/













































































































































































































































































































































































































Текст
м. г. чиликин
В. И. КЛЮЧЕВ
А. С. САНДЛЕР
ТЕОРИЯ
АВТОМАТИЗИРОВАННОГО
ЭЛЕКТРОПРИВОДА
Допущено Министерством высшего и среднего
специального образования СССР в качестве
учебного пособия для студентов вузов, обучаю-
щихся по специальности «Электропривод и
автоматизация промышленных установок»
МОСКВА «ЭНЕРГИЯ» 1979
Сканировал Кириллов Р.С.
УГГУ
Екатеринбург
2009г
ЭГП-05-1
С/2Д.0М
БЭД-Здеш
4-61
ЭДК-ба-8Э=52 (075.8)
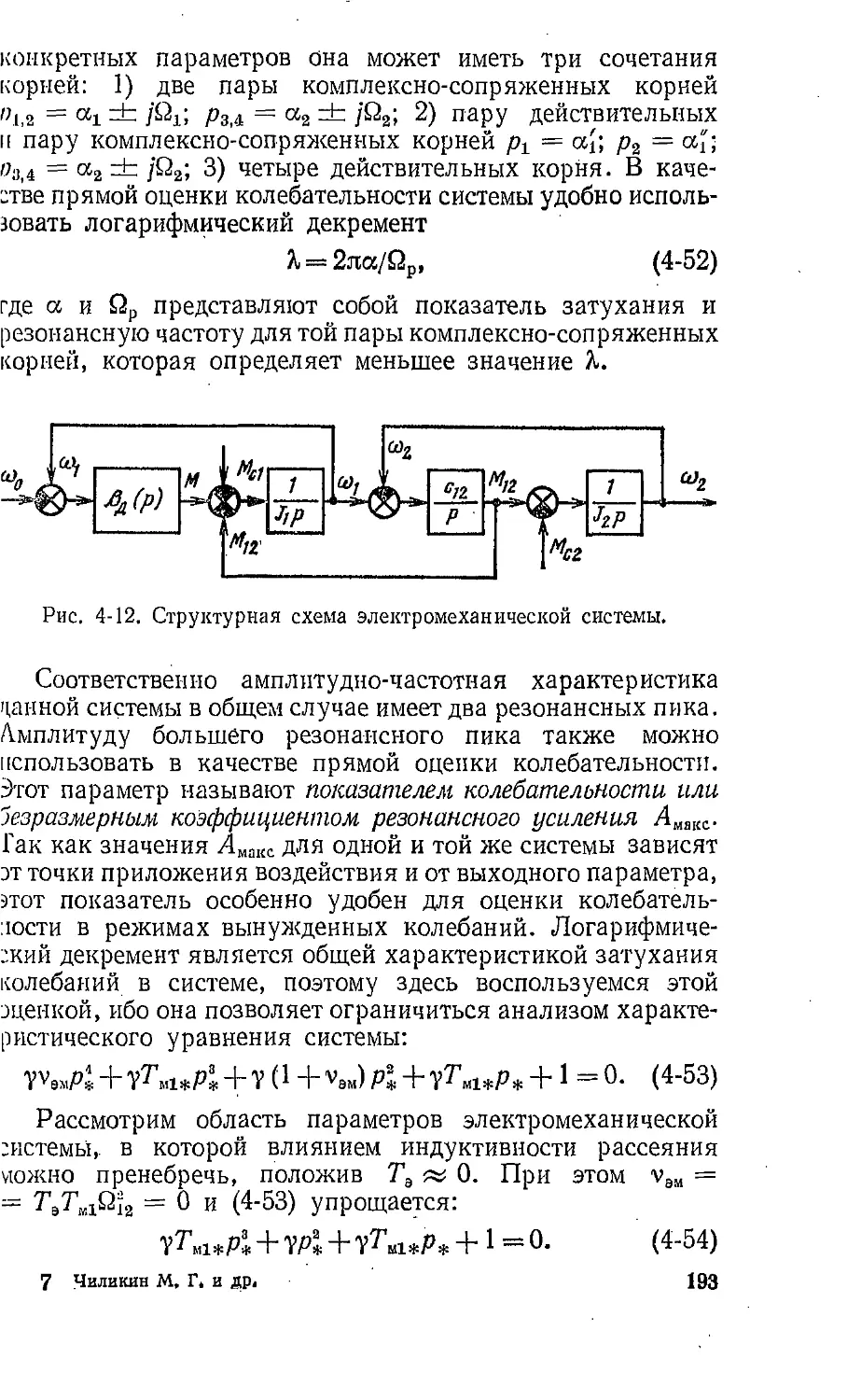
Чиликин М. Г. и др.
4-61 Теория автоматизированного электропривода:
Учеб, пособие для вузов/Чиликин М. Г., Клю-
чей В. И., Сандлер А. С. — М.: Энергия, 1979.—
616 с., ил.
В пер.: 1 р. 50 к.
В книге излагаются общие вопросы теории автоматизированного
электропривода. Рассматриваются статические и динамические свЬйства
разомкнутых электромеханических систем, а также вопросы параметри-
ческого и автоматического регулирования нх основных координат и
выбора двигателей.
Книга предназначена в качестве учебного пособия для студентов
специальности «Электропривод и автоматизация промышленных уста-
новок». Она может быть также полезна широкому кругу инженерно-
технических работников, занятых проектированием, исследованием, на-
ладкой и эксплуатацией автоматизированных электроприводов.
30307-014
ч-----------
051(01)-79
93-79.
2302030000
ББК 31.291
6П2.1.081
..©.„-.Изда-г-ельетво «Энергия», 1979 г.
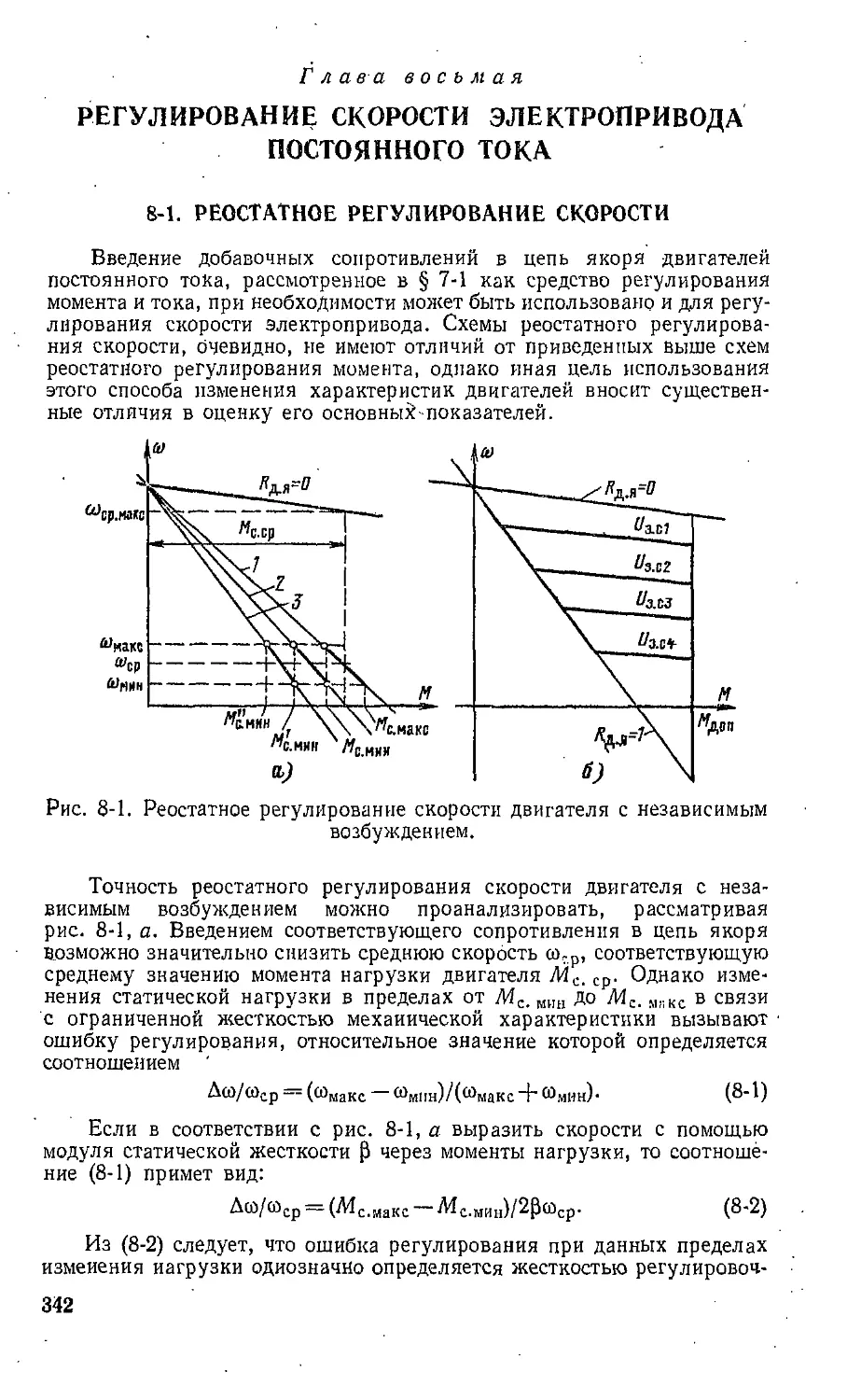
ПРЕДИСЛОВИЕ
Курс «Теория электропривода», созданный около полу-
века назад, до настоящего времени занимает в подготовке
инженеров по специальности «Электропривод и автомати-
зация промышленных установок» одно из главных мест.
Однако в теории и практике электропривода в последние
годы произошли качественные изменения, которые вызвали
необходимость серьезной переработки не только содержа-
ния этого курса, но и его методических основ. В процессе
развития техники возросла роль замкнутых систем элек-
тропривода; повысились требования к точности регулиро-
вания переменных и воспроизведения заданных законов
движения; в связи с интенсификацией рабочих режимов
усилилось влияние динамических свойств электропривода
па производительность машин и качество технологических
процессов. Как следствие, возникла задача значительного
расширения в курсе вопросов динамики электромеханиче-
ских систем на базе широкого использования методов
теории автоматического управления.
Эта задача уже нашла отражение в новой программе
курса «Теория электропривода», утвержденной Министер-
ством высшего и среднего специального образования СССР
в 1975 г., а данная книга представляет собой первый опыт
создания учебного пособия по курсу с учетом изложенных
выше замечаний. Наряду с традиционными вопросами
теории электропривода в книге существенно расширено
рассмотрение динамических свойств разомкнутых и зам-
кнутых электромеханических систем как с жесткими, так
п с упругими механическими связями. Изложение материала
базируется на широком использовании обобщенной теории
динамических процессов электромеханического преобразо-
вания энергии и математического аппарата теории автома-
тического регулирования. Таким образом, в книге отра-
жено основное содержание новой программы курса, при-
’t* 3
чем значительное внимание уделено освещению нового
материала.
При работе над данной книгой авторы считали важной
задачей дать общее представление об основном содержании
современной теории электропривода как технической науки,
поэтому ряд вопросов теории упругих электромеханиче-
ских систем и регулирования координат электропривода
в книге изложен полнее, чем предусмотрено программой.
Эти материалы могут быть полезными при курсовом проек-
тировании и выполнении научно-исследовательских работ,
а также в процессе дальнейшей отработки программы
курса.
В книге § 4-2, 6-1 — 6-3, 7-6, 8-1 и 8-2 написаны
М. Г. Чиликиным; главы 1—5 (кроме § 4-2), 7 (кроме § 7-1
и 7-6), 8 (кроме § 8-1 и 8-2), 11 и 12, а также § 6-4—6-6,
9-6, 13-1 и 13-2 — В. И. Ключевым; главы 9 (кроме § 9-6)
10и 14 (кроме§ 14-1 и 14-5), атакже§7-1 и 13-3 — А. С.Сэн-
длером. Редактором А. О. Горновым написаны § 14-1 и 14-5.
В процессе постановки одноименного курса и работы
над книгой авторы постоянно опирались на неоценимую
практическую помощь своих коллег — сотрудников ка-
федры автоматизированного электропривода Московского
энергетического института, за которую выражают глубо-
кую признательность.
Авторы приносят также искреннюю благодарность ре-
цензентам— профессорам Ю. А. Борцову, А. В. Баша-
рину и А. И. Зайцеву за полезные советы, которые содей-
ствовали улучшению содержания книги, а также канд.
техн, наук А. О. Горнову, взявшему на себя большой труд
по редактированию рукописи.
Авторы будут признательны за все замечания по содер-
жанию книги, которые следует направлять по адресу.
113114, Москва, М-114, Шлюзовая наб., 10, издательство
«Энергия».
Авторы
ВВЕДЕНИЕ
Эффективность средств производства, которыми распо-
лагает человеческое общество, в значительной степени опре-
деляется совершенством способов получения энергии, необ-
ходимой для выполнения механической работы в производ-
ственных процессах. В свое время создание паровой машины
взамен гидравлического двигателя послужило мощным
толчком к развитию производства в XIX в., названном ве-
ком пара. Наш XX в. получил название века электричества
в первую очередь потому, что основным источником меха-
нической энергии в нем стал более совершенный электри-
ческий двигатель и основным видом привода рабочих
машин в промышленном производстве является электриче-
ский привод.
Электрический привод рождался в недрах века пара
и прошел большой путь от первого электропривода, пред-
назначенного для перемещения небольшого катера, осу-
ществленного в 1838 г. академиком Б. С. Якоби, до совре-
менного автоматизированного электропривода, приводя-
щего в движение бесчисленное множество рабочих машин
и механизмов в промышленности, на транспорте, в сель-
ском хозяйстве и в бытовой технике и автоматически
управляющего их технологическими процессами. Благо-
даря возможности изготовления в широком диапазоне
Мощностей — от долей ватта до десятков тысяч киловатт —
современный электропривод применяется в виде одиночного
(индивидуального) электропривода каждого механизма,
что упрощает кинематические цепи машин и облегчает
.задачу автоматического управления их рабочим процессом.
В автоматизированном электроприводе нашли применение
II получили дальнейшее развитие основные достижения
современной техники управления — от новейших аппара-
тов до полупроводниковых приборов и управляющих
Вычислительных машин.
Б
Электрический привод представляет собой электроме-
ханическое устройство, предназначенное для приведения
в движение рабочего органа машины и управления ее тех-
нологическим процессом. Он состоит из трех частей: элек-
трического двигателя, осуществляющего электромеханиче-
ское преобразование энергии, механической части, пере-
дающей механическую энергию рабочему органу машины,
и системы управления, обеспечивающей оптимальное по
тем или иным критериям управление технологическим про-
цессом. Характеристики двигателя и возможности системы
управления определяют производительность .механизма,
точность выполнения технологических операций, динамиче-
ские нагрузки механического оборудования и ряд других
факторов. С другой стороны, нагрузка механической части
привода, условия движения ее связанных масс, точность
передач и т. п. оказывают влияние на условия работы дви-
гателя и системы управления, поэтому электрические
и механические элементы электропривода образуют единую
электромеханическую систему, составные части которой
находятся в тесном взаимодействии.
' Свойства электромеханической системы оказывают ре-
шающее влияние на важнейшие показатели рабочей ма-
шины и в значительной мере определяют качество и эконо-
мическую эффективность технологических процессов. Раз-
витие автоматизированного электропривода ведет к совер-
шенствованию конструкций машин, к коренным изменениям
технологических процессов, к дальнейшему прогрессу во
всех отраслях народного хозяйства/ поэтому теория элек-
^тропфйвбда — техническая наука, изучающая общие свой-
ства электромеханических систем, законы управления их
движением и способы синтеза таких систем по заданным
показателям — имеет важнейшее практическое значение.
Теория электропривода как самостоятельная наука
родилась в нашей стране. Началом ее зарождения можно
считать 1880 г., когда в журнале «Электричество» была
опубликована статья Д. А. Лачинова «Электромеханиче-
ская работа», в которой были обоснованы преимущества
электрического распределения механической энергии и
доказана целесообразность одиночного (индивидуального)
электропривода в сравнении с трансмиссионным, а также
впервые исследован ряд важных вопросов электропривода.
Первым систематизированным трудом, в котором с большой
полнотой рассматривались вопросы теории электропривода,
была изданная в 1925 г. книга С. А. Ринкевича «Электри-
6
[ИвСКое распределение механической энергии». Дальнейшее
ИИЯНП'ГПе теория электропривода получила в трудах В. К.
Попона, А. Т. Голована, Д. П. Морозова и др.
Ц Работы этих ученых и других [2—4] определили круг
|Ьб1ЦНХ вопросов, их систематизацию и методологию, кото-
£Ы0 до настоящего времени составляют основу науки об
Юктроприводе. Однако за последние два десятилетия в свя-
| |Н с бурным развитием техники в теории и практике элек-
| Тропривода произошли качественные изменения. Развитие
в Машиностроения, совершенствование технологических про-
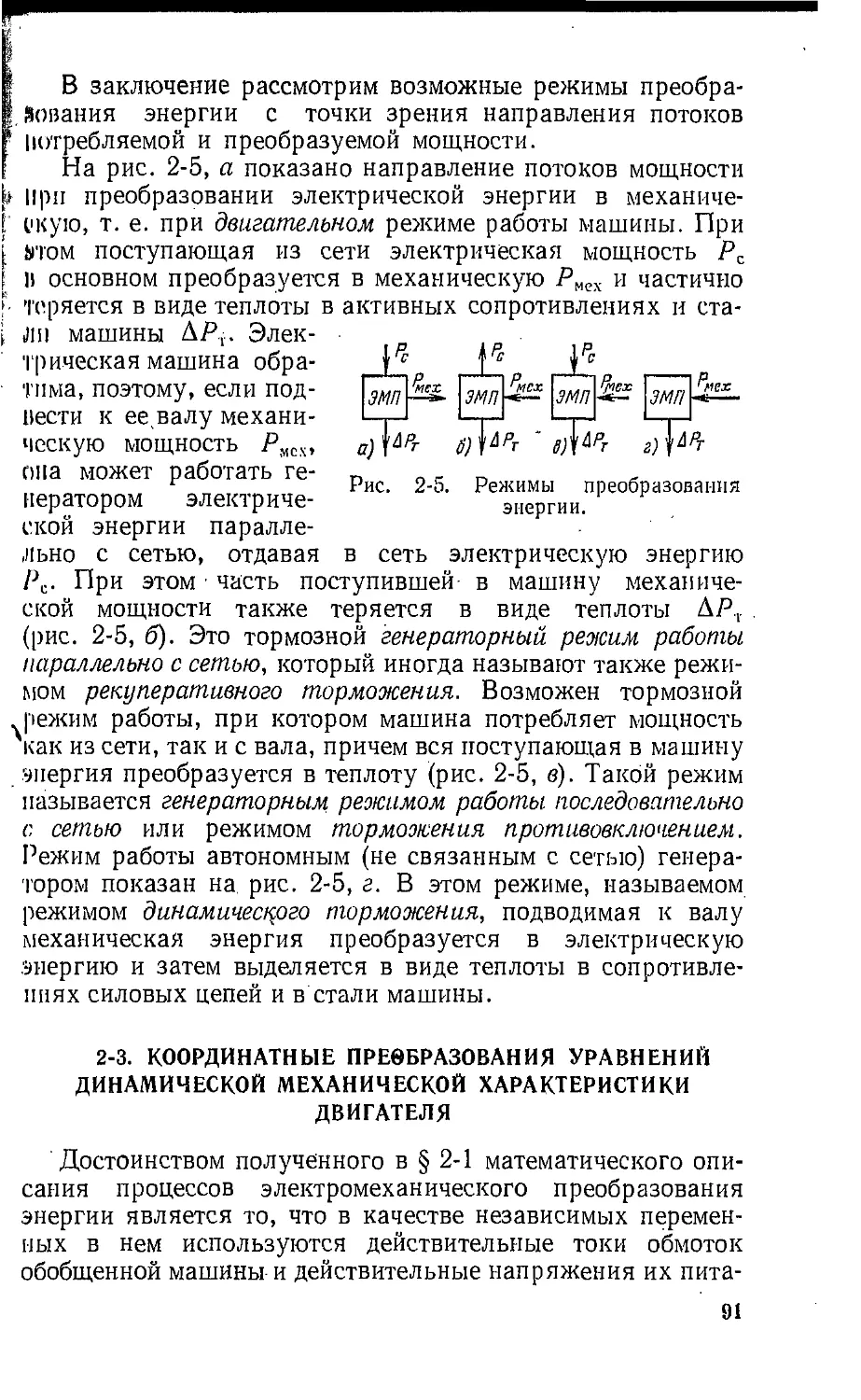
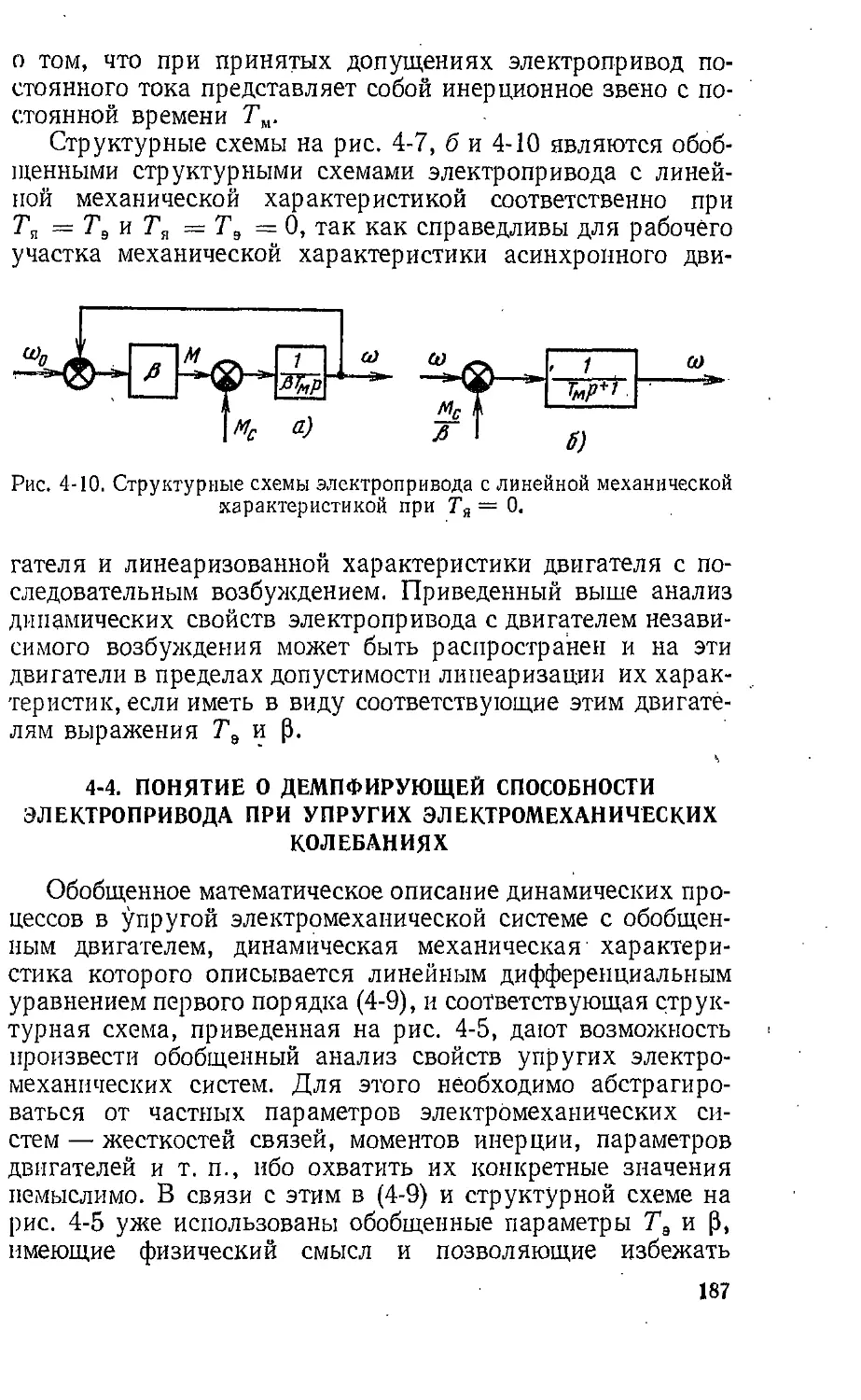
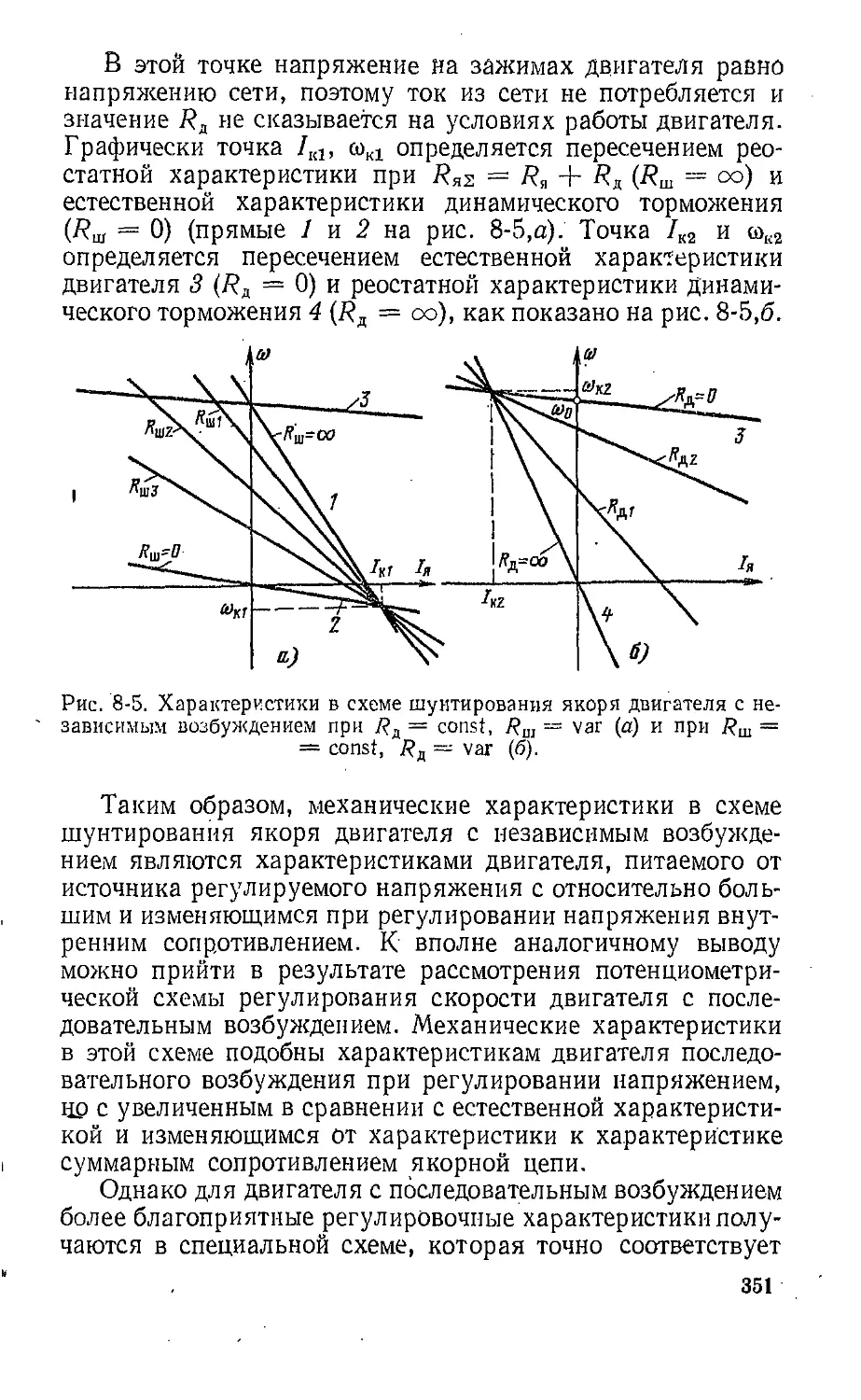
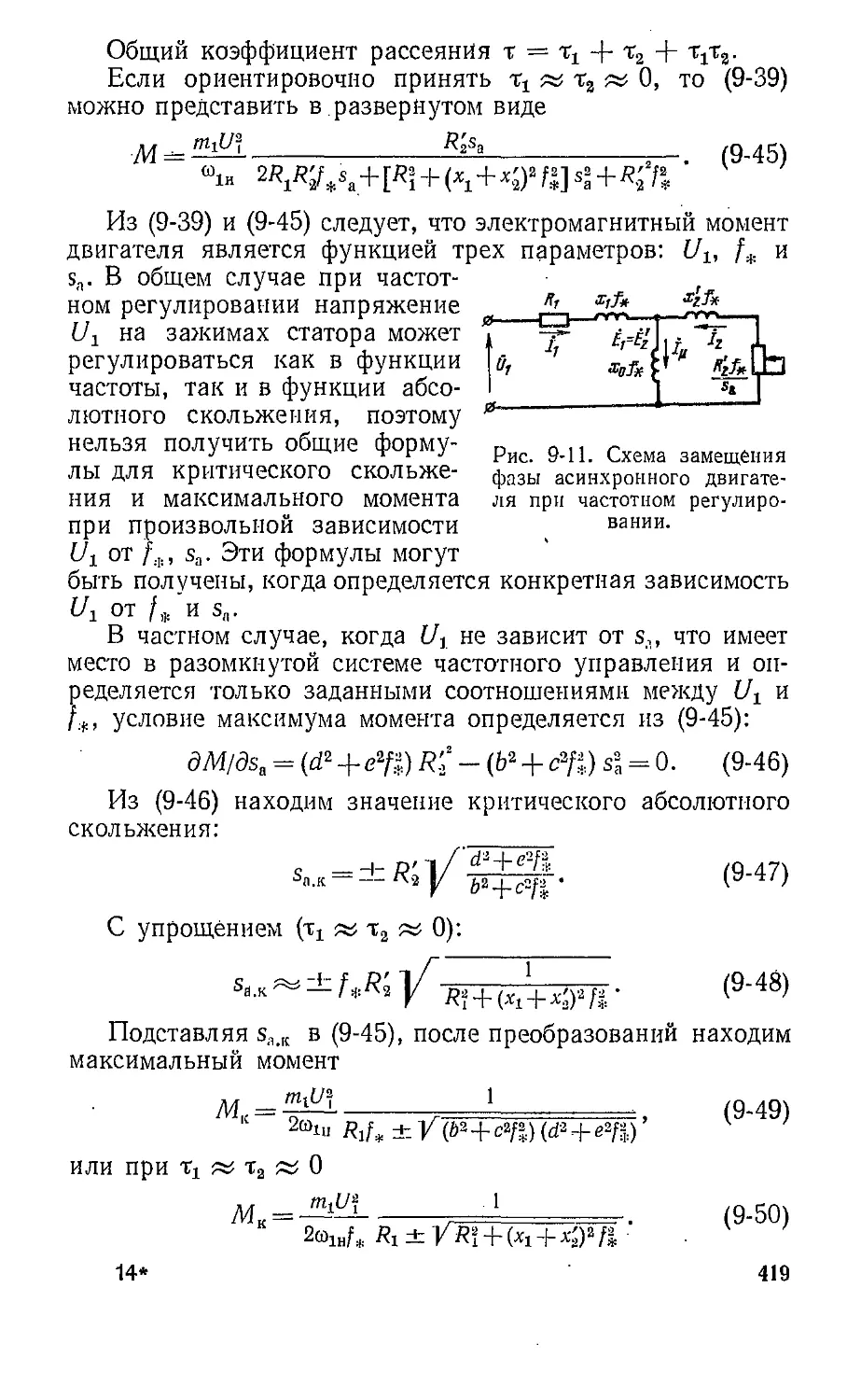
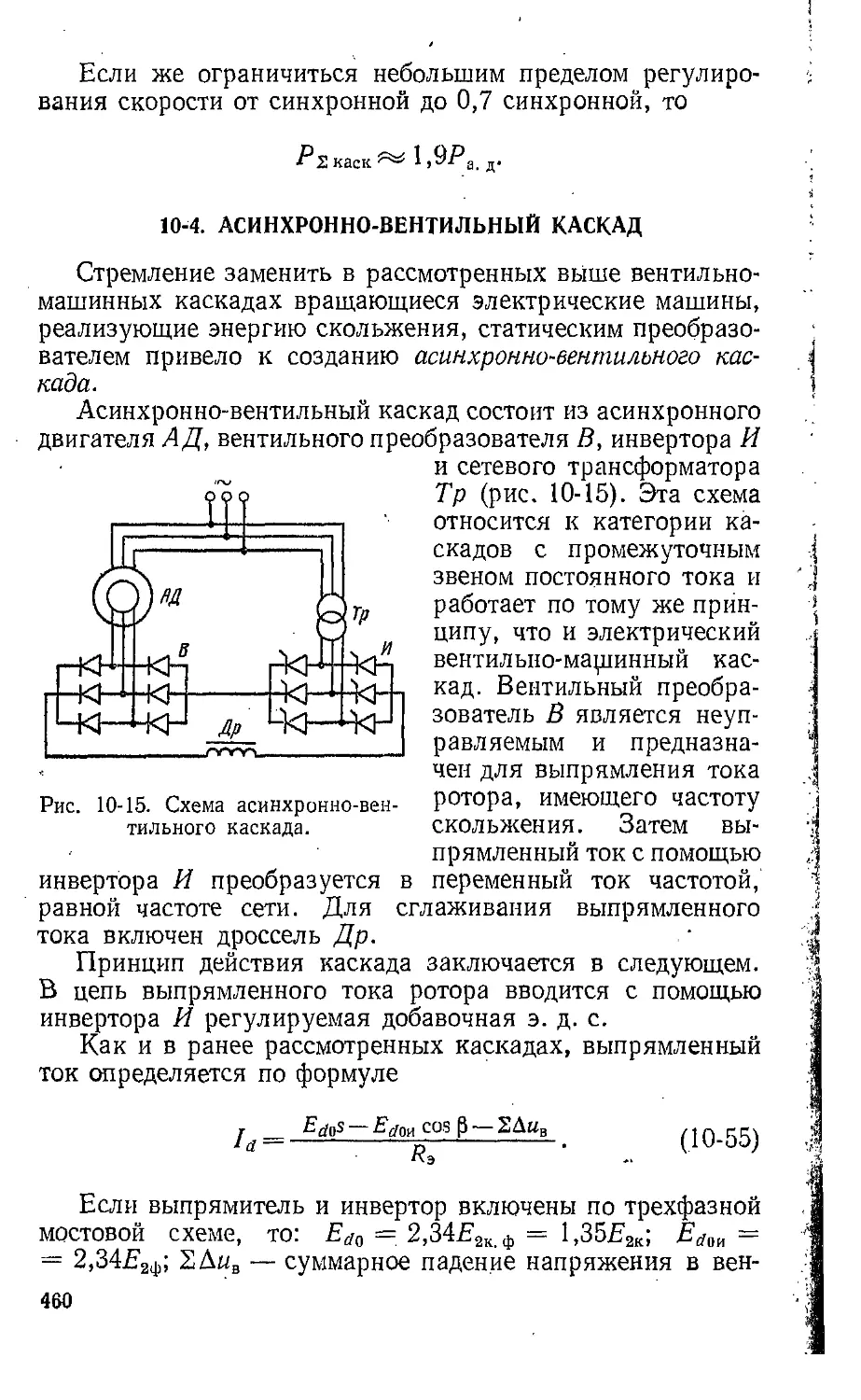
F Электрическая
. сеть
, ан» —— систем11 упрарлмиг1
---------------------------------1 Механическая часть
^Двигатель ~[
ГЛ М
j. ЭМП
рд
пм
РМ
От датчиков'
обратных связей
I ‘вмех
I (вмех)
\Ы„„Т
I (oinex)
J
1
тгИ
т ш В
Ш I
От задающих
устройств
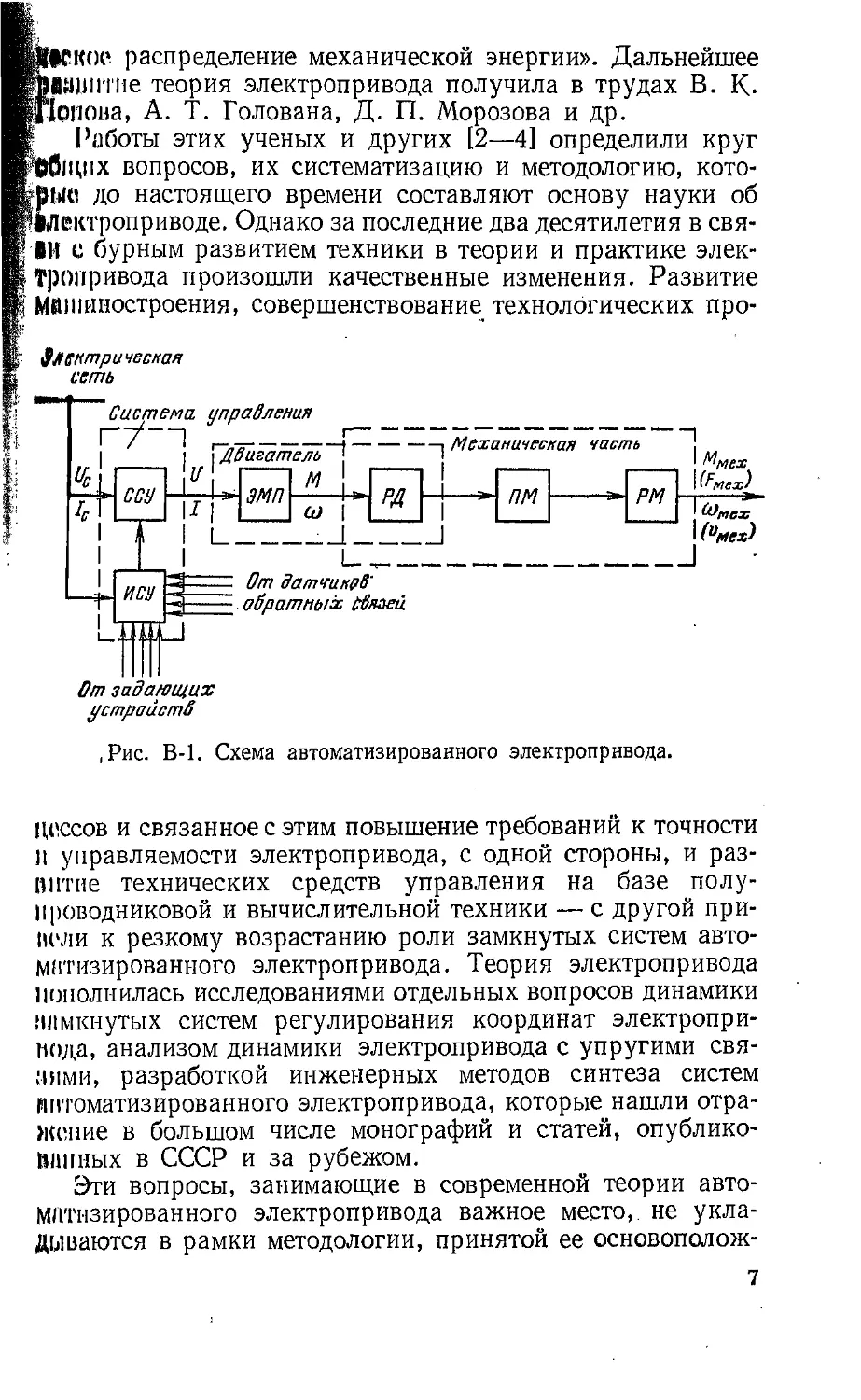
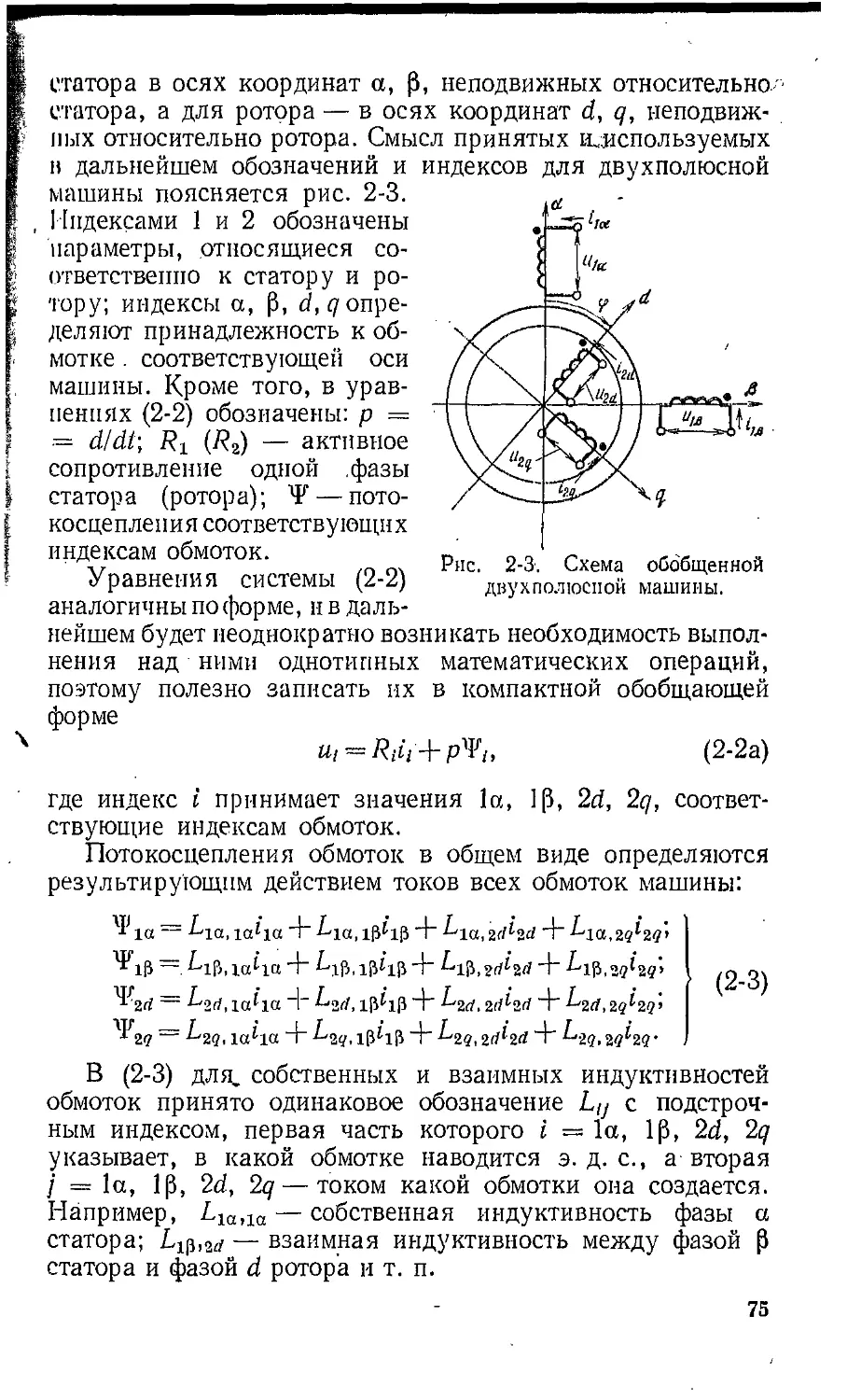
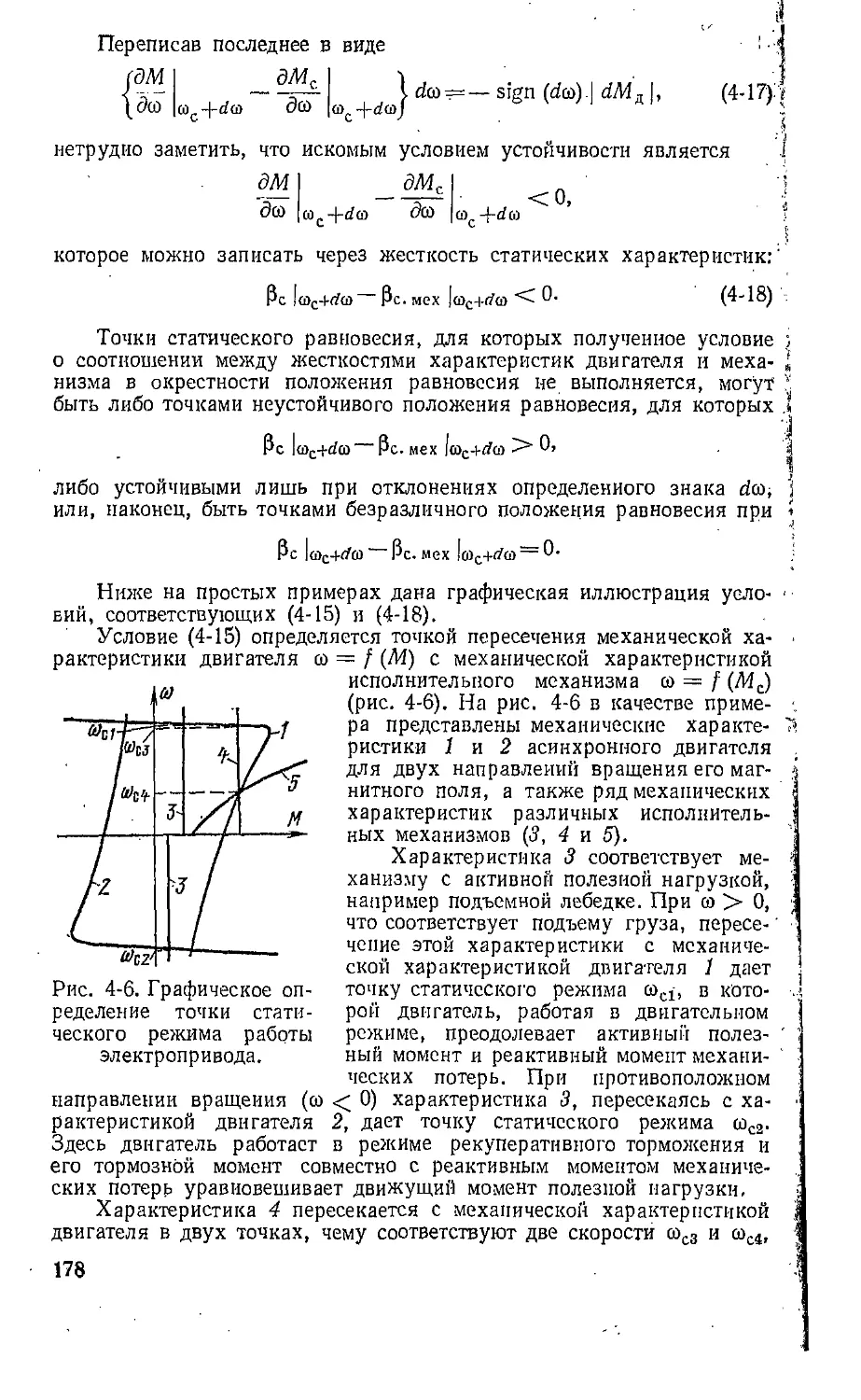
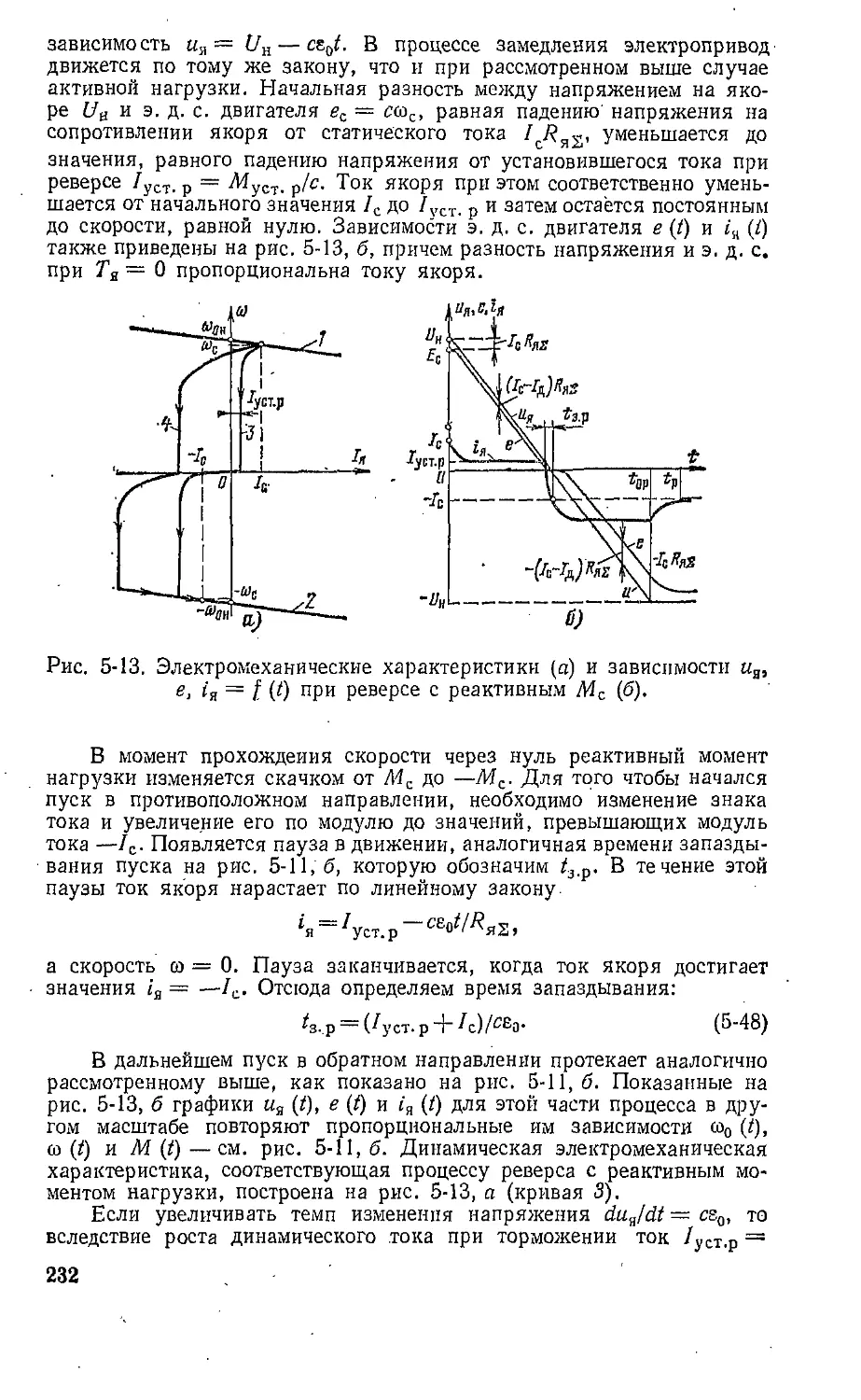
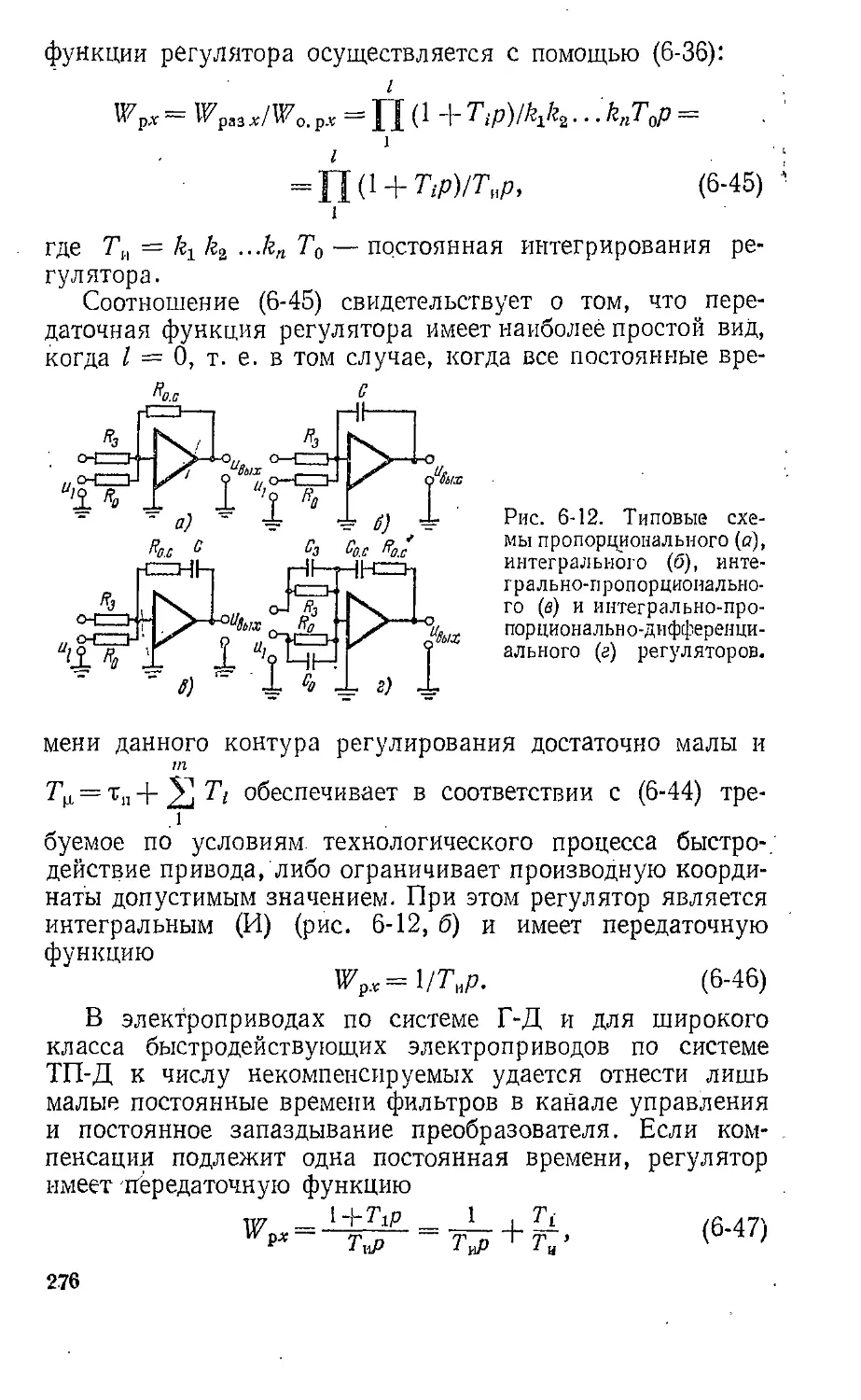
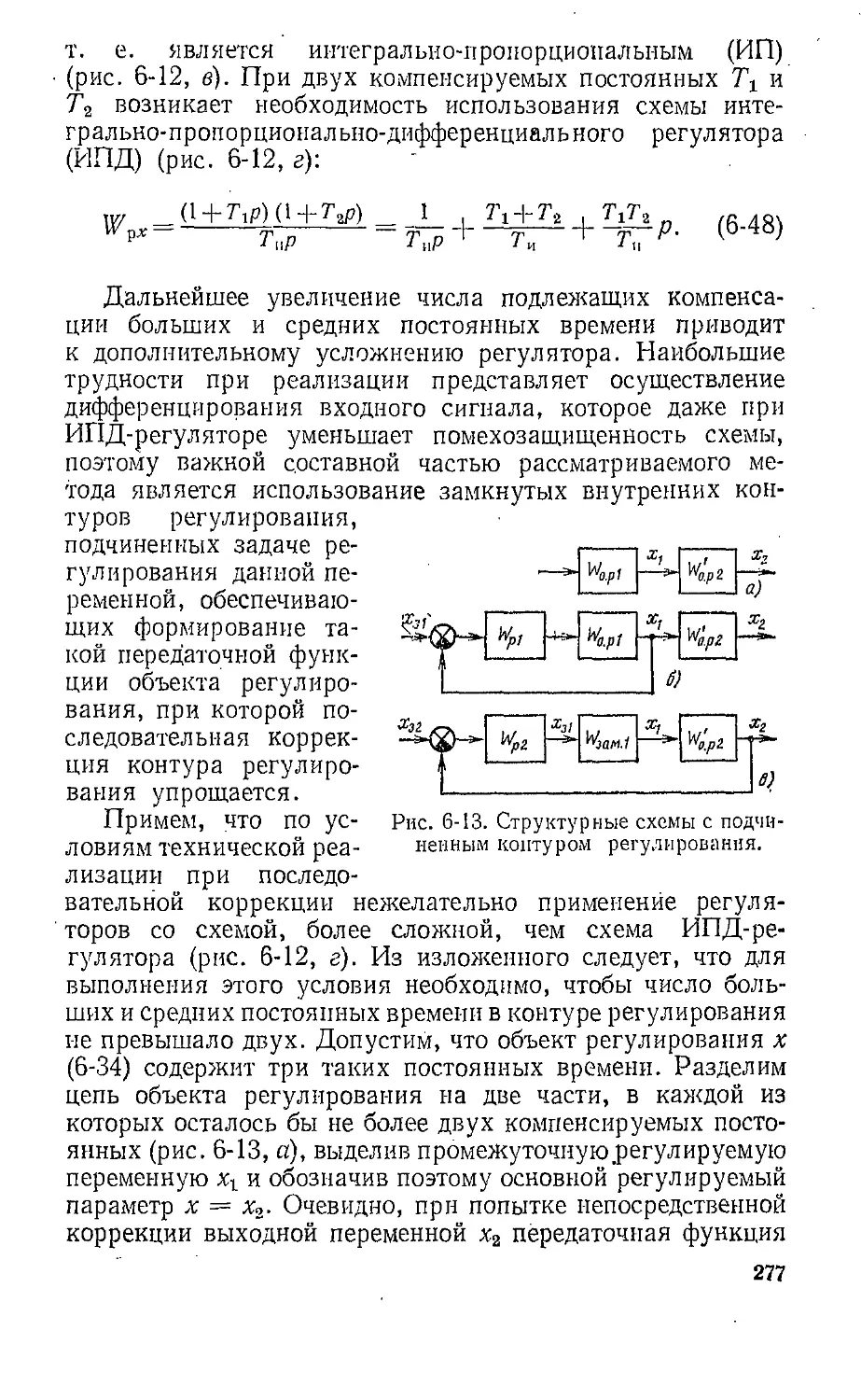
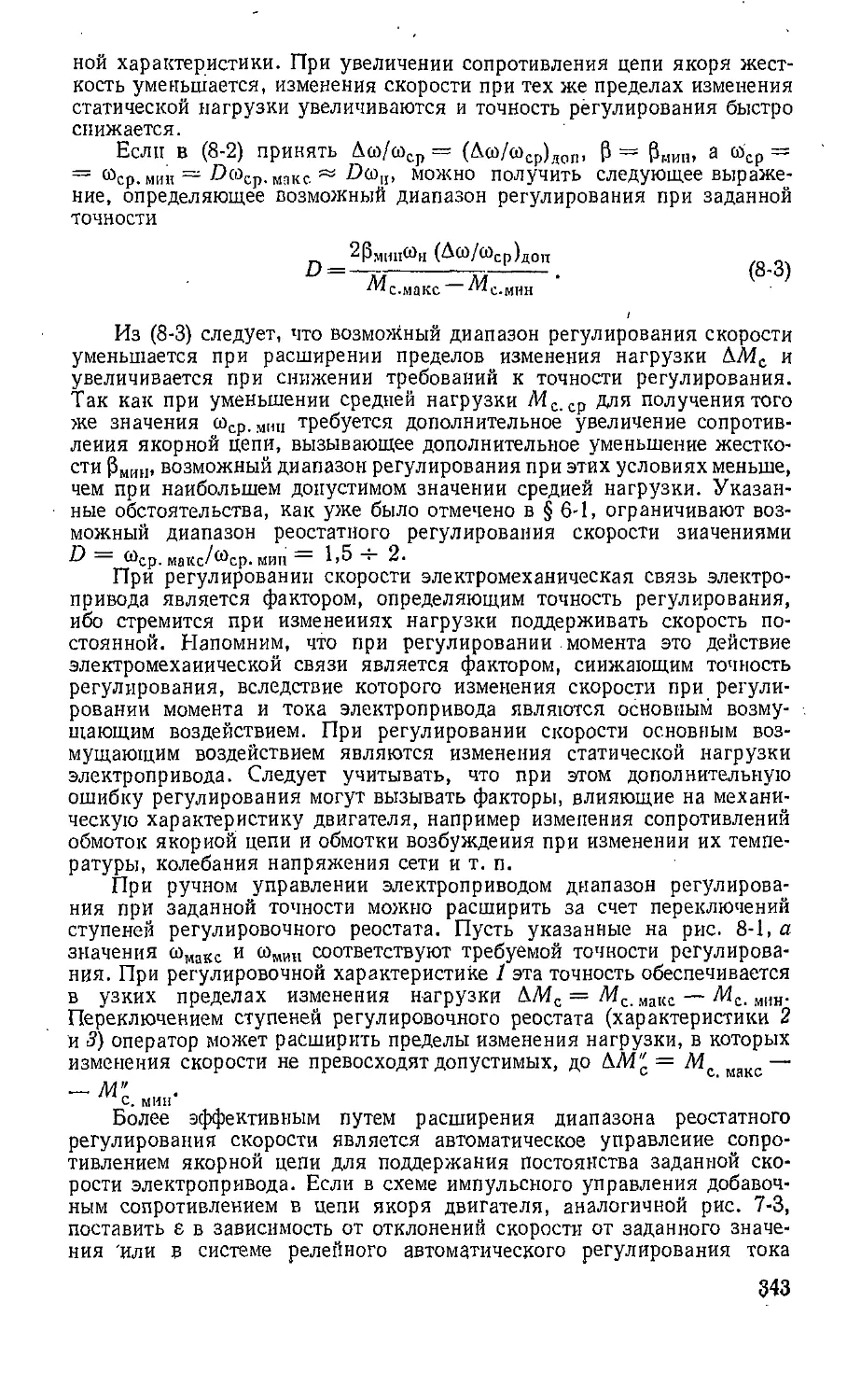
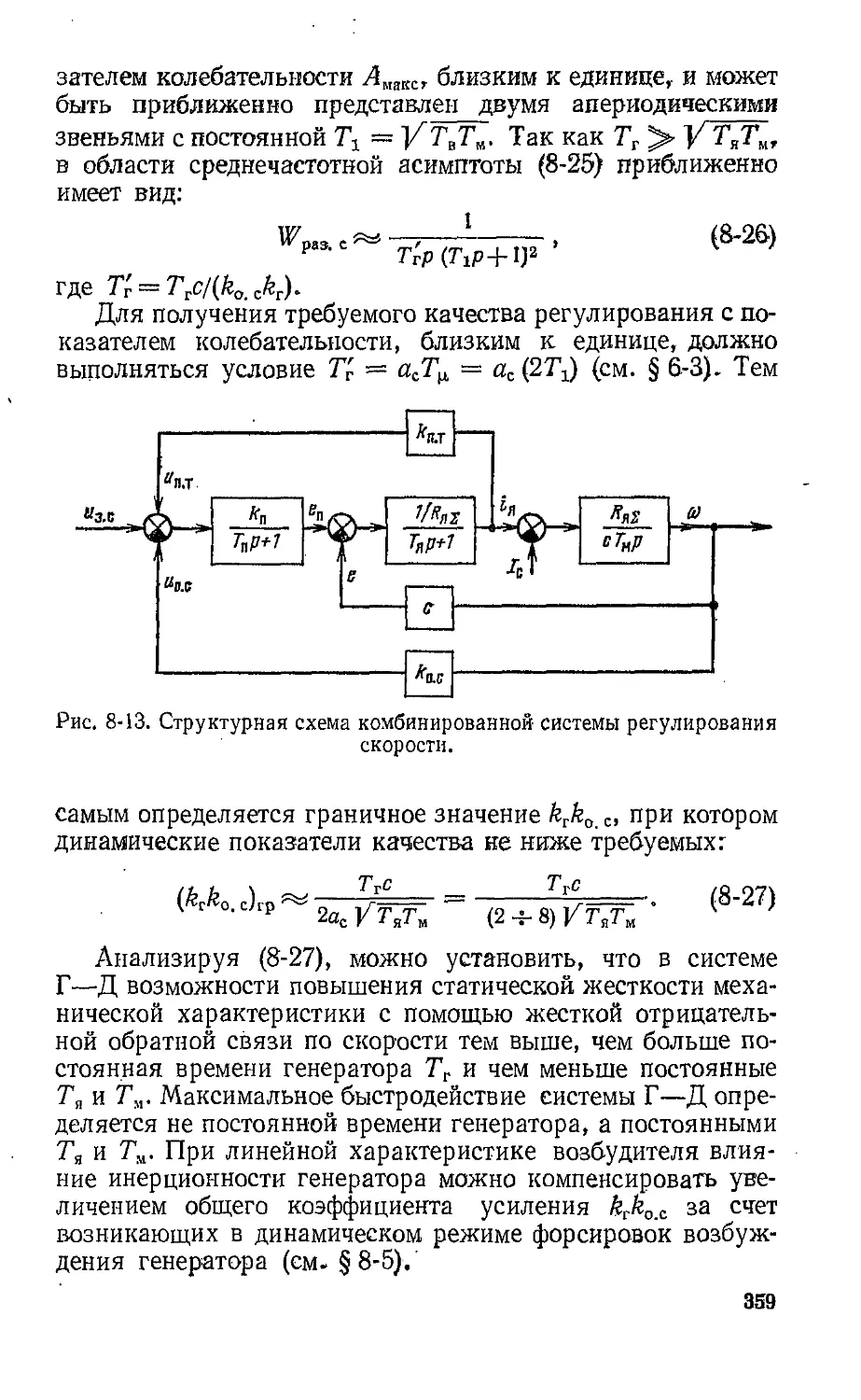
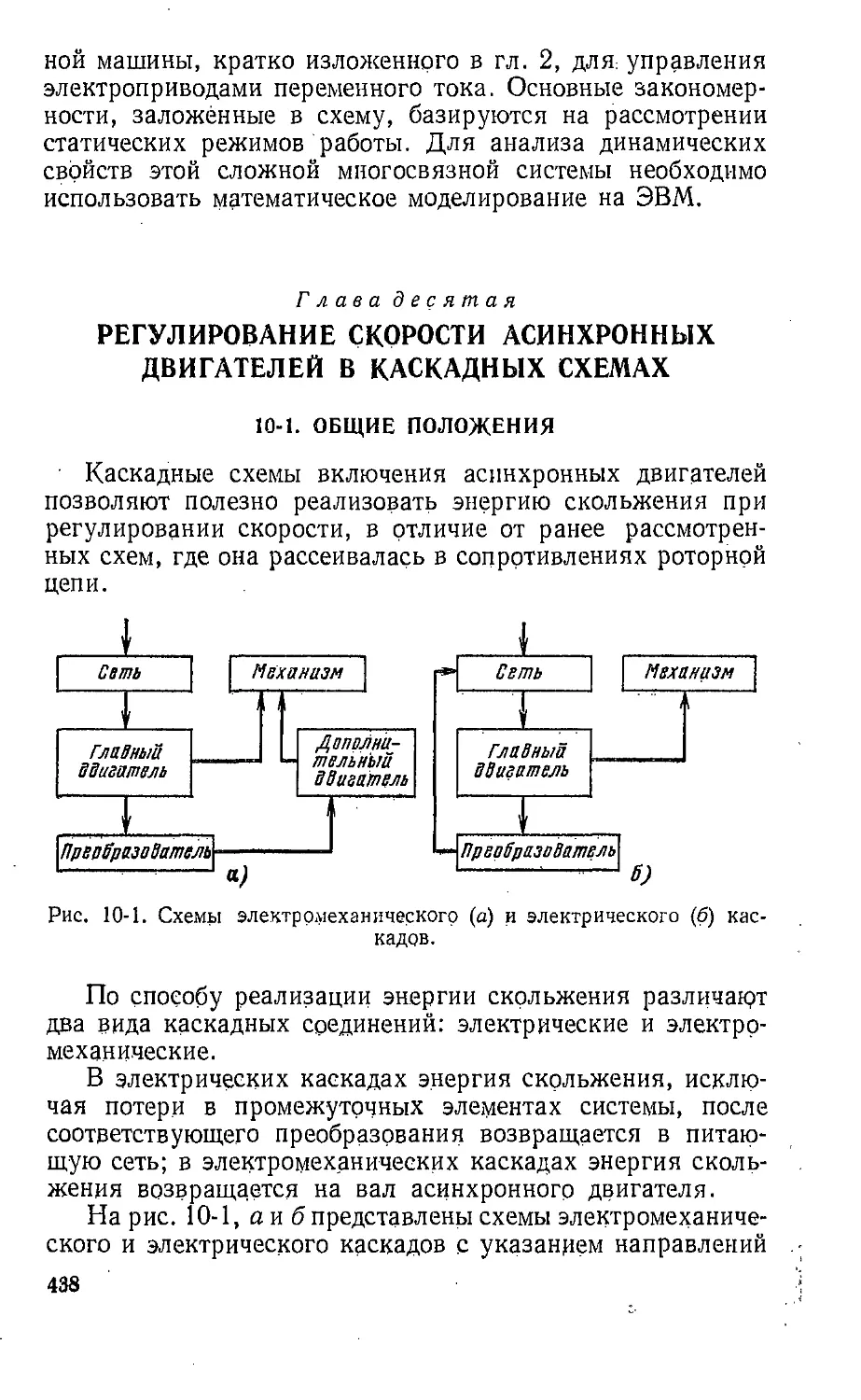
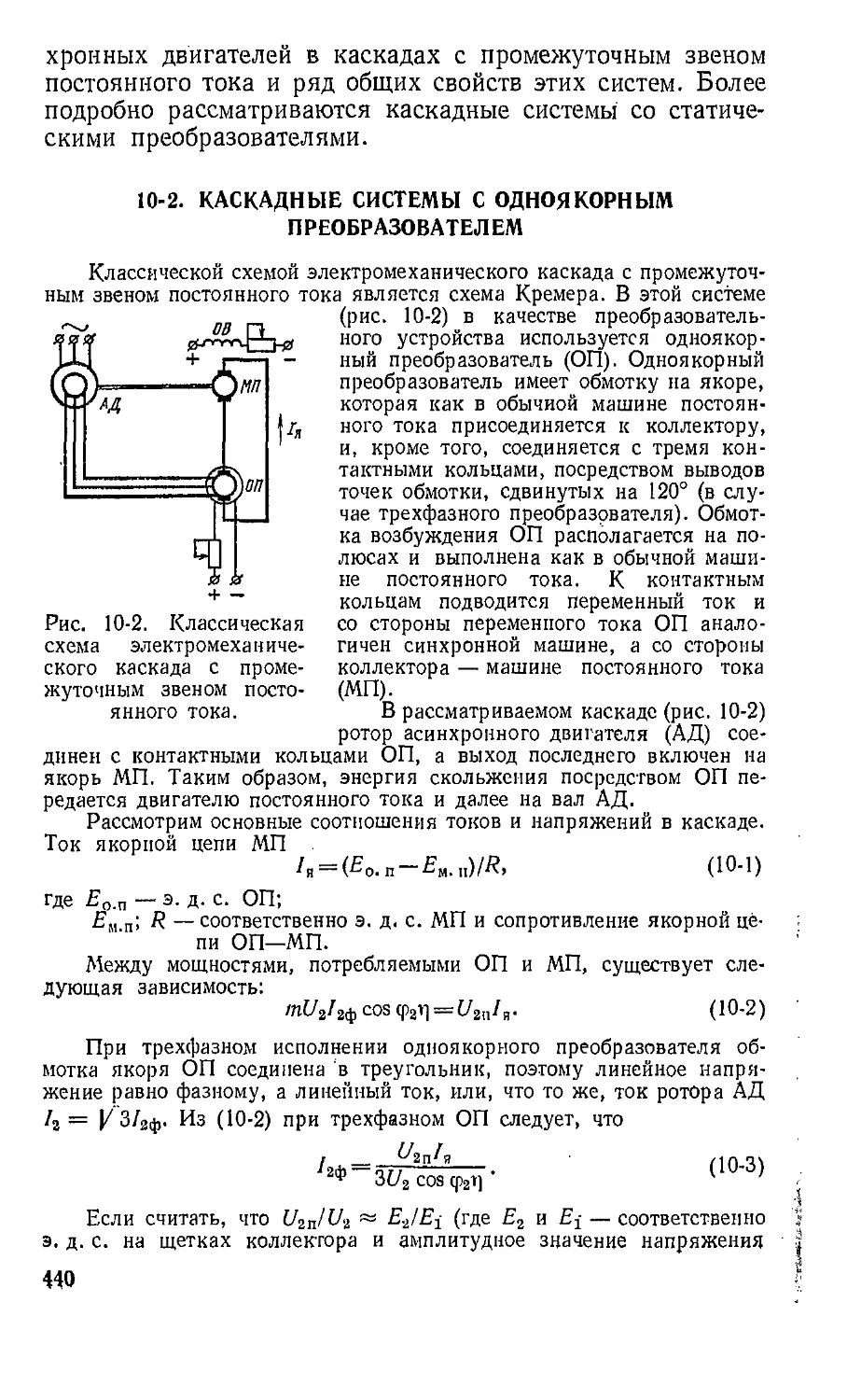
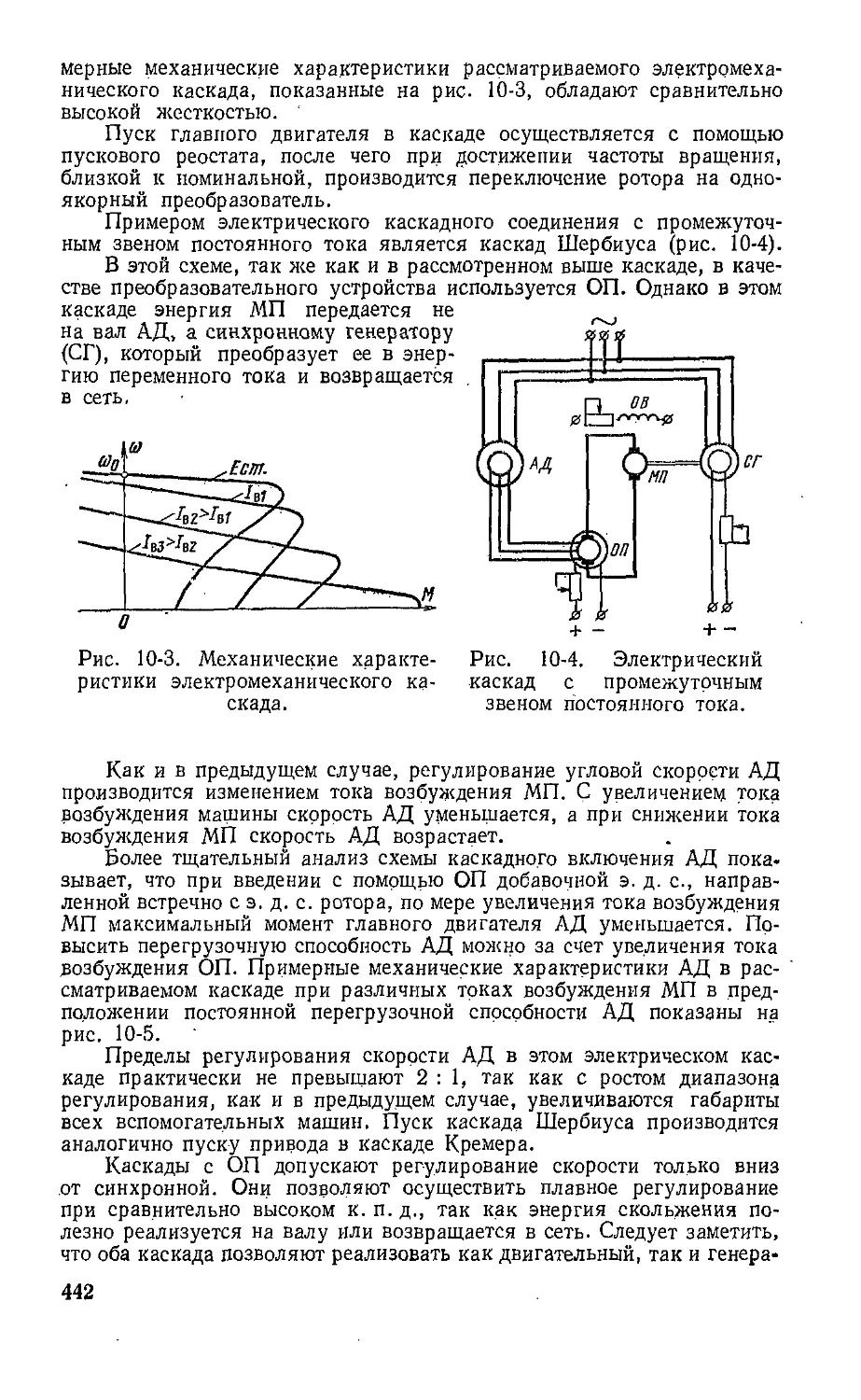
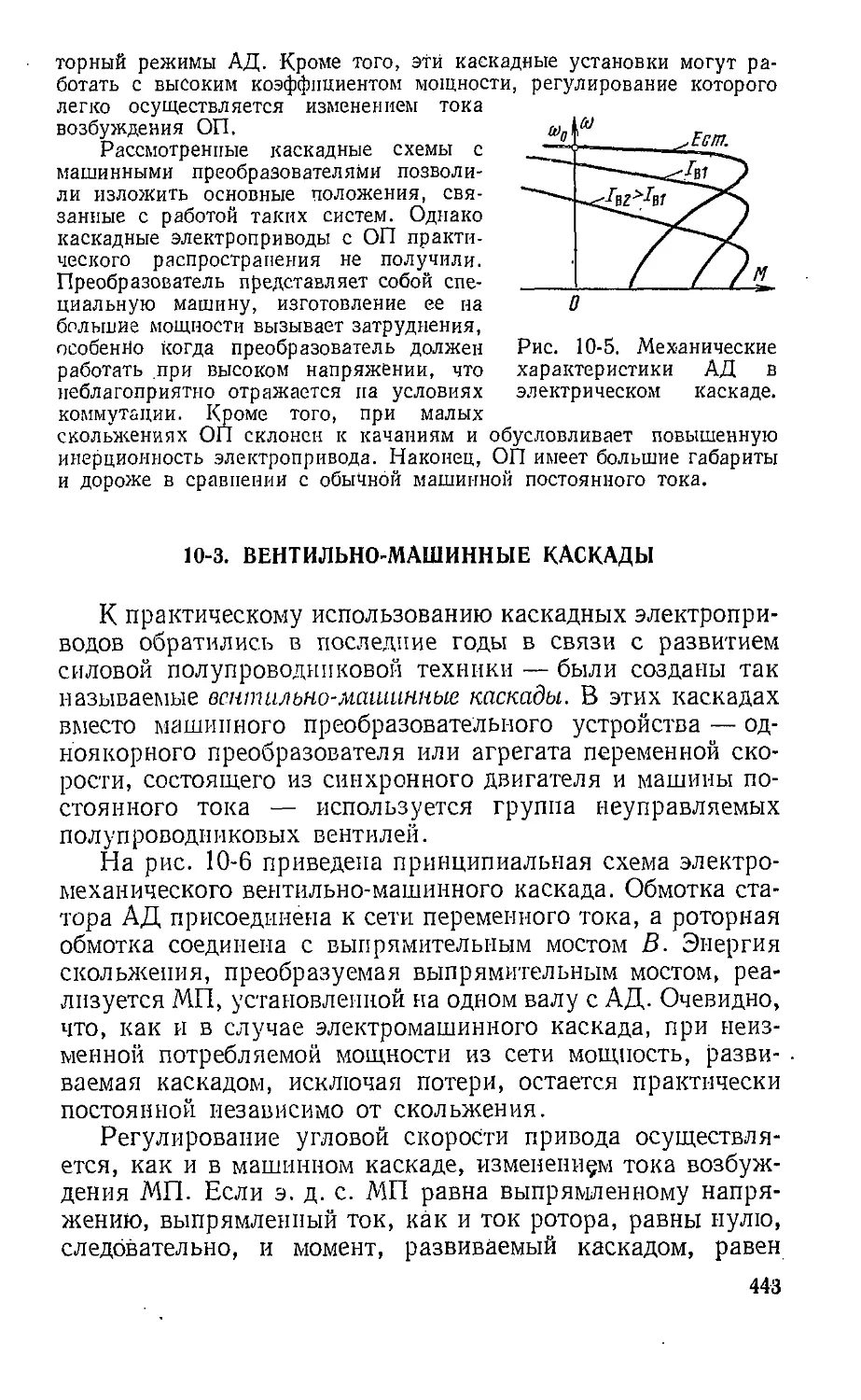
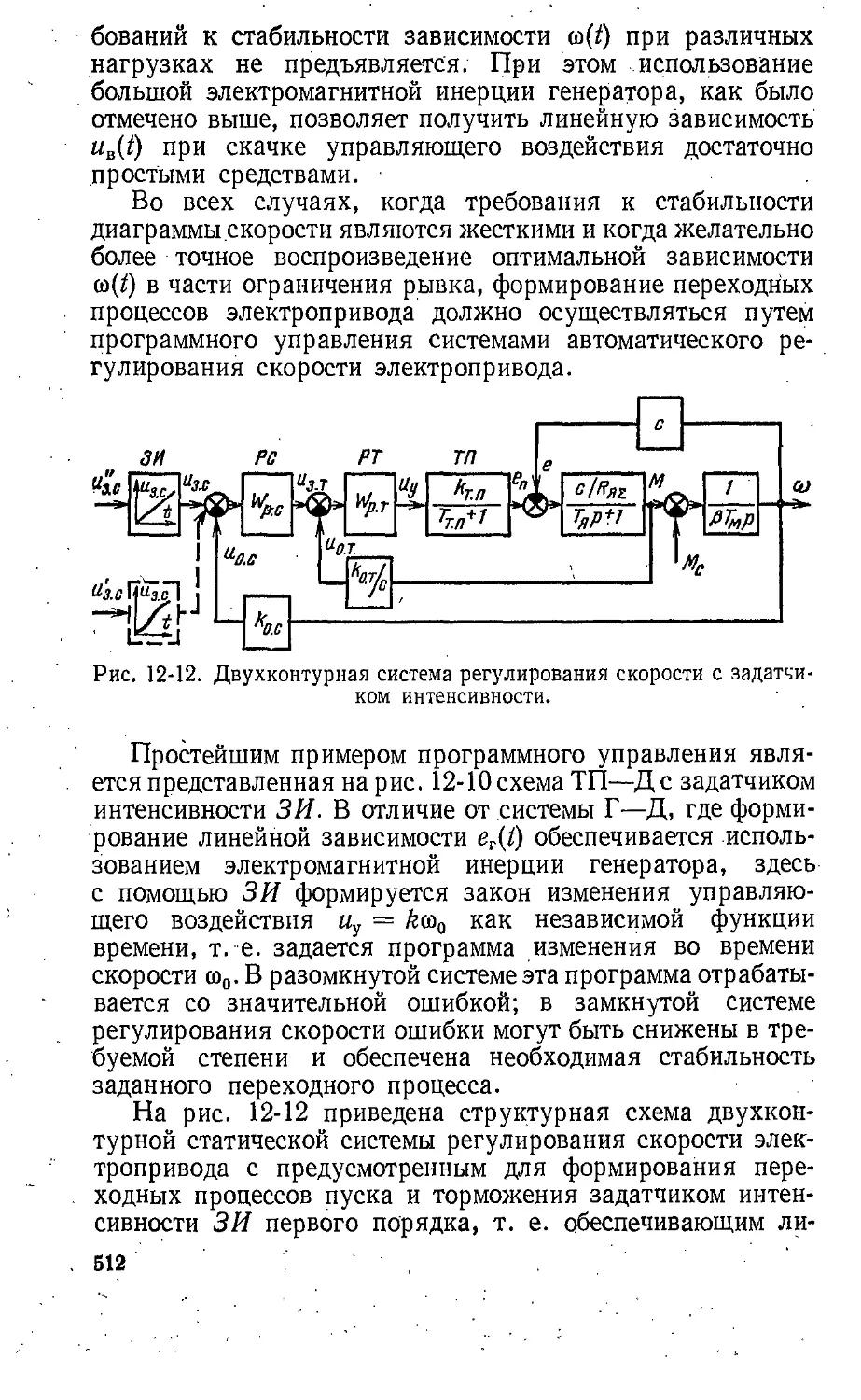
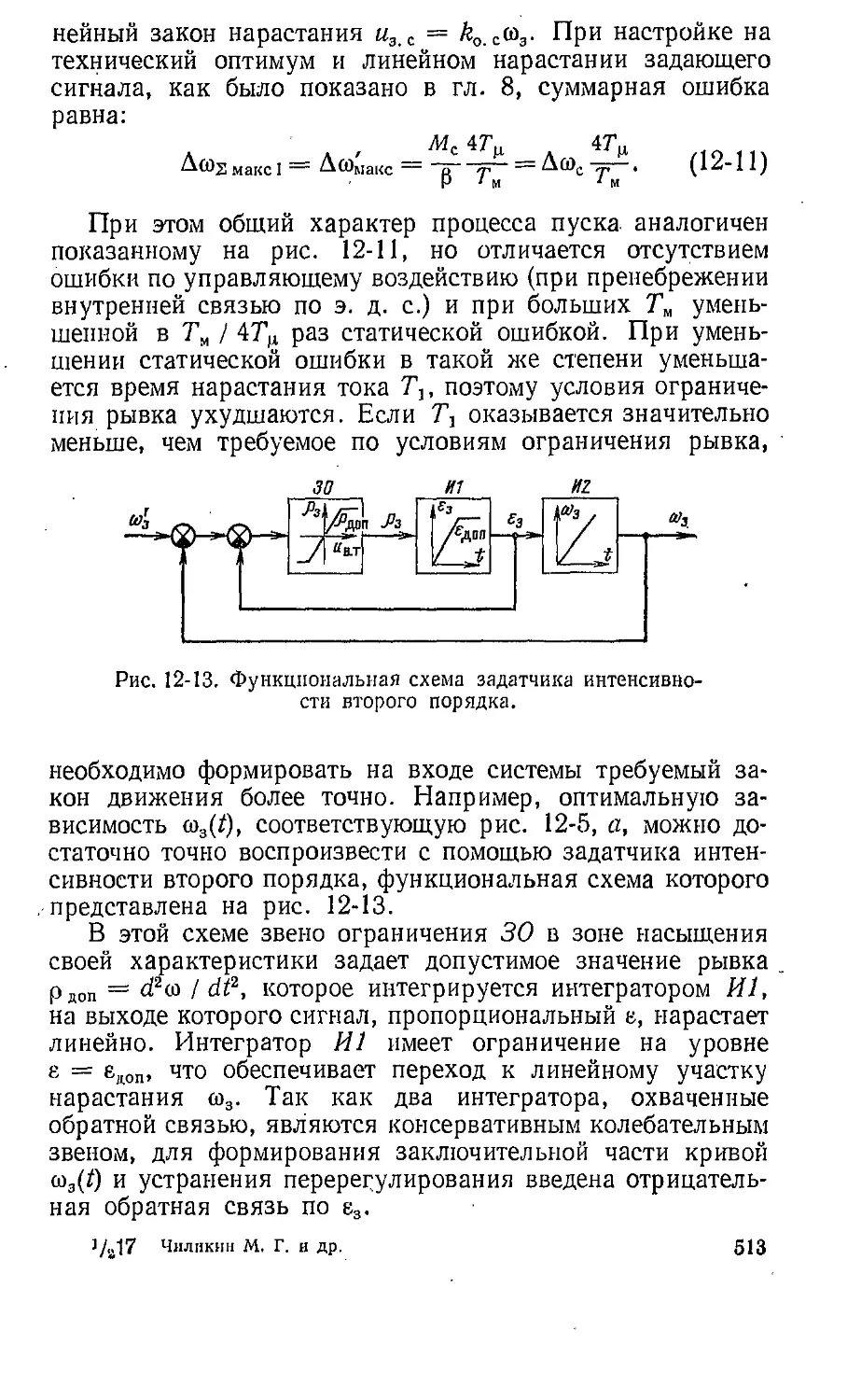
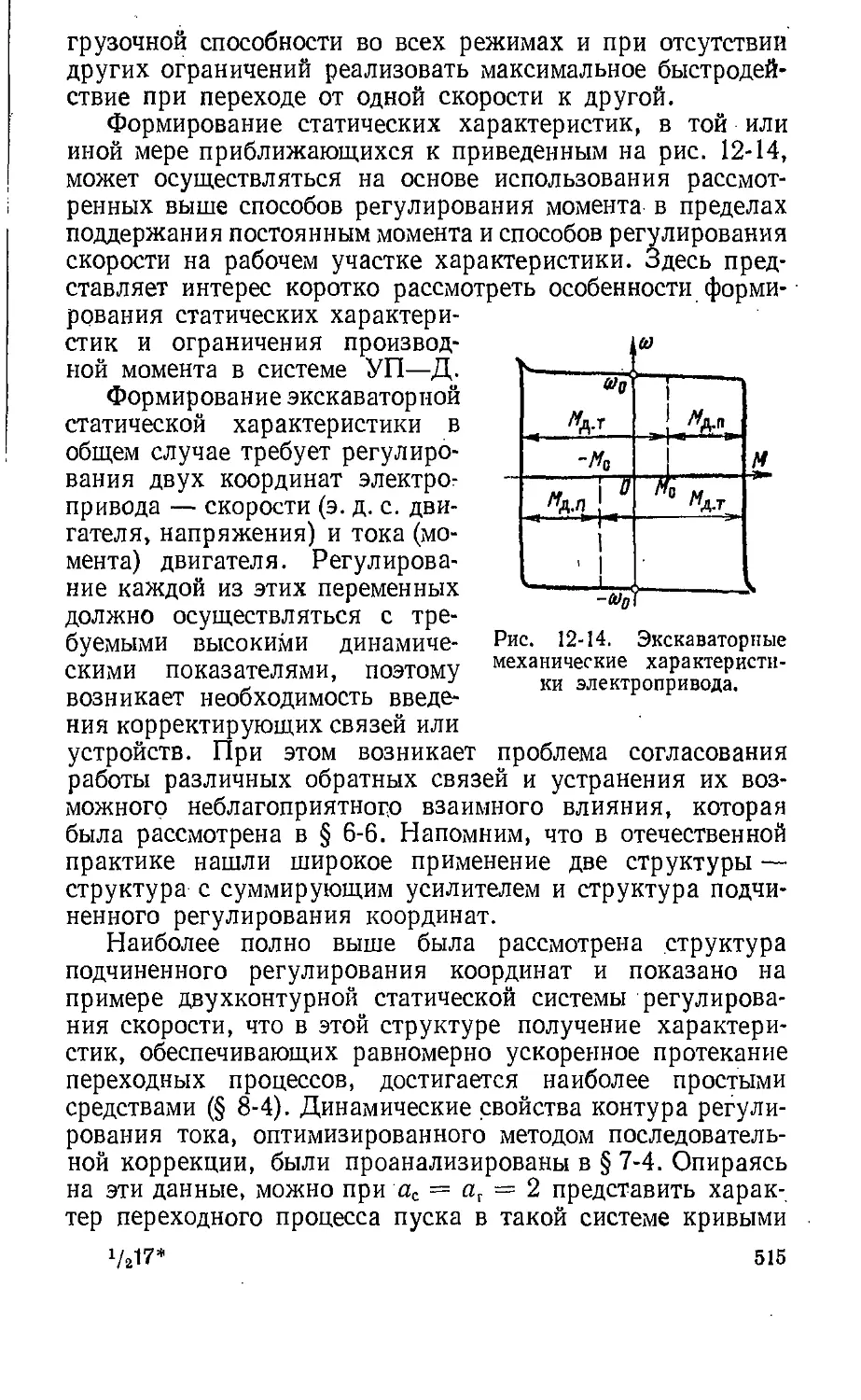
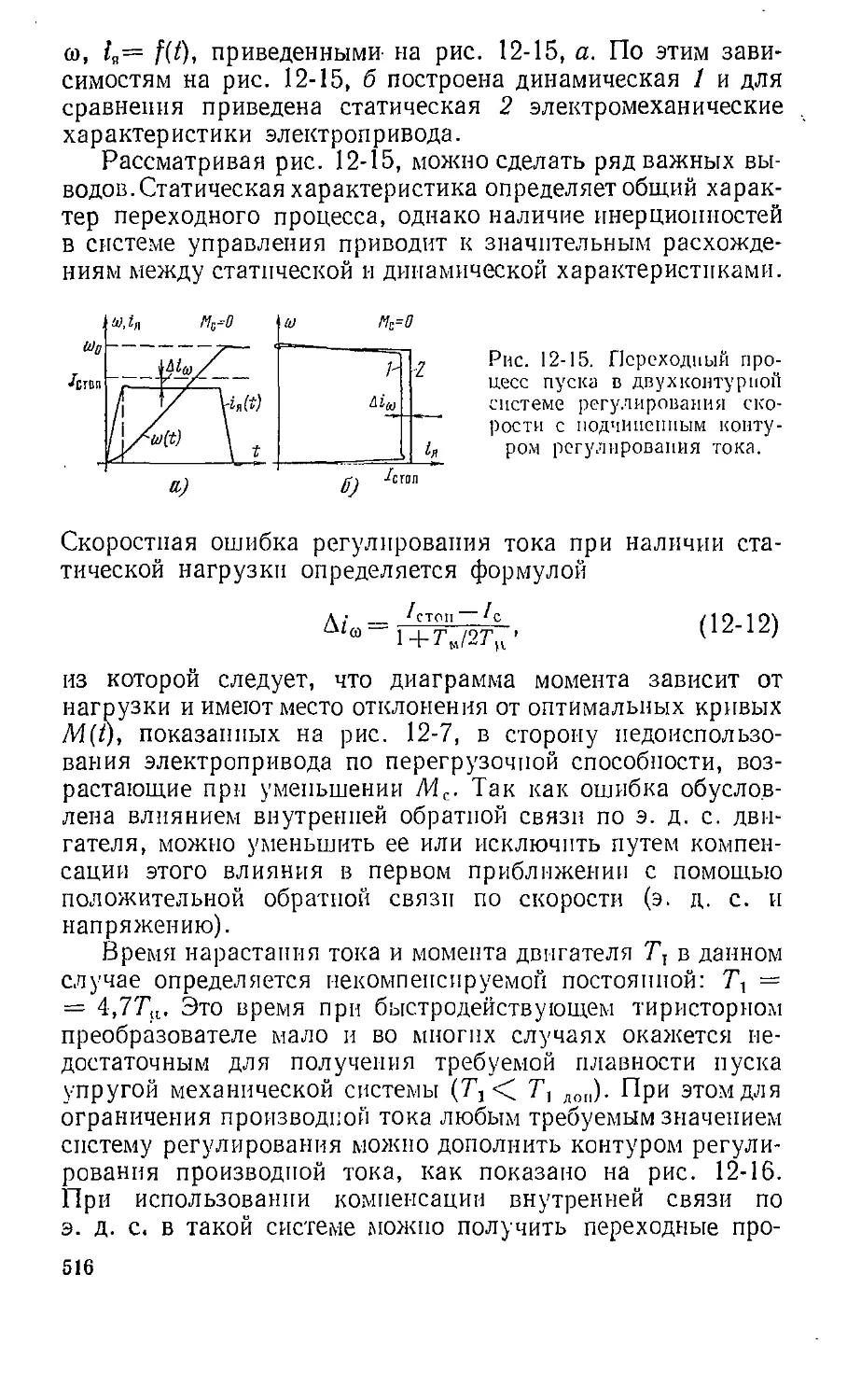
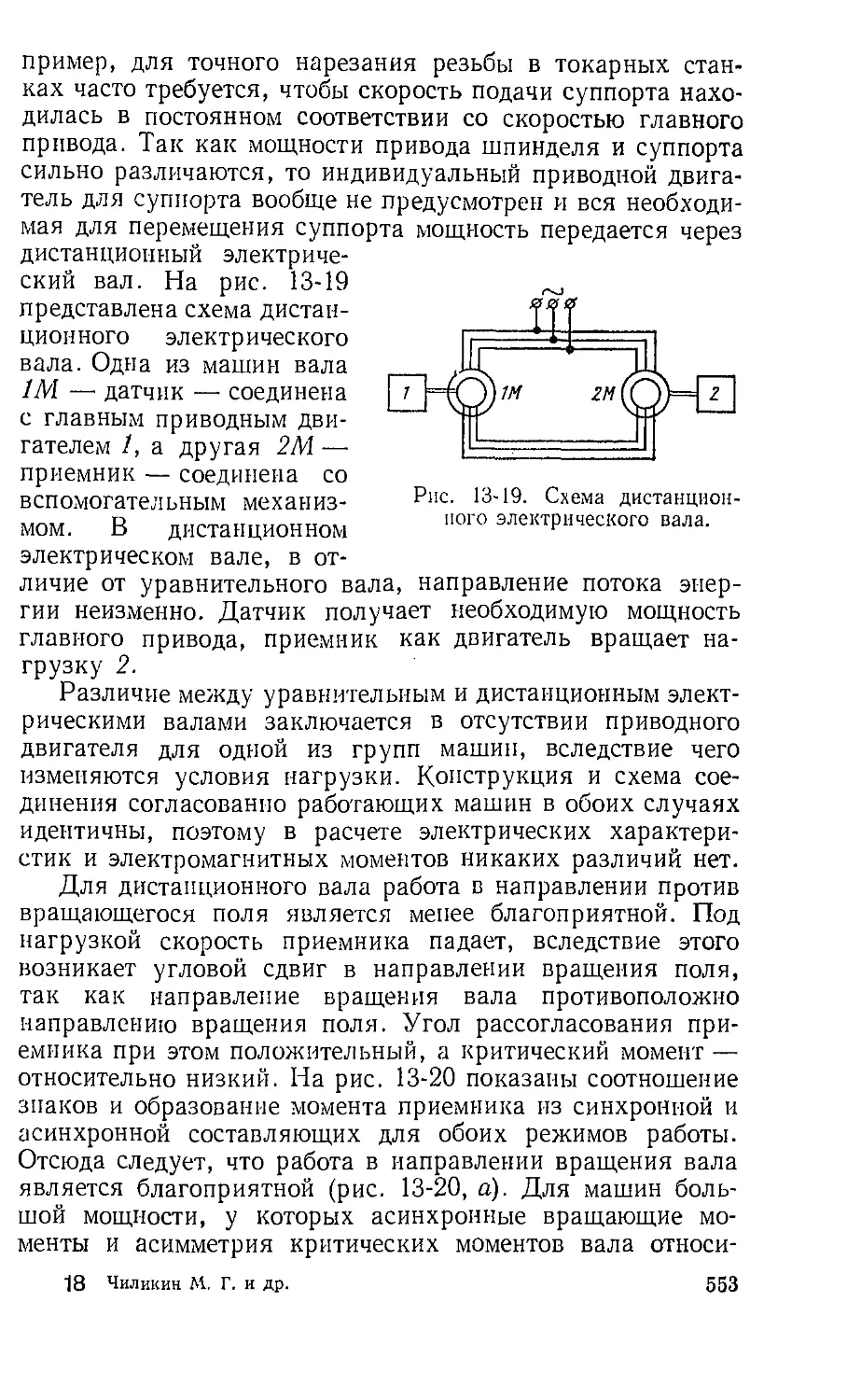
,Рис. В-1. Схема автоматизированного электропривода.
Лиссов и связанное с этим повышение требований к точности
и управляемости электропривода, с одной стороны, и раз-
витие технических средств управления на базе полу-
проводниковой и вычислительной техники — с другой при-
вели к резкому возрастанию роли замкнутых систем авто-
матизированного электропривода. Теория электропривода
Пополнилась исследованиями отдельных вопросов динамики
япмкнутых систем регулирования координат электропри-
вода, анализом динамики электропривода с упругими свя-
зями, разработкой инженерных методов синтеза систем
Автоматизированного электропривода, которые нашли отра-
жение в большом числе монографий и статей, опублико-
ванных в СССР и за рубежом.
Эти вопросы, занимающие в современной теории авто-
матизированного электропривода важное место, не укла-
дываются в рамки методологии, принятой ее основополож-
7
никами, главным образом потому, что требуют использо-
вания аппарата теории автоматического управления, на
которую отмеченные выше работы опираться, естественно,
не могли. В данной книге предпринимается попытка ото-
брать наиболее общие вопросы теории электропривода на
данном этапе ее развития и в систематизированном виде
изложить их, пользуясь методами теоретической механики,
теории электрических машин и теории автоматического
управления. При этом авторы стремились по возможности
сохранить классическую структуру теории электропривода,
заложенную в указанных выше трудах, и в достаточной
мере осветить сохранившие свое значение вопросы ее тра-
диционного содержания, руководствуясь действующей про-
граммой курса «Теория электропривода».
Таким образом, объектом изучения в данной книге явля-
ются электромеханические системы автоматизированного
электропривода. Структурная схема такой системы пред-
ставлена на рис. В-1. Электрическая мощность, потребляе-
мая из электрической сети (или от автономной энергетиче-
ской установки) в силовой части системы управления ССУ
преобразуется в регулируемую электрическую мощность,
подводимую к обмоткам электродвигателя. На схеме дви-
гатель представлен двумя элементами — электромехани-
ческим преобразователем ЭМП, преобразующим электри-
ческую мощность в электромагнитную механическую мощ-
ность, и массой ротора РД, на которую воздействует момент
двигателя М при угловой скорости со. Механическая мощ-
ность от ротора двигателя передается передаточному меха-
низму ПМ, который преобразует ее и передает рабочему
органу машины РМ.
Система управления электроприводом состоит из сило-
вой части ССУ и информационной части ИСУ. Информа-
ционная часть системы получает командные сигналы от
задающих устройств и информацию о состоянии электро-
привода и течении технологического процесса от датчиков
обратных связей. На основании этих данных в соответствии
с заложенным алгоритмом здесь вырабатываются воздей-
ствия на силовую часть системы управления ССУ и электро-
механический преобразователь ЭМП, управляющие дви-
жением системы и технологическим процессом машины.
По отношению к системе управления СУ электромеха-
нический преобразователь ЭМП и механическая часть
представляют собой разомкнутую систему электропривода
как объект автоматического управления и регулирования
8
Переменных. Изучение физических свойств разомкнутых
II замкнутых по основным регулируемым координатам
Систем электропривода, анализ особенностей взаимодей-
ствия упругой многомассовой механической части привода
С электрической частью в единой электромеханической си-
стеме., а также вопросы выбора электродвигателей на основе
анализа режимов работы электромеханической системы
II составляют основное содержание современной теории
электропривода и одноименного курса, имеющего в учеб-
ном процессе подготовки специалистов по электроприводу
II пашей стране определяющее значение.
Глава первая
МЕХАНИКА ЭЛЕКТРОПРИВОДА
1-1. КИНЕМАТИЧЕСКИЕ СХЕМЫ ЭЛЕКТРОПРИВОДОВ
Механическая энергия, вырабатываемая электрическим
двигателем, используется для совершения необходимой
механической работы и для управления технологическим
процессом приводимого в движение механизма. Механиче-
ская часть системы (рис. В-1) включает в себя все механи-
чески связанные между собой движущиеся инерционные
массы двигателя, передач и рабочего оборудования техно-
логической установки. Непосредственное представление
о движущихся массах установки и механических связях
между ними дает кинема-
тическая схема электро-
привода.
Кинематические схемы
конкретных электроприво-
дов бесконечно многообраз-
ны, однако они обладают
общими особенностями, ко-
торые можно установить,
рассмотрев ряд характер-
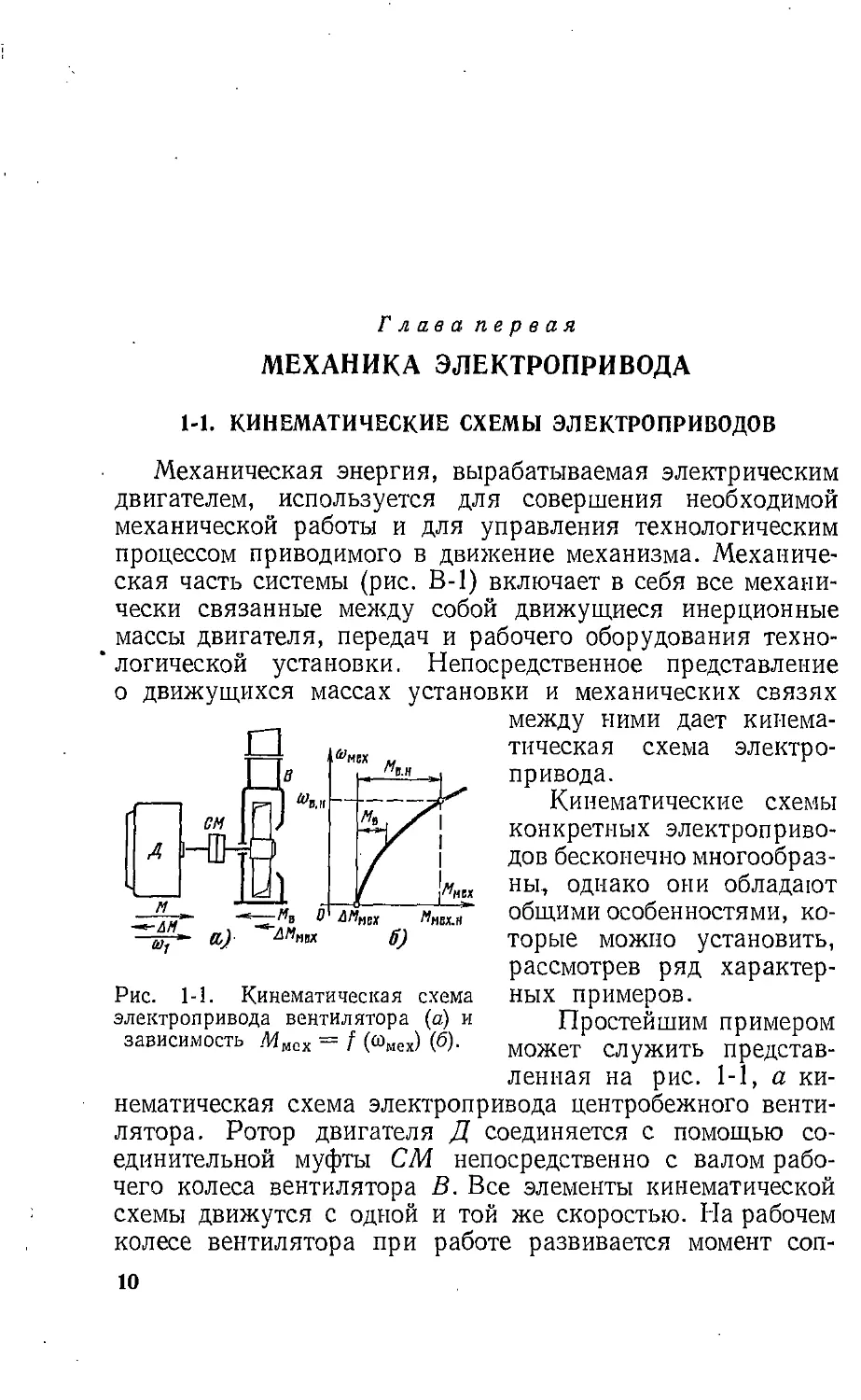
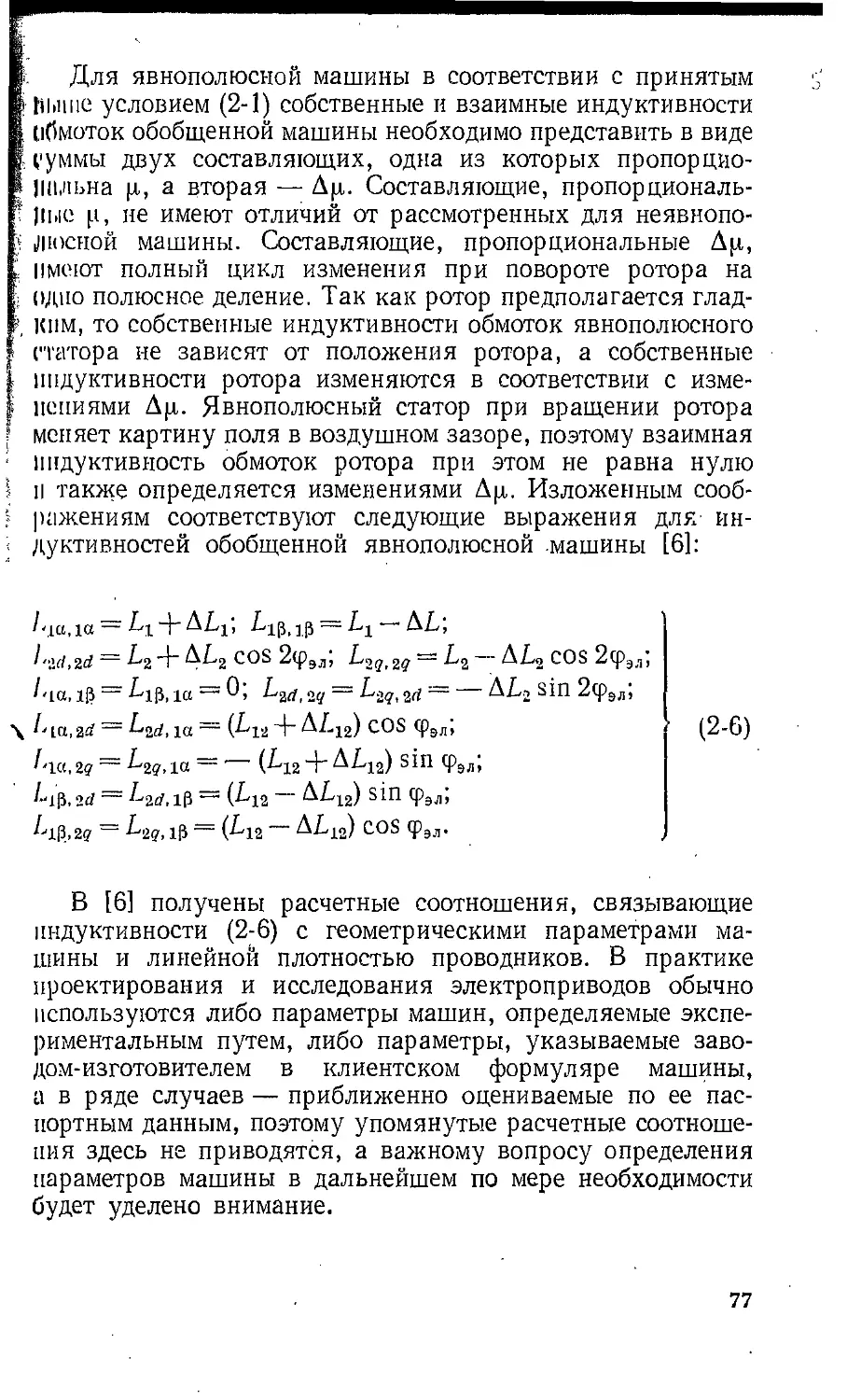
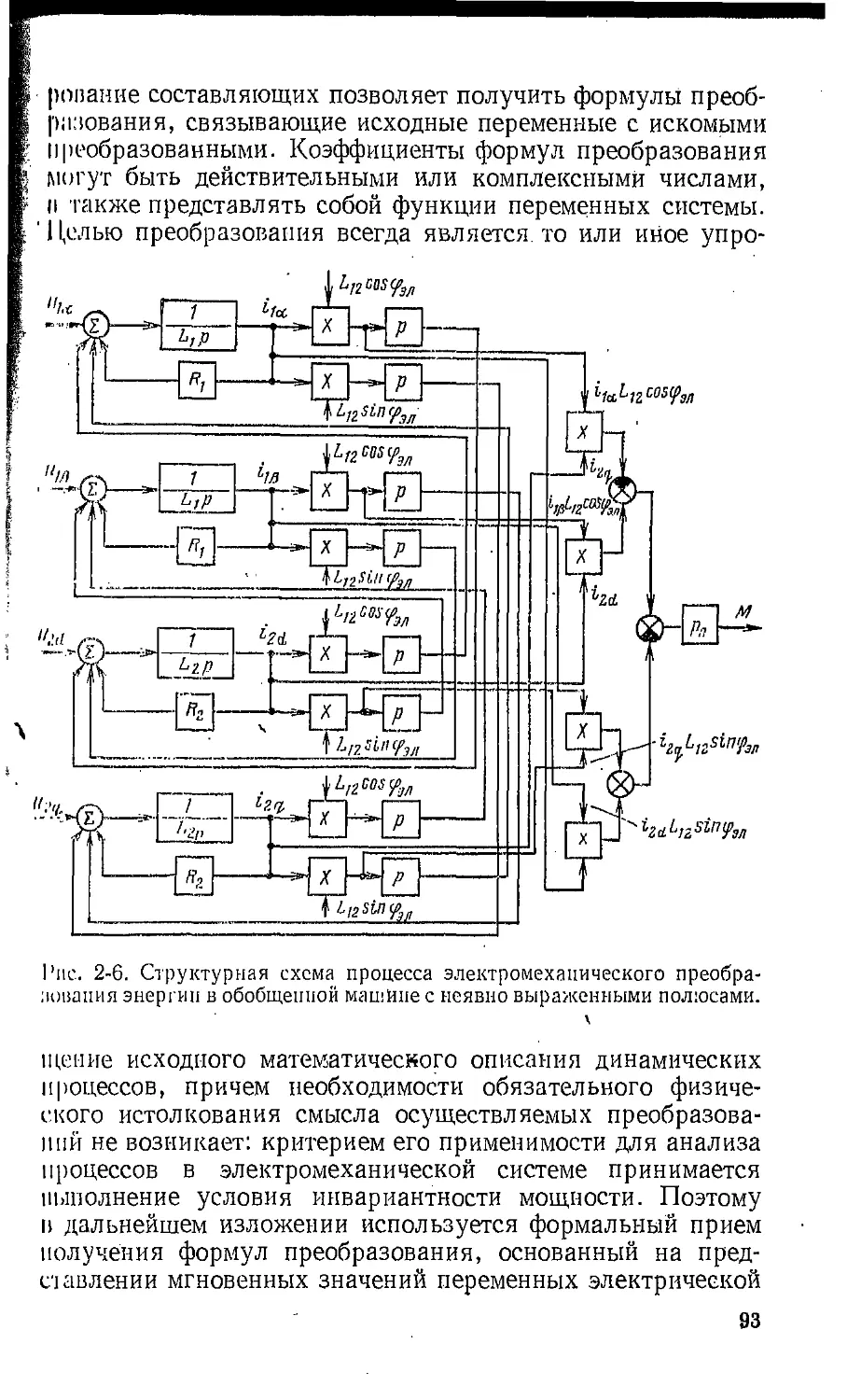
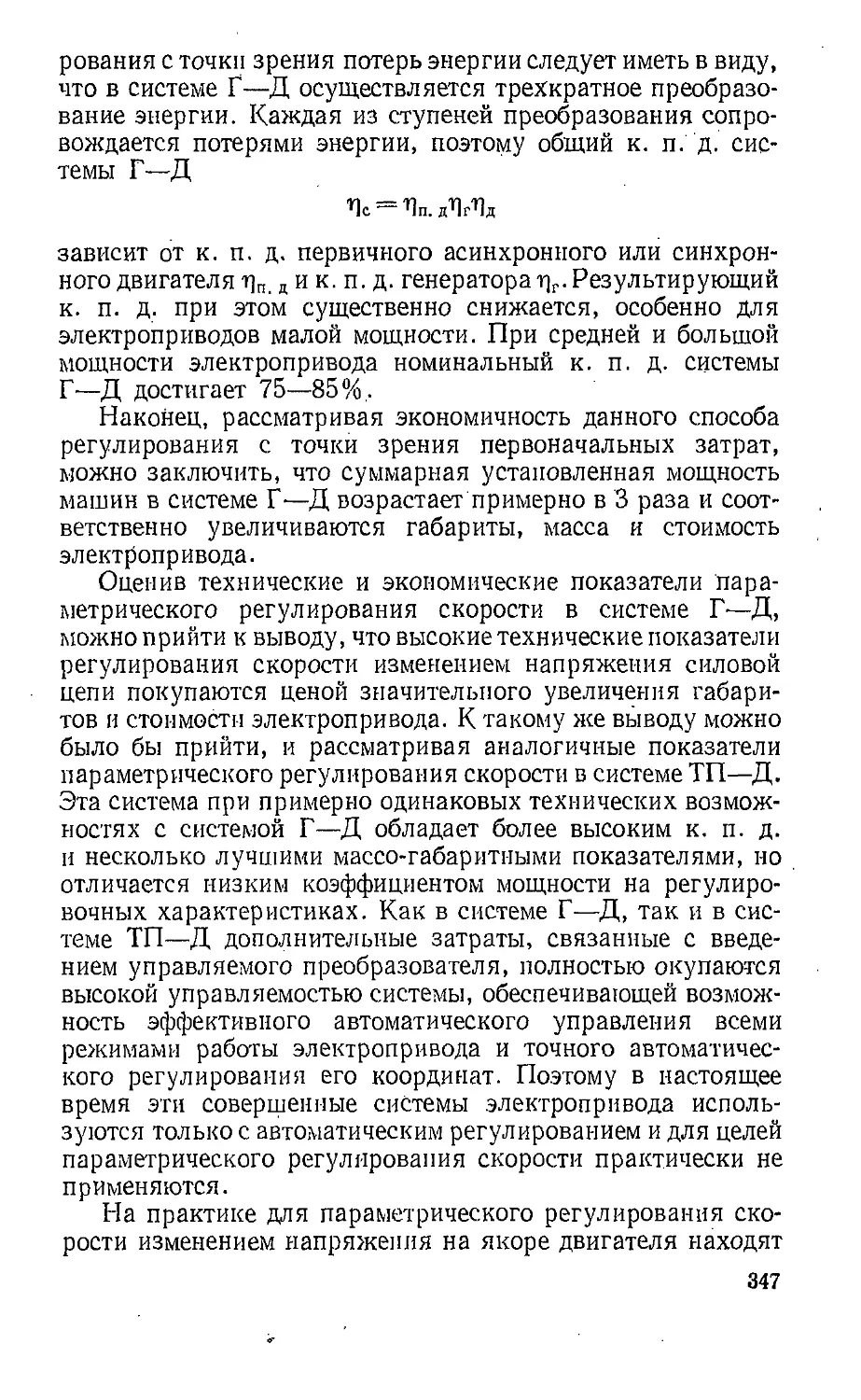
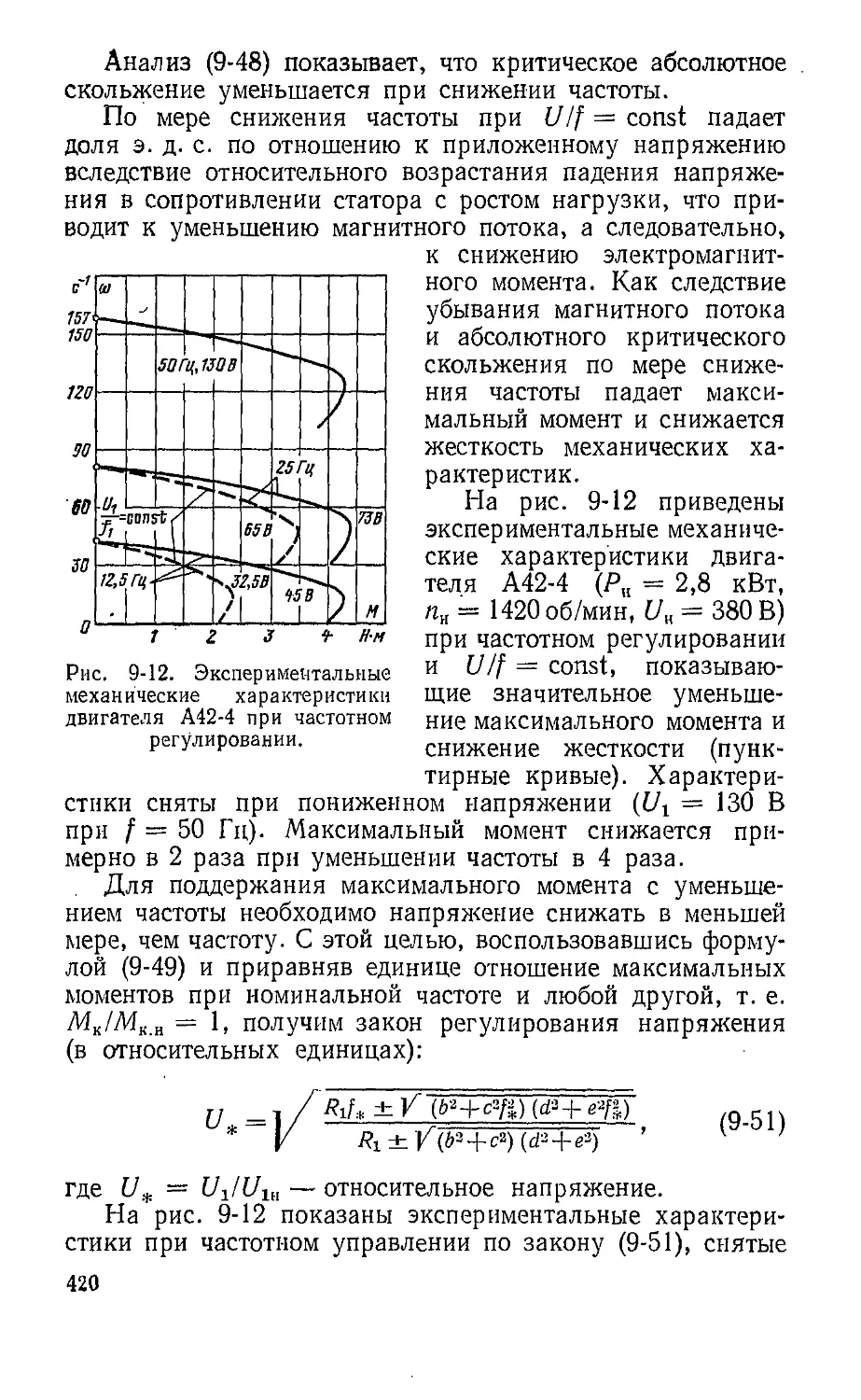
Рис. 1-1. Кинематическая схема ных примеров.
