой площадке. В этом случае реакция N является нормаль-
нормальной составляющей равнодействующей реактивных сил, распределен-
распределенных по этой площадке. Ее линия действия оказывается сдвинутой
в сторону движения катка на некоторое расстояние б от линии
действия силы G. Реакция плоскости N и вес катка О образует пару
сил сопротивления качению с плечом б. Момент этой пары называется
моментом сопротивления качению. Величина его
а) определяется произведением нормальной реакции
на плечо пары б, называемое коэффициентом
трения качения:
Mcmp = N6. F6.1)
Коэффициент трения качения выра-
выражается в линейных единицах. Значение
коэффициента трения качения для некоторых ма-
материалов приводится в следующей таблице:
Материал тела и плоскости
'СЦ
Рис. 149.
Мягкая сталь по мягкой стали . . . .
Стальной бандаж по стальному рельсу .
Дерево по стали
Дерево по дереву
Ь\см\
0,005
0,05
0,03—0,04
0,05—0,06
Определим наименьшую горизонтальную силу Р, приложенную
к центру цилиндрического катка, находящегося на горизонтальной
плоскости (рис. 149, (У), которая может вывести каток из состояния
покоя. Для того чтобы каток начал катиться, необходимо, чтобы
момент пары сил, составленный силой Р и силой сцепления Fcu, был
больше момента сопротивления, т. е.
PR>N -б,
откуда
Так как в рассматриваемом случае N — G, то Я/////руяхг/У/77//////,
±
F6.2)
Рис. 160.
Выражение F6.2) показывает, что модуль силы Р, приводящей
цилиндрический каток в движение, обратно пропорционален радиусу
катка R. Если действие силы Р прекращается (рис. 150), качение
катка происходит замедленно до остановки вследствие действия пары
сопротивления.
188
§ 67. Теорема о кинетической энергии механической системы
в общем случае ее движения (теорема Кенига)
Кинетическая энергия механической системы определяется как
сумма значений кинетической энергии всех входящих в эту систему
материальных точек:
¦j^. F7.1)
Положим, что система материальных точек Ж,, М2 М1 Мп
движется как угодно в пространстве (рис. 151).
Выберем неподвижную систему отсчета Oxyz. В качестве под-
подвижной системы отсчета возьмем систему осей |, т|, ?, проведенных
через центр масс системы парал-
параллельно неподвижным осям х, у, z и
движущихся с центром масс посту-
поступательно. Тогда абсолютное движе-
движение системы точек можно рассма-
рассматривать как совокупность поступа-
поступательного движения системы вместе
с центром масс (переносное движе-
движение) и относительного движения си-
системы по отношению к центру масс.
Абсолютная скорость V/ любой
точки ML механической системы
определится как геометрическая
сумма скорости центра масс и отно-
относительной скорости этой точки в ее движении по отношению к центру
масс.
vi = vc-|-v,r. F7.2)
Из векторной алгебры известно, что скалярное произведение двух
одинаковых векторов равно квадрату их модуля. Действительно,
Рис. 151.
Преобразуем выражение кинетической энергии F7.1), учитывая
формулу F7.2):
7 =
v) =
m.v) = j 2 m
lvl ¦ vt = ~ ^ «,(vc + v/r) • (vc + v/r) =
vc +
I
В полученном выражении первое слагаемое можно преобразовать:
mtvc = 2 с 2i m( == T mvc-
189
Покажем, что второе слагаемое равно нулю. Для этого проведем
из центра масс С радиусы-векторы рг во все точки системы. Радиус-
вектор центра масс рс = 0.
Согласно формуле C2.1)
Рс
Следовательно,
i — ° и ~л
Так как радиус-вектор р,- проведен из начала координат подвижной
системы отсчета, то производная -^- представляет собой относитель-
относительную скорость точки vir:
d vi vi dpi vi „ ,г.~ л\
dt A4 i"i ^J ' dt ^oJ ' lr
На основании F7.4)
Тогда выражение F7.3), определяющее кинетическую энергию системы,
принимает вид
~т~^-. F7.5)
Равенство F7.5) выражает теорему о кинетической энергии меха-
механической системы: кинетическая энергия механической оастемы
равна сумме кинетической энергии центра масс системы,
масса которого равна массе всей системы, и кинетической энер-
энергии этой системы в ее относительном движении по отношении)
к центру масс.
Эта теорема была установлена голландским математиком С. Кени-
гом A751 г.).
§ 68. Кинетическая энергия твердого тела
В настоящем параграфе получены формулы для вычисления кине-
кинетической энергии твердого тела во всех случаях движения.
1. Поступательное движение твердого тела
При поступательном движении твердого тела скорости всех его
точек в каждый момент времени геометрически равны между собой
(рис. 152). Кинетическая энергия тела определится F7.1):
190
mtv\ v
2
Так как 2 mi — т< то окончательно
F8.1)
На основании F8,1) устанавливаем, что кинетическая энергия
твердого тела, движущегося поступательно, равна половине
произведения массы тела на квадрат его скорости.
Рис. 152.
Таким образом, кинетическая энергия тела, движущегося посту-
поступательно, вычисляется как кинетическая энергия материальной точки,
умеющей массу данного тела.
2. Вращение твердого тела вокруг неподвижной оси
При вращении твердого тела вокруг неподвижной оси (рис. 153)
скорость любой точки тела определяется как вращательная скорость
Vt = Rid).
Кинетическую энергию твердого тела определяем по формуле
F7.1):
Здесь 2j»
щения.
Кинетическая энергия тела
= /г — момент инерции тела относительно оси вра-
враF8.2)
На основании F8.2) устанавливаем, что кинетическая энергия
твердого тела, вращающегося вокруг неподвижной оси, равна
полотне произведения его момента инерции относительно оси
вращения на квадрат угловой скорости тела.
Сравнив формулы F8.2) и F8Л), можно заметить, что при вра-
вращения тела его момент инерции играет такую же роль, как его масса
при поступательном движении.
191
3. Плоское движение твердого тела
Положим, что при плоском движении твердого тела его центр
масс С движется в плоскости чертежа (рис. 154). Разложим это дви-
движение на поступательное движение вместе с центром масс и относи-
относительное движение по отношению к центру
масс (см. § 67).
В этом случае относительное движение
представляет собой вращение тела вокруг
оси С?, проходящей через центр масс С пер-
перпендикулярно к плоскости чертежа. Опреде-
Определим кинетическую энергию тела по теореме
Кенига F7.5):
Рис'154- T = \mv% + ±Jcf?. F8'3)
Здесь -к mv2c — кинетическая энергия тела в поступательном дви-
\
жении вместе с центром масс, а ¦=- ^с?ш — кинетическая энергия
во вращении тела вокруг неподвижной оси С?, определенная на осно-
основании формулы F8.2).
4. Сферическое движение твердого тела
Скорости точек твердого тела при сферическом движении в каждый
момент можно рассматривать как вращательные вокруг мгновенной
оси вращения (рис. 155). Поэтому кинетическая
энергия тела, совершающего сферическое дви-
движение в данный момент, определяется по фор-
формуле:
Т — -к Ja®2, F8.4)
где со — мгновенная угловая скорость тела;
Jq — момент инерции твердого тела относи-
относительно мгновенной оси вращения.
Выражение F8.4) показывает, что кинети-
кинетическая энергия твердого тела, совершаю-
совершающего сферическое движение, равна половине
произведения момента инерции тела отно-
относительно мгновенной оси вращения на ква-
квадрат угловой скорости тела. Рис"
При этом величина момента инерции Jq непрерывно изменяется,
так как изменяется положение мгновенной оси 2 по отношению к телу.
5. Общий случай движения твердого тела
Движение свободного твердого тела в общем случае можно раз-
разложить на два составляющих движения: на переносное поступательное
192
движение вместе с центром масс и относительное сферическое дви-
движение по отношению к центру масс (рис. 156). Тогда кинетическая
энергия тела определится по формуле Кенига о
F5.5): '
)-С2"
F8.5)
Таким образом, кинетическая энергия
твердого тела в общем случае его движения
равна сумме кинетической энергии тела
в его переносном поступательном движении
вместе с центром масс и его кинетической
энергии в сферическом движении относи-
относительно центра масс.
Рис. 156
§ 69. Теорема об изменении кинетической энергии
механической системы
Установим зависимость между изменением кинетической энергии
механической системы и работой приложенных к ее точкам сил. Для
этого разделим силы, действующие на точки Mv, М2, М3 Мп,
на внешние силы Pi, Рг Р( Рп и внутренние силы Р{>
Рг, ..., PJ, .... Р«. Применим к движению каждой точки Mi тео-
теорему об изменении кинетической энергии. Положим, что при пере-
мещении механической системы из пер-
первого положения во второе каждая точка Mt
перемещается из Мг A) в М1 B), причем
скорость ее изменяется от vt ^ и vi B)
(рис. 157).
Тогда по уравнению F2.3) для каждой
материальной точки имеем
Рис. 157.
(/=1, 2 rt),
где Af—работа силы pf и Aj — работа силы Р/ на перемещении
Просуммируем левые и правые части составленных п равенств:
(уч m,v\\
У.—2—I =^1—кинетическая энергия системы
/V mtvh т
в первом ее положении; У—я—j =='2 — кинетическая энергия си-
системы во втором положении.
13 А. А. Яблонский
193
Таким образом,
r2-Ti=2Mf+Si4f F9.1)
Уравнение F9.1) выражает теорему об изменении кинетической
энергии механической системы: изменение кинетической энергии
механической системы на некотором перемещении равно сумме
работ внешних и внутренних сил, действующих на материаль-
материальные точки системы на этом перемещении.
Согласно F5.4) сумма работ внутренних сил твердого тела на
любом перемещении равна нулю, т. е. 2 -М — О-
Для твердого тела уравнение F9.1) принимает вид
Т2 — 7'1 = 2i4f, F9.2)
т. е. изменение кинетической энергии твердого тела на неко-
некотором перемещении равно сумме работ внешних сил, дейст-
действующих на тело на этом перемещении.
§ 70. Механический коэффициент полезного действия машины
Для установления мощности машины необходимо рассмотреть
действующие на машину силы. Эти силы можно разделить на три
категории:
1. Силы, совершающие положительную работу, называемые дви-
движущими силами, например, давление пара на поршень в цилиндре
паровой машины или газа в двигателе внутреннего сгорания.
2. Силы, совершающие отрицательную работу, называемые силами
сопротивления. Силы сопротивления делятся на две группы:
а) полезные силы сопротивления — силы, для преодоления кото-
которых предназначена машина, например, сопротивление поднимаемого
машиной груза и т. д.;
б) вредные силы сопротивления — побочные силы сопротивле-
сопротивления, как, например, силы трения, сопротивление воздуха и т. п.
3. Силы тяжести отдельных частей машины, совершающих
попеременно то положительную, то отрицательную работу. Работа
этих сил за полный цикл работы машины равна нулю, так как ре-
результирующее перемещение точки приложения каждой силы тяжести
равно нулю.
При установившемся движении машины ее кинетическая энергия
не изменяется и сумма работ приложенных к ней движущих сил и
сил сопротивления равна нулю
"дв. с ~Т" -"пол. сопр \~ "вр. сопр == "•
Так как работа сил сопротивления отрицательна, то эту сумму
можно представить в виде
дв. с I Лпол. сопр I I лвр. сопр I "•
ИЛИ
"дв. с == I -"пол. сопр I "Т~ I "вр. сопр |»
194
т. е. при установившемся движении машины работа движущих
сил равна абсолютной величине работы сил сопротивления. Это
значит, что работа, затрачиваемая на приведение машины в движение,
расходуется на преодоление полезных и вредных сопротивлений:
Л Л I Л
¦"затр — ¦"пол. сопр~I -^вр. сопр-
Механический коэффициент полезного действия машины г| при
установившемся ее движении равен отношению полезной работы
машины к работе, затраченной на приведение машины в движение:
1. G0.1)
затр
Если известны полезная мощность машины Л/маш и мощность
двигателя, приводящего ее в движение Л/дв> то механический коэф-
коэффициент полезного действия машины
П = Ц^. G0.2)
§ 71. Примеры применения теоремы об изменении
кинетической энергии механической системы
Пример 36. На цилиндрический вал весом 8 кн и диаметром
20 см насажено маховое колесо весом 25 кн и радиусом инерции
относительно оси колеса ^ = 0,6 м. Вследствие трения в подшипни-
подшипниках вращение вала замедляется. Коэффициент трения в подшипниках
равен 0,05, начальная угловая скорость вала 120 об/мин. Опреде-
Определить, сколько оборотов сделает вал до остановки.
Решение. Так как вал с маховиком представляет собой твер-
твердое тело, то изменение кинетической энергии его происходит согласно
уравнению F9.2):
В момент остановки Г = 0 и уравнение F9.2) принимает вид
-7-0=2^- (а)
Кинетическая энергия вала с маховиком, вращающегося вокруг
неподвижной оси, которую примем за ось х, определяется по фор-
формуле F8.2):
4 (б)
где Jx — момент инерции этого вала с маховиком относительно оси
вращения.
К валу приложены внешние силы: суммарный вес вала и махо-
маховика О, нормальная реакция подшипников N и сила трения скольже-
скольжения F, приложенная к валу в точке, где передается давление вала
13* 195
на подшипники, и направленная противоположно вращательной ско-
скорости v этой точки (рис. 158). Работу этих сил можно вычислить
по формуле F5.9), так как момент каждой силы относительно оси
вращения постоянен. Угол поворота вала изменяется от 0 до ф и
сумма работ внешних сил
Так как силы О и N пересекают ось
вращения вала, то их моменты относительно
этой оси равны нулю.
Момент относительно оси вала имеет лишь
сила трения F, модуль которой F = /N.
Так как угол наклона силы N к вертикали
практически очень мал, то Л/ ж G и F « /О.
Поэтому сумма работ внешних сил
Рис 158
— FRq> = —
(в)
Момент силы трения отрицателен, так как направление вращения
вала (против движения часовой стрелки) принимается за положи-
положительное, а момент силы трения направлен противоположно (по дви-
движению часовой стрелки).
Подставив выражения (б) и (в) в уравнение (а), получаем
откуда Ф = .
(г)
2 — ./"-\ч" и1»;*« т—2/GR '
Вычислим моменты инерции вала (сплошного цилиндра) и махо-
махового колеса по соответствующим формулам:
mBR2 GR2 8000-ОД2 _ „
Jx = ¦
г
->х„ =
GA
¦ 2g ~ 2
25000 Об2
= 918,4 кг-
" g — 9,81
Момент инерции рассматриваемого тела равен сумме моментов
инерции вала и маховика:
Jx = jXa-f 4м = 4,1 + 918,4 = 922,5 кг ¦ м2.
Начальная угловая скорость тела
и — яп° — л'ш = 4я сек-1
Подставляя числовые значения величин в формулу (г), получаем
величину угла ф в радианах:
922,5 16п2
2 • 0,05 • 33 000 • 0,1
= 44.73л2.
196
Выразив ф в оборотах, найдем число оборотов вала до остановки:
44,73л2
ф:
-=22,36я
оборотов
Пример 37. Цилиндрический каток диаметром 0,5 м вкатывается
на наклонную плоскость, имея в начальный момент скорость точек
оси 1,4 м/сек. Угол наклона плоскости к горизонту равен 30°, коэф-
коэффициент трения качения равен 0,5 см. Определить путь, пройденный
осью катка до остановки, предполагая, что каток катится по наклон-
наклонной- плоскости без сколь-
скольжения.
Решение. К плоскому
движению ка!ка применим
теорему об изменении кине-
кинетической энергии системы
в форме уравнения F9.2):
В момент остановки
(\
= и,
тогда
(а)
Рис 159.
На рис. 159 показано перемещение среднего сечения катка. На-
Начальное значение кинетической энергии катка, совершающего плоское
движение, находим по формуле F8 3)
Момент инерции цилиндра относительно его продольной оси
согласно формуле C6.4) равен ^cg = —к—. Угловая скорость катка
равна отношению линейной скорости его центра тяжести С к рас-
стоянию от точки С до мгновенного центра скоростей, т. е. ©п — "гг-
Подставив значение УС? и щ в формулу (б), получим
1 mR2
g
(в)
На каток действуют внешние силы: вес катка G, нормальная
реакция плоскости N и сила сцепления Fcu.
Разложим вес катка Q на две составляющие силы:
Gj — Gcosoc и G2 — G sin а.
При наличии сопротивления качению сила G! и нормальная реак-
реакция N составляют пару сопротивления качению с плечом 6 = 0,5 см
(см. § 66).
197
Работу совершают сила G2 и пара сопротивления О,, N.
Сила сцепления /\.ц работу не производит, так как скорость
мгновенного центра скоростей, в котором она приложена, равна нулю.
Работа силы О2
AOl = — G2 • s = — G • sin a • s.
Работу пары сопротивления определяем по формуле F5.9):
Лопр = — Мсопр • ф,
где
Мсопр = N6 = Ох • 6 = О • cos a • й.
При перемещении катка из положения / в положение // точка Ко
переходит в положение К\, а точка Lo — в положение Lx, причем
каток поворачивается на угол ф.
Если каток катится без скольжения, то длина дуги Ar0Z.0 = /CIZ.1
равна длине отрезка KqL^ т. е. равна пути 5, пройденному центром
катка. Изменение угла поворота катка ф можно определить:
Подставим значения Л1сопр и ф в выражение работы пары сопро-
сопротивления
= — О cos а • б • -^.
Работа отрицательна, так как направление пары противоположно
направлению вращения катка.
Подставим в уравнение (а) значение кинетической энергии (б),
а также работу силы О2 и пары сопротивления:
3 Gvl s
— j-—— = — G ¦ sma ¦ s— G • cos a • 6 ¦ -^-,
отсюда найдем путь, пройденный центром катка до остановки:
3 4, 3 ^
029
^lsina + ^cosaj 98 @5+^
9,8 @,5+-^0,8661
==0,29 М.
Примечание. При скольжении сплошного цилиндра по плоскости со
скоростью vQ% т. е. при поступательном движении, его кинетическая энер-
энергия согласно F8.1) равна -^mv\t а при качении цилиндра по плоскости
без скольжения с той же скоростью оси vc кинетическая энергия равна
3 2 *
¦j- mvc, так как к энергии поступательного движения добавится энергия во
вращении.
198
Пример 38. Доска весом G, лежит на двух одинаковых цилин-
цилиндрических катках весом О каждый, находящихся на горизонтальной
плоскости. К доске приложена постоянная горизонтальная сила Р.
При движении системы скольжение между катками и доской, а также
между катками и плоскостью отсутствует. Определить ускорение
движения доски, пренебрегая сопротивлением качению (рис. 160, а).
Решение. К движению механической системы, состоящей из
доски и двух катков, применим теорему об изменении кинетической
энергии в форме уравнения F9.1):
т — ro=
Работа внутренних сил каждого из твердых тел равна нулю
согласно F5.4). Работа внутренних сил взаимодействия между катком
и доской равна нулю, так как эти силы равны по модулю, противо-
противоположны по направлению и при- .
ложены к точкам, элементарные Р
перемещения которых одинаковы
(на рис. 160, б эти силы не по-
показаны)
Таким образом,
г
>
Кинетическая энергия каждого
из цилиндрических катков, совер-
совершающих плоское движение
4 g
Jc-
Кинетическую энергию доски, рнс ]60
движущейся поступательно со ско-
скоростью v, равной скорости верхней точки обода каждого катка,
определяем по формуле F8.1):
т, 1 о 1 Gtv2
При качении катка без скольжения его мгновенный центр скоро-
скоростей находится в точке соприкасания с неподвижной плоскостью.
Из кинематики известно, что скорости точек пропорциональны рас-
расстояниям точек от мгновенного центра скоростей, т. е.
v 2R
— = -ту- = 2, откуда v = 2vc.
С
Кинетическая энергия всей механической системы, т. е. двух кат-
катков и доски равна:
199
или
Аналогично
На систему действуют внешние силы: движущая сила Р, веса
частей О и О] и реакции неподвижной плоскости в виде нормаль-
нормальных реакций Nx и N2 и сил сцепления Flcu и F2cu.
Работа сил тяжести на горизонтальном перемещении их точек
приложения равна нулю
Работа реакций, приложенных в мгновенных центрах скоростей
катков, равна нулю. Сумма работ внешних сил содержит только
работу силы Р на перемещении доски s, т. е.
Подставляя значения Тх, То и 2 /if в уравнение F9,1), находим
\ v2 1*2
или
C0 + 40i) {v2 — г»о) = &gPs.
Продифференцировав это уравнение по времени, получим
Здесь -— = w — ускорение прямолинейного движения доски;
ds
-—- = v — скорость доски, т. е
2vw C0 -f- 40j) = 8gPv,
откуда
4P
w g
Пример 39. Однородный стержень BD длиной 1 = 0,8 м опи-
опирается концами на гладкую стену и гладкий пол.
Стержень, первоначально удерживаемый в состоянии покоя под
углом BDE = 60° к горизонтали, начинает падать, оставаясь в одной
и той же вертикальной плоскости. Определить скорость конца В
стержня в момент удара его о пол (рис. 161, а).
Решение. Стержень движется в вертикальной плоскости как
линейка эллипсографа, т. е. конец D движется по горизонтали, а ко-
конец В по вертикали. Мгновенный центр скоростей стержня Р нахо-
находится в точке пересечения перпендикуляров к направлениям скоростей
200
точек В и D (рис. 161, б). В момент падения стержня на пол мгно-
мгновенный центр скоростей оказывается в точке D (рис. 161, в). Для
определения скорости точки В стержня в этот момент воспользуемся
теоремой об изменении кинетической энергии системы в форме урав-
уравнения F9 2):
71 —ro = 24f.
где То = 0, так как в начальный момент стержень был неподвижен
Вычислим кинетическую энергию стержня в момент его падения на
землю по формуле F8 3), так как движение стержня плоское:
Выразим скорость центра тяжести стержня vc и угловую ско-
скорость стержня со через скорость конца vB, которую требуется оп-
определить
б)
8)
Пользуясь расстояниями от точек С и В до мгновенного центра
скоростей D (рис. 161, в), получаем
DC Tl
~DB
1
2
откуда
DB
ИЛИ
—S
Момент инерции однородного стержня относительно оси Cg, про-
проходящей через его центр тяжести, можно определить по формуле
Подставим значения vc,
в выражение кинетической энергии:
201
К стержню приложены внешние силы: вес стержня G и реакции
плоскостей NB и ND.
Работа сил Ne и No равна нулю, так как каждая из этих сил
перпендикулярна к скорости ее точки приложения. Сумма работ
внешних сил содержит только работу силы тяжести, определяемую
по формуле F1.1):
2 Af = GH = Q-^sin60° = ?%-GL
Подставляем значения кинетической энергии и суммы работ
в уравнение F9.2):
1 а 2 _ /з Q
откуда
9.8 .oj= 4.51 м/сек.
Вопросы для самоконтроля
1. Каковы две меры механического движения и соответствующие им
измерители действия силы?
2. Как определяется работа постоянной по модулю и направлению силы
на прямолинейном перемещении?
3. Чему равна работа силы трения скольжения, если эта сила постоянна
по модулю и направлению1
4. Каким простым способом можно вычислить работу постоянной по
модулю и направлению силы на криволинейном перемещении?
5. Чему равна работа равнодействующей силы?
6. Как выразить элементарную работу силы через элементарный путь
точки приложения силы и как — через приращение дуговой координаты этой
точки?
7. Каково векторное выражение элементарной работы?
8. Каково выражение элементарной работы силы через проекции силы
на оси координат?
9. Напишите различные виды криволинейного интеграла, определяющего
работу переменной силы на конечном криволинейном перемещении?
10. В чем состоит графический способ определения работы переменной
силы на криволинейном перемещении?
11. Как вычисляется работа силы тяжести и работа силы упругости?
12. На каких перемещениях работа силы тяжести:
а) положительна,
б) отрицательна,
в) равна нулю?
13. В каком случае работа силы упругости положительна и в каком
отрицательна?
14. Сформулируйте теорему об изменении кинетической энергии мате-
материальной точки
15. Сформулируйте теорему об изменении кинетической энергии мате-
материальной точки в относительном движении. Почему равна нулю работа
кориолисовой силы инерции?
l(j. Какова сумма работ внутренних сил твердого тела на любом пере-
перемещении тела?
17. Как вычисляется сумма элементарных работ внешних сил, прило-
приложенных к твердому телу:
202
а) в случае поступательного движения; б) в случае его вращения вокруг
неподвижной оси и в) в общем случае его движения?
18. Как вычисляется мощность сил, приложенных к твердому телу,
вращающемуся вокруг неподвижной оси с угловой скоростью «в?
19. Что представляет собой сопротивление качению, что называется
коэффициентом трения качения и какова его размерность?
20 Сформулируйте теорему Кенига о кинетической энергии механи-
механической системы в общем случае ее движения.
21 Как вычисляется кинетическая энергия твердого тела в различных
случаях его движения?
22. Сформулируйте теорему об изменении кинетической энергии меха-
механической системы.
ГЛАВА XI
ПОТЕНЦИАЛЬНОЕ СИЛОВОЕ ПОЛЕ
§ 72. Силовое поле. Потенциальное силовое поле и силовая
функция. Потенциальная энергия
Силовым полем называется физическое пространство, удо-
удовлетворяющее тому условию, что на точки механической си-
системы, находящейся в этом пространстве, действуют силы,
зависящие от положения этих точек или от положения точек
и времени (но не от их скоростей).
Силовое поле, силы которого не зависят от времени, назы-
называется стационарным.
Примерами силового поля могут служить поле силы тяжести,
электростатическое поле, поле силы упругости.
Стационарное силовое поле называется потенциальным, если
работа сил поля, действующих на механическую систему, не
зависит от формы траекторий ее точек и определяется только
их начальным и конечным положениями.
Эти силы называются силами, имеющими потенциал, или кон-
консервативными силами.
Докажем, что приведенное условие выполняется, если существует
однозначная функция координат:
U{xv ух. zv x2, y2, z2 х„, уп, zn), G2.1)
называемая силовой функцией поля, частные производные от кото-
которой по координатам любой точки Ml(i=l, 2 п) равны проек-
проекциям приложенной к этой точке силы на соответствующие оси, т. е.
у W . у __dU . _ __dU 72 „.
1 dxt l dyt l dzi v '
Элементарную работу силы, приложенной к каждой точке, можно
определить по формуле F0.6):
ЬАг = Хх dxx + Kj dyx + Lx dzv
ЬА2 = X2 dx2 + Y2 dy2 -\- Z2 dz2,
203
Элементарная работа сил, приложенных ко всем точкам системы,
равна:
6Л = 2 &Ai = l(*i dxx + К, dyi + Zi d*i) + (A-8 dx2 + Y2 dy2 +
Пользуясь формулами G2.2), получаем
Как видно из G2.3), элементарная работа сил потенциаль-
потенциального поля равна полному дифференциалу силовой функции.
Работа сил поля на конечном перемещении механической системы
из положения A) в положение B) равна:
B)
Л1|2= fdU = U2-Uv G2.4)
т. е. работа сил, действующих на точки механической системы
в потенциальном поле, равна разности значений силовой функ-
функции в конечном и начальном
положениях системы и не
зависит от формы траекто-
траекторий точек этой системы.
Из этого следует, что си-
силовое поле, для которого суще-
существует силовая функция G2.1),
действительно является потен-
потенциальным.
.„ Формула G2.4) показывает,
что работа сил, действую-
действующих на точки системы в по-
потенциальном поле на всяком
Рис. 162. замкнутом перемещении,
т. е. на перемещении, при
котором начальные и конечные положения для всех точек сов-
совмещены, равна нулю, так как в этом случае U2=^UX,
Введем понятие потенциальной энергии. Пусть, например, меха-
механическая система Mlt М2, .... Мп (рис. 162) находится в потен-
потенциальном поле под действием сил Pj, P2 Рп. Примем некоторое
произвольное положение этой системы Mf\ Ж20) М^ за нулевое
положение.
Потенциальная энергия системы в любом данном ее поло-
положении равна сумме работ сил потенциального поля, приложен-
приложенных к ее точкам на перемещении системы из данного положе-
204
ния в нулевое. Так как эта сумма работ зависит только от того,
из какого положения система перемещается в выбранное нулевое
положение, то потенциальная энергия /7 зависит только от положе-
положения системы.
Таким образом, потенциальную энергию системы можно пред-
представить как функцию координат ее точек:
П = П{хх, yv zv x2, y2, z2 х„, у„, г„), G2.5)
Из определения потенциальной энергии системы следует, что
в нулевом положении ее значение равно
нулю:
Положим, что механическая си-
система перемещается из первого поло-
положения Mi1', М2\ ..., М^ во второе
Mf\ M2] М},2> (рис. 163).
Из определения потенциальной энер-
энергии следует, что работа сил поля, при-
приложенных к точкам системы, на ее
перемещении из первого положения
в нулевое М(°\ М$] М(„0), равна
потенциальной энергии системы в пер- рис ]вз
вом положении Пх. Аналогично работа
сил поля на перемещении системы из второго положения в нулевое
равна потенциальной энергии системы во втором положении П2.
Отсюда следует, что работа сил поля на перемещении системы
из первого положения во второе равна разности:
^1,2 = ^1— Л2. G2.6)
Таким образом, работа сил приложенных к точкам механи-
механической системы, на любом ее перемещении равна разности зна-
значений потенциальной энергии в началь-
начальном и конечном положениях системы.
Установим зависимость между силовой
функцией и потенциальной энергией меха-
механической системы.
При перемещении механической системы
из данного положения ЛТ,, Л12, ..., Мп
(рис. 164) в нулевое положение
1 , М2 Мп работа приложенных
рис ig^ к точкам сил равна потенциальной энер-
энергии П системы в этом положении С дру-
другой стороны, эту работу можно определить по формуле G2.4) как
разность значений силовой функции U в нулевом положении и в дан-
данном, т. е.
A = n=U0—U. G2.7)
205
Равенство G2.7) показывает, что потенциальная энергия системы П
отличается от силовой функции U, взятой со знаком минус, на по-
постоянную величину UQ.
Из равенства G2.7) следует
Тогда на основании формулы G2.2)
X Ш ¦ V дП •
дП ди
— Ш ПО R4
— ~~dTi' G2-8)
т. е. проекции на координтные оси силы, действующей в потен-
потенциальном поле на каждую точку Mt механической системы,
равны взятым со знаком минус частным производным от по-
потенциальной энергии системы по соответствующим координа-
координатам этой точки.
Рассмотрим, какой вид получат выведенные выше формулы при
движении в потенциальном поле лишь одной материальной точки.
Силовая функция в этом случае имеет вид
U(x, у, z), G2.9)
где х, yt z — координаты рассматриваемой точки.
Потенциальная энергия точки:
П(х, у, z). G2.10)
Формулы G2.2), определяющие проекции X, Y, Z действующей
на точку силы поля на оси координат, принимают вид
дх ду дг v '
Формулы G2.8) принимают вид
Х- — — Y — — ?L Z — — ?L Г72 19-»
Л~ дх ' Г — ду ' дг • К'*Л2)
По заданной функции П(х, у, z) G2.10) легко дать геометри-
геометрическую характеристику зависимости потенциальной энергии точки от
ее положения в пространстве.
Геометрическое место точек пространства, в которых потенци-
потенциальная энергия материальной точки имеет одно и то же значение С,
определяется из уравнения
П(х, у, z) = C. G2.13)
Уравнение G2.13) определяет некоторую поверхность в простран-
пространстве, которая называется поверхностью равного потенциала или
эквипотенциальной поверхностью. Давая параметру С всевозможные
значения, можно получить бесчисленное множество эквипотенциаль-
эквипотенциальных поверхностей. Через каждую точку поля проходит одна экеи-
206
потенциальная поверхность. Параметру С = 0 соответствует нулевая
эквипотенциальная поверхность, проходящая через нулевое положение
Л1@); во всех ее точках потенциальная энергия равна нулю. Проведя
бесчисленное множество бесконечно близких эквипотенциальных по-
поверхностей, можно разделить потенциальное поле на ряд бесконечно
тонких слоев. Установим направление силы поля в каждой точке
по отношению к эквипотенциальной поверхности, проходящей через
эту точку. Положим, что точка М перемещается в бесконечно близкое
положение М! на той же эквипотенциальной поверхности (рис. 165).
Тогда элементарная работа силы поля Р на
перемещении ММ' согласно F0.5) равна
ЬА = Р • ММ' = Р • ММ' • cos (P, ММ').
С другой стороны, эта работа определяется
формулой G2.6):
потому что П — П' в точках М и М', при-
принадлежащих одной и той же эквипотенциаль- рис. 165.
ной поверхности. Так как Р ф О, ММ' Ф О,
то cos(P, ЛШ') = 0, т. е. Р _]_ ММ', следовательно, сила Р на-
направлена по нормали к эквипотенциальной поверхности, про-
проходящей через данную точку.
Положим, что точка получает элементарное перемещение ММ"
по направлению силы, тогда
ЬА = Р- MM" -cosO = P- MM">0.
Согласно формуле G2.6)
ЬА=П — П".
Сопоставляя два выражения элементарной работы, находим
П — П">0, или /7>/7".
Следовательно, сила Р направлена в сторону уменьшения
значений потенциальной энергии.
§ 73. Примеры потенциальных силовых полей
1. Поле силы тяжести
Сила тяжести, работа которой не зависит от траектории ее точки
приложения, является примером силы, имеющей потенциал. Исследуем
поле этой силы:
1. Рассмотрим сначала движение в этом поле одной материальной
точки весом О. Направим ось z вверх по вертикали, а оси хну
произвольно в горизонтальной плоскости.
207
Определим потенциальную энергию материальной точки М
(рис. 166), применяя формулу G2.12) к проекциям силы тажести G
на оси координат:
дП
дП
7—
дП
Отсюда следует, что
потенциальная энергия
точки П зависит
только от координаты z. Тогда-^—=—г- = G, откуда йП = О dz.
^—
Интегрируя, получаем
Рис 166.
Положим, что потен-
потенциальная энергия точки равна
нулю при z = 0, т. е. при-
примем за нулевую эквипотен-
эквипотенциальную поверхность коор-
координатную плоскость хОу.
Тогда С=0 и потенциаль-
потенциальная энергия точки
n = Gz. G3.1)
Согласно G2.13) уравне-
уравнения эквипотенциальных по-
поверхностей имеют вид
Gz = const или z = const,
т. е. эквипотенциальные поверхности поля силы тяжести представляют
собой горизонтальные плоскости.
Очевидно, что эквипотенциальные поверхности поля силы тяжести
можно считать плоскостями лишь на сравнительно небольшом протяже-
протяжении, где можно пренебрегать кривиз-
кривизной земной поверхности.
Сила тяжести направлена перпен-
перпендикулярно к этим плоскостям в сто-
сторону уменьшения значений потен-
потенциальной энергии.
Определим работу силы тяжести
на перемещении точки из Мт в ЖB)
по формуле G2.6):
О
г
р
^1.2 = J
Ус
yi\ /9\ Mj i<y\ г ИС. ID/ -
гдеЯ=2 —г' при г > 2 .
Полученное выражение совпадает с формулой F1.1).
2. Рассмотрим теперь механическую систему Mv М2, ¦••,
на которую действуют силы тяжести
G2,
Gn (рис. 167).
208
Определим потенциальную энергию системы при помощи фор-
формулы G3.1):
Координаты центра тяжести системы определяются по формулам
из статики:
2 Qizi v ~ ^
откуда V G^^ = Ozc,
тогда
П = Огс. G3.2)
т. е. потенциальная энергия механической системы, находя-
находящейся под действием сил тяжести, равна произведению веса
системы на высоту ее центра тяжести над нулевой эквипо-
эквипотенциальной плоскостью.
2. Поле центральной силы
Положим, что на материальную точку М массой т (рис. 168)
действует сила притяжения к центу О, равная Р = k —, где г = ОМ.
Проведем через точку О три взаимно перпендикулярные коор-
координатные оси х, у, z.
Обозначим углы, составленные направлением ОМ с этими осями
через а, р, у.
Определим проекции силы Р на оси
координат:
X — —
, т х , т
/n
Z = —y
. т z _ . т Рис 168
Полный дифференциал потенциальной энергии /7 (лг, у, z) точки М
.„ дП дП , дП .
dndx + ^+dz
Пользуясь формулами G2.12), имеем
йП = — (X dх + Y dy + Z dz) = k ^ {x dx + у dy + z dz)
Так как г2 = x2 + у2-f- z2, то r dr — xdx-\-y dy -\-z dz.
14 А. А. Яблонский 209
Пользуясь этим равенством, получаем
• г-ш , т , , dr
Интегрируя, получаем:
Потенциальная энергия точки зависит от ее расстояния г до
центра притяжения. Положим, что /7 = 0 при т — оо. Тогда С = 0
и потенциальная энергия точки
П = — ^-. G3.3)
Уравнения эквипотенциальных поверхностей согласно G2.3) имеют
вид
= const или г = const,
т. е. эквипотенциальные поверхности поля силы притяжения пред-
представляют собой сферические поверхности с центром в точке О.
Сила притяжения Р направлена по нормали к эквипотенциальной
поверхности, проходящей через данную точку, в сторону уменьшения
значений потенциальной энергии.
§ 74. Закон сохранения механической энергии
При движении механической системы под действием сил, имею-
имеющих потенциал, изменения кинетической энергии системы определяются
зависимостями G0.1) и G2.6):
откуда
т. е.
Т-\-П~ const. G4.1)
Сумму кинетической и потенциальной энергий системы называют
полной механической энергией системы и обозначают Е:
Е = Т-\-Л.
Выражение G4.1) принимает вид
Е = const. G4.2)
Таким образом, при движении механической системы под
действием сил, имеющих потенциал, полная механическая
энергия системы за все время движения остается неизменной.
В реальных условиях на механическую систему могут действовать
не только потенциальные силы, и полная механическая энергия
системы может изменяться. Это происходит, когда часть энергии
210
механической системы расходуется на преодоление различных сопро-
сопротивлений или наблюдается приток энергии от других систем.
Расход механической энергии движущейся механической системы
обычно означает превращение ее в теплоту, электричество, звук или
свет, а приток механической энергии связан с обратным процессом
превращения различных видов энергии в механическую энергию.
§ 75. Движение точки под действием центральной силы.
Закон площадей. Уравнение Бине
В § 54 установлено, что если на материальную точку М дей-
действует центральная сила Р (рис. 169), то момент количества движе-
Рис 169
Рис. 170.
ния этой точки Lo относительно центра силы О постоянен и точка
движется в плоскости /, перпендикулярной к Lq. В этом случае
Lo = const. G5.1)
По формуле E4)
(^) G5.2)
Рассмотрим векторное произведение: г X dr.
Площадь треугольника ОММ' (рис. 170), построенного на век-
векторах г и rfr, равна половине модуля этого векторного произведения:
Площадь треугольника ОММ' представляет собой площадь,
описанную радиусом-вектором г движущейся точки в течение проме-
промежутка времени dt.
Чтобы охарактеризовать быстроту изменения этой площади с тече-
dF
времени, введем величину —гг. называемую секторной ско-
сконием
ростью
dP
dt
rfr
dt
Сравнивая полученную формулу с выражением G5.2), устана-
устанавливаем
: const. G5.3)
dF „
—тг = С
14*
211
С точностью до величины первого порядка малости площадь
треугольника ОММ' можно определить как площадь кругового
сектора, т. е.
Тогда секторная скорость
dF I r, dw 1 „ ¦ , .__ ..
It ^ Т ~dt == ~2~ *= const- G5-4)
Из равенства G5.3)
о- G5.5)
Выражение G5.5) показывает, что при движении точки под
действием центральной силы площадь, описываемая радиусом-
вектором точки, изменяется
пропорционально времени. Это
положение называется законом
площадей.
Чтобы получить дифферен-
дифференциальное уравнение траектории
материальной точки, движущейся
под действием центральной силы,
воспользуемся полярными коорди-
координатами в плоскости / (рис. 171).
Рис. 171. Проведем полярную ось х через
центр силы О и начальное положе-
положение точки Мо. Тогда начальные значения координат будут ОМ0=го
и фо = О. Проекции скорости точки на оси полярных координат г
и ф можно определить по формулам из кинематики:
vr=r, г^—Гф.
Подставляя значения проекций начальной скорости, имеем
v0 cos а = r0, v0 sin а = гофо.
Таким образом, начальные условия движения точки имеют вид
to — Q; г = г0; фо = О; r0 = i»0cosa; ro% = vosina. G5.6)
Проекции ускорения точки w на оси полярных координат г и
можно определить по формулам из кинематики:
Второе выражение можно преобразовать:
«V = j 0-2Ф + 2гг Ф) = -J- -ft (/-2Ф).
212
Спроектировав векторы левой и правой частей основного урав-
уравнения динамики /mw = P на оси полярных координат, получим
mwr = Рг,
Проекции центральной силы Р на оси полярных координат равны
в случае притяжения Рг = — Р; Рф = 0;
в случае отталкивания РГ = Р; Рф = 0.
Подставив в уравнение (а) значения w, и wv, получим дифферен-
дифференциальные уравнения движения точки в полярных координатах:
т('г'-г&) = Рг, )
т d . 2-, . G5.7)
Из второго уравнения G5.7) находим:
г2ф = const.
Произведение л2ф, не зависящее от времени, равно своему началь-
начальному значению, т. е.
г2Ф=Фо-
Подставляя начальные условия, получаем
г2ф = rovo sin а. (б)
Согласно G5.4) секторная скорость
1 • • 1С
С — ~2 r2q>, откуда ф=-^-. (в)
Пользуясь равенством (б), находим
C rvsi
G5.8)
Таким образом, секторная скорость полностью определилась на-
начальными условиями движения.
Определим производные гиг, пользуясь формулой (в):
1 dt ~ d<p dt d(fw d(f r2 dy
d'r d'r dw d'r • o^ d2 I 1 \ 1С AC2 d2 I 1 \
dt ~~ dy dt ~ dq> * dy* \ r) r2 ~ r2 dq2 \r)'
Таким образом
213
Подставив в первое равенство G5.7) значение г из G5.9) и зна-
значение ср из формулы (в), получим
r2 dy* \ r ) r3 m '
•откуда
Уравнение G5.10) представляет собой дифференциальное урав-
.нение траектории точки в форме Бине.
Из дифференциальной геометрии известно, что в случае, если
выражение -з-j-(— )Ч положительно, то кривая обращена к по-
полюсу вогнутостью, а если оно отрицательно, то выпуклостью.
Из этого следует, что в случае притяжения, когда РТ < 0 траек-
траектория обращена к полюсу О вогнутостью, а в случае отталкивания
при Рт > 0 — выпуклостью.
§ 76. Поле ньютоновой силы притяжения. Вид траектории точки
в зависимости от начальных условий движения..
Законы Кеплера
В поле ньютоновой силы тяготения тело, рассматриваемое как
материальная точка, движется под действием силы притяжения Р.
Проекция этой силы на ось г
Р> /71/7*0 /т?* 1 \
т = —1—р°Г> G6.1)
.где т0 — масса тела, вокруг которого движется рассматриваемое тело;
m—-масса рассматриваемого тела;
г — расстояние между центрами тяжести этих тел.
Уравнение Бине G5.10) в этом случае принимает вид*
d2
Установим по уравнению G6.2) вид траектории тела, движущегося
в поле ньютоновой силы тяготения в зависимости от начальных
условий движения.
Введем обозначение:
G6.3)
Тогда уравнение G6.2) примет вид
214
Подставив значение С G5.8) в формулу G6.3), получим
2 2
?o^in2a G65>
В уравнении G6.4) угол ф является аргументом, величина
искомой функцией.
Общий интеграл уравнения G6.4) складывается из общего инте-
интеграла однородного уравнения и частного решения этого уравнения.
Характеристическое уравнение z2-\-l—0 имеет корни zli2=±t..
Этим корням соответствует общее решение:
(—) =С1СО5ф + С25тф.
\' /одн
Частное решение уравнения G6.4) имеет вид
A) =Л = ±.
\Г /части Р
Тогда общее решение уравнения G6.4) получим в виде
Ccosy{Csin<f+
C1cosy{C2sinf+. G6.6>
Дифференцируя G6.6) по ф, получим первый интеграл уравне-
уравнения G6.4):
^()^ <76-7>
Постоянные Сх и С2 определим подстановкой в уравнения G6.6).
и G6.7) начальных условий G5.6):
*0 = 0; г = г0; Ф0 = 0; r0 —¦y0cosa;
Из G6.6)
Так как
dr
dr __ dt _ г
dtp йц> m
IT
то
Пользуясь этим, из G6.7) найдем
1 rQ
Го Фо
215
Из начальных условий
Подставим найденные значения постоянных Cj и С2 в уравнение
<76.6):
Введем новые постоянные:
Ji ilil G6.9)
ro Z7 ro
Величину этих постоянных можно определить из формул G6.9):
/"П. 1\2 . ctg2a / I ; I 2~~
У \го Р! го V го5тг<х pi rop
G6.10)
или e = arcta:—^— ctga. G6.11)
Подставив значения D и е в уравнение G6.8), получим
j = Dcos((f — e) + - . G6.12)
Введем новую постоянную
e = /?D G6.13)
и новую пременную
г|) = ф —е. G6.14)
Тогда уравнение G6.12) примет вид
Откуда
г = -—-!¦ - G6.16)
1 -\- е cos г[) '
Уравнение G6.16) представляет собой уравнение конического
сечения в каноническом виде. Величины р и е являются основными
параметрами, определяющими форму конического сечения.
В зависимости от величины эксцентриситета е имеем следующие
.виды конического сечения:
е = 0 — окружность;
е < 1 — эллипс;
е= 1 —парабола;
е > 1 —гипербола.
Таким образом, под действием ньютоновой силы тяготения тело
описывает траекторию в виде конического сечения, форма которого
зависит от величины эксцентриситета е.
216
При е < 1 траектория тела представляет собой эллипс, полуоси*
которого определяются по формулам из геометрии:
а 1-е2
, л/"л о Р
~~ v ~ ~ ут=
Расстояние между фокусами равно:
2с — 2ае.
G6.17)
G6.18>
G6.19)
Точка Р на эллиптической орбите планеты, находящаяся на наимень-
наименьшем расстоянии от центра притяжения О (Солнца), называется периге-
перигелием, а точка А, наиболее удаленная от центра, — афелием (рис. 172).
Перигелию Р соответствуют зна-
значения
= е, т. е. i[) =
= а ~ с —
'Я -I
Афелию соответствуют
ф = е-4-л, т. е. \|) = :
I . Р
рис. 172.
' max — "• i^ •- — 1 е •
Определим продолжительность об-
обращения тела по эллиптической
орбите.
Площадь Р, которую описывает радиус-вектор точки М за пе-
период обращения Т, представляет собой площадь эллипса с полу-
полуосями а и Ь:
С другой стороны, эта площадь согласно G5.5)
Приравнивая значения площади, находим
Согласно G6.18)
СТ = па1 |Л _
или
откуда
или иа основании G6.17)
Т2_ Я а 1
— С2
217
Подставив значение р, определяемое формулой G6.3), оконча-
окончательно получим
кг- G6-20)
т. е. квадрат периода обращения тела по эллиптической орбите
пропорционален кубу большой полуоси орбиты.
Движение планет вокруг Солнца представляет собой рассмотрен-
рассмотренное выше движение тел по эллиптическим орбитам под действием
ньютоновой силы притяжения. Законы движения планет были открыты
немецким астрономом Кеплером A571—1630) до открытия Ньюто-
Ньютоном закона всемирного тяготения и подготовили открытие этого закона.
Закон всемирного тяготения дал математическое обоснование за-
законам Кеплера, которые формулируются так:
1. Под действием ньютоновой силы тяготения все планеты
движутся по эллипсам, в одном из фокусов которых нахо-
находится Солнце.
2. Площади, описываемые радиусами-векторами планет от-
относительно Солнца, пропорциональны времени.
3. Квадраты времени обращения планет относятся как
кубы больших полуосей их орбит.
Первый закон Кеплера вытекает из уравнения Бине G6.2).
Второй закон Кеплера выражает установленную выше (§ 75) тео-
теорему площадей.
Третий закон Кеплера можно получить на основании G6.20).
Действительно, обозначив время обращения двух планет вокруг
•Солнца Тх и Т2, а большие полуоси их орбит — ах и а2, из G6.20)
лолучим
т2
*
G6-21)
§ 77. Понятие о траекториях искусственных
спутников Земли
Движение искусственных спутников Земли в поле земного тяго-
тяготения совершается под действием силы притяжения к Земле:
^ G7.1)
где М — масса Земли;
m — масса спутника;
г — расстояние между центрами тяжести Земли и спутника;
/ — постоянная тяготения*.
* Постоянная тяготения / выражает в ньютонах силу взаимного при-
притяжения двух масс ъ \ кг каждая, находящихся на расстоянии 1 м друг
•от друга. Она определена Кавендишем в 1798 г.:
/ = 6,67-КГ11 м*/кг-сек*.
218
Для тела, находящегося на поверхности Земли,
г. „ , Mm
откуда
f—MZL
J м ¦
G7.2>
Здесь R расстояние от данного тела до центра земного шара-
(геоида), равное 6,37 • 106 м.
Определим минимальную начальную ско-
скорость тела vQ (рис. 173), при которой тело
становится искусственным спутником Земли, по-
полагая, что эта скорость направлена перпенди-
перпендикулярно к направлению силы притяжения Р,
т. е. а = 90°.
Эту скорость называют первой космической
скоростью.
Положим, что тело находится на расстоя-
расстоянии Н от поверхности Земли.
Из траекторий тела, движущегося под дей- рис. 173.
ствием ньютоновой силы тяготения, рассмотрен-
рассмотренных в § 76, только окружность и эллипс соответствуют движению>
спутника (рис. 174). Чтобы судить о форме траектории тела, не-
необходимо найти эксцентриситет конического сечения е.
Направление начальной скорости
Гипербола и„ > 11,2 км/сек
Парабола V, = It, 2 хм/сек
Окружность U, - 7,9нм/сек
Эллипс 13 км/сек *=-V,<- п.2«м/сех
Рис 174.
Для определения е найдем сначала параметр р по формуле G6.5)г
Здесь
sina==sin90°=l. /яо=
и согласно G7.2)
Подставив эти значения, получим
Далее определим постоянную D по формуле G6.10) при
D
ra p R + H
Эксцентриситет е найдем по формуле G6.13):
{R + H)v2n
e = pD=K ^gRJ ° -1. G7 3)
Минимальной скорости fo = t/[ соответствует минимальный эксцен-
эксцентриситет е — 0, при котором траектория тела является окружностью.
При е = 0
откуда
Модуль первой космической скорости у поверхности Земли при
= 0
Vi = VlR- G7.4)
Подставив числовые значения, имеем
Vi = |^9,81 • 6,37 • 106 м/сек «7,9 км/сек.
При начальных скоростях, которые меньше первой космической
скорости, тело не выйдет на круговую орбиту, а возвратится на
Землю. Движение по круговой орбите невозможно и в том случае,
когда при достаточной начальной скорости ее направление не пер-
перпендикулярно к г0.
Минимальная начальная скорость, при которой тело, преодолев
земное тяготение, удаляется в межпланетное пространство, называется
второй космической скоростью. Это имеет место при незамкнутой
траектории тела — параболе и гиперболе, т. е. при е^>1.
220
Определим модуль второй космической скорости из выражения
G7.3) при е— 1
2
откуда
У поверхности Земли при # = 0
vn = V2gR- G7 5)
Из выражений G7.4) и G7.5) устанавливаем зависимость между
первой и второй космическими скоростями:
«„=¦/20,. G7.6)
отсюда находим числовое значение второй космической скорости:
vu= 1,414- 7,9= 11,2 км/сек.
Таким образом, в зависимости от модуля начальной скорости
возможны следующие случаи движения тела в поле земного тяготе-
тяготения (рис. 174): при ^0= 7,9 км/сек траектория тела — окружность;
при ?,9 км/сек < v0 < 11,2 км/сек — эллипс; при v0 — 11,2 км/сек—
парабола; при v0 > 11,2 км/сек — гипербола.
Вопросы для самоконтроля
1. Какое силовое поле называется потенциальным?
2. Что называют силовой функцией?
3. Как определить элементарную работу сил потенциального поля и
работу этих сил на конечном перемещении системы, если известна силовая
функция поля?
4. Какова работа сил, действующих на точки системы в потенциальном
поле, на замкнутом перемещении?
5. Чему равна потенциальная энергия системы в любом ее положении?
6. Чему равно изменение потенциальной энергии механической системы
при перемещении ее из одного положения в другое?
7. Какая зависимость существует между силовой функцией потенциаль-
потенциального поля и потенциальной энергией системы, находящейся в этом поле?
8. Как определяются проекции на координатные оси силы, действую-
действующей в потенциальном поле на любую точку системы?
9. Какие поверхности называются эквипотенциальными и каковы их
уравнения?
10. Как направлена сила, действующая на материальную точку в потен-
потенциальном поле, по отношению к эквипотенциальной поверхности, проходя-
проходящей через эту точку?
11. Чему равна потенциальная энергия материальной точки и механиче-
механической системы, находящихся под действием сил тяжести?
12. Какой вид имеют эквипотенциальные поверхности поля силы тяжести
и ньютоновой силы тяготения?
13. В чем заключается закон сохранения и превращения механической
энергии?
221
14. Почему под действием центральной силы материальная точка опи-
описывает плоскую кривую?
15. Что называют секторной скоростью и как выразить ее модуль в по-
полярных координатах?
16. В чем заключается закон площадей?
17. Какой вид имеет дифференциальное уравнение в форме Бине, опре-
определяющее траекторию точки, движущейся под действием центральной силы?
18. По какой формуле определяется модуль ньютоновой силы тяготения?
19 Каков канонический вид уравнения конического сечения и при ка-
каких значениях эксцентриситета траектория тела, движущегося в поле нью-
ньютоновой силы тяготения, представляет собой:
1) окружность;
2) эллипс;
3) параболу;
4) гиперболу?
20. Сформулируйте законы движения планет, открытые Кеплером.
21. При каких начальных условиях тело становится спутником Земли и
при каких — оно способно преодолеть земное притяжение?
22. Каковы первая и вторая космические скорости?
ГЛАВА XII
ДИНАМИКА ПОСТУПАТЕЛЬНОГО И ВРАЩАТЕЛЬНОГО ДВИЖЕНИЙ
ТВЕРДОГО ТЕЛА
§ 78. Дифференциальные уравнения поступательного движения
твердого тела
При -поступательном движении твердого тела все его точки дви-
движутся так же, как и его центр масс. Поэтому дифференциальные
уравнения движения центра масс тела (§ 43) являются дифферен-
дифференциальными уравнениями поступательного движения твердого тела:
NIXq ==: J?j л. i = X т
Здесь т — масса тела;
хс, ус, zc — координаты центра масс тела;
Xе, YE, ZE—проекции внешней силы pf на оси координат;
Xе, Ye, Ze — проекции главного вектора внешних сил на эти оси.
По дифференциальным уравнениям поступательного движения
можно решать два основных типа задач на поступательное движение
твердого тела:
1) по заданному движению твердого тела определять главный
вектор приложенных к нему внешних сил и
2) по заданным внешним силам, действующим на тело, и началь-
начальным условиям движения находить кинематические уравнения движе-
движения тела, если известно, что оно движется поступательно.
222
Условие, при котором движение тела является поступательным,
рассмотрено в § 95.
Изучение поступательного движения твердого тела, таким обра-
образом, сводится к изучению движения отдельной материальной точки,
имеющей массу этого тела.
Во многих примерах, рассмотренных выше, дифференциальные
уравнения движения материальной точки применялись к поступатель-
поступательному движению твердого тела.
§ 79. Дифференциальное уравнение вращения твердого тела
вокруг неподвижной оси
Рассмотрим твердое тело, вращающееся вокруг неподвижной
оси z с угловой скоростью w (рис. 175). Вычислим кинетический
момент этого тела относительно оси его
вращения. Момент количества движения
точки М, тела относительно оси z
где г, — радиус окружности, описывае-
описываемой точкой ML;
¦vt = Г;0) — алгебраическая величина вра-
вращательной скорости точки Мь.
Подставляя это значение Vp получаем
Кинетический момент твердого тела
относительно оси z
Lz =
= 2 пцг](х> — ю
Рис. 175.
Здесь 2 miri^Jz — момент инерции твердого тела относительно
оси z.
Таким образом,
LZ = JZ<*. G9.1)
т. е. кинетический, момент вращающегося твердого тела от-
относительно неподвижной оси его вращения равен произведению
момента инерции тела относительно той же оса на угловую
скорость тела.
Рассмотрим изменение кинетического момента тела относительно
оси z под действием приложенных к нему задаваемых внешних сил
Pi,
г, .... Рл. Теорема об изменении кинетического момента меха-
механической системы выражается уравнением E6.2):
dt
223
Реакции подшипника В и подпятника А являются внешними си-
силами, но при отсутствии трения их моменты относительно оси z
равны нулю и правая часть уравнения E6.2) содержит только сумму
моментов задаваемых внешних сил.
При наличии трения эта сумма содержит также момент сил
трения.
Так как по G9.1) Lz = J/a = У/р, то -зр = /г(Р' а потому урав-
уравнение E6.2) принимает вид
У/Р = 2Л1?. G9.2)
Уравнение G9.2) представляет собой дифференциальное урав-
уравнение вращения твердого тела вокруг неподвижной оси.
Сравним уравнение G9.2) с дифференциальным-уравнением посту-
поступательного прямолинейного движения твердого тела:
т'хс =
Очевидно, что момент инерции твердого тела при вращательном
движении имеет то же значение, что и масса тела при его поступа-
поступательном движении: момент инерции является характеристикой
инертности тела при вращательном движении.
Если вращение тела происходит в одном направлении, то это
направление считают положительным. В этом случае моменты дви-
движущих сил положительны, моменты сил сопротивления отрицательны,
а главный момент внешних сил может иметь тот или другой знак.
Если 2 Mfz > 0, то ? = <р>0, т. е. тело вращается ускоренно.
Если ^j Miz = 0, то е = ф = 0; со = const, т. е. вращение тела
равномерное (по инерции). Если 2 Mfz < 0, то е = <р < 0, т. е. тело
вращается замедленно.
По дифференциальному уравнению G9.2) можно решать следую-
следующие задачи:
1) по заданному уравнению вращения тела Ф = /@ и его мо-
моменту инерции Jz определять главный момент внешних сил, дей-
действующих на тело:
2) по заданным внешним силам, приложенным к телу, по началь-
начальным условиям вращения ф0 и &>0 и по моменту инерции тела Jz на-
находить уравнение вращения тела q> = /(t);
3) определять момент инерции тела Jz относительно оси враще-
вращения, зная величины Alf и q>.
Пример 40. Натяжения ветвей ремня, приводящего во вращение
шкив, равны 20 и 40 м. Шкив имеет вес 80 «, радиус 30 см и
радиус инерции относительно оси вращения 25 см. Составить урав-
уравнение вращения шкива из состояния покоя, пренебрегая трением.
224
Решение. Дифференциальное уравнение вращения шкива вокруг
неподвижной оси Ох (рис. 176) имеет вид G9.2)
К шкиву приложены внешние силы: реакции ветвей ремня Tj
и Т2, вес шкива G и составляющие реакции опоры \0 и Zo.
Направление вращения тела принимают всегда за положительное
направление Тогда моменты сил, направленных в сторону вращения,
положительны, а моменты сил, направленных
противоположно, отрицательны. Главный мо-
момент внешних сил ~у
Мх = Тгг — Т2г = 40 • 30 — 20 • 30 ==
= 600 « • см = 6 н • м,
\
(моменты сил G, Yo, Ъо относительно оси ^
Ох равны нулю). Момент инерции шкива А
определяем по радиусу инерции:
, .2 G .2 80-0.252 п С1 ,
./, = шл = Т1, = -д^—= 0.51 кг-ж2.
Подставляем числовые значения Jx и Мх ь уравнение G9.2):
0,51ф = 6.
Отсюда находим угловое ускорение
ф =-jr-?y- = 11,7f
Интегрируем дважды по /:
По начальным условиям /0 = 0, фо=:О, фо = 0 находим С1 = 0
и С2 = 0.
Таким образом, уравнение вращения шкива имеет вид
Ф = 5,88/2.
Пример 41. Однородная прямоугольная пластинка весом О, дли-
длиной L и высотой h вращается вокруг вертикальной оси Cz, являю-
являющейся ее осью симметрии (рис. 177)
При вращении пластинка испытывает сопротивление воздуха.
Сила сопротивления, приложенная к каждому элементу пластинки,
направлена перпендикулярно к плоскости пластинки, пропорциональна
площади элемента и квадрату скорости его движения, причем коэф-
коэффициент пропорциональности равен а. Определить промежуток вре-
времени Т, в течение которого угловая скорость пластинки уменьшится
ОТ COj ДО СО2.
15 А А. Яблонски? 225
Решение. Воспользуемся дифференциальным уравнением вра-
вращения твердого тела вокруг неподвижной оси G9.2):
УС2ф = Мег-
Для определения момента инерции пластинки представим ее
в виде множества тонких полос, перпендикулярных к оси Cz
г
С
Рис 177.
Рис. 178
(рис. 178). Момент инерции каждой полосы можно определить по
формуле
Момент инерции всей пластинки относительно оси Cz:
'¦~ Zi 12 —2
~ 12
К вращающейся пластинке прило-
приложены внешние силы: ее вес G, реакции
подшипника В и подпятника Л и силы
сопротивления воздуха (рис. 179). Вес-6
и реакции опор моментов относительно
оси Cz не имеют.
Для получения главного момента сил
давления воздуха относительно оси Cz
найдем сначала силу, приложенную
к элементарной площадке dF = h dl,
скорости точек которой равны v = со/.
Сила давления воздуха, приложенная
к элементарной площадке:
Рис. 179.
Момент этой силы, направленной в сторону, противоположную
вращению относительно оси Cz:
— аЛсо2/3 dl.
226
Интегрируя, получаем главный момент сил давления воздуха:
2
= — 2 J а/мо2/3 d/ = —^- a/z<o2ZA
= — 2 J
о
Подставляя найденное значение в уравнение G9.2), получаем
отсюда определяем
rfco _ 3 ahgL* „
Разделяем переменные и интегрируем в пределах, соответствую-
соответствующих изменению, угловой скорости пластинки от Wj до со2:
о, г
f do _ 3 aftg?2 Г ,. М 1 \_ 3 qftgZ.2 -
J "й2" — 8 О J al- \щ щ)— 8 G '
(о, — со2 3^ ahgL2
8 G
или
откуда определяем искомый промежуток времени:
~ 8G щ—щ
~~ 3akgL2 ©jtflj "
§ 80. Сохранение кинетического момента вращающейся
системы. Скамейка Жуковского
В § 56 установлено, что сохранение кинетического момента ме-
механической системы Lz относительно неподвижной оси г происходит
при условии, если главный момент Мг внешних сил, приложенных
к системе, относительно этой оси равен нулю. Для твердого тела,
вращающегося вокруг неподвижной оси, при Mf=0
Lz = Jza> = const.
Так как Jz = const, то со = const, т. е. твердое тело вращается
равномерно (по инерции). Если отдельные элементы вращающейся
системы в процессе вращения изменяют свое положение по отноше-
отношению к неизменяемой оси вращения, то изменяется величина момента
инерции системы Jz относительно этой оси. Тогда при Lz = const
изменяется угловая скорость вращения системы со.
15* 227
В этом случае при Мг = О
Lz = Jlz<s>1 = J2za>2 == const, (80.3)
где Jlz, J2z — моменты инерции вращающейся системы при двух раз-
разных положениях ее элементов,
©!, со2—угловые скорости вращения системы, соответствующие
значениям моментов инерции Jlz и J2z.
Из (80.1)
5' = 7?Г1 (80-2)
т. е. при увеличении момента инерции системы угловая скорость ее
вращения уменьшается и наоборот.
Условие (80.2) наглядно демонстрируется на приборе, называемом
«скамейка Жуковского». Этот прибор представляет собой круглую
горизонтальную платформу на шариковых подшипниках, которая
может вращаться вокруг вертикальной оси при очень малом трении.
На платформу помещается человек, и систему приводят во вращение.
Внешними силами, действующими на вращающуюся систему ска-
скамейка— человек, являются силы тяжести скамейки и человека и
реакция опоры (трением пренебрегаем). Эти вертикальные силы не
имеют моментов относительно оси вращения, а потому Lz = const.
Изменяя положение своих рук и тем самым изменяя момент инерции,
человек изменяет угловую скорость системы.
§ 81. Физический маятник и его малые колебания
Физическим маятником называется твердое тело, имеющее
неподвижную горизонтальную ось вращения, не проходящую
через его центр тяжести, и находящееся под
действием только силы тяжести.
Ось вращения физического маятника назы-
называется осью привеса маятника.
Примем ось привеса маятника за ось х.
'/ Координатную плоскость yOz проведем через
центр тяжести С маятника и совместим эту пло-
плоскость с плоскостью чертежа (рис. 180). На маят-
маятник, отклоненный от положения покоя, действуют
внешние силы: его вес О и составляющие реакции
цилиндрического шарнира Уо и Zo. Трением в шар-
шарнире пренебрегаем. Реактивные силы не имеют
моментов относительно оси привеса. Момент силы G
относительно оси х равен:
Мх = — Ой sin ф.
Рис. 180.
При повороте маятника на угол ср в положительном направлении,
т. е. против движения часовой стрелки, сила Q стремится вращать
плоскость zOy по движению часовой стрелки и наоборот. Следова-
228
тельно, знак момента силы Q относительно оси х противоположен
знаку угла поворота маятника ф и знаку sin ср.
Дифференциальное уравнение G9.2) вращения тела вокруг непо-
неподвижной оси принимает для маятника вид
J^ = — Gfifsinq>, (81.1)
где Jx— момент инерции маятника относительно оси привеса,
О — вес маятника;
d — расстояние от центра тяжести маятника до оси привеса.
Уравнение (81.1) можно представить в виде
<j> + -^-sin<p = O. (81.2)
Уравнение (81.2) представляет собой дифференциальное уравне-
уравнение качаний физического маятника. Это уравнение отличается
от дифференциального уравнения качаний математического маятника
B4.1) только значением постоянного коэффициента при sinq).
Уравнение B4.1) имеет вид
ф -f- ~ sin <р = 0.
Определим длину математического маятника, период качаний кото-
которого равен периоду качаний данного физического маятника. Для этого
приравняем значения постоянных коэффициентов при БШф в уравне-
уравнениях B4.1) и (81.2)
g __Gd
I - /, '
отсюда
/
L— Gd ~ md- (til-d)
Формула (81.3) определяет приведенную длину физического
маятника, т. е. длину такого математического маятника,
период качаний которого равен периоду качаний данного физи-
физического маятника.
Воспользуемся зависимостью C5.1) между моментами инерции
маятника относительно параллельных осей Ох и Сх:
Jx = JCx -j- md2 — micx + md1,
где tCx — радиус инерции маятника относительно оси Сх.
Подставим это значение Jx в формулу (81.3):
m!2Cx-{-md2
l = ¦
md
229
Отсюда получаем другое выражение приведенной длины физи-
физического маятника:
г.
(81.4)
Формула (81.4) показывает, что l>d.
Отложив по прямой ОС отрезок ООХ = 1, получим точку Ох,
называемую центром качания маятника. Ось, проходящая через
центр качания параллельно оси привеса, называется осью качаний
маятника. Воспользуемся формулой (81.4) для установления особых
свойств оси привеса и оси качаний физического маятника. Положим,
что маятник качается вокруг оси
г привеса Ох (рис. 181, а).
Определим по формуле (81.4)
его приведенную длину:
Обозначим
1Сх
отсюда
tcx — bd, (81.5)
тогда приведенная длина маятника
Рис. 181.
где d = ОС, Ъ = СОХ, точка Ох — центр качаний и ось Охх — ось
качаний. Сделаем ось качаний Охх осью привеса маятника (рис. 181, б);
тогда расстояние от центра тяжести маятника до этой оси станет
равным Ъ, а его приведенная длина согласно (81.4)
, 1сх
Пользуясь формулой (81.5), найдем:
отсюда следует, что осью качаний второго маятника является бывшая
ось привеса Ох. Приведенные длины обоих маятников равны:
Следовательно, и периоды качаний обоих маятников тоже равны.
Таким образом, если ось качаний физического маятника сде-
сделать осью привеса, то прежняя ось привеса станет его осью
качаний.
Это положение составляет содержание теоремы Гюйгенса о свой-
свойстве взаимности оси привеса и оси качаний физического маятника»
230
В случае малых колебаний физического маятника втфяйф диф-
дифференциальное уравнение (81.2) принимает вид дифференциального
уравнения гармонического колебательного движения:
" Ш " (81.6)
или
где k =
= 0
— частота колебаний маятника.
Решение дифференциального уравнения (81.6), т.
малых колебаний маятника имеет вид
= Cl cos kt -f- C2 cos kt.
«ли
где а — амплитуда колебаний маятника в радианах;
{J — начальная фаза колебаний.
Период малых колебаний физического маятника
Т =
е. уравнение
(81.7)
(81.8)
(81.9)
Период малых колебаний физического маятника можно определить
и по формуле B4.6) как период малых колебаний математического
маятника, длина которого равна приведенной длине / данного физи-
физического маятника:
Т = '.
(81.10)
Пример 42. Маятник представляет собой
однородный круглый диск радиусом г. Ось при-
привеса маятника перпендикулярна к плоскости
диска и отстоит от его центра на расстоянии -^-.
Определить приведенную длину, положение
центра качания и период качаний маятника.
Решение. Приведенную длину этого маят-
маятника (рис. 182) определим по формуле (81.3):
1 = 1*-
md
Момент инерции маятника относительно оси привеса Ох найдем
по формуле:
Jr = Jrr-+ md2.
Рис. 182.
г, I
При JCx =
и <* —
231
Приведенная длина маятника
т2
Отложив вдоль ОС отрезок OOx = L=-^r, получаем центр кача-
качаний маятника О1 на ободе диска.
Период качаний определяем по формуле (81.10):
¦Пример 43. Показать, что приведенная длина и период качаний
маятника, представляющего собой подвешенную за середину дугу
окружности, зависят лишь от радиуса окружности /? и не зависят
от центрального угла 2а.
Решение. Приведенная длина рассматриваемого маятника
(рис. 183), согласно (81.3),
J
I—
md '
-у Положение центра тяжести дуги окруж-
окружности определяется формулой 1G2.2) ч. I)]:
i
\
\
\
\
Поэтому
О, По формуле C5.1) имеем:
Рис. 183. j =Jr ~\~ т{Р и J —.
Подставим в первую формулу значение JCx, найденное из второй:
Определим момент инерции дуги АВ относительно оси Dx, про-
проходящей через центр окружности:
7п,.==2то.г2 = 2яг,/?2 = R2^tn, = mR2.
UX lit i
Подставим в формулу (а) значения JDx, DC и d:
232
Подставив значения JOx и d в формулу (81.3), определим приве-
приведенную длину физического маятника:
«Л 1
хп а \
Ось качаний маятника Охх и ось привеса Ох находятся на оди-
одинаковом расстоянии от центра окружности D.
Период качаний маятника найдем по формуле (81.10):
g
Т = 2л т/— == 2я
г g
Таким образом, приведенная длина и период качаний маятника
не зависят от центрального угла 2а.
Для маятника, представляющего собой полную окружность, при-
приведенная длина и период качаний являются такими же.
§ 82. Опытное определение моментов инерции тел
Вычисление моментов инерции неоднородных и однородных тел
неправильной геометрической формы в ряде случаев бывает сложным.
Поэтому моменты инерции таких тел опреде-
определяют обычно опытным путем. Опытное определе-
определение моментов инерции основывается на наблюдении
того или иного вида вращения твердого тела во-
вокруг неподвижной оси, так как момент инерции
тела — это характеристика его инертности во вра-
вращательном движении.
Рассмотрим три экспериментальных способа
определения моментов инерции тел, применяющихся
в технике: способ качаний, способ крутильных
колебаний и способ падающего груза.
1. Способ качаний
Положим, что требуется определить момент
инерции и радиус инерции какой-нибудь детали,
например, шатуна, относительно оси, проходящей
через его центр тяжести. Для этого предвари-
предварительно определяют положение центра тяжести ша-
туна. Затем шатун подвешивают, продев через
втулку тонкий цилиндрический стержень (рис. 184), чтобы он мог
качаться вокруг горизонтальной оси. Отклонив шатун от положения
покоя на небольшой угол, его приводят в колебательное движение
и наблюдают время т определенного числа колебаний п. По этим
данным определяют величину периода колебаний:
,рис
233
Подвешенная таким образом любая деталь представляет собой физи-
физический маятник с осью привеса Ох, совпадающей с осью стержня.
Период качаний физического маятника определяется по фор-
формуле (81.9):
Из этой формулы можно определить момент инерции детали Jx
относительно оси привеса Ох:
(82.1)
так как Т — период качаний, G — вес детали и d — расстояние от ее
центра тяжести до оси привеса известны.
Для определения момента инерции детали относительно централь-
центральной оси Сх, параллельной оси привеса Ох, воспользуемся форму-
формулой C5.1):
откуда
JCx = Jx-md*=°§?—2-Л (82 2)
Определив момент инерции детали JCx относительно центральной
оси, параллельной оси привеса, можно определить радиус инерции
детали относительно этой оси:
(82-3)
2. Способ крутильных колебаний
Рассмотрим определение моментов инерции тел по способу кру-
крутильных колебаний. К нижнему концу проволоки, защемленной верх-
верхним концом неподвижно, подвешивают сначала эталон, т. е. тело,
момент инерции которого относительно центральной оси Cz известен
(рис. 185), а затем деталь, момент инерции которой относительно
оси Cz следует определить-(рис. 186). Тело, прикрепленное к про-
проволоке, поворачивают на некоторый угол ср0 вокруг вертикальной
оси Cz и отпускают. Под действием сил упругости закрученной про-
проволоки система стремится вернуться в положение покоя. Возвратив-
Возвратившись в это положение, система обладает угловой скоростью, вслед-
вследствие чего поворачивается на угол q>0 в противоположную сторону.
Таким образом, возникают крутильные колебания системы. На тело
со стороны проволоки, закрученной на угол ф, действует момент
сил упругости, пропорциональный этому углу:
Мкр = —
234
GJa
Здесь с = ——- —коэффициент жесткости, зависящий от модуля упру-
упругости материала проволоки при кручении О, полярного момента инер-
инерции сечения проволоки Jo и длины проволоки I.
Рис. 185.
Рис. 186.
Дифференциальное уравнение крутильных колебаний получаем на
основе дифференциального уравнения вращения G9.2):
или
Сг
(82.4)
Уравнение (82.4) представляет собой дифференциальное уравнение
гармонического колебательного движения.
Частота колебаний
k =
Сг
Период колебаний
(82.5)
Чтобы получить формулу, не содержащую коэффициента с, надо
определить путем наблюдений период крутильных колебаний эта-
эталона Tj и период крутильных колебаний испытуемой детали Г2.
Тогда по формуле (82.5)
Здесь JlCz — момент инерции эталона относительно оси Сг,
J2Cz — момент инерции детали относительно оси Cz.
235
Найдем отношение периодов:
отсюда
ICz
1Сг
Т2
1 2
; — J\Cz-
По этой формуле можно найти момент инерции J2Cz испытуемой
детали, зная момент инерции эталона /]Сг и определив периоды кру-
крутильных колебаний Тг и Т2.
В
3. Способ падающего груза
Чтобы определить момент инерции махового колеса радиусом г
относительно оси его вращения Сх при помощи метода разгона
падающим грузом, колесо обматывают тонкой проволокой, к концу
которой привязывают груз В
весом О[. Груз помещают
на горизонтальную пло-
площадку (рис. 187). Освободив
груз от этой связи, предо-
предоставляют ему возможность
опускаться, приводя во вра-
вращение маховое колесо. Опре-
j--r-r делив время Т1 падения
груза с высоты Н, повто-
повторяют тот же опыт с другим
грузом О2, определяя время
его падения Т2.
На маховик, приводимый
%,,,,л,.,.,,,\ во вращение падающим гру-
i зом В, действуют внешние
¦? силы: его вес Q, натяжение
Рис. 187. Рис. 188. проволоки S, являющееся
движущей силой, нормальная
реакция подшипников N и сила трения в подшипниках. Направление
вращения маховика примем за положительное направление.
Дифференциальное уравнение его вращения G9.2) будет иметь вид
л У////////4
где Л1тр — момент сил трения
р
На груз весом Gx действуют две силы: его вес
проволоки S', модуль которой S' = 5 (рис. 188).
Направим ось Z вниз по траектории движения груза
начальное положение груза О за начало координат.
(а)
и реакция
приняв
236
Составим дифференциальное уравнение движения груза:
^- г = Ог — S' (б)
Путь, пройденный грузом по вертикали, равен пути, пройденному
точкой обода маховика. Поэтому координата z связана с углом пово-
поворота маховика зависимостью
откуда
z = гф и ф = —.
Подставим это значение ф в уравнение (а):
-j*-z = Sr — Л!тр. (в)
Умножив уравнение (б) на г и сложив его с уравнением (в),
получим:
откуда
gr(Gxr — Мтр)
Z — —т=г-
Так как z = const, то по формуле для равнопеременного движе-
движения точки при начальных условиях t0 = О, z0 = 0, z0 — 0
При t — Tv z = H, а потому
g/-(Gtr
В это выражение входит неизвестная величина момента сил тре-
трения Мгр, который принимается одинаковым в обоих опытах. Чтобы
исключить Мтр, воспользуемся аналогичным выражением для падения
груза весом О2:
Из этих двух выражений найдем значения Мтр и приравняем их:
он он
Мтр = Охг — (О1Г* + JCxg) = G2r Щ-f (Q^ + JCxg).
&rl 1 grl
237
Отсюда можно определить момент инерции махового колеса
в зависимости от величин, заданных в условии:
УМ/'/.
§ 83. Примеры на применение теоремы об изменении
кинетического момента механической системы
Пример 44. Через неподвижный блок весом О, с массой равно-
равномерно распределенной по ободу,,перекинута веревка, весом которой
можно пренебречь. К концу веревки подвешен груз В весом Q.
По веревке от другого ее конца
начинает подниматься человек А
таким же весом с относительной
скоростью и. Определить угловую
скорость вращения блока со и ско-
скорость движения груза \в, вызван-
вызванные движением человека, если
в начальный момент система была
неподвижна (рис. 189).
Решение. Рассмотрим меха-
механическую систему, состоящую из
Рис. 189. Рис. 190. блока и двух материальных то-
точек — человека и груза. К дви-
движению этой системы применим теорему об изменении кинетического
момента в форме E6.2):
dLx = ,,е
dt х<
где ось Ох — ось вращения блока (рис. 190).
На рассматриваемую систему действуют внешние силы: вес чело-
человека Q, вес груза Q, вес блока G и реакция оси блока R.
Главный момент внешних сил относительно оси Ох равен:
(реакция оси R и вес блока G не имеют моментов относительно
оси Ох).
Так как Мх = 0, то
= const.
(а)
До начала движения человека вверх по веревке система находи-
находилась в состоянии покоя и кинетический момент ее был равен нулю, т. е.
238
Согласно условию (а) имеет место сохранение кинетического мо-
момента системы, следовательно, в любой момент времени
LX = Q. (б)
Предположим, что при движении человека по веревке блок вра-
вращается с угловой скоростью со против движения часовой стрелки.
Тогда скорость движения груза v^ будет направлена вверх и равна
vB~(dr. Человек будет иметь относительную скорость и, направлен-
направленную вверх, и переносную скорость \е, направленную вниз и равную
ve — аг. Кинетический момент всей механической системы
А* — м* ~т~ **2х Ч~ ^з^-
Считаем моменты количеств движения точек системы положитель-
положительными, если они направлены по отношению к точке О против движе-
движения часовой стрелки, и отрицательными — в обратном случае.
Момент количества движения груза В
Lu = mvBr = -Q®r*.
Момент количества движения человека А
L2x = m(ve — u)- г = у (юг2 — иг).
Кинетический момент блока, вращающегося вокруг неподвижной
оси Ох, определим по формуле G9.1):
Так как масса блока равномерно распределена по ободу, то его
момент инерции относительно оси Ох равен
тогда
Кинетический момент системы
Приравнивая его нулю согласно условию (б), имеем
ИЛИ
2Q«r2 — Qur + Otor2 == О,
отсюда
__ Qu
239
Положительные ответы указывают на то, что предположенное
направление вращения блока и движения груза совпадают с действи-
действительными.
Пример 46. Круглая горизонтальная платформа весом О и радиу-
радиусом R вращается вокруг вертикальной оси с угловой скоростью со0.
В точке D платформы на расстоянии г от этой оси стоит человек
весом Q. Определить, пренебрегая трением в подпятнике и подшип-
подшипнике, угловую скорость и, с которой будет вращаться платформа,
когда человек начнет перемещаться по платформе с относительной
скоростью и по окружности радиусом г в сторону вращения плат-
платформы.
Решение. К механической системе, состоящей из платформы
и человека (материальной точки), применим теорему об изменении
кинетического момента механической системы в форме уравне-
уравнения E6.2):
dLz me
dt z'
где ось z — ось вращения платформы.
Если пренебречь трением в подшипнике и подпятнике, то внеш-
внешними силами, действующими на рассматриваемую систему, будут: вес
Рис. 191
Рис. 192.
платформы G, вес человека Q и реакции подпятника А и подшип-
подшипника В (рис. 191).
Момент каждой из этих сил относительно оси Z равен нулю.
Поэтому Alf=O и Z.2 = const.
Определим значения кинетического момента системы до начала
движения человека и после него; приравняем эти значения, так как
кинетический момент системы не изменяется.
1. Начальный момент времени ?0 = 0(рис. 191). Полагая
платформу однородным диском, определяем ее момент инерции относи-
относительно оси z по формуле:
GR2
. _
2g '
240
Кинетический момент платформы
Ll2 — Jza0 = 2g .
Момент количества движения человека, движущегося только
вместе с платформой,
L2z = mver = -^ соог2.
Кинетический момент системы
•ЛЛ — *-1г ""Г Чг — —2g ' ~g '
2. Произвольный момент времени t при движении
человека (рис. 192). Кинетический момент платформы:
Момент количества движения человека
L2z = m (ve + «) r = -|- со/-2 + -|- «г.
Кинетический момент системы
Г/Ч—/ -U/ _ G^«> | Q^a ¦ Q ,,Г
(?г)< = L\z -\- L2z — ¦ 2g i J Г У Г<
Приравниваем значения кинетического момента.
, Qrw0 _ G^<a Qra , Qur
-Г g — ^~ ^
2g -Г g — 2g ^~ g ^ g
или
{OR2 + 2Qr2) co0 = (OR2 + 2Qr2) со + 2Qur,
откуда
_ 2Qur
т. е. при движении человека в сторону вращения платформы угло-
угловая скорость платформы уменьшилась.
Вопросы для самоконтроля
1. Каковы дифференциальные уравнения поступательного движения
твердого тела?
2. По какой формуле вычисляется кинетический момент твердого тела,
вращающегося вокруг неподвижной оси, относительно этой оси?
3. Какой вид имеет дифференциальное уравнение вращения твердого
тела вокруг неподвижной оси?
16 А. А. Яблонский 241
4. При каких условиях тело вращается вокруг неподвижной осиг
а) ускоренно; С) равномерно; в) замедленно?
5. Мерой чего является момент инерции твердого тела относительно оси?
6. Каковы основные типы задач, которые можно решать при помощи
дифференциального уравнения вращения тела вокруг неподвижной оси?
7. Какое положение механики иллюстрируется при помощи скамейки
Жуковского?
8. Что называют приведенной длиной, центром и осью качания физи-
физического маятника?
9. По какой формуле вычисляется приведенная длина физического
маятника?
10. Каким свойством обладают ось привеса и ось качаний физического-
маятника?
11. По какой формуле вычисляется период малых колебаний физического
маятника?
12. Назовите способы опытного определения моментов инерции твердых
тел и укажите, в чем заключается их сущность
ГЛАВА XIII
ДИНАМИКА ПЛОСКОГО ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
§ 84. Теорема о зависимости между кинетическими моментами
механической системы относительно неподвижного центра
и относительно центра масс системы
В § 56 рассмотрена теорема об изменении кинетического момента
механической системы относительно неподвижного центра.
Для изучения сложного движения твердого тела, каким является
плоское движение, необходимо воспользоваться зависимостью между
кинетическими моментами механи-
механической системы относительно не-
неподвижного центра и относительно
центра масс системы.
Для установления этой зависи-
зависимости любое движение механи-
механической системы разлагают на два
составляющих движения: перенос-
переносное движение с подвижной систе-
системой отсчета C|tj?, движущейся
поступательно, и относительное
движение по отношению к этой
системе (рис. 193). Эти движения
Рис. 193 называют поступательным движе-
движением системы с центром масс и
относительным движением ее по отношению к центру масс. Такое же
разложение движения системы производилось в § 67 для вычисления
ее кинетической энергии.
В каждую точку Mt механической системы проведем радиусы-
векторы: г^ — из начала координат неподвижной системы отсчета О
242
и рг — из центра масс системы С. Эти радиусы-векторы связаны
зависимостью:
Абсолютная скорость V; любой точки Mt равна геометрической
сумме ее переносной и относительной скоростей:
В соответствии с этим вектор количества движения точки равен:
Кинетический момент системы относительно неподвижного центра О
определится по формуле:
Подставив значения rt и trifli, получим
Lo = 2 (гс + Pi) X (m,vc + mivir) = 2 rc X ^
+ 2 rc X Щ*1г + 2 Рг X "iiVc + 2 Рг X m,v,r.
Преобразуем каждое из слагаемых полученного выражения в от-
отдельности:
1) 2 гс X wtvc = гс X 2 ЩЧс = гс X vc 2 % = rc X mvc =
= rc X К. где К = т\с — главный вектор количества движения си-
системы;
2) 2 гс X т^1т — гс X 2 mivtr = 0. так как согласно F7.4)
2»ttvir = 0;
3) 2 Р/ X wtvc — B mi?i) X vc = 0, так как согласно § 32
2 /и4рг = mpc, а радиус-вектор центра масс рс == 0;
4) 2 Pi X mivir = Lcr> r^e LCr — кинетический момент системы
относительно центра масс в ее относительном движении по отноше-
отношению к этому центру.
Подставив эти значения в выражение кинетического момента
механической системы, получим
(84.1)
Уравнение F4.1) выражает теорему о зависимости между кинетиче-
кинетическим моментом механической системы относительно неподвижного
центра и относительно центра масс системы: при любом движении
механической системы ее кинетический момент относительно
неподвижного центра равен геометрической сумме: момента
относительно этого центра главного вектора количества дви-
движения системы, условно приложенного в центре масс, и кине-
кинетического момента системы в ее относительном движении по
отношению к центру масс относительно этого центра.
16* 243
Обозначим момент главного вектора количества движения К»
условно приложенного в центре масс, относительно неподвижного
центра О:
rcXK = L0K.
тогда уравнение (84.1) примет вид
L0 = LOK-f-LCr. (84.2)
Если центр О, относительно которого вычисляется кинетический
момент механической системы, совпадает в данный момент с центром
масс системы С, то гс = 0 и формула (84.1) принимает вид
Lc = LCr, (84.3)
т. е. кинетические моменты механической системы относи-
относительно центра масс в абсолютном движении и в относитель-
относительном движении по отношению к центру масс геометрически
равны.
В проекциях на оси, координат получим три равенства, соответ-
соответствующих векторному равенству (84.2):
= LxK "Г" h
(84-4>
Здесь Lx, Ly, Lz—кинетические моменты механической системы отно-
относительно неподвижных осей х, у, z;
LxK, LyK, LzK—моменты главного вектора количества движения
системы К, условно приложенного в центре масс,
относительно осей х, у, z\
L\T% L^r, L^T—кинетические моменты системы относительно по-
подвижных осей |, л\, ?, проходящих через центр
масс С в относительном движении системы по
отношению к центру масс, т. е. по отношению
к системе отсчета СёЛС-
Если ось, относительно которой вычисляется кинетический момент
механической системы, проходит в данный момент через ее центр
масс, то ИЗ'формул (84.4)
к = hr> (84.5)
так как
LxK = Q.
Таким образом, кинетические моменты механической системы
относительно оси, проходящей в данный момент через центр
масс системы, в абсолютном и в относительном движениях
системы по отношению к центру масс равны по величине и
одинаковы по знаку.
244
Пример 46. В эпициклическом механизме кривошип /// весом О3
вращается с угловой скоростью со вокруг неподвижной оси Ох. Кри-
Кривошип приводит в движение колесо // весом О2 и радиусом г2, катя-
катящееся без скольжения по неподвижному колесу / радиусом Г\
(рис. 194). Найти кинетический момент механизма относительно
оси Ох, перпендикулярной к плоскости механизма.
Рис. 194.
Рис. 195.
Решение. Кинетический момент эпициклического механизма-
относительно оси Ох (рис 195) складывается из кинетических
моментов колеса // и кривошипа III относительно этой оси:
Lx = L'x + L'x'- (a)-
Направление вращения кривошипа против движения часовой
стрелки примем за положительное направление.
Кинетический момент колеса // определим по формуле (84.3)г
Lx = Ljck-j- L\t- (б)
Скорость центра колеса //
vA = О А • <о = (Г! + г2) со.
Направление главного вектора количества движения К колеса //'
совпадает с направлением v^, а его модуль
ч- On , ,
Момент вектора К. условно приложенного в центре тяжести
колеса // и направленного против движения часовой стрелки относи-
относительно точки О, положителен и равен
ХК ? V l-f 2)
245-
Движение колеса // относительно подвижных осей координат ?,
¦у], ?, проходящих через центр тяжести А колеса //, является вращением
против движения часовой стрелки вокруг оси А%. Кинетический мо-
момент колеса в этом движении относительно подвижной оси Л|,
перпендикулярной к плоскости колеса, положителен и согласно фор-
формуле G9.1) равен:
Момент инерции колеса (однородного диска) найдем по формуле
Угловую скорость колеса // определим как отношение модуля
скорости его центра к расстоянию от его центра до мгновенного
дентра скоростей Р колеса //:
По найденным значениям /^ и щ получим
Подставив значения Lxk и L\t в формулу (б), найдем кинети-
кинетический момент колеса //:
Кривошип /// вращается против движения часовой стрелки вокруг
неподвижной оси Ох. Его кинетический момент относительно этой
¦оси найдем по формуле G9.1):
где момент инерции кривошипа (однородного стержня)
Подставив это значение Jx, получим кинетический момент кри-
кривошипа
L>x —— 7, СО.