электропривода вентилятора (я) и Простейшим примером
зависимость Ммсх = f («мех) (б). может служить представ-
ленная на рис. 1-1, а ки-
нематическая схема электропривода центробежного венти-
лятора. Ротор двигателя Д соединяется с помощью со-
единительной муфты СМ непосредственно с валом рабо-
чего колеса вентилятора В. Все элементы кинематической
схемы движутся с одной и той же скоростью. На рабочем
колесе вентилятора при работе развивается момент соп-
ю
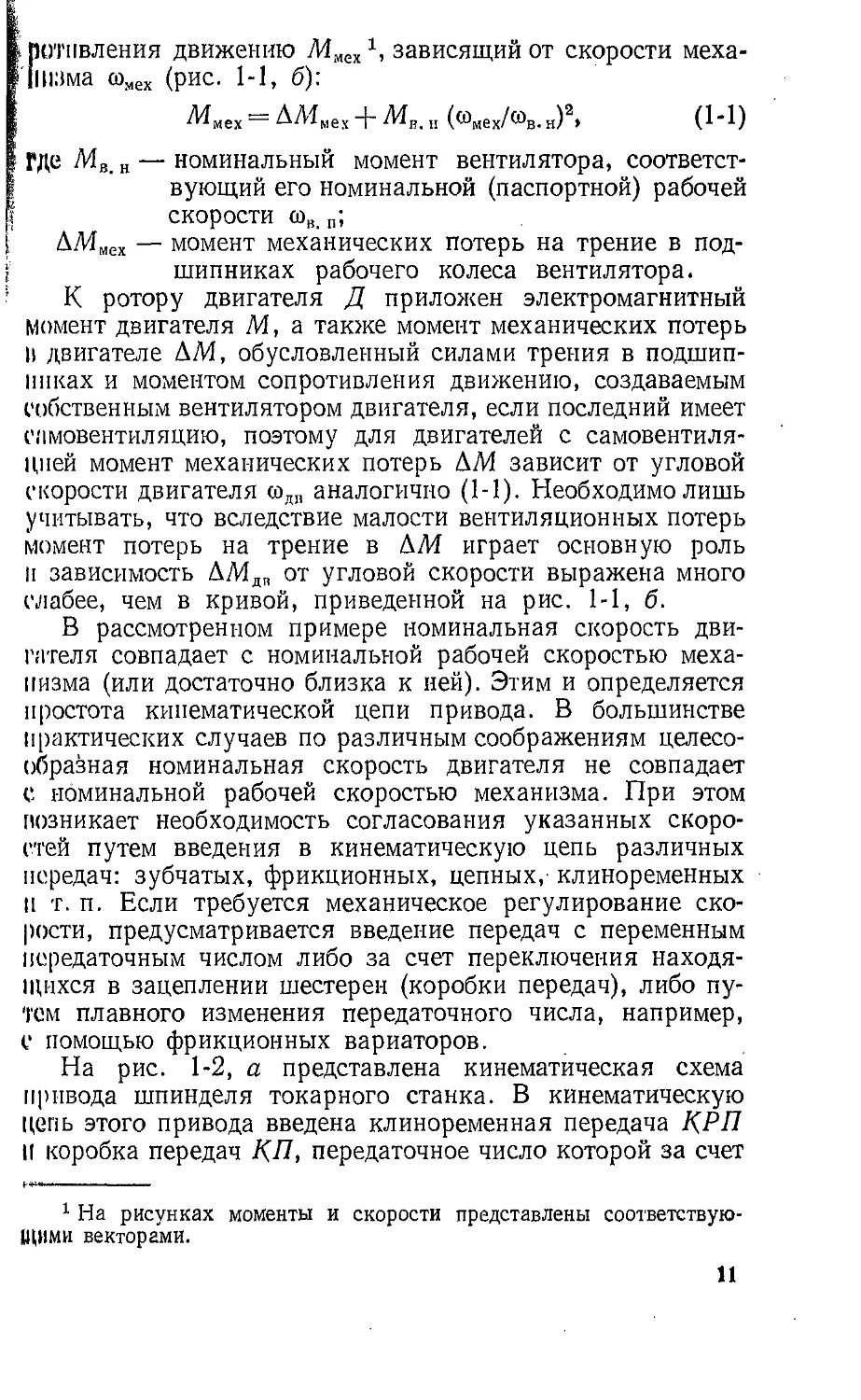
flOTi^eHHH движению Мяех х, зависящий от скорости меха-
ШЗма сомех (рис. 1-1, б):
Л4мех = ДА1мех + А4В-н (соиех/«в.н)1 2, (1-1)
Где Мв н — номинальный момент вентилятора, соответст-
вующий его номинальной (паспортной) рабочей
скорости сов.
АМмех — момент механических потерь на трение в под-
шипниках рабочего колеса вентилятора.
К ротору двигателя Д приложен электромагнитный
момент двигателя М, а также момент механических потерь
В двигателе ДМ, обусловленный силами трения в подшип-
никах и моментом сопротивления движению, создаваемым
собственным вентилятором двигателя, если последний имеет
самовентиляцию, поэтому для двигателей с самовентиля-
цней момент механических потерь ДМ зависит от угловой
скорости двигателя соД11 аналогично (1-1). Необходимо лишь
учитывать, что вследствие малости вентиляционных потерь
момент потерь на трение в ДМ играет основную роль
п зависимость ДМд„ от угловой скорости выражена много
слабее, чем в кривой, приведенной на рис. 1-1, б.
В рассмотренном примере номинальная скорость дви-
гателя совпадает с номинальной рабочей скоростью меха-
низма (или достаточно близка к ней). Этим и определяется
простота кинематической цепи привода. В большинстве
практических случаев по различным соображениям целесо-
образная номинальная скорость двигателя не совпадает
С номинальной рабочей скоростью механизма. При этом
возникает необходимость согласования указанных скоро-
стей путем введения в кинематическую цепь различных
передач: зубчатых, фрикционных, цепных, клиноременных
п т. п. Если требуется механическое регулирование ско-
рости, предусматривается введение передач с переменным
передаточным числом либо за счет переключения находя-
щихся в зацеплении шестерен (коробки передач), либо пу-
тем плавного изменения передаточного числа, например,
с помощью фрикционных вариаторов.
На рис. 1-2, а представлена кинематическая схема
привода шпинделя токарного станка. В кинематическую
цепь этого привода введена клиноременная передача К.РП
II коробка передач КП, передаточное число которой за счет
1 На рисунках моменты и скорости представлены соответствую-
щими векторами.
И
введения в зацепление шестерен с различным числом
зубьев может изменяться ступенями. Выходной вал коробки
передач связан со шпинделем станка Ш, в котором устанав-
ливается заготовка 3 обрабатываемой детали. В резуль-
тате взаимодействия вращающейся детали с неподвижным
резцом Р возникает усилие резания Fz и момент резания
Маех = Мг = Ргг3, (1-2)
где.г3 — радиус заготовки обрабатываемой детали.
В процессе обработки данной детали усилие и момент
резания остаются постоянными. Полезный момент нагрузки
механизма Л4мех в данном случае от угловой скорости
Рис. 1-2. Кинематическая схема электропривода шпинделя токарного
станка (а) и зависимость Л1мех = f (шмех) (б).
не зависит (рис. 1-2, б), но при постоянном Fz он увеличи-
вается пропорционально радиусу обрабатываемой детали г3.
Кроме полезного момента нагрузки Ммех = Мг, а также
приложенных к ротору двигателя электромагнитного мо-
мента двигателя М и момента потерь ДМ во всех элемен-
тах рассматриваемой кинематической цепи действуют силы
трения в подшипниках, в зубчатых зацеплениях, в трущихся
поверхностях клиноременной передачи и т. п.
Примером механизма, в котором все действующие силы
и моменты обусловлены трением, может служить меха-
низм передвижения тележки мостового крана, переме-
щающейся по горизонтальному пути, кинематическая схема
которого приведена на рис. 1-3, а. Двигатель Д через
двухступенчатый редуктор Р вращает пару ведущих колес
тележки, преодолевая силу сопротивления движению те-
лежки ?мех, обусловленную трением скольжения в под-
шипниках и трением качения колес тележки по рельсам.
Учитывая, что силы и моменты трения пропорциональны
12
нормальному давлению, можно записать:
= + (1-3)
где f = Мгр. K/W — коэффициент трения качения;
И = Fip. c/N — коэффициент трения скольжения;
M-vp. к — момент трения качения;
F-rp. с — сила трения скольжения;
G — сила тяжести тележки;
7?к, ги — радиусы колес и цапф оси колес;
k3 — коэффициент запаса.
В рассматриваемом случае сила сопротивления движе-
нию FMex связана с наличием сухого трения. Силы трения
Рис. 1-3. Кинематическая схема электропривода передвижения тележки
'крана (а) и зависимость fMex = / фмех) (#)•
скольжения находятся в сложной нелинейной зависимости
от скорости, с учетом которой сила FMex, строго говоря,
нелинейно зависит от скорости движения механизмов умех
(кривая 1 на рис. 1-3, б). В большинстве механизмов тре-
ние покоя (умех = 0) незначительно превышает трение при
движении и без существенной погрешности силы сухого
трения при анализе могут быть приняты постоянными Гмех=
= const (прямая 2 на рис. 1-3, б). Однако следует иметь
в виду, что существуют механизмы (например, конвейеры
большой протяженности), у которых силы трения покоя
превышают силы трения при рабочей скорости на 30—40%.
При исследовании и проектировании электроприводов
таких механизмов не учитывать зависимости сил сухого
трения от скорости нельзя.
13
Сила FMex в соответствии с (1-3) зависит от веса тележки
с перемещаемым грузом G и от дополнительных сил трения
реборд колес о рельсы, которые при возникновении пере-
косов могут значительно увеличивать сопротивление дви-
жению и учитываются введением коэффициента запаса k3.
Кроме рассмотренных сил и моментов, а также приложен-
ного к ротору двигателя момента М на каждом валу редук-
тора действуют моменты, обусловленные потерями на тре-
ние. При отключении двигателя от сети быстрая остановка
механизма обеспечивается приложением к валу двигателя
момента механического тормоза Т.
Сравнивая три рассмотренных примера, можно устано-
вить, что вентилятор и шпиндель станка для совершения
полезной работы должны вращаться всегда в одном, строго
определенном направлении, т. е. в силу конструктивных
особенностей или особенностей технологии не требуют
изменения направления движения. Электропривод таких
механизмов называется нереверсивным. Механизм передви-
жения тележки должен иметь возможность двигаться
как в прямом, так и в обратном направлении, поэтому
требует применения реверсивного электропривода. В связи
с этим зависимость Fan = f (имм) на рис. 1-3, б показана
как для положительных значений скорости, соответствую-
щих движению в прямом направлении, так и для ее отри-
цательных значений, имеющих место при движении назад.
Из физических представлений следует, что при изменении
направления движения все силы сухого трения должны
изменить свой знак, так как трение при любом направле-
нии противодействует движению. Это обстоятельство нахо-
дит свое отражение в ходе рассматриваемой зависимости.
Другим примером механизма с реверсивным приводом
может служить приведенная на рис. 1-4, а кинематическая
схема одноконцевой подъемной лебедки крана. Двигатель Д,
на валу которого установлен механический тормоз Т,
через двухступенчатый редуктор Р вращает барабан Б,
который с помощью полиспаста П поднимает или опускает
крюковую подвеску КП с грузом. В данном случае приме-
нение полиспаста с передаточным отношением 1„ позво-
ляет при прочих равных условиях применить редуктор
с меньшим передаточным числом, имеющий меньшие габа-
риты и стоимость. Полезной нагрузкой подъемной лебедки
является сила тяжести поднимаемого груза и крюковой
подвески G = Grp + Go. Эта сила всегда направлена в сто-
рону спуска и не зависит от скорости перемещения груза
14
(небольшим сопротивлением воздуха при реальных ско-
ростях движения груза пренебрегаем). Соответственно
зависимость FMex = f (умех) имеет вид, показанный на
рис. 1-4, б.
Стационарные подъемные установки с тяжелыми грузо-
подъемными устройствами для снижения рабочей на-
грузки FMex обычно выполняются уравновешенными. При-
Рис. 1-4. Кинематическая схема электропривода подъемной лебедки
крана (а) и соответствующая зависимость FMCX — f (vMex) (б).
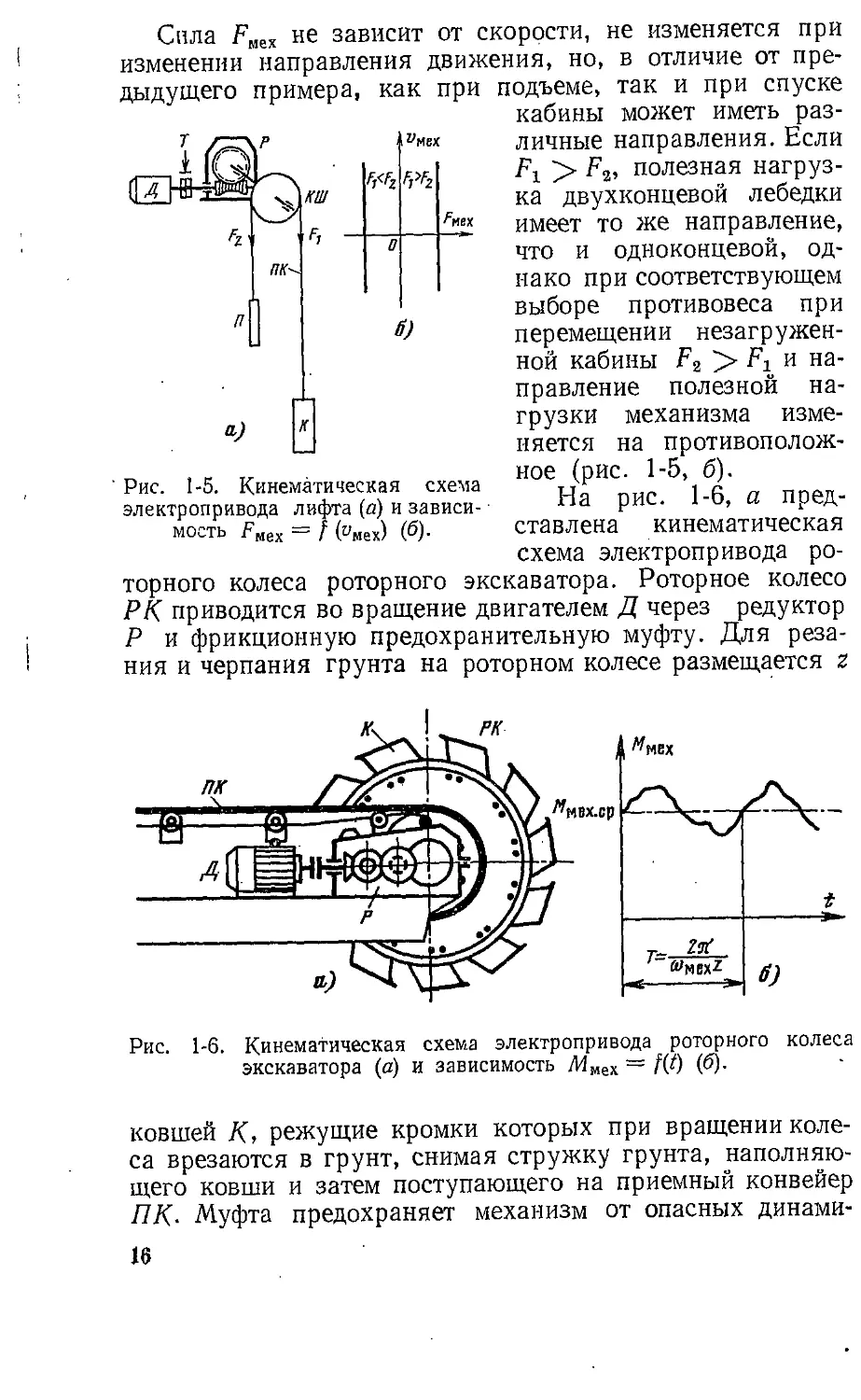
мером может служить приведенная на рис. 1-5, а кинема-
тическая схема двухконцевой подъемной лебедки лифта.
Двигатель Д, на валу которого предусмотрен механический
тормоз Т, через червячный редуктор Р приводит во вра-
щение канатоведущий шкив Kill. Кабина К и противовес П
закреплены на концах подъемного каната ПК, наложен-
ного на канатоведущий шкив. Передача усилий от канато-
ведущего шкива к канату и в обратном направлении осу-
ществляется за счет сил трения между шкивом и канатом.
В данном случае полезная нагрузка механизма опреде-
ляется разностью сил натяжения каната со стороны ка-
бины F1 и со стороны противовеса Fa:
(1-4)
15
Сила FMex не зависит от скорости, не изменяется при
изменении направления движения, но, в отличие от пре-
дыдущего примера, как при
Рис. 1-5. Кинематическая схема
электропривода лифта (а) и зависи-
мость Fмех = / (^мех) (0-
подъеме, так и при спуске
кабины может иметь раз-
личные направления. Если
Fx > F2, полезная нагруз-
ка двухконцевой лебедки
имеет то же направление,
что и одноконцевой, од-
нако при соответствующем
выборе противовеса при
перемещении незагружен-
ной кабины F2 > и на-
правление полезной на-
грузки механизма изме-
няется на противополож-
ное (рис. 1-5, б).
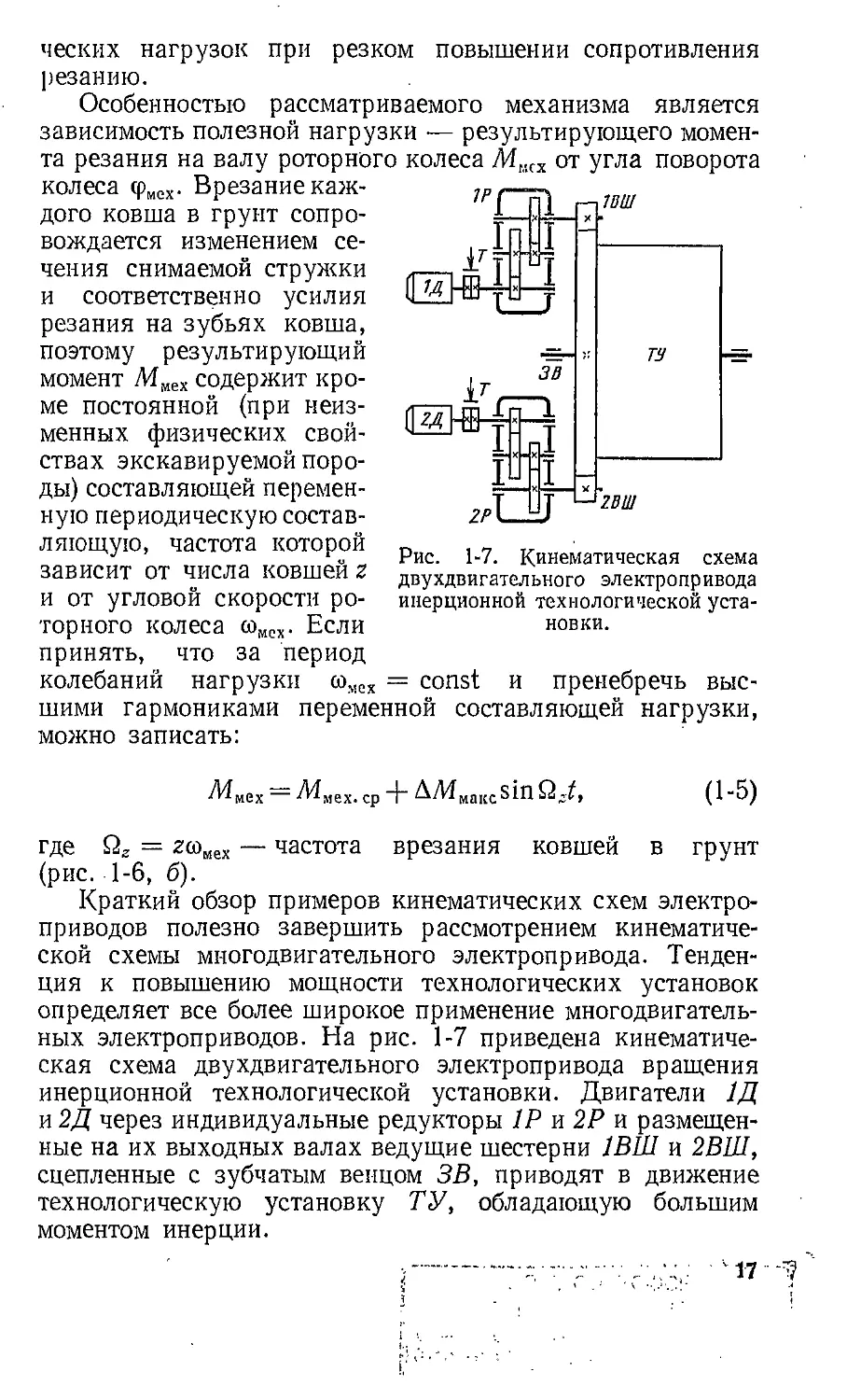
На рис. 1-6, а пред-
ставлена кинематическая
схема электропривода ро-
торного колеса роторного экскаватора. Роторное колесо
РК приводится во вращение двигателем Д через редуктор
Р и фрикционную предохранительную муфту. Для реза-
ния и черпания грунта на роторном колесе размещается z
Рис. 1-6. Кинематическая схем электропривода роторного колеса
экскаватора (а) и зависимость /Имех = f(t) (б).
ковшей К, режущие кромки которых при вращении коле-
са врезаются в грунт, снимая стружку грунта, наполняю-
щего ковши и затем поступающего на приемный конвейер
ПК. Муфта предохраняет механизм от опасных динами-
16
ческих нагрузок при резком повышении сопротивления
резанию.
Особенностью рассматриваемого механизма является
зависимость полезной нагрузки •— результирующего момен-
та резания на валу роторного колеса AfMCX от угла поворота
колеса срмех. Врезание каж-
дого ковша в грунт сопро-
вождается изменением се-
чения снимаемой стружки
и соответственно усилия
резания на зубьях ковша,
поэтому результирующий
момент Ммех содержит кро-
ме постоянной (при неиз-
менных физических свой-
ствах экскавируемой поро-
ды) составляющей перемен-
ную периодическую состав-
ляющую, частота которой
зависит от числа ковшей z
и от угловой скорости ро-
торного колеса юмсх. Если
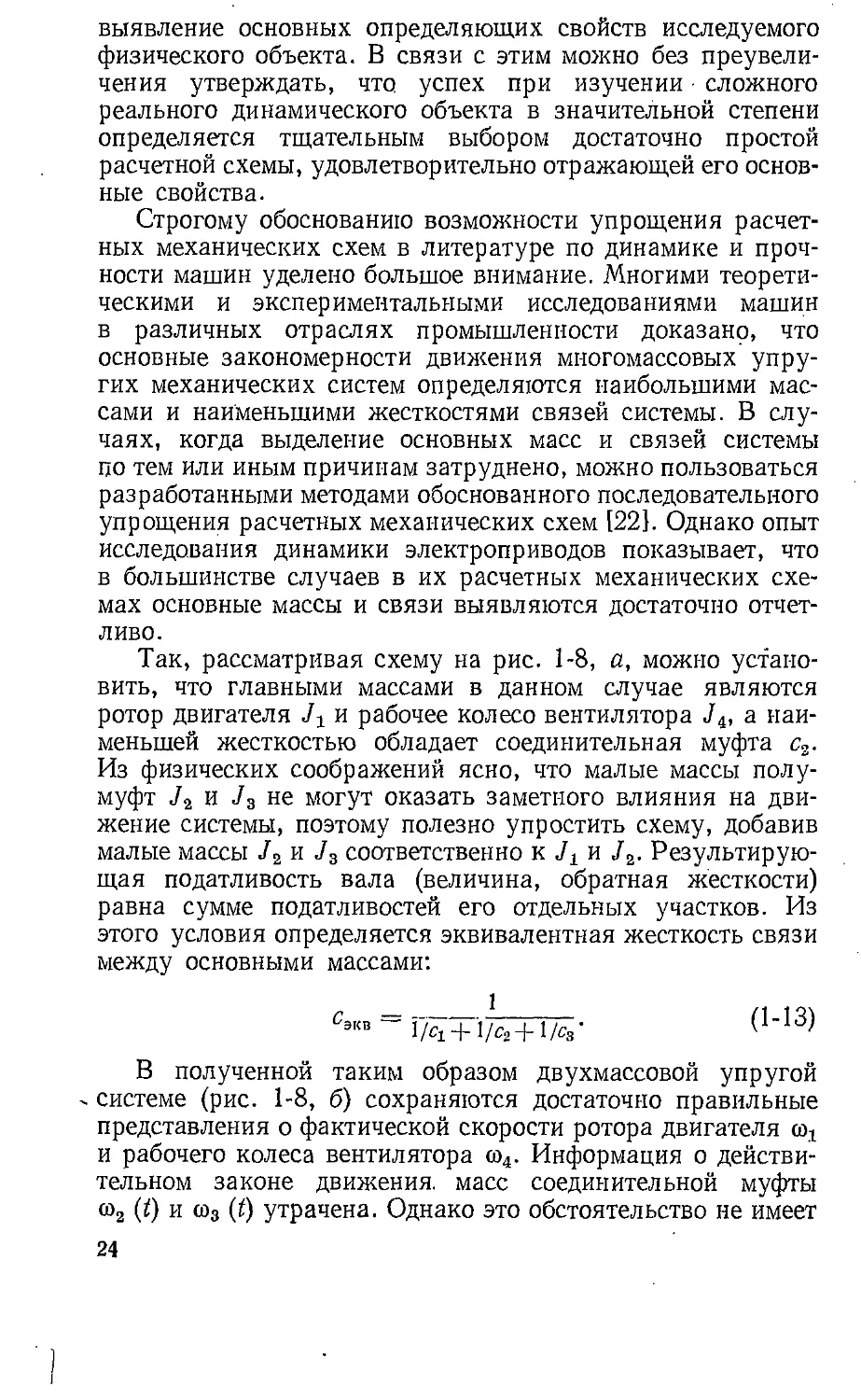
Рис. 1-7. Кинематическая схема
двухдвигательного электропривода
инерционной технологической уста-
новки.
принять, что за период
колебаний нагрузки со5,ех = const и пренебречь выс-
шими гармониками переменной составляющей нагрузки,
можно записать:
4tMex — 44мех, ср 4“ АЛ4макс SIU £2Д, (1"5)
где = zcoMex — частота врезания ковшей в грунт
(рис. 1-6, б).
Краткий обзор примеров кинематических схем электро-
приводов полезно завершить рассмотрением кинематиче-
ской схемы многодвигательного электропривода. Тенден-
ция к повышению мощности технологических установок
определяет все более широкое применение многодвигатель-
ных электроприводов. На рис. 1-7 приведена кинематиче-
ская схема двухдвигательного электропривода вращения
инерционной технологической установки. Двигатели 1Д
'л2Д через индивидуальные редукторы 1Р и 2Р и размещен-
ные на их выходных валах ведущие шестерни 1ВШ и 2ВШ,
сцепленные с зубчатым венцом ЗВ, приводят в движение
технологическую установку ТУ, обладающую большим
моментом инерции.
---------------------------------------------
Полезной нагрузкой рассматриваемого электропривода
является момент сопротивления вращению технологической
установки Л4МСХ, который в частном случае может пред-
ставлять собой момент сухого трения. Кроме того, как
и во всех рассмотренных примерах, сопротивление движе-
нию увеличивается потерями на трение во всех элементах
кинематической цепи.
Рассмотренные примеры дают представление о наи-
более характерных видах нагрузок электроприводов. На-
грузки вентилятора, шпинделя токарного станка, ротор-
ного колеса экскаватора являются примерами реактивных
моментов и сил, действующих в механической части элек-
тропривода. Это — моменты и силы сопротивления движе-
нию рабочего органа механизма, возникающие как реак-
ция перемещаемого газа, обрабатываемого изделия или
разрушаемого грунта на активный движущий момент или
усилие, создаваемые двигателем. Важнейшей особенностью
реактивной нагрузки является изменение скачком ее зна-
чения и направления при изменении знака скорости. Наи-
более ярким примером такой нагрузки являются силы и
моменты сухого трения, которые при изменении знака
скорости изменяют свое направление, сохраняя абсолют-
ное значение (см. рис. 1-3, б).
Другой важной разновидностью нагрузок электропри-
вода являются активные силы и моменты, не изменяющиеся
по значению и направлению при изменении направления
движения рабочего органа механизма. Таким свойством
обладают силы и моменты потенциального характера. При-
мером потенциальной силы является сила тяжести пере-
мещаемых по вертикали грузов (см. рис. 1-4, б и 1-5, б).
Зависимость нагрузок электропривода от скорости (прн1
неизменном направлении движения) в общем случае можно
выразить показательной функцией
Ммех = ₽(о”,
где р — коэффициент пропорциональности.
При п = 2 нагрузка называется вентиляторной. Такой
зависимостью момента сопротивления от скорости обла-
дают центробежные вентиляторы. В общем случае венти-
ляторная нагрузка может характеризоваться более высо-
ким показателем степени п > 2, в частности такой харак-
теристикой обладают центробежные насосы, работающие
на противодавление.
18
При п = 1 нагрузка линейно зависит от скорости.
Такой характеристикой обладают силы и моменты вязкого
трения, которые в рассмотренных примерах не упомина-
лись, так как в большинстве реальных механизмов, не име-
ющих специальных устройств, предназначенных для соз-
дания момента сопротивления, пропорционального скорости
движения, невелики в сравнении с всегда присутствующими
потерями на сухое трение. В частности, показанное на рис.
1-3, б (кривая 1) небольшое увеличение момента трения
по мере возрастания скорости отражает наличие в системе
выраженной составляющей вязкого трения. Этой состав-
ляющей вследствие малости обычно пренебрегают, пола-
гая момент трения при данном направлении движения
независимым от скорости (прямая 2 на рис. 1-3, б). Однако
известно, что влияние сил вязкого трения на динамику
механической системы имеет принципиальное значение
и более подробно этот вопрос будет изложен в § 1-4,
1-5.
В большинстве практических случаев показатель сте-
пени п = О (Л4МСХ —.const). При этом нагрузка не зависит
ст скорости. Идеальным примером постоянной нагрузки
может служить сила тяжести поднимаемого груза (см.
рис. 1-4, б). При неизменном направлении движения можно
считать постоянной нагрузку, обусловленную сухим тре-
нием.
Значительное влияние на динамические процессы в элек-
тромеханической системе электропривода оказывают на-
грузки, содержащие переменную периодическую состав-
ляющую. Как правило, такие нагрузки зависят от угла
поворота рабочего органа механизма. В частности, очевидна
зависимость нагрузки от угла поворота роторного колеса
в схеме на рис. 1-6. Легко представить себе появление
периодической составляющей нагрузки в схеме на рис. 1-2
в случае когда обрабатываемая деталь имеет продольные
пазы; при этом такие изменения нагрузки связаны с углом
поворота изделия. В подобных случаях иногда допустимо
полагать скорость механизма не изменяющейся за период
пульсаций нагрузки и представлять нагрузку в виде функ-
ции времени (см. рис. 1-6, б). Причиной появления перио-
дических нагрузок, зависящих от угла поворота двига-
теля, могут явиться нелинейные кинематические связи
типа кривошипно-шатунного механизма, кулисного меха-
низма, карданной передачи и т. п., а также кинематические
погрешности передач (см. § 1-7).
19
Приведенные примеры кинематических схем позволяют
наглядно рассмотреть процесс перехода от частных кине-
матических схем к обобщенным расчетным схемам механи-
ческой части электропривода, применяемым в теории элек-
тропривода.
1-2. РАСЧЕТНЫЕ СХЕМЫ МЕХАНИЧЕСКОЙ ЧАСТИ
ЭЛЕКТРОПРИВОДА
Кинематическая схема привода дает представление об
идеальных кинематических связях между движущимися
массами конкретной установки, однако она не отражает
того важного обстоятельства, что все элементы кинемати-
ческой цепи при нагружении в той или иной степени де-
формируются, т. е. обладают конечной жесткостью. Кроме
того, в общем случае инерционные массы системы движутся
с различными скоростями, поэтому моменты инерции
отдельных вращающихся элементов J или поступательно
движущиеся массы установки т непосредственно сравнивать
невозможно, равно как нельзя сравнивать по значению
моменты или силы, действующие в движущихся с разными
скоростями элементах. Поэтому для анализа условий дви-
жения исследуемого механического объекта необходимо
с помощью кинематической схемы составить расчетную
механическую схему, в которой моменты инерции и моменты
нагрузки вращающихся элементов, массы и действующие
силы поступательно движущихся элементов, перемещения
элементов, а также реальные жесткости механических
связей заменены эквивалентными величинами, приведенными
к одной и той же расчетной скорости. Обычно наибольшие
удобства представляет приведение схемы к угловой ско-
рости двигателя, однако при решении ряда задач оказыва-
ется полезным приведение ее к скорости механизма (осо-
бенно в тех случаях, когда механизм движется поступа-
тельно) либо к любой другой скорости.
Условием соответствия приведенной расчетной схемы
реальной механической системе является выполнение за-
кона сохранения энергии. При приведении необходимо обес-
печить сохранение запаса потенциальной и кинетической
энергии системы, а также элементарной работь! всех дей-
ствующих в системе сил и моментов на возможных пере-
мещениях [26]. Соответственно при приведении момента
инерции i-ro элемента схемы, движущегося с угловой
20
скоростью со/, к скорости «>! следует записать:
j npia~l/2 = J
Следовательно, приведение вращающихся масс уста-
новки можно произвести по формуле
Jnpi = = Ji/ili, (1-6)
где iLi = сщ/сщ — передаточное число от вала приведения
к i-му валу установки.
Для поступательно движущейся массы ту условие
сохранения запаса кинетической энергии имеет вид:
^np/®1/2 = myy)/2.
Отсюда
Л,рУ = т7у)/(о? = тур^, (1-7)
где pi/= ty/cOi — радиус приведения /-го поступательно
движущегося элемента к скорости звена приведения сщ.
Приведение вращательных cpz и поступательных Sj
перемещений к угловой скорости «>! осуществляется с по-
мощью следующих формул:
Фпр I Ф^Ц, фпрУ = (1-6)
Жесткость i-ro упругого элемента системы определяется
соотношением
Ci = MIipi/kqh
где Мкр/ и А(рг — крутящий момент и соответствующая
деформация i-ro упругого элемента.
В дальнейшем изложении чаще всего предполагается,
что деформации подчиняются закону Гука, и принима-
ется Ci = const, но в общем случае связь между нагрузкой
и деформацией может быть нелинейной. Условие равенства
запаса потенциальной энергии в i-м упругом приведенном
и реальном элементе имеет вид:
сПр i Афпр :/2 = Ci A<pf/2.
Отсюда с учетом (1-8) получим следующую формулу
приведения жесткостей:
cnpi = CiH\i. (1-9)
Для /-й упругой связи между поступательно движу-
щимися массами аналогично получим:
спрj~cj'Pijt (1-16)
21
где Cj = Fj/ASj — жесткость линейного упругого эле-
мента.
Условие равенства элементарной работы момента Mit
действующего на i-м валу, в приведенной схеме и реаль-
ной системе запишется так:
А1Пр i ^Фпр i ~ М( 6ф/.
С учетом (1-8)
= (1-Н)
Аналогично для силы Fj, приложенной к /-му поступа-
тельно движущемуся элементу, получим формулу приве-
дения в виде
(Илр/=% (1-12)
Полученные формулы приведения позволяют при извест-
ных параметрах элементов реальной механической системы
осуществить переход к расчетной приведенной схеме этой
системы без каких-либо затруднений.
Будем считать заданными силы и моменты., действующие
в механической системе, все данные кинематики, а также
известными конструктивные размеры и материалы элемен-
тов кинематической цепи. Последние данные позволяют
с помощью справочной литературы рассчитать их мо-
менты инерции и эквивалентные жесткости {22].
Задача определения эквивалентной жесткости элемен-
тов механического оборудования возникает в связи со слож-
ностью реальных упругих связей между массами. Каждый
элемент кинематической цепи — валы, соединительные муф-
ты, зубчатые зацепления — обладает конечной жесткостью
и конечной массой. Под нагрузкой в зацеплениях возни-
кают радиальные усилия, которые вызывают деформации
изгиба валов, а также деформации опор и подшипников.
Упругие канаты, связывающие поступательно движущиеся
и вращающиеся массы установки, при нагрузке вызывают
деформации осей, подшипников и опор направляющих
шкивов, а также металлоконструкций, на которых эти
шкивы установлены. Жесткость i-ro вращающегося элемента
или жесткость линейной связи между массами /-го поступа-
тельно движущегося элемента должна определяться с уче-
том деформаций, возникающих при нагрузке во всех вза-
имодействующих деталях соответствующего узла системы.
Воспользуемся полученными формулами приведения
для составления расчетных схем механической части элек-
троприводов, рассмотренных в § 1-1. Как было отмечено выше,
22,
инерционные массы двигателя и вентилятора (см. рис. 1-1)
движутся с одной скоростью, если полагать связи между
ними абсолютно жесткими. В действительности вал дви-
гателя Д, эластичная соединительная муфта СМ и вал
вентилятора В имеют конечную жесткость, поэтому даже
простейшая из рассмотренных в § 1-1 установок представля-
ет собой многомассовую упругую систему с несколькими
степенями свободы. С учетом жесткостей вала двигателя
сх, муфты с2 и вала вентилятора с3 расчетная меха-
ническая схема показана на рис. 1-8, а. Для наглядности
она представлена в ви-
де длинного безынер-
ционного вала, в раз-
ных точках которого
размещены сосредото-
ченные массы: двигате-
ля Jx, ведущей J2 и ве-
домой J3 полумуфты и
рабочего колеса венти-
лятора J4. Представле-
ние о моментах инерции
дают размеры соответ-
ствующих элементов схе-
мы, изображающих мас-
сы, а жесткости сг, с2 и
с3 обратно пропорцио-
нальны длине соответст-
Рис. 1-8. Расчетные механические схе-
мы электропривода центробежного вен-
тилятора.
вующих отрезков вала.
Вследствие конечной жесткости связей мгновенные угло-
вые скорости масс ©х, со2, ®з, ®4 различны. Однако следует
иметь в виду, что реальные деформации ограниченны, по-
этому средняя скорость движения масс на конечных отрез-
ках времени должна быть одинаковой.
Нетрудно видеть, что простейший из рассмотренных
электроприводов с учетом упругих механических связей
представляет собой достаточно сложную многомассовую
систему. Анализ динамических процессов в такой системе
представляет определенные трудности и на практике он
дополнительно осложняется отсутствием количественных
характеристик всех элементов и связей. С другой стороны,
даже при наличии точных данных о всех параметрах си-
стемы учет ряда второстепенных факторов, незначительно
влияющих на условия движения системы, но усложняю-
щих ее анализ, при исследованиях неизбежно затрудняет
23
выявление основных определяющих свойств исследуемого
физического объекта. В связи с этим можно без преувели-
чения утверждать, что успех при изучении • сложного
реального динамического объекта в значительной степени
определяется тщательным выбором достаточно простой
расчетной схемы, удовлетворительно отражающей его основ-
ные свойства.
Строгому обоснованию возможности упрощения расчет-
ных механических схем в литературе по динамике и проч-
ности машин уделено большое внимание. Многими теорети-
ческими и экспериментальными исследованиями машин
в различных отраслях промышленности доказано, что
основные закономерности движения многомассовых упру-
гих механических систем определяются наибольшими мас-
сами и наименьшими жесткостями связей системы. В слу-
чаях, когда выделение основных масс и связей системы
по тем или иным причинам затруднено, можно пользоваться
разработанными методами обоснованного последовательного
упрощения расчетных механических схем [221. Однако опыт
исследования динамики электроприводов показывает, что
в большинстве случаев в их расчетных механических схе-
мах основные массы и связи выявляются достаточно отчет-
ливо.
Так, рассматривая схему на рис. 1-8, а, можно устано-
вить, что главными массами в данном случае являются
ротор двигателя и рабочее колесо вентилятора J4, а наи-
меньшей жесткостью обладает соединительная муфта с2.
Из физических соображений ясно, что малые массы полу-
муфт J2 и J3 не могут оказать заметного влияния на дви-
жение системы, поэтому полезно упростить схему, добавив
малые массы J3 и J3 соответственно к JL и J2. Результирую-
щая податливость вала (величина, обратная жесткости)
равна сумме податливостей его отдельных участков. Из
этого условия определяется эквивалентная жесткость связи
между основными массами:
сэкв = ’13)
В полученной таким образом двухмассовой упругой
- системе (рис. 1-8, б) сохраняются достаточно правильные
представления о фактической скорости ротора двигателя юг
и рабочего колеса вентилятора со4. Информация о действи-
тельном законе движения, масс соединительной муфты
со2 (t) и ю3 (0 утрачена. Однако это обстоятельство не имеет
24
значения, так как вследствие малости масс J2 и J3 их дви-
жение полностью определяется движением основных масс
системы Jr и J4.
Для решения ряда задач динамики электропривода воз-
можно дальнейшее упрощение расчетной схемы механиче-
ской части электропривода вентилятора за счет пренебре-
жения податливостью его связи с двигателем. Положив
сэкв = ':зо> получим простейшую расчетную схему этого
электропривода, приведенную на рис. 1-8, в. Здесь все
массы связаны жестко и движутся с одинаковой угловой
скоростью ©!, закон изменения которой в той или иной
степени отличается от действительного закона изменения
скорости как ротора двигателя со, (t), так и рабочего колеса
вентилятора ®4 (t). Если переход от схемы рис. 1-8, а
к схеме рис. 1-8, б практически не искажает важнейших
свойств исследуемой системы, то переход от упругой системы
к жесткой изменяет ее физические свойства, поэтому при
использовании простейшей расчетной схемы рис. 1-8, в
следует четко представлять себе, для решения каких задач
электропривода она применима и какие процессы в реаль-
ном объекте она не отражает.
Различные валы кинематической цепи электропривода
шпинделя токарного станка связаны с двигателем различ-
ным передаточным числом и вращаются с разными скоро-
стями, поэтому здесь составление расчетной схемы должно
начинаться с приведения к одной скорости всех действую-
щих в системе сил и моментов и всех движущихся масс
и жесткостей связей с помощью формул (1-6) — (1-12).
Осуществив приведение, например, .к скорости двигателя,
получим представленную на рис. 1-9, а расчетную схему
механической части электропривода, в которой аналогично
предыдущей схеме размеры элементов, изображающих массы,
и длины валов между массами в некотором масштабе отра-
жают значения соответствующих приведенных моментов
инерции и податливостей связей между ними. На этой
схеме: и JX1 — моменты инерции ротора двигателя и
шкива ременной передачи, — жесткость связи между
ними; c'i — приведенная жесткость ременной передачи;
J'it J'n — приведенные моменты инерции шкива и блока
шестерен на первом валу коробки, с’п — приведенная жест-
кость связи между ними; J'3 — приведенный момент инер-
ции промежуточного вала коробки; с3 и с41 — приведенные
жесткости связей массы J3 с массой и с приведенной
массой выходного вала коробки J41; с4 — приведенная
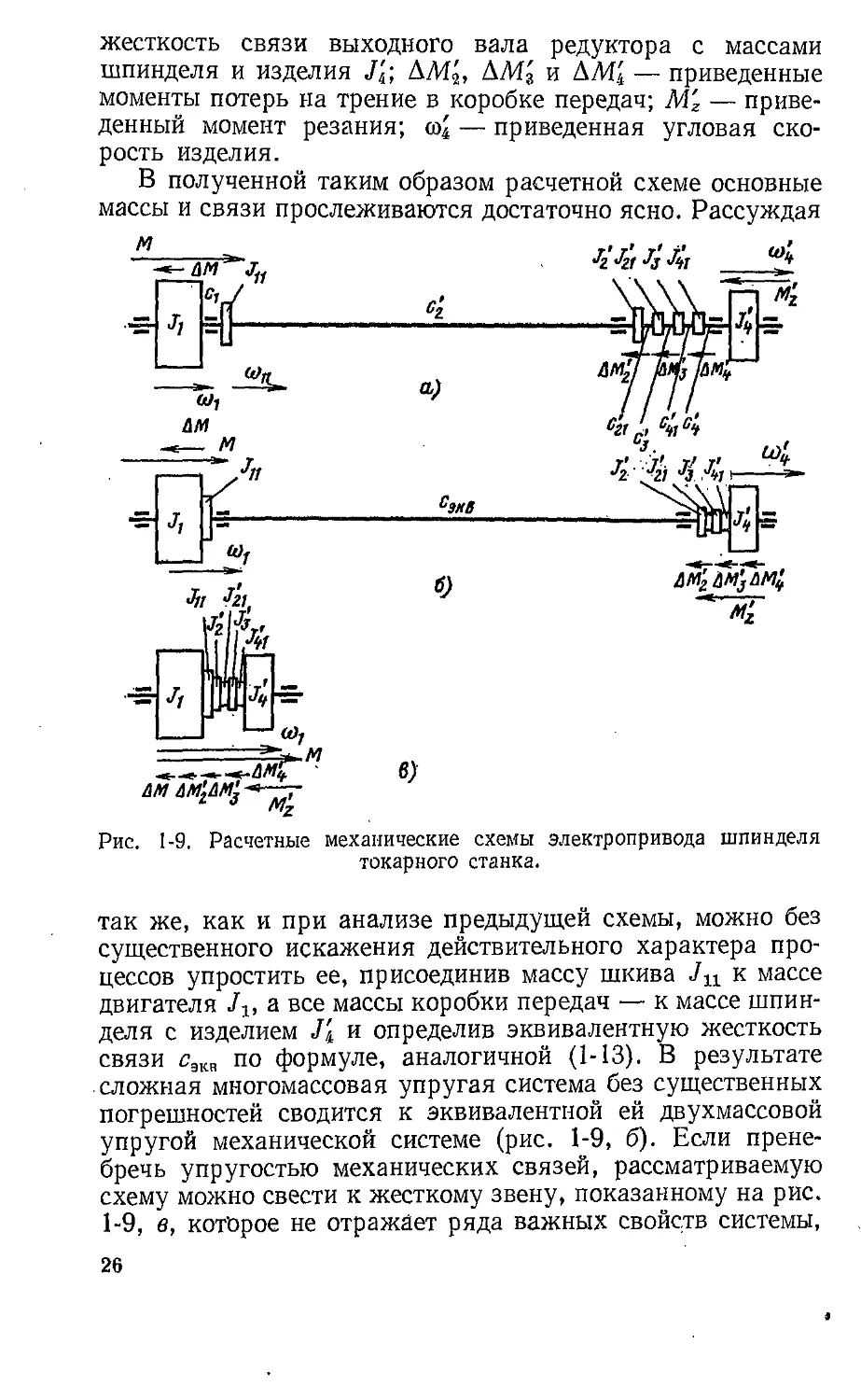
25
жесткость связи выходного вала редуктора с массами
шпинделя и изделия ЬМ.^, ДЛ1з и ДЛ1( — приведенные
моменты потерь на трение в коробке передач; М'г — приве-
денный момент резания; Ю4 — приведенная угловая ско-
рость изделия.
В полученной таким образом расчетной схеме основные
массы и связи прослеживаются достаточно ясно. Рассуждая
Рис. 1-9. Расчетные механические схемы электропривода шпинделя
токарного станка.
так же, как и при анализе предыдущей схемы, можно без
существенного искажения действительного характера про-
цессов упростить ее, присоединив массу шкива JX1 к массе
двигателя Jx, а все массы коробки передач — к массе шпин-
деля с изделием и определив эквивалентную жесткость
связи сэкв по формуле, аналогичной (1-13). В результате
сложная многомассовая упругая система без существенных
погрешностей сводится к эквивалентной ей двухмассовой
упругой механической системе (рис. 1-9, б). Если прене-
бречь упругостью механических связей, рассматриваемую
схему можно свести к жесткому звену, показанному на рис.
1-9, в, которое не отражает ряда важных свойств системы,
26
по весьма удобно для решения задач, в которых эти утра-
ченные свойства существенного значения не имеют.
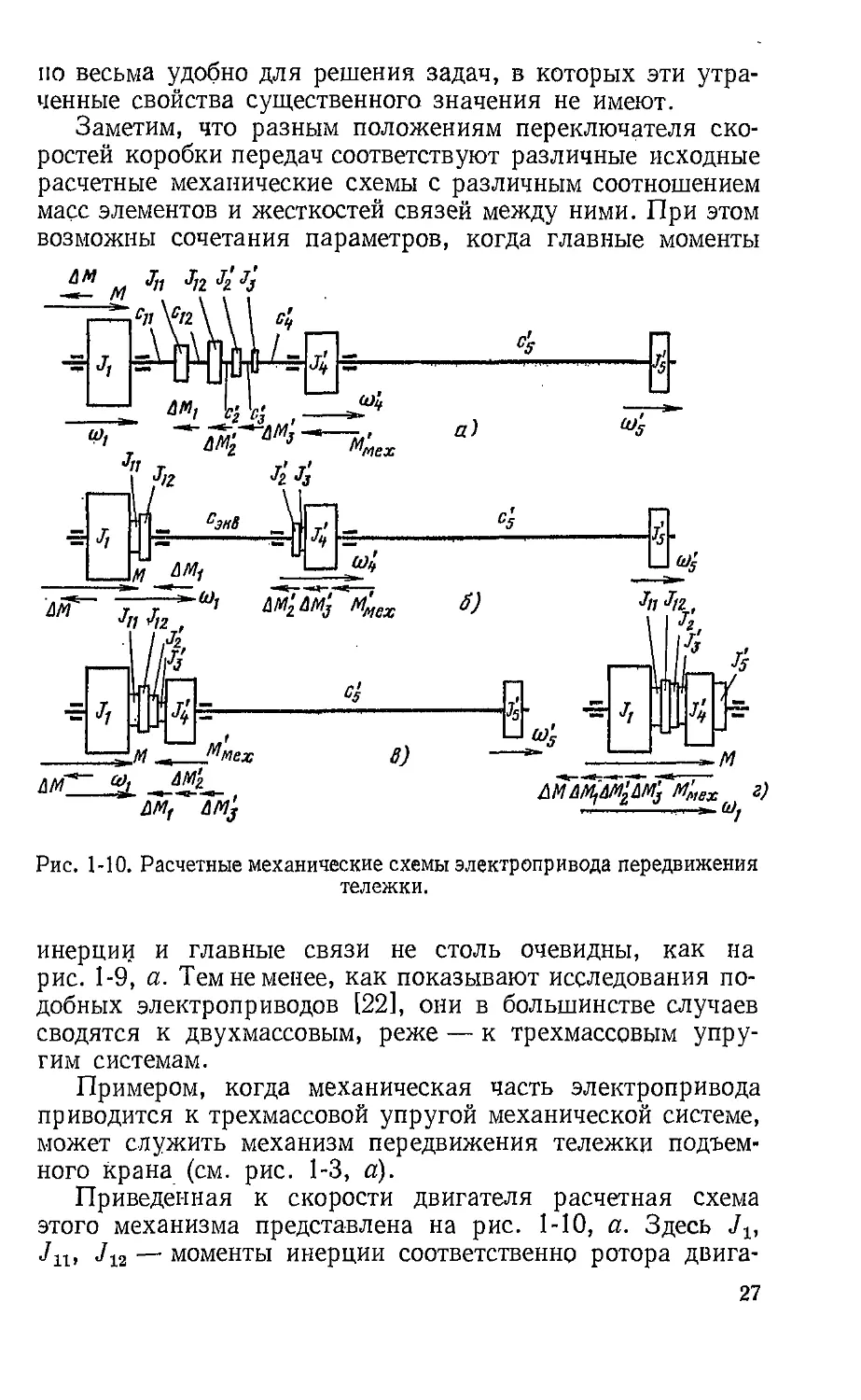
Заметим, что разным положениям переключателя ско-
ростей коробки передач соответствуют различные исходные
расчетные механические схемы с различным соотношением
масс элементов и жесткостей связей между ними. При этом
возможны сочетания параметров, когда главные моменты
Рис. 1-10. Расчетные механические схемы электропривода передвижения
тележки.
инерции и главные связи не столь очевидны, как на
рис. 1-9, а. Тем не менее, как показывают исследования по-
добных электроприводов [22], они в большинстве случаев
сводятся к двухмассовым, реже — к трехмассовым упру-
гим системам.
Примером, когда механическая часть электропривода
приводится к трехмассовой упругой механической системе,
может служить механизм передвижения тележки подъем-
ного крана (см. рис. 1-3, а).
Приведенная к скорости двигателя расчетная схема
этого механизма представлена на рис. 1-10, а. Здесь Jx,
J1X, ^12 — моменты инерции соответственно ротора двига-
27
теля, ведущей полумуфты, ведомой полумуфты с входным
валом редуктора; си, с12 — жесткости связей между этими
массами; Д — приведенный момент инерции промежуточ-
ного вала редуктора; с'2 и с3 — приведенные жесткости его
связей с входным и выходным валом; J3 и J[ — приведенные
моменты инерции соответственно выходного вала редук-
тора и поступательно движущихся масс тележки т^, ci —
приведенная жесткость связи меж-
ду ними; J3—приведенный момент
инерции поступательно движуще-
гося груза т2 и с3 — приведенная
жесткость связи между массами тх
и т2; ЛЛ42 и AM'i — приведенные
моменты потерь в редукторе; Ммех—
приведенный момент силы сопро-
тивления движению тележки FKa.
Особенностью механизма яв-
ляется наличие поступательно дви-
жущихся масс тележки т1 и груза
тг, связанных подвеской груза на
подъемном канате, который в дан-
ном случае можно рассматривать'
в качестве гибкой нерастяжимой
нити. При равномерно ускоренном
движении этих масс под действием
силы F в отклоненном равновесном
ного груза.
положении груза силу тяжести
G = m^g можно разложить на две составляющие: F12 =
= a2m2 и FK, как показано на рис. 1-11. На рис. 1-11 alt
а2 — ускорения масс, g— ускорение свободного падения.
Составляющая FK уравновешивается натяжением каната,
а составляющая F12 является искомой силой взаимодей-
ствия между массами:
F12 = Gtga=r^(S1-S2).
(1-14)
Приведя (1-14) к скорости звена приведения, получим:
✓ч 2
Л112 = г^7щ(Ф1-ф2) = спр(ф1-ф2), С1'15)
где р — радиус приведения;
Л412 — приведенный момент силы упругого взаимодей-
ствия между массами тх и т2;
Ф1! Фа — приведенные координаты масс <рх = Sx/p; <р2 —
= S2/p.
28
Таким образом, жесткость связи груза с массами те-
лежки в данном случае является переменной величиной,
зависящей от угла отклонения нити подвеса от верти-
кали а. При реальных небольших углах а нелинейность
связи можно не учитывать, приближенно принимая
Zcosa х I. В этом случае
спр Gp2/l = const. (Ы6)
Жесткость спр получена в результате рассмотрения ста-
тического равновесия системы. Ее выражение можно ис-
пользовать и в динамических процессах, пренебрегая при
малых углах а вертикальным перемещением груза.
Рассматривая расчетную схему на рис. 1-10, а, можно
видеть в ней три существенные массы: ротора дигателя Jx,
тележки J't и груза J'^. Остальные массы незначительны
и без существенной погрешности учтены увеличением момен-
тов инерции и J's, как показано на рис. 1-10, б, а жест-
кости связей между ними заменены эквивалентной связью
сэкв. Полученная трехмассовая система отражает основные
особенности движения рассматриваемого механизма и поз-
воляет получить представление о законах изменения ско-
ростей трех существенных масс системы «х (Z), ю4 (Z) и
соБ (Z), достаточно близких к истинным.
В зависимости от конкретных целей исследования схема
может быть без большой погрешности дополнительно
упрощена. Жесткость связи раскачивающегося груза с те-
лежкой c's = <?„р обычно на порядок или на два порядка
меньше, чем эквивалентная жесткость передач сэкп, поэтому
при рассмотрении колебательных процессов в передачах
можно свести схему к двухмассовой, приняв c's « 0, а при
исследовании процессов раскачивания груза принять
сэкв = оо и использовать двухмассовую схему, показанную
на рис. 1-10, в. Наконец, при условиях, которые рассма-
триваются ниже, можно пренебречь упругими связями
в системе и свести ее к жесткому приведенному звену,
представленному на рис. 1-10, г. Этот вариант расчетной
механической схемы для механизмов с гибкими связями
дает наиболее далекие от истины представления о динами-
ческой системе, но при решении ряда задач его использо-
вание благодаря простоте оказывается наиболее предпочти-
тельным.
Рассмотренные примеры поясняют процессы перехода
от кинематической схемы электропривода к его приведенной
расчетной механической схеме и возможности упрощения
29
Рис. 1-12. Обобщенные расчетные
механические схемы электропри-
вода.
последней. Анализируя полученные результаты, можно
заключить, что совершенно разнотипные механизмы сво-
дятся к трем типичным расчетным схемам: к трехмассовой
упругой системе; к двухмассовой упругой системе; к жест-
кому приведенному механическому звену. Эти три расчет-
ные механические схемы представляют собой обобщенные
расчетные схемы механической части автоматизированного
электропривода, которые в дальнейшем изложении позво-
ляют изучать его общие свойства, абстрагируясь от бес-
численных частностей, при-
сущих конкретным .произ-
водственным механизмам.
Обобщенная трехмассо-
вая расчетная схема пред-
ставлена на рис. 1-12, а.
Ее параметрами являются
суммарные приведенные
моменты инерции Jr, J2 и
J3 и эквивалентные приве-
денные жесткости безынер-
ционных механических уп-
ругих связей между J}
и J2 — с12 и между J2 и
J3 — с23. Первая масса
представляет собой ротор двигателя и жестко связан-
ные с ним элементы; на эту массу действуют момент
двигателя М и момент сопротивления Л4С1, который в рас-
смотренных примерах является суммарным моментом потерь
на валу двигателя и в жестко с ним связанных элементах.
К промежуточной массе механизма J2 приложен момент
сопротивления Л1с2, который в схеме на рис. 1-10, б пред-
ставляет собой сумму приведенного момента сопротивле-
ния движению тележки и приведенных моментов потерь
на трение в жестко с ней связанных элементах кинемати-
ческой цепи. К третьей массе J3 приложен момент сопротив-
ления движению этой массы Afc3, который в частном
примере схемы рис. 1-10, б, если пренебречь малыми
силами вязкого трения груза о_воздух, может быть при-
нят равным нулю. В общем случае будем полагать, что каж-
дый из моментов Мс1, Л1с2 и Л1с3 может содержать активную
составляющую нагрузки, реактивные составляющие со-
противления движению, в частности, сухого и вязкого
трения, а также периодическую составляющую нагруз-
ки.
30
Трехмассовая упругая система при исследовании элек-
тромеханических систем автоматизированного электропри-
вода используется в редких случаях, когда возникает
необходимость более детального анализа условий движе-
ния их механической части. Для решения задачи в таких
случаях обычно используется математическое моделирова-
ние на аналоговых или цифровых вычислительных маши-
нах. Для исследования отдельных физических особенностей
трехмассовая система, как правило, сводится к двухмас-
совой.
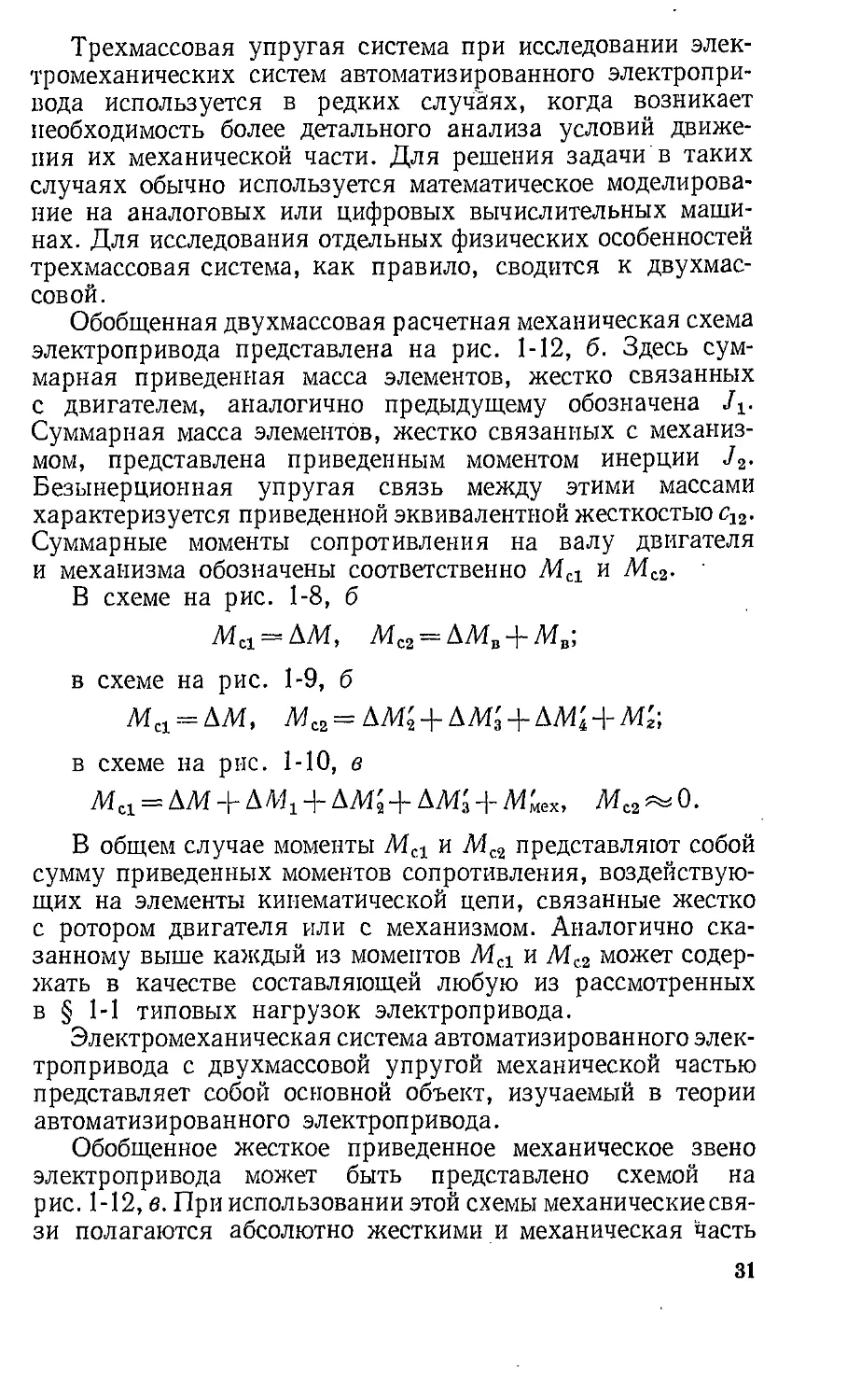
Обобщенная двухмассовая расчетная механическая схема
электропривода представлена на рис. 1-12, б. Здесь сум-
марная приведенная масса элементов, жестко связанных
с двигателем, аналогично предыдущему обозначена
Суммарная масса элементов, жестко связанных с механиз-
мом, представлена приведенным моментом инерции J2-
Безынерционная упругая связь между этими массами
характеризуется приведенной эквивалентной жесткостью с12.
Суммарные моменты сопротивления на валу двигателя
и механизма обозначены соответственно Л4С1 и Л1с2.
В схеме на рис. 1-8, б
Л4С1 = ДЛ4, Л1С2 = ДЛ4В +/Ив;
в схеме на рис. 1-9, б
Л4С1 = ДМ, ТИС2 = ДЛ12 +ДМз + ДМЯ-Мг;
в схеме на рис. 1-10, в
Mci = \М. ДЛД Н~ ДМ2-ф ДМ3 -ф Л4мех, Мс2 0.
В общем случае моменты Л4С1 и Мс2 представляют собой
сумму приведенных моментов сопротивления, воздействую-
щих на элементы кинематической цепи, связанные жестко
с ротором двигателя или с механизмом. Аналогично ска-
занному выше каждый из моментов Л1С1 и Мс2 может содер-
жать в качестве составляющей любую из рассмотренных
в § 1-1 типовых нагрузок электропривода.
Электромеханическая система автоматизированного элек-
тропривода с двухмассовой упругой механической частью
представляет собой основной объект, изучаемый в теории
автоматизированного электропривода.
Обобщенное жесткое приведенное механическое звено
электропривода может быть представлено схемой на
рис. 1-12, в. При использовании этой схемы механические свя-
зи полагаются абсолютно жесткими и механическая часть
31
привода представляется эквивалентной массой с моментом
инерции Jx, на которую воздействует электромагнитный
момент двигателя М. и суммарный приведенный к валу
двигателя момент сопротивления Л4„ включающий все
механические потери в системе, в том числе и механиче-
ские потери двигателя. Суммарный приведенный момент
инерции электропривода J%, как следует из рассмотрения
рис. 1-8, в, 1-9, в и 1-10, г, может быть выражен в общем
виде следующей формулой:
п т
= S (W+S m7pV, (1-17)
i=l /=1
где пит — число масс установки, соответственно вра-
щающихся и движущихся поступательно.
Если в качестве вала, к которому осуществляется при-
ведение, выбрать вал двигателя сох = о\в, как это наиболее
часто принимается на практике, (1-17) можно несколько
видоизменить:
п т
Js = У] (^гЛп) 4- У] (1-18)
1=2 / = 1
Суммарный приведенный к валу двигателя момент
сопротивления, рассматривая схемы на рис. 1-8, в, 1-9, в
и 1-10, г, можно в общем виде записать так:’
<7 р
МС = ДМ +£ + + (AF7 + Fc/)piy, (1-19)
1=1 /=1
где q — число вращающихся элементов кинематической
цепи, к которым приложены моменты потерь ДЛ4г
и моменты полезной нагрузки Ми',
р — число поступательно движущихся элементов с при-
ложенными силами потерь на трение ДЕ7 и силами
полезной нагрузки Fzj.
После приведения всех сил и моментов, действующих
в системе, следует просуммировать все приведенные моменты
механических потерь и все приведенные моменты полез-
ной нагрузки механизма. В результате (1-19) примет вид:
Мс = ДЛ424-Л4пЕ, (1-20)
где ДЛ12 — суммарный приведенный момент потерь в агре-
гате, включая момент механических потерь
двигателя;
Д1П2 — суммарный приведенный момент полезной на-
грузки механизма.
32
Так как механические потери присутствуют вб есех'
случаях, приведенный момент ЛД всегда в той или иной
степени отличается по характеру от типовых нагрузок
электропривода, рассмотренных в § 1-1. Так, с учетом (1-20)
и рис. 1-8, в суммарный момент нагрузки вентилятора
содержит составляющую потерь на сухое трение (если
пренебречь слабо выраженной составляющей вентиляцион-
ных потерь в двигателе):
.Мс = №1+Мла(М (1-21)
где А/И2 = АЛ4 + АЛД;
Мв.н-Ммех.н- АМВ;
^мех. н “ ^в. н/^в. hj
Т’г.н — номинальная (паспортная) потребляемая вентиля-
тором мощность;
— номинальная (паспортная)
“в. п
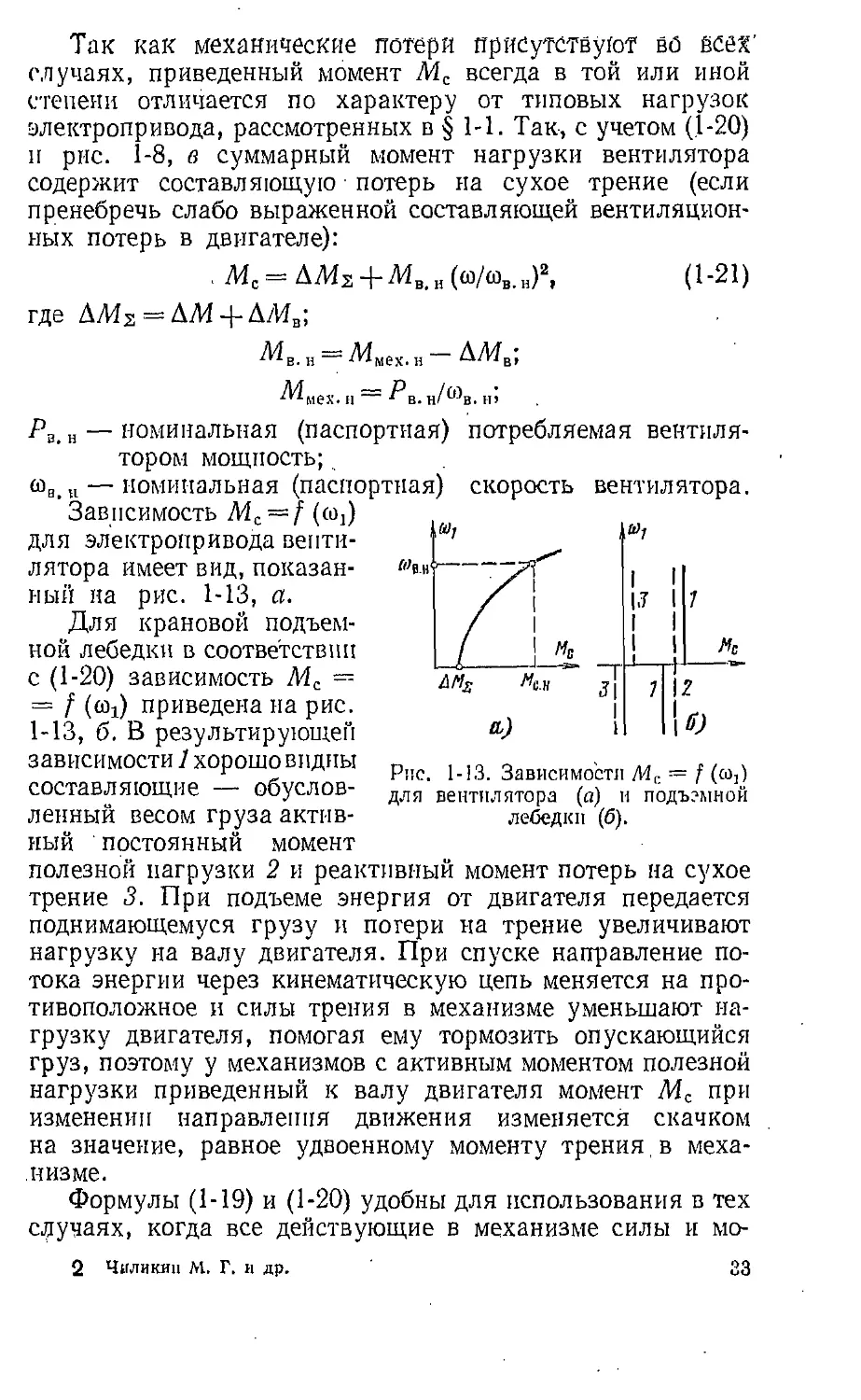
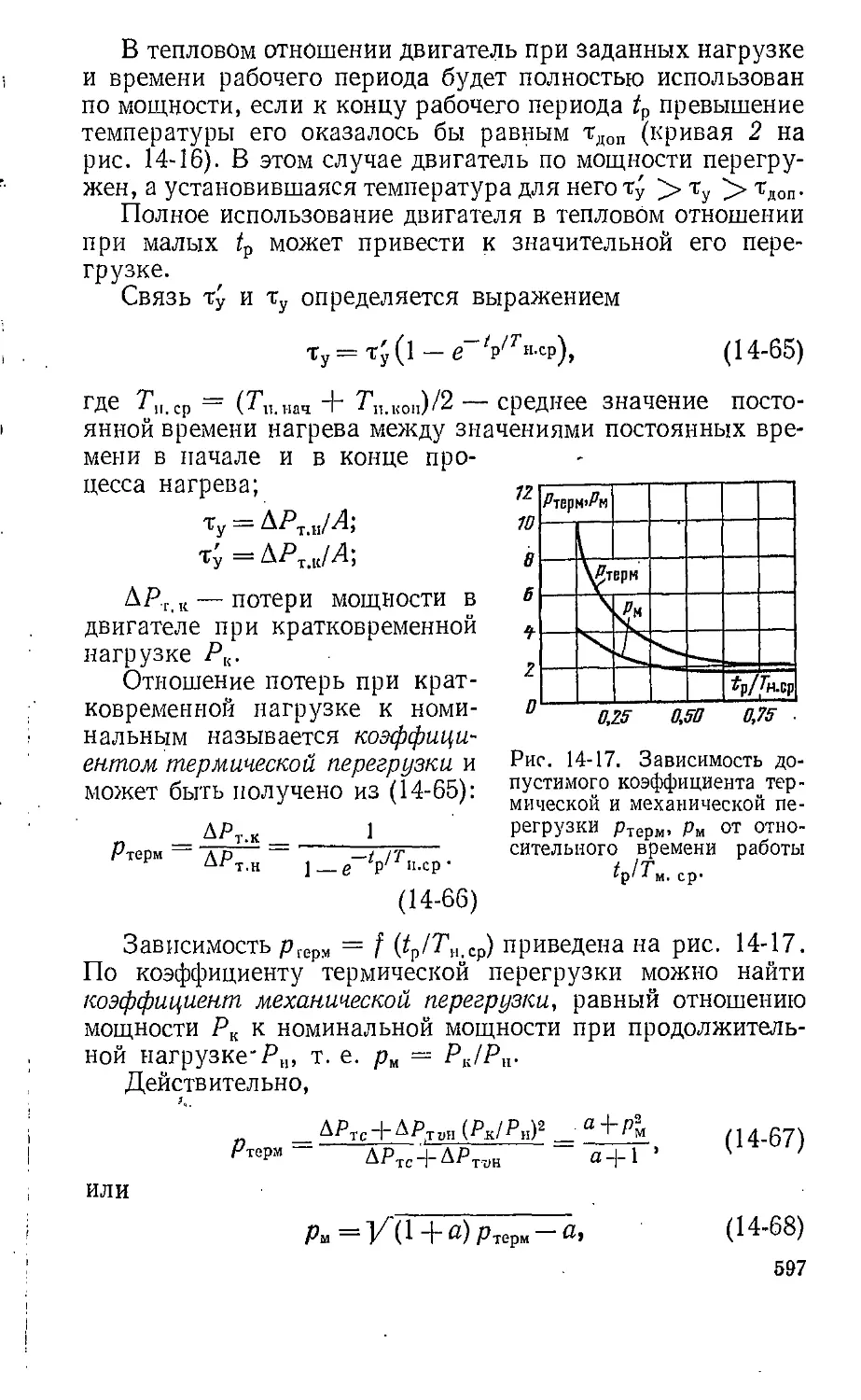
Зависимость M.z — f (coj)
для электропривода венти-
лятора имеет вид, показан-
ный на рис. 1-13, а.
Для крановой подъем-
ной лебедки в соответствии
с (1-20) зависимость Л4С —
= f (сщ) приведена на рис.
1-13, б. В результирующей
зависимости 1 хорошо видны
составляющие — обуслов-
ленный весом груза актив-
ный постоянный момент
скорость вентилятора.
Рис. 1-13. Зависимости Mz = f (сор
для вентилятора (а) и подъзмной
лебедки (б).
полезной нагрузки 2 и реактивный момент потерь на сухое
трение <3. При подъеме энергия от двигателя передается
поднимающемуся грузу и потери на трение увеличивают
нагрузку на валу двигателя. При спуске направление по-
тока энергии через кинематическую цепь меняется на про-
тивоположное и силы трения в механизме уменьшают на-
грузку двигателя, помогая ему тормозить опускающийся
груз, поэтому у механизмов с активным моментом полезной
нагрузки приведенный к валу двигателя момент Л4С при
изменении направления движения изменяется скачком
на значение, равное удвоенному моменту трения,в меха-
низме.
Формулы (1-19) и (1-20) удобны для использования в тех
случаях, когда все действующие в механизме силы и мо-
2 Чиликни М. Г. и др.
33
Менты определены. Обычно потери на трение в механизме
неизвестны и для их учета используется к. п. д. механизма
Лмех = ПЛПз • • • >
где »]!, т]2, — к. п. д. элементов кинематической цепи.
Если известен полезный момент нагрузки механизма Маех>
то для прямого направления энергии приведенный к валу
двигателя момент сопротивления может быть определен
из равенства
AlcCOj = ^мех^мех/Лмех- (1-22)
Следовательно,
Мс — ^мехЛ'оЛмех»
где j0 — = Ём'з--- — общее передаточное число
от двигателя к рабочему органу механизма.
При обратном направлении потока энергии через кине-
матическую цепь получим:
Л4С ~ ^мех'Пмех/^О' (1“23)
Если рабочий орган движется поступательно, уравнение
баланса мощностей при прямом направлении потока энер-
гии запишется так:
f мех^мех/Лмех*
Отсюда
Мс = ЕмехрЛ1Нех- (1-24)
Соответственно для обратного направления потока меха-
нической энергии
Л4с = /?мехРПмех- , (1-25)
В качестве примера определим приведенный момент
сопротивления для подъемной лебедки (см. рис. 1-4, а)
при подъеме груза:
= Ор/т)л — Gdg/2ipinf]pTin,
где ip, in — передаточные числа редуктора и полиспаста;
-щ, 11Р> Лп — к. п- Д- лебедки (общий), редуктора и поли-
спаста.
При спуске груза
Л4С2 — йрт]л — О4/йТ]рТ]л/2/р1п.
При необходимости для механизмов с поступательным
движением рабочего органа жесткое механическое звено
34
может быть приведено к скорости поступательного дви-
жения. В этом случае жесткое приведенное звено представ-
ляет собой эквивалентную поступательно движущуюся
массу т2, к которой приложены приведенное усилие дви-
гателя F и суммарная приведенная сила сопротивления
движению Fc. Параметры F, Fc и определяются по фор-
мулам
F = M/p- Fc = Mz/p = F№ex/t\aax; m^Js/p2.
Жесткое механическое звено позволяет наиболее про-
стым путем учесть инерцию механической части привода
и действующие здесь силы и моменты, поэтому является
наиболее широко применяемой расчетной механической
схемой электропривода. Однако при использовании этой
расчетной схемы во избежание ошибок следует помнить,
что она не отражает ря-
да важных физических
свойств реальной меха-
нической системы, а на-
грузки, действующие в
элементах кинематиче-
ской. цепи, оценивает
весьма приближенно (см.
§ 1-4).
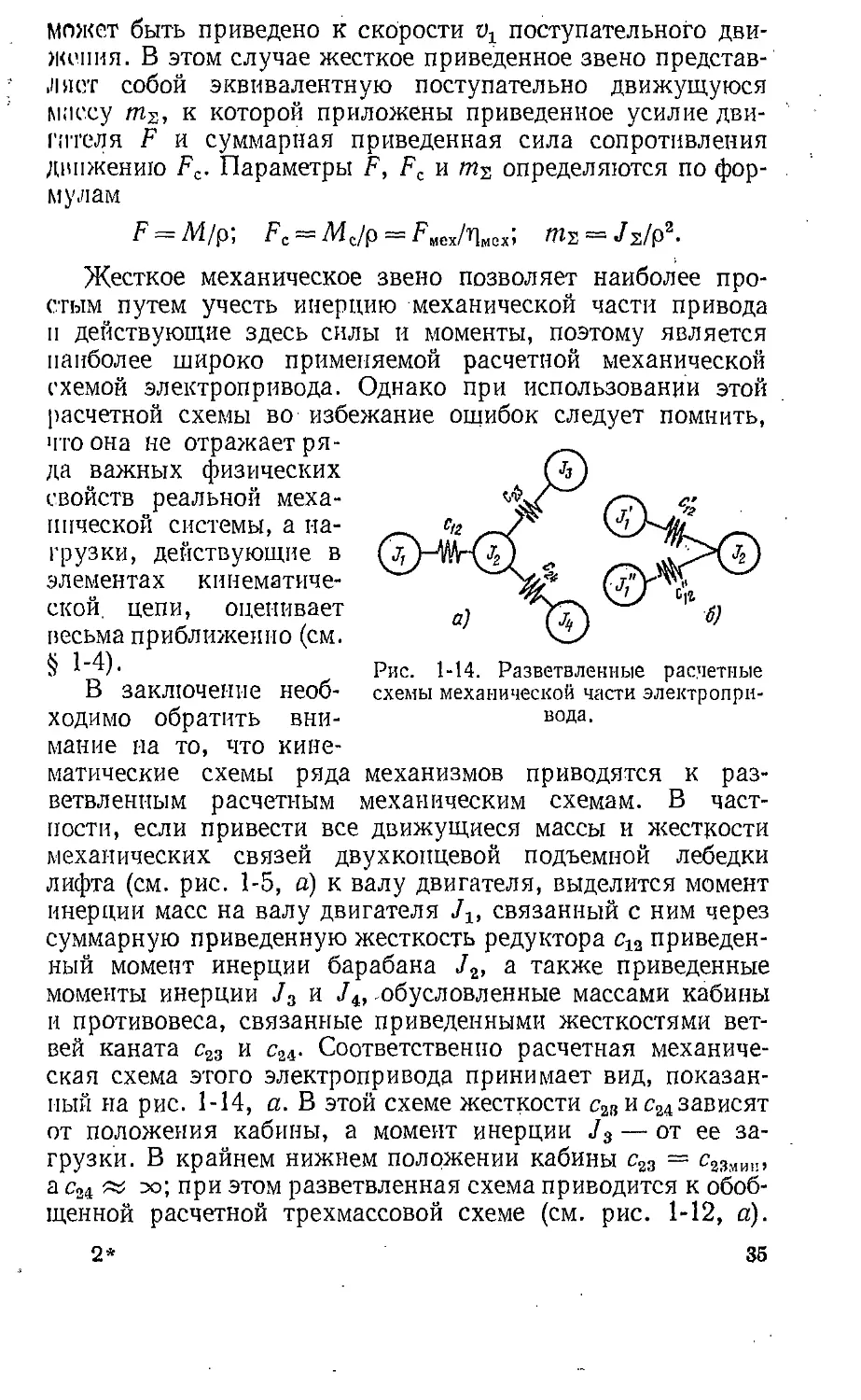
В заключение необ-
ходимо обратить вни-
мание на то, что кине-
Рис. 1-14. Разветвленные расчетные
схемы механической части электропри-
вода.
матические схемы ряда механизмов приводятся к раз-
ветвленным расчетным механическим схемам. В част-
ности, если привести все движущиеся массы и жесткости
механических связей двухконцевой подъемной лебедки
лифта (см. рис. 1-5, а) к валу двигателя, выделится момент
инерции масс на валу двигателя Jlt связанный с ним через
суммарную приведенную жесткость редуктора с12 приведен-
ный момент инерции барабана 72, а также приведенные
моменты инерции J3 и Jit обусловленные массами кабины
и противовеса, связанные приведенными жесткостями вет-
вей каната с23 и с24. Соответственно расчетная механиче-
ская схема этого электропривода принимает вид, показан-
ный на рис. 1-14, а. В этой схеме жесткости с23 и с24 зависят
от положения кабины, а момент инерции J3 — от ее за-
грузки. В крайнем нижнем положении кабины с23 = с23ми|;,
а с24 « эо; при этом разветвленная схема приводится к обоб-
щенной расчетной трехмассовой схеме (см. рис. 1-12, а).
2*
35
i\ разветвленным расчетным схемам приводятся и схемы
многодвигательных электроприводов. Так, если все дви-
жущиеся массы и жесткости двухдвигательного электропри-
вода инерционной технологической установки (см. рис. 1-6)
привести к угловой скорости двигателей, после выде-
ления основных масс и жесткостей можно получить рас-
четную схему, представленную на рис. 1-14, б. Здесь J\
и J\ — моменты инерции на валах двигателей 1Д и 2Д;
cj2 и с','2 — приведенные жесткости каждого валопровода;
J2 — приведенный момент инерции механизма. Если пред-
положить, что двигатели многодвигательного привода дви-
жутся синфазно, подобные разветвленные схемы можно
привести к обобщенной двухмассовой расчетной механиче-
ской схеме. При переходе от схемы рис. 1-14, б к схеме
рис. 1-12, б параметры последней определяются соотно-
шениями
•Л “Л А; ci2 = 4~
Однако разветвленные схемы отражают ряд важных
физических особенностей .многодвигательных электропри-
водов, которые при переходе к обобщенной двухмассовой
схеме утрачиваются.
1-3. УРАВНЕНИЯ ДВИЖЕНИЯ И РЕЖИМЫ РАБОТЫ
ЭЛЕКТРОПРИВОДА
Механическая часть электропривода представляет со-
бой систему твердых тел, на движение которых наложены
ограничения, определяемые механическими связями. Урав-
нения механических связей устанавливают соотношения
между перемещениями в системе, а в тех случаях, когда
задаются соотношения между скоростями ее элементов,
соответствующие уравнения связей обычно интегрируются.
В механике такие связи называются голономными [6].
В системах с голономными связями число независимых
переменных — обобщенных координат, определяющих по-
ложение системы — равно числу степеней свободы системы.
Известно, что наиболее общей формой записи дифферен-
циальных уравнений движения таких систем являются
уравнения движения в обобщенных координатах (уравне-
ния Лагранжа):
4 ЙгЧ(1-26)
dt \ dqt / dqt '
36
где FK — запас кинетической энергии системы, выражен-
ный через обобщенные координаты qt и обоб-
щенные скорости qr,
Qi ~ — обобщенная сила, определяемая суммой
элементарных работ всех действующих сил на возмож-
ном перемещении ?>qt.
Уравнения Лагранжа дают единый и достаточно про-
стой метод математического описания динамических про-
цессов в механической части привода; их число определя-
ется только числом степеней свободы системы. В случаях,
когда все действующие на систему силы являются потен-
циальными, в дальнейшем изложении используются урав-
нения Лагранжа в виде
А (?L\ -А.^0 (1-27)
где L — функция Лагранжа.
Функция Лагранжа представляет собой разность между
кинетической WK и потенциальной №п энергиями системы,
выраженными через обобщенные координаты qt и обобщен-
ные скорости q(, т. е.
A = FK-Fn. (1-28)
В качестве обобщенных координат могут быть приняты
как различные угловые, так и линейные перемещения
в системе, поэтому в принципе при математическом описа-
нии динамики механической части привода с помощью
уравнений Лагранжа предварительного приведения ее эле-
ментов к одной скорости не требуется. Однако до выполне-
ния операции приведения в большинстве случаев невоз-
можно количественно сопоставлять между собой различ-
ные массы системы и жесткости связей между ними, следо-
вательно, невозможно выделить главные массы и главные
упругие связи, определяющие минимальное число степеней
свободы системы, подлежащее учету при исследовании.
Поэтому составление приведенных расчетных механических
схем и их возможное упрощение является первым важным
этапом исследования сложных электромеханических систем
электропривода независимо от способа получения ее мате-
матического описания.
Получим уравнения движения обобщенных расчетных
механических схем электропривода, представленных на
рис. 1-12. В трехмассовой упругой системе обобщенными
координатами являются угловые перемещения масс <plf
37
<р2, фз, им соответствуют обобщенные угловые скорости coj,
со2 и со3. Запас кинетической энергии в системе
= JxCOi/2 -|- J+ Jatt)g/2. (1-29)
Для определения обобщенной силы Qx необходимо вы-
числить элементарную работу всех моментов на возможном
перемещении дер/.
— (М. Ма А113) бфц
где Л112 = с12 (фх — ф2) — момент упругого взаимодействия
между массами и /2.
Следовательно,
= (1-30)
Аналогично определяются две другие-обобщенные силы:
Qa = Л112 Л4са Л123; <23 = Л123 Afc3, (1-31)
где М,3 = с23 (ф2 — Фз).
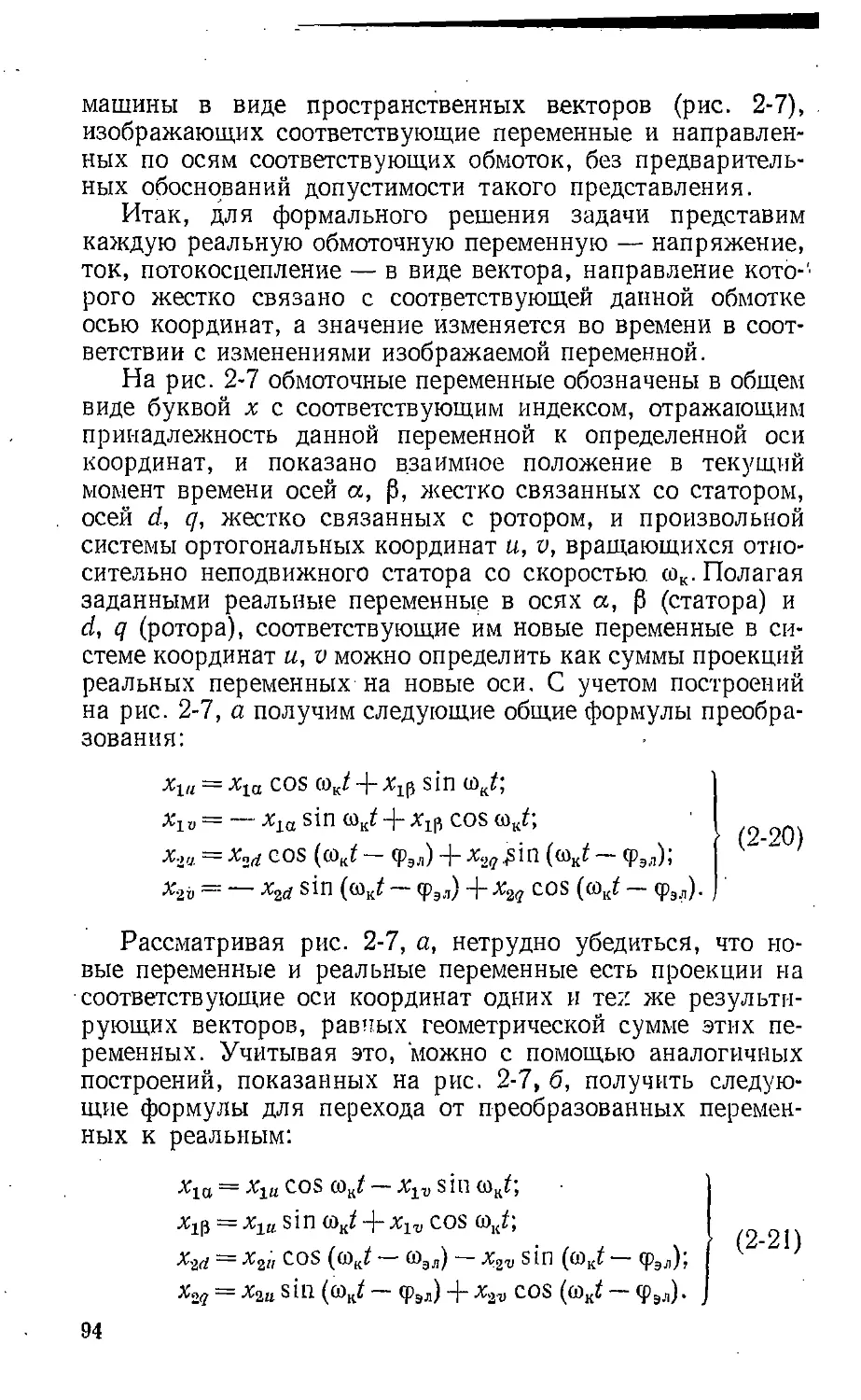
Рис. 1-15. Структурная схема трехмассрвой механической системы.
В результате дифференцирования (1-29) и с учетом
(1-26), (1-30) и (1-31) имеем следующую систему уравнений
движения:
М-Мс1-М12 = ^;
(1-32)
С помощью уравнений движевдя (1-32) нетрудно соста-
вить структурную схему трехмассовой упругой механиче-
ской системы- как объекта управления, представленную
на рис. 1-15. Управляющим воздействием здесь является
электромагнитный момент двигателя М, возмущающими
38
воздействиями — моменты нагрузки Л4С1, Mi2 и Л4с3. Регу-
лируемыми переменными могут быть угловые скорости
(Di, ы2 или со3, перемещения <рх, ср2 и ср3, а также моменты
упругого взаимодействия между массами Л412 и Л123. Пре-
образовав структурную схему, получим передаточную функ-
цию механической части привода по управляющему воз-
действию при выходной переменной сог (р):
_ (р)
М(р)
(р)
_ ____________^2^зРа 4~ [с23 (А + ^з)~|~^2^з] Р2Ч~с12С23_________
р {JjJ2^3Р4+[ЛС23 з)+^Зс12 (•Л+А)] Р2+с12с23 (Л +з)}
Р(Р)
pQ(p) '
(1-33)
Передаточная функция механической части привода
по управляющему воздействию при выходной перемен-
ной ы2 (р)
»V7 /п\ ш2 (р) С12^3Р2 + С12С23 /1 пм
Wa2 (р> - ~м~ю ~ (1
Передаточная функция механической части привода
по управляющему воздействию при выходной перемен-
ной ы3 (р)
’’-W"W = S>' (1-35>
Передаточная функция механической части привода
по управляющему воздействию при выходной перемен-
ной М12 (р)
\т /п\ ^12 (р) с12А^зР2 + с12с23 (Л+ А) /1 ос\
(р) -• (1 -36)
Передаточная функция механической части привода
по управляющему воздействию при выходной перемен-
ной М23 (р)
3123 (Р) ~ ^23 (Р)/^ (Р) ~ С12С23^з/Q (Р)" (1 -37)
Аналогично могут быть получены передаточные функ-
ции по возмущающему воздействию, например:
W'al (р) = (ох (р)/Мс1 (р) = - Wal (р); (1-38)
^1(р)-ы1(р)/Мс2(р) = -117а2(р); (1-39)
.. М7ш(р) = сР1(р)/Л4сз(р)== —Газ(р). (1-40)
Систему уравнений движения для обобщенной расчет-
ной двухмассовой схемы электропривода нетрудно полу-
39
чить с помощью (1-32), приняв 7И,3 = 0, Л4с3 — О, J3 = О:
М-Мс1-М1г = Л^; 1
. (1-41)
M12-Mc2 = J2^,
где Л412 = с12 (фх — ф2).
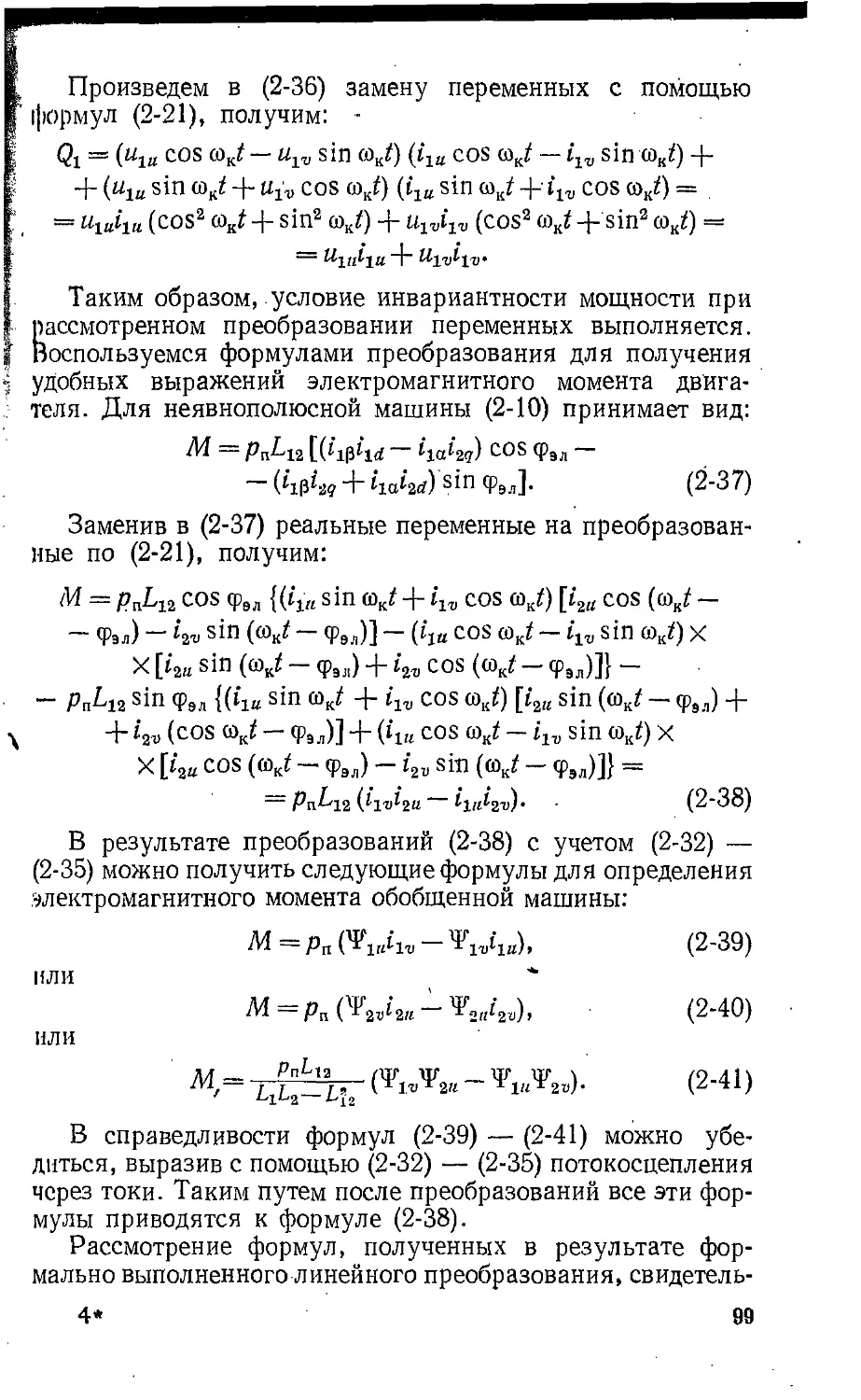
Структурная схема двухмассовой упругой механиче-
ской системы представлена на рйс. 1-16, а. Аналогично
Рис. 1-16. Структурные схемы двухмассовой механической системы.
предыдущему получим передаточные функции этой системы
по управляющему воздействию
= (1-42)
где Q12 = Vс12 (Jx + J2) /JXJ2 — частота свободных коле-
баний двухмассовой упругой системы:
Ц7“3(р) = лчрГ = ’ (1 ’43)
да
= (1-44)
Передаточные функции двухмассовой упругой системы
по возмущающему воздействию Л4С1 или Л4с3 имеют вид:
^,х(р) = ю1(р)/Л4с1(р) = Гю1(р); (1-45)
о-46»
Г^(р) = ю2(р)/Л1с1(р) = ^(й2(р); ,(1-47)
W7' ! п\ ®2 (р) Р~~\~ [A/IA -"ЬА)] . о до\
Гц12 (Р) = м12 (р)/Мс1 (р) = r№2 (р): (1 -49)
1J7" (п\ М12 (р) [71/(А 4~ /;)] ,< -Q,
^ин(р) Мс2(р) р2+й?2 . (1-50)
40
Характеристическое уравнение системы (1-41) опреде, ;
ется, например, из (1-44):
Корни уравнения
Ра — — /^12» (1-51)
Таким образом, при отсутствии в системе сил, завися-
щих от скорости, двухмассовая упругая механическая
система представляет собой идеальное колебательное звено
без затухания, причем Q12 есть частота свободных колеба-
ний этой системы.
Математическое описание простейшей расчетной' меха-
нической схемы электропривода — жесткого приведенного
звена (см. рис. 1-12, в) — получим с помощью (1-41), поло-
жив в этой системе Jx — J?., Л4С1 — Мс, Л413 — О, J2 — 0:
(1-52)
Структурная схема механической части электропривода
в этом случае принимает наиболее простой вид, показан-
ный на рис. 1-17, а. Нетрудно видеть, что жесткое меха-
ническое звено является интегрирующим звеном.
Выше было отмечено, что передачи ряда электроприво-
дов содержат нелинейные кинематические связи типа
кривошипно-шатунных, кулисных и тому подобных меха-
низмов. Для таких механизмов радиус приведения р
является переменной величиной, зависящей от положения
механизма, и при получении математического описания
необходимо это обстоятельство учитывать.
Рассмотрим двухмассовую систему, первая масса кото-
рой вращается со скоростью двигателя ы и представляет
собой суммарный приведенный к валу двигателя момент
инерции всех жестко и линейно связанных элементов,
а вторая масса т движется с линейной скоростью v и пред-
ставляет собой суммарную массу элементов,' жестко и ли-
нейно связанных с рабочим органом механизма. Связь между
скоростями со и v нелинейна, причем р = р (<р). Для полу-
чения уравнения движения такой системы без учета упру-
гих связей воспользуемся уравнением Лагранжа (1-26),
приняв в качестве обобщенной координаты угол ср. Вна-
чале определим обобщенную силу:
Q 6<р = М. б ср — M'z б<р — Fc 8S,
41
где Me — суммарный момент сопротивления от сил, воз-
действующих на линейно связанные с двигате-
лем массы, приведенный к валу двигателя;
Ес—результирующая всех сил, приложенных к ра-
бочему органу механизма и к линейно связан-
ным с ним элементам;
6S — возможное бесконечно малое перемещение
массы т.
Следовательно,
Q = М - М' - FcP (Ф) = М - Мс (Ф).
Запас кинетической энергии системы
_ А®2 । mvi _ Aw2 , mp2 (ср) со2
MZk— 2 + 2 ~~~2~
В применении к данному
ния (1-26) видоизменяется:
d
dco
= -h (Ф)
т—2— =
случаю левая часть уравне-
cMs (<р) со2 _
dtp 2
dJ2(cp) 2 (ф) W2
dtp ® rftp 2
dm co2 dJ 2 (tp)
— Jz (ф) dt +-2 d(p •
Таким образом, в рассматриваемом случае уравнениедви-
жения жесткого приведенного звена имеет вйд:
dm со2 dJv (ср)
М-Мс(ф) = /2(ф)^ + -1--^. (1-53)
Рассматривая (1-53), нетрудно установить, что при
наличии нелинейных механических связей уравнение дви-
жения электропривода существенно усложняется, так как
становится нелинейным и содержит переменные коэффи-
циенты, зависящие от углового перемещения ротора дви-
гателя. Решение аналогичной задачи с учетом упругих
связей приведено в § 1-7.
Полученные математические описания динамических
процессов в механической части электропривода, представ-
ляемой обобщенными расчетными механическими схемами,
позволяют проанализировать возможные режимы движе-
ния электропривода. Прежде всего, необходимо различать
переходные и установившиеся механические процессы при
работе электропривода. Если к динамической системе,
находящейся, например, в покое, скачком приложить
42
управляющее или возмущающее воздействие, то система
перейдет в неустановившееся состояние движения, которое
можно представить в виде одновременного протекания двух
процессов: процесса свободного движения системы, вы-
веденной из состояния равновесия, и процесса принужден-
ного ее движения, задаваемого приложенным управляю-
щим или возмущающим воздействием. Это неустановившееся
состояние динамической системы и называется переходным
процессом. С течением времени свободная составляющая
переходного процесса постепенно затухает и после ее пол-
ного затухания система переходит в установившийся режим,
в котором имеет место только принужденное движение,
характер которого определяется приложенными воздей-
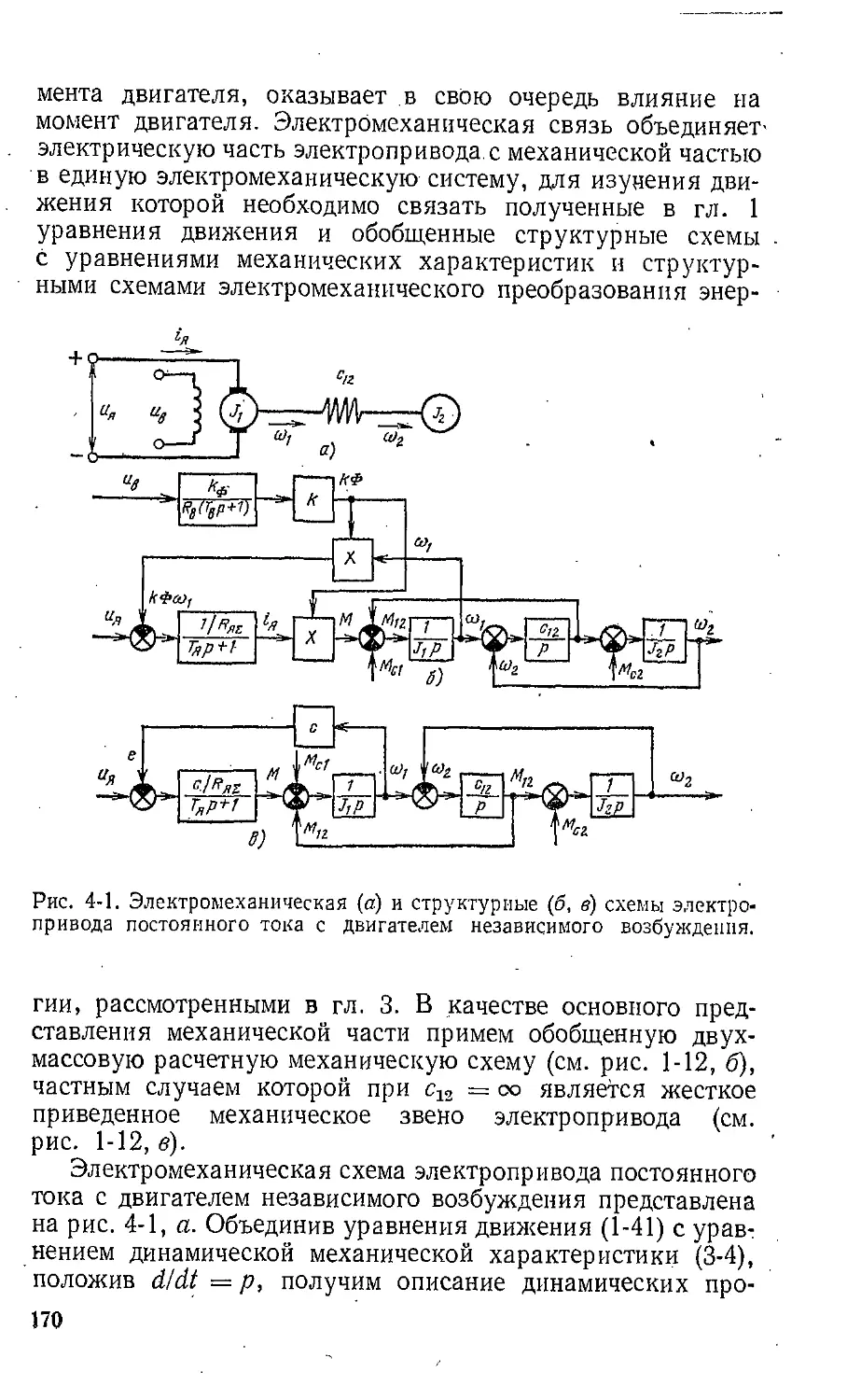
ствиями .
Переходный процесс-Есегда-связан с изменениями ско-
ростейдвижениямасс электропривода, поэтому всегда
является динамическим процессом. Установившиеся режимы
работы электропривода в зависимости от характера при-
ложенного к системе воздействия могут быть либо ста-
тическими, либо динамическими. Если все действующие
в механической части привода силы и моменты сопротив-
ления постоянны (Мс = const), а момент двигателя пол-
ностью уравновешивает их (М = Мс — const), то после
затухания свободной составляющей переходного процесса
наступает установившийся статический режим работы элек-
тропривода, при котором в соответствии с (1-52) скорость
электропривода постоянна (da/dt = 0). В случаях, когда
возмущающее воздействие Мс содержит периодически ме-
няющуюся в функции времени составляющую (см. рис.
1-6, б), после затухания переходного процесса наступает
установившийся режим принужденного движения с коле-
бательной составляющей, обусловленной изменениями на-
грузки. Такой установившийся режим движения является
динамическим, так как в этом режиме массы системы будут
двигаться с переменной скоростью.
Таким образом, условием статического режима работы
электропривода является движение его механической части
с постоянной скоростью (da/dt = 0). Характерным призна-
ком динамических переходных и установившихся процес-
сов движения является наличие изменений скорости
(dcn/dt 0).
Рассмотренные определения режимов работы электро-
привода касались характера движения его механической
части. Их полезно дополнить некоторыми энергетическими
43
соображениями. С энергетической точки зрения режимы
работы электропривода можно разделить на двигательные
и тормозные, отличающиеся направлением потока-энергии
Ч5р?ТШханические передачи привода. Двигательный режим
соответствует прямому направлению передачи механи-
ческой энергии, вырабатываемой двигателем, к рабочему
органу механизма. Этот режим обычно является основным
и для проектирования механического оборудования, напри-
мер редукторов. Однако при- работе электропривода доста-
точно часто складываются условия для обратной передачи
механической энергии от рабочего органа механизма к дви-
гателю, который при этом должен работать в тормозном
режиме. В частности, для электроприводов с активной
нагрузкой двигательный и тормозной режимы работы ве-
роятны практически в равной степени. Тормозные режимы
работы электропривода возникают также в переходных
процессах замедления инерционных масс системы, в которых
освобождающаяся кинетическая энергия поступает от соот-
ветствующих масс к двигателю. Однако в переходных про-
цессах торможения привода направление потока энергии
через механические передачи может оставаться прямым.
Изложенные соображения позволяют сформулировать
правило знаков момента двигателя, которое следует иметь
в виду при пользовании полученными уравнениями движе-
ния. При прямом направлении передачи механической мощ-
ности Рмех = Мео ее знак положителен, следовательно,
движущие моменты двигателя должны иметь знак, совпа-
дающий со знаком скорости. В тормозном режиме Рмсх < О,
поэтому тормозные моменты двигателя должны иметь
знак, противоположный знаку скорости.
При записи уравнений движения были учтены направ-
ления моментов, показанные на обобщенных расчетных
схемах, например на рис. 1-12, в. Правило знаков для
моментов сопротивления противоположно: тормозные мо-
менты нагрузки должны иметь знак, совпадающий со зна-
ком скорости, & движущие активные нагрузки — знак,
противоположный знаку скорости.
1-4. УСТАНОВИВШИЕСЯ РЕЖИМЫ ДВИЖЕНИЯ
МЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА
Для изучения установившихся режимов движения меха-
нической части электропривода удобно пользоваться ча-
стотными методами анализа свойств динамических систем.
44
Если обозначить М — Мс — Мд, то в соответствии с рис.
1-17, а передаточная функция механической части по ре-
зультирующему входному воздействию может быть записана
в виде
№ш(р) = ю(р)/Мд(р)= 1/J2p. (1-54)
Амплитудно.-фазовую характеристику жесткого механи-
ческЪго^венаполуню^^ в (1-54) р = ;й:
Wш (/й) = — j/Jхй.
Следовательно,
Аш (й) = 1/7хй; ф(й)== — л/2 = const.
Амплитудно-частотная и фазо-частотная характеристики
простейшего механического звена электропривода пока-
заны на рис. 1-17, б. При йО
амплитуда скорости неограниченно
возрастает, стремясь к бесконечно-
сти. Физический смысл этого заклю-
чается в том, что при Мд = const ста-
тический устанрвившийся режим ра-
боты наступает при со = оо, так как
при этом da/dt 0. Для получения
статического режима работы при ко-
нечном значении угловой скорости
необходимо, чтобы при этой скоро-
сти наступало равенство М = Мс,
при котором Мд = 0 и ditildt — 0.
Если Мд изменяется с частотой
Й 0, то амплитуды колебаний ско-
рости ограничиваются механической
инерцией тем в большей степени, чем
выше частота й. Так как убывание
амплитуд с ростом й происходит до-
статочно быстро, то при й > (30 ч-
G0) с-1 и ограниченных по значе-
нию амплитудах Мд амплитуды ко-
лебаний скорости обычно пренебре-
жимо малы. Иными словами, вслед-
Рис. 1-17. Структур-
ная схема (а) и ча-
стотные характеристи-
ки (б) жесткого при-
веденного механиче-
ского звена электро-
привода.
ствие инерции механическая часть
электропривода является фильтром низких частот.
Жесткое приведенное звено отражает свойства реаль-
ной механической части электропривода лишь в первом
приближении. Значительно более полное представление
об этих свойствах дает использование двухмассовой расчет-
45
ной схемы. Рассмотрим в качестве примера, как ведет
себя двухмассовая упругая система под действием возму-
щающего момента Л1с2, представляющего собой гармони-
ческую функцию частоты й. Уравнение амплитудно-фазо-
вой характеристики процессов движения получим, подста-
вив в (1-46) р = /й:
= ~ '^7 (й/ад[1-(й/й12)2] ’
где k.wi = П12 (Jу + J%).
Таким образом, амплитудно-фазовая характеристика
представляет собой чисто мйймукгтОИЧину, амплитуда
которой при Й = 0 и й = й12 равна бесконечности, а фаза
в точке й = й12 меняется от — у до — л скачком. Свойства
упругой двухмассовой си-
стемы наглядно отражают-
ся в ее амплитудно-ча-
стотной характеристике
= f (И), показанной
на рис. 1-18, а.
При й = О, т. е. при
приложении к системе по-
стоянного момента нагруз-
ки Мс2, не изменяющегося
во времени, угловая ско-
Рис. 1-18. Частотные характеры- рость со^ неограниченно
стики двухмассовой системы без возрастает, стремясь к бес-
учета естественного демпфирова- конечности. Эта часть ха-
ния> рактеристики аналогична
рассмотренной выше ам-
плитудно-частотной характеристике жесткого механическо-
го звена (см. рис. 1-17, б), так как Мс2 = const пред-
ставляет собой активный момент, под действием которо-
го в связи с отсутствием других сил (напомним, что пере-
даточная функция определяется в предположении равен-
ства нулю других возмущающих и управляющих воздей-
ствий) массы системы движутся с постоянным средним
ускорением dm/dt ^*0 и с течением времени скорость тео-
ретически может возрастать неограниченно.
При увеличении частоты возмущений по мере прибли-
жения ее к й — й12 установившиеся амплитуды вынужден-
ных колебаний скорости начинают вновь быстро возрастать.
При й — й12 функция = /(Й) терпит разрыв, ампли-
46
Туды возрастают до бесконечности — наступает механиче-
ский резонанс. При резонансе скачком на 180° изменяется
фаза колебаний, как это видно из приведенной на рис.
1-18, б фазо-частотной характеристики системы.
Возможность резонансных явлений является одной из
важных особенностей механической части привода, которая
полностью утрачивается при переходе к использованию для
анализа механических процессов жесткого приведенного
механического звена.
В реальных системах неограниченного возрастания ам-
плитуд колебаний не наблюдается, так как в них всегда
присутствуют силы, препятствующие развитию колебаний,
приводящие к поглощению энергии механических колеба-
ний. Такие силы в механике называются диссипативными
и отличие от консервативных динамических или потен-
циальных сил, сохраняющих энергиюколебательной системы
неизменной. Примером диссипативной силы может служить
вязкое трение, рассмотренное в § 1-1. Наиболее часто
силы вязкого трения являются внутренними диссипативны-
ми силами, возникающими при деформации механического
оборудования. Силы внутреннего вязкого трения пропор-
циональны скорости деформации элемента и направлены
противоположно скорости деформации. При принятом пра-
виле знаков тормозной момент вязкого трения может быть
выражен формулой
(1-55)
Мв.т=Р12 (“1- ®г)»
где и со2 — угловые скорости концов деформируемого
элемента.
Наличие внутреннего вязкого трения в упругой системе
обычно отражается на расчетной схеме включением парал-
лельно упругой связи механического демпфера, показан-
ного на рис. 1-12, б пунктиром. Получим математическое
описание схемы рис. 1-12, б с учетом внутреннего вязкого
трения и проанализируем его влияние на свойства системы.
После записи и преобразований уравнения Лагранжа
(1-26) можно записать в виде
М-М'м-Мс1 = ^^-, '
(1-56)
где М[2 = М12 + Мв.т = с12 (cpj — ф2) + р1а (сох — со2) —
момент нагрузки упругой связи с учетом момента потерь
на внутреннее вязкое трение МВрТ.
47
Структурная схема, соответствующая (1-56), представ-
лена на рис. 1-16, б. Преобразовав эту схему, получим пере-
даточную функцию системы по возмущению 7Ис2, полагая
выходной переменной угловую скорость
W' /п\____Ю1 (р) _______(1/^аР) (Pig-f-Cia/p) (W)____ __
Mi2 (р) 1 + (Р1г + С12/Р) (1/Лр) + (Pia + cia/P) (1/Ар)
__ _______Р13 glg/P_______
Jl-fiP1 + (Л + ЛО (₽12Р + С12)
Обозначим
Р12 (А "Ь А)/^1^2= т; Ci2 (Jy -|- = Qi-2.
Тогда после преобразований имеем:
(Р) = (Ь57)
•'l’TJ2 Р \Р -Г ZaB. тР + ^12/
Приравнивая нулю знаменатель (1-57), определяем корни
характеристического уравнения системы (1-56):
Р1 = 0; р2, 3 = — “в. т ± / - «В. т • (1-58)
Сравнивая (1-58) с (1-51), можно убедиться, что учет
внутреннего вязкого трения вносит в систему затухание
и двухмассовая упругая механическая система приобретает
свойства реального колебательного звена с коэффициентом
затухания а„. т и частотой колебаний Qp = 2 — as. t .
В большинстве практических случаев внутренние силы вяз-
кого трения весьма малы. Как показывают многочисленные
исследования, естественное затухание колебаний под дей-
ствием внутренних сил вязкого трения характеризуется
логарифмическим декрементом Хв т, ограниченным пределами
0,1 sC 7В.... 0,3. Логарифмический декремент связан с ко-
эффициентом затухания и частотой колебаний следующим
соотношением:
Хв. т = 2лав, T/Qp = 2лав. УУ — ав, т • (1-59)
Уравнение амплитудно-фазовой характеристики системы
можно получить, подставив в (1-57) р ~ ]Q. После преобра-
зований это уравнение приобретает вид:
1ГШ1(/П) =
1 -(2%. Л) (Й/М3-! [> +(£2Ч2)2 (М. Т/£2Ь— О]
Acol (Й/Йг) [(1 - Й2/^.2)3+(4ав .t/Q1-3) (fi/Q12)2]
(1-60)
48
Модуль (1-60) определяет уравнение амплитудно-ча-
стотной характеристики
А»(й) =
1 л Г____________1 + (2ав, т/Й12)2 (Q/Qta)2 /1 г 1 \
у (Q/Qla)2 [(1 — (Q/Qxa)2)3+ (2ав.т/£21в)з (Q/£2i3)=J ‘
С помощью (1-60) получаем фазо-частотную характери-
стику в виде
ф = л + arctg
1+(4«^. т/Д?а—Ч (Q/Q^)8
(2ав. т/^12) (fi/^12)2
(1-62)
Рассматривая полученные соотношения, можно сделать
вывод, что основные свойства системы определяются часто-
той ее свободных недемпфированных колебаний й12 и коэф-
фициентом затухания авт. Преобразовав (1-59), получим
следующее соотношение:
а|.т/П1., = Х2.т/(4л2 + Х2.т). (1-63)
Указанные выше реальные значения Хв т достаточно
малы, поэтому Хв. т 4л2 и формулу (1-63) можно упро-
стить:
ав.7/й12я«Хв.т/2л. (1-64)
Если левую и правую части (1-61) умножим на согла-
сующий коэффициент kal и подставим в это соотношение
(1-64), получим уравнение амплитудно-частотной характе-
ристики:
(й) = 1/--------------1 + CIb.tM2) (Q/Qi.2)2--:-----
|/ (£2/£212)=[(1 — (Й/Й12)2)2+(^ ТМ2) (Й/Й13)2]
(1-65)
Уравнение амплитудно-частотной характеристики, вы-
раженное в масштабе согласующего коэффициента, явля-
ется обобщенной зависимостью, свидетельствующей о том,
что резонансное усиление вынужденных колебаний пол-
ностью определяется логарифмическим декрементом си-
стемы Хв т.
На рис. 1-19, я и.б представлено семейство амплитудно-
частотных и фазо-частотных характеристик, рассчитанных
по (1-65) при различных значениях А,в. т = const.
Так как ав «С ^12, то О коэффициенте
резонансного усиления можно получить приближенное
представление, подставив в (1-65) й/й12 = 1:
k?. у ==« /гшИ^ (й) =Gj; = У(я2 -ф Ц. т)/Ч т л/Кв. т. (1-66)
49
[fl
Рассматривая кривые на рис. 1-19, а или подставляя
реальные значения Хв т в (1-66), можно убедиться, что
демпфирование, обусловленное естественными диссипа-
тивными силами, весьма невелико и в зоне резонанса вы-
нужденные колебания усиливаются в 10—30 раз. С другой
стороны, если сравнивать это усиление с недемпфированным
механическим резонансом, можно установить, что естест-
венное демпфирование существенно изменяет свойства ме-
ханической части привода. Поэтому при исследованиях
Рис. 1-19. Частотные характеристики двухмассовой системы с учетом
естественного демпфирования.
рования возникает во всех случаях, когда исследуются
вынужденные колебания, а другие демпфирующие фак-
торы отсутствуют. При математическом моделировании
переходных процессов в таких системах также полезно
учитывать естественное демпфирование, так как в против-
ном случае возникающие при переходных процессах неза-
тухающие колебания затрудняют правильное представле-
ние об их характере. Вместе с тем в дальнейшем рассма-
триваются многие вопросы динамики упругих электромеха-
нических систем без учета внутреннего вязкого трения.
1-5. МЕХАНИЧЕСКИЕ ПЕРЕХОДНЫЕ ПРОЦЕССЫ
ЭЛЕКТРОПРИВОДА
Изменения управляющего или возмущающего воздей-
ствий вызывают в динамической системе переходные про-
цессы, в течение которых она постепенно переходит от на-
50
Пильного состояния, определяемого начальными условиями,
К новому установившемуся процессу движения, заданному
новыми силами и моментами, воз-
действующими на систему. В каче-
стве простейших примеров рас-
смотрим ряд переходных процес-
сов в механической части элект-
ропривода, представленной жест-
ким механическим звеном (см.
рис. 1-12, в).
Допустим, начальная скорость
со11ач == 0, момент сопротивления
отсутствует: Мс = 0, а к рото-
ру двигателя в момент времени
Рис. 1-20. Переходный
процесс пуска электро-
привода при М =
1 = 0 прикладывается электромагнитный момент двигате-
ля, изменяющийся по экспоненциальному закону с по-
стоянной времени Т:
М=Мкаче~‘/т. (1-67)
Решим уравнение движения электропривода (1-52) отно-
сительно дифференциала скорости:
dm — dt = edt, (1-68)
где е = (М — Мс) /Js — ускорение инерционных масс при-
вода.
Проинтегрируем обе части полученного равенства при
Мс = 0 и заданном законе изменения движущего момента:
to i t
f dm = f dt = f еначе~ Чт dt.
о о s о
В результате получим:
(1-69)
где енач = (d(i)/dl)am = — начальное ускорение.
На рис. 1-20 в соответствии с (1-67) и (1-69) построены
зависимости М =f (t) и со = f (i).
Скорость нарастает по экспоненциальному закону от
нуля до установившегося значения соуст = еатТ с ускоре-
нием, уменьшающимся по мере возрастания скорости в связи
с уменьшением момента двигателя, которому ускорение
пропорционально. Это переходный процесс пуска электро-
привода до скорости со = соуст. Время переходного процесса
51
теоретически равно бесконечности, а практически процесс
можно считать закончившимся, в соответствии со свой-
ством экспоненты, через время /п п = (3 4- 4) Т.
Рассмотрим условия движения электропривода при
постоянных моменте двигателя и моменте сопротивления
(Л4 = const и Л4С = const). В результате интегрирова-
ния (1-68)
() /
J da — ^edt,
получим известную формулу равномерно ускоренного дви-
жения:
Ю=й)Нач + ^. (1-70)
С помощью (1-70) при необходимости можно определить
время изменения скорости от сонач до сокоп, т. е. время
переходного процесса:
А», п = (®кон ^нач)/® ~ J2 (^кон ~~ ®нач)/(714 с14с). (1"71)
При М — 8 = 0 и электропривод сохраняет состоя-
ние покоя сонач =0 или равномерного движения со = со|1ач =
= const до тех пор, пока равенство М = Л4С не будет на-
рушено, На рис. 1-21, а показан
случай, когда М = Мс и имеет
место состояние покоя со)1пч — 0.
В момент t =0 момент двигателя
скачком увеличивается до значения
М = М1> Мс и электропри-
вод сразу переходит в режим, рав-
номерно-ускоренного движения с
ускорением ех = — Мс) М%.
Если оставить момент двигателя
неизменным М. — М.х const, этот
режим будет длиться сколь угодно
долго, а скорость будет неограни-
ченно возрастать.
На практике при достижении
процессЫ-Электропривода электроприводом требуемой скоро-
при М const и Л4С — сти обеспечивается снижение мо-
= const. .. ..
мента двигателя до /14 = Л4С, уско-
рение быстро уменьшается до нуля
и наступает статический установившийся режим при со =
= соКО!), как показано на рис. 1-21, а. Следовательно,
в данном случае имеет место переходный процесс изменения
52
f угловой скорости от сонач до сок011, который' обеспечивается
соответствующими изменениями момента двигателя.
Рисунок 1-21, б иллюстрирует процесс реверса электро-
привода с реактивным моментом Л1С от начальной ско-
рости сонач одного направления до конечной скорости сокои
'противоположного знака. В момент времени t = 0 момент
двигателя скачком изменяется от М = Мс до М =— Мг
и происходит замедление привода по закону
со = сонач - (Mi + MJ tlJ
При t = /т = Jsco„a4/ (All + A4C) скорость двигателя ме-
няет свой знак и реактивный момент нагрузки скачком
меняет свое направление на противоположное. Это приводит
к соответствующему изменению ускорения, и разгон при-
вода в обратном направлении описывается количественно
по-иному:
со — — (M-i — MJ t/Js,
т. е. пуск в обратном направлении протекает значительно
медленнее, чем торможение. Для перехода к статическому
режиму движения в момент п, аналогично выше рассмотрен-
ному, момент двигателя скачком уменьшается до значе-
ния М = —Mz.
Рассмотренные простейшие примеры позволяют сделать
\ важный вывод о том, что закон изменения скорости при-
вода в переходных процессах определяется характером
изменения во времени момента двигателя. Так, при =
= const для получения экспоненциальной кривой скорости
со (/) при пуске необходимо обеспечить экспоненциальную
зависимость М (t) (см. рис. 1-20); для получения равномерно
ускоренного процесса пуска необходимо формировать пря-
моугольный закон изменения момента двигателя во вре-
мени (рис. 1-21, а) и т. п. Следовательно, формирование
требуемых законов движения электропривода обеспечи-
вается формированием соответствующих законов измене-
ния во времени электромагнитного момента двигателя.
В этом заключается одна из фундаментальных задач авто-
матизированного электропривода.
Уравнение движения жесткого приведенного механиче-
ского звена электропривода позволяет в наиболее простой
и наглядной форме анализировать условия движения при-
вода. Если известен характер изменения момента двига-
теля и приведенного момента нагрузки, с помощью (1-52)
можно установить характер кривой со (/), не прибегая
к решению этого уравнения.
53
На рис. 1-22, а в виде примера показаны графики вен-
тиляторной нагрузки Л4С (со) и постоянного момента дви-
гателя М = Л4С11. В соответствии с (1-52) привод будет
разгоняться с ускорением
Mt. н ЛсИ— (сИв. н ДЛ?в) (со/сс>в. н)2
е =
•^2
(1-72)
где /Ис. н — номинальный статический момент;
Мв. н — номинальный момент вентилятора;
Л4В — момент вентилятора.
Очевидно, в начальный момент пуска при со = 0 уско-
рение максимально, а затем по мере увеличения скорости
'оно непрерывно уменьшается, стремясь к нулю при © = сов< н.
Эти соображения позволяют установить, что Качественно
Рис. 1-22. К анализу условий пуска
электропривода вентилятора.
кривая со (/) в данном
случае должна иметь
форму, показанную на
рис. 1-22, б.
Простота и нагляд-
ность представления ме-
ханической части приво-
да жестким механиче-
ским звеном оправды-
вают его широкое ис-
пользование при иссле-
дованиях динамики элек-
тропривода. Однако полезно посмотреть, какой харак-
тер имеют простейшие из рассмотренных переходных про-
цессов при учете упругих связей. Используем для этой цели
обобщенщю.двухмассовуж расчетн ую..механическую схему
и Соответствующие ей уравнения движения электропри-
вода (1-41). Для большей наглядности сравнительного
/ анализа будем полагать, что рассматриваются переходные
/ процессы механизма передвижения мостового крана (см.
рис. 1-3, а). В соответствии с расчетной схемой (см. рис.
1-10, в) примем Л4с2 « 0, силами внутреннего вязкого тре-
ния также пренебрежем, положив Л4С1 =-- const. Для полу-
чения уравнения движения, разрешенного относительно
\ угловой скорости двигателя кц, воспользуемся передаточ-
\ной функцией W'ai (р) (1-42), при этом будем считать вход-
ным воздействием разность моментов М — Л4С1. В результате
искомое уравнение движения можно записать в виде
1 d3<£>i . dcof _ 1 d2(M — /Ис1) , М — ЛД1 ,,
~dir + ~dT ~ 7^; dt2 + Ji+j2 1 J'
54
(1-74)
Будем рассматривать переходный процесс пуска элек-
тропривода при нулевых начальных условиях и при М. —
= const (см. рис. 1-21, а). При этом уравнение дви-
жения (1-73) упрощается:
1 d3G>t , dcof
Qf7 dt3 + ~dT “ ScP’
где 8cp — среднее ускорение, scp = (M — MC1)/(J1 + J2).
Корни характеристического уравнения (1-74) pt = О,
/72)3 = ± /й13, причем нулевой корень определяет частное
решение, соответствующее установившемуся равномерно
ускоренному движению системы <dx = 8срЛ Учитывая
характер корней и это частное решение, находим общее ре-
шение (1-74) в виде
<DX = еср£ + A cos Q12£ + В sin Q12£.
Начальные условия: t — 0, (а»1)0 = 0, =
= (Л4 — Mcl)/J! = (Jj + J3)8cp/71 позволяют определить
коэффициенты А и В и представить решение в виде
*Z 2®CD •
“1 = 8ср* + 7^ sin п13^-
(1-75)
Аналогичным путем можно получить решение относи-
тельно скорости движения механизма а»2:
«а = еср£ — s in Q12t (1-76)
Соответствующие формулам (1-75) и (1-76) кривые (О
и а»2 (f) представлены на рис. 1-23, а. Сравнивая эти кривые
с процессом в той же системе, рассмотренным без учета
упругих связей (рис. 1-21, а), нетрудно установить, что
при Мс = Л4С1 8 = еср. Иными словами, жесткое приведен-
ное динамическое звено дает удовлетворительные представ-
ления о движении механической части привода в среднем и
не отражает возникающих при переходных процессах в ре-
альной механической системе упругих механических коле-
баний. Фактические скорости и ускорения движущихся
масс в упругой системе могут существенно отличаться от
средних, как это показано на рис. 1-23, а и б.
Зависимости (1-75) и (1-76) свидетельствуют о том, что
движение масс привода не является равномерно ускорен-
ным — массы движутся с переменным ускорением. Кривые
скоростей а»! (I) и а»2 (/) содержат переменные периодиче-
ские составляющие, изменяющиеся с частотой Qla и имею-
55
щие противоположные фазы. Амплитуда переменной со-
ставляющей в скорости двигателя Wj тем меньше, чем меньше
масса механизма. При малых J2 амплитуда колебаний ско-
рости первой массы невелика и характер изменения скоро-
сти сот в переходных процессах может быть близким к по-
казанному на рис. 1-20 и 1-21. Однако и в этих случаях
следует помнить, что характер движения второй массы оста-
ется колебательным, так как амплитуда колебаний второй
массы зависит только от среднего ускорения системы и ее
частоты свободных колебаний.
Рис. 1-23. Пуск электропривода с двухмассовой упругой механической
частью (Jj > J2) при М = const и /Ис1 = const без учета (а) и с учетом
естественного демпфирования (б).
В заключение рассмотрим, как влияют внутренние дисси-
пативные силы на переходные процессы в упругой двухмас-
совой механической системе. Для получения дифференци-
ального уравнения движения системы относительно скоро-
сти сщ с учетом естественного демпфирования произведем
алгебраизацию системы уравнений (1-56), разрешим ее
относительно и после преобразований при Mt.s = 0
получим: *
1 d3u>i , 2ав.т , dti)[
dt3 ' + dt3 dt ~
d"-(M — Mcl) , 2aB.T
~ J&i.dt3 ф (A + Alfii;, dt ф CP‘
При M — Ma = const уравнение движения можно
представить в упрощенном виде:
1 d3<fli 2схв,т rf-Mj । dtiii
!2ia dt3 G“s dt3 ‘ (It CP-
56
Учитывая вид корне?! характеристического уравнения
/), — 0; р1]3 = —ав т ± /йр, решение следует искать в виде
“1 = 8ср? + е”ав'т/ (A cos Qpif + В sin Qpif),
Где йр = ]/й?<> — а|,т.
При начальных условиях t = 0, (loj)o = 0 и (dajdt^ =
- (М —определим коэффициенты А и В.
Решение примет вид:
J S
ю1 = 8ер? + т7г-е“авУ sin Qpt (1-78)
г v jb&P г
Таким же путем получим решение системы (1-56) отно-
сительно скорости механизма:
со., = 8CJ — -^е-ав.Р sin Q/. (1-79)
LP S!p p '
Сравнив (1-75) и (1-76) с (1-78) и (1-79), можно убедиться,
что внутреннее вязкое трение, не меняя общей формы реше-
ния и относительной фазы колебаний, вызывает затухание
колебаний и некоторое уменьшение их частоты йр < й]2.
Таким образом, с учетом естественного демпфирования сво-
бодные колебательные составляющие процесса постепенно
^затухают, как это показано на рис, 1-23, б, и наступает
режим равномерно ускоренного движения системы.. Так
как естественное демпфирование невелико, колебания за-
тухают медленно. При наибольшем естественном логариф-
мическом декременте %в. т - 0,3 за время затухания колеба-
ний до 5% начальной амплитуды система успевает совер-
шить около 10 колебаний, а при %в т = 0,1 — свыше 30.
Упругие колебания в механической части привода, как
правило, неблагоприятно сказываются на его работе, так
как увеличивают динамические нагрузки, вызывают нерав-
номерность движения, которая снижает точность выполне-
ния технологического процесса, а колебания масс па гиб-
кой подвеске в ряде случаев затрудняют управление соот-
ветствующими установками.
1-6. ДИНАМИЧЕСКИЕ НАГРУЗКИ ЭЛЕКТРОПРИВОДА
В соответствии с принципом Даламбера правые части по-
лученных выше уравнений! движения электропривода пред-
ставляют собой моменты действующих в системе сил инер-
57
ции. В теории электропривода эти силы и, моменты принято
называть динамическими силами и моментами-.
d.Vj dwi
в отличие от сил и моментов сопротивления, которые непо-
средственно с ускорением масс не связаны и потому назы-
ваются статическими. Строго говоря, последний термин
неточен: выше было отмечейо, что во многих практических
случаях моменты и силы сопротивления содержат периоди-
ческую составляющую и в этих случаях называться стати-
ческими могут лишь условно.
Уравнение движения приведенного жесткого механи-
ческого звена электропривода определяет суммарную дина-
мическую нагрузку электропривода:
Динамический момент является алгебраической вели-
чиной, знак которой определяется сформулированным выше
правилом знаков для нагрузочных моментов электропри-
вода. При ускорении системы динамический момент явля-
ется тормозным — его знак совпадает со знаком скорости.
Двигатель, преодолевая этот динамический момент, совер-
шает работу, затрачиваемую на увеличение запаса кинети-
ческой энергии системы. При замедлении системы, напро-
тив, динамический момент является движущим, его знак
противоположен знаку скорости; освобождающаяся при
уменьшении скорости кинетическая энергия расходуется на
совершение работы по преодолению результирующего мо-
мента М — Мс, который в этом случае является тормозным
(см. рис. 1-21).
Таким образом, потоки энергии через передачи электро-
привода даже при неизменной полезной нагрузке в зависи-
мости от условий движения могут быть различными. На-
грузки передач в переходных процессах могут существенно
увеличиваться, что вызывает соответствующее увеличение
показанных на рис. 1-9 и 1-10 моментов потерь на трение
в передачах &Mit так как известно, что последние зависят от
давления в трущихся поверхностях, а следовательно, от
нагрузки передач.
Суммарные потери мощности на трение в передачах мож-
но представить в виде
ДРтр = ДР0 + ЛРи,
58
где АР0 — постоянная составляющая потерь на трение;
ДА„ — переменная составляющая потерь, пропорцио-
нальная моменту нагрузки передачи.
Соответственно к. п. д. передач электропривода в общем
случае зависит от нагрузки:
П =______£12_____ _ ______^112_____ (1-80)
1 Ри + ЛРч + ЛРъ M12 + &M0 + &Mv ’ ои>
Рис. 1-24. Зависи-
мость и = f (М12)-
Рис. 1-25. Приведенное жест-
кое двухмассовое звено элект-
ропривода.
где Р12 = Mi2a — полезная передаваемая
Если обозначить ДЛ4,, = ЬМ12, то
формула (1-80) примет вид:
П = 1 + ДМ0/М12+& •
При ДЛ40 #=0к. п. д. при изменении
полезной нагрузки передач является ве-
личиной переменной и при Л412 -> 0
стремится к нулю, поэтому указываемые
в справочной литературе значения т} со-
ответствуют номинальной нагрузке пе-
редач Л413 = М12н, а при изменениях
нагрузки к. п. д. изменяется, как показано на рис. 1-24.
Форма зависимости ц = f (Л413) свидетельствует о том,
что наиболее быстро к. п. д. изменяется при малых нагруз-
ках передач, в остальной зоне
кривая достаточно полога.
При относительно малой по-
стоянной составляющей по-
терь ДЛ4о->гО к. п. д. стремит-
ся к постоянному значению
тЬо = 1/(1 -\-Ь) = const.
Для анализа влияния ди-
намических нагрузок на поте-
ри в передачах механическая часть электропривода может
быть представлена приведенным жестким двухмассовым
звеном, схема которого показана на рис. 1-25. Здесь —
момент инерции масс на валу двигателя, J2 — приведен-
ный момент инерции масс механизма. Передачи электропри-
вода условно представлены безынерционной цилиндриче-
ской зубчатой парой с передаточным числом i = 1 и к. п. д.
Пт» характеризующим переменную составляющую потерь
в передачах. Постоянные составляющие приведенного мо-
мента потерь в передачах ДЛДя и ДМ22 приложены соот-
ветственно к массам и J2.
59
В соответствии с рис. 1-25 полезной нагрузкой передач'
является результирующий момент на валу механизма
М13 = Л1СЗ-}- J38,
где 7ИСЗ = Ммех + AM.J2 — приведенный суммарный мо-
мент сопротивления на валу механизма.
Уравнение движения вала двигателя имеет-вид:
(1-82)
гдеМс1 = ДЛ412;
М]'г — приведенный к валу двигателя момент нагрузки ,
передач с учетом потерь.
Так как для прямой передачи энергии от двигателя к ме-
ханизму '
7Hi2 = Min/riti = (1 -]- b) (7Иса -Т J2e)>
то (1-82) в этом случае имеет вид:
м - Л4С1 - (1 + Ь) мсз = [Л + (1 + Ь) А] (1-83)
Для обратного направления энергии
М'ц = Л41гт]0 = (Л1с2 ~Н Л8)/(1 + ^)>
следовательно, уравнение движения запишется иначе:
+ О-84»
Таким образом, при одних и тех же полезных нагрузках
приведенные значения момента сопротивления и суммарного
момента инерции двигателя для различных направлений
передачи энергии оказываются разными. Для прямой пере-
дачи формулы приведения имеют вид:
Мс.пр = Ме1 + (.1+Ь)Мй; Лпр = Л + (Ц-&) А, (1-85)
а для обратной
Мс.о6р = Мс1 + Ми/(1+&); /2обр = Л + //(1+^). ’ (1-86)
Для электропривода с червячной передачей при исполь-
зовании уравнений (1-85) и (1-86) следует учитывать, что
к. п. д. обратной передачи обр меньше, чем к. п. д. прямой
передачи энергии ципр. Изложенное позволяет при исполь-
зовании простейшей расчетной механической схемы учи- :
тывать влияние динамических нагрузок на потери энергии
в передачах. Динамическая составляющая нагрузки при :
go . !
Прямой передаче в соответствии с (1-83) и (1-85)
= А® - 7, + dJ;t)7, -<•₽) 0-87)
Соотношение (1-87) свидетельствует о том, что влияние
динамических нагрузок на потери в передачах может быть
существенно лишь при больших приведенных моментах инер-
ции механизма. В случаях, когда основную долю в моменте
инерции составляет Jlt динамический момент двигателя
и основной части расходуется на ускорение масс на валу
двигателя, а нагрузка передач определяется главным обра-
зом приведенным моментом сопротивления Л4С2. Поэтому
необходимость учета влияния динамических нагрузок-на
механические потери характерна для электроприводов
инерционных механизмов, приведенный момент инерции
которых соизмерим или значительно превышает момент
инерции двигателя. Особенно важно учитывать этот фактор
при расчетах, связанных с выбором мощности двигателя.
Кроме того, в связи с несимметрией учет динамических
потерь в передачах весьма важен для электроприводов
с червячной передачей. В большинстве остальных случаев
при исследованиях динамики электропривода влиянием
динамических нагрузок на потери в передачах пренебре-
гают.
\ Правильное определение динамических нагрузок пере-
дач электропривода имеет важное практическое значение.
Нагрузки передач определяют износ механического обору-
дования, поэтому ограничение их, уменьшение колебатель-
ных нагрузок обеспечивают повышение надежности и дол-
говечности механической части привода и приводимого
в движение механизма. Для правильных оценок нагрузок
передач принципиально более важное значение имеет учет
упругой связи между основными массами системы, чем стро-
гий учет механических потерь. Рассмотрим, какой характер
имеют нагрузки передач при пуске электропривода с М =
Му = const, МС1 = const и Мс2 = const с учетом конеч-
ной приведенной жесткости передач с12, связывающей
массы двигателя Jy с массами механизма J2 (см. рис. 1-12, б).
Для этой цели разрешим систему уравнений (1-41) относи-
тельно упругого момента М12:
I ^. + M12 = JAp + Mc2, (1-88)
Q6 12 и*
где
еср = (^1 ~ Л4С1 —/Иц)/)^</2).
61
Решение уравнения (1-88) при начальных условиях ’
t = 0, (М12)о = Мс2, (dM12/dOo = Ci2 (®i — ®2)0 = 0 имеет
вид:
M12 = J28cp(l -cos Q12/) + Mc2. (1-89)
Характер изменения нагрузки передач во времени, соот-
ветствующий (1-89), показан на рис. 1-26.
При тех же условиях нагрузка механической связи
в жестком приведенном двухмассовом звене (см. рис. 1-25)
равна:
Mi2np = A8cP + MC2 = const. (1-90)
№
^Z2HSKC
^7ZCJ>
Рис. 1-26. Динамические нагруз-
ки передач при пуске электро-
привода.
---------без учета затухания;
-------— с учетом естественного
демпфирования.
Жесткое приведенное звено дает представление лишь
о средних скоростях, ускорениях и нагрузках элементов
системы. В этом можно вновь
убедиться, сравнивая (1-89)
с (1-90). Из сравнения сле-
дует, что М12пр есть средний
момент фактической нагрузки
передач М12ср, которая с уче-
том их конечной жесткости
имеет обусловленную механи-
ческими колебаниями пере-
менную составляющую. За
счет колебаний максимальная
нагрузка передач увеличи-
вается и может значительно
превышать среднюю (рис.
1-26). Это превышение характеризуется так называемым
динамическим коэффициентом
^д— ^12 макс/^12 ср- (1"91)
Подставляя максимум нагрузки, определяемый зависи-
мостью (1-89), в выражение (1-91), получаем для рассма-
триваемого процесса динамический Коэффициент в виде
^д== (ЛТс2 + 2/28ср)/(Л1с2 + J28cp). (1-92)
i
Из (1-92) видно, что динамический коэффициент увели-
чивается с увеличением ускорения 8ср и инерционности ме-
ханизма J2. Для механизмов с большим моментом инерции
динамическая нагрузка может значительно превышать
статическую, при этом динамический коэффициент дости-
гает значения /гд = 2. При аналогичных переходных про-
цессах с ненулевыми начальными условиями имеют место
и значительно большие /гд.
62
Динамические колебательные процессы, если исключить
из рассмотрения низкочастотные колебания, обусловленные
раскачиванием перемещаемых на губкой подвеске грузов,
О среднем не влияют на длительность переходных процессов
пуска, реверса, торможения электропривода и соответ-
ственно не снижают производительности механизма. Од-
нако считаться с ними приходится, так как они бесполезно
увеличивают нагрузку передач и рабочего оборудования
И ускоряют их износ. Поэтому динамический коэффициент
является, с одной стороны, важной характеристикой усло-
вий работы механического оборудования, а с другой сто-
роны, одним из основных показателей динамических ка-
честв электромеханической системы автоматизированного
электропривода. Динамический коэффициент существенно
зависит от структуры и параметров электропривода, пра-
вильный выбор которых при проектировании является
эффективным средством увеличения срока службы электро-
привода и механического оборудования.
С учетом естественного демпфирования уравнение дви-
жения электропривода, определяющее изменения нагрузки
передач, получим при тех же условиях из системы (1-56)
в виде
ДГ + Я2 = As + МС2. (1-93)
Решение (1-93) при тех же начальных условиях имеет вид:
М1г = Л8сре-ав-^ (1 — cos йР0 + Мс2.
Учитывая, что естественное демпфирование невелико,
максимум момента наступает в момент времени /макс, весьма
близкий к = л/йр. Принимая £макс получаем сле-
дующее выражение для динамического коэффициента:
(Лесре-“в-я/£2Р + /Цс2)/(А8ср + Мс2). (1-94)
С учетом (1-59) его можно переписать в несколько ином
виде: ;
/гд (Л8сре“А.т^ + Mc2)/(J28cp + Mc2). (1-95)
Подставляя в (1-95) значения %в. т = 0,1 4- 0,3 нетрудно
установить, что максимум динамической нагрузки за счет
естественного затухания снижается при наибольшем %в> т
Примерно на 15%, что в большинстве практических расче-
тов соизмеримо с точностью определения параметров сис-
63
темы. Незначительное влияние естественного демпфиро-
вания на первый максимум нагрузки наглядно устанавли-
вается и сравнением сплошной и пунктирной кривых на
рис. 1-26. Следовательно при анализе максимальных дина-
мических нагрузок при переходных процессах пуска и
торможения электропривода, а также при ряде других про-
цессов естественным демпфированием можно пренебрегать..
1-7. ВЛИЯНИЕ КИНЕМАТИЧЕСКИХ ПОГРЕШНОСТЕЙ И
ЗАЗОРОВ В ПЕРЕДАЧАХ ЭЛЕКТРОПРИВОДА
Одним из главных требований, предъявляемых к передаточному;
механизму привода, является требование высокой'равномерности пере- '
дачи крутящего момента. Это требование обеспечивается строгим по- '
стоянством установленной кинематической связи между мгновенными
значениями скоростей входного и выходного валов, т. е. постоянством
передаточного числа Л Однако реальные передачи имеют ограниченную ’
точность изготовления, поэтому равномерность движения связываемых i
ими масс электропривода всегда в той или иной степени нарушается '
неточностью изготовления зубьев передач, наличием эксцентриситетов]
зубчатых, фрикционных передач или ведущих колес механизмов пере-4
движения, неравномерностью толщины; ремня в ременной передаче,)
неравномерностью движения цепи по зу-j
§
«а
&
§
Рис. 1-27. Кинематиче-
ская погрешность передач
зубчатого зацепления.
бьям звездочки в цепной передаче и т. п.1
Нарушение постоянства передаточного!
числа, даже незначительные пульсации»
его, вызывают колебаний скоростей свя-J
занных масс электропривода и, как след-1
ствие, появление дополнительных дипа-ч
мическнх нагрузок [27]. 1
Реальная зубчатая передача всегда!
обладает рядом погрешностей, обусловлен-^
ных неточностями изготовления. При од-]
непрофильном зацеплении с точным коле-J
сом имеет место погрешность угла поворотам
колеса, показанная в пределах одного обо-1
изготовленного зубчатого
рота на рис. 1-27. Максимальная суммарная погрешность называется;]
кинематической погрешностью колеса; она вызывается всеми неточно-. )
стями изготовления данного колеса. Составляющая кинематической.;
погрешности, период которой определяется углом поворота колеса на ]
один оборот, возникает 'вследствие биения венца (эксцентриситета) и [
накопленной ошибки окружного шага. Накладывающаяся на нее цикли- [
ческая погрешность обусловлена разностью соседних окружных шагов -
и, главное, отклонениями профиля зубьев от идеального. В последнем
случае частота циклической погрешности совпадает с частотой пере-
хода зацепления с зуба на зуб.
Вследствие указанных погрешностей передаточное число зацепле-.
ння не остается постоянным, а испытывает при работе малые периоди-
ческие изменения относительно среднего значения, вызывающие соот-
ветствующие пульсации скоростей и ускорений связанных зацеплением
валов. Эксцентриситеты, накопленные ошибки зубчатых колес п дру-
гие аналогичные погрешности элементов каждого вала передач сум.ми-.
64 '
руются геометрически й Являются Источником возмущений с угловой
чистотой, равной угловой скорости данного вала. На них накладываются
периодические изменения мгновенного радиуса зацепления, обусловлен-
ные систематическими погрешностями изготовления зубьев передач.
В общем случае выражение для мгновенного значения пере-
даточного числа i имеет вид:
' п k
Г = /о “Ь Аймаке А COS г 0"96)
1 1
где Дг'максА — k-я амплитуда переменной составляющей;
ЙЛ — спектр частот возмущений передаточного отношения при-
вода, обусловленных погрешностями различных элемен-
тов передач;
п — общее число валов и зацеплений в кинематической цепи
привода.
Таким образом, редукторный электропривод прн работе испыты-
вает со стороны передач механические возмущения различной частоты,
увеличивающие динамические нагрузки элементов привода, вызываю-
щие шум н вибрации.
Из всего спектра возмущений, источником которых является пере-
даточный механизм привода, прн анализе динамических нагрузок за-
служивают внимания те, которые в приведенной схеме имеют наиболь-'
шее значение, а также те, которые наи-
более близки к частоте свободных коле-
баний привода. Практически наиболее ве-
роятен случай, когда одно главное воз-
мущение определяет периодические откло-
нения передаточного числа от среднего
^качения.
Рассмотрим условия свободного дви-
жения двухмассовой механической систе-
мы с упругой связью и реальной переда-
чей, схема которой приведена на рис. 1-28.
Ее можно рассматривать как приведенную
к валу двигателя (или механизма, если
ото удобнее) расчетную схему редуктор-
Рис. 1-28'. Двухмассовая
упругая механическая си-
стема с реальной переда-
чей.
иого привода с пренебрежимо малыми моментами инерции промежуточ-
ных валов передач. В этом случае с±.2 есть суммарная приведенная к валу
двигателя жесткость всех элементов привода, J2 — приведенный к валу
двигателя момент инерции механизма, а эквивалентная передача обла-
дает переменным передаточным отношением
i = 1 + Дгмакс cos Й^, (1-97)
где Й — частота возмущений.
Следует заметить, что в (1-97) частота Й пропорциональна угловой
скорости со, (илн ш1)> т. е. непостоянна. Однако изменениями со2 в те-
чение периода изменений параметра можно пренебречь, приближенно
полагая эту скорость равной ее среднему значению, При этом справед-
ливы соотношения
со2 = а)2 + а>2 Дг’макс cos Й/;
t
Фа = j о/ dt = <р2 + .Дфмакс sin ПД
о
3 Чилнкин М. Г. и др.
(1-98)
(1-99)
65
Где Афмакс = -^2-Д(маКС — максимальней угловая погрешность Зацеп-
ления.
Уравнения свободного движения рассматриваемой системы при
отсутствии внешних и внутренних диссипативных сил удобно записать:
в виде уравнений Лагранжа
AW_^=0-
di \dqj dqr
(dL\ _ 0L
dt\dq2)' dq2
(1-100)
(1-102)
Примем в качестве обобщенных координат qr — ф] и q2 = ф2. Тогда'!
функцию Лагранжа L можно записать так: '
L = Лф?/2 + 72ф| - с12 (ф! - ф()2/2. (1-101)?
После подстановки этой функции в уравнения Лагранжа получим]
уравнения движения системы:
Т dWi . , ,. п
J г —Н ci2 (ф1 — фЛ=0;
Т da2 . /.dtp',
j2-dr-c^-^ir0--
Уравнения (1-102) позволяют установить основные особенности’
влияния кинематических погрешностей на движение электропривода.;
Кинематические погрешности являются источником внутренних пер ио- -
дических возмущений, амплитуда которых пропорциональна макси-'
муму угловой ошибки Дфмакс 11 возрастает с увеличением жесткости уп-:
ругой связи с]2, а частота пропорциональна скорости электропривода. *
Так как угловая погрешность A<pM£iKC невелика, максимум возмущения;
ДЛ4.т,;||.,. обычно составляет несколько процентов рабочей нагрузки'
передач и в наиболее тяжелых случаях не превосходит 15—20% ее:
значения, поэтому в большинстве случаев с влиянием кинематических:
погрешностей передач можно было 6bi не считаться, однако фактнче- '
ская динамическая нагрузка, обусловленная внутренним возмущением,
может многократно возрастать в связи с явлением резонанса.
Если частота возмущений при максимальной рабочей скорости
электропривода ймаКс > Н12, то в процессе работы скорость электро- <
привода может принять значение, при котором Й = й12. Наступает
резонанс, вследствие которого вынужденные колебания резко усили- <
ваются тем в большей степени", чем слабее демпфирование упругой
механической части привода (см. рис. 1-19, а). Резонансное усиление
упругихдаколебаний, вызванных погрешностями передач, во многих
практических случаях является причиной быстрого износа и выхода
из строя передач, снижения точности отработки заданных законов
движения электропривода или нарушения нормального течения техно-'
логического процесса рабочей машины.
Система уравнений (1-102) нелинейна в связи с наличием во втором
уравнении члена, содержащего произведение. Однако следует учесть,
что пульсации передаточного числа электропривода невелики. В боль-
шинстве случаев они не превышают 1% среднего значения и лишь для
ряда инерционных механизмов достигают 2—5%, поэтому при анализе
динамики электропривода с учетом кинематических погрешностей пере- :
66
Дй'1 можно упростить математическое описание системы, приближенно
Йшияв во втором уравнении системы (1-102) rf<p(,/d<p2 ~ 1- С учетом дей-
'Пующих в системе моментов уравнения движения принимают вид:
Л4-с12(ф1-<р')-Л4с1 = 71-
§
г
й
, f\ лх т
с12 (ф1~фа)~Мс2 = А —•
(1-103)
Принятое допущение позволяет перейти от системы уравнений
С переменными коэффициентами к системе линейных дифференциальных
урпнпенпй движения с постоянными коэффициентами. Если подставить
И (1-103) выражение для ф( (1-99), систему можно переписать так:
М — С12 (ф1 —фа)-С12 Дфмакс sinQZ—Mcl = Ji ;
С12(ф1-ф2)+«2 Дфмакс sin Ш — Mz2 = J2-^.
(1-104)
Теперь наглядно видно, что система (1-104) в отличие от (1-102)
Ilf содержит переменных коэффициентов и является линейной систе-
мой с постоянным по амплитуде возмущением А7ИМ = с12Дфм, прило-
женным к обеим массам в противофазе и изменяющимся по синусои-
дальному закону с частотой Q, пропорциональной угловой скорости
Привода. Однако во избежание принципиальных ошибок следует пом-
нить, что указанное возмущение в виде самостоятельных моментов в си-
стеме отсутствует — оно является неотъемлемой составной частью уп-
ругого момента:
М12 = С12 (ф1 —ф2 —Дфмакс sin Qt).
Заметим, что рассмотренные здесь условия движения механиче-
ской системы аналогичны системе с поступательным движением рабо-
чего органа и переменным радиусом приведения, например системе
С кривошипно-шатунным или кулисным передаточным механизмом,
Однако количественная разница в их условиях работы весьма велика.
При необходимости учета упругости механической связи масс в таких
системах необходимо составить расчетную механическую схему и запи-
сать уравнения движения в форме уравнений Лагранжа (предпола-
гается, что уравнение механической связи между скоростями v и со
интегрируемо). При этом уравнения движения в связи со значитель-
ными изменениями радиуса приведения содержат значительные пере-
менные коэффициенты и указанная выше рекомендация об упрощении
уравнений движения системы с переменным передаточным числом
Неприемлема.
В предшествующем рассмотрении механические связи между мас-
сами электропривода полагались непрерывными и не учитывалась воз-
можность их нарушения при размыкании зазоров, присутствующих
1> соединениях механизма. Наличие зазоров является характерной-осо-
бенностью электроприводов, передаточный механизм которых содержит
зубчатые, цепные, реечные, винтовые и тому подобные соединения.
Для цилиндрических зубчатых передач минимально допустимые
зазоры в зацеплении определяются технологическими допусками и воз-
можными изменениями размеров зубьев при их нагреве. Таким обра-
зом, определенный минимальный зазор необходим для нормальной
3*
67
С12 & %
Рис. 1-29. Упругая
двухмассовая система
с зазором.
работы передачи; с течением времени в результате износа кинематиче- J
ские зазоры увеличиваются, соответственно возрастает и их’влияние
на условия работы электропривода, которое, как правило, неблаго- Т
приятно. При выборе зазоров возникают удары, ускоряющие износ пе- .?
редач; во взаимосвязанных механизмах точ- ]
ных машин, например станков, зазоры яв- .1
ляются фактором, снижающим точность вы- :
полнеиия технологических операций; в сле-
дящем электроприводе зазоры уменьшают
точность слежения за объектом и т. д. ’
Для выяснения физических особенно- ;
стей процессов выбора зазоров рассмотрим j
пуск двухмассовой системы, схема которой i
представлена на рис. 1-29. При рассмотре- ;
нии для упрощения пренебрежем потерями на трение и будем пола- ;
гать, что в исходном положении обе массы неподвижны, к массе J/ i
прикладывается движущий момент М = Мг= const, а к массе 1
J2 — тормозной реактивный момент нагрузки Л4с2. ' 1
Показанный на схеме зазор Дф3 представляет собой суммар- |
ный приведенный зазор системы, который с учетом (1-8) можно вычис- .1
лить с помощью следующей формулы приведения: I
Дфз=2ДфзАг + 2(Д«з//Р1/). (1-Ю5) >
где Дф3; — действительные зазоры в соответствующих зацеплениях, я
выраженные в угловом перемещений t-ro вала;
AS3/ — действительные зазоры в связях . с поступательно движу- 1
щимнея массами, выраженные в линейном перемещении 1
/-й массы. j
Размеры зазора в зубчатом зацеплении тем больше, чем при прочих j
равных условиях выше модуль зацепления. Как следствие, наиболь- 1
шйм действительным зазором всегда обладают выходные ступени пони- J
жающих скорость зубчатых передач. В соответствии с (1-105) эти зазоры я
при приведении к валу двигателя умножаются на наибольшее переда- |
точное число ц; и в суммарном приведенном зазоре Дф3 играют основ- 1
ную роль. В период выбора зазора Афз механическая связь между мае- I
сами j/и J2 отсутствует и под действием момента двигателя Мг инер- .1
цйонные массы движутся равноускоренно: |
co1=jM1f/Jl = eot (1-106) j
За время выбора зазора t0 двигатель успевает разогнаться до не- 3
которой скорости со111ач, которую при равномерно ускоренном движе- J
нии можно определить по формуле
* ' collla4==]/^2so Дф3- (1-107) ।
Так как инерционные массы механизма J2 при этом неподвижны, ‘
процесс выбора зазора оканчивается упругим ударом, при котором 1
запасенная во вращающихся с угловой скоростью wlna4 массах кине- ’
тическая энергия частично рассеивается в виде тепла, а в основном |
переходит в энергию упругих деформаций, вызывая дополнительные ।
динамические нагрузки передач. Если начало отсчета времени t сов- Я
местить с моментом окончания выбора зазоров и не учитывать факторов, |
вызывающих затухание колебаний, движение электропривода после '
выбора зазора может быть представлено уравнением движения (1-88).
68 )
Решение уравнения (1-88) при начальных условиях: t — О,
(Л412)о = О> (AW12/d;)o=Ci2®iH24 имеет ВИД:
^i2 = M12rp + C-x-2g^ sin Й12/ —Л412ср cos П12/, (1-108)
где
М12ср = ^2Ёср “F7ИС.
За счет возникающих в результате удара механических колебаний
максимальная нагрузка передач возрастает в сравнении с нагрузкой
передач Л412гр, которая имела бы место при жесткой связи масс и от-
сутствии зазоров. В соответствии с (1-108) динамический коэффициент,
характеризующий максимум упругого момента при выборе зазоров
М12макс по отношению к средней нагрузке передач, определяется соот-
ношением
Соотношение (1-109) свидетельствует о том, что возникающие при
ударе упругие механические колебания увеличивают нагрузки передач
в значительной степени. При слабом демпфировании при соцшч =/= 0
/гд > 2. Динамический коэффициент увеличивается при возрастании
начальной скорости а)111а1, тем в большей степени, чем выше жесткость
системы с12. С учетом (1-107) формулу (1-109) можно представить в виде
о-"»)
Из (1-110) .следует, что при данном моменте инерции двигателя J2
и данном зазоре в передачах Дср3 динамическая нагрузка передач опре-
деляется ускорением в период выбора зазоров и соотношением при-
веденных инерционных масс двигателя и механизма. С увеличением Л
динамический коэффициент увеличивается тем медленнее, чем больше
момент инерции механизма. При -> оо динамический коэффициент
стремится к предельному значению:
^дсо ~ 1 Н-2 J 1С12е0 Дсрз/Мщ ср •
Механическая часть автоматизированного электропри-
вода по отношению к его электрической части является объ-
ектом управления, которое обеспечивает режимы движения
системы, оптимальные по тем или иным показателям для
технологического процесса установки и для ее электриче-
ского и механического оборудования. Поэтому правильные
представления о физических свойствах механической части
электропривода имеют для последующего изложения исклю-
чительно важное значение и рассмотрение материалов дан-
ной главы полезно завершить обобщенным математическим
описанием и составлением обобщенной Структурной схемы,
отражающей все установленные выше особенности. При этом
за основу необходимо принять представление механической
части привода двухмассовой упругой механической снсте-
69
мой, которая принципиально полно отражает физические .
особенности реальных систем и в то же время является пре-
дельно упрощенной моделью таких систем. Дальнейшее
упрощение путем перехода к рассмотрению жесткого при-
веденного звена связано с утратой моделью ряда важных
динамических свойств объекта.
Выше установлено, что во многих практических слу-,
чаях возникает необходимость учета естественных диссипа-
тивных сил, присутствующих в реальных кинематических
цепях. Рассмотрено влияние динамических нагрузок пере-
дач на действующие в них моменты потерь на трение, имею-
щих характер сухого трения, и показано, что при опреде-
ленных параметрах механизма и конструктивных особен-
ностях передач с этим влиянием нельзя не считаться. Ана-
лиз влияния кинематических погрешностей передач пока- '
зал, что этот фактор, присутствующий практически во всех
реальных электроприводах, влияет на динамические на-
грузки механического оборудования и на качество техноло-
гического процесса приводимого в движение механизма,
поэтому необходимо наличие кинематических погрешностей
передач иметь в виду и при необходимости учитывать. На-
конец, установлено, что на динамику электропривода су-
щественное влияние оказывают присутствующие в реальных
передачах зазоры.
С учетом всех перечисленных факторов система уравне-
ний движения механической части привода при принятых
допущениях может быть записана в следующем общем
виде:
м -- м", - Mc'j-м;2 [i + ь sign /и12]=л ;
м;4 - м'с.2 - - м;2 = л ,
(1-ш)
где М13—с12 (фх - ф2 - Афк.п - Дфз/2) при ф, - ф, - Дфк.п |>
> Дфз/2; М13 = 0 при | Ф1 — ф2 — Дфк.п! < Дд>3/2;
= + ^2 dM12/dt — упругий момент с учетом внут-
реннего вязкого трения;
Mei и Мс2 — активные постоянные моменты на-
грузки на соответствующих валах;
Мс’1 = | Мез I sign ©!
и Мс2 = | Мс21 sign (о2 — моменты сухого трения на соот-
ветствующих валах;
Д4"1'=Р1со1 и Мс2=Р2й)г — моменты вязкого тренця на. соот-
ветствующих валах. '
70
Системе (1-1 И) соответствует обобщенная структурная
схема механической части электропривода, приведенная
па рис. 1-30. Эта схема учитывает важнейшие факторы, вли-
яющие на динамические механические процессы в электро-
механических системах автоматизированного электропри-
вода. Эта схема наглядно показывает, что механическая
часть электропривода представляет собой объект управле-
ния с существенными нелинейностями, обусловленными
наличием зазоров и сухого трения. Чаще всего при иссле-
Рис. 1-30. Обобщенная структурная схема механической части электро-
привода.
дованиях электропривода не возникает необходимости
и одновременном учете всех факторов и нелинейностей,
представленных в схеме на рис. 1-30, так как обычно при
конкретном анализе цели исследования определяют и
ограниченное число факторов, представляющих наиболь-
ший интерес. Однако во многих задачах возникает необхо-
димость использования этой схемы в полном виде без упро-
щений. Для решения таких задач следует использовать
вычислительные машины.
Глава вторая
ЭЛЕКТРОМЕХАНИЧЕСКОЕ ПРЕОБРАЗОВАНИЕ
ЭНЕРГИИ
Й-1. ОБОБЩЕННОЕ МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ПРОЦЕССОВ
ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ
Электрический двигатель является основным элементом
электрического привода, поэтому теория автоматизирован-
ного электропривода не только непосредственно опирается
71
на теорию электрических машин 17, 81, но и включает в себя
в качестве основополагающего раздела ряд общих вопросов
электромеханики. К числу таких вопросов относятся общие
физические представления о процессах электромеханиче-
ского преобразования энергии, сведения об их важнейших
особенностях и характеристиках, а также анализ электро-
механических свойств основных разновидностей двига-
телей.
В теории автоматизированного электропривода электри-
ческий, двигатель — элемент сложной электромеханической
системы, выбираемый, как правило, по каталогу и потому
обладающий определенными параметрами и конструкцией.
При этом главным является изучение свойств и характери-
стик двигателя, определяющих его динамическое взаимодей-,
ствие с остальными элементами электромеханической си-
стемы, с целью выявления законов
управления процессами электромеха-
нического преобразования энергии,
обеспечивающих оптимальные по тем
или иным показателям режимы рабо-
ты электропривода и приводимого в
движение механизма.
Рассматривая двигатель как эле-
мент электромеханической системы,
целесообразно механическую инер-
цию ротора и момент потерь на его
валу отнести к механической части
t
Рис. 2-1. Электроме-
ханический многопо-
люсник.
системы, считая механическими переменными электромаг-
нитный момент двигателя М и угловую скорость его ро-
тора со. Этому условию соответствует представление дви-
гателя в виде электромеханического многополюсника
(рис. 2-1), имеющего п пар электрических зажимов, соот-
ветствующих обмоткам двигателя, к которым подведены
напряжения ult и2, ип, и одну пару механических зажи-
мов, представляющих безынерционный ротор двигателя,
на котором пщ1 скорости со в результате электромеханиче-
ского преобразования энергии развивается электромагнит-
ный момент машины М. Переменные со, М связывают элек-
тромеханический преобразователь ЭМП с механической
частью системы, а напряжения ult и2, ..., ип — с системой
управления электроприводом.
Достаточно полные представления о принципах дейст-
вия, конструктивных особенностях и характеристиках ос-
новных разновидностей двигателей, которые дает теория
72
Электрических машин, служат в теории электропривода
Хорошей основой для обобщенного анализа динамических
процессов электромеханического преобразования энергии.
Любая многофазная электрическая машина с п-фазной
Обмоткой статора и m-фазной обмоткой ротора при условии
равенства полных сопротивлений фаз статора (ротора)
для изучения таких процессов может быть представлена
эквивалентной двухфазной машиной [6]. Возможность та-
utfz
Поверхность статора
$ Вращенпв поверхность ротора
у-О
Ротор \ /
rfi Роковый слои тризы d /
и' Токовый слой /разы у
\ Рис. 2-2. Схема двухфазной двухполюсной машины (а) и развёрнутая
схема обобщенной машины (б).
кой замены создает условия для получения обобщенного
математического описания процесса электромеханического
преобразования энергии во вращающейся электрической
машине на основе рассмотрения идеализированного двух-
фазного электромеханического преобразователя, который
в специальной литературе получил название обобщенной
электрической машины.
На рис. 2-2, а приведена схема двухфазной двухполюс-
ной электрической машины с явно выраженными полю-
сами, а на рис. 2-2, б представлена для сравнения соответ-
ствующая ей схема — развертка идеализированной обоб-
щенной машины. Из сравнения следует, что обобщенная
машина является упрощенной моделью реальной машины.
В реальной машине обмотки уложены в пазах статора и
ротора, а это вызывает, с одной стороны, несинусоидаль-
ность м. д. с.обмоток, с другой — неравномерность воздуш-
ного зазора. В обобщенной машине сосредоточенные в па-
73
зах проводники с током заменены синусоидальными токо-
выми слоями, эквивалентными по м. д. с. первым гармони-
кам м. д. с. соответствующих реальных обмоток. Неравно-
мерность зазора, обусловленная пазами, не учитывается,
а наличие явнополюсной структуры на статоре (или роторе),
как показано на рис. 2-2, б, может быть учтено введением
1-й гармоники переменной составляющей зазора.
При анализе динамических процессов в обобщенной элек-
трической машине, кроме того, принимается, что магнитная
цепь машины имеет очень высокую магнитную проницае-
мость и не насыщается. Иными словами, предполагается,
что энергия магнитного поля сосредоточена в воздушном
зазоре. Зазор явнополюсной машины принимается равно-
мерным, а показанная на рис. 2-2, б неравномерность учи-
тывается введением переменной радиальной магнитной
проницаемости [6]
Ирад = р.-Др.= |Л-Др.макс COS 2фэл, (2-1)
где <р,л = рпф — электрический угол поворота ротора от-
носительно статора;
Ф — геометрический угол поворота ротора от-
носительно статора;
р„ — число пар полюсов машины.
Условием возможности приведения многофазной машины
к эквивалентной двухфазной является ее симметрия, поэ-
тому полные сопротивления фаз статора (ротора) обобщен-
ной машины равны. Напряжения питания обмоток могут
быть несимметричными; при этом для анализа динамики
следует пользоваться известным методом симметричных
составляющих.
Динамика обобщенной машины описывается четырьмя
уравнениями электрического равновесия в цепях ее обмо-
ток и уравнением электромеханического преобразования
энергии, выражающим электромагнитный момент машины
как функцию электрических и механических координат
системы. Уравнения Кирхгофа, выраженные через потоко-
сцепления, имеют вид:
uia = RAila -ф pTlo;
Mip — , /9-2)
~ Rtf-Zd 4“ PX^2d'i
«2? = ^2^*27 “F P^27’ ,
Уравнения (2-2) записаны для реальных напряжений,
токов и параметров обобщенной машины, т. е. для обмоток
74
индексов для двухполюсной
J3
Рис.
2-3'. Схема
двухполюсной
обобщенной
машины.
I статора в осях координат а, р, неподвижных относительно-’
статора, а для ротора — в осях координат d, q, неподвиж-
ных относительно ротора. Смысл принятых неиспользуемых
н дальнейшем обозначений и
машины поясняется рис. 2-3.
, Индексами 1 и 2 обозначены
параметры, относящиеся со-
ответственно к статору и ро-
тору; индексы а, р, d, q опре-
деляют принадлежность к об-
мотке . соответствующей оси
машины. Кроме того, в урав-
нениях (2-2) обозначены: р =
1 •= d/dt; R± (/?2) — активное
I сопротивление одной .фазы
| статора (ротора); Т — пото-
| косцеплепия соответствующих
| индексам обмоток.
* Уравнения системы (2-2)
аналогичны по форме, и в даль-
нейшем будет неоднократно возникать необходимость выпол-
нения над ними однотипных математических операций,
поэтому полезно записать их в компактной обобщающей
форме
ut — Rdi-Yp^i, (2-2а)
где индекс I принимает значения la, 1р, 2d, 2q, соответ-
ствующие индексам обмоток.
Потокосцепления обмоток в общем виде определяются
результирующим действием токов всех обмоток машины:
гР 1а = Lla, ю4а 4" ^-1а, 1(54(5 4“ ^la, 2rf4<Z 4“ Дпх,2г4?’
^1(5 = .^1(5, ia4a 4" ^1(5,1(51'1(5 4" ^1|5, 4" ^1(5,2427’
^2rf = ^2rf,ia4a 4" 1(54(5 4" -^2rf, 2rf4rf 4" -^2rf,2?4(?>
4^27 = ia4a 4“ ^2?,ip4|5 4" ^-27,2rf4rf 4" ^'27,274?-
(2-3)
В (2-3) для. собственных и взаимных индуктивностей
обмоток принято одинаковое обозначение L,j с подстроч-
ным индексом, первая часть которого i — la, ip, 2d, 2q
указывает, в какой обмотке наводится э. д. с., а вторая
/ = la, ip, 2d, 2q — током какой обмотки она создается.
Например, Lla,la — собственная индуктивность фазы a
статора; — взаимная индуктивность между фазой р
статора и фазой d ротора и т. п.
75
Принятые в (2-3) обозначения и индексы обеспечивают
однотипность всех уравнений, что позволяет прибегнуть
к удобной для дальнейшего изложения обобщенной форме
записи этой системы
/ = 2?
Ц (2-За)
/=1а
При работе машины взаимное положение обмоток ста-
тора и ротора изменяется, поэтому собственные и взаимные
индуктивности обмоток в общем случае являются функцией
угла поворота ротора =f(<p9J1). Для симметричной не-,
явнополюсной машины собственные индуктивности обмо-'
ток статора и ротора не зависят от положения ротора
— L1(J — Zvj — const, — const, а вза-
имные индуктивности между обмотками статора или ротора
равны нулю (Lla, Х|з == Tip,ia — == 0), так
как магнитные оси этих обмоток сдвинуты в пространстве
на угол срэд = 90°. Взаимные индуктивности обмоток ста-
тора и ротора проходят полный цикл изменений при пово-
роте ротора на угол <рэл — 2л, поэтому с учетом принятых
на рис. 2-3 направлений токов и знака угла поворота ро-
тора можно записать:
Lla.id — Ь2С1, ta = Mg COS <рэл > Да, 27 = Дула 1=3
= Д2-cos (фэл 4-90°) = —Д3 sin фэЛ;
Др,2? 33 Д?,1Р = Д2 COS фэл, Ljp, ~ Дй;1Р ~ Д2 SIH Фэл- .
(2-4)
Таким образом, для неявнополюсной обобщенной ма-
шины уравнения электрического равновесия (2-2) могут
бщь выражены с учетом (2-3) и (2-4) через токи обмоток:
Wia — ^xha 4" РДД 4"РД2 (COS фэл) i2d
(sin фэЛ) izq',
«хр = #x*Jp + РДД + рДг (sin Фэл) izd +
+ pL.2 (cos фэл) Д;
Щд — + pLzizd + рД2 (cos фэл) ila
4-рД2 (sin <p9J1) ilfJ;
M2? 33 Д2Д 4" рДД — pLyz (si° фэл) ha 4"
4- рД2 (COS фэл) tip.
(2-5)
76
Для явнополюсной машины в соответствии с принятым
выше условием (2-1) собственные и взаимные индуктивности
Нбмоток обобщенной машины необходимо представить в виде
1’уммы двух составляющих, одна из которых пропорцио-
нальна pi, а вторая — Др. Составляющие, пропорциональ-
ные р, не имеют отличий от рассмотренных для неявнопо-
люсной машины. Составляющие, пропорциональные Др,
имеют полный цикл изменения при повороте ротора на
одно полюсное деление. Так как ротор предполагается глад-
ким, то собственные индуктивности обмоток явнополюсного
статора не зависят от положения ротора, а собственные
индуктивности ротора изменяются в соответствии с изме-
нениями Др. Явнополюсный статор при вращении ротора
меняет картину поля в воздушном зазоре, поэтому взаимная
индуктивность обмоток ротора при этом не равна нулю
п также определяется изменениями Др. Изложенным сооб-
ражениям соответствуют следующие выражения для ин-
дуктивностей обобщенной явнополюсной машины [6]:
1‘ia.ia ~ 4" Д^1’> ^1(5,1(5 = ^1 &L',
l‘2<l,2d ~ ^-2 4“ ^^2 СО® 2(рэл, Loy,2? — COS 2фэл,
= Д1[5,ict ^2rf,2?= -^2?,2rf = ДД sin 2фэл;
I'ia,2d ~ Lid, la ~ (^12 4~ AL12) COS <рэл»
^'ia,2? = ^2q,ia — (L12 4" AL12) SIH Фэл!
М(5,2d — ^2d, 1P ~ (М2 ^^12) фэл>
Mp.2? = Ltq, 1(5 — (М2 AM2) COS фэл-
(2-6)
В [6] получены расчетные соотношения, связывающие
индуктивности (2-6) с геометрическими параметрами ма-
шины и линейной плотностью проводников. В практике
проектирования и исследования электроприводов обычно
используются либо параметры машин, определяемые экспе-
риментальным путем, либо параметры, указываемые заво-
дом-изготовителем в клиентском формуляре машины,
а в ряде случаев — приближенно оцениваемые по ее пас-
портным данным, поэтому упомянутые расчетные соотноше-
ния здесь не приводятся, а важному вопросу определения
параметров машины в дальнейшем по мере необходимости
будет уделено внимание.
77
С учетом (2-3) и (2-6) уравнения Кирхгофа для явно-
полюсной машины принимают вид:
wla = + Р + АД) На + Р (^12 + А Д2) (COS фэл) i2d —
— р (Д2-|-AL12) (sin фэл) i29;
Mi₽ = -^14(5 + Р (4—i\p + p (£12 — AL12) (sin срэЯ) i2d-f-
4" P (-^12 AL12) (COS фэл) Hq’’
l^2d ~ R^izd 4" P (Дз 4“-AL12) (COS фэл) Ha 4" P (^-12 А Д2) X
X (sin фэл) i1P + p (L2 + АД cos 2фэл) Д—рАД (sin2срэя) Д;
^2? = RzHq 4- P (-^12 4- AL12) (sin фэЛ) tja p (A12 AL12) X
X (cos фэл) tip - рАД (sin 2фэЛ) i2rf + (Д - AL2.cos 2фэл) Д.
(2.7)
Для дальнейшего изложения полезно развернутую-
запись уравнений электрического равновесия (2-7) заменить
компактной обобщающей записью, аналогичной (2-2а),
с учетом (2-За):
/ = 2?
Ui = RiH + P У! Li.jij, (2-7а);
/ ---la
где Ljj определяются по формулам (2-6).
В результате взаимодействия токов, протекающих по '
обмоткам обобщенной машины, на ее роторе развивается
электромагнитный момент М, который может быть опреде-
лен с помощью известных соотношений [6]:
1 = 2(/ 1=2(7
2гЛ = 4 2 (2-8)
Z=ia • л » = 1а
С помощью (2-За) электромагнитный момент машины
может быть выражен через токи обмоток:
1 = 2(7 / = 2(7 д,
«4 2'<2^- (и»
i=la /=1а
Подставляя в (2-9) выражения для собственных и вза-
имных индуктивностей обмоток (2-6), получаем уравнение
электромеханического преобразования энергии в обобщен-
ной явнополюсной электрической машине в виде
= Рп {[Чр^2</ (^*12 ALJ2) HaHj .(^-12 4- AL|2)] cos фэл
(^12 Д-^ia) 4- HaHd (^12 4- AL12)] sin ф9л 4”
+ АД (i|? - sin 2фэл - 2&L2i2di2g cos 2<рэл}, (2-10)
где pa = й?фэл/й?ф — число пар полюсов машины.
78
к Уравнения электрического равновесия (2-7) в сочетании
р уравнением электромагнитного момента (2-10) представ-
йиют собой развернутое математическое описание дйнами-
Чгского процесса электромеханического преобразования
НПсргии, которое в дальнейшем будет конкретизировано
[для наиболее широко используемых в автоматизированном
Электроприводе разновидностей электрических двигателей.
|'|3 обобщенной форме записи оно принимает вид:
Ui ~ p V
М =
t = 2<7 / = 2<7
dLi.j .
ll
(2-Н)
/=1<Х
Необходимо подчеркнуть, что принятая обобщенная
; форма записи уравнений двухфазной обобщенной машины
‘ обеспечивает возможность их использования для описания
’ динамических процессов в любой многофазной многообмо-
точной машине. Например, уравнения (2-7а) и (2-9) спра-
ведливы для трехфазной машины при наборе индексов i, j
в соответствии с обозначениями ее обмоток. Дополнительно
при этом требуется определить лишь значения соответству-
ющих коэффициентов самоиндукции и взаимной индукции
Легко убедиться, что переход к трехфазной машине,
не меняя физической сути математического описания, де-
лает его громоздким. Общее число уравнений возрастает
е 5 до 7, а число значимых коэффициентов Lit j для неявно-
полюсной машины увеличивается с 12 до 36, что влечет
за собой существенное усложнение уравнений. Поэтому
во всех случаях, когда при исследованиях динамики трех-
фазиой машины переменного тока не накладывается огра-
ничений на корректность замены ее эквивалентной двухфаз-
ной машиной, использование, полученного обобщенного
математического описания динамических процессов электро-
механического преобразования энергии в двухфазном ва-
рианте ведет к цели наиболее наглядным, простым и удоб-
ным путем.
2-2. РЕЖИМЫ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ И
ИХ ХАРАКТЕРИСТИКИ
Используем полученные в § 2-1 соотношения для анализа
физических особенностей процессов преобразования энер-
гии, разъяснения ряда важных для теории электропривода
- 79
понятий, а также определения характеристик двигателя -й|
электропривода, которыми в дальнейшем изложении будем!
постоянно пользоваться. В электрическом двигателе осу-3
ществляется связь механического движения привода и]
приводимого им в движение механизма с электрическими!
процессами в системе автоматического управления электро-/]
приводом и наоборот. Эта связь объединяет механическую^
и электрическую части электропривода в единую электро-.5
механическую систему, и ее различные проявления в даль-;
нейшем обозначаются общим термином — электромеханиче-
ская связь электропривода. Для анализа сути этого понятия
воспользуемся уравнениями (2-2), представив их в обобщен-
ной форме записи с учетом (2-За):
/ = 2?
= 2 Lvh- (2-12)
i — la
Так как Lij в соответствии с (2-6) зависят от угла ср,
а следовательно, и от времени t, уравнения (2-12), выполнив
дифференцирование по t, можно преобразовать к виду
dij %2’ дЦ / .
Щ— Д/t'z + -фсо (2'13)
j = la / = 1а
где со = d(pldi — угловая скорость вала двигателя.
Первый член каждого уравнения (2-13) представляет
собой падение напряжения на активном сопротийлении
цепи данной обмотки, второй — результирующую э. д. с.
самоиндукции и взаимной индукции е1л, вызванную изме-
нениями токов в обмотках, а третий член отражает взаимо-<
действие механической и электрической частей электропри-
вода, так как представляет собой результирующую э, д. с.
eit наведенную в обмотке в результате механического дви-
жения ротора машины:
dLu .
(2‘14)
/=1а
Наличие в (2-13) э. д. с. ег, зависящих от угловой ско-
рости ротора двигателя, приводит к тому, что изменения
скорости, обусловленные механическими процессами, вызы-
вают изменения токов i{, потребляемых обмотками машины.
Рассмотренное явление и представляет собой- электромеха-
ническую связь в системе электропривода, благодаря ко-
80
торой существует зависимость токов силовой цепи'электро-
привода от его скорости. Количественно эта связь в различ-
ных режимах работы характеризуется зависимостями i{ =
= [ (со) или со =f (i(), называемыми электромеханическими
характеристиками двигателя.
Так как токи Ц в соответствии с электромеханической
характеристикой зависят от угловой скорости ротора ма-
шины, ее электромагнитный момент, определяемый (2-9),
также является функцией скорости. Зависимости М. = f (со)
пли со — соответствующие различным режимам ра-
боты двигателя, называются его механическими харак-
теристиками. Механическая характеристика связывает
электромагнитный момент двигателя, реализующийся в про-
цессе электромеханического преобразования энергии, с уг-
ловой скоростью’ вала машины, которая определяется усло-
виями движения механической части привода. Так как
в системе электропривода приложенные к обмоткам двига-
теля напряжения ut являются управляющими воздействи-
ями со стороны системы автоматического управления элек-
троприводом, а электромагнитный момент в соответствии
с (2-7а) и (2-9) зависит от этих воздействий, механическая
характеристика двигателя определяет взаимодействие элек-
трической и механической частей привода в .электромехани-
ческой системе и является основным показателем статиче-
ских и динамических свойств электропривода.
Ниже будет показано, что в большинстве случаев авто-
матическое управление электроприводом имеет целью фор-
мирование семейства определенного вида механических
характеристик. Если формирование требуемых механиче-
ских характеристик обеспечивается непрерывным измене-
нием управляющих воздействий и{ в функции сигналов
обратных связей, результирующую зависимость М =
= f (со) или со = f (М) будем называть механической ха-
рактеристикой электропривода, в отличие от механических
характеристик двигателя, соответствующих работе его при
нерегулируемых входных напряжениях и{. Иными словами,
в разомкнутых системах электропривода механическая
характеристика электропривода совпадает с механической
характеристикой двигателя, а в замкнутых системах их
необходимо различать. Заметим, что управляющими воз-
действиями в общем случае могут быть не только напряже-
ния Ui, -но и регулируемые параметры двигателя — актив-
ные и реактивные сопротивления его обмоток, устанавли-
ваемые для различных режимов работы на различных уров-
81
нях либо регулируемые автоматически. В последнем случае
механические характеристики, формируемые непрерывным
изменением регулируемого параметра в замкнутой системе
регулирования, являются механическими характеристи-
ками электропривода и отличаются от механических харак-
теристик двигателя, соответствующих дискретным значе-
ниям этого параметра.
Механические характеристики двигателя, так же как
и его электромеханические характеристики, отражают про-
явления электромеханической связи в электромеханической
системе привода. Электромеханические характеристики ис-
пользуются либо в качестве промежуточных зависимостей,
связывающих момент двигателя в замкнутой системе регу-'-
лпровапия с управляющими воздействиями, либо для опре-
деления электрических нагрузок двигателя в рабочих
режимах.
Механические характеристики электропривода в соче-
тании с полученными в гл. 1 уравнениями движения механи-
ческой части позволяют исследовать движение электроме-
ханической системы в целом, поэтому анализ мехаииче-.
ских и электромеханических характеристик двигателей
в теории электропривода занимает важное место.
Не вдаваясь в строгий анализ условий движения элек-
тромеханической системы, рассмотрим с позиций общих
физических представлений процесс работы машины при
одновременном подключении всех ее обмоток к источникам
постоянного напряжения ut = const (рис. 2-3). При этом
вследствие электромагнитной инерции обмоток в машине
возникает электромагнитный переходный процесс, резуль-
татом которого является нарастание во времени потоко-
сцепленнй Т, (Z). Статор и ротор возбуждаются, образуя
систему взаимодействующих постоянных магнитов, и соз-
дается электромагнитный момент, стремящийся привести
эту систему в положение, в котором запас магнитной энер-
гии максимален — на рис. 2-3 это положение соответствует
ср = 0. Под действием электромагнитного момента в механи-
ческой части привода возникает механический переходный
процесс, рассмотренный в гл. 1. Ротор поворачивается,
стремясь в положение ср = 0, причем изменения механиче-
ской координаты t/ср/dt = со в соответствии с (2-7 а) оказы-
вают влияние на течение электромагнитного процесса
(0-
Рассмотренный процесс работы машины является элек-
тромеханическим переходным процессом при изменении
82
управляющего воздействия, например при отработке оче-
редного шага шаговым двигателем. Нетрудно видеть, что
он складывается из взаимосвязанных электромагнитного
и механического переходных процессов, поэтому анализ
такого процесса должен производиться на базе совместного
решения уравнений (2-7 а), (2-9) и уравнений движения
механической части системы, которые были получены выше.
Причиной электромеханического переходного процесса
могут явиться изменения возмущающих воздействий в ме-
ханической части системы. Такой процесс легко иллюстри-
ровать тем же примером, если принять, что нарастание
потокосцеплении до конечных значений происходит
при ср = 0, и механический переходный процесс отсутст-
вует. Далее, когда = const, к механической системе
прикладывается внешний возмущающий момент, под дей-
ствием которого ротор двигателя изменяет свое положение.
Изменение механической координаты и в этом случае бла-
годаря электромеханической связи вызовет электромагнит-
ный процесс, связанный! с механическим переходным процес-
сом, однако воздействие приложено к механической части
системы, поэтому протекание таких процессов имеет опреде-
ленные особенности.
Известно, что в переходных процессах электрические и
механические переменные могут быть представлены в виде
\ двух составляющих: принужденной и свободной (переход-,
ной). Переходные составляющие переменных в связи с нали-
чнем диссипативных элементов постепенно затухают, и
после полного их затухания наступает установившийся
режим, при котором остаются только принужденные состав-
ляющие всех, переменных. Иногда требуется различать
понятия установившегося режима работы электропривода
и установившегося процесса электромеханического* преоб-
разования энергии. Так, рассмотренный выше пример вклю-
чения обмоток машины на постоянные напряжения в прак-
тике электропривода используется для электрической
фиксации рабочего органа механизма в определенном поло-
жении. При этом установившийся режим работы электропри-
вода — удержание рабочего органа в требуемом фиксиро-
ванном положении, когда развиваемый двигателем электро-
магнитный момент уравновешивает возмущающее воздей-
ствие. Однако в этом режиме угловая скорость ротора
равна нулю, механическая работа не совершается и, следо-
вательно, процесс электромеханического преобразования
энергии отсутствует.
83
Рассмотренный пример подтверждает известное положе-
ние, что при поддержании токов в катушках машин посто-
янными установившийся режим непрерывного преобразо-
вания электрической энергии в" механическую работу
невозможен. Для непрерывного преобразования энергии
необходимо протекание по обмоткам машины переменных
токов, которые могут быть получены питанием всех или
части обмоток от источников переменного тока, а для дви-
гателей постоянного тока за счет применения механических
коммутаторов тока (коллекторов) либо за счет использова-
ния вентильного коммутатора, осуществляющего преобра-
зование постоянного тока в переменный аналогично коллек-
тору. Из теории электрических машин также известно, что,
для создания среднего момента необходимо, чтобы частоты'
токов статора и ротора находились во вполне определенных
соотношениях, зависящих от вида машины и обеспечиваю-
щих неподвижность поля ротора относительно поля ста-
тора.
Процессы преобразования энергии аналогично рассмо-
тренным в гл. 1 механическим процессам разделяются на
динамические и статические. Переходный процесс электро-
привКда^сегщ^'ЗШГЯ5Тся~ди-намическим процессом-,-^так как
в этом процессе в связи с наличием свободных токов и сво-
бодных составляющих механических переменных момент
двигателя М, его угловая скорость со и другие координаты
системы изменяются и потому обязательно зависят от вре-
мени t. Установившийся режим преобразования энергии
в зависимости от условий работы системы может быть либо
динамическим, либо статическим., Установившийся режим
работы остается динамическим в тех случаях, когда управ-
ляющие воздействия или возмущающие моменты в механи-
ческой части системы содержат периодическую составляю-
щую, вследствие которой принужденные скорость и момент
также содержат соответствующие периодические состав-
ляющие. При этом затухание свободных составляющих,
возникших, например, в момент включения системы, сви-
детельствует об окончании переходного процесса, а в на-
ступившем установившемся режиме все переменные системы
испытывают вынужденные периодические изменения и ра-
бочий режим остается динамическим.
Статическим режимом работы электромеханической си-
стемы будем называть такой установившийся режим, в ко-
тором угловая скорость и момент двигателя остаются посто-
янными и от времени не зависят (dealdt = 0; dM/dt = 0).
84
Статические установившиеся режимьг работы электропри-
: Пода встречаются чаще, чем динамические установившиеся
процессы; анализ электромеханических свойств двигателей
; наиболее просто осуществляется по статическим режимам
( работы, поэтому в дальнейшем изложении изучению статики
i электропривода уделяется значительное внимание.
* В .связи с существованием динамических и статических
f режимов преобразования энергии в электроприводе исполь- /'
иуются понятия динамических и статических характера-/
t \tnuK двигателя (или электропривода).
i ' Динамической механической характеристикой называ-
J ется зависимость М = f (со) или со = f (/И) в переходных
процессах и динамических установившихся режимах пре-
образования энергии. Математически связь между момен-
том и угловой скоростью в этих режимах выражается диффе-
ренциальными уравнениями динамической механической
характеристики f (М, со, t) = 0. Для обобщенной машины
динамические механические характеристики определяются
полученной в § 2-1 системой уравнений электрического рав-
новесия и электромеханического преобразования энергии.
Следовательно, в общем виде уравнения динамической меха-
нической характеристики двигателя имеют вид:
i = 2q I
«,=ад+ У У -Дч.
1,1 dt 1 Оф 1
i = la j = la
/ = 2? J = 2<7
2 '< 2
i'=la /=la
(2-15)
М
Зависимости = f (co) или co = f (Д) в переходных
процессах и динамических установившихся режимах назы-
ваются динамическими электромеханическими характери-
стиками. Они выражаются уравнениями динамической
электромеханической характеристики f (iit со, t) =0, пред-
ставляющими собой уравнения электрического равновесия
для силовых цепей двигателя. В системе (2-15) первые
четыре уравнения являются уравнениями динамической
электромеханической характеристики обобщенной машины.
Из (2-15) легко установить, что динамические механические
П электромеханические характеристики зависят от условий
протекания динамического процесса, ибо уравнения дина-
мических характеристик устанавливают связь в каждый
момент времени между механическими переменными при
85
соответствующих значениях их производных и зависящих!
от времени параметров машины. !
Система (2-15) содержит пять дифференциальных урав-|
нений, которые связывают шесть переменных: четыре тока,’
скорость и момент. При анализе динамических механиче-1
ских характеристик одна из механических координат со’’
или М. должна рассматриваться как независимая перемен- ’
ная. Если независимая переменная задана в виде известной^
функции времени ы (/) или М (/), уравнения динамической!
механической характеристики однозначно определяют соот-,1
ветствующую зависимую переменную М. (t) или со (/) и
после исключения параметра t позволяют получить в ана-)
литической форме или построить графически соответствую-
щую динамическую зависимость М (со) или со (М). Для t
линейных задач систему уравнений динамической мехами-.:
ческой характеристики, записанных в операторной форме, ‘
обычно удается представить в виде
а (Р) ® (р) + b (р) М (р)=с(р) U (р), (2-16)
где со (р), М (р), U (р) — изображения механических пе-'
. ременных и управляющего воз-:
действия;
а (р), Ъ (р), с (р) — операторные коэффициенты при -
соответствующих переменных. .
Уравнение динамической механической характеристики
(2-16) связывает изображения механических переменных-
с управляющими воздействиями. Решая (2-16) относительно !
ы (р), получаем в явном виде операторную зависимость
со = f (М):
(л ( — с и _ ь м
(Р) а(р) а(р) ’ '
Решив (2Д6) относительно момента, получим:
'' ь (р) ь (р)
Динамические ' механические характеристики, соответ-
ствующие переходным процессам электропривода, для
анализа общих электромеханических свойств двигателей ин-
тереса не представляют. Вид таких характеристик определя-
ется частными условиями движения всей электромеханиче-
ской сйстемы: управляющими и возмущающими воздей-
ствиями, начальными значениями электрических и механи-
ческих координат системы, параметрами механической
части привода, поэтому они должны рассматриваться как
86
। частные характеристики системы электропривода в целом,
| соответствующие конкретным условиям протекания того
пли иного переходного процесса.
Для анализа общих электромеханических свойств дви-
,1'ателя большой интерес представляют динамические меха-
’ иические характеристики, соответствующие установившимся
I режимам работы при наличии в механической части при-
> иода периодических возмущений. При этом принужденное
! движение системы является периодическим и можно анали-
! зировать динамические свойства двигателя по динамиче-
ским механическим характеристикам, полагая скорость или
момент двигателя гармонической функцией времени.
При записи уравнения динамической механической ха-
рактеристики в операторной форме для анализа динамиче-
ских электромеханических свойств двигателей эффективно
использование частотных характеристик.
Условием статического режима является отсутствие из-
менений угловой скорости двигателя daldt = 0. При этом
переменные токи it в обмотках машины в соответствии
с (2-14) должны иметь неизменное среднее значение, а это
обеспечит в соответствии с (2-15) неизменность среднего
момента машины. Механическая характеристика двигателя,
соответствующая такому режиму работы, называется ста-
^тнческой механической характеристикой! М=/(«) или
to == f (Л4). В связи с распространенностью статических
режимов работы электропривода статические механические
характеристики являются важнейшими характеристиками
различных двигателей.
Установившемуся статическому режиму соответствует
равенство электромагнитного момента двигателя сумме всех
приложенных к механической системе моментов сопротив-
ления М = Мс. В процессе работы электропривода его
нагрузка может изменяться в значительных пределах, соот-
ветственно изменяется и момент двигателя. При этом в за-
висимости от технологических требований к электроприводу
в одних случаях желательно, чтобы изменения момента не
вызывали изменений угловой скорости, в других необхо-
димо, чтобы при возрастании нагрузки скорость существенно
снижалась, в третьих требуется постоянство электромаг-
нитного момента при широких изменениях скорости и т. п.
Информация о том, в какой степени изменения момента ска-
зываются на изменениях скорости двигателя и наоборот,
заключена в механической характеристике двигателя. Сте-
пень изменения угловой скорости при изменениях момента
87
или наоборот, степень изменения момента при изменениях
скорости двигателя, определяемая статической механиче-
ской характеристикой, в теории электропривода количе-
ственно характеризуется статической жесткостью механи-
ческой характеристики:
0с = <Ш/Жо. (2-1.7)
Формирование определенного вида статических механи-
ческих характеристик электропривода представляет собой,
одну из основных задач управления электроприводом. Из
содержания § 1-5 следует, что для осуществления равно-
мерно ускоренного пуска с заданным ускорением необхо- ;
Рис. 2-4. Статические и динамические механические характеристики, j
димо в переходном процессе приложить к ротору двигателя
электромагнитный момент М1г превышающий статический .
Mz на значение требуемого динамического момента Мя =
= а при достижении заданной угловой скорости о»!
автоматически снизить момент М до М = Л4С. Эта задача
может быть решена формированием механической харак-'
теристики с пусковым моментом М = Мг = const, имею-
щей при со < w1 нулевую жесткость, а при со = ссц |3 = сю
(рис. 2-4, а, характеристика /). Положим, что подбором
обратных связей, воздействующих на напряжения щ, эту
характеристику каким-то образом удалось реализовать, и
рассмотрим на этом примере смысл и практическое значение
различных динамических характеристик.
Если бы статическая характеристика 1 была справед-
лива и для динамических режимов, то она точно обеспечила
бы изменения момента двигателя М, требуемые для равно-
мерно ускоренного пуска двигателя до угловой скорости оц. 1
В этом легко убедиться, сопоставляя рис. 1-21, ас рис. 2-4, а. 1
Однако вследствие электромагнитной инерции двигателя и I
88 I
инерционности системы управления динамическая механи-
ческая характеристика может в. той или иной степени отли-
чаться от статической. При этом реальные зависимости
Л1 (0 и со (I), полученные путем осциллографической записи
И процессе пуска электропривода, отличаются от кривых
па рис. 1-21, а, как показано на рис. 2-4, б.
Экспериментальные кривые М (I) и со (I) позволяют
путем исключения времени t получить динамическую меха-
ническую характеристику со = f (М), соответствующую
данному процессу пуска (кривая 2 на рис. 2-4, а). Сравнивая
динамическую механическую характеристику со ста-
тической, можно убедиться, что использование статиче-
ских механических характеристик для анализа динамиче-
ских процессов электропривода может приводить к недопу-
стимым погрешностям.
На рис. 2-4, а показаны динамические механические
характеристики электропривода при работе в установив-
шемся режиме гармонических колебаний относительно
точек А и В. В точке А принужденные гармонические коле-
бания момента с амплитудой' Д/Их вызывают колебания уг-
ловой скорости ± А со, в то время как по статической харак-
теристике электропривода 1 Д<в = 0. Соответствующая
динамическая характеристика имеет вид эллипса 3. В точке
\ В принужденные гармонические колебания скорости Лт,
судя по статической характеристике 1, не должны были
бы вызывать изменений момента (ДМ = 0), но динамиче-
ская характеристика 4 свидетельствует об изменениях мо-
мента с амплитудой ДМ2. Подобные расхождения статиче-
ских и динамических характеристик имеют место в боль-
шинстве автоматизированных электроприводов и, как ниже
будет показано, вызываются электромагнитной инерцион-
ностью двигателей и систем автоматического управления
электроприводами.
Рассмотренные сопоставления статических и динамиче-
ских механических характеристик поясняют нх практиче-
ское значение. Для анализа статических режимов работы
полную информацию об электромеханических свойствах
двигателя и электропривода дают статические характери-
стики. Однако в динамических режимах судить об электро-
механических свойствах двигателя и всего электропривода
по статическим характеристикам в большинстве случаев
нельзя. Как показано на рис. 2-4, а, абсолютно жесткая
статическая характеристика в установившемся динамическом
режиме работы электропривода превращается в достаточно
89
мягкую динамическую характеристику, а.абсолютно мягкая/:
статическая характеристика при тех же условиях заменя- |
ется довольно жесткой динамической механической харак- !
теристикой.
Таким образом, для правильного суждения о жесткости '
механических характеристик привода в динамических ре- :
жимах необходимо ввести понятие динамической жесткости .
механической характеристики. Модуль динамической же-
сткости в соответствии с рис. 2-4, а можно определить как :
отношение амплитуд гармонических установившихся коле- *
баний момента и угловой скорости относительно средних
значений:
| ₽д | = АМд/АсОд. (2-18) i
Для нелинейных систем целесообразно амплитуду при-
нужденных колебаний А<вд выбирать достаточно малой для
того, чтобы колебания переменных системы оставались
в пределах приемлемой линеаризации ее характеристик.
Иными словами, (2-18) в общем случае должно быть до-
полнено условием А<вд -> 0.
Определение динамической жесткости по (2-18) имеет
целью разъяснить физический смысл этого понятия. В об-
щем виде математическое выражение динамической же-
сткости должно давать представление не только о модуле
жесткости, но и о сдвиге по фазе между колебаниями мо-
мента и угловой скорости. Его можно получить с помощью
уравнения динамической характеристики, записанного для
операторных изображений отклонений момента и скорости
от средних значений АЛ4 (р) = /ДАсо (р)1. Из (2-16) при
U (р) = 0 находим выражение динамической жесткости
в операторной форме:
о /Ю = (Р) = М W
|д’/; ДСО (р) <й(р) *
(2-19)
Рассматривая (2-19), можно убедиться, что динамическая
жесткость механической характеристики 0Д(р) представ-
ляет собой передаточную функцию электромеханического
преобразователя энергии (см. рис. 2-1), если входным
параметром принять скорость ротора двигателя со (р),
а выходным — электромагнитный момент М (р). В замкну-
тых системах электропривода эта передаточная функция
должна определяться с учетом действия обратных связей.
Представление динамической жесткости в виде (2-19) по-
зволяет вести ее анализ частотным методом.
90
В заключение рассмотрим возможные режимы преобра-
зования энергии с точки зрения направления потоков
потребляемой и преобразуемой мощности.
[ На рис. 2-5, а показано направление потоков мощности
При преобразовании электрической энергии в механиче-
t скую, т. е. при двигательном режиме работы машины. При
[ атом поступающая из сети электрическая мощность Рс
f В основном преобразуется в механическую Рмсх и частично
>• теряется в виде теплоты в
[ Ли машины ДРТ. Элек-
трическая машина обра-
тима, поэтому, если под-
вести к ее.валу механи-
ческую мощность Рмсх,
она может работать ге-
нератором электриче-
ской энергии паралле-
активных сопротивлениях и ста-
ЭМП
- 47^
Рис. 2-5. Режимы преобразования
энергии.
льно с сетью, отдавая в сеть электрическую энергию
При этом часть поступившей- в машину механиче-
ской мощности также теряется в виде теплоты
(рис. 2-5, б). Это тормозной генераторный режим работы
параллельно с сетью, который иногда называют также режи-
мом рекуперативного торможения. Возможен тормозной
.режим работы, при котором машина потребляет мощность
'как из сети, так и с вала, причем вся поступающая в машину
энергия преобразуется в теплоту (рис. 2-5, в). Такой режим
называется генераторным режимом работы последовательно
с сетью или режимом торможения противовключением.
Режим работы автономным (не связанным с сетью) генера-
тором показан на рис. 2-5, г. В этом режиме, называемом
режимом динамического торможения, подводимая к валу
механическая энергия преобразуется в электрическую
энергию и затем выделяется в виде теплоты в сопротивле-
ниях силовых цепей и в стали машины.
2-3. КООРДИНАТНЫЕ ПРЕОБРАЗОВАНИЯ УРАВНЕНИЙ
ДИНАМИЧЕСКОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ
ДВИГАТЕЛЯ
Достоинством полученного в § 2-1 математического опи-
сания процессов электромеханического преобразования
энергии является то, что в качестве независимых перемен-
ных в нем используются действительные токи обмоток
обобщенной машины и действительные напряжения их пита-
91
ния. Такое описание динамики системы дает прямое пред-;
ставление о физических процессах в системе, однако, к co-i
жалению, является крайне сложным для анализа. Рассма-j
тривая (2-15), можно установить, что эта система дифферен-^
циальных уравнений нелинейна в связи с наличием произве-
дений переменных (ю;1у) и (г\«/), а также содержит периоди-1
ческие коэффициенты в связи с зависимостью собственных!
и взаимных индуктивностей машины от механической]
координаты ср. Аналитическое решение такой системы в об- ]
щем виде представляет непреодолимые трудности, а при!
использовании вычислительной техники решение полу-!
чается весьма громоздким. I
Наглядное представление о сложности взаимных связей:
в рассматриваемой системе дает приведенная на рис. 2-6
структурная схема процесса электромеханического . йре-
образования энергии в обобщенной машине с неявно выра-<
женными полюсами. Из рассмотрения этой схемы следует,
что при решении задачи на аналоговой модели потребовалось
бы большое число блоков перемножения, блоков нелиней-’
ностей для задания функций cos срэл и sin срэл, источников
синусоидальных напряжений щ и т. д.
При решении многих задач значительное' упрощение;
математического описания процессов электромеханического
преобразования энергии достигается путем линейных преоб-
разований исходной системы уравнений за счет замены-
действительных переменных новыми переменными при уело-',
вин сохранения адекватности математического описания^
физическому объекту. Условие адекватности обычно фор- i
мулируется в виде требования йнвариантности мощности
при преобразовании уравнений. Вновь вводимые перемен-X
ные могут быть либо действительными, либо комплексными,
связанными с реальными переменными формулами преобра-
зования, вид которых должен обеспечивать выполнение/
условия инвариантности мощности. Вначале рассмотрим
действительные преобразования, позволяющие перейти от
физических переменных, определяемых системами коорди-
нат, жестко связанными со статором (а, р) и с ротором
(d, q), к расчетным переменным, соответствующим системе
координат, вращающейся в пространстве с произвольной
скоростью (0к.
Решение задачи линейного преобразования дифферен-
циальных уравнений сводится к отысканию системы коэф-
фициентов, умножение на которые исходных переменных
дает составляющие преобразованных переменных. Сумми-
92
ропание составляющих позволяет получить формулы преоб-
разования, связывающие исходные переменные с искомыми
преобразованными. Коэффициенты формул преобразования
могут быть действительными или комплексными числами,
и также представлять собой функции переменных системы.
11,елью преобразования всегда является то или иное упро-
1’ис. 2-6. Структурная схема процесса электромеханического преобра-
зования энергии в обобщенной машине с неявно выраженными полюсами.
щение исходного математического описания динамических
процессов, причем необходимости обязательного физиче-
ского истолкования смысла осуществляемых преобразова-
ний не возникает: критерием его применимости для анализа
процессов в электромеханической системе принимается
выполнение условия инвариантности мощности. Поэтому
в дальнейшем изложении используется формальный прием
получения формул преобразования, основанный на пред-
ставлении мгновенных значений переменных электрической
93
машины в виде пространственных векторов (рис. 2-7),
изображающих соответствующие переменные и направлен-
ных по осям соответствующих обмоток, без предваритель-
ных обоснований допустимости такого представления.
Итак, для формального решения задачи представим
каждую реальную обмоточную переменную — напряжение,
ток, потокосцепление — в виде вектора, направление кото-'
рого жестко связано с соответствующей данной обмотке
осью координат, а значение изменяется во времени в соот-
ветствии с изменениями изображаемой переменной.
На рис. 2-7 обмоточные переменные обозначены в общем
виде буквой х с соответствующим индексом, отражающим
принадлежность данной переменной к определенной оси
координат, и показано взаимное положение в текущий
момент времени осей а, (3, жестко связанных со статором,
осей d, q, жестко связанных с ротором, и произвольной
системы ортогональных координат и, V, вращающихся отно-
сительно неподвижного статора со скоростью сок. Полагая
заданными реальные переменные в осях а, Р (статора) и
d, q (ротора), соответствующие им новые переменные в си-
стеме координат и, v можно определить как суммы проекций
реальных переменных на новые оси. С учетом построений
на рис. 2-7, а получим следующие общие формулы преобра-
зования:
*uz = *ia cos сок/-|-л:10 sin
Xlv == — SIH Xjp COS
x2,j. = xsd cos (coK£ - Фэл) + x2Q jsin (<oK£ - <рэЛ);
Х2Ь X2d SIH (ык/ Фэл) ~ЬX2g COS (0)к^ фэл)*
(2-20)
Рассматривая рис. 2-7, а, нетрудно убедиться, что но-
вые переменные и реальные переменные есть проекции на
соответствующие оси координат одних и тех же результи-
рующих векторов, равных геометрической сумме этих пе-
ременных. Учитывая это, можно с помощью аналогичных
построений, показанных на рис. 2-7, б, получить следую-
щие формулы для перехода от преобразованных перемен-
ных к реальным:
xla = xvi cos сок/ — sin <ок£;
= х^и sin х1г! cos ык/;
= *2» cos (юк/— соэл) — х2Т, sin (&V — фэЛ); '
Х2? = Х2ц5Ш(юк/-фэл) + х31)СО8(юкг-фэЛ).
94
Рис. 2-7. Переменные обобщенной машины в различных системах координат.
О‘
Пользуясь полученными формулами, произведем преоб-
разование уравнений динамической электромеханической,
характеристики обобщенной машины. Для этой цели выра- -
зим в (2-2) с помощью (2-41) все реальные переменные!
в осях и, v:
।
ulu cos — ulv sin (i>Kt = (ilu cos (i>Kt — ilv sin (оД) ф- !
ф- Ji (^1“ cos ~ sin “K^: (2-22)
ulu sin (i\.t ф- и1а cos.o)K^ = (i1H sin coK7 + i1TI cos «Д) ф-
+ Ji sin cos ' (2-23)
Uw COS ((OKf - фэл) - ll2v sin (oV - Cp9J1) =
= R., [j2„ COS (0)^ - фэл) - i2v sin (co,J - фал)] +
+ PF2/z cos (&V - фэл) - ^2a Sin (0)1С/ - Фэл)]; (2-24)
и.,,, sin («Д - Фэл) + «2» COS (<M — Фэл) =
= Ri [t2« s in (<M - фэл) + hu COS (®KZ - Фэл)] Ф-
+ 'dt Sin ~ fp3J') + Ta'J C0S ~ (2‘25)
Из полученной системы уравнений необходимо выделить
уравнения электрического равновесия в каждой цепи, выра-
женные в координатах и, v. Для получения такого уравне-
ния для оси и статора необходимо в (2-22) и (2-23) произве-
сти все предусмотренные этими уравнениями операции диф-
ференцирования произведений переменных на тригонометри-
ческие функции механической координаты. Выполнив диф-
ференцирование, получим:
ulu cos aj — ulv sin ©ф = 7?! (iln cos m,./ — 4a sin <»K0 +
dTi d'Fl
4—cos — V1HcoK sin ------------------------ sin al(t — Т1т,и1( cos иф;
til- C1L
(2-26)
ulu sin иф cos aAt = RY (iltt sin + it v cos (oK7) +
+ d^u sin + TlumKcos + -^~- cos aKt — sin «Д.
(2-27)
Уравнение (2-26) необходимо умножить на cos юк4
а (2-27) — на sin сок£, а затем сложить их. Учитывая,
что cos2 aj + sin2 = 1, после приведения подобных
96
членов имеем: „
uli[ = R1i1„ + d^u/dt--y¥1:u<i)K. ,
Если умножить (2-26) на — sin сок(, а (2-27) на cos a>Kt,
Можно получить уравнение для оси v статора:
ulv = + d^lv/dt + Ч^сОк-
Аналогично можно найти и преобразованные уравнения
влектрического равновесия для ротора. В результате си-
стема уравнений динамической электромеханической харак-
теристики имеет вид:
— Rdm 4~
— Rdiv dWlv/dt а>кЧ\п; •
uw = R2i2lt + d^tl/di - ((Ок - а>9Л)
~~ R^2V Ч~ dW2v/dt -j- ((0к (09л) Ч^,/. J
Преобразования уравнений потокосцеплений для боль-
шей наглядности выполним только для неявнополюсной
машины. В реальных координатах 1а, 10, 2d, 2q с учетом
^(2-4) они имеют вид:
^1а = ~Ь А12 COS фэл^'гй А12 Sin ф9л^2?> |
= Aii'ip ~|~ L12 sin ср9Л(.2й Ц-cos фэ112^> I (2 29)
~ L2i2l/ + ^-12 cos фэл Ча + sin <p9Jj'i₽>
^2? ~ L2i2q ^12 Sift фэлЦа 4~ Aj2 COS ф9Л1'1р,
С помощью (2-21) произведем замену переменных в пер-
вых двух уравнениях системы (2-29):
Ч\„ cos coKi — Тр, sin ик( = Li (t'iu cos ык/ — ilv sin coKt)
+L12 COS Ф9„ [l2z/ COS (®Kf Фэл) sin.(®^ Фэл)]
“ ^-12 sin фал [j3(/sin ((Ок^—ф9л) + cos (coK( —<p9,,)]; (2-30)
Ч\„ sin cos aKt = L1 (ilu sin 0)^ + ^ cos (DKt) +
+ L12 sin <р9л [i2U COS (0)K( - <р9л) - i2« Sin ((0^ - Фэл)] +
~|- L12 COS ф9л [i2u Sin (0)K( - Фал) + i2v COS ((0^ - ф9л)]- (2'31)
Умножив левые и правые части (2-30) на cos aKt, а (2-31) -
па sin a>Kt, сложив эти уравнения и сгруппировав члены,
4 Чиликни М. Г. и др. .97
получим: :
Ф1И (cos2 ик/ sin2 °V) = Ши (cos2 ®Kt 4- sin2 +
+ ^2« [(cos <рэл cos (0^ + sin <р9Л sin (DKif) cos {aKt — фэл)] —
— LJ9i2v [(cos <р9Л cos (0Kt + sin <р9Л sin соД) sin (oV — Ф9Л) -
— (cos ф9Л sin d)Kt — sin <Р9Л COS MKZ) COS (ик/ — ф9л)] =
= (cos2 <oK£ + sin2 <оД) + L12i2Il [cos2 (&V - <р9Л) + •
+ sin2 (&V - <р9л)] - L12j2„ [cos («Д - <р9л) sin (coKZ - ф9л) ~
- sin (<V - <р9Л) cos (oV - ф9Л)].
Следовательно,
Ф\и — 4" Д.2г2“‘ (2-32
Умножив левые и правые части (2-30) на — sin «Д,;
а (2-31) на cos aKt, аналогично изложенному выше имеем:-
ФД = ТдД-и 4" (2-33)?
Если произвести такие же действия с остальными урав-<
нениями (2-29), можно получить преобразованные уравне-
ния потокосцеплений для роторной цепи: |
Ф^и = L2i2U 4- Е1211п; | 1
w ____т I т ( (2"34)|
i2u — “Г ) 1
Подставляя (2-32) — (2-34) в (2-28), получаем преобра-1
зованные уравнения динамической электромеханической]
характеристики в виде < "
= (7?14" РД1) ini 4~ pE12i2K L1(oKila L12o)Ki2a;
«it, =.(^i 4- pL-j) iiv 4- pLvli2V + До 4- L12cdki2U;
^2« (^2 4" pE2) i2u 4“ P^izi-111 Ejo (0)к ®эл) 4t> —
E2 (tt)K ®эл) i2v>
u2v — № 4- pE2) i2v 4- pL12ilv 4- Ll2 (cok — со9л) ilu 4-
4" E2 (CDk W9j) ^2«‘
(2-35)«
Проверим, выполняется ли при данном координатном:
преобразовании уравнений обобщенной машины требование^
инвариантности мощности и соответственно момента, так1:
как скорость преобразованию не подлежит. Для упрощения1
выкладок примем u2(i = u2q = 0. Тогда вся мощность посту-;
пает в машину со стороны статора: 1
Ql ~ ^la^ia 4" ^1РЧ.р- (2-36) >
i
98 1
Произведем в (2-36) замену переменных с помощью
формул (2-21), получим: -
Ql = (Uiu COS (IV — uyv sin oV) (l'l« COS <oKZ — ilv sin C0K£) +
+ (ulu sin cOgZ + U{v cos mKf) (ilu sin aRt -|- ilv cos ®KZ) =
= uluilu (cos2 <oRt + sin2 aRt) + (cos2 (oK£ 4- sin2 coKZ) —
= 4~
Таким образом, условие инвариантности мощности при
рассмотренном преобразовании переменных выполняется.
Воспользуемся формулами преобразования для получения
| удобных выражений электромагнитного момента двига-
' теля. Для неявнополюсной машины (2-10) принимает вид:
М ~ pJ-^12 [(^'i₽4d Ча^'г?) COS ф9л
"Ь ЧаЧ</) sin Фэл]- (2-37)
Заменив в (2-37) реальные переменные на преобразован-
ные по (2-21), получим:
М = pnL12 cos <р9Л {(i1H sin сокг + ilv cos a>Rt) [i2U cos (®Rt —
- Фэл) - hv sin (oV ~ Фэл)] - (hu cos ®Rt - ilv sin aRt) x
X [i2u sin (a>Rt - <p9J1) + i2v cos (dJRt - <рэл)]} -
- pnL12 sin ф9Л {(ilzt sin aRt + ilv cos a>Rt) [i2U sin (coRt — <р9Л) +
4 + i2V (cos <s>Rt - ф9л)] + (i1I£ cos ®Rt - ilv sin cdk£) x
X [i2U cos (a>Rt - ф9л) - i2V sin (a>Rt - <рэл)]} =
~ Pn^i2 iiiiizvh (2-38)
В результате преобразований (2-38) с учетом (2-32) —
(2-35) можно получить следующие формулы для определения
электромагнитного момента обобщенной машины:
(2-39)
или
(2-40)
или
(2-41)
В справедливости формул (2-39) — (2-41) можно убе-
диться, выразив с помощью (2-32) — (2-35) потокосцепления
через токи. Таким путем после преобразований все эти фор-
мулы приводятся к формуле (2-38).
Рассмотрение формул, полученных в результате фор-
мально выполненного линейного преобразования, свидетель-
4* 99
ствует о том, что данное линейное преобразование имеет.-'
вполне определенный физический-смысл. Переменныетоки '
обмоток фаз обобщенной машины, сдвинутые во времени на
угол <рэл = 90°, благодаря смещению на такой же простран-.,.'
ственный угол обмоток фаз, создают результирующую*
м. д. с., вращающуюся относительно обмоток. Мгновенное’.;
положение вектора результирующей м. д. с. определяется j
геометрической суммой векторов м. д. с. соответствующих;.;
обмоток, поэтому токи этих обмоток можно рассматривать J
как проекции вектора результирующего тока, пропорцио-1
нального результирующей м. д. с. на их оси. Один и тот 1
же вектор результирующей м. д. с., как следует из рассмо- |
трения рис. 2-7, может быть создан парами как неподвиж- |
ных, так и вращающихся обмоток. Формулы преобразова- J
ния токов и устанавливают взаимную связь между проек-
циями результирующего вектора тока на соответствующие -
оси а, ₽; d, q или и, v.
- Физический смысл преобразования координат можно по-
яснить и не прибегая к векторному представлению м. д. ,с. .
и токов. Каждая обмотка обобщенной машины создает сину- <
соидальный пространственный токовый слой, неподвиж-
ный относительно обмотки, имеющий амплитуду, изменяю- .]
щуюся во времени пропорционально изменениям тока ]
обмотки. Тот же токовый слой может быть.создан двумя
обмотками, сдвинутыми в пространстве на 90° и вращающи-
мися относительно реальной обмотки со скоростью «к.
Эти обмотки создают результирующий синусоидальный токо-
вый слой, вращающийся относительно них со скоростью, -
зависящей от частоты протекающих по обмоткам токов.
Формулы преобразования обеспечивают вращение резуль- -
тирующего токового слоя со скоростью — чем обеспе-
чивается его неподвижность относительно исходной обмотки. ;
Амплитуды токов двух обмоток, вращающихся относительно .<
исходной’ со скоростью сок, определяются формулами пре-
образования таким образом, чтобы изменения во времени !
амплитуды вращающегося со скоростью —«к токового j
слоя точно соответствовали изменениям амплитуды токо- ?
вого слоя исходной обмотки.
Рассматривая полученные уравнения динамической мё- .'
ханической характеристики, двигателя в осях и, v, можно
убедиться, что запись уравнений для статора и ротора .:
в одних и тех же осях, т. е. переход к модели с взаимно ч
неподвижными обмотками, существенно упрощает матема-
тическое описание .динамических процессов электромеха- ;
100
i ПНческого преобразования'энергии. Коэффициенты - взаим-
ной индукции и потокосцепления, взаимно неподвижных
обмоток (2-32) — (2-34) становятся независимыми от меха-
। Иической координаты, а движение реальных обмоток и вра-
I'iic. 2-8. Структурная схема, соответствующая записи уравнений ди-
намической, механической характеристики в осях и, V.
в схему механической части
Шенне координатных осей учитываются в уравнениях элек-
трического равновесия введением дополнительных э. д. с.
вращения. Значительно упрощается уравнение электромаг-
нитного момента двигателя, в котором устраняется непо-
средственная зависимость от угла <рэ., и электромеханиче-
ская связь проявляется посредством зависимости токов и
иотокосцеплений обмоток от скорости двигателя. Соответ-
ственно упрощается и структурная схема двигателя, пред-
101
ставленная на рис. 2-8, которая соответствует уравнениям
(2-35) и (2-38).
Структурная схема представляет взаимную связь элек-!
тромеханического преобразователя с другими частями элек-
тромеханической системы автоматизированного электро-
привода. Здесь напряжения и1и, и1г), м2„, и21) есть преобразо-
ванные управляющие воздействия, связывающие двигатель
с сйстемой управления. Электромагнитный момент машины
М зависит не только от управляющих воздействий щ,
но и от возмущающих воздействий в механической части
привода в связи с зависимостью от скорости со, значение
которой введено на вход структурной схемы рис. 2-8 из
структурной схемы механической части. Эта зависимость
является конкретным проявлением электромеханической
связи электропривода. Выходом схемы является момент М,
приложенный к ротору машины'и являющийся управляю-
щим воздействием по отношению к механической части
электропривода.
Анализ структурной схемы показывает, что, несмотря на
очевидные упрощения, изучение динамических процессов
электромеханического преобразования энергии и во вза-
имно неподвижных осях остается весьма сложной нелиней-
ной задачей. Сохраняются нелинейности вида произведений
переменных и Цу, что практически исключает возмож-
ность получения аналитических решений и требует для ис-
следования динамики электромеханической системы исполь-
зования аналоговых или цифровые вычислительных машин.
Структурную схему модели электромеханического пре-
образования энергии можно несколько упростить, если
в уравнениях динамической механической характеристики
заменить токи на соответствующие потокосцепления.
Изложенные выше соображения о физическом смысле
преобразований переменных обобщенной машины свидетель-
ствуют о возможности комплексного преобразования. Дей-
ствительно, напряжения, токи и потокосцепления в (2-35),
(2-38) суть проекции результирующих векторов, изобража-
ющих соответствующие величины, на ортогональные оси
координат и, V. Если ось и принять за действительную,
а ось v за мнимую оси плоскости комплексного переменного,
изображающие векторы можно представить в виде
~ Им 4“ Ли” ^2 ~ 4“ /^2^’
~ ^2 ~ ^24 4" /^2'В»
(2-42)
102
Уравнения (2-35) при комплексной записи величин
Изображающих векторов для оси и представляют собой дей-
ствительную часть соответствующих комплексных уравне-
ний статора и ротора, а для оси v — мнимую. Этому усло-
вию отвечают следующие уравнения динамической механи-
ческой характеристики в комплексной форме:
«2 = Я/2 + —+ / (®к - ®8Л)
A4 = pnL12Im(f1x^),
(2-43)
где I* — величина, комплексно сопряженная величине Г2.
Векторы потокосцеплений могут быть выражены через
результирующие векторы токов статора 1г и ротора 12:
Ч\ = L-J-. + LVih; 1
„ 11 12 “ } (2-44)
Подставляя (2-44) в (2-43), получаем уравнения динами-
ческой механической характеристики, выраженные через
векторы результирующих токов статора и ротора:
th. = R1l1 + (р + /ик) (L& + L12?2);
«2 = T?2i2 + [p + / (coK - и8Л)J (L2l2 + LiJJ;
M = p„L12 Im^XZl),
(2-45)
где p = dldt.
Комплексное преобразование при шэ;1 — const дает воз-
можность аналитическим путем исследовать зависимость
момента асинхронной машины от времени в электромаг-
нитном переходном процессе и в дальнейшем изложении
будет использовано для этой цели.,
Рассмотренные вещественное и комплексное двухфазные
преобразования уравнений динамической механической ха-
рактеристики обобщенной машины в значительной степени
облегчают анализ динамических режимов электропривода
и во многих случаях позволяют при моделировании на
ЭВМ вместо реальных переменных токов и напряжений обмо-
ток оперировать соответствующими им после преобразова-
ния постоянными величинами. Этого в ряде случаев уда-
ется достичь удачным выбором угловой скорости координат-
ных осей и, v. На практике наиболее широко использу-
ются следующие варианты выбора этой скорости,
u 103
Вариант ик = 0. Этот вариант обеспечивает преобразо-
вание реальных переменных ротора, выраженных в осях 2d,
2q, к неподвижным осям 2а, 2{3, связанным со статором ма-
шины. Уравнения электромеханической характеристики
в осях а, р имеют вид:
^ia ~ Rdia Ч" dt',
Uip = Ч~ dW^/dt, (2-46)
Ща ~ Rj"za Ч" Ч~ С|)эл^2|3>
Ч" ^Ч^2р/^ ^эл^зи* .
При1 преобразовании a, Р напряжения и токи обмоток
машины остаются переменными, но имеют одинаковую
частоту, равную частоте сети. 1
Вариант шк = иэл. Этот вариант соответствует преоб- '
разованию реальных переменных машины к осям d, q,
жестко связанным с ротором машины. Уравнения электро-
механической характеристики в осях d, q можно предста-
вить в. виде
== Ri^m Ч- d^¥iri <вэл^1у>
= Rjj-iq Ч~ d^Yq/dt Ч~ (2 47)
м^ = 7?2»г</Ч-^Ч,2<//^;
^2? " R^2g Ч" d2^2qldt.
•
Здесь также напряжения и токи являются переменными,
но имеют как в роторе, так и в статоре частоту со0эл — ©эл>
т. е. частоту тока ротора.
Если принять сок = со0эл, можно осуществить преобра-
зование х, у, т. е. выражение всех переменных системы
в осях х, у; вращающихся с синхронной скоростью поля
машины. Пусть при этом к реальным обмоткам статора
приложена симметричная двухфазная система напряже-
ний:
^1и ” ^Гмакс COS 0)q9ji/,
Uip U1макс COS (й10эл/ л/2).
С помощью формул прямого преобразования (2-20),
положив сок = <вОэл, преобразуем напряжения и1а,
- в соответствующие им напряжения и1х, и^:
‘ — t/хмакс COS 0)()ЭЛ( Ч” ^1макс sin2 <ЮОэл/ = ^щакс,
“ ^1иакс cos о)оэл/ sin с0дЭл/ L/iMaKCsin(Oo9J1/cos е)оэл/ ~ 0.
104
Таким образом:, в синхронно вращающихся координат-
ных осях х, у реальные переменные напряжения; прило-
женные к обмоткам статора, преобразуются в постоянное
напряжение L/1MaKc = const, приложенное по оси х. Этот
результат имеет очевидный физический смысл: вращающееся
.магнитное поле, создаваемое при неподвижных обмотках
статора переменными напряжениями и1а, и^, при переходе
к обмоткам, вращающимся со скоростью поля, может быть
создано только постоянным напряжением С/1мякс. Во многих
случаях при исследованиях динамики машин переменного
тока возможность замены синусоидальных переменных
постоянными, достигаемая преобразованием к соответствую-
щим осям координат, существенно упрощает моделирова-
ние и анализ его результатов.
Рассмотренные частные случаи выбора скорости коор-
динатных осей и, v, разумеется, не исчерпывают всех пред-
ставляющих практический интерес возможных значений сок.
Так, в [28] предложена система ортогональных координат,
обозначенная индексами g, i и названная колеблющимися
координатами. Ось g этой системы совмещается с изобра-
жающим пространственным вектором интересующей пере-
менной машины, что позволяет упростить систему урав-
нений, так как проекции этой величины и ее производных,
па ось i в этом случае равны нулю. Если исследуемой вели-
чиной является изображающий вектор zZ2, скорость коор-
динатных осей g, i должна быть принята равной:
«к е)дэл
где 6 — угол между вектором ilt и искомым вектором й2.
При таком подходе с помощью, комплексного двухфазного
преобразования задача сводится к решению дифференци-
альных уравнений с неизвестными переменными |й2| и б.
Заметим, что в [29] аналогичный подход при совмещении
оси координат с вектором результирующего поля в воз-
душном зазоре машины назван ориентированием по полю
машины.
Завершая рассмотрение общих вопросов динамики элек- .
тромеханического преобразования энергии, нужно подчерк-
нуть, что выбор в качестве обобщенной модели двухфазной
машины позволил в наиболее компактной и наглядной форме
получить обобщенное математическое описание, отражаю-
щее основные физические особенности динамических про-
цессов электромеханического преобразования энергии для
широкого класса двигателей. Уравнения динамической
’ 105 '
механической характеристики (2-15), полученные на базе ч
уравнений обобщенной двухфазной машины, отражают -
физические связи во вращающихся электрических маши-
нах в наиболее общем виде. При надлежащем выборе комп- -i
лекта индексов i, j эти уравнения применимы к любой т, .
n-фазной вращающейся машине при сформулированных, '
выше общих допущениях.
Уравнения динамической механической характеристики, •
полученные в данном параграфе в результате двухфазных
действительного и комплексного преобразований, непо-
средственно применимы к двухфазным машинам и поэтому
представляются менее общими, чем (2-15). Большинство'
применяемых в промышленном электроприводе двигате-
лей переменного тока являются трехфазными либо много-
фазными. Примером последних может служить имеющий i
массовое применение асинхронный двигатель с коротко-
замкнутой роторной обмоткой, выполненной в виде бели-
чьей клетки, число фаз которой равно числу ее стержней.
Как показано в [6], динамика любой симметричной много-
фазной машины, имеющей в общем случае т фаз статора
и п фаз ротора, может быть путем замены переменных опи-
сана системой уравнений эквивалентной двухфазной маши-
ны. Использование в качестве обобщенной модели двухфаз-
ной машины позволяет избежать значительных математи-
ческих трудностей, связанных с увеличением числа урав-
нений переменных и параметров машины, и за счет этого ’’
существенно облегчает понимание природы преобразова- •
ния энергии во вращающейся машине. Таким образом, для ‘
придания большей общности рассмотренным в данном пара-
графе методам и полученным уравнениям динамической
механической характеристики необходимо дополнить их
изложением принципов трехфазно-двухфазного преобра-
зования переменных.
Итак, имеет место задача преобразования реальных
переменных х1гг, хи, х1с статора трехфазной машины к орто-
гональной системе координат 1а, 1|3, т. е. к реальным пере-
менным статора эквивалентной двухфазной машины. Реше-
ние этой задачи существенно осложняется необходимостью
перехода от объекта с тремя фазами к обобщенной модели
с двумя фазами, так как разница в числе фаз создает зна-
чительно больше возможностей для неувязок, чем двух-
фазные преобразования. Напомним, что задача решается
отысканием формул- преобразования переменных при усло-
вии инвариантности мощности, Воспользуемся тем же
Юб
приемом, что и при двухфазных преобразованиях: пред-
ставим реальные переменные трехфазной машины в виде
векторов и будем полагать, что преобразованные-перемен-
Рис. 2-9. Схема преобразования переменных трехфазной машины.
ные в осях 1а, 1р пропорциональны сумме проекций реаль-
ных переменных х1а, х1й, х1с на оси 1а, 1р. На основании
построений, показанных на. рис. 2-9, а, можно записать:
_ 1
’‘la — ~2 2 /’
//з Уз \
Х1|з кс I 2 xii> g -Vic / >
(2-48)
Где k.. — согласующий коэффициент, выбор которого дол-
жен осуществляться из условия инвариантности мощ-
ности.
Рассмотрим наиболее распространенный в практике
случай, когда переменные трехфазной машины подчиняются
условию
%ia +-К1& + х1с — 0. (2-49)
С учетом (2-49) уравнения (2-48) преобразуются к виду
_ 3, •
•^la — 2
. (^i ь -^к) • .
(2-50)
Переменные х2</, для роторной цепи машины также
определяются (2-48) и (2-50) при соответствующей замене
индексов.
107
Формулы обратного преобразования можно получить-
аналогичным путем с помощью рис. 2-9, б: J
а ~ i
г’1|3
Чр
(2-51)'
При выполнении условия (2-49) третье уравнение системы
(2-51) может быть получено с помощью первых двух, так >
как х1с = — (xlfl Ч~ xlb). Для определения согласующего
коэффициента /гс, обеспечивающего выполнение условия .
инвариантности мощности при преобразовании"переменных, >
выразим через переменные эквивалентной двухфазной ма- ’
шины с помощью (2-51) суммарную1 мгновенную мощность, /
потребляемую обмотками статора трехфазной машины: '
^la^la Ч" ^ib^ib Ч" = (kcU-^a) (/icha) Ч~
, / 1
I 2 Ч" '
( 2" ^1“
__/ 3 . .3 . \
“с 1 2 ^iaha Ч- 2 у
2 ha-Г 2
1 • Кз
2 110 2
Следовательно, для выполнения условия инвариант-
ности мощности согласующий коэффициент должен иметь
значение kz — ]/ 2/3.. При этом
U-laiia + ^Ib^lb 4".ulchc — Ч" ^1рЧ₽*
В более общем случае х1а Ч- хи + х1с =/= 0, и тогда при-
ходится считаться с наличием переменных нулевой после-
довательности х0. В соответствии с [6] формулы прямого
•и обратного преобразования для этих условий имеют вид:
108
Практически необходимость использования формул пре-
образования (2-52) возникает при строгом анализе несим-
метричных режимов работы симметричной трехфазной ма-
шины. При этом следует иметь в виду, что токи нулевой
• последовательности, как показано в [6], не влияют на момент,
развиваемый двигателем, поэтому в большинстве случаев
влияние переменных нулевой' последовательности на ди-
намику электромеханических систем может не ' учиты-'
ваться.
Итак, изложен обобщенный и достаточно гибкий мате-
матический аппарат, позволяющий исследовать статические
и динамические режимы электромеханического преобразо-
вания энергии в двигателях различного типа. Однако
следует подчеркнуть, что в современной теории и практике
1 автоматизированного электропривода значение обобщенной
теории динамических процессов электромеханического пре-
образования энергии далеко выходит за рамки только эф-
фективного инструмента исследования динамических про-
цессов в электромеханических системах. Обобщенные урав-
нения и аппарат двухфазных и трехфазных координатных,
преобразований в настоящее время уже являются матема-
тической основой построения управляющих вычислитель-
ных машин, обеспечивающих автоматическое управление
процессами электромеханического преобразования энер-
гии в системе электропривода. В частности, фирмой «Сименс»
разработана серия регулируемых электроприводов пере-
менного тока с системой управления, названной системой
TRANSVEKTQR, управляющее устройство которой осу-
ществляет преобразование переменных трехфазной машины
и производит необходимые координатные преобразования
переменных и вырабатываемых управляющих воздействий
па этой математической основе [30]. Аналогичные раз-
работки систем управления асинхронными электроприво-
дами ведутся и в нашей стране [28].
109
2-4. ОГРАНИЧЕНИЯ, НАКЛАДЫВАЕМЫЕ НА ПРОЦЕССЫ
ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ
Процессы электромеханического преобразования энер-
гии сопровождаются неизбежными потерями энергии в ак-
тивных сопротивлениях обмоток машин, в стали магнито-'
проводов, а также механическими потерями. Энергия потерь
выделяется в виде тепла в соответствующих элементах дви-
гателя и вызывает его нагревание. Известно, что потери
энергии в двигателе можно представить в виде суммы посто-
янных и переменных потерь. Постоянные потери АРС :
от момента, развиваемого двигателем и соответственно от
токов, протекающих по его силовым обмоткам, практически
не зависят. Переменные потери АР„ представляют собой
потери в активных сопротивлениях силовых цепей, которые
пропорциональны квадрату тока /, протекающего по этим
сопротивлениям. Следовательно,
АРТ = &РС + \PV = АРС 4- kl2.
Увеличение количества полезной энергии, вырабатывае-
мой двигателем в единицу времени, влечет за собой ув$ли-,
чение потребляемого из сети тока и соответствующее воз-
растание переменных и суммарных потерь, поэтому, при
возрастании полезной нагрузки двигателя увеличивается
количество тепла, выделяемое в его массе в единицу вре- <
менй, что вызывает повышение температуры его частей.
Изложенные соображения определяют важнейшее огра-
ничение, накладываемое на процессы электромеханического
преобразования энергии,— ограничение по нагреву дви-
гателя. Полезная мощность, развиваемая двигателем, по-
требляемый из сети ток, электромагнитный момент двига- •
теля не должны достигать значений, при которых рабочая
температура двигателя может превысить допустимую. До-
пустимая по нагреву нагрузка двигателя называется его
номинальной нагрузкой и указывается в паспортных и ката-
ложных данных. Таким образом, номинальная нагрузка —
это такая нагрузка двигателя, при которой двигатель, рабо-
тая в номинальном режиме (продолжительном, повторно-
кратковременном или др., см. § 14-1), нагревается до допус-
тимой температуры. К числу номинальных данных двига-
теля относятся номинальная мощность на валу Pw, номи-
нальный ток /н, номинальные напряжения питания обмо-
ток UH, номинальная скорость сон (обычно указывается пп
в об/мин). Для двигателей переменного тока в число номи-
110
пильных данных включаются номинальный к. п. д. г]н
п номинальный коэффициент мощности cos <рн. Для двига-
телей постоянного тока номинальный к. п. д. определяется
с помощью других номинальных данных:
100%.
Вследствие тепловой инерции кратковременные пере-
грузки, например, в процессе пуска при достаточно малой
продолжительности не могут вызвать заметного изменения
температуры частей двигателя, поэтому ограничения, накла-
дываемые нагревом, не исключают возможности кратковре-
менного значительного превышения номинальной нагрузки
двигателя. Допустимое ограничение определяется так назы-
ваемой перегрузочной способностью двигателя:
Х = МДОП/МИ,
где Л4Д0П — максимально допустимый момент двигателя при
кратковременной перегрузке.
Перегрузочная.способность различных двигателей огра-
ничивается различными причинами. Для двигателей постоян-
ного тока это ограничение является наиболее жестким,
ибо связано с условиями коммутации тока якоря коллек-
тором. Известно, что перегрузка этой машины по току при-
водит к возрастанию искрения под щетками. При недопус-
тимо большом токе искрение достигает опасных размеров,
при которых возможно перекрытие коллектора дугой (так
называемый круговой огонь на коллекторе, обычно выво-
дящий машину из строя). Наибольшее значение тока, при
котором обеспечивается удовлетворительная коммутация,
и ограничивает предельно допустимое значение момента
двигателя Л1Д0П.
Следует заметить, что условия коммутации накладывают
еще одно ограничение на режимы преобразования энергии
в машинах постоянного тока. Искрение на коллекторе зави-
сит не только от уровня тока якоря, но и от темпа его изме-
нения во-времени, так как при быстрых изменениях тока
имеет место отставание потока дополнительных полюсов
от тока якоря вследствие электромагнитной инерции и
наличия вихревых токов. Поэтому при работе машины
постоянного тока должно выполняться условие dijdt
(dijdf)доп, где (dijdt)^ — максимально допустимый
по условиям коммутации темп изменения тока якоря.
Соответственно должен быть ограничен и максимальный
темп изменения момента двигателя dM/dt sg; (dMIdf}^.
Ill
Для бесколлекторных машин, переменного тока допус-
тимы значительно большие перегрузки по току силовых
цепей, чем для машин с коллекторами. При этом значения
Мд0П обычно ограничиваются наибольшим моментом, кото-
рый машина способна развить при номинальном напряже-
нии сети и номинальном возбуждении, если таковое имеется.-
Обычно при оценке Мяоп следует учитывать допустимое по
нормам снижение напряжения сети относительно его номи-
нального значения.
В заключение необходимо обратить внимание на то, что
при математическом описании процессов электромехани-
ческого преобразования энергии не учитывались внутренние'
активные и индуктивные сопротивления источников.пита-
ния, т. е. предполагалось питание силовых обмоток машины
от сети бесконечно большой мощности. Это предположение \
справедливо в подавляющем большинстве случаев пита-'
ния двигателей непосредственно от промышленных сетей, •
так как пренебрежимо малое влияние отдельных токопри-
емников на питающую сеть является обязательным условием
нормальной работы других токоприемников.
Однако для электроприводов большой мощности либо
для автономных установок, не связанных с энергосистемой,,
мощность двигателя оказывается соизмеримой с мощностью
генератора, трансформатора или слабой сети. В этих
условиях анализ процессов электромеханического преобра-
зования энергии требует учета влияния внутренних сопро-.-1
тивлёний источника питания. Обычн'о такой учет не ослож- •
няет математическое описание, так как может быть с прием-
лемой точностью обеспечен увеличением активных и индук-
тивных сопротивлений обмоток машины на значение соот-
ветствующих сопротивлений источника питания.
Глава третья
ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА
ДВИГАТЕЛЕЙ
З-f. ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА ДВИГАТЕЛЕЙ
ПОСТОЯННОГО ТОКА С НЕЗАВИСИМЫМ ВОЗБУЖДЕНИЕМ
Двигатель постоянного тока с независимым возбужде-
нием является в настоящее время основным типом двига-
теля, используемым в автоматизированном электропри-
воде при наиболее высоких требованиях к статическим и
112
динамическим показателям. Обмотки этой машины полу-
чают питание от. источника-постоянного тока. Как было
показано”выше, необходимым- условием непрерывного про-
цесса электромеханического преобразования энергии яв-
ляется протекание хотя бы по части обмоток машины пере-
менных токов. Выполнение этого условия в машине постоян-
ного тока обеспечивается работой коллектора, коммутирую-
щего постоянный ток, поступающий в якорную обмотку
со стороны источника питания, с частотой, равной частоте
вращения ротора со9л. Таким образом, с точки зрения внут-
ренних процессов двигатель постоянного тока является
машиной переменного тока и уравнения, описывающие его
динамическую характеристику, являются частным случаем
обобщенного математического описания процессов электро-
механйческого преобразования энергии, полученного в гл. 2.
Модели двигателя постоянного тока соответствует вклю-
чение обмоток двухфазной обобщенной машины по схеме,
показанной на рис. 3-1, а. Здесь обмотка статора по оси ,1|3
включена на постоянное напряжение ив, а обмотка оси 1а
не используется. Обмотки фаз 2d и 2q ротора питаются
переменными токами z2rf и i2(? от преобразователя частоты
(ПЧ), осуществляющего коммутацию токов iirt и i2(7 в функ-
ции угла поворота ротора ср9л с частотой со9л. Если в ка-
честве ПЧ используется механический коммутатор — кол-
лектор машины, схема на рис. 3-1, а представляет собой
модель двигателя постоянного тока. В случае, когда в ка-
честве ПЧ используется вентильный преобразователь час-
тоты, коммутируемый датчиком углового положения ротора,
эта же схема является схемой модели вентильного двига-
теля, поэтому анализ электромеханических свойств дви-
гателей постоянного тока в пределах допущений, лежащих
в основе общей модели, справедлив и для вентильного дви-
гателя на базе синхронной машины, получающего питание
от мощной сети постоянного тока.
В непрерывном процессе электромеханического преоб-
разования энергии м. д. с. обмотки ротора должна быть
неподвижна относительно м. д. с., создаваемой обмоткой
статора. Учитывая, что постоянный ток возбуждения iB
создает поле, неподвижное относительно статора, можно
заключить, что этому условию соответствует протекание
по обмоткам ротора модели на рис. 3-1, а токов, изменяю-
щихся по следующему закону:
^я COS фэл, ^я SIH фэл’
113
В этом можно убедиться, осуществив преобразование х
этих токов к осям а, р, неподвижным в пространстве.
С помощью формул (2-20) находим:
ha = h COS2 ф9л + i„ sin2 <рэл = 1Я;
i2p = cos <рэл sin <рэл - i„ sin <рэл cos <рэл = 0.
Итак, в осях а, р действительным переменным токам1
обмотки ротора эквивалентна одна якорная обмотка, обте-
каемая постоянным током 1Я и создающая поле, неподвижное
в пространстве и направленное по оси а (рис. 3-1, б). Рас- .
Рис. 3-1. Схема включения обмоток обобщенной машины (а) для полу-
чения модели двигателя постоянного тока независимого возбуждения (6).
сматривая эту схему, можно установить, что преобразование ;
токов i2d, i2(7 к осям, а, р в физическом отношении аналогично
преобразованию этих токов коллектором машины в пос-
тоянный ток 1я. Поэтому для получения уравнений динами- ’
ческой механической характеристики двигателя постоянного
тока можно непосредственно воспользоваться уравнениями
обобщенной машины в осях а, р. В соответствии с рис. 3-1, б
положим в уравнениях (2-46) и1р = ик; = iB; u2a = ия,
ha ~ h\ “ ^в> ^-2 = ^2 = Щ.а =.th$ “
= i2p = 0 и получим искомые уравнения в виде
zzb = tB/?B -f- Z.D di3/dt,
dh/dt -f- С0элЬ^21в,
Л4 ~ PnL^hh’
114
(3-1)
J
1
Показанные на рис. 3-1,6 обмотки машины, располо-
женные на статоре по оси а, непосредственно в процессе
электромеханического преобразования энергии не участ-
вуют, поэтому их параметры в явном виде в (3-1) не пред-
ставлены, а их сопротивления и индуктивности включены
в общее сопротивление и общую индуктивность рассея-
ния Ья якорной цепи. Напомним, что обмотка дополнитель-
ных полюсов ДП обтекается током якоря и вблизи оси
щеток а, т. е. в зоне, где осуществляется коммутация тока
в проводниках обмотки якоря, создает такое по значению
и направлению магнитное поле,
при котором процессы коммутации
протекают наиболее благоприят-
но.
Компенсационная обмотка КО
является распределенной обмот-
кой, закладываемой в пазы на глав-
ных полюсах аналогично якорной
обмотке. За счет протекающего по
ней тока якорной цепи она создает
Рис. 3-2. Схема двигателя
постоянного тока с неза-
висимым возбуждением.
м. д. с., компенсирующую м. д. с.
реакции якоря по поперечной оси
а, которая искажает форму поля
машины под главными полюсами и
в связи с насыщением магнитопро-
вода вызывает размагничивающую
продольную составляющую. Благодаря действию компен-
сационной обмотки влияние поперечной реакции якоря
па поле главных полюсов практически исключается и усло-
вия электромеханического преобразования энергии макси-
мально приближаются к тем, которым соответствуют урав-
нения (3-1).
Таким образом, обмотки ДП и КО являются вспомога-
тельными обмотками машины, поэтому в дальнейшем изло-
жении двигатель постоянного тока с независимым возбужде-
нием представляется схемой, приведенной на рис. 3-2.
При питании двигателя от сети постоянного тока обмотка
возбуждения через добавочное сопротивление 7?д. в подклю-
чается к той же сети параллельно якорю, т. е. н = £/я. н,
где Uв. „ и ия_ н — номинальные напряжения соответствую-
щих обмоток двигателя. В общем случае при регулируемом
напряжении якорной цепи обмотка возбуждения имеет
отдельный источник питания, причем, как правило, UB. н =/=
1Д. н- Показанная на рис. 3-2 э. д. с. двигателя в соот-
115
ветствии с (3-1) определяется соотношением • ' '
е = соэЛг»в = - /гфсо> (3‘2)
• где k = pnNI2stcr,
N—число активных проводников якоря;
а — число параллельных ветвей обмотки якоря.
. Заметим, что все формулы в данной книге записываются
только в системе единиц СИ. В паспортных данных и ката-
логах указывается частота вращения в оборотах в минуту
> и обозначается п. Соответствующие значения угловой ско-
рости в системе СИ можно определить по формуле
(о = л/г/30.
Уравнение для определения момента в (3-1) с учетом
(3-2) принимает следующий вид: \ ,
М = рп£12Ця = йФ1я. (3-3)
Следовательно, систему уравнений (3-1) с учетом (3-2),
(3-3) и рис. 3-2 можно записать в виде
D
«в = -^(1+Твр)Ф; ’
- ЙФ -I (3-4)
мя = ^я2(1 -ф Т?р) гяе; ч
Л4 = йФ1я,
ГДе /?в2 = /?в + #д. в!
/?Я2 = ^ + /?д.п + ^к.о + ^И.п + ^д.я;
Тв —
йф = Ф//в; .
^я ^«яе/^яХ, ^я2 ^я ^д, п ^к. о ^и. п>
р — d/dt‘,
7?„. п, £и. п — сопротивление и индуктивность источника
питания.
Математическое описание динамической механической .
характеристики двигателя постоянного тока (3-4) нелинейно
в связи с тем, что э. д. с. двигателя е и электромагнитный '
момент М пропорциональны произведениям потока соот- ,
ветственно на скорость и на ток якоря. Структурная схема i
электромеханического преобразования энергии, .соответ- 1
ствующая (3-4), приведена на рис. 3-3, а. Схема наглядно
показывает,-Что процессы в цепи возбуждения при ив = ।
116
= UB = const или uB =f (f) протекают.независимо от про-
цессов в якорной цепи. Цепь возбуждения двигателя пред-
ставляет собой, апериоди- '
ческое звено с постоянной
времени Тп, которая при
Кд. в =0 для двигателей
мощностью от 1 до 1000 кВт
лежит в пределах Тв —
= 0,2 4- 5 с, причем с уве-
личением мощности быстро
возрастает. Как отмечено
выше, Изменения потока
вносят нелинейность в ма-
тематическое описание про-
цессов в цепи якоря,одна-
ко двигатель в болыпин-
Рис. 3-3. Структурные схемы элек-
тромеханического преобразования
энергии в двигателе постоянного
стве практических случаев тока.
работает при постоянном
потоке. При этом уравнение динамической механической
характеристики двигателя принимает следующий вид:
ия/гФ k-Ф- г dM
(3-5)
Структурная схема электромеханического преобразо-
вания энергии, соответствующая этим условиям, представ-
лена на рис. 3-3, б. । Она свидетельствует о том, что при .