OP"
Сложив значения i'J и LrJJ, получим кинетический момент меха-
механизма относительно оси Ох:
§ 86. Теорема об изменении кинетического момента
механической системы в относительном движении по
отношению к центру масс
Для доказательства теоремы воспользуемся равенством (84.1)г
L0 = rcXmvc-|-Lc,.
Продифференцируем это выражение по t:
dL- drr d\r dLrr
dt dt <^""c-r ¦c/n- dt -г dt
~ = vc, следовательно, ——
Здесь —~ = vc, следовательно, ——- X "^vc = 0 и
ГсХ"! ~5f- = гс X mwc = гс X RE.
Тогда
Главные моменты внешних сил относительно неподвижного-
центра О и подвижного центра масс С связаны зависимостью, уста-
установленной в статике:
М? = М^ — rcXR*- (85.2)
Подставляя (85.1) и (85.2) в уравнение E1.1):
получаем
откуда -^- = Мс- (85.3>
Уравнение (85.3) выражает теорему об изменении кинетического-
момента механической системы в относительном движении по отно-
отношению к центру масс системы: производная по времени от кине-
кинетического момента механической системы относительно центра
масс системы в относительном движении системы по отно-
отношению к этому центру геометрически равна главному моменту
внешних силг, действующих на точки системы относительно
центра масс.
Векторному уравнению (85.3) соответствуют три уравнения в проек-
проекциях на оси координат:
^ Е V Я W Е V4 Я ?г Е
(85.4>
24Г
Здесь L|r, 1ЦГ, Lir — кинетические моменты механической системы
в ее относительном движении по отношению к центру масс, вычи-
вычисленные относительно подвижных осей |, г\, ?, проходящих через
центр масс;
М%, Мц, M-q—главные моменты внешних сил, действующих на
точки системы относительно этих же осей.
Уравнения (85.4) показывают, что производная по времени от
кинетического момента механической системы относительно
любой оси, проходящей через центр масс системы, в относи-
относительном движении системы по отношению к центру масс равна
главному моменту внешних сил, действующих на точки системы,
относительно этой оси.
Следствия теоремы: 1. Если главный момент внешних
¦сил относительно центра масс все время остается равным нулю,
то кинетический момент механической системы в ее относи-
относительном движении по отношению к центру масс, вычисленный
¦относительно центра масс, не изменяется.
с"
Из уравнения (85.3) следует, что если Мс = 0, то
—J^- = 0 и LCr = const. (85.5)
2. Если главный момент внешних сил относительно неко-
некоторой оси, проходящей через центр масс системы, все время
остается равным нулю, то кинетический момент механической
системы в относительном движении по отношению к центру
масс, вычисленный относительно этой оси, не изменяется.
Из уравнения (85.4) следует, что если УИ|=О, то
-?- = 0 и Llr = const.
Рассмотренные следствия из теоремы называют законом сохра-
сохранения кинетического момента механической системы в относи-
относительном движении по отношению к центру масс.
Классическим примером применения этого закона является прило-
приложение его к движению тел солнечной системы. Это движение проис-
происходит под действием внутренних сил взаимного притяжения между
телами этой системы.
Поэтому кинетический момент солнечной системы LCr относи-
относительно ее центра масс должен оставаться неизменным по модулю и
«аправлению Это положение было установлено французским мате-
математиком и астрономом Лапласом A749—1827).
Если единственной внешней силой, приложенной к механической
системе, является сила тяжести, то главные моменты внешних сил
¦относительно центра масс и относительно любой оси, через него
проходящей, равны нулю.
В этом случае кинетический момент системы относительно центра
масс LCr, а также ее кинетический момент относительно любой оси,
248
проходящей через центр масс, например Z,|r, остаются постоянными.
Так, например, во время прыжка танцовщика его кинетический момент
Z.j относительно вертикальной оси ?, проходящей через центр тяже-
тяжести,не изменяется.
Если в начале прыжка танцовщик приобрел угловую скорость во-
вокруг оси ?, то его кинетический момент в относительном движении
по отношению к центру масс, т. е. во вращении вокруг оси ?, вы-
вычисляется по формуле G9.1): Z-g = Jgto.
Так как L^ — const, то Jii&i — -/2№> откуда
т. е. танцовщик может изменять угловую скорость во время прыжка,
изменяя момент инерции тела путем изменения положения рук. Сохра-
Сохранением кинетического момента относительно центральной оси объяс-
объясняется, например, и способность кошки, используя движение хвоста,
переворачиваться во время падения и способность бегущей по лесу
собаки быстро поворачиваться, обегая деревья.
§ 86. Дифференциальные уравнения плоского движения
твердого тела
Положим, что твердое тело совершает плоское движение. Сов-
Совместим с плоскостью чертежа плоскость
масс тела, показав плоскую фи-
фигуру, полученную от сечения тела
этой плоскостью (рис. 196). В дина-
динамике за полюс принимают не произ-
произвольную точку фигуры, а центр
масс тела. Тогда уравнения движе-
движения плоской фигуры имеют вид
в которой движется центр-
7
р;
Если
Pf.
196.
известны внешние силы
. ., Р„, действующие на
тело, то два дифференциальных уравнения движения плоской фигуры
можно получить из дифференциальных уравнений D3.2):
где т — масса тела, Xе и Yb — проекции главного вектора внешних
сил, приложенных к телу, на оси х и у.
249-
Третье дифференциальное уравнение движения плоской фигуры
получают из уравнения (85.4):
~dT
Здесь L& — кинетический момент тела относительно оси ? в относи-
относительном движении тела по отношению к центру масс;
ось ? проходит через центр масс тела перпендикулярно
к чертежу;
Aif — главный момент внешних сил, приложенных к телу,
относительно той же оси ?.
Так как относительное движение тела по отношению к центру
масс, т. е. по отношению к подвижной системе осей С?т]? является
.вращением вокруг оси ?, то кинетический момент Lj, определяется
ло формуле G9.1):
Дифференцируем по t:
dL^r da
Подставляя это значение в уравнение (85.4), получаем
¦VI В Е
Таким образом, дифференциальные уравнения плоского движения
твердого тела имеют вид:
гЕ ___ v-E
(86.1)
Интегрируя эти уравнения, можно определить хс, ус и ф как
функции времени
Для определения шести постоянных интегрирования используются
начальные условия движения: координаты центра масс л;со> усо и
угол поворота тела сро в начальный момент /0 = 0, а также проекции
начальной скорости центра масс на оси координат jcc0> yco и началь-
начальная угловая скорость тела ср0.
При определении движения несвободного твердого тела наряду
с задаваемыми внешними силами учитываются и неизвестные реакции
связей. В этом случае для решения задачи используются дополни-
дополнительные уравнения, определяющие ограничения движения тела имею-
имеющимися связями.
В том случае, когда траектория центра масс задана, удобно поль-
пользоваться дифференциальными уравнениями движения точки С в проек-
проекциях на касательную и главную нормаль к этой траектории.
250
Тогда дифференциальные уравнения плоского движения твердого-
тела имеют вид
(86.2>
Здесь 5С — дуговая координата центра масс, vc — его скорость и.
р—радиус кривизны его траектории.
§ 87. Примеры на плоское движение твердого тела
Пример 7. Однородный диск радиусом г = 20 см вращаете»
вокруг неподвижной оси Oz, проходящей через одну из точек era
обода, перпендикулярной к его плоскости (рис. 197, а). В момент,
Рис. 197.
когда радиус ОС составляет угол 30° с вертикалью, диск отделяется
от оси вращения, имея скорость центра vc = 2 м/сек. Определить
дальнейшее движение диска.
Решение. После отрыва от оси на диск- действует одна внеш-
внешняя сила — его вес G. Так как в момент отрыва скорости всех точек
диска лежат в плоскости хОу и сила тяжести лежит тоже в этой
плоскости, то диск будет двигаться в плоскости хОу.
Установим начальные условия этого плоского движения по
рис. 197, б, считая момент отрыва начальным моментом to = O.
Координаты центра тяжести диска в этот момент:
л:Со = — ОС0sin30°:= — 0,2.0,5 = — 0,10 м,
yCo=OC0cos 30° = 0,2-0,866 = 0,17 м.
251
Угол поворота диска будем отсчитывать от подвижной оси ?
к радиусу СА, обозначив А точку диска, совпадающую в момент
отрыва с началом координат. Тогда начальное значение угла пово-
поворота
Знак минус указывает на отсчет угла по движению часовой
стрелки.
Проекции начальной скорости центра тяжести диска на оси
координат:
хСо = vCa cos 30° = 2 • 0,866 = 1,73 м/сек;
уСо = vCa sin 30° = 2 ¦ 0,5 = 1 м/сек.
Модуль начальной угловой скорости диска
Алгебраическая величина угловой скорости вращения, происходя-
происходящего по движению часовой стрелки:
Фо = — ©о — —Ю сек~1.
Таким образом, начальные условия имеют вид
to = O, хс0=— 0.10 м; ус0 = 0,П м. фо = — -|-;
хс0= 1,73 м/сек; ус0=1 м/сек, фо = —10 сек~г.
Составим дифференциальные уравнения (86.1) плоского движения
диска под действием силы G:
= ^iXf = 0, откуда хс = 0;
тУс = 2 У^ = ° = т%> откуда ус = g;
Лф — 2 №% = 0, откуда ф = 0.
Интегрируем первое уравнение два раза по t:
По начальным условиям находим С1 и С2:
Сх= 1,73; С2 = — 0,10.
Получаем уравнение движения центра тяжести диска вдоль оси х:
хс= 1,73^ — 0,10.
Интегрируем второе уравнение два раза по t:
252
По начальным условиям находим С3 и С4:
С3=1; С4 —0,17.
Уравнение движения центра тяжести диска вдоль оси у будет
Интегрируем третье уравнение два раза по t:
По начальным условиям определяем С5 и С6:
С5 = -10;
С, = -¦=-.
Получаем уравнение вращения диска вокруг оси
через его центр тяжести:
проходящей
Ф =
= —10^ —-д..
Таким образом, уравнения плоского движения диска имеют вид
хс= 1,73*—0,10,
yc = 4,9t2-\-t-\-Q,l7,
Здесь: t — в секундах, хс> ус — в метрах, ф — в радианах.
Исключая t из первых двух уравнений, находим уравнение траек-
траектории центра тяжести:
t:
1,73
Полученное уравнение является уравне-
уравнением параболы. Чтобы определить положение
ее вершины, следует привести уравнение
к виду
?
ч* ~, — ^ v, „„ рис 19Q
где о и b — координаты вершины.
Пример 48. Однородный тонкий стержень АВ длиной I и весом О
прикреплен концом В к вертикальной нити BD, а концом А опи-
опирается на гладкую горизонтальную плоскость, составляя с ней угол
фо==45° (рис. 198). В некоторый момент нить BD пережигают и
стержень начинает падать. Определить реакцию плоскости в точке А
в момент начала падения стержня.
253
Решение. При наличии нити реакция плоскости, так же как
и реакция- нити, составляет „-к- О. Освобожденный от нити стержень
будет двигаться под действием двух внешних сил: веса G и реакции,
плоскости N (рис. 199). Так как эти силы вертикальны и в началь-
начальный момент стержень был в состоянии покоя, то центр тяжести
стержня будет двигаться по вертикали. Направим ось у вверх по
траектории центра тяжести стержня, поместив начало коор-
координат в опорной плоскости. Соста-
Составим дифференциальные уравнения (86.1)
плоского движения стержня в пло-
скости хОу:
'////////////'//УК
1
X
С
тх
== 2
О,
= — Л? у cos ф.
Из первого уравнения и следует,
рис, 199. что центр тяжести стержня движется
по вертикали.
В двух последних уравнениях имеются три неизвестные вели-
величины ус, ф и N. Для их определения необходимо составить еще
четвертое уравнение, выражающее ограничение, которое накладывает
на движение стержня связь — горизонтальная плоскость. Так как
конец стержня А перемещается ,по горизонтали, то
/
Находим производные:
Ус = 2 Ф cos Ф>
Ус = 2" (Ф cos Ф — Ф2 sin ф).
Во второе уравнение подставляем это значение ус, а в третье
ml2
уравнение подставляем значение момента инерции стержня J^ = —г^-
относительно оси С?, перпендикулярной к плоскости движения
стержня хОу:
i — ф2з1пф)^Л/' — О, (а)
ИЛИ -^-ф = —Л/СОЭф.
(б)
Чтобы исключить из этих уравнений ф и определить N, умножим
уравнение (б) на —Зсовф и сложим его с уравнением (а). Тогда
254
получим
откуда
— ^- ф2 sin ф = N — G + ЪЫ cos2 ф,
N =
G я- ф2 Sinq>
! cos2 ф
В начальный момент t0 = 0 имеем ф0 = 45° и ф0 = 0, поэтому
д. G _ G __ 2 г
°~ 1+3cos245" ~~ j , _3 ~~ 5
Пример 49. Однородный цилиндр весом О и радиусом г катится
без скольжения по наклонной плоскости, составляющей с горизонтом
угол а. Коэффициент сцепления ра-
равен /сц. Определить: 1) ускорение дви-
движения центра тяжести цилиндра и 2) угол
наклона плоскости, при котором начи-
начинается скольжение цилиндра, без учета
сопротивления качению.
Решение. Движение цилиндра
совершается под действием трех внеш-
внешних сил: веса G, нормальной реакции
плоскости N и силы сцепления Fcn.
Направим оси хну, как указано на
рис 200. Через центр тяжести ци-
цилиндра С проведем оси | и г| и ось ?,
перпендикулярную к плоскости чертежа
и направленную к читателю. Момент Рис. 200,
силы относительно оси С? будет поло-
положителен, если сила стремится вращать плоскость чертежа вокруг
точки С против движения часовой стрелки, и отрицателен — в про-
противоположном случае.
Составим дифференциальные уравнения (86.1) плоского движения
тела:
тхс = 2 Xf = Gsinot — Fzu, (a)
(б)
(в)
все время ус = г = const, то ус = 0, а потому из
Так как за
уравнения (б)
N — G cos а = 0,
откуда N = G cos a.
Дифференциальные уравнения (а) и (в) содержат три неизвестные
величины: хс, Fca и ф. Для определения этих неизвестных к двум
составленным уравнениям добавим еще одно уравнение.
255
Так как цилиндр катится без скольжения, то точка Р соприкаса-
соприкасания среднего сечения цилиндра с плоскостью является мгновенным
центром скоростей среднего сечения.
Поэтому
vc=\e>\r. (г)
Проекция скорости точки С на ось х:
Алгебраическая величина угловой скорости <р отрицательна, так
как цилиндр вращается no движению часовой стрелки, т. е.
Ф = —|ю|,
где | со ] — абсолютное значение угловой скорости.
Формулу (г) можно представить в виде
хс = — щ.
Дифференцируя это выражение по t, получаем необходимое для
решения задачи четвертое уравнение:
хс = — щ. (д)
Из уравнения (д) имеем
хс
Момент инерции цилиндра относительно оси С?
Подставив эти значения в уравнение (в), получаем
тг2 I хг\ тхг
^—РспГ, или —2?- = Fcu.
2
Решив это уравнение совместно с уравнением (а), найдем хс
тхс = G sin а — Fca,
тх.
*с _F
3 0 2
— тхс = Gsina, откуда хс=-^—sin a = -^ g sin a.
mxr 1
^сц = —2^" == "J G sin a-
Полученный результат показывает, что центр тяжести цилиндра
•* 2
движется равноускоренно с ускорением wc = \xc\ =-^ g sina, не
зависящим от веса цилиндра.
256
Для определения угла наклона плоскости, при котором начи-
начинается скольжение цилиндра, воспользуемся известным положением
из статики:
F -^Г pmax — f N
сц ^^ сц ¦> сц
Подставив значения /\ц и А/, получаем
¦д- О sin a <; /CUG cos а,
откуда
tga<3/cu.
Таким образом, скольжение начнется при a = arctg 3/сц.
Вопросы для самоконтроля
1. Сформулируйте теорему о зависимости между кинетическими момен-
моментами механической системы относительно неподвижного центра и относи-
относительно центра масс системы в векторной форме и в проекциях на оси коор-
координат.
2. Как формулируется теорема об изменении кинетического момента
механической системы в относительном движении по отношению к центру
масс в векторной форме и в проекциях на оси координат?
3. Почему сила тяжести не влияет на изменение кинетического момента
механической системы относительно центра масс и относительно любой оси,
проходящей через центр масс системы?
4. Почему кинетический момент солнечной системы относительно ее
центра масс не изменяется?
5. Какой вид имеют дифференциальные уравнения плоского движения
твердого тела и на основании каких теорем они получены?
6. Каким видом дифференциальных уравнений плоского движения твер-
твердого тела удобно пользоваться, если задана траектория центра масс тела?
ГЛАВА XIV
ДИНАМИКА СФЕРИЧЕСКОГО И СВОБОДНОГО ДВИЖЕНИЙ
ТВЕРДОГО ТЕЛА
§ 88. Кинетические моменты твердого тела относительно
неподвижной точки и координатных осей
при его сферическом движении
Кинетический момент твердого тела, совершающего сферическое
движение, относительно неподвижной точки (рис. 201), определяется
по общей формуле E5.1):
Из кинематики известно (§ 116), что скорость уг любой точки Мс
тела, совершающего сферическое движение, определяется векторным
произведением:
у^ = ю X г,.
17 А. А. Яблонский 257
Здесь to — вектор угловой скорости тела, направленный по мгно-
мгновенной оси Q, a ri — радиус-вектор, проведенный в точку Mt из
неподвижной точки О. Подставляя это значение V; в формулу E5.1),
получаем
L0 = Sr/Xffl,(«Xr(). (88.1)
Воспользуемся известной формулой двойного векторного произ-
произведения:
А X (В X С) = В (А • С) — С (А ¦ В).
Согласно этой формуле выражение (88.1) примет вид
= w 2 Щг\ — 2 tnft (<•> • rt). (88.2)
Для определения расстояния от точки
до начала координат имеем
Скалярное произведение векторов
можно выразить через их проекции на оси
координат:
Ю • Г( = &x +
Рис. 201.
Пользуясь этими выражениями, получим кинетический момент
тела относительно точки О в виде
: ft)
Щ
• fL + zf) -
Определим кинетический момент тела относительно оси х, про-
проходящей через точку О, как проекцию Lo на ось х:
lx=©^ 2 «, (jf? -h у? +«?)—2 «,*, К*, + V* + ШЛ>
После соответствующих преобразований
i<x=©, 2 «х (у? + «?) — »у 2 »i*ty (—»г 2 «,«,*,.
Здесь 2 mi (у\ ~Ь zf) == /г — момент инерции тела относительно оси х;
2 т1х1^1= /ту — центробежный момент инерции тела отно-
относительно осей д: и у;
2 tnizixi==^zx— центробежный момент инерции тела отно-
относительно осей z и х.
Подставляя эти значения в выражение, определяющее Lx, полу-
получаем формулы для вычисления кинетических моментов тела, совер-
258
шающего сферическое движение относительно оси а; и по аналогии
относительно осей у и г:
Lx —
— Jxya>y — Jzx(az,
(88.4)
Если за оси координат приняты главные оси инерции в неподвиж-
неподвижной точке О, то центробежные моменты инерции тела относительно
этих осей равны нулю, т. е.
тогда формулы (88.4) принимают вид
(88.5)
§ 89. Дифференциальные уравнения сферического движения
твердого тела (динамические уравнения Эйлера)
При сферическом движении твердого тела его кинетический
момент Lo относительно неподвижной точки О изменяется согласно
уравнению E6.1):
dLn __p
dt "
Свяжем с движущимся
телом подвижные оси коор-
координат |, х\, ?, обозначив
орты этих осей ij, jj,
(рис. 202).
Разложим вектор Lo на
составляющие, имеющие на-
направление осей J, ч\, ?:
(89.1) ?
Согласно E6.2) проек- рис, 202.
ции L|, L^, Li вектора Lo
на оси |, г], Z представляют собой кинетические моменты тела отно-
dLo
сительно этих осей. Определим производную .. , учитывая, что
орты ilt jI; kj — переменные векторы:
17*
259
Производные ортов i^ jx> k[ по времени можно выразить по фор-
формулам из кинематики (§ 124):
Пользуясь этими формулами, преобразуем первую сумму в правой
части равенства (а):
i. Ji
0)| CO-
= w X (Ч
= h (%k~
= <«> X Lo =
Подставив это выражение в равенство (а), получим
dbr
или
rfL
dt
Г =
(89.2)
где множители при ортах представляют собой проекции вектора —,—
на подвижные оси координат |, т), S-
Подставив это выражение в равенство E6.1), находим
dL%
dLt
Этому векторному равенству соответствуют три равенства в проек-
проекциях на подвижные оси \, г], t,:
dLt
dL^
IF
*k
dt
т, — a»nZ.|) = Aff.
(89.3)
260
Если за подвижные координатные оси приняты главные оси инер-
инерции тела в точке О, то кинетические моменты тела относительно
этих осей определяются по формулам (88.5):
В этом случае уравнения (89.3) принимают вид
d&n
(89.4)
d&y p.
где J\, Jv Jt, — моменты инерции тела относительно его главных
осей инерции в точке О;
Mf, м\, М^ — главные моменты внешних сил, приложенные к телу,
относительно этих осей;
coj, co^, (Oj — проекции вектора угловой скорости тела ю на оси |,
т], С- Эти проекции можно определить по формулам
Эйлера из курса «Кинематика» (§ 130):
со| = xjjsin 9 sintp—(- 9 coscp,
со^ = ф sin Э cos ф — 9 sin ф,
coj ^ijjcos 9 —1~ ф,
где \j), 9, ф—углы Эйлера, определяющие положение тела при сфе-
сферическом движении (см. ч. I, «Кинематика», § 113).
Дифференциальные уравнения (89.4) сферического движения твер-
твердого тела называются динамическими уравнениями Эйлера.
Интегрирование динамических уравнений Эйлера связано с боль-
большими трудностями. Поэтому исследователи этого вопроса рассматри-
рассматривали лишь частные случаи сферического движения твердого тела.
Наиболее существенные результаты по этому вопросу имеются в
работах Эйлера, Лагранжа и С. В. Ковалевской. Теория сфериче-
сферического движения твердого тела лежит в основе теории гироскопов,
получивших широкое применение в технике.
§ 90. Понятие о гироскопе. Кинетический момент быстро
вращающегося гироскопа
Гироскопом называется твердое тело, вращающееся вокруг
оси материальной симметрии, одна из точек которой непо-
неподвижна.
Положим, что гироскоп имеет неподвижную точку О и ось сим-,
метрии O'Q (рис. 203). Если гироскоп вращается вокруг оси О? с угло-
угловой скоростью со и положение оси О? не изменяется, то вектор
261
угловой скорости гироскопа <о направлен по оси О?. Его проекции
на подвижные оси координат
Рис. 203.
Как установлено в § 39, ось симметрии О? является главной
осью инерции для всех своих точек, в том числе и для точки О.
, Поэтому кинетические моменты гироскопа отно-
относительно осей |, г\, ?, определяются по форму-
формулам (88.5):
где Jg — момент инерции гироскопа относи-
относительно оси Ofr
Кинетический момент гироскопа относительно
неподвижной точки О
Рассмотрим теперь сложное движение гиро-
гироскопа, состоящее из вращения вокруг его оси
симметрии Ot, с угловой скоростью со и вра-
вращения вместе с этой осью вокруг неподвижной
оси Oz с угловой скоростью »! (рис. 204, а).
В этом случае вектор абсолютной угловой скорости гироскопа о>2
определяется диагональю параллелограмма, построенного на угловых
скоростях составляющих вра-
вращений:
Кинетический момент гиро-
гироскопа Lo относительно точки О
можно определить по его
проекциям на подвижные оси
координат |, т|, ?, пользуясь
формулами (88.5).
В этом случае направле-
направление Lo не совпадает с направ-
направлением оси гироскопа ?. Если
угловая скорость вращения ги-
гироскопа вокруг его оси сим-
симметрии со во много раз больше
угловой скорости вращения
самой этой оси coj, то направления векторов w, w2, а следовательно,
Z,j и Lo, весьма близки между собой.
В дальнейшем, полагая, что угловая скорость со вращения гиро-
гироскопа вокруг его оси симметрии во много раз превышает угловую
скорость coj вращения самой оси (рис. 204, б), условимся считать
Рис. 204.
262
кинетический момент гироскопа относительно неподвижной точки О
направленным вдоль оси симметрии гироскопа и равным:
L0 = Jta. (90.1)
На этом условии основана приближенная теория гироскопических
явлений, которая изложена в данном курсе.
§ 91. Гироскоп с тремя степенями свободы
Гироскопом с тремя степенями свободы называется гиро-
гироскоп, движение которого ограничено только наличием одной не-
неподвижной точки.
Положение твердого тела, одна из точек которого неподвижна,
можно определить заданием трех эйлеровых углов i|\ 9 и <р. Из этого
следует, что такое тело имеет три степени свободы. Гироскоп
с тремя степенями свободы, быстро вращающийся вокруг своей оси,
обладает особым физическим свойством — оказывать сопротивление
силам, стремящимся сместить его ось. Чтобы обнаружить это свой-
свойство, рассмотрим гироскоп, неподвижная точка которого совпадает
с его центром тяжести.
Рис. 205.
На рис. 205, о, б показан гироскоп, острие которого совпадает
с его центром тяжести С. Острие гироскопа совмещено с неподвиж-
неподвижной точкой опоры. Сила тяжести гироскопа в любом его положении
уравновешена реакцией опоры.
Рассмотрим действие некоторой силы Р на гироскоп, находящийся
в сестоянии покоя (рис, 205, а), и на гироскоп, вращающийся вокруг
своей оси симметрии С? с большой угловой скоростью © (рис. 205, б).
Положим, что постоянная по модулю сила Р, перпендикулярная
к оси симметрии гироскопа, действует на неподвижный гироскоп
263
(рис. 205, а) в течение некоторого промежутка времени. Будем счи-
считать, что до действия силы Р ось симметрии гироскопа CZ, совпадает
с неподвижной осью Cz и что линия действия силы Р лежит в пло-
плоскости yCz.
Очевидно, что под действием силы Р гироскоп начинает вра-
вращаться вокруг оси Сх, перпендикулярной к плоскости, проходящей
через линию действия силы Р и неподвижную точку С. Главный
момент внешних сил, действующих на гироскоп, относительно непо-
неподвижной точки С равен лишь моменту силы Р и направлен по оси Сх.
Его модуль
Pd. (91.1)
При наличии постоянного момента Мс гироскоп вращается равно-
равноускоренно и в течение промежутка времени т угловая скорость вра-
вращения гироскопа вокруг оси Сх возрастает от 0 до щ.
После прекращения действия силы Р гироскоп продолжает вра-
вращаться по инерции вокруг оси Сх с постоянной угловой скоростью calt
которую он приобрел под действием силы Р, т. е. ось симметрии
гироскопа перемещается в плоскости yCz, в которой была распо-
расположена линия действия силы Р.
Действие силы Р на тот же гироскоп, вращающийся вокруг своей
оси симметрии с большой угловой скоростью to (рис. 205, б), дает
совершенно другой эффект.
Согласно условию (90.1) кинетический момент гироскопа относи-
относительно неподвижной точки С направлен по оси симметрии гиро-
гироскопа С? и равен
Lc = Jta. (91.2)
По теореме Резаля (§ 57) скорость точки А — конца вектора Lc
кинетического момента гироскопа относительно неподвижной точки
С — геометрически равна главному моменту внешних сил, приложен-
приложенных к гироскопу, относительно той же точки, т. е.
и = Мс. где
Направление главного момента Мс совпадает с направлением
оси Сх, перпендикулярной к плоскости, проходящей через центр
тяжести С и линию действия силы Р, а потому и скорость и напра-
направлена параллельно оси х.
Из этого следует, что сила Р, параллельная оси Су, вызывает
перемещение оси симметрии гироскопа Ct, в плоскости zCx, т. е.
вращение ее вокруг оси Су, а не вокруг оси Сх, как в случае
гироскопа, не вращающегося вокруг своей оси симметрии.
Сопоставляя результаты действия силы Р на гироскоп, находив-
находившийся в состоянии покоя, и на гироскоп, вращающийся вокруг
своей оси симметрии с большой угловой скоростью, устанавливаем,
что смещение оси быстро вращающегося гироскопа происходит
264
не по направлению силы, а по направлению ее момента, пер-
перпендикулярно к направлению силы.
В момент прекращения действия силы Р главный момент внешних
сил относительно точки С равняется нулю и в дальнейшем
остается равным нулю. Поэтому, начиная с этого момента,
и ¦¦
¦¦М$=0.
т. е. точка А, а следовательно, и вся ось симметрии гироскопа
мгновенно останавливается.
Начиная с этого момента, гироскоп только вращается с угловой
скоростью со вокруг своей оси симметрии Ct,, отклоненной от пер-
первоначального положения на угол а.
Таким образом, быстрое вращение сообщает гироскопу спо-
способность противодействовать силам, стремящимся изменить
направление его оси вращения.
§ 92. Случай регулярной прецессии
В § 91 рассмотрено движение гироскопа с тремя степенями сво-
свободы в случае, когда сила тяжести не оказывает влияния на движе-
движение гироскопа, Рассмотрим теперь гироскоп, центр тяжести которого
не совпадает с точкой опоры. Примером
такого гироскопа может служить волчок,
опирающийся на неподвижную поверхность
острием О, которым оканчивается его ось
симметрии (рис. 206).
Положим, что ось симметрии волчка OZ,
составляет с неподвижной вертикальной
осью Oz угол 0 и волчок вращается вокруг
оси 01, с большой угловой скоростью со.
Кинетический момент волчка относительно
неподвижной точки О согласно (90.1) на-
направлен по оси О? и
Lo = J#>.
На волчок действуют, внешние силы: его
вес G, приложенный в центре тяжести, и
реакция опоры О.
Так как момент реакции опоры относительно точки О
нулю, то главный момент внешних сил относительно этой
равен моменту силы тяжести О.
Обозначив OC = d, находим
Рис. 206.
равен
точки
с?
Вектор Мо направлен перпендикулярно к вертикальной плоско-
плоскости zO?, проходящей через линию действия силы О и точку О.
265
По теореме Резаля скорость и точки Л — конца кинетического
момента Lo — геометрически равна главному моменту внешних сил Mf:
Следовательно, скорость и точки А параллельна вектору Мо,
т. е. в любой момент времени перпендикулярна к плоскости zOt,.
Из этого вытекает, что ось симметрии волчка О? вращается
вокруг неподвижной оси Oz с некоторой угловой скоростью ш{,
описывая коническую поверхность.
Угол 0, составленный осями О? и Oz, при этом движении остается
постоянным. Это движение, совершаемое осью симметрии волчка,
называется регулярной прецессией, а угловая скорость щ ее вра-
вращения вокруг неподвижной оси Oz называется угловой скоростью
прецессии. Для ее определения воспользуемся выражением скорости и.
По теореме Резаля
u — Mo = Gd sin6.
С другой стороны, скорость и можно рассматривать как враща-
вращательную скорость точки А во вращении волчка вокруг неподвижной
оси Oz с угловой скоростью coj. Ее модуль: и = АВщ, где АВ — рас-
расстояние от точки А до оси Oz:
АВ — О A sin 0 = Lo sin 9 = У?« sin 0.
Таким образом,
и = /?0X0] sin 9.
Приравниваем два выражения, определяющие модуль скорости и:
/^сой! sin 0 = Qd sin 0,
отсюда
Формула (92.1) показывает, что угловая скорость прецессии щ
тем меньше, чем больше угловая скорость со вращения волчка
вокруг его оси симметрии.
§ 93. Гироскоп с двумя степенями свободы.
Гироскопический момент
Рассмотрим теперь гироскоп с двумя степенями свободы. Этот
гироскоп представляет собой маховик (рис. 207, а), ось симметрии
которого DE опирается на подпятники, укрепленные в подвижной
раме. Рама может вращаться вокруг неподвижной оси АВ, проходя-
проходящей через центр тяжести С маховика. Положение гироскопа опре-
определяется двумя величинами: углом поворота маховика вокруг его
оси DE и углом поворота рамы вокруг оси АВ, т. е. гироскоп имеет
две степени свободы. Положим, что маховик вращается вокруг своей
266
оси симметрии Ct, с большой угловой скоростью со, а рама, несущая
подпятники D и Е, неподвижна. Если смотреть от точки Е к точке С,
видно вращение ¦ маховика происходящим против движения часовой
стрелки. Тогда кинетический момент маховика относительно точки С
направлен от точки С к точке Е и имеет модуль /,с = 7^о).
Рис. 207.
Предположим теперь, что раме сообщено вращение вокруг оси АВ
с небольшой угловой скоростью й>х и что это вращение происходит
против движения часовой стрелки, если смотреть от точки В
к точке С.
В этом случае точка F — конец вектора кинетического момента
маховика Lc — имеет вращательную скорость и, направленную
в сторону вращения рамы и равную по модулю
и = ?с@] =
(93.1)
Определим, какие внешние силы действуют на раму при этом
вращении.
По теореме Резаля главный момент внешних сил Мс относительно
точки С геометрически равен скорости и. На раму с укрепленным
в ней маховиком действуют внешние силы: сила тяжести G гиро-
гироскопа и реакции подшипников А и В, в которых находится ось
рамы. Сила тяжести G, приложенная в точке С, не имеет относи-
относительно нее момента, и следовательно, главный момент внешних сил Мс
представляет собой суммарный момент реакций подшипников.
Так как при вращении рамы центр тяжести гироскопа остается
неподвижным, то согласно уравнению D3.1) главный вектор внешних
сил равен нулю.
Отсюда следует, что внешние силы, приложенные к гироскопу,
приводятся к паре сил с моментом Мс-
Реакции подшипников А и В складываются из статических и
динамических реакций (рис. 207, а). Статические реакции, уравно-
уравновешивающие силу тяжести G, постоянны по модулю и направлению
267
и вследствие симметрии
Динамические реакции составляют пару сил с моментом Mf.
Плоскость пары перпендикулярна к моменту Мс и, следовательно,
совпадает с плоскостью, определяемой осями АВ и DE. На рис. 207, а
эта плоскость вертикальна и в соответствии с направлением мо-
момента Мс силы пары направлены: Rb"h — вверх и R™H— вниз При
вращении рамы плоскость пары сил (Яд™, RaHB) поворачивается
вместе с рамой. Зная расстояние между подшипниками, т е плечо
пары сил АВ, можно определить модули динамических реакций
подшипников.
Пользуясь теоремой Резаля и формулой (93 1), получаем
тогда динамические реакции подшипников
Ra" — Rb = AB ' . (93.2)
Статическая и динамическая реакции в каждой точке складываются
геометрически При вертикальном положении плоскости пары
(RT". RfT") линии действия статических и динамических реакций
совпадают В этот момент одна из полных реакций подшипников
имеет минимальное значение, а другая — максимальное:
ГТ ТИЛИ •* 7"lYUVl-
2 АВ
(93 3)
По закону равенства действия и противодействия устанавливаем,
что действие рамы на подшипники выражается также парой сил.
Момент пары сил, приложенной к подшипникам, равен по модулю Мс>
но направлен в противоположную сторону. Этот момент называют
гироскопическим
Обозначив его Мг, получим
Мг = —Мс- (93 4)
Появление гироскопического момента называется гироскопическим
эффектом
На рис. 207, б показаны гироскопический момент Мг и соответ-
соответствующая ему пара сил (Рди°, Рдиь), приложенная к подшипникам.
Таким образом, при вращении рамы гироскопа подшипники испыты-
испытывают, кроме статических давлений Р" и Рдт, динамические давле-
давления Р"н и Р™". Давления рамы на подшипники противоположны по
268
направлению соответствующим реакциям подшипников и равны им
по модулю, т е
ст ст G
Полное давление на каждый подшипник равно геометрической
сумме статического и динамического давлений
Появление динамических давлений на подшипники обусловлено
действием сил инерции гироскопа на опоры
Гироскопический момент представляет собой момент пары, соста-
составленной силами инерции гироскопа
Гироскопический эффект в той или иной форме проявляется
всегда, когда изменяется направление оси быстро вращающегося
гироскопа
В § 91 для гироскопа с тремя степенями свободы установлено,
что под действием приложенной силы его ось поворачивается в пло-
плоскости, перпендикулярной к силе Предпочожим, что на гироскоп,
изображенный на рис 207, а, б, действует в течение малого проме-
промежутка времени т сила, имеющая направление скорости и При на-
наличии трех степеней свободы ось гироскопа DE повернулась бы
в плоскости рамы вокруг точки С по движению часовой стрелки
Опоры гироскопа с двумя степенями свободы этого перемещения не
допускают При этом они испытывают давление в виде пары
(рди"> р^ин), стремящейся повернуть плоскость рамы по движению
часовой стрелки, а рама гироскопа в результате действия приложен-
приложенной силы начинает и продоажает вращаться вокруг оси АВ, как
указано на рис 207, а
Следовательно, гироскоп с двумя степенями свободы не обла-
обладает способностью противодействовать изменению направления
его оси вращения
Гироскопы получили широкое применение в различных обла-
областях техники- на транспорте, в морском флоте, в авиации, в военном
деле и проч
Так, например, гироскопический эффект используется при езде
на велосипеде
Гироскопические устройства обеспечивают также устойчивость
движения двухколесного автомобиля и вагона однорельсовой желез-
железной дороги
С помощью гироскопических устройств направляются по задан-
заданному курсу движения судов в открытом море и совершаются слепые
полеты самолетов
Гироскопические приборы используются для управления полетом
баллистической ракеты и обеспечивают движение в заданном напра-
направлении торпеды.
269
Для того чтобы обеспечить пуле и снаряду устойчивость в по-
полете, ствол винтовки и орудия снабжают винтовой нарезкой. Тогда
при выходе из ствола пуля и снаряд получают быстрое вращение
вокруг продольной оси и приобретают свойства быстро вращающе-
вращающегося гироскопа, обеспечивающие их устойчивость в полете*.
§ 94. Примеры гироскопических явлений
Пример 50. Велосипедное колесо весом G свободно насажено
на ось ВС длиной I (рис. 208). Момент инерции колеса относительно
оси ВС равен J. Колесу сообщили быстрое вращение с угловой
скоростью (а вокруг этой оси, расположенной горизонтально, и
закрепили только точку В.
Определить движение колеса,
пренебрегая весом оси.
N
j
Рис 208.
м?
Рис. 209.
Решение. Так как неподвижной является только точка В, то
вращающееся колесо представляет собой гироскоп с тремя степенями
свободы. Положим, что колесо вращается вокруг оси ВС против
движения часовой стрелки, если смотреть от точки С к точке В.
Кинетический момент гироскопа относительно точки В имеет напра-
направление, указанное на рис. 209, и модуль
LB = М.
Главный момент внешних сил относительно точки В равен мо-
моменту силы тяжести колеса G, так как реакция опоры В момента
не имеет:
Момент Мв направлен перпендикулярно к вертикальной плоскости,
проходящей через линию действия силы G и неподвижную точку В,
причем, смотря ему навстречу, можно видеть силу G вращающей
эту плоскость против движения часовой стрелки.
* Применение гироскопов в технике изложено в книге Е. Л. Николаи.
Гироскоп и некоторые его технические применения, Гостехиздат, 1947.
270
На основании теоремы Резаля
откуда
и=Мв = GL
Скорость и точки А — конца вектора LB — имеет направление
главного момента внешних сил Мд. Следовательно, ось колеса ВС
поворачивается вокруг вертикальной оси Bz и центр тяжести колеса С
описывает окружность в горизонтальной плоскости. Чтобы найти
угловую скорость этой прецессии щ, представим скорость и как
вращательную скорость точки А:
и = LBcoL = JgxOj.
Приравнивая два значения и, получаем
Ой,
откуда определяется угловая скорость прецессии:
GI
Прецессия имеет место потому, что центр тяжести колеса С
не совпадает с точкой опоры В.
Пример 51. Ротор быстроходной турбины, ось которой совпадает
с продольной осью корабля, имеет вес 0 = 39,2 км, радиус инерции
относительно оси вращения
0,75 м и угловую скорость 9
и = 3000 обIмин. Опреде-
Определить максимальные гироско-
гироскопические давления турбины
на подшипники при килевой
качке с амплитудой <р0 = 5°
и периодом Т = 12 сек, если
расстояние между подшип-
подшипниками АВ = 2 м.
Решение. Обозначим
продольную и поперечную
оси судна Ох и Оу (рис. 210). Определим кинетический момент
ротора турбины, вращающегося вокруг оси Ох, отнбсителыш его
центра тяжести С:
, , G 0 пп 39200 „ _С9 3,14-3000 7ПС е„п ,,
Lc — JCxa> = — i2 -?r = j • 0,752 5q =706 500 кг • M2/cewr
Килевая качка представляет собой качание судна вокруг попереч-
поперечной оси Оу.
Положим, что это качание происходит по гармоническому законуг
. 2я ,
ф = cposin-~-f.
Рис. 210.
27L
Угловая скорость вращения корпуса судна вокруг оси у:
dm 2я 2я ,
«! = -gj- — ~y ф0 cos ~y t.
Наибольший модуль угловой скорости щ, соответствует значе-
2я , , ,
ниям cos -у- с == х г.
2л —
2жро\ 36 9,86 Л _._ ,
щ =—=?— = —~— = то~~П7 = 0,046 сек~1.
'max T T 18-12
Положим, что нос судна поднимается, а корма опускается. Тогда
вращательная скорость и конца вектора Lc направлена вертикально
вниз и равна
и = /^^со^.
Согласно теореме Резаля момент пары, составленной реакциями
подшипников и приложенной к ротору турбины, направлен так же,
как и скорость и — вертикально вниз
Мс = и = Lc<*>v
Гироскопический момент, т. е. момент пары, приложенной к под-
подшипникам, определяется согласно (93.4):
т. е. гироскопический момент направлен вертикально вверх
Пара (Рдин, Рдин), составленная динамическими давлениями ротора
на подшипники, лежит в горизонтальной плоскости, а силы Рдин
и Рдин имеют направления, указанные на рис. 209.
Определяем эти силы:
Мг
16 25
~~ "Г К
Ра —Ув —-ав~~АВ~-
Максимальные гироскопические давления ротора на подшипники
равны:
„дин _пин _ с'Хах _ 706500-0,046 _ ,
При движении кормы вверх динамические давления ротора на под-
подшипники имеют направления, противоположные указанным на рис. 210.
§ 95. Дифференциальные уравнения движения свободного
твердого тела
Движение свободного твердого тела можно рассматривать как
совокупность двух его движений: поступательного вместе с центром
масс и сферического вокруг центра масс.
272
Рассмотрим свободное тело, движущееся под действием внешних
f fjf
сил
pf,
р
pf
Pjf (рис. 211).
Проведем через центр масс тела оси |, ц, ?, неизменно связанные
с движущимся телом, направив их по главным центральным осям
инерции тела, а также оси
Х\, yv 2], движущиеся по-
поступательно, т. е. остаю-
остающиеся параллельными непо-
неподвижным осям х, у, z. Диф-
Дифференциальные уравнения по-
поступательного движения тела
вместе с центром масс по-
получаются на основе теоремы
о движении центра масс си-
системы.
тх,
= JJj л i
X.
mzc =
Vх*
Рис. 211.
f = ZE,
(95.1)
Здесь т — масса тела;
xc, yc, zc— координаты центра масс тела;
Xе, Ye, Ze — проекции главного вектора внешних сил, приложенных
к телу, на неподвижные координатные оси х, у, z.
Сферическое движение твердого тела вокруг центра масс пред-
представляет собой движение тела по отношению к системе осей Сххухгх.
Это движение определяется динамическими уравнениями Эйлера:
h-
V
h
dt
dt
= Al
(95.2)
Здесь У^,
со
л,
У^ — моменты инерции тела относительно главных цент-
центральных осей инерции ?,, ц, ?;
cog — проекции вектора угловой скорости тела на оси
|, г], С. неизменно связанные с телом;
ц, МЕ—главные моменты внешних сил, приложенных к телу,
относительно осей |, т), ?.
Уравнения (95.1) и (95.2) составляют шесть дифференциальных
уравнений движения свободного твердого тела.
Выразив проекции угловой скорости <0|, ю^, со^ через эйлеровы
углы f, В, ф и их производные по времени (см. ч. I, «Кинематика»,
Aif,
18 А. А. Яблонский
273
§130), получим шесть дифференциальных уравнений второго порядка,
Интегрирование этих уравнений даст шесть уравнений движения сво-
свободного твердого тела.
Постоянные интегрирования определяются по начальным условиям
движения. Как указывалось выше, интегрирование последних трех
уравнений связано с большими трудностями.
Установим условие, при котором движение твердого тела является
поступательным. При поступательном движении сферического движе-
движения тела вокруг центра масс не происходит, и кинетический момент
его относительно центра масс все время равен нулю:
LCr = const = 0.
Согласно следствию из теоремы о кинетическом моменте системы,
в относительном движении по отношению к центру масс имеем: если
Lc, = const, то
М? = 0.
Таким образом, для того чтобы твердое тело двигалось посту-
поступательно, необходимо, чтобы в начальный момент движения
кинетический момент тела относительно центра масс был
равен нулю и главный момент внешних сил относительно
центра масс тела все время оставался равным нулю.
Вопросы для самоконтроля
1. По каким формулам вычисляются кинетические моменты твердого
гела относительно неподвижной точки и относительно координатных осей
при его сферическом движении?
2. Чему равны кинетические моменты твердого тела относительно глав-
главных осей инерции, проведенных из неподвижной точки тела, при его сфери-
сферическом движении?
3. Какой вид имеют динамические уравнения Эйлера?
4. Какое твердое тело называют гироскопом?
5. Чему равен и как направлен кинетический момент быстро вращаю-
вращающегося гироскопа относительно его неподвижной точки'
6. Какими физическими свойствами обладает быстро вращающийся гиро-
гироскоп с тремя степенями свободы?
7. Какой эффект производит действие одной и той же силы, приложен-
приложенной к оси неподвижного и быстро вращающегося гироскопа с тремя степе-
степенями свободы?
8. Выведите формулу для вычисления угловой скорости прецессии оси
гироскопа.
9. В чем состоит разница в свойствах гироскопов с двумя и тремя сте-
степенями свободы?
10. Какова физическая сущность гироскопического эффекта и при каких
условиях он наблюдается?
274
11. По каким формулам определяются динамические реакции подшипни-
подшипников, в которых вращается рама вращающегося гироскопа с двумя степенями
.свободы?
12. Каковы дифференциальные уравнения движения свободного твердого
тела'
13. При каких условиях движение свободного твердого тела является
поступательным?
ГЛАВА XV
ТЕОРИЯ УДАРА
§ 96. Явление удара
Движение твердого тела, происходящее под действием обычных
сил, характеризуется непрерывным изменением модулей и направлений
скоростей его точек. Однако встречаются случаи, когда скорости
точек тела, а следовательно, и количество движения твердо'го тела,
за ничтожно малый промежуток времени получают конечные изме-
изменения.
Явление, при котором за ничтожно малый промежуток
времени скорости точек тела изменяются на конечную вели-
величину, называется ударом
Примерами этого явления могут служить: удар мяча о стену, удар
кия о биллиардный шар, удар молота о болванку, лежащую на нако-
наковальне, удар бабы копра о сваю и ряд других случаев.
Конечное изменение количества движения твердого тела или мате-
материальной точки за ничтожно малый промежуток времени удара происхо-
происходит потому, что модули сил, которые развиваются при ударе, весьма
велики, вследствие чего импульсы этих сил за время удара являются
конечными величинами.
Такие силы называются мгновенными или ударными.
§ 97. Действие ударной силы на материальную точку
Рассмотрим материальную точку М (рис. 212), движущуюся под
действием приложенных к ней сил. Равнодействующую этих сил
¦(конечной величины) обозначим Рк. Положим, что в некоторый
момент tt на точку М, занимавшую положение В, дополнительно
начала действовать ударная сила Р, прекратившая свое действие
в момент t2 = tl-\-x, где т — время удара.
Определим изменение количества движения материальной точки
за промежуток времени т. Обозначим S и SK импульсы сил Р и Рк,
действовавшие на точку за время t.
По теореме изменения количества движения материальной точки
имеем:
mv2 — т\х = S + SK (a)
Импульс SK силы Рк за ничтожно малый промежуток времени т»
будет величиной того же порядка малости, что и т. Импульс же S
18* 275
ударной силы Р за это время является величиной конечной. Поэтому
импульсом Sl( (по сравнению с импульсом S) можно пренебречь.
Тогда уравнение (а) примет вид
mv2
или
(97.1)
(97.2)
Рис. 212.
Уравнение (97.2) показывает, что скорость v2 отличается от ско-
скорости V! на конечную величину —. Ввиду того, что продолжитель-
продолжительность удара т ничтожно мала, а скорость точки в течение этого
промежутка времени имеет конечную
величину, перемещение точки за
— время удара весьма мало и им мож-
можно пренебречь.
В положении В точка получает
конечное изменение скорости от vt
до v2- Поэтому в положении В, где
действовала ударная сила, происхо-
происходит резкое изменение траектории точ-
точки ABD. После прекращения дейст-
действия ударной силы точка движется
снова под действием равнодействую-
равнодействующей Рк (на участке BD).
Таким образом, можно сделать-
следующие выводы о действии ударной силы на материальную точку:
1) действием не мгновенных сил за время удара можно прене-
пренебрегать;
2) перемещение материальной точки за время удара можно
не учитывать;
3) результат действия ударной силы на материальную точку выра-
выражается в конечном изменении за время удара вектора ее скорости,
определяемом уравнением (97.2)
§ 98. Теорема об изменении количества движения
механической системы при ударе
Положим, что к точкам механической системы одновременно при-
приложены ударные импульсы. Определим вызванное ими изменение коли-
количества движения рассматриваемой системы. На основании § 97
действием на точки конечных сил за время удара будем прене-
пренебрегать. Разделим ударные силы, действующие на каждую точку
ML{i=\, 2, ..., п) механической системы, на внешние и внутрен-
внутренние силы.
Обозначим равнодействующие внешних и внутренних ударных
импульсов, приложенных к каждой точке, Sf и Si-
276
Обозначим скорости каждой точки Mt системы в момент начала
действия ударных сил v,-, а момент окончания их действия и,-.
Тогда для каждой точки Mt системы уравнение (97.1) будет иметь
вид:
m»(u/ — Vi) = Sf+Sf /=1.2 n).
Суммируя составленнные п уравнений, получаем
2 mnt — 2 miMi = 2 Sf + 2 Si-
Здесь 2 ЩЩ = К — количество движения механической системы
в момент окончания действия ударных сил;
2 mt\i — Ко—количество движения механической системы
в момент начала действия ударных сил.
По свойству внутренних сил
2sf = O;
следовательно,
К —K0 = 2sf. (98.1>
Уравнение (98.1) выражает теорему об изменении количества дви-
движения механической системы при ударе: изменение количества
движения механической системы за время удара равно геоме-
геометрической сумме всех внешних ударных импульсов, приложен-
приложенных к точкам системы.
Векторному уравнению (98.1) соответствуют три уравнения в проек-
проекциях на оси координат:
Кх — КхО =
Ку — Куо = ^j Siy,
Kz — KzO = ^4 Siz-
(98.2>
Эти уравнения показывают, что изменение проекции количества
движения системы на любую ось равно сумме проекций на ту же
ось всех внешних ударных импульсов, приложенных к системе.
Количество движения механической системы можно выразить через
массу всей системы т и скорости центра масс системы vc и ис по
формулам:
К = тис и K0 = fftvc.
Подставив эти значения в уравнение (98.1), получим
Ш1С — т\с = 2 Sf. (98.3)
Уравнение (98.3) определяет изменение скорости центра масс
системы при ударе.
27Г
Векторному уравнению (98.3) соответствуют три уравнения
в проекциях на оси координат:
(98.4)
тисг
Эти уравнения определяют изменение проекции скорости центра
масс на любую ось при ударе.
Из уравнений (98.1) и (98.2), при отсутствии внешних ударных
импульсов,
Ssf
= КО;
—v
c>
---6 м,
т. е. при действии на механическую систему лишь внутренних
ударных импульсов количество движения системы не изме-
изменяется.
Таким образом, удары, возникающие при столкновении тел, bxo-
лящих в одну механическую систему, не могут вызвать изменения
количества движения системы, т. е. скорости движения ее центра
juacc.
§ 99. Удар шара о неподвижную поверхность.
Коэффициент восстановления при ударе
Положим, что шар массой т движется поступательно и скорость
•его центра v направлена по нормали к неподвижной массивной поверх-
поверхности в некоторой ее точке А
(рис. 213, а). В момент вре-
времени t, когда шар достигает
этой поверхности, происходит
удар, называемый прямым.
Различают две фазы этого
удара. В течение первой фазы
удара шар деформируется до
тех пор, пока скорость его не
станет равной нулю. Ничтожно
малый промежуток времени,
в течение которого происходит
деформация, обозначим т^. Во
Рис 213 время этой фазы начальная ки-
кинетическая энергия шара пере-
переходит в потенциальную энергию сил упругости деформированного
тела и частично расходуется на нагревание тела.
В течение второй фазы удара под действием сил упругости шар
частично восстанавливает свою первоначальную форму. Ничтожно
малый промежуток времени, в течение которого происходит восста-
восстановление, обозначим т2.
Из-за остаточных деформаций и нагревания шара первоначальная
кинетическая энергия шара полностью не восстанавливается. Поэтому
шар отделяется от поверхности со скоростью и, модуль которой
меньше модуля его скорости до удара v.
Отношение модуля скорости шара в конце удара к модулю его»
скорости в начале удара при прямом ударе шара о неподвижную-
поверхность называется коэффициентом восстановления при ударе.
* = ¦?• (99.1>
Значения коэффициента восстановления для различных материалов-
определяются опытным путем.
В расчетах обычно принимают коэффициент восстановления
зависящим лишь от материала соударяющихся тел, однако опыты
показывают, что коэффициент восстановления зависит также or
формы соударяющихся тел и соотношения их масс.
Коэффициент восстановления можно определить при помощи сле-
следующего простого опыта (рис. 213, б). Шарику из испытуемого
материала дают возможность падать без начальной скорости с высоты ht
на массивную горизонтальную плиту из того же или другого испы-
испытуемого материала и определяют высоту h2, на которую он подни-
поднимается после удара.
Применяя к движению шарика под действием силы тяжести
на участке М0М1 теорему об изменении кинетической энергии, можно-
определить скорость шарика в начале удара:
По той же теореме для участка МХМ2 можно определить его*
скорость в конце удара:
Подставив значения г» и и в формулу (99.1), можно определить-
коэффициент восстановления:
Совершенно очевидно, что
Например, для стекла коэффициент восстановления принимается;
равным 15/i6. Для слоновой кости—%, для стали—5/9, для дерева—У2.
В случае неупругого удара явление удара заканчивается одной
первой фазой. В этом случае м = 0 и & = 0. При абсолютно упру-
упругом ударе u = v и & = 1. В этом случае происходит полное восста-
восстановление формы шара.
Коэффициенту восстановления при ударе можно дать и другую-
физическую интерпретацию.
27Э-
Обозначим Nj переменную ударную реакцию гладкой поверхности,
действующую на шарик в течение первой фазы, a Nn—в течение вто-
второй фазы. Тогда модули импульсов этой силы, соответствующие
лервой и второй фазам удара, будут:
5I = J Nxdt- Sn= f Nndt.
Воспользуемся для первой и второй фаз удара теоремой об изме-
изменении количества движения материальной точки (§ 48).
Теорему применим в проекциях на нормаль к поверхности,
.направленную вертикально вверх (рис. 214), учитывая, что скорость
шарика в конце первой и в на-
\
чале второй фазы равна нулю:
О — mvn = Sln,
mun — 0 = SUn.
Представив значения проекций
в виде vn = — v;un = и, Sin = St;
5]jn = 5ji, получим
mv = Sim, /пи = Sn.
Найдем отношение модулей
импульсов:
Рис 214.
Рис. 215
1 '""• JZ U /QQ О\
I mv v v '
Таким образом, отношение модулей импульсов ударной реак-
реакции гладкой поверхности за вторую и первую фазы удара равно
коэффициенту восстановления при ударе.
Если k=l, то Sn = Sl и u — v.
Рассмотрим теперь удар шара о неподвижную гладкую поверх-
поверхность в случае, когда скорость его центра v образует с нормалью
к поверхности угол падения а (рис. 215). Определим скорость и,
с которой он отскакивает от этой поверхности и угол отражения |3,
составленный скоростью и и нормалью к поверхности. Для этого
проведем через нормаль к поверхности и вектор скорости центра
шара v плоскость, совместив ее с плоскостью чертежа. Спроекти-
Спроектируем вектор скорости v на нормаль и касательную в этой плоскости.
При отсутствии трения реакция поверхности направлена по нормали
и ее проекция на касательную Ах равна нулю. На основании теоремы
о проекции количества движения
тих — mvx = 0, или их = vx.
Изменение нормальной составляющей скорости при ударе проис-
происходит согласно формуле (99 1):
* = т?4. ("-4)
280
откуда
где \ип\ и |vn| — абсолютные значения проекций скоростей и и v
на нормаль.
Модуль скорости центра шара и после удара
-1 Г 2 \ 2~ л/~ 2 2 2~ л/ 2 2~
^•y/si^a-f-^cos2^ (99.5>
Найдем связь между углом падения шара а и углом отражения р.
По рис. 215
Так как & < 1, то \g р > tg a и p > a, т. е. угол отражения больше
угла падения
В случае абсолютно упругого удара: k = 1, tg р = tg a и р = a^
т. е. угол отражения равен углу падения.
§ 100. Прямой центральный удар двух тел
Предположим, что при поступательном и прямолинейном движе-
движениях двух тел их центры тяжести С1 и С2 движутся вдоль одной и
той же прямой со скоростями vl и v2. Пусть масса первого тела
равна тх, а масса второго — т2.
Если второе тело находится впереди и vl > v2, то в некоторый:
момент первое тело нагонит второе и произойдет удар этих тел.
На рис. 216, а изображен удар двух шаров, при котором ско-
скорости центров тел в начале удара направлены по общей нормали,
к поверхностям этих тел в точке их
соприкосновения.
Удар, происходящий при этом усло-
условии, называется прямым центральным
ударом двух тел
Определим, пользуясь теоремой
импульсов, скорости этих тел после рис
удара.
О г момента t соприкосновения тел происходит смятие тел до тех
пор, пока их скорости не сравняются между собой. Общую скорость
тел в момент наибольшей деформации t1 — t-\*-T1 обозначим и. Если
соударяющиеся тела совершенно лишены упругости, т. е. удар является
неупругим, то, начиная с этого момента, они движутся как одно
целое, не отделяясь друг от друга.
Удар упругих тел, или упругий удар, не заканчивается в момент,
когда скорости соударяющихся тел становятся равными. Начиная
с этого момента, происходит восстановление первоначальной формы
тел за счет накопившейся в них потенциальной энергии упругой
281
деформации. В некоторый момент времени t2=zt1-\-x2 тела отде-
отделяются друг от друга, имея различные скорости щ и и2. направлен-
направленные так же, как и скорости \г и v2, по общей нормали к поверх-
поверхностям соударяющихся тел в точке касания. Рассмотрим сначала
первую фазу удара от момента t до момента их наибольшей дефор-
деформации t-\-xv
Проведем ось х по общей нормали к поверхностям соударяю-
соударяющихся тел в точке их касания, направив эту ось в сторону движе-
иия тел до удара.
Условимся обозначать vx, v2, uv u2 не абсолютные величины
скоростей тел в начале и в конце удара, а алгебраические величины,
равные проекциям этих скоростей на
ось х, В течение первой фазы продол-
продолжительностью Tj к телам приложены
взаимные ударные реакции, равные по
модулю и направленные по оси х в про-
противоположные стороны (рис. 216, б).
Импульс ударной реакции, действую-
Рис. 216, б. щей на пеРвое тело, S! направлен в сто-
сторону, обратную направлению оси х,
а импульс реакции, приложенной ко второму телу Si имеет направле-
направление оси х. Модули импульсов равны:
Силы взаимодействия соударяющихся тел являются для рассматри-
рассматриваемой системы тел внутренними силами. Согласно уравнению (98.1)
количество движения системы при ударе не изменяется.
Приравняем значения проекций на ось х количества движения
системы тел в начале удара и в момент наибольшей деформации:
mxvx -f- m2v2 = (т1 -f- m2) и,
откуда
тл-\-т2 7
Чтобы определить импульсы ударных сил взаимодействия тел
за время первой фазы удара, воспользуемся уравнением (98.4), учи-
учитывая, что для каждого тела в отдельности эти импульсы являются
внешними:
для первого тела
S 1
l l
для второго тела } A00.2)
т2{и — v2) = S{. j
Подставив в последнее равенство значение и из формулы A00.1),
найдем модули ударных импульсов первой фазы:
Si = щ[m'v>±т*щ
282
Рассмотрим теперь вторую фазу упругого удара от момента наи-
наибольшей деформации t-\-xy до момента t-\-xl-\-x2 полного или
частичного восстановления и отделения тел друг от друга. Обозна-
Обозначим Sn и Sn импульсы ударных реакций соударяющихся тел за
время т2. Их направления совпадают с направлениями соответствую-
соответствующих ударных импульсов первой фазы удара, изображенных на рис. 217.
Проекции их и и2 скоростей тел в конце удара на ось х определим
по уравнению (98.4) для второй фазы удара:
х(их — a) = — S\h \
, A00.4>
2{и2— и) = 5ц- >
тх
т2
На основании (99.3)
S\\ = kS\ и S\i = kSi-
Подставим в уравнение A00.4) эти значения импульсов:
/и, (и, — и) = — kSi,
Разделив первое уравнение A00.5) на первое уравнение A00.2)
и второе уравнение A00.5) на второе уравнение A00.2), получим.
и — %>i и, — г>2
отсюда
V V -Г ! 1 I (Ю0.6)
— г»2)= мA-+¦&) — kv2, J
а, == а-\- k(u — v,) = и (I -\- k) — kv,,
и2 = и-|-й(м — г»2)= мA-+¦&) — kv
Подставляя значения и, получим окончательно
^i;C- •* 1 (Ш07)
f j
Так как внутренние силы не изменяют количества движения
системы, то за все время удара оно остается неизменным, т. е.
т1и1-\- m2u2 = m1v1-\-m2v2. A00.8)
Из формул A00.6)
— v2).
откуда
Таким образом, коэффициент восстановления при ударе двух
тел равен отношению модулей относительной скорости тел
после удара и до него.
283
Определим модуль ударного импульса, приложенного к каждому
телу, за весь период упругого удара:
Подставив значения Si и 5ц из вторых уравнений A00.2) и A00.4)
и затем значение «2 из второй формулы A00 6), найдем
S = S' = т2 (й2 — »г) = тг Iй О + Щ — kv2 — v2] =
==«2(l+ft)(B —o2) = 0 + ftMi.
Пользуясь формулой A00.3), получим
S = {\ + k) ^™2mi(vx-v2). A00.10)
На основании установленных здесь общих формул получим фор-
формулы для определения скоростей тел после удара и ударных импуль-
импульсов в случаях неупругого и абсолютно упругого ударов.
При" н еу п р уго м ударе k — 0 удар имеет только первую
фазу В этом случае после удара тела движутся совместно со ско-
скоростью, определяемой по формуле A00.1):
т^, -\- m2v2
t
Модуль ударного импульса определяется выражением A00.3):
При абсолютно упругом ударе k=\. В этом случае
-формулы A00 6), определяющие скорости тел после удара, прини-
принимают вид
мх = 2« — w, = ¦ i ——У- — г». = •», г-2— (У-, — Vn).
A00.11)
Формула A00.10), определяющая модуль ударного импульса, при-
приложенного к каждому телу, за весь период абсолютно упругого
удара, принимает вид
Из формул A00.3) и A00.12) следует, что при абсолютно
упругом ударе ударный импульс вдвое больше, чем при неупру-
неупругом Это объясняется тем, что при абсолютно упругом ударе
к импульсу фазы деформации добавляется импульс фазы восстано-
восстановления такого же модуля.
284
§ 101. Потеря кинетической энергии при ударе двух тел.
Теорема Карно
Из-за остаточных деформаций и нагревания тел при ударе про-
происходит частичная потеря начальной кинетической энергии соударяю-
соударяющихся тел.
Определим потерю кинетической энергии при упругом ударе тел,
имеющих коэффициент восстановления k.
Начальная кинетическая энергия тел
Кинетическая энергия тел в конце удара
T = j mtf + jm^l
Потеря' кинетической энергии тел за время удара
те O + w) (u ") + m (^ + ) (v — u2). (a)
:}
— 2 •v * ' ^ ^ * — ^ ^^ 2
По формулам A00 6) находим
г>! — их — vx — и A -\- k) -(- Аг<1 = A -(- fe) (f x — и),
Подставим эти значения в уравнение (а):
То—Т = j Щ A + ?)(»1 — и)(^ 1 + Mi)+ ^ тгA+к)(ъ
Преобразуем это выражение при помощи уравнения A00.2):
На основании A00.9)
То — Т = j (I + k) Si [— fe (w, — v2) + (Wl — v2)} =
= -i(l + ft)S,(l— k)(vt — o2).
Подставив в это выражение значение ударного импульса A00.3)
получим потерю кинетической энергии при упругом ударе в виде
Так как k < 1, то Го — Г > 0, или То > Г, т. е. при ударе про-
происходит потеря кинетической энергии.
285
Лишь при абсолютно упругом ударе (k=l) То — Г = 0, т. е.
потери кинетической энергии не происходит.
Согласно A00.3)
m\m\ (vx - v2f
откуда
—[- Wig tH\TTl2 /Mj /Wj
Преобразуем выражение A01.1) на основе полученной зависи-
зависимости, заменяя далее Si и Si их значениями из уравнений A00.2):
_/j д.я^ Г mi (vi — иJ . m2 (v2 — иJ1 _
t —^г fwitPi— ц)гA + ^)г i m2 (Vi — и)*
)*L 2 "I 2
— (l + ft)*
На основании уравнений (б)
f ^f] A01.2)
В этом выражении величины (vt — и{) и (v2 — м2) представляют
собой скорости, потерянные телами при ударе.
Обозначим кинетическую энергию тел, соответствующую их поте-
потерянным скоростям Т*. Ее величина
T*=jml(vi — u1f-\-jm2(v2~u2f. A01.3)
Тогда выражение A01.2), определяющее потерю кинетической
энергии тел при ударе, примет вид
. A01.4)
Таким образом, кинетическая энергия, потерянная телами при
упругом ударе, равна произведению коэффициента . , . на кинети-
_. L-f-R
ческую энергию тел Т , соответствующую их потерянным скоростям.
При неупругом ударе, когда & = 0 и их = и2 — и, формула A01.2)
принимает вид
То — Т = 1 miivi - uf +1 m2 (t»2 — иJ - Г. A01.5)
286
Формула A01.5) выражает теорему Карно*: кинетическая энер-
энергия, потерянная телами при неупругом ударе, равна кинетиче-
кинетической энергии тел, соответствующей их потерянным скоростям.
Если при неупругом ударе одно из тел, например второе, до
удара находилось в покое, то
Формула A00.1) принимает вид
Mr
Определим Т, пользуясь этим значением и:
1 "J?f?
7 = _ (от _|_ m2) -. * ., =
Потеря кинетической энергии при ударе
щ
откуда
V A01.6)
Выражение A01 6) показывает, что если масса гп2 тела, находив-
находившегося до удара в покое, велика по сравнению с массой т1 движу-
движущегося тела, то коэффициент ^—« 1.
тх-\-т,ч
В этом случае почти вся кинетическая энергия движущегося тела
теряется при ударе, расходуясь на деформацию тел.
Наоборот, если масса т2 тела, находившегося до удара в покое,
мала по сравнению с массой тх движущегося тела, то коэффициент
—^~ мал и потеря кинетической энергии на деформацию тел
незначительна.
На этом основании наковальня должна иметь вес, во много раз
превышающий вес молота, чтобы кинетическая энергия молота пол-
полностью использовалась на деформацию металла.
Наоборот, вес бабы копра, забивающего сваи в грунт, должен
быть по возможности велик по сравнению с весом сваи, чтобы она
при забивке не деформировалась.
* Л. Карно A753—1823) — выдающийся французский ученый и обще-
общественный деятель эпохи Французской буржуазной революции.
287
§ 102. Теорема об изменении кинетического момента
механической системы при ударе
Рассмотрим изменение кинетического момента механической си-
системы из п материальных точек при ударе.
В § 98 составлено уравнение изменения количества движения
материальной точки Mt A=1, 2, ..., я) под действием приложен-
приложенных к ней внешних и внутренних ударнвйГ импульсов:
A=1, 2, .... в).
Проведем в каждую точку Mt системы из произвольно выбранного
неподвижного центра О радиус-вектор гг.
Умножим векторно вектор г^ на каждую из частей составленного
равенства:
?+TtXSi (t—l, 2 ft).
Просуммируем уравнения, составленные для всех п точек меха-
механической системы:
2 rt X m,u, — 2 г, X «,v, = 2 i"; X Sf+2 П X S/.
Здесь 2 ri X тгщ = Lo — кинетический момент системы относи-
относительно центра О в момент окончания
действия ударных сил;
2 г/ X /Я(У,- = Lo* — кинетический момент системы относи-
относительно центра О в момент начала дей-
действия ударных сил;
2 ft X Sf = 2 Mo (S/)—главный момент всех внешних ударных
импульсов, приложенных к точкам си-
системы, относительно центра О;
,2Г' X Sf ==2 Mo (sf) = 0—главный момент всех внутренних удар-
ударных импульсов относительно центра О
(по свойству внутренних сил равный
нулю),
Подставляя эти значения, получаем
(f) A02.1)
Уравнение A02.1) выражает теорему об изменении кинетического
момента _механической системы при ударе: изменение кинетического
момента механической системы относительно любого центра
при ударе равно геометрической сумме моментов всех внешних
ударных импульсов, приложенных к точкам системы, относи-
относительно того же центра.
Из уравнения A02.1) при отсутствии внешних ударных импуль-
импульсов, т. е. при 2^o(Sf) = 0,
288
Таким образом, если к точкам механической системы при-
приложены только внутренние ударные импульсы, то кинетический
момент системы относительно любого центра не изменяется.
Векторному уравнению A02.1) соответствуют три уравнения
в проекциях на оси координат:
(Ю2.2)
т. е. изменение кинетического момента механической системы
относительно любой оси при ударе равно сумме моментов всех
внешних ударных импульсов, приложенных к точкам Системы
относительно той же оси.
§ 103. Действие ударных сил на твердое тело, вращающееся
вокруг неподвижной оси, и на твердое тело, совершающее
плоское движение
Положим, что твердое тело вращается вокруг неподвижной оси г.
В момент, когда оно имело угловую скорость щ, на него подей-
подействовали внешние силы.
Определим изменение угловой скорости тела под действием этих
сил. Для этого воспользуемся уравнением A02.2):
Кинетический момент твердого тела относительно оси вращения
равен произведению момента инерции тела относительно этэй оси
на угловую скорость тела G9.1), т. е.
Lz = Jzg>q, Lz = /г<д.
Lz = Jzg>q, Lz
Подставив эти значения в уравнение A02.2), получаем
уг (со—wo)=;s^(sf),
откуда
S(f)
ю — соо= ^ /v '; . A03.1)
Таким образом, изменение угловой скорости твердого тела,
вращающегося вокруг неподвижной оси, под действием внешних
ударных сил равно сумме моментов импульсов этих сил отно-
относительно оси вращения, разделенной на момент инерции тела
относительно той же оси.
Выясним теперь влияние внешних ударных сил на плоское дви-
движение твердого тела. Рассмотрим это движение тела как совокуп-
совокупность двух движений: поступательного движения вместе с центром
масс и вращения вокруг оси, проходящей через центр масс перпен-
перпендикулярно к той плоскости, в которой он движется.
19 А. А. Яблонский 289
В плоскости движения центра масс проведем оси хну. Поло-
Положим, что в момент начала действия ударных сил скорость центра
масс была vc, а угловая скорость — м0.
Обозначим скорость центра масс в момент конца действия удар-
ударных сил ис, а угловую скорость тела — со.
Изменение проекций скорости центра масс определяют два урав-
уравнения (98.4):
J A032)
J
где Sfx и Sfy — проекции внешнего ударного импулься sf на оси
хну.
dLrr dLT
Так как ,, ¦<=z—— (84.4), то изменение угловой скорости тела
определяет уравнение A03.1):
/г((о —co0) = 2^s(sf). A03.3)
где Ji — момент инерции тела относительно подвижной оси ?, про-
проходящей через центр тяжести перпендикулярно к плоско-
плоскости ху;
Mi (sf) — момент внешнего ударного импульса sf относительно той же
оси.
Таким образом, внешние ударные силы, действующие на твер-
твердое тело, совершающее плоское движение, вызывают конечное
изменение скорости центра масс тела, определяемое уравне-
уравнениями A03.2), и конечное изменение угловой скорости тела,
определяемое уравнением A03.3).
§ 104. Центр удара твердого тела, вращающегося вокруг
неподвижной оси
Допустим, что к твердому телу, вращающемуся вокруг непо-
неподвижной оси (рис. 217), в некоторой его точке приложен внешний
ударный импульс. Этот импульс вызывает появление в опорных точ-
точках ударных реакций, а опоры испытывают ударные давления.
Действие ударных сил на опоры может вызвать их повреждение.
Установим условия, при которых опоры вращающегося твердого
тела, когда к нему прикладывается внешний ударный импульс, не
испытывают действия ударных сил.
Выберем следующую систему осей координат: ось z направим
по оси вращения тела в сторону угловой скорости о>, плоскость yOz
проведем через ось вращения и центр тяжести тела С (лгс = 0;
ус = d ф 0; гсФ 0), а ось х покажем так, чтобы получить правую
координатную систему Oxyz.
Эту систему осей, связанную с вращающимся телом, будем счи-
считать неподвижной, так как перемещения тела за время удара не
происходит.
290
Разложим действующий на тело в точке К(хк, ук, zK) ударный
импульс S? на составляющие: sf, S^, Sf. Расстояние от опорных точек А
и В до плоскости хОу обозначим hx и А2.
Реактивные ударные импульсы SA и SB, приложенные к телу
в опорных точках А и В, разложим на составляющие
SCC м С С в
Результатом действия на тело ударных сил является изменение
скорости центра масс тела и изменение его кинетического момента.
Изменение скорости центра
масс можно определить тремя
уравнениями (98.4), а изменение
его кинетического момента отно-
относительно неподвижной точки О
тремя уравнениями A02.2).
Совокупность этих шести
уравнений имеет вид
("су — vcy)
-Lf^Z My (Sf),
A04,1)
Положим, что вращение тела,
как до удара, так и после него,
происходит в направлении, со-
соответствующем вектору о), ука-
указанному на рис. 217, а угловая
скорость его за время удара
изменяется от со0 до со. Тогда вращательная скорость точки С па-
параллельна оси д; и направлена противоположно направлению этой оси.
До удара
после удара
vc —
ис = cod.
Ее проекции на оси координат:
до удара
после удара
иСх = — tod; иСу == 0; аСг = 0
19*
291
Кинетические моменты тела относительно координатных осей
определяются по формулам (88.4).
Проекции вектора угловой скорости тела на оси координат будут:
до удара
щх = 0; <оОу = 0; aOz = ю0;
после удара
ах = 0; ау = 0; и>г = со.
При этих значениях формулы (88.4) принимают вид
Здесь Jz — момент инерции тела относительно оси z;
Jzx, Jyz — центробежные моменты инерции тела относительно осей
z, х и осей у, z.
Подставляем значения проекций скорости точки С и кинетических
моментов тела в левые части уравнений A04.1), а также проекции
и моменты всех внешних ударных импульсов в правые части этих
уравнений:
— md (со — соо) = S
0 = Sy
— Jyz (© — coo) =
Jz (o — coo) =
Bx,
— Sz xK
~ SByh2'
A-Saxh'
A04.2)
Из шести уравнений A04.2) можно определить изменение угло-
угловой скорости тела при ударе <о — соо, четыре проекции на оси коор-
координат реактивных ударных импульсов: SAx, SAy, SBx, SBy и сумму
проекций реактивных импульсов на ось вращения z: SA:,-]-SBz,
Установим условия, при которых эти проекции, а следовательно,
и ударные импульсы SA и SB равняются нулю. Для этого в урав-
уравнениях A04.2) приравняем нулю все проекции реактивных импульсов
— md (ю — (Do) = 5^
A04.3)
292
Первое условие устанавливаем по второму и третьему урав-
уравнениям A04.3).
Так как SE =0 и SE = 0, то SE = \SE\. т. е. внешний удар-
ударный импульс должен быть направлен перпендикулярно к пло-
плоскости, проведенной через центр масс и ось вращения тела.
Для получения второго условия рассмотрим остальные уравнения
A04.3). При SE — SE = Q первое, четвертое, пятое и шестое урав-
уравнения принимают вид
— md (<а — coq) = SE.
— Jzx((x> — ио) = О,
Из четвертого уравнения A04.3)
4, = 0, A04.4)
Из первого уравнения определяется изменение угловой скорости
тела при ударе:
»-»o = ~S-- (Ю4.5)
Из пятого и шестого уравнений определяются координаты zK и
ук точки К, в которой должен быть приложен внешний ударный
импульс SE:
г y(o)^ y(
Jz I SEX\_JZ
)
Sf SE\ md) md
Координата хк может иметь любую величину, а координаты ук
и zK должны иметь значения:
Так как согласно C5.1) Jz = JCz-\-md2, то формуле A04.7)
можно придать вид
+ <104-8>
293
Из этой формулы следует, что ук > d, т. е. проекция К1 точки К
на плоскость yOz должна находиться от оси вращения Ог дальше,
чем центр тяжести тела С.
Формулы A04.7) и A04.8) аналогичны формулам (81.3) и (81.4),
определяющим приведенную длину физического маятника.
Предположим теперь, что точка К приложения ударного импульса
лежит в плоскости хОу (zk — 0). Тогда из пятого уравнения полу-
получаем, что Jyz — 0, т. е. что ось вращения z должна быть главной
в точке О поскольку и Jzx = 0.
Второе условие отсутствия ударных давлений на опоры вра-
вращающегося тела можно сформулировать так:
1) ось вращения тела должна быть главной осью инерции
в точке пересечения ее с плоскостью, перпендикулярной оси
вращения и содержащей точку приложения ударного импульса;
2) положение центра удара — точки в этой плоскости, к ко-
которой должен быть приложен внешний ударный импульс SE
для того, чтобы ось не испытывала ударных давлений, опре-
определяется координатой ук по формулам A04 7) или A04.8).
Известно, что если однородное тело имеет плоскость симметрии,
то во всех точках этой плоскости одна из главных осей инерции
направлена по перпендикуляру к этой плоскости (§ 39).
Поэтому для тела, имеющего плоскость симметрии, выведенные
условия отсутствия реактивных ударных импульсов получают сле-
следующую формулировку:
1) ось вращения тела должна быть перпендикулярна пло-
плоскости симметрии тела;
2) ударный импульс должен действовать в плоскости сим-
симметрии тела, быть перпендикулярным к прямой, проходящей
через ось и центр тяжести тела, а точка приложения удар-
ударного импульса должна совпадать с центром удара, определяе-
определяемым координатой ук по формулам A04.7) или A04.8).
§ 105. Примеры действия ударных сил
Пример. 52. Деревянный шар массой тх, имеющий скорость v^
ударяя неподвижный деревянный шар, теряет половину своей ско-
скорости. Полагая удар шаров прямым и центральным, а коэффициент
восстановления равным 0,5, определить массу второго шара и его
скорость после удара.
Решение. При v2 = Q воспользуемся формулой A00.9):
Так как k — 0,5, а их — 0,5^, то
0,5-^-^-^
Vi Vi
откуда и2 — vx.
294
Подставляя в A00.7), получаем
или j-
2
т.
т. е. m2 = -g2-.
По формуле A00.8)
Таким образом, после удара второй шар, масса которого в два
раза меньше массы первого, получит скорость, которую имел пер-
первый шар до удара.
Пример 53. Молот весом Ох = 40 кя падает на наковальню с
высоты h = 2 м. Вес наковальни вместе с куском металла, подвер-
подвергающимся ковке, равен <32 = 360 кн. Приближенно рассматривая
удар молота о наковальню как удар свободных тел, найти коэффи-
коэффициент полезного действия молота.
Решение. Как известно, коэффициент полезного действия ма-
машины равен отношению полезной работы к работе, затрачиваемой
на приведение машины в движение.
В данном случае полезной является работа, израсходованная на
деформацию металла. Эта работа равна потере кинетической энергии
тел при ударе То — Т.
Работа затрачиваемая на подъем молота, равна увеличению его
потенциальной энергии, т. е. Gxh.
При падении молота его потенциальная энергия переходит в ки-
кинетическую. Таким образом, затрачиваемая работа равна кинетиче-
кинетической энергии тел до удара То. Коэффициент полезного действия
молота
По формуле A01.6)
=ИЛИ Ц = -^
Т1 = г=
1 ml-\-m2
Подставляя числовые значения, найдем
_ 360 _ - -
^-40 + 360— °'Э-
Пример 64. Маятниковый копер Шарпи для определения сопро-
сопротивления материалов удару имеет массу m и момент инерции отно-
относительно оси вращения Jx. Центр тяжести С маятника находится на
расстоянии d от оси его вращения (рис. 218).
295
Отклонив маятник от положения покоя, его освобождают. В наи-
наинизшем положении вращающийся маятник разбивает испытуемый об-
образец и продолжает поворачиваться, потеряв при ударе часть своей
энергии. Полагая, что сила удара направлена горизонтально, опреде-
определить, где должен быть помещен образец, чтобы ось вращения маят-
маятника не испытывала удара.
Решение. Для того чтобы ось вращения маятника (рис. 218)
при его ударе об испытуемый образец не испытывала действия
ударной силы, должны быть выполнены условия, установленные
в § 104. По условию задачи внеш-
внешний ударный импульс S?, прило-
приложенный к маятнику, горизонтален,
т. е. перпендикулярен к плоско-
плоскости zOx, проходящей через ось
вращения маятника Рх и его центр
тяжести С. Следовательно, первое
условие выполнено.
Импульс S? приложен в пло-
плоскости yOz, проходящей через
центр тяжести маятника С пер-
перпендикулярно к его оси враще-
вращения Ох. Тогда второе условие
состоит в следующем:
а) ось вращения маятника дол-
должна быть его главной осью инер-
инерции в точке О;
б) центр удара К должен находиться на оси Oz, проходящей
через центр тяжести, на расстоянии от оси вращения Ох, опреде-
определяемом формулой A04.7).
Условие (а) выполнено, так как маятник симметричен относи-
относительно плоскости yOz. Ось Ох, перпендикулярная к этой плоскости»
является главной осью инерции. В соответствии с условием (б)
Рис. 218.
" md '
Согласно формуле (81.3) это расстояние равно приведенной длине
маятника /.
Таким образом, центр удара совпадает с центром мачаний маятника.
Пример 55. Баллистический маятник, служащий для определения
скорости снаряда, представляет собой цилиндр, открытый с одного
конца, наполненный песком и подвешенный так, что он может пово-
поворачиваться вокруг горизонтальной оси Ох (рис. 219, а). Снаряд*
попадая в цилиндр, производит поворот маятника вокруг оси Ох на
некоторый угол а. Снаряд влетает в цилиндр на расстоянии I от оси
привеса, причем эта ось не испытывает удара. Известны также:
/Wj-масса снаряда, те-масса маятника, OQ = d — расстояние от центра
тяжести маятника до оси Ох. Определить скорость снаряда v.
296
Решение. К удару, происходящему при попадании снаряда
в неподвижный цилиндр, применим теорему о кинетическом моменте
механической системы при ударе.
6)
А—*
w
1 \
J J^
~г—-
ТсГ
--
.С'
f
G,
Рис. 219.
Кинетический момент системы маятник-снаряд до удара равнялся
кинетическому моменту снаряда относительно оси Ох,- т. е.
Lx =
После неупругого удара снаряд движется вместе с маятником,
имеющим угловую скорость (о. Кинетический момент системы отно-
относительно оси Ох
Подставляя значения моментов инерции маятника Jx==mt%x и сна-
снаряда Jlx = m^2, получаем
Lx — (ml* -f- mil2) со.
Так как к системе были приложены только внутренние ударные
импульсы, кинетический момент системы при ударе не изменился, т. е.
или
откуда
.x L,x
i
m,\vl = {mix -\~ mil2) со,
v==
(a)
297
Действие снаряда на цилиндр выражается ударным импульсом,
который для цилиндра является внешним. По условию этот импульс
не вызывает ударных давлений маятника на ось. Этот импульс рас-
расположен в плоскости yOz, проходящей через центр тяжести маят-
маятника С перпендикулярно к его оси вращения Ох. В этом случае
центр удара К находится на оси О z, проходящей через центр тя-
тяжести маятника С, Расстояние от центра удара К до оси привеса
маятника определяется по формуле A04.7):
l-^ J* —_ m'* = '*
md md d '
откуда
il=ld.
Подставляя значение ix в формулу (а), определяющую скорость
снаряда, получаем
mid 4- т. I2 md-\-m,l ,,,.
v = -C-j—*— <о = -J-—— со. (б)
Для определения угловой скорости со баллистического маятника
в конце удара воспользуемся теоремой об изменении кинетической
энергии, рассматривая поворот маятника на угол а после удара
(рис. 219, б):
Г-7-0 = 2,4,. (в)
В наивысшем положении маятника Т = 0. Кинетическая энергия
вращающегося тела в начальном положении (где произошел удар):
= у (mdl -j- mxl2) со2 = -к {md -f- mxl) со2.
Сумму работ сил тяжести снаряда и маятника определяем по фор-
формуле F1.1):
At == — Gh — Gjfti = —mgd A — cos a) — mxgl A — cos a) =
= — gr(OTrf + mi0(l —cosa)==: — 2 g{md-\-mxl) sin2 —
Подставляем значения То и ^iAl в уравнение (в):
i lO со2 = — 2g- (md -f- m^) sin2 -| .
2
Отсюда определяем угловую скорость маятника:
?
/ #
Подставив значение со в формулу (б), получаем величину скорости
снаряда:
v = ¦
298
Вопроси для самоконтроля
1. Какое явление называется ударом?
2. Чем характеризуется ударная сила?
3. Какой эффект имеет действие ударной силы на материальную точку?
4. Сформулируйте теорему об изменении количества движения механи-
механической системы при ударе в векторной форме и в проекциях на оси коор-
координат.
5. Могут ли внутренние ударные импульсы изменить количество движе-
движения механической системы?
6. Что называют коэффициентом восстановления при ударе и как он
определяется опытным путем? В каких пределах находятся его числовые
значения?
7. Какова зависимость между углами падения и отражения при ударе
шара о гладкую неподвижную поверхность?
8. Чем характеризуется первая и вторая фазы упругого удара? В чем
состоит особенность абсолютно упругого удара?
9. Как определяются скорости двух шаров в конце каждой фазы пря-
прямого центрального удара (неупругого, упругого, абсолютно упругого)?
10. Какова зависимость между ударными импульсами второй и первой
фаз при абсолютно упругом ударе?
11. Какова потеря кинетической энергии двух соударяющихся тел при
неупругом, упругом и абсолютно упругом ударах?
12 Как формулируется теорема Карно?
13. Как формулируется теорема об изменении кинетического момента
механической системы при ударе в векторной форме и в проекциях на оси
координат?
14. Могут ли внутренние ударные импульсы изменить кинетический
момент механической системы?
15. Какие изменения вносит действие ударных сил в движение твердых
тел: вращающегося вокруг неподвижной оси и совершающего плоское дви-
движение?
16. При каких условиях опоры вращающегося тела не испытывают дей-
действия внешнего ударного импульса, приложенного к телу?
17. Что называют центром удара и каковы его координаты?
ГЛАВА XVI
ПРИНЦИП ГЕРМАНА — ЭЙЛЕРА - ДАЛАМБЕРА ДЛЯ МАТЕРИАЛЬНОЙ
ТОЧКИ И ДЛЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
§ 106. Принцип Германа — Эйлера — Даламбера для
материальной точки
Принципом Германа — Эйлера — Даламбера называют общий ме-
метод, при помощи которого уравнениям динамики по форме придается
вид уравнений статики. Этот метод, предложенный в 1716 г.
Германом и обобщенный в 1737 г. Эйлером, получивший название
петербургского принципа, часто называют началом или принципом
Даламбера, хотя действительная сущность начала Даламбера не ана-
аналогична петербургскому принципу *.
* Николаи Е. Л. О начале Даламбера и о силах инерции. Труды
Ленинградского индустриального института, № 6, 1936.
299
Положим, что материальная точка М под действием системы
сил Р,, Р2, .... Р„ движется с ускорением w (рис. 220).
Основное уравнение динамики имеет вид
«W^ + Pj+.-.+P,,.
Перенесем член mw из левой части уравнения в правую. Тогда
Так как —/и\у = Ф, то
Pi + P2+---+P« + * = 0. A06.1)
Полученное соотношение формулируется так: геометрическая
сумма всех приложенных к точке сил и силы инерции этой
точки равна нулю.
Это означает, что для решения задачи динамики материальной
точки по принципу Германа — Эйлера — Даламбера следует, помимо
приложенных к точке М сил, условно прило-
приложить к этой точке и силу инерции Ф. Тогда
многоугольник рассматриваемой системы сил
Р1( Р2. ... г Р„. Ф будет замкнут и суммы их
проекций на координатные оси будут равны
нулю. Как известно (§ 2), в действительности
сила инерции материальной точки приложена не
р к ней, а к телу, сообщающему точке ускорение.
Приложение силы инерции к точке является
рис 220 лишь условным приемом, сводящим задачу ди-
динамики по форме решения к задаче статики.
Благодаря своей простоте этот метод получил широкое примене-
применение во многих прикладных дисциплинах. В ряде случаев он обес-
обеспечивает наиболее простое и удобное решение задач динамики.
§ 107. Примеры применения принципа
Германа — Эйлера — Даламбера
Пример 56. Подъемник весом G = 7350 « поднимается равно-
равноускоренно и в первые 5 сек проходит 25 м. Найти натяжение под-
поднимающего его троса.