Ф = const электромеханический преобразователь представ-
ляет собой апериодическое звено с электромагнитной пос-
тоянной времени Т„. Индуктивность рассеяния якорной
цепи двигателя может быть вычислена по приближенной
формуле Уманского—Линвилля:
где у — 0,6 для некомпенсированных и у = 0,25 для ком-
пенсированных двигателей.
Постоянная времени якорной цепи двигателей средней
п большой мощности лежит в пределах Т., = 0,02 -4- 0,1 с,-
причем наибольшие значения соответствуют некомпенсиро-
ванным либо тихоходным двигателям.
Так как М = ЛгФг„, с помощью (3-5) нетрудно получить
уравнение динамической электромеханической характе-
ристики в виде
.; Щ АФ „ гр <ИЯ
‘-Я р р ш 1 я л/
(3-6)
117
Обозначив в уравнениях (3-5) и (3-6) -^- = р, решим
их относительно скорости:
+ ' <3-7>
“,=тг~1аг<1 + 7»/- <3'8)
В соответствии со
Рекуперативное .
Рис. 3-4. Статическая ме-
ханическая характеристи-
ка двигателя постоянного
тока с независимым воз-
буждением.
Анализ электромеханических свойств двигателя постоян-
ного тока с независимым возбуждением целесообразно
начать с рассмотрения статических режимов работы.
~ ктурной схемой на рис. 3-3, б ста-
тический режим работы имеет ме-
сто при и = 1/я =const, ср = const,
чему соответствует и М = const.
Учитывая это, получаем с помощью’
(3-7) и (3-8) уравнения статических
характеристик двигателя:
со = Ujk® - 7?я2Ж2Ф2; (3-9)
со = ^Ф-/?я2/я/^Ф. (3-10)
Уравнения (3-9) и (3-10) свиде-
тельствуют о том, что при Ф =
=const скорость двигателя постоян-
ного тока находится в линейной за-
висимости от развиваемого им мо-
мента и от протекающего при
этом в силовой цепи тока якоря.
Характеристики определяются тремя параметрами: напря-
жением питания якоря 1/я, потоком машины Ф и суммарным
сопротивлением якорной цепи /?я2 = 7?я я. Механи-
ческая характеристика (рис. 3-4) пересекает ось ординат
при скорости идеального холостого хода соо = ия11гФ.
При этой скорости э. д. с. двигателя Ео = &Фсоо равна
приложенному напряжению 1/я, ток в якорной цепи от-
сутствует и электромагнитный момент двигателя в соот- :
ветствии с (3-3) равен нулю. При 0 < со < соо Е < U.A j
и уравнение электрического равновесия для якорной цепи j
можно записать в виде j
ия = Е + 1яЪ^. (З-Н)
Умножив левую и правую части (3-11) на получим -
уравнение баланса мощностей в виде
ия1я = Е1я + 1*яЯяъ, (3-12)
118
которое свидетельствует о- работе двигателя в двигатель-
ном режиме. При этом потребляемая из сети мощность
1/„1я частично преобразуется в электромагнитную мощность
Е1Я = Ми, а частично теряется в сопротивлениях якор-
ной цепи InRnx- При скорости со > и0 э. д. с. двигателя
Е > 1/я, ток якорной цепи и электромагнитный момент
двигателя изменяют знак и двигатель переходит в генера-
торный режим работы параллельно с сетью (рекупера-
тивное торможение). Знак потребляемой и электромагнит-
ной мощности в связи с изменением знака тока якоря изме-
няется на противоположный:
— I„Un — —Е1Я +ЦК- (3-13)
В этом режиме подведенная к двигателю механическая
мощность — Мео, обусловленная активным движущим
моментом нагрузки, преобразуется в электромагнитную
мощность (— Е1Я), которая отдается в сеть (— USI„) за
вычетом потерь энергии в сопротивлениях якорной цепи
/я^яЕ-
Неподвижный якорь двигателя (со = 0) потребляет из
сети ток короткого замыкания /кз — ия/Кях и развивает
движущий момент Мк. 3 = кФия/Кя%. В этом режиме
э. д. с. двигателя равна нулю и электромеханическое пре-
образование энергии отсутствует (£/я = Мео =0). Вся
потребляемая из сети мощность превращается в тепло,
выделяющееся в сопротивлениях якорной цепи. Если с помо-
щью внешнего источника механической мощности (например,
за счет энергии опускающегося груза в кинематической схеме
на рис. 1-4) заставить якорь двигателя вращаться в сто-
рону, противоположную двигательному режиму (на рис. 3-4
со < 0), двигатель перейдет в режим работы генератором
последовательно с сетью (режим противовключения). В этом
режиме ток не изменяет своего направления /я > 0, поэтому
из сети продолжает потребляться мощность ия1я, но одно-
временно в связи с изменением знака скорости с вала потреб-
ляется механическая мощность — Мео, которая преобра-
зуется в электромагнитную мощность — Е1Я. Вся потреб-
ляемая двигателем в этом режиме энергия выделяется в виде
тепла в сопротивлениях якорной цепи:
+ = (3-14)
Вследствие того что между моментом и током якоря имеет
место пропорциональная зависимость, электромеханическая
характеристика двигателя с независимым возбуждением при
119
Ф = const отличается от механической только масштабом.'
по оси абсцисс и дает ту же информацию о режимах работы,,
что и механическая характеристика (рис. 3-4).
Статическая жесткость механической характеристики,
может быть определена дифференцированием уравнения (3-5)’
при dM/dt — 0:
рс = й!М/^со = -й2Ф2/Дя5: = —р, (3-15)
где Р — модуль статической жесткости.
Так как при принятых допущениях механическая харак-
теристика двигателя с независимым возбуждением линейна,
модуль ее статической жесткости постоянен (см. рис. 3-4):
Р = ДМ1/Дсо1 = Мк.3/соо = Мн/Дсон, (3-16)
где. Дсон = соо — соп — абсолютное снижение угловой ско-
рости двигателя на данной характеристике при возраста-
нии момента М от нуля до Мн.
С учетом (3-16) уравнения (3-9) и (3-10) можно представ
вить в виде
со = соо — М/Р = со0 (1 — М/Мк. 3) (3-17).
или
со = соо-£Ф/я/Р = соо(1 ;-/я//к,3). (3-18)
Для удобства сопоставления характеристик различных
двигателей полезно записать их в относительных величинах.
В качестве базисных величин обычно принимаются: Un,
/н> Фн> R» = £/„//,„ «с„ = н/с, Ми = с/н, где с =,
— йФн. Уравнения (3-9) и (3-10) в относительных единицах
примут следующий вид:
со* = «о* ~ Яя2*М*/Ф£ (3-19)
или
со* — соо* ДяеД я*/Фя*- (3-20)
Механические и электромеханические характеристики
двигателей, соответствующие t/„ = Lf„, Ф = Фп и отсутст-
, вию добавочных сопротивлений в якорной цепи двигателя,
называются естественными характеристиками в отличие ot
! искусственных характеристик, получаемых варьированием,
указанных параметров. В относительных единицах урав-
нения естественных механической и электромеханической
характеристик могут быть получены с помощью (3-13)
120 :
перепад скорости на
.0*
я,,.
1^Н.8*=Ял*
Рис. 3-5. ЕстестЁенная ме-
ханическая характеристи-
ка двигателя постоянного
тока с независимым воз-
буждением.
Он значительно Пре-
о
7
и (3-20): '
®* = 1- R№M* ' . (3-21)
или
со* = 1(3-22)'
Так как при Ф = Фи М* = /„*, уравнения' (3-21)
и (3-22) идентичны и естественные.механическая и электро-
механическая характеристики в относительных единицах
совпадают (рис. 3-5). Номинальный
естественной характеристике Дсон. е
В относительных единицах равен
относительному сопротивлению
якоря /?„*, относительный ток ко-
роткого замыкания обратно про-
порционален Ra*:
Л<.з* “ I к. з/Ai ~ UH/RsJa — 1 /R»*-
(3-23)
Собственное сопротивление'
якорной цепи R;i Rn, поэтому
ток короткого замыкания на естест-
венной характеристике у двигателей
средней и большой мощности пре-
вышает номинальный в 10—20 раз.
восходит ток /я. доп, допустимый по условиям коммутации,
в лежит далеко за пределами показанного на рис. 3-5 ра-
бочего участка естественной механической характеристики.
Перегрузочная способность двигателей с независимым воз-
буждением нормального исполнения обычно лежит в пре-
делах К — Млоп/Мг, = 2-4- 2,5 и для компенсированных
двигателей совпадает с кратностью допустимой по условиям
коммутации перегрузки по току.
Благодаря малости относительного сопротивления якор-
ной цепи номинальный перепад скорости на естественной
характеристике для двигателей средней и большой мощности
составляет несколько процентов скорости идеального хо-
лостого хода, уменьшаясь с возрастанием мощности дви-
гателя. Соответственно жесткость механической характе-
ристики при этом возрастает обратно пропорционально
сопротивлению:
Р = Л4К. з/®0н = Д1н/®0Н^Я’
Увеличение сопротивления якорной цепи за счет вве-
дения добавочных сопротивлений приводит в соответствии
121
с (3-9) к снижению жесткости механической характеристики,J
а на скорости идеального холостого хода. не сказывается ?
(прямая 2 на рис. 3-6). Введение сопротивлений в цепь)
якоря двигателя является простейшим средством ограни- '
чения тока, потребляемого двигателем при пуске, поэтому
двигатель при питании от. сети обязательно снабжается1’
пусковым реостатом, сопротивление которого достаточно
для ограничения тока допустимым значением при со = 0.
и по мере увеличения скорости постепенно уменьшается-
Рис. 3-6. Статические характе-
ристики двигателя с независи-
мым возбуждением при различ-
ных значениях параметров.
до нуля вручную или схемой ;
автоматического управления, j
Изменение потока двигате-1
ля Ф в связи с насыщением)
его магнитной цепи в номи-!
нальном режиме практически,
возможно в сторону умень-
шения потока—ослабления
поля двигателя (см. рис. 3-12).
Уменьшение потока вызы-
вает увеличение скорости
идеального холостого хода <я0^
и уменьшение момента корот-
кого замыкания Мк. 3, а ток
короткого замыкания при этом
не претерпевает изменений.
Соответственно модуль стати-
ческой жесткости механичес-
кой характеристики (3-15)
уменьшается пропорциональ-
но квадрату потока (прямые 3 и 4 на рис. 3-6). Ослабление
поля в пределах рабочих нагрузок приводит к увеличению i
скорости двигателя, причем с уменьшением потока при одной ;
и той же нагрузке растут соответствующие данному моменту
М токи /я.
Изменение напряжения, подведенного к якорю двигателя
при номинальном потоке, является в регулируемом электро-
приводе постоянного тока основным управляющим воздейст-
вием. Как правило, изменение напряжения 13я возможно
только в сторону уменьшения в сравнении с номинальным,
причем для мощных двигателей это ограничение является
жестким, ибо допустимое по условиям работы коллектора i
повышение напряжения невелико. Ряд двигателей краново- I
металлургических серий рассчитан на возможную работу '
с напряжением 1/я = 21/н, однако это является исключе-
122
нием из общего правила. Как следует из (3-9), при изме-
нении 1/я пропорционально изменяется скорость идеаль-
ного холостого хода двигателя, а жесткость механических
характеристик при любом уровне напряжения одинакова,
поэтому механические характеристики при ия = var имеют
вид параллельных прямых 1, 5, 6, 7 и 8 на рис. 3-6. В отли-
чие от ослабления поля, изменение напряжения на якоре
позволяет не только изменять угловую скорость, но и огра-
ничивать ток короткого замыкания. Плавное повышение
Рис. 3-7. Схема динамического торможения двигателя с независимым
возбуждением (а) и соответствующие ей механические характеристики '
двигателя (б, в).
напряжения на якоре от 0 до ия „ обеспечивает наиболее
благоприятные условия пуска двигателя.
В представленном на рис. 3-6 семействе характеристик
определенным своеобразием отличается характеристика 6,
соответствующая ия = 0. Эта характеристика проходит
через начало координат и полностью располагается только
в тормозных квадрантах, так как энергия к якорной цепи
от внешнего источника не подводится. При наличии актив-
ной нагрузки, приложенной к валу, якорь двигателя при-
водится во вращение за счет подведенной со стороны меха-
низма механической мощности. Под действием возрастаю-
щей э. д. с. двигателя в якорной цепи, замкнутой через
источник питания бесконечной мощности накоротко, начи-
нает протекать ток и машина развивает тормозной момент,
противодействующий движущему моменту активной на-
грузки. Подводимая механическая мощность — Л1<в пре-
образуется в электромагнитную — Е1Я и выделяется в виде
тепла в сопротивлениях якорной цепи:
Е1Я = 1\ЕЯ.
123
Это режим динамического торможения, в котором дви-'
гатель работает автономным генератором на сопротивление '
якорной' цепи. Для осуществления режима динамического j
торможения якорь двигателя должен быть замкнут на внеш- 1
нее сопротивление Ra й (рис. 3-7, а). Уравнения стати-
ческих характеристик двигателя при динамическом тормо-';
жении можно' получить, приняв в (3-9) и (3-10) U„ = 0:
и = — R^M/k2®^ — Л4/Р (3-24)
или
Ы = —7?я2;7яДФ = —МДя/р. (3-25)'.
Увеличение суммарного сопротивления якорной цепи j
за счет введения добавочного сопротивления 7?д. я умень-
шает жесткость характер и- -
стик динамического торможе-’,.
ния (рис. 3-7, б). К аналогич-
ным изменениям жесткости
приводит в соответствии с
(3-24) и уменьшение потока -
двигателя при динамическом
торможении (рис. 3-7, в).
Заканчивая рассмотрение'
статических характеристик
двигателя с независимым воз-:
буждением, необходимо отме-
тить, что все изложенное спра-
ведливо для компенсирован-
ных двигателей и к двигателям,
не имеющим компенсацион-
400 800 >200 шм,н-м
- ч
Рис. 3-8. Естественные харак-
теристики двигателя ДП-62.
ной обмотки, может быть отнесено с некоторым приближе-
нием. .Для последних действие продольной составляющей,
поперечной реакции якоря приводит при ДЕ = const
к уменьшению потока двигателя по мере роста тока якоря
в нелинейной зависимости, что вызывает возрастание ста-
тической жесткости механической характеристики, осо-
бенно ощутимое в зоне допустимой перегрузки М > Л1„.
В этом можно убедиться, рассматривая представленные
на рис. 3-8 механические характеристики двигателя ДП-62
(Р„ = 46 кВт; =- 625 об/мин; /я „ = 233 А; „ =
= 220 В). Пунктирная прямая на этом рисунке рассчитана
с помощью (3-9) прн Ф = Фн = const. Ее отклонения от
фактической механической характеристики наглядно ил-
люстрируют, сказанное выше. Нетрудно видеть, что реак-
ция якоря существенно искажает форму механической харак-
124
теристики и неблагоприятно сказывается на перегрузочной
способности двигателя, так как при токе' якоря, равном
допустимому, поток машины оказывается сниженным в срав-
нении с номинальным на 10—15%. Поэтому при прочих
равных условиях йерегрузочная способность некомпен-
сированных двигателей ниже, чем у компенсированных.
Динамические свойства двигателя постоянного тока
отражены в его уравнении динамической механической
характеристики (3-5), которое в соответствии с принятыми
выше обозначениями можно представить в виде
М^МК.3~^-ТЯ^-. (3-26)
Уравнение динамической механической характеристики
устанавливает связь между механическими переменными
в общем виде, справедливом для любых режимов работы
электропривода. Форма конкретных динамических харак-
теристик определяется совокупностью условий и связей,
наложенных' на движение электромеханической системы
в целом в данном процессе, поэтому, как было отмечено
в гл. 2, двигатель имеет бесчисленное множество динами-
ческих характеристик, соответствующих переходным про-
цессам и зависящих от вида механической части, от началь-
ных условий, от уровня и характера управляющих и воз-
мущающих воздействий. Эти характеристики несут инфор-
мацию о свойствах динамической системы, состоящей из
электромеханического преобразователя энергии и меха-
нической части. Вследствие этого использовать их для
анализа электромеханических свойств самого двигателя
трудно. Напротив, в установившихся динамических режи-
мах работы, обусловленных, например, наличием периоди-
ческой составляющей нагрузки электропривода, динами-
ческая механическая характеристика для каждого цикла
установившихся колебаний одинакова и форма ее зависит
только от электромеханических свойств двигателя. Примем,
что момент двигателя в установившемся режиме изменяется
но закону М = Мсг> + АМмвкс sin Qt, тогда (3-26) одно-
значно определяет соответствующий закон изменения ско-
рости:
Мк. з ^ср АЛТмпкс . йТ’я Аймаке
И =------g-----------а--Sin Lit-------5----COS Ш.
Р Р Р
На рис. 3-9 показаны зависимости Дсо (/) и АЛ4 (/)
И соответствующая им динамическая характеристика —
. 125
замкнутая кривая 1. Нетрудно видеть, что электромагнитна^
инерция якорной цепи вызывает значительные отклонений,
динамической характеристики 1 от статической 2. Умень-;
шение частоты вынужден-
ных колебаний й или соот-'
ветствующее снижение по-
стоянной времени Тя при-
водит к уменьшению этих
отклонений (кривая 3), и в’
пределе при Т„ ->0 или]
й ->0 динамическая харак-
теристика сливается со ста-
тической. Эти рассуждения
приводят к выводу о целе-
сообразности использова?
ния для анализа динамиче-
ских свойств двигателя ча-
Рис. 3-9. Динамические механиче-
ские характеристики двигателя с
независимым возбуждением.
стотного метода. Для этой цели с помощью структурной
схемы на рис. 3-3, б получим выражение динамической же-
сткости механической характеристики (см. §2-2):
Ря(р) = Д4 (р)/«(р) = - р/(1 + Тяр). (3-27)
Амплитудно-фазовую характеристику динамической
жесткости получим подстановкой в (3-27) р = jQ;
P»(|S) = P (3-28)
1 -j- / Яйй
Соответствующие (3-28) амплитудно-частотная и фазо-
частотная характеристики динамической жесткости:
|₽д| = ₽//1 + Т^2; (3-29)
Т (Й) = л - arctg ТЯЙ. (3-30)
Амплитудно-фазовая характеристика динамической жест-
кости (3-28) представлена на рис. 3-10, а, а на рис. 3-10, б
показаны соответствующие ей амплитудно-частотная и фазо-
частотная характеристики. Рассматривая их, можно уста-
новить, что электромагнитная инерция приводит к умень-
шению модуля динамической жесткостй тем в большей сте-
пени, чем выше частота колебаний й. Одновременно сдвиг
по фазе между колебаниями скорости и момента изменяется
от 180°, соответствующих статической жесткости (й = 0),
до 90° при й ->оо. Введение добавочных сопротивлений
в цепь якоря уменьшает Тя. При этом, если в пределах
126
возможных частот колебаний модуль динамической жест-
кости снижается незначительно, а фазовый сдвиг остается
близким к 180°, можно
без существенных по-
грешностей исследовать
динамические процессы,
пользуясь выражением
статической механиче-
ской характеристики.
j
УЧ-Щ
рРЦя)'
£ о
3L
Z.
Р
Я
б)
Частотные характе-
ристики динамической
Рис. 3-10. Частотные характеристики
динамической жесткости.
жесткости упрощают оп-
ределение зависимости от времени одной из механических
переменных по известной для установившегося колебате-
льного режима другой. Если М — Л1ср + АЛ4макс sin Qt,
зависимость <в (/) определится соотношением
со = соср + АЛ1макс sin (Q/ - У). (3-31)
Зависимость М (/) по заданной функции со (/) =
= AwMaitcs'n определяется аналогичным путем:
Л4 = <„ +... Р.Ам^.с.. sin (Ш + У). ч (3-32)
V 1+71Q2
Таким образом, суждение о жесткости естественной
механической характеристики по статической 'зависимости
М = / (со) и по статической жесткости Р дает правильные
представления лишь для статических режимов или при
достаточно плавных изменениях нагрузки. При изменениях
нагрузки скачком, а также в установившихся колебатель-
ных режимах динамическая характеристика может сущест-
венно отклоняться от статической и необходимо оценивать
эти отклонения с помощью частотных характеристик дина-
мической жесткости.
3-2. ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА ДВИГАТЕЛЕЙ
С ПОСЛЕДОВАТЕЛЬНЫМ И СМЕШАННЫМ ВОЗБУЖДЕНИЕМ
Схема двигателя с последовательным возбуждением может
быть получена аналогично двигателю с независимым воз-
буждением при включении обмотки возбуждения последо-
вательно в цепь якоря (рис. 3-11, а). Включение обмотки
возбуждения в силовую цепь, мощность которой на два
127
порядка выше, чем мощность цепи возбуждения, создает' '
условия для форсированного изменения потока двигателя. \
При этом анализ динамических свойств двигателя без :
учета влияния вихревых токов, наводящихся в полюсах :
И станине при быстрых изменениях потока, приводит в боль-
шинстве случаев к значительным ошибкам. В первом при- '
ближении влияние вихревых токов может быть учтено добав- .
лением короткозамкнутой обмотки на оси 0, показанной
на рис. 3-11,6, имеющей условное число витков kjb>t, обте- \
Рис. 3-11. Схема двигателя постоянного тока с последовательным воз- ‘
буждением (а) и соединение обмоток обобщенной машины для получения .
модели (б). . ;
каемой током tB. и связанной с потоком машины Ф по про-
дольной оси 0 коэффициентом связи, равным единице. С уче-
том этой фиктивной обмотки математическое описание дина-
мического процесса преобразования энергии в двигателе
с последовательным возбуждением имеет следующий вид:
ия = £Фсо + ,я/?я2 + Ая ;
(3-33)
М = M>iB,
где Яя2 = /?я + яв-
Индуктивность рассеяния якорной цепи Ая значительно ;
меньше, чем индуктивность обмотки возбуждения, связан- j
ной с главным потоком двигателя, поэтому ею в ряде слу-
чаев можно пренебречь. Однако такое допущение вносит.
принципиальное искажение в характер процессов, ибо при J
128 ‘ ;
Ля — 0 ток двигателя при изменениях скачком приложен-
ного напряжения приобретает возможность изменяться скач-
ком. Для практического пользования уравнениями (3-33)
необходимо исключить из них вихревой ток iB т. С этой
целью первое уравнение системы разделим на т, а вто-
рое— на сложим их и, обозначив Ф = &ф (/„-)-
+ 1В. т)> получим:
"о
k Ф di d®
= Ф“ + V + Тя ~dT + V ~dt~'’
фм _|_ ;я + тв + -р- ,
RrZ dt Аф dt
М = £Ф1Я,
(3-34)
где. Tbs = т/7?в.т+ ^Фдав//?я2 = 7^ т + 7\^ (1,1 -М ,2)7;.
Уравнения динамической механической характеристики
(3-34) нелинейны в связи с наличием произведений перемен-
ных е — /?Ф<й и М = У?Ф1Я, а также в связи с нелинейной
зависимостью потока двигателя от м. д. с. возбуждения
(рис. 3-12). Как показано на рис. 3-12, в номинальном режиме
магнитная цепь машины насыще-
на (кривая /), поэтому изменения
токов при г’я > /н не приводят к
существенным изменениям потока
и соответственно коэффициент ЛФ
с ростом тока якоря быстро умень-
шается (кривая 2).
В дальнейшем изложении для
качественного анализа статических
характеристик двигателя исполь- рис' 3’12, Характеристи-
зуется показанная на рис. 3-12 ло-
маной 3 кусочно-линейная аппрок-
симация кривой намагничивания. Эта аппроксимация на-
глядно показывает, что в области перегрузок электромеха-
нические свойства двигателя с последовательным возбужде-
нием приближаются к свойствам двигателя с независимым
возбуждением. В то же время следует учитывать, что уве-
личение тока якоря от /н до тока, допустимого по условиям
коммутации, вызывает увеличение м. д. с. обмотки воз-
буждения, которое полностью компенсирует продольную
составляющую поперечной реакции якоря и вызывает уве-
личение результирующего потока на 10—20%. Благодаря
этому отпадает необходимость в компенсационной обмотке
и перегрузочная способность двигателей с последователь-
б Чнлнкин М. Г. и др.
129
ным возбуждением оказывается более высокой (X = 2,5
3,0), чем у двигателей с независимым возбуждением.
Для удобства составления структурной схемы электро-
механического преобразования энергии в двигателе с после-
довательным возбуждением представим (3-34) в следующем
виде:
di Ro v _
“ е ~ ~dt Ф:
М = /гФ1я', е = ЛФо.
кф dt
di„
ТяЯя^-^- = ия — е —
(3-35)
Структурная схема, соответствующая (3-35), представ-
лена на рис. 3-13. Следует иметь в виду, что Тв%1кф
Рис. 3-13. Структурная схема электромеханического преобразования
энергии в двигателе постоянного тока с последовательным возбуждением.
= const и нелинейность кривой намагничивания учитывает-
ся нелинейностью обратной связи по потоку, обратно про-
порциональной Лф. Зависимость 1/Лф = f (Ф) может быть
определена с помощью рис. 3-12.
Наличие нелинейностей типа произведения переменных
затрудняет аналитическое решение (3-35) и определяет
необходимость использования ЭВМ, поэтому при исследо-
вании ряда динамических режимов двигателя представляет
130
интерес линеаризация уравнений динамической механиче-
ской характеристики в пределах малых отклонений перемен-
ных от значений, соответствующих статическому режиму
работы. Прежде чем перейти к такой линеаризации, рас-
смотрим статические характеристики'двигателя и влияние
параметров на их форму.
Полагая для статического режима в (3-33) dijdt — О,
б/ф/tW = 0, и„ = U„, iB' т = 0, с помощью несложных
преобразований можем получить уравнения статических
характеристик двигателя последовательного возбуждения:
со = ^я/Ш(/я)-Л4/?я2//г2Ф2(/я); (3-36)
ш = ^я/ЛФ(/я)-/я/?я2/ЛФ(/я). (3-37)
Очевидным отличием их является зависимость потока
двигателя от тока якоря (рис. 3-12). При токах якоря,
вызывающих изменения потока в пределах линейной части
кривой намагничивания, &ф = const и уравнения (3-36) и
(3-37) можно преобразовать к виду
со = ия/У ккФМ — /?яв/Ж>;’ (3-38)
со = 1/я/^ф7я — R^/kk^. (3-39)
Уравнение (3-38) свидетельствует о том, что при умень-
шении момента скорость двигателя возрастает, стремясь
к бесконечности при М ->0. Физически это объясняется
условиями электрического равновесия при идеальном хо-
лостом ходе машины: при /я — 0 э. д. с. машины должна
уравновешивать приложенное напряжение, т. е. Е Uv,
а это в связи с уменьшением потока до нуля возможно
только при неограниченном возрастании скорости (Е —
— кФ со). Реально в связи с наличием остаточного потока
Фост скорость идеального холостого хода ограничена зна-
чением со0 — и„/кФ0„, однако вследствие малости Фост
это значение скорости недопустимо велико. По мере воз-
растания момента скорость снижается по гиперболическому
закону и при неограниченном возрастании его скорость
асимптотически приближается к критическому значению
сок = — R„%/kk®. Аналогичный вид имеет и соответствую-
щая (3-39) зависимость скорости от тока якоря. Практи-
чески, как следует из рассмотрения рис. 3-12, в области
номинальной нагрузки машина насыщается, увеличение
тока при /я > 7„ не вызывает существенного возрастания
потока и статические характеристики двигателя прцблн-
б*
131
жаются к- линейным зависимостям, аналогичным двига-
телю с независимым возбуждением.
На рис. 3-14, а, б показаны семейства электромехани-
ческих и механических характеристик двигателя, соот-
ветствующие различным сопротивлениям якорной цепи
= 7?я + 7?в + 7?д. я. Естественная механическая ха-
рактеристика (7?д. я = 0) имеет рассмотренный выше харак-
тер и обеспечивает по мере уменьшения электромагнитного
момента двигателя от номинального все более быстрое воз-
растание скорости. Так как механическая мощность пред-
ставляет собой произведение момента на скорость, эта
закономерность определяет работу двигателя при пример-
Рис. 3-14. Электро-
механические (а) и
механические (б)
статические харак-
теристики двигате-
ля с последователь-
ным возбуждением.
ном постоянстве мощности. Если говорить точнее, меха-
ническая характеристика (3-36) не обеспечйвает постоянства
мощности, однако изменения мощности при изменениях
нагрузки здесь значительно меньше, чем у двигателя с
жесткой механической характеристикой. Для ряда меха-
низмов мягкая характеристика двигателя с последователь-
ным возбуждением повышает производительность .за счет
возрастания скорости при малых нагрузках.
Для расчета статических характеристик по (3-36) и (3-37)
необходимо знать зависимость Ф (/я) для данного двигателя
либо воспользоваться для ее определения универсальными
зависимостями, указываемыми в справочной литературе.
На практике чаще бывают известны непосредственно ес-
тественные характеристики со = f (/я) и со = f (Л4) [или
М = /(/„)], которые для двигателей некоторых серий
приводятся в каталогах или могут быть рассчитаны по
известным из справочной литературы соответствующим уни-
версальным кривым. При наличии естественных характе-
ристик двигателя расчет искусственных характеристик
не представляет труда. Так, при введении добавочного
сопротивления в цепь якоря рассчитать искусственные
132
реостатные характеристики можно с помощью соотношения
^я. и — (Яя + Rs + Кд. я) hi
"И1 ~ "е1 г/я.и-(/?я+/?в)4г .
(3-40)
Смысл обозначений в (3-40) поясняется рис. 3-14, а и б.
Рассматривая приведенные на этом рисунке характеристики,
соответствующие различным сопротивлениям цепи якоря,
можно сделать вывод, что увеличение сопротивления якор-
ной цепи при каждом значении момента уменьшает жест-
кость механической характеристики и ограничивает ток
короткого замыкания.
Характеристики при я =0 и мя < 1/я. н могут быть
также рассчитаны с помощью (3-40), если подставить в чис-
литель эти значения напряжения
(рис. 3-15). Эти характеристики сви-
детельствуют о том, что уменьшение
напряжения приводит к снижению
скорости при данной нагрузке, не из-
меняя соответствующей этой нагрузке
жесткости механической характери-
стики.
Механическая характеристика при
Uя = 0 соответствует режиму динами-
ческого торможения двигателя при
замкнутой накоротко его якорной це-
пи. В данном случае торможение про-
текает при самовозбуждении и за-
служивает дополнительного рассмот-
рения. В общем случае при пита-
нии двигателя от сети с постоянным
ские характеристики
двигателя1' с последо-
вательным возбужде-
нием при различных
напряжениях питания.
напряжением ия =
— Uя, н для осуществления режима динамического тормо-
жения его якорная цепь замыкается на внешнее сопротив-
ление я (рис. 3-16, а). Если с помощью внешнего источ-
ника механической энергии (например, за счет движущей
активной нагрузки) привести якорь двигателя во враще-
ние, то при выполнении определенных условий двигатель
самовозбуждается и развивает зависящий от скорости
тормозной момент.
Первым условием самовозбуждения является наличие
остаточного потока такого знака, чтобы при данном направ-
лении вращения э. д. с., наводимая остаточным потоком,
вызывала ток возбуждения, увеличивающий поток двига-
теля. Если двигатель работал в двигательном режиме при
а> > 0, то его э. д. с. в режиме торможения при ® > 0
133
создает ток, направленный противоположно току якоря,
в предшествующем режиме. Этот ток, протекая по обмотке',
возбуждения, создает м. д. с., уменьшающую поток оста-
точного намагничивания, и самовозбуждение исключается.
Если при этом изменить направление вращения (® < 0), ,
двигатель самовозбудится, поэтому характеристика на рис.,
3-15 при = 0 существует только в четвертом квадранте.
Обеспечить торможение во втором квадранте можно,
переключив либо выводы якоря, либо выводы обмотки
возбуждения.
Второе условие самовозбуждения поясняется рис. 3-16, б.
Здесь приведен ряд зависимостей Е (1Я), соответствующих ’
Рис. 3-16. Динамическое торможение с самовозбуждением двигателя
с последовательным возбуждением.
различной скорости движения якоря. Если воспользоваться :
кусочно-линейной аппроксимацией кривой намагничивания,
показанной на рис. 3-12, зависимости Е (/я) приближенно
линеаризуются, причем при /я > /,,„с поток принимается’-!
приближенно постоянным. На рис. 3-16, б показана также J
прямая/я =f(E) = E/Raz. При самовозбуждении Е (/я) =
= /я (Е) и второе условие самовозбуждения графически ]
выражается наличием точки пересечения этих зависимостей. ’ j
Это условие на рис. 3-16, б выполняется только при со s>2, j
причем критическое значение скорости ®1(р «®2. Таким '•
образом, самовозбуждение может наступить только после '
достижения скорости ®кр, при которой наклон линейной
части характеристики Е (/я) совпадает с наклоном прямой •
/я — E/R^. Следовательно, при увеличении суммарного ,
сопротивления цепи якоря самовозбуждение наступает 1
при более высоких скоростях икр.
Изложенные соображения позволяют установить форму
характеристики динамического торможения с самовозбуж-
дением (рис. 3-16, в). При со о)кр самовозбуждение отсут-
ствует и /я — 0. При со = сокр двигатель самовозбуждается,
134
ток якоря при принятой аппроксимации возрастает до
1Я =^я. нас и при дальнейшем увеличении скорости двига-
тель имеет линейную зависимость ® (/„), соответствующую
Ф = Фнас ж const. Поэтому при принятой идеализации
электромеханическая характеристика при динамическом
торможении с самовозбуждением имеет вид ломаной 1
на рис. 3-16, в. В связи с наличием остаточного .потока ток
при ® < ®кр несколько возрастает, а реальная форма
кривой намагничивания приводит к дополнительным откло-
нениям фактической зависимости и (/я) (кривая 2 на рис.
3-16, в) от приближенной зависимости (кривая 1 на рис.
3-16, в). Форма механической характеристики в этом режиме
аналогична форме электромеханической характеристики
(кривая 2 на рис. 3-16, в), в этом можно убедиться, рассмат-
ривая приведенные на рис. 3-16, г механические характе-
ристики динамического торможения с самовозбуждением
при различных добавочных сопротивлениях якорной цепи
^д. Я-
Для исследования динамических свойств двигателя с последователь-
ным возбуждением частотным методом можно прибегнуть к линеари-
зации уравнений динамической механической характеристики в окрест-
ности точки статического режима работы. С этой целью необходимо
обратиться к известному из теории автоматического регулирования
методу линеаризации нелинейных уравнений [12], которым целесооб"
разно воспользоваться в данном случае в связи с наличием в линеари-
зуемой системе уравнений произведений переменных. Пусть нелинейное
дифференциальное уравнение имеет вид:
F (xi\ it; #i ...) = ф(/; /; f ...), (3-41)
где х^ Xi, Xi ... — переменные системы и их производные по времени
(i = 1, 2, 3 ...);
f, f, f ... — управляющие и возмущающие воздействия и их
производные по времени.
В статическом установившемся режиме работы xt — xl, f = /°, а все
производные X/ и f равны нулю:
Г(х?) = Ф(/°). (3-42)
При линеаризации рассматриваются условия движения системы
при достаточно малых отклонениях переменных от их значений, соот-
ветствующих установившемуся режиму (3-42). При этом переменные
можно представить в виде
xt (?)=x° + Axz (?); =
^ (7) = Д^(0 ит. д,
135
Для линеаризации функция F (х/, х/, х/ ...) раскладывается в ряд
по степеням отклонений переменных, причем производные рассматри-
ваются как самостоятельные переменные
/ dF \о /dF \° / dF \°
f«)+g) М®.) 41,+Ы “<+-+8f-
=ф(Л f; f)> (3-43)
( dF\° fdF\o / dF\° „
где — • — ; — частные производные от F по соответствую-
щей/ / ' \dxi ) \oxi) '
щим переменным при значениях переменных
xi = x°i, Xi = 0, Xi = 0;
6F — часть разложения, содержащая члены выс-
шего порядка малости (произведения и степени
• отклонений и их производных).
Линеаризованное уравнение (3-41) получаем почленным вычита-
нием (3-42) из (3-43), пренебрегая члена-
ми высшего порядка малости:
Рис. 3-17. Линеаризация
кривой намагничивания.
+ £ф (iH + /в, т) и первые
вид:
( dF \о . , f dF \° . . . / dF \о . .. ,
A%z^7/z+W Дх'+'"
---+=Ф (f;/; 7)—Ф (/°)- (3-44)
Приступая к линеаризации системы
(3-34), заметим, что, так как линеариза-
ция осуществляется в окрестности точки
статического равновесия, кривую намагни-
чивания следует аппроксимировать каса-
тельной в точке /я; Ф°, как показа-
но на рис. 3-17. При этом Ф = Фо +
два уравнения системы (3-34) принимают
(Ф-Фо) /?я2 +^Фа>+^я2тя’^- + = *Ф«Я;
^Ф^яХ’я+^Ф^ + ^Ф^яХ^я^ + — £ф“я.
Вычтя почленно из первого уравнения второе, получим более удоб-
ный для решения вид системы (3-34):
Ф — Фо—^ф^я + Т’в. т= 0;
%я%тв %" + ^фФш + ^ф^яЗ’я +
+ ^ф^яХ^я ~ ^Фия1
7И=АФ1Я,
136
Линеаризуем систему (3-45) по (3-44) и, обозначив djdl== р, имеем:
(Ц-Т^ДФ-^Д^О; :
(^фШ° + /?я2Твр) ДФ + ^ф/?я2 (1+7’яр)Д:я =
= йфДия —^Фф0Дш;
ДЛ4 = АФ0ДГя+А/5 ДФ,
Решив систему (3-46) относительно Дгя и ДЛ4, получим линеаризо-
ванные уравнения динамических электромеханической и механической
характеристик двигателя:
Л. (\+Тя,тР)(Ьия-ЬФ<>Ьи>)_____
Я~ R^^T^ + R^iT^ + T^p + R^ + kk'^’
(йФ° + «г'ф/") (Д«„ —йф0 Дш)
W,.TWz (T^ + Ta)p+R^+kk^ (348)
1 Уравнения (3-47) и (3-48) отражают важнейшие динамические
особенности двигателя с последовательным возбуждением при условии
ограничения пределов откло-
нения переменных от точки
статического равновесия.
Сравнивая их, можно уста-
новить, что наличие- конту-
Рис. 3-18. Структурная схема элект-
ромеханического преобразования энер-
гии в двигателе последовательного воз-
буждения при линеаризации.
ра вихревых токов опреде-
ляет более значительные ко-
лебания тока, чем момента
при тех же условиях. Это
различие существенно уси-
ливается, если не учиты-
вать индуктивности рассеяния якорной цепи, положив Тя » 0. При
этом порядок числителя и знаменателя (3-47) становится одинако-
вым, что свидетельствует о возможности изменения тока якоря
скачком и, как было отмечено выше, существенно искажает дей-
ствительный характер процессов, поэтому во всех случаях, когда ста-
вится задача оценки характера изменения тока и его значения в том
или ином динамическом режиме, следует пользоваться уравнением
(3-47), не прибегая к дополнительным упрощениям.
Так как Тя и Тв. т много меньше ТвЗ, можно принять в (3-48)
ТяГв. т ~ 0 и получить следующее приближенное уравнение линеари*
зованной механической характеристики:
= (3-49)
где р = АФ° (йф(| + ^йф/^)/(/?я2 + ййфШ0) — модуль статической же-
' сткости;
7’э = ^яа (Т’вх + ^’я^^ях + ^^Ф®0 ~~ эквивалентная электро-
магнитная постоянная
якорной цепи двигателя.
Уравнению (3-49) соответствует структурная схема электромеха-
нического преобразования энергии в двигателе с (Последовательным воз-
буждением, представленная на' рис, 3-18, Положив в (3-49) Д«я = 0,
137
получим приближенное выражение динамической жесткости механиче-
ской характеристики:
₽д=-Р/ГэР + 1). (3-50)
Сравнивая (3-50) с (3-27), можно сделать вывод, что при малых
отклонениях от точки статического равновесия динамические свойства
двигателя с последовательным возбуждением аналогичны свойствам
двигателя с независимым возбуждением, однако отличаются непостоян-
ством модуля динамической жесткости и эквивалентной электромагнит-
ной постоянной в различных точках статической характеристики при
/я < /н. Если магнитная цепь двигателя не насыщена, т. е. k® =
= £ф макс = const, то йф/“ = Ф° и модуль статической жесткости опре-
деляется соотношением
₽ = 2^ф02/(7?я2+^фмаксШ0),
из которого следует, что . с уменьшением нагрузки статическая же-
сткость механической характеристики уменьшается весьма быстро как
зд счет уменьшения потока Ф°, так и за счет возрастания скорости со0.
'Модуль динамической жесткости при этом дополнительно снижается
за счет электромагнитной инерции, характеризуемой постоянной вре-
мени
Т (Г°з+Л.)
В ^яз+^Фмакс®0’
аналогично двигателю с независимым возбуждением. При сопоставле-
нии необходимо иметь в виду, что 7в2 + Тя при ненасыщенной машине
намного превосходит Тя для двигателя с независимым возбуждением,
ио включение обмотки возбуждения в силовую цепь приводит к тому,
что Тд зависит от скорости <т>° и поэтому существенно снижается. В об-
ласти насыщения при Z“ > /н k'I} « 0 и TbS стремится к значению, соот-
ветствующему индуктивности рассеяния обмотки возбуждения. При
этом
₽ = А2Ф02/7?яа = С2//?я2 ; тэ = ТЯ = Ья2/Яяа,
где Ья2 — суммарная индуктивность рассеяния якорной цепи.
Таким образом, в области перегрузок динамические свойства дви-
гателя с последовательным возбуждением практически совпадают с рас-
смотренными выше свойствами дви-
гателя с независимым возбуждением.
Линеаризованные характери-
стики двигателя с последовательным
возбуждением (3-47) и (3-48) могут
быть использованы для анализа уста-
новившихся колебательных режимов
электромеханических систем с дви-
гателем последовательного возбуж-
дения, а также для проверки устой-
чивости и качества замкнутых систем
регулирования с таким двигателем
смешанным возбуждением. при малых отклонениях от положе-
ния статического равновесия. В то
же время приведенное рассмотрение динамических свойств двигателя
с последовательным возбуждением иллюстрирует общий подход к
138
анализу процессов электромеханического преобразования энергии, опи-
сываемых нелинейными уравнениями, позволяющий получать прибли-
женные аналитические соотношения путем линеаризации этих уравне-
ний. В частности, такой подход полностью применим к анализу динами-
ческих свойств двигателей со смешанным возбуждением.
Схема включения двигателя со смешанным возбуждением
приведена на рис. 3-19. Сравнивая ее с расчетной схемой
двигателя с последовательным возбуждением (см. рис.
3-11, б), можно установить, что расчетная схема на
рис. 3-11,6 справедлива и для двигателя со смешанным
возбуждением, если заменить в ней эквивалентный контур
вихревых токов реальным контуром обмотки независимого
возбуждения ОВН, поэтому уравнения динамической меха-
нической характеристики двигателя можно записать по
аналогии с (3-33) при тех же допущениях в следующем виде:
«В С1. В^Н. В Н- ®11. в >
ия = кФ® + inR^ + Ц в ;
Л4 = £Фгя,
(3-51)
где «в, iH B — напряжение и ток независимого возбужде-
ния;
®н. в, ^н.в — число витков и полное сопротивление кон-
тура обмотки ОВН-,
®п. в — число витков последовательной обмотки воз-
буждения ОВП.
Умножив первое уравнение системы на иун. в//?н. в> авто-
рое— на ауп. B/Raz, сложив первое уравнение со вторым,
получим систему уравнений, описывающих динамическую
механическую характеристику двигателя смешанного воз-
буждения:
ия \ т9- — । ® । 'г dix , Тbs d® .
п "Г 1 н в — -р “Г -г J я "г "ь ДГ >
кФ ш кФ al (3-52)
АФсо , . । diB , Т'п.в ^Ф .
Кя2 “ dt + кф dt’
М = кф1в,
k .
где Ф = — (Fп. в -J- Fa в) = k® (ц + iн. в);
“'п. в
тО ^в ^н. в . / ___ .• И’н. в .
Гн. в— р и. , 1н.в —I-н. ви. >
Кв. В “'ll. В “'ll. В
гр, __ ^Фшн. В I АФШП. В _ гр .гр
* вЗ — р "Гр •" н. в ”Г * п.в*
^н.в КЯ2
139
Система (3-52) отличается от. системы (3-34) только нали-.t
чием в первом уравнении постоянной составляющей (при (
UB — const) приведенного к якорной цепи тока независимого '
возбуждения А. в и
И
те
‘Н.В
н. в
*в-
#н.в 1 |лгв2
та
‘л
Рис. 3-20. Зависимость
Ф = f (;'п2) для двигателя
со смешанным возбужде-
нием.
выражением, суммарной постоянной .
времени Твх, два других уравнения
при Тв = Тп в совпадают, поэтому >
линеаризация уравнений (3-52) при .
UB = const приводит к линеари-
зованным уравнениям (3-46) —
(3-50), полученным для двигате-
ля с последовательным возбужде- <
нием.
Различие проявляется в зави- ;
симости потока от ’ тока якоря j
— / VbS/ ~ ПЧ Т ‘-в. в — 1 в. в)
Для двигателя со смешанным воз-
буждением. она имеет вид, пока-
Рассматривая эту зависимость, мож-
режиме, расширяя
возбуждения
занный на рис. 3-20.
но установить, что обмотка независимого возбуждения,
действующая в двигательном режиме согласно с последо-
вательной обмоткой, уменьшает пределы изменения пото-
ка в этом
шанного
близок по электромеха-
ническим свойствам дви-
гателю с независимым
возбуждением. Область
линейной зависимости
потока от м. д. с. воз-
буждения смещается во
второй квадрант, соот-
ветствующий генератор-
ному режиму работы. В
этой области возрастание
тока якоря вызывает
быстрое уменьшение потока двигателя вплоть до нуля при
/я — Д. в> поэтому статическая характеристика ю = f (/„)
двигателя со смешанным возбуждением имеет вид, показан-
ный на рис. 3-21, а. При 1Я — 0 поток двигателя Ф — Фи в
определяется м. д. с. обмотки независимого возбуждения.
Его относительное значение ФН.В(ФН зависит от соотноше-
ния м. д. с. обмоток независимого и последовательного
возбуждений в номинальном режиме. Обычно это соотноше-
ние подбирается таким, чтобы поток двигателя при иде-
140
область, где двигатель
сме-
—
й ..... Weа
'°-) б)
Рис. 3-21. Статические характеристи-
ки двигателя со смешанным возбуж-
дением.
альном холостом ходе лежал в пределах Фнв = (0,7 ч-
0,85)Фн. Соответственно скорость идеального холостого
хода ограничивается значениями
' Юо = Юн^^_ = (1,3- 1,6)шн,
обеспечивающими более значительное возрастание скорости
с уменьшением момента двигателя, чем у двигателя с неза-
висимым возбуждением, но существенно меньшее, чем .при
мягкой характеристике двигателя с последовательным воз-
буждением. В области генераторного режима (7Я < .0)
в связи с уменьшением потока скорость быстро возрастает
и характеристика асимптотически приближается к прямой
/я = /°н. в — const, которой соответствует Ф = 0.
Этими же особенностями объясняется и форма статичес-
кой механической характеристики, показанной на рис.
3-21, б. В связи с тем что М — ЙФ/Я, механическая харак-
теристика в области генераторного режима имеет максимум
момента и асимптотически приближается к оси ординат
слева. Рассматривая эту зависимость, можно установить,
что эффективность рекуперативного торможения в связи
с размагничивающим действием последовательной обмотки
оказывается невысокой. Более благоприятные условия
рекуперативного торможения можно обеспечить, исключая
размагничивающее действие обмотки при /я < 0, М < 0
(пунктирная прямая на рис. 3-21, б).
На основании изложенного можно заключить, что усло-
вия электромеханического преобразования энергии в дви-
гателе со смешанным возбуждением аналогичны таковым
для двигателя с последовательным возбуждением, а электро-
механические свойства двигателя со смешанным возбужде-
нием занимают промежуточное положение, приближаясь
в зависимости от соотношения м. д. с. обмоток возбуждения
в номинальном режиме к двигателю либо с последователь-
ным, либо с независимым возбуждением.
3-3. ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА АСИНХРОННЫХ
ДВИГАТЕЛЕЙ
Асинхронный двигатель благодаря конструктивной про-
стоте является наиболее массовым двигателем, широко
применяемым в электроприводе промышленных установок.
Схема включения трехфазного асинхронного двигателя
141
с фазным ротором показана на рис. 3-22, а, соответствующая ’<
ей двухфазная модель представлена на рис. 3-22, б. Мате-
матическое описание динамической механической харак-
теристики в неподвижных осях а, 0 (<ок = 0) можно полу-
чить с помощью (2-43), положив й2 = 0 и обозначив штри-
хами приведенные к статору токи и сопротивление роторной
цепи = R* + R'a2:
^1Р = “Ь dt,
0 = jRjSl'ja + (№2а/(И -ф СОэд^гр;
0 = dW^/dt
М — Pn^-i2 CipAa l'ial2p) •
(3-53)
Рис. 3-22. Схема включения (а) и
двухфазная модель (6) асинхронно-
го двигателя.
В установившемся симметричном режиме работы пере-
менные двигателя представляют собой сдвинутые относи-
тельно друг друга по фа-
зе синусоидальные вели-
чины, изменяющиеся в осях
a, Р с частотой сети ©Оэл =
= 2лД. Пользуясь симво-
лическим методом, эти пе-
ременные можно предста-
вить в виде вращающихся
векторов О1а, /1а, /1₽
и т. д. Так как переменные
фазы Р отстают от соответ-
ствующих переменных фа-
зы а на <рэл — 90°, между
ними очевидна следую-
щая связь: £71(1 = — jUla;
тт А₽ = — /Да и т. д.
Напомним, что производная по времени от вектора,
неизменного по модулю и вращающегося со скоростью
иОэл, может быть получена умножением этого вектора на
/<оОэл. Например:
4^ = 4 СИЛ'--') -
= = /шОэлТ1а.
Учитывая отмеченные соотношения, для фазы а статора
и ротора уравнения электрического равновесия из (3-53)
142
могут быть представлены в виде
= R-Jia + /©оэл^ха!
О = Rid2а Н~ /^оэл^га /^эл^гос
Если в (3-54) потокосцепления выразить через намаг-
ничивающий ток /ц, = Д + /.j с помощью формул (2-41)
(3-54)
^ха — (Лх Л 2) Ла + £12^ц’>
^2а — (^2 £12) Ла 4~ Л12Л’
а параметры Lx, L2 и £хг двухфазной модели двигателя,
выразить через парамет-
ры трехфазного двигате-
ля, указываемые в ката-
логах, клиентских фор-
мулярах и справочни-
ках, с помощью соотно-
шений
£1 = (Л 4"^:ц)/ИОЭЛ>
L-2 — (^2+^ц)/®09л;
£12 = ^м/^оэл
Рис. 3-23. Векторная диаграмма (а)
и схемы замещения фазы (б, в) асин-
хронного двигателя.
и, кроме того, с помо-
щью формул (2-51) заме-
нить переменные двух-
фазной модели соответствующими эффективными значения-
ми переменных трехфазного двигателя, то уравнения элек-
трического равновесия (3-54) примут вид:
£ф — RJ1 + jxj 1 4~ £1; )
— £2 = (£-2S/s) Л 4~ 2> /
где £1 = £2 = /7|.1х/,
(3-55)
S (ыоэл *г>эл)/Ыогл (C0q СО)/(О0.
Уравнениям (3-55) соответствует векторная диаграмма,
показанная на рис. 3-23, а, и схема замещения фазы асин-
хронного двигателя, приведенная на рис. 3-23, б. Рассмот-
рение электромеханических свойств асинхронного двигателя
начнем с установившихся статических режимов работы,
воспользовавшись для этой цели упрощенной схемой заме-
щения фазы двигателя, показанной на рис. 3-23, в. Ток
143
фазы ротора
С/ф
]/’(«1 + /?-22/s)2 + ^ ’
(3-56)
где хк — реактивное сопротивление короткого замыкания,
хк. = + х'3.
Электромагнитная мощность, передаваемая через , воз-
душный зазор ротору двигателя,
Рэм = 3I’*R’3S/s---------------
0?i+tf2S/s)2 + 4 ,
Эта же мощность может быть выражена через
магнитный момент и скорость поля двигателя:
(3-57) J
электро- !
(3-58) ]
Приравнивая (3-57) и (3-58), получаем уравнение стати- <
ческой механической характеристики двигателя:
Рэм = 7Ию0.
(3-59)
Анализ функции (3-59) показывает, что она имеет точки
экстремума; критическое скольжение, соответствующее экст-
ремуму, может быть определено путем дифференцирования
(3-59) по s и последующего приравнивания нулю этой произ-
водной:
Я =-+-
К V'Rl + xi '
(3-60)
Подставляя (3-60) в (3-53), получае,м выражение крити-
ческого момента:
Мк =.....- - —. (3-61)
2соо[/?1 ±Г/?!+4]
С учетом. (3-60) и (3-61) уравнение (3-59) может быть
после преобразований представлено в форме так называемой
уточненной формулы Клосса
М = --,-Л(-^9к) , (3-62)
s/sK-r-sK/s-|-2(zsK v '
где a = T?1//?2s-
Рассмотрим полученную зависимость. Нетрудно видеть,
что при s sK механическая характеристика близка к ли-
нейной зависимости М 2AfKs/sK, а в области больших
144
скольжений s^>sK имеет гиперболический характер: М да
да 2MKsK/s. При s = sK момент принимает максимальные
значения, причем в двигательном режиме (sK. д > 0) соот-
ветствующее значение критического момента Л4К. д, как это
следует из (3-61), меньше, чем в генераторном режиме
/Ик. г (sK. г < 0). С помощью (3-61) можно эту разницу оце-
нить количественно:
МК.Г = МК.Д
К. д
1 Д [ $к |
1 —— С1 | Sk I
(3-63)
Так как со = со0 (1 — s), в соответствии с (3-62) естест-
венная механическая характеристика асинхронного дви-
гателя с фазным ротором
относительно небольшой
мощности имеет вид, по-
казанный на рис. 3-24, а.
Рабочий участок характе-
ристики, соответствующий
“к. г > м > юк. д> обладает
высокой жесткостью.
Максимальное значение
момента двигателя Мк в
двигательном режиме опре-
деляет его перегрузочную
способность. При этом не-
обходимо иметь в виду,
что этот момент зависит
Рис. 3-24. Естественная механиче-
ская (а) и электромеханические (б)
характеристики асинхронного дви-
гателя.
от квадрата приложенного напряжения U$, вследствие
чего асинхронный двигатель весьма чувствителен к коле-
баниям напряжения сети. В каталожных данных для асин-
хронных двигателей указывается перегрузочная способ-
ность двигателя при номинальном напряжении А = Мк/М„.
При определении момента допустимой перегрузки следует
учитывать возможное снижение напряжения сети на 10%:
Мдоп = ({7ф/{7Ф.Н)2Ж1^0,8ШП.
Электромеханические естественные характеристики
асинхронного двигателя w = f (Д) и со = f (/2) показаны
на рис. 3-24, б. Зависимость а = f (Z0 построена с помо-
щью (3-56) и соотношения со = со0 (1 —s) (сплошная кри-
вая). Зависимость со == f (Д) в основном повторяет форму
кривой со = / (Г2), так как определяется соотношением
Д = — Г2. Она показана на рис. 3-24, б пунктирной
145
кривой, которая имеет наиболее значительные отклонения
от кривой ю = f (/%) в области идеального холостого хода. ;
Действительно, при со = <о0 ток ротора равен нулю, а ста- i
тор потребляет из сети ток холостого хода, основной состав- *
ляющей которого является намагничивающий ток /мо. ;
По мере роста тока ротора эти кривые сближаются.
Рис. 3-25. Естественные и искусственные механические характеристики
асинхронного двигателя.
Влияние параметров на форму механической характе-
ристики асинхронного двигателя показано на рис. 3-25.
Увеличение сопротивления ротора R'2z приводит в соот-
ветствии с (3-60) к увеличению критического скольжения,
а критический момент (3-61) остается неизменным
(рис. 3-25, а). Увеличение или R± уменьшает sK и Мк
(рис. 3-25, б).
Несколько подробнее необходимо остановиться на влия-
нии на электромеханические свойства асинхронного дви- 5
гателя изменений напряжения (рис. 3-25, в) и частоты тока ’
(рис. 3-25, г), подводимого к его статору. В пределах рабо-
чего участка механической характеристики, когда ток )
146
статора не превышает существенно номинальное значение,
произведением' (3-55) можно пренебречь вследствие
относительной.малости. При этом Ег tv [7ф и с известным
приближением можно записать:
{/ф^£1 = 4>44/1®1Ф~АФ- (3-64)
Рис. 3-26. Кривая
намагничивания
асинхронного дви-
гателя.
Из (3-64) следует, что при неизменной частоте j\ — const
изменения напряжения приводят к соответствующим изме-
нениям магнитного тока двигателя. Так как в номиналь-
ном режиме магнитная цепь двигателя насыщена (рис. 3-26),
то повышение напряжения сверх номи-
нального приводит при прочих равных
условиях к быстрому возрастанию тока
намагничивания /и. У двигателей нор-
мального исполнения ток холостого хо-
да 10« /Ц11 = (0,25 -н 0,35)/1п, поэтому
повышение напряжения на 20—30%
может увеличивать ток холостого хода
до значений, превышающих номиналь-
ный ток /1н, и двигатель может нагревать-
ся этим током сверх допустимой темпера-
туры даже при отсутствии полезной на-
грузки на его валу. При тех же условиях
снижение напряжения вызывает в соот-
ветствии с (3-64) уменьшение магнит-
ного потока, поэтому напряжение, приложенное к обмоткам
статора асинхронного двигателя, при Д — const может
рассматриваться как управляющее воздействие, определяю-
щее поток двигателя, аналогично напряжению £7В, прило-
женному к обмотке возбуждения двигателя постоянного
тока. Форма механических характеристик при — const
н 17ф = var показана на рис. 3-25, в. Она определяется
соотношениями (3-60) и (3-61), из которых следует, что
скольжение sK при этом остается неизменным, а критический
момент уменьшается пропорционально квадрату напря-
жения.
Во всех рассмотренных вариациях параметров скорость
идеального холостого хода двигателя <о0 оставалась неизмен-
ной. Изменения частоты тока статора приводят к пропор-
циональному изменению <о0, но одновременно при 17ф —
= const вызывают обратно пропорциональные частоте изме-
нения потока двигателя Ф. Так как в номинальном
режиме машина насыщена (рис. 3-26), при 17ф = 1/ф-н
допустимо только увеличение частоты Д > /1н, что вызы-
147
вает соответствующее уменьшение потока Ф. В соответ-?
ствии с (3-61) увеличение ^приводит к уменьшению кри-1
тического момента из-за увеличения <о0 и повышения индук-1
тивного сопротивления рассеяния, соответствующего ис-]
кусственной характеристике хк и = хк (Л.//щ)Критическое;)
скольжение при этом также уменьшается, а скорость иде-)
ального холостого хода увеличивается, как показано на
рис. 3-25, г.
При уменьшении частоты для снижения скорости
< юон> по-видимому, необходимо дополнительно изме-
Рис. 3-27. Схема включения (а)
и механические характеристи-
ки (6) двигателя с короткозамк-
нутым ротором.
нять напряжение питания f/ф,
таким образом, чтобы поток ?
поддерживался примерно по-
стоянным.
Приведенный выше анализ
основан на предположении,
что при данной механической
характеристике в любой ее
точке параметры двигателя
R*, xlt х'> остаются неизмен-
ными. Известно, что это до-
пущение вполне приемлемо в
пределах рабочего участка ме-
ханической характеристики,
а при s > sK является в большинстве случаев грубым. При
больших токах сказывается насыщение зубцов, что вызы-
вает уменьшение индуктивного сопротивления рассеяния.:?
С возрастанием частоты тока ротора существенно прояв-;
ляется эффект вытеснения тока, вызывающий увеличение
активного сопротивления роторной обмотки Rz. Для двига-,
теля с фазным ротором, которым можно управлять таким?
образом, чтобы во всех режимах обеспечивалась работа
в пределах рабочего участка его характеристик, указанные
изменения параметров не имеют существенного значения. i
В наиболее массовом варианте асинхронного электропривода
с короткозамкнутым ротором двигателя влияние измене-.,
ний параметров весьма существенно и его во всяком случае'
следует иметь в виду.
Схема включения асинхронного короткозамкнутого двй- '
гателя приведена на рис. 3-27, а, а варианты статических'
механических характеристик показаны на рис. 3-27, б. *
В отличие от двигателя с фазным ротором пуск коротко- ,
замкнутого двигателя осуществляется в большинстве прак-i
тических случаев прямым включением его обмотки статора]
148
в сеть, а для торможения используется режим противо-
включения. Поэтому область механической характеристики
при s > sK имеет для такого двигателя важное значение,
определяя его пусковые и тормозные возможности. Пуско-
вой момент Мп, развиваемый двигателем при <и — 0 (s =
= 1), является важным показателем, включаемым в число
каталожных данных двигателя в виде отношения 7ИП/МН.
Практически при оценке пускового момента следует, учи-
тывая возможность понижения напряжения сети на 10%,
снижать каталожное значение Мп на 20%. Кроме того,
для короткозамкнутых двигателей в каталогах указывается
кратность пускового тока /1П//1Н,
Для сокращения длительности переходных процессов
пуска и торможения желательно увеличивать пусковой и
тормозной моменты, а для уменьшения нагрузок на сеть
полезно ограничивать пусковые и тормозные токи двига-
теля. Если двигатель имеет ротор с круглыми пазами, то
изменения сопротивления роторной обмотки, обусловлен-
ные эффектом вытеснения тока, хотя и вызывают отклоне-
ния формы механической характеристики от определяемой
формулой (3-61), но не обеспечивают значительного уве-
личения пускового и тормозного моментов и заметного огра-
ничения соответствующих токов (кривая 1 на рис. 3-27, б).
Изготовление двигателя с увеличенным сопротивлением
роторной клетки дает модификацию, называемую двигате-
лем с повышенным скольжением (кривая Г на рис. 3-27, б).
При этом достигается увеличение пускового и тормозных
моментов, но понижается жесткость рабочего участка
механической характеристики, снижается номинальная ско-
рость и возрастают потери в роторной цепи двигателя:
ДР2 = /Им0 — Afco = 7H(o0s. (3-65)
Соотношение (3-65) свидетельствует о том, что потери
в роторной цепи при М — const пропорциональны сколь-
жению. Двигатели с повышенным скольжением имеют номи-
нальное скольжение s„ = 0,04 -ь 0,12, что в 2—3 раза
превышает номинальное скольжение того же двигателя
нормального исполнения. Соответственно возрастают номи-
нальные потери двигателя, что вынуждает при прочих
равных условиях снижать допустимый по нагреву, т. е.
поминальный, момент и номинальную мощность двигателя.
Увеличение потерь в роторной цепи вызывает также сниже-
ние к. п. д. двигателя, поэтому обычно двигатели с повы-
149
шенным скольжением в установках, работающих длительно*
с номинальной нагрузкой, не используются. 1
Более сильно зависит от скольжения активное conpo-J
тивление двигателей с глубоким пазом (кривая 2 на рис.'?
3-27, б), особенно с двойной беличьей клеткой (кривая 3?
на том же рис.). Сопротивление роторной обмотки таких!
двигателей в номинальном режиме невелико, но сильней
увеличивается при возрастании частоты тока ротора в пус-1
ковых режимах и в режиме противовключения. Подбором^
параметров двойной клетки удается обеспечить практи-:|
ческое постоянство момента двигателя в переходных про--4
цессах и в то же время обеспечить высокую жесткость рабо- J
чего участка механической характеристики и значения!
к. п. д., близкие к двигателям нормального исполнения.!
Кроме того, .увеличение активного сопротивления двойной-
беличьей клетки при больших скольжениях ограничивает’?
потребляемый двигателем ток. ;
Для анализа динамических свойств асинхронного дви--
гателя запишем уравнения (3-53) в осях х, у (<вк = <вОэл):’
при Т?л2 = 0, выразив токи и потокосцепления в соответствии
с (2-43) аналогично (2-44):
dt
d^ly
dt
„_______^1^3 1ТГ | Kl^-12 ur , Uf .
LiL2 — Ll2lx' L^-L^ sx±
W i m пр
ull/ r^r„__rz i.i _ra
2x ______Rgbj w i
dt ~ LiL2-Lfs
+ -гё=Ь- 4^;
— ь12
^2^1 uj. ,
dt ~ LiLz-lb +
M — • Pn^l2 -pw ЦТ _ ЦГ W -j
Li.L2—Ll2''ly^ix rixr2y)-
-*
..1
(3-66) ]
Уравнениям (3-66) соответствует структурная схема
электромеханического преобразования энергии в асинхрон- (
ном двигателе, приведенная на рис. 3-28. Как выше отме-
чалось, наличие нелинейностей, связанных с произведениями
переменных, затрудняет аналитическое исследование дина-
мических процессов, возможности которого практически ;
150
ограничиваются рассмотрением электромагнитных переход-
ных процессов при. постоянной скорости двигателя со9л.
Поэтому во всех случаях, когда возникает необходимость
анализа переходных процессов пуска, реверса, торможения
двигателя при неизменной частоте сети при широких преде-
Рис. 3-28. Структурная схема электромеханического преобразования
энергии в асинхронном двигателе.
лах изменения скорости и результирующего магнитного
потока, следует прибегать к использованию ЭВМ. Струк-
турная схема на рис. 3-28 позволяет легко составить схему
модели для решения задачи на АВМ.
Однако во многих случаях представляет интерес анализ
динамических процессов при ограниченных пределах изме-
нения скорости и мало меняющемся результирующем потоке
двигателя [32, 33]. Такие условия складываются, например,
151
при рассмотрении переходных процессов, обусловленных *
изменением нагрузки электропривода скачком, либо при*3
анализе установившихся динамических режимов работы,,
обусловленных периодически меняющейся нагрузкой.
Получим линеаризованное уравнение динамической меха-
нической характеристики, воспользовавшись изложенным
в [33]. Рассмотрим динамический режим работы двигателя,
имеющий место по истечении времени после его подключе-
ния к источнику переменного тока, достаточного для зату-
хания свободных составляющих, обусловленных переход-
ным процессом включения. В этом режиме изменения ско-
рости ограничены и вызывают такие изменения токов ротора
и статора, при которых результирующий магнитный поток,
определяемый в соответствии с (3-64) напряжением источ-
ника питания, остается практически постоянным. При этом
потокосцепления статора и Чг1!/ могут быть приняты
приближенно постоянными. Если действительные напряже-
ния, приложенные к обмоткам статора, записать в виде
^1а ~ ^Хмакс COS Ujg ^Хмакс ®Оэл^> ТО В ОСЯХ X, у,
как было показано в § 2-3, им соответствуют преобразован-
ные напряжения
Щх — ^хмакс ~ COnst, tlly — 0.
Если в первых двух уравнениях системы (3-66) принять
7?! да 0; ЧГ1Л. = const; Ч;1у = const, подстановка значений
и1х и и1у дает возможность определить потокосцепления ста-
тора:
= 0; Yjy = : ^Хмакс/®оэл>
Выполним вспомогательные преобразования:
R’zLi шоэлТ?2 (Xji+xj) ш0элТ?2
LjZ.2 — £[(x(i + Xi) (Х|, + Х0 — Xpj Xi + хл
Последнее равенство записано на основании (3-60) при
7?! = 0. С учетом полученных соотношений последние три
уравнения системы (3-66) принимают следующий вид:
dWix/dt + Ооэл8Л'яд: - ©оэлвТад = 0,
4" ®0эл®к^2!/ 4“ "уТ" ^Хмакс»
М — UT ПТ
т ~ LiL2-Li2
(3-67) .
Несмотря на ряд упрощающих допущений, система (3-67)
остается нелинейной в связи с наличием произведений
152
и s^y, однако в таком виде, благодаря линейной зависи-
мости момента от Ч’ад. (Ч^у — const), представляется воз-
можным путем преобразований получить уравнение, непо-
средственно связывающее момент и скольжение в динами-
ческих режимах. Положим d/dt = р и произведем преоб-
разования алгебраизированных уравнений (3-67), имея
в виду, однако, что эти уравнения нелинейны и поэтому
допустимы только такие их преобразования, при которых
строго сохраняется предусмотренный исходными уравне-
ниями порядок дифференцирования переменных [33]. С этой
целью вначале из первого уравнения определим
= + <3’68>
шоэлд
Подставляя (3-68) во второе уравнение (3-67) и соблю-
дая получающийся порядок дифференцирования перемен-
ных, получаем выражение для 4;2V:
пг _________________(^'ia/^'i) $к^1макс_______ (R-RQ1
2Х~ (Р + шоэА) [(1/о>оэл8) (Р+юоэл«к)] + ®оэЛ« ' '
Остается подставить (3-69) в третье уравнение системы
(3-67) и получить упрощенное уравнение динамической ме-
ханической характеристики в виде
м = ------------------------------ ('3-701
(1 + TbP)[(Sk/s)(1+T9P)] + s/Sk ’ ' >
где Тв — 1/<Воэл?к — электромагнитная постоянная времени;
ДД ___ 1 pnLii/LiU шанс ___
к~ 2 Ш0%л (LiLa-LU “
___1_________________Uimskc_____________3(7ф
~ 2 и0 (2xg + x')/x^ + x'7xg) ~ 2ш0 ’
Последнее соотношение получено путем преобразования
двухфазного напряжения U1MiKe к трехфазному IK макс
по (2-51):
^ф.макс ~2 ^Ф. макс = 1/ ^ф. макс = 3 t/ф.
Кроме того, учтено, что х^ хг и х\.
Уравнение (3-70) в статическом режиме работы, когда
р = 0, переходит в формулу Клосса:
sk/s + s/sk
153
Таким образом, полученное приближенное уравнение!
динамической механической характеристики дает в каче-J
стве частного случая статического режима работы известное^
приближенное уравнение статической характеристики и в то ]
же время отражает влияние электромагнитной инерции при]
ограниченных по амплитуде колебаниях . в окрестности 1
точек статической характеристики. Для линеаризации урав- 5
нения (3-70) путем разложения в ряд в виде (3-44) вначале
необходимо выполнить операции дифференцирования в по- ;
следовательности, полученной при его выводе: i
/ S2 dM. , d'2M 1 ds J
-Л--^--^- = 2М —. (3-71)
3 s dt dt sK ' '
Разложим (3-71) в ряд и после преобразований получим:
еО2 \
1 +А- ДМ + 2Т,
«к/
rfA/W d2A/W
dt + 13 dt1 ~
2/W„ I ч2_4O2 os
—- p-------rAs + T9-----*—
sK \s2+s“- s2+s°-
(3-72) 1
Так как As = s° — s = —Aco/®O, положив в (3-72) все
производные равными нулю, получим выражение статиче-
ской жесткости линеаризованной механической характе-
ристики АЛ4 — / (Ди):
₽с
2МК (s2-S°2)s2
Н+О2 ’
(3-73)
В соответствии с формой статической механической ха-
рактеристики, показанной на рис. 3-24, а, жесткость рс
при s° < sK с увеличением s° уменьшается по модулю вна-
чале незначительно, а вблизи sK весьма быстро. При s° = sK
статическая жесткость равна нулю и при дальнейшем воз-
растании среднего скольжения становится положительной.
Практический интерес представляет анализ уравнения ди-
намической механической характеристики (3-70) в области
рабочего участка механической характеристики, где s°/sK
<< 1; Sk/(Sk + s°2) w 1, а8°7(3к+з°2) « 0. При этом (3-72)
154
существенно упрощается:
(Т9р + 1)ДМ = —^Ай. (3-74)
Ш(РК
При s° = О Ай = й — й0» поэтому для рабочего уча-
стка механической характеристики линеаризованное урав-
нение, связывающее момент и скорость асинхронного дви-
гателя, имеет вид:
(Твр+1)М = Р(й0-й), (3-75)
где Р — 2Мк/й0зк — модуль жесткости линеаризованной
статической характеристики.
Пределы целесообразного использования (3-75) ограни-
чиваются значениями момента — 0,8 Мк 'М sc 0,8 Мк.
Структурная схема электромеханического преобразования
энергии, соответствующая
(3-75), представлена на рис.
3-29'. Уравнение динамиче-
ской жесткости в соответ-
ствии с этой схемой имеет
Рис. 3-29. Структурная схема, со-
ответствующая работе асинхронно-
го двигателя в пределах рабочего
участка механической характери-
стики.
вид:
Рд = М (р)/й (р) =
=-Р/(1+Лр). (3-76)
Сравнивая (3-75) и (3-76)
с аналогичными характери-
стиками двигателя постоянного тока с независимым возбуж-
дением (3-5) и (3-27), можно убедиться в их идентичности.
Таким образом, в пределах рабочего участка механической
характеристики динамические свойства асинхронного дви-
гателя аналогичны свойствам двигателя независимого воз-
буждения. Сравнение структурных схем рис. 3-29 и 3-3, б
наглядно показывает, что. для асинхронного двигателя ча-
стота /у является управляющим фактором, аналогичным
напряжению ыя, приложенному к якорной цепи двигателя
с независимым возбуждением, однако при этом необходимо
помнить, что структурная схема на рис. 3-29 удовлетвори-
тельно отражает динамические свойства асинхронного дви-
гателя только при условии примерного постоянства Tj
и в пределах рабочего участка его механической характери-
стики.
Поток асинхронной машины находится в сложной зави-
симости от С7ф, и /1( для анализа которой при широких
пределах изменения частоты уравнения (3-55) полезно
155
(3-77)
представить в виде
Аф = R1J1 + !а*х1н^1 + /®0 |_и
О — Ri/Sai^ 4“ /^2нА РАн А1’
где ®о — ®о/®он = fjJfiH — угловая скорость,
поля или частота
статора в долях но-
минальной;
х1н, х2н> Хцп — индуктивные соп-
ротивления при
номинальной ча- j
стоте;
Sa — (®о — «>)/®он = ®о* — и/Юон — абсолютное сколь- -
жение.
Из первого уравнения (3-77) можно определить суммар-
ную реактивную э. д. с. статора при coj = 1, которая про-
порциональна потокосцеплению статора Тр.
— / (xiiJi xnijp) = Vi)/®*- (3-78)
Рис. 3-30. Схема
питания асин-
хронного корот-
козамкнутого
двигателя от ис-
точника тока.
Из (3-78) следует, что для выполнения условия ЧА — const
при 7?х = 0 и изменениях частоты достаточно поддерживать
отношение U$/fi — const. Однако практически произведе-
ние R1i1 пренебрежимо мало в сравнении с иф толькр при
работе с (/ф= t/ф.н, f = Ан и A sg 2/1н. При снижении
частоты и пропорциональном снижении
иф роль AjZj в (3-77) непрерывно возра-
стает, что в области частот A 'C/i» приводит
к снижению значения потокосцепления
Vi и уменьшению критического момента,
поэтому уравнение (3-75) при снижении ча-
стоты А и tA/A = const применимо лишь
в пределах, при которых | /jTA I I Аф |.
Весь приведенный выше анализ свойств
асинхронного двигателя основан на пред-
положении, что статор получает питание
от источника стабильного напряжения иф,
независимого от тока двигателя. Так как
при частотном управлении преобразова-
тель частоты может обладать свойствами
источника тока, для полного представления динамиче-
ских свойств асинхронного двигателя необходимо рассмот-
реть особенности его работы в случае питания статора от
источника тока (A = const, рис. 3-30). Уравнения динамиче-
ской механической характеристики в осях х, у в этом слу-
156
чае имеют вид:
l'ix = 0, 11у = -ф- /1макс = COilst,
О = Н J/ ' (®Оэл ®эл)
(3'79)
О = iiyRs Н di [- (<£>Оэл ®эл)
М = Рп^12^1макс^2*>
ГДе 'Pjx ~ L^i^x, 'Ргу ^2^“1у ~Ь ^12^1макс-
Из уравнения для оси 2х определим ток фазы для оси 2у:
1ад — — х ± хг ‘ I Хмакс + щ'"2^ ' (®Оэл. HSK1 + р)> (3-80)
ХЦн+Х2н Шоэл.н
где sKi = Т?2/(Хр,н + 4)-
Затем, соблюдая отмеченные выше условия преобразо-
ваний, подставим (3-80) в уравнение для оси 2у и решим
его относительно тока фазы для оси 2х:
^|.ih Л'максшоэл.н5к1
l2.V — х ! х' Г i Т
ЦН 2Н (йоэл.нМ+р) —----------— (Шоэл.нМ+ р) + ш0ЭЛ.Н5а
L Иоэл.н’а J
(3-81)
Подставляя (3-81) в последнее уравнение системы (3-79),
получаем:
М -------------------------п---—, (3-82)
(1+Т81р) -^(1 + Тэ1р) +-^7
L ьа J 5к1
где
дд________1макс _________ ____1ф_______и
К1~ ЧРцнЮ “ 2ш0н(хцн + 4) ’
Л1=—!—;
‘ МОЭЛ. HSK1
/ф — действующее значение трехфазного тока, соответ-
ствующее максимальному току двухфазной мо-
дели ily = 71макс = const:
^Хмакс = ~2 ^сЛф.макс = "rf 1^2/^ = }/3/Хф.
Сравнивая уравнение динамической механической ха-
рактеристики (3-82) с (3-70), можно установить, что они
совпадают по форме и отличаются лишь выражениями кри-
157
тического скольжения и электромагнитной постоянной вре-
мени. Следовательно, выполнив линеаризацию уравнения
(3-82) при Sg = 0 аналогично выполненной для уравне-
ния (3-70), получим приближенное уравнение динамической
механической характеристики для | М | (0,7 + 0,8) Л4К1:
(Ц-Тэ1р)Мк1 = Р1(®0 — ®), (3-83)
где
Pi = 27Ик1/®Оэл HsK1.
Уравнения (3-77) для случая питания статора двигателя
от трехфазного источника тока
/х = const;
0 = R<l/Sa!2 -J- jxj2 + /Хр.н/|1
Рис. 3-31. Векторная диаграмма (а)
и кривая намагничивания для ана-
лиза динамического торможения
асинхронного двигателя (б).
малости г< — R, 4- /
свидетельствуют о том, что в этом случае условия преобра-'
зования энергии одинаковы при любой частоте а* и совпа-
дают с работой при иф —
= const только при CO|f = O,
когда статор питается по-
стоянным током и поле ма-
шины относительно стато-
ра неподвижно. Если прй
Uф '== COnst И (Bg =z О)0„ в
соответствии с (3-77) раз-
магничивающее действие
тока /з при увеличении
приводит к уменьшению
Э. Д. С. Ех = <ВОнХцн/ц, что
вызывает увеличение тока
статора /ц компенсирующее реакцию ротора, то при пи-
тании от источника тока его напряжение в каждый мо-
мент времени принимает значения, поддерживающие ток
статора постоянным = const, размагничивающее дей-
ствие тока ротора проявляется полностью и намагничиваю-
щий ток машины с ростом тока ротора быстро умень-
шается.
Если для статического режима работы положить р = 0
и подставить (3-81) в (3-80), можно определить ток i'iy:
_ хцн r sa
X ,-1-х' '1макс 45_Lo2 •
Л|1ЯТ*2я Зк~5а
С помощью (3-81) и (3-84) на рис. 3-31, а построена век-
торная диаграмма для рассматриваемого случая питания
158
(3-84)
двигателя от источника тока Д = const. Диаграмма пост-
роена для переменных двухфазной модели двигателя и,
как ясно из предшествующего изложения, справедлива для
трехфазного двигателя при в ]/3 раз меньшем масштабе
переменных, соответствующем замене максимальных зна-
чений двухфазных токов /1макс, Дмакс и /ммакс эффективными
значениями трехфазных токов /1ф, 1'2 и /и. С учетом такой
замены векторная диаграмма на рис. 3-31, а и формулы (3-81)
и (3-84) позволяют определить трехфазный намагничиваю-
щий ток двигателя:
/ц = (/ 1ф — i-lyl’V3 )2 4" 3 )" Ш IЗйI 4“ sa. (3-85)
При выводе (3-85) принято: х^1(х^ 4- 1. Фор-
мула (3-85) наглядно подтверждает отмеченную выше осо-
бенность работы двигателя при питании от источника тока:
намагничивающий ток машины и ее поток при увеличении
скольжения sa быстро снижается, поэтому для получения
значения МК1 = Мк. е, где Л4К. е — критический момент на
естественной характеристике двигателя при питании от
сети с . С/ф = н, необходимо устанавливать ток /1ф —
= (1,2 ч- 1,5) /ф.н = (3 -ь- 5) /и„. При изменении sa от О
до оо /ц изменяется по (3-85) от = /1ф до I» ъ 0, при этом
фактические значения потока ограничиваются насыщением
магнитной цепи, а быстро уменьшается по мере возра-
стания /ц (рис. 3-31, б). Как следствие (3-80) — (3-84), не
учитывающие насыщения магнитной цепи, применимы
только при /1ф < 0,5 /1ф. „.
Широкие пределы изменения потока при изменениях
тока ротора являются причиной более высокой электро-
магнитной инерционности двигателя при Д — const по
сравнению с питанием от источника напряжения — const.
Действительно, сравнивая Т3 = 1 /®Оэлзк = (лу 4- х'2)/шПэл_ nJR'3
и Тз2 = 1/®оэл. Ai = (*ц 4- 4)/®оэл. Ль можно убедиться,
что Та Тл. С ростом тока статора вследствие насыщения х^
снижается и ТВ1 уменьшается, стремясь при больших насы-
щениях к Тв.
В отличие от случая работы при иг — const при пита-
нии двигателя от источника тока зависимости момента и
токов от абсолютного скольжения и рассмотренные выше
особенности работы двигателя остаются одинаковыми при
любой частоте тока статора Д (®Ои.). Механические характе-
ристики М = f (со) различаются между собой в соответст-
вии с зависимостью ® = ®Он (соОг1. — sj, поэтому при раз-
159
личной частоте тока статора j\ (со0:?) = var и /1ф = const ,j
статические характеристики со = / (714) имеют вид, пока- ]
занный на рис. 3-32, а. Среди этих характеристик особого
внимания заслуживает характеристика при соо* = 0. <
Режим работы двигателя при wOs. = 0 является режимом \
динамического торможения при питании статора постоянным i
током. Этот режим широко используется на практике бла- '
годаря простоте реализации — получить постоянный ток i
(соО;!. — 0) проще, чем изменить частоту сети. Все сказан- .
Рис. 3-32. Механические характеристики асинхронного двигателя при
шо* = var и Лф — const (а) и для соОа. = 0 при различных токах ста-
тора (б).
------— без учета насыщения; ------- — с учетом насыщения магнитной
цени.
ное выше для случая питания от источника тока /1ф = const
полностью справедливо и для режима динамического тор-
можения, если /1ф есть трехфазный переменный ток, экви-
валентный по результирующей м. д. с. постоянному току
в обмотках при w0;i. = 0, поэтому для режима динамического
торможения для /1ф принято обозначение 7ЭКВ. Определить
7ЭКВ можно из соотношения
3/2 , г,
2 ^ЭКВ®1 - П,
где Fn — результирующая м. д. с., создаваемая постоян-
ным током, протекающим по обмоткам фаз статора.
160
На рис. 3-32, б для ®0* = 0 приведены механические
характеристики для различных значений /1ф = /экв. Без
учета насыщения (хи = const) в соответствии с (3-82) при
р = 0 характеристики имеют вид, показанный пунктир-
ными кривыми. Для этих характеристик sK1 = const,
М,(1 ~ Насыщение существенно влияет на форму ха-
рактеристики в зоне небольших скольжений (на рис. 3-32, б
сплошные кривые), а при больших sa вследствие размаг-
ничивающего действия тока ротора насыщение прекра-
щается и сплошные кривые сливаются с пунктирными.
Нетрудно видеть, что насыщение вследствие уменьшения хЦн
увеличивает sK1 и уменьшает Мк1.
Линеаризованным уравнением динамической механиче-
ской характеристики (3-83) в области малых абсолютных
скольжений можно с удовлетворительным приближением
пользоваться и при /1ф > 0,5 /1ф. „, если подставлять зна-
чения Мк1 и s1(l с учетом насыщения и оценивать электро-
магнитную постоянную по формуле
(-Х^ц "4“ Х.2ц)/О)оэ л.
где %цн = ДБ^/Д/^ — динамическое индуктивное сопроти-
вление намагничивания в зоне насыщения (см. рис. 3-26).
3-4. ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА СИНХРОННЫХ
ДВИГАТЕЛЕЙ
Синхронные двигатели находят широкое применение
в электроприводах средней и большой мощности, работаю-
щих длительно и, как правило, не требующих регулирова-
ния скорости. В последние годы в связи с развитием полу-
проводниковой преобразовательной техники имеется тен-
денция к использованию синхронных двигателей с частот-
ным управлением и в регулируемых электроприводах,
однако нерегулируемый электропривод остается основной
областью их применения.
Схема эквивалентной двухфазной синхронной машины
с явнополюсным ротором показана на р'ис. 3-33. Обмотки
фаз статора питаются симметричной двухфазной системой
напряжений:
^Амакс 81П
^iP = ^Аиакс si^ (^Овл^ 90 ) = Б\ыакс COS оэлБ
6 Чилнкнн М. Г. и др.
161
Обмотка возбуждения размещена на оси 2d явнополюс-
ного ротора и подключена к источнику постоянного напря-
жения UB. Уравнения электромеханической характери-
Рис. 3-33. Схема двухфазной
модели синхронного двига-
стики, записанные для реальт
ных переменных в осях 1а, /р,
2d, 2q, имеют вид:
и1а — Rd-ia d^¥ia/dt,
UB = RBiB + dWB/dt.
(3-86)
Особенностью рассматривае-
мого двигателя является син-
хронное вращение ротора с вра-
щающимся полем статора. При
работе в двигательном режиме
теля. ротор отстает от поля статора
На УГОЛ 6ЭЛ == фоэл — Фэл =
= ®Оэл/ — Фэл> поэтому наиболее удобный для анализа вид
уравнения динамической характеристики имеют в осях d,
q. Вначале преобразуем напряжения и1а, к осям d, q с
помощью формул прямого преобразования (2-20):
tha = и1а cos фэл + Ujg sin срэл =
~ ^1макс (sin ©оэл^ COS фэл СО8(£>0эл/ Sin фэл) — ^Алакс Sin 0ЭЛ>
= — uia Sin Фэл + «1Р cos фэл =
= ^1макс (— Sin СО0эл/ sin фэ,, - COS СО0эл/ COS фэл) =
^-Амакс COS 69л.
Уравнения динамической механической характеристики
синхронного двигателя в осях d, q имеют вид:
^Амакс Sin 6ал d^dt й)9л’
А1макс COS б9л = Rdlq “Ь d4?iq/dt
£/а = /?Л + ^вЖ ( ’
M=pa^iailq-^M. J
Запишем уравнения потокосцеплений с учетом того, что
для явнополюсного ротора Lld L1? и L12d Л12?:
= Lldild “ЬLizcds'r =
162
Уравнения (3-87) нелинейны в связи с наличием произ-
ведений переменных, поэтому для строгого анализа дина-
мических режимов синхронного двигателя следует исполь-
зовать цифровые или аналоговые вычислительные машины.
Для исследования на АВМ задача может быть подготовлена
с помощью структурной схемы электромеханического пре-
образования энергии в синхронном двигателе, соответст-
вующей (3-87). Структурная схема представлена на рис. 3-34.
Приближенное уравнение динамической механической ха-
рактеристики может быть получено с помощью угловой
статической характеристики двигателя, для получения
<Wld dVlq d4B
которой примем в (3-87) —тг- = —тт- ------- ~тг- = 0; о>эл =
- vl’l' (Л-1* Ш
= юОэ1, пренебрежем активным сопротивлением статора
Д й 0 и примем, что обмотка возбуждения получает пи-
тание от источника тока и во всех режимах А = —/в =
= const. При этом система (3-87) принимает вид:
^Амакс 81П 0ЭЛ • ®0эдА1уА? ' ’
^Амакс COS 0ал — <00э Arf (00элЛ12^/в =
— Xirf Ad ' ДМкс i
At = рп [ A12rf/BА? + (Aid А1?) /id/1^].
(3-88)
Из первого и второго уравнений (3-88) определяются
токи статора:
А<7 = ^Амакс Sill 0эЛ/Х1£, /id = (Амакс ^Амакс COS 0эл)/^Щ*
Подставляя выражения токов в третье уравнение (3-88)
и учитывая, что L12IB = £макс/стОэл, после преобразований
получаем уравнение угловой характеристики двухфазного
явнополюсного синхронного двигателя в виде
М =
/Дмакс^максОэл
<0<Ad
1 ЕАмакс
2ш0
-----—) sin 20эл.
Xtf / э
Произведем замену переменных двухфазной машины пе-
ременными трехфазной с помощью (2-53) и перейдем к эф-
фективным значениям э. д. с. и напряжения. В результате
получим известное уравнение угловой характеристики трех-
фазного явнополюсного синхронного двигателя:
,, 34/фЕ sin 0эл
М =-----!-----
, ЗС/ф / 1 1 \
+ -я—V--------—-------)sin20Bq. (3-89)
2со0 \ xiq xid! э v ’
Уравнение (3-89) свидетельствует о том, что электромаг-
нитный момент.синхронного двигателя состоит из двух со-
6*
163
ставляющих, первая из которых обусловлена взаимодейст-
вием вращающегося поля статора с полем возбужденного
ротора, а вторая представляет собой реактивный момент,
обусловленный явнополюсным исполнением ротора. Вслед-
ствие явнополюсности энергия магнитного поля макси-
мальна при любом из двух возможных соосных с полем
статора положений ротора, что и определяет зависимость
реактивного момента от двойного угла 8ЭЛ.
Рис. 3-34. Структурная схема преобразования энергии в синхронном
двигателе.
Примерный вид угловой характеристики М = f (0ЭЛ)
показан на рис. 3-35, а. Рассматривая ее, можно убедиться,
что увеличение угла 69Л вызывает рост электромагнитного
момента вначале в зависимости, близкой к линейной. При
6ЭЛ > 45° темп нарастания момента быстро снижается и
после достижения максимума 7Имакс дальнейшее возраста-
ние угла 6ЭЛ влечет за собой уменьшение момента двига-
теля. Без учета явнополюсности ротора максимум момента
наступает при 8ЭЛ = 90°; в номинальном режиме работы,
когда двигатель развивает номинальный электромагнит-
ный момент М„, 8ал „ = 20 -н 30°. Этим обстоятельством
определяется перегрузочная способность синхронного дви-
гателя, которая лежит в пределах X = Ммакс/Мн = 2-5-3.
164
Рассмотрение рис. 3-35, а позволяет заключить, что
реактивный момент увеличивает крутизну рабочего участка
угловой характеристики и несколько повышает перегрузоч-
ную способность двигателя. Перегрузочная способность
синхронного двигателя менее чувствительна к понижению
напряжения сети, чем у асинхронного двигателя, что отно-
сится к числу его важных достоинств. Этот вывод следует
непосредственно из (3-89), если учесть, что реактивный
Рис. 3-35. Угловая (а) и механические (б) характеристики синхронного
двигателя.
момент, зависящий от квадрата напряжения, мало влияет
на перегрузочную способность, а основная составляющая
момента линейно зависит от напряжения (/ф, так как э. д. с.
машины Е определяется током возбуждения /в.
Рабочий участок угловой характеристики М = f (6ЭЛ)
можно с достаточной для многих задач инженерной прак-
тики точностью заменить линейной зависимостью М =
= / (0эл), проходящей через точку номинального режима:
М^-/^еэл = Ь8, М<0,9М,1акс. (3-90)
Оэл.Н
Дифференцируя (3-90), получаем приближенное уравне-
ние динамической механической характеристики:
^- = &(со0-М). (3-91)
На основании приведенного в первой главе рассмотре-
ния упругих механических систем и уравнений (3-90) и
(3-91) можно составить механическую модель, отражаю-
щую особенности синхронного двигателя (показана на
165
Рис. 3-36. Механический аналог (а)
•и структурная схема (б) синхронно-
го двигателя.
рис. 3-36, а). Здесь электромагнитная связь между вращаю-
щимся магнитным полем и полем ротора заменена меха-
нической пружиной с жесткостью Ь, а приведенный момент''
инерции ротора и механизма представлен подвешенной на
этой пружине массой т. Очевидно, механический ана-
лог синхронного двигателя' '
представляет собой идеаль-
ное колебательное звено,д
котором возникающие по
тем или иным причинам
колебания не затухают.
Действительно, повышен-
ная склонность к колеба-
ниям является характер-
ной особенностью рассмот-
ренной модели синхрон-
ного двигателя (см. рис.
3-33). Однако реальные
синхронные двигатели обычно имеют на роторе коротко-
замкнутую обмотку, которую называют демпферной или
пусковой обмоткой. Эта обмотка при колебаниях скорости
ротора создает асинхронный момент, который, как следует
из § 3-3, в первом приближении можно представить про-
порциональным скольжению. С учетом этого момента урав-
нение угловой механической характеристики (3-90) прини-
мает следующий вид:
М — 7Исин4-Л4асин — ^0 +Р (®о — ш), (3-92)
где b = MH/0n; р = 2MK/sKcoo.
Так как 6 = (ю0 — (о)/р, в операторной форме уравне-
ние динамической механической характеристики запишется
в виде
7И = (Р + Ш(®о-“)- (3-93)
Структурная схема электромеханического преобразова-
ния энергии, соответствующая (3-93), показана на
рис. 3-36, б. Сравнивая ее со структурной схемой, приве-
денной на рис. 1-16, б, можно установить, что асинхрон-
ный момент, создаваемый демпферной клеткой, оказывает
влияние, аналогичное внутреннему вязкому трению, по-
этому схема механического аналога синхронного двигателя
с учетом наличия демпферной обмотки должна быть до-
полнена механическим демпфером с вязким трением, как
показано на рис. 3-36, а пунктиром.
166
Уравнение (3-93) свидетельствует о том, что в статиче-
ском режиме работы при любых значениях 7И(о = й0 =
= const и статическая механическая характеристика имеет
вид прямой 1, параллельной оси абсцисс (рис. 3-35, б),
существующей в пределах — Л4макс М 7Имакс, так как
при превышении нагрузкой этого значения момент двига-
теля в соответствии с угловой характеристикой умень-
шается и двигатель выпадает из синхронизма. В динамиче-
ских, режимах механическая характеристика синхронного
двигателя, как следует из (3-93), не является абсолютно
жесткой. В установившемся динамическом режиме выну-
жденных колебаний изменениям момента с амплитудой
ДЛ4макс соответствуют согласно (3-93) определенные ампли-
туды Дсомакс колебаний скорости и динамическая механиче-
ская характеристика имеет вид эллипса (кривая 2 на
рис. 3-35, б). Динамическая жесткость определяется соот-
ношением
₽ = - (Р + б/р). (3-94)
Соответственно амплитудно-частотная и фазо-частотная
характеристики динамической жесткости имеют вид:
IPd==/p2 + (W; (3-95)
Т (Q) = л - arctg-^. (3-96)
С возрастанием частоты жесткость механической харак-
теристики синхронного двигателя быстро убывает, стремясь
к значению, определяемому жесткостью рабочего участка
асинхронной характеристики М = / (со), а фазовый сдвиг
T (Q) возрастает от л/2 до л.
С учетом электромагнитной инерции имеет место более
сложная форма характеристик динамической жесткости.
В частности, приближенный учет влияния электромагнит-
ной инерции на жесткость асинхронной характеристики
с помощью (3-76) позволяет заключить, что с возрастанием
частоты модуль жесткости должен стремиться к нулю,
а фазовый сдвиг вначале возрастает, но, не достигнув зна-
чения T (Q) = л, должен снижаться, вновь стремясь
к л/2. Учет влияния электромагнитной инерции на зави-
симость синхронного момента от скорости вносит дополни-
тельные коррективы. Однако основные особенности дина-
мического взаимодействия синхронного двигателя с приво-
димой в движение механической системой можно проанали-
зировать с помощью (3-94).
167
Как показано на рис. 3-35, а, в синхронизме, синхрон-
ный двигатель может работать в двигательном и генератор-
ном рекуперативном режимах. Пуск двигателя благодаря
наличию демпферной клетки протекает в асинхронном ре-
жиме; особенности пусковых режимов синхронного двига-
теля анализируются в гл. 5.
Заканчивая анализ электромеханических свойств син-
хронного двигателя, отметим в качестве важного его достоин-
ства возможность регулирования реактивной мощности
путем воздействия на ток возбуждения 7В. Полученное
из (3-88) выражение тока Ild свидетельствует о том, что
при прочих равных условиях знак и сам ток определяются
током возбуждения 1К, которому пропорциональна при при-
нятых для обобщенной машины допущениях э. д. с. £макс.
Ток Ilq не зависит от тока возбуждения, поэтому влияние
уровня возбуждения двигателя на условия преобразования
энергии можно проанализировать с помощью векторных
диаграмм, соответствующих системе (3-88) при 0ЭЛ = const.
При относительно небольшом токе возбуждения £мокс <
< £1макс cos 0ал и ток направлен в отрицательную
сторону оси d (рис. 3-37, а). При этом ток статора Д отстает
от приложенного напряжения на угол срх и из сети потреб-
ляется реактивная мощность, тем большая, чем меньше ток
возбуждения. Увеличивая ток возбуждения, можно изме-
нить направление тока ild и . установить его таким, при '
котором вектор тока статора /г совпадает по направлению
с напряжением сети (рис. 3-37, б). При этом двигатель
потребляет из сети (или отдает в сеть) только активную
мощность, работая с cos срх = 1. Дальнейшее увеличение |
тока возбуждения и э. д. с. двигателя £ приводит к работе 5
двигателя с опережающим cos (рг и отдаче реактивной энер-
гии в сеть (рис. 3-37, в).
Из сравнения векторных диаграмм на рис. 3-37, а—в 1
можно заключить, что при 0ал = const увеличение тока
возбуждения и э. д. с. £ вызывает увеличение активной j
составляющей тока Д, рост активной мощности, а следо- !
вательно, и момента двигателя. При неизменном моменте
двигателя увеличение тока возбуждения приводит к умень- j
шению угла 0ал, а работа при cpi = 0 соответствует мини- '
мальному току статора потребляемому двигателем при
этом моменте. Как следует из (3-89), увеличение тока воз-
буждения 7В и э. д. с. Е приводит к увеличению перегрузоч-
ной способности синхронного двигателя, поэтому форсиро-
вание возбуждения при пиках нагрузки на практике ис-
168
пользуется для повышения устойчивости работы двигателя
в этих режимах.
Допустимые пределы изменения тока возбуждения огра-
ничиваются, с одной стороны, условием статической устой-
Рис. 3-37. Векторные диаграммы синхронного двигателя при различном
токе возбуждения.
чивости, а с другой стороны, нагревом обмотки возбужде-
ния и условиями самораскачивания [34]. Как наименьшие,
так и наибольшие допустимые значения тока зависят от
развиваемого двигателем момента.
Глава четвертая
ДИНАМИЧЕСКИЕ СВОЙСТВА
ЭЛЕКТРОМЕХАНИЧЕСКИХ СИСТЕМ
4-1. ОБОБЩЕННЫЕ ЭЛЕКТРОМЕХАНИЧЕСКИЕ И
СТРУКТУРНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА
Из изложенного выше уже ясно, что хотя для механиче-
ской части привода электромагнитный момент двигателя и
является управляющим воздействием, это взаимодействие
в подавляющем большинстве случаев не является односто-
ронним: благодаря наличию электромеханической связи
движение механической части, вызванное воздействием мо-
169
мента двигателя, оказывает в свою очередь влияние на
момент двигателя. Электромеханическая связь объединяет'
электрическую часть электропривода.с механической частью
в единую электромеханическую систему, для изучения дви-
жения которой необходимо связать полученные в гл. 1
уравнения движения и обобщенные структурные схемы
с уравнениями механических характеристик и структур-
ными схемами электромеханического преобразования энер-
Рис. 4-1. Электромеханическая (а) и структурные (б, s) схемы электро-
привода постоянного тока с двигателем независимого возбуждения.
гии, рассмотренными в гл. 3. В качестве основного пред-
ставления механической части примем обобщенную двух-
массовую расчетную механическую схему (см. рис. 1-12, б),
частным случаем которой при с12 = оо является жесткое
приведенное механическое звено электропривода (см.
рис. 1-12, в).
Электромеханическая схема электропривода постоянного
тока с двигателем независимого возбуждения представлена
на рис. 4-1, а. Объединив уравнения движения (1-41) с урав-
нением динамической механической характеристики (3-4),
положив d/dt — р, получим описание динамических про-
170
цессов в рассматриваемой системе в виде’
«в = -^-(1+Лр)Ф;
“я = Ras (1 + Тър} гя + АФй1;
&Фгя — с12 (срг — <р2) - Мс1= /ipcof,
ci2 (<Р1 - <Р2) - Мс2 = J2p&2.
(4-1)
Соответствующая уравнениям (4-1) структурная схема
рассматриваемой электромеханической системы показана на
Рис. 4-2. Электромеханическая (л) и структурные (б, в) схемы электро-
привода постоянного тока с двигателем последовательного возбуждения.
рис. 4-1, б. При переменном потоке система (4-1) нелинейна,
поэтому для исследования динамических процессов при
этих условиях необходимы использование ЭВМ либо линеа-
ризация системы (4-1) в области малых отклонений от точки
статического равновесия методом, изложенным в § 3-2.
Структурная схема на рис. 4-1,6 будет использоваться
в дальнейшем при рассмотрении замкнутых систем управле-
ния возбуждением двигателя.
171
В большинстве практических случаев Ф = Фн = const, )
£Ф„ = с, система (4-1) линеаризуется и может быть запи-
сана в виде
%Я2()+Тяр)1л = и^-С(й^
С1'я с12 (Ф1 Фг) Л4д ~
С12 (ф1 Ф2) ^С2 ~ Apw2-
(4-2)
Структурная схема электромеханической системы при
постоянном потоке двигателя показана на рис. 4-1, в. Эта
схема учитывает важнейшие особенности электромеханиче-
ских систем приводов постоянного тока в наиболее простом
и удобном для анализа виде. При необходимости из общего
математического описания (4-2) и соответствующей струк-
турной схемы могут быть получены уравнения и структур-
ные схемы для частных случаев, когда не требуется учет
упругих механических связей (с12 = оо) или когда можно
пренебречь индуктивностью якорной цепи (Тя 0).
Электромеханическая схема электропривода постоянного
тока с двигателем последовательного возбуждения пред-
ставлена на рис. 4-2, а. С помощью (1-41) и (3-35) можно
записать уравнения динамики этой системы в виде
р Т
nft# рФ = ия - ЛФО) - T^pi* - Ф;
ТЯКя2р1я = «я - АФсо - -^фу рФ - Rnziv,
£Ф1Я - С12 (<Р1 - ф2) - мс1 = JiPWJ
с12 (ф1 Ф2) Мс2 = J^P^i-
(4-3)
На рис. 4-2, б представлена структурная схема электро-
механической системы с двигателем последовательного воз-
буждения, которая может быть использована при модели-
ровании ее на аналоговой или для подготовки программы
для расчета на цифровой ЭВМ. При рассмотрении динами-
ческих режимов, в которых отклонения переменных от
точки статического равновесия не выходят за пределы до-
пустимой линеаризации нелинейной механической харак-
теристики двигателя, следует пользоваться линеаризован-
ным уравнением динамической механической характери-
стики (3-48). Пренебрегая в этом уравнении произведением
малых ТЯТВ^ по сравнению с Тв% и используя соответст-
вующее этому случаю уравнение (3-40), получаем линеари-
172
зованное, математическое описание рассматриваемой си-
стемы:
(1 + Твр) ДЛ4 = кщ, - рДсор
Д714 — ДМ]2 — Д/Ис1 = JjpAcOj;
(4-4)
ДЛ412 — ДТИс2 = 72рДсо2.
В (4-4) все переменные представляют собой отклонения
от средних значений, соответствующих точке"етатического
режима движения системы, причем эквивалентная статиче-
ская жесткость и эквивалентная электромагнитная по-
стоянная времени определяются соотношениями из (3-49).
Рис. 4-3. Электромеханическая (а) и структурная (б) схемы асинхронного
электропривода.
Структурная схема электромеханической системы для
отклонений переменных от статической точки в пределах
допустимой линеаризации представлена на рис. 4-2, в.
Уравнения динамики электромеханической системы с
асинхронным двигателем (рис. 4-3, а) могут быть записаны
с помощью (3-53) путем представления этих уравнений
в комплексной форме в осях х, у в сочетании с уравнениями
движения двухмассовой упругой системы (1-41):
И1 — Н г- + /®оэл^1>
О=R&2+4г + / (®оэл - <о18л)
Im [Z\ X Zg] с12(ф! <р2) 7ИС1= J
С12 (Ф1 - ф2) - ^с2 = Л?®2»
(4-5)
где ¥ 1= Г?! + Д12?2; Чг2 = L2l2 + L12lv
Ввиду существенной нелинейности системы (4-5) ее ре-
шение требует применения ЭВМ. Необходимость использо-
173
вания для исследования динамики асинхронного электрод
привода громоздкой системы (4-5) возникает, когда расД
сматриваемый динамический процесс протекает при широ-'
ких пределах изменения результирующего потока и ско- ,
роста двигателя (например, пуск двигателя включением
в сеть). Для многих практических случаев важно проана- •
лизировать динамические процессы, протекающие в пре- ‘
делах рабочего участка механической характеристики. При
этом целесообразно использовать линеаризованное уравне- ,
ние динамической механической характеристики асинхрон-
ного двигателя в виде (3-74), что позволяет записать урав- :
нения динамики системы в более удобной для анализа
форме:
(i + —L_p)M = ^-((o-a,1); | ;
\ ^Оэл^к /
М с12 (Ф1 Фг) МС1= J.
с12(Ф1-Ф2)-А4С2=ЛР®2- J 1
Структурная схема электромеханической системы при
этом имеет вид, показанный на рис. 4-3, б.
’ При анализе динамики электромеханической системы -
с синхронным двигателем можно воспользоваться уравне-
ниями динамической электромеханической характеристики '
из (3-87), дополнив их с учетом асинхронной составляющей
системой (4-6). Для дальнейшего изложения достаточно ог-
раничиться записью уравнений динамики и составлением 1
структурной схемы синхронного двигателя при предполо- 1
жении абсолютной жесткости механических связей, вое- ?
пользовавшись для этого упрощенным уравнением динами- |
ческой механической характеристики синхронного двига- I
теля (3-93) и уравнением движения (1-52): 1
7И = (р + Ь/р)(соо-®); 1 1
М - Мс = J1Pa. ) 1 ' 1
Структурная схема электромеханической системы с син- 1
хронным двигателем, составленная согласно (4-7), показана I
на рис. 4-4.
Приведенный обзор электромеханических систем авто-
матизированного электропривода дает представление о наи-
более важных с позиций теории электропривода их разно-
видностях. В то же время он свидетельствует о возможности .
обобщенного изучения динамики электромеханических си- ё
стем в связи с тем, что полученные в гл. 3 и используемые
174 j
здесь уравнения динамических характеристик различных
двигателей в определенных условиях идентичны.
Возможность такого обобщения вытекает непосредст-
венно из сравнения уравнений динамической жесткости,
полученных в гл. 3 для
двигателей с независимым
возбуждением (3-27), с по-
следовательным и смешан-
ным возбуждением при ли-
неаризации в окрестности
точки статической характе-
ристики (3-49) и для асин-
Рис. 4-4. Упрощенная структурная
схема синхронного электропривода.
хронного двигателя при
линеаризации рабочего участка характеристики (3-74).
Все эти уравнения вполне аналогичны по форме и отли-
чаются только выражениями статической жесткости |3 и
электромагнитной постоянной времени 7\ (Тя). В связи
с этим уравнения динамики (4-2), (4-4) и (4-6) можно пред-
ставить в обобщенной форме:
(1 4-7,эр)714="р(ы0-й1);
7И - с12 (<Р1 - фг) - МС1 =
^12 (Ф1 Фг) ТИС2 =
(4-Й)
Уравнения (4-8) являются обобщенными уравнениями
динамики электромеханической системы с двигателем, об-
ладающим линейной или линеаризованной механической
характеристикой, динамическая жесткость которой имеет
вид передаточной функции апериодического звена с по-
стоянной времени Т9 и коэффициентом усиления [3:
₽д = -|3/(1+Лр)- (4-9)
Уравнениям (4-8) соответствует обобщенная структур-
ная схема электромеханической системы, приведенная на
рис. 4-5. Уравнения (4-8) и структурная схема на рис. 4-5
справедливы для любого электропривода, уравнение дина-
мической механической характеристики которого в рас-
сматриваемом процессе может быть с приемлемой точностью
представлено первым уравнением системы (4-8), а механи-
ческую часть удовлетворительно представляет двухмассо-
вая расчетная механическая схема. Особенности применяе-
мого двигателя при этом отражаются в конкретных значе-
175
ниях переменных и выражениях параметров:
для двигателя с независимым возбуждением
<о0 = ия/с; р = с2/7?яя; TB = T„ = Lnz/Ras; (4-10)
для двигателей с последовательным и смешанным воз-
буждением при линеаризации в окрестности точки статиче-
ского режима
₽ М)О(6ФО-Ш^Я)
Р Дя2 + ^“° ’
Т3 = М = Ш\ <и = А(й;
для асинхронного двигателя при линеаризации рабочего
участка его механической характеристики
®0 = 2л/:1/рп; р = 27WK/sKcoo; Т э = l/coO3JlsK. (4-12)
Необходимость использования полных уравнений дина-
мики (4-1), (4-3) и (4-5) и соответствующих структурных
Рис. 4-5. Обобщенная структурная схема электропривода с линейной
механической характеристикой.
схем возникает при решении ограниченного круга вопросов,
как правило, связанных с изучением характера протекания
переходных процессов пуска и торможения разомкнутых
систем электропривода с существенно нелинейной пусковой
характеристикой. Важнейшие же особенности взаимодейст-
вия электрического двигателя с приводимой в движение
механической системой, а также большой круг задач ана-
лиза и синтеза замкнутых систем автоматизированного
электропривода успешно решаются на базе линеаризации,
п приближенного учета влияния электромагнитной инерции
с помощью (4-8).
4-2. СТАТИЧЕСКИЕ РЕЖИМЫ РАБОТЫ ЭЛЕКТРОПРИВОДА
Статическому режиму работы электропривода соответствует дви-
жение всех элементов электромеханической системы с постоянной и
одинаковой скоростью. Этот режим наступает после затухания свобод-
173
них составляющих переходного процесса, вызванного изменением уп-
равляющего или возмущающего воздействий, и характеризуется равен-
ством электромагнитного момента двигателя суммарному моменту со-
противления. Последнее следует непосредственно из уравнений дви-
жения электропривода, если принять в них р = 0. Так, для электро-
механической системы с упругой связью, положив в (4-8) р = 0, полу-
чим:
М-с12 (ф,—ф2)—Л4с1 = 0; j
С12 (ф1— фз)— Л4с2 = 0, / .
откуда
^=Л4С1 + Л4С2==Л4С.
Для одномассовой расчетной механической схемы, положив в урав-
нении движения электропривода
M-Mc=7spco (4-14)
р = 0, получим тот же результат: М = Л4С.
В гл. 1 было показано, что в общем случае суммарный момент со-
противления в той или иной степени зависит от скорости. Зависимость
Л1С = f (со) принято называть механической характеристикой исполни-
тельного механизма, а так как момент двигателя также в соответствии
с его механической характеристикой зависит от скорости, условие
статического режима можно записать в виде
М (сос) = Л4с (сос), (4-15)
где сос — угловая скорость электропривода в статическом режиме.
Рассмотрим условие, при котором статический режим будет устой-
чивым. Для этого необходимо, чтобы при бесконечно малом отклонении
скорости da> от статической сос, вызванном каким-либо возмущением,
система стремилась в исходное состояние. Последнее означает необходи-
мость возникновения в окрестности точки статического равновесия
сос ± dco бесконечно малого приращения динамического момента <ДИд,
имеющего знак, противоположный знаку d(o.
Запишем (4-14), используя выражение динамической механиче-
ской характеристики двигателя М (со, t),
Л4(«, 0-Mc(o)) = 7s-^.'
При этом условие требуемого но условию устойчивости прираще-
ния динамического момента имеет вид:
d [Л4 (со, <)— Л4С (со)] = —sign (dco) | сШд|
или
дМ I J , дМ I I
dco + - dt-----------X
dCO |(!)c-|-dC!) dt |(!)c4-dC!) |<Dc-|“</<!)
Xdco = —sign (do>) | сШд |. (4-16)
Проанализируем полученное выражение в более простом варианте,
когда динамическая характеристика двигателя совпадает со статиче-
ской М (со, I) = М (со):
дМ
да>
da
|<oc+d<o
ЗЛ4С I
<?С0 ]<oc-|-d<o
dco —
—— sign (dco) |сШд |,
177
Переписав последнее в виде !•Ч
дМ. I d/l4c I ) , ,, . . . ,, 1
---------------“И I da — — sign (cZco).\dMa , (4-17)1
да |m+d<o да +da ь v /I д| \
с с J
нетрудно заметить, что искомым условием устойчивости является 1
дЛ41 _^Ис|. <0 Ч
да |Мс+</<о да |шс+</й> ’ <
которое можно записать через жесткость статических характеристик:'
Зс l<oc-Wto Зс.мех |<ос+Лй < 0- (4'18)
Точки статического равновесия, для которых полученное условие
о соотношении между жесткостями характеристик двигателя и меха-
низма в окрестности положения равновесия не выполняется, могут
быть либо точками неустойчивого положения равновесия, для которых
Зс |<ос+</со Зс.мех lcoc+rf<o > 0>
либо устойчивыми лишь при отклонениях определенного знака da,
или, наконец, быть точками безразличного положения равновесия при
Зс |<oc+rfco' Зс. мех 1сос+Ло = 0.
Ниже на простых примерах дана графическая иллюстрация усло-
вий, соответствующих (4-15) и (4-18).
Условие (4-15) определяется точкой пересечения механической ха-
рактеристики двигателя со
Рис. 4-6. Графическое оп-
ределение точки стати-
ческого режима работы
электропривода.
= f (Л4) с механической характеристикой
исполнительного механизма со = f (Л4С)
(рис. 4-6). На рис. 4-6 в качестве приме-
ра представлены механические характе-
ристики 1 и 2 асинхронного двигателя .
для двух направлений вращения его маг- >
нитного поля, а также ряд механических <
характеристик различных исполнитель- :
ных механизмов (3, 4 и 5).
Характеристика 3 соответствует ме- 1
ханизму с активной полезной нагрузкой,
например подъемной лебедке. При со > 0, ;
что соответствует подъему груза, Пересе-'
чепие этой характеристики с механиче-
ской характеристикой двигателя 1 дает ]
точку статического режима coci, в кото- •..<
рой двигатель, работая в двигательном
режиме, преодолевает активный полез- '
ный момент и реактивный момент механи- '
ческих потерь. При противоположном
направлении вращения (со < 0) характеристика 3, пересекаясь с ха-
рактеристикой двигателя 2, дает точку статического режима toc2.
Здесь двигатель работает в режиме рекуперативного торможения и
его тормозной момент совместно с реактивным моментом механиче-
ских потерь уравновешивает движущий момент полезной нагрузки.
Характеристика 4 пересекается с механической характеристикой
двигателя в двух точках, чему соответствуют две скорости сос3 и сос4,
178
при которых выполняется условие статического равновесия (4-15).
Однако устойчивым это равновесие является только при скорости сосз.
Незначительное отклонение скорости от сос4 вниз дает уменьшение мо-
мента двигателя и в соответствии с (4-17) появляется динамический
момент отрицательного знака, вызывающий дальнейшее снижение
скорости. Аналогичное отклонение скорости вверх от сос4 приводит,
напротив, к увеличению момента двигателя и к появлению положитель-
ного динамического момента, что вызывает дальнейшее возрастание
скорости вплоть до со = сос3, поэтому участок механической характе-
ристики асинхронного двигателя при со сок обычно называют не-
устойчивым.
При со = сос3 динамические моменты, возникающие при любом
малом отклонении скорости, направлены на уменьшение возникшего
отклонения скорости и возвращают электропривод в точку устойчивого
равновесия. Увеличение момента нагрузки вплоть до значения, соот-
ветствующего критическому моменту двигателя, приводит к слиянию
точек устойчивого и неустойчивого равновесия в одну точку со — сок =
-= соо (1 — sI(), для которой устойчивость зависит от направления
отклонения. Динамический момент, возникающий прн отклонениях от
точки статического равновесия, и условие устойчивости зависят как от
формы характеристики двигателя, так и от вида характеристики испол-
нительного механизма (4-18).
На рис. 4-6 показана механическая характеристика вентилятора 5,
пересекающая характеристику двигателя в точке шс4. Путем аналогич-
ного анализа можно установить, что благодаря более значительным из-
менениям момента нагрузки, чем момента двигателя, возникающие при
отклонениях скорости от сос4 динамические моменты возвращают си-
стему к скорости сос4 и равновесие становится устойчивым.
Из изложенного следует, что при Мс — const устойчивость стати-
ческого режима работы зависит от знака жесткости статической меха-
нической характеристики двигателя. Условие устойчивости (4-18) при-
мет при этом более простой вид:
Рс = сШ/Ао < 0.
В общем случае устойчивость статического режима работы электро-
привода определяется динамической жесткостью механической харак-
теристики и параметрами механической части привода, что следует из
(4-16), поэтому она должна устанавливаться на основании анализа
уравнения системы или частотными методами теории автоматического
регулирования.
4-3. ДИНАМИЧЕСКИЕ РЕЖИМЫ ЭЛЕКТРОПРИВОДА
С ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ
В большинстве практических случаев, когда к управляе-
мости электропривода во всех режимах предъявляются
наиболее высокие требования, в настоящее время исполь-
зуются двигатели постоянного тока с независимым возбу-
ждением, управляемые изменением напряжения на об-
мотке якоря. Близкий ему по управляемости асинхронный
или синхронный электропривод с частотным управлением
179
требует применения более сложных преобразователей щ
пока используется значительно реже, чем электропривод!
постоянного тока. Кроме того, как объект управления при
выполнении отмеченных выше условий асинхронный дви-j
гатель достаточно близок к двигателю с независимым воз-3
буждением. Все эти соображения определяют необходимость’^
особого внимания к анализу динамических свойств электро^
привода с двигателем постоянного тока с независимым воз-з
буждением как объекта автоматического управления. •
------ с
Рис. 4-7. Структурные схемы электропривода постоянного тока.
Движение электропривода с двигателем независимого
возбуждения описывается системой уравнений (4-2), кото- )
рая при с12 = .оо, т. е. без учета упругости механических
связей, примет следующий вид:
(1 Ч-Т’яР) 1’я ==«я —
iA-Iz = ~TKpa, (4-19)
где Т„ = JzRns/c2 = /s/Р — электромеханическая посто- -
янная двигателя с линейной механической ха-
рактеристикой;
/с = Mz/c — ток статической нагрузки.
Структурная схема, соответствующая (4-19), представ-
лена на рис. 4-7, а. С помощью этой схемы получим переда-
точную функцию электропривода по управляющему воз-
действию:
= "dw = ТяТмР2+тмр+1 • (4‘20)
Передаточная функция по возмущающему воздействию —
статическому току двигателя — имеет вид:
W' ю(р)__________________________ (4-21)
- с(тятмр2+тмр + 1) V*
В ряде случаев для анализа удобнее считать входным
управляющим воздействием скорость идеального холостого.
180
хода соо. При этом система уравнений (4-19) записывается
в несколько ином виде:
7И(1+Лр) = ₽(Мо-М); 1 _
M-Mc = $T„p(i), J ’
а структурная схема электропривода с двигателем незави-
симого возбуждения показана на рис. 4-7, б. Этой схеме
соответствуют передаточные функции по управляющему
воздействию
(р) = —(Д- = ‘ (4-23)
'' Йо (р) ТяТыР2+Тыр + ^ ' '
и по возмущающему моменту нагрузки
= - MJ.P) = р (T„7’MJ+?Mp +1) • ' (4‘24)
Корни характеристического уравнения рассматриваемой
системы
Р1.2 2Т — у 47-2 — тт -
я ’ Я ям
<4-26)
где m — Tjl\ — отношение постоянных времени электро-
привода.
При m < 4 система имеет комплексные корни и электро-
привод постоянного тока представляет собой колебательное
звено со степенью демпфирования, определяемой отноше-
нием постоянных времени. Уменьшение сопротивления якор-
ной цепи уменьшает Т„ и увеличивает Тя, что влечет за
собой быстрое снижение m и соответствующее увеличение
колебательности электропривода. При /?Я2 ->0 и 7,м->0
передаточная функция, например (4-23), представляет собой
передаточную функцию консервативного колебательного
звена с частотой свободных электромеханических колеба-
ний
ЙЭм=1/КЛТм = с/]/М2. (4-26)
При m < 4 в установившихся динамических процессах
вынужденных колебаний под действием периодической со-
ставляющей управляющего или возмущающего воздействия
электропривод в области частот, близких к QSM, может
увеличивать амплитуды колебаний вследствие электроме-
ханического резонанса, даже при абсолютно жестких связях
в механической части привода.
181
Динамические свойства электропривода постоянного тока
с двигателем независимого возбуждения можно достаточней
полно проанализировать, рассматривая установившиеся]
режимы вынужденных колебаний, причем свойства этого]
электропривода как объекта автоматического регулирова-j
ния, важные для последующего изложения, выявляются]
при изучении установившихся колебательных процессов;-
вызываемых периодической составляющей управляющего
воздействия и0.
Пользуясь частотным методом, получим с помощью
(4-23) выражение амплитудно-фазовой характеристики:
Wa(jQ)~ ГйГм(/й)2+тм(/й) + 1 • (4т27)
Преобразовав (4-27), с учетом (4-26) найдем: •
ту/ //О'! _ (1 Q /^Эм) /У/ЯЙ/ЙЭ|[ (Л OQ\
“(/ J (1-й®/й|и)2+т£27й1м ’
Амплитудно-частотная характеристика ;
A(0(Q) = -7==L===. (4-29) :
У (1 - й7йэм)2 + тй2/йэм
Фазо-частотная характеристика
Т (Q) = — arctg (4-30) J
1 — S2 /й2эм г
Полученные выражения частотных характеристик коле- =
бательного звена удобны для анализа свойств электропри- j
вода постоянного тока. Согласно [11] передаточную функ- '
цию колебательного звена можно выразить через другие. ]
параметры (при коэффициенте усиления k = 1): • ;
1
^(Р)= 7’sp2_|_2§7’ip+l ’ (4’31) j
где 7\ — постоянная времени колебательного звена; ;
| — коэффициент демпфирования. j
Корни характеристического уравнения (4-31) 1
Р1.2 = “ ± Я7Л -1/Л = (- g ± (4-32) J
Таким образом, колебательному звену соответствуют j
значения коэффициента демпфирования £ < 1. При £ — 1 ;
(критическое демпфирование) (4-31) можно разложить на .
множители, каждый из которых представляет собой произ- ,
ведение передаточных функций двух инерционных звеньев
182
с одинаковыми постоянными Т'"= Т" — Ти а при g > 1 —
с разными постоянными Т" = \/рг и Т" = 1/р3. Установив-
шиеся динамические режимы вынужденных колебаний дан-
Рис. 4-8. Логарифмические характеристики колебательного звена.
кого звена наглядно иллюстрируются логарифмическими
характеристиками при различных значениях £ (рис. 4-8).
Обращаясь вновь к рассмотрению частотных характери-
стик электропривода постоянного тока, можно установить
183
связь между параметрами обобщенного колебательного’,
звена и параметрами электропривода. Постоянная 7\ ==
= VТЯТМ, т. е. обратна резонансной частоте свободных
колебаний Пам. Коэффициент демпфирования можно опре-
делить из условия
2?Л = ТМ
откуда
§ = 7м/2Л = Тм/2/ТХ. = /^/2. (4-33)
Рис. 4-9. Амплитудно-фазовые ха-
рактеристики электропривода по-
стоянного тока.
Из (4-33) следует, что отношение постоянных времени
электропривода Тн и Тя однозначно определяет степень
демпфирования колебатель-
ных процессов. Из рассмот-
рения рис. 4-8 можно за-
ключить, что резонансное-
усиление колебаний имеет
место при £ < 0,7, т. е. при
m < 2. При 0,4 < g <0,7
имеет место значительное
демпфирование и резонанс-
ное усиление колебаний
невелико; этой области со-
ответствуют значения
0,64< m <2. Дальнейшее
уменьшение m приводит к
быстрому возрастанию резонансного пика, причем резо-
нансная частота практически совпадает с Пам.
В соответствии с (4-28) амплитудно-фазовые характери-
стики электропривода при управляющем воздействии и раз-
личных m имеют вид, представленный на рис. 4-9, а. При
Q = Пам характеристики отсекают на оси ординат отрезки,
равные —1/j/m, которые приближенно (при m < 1) харак-
теризуют коэффициент резонансного усиления колебаний.