Решение. Приложим к подъемнику действующие на него силы:
его вес G и реакцию троса Т (рис. 221). Условно приложим к подъ-
подъемнику его силу инерции Ф = — /ту, направив ее противоположно
ускорению w, т. е. вниз. Тогда геометрическая сумма сил G, Т и Ф
равна нулю:
Так как силы направлены по одной прямой, то
Т — О — Ф = 0,
откуда
300
Для определения реакции троса найдем модуль силы инерции
подъемника, определив предварительно его ускорение. Уравнение
равноускоренного движения из состояния
покоя:
н _ wt2 . а)
6)
откуда
Г
211 2-25 г, , ,
w = -р- = —г2~ = 2 м[сек2.
Модуль силы инерции
Л tf 7350 „ , сп„
ф = rrvw = — iw = -7Г5- •2=1500 н.
Находим реакцию троса, равную его натя-
натяжению:
Т = G-\-0 — 7350 +1500 = 8850 н.
При движении подъемника вниз с тем же ускорением (рис. 221, б)
откуда
G
Т
Ф
Рис. 221.
1
Г
1
= G — Ф = 7350 — 1500 = 5850 н
При равномерном движении подъемника (как вверх, так и вниз)
•W = 0, Ф = 0, а потому
Г = G = 7350 «.
Пример 57. Шарик Л весом О = 50 с« подвешен на нити дли-
длиной i = 40 см, закрепленной в неподвижной точке О. Шарику
сообщается равномерное движение по окружности в горизонтальной
плоскости, при котором нить составляет с вертикалью угол а = 30°.
Определить натяжение нити и скорость шарика этого конического
маятника (рис. 222, а).
Реш ение. Прикладываем к шарику действующие на него силы:
его вес О и реакцию нити Т (рис. 222, б). Условно прикладываем
к шарику и его силу инерции Ф.
При равномерном движении сила инерции шарика Ф равна нор-
нормальной силе инерции Фл, направленной противоположно нормаль-
нормальному ускорению wn. Ее модуль
mv4
где r — lsina.
Строим замкнутый треугольник сил Q Т, Ф. Из треугольника
определяем модули сил Т и Ф:
G
СП
— ~cosa~ "осс ~ 57> СН''
= 50- 0,577 = 28,85с«.
301
Определив модуль силы инерции, находим скорость шарика А:
0.2885.9,8-0,4-
Рис. 222.
Пример 68. Гиря М весом 0 = 5 и, подвешенная к пружине,
совершает колебания согласно уравнению jc = 2sin20? (t — в секун-
секундах, х — в сантиметрах) Определить наибольшее и наименьшее
натяжения пружины при колебниях (рис. 223, а).
6)
г)
Q:
т
р,
G
Ф.
х
Рис. 223.
Решение. К движению гири применим принцип Германа —
Эйлера — Даламбера.
Приложим к гире действующие на нее силы: ее вес О и реакцию
пружины Р. При отсутствии колебаний P = G (рис. 223, б).
302
Определим силу инерции гири. Для этого найдем по уравнению
движения гири проекцию ее ускорения на ось х (см. ч. I. «Кине-
«Кинематика» § 83):
wx = х = — 800 sin 20* (см/сек2) = — 8 sin 20* (м/сек2).
Так как проекции на ось jc силы инерции Ф и ускорения w
гири имеют противоположные знаки, то проекция силы инерции
Фх = — mwx = wx — — g^- (—8 sin 20*) = 4,08 sin 20* («).
Проекция силы инерции изменяется периодически. Рассмотрим
промежуток времени, в течение которого sin 20* изменяется непре-
непрерывно от -\- 1 до — 1. Проекция силы инерции в этом промежутке
изменяется непрерывно от —)— 4,08 до —4,08 и.
В первой половине этого промежутка времени сила инерции
направлена по направлению оси х, т. е. вниз, и абсолютная вели-
величина ее убывает от 4,08 н до нуля. Во второй половине проме-
промежутка сила инерции направлена противоположно направлению оси,
т. е. вверх, и абсолютная величина ее возрастает от нуля до 4,08 «.
Определим натяжение пружины в моменты времени *j и *2, соот-
соответствующие экстремальным значениям проекции силы инерции:
1. sin 20*!= 1.
Координата центра тяжести гири х1 = 2 см (рис. 223, в). Проек-
Проекция силы инерции Ф1х = 4,08 н. Сила инерции Ф] направлена
вниз и имеет модуль Фг = 4,08 и. Приложим ее условно к гире.
Тогда геометрическая сумма сил G, Pj и Ф1 будет равна нулю,
а потому и сумма их проекций на ось х равна нулю:
2 *, = <>; _я, + о + Ф1 = 0.
откуда
Р1==О4-Ф1=-5 + 4,08 = 9,08 к.
2. sin 20*2 = —1.
Координата центра тяжести гири лг2 = — 2 см (рис. 223, г).
Проекция силы инерции Ф2* — — 4,08 я. Сила инерции Ф2 напра-
направлена вверх и имеет модуль Ф2 = 4,08 к. Приложим ее условно
к гире. Тогда снова геометрическая сумма сил G, Р2 и Ф2 равна
нулю, а потому сумма их проекций на ось х равна нулю:
2*, = 0, — р2 — Ф2 + С = 0,
откуда
P2=G —Ф2 = 5 — 4,08 = 0,92 «.
Таким образом, натяжение пружины при колебаниях изменяется
периодически, принимая все значения в пределах от 0,92 до 9,08 н.
В § 89 первой части курса установлено, что при гармоническом
колебательном движении точки ее ускорение направлено к среднему
303
положению точки, т. е. к началу координат. Поэтому сила инерции
материальной точки в любом положении направлена от начала коор-
координат. Ее модуль имеет максимум в крайних положениях точки
(рис. 223, в и г), где имеет максимум модуль ускорения.
§ 108. Принцип Германа — Эйлера — Даламбера
для несвободной механической системы
При изучении движения несвободной механической системы,
так же как и при изучении движения одной несвободной точки, при-
применяют принцип освобождаемое™ от связей (см. § 21). По этому
принципу имеющиеся связи отбрасывают, заменяя их действие соот-
соответствующими реакциями. Полученную механическую систему рассма-
рассматривают как свободную, находящуюся под действием задаваемых сил
и реакций связей.
Рассмотрим несвободную механическую систему, состоящую из п
материальных точек.
Применим к каждой точке Мь этой системы принцип Германа —
Эйлера—Даламбера (см. § 106). Тогда
f*i = 0 (/=1.2 п), A08.1)
где Р[ — равнодействующая всех задаваемых сил, приложен-
приложенных к точке М[,
R, — равнодействующая реакций связей, приложенных
к этой точке.
Ф(- = — WjWj — сила инерции материальной точки ML.
Уравнение A06.1) показывает, что а любой момент времени
геометрическая сумма равнодействующей задаваемых сил, равно-
равнодействующей реакции связей и силы инерции для каждой мате-
материальной точки несвободной механической системы равна нулю.
Это положение называется принципом Германа—Эйлера —
Даламбера для несвободной механической системы.
Сложив все п уравнений A08. 1), получим
i = 0. A08.2)
Здесь 2 Р/ = Р* — главный вектор задаваемых сил;
2r, = R*— главный вектор реакций связей;
У] Ф1 = ф* — главный вектор сил инерции точек системы.
Подставляя эти значения в уравнение A08.2), получаем
0. A08.3)
Из уравнения A08.3) следует, что в любой момент времени
для всякой несвободной механической системы геометрическая
сумма главных векторов задаваемых сил, реакций связей и сил
инерции материальных точек системы равна нулю.
Проведем из произвольного неподвижного центра О в каждую
точку системы Mt радиус-вектор г^.
304
Умножим векторно радиус-вектор г1 каждой точки Mt на сумму
векторов левой части равенства A08.1):
г,ХР/ + ^ХК/ + г,ХФ< = 0 (/=1, 2 д).
Сложим все п полученных уравнений:
2 «¦/ X P/ + S f( X R/ + S rr X Ф, = 0. A08.4)
Здесь 2Г* X Р/ = 2 Mfo = Мо — главный момент задаваемых сил
относительно центра О;
2 Ti X R< = 2 Mfo = Mo — главный момент реакций связей
относительно центра О;
2 ri X Фг = 2 М;о = Мо — главный момент сил инерции точек
системы относительно центра О.
Подставляя эти значения в уравнение A08.4), получаем
Мо + М§ + Мо = 0. A08.5)
Уравнение A08.5) показывает, что в любой момент времени
для всякой несвободной механической системы геометрическая
сумма главных моментов задавамих сил, реакций связей и
сил инерции материальных точек системы относительно любого
неподвижного центра равна нулю.
§ 109. Приведение сил инерции точек твердого тела
к простейшему виду
К системе сил инерции точек твердого тела можно применить
метод Пуансо—метод приведения сил к некоторому центру, рассмотрен-
рассмотренный в статике (см. ч. I «Статика», § 18 и 50). В динамике за центр
приведения сил инерции выбирают обычно центр масс тела С. Тогда
в результате приведения получится сила Ф*, равная главному вектору
сил инерции точек тела, и пара сил с моментом Мф, равным глав-
главному моменту сил инерции относительно центра масс
ф*=:2Ф( = — 2"W. A09.1)
A09.2)
где радиусы-векторы гг проведены во все точки тела из центра масс.
Количество движения системы
j = mv
c.
Продифференцировав это выражение по времени, будем иметь
~аг — т -щ- или
20 А. А. Яблонский 305
Пользуясь этим выражением, получим главный вектор сил инер-
инерции точек твердого тела при любом ее движении:
Ф* = — mxvc. A09.3)
Остается определить главный момент сил инерции точек тела
относительно центра масс.
Рассмотрим некоторые случаи движения твердого тела.
I. Поступательное движение
В случае поступательного движения ускорения всех точек тела
геометрически равны ускорению его центра масс
При этом условии
М? = — 2 rt X rntvit — — 2 «"* X mfWc = — 2 m'r« X wc =
= -/nrcXwc = 0,
2«*
так как радиус-вектор центра масс гс = -= относительно центра
масс равен нулю
В этом случае силы инерции точек твердого тела приводятся
к равнодействующей, приложенной в центре масс и равной главному
вектору сил инерции, а потому
ф = ф* = —
Таким образом, при поступательном движении силы инерции
точек твердого тела приводятся к равнодействующей силеу
приложенной в центре масс тела, равной по модулю произ~
ведению массы тела на модуль ускорения его центра масс и.
направленной противоположно этому ускорению.
2. Вращение твердого тела, имеющего плоскость материальной
симметрии, вокруг неподвижной оси, перпендикулярной
к этой плоскости
В этом случае неподвижная ось вращения тела является главной
осью инерции тела в точке О.
Каждой точке М'{ (рис. 224, а) соответствует точка M"t такой же
массы, симметричная относительно заданной плоскости (на рис. 224, а
эта плоскость заштрихована).
Из кинематики известно, что ускорения всех точек, лежащих на
одной прямой, параллельной оси вращения, геометрически равны.
Поэтому силы инерции Ф,' = — m'iw'i и $"i = — m'^w'^ точек M't
и М" геометрически равны и их равнодействующая приложена
в точке Mv лежащей в плоскости симметрии.
Отсюда следует, что в точке М1 приложена равнодействующая
сил инерции всех точек тела, лежащих на перпендикуляре к пло-
плоскости симметрии, восстановленном в этой точке. Таким образом,
306
сложение сил инерции точек тела в этом случае движения сводится
к сложению сил инерции точек материальной плоской фигуры, имею-
имеющей массу данного тела и тот же момент инерции относительно оси
вращения (рис. 224, б).
Приведем силы инерции точек фигуры к центру ее вращения О.
При приведении получим силу, приложенную в этом центре, и пару
а)
б)
г)
Рис 224.
сил, лежащую в плоскости фигуры. Сила равна главному вектору,
определяемому формулой A09.3):
Ф* = — mwc.
Главный вектор направлен противоположно ускорению центра
масс wc и имеет модуль:
Ф* = mwc.
Для определения момента пары разложим силу инерции каждой
точки на вращательную и центробежную силу инерции, направленные
20*
307
противоположно вращательному и центростремительному ускорениям
этой точки.
Их модули определим по формулам
| Ф° | = mi | w* | = m-iTi | е |, Ф? = miivf = m^co2.
Так как линии действия центробежных сил инерции проходят-
через центр вращения О, то искомый момент пары равен сумме
моментов вращательных сил инерции относительно точки О:
Мф = М$ = - 2 Ф'т = -2ffl«r?e = -eS тЛ
Здесь 2/и<г*—Л — момент инерции материальной плоской фи-
фигуры относительно оси Oz, перпендикулярной к ее плоскости, рав-
равный моменту инерции данного тела относительно этой оси.
Таким образом, алгебраическая величина момента пары, соста-
составленной силами инерции,
ЖФ = —У2е, A09.4)
где Jz — момент инерции тела относительно оси вращения;
е — алгебраическая величина углового ускорения тела.
Вектор Мф направлен перпендикулярно к плоскости фигуры, т. е.
по оси вращения тела противоположно вектору углового ускоре-
ускорения, т. е.
МФ = —Ле.
Как известно из статики (§ 55), силу Ф* и пару с моментом Мф,
лежащих в одной плоскости, можно заменить одной равнодействую-
равнодействующей силой Ф, геометрически равной главному вектору Ф* (рис. 224, в).
Линия действия этой силы отстоит от центра приведения О на
расстоянии
Мф
h = ~. A09.5)
Таким образом, при вращении твердого тела, имеющего пло-
плоскость материальной симметрии, вокруг оси, перпендикуляр-
перпендикулярной к этой плоскости, силы инерции точек тела приводятся
к равнодействующей силе, лежащей в плоскости симметрии.
Модуль и направление этой силы определяются формулой A09.3),
а расстояние от ее линии действия до точки пересечения оси
вращения с плоскостью симметрии—формулой A09.5).
Покажем, что линия действия равнодействующей сил инерции Ф
проходит через центр качаний. Для этого продолжим линию дей-
действия этой силы до пересечения с прямой ОС; перенесем в точку
их пересечения Ох силу Ф и разложим ее на две составляющие Ф*
и Фц (рис. 224, г).
На основании теоремы о моменте равнодействующей силы
(ч. I, «Статика», § 21)
-Уге. (а)
308
Так как линия действия Фц проходит через точку О, то
Принимая OC — d, имеем
Фв = mw\ = m • ОС • е = т • d ¦ е.
Поэтому на основании (а) и (б):
Ж (Ф)о = — Уге = — md • е
откуда
Из этого равенства на основании (81.3) следует, что точка О,,,
через которую проходит линия действия равнодействующей сил инер-
инерции Ф, является центром качаний.
3. Вращение твердого тела, имеющего плоскость материальной.
симметрии, вокруг центральной оси, перпендикулярной
к этой плоскости
В этом случае ось вращения тела является главной центральной
осью инерции тела, так как она проходит чегез центр масс тел»,
перпендикулярно к плоскости симметрии (рис. 225).
При неподвижном центре масс тела из фор-
формулы A09.3) следует |||
Ф* = mwc = 0,
т. еу главный вектор сил инерции точек тела ра-
равен нулю.
Из формулы A09.4)
' = — Jc&
A09.6)
где УСг—момент инерции тела относительно оси
вращения.
Таким образом, если твердое тело вращается
вокруг неподвижной оси, которая является
его главной центральной осью инерции, то
силы инерции точек тела приводятся к паре
сил, лежащей в плоскости материальной сим-
симметрии тела, момент которой определяется по формуле A09.6)..
4. Плоское движение твердого тела, имеющего плоскость
материальной симметрии
Рассмотрим такое движение твердое тела, имеющего плоскость-
материальной симметрии, при котором все точки тела движутся
параллельно этой плоскости (рис. 226). Это движение тела можно
30»-
разложить на поступательное движение с центром масс тела С и
вращение вокруг подвижной оси Ct,, проходящей через центр масс
тела перпендикулярно к плоскости симметрии.
Как уже известно, силы инерции поступательного движения при-
приводятся к силе, приложенной в центре масс и определяемой фор-
формулой A09.3):
Силы инерции вращатель-
вращательного движения в таком случае
приводятся к паре сил, лежа-
лежащей в плоскости симметрии и
имеющей момент
Мф = — J&, A09.7)
где Ji — момент инерциии тела
относительно главной
центральной оси инер-
инерции С$.
Таким образом, если твер-
твердое тело, имеющее плоскость
материальной симметрии.
Рис. 226. движется параллельно этой
плоскости, то силы инерции
.точек тела приводятся к силе, приложенной в центре масс и
равной главному вектору сил инерции, и к паре сил, лежащей
s плоскости симметрии, величина момента которой опреде-
определяется формулой A09.7).
В более сложных случаях движения тела главный вектор и глав-
главный момент сил инерции относительно центра приведения находят
аналитическим путем, т. е. по их проекциям на три координат-
.ные оси.
§ 110. Определение динамических реакций подшипников
при вращении твердого тела вокруг неподвижной оси.
Вращение твердого тела вокруг его главной центральной
оси инерции
Рассмотрим твердое тело, вращающееся вокруг неподвижной
<оси z под действием приложенных к нему внешних задаваемых сил
pf, pf pf (рис. 227, а). Положим, что в рассматриваемый
момент тело имеет угловую скорость ю и угловое ускорение е.
Чтобы воспользоваться принципом Германа—Эйлера — Даламбера,
лриложим к каждой точке тела УИг силу инерции Ф^
При неравномерном вращении тела эта сила состоит из враща-
вращательной силы инерции Ф°, направленной противоположно вращатель-
•310
ному ускорению точки Mt и центробежной силы инерции Ф?, на-
направленной противоположно центростремительному ускорению этоЛ
точки. Применяя принцип осво-
освобождаемое™ от связей (§ 21),
заменяем действие на тело под-
подпятника А и подшипника В
реакциями RA и RB, разложив t
их на составляющие \А, YA, "
Расстояние АВ между опо-
опорами тела обозначим h. На
основании принципа Германа —
Эйлера — Даламбера внешние
задаваемые силы, реакции свя-
связей и силы инерции должны
удовлетворять уравнениям
A08.3) и A08.5), которые
в данном случае принимают
вид
A10.1)
но Мал = 0.
Первому уравнению A10.1)
соответствуют три уравнения
проекций внешних задаваемых
сил, реакций связей и сил инер-
инерции на оси координат. Второму
уравнению A10.1) соответ-
соответствуют три уравнения момен-
моментов этих же сил относительно
N
*:
/
ф*
UX
щ
rft4
Рис. 227.
осей координат. Таким образом, всего имеем шесть следующих;
уравнений:
31L
Установим формулы для вычисления сумм проекций сил инерции
1на оси координат и их моментов относительно этих осей.
Модули центробежной и вращательной сил инерции определим
по формулам B.10):
где rt — радиус окружности, описываемой точкой.
Разложим каждую из этих сил на составляющие, направленные
по осям координат (рис. 227, а, б). Найдем алгебраические значе-
значения этих составляющих, т. е. проекции сил Ф/ и Ф? на оси коор-
.динат:
ФУ, = Ф? cos(Ф?, i) = m,r,©2 Щ = т,х^;
Ф?у = Ф? cos (ф?, j) == ruffi -^ =
Ф'х = Ф' cos(Ф?. l)=mlrfiZL = m,yfi;
Ф% = 0a{Cos(<!>l j)= — mffi Щ- = — miXfi.
Найдем суммы проекций сил инерции на оси х и у, пользуясь
равенствами 2 mixi = tnxc, 2 miVi = тУс полученными из фор-
формул C2.2):
= со2 2 т(У( — е 2 mixi =
Найдем суммы моментов сил инерции относительно осей х и у
как суммы моментов центробежных и вращательных сил инерции:
1=2 л**ц+2 и*г;=-
= —2 «гу/о2
2
где /уг = 2 miVizi и /иг = 2 mi^ixi — центробежные моменты инер-
инерции тела относительно осей у, ? и осей z, x:
= 2 mixf^zi + 2 miyfizi = w2 2 f"-iZiXt + e 2
312
Учитывая, что центробежные силы инерции пересекают ось г*
найдем сумму моментов сил инерции относительно оси z как сумму
моментов только вращательных сил инерции, не разложенных на-
составляющие:
2 M& = 2 МТ* = — 2 »(/¦ {ег, = — е 2 «/*¦? = — Ле.
Подставив найденные значения в уравнения A10.2), получим
Хв~т тхс<а2-\- тусг =0,
— mxrz —
2 4-
2j Miy-
= 0,
= 0,
A10.3)
Ж9 / p о
Последнее из уравнений A10.3) не содержит реакций опор. Это
уравнение представляет собой дифференциальное уравнение враще-
вращения тела G9.2).
Остальные пять уравнений позволяют определить пять составляю-
составляющих реакций подпятника А и подшипника В.
В первое, второе, четвертое и пятое уравнения A10.3), из кото-
которых определяются составляющие реакций опор вдоль осей х и у,
входят члены, зависящие как от внешних задаваемых сил, так и or
сил инерции. Следовательно, каждая из этих реакций имеет стати-
статическую составляющую, вызываемую действием внешних задаваемых
сил Р(, и динамическую составляющую, зависящую от сил инерции.
Члены уравнений A10.3), зависящие от сил инерции, отмечены
рамками.
При быстром вращении тела динамические составляющие могут
иметь большие значения.
Установим условия, при которых динамические составляющие
реакций подпятника и подшипника равны нулю. Чтобы получить эти
условия, приравняем нулю сумму членов, зависящих от сил инерции,
в каждом из уравнений A10.3):
>>се = 0,
A10.4)
тус«>2 — тхсг = О,
A10.5)
313
Решая систему уравнений A10.4) относительно хс и ус, на-
находим
хс = 0, ус = 0,
т. е. устанавливаем, что центр тяжести тела должен находиться на
¦оси его вращения.
Решая систему уравнений A10.5) относительно Jyz и Jzx, на-
лодим
Это означает, что ось вращения тела z должна быть главной
осью инерции тела для начала координат.
Таким образом, установлено, что динамические составляющие
реакций подпятника и подшипника равны нулю в том случае,
если ось вращения тела является главной центральной осью
инерции тела.
Для выполнения этого условия вращающимся частям машин обычно
придают форму тел вращения с тем, чтобы это тело вращалось
вокруг своей оси симметрии.
Если из-за неточности изготовления ось вращения тела не ока-
окажется главной центральной осью инерции, то эта погрешность устра-
устраняется специальными приемами.
§ 111. Примеры применения принципа Германа — Эйлера —
Даламбера для механической системы
Пример 69. Бадья весом О поднимается при помощи лебедки
весом Q с постоянным ускорением w (рис. 228, а). Лебедка уста-
установлена на однородной горизонтальной балке АВ длиной/ и весом Р,
заделанной концом А в стену. Расстояние от оси барабана лебедки
до стены равно а. Определить реакции заделки.
Решение. Для определения реакций опор при помощи прин-
принципа Германа — Эйлера — Даламбера к точкам системы условно при-
прикладывают их силы инерции и, освобождая систему от связей, при-
прикладывают реакции этих связей. В зависимости от вида полученной
•системы сил составляют те или иные уравнения проекций сил на
оси, соответствующие векторному уравнению A08.3), и уравнения
моментов сил относительно осей, соответствующие векторному урав-
уравнению A08.5).
Обозначим:
г — радиус барабана;
JOx — момент инерции барабана относительно его оси;
М — момент, действующий на барабан лебедки, вызывающий
подъем бадьи.
Сила инерции бадьи Ф направлена противоположно ускорению w
и имеет модуль Ф = mw = — w.
314
Положим, что барабан лебедки имеет плоскость симметрии, кото-
которая совмещена с плоскостью чертежа (рис. 228, б) и что центр
тяжести барабана С находится на оси вращения.
В § 109 установлено, что в этом случае силы инерции точек
вращающегося тела приводятся к паре сил, момент которой опре-
определяется по формуле A09.4). Пользуясь этой формулой, найдем
абсолютную величину момента пары,
составленной силами инерции точек с
барабана:
Угловое ускорение барабана
можно определить по вращательному
ускорению точек обода барабана,
которое равно ускорению груза:
е =
\
w
г
w
т
Мф
Следовательно,
w
г
К механической системе, состоя-
состоящей из балки, лебедки и бадьи, при-
применяем принцип Германа — Эйлера —
Даламбера.
Прикладываем условно к системе
силу инерции бадьи Ф и пару с мо-
моментом Мф, составленную силами
инерции точек барабана, направив
момент этой пары противоположно
вектору углового ускорения е.
Заменяем действие заделки реакцией ]
кальной, и реактивной парой с моментом
М
Рис. 228.
в данном случае верти-
д
Для полученной системы параллельных сил на плоскости составляем
уравнение проекций на ось, параллельную силам (алгебраическую»
сумму сил, равную нулю), и уравнение моментов относительно-
точки А:
= 0; М
2Рг = 0; RA — P — Q — G — Ф =
-\- М- \МФ\ -Р ¦ L_Qa_
_ф(й _|_ г)==
Уравнение B) можно значительно упростить, так как из уравне-
уравнения моментов сил, приложенных к барабану относительно его-
оси Ох, следует, что
М — | МФ | — Gr — Фг == 0
315-
или
Подставляя это значение М в уравнение B), найдем, что
МА — Р ¦ ^ — Qa — Оа — Фа = 0.
Таким образом,
Пример 60. Однородный диск весом О и радиусом R может
вращаться вокруг горизонтальной оси, перпендикулярной к плоскости
писка и проходящей через точку О его обода. Диск отпущен из
наивысшего положения без
начальной угловой скорости.
Определить реакцию оси
диска в тот момент, когда
центр тяжести диска и его
ось вращения лежат в одной
горизонтальной плоскости, и
равнодействующую сил инер-
инерции в этот момент.
Решение. Чтобы вос-
воспользоваться принципом Pep-
Peps' мана — Эйлера — Даламбера,
необходимо определить силы
инерции точек диска. Для
этого необходимо найти
угловую скорость со и угло-
угловое ускорение е диска при
Рис 229. горизонтальном положении
отрезка ОСХ (рис. 229). Най-
Найдем сначала угловую скорость диска в момент, когда отрезок ОС
составляет с вертикалью угол ср. Воспользуемся теоремой об изме-
изменении кинетической энергии механической системы в форме уравне-
яия G0.2):
В
где 70 = 0, так как движение диска началось из состояния покоя.
Кинетическую энергию вращающегося диска определим по формуле
<69.2):
1
Момент инерции диска относительно оси вращения найдем по
формулам C5.1) и C6.2):
Подставив значение Jx, получим
_ 4 т со __— —
Работу силы тяжести определим по формуле F1.1):
A0 = GH = GR (\l — cos ф).
Подставив значения Т и Аа в уравнение G0.2), будем иметь
I- .2. #2W2 _ о/? A _ cos ф),
откуда
co2 = ^--fr(l— соэф), или
= 2у -^-A—СОБф) .
Продифференцировав по времени выражение, определяющее со2,
получим
Так как -^- = е и -^- = (о, то
da 2 g
e=itt=y-r
Определим угловую скорость диска со и угловое ускорение е
при ф — y:
Рассматриваемый случай соответствует вращению тела, имеющего
плоскость материальной симметрии, вокруг оси, перпендикулярной
к этой плоскости. В § 109 установлено, что если центр тяжести
такого тела не лежит на оси вращения, то силы инерции точек тела
проводятся к равнодействующей. Определим модули равнодействую-
равнодействующих вращательных и центробежных сил инерции точек диска, поль-
пользуясь формулами A09.3):
0B = mwBc = mRe=— R ¦ \^ = \o;
g 6 К о
= _| R . | _jL = 1 о.
317
Силы Ф" и Фц направлены противоположно вращательному и
центростремительному ускорениям центра тяжести диска w?. и w?.
Положим, что АВ является линией действия равнодействующей
сил инерции Ф и приложим эту силу в точке К этой прямой, на-
находящейся на горизонтальном диаметре диска.
Приложим также к диску задаваемую силу G. Заменим действие
шарнира О реакцией, разложив ее на составляющие Yo и Ъо. Для опре-
определения этих составляющих по принципу Германа—Эйлера—Далам-
бера составим для плоской системы сил О, Yo, Zo, Фв, Ф" уравне-
уравнения проекций на оси у и г;
г = 0; Уо — Ф» = 0, откуда Ko = 04 = |G;
— O + ZO + 0B = O, откуда ZO=-G — 0B = 1 О.
Модуль равнодействующей сил инерции Ф==фв-)-фц
Найдем величину главного момента сил инерции относительна
точки О по формуле A09.4):
т — jxb — 2 g д: 3 ^ — utx,
что и очевидно, так как
откуда
\M*\ = M
Расстояние от точки О до линии действия силы Ф найдем па
формуле A09.5):
,,„ i _ GR __ 3/5
Ф 2 «_ 10 *
Пример 61. Однородная тонкая пластинка весом О имеет форму
прямоугольного треугольника с катетами а и Ь. Пластинка вращается
с постоянной угловой скоростью к» вокруг вертикальной оси, совпа-
совпадающей с катетом Ъ. Определить реакции подпятника и подшипника,,
полагая, что они находятся в вершинах А я В треугольника.
Решение. Свяжем с пластинкой подвижную систему координатц
направив ось z по оси вращения пластинки, ось у — по катету а и
ось х — перпендикулярно к плоскости пластинки (рис. 230). Чтобы
воспользоваться принципом Германа — Эйлера — Даламбера-, опре-
определим силы инерции точек пластинки. Для этого разобьем пластинку
318
на элементарные площадки. При равномерном вращении пластинки
сила инерции каждого элемента имеет только центробежную соста-
составляющую, модуль которой определится по формуле C.5):
Ф" = 2
Направление силы Ф'г' противоположно направлению центростре-
центростремительного ускорения элемента w^. Силы инерции элементов образуют
систему параллельных сил, направленных в одну сторону и лежащих
в плоскости пластинки yAz. Такая система сил приводится к равнодей-
равнодействующей Фц, равной главному вектору этих сил и, следовательно,
определяемой по формуле A09.3):
Так как расстояние от центра
тяжести треугольной пластинки С
до оси вращения
составляет -%- а,
О
то центростремительное ускорение
точки С равно:
1 ,
Модуль равнодействующей сил
инерции
1 1 G
3 3 g
Направление силы Фц противо- рис 230
положно направлению ускорения w?.
Для определения линии действия силы Фц найдем главный момент
сил инерции относительно точки А:
лФ V rf>u~ V ™ .. ~ .-1? ..» V . .. . „2 /
= -=- — я<о2
3 g
1
где Jyz = -тн- mab—центробежный момент инерции треугольной пла-
пластинки относительно осей у, z, направленных по катетам треуголь-
треугольника (см. § 40).
Подставив значение Jyz, получим
1
1 О и ¦>
Расстояние от линии. действия равнодействующей Фц до точки А
найдем по формуле A09.5):
1 G
k_\K\ __ И^аЬ^ 1
Ф ~ \ G а ~~ 4 0>
319
Приложим к пластинке задаваемую силу G и реакции подшипника В
и подпятника А. Так как сила G и равнодействующая сил инерции Фц
расположены в плоскости пластинки, то реакции опор лежат тоже
в этой плоскости, имея составляющие \в, YA, ЪА.
Согласно принципу Германа — Эйлера — Даламбера составим для
плоской системы сил G, YB, \A, 2А и ф11 уравнения, соответствую-
соответствующие уравнениям A08.3) и A08.5), в следующем виде:
^ Z; — 0; — О —у- Z,А —- 0.
Из первого уравнения
G a \ G „ Т
~ 3 ~~~5~Ya<i> ~~b~~ Ylbg
Из второго уравнения
V — —V f Д Ga^S + b<*) Gatf ___ Ga Dg - 3to2)
rа— гв ^ i2bg 3g ~~ \2bg
Из третьего уравнения ZA—G.
При вращении пластинки составляющие реакций опор YA и YB
вращаются вместе с ней,
Вопроси для самоконтроля
1. В чем заключается сущность принципа Германа — Эйлера—Даламбера
для материальной точки?
2. Каким условиям удовлетворяют в любой момент времени главные
векторы внешних задаваемых сил, реакций связей и сил инерции точек
несвободной механической системы и главные моменты этих сил относи-
относительно любого центра?
3. Каковы модуль и направление главного вектора сил инерции меха-
механической системы?
4. К чему приводятся силы инерции точек твердого тела:
а) при поступательном движении тела;
б) при вращении тела, имеющего плоскость материальной симметрии,
вокруг неподвижной оси, перпендикулярной к этой плоскости;
в) при плоском движении тела, имеющего плоскость материальной
симметрии?
5. При каких условиях динамические давления вращающегося тела на
опоры равны нулю?
6. Каково число и каков вид уравнений, выражающих принцип Гер-
Германа — Эйлера — Даламбера для несвободной механической системы в про-
проекциях на оси координат, в случаях, когда задаваемые внешние силы, реак-
реакции связей и силы инерции материальных точек твердого тела образуют:
а) плоскую систему параллельных сил;
б) систему сил, произвольно расположенных на плоскости;
в) систему параллельных сил в пространстве;
г) произвольную систему сил в пространстве?
320
ГЛАВА XVII
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
§ 112. Обобщенные координаты и число степеней свободы
Перемещения точек несвободной механической системы не могут
быть совершенно произвольными, так как они ограничены имеющи-
имеющимися связями. Это означает, что не все координаты точек независимы.
Рис. 231.
Рис. 232.
При таком условии положение точек системы определяется заданием
только независимых координат. Остальные координаты опре-
определяются из уравнений связей (см. § 21).
Независимые величины, заданием которых однозначно опре-
определяется положение всех точек механической системы, назы-
называются обобщенными координатами этой системы. Для голо-
номных систем число независимых обобщенных координат
механической системы равно числу степеней свободы этой
системы.
Так, например, положение рычага АВ с осью вращения О
(рис. 231) вполне определяется заданием его угла поворота ф. Угол ф
можно рассматривать как обобщенную координату
рычага.
Так как положение рычага определяется одной
обобщенной координатой, то рычаг имеет одну
степень свободы.
Положение всех точек кривошипного механизма
(рис. 232) вполне определяется заданием только
угла поворота кривошипа ф. Этот угол можно при-
принять за обобщенную, координату этой системы,
имеющую также одну степень свободы.
Положение всех точек центробежного регуля-
регулятора (рис. 233), вращающегося вокруг вертикаль-
вертикальной оси, определяется заданием угла поворота
регулятора ф и угла си, образованного каждым из
стержней с вертикалью. Не зависящие друг от друга углы ф и а
можно считать обобщенными координатами.
Так как положение регулятора определяется двумя обобщенными
координатами, то он имеет две степени свободы.
Положение свободной материальной точки в пространстве опреде-
определяется тремя декартовыми координатами, не зависимыми друг от друга.
Рис. 233.
21 А. А. Яблонский
321
Поэтому свободная материальная точка имеет три степени свободы.
Твердое тело, вращающееся вокруг неподвижной оси, имеет одну
степень свободы, так как его положение определяется только углом
поворота ф.
Тело, совершающее сферическое движение, имеет три степени
так как его положение определяется тремя эйлеровыми
углами \|), Э, ф.
Свободное твердое тело,
движение которого опреде-
определяется шестью уравнениями,
имеет шесть степеней свободы.
Механическая система, по-
положение которой определяют s
обобщенных координат, имеет s
степеней свободы.
рис. 234. Декартовы координаты лю-
любой точки Mt механической си-
системы являются функциями обобщенных координат этой системы. Так,
например, зная длину кривошипа г и длину шатуна I кривошипно-
шатунного механизма (рис. 234), можно выразить декартову коорди-
координату ползуна В через обобщенную координату ф:
или
хв — г cos
— г2 sin2
Таким же образом можно определить координату любой точки
этого механизма.
Обозначим обобщенные координаты механической системы, имею-
имеющей s степеней свободы, через
Я\, Яг Яэ-
Декартовы координаты любой
точки ML этой системы при стацио-
стационарных связях являются функциями s
обобщенных координат:
Xi = xt (qx, q2 qs),
У/=У/(?1. 42 4t). (H2.1)
zi = zi(qv Яг Яз)-
При наличии нестационарных свя- Рис. 235.
зей декартовы координаты всех то-
точек механической системы являются функциями не только обобщен-
обобщенных координат, но и времени:
Xi = xt (qv q2 qs, t),
У1=МЯ1. Яг qS' 0- [ (П2.2)
Я2>
Я,, t).
322
Например, при переменной длине нити маятника OM = l^=l0 — ct
(рис. 235) точка М имеет координаты
Эти координаты зависят не только от обобщенной координаты ф,
но и от времени t.
§ 113. Возможные (виртуальные) перемещения механической
системы. Идеальные связи
Возможными, или виртуальными, перемещениями несвобод^
ной механической системы называются воображаемые беско-
бесконечно малые перемещения, допускаемые в данный момент на-
наложенными на систему связями.
Возможные перемещения точек механической системы рассматри-
рассматривают как величины первого порядка малости, пренебрегая при этом
величинами высших порядков малости.
Поэтому криволинейные перемещения точек заменяют прямоли-
прямолинейными отрезками, отложенными по касательным к траекториям
точек, и обозначают 6s. Так, например, возможным перемещением
рычага АВ (рис. 236) является его поворот на бесконечно малый
А
A'A,
Рис. 236. Рис. 237.
угол бф вокруг точки О. При этом повороте точки А я В должны
переместиться по дугам окружностей ААХ и ВВХ. С точностью до
величин первого порядка малости эти перемещения заменяют возмож-
возможными перемещениями ЫА = АА' и Ь%в = ВВ' в виде прямолинейных
отрезков, отложенных по касательным к траекториям точек, а по.
величине равных:
bsA = О А • 6ф; bs3 = OB ¦ бф.
Возможным перемещением кривошипного механизма, изображен-
изображенного на рис. 237, является перемещение, соответствующее повороту
кривошипа О А на бесконечно малый угол бф вокруг оси вала.
Возможное перемещение bsA пальца кривошипа А представляет
собой отрезок касательной АА' к дуге окружности с центром
в точке О, равный по величине 6s А = О А ¦ бф.
Возможным перемещением bsB ползуна В является бесконечно,
малый отрезок ВВХ прямолинейной траектории точки В.
Действительные перемещения несвободной механической системы,
движущейся под действием приложенных к ней сил, входят в число
21* 323.
I
Рис. 238.
ее возможных перемещений, являясь их частным случаем. Однако
это справедливо лишь для стационарных связей. В случае нестацио-
# нарных связей действительные переме-
^/1«. щения системы не относятся к числу
>г ' Мг Л*2 ее возможных перемещений.
"^ *" Все силы, действующие на несво-
несвободную материальную точку или не-
несвободную механическую систему, де-
делят на задаваемые силы и реакции
связей.
Задаваемые силы выражают действие
на механическую систему тел, вызы-
вызывающих или стремящихся вызвать опре-
определенное ее движение.
Реакции связей выражают действие связей, ограничивающих дви-
движение механической системы или препятствующих ему.
Рассмотрим механическую систему, состоящую из п. материальных
точек М^ М2, ¦ ¦ ¦, Мп, подчиненную связям; реакции связей обо-
обозначим Rx, R2 Rn (рис. 238).
Дадим системе какое-либо возможное
перемещение; возможные перемещения то-
точек системы обозначим 6Sj, 6s2, • • ., 6sn.
Вычислим сумму работ реакций Rv
R2 Rn на этих перемещениях.
Если сумма работ реакций связей
на любом возможном перемещении си-
системы равна нулю, то такие связи
называются идеальными.
Согласно этому определению для
идеальных связей
2/?j6^cos(R;, 6s,) = 0. A13.1)
Положим, что тело может скользить
между параллельными гладкими поверх-
поверхностями (рис. 239, а). Сообщим телу воз-
возможное перемещение и вычислим работу
реакций связи на этом перемещении.
Считая, что давление тела передается
на нижнюю поверхность, приложим к телу
нормальную реакцию этой поверхности N.
Возможное перемещение точки приложения этой силы 6s лежит
в плоскости, касательной к опорной поверхности.
Работа силы N на перемещении 6s равна:
N bs cos (N, 6s) = N 6s cos 90° = 0.
Следовательно, рассматриваемая двусторонняя связь является
идеальной, так как условие A13,1) выполнено.
Рис. 239.
324
Положим теперь, что тело может скользить между параллель-
параллельными шероховатыми поверхностями (рис. 239, б).
Тогда реакция плоскости R состоит из нормальной реакции N
и силы трения F. Найдем сумму работ этих составляющих реакции
на возможном перемещении 6s:
Nbs cos (N, 6s) + /76scos(F, 6s) = N 6s cos 90° -4-
+ Fbs cos 180° = — F6s Ф 0.
Следовательно, рассматриваемая двусторонняя связь не является
идеальной, так как условие A13.1) не выполнено.
Отметим, что, хотя связь, осуществленная с трением, не является
идеальной, тем не менее такую связь можно условно рассматривать
как идеальную. Для этого следует перевести силы трения из группы
реакций связей в группу задаваемых сил. Тогда сумма работ реак-
реакций (без сил трения) на возможных перемещениях будет равна нулю,
т. е. условие A13.1) будет выполнено.
В некоторых случаях и шероховатая поверхность является иде-
идеальной связью. Так, например, если тело катится по неподвижной
шероховатой поверхности без скольжения, то линия соприкоснове-
соприкосновения тел является мгновенной осью вращения. Скорости точек сопри-
соприкасания тел равны нулю, а потому возможные перемещения этих
точек равны нулю. В этом случае 6s = 0 и ра-
работа реакции R, являющейся геометрической
суммой нормальной составляющей и силы сцеп-
сцепления на этом перемещении, равна нулю.
Таким образом, шероховатая поверхность, по
которой катится без скольжения тело (рис. 240),
также удовлетворяет условию A13.1).
Условие A13.1), при котором связь является
идеальной, относится не только к двусторон- рис. 240.
ним, но и к односторонним связям.
Однако в последнем случае должны рассматриваться лишь неос-
вобождающие возможные перемещения, которые оставались бы
возможными и в случае, если бы данная связь была двусторонней.
§ 114. Принцип возможных перемещений
Рассмотрим несвободную механическую систему Мг, М2 Мп,
находящуюся в состоянии покоя.
Если система находится в состоянии покоя, то действующие на
нее силы взаимно уравновешиваются.
Разделим силы, приложенные к точкам системы, на задаваемые
силы и реакции связей. Обозначим равнодействующие задаваемых
сил, приложенных к каждой из точек системы, Pls P2 РЛ,
а равнодействующие реакций связей, приложенным к тем же точкам
Rl R2 R« (Рис 241).
-22 А. А. Яблонский 325
Так как силы, приложенные к каждой из точек системы, взаимно
уравновешиваются, то для каждой точки
=l, 2, .... n),
откуда Рг = — Rj, т. е. силы Р,- и R; равны и направлены по одной
прямой в противоположные стороны.
Мысленно сообщим рассматриваемой системе, находящейся в со-
состоянии покоя, возможное перемещение из занимаемого ею положе-
положения. Обозначим 6st, 6s2 6sn возможные перемещения точек
системы Мх, М2, •••. Мп.
Вычислим сумму работ сил, приложенных к каждой из точек
системы, на возможном перемещении этой точки.
Так как силы Pt и R, равны и противоположны по направлению,
то cos(P;, 6s;) = — cos(R?, 6s;) и работы этих сил на перемеще-
перемещении 6s/ равны по величине, но противоположны по знаку. Поэтому
сумма работ этих сил равна нулю,
т. е.
Я, 6s, cos (Р,. 6s,)+
, 6s, cos (R,, 6s,) = О
(/=1, 2, .... в).
Просуммировав все п уравнений,
составленных для сил, приложенных
к каждой точке системы, получим
•+ 2 #» ?>si c°s (R,. 6s,) = 0. A14.1)
Будем предполагать, что в рассматриваемой механической си-
системе все связи двусторонние и идеальные, относя силы трения,
если они имеются, к задаваемым силам. Тогда сумма работ реакций
связей на возможных перемещениях должна быть равна нулю, т. е.
При этом условии уравнение A14.1) примет вид
2 Pt bst cos (Рг, 6s?) = 0. A14.2)
Уравнение A14.2), называемое уравнением работ, выражает
одно из важнейших положений механики, называемое принципом
возможных перемещений.
Принцип возможных перемещений формулируется так:
Если в некотором положении механической системы с дву-
двусторонними идеальными связями приложенные к ней силы урав-
уравновешиваются, то на любом возможном перемещении системы
из этого положения сумма работ задаваемых сил равна нулю.
326
В случае односторонних связей уравнение A14.2) остается спра-
справедливым лишь в случае, когда возможные перемещения являются*
неосвобождающими. В общем же случае при односторонних связях
% Р i bs t cos (Pt, 6s()<0.
Если в каждую точку Mt системы из некоторого центра О провести
вектор гI, то возможное перемещение этой точки bst будет соответ-
соответствующим возможным приращением радиуса-вектора точки:
bst = brt (*.= I, 2 л).
Тогда уравнение работ A14.2) примет вид:
2Рг-&гг = 0. A14.3)
Обозначим проекции задаваемой силы Рг на неподвижные оси
декартовых координат X\, Yt, Zlt а проекции возможного переме-
перемещения бгг на те же оси bxt, bylt bzt. Пользуясь аналитическим
выражением элементарной работы F0.6), представим уравнение работ
A14.2) в следующем виде:
Принцип возможных перемещений облегчает вывод условий рав-
равновесия задаваемых сил, приложенных к несвободным системам, со-
состоящим из большого числа тел. Это объясняется тем, что уравне-
уравнение работ, выражающее этот принцип, не содержит реакций связей.
Применение же уравнений равновесия статики потребовало бы опре-
определения большого числа неизвестных реакций связей.
Если система, состоящая из большого числа тел, имеет одну
степень свободы, то одно из равенств A14.2), A14.3) или A14.4)
устанавливает сразу условие равновесия задаваемых сил, приложен-
приложенных к системе. Если эта система имеет несколько степеней свободы,
то уравнения работ составляются для каждого независимого переме-
перемещения системы в отдельности. Таким образом, получается столько
условий равновесия системы, сколько степеней свободы она имеет.
§ 115. Применение принципа возможных перемещений
к простейшим машинам
Простейшие машины являются системами с одной степенью сво-
свободы. На машины действуют: движущая сила Р или вращающий мо-
момент MBp и сила сопротивления R или момент сопротивления Жсопр.
Положим, что силы (или моменты) и реакции имеющихся связей
взаимно уравновешиваются.
Для установления условий равновесия сил Р и R машине сооб-
сообщают возможное перемещение и составляют уравнение работ. На
основании A14.3) условие равновесия сил Р и R получает вид
P-6rp + R-6r^ = 0. A15.1)
22* 327
где Ьгр — возможное приращение радиуса-вектора точки приложения
силы Р, соответствующее ее возможному перемещению.
6гл — возможное приращение радиуса-вектора точки приложения
силы R, соответствующее ее возможному перемещению.
Положим, что возможное перемещение системы из состояния
покоя происходит в течение ничтожно малого промежутка времени т.
Тогда точки приложения сил перемещаются со скоростями
Vp=^ и v* = % A15.2)
Эти скорости называются возможными (виртуальными) скоростями
точек.
Разделив уравнение работ A15.1) на величину т, получим
Подставив значение возможных скоростей точек, будем иметь
Р ¦ Vp + R • уд==0, или Pvpcos(P, vp)-{-RvRcos(R, vR) = 0.
Обозначим проекции сил Р и R на направление соответствующих
скоростей Р' и R', т. е.
, vP); #' = #cos(R, vR);
тогда
P'vp-\-R'vR = 0.
Если направления Р' и vP совпадают, то направления R' и vR
противоположны.
Пользуясь абсолютными величинами проекций, получим
\P'\vp~\R'\vR = 0,
отсюда
Соотношение A15.3) можно выразить так: то, что выигры-
выигрывается в силе теряется в скорости.
Это положение, установленное Галилеем, носит название золотого
правила механики.
Рассмотрим некоторые простейшие машины.
1. Полиспасты
Полиспаст состоит из двух систем блоков, каждая из которых
помещена в общей обойме (рис. 242). Одна обойма закреплена не-
неподвижно, а другая движется.
Сила Р, приложенная к концу нити, является движущей силой,
а вес поднимаемого груза G — силой сопротивления.
328
Определим зависимость между силами Р и G при помощи прин-
принципа возможных перемещений. Сообщим системе возможное пере-
перемещение, совпадающее с ее истинным переме-
перемещением при подъеме груза. Если точка при-
приложения силы Р получит перемещение 6sP, то
каждая из шести частей нити между блоками
уменьшится на -щ 6sp. Поэтому точка приложе-
приложения силы G переместится вверх на 6sG = -g-6sp.
Составим уравнение работ в виде A14.2):
P6sp — G6% = 0
или
Pbsp — G-i-6sp = 0.
Поделив уравнение на 6sp, найдем
т. е. движущая сила меньше веса поднимаемого
груза во столько раз, сколько блоков имеет
полиспаст.
2. Клиновый пресс
Установим зависимость между движущей
силой Р, приложенной к клину, и силой со-
сопротивления R сжимаемого тела при помощи
принципа возможных перемещений. Для этого
сообщим системе возможное перемещение, указанное пунктиром на
рис. 243, и составим уравнение работ в виде A14.2):
Pbsp —
Рис. 242.
й л,\—\-~Ьв,
•л»
Рис. 243.
Зависимость между возможными перемещениями точек приложе-
приложения сил Р и R установим из треугольника перемещений CCXD (рис. 244):
23 А. А. Яблонский
329
Подставив это значение bsR в уравнение работ, получим
Pbsp — 2Rbsptga = 0.
Поделив уравнение на bsp, найдем
P = 2Rlga.
3. Винтовой пресс
На рис. 245 изображена схема винтового пресса. Давление пресса
на тело возникает под действием пары сил (Р, Р'), приложенной
к его рукоятке.
Зависимость реакции N сжимаемого тела от момента приложен-
приложенной пары сил установим, пользуясь принципом возможных переме-
перемещений. Сообщим частям пресса возможные перемещения, совпадаю-
совпадающие с их инстинными перемещениями при работе пресса. Повернем
рукоятку АВ на малый угол бср в сторону действия пары сил. Тогда
точка приложения силы N получит воз-
возможное перемещение бя^, направление
—)В которого противоположно направлению
силы N. Составим уравнение работ
в виде A14.2). Работу пары сил опре-
определим по формуле F5.7) как произве-
произведение ее момента на приращение угла
поворота тела:
Мбср — Nbsjy = О,
где момент пары М — 2Р1.
Рис. 245. При одном обороте рукоятки винт
перемещается вдоль оси на величину h,
называемую шагом винта. Для определения зависимости между бср
и bsN воспользуемся тем, что продольное перемещение винта bsN
составляет такую же часть шага винта h, какую угловое перемеще-
перемещение бср составляет от угла 2я, т. е.
6s бф
ф
^w откуда bs»=-ш
Подставив это значение dsN в уравнение работ, получим
2Р./.бф —Л/-^-6ср = 0.
Поделив уравнение на бср, найдем
Сила, сжимающая тело, равна найденной реакции
330
4. Стержневой пресс
Найдем соотношение между движущимися силами Р и Р', при-
приложенными к вершинам А и В ромбического четырехзвенника,
и силой сопротивления R, приложенной в точке D пресса, если
Р — — Р'; длины стержней пресса указаны на рис. 246.
Для установления этой зависимости воспользуемся уравнением
работ вида A14.4), которое для сил, параллельных оси у, будет
иметь вид
РуЬуА + РуЬув + RybyD = 0. (а)
Проекции сил Р, Р' и R на ось у
Г) О. г> Г), г\ Г)
л у г , * у —" » ^У ^ ¦
Координаты точек приложения этих сил по оси у:
уА = b cos p + а sin a;
yB = b cos р — a sin а;
yD = 2b cos p.
Проекции возможных перемещений этих , точек на ось у нахо-
находим, дифференцируя выражения, определяющие координаты этих
точек:
ЬуА = — b sin (J • 6ji -f" a cos a • 6a;
byB = — b sin p • 6p — a cos a ¦ 6a;
6yn = — 2?sinp • 6p.
Подставляя найденные значения в урав-
уравнение (а), получаем
P&sinp ¦ 6р—Pa cos a • 6a—Pb sinp • 6p—
— Pa cos a • 6a + R2b sin p • 6p = 0,
откуда
F)
p p a cos a 6a
К~ИТ sinB 66
''//////////////////УХ// /Л
Рис. 246.
Для установления зависимости между элементарными прираще-
приращениями углов аир воспользуемся уравнением, характеризующим
связь:
2d — 2a cos a — 2c -f- 2b sin p.
Дифференцируя это выражение, получаем
0 — — 2а sin аба + 2b cos рбр,
откуда
6а Ь cos fi
ЭДГ a sin a
23*
331
Подставляя это значение в выряжение (б), находим
р ра cos а Ь cos p
Ь sin p a sin а '
отсюда получаем зависимость между величинами сил R и Р в виде
а)
б)
§ 116. Примеры применения принципа возможных перемещений
к определению реакций связей
В статике обычно приходится определять реакции связей, дей-
действующие на систему, не обладающую ни одной степенью свободы.
Такой системой является каждое
сооружение, несущее нагрузку, так
как оно должно быть неизменяе-
неизменяемым и неподвижно прикрепленным
к земле.
В этом случае принцип осво-
бождаемости от связей используют
следующим образом.
Отбрасывают ту связь, реакцию
которой требуется определить. Дей-
Действие связи заменяют ее реакцией,
которая переходит в число задавае-
задаваемых сил. При этом система, осво-
освобожденная от однсгй связи (если она
статически определима), получает
одну степень свободы.
Системе сообщают возможное
перемещение, соответствующее этой
степени свободы.
Составляют уравнение работ
в виде A14.2) или A14.4), в кото-
которое входят не только задаваемые силы
но и реакция отброшенной связи.
Из этого уравнения сразу опреде-
определяют искомую реакцию.
Для определения реакций других связей поступают так же, отбра-
отбрасывая снова только одну связь, т. е. сообщая системе одну степень
свободы.
Пример 62. Конструкция, образованная стержнями, соединенными
на концах шарнирами, удерживается в указанном на рис. 247, а по-
положении нитью АВ. Найти натяжение нити, вызываемое грузом О,
подвешенным в точке D.
Решение. Чтобы определить натяжение нити АВ, мысленно
отбросим эту связь, заменив ее действие на рассматриваемую систему
реакциями Т и Т', приложенными в точках А и В (рис. 247, б).
После отбрасывания связи система получит одну степень свободы-
Рис. 247.
332
Сообщим этой системе возможное перемещение, переместив
точку D вниз по вертикали. Тогда вертикальные диагонали обра-
образованных стержнями ромбов удлинятся на одну и ту же величину 6s.
Возможные перемещения точек А, В, D будут:
Составим уравнение работ в виде A14.2):
46s.
отсюда найдем реакцию нити, равную ее натяжению:
V — G-^- = 4G.
bsB
Пример 63. Пользуясь принципом возможных перемещений, оп-
определить усилия в стержнях 4, 5, 7, вертикальной фермы, изоб-
изображенной на рис. 248,а.
г)
' ШГ
W//'LW//////////<, в/. v7777/r77/7/////R 'Л ///.
А\ ^ \о А о
Рис. 248.
Решение. Как известно из статики, внутреннее усилие в каж-
каждом стержне равно по величине реакциям этого стержня, приложен-
приложенным к узлам фермы.
При определении усилий в стержнях фермы при помощи принципа
возможных перемещений все стержни фермы условно считают рас-
растянутыми, а истинный характер усилия определяют по знаку ответа.
Для определения усилия в каком-либо стержне фермы этот стер-
стержень мысленно отбрасывают. Действие стержня заменяют его реак-
реакциями, приложенными к соответствующим узлам фермы и направлен-
направленными от узлов во внутрь стержня. Эти реакции переходят в группу
задаваемых сил, действующих на ферму. После удаления одного
стержня ферма получает одну степень свободы. Ферме сообщают
возможное перемещение и составляют уравнение работ.
333
В уравнение работ, кроме задаваемых сил, входит реакция уда-
удаленного стержня, приложенная к узлу фермы, который получает
возможное перемещение.
На рис. 248 б, в, г пунктиром показаны части фермы, получив-
получившие возможные перемещения после поочередного удаления стерж-
стержней 4, 5, 7. Неизменяемые части фермы на этих рисунках заштри-
заштрихованы.
1. После удаления стержня 4 (рис. 248,(?) часть фермы CDE
получает возможность поворачиваться вокруг точки Е. Сообщаем этой
части возможное перемещение — поворот на малый угол 6ф вокруг
точки Е по движению часовой стрелки (можно было бы сообщить
поворот и в противоположную сторону).
Учитывая, что работа силы при повороте тела равна моменту
силы относительно центра вращения, умноженному на угол пово-
поворота тела, и положительна, если направление момента совпадает
с направлением угла поворота, составим уравнение работ задаваемых
сил и силы Т4 в виде A14.2):
Рха бф + Q%b бф + ТАЬ 6ф = О,
откуда
74_—
Знак минус показывает, что стержень 4 сжат.
2. После удаления стержня 5 (рис. 248, в) часть фермы KECDF
получает одну степень свободы. Параллелограмм KEDF без диаго-
диагонали EF становится изменяемой фигурой. Сообщаем части KECDF
возможное перемещение — изменение углов параллелограмма KEDF,
т. е. поворот стержней КЕ и FD вокруг неподвижных точек К и F
на один и тот же малый угол бф.
Так как перемещения точек Е и D при этом равны по величине
и совпадают по направлению, то треугольник ECD перемещается
поступательно.
Следовательно,
bsE = bsc = bsD — 6s.
Составляем уравнение работ задаваемых сил и силы Т5 в виде
A14.2):
Р^с + Рз 6^ + 7-56^ = О
или
Pj ds + Р2 6s -j- Г5 bs = 0,
откуда
T6 = -Pl-Pa
Стержень 5 сжат.
3. После удаления стержня 7 изменяемой фигурой становится
параллелограмм KEFL. Сообщаем части фермы KECDFL возмож-
возможное перемещение, при котором прямоугольник ECDF перемещается
поступательно.
334
Составляем уравнение работ задаваемых сил и силы Т7:
Л o
Здесь
— Т7 6sp cos а = 0.
bsc — 6s E = 6s p = 6s,
b
cos а =
a? + b2
П вставляя эти значения в уравнение работ, получаем
Р, 6s + Р2 6s — Т7 6s —?===- = 0.
1 ^ 2 7 Уа* + Ь*
Отсюда
Стержень 7 растянут.
Принцип возможных перемещений так же, как и способ Риттера
(см. «Статику» § 26), позволяет усилие в каждом стержне фермы
определять независимо от других усилий.
Пример 64. Определить при помощи принципа возможных пере-
перемещений реакции неподвижной шарнирной опоры А и подвижной
шарнирной опоры В составной балки, изображенной на рис. 249а.
Дано: q = 25 кн/м, М=100 кн - м, Рх~ 100 кк, Рх—\ЬЪкп,
Р3= 120 кн.
Решение. Равномерно распределенную нагрузку заменим сосре-
сосредоточенной силой Q = 8q = 200 кн, приложенной на расстоянии 4 м
от центра опоры А,
Реакцию неподвижной шарнирной опоры А определим по гори-
горизонтальной и вертикальной составляющим.
1. Чтобы определить составляющую Х^, мысленно отбросим
связь, препятствующую горизонтальному перемещению балки, т, е.
заменим неподвижную шарнирную опору А шарнирной опорой на
катках, приложив при этом к балке горизонтальную реакцию ХА
(рис. 249, б). Получим составную балку, имеющую все опоры на
катках.
Сообщим этой балке возможное перемещение—горизонтальное
перемещение 6s, направленное вправо (можно было бы направить
его и влево). Работа всех вертикальных сил на горизонтальном пере-
перемещении 6s равна нулю.
Работа пары сил согласно формуле F5.7) равна нулю, так как
балка, к которой приложена пара, не получила поворота. На воз-
возможном перемещении работу совершают только силы \А и Р2.
Уравнение работ A14.2) имеет вид
ХА ¦ bs — Р2 cos 30° • 6s == 0;
отсюда
XA = P2cos3Qa=m кн.
335
Знак плюс в ответе означает, что принятое направление силы ХА
совпадает с действительным.
2. Чтобы определить вертикальную составляющую YA реакции
опоры А, мысленно отбросим связь, препятствующую вертикальному
перемещению конца А, приложив при этом к балке реакцию \А
(рис. 249, в). Установим, какое перемещение можно сообщить по-
полученной системе, не нарушая имеющихся связей.
Поступательному перемещению по горизонтальному направлению
балки FD препятствует опора А, по вертикальному— опоры С и D.
а)
1
1
1
ч ..
immmiigo
8 м \2м] 2 м
i t
2м 2м \
Бм
F
\ 6
С
м j 4;
г
1
i
6м !
S)
6S
5
е' *><зо0
О
! !
в)
~ir—-Ч.6 \ е \*<т
г с I"
ад>^
w/w
г,
A
14
Рис 249
Поворот балки FD, лежащей на двух опорах С я D, невозможен.
Балку EJF можно повернуть на малый угол вокруг неподвижной
точки f\, тогда шарнир Е переместится по вертикали. Так как
точки А и Е балки АЕ могут перемещаться по вертикали, а точка В
не может, то балка АЕ повернется при этом вокруг точки В.
Повернем балку АЕ, например, по движению часовой стрелки
на угол бфх; тогда балка EF повернется против движения часовой
стрелки на некоторый угол 6ф2. Отметим возможные перемещения
тех точек, где приложены силы.
При составлении уравнения работ определим работу пары сил по
формуле F5.7) как произведение — | Ж|6ф, где знак минус обуслов-
обусловлен тем, что поворот произведен на угол (xfx no движению часовой
стрелки, а пара стремится вращать плоскость в противоположную
сторону.
336
Уравнение работ A14.2) для определения реакции YA будет
иметь вид
ya • bsA — Q ¦ bs3 — | M | бфх + />! • 6sj + P2 • cos 60° • 6s2 = 0.
Выразим перемещения всех точек через одну и ту же величину,
например, бф^ Для этого представим перемещение каждой точки
балки АЕ как произведение угла бфх на расстояние от точки до центра
вращения В, а перемещение каждой точки балки EF — как произ-
произведение угла бф2 на расстояние от точки до центра вращения /^
Зависимость между углами бф! и 6ф2 получим, имей в виду пере-
перемещение шарнира Е:
bsE = BE ¦ 6ф-[ = FE • 6ф2, откуда 4бф1 = 8бф2, или бф2 =
6$_д=10бф1; б53=6 6ф1; Й5, = 2бф1; 6s2 = 6 бф2 = 3
Подставим эти значения в уравнение работ:
УА- Юбф!- Q- 6бф1 — ]M\i*f1 + P1-2t*p1-{-/Vcos60°
YA = 0,6 Q + 0,1 | M | — 0.2/3! — 0,ЗЯ2 cos 60°.
Подставив числовые значения, найдем УА:
YA = 0,6- 2004-0,1 • 1000 — 0,2- 100 — 0,3 • 160 • 0,5== 176 кн.
Знак плюс в ответе означает, что реакция YA направлена вверх-
3 Для определения реакции опоры В мысленно отбросим эту
опору, приложив к балке ее реакцию RB.
Сообщим полученной системе возможное перемещение, повернув-
балку АЕ вокруг неподвижной точки А, тогда балка EF повернется
вокруг точ*ки F (рис. 249, г).
Составим уравнение работ для определения RB:
— Q -653 4-1 M\lxf1 + RB-6sB~P1 ¦ bsx — Р2 ¦ cos 60° • 6s2 == 0.
Выразим возможные перемещения всех точек через угол пово-
поворота 6ф: бруска АЕ:
= 14 бф! = 8 бф2; бф2 = ~ бф!1,
Подставим эти значения в уравнение работ:
— Я2 cos 60° •-^-бф! = 0,
ззт
•отсюда
21
RE = 0,4 Q — 0,11 M | + 1,2 Pl -\-~ ¦ P2 . cos60
Подставив числовые значения, найдем RB:
RB = 0,4- 200 — 0,1 • 1000+1,2. 100-f |i- • 160 ¦ 0,5= 184кн.
Точно так же можно найти и реакции опор С и D балки.
Как видно, реакция каждой опоры входит лишь в одно уравне-
уравнение работ. Таким образом, каждая реакция определяется из одного
уравнения независимо от реакций других опор.
Пример 66. На левую часть трехшарнирной арки действует вер-
вертикальная нагрузка Р. Линия действия силы Р расположена на рас-
расстоянии а от центра левого пятового шарнира А. Пролет арки ра-
равен 21, а высота ее равна /г. Определить горизонтальную составляю-
составляющую реакции пятового шарнира В (рис. 250, а).
Рис 250
Решение. Мысленно отбросим связь, препятствующую гори-
горизонтальному перемещению точки В, превратив опору В в шарнир-
шарнирную опору на катках. Действие отброшенной связи заменим гори-
горизонтальной реакцией Хв (рис. 250, б), которая перейдет в группу
задаваемых сил. При этом система получит одну степень свободы.
Установим, какие перемещения являются для этой системы воз-
возможными.
Левая часть системы имеет неподвижную точку А. Поэтому ее
возможным перемещением является поворот на малый угол вокруг этой
точки. Произведем этот поворот по движению часовой стрелки. Шарнир
С получит перемещение 6sc, направленное перпендикулярно к от-
отрезку АС.
Возможное перемещение правой части, не имеющей неподвижной
точки, представляет собой ничтожно малое перемещение плоской
фигуры в ее плоскости. Это перемещение можно рассматривать как
.338
поворот на малый угол вокруг мгновенного центра вращения фигуры.
Из кинематики известно, что мгновенный центр вращения фигуры
находится в точке пересечения перпендикуляров, восставленных
в точках фигуры к направлениям скоростей этих точек. Возможные
перемещения точек имеют направления возможных скоростей. Поэтому
мгновенный центр вращения фигуры можно определить как точку
пересечения перпендикуляров, восставленных в двух точках фигуры
к направлениям возможных перемещений этих точек.
Восставим перпендикуляры в точке С к перемещению 6sc и
в точке В к горизонтальному перемещению bsB; их пересечение
определит точку Е — мгновенный центр вращения правой части си-
системы.
Для упрощения уравнения работ перенесем силу Р по линии ее
действия в точку D, возможное перемещение которой bsD направ-
направлено по линии действия силы Р.
Составим уравнение работ в виде A14 2):
Р bsD — XBbsB = 0.
Выразим перемещения точек D и В, принадлежащих разным ча-
частям системы, через перемещение шарнира С, связывающего обе
части. Перемещения точек D и С левой части пропорциональны
расстояниям этих точек от центра вращения левой части А:
6sn AD a a
—— = = , , откуда bsn = bsr , .
6sc AC Yl2 + b2 D Yl2-\-h2
Перемещения точек В и С правой части пропорциональны рас-
расстояниям от этих точек до мгновенного центра вращения этой части:
6s ЕВ 2А 2Л
—~ — откуда bsB = bsc
6sc ЕС Vl2 -f- h2 ' B c YI2 4- h2 '
Подставив эти значения bsD и bsB в уравнение работ, получим
Р bsc „ а — Хв bsc -jJL= = О,
с yi2+h2 в с Yi*-\-h2
откуда найдем Xв:
Знак плюс в ответе означает, что указанное на рис. 250, б нап-
направление Хд совпадает с действительным.
Аналогичным путем можно найти YB, а также ХА и Уд.
Для системы, состоящей из нескольких тел, определять реакции
•опор при помощи принципа возможных перемещений особенно удобно
в том случае, когда требуется определить реакции не всех опор,
& лишь одну или несколько, так как в отличие от обычного метода
статики уравнение работ A14.2) или A14.4) позволяет определять
реакцию каждой связи сразу, независимо от других реакций.
339
Пример 66. Пользуясь принципом возможных перемещений, опре-
определить реакции составной рамы, изображенной вместе с заданной
нагрузкой на рис. 251, если Pxz=10 кн, q = 5 кн/м, Р2 = 80 кн
и М = 200 кн • м.
Решение. Заменим равномерно распределенную нагрузку сосре-
сосредоточенной силой <2 = <7-4 = 5-4 = 20 кн, приложенной к середине
загруженного участка, а силу Р2 разложим на горизонтальную и.
вертикальную составляющие:
р2 = Р2 cos 60° = 80 • 0,5 = 40 кн.
р = Р2 cos 30° = 80 Щ- — 40 YT = 69,3
кн.
Сперва определим реакцию заделки: реактивный момент МА,
горизонтальную составляющую ХА и вертикальную составляющую YA.
Для определения реактивного мо-
Q Рг „ мента МА отбросим связь, препят-
п ST\P* ствующую повороту рамы, за'менив
4 2 заделку шарнирно-неподвижной опо-
р т-9 | р> 1—Г Рой и приложим к раме реактивный
Р момент МА (рис. 252, а).
Сообщим системе возможное пе-
(ц( ^ ремещение, повернув раму АС вокруг
шарнира А на угол бф, например,
против движения часовой стрелки.
Тогда рама СВ будет совершать
B?s~J~ плоское движение.
w)Mm Найдем мгновенный центр вра-
вращения О! и, выражая элементарное
перемещение bs шарнира С через
элементарные углы поворота бф рамы АС и бф! рамы СВ, найдем
соотношение между ними:
Рие-
AC 4i/9
bs = АС ¦ 6Ф = ОХС ¦ бф1; бф1 = -^ бФ = |^=г ЙФ = 0,5 бФ.
Заметим, что поворот рамы СВ вокруг мгновенного центра враще-
вращения Ог на угол 6ф! будет происходить по движению часовой стрелки.
Составим уравнение работ для определения реактивного мо-
момента МА, учитывая, что работа силы при повороте тела равна
моменту силы относительно центра вращения, умноженному на угол
поворота тела, и положительна в случае, если направления момента
и угла поворота совпадают.
— Q
— Р'2 ¦
Подставив значение 6ф], получим
А бф _ р1. з 6ф — Q • 6 • 0,5 бф — P'i ¦ 8 • 0,5 бф —
— P"i • 2 • 0,5 бф + М • 0,5 бф = 0.
340
Отсюда
— 0,5Ж = 219 кн ¦ м.
Для определения горизонтальной составляющей заделки Хд пред-
представим опору в виде ползуна А в горизонтальных направляющих,
жестко скрепленного с рамой АС, и приложим к нему реакцию Хд
(рис. 252, б).
с)
dip,
/
О,
А
zA i.
р;
Mf\^
V—4-^-,
Mil
I
I
I
г г;
р'г
/?*
Рис. 252.
Сообщим всей системе возможное перемещение — поступательное
перемещение 6s, например, вправо, так как поворот ползуна в на-
направляющих невозможен.
Составим уравнение работ для определения величины горизон-
горизонтальной составляющей заделки XА:
XAbs-\-Pibs-\-P2bs = Q; ХА = — Рх — Р-2 = — 50 кн.
Знак минус показывает, что горизонтальная составляющая заделки
направлена в сторону, противоположную направлению, указанному
на рис. 252, б.
341
Для определения вертикальной составляющей задеЛки Y^ отбро-
отбросим связь, препятствующую вертикальному перемещению точки А,
заменив заделку ползуном А в вертикальных направляющих, жестка
скрепленным с рамой АС, и приложим к нему реакцию Y^.
Сообщим раме АС возможное перемещение—поступательное пере-
перемещение 6s, например, вверх. Тогда рама СВ будет совершать пло-
плоское движение, а точка О2 будет ее мгновенным центром вращения.
Составим уравнение работ для определения величины вертикальной
составляющей заделки Yд, выразив перемещение всех точек приложе-
приложения сил через элементарный угол бф поворота рамы СВ вокруг
мгновенного центра вращения О2, учитывая, что возможное пере-
перемещение шарнира С равно поступательному перемещению рамы АС
и б5 = 8 6ф (рис. 262, в).
Кл8 6ф — Q ¦ 6 бф — Pi • 2 бф-f М 6ф = О,
откуда
Для определения реакции подвижной опоры В отбросим эту связь,
заменив ее действие реакцией RB (рис. 252, г).
Сообщим раме СВ возможное перемещение —- поворот на угол бф
вокруг шарнира С, например, против движения часовой стрелки.
Тогда bs = 8b(p. Рама АС при этом остается неподвижной.
Составим уравнение работ для определения реакции RB подвиж-
подвижной опоры В:
RB8 бф — Q • 2 6ф — Кб бф — М 6ф = О,
отсюда
2Q4-SP1 — M
Кв = '—? = 82 кн.
Для проверки правильности решения задачи убедимся в том, что
удовлетворяются уравнения равновесия
= 0, 2^ = 0 и
для всей рассматриваемой системы.
Действительно,
= -—50+ 10 + 40 = 0;
SK,- = YA — Q — Pi + Rb = 7,3 — 20 — 69,3 + 82 = 0.
2MlA=MA — Pi • 3-Q • 6-Р2 • 4-Р;'• 10-M + Rb- 12 =
= 219 — 30 — 120 — 160 — 693 + 984 = 0.
Сопоставляя решение этой задачи, полученное путем применения
уравнения работ A14.2), с решением, которое могло бы быть полу-
получено при составлении уравнений равновесия рассматриваемой системы
сил, еще раз отметим следующие основные особенности решения
задач при помощи принципа возможных перемещений:
342
1) каждая составляющая любой реакции связи определяется не-
независимо от других реактивных сил;
2) определение составляющих реакций внешних связей (в рас-
рассматриваемом случае опор А и В) не требует определения реакции
внутренних связей (шарнира С).
Для системы, состоящей из нескольких тел, определять реакции
опор при помощи принципа возможных перемещений особенно удобно
в том случае, когда требуется определить реакции не всех опор,
а лишь одну или несколько реакций.
Вопросы для самоконтроля
1. Что представляют собой обобщенные координаты механическая
системы?
2. Чему равно число степеней свободы механической системы?
3. В каком случае декартовы координаты точек системы зависят не
только от обобщенных координат, но и от времени?
4. Что называют возможными перемещениями механической системы?
5. Зависят ли возможные перемещения от действующих на си-
систему сил?
6. Какие связи механической системы называются идеальными?
7. Почему связь, осуществленная с трением, не является идеальной
связью?
8. Как формулируется принцип возможных перемещений?
9. Какие виды может иметь уравнение работ?
10. Почему принцип возможных перемещений упрощает вывод условий
равновесия сил, приложенных к несвободным системам, состоящим из боль-
большого числа тел?
11. Как составляются уравнения работ для сил, действующих на меха-
механическую систему с несколькими степенями свободы?
12. Какова зависимость между движущей силой и силой сопротивления
в простейших машинах?
13. Как формулируется золотое правило механики?
14. Каким образом определяют реакции связей при помощи принципа
возможных перемещений?
ГЛАВА XVIII
ОБЩЕЕ УРАВНЕНИЕ ДИНАМИКИ
§ 117. Принцип возможных перемещений в случае движения
системы. Общее уравнение динамики
Принцип возможных перемещений, дающий общий метод решения1
задач статики, можно применить и к решению задач динамики. На
основании принципа Германа—Эйлера—Даламбера для несвободной
механической системы (§ 109) в любой момент времени геометри-
геометрическая сумма равнодействующей задаваемых сил, равнодействующей
реакций связей и силы инерции для каждой точки Mt механической
системы равна нулю:
R, + R<-f Ф; = 0,
(/=1, 2 п)
34а
Если система получает возможное перемещение, при котором
каждая точка имеет возможное перемещение 6s( (рис. 253), то сумма
работ этих сил на перемещении 6s, должна быть равна нулю:
Ptbsi cos(P,, 6s,) -{-RtbSi cos (R,, 6s,) +
-f-Ф, 6.5,СО8(Ф,, &S,) = 0 (/=1, 2 П). A17.1)
Суммируя все п уравнений A17.1), получаем
2 Pi 6s, COS (P,, 6s,) + 2#/65tcos(R2. 6S,) +
+ 2 <?*&?, cos (Ф?, 6s,) = 0. A17.2)
Положим, что все связи в рассматриваемой механической системе
двусторонние и идеальные (силы трения, если они имеются, отнесены
к числу задаваемых сил). Тогда сумма работ реакций связей на воз-
возможных перемещениях системы
равна нулю:
2
cos
\ При этом условии уравнение( 117.2)
#я^ч?*""*' имеет ВИД
Рп
Рис. 253.
6^cos(P/. 6s,)
1 ?>si cos (Фг, 6s;) = 0.
A17.3)
Уравнение A17.3) называемое
общим уравнением динамики,
показывает, что в любой момент времени сумма работ всех
задаваемых сил и сил инерции материальных точек несвободной
механической системы с двусторонними идеальными связями
на любом возможном ее перемещении равна нулю.
Если в каждую точку М( системы из некоторого центра О про-
провести вектор Г;, то возможное перемещение этой точки 6вг будет
соответствующим приращением радиуса-вектора точки:
bst^brt (i = 2, I га).
Так как возможное перемещение точки не обязательно направлено
в сторону ее действительного движения, то возможное приращение
радиуса-вектора 6г( не всегда равно действительному приращению
радиуса-вектора точки <2г(.
Работу задаваемых сил Рг и сил инерции Ф^ на возможных пере-
перемещениях точек системы 6rt можно представить в виде скалярных
произведений F0.5).
Тогда уравнение A17.3) примет вид
или
A17.4)
344
Обозначим Xt, Yt, Zt проекции задаваемых сил Рг на неподвижные
оси декартовых координат, Фи, Ф1у, Фи — проекции сил инерции Ф;,
а 6xt, 6yt, bzt — проекции векторов возможных перемещений 6т1
на те же оси.
Пользуясь аналитическим выражением элементарной работы F0.6),
уравнению A17.4) можно придать следующий вид
Ъ[{Х1 + Ф1х)Ьх1 + (у1 + Ф1у)Ъу1 + {г1 + Ф1г)Ъг1\ = О. A17.5)
Выразим проекции силы инерции точки на оси координат через
проекции ее ускорения:
Подставив эти значения в уравнение A17.5), окончательно получим
2 [(Х( - mix\) 6xt + (К, — м^) 6у (. + (Z, - «,*,) bzt\ = 0. A17.6)
Общее уравнение динамики A17.6) позволяет составить дифферен-
дифференциальные уравнения движения любой механической системы. Если
механическая система состоит из отдельных твердых тел, то силы
инерции точек каждого тела можно привести к силе, приложенной
в некоторой точке тела, и паре сил. Сила равна главному вектору
сил инерции точек этого тела, а момент пары равен главному мо-
моменту этих сил относительно центра приведения (см. § 109). Чтобы
воспользоваться принципом возможных перемещений, к каждому телу
прикладывают действующие на него задаваемые силы, а также условно
прикладывают силу и пару, составленные силами инерции точек тела.
Затем системе сообщают возможное перемещение и для всей сово-
совокупности задаваемых сил и приведенных сил инерции составляют
уравнение A17.3) или A17.6).
Если среди связей системы имеются односторонние связи, то для
применения общего уравнения динамики необходимо, чтобы возмож-
возможные перемещения системы не были освобождающими.
§ 118. Примеры применения общего уравнения динамики
Пример 67. На треугольной призме, боковые грани которой
образуют с горизонтом углы аир, помещены два груза А и В
весом Qj и О2, связанные между собой невесомой и нерастяжимой
нитью, переброшенной через блок С (рис. 254, а). Зная, что коэф-
коэффициент трения скольжения равен /, определить ускорение движения
грузов w и натяжение нити; массой блока пренебречь.
Решение. Заданная механическая система состоит из двух
грузов, движущихся поступательно. Нить и блок, массы которых
не учитываются, являются связями. Система имеет одну степень
свободы.
Предположим, что груз А движется вниз, а груз В вверх.
345
Покажем задаваемые силы — веса грузов Ох и О2, нормальные
реакции боковых граней призмы Nj и N2 и силы трения Fx и F^
(рис. 254, б).
Модули сил трения соответственно равны:
и Ft =
где
Поэтому
/71 = /G,cosa и /72 = /G2cosp.
Силы трения направлены в стороны, противоположные направле-
направлениям движения грузов.
Так как грузы движутся
A s\ /S^-^sN. _ поступательно, то равнодей-
равнодействующие сил инерции при-
приложены в центрах тяжести
тел, а их модули
В
'//////////////////////,7//////////////////?.
g
w;
9w =
2
Приложим к грузам усло-
условно силы инерции Фх и Ф2,
направив их противоположно-
ускорению w.
Сообщим мысленно си-
системе возможное поступа-
поступательное перемещение 6s, на-
например, в сторону движения
грузов.
Составим общее уравне-
уравнение динамики, применяя
A17,3), в которое не войдут
нормальные реакции боко-
боковых граней призмы tix и N2,
направления которых пер-
перпендикулярны к возможным
перемещениям грузов.
Gx sin a 6s — Oxf cos a 6s —
— Фх bs — G2 sin p 6s —
— G2/ cos p6s—Ф2 6s = 0.
Подставляя в это уравнение значение сил инерции и деля его
на 6s, получаем
G, sin a — GJ cos a L w — G2 sin p — O2/ cos p j- w = 0.
346
Из этого уравнения определяем ускорение грузов:
= tf Gl (sin а ~ f cos я) ~ G*(sln P + f cos P
w
Если
j (sin а — / cos a) — G2 (sin p + / cos p) > 0,
то грузы движутся в указанном выше направлении.
Для определения натяжения нити 5 на основании принципа Гер-
Германа — Эйлера — Даламбера составим для сил, приложенных к телу,
и его силы инерции уравнение проекций на ось х (рис. 254, в):
S —
или
л
S = Gj (sin a — / cos a) - w.
Подставив значение w, после соответствующих преобразований,
получим
G,O2
о
¦ [sin а + sin p -|- /(cosp — cos a)].
Пример 68. Барабаны радиусами гх и г2, соединенные между собой
жестко, могут вращаться вокруг горизонтальной оси. На барабаны
намотаны нерастяжимые нити, к концам которых подвешены груз А
весом G] и груз В весом G2. Система движется под действием сил
тяжести грузов. Определить угловое ускорение барабанов, пренебре-
пренебрегая их массами и массой нитей (рис. 255, о).
Рис. 255.
Решение. Предположим, что соотношение грузов таково, что
барабаны вращаются с угловым ускорением е в направлении, обрат-
обратном движению часовой стрелки (рис. 255, б).
347
Заданная механическая система состоит из двух грузов, движу-
движущихся поступательно. Нити и барабаны, массы которых не учиты-
учитываются, являются связями. Система имеет одну степень свободы.
Покажем задаваемые силы — веса грузов Oj и G2. Силы инерции
точек каждого груза, движущегося поступательно, приводятся к равно-
равнодействующей силе, приложенной в центре тяжести груза. Приложим
к грузам условно силы инерции Фх и Ф2, направив их противоположно
ускорениям грузов Wj и w2. Так как ускорения грузов равны вра-
вращательным ускорениям точек ободов барабанов то модули сил
инерции
Ф1== m1w1= miwj = —?¦ r,e;
Ф2 = m2w2 = m2w\ = —- г2г.
о
Сообщим мысленно системе возможное перемещение, повернув
барабаны на угол 6ф по направлению их действительного вращения
(за возможное перемещение можно было бы принять элементарное
перемещение системы и в сторону, противоположную ее действитель-
действительному движению).
Возможные перемещения грузов равны возможным перемещениям
точек ободов барабанов, т. е.
6sl = гг 6q>; 6s2 = г 2 бф.
Составим общее уравнение динамики в виде A17.3):
Gx bsx — Фг 6sx — О2 bs2 — Ф2 6s2 = 0.
Подставим в это уравнение значения возможных перемещений
и сил инерции:
Gxrj 6ф - Tjer, 6ф — G2r2 бф г2ег2 бф = 0.
о &
Из этого уравнения определяем угловое ускорение барабанов:
с _ (G,rt —
Ускорение вращения в принятом при решении задачи направлении
имеет место при е > 0, т. е. при условии
°iri— О2г2> 0, или Gj>G2-p-.
Пример 69. Решить пример 59, учитывая массы барабанов, равно-
равномерно распределенные по их поверхностям. Известно, что вес малого
барабана равен Qu а большого—Q2.
Решение. Так как центры тяжести барабанов находятся на оси
вращения, то силы инерции их точек приводятся к парам сил
(см. § 109). Пары направлены противоположно угловому ускорению
барабанов е (рис. 255, в), а величины их моментов определяются
по формулам A09.6).
348
Учитывая, что массы барабанов равномерно распределены по их
поверхностям, определяем моменты инерции барабанов относительно
оси вращения Сх по формулам:
!f *. J*=
Абсолютные величины моментов пар, составленных силами инер-
инерции точек барабанов, полагая е > 0, находим по формуле A09.6):
г1г.
Сообщим системе возможное перемещение — поворот барабанов
на угол бф в сторону их действительного вращения, и составим
общее уравнение динамики A17.3):
О1 6s, — 0i 6*i — G2 bs2 — Ф2
Мл
— | Mf |бф =
Здесь работа пар, составленных силами инерции, отрицательна,
так как направления пар и поворота барабанов на угол 6ф противо-
противоположны.
Подставив в составленное уравнение A17.3)
значения величин из примера 59 и значения мо-
моментов пар, получим
а—,
G
G,
Gxrx • йф rizrl • бф — G2r2
о
г2 ¦ Оф — гуъ ¦ ф — ,
бф —
1 = 0,
отсюда найдем угловое ускорение барабанов:
Пример 70. Центробежный регулятор вращается вокруг верти-
вертикальной оси с постоянной угловой скоростью ». Вес каждого шара
равен Gv а вес муфты G. Муфта отжимается вниз пружиной, закре-
закрепленной верхним концом на оси регулятора. При а = 0 пружина
не деформирована; коэффициент жесткости пружины равен с. Длина
каждого стержня равна /; оси подвеса стержней отстоят от оси ре-
регулятора на расстоянии а. Определить угловую скорость регуля-
регулятора (л, которой соответствует угол а, пренебрегая весом стержней
и пружины (рис. 256, а).
Решение. Центробежный регулятор представляет собой механи-
механическую систему, состоящую из трех тел — двух шаров и муфты,
соединенных при помощи связей — стержней и пружины.
24 А. А. Яблонский
349
Покажем приложенные к регулятору задаваемые силы: веса ша-
шаров Oi и вес муфты G. Так как пружина не является идеальной
связью, то ее реакцию Р отнесем к задаваемым силам (рис. 256, б).
Найдем укорочение пружины, соответствующее углу а:
Л = 21 — 21 cos а =^ 21 A — cos а).
Моауль реакции пружины
P = cA = 2c/(l —cos a).
Приложим к системе условно силы инерции ее точек. При равно-
равномерном вращении регулятора силы инерции шаров являются центро-
центробежными, направленными противоположно
центростремительным ускорениям шаров. Их
модули определим по формуле:
Ф == фа =
= -^- (a +I sin а) со2,
где г = a-\-l sin а — расстояния центров тя-
тяжести шаров до оси вращения регулятора.
Рассмотрим возможное перемещение си-
системы, при котором происходит изменение
угла а. Проведем оси координат, как ука-
указано на рис. 256,<У, и составим общее уравне-
уравнение динамики в виде A17.5):
Рис. 256,0.
— Ф Ьх . -f- Ф' Ьх,
= 0.
Определим координаты точек приложения сил в выбранной си-
системе координат. Проекции возможных-перемещений этих точек
найдем, дифференцируя координаты по переменной а.
Ьу. ==6у. = — I sin а 6а;
ЬхА = — I cos а ба.
Ьхд =1 cos а 6а.
Ьув = — 21 sin аба.
У a =yAi =
хА —
х. = a-f-Jsina;
ув =
или
Подставив эти значения в общее уравнение динамики, найдем
— 2O1Zsina6a —(O-r-PJZsina6a + 20icosa6a = O,
Ф cos a = [Gj + О + 2cl A — cos a)] sin a.
Приравняем значение силы инерции полученному для нее выра-
выражению
Ф = -^- (a +1 sin а) со2 =
о
+ О + 2cl (\ — cos a)] tg a,
350
отсюда найдем угловую скорость регулятора, соответствующую не-
некоторому углу а:
[ — cosa)]gtgg
G, (a4-*sina)
Пример 71. К концам нерастяжимой и невесомой нити прикре-
прикреплены груз А весом О1, находящийся на горизонтальной плоскости,
и груз В весом О2, расположенный на наклонной плоскости, которая
С Е
Рис. 257
составляет с горизонтом угол а (рис. 257, а). От груза А нить
идет через неподвижный блок С, охватывает подвижной блок D,
а затем через блок Е, находящийся на одной оси с блоком С, идет
к грузу В параллельно скату наклонной плоскости. К подвижному
блоку D подвешен груз К весом G3. Коэффициенты трения груза А
о горизонтальную плоскость и груза В о наклонную плоскость соот-
соответственно равны Д и /2. Определить, пренебрегая" массами блоков,
24*
351
ускорения грузов, предполагая, что груз К опускается, а грузы А
и В движутся, приближаясь к блокам С и Е.
Решение. Заданная механическая система состоит из трех гру-
грузов А, В и К, движущихся поступательно.
Условимся определять положение грузов А, В и К соответственно
координатами их центров тяжести х, s и у, отсчитываемыми от на-
начальных положений этих центров (рис. 257, б).
Нерастяжимая нить, связывающая грузы, накладывает на выбран-
выбранные координаты следующее условие:
У = —f- • (а)
Так как три координаты определяются одним уравнением, то не-
независимыми являются из них две. Следовательно, рассматриваемая
система имеет две степени свободы.
Примем координаты х и у за обобщенные координаты системы.
Продифференцировав равенство (а) два раза по времени, получим
т. е. алгебраические значения ускорений грузов связаны между собой
зависимостью
W4w .,.
(б)
Здесь каждое из ускорений положительно, если его направление
совпадает с направлением выбранной оси координат, и отрицательно —
в противоположном случае.
Приложим к системе задаваемые силы: веса грузов Q1, Q2, G3,
а также силы трения Fl и F2, относя их к задаваемым силам. Вели-
Величина каждой силы трения равна произведению коэффициента трения
на нормальное давление между телами и плоскостью, т. е.
F1 = f1Ql; F2 = f2Q2cosa.
Условно приложим в центре тяжести каждого груза равнодейст-
равнодействующую сил инерции его точек.
Направим эти силы противоположно ускорениям, имеющим условно
направление Осей координат.
Определим их значения:
л J-"» Л
01 = mlw1 = -^-w1; 02 = m2w2 = -±w2; Фй = т,л<а)ъ = -±1юг.