Как следует из (4-30), при этом сдвиг по фазе Т (£2ам) = 90°
при любом соотношении постоянных времени, поэтому при-
веденные на рис. 4-8 логарифмические фазо-частотные ха-
рактеристики для всех значений | пересекаются в точке
Й7\ = Я/Пам — 1 и дают на этой частоте сдвиг по фазе,
равный 90°.
Амплитудно-фазовая характеристика при синусоидаль-
ном изменении момента нагрузки АЛ4С = АЛ4С1 макс sin Qt
после подстановки р = /Q в (4-24) и преобразований может
184
быть получена в виде
Щ(/й) =
(4-34)
Амплитудно-частотная характеристика
1 / 1+тй7я|м
₽ |/ (1-Я7й1м)2 + тЯ7й1м ’
Фазо-частотная характеристика
^(й) = агс18^-М1-/п-^Л (4-36)
Сравнивая полученные выражения частотных характери-
стик с аналогичными для управляющего воздействия, можно
установить, что характер воздействия существенно влияет
на их вид. Форма амплитудно-фазовых характеристик
(4-34) зависит от соотношения постоянных времени т, как
показано на рис. 4-9, б. Сравнение рис. 4-9, б с рис. 4-9, а
свидетельствует о том, что при вынужденных колебаниях,
вызванных изменениями Мс, сдвиг по фазе между колеба-
ниями момента и скорости меньше, чем характерный Для
обобщенного колебательного звена. Сравнение (4-35) с (4-29)
при р = 1 показывает, что при этом колебательность элект-
ропривода возрастает.
В гл. 1 были рассмотрены характеристики колебатель-
ного звена, которым является двухмассовая упругая меха-
ническая система, и установлено, что механические коле-
бания в такой системе демпфируются за счет диссипативных
механических сил весьма слабо, т. е. механическая часть
электропривода с учетом упругих связей представляет собой
слабо демпфированное колебательное звено. Здесь показано,
что электропривод с двигателем независимого возбуждения
без учета упругости представляет собой также колебатель-
ное звено, и важно оценить, в каких пределах демпфированы
электромеханические колебания, обусловленные обменом
энергией между жестким механическим звеном и электри-
ческой цепью якоря двигателя, обладающей электромагнит-
ной инерцией.
При работе на естественной характеристике Тя = 0,02 ~
4-0,1 с. Электромеханическая постоянная 7\, изменяется
в более широких пределах, и ее удобно выразить через
расчетный параметр — электромеханическую постоянную
185
времени собственно двигателя и отношение моментов инер!
ции электропривода <72 и якоря двигателя Удв: 1
Л1 = ^/₽=Лв^/₽Лв = 71м.двТ- (4-37)1
Для двигателей мощностью выше 10 кВт ориентировочно1!
Тя. дВ = 0,02 4- 0,1 с, причем обычно значения Тк дв соиз-1
меримы или близки Тя, поэтому для электроприводов с не-]
большим моментом инерции механизма наиболее вероятные|
значения m заключены в пределах 0,5 < m <_ 2, а для эле-1
ктроприводов со значительной инерцией механизма m > 2.1
В этих пределах резонансное усиление колебаний невелико 1
и электропривод постоянного тока представляет собой коле-!
бательное звено с высоким коэффициентом демпфирова- |
ния g 5- 0,4. -j
Это обстоятельство при рассмотрении электроприводов
постоянного тока как объекта автоматического регулирова- --
ния позволяет прибегать к упрощенному представлению
передаточной функции (4-23)
^(р)=1/(ГПГир+1)2, (4-38).
т. е. заменять колебательное звено двумя апериодическими
с постоянной 7\ = УТЯТ„. Асимптотическая логарифмц- /
ческая амплитудно-частотная характеристика, соответст-л
вующая (4-38), при Q < \/У1\Тя = 1/7\ имеет вид гори- ;
зонтальной прямой, совпадающей с осью абсцисс, а при j
£2 > 1/]/’?я?м = 1/7\ представляет собой прямую с накло- ;
ном —40 дБ/дек (пунктирная линия на рис. 4-8, а). Срав- ;
нивая эту зависимость с реальными амплитудно-частотными;’
характеристиками колебательного звена при различных
значениях можно установить, что при £ > 0,4 расхожде-
ния незначительны. Ошибка в сторону занижения ампли- J
туды при > 0,4 не превышает 3 дБ/дек, что обычно допу-
стимо, и в дальнейшем эта возможность упрощенного пред-
ставления колебательного звена будет использоваться.
Для решения ряда задач при 4 можно пренебречь :
индуктивностью якорной цепи. При этом система уравне- ;
ний (4-22) дополнительно упрощается:
М = р (и0 — и); 1
714 —714с = р?мрсо. )
(4-39)
Структурная схема, соответствующая (4-39), приведена
на рис. 4-10, а. Ее нетрудно преобразовать к виду, показан-
ному на рис. 4-Ю, б. Схема на рис. 4-10, б свидетельствует J
186 .
о том, что при принятых допущениях электропривод по-
стоянного тока представляет собой инерционное звено с по-
стоянной времени Т„.
Структурные схемы на рис. 4-7, б и 4-10 являются обоб-
щенными структурными схемами электропривода с линей-
ной механической характеристикой соответственно при
Тя = Ts и Тя = Та = 0, так как справедливы для рабочего
участка механической характеристики асинхронного дви-
Рис. 4-10. Структурные схемы электропривода с линейной механической
характеристикой при Тя — 0.
гателя и линеаризованной характеристики двигателя с по-
следовательным возбуждением. Приведенный выше анализ
динамических свойств электропривода с двигателем незави-
симого возбуждения может быть распространен и на эти
двигатели в пределах допустимости линеаризации их харак-
теристик, если иметь в виду соответствующие этим двигате-
лям выражения Ts и 0.
4-4. ПОНЯТИЕ О ДЕМПФИРУЮЩЕЙ СПОСОБНОСТИ
ЭЛЕКТРОПРИВОДА ПРИ УПРУГИХ ЭЛЕКТРОМЕХАНИЧЕСКИХ
КОЛЕБАНИЯХ
Обобщенное математическое описание динамических про-
цессов в упругой электромеханической системе с обобщен-
ным двигателем, динамическая механическая характери-
стика которого описывается линейным дифференциальным
уравнением первого порядка (4-9), и соответствующая струк-
турная схема, приведенная на рис. 4-5, дают возможность
произвести обобщенный анализ свойств упругих электро-
механических систем. Для этого необходимо абстрагиро-
ваться от частных параметров электромеханических си-
стем — жесткостей связей, моментов инерции, параметров
двигателей и т. п., ибо охватить их конкретные значения
немыслимо. В связи с этим в (4-9) и структурной схеме на
рис. 4-5 уже использованы обобщенные параметры Та и 0,
имеющие физический смысл и позволяющие избежать
187
оценки конкретных значений частных параметров с, 7?ях вд
Анализ упругой двухмассовой системы, приведенной?
в гл. 1, позволяет характеризовать ее двумя параметрами:?
частотой свободных колебаний двухмассовой упругой?
системы, .<
= ^12 (*^ 1 "Ь J2)/JJ2» 1
отношением суммарного момента инерции установки':
к моменту инерции масс, жестко связанных с валом дви-'
гателя,
7 = (Л + Л)/Л = JzUx-
Кроме того, введем электромеханическую постоянную >
времени двигателя и жестко связанных с ним масс меха- ;
низма ?
= *
которая позволит выразить введенную выше электромеха- j
ническую постоянную электропривода Т„ следующим обра-1
зом: i
Для облегчения обобщенного анализа введем безразмер- <
ное время, отнесенное к периоду свободных колебаний ме- ‘
ханической системы, т* == t/T12 — Этому времени^
соответствует безразмерный оператор
р* — d/dt* = d/Q^dt == р/й12. /
С помощью структурной схемы, показанной на рис 4-5, ;
получим передаточную функцию электромеханической си-,’
стемы ДОдиз (/?), считая входным воздействием М3 — fko0. J
С учетом соотношений cl2Ux — (у — 1) ЭД.2/у; = ?
= й;3/у; /2/р — (у— 1) ТМ1 выразим все параметры через';
обобщенные и перейдем к безразмерному оператору р*. j
В результате можно представить эту передаточную функ-
цию в виде '
ТЪмР* + у7’м1*Р*+у (1+тэм) + 1 ’ .
где v9M = TsTa^i2 = QJ3/Q|M — отношение квадратов ча- ’
стот недемпфированного механического й12 й ;
электромеханического Q-JM резонансов в системе;
7'м1.|. = ^й"12 — относительная электромеханическая?
постоянная двигателя.
Обобщенный параметр v9M можно представить как про- •
изведение относительных постоянных = 7\Q и Тм1;|. = :
==
188
Аналогичным путем получим передаточную функцию
по управляющему воздействию
ту/ (п \_ М (р*) ___ (Р5 О С4 411
Wm (Р*> ~ мм ~-------ЩЛ------’ (4'41}
где Q (р*) — характеристический многочлен системы, за-
писанный в знаменателе (4-40).
Передаточные функции по возмущающему воздействию
па валу двигателя
ту/' /п \ Л412 (р*) _ (V 0 (^мТ^Р* + V9mP«) , /д дот
= ---------. (4-42)
ту/' If, \ Л4 (р*) _ (ТР*"1~1) /д дот
Wm “ -ЩрТ • (4'43>
Передаточные, функции по возмущающему воздействию
па валу механизма
= (4-44)
n^W=~i№ <4‘45>
Рассматривая (4-40) и выражения других передаточных
функций электромеханической системы, можно установить,
что рациональный выбор обобщенных параметров и исполь-
зование относительного времени т,|: существенно упрощают
задачу анализа данной системы. Действительно, ее динами-
ческие свойства полностью определяются соотношением
инерционных масс у, отношением квадратов резонансных
частот v9J1 и относительным значением электромеханической
постоянной двигателя
При записи уравнений (4-9) естественное демпфирование,
обусловленное действующими в механической части дисси-
пативными силами, не учитывалось. В гл. 1 было показано,
что механическая часть электропривода с учетом упругой
связи представляет собой недемпфированное колебательное
звено, имеющее мнимые корни pL2 = ±/П12. Однако легко
убедиться, что рассматриваемая электромеханическая си-
стема при ТМ1 # 0 и у > 1 не имеет таких корней и обла-
дает значительным запасом устойчивости. Действительно,
при этом все коэффициенты характеристического уравне-
ния Q (/?*) = 0 положительны, а предпоследний определи-
тель Гурвица после преобразований может быть представлен
и виде
Аз = ?2Ла* (? - О- (4-46)
189
с
Таким образом, в результате взаимодействия, обуслов-
ленного электромеханической связью между упругой коле-
бательной частью системы и ее электрической частью,
данная двухмассовая система утрачивает свойства консер-
вативного колебательного звена. Это объясняется демпфи-
рующим действием, которое оказывает электропривод с ли-.,
нейной механической характеристикой на упругие механи-
ческие колебания. Линейная зависимость момента, раз-
виваемого двигателем, от скорости аналогична введению,
в систему вязкого трения. Вследствие электромеханической
связи колебания скорости двигателя вызывают колебания
тока, в результате чего энергия колебаний постепенно рас-
сеивается в виде тепла в сопротивлениях якорной цепи,,
а в замкнутой системе регулирования может частично от-
водиться в сеть.
Установившиеся режимы вынужденных колебаний элект-
ромеханической системы наглядно представляются ам-
плитудно-частотными характеристиками. Если в (4-42) и
(4-43) подставить р* = /й* = /й/й12, разделить действи-
тельные и мнимые части выражений н затем определить mo/.j
дули соответствующих амплитудно-фазовых характеристик, '
то получим амплитудно-частотные характеристики по воз- )
мущению А4С1, действующему на вал двигателя: .1
(у—1) Й$ (T'mi*."РУэмЯ«) (5
[1 —у (1-f-v/S) Й#+уу8МЙ*]г-|-у2Тм^Й*(1—й#)2’ .*
(4-47).
(УЙ|-1)2
[1,-у (1+т^)й*+уу9Мй;]2+/7’мий“ (1-Й*)а ’
(4-48)'
На рис. 4-11, а представлены амплитудно-частотные ха-.’
рактеристики, рассчитанные по (4-47) и (4-48) при у = 10; ;
ТМ1 = 0,02 с; Т9 = 0,1 с для ряда значений й12. Аналогии- j
ные зависимости, соответствующие Тя = 0, приведены на ;
рис. 4-11,6. Рассмотрение этих характеристик позволяет 4
сделать ряд выводов. При наличии значительной электро-
магнитной инерции силовой цепи (Т9 = 0,1 с) на частотах,
близких к Й12, имеет место большой резонансный пикр..
причем амплитуда его возрастает по мере возрастания Й12.
Это объясняется ослаблением электромеханической связи ;
по мере увеличения частоты при данном значении Ts, что *
190
вытекает из рассмотрения выражения динамической жест-
кости
Рд = - Р/(1 + Т\р). (4-49)
С ростом частоты жесткость механической характери-
стики падает и появляется сдвиг по фазе, дополнительно
уменьшающий составляющую
момента двигателя, эквива-
лентную вязкому трению.
Кроме того, с ростом частоты
уменьшаются при прочих рав-
ных условиях амплитуды ко-
лебаний скорости двигателя;
оба фактора приводят к тому,
что с увеличением частоты
Q12 возрастают пики упруго-
го момента, а амплитуды ко-
лебаний момента и тока дви-
гателя в зоне резонанса ос-
таются на прежнем уровне.
Основную роль при этом иг-
рает электромагнитная инер-
ция: при Ts — 0 резонансный
пик практически исчезает
(рис. 4-11,6), демпфирование
резко усиливается.
Рис. 4-11. Амплитудно-частотные
характеристики электропривода с
упругой связью.
/ — О,. = 21 рад/с; 2 — П12 = 31,4
рад/с; 3 — О12 = 62,8 рад/с; -----
О 1В 20 30 40 50 60 70 c'J .
fl
Установившиеся режимы вынужденных колебаний при
возмущении, действующем на вал механизма Л4сг, предста-
вляют соответствующие (4-43) и (4-45) амплитудно-частотные
характеристики:
Лм12 (Й J = /[TWWWiW; (4-50)
^«(QJ^l/IQI. (4-51)
Сопоставляя (4-47) и (4-50), можно заметить, что дина-
мические свойства электромеханической системы в режимах
191
вынужденных колебании зависят от места приложения ме-
ханического возмущающего воздействия. Изменяется форма ;
амплитудно-частотной характеристики, которая при Й = О
дает значение Дм12 (0) = 1, в то время как в соответствии,
с (4-47) 4^12 (0) = 0. С увеличением момента инерции ме-
ханизма амплитуды колебаний момента под действием Л4с2
быстро уменьшаются, в то время как под действием мо-
мента Л/с1 они в этих условиях возрастают.
Таким образом, благодаря демпфирующему действию
электропривода с линейной механической характеристикой,
имеющей отрицательную жесткость, склонность механиче-
ской части электропривода к колебаниям подавляется и ре-
зонансное усиление колебаний ограничивается в степени,
зависящей от параметров электромеханической системы.
Во многих практических случаях подбором параметров
можно свести колебательность системы к минимуму, обес-
печив тем самым минимальные нагрузки механического
оборудования, соответствующее уменьшение его износа и
достижение более высоких точностных показателей.
4-5. ВЛИЯНИЕ ПАРАМЕТРОВ ЭЛЕКТРОПРИВОДА
НА КОЛЕБАТЕЛЬНОСТЬ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ
Из всех параметров электромеханической системы наи-
больший интерес для анализа влияния на демпфирующую
способность электропривода представляют те, которые
в процессе проектирования и наладки можно изменять про-
стыми средствами
в более или
менее широких
пределах
Инерционные массы механической части системы и жест-
кости механических связей при этих условиях являются
чаще всего заданными, хотя следует иметь в виду возмож-
ность изменения в нужном направлении соотношения инер-
ционных масс установки у за счет выбора соответствующих
передаточного числа редуктора и номинальной скорости
двигателя. Поэтому в схеме, показанной на рис. 4-12,
основным фактором, воздействуя на который можно изме-
нять динамические свойства электромеханической системы
для уменьшения ее колебательности, является динамическая
жесткость механической характеристики электропривода 0Я.
Изменения Ря (р) обеспечиваются применением различных
обратных связей либо изменением сопротивления силовой
цепи.
Рассматриваемая электромеханическая система является
системой четвертого порядка, поэтому в зависимости от
192
конкретных параметров она может иметь три сочетания
корней: 1) две пары комплексно-сопряженных корней
"1,2 = ± /йх; рзд = а2 ± /П2; 2) пару действительных
и пару комплексно-сопряженных корней pr — aj; р2 = а[;
о;),4 = а2 ± /П2; 3) четыре действительных корня. В каче-
стве прямой оценки колебательности системы удобно исполь-
зовать логарифмический декремент
Z = 2na/Qp, (4-52)
где а и Йр представляют собой показатель затухания и
резонансную частоту для той пары комплексно-сопряженных
корней, которая определяет меньшее значение Л.
Рис. 4-12. Структурная схема электромеханической системы.
Соответственно амплитудно-частотная характеристика
цанной системы в общем случае имеет два резонансных пика.
Амплитуду большего резонансного пика также можно
использовать в качестве прямой оценки колебательности.
Этот параметр называют показателем колебательности или
безразмерным коэффициентом резонансного усиления Дмакс.
Гак как значения Лмакс для одной и той же системы зависят
эт точки приложения воздействия и от выходного параметра,
этот показатель особенно удобен для оценки колебатель-
ности в режимах вынужденных колебаний. Логарифмиче-
ский декремент является общей характеристикой затухания
колебаний в системе, поэтому здесь воспользуемся этой
оценкой, ибо она позволяет ограничиться анализом характе-
ристического уравнения системы:
TVeMp‘+yTM1H!p’+T(l+veM)p| + y7’M1H!pH! + l =0. (4-53)
Рассмотрим область параметров электромеханической
системы, в которой влиянием индуктивности рассеяния
иожно пренебречь, положив Та «з 0. При этом v3M =
= T3T,aQ'i2 = 0 и (4-53) упрощается:
+ + + (4-54)
7 Чиликин М, Г, и др<
193
Предположим, что имеется возможность изменять мо'-.
дуль жесткости механической характеристики 0 в преде-*
лах от бесконечности до нуля, например за счет измене»;
ния двигателя постоянного тока от нуля до бесконеч-
ности. При этом при данных параметрах механической частц’
значение Т,,!* изменяется также от нуля до бесконечности;
(0 = с2/7?я2, ТМ1 = JiRns/c2). Рассмотрим, какими свой»;
ствами будет обладать система при крайних значениях]
варьируемого параметра Тм1#. При Тм14: = оо (0 = 0) урав--
нение (4-54) примет вид:
рЖ+1)=о,
т. е. при этом система содержит недемпфированное механи-
ческое колебательное звено с частотой свободных колеба-
ний й12. При 0 = 0 электромеханическая связь отсутствует,
колебаний тока нет, отвода энергии колебаний в электри-
ческую часть системы также нет и механическая часть
обладает свойствами, рассмотренными в гл. 1.
При = 0 (0 = оо) уравнение (4-54) также упро-
щается:
Корни этого уравнения = ±//]/у. Переходя к дей-
ствительному времени t, получаем:
Р1,2 = ± Аг/1/ГТ=±/]/'7^ =±/Йо2, (4-55)1
где П02 = j/"— частота свободных колебаний массы
с моментом инерции Л ПРИ жесткой заделке вала двигателя.
В этом случае отсутствуют колебания массы двигателя
с моментом инерции .Ц и демпфирующая способность элект-
ропривода оказывается равной нулю по причине чрезмерно
сильной электромеханической связи.
Таким образом, как при предельно слабой электромеха-
нической связи (0 = 0), так и при предельно сильной (жест-;
кой)1 электромеханической связи (0 = оо) демпфирующий,
эффект отсутствует и логарифмический декремент (4-52)
равен нулю. При увеличении 0 от нуля значение Т.,-^ =
= TM1Q12 уменьшается, логарифмический декремент воз-
растает, достигает максимума и при дальнейшем увеличе-
нии 0 -> оо вновь стремится к нулю. В этом можно убе-
диться, рассматривая приведенную на рис. 4-13, а зависи-
мость А = f рассчитанную по (4-52) и (4-54) с по-
мощью формул Кардана.
194 - '
В гл. 1 было отмечено, что значения логарифмического
декремента, обусловленного внутренним вязким трением
в механической части электропривода, лежат в пределах
Х„, т = 0,1 -г- 0,3, Причем показано, что колебательность
системы при этом значительна и для решения ряда -задач
таким демпфированием можно пренебречь. Малое демпфиро-
вание, вносимое в систему электроприводом, в этих слу-
чаях также может не учитываться. Если принять в качестве
граничного значения пре-
небрежимо малое значение
Л-.р, определяемое условия-
ми задачи, можно разде-
лить сочетания параметров
электромеханической си-
стемы на области слабой,
существенной и жесткой
электромеханической связи.
В области слабой элект-
ромеханической связи (об-
ласть III на рис. 4-13)
X < ^гр, демпфирование
пренебрежимо мало по при-
чине малой жесткости ме-
Рис. 4-13. Зависимости —
(а) 11 (®) Для электро-
механической системы при 7\ = 0.
ханической характеристи-
ки. В области жесткой
электромеханической связи
(область I на рис. 4-13, а)
X < Хгр из-за чрезмерно
большой жесткости механической характеристики. В обла-
сти существенной электромеханической связи (область II
па рис. 4-13, а) X > Л.гр, демпфирование значительно и при
оптимальной жесткости р,,,,,. и соответствующем (Т^Эопт
достигает максимально возможного при данных пара-
метрах значения А.мякс.
Из рассмотрения (4-54) и изложенного следует, что зна-
чение Х.,акс в системе без электромагнитной инерции зависит
только от соотношения моментов инерции масс у =
Кривая X •= f (7\,1;|.) на рис. 4-13, а рассчитана при у = 3,5
и ее максимум Х„акс неизменен для любых жесткостей с13
и соответственно частот Qla, но наступает при различных
значениях ролг:
Ропт-Л^МЛа^опт- (4-56)
Формула (4-56) свидетельствует о том, что чем больше
частота свободных механических колебаний системы, тем
7*
195
Рис. 4-14. Зависимости f (р)
при Г, 0.
при большей жесткости 0ОШ достигается максимум логариф-
мического декремента A,itSKC. Расчеты зависимостей X =
= f выполненные при различных у, позволили по-
лучить обобщенную зависимость %макс = f(y), приведенную
на рис. 4-13, б. Эта зависимость свидетельствует о том, что
при Тэ — 0 подбором жестко-
сти Р = 0ОПТ можно получить
существенное демпфирование
только при у 1,5, причем
с ростом у демпфирование бы-
стро возрастает и при у 9
% = оо, т. е. система имеет
действительные отрицатель-
ные. корни и при необходимо-
сти может быть представлена
тремя последовательно вклю-
ченными апериодическими
звеньями. Этим и объясняет-
ся отсутствие резонансного
пика на амплитудно-частот-
ных характеристиках на рис.
4-11, б (Т9 = 0).
Таким образом, имеем ис-
черпывающее представление
о возможном снижении коле-
бательности электромеханике- '
ской системы за счет воздейст- *
вия на ее электрическую часть
при Ts = 0. Аналогичный ана- [
лиз проведен и для более об-
щего случая Ts 0. На рис. .
4-14, а показаны рассчитан- |
ные на цифровой ЭВМ зави- |
симости % = f (р), где р = j
= Rsis/Rn. д, полученные с по-
мощью (4-52) и (4-53) при TSTK1 — 0,0027 [cP = const, Йо — 5
= Vc12Ux = 10 с-1 = const и различных значениях у. Срав-1
нивая эти кривые с приведенной на рис. 4-13, а, можно |
убедиться, что и при учете индуктивности влияние измене-1
ний жесткости механической характеристики электроприво-1
да аналогично рассмотренному выше. Обращает на себя |
внимание, что зависимость А,макс от у особенно сильно про- |
является при у < 2,5, а при.у > 3 разница между кривы- I
ми с конечным значением у и для у = оо незначительна. 1
196
На рис. 4-14, б приведены аналогичные зависимости,
рассчитанные при различных значениях Тэ при у = 1,5 и
тех же остальных параметрах, цто и на рис. 4-14, а. Эти
кривые интересны тем, что наглядно показывают, что при
малых значениях у возрастание электромагнитной инерции,
характеризуемой постоянной Та, приводит к уменьшению
колебательности электромеханической системы. Так как
индуктивность рассеяния диссипативными свойствами не
обладает, возможность ее демпфирующего действия требует
разъяснений.
При малых у система имеет две пары комплексных кор-
ней и две резонансные частоты, из которых первая пара и
первая частота характеризуют колебательность двигателя,
а вторая резонансная частота близка к частоте свободных
механических колебаний. При увеличении индуктивности
рассеяния колебательность двигателя увеличивается и мень-
ший резонансный пик амплитудно-частотной характери-
стики возрастает. Однако увеличение колебательности дви-
гателя при малом моменте инерции увеличивает электро-
механическую связь и отвод энергии механических.колеба-
ний в цепь якоря; второй резонансный пик соответственно
уменьшается. Увеличение индуктивности приводит к умень-
шению общей колебательности системы только до того ее
значения, при котором наступает равенство резонансных
пиков. Дальнейшее увеличение индуктивности вызывает
возрастание колебательности. Такие условия наступают
тем раньше, чем больше у, и при у > 5 влияние индук-
тивности в основном отрицательно. Как показывает
рис. 4-14, б, при у = 1,5 увеличение Тэ может увеличить
в 2,5 раза затухание колебаний по сравнению со случаем
Л = 0.
Если используется способ изменения жесткости 0, при
котором 7\ТМ1 — const (простейшим примером является
изменение суммарного сопротивления якорной цепи), то из
рассмотрения уравнения (4-53) можно заключить, что
в электромеханической системе при Та 0 максимально
возможное демпфирование однозначно определяется зна-
чениями и у. Действительно, изменения жесткости 0
от нуля до бесконечности приводят к изменению от
бесконечности до нуля, что в соответствии с рассмотрен-
ным выше выявляет при данных у = const и v3.., = const
единственный максимум логарифмического декремента ^макс.
Это обстоятельство дает возможность получить обобщенные
зависимости, характеризующие максимальное демпфиро-
197
вание в электромеханической системе, возможное при опти-
мальном сочетании ее параметров. Такие зависимости
Какс == f (V9m) При у = Const бЫЛИ рЭССЧИТЭНЫ НЭ ЦИфрО-
Рис. 4-15. Обобщенные характери-
стики Оэм) при ? = const.
войЭВМ [41]. На рис. 4-15
они показаны сплошными
линиями.
Расчеты, выполненные
для более общего случая,
когда при изменениях 0
претерпевают изменения
как 7\.П;, так и при-
водят к получению зави-
симостей, совпадающих с
представленными на рис.
4-15. Это позволяет утвер-
ждать, что обобщенные за-
висимости на рис. 4-15 ха-
рактеризуют при каждом
значении обобщенного па-
раметра v3M и данном у мак-
симально возможный ПО-
казатель затухания колеба-
ний в системе независимо от
способа изменения жестко-
сти механической характеристики. Поэтому кривая /, прове-
денная через максимумы кривых А,мякс = / (v3M), дает полное
представление о предельно возможном демпфировании элек-
тромеханической системы, имеющей структурную схему,
показанную на рис. 4-5.
"4-6. КОСВЕННЫЕ ОЦЕНКИ ДЕМПФИРУЮЩЕЙ СПОСОБНОСТИ
ЭЛЕКТРОПРИВОДА ПРИ УПРУГИХ КОЛЕБАНИЯХ
Упругая электромеханическая система вследствие наличия трех
перекрестных связей в своей структурной схеме (см. рис. 4-5) является
неблагоприятным объектом автоматического управления. При регу-
лировании координат такой системы использование методов теории
автоматического управления для синтеза связано со значительными
трудностями, преодолеть которые удастся лишь путем тех или иных
упрощений. Допустимость таких упрощений зависит от динамических
свойств объекта при конкретных сочетаниях параметров. Так, если
электромеханическая связь по каким-либо причинам ослаблена и демп-
фирующее влияние электропривода на механические колебания незна-
чительно, можно воспользоваться рекомендацией (13] и представить
упругую механическую часть электропривода колебательным звеном
с малым коэффициентом демпфирования, обусловленным внутренними
диссипативными силами механизма (А.= Х.В. ч). Однако если этой же
1'33
рекомендацией воспользоваться в случае сильной электромеханической
связи, обеспечивающей критическое демпфирование, задача будет без
каких-либо оснований осложнена, так как в этом случае объект регули-
рования можно представить как апериодические звенья.
Точные заключения относительно возможных упрощений можно
сделать, определив корни уравнения (4-54) или построив амплитудно-
частотные характеристики системы, но этот путь использования пря-
мых оценок колебательности трудоемок, поэтому значительный интерес
представляют косвенные оценки демпфирующей способности электро-
привода, удобные для практического пользования, хотя и имеющие
меньшую точность.
Примером такой оценки может служить критерий возможности
раздельного рассмотрения динамических процессов в электрической
и механической частях привода, полученный в [42]. Этот критерий
для разомкнутой системы генератор—двигатель (Г—Д) сформулирован
в виде следующего условия пренебрежимо слабой электромеханиче-
ской связи:
7’„TMQ%>1. (4-57)
Если условие (4-57) выполняется, можно пренебречь электромеха-
нической связью и представлять электропривод в виде двух направлен-
ных колебательных звеньев. Недостатками этого критерия являются
некоторая количественная неопределенность и тот факт, что он далеко
не охватывает всех возможных случаев,
когда электромеханической связью при
упругих колебаниях можно пренебречь.
В этом можно убедиться, применив (4-57)
к области пренебрежимо слабой электро-
механической связи на рис. 4-13, а.
В [21] предложен частотный критерий
оценки пренебрежимо слабой электромеха-
нической связи с несколько более широ-
кими возможностями. Прежде чем перейти
Рис. 4-16. Структурная
схема процесса электро-
механического преобразо-
вания энергии.
к его изложению, рассмотрим задачу кос-
венной оценки демпфирующей способности электропривода с общих
позиций. Демпфирующее действие электропривода обусловлено отво-
дом энергии механических колебаний в электрическую часть системы п
поглощением ее имеющимися здесь диссипативными элементами. Пусть
скорость двигателя гщ при вынужденных упругих механических коле-
баниях изменяется по закону cdx = Дсо1макс sin Qt. Тогда, пользуясь
воспроизведенной на рис. 4-16 структурной схемой электромеханиче-
ского преобразования энергии в рассматриваемом двигателе при соо = О,
можно определить закон изменения момента двигателя:
М = | ря | Дшхмакс sin (Q< + ф) = ЛЛДИ|КС sin (Q/ ф- ф); (4-58)
где
13 Лоумакс
ф = л —arctg TeQ; ДМмакс = -^=^=-.
Энергию колебаний, отводимую за один цикл, можно определить
по формуле
т
и
ДДЦ= (4-59)
о
199
Подставляя выражения скорости и момента, получаем:
ДДц=з 0,5Гц Дш1макс Ломакс cosip. (4-60)
Рассматривая (4-60), приходим к заключению, что пренебрежимо
слабое демпфирование может быть либо при ДЛ1ма1;с -+ 0 при данных
значениях Дсо1маКС (слабая электромеханическая связь), либо при
Аш1макс 0 ПРИ данных значениях ДЛ4макс (жесткая электромехани-
ческая связь). Кроме того, как в том, так и в другом случае отводимая
энергия колебаний дополнительно уменьшается сдвигом по фазе ф
между колебаниями момента и скорости, если он отличается от л. При
данных значениях ДсО1МаКс и АЛ4маКС наибольшая энергия колебаний
поглощается при ф = л:
макс = макс ЛЛ1 чакс/2.
Оценивать условия отвода энергии колебаний необходимо па ча-
стоте недемпфированных колебаний системы. Если какой-либо косвен-
ный показатель свидетельствует об отсутствии отвода энергии на этой
частоте, можно сделать вывод, что демпфирование отсутствует. Следо-
вательно, решение задачи об условиях пренебрежимо малой демпфи-
рующей способности электропривода сводится к поиску показателя,
зависящего как от параметров электрической, так и от параметров ме-
ханической части системы, надежно подтверждающего стпемление
к нулю энергии, поглощаемой электроприводом, па частоте недемпфи-
рованных колебаний.
Так как демпфирующее действие электропривода обусловлено эле-
ктромеханической связью, оценка степени электромеханической связи
при упругих колебаниях может служить косвенной оценкой и демпфи-
рующей способности электропривода. Во всяком случае можно утвер-
ждать, что наличие недемпфированного резонанса на частоте, свобод-
ных механических колебаний Qj2 может иметь место только при отсут-
ствии электромеханической связи. В [21] предложен в качестве оценки
электромеханической связи коэффициент электромеханической связи /гэ. г,
определяемый как отношение амплитуд колебаний момента (тока) М
к колебаниям упругого момента на частоте Qj2 при воздействии
возмущения на вал двигателя:
га/ (р) =
Э'С kwistp) p---/QI3
(4-61)
Преимуществом этого показателя является простота его определе-
ния, так как в соответствии- с (4-61) характеристические многочлены
(₽) и W'a/io (Р) ПРИ вычислениях сокращаются. Определение/гэ. с
не представляет существенных трудностей и при повышении порядка
электромеханической системы при введении инерционных управляю-
щих элементов и замыкании ее обратными связями. Впрочем, в этом
скрыт и его недостаток: при таком сокращении точная информация
о динамических свойствах объекта, естественно, утрачивается, поэтому
важно проанализировать, как связан этот показатель с прямыми пока-
зателями колебательности, хотя бы для выборочных сочетаний пара-
метров электромеханической системы.
Если (4-48) разделить на (4-47) и положить Я, =1 (Я = Я12),
можно получить для электромеханической системы, представленной
структурной схемой на рис, 4-5, следующее выражение коэффициента
200
электромеханической связи:
,v3. С— ,----------— --------- •
тм1й]2]/1 + Г5О12
Если Т.j « 0, т. с. элекгромапщтпой инерцией можно пренебречь,-
(4-62) принимает вид:
^’э.с= I/T'mi* —'/7 к,^jg, (4-63)
Л.ля этого случая были проведены расчет!г логарифмического дек-
ремента А по (4-52) 11 (4-54) и соответствующих значении г по (4-63).
В результате расчетов получены приведенные на рис. 4-17, а обобщен-
ные зависимости /гэ. с = j (у) при X = const, т. е. кривые равной коле-
а)
Рис. 4-17. Зависимости /-:э, с = f (у) при А = const для случая Тэ «=: О
(а) и /?э. с = Z (v9M) при у = оо (б).
бательности электромеханической системы. На рис. 4-17, п в качестве
границы пренебрежимо слабой электромеханической связи принято усло-
вие X — Арр — 0,25 (граница отмечена штриховкой). Значения с,
лежащие выше кривой А = Агр, относятся к области жесткой, а ниже —
слабой электромеханической связи. Внутри этой кривой заключена об-
ласть существенной электромеханической связи, где А > Агр.
Рассмотрим случай, когда Тв =/-0, но механизм обладает большой
механической инерцией и можно приближенно принять J2—<x> и
у == оо. Выше было показано, что это допущение становится приемле-
мым при у > 5, так что представляет интерес во многих практических
случаях. При этом (4-62) принимает вид:
*э.с---------, (4-64)
7’miQq I- 1 + Т’эйо
где Йо = у Cn/Ji — частота свободных колебаний двигателя при жест-
кой заделке вала механизма.
201
Для этого случая при А, = const рассчитаны обобщенные зависи-
мости ka. с — / (v3M), где = ТЭТМ1Й5. Эти зависимости приведены
на рис. 4-17, б. Они характеризуют равную колебательность электро-
механической системы при Тэ Ф 0, но у =» <х>. Здесь также в качестве
границы существенности электромеханической связи принято А,гр = 0,25
(граница отмечена штриховкой). На рисунке указаны также области
жесткой (7), существенной (II) и слабой (III) электромеханических
связей.
Зависимости, приведенные на рис. 4-12, а, б, позволяют утверж-
дать, что коэффициент ka. с дает надежный критерий оценки пренебре-
жимо слабой электромеханической связи, который можно представить
в виде
с —
Am (Qja) ।
Ам 12 (S2 ia)
(4-65)
если принять в качестве граничного значения затухания А = Агр = 0,25,
либо в виде
k9. с = Д--^—sg 0,2, (4-66)
А м 12 (^1а)
если по условиям задачи можно пренебречь значениями А АгР = 0,5.
Сочетания параметров, при которых демпфирование пренебрежимо
мало вследствие чрезмерной жесткости механической характеристики,
оценить с помощью ks. с более сложно, так как иа границе жесткой
электромеханической связи значения k3, с изменяются в широких пре-
делах. Границы жесткой и слабой электромеханических связей сли-
ваются при у < 1,4 и v3M 3, причем последнее условие совпадает
с (4-57),' но более конкретно.
Изменения /гэ. с на границе жесткой электромеханической связи
закономерны: изложенные выше соображения свидетельствуют о необ-
ходимости оценки на резонансной частоте, а при абсолютно жесткой
электромеханической связи резонансная частота равна Й02 (4-55), что
соответствует свободным колебаниям массы с моментом инерции J2 прн
жесткой заделке вала двигателя. Однако на частоте Q02 = Qt2/|/y
числитель (4-48) обращается в нуль при любом уровне демпфирования,
поэтому использовать рассматриваемый коэффициент на этой частоте
невозможно, вследствие чего границу жесткой связи по /гэ. с можно оце-
нивать ориентировочно и в ограниченных пределах. При Та = 0 и
у > 1,4 ее можно описать приближенной зависимостью /гэ, с. гр = 18
1g 0,834 у. При у > 5 и Тэ Ф 0 границу жесткой электромеханической
связи можно ориентировочно оценивать условием ka. с. гр ~ l/v,M.
В области, где вследствие влияния электромагнитной инерции
границы жесткой и слабой электромеханических связей сближаются,
существенное влияние на поглощение энергии механических колебаний
электроприводом в соответствии с (4-60) оказывает сдвиг по фазе ф
между колебаниями момента М и скорости toy двигателя, поэтому при
значительном влиянии электромагнитной инерции его следует учиты-
вать, определяя коэффициент электромеханической связи по активной
составляющей момента двигателя:
^э.с. а —
Ли (Q13) Icos^ (Qia) I
^4112 (Лй)
= А9.с|СО8ф(Й12)|.
(4-67)
202
Для рассматриваемой системы этот коэффициент с учетом (4-58)
определяется соотношением
с. а= ^э. с ~ г ~ ' • (4-68)
Vl+^Qh Гм1£212 (1 +Г1ЙМ
Кроме того, как показывает анализ, при у > 5 более точную оценку
пренебрежимо малого демпфирования дает условие
где
^э.с.а—
Wm (р)
W М 12 (р)
I COSф (Ярез) I <о,1,
р = /^рез
(4-69)
^рез — Q12 + Яэ. м = VЯр2 + 1/71 эТ’м! • ’
Зависимости, приведенные на рис. 4-17, а, б, свидетельствуют
о наличии связи между значениями k3, с и А, тем более определенной, чем
слабее электромеханическая связь. Наличие этой связи вызывает есте-
ственное стремление использовать коэффициент электромеханической
связи не только для оценки пренебрежимо слабой электромеханиче-
ской связи, по и для определения ее оптимальных по условию минимума
колебательности значений. На рис. 4-17, а показана зависимость
/сэ. с.Опт = f (?) (кривая 1), с помощью которой можно определить, ис-
пользуя (4-63), оптимальную жесткость механической характеристики
при Тэ ~ 0:
Ропт “ ^Э. С. О11Т^1Я.12‘ (4?70)
Так как значения /гэ. с_ опт при у > 1,4 лежат в пределах 1,1—1,8,
для ориентировочных расчетов при Т3 « 0 можно принимать k3, с. опт =
— 1,4. Аналогичная зависимость k3, с. опт —f (чэм) при Т3 =/= 0 и у = оо
показана на рис. 4-17, б пунктирной кривой. В более общем случае
при различных значениях у такие же зависимости приведены 'на рис. 4-15
(штриховые кривые). Эти зависимости позволяют определять опти-
мальные значения модуля статической жесткости механической харак-
теристики при любых параметрах двухмассовой упругой электромеха-
нической системы с помощью (4-62):
Ропт = ^э. с. опт71Я121^"1-{-Т’эЯгл» (4-71)
Штриховая кривая 2 на рис. 4-15 представляет значения коэффи-
циента электромеханической связи k3, с. п, соответствующие предельной
демпфирующей способности электропривода. Эта зависимость свиде-
тельствует б том, что необходимым условием максимальной демпфи-
рующей способности являются значения коэффициента электромехани-
ческой связи, близкие к единице. К. сожалению, это условие не является
достаточным, поэтому при использовании его для ориентировочных оце-
нок необходимо иметь в виду все вышеизложенное.
Исходя из аналогичных соображений, предложены другие косвен-
ные оценки, более точно характеризующие демпфирование в области
существенной и жесткой электромеханических связей. Эти оценки,
в отличие от рассмотренной, имеют максимум при изменениях жест-
кости механической характеристики, удовлетворительно совпадающий
с максимумом демпфирующей способности. Их использование предста-
вляет интерес для ориентировочных оценок оптимальных параметров
в замкнутых по координате первой массы и ее производным электро-
механических системах.
203
“я
Рис. 4-18. Расчетная электромеха-
ническая схема редукторного элект-
ропривода.
4-7. НЕЛИНЕЙНЫЕ ЭЛЕКТРОМЕХАНИЧЕСКИЕ КОЛЕБАНИЯ
В СИСТЕМЕ С КИНЕМАТИЧЕСКИМ ЗАЗОРОМ
В гл. 1 были выявлены важные особенности механической части
электропривода, связанные с наличием кинематических погрешностей
передач и зазоров. Анализ показал, что при наличии погрешности
передач пульсации передаточного числа являются внутренними пе-
риодическими возмущениями (их частота пропорциональна скорости
привода), вызывающими параметрическое возбуждение упругих меха-
нических колебаний. Представляет интерес установить, как влияет на
установившиеся режимы коле-
баний, возбуждаемых внутрен-
ними возмущениями, рассмот-
ренное выше демпфирующее дей- ;
ствие электропривода и нели-
нейность механической части,
обусловленная зазором.
Возможность регулярного
размыкания и замыкания зазо-
ров при колебаниях практике- ,
ски исключает использование
применявшейся выше линеариза-
ции системы в области малых отклонений от точки статичесиого рав- ’
новесия. В связи с рассмотрением установившихся колебательных
процессов необходимо воспользоваться методом гармонической линеа-
ризации, который позволяет выявить важ-
нейшие физические особенности существенно
нелинейной системы [40\ В качестве объекта
исследования выберем электромеханическую
систему с двигателем постоянного тока, элек-
тромеханическая схема которой представле-
на на рис. 4-18. Для некоторого упрощения
анализа ограничимся рассмотрением инер-
ционных механизмов с у > 5. При у > 5
процессы в системе близки к процессам в од-
номассовой системе с у = оо , так как при
этом масса механизма движется со средней
скоростьюф2 ~ const, практически не участ-
вуя в колебательном процессе.
В данном случае упругий момент
является нелинейной функцией F (Дф) раз-
ности углов Дф = ф1 — ф2' (рис. 4-19). Пола-
гая в установившемся режиме = const и учитывая нелинейности,
для схемы на рис. 4-18 записываем следующие уравнения, отражаю-
щие динамику системы:
, . _ , _ di„
cia-F (Дф) = 71~-1.
Перейдя при нулевых начальных условиях к операторной форме,
разрешим (4-72) относительно угла закручивания валопровода:
(Л7,яР^+'71р2-НРр) Дф (р) + (1 -\-Т яр) F (Дф) = А4Ср —
- (₽Р + J1P2+ JiTzP*) Дф2 (р), (4-73)
*П
ЛРз
«1
«а
4-19. Зависи-
Рис.
масть М& = f (Дф).
(4-72)
&д> .
204
s
где Дф2 (р) == Дфг (0 = Дфмакс 31п № — изображение возмущения, обу-
словленного неравномерностью хода; Л4ср = сия/Дя2 — рй2 — средний
момент нагрузки.
Для анализа установившихся режимов вынужденных колебаний
примем, что Дф на входе нелинейного элемента изменяется синусои-
дально с частотой изменения возмущения и содержит постоянную со-
ставляющую, обусловленную средним моментом нагрузки Л4ср, т. е.
решение (4-73) будем искать в виде
Дф= Дф0 + Л sin й/ = Дф0 + Дф_,. (4-74)
При этом нелинейную функцию F (Дф), выделив постоянную соста-
вляющую и основную гармонику, заменим приближенным уравнением
гармонической линеаризации
7?(Дф) = <70(Л, Q> ДФО)+?1(Л’ Й’ ДФО) ДФ~, С4'75)
2л
где' </о(л> ДФо)~^ f Р (Дфо, Л sin Ш) d (Й7);
о
2Л
qt (Л, й, Дф0) = —-г I F (Дфо, A sin й/) sin Й/ d (Й7).
ОТА J
о
Положим Ш = и и с учетом обозначений, приведенных на рис. 4-19,
вычислим коэффициенты уравнения (4-75), имея в виду, что обычно при
наличии постоянной составляющей нагрузки зазор в противоположную
движению сторону при колебаниях полностью не выбирается:
«а _________________
<7о(Л1, Дфо) = Л. ( С12 (Дфо + A sin u) du = ~ Т/ —
Ь »} JI у \ /1 /
С12Дфо, £12 ДфОагс5|п Дфо. (4
х? ОТ А
1 ?*
<7!(Л, дфо)=^д I 4а (Дфо + Л sin и) sin и du —
4
_ 4а 42 . Дфо 42
л arcsin—^- —
(4-77)
Уравнение (4-73) при подстановке в него гармонически линеаризо-
ванной функции (4-75) может быть записано в виде системы двух урав-
нений, отражающих баланс постоянной и переменной составляющих
решения:
У1 _ ( Дфо? _ + 4^0 arcsin ^ = М .
Л f \ A f £> ОТ А
^1Тяр3 + JiP2 + ₽р) Дф~ (р) + (1+Л1Р) х
X _ с_12 arcsin У1 _ (^£о\21 Дф~ (р) =
I л ОТ А ОТА f \ А / I
— — (₽Р + ЛР2 + 7171 яр3) Дф2 (р).
205
Полученные уравнения для возможности более общего анализа
целесообразно представить в относительных единицах и произвести
ряд преобразований. Выполнив эти операции, получим:
iV'-(тг)’-Ф + <4-78)
Й<'^НЛ+тэт)'+*1*«»-м-
= ~ р++S pS)ЛЛ/*м (4‘79)
где
q^ =; 1 _ 1 arcsill Лф*о _ j/'i.-fer (4-80)
с» 2 л А,„ лА, у \ A,f. ) v '
Д4,12~ = с12Д<р~/УИб — первая гармоника упругого момента, отнесен-
ная к базовому моменту;
ДТП, =-^^(-)- = sin Qf =- AM, M..iKC sin Q/; (4-81)
/И/ x /VI x
A, — с\2А1Мь — A/Arp,-; — Л1,|2~макс — амплитуда периодической со-
ставляющей (4-74) в относительных единицах; Д<р,0 — Arp()/Aiprt — по-
стоянная составляющая решения (4-74), отнесенная к базовому углу
закручивания валопровода
АгрГ) — Мй/с12.
Уравнения (4-78) и (4-80)
не зависят от частных парамет-
ров системы электропривода,
поэтому путем их решения мож-
но получить обобщенные зави-
симости относительного коэффи-
циента гармонической линеари-
зации q от относительной ам-
плитуды колебаний А, при зна-
чениях постоянной составляю-
щей нагрузки Л4,ц.р ~ const.
Рассчитанные зависимости q =
— f И*) при М,ср — const пред-
ставлены па рис. 4-20.
Рассматривая эти зависимо-
сти, можно убедиться, что при
неизменной средней нагрузке
передач колебания с системати-
Рис. 4-20. Зависимости q = / (А,)
при Л1,ср const.
ческими зазорообразованнямн с увеличением их амплитуды сопровож-
даются уменьшением коэффициента гармонической линеаризации q,
поэтому механическая система с зазором подобна рассматриваемым
в нелинейной механике системам с уменьшающейся по мере увели-
чения нагрузки жесткостью 115|.
Для анализа установившихся параметрически возбуждаемых коле-
баний получим выражение амплитудно-частотной характеристики ли-
206
неаризованнои системы:
А
Л1 * г?. \М
М:1КС
макс
7яЙ2(1/7я7\,гЙ5-Й-/Й5) + (^а/^о)2
(4-82)
[q (4*, <И*ср) - Й2/Й§]2 + ТЙЙ2 [q (Л,„, МфСр)-|-
+ 1/WHW
Таким образом, в исследуемой нелинейной системе амплитуды коле-
баний зависят при данной частоте возмущений не только от возмуще-
ний АЛ4„, но и от средней на-
грузки передач Л4,(1Ср. Кривые
па рис. 4-20 свидетельствуют о
том, что каждому значению ам-
плитуды колебаний А* соответ-
ствуют определенные значения
средней нагрузки Л4<,ср, при ко-
торых ?=1, т. е. зазоры не
размыкаются. В этих пределах
рассматриваемая система яв-
ляется параметрически возбуж-
даемой системой с линейной за-
висимостью Л412 = / (Aq>) и ее
свойства можно проанализиро-
вать с помощью (4-82), полагая
<7 (Лф, М *Ср) — 1.
Расчет амплитудно-частот-
ной характеристики для систе-
мы с зазором может быть про-
изведен графоаналитическим цу-
гом. Для этой цели при задан-
ных параметрах электромехани-
ческой системы необходимо с
помощью (4-82) рассчитать се-
мейство зависимостей
зуя соотношение
Рис. 4-21. Зависимости А :|. — f (q)
при Й = const для слабо демпфи-
рованной системы.
...12 = / (<?) при й — const. Далее, исполь-
— АЛ,#макс,
(4-83)
это семейство следует пересчитать в зависимости A,t — j (<7) при Й =
--const, соответствующие'заданному возмущению ЛЛ4,,}1аКс. Располо-
жив полученные зависимости Ai: = f (</) при Q = const в одних коор-
динатах с зависимостями q~f(A^) при Л4.,;(.р const (рис. 4 21),
в точках пересечения этих семейств получим решение задачи в виде
значений Л.,д;, Л4ФСр*, Qfr, где /г — 1, 2, 3 и т. д.
Расчет амплитудно-частотных характеристик слабо демпфирован-
ной нелинейной системы при /„==0, Тт = 1,3 с, Qo — 22 рад/с и
ЛД1;.,„акс -- 0,15 приведен па рис. 4-21. На этом рисунке пунктирными
линиями нанесены зависимости q — f (A.t) при /И5,ср = const в широ-
ком диапазоне изменений амплитуды колебаний. Там же сплошными
кривыми показаны зависимости A... = f(q''), рассчитанные по (4-82)
207
при указанных выше параметрах. Точки пересечения сплошных и пунк-
тирных кривых па рис. 4-21 дают решения системы. Амплнтудпо-частот-:
ные характеристики, соответствующие этим решениям, представлены
па рис. 4-22, а.
В случае слабого демпфирования обнаруживается значительное
изменение динамических свойств привода при колебаниях, сопровож-
дающихся зазорообразованнями. Как выше было отмечено, вследствие
уменьшения коэффициента гармонической линеаризации при возраста-
нии амплитуды колебаний можно установить аналогию рассматривае-
мой системы с механическими нелинейными системами, в которых уве-
Рис. 4-22. Амплитудно-частотные характеристики слабо демпфирован
ной системы с зазором (а) и зависимости А* = f (А4 ,kCp) (б).
личение амплитуд вызывает уменьшение жесткости с]2. Действительно,
как это следует из рассмотрения рис. 4-22, а, нелинейность, обуслов-
ленная зазором в передачах, вызывает значительную деформацию ре-
зонансной кривой, «затягивает» резонансные колебания в область ча-
стот, меньших резонансной частоты, определяет неоднозначность ампли-
тудно-частотных характеристик в широком диапазоне изменения ча-
стоты возмущений. Здесь же обнаруживается своеобразие системы с за-
зором, связанное с тем, что нелинейность ее существенно зависит от
средней нагрузки передач Л4!гср. При достаточно большой нагрузке
зазорообразовапия исключаются и система является линейной.
Зависимости, приведенные на рис. 4-21 и 4-22, а позволяют понять
физику явления. Кривая 3 па рис. 4-22, а представляет собой ампли-
тудно-частотную характеристику линейной системы. Увеличение ско-
рости электропривода от нуля приводит к возрастанию частоты Я и
к соответствующему возрастанию переменной составляющей нагрузки
передач. До тех пор пока переменная составляющая меньше средней
нагрузки передач, зазор замкнут и система линейна. При АД-ср — 0,2
(кривая 7) равенство Л» = ЛЛ4*ср наступает в точке К и при даль-
208
нейшем роете амплитуды зазор открывается. Это приводит к уменьше-
нию гармонически линеаризованной жесткости и к смещению зоны ре-
зонанса ближе к точке К. За счет этого амплитуда при той же частоте
дополнительно возрастает, коэффициент гармонической линеаризации
вновь уменьшается — идет лавинообразный процесс нарастания ам-
плитуды до точки L, где наступает равновесие. При уменьшении ча-
стоты Й амплитуды возрастают вплоть до точки М, где максимальная
амплитуда при данной частоте в кривой = / (<у) становится меньше
значения q, определяемого кри-
вой q = f (Л при ЛГцр = 0,2.
Условия резонанса нарушают-
ся, н амплитуды уменьшаются
до малых значений, определяе-
мых кривой линейной системы.?.
Увеличение средней нагруз-
ки передач приводит к возра-
станию амплитуд колебаний
(рис. 4-22, а, кривая 2), а ха-
рактер деформации кривой ос-
тается тем же. Нетрудно видеть,
что в зоне линейного резонанса
пел и ценность, обусловлен пая
зазором, ограничивает амплиту-
ды колебаний значениями, бли-
зкими к средней нагрузке пере-
дач, по расширяет зону резо-
нансных колебаний в сторону
низких частот тем в большей
степени, чем меньше средняя
нагрузка.
Интересны зависимости
А,,, = / (Л4*Ср) при Й = const,
приведенные для двух значений
частоты на рис. 4-22, б. При ча-
стоте Q/Qo = 0,5 колебания с
зазорообразоваииями, возник-
шие прн малой средней нагруз-
ке, с увеличением средней на-
Рис. 4-23. Амплитудно-частотные
характеристики системы с зазором
прн высокой демпфирующей спо-
собности электропривода.
1рузки увеличиваются по кри-
вой АВ. В точке В зазор перестает открываться, и амплитуда колеба-
ний в линейной системе быстро уменьшается до значения, соответст-
вующего точке С. При уменьшении нагрузки амплитуда остается не-
большой до точки D, где зазор вновь начинает открываться и ампли-
туда возрастает до кривой АВ. Аналогичные переходы при частоте
Й/Йо = 0,7 обозначены точками A'B'C'D'.
Влияние демпфирующего действия электропривода па установив-
шиеся колебания в системе с зазором иллюстрируют к’ривые 1—3
(рис. 4-23), опи соответствуют линейной системе прн параметрах,
имеющих сочетания; Тя = 0,03 с, ГМ1 = 0,03 с (кривая 7); Тя =
— 0,1 с, Тм = 0,03 с (кривая 2) и Гя — 0,1 с, Twi —- 0,06 с (кривая 3).
Для всех этих кривых = 22 рад/с. Демпфирование при параметрах,
соответствующих кривой 3, ослаблено, поэтому рассчитанные при
Л/14„.макс — 0,15 зависимости A* — f (П/Йо) при Л4ФСр = 0,1 (кривая 3'),
ЛД,ср 0,4 (кривая 3") и ТИ,5ср = 1,0 (кривая 3"') имеют рассмотренный
выше характер, но максимально возможные амплитуды снижаются.
209
При увеличении демпфирования происходит не только снижение ам- ’ '
плитуд, но и сужение области нелинейного резонанса (кривые 2' при
= 0,1 и 2" при М.е р = 0,4). При максимальном демпфировании
кривые для нелинейного резонанса практически совпадают с характери- ’
стикой 1 линейной системы.
Выбор оптимальных параметров линейной системы обеспечивает ;
минимум ее колебательности и при колебаниях с зазорообразованнямн. 1
Это обстоятельство позволяет в случаях, когда целью оптимизации |
является снижение нагрузок передач, ограничиваться подбором пара- |
метров, обеспечивающих максимум демпфирующей способности линей-
ной системы. 1
Метод гармонической линеаризации является эффективным средст- ,
вом анализа физических особенностей установившихся колебательных ;
процессов в нелинейных электромеханических системах. Однако необ- J
ходимо иметь в виду, что его применение дает близкие к истине резуль-
таты при условии, что линейная часть системы является фильтром низ- ।
кой частоты. Если характеристическое уравнение для (4-73) записать
в виде
<2(р)Дср(р)+/?(р)Е(Д<р) = 0,
можно сформулировать следующие условия удовлетворительной точ-
ности метода [40]: 1.) степень многочлена R (р) должна, быть ниже сте-
пени многочлена Q (р); 2) многочлен Q (р) не должен иметь мнимых
корней и корней с положительной вещественной частью; зависимость
q (Л) должна быть плавной. Нетрудно убедиться, что для рассмотрен- I
ной системы эти условия выполняются. \
Сопоставления зависимостей, полученных выше с помощью гар-
монической линеаризации, с аналогичными зависимостями, получен- •
ными путем решения (4-72) на ЭВМ при учете реальных условий двм- й
жения системы с переменным передаточным числом и зазором (см. § 1-7), [
свидетельствуют о том, что гармоническая линеаризация дает правиль- i
ные представления о характере процессов и физических свойствах 1
нелинейного объекта. Количественные расхождения при определении .1
резонансных амплитуд колебаний достигают 30—40% и объясняются 3
спецификой действия внутреннего возмущения, обусловленного пуль-
сациями передаточного числа. Запись (4-73) предполагает, что возму-
щающий момент ДЛ'1 (4-81) приложен к массе якоря двигателя постоянно,
а в действительности при размыкании зазора его действие прекра-
щается. Несмотря на эту особенность, снижающую точность количест- ‘
венных оценок, использование метода гармонической линеаризации и
в данном случае привело к успешному решению задачи аналитического
изучения свойств нелинейной электромеханической системы, |
<
4-8. ОСОБЕННОСТИ ЭЛЕКТРОПРИВОДА С СИНХРОННЫМ J
ДВИГАТЕЛЕМ J
Проведенный выше анализ динамических процессов в i
электромеханической системе, которая в установившихся ]
режимах может быть с достаточным приближением пред- 1
ставлена структурной схемой на рис. 4-5, охватывает широ- 1
кий класс электроприводов переменного и постоянного тока. ]
В предшествующем изложении было доказано, что для боль- |
210 I
шинства разновидностей двигателей уравнение динамиче-
ской механической характеристики в этих режимах линеа-
ризуется и динамическая жесткость имеет обобщенное вы-
ражение (4-49). Исключение представляет лишь синхрон-
ный двигатель и его разновидности, динамика которого
в первом приближении описывается системой (4-8), а струк-
турная схема электропривода с синхронным двигателем по-
казана на рис. 4-4. С помощью этой структурной схемы
можно получить передаточную функцию электропривода,
считая выходным параметром скорость, а входным — мо-
мент нагрузки Л4С:
~ Мс(р) ~ ” |ИЛУ + Р + Л,йев) ’ . (4"84)
где QCB — Vb/J-s — частота свободных недемпфированных
колебаний.
С помощью той же схемы можно получить передаточную
функцию по нагрузке для момента двигателя М:
W'M (р)=м (р)/мс (р) = - (р+тийгв)/(тир2+р+тда.
(4-85)
В ряде случаев нас может интересовать в качестве выход-
ного параметра угол поворота ротора относительно оси
поля статора о = <р0 — ф или, что то же, синхронная со-
ставляющая момента двигателя Л4СШ) « Ьо. Соответствую-
щую передаточную функцию легко получить из (4-84), если
учесть, что при <о0 = 0 со — —Дсо и 6 есть интеграл от Дсо
по времени:
Г(|(р) = --Дсо(р)/Л4с (Р)Р= 1/Р (Л,Р2 + р + Л^св)- (4-86)
Амплитудно-фазовая характеристика электропривода,
соответствующая (4-86), имеет вид:
Ге (/Й) = . (4-87)
р[Гм (fiM-Q-y + Q"]
Амплитудно-частотная характеристика для тех же усло-
вий
Л£(Й) -
Р (Qcb-Q2)S + Q2
(4-88)
и соответствующая фазо-частотнад. характеристика
ф(й) = —arctg р (4-89)
1 м ЦйСВ —‘ W )
211
Таким образом, если момент нагрузки изменяется по
СИНуСОИДаЛЬНОМу Закону Мс = ДЛ1С. макс sin то угол 0
изменяется по такому же закону:
6 = 0м;1КС sin (QZ + гр) = АЛ4,..мак36 (Q) sin [Ш + ф (Q)]. (4-90)
Согласно (4-90) амплитуда и сдвиг по фазе между коле-
баниями зависят от частоты. Рассматривая эти зависимости,
можно убедиться, что они соответствуют колебательному
звену с коэффициентом демпфирования, определяемым жест-
костью асинхронной механической характеристики двига-
теля. Чем больше модуль жесткости этой характеристики,
тем меньше при колебаниях синхронная составляющая мо-
мента и тем меньше резонансный пик, наступающий при
частоте колебаний момента нагрузки, близкой к частоте
свободных колебаний электропривода QC1).
Если представить характеристическое уравнение си-
стемы в виде
р-+рЛ + 1=0, (4-91)
где p^dldt^plSl^,
I* = ^св;
Тм* = 7’м^св = /я^св/Р,
то можно установить его полное совпадение с характери-
стическим уравнением упругой электромеханической си-
стемы (4-53) при = 0 и у — со. Это означает, что электро-
привод с синхронным двигателем эквивалентен асинхрон-
ному электроприводу с упругой механической связью при
бесконечно большой массе механизма. Роль упругой меха-
нической связи при этом выполняют силы электромагнит-
ного взаимодействия между полем ротора и полем статора.
Это важное обстоятельство вновь подчеркивается потому,
что-оно позволяет распространить выполненный выше ана-
лиз динамических свойств электромеханической системы и
на электропривод с синхронным двигателем. Если учесть
электромагнитную инерцию демпферной обмотки, можно
при работе в установившемся колебательном процессе,
когда колебания совершаются в пределах небольших сколь-
жений относительно скорости поля машины ю0, записать
уравнение динамической механической характеристики для
асинхронной составляющей момента с большей степенью
приближения:
М = [₽д (р) + b/р] (®о - и), (4-92)
212
где динамическая жесткость линеаризованной характери-
стики для асинхронной составляющей момента в соответст-
вии с (3-75) определяется соотношением
Структурная схема электропривода с синхронным двига-
телем, учитывающая электромагнитную инерцию демпфер-
ной обмотки, представлена па рис. 4-24. С помощью- этой
схемы нетрудно получить передаточную функцию для ско-
рости по возмущающему воздействию:
(р) =------. (4-93)
Характеристическое уравнение (4-93) можно выразить
через обобщенные параметры и относительное время:
ТВТMQ“up’ + + (1 + ТвТ^а) р., + = О-
Если обозначить 7\7\№.„ == VgM и 7\,QCI! = 'At*, то
характеристическое уравнение примет вид:
<,мр* ++л’эМ)Р*+ А* -0. (4-94)
Сравнивая (4-94) с (4-53) при у =- оо, можно установить
их полную аналогию, поэтому весь проведенный выше для
этих условий анализ и
полученные зависимости
полностью применимы
для оценки динамиче-
ских свойств синхрон-
ного электропривода с
учетом влияния элект-
ромагнитной инерции на
асинхронную составляю-
щую его момента. В част-
Рис. 4-24. Структурная схема электро-
привода с синхронным двигателем при
учете электромагнитной инерции дем-
пферной обмотки.
ности, можно заключить, что высказанное выше на основа-
нии (4-88) утверждение о том, что резонансное усиление
колебаний в синхронном электроприводе тем меньше, чем
больше р, — неверно. Как было показано выше, электро-
магнитная инерция при у = оо всегда увеличивает коле-
бательность электромеханической системы. Если при 7\ — 0
и р = оо колебания скорости и угла 6 не могут возникать,
то при Тв 0 и р = оо (если изменять р, меняя активное
сопротивление демпферной обмотки) демпфирование тео-
ретически отсутствует. Это означает, что существует опти-
мальная жесткость механической характеристики асинхрон-
213
ной составляющей момента и оптимальное активное сопро-
тивление демпферной клетки, при которых демпфирование
максимально и дальнейшее увеличение жесткости может
приводить к его ухудшению. Об оптимальной жесткости
можно судить по кривым на рис. 4-15 и соответствующим
выражениям коэффициента электромеханической связи (см.
§ 4-6).
Г лава пятая
ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПЕРЕХОДНЫЕ
ПРОЦЕССЫ
5-1. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ЭЛЕКТРОПРИВОДА
С ЛИНЕЙНОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ
ПРИ СКАЧКЕ ЗАДАНИЯ
Общие сведения о механических переходных процессах
электропривода уже были изложены в § 1-4. При этом рас-
смотрении в качестве управляющего воздействия прини-
мался момент двигателя, который либо нарастал скачком
до некоторого значения М = const, либо задавался как не-
зависимая функция времени М (£). Приведенный выше обзор
электромеханических свойств двигателей и динамических
установившихся процессов показал, что момент двигателя
в динамике из-за наличия электромеханической связи всегда
зависит от скорости. Поэтому данная глава посвящена
анализу электромеханических переходных процессов пуска,
изменения скорости и торможения электропривода, а также
переходных процессов, вызванных изменением нагрузки,
с учетом зависимости момента от скорости, определяемой
уравнением динамической механической характеристики.
При этом, как и в гл. 4, основное внимание уделено рас-
смотрению переходных процессов электропривода с обоб-
щенным двигателем, динамическая механическая характе-
ристика которого описывается линейным дифференциальным
уравнением первого порядца (см. рис. 4-5).
Изучая динамические свойства разомкнутой системы
электропривода как объекта автоматического управления,
целесообразно в качестве управляющего воздействия рас-
сматривать скорость идеального холостого хода ®0, кото-
рая определяется для электропривода постоянного тока
приложенным напряжением (/я, а для асинхронного элект-
ропривода частотой тока статора
214
Сначала рассмотрим переходные процессы, возникающие
при изменении управляющего воздействия скачком. При-
мерами таких переходных процессов могут служить пуск
электроприводов переменного и постоянного тока включе-
нием на сеть с введенными в цепь роторной или якорной
обмотки добавочными сопротивлениями, переключение на
динамическое торможение или в режим торможения про-
тивовключением при тех же условиях. В большинстве по-
добных переходных процессов электромагнитная постоян-
ная времени Тэ за счет введения добавочных сопротивле-
ний в силовую цепь значительно снижена, а электромехани-
ческая Т„, напротив, увеличена, поэтому влияние электро-
магнитной инерции на характер переходных процессов не-
велико и можно принять Тэ & 0.
В зависимости от параметров электромеханической си-
стемы динамические процессы в упругой механической
части электропривода могут рассматриваться либо без учета
электромеханической связи, либо с ее обязательным учетом.
Если электромеханическая связь является пренебрежимо
слабой, то демпфирующим влиянием электропривода на
условия движения механической части можно пренебречь.
При этом переходные процессы электропривода в среднем,
без учета возможных механических колебаний, можно рас-
сматривать, полагая механические связи жесткими (с12 =
= сю). Определяемый при этом закон изменения момента
двигателя М — f (/) может быть использован для анализа
развития колебаний в механической части в качестве упра-
вляющего воздействия, как это было принято в гл. 1.
Следует заметить, что случаи пренебрежимо слабой
электромеханической связи на практике встречаются весьма
часто (у < 1,5, Qj2 >50 с-1, > 3 и т. п.). Колебания,
возникающие в механизме, слабо отражаются на перемен-
ных электрической части системы, и внешне переходные
процессы электропривода выглядят вполне благополучно
даже в тех случаях, когда колебания в механической части
вызывают ускоренный износ механического оборудования.
На практике распространены и случаи, когда электро-
механическая связь является существенной или жесткой.
При этом правильное представление о характере переходных
процессов в системе можно составить, только рассматривая
движение электропривода с учетом упругости как единой
электромеханической системы. Сначала рассмотрим более
простые случаи, когда можно принять с12 = сю. При сфор-
мулированных допущениях электропривод с линейной ме-
215
химической характеристикой имеет структурную схему,
представленную на рис. 4-10, б. Передаточную функцию по
управляющему воздействию можно записать в виде
^(р)=1/(Лр + 1). (5-1.)
Электропривод представляет собой апериодическое звено
с постоянной времени Т„. Из теории регулирования извест-
но, что при подаче на вход такого звена типового воздей-
ствия в виде единичного скачка переходная функция h (i)
имеет вид [11]:
/г(/) = (1 — (5-2)
Если для двигателя постоянного тока в качестве управ-
ляющего воздействия принять напряжение ия, то переход-
ную функцию (5-2) можно представить в виде
^(Z) = ^B(l-e’z/4 (5-3)
рость электропривода
Рис. 5-1. Переходная
функция электропривода
с линейной механической
характеристикой.
где k№ = 1/с— коэффициент передачи двигателя.
Переходная функция (5-2) показана на рис. 5-1. Ско-
при подаче на вход управляющего
сигнала скачком меняется по экс-
поненте с постоянной времени Тю.
Полное время переходного процес-
са tn п теоретически равно беско-
нечности, а практически считают
процесс закончившимся, когда ско-
рость достигает 95% установивше-
гося значения, чему соответствует
tn. „ = зтм.
Переходные процессы электро-
привода многообразны и протекают
во многих случаях при ненулевых
начальных условиях, поэтому бо-
лее полные представления о них можно получить, решая
задачу классическим или операторным методом с необходи-
мым учетом всех условий работы электропривода.
Рассмотрим переходный процесс изменения скорости
электропривода от начального значения ® = (онач до но-
вого значения, определяемого скачком управляющего воз-
действия <в0 или нагрузки Л4С. В соответствии со структур-
ной схемой на рис. 4-10, б движение электропривода опи-
сывается следующим дифференциальным уравнением:
216
где ®с _ ю0 — 7Ис/р = ю0 — Л®с — установившееся зна-
чение скорости;
Дюс — статический перепад скорости, обусловленный
моментом нагрузки (рис. 5-2, а).
Решение неоднородного уравнения (5-4)
со = <ос + Аё~(/Тк
при начальных условиях 1=0, соо = мнаЧ имеет следую-
щий вид:
со = сос + (юнач — (ос) e~t/T^. (5-5)
Так как в соответствии с уравнением механической ха-
рактеристики со ==(Л4К.3 — Л4)/(3, дифференциальное урав-
Рис. 5-2. Механическая характеристика (а) и зависимости ©, М = f (/)
(6).
нение системы, разрешенное относительно момента, анало-
гично уравнению (5-4):
Tw-^- + M=Mzi (5-6)'
При начальных условиях t = О, М = /Инач и Мс =
= const (рис. 5-2, а) решение (5-6) имеет вид:
М = Мс + (Мнач-Мс)е-//г«. (5-7)
Графики переходного процесса, соответствующие (5-5)
и (5-7), представлены на рис. 5-2, б. Продифференцировав
уравнение (5-5), получим зависимость ускорения электро-
привода е от времени:
8 = еичв“'/т», (5-8)
где 8нач = (<ос — ©иач)/^» — начальное ускорение электро-
привода.
217
Рассматривая рис. 5-2, б, видим, что уменьшение уско-
рения по мере возрастания скорости, определяемое (5-8),
объясняется непрерывным уменьшением динамического мо-
Рис. 5-3. Схема реостатного пуска
(а) и соответствующие электроме-
ханические характеристики (б).
мента 7Ид — М — Мй от
начального 'значения
Мд. нач = Мнач — Мс до ну-
ля по мере возрастания
скорости от со = сонач до
со = ®с. Если бы динами-
ческий момент в переход-
ном процессе оставался рав-
ным начальному Л4Д. пач =
= const, скорость (о изме-
нялась бы по линейному
закону, как показано на
рис. 5-2, б касательной к
начальной точке кривой
со (/). Построения на рис.
5-2, б подтверждают физи-
ческий смысл электроме-
ханической постоянной электропривода Т„: это время,за
которое скорость и момент достигают установившегося зна-
чения при Мя = Мд. нач = const.
Зависимости (5-5) и (5-7) являются общими и позволяют анализиро-
вать характер переходных процессов
нической характеристикой во всех
режимах. Воспользуемся получен-
ными общими выражениями для ана-
лиза переходных процессов электро-
привода постоянного тока с двига-
телем независимого возбуждения.
Рассмотрим процесс реостатно-
го пуска такого электропривода,
предполагая, что системауправления
электроприводом в процессе пуска
обеспечивает автоматическое пере-
ключение ступеней пускового рео-
стата (рис. 5-3, а) таким образом,
что начальное и конечное значения
момента двигателя остаются неиз-
менными (рис. 5-3, б). В начальный
момент пуска в якорную цепь введе-
электропривода с линейной меха-
Рис. 5-4. Зависимости со, /я =
= / (б при пуске двигателя с
независимым возбуждением.
но полное сопротивление пускового
реостата, которое ограничивает пусковой ток значением /я = Л (пуско-
вая характеристика 7). При увеличении скорости до значения соко[|1
замыканием Kt выводится первая ступень ’ пускового реостата, ток
вновь возрастает до Ilt продолжается пуск по характеристике 2 и т. д.
Пользуясь (5-5) и (5-7) и учитывая, что при Ф = Фн = const М ~ Za,
218
для каждой ступени записываем уравнения движения электропривода:
_____________________________________________/_
coz = coCf + ((olia4f-©ci)e ?Mt; (5-9)
гя = /с + (/1-/е)г_'/Гмг, (5-10)
гда TMi=J2/₽/;
Р; = c2/RaSi — модуль жесткости i-й пусковой механической ха-
рактеристики.
Зависимости и (/) и (п (/) для рассматриваемого процесса пуска
приведены на рис. 5-4. Время работы на каждой пусковой характери-
Рис. 5-5. Электромеханические характеристики (а) и зависимости и,
ia = f (О ПРИ реверсе электропривода (б).
стике можно определить, подставив в (5-9) или (5-10) значения <вконг
или соответственно тЯкон( = Л и решив полученные показательные
уравнения относительно времени:
= = (5-12)
По мере увеличения скорости и перехода от ступени к ступени R
уменьшается, а модуль жесткости (3; увеличивается. Это приводит
к постепенному уменьшению продолжительности работы на пусковых
ступенях, как видно из рис. 5-4;
На переходный процесс реверса электропривода, как было уста-
новлено в § 1-4, оказывает влияние характер статического момента.
Если реверс осуществляется при активном моменте Л4С = const, система
электропривода остается линейной и зависимости и, М — f (t) описы-
ваются уравнениями (5-5) и (5-7) во всем диапазоне изменения скорости.
Электромеханические характеристики, соответствующие рассматривае-
мому процессу, показаны па рис. 5-5, а. .Здесь прямая 1 является ха-
рактеристикой, на которой электропривод работал в предшествующем
режиме; если считать предшествующий режим установившимся, эта
219
характеристика определяет начальную скорость при реверсе инач,
соответствующую току /с. Для осущёствления реверса двигателя скач-
ком меняется полярность напряжения на его якоре и для ограничения
тока в цепь якоря вводится добавочное сопротивление
Яд! = (t/H + £иач)/Л Кд. я — (^н + ^нач)/^! Кд. я> (5-13)
При этом электромеханическая характеристика имеет вид пря-
мой 2 на рис. 5-5, а.
В .(5-13) учтено, что вследствие механической инерции скорость
двигателя в момент переключения измениться скачком не может. Ха-
рактер изменения скорости во времени определяется (5-5) при подста-
новке в это выражение значения установившейся скорости противо-
положного знака — ис:
<0 = —Ц>с4"(®пач4"®с) е м< (5-14)
Зависимость момента от времени определяется (5-7) при М ~ 0:
^я=/с-(Л + /с)е-^м- (5-15)
Зависимости и, i„ = / (f), соответствующие (5-14) и (5-15), пока-
заны на рис. 5-5,6 сплошными кривыми. Нетрудно видеть, что при
рассмотренном процессе реверса установившаяся скорость шс значи-
тельно превышает скорость идеального холостого хода и что длитель-
ность процесса могла бы быть сокращена за счет постепенного выведе-
ния ступеней реостата, поэтому обычно используется лишь первая
часть рассмотренного процесса — торможение противовключением до
скорости <о = 0, а затем следует реостатный пуск. до естественной
характеристики, аналогичный рассмотренному выше. Если торможение
противовключением используется для остановки электропривода, дви-
гатель при скорости и — 0 отключается от сети.
Реактивный момент нагрузки при переходе скорости через нуль
изменяет знак (рис. 5-5, а), поэтому до и = 0 процесс торможения про-
текает так же, как и при активном моменте, и показан сплошными кри-
выми и (f) и 1я (0 на рис. 5-5, 6. При изменении направления вращения
реактивный момент изменяет знак и процесс пуска в этом направлении
описывается уравнениями (5-5) и (5-6) при других значениях начальной
и установившейся скорости (<онач = 0; ®с=— ®с), а также начального
и установившегося токов (/нач = —Z2; /с = —7С):
<о = — сое (1 — е (5-16)
(-я = _/с-(/2-_/с)е"//Гм. (5-17)
Зависимости и, гя = / (0 прн пуске в противоположную сторону
представлены на рис. 5-5, б (кривые 3 и 4). Заметим, что при переходе
через нуль скорости динамический момент скачком изменяется от зна-
чения
44д(_о;=— (Л42—А4С)
до значения
^д<-ю> = (Л4а — Л4с),
что влечет за собой соответствующее изменение ускорения электропри-
вода. Этим объясняется излом в зависимостях со, = f (0 при t — 0,
хорошо видный на рис, 5-5, б (переход к кривым 3 и 4),
220
В заключение рассмотрения переходных процессов при 7’э = 0
остановимся на процессе динамического торможения. Как следует из
изложенного в § 3-1, для осуществления этого режима двигатель отклю-
чается от сети и якорь его замыкается иа добавочное сопротивление,
которое должно обеспечить ограничение тока двигателя допустимым
значением /11ач = —If.
Ндл— ^пач/Л ^д.я— с®цач/^1 ^д.я'
Соответствующие электромеханические характеристики предста-
влены на рис. 5-6, д.. Модуль жесткости статической характеристики
при динамическом торможении можно определить по отношению при-
ращения момента к приращению скорости, например, р = Alg/on,.,,,.
Вычислив соответствующее значение Тм = JE/P и подставив в (5-5)
установившееся значение скорости —ис, определяемое, как показано
на рис. 5-6, а, активным моментом нагрузки Л4С (/с), получим выраже-
ния, совпадающие по форме с
(5-14) и (5-15). Графики переход-
ного процесса приведены на рис.
5-6, б, причем при активном мо-
менте нагрузки двигатель под
действием нагрузки разгоняется
в обратном направлении до ско-
рости —<вс, а при реактивном —
останавливается.
Примеры использования по-
лученных выше общих решений
(5-5) и (5-7) для описания кон-
кретных переходных процессов
можно было бы продолжить,
но уже. из изложенного ясно,
что в любом конкретном случае
Рис. 5-6. Электромеханические ха-
рактеристики (а) и зависимости и,
1Я = f (t) при динамическом тормо-
жении (б).
прежде всего определяются механические характеристики — пер-
вая, соответствующая предшествующему режиму, определяющая
начальную скорость, и вторая, в соответствии с которой протекает
переходный процесс. Последняя для асинхронного двигателя или для
двигателя с последовательным возбуждением должна представлять
собой линеаризацию нелинейной характеристики, лежащую возможно
ближе к истинной характеристике двигателя в диапазоне изменения
скорости в переходном процессе.
Переходные процессы пуска или реверса завершаются
выходом на естественную' характеристику, когда добавоч-
ные сопротивления в силовой цепи полностью выводятся.
При этом имеет место максимальное значение Тв =
и влияние электромагнитной инерции на характер переход-
ных процессов может быть существенным. Передаточная
функция электропривода по управляющему воздействию
при Тв ^0 получена в § 4-3:
П7 — _______1_______
и0(р) (TsT^ + TKp + l)'
Там же приведен анализ корней характеристического
уравнения системы, которые при m — ТК!ТЭ <; 4 являются
221
комплексно-сопряженными:
Pi,2 = —a±/Qp>
где « = .5^-; Qp = ]/1/7’117'M —1/4Тя . При этом условии
электропривод является колебательным звеном, переходная
функция которого при единичном скачке задания со0 = 1 (f)
имеет вид [11]:
h(t)= 1 — sjn [q J — arctg—j. (5-18)
Snip \ H a /
Если (5-18) выразить через отношение постоянных вре-
мени т и перейти к безразмерному времени t/TM,
получим другое выражение переходной функции:
h (/*) = 1 — е 2 Z* ^cos— t* +
+ (5-19)
I -> Г « О 1 11 л ЧС/ \ /
у 4т — т1 2 /
На рис. 5-7 показан ряд переходных функций электро-
привода при 7\ = 0 для различных значений т. Рассмат-
ривая эти зависимости, видим, что при уменьшении т
колебательность электропривода в переходном процессе
возрастает и изменения скорости сопровождаются все более
вода при Ts 0.
чальных условиях.
значительным перерегулированием.
Как было показано в гл. 4, электро-
привод с двигателем постоянного то-
ка независимого возбуждения в боль-
шинстве случаев представляет собой
хорошо демпфированное колебатель-
ное звено, поэтому колебания зату-
хают в течение одного-двух перио-
дов.
Переходная функция дает лишь
общее представление о характере пе-
реходных процессов при нулевых на-
Найдем решение для ненулевых
начальных условий, необходимое, в частности, для анали-
за характера переходного процесса при ударном приложе-
нии нагрузки. Дифференциальное уравнение системы при
Л1С = const, разрешенное относительно скорости, запишем
с помощью (4-20), положив для‘общности = Ту
ЛЛ,-^ + Л14г + (й = (йо--р-=(0с (5-20)
222
Аналогичным путем получим дифференциальное урав-
нение, разрешенное относительно момента двигателя:
ТаТи^ + Ти^- + М = Мс. (5-21)
Общее решение (5-20) при начальных условиях t = 0
(ю)0 = сонач; (d(i)/dt)0 = (Л4„ач - MJ/Js
имеет вид:
со = сос4-е~“/(Л cos QpZ-фВ sin Qpt). (5-22)
Коэффициенты А и В найдем, подставив в (5-22) и в его
производную соответствующие начальные условия
®нач = “с Ч~ »
(Аф,яч — MJU 2 = — аА + QpB.
Подставив найденные коэффициенты Л и В в (5-22),
получим:
со = сос + е-афсоН!,ч —wc) cos Пр/ +
Af —М -|-7va (ы —m) ~i
+ -^-------с I нач--------—sin. (5-23)
J s Ьйр
Для решения (5-21) необходимо определить начальное
значение производной момента (dM/df)0. При (со)о = collfl4
и Мп = Л4нач эту производную можно найти из уравнения
динамической механической характеристики электропри-
вода
Миач = ₽ (“о - ®нач) - 1\ (dM/df)n. (5-24)
Разрешая (5-24) относительно (dM/dt)0, имеем:
(йЛ4/^)о = (₽Дмнач-Л4нач)/Ке, (5-25)
где Аю„ач — cig ®нач.
Общее решение (5-21) запишем в виде
М = A4c4-e~“z(C cos Qpi + D sin QpZ). (5-26)
Определив с помощью начальных условий значения
коэффициентов С и D, получим общее выражение момента:
М = А4С + е~а( (Л4нач — Л4С) cos Qp( +
I Р Амнач Мнпч (1 aTs)- a,T3Mz q Л Щ971
223
Полученные общие зависимости со (/) и М (/) в частных
случаях существенно упрощаются, если предшествующий
режим работы электропривода является установившимся.
Так, для анализа процесса ударного приложения нагрузки
(5-23) при 7Инач = Мс_ нач и юиач = сос. нач и с учетом того,
что
(Мс. пач - Л4с)/(СОс. нач - С0с) = — 0,
после преобразований примет вид:
—(5'28>
г 1 i 1Д5Л-1 м mJ
где -= arctg ~т~р
Уравнение (5-27) в этом режиме можно упростить за
счет того, что при установившемся предшествующем ре-
Рис. 5-8. Переходный процесс ударного приложения нагрузки (я) и
соответствующие механические характеристики (б).
жиме 7И11;1Ч 0Лсо11ач и в соответствии с (5-25) (dMtdt)a = 0.
В результате некоторых преобразований! (5-27) представим
в виде
(Мс 11пч——Mz)e~at /
Л1 = Л1с+Д±^---------sin (£V + arctg. (5-29)
Qp V Л?,, \ a j
Общий характер процесса определяется отношением
постоянных времени гп и для m = 1 иллюстрируется зави-
симостями со, М =f (t), приведенными на рис. 5-8, а. Фи-
зические особенности процесса удобно проследить, сопо-
ставляя статическую характеристику 1 с построенной с по-
мощью рис. 5-8, а динамической характеристикой для рас-
сматриваемого процесса 2 (рис. 5-8, б). При возрастании
скачем момента нагрузки происходит процесс снижения
224
скорости, вызывающий в свою очередь рост тока и момента
двигателя. Однако вследствие наличия индуктивности рас-
сеяния нарастание момента двигателя идет медленнее, а
скорость снижается в большей степени, чем это определя-
ется статической характеристикой 1, поэтому при возраста-
нии момента до М = Л4С скорость со < <ос, что влечет за
собой дальнейший! рост момента до значения Л4макс. Коле-
бания затухают, и после двух-трех периодов достигается
установившийся режим М = Л4С; со — сос.
Максимальный динамический перепад скорости Дсос макс
при этом превышает статический перепад Дсос в тем большей
степени, чем больше жесткость статической характеристики
и чем больше Тэ. Таким образом, отклонения скорости
от требуемого значения за счет электромагнитной инерции
существенно увеличиваются, что для механизмов с ударной
нагрузкой в ряде случаев по условиям технологии является
неблагоприятным. Заметим, что этот вывод о влиянии
электромагнитной инерции выше уже был получен при
частотном анализе динамической жесткости механических
характеристик электропривода. Увеличение модуля дина-
мической жесткости в широком диапазоне частот влечет
за собой уменьшение динамического перепада скорости
при ударном приложении нагрузки.
5-2. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ЭЛЕКТРОПРИВОДА
С ЛИНЕЙНОЙ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ
ПРИ ЛИНЕЙНОМ НАРАСТАНИИ ЗАДАНИЯ
В рассмотренных переходных процессах задающее воз-
действие изменялось скачком; при этом максимальные ток
и момент, развиваемые двигателем в переходных процессах,
зависят от величины скачка. При пуске электропривода
включением, его в сеть возникает очевидная проблема огра-
ничения максимумов тока и момента двигателя допустимыми
значениями, что и обеспечивалось в каждом процессе вве-
дением добавочных сопротивлений в силовую цепь двига-
теля. Однако введение сопротивлений в цепь якоря двига-
теля связано с увеличением потерь энергии в переходном
процессе (см. гл. 14), поэтому представляют интерес способы
пуска электропривода, не требующие введения токоограни-
чивающих сопротивлений. Примером такого способа может
служить рассматриваемое в данном параграфе ограничение
темпа нарастания управляющего воздействия допустимым
значением соо == &ot, где е0 представляет собой допустимое
8 Чиликин М. Г. и др.
225
ускорение электропривода, которое, как было отмечено
в гл. 1, ограничивается либо перегрузочной способностью
двигателя, либо техническими требованиями к электропри-
воду со стороны производственного механизма. Практически
для двигателей постоянного тока ограничивается темп на-
растания приложенного к якорю двигателя напряжения
«я (0 = (du„/dt)Ma t = c&ot, (5-30)
а для асинхронных двигателей — темп нарастания частоты
тока статора.
Чтобы иметь возможность анализировать как процессы
увеличения скорости, так и переходные процессы замедле-
ния электропривода, запишем закон изменения управляю-
щего воздействия в более общем виде:
“о (О==“онач + £(Л (5-31)
Дифференциальное уравнение системы, разрешенное
относительно скорости (5-20), с учетом (5-31).принимает вид:
Л7,м-^- + 7’м^г + “ = о)0Нач + ^-Дсос. (5-32)
Итак, необходимо решить при ненулевых начальных
условиях дифференциальное уравнение с правой частью,
линейно зависящей от времени. Определим частное реше-
ние, соответствующее установившемуся режиму, который
наступает после затухания свободных составляющих. Для
этого режима общий характер движения определяется
правой частью (5-32), поэтому частное решение будем искать,
в виде
ю = д4-И. (5-33)
Подставив (5-33) в (5-32), получим:
ЬТЯ + а + Ы = со0 мч + еД — А<ас,
откуда
Й = ®Онач-Дюс-8о^м; ^ = £о-
Общее решение (5-32) будем искать в виде
w — ш0 пач ~ Д(йс ~ м -)-£(/ +
4-е~“ДД cos Qp^-f-Fsin Ц/). (5-34)
Коэффициенты Е и F определяем исходя из началь-
ных условий: t = 0, (©)о = сонач; Л40 — Л4нач; (day/df)0 =
226
(5-35)
= (Мнач — В результате получаем:
СО = СОо нач Дсо2 8qI (СОо нач С^нач 4“ ^^2 ) ® X
уГепчО / ЛГнач-Мс-РГмеО-₽Гм“(“онзЧ-“наЧ + Д“2) у
XLC0S ^(%иач- “нач + Д“2 ) Х
XsinQp^,
где Дсо2 = Дсос + е0Тм.
Дифференциальное уравнение системы, разрешенное от-
носительно момента двигателя, имеет вид:
Л7м-^- + л4г + М = <+.₽£оГм- (5-36)
Не повторяя аналогичных промежуточных этапов, за-
писываем окончательное решение (5-36):
М = Мс + ре0Тм - (М„ач - Мс - ₽е0Тм) е-^ X
..„С о / I Р ^СОнзч Д^чачН" 7(МНач Рер7м) v
COSWpf-t- Тэйо(Мнач-Л/с-реоГм) х
XsinQp/|. (5-37)
Выше было отмечено, что обычно рассматриваемый
электропривод представляет собой колебательное звено со
значительным коэффициентом демпфи-
рования, поэтому свободные состав-
ляющие решений (5-35) и (5-37) за-
тухают в течение одного-двух перио-
дов колебаний и устанавливается
процесс равномерно ускоренного дви-
жения с ускорением е0. При этом
скорость отстает от закона измене-
ния управляющего воздействия на
Дсо2 = Дсос -ф &йТя, а момент двигате-
ля Л1уСТ = Л4С Н- РДЛо = Мс "Ь J2^о-
Изложенное иллюстрируют графики
Рис. 5-9. Переходный
процесс при линейном
нарастании управляю-
щего воздействия с
учетом Тэ 0.
переходного процесса пуска при •
нулевых начальных условиях и Л4С = 0,. приведенные на
рис. 5-9. Из рис. 5-9 видно, что вследствие электромагнит-
ной инерции первая производная момента при t = 0 равна
нулю, если предшествующий режим был установившимся-.
Значительное затухание колебаний приводит к тому, что
влияние электромагнитной инерции проявляется лишь в на-
чале процесса. Как только прекращаются колебания тока
и момента двигателя, влияние индуктивности на характере
8*
227
процесса не сказывается. Это позволяет сделать вывод, что
во всех случаях, когда т > 2, можно без большой погреш-
ности пренебречь электромагнитной инерцией, положив
Л ~ о.
Зависимости со, М — f (f) при Тэ — 0 можно получить
непосредственно, из (5-35) и (5-37), если учесть, что при этом
£2р = 0, cos QpZ е= 1, sin Др/ == 0:
со == &ot (со0 нач Дсос 7нс0) X
Х(1 _e-^M) + Wnaqe-^M; (5-38)
М = (Мс + ₽в07м) (1 - + M^e~tLT«. (5-39)
Рис. 5-10. Переходный
процесс при линейном на-
растании управляющего
воздействия при Тв = 0.
37... а
Кривые со, М =f (t), соответствующие (5-38) и (5-39),
для случая, когда предшествующий режим работы был не-
установившимся и Мс Ф 0, пока-
заны на рис. 5-10. Здесь, так же
как и на рис. 5-9, хорошо видна ос-
новная закономерность — линей-
ный закон изменения управляюще-
го воздействия определяет, за ис-
ключением начального участка,
равномерно ускоренное изменение
скорости с ускорением, пропорцио-
нальным темпу нарастания напря-
жения пя или частоты Д. Длитель-
ность переходного начального уча-
стка зависит от электромеханиче-
ской постоянной 7М, причем при
Тэ = 0 момент нарастает до зна-
чения Л1с + J2e0 за время, при-
при колебательном характере про-
цесса с учетом 7\ =4= 0 — быстрее, хотя общее время за-
тухания свободной составляющей в этом случае также
примерно равно 37м.
После затухания свободных составляющих скорость на-
растает по линейному закону, как было уже отмечено, от-
ставая от кривой соо (if) на значение Дсо2 = Дсос + г0Ты.
Таким образом, задаваемый на входе системы закон из-
менения скорости воспроизводится с ошибкой, ( которая
в установившемся процессе складывается из ошибки, рав-
ной статическому перепаду скорости Дсос = Л4С/(3 и дина-
мическому перепаду Дсод = J2e0/p = 7ме0, определяемым
по статической механической характеристике полным
установившимся моментом двигателя AiyCT.n- Нетрудно ви-
228
деть, что для двигателя постоянного тока значение Дсод
пропорционально падению напряжения и якорной цепи от
полного тока:
Дсо2 = (Л4С+/2е0)/Р = (7с4-7д)7?я2/с. (5-40)
Увеличение модуля жесткости статической механической
характеристики влечет за собой соответствующее уменьше-
ние отклонения, кривой со (t) от заданной зависимости соо (7).
Воспользуемся полученными общими выражениями зависимостей со,
М = f (t) (5-38) и (5-39) для анализа конкретных переходных процес-
сов электропривода с линейной механической характеристикой. При
пуске электропривода плавным подъемом управляющего воздействия
от нуля до установившегося значения существенное влияние на пере-
ходный процесс оказывает характер момента нагрузки.
Если нагрузка представляет собой реактивный момент, переход-
ный процесс пуска распадается на два участка, соответствующих не-
линейности этой нагрузки. На первом этапе возрастание ш0 вызывает
линейное возрастание момента короткого замыкания двигателя по за-
кону
Л41(.3=Рсоо=РМ» (5-41)
но до тех пор, пока Мк. 3 Ме, скорость остается равной нулю, так
как электропривод заторможен реактивной нагрузкой. Первый этап
заканчивается при Мк, 3 = это условие позволяет с помощью (5-41)
определить время запаздывания начала пуска:
. f3 = Mc/₽coo. (5-42)
На втором этапе движение электропривода определяется (5-38)
и (5-39) при условиях Миач —Ме; со0пач = Дсос; со11ач = О:
w=e0f-e07’M(l-e-//7’M); (5-43)
Л4 = (Л4с+реоГм) (1 -(5-44)
Каждому текущему значению соо соответствует вполне определен-
ная механическая характеристика двигателя. Как показано на
рис. 5-11, а, в исходном положении двигатель имел характеристику
динамического торможения /; в конце первого этапа соо = Дсос, что
соответствует характеристике 2. Момент двигателя на первом этапе
нарастал при со = 0 до значения Л4С, как показано участком динами-
ческой механической характеристики (кривая 4 на рис. 5-11, а), сов-
падающим с осью абсцисс от 0 до М = Л1С. Соответствующая зависимость
М (/) и со (/) = 0 для первого этапа переходного процесса показана
на рис; 5-11, б на участке 0 < t С /3.
Для второго этапа начало отсчета времени в (5-43) и (5-44) пере-
несено в точку t = t3. Перенеся начало координат в эту точку, построим
соответствующие (5-43) прямую е0 (I — t3) и кривую со (/), отстающую
от нее на е0Тм. Кривая е0 (I — t3) отстоит от кривой со = eot по вертикали
на отрезок Дсос, что определяет суммарный перепад скорости Дсо2 =
= Дсос + е0Тм. В соответствии с (5-44) момент двигателя на этом этапе
нарастает от М = Мс до Муст, п = + Ре0Гм по экспоненте за время
ЗГМ. Зависимости со, М = f (/), соответствующие второму этапу пере-
229
ходного процесса, позволяют построить динамическую механическую
характеристику в пределах от со = 0 до со = соКОнз> ГД® ®кон2 — конеч-
ная скорость на втором этапе (рис. 5-11, а).
Второй этап заканчивается в момент времени 10, когда управляю-
щее воздействие достигает требуемого установившегося значения и его
дальнейший рост должен быть прекращен. Двигатель при этом выходит
на естественную характеристику 3 и в дальнейшем имеет место процесс,
Рис. 5-11. Механические характеристики (а) и зависимости со, М = f (t)
(б) при пуске с реактивным моментом нагрузки.
описываемый (5-5) и (5-7) при соответствующих начальных условиях.
Как было установлено, скорость на этом участке нарастает по экспо-
ненте, а момент уменьшается по тому же закону, стремясь к Л4С
(рис. 5-11,6). Общее время переходного процесса составляет:
^п. п = + 3'ГМ.
Обычно Тк < 10, поэтому время переходного процесса определяется
временем нарастания напряжения на якоре или частоты тока статора
до установившегося значения.
Рассмотрим процесс реверса электропривода путем плавного из-
менения управляющего воздействия, при котором скорость идеального
холостого хода изменяется по закону
со0 = со0>1 — (5-45)
от шс. нач = “он До соокон = —“он- Если считать момент активным,
определить начальное и конечное значения скорости можно по меха-
ническим характеристикам 1 и 2, представленным на рис. 5-12, а. Под-
ставляя в (5-38) и (5-39) значения соопа;, = соон; соН1Ч = сос; 7Ипач = Мс
и учитывая, что ускорение е0 в (5-45) отрицательно, получаем:
со = сосе м — ео^ + (“он — Т’яЕо) (1—е м)> (5-46)
/W = Mc-pe0TM(l-e-^M). (5-47)
Зависимости (5-46) и (5-47) определяют характер изменения ско-
рости и момента на первом этапе реверса, который заканчивается в мо-
мент /ор, когда а>0 достигает установившегося значения —шон. Соответ-
ствующие графические зависимости со, М = f (f) представлены на
рнс; 5-12, б. Так как в этом процессе ускорение отрицательно, динами-
ческий момент Jv60 отрицателен и суммарный установившийся момент
при реверсе MyCT. р определяется разностью М — ₽е07’м. Как следст-
230
вне, ошибка, с которой скорость со следует за изменением соо, умень-
шается: Дсо2 = Дсос — боЛ1- В зависимости от Мс, е0-и Т.л она может
быть равна нулю (Дсос = е0Ги) или изменить свой знак (Дсос < е07\,).
При этом и момент двигателя Муст. р также становится равным нулю
или изменяет знак.
Если Дсо2 > 0, т. е. Дюс > е0Тм, двигатель в процессе снижения
скорости продолжает работать в двигательном режиме, а при измене-
Рис. 5-12. Переходный процесс реверса плавным изменением управляю-
щего воздействия при активной нагрузке.
нии знака скорости переходит в тормозной режим с тем же моментом
М — Муст. р. При Дсо2 < 0 и Мс < Ре07м двигатель при снижении
скорости работает в тормозном режиме, а при пуске в противополож-
ном направлении переходит в двигательный режим. Значение момента
Муст.р = Мс — Ре0Тм определяет при t = tOp в конце процесса нара-
стания соо до значения — шон начальное значение скорости ®начц для
заключительного второго этапа реверса. Динамическая механическая
характеристика, соответствующая первому (основному) этапу реверса,
показана на.рис. 5-12, а (кривая 3).
Второй, заключительный этап реверса протекает при <в0 = —соон ==
— const и определяется соотношениями (5-5) и (5-7). На этом этапе мо-
мент двигателя нарастает до М = 7ИС по экспоненте с постоянной Тм,
а скорость плавно увеличивается в соответствии с механической харак-
теристикой 2 (рис. 5-12, а) до установившегося значения со = —со'.
Длительность этого процесса примерно равна ЗТ,,, что обычно соста-
вляет небольшую долю общего времени реверса tp = tOp + ЗТЫ, кото-
рое определяется главным образом временем реверсирования упра-
вляющего воздействия /ор.
Более сложный вид имеет характер процесса реверса при реактив-
ном моменте нагрузки. Рассмотрим этот процесс, причем для конкрети-
зации физических представлений будем иметь в виду электропривод
с двигателем постоянного тока независимого возбуждения, электроме-
ханические характеристики которого 1 и 2, соответствующие началу
и концу процесса, приведены на рис, 5-13, а, На рис, 5-13, б показана
231
зависимость иа = t/H — cs0Z. В процессе замедления электропривод
движется по тому же закону, что и при рассмотренном выше случае
активной нагрузки. Начальная разность между напряжением на яко-
ре Ua и э. д. с. двигателя ес = «ос, равная падению напряжения на
сопротивлении якоря от статического тока IсЯя21, уменьшается до
значения, равного падению напряжения от установившегося тока при
реверсе /уст. р = Л4уст. р/с. Ток якоря при этом соответственно умень-
шается от начального значения /с до /уст. р и затем остается постоянным
до скорости, равной нулю. Зависимости э. д. с. двигателя е (/) и (Z)
также приведены на рис. 5-13, б, причем разность напряжения и э. д. с.
при Тя = 0 пропорциональна току якоря.
Рис. 5-13. Электромеханические характеристики (а) и зависимости ия,
е, h = f (0 при реверсе с реактивным Мс (б).
В момент прохождения скорости через нуль реактивный момент
нагрузки изменяется скачком от Л4С до —Л4С. Для того чтобы начался
пуск в противоположном направлении, необходимо изменение знака
тока и увеличение его по модулю до значений, превышающих модуль
тока —/с. Появляется пауза в движении, аналогичная времени запазды-
вания пуска на рис. 5-11,6, которую обозначим Z3,p. В течение этой
паузы ток якоря нарастает по линейному закону
гя = /уст.р — СЕ«^я2,
а скорость со = 0. Пауза заканчивается, когда ток якоря достигает
значения /я = —/с. Отсюда определяем время запаздывания:
^з,р == (^уст. р ~Ь ^с)/СЕ0‘ (5-48)
В дальнейшем пуск в обратном направлении протекает аналогично
рассмотренному выше, как показано на рис. 5-11,6. Показанные на
рис. 5-13, б графики ия (Z), е (Z) и (я (/) для этой части процесса в дру-
гом масштабе повторяют пропорциональные им зависимости соо (0,
со (Z) и М (Z)—см. рис. 5-11,6. Динамическая электромеханическая
характеристика, соответствующая процессу реверса с реактивным мо-
ментом нагрузки, построена на рис. 5-13, а (кривая 3).
Если увеличивать темп изменения напряжения du.Jdt — cs0, то
вследствие роста динамического тока при торможении ток /у СТ.Р =
232
= Zc — /д вначале уменьшается до нуля, а затем изменяет знак. При
этом время запаздывания /З.р в соответствии с (5-48) уменьшается и
при /уст. р = —/с становится равным нулю. Из уравнения движе-
ния —Л4С — Mz — можно определить ускорение, соответствую-
щее этому условию:
е01 = -2Ч/^ = -2ЧМн. (5-49)
Если [ в0 I > ] eoi |, то процесс изменения скорости при реверсе
является непрерывным и влияние реактивного момента сказывается
лишь на изменении скачком, ускорения при переходе скорости через
нуль. Динамическая механическая характеристика двигателя при этом
имеет вид, показанный на рис, 5-13, а (кривая 4),
Рассмотренные переходные процессы дают возможность
сделать общий вывод о том, что закон изменения напряже-
ния «я в электроприводе
постоянного тока или ча-
стоты' Л для электроприво-
да переменного тока опре-
деляет характер изменения
скорости в переходном про-
цессе с тем большей точ-
ностью, чем меньше элект-
ромеханическая постоян-
ная времени Тк. Этот вывод
справедлив не только для
линейного закона измене-
ния управляющего воздей-
ствия, но и при более
Рис. 5-14. Переходный процесс
пуска при нарастании напряжения
ия по экспоненте.
сложных зависимостях соо (О- В качестве примера оценим
характер изменения скорости (или пропорциональной ей
э. д. с. двигателя) в переходном процессе пуска электро-
привода постоянного тока при Мс = 0, если приложен-
ное к якорю напряжение нарастает не по линейному, а по
экспоненциальному закону
ия = (7н(1_е-^и.п), (5-50)
где Т„.п — постоянная времени источника питания, причем
будем считать, что Т„л Т„.
Зависимость и„ (/), соответствующая (5-50), представ-
лена на рис. 5-14 (кривая /). Начальная часть этой кривой
близка прямой 2, соответствующей неизменному значению
dujdt = (dujdf) |1ач — const;
(dus/dt)Ha4 — Uп се0.
233
Если бы напряжение нарастало по закону «я =ce'ot,
ток якоря стремился бы к значению /д.макс = J stile =
= PTHeJ/c по экспоненте с постоянной Тя, как это было
установлено выше (пунктирная кривая 3). Однако темп
нарастания напряжения в действительности (кривая /)
непрерывно уменьшается с постоянной Тпл
dujdt =Uue~t,Tw-^> (5-51)
поэтому после достижения максимума /д.макс = JstiJc, где
е# пропорционально dujdt при t — tmKZ, ток начинает сни-
жаться по зависимости, близкой (5-51). Электродвижущая
сила двигателя е изменяется по кривой 4, отличаясь в каж-
дый момент времени от и„ на падение напряжения в цепи
якоря при данном токе. Нетрудно видеть, что чем меньше
Т„, тем меньше падение напряжения при данном динами-
ческом токе, тем ближе кривая 4 к кривой 1. Так как
Щ = е + ,
производная напряжения связана с производной э. д. с.
двигателя соотношением
dujdt = de/dt + ₽я2 dijdt. (5-52)
В момент t = /макс dijdt = 0, поэтому имеет место
равенство
(^я/^ = /макс = (^)/ = /иакс
или
80 = (too/dO/-/MaKC=
Поэтому максимум динамического тока равен /дМакс =
= J?ti/c. Так как еа <; £«> максимум тока /д.маКс меньше,
чем установившийся динамический ток при начальном темпе
нарастания напряжения, причем разница увеличивается
с возрастанием Ти. Это понятно, так как с возрастанием Та
увеличивается время достижения максимума /макс и
уменьшается. При Тм->0 /д.макс/д.макс, ^аКс ->0 и
кривая е (t) сливается с кривой ия (f).
Установленная общая зависимость характера'переходно-
го процесса от характера изменения управляющего воздей-
ствия в электроприводе играет важную роль и используется
для оптимального управления переходными процессами
(см. гл. 12).
234
5-3. ПЕРЕХОДНЫЙ ПРОЦЕСС ВЫБОРА ЗАЗОРА
ПРИ СУЩЕСТВЕННОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СВЯЗИ
Анализ переходных процессов электропривода с линейной механи-
ческой характеристикой необходимо заключить рассмотрением харак-
тера переходных процессов в упругой электромеханической системе
с зазором. Механический переходный процесс выбора зазора в упругой
двухмассовой системе уже был рассмотрен в § 1-7, причем пусковой
момент двигателя предполагался постоянным. Имея в виду случаи,
когда электромеханическая связь в системе существенна и оснований
для раздельного рассмотрения процессов в упругой механической си-
стеме и в двигателе нет, получим соотношения, характеризующие выбор
зазора в системе прн линейном нарастании управляющего воздействия,
при условии, что приведенный момент инерции механизма много больше
момента инерции двигателя (у >5).
В случаях, когда после удара, возникающего в конце процесса
выбора зазора, повторного размыкания зазора не происходит, рассмат-
риваемый процесс распадается на два этапа, в пределах каждого из
которых система является линейной. На первом этапе, когда зазоры
открыты, механизм кинематически не связан с двигателем и последний
ускоряется по закону, определяемому нарастанием управляющего воз-
действия соо = в0/. Если принять Тэ = 0, изменение скорости двига-
теля в процессе выбора зазора определяется (5-38) при нулевых началь-
ных условиях:
coi = Bol-EoTM1(l-е-//Гм1)» (5-53)
где ТК1 = Jj/P — электромеханическая постоянная двигателя;
Jj — момент инерции первой массы двухмассовой системы,
представляющей ротор двигателя и все жестко с ним
связанные элементы.
Основную долю в значении Ji составляет момент инерции двига-
теля. Моментом механических потерь на валу двигателя пренебрегаем.
Изменения момента двигателя в этом процессе определяются (5-39):
М = ₽Е„Тн1(1-е“//Гм1)-
Зависимость угла поворота вала двигателя от времени можно полу-
чить интегрированием (5-53):
Ф1=J dt= Eq -TK1t + TЙ! (1 -е_//Гм))]. (5-54)
__ЦТ .
В конце выбора зазоров ф1 = Дф3, t = /0, а е М1 « 0, так как
собственная электромеханическая постоянная времени двигателей сред-
ней и большой мощности составляет сотые доли секунды и ТК1 /0.
Разрешив при этих условиях (5-54) относительно ta, получим:
— Тщ (1 + |/Л2Дср3/ео7\ц— 1)’ (5-55)
__I /Т .
Подставляя (5-55) в (5-53) и полагая е 0 м1^0, получаем соотно-
шение для определения начальной скорости двигателя в момент удара
при заданном зазоре в передачах:
®1нач ео^м1 Р^^Дфз/еоТм! — 1' (5-56)
235
Заметим, что при = 0 (5-56) совпадает с (1-71), т. е. при доста-
точно малых Т!А1 допустимо пользоваться более простым соотноше-
нием (1-71). Если, напротив, значение Та1 велико и время выбора за-
зоров меньше Т„х, то формулы (5-55) и (5-56) несправедливы. При этом
весь процесс выбора зазоров протекает при переменном ускорении и
необходимо более точное определение начальной скорости, например
путем построения зависимости цц (i) по (5-54), определения значения ф
при срг = Дсрз н затем вычисления по (5-53) при t — ta.
На втором этапе, когда зазор замкнут, движение электропривода
описывается системой (4-6) при Ts = 0, ненулевых начальных условиях
и изменении управляющего воздействия по закону (5-31). Используя
эти исходные данные, получим операторное изображение момента дви-
гателя (по Карсону) и выразим все коэффициенты через обобщенные
параметры (§ 4-4), а моменты — в относительных единицах, приняв за
базовое значение момента динамический момент — J^с0. После
преобразований изображение момента принимает вид:
М, (р) =
иачрЗ + А- р=+('Т7’м1М*нач J-Izzl р+(1+м tc)
__-“'~2 fclUf Т 2\Г Ьр /
Р3 + Qr Р~+У^мР“Ь1
ЫЫ j Cj I11
(5-57)
Соответствующее изображение упругого момента:
Mtl2 (р) =
Л, Г| Т пач о I
(У — I) 7 В * * м1 ~ХГ~ Р +
у So
+ Г(У- 1)Лп (Х11ач + щЦм* с) + Р-F -НИ,с
(5-58)
В соотношениях (5-57) и (5-58) использовано обозначение
ТИфначс~ (won;i4 f!)iа.ч.|)/А’яv
— начальное значение момента двигателя в относительных единицах.
При известных параметрах электромеханической схемы и вычис-
ленных начальных условиях оригиналы нско.мых функций могут быть
определены с помощью теоремы разложения. Если обозначить
Mt (р) = Р (p)/Q (р),
где Р (р) и Q (р) — соответственно полиномы числи геля и знаменателя
функции, то оригинал ее при отсутствии нулевых и кратных корней
может быть вычислен по формуле
м* (0 =
k — n.
_А(_0) , V Р(р,,) еРк1
Q (0) г p;,Q' (pft)
k 1
(5-59)
где рь — корни характеристического уравнения Q (р) = 0:
Q' (.Pk) = W/dp)
236
На рис. 5-15 представлены графики первого и второго этапов
переходного процесса выбора зазоров, рассчитанные для следующих
параметров электромеханической системы: у = 10; Й12 = 62 рад/с;
е0 = 15 рад/с2; Тщ — 0,02 с; Дср3 = 0,35 рад. Время выбора зазора,
рассчитанное по (5-55), 10 — 0,23 с, а начальная скорость по (5-56)
<о1Н!1Ч =3,25 рад/с.
Зависимости со() (/), Wj (/), /И,„(/) и /И.,.12 (/), приведенные на рис. 5-15,
хорошо отражают особенности процесса выбора зазоров в электропри-
воде инерционного механизма. Ускорение может быть выбрано исходя
из допустимого по перегрузочной способности тока и момента двигателя
либо принято равным допустимому для механизма ускорению едоп по
условиям технологии. Так как в период выбора зазоров момент инер-
ции электропривода в у раз меньше, чем суммарный момент инерции
всей системы, момент двигателя и ток в период выбора зазора в у раз
меньше установившегося момента н тока после выбора зазора. На
рис. 5-15 установившийся момент при пуске /И;еуст.,, — 1, (/Иуст п =
= J2b{j), а в период выбора зазора /И з — О', 1 (/Ин 3 = 0,'U2eo)i
так как у = 10.
Выбор зазора оканчивается упругим ударом, в результате кото-
рого возрастает и момент двигателя /Й и момент нагрузки передач Л4Г,,
причем темп нарастания упругого момента /И12 выше, чем темп нараста-
ния момента двигателя, максимум Mi2MnKC > AJMiKc и наступает раньше
максимума Л1МПКС. Скорость при ударе быстро снижается, по возника-
ющий перепад скорости незначительно превышает установившийся,
а колебания скорости и упругого момента быстро, практически в те-
чение одного периода, затухают. В этом проявляется благотворное
демпфирующее действие электропривода с линейной механической ха-
рактеристикой, благодаря которому снижается максимум нагрузки
передач и практически исключаются колебательные нагрузки, увели-
чивающие износ механического оборудования.
Использованный путь аналитического расчета переходного про-
цесса даже при принятых упрощениях остается достаточно трудоемким
и получить таким путем более или менее общие представления о влия-
нии различных факторов на максимумы моментов /И12 п /И практически
невозможно. Более того, в настоящее время, когда в распоряжении
исследователя имеется совершенная вычислительная техника, тратить
237
время на громоздкие расчеты частного характера Нецелесообразно.
Эффективным инструментом исследования, позволяющим при необхо-
димости обобщенного анализа получить универсальные графические,
а с применением известных методов планирования эксперимента и
статистической обработки их результатов н приближенные аналитиче-
ские зависимости, является математическое моделирование.
5-4. ПЕРЕХОДНЫЕ ПРОЦЕССЫ ЭЛЕКТРОПРИВОДА
С АСИНХРОННЫМ КОРОТКОЗАМКНУТЫМ ДВИГАТЕЛЕМ
Асинхронный двигатель с фазным ротором как в устано-
вившихся, так и в переходных процессах работает в преде-
лах рабочего участка его механической характеристики.
Рабочий участок характеристики с достаточной степенью
точности линеаризуется даже с учетом электромагнитной
инерции, поэтому весь приведенный выше анализ переход-
ных процессов электропривода с линейной механической
характеристикой без существенных исключений распростра-
няется на этот двигатель и нет необходимости специально
рассматривать переходные процессы асинхронного электро-
привода с двигателем с фазным ротором.
Конструкция ротора короткозамкнутого двигателя ис-
ключает возможность введения добавочных сопротивлений
в цепь его обмотки, поэтому ограничить абсолютное сколь-
жение в переходных процессах пуска и торможения неболь-
шими значениями можно только путем плавного изменения
частоты тока статора. Применение индивидуальных источ-
ников питания с регулируемой частотой является одним из
наиболее сложных и дорогих технических решений, поэтому
большинство простых и дешевых асинхронных электропри-
водов с короткозамкнутыми двигателями, имеющих самое
широкое распространение, пускаются включением в сеть,
и нелинейность механической характеристики этих двига-
телей проявляется полностью, так же как и в режимах
торможения противовключением или динамического тор-
можения. При этих условиях, как было отмечено в § 3-3,
на характер переходных процессов оказывает существенное
влияние электромагнитная инерция двигателя. Влияние
нелинейности механической характеристики и электромаг-
нитной инерции и определяет необходимость особого рас-
смотрения переходных процессов этого двигателя.
С учетом электромагнитной инерции движение асинхрон-
ного электропривода в переходном процессе пуска включе-
нием в сеть можно описать, воспользовавшись уравнениями
динамической механической характеристики в комплексной
238
форме в осях и и v (2-45) и уравнением движения механи-
ческой части в виде (1-52):
u-i — RJi + + L12 4* /<ок (Ljtj Lni2);
О = R212 4- L2 4- Т12 4- j (<ок — <оЭ1) (L2Z2 4~L124);
44 = pnL12Im(?1xt2*);
(5-60)
Аналитическое решение этой нелинейной системы урав-
нений в общем случае, как выше уже отмечалось, представ-
ляет трудности, поэтому анализ электромеханических пере-
ходных процессов с учетом электромагнитной инерции сле-
дует вести с помощью ЭВМ. Однако оценить влияние
электромагнитной инерции в общем виде удается, рассмат-
ривая процесс включения двигателя в сеть при неизменной
скорости ротора со = const. Применительно к процессу
пуска рассмотрим электромагнитный переходный процесс,
возникающий на начальном этапе, когда скорость двига-
теля еще не успела существенно измениться и можно при-
ближенно принять соэя = 0. Анализировать такой процесс
удобнее всего в осях а, Р, принимая сок = 0. Так как ско-
рость неизменна, изменения токов ir и Г2 определяются
первыми двумя уравнениями системы (5-60), которые при
этих условиях можно записать в виде
+Li dt +^12 dt';
0 = ^4-L2>4-L12>-. J
(5-61)
Переходя к изображениям переменных по Карсону при
нулевых начальных условиях, а также учитывая, что сину-
соидальное напряжение сети, представленное вектором Я1(
имеет изображение йг = и11ЛЖ1£,аэл{ = £/1макср/(р -/сооэл),
получаем:
(/?! + L,p) (р)4- Ly2pi'2 (р) = Ur макср/(р - /соО9л);
(#2 4- Агр) i2 (р) 4- А1?РЧ (р) = 0.
(5-62)
239
Решая (5-62) относительно векторов тока (р) и 1"г (р),
получаем их изображения:
; /„)_________________МЛКсР (R-2 4~ ДР)___________/С СО\
(р-/Сооэл)[(Л1ц-/.1Лр2+№Ц</?;л1)р+л1/?:] ’
___ __ ____________________Т/j макс-Т-таР-1________________
(5-64)
Характер изменения свободных составляющих и их за-
тухание определяются корнями pt и р2 характеристического
уравнения (корень знаменателя р0 /соПЭ1 определяет уста-
новившийся режим, так как относится к изображению
напряжения):
1/'[ I2___RiR'
Г L 2 —Z,^) | [jl-Ly
(5-65)
Если (5-65) представить в виде
Pi. 2
Ri^+Rjr-i
-jfTRiLi-R^i^+iRiR^U
(5-66)
то можно установить, что в рассматриваемом случае, когда
(|)эл = 0, система имеет разные отрицательные действитель-
ные корни. Для оценки корней упростим (5-66), учитывая,
что практически R^ и близки друг другу. Примем
RiL'2 » L^R'i и 7?! R',:
^2)М- (5-67)
Выразим в (5-67) Lt, L'> и L12 через индуктивные сопро-
тивления асинхронного двигателя хь х'>, Хц (см. § 3-3) и,
учитывая, что хи хх и хи )> х.2, получим:
Р1 = —«оэАЛц/С^ + а'и); (5-68)
р2 = — (%! Ч-гхДДх! 4-Хц). (5-69)
В (5-68) и (5-69) обозначено sK = R',/(x1 + х.>) для удоб-
ства оценки реальных коэффициентов затухания. Сравни-
вая (5-68) и (5-69), можно заключить, что коэффициент за-
тухания ах значительно меньше коэффициента затухания
а3 — их отношение можно оценить значением х1/2х(1.
В дальнейшем используем (5-68) и (5-69) для количествен-
240
ной оценки затухания, но предварительно найдем ориги-
налы токов, обозначив рх = —и р.2 — —а.,, при этом
имеются в виду их точные значения, определяемые из
(5-65) и (5-66):
т /J.\ _ Uj макс (Д' 4~/Д^О Эл) g ° ЭЛ |
1 U — Ц.2 _(а1 + /«0э.1)(а2+/о)оэ,1) -г
е~"а'( — е~а-1 . (5-70)
1 (ai + /w03.,) (ai-a2) 1 (а2 + /Ш(|Э1) (а2 —а0 . ’ 7
11 I Г /т i>,ao э.7
' _ <-'1максА12 /ш0 э,чк ।
2 7'11'2—1-12 (а1 + /И0 0.1) (а2 + /И0 Эл)
. аге~ait . а2е~
(оц + Дооэл) (a2-«i) + (а2 + /шОэл) (ai-a2)_ ’
(5-71)
Таким образом, вектор каждого тока содержит кроме
установившейся составляющей, изменяющейся с частотой
соОэл, две переходные составляющие, имеющие апериоди-
ческий характер и затухающие с коэффициентами затуха-
ния at и а3. Для вычисления момента двигателя по третьему
уравнению системы (5-60) необходимо определить комплек-
сно-сопряженный вектор тока ротора:
- ' __ млКеТ 12_ 1 ___Др эл° ° ЭЛ______ I
2 “ 1-iL2 — Ц., I. (ai —/сй()9л)а2 -/ш0эл 7"
+ (aj—/сооэл) (а2 —«J 1 (а2 —/ото эл) («1—а2)
(5-72)
Подставив (5-70) и (5-72) в (5-60), можно найти составля-
ющие электромагнитного момента, определяемые взаимо-
действием составляющих токов. В качестве примера опре-
делим установившееся значение пускового момента Муст
пропорциональное мнимой части произведения первых
членов (5-70) и (5-72):
Муст, п = Р.Л12 Im (fl уст X /Дуст) =
рцС/1 макс А 12 т / /?2й^о э.т ~1“ fl^6 эл^-12
р^-Д]2)2 111 (a-j+co^) (аг1-«6эл).
(5-73)
С учетом того, что амплитуда напряжения двухфазной
модели {/1макс связана с амплитудой трехфазного напря-
жения согласующим коэффициентом j/" у 171
171 макс — 1/^2 (Зф) — 1^3 U 1ф,
241
выразив в (5-73) индуктивности через реактивные сопро- ,,
тивления, получим:
М =________________________3UV’R.2------------------ (5.74)
у"'п со (^ + 4 + ^4/^) (af/cog3JI+1) (а^/со§эл+,1) 1 7
Если в (5-74) подставить выражения ах и а2 из (5-65)-
и (5-66) и выполнить некоторые преобразования с учетом
малости xlt х> по сравнению с х^, можно получить значение
пускового момента, определяемое (3-62).
Так как процедура получения составляющих момента
из этого примера ясна, опустим промежуточные выкладки
и приведем полное выражение пускового момента в виде [23]
44„(0
44 у ст. П
1 + е~ + “=>z — (е~“^ + е~а^) cos со0 3ilt —
1 +сс1юа/(00эл
«а/соо эл — оц/соо эл
(g-схЦ _e-aaQ sjn юОэд(.
(5-75)
Нетрудно видеть, что из девяти возможных составляю-
щих момента, определяемых' сочетаниями произведений
составляющих токов (5-70) и (5-72), в (5-75) присутствуют
семь составляющих, если учесть, что апериодическая состав-
ляющая представляет собой сумму моментов, определяемых
произведениями апериодических составляющих токов с раз-
ными коэффициентами затухания. Можно убедиться, что
произведение составляющих (5-70) и (5-72) с одинаковыми
коэффициентами затухания не содержит мнимой части и мо-
мента не создает. Периодические составляющие (5-75)
обусловлены взаимодействием затухающих апериодических
составляющих с принужденными токами, поэтому имеют
угловую частоту колебаний соОэл.
Выше было показано, что ax -С а2, поэтому характер
изменения момента определяется главным образом пере-
менными составляющими момента, затухающими с коэффи-
циентом ах- Логарифмический декремент для этих состав-
ляющих можно оценить, с помощью (5-68):
А = 2na/f2 2nsKXx/(Xx -|- хн),
так как Q г= ш0Э1.
Известно, что меньше xt + на порядок, a sK =
= 0,1 -ь 0,5, поэтому логарифмический декремент для
колебательной составляющей можно оценить десятыми до-
лями единицы. Это значит, что за время затухания соверша-
ются десятки колебаний периодической составляющей,
которая суммируется с установившимся значением и по-
242
вначале увеличивается
Рис. 5-16. Зависимости
aJ, а2 = / (ш/wo).
рождает пики пускового момента, превышающие статиче-
ский пусковой момент в несколько раз.
Таким образом, электромагнитная инерция асинхрон-
ного двигателя, с одной стороны, ограничивает темп нара-
стания момента, так как исключает возможность его нара-
стания до Му„. „ скачком, а с другой — существенно ухуд-
шает характер процесса пуска, вызывая большие и много-
кратно повторяющиеся пики нагрузки, ускоряющие износ
двигателя и механического оборудования.