Сообщим системе возможное перемещение в сторону возрастания
выбранных координат. Обозначим возможные перемещения грузов
6л:, 6s и 6у. Согласно условию (а) эти перемещения связаны между
собой зависимостью:
6у= bx + bs ; 6s = 26y — 6x. (в)
352
Составим общее уравнение динамики рассматриваемой механической
системы в виде A17.3):
- (*i + Ft) блг + (Os — Ф3) бу — (Оа sin а + Ф2 + F2) 65 = 0.
Подставим в это уравнение значения сил инерции и сил трения,
а также выразим 6s через Ьх и 6у по условию (в):
или
/_ ?l Wl _ /,о, + О2 sin a + ^ w2 + f2O2 cos a) 6x +
4- [o3 — ^5- W' + W2 — 2O2 sin a —• ^S-w2 — 2/2O2 cos a) 6y = 0.
Так как это равенство справедливо при любых значениях Ьх и
ду, то коэффициенты при этих приращениях обобщенных координат
равняются нулю. Приравняв нулю коэффициенты при бд; и 6у, получим
Olwl — G2w2 = [O2 (sin a -f- /2 cos a) — f\Ox] g,
G8w, + DO2 + O3) w2 = [2G3 — 4G2 (sin a + /2 cos a)] ?.
Решив эту систему уравнений относительно ускорений wl и w2
грузов Л ий, найдем
2cosa) —
_ „ O|G» B + /1) — ^2 DG, + G3) (sin a + /2 cos a)
— S G1DG2+G,)
Ускорение груза К определим по условию (б):
да, + да2 _ G3 (G| + Ga) — 2<?iG2 (/1 + sin a + /2 sin a)
2 ~^ GlD
§ 119. Обобщенные силы и примеры их вычисления
Рассмотрим механическую систему из п материальных точек М1§
М2 Мп, находящуюся под действием системы сил Ри Р2 Рп
<рис. 258).
Предположим, что механическая система имеет s степеней сво-
свободы, т. е. ее положение определяется s обобщенными координа-
координатами qv q2 qs.
Дадим обобщенной координате qj бесконечно малое прираще-
иие bqj, не изменяя остальных обобщенных координат механической
353
системы. Тогда точки системы получат бесконечно малые перемеще-
перемещения 6sj, os2, ..., bsn.
Так как эти перемещения допускаются связями, то совокупность
этих перемещений будет одним из возможных перемещений системы.
Силы Pj, Р2 Ря совершат на перемещениях 6st 6s2, .... 6sn
элементарную работу:
Отношение работы ЬАЧ к приращению обобщенной коорди-
координаты bqj назовем обобщенной силой, соответствующей координате q=,
и обозначим Qji
_ 6Л<г1 _ S pi bsi cos (р«- 6s<)
J bq. bq.
I 1
Обобщенной силой Qj, соответствующей обобщенной коор-
координате </у, называют скалярную величину, определяемую отно-
отношением элементарной работы действующих сил, на переме~
щении механической системы, вызван-
вызванном элементарным приращением 6qj
координаты qj, к величине этого при-
приращения.
Равенство A19.1) можно представить
в виде
QJbqj=yjPibslcos(Pl, fts,). A19.2)
рис 258 откуда следует, что произведение обобщен-
обобщенной силы, соответствующей координате q^
на приращение этой координаты 6<fy, равно элементарной работе
приложенных к системе сил на перемещении системы, вызванном
приращением этой координаты.
Из формулы A19.2) видно, что размерность обобщенной силы
зависит от размерности соответствующей обобщенной координаты:
Так, например, линейной обобщенной координате q соответствует
обобщенная сила Q, измеряемая единицами силы.
Если за обобщенную координату q принят угол ф, измеряемый
в радианах, то размерность обобщенной силы Q совпадает с раз-
размерностью момента. Так как каждой обобщенной координате соот-
соответствует обобщенная сила, то число обобщенных сил механической
системы равно числу обобщенных координат, причем размерность
каждой из обобщенных сил соответствует размерности соответствую-
соответствующей обобщенной координаты. Известно, что существует два способа
группировки сил, действующих на механическую систему:
1) деление на внешние и внутренние силы;
2) деление на задаваемые силы и реакции связей.,
354
Соответственно этому обобщенные силы разделяются или на обоб-
обобщенные внешние и обобщенные внутренние силы или на обоб-
обобщенные задаваемые силы и обобщенные реакции связей.
Покажем, что в случае стационарных связей обобщенные
реакции идеальных связей равны нулю. Действительно, для на-
нахождения обобщенной реакции, соответствующей координате q,, сле-
следует вычислить сумму работ реакций связей на перемещении системы,
соответствующем приращению 6qf этой координаты, а затем опре-
определить обобщенную реакцию связи по формуле:
Qj==
„ 2 Ri 6si cos
j
_
Как указывалось выше (§ 112), в случае стационарных связей
описанное перемещение системы является одним из возможных пере-
перемещений этой системы, а потому сумма работ реакций идеальных
связей на этом перемещении равна нулю:
отсюда следует, что
<2? = 0 (У=1, 2 s). A19.3)
Таким образом, при определении обобщенных сил, реакции иде-
идеальных связей выпадают.
Рассмотрим примеры вычисления обобщенных сил.
Пример 72. Рычаг АВ вращается вокруг горизонтальной оси,
проходящей через точку О, перпендикулярно к плоскости рисунка
(рис. 259). К концам рычага приложены вертикальные силы Рг и Р2,
ОА = а, ОВ — b. Приняв угол ф, опреде-
определяющий положение рычага, за обобщенную
координату, определить соответствующую ей
обобщенную силу.
Решение. Для нахождения обобщенной
силы Qq,, соответствующей обобщенной коор-
координате ф, сообщаем координате ф прираще-
ние 6ф (рис. 259). Отмечаем перемещения,
которые получают при этом точки приложе-
приложения сил Pj и Р2. Эти перемещения направлены \р
перпендикулярно к отрезкам ОА и ОВ и
раВНЫ: * л л ал Рис.259,
us, = а 6ф и os2 = o бф.
Составляем сумму работ сил Pt и Р2 на перемещениях 6sx и 6s2.
вызванных приращением угла поворота рычага ф:
бЛф = Рг bSi sin ф — Р2 bs2 sin ф.
Подставляя значения перемещений 6sj и б^ получаем
355
Обобщенную силу Q^ определяем по формуле A19.1) как отно-
отношение работы бЛф к приращению координаты 6ц>:
Полученный результат показывает, что обобщенная сила (Х, со-
соответствующая углу ф, равна главному моменту сил, приложенных
к рычагу, относительно опорной точки О.
Пример 73. Центробежный регулятор вращается вокруг верти-
вертикальной оси. Вес каждого шара регулятора равен О, вес остальных
частей может не учитываться. Длины стержней равны I. Приняв
за обобщенные координаты угол а, образо-
образованный стержнями регулятора с вертикалью,
и угол поворота регулятора ф вокруг вер-
вертикальной оси, найти обобщенные силы,
соответствующие этим обобщенным коорди-
координатам.
Решение. Для нахождения обобщенной
силы Qa, соответствующей обобщенной коор-
координате а (рис. 260), даем углу а прираще-
приращение 6а, оставляя угол ф неизменным. Отме-
Отмечаем перемещения, которые получают точки
приложения весов шаров. Перемещения этих
точек 6si и 6s2 направлены перпендикулярно
к стержням Л]С] и А2С2 и равны
6sj = 6s2 = / 6а.
Составляем сумму работ задаваемых сил тяжести шаров на пере-
перемещениях 6sj и 6s2. вызванных приращением угла а:
6Ла — — G • 6S] • sin a — О ¦ 6s2 • sin a = — 20 • / • 6а • sin a.
Определяем обобщенную entry Qa по формуле A19.1):
О„ — ^ф$- —-2G-1- sin a.
^а оа
Для нахождения обобщенной силы <Зф, соответствующей обобщенной
координате ф, дадим углу ф приращение 6ф, оставляя угол а неиз-
неизменным.
Точки приложения весов шаров при повороте регулятора на
угол 6ф перемещаются в плоскости, перпендикулярной к оси регу-
регулятора. Работа сил тяжести О на этих перемещениях равна нулю:
Обобщенная сила, соответствующая координате ф,
356
§ 120. Выражение обобщенных сил через проекции сил
на неподвижные оси декартовых координат.
Случай сил, имеющих потенциал
Рассмотрим механическую систему из п материальных точек, на-
находящуюся под действием сил Рх> Р2, .... Р„.
Положим, что система имеет s степеней свободы, т. е. ее поло-
положение определяется s обобщенными координатами qv q2 qs.
Найдем выражение обобщенной силы, соответствующей каждой обоб-
обобщенной координате системы. Для этого проведем в каждую точку
системы Mt из начала неподвиж-
неподвижной системы декартовых коорди-
координат радиус-вектор rt (рис. 261).
При наличии нестационарных
связей радиус-вектор точки, так
же как и ее декартовы коорди-
координаты, является функцией всех
обобщенных координат и времени:
гг = г,- (qv q2 qs, t)
(i=\, 2 n).
Чтобы найти обобщенную си-
силу Qj, соответствующую обобщен-
обобщенной координате qj, сообщим коор- Рис. 261.
динате qj элементарное прираще-
приращение 6qj, тогда радиус-вектор каждой точки Mt получит прираще-
приращение, обусловленное приращением только одного аргумента qy.
brij = -pT6qJ. A20.1)
Составим сумму работ всех сил, действующих на систему, на
возможных перемещениях точек Ьт^, вызванных приращением коор-
координаты bqj. Воспользуемся для этого выражением элементарной
работы силы в виде скалярного произведения F0.5):
Подставив это выражение в формулу A19.1):
6AqJ
получим обобщенную силу Qj в виде суммы скалярных произведений
векторов:
п
^^.^L. A20.2)
357
Выразив эти скалярные произведения через проекции векторов-
сомножителей на -неподвижные оси декартовых координат, получим
обобщенную силу Qj в следующем виде:
Аналогичное выражение можно получить и для обобщенной силы
инерции A20.3):
дх. у ог.\
Рассмотрим теперь случай, когда силы, действующие на механи-
механическую систему, имеют потенциал. Тогда согласно G2.8) проекции
этих сил на оси координат равны взятым с обратным знаком
частным производным, от потенциальной энергии системы по соот-
соответствующим координатам точек:
у дП „ дП 7 дП
Подставив эти значения проекций сил в формулу A20.3), получим
^П дх дП ду дП д
Потенциальная энергия механической системы согласно G2.5)
является функцией" декартовых координат точек системы
П = П{хх, уи zu x2, .... гп).
Декартов-ы координаты точек системы являются функциями ее
обобщенных координат и времени A12.2):
xt = xl(q1, Щч, ..., qs, t),
У[ = УЛЯ1> Чч Qs- 0.
zi = zi(q1, q2, ..., qs, t).
Подставив в выражение G2.5) значение декартовых координат
из A12.2), получим потенциальную энергию Я механической системы,
как функцию обобщенных координат и времени:
q2 qs, /). A20.5)
358
В случае стационарных связей зависимость декартовых коорди-
координат от обобщенных координат имеет вид A12.1)
xi = xi (Vv Чч Я*)<
У/ = У/ (<?i. Яг Я*)<
*| = «|(?1. ?2- •••¦ 4s)-
Потенциальная энергия системы в этом случае является функцией
только обобщенных координат:
П = П{Чх, q2, .... qs). A20.6)
Найдем частную производную от потенциальной энергии системы /7
по обобщенной координате qj, рассматривая П как сложную функ-
функцию обобщенных координат, определяемую зависимостями G2.5) и
A12.1).
Эта производная определяется суммой З/t слагаемых. Каждое
слагаемое равно произведению частной производной от П по одной
из Зге декартовых координат точек xlt yv zv х2, .... zn на произ-
производную от этой декартовой координаты по выбранной обобщенной
координате q}:
dqj — Zi { dxt - dqj "+" dyi ' dqj *~ dZi ' dqj) ' @)
Сопоставляя выражения (а) и (б), устанавливаем:
Qj = —щ C/=l. 2, .... s). A20.7)
Формулы A20.7) показывают, что в случае сил, имеющих по-
потенциал, обобщенная сила, соответствующая обобщенной коор-
координате <7,-, равна взятой со знаком минус частной производной
от потенциальной энергии механической системы по этой коор-
координате.
§ 121. Общее уравнение динамики в обобщенных силах.
Условия равновесия сил
Преобразуем общее уравнение динамики A17.4):
Подставим в это уравнение наиболее общие возможные переме-
перемещения точек системы 6гг, вызванные одновременными бесконечно
малыми приращениями всех обобщенных координат системы. Эти
359
перемещения равны геометрической сумме возможных перемещений,
вызванных приращениями отдельных обобщенных координат, т. е.
Общее уравнение динамики примет следующий вид:
i?ty = 0. A21.1)
Суммируя сначала по точкам системы (/=1, 2 п), а затем
по обобщенным координатам (/=1, 2, ..., s), получаем
или
л
Здесь 2j Р* ' ~т^~ — Qj — обобщенная сила, соответствующая обоб-
обобщенной координате q,.
п
Сумма \, Ф[ • -з^- является обобщенной силой инерции, соответ-
соответствующей обобщенной координате qy.
t=.\
Пользуясь выражениями A20.2) и A21.3), получим общее урав-
уравнение динамики A21.2) в виде
= 0. A21.4)
Приращения обобщенных координат 6<7/ произвольны и не зави-
зависят друг от друга.
Поэтому в полученном уравнении все коэффициенты при этих
приращениях должны быть равны нулю.
Приравняв нулю эти коэффициенты, получим
Q.-Jf-Qf — O (У—1. 2, .... s). A21.5)
360
Уравнения A21.5) эквивалентны общему уравнению динамики
A21.4).
Если силы, действующие на механическую систему, уравновеши-
уравновешиваются, т. е. механическая система находится в состоянии покоя,
или все ее точки движутся прямолинейно и равномерно, то силы
инерции ее точек равны нулю.
Следовательно, и обобщенные силы инерции системы равны нулю:
Qf = O (у = 1, 2, .... s).
Тогда уравнения A21.5) принимают вид
Q. = 0 G=1, 2 s) A21.6)
Равенства A21.6) выражают условия равновесия сил в обобщен-
обобщенных силах.
Так, например, в примере 62 для рычага получено выражение
обобщенной силы Q4, соответствующей обобщенной координате ф.
Рычаг имеет одну степень свободы. Если приложенные к нему
силы уравновешиваются, то согласно A21.6)
т. е. сумма моментов задаваемых сил Pj и Р2, действующих на ры-
рычаг, относительно опорной точки рычага равна нулю. Такое же усло-
условие равновесия сил установлено в § 27 курса статики.
Преобразуем условия равновесия A21.6) для консервативных сил,
т. е. сил, имеющих потенциал. Для любой системы сил условия
равновесия имеют вид
В случае консервативных сил обобщенные силы определяются
формулами A20.7):
Следовательно, условия равновесия консервативной системы сил
имеют вид
¦^ = 0 G=1. 2 s). A21.7)
§ 122. Примеры на применение условия равновесия
консервативной системы сил
Пример 74. Прямолинейный однородный стержень АВ длиной 21
упирается нижним концом А в гладкую вертикальную стену, соста-
составляя с ней угол ф, а в промежуточной точке D на гладкий горизон-
горизонтальный цилиндрический стержень, параллельный стене, отстоящий от
361
нее на расстоянии а. Определить угол ф, при котором стержень
находится в состоянии покоя (рис. 262, а).
Решение. Примем за обобщенную координату угол <р, обра-
образованный осью стержня с вертикальной стеной.
Рис. 262.
Проведем через точку D координатные оси Dx и Dy (рис. 262, б).
Определим потенциальную энергию стержня в поле сил тяжести:
Так как
то
ус = / cos ф — a ctg ф,
П = О (/ cos ф — a ctg ф).
Найдем первую производную от потенциальной энергии по обоб-
обобщенной координате ф:
дП
В случае равновесия консервативной системы сил на основании
A21.7)
Поэтому
Sltl2(p
т. е.
— Z sin ф = О,
у.
По этой формуле определяется то значение угла ф, составленного
осью стержня с вертикальной стеной, при котором он находится
в состоянии покоя.
362
Пример 75. Пружина АВ удерживает однородный стержень ОВ
длиной / и весом G под углом ф к горизонту. Конец пружины А
прикреплен к горизонтальной плоскости на расстоянии АО = 1
(рис. 263). Определить коэффициент жесткости с этой пружины,
если известно, что длина
У
пружины в ненапряженном
состоянии равна L.
Решение. Для опреде-
определения коэффициента жест-
жесткости пружины с восполь-
воспользуемся условием равновесия
консервативных сил A21.7).
Примем за обобщенную
координату угол ф, образо-
образованный осью стержня с го-
горизонтом. Проведем через
точку О координатные оси
Ох и Оу.
Потенциальную энергию рассматриваемой механической системы
определим как сумму потенциальной энергии стержня в поле сил
тяжести По и потенциальной энергии деформированной пружины Пр.
Здесь П = Па-\-Пр.
По — Оус = Q -х sin ф;
Рис. 263.
ей2
ПоэтомУ
с B1 cos -|- — LY
с B1 cos ^-
Найдем первую производную от потенциальной энергии по обоб-
обобщенной координате ф.
l
Ql
_.
= -n- cos ф — cZ2 sin ф -f- cLl sin-^ .
Так как в рассматриваемом состоянии покоя системы -*— = 0, то
-к- cos ф — сР sin ф -\- сЫ sin % = 0.
Из этого равенства определяем, каким в рассматриваемом случае
должен быть коэффициент жесткости пружины:
G cos ф
2 u sinqi
L sin-^-
363
§ 123. Понятие об устойчивости состояния покоя механической
системы с одной степенью свободы в консервативном силовом
поле
Состояние покоя механической системы может быть устой-
устойчивым, неустойчивым и безразличным.
Состояние покоя механической системы называется устойчивым,
если эта система, выведенная из положения покоя, будет совершать
колебания около этого положения.
Состояние покоя механической системы называется неустойчи-
неустойчивым, если при сколь угодно малом отклонении системы из положе-
положения покоя она удаляется от этого положения и колебаний около
этого положения не возникает.
Состояние покоя механической системы называется безразличным,
если при отклонении ее из этого положения она и в новом поло-
положении может оставаться в состоянии покоя.
Критерий устойчивости состояния покоя для систем с голоном-
ными и стационарными связями, находящихся в консервативном си-
силовом поле, устанавливается в зависимоети от потенциальной энер-
энергии этих систем.
Представим себе механическую систему с голономными стацио-
стационарными связями, находящуюся под действием сил, имеющих потен-
потенциал. Такую систему, как указывалось выше (§ 72), называют кон-
консервативной.
Для консервативной системы уравнения равновесия сил имеют
вид A21.7):
Из уравнений A21.7) следует, что положениям покоя консерва-
консервативной системы соответствуют экстремальные значения потенциаль-
потенциальной энергии системы.
Однако по уравнениям равновесия сил A21.7) нельзя судить об
устойчивости состояния покоя в этих положениях системы. Условие
устойчивости состояния покоя механической системы содержится
в теореме Лагранжа — Дирихле. Эта теорема устанавливает, что те
положения покоя консервативной системы, в которых потен-
потенциальная энергия системы достигает минимума, являются
ее устойчивыми состояниями покоя.
Для консервативной системы с одной степенью свободы положе-
положения покоя определяются одним уравнением:
-^- = 0 A23.1)
Чтобы определить, устойчиво ли состояние покоя в рассматри-
рассматриваемом положении системы, необходимо выяснить имеет ли потен-
364
циальная энергия системы в этом положении минимум, т. е. выпол-
выполняется ли условие
|?0. A23.2)
Уравнением A23.2) и пользуются при решении задачи об устой-
устойчивости состояния покоя системы с одной степенью свободы.
Критерий Лагранжа — Дирихле является достаточным (но не необ-
необходимым) условием устойчивости состояния покоя системы в поле
консервативных сил.
Остановимся теперь на вопросе о том, как оценить состояние
покоя консервативной системы в положении, в котором она не имеет
минимума потенциальной энергии.
Ответ на этот вопрос содержится в специальных теоремах
А. М. Ляпунова*.
На рис. 264, а изображено положение покоя физического маят-
маятника, соответствующее наинизшему положению его центра тяжести.
В этом положении потенциальная энергия маятника в поле силы тя-
тяжести имеет минимум и это состояние покоя является устойчивым.
а)
б)
в)
'/////////////////////////////У,
Рис. 264.
Если вывести маятник из этого положения, отклонив его на неко-
некоторый угол в вертикальной плоскости, то он начнет качаться вокруг
оси привеса.
На рис. 264, б изображен маятник в том положении, при кото-
котором его центр тяжести занимает наивысшее положение. В этом по-
положении потенциальная энергия маятника имеет максимум и это
состояние покоя является неустойчивым.
Если вывести маятник из этого положения, то он не возвратится
в первоначальное положение.
* Ляпунов А. М. Общая задача об устойчивости движения. Гостех-
издат, 1950.
25 А. А. Яблонский
365
На рис. 264, в изображен шарик, находящийся на горизонтальной
плоскости. Состояние покоя шарика является безразличным. Потен-
Потенциальная энергия шарика в любом положении на плоскости не имеет
ни минимума, ни максимума, являясь постоянной величиной, не изме-
изменяющейся при изменении положения шарика.
§ 124. Примеры на определение условий
устойчивости состояния покоя механической системы
с одной степенью свободы
Пример 76. Определить условие устойчивости состояния покоя
метронома, изображенного на рис. 265, представляющего собой маят-
маятник с двумя грузами А и В, если вес этих
грузов Gj и G2, а их расстояния от точки О
соответственно равны 1Х и /2; весом стержня
пренебречь.
Решение. Примем за обобщенную коорди-
координату угол ср, образованный осью метронома
с вертикалью.
Проведем через точку О (ось метронома)
координатные оси Ох и Оу.
Потенциальная энергия рассматриваемой си-
системы в поле сил тяжести
Рис. 265.
дП
При расположении груза А внизу
уг = •— lx cos ф; у2 = l2 cos ср.
Поэтому
Л = (О2/2 — G^) cos ф.
Найдем первую и вторую производные от
потенциальной энергии по обобщенной коорди-
координате ф:
-з— = — (G2/2 — G^j) sin ф = (Gili — G2/2) sin ф;
-щр = (<Vi — <ЗДcos Ф-
дП
В состоянии покоя
dtp
¦ О.
Это будет в двух случаях:
1) если G^ —G2/2 = 0, т. е. G,/j = G2/2;
2) если зтф = 0, т. е. ф = 0 или ф= 180°.
При Gj/j = G2/2 нет ни максимума, ни минимума потенциальной
=o)> а потому этому случаю соответствует безраз-
безразэнергии
личное равновесие.
366
Найдем соотношение между О1 и G2, при котором при <р = О
метроном находится в устойчивом состоянии покоя.
Поэтому состояние покоя метронома устойчиво, если
При ф=180° и
т. е. это состояние покоя метронома неустойчиво.
Пример 77. По гладкому неподвижному проволочному кольцу
радиусом г, расположенному в вертикальной плоскости, может
скользить без трения гладкое
кольцо В. К кольцу подвешен
груз весом Q и привязана нить,
перекинутая через ничтожно
малый неподвижный блок А,
находящийся в высшей точке
кольца. К концу этой нити под-
подвешен груз весом Р (рис. 266)
Определить, при каких зна-
значениях центрального угла ф
рассматриваемая механическая
система будет находиться в со-
состоянии покоя и установить,
какие из этих состояний покоя
устойчивы.
Решение. Примем за об-
обобщенную координату системы
центральный угол ф и про-
проведем через центр блока А
координатные оси Ах и Ау.
Потенциальная энергия рассматриваемой системы в поле сил
тяжести равна:
Рис. 266.
/7 = ПР
= Рур + QyQ.
Обозначив L длину нити BAD, a
до центра тяжести груза Q, получим
расстояние от центра кольца В
Br sin* !¦
25*
367
тогда:
nD = -P[L-
= —P(L-2rsin|-)—QB
== — PL + 2/V sin | — 2Qa sin21- — Q/.
Найдем первую и вторую производные от потенциальной энергии
по обобщенной координате ф:
% —2Qrsin-|- cos-| = rcos-|-(P —2Qsin|);
— Qr cos21- = —1 Pr sin J + 2Qr sin2 -| — Qr.
Рассматриваемая механическая система находится в состоянии покоя,
т. е. приложенные к ней консервативные силы уравновешиваются
в том случае, если
— = 0
dtp
т. е. .
rcos-| \Р — 2Qsin
Из этого равенства устанавливаем два условия возможного со-
состояния покоя системы:
cos^ = 0; т? = -2' Ф1 = я;
Р 9Г)«1пф2 П- «in412 Р
и — ^ysiny—и, sin" = О"'
Для того, чтобы состояние покоя было устойчивым, необходимо
выполнение условия A23.2), т. е.
При <р1 = я
Состояние покоя устойчиво, если
Qr— ±Pr
368
т. е.
2Q>P или
2) При sinf = ^-
Р2Г I P2
-Щ ЧГ — г \
Так как
то
2Q>P.
Поэтому
т. е. в этом положении тело находится в неустойчивом состоянииг
покоя.
Результаты исследования показывают, что при (рг = л система
р
находится в устойчивом состоянии покоя, ес*ли Q > -^, а при.
Sin^ = -^r состояние покоя системы неустойчиво.
Вопросы для самоконтроля
1. Какой вид имеет общее уравнение динамики?
2. Какая величина называется обобщенной силой, соответствующей не-
некоторой обобщенной координате системы, и какую размерность она имеет?-
3. Чему равны обобщенные реакции идеальных связей?
4. В какой последовательности вычисляется обобщенная сила?
5. Выведите общее уравнение динамики в обобщенных силах.
6. Какой вид имеют условия равновесия сил, приложенных к системе,,
полученные из общего уравнения динамики?
7. Какими формулами выражаются обобщенные силы через проекции
сил на неподвижные оси декартовых координат?
8. Как определяются обобщенные силы в случае сил, имеющих потенциал?
9. Каков вид условий равновесия сил, имеющих потенциал?
10. Каким может быть состояние покоя механической системы?
11. Каков критерий устойчивости состояния покоя механической си-
системы с одной степенью свободы?
ГЛАВА XIX
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ДВИЖЕНИЯ
МЕХАНИЧЕСКОЙ СИСТЕМЫ В ОБОБЩЕННЫХ КООРДИНАТАХ
§ 125. Уравнения Лагранжа второго рода
Положим, что механическая систе-ма из п материальных точек
имеет s степеней свободы. В случае голономных, нестационарных,
связей радиус-вектор rt любой точки М{ этой системы является
361>
¦функцией обобщенных координат qx, q2, ..., qs.H времени t:
rt = rl(ql. q2 Я* О- A25.1)
Обобщенные координаты системы qx, q2, ..., qs являются функ-
функциями времени. Поэтому радиус-вектор гг является сложной функ-
функцией времени и вектор скорости точки vf определяется по правилу
дифференцирования сложной функции:
dtj_ ___^?(_^ i dtt
«ли
В случае стационарных связей
r^ A25-3)
Производные от обобщенных координат по времени q} называются
¦обобщенными скоростями.
Из выражения (а) следует, что частная производная от V; по
какой-либо обобщенной скорости q} равна коэффициенту при qj
в правой части этого выражения, т. е. равна частной производной
от Ti по координате qy.
^- = Ф~. (б)
dq, <>Я, ^ >
Кинетическая энергия механической системы, как известно, опре-
определяется по формуле
п 2 1я
Stn,Vi 1 %^ч
-5J-=2"i<lt'v'"v'> A25>4)
1=1 1=1
Из выражения A25.2) следует, что вектор скорости точки v,,
ъ случае голономных, нестационарных связей является функцией
•обобщенных координат, содержащихся в выражениях -^-, обобщен-
обобщенных скоростей и времени. Поэтому кинетическая энергия механиче-
механической системы является функцией тех же переменных:
q2 qs. qlt q2, ..., qs, t). A25.5)
Найдем частные производные кинетической энергии по обобщен-
обобщенной координате qj и обобщенной скорости qj, дифференцируя выра-
.370
жение A25.4) как сложную функцию:
дТ
Преобразуем последнее выражение на основании равенства (б)
дТ
—— = V т,\,
Продифференцируем это выражение по времени:
dt\? '• dqj) A ' at
Рассмотрим две суммц, входящие в правую часть полученного-
равенства (в), учитывая, что для несвободной точки
1. С помощью равенства A20.2), определяющего обобщенную-
силу, находим
2. Для установления значения второй суммы рассмотрим варажение-
d (дгЛ
dt
Частная производная -^- является функцией тех же переменных*
от которых согласно A25.1) зависит радиус-вектор точки г,-. Диф-
Дифференцируя -~- как сложную функцию времени, получаем:
d (дГ1\
dt \oqj j oqj • oqi 1 aqj • 0^2 oqj- oqs s ' aqjdt ч '
Найдем частную производную -j-^-i дифференцируя по qj выра-
выражение (а):
d\i
dqj dqtdqj 4i ' dq2dqj Ч2> ' ' ' * dqsdqj ч<>< dt dqj ' y r
371
Правые части выражений (г) и (д) отличаются только последова-
последовательностью дифференцирования, которая при непрерывных функциях
не имеет значения, следовательно:
_d_ I dti \ dvj
dt \dqjj~ dqj '
Пользуясь этой зависимостью, преобразуем вторую сумму в пра-
лой части равенства (в):
Подставив найденные значения обеих сумм в равенство (в) и рас-
рассматривая механическую систему со стационарными идеальными свя-
связями, для которой Qy = 0, получим
_d_(_dT_\ о , дТ
dt \ dqj ) J dqj
ИЛИ
L) — — = QJ (J=l, 2 s). A25.6)
\dqj j dqj
Систему s дифференциальных уравнений A25.6) называют урав-
уравнениями Лагранжа второго рода. Эти уравнения представляют
-собой дифференциальные уравнения второго порядка относительно
обобщенных координат системы qx q2, ..., qs. Интегрируя эти диф-
дифференциальные уравнения и определяя по начальным условиям по-
постоянные интегрирования, получаем 5 уравнений движения механи-
механической системы в обобщенных координатах:
qj = qj(t) U=l, 2 s). A25.7)
Уравнения Лангранжа второго рода сыграли решающую роль в раз-
развитии динамики системы и широко используются для решения многих
задач механики.
§ 126. Кинетический потенциал. Уравнения Лагранжа второго
рода для консервативной системы
Положим, что на рассматриваемую систему, наряду с силами,
имеющими потенциал (консервативными силами), действуют силы, не
имеющие потенциала (неконсервативные силы). При этом условии
обобщенную силу Qj удобно представить в виде суммы обобщенной
силы Qj, соответствующей консервативным силам Р, и обобщенной
силы Qj, соответствующей неконсервативным силам F;:
р р
372
Если на рассматриваемую систему действуют только консерватив-
консервативные силы, то обобщенная сила определится формулой A20.7):
В этом случае уравнения Лагранжа второго рода принимают сле-
следующий вид:
— I-?- — = -- 0 = 1.2 s). A26.1>
dt \ dgj } dgj dgj v r
Уравнения A26.1) можно преобразовать путем введения функции.
Лагранжа L = T — П, называемой кинетическим потенциалом.
Согласно A25.5)
Т = Т(<ь q2, ¦¦¦, qs, qv <72 Ъ> О-
Согласно A20.5)
n = n{qv q2, .... qs, t).
Следовательно, кинетический потенциал L является функцией
обобщенных координат, обобщенных скоростей и времени:
L = H.4l, q2 qs, qt. q2 qt. t). A26.2)
Потенциальная энергия является функцией только обобщенных
координат и времени, а потому
¦ *?. = <) (У=1. 2 s).
Пользуясь этим условием, получим
дТ _ dL . дП
/)/i' fin ' fi/i i
дТ dL
dL \ 1L дП дП
dqj dqj
Подставив эти частные производные в уравнения Лагранжа A26.1),
будем иметь
A-1 dL \ — 1L. —
dt [ d4j) dqj dqj ~ dqj '
или
dt \ dqj I dqj
Уравнения A26.3) называются уравнениями Лагранжа второго
рода для консервативной системы.
Уравнения Лагранжа широко используют при изучении свобод-
свободных колебаний механических систем во многих областях техники.
Применение уравнений Лагранжа второго рода к определению частоты
373
и периода свободных колебаний механической системы с одной сте-
степенью свободы показано в примерах § 128.
Применение уравнений Лагранжа к изучению свободных и выну-
вынужденных колебаний механических систем с конечным числом степе-
степеней свободы можно найти в ряде специальных курсов *.
§ 127. Циклические координаты, циклические интегралы
Обобщенные координаты, которые не входят явно в выра-
выражение кинетического потенциала L, называются циклическими
координатами.
Предположим, что среди s обобщенных координат системы коор-
координаты qv q2, ..., qk (ft < s) являются циклическими.
Тогда по определению циклических координат производные от
кинетического потенциала по этим координатам равны нулю:
-~у = 0 (/=1. 2 к). A27.1)
В этом случае k уравнений A26.3) принимают вид
Ufjh0 (У=1>2 k)- A27-2)
откуда
^ C/=l, 2 ft). A27.3)
Равенства A27.3) называются циклическими интегралами.
Рассмотрим некоторые примеры циклических координат.
Положение точки в пространстве определяется тремя координа-
координатами. Примем декартовы координаты свободной материальной точки х,
у, z, за обобщенные координаты. Тогда кинетическая и потенциаль-
потенциальная энергии точки, движущейся в поле силы тяжести определятся
следующими выражениями:
Кинетический потенциал точки
L = Т — П = -i- m (х2 + у2 + г2) — mgz.
Координаты х и у не входят в выражение кинетического потен-
потенциала L, т. е. являются циклическими координатами. Циклические
интегралы имеют вид
= mx = const, или х = const;
дх
dL
ду
= ту = const, или у = const.
* А. А. Яблонский и С. С. Норейко. Курс теории колебаний.
Изд-во «Высшая школа». 1961 и последующие издания.
374
Эти выражения показывают, что проекции скорости точки на-
горизонтальные оси координат постоянны, т. е. движение проекции
точки на горизонтальную плоскость происходит равномерно и прямо-
прямолинейно, или при л; —0 и у = 0 проекция точки на горизонтальную-
плоскость неподвижна, т. е. точка движется по вертикали. Под дей-
действием силы тяжести изменяется
только вертикальная составляющая
скорости точки.
В качестве второго примера
рассмотрим движение материаль-
материальной точки массой т под действием
центральной силы.
Центральная сила направлена
-X к некоторому центру, а ее модуль
является функцией расстояния от
точки до центра.
Рис. 267. Воспользуемся полярными ко-
координатами, принимая их за об-
обобщенные координаты (рис. 267). Определим кинетическую энергию-
точки, выражая модуль скорости точки v через ее проекции на оси
полярных координат vr и v^ (см. ч. I, «Кинематика», § 128):
mv2
т
В § 73 показано, что потенциальная энергия материальной точки,
находящейся в поле ньютоновой силы притяжения, является функцией
расстояния от точки до центра притяжения. Это положение справедливо-
и при другом законе изменения центральной силы, т. е.
Я = /</¦).
Кинетический потенциал точки
1 = 7 — n=^-(r'2 + rV) — /(г).
Так как угловая координата <р не входит явно в выражение кине-
кинетического потенциала L, то она является циклической. Соответствую-
Соответствующий ей циклический интеграл имеет вид
dL
dip
.= тг2ц> = const,
или
= const.
Это равенство выражает закон сохранения момента количества
движения материальной точки относительно центра E4.4)
§ 128. Примеры применения уравнений Лагранжа
второго рода
Пример 78. В эпициклическом механизме кривошип с противо-
противовесом вращается под действием приложенного к нему момента М
(рис. 268, а). Момент инерции кривошипа с противовесом относи-
375
тельно оси его вращения равен Jo. Центр тяжести бегущей шестерни
и кривошипа с противовесом находится на оси вращения кривошипа.
Расстояние между осями шестерен равно /. Бегающая шестерня имеет
радиус Т\, массу т1 и момент инерции относительно ее оси Jt. Опре-
Определить пренебрегая трением угловое ускорение кривошипа и окружное
усилие в точке соприкасания шестерен.
Решение. Рассматриваемая механическая система имеет одну
степень свободы. За обобщенную координату системы примем угол
поворота кривошипа ф, отсчитанный от горизонтали.
Рис 268
Для определения углового ускорения кривошипа с противовесом
= Ф применим уравнение Лагранжа второго рода A25.6):
Чтобы воспользоваться этим уравнением, определим кинетическую
энергию системы как функцию обобщенной координаты ф и обобщен-
обобщенной скорости ф, равной угловой скорости кривошипа ю.
Кинетическая энергия системы равна сумме кинетической энер-
энергии Т\ кривошипа с противовесом, вращающегося вокруг неподвиж-
неподвижной оси, и кинетической энергии Т^\ бегающей шестерни, совершающей
ялоское движение.
По формуле F9.2)
По формуле F9.3)
Скорость центра тяжести шестерни
vA = О А ¦ о»
376
Угловую скорость бегающей шестерни щ определим при помощи
мгновенного центра скоростей, находящегося в точке В соприкаса-
соприкасания шестерен (рис. 268, б):
v. I .
©!==—4- = — ф.
Подставив значения vA и a>lt получим
Кинетическая энергия системы
т = тг + тп=-I (j0+щр+у, -^-) фХ
Из этого выражения следует, что кинетическая энергия системы
зависит от обобщенной скорости ф и не зависит от обобщенной
координаты ф, т. е. от положения механизма. Найдем производные:
4^-=0; (а)
dt
На механизм действуют задаваемые силы: вес движущихся ча-
частей О, приложенный в точке О и вращающий момент М, прило-
приложенный к кривошипу.
Чтобы найти обобщенную силу Q^, соответствующую обобщенной
координате ф, дадим системе возможное перемещение, сообщив углу ф
приращение бф.
Составим сумму элементарных работ задаваемых сил на этом воз-
возможном перемещении. В эту сумму войдет только работа вращаю-
вращающего момента, определенная по формуле F5.7):
бЛф = М бф.
Обобщенную силу получим .согласно A19.1):
Подставив найденные значения (а), (б) и (в) в уравнение Лаг-
ранжа, получим
откуда
М
377
Для определения окружного усилия в точке касания шестерен
рассмотрим плоское движение бегающей шестерни. Составим диф-
дифференциальное уравнение вращения шестерни вокруг оси ?, проходя-
проходящей через центр тяжести А (рис. 269). К шестерне приложены
силы: ее вес Gj, составляющие реакции кривошипа R, и R2 и со-
составляющие реакции неподвижной шестерни Sj и S2-
Реакция Sj представляет собой окружное уси-
усилие. Направление вращения шестерни примем по-
положительным. Тогда уравнение ije = Mf будет
иметь вид
1G,
Рис. 269.
откуда S1 = —i-?j.
Чтобы найти угловое ускорение шестерни
продифференцируем по времени выражение
¦~Ь
Подставляя это значе-
„ «tot l da I
Получим _===__,т. е. г1 = -е.
ние ev найдем окружное усилие:
с J\l
ri
Пример 79. Редуктор скоростей, используемый в электродвига-
электродвигателе, изображенный на рис. 270, имеет колесо 1, насаженное на
ведущий вал / редуктора, с числом зубьев zx,
сателлиты 2 с числом зубьев z2, опоры которых
помещаются в звене, называемом водилом, при-
принадлежащем валу //, а оси находятся от оси этого
вала на расстоянии Н, и закрепленное в корпусе
колесо 3 с числом зубьев zz.
Момент инерции масс, связанных с ведущим
валом, относительно оси вала равен Jt; масса каж-
каждого сателлита т2, а его момент инерции относи-
относительно собственной оси У2! момент инерции масс,
связанных с ведомым валом, относительно его оси Уп.
Полагая, что к ведущему валу / приложен по-
постоянный вращающий момент Мвр, а к ведомому
валу // постоянный момент сил сопротивления /Исопр,
определить угловые ускорения ведущего и ведо-
ведомого валов редуктора, а также угловые ускоре-
ускорения сателлитов.
Решение. Рассматриваемая механическая
система имеет одну степень свободы. За обобщенную координату
системы примем угол поворота ведущего вала <pj.
Для определения углойых ускорений всех звеньев редуктора при-
применим уравнение Лагранжа второго рода A25.6).
Рис, 270.
378
Чтобы воспользоваться этим уравнением, определим кинетическую
энергию системы как функцию обобщенной скорости ф,, равной
угловой скорости ведущего вала ю,.
Для вычисления кинетической энергии рассматриваемой системы
необходимо знать угловые скорости всех звеньев редуктора: ведущего
вала (колеса /) щ, ведомого вала (водила) ю1(, сателлита ю2.
Определим эти угловые скорости способом Виллиса, содержание
которого заключается в следующем.
Предположим, что вращение всех звеньев механизма происходит
в направлении, противоположном движению часовой стрелки, а истин-
истинное направление вращения звена установим по знаку его угловбй
скорости, полученному в результате вычисления. Знак плюс покажет,
что вращение звена происходит в направлении, противоположном
движению часовой стрелки, а знак минус — что вращение звена про-
происходит в направлении движения часовой стрелки.
Каждое колесо (звено) механизма участвует в двух вращениях:
1) в относительном (по отношению к водилу) вращении вокруг
собственной оси и 2) в переносном вращении вместе с водилом
вокруг его оси.
Поэтому, абсолютная угловая скорость каждого колеса/, 2 К
{(?>!, а>2, ¦ • •» Щ) равна алгебраической сумме его относительной и
переносной угловых скоростей, причем для каждого колеса пере-
переносной угловой скоростью является угловая скорость водила
(ю1е = <й2« = • • • = Ще = о^-
Мысленно остановив водило, лишаем все колеса их переносного
вращения.
Зная абсолютные и переносные угловые скорости колес, опре-
определяем их относительные угловые скорости:
(iJr = @2 — (д2е = а>2
Так как при остановленном водиле оси всех колес неподвижны,
то соотношение между относительными угловыми скоростями, колес
такое же как и в обычной зубчатой передаче:
— _(—1) iA_k)r или -—__(— 1) t{l_k)r
Это соотношение носит название формулы Виллиса; в ней:
hi-k) г — передаточное отношение от колеса 1 к колесу k;
т — число внешних зацеплений от колеса 1 к колесу к.
Переходя к решению рассматриваемого примера, приведем фор-
формулы Виллиса, устанавливающие зависимости между относительными
379
угловыми скоростями колес 1 и 2, а также 2 и 3:
^Z^L==<-iy»*A_2),; Где m==i и J(,_a)r = ^ (а)
J^L==(_iy»/B_3)j.t где ж = 0 и /B_3)г = ^. (б)
3 // 2
В этом примере от абсолютных угловых скоростей отнимается
угловая скорость (оя, являющаяся переносной угловой скоростью
для каждого колеса данного редуктора, поскольку водило в этом
редукторе связано с ведущим валом //.
Перемножая левые и правые части равенств (а) и (б), получаем;
zi
Так как щ — aj и <о3 = 0, то
откуда
Из равенств (а) и (в) находим
__ гх гг — z2 ^
2 г2 zl+z3 '
Знаки полученных значений сол и @2 показывают, что вал П вра-
вращается в направлении, противоположном движению часовой стрелки,
а сателлит 2 вращается в направлении движения часовой стрелки.
Составим выражение кинетической энергии всех движущихся
частей редуктора.
Jrf (m2v2C2 | J2<4) Jn®u
где
vc2 = Hvsn =
Выразив все линейные и угловые скорости через угловую ско-
скорость ведущего вала Oj, получим
Из полученного выражения кинетической энергии всех движущихся
частей редуктора находим выражение приведенного к оси ведущего
вала момента инерции:
z\H2 [zx z3-z2\2 z\
ЛР = J, + Zm2 {Zi + ^J + 2 J2 [— -^rj +J
380
Для определения углового ускорения ведущего вала 6/==^, при-
применим уравнение Лагранжа второго рода:
d (дТ\ д7 ^Q
dt U<P7/ дУ; Ф/<
Найдем производные:
дТ . •
^ = ./,„„,.
На механизм действуют задаваемые силы: вес движущихся частей,
приложенный в точке, находящейся на прямой, совпадающей с осями
ведущего и ведомого валов; вращающий момент Мвр, приложенный
к ведущему валу, и момент сил сопротивления Жсопр> приложенный
к ведомому валу.
Чтобы найти обобщенную силу <?ф , соответствующую обобщенной
координате <р7, добавим к углу ф; приращение бф7.
Составим сумму элементарных работ задаваемых сил на этом
возможном перемещении. В эту сумму войдет работа вращающего
момента /Ивр и момента сил сопротивления Мсопр, которая отрица-
отрицательна
6Лф/ = Мвр Ыр, — Мсопр 6ф„.
Зависимость между угловыми перемещениями ведущего и ведомого
валов равна зависимости между их угловыми скоростями. Поэтому
Тогда
-)вф/.
Обобщенную силу получим согласно A19.1)
Подставив найденные значения (г), (д) и (е) в уравнение Ла-
Лагранжа, получим
26 А. А Яблонский 381
откуда
Очевидно,
Мвр — Мсопр ¦
lv
4*i + чJ^
«2 = % = —-f-
Так как
M
сопр
0—L
Ч_У
Т
\
то знаки угловых ускорений всех звеньев редуктора совпадают
со знаками угловых скоростей этих звеньев. Это значит, что все
звенья редуктора вращаются ускоренно.