Анализ зависимости коэффициентов затухания от ско-
рости ротора показывает, что коэффициент затухания
при со 0 с возрастанием скорости
незначительно, а затем все более
быстро до значения, равного при-
мерно половине значения а2 при
со = 0 [4]. Коэффициент аг при
этом уменьшается примерно в 2
раза и зависимости аха2 = / (со/со0)
имеют вид, показанный на рис.
5-16. В процессе пуска в связи с
возрастанием скорости затухание
колебаний момента, возникших в
первый момент пуска в соответст-
вии с (5-75), увеличивается внача-
ле медленно, а при со > О,5со0 весьма быстро. Следова-
тельно, число колебаний момента за время пуска тем боль-
ше, чем меньше ускорение электропривода, т. е. увеличива-
ется при возрастании момента инерции механизма и при
увеличении статической нагрузки.
К моменту перехода на устойчивый участок статической
характеристики (s< sK) колебания, возникшие при вклю-
чении двигателя, как правило, затухают и дальнейший
процесс увеличения скорости двигателя до сос протекает
в соответствии с линеаризованной динамической механи-
ческой характеристикой двигателя (3-75), а характер пере-
ходного процесса определяется отношением т постоянных
времени Т„ и 7\, как это было подробно рассмотрено выше.
Переходный процесс пуска асинхронного двигателя
при m « 1 и /И; = 0 представлен кривыми со, М = / (t) на
рис. 5-17, а. Эти кривые наглядно иллюстрируют отмечен-
ные выше особенности влияния электромагнитных пере-
n / dM \
ходных процессов. Производная момента -^т- #=оо, но
\ ш /нач
имеет весьма большие значения, так как время нарастания
243
момента до максимума Л4макс-П меньше периода перемен-
ного тока. Возникновение свободных составляющих тока
приводит к появлению пиков момента, значительно превы-
шающих значения по статической характеристике. В этом
можно убедиться, сравнивая приведенные на рис. 5-17, б
статическую 1 и динамическую 2 механические характери-
стики для этого процесса. Еще более значительные пики
момента имеют место при реверсе двигателя с незатухшим
полем.
Рассмотренные особенности переходных процессов асин-
хронного электропривода с короткозамкнутым двигателем
относятся к числу его существенных недостатков и обычно
снижают надежность его работы по сравнению с той, кото-
Рис. 5-17. Переходный процесс пуска асинхронного короткозамкнутого
двигателя (а) и соответствующие механические характеристики (6).
рую можно было бы ожидать при его конструктивной про-
стоте, поэтому в последние годы уделялось много внимания
проблеме борьбы с переходными составляющими тока и
момента. Установлено, что существенное снижение этих
составляющих достигается при ограничении темпа нараста-
ния амплитуды напряжения, приложенного к двигателю
при пуске. Ограничение темпа нарастания напряжения
может быть достигнуто с помощью дросселей насыщения,
тиристорных регуляторов напряжения и т. п. Кроме того,
влияние электромагнитной инерции оказывается мини-
мальным при пуске электропривода плавным повышением
частоты при условии ограничения абсолютного скольжения
значениями, соответствующими рабочему участку механи-
ческих характеристик при = const. При этом механиче-
ские характеристики линеаризуются в соответствии с (3-75)
и переходные процессы имеют характер, рассмотренный
в § 5-2.
244
На практике для оценок длительности переходных про-
цессов пуска или реверса иногда достаточно использовать
статическую характеристику двигателя и уравнение дви-
жения (1-52). Такие оценки, в частности, бывают полезны
для контроля при моделировании системы (5-60) на АВМ.
Задача решается аналитически при выражении статической
характеристики уточненной формулой Клосса (3-62) [1],
Однако обычно для указанной цели предпочтительны при-
ближенные графоаналитические методы в связи с тем, что
механическая характеристика асинхронных короткозамк-
нутых двигателей всегда существенно отличается от (3-62)
из-за эффекта вытеснения тока, используемого для повы-
шения пускового момента.
Рис. 5-18. Статические характеристики (а) и графики переходных про-
цессов (б) при графоаналитическом расчете.
Простейшим путем является использование метода ко-
нечных приращений. На участке изменения скорости Диг =
— “/кон •— ш/пач-при его достаточной малости момент дви-
гателя Mi и нелинейно зависящий от скорости момент
нагрузки Mci могут быть приняты равными средним зна-
чениям Мср( и Мс.ср/ на этих участках (рис. 5-18, а). Тогда
в соответствии с уравнением движения (1-52) время Д£/,
за которое скорость изменяется на Дсо/, определяется по
формуле
Дсо;/(Л4ср,- — Мс. cpJ) = Js Д<в,/Мд(. (5-76)
Вычисляя для каждого из показанных на рис. 5-18, а
участков, начиная с первого, и суммируя при переходе от
интервала к интервалу Дсог и Д£г, строится кривая со (/),
как показано на рис. 5-18, б. Полное время пуска 4 = 2Д^.
При известной зависимости со (I) зависимость М (Q опре-
245
делается с помощью статической механической характери-
стики.
Нетрудно видеть, что точность этого метода возрастает
при уменьшении Д/,. Для ориентировочных расчетов во
многих случаях достаточно принять Дсо = сос и определить
среднее значение пускового момента:
Al„.cp№« + Mn)/2.
Тогда время пуска при Ме = const вычисляется без
промежуточных расчетов:
1п Jг<ос/(Д4ср — Л1с).
(5-77)
Аналогично можно вычислить время торможения про-
тивовключением, если принять Л4Т ср яз (Л4нач + Л1„)/2:
Jvco1)a4/(/WT Ср — Мс).
(5-78)
5-5. ОСОБЕННОСТИ ПЕРЕХОДНЫХ ПРОЦЕССОВ
СИНХРОННОГО ДВИГАТЕЛЯ
Анализ установившихся динамических режимов работы
(см. гл. 4) показал, что электропривод с синхронным дви-
гателем при жестких механических связях аналогичен
асинхронному электроприводу с упругой механической
связью и соответственно отличается склонностью к упру-
гим механическим колебаниям. Рассмотрим, какой харак-
тер имеют переходные процессы, возникающие прн измене-
ниях скачком нагрузки этого электропривода. Уравнение,
описывающее зависимость угла е от времени в динамиче-
ских процессах при принятой выше приближенной динами-
ческой механической характеристике, можно записать с по-
мощью (4-86):
где 0С = Мс/Ь — угол, соответствующий статическому ре-
жиму при М — Л4С.
Корни характеристического уравнения:
А,2=— “±1/"~т-^ев = — а±/Йр, (5-80)
£1 м " м
где а-—коэффициент затухания; Qp = ]/QcB — 1/47"^—
— частота колебаний при Тя > 1/2QCB.
246
Общее решение (5-79) запишется в виде
0 = 9с4-е~а< (Л cos ф- В sin QpZ),
где значения коэффициента А и В определяются начальными
условиями: при t = О (0)о = 0IIOIl; (dg/d/)0 = co0sHa4.
Подставив значения А и В, получим:
e = Oc + e^[(0Iia )-Oc)cos QpM-
+ sin Q Л (5.s j j
«Р .1
После преобразований представим (5-81) в виде
9 = 9С + е’]/"(б,,»., - 0J'2 + роо^Н!,ч+«.(9нач--Вс2рх
Xsin(Qp/ + ipe), (5-82)
где
Если предшествующий режим был установившимся,
5>.ач ~ 0 н уравнение (5-82) упрощается:
0 = 0с + е a/p<(0iia4_o^ + ^fc^x
* й р
/ йп \
Xsin'Qp/ + arctg-^). (5-83)
Из (5-83) видно, что при изменении нагрузки скачком
ротор синхронного двигателя совершает затухающие коле-
бания относительно точки статического равновесия. ЛАак-
симум угла 9 в этом процессе зависит от скачка нагрузки;
сравнив (5-82) с (5-83), можно заключить, что если скачок
нагрузки наступает до затухания колебаний, возникших
в предшествующем переходном процессе, этот максимум
может существенно увеличиваться из-за sHa4 ф 0.
Момент двигателя определяется уравнением динамиче-
ской механической характеристики
М -= bQ + р ,
поэтому при необходимости может быть получен подста-
новкой (5-83) и его производной в это уравнение. Зависи-
мость скорости от времени также определяется (5-83) в со-
ответствии с соотношением
со = &)0 — d.Q/dt.
247
Рис. 5-19. Пусковые ме-
ханические характеристи-
ки синхронного двига-
теля.
Максимум динамического падения скорости, пик момента
и общая колебательность процесса при прочих равных усло-
виях определяются коэффициентом затухания а. Как сле-
дует из (5-80), коэффициент затухания возрастает при уве-
личении жесткости асинхронной механической характе-
ристики ₽, т. е. при уменьшении 7\„ и при Тм «С 1/2Йсв
демпфирование становится критическим, а характер пере-
ходного процесса апериодическим. Однако, как уже отме-
чали выше, этот вывод требует уточнения, так как получен
без учета электромагнитной инерции демпферной обмотки,
которая всегда присутствует и в той или иной степени
ухудшает демпфирование; при
Tw -> 0 и Тв ф 0 демпфирование
стремится к нулю.
Соотношения (5-81) и (5-82) мо-
гут быть в первом приближении
использованы и для анализа про-
цессу втягивания двигателя в син-
хронизм при пуске. Наличие демп-
ферной обмотки позволяет осуще-
ствлять асинхронный пуск син-
хронного двигателя в соответствии
с пусковыми характеристиками,
показанными на рис. 5-19. Харак-
теристика 1 соответствует относи-
тельно небольшому сопротивлению
демпферной обмотки. При это.м критическое скольжение
мало, что увеличивает жесткость рабочего участка р и
уменьшает пусковой момент Характеристика 2, на-
против, соответствует повышенному сопротивлению этой
обмотки, поэтому жесткость рабочей части характеристики
уменьшается, но возрастает пусковой момент М112.
Сточки зрения условий начального участка пуска дви-
гателя до подсинхронной скорости совх, которой соответ-
ствует скольжение sBX, предпочтительна характеристика 2,
особенно, в том случае, когда пуск осуществляется со зна-
чительной нагрузкой на валу.
При достижении двигателем подсинхронной скорости
совх в цепь обмотки возбуждения двигателя подается посто-
янный ток, магнитный поток начинает нарастать до номи-
нального значения и наступает второй этап пуска — втя-
гивание двигателя в синхронизм. Строгий анализ этого
этапа осложняется протекающими при этом электромагнит-
ными процессами. В первом приближении для оценки
248
условий втягивания в синхронизм можно воспользоваться
(5-82). Для этого запишем (5-82) в отклонениях от точки
статического равновесия и положим §нач = sEX:
Д9 = У д(Г- ач + (^вх + аланач)2. sin + ^e)i (5.84)
F йй р
где
. Авначйр
•фдо = arctg -- ----- ..
CO0SBX“Ta ^И13Ч
При одной и той же нагрузке статическая характери-
стика 2 на рис. 5-19 обеспечивает меньшую начальную
скорость при втягивании в синхронизм и соответственно
большее входное скольжение sBX = sBX2. Зависимость (5-84)
наглядно показывает, что при прочих равных условиях
увеличение sBX увеличивает амплитуду колебаний угла
ДО в процессе втягивания в синхронизм. Так как (5-84)
получено путем линеаризации угловой характеристики
двигателя, коэффициент b с ростом амплитуды уменьшается,
поэтому возрастание sBX ухудшает условия синхронизации
и при больших значениях входного скольжения синхрони-
зация оказывается невозможной.
Таким образом, более благоприятные условия втягива-
ния в синхронизм обеспечиваются более жесткой пусковой
механической характеристикой. Практически пусковая об-
мотка рассчитывается таким образом, чтобы обеспечить
удовлетворительные условия пуска до подсинхронной ско-
рости при заданном максимальном значении момента на-
грузки Мс и в то же время ограничить sBX допустимым
значением sBX = 0,03 -ь 0,05.
Глава шестая
РЕГУЛИРОВАНИЕ КООРДИНАТ ЭЛЕКТРОПРИВОДА
6-1. СПОСОБЫ РЕГУЛИРОВАНИЯ КООРДИНАТ
И ИХ ОСНОВНЫЕ ПОКАЗАТЕЛИ
Электрический привод осуществляет не только преобра-
зование электрической энергии в механическую, необходи-
мую для совершения полезной работы, но и управление
рабочим процессом приводимого в движение механизма.
Технологические требования определяют необходимость на
249
отдельных этапах работы задавать п с требуемой точностью
поддерживать на заданном уровне те или иные механиче-
ские переменные (положение рабочего органа механизма, его
скорость, ускорение, момент двигателя, нагрузку передач
и т. п.); принудительно изменять эти переменные в процессе
управления технологическим процессом; ограничивать пе-
ременные уровнем, допустимым по условиям технологии
или прочности механического оборудования, а также по
нагреву и перегрузочной способности двигателя (см. § 2-4).
Таким образом, управление технологическим процес-
сом механизма и реализация ограничений, накладываемых
на допустимые нагрузки электрического и механического
оборудования, определяют необходимость регулирования
координат электромеханической системы электропривода.
3 зависимости от задач управления электроприводом и
механизмом регулирование координат может осуществлять-
ся с целью: (Г) поддержания заданного уровня переменной;
(2) изменения переменной по требуемому закону; 3) ограни-
чения переменной допустимом значением;.4) отработки
произвольных законов движения, задаваемых на входе
системы, с требуемой точностью (следящий электропривод).
Ограничение координат является частным.случаем первых
двух функций электропривода, но заслуживает самостоя-
тельного рассмотрения в связи с практической важностью.
Возможные способы .управления переменными электро-
привода подразделяются на две обширные группы: параметр
рические’способы управления, используемые в разомкнутых,
системах, и способы автоматического регулирования коор-
динат с помощью тех или иных .обратных связей. Под пара-
метрическим. управлением понимается изменение заданного
уровня регулируемой переменной путем установки нового
.значения того или иного параметра двигателя, от которого
зависит его механическая характеристика. Задавая на раз-
личных этапах движения электропривода различные ме-
ханические характеристики, параметрическим способом
удается более или менее удовлетворительно управлять
ускорением, нагрузкой механического оборудования и даже
положением рабочего органа механизма, осуществляя его
точную остановку в требуемых точках пути.
Параметрические способы управления благодаря про-
стоте их реализации находят в современном электроприводе
широкое применение. Однако возможности этих способов
ограниченны и во многих ответственных случаях с их по-
мощью обеспечить требуемые режимы работы и показатели
250
электропривода нельзя. В связи с совершенствованием тех-
нологии и автоматизацией рабочих процессов требования
к точности регулирования координат и управляемости
электропривода непрерывно растут, поэтому область при-
менения замкнутых систем электропривода расширяется,
а основным содержанием-теории электропривода уже стало
изучение электромеханических систем с автоматическим
регулированием координат.
Как известно из теории автоматического управления,
существуют два принципиально различных способа регули-
рования переменных системы: регулирование по отклоне-
нию переменной от заданного значения, основанное на ис-
пользовании отрицательной обратной связи по регулируе-
мому параметру, и регулирование по возмущению, пред-
полагающее компенсацию влияния возмущения с помощью
положительной обратной связи. В электроприводе в силу
известных преимуществ, которые будут отмечены ниже,
основным является регулирование по отклонению, причем
достаточно широко используются комбинированные систе-
мы, в которых регулирование по отклонению дополняется
компенсацией влияния нагрузки. Самостоятельно регули-
рование по возмущению практически не применяется, если
исключить из рассмотрения компаундные обмотки двига-
телей и устаревшие разомкнутые системы постоянного тока
с компенсацией падения напряжения в силовой цепи дви-
гателя.
При регулировании переменных электромеханической
системы в качестве регулируемого может быть использован
любой параметр, от которого данная переменная зависит.
До тех пор пока изменения регулируемого параметра осу-
ществляются вручную, способ регулирования координаты
является параметрическим. Если же изменения параметра
осуществляются автоматически в зависимости от уровня
регулируемой координаты с помощью предусмотренной для
этой цели обратной связи, имеет место автоматическое ре-
гулирование переменной, а регулируемый параметр явля-
ется управляющим воздействием. Например, регулирование
скорости двигателя постоянного тока с помощью реостата
в цепи независимого возбуждения двигателя является пара-
метрическим, однако регулирование тока якоря с помощью
реле тока, включенного в цепь якоря и воздействующего
на тот же реостат с целью ограничения тока при переходных
процессах ослабления поля, представляет собой релейную
систему автоматического регулирования тока.
251
Каждый из возможных способов регулирования коор-
динат электропривода можно характеризовать точностью,
диапазоном и плавностью регулирования.
Точность регулирования переменной определяется воз-
можными отклонениями ее от заданного значения под дей-
ствием возмущающих факторов, например изменений на-
грузки при регулировании скорости, изменений скорости
при регулировании момента двигателя, колебаний напря-
жения сети и т. п. При параметрическом регулировании
в качестве заданного может быть принято среднее значение
координаты при известных пределах изменения всех воз-
мущающих воздействий, подлежащих учету в данном конк-
ретном случае. При этом оценкой точности регулирования
может служить отношение наибольшего отклонения Дхиакс
к среднему значению хср:
Д^ ~ Д-^макс/Л'ср = Самаке ^мин)/(-^макс"1_-^мин), (6"1)
где хмавс и хмип — максимальное и минимальное значения
переменной х при данных значениях параметра или задаю-
щего сигнала и пределов изменения возмущений.
Таким образом, количественная оценка точности способа
регулирования зависит от среднего уровня регулируемой
переменной и определяется конкретными пределами изме-
нений возмущающих воздействий.
В зависимости от требований, предъявляемых к электро-
приводу, и особенностей регулируемой переменной оценка
точности регулирования может относиться к статическим
режимам работы либо охватывать и динамические процессы.
Например, точность параметрического регулирования ско-
рости изменением напряжения двигателя постоянного тока
при «„ = И,,.,,, Ф = Ф„ и изменениях нагрузки от 0 до Мн
в статическом режиме работы определяется модулем стати-
ческой жесткости механической характеристики и в соот-
ветствии с (6-1) имеет вид:
Дсо* = Дмн/(2м0 - Дм„) = Мн/(2рм0 - Мп). (6-2)
Однако если нагрузка по условиям работы изменяется
скачком, динамический перепад скорости при ударном при-
ложении нагрузки в соответствии с (5-28) из-за электромаг-
нитной инерции якорной цепи может превышать статиче-
ский Дмд = м() — “мин > Д“ц- При этом более полное
представление о точности регулирования дает подстановка
в (6-1) значений ммакс и мМИ11, определенных с учетом дина-
мики.
252
Количественная оценка точности регулирования по (6-1)
во многих случаях применима и при автоматическом регу-
лировании координат. В частности, при регулировании ско-
рости (6-2) определяет требуемую жесткость механической
характеристики в замкнутой системе регулирования:
Ррасч (1 Д®расч*)/2®орасч' (6"3)
Соотношение (6-3) свидетельствует о том, что при задан-
ной относительной точности Дмрасч4; и заданных пределах
изменения нагрузки 0 — Ми требуемая жесткость возра-
стает по мере снижения расчетного значения скорости ®Орасч.
При этом в ряде случаев для оценки точности регулирования
в динамических процессах, особенно при сравнении различ-
ных систем и настроек регуляторов, можно воспользоваться
частотной характеристикой динамической жесткости) Рд(/Й) |
замкнутой системы (2-19).
Если по условиям работы электропривода важна точ-
ность воспроизведения значений регулируемой координаты,
задаваемых на входе системы автоматического регулирова-
ния, требования к точности определяются допустимой
ошибкой регулирования Дх3. лоп, абсолютное значение ко-
торой при единичной обратной связи можно записать так:
А^з. макс |^з % |макс Ах3. доп, (6-4)
где х3 — задающий сигнал;
х — текущие значения регулируемой переменной в ста-
тических и динамических режимах работы.
Условие (6-4) должно выполняться с учетом возможных
ограничений максимальных значений переменной и ее
производных. Если это условие распространяется только
на статические режимы работы, его выполнение существенно
упрощается.
Диапазон регулирования характеризует пределы изме-
нения средних значений переменной хср (либо ее значений,
соответствующих конкретному другому уровню возмущаю-
щих воздействий), возможные при данном способе регули-
рования:
D *^cp. макс/^ср. мин’ (6“5)
Возможные пределы регулирования переменной ограни-
чиваются сверху максимально допустимыми или максималь-
но реализуемыми значениями переменной, а снизу — тре-
буемой точностью или минимально реализуемыми значения-
ми переменной при данном способе регулирования. Поясним
253
сказанное на примере регулирования скорости двигателя,
для которого данный показатель имеет особо важное прак-
тическое значение. Допустим, что для регулирования ско-
рости используется введение сопротивлений в цепь якоря —
реостатное регулирование. Рассматривая характеристики
на рис. 6-1, видим, что при данном способе регулирования
диапазон регулирования сверху ограничен естественной
характеристикой двигателя 1 = 0), а снизу при по-
стоянном статическом моменте Mz = Л4с.ср = const фор-
мально не ограничивается, так как характеристика 2 обес-
печивает минимальную скорость сомп., = 0, и возможный
диапазон регулирования в соответствии с (6-5) теоретически
равен бесконечности. Практического интереса этот вывод
не представляет в связи с тем,
что неучтенные дополнитель-
ные возмущения и реально
всегда присутствующие откло-
нения нагрузки от расчетно-
го среднего значения Мс. ср
не позволяют получить ста-
бильной работы электропри-
вода со скоростью, близкой
нулю. Двигатель прн одном
уровне возмущений будет уве-
личивать скорость в несколь-
ко раз, а при другом — пол-
ностью останавливаться.
Очевидно, нижний уровень
скорости <оср м„„ ограничи-
Рис. 6-1. К определению поня-
тия диапазона регулирования
скорости.
вается заданной точностью регулирования (6-1) при данных
пределах изменения возмущений Мг-макс и Л1с м11|1, которая
соответствует показанной на рис. 6-1 характеристике 3.
Даже при невысоких требованиях к точности и небольших
пределах изменения нагрузки реостатное регулирование
обеспечивает диапазон регулирования D (1,5 ч- 2); 1, ко-
торый при расширении пределов изменения нагрузки
быстро снижается.
При Мс мин = М'с ,,,,,, < 0 (рис. 6-1) регулировать ско-
рость изменением сопротивления в якорной цепи невозмож-
но, так как при этом введение сопротивлений при Мс < 0
вызывает не снижение, а увеличение скорости. Ограничен-
ные возможности реостатного регулирования обусловлены
тем, что снижение скорости достигается за счет уменьшения
жесткости механической характеристики прн соо — const.
254
Точность регулирования при этом снижается как за счет
уменьшения мср, так и за счет уменьшения жесткости.
Оценка возможных пределов регулирования представ-
ляет интерес не для всех координат электропривода. Она
имеет важнейшее значение при регулировании скорости.
Кроме того, представляет интерес оценка возможных пре-
делов регулирования тока, момента, ускорения двигателя.
Плавность регулирования характеризует число дискрет-
ных значений регулируемого параметра, реализуемых при
данном способе в диапазоне регулирования. Ее можно оце-
нить коэффициентом плавности
K^XiKxt-Xt^,
где xL и Xi^ — значения переменных па соседних ступенях
регулирования.
Чем выше число реализуемых ступеней регулирования,
тем выше плавность. Оценка плавности — чисто техниче-
ский показатель, связанный с условиями управления регу-
лируемым параметром. Если управление параметром связа-
но с переключениями в силовой цепи системы электропри-
вода, возможное число ступеней регулирования ограничи-
вается приемлемыми габаритами коммутирующего устрой-
ства. Чем меньше мощность цепи, в которой нужно осуще-
ствлять изменения параметра, тем возможная плавность
выше.
Главной переменной, необходимость регулирования ко-
торой диктуется технологическими требованиями, в боль-
шинстве случаев является скорость электропривода. Воз-
можность длительной работы электропривода с любой ско-
ростью в заданном диапазоне регулирования определяет
необходимость рассмотрения дополнительного показателя
регулирования скорости: допустимой нагрузки двигателя
при регулировании.
Допустимая по нагреву нагрузка двигателя Млоп при
регулировании скорости может изменяться, с одной стороны,
за счет изменения потерь, выделяющихся в двигателе при
данном моменте нагрузки при регулировании, а с другой
стороны — в связи с изменениями условий охлаждения
двигателя, особенно при его самовентиляции (см. гл. 14).
Если двигатель имеет независимую вентиляцию, второй
фактор отпадает и в качестве критерия допустимости на-
грузки при любой скорости может быть принято номиналь-
ное значение тока двигателя /н. При этом дополнительно
предполагается, что изменения постоянных потерь в двига-
255
теле при регулирований могут не учитываться. Приняв?
/ — 1п = const, можно в диапазоне регулирования ско- ?
рости получить зависимость Мдоп = f (со), характеризую- <
щую допустимую нагрузку двигателя при регулировании ‘
скорости. Заметим, что более точно эту зависимость можно j
в общем случае определить, приняв в качестве критерия }
допустимые потери в двигателе при каждой скорости и
вычислив соответствующие значения допустимого тока;
Лоп = /(“). ;
Необходимость оценки допустимой нагрузки при регу-
с тем, что нагрузка^ '
движение механиз- +:
лировании скорости возникает в связи
И
й'макс
л'мии
а
m,ms
^оп.мин ^доп.макс .
Рис. 6-2. Зависимости
Мдоп = / (“) и 7Ис=/(со)
при регулировании ско-
рости.
приводимого в
ма в общем случае также зависит Ц
от скорости (см. гл. 1), поэтому для 1
каждого конкретного случая при-Я
регулировании скорости известна
зависимость фактической нагрузки?
привода от скорости Mz =f
На рис. 6-2 кривой / представ--
лена зависимость Л1доп = f (со), оп-?
ределенная в диапазоне регулиро-
вания ®макс — юмин ДЛЯ конкрет-
ного способа регулирования. Boj
всем диапазоне должно выпол-'
няться условие Mz Мдоп, ко--
торому отвечают две зависимости Mz =f (со), представлен-^
ные кривыми 2 и 3 на рис. 6-2. Закон изменения Mz, характер
ризуемый кривой 2, существенно отличается от изменений?
допустимой нагрузки (кривая /), поэтому двигатель в основ-|
ной части диапазона регулирования недоиспользован по^
нагреву (заштрихованная область на рис. 6-2). Напротив,
кривая 3 представляет случай, когда и момент нагрузка?
и допустимый -момент примерно одинаково зависят от ско-Я
рости.„При этом двигатель полностью используется по на-Я
греву во всем диапазоне регулирования. Д
Этот пример .свидетельствует о том, что каждому способуД
регулирования скорости соответствуют наиболее благо-Д
приятные условия''изменения нагрузки в процессе. регули.Я
рования. Так, если Мдоп — const, говорят, что это способе
регулирования при постоянном моменте, если Мдоп =Я
— Рдоп/м, причем Рдоп — const, говорят о регулировании®
при постоянной мощности и т. п. Использование способа®
регулирования, обеспечивающего Рдоп = const для меха®
низма с постоянным моментом или с вентиляторной нагрузЯ
256 . Я
кой, влечет за собой необходимость завышения мощности
двигателя и недоиспользования его по нагреву.
Важным показателем регулируемого электропривода
является его экономичность. Применение регулируемого
электропривода связано с определенными дополнительными
первоначальными затратами и эксплуатационными расхо-
дами, которые должны окупаться повышением производи-
тельности и надежности работы установки, а также улучше-
нием качества продукции. Экономическая эффективность
регулируемого электропривода в каждом конкретном слу-
чае должна определяться технико-
экономическим расчетом, учитываю-
щим все указанные факторы. При
сравнении различных способов регу-
лирования ориентировочное суждение
о капитальных затратах, можно соста-
вить, оценивая массогабаритны^ по-
казатели дополнительного оборудова-
ния по его установленной мощности, рис. 6-3. Показатели
а эксплуатационные затраты на элек- качества регулирова-
троэнергию — к. п. д., характеризую- ния-
щим потери энергии, и cos <р, харак-
теризующим потребление реактивной мощности при регули-
ровании. Если электропривод работает в циклическом режи-
ме с различными скоростями на различных участках цикла,
следует известными методами определять средневзвешенные
за цикл значения к. п. д. и коэффициента мощности.
При автоматическом регулировании координат электро-
привода важное значение имеют динамические ’показатели
качества регулирования: быстродействие, колебательность
и перерегулирование, оцениваемые по характеру переход-
ного процесса при скачке управляющего сигнала (рис. 6-3).
Быстродействие может характеризоваться временем регу-
лирования tp, за которое переменная первый раз достигает
заданного значения; временем первого максимума £макс,
когда, отклонение регулируемого параметра достигает пер-
вого максимума; общим временем переходного процесса
tn.n. Колебательность, как было принято в гл. 4, может
характеризоваться наименьшим значением логарифмиче-
ского декремента К или частотным показателем колебатель-
ности Лмакс. Перерегулирование характеризуется максималь-
ным отклонением, противоположным начальному, отнесен-
ным к заданному (установившемуся), значению регулируе-
мого параметра.
9 Чиликин М. Г. и др. 257
6-2. СИСТЕМА УПРАВЛЯЕМЫЙ ПРЕОБРАЗОВАТЕЛЬ —
ДВИГАТЕЛЬ
При автоматическом регулировании координат электро-
привода в качестве управляющего воздействия может быть
выбран любой параметр, оказывающий влияние на регули-
руемую переменную, и соответственно существует большое
многообразие непрерывных, релейных и импульсных систем
регулируемого электропривода, примеры которых в даль-
нейшем будут рассмотрены. Однако наиболее употребитель-
ны системы, основанные на регулировании тех параметров,
которые обеспечивают наибольшую управляемость электро-
привода во всех режимах.
QO<
-!Ч
ОВД
б)
осо
пч
в) АД \Cj)frear
Рис. 6-4. Система управляемый преобразователь—двигатель.
В предшествующем изложении было установлено, что
наиболее высокая управляемость электропривода постоян-
ного тока обеспечивается регулированием напряжения,
приложенного к якорной цепи, при постоянном потоке
двигателя. Аналогичные возможности для асинхронного
электропривода дает использование частотного управления
с воздействием на напряжение питания для поддержания
постоянства результирующего магнитного потока двигателя.
Эти эффективные способы управления могут быть реализо-
ваны только при наличии индивидуального управляемого
источника питания силовой цепи двигателя, т. е. осуще-
ствляются по системе управляемый преобразователь —
двигатель (УП-Д).
Для питания двигателей постоянного тока используются
либо электромашипиые преобразователи-генераторы посто-
янного тока, система Г-Д (рис. 6-4, а), либо статические
управляемые вентильные, например тиристорные преобра-
зователи переменного трехфазиого напряжения сети в регу-
лируемое напряжение постоянного тока, система ТП-Д
258
(рис. 6-4, б). Для частотного управления асинхронным и син-
хронным электроприводом предусматриваются индивидуаль-
ные вентильные преобразователи частоты, позволяющие
при изменениях частоты регулировать уровень напряжения,
система ПЧ-АД (рис. 6-4, в).
Питание от источника соизмеримой мощности оказывает
на механические характеристики двигателя влияние в связи
с уменьшением напряжения питания по мере роста тока
нагрузки. Задача учета этого влияния осложняется нели-
нейностью внешних характеристик, которая для генератора
постоянного тока обусловлена возможными изменениями
скорости первичного двигателя при колебаниях нагрузки
и влиянием реакции якоря, а для тиристорных преобразо-
вателей напряжения — нелинейностью характеристик вен-
тилей, условиями согласования управления нереверсив-
ными преобразователями, образующими схему реверсив-
ного преобразователя, и возможностью режима прерыви-
стых токов.
С учетом указанных факторов статические внешние
характеристики управляемых преобразователей в общем
случае могут иметь вид нелинейных зависимостей ulip —
= f («у. Gip), гДе Ар — ток нагрузки преобразователя; пу —
напряжение управления преобразователем, а динамические
внешние характеристики могут отличаться от статических
на значение падения напряжения па имеющихся в силовой
цени преобразователя индуктивностях, зависящее от произ-
водной тока нагрузки
^пр ~ f (^у> Ср) ^^апр (Ср)/^С
где
^опр (Ср) АогПр (^*пр) Ср*
Так как ипр = ия = с® + £я/?яд и iIip = i„, при наличии
графических зависимостей мпр =- щ, = f (иу, inp) — f («у, t„)
графический расчет электромеханических характеристик
в разомкнутой системе УП-Д с учетом нелинейностей пре-
образователя не представляет затруднений. При иу — [7у1 =
= const для нахождения зависимости е = с® -.=/(ta) до-
статочно произвести несложную операцию графического вы-
читания с® = ия (ну1, i„) — 1„ДЯ д-, причем в связи с малостью
и линейностью падения напряжения в якоре двигателя
можно заключить, что форма внешних характеристик пре-
образователя определяет и форму механической характе-
ристики двигателя. Семейство внешних характеристик
9* 259
преобразователя мпр = f (иу, inp) может быть использовано ]
и для графического расчета статических механических ха-1
рактеристик в замкнутой системе УП-Д. Анализ динами-
ческих процессов в системе УП-Д с учетом существенных '
нелинейностей преобразователя при необходимости может 'j
быть выполнен с помощью ЭВМ. . i
Основной задачей теории автоматизированного электро-
привода является изучение общих свойств и характеристик -
регулируемого электропривода в статических и динамиче- !
ских- режимах работы. Решение этой задачи возможно при 1
линеаризации внещних характеристик преобразователей.
Как показывает анализ внешних характеристик генерато-.
ров и реверсивных тиристорных преобразователей с со- J
вместным согласованным управлением, их внешние харак- j
теристики линеаризуются без существенных погрешностей, *
что дает основание в дальнейшем изложении эквивалентное 3
сопротивление и индуктивность силовой цепи преобразова-
теля, питающего двигатель постоянного тока, принимать ]
постоянными и включать их в суммарное сопротивление |
и в’ суммарную индуктивность якорной - цепи двигателя:
=/?„₽ + /?..л? — Апр + Ая, д, $
где #пр =₽я.г, Лпр = Л.,г — для генератора;
7?пр = 7?т-п, Апр = £т.п— для тиристорного преобра- j
зователя. )
. При этом остаются справедливыми все формулы, полу- <
ченные в § 3-1 для двигателя постоянного тока с независи- 1
мым возбуждением, если в них заменить ия на э. д. с. преоб-
разователя епр. В частности, уравнения статических харак- :
теристик (3-9) и (3-10) принимают вид: _
о) = £пр//гФ —гя7?Я2/^Ф; 1
Со = Дпр/^Ф-Л47?я2/^Ф2, /
где Епр — Ег для генератора;
Епр = ЕГ.П для тиристорного преобразователя.
Нарушение согласования совместного управления ревер-
сивным тиристорным преобразователем и режим преры-
вистых токов при раздельном управлении могут вызывать
более существенные нелинейности внешних характеристик.
Однако и в этом случае возможна их кусочно-линейная
аппроксимация, при которой эквивалентное сопротивление .
преобразователя остается постоянным в пределах каждого
линейного участка.
260
Для обобщенного анализа как генератор постоянного
тока, так и тиристорный преобразователь в динамических
процессах, можно представить апериодическим звеном с пе-
редаточной функцией
П7 /Щ _ е,1Р _ ^ПР /К 7\
й7,,р(р) щ>Лр) ТпрР+1' (6’7)
I
где нох —напряжение возбуждения генератора '(дв) или
управления тиристорного преобразователя '(иу);
Лпр — коэффициент усиления по напряжению гене-
ратора '(^г) или тиристорного преобразователя
7’пр — постоянная времени цепи возбуждения генера-
тора Тг или тиристорного преобразователя Тт>п.
Специфика преобразователей проявляется в количест-
венных соотношениях постоянных времени и коэффициентов
усиления. Генератор постоянного тока имеет большую по-
стоянную времени, которая при мощности выше 100 кВт
лежит в пределах = ТГ = 1 -.4 с. Тиристорный пре-
образователь является более быстродействующим элемен-
том; при полупроводниковой системе импульсно-фазового
управления (СИФУ) его эквивалентная постоянная времени
Тпр = Тг = 0,01 с; она учитывает запаздывание и инер-
ционность фильтров СИФУ, а при наличии в СИФУ маг-
нитных усилителей значение может быть на порядок
выше, причем определяется инерционностью магнитных
усилителей. .
Не менее существенны различия и в’ коэффициентах уси-
ления, особенно по мощности. Мощность управления тири-
сторного преобразователя с полупроводниковой СИФУ со-
ставляет несколько, а с магнитной —- десятки ватт. Гене-
раторы, средней и большой мощности имеют на два —
четыре порядка большую мощность возбуждения, которая
дополнительно увеличивается необходимостью форсирова-
ния переходных процессов, поэтому для согласования вы-
ходной мощности системы управления с требуемой для
управления генератором питание обмотки возбуждения
генератора осуществляется от усилителя мощности воз-
будителя. В качестве возбудителей генераторов средней
мощности используются магнитные усилители и тиристор-
ные преобразователи, а при значительной мощности воз-
буждения — тиристорные или электромашинные преобра-
зователи.
261
Если тиристорный возбудитель аналогично (6-7) предстгй
вить апериодическим звеном с постоянной времени 77$
и коэффициентом усиления по напряжению &т.в, то систем
Г-Д можно поставить в’соответствие структурную схему]
приведенную на рис. 6-5, а. Так как при полупроводнике- |
вой СИФУ постоянная Тт_в на два порядка меньше, чем Тт, |
при обобщенном рассмотрении свойств регулируемого элек- з
тропривода можно полагать 0 (рис. 6-5, б). В этом 1
варианте структурная схема системы Г-Д совпадает со я
структурной схемой системы ТП-Д, приведенной на Д
рис. 6-5, в, если обозначить kT BkP = kna. ! S
262
Уравнение динамической. характеристики обобщенного
двигателя с линейной механической характеристикой (3-26)
справедливо и для системы УП-Д постоянного тока, если
с учетом сказанного выше полагать 0 = и о0 =
= Envlc. В рамках применимости (3-26) для описания дина-
мической механической характеристики асинхронного дви-
гателя и допустимости представления преобразователя
частоты апериодическим звеном (6-7) можно составить обоб-
щенную структурную схему электропривода по системе
УП-Д (рис. 6-5, г), аналогичную схеме на рис. 6-5, в и со
строго оговоренным приближением справедливую для асин-
хронного электропривода по системе ПЧ-АД при ограни-
чении во всех режимах работы абсолютного скольжения
|sa | <^sK. При этом следует иметь в виду, что (3-26) для
асинхронного двигателя получено при = 0 и для систе-
мы ПЧ-АД учесть основное влияние внешней характеристики
преобразователя на режимы работы системы включением
внутреннего сопротивления преобразователя в сопротивле-
ние фазы статора не удается.
Ряд вопросов анализа динамики двигателя с последова-
тельным возбуждением, управляемого по системе УП-Д,
также могут быть рассмотрены на базе структурной схемы
на рис. 6-5, г в пределах допустимой линеаризации его
механических характеристик.
Таким образом, структурные схемы, приведенные на
рис. 6,-5, а—д, дают широкую основу для обобщенного
изучения статических и динамических свойств регулируе-
мого электропривода. При необходимости анализа динамики
электропривода по системе УП-Д с учетом упругих связей
механическую часть электропривода следует представить
в первом приближении двухмассовой расчетной механиче-
ской схемой. При учете зазора в кинематической цепи
движение такой электромеханической системы описывается
следующей системой уравнений:
ТПр 4“ COq = &пр Wy,
Т9 dMJdt + М = 0 (и0 - coj;
М — Л4С1 — Л412 = 07’м1 d^/dt;
Af12-Mc2 = 0(V-l)TB1dM2/di; ( }
^12 = С12(Ф1“ Фг) —Лфз/2 При I фх — Фа1> Аф3/2;
Л112 = 0 при |ф!-ф2| <Афа/2,
263
-й
- J
Структурная схема, соответствующая (6-8), показан^
на рис. 6-5, д. Она дает наиболее полное представление о(
электромеханической системе регулируемого электропри-
вода как об объекте автоматического управления. Харак-!
терными особенностями системы являются наличие элемен-
тов, не являющихся звеньями направленного действия, и
наличие нелинейности, вносимой кинематическим зазором*
Строго говоря, остальные элементы электропривода
возбудитель, преобразователь, двигатель — также обла-
дают в той или иной степени нелинейными характеристик
ками, которые при записи уравнений (6-8) заменены при^
ближенными линейными зависимостями. Использование;
для управления электроприводом решающих усилителей
с высоким и стабильным коэффициентом усиления создает;
для такой линеаризации наиболее благоприятнее условия?;
Однако существенные нелинейности, такие, как сухое тре-
ние при движении со знакопеременной скоростью, возмоЖу-
ный люфт в характеристиках тиристорных преобразовате--
лей с совместным управлением, кинематический зазор, еслй
при движении системы создаются условия для его размыт
кания, должны учитываться либо методом гармонической
линеаризации, либо путем решения задачи на ЭВМ.
Структурные схемы на рис. 6-5 не учитывают ряд дру^
гих особенностей конкретных элементов электропривода^
оказывающих более или менее существенное влияние на;
динамические свойства и статические характеристики элек|
тропривода. Например, при разработке быстродействующи^
электроприводов по системе ТП-Д в ряде случаев возникав^
необходимость учета дискретности и постоянного запазды^
вания преобразователя; разработка высокоточных систем
регулирования координат требует учета возможностей при-;
меняемых задающих и измерительных устройств; реализа^
ция глубокого регулирования скорости в системе ПЧ-АД
требует учета несинусоидальности напряжения преобразо^
вателя, вызывающей при малой средней скорости ее зна-,
чительные пульсации, и т. п. -i
6-3. ЧАСТОТНЫЕ ОЦЕНКИ ТОЧНОСТИ И КАЧЕСТВА j
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ КООРДИНАТ j
Изучение динамических свойств электромеханических систем авто-1
матизированного электропривода, замкнутых обратными связями по<
различным переменным, базируется на математических методах тео>;
рии автоматического регулирования. Кратко воспроизведем здесв?
важнейшие представления теории автоматического регулирований
264
о связи ЛАЧХ разомкнутого контура регулирования с точностью и
динамическими качествами замкнутого контура регулирования пере-
менной х [И, 13].
При единичной обратной связи передаточная функция разомкну-
того контура регулирования имеет вид:
1^,разх = ^рл^о.рх> (6-9)
где l^px, И70. р х — передаточные функции соответственно регулятора
переменной х и объекта регулирования.
В результате приемлемых упрощений (6-9) может быть представ-
лена в виде
!=П
k П 0+7»
^pa3. = -fe^—:--------, (6-10)
Pv II о+^р)
i= 1
где v — порядок астатизма контура;
т, п — число последовательно включенных соответственно инерцион-
ных и форсирующих звеньев.
Для анализа связи точности регулирования с передаточной функ-
цией разомкнутой системы воспользуемся передаточной функцией
ошибки в замкнутой системе
WЬх ~^хз(.Р)/хз (Р)~^ 1^зам.к= 1/(1+1^разл')> (6-И)
3
где U73aM.v = х (рУхз (р) — передаточная функция замкнутого контура
регулирования переменной х.
В статической системе (v = 0) статическая ошибка в соответствии
с (6-10) и (6-11) определяется соотношением
Дх3 (0) = х3 (0)/[1 +Граз* (0)] =х3 (0)/(1 +*)х3 (0)/*, (6-12)
т. е. при k > 1 обратно пропорциональна общему коэффициенту уси-
ления разомкнутого контура и возрастает с увеличением заданного
значения переменной. Соответственно для получения требуемой стати-
ческой ошибки Дх3. д011 (0) необходимо, чтобы ордината низкочастот-
ной области логарифмической амплитудно-частотной характеристики
(ЛАЧХ) разомкнутого контура отвечала условию
201g^201g-g^?j-. (6-13)
илз-доп
Уравнение (6-12) характеризует ошибку по управляющему воз-
действию. Наряду с этой ошибкой при работе электропривода возни-
кают дополнительные ошибки, связанные с теми или иными возмуще-
ниями. Передаточная функция ошибки по возмущению F (р)
и/д*в = Дхв (p)/F (р) = -х (p)!F = (р)/[1 +lFpa3A- (р)], (6-14)
где TF'a3X — передаточная функция объекта по возмущению.
С помощью (6-11) и (6-14) можно получить изображение суммарной
ошибки замкнутого’контура:
ДХЕ (р) = Дхз (р) + Дхв (р) = [х3 (p)-f-F (р) (р)]/[1 +
+ ^разл-(р)]- (6-15)
265
Суммарная статическая ошибка определяется из (6-15) при р = О
и позволяет уточнить требования к низкочастотной части ЛАЧХ (6-13):
20 1g k 20 1g жз-макс^0) + ^акс (0)
Д^доп(°) ’
где А:в.макс = ^макс (0) ^раэх (0).
Если v= 1, контур регулирования обладает астатизмом первого
порядка. При этом статическая ошибка Дх3 (0) = 0, так как при на-
личии в системе интегрирующего элемента в установившемся режиме
рассогласование на входе системы должно быть равно нулю при любом
требуемом значении выходного параметра. В связи с тем что возмуще-
ние воздействует на объект регулирования, а задающий сигнал — иа
вход регулятора, наличие интегрального элемента в разомкнутой цепи
регулирования не всегда исключает статическую ошибку Дх„ (0). В этом
можно убедиться, рассматривая (6-15). При v = I и р -> 0 й7раз v (р) -*
—оо, что и приводит к равенству пулю ошибки Ах3 (0). Однако ошибка
Дхв (0) может иметь конечное значение, если ’ИР’рп., л- (/’) также обладает
астатизмом первого порядка. В системе электропривода статическая
ошибка по нагрузке Мс отсутствует лишь в тех случаях, когда инте-
гральный элемент находится на входе системы регулирования или во
всяком случае расположен в структурной схеме разомкнутой системы
до точки приложения нагрузки.
В астатической системе регулирования требования к точности
могут определяться допустимой установившейся динамической ошиб-
кой, возникающей при возрастании задающего сигнала по линейному
закону
Х-( (/) = Х3.макс^ -— -^з.макс/Р• (6-17)
Изображение ошибки по управлению в этом режиме
ДМР) = *з.Макс/р [1 + ^ряз.г (Р)1- (6-18)
Подставляя (6-10) и (6-17) в (6-18) при р 0, получаем устано-
вившуюся ошибку по первой производной:
(°) = Хл.макс/Л. (6-19)
Следовательно, для обеспечения требуемой динамической точно-
сти регулирования при v — 1 необходимо выполнение условия
L(l) = 201gfe^20 1g Д”2.^ (6-20)
(II доп (Л
При астатизме второго порядка (у = 2) имеет место равенство
нулю статической ошибки Дх, (0) и динамической ошибки но первой
производной управляющего воздействия Дх,,!, — 0. При этом требо-
вания к точности регулирования могут определяться установившейся
динамической ошибкой по второй производной задающего сигнала
Дх3.2) (0) при х3 (/) = х3. ма1(с /3 х,,. „акс/р2- Аналогичным путем можно
показать, что прн этом низкочастотная часть ЛАЧХ не должна опу-
скаться ниже точки Й= 1, L (Q) = 20 1g у*--ака :
A-V3(2) (U)
L (1)= 20 1g fe 20 1g ^M!l,lc (6-21\
Д*3(2) ДОП10)
266
Таким образом, необходимая точность регулирования обеспечи-
вается уровнем и формой низкочастотной части ЛАЧХ. Начальные
участки частотных характеристик, обеспечивающие требуемую точ-
ность при рассмотренных значениях v = 0, 1, 2 в соответствии с (6-13),
(6-19) п (6-21), показаны па рпс. 6-6. В статическом контуре регулиро-
вания (рис. 6-6, а) низкочастотная часть представляет собой горизон-
тальную прямую па уровне требуемого по условиям статической точ-
ности общего коэффициента усиления разомкнутой системы. При аста-
тизме первого порядка (v = 1, рнс. 6-6, б) эта часть представляет собой
ди
Тз.накс
____Я
Рис. 6-6. Низкочастотная часть ЛАЧХ при различном порядке астатизма.
прямую с наклоном —20 дБ/дек. Продолжение этой прямой до пересе-
чения с осью абсцисс дает частоту Qg, численно равную общему требуе-
мому коэффициенту усиления (6-20). Это значение коэффициента уси-
ления обычно называют добротностью контура по первой производной
(пли по скорости):
Пл — k. — х„ /Дх,,,,
и х з.макс' з(1)до(1-
Наконец, при астатизме второго порядка (v = 2, рис. 6-6, в) низ-
кочастотная часть ЛАЧХ имеет наклон —40 дБ/дек н продолжение ее
отсекает на оси абсцисс отрезок Sg, численно равный корню квадрат-
ному из общего коэффициента усиления (Qg = ]//e). Для получения
требуемой динамической точности (6-21) необходимо выполнение ус-
ловия
йб 1/Л^'з.макс/Ах3(2) доп ~ у/ k" (6-22)
где /г., — добротность по второй производной (по ускорению).
Если требуется ограничить допустимым значением динамическую
ошибку при вынужденных колебаниях с частотой Пв, обусловленных
изменениями входного воздействия по закону
%з (0 —^з.макс sin (6-23)
необходимое условие, накладываемое па низкочастотную часть ЛАЧХ,
можно получить из (6-11), полагая | Ц7разд. (/Йп) I > 1:
i ^рал.г (/Йв) I ^-з.м/А-^з.доп* (6-24)
Таким образом, для получения заданной точности в этом устано-
вившемся динамическом режиме необходимо, чтобы ордината ЛАЧХ
267
'при Q = Q,, отвечала условию
Л(Ов) > 201g Jh2SHL.
/Х"1З.ДОП
(6-25)
Перейдем к краткому изложению полученных в теории автомати-
ческого управления частотных оценок качества. Согласно [13] поло-
жим в основу оценок частотный показатель колебательности контура
регулирования, численно равный максимальному резонансному коэф-
фициенту усиления ЛАЧХ замкнутого контура:
^макс-^ i ^вам. г (/^) 'макс
При регулировании координат электропривода требуемые значе-
ния показателя колебательности лежат в пределах -4M:|k-c — I -н 1,3,
причем в большинстве практических случаев желательны нлп исоб-
Найквиста может характеризоваться удаленностью амплитудно-фазо-
вой характеристики (АФХ) разомкнутого контура 11^.,., v (/!2) от точки
— 1, /О, т. е. определенным запасом по амплитуде при ф (Q) -- л и
соответствующим запасом по фазе Дф — лф(£2) при I Ц/р,п л. (/О) I =»
« I. Доказано, что необходимым и достаточным условием того, чтобы
показатель колебательности был нс больше требуемого, является на-
хождение АФХ разомкнутого контура вис круга (рис. 6-7, о) с радиу-
сом, равным:
R = '4макс/(-4макс— l)> (6-27)
центр которого расположен па оси абсцисс на расстоянии от начала
координат
С — - Амакс/(/1мькс— !)• (6-28)
На рис. 6-7, б приведены зависимости Дф — /' (/.) при Ляакс = const
[13], позволяющие, исходя из требуемого показателя колебательности,
определить требуемые значения запаса по фазе в области значений
модуля АФХ, близких к 1, т. е. на участке ЛАЧХ, примыкающем
к частоте среза йс. Очевидно, при данном значении Анакс в соответ-
268
ствни с рис. 6-7, а необходимо определяю значения запаса по фазе
в пределах
20 1g •-< 20 1g А г- 20 1g .
масс " Г ' 71М.|);С 1
(6-29)
Рис. 6-8. Иллюстрация тре-
бований к ЛАЧХиЛФЧХ,
всходя из заданного по по-
казателю колебательности за-
паса устойчивости.
получения показателя коле-
Ограничимся рассмотрением минимально-фазовых разомкнутых
систем регулирования, наиболее характерных для регулируемого
электропривода. Па рис. 6-8 приведен пример асимптотической ЛАЧХ
I. (й) разомкнутого контура, по кото-
рой в диапазоне (6-29) построена с по-
мощью кривых рис. 6-7, б допусти-
мая граница запаса по фазе Аф.,,,,, (й).
Фазовая характеристика контура л i-
-I- ф (й) лежит вне этой границы. Это
означает, что АФХ разомкнутого кон-
тура не пересекает запретной окруж-
ности (рис. 6-7, а), соответствующей
требуемому показателю колсбатсльпо-
сти /1м.,|1с, и можно утверждать, что
колебательность замкнутого контура
не превысит требуемого уровня.
Таким образом, основной показа-
тель характера переходных процессов
в замкнутом контуре регулирования
однозначно связан со среднсчастотпой
частью АФХ разомкнутого контура.
Из кривых рис. 6-7, м следует, что дл
бате..'п.пости - 1,3 необходимо при Й <; Й,. иметь запас по ам-
плитуде не менее. 13 дБ, а при Й > йс — не мепсе .г> дБ. Максимальный
запас, по фазе должен составлять не менее !>0°. Известно, что эти ус-
ловия выполняются в том случае, если в области частоты среза ЛАЧХ
разомкнутого контура имеет достаточ-
но протяженный участок с наклоном
—20 дБ/дек. Для рассматриваемого
класса систем практически все пока-
затели качества могут быть оценены
по срсдпечастотпо.му участку асимпто-
тической ЛАЧХ разомкнутого конту-
ра, однако фазовая характеристика
может быть использована для ряда
уточнений.
Сопоставление простейших типо-
вых ЛАЧХ с их переходными функ-
циями позволило в теории управле-
ния установить ряд количественных
частотных оценок динамических пока-
зателей качества. Допустим, в резу-
льтате той или иной коррекции полу-
чена передаточная функция разомкнутого контура (6-10), которой со-
ответствует ЛАЧХ, показанная па рис. 6-9. Тогда положение сред-
нечастотной асимптоты с наклоном —20 дБ па декаду позволяет оце-
нить быстродействие замкнутого контура и возможное перерегулиро-
вание (см. рис. 6-3). Так, время регулирования (время первого сог-
ласования) и время достижения первого максимума /ма1£с опреде-
269
-годв/ввк
&Ф -liOfipiatiK'
Рис. 6-9. Асимптотическая
ЛАЧХ, обеспечивающая тре-
буемое качество регулирова-
ния.
ляются частотой среза:
fp = (1,5 4- 2)/Йс; (6-30)-
Время затухания возникшего перерегулирования определяется
нижней сопрягающей частотой Й1Н этого участка, поэтому оценка об-
щего времени переходного процесса имеет вид:
^п.п ^n/^c + 2/^in. (6-31) <
Наличие перерегулирования определяется главным образом при- 1
сутствием в ЛАЧХ участков с наклоном —40 дБ/дек и более, непосред- •
ственно примыкающих к среднечастотной асимптоте при частотах сопря-
жения Qjh и соответственно. Приближение достаточно протяжен-
ного низкочастотного участка с наклоном —40 дБ/дек к частоте среза
вызывает увеличение перерегулирования. Напротив, если Qln значи-
тельно удалена от Йс, перерегулирование невелико. Аналогично уда-
ление Й1в от Йс в высокочастотной области также уменьшает влияние на
качество регулирования участков с отрицательным наклоном, большим
20 дБ/дек. Приближенная оценка перерегулирования, исходя из за-,
паса по фазе на частоте среза, приведена в [35]:
А-Чмакс —Л-уст [1 SIn (Не)]- (6-32)
Если ЛАЧХ не имеет участков- с наклоном выше —20 дБ/дек,
т. е. система является апериодическим звеном, запас по фазе на ча-
стоте среза не менее 90° и перерегулирование отсутствует, что следует
и из (6-32). Появление участков с наклоном выше —20 дБ/дек умень-
шает запас по фазе на частоте среза, и перерегулирование растет.
Таким образом, ЛАЧХ разомкнутого контура дает достаточные
представления о свойствах замкнутой системы регулирования. Низко-
частотная часть ЛАЧХ характеризует статическую и динамическую
точность регулирования. Среднечастотная часть определяет колеба-
тельность, быстродействие и перерегулирование. -Высокочастотный
участок характеристики при выполнении отмеченных условий незна-
чительно влияет на динамические показатели качества, сказываясь
в основном па характере начального участка переходного процесса и
на перерегулировании. Изложенные положения позволяют определить
форму и количественные показатели ЛАЧХ, обеспечивающей выполне-
ние требований к точности и качеству регулирования координаты, и
затем тем или иным путем реализовать эту желаемую ЛАЧХ разомкну-
того контура регулирования.
Формирование требуемой ЛАЧХ, исходя из ЛАЧХ объекта регу-
лирования, может быть’ осуществлено с помощью формирующих жест-
ких отрицательных и положительных внутренних связей, корректи-
рующих гибких обратных связей, в том числе и по регулируемой коор-
динате (параллельная коррекция), а также путем формирования соот-
ветствующей передаточной функции Wpx регулятора иа входе разом-
кнутого контура (последовательная коррекция).
Жесткие обратные связи, охватывающие отдельные элементы
разомкнутой цепи регулирования, позволяют изменять общий коэф-
фициент усиления и, главное,-соотношение постоянных времени в кон-
туре. Известно, что жесткая положительная обратная связь, охваты-
вающая инерционное звено, увеличивает его коэффициент усиления
и вызывает соответствующее увеличение эквивалентной постоянной
времени. При критических параметрах эта связь превращает инерцион-
ное звено в интегрирующее; этот эффект используется в электроприводе
270 j
для формирования требуемых динамических качеств и статических,
характеристик. Отрицательная жесткая связь уменьшает эквивалент-
ную постоянную времени инерционного звена, но уменьшает и его коэф-
фициент усиления. Формирующие отрицательные связи также находят
применение, главным образом для увеличения линейности и уменьше-
ния неоднозначности характеристик отдельных элементов электропри-
вода. Однако возможности формирования требуемой ЛАЧХ жесткими
связями ограниченны, поэтому обычно этот способ применяется в соче-
тании с параллельной коррекцией.
В настоящее время в связи с расширением использования полупро-
водниковой техники управления и созданием унифицированных блочных
систем регуляторов (УБСР) непрерывного и дискретного действия, пред-
назначенных для управления электроприводом, основным способом
становится последовательная коррекция либо смешанная последова-
тельно-параллельная коррекция контуров регулирования. При из-
вестной ЛАЧХ объекта регулирования Бо. рх и выбранной на основе
изложенных выше соображений требуемой ЛАЧХ разомкнутого кон-
тура Apa3A- требуемая ЛАЧХ регулятора определяется по формуле
Lpx (^)= Бо.рд- (И) Бразл- (^)- (6-33)
Синтез контура регулирования при последовательной коррекции
завершается подбором схемы регулятора, обеспечивающей получение
требуемой для (6-33) передаточной функции регулятора и расчетом
параметров этой схемы [11, 13].
6-4. МЕТОД ПОСЛЕДОВАТЕЛЬНОЙ КОРРЕКЦИИ
С ПОДЧИНЕННЫМ РЕГУЛИРОВАНИЕМ КООРДИНАТ
Разработанный в теории автоматического управления
метод синтеза систем регулирования по ЛАЧХ, основные
позиции которого кратко изложены выше, обеспечивает
наиболее широкие возможности удовлетворения противо-
речивых требований к статическим и динамическим свой-
ствам электропривода в наиболее сложных случаях. Однако
его массовое использование при проектировании электро-
привода несколько осложнено из-за трудностей практиче-
ской реализации регулятора по (6-33), а динамические свой-
ства, получаемые в результате синтеза, недостаточно опре-'
делены, и их подстройка в процессе наладки при сложной
передаточной функции регулятора может оказаться не-
простой и мало удобной.
В то же время в подавляющем большинстве случаев
весь комплекс требований к точности регулирования, рас-
смотренный в § 6-3, к электроприводу не предъявляется,
и главной задачей является обеспечение высокого быстро-
действия при определенном характере переходных про-
цессов, т. е. в основу синтеза контура регулирования могут
быть положены необходимые динамические показатели ка-
чества. Для таких условий в теории автоматизированного
271
электропривода разработан инженерный метод синтеза
унифицированных контуров регулирования, получивший
название метода последовательной коррекции с подчинен-
ным регулированием координат [17, 36].
В основе метода лежат представления, известные из
теории автоматического управления, и кратко изложенные
в § 6-3. Примем, что передаточная функция объекта регули-
рования имеет вид:
Tv? ___ кукч ... knC 11 .
°'Р*~ ,n > (6-34)
1[(1 + Пр)
i
здесь тп — постоянное запаздывание;
Tt — постоянные времени элементов объекта регули-
рования.
Постоянные т„ и можно разделить, с одной стороны,
на большие и средние постоянные времени, определяющие
среднечастотную часть ЛАЧХ и соответственно быстродей-
ствие контура при данном общем коэффициенте усиления,
а с другой — на малые постоянные, определяющие высоко-
частотную часть ЛАЧХ, которая незначительно влияет на
характер переходных процессов. Пользуясь соотношением
XiWi = Xt, (6-35)
IV I
где Wt и Xi — передаточная функция и входная переменная
i-ro звена, можно компенсировать средние и большие посто-
янные времени, исключив их из разомкнутого контура регу-
лирования. Аналогичным путем можно исключить из разомк-
нутого контура регулирования все коэффициенты klt k2, ...
..., kn, а для устранения статической ошибки ввести в него
интегральный элемент с постоянной Тп. Таким образом,
исходный разомкнутый контур регулирования удается за-
менить результирующим контуром, имеющим общий коэф-
фициент усиления, равный единице (обратная связь пред-
полагается единичной), но обладающим астатизмом первого
порядка и обеспечивающим высокое быстродействие бла-
годаря малости постоянных времени, оставшихся некомпен-
сированными:
№'раз .V = №рЛ.Г0. p.v =--------------, (6-36)
ТоР П (1+ПР)гг“Р
Z-J- 1
272
имеющая наибольшее зна-
Sf-Lll-L
с~Ге Т^Т^Тм
где I — число больших и средних постоянных, компенсиро-
ванных регулятором.
Примем для определенности, что То больше, чем неком-
пенсированная постоянная Tz+1,
чение из всех ш — I некомпен-
сированных постоянных. Тогда
асимптотическая ЛАЧХ, соот-
ветствующая (6-36), примет вид,
показанный на рис. 6-10. Не-
трудно видеть, что при приня-
том условии частота среза йс
определяется постоянной То.
При отсутствии малых постоян-
ных времени и постоянного за-
паздывания запас по фазе на
частоте среза был бы около 90°
и переходный процесс в замк-
нутом контуре регулирования имел апериодический харак-
тер. Наличие малых постоянных и запаздывания приводит
к уменьшению запаса по фазе на частоте среза
-БОдБ/Ввк-'Л \
Рис. 6-10. Асимптотическая
ЛАЧХ контура, полученная
методом последовательной
коррекции.
Дф(йс) ==л — л/2 — т„Йс — У, arctg Т(йс, (6-37)
I -J- 1
что соответственно увеличивает колебательность контура и
приводит к перерегулированию. Так как наибольшая из
малых постоянных времени Т/+1 < Тп, на частоте среза
Ф/ (&<•) < 45°, что дает основание в (6-37) приближенно
принять arctg Т$с ж TtQ,.. Тогда получим:
/ m \
Дф (Йс) = л/2 - тп + У TtЙс = л/2 - Тцйс, (6-38)
\ i +1 /
m
где = т„ + У Л — суммарная некомпенсированная по-
1
стояиная контура с учетом малой постоянной запаздывания
преобразователя.
Из (6-38) следует, что влияние звеньев с малыми постоян-
ными времени и постоянного запаздывания на колебатель-
ность замкнутого контура при ограниченном числе малых
постоянных m — / < 5 с достаточным приближением экви-
валентно влиянию па колебательность того же контура
одного инерционного звена, постоянная времени которого
Тп. равна сумме всех малых постоянных и запаздывания.
273
Следовательно, полученная в результате последовательной
коррекции ЛАЧХ разомкнутого контура, соответствующая
(6-36), может быть без существенной погрешности в высоко-
частотной части заменена прямой с наклоном —40 дБ/дек
при Q Дэ 1/T|t. В [13] для рассматриваемого случая полу-
чено условие, при выполнении которого частотный показа-
тель колебательности замкнутого контура не ниже заданного
То ЗТ’ц^Лйакс -|- Лмакс ]/"Лйакс 1)1 (6-39)
Из (6-39) следует, что при рассматриваемом методе кор-
рекции динамические показатели контура однозначно оп-
ределяются соотношением постоянных времени а = То/Т^.
Для получения показателя колебательности Днакс ---- 1
следует выбирать Т(. в 2 раза большей (а =2), чем суммар-
ная некомпенсируемая постоянная контура Т,,. Если до-
пустима колебательность Дмакс = 1,2, отношение постоян-
ных может быть снижено до 0,9 и т. д. Однако необходимо-
сти в использовании косвенных частотных оценок качества
в данном случае нет, так как представляется возможным
судить о качестве процессов непосредственно по корням
характеристического уравнения замкнутого контура регу-
лирования. Действительно, (6-38) дает основание принять
fj (Ц-Т^^Ц-Д.р, (6-40)
Z+ 1
что дает передаточную функцию разомкнутого контура
в виде
^ра,л-= 1/^(1+ВД. (6-41)
Соответствующая (6-41) передаточная функция замкну-
того контура
W^x=l/(T0T^+T0p + l) (6-42)
имеет следующие корни знаменателя:
р =------L. Н; 1/Г—~----— =
2Tlt V 47’ji
= <W3>
Выражение (6-43) подтверждает высказанное выше суж-
дение о том, что рассматриваемый метод синтеза позволяет
274
исключить из рассмотрения конкретные значения коэффи-
циентов усиления и частные величины постоянных времени.
Требуемые колебательность и перерегулирование обеспечи-
ваются выбором отношения постоянных времени а = TJT^,
а быстродействие определяется только суммарной неком-
пенсированной! постоянной 7Д. При а < 4 реакция замкну-
того контура на единичный скачок задания определяется
следующим соотношением:
... < —//2Г { ]'г4а — а' , , . }Л4а—а'2 Д ,с ,,ч
х(/) = 1-ег/ H^cos— -2-—/-|-sin-—2------(6-44)
На рис. 6-11 приведены зависимости х (/) при различных
значениях а. Условимся оценивать быстродействие контура
временем /р1, соответствующим
моменту, когда регулируемая
переменная первый раз дости-
гает значения, равного 95%
установившегося. Тогда из рас-
смотрения рис. 6-11 можно за-
ключить, что при увеличении а
быстродействие контура умень-
шается. В то же время умень-
шение соотношения постоянных
времени вызывает возрастание
колебательности процесса и, что
особенно важно, перерегулиро-
вания. При а = 2 обеспечивает-
Рис. 6-11. Переходные функ-
ции замкнутого контура при
различных значениях а.
ся минимальное время регули-
рования (?р1 = 4,7 7Д) при перерегулировании, мень-
шем 5% (Ахнякс1 — 0,043), и коэффициенте демпфирования
g = Т0/2 ]/70Т|1 = ]У2/2. Для ряда регулируемых электро-
приводов при соответствующем уровне 7Д такие показатели
качества являются оптимальными, ио в других случаях
может требоваться монотонность процесса или, напротив,
желательна его большая колебательность. Выбором соот-
ношения постоянных в пределах а — 1 4- 4 можно обеспе-
чить оптимальные динамические показатели, и в этом смысле
рассматриваемый метод коррекции называют методом опти-
мизации контура регулирования по быстродействию.
При известной требуемой передаточной функции разомк-
нутого контура (6-41) и заданной передаточной функции
объекта регулирования (6-34) определение передаточной
275
функции регулятора осуществляется с помощью (6-36):
= Fpa3X/Wo. рх = П (1 + 7\р№& knTop =
= П(1 + Ш„/>- (6-45) '
1
где Ти = kx /г2 ...kn То — постоянная интегрирования ре-
гулятора.
Соотношение (6-45) свидетельствует о том, что пере-
даточная функция регулятора имеет наиболее простой вид,
когда I = 0, т. е. в том случае, когда все постоянные вре-
Рис. 6-12. Типовые схе-
мы пропорционального (с),
интегрального (б), инте-
грально-пропорционально-
го (в) и интегрально-про-
порционально-дифференци-
ального (а) регуляторов.
мени данного контура регулирования достаточно малы и
т
обеспечивает в соответствии с (6-44) тре-
.1
буемое по условиям технологического процесса быстро-,
действие привода, либо ограничивает производную коорди-
наты допустимым значением. При этом регулятор является
интегральным (И) (рис. 6-12, б) и имеет передаточную
функцию
Wpx=l/T„p. (6-46)
В электроприводах по системе Г-Д и для широкого
класса быстродействующих электроприводов по системе
ТП-Д к числу некомпенсируемых удается отнести лишь
малые постоянные времени фильтров в канале управления
и постоянное запаздывание преобразователя. Если ком-
пенсации подлежит одна постоянная времени, регулятор
имеет передаточную функцию
w — + ___1__|_ Ti /6-47)
W*x~ -Т^+т^ (°4''
276
т. е. является интегрально-пропорциональным (ИП)
(рис. 6-12, в). При двух компенсируемых постоянных 7\ и
Т2 возникает необходимость использования схемы инте-
грально-пропорционально-дифференциального регулятора
(ИПД) (рис. 6-12, г):
-----------(1-FT’ip) (Ч-Т’аР) - 1 ।___+ Tt . TiTz ,г. до,
______________________________________-_ -т— + р. (6-48)
Дальнейшее увеличение числа подлежащих компенса-
ции больших и средних постоянных времени приводит
к дополнительному усложнению регулятора. Наибольшие
трудности при реализации представляет осуществление
дифференцирования входного сигнала, которое даже при
ИПД-регуляторе уменьшает помехозащищенность схемы,
поэтому важной составной частью рассматриваемого ме-
тода является использование замкнутых внутренних кон-
туров регулирования,
подчиненных задаче ре-
гулирования данной пе-
ременной, обеспечиваю-
щих формирование та-
кой передаточной функ-
ции объекта регулиро-
вания, при которой по-
следовательная коррек-
ция контура регулиро-
вания упрощается.
Примем, что по ус-
ловиям технической реа-
Рис. 6-13. Структурные схемы с подчи-
ненным контуром регулирования.
лизации при последо-
вательной коррекции нежелательно применение регуля-
торов со схемой, более сложной, чем схема ИПД-ре-
гулятора (рис. 6-12, г). Из изложенного следует, что для
выполнения этого условия необходимо, чтобы число боль-
ших и средних постоянных времени в контуре регулирования
не превышало двух. Допустим, что объект регулирования х
(6-34) содержит три таких постоянных времени. Разделим
цепь объекта регулирования на две части, в каждой из
которых осталось бы не более двух компенсируемых посто-
янных (рис. 6-13, ц), выделив промежуточнуюрегулируемую
переменную и обозначив поэтому основной регулируемый
параметр х = х2. Очевидно, прн попытке непосредственной
коррекции выходной переменной х2 передаточная функция
277
объекта имеет вид:
^о.рл-=^о.р1^о.р2. (6-49)
В этой передаточной функции подлежат компенсации,
как выше принято, три постоянные времени, и регулятор
получился бы трудно реализуемым. Чтобы избежать этого,
введем подчиненный контур регулирования промежуточной
переменной (рис. 6-13, б) и оптимизируем его изложен-
ным выше методом коррекции. Для этого введем в контур
регулятор с передаточной функцией (Гр1, которая при
двух компенсируемых постоянных получится в виде (6-48).
Передаточная функция оптимизированного разомкнутого
контура для переменной хг примет вид:
^раз1 = а1Тц1р(Тц1р + 1) • (6’50)
Для замкнутого подчиненного контура регулирования
получаем:
^заы1 = W+1 ‘ (6'51}
Переходя к регулированию основной переменной, пере-
даточную функцию объекта для переменной х2 получаем
в .виде (рис. 6-13, в)
№о.Р2=№заЛР2. (6-52)
Рассмотрим, что дало введение промежуточного подчи-
ненного контура регулирования переменной лу для ре-
шения основной задачи — регулирования переменной х2.
Сравнение (6-52) с (6-49) свидетельствует о существенном
изменении свойств объекта регулирования. Теперь в цепи
объекта регулирования осталась одна большая постоянная
времени (ее содержит (Го. р2 по условию) и колебательное
звено с высоким коэффициентом демпфирования и опти-
мальным показателем колебательности (при ах — 2, g =
—1/]/'2; Лмакс = 1),. наибольшая постоянная времени ко-
торого может быть отнесена к малым постоянным, так как
Тох — ai — 1 ч- 4. Примем это значение постоян-
ной за суммарную оценку некомпенсируемых иперцион-
ностей для второго контура Tfl2 — аг Тщ и, следуя изло-
женному выше, получим передаточную функцию разомкну-
того контура регулирования переменной х2 в виде
^Раз2 = аЛТ^р + 1) ’ <6’53>
278
На рис. 6-14 приведены ЛАЧХ, соответствующие (6-53)
при различных значениях аг и а2. При аг = а2 = 4 (рис.
6-14, а) запас по фазе на частоте среза Qc = 1 / 16 Тщ
в соответствии с (6-38) за счет двух апериодических звеньев
2Т "
1Гза„1 уменьшается на угол фк (йс) «=г2 /=«0,25 рад,
т. е. на 14°. Соответственно запас по фазе на этой частоте
составляет 90 — 14 = 76°, чем
обеспечивается высокое демпфи-
рование, аналогичное внутрен-
нему контуру. При «1 = а2 = 2
(рис. 6-14, б), заменив для пост-
роения асимптотической ЛАЧХ
колебательное звено с Дмпкс = 1
двумя апериодическими звенья-
ми с постоянной Тк =]/2 Тм1,
тем же путем можно установить,
что на частоте среза запас по
фазе достигает 50°, что при от-
сутствии в низкочастотной части
ЛАЧХ участков с наклоном
—40 дБ/дек также обеспечи-
вает коэффициент колебательно-
сти, близкий к единице, анало-
^ЗОдВ^вк a^Z;az=Z
У
1,(5?)
в) \
^ZOAB/дек a^Z;az=1
_L_
_________g
Jj^rBOfiB/dSK
В) # \
гично подчиненному контуру.
При ах = 2 и а2 = 1 (рис.
6-14, в) запас по фазе на частоте
среза уменьшается до 10° и ко-
Рис. 6-14. Логарифмические
характеристики системы с
подчиненным контуром регу-
лирования.
лебательность внешнего конту-
ра резко возрастает. Рассмотрение других вариантов при-
водит к выводу о том, что при = 1 ч- 4 для ограничения
показателя колебательности основного контура значением
Амакс sC 1,2 значения а2 должны лежать в пределах а2 =
= 2-1-4.
Этот анализ применим к случаю, когда для регулиро-
вания выходной координаты возникает необходимость обра-
зования нескольких внутренних контуров. На рис. 6-15
приведена обобщенная структурная схема многоконтурной
системы подчиненного регулирования. Передаточная функ-
ция внутреннего (первого) замкнутого контура определя-
ется (6-51). Для.второго контура ее можно получить с по-
мощью (6-53), полагая, что некомпенсируемые постоянные
279
имеются только в первом контуре:
’ (6'54)
Для получения передаточной функции №замз доста-
точно умножить знаменатель (6-54) на ar а2 as Tfil р и до-
бавить единицу:
Гзя”3 = “Ж7’^1Р^Ь«^^%7ф1Р34-«Ж7ф1Р24-V2a3V +1 ‘
(6.55)
Можно было бы продолжить запись передаточных
функций для контуров более высокого порядка, однако
Рис. 6-15. Структурная схема многоконтурной системы подчиненного
регулирования.
в этом нет нужды. Приведенный анализ ЛАЧХ, соответ-
ствующей (6-53), свидетельствует о том, что при выборе
а2 2 замкнутый внутренний контур может быть заменен
апериодическим звеном с постоянной времени а± Т1Л
№рам 1 /а&Т{llp (atT|Пр +1 )• (6-56) .
Аналогичное приближение при указанных условиях
может быть использовано при записи передаточной функции
разомкнутого третьего контура и для контуров более
высокого порядка. Ограничиваясь для каждой переменной
линейным приближением передаточной функции преды-
дущего контура, при ат = а2 — ... ап — 2 можно получить
общее выражение передаточной функции замкнутого i-го-
контура:
= 1 /[2;Ttllp (2-1TM1p + 1)4-1]. (6-57)
Следовательно, с увеличением номера контура регу-
лирования постоянная времени, не компенсируемая регу-
лятором, быстро возрастает и быстродействие контура
снижается в 2г-1 раз. Такой способ настройки многоконтур-
ной системы в литературе получил название настройки на
технический оптимум (Betragsoptimum) или оптимизации
280
контуров по модулю, причем ряд авторов не прибегает к
приближенному представлению разомкнутого контура
(6-56), а предпочитает запись полных передаточных функций,
аналогично (6-54) и (6-55). Между тем допустимость такого
упрощения, обеспечивающего максимальную общность ма-
тематического описания динамических свойств всех контуров
с помощью (6-57), вытекает не только из приведенного
анализа частотных оценок, но и доказана построением
переходных характеристик контуров по их полной пере-
даточной функции [17]. Так, передаточной функции (6-54)
соответствует переходная функция
х2(т) = 1 — e2t —-e-Tsin ]/3 т, (6-58)
а передаточной функции (6-55)
х3 (т) = 1 [(2т — 1) cos 2т — (2 +2т) sin 2т]. (6-59)
В (6-58) и (6-59) использовано безразмерное время
т = t / 2£~ 1 Тп. Сравнивая соответствующие (6-44), (6-58)
и (6-59) кривые х (т), приве-
денные на рис. 6-16, можно
убедиться, что уточнения, вно-
симые использованием полно-
го характеристического урав-
нения, незначительны и соиз-
меримы с точностью инженер-
ных расчетов. Основная за-
кономерность — уменьшение
быстродействия при возраста-
нии номера контура i — на-
глядно иллюстрируется эти-
ми кривыми и хорошо отра-
жается в (6-57).
Важнейшим достоинством
Рис. 6-16. Переходные функции
контуров различного порядка.
рассмотренного метода яв-
ляется его простота и опре-
деленность получаемых ста-
тических и динамических качеств контура регулирования.
Последнее одновременно является и недостатком метода,
так как требования к точности регулирования в ряде
случаев могут быть более высокими, чем точность с опреде-
ленностью получаемая в результате последовательной кор-
рекции. В связи с этим, кроме рассмотренной настройки
на технический оптимум, в теории систем электропривода
281
с подчиненным регулированием координат рассматривается
возможность настройки на так называемый симметричный
оптимум [37]. Для уменьшения динамических ошибок
могут требоваться в низкочастотной области ЛАЧХ более
высокие коэффициенты усиления, чем обеспечивает детер-
минированная ЛАЧХ, соответствующая техническому опти-
муму (см. рис. 6-10). Для этого необходимо иметь ЛАЧХ
разомкнутого контура с участком —40 дБ/дек в низко-
частотной части, т. е. ЛАЧХ, показанную на рис. 6-9.
Для ЛАЧХ такого вида максимум запаса по фазе имеет
место примерно в середине среднечастотной асимптоты
с наклоном —20 дБ/дек, поэтому они в теории регулирования
получили название симметричных, в отличие от ЛАЧХ на
рис. 6-10, для которых запас
по фазе с ростом частоты моно-
тонно убывает.
Настройка контура регули-
рования на симметричный опти-
мум предполагает получение
оптимизированной передаточной
функции разомкнутого контура
в виде
W ' _1+4Т<- 1
1КРззЛ- 4ГцР 2^tp(7’(Jp+l)-
(6-60)
Для объекта регулирования,
обладающего астатизмом перво-
го порядка, (6-60) является точным выражением полу-
ченной в результате оптимизации передаточной функции
разомкнутого контура, а для статического объекта (6-60)
может приближенно выражать эту передаточную функцию
в области средних частот. Асимптотическая ЛАЧХ, соот-
ветствующая (6-60), приведена па рис. 6-17. Сравнивая ее
с ЛАЧХ, соответствующей техническому оптимуму (см.
рис. 6-10), можно установить, что при В >1 / 4 частот-
ные характеристики совпадают, а при Q < 1 / 4 наст-
ройка на симметричный оптимум обеспечивает более вы-
сокие значения амплитуд за счет участка, имеющего наклон
—40 дБ/дек. Следовательно, настройка на симметричный
оптимум увеличивает динамическую точность регулирова-
ния, однако наличие в низкочастотной части участка с на-
клоном —40 дБ/дек, как было отмечено в § 6-3, приводит
к существенному увеличению перерегулирования.
Цг)
Рис. 6-17. Логарифмические
частотные характеристики
контура при настройке на
симметричный оптимум.
282
В соответствии с (6-60) передаточная функция замкну-
того контура, настроенного на симметричный оптимум,
имеет вид:
П7 — 1+4ТцР ,
И'замх — 8Гз/я_|_8Т^,а_|_47’(гр+Г '
Сравнивая (6-60а) с (6-54) при at = а2 = 2, можно
установить, что корни характеристического уравнения пер-
вого контура, настроенного на симметричный оптимум,
совпадают с корнями характеристического уравнения вто-
рого порядка при настройке на технический оптимум.
Следовательно, логарифмический декремент и время за-
тухания свободных составляющих переходного процесса
при настройке на симметричный и технический оптимумы
одинаковы. Увеличение перерегулирования и частотного
показателя колебательности Лиакс при симметричном оп-
тимуме обусловлены наличием форсирующего звена в чис-
лителе передаточной функции (6-60а).
Для более полного сравнения настройки на симметрич-
ный и технический оптимум рассмотрим коррекцию кон-
тура, объект регулирования которого содержит одну
большую постоянную 7\ и несколько малых некомпенси-
руемых постоянных, оцениваемых суммарной постоянной
Wo.px = k0/(T1P + 1)(Тир + 1), (6-61)
где k0 — общий коэффициент усиления разомкнутого кон-
тура.
В области средних частот при Q > 1 / 7\ (6-61) можно
с некоторым приближением представить в виде
IFo.p^VW^p+l). (6-61Э)
Для коррекции на вход контура введем ИП-регулятор
с передаточной функцией
Wpx = (l + TKp)/T„p. (6-616)
Соответственно передаточная функция разомкнутого
контура определяется произведением передаточных функций
(6-61а) и (6-616):
^Раз^^0(1 + Ткр)/ГиТ1Р2(Тмр + 1). (6-62)
При настройке на симметричный оптимум необходимо
привести (6-62) к виду (6-60), что обеспечивается выполне-
нием условий: Тк = 47^ и Т,л = 2/г07ц (47ц / Тт).
283
При настройке на технический оптимум необходимо ’
осуществить в (6-61) компенсацию большой постоянной Тх. '
Следовательно, для получения передаточной функции (
(6-50) необходимо в (6-616) принять: Тк = Т1пТи — 2kQ Т^.
Сравнивая полученные значения Тк и Ts„ можно прийти *
к выводу, что при 7\ > 47'^ настройка на симметричный
оптимум дает значения постоянной интегрирования меньше,
чем при техническом оптимуме в Тг / 47^ раз. Соответствен-
но быстродействие контура при низких частотах оказыва-
ется более высоким, динамические ошибки уменьшаются,
а перерегулирование возрастает. При 47\l пред-
почтительна настройка на технический оптимум.
6-5. ИСПОЛЬЗОВАНИЕ ПОСЛЕДОВАТЕЛЬНО-ПАРАЛЛЕЛЬНОЙ
И ПАРАЛЛЕЛЬНОЙ КОРРЕКЦИИ
При оптимизации контуров регулирования по быстро-
действию изложенным методом последовательной коррек-
ции достигаемое быстродействие определяется суммой не-
компенсируемых постоянных времени разомкнутого контура
регулирования?^, причем с возрастанием номера контура
некомпенсируемая инерционность быстро возрастает
7\ii = 2‘" 1 7Д. В системе УП-Д с быстродействующим
вентильным преобразователем практический уровень 7Д,
достигаемый при последовательной коррекции, не пре-
вышает 0,01 с, что обеспечивает при двух-трех контурах
регулирования достаточно высокое быстродействие. В си-
стеме Г-Д наличие в контуре регулирования постоянной .,
времени генератора, превышающей постоянную якорной .
цепи на два порядка, создает условия, при которых в ряде
случаев компенсация относительно малой 1\ нецелесо-
образна. При этом уровень некомпенсируемой инерцион-
ности увеличивается в несколько раз и быстродействие ,
контура при щ = 2 чаще всего оказывается недостаточным.
Выбор at < 2 быстро ухудшает качество регулирования
и использование этого пути для повышения быстродей-
ствия требует применения дополнительной параллельной
коррекции.
Рассмотрим разомкнутую цепь регулирования коорди-
наты х, передаточная функция которой за счет введения
регулятора с передаточной функцией получена в виде
in
W^3X-=l/Topll(\ + TlP), (6-63)
1
284
причем для получения требуемого быстродействия необхо-
т
димо выбрать ТО<2Т|Л = 2 У, Tt. Так как качество
1
регулирования при То < Т» неудовлетворительно, введем
вспомогательный контур отрицательной связи по произ-
водной регулируемой величины с передаточной функ-
Рис. 6-18. Дополнительная параллельная коррекция контура регули-
рования.
цией ср (рис. 6-18, а}. Тогда передаточная функция
разомкнутого контура регулирования за счет корректи-
рующей обратной связи примет вид:
w —___________________;__________
w раз.к.с— „I
ТоР ] (1 + Tip) + 7\. cP
m
L 1
Рассматривая (6-64), можно установить, что охват
разомкнутого контура с последовательным корректирую-
щим регулятором дополнительной гибкой связью по регу-
лируемой переменной позволяет получить эквивалентный
разомкнутый контур, содержащий интегральное звено с
увеличенной эквивалентной постоянной Т'о — 7'0 + Тк с и
замкнутый единичной связью контур малых постоянных
времени с единичным коэффициентом усиления и умень-
шенными в То / (То + Тк с) раз коэффициентами при р,
р2, р3 и т. д. При m sg 2 эквивалентный замкнутый контур
при малых постоянных всегда устойчив, а увеличение
Тк. с вызывает смещение частоты сопряжения эквивалент-
ного колебательного звена в сторону увеличения, а частоты
среза 1 / — в сторону уменьшения. При достаточном
удалении частоты сопряжения в область высоких частот
285
влияние эквивалентного колебательного звена на запас по
фазе, при частоте среза пренебрежимо мало, поэтому для
анализа можно использовать обычное при последовател
ной коррекции представление (6-63) в приближенном<bi
^Разл-= 1/7OP(^P + D- (6<
При этом передаточная функция представленного г
рис. 6-18, б замкнутого контура примет вид:
^заМЛ=1/[адр2+(^о+^к.с)р+1]. - . ;
Корни характеристического уравнения (6-66):
= <6'67)
где а = (То 4- — а + Тк <. / Т^.
Очевидно, при данном а выбором Тк. с можно обеспечит
любой требуемый коэффициент демпфирования. Допустим,
требуется критическое демпфирование. При этом
й'к — 4cz = 0; й,< = 2]/й. (6-68)
Отсюда
^к.с=^(2]/й-й). (6-69)
Следовательно, при сформулированных условиях ис-
пользование последовательно-параллельной коррекции
путем выбора Тк. с в соответствии с (6-69) может обеспечить
апериодический характер переходных процессов электро-
привода при а < 4. В частном случае при а = 4 Тк_ с = 0,
так как апериодический характер процессов обеспечивается
основным методом последовательной коррекции. Для по-
лучения при данном а оптимального быстродействия тре-’
буется коэффициент ' демпфирования, равный 1/]/2.
Для этого случая условие оптимизации имеет вид:
£ _ 1 ^р-рТ'к. с _ 1
2 -/2‘
После преобразований получим:
= ТД/^-й). (6-70)
При а — 2 имеем Тк. с = 0, получая принятое выше
при настройке на технический оптимум основное условг
То = 2Т^. Если же по каким-либо причинам необход .
выбор То < 27)п требуемое качество регулирования мож
быть обеспечено выбором Тк, с в соответствии с (6-70).
286
Таким образом, введение последовательно-параллельной
коррекции контура расширяет возможности получения.
i требуемого качества регулирования. Если оценить время
-'•йтухания свободных составляющих процесса с помощью
уМ?) И (6-6Я) .СППТ»г,П1Р1шсм________
tn.n = ^T0=3T»yq^, (6-71)
4 заключить, что возможность выбора менрших отно-
То/Т^ за счет дополнительной параллельной кор-
_лдии обеспечивает увеличение быстродействия контура
•ри заданном уровне Т^. Эта возможности; как показано
ниже, представляет особый интерес в /системе Г-Д при
использовании формирующих положительных связей.
Вместе с тем следует подчеркнутьучто при числе малых
постоянных m > 2 на использование изложенного под-
дхода накладываются серьезные Ограничения. При этом
в (6-64) эквивалентный замкнутый контур малых постоян-
ных может оказаться неустойчивым и судить только по
виду ЛАЧХ о запасе устойчивости замкнутого контура
нельзя. Следовательно, в подобных случаях использование
соотношений ^6-67), (6-651/может быть недопустимым, а
введение сильшТйчц1бко1усоставляющей в связи с ограни-
ченной линейностыоэЛЪмонтов контура в ряде практичес-
ких случаев является/причТнцм трудно устранимых авто-
колебаний большой/частоты иТяардниченной амплитуды.
Поэтому при m использование рассмотренного под-
хода должно либр основываться на анализе устойчивости
(6-64), либо его' результаты должны проверяться путем
расчета переходных процессов оптимизированной системы
на ЭВМ. /
6-6. ТИПОВЫЕ СТРУКТУРЫ ЭЛЕКТРОПРИВОДОВ, ТРЕБУЮЩИХ
РЕГУЛИРОВАНИЯ И ОГРАНИЧЕНИЯ НЕСКОЛЬКИХ КООРДИНАТ
До /сих пор рассматривалась задача регулирования
_ щой/координаты электропривода и для получения тре-
. у ем/го качества вводились дополнйтельные внутренние
или/параллельные контуры регулирования, подчиненные
«основной задаче — регулированию выходной переменной
^системы. При -атоя' выли исключены из рассмотрения
случаи, когда необходимо регулировать несколько коор-
чнат электропривода, с тем чтобы акцентировать внимание
возможностях коррекции динамических свойств системы
287
регулирования отдельно взятой переменной. Как выше
было отмечено, в большинстве регулируемых электронри-»
водов требуется регулировать несколько координат, причем ;
на различных этапах работы основными регулируемыми У
переменными являются разн^е^гоординаты. Наиболее^: ;
рактерным примером мржбтслужить электропривод,
торый на однюс^этапд^рабочего процесса требует точнфа*^
регулирования шерсти, а на других может включаться ’
на упор и неуэбходтаоточное дозирование развиваемого
двигателеммомента. Потги во всех электроприводах даже.-,
при требуемом регулировании одной координаты возни-
^дде^йбобходимость ограниченшт^дцугих координат и их
производных, что определяет необходтя>е₽4енкон^р©^
автоматического регулирования и этих переменных. . . ..
I При необходимости самостоятельного регулирован -'Kj
[ нескольких переменных возникает задача построения стру
тур автоматизированного электропривода, обеспечивающих
автоматический выбор переменных, подлежащих регули- !
рованию в данный момент. При этом электромеханическая
система содержит несколько имеющих самостоятельное
значение систем регулирования координат, и структура
электропривода должна обеспечивать их правильное взаи-
модействие во всех режимах работы. С этих позиций из
всего многообразия конкретных' схем регулируемого
электропривода, созданных на различных этапах его раз-
вития, можно выделить следующие. три типа структур,,
обладающих характерными особенностями: ’1) структура
с суммирующим усилителем; 2) структура независимого
регулирования координат; 3) структура подчиненного ре-
гулирования координат. Рассмотрим особенности этих
структур, положив, что регулированию подлежат п коор-
динат электропривода.
-Структура с суммирующим усилителем, до недавнего
времени имевшая в регулируемом электроприводе исклю-
чительное применение, показана на рис. 6-19. Ее основной
особенностью является суммирование всех сигналов над
вхоДё~ббщего суммирующего, усилителя, на который обычней
возлагается также задача увеличения общего коэффициента
усиления системы до требуемого уровня.^Регулирование
координат хг, х2, ..., хп может вызывать противоречив^
изменения режима работы, электропривода. Например,'
регулирование скорости действует в направлении увели-
^нйя1жесткости~механичеёкой~'Харак'геристикц1 а система
'регулирования момента своим действием препятствует
288
эйму, вызывая смягчение. МРУЯ-НПЧРСКПЙ хяряктерйсФИДИ.
1 Поэтому обьшно одновременное действие обрятных связей
нежелательно или недопустимо и для ргп .иситнлчения
рассматриваемой структуре в нети обратных связей
(ятся нелинейные элементы, отключающие данную связь
ри уровне регулируемой переменной^ меньшем порогового
напряжения нелинейного элемента, называемого напря-
жением отсечки /7ОТС. Как следствие, рассматриваемую
структуру часто называют системой с отсечками по соответ-
Рис. 6-19. Регулирование нескольких координат электропривода по
структуре с суммирующим усилителем.
При наличии отсечек в цепях всех обратных связей
показанный на схеме задающий сигнал и3 не определяет
10ЛНостъю^задЖЩ5г'5~значёния ни бдноЗп из регулируемых
перемен^И^'ишювньтшУатаО'рцтаг^адшоц^ каж-
дой координаты, является "*Н@ряжение~ отсечки в цепи
соответствующей обратной~связи. При необходимости за-
дания уровня данной переменной возникает необходимость
’регулирования отсечки в цепи этой обратной связи, поэтому
щже.если при работе требуется изменять уставку только
| ной переменной, необходимо изменять напряжения в двух
1спях схемы (и3 и «отс), а при необходимости регулирования
нескольких параметров задача соответственно осложняется.
Стремление упростить командоаппарат, с помощью ко-
торого осуществляется управление электроприводом, часто
унуждает отказываться от применения более чем одной
10 Чиликин М. Г. и др, 289
обратной связи с отсечкой. Кроме того, связи, корректив
рующие динамику системы, обычно также выполняются*
линейными. При этих условиях независимая настройка
качества регулирования всех переменных оказывается^
невозможной. Так как взаимное влияние главных и кор,1
ректирующих связей обычно неблагоприятно, системы с сум!
мирующим усилителем требуют так называемой компромисс
сной настройки контуров регулирования, при которой’
получить оптимальные качества системы невозможно.
Основным достоинством схем с суммирующим усили-«
телем является их простота реализации при использовании^
электромашинных и силовых магнитных усилителей дл^
Рис. 6-20. Структура независимого регулирования координат параллель-^
него типа.
питания двигателей или возбуждения генераторов в си- jj
стеме Г-Д. Однако ограниченные возможности формнро-^
вания требуемых статических и динамических характеристик *
электропривода привели к использованию более совер- '
шенных структур даже на базе этой техники управления. ;
В настоящее время в связи с широким использованием
для управления электроприводом высококачественных опе-
рационных усилителей область применения структуры с,
суммирующим усилителем быстро сокращается. 1
Полностью независимую настройку контуров регулиро-
вания обеспечивает структура на рис. 6-20. Здесь для’;
управления каждой переменной предусматривается отдель-
ный регулятор и в каждый момент времени регулируется?,
только одна из переменных. Последнее обеспечивается
предусмотренным для этой цели логическим переключа- ’
ющим устройством ЛПУ, которое подключает ко входу .•
системы выход того регулятора, воздействие которого
в данный момент является определяющим. Методом после-
довательной коррекции в этой структуре представляется.-
возможным осуществить индивидуальную оптимизацию1
290
каждого контура регулирования, ограничение координат
достигается, простым ограничением максимальных зада-
ющих сигналов х31, лз2, ..., хзп.
Недостатком схемы является усложнение, связанное
с введением ЛПУ, и невозможность осуществления подчи-
ненных контуров регулирования в случаях, когда при
последовательной коррекции передаточная функция ре-
гулятора получается трудно реализуемой. Эта схема нашла
некоторое применение за рубежом [38]. В отечественном
электроприводе она не применяется в связи с преиму-
ществами третьей типовой структуры, которая выше уже
рассматривалась в общем ви-
де как средство коррекции
передаточной функции объек-
та регулирования. Имеется
в виду представленная на рис.
6-15 многоконтурная струк-
тура подчиненного регулиро-
вания координат электропри-
вода. В этой структуре при
необходимости каждый внут-
ренний подчиненный контур
регулирования может рабо-
тать как самостоятельная си-
Рис. 6-21. Ограничение задаю-
щих сигналов в системе под-
чиненного регулирования.
стема регулирования, незави-
симая от всех внешних контуров регулирования. Эта осо-
бенность связана с тем, что заданное значение регулиру-
емой переменной любого внутреннего контура определя-
ется выходом регулятора следующего по порядку контура.
Для ограничения координаты X/ достаточно ограничить
выход регулятора (i + 1)-го контура, сформировав стати-
ческую характеристику вида, показанного для П-регуля-
тора на рис. 6-21, а, а для И-регулятора — на рис. 6-21, б.
До тех пор, пока результирующий сигнал на входе
(I + 1)-го контура меньше порогового, сигнала Дх0 (рис.
6-21, а) или пока выходное напряжение И-регулятора не
достигает максимального значения х3. макс, контур регу-
лирования Xi работает как вспомогательный контур, под-
чиненный регулированию координаты какого-либо внеш-
него контура. При выходе регулятора Wp (i+1) в зону
ограничения его выходного сигнала заданное значение
x3i становится постоянным (хз1 — x3i макс = const). Цепь
регулирования на входе t-го контура размыкается, и схема
обеспечивает регулирование переменной xt до тех пор,
Ю*
291
пока не выйдет из зоны ограничения выходной сигнал*
(t 4- 1)-го регулятора, либо, напротив, пока не перейду!'
в режим ограничения регулятор t-го или любого подчинен-'
ного ему контура. Если ни один из регуляторов не работает'
в зоне ограничения, осуществляется регулирование хп во:
внешнем контуре. При этом все внутренние контуры ра-
ботают как подчиненные задаче регулирования выходной
координаты системы.
Таким образом, структура подчиненного регулирования,
обеспечивает возможность настройки каждого внутреннего
контура независимо от настройки его внешних контуре
Благодаря этому в такой структуре .возможно ввёдени
в контур регулирования xt дополнительных формирую-
щих или корректирующих обратных связей, необходимых
для регулирования i-й переменной, причем эти связи не
оказывают влияния на работу всехконтуров регулирования,
внутренних по отношению к данному. В этой возможности ’
заключено важное преимущество структуры с подчиненным
регулированием координат.
Однако в сравнении со структурой независимого регу- <
лирования координат рассматриваемая структура отли-
чается зависимостью настройки внешних контуров от ди-
намических качеств внутренних подчиненных контуров.
Эта зависимость, в частности, проявляется в увеличении
некомпенсируемой инерционности по мере возрастания,
номера контура, усиливающейся при повышении 'требова-
ний к демпфированию внутренних контуров, т. е. при
увеличении at 1( at 2 и !. д. В ряде практических
случаев полностью независимое регулирование координат,
обеспечиваемое структурой параллельного типа (рис. 6-20),
является необходимым или предпочтительным. В этих
случаях может представить интерес модификация много-
контурной структуры подчиненного регулирования, позво-
ляющая получить полностью или частично независимое
регулирование координат, схема которой показана на
рис. 6-22.
Основной идеей структуры с независимым регулирова-
нием координат последовательного типа является компен-
сация влияния обратной связи внутреннего контура при
работе внешнего с помощью соответствующей положитель-
ной связи. На вход i-го регулятора (кроме первого) в со-
ответствии со сказанным подаются три сигнала: задающий
хз! от регулятора (г + 1)-го контура, отрицательная связь
по собственной регулируемой переменной Xt и положитель-
292 .
ная обратная связь по регулируемой переменной (i —1)-го
контура. В соответствии с рис. 6-22 можно записать:
X3(Z-1) ~ (^хз1 Х1 4“ х1-1 j Wpl — (Хз1 Х{) Wpi Xi-}.
Результирующий сигнал на входе внутреннего контура
выражается соотношением
A*U-1) = x3(l-i) x(l-l) + xl~2 ijz =
— (хз1 xl) Wpi 4“ .
Следовательно, при работающих регуляторах сигнал на
входе каждого из внутренних регуляторов не зависит от
вательного типа.
собственной обратной связи. При этом замкнут только
внешний контур и осуществляется регулирование пёре-
мен ной х„.
При ограничении х^ насыщается регулятор внеш-
' него /-го контура, соответственно Wpl z= 0 и х3 =
= xs (/-и макс = const. В этом случае система обеспе-
чивает регулирование х^г.
В соответствии с изложенным коррекцию каждого
контура регулирования представляется возможным осу-
ществлять независимо от других обратных связей, учиты-
вая лишь Наличие в разомкнутой цепи регуляторов внут-
ренних контуров. Передаточная функция объекта регу-
лирования для i-го контура может быть записана так:
№о.рг=№р3з{1.^ог.
При настройке на технический оптимум
^pas(i-l) — l/2Tgp (ТцР + 1)>
293
если предполагать, что некомпенсируемые постоянные
имеет только первый контур. Следовательно, передаточная
функция регулятора i-ro контура (i > 1) имеет вид:
а передаточная функция замкнутого контура не завис,
от номера контура. Соответственно не зависит от порядку,,
контура и его быстродействие. Однако выбор передаточных-
функций регуляторов в соответствии с (6-72) при L
приводит к необходимости использования Д- и ПД-реп... .
ляторов, что является недостатком, аналогичным струе
туре на рис. 6-20.
Г лава седьмая
РЕГУЛИРОВАНИЕ МОМЕНТА ЭЛЕКТРОПРИВОДА
7-1, РЕОСТАТНОЕ РЕГУЛИРОВАНИЕ МОМЕНТА И ТОКА
ДВИГАТЕЛЕЙ
Введение дополнительного сопротивления в цепь :
двигателей постоянного тока или в цепь ротора асин. -
ного двигателя приводит при данной скорости электро-
привода к уменьшению тока и развиваемого двигателем
электромагнитного момента. Эта зависимость открыв-1'- .
определенные возможности для регулирования моме! •
тока этих двигателей, которые широко используются :
практике.
Схема реостатного регулирования тока двигателя с в-
зависимым возбуждением показана на рис. 7-1, а. На р:
7-1,6 показаны электромеханические естественная xapai
ристика 1 и полученная за счет введения в цепь яг-
сопротивления 7?д. я реостатная характеристика 2. 1
сматривая реостатную характеристику с позиций зад
регулирования тока двигателя, можно установить, •,
путем параметрического регулирования, т. е. при ух;
новке неизменного сопротивления 7?д я, получить стабиль.,.
требуемое значение тока в широких пределах изменения
скорости невозможно. При регулировании тока и момента
электромеханическая связь электропривода играет роль
сильного возмущающего воздействия, вызывающего тем
большие отклонения от средних значений, чем меньше
сопротивление якорной цепи R*z и чем шире предел’
изменения скорости электропривода Асо =
294
В соответствии с рис. 7-1,6 точность регулирования
при заданных пределах Д<л может быть оценена соотноше-
. • ем
Д7я* ~ (Дакс Дин)/(Дакс"Т Iмин)-
Диапазон реостатного параметрического регулирования
. .а и момента ограничен сверху перегрузочной способ-
> /стью двигателя по условиям коммутации, а пределы изме-
нения скорости, в которых можно получить заданную
точность регулирования, уменьшаются с ростом стати-
'•’й жесткости р. Расширение пределов изменения ско-
' Д Реостатное регулирование тока двигателя с независимым воз-
[И Суждением.
I
' йети при данной точности регулирования обеспечивается
^'ччатым изменением сопротивления реостата, как по-
V ? на рис. 7-1,б.
"Давность реостатного регулирования момента и тока
, ...зомкиутой системе невелика. В связи с необходимостью
Исключений в силовой цепи двигателя получение боль-
! • U числа ступеней реостата связано с увеличением габа-
Д коммутирующего устройства. Тем не менее при вы-
. С требуемой точности регулирования и широких пре-
.>7 изменения скорости, например в переходных про-
'•‘йх пуска и торможения, требуемое, число ступеней
• Жирования сопротивления может быть значительным.
г'грчность регулирования тока и момента обычно опре-
; Дйётся заданными максимальными Д и Мг и минималь-
ными /2 и 7И2 допустимыми значениями. Для переходных
фоцессов пуска и торможения максимальные значения
/х и Мх определяются либо перегрузочной способностью
двигателя, либо максимально допустимым ускорением
электропривода едоп в соответствии с уравнением движения:
..у Ml — /Ис.мин + МИНЁДОИ. (7"1)
' 295
Минимальное значение момента при этом выбирается’
из условия
М2^Л4с.накс (7-2)
К '
При реостатном регулировании тока и момента для-
ограничения этих переменных при механических nepe-j
грузках максимальное значение момента Мг — М„оа вы-)
бирается исходя либо из перегрузочной способности дви-
гателя, либо из допустимого для механизма максимального)
момента при работе на упор.
Требуемая точность регулирования момента и тока при,
заданных пределах изменения скорости определяет числом
' ras h Л
Рис. 7-2. Реостатное регулирование тока двшателя с последовательными
возбуждением. • Я
ступеней регулировочного реостата. В этом можно убе-Я
диться на примере реостатного регулирования тока двига-Я
теля с последовательным возбуждением, схема котооогод
приведена на рис. 7-2, а. Естественная характеристикам
двигателя изображена на рис. 7-2, б (кривая 1), там жёи
показаны значения Л и /2. В осях <а (второй квадрант ’
на рис. 7-2, б) прямым = const и /2 = const (первый ,
квадрант) соответствуют прямые 2 и 3- Отрезок ав прй-«
Т?я2 = — ип/1и определяет пределы изменения ско-)
роста, в которых обеспечивается заданная точность. регу-,1
лированйя тока. Ему в первом квадранте на электромеха-
нической характеристике 4 (Т?Я2 = 7?г) соответствует^
участок а'Ь', в пределах которого /2 < Л < Л- При ®
для поддержания тока в этих пределах необходимо вы-,
вести первую ступень сопротивления 7?д1, которая опре-(
деляется отрезком Ьс. Аналогичные соответствия можно]
установить, рассматривая и остальную часть диаграммы, j
При этом можно заметить, что целому числу ступеней ’
296
(7-3)
сопротивления соответствует вполне определенное значение
/2, которое должно быть уточнено в процессе расчета
ступеней реостата.
' Для двигателя с независимым возбуждением требуемое
число ступеней пускового реостата т может быть определено
аналитически по формуле
. ig(/a//t)
где — сопротивление якорной цепи двигателя.
Расчет ступеней реостата, вводимого в цепь якоря
двигателя постоянного тока для регулирования момента,
тока или скорости, наиболее удобно осуществляется по
характеристикам двигателя, построенным в относительных
единицах (см. § 3-1). На рис. 7-1, в построены характеристи-
ки, обеспечивающие при пуске изменения момента в пре-
делах от 7И1:(. до М'г*. При номинальном моменте (М* = 1)
в соответствии с (3-21) можно записать:
^я2 = 1—
С учетом этого соотношения на рис. 7-1, в обозначены
отрезки, в относительных единицах выражающие сопро-
тивление якорной цепи самого двигателя Т?Я!|. и сопротив-
ления ступеней реостата R3:t.. Сопротивление,.
например, первой ступени определяется с помощью номи-
нального сопротивления двигателя 7?„ =
= (f/H/7H). Этот же метод расчета ступеней реоста-
та применим для асинхронного двигателя при RH =
= Дак/КЗ/ги, если заменить его естественную характе-
ристику прямой, проходящей через точки (со0, 0) и (®н,
7ИН). Такой расчет может быть проведен с учетом кривизны
характеристик в зоне требуемых значений момента, если
механические характеристики аппроксимировать прямыми,
проходящими через действительные точки характеристики,
при М — Мх и М = 7И2 [31].
Таким образом, реостатное регулирование момента при
широких пределах изменения скорости для получения
необходимой точности требует переключения сопротивле-
ний якорной цепи. Чем выше требуемая точность, Тём
большим числом ступеней реостата она обеспечивается.
При параметрическом регулировании переключения
осуществляются вручную оператором либо автоматически
по программе в функции времени. Автоматическое релей-
ное регулирование момента по отклонению обеспечивается
297
переключением сопротивлений в силовой цепи в функции
непосредственно измеряемого тока двигателя либо в функ-
ции, связанной с ним электромеханической характе-
ристикой скорости двигателя. Релейные системы реостат-
ного регулирования тока якоря при высокой чувствитель-
ности релейного элемента благодаря электромагнитной инер-
Рис. 7-3. Импульсная си-
стема реостатною регули-
рования момента.
ции якорной цепи способны обес-
печить высокую точность регулн-
рования тока. При этом благодаря
большой частоте переключений
среднее значение сопротивления 'j
якорной цепи при изменениях ско- -
роста изменяется по прямой 2 на -
рис. 7-2, б и ток поддерживается
равным току 1Х.
В качестве примера рассмотрим им-
пульсное управление моментом асинхрон-
ного двигателя с контактными кольца-
ми, осуществляемое периодическим изме-
нением сопротивления роторной цепи дви-
гателя. Принципиальная схема такого
управления приведена на рис. 7-3.
Здесь на выходе выпрямителя В в роторной цепи включены последова-
тельно резисторы R и дроссель Lf, а параллельно резистору R подклю-
чен тиристорный ключ /<. При этом, когда ключ открыт, резистор R
шунтирован, т. е. внешнее сопротивление между точками а и б равно
нулю; в этом случае момент, развиваемый двигателем, определяется
практически его естественной характеристикой. Если же ключ К. за-
крыт, то внешнее сопротивление равно R, что отвечает реостатной ха-
рактеристике двигателя.
Рис. 7-4. Схема замещения при импульсном регулировании в цепи
ротора.
С помощью системы управления СУ ключ К периодически откры-
вается и закрывается, в результате чего изменяется дополнительное
сопротивление в роторной цепи в пределах от 0 до R. Изменением соот-
ношения между интервалами времени, в течение которых ключ открыт
или закрыт, можно регулировать ток в цепи выпрямленного напряже-
ния и, следовательно, плавно регулировать момент, разбиваемый дви-
гателем.
Анализ работы рассматриваемого привода можно производить,
пользуясь схемой замещения по переменному току пли схемой замеще-
298
пия, приведенной к цепи выпрямленного напряжения. В последнем
случае соответствующие зависимости оказываются проще, поэтому и
воспользуемся схемой замещения иа рис. 7-4, где параметры статора
приведены к роторной цепи. При включении трехфазного мостового
выпрямителя в роторную цепь в любой момент времени, за исключением
коммутационных периодов, ток проходит только по двум фазам ротора,
а форма его определяется индуктивностью фазы двигателя и индуктив-
ностью сглаживающего дросселя.
Рассмотрим т-и период работы ключа. С момента времени mta
(где /ц — длительность цикла) ключ открыт в течение времени mta <
< t < (т + е) /ц и закрыт в течение времени (т + в) < t «£
•С (т + 1) /ц. В период открытого состояния ключа
dido , 1 , __Ud
dt -г То d0 Lf ’
при закрытом ключе
dids । 1 • __Urf
dt Т., ‘1з Lf '
где Lf — индуктивность сглаживающего дросселя;
(7-4)
(7-5)
Го - (3) + /?/]; Т3 = Lf/[R3 (s) + Rf + /?]
— соответственно постоянные времени цепи выпрямленного напряже-
ния при открытом и закрытом состоянии ключа; здесь R3 (з) —
= [2/?; + 3 (х' + х2)/я] s + 2/?2 — эквивалентное сопротивление;
/?1, /?2> х2 — соответственно активное и индуктивное сопротивле-
ния фазы статора и ротора;
s — скольжение двигателя;
Rf, R — сопротивление сглаживающего дросселя п добавоч-
ное сопротивление в роторной цепи;
3 (х' + x2).s/jt— составляющая, учитывающая падение напряжения,
вызванное процессом коммутации вентилей.
Решения (7-d) и (7-5) имеют вид:
';7о(0 = (Л/.1;1ч-Л/о)е“(/^'"и/7°+Л/о; (7-6)
ids (0 = (Л/кон- /rf3)e“('_(m+E)W7’3 + /tf3> (7-7)
где
(«)+/?/]; (7-8)
/*=Ш(5) + /?/+/?!• (7-9)
Если пренебречь влиянием тока намагничивания и падением напря-
3
жения в вентилях, то Lflos = — E's ; здесь Е[ — э. д. с. фазы ста-
ет:
тора, приведенная к роторной цепи при s — 1.
При заданных в и /ц
г irfo (1 ^>) (14“ ids (I м) . П 101
I Ido (1 —Л.) + Ids (1 н) 1'7 1 И
где е-<‘-НцГ3>
299
Таким образом, кривая изменения выпрямленного тока имеет вид,
показанный на рис. 7-5. Средний выпрямленный ток
, _1
ziZcp — /
-(гл-be)
(fti -j- I)
J 'л> (0 dt =
”L /?7/ц (m-l-еНц -J
= 7“ К^/иач— Ido) To (1 —^-) + (Gkoh — Ida) T3 (1 —11)] +
+ ₽Л/о + (1—e) Ida- (7’12)
Среднеквадратичный ток
Ida кв —
/(m + s)t^ ('»-НИц \"1Д
j- 1 ido(t)dt-l~ i lds(/)<# |
‘ц l J J /
\ '"-Ц ('« + *% /
— £ e/cfo (1 —e) /йз+ {у (IdBB4 — Ido)2 To (1 —^)2 +
+ “2 ^dK0H — Ida)2 T3 (1 — p)2-|-2 [/f/0 (Idna4— Ido) To (1 —Л) -f-
+ Л/3 UdKoB-Ids) T3 (I -|,l)]}],/2- (7-13)
Потери в обмотке ротора двигателя
ДР2 = Г£'^о5—3 (х( -|- х2) /^Ср —1 /— 27?1з/экв (7'14)
Электромагнитный момент двигателя
==у—3 (*1+ xi) hep — ] 7tfcP —2/?]s/Jkb| . (7-15)
При сравнительно высокой частоте коммутаций ключа можно счи-
тать, что /9КВ « ldzp, тогда:
i[£<foS — 3s (х] + х2) Ztfcp/л] lazp — ZRisIdcp}- (7-16)
Если аппроксимировать X и р первыми двумя членами разложения
в ряд Тейлора, то
X = e~et"J Т° 1 - е<ц/Т0; р=е“° -Е)1 - (1 -е) ta/T3,
и в результате преобразований получим упрощенное выражение для ldcp.
По (7-16) с учетом (7-17), полагая для упрощения Rf = 0, на
рис. 7-6, а построены в относительных единицах статические механиче-
ские характеристики асинхронного двигателя мощностью 3,2 кВт при
различных е (от 0 до 1) и частоте коммутации ключа 200 Гц. Рассма-
тривая эти зависимости, можно убедиться, что импульсное регулирова-
300
ние при 6 = const обеспечивает получение характеристик, анало-
гичных по форме характеристикам реостатным, поэтому его использо-
вание без автоматического контроля регулируемого параметра неэф-
фективно.
Из (7-15)-следует, что при /Лр = const момент, развиваемый дви-
гателем в статическом режиме, остается постоянным. Таким образом,
поддерживая постоянным среднее значение выпрямленного тока на
различных уровнях, можно регули-
ровать момент двигателя с высокой
точностью. Для решения этой задачи
значение е должно автоматически из-
меняться в функции отклонения тока
Id от заданного значения /d3. Поддер-
живая выпрямленный ток на уровнях
/Л, 1аг, ld3 постоянным, можно полу-
чить характеристики электропривода,
обеспечивающие постоянство момента
(прямые 1, 2 и 3 на рис. 7-6, а) при
изменениях скорости двигателя с точ-
ностью, зависящей от коэффициента
усиления регулятора.
На практике обычно прибегают
к использованию релейных систем
Рис. 7-5. Зависимость Id =
= f «)
автоматического регулирования выпрямленного тока, в которых точ-
ность регулирования определяется чувствительностью или коэффициен-
том возврата релейного элемента, а частота коммутации сопротивления
и е зависят от скорости и добавочного сопротивления. Известно, что
возможная частота коммутации тиристорного ключа, работающего
Рис. 7-6. Механические характеристики при импульсном (а) и релейном
(б) регулировании момента.
в цепи постоянного тока, ограничена. Этот фактор влияет иа точность
регулирования и на возможные пределы изменения скорости, в которых
удается поддерживать момент постоянным. Примерные зависимости
со — f (М) для релейной системы регулирования выпрямленного тока
при различных значениях заданного тока I3i, /з2, /з3 показаны на
рис, 7-6, б,
301
7-2. СИСТЕМА ИСТОЧНИК ТОКА — ДВИГАТЕЛЬ
Источники питания, используемые в электроприводе: сети постоян-
ного и переменного тока, генераторы в системе Г—Д, тиристорные
преобразователи в системе ТП—Д, вентильные преобразователи ча-
стоты и т. п., как правило, имеют относительно малое внутреннее со-
Рис. 7-7. Схема системы
электропривода ПТ — Д.
противление и их напряжение при из-
менениях тока нагрузки в допустимых
пределах изменяется незначительно.
Именно такие источники питания, об-
ладающие свойствами источника неиз-
менного напряжения, и предполагались
во всем предшествующем изложении.
Однако в последние годы выявляется
тенденция к использованию в элект-
роприводе и источников питания, спо-
собных при широких пределах изме-
нения сопротивления нагрузки поддерживать неизменным ток, т. е.
источников питания, обладающих свойствами 'источника тока |,39]. В
электроприводах переменного тока они нашли применение в инверторах
тока,а использование их для питания двигателей постоянного тока
представляет особый интерес в случаях, когда главной регулируемой
координатой является момент двигателя.
Предположим, что источник тока, используемый для питания дви-
гателя постоянного тока с независимым возбуждением, способен обеспе-
чивать как питание двигателя при работе последнего в двигательном
режиме, так и рекуперацию эперг
мозио.м режиме. Схема электро-
привода по системе источник
тока — двигатель (ИТ—Д) по-
казана на рис. 7-7. Якорь дви-
гателя обтекается неизменным
по значению током 7Я — =
=- const, а управление электро-
приводом осуществляется воз-
действием на цепь возбужде-
ния. При неизменном токе яко-
ря момент двигателя пропор-
ционален потоку
М =/г/нФ = Х’мФ, (/?„ = */„),
(7-18)
поэтому, изменяя поток двига-
теля, можно регулировать как
значение, так и знак момента.
Питание двигателя от источни-
ки, вырабатываемой двигателем в тор
Рис. 7-8. Механические характер,!
стики в системе ИТ — Д при раз-
личных значениях потока двнга-
ка тока полностью исключает
теля.
электромеханическую связь, так
как любые изменения скорости и соответственно э. д. с. двигателя
компенсируются без запаздывания изменением э. д. с. источника пи-
тания, поддерживающим ток нагрузки неизменным. Поэтому при
Ф — const двигатель развивает постоянный момент при любых воз-
мущениях, в том числе и при реальных пределах изменения скорости.
Механические характеристики для различных значений момента
двигателя в пределах от —Фн до +ФН показаны на рис. 7-8. Рассма-
302
(7-19)
А’я2 в соответствии
, что при скоростях
о В о Л о С
тривая их, можно установить, что электропривод по системе ИТ—Д
обладает свойствами полноуправляемого источника момента, обеспе-
чивающего точное и плавное регулирование момента в пределах —Л4Н
до +Л!Н как в двигательном, так и в тормозном режимах при любом на-
правлении скорости. Для получения знакопеременного момента в дан-
ном случае не требуется изменения направления тока якоря, поэтому
источник тока может обладать односторонней проводимостью. Эти
условия определяют минимальные габариты управляемого вентильного
преобразователя, на базе которого может быть реализован источник
тока, например нереверсивного тиристорного преобразователя, замкну-
того быстродействующей токовой связью.
Для получения во втором и четвертом квадрантах характеристик,
как па рис. 7-8, при односторонней проводимости источника тока
необходимо, однако, обеспечить изменение знака напряжения иа его
зажимах при достижении э. д. с. двигателя Е = s (при со < 0).
При этом источник тока перейдет в режим рекуперации; граничная
скорость, соответствующая этому переходу, может быть определена из
равенства
“rp = {Л^/!<Ф
Зависимость corp = f (М) для двух значении
с (7-19) нанесена на рис. 7-8^пунктиром. Видно
со > 0 (первый квадрант) и со^ 0 (третий квад-
рант) в системе ИТ—Д существует двигатель-
ный режим; в диапазоне скоростей от со = 0
до со = согр режим торможения противовключе-
нием и при скоростях, превышающих сог[), режим
рекуперации (рис. 7-8).
Использование управляемого преобразова-
теля (/ = var) позволяет расширить диапазон
регулирования момента за счет увеличения то-
ка якоря иа отдельных этапах работы электро-
привода до значений, допустимых по условиям
коммутации. Однако наиболее простые схем-
ные решения с высокими показателями каче-
ства регулирования момента получаются при
использовании параметрических источников
тока, принцип действия которых основан на яв-
лении резонанса в цепи переменного тока, содер-
жащей индуктивность и емкость.
Известен ряд схем подобных преобразова-
телей, наиболее распространенный вариант трех-
фазной схемы индуктивно-емкостного преоб-
разователя для питания двигателя постоянного
тока (39] показан на рис. 7-9. Эга схема при
определенном выборе параметров обеспечивает
стабилизацию тока нагрузки в широких пределах
э. д. с. двигателя, ограничиваемых только линейностью и допустимым
током и напряжением ее элементов.
При этом благодаря симметрии схемы в установившихся режимах
работы можно ограничиться рассмотрением работы одной фазы. Ток
нагрузки одной фазы при принятых на схеме направлениях равен;
ОМ
Рис. 7-9. Схема
трехфазного индук-
тпвно-емкостНого
преобразователя.
изменения про,иво-
(7-20)
аоз
Токи реактивных элементов схемы определяются известными соот-
ношениями:
= ~ixc\ 1 l~Ul/!xl- (7-21)
Следовательно,
i2=-Ucr!Xc-ULl!XL. (7-22)
При хс — Xj = х соотношение (7-22) принимает вид:
1^-^с + °ь)Их=!ил1х' (7-23)
где = ис + О'; —линейное напряжение питающей сети.
Так как выпрямленный ток /,/ пропорционален эффективному зна-
чению тока /2> и3 (7-23) со всей очевидностью вытекает, что при идеаль-
ных линейных реактивных элементах ток якоря двигателя не зависит
от противо-э. д. с. двигателя и сопротивления цепи нагрузки и при
ил = const является постоянным: /я = la = const.
Рис. 7-10. Характеристики электропривода по системе ИТ — Д с источ-
ником тока, содержащим неуправляемый выпрямитель.
Индуктивно-емкостный преобразователь (ИЕП) является наиболее
простым из возможных источников тока, обеспечивающим высокую 1
стабильность тока в динамических режимах, и обладает высоким к. п. д.
и равным единице коэффициентом мощности. Однако наличие неуправ-
ляемого выпрямителя исключает возможность рекуперации энергии
в сеть при тормозных реЖимах работы двигателя, что снижает управ-
ляемость привода.
На рис. 7-10 показаны электромеханические и механические харак-
теристики двигателя в системе индуктивно-емкостный преобразова-
тель — двигатель ИЕП—Д. Зона поддержания тока якорной цепи по-
стоянным при этом. ограничивается областью двигательного режима
и узкой областью режима противовключения от со = 0 до со = согр.
При со = согр (7-19) напряжение на выходе источника тока равно нулю
и при дальнейшем увеличении со ток (э. д. с.) возрастает в соответствии
с характеристикой динамического торможения. Таким образом, для
системы ИЕП—Д зависимость согр = / (Л!) определяет скорость, при
которой характеристики на рис. 7-10, а, б имеют излом и при | со j >‘
> | согр | соответствуют характеристикам динамического торможения
при соответствующем значении потока Ф (рис. 7-10, б).
304
Ограничение пределов, в которых момент поддерживается посто-
янным, в рассмотренной схеме можно практически устранить введе-
нием в цепь якоря постоянно включенного или вводимого на время
торможения дополнительного сопротивления /?Дг На рис. 7-10, б
семейство механических характеристик при введении в цепь якоря
добавочного сопротивления показано для четвертого квадранта тон-
кими линиями. Они в пределах до со = согп аналогичны характеристи-
кам системы с рекуперацией энергии (см. рис. 7-8), однако введение
постоянно включенного сопротивления значительно повышает потреб-
ляемую мощность в двигательном режиме и режиме противовключе-
ния. Этот эффект может быть существенно снижен путем введения доба-
вочного сопротивления только в режимах торможения.
В тех случаях, когда от одного индуктивно-емкостного преобра-
зователя с неуправляемым выпрямителем питается несколько соединен-
ных последовательно машин, часть которых работает в двигательном,
а часть в тормозном режиме, недостаток источника, связанный с не-
возможностью рекуперации, может не проявляться, так как 2ДЯ мо-
жет оставаться положительной. В этом случае роль дополнительного
Сопротивления 7?я, я, включенного в якорную цепь машины, работающей
в тормозном режиме, играет э. д. с. последовательно включенной ма>-
шины, находящейся в двигательном режиме.
7-3. РЕГУЛИРОВАНИЕ МОМЕНТА (ТОКА)
В СИСТЕМЕ УП—Д
Автоматическое поддержание постоянства момента
электропривода по системе УП—Д при постоянном потоке
двигателя обеспечивается введением в систему управления
Рис. 7-11. Принципиальная (я) и структурная (б) схемы регулирования
тока в системе УП—Д.
электроприводом отрицательной обратной связи по току
якоря двигателя. Принципиальная схема электропривода
с отрицательной обратной связью по току приведена на
рис. 7-11, а, а соответствующая ей структурная схема
контура регулирования тока показана на рис. 7-11, б.
Анализ влияния обратной связи по току (моменту) начнем
с получения уравнения динамической механической характе-
ристики замкнутой системы электропривода. В соответ-
305
ствии с рис. 7-11, б можно записать: ч
(«3. Т ^ол^'я) = (^пР 4~ 1) ^П> 1 ,у 24Л '
en--cco = 7?aS(Tap+l)i„. J ;
Путем преобразования системы (7-24) получим.уравне- '
ние динамической механической характеристики электро-.
привода либо в виде зависимости скорости от момента |
.. (7’яР + 1) ГпР+О+^о.А м п |
“-c-(Tnp+i)' СЧЙ.Г+Т) м’ (7’2о) ’
либо в виде зависимости момента от скорости
м~ ^s(TnP+i)(T,1P+i)+^A-
__________f2 .7 п.р +!)---- ш (7-96)
Полученный математический аппарат используем для
анализа статических характеристик рассматриваемого ’
электропривода. Уравнение статической механической ха-
рактеристики получим из (7-26) при р = 0:
М = Л4к.з - = ₽т (®0.т - и), (7-27) -
где Л4К 3 = U3,т /?п с / (Л?я2 + /г0.т &п) — момент короткого за- j
мыкания; рт = 0/(1 + /г0.т kn/Rss)—модуль статической j
жесткости; <о0= U3 т kjc — скорость идеального холо- ;
стого хода в замкнутой системе регулирования.
Примем, что необходимо получить заданное значение
момента стопорения электропривода Мкз — МС]О„. Ойо мо-
жет быть получено при различных значениях коэффици-
ента обратной связи по току выбором соответствующих
значений 1/зл с помощью соотношения
R3. Т ~ ^4 СТОП (^я2 “Ь ^0.
Этим условиям соответствует семейство механических i
характеристик электропривода, приведенное на рис. 7-12. \
Рассматривая его, можно установить, что статическая ?
точность регулирования момента в данной схеме при ’
прочих равных условиях ограничена сильным возмущаю- ?
щим воздействием,оказываемым внутренней обратной связью ,
по э. д. с. двигателя. Вследствие действия этой связи ско- -I
рости двигателя в замкнутой системе регулирования ока- ;
зывают на момент тем более значительное влияние, чем '
меньше коэффициент обратной связи по току. При возраста- >
306 J
Рис. 7-12. Механические
характеристики электро-
привода с обратной свя-
зью по току.
реверсивного преоб-
нии /год жесткость статической характеристики умень-
шается и при неограниченном возрастании k0 т или /?п стре-
мится к нулю. Однако при реальных значениях этих коэф-
фициентов исключить существенное влияние изменений
скорости на точность регулирования момента.без принятия
специальных мер, рассматриваемых ниже, практически не-
возможно.
При отсутствии обратной связи по току (йот 0) для
получения момента Л4СГ0|1 необходимо небольшое значение
(7ЗТ, обеспечивающее получение э. д. с. преобразователя,
равной падению напряжения на
суммарном сопротивлении якорной
цепи Д6/стоп = /стоп Увеличе-
ние /?от приводит к соответствую-
щему возрастанию (7ЗТ и э. д. с.
преобразователя при холостом хо-
де (/,, —=0), поэтому при больших
коэффициентах обратной связи на
форме характеристик двигателя
сказывается ограничение э. д. с.
преобразователя, обусловленное в
системе Г—Д насыщением магнит-
ной цепи генератора и ограничен-
ностью максимального напряже-
ния возбуждения, а в системе
ТП—Д необходимым ограничением
предельных углов регулирования
разователя в выпрямительном и инверторном режимах.
Если представить характеристику преобразователя ли-
нейной зависимостью Еп = /?,, Ду с идеальным ограни-
чением э. д. с. максимальным значением Дп.мякс, то легко
установить, что пределы изменения скорости, в которых
с помощью отрицательной связи по току обеспечивается
с той'или иной точностью регулирование момента, ограни-
чены сверху и снизу характеристиками разомкнутой си-
стемы, соответствующими £ = ± Е„ макс = .const (рис.7-12).
Использование этой особенности в случаях, когда не-
обходимо широкое и плавное регулирование момента и не
требуется регулирования скорости, позволяет формировать
экскаваторные механические характеристики электропри-
вода с регулируемым стопорным моментом с помощью
отрицательной связи по току без применения других
связей. На рис. 7-13, а показана зависимость Ес
для каскада, состоящего из генератора и тиристорного
307
возбудителя, где иу — напряжение управления возбуди-
теля. Выбрав задающее напряжение изт, обеспечивающее
работу преобразователя при холостом ходе в зоне глубо-
Рис. 7-13. Зависимость Ег = f (t/y) (а) и соответствующие экскаватор-
ные характеристики электропривода (б).
кого насыщения, и установив необходимый коэффициент
обратной связи, получим экскаваторную характеристику 1,
показанную на рис. 7-13, б. Уменьшая задающий сигнал
при неизменном fe0T — const, можно регулировать стопор-
ный момент двигателя в широких пределах (характеристики
Рис. 7-14'. Принципиальная схема
комбинированной системы регули-
ррвания тока с фррмирукдцей по-
ложительной связью по скорости.
fe0T эффективным средством
мента от скорости является
положительной обратной св?
2, 3, 4 на рис. 7-13, б). Бла-
годаря простоте, электро-
привод, замкнутый одной
обратной связью по току,
нашел некоторое примене-
ние для инерционных ме-
ханизмов, однако случаи,
когда при регулировании
момента не требуется ре-
гулирование скорости, на
практике встречаются ред-
ко.
При конечных значе-
ниях коэффициентов уси-
ления kn и обратной связи
уменьшения зависимости мо-
использовцние формирующей
зи по скорости двигателя, т. е.
компенсационного принципа в дополнение к основной сис-
теме регулирования по отклонению. Принципиальная схема
такой системы представлена на рис. 7-14; на схеме показан
тахогенератор ТГ, введенный для получения сигнала по-
308
ложительной формирующей связи по скорости. Уравне-
ние статической характеристики электропривода в этой
схеме можно получить из соотношений
3. Т ^О. Т^Я “Ь ^П. С®) = ^П, 1 28)
£п — ссо = /и/?я2, J
где kn с — коэффициент положительной связи по скорости.
Отсюда
дд 'U3,ik„c с3 fen.cfeiic „ лох
Модуль статической жесткости механической характе-
ристики в замкнутой по току системе зависит от коэффи-
циента формирующей обратной связи по скорости:
Рзам. т=(С2—&п.<Лпс)/(^яЗ + ^о.т^п)- (7-30)
При увеличении коэффициента fen с модуль статической
жесткости быстро убывает и при критической положитель-
Рис. 7-15. Механические ха-
рактеристики в комбиниро-
ванной системе регулирова-
ния момента.
ной связи по скорости йп с к =
— с / /?п становится равным ну-
лю. Дальнейшее увеличение /?п с
приводит к изменению знака же-
сткости, как это показано на
рис. 7-15. При критический по-
ложительной связи статическая
ошибка, обусловленная измене-
ниями скорости, исключается, и
система обеспечивает астатиче-
ское регулирование момента без
введения в цепь регулирования
регуляторов с интегральной ха-
рактеристикой.
Сочетание компенсационного
принципа с регулированием по
отклонению дает комбинированную систему управления,
обеспечивающую высокую статическую точность регулиро-
вания наиболее простым путем при применении таких
средств управления, как магнитные усилители.
Формирующую положительную связь по скорости на
практике используют только в тех случаях, когда в схему
вводится тахогенератор для создания отрицательной об-
ратной связи по скорости для регулирования скорости
электропривода. При этом в пределах изменения скорости,
в которых необходимо регулировать или ограничивать
309
допустимым значением момент двигателя, тахогенератор
используется для получения слабой формирующей поло-
жительной связи по скорости, повышающей точность регу-
лирования момента. Заметим, что возможно использование
чисто компенсационной системы регулирования момента,
т. е. системы с положительной связью по скорости, не
замкнутой отрицательной обратной связью по току. При
критической положительной связи по скорости и k0T = О
уравнение статической характеристики (7-29) принимает
вид:
М ~U3 Tknc/Ra-2 = const. (7-31)
Выбором задающего сигнала L/3.t из условия (7ЗТ1 =
= Метоп / kn с в такой системе можно получить ха-
рактеристику, аналогичную характеристике при knCK на
рис. 7-15. Нетрудно видеть, что в соответствии с (7-31)
задающий сигнал изл выбирается таким, чтобы при со = О
компенсировать падение, напряжения в якорной цепи при
стопорном токе /'топ. При возрастании скорости увели-
чивающаяся э. д. с. двигателя компенсируется сигналом
положительной связи по скорости, поэтому .ток и момент
остаются постоянными. Такой принцип используется для
управления пуском двигателей малой и средней мощности
в электроприводах станков и получил название «упрежда-
ющего токоограничения».
При использовании чисто компенсационного способа
регулирования момента необходимо учитывать, что момент
при этом может иметь значительную нестабильность, про-
порциональную изменениям напряжения питающей сети и
обратно пропорциональную температурным изменениям сум-
марного сопротивления медных обмоток машины R3%.
Комбинированный способ управления лишен этого недо-
статка.
В системах, где тахогенератор не предусматривается,
в качестве формирующей связи при регулировании момента
успешно используется положительная связь по напряже-
нию преобразователя. Примером подобной системы может
служить устаревшая система с трехобмоточным генератором,
длительное время использовавшаяся для формирования
экскаваторных характеристик в системе Г—Д. Схема си-
стемы трехобмоточный генератор—двигатель (ТГ—Д)
приведена на рис. 7-16, а. Генератор Г в этой схеме имеет
три обмотки возбуждения: обмотку независимого возбуж-.
дения ОНВ, обмотку параллельного возбуждения ОШВ,
310
м. д. с. которой пропорциональна напряжению генератора,
* и последовательную обмотку ОПВ, м. д. с. которой пропор-
циональна току якоря. В пределах линейного участка
характеристики холостого хода генератора система ТГ—Д
I является системой регулирования тока двигателя, уровень
которого задается м. д. с. обмотки ОНВ, а обмотка ОШВ
। выполняет функции формирующей положительной связи
по напряжению, близкой по характеру к обратной связи
по скорости двигателя. Работа в зоне насыщения магнит-
ной цепи генератора обеспечивает жесткий участок экска-
ваторной характеристики.
; , На рис. 7-16, б показано семейство механических ха-
рактеристик в системе ТГ—Д при отключенной обмотке
Рис. 7-16. Система ТГ — Д (а) и ее механические характеристики (б, в).
ОШВ и изменении м. д. с. независимой обмотки ОНВ.
Аналогичные характеристики при критической положитель-
ной связи по напряжению приведены на рис. 7-16, в. Они
свидетельствуют о том, что использование комбинирован-
ного управления в этом простейшем варианте-позволяет
формировать экскаваторные характеристики с поддержа-
нием постоянства момента в широких пределах изменения
скорости двигателя. Однако необходимость переключений
в цепях обмоток возбуждения и невысокая динамическая
точность регулирования момента привели к полному вы-
теснению системы ТГ—Д более совершенными системами
с высоким коэффициентом усиления.
Необходимо заметить, что при использовании струк-
туры с суммирующим усилителем (см. §.6-6) отрицательная
обратная связь по току с отсечкой во многих случаях при-
меняется в сочетании не с положительной, а с непрерывной
отрицательной связью по напряжению, вызванной необхо-
димостью стабилизации скорости и напряжения генера-
тора. Из соотношений (7-29) и (7-30) следует, что введение
311
отрицательной связи по скорости (fen.c < 0) при прочих
равных условиях увеличивает жесткость механических
характеристик. При этом влияние изменений скорости на
развиваемый двигателем момент усиливается и задача по-
лучения требуемой точности регулирования момента до-
полнительно осложняется. .
Перейдем к анализу динамических свойств контура
регулирования тока по схеме рис. .7-11. С помощью (7-26)
при и31 = 0 получим уравнение динамической жесткости
механической характеристики в замкнутой системе
T.P+^+ko.^l^(TnP+\y
(7-32)
При безынерционном преобразователе (Тп = 0) урав-
нение (7-32) принимает вид:
+ (7-33)
где
О ____ ______Р______. ГТ ___ _____'_______
Рзам- \ + (ko_kn/R^y ' Э“ l + (*o.TVW
Уравнение (7-33) по
динамической жесткости
Рис. 7-17. Амплитудно-ча-
стотные характеристики ди-
намической жесткости в си-
стеме регулирования тока
(момента) двигателя.
форме совпадает с выражением
в разомкнутой системе УП—Д,
системы УП—Д (кривая
а анализ его параметров пока-
зывает, что при Тп = 0 отри- _•••
нательная обратная связь по то-
ку влияет на характеристики
электропривода вполне анало- Д
гично введению сопротивления 1
в цепь якоря двигателя. Модуль
жесткости рзам при этом умень- ,<
шается и одновременно умень-
шается эквивалентная постоян-
ная времени Тэ. J
На рис. 7-17 приведены ам-
плитудно-частотные характери- |
стики динамической жесткости .*
1₽д.т1 = f (ЭД для разомкнутой
Г) и для системы, замкнутой
отрицательной связью по току при Тп = 0 (кривая 2). ,
Нетрудно видеть, что при безынерционном преобразова- ;
теле динамическая жесткость механической характеристики
в замкнутой системе регулирования момента во всем диапа- s
312
зоне частот снижается относительно динамической жест-
кости в разомкнутой системе. Следовательно, точность ре-
гулирования момента при этом в широком диапазоне ча-
стот остается высокой и динамические ошибки регулирова-
ния с ростом частоты снижаются.
Учет инерционности преобразователя существенно из-
меняет положение. Качественно форму амплитудно-частот-
ных характеристик динамической жесткости в этом случае
можно определить на основании анализа (7-32). При
Q < 1 / Та зависимость |рдл| = f (Q) близка к кривой 2,
а при Q 1 / Тп приближается к зависимости динамической
жесткости в разомкнутой системе, показанной на рис. 7-17
кривой 1. Чем больше Та, тем увеличение модуля динами-
ческой жесткости |рдт| в сравнении со статической жест-
костью рз.1м наступает при меньших частотах Q. Этим усло-
виям отвечают показанные на рис, 7-17 кривые 3, 4 и 5,
соответствующие различным значениям < Ttl2 < Tn3.
Они свидетельствуют о том, что инерционность преобразо-
вателя является фильтром в цепи регулирования, умень-
шающим влияние отрицательной связи по току при вы-
нужденных колебаниях в тем большей степени, чем больше
Т„ и чем выше частота колебаний скорости Q. Динамиче-
ские ошибки регулирования при увеличении Та возрастают.
Этот эффект, как ниже будет показано, при определенных
условиях может быть использован для уменьшения коле-
бательности электромеханической системы с упругой
связью.
До сих пор не затрагивался вопрос о качестве регули-
рования тока и момента в рассматриваемой системе. При на-
личии формирующей обратной связи по скорости или на-
пряжению динамические свойства контура регулирования
тока при определенных соотношениях параметров полу-
чаются удовлетворительными без применения какой-либо
коррекции. Однако такие условия складываются далеко
не всегда. При необходимости снижения динамических оши-
бок регулирования требуется и при комбинированном
управлении использование сильной отрицательной связи
по току. Возрастание общего коэффициента усиления ра-
зомкнутого контура приводит к повышению колебатель-
ности и возникает необходимость его последовательной
или параллельной коррекции. При этом открываются и
дополнительные возможности для увеличения точности
регулирования.
313
7-4. КОНТУР РЕГУЛИРОВАНИЯ ТОКА В СИСТЕМЕ УП—Д,
ОПТИМИЗИРОВАННЫЙ МЕТОДОМ ПОСЛЕДОВАТЕЛЬНОЙ
КОРРЕКЦИИ
Воспользуемся изложенным в § 6-4 методом последова-
тельной коррекции для синтеза контура регулирования
тока в системе УП—Д, причем для определенности будем
полагать, что используется быстродействующий, например
Рис. 7-18. Принципиальная (а) и структурная (б) схемы контура регу-
лирования тока в системе ТП — Д.
тиристорный, преобразователь. Принципиальная схема
синтезируемого контура регулирования приведена на
рис. 7-18, а. В схеме на вход тиристорного преобразова-
теля ТП введен регулятор тока РТ на базе операционного
усилителя, причем показанные на рисунке цепи входов и
314
обратных связей усилителя выявятся только в результате
синтеза и пока вид их будем предполагать неизвестным.
Для усиления сигнала обратной связи по току, снимае-
мого с шунта силовой цепи, а также для потенциального
разделения силовых цепей и цепей управления введен дат-
чик тока ДТ. Структурная схема системы регулирования
показана на рис. 7-18, б, причем тиристорный преобразо-
ватель представлен звеном, учитывающим его постоянную
запаздывания ттп и инерционность фильтра в СИФУ Тф.
Передаточная функция объекта регулирования тока
с учетом показанной на схеме внутренней связи по э. д. с.
двигателя имеет вид:
Ь р~ ТТ.ПР Т г,
__кт. н1-__,_______7 мУ______ /7 441
W'o.p.T- Гф/?+1 ^/ + ^+1)-
Следовательно, при принятых при составлении струк-
турной схемы допущениях объект регулирования состоит
из последовательно соединенных инерционного звена с ма-
лой постоянной Тф, звена с малым запаздыванием тт.п,
дифференцирующего звена с постоянной времени 7\, и ко-
лебательного звена.
Отнесем инерционность фильтра и постоянное запазды-
вание к некомпенсируемым инерционностям контура, при-
няв Тр = тт.п + Тф. Для полупроводниковой СИФУ
обычно Тц = 0,01 с. Соответственно (7-34) принимает вид:
°-р>т~(Л>+1)*яз ( ’
Рассмотрим ЛАЧХ части объекта регулирования, отно-
сящейся к двигателю:
п/ _____________
w^~TsT^+TaP+\-
Twp
(7-36)
При реальных соотношениях постоянных Тя и Тк, как
было показано в гл. 4, колебательное звено в (7-36) имеет
высокий коэффициент демпфирования и показатель коле-
бательности, близкий к единице. При этих условиях при
построении асимптотической ЛАЧХ колебательное звено
без большой погрешности можно заменить двумя аперио-
дическими звеньями с равными постоянными времени
т = КтТт;. '
На рис. 7-19 представлены сплошными линиями 1, 3,
5 логарифмические асимптотические характеристики, со-
315
ответствующие (7-36), .причем характеристика 1 построена
для случая Тя — Т,,, характеристика 3 — Тщ > Т,„ и ха-
рактеристика 5 — Та. На том же рисунке для срав-
Рис. 7-19. Логарифмические частот-
ные характеристики, соответствую-
щие (-7-36).
< Т„ проходит ниже, а при
станием колебательности — bi
нения приведены асимпто-
тические ЛАЧХ апериоди-
ческого звена с постоян-
ной времени Тя, Тл и Тп2
(пунктирные линии 2, 4 и
6). Из рис. 7-19 видно, что
при средних и больших
частотах эти сплошные и
пунктирные зависимости
достаточно близки, особен-
но если учесть, что дейст-
вительная ЛАЧХ при Тк2<.
ТЯ1 > Ти в связи с возра-
;ше .максимума асимптоты.
Это наблюдение свидетельствует о целесообразности для
синтеза динамических качеств дальнейшего упрощения
(7-35) путем замены (7-36) передаточной функцией аперио-
дического звена с постоянной времени Тя:
'/яя2
°-р-т^7>+1 тяР + \ •
(7-37)
Структурная схема контура регулирования в соответ-
ствии с (7-37) принимает вид, показанный иа рис. 7-18, в.
Сравнивая ее с исходной структурной схемой рис. 7-18, б,
можно убедиться, что суть принятого в (7-37) допущения
сводится к пренебрежению внутренней обратной связью
э. д. с. двигателя. Пренебрежение этой связью приводит
к исключению из рассмотрения дополнительного запаса
по фазе, обусловленного дифференцирующей составляю-
щей (7-36) в области частот, меньших \/Тя, что обеспечивает
некоторый запас в определении динамических показателей
качества при последовательной коррекции. Существенные
различия амплитуд в области Низких частот сказываются
на точности регулирования, поэтому при оценке точности
регулирования внутреннюю связь по э. д. с. следует учи-
тывать.
В результате последовательной коррекции должна быть
получена передаточная функция разомкнутого контура
тока в виде
1VZ 1/^0. т
раз'т~%7> (Т^р+Л)-
(7-38)
316
Разделив (7-38) на (7-37), получим передаточную функ-
цию регулятора тойа
Гр.т = (Тяр + 1)/Т^р = Тя/Ти.т+ 1/Ти.тр. (7-39)
Получена передаточная функция ИП-регулятора (см.
рис. 6-12, в) с постоянной интегрирования
= ' (7-40)
и коэффициентом усиления пропорциональной части
/гу/г = Тя / Ти т. В соответствии с рис. 6-12, в на принципи-
альной схеме контура регулирования тока (рис. 7-18, а)
в цепь обратной связи РТ введены сопротивление Pox.i
и емкость Сост, а на входы включены сопротивления
/?з.т и /?0.т.
Так как
71и.т = ^з.тС’о.с.т и /гу.т = ^о.с.Ж.т, (7-41)
то компенсирующая постоянная регулятора тока Ткл
определяется соотношением
7’к.т = 7?0 с ТСО.с.т= Тя. (7-42)
Для расчета параметров схемы необходимо задаться
максимальным значением и3.т = (/З.т.макс, соответствующим
максимально-допустимому току якоря /стоп и определить
коэффициент обратной связи по току:
^О.Т - (7з т макс//ст0п - &Д Т (R3.t/^O.t)> (7-43)
где &д.т — коэффициент передачи датчика тока ДТ
(рис. 7-18).
Затем с помощью (7-40) можно вычислить Тнл и, зада-
ваясь А’з.т, определить значение С0.с.т; Д0.с.т определяется
из (7-42), а сопротивление Л?от— из (7-43). Простота
определения параметров при рассматриваемом методе син-
теза контура с заданными динамическими свойствами
очевидна и является его важным достоинством.
На рис. 7-18, а параллельно цепи обратной связи ре-
гулятора тока включена цепочка из двух стабилитронов
Стрл, обеспечивающая ограничение его выходного напря-
жения (рис. 7-20). Необходимость ограничения выходного
напряжения обычно связана либо с данными усилителя, ли-
бо с необходимостью ограничения напряжения управления
317
преобразователя. В рассматриваемом случае напряжение
^у. макс определяется максимально допустимым углом ре-
гулирования реверсивного вентильного преобразователя
в инверторном режиме и тем самым ограничивает э. д. с.
преобразователя значением Дп.макс-
Перейдем к анализу свойств синтезированной системы
регулирования. Благодаря наличию интегральной состав-
ляющей в (7-40) и соответственно в
(7-38) контур обладает астатизмом пер-
вого порядка и статическая ошибка
регулирования тока отсутствует. С
учетом отмеченного ограниченияэ. д. с.
преобразователя Е„ Еп. макс стати- .
ческие электромеханические характе-
ристики электропривода имеют вид,
показанный на рис. 7-21. При 1/у «£
i/y. макс Еп SZ Еп. ммс контур обеспе- •.
чивает точное поддержание постоян-
ства тока и при Ф.= Фц’= const мо-
мента двигателя; электромеханиче-
ская связь электропривода в статике
полностью устраняется. Пределы из- .
в которых система способна поддер-
1
Шумане ^з.т~Ц).т
0 -и .
иу.макс
Рис. 7-20. Статическая
характеристика ИП-
регулятора с ограни-
чением выходного на-
пряжения.
Рис. 7-21. Статические ха-
рактеристики электропри- '
вода с контуром регули-
рования тока, оптимизи-
рованным методом после-
довательной коррекции.
менения скорости,
живать ток постоянным, ограничиваются указанными воз-
можными пределами изменения (7у и Еп, т. е. харак-
теристиками разомкнутой сис-
темы электропривода, соответст-
вующими +£,п.макс (прямая /) И
—•Е'п.макс (прямая 2 на рис. 7-21).
В этих пределах, как можно
установить сравнением рис. 7-21
с рис. 7-8, рассматриваемый элек-
тропривод обладает такими же ста-
тическими характеристиками, как
и, система ИТ—Д, т. е. являет-
ся источником момента. Поэтому,
как отмечалось, в системе ИТ—Д
может быть в качестве источника
тока использован нереверсивный
тиристорный преобразователь, зам-
кнутый астатической системой ре-
гулирования тока, однако только при условии достаточ-
ной точности регулирования не только в статических,
но и в динамических режимах.
318 '
Передаточная функция замкнутого контура тока имеет
вид:
W^== aTTliP (4р+1)+Г <7'44)
Последовательная коррекция обеспечивает получение ди-
намических показателей электропривода, однозначно опре-
деляемых выбором соотношения постоянных времени кон-
тура ат — Т0'Т / Тц (см. § 6-3). Настройка контура на тех-
нический оптимум (ат = 2) дает минимальное время ре-
гулирования при перерегулировании, не превышающем
5%. Для ряда электроприводов по тем или иным причинам
может быть нежелательным даже такое небольшое пере-
регулирование и требуется получение апериодического ха-
рактера переходных процессов; в других случаях, напротив,
целесообразно уменьшение времени регулирования за счет
некоторого увеличения колебательности системы. Удовлет-
ворение этих требований в полученной системе не пред-
ставляет затруднений и обеспечивается выбором а: в пре-
делах я, = 1 -г 4.
Быстродействие контура определяется только соотно-
шением постоянных времени «г и уровнем суммарной
некомпенсируемой постоянной Т^. При настройке па техни-
ческий оптимум (а{ = 2) время регулирования = 4,7 Тр.
Следовательно, при T\L — 0,01 с скачок задания от 0 до
^з.т.макс, обеспечивающий возрастание тока от 0 до /„оп =
= 2/„, отрабатывается электроприводом за время tp =
= 0,05 с. При этом средний темп нарастания тока состав-
ляет 40 /„ что удовлетворяет высоким требованиям.
Для многих электроприводов такое быстродействие может
превышать допустимый темп нарастания тока якоря по
условиям коммутации и допустимый рывок по условиям
движения механической части привода. В подобных слу-
чаях темп нарастания тока может быть ограничен введением
дополнительного контура регулирования производной тока
[17] либо снижен увеличением уровня некомпенсируемой
инерционности за счет отказа от компенсации постоян-
ной Тя. В последнем случае следует иметь в виду, что
возрастание Тц не только ограничивает быстродейст-
вие, но и увеличивает динамические ошибки регулирова-
ния.
Изображение ошибки регулирования тока при единич-
ной обратной связи в случае изменения задающего сиг-
319
нала i3 (р) имеет вид:
л- / ч Ь(р) ‘з(р)ат7’цр(7’||р+1)
^з(Р)-1 + 117раз т - аттмр(Гцр+1)+.1 • (7‘45)
Из (7-45) следует, что статическая ошибка при р = О
отсутствует. Установившаяся динамическая ошибка при
изменении задающего сигнала по линейному закону мо-
жет быть определена путем подстановки в (7-45) изобра-
жения сигнала задания для этого случая
\ ш /макс \ ш /макс Р
что при р = 0 дает:
Ai3 макс = (4гi «тТ’ц. (7-46)
\ Ш /макс
На рис. 7-22 представлена кривая изменения тока
якоря 2 при линейном нарастании задающего сигнала 1
в условиях отсутствия внутренней связи по э.’ д. с. двига-
теля (например, при снятом возбуждении Ф = 0, с =’0).
' При данном (di3/d/)MaKC установившаяся ошибка тем
больше, чем больше некомпенсируемая инерционность кон-
тура Т^. Уменьшение аг при данной
приводит к уменьшению устано-
/ вившейся ошибки, но в связи свозра-
// станием колебательности максимум
1 динамической ошибки в переходном
процессе может существенно превы-
/шать установившуюся динамическую
t ошибку в этом процессе, что может/
оказаться нежелательным.
Рис. 7-22. Установив-
шаяся - динамическая
ошибка регулирования
тока при линейном на-
растании задающего
сигнала.
При практической оценке точности
регулирования тока в рассматривае-
мой схеме особый интерес представ-
ляет анализ ошибок, обусловленных
влиянием возмущающего воздействия,
оказываемого при работе электро-
привода внутренней связью по э. д. с.
двигателя. При синтезе контура регулирования эта связь
нами не учитывалась, однако • реально она существует и
изменения скорости в переходных процессах существенно
сказываются на точности поддержания постоянства тока.
В соответствии с (6-14), полагая возмущающим воздейст-
вием э. д. с. (скорость), можно при единичной обратной
320
Мр) дЛр(У+1)
связи записать:
Так как постоянство тока, обеспечиваемое системой,
при постоянном статическом моменте приводит к равно- .
мерно ускоренному изменению скорости, определим устано-
вившуюся динамическую ошибку регулирования тока при
этих условиях, т. е. при изменении возмущающего воз-
действия по линейному закону и (/) = ечакс t емакС / р.
Подставляя изображение со (р) в (7-47) при р = О,
получаем:
Аммане ” ^макс^тТ1^/R я2- (7-48)
При этом установившаяся ошибка регулирования мо-
мента составит:
АТИщмакс = п — р£макЛ;Тм. (Z"49)
'яЗ " -
Таким образом, установившаяся динамическая ошибка
регулирования момента тем больше, чем больше жесткость
механической характеристики электропривода в разомкну-
той системе, чем выше суммарная некомпенсируемая по-
стоянная контура Тц. и чем больше отношение постоянных
времени а,, т. е. чем выше демпфирование колебательных
процессов в замкнутом контуре регулирования. Эта ошибка
определяет расхождение между статической и динамичес-
кой механическими характеристиками электропривода в пе-
реходных процессах.
На рис. 7-23, а (кривая /) показан процесс нарастания
тока при скачке задания без учета влияния внутренней
связи по э. д. с. двигателя при ас — 2. Установившаяся
ошибка при этом отсутствует и после затухания переход-
ного процесса устанавливается постоянное значение тока,
равное заданному стопорному току /стоп. При этом сигнал
на входе регулятора тока (7зт-макс — Йд.т = 0 и напря-
жение на выходе интегратора не изменяется, соответственно
постоянна и э. д. с. преобразователя Еп = 1„оа Л?я2. В ре-
альном процессе пуска, например, вхолостую (Л4С = 0)
под действием возрастающего до Л4Ст0П момента двигателя
скорость начнет увеличиваться (кривая 3) и для под-
держания тока постоянным потребуется увеличение э.д. с.
преобразователя по закону Еп = ссо + /стоп Т?я2. При неиз-
менном токе скорость, нарастает линейно, соответственно
11 Чиликин М. Г. и др. 321
I
линейно должны возрастать э. д. с. £п и выходной сигнал
регулятора тока. Отсюда ясно, что для того, чтобы напря-
жение на выходе интегрального регулятора возрастало по
линейному закону, на его входе должно быть постоян-
ное напряжение Т/зл..ма1!С — 0 и соответствующая
ошибка регулирования, определяемая (7-49).
Процесс нарастания тока при пуске с учетом влияния -
э. д. с. двигателя показан на рис. 7-23, а (кривая 2). В этом
случае ток устанавливается меньше стопорного значения на
динамическую ошибку. На рис. 7-23, б показан процесс
снижения скорости двигателя по линейному закону под
действием нагрузки на валу двигателя Л4С, значительно
Рис. 7-23. Динамическая ошибка регулирования тока при линейном
изменении скорости двигателя.
превышающей момент двигателя Л4СТОП (прямая 7). При этом
для снижения э. д. с. преобразователя по мере снижения
скорости необходим на входе регулятора тока сигнал про-
тивоположного знака, который обеспечивается превышением
тока якоря над заданным на значение Д1Имакс» Которое
при е < 0 в соответствии с (7-48) отрицательно (кривая 2).
На рис. 7-23, в показана статическая характеристика
электропривода 1 и построены динамические характеристики
2 (пуск) и 3 (стопорение). Сравнение характеристик свиде-
тельствует о том, что внутренняя связь по э. д. с. может
вызвать при определенных темпах изменения скорости зна-
чительные отклонения динамических характеристик при-
вода от статической. Особенно нежелательны выбросы тока
за стопорное значение при перегрузках, но и при пусках
и торможениях существенная ошибка регулирования тока
и момента может заметно снизить возможное быстродействие
привода, увеличивая время переходных процессов.
Для оценки относительной ошибки в переходных про-
цессах пуска и торможения можно получить- удобную фор-
322
мулу, воспользовавшись уравнением движения для опреде-
ления Вмакс*
®макс= (Л4С1ОГ,-ДЛ4
сомакс MJ/Jf. (7-50)
Подставляя (7-50) в (7-48), с учетом соотношения М =
— с!я после преобразований, получаем:
Д^(0маис 1 Мс/Мгтпп /7 гп
“7----~ "1 г /п т ' ’ v ’° И
'стоп 1 г ' м/‘‘т' ц
В частности, при = 0,01 с, аг = 2, Мс = 0 и Тп =
= 0,02 с ошибка регулирования составляет половину сто-
порного тока. С возрастанием и аг она дополнительно
увеличивается. Напротив, увеличение Тм и Л4С при пуске
приводит к уменьшению динамической ошибки. Приведен-
ная оценка свидетельствует о том, что при высоком быстро-
действии электропривода, т. е. при быстрых изменениях
скорости, контур регулирования тока, оптимизированный
методом последовательной коррекции, даже при минималь-
ной Ту, = 0,01 с может давать большие динамические
ошибки. С учетом изложенного в § 6-5, в случаях, когда
Дг'м при пуске или стопорении привода превышает допу-
стимое значение, требуемую точность регулирования мо-
мента в переходных процессах можно получить, дополнив
последовательную коррекцию параллельной. При этом,
задавшись допустимой ошибкой Д/м доп, с помощью (7-48)
можно вычислить допустимое значение яг.доп 1, а соот-
ветствующую ему повышенную колебательность контура
устранить введением гибкой обратной связи по току якоря.
Структурная схема контура регулирования тока в си-
стеме Г—Д .без учета внутренней обратной связи по э. д. с.
двигателя показана на рис. 7-24, а. Его отличает от рас-
смотренного в системе ТП—Д наличие генератора — до-
полнительного инерционного звена с весьма большой по-
стоянной времени.
Непосредственное применение метода последовательной
коррекции при сохранении суммарной некомпенсируемой
постоянной на том же уровне, что и в системе ТП—Д
(Тц = т;.:п + Тф = 0,01 с), приводит к следующей пере-
даточной функции регулятора тока:
w - (Лр+1)(Д,р+1) _ ДТ тг + Тя , 1
р-т (К.ЛЛ.Лщ)^
Как уже отмечалось, реализация И ПД-регулятор а свя-
зана с известными трудностями, поэтому в данном случае
И* 323’
предпочтительно либо увеличение некомпенсируемой по-
стоянной контура за счет отказа от компенсации Тя (Тц =
= тпР + Гф + Тя), либо применение внутреннего подчи-
ненного контура регулирования э. д. с. генератора. Первый
путь приводит к схеме ИП-регулятора тока с большой
пропорциональной частью Аул. = Тг/Т„ и в связи с увели-
чением Тр, имеет повышенную динамическую ошибку. На
этом пути наиболее вероятна необходимость дополнительной
параллельной коррекции контура для получения требуе-
мой точности регулирования.
Рис. 7-24. Структурная схема контура регулирования тока в системе
Г — Д без учета внутренней обратной связи по э. д. с. двигателя.
Второй путь связан с некоторым усложнением схемы за
счет введения подчиненного контура регулирования э. д. с.,
объективной необходимости регулирования которой обычно
нет.
Структурная схема контура регулирования тока с под-
чиненным контуром регулирования э. д. с. генератора
представлена на рис. 7-24, б. Передаточная функция регу-
лятора э. д. с. имеет вид:
п/ — Л-р-М _ 7Г । 1 (7-52)
р-9“*т.вМо.в«э7'цР 7\,.3^Т^р’ V
где Ти.э = &т.в kr k0 3 аэ Тц; k0t9 — коэффициент отрица-
тельной обратной связи по э. д. с.; k.tR — коэффициент
усиления тиристорного возбудителя.
Параметры ИП-регулятора э. д. с. (7-52) (см. рис. 6-12, б)
могут быть определены из соотношений
ту ^з.э р . £, _£ э .
з. э. м — ^д. эр г. макс, ^о. э ^д. э р ,
''О-Э z'0.3
^.ВСо.е.э=Т,э; ^о.с.эСо.е.э=Л,
324
где k^9 = м0.э/ег — коэффициент усиления датчика э. д. с.
генератора; £/3.эмакс — максимальное выходное напряжение
регулятора тока, обеспечивающее ограничение максималь-
ного значения э. д. с. генератора Ег_тс.
При необходимости ограничение сигнала управления
на входе тиристорного возбудителя может быть обеспе-
чено подключением параллельно цепи обратной связи ре-
гулятора э. д. с. стабилитронов.
Замкнутый контур регулирования э. д. с. имеет пере-
даточную функцию:
W 1/&О.Э 1/^0.Э Z-7
^заМ.э-аэ7^(7^+1) + 1~ a3T^p+l •
Следовательно, передаточная функция объекта регули-
рования тока в данном случае принимает вид:
ц/ (7-54)
°-р-т
Отсюда регулятор тока должен иметь следующую пере-
даточную функцию:
= + (7'55>
4-1
ГДе 7"'it т (^о.т/^о.э
Таким образом, в данном случае регулятор тока должен
быть интегрально-пропорциональным аналогично схеме
ТП-Д.
При учете полученного в (7-55) выражения Тит расчет
параметров регулятора тока может быть выполнен анало-
гично рассмотренному выше для системы с тиристорным
преобразователем. Полученная передаточная функция
замкнутого контура тока
№рт =-----—гй (7-56)
Р-т атаэ7’мр(аэ7’|др+1) v >
отличается от (7-44) большей (при a3 > 1) некомпенсируе-
мой постоянной ав Tv. При аэ = 2 и прочих равных усло-
виях быстродействие контура получается в 2 раза меньшим,
а установившаяся динамическая ошибка регулирования
тока при линейном изменении скорости двигателя (7-47)
соответственно в 2 раза большей. Однако если Тя Ц- >
> аэ Д(, то отказ от подчиненного контура регулирования
э. д. с. и компенсации Тя приводит к худшим показателям
контура регулирования тока и может быть целесообразным
325
только в сочетании с введением гибкой отрицательной
связи по току якоря<
Необходимо иметь в виду, что хотя компенсация по-
стоянной времени генератора математически исключает
инерционность из (7-56), физически в контуре регулирования
она присутствует и проявляет себя как фильтр низких
частот. Рассматривая частотные характеристики контура
регулирования тока или любой другой координаты в си-
стеме Г—Д, нельзя не учитывать того обстоятельства,
что быстрые изменения э. д. с. генератора требуют прило-
жения к обмотке возбуждения генератора больших напря-
жений, обеспечивающих форсированное протекание про-
цессов изменения поля генератора. В соответствии с пере-
даточной функцией генератора при линейном изменении
Zde'r \ , . Ide.. \ 1
э. д. с. генератора по закону с, = ~
если ег <; Ег„, можно приближенно записать
tj _____ (ТгР~\~ 1) /der \ T’r /der V
в‘макс~ krp \dt )m^kc\dthmiz
При ег Др.макс соотношение (7-57) можно использовать
и для определения максимального напряжения возбуждения
генератора в колебательном процессе, когда ег = Д£г япкс х-
xsin Q,t. При этом подстановка в (7-57) амплитуды произ-
водной от et дает:
U в. макс — (Л/^г) ДДГ.макс- (7-58)
Уравнение (7-58) свидетельствует о том, что при устано-
вившихся колебаниях в связи с большим значением Тг
максимум напряжения, приложенного к обмотке возбуж-
дения генератора, должен быстро возрастать с увеличе-
нием 'частоты и амплитуды колебаний э. д. с. Оценим с
помощью (7-58) значение £/в,макс в режиме вынужденных
колебаний на частоте среза контура регулирования э. д. с.,
настроенного на технический оптимум; насыщением магнит-
ной цепи генератора пренебрегаем, тогда
IJ — -С —L ЛР — Л. макс и (7-59'i
ив.макс, с 2У ^^г.макс 9^ £ мв. н> v
(7-57)
где п Hvl[/kr.
Отсюда определяется коэффициент форсирования воз-
буждения генератора, который требуется в данном режиме:.
макс Л макс
- ф’с“ ив.п ” 2ГИ £г..„
(7-60)
326
При Д£г. макс = 0,1 Ег „, = 0,01 си = (1-5-5) с'
требуемый запас по напряжению возбудителя лежит в пре-
делах с<ф с = 5-5-25. Практически запас по напряжению
возбуждения определяется с помощью (7-57), исходя из
максимального темпа нарастания э. д. с. генератора
(der/dt)MKC, требуемого для получения dijdt = (dijdty^
и d&ldt = &тРеб- Получаемые таким образом значения
аФ. треб обычно не превосходят «ф = 4, а целесообразные
пределы завышения мощности возбудителя ограничивают
предельные значения коэффициента форсирования величи-
ной аф. макс — Ю. При этом в соответствии с (7-58) опре-
деляются граничные значения частоты и амплитуды колеба-
ний э. д. с. генератора, до которых система Г—Д остается
линейной:
Л^г. макс °^ф. действ
ЬЛ р "d р
*-Г.Н * г
(7-61)
где «ф.действ — действительный коэффициент форсирования,
определяемый максимальным напряжением выбранного воз-
будителя .
При невыполнении условия (7-61) система Г—Д является
нелинейной и ее амплитудно-частотные характеристики ста-
новятся зависимыми от амплитуды возмущающих и управ-
ляющих воздействий. Нелинейность определяется главным
образом нелинейностью характеристики возбудителя, кото-
рую можно представить типовой нелинейностью линейного
звена с ограничением выходного сигнала.
Если воспользоваться методом гармонической линеари-
зации [40], можно установить, что при вынужденных коле-
баниях коэффициент гармонической линеаризации такого
звена с возрастанием амплитуды колебаний уменьшается.
Соответственно, при «ф.действ < «ф. с на частоте среза факти-
ческий коэффициент усиления разомкнутого контура мень-
ше расчетного, что равносильно увеличению отношения
аэ > 2. Качество регулирования при этом изменяется в сто-
рону меньшей колебательности, однако быстродействие сни-
жается, и судить о нем по частоте среза 1/2 нет основа-
ний. Максимальное быстродействие системы Г—Д «в боль-
шом» определяется только запасом по напряжению возбуди-
теля в соответствии с (7-57). Это обстоятельство в системе
Г—Д существенно упрощает задачу надежного ограничения
допустимыми значениями максимальных ускорений и темпов
изменения тока (см. гл. 12).
327
В заключение отметим, что использование последова-
•тельной коррекций контура тока в системе Г—Д с подчи-
ненным контуром регулирования э. д. с. генератора наибо-
лее оправдано в мощных электроприводах, генераторы кото-
рых по условиям коммутации требуют строгого ограничения
максимального напряжения на коллекторе.
7-5. РЕГУЛИРОВАНИЕ ТОКА В СИСТЕМЕ Г—Д
С ФОРМИРУЮЩЕЙ ПОЛОЖИТЕЛЬНОЙ СВЯЗЬЮ
ПО НАПРЯЖЕНИЮ ГЕНЕРАТОРА
При использовании для управления системой Г—Д магнитных
усилителей либо тиристорных возбудителей коэффициент усиления
системы ограничен и получение высокой точности стабилизации тока
вызывает затруднения. При этих условиях наиболее простым путем
увеличения точности, регулирования является создание комбинирован-
ной системы управления, т, е. дополнение регулирования по отклоне-
Рис. 7-25. Принципиальная (а) и структурные (б, в) схемы регулирова-
ния тока в системе Г — Д с формирующей связью по напряжению гене-
ратора.
нию компенсацией основного возмущения-с помощью положительной
обратной связи по скорости (см. § 7-3). В случаях, когда тахогенератор \
для регулирования скорости в системе не предусматривается, тот же f
эффект компенсации может быть обеспечен положительной связью по .<
напряжению генератора. ; i
Схема электропривода по системе Г—Д с положительной связью по 1
напряжению генератора приведена на рис. 7-25, а. Для составлений !
структурной схемы объекта регулирования тока запишем уравнение,]
сигнала на входе тиристорного возбудителя: ч
Ыу ==из.т~ио.т + ип.н==:Из.т'—^д.п2г'я—^Д.п2 ^7 "Ь j
+ ^П.Н (ег — 1Я^Я.г) = ИЗ.Т— ^О.т^’я + ^т j+&п.нег> (7-62)/
г,п‘е feo.T = ^Д.пВ + ^п.Л.г’, 7'т==^'д.п2/(^д.п2."Ь^п.н^я,г)> ч
328 <
Таким образом, в рассматриваемой системе действует жесткая
положительная связь по э. д. с. генератора, жесткая отрицательная
связь по току якоря, обусловленная как падением напряжения на до-
полнительных полюсах, так и влиянием падения напряжения на сопро-
тивлении якоря генератора г на сигнал положительной связи по
напряжению, а также гибкая отрицательная связь по току якоря, свя-
занная с наличием индуктивности рассеяния последовательных обмоток
машин, с которых в данной схеме снимается сигнал обратной связи по
току. Соответствующая структурная схема контура регулирования тока
без учета внутренней связи по э. д. с. двигателя представлена на
рис. 7-25, б.
Определим передаточную функцию возбудителя и генератора, ох-
ваченных положительной связью по э. д. с. генератора:
пр ____________________^т.в^г______________
Т В г 7’г7’т.вр2-|-(7’г + 7'т.в) p + (l —^п.н&т.в&г)
При критической положительной связи по напряжению йп. н. Кр —
= 1/йт, в • йг (7-63) принимает вид:
^.В.г =----------(7’64)
/Т I Т J т.в' г ,, I 1 \ J гР V т.вР “Г и
(1 г +1 т.в) Р I -гп—Пг Р -Г 1
X1 г~г1 т.в /
Приближенное равенство (7-64) вносит несущественную погреш-
ность, так как Тг > Тг, в. Структурная схема контура тока с учетом
(7-64) принимает вид, показанный на рис. 7-25, в. С ее помощью опре-
делим передаточную функцию объекта регулирования:
iw_______________^т.в&г___________1/fep.T i-i сеч
ор-т WrP(7\.Bp+1)(7>+1) ( }
где ЛК^А.вМо.т) Тг; ^=Т^ + ТЙ.
Передаточная функция контура с критической формирующей
положительной связью по напряжению имеет вид, совпадающий с полу-
чаемым методом последовательной коррекции при условии Т.. =
-Тг.в+Тя. И
Требуемый коэффициент демпфирования колебаний в переходном
процессе аналогично последовательной коррекции легко обеспечить
выбором отношения ат = Т^Т,Л = Г4- 4 за счет подбора коэффициента
обратной связи по току k0, т или коэффициента усиления по напряжению
йт. вйг. Однако увеличенная за счет нескомпенсированной постоянной
якорной цепи суммарная инерционность повышает вероятность того,
что определяемая (7-48) ошибка регулирования тока в динамических
процессах окажется больше допустимой. В подобных случаях необхо-
димо по допустимой ошибке AiM макс с помощью (7-48) определить допу-
стимое при данной значение ят. доп и затем обеспечить это соотноше-
ние подбором коэффициентов /гт. в и й0.т- Так как при большом значе-
нии Гр и высокой требуемой динамической точности регулирования
ат.доп<1> колебательность контура регулирования и перерегулиро-
вание должны быть снижены за счет введения гибкой отрицательной
обратной связи по току якоря (см. § 6-5).
В рассматриваемом случае сигнал гибкой обратной связи по току
якоря, как было установлено при составлении структурной схемы;
приведенной на рис. 7-25, б, естественно присутствует в сигнале обрат-
ной связи по току, снимаемом с обмоток дополнительных, полюсов
329
ДПГ и ДПД, в связи с наличием индуктивности рассеяния этих обмо-
ток. С учетом этой составляющей передаточная функция замкнутого
контура регулирования тока имеет вид:
Г заи'т=+(70°+Л) р+i • (7’66)
Корни характеристического уравнения
Р1Л 2Т0Т^ - V ) Т0Т^- (7'6 }
Следовательно, при данной индуктивности рассеяния дополни-
тельных полюсов критическое демпфирование обеспечивается следую-
щим отношением постоянных времени:
аТ1К=2^1— Ji). (7-68)
Задавшись коэффициентом демпфирования, соответствующим тех-
ническому оптимуму, можно таким же путем определить требуемое
соотношение постоянных времени и для этих условий. Полученное,
таким образом значение ат следует сравнить с требуемым по условию
динамической точности ат. доп- Если ат < «т.доп, Для удовлетворения
требований к точности регулирования при заданном коэффициенте демп-
фирования необходимо увеличивать тем или иным путем коэффициент
гибкой связи по току в сравнении с естественным его значением, опреде-
ляемым индуктивностью рассеяния обмоток дополнительных полюсов.
При использовании в качестве возбудителей генераторов ревер-
сивных магнитных усилителей рассматриваемый метод при неблаго-
приятных сочетаниях параметров и высоких требованиях к динамиче-
ской точности регулирования тока не^рантирует определенных (7-64)
динамических качеств. Возможность проявления релейных участков
при сравнительно больших постоянных времени усилителя и якорной
цепи во многих случаях приводят к развитию автоколебаний тока, как
правило, с большой частотой и относительно небольшой амплитудой.
Эти автоколебания при наладке системы устраняются либо снижением
коэффициента обратной связи по току при соответствующем увеличе-
нии динамической ошибки, либо за счет введения дополнительных
корректирующих гибких связей,
7-6. РЕГУЛИРОВАНИЕ МОМЕНТА АСИНХРОННОГО
ДВИГАТЕЛЯ ИЗМЕНЕНИЕМ НАПРЯЖЕНИЯ
При различных напряжениях (7ф, приложенных к обмотке статора j
асинхронного двигателя, в соответствии с (3-64)—(3-67) механические i
характеристики имеют вид, показанный сплошными кривыми на |
рис. 7-26. При данной скорости со = const (s — const) момент изме- j
няется пропорционально квадрату напряжения (/ф, а при
< £7ф. = const он зависит от скорости аналогично естественной харак-
теристике ((/ф=£/ф. и). Если исключить из рассмотрения область
линейной части механических характеристик (s < 0,8 sK), можно ут- 3
верждать, что при (/ф = const изменения скорости в широких пределах
(s > 0,8 sK) не вызывают существенных отклонений момента от среднего Л
ззо .1
значения. Следовательно, подводя к двигателю необходимое напряже'-
ние t/ф, можно с удовлетворительной точностью задавать,требуемые
значения момента двигателя, т. е. осуществлять его. регулирование.
Точность параметрического регулирования момента изменением
напряжения выше у короткозамкнутых двигателей с повышенным
скольжением, с глубоким пазом
и особенно у двигателей с двой-
ной беличьей клеткой (см. рис.
3-27, б). У двигателей с фазным
ротором форма механических ха-
рактеристик, аналогичная кри-
вой 3 (рис. 3-22, б), может быть'
получена включением в. цепь ро-
тора контура R—L [1].
Пунктирные кривые на рис.
7-26 характеризуют изменения
тока статора 1L при изменениях
скорости. При со < <ок (s > зк)
увеличение скольжения вызы-
вает снижение момента, однако
Рнс. 7-26. Примерные механические
характеристики двигателя с корот-
козамкнутым ротором при различ-
ных напряжениях.
ток продолжает возрастать. Уве-
личение тока определяет рост потерь в обмотках двигателя, поэтому
данный способ регулирования используется главным образом для управ-
ления моментом в переходных процессах пуска и торможения противо-
включением. Изменяя напряжение на двигателе по соответствующему
закону «ф = f (f), можно формировать заданный характер движения
электропривода со = f (f) в этих режимах (см. § 12-1).
Для осуществления плавного управления напряжением ис-
пользуются различные регуляторы напряжения переменного тока:
дроссели насыщения (магнитные усилители) и тиристорные регуля-
торы напряжения. Схема асинхронного электропривода с использо-
ванием в качестве регулятора напряжения силового магнитного усили-
теля с внутренней обратной связью по току (с самоподмагничиваиием)
приведена на рис. 7-27, а.
331
Известно, что внутренняя обратная связь по току, осуществляемая
вентилями В1—В6, обеспечивает вид вольт-амперных характеристик
Uup = f (/др) при ly = const, показанный на рис. 7-27, б. В соответ-
ствии с этими зависимостями при /у = const падение напряжения на
дросселе <7др остается постоянным в широких пределах изменения на-
грузки /Др. Следовательно, при /у = const в такой схеме напряжение
на статоре двигателя 1/ф = const и характеристики электропривода не
имеют отличий от приведенных на рис. 7-26, если пренебречь небольшим
активным сопротивлением силовой цепи регулятора.
Если из схемы на рис. 7-27, а исключить вентили В1—В6, полу-
чится простейшая схема асинхронного электропривода с дросселем
насыщения в. цепи статора. Вольт-амперные характеристики дросселя
насыщения без самоподмагничивания (7др — f (/др) при /у — const
приведены на рис. 7-28, а. Они существенно отличаются от характери-
стик магнитного усилителя с самоподмагничиванием, причем при ма-
лых токах /v = const регулятор обладает очевидными свойствами источ-
ника тока," а при больших /у — const нелинейность характеристик
уменьшается и дроссель имеет примерно постоянное индуктивное сопро-
тивление ядр= Удр//др ~ constr
Рис. 7-28. Характеристики
дросселя насыщения (а) и ме-
ханические характеристики
двигателя (б).
Механические характеристики 1^и регулировании момента с по-
мощью дросселя насыщения показаны на рис. 7-28, б. Максимально
допустимому значению тока /у = /у.макс соответствует характеристика
2, которая отличается от естественной характеристики 1 в связи с тем,
что при /у = /у.макс хдр — Ядр.мии + 0- При уменьшении /у хдр уве-
личивается и критическое скольжение в соответствии с (3-60) умень-
шается. Особо быстрое- снижение sK имеет место при небольших. /у.
При этом дроссель насыщения является регулятором тока статора,
поддерживая его при /у = const постоянным (I/ « const). Так как
при /у = 0 хдр =,£ со, соответствующая характеристика 3 ограничивает
диапазон' регулирования момента снизу.
Возможные пределы регулирования момента с помощью дросселя
насыщения заключены на рис. 7-28, б между заштрихованными обла-
стями. Аналогичное ограничение пределов регулирования момента имеет
место и в схеме с магнитным усилителем с самоподмагничиванием.
При использовании магнитных усилителей и тиристорных регуля-
торов напряжения точность регулирования момента может быть повы-
шена путем использования тех или иных обратных связей. Однако
нелинейный характер зависимости момента от тока и скольжения,
а также отсутствие простых и надежных способов непосредственного
измерения момента двигателя ограничивают возможности точного регу-
лирования момента по отклонению, .
332
7-7. РЕГУЛИРОВАНИЕ МОМЕНТА АСИНХРОННОГО
ЭЛЕКТРОПРИВОДА ПРИ ЧАСТОТНОМ УПРАВЛЕНИИ
Как было установлено в гл. 3, управляемость асинхрон-
ного электропривода, аналогичная управляемости электро-
привода постоянного тока, обеспечивается путем одновре-
менного регулирования напряжения и частоты переменного
тока, подводимого к статору двигателя. Для реализации
этого способа питание двигателя должно осуществляться
по системе ПЧ—АД, причем преобразователь частоты может
обладать свойствами либо источника напряжения, либо
источника тока. Рассмотрим вначале условия регулирования
момента в системе с регулируемым источником стабильного
трехфазного напряжения переменной частоты (ИТН).
Уравнения динамической механической характеристики "
асинхронного двигателя, записанные в осях х, у (<ок —
— ш«эл) в комплексной форме, имеют вид:
«1 = Rih + d^h/dt + /®оЛ; |
О = Д272 + d^2/dt + / (сооэл - иэл) Ф2; | (7-69)
М = рлЬ12 Xi2*). )
При управлении асинхронным электроприводом по ана-
логии с электроприводом постоянного тока стремятся поддер-
живать постоянным потокосцепление ротора Ф2 или резуль- .
тирующий магнитный поток = jLi2(7i + 72), либо потоко-
сцепление статора Ч\. Рассмотрим сначала случай, когда
воздействием на напряжение йг обеспечивается постоянство
потокосцепления статора. Так как при этом Фх = const,
dW-Jdt = 0, из первого уравнения (7-69) следует:
= (йх - /?1?1)//<»оэ л = const. (7-70)
При 7?х w 0 условие (7-70) максимально упрощается:
| Vi | ^ | «1 |/йОэл = U1//1 = const. (7-71)
Этот случай был подробно рассмотрен в §3-5, и уравнение
динамической механической характеристики двигателя в
результате линеаризации в пределах |sa| 0,6 sa- к полу- 5
чено в виде
^ = РРп(сооэл-Юэл)-Тэ-^-, (7-72)
где Tg 1/^оэл. к»
®а.к = (®оэл ®ал (к))/*А)9Л. н ==7?2/(-'Т “К Х<^.
333
Вид уравнения (7-72) свидетельствует о том, что и при
частотном управлении асинхронным электроприводом ана-
логично электроприводу постоянного тока (см. § 7-3) при
регулировании момента целесообразно использовать форми-
рующую положительную обратную связь по скорости.
Соответствующая схема частотного регулирования момента
электропривода показана па рис. 7-29,а. Здесь сигнал
задания момента t/3 м суммируется с сигналом положитель-
Рис. 7-29. Схема (а), статические характеристики (б) и структурная
схема (в) системы управления с источником напряжения.
ной связи по скорости Ссо. Результирующий сигнал по-
дается на вход управления частотой ч преобразователя,
а также в соответствии с (7-71) через пропорциональное
звено задания напряжения с коэффициентом усиления k3 „
на вход управления его напряжением £7у „• Для этой схемы
справедливо уравнение
®оэл = kfUy.4~kf (U3.м-j-kn.смэл). (7-73)
Подставляя (7-73) в (7-72), получаем уравнение динами-
ческой механической характеристики электропривода с
компенсационной системой регулирования момента:
М=₽Рп[^з.м + (Мп.с-1)®Эл]-Л-^. (7-74)
При критической положительной связи по скорости
fy&n. с = 1 уравнение динамической механической харак- -
334
теристики принимает вид:
M = k и — Т —
1VL з, м л э ,
, о , 2Л4крп^у
где k„ = ^p„kf = -—-
J ^а. kwi)h
В статическом режиме
М = kaU3, м = const,
(7-75)
(7-76)
что вполне аналогично (7-31), полученному выше для ком-
пенсационного способа регулирования момента в системе
УП—Д. Механические характеристики М = /(со) обеспе-
чивают астатическое регулирование момента в диапазоне
изменений скорости двигателя, ограниченном снизу и сверху
статическими механическими характеристиками 1 и 2,
соответствующими LR = {/1И = const и соОэл = ± соОэл. и,
как показано на рис. 7-29,6. При рассмотрении этого ри-
сунка следует иметь в виду, что при нереверсивном преобра-
зователе ИТН режим рекуперативного торможения невозмо-
_жен и механические характеристики во втором и четвертом
квадрантах ограничены механической характеристикой ди-
намического торможения асинхронного двигателя >3 (при
поддержании = const).
В соответствии с (1-52) и (7-75) структурная схема рас-
сматриваемого электропривода при принятых допущениях
имеет вид, показанный на рис. 7-29,в. Инерционность регу-
лирования момента определяется небольшой эквивалентной
постоянной времени Т3. /
При частотном регулировании момента асинхронного
двигателя пренебрежение влиянием сопротивления Rlt как
правило, недопустимо. При работе в области малых частот
Д реактивное сопротивление статорной обмотки близко нулю
(соОэ, йз 0), и ток статора определяется сопротивлением RJf
поэтому простейший закон частотного регулирования (7-71)
представляет в данном случае теоретический интерес, а
практически необходимые для поддержания ЧД = const
изменения напряжения определяются формулой (7-70).
Например, для получения характеристики динамического
торможения 3 в соответствии с (7-70) необходимо напряже-
ние IR, равное падению напряжения на омическом сопротив-
лении обмотки статора от тока /х = f(sa).
В соответствии с (7-70) для поддержания постоянства
потокосцепления ЧГ1 можно также использовать компенса-
ционный принцип, применив нелинейную положительную
335
обратную связь по току статора. Так как положение вектора
напряжения Ux произвольно, можно записать в вектор-
ной форме -
= ktfly. ч “ ^и^з.н^у. ч “Ь ^п. т^1» (7-77)
где йп. т — коэффициент положительной связи по току ста-
тора.
Подставляя (7-77) в (7-70), при &п.т = Ry и Uft4 с учетом
обозначений на рис. 7-29,а получаем:
ktlk3 vPv ч +Йп /1 kUk3 н
Ч\ ------------=-----------=---------= const.
l'kfUy.4 jKf
Таким образом, для выполнения (7-70) схему на рис. 7-29, а
необходимо дополнить положительной связью по падению
напряжения на активном сопротивлении цепи статора
Дйа — R1i1. Реализация этого пути в соответствии с (7-77)
требует в цепи управления векторного суммирования задаю-
щего сигнала и3_ и = иу.ч с сигналом обратной связи по току
с учетом сдвига по фазе между напряжением и током ix.
Заметим, что если осуществить векторную положитель-
ную связь по падению напряжения на полном сопротивлении
обмотки ?! = /?! + /лу, можно компенсировать и падение
напряжения на реактивном сопротивлении статора и под-
держивать постоянной э. д. с. Ег.
Однако практическая реализация этого теоретически
простого и ясного пути в связи с необходимостью векторного
суммирования переменных и перехода к постоянным управ-
ляющим воздействиям t/y. и и Uy ч затруднительна. При не-
обходимости задача может быть решена на базе использова-
ния математического аппарата координатных преобразова-
ний переменных (см. §9-6).
Возможен и другой способ компенсации падения напря-
жения на активном сопротивлении — компенсация по управ-
ляющим воздействиям. Эту возможность можно установить,
если путем решения системы (7-69) определить взаимосвязь
между' напряжением и потокосцеплением в общем виде:
(йоэл-йэл)2 1^! + й?эл (^2- L?S)21 +
-|-2/?1/?2^'2айоэЛ (йрэл йЭ1)-|-/?2 Ч~ йдэл^|)
^ia)2 (йрал йэл)2-|-£.д/?а
(7-78)
335
Подставив в (7-78) выражение для соОэл из (7-73), при
kjkn. с = 1 получим:
/, kJU3. м + Ч (Z-li-2 — Мз)2] +
^2RiR2L\~ikfu3, Muy. ч + /?22 (Ri -{-Likfuy. ч)
-----------------А 5-5--------—3----------.
(LjL2— L^)3 kfiis. м-|- LiR'2
(7-79)
Из (7-79) следует, что поддерживать постоянным
можно, изменяя напряжение их в функции «3. м и иу. ч по
закону, определяемому этим
соотношением. Схема компен-
сации влияния Ri по управ-
ляющим воздействиям пока-
зана на рис.7-29,апунктиром,
где функциональный преобра-
зователь ФП осуществляет
операции, предусмотренные
(7-79) с целью поддержания
потокосцепления постоянным.
Рассмотренное управление
Рис. 7-30. Схема системы частот-
ного управления с источником
тока.
асинхронным электроприво-
дом обладает основным недостатком, свойственным всем
компенсационным системам: отсутствие контроля отклонения
регулируемого параметра от заданного значения определяет
существенное влияние колебаний параметров электропри-
вода на точность регулирования момента. В то же время
влияние малых постоянных времени в цепи регулирования
(например, инерционности преобразователя) при таком
управлении несущественно, что дает основания их не учиты-
вать и упрощает наладку. При использовании замкнутых
систем регулирования по отклонению анализ динамических
свойств следует вести с учетом этих инерционностей.
Если питание асинхронного двигателя осуществляется от
преобразователя частоты со свойствами источника трехфаз-
ного тока ИТТ, схема регулирования момента принимает
вид, показанный на рис. 7-30. При этом значения тока
статора во всех режимах задаются напряжением иу. т, а
напряжение определяется нагрузкой. Как следствие, при
идеальном источнике тока динамическая механическая
характеристика описывается вторым и третьим уравнениями
системы (7-69) при гх = /(цу. т).
Аналогично изложенному выше изменения напряжения
цу. т'при регулировании должны обеспечивать постоянство
337
результирующего потока машины или потокосцепления
ротора Чг2. В установившихся режимах взаимосвязь между
|7Х| и |Фг| может быть установлена с помощью (7-69) в виде
/i=’£vA1+^(w°-“wJ2- (7'80)
С учетом положительной связи по скорости (7-73) можно
при kjk^, с = 1 записать (7-80) так:
•*-12 г
Следовательно, для поддержания потокосцепления ро-
тора постоянным необходимо поставить задание тока /х
в зависимость от управляющего сигнала £/3. м, которая
определяется (7-81). В схеме на рис. 7-30 для этой цели
предусмотрен нелинейный блок НБ. Сравнивая (7-81) с
(7-79), можно заключить, что в схеме с источником тока
компенсация изменений потока осуществляется проще, чем
с источником напряжения.
Частотное управление при Tg — const обеспечивает усло-
вия регулирования переменных асинхронного двигателя,
аналогичные двигателю постоянного тока, так как при этом
момент пропорционален перепаду скорости юОэл — юзл или
частоте скольжения
/И = Зрп ^7“ (^000
Кроме того, условие = const дает существенное повы-
шение перегрузочной способности асинхронного двигателя.
Однако если стремиться вести управление таким образом,
чтобы при широких пределах изменения момента иметь
минимальные потери энергии в двигателе, от условия Чг2 ==
= const приходится отказаться. При этом в области малых
моментов нужно снижать поток, обеспечивая уменьшение
суммарных потерь энергии за счет уменьшения потерь на
намагничивание. Заметим, что оптимальное по критерию
минимума потерь управление двигателем постоянного тока
также1 требует уменьшения тока возбуждения по мере сни-
жения момента.
Благодаря тому что асинхронная машина с коротко-
замкнутым ротором имеет меньший момент инерции ротора
и при частотном управлении большую перегрузочную спо-
собность по моменту, чем машина постоянного тока, асин-
338
хронный электропривод с частотным управлением позволяет
обеспечить более высокое быстродействие, чем привод
постоянного тока. Это определяет перспективность подоб-
ных систем.
7-8. ВЛИЯНИЕ ОБРАТНОЙ СВЯЗИ ПО ТОКУ (МОМЕНТУ)
НА ДИНАМИКУ УПРУГОЙ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ
Регулирование момента электропривода с помощью обратных свя-
зей имеет целью устранение зависимости момента от скорости, опреде-
ляемой электромеханической связью, которая при этом играет роль
одного из наиболее существенных возмущающих воздействий. Чем
точнее регулируется момент, тем меньше динамическая ошибка в широ-
ком диапазоне частот, тем в большей степени подавляется электромеха-
ническая связь, обусловленная внутренней связью по э. д. с. двига-
теля в электроприводе постоянного тока или зависимостью тока от
скольжения асинхронного двигателя.
Между тем в гл. 4 было установлено, что электромеханическая
связь является фактором, обеспечивающим демпфирование механиче-
ских колебаний, возникающих в механической части электромеханиче-
ской системы. Было показано, что существует значение модуля жест-
кости статической характеристики электропривода, при котором демп-
фирующий эффект максимален и в широком диапазоне параметров элек-
тромеханической системы выбор оптимальной жесткости позволяет
свести к минимуму колебательность механической части, что благо-
творно сказывается на надежности, долговечности и точности работы
электропривода. Замыкание системы электропривода отрицательной
обратной связью по току пли моменту всегда в той или иной степени
уменьшает жесткость механической характеристики, поэтому всегда
влияет иа демпфирование и при высокой точности регулирования может
сводить этот эффект к нулю.
При безынерционном преобразователе отрицательная обратная
связь по току, как было выше показано, эквивалентна введению до-
полнительных сопротивлений в силовую цепь двигателя. Если в разом-
кнутой системе жесткость естественной характеристики обеспечивала
избыточно жесткую электромеханическую связь, введением отрицатель-
ной связи по току можно увеличить демпфирующий эффект до макси-
мального, подобрав соответствующее отрицательное значение коэффи-
циента обратной связи по току. Если в разомкнутой системе демпфиро-
вание снижено по причине слабой электромеханической связи, введение
отрицательной связи по току может только ухудшать демпфирование,
ослабляя электромеханическую связь вплоть до пренебрежимо малого
уровня. В этих случаях увеличение демпфирования до оптимального
может быть достигнуто введением положительной обратной связи по
току, увеличивающей жесткость механической характеристики.
Таким образом, подбирая значение и знак обратной связи по току,
можно реализовать условия оптимизации электромеханической системы
по критерию минимума колебательности в установившихся и переход-
ных процессах. Этот путь не связан с дополнительными потерями
энергии в силовой цепи, которые имеют место при введении добавочных
сопротивлений, однако, к сожалению, может быть использован в огра-
ниченном числе практических случаев. Дело в том, что, как правило,
339
отрицательная обратная связь по току или моменту вводится не для
оптимизации электромеханической связи, а для ограничения тока,
стабилизации или формирования определенного закона изменения
момента при работе электропривода. Во всех этих случаях к системе
регулирования предъявляются- высокие требования в отношении точ-
ности регулирования, требуются минимальные расхождения между
статическими и динамическими характеристиками, а это при быстродей-
ствующем преобразователе приводит к практически полному подавле-
нию электромеханической связи, особенно при использовании форми-
рующей-положительной связи по скорости.
Некоторые возможности сохранения высокого демпфирования меха-
нических колебаний, если оно имеет место в разомкнутой электромеха-
нической системе при естественной жесткости механической харак-
теристики, дает использование инерционности преобразователя. Рас-
сматривая рис. 7-17, можно установить, что при большой инерционности
преобразователя высокая точность регулирования момента имеет место
в статическом режиме и при весьма низких частотах колебаний. Даль-
нейшее увеличение частоты приводит к возрастанию модуля динами-
ческой жесткости до значений, близких к модулю естественной жестко-
сти в разомкнутой системе. Если частота свободных колебаний системы
лежит в области, где благодаря фильтрующему действию большой
постоянной времени преобразователя динамическая жесткость близка
к естественной, создаются условия для сохранения высокой демпфирую-
щей способности электропривода при упругих механических колебаниях
во всех режимах работы.
Полоса пропускания частот системы регулирования момента при
заданной Т^р зависит от коэффициента отрицательной обратной связи
по току (моменту) двигателя, поэтому при инерционном преобразова-
теле имеется возможность обеспечить высокую статическую точность
регулирования с помощью формирующей положительной связи по ско-
рости и подобрать такой коэффициент отрицательной связи по току,
при котором на частоте Q12 динамическая жесткость близка к естест-
венной. При этом надежным инструментом для выбора коэффициента
обратной связи по току может служить коэффициент электромеханиче-
ской связи k3. с (см. § 4-6). Его выражение для системы УП—Д с посто-
янной преобразователя Т^р, замкнутой отрицательной связью по току,
может быть представлено в виде
ь = 1 1 / ______________П12Гйр+1________________ jj.
9-с ТМ1Й12|/ (Гя + Гпр)2й?2 + [ГяГпр£2ч2 — (1+а;,т)]2- ™
где k'o т = /гпр&0 Т/Дя2: ~ относительный коэффициент отрицательной
обратной связи по току якоря.
Сопоставляя значение k3, с ест, которое определяется с помощью
(7-82) при k'o т = 0 и ГПр — 0, со значением k3, с для замкнутой системы
при различных k' т и Тпр, можно выбрать то значение й3, с, которое
лежит достаточно близко к значению йэ. с ест и в то же время соответ-
ствует значению fe' т, обеспечивающему удовлетворительную точность
регулирования момента. Максимум значения k3, с в данном случае сов-
падает с максимумом демпфирования упругих механических колебаний,
поэтому, если имеется возможность выбирать значение k' т, исходя из
критерия минимума колебательности электромеханической системы,
340
оптимальное значение k'o т может быть определено по формуле
^о.т.опт== 7’я7’пр^12—1- (7-83)
В контуре регулирования тока, оптимизированном методом после-
довательной коррекции, роль фильтра в цепи регулирования тока
может выполнять постоянная интегрирования ИП-регулятора тока.
Как показывает анализ, при характерном для системы ТП—Д уровне :
суммарной некомпенсируемой постоянной контура = 0,01 с быстро-
действие контура при настройке на технический оптимум является
высоким и электромеханическая связь на частотах И]2 = 10 4- 30 рад/с
ослабляется. При этом можно в известных пределах уменьшить ослаб-
ление демпфирования отрицательной связью по току за счет выбора
значений ат > 2. Однако при этом следует убедиться, не снижается ли
такой настройкой динамическая точность регулирования тока в непри-
емлемых пределах.
Для устранения неблагоприятного влияния сильной отрицательной
связи по току на демпфирование упругой электромеханической системы
может быть использовано включение в цепь обратной связи узкополос-
ного фильтра, резко ослабляющего действие отрицательной связи по
току на частотах, близких к частоте свободных механических колеба-
ний П12. Этот путь представляет интерес для линейных систем со ста-
бильной резонансной частотой. Как было показано в § 4-7, нелинейность,
обусловленная кинематическими зазорами, расширяет область резо-
нанса в сторону частот, меньших И12; при этом применение фильтра
с острой настройкой на резонансную частоту практически исклю-
чается.
Рассмотренный вопрос имеет важное практическое значение. Дей-
ствие сильной отрицательной связи по току в переходных процессах
может снижать электромеханическую связь до уровня, при котором
демпфирующее влияние электропривода на упругие колебания в его
механической части пренебрежимо мало. При неблагоприятных усло-
виях, особенно при наличии периодических внутренних возмущений,
обусловленных кинематической погрешностью передач (см. § 1-7),
отсутствие существенного демпфирования может приводить к развитию
резонансных механических колебаний, увеличивающих износ передач
и отрицательно влияющих на точность выполнения технологических
операций. В ряде наиболее сложных случаев может возникать необ-'
ходимость отказа от работы системы токоограничения в переходных
процессах и формирования переходных процессов путем программного
управления, методами, которые будут рассмотрены в гл. 12.
В заключение заметим, что электропривод по системе ИТ—Д
без обратных связей обладает свойствами практически идеального
источника момента, поэтому демпфирующего влияния на механиче-
ские колебания оказывать не может. Пусковой участок механической
характеристики асинхронного короткозамкнутого двигателя имеет
небольшой положительный наклон. Эта зависимость момента от скоро-
сти противоположна по знаку вязкому трению, поэтому является фак-
тором, ослабляющим демпфирование колебаний, обусловленное дисси-
пативными силами в-механической части привода. При слабом влиянии
внутреннего вязкого трения положительная, жесткость пускового уча- .
стка механической характеристики может приводить к неустойчивости
электромеханической системы [22]. Однако работа на этом участке крат-
ковременна; неустойчивость проявляется в возрастании возникающих
по любым причинам механических колебаний, которые при переходе на
устойчивый участок характеристики быстро затухают.
341
Глава восьмая
РЕГУЛИРОВАНИЕ СКОРОСТИ ЭЛЕКТРОПРИВОДА
ПОСТОЯННОГО ТОКА
8-1. РЕОСТАТНОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ
Введение добавочных сопротивлений в цепь якоря двигателей
постоянного тока, рассмотренное в § 7-1 как средство регулирования
момента и тока, при необходимости может быть использовано и для регу-
лирования скорости электропривода. Схемы реостатного регулирова-
ния скорости, очевидно, не имеют отличий от приведенных выше схем
реостатного регулирования момента, однако иная цель использования
этого способа изменения характеристик двигателей вносит существен-
ные отличия в оценку его основный-показателей.
Рис. 8-1. Реостатное регулирование скорости двигателя с независимым
возбуждением.
Точность реостатного регулирования скорости двигателя с неза-
висимым возбуждением можно проанализировать, рассматривая
рис. 8-1, а. Введением соответствующего сопротивления в цепь якоря
возможно значительно снизить среднюю скорость со7р, соответствующую
среднему значению момента нагрузки двигателя /Ис. ср. Однако изме-
нения статической нагрузки в пределах от /Ис. мин до Mz. MilKC в связи
с ограниченной жесткостью механической характеристики вызывают
ошибку регулирования, относительное значение которой определяется
соотношением '
Дй)/соср — (<|>макс сйм1!н)/(сймакеЧ~ ®мин)- (8-1)
Если в соответствии с рис. 8-1, а выразить скорости с помощью
модуля статической жесткости Р через моменты нагрузки, то соотноше-
ние (8-1) примет вид:
Д(й/ЮСр — (Мс.макс М с.мин)/2^Сйср. (8-2)
Из (8-2) следует, что ошибка регулирования при данных пределах
изменения нагрузки однозначно определяется жесткостью регулировоч-
342
ной характеристики. При увеличении сопротивления цепи якоря жест-
кость уменьшается, изменения скорости при тех же пределах изменения
статической нагрузки увеличиваются и точность регулирования быстро
снижается.
Если в (8-2) принять Дсо/соср = (Д.со/соср)дог,, Р = Риии> а “ср =
— ®ср. мин = ^®ср. макс ~ можно получить следующее выраже-
ние, определяющее возможный диапазон регулирования при заданной
точности
мип^н (Дсо/соср)
доп /о о-.
и=---------------г~.--- . (8-О)
^с.макс ^с.мин
Из (8-3) следует, что возможный диапазон регулирования скорости
уменьшается при расширении пределов изменения нагрузки ДЛ1С и
увеличивается при снижении требований к точности регулирования.
Так как при уменьшении средней нагрузки Мс. ср для получения того
же значения соср. миц требуется дополнительное увеличение сопротив-
ления якорной цепи, вызывающее дополнительное уменьшение жестко-
сти ₽ми11, возможный диапазон регулирования при этих условиях меньше,
чем при наибольшем допустимом значении средней нагрузки. Указан-
ные обстоятельства, как уже было отмечено в § 6-1, ограничивают воз-
можный диапазон реостатного регулирования скорости значениями
= 4>ср. макс/“ср. мин = ~ 2.
При регулировании скорости электромеханическая связь электро-
привода является фактором, определяющим точность регулирования,
ибо стремится при изменениях нагрузки поддерживать скорость по-
стоянной. Напомним, что при регулировании момента это действие
электромеханической связи является фактором, снижающим точность
регулирования, вследствие которого изменения скорости при регули-
ровании момента и тока электропривода являются основным возму-
щающим воздействием. При регулировании скорости основным воз-
мущающим воздействием являются изменения статической нагрузки
электропривода. Следует учитывать, что при этом дополнительную
ошибку регулирования могут вызывать факторы, влияющие на механи-
ческую характеристику двигателя, например изменения сопротивлений
обмоток якорной цепи и обмотки возбуждения при изменении их темпе-
ратуры, колебания напряжения сети и т. п.
При ручном управлении электроприводом диапазон регулирова-
ния при заданной точности можно расширить за счет переключений
ступеней регулировочного реостата. Пусть указанные на рис. 8-1, а
значения сомаКС и соМИ!1 соответствуют требуемой точности регулирова-
ния. При регулировочной характеристике 1 эта точность обеспечивается
в узких пределах изменения нагрузки Д/Ис — MQ. маКС — Л4С. МНН.
Переключением ступеней регулировочного реостата (характеристики 2
И 3) оператор может расширить пределы изменения нагрузки, в которых
изменения скорости не превосходят допустимых, до ДАТ'= А4С макс —
— М"
с. мин
Более эффективным путем расширения диапазона реостатного
регулирования скорости является автоматическое управление сопро-
тивлением якорной цепи для поддержания постоянства заданной ско-
рости электропривода. Если в схеме импульсного управления добавоч-
ным сопротивлением в цепи якоря двигателя, аналогичной рис. 7-3,
поставить е в зависимость от отклонений скорости от заданного значе-
ния 'или в системе релейного автоматического регулирования тока
343
якоря связать заданное значение тока /3 с е, можно существенно
увеличить точность регулирования скорости и получить при различных
значениях задания скорости U3, с с учетом ограничения максимального
тока значением /доп семейство характеристик, показанное на рис. 8-1, б.
Такой способ регулирования обеспечивает также и высокую плавность
регулирования, в то время как в разомкнутой системе целесообразное
число ступеней регулировочного реостата ограничивается приемлемыми
габаритами коммутирующей аппаратуры.
В случаях, когда при регулировании скорости работа двигателя -
на регулировочной характеристике может совершаться длительно,
важное значение имеет отмеченный в § 6-1 дополнительный показа-
тель — допустимая нагрузка на регулировочных характеристиках.
Если в качестве критерия допустимой нагрузки принять ток, проте-
кающий по обмоткам двигателя, т. е. принять i„ = /я. н, то при ия =
— Ur. п и Ф — Фн допустимая величина момента определяется соотно-
шением;
Й4доп “ ^Фн^Я.Н “ = const.
Рис. 8-2. Реостатное
регулирование скоро-
сти двигателя с после-
довательным возбуж-
дением.
Таким образом, реостатное регулирование скорости есть регулиро-
вание при постоянном моменте. Для полного использования двигателя
во всем диапазоне регулирования необходи-
мо применять этот способ для механизмов,
у которых момент нагрузки не зависит от
скорости. При этом следует также иметь в
виду, что у двигателей с самовентиляцией
при снижении скорости ухудшается тепло-
отдача, и допустимый по нагреву момент су-
щественно снижается.
Реостатное регулирование скорости дви-
гателя с последовательным возбуждением
иллюстрируется зависимостями, приведенны-
ми на рис. 8-2. В области нагрузок,, близ-
ких к номинальной, механические характе-
ристики легко линеаризуются. При этом
справедливы высказанные выше соображе-
ния о точности реостатного регулирования
двигателя с независимым возбуждением. Осо-
бенностью реостатного регулирования скоро-
сти двигателя с последовательным возбуждением является нелиней-
ность характеристик этого двигателя, вследствие которой при прочих
равных условиях точность регулирования быстро снижается при
уменьшении средней нагрузки. Если в качестве критерия допустимой
нагрузки на регулировочной характеристике принять номинальный
ток двигателя /я. доп = Ц. н — const, то допустимый момент при ре-
гулировании определится (8-3), т. е. реостатное регулирование скоро-
сти двигателя с последовательным возбуждением относится к числу
способов регулирования при постоянном моменте.
Реостатное регулирование скорости осуществляется простыми и
дешевыми техническими средствами, однако его недостатком являются
значительные потери энергии в регулировочном реостате, возрастающие
по мере снижения скорости двигателя при данной статической на-
грузке.
344
8-2. ПАРАМЕТРИЧЕСКОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ
ИЗМЕНЕНИЕМ НАПРЯЖЕНИЯ НА ЯКОРЕ ДВИГАТЕЛЯ .
Рис. 8-3. Параметриче-
ское регулирование ско-
рости в системе Г — Д.
Быстрое снижение жесткости механических характе-
ристик двигателя с независимым возбуждением при реостат-
ном регулировании обусловлено тем, что при введении со-
противления в цепь якоря скорость идеального холостого
хода ®0 остается неизменной. Так как скорость ®0 опреде-
ляется приложенным к якорю напряжением Un и потоком
двигателя Ф, более благоприятные условия Для регулирова-
ния скорости обеспечивает изме-
нение этих параметров. Рассмот-
рим особенности параметрического
регулирования скорости воздейст-
вием на напряжение на якоре дви-
гателя.
В § 6-2 уже отмечалось, что для
реализации этого способа регули-
рования необходимы управляемые
источники напряжения — различ-
ные электромашинные, магнитные
или вентильные преобразователи,
и было рассмотрено влияние огра-
ниченной мощности источника пи-
тания на механические характери-
стики электропривода в этой сис-
теме. В качестве примера оценим
основные показатели параметриче-
ского регулирования скорости в
системе Г—Д. Такое регулирова-
ние может быть осуществлено путем
буждения генератора 1В г с помощью регулируемого доба-
вочного сопротивления в цепи его обмотки возбуждения
или, как показано на рис. 8-3,а, с помощью потенциомет-
ра /7, позволяющего регулировать подведенное к обмотке
возбуждения напряжения Ua г.
Изменяя ток возбуждения генератора, можно получить
ряд значений э. д. с. генератора £г, которым соответствует
семейство механических характеристик системы Г—Д, при-
веденное на рис. 8-3,6. Сравнение этих характеристик с по-
казанными на рис. 8-1,6 реостатными характеристиками
свидетельствует об очевидных преимуществах регулирова-
ния напряжения в цепи якоря перед реостатным в отноше-
нии точности и возможного диапазона регулирования ско-
.345
изменения тока воз-
роста. При данной э. д. с. генератора £„• *= const и задан-
ных пределах изменения нагрузки Д7ИС ошибка регулиро-
вания определяется выражением (8-2), в котором жесткость
(J не зависит от уровня управляющего сигнала:
Р=^Жя.г + ^д) = ^я2)
где Т?я2 — суммарное сопротивление силовой цепи системы
Г-Д.
Так как суммарное сопротивление якорной цепи при
средней и большой мощности машин невелико, жесткость
статической характеристики в системе Г—Д значительна и
обеспечивает получение диапазона параметрического регу-
лирования напряжения в пределах D — 6-г-Ю даже с уче-
том влияния гистерезиса в магнитной цепи. Гистерезис
является фактором, вызывающим неоднозначность стати-
ческих характеристик, соответствующих данному значению
напряжения и тока возбуждения генератора. Так как оста-
точная э. д. с. генератора Д£ост составляет 2—5% номиналь-
ной, относительная ошибка, определяемая гистерезисом,
может быть оценена соотношением
Ди7иср = Д£ост/£г. ср D (Д£ост/£г н) = (0,02 Ч-- 0,05) D,
т. е. на пониженных скоростях влияние гистерезиса может
быть значительным.
Следует заметить, что управление в цепи возбуждения,
имеющей небольшую мощность в сравнении с номинальной
мощностью генератора, обеспечивает возможность доста-
точно плавного регулирования скорости. Если эту возмож-
ность удается реализовать, при ручном управлении опера-
тор перемещением рукоятки командоаппарата может уста-
навливать любую требуемую скорость, компенсируя дей-
ствие возмущений. При этом требуемая точность при данном
значении U3 = const существенно снижается.
Регулирование напряжением, так же как и реостатное,
осуществляется при постоянном потоке двигателя Ф =
= Фн = const. Соответственно допустимая нагрузка при
регулировании для двигателей с независимой вентиляцией
определяется (8-3), т. е. данный способ регулирования отно-
сится к числу способов регулирования при постоянном
моменте.
Регулирование возбуждения генератора не связано с до-
полнительными потерями мощности, так как мощность,
потребляемая в цепи возбуждения, при регулировании
уменьшается. Однако при оценке экономичности регули-
346
рования с точки зрения потерь энергии следует иметь в виду,
что в системе Г—Д осуществляется трехкратное преобразо-
вание энергии. Каждая из ступеней преобразования сопро-
вождается потерями энергии, поэтому общий к. п. д. сис-
темы Г—Д
Лс = Лп. лЛ/Пд
зависит от к. п. д. первичного асинхронного или синхрон-
ного двигателя 1%. д и к. п. д. генераторат]г. Результирующий
к. п. д. при этом существенно снижается, особенно для
электроприводов малой мощности. При средней и большой
мощности электропривода номинальный к. п. д. системы
Г—Д достигает 75—85%..
Наконец, рассматривая экономичность данного способа
регулирования с точки зрения первоначальных затрат,
можно заключить, что суммарная установленная мощность
машин в системе Г—Д возрастает примерно в 3 раза и соот-
ветственно увеличиваются габариты, масса и стоимость
электропривода.
Оценив технические и экономические показатели пара-
метрического регулирования скорости в системе Г—Д,
можно прийти к выводу, что высокие технические показатели
регулирования скорости изменением напряжения силовой
цепи покупаются ценой значительного увеличения габари-
тов и стоимости электропривода. К такому же выводу можно
было бы прийти, и рассматривая аналогичные показатели
параметрического регулирования скорости в системе ТП—Д.
Эта система при примерно одинаковых технических возмож-
ностях с системой Г—Д обладает более высоким к. п. д.
и несколько лучшими массо-габаритными показателями, но
отличается низким коэффициентом мощности на регулиро-
вочных характеристиках. Как в системе Г—Д, так и в сис-
теме ТП—Д дополнительные затраты, связанные с введе-
нием управляемого преобразователя, полностью окупаются
высокой управляемостью системы, обеспечивающей возмож-
ность эффективного автоматического управления всеми
режимами работы электропривода и точного автоматичес-
кого регулирования его координат. Поэтому в настоящее
время эти совершенные системы электропривода исполь-
зуются только с автоматическим регулированием и для целей
параметрического регулирования скорости практически не
применяются.
На практике для параметрического регулирования ско-
рости изменением напряжения на якоре двигателя находят
347
применение более простые схемы. Например, при многодви-.
гательном электроприводе механизма возможно ступенча-
тое изменение напряжения, приложенного к каждому дви-
гателю, за счет переключения двигателей с последователь-
ного соединения на параллель-
ное и наоборот. Широкое при-
менение находят также специаль-
ные схемы, использующиеся для
регулирования подведенного к
якорю двигателя напряжения с
помощью реостатных делителей
напряжения — потенциометров.
Такие схемы получили в элек-
троприводе название схем шун-
тирования якоря.
Потенциометрическая схема
регулирования скорости двига-
телей с независимым возбуж-
дением приведена на рис. 8-4,а.
При двигателе небольшой мощ-
ности потенциометр может быть
Рис. 8-4. Регулирование ско-
рости двигателя с независи-
мым возбуждением в потен -
циометрической схеме. выполнен в виде реостата с пол-
зушкой, перемещением которого
подведенное к двигателю напряжение сети можно изме-
нять от 0 до и. = Пн. Электромеханическая и механиче-
ская характеристики двигателя в этой схеме могут быть
получены по полной аналогии с системой УП—Д, если
рассматривать потенциометр как источник регулируемого
напряжения с внутренней э. д. с., равной напряжению
холостого хода
Д,₽ = Ux_ х = Ua = UH = аш^н (8-4)
и внутренним сопротивлением
Япр = ЯшЯя/(Яш + Яд) = аш (1 — аш)7?п. (8-5)
Подставляя (8-4) и (8-5) в (6-6), получаем уравнения
характеристик в потенциометрической схеме (рис. 8-4, а)
в следующем виде:
^-аш(о0н--^+Кш(1с~Кш)/?п 7„; (8-6)
® - аш®он - м> (8-7)
348
Из (8-7) следует, что при перемещении движка потенцио-
метра скорость идеального холостого хода уменьшается
пропорционально аш, а модуль жесткости статической ха-
рактеристики
г2
(8'8)
является переменной, зависящей оташ. При аш — Л йаш =
= 1 жесткость Рш равна жесткости естественной характе-
ристики двигателя р при питании его от бесконечно мощной
сети. При промежуточных значениях аш модуль жесткости
Р,„ < р, причем его минимум может быть определен обычным
путем. Продифференцировав знаменатель (8-8) по аш и при-
равняв производную нулю, нетрудно определить значение
«ш = 0,5, при котором рш имеет минимум
Рш. мин = + 0,25^). (8-9)
Полученный результат позволяет построить механичес-
кие характеристики двигателя в потенциометрической схеме
(рис. 8-4, б).
Рассматривая (8-9), можно установить, что минимальная
жесткость механической характеристики в потенциометр и*
ческой схеме по модулю тем больше, чем меньше сопротивле-
ние потенциометра /?„, т. е. чем больше его мощность.
Так как при регулировании поток двигателя остается
постоянным (Ф = Фн), допустимая нагрузка двигателя без
учета изменения условий охлаждения постоянна М. = М„ =
— const. При такой нагрузке двигателя мощность потен-
циометра превышает номинальную мощность двигателя, так
как определяется напряжением сети Un и наибольшим током
потенциометра 7П. макс = Л + /ш. макс > Л,- Наибольший
ток шунтирующей части потенциометра /ш. макс быстро
увеличивается при уменьшении Rn, поэтому минимальная
жесткость механических характеристик в рассматриваемой
схеме ограничивается приемлемой мощностью потенциомет-
ра. Тем самым ограничивается и возможный при данных
пределах изменения нагрузки и требуемой точности диапа-
зон регулирования скорости.
Плавность регулирования при небольшой мощности
двигателя, позволяющей использовать ползунковый реостат,
получается достаточно высокой. Однако с возрастанием
мощности двигателя эта возможность исключается и регули-
рование осуществляется переключением ступеней регули-
ровочных сопротивлений и Rs с помощью силовой комму-
349
тирующей аппаратуры. При таком регулировании принимать,
суммарное сопротивление потенциометра + 7?д
постоянным нецелесообразно, так как сопротивления /?,„
и могут регулироваться независимо, и (8-6) и (8-7)
удобно представить в виде
/?я + аш#д ,. ,о
со = ашсоон---------1я; (8-10)
Яя+,аиЛ . , /О 1 1 \
со = ашсооп---------М. (8-11)
При этом полезно иметь в виду, как изменяются характе-
ристики двигателя при изменении Rm при неизменном /?д
или наоборот. Примем сначала /?д = const и будем изменять
в (8-10) 7?ш(а,„). При изменении шунтирующего сопротивле-
ния от бесконечности до нуля скорость идеального холостого
хода непрерывно уменьшается от со0„ до нуля, а жесткость
возрастает от р,„ = с2/(/?я + 7?д) до 0,„ = 0. Все эти харак-
теристики пересекаются в одной точке, в которой ток
якоря двигателя имеет значение
41 = 04- (8-12)
при скорости в режиме противовключения
®м. = —4,414- (8-13)
Это можно установить, определив напряжение на за>кн-
мах якоря двигателя при 7Я = /К1 н со = сок1:
Ия —ЛсЛ+С(Ок1- (8-14)
Подставив (8-13) в (8-14), убеждаемся, что в этой точке
на зажимах якоря напряжение равно нулю, так как э. д. с.
двигателя, работающего в генераторном режиме, равна
падению напряжения на сопротивлении якоря. При любом
сопротивлении /?и, ток 1Ш в этой точке равен нулю, поэтому
она является общей для всего рассматриваемого семейства
характеристик (рис. 8-5,а). Аналогичная общая точка обна-
руживается и в семействе характеристик, соответствующем
Rlu — const и 7?д — var (рис. 8-5,6). Все эти характеристики
пересекаются в то'чке, где ток якоря определяется соотно-
шением
4а = — Uu/Rm,
а скорость имеет значение
®к2 = (^п 424)4 = ®о„ (1 + 4./4Л
350
В этой точке напряжение на зажимах двигателя равно
напряжению сети, поэтому ток из сети не потребляется и
значение /?д не сказывается на условиях работы двигателя.
Графически точка 1К1, сок1 определяется пересечением рео-
статной характеристики при = /?я + (#ш = оо) и
естественной характеристики динамического торможения
(/?ш = 0) (прямые 1 и 2 на рис. 8-5,а). Точка /к2 и шк2
определяется пересечением естественной характеристики
двигателя 3 (Кд = 0) и реостатной характеристики динами-
ческого торможения 4 = оо), как показано на рис. 8-5,6.
Рис. 8-5. Характеристики в схеме шунтирования якоря двигателя с не-
зависимым возбуждением при /?д = const, — var (а) и при Rm =
= const, /?д — var (б).
Таким образом, механические характеристики в схеме
шунтирования якоря двигателя с независимым возбужде-
нием являются характеристиками двигателя, питаемого от
источника регулируемого напряжения с относительно боль-
шим и изменяющимся при регулировании напряжения внут-
ренним сопротивлением. К вполне аналогичному выводу
можно прийти в результате рассмотрения потенциометри-
ческой схемы регулирования скорости двигателя с после-
довательным возбуждением. Механические характеристики
в этой схеме подобны характеристикам двигателя последо-
вательного возбуждения при регулировании напряжением,
цр с увеличенным в сравнении с естественной характеристи-
кой и изменяющимся от характеристики к характеристике
суммарным сопротивлением якорной цепи.
Однако для двигателя с последовательным возбуждением
более благоприятные регулировочные характеристики полу-
чаются в специальной схеме, которая точно соответствует
351
названию «схема шунтирования якоря», приведенной на
рис. 8-6,а. В этой схеме сопротивление шунтирует только
обмотку якоря Двигателя, а обмотка возбуждения вклю-
чается последовательно в цепь добавочного сопротивления
Яд. Как следствие, в сравнении с потенциометрической
схемой, здесь кроме снижения подведенного к цепи якоря
Двигателя напряжения достигается эффект увеличения тока
Рис. 8-6. Схема шунтирования якоря двигателя с последовательным
возбуждением (а) и соответствующие ей электромеханические (б) и ме-
ханические (в) характеристики при = const, = var.
возбуждения за счет тока, протекающего по Яш. Благодаря
последнему ток возбуждения при идеальном холостом ходе
/я = 0 не равен нулю:
ho — Лио= (1 ~’ аш) + RB),1
где «ш = ЯШ/(ЯШ + Яд + RB), а скорость идеального хо-
лостого хода имеет ограниченное значение
®0ш = ссшС/с/^Ф (/в0).
При со = со0ш двигатель переходит в генераторный ре-
жим, в котором поступающая с вала механическая энергия
преобразуется в электрическую и теряется в виде тепла
в сопротивлениях Яя и Яш. Двигатель работает генератором
параллельно с сетью на сопротивление Rm и увеличение
напряжения на Яш по мере роста скорости двигателя вызы-
вает постепенное уменьшение потребляемого из сети тока, ‘
т. е. тока возбуждения. При /ШЯШ -> С/с/в -> 0, а скорость
двигателя неограниченно возрастает, поэтому в области
генераторного режима электромеханическая характеристика
по мере роста скорости асимптотически приближается к
прямой i3 = /к2 = — Uc/Rai. Так как при этом поток '
стремится к нулю, момент двигателя в генераторном режиме
352 " ' - - ' '
вначале возрастает, достигает максимума и в дальнейшем
при со —> со, М — кФ1я -> 0, т. е. механическая характе-
ристика асимптотически приближается к оси ординат слева.
Электромеханические и механические характеристики в
схеме шунтирования якоря двигателя с последовательным
возбуждением на рис. 8-6,6 и в приведены для случая, когда
7?ш — const, 7?д = var. Благодаря ограниченной скорости
Рис. 8-7. Характеристики в схеме рис. 8-6 при == const, = var.
идеального холостого хода эти характеристики создают бо-
лее благоприятные условия для регулирования скорости,
чем характеристики в потенциометрической схеме.
Регулирование RU1 при Ra = const дает семейство харак-
теристик, приведенное на рис. 8-7, а я б. Аналогично потен-
циометрической схеме все эти характеристики пересекаются
в одной точке, соответствующей /i;](MKi) и в которой
падение напряжения в якоре уравновешивается его э. д. с.
Эта точка определяется пересечением реостатной характе-
ристики, соответствующей Рд при Rm = оо, и характерис-
тики динамического торможения с независимым возбужде-
нием при /?ш = 0 и Ф = Фх = const, где Фх = Д/в]) =
= Ж/Яд)-
В схеме шунтирования якоря (рис. 8-6,а) при определе-
нии допустимой нагрузки на регулировочных характерис-
тиках необходимо учитывать, что в двигательном режиме
iB > 1Я. Это вынуждает в качестве критерия допустимой
нагрузки при постоянной теплоотдаче принимать номиналь-
ный ток обмотки возбуждения /доп — /в п = что обеспе-
чивает регулирование при потоке, равном номинальному,
12 Чиликин М. Г. и др. 353
йо требует по мере снижения скорости уменьшения момента
Мдоп< Ма таким образом, чтобы выполнялось условие
ДоП ~ ^В. Н Дг
В заключение отметим, что использование для регулиро-
вания напряжения сопротивлений является весьма простым
и дешевым техническим решением, однако следует иметь
в виду, что этот способ регулирования сопровождается
значительными потерями в сопротивлениях 7?ш и Rn.
Эти потери возрастают с уменьшением внутреннего сопро-
тивления потенциометра и соответствующим увеличением
получаемой жесткости характеристик, поэтому в отношении
потерь энергии при регулировании потенциометрические
схемы еще менее экономичны, чем реостатное регулирова-
ние.
•
8-3. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ
В СИСТЕМЕ УП—Д
Диапазон регулирования скорости изменением напряже-
ния на якоре двигателя в системе УП-—Д может быть зна-
чительно расширен за счет автоматического регулирования
скорости по отклонению от заданного значения. В простей-
Рис. 8-8. Автоматическое регулирование скорости в системе УП —Д.
шем варианте такое управление может быть осуществлено
электрическим суммированием на входе системы напряже-
ния Д3. с, пропорционального заданному значению скорости,
и отрицательного напряжения £/0 с, пропорционального
фактической скорости двигателя, снимаемого с якоря тахо-
генератора ТГ (рис. 8-8,а). Соответствующая структурная
схема системы регулирования скорости представлена на
рис. 8-8,6. С помощью этой схемы можно записать следую-
щие уравнения, описывающие динамическую характерис-
тику электропривода, замкнутого отрицательной обратной
354
связью по скорости
(^3. С ^0. С®) ~ (Т„Р -|- 1) Сп,
еп — с® = Дя (Тяр + 1) 1я.
(8-15)
В результате преобразований (8-15) получим уравнение
динамической электромеханической характеристики элек-
тропривода
„ _ _ £я_2 (Т>+1)(7>+1)
с(Г[1Р+1)+/г0.с/гп С (Тпр+ 1)+Мп V ’
которое с учетом того, что при Ф = Фп — const, М. = cin
позволяет получить и соответствующее уравнение динами-
ческой механической характеристики электропривода
., _ из. А______________/?ns(7\.P + 1) (Л.Р+1) м /о ,7)
c(Tnp-\-V)+k0.ck„ с2(Л,р+1)+с/г0.е/гп ’
При р — 0 уравнение (8-17) представляет собой уравне-
ние статической механической характеристики
U k
ю = - , -V '!-------------
c+«o.c«u с--'гс/г0. с/гп
(8-18)
Рассматривая (8-18), можно установить, что с увеличе-
нием коэффициента обратной связи по скорости /г0 с при
прочих равных условиях умень-
шается скорость идеального холо-
стого хода и возрастает, жесткость
механической характеристики. Ска-
занное поясняется статическими
характеристиками, представленны-
ми на рис. 8-9, где показано, что
при неизменном задающем сигнале
£/3 с — обеспечивающем номи-
Рис. 8-9. Статические ме-
ханические характеристи-
ки электропривода с об-
ратной связью по скоро-
сти.
нальную скорость электропривода
в разомкнутой системе (£0. с = 0),
введение отрицательной связи с
коэффициентом k0. z = k0.ci снижает
скорость идеальною холостого хо-
да, но существенно увеличивает
жесткость. Для получения номинальной скорости задаю-
щий сигнал должен быть увеличен до t/3. с — U3 > U30.
Чем выше коэффициент обратной связи k0. с, тем большее
напряжение t/3. с требуется для получения той же скоро-
сти, и тем меньше ошибка регулирования, обусловленная
12*
355
изменениями статической нагрузки. Статизм при данном
коэффициенте обратной связи уменьшается с возрастанием
коэффициента усиления kn и теоретически при k0 ckn -> do
статическая ошибка регулирования стремится к нулю.
Принимая в (8-17) t/3-c = 0, получаем выражение дина-
мической жесткости механической характеристики электро-
привода в замкнутой системе
R — P + Po.c/l^nP-H) /о 1СП
T'nP + l ’
где р0.с = ck0. ckn/R„z — составляющая модуля статичес-
кой жесткости, обусловленная действием отрицательной об-
ратной связи по скорости.
Рис. 8-10. Частотные характеристики динамической жесткости механи-
ческих характеристик электропривода с отрицательной обратной связью
по скорости.
При Тп — 0 уравнение амплитудно-частотной характе-
ристики динамической жесткости принимает вид:
1 Рд 1 = Рзам.с/T/'l , (8-20)
где рзан. с = Р + Ро. с — модуль статической жесткости в
замкнутой по скорости системе.
Фазо-частотная характеристика не зависит от k0 с и
определяется соотношением (3-30), полученным для разомк-
нутой системы. Нетрудно видеть, что модуль динамической
жесткости при любой частоте в k? ж = рз1у./р раз больше
модуля динамической жесткости в разомкнутой системе при
той же частоте. Фазовый сдвиг между колебаниями скорости
и момента двигателя остается постоянным при данной
частоте для любых значений &0. с (рис. 8-10,а). При Тп О
356
путем анализа (8-19) можно заключить, что инерционность
преобразователя приводит к уменьшению модуля динами-
ческой жесткости с ростом частоты колебаний и к соответ-
ствующему возрастанию фазового сдвига. Последнее ана-
лизируется более наглядно, если представить (8-19) в виде
а __________________ Рза>'. с (Т„. эР ~Н О /Я 911
Р*- (Г„РН-1) (ГярЧ-!)’
где Т =______—Т = —Гп-
А П-9 Р + Ро.с п
Так как при 6у. ж > 1 Тл 3 < Тп, при возрастании час-
тоты и больших Тп сдвиг по фазе вначале быстро возрастает,
а затем уменьшается, стремясь к фазовому сдвигу при тех
же частотах в разомкнутой системе, поэтому при Тп =/= О
частотные характеристики динамической жесткости имеют
вид, показанный на рис. 8-10,6.
Модуль статической жесткости в замкнутой по скорости
системе зависит как от действия внутренней связи по э. д. с.
двигателя, так и от действия внешней связи по скорости
С = ₽ + ₽О. С == c*/R^ + ck0, Л/Яя2. (8-22)
Соответственно коэффициент увеличения жесткости за
счет отрицательной связи по скорости определяется по
формуле
^у.ж = (Р + Ро.с)/Р = 1+/го.Л/с. (8-23)
Таким образом, в рассматриваемой системе увеличением
коэффициента усиления и коэффициента обратной связи по
скорости возможно лю-
бое требуемое увеличе-
ние статической жестко-
сти и соответствующее
увеличение динамиче-
ской жесткости в диапа-
зоне частот, ограничен-
Рис. 8-11. Структурная схема контура
регулирования скорости при Тп = 0.
ном инерционностью
преобразователя. Однако при оценке возможного увеличе-
чения жесткости механических характеристик и связанной
с нею точности регулирования скорости нельзя не учитывать
того, что достигаемое таким путем увеличение жесткости
сопровождается, при прочих равных условиях, ухудшением
качества переходных процессов в системе. В этом можно
убедиться, рассматривая влияние увеличения жесткости
при регулировании скорости по отклонению в системе с
Тп = 0.
357
Структурная схема контура регулирования скорости при
Та — 0 путем преобразований может быть представлена в
виде, не имеющем отличий от структурной схемы в разомкну-
той системе УП—Д (рис. 8-11). Этой схеме соответствует
передаточная функция разомкнутого контура, которую
можно представить в виде
Саз с=—-----5----->
Р Тмр(Тяр+1)
(8-24)
где Тм=Тм(Р/Рзам.с)==С/Сж-
Следовательно, динамические показатели замкнутого
контура скорости определяются соотношением постоянных
времени Т'№ и Тя вполне аналогично разомкнутой системе,
в которой при Тк < 4ТЯ переходные процессы имеют коле-
Л(Я)
-БОдБ/Век'Л
Рис. 8-12. Асимптоти-
ческая ЛАЧХ конту-
ра регулирования ско-
рости в системе Г—Д.
бательный характер, причем колеба-
тельность при данной Тя возрастает
с уменьшением Тм. Так как 7’м< Тк,
увеличение жесткости механической
характеристики в замкнутой системе,
как было выше отмечено, вызывает
ухудшение динамических показате-
лей, поэтому без применения того
или иного вида коррекции получе-
ние высокой точности регулирования
в рассматриваемой системе практи-
чески исключено.
Малая постоянная времени быстро-
действующего преобразователя при
этом 'является фактором, дополнительно уменьшающим
запас по фазе на частоте среза контура регулирования,
дополнительно ограничивает возможности повышения ко-
эффициента обратной связи по скорости. Большая инер-
ционность преобразователя, например постоянная вре-
мени цепи возбуждения генератора, при определенных
условиях может способствовать получению более высокой
точности регулирования. Для анализа этой возможности
передаточную функцию разомкнутого контура скорости
удобно представить в виде я
W7 _ П/ ]W _
" раз. с — w г w дв — ।
__________1/с_________
। Т яТ кР~ + Ткр + 1
(8-25)
Асимптотическая ЛАЧХ (рис. 8-12), соответствующая
(8-25), построена с учетом того, что при реальных значениях
Т„ и Тм двигатель является колебательным звеном с пока-
358
зателем колебательности Л„аЕСГ близким к единице, и может
быть приближенно представлен двумя апериодическими
звеньями с постоянной 7\ == У ТВТК. Так как Тг VТЯТК,
в области среднечастотной асимптоты (8-25) приближенно
имеет вид:
1
ТгР(Т1Р+1)2 ’
(8-26)
^раэ.е~
где Tr = Trc/(ko_ckr).
Для получения требуемого качества регулирования с по-
казателем колебательности, близким к единице, должно
выполняться условие Т'т — = ас (2TJ (см. § 6-3). Тем
Рис. 8-13. Структурная схема комбинированной системы регулирования
скорости.
самым определяется граничное значение krk0 с, при котором
динамические показатели качества не ниже требуемых:
(^о-с)гр^2ас/7^ ~ (2 4-8)/тХ '’ (8’27)
Анализируя (8-27), можно установить, что в системе
Г—Д возможности повышения статической жесткости меха-
нической характеристики с помощью жесткой отрицатель-
ной обратной связи по скорости тем выше, чем больше по-
стоянная времени генератора Тг и чем меньше постоянные
Тя и Тя. Максимальное быстродействие системы Г—Д опре-
деляется не постоянной времени генератора, а постоянными
Тя и Тя. При линейной характеристике возбудителя влия-
ние инерционности генератора можно компенсировать уве-
личением общего коэффициента усиления kzkoz за счет
возникающих в динамическом режиме форсировок возбуж-
дения генератора (см. § 8-5).
359
Ограничения, связанные с качеством регулирования, су-
щественно сужают возможности рассматриваемого способа
регулирования. Стремление повысить точность регулиро-
вания, не прибегая к сложной динамической коррекции
системы, определяет целесообразность использования ком-
бинированного способа управления: дополнения системы
регулирования по отклонению компенсацией возмущения,
обусловленного нагрузкой. Из возможных реализаций ком-
пенсации ограничимся рассмотрением простейшего случая,
когда для этого используется жесткая положительная
обратная связь по току якоря двигателя.
Структурная схема такой комбинированной системы
регулирования представлена на рис. 8-13. Этой схеме соот-
ветствуют следующие уравнения, описывающие динамичес-
кую механическую характеристику электропривода:
(^з. с'Ь&п.тС ^о. с®) {Т пр -|- 1) е„, 1 (8-28)
еп-С(й = 7?я(Лр + 1)С- J
В результате преобразования (8-28) получим уравнение
динамической механической характеристики электропри-
вода в комбинированной системе регулирования в виде
Cfenc
М ______________________________________
*32(^ + i)(^+l)-Mn.T
_________°2 lj+ckTo. с-------------- до (п) — В (О) И (П)
(8-29)
Выразив динамическую жесткость (р) через
статической жесткости в замкнутой по скорости
Рзам.с, получим:
о _________Взгм. с Тп. эР4~ 1)_
Рд ЛЛрЧ^ + ЛОр + ^МпЛ ’
модуль
системе
(8-30) ’
Уравнение (8-30) свидетельствует о том, что введение
положительной связи по току увеличивает модуль статиче-
ской жесткости в замкнутой системе
(М1)
причем при knknx = модуль статической жесткости
возрастает до бесконечности, а (8-30) принимает вид:
о _____________Взом.с Тп. чР -|~ 1)__ /О
Рд“ (Тп + Л) р [ТпТярЦТп + Т3)+1]
360
При значительной инерционности преобразователя (Тп
Тя) уравнение (8-32) можно упростить:
о ___________________ Раам. с (Тп. эР~Н 1)
Тпр(Тяр + \) •
(8-33)
Сравнивая (8-33) с (8-21), можно установить, что при
этих условиях положительная связь по току бесконечно
увеличивает модуль статической жесткости (0зам.с — 60 при
Й — 0) и незначительно сказывается на показателях ка-
чества регулирования. Действительно, при построении
асимптотических ЛАЧХ динамической жесткости, соответ-
ствующих (8-33) и (8-21), выявляется, что при й 1/Тп
(8-21) приближенно можно представить в виде (8-33). Это
значит, что среднечастотная асимптота разомкнутого кон-
тура регулирования скорости при введении положительной
связи по току не претерпевает существенных изменений,
и динамические показатели комбинированной системы регу-
лирования определяются коэффициентом усиления и коэф-
фициентом отрицательной связи по скорости. Выбирая koz
из условия (8-27) knkox — (£п&0.с)гр и устанавливая кри-
тическое значение коэффициента положительной связи по
току ИЗ условия (^п^п.т)кр = можно исключить стати-
ческую ошибку при нагрузке электропривода при относи-
тельно высоких динамических показателях качества регу-
лирования, соответствующих условию (8-27).
Положительная связь по току при Та !> Т„, что харак-
терно для системы Г—Д, является эффективным средством
увеличения статической точности регулирования. Динами-
ческая точность регулирования при этом возрастает незначи-
тельно, так как уже при небольших частотах Й > \/Тп
амплитудно-частотная характеристика 0Л(/Й) практически
совпадает с такой же зависимостью при /гпл = 0.
Из сказанного следует, что в комбинированной системе
регулирования динамическая точность определяется в ос-
новном точностью регулирования по отклонению. Это объяс-
няется форсирующим действием отрицательной обратной
связи по скорости. Выше было отмечено, что для получения
данного значения скорости при увеличении ko z требуется
увеличивать входное напряжение из с. Чем больше k0,t тем
больше при тех же отклонениях скорости от установившегося
значения напряжение, прикладываемое к обмотке возбуж-
дения генератора, что обеспечивает ускоренное протекание
динамических процессов в системе регулирования. Сигнал
положительной связи по току невелик и от отклонения ско-
361
рости не зависит, так как его действие только компенсирует
небольшое падение напряжения в цепи якоря, поэтому в ди-
намических процессах он фильтруется инерционностью
цепи возбуждения генератора.
При высоком быстродействии преобразователя (Тп & 0)
увеличение жесткости механических характеристик за счет
положительной обратной связи по току ухудшает качество
регулирования примерно в той же степени, что и регулиро-
вание по отклонению. Действительно, при Тл « 0 (8-32)
принимает вид передаточной функции интегрирующего
звена:
Рд^-Рзам.с/Лр- (8-34)
Передаточная функция разомкнутого контура
^р.зс^— (8-35)
р ТмТяР2 ' '
(8-36)
при этом соответствует последовательному соединению двух
интегрирующих звеньев, что при замыкании обратной
связью дает консервативное колебательное звено
^3ЯМ. С ПУ ГУ . ,
ГмГяр2 4-1
е частотой незатухающих колебаний £2ЭЛ = 1/]/"Тя7^.
В этом случае для получения требуемой точности и при
комбинированном способе регулирования необходима па-
раллельная или последовательная коррекция, обеспечиваю-
щая удовлетворительное качество регулирования.
Чисто компенсационный способ регулирования скорости
на практике находит крайне ограниченное применение в
связи с тем, что обеспечиваемая даже при критической
положительной связи по току точность регулирования не-
допустимо снижается температурными изменениями сопро-
тивления' обмоток машин, колебаниями напряжения сети,
питающей тиристорный преобразователь, и нелинейностью
характеристик преобразователя. Влияние последнего фак-
тора поясняется кривыми на рис. 8-14.
На рис. 8-14,а показана нелинейная зависимость Ец =
= В номинальном режиме преобразователь работает
при сниженном коэффициенте усиления и для компенсации
падения напряжения в якорной цепи необходим сиг-
нал положительной связи по току, равный Д(/Т.и. Этому
режиму на рис. 8-14,6 соответствует характеристика 1,
жесткость которой при 1Я < близка к абсолютной, а при
/я > постепенно снижается в связи с дальнейшим умень-
362
шением коэффициента усиления преобразователя. Уменьше-
ние задающего сигнала t/3C от U3Ca до U3X1 приводит
к переходу на участок характеристики с более высоким
коэффициентом усиления. При этом коэффициенте усиления
тот же сигнал А(/Т.п дает перекомпенсацию падения напря-
жения в якорной цепи и механическая характеристика
двигателя имеет вид кривой 2 на рис. 8-14,6.
В заключение необходимо отметить, что во многих прак-
тических случаях требуемая точность регулирования ско-
рости электропривода обе-
спечивается замыканием
системы УП—Д отрицате-
льной обратной связью по
напряжению на якоре дви-
гателя. Такая система под-
держивает с определенной
точностью постоянным на-
пряжение, которое в разом-
кнутой системе при возра-
стании нагрузки и тока
якоря снижается в связи с п
. г Рис. 8-14. Статические характе-
падением напряжения В ристики компенсационной системы
цепи преобразователя. В регулирования скорости,
пределе при бесконечном
коэффициенте усиления си-
стемы U„ = const, и система обеспечивает получение ме-
ханической характеристики двигателя, соответствующей
его питанию от бесконечно мощной сети. При конечном
коэффициенте усиления жесткость механических характе-
ристик в такой системе может быть значительно повышена
введением положительной связи по току. При постоянстве
потока двигателя в случае необходимости подбором коэф-
фициента обратных связей по напряжению и току можно
получить сигнал, эквивалентный обратной связи по ско-
рости (по э. д. с. двигателя), что в ряде случаев позволяет
избежать установки тахогенератора и для осуществления
обратной связи по скорости использовать схему тахометри-
ческого моста.
8-4. ПОСЛЕДОВАТЕЛЬНАЯ КОРРЕКЦИЯ КОНТУРА
РЕГУЛИРОВАНИЯ СКОРОСТИ В СИСТЕМЕ ТП—Д
Первые оценки динамических свойств контура регули-
рования скорости, полученные выше, свидетельствуют о том,
что наименьшие возможности увеличения статической точ-
363
ности регулирования в системе УП—Д, замкнутой отрица-
тельной обратной связью по скорости без применения кор-
ректирующих средств, имеют место при высоком быстро-
действии преобразователя, когда Тп ж 0, поэтому рассмот-
рение вопросов, связанных с последовательной коррекцией
этого контура регулирования, целесообразно начать с сис-
темы ТП—Д.
Структурную схему контура регулирования скорости,
приведенную на рис. 8-8, б, с учетом внутренней связи по
Рис. 8-15. Последовательная коррекция контура регулирования ско-
рости.
э. д. с., полагая Тп = и вводя на вход системы регулятор
скорости PC, можно представить в виде, показанном на
рис. 8-15,а. С ее помощью определяется передаточная функ-
ция объекта регулирования скорости в системе ТП—Д:
TV7 _ *4!__________________
грр+1 ТяТмр*+Т„р+1 '
С помощью (6-45) определим передаточную функцию
регулятора скорости:
тту ^раз. с Т яТ мР2 + Тар 4-1
^Р-с = Го.р.с =
(8-38)
где = (а^0. Сй„/с) Ти.
Следовательно, в данном случае необходим ИПД-регуля-
тор (см. рис. 6-12,г). Приведем соотношения для расчета
параметров регулятора [17]
' = До. А. с; Тм/Т„ = (RUCO + До. сС0. с)/Д0Со. d
Ro. cGp
364
В результате коррекции получена передаточная функ-
ция замкнутого контура регулирования скорости вида
Гзам'с = WJTuP+Т+г ’ (8'39)
в соответствии с которой быстродействие контура опреде-
ляется некомпенсируемой постоянной Т^, перерегулирова-
ние и затухание колебаний может быть установлено в тре-
буемых пределах соответствующим выбором соотношения
постоянных времени контура а'с. Настройка на технический
оптимум («с = 2) обеспечивает получение перерегулирова-
ния, не достигающего 596 при высоком коэффициенте демп-
фирования § — 1/]/2 и минимальном показателе колебатель-
ности (Л1!!ШС = 1).
Для оценки жесткости механических характеристик
электропривода при такой настройке получим уравнение
динамической механической характеристики. Связь между
моментом и скоростью в рассматриваемой системе опреде-
ляется уравнениями
(Доф с ^0. е^) р. с ^у»
= (УпР Н” 0 ^п>
с (?„ - ссо) = (Ткр + 1)Л1. .
(8-40)
При Т„ = T\i с учетом (8-38) система (8-40) в результате
преобразований дает уравнение динамической характерис-
тики электропривода
м ₽Сз.с(7я7\..^ + Л.Р-Н)
₽ [(7\Л, Р2+(Л, + аеГ11) р-1- 1]
Следовательно, динамическая жесткость механической
характеристики определяется соотношением
₽ [(ТЯТК + а'сТ^ р* + (Тк + асТц) р + 1]
а’^р (Д1р + 1)(Л,р + 1)
(8-42)
Рассматривая (8-42), можно установить, что модуль
статической жесткости благодаря наличию интегральной
составляющей в передаточной функции регулятора равен
бесконечности, т. е. статическая характеристика электро-
привода является абсолютно жесткой. Как повлияла кор-
365
рекция на динамическую жесткость при различных частотах,
можно оценить, построив асимптотическую ЛАЧХ динами-
ческой жесткости при а'г = 2. Обратим внимание на то, что
многочлен в числителе (8-42) представляет собой характе-
ристическое уравнение колебательного звена с высоким
коэффициентом демпфирования. Действительно,
7\, 4- 2Т.. \+2Т../Тч
= --- “Т...^- = Ее (8-43)
ТЯТМ + 2ТЬ ]/1+27ц/7иТи
где = Та/2 У TttTa — коэффициент демпфирования, обу-
словленный внутренней связью по э. д. с. двигателя в
разомкнутой системе.
Так как двигатель обычно представляет собой колеба-
тельное звено с = 0,4 ч-0,7 а в соответствии с (8-43)
многочлен числителя (8-42) с известной ошибкой,
не превышающей 6 дБ [11], можно заменить двумя форси-
рующими звеньями и записать (8-42) в виде
В (р) —________P.(7iP+2P------ (8-44)
2Тмр (Тмр-1-1) (Г„р+1) ’
где Т1 = УТЯТЯ + 2Т^1.
Асимптотическая ЛАЧХ для Т„ — Тя > Тц, соответ-
ствующая (8-44), построена на рис. 8-15,6 (кривая 1). Там же
штриховой линией 2 показана аналогичная зависимость
динамической жесткости двигателя в разомкнутой системе.
Сравнивая эти зависимости, можно видеть, что введение
последовательной коррекции увеличивает жесткость меха-
нической характеристики не только в статике, но и в широ-
ком диапазоне частот в динамике. Благодаря компенсации
относительно больших постоянных Тл и Тм жесткость меха-
нической характеристики остается достаточно высокой даже
в области частот, превышающих частоту среза Qc = 1/2у
разомкнутого контура скорости, настроенного на техничес-
кий оптимум.
Рассмотренная коррекция практически исчерпывает воз-
можность повышения динамической точности и быстродей-
ствия регулирования скорости в системе УП—Д. В системе
ТП—Д при м 0,01 с время регулирования при настройке
на технический оптимум составляет около 0,05 с, и при
необходимости дальнейшего увеличения быстродействия, как
выше отмечалось, необходим более тщательный учет дина-
мических процессов в преобразователе. Жесткость механи-
ческой характеристики и динамическая точность регулиро-
366
вания определяются уровнем некомпенсируемой постоянной
7ц. Статическая ошибка регулирования теоретически равна
нулю, а практически определяется возможной точностью
задания и измерения скорости. Динамическая ошибка при
линейном нарастании задающего сигнала <о0 = 80i ей/р
в соответствии с (6-18) определяется соотношением
Л ®з(р) 80а'Тц(Гцр+1)
3 1+^раз.с -^(ТкР+О+С
Определим значение установившейся ошибки при линей-
ном нарастании задающего сигнала, приняв р = 0:
макс!
(8-46)
Сравнивая (8-46) с (5-35), можно сделать вывод, что
коррекция уменьшает установившуюся динамическую ошиб-
ку при линейном нарастании задающего сигнала в сравнении
с разомкнутой системой в отношении постоянных времени
<£Г\ЛТК. Чем больше суммарный приведенный к валу дви-
гателя момент инерции, тем более значительное снижение
ошибки достигается последовательной коррекцией.
Ошибка регулирования скорости при изменении стати-
ческого момента определяется с помощью (6-14):
Л. ’ ( (р) (T’aP-l-l) «'Jv-P (Гцр + 1)
₽(ТйТмр2 + Л,р+1) <ГцР(ГцР+1) + 1 •
(8-47)
Полученное выражение подтверждает, что статическая
ошибка (р = 0) отсутствует, и позволяет определить уста-
новившуюся ошибку при линейном нарастании момента:
А , / dMz \ а'Т
Ломакс! — ( 7П~1 R ' (8-48)
\ /макс Р
Рассмотренные показатели качества регулирования удов-
летворяют достаточно высоким требованиям, однако прак-
тическая реализация системы с ИПД-регулятором связана
с известными трудностями из-за снижения помехозащищен-
ности системы дифференцирующим действием регулятора.