Пример 80. Маятник представляет собой тонкий однородный
стержень длиной / и массой т, несущий на своем конце груз А, при-
принимаемый за материальную точку массой тх (рис. 271, а). К стержню
прикреплены две пру-
) жины с коэффициентами
жесткости с на расстоя-
расстоянии h от его. верхнего кон-
конца; противоположные кон-
концы пружин закреплены.
Найти циклическую часто-
частоту и период малых свобод-
свободных колебаний маятника.
Решение. Рассма-
Рассматриваемая механическая
система имеет одну сте-
степень свободы. За об-
обобщенную координату си-
системы примем угол ф, об-
образованный осью маятника
, с вертикалью (рис. 271, б).
Система находится под
действием консервативных
сил — сил тяжести и сил упругости. Для получения дифференциаль-
дифференциального уравнения качаний маятника воспользуемся уравнением Лагранжа
второго рода для консервативной системы в форме A26.1):
d /дТУ
\
-К
Рис 271.
d 1дТ\ (*Л__ дП
dt \dq> ) дц> ду
Кинетическую энергию системы определим как сумму кинети-
кинетической энергии Т\ стержня', вращающегося вокруг оси Ох, и кинети-
кинетической энергии 7ц груза А.
382
По формуле F9.2)
Подставив _ значение момента инерции стержня Jx = -^ml2, по-
получим
Г, = j • -j тРю2 = -g-
Кинетическая энергия груза А
Т = Г! + Г„ = 1 (и + 3/иО / V.
Кинетическая энергия системы
= 1
отсюда
4^ = 0. (а)
—г- = — {т-\-Ът{) /2ф,
йф 3
ду 1 3
Определим потенциальную энергию маятника, отклоненного от
вертикального положения на малый угол ф как сумму потенциаль-
потенциальной энергии П\, соответствующей силам тяжести, и /7П, соответ-
соответствующей силам упругости. Положим, что потенциальная энергия
маятника в вертикальном положении равна нулю. При повороте маят-
маятника на угол ф центры тяжести его частей получают вертикальные
перемещения вверх:
.11 I .,
hc = -^ — y cos ф = Tj- A — cos ф); ,
hA = / — I cos ф = I A — cos ф).
Потенциальная энергия Пх при отклонении на угол ф опреде-
определяется согласно G3.2):
mg(
При повороте маятника на угол ф одна из пружин укорачивается,
а другая удлиняется на величину у, которая с точностью до величин
первого порядка малости равна:
у = Лф.
26* 383
Потенциальная энергия Пи определяется как работа суммарной
реакции пружин Р при перемещении маятника в вертикальное
(нулевое) положение (см. § 72).
По формуле F1.4)
Суммарная потенциальная энергия системы
Я - Я, + Я„ = gl (f-f- m,) A - cos Ф) +
Ограничиваясь малыми величинами второго порядка, имеем
тогда
Найдем производную Я по обобщенной координате ф:
. (в)
Подставив найденные значения (а), (б), (в) в уравнение Лаг-
ранжа A23,1), получим
T(m + 3oti) /2ф = — Г gl [Щ- + тЛ + 2ch2\ ф,
или
Полученное уравнение является дифференциальным уравнением
малых свободных колебаний системы вида A1.2) ф -j- &2Ф = 0. Поэтому
циклическая частота свободных колебаний рассматриваемой системы
Период свободных колебаний этой системы
У ^fj-
Т = ~ = 2л/
Пример 81. Блок, представляющий собой однородный диск радиу-
радиусом /? и .массой т, может вращаться вокруг горизонтальной оси О
(рис. 272, а). Через блок перекинута нерастяжимая нить. Конец А нити
прикреплен к пружине с коэффициентом жесткости с, а к другому
ее концу В прикреплен груз массой тх. Определить движение груза,
384
которое возникает, если в положении покоя системы ему сообщить
начальную скорость v0, направленную вниз. Массами пружины и
нити, а также трением пренебречь; скольжение нити отсутствует.
Решение. Примем за обобщенную координату системы верти-
вертикальное отклонение z груза от положения покоя (рис. 272, б). Рас-
Рассматриваемая система находится под действием консервативных сил —
сил тяжести и силы упругости.
Воспользуемся уравнением Лагранжа в виде A26.1):
d /дТ\ дТ __ дП
dt [dzj dz ~ дг
Кинетическая энергия системы определится как сумма кинети-
кинетической энергии груза, совершающего поступательное движение,
Рис. 272.
и кинетической энергии блока, вращающегося вокруг неподвижной
оси О. Пользуясь формулами F9.1) и F9.2), получим
о v z . mR2
Здесь, v = z; 00 = -^- = -^-; Jo — —g—
Следовательно, Т = -^- mxz2-\-у '"^ч -gj- = — (/«!+ -^-
(a)
F)
Потенциальную энергию системы определим как сумму потен-
потенциальной энергии /7[, соответствующей силам тяжести, и потенциаль-
потенциальной энергии Пи, соответствующей силам упругости.
385
За нулевое положение примем положение покоя системы. Потен-
Потенциальную энергию системы в положении,- определяемом координа-
координатой z, найдем как работу, совершаемую силами тяжести О] и G
и силой упругости Р при переходе системы из рассматриваемого
положения в нулевое.
Для сил тяжести
В положении покоя удлинение пружины от веса груза Ql
1 —^
J ст — с •
При отклонении груза вниз от положения покоя на величину z
удлинение пружины
/« + *•
Потенциальная энергия Пц определится как работа силы Р при
переходе системы в нулевое положение.
По формуле F1.4)
2~= f"
"ii— 2 2 — с 2 *
Суммарная потенциальная энергия
Я = Я, + Я„ = — Gxz -f c/CTz + -^г •
Так как Gj :^ с/ст> то окончательно
П——П- и -з— = cz. (в)
Подставив значения (а), (б), (в) в уравнения Лагранжа, получим
или
Полученное уравнение является дифференциальным уравнением
малых свободных колебаний системы:
Поэтому циклическая частота свободных колебаний системы
6 =
386
Период свободных колебаний системы
¦-?-*/
Решение полученного дифференциального уравнения имеет вид
<И.З):
z — Сх cos kt —|—С2 sin kt.
Дифференцируя это выражение по t, получаем
z — — kCx sin kt -\- kC2 cos kt.
Подставляя в эти уравнения ? = 0, 20 = 0, zQ = v0, находим по-
постоянные интегрирования:
0 = ^; vo=kC2, откуда С2 = -^-.
При найденных значениях С! и С2 уравнение движения груза
получает вид
Пример 82. Определить циклическую частоту и период малых
свободных колебаний груза весом О, лежащего на двухопорной
балке (рис. 273). Расстояния груза от опор балки равны а и Ь.
Незагруженное состояние
состояние покоя
Шиш.
ЛооизВольное положение
при колебании
Рис. 273.
Модуль упругости материала балки равен Е, момент инерции попе-
поперечного сечения — J. Весом балки пренебречь.
Решение. Совместим начало координат О с положением покоя
груза и направим ось у вертикально вниз.
За обобщенную координату системы примем координату груза у.
На груз действуют консервативные силы — сила тяжести G и реак-
реакция упругой балки Р. Циклическую частоту колебаний груза, лежа-
лежащего на упругой балке, определим по уравнению Лагранжа A23.1):
d_ /дТ^\ _ д7_ __ __ дП_
dt \ду ) ду ду
387
Кинетическая энергия груза (материальной точки)
Т =-^ mv2 — -^ ту2.
Найдем необходимые для уравнения Лагранжа производные:
(б)
Потенциальную энергию системы определим как сумму потен-
потенциальной энергии Я[, соответствующей силе тяжести, и потенциаль-
потенциальной энергии Пц, соответствующей силе упругости.
За нулевое положение примем положение покоя груза на балке,
имеющей прогиб /ст. Потенциальную энергию найдем как работу
сил G и Р при перемещении груза, имеющего координату у, в ну-
нулевое положение.
Потенциальная энергия, соответствующая силе тяжести,
Потенциальная энергия, соответствующая силе упругости, опре-
определится при помощи формулы F1.4) как работа силы Р при изме-
изменении координаты груза от у до 0, т. е. при изменении прогиба
балки от /ст + У до /ст:
Пп = у с (/ст + УJ — \ ср„ = с/„у + -i- су2.
Суммарная потенциальная энергия
Я = /7,+Я„ = — Оу + с/сту + усу2.
Так как в состоянии покоя G = с/ст, то
Я — — cv2
Подставив значения (а), (б), (в) в уравнение Лагранжа, получим
ту= ~ су,
или
•• . с п
Полученное уравнение имеет вид A1.2), т. е. является дифферен-
дифференциальным уравнением свободных колебаний груза.
Поэтому циклическая частота свободных колебаний груза, лежа-
лежащего на упругой балке
388
Коэффициент жесткости с для балки с шарнирными опорами и
расположением груза, указанным на рис. 273, известен из курса
сопротивления материалов:
С ~
где Е— модуль упругости материала, a J—момент инерции попе-
поперечного сечения балки.
Подставляя значение с, получаем циклическую частоту малых сво-
свободных колебаний груза:
Период колебаний груза
т = 2я == 2яаЬ
О
iEJg{a-\-b)
Пример 83. Определить циклическую частоту и период малых свобод-
свободных колебаний механической системы, изображенной на рис. 274, состоя-
состоящей из груза А массой
tftj = 1 кг, блока В мас-
массой яг2 = 0,2 кг, радиус
которого г2 = 2 см, обой-
обоймы D массой /га3 = 0,1 кг,
сплошного однородного
диска Е массой т4 = 4 кг,
радиус которого г4=4 см,
и горизонтальной пру-
пружины с ко'эффициентом
жесткости с =10 н/см,
прикрепленной к верти-
вертикальной плоскости. Тре-
Трением, массами нити и пру-
Рис 274 жины пренебречь.
Получить также урав-
уравнение малых свободных
колебаний груза А и определить амплитуду этих колебаний, если
в начальный момент при ? = 0: уо=1 см, а уо = 8 см/сек.
Решение. Рассматриваемая механическая система имеет одну
степень свободы. Примем за обобщенную координату этой системы
вертикальное отклонение у груза А от положения покоя.
1. Вычислим кинетическую энергию каждого из элементов системы
и кинетическую энергию всей системы.
Кинетическая энергия груза А, движущегося поступательно со
скоростью v = у
38Э
Кинетическая энергия блока В, вращающегося вокруг неподвиж-
неподвижной оси О2х
т J2x<4
1 6л — —2"— '
Так как блок представляет собой однородный круглый диск мас-
массой т2, радиус которого г2,
2,
hx = ~2~ •
Учитывая, что у = r2ft>2> т- е- Ы2= > получаем
2 " 2 * 2
Гбл=2"~2~'7Г = ~2~"
Кинетическая энергия обоймы D, движущейся поступательно
* об== g :== 2 '
Кинетическая энергия диска Е, совершающего плоское движение
Так как диск катится без скольжения, то мгновенный центр ско-
скоростей диска' находится в точке соприкасания диска с плоскостью.
Поэтому
Для сплошного однородного круглого диска
Подставляя найденные значения vc, ш4 и УС|, получаем
та.г\у2 3
Кинетическая энергия всей механической системы
т. е.
или
390
— 2 ~^ 4 ' 2 ' 4 4
2. Вычислим потенциальную энергию механической системы как
сумму потенциальной энергии системы в поле сил тяжести Пх и по-
потенциальной энергии деформированной пружины Пп:
Я = /7,4-/7».
Потенциальная энергия системы Пх определяется работой, совер-
совершаемой силой тяжести О груза А, так как центры тяжести блока В,
обоймы D и диска Е на рассматриваемом перемещении системы не
изменяют высоты своего расположения
Потенциальную энергию деформированной пружины Пп в поло-
положении, определяемом координатой у, найдем как работу, совершае-
совершаемую силой упругости пружины Р при переходе системы из рассма-
рассматриваемого положения в положение покоя.
В положении покоя удлинение пружины от веса О груза А
равно
Уст с •
При отклонении груза А вниз от положения покоя на расстоя-
расстояние у удлинение пружины равно (/Ст + У)-
Потенциальная энергия /7ц определится как работа силы Р при
переходе системы из рассматриваемого положения в положение покоя:
Суммарная потенциальная энергия системы
2 '
Так как в состоянии покоя системы
то ~ ° ст"
„ су2
3. Подставим найденные значения Г и Я в уравнение Лагранжа
второго рода:
d 1дТ\ дТ__о _____ Ш
dt \ ду I ду у ду
Так как
?_ = 0.
ду
дП _
391
получаем
откуда
Это выражение есть дифференциальное уравнение малых свобод-
свободных колебаний механической системы:
Циклическая частота этих колебаний
¦/¦
1000
1+0,1+0,1+|-.4
Период колебаний механической системы
4. Пользуясь заданными начальными условиями, найдем уравнение
движения груза А:
у = Cj cos ?/ +¦ С2 sin kt,
у = — kCx sin kt + AC2 cos й^.
При * = 0
Уо = ^!, у0 = йС2 = ф0,
откуда
Подставляя значения Сх и С2, получаем
у = у0 cos kt + — sin kt
или
V = 1 COS 1
,683inll,8^ (см).
Амплитуда колебаний груза А находится по следующей формуле:
а = /МЩ9 =/7^^* =УШ~ 1.21 см.
392
iL
Пример 84. Определить малые свободные колебания подпрыгивания
и продольной качки головного пассажирского вагона электропоезда,
имеющего две тележки (рис. 275), если известно, что масса вагона при нор-
нормальном заполнении его пассажирами равна 31,5 иг, расстояние от центра
тяжести подрессоренной части вагона до вертикальных плоскостей,
проведенных через оси те-
тележек, /1 = /2 = / = 6,65 м,
момент инерции подрессо-
подрессоренной части — кузова ва-
вагона с пассажирами относи-
относительно центральной оси С\,
перпендикулярной к оси
пути /С?=11,5 ¦ 105 кгм2,
а эквивалентная жесткость
двойного рессорного под-
подвешивания каждой тележки
сэ= 1580 кн/м.
Решение. Малые сво-
свободные колебания подпрыги-
подпрыгивания подрессоренной ча-
части вагона характеризуются
уравнением z = fi(t), а малые свободные колебания продольной
качки уравнением ф = /2 (t), где z и ф — обобщенные координаты
рассматриваемой системы.
Кинетическая энергия подрессоренной части вагона определится
по формуле для вычисления кинетической энергии твердого тела
в плоском движении:
Рис 275
Так как vc =
= ф, то
Потенциальную энергию системы найдем как сумму потенциаль-
потенциальной энергии подрессоренной части вагона в поле сил тяжести Пх
и потенциальной энергии деформированных рессор тележек Пп:
Здесь
= П1-\-Пп.
Л, =
Поэтому
393
Так как
\ дг /г=о
ТО
и
Уравнения Лагранжа второго рода для рассматриваемой механи-
механической системы будут следующими:
d 1дТ\ дТ __ дП,
Л I дг ) дг ~ дг'
JL (JL\ — lH.— дП
dt \ дф / дщ Ар
Вычислим значения производных:
дТ • d [дТ\ ¦¦ дТ п дП
дг dt \дг I дг дг
дТ , ¦ d 1дТ\ , ¦¦ дТ п дП п ,.
Подставив эти значения в уравнения Лагранжа, получим
mz — —2c4z; z-\ ^-z = 0; fa)
•Wp — — ^c3P(f, ф-т--^1_ф = 0. (б)
Эти дифференциальные уравнения представляют собой два неза-
независимых .линейных дифференциальных уравнения второго порядка;
каждое из них содержит лишь одну неизвестную функцию.
Уравнение колебательного движения — подпрыгивания подрессо-
подрессоренной части вагона, соответствующее дифференциальному уравне-
уравнению (а), имеет вид
« = C1sin(ft1^ + a1).
Уравнение колебательного движения — продольной качки подрес-
подрессоренной части вагона, соответствующее дифференциальному уравне-
уравнению (б), имеет вид
Здесь Cj, C2, ax и а2 — произвольные постоянные, определяемые
из начальных условий движения.
Вычислим циклические частоты этих колебаний:
2-
1580-
1000
31500
1580.
1000
100'32 « 10 СеК '
ь 1/2^Г"_1/2-1580-1000 . i/TT8~76 — 11 7 сек-i
394
Пример 85. Эллиптический маятник состоит из ползуна массой т1ш
скользящего по гладкой горизонтальной плоскости, и шарика мас-
массой т2, соединенного с ползуном стержнем длиной / (рис. 276).
Найти уравнение движения ползуна и период качаний маятника при
условии, что в начальный момент маятник
отклонен на угол ф0 от вертикали и вся
система находится в состоянии покоя.
Вертикальную ось провести через началь-
начальное положение центра тяжести системы;
массой стержня пренебречь.
Решение. Проведем оси координат
так, как указано на рис. 276, полагая, что
ось Оу проходит через начальное поло-
положение центра тяжести системы.
Положение системы по отношению
к неподвижным осям хОу можно опре-
определить координатой центра тяжести пол-
ползуна х1 и углом поворота маятника ф,
отсчитанным от вертикали, т. е. рассматри-
рассматриваемая система имеет две степени свободы.
Примем координату хх и угол ф за
обобщенные координаты. Тогда зависи-
зависимость координаты х2 центра тяжести шарика от обобщенных коор-
координат будет иметь вид
= х± — / sin ф,
Чтобы воспользоваться уравнениями Лагранжа, выразим кинетиче-
кинетическую энергию системы в зависимости от обобщенных координат и
обобщеных скоростей.
Кинетическая энергия ползуна, движущегося поступательно вдоль
оси Ох
т. 1 2 1 -2
Т\ = -2 miVi =-jtni xi-
Кинетическая энергия шарика, движущегося в вертикальной пло-
плоскости:
1 2 1 " •
Тц = ш2 v2 = у т2 (х\ + у|).
Кинетическая энергия всей системы:
Т = Т{ + Ти = j mA + j m2 (х* + у2).
Продифференцировав по времени равенства (а), получим
х2 = xi — l(p cos ф;
395
Пользуясь этими значениями, получим кинетическую энергию
системы в виде:
Т = -х rtiix\ -\- у тг {х\ — 2lxi(f> cos cp -f- Fq2 cos2 ф -\- l2q>2 sin^ =
1 * 2 1 2*9 * •
= -j (mi -|~ mi) x\ -\- -=- /тег/ ф — /»2/х1ф cos ф.
Так как система находится под действием консервативных сил —
сил тяжести, то воспользуемся уравнениями Лагранжа для консерва-
консервативной системы.
Для этого найдем потенциальную энергию системы, пользуясь
формулой G3.2), приняв плоскость движения ползуна за нулевую
плоскость:
П = — G2y2 = — m^gl cos ф.
Кинетический потенциал системы
L = T — П = j(mi-\-m2) xi + ±m2l%2 —
— m2lxi(f1 cos ф -f- m2gl cos ф.
Так как обобщенная координата xi не входит в выражение кине-
кинетического потенциала L, то она является циклической координатой.
Уравнение Лагранжа второго рода, соответствующее этой коор-
координате, имеет вид A24.2):
dt \ ии-j
Ему соответствует циклический интеграл:
— = С
dxi
т. е.
dL
—— = (тм, -f- т2) Хл — m2l<$ cos ф = С,.
дх\
Это уравнение можно проинтегрировать по времени и получить
второй интеграл уравнения Лагранжа:
(т1 -\- щ) xXl— т%1 sin ф = Cxt -j- C2.
Постоянные интегрирования следует определить по начальным
условиям движения системы. Установим начальные значения обобщен-
обобщенных скоростей и обобщенных координат.
Так как в начальный момент t = 0 система находилась в покое,
то начальные значения обобщенных скоростей
х10 = 0; ф0 = 0.
Угол поворота маятника имеет начальное значение ф0, заданное
в условии.
396
Установим начальное значение координаты xt в выбранной системе
координат. Воспользуемся тем, что в начальный момент центр тяже-
тяжести маятника находился на оси у.
По формуле, определяющей координату центра тяжести, получим
или
ntjXjo + т2 (х10 — I sin ф0) = О,
откуда
Подставляя начальные значения х10 = 0 и фо = О в первый интеграл,
находим:
С1 = 0.
Подставляя значения f = 0, лгю =—тт—/sincjpg и ф = ф0 во вто-
второй интеграл, получаем:
(«! + /и2) щ "^т2 Isin Фо — m2l sin Фо = С2>
откуда
С2 = 0.
При этих значениях Сг и С2 второй интеграл принимает вид:
х, = г^—/sinm. A)
Уравнение A) представляет собой одно из двух уравнений движе-
движения системы. При помощи этого уравнения найдем координату центра
тяжести маятника в любой момент времени t:
ntyXi -\- т2лг2 тхХу -f- т2 {ху — / sin ф)
с
l sin ф = Xi - Xl = °'
т е. центр тяжести системы движется по оси у.
Это обусловлено отсутствием горизонтальных внешних сил и
начальной скорости центра масс системы по оси х.
Воспользуемся уравнением Лагранжа, соответствующим коорди-
координате ф, которая не является циклической.
Находим производные:
—— = т,/2<р — ni2lxl cos ф;
— = m2lxi(p sinф — m2gl sin ф = mj. (лгхф — g) sin ф.
27 А. А, Яблонский 397
Продифференцировав по времени первое уравнение движения
системы, получим
хх = ——— /ф cos ф.
Пользуясь этим выражением и полагая для малых углов
i ф, COS ф г=Ь 1,
имеем:
dl 2. m\l2 .
d I dL
d. I dL\_
dt \ d<f }
= m ( Щ^_ t ¦ 2 _
После подстановки этих выражений уравнение Лагранжа примет
вид
= 0.
Оставляя в дифференциальном уравнении лишь величины первого»
порядка малости, получаем:
ИЛИ
Полученное уравнение, представляет собой дифференциальное
уравнение гармонических колебаний:
Решение этого дифференциального уравнения имеет вид A1.3):
ф = С3 cos kt -f- C4 sin W.
Продифференцировав это выражение по t, получим
Ф = — C3k sin kt-\-CAk cos kt.
Подставив в эти уравнения начальные условия: t — 0; ф = ф0>
<ро = О, найдем:
C3 = <ft). С4 = 0.
Таким образом, второе уравнение движения системы, т. е. урав-
уравнение малых колебаний маятника, примет вид:
ф = ф0СО5^, B)
где частота колебаний маятника
*-/!
га,
398
Период колебаний
При тх~^>т2 перемещения ползуна, определяемые уравнением A),
малы, а период колебаний маятника приближается к периоду коле-
колебаний Т* математического маятника длиной /:
Г
_*./<
Уменьшая массу ползуна т1 без изменения длины маятника, можно
уменьшить период его колебаний Т.
Рассмотренная механическая система называется эллиптическим
маятником потому, что при движении ползуна по оси х, а центра
тяжести системы по оси у, центр шарика движется по эллипсу.
Вопросы для самоконтроля
1. Функцией каких аргументов является вектор скорости точки, принад-
принадлежащей механической системе с s степенями свободы?
2. Чему равна частная производная от вектора скорости точки системы
по какой-либо обобщенной скорости?
3. Функцией каких аргументов является кинетическая энергия системы,
подчиненной голономным нестационарным связям?
4. Какой вид имеют уравнения Лагранжа второго рода? Чему равно
число этих уравнений для каждой механической системы?
5. Какой вид принимают уравнения Лагранжа в случае, когда на си-
систему действуют одновременно консервативные и неконсервативные силы?
6. Что представляет собой функция Лагранжа, или кинетический по-
потенциал?
7 Какой вид имеют уравнения Лагранжа второго рода для консерва-
консервативной системы?
8. В зависимости от каких переменных величин должна быть выражена
кинетическая энергия механической системы при составлении уравнений
Лагранжа?
9. Как определяется потенциальная энергия механической системы,
находящейся под действием сил упругости?
10. Какие обобщенные координаты называют циклическими и какой вид
имеют циклические интегралы?
27*
Механические величины и единицы их изме
400
рения в системах СИ (МКС), СГС и МКГСС
ПРИЛОЖЕНИЯ.
Таблица 1
квадратный сантиметр
квадратный метр
40L
Таблица 2
Соотношения между единицами механических величин
Название ме-
механической
величины
Масса
Сила
Работа
Мощность
Основные единицы измерения и соотношения между единицами
различных систем
1 килограмм (кг) = 0,102 т. е. м.
1 техническая единица массы (т. е. м.) = 9,81 кг
1 ньютон (и) = Ю5 дан = 0,102 кгс
1 килограмм — сила (кгс) = 9,81 к
1 джоуль (дж) = 107 эргов (эрг) = 0,102 кгс ¦ м
1 килограмм —сила —метр (кгс -м) = 9,81 дж
I ватт-час (em • ч) = 3600 еда • сек = 3600 дж
1 киловатт-час (кет ¦ ч) = 36 • 105 дж
1 ватт (вт) — I дж/сек = 107 эрг/сек = 0,102 кгс • м/сек
1 кгс ¦ м/сек = 9,81 вт
1 киловатт (кет) = 103 в/л = 102 кгс ¦ м/сек = 1,36 л. с.
1 лошадиная сила (л. с) = 75 кгс ¦ м/сек = 736 вт = 0,736 кв/и
•402
ИМЕННОЙ И ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Амплитуда
— вынужденных колебаний 51, 65
— затухающих колебаний 43
—' свободных колебаний 31
Апериодическое движение 44
Афелий 217
Бернулли Даниил 6
Бернулли Иван 6
Вектор главный
— внешних сил 126
— внутренних сил 99
— количества движения 141
— сил инерции 305
Виртуальные перемещения 323
Гагарин Ю. А. 8
Галилей 6, 8
Герман Яков 6, 299
Гелиоцентрическая система осей ко-
координат 11
Гироскоп 261
— с двумя степенями свободы 266
— с тремя степенями свободы 263
Гироскопический
— момент 268
— эффект 269
Главный момент внутренних сил си-
системы 100
Главные оси инерции 113
Грамм массы 10
Гюйгенс 5, 230
Даламбер 6, 299
Декарт 5, 167
Декремент 43
— логарифмический 44
Джоуль 173
Дина 10
Динамика 5
— относительного движения матери-
материальной точки 83
— свободной материальной точки 14
— тела переменной массы 148
Динамические реакции подшипников.
310
Жуковский Н. Е. 7
Задача динамики вторая 17
— первая 16
Закон
— инерции 8
— независимости действия сил 8
— площадей 212
— пропорциональности силы и уско-
ускорения 8
— равенства действия н противодей-
противодействия 8
Закон сохранения
— движения центра масс 127
— кинетического момента 163
—• количества движения 142
— механической энергии 210
Законы Кеплера 218
Импульс
—¦ равнодействующей 137
— силы 135
— ударный 277
— элементарный 135
Инертность 9
Инерциальные системы отсчета 11, 87*
Искусственные спутники Земли 218.
Кавендиш 218
Карно 287
Кениг 189
Кеплер 218
Киловатт 174
Килограммометр 174
Кинетический потенциал 372
Классификация сил 99
Ковалевская С. В. 261
Колебания материальной точки
•— вынужденные 47
— затухающие 39
— свободные 29
403-
Колесо ведомое 128
— ведущее 128
Количество движения 137, 141
Коэффициент
— динамичности 52, 65
— жесткости 30
— затухания 44
— трения качения 188
Критерий устойчивого состояния по-
покоя системы 364
Крылов А. Н. 5, 8
-Лагранж 6
Лагранжа функция 373
Лаплас 248
Лейбниц 167
Лошадиная сила 174
Ляпунов А. М. 7, 305
Малые колебания консервативной си-
системы
— с двумя степенями свободы 393,
395
— с одной степенью свободы 382,
387, 392
Масса 9
Маятник
— математический 78
¦— физический 228
— эллиптический 395
Меры механического движения 166
Механика
— классическая 6
— релятивистская 6
Механический коэффициент полез-
полезного действия машины 194
Мещерский И. В. 7, 148
Множитель Лагранжа 74
Момент
— главный сил инерции 305
— инерции 102
— кинетической системы 161
— кинетический твердого тела 223
— центробежный 112
Мощность 174
Несвободная материальная точка 70
Неуравновешиваемость динамическая
313
Ньютон 5
Ньютон (единица силы) 10
Обобщенная координата 321
Определение моментов инерции
— способом качаний 233
— способом крутильных колебаний
234
— способом падающего груза 236
Остроградский М. В. 7
Ось
— инерции главная 113
— инерции главная центральная 114
— качаний физического маятника 230
— привеса физического маятника 228
Отклонение падающих тел к восто-
востоку 89
Относительный покой материальной
точки 88
Падение тела
— без учета сопротивления воздуха
18
— с учетом сопротивления воздуха
22
Перемещение
— возможное 323
— элементарное 171
Перигелий 217
Период
— вынужденных колебаний 50, 64
— затухающих колебаний 43
— свободных колебаний 32
Период качаний
— математического маятника 79
— физического маятника 231
Поле
— потенциальное 203
— силовое 203
— силы тяжести 207
— стационарное 203
— центральной силы 209
Полиспаст 329
Постоянная тяготения 218
Постоянные интегрирования 18
Потенциальная энергия 204
Правило механики, золотое 328
Пресс
— винтовой 330
— клиновый 329
— стержневой 331
Прецессия оси гироскопа 266
Приведение сил инерции 305
Приведенная длина физического ма-
маятника 229
Принцип
— возможных перемещений 325
— Германа — Эйлера — Даламбера
299, 304
— относительности классической ме-
механики 88
— освобождаемости от связей 304
Пуассон 6
Работа
— внутренних сил в твердом теле
183
— постоянной силы 168
— равнодействующей силы 171
-404
— сил в потенциальном поле 204,
205
— сил, приложенных к вращающе-
вращающемуся твердому телу 185
— сил, приложенных к твердому те-
телу, движущемуся поступательно
184
— силы тяготения 174
— силы тяжести 174
— силы упругости 175
— силы элементарная 169
Радиус инерции 103
Реакции
— динамические подшипников при
вращении твердого тела 310
— идеальных связей 324
Риттера способ 335
Связь
— голономная 71
— двусторонняя (удерживающая) 71
— идеальная 324
— неголономная 71
— нестационарная 70
Связь
— односторонняя (неудерживающая)
71
— стационарная 70
— с трением 74
Сдвиг фазы колебаний 64
Сила
— возмущающая гармоническая 47
— восстанавливающая 29
— задаваемая 72
— инерции 12
— инерции вращательная 13
— инерции касательная 12
— инерции кориолисова 84
— инерции нормальная 12
— инерции переносная 84
— инерции центробежная 13
— консервативная 203
— обобщенная 353
— полезного сопротивления 194
— тяжести 88
— ударная 275
— упругости 175
— центральная 156
Системы механических единиц изме-
измерения 10
Скамейка Жуковского 228
Скорость
— обобщенная 370
— относительная присоединяющейся
массы 150
Сопротивление
— вредное 194
— качению 187
— полезное 194
Сопротивление пропорциональное
скорости 40
Состояние покоя
— безразличное 364
— неустойчивое 364
— устойчивое 364
Стевин 6
Твердое тело 101
Тело переменной массы 148
Т. е. м. (техническая единица массы)
10
Теорема
— импульсов 139, 143
— импульсов при ударе 276
— Карно 287
— Кенига 190
— Лагранжа — Дирихле 365
— о движении центра масс 125
— о моментах инерции относительно
параллельных осей 104
— об изменении кинетического мо-
момента механической системы 162
Теорема
— об изменении кинетической энер-
энергии материальной точки и механи-
механической системы 177, 193
— об изменении количества движе-
движения материальной точки и механи-
механической системы 137, 141
— об изменении момента количества
движения материальной точки \55
— Резаля 165
Теоремы Ляпунова 365
Теория удара 275
Траектории искусственных спутников
Земли 218
Удар
— неупругий 281
— прямой, центральный 281
— упругий 281
Уравнение
— Бине 211
— Мещерского 150
— общее динамики 341
— основное динамики материальной
точки 9
Уравнения движения естественные
материальной точки 15
Уравнения
— Лагранжа второго рода 369
— Эйлера динамические 259
Условия равновесия консервативной
системы сил 361
Устойчивость состояния покоя 365
Уравновешивание сил инерции 314
Фаза колебаний
— вынужденных 48
405
— вынужденных при наличии сопро-
сопротивления 64
— начальная 31
— свободных колебаний 31
Физический маятник 228
Формула
— Виллиса 379
— Циолковского 152
Функция
— Лагранжа 373
— силовая 203
Фурье 6
'Центр качаний физического маятни-
маятника 230
Центр масс 100
Центр удара 294
Центральный эллипсоид инерции 114
Циклический интеграл 374
Циклические координаты 374
Циолковский К. Э. 7, 152
¦Чаплыгин С. А. 7
Частота циклическая
— вынужденных колебаний 50
— затухающих колебаний 42
— изменения возмущающей силы 48
— свободных колебаний 32
Эйлер 6
Эйнштейн 6
Эквипотенциальная поверхность 206
Эллипсоид инерции 112
Энгельс 167, J68
Энергия
— кинетическая материальной точки
167
— кинетическая механической систе-
системы 189
— кинетическая твердого тела 190
— механическая полная 210
— потенциальная 204
— потерянная при неупругом ударе
285
Явление
— биений 54
— резонанса 55
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
Глава I. Введение в динамику
§ 1. Предмет динамики. Краткий исторический обзор развития динамики 5
§ 2. Основные законы механики (законы Галилея—Ньютона) .... 8
Вопросы для самоконтроля 11
Глава П. Динамика свободной материальной точки
§ 3. Дифференциальные уравнения движения свободной материальной
точки в декартовых координатах 14
§ 4. Естественные уравнения движения материальной точки 15
/§ 5. Две основные задачи динамики точки 16
§ 6. Свободное падение тела без учета сопротивления воздуха .... 1^
§ 7. Движение тела, брошенного под углом к горизонту, без учета со-
сопротивления воздуха ..... 19
§ 8. Движение падающего тела с учетом сопротивления воздуха ... 22
§ 9. Пример интегрирования дифференциальных уравнений движения
точки для случая силы, зависящей от времени 24
§ 10. Пример интегрирования дифференциального уравнения движения
точки для случая силы, зависящей от положения точки 26
Вопросы для самоконтроля 29
Глава III. Колебательное движение материальной точки
§ 11. Виды колебательных движений материальной точки. Свободные ко-
колебания материальной точки 29
§ 12. Свободные колебания груза, подвешенного к пружине 33
§ 13. Примеры на свободные колебания 35
§ 14. Затухающие колебания материальной точки 39
§ 15. Апериодическое движение точки 44
§ 16. Вынужденные колебания материальной точки 47
§ 17. Явление биений 54
§ 18. Явление резонанса 55
§ 19. Примеры на вынужденные колебания 56
§ 20. Влияние сопротивления движению на вынужденные колебания . . 60
Вопросы для самоконтроля . . . . . . Ь9
Глава IV. Динамика несвободной материальной точки
§ 21. Несвободная материальная точка. Связи и динамические реакции
связей 70
§ 22. Дифференциальные уравнения движения материальной точки по
заданной неподвижной поверхности 73
§ 23. Дифференциальные уравнения движения материальной точки по
заданной плоской неподвижной линии 75
407
Стр.
¦§ 24. Математический маятник и его малые колебания 78
§ 25. Примеры на движение несвободной материальной точка .... 80
Вопросы для самоконтроля . 82
Глава V. Динамика относительного движения материальной точки
§ 26. Дифференциальные уравнения относительного движения материаль-
материальной точки. Переносная и кориолисова силы инерции 83
§ 27. Принцип относительности классической механики. Инерциальные
системы отсчета 87
§ 28. Случай относительного покоя. Сила тяжести .88
•§ 29. Отклонение падающих тел к востоку 89
§ 30. Примеры на относительное движение материальной точки .... 92
Вопросы для самоконтроля 98
Глава VI. Система материальных точек. Твердое тело.
Моменты инерции твердого тела
§ 31. Силы, действующие на точки механической системы 98
§ 32. Центр масс системы материальных точек и его координаты . . . 100
§ 33. Твердое тело 101
§ 34. Моменты инерции твердого тела. Радиус инерции 102
$ 35. Теорема о моментах инерции твердого тела относительно параллель-
параллельных осей (теорема Штейнера) 104
§ 36. Вычисление моментов инерции однородных тел относительно осей,
проходящих через их центры тяжести и являющихся осями симметрии 105
§ 37. Формула для вычисления момента инерции твердого тела относи-
относительно любой оси, проходящей через начало координат. Центро-
Центробежные моменты инерции Ш
§ 38. Эллипсоид инерции. Главные оси и главные моменты инерции . . .112
§ 39. Свойства главных и главных центральных осей инерции 114
§ 40. Вычисление моментов инерции твердого тела относительно произ-
произвольных осей 117
§ 41. Примеры вычисления моментов инерции однородных тел относи-
относительно произвольных осей 118
Вопросы для самоконтроля 124
Глава VII. Теорема о движении центра масс механической системы
§ 42. Дифференциальные уравнения движения механической системы . . 124
§ 43. Теорема о движении центра масс механической системы 125
§ 44. Иллюстрация теоремы о движении центра масс механической
системы 127
§ 45. Примеры применения теоремы о движении центра масс механиче-
механической системы , 129
Вопросы для самоконтроля 134
Глава VIII. Теоремы об изменении количества движения
материальной точки и количества движения механической системы
§ 46. Импульс силы и его проекции на координатные оси . 135
§ 47. Импульс равнодействующей 137
§ 48. Теорема об изменении количества движения материальной точки 137
§ 49. Примеры применения теоремы об изменении количества движения
материальной точки 139
§ 50. Теорема об изменении количества движения механической системы 141
§ 51. Примеры применения теоремы об изменении количества движения
механической системы . 144
§ 52. Понятие о теле переменной массы. Уравнение Мещерского. Форму-
Формула Циолковского 148
Вопросы для самоконтроля 153
408
Стр.
Глава IX. Теоремы об изменении момента количества движения
материальной точки и об изменении кинетического момента
механической системы
§ 53. Моменты количества движения материальной точки относительно
центра и относительно оси ¦ .... 153
§ 54. Теорема об изменении момента количества движения материаль-
материальной точки 155
§ 55. Кинетический момент механической системы относительно центра
и оси 161
§ 56. Теорема об изменении кинетического момента механической системы 162
§ 57. Кинематическая интерпретация теоремы об изменении кинетического
момента механической системы относительно центра. Теорема Разаля 165
Вопросы для самоконтроля 166
Глава X. Работа. Теорема об изменении кинетической энергии
§ 58. Две меры механического движения 166
§ 59. Работа постоянной силы 168
§ 68. Элементарная работа. Работа силы на конечном пути. Теоремы о
работе силы. Иозбражение работы в виде площади 169
§ 61. Работа силы тяжести, силы упругости и силы тяготения .... 174
§ 62. Теорема об изменении кинетической энергии материальной точки 177
§ 63. Теорема об изменении кинетической энергии материальной точки
в относительном движении 179
§ 64. Примеры применения теоремы об изменении кинетической энергии
материальной точки 180
§ 65. Работа сил, приложенных к твердому телу 183
§ 66. Сопротивление качению 187
§ 67. Теорема о кинетической энергии механической системы в общем
случае ее движения (теорема Кенига) 189
§ 68. Кинетическая энергия твердого тела 190
§ 69. Теорема об изменении кинетической энергии механической системы 193
§ 79. Механический коэффициент полезного действия машины .... 194
§ 71. Примеры применения теоремы об изменении кинетической энергии
механической системы 195
Вопросы для самоконтроля 202
Глава XI. Потенциальное силовое поле
§ 72. Силовое поле. Потенциальное силовое поле и силовая функция
Потенциальная энергия 203
§ 73. Примеры потенциальных силовых полей 207
§ 74. Закон сохранения механической энергии 210
§ 75. Движение точки под действием центральной силы. Закон площадей.
Уравнение Бине 211
§ 76. Поле ньютоновой силы притяжения. Вид траектории точки в зави-
зависимости от начальных условий движения. Законы Кеплера . . . 214
§ 77. Понятие о траекториях искусственных спутников Земли 218
Вопросы для самоконтроля 221
Глава XII. Динамика поступательного и вращательного движений
твердого тела
§ 78. Дифференциальные уравнения поступательного движения твердого
тела 222
§ 79. Дифференциальное уравнение вращения твердого тела вокруг
неподвижной оси ... 223
§ 80. Сохранение кинетического момента вращающейся системы. Ска-
Скамейка Жуковского 227
409
Стр.
§ 81. Физический маятник и его малые колебания 228
§ 82. Опытное определение моментов инерции тел 233
§ 83. Примеры на применение теоремы об изменении кинетического мо-
момента механической системы 238
Вопросы для самоконтроля 241
Глава XIII. Динамика плоского движения твердого тела
§ 84. Теорема о зависимости между кинетическими моментами механиче-
механической системы относительно неподвижного центра и относительно
центра масс системы 242'
§ 85. Теорема об изменении кинетического момента механической систе-
системы в относительном движении по отношению к центру масс . . . 247
§ 86. Дифференциальные уравнения плоского движения твердого тела 249
§ 87. Примеры на плоское движение твердого тела 251
Вопросы для самоконтроля 257
Глава XIV. Динамика сферического и свободного движений
твердого тела
§ 88. Кинетические моменты твердого тела относительно неподвижной
точки и координатных осей при его сферическом движении .... 257
§ 89. Дифференциальные уравнения сферического движения твердого
тела. (Динамические уравнения Эйлера) 259
§ 90. Понятие о гироскопе. Кинетический момент быстро вращающегося
гироскопа . 261
§ 91. Гироскоп с тремя степенями свободы ....... .... 263
§ 92. Случай регулярной прецессии 265
§ 93. Гироскоп с двумя степенями свободы. Гироскопический момент . . 266
§ 94. Примеры гироскопических явлений "... 270
§ 95. Дифференциальные уравнения движения свободного твердого тела 272
Вопросы для самоконтроля 274
Глава XV. Теория удара
§ 96. Явление удара . . . - 275
§ 97. Действие ударной силы на материальную точку 275
§ 98. Теорема об изменении количества движения механической систе-
системы при ударе . . 276
§ 99. Удар шара о неподвижную поверхность. Коэффициент восстано-
восстановления при ударе 278
§ 100. Прямой центральный удар двух тел . /¦ 281
§ 101. Потеря кинетической энергии при ударе двух тел. Теорема Карно 285
§ 102. Теорема об изменении кинетического момента механической си-
системы при ударе 288
§ 103. Действие ударных сил на .твердое тело, вращающееся вокруг
неподвижной оси, и на твердое тело, совершающее плоское дви-
движение . 289
§ 104. Центр удара твердого тела, вращающегося вокруг, неподвижной оси 290
§ 105. Примеры действия ударных сил 294
Вопросы для самоконтроля ..... 299
Г лапа XVI. Принцип Германа — Эйлера — Даламбера
для материальной точки и для механической системы
§ 106. Принцип Германа — Эйлера — Даламбера для материальной точки 29&
§ 107. Примеры применения принципа Германа — Эйлера — Даламбера 300
§ 108. Принцип Германа — Эйлера — Даламбера для несвободной меха-
механической системы ... ... 304
§ 109. Приведение сил инерции точек твердого тела к простейшему виду 305
410
Стр.
§ 110. Определение динамических реакций подшипников при вращении
твердого тела вокруг неподвижной оси. Вращение твердого тела
вокруг его главной центральной оси инерции 310
§ 111. Примеры применения принципа Германа — Эйлера — Даламбера
для механической системы 314
Вопросы для самоконтроля 320
Глава XVII. Принцип возможных перемещений
§ 112. Обобщенные координаты и число степеней свободы 321
§ 113. Возможные (виртуальные) перемещения механической системы
Идеальные связи 323
§ 114. Принцип возможных перемещений , . 325
§ 115. Применение принципа возможных перемещений к простейшим
машинам . . ' 327
§ 116. Примеры применения принципа возможных перемещений к опре-
определению реакций связей 332
Вопросы для самоконтроля 343
Глава XVIII. Общее уравнение динамики
§ 117. Принцип возможных перемещений в случае движения системы.
Общее уравнение динамики 343
§ 118. Примеры применения общего уравнения динамики 345
§ 119. Обобщенные силы и примеры их вычисления 353
§ 120. Выражение обобщенных сил через проекции сил на неподвижные
оси декартовых координат. Случай сил, имеющих потенциал . . . 357
§ 121. Общее уравнение динамики в обобщенных силах. Условия равно-
равновесия сил 359
§ 122. Примеры на применение условия равновесия консервативной си-
системы сил 361
§ 123. Понятие об устойчивости состояния покоя механической системы
с одной степенью свободы в консервативном силовом поле . . . 364
§ 124. Примеры на определение условий устойчивости состояния покоя
механической системы с одной степенью свободы 366
Вопросы для самоконтроля 369
Глава XIX. Дифференциальные уравнения движения
механической системы в обобщенных координатах
§ 125. Уравнения Лагранжа второго рода 369
§ 126. Кинетический потенциал. Уравнения Лагранжа второго рода для
консервативной системы 372
§ 127. Циклические координаты, циклические интегралы 374
§ 128. Примеры применения уравнений Лагранжа второго рода . . . 375
Вопросы для самоконтроля ' 399
Приложения
Таблица 1.' Механические величины и единицы их измерения в системах
СИ(МКС), СГС и МКГСС .401
Таблица 2. Соотношения между единицами механических величин 402
Именной и предметный указатель 403