Стремление избежать применения ИПД-регулятора скорости
определяет широкое использование в системе регулирования
скорости подчиненного контура регулирования тока. При-
менение двухконтурной структуры подчиненного регули-
рования тока и скорости в большинстве случаев дополни-
тельно оправдано необходимостью регулирования тока
(момента) с целью ограничения его во всех режимах допус-
тимым значением. Однако следует иметь в виду, что и в
367
структуре, приведенной на рис. 8-15,а, задача ограничения
тока может быть решена применением отсечки по току
(см. § 12-3).
Дополнив систему регулирования тока, показанную на
рис. 7-18,а, регулятором скорости PC, получим приведен-
ную на рис. 8-16,а схему регулирования скорости в системе
ТП—-Д с подчиненным контуром регулирования тока, опти-
мизированным методом последовательной коррекции, рас-
смотренным в § 7-4. Рассмотрим, какими свойствами будет
обладать такая система регулирования скорости, причем
показанная на рис. 8-16,а схема регулятора скорости PC
пока не известна и подлежит определению.
Рис. 8-16. Принципиальная (а) и структурные (б, в) схемы регулирова-
ния скорости с подчиненным контуром тока.
Структурная схема рассматриваемой системы регулиро-
вания представлена на рис. 8-16,6. В соответствии с ней
объект регулирования скорости в данном случае состоит
из замкнутого контура регулирования тока и механического
звена электропривода и имеет следующую передаточную
функцию:
п/------------т_________(8-49)
^о.р.с- ^^(7^4-1) + ! сТмр-
Следуя изложенной в § 6-4 методике, пренебрежем чле-
ном,- содержащим р2, в передаточной функции контура тока:
<8'50)
г рР “Г 1 Ci тлр
368
Из (8-50) следует, что для контура скорости некомпенси-
руемая постоянная в аг раз больше, чем для контура тока,
т. е. = atT^. Целью последовательной коррекции яв-
ляется получение оптимальной передаточной функции ра-
зомкнутого контура в виде
И^раз. с
1/&о. с
«сат7’цР(ат7’(хр-Ь1) ’
(8-51)
где ас = Тох/Тпс — соотношение постоянных времени в
оптимизированном контуре регулирования скорости.
Разделив (8-51) на (8-50), получим искомую передаточ-
ную функцию регулятора скорости:
№р.с
kg. т^м
йс.
(8-52)
Таким образом, необходим пропорциональный регулятор
скорости, схема которого показана на рис. 6-12,а и уже
использована на рис. .8-16,а. Его передаточная функция
^р.’с = «о.с.с/^.с (8-53)
Коэффициент обратной связи должен быть приведен
к цепи задающего сигнала:
^0. С ~ ^ТГ (^3. е/^о. с)*
(8-54)
Соотношения (8-52)—-(8-54) позволяют рассчитать пара-
метры регулятора. Задавшись, например, R3C и приравняв
(8-52) и (8-53), можно определить сопротивление обратной
связи регулятора
Ro. с. с = Яз. с ’ <8-55>
Ко. с ЛяЗ асаг'|Л
где /г0.с определяется с помощью (8-54).
Напряжение пробоя стабилитронов в цепи, шунтирую-
щей 7?0.с.с, определяют, исходя из требуемого стопорного
тока и момента электропривода Цстаб — Ц3.т.макс, как это
было отмечено в § 7-4.
Для упрощения получения уравнения динамической
механической характеристики электропривода в рассмат-
риваемой схеме, обратим внимание на то, что в связи с ма-
лостью некомпенсируемой постоянной контур тока является
быстродействующим, и в диапазоне малых и средних частот
существенно снижает влияние внутренней связи по э. д. с..
Поэтому увеличением жесткости механической характерис-
тики за счет внутренней обратной связи по э. д. с. можно
169
пренебречь. Тогда уравнение динамической механической
характеристики можно записать с помощью структурной
схемы на рис. 8-16,<з в виде
М = — Рд(р)(сооз-«)), (8-56)
Где СОд3 = q/^O. с»
₽1 \ ______________РЛ._______ _________Рзам
Д’/7'- aza^\ (аттмр+1) а/Т^Р-Н
Асимптотическая ЛАЧХ динамической жесткости при
йт = «с = 2 приведена на рис. 8-17. Сопоставим ее с анало-
гичными характеристиками, приведенными для одноконтур-
ной системы регулирования скорости на рис. 8-15,6. В одно-
,^(я)
-20дБ/вс к
я
1
гтР
Рис. 8-17. Асимптотиче-
ская ЛАЧХ динамической
жесткости механической
характеристики в схеме
на рис. 8-16, а.
контурной системе благодаря нали-
чию интегральной составляющей
регулятора жесткость при р -> О
неограниченно возрастала и стати-
ческая характеристика не имела
статизма (031м = сю). В двухкон-
турной системе модуль статической
жесткости 0зам ограничен:
Рзам — рт1 (8-57)
и жесткость статической характе-
ристики зависит от соотношения
динамических параметров — по-
стоянных времени Тк и Тос =
в инерционных механизмах,
— аса,Т^. При данной
обладающих большой Тк (более аса,Т^, рассматриваемая
система обеспечивает высокую жесткость 031м > ₽ На-
против, для механизмов с малой Тк она может обеспечи-
вать жесткость, даже меньшую, чем в разомкнутой системе
(7\ (Ъ&тГу}.
Уравнение статической характеристики
<0
6з.с
^о. с
м
(8-58)
описывает механическую характеристику в пределах |М| <
< 2ИСТОП (|/я| < /стоп), в которых регулятор скорости рабо-
тает на линейной части своей характеристики (рис. 8-18,а).
При |М | Ss Метоп стабилитроны СТ (рис. 8-16) ограничивают
выходной сигнал регулятора скорости значением Z73.T =
= [/З.т.макс = const, контур регулирования скорости раз-
мыкается и система работает как астатическая система регу-
370
лирования момента (тока) двигателя (см. § 7-4). Поэтому
статические характеристики при U3r = const и различных
отношениях Т^/с^а/Гц имеютвид, показанный на рис. 8-18, б.
Здесь характеристика, соответствующая Т„ = azaxTv, со-
впадает с естественной характеристикой разомкнутой сис-
темы ТП—Д (Рззм = Р).
Обращаясь вновь к сравнению ЛАЧХ динамической
жесткости, приведенных на рис. 8-15,6 и 8-17, можно уста-
новить, что в одноконтурной системе благодаря меньшей
некомпенсируемой постоянной модуль динамической жест-
кости выше, чем в двухконтурной во всем диапазоне суще-
ственных частот, причем в области среднечастотной асимп-
тоты модуль жесткости рзам
где а' соответствует одно-
контурной системе. Сдвиг
по фазе между колебания-
ми скорости и момента до-
стигает —45° при наличии
подчиненного контура тока
при частоте в 2 раза мень-
шей, чем в одноконтурной
системе.
выше примерно в aza.s/a'c раз,
Рис. 8-18. Характеристика регуля-
тора скорости (а) и статические
характеристики электропривода в
схеме на рис. 8-16, а.
Из изложенного сле-
дует, что при регулирова-
нии скорости введение под-
чиненного контура регули-
рования тока обеспечивает
упрощение схем применяемых регуляторов, эффективно
решает задачу ограничения тока и момента двигателя
допустимым значением, однако в ат раз увеличивает не-
компенсируемую инерционность контура регулирования
скорости, соответственно снижая быстродействие и точ-
ность регулирования. Ошибки регулирования по управ-
ляющему и возмущающему воздействиям легко определить,
если представить структурную схему на рис. 8-16,5 в виде,
показанном на рис. 8-16,в. В соответствии с этой схемой
ошибку по управляющему воздействию определяют по
формуле
д / “о.з (р) _ <й0.3 (p)as.ayTilp(arTlip+l)
^р^/р^р - асатТцр(Й17>4-1) + 1 •
(8-59)
Соотношение (8-59) свидетельствует об отсутствии стати-
ческой ошибки по управляющему воздействию: при Л4С =
371
= 0 в установившемся режиме в соответствии с (8-56)
<а = со0з = i/з.с/^о.с = const. При линейном нарастании
задающего сигнала со0 3(р) = е0/р установившаяся ошибка
составит Лсоз макс1 = При настройке на техничес-
кий оптимум (пе = аг = 2) ошибка в этом режиме в 2 раза
выше, чем определяемая по (8-46) ошибка одноконтурной
системы.
С помощью рис. 8-16,в ошибку по возмущающему воздей-
ствию, обусловленному нагрузкой электропривода, можно
рассчитать по формуле
Л“ |}ГМ [асат7> №₽+ 1) + 1] • <8'60)
Статическая ошибка по нагрузке
z Л4С асат7’|1 Мс
Аймаке — “о т = "р (о-01)
Р 1 ц Рзам
Рис. 8-19. Переходные процессы
при линейном нарастании задаю-
щего сигнала.
определяется модулем статической жесткости механической
характеристики электропривода рзРМ, как это и следует из
вышеприведенного рассмотрения механических характе-
ристик. Соответственно при
линейном возрастании мо-
мента Л4С динамическая
ошибка непрерывно возра-
стает и ее установившееся
значение равно бесконеч-
ности .
Па рис. 8-19,а и б при-
ведены графики переход-
ных процессов при Л4С =
— const и изс = koxs0t в
одноконтурной и двухкон-
турной системах регулирования скорости. Сравнивая их
между собой, можно наглядно видеть, что в двухкон-
турной системе динамическая ошибка в этом режиме сум-
мируется со статической Аш(,акс, соответствующей моменту
Л4С, поэтому точность регулирования получается сущест-
венно меньшей, чем при одноконтурной системе. Устранение
статической ошибки позволяет несколько повысить и дина-
мическую точность регулирования, поэтому представляет
интерес реализовать астатическое регулирование при сохра-
нении присущей двухконтурной системе простоты регуля-
торов. Решить эту задачу можно двумя путями: введением
дополнительного контура регулирования скорости или
372
использованием в двухконтурной системе компенсационного
принципа регулирования/
Структурная схема трехконтурной системы с двумя кон-
турами регулирования скорости и подчиненным контуром
регулирования тока приведена на рис. 8-20,а. Для внешнего
ь(я)
Рис. 8-20. Структурная схема трехконтурной системы регулирования
скорости (а) и ЛАЧХ динамической жесткости характеристик электро-
привода (б).
контура регулирования скорости объектом регулирования
является замкнутый внутренний контур, передаточная
функция которого имеет вид:
<8'62)
В результате последовательной коррекции необходимо
получить следующую передаточную функцию разомкнутого
внешнего контура регулирования скорости:
< jy________________1/fep.ci_________ г о _ с о \
р;'3' ‘1 - а^а^Т^р [а^Г^Т^ 1)+ 1] •
Следовательно, регулятор скорости внешнего контура
регулирования должен иметь передаточную функцию интег-
рирующего звена
<М4>
С помощью структурной схемы на рис. 8-20,а, приняв
feocl ~ ^о.о с учетом (8-52) и (8-64) получим выражение
динамической жесткости механической характеристики:
(р) = - ^О. с (1 + Wp. Cl) №р. с^зам.т =
РГ„(1+аС1асатТгр) ,0 Д|Х.
=-------ГД' (8'65)
а^асатТу.р (а-t'рР+ Ч
373
Асимптотическая ЛАЧХ динамической жесткости, соот-
ветствующая (8-65), для настройки на технический оптимум
пс1 = az = аг = 2 представлена на рис. 8-20,6. Сопоставле-
ние этой характеристики с аналогичной характеристикой
двухконтурной системы (рис. 8-17) свидетельствует о том,
что введение дополнительного контура регулирования ско-
рости обеспечивает астатическое регулирование скорости по
нагрузке и увеличивает точность поддержания постоянства
скорости в области низких частот. В области среднечастот-
ной асимптоты модуль динамической жесткости остается
таким же, как и в двухконтурной системе, что дает основа-
ния предполагать, что при быстрых изменениях нагрузки
точность регулирования в астатической системе незначи-
тельно отличается от динамической точности более простой
двухконтурной системы.
Ошибку регулирования по управляющему воздействию
определим с помощью передаточной функции разомкнутого
контура (8-63) и формулы (6-11):
. . Моз (р) аС1аса,.Грр [асатТ(атТцр + 1) + 1]
«^^[^^(a^p+O+lJ+l •
Трехконтурная система, как и двухконтурная, обладает
астатизмом первого порядка по управляющему воздействию,
причем динамическая ошибка при линейном нарастании
задающего сигнала со0з = е0/ = е0/р
Aw3, макС1 — (8-67)
при добавлении третьего контура увеличивается в ас1аспт/а£
раз по сравнению с (8-59) и в ас1 раз по сравнению с (8-46).
Так наглядно подтверждается отмеченная выше особенность
многоконтурных систем подчиненного регулирования —
при настройке на технический оптимум некомпенсируемая
постоянная возрастает в 2'-1 раз с возрастанием номера
контура i. Соответственно возрастает и динамическая ошиб-
ка регулирования.
Для определения ошибки регулирования по возмущаю-
щему воздействию структурную схему на рис. 8-20,а необ-
ходимо преобразовать. Сначала объединим две обратные
связи по скорости в одну, используем упрощенную переда-
точную функцию замкнутого контура тока и осуществим
переход от тока к моменту (рис. 8-21,а). Затем перейдем
к единичной обратной связи по скорости (рис. 8-21,6). и с
учетом (8-65) получим удобную для поставленной цели
структурную схему (рис. 8-21 ,в). В соответствии с этой схе-
374
мой с помощью (6-14) можно записать:
(р)
₽Л(Р —₽д(Р)
Лю' (р)
___________44с (р) аС1ОеатТ^р (ясТцР+1)____________
Р7'м[ас1асат7'цР3 + аС1а?а!т7'иР2 + ас1асат7’цР + П
Как уже было показано, трехконтурная система обеспе-
чивает астатическое регулирование и по нагрузке. Устано-
Рлс. 8-21. Преобразования трехконтурной структурной схемы регу-
лирования скорости.
вившаяся ошибка при линейном нарастании нагрузки во
времени ограничена значением
ае;Т|1 асат^|
макс Р Т м
(8-68)
Сопоставление (8-68) с (8-48) приводит к выводу, на
первый взгляд, неожиданному: отмеченная выше законо-
мерность, свойственная многоконтурной системе подчинен-
ного регулирования с последовательной коррекцией, опре-
деляющая увеличение ошибки регулирования по управляю-
щему воздействию, для возмущения по нагрузке оказывается
справедливой не во всех случаях. При настройке на технн-
375
ческий оптимум а. = ал = дг — 2 в режиме линейного
нарастания нагрузки ошибка по скорости в одноконтурной
системе относится к ошибке в трехконтурной системе как
Т„ : 16ТЦ. При Тп = 167tl динамическая точность регу-
лирования в этом режиме оказывается одинаковой, хотя
номер контура регулирования в сравниваемых системах
отличается на две единицы. Более того, при большом моменте
инерции механизма и прочих равных условиях ошибка в
трехконтурной системе оказывается в 7)» Л 67), раз меньше,
чем в одноконтурной, и лишь при Тм < 167),. увеличение
некомпенсируемой инерционности контура сказывается так
же, как и при изменениях управляющего воздействия.
Некоторую ясность в этот вопрос вносит сравнение час-
тотных характеристик динамической жесткости, определяе-
мых (8-42) и (8-65) при Тм = 16Т^. При сравнении пренебре-
жем в (8-42) составляющими, обусловленными внутренней
связью по э. д. с. двигателя, и заменим многочлен второго
порядка произведением передаточных функций двух апе-
риодических звеньев с постоянной 7\ = ]/7\ТЯ:
а (п\ _ Р ГяГмР3 + Тмр+ 1)____1?
«cWV+1)(7>+1)
(8-69)
Рис. 8-22. Асимптотиче-
ские ЛАЧХ динамической
жесткости механической
характеристики в одно-
контурной (/) и трехкон-
турной (2) системах регу-
лирования скорости.
При р = 1, а'с = 2, Тя — 2Тц и Т„ = 16Т|Л (8-69)
соответствует асимптотическая ЛАЧХ, показанная на
рис. 8-22 ломаной 1. При тех же
условиях и ас = ат — 2 для трех-
контурной схемы по (8-65) анало-
гичная зависимость показана там
же ломаной 2. Сравнивая их, мож-
но убедиться, что низкочастотные
асимптоты модуля динамической
жесткости в той и другой системе
при Т„ = 167)1 совпадают. Так как
при увеличении момента инерции
механизма одним и тем же значе-
ниям момента двигателя М соот-
ветствуют уменьшающиеся ускоре-
ния, рассматриваемая ошибка опре-
деляется динамической жесткостью в области низких частот
и получается одинаковой. Можно убедиться, что при Т., <
< 167), во всем диапазоне частот модуль динамической
жесткости в одноконтурной системе оказывается больше,
376
разъяснения этого вопроса рас-
Рис. 8-23. Структурные схемы контура
скорости при настройке на симметрич-
ный оптимум.
чем в двухконтурной, что определяет и меньшую ошибку
регулирования.
Остается неясным, почему граничное значение составляет
именно Тм = 16ТЦ. Для
смотрим несколько иной
путь получения астати-
ческой системы регули-
рования скорости, поз-
воляющий ограничить-
ся использованием двух-
контурной структуры с
подчиненным контуром
тока. С этой целью на
вход замкнутого конту-
ра тока включим ИП-ре-
гулятор скорости PC с
компенсирующей по-
стоянной 1\ и постоян-
ной интегрирования Т„,
как показано на рис.
8-23,а. При этом пере-
даточная функция ра-
зомкнутого контура скорости при Мс = 0 примет вид:
c/k0. т 1
W_________________________
раз'с Тир аг7>+1 рТрР •
Если сравнить (8-70) с передаточной функцией (6-60),
получаемой при настройке на симметричный оптимум (см.
§ 6-4), можно установить, что по структуре они идентичны.
Учитывая, что некомпенсируемая инерционность для дан-
ного случая равна = 2Т^, (6-60) принимает вид:
1+8Тцр 1/Ао.е
(8-70)
(8-71)
W7pa3-C 87> 4Гцр (27^+1) •
Приравнивая соответствующие коэффициенты (8-70) и
(8-71), получаей соотношения для расчета параметров ИП-
регулятора скорости:
1
32ТХ.с
Отсюда
с
--------; Тк-8Та = 7и. (8-72)
Т _ 167’^0. Сс
ko. тРГм
(8-73)
377
(8-74)
С учетом (8-72) и (8-73) при ят = 2 структурную схему
на рис. 8-23,я можно преобразовать, как показано на
рис. 8-23,6 и в. В соответствии с рис. 8-23,в в динамическая
жесткость механической характеристики в данном случае
определяется соотношением
₽Т„(1+8Тур)
Ря 327^(27^+1)
Сравнивая (8-74) с (8-65) при ас1 = az = ят = 2, убеж-
даемся в их полном совпадении. Таким образом, установлено,
что динамическая жесткость механической характеристики
и соответственно реакция на изменения нагрузки как трех-
контурной астатической системы, настроенной на техничес-
кий оптимум, так и двухконтурной двукратноинтегрирую-
щей системы, настроенной на симметричный оптимум,
идентичны. Это наглядно видно из рис. 8-23,в при сравнении
его с рис. 8-21,в с учетом одинаковости .(8-74) и (8-65).
Однако последнее сопоставление выявляет различия в пере-
даточных функциях по управляющему воздействию.
Эти различия можно установить, определив, например,
ошибку по управляющему воздействию с помощью (8-71)
и (6-11):
' . . «Оз (р) «Оз (р) 327’iip3(2rM.p+1)
Аш3 (р) =----------=-----;--------------------. (8-75)
1 + Граз.с 32^p2(2TMp+l) + 87-up+l 1
Та же ошибка в трехконтурной системе определяется по
(8-66) при яс1 = ас = ат = 2:
327Т.р"(2Г|1р+1) + 8Т(1(>+1
Таким образом, астатическая двухконтурная система по
управляющему воздействию обладает астатнзмом второго
порядка. Установившаяся ошибка при линейном нараста-
нии задания в этой системе равна нулю, а при нарастании
задающего сигнала с постоянной второй производной
dta/dt* = рнакс = const ограничена значением Aci>3.HaKc2 =
= 167црмак(:.
Это и дает основания называть систему с ИП-регулято-
ром скорости двукратпоинтегрирующей. Трехконтурная
система с И-регулятором скорости этим свойством не обла-
дает, поэтому настройка на симметричный оптимум двух-
контурной системы представляет интерес во всех случаях,
когда важно иметь минимальную установившуюся ошибку
378
при линейном нарастании задания. Как было отмечено
в § 6-4, перерегулирование при скачке задания в этой систе-
ме значительно больше, чем при настройке на технический
оптимум, а при линейном нарастании задающего сигнала
процесс ликвидации ошибки сопровождается перерегули-
рованием тока до 56% установившегося значения. Из срав-
нения рис. 8-23,в с рис. 8-21 ,в можно заключить, что в систе-
ме с ИП-регулятором скорости можно было бы получить
процессы при изменениях управляющего воздейстрия, со-
ответствующие настройке на технический оптимум, если
на задающий вход регулятора включить фильтр с переда-
точной функцией:
№р ci 1
П7 — р =__________________
З-Ф-с- 1 + «7р.с1 87>+1
Однако при этом установившаяся ошибка при линейном
нарастании задания уже не равна нулю и определяется по
(8-67).
Возвращаясь к анализу процессов при изменениях
нагрузки, вновь подчеркнем, что в рассмотренной выше
трехконтурной системе они полностью аналогичны системе,
настроенной на симметричный оптимум. Сравнение ЛАЧХ
контуров, настроенных на технический и симметричный
оптимум (см. рис. 6-17), свидетельствует об увеличении при
симметричном оптимуме динамических коэффициентов уси-
ления контура в области низких частот. Было показано,
что это происходит благодаря выбору постоянной Тк не из
условия равенства компенсируемой постоянной, а в опре-
деленном отношении к суммарной некомпенсируемой инер-
ционности (Тк = 4ТЦС = 8TLl). При неизменной частоте
среза это позволяет выбирать меньшую постоянную инте-
грирования регулятора Ти = Тк, чем при компенсации
постоянной времени 7\ > 4ТЦС, а уменьшение Т„ и опре.-
деляет увеличение быстродействия и точности регулирова-
ния при низких частотах. При 7\ = 4ТИС настройки на тех-
нический и на симметричный оптимумы примерно равно-
ценны [17].
Это позволяет объяснить, почему при Тп > 167^ в трех-
контурной системе динамическая ошибка по возмущению
меньше, чем в одноконтурной. При оптимизации контура
скорости компенсируемой является электромеханическая
постоянная Т,л. В сравнении с двухконтурной системой
настройка на технический оптимум целесообразна при
Т,л = 7\ = 4ТЦС = 8Тр.. При сравнении трехконтурной
379
системы с одноконтурной, в которой частота среза в 2 раза
меньше, и было установлено, что соответственно граничное
значение Т,, должно быть в 2 раза больше.
Проблема увеличения динамической точности регулиро-
вания скорости решается наиболее сложно в тех случаях,
когда технологические требования к электроприводу опре-
грузки скачком в однократноинтегрирующей системе [17].
деляют необходимость ограничения максимума переходной
динамической ошибки при ударном приложении нагрузки.
Для рассмотренных выше систем подчиненного регулирова-
ния с последовательной коррекцией в [17] проведен инте-
ресный сравнительный анализ процессов при скачке возму-
щения по нагрузке.
Для исследования влияния выбора коэффициентов ал,
аг, непосредственно на характер процессов приложения
скачка нагрузки были рассчитаны кривые переходных про-
цессов в однократноинтегрирующей двухконтурной системе
(рис. 8-16,0) и в трехконтурной астатической системе
(рис. 8-20,а). Расчеты выполнены в относительных едини-
380
цах, причем ошибка отнесена к базовому падению скорости
Лсоб в однократно-интегрирующей системе при = аг = 2.
На рис. 8-24 приведен ряд кривых Дсо* = /(т), где
т = НахТ^ для одноконтурной системы при различных зна-
чениях ас и as = 2. Эти кривые наглядно подтверждают
анализ общих свойств систем регулирования с последова-
0 Z ‘ь В 8 1D 1Z
Рис. 8-25. Расчетные кривые изменения скорости в двукратноинтегри-
рующей системе [17].
тельной коррекцией, приведенный в § 6-4, и, в частности,
приведенный выше анализ свойств двухконтурной статичес-
кой системы регулирования скорости. Уменьшение az при
дт — 2 приводит к уменьшению статической ошибки, опре-
деляемой (8-61), но одновременно ухудшается затухание
возникающих в переходном процессе колебаний. Весьма
интересен факт, что при этом максимум переходной дина-
мической ошибки также снижается, поэтому если требований
к демпфированию возникающих колебаний не предъявляет-
ся, с точки зрения динамической точности предпочтителен
выбор значений az < 2.
381
Аналогичные зависимости для трехконтурной астатичес-
кой системы регулирования скорости приведены на рис. 8-25.
Они соответствуют различным сочетаниям ас1 и ас при ат —
=2. Здесь статическая ошибка равна нулю, но максимум
динамической ошибки, отнесенной к статической ошибке
в однократноинтегрирующей системе, оказывается постоян-
но близким к единице. Уменьшение и здесь приводит к не-
которому снижению ошибки, однако при этом увеличивается
колебательность и для ее демпфирования нужно увеличивать
ас1 > 2, причем при ас = 1
колебательность не устра-
няется даже значительным
увеличением ас1.
По результатам расче-
тов и экспериментов в [17]
были получены зависимо-
сти Лсо^маке = М), пока-
занные на.рис. 8-26. Здесь
кривая 1 соответствует од-
нократноинтегрирующей, а
кривая 2 — астатической
двукратноинтегрирующей
(или трехконтурной)систе-
ме. Нетрудно видеть, что
рассмотренные астатиче-
Рис. 8-26. Зависимости Л<й;|;Макс =
= f (яс) И ^*макс f (яс)-
ские системы, существенно увеличивая точность регулиро-
вания в статике, в динамике дают ошибки весьма незначи-
тельно отличающиеся от ошибок в статической (однократ-
ноинтегрирующей) двухконтурной системе. . Если учесть,
что при аа — а.: = 2 уменьшение ошибки на 10% в систе-
ме, настроенной на симметричный оптимум, по сравнению
со статической сопровождается увеличением перерегулиро-
вания по току до 56% (кривая 3 на рис. 8-26), то можно
заключить, что использование астатических систем подчи-
ненного регулирования для увеличения динамической точно-
сти при ударном приложении нагрузки неэффективно. Про-
веденное вышесрацнение ЛАЧХ динамической жесткости ме-
ханических характеристик в одноконтурной и в трехконтур-
ной астатических системах свидетельствует об определенных
преимуществах одноконтурной астатической системы регу-
лирования скорости, настроенной на технический оптимум,
перед многоконтурными астатическими системами.
Рассмотрим второй путь повышения точности регулиро-
вания статической системы регулирования скорости с под-
382
чиненным контуром тока — компенсацию действия нагрузки
за счет введения положительной обратной связи по току
якоря. Структурная схема такой системы приведена на
Рис. 8-27. Структурные схемы двухконтурной астатической системы с
компенсацией нагрузки.
рис. 8-27,а. Определим передаточную функцию участка
схемы, замкнутого положительной связью по току:
Гзам п т =---;0,т---------------------. (8-77)
зам-п,т а17’р.рг+атТ(1р + 1-Ау.сЛп.т^0.т
При критической положительной связи /гп.т.к = /г0.т//гус
передаточная функция (8-77) примет вид:
^зам.п.т- аЛ'^°рТ+1)- (8-78)
Структурная схема системы при критической положи-
тельной связи по току показана на рис. 8-27, б. Рассмат-
ривая ее, можно заключить, что контур неустойчив, так
как разомкнутая цепь регулирования содержит два инте-
грирующих звена, поэтому повышение статической точно-
сти регулирования за счет введения положительной связи
по току возможно только при введении дополнительной
коррекции, обеспечивающей сохранение требуемого каче-
ства регулирования. Если использовать для этой цели
гибкую отрицательную связь по скорости, как показано на
рис. 8-27, в и г, то получим передаточную функцию разомк-
нутого контура скорости в виде
__ WU + ^.cP) __ 1+Тг.ср
разх ~ VW (V+1) " (Г,р+1) ’ ( ’
383
Сравнивая (8-79) с (8-71), при лс — йг = 2 можно уста-
новить, что структура (8-79) позволяет осуществить настрой-
ку на симметричный оптимум, но при некомпенсируемой
постоянной в 2 раза меньшей, чем в (8-71):
м/раз.с- 47> + о
Отсюда определяется постоянная времени гибкой отри-
цательной связи по скорости:
ТГ.С = 4ТЦ. (8-81)
Не повторяя приведенного выше анализа, можно утвер-
ждать, что использование компенсации нагрузки в 2 раза
повышает динамическую точность и быстродействие контура
регулирования скорости в сравнении с системой с ПИ-регу-.
лятором и с трехконтурпой системой регулирования ско-
рости. Интересно отметить, что введение гибкой связи по
скорости по условию Тг с = 4Tfl равносильно использо-
ванию в схеме рис. 8-27, а вместо обратной связи по пол-
ному току жесткой положительной связи по статическому
току 7С.
8-5. ОСОБЕННОСТИ ПОСЛЕДОВАТЕЛЬНОЙ КОРРЕКЦИИ
КОНТУРА РЕГУЛИРОВАНИЯ СКОРОСТИ В СИСТЕМЕ Г—Д
В § 8-3 при рассмотрении общих вопросов регулирования
скорости в системе УП—Д уже было показано, что наличие
большой постоянной времени цепи возбуждения генератора
является фактором, облегчающим задачу увеличения стати-
ческой точности регулирования без применения какой-либо
коррекции. Это обстоятельство должно учитываться и при
использовании последовательной коррекции, обеспечиваю-
щей дополнительные возможности увеличения быстродей-
ствия, повышения точности и улучшения качества переход-
ных процессов. Так же как и для системы ТП—Д, задача
последовательной коррекции может решаться в зависимости
от использования подчиненных контуров регулирования по-
разному. Представляет интерес сопоставить получаемые
при этом результаты.
Принципиальной схеме системы Г—Д с тиристорным
возбудителем (см. рис. 6-4, а) соответствует структурная
схема, представленная на рис. 8-28, а. Передаточная функ-
ция объекта регулирования скорости, если для удобства
дальнейших сопоставлений пренебречь внутренней связью
184
по э. д. с. двигателя, имеет более сложный вид, чем при тех
же условиях в системе ТП—Д
W__________________________________ (8-82)
°-р-с- (Гт.пр + 1)(Ггр + 1)(7яр+1ЖмР ’ ’
в связи с добавлением генератора, обладающего большой
постоянной времени Тг. Необходимость компенсации посто-
янных Тг, Тя и Тк, если их отнести к большим и средним
постоянным контура, практически исключает использова-
Рис. 8-28. Структурные схемы регулирования скорости в системе Г—Д
с тиристорным возбудителем.
ние в данном случае одноконтурной системы, оптимизиро-
ванной методом последовательной коррекции. Упростим
передаточную функцию объекта регулирования скорости за
счет введения подчиненного контура регулирования тока,
настроенного на технический оптимум:
ну_____________
И'раз.т- 2Т^р (7VP+1)-
(8-83)
Передаточная функция объекта регулирования тока
W ______ _______^Т.П^Г^яД_______ (О ОД\
^°-Р-т - (7rp+ 1) (Тяр+ 1) (7мр+ 1) •
Разделив (8-83) на (8-84), получим передаточную функ-
цию ИПД-регулятора тока
W7 (Т'гР + 0 (ТяР + В ______ (T'rP + l) (Т'яР+О . /О ОС\
^р.т ~ /Ь Ь Ь IP 9.Т п ~~ Т п •
(*oA.nVM2V
13 Чиликин М. Г. и др.
385
Передаточная функция замкнутого контура тока
1 До.т
П7 ____________________
И'зам.т 27’мр(Гмр+1)+1 •
(8-86)
С учетом (8-86) структурная схема контура регулиро-
вания скорости принимает вид, показанный на рис. 8-28, б,
причем полностью совпадает с аналогичной структурной
схемой системы ТП—Д (рис. 8-16, б). Следовательно, точ-
ность регулирования и динамические качества контура ре-
гулирования скорости в данном слу-
чае практически те же, что и в двух-
контурной астатической схеме регу-
лирования скорости в системе ТП—Д,
подробно проанализированные выше.
Особенности системы Г—Д при этом
проявляются в усложнении схемы
регулятора тока (ИПД-регулятор вме-
сто ИП-регулятора) и в необходимо-
сти учета возможного ограничения
быстродействия системы в связи с ог-
раниченной мощностью возбудителя.
Тиристорный возбудитель генера-
тора имеет нелинейную характеристи-
Рис. 8-29. Характери-
стика тиристорного
возбудителя.
ку с ограничением выходного напряжения максималь-
ным значением Пв. макс = афПВ| „ (где аф — коэффициент
форсировки), соответствующим допустимому углу регули-
рования в инверторном режиме (рис. 8-29). В соответствии
с уравнением цепи возбуждения генератора
= + (8-87)
для получения быстрого изменения э. д.с. генератора во
времени необходимо прикладывать к его обмотке возбужде-
ния повышенное напряжение ив. Так как максимальное
напряжение возбудителя ограничено значением Пвмакс,
ограничен и максимально возможный темп изменения э. д. с.
генератора:
(der | __ ^В.макс^г е? /О OQ\
J ----------Т------• (8-88)
/макс 1 г
Если при работе системы сигнал управления на входе
тиристорного возбудителя превысит пороговое значение
L/y макс, дальнейший рост напряжения возбуждения прек-
ращается и при иу >ПУ. макс система Г—Д работает как
386
разомкнутая система с приложенным к обмотке возбужде-
ния генератора напряжением ив — макс — const. Этим
ограничиваются пределы, в которых допустима принятая
линеаризация характеристик системы Г—Д, поэтому в сис-
теме Г—Д, оптимизированной методом последовательной
коррекции, выбор запаса по напряжению возбуждения аф
имеет весьма важное практическое значение. Если необхо-
димо,' чтобы все полученные выше оценки точности и быстро-
действия двухконтурной однократноинтегрирующей системы
регулирования скорости были справедливы для системы
Г—Д, следует рассчитать все основные переходные процессы
в соответствии с линейной структурной схемой, определить
зависимость ив — f (t) для этих режимов и найденное таким
образом максимальное напряжение на обмотке возбужде-
ния генератора принять в качестве номинального напря-
жения тиристорного возбудителя Ur.„ = аф[/в.„.
На практике при последовательной коррекции контура
регулирования скорости в системе Г—Д, стремясь избежать
применения ИПД-регулятора тока, при оптимизации подчи-
ненного контура тока прибегают к введению внутреннего
подчиненного контура регулирования э. д.с. генератора
(см. § 7-4). В этом случае передаточная функция замкнутого
контура тока имеет вид:
^зам.т = 4Г|1Р (2Тмр+1) +1 ’ (8‘89)
т. е. отличается от приведенной на рис. 8-28, б только уров-
нем некомпенсируемой постоянной контура тока. Соответ-
ственно для системы регулирования скорости с подчиненны-
ми контурами регулирования тока и э. д. с. генератора
справедливы все полученные выше для двухконтурной
однократноинтегрирующей системы формулы и соотноше-
ния, но при Т (ХС= 2ТЦт = 4Т(1 (в два раза большей). Отсюда
можно заключить, что в системе Г—Д получаемое при этих
условиях быстродействие и точность регулирования в 2 раза
ниже, чем в системе ТП—Д. В свете изложенного высокий
порядок астатического контура регулирования скорости
в системе Г—Д делает малоэффективным применение взамен
П-регулятора скорости ИП-регулятора с настройкой на
симметричный оптимум. При этом компенсирующая постоян-
ная регулятора возрастает в 2 раза (Тк = 471Ц(. = 167^) и
соответственно в 2 раза ухудшаются динамические показа-
тели системы регулирования.
Таким образом, использование структуры с подчиненны-
ми контурами э. д. с. и тока обеспечивает невысокую точ-
13* 387
ность регулирования. Если требования к точности регули-
рования скорости определяются условиями работы в стати-
ческих режимах, можно использовать ИП-регулятор ско-
рости с настройкой на симметричный оптимум. Если же
определяющей является динамическая ошибка регулиро-
вания скорости, следует избегать использования подчинен-
ного контура регулирования э. д. с. генератора, либо
в случае необходимости регулирования э. д. с. генератора
прибегнуть к комбинированной системе регулирования
аналогично рассмотренному в § 8-5.
8-6. РЕГУЛИРОВАНИЕ СКОРОСТИ ИЗМЕНЕНИЕМ
ПОТОКА ДВИГАТЕЛЯ
До сих пор, рассматривая регулирование скорости дви-
гателя постоянного тока с независимым возбуждением, по-
лагали поток двигателя Ф = Фн = const. Рассмотрим,
какие возможности для регулирования скорости можно
реализовать, воздействуя на магнитный поток двигателя.
Уравнения статических электромеханической (3-9) и
механической (3-10) характеристик для анализа влияния
изменений потока двигателя удобно записать в виде
Л = 4з.н-^-о); (8-90)
А1 = Л1к.3-рий) = ₽11(©ои-®), (8-91)
где 7К. з. н = UJRnz — ток короткого замыкания якор-
ной цепи при номинальном напряжении;
з ~ /гФ/к з. „ — момент короткого замыкания;
®ои ~ UJk<$ — скорость идеального холостого хода ис-
кусственной характеристики, соответствующей различным
значениям потока;
Ри = &2Ф2/7?я2 — модуль статической жесткости, соответ-
ствующий различным значениям потока.
Так как в номинальном режиме магнитная цепь двига-
теля насыщена, возможности увеличения потока сверх но-
минального незначительны и практического интереса не
представляют. Исходя из этого обмотка возбуждения дви-
гателя рассчитывается по нагреву на ток возбуждения, не-
обходимый для получения номинального потока, поэтому
регулировать поток можно только в сторону уменьшения —
ослабления поля двигателя.
Статические характеристики двигателя при регулиро-
вании потока показаны на рис. 8-30. Электромеханические
383
характеристики при различных значениях потока в соот-
ветствии с (8-90) пересекаются в точке со — О, /я = /к 3. н
(рис. 8-30, а). Механические характеристики в связи с умень-
шением момента Л1К. 3 в (8-91), пропорциональным умень-
шению потока, пересекаются в двигательном режиме
(рис. 8-30, б), причем точка пересечения с естественной
характеристикой по мере уменьшения потока перемещается
в сторону меньших моментов. Однако при реальных преде-
лах ослабления поля и при нагрузках, не превышающих
поминальную, скорость двигателя при ослаблении поля
возрастает, как это показано для номинального момента Л1Н
на рис. 8-30, б.
Рис. 8-30. Характеристики двигателя постоянного тока с независимым
возбуждением при ослаблении поля.
Реальные пределы изменения потока ограничены сверху
номинальным потоком Фмакс = Фп, а снизу — минимальным
значением ФМ11П, при котором усиливающееся отрицательное
влияние реакции якоря и ухудшающиеся условия коммута-
ции при ослаблении поля остаются допустимыми, а скорость
двигателя не превышает допустимой по условиям механиче-
ской прочности якоря. Эти факторы ограничивают возмож-
ный диапазон регулирования скорости для двигателей нор-
мального исполнения значением D = 1,5 4- 2. Специаль-
ные двигатели, рассчитанные на глубокое ослабление поля
двигателя, обеспечивают диапазон регулирования D = 8.
Несмотря на то что модуль жесткости |3„ при ослаблении
поля уменьшается, точность во всем диапазоне регулирова-
ния остается достаточно высокой.
В отличие от всех вышерассмотренных способов регули-
рования скорости, при ослаблении поля регулирование
осуществляется при изменяющемся потоке, что определяет
принципиально иную зависимость допустимой нагрузки
389
от скорости. Если принять в качестве критерия допустимой
нагрузки ток /я = Ia — const, то допустимый момент при
регулировании определится соотношением
МДОП = ЛФ/Н> (8-92)
которое показывает, что при ослаблении поля нагрузки на
валу двигателя необходимо снижать. Выразив из (8-90) ско-
рость при 1Я — /н и подставив это выражение в (8-92),
получим:
у __ I р р
= н юн "а ZH = -f-H, (8-93)
где Р». я — номинальная электромагнитная мощность дви-
гателя.
Умножив (8-93) на со, получим следующее условие до-
пустимой нагрузки:
•Рдоп==^доп“ = 'Р5.Н = СОП51. (8-94)
Таким образом, регулирование скорости ослаблением
поля для полного использования двигателя по нагреву
должно осуществляться при постоянной мощности нагрузки.
На рис. 8-31 приведены зависимости 7ИД0П = f (со) и Рдоп =
= f (со) в диапазоне изменений скорости двигателя с неза-
висимым возбуждением, обеспечиваемом всеми рассмотрен-
ными способами регулирования его скорости. Реостатное
Рис. 8-31. Зависимости
ДДоп> Рдоп = / (<>)•
регулирование и регулирование на-
пряжением якорной цепи осуществ-
ляется в пределах 0—сон при постоян-
ном моменте и линейно возрастающей
мощности. Ослабление поля охваты-
вает зону ел > со„ и осуществляется
при постоянной мощности Р = Рп =
= const и допустимом моменте, из-
меняющемся обратно пропорциональ-
но скорости (8-93).
Для осуществления параметриче-
ского регулирования скорости ослаб-
лением поля в цепь обмотки возбуж-
дения вводится регулировочный реостат. Относительно не-
большая мощность цепи возбуждения позволяет при этом
получить достаточно высокую плавность регулирования.
Простота, экономичность данного способа регулирования
и благоприятные регулировочные характеристики опреде-
ляют его широкое использование на практике.
390
Рассмотрим, как влияет ослабление поля на динамиче-
ские характеристики привода. Динамическая жесткость
механической характеристики при ослаблении поля выра-
жается соотношением (3-27):
₽«(P)=T^. (8-95)
где р„ — модуль статической жесткости, пропорциональный
квадрату потока двигателя.
Амплитудно-частотные характеристики динамической
жесткости | рд | — f (й) во всем диапазоне частот имеют
модуль жесткости, снижающийся при ослаблении поля,
а фазо-частотная характеристика при этом не изменяется.
Передаточная функция двигателя в соответствии с рис. 4-7,а
имеет вид:
W“ = МЩ = Tu.llP (ГяР+1) + 1 > (8‘96)
где 7\„ = Jz -= RM/W.
Рассматривая (8-96), можно установить, что при ослаб-
лении поля двигателя вследствие увеличения электромеха-
нической постоянной Т„ соотношение постоянных времени
изменяется в сторону снижения показателя колебательности
и увеличения коэффициента демпфирования переходных
процессов. При большом моменте инерции механизма и зна-
чительном ослаблении поля электромагнитные переходные
процессы могут протекать замедленно.
Для механизмов, момент нагрузки которых при регули-
ровании скорости изменяется так, что мощность остается
примерно постоянной, ослабление поля двигателя постоян-
ного тока с независимым возбуждением является лучшим
способом регулирования скорости. Именно этим объясняется
разработка специальных серий двигателей, рассчитанных на
глубокое ослабление поля. На основе их применения реали-
зуются наиболее простые системы регулирования скорости
в сравнительно широком диапазоне (до D — 8), в которых
для управления пуском двигателя используется ступенчатое
реостатное регулирование пускового тока и момента дви-
гателя. При этом, если по технологическим условиям тре-
буется более высокая стабильность заданной скорости
электропривода, чем обеспечиваемая жесткостью |3И при
параметрическом регулировании, для увеличения точности
регулирования могут использоваться системы автоматиче-
ской стабилизации скорости, замкнутые отрицательной об-
391
ратной связью по скорости, воздействующей на напряже-
ние возбуждения двигателя.
Для осуществления автоматического регулирования по
отклонению необходимо осуществить питание обмотки воз-
буждения двигателя от усилителя мощности — например
тиристорного возбудителя. Принципиальная схема авто-
матического регулирования скорости воздействием на цепь
Рис. 8-32. Принципиальная (а) и структурная (б) схемы системы авто-
матического регулирования скорости воздействием на поток двигателя.
возбуждения двигателя показана на рис. 8-32, а. Уравне-
ния, описывающие работу этой схемы, если полагать ха-
рактеристику намагничивания двигателя линейной и одно-
значной и пренебречь влиянием вихревых токов в стали
магнитопровода, имеют вид:
Wy = "т (1 ~Ь Тт, вР) j
ия — !гФ(л -|- isRus + Ls ;
Вследствие того что регулирование осуществляется из-
менением потока двигателя, система (8-97) является нели-
392
нейной. Для решения задачи оптимизации данной схемы
регулирования скорости методом последовательной коррек-
ции необходимо систему (8-97) линеаризовать методом, из-
ложенным в § 3-2. Полагая индуктивность U, пренебрежимо
малой и принимая Mz = 0 при ия — Uu = const, получаем:
Д% —' (1 + ?т.вР) Дув>
Див = -^(1+Т„р)ДФ;
ДФ = —^-(1+П.ир)Дсо,
(8-98)
где Диу, Див, ДФ и Ди — малые отклонения переменных
от точки статического равновесия, определяемой значениями
соответственно Uy, U°B, Ф° и Т„. и = /гЯяг/^Ф02 =
= /s/Ри — электромеханическая постоянная двигателя при
Ф = Ф°.
Структурная схема рассматриваемого объекта регули-
рования скорости с включенным на вход регулятором ско-
рости показана на рис. 8-32, б. При практической реализа-
ции схемы необходимо учитывать, что в соответствии с (8-98)
ДФ и Ди имеют противоположные знаки. С этой целью на
вход регулятора скорости можно подать постоянное напря-
жение и'з. с, задающее номинальную скорость, и вычитать
из него значение Д£73. с. Передаточная функция объекта,
если принять = 7\ в, имеет вид:
п/ _________ М°М11_____________ /Я ОО\
°-р-с ®0(Tbp+1)(T2i.„p+1)(V+1) • { )
1/*О.С
(8-100)
Для настройки на технический оптимум необходимо
получить оптимальную передаточную функцию разомкну-
того контура в виде
^раз.с- 2Tvip(Tvp + V) •
Разделив (8-100) на (8-99), определим передаточную
функцию регулятора скорости:
w (7>-Н)(П.пР+1) „ГвР+ОСП.пР+О ,„1ПП
р-с~ (/гох/гт.вЧы0/ЯвФ0)27YP Т.п
Тир
Таким образом, для одноконтурной системы регулиро-
вания скорости и в данном случае необходим ИПД-регуля-
тор. Благодаря наличию интегральной составляющей в
393
(8-101) система обеспечивает астатическое регулирование
скорости 15 а к по управляющему, так и по возмущающему
воздействиям, а динамическая точность и быстродействие
определяются значением 2Т^. При этом неучтенная выше
малая постоянная может быть учтена увеличением сум-
марной некомпенсируемой постоянной контура = 7\ в +
+ Тя.
Однако в данном случае в связи с нелинейностью системы
оптимальная настройка сохраняется в ограниченных пре-
делах отклонений переменных от принятой при линеари-
зации точки статического равновесия со0, Ф°. Если полагать
характеристику намагничивания двигателя линейной,
в структурной схеме на рис. 8-32, б нелинейность заключена
в электромеханической постоянной Th. и. Выше было по-
казано, что в разомкнутой системе ослабление поля приводит
к увеличению Тм „, соответствующему возрастанию демп-
фирования и к некоторому увеличению длительности про-
цессов.
При переходе к замкнутой системе регулирования исход-
ную точку для оптимизации также необходимо выбрать
так, чтобы изменения потока при регулировании вызвали
увеличение демпфирования контура, а не его ослабление и
связанное с этим ухудшение качества регулирования. Так
как условия компенсации постоянной Ти при линейной ха-
рактеристике намагничивания от изменений потока не за-
висят, с учетом (8-101) передаточную функцию разомкну-
того контура можно записать в виде
ИЛ7 Тк.расчР+1
раз'сЯРф„ /ф°\2 "Т/ф,, \2Г , .1 . .. ’
W»W Т"-расчРЦ Ф°/ мР+ U (7РР+
ГДС Тк< расч Ты. и.расч»
т
* н4расч
^о.|Лт.в^фИрасч от,
ОТ
'в расч
Из рассмотрения (8-102) следует, что для выполнения по-
ставленного выше условия необходимо в качестве расчет-
ной точки для оптимизации выбирать режим, где Тк, расч и
Ты. и. расч максимальны. Таким режимом является работа
при минимальном потоке двигателя. При этом оптимальное
соотношение постоянных контура будет иметь место только
при максимальной скорости, а по мере усиления поля в со-
ответствии с (8-102) оно изменяется в сторону увеличения
демпфирования динамических процессов»
394
При необходимости ограничения тока якоря в рассмот-
ренную схему может быть добавлена нелинейная обратная
связь по току с отсечкой либо введен подчиненный контур
регулирования тока якоря [17].
Способ регулирования скорости ослаблением поля доста-
точно широко используется и в системах УП—Д наряду
с основным в этих случаях регулированием изменением
напряжения. В простейшем варианте в системах с отрица-
тельной связью по напряжению или по э. д. с. двигателя
предусматриваются одна-две ступени ослабления поля после
выхода на основную характеристику, т. е. используется
параметрическое регулирование скорости ослаблением поля.
При необходимости непрерывного регулирования скорости
как в зоне регулирования напряжением, так и в зоне регу-
лирования потоком строятся так называемые системы двух-
зонного регулирования скорости, примером которой может
служить функциональная схема двухзонного регулирова-
ния скорости в системе ТП—Д, приведенная на рис. 8-33.
Рассматривая эту схему, можно установить, что по ка-
налу управления э. д. с. преобразователя она представляет
собой двухконтурную систему регулирования скорости с
ИП-регулятором тока РТ, ИП-регулятором скорости PC,
задающим фильтром ЗФ, задатчиком интенсивности ЗИ
(см. § 12-2) и командоаппаратом КА. Схема дополнена двух-
контурной системой регулирования э. д. с. двигателя воз-
действием на его цепь возбуждения. Этот канал содержит
ИП-регулятор тока возбуждения РТВ, И-регулятор э. д. с.
двигателя и блок выделения модуля э. д. с. — выпрямитель
В. Сигнал, пропорциональный э. д. с. двигателя, полу-
чается алгебраическим суммированием и /„Яях, как по-
казано на схеме. Каждый регулятор имеет ограничение вы-
ходного сигнала: РТ — ограничивает максимальную э. д. с.
преобразователя £макс, PC — стопорное значение тока /стоп,
РТВ — максимальное напряжение возбудителя £в. макс,
а РЭ ограничивает ток возбуждения двигателя номиналь-
ным значением.
При регулировании напряжением на якоре | е | <
регулятор э. д. с. работает в зоне ограничения, задавая но-
минальный ток возбуждения. Электропривод работает при
Ф — Фн = const и обеспечивает астатическое регулирование
скорости, как это было рассмотрено в § 8-4. Если командо-
аппаратом КА задано значение скорости, превышающее
номинальную скорость двигателя, то система регулирова-
ния э. д. с. преобразователя во всем переходном процессе
395
Пуска двигателя работает как система поддержания задан-
ного тока /стоп; регулятор скорости PC при этом работает
в зоне насыщения его характеристики. До тех пор пока
идет процесс ускорения до основной скорости <вн | е | <
< £3 — £п, регулятором РТВ поддерживается номинальное
значение тока возбуждения. Дальнейшее увеличение ско-
Рис. 8-33. Функциональная схема электропривод
роста приводит к увеличению | е | > £„ > £ч, начинает- а
ся процесс ослабления поля, в котором регулятор тока РТ |
поддерживает постоянным ток якоря, а регулятор э. д. с. 1
РЭ, воздействуя на ток возбуждения, стремится поддержи- |
вать э. д. с. двигателя равной номинальному значению, |
вплоть до выхода на' заданную скорость, контролируемую |
регулятором скорости. ;
Обратим внимание на то, что в процессе пуска выше ос- ,
новной скорости система работает в режиме, аналогичном
системе источник тока — двигатель (см. § 7-2). Действитель-
но, при этом тиристорный преобразователь работает в ре-
жиме источника тока 1Я = /ст0„ = const и идет процесс ;
изменения потока двигателя таким образом, что э. д. с. ,
его поддерживается постоянной. Однако основным каналом
управления в схеме рис. 8-33 является канал управления ;
напряжением на якоре, который и обеспечивает стабили- ’
зацию скорости на заданном уровне прн любом значении i
потока двигателя.
Имеется принципиальная возможность построения анало-
гичной системы, но с основным каналом управления пото-
ком двигателя. В такой системе во всех режимах работы
ТП работает как источник тока, поддерживая с помощью
обратной связи по току заданное значение тока якоря.
Такое построение системы может представлять интерес как
возможность реализации полностью управляемого по по-
396
току двигателя реверсивного электропривода с неревер-
сивным тиристорным преобразователем (см. § 7-2).
Ограничимся здесь рассмотрением системы источник то-
ка — двигатель с нерегулируемым индуктивно-емкостным
преобразователем как объекта регулирования скорости.
Принципиальная схема регулирования скорости в системе
РТВ рз
с двухзонным регулированием скорости.
ИТ—Д показана на рис. 8-34, а. Динамические процессы
в этой схеме описываются следующей системой дифферен-
циальных уравнений:
^Т.В (^З.С ^О.С®)-(1 ~Ь Л.,,?) Wb>
^ = (1 + Лр)Ф;
kIa®-Mr = Js~.
(8-103)
Уравнениям (8-103) соответствует структурная схема,
приведенная на рис. 8-34, б. С помощью (8-103), полагая
7\ в « 0, получим уравнение динамической механической
характеристики
__^з.с _ #в (1 Т-ТвР) дд
k k kk<rJ,
о,с О.С Т.в н
(8-104)
Отсюда динамическая жесткость механической характе-
ристики определяется соотношением
о ^о.Л.в^фЛ, = 0чм . /О 1ПК\
₽«=Т?в(1+7вр) Т+7ДГ 10Ь)
Таким образом, при безынерционном преобразователе
электропривод по схеме рис. 8-34, а обладает механической
характеристикой, аналогичной характеристике двигателя
397
с независимым возбуждением при U„ = const, однако от-
личается значительно большей инерционностью цепи фор-
мирования момента, так как Тв ;> Тя. Передаточная функ-
4-ZH=const
Рис. 8-34. Принципиальная (а) и структурная (б) схемы регулирования
скорости в системе ИТ—Д.
ция разомкнутого контура регулирования скорости в соот-
ветствии с рис. 8-34, б имеет вид:
<8-106>
где Tn. и = J s. /₽з:м — электромеханическая постоянная
электропривода.
Сопоставляя (8-106) с (4-20), можно прийти к выводу,
что при одинаковых модулях жесткостей характеристик
в разомкнутой системе УП—Д и в замкнутой системе ИТ—Д
соотношение постоянных Тм и и Т3 оказывается значительно
Рис. 8-35. Механические характе-
ристики электропривода в системе
ИТ—Д с обратной связью по ско-
рости (а) и по э. д. с. (б).
менее благоприятным, чем
соотношение постоянных
Тл и Тя двигателя. Для
получения удовлетворите-
льного качества регулиро-
вания приходится ограни-
чивать коэффициент обрат-
ной связи значениями, при
которых жесткость рабоче-
го участка механических
характеристик оказывает-
ся невысокой.
Примерный вид харак-
теристик показан на рис.
8-35, а. При их построении учтено, что напряжение U3 макс
(рис. 8-29) в аф = 2 -ь 4 раза превышает номинальное
напряжение возбуждения двигателя для форсирования
переходных процессов, поэтому обратная связь по скорости
поддерживает скорость постоянной только в пределах
линейного участка характеристики возбудителя, в конце
398
которого ток возбуждения значительно превышает номи-
нальный и с учетом насыщения магнитной цепи двигателя
устанавливается поток, превышающий номинальный на
10—30%. Соответственно пусковой момент, как показано на
рис. 8-35, а, составляет (1,1—1,3) Ми.
Если по техническим требованиям желательно получе-
ние мягких характеристик, аналогичных характеристикам
двигателя с последовательным возбуждением, можно ис-
пользовать обратную связь по э. д. с. двигателя. При этом
характеристики электропривода нелинейны; уравнение ста-
тических характеристик имеет следующий вид (рис. 8-35, б):
(8-107)
где kQ— коэффициент обратной связи по э. д. с.
Наличие в контуре регулирования большой постоянной
времени обмотки возбуждения определяет целесообразность
Рис. 8-36. Двухконтурная система регулирования скорости в системе
ит-д.
использования последовательной коррекции. При указан-
ном выше значительном запасе по напряжению возбужде-
ния (схф = 2 ~ 4) полезно ввести ограничение максималь-
ного тока возбуждения в переходных процессах допустимым
значением, а это наиболее удобно обеспечивается введением
подчиненного контура регулирования тока возбуждения,
как показано на рис. 8-36.
Передаточную функцию объекта регулирования тока
возбуждения, если отнести инерционность тиристорного
возбудителя к некомпенсируемой = 7ТВ, можно запи-
сать в виде
Г°- Р-в = RB (ТъР -н')В(Т^р +1)'' (8-108)
Для получения оптимальной передаточной функции этого
контура вида (6-50) необходима следующая передаточная
399
функция регулятора тока возбуждения:
W'p.T.
В.
Л,р+ 1_______
(^О.Т^Т.в/^в) Ят^цР
(8-109)
Таким образом, регулятор тока возбуждения должен
иметь передаточную функцию интегрально-пропорциональ-
ного звена. Передаточная функция объекта регулирования
скорости состоит из передаточной функции замкнутого
контура тока, которую упростим, отбросив в знаменателе
член второго порядка, и передаточной функции механиче-
ского звена:
' 1/^0. Т. В 1
°-р-с““Л₽+17^’
(8-110)
Регулятор скорости должен иметь передаточную функ-
цию
(8-111)
Ф О.С И С Т |Л
пропорционального звена.
Синтезированная система регулирования скорости в пре-
делах допустимой линеаризации характеристик ее элемен-
тов обладает статическими и динамическими свойствами
однократноинтегрирующей системы, подробно рассмотрен-
ными выше. Выражение динамической жесткости механиче-
ской характеристики, справедливое для линейного участка
характеристики регулятора скорости, показанной на
рис. 8-36, имеет вид:
₽д (Р) = — асаттц(атТир + 1) “ ” «Лр + 1 ' <8’112)
Модуль статической жесткости
Рзам ~
совпадает с (8-57), несмотря на принципиально иное постро-
ение системы электропривода, равно как и полученное
в (8-56) выражение динамической жесткости ₽д (р). Следова-
тельно, по статической и динамической точности регулиро-
вания инерционная система управления по каналу потока
оказывается в результате последовательной коррекции рав-
ноценной быстродействующей системе ТП—Д. Однако этот
результат не должен ввести в заблуждение: как было отме-
чено в § 8-5 для системы Г—Д, большая инерционность об-
мотки возбуждения ограничивает реально достижимое
400
быстродействие целесообразным завышением мощности воз-
будителя. Например, время регулирования тока возбуж-
дения в линейном синтезированном контуре составляет
около 57ц « 0,05 с. При постоянной времени Тв = 2,5 с
для достижения такого быстродействия необходим коэффи-
циент форсирования аф « 50, т. е. завышение мощности
возбудителя в 50 раз. При практически приемлемом зна-
чении аф = 5 время регулирования тока, потока и момента
двигателя в рассматриваемой системе составит около 0,5 с.
Такое быстродействие может оказаться достаточным для
электроприводов механизмов, требующих ограничения темпа
нарастания момента dM/dt (dM/dt)aon или рывка р =
= d2a/dt2 рлоп (см. гл. 12). В то же время очевидно, что
для электроприводов, требующих реализации максималь-
ного быстродействия, использование системы, полностью
управляемой потоком двигателя, нецелесообразно.
8-7. ВЛИЯНИЕ ОБРАТНОЙ СВЯЗИ ПО СКОРОСТИ
НА ДИНАМИКУ ЭЛЕКТРОПРИВОДА С УПРУГОЙ
МЕХАНИЧЕСКОЙ СВЯЗЬЮ
Структурная схема электромеханической системы с упругой связью,
замкнутой отрицательной обратной связью по скорости двигателя а>х-,
соответствующая системе регулирования, показанной на рис. 8-8, а,
представлена на рис. 8-37, а. Обратив особое внимание па структурные
схемы, приведенные на рис. 8-11, 8-16, в, 8-21, в, 8-23, в, можно убе-
диться, что для анализа общих динамических свойств по реакции на
изменения нагрузки все электромеханические системы с упругой связью,
замкнутые обратной связью по скорости, могут быть представлены общей
структурной схемой, показанной на рис. 8-37, б. В этой структурной
схеме выражения динамической жесткости могут учитывать влияние
внутренней обратной связи по э. д. с. двигателя, как это имеет место
в (8-30) и (8-42), либо определяться без учета этой связи. Следует заме-
тить, что в системах, оптимизированных методом последовательной
коррекции, как это следует из анализа (8-42), электромеханическая
связь определяется внешней обратной связью по скорости, а учет вну-
тренней связи по э. д. с. не дает существенных уточнений. В однокон-
турной системе это объясняется более сильным действием внешней
связи по сравнению с внутренней во всем диапазоне частот (см.
рис. 8-15, б), а в двух- и трехконтурных — значительным ослаблением
внутренней связи по э. д. с. работой быстродействующего подчиненного
контура регулирования тока (см. § 7-4).
Сопоставив структурную схему рис. 8-37, б со структурной схемой
разомкнутой упругой электромеханической системы (см. рис. 4-5)
и структурной схемой такой же системы, замкнутой обратной связью
по току (см. рис. 7-44), можно установить, что во всех этих в общем-то
различных системах использование выражений динамической жестко-
сти Рл (р) позволяет вести анализ динамических свойств с помощью
одной и той же структурной схемы. Общим для всех этих систем явля-
ется отсутствие обратных связей по координате массы механизма coj.,
401
ее производным и обратных связей по упругому моменту и его произ-
водным. Если учесть, что на практике такие связи применяются отно-
сительно редко, — в некоторых следящих системах и в системах авто-
матического регулирования нагрузки упругой связи, класс электро-
механических систем, представимых структурной схемой на рис. 8-37, б,
достаточно широк.
Вид этой структурной схемы позволяет сделать следующий общий
вывод: при заданных параметрах механической части динамические
свойства электромеханических систем указанного класса однозначно
определяются выражением динамической жесткости механической
характеристики электропривода.
С другой стороны, приведенный выше анализ частотных характе-
ристик динамической жесткости в различных системах регулирования
скорости позволяет сделать другой не менее важный общин вывод.
Рис. 8-37. Структурные схемы упругой электромеханической системы,
замкнутой обратной связью по скорости.
Каким бы способом ни обеспечивалось получение требуемого качества
регулирования — формированием ли приближенной передаточной функ-
ции (8-26) за счет использования большой постоянной времени Тг или
синтезом системы регулирования, оптимизированной методом после-
довательной коррекции, задача сводится к получению частотных харак-
теристик динамической жесткости в области средних и высоких частот,
близких аналогичным характеристикам динамической жесткости,
описываемой передаточной функцией апериодического звена первого
порядка:
Рд(Р)^Т ЧМ-П’ (8-113)
* э.замР “г 1
где Рзам — модуль динамической жесткости механической характери-
стики в области среднечастотной асимптоты;
^э.заи—эквивалентная электромагнитная постоянная в цепи
формирования момента двигателя.
Для статических систем регулирования динамическая жесткость
определяется (8-113) во всем диапазоне с высокой степенью приближения,
402
В этом можно убедиться, рассматривая рис. 8-17 и выражения динами-
ческой жесткости для таких систем: (8-56), (8-105) и (8-112).
Для систем, динамическая жесткость которых в результате коррек-
ции во всем диапазоне частот точно или приближенно выражается
(8-113), для анализа электромеханических свойств упругой системы,
замкнутой обратной связью по скорости двигателя, могут быть исполь-
зованы без каких-либо затруднений универсальные характеристики
колебательности разомкнутой двухмассовой упругой электромехани-
ческой системы, приведенные в гл. 4. Для того чтобы воспользоваться
этими характеристиками, в структурной схеме на рис. 8-37, б заменим
электромеханическую постоянную в разомкнутой системе ТМ1 на экви-
валентную электромеханическую постоянную электропривода с обрат-
ной связью
Гм.зам! = А/Рэам = (Р/Рзам) Т .1- (8-114)
Заменив PTMi на Рзам^м.замь получим структурную схему, совпа-
дающую с обобщенной структурной схемой электропривода с линейной
динамической механической характеристикой первого порядка (см.
рис. 4-5), для которой при переходе к обобщенным параметрам и были
получены приведенные в гл. 4 универсальные характеристики и кос-
венные оценки. Следовательно, для пользования этими универсальными
зависимостями, получив выражение динамической жесткости системы
в виде (8-113), необходимо вычислить по (8-114) TM3SMj;. При данных
значениях Q12 полученные эквивалентные постоянные Т3.зак и Т^зам!
определяют динамические свойства системы вполне аналогично тому,
как Т„ и Тл определяют динамические свойства той же электромеха-
нической системы в разомкнутом виде.
В качестве примера рассмотрим влияние двухконтурной статиче-
ской системы регулирования скорости двигателя на динамику электро-
привода с упругой механической связью. В соответствии с (8-56) элек-
тромагнитная постоянная в данной системе равна T3,3av — атТц.
В системе ТП—Д T\t = 0,01 с, поэтому в зависимости от принимаемого
соотношения постоянных контура тока Т3.за1Л = 0,01 -т- 0,04 с. Выби-
рая настройку на технический оптимум, можно получить ТЭ13ЯМ < Тя,
что дает возможность уменьшить влияние инерционности якорной цепи
на демпфирование механических колебаний электроприводом в области
параметров, где оно отрицательно, в несколько раз. Эквивалентная
электромеханическая постоянная в соответствии с (8-57) и (8-114) равна
асатТм, и она в зависимости от соотношения р и рзам может быть либо
меньше (Рзам > р), либо равна (р = Рзам), либо больше постоянной Тм
в разомкнутой системе (рзам < Р). Если в разомкнутой системе УП—Д
при работе на естественной характеристике имело место ослабленное
демпфирование, соответствующее области слабой электромеханической
связи (см. рис. 4-17), то переход к оптимизированной замкнутой системе
при Рзам < Р приведет к дальнейшему уменьшению демпфирования.
Напротив, увеличение р3(]М в сравнении с Р может повышать демпфиро-
вание вплоть до оптимального и при дальнейшем увеличении приводить
вновь к возрастанию механических колебании, но уже по причине из-
лишне жесткой электромеханической связи.
Представление об оптимальной с точки зрения минимума колеба-
тельности в переходных процессах жесткости механической характе-
ристики в замкнутой системе Рзам.0Лт можно получить, определив отно-
сительную частоту механических колебаний vonT при дайной у по кривым
на рис. 4-15 и соответствующее ей оптимальное значение коэффициента
электромеханической связи йэ.с.опт. Далее по (4-71) при Тэ = Тэ,зы =
403
= атТ^ определяется значение Рзам.0Пт и сравнивается с полученным
фактическим значением рзам. Если требуемая статическая жесткость
механических характеристик другими требованиями строго не регла-
ментирована, можно варьировать значение ас в допустимых пределах,
изменяя жесткость в направлении оптимальной.
В астатических системах регулирования скорости (8-113) соответ-
ствует только среднечастотной асимптоте ЛАЧХ динамической жест-
кости (см. рис. 8-15,6, 8-20,6, 8-22). Если параметры механической
части таковы, что частота свободных механических колебаний Q13
лежит в области средних или больших частот, можно использовать
(8-113) аналогично статическим системам. В случаях, когда Q12 неве-
лика, задача оценки влияния обратной связи по скорости на динамику
упругой системы существенно осложняется. Для ориентировочных оце-
нок может быть использован коэффициент электромеханической связи
по активной составляющей момента Аэ.са (см. § 4-6) путем подстановки
в его формулу значений | [Зд (/Qj2) I и ф (j^j2), определяемых с помощью
соответствующего полного выражения динамической жесткости, напри-
мер (8-74). Однако такая оценка ориентировочна и должна проверяться
решением задачи на ЭВМ.
Глава девятая
РЕГУЛИРОВАНИЕ СКОРОСТИ АСИНХРОННЫХ
ЭЛЕКТРОПРИВОДОВ
9-1. ОБЩИЕ СВЕДЕНИЯ
Проведенный в гл. 3 анализ влияния параметров на
механические характеристики асинхронного двигателя сви-
детельствует о принципиальной возможности при неизмен-
ной частоте напряжения, приложенного к статорной об-
мотке, регулировать скорость изменением числа пар полю-
сов р„, изменением напряжения Ult а для двигателя с фаз-
ным ротором — введением добавочных активных сопротив-
лений в цепь ротора.
Изменением числа пар полюсов при Д = const обеспе-
чивается ступенчатое регулирование синхронной скорости
®о = ^fl/Pn,
причем при одной обмотке на статоре число ступеней равно
двум, а при двух обмотках переключение числа полюсов
каждой из них дает четыре ступени регулирования. Таким
образом, данный способ регулирования требует применения
специальных двигателей.
Параметрическое регулирование изменением напряже-
ния Ult как выше было показано, является средством регу-
лирования момента асинхронного электропривода. При
404
использовании этого способа для регулирования скорости
необходимо обеспечивать автоматическое регулирование
напряжения с помощью отрицательной обратной связи по
скорости. Развитие полупроводниковой техники управления
привело к созданию таких систем с тиристорными регулято-
рами напряжения.
Реостатное регулирование скорости асинхронного дви-
гателя с фазным ротором продолжает находить практиче-
ское применение при невысоких требованиях к точности
регулирования. Основные особенности этого способа регу-
лирования аналогичны рассмотренным в § 8-1 для электро-
приводов постоянного тока. Дополнительные возможности
регулирования скорости дает импульсное управление до-
бавочным сопротивлением в цепи ротора двигателя. Кроме
того, некоторое практическое применение находит специаль-
ная система регулируемого асинхронного электропривода
с управляемой муфтой скольжения.
Наибольший теоретический и практический интерес пред-
ставляет изучение частотного управления всеми режимами
работы электропривода переменного тока, поэтому основ-
ное внимание в данной главе уделено анализу особенностей
частотного регулирования скорости электроприводов с асин-
хронными двигателями переменного тока.
9-2. РЕГУЛИРОВАНИЕ СКОРОСТИ АСИНХРОННОГО
ЭЛЕКТРОПРИВОДА ИЗМЕНЕНИЕМ ПОДВОДИМОГО
НАПРЯЖЕНИЯ
Форма механических характеристик, соответствующих
различным значениям 1/г = const, приведенных на рис. 7-26,
наглядно свидетельствует о том, что для получения жестких
механических характеристик необходимо плавное регули-
рование напряжения для поддержания заданных значений
скорости с помощью отрицательной обратной связи по ско-
рости. Такое регулирование может быть осуществлено либо
с помощью трехфазного магнитного усилителя с внутренней
обратной связью по току, либо с помощью тиристорного
регулятора напряжения (см. § 7-6). Рассмотрим основные
показатели автоматического регулирования скорости асин-
хронного электропривода в таких системах.
Схема электропривода, регулируемого напряжением,
приведена в общем виде на рис. ф1. Здесь: PH— регуля-
тор напряжения с управляющим устройством УУ, под кото-,
рым подразумевается либо обмотка управления магнитного
405
усилителя с самоподмагничиванием, либо СИФУ тиристор
ным регулятором; ТГ — тахогенератор; У — промежуточ
ный усилитель. Примерные механические характеристики
которые получаются в разомкнутой системе при <7у = const
показаны на рис. 9-2 тонкими линиями, а утолщенными ли
ниями изображены характеристики, соответствующие U3 =
= const в замкнутой систе-
ме регулирования.
Для анализа динамических
свойств электропривода в
Рис. 9-2. Примерные механиче-
ские характеристики в замкну-
той системе регулирования.
/ — Uy = Щтакс- — «у ~ О-
Рис. 9-1. Схема асинхронного элек-
тропривода при регулировании ско-
рости изменением подводимого на-
пряжения.
замкнутой системе управления следует учесть, что асин-
хронный двигатель является нелинейным объектом. Выпол-
ним указанный анализ в области малых отклонений от ста-
тического состояния, не учитывая при этом электромагнит-
ных переходных процессов. В соответствии со схемой на
рис. 9-1 в результате линеаризации характеристик ее эле-
ментов можно записать:
«1 = knCC = knkylly — [«си («з &o.c®)]> (9" 1)
где a — угол управления тиристоров.
Момент двигателя по упрощенной формуле
2М Ul
M = f(S’ = <9'2)
или
М = ф(®, U*) = щ (9-3)
*' (соо —CO)24-s2(D2 v '
здесь U* = U/Uн — относительное напряжение (по первой
гармонике), подводимое к статору.
406
В результате линеаризации уравнения (9-3) получим
выражение для динамического момента электропривода
+ (9-4)
где р = | <334/5(0 | — модуль жесткости механической ха-
рактеристики;
kM = dM/dU*.
Передаточная функция разомкнутой системы электро-
привода при воздействии на напряжение статора (ЛЛ4С = 0)
для 0 < 0:
Лео k..
= = ₽(1 + тмр)’ (9‘5)
где Т„ == J2/p.
Передаточная функция разомкнутой системы электро-
привода по возмущающему воздействию (Al/* = 0):
(9-6)
Используя (9-1) и (9-4), можно составить структурную
схему асинхронного привода для замкнутой системы регу-
Рис. 9-3. Структурная схема асинхронного привода для замкнутой
системы регулирования.
лирования (рис. 9-3). Эта схема составлена при предполо-
жении, что промежуточный усилитель У, управляющее
устройство УУ и сам регулятор напряжения PH являются
безынерционными (см. рис. 9-1). Кроме того, не учитываются
электромагнитные переходные процессы в асинхронном
двигателе. С помощью структурной схемы нетрудно опре-
делить передаточную функцию замкнутой системы регу-
лирования скорости по управляющему воздействию:
Aw (р) kvkiknkM &
= ₽Гмр-Н)+*0.сМ1Мл (9'7)
407
Аналогично определяется передаточная функция замк-
нутой системы по возмущающему воздействию:
W(Р) = = “ + O + ’ (9'8)
При Ан3 = 0 в соответствии со структурной схемой на
рис. 9-3 можно записать:
АЛ1 = АЛ13 — р Дю = — + ₽) А®.
Отсюда можно определить выражение динамической
жесткости механической характеристики в замкнутой сис-
теме:
₽л(Р) = (9-9)
Таким образом, динамическая жесткость не зависит от
частоты и динамическая механическая характеристика при
принятых допущениях совпадает со статической. Модуль
жесткости возрастает с увеличением общего коэффициента
усиления системы регулирования. Пользуясь (9-8), при р —
= 0 или (9-9) можно найти перепад скорости при соответ-
ствующем перепаде статического момента. При этом следует
иметь в виду, что коэффициенты k„, kM не являются по-
стоянными, их можно подсчитать в зависимости от выбран-
ной точки равновесия.
Более точные исследования режимов работы электро-
привода в «большом» с учетом электромагнитных процессов
могут быть проведены с использованием ЭВМ.
Регулирование скорости двигателя с короткозамкнутым
ротором в замкнутой системе хотя принципиально и воз-
можно, однако ограничено в длительном режиме сравни-
тельно небольшим диапазоном при постоянном мЪменте
нагрузки вследствие значительных потерь, выделяющихся
в двигателе. Большее практическое значение имеет схема
включения асинхронного двигателя с контактными кольцами
и дополнительным сопротивлением в роторной цепи, регу-
лируемого изменением напряжения, подводимого статору.
Механические характеристики при такой схеме включения
идентичны тем, которые приведены на рис. 9-2.
Несколько подробнее остановимся на энергетических
показателях асинхронного привода, регулируемого изме-
нением подводимого напряжения для выявления возмож-
ностей использования его при различном статическом мо-
менте нагрузки. С известными упрощениями потери в меди
408
статора равны:
APM1 = M®os^-, (9-10)
где /?ь — соответственно активное сопротивление фазы
статора и суммарное приведенное сопротивление фазы ро-
торной цепи.
Потери меди в роторной цепи
&Р'м2 = Mcoos.
Потери в стали статора
ДРС1 = ЛРС1Н(Ф/ФН)% (9-11)
где ДРС111 — номинальные потери в стали статора; Ф, Фн —
текущее и номинальное значения магнитного потока дви-
гателя.
Потери в стали статора не остаются постоянными при
регулировании напряжения и могут быть практически оп-.
ределены по формуле
ДРсх = ДРс1н^-^. (9-12)
Потери в стали ротора можно не учитывать, а учитывать
только механические потери, считая их постоянными. Если
регулирование скорости осуществляется, например, с по-
мощью тиристорного регулятора напряжения с фазовым
управлением, то возникают дополнительные потери в дви-
гателе, обусловленные высшими гармониками в кривой
напряжения. Потери в меди статора и ротора за счет выс-
ших гармоник возрастают в среднем на 10%. Общие элек-
тромагнитные потери в меди и стали двигателя, рассчитан-
ные с учетом высших гармоник, возрастают не более чем
на 10—12% по сравнению с общими потерями, определен-
ными при синусоидальном напряжении.
Коэффициент мощности асинхронного электропривода
с фазовым управлением можно определить по формуле
Р = cos (фх + ФО , (9-13)
где фх — угол сдвига между вектором тока статора и прило-
женным синусоидальным напряжением; фх — фазовыя^сдвиг
первой гармоники приложенного к двигателю напряжения
по отношению к напряжению питающей сети, возрастающей
с ростом угла регулирования; kj — коэффициент загрузки
двигателя по току.
409
Весьма существенным является вопрос использования
двигателя при регулировании скорости и определения в свя-
зи с этим диапазона регулирования с учетом характера
нагрузки и режима его работы.
При снижении напряжения, подводимого к статору,
уменьшается магнитный поток двигателя, что при постоян-
стве момента нагрузки приводит к возрастанию токов
ротора и статора, поэтому возрастают потери и превышение
температуры обмоток двигателя. Возрастание потерь и,
кроме того, ухудшение условий вентиляции двигателя
с уменьшением угловой скорости приводит к необходимости
снижения допустимого момента.
Для длительного режима работы допустимый момент
двигателя можно приближенно определить на основании
следующего.
Потери в меди ротора соответственно при номинальном
и текущем значениях скольжения s равны: .
= (9-14)
3IIR2Z = М<а0з, (9-15)
где Т?2> P2s — соответственно сопротивление фазы обмотки
ротора и суммарное сопротивление роторной цепи двига-
теля при текущем скольжении s и моменте М.
Разделив (9-15) на (9-14), получим:
Л>*доп = М*8/5н, (9-16)
где
М* = М/Мн;
SH (^22/^2)» ^2*доп =
Если принять, ЧТО Д#доп = Рд/-1Н, то
12*доп —(9-17)
где Рд — коэффициент ухудшения теплоотдачи при сниже-
нии скорости.
Тогда допустимый момент двигателя
Л1ДОП = Л1Н (s'/s) |3Л. (9-18)
Отсюда следует, что номинальный момент (или номи-
нальная мощность) двигателя, предназначенного для работы
в длительном режиме при регулировании напряжением, по
сравнению с нерегулируемым асинхронным приводом дол-
жен быть увеличен. Коэффициент завышения мощности
410
в длительном режиме можно найти по формуле
£p>s/Sh|V
Текущее скольжение на регулировочной характеристике
связано с диапазоном регулирования D = <он/<о:
s = (D- 1 +s'H)/D. (9-19)
Так как коэффициент теплоотдачи зависит от скорости,
ориентировочно можно принять, что линейно зависит от
скорости и равен:
где рл° — коэффициент ухудшения теплоотдачи при непо-
движном роторе двигателя.
С учетом (9-19)
D — 1+s'
kp+ [р;’(О-1) + 1] • (9’2 >
4 Рн
(9-22)
Для длительного режима работы с вентиляторным мо-
ментом нагрузки Шс = А (<о/(ои)2] коэффициент завышения
мощности двигателя может быть найден из следующих сооб-
ражений. Максимум потерь мощности в роторной цепи при
вентиляторной нагрузке не зависит от скольжения и равен
[1]:
ДР _ 4_ Рн_______________4Л4„юн __ 4М-,со0
^^2макс — 27(1—s'H)3 27(1—s')3 27(1—s')3’
Допустимые потери мощности в роторе
АР 2н — MH(O0SH.
Коэффициент завышения мощности при рА = 1
диапазоне регулирования
t, _ 2макс ___ 4_____1___
Р~ ДР2н ~ 27*н(1-*н)2'
и любом
(9-23)
В самовентилируемом двигателе коэффициент завышения
мощности зависит от диапазона регулирования и равен для
вентиляторной нагрузки
D — 1+s'
kp = С2РРло+1-₽Ло)5н ' (9‘24)
Анализ (9-24) показывает, что коэффициент завышения
мощности имеет максимум, соответствующий D = 1,5, т. е.
при той скорости, при которой в роторной цепи имеет место
максимум потерь.
411
По (9-25) на рис. 9-4 построено семейство характеристик
kP = f (D) для асинхронного двигателя с контактными
кольцами с Л4С = const и различными постоянно включен-
ными сопротивлениями 1, 2, 3, 4 в роторной цепи, соответ-
ствующими различным s». Из рис. 9-4 видно, что подключе-
ние дополнительного сопротивления значительно снижает
коэффициент завышения мощности двигателя.
Регулирование скорости асинхронного двигателя с кон-
тактными кольцами при вентиляторной нагрузке требует
значительно меньшего’ завы-
ного двигателя с контактными
кольцами с Л4С = const и раз-
личными сопротивлениями в ро-
торной цепи.
шепия мощности, чем при на-
грузке с неизменным статиче-
ским моментом. Так же как и
для Л4С = const, при вентиля-
торной нагрузке с увеличе-
нием s„ коэффициент завыше-
ния мощности становится
меньше. Различные максима-
льные значения kp, обуслов-
ленные разными s'n, соответст-
вуют (при Л4С = А (со/и,,)2) s =
= 1/3 или диапазону D — 1,5.
Так как обычно привод
длительно не работает только
при одной минимальной ско-
рости с Mz = const или с вен-
тиляторной характеристикой
при со — О,66со0, то расчет коэффициента завышения мощ-
ности следует производить с учетом графика работы про-
изводственного механизма.
Регулирование скорости изменением напряжения, под-
водимого к статору, находит применение преимущественно
при использовании двигателей небольшой мощности (до 20—
30 кВт) с контактными кольцами при включении дополни-
тельного сопротивления в роторной цепи для механизмов
повторно-кратковременного и кратковременного режимов
работы.
9-3. ИМПУЛЬСНОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ
АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ
Большое практическое значение имеет импульсное регулирование
скорости асинхронного двигателя с контактными кольцами при автома-
тическом управлении периодическим изменением добавочного сопро-
тивления в роторной цепи двигателя. Принципиальная схема такого
412
способа регулирования представлена на рис. 9-5. Здесь дополнитель-
ное сопротивление /?, включенное в цепь выпрямленного напряжения
роторной цепи, автоматически коммутируется ключом. В схеме реали-
зуется обратная связь по скорости и току роторной цепи.
При суммировании сигнала обратной связи по скорости и0.с с сиг-
налом обратной связи по току ktId можно получить такие значения
напряжения срабатывания релейного
элемента, которые приводят соответ-
ственно к замыканию и размыканию
ключа, шунтирующего сопротивле-
ние R.
Эти напряжения срабатывания
равны:
и1=“о.с+йЛср; 1
"2 = “о.с +Vdcp- J
(9-25)
С ростом сигнала «о.с срабатыва-
ние релейного элемента происходит
при меньших значениях выпрямлен-
ного тока 7Лр.
Напряжение обратной связи по
скорости
“о.с = “з — ka(£,=ka№0(s3 — s), (9-26)
Рис. 9-5. Схема импульсно-
го регулирования асинхрон-
ного двигателя с контактны-
ми кольцами при автомати-
ческом управлении периоди-
ческим изменением добавоч-
ного соп ротивления в ротор-
ной цепи двигателя.
где и3 (sj) — заданное напряжение
(скольжение), определяющее вступле-
ние в действие обратной связи по ско-
рости.
Из (9-26) следует, что и0.с линей-
но изменяется в функции скольжения,
так же как и Id ср.
Заданный ток 7f/icp = f (s) = const
и соответственно s3 определяют коор-
динаты точки характеристики (/^1Ср,
динатами /rfcp — 0, s01 можно найти из следующих положений. До-
пустим, что, используя обратную связь по скорости, ток можно регу-
лировать до значения, равного нулю, тогда напряжение оОратной связи
“о.с = Uz- Скольжение s, соответствующее /rfcp = 0, равно:
S31). Другую точку с коор-
so = s3 — U2/kaa0. (9-27)
Так как (У2 зависит от уставки тока l"i, то, следовательно, s0 ли-
нейно зависит от этого значения тока, поэтому можно считать характе-
ристику /rfCp = / (s) линейной, а наклон ее определяется значением U2
и коэффициентом передачи 7гю. Из (9-27) следует, что чем меньше U2
и больше /гю, тем большую жесткость будет иметь характеристика
Л/ср = /(«)•
. В связи с тем что в рассматриваемой схеме при е = 0 предельная
механическая характеристика двигателя соответствует постоянно вклю-
ченному сопротивлению R = Rlt то нижними предельными значениями
тока Гд будут те значения, которые определяются точками пересече-
ния этой характеристики и желаемыми характеристиками в замкнутой
системе управления. По характеристикам 1^^ — f (s) и уравнению
413
(9-27) могут быть построены механические характеристики двигателя
при автоматическом регулировании скорости (рис. 9-6).
Энергетические показатели электропривода с импульсным управ-
лением в цепи ротора несколько отличаются от реостатного управления
в связи с наличием выпрямительного моста. Потери мощности в элек-
троприводе являются суммой переменных, зависящих от нагрузки,
и постоянных потерь, не зависящих от нагрузки. Переменные потери
в рассматриваемом случае найдем, приводя их к роторной цепи двига-
теля, т. е.
ДР2пер= Д^ + ДР2=/9ер Рэ (*) + *с + * U “е)]- (9-28)
Постоянные потери в двигателе, если не учитывать возрастание их
за счет появления высших гармонических, обусловленных включением
выпрямительного моста в роторе, равны:
ДР 2пост = рн К1 — Лн)/ЛnJ — 'Wh«oSh (1 + Ri/R'i) • (9-29)
Коэффициент полезного действия электропривода
где Р2 — мощность, развиваемая двигателем; ДР — ДР2пер + Д/’хпост—
суммарные потери при импульсном управлении асинхронным приводом.
Коэффициент полезного действия электропривода может быть
рассчитан также и с помощью эквивалентной схемы замещения по пере-
менному току; кроме того, по ней
можно найти зависимость тока ста-
Рис. 9-6. Механические
характеристики асинхрон-
ного двигателя с контакт-
ными кольцами при ав-
томатическом регулирова-
нии скорости.
Рис. 9-7. Примерные харак-
теристики к. п. д. и коэффи-
циента мощности асинхрон-
ного двигателя с контактны-
ми кольцами.
стики к. п. д. и коэффициента мощности двигателя с контактными
кольцами при 8 = 0,7, R == 5 Ом и частоте коммутации 200 Гц для дви-
гателя мощностью 3,2 кВт даны на рис. 9-7.
Анализ полученных кривых показывает то, что коэффициент мощ-
ности привода поддерживается на относительно высоком уровне почти
постоянным (в зоне скольжения от s = 1,0 до s = 0,4), так же как и
414
при реостатном управлении. Коэффициент полезного действия электро-
привода низок и с ростом скольжения резко падает, что обусловлено
высоким сопротивлением роторной цепи и влиянием высших гармоник.
Импульсное управление асинхронным двигателем с контактными
кольцами в цепи выпрямленного тока ротора простыми средствами
обеспечивает плавное и в широких пределах регулирование скорости
с высоким быстродействием.
9-4. РЕГУЛИРОВАНИЕ СКОРОСТИ ЭЛЕКТРОПРИВОДА
С ПОМОЩЬЮ ЭЛЕКТРОМАГНИТНОЙ МУФТЫ СКОЛЬЖЕНИЯ
Параметрическое регулирование скорости электропривода с по-
мощью электромагнитной муфты скольжения не может обеспечить необ-
ходимой точности и большого диапазона вследствие незначительной
жесткости механических характеристик и снижающейся по мере умень-
шения тока возбуждения перегрузочной способности муфты. С целью
расширения диапазона регулирования скорости и получения высокой
точности используется система автоматического регулирования.
На рис. 9-8 показана принципиальная схема автоматического
регулирования скорости электропривода с электромагнитной муфтой
скольжения (ЭМС) с отрицательной обратной связью по скорости, реа-
лизуемой при помощи тахогенератора
ТГ, связанного с выходным валом элек-
тропривода. Регулятором скорости PC
задается напряжение, сравниваемое
с сигналом обратной связи; разность
этих сигналов подается на усилитель
У, выход которого подключается, че-
рез щетки и контактные кольца, к об-
зме
&l;=COnSt
мотке возбуждения ЭМС.
Возможно и бесконтактное испол-
нение ЭМС, в которой обмотка воз-
буждения располагается в корпусе
муфты неподвижно относительно вра-
щающегося якоря. В таких устройст-
вах в качестве датчика обратной свя-
Рис. 9-8. Принципиальная
зи по скорости вместо тахогенератора
может быть применен электромагнит-
ный импульсный датчик.
На рис. 9-9 приведены пример-
ные механические характеристики
ЭМС при автоматическом регулиро-
вании с отрицательной обратной свя-
зью по скорости. Они расположены
схема автоматического регу-
лирования скорости электро-
привода с электромагнитной
муфтой скольжения (ЭМС),
с отрицательной обратной
связью по скорости.
между характеристиками,
обозначенными цифрами 1 и 2 и соответствующими, приблизительно,
0,1 7Н и номинальному токам возбуждения ЭМС при параметрическом
регулировании.
Точность регулирования оказывается высокой, также как и диапа-
зон регулирования, который может составить до (40—50) : 1 и зависит
от коэффициента усиления системы; с увеличением последнего возра-
стает допустимый диапазон регулирования.
Потери в ЭМС складываются из потерь в якоре (роторе), обуслов-
ленных скольжением и передаваемым моментом; в обмотке возбужде-
415
ния, в стали ротора, определяемые угловой скоростью и механическими
потерями.
С увеличением скольжения превалируют потери скольжения; номи-
нальная мощность, затрачиваемая на возбуждение ЭМС общего назна-
чения с номинальным моментом от 75
ЭМС при автоматическом ре-
гулировании с отрицатель-
ной обратной связью по ско-
до 1600 Н • м, составляет в среднем от
3 до 0,7% максимальной мощности, пе-
редаваемой муфтой. В ЭМС специаль-
ного назначения для передачи боль-
ших моментов мощность, затрачивае-
мая на возбуждение, еще меньше.
Таким образом, к. п. д. муфты
равен:
Мш
Пэме Мш + Мша. дз + ДРВ + ДРМСХ
ИЛИ
_ Л4со
Пэмс ~ Ма>а. д + ДРв + ДРмех ’
(9-30)
где М — момент, передаваемый ЭМС;
ша.д, со —соответственно скорость при-
ростн. водного асинхронного двигателя и
выходного вала муфты; ДРВ — мощ-
ность, затрачиваемая на возбуждение; ДРмех — мощность, обуслов-
ленная механическими и вентиляционными потерями.
При регулировании ско-
рости с постоянным момен-
том нагрузки, пренебрегая
для муфт средней и боль-
шой мощности ДРВ и ДРМСХ
по сравнению с Ми>а.д, по-
лучаем:
Пэме'53! s- 1)
Из (9-31) следует, что с
возрастанием s к. п. д. муф-
Рис. 9-10. Графики потребляемой (7),
полезной (?) мощностей, потерь в яко-
ре муфтьЩЙ) и к. п. д. (4) при неизмен-
ном и вентиляторном моментах на-
грузки.
ты снижается, развиваемая
мощность снижается пропор-
ционально уменьшению ско-
рости, а потребляемая муф-
той мощность неизменна.
Следовательно, избыточная
мощность рассеивается в виде
тепла в рабочей поверхности
якоря муфты. Зависимости потребляемой мощности потерь в якоре
муфты полезной мощности и к. и. д. от угловой скорости при неизмен-
ном и вентиляторном моментах нагрузки приведены на рис. 9-10, а и б.
Анализ этих зависимостей указывает на то, что потери мощности в якоре
ЭМС, как и следовало ожидать, совпадают с потерями мощности сколь-
жения в роторной цепи асинхронного двигателя при реостатном регу-
лировании, а также при регулировании изменением подводимого напря-'
жения,
416
Коэффициент полезного действия электропривода с ЭМС равен:
П^а.дЛэмС^Па.д (i—s), (9-32)
где Т]а.д — к- п- Д- приводного асинхронного двигателя.
Так как к. п. д. асинхронного двигателя является функцией, раз-
виваемой мощности т)а.д = f (Мео), то со снижением скорости выход-
ного вала ЭМС к. и. д. электропривода будет еще более резко падать,
чем на характеристиках рис. 9-10.
Коэффициент мощности электропривода с ЭМС зависит только от
передаваемого момента и определяется коэффициентом мощности асин-
хронного двигателя. Если регулирование скорости производится с по-
стоянным моментом, равным номинальному, то коэффициент мощности
поддерживается номинальным независимо от скольжения ЭМС. При
вентиляторной нагрузке коэффициент мощности зависит от скольжения
ЭМС и заметно снижается со снижением скорости.
Вследствие значительных потерь мощности в якоре ЭМС находят
применение в приводах небольшой мощности (примерно до 20 кВт),
регулируемых с постоянным моментом и работающих в повторно-кратко-
временном и кратковременном режимах. В случае вентиляторной на-
грузки пределы регулирования, как и используемая мощность при-
вода, могут быть значительно расширены.
Электропривод с электромагнитной муфтой скольжения привле-
кает своей простотой, высокой плавностью регулирования и малой
мощностью преобразовательного устройства для намагничивания муфты.
9-5. ЧАСТОТНОЕ РЕГУЛИРОВАНИЕ СКОРОСТИ
АСИНХРОННОГО ЭЛЕКТРОПРИВОДА
Частотное регулирование скорости асинхронного элек-
тропривода осуществляется изменением частоты и напря-
жения, питающего двигатель. На основании системы диф-
ференциальных уравнений обобщенной машины (см. гл. 2)
для установившегося режима частотного управления асин-
хронным двигателем получим уравнения электрического
равновесия:
Ui — RJi + lxif*h + faJ* (Л +
о + (Л + /0. (9‘33)
где ifa — первичное фазное напряжение при частоте fa
Ar = fafai — относительная частота статора — отношение
частоты напряжения статора к ее номинальному значению;
sa = А//1Н = (wi ~ — относительная частота ротора
или параметр абсолютного скольжения, выполняющий ту
же роль, что и относительное скольжение s при постоянной
частоте, однако оно неоднозначно характеризует момент
двигателя, так как он зависит и от частоты статора.
14 Чвллкнн М. Г. н др. 417
Параметр абсолютного скольжения характеризует не
только частоту тока ротора, но и момент двигателя;
х^Ф, х^, x'f, — индуктивные сопротивления при про-
извольной частоте.
Уравнениям (9-33) соответствует схема замещения, при-
веденная на рис. 9-11. Из схемы замещения после соответ-
ствующих преобразований получаем э. д. с. •
Е —E' — Uf ~\f ^-2 Sa
— fjf 1/ А 1Г* у B(h,say (9-34)
Магнитный поток в воздушном зазоре
ф __ 1 / Л (sa) . (9-35)
Ciflu V В sa) ’
ток статора
(9-36)
Л ' B(f*,sa) В(/,, sa)>
приведенный ток ротора
I' = U; (9-37)
VB(f.„ sa)’
ток намагничивания
и1/а2+^ и 1/ . (9-38)
B(f*, sa)
электромагнитный момент двигателя дд ^asa Win В (f*, sa) • (9-39)
В (9-34)—(9-39) приняты следующие обозначения:
Л (sa) = /?f + xfsl; (9-40)
В (f*, sa) = (^ + с2Д) sa + 2R1R'if^sa + (d2 + е2Д) ; (9-41)
С (sa) = а2 -(- (1 -(-То)2 sj; (9-42)
D (sa) = а2 + т.&;; (9-43)
а - R'i/xy, b = Rr (1 + т2); с = хцт; d = Ryxy е = 1 + тх. (9-44)
Коэффициенты рассеяния соответственно для статора
и ротора
т1 = х1/х|Л; т2 = х-а/Хц.
4.18
Общий коэффициент рассеяния т = Тх + т2 + тхт2-
Если ориентировочно принять « та » 0, то (9-39)
можно представить в развернутом виде
М =±= . (9-45)
Из (9-39) и (9-45) следует, что электромагнитный момент
двигателя является функцией трех параметров: l/lt и
sa. В общем случае при частот-
ном регулировании напряжение
на зажимах статора может
регулироваться как в функции
частоты, так и в функции абсо-
лютного скольжения, поэтому
Рис. 9-11. Схема замещения
фазы асинхронного двигате-
ля при частотном регулиро-
вании.
нельзя получить общие форму-
лы для критического скольже-
ния и максимального момента
при произвольной зависимости
(Ух от Д1:, sa. Эти формулы могут
быть получены, когда определяется конкретная зависимость
Ui от //и s„.
В частном случае, когда Ur не зависит от s,, что имеет
место в разомкнутой системе частотного управления и оп-
ределяется только заданными соотношениями между Ur и
f*, условие максимума момента определяется из (9-45):
^M/<9sa = (d2 + e7j)/?.f-(b2 + c2/j)s;a = 0. (9-46)
Из (9-46) находим значение критического абсолютного
скольжения:
(9-47)
С упрощением (тх « т2 « 0):
Sa -к — f* + ' (9’
Подставляя sa,K в (9-45), после преобразований находим
максимальный момент
_______ 1
к 2“1п + V’
ИЛИ При Тх & Т2 « 0
Л4К = —--------z < 1 —.
2a>xHf* Дх±/КШ*1 + ^)2Я
(9-49)
(9-50)
14*
419
Анализ (9-48) показывает, что критическое абсолютное
скольжение уменьшается при снижении частоты.
По мере снижения частоты при UIf — const падает
доля э. д. с. по отношению к приложенному напряжению
вследствие относительного возрастания падения напряже-
ния в сопротивлении статора с ростом нагрузки, что при-
водит к уменьшению магнитного потока, а следовательно,
Рис. 9-12. Экспериментальные
механические характеристики
двигателя А42-4 при частотном
регулировании.
к снижению электромагнит-
ного момента. Как следствие
убывания магнитного потока
и абсолютного критического
скольжения по мере сниже-
ния частоты падает макси-
мальный момент и снижается
жесткость механических ха-
рактеристик.
На рис. 9-12 приведены
экспериментальные механиче-
ские характеристики двига-
теля А42-4 (Рп = 2,8 кВт,
пя — 1420 об/мин, иц — 380 В)
при частотном регулировании
и Ulf = const, показываю-
щие значительное уменьше-
ние максимального момента и
снижение жесткости (пунк-
тирные кривые). Характери-
стики сняты при пониженном напряжении (t/x = 130 В
при f — 50 Гн). Максимальный момент снижается при-
мерно в 2 раза при уменьшении частоты в 4 раза.
Для поддержания максимального момента с уменьше-
нием частоты необходимо напряжение снижать в меньшей
мере, чем частоту. С этой целью, воспользовавшись форму-
лой (9-49) и приравняв единице отношение максимальных
моментов при номинальной частоте и любой другой, т. е.
Л4К/Л4КН = 1, получим закон регулирования напряжения
(в относительных единицах):
1 />х/, ± V (&Ч-с3Ю №+ е'^)
V 7?1±K(*3+c2)(d3+^)
(9-51)
где U* — UJU^ — относительное напряжение.
На рис. 9-12 показаны экспериментальные характери-
стики при частотном управлении по закону (9-51), снятые
420
при пониженном напряжении (сплошные кривые). Макси-
мальный момент сохраняется постоянным со снижением
частоты за счет увеличения магнитного потока, а критиче-
ское абсолютное скольжение изменяется с частотой так же,
как и в случае UIf = const.
О степени увеличения магнитного потока для поддержа-
ния максимального момента при любой частоте можно судить
из следующих соображений.
Выражение для электромагнитного момента можно за-
писать в форме:
Л4 = кмГ^Ф cos ср2, (9-52)
где
, м1с1(1н
КЛ1 — —------,
К
cos <р2 — ,
(9-53)
/2 — с^1аФ
За
После несложных преобразований имеем:
М = Ы1ПФ2 = 6Ф2 g cos2 q>2. (9-54)
Используя (9-54), получаем:
мк _ sa.K cos2 срак
Мк.н sa. К. н COS3 файл
(9-55)
где = Фк/Фк.н — отношение магнитных потоков, соот-
ветствующих максимальному моменту при произвольной
частоте и напряжении.
Из (9-55) следует
= £05 срак.н -]/ «алсн _ ,д 5б)
COS фак г Sa-K
Расчеты, произведенные по (9-56), показывают, что для
поддержания постоянства максимального момента двигателя
требуется увеличение магнитного потока по мере снижения
частоты. Так, для двигателя А42-6 при частоте, близкой
к нулю, поток, соответствующий этому моменту, необхо-
димо увеличить почти в 2 раза по сравнению с номинальным,
что возможно для ненасыщенной машины. Поддержание
такой перегрузочной способности двигателя достигается
421
подведением к статору повышенного напряжения, что при
холостом ходе двигателя вызывает значительное возраста-
ние тока намагничивания, превосходящего даже номиналь-
ное значение Тока статора.
Из расчетов, произведенных для двигателя А42-6 без
учета насыщения, следует, что уже при f* =0,1 ток холос-
того хода равен номинальному току статора. В реальных
условиях, учитывающих насыщение, ток холостого хода
Достигает номинального значения тока статора при еще
более высокой частоте, а получение достаточной перегрузоч-
ной способности в зоне малых частот оказывается невоз-
можным.
При частотном регулировании жесткость механических
характеристик на рабочем участке можно принять постоян-
ной и равной производной от момента двигателя по скорости
в точке идеального холостого хода (sa = 0).
Воспользовавшись выражением электромагнитного мо-
мента при частотном управлении (9-39), можно, если учесть
sa — (®i — найти:
0с==дМ (9-57)
Г ОСО COiHOSa ’ v 7
• I _______ __J________ /Л ЕО\
dsa |sa = o и1н (d^ + e^R',
Жесткость механической характеристики
ft _ | - __ rrijUl _1_____ /Л ЕЛ\
Рс да |sa = o со?„ (d2 + e2^:)/?'•
Если диапазон регулирования скорости заменить диа-
пазоном регулирования частоты, то жесткость характери-
стики на минимальной скорости равна:
= (9-60)
где D — диапазон регулирования.
О точности регулирования можно судить по относитель-
ному перепаду скорости при заданном изменении момента
ДМ. Точность регулирования при минимальной скорости
Дсо* = ДМЕ>/рси1п. (9-61)
Если момент изменяется от нуля до номинального зна-
чения, то
Д®*„==М„Р/рси1в, (9-62)
422
Подставив в (9-62) рс из (9-60), получим:
Л _ _ Л4„Р (^+^2/02)^
*н т^/соц
(9-63)
На рис. 9-13 приведена характеристика Дсо*,, = f (D),
рассчитанная по (9-63) для двигателя А42-6 мощностью
1,7 кВт. Из этого графика, построенного для неизменной
перегрузочной способности (Мк = Л7КН), следует, что уже
при диапазоне £>=6:1 точность регулирования весьма
низкая и составляет Дсо*н = 0,2.
Обеспечение большей точности достигается автомати-
ческим регулированием.
Рис. 9-13. ГрафикДсо*!, =
= f (D) для двигателя
А42-6 мощностью 1,7 кВт.
Рис. 9-14. Структурная схе-
ма автоматического регули-
рования асинхронного дви-
гателя с отрицательной об-
ратной связью по скорости.
Рассмотрим систему автоматического регулирования
асинхронного двигателя с отрицательной обратной связью
по скорости. Структурная схема такой системы показана
на рис. 9-14. Частота напряжения, питающего асинхронный
двигатель, пропорциональна разности между задающим
напряжением U3 и напряжением обратной связи Uox:
- ^о.е) = (t/з - М>), (9-64)
W1H ш1и
где kfi — коэффициент передачи блока управления частотой
преобразователя 77; ka — коэффициент передачи датчика
скорости ДС.
В замкнутой системе частота на заданной механической
характеристике двигателя не постоянна, а является функ-
цией нагрузки (или sa).
Из (9-64) после преобразований получим:
+ (9-65)
423
где /о* — относительная частота для заданной механической
характеристики в замкнутой системе при sa = О,
kflU3
fo*=----I ь ; • (9-66)
'°* WiH(l+fyAo) v ’
Подставив значение из (9-5) в (9-39), после преобразо-
ваний получим уравнение механической характеристики
асинхронного двигателя в автоматической системе частот-
ного регулирования с отрицательной обратной связью по
скорости:
_ гтчУУа____________J____________
“1Н [63 + c2(fo*+M)]fe +
+Р2+е2 (/о* +M)] + 2*i (f0# + V.)- (9-67)
По (9-60) и (9-67) можно найти жесткость механической
характеристики в замкнутой системе:
mrUl f0, (l+fy£m)
'3" —^7(^+^)
(9-68)
Совместное решение (9-62) и (9-68) дает зависимость меж-
ду коэффициентом усиления системы и требуемым диапазо-
ном регулирования скорости при заданной точности:
<9-69>
©1н
На рис. 9-15 построена зависимость k = f (D) частотно-
управляемого двигателя типа А42 при Дсо:|;|, = 0,1 и регу-
лировании напряжения по закону (9-51). Соблюдение более
высокой точности вызывает возрастание коэффициента уси-
ления системы для того же диапазона регулирования.
В общем случае система автоматического регулирования
может быть снабжена вторым контуром обратной связи,
воздействующим на напряжение двигателя и предназна-
ченным для поддержания необходимой перегрузочной спо-
собности во всем диапазоне регулирования.
В этом отношении представляет интерес рассмотрение
системы автоматического регулирования, в которой осу-
ществляется стабилизация магнитного потока при измене-
нии нагрузки.
Структурная схема замкнутой системы с отрицательной
обратной связью по потоку показана на рис. 9-16. Магнит-
424
ный поток в соответствии с рис. 9-16
b k
= (9'70)
где ku = UJUу — коэффициент усиления преобразователя
по напряжению;
, Ф 1 /A(sa) ,,
= -у - = — коэффициент передачи дви-
гателя;
= и0 С/Ф — коэффициент передачи датчика потока;
^дФ = 1/с71Н.
Рис. 9-15. Зависимость k =
— f (D) частотно-управляе-
мого двигателя А42.
Рис. 9-16. Структурная схема
замкнутой системы с отрица-
тельной обратной связью по
потоку.
Формулу (9-70) можно представить в виде
ф(г __ /та
* с^и /В(/ф) sa)+A/A(sa)’
k = Йу/Сдф^ф.
(9-71)
(9-72)
Подставляя (9-71) в (9-54), получаем выражение для
момента двигателя в замкнутой системе с обратной связью
по потоку:
m,k?,U?. R!,ss
Л4 = -1-^-г/....... ._______(9-73)
«in sa) + A/A(sa)F
Из сопоставления (9-71) и (9-35) получим выражение для
напряжения на двигателе в данной системе, которое должно
регулироваться в соответствии с соотношением
и. = нии3
sa)
Vb sa) + А/А (sa)
(9-74)
При постоянном моменте нагрузки задающее напряжение
в функции частоты нужно регулировать так, чтобы поток
425
(для всех частот) сохранялся неизменным и равным потоку
при номинальной частоте, напряжении и идеальном холо-
стом ходе, т. е. Ф = Фо = const. При этом задающий
сигнал
__кииз __ yd2+eifi+k
3 £71ц /ЗЧ-Тз
(9-75)
Максимальный момент двигателя
— vl ____________-* а~к г ^-,2. (9-76)
(Of,, [КВ(А- sa.K)+*/X (sa.K)]2
Анализ выражения (9-71) показывает, что с ростом
коэффициента усиления системы (k > 10) и изменении sa
Рис. 9-17. Механические харак-
теристики двигателя А42-6 дЛя
разных частот и коэффициентов
усиления системы.
поток практически сохраня-
ется неизменным.
Критическое абсолютное
скольжение и максимальный
момент при k -> оо стремят-
ся к предельному значению:
sa.K R'i/x'i, (9-77)
М ->
к 2Ш1нх' +
(9-78)
На рис. 9-17 приведены
механические характеристики
двигателя А42-6 для разных
частот и коэффициентов уси-
ления системы при регули-
ровании задающего напряже-
ния в соответствии с (9-75).
Из (9-77) и (9-78) следу-
ет, что предельные значения
критического абсолютного скольжения и максимального
момента не зависят от частоты. Практически, начиная с не-
которого большого., коэффициента усиления, механические
характеристики подобны при любой частоте, двига-
тель имеет постоянную перегрузочную способность
и машина оказывается ненасыщенной, если задающее на-
йряжение устанавливается не выше того, которое опреде-
ляется равенством (9-75).
Если аппроксимировать механическую характеристику
в зоне малых скольжений прямой линией и считать, что дви-
426
гатель развивает момент, равный максимальному, в есте-
ственной схеме включения при скольжении вдвое меньшем,
чем saK, то максимальный диапазон регулирования ско-
рости
. Офомакс^2/8К, (9-79)
где sK — критическое скольжение двигателя в естественной
схеме включения.
Для двигателей небольшой мощности sK л; 0,2 -ь 0,3;
тогда диапазон частотного регулирования в замкнутой сис-
теме с обратной связью по
потоку не превышает (7—
10) : 1.
С целью расширения
диапазона регулирования
необходимо рассмотренную
систему дополнить обрат-
ной связью по скорости с
воздействием на частоту и
задающее напряжение кон-
тура стабилизации потока.
Структурная схема ча-
стотного регулирования с
контуром стабилизации
магнитного потока и ско-
рости с обратной связью
Рис. 9-18. Структурная схема час-
тотного регулирования с контуром
стабилизации магнитного потока и
скорости с обратной связью по ско-
рости.
по скорости показана на
рис. 9-18, где ФП — функциональный преобразователь в
канале связи частоты и напряжения; И — инвертор; В —
выпрямитель; ДН — датчик напряжения, ДС — датчик
скорости; u3f — задающее напряжение канала регулирова-
ния частоты и и3и — задающее напряжение канала регу-
лирования напряжения.
Механические характеристики в двухконтурной системе
частотного регулирования описываются уравнением
м=+s‘k]2 > (9'8°)
OJ1H ° V0*> sa)
где
Uz* = ku
Й /U1Н.
Двухконтурная система автоматического частотного ре-
гулирования с принятыми выше допущениями может дать
427
неограниченный диапазон регулирования. Практически
ограничения допустимого диапазона регулирования ско-
рости обусловлены лишь особенностями используемого
конкретного преобразователя частоты.
Если применяется двигатель с независимой вентиляцией,
то частотное регулирование во всем диапазоне от номиналь-
ной скорости вниз допускает постоянный момент нагрузки,
равный номинальному. В случае самовентилируемого дви-
гателя должно быть учтено ухудшение условий охлаждения.
Ограничений диапазона регулирования не возникает при
вентиляторной нагрузке.
В установившемся режиме полные потери в двигателе
зависят от нагрузки, магнитного потока и частоты и могут
быть выражены в относительных единицах по формуле [24]
\Р = р/| + a (/*) ф| + а31^ + ймех/г, (9-81)
где р = ал + оэ2 — коэффициент переменных потерь в меди
статора и ротора от приведенного тока ротора;
р «р2 = 0,28 4- 0,32;
° (/*) = + «ст вД — коэффициент потерь в стали
статора от гистерезиса и вихревых токов;
ост + о„.в = 0,19 4- 0,22; отношение ост.в/ост при 50 Гц
составляет 0,12—0,6 — меньшие значения относятся к лис-
там из высоколегированной стали толщиной 0,35 мм, боль-
шие — к листам из слаболегированной стали толщиной
0,5 мм;
а3 — доля электрических потерь, обусловленных намагни-
чивающим током, при номинальном режиме;
а3 = 0,02 4- 0,06;
амех = — отношение механических потерь к но-
минальным потерям при номинальной скорости;
п = 1 4- 1,5;
I* = — относительный ток ротора;
Ф* = Ф/Фн — относительный поток;
Ai* “ Ai/Ai'i — относительный ток намагничивания.
Коэффициент полезного действия двигателя
11 = 1 — М (со/соп)+ДР ’ (9‘82)
где М* — М/Мн — относительный момент двигателя.
Без учета потерь в стали коэффициент мощности, зави-
сящий от f* и sa, определяется на основе схемы замещения
(рис. 9-11):
RiC (sa) + /a./?2Sa
cos ф, = / v
V в VС (sa)
(9-83)
428
Потери в Двигателе являются функцией момента нагруз-
ки, магнитного потока и частоты, поэтому в общем случае
минимум потерь определяется системой равенств:
д(кР)/дФ*=0;
д (ДР)/5Л4* =0;
d(bP)/df*=O. .
(9-84)
При выполнении первого равенства второе имеет решение
Mt = 0, а третье — дает отрицательное значение частоты,
поэтому единственным условием минимума потерь является
равенство нулю производной потерь по потоку. Запишем
формулу (9-81) в следующем виде, приняв, что Ц = ЛД/Ф;(.
и Ф (Ф*):
= Р Ж + ° (^*)Ф* + • (9‘85)
Для упрощения обозначим потери на возбуждение и ме-
ханические как
s (Д|;Ф*) = о (f*) Ф;;-)-аэф (Ф#) + аиех%. (9-86)
Тогда
д ^Р)/дФ, = —2р = 0, (9-87)
откуда
Следовательно, потери в двигателе минимальны для
произвольных момента нагрузки и частоты, если при каж-
дой паре значений момента и частоты равны абсолютные
значения производных по потоку от потерь на возбуждение
и переменных потерь.
Необходимо отметить, что в режиме минимальных потерь
во всем диапазоне частот (0< / . 1) и нагрузках от хо-
лостого хода до номинальной и выше двигатель должен
работать с потоком больше номинального, по крайней мере
с потоком на нелинейной части кривой намагничивания.
По мере снижения частоты поток возрастает. С увеличением
магнитного потока при заданном моменте нагрузки, пере-
менные потери в двигателе уменьшаются из-за уменьшения
активной составляющей тока. Однако чрезмерное увеличе-
ние потока вызывает возрастание тока намагничивания и,
следовательно, потерь на возбуждение.
429
Для некоторого значения потока имеет место минимум
потерь. Если момент нагрузки и частота равны номиналь-
ным, потери меньше номинальных; по мере снижения час-
тоты потери уменьшаются, причем минимум потерь смеща-
ется в область больших значений потока, поэтому управ-
ление по минимуму потерь обеспечивает нагрузку выше
номинальной; в режиме минимальных потерь допустимая
нагрузка возрастает со снижением частоты.
Так как с ростом момента нагрузки возрастает поток
двигателя и одновременно возрастает абсолютное скольже-
ние, то перегрузочная способность в режиме минимальных
потерь выше номинальной при любой частоте, хотя и огра-
ничена предельным насыщением. В режиме минимальных
потерь и больших моментах поток выше Фо и достигает
предельного значения, обусловленного насыщением, поэ-
тому и перегрузочная способность оказывается выше, чем
в режиме Ф = Фо = const, достигая 3—6-кратного значения
паспортного значения максимального момента двигателя.
Такое увеличение максимального момента может оказаться
неприемлемым для механизма и самого двигателя. Вслед-
ствие этого управление по минимуму потерь в большинстве
случаев целесообразно вести до паспортного максимального
момента, а с дальнейшим увеличением момента не регули-
ровать напряжение.
При регулировании потока в режиме минимальных по-
терь коэффициент мощности зависит от момента нагрузки
и частоты. По мере снижения частоты и при заданном мо-
менте нагрузки cos падает, а затем в зоне малых частот
возрастает. Для = 1 и М* = 1, cos фх в режиме мини-
мальных потерь ниже номинального примерно на 5—10%,
что обусловлено увеличением потока. Однако наряду со
снижением cos снижается и ток статора (в среднем на
10—15%), что приводит к снижению потерь энергии в элек-
троприводе. Основным недостатком системы, обеспечиваю-
щей режим минимальных потерь, является относительная
сложность ее реализации.
Достаточно близким к минимуму полных потерь является
способ управления по минимуму тока статора, что соответ-
ствует минимуму потерь в меди статора, зависимость ко-
торых от потока аналогична зависимости полных потерь.
Реализация управления по минимуму тока статора проще,
чем по минимуму потерь.
Из рассмотренных способов плавного и глубокого регу-
лирования скорости асинхронных электроприводов самым
430
эффективным является частотное регулирование, отличаю-
щееся высокими энергетическими показателями, возможно-
стью регулирования скорости в большом диапазоне со зна-
чительной перегрузочной способностью.
Развитие в настоящее время полупроводниковой техники
и создание на этой базе преобразователей частоты несом-
ненно будет способствовать широкому внедрению электро-
приводов переменного тока с частотным управлением.
9-6. РЕГУЛИРОВАНИЕ СКОРОСТИ АСИНХРОННОГО
ЭЛЕКТРОПРИВОДА С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА
ОРИЕНТИРОВАНИЯ ПО ПОЛЮ ДВИГАТЕЛЯ
При рассмотрении математического аппарата координат-
ных преобразований переменных обобщенной электрической
машины (см. § 2-3) было отмечено, что координатные пре-
образования переменных не только являются эффективным
средством упрощения анализа характеристик электропри-
вода, но и открывают определенные возможности синтеза
управляющих вычислительных устройств для автоматиче-
ского управления электроприводами переменного тока.
Для выяснения этих возможностей предположим, что сис-
тема частотного управления асинхронным короткозамкну-
тым двигателем обеспечивает поддержание постоянства
потокосцепления ротора Ф2 = const, и запишем для ста-
тического режима работы уравнения механической ха-
рактеристики в осях х, у (сок = со0эл):
uix = ®о ЭЛЧТ1;/;
tliy == ЧЛ 4~ ®0 ЭлЧт1х;
О = ^2X^2 (®0эл ®эл) (9-89)
О = l'2f/^2 (^Оэл ®9л) 2-V’
При совмещении оси х с вектором напряжения и± и1у— О,
а и1х = = const. Поступим иначе, совместим ось х
с вектором потокосцепления ротора Тг. Тогда получим
Ф2Л; = 'Ки.кс = const, = 0 и в соответствии с третьим
уравнением (9-89) 1гх — 0. С учётом этого система (9-89)
431
примет вид:
u-ix — i'lxRi ®0Л,
uiy — hy^i + ®оэл^1л!
0 = 4“ (®Оэл ®эл) ^2макс>
М=рп^*Лакс.
(9-90)
Система (9-90) свидетельствует о том, что при совмеще-
нии координатной оси х с вектором вращающегося магнит-
ного поля машины основные взаимосвязи между парамет-
рами и переменными асинхронного двигателя аналогичны
таковым для двигателя постоянного тока. Действительно,
так как
4^2*' ~ ^2^2х “Ь ^12^1х = ^12^1х = ^2м ко (9-9 1)
ток ilx является намагничивающим током машины, а элек-
тромагнитный момент при Т2макс = const пропорционален
току 11у:
М = рп L*- kMilg. (9-92)
Ь2
Отсюда следует, что если при управлении асинхронным
двигателем оперировать в цепях управления не с реальными
переменными машины, а с преобразованными к координат-
ным осям, ориентированным по полю, можно раздельно
управлять величинами магнитного потока и момента дви-
гателя, имея дело не с переменными синусоидальными ве-
личинами, а с постоянными их преобразованными значе-
ниями. Это позволяет строить систему управления асин-
хронным двигателем аналогично рассмотренному выше для
двигателя постоянного тока. Основой построения таких
систем является информация о мгновенном значении и
пространственном положении вектора потокосцепления в
воздушном зазоре, измерение которого обычно осущест-
вляется с помощью датчиков Холла. Рассмотрим в каче-
стве примера один из вариантов системы, использующей
координатные преобразования переменных асинхронного
двигателя для целей управления [29, 30].
В соответствии с изложенным для реализации управле-
ния потоком и моментом двигателя по отклонению необхо-
димо измерить мгновенные реальные трехфазные токи ста-
тора и поток в воздушном зазоре, осуществить преобразо-
вание трехфазных переменных к эквивалентным двухфаз-
432
ним и произвести координатное преобразование их к осям,
ориентированным по полю. Определенные таким образом
преобразованные текущие значения 11х и tly остается срав-
нить с их заданными значениями, получить сигналы управ-
ления потоком и моментом в осях х, у, а затем осуществить
БКПЗ
Чх
М3 If и 3
6MZ
] тгмакс.з г—
рп
I . V
. ‘гмакс
LfcC
t'fi.
I Переменные, ориентирован- .Коррвина/пные Переменные^____ ।
। ные по полю \прсо6раоовани\ ориентированные отно-
сительна статора
-----1- ев?
I —
1______
__________Ti
"лс Э I \u'e3
u7s s |W/fJ / '
<1 I
БВЗП I
Г Ча.
5Vnz~^r~
Ча.
Рис. 9-19. Структурная схема системы Transvektor.
ВЕЕМ
пч
I Че
'4,J
I и ' UC
-Ц-. j 71a
Bvm' 1 %,
ял
обратные координатное и двухфазно-трехфазное преобра-
зования и получить действительные сигналы для управле-
ния трехфазным преобразователем частоты. Для осущест-
вления этой цепочки операций необходимо управляющее
вычислительное устройство, особенности которого можно
установить, рассматривая схему, приведенную на рис. 9-19
[30].
Система управления состоит из трех крупных блоков:
блока вычисления текущих значений переменных БВТГГ,
блока регуляторов переменных БРП и блока вычисления
заданных значений переменных — управляющих воздей-
ствий БВЗП. Рассмотрим назначение, основные элементы
и некоторые особенности каждого из этих устройств.
Блок БВТП преобразует измеренные с помощью дат-
чиков Холла, трехфазные мгновенные значения потока
В воздушном зазоре Ч^ и Ч^ и измеренные с помощью
43Э
датчиков тока действительные трехфазные переменные токи
ila и ilb в ориентированные по полю значения потокосцеп-
ления ротора Ч^яакс, намагничивающего тока ilx и актив-
ного тока iL!l. Он состоит из блоков фазных преобразований
БФП1 и БФП2, блока векторного фильтра БВФ и блока
координатного преобразования БКП2. Блок БФП1 осу-
ществляет трехфазно-двухфазное преобразование потоко-
сцепления в воздушном зазоре в соответствии с формулами
(2-48) ___
^0 = ]/3/2 4^;
TBp = /273 е/ЛШ
(9-93)
Кроме того, блок БФП1 вычисляет необходимое для кон-
троля потокосцепление ротора в соответствии с формулами:
4f20 = ^^a-(L2-L12)ila;
Ь12
Т2Р = ^Т11Р-(Л3-ММ-
1^12
(9-94)
Необходимые для решения (9-94) значения iia и tip
вычисляются блоком БФП2 по формулам, аналогичным
(9-93).
Рис. 9-20. Структурная схема векторного фильтра БВФ.
Блок векторного фильтра БВФ решает задачу опреде-
ления мгновенного пространственного угла поворота фОэл
Вектора потокосцепления ротора Т2. Решение этой задачи
осложняется наличием зубцовых пульсаций потока машины,
уменьшение влияния которых обеспечивается активным
векторным фильтром рис. 9-20. Его составной частью яв-
ляется блок координатного преобразования БКП1, на два
входа которого подаются текущие значения Т2а и Т2Р,
434 (
а к двум другим входам подводятся функции si п ф'оэл и cos ф'Оэл
вырабатываемые управляемым генератором колебаний У ГК.
В общем случае ф^эл фОвл, поэтому блок БКП1 осущест-
вляет координатное преобразование а, 0 -> и, v в соответ-
ствии с (2-40):
Ч'г» = ^2а cos фоэл + Т2|3 sin ф$эл; 1
= — ^2а sin Фоэл + ^2Р COS ф£эл. /
Так как Ф2а = Чг2макс cos фОэл и ЧГ2Р = Чг2м:1КС sin ф09Л, то,
подставив эти выражения в (9-95), после преобразований по-
лучим:
^2« “и^гмзкс COS (фоэл фээл)1 1 ,g gg)
^2u Фгмакс 81П (фоэл фоэл)1 /
Нетрудно видеть, что на выходе блока БКП1 получаются
составляющие вектора Ч^ в виде периодических функций
разности между действительным углом поворота фОэл и вы-
даваемым генератором колебаний У ГК фоэл. Предусмотрен-
ное в схеме вычислительное устройство ВУ’выделяет модуль
Чг211акс и определяет угол ДфОвл = фоэл— Фоэл- Сигнал отри-
цательной связи по углу подается на вход ///7-регулятора
фазы РФ, выходная величина которого воздействует на У ГК
в направлении уменьшения ДфОэл.
При отсутствии в кривой потока высших гармоник в ус-
тановившемся режиме благодаря интегральной составляю-
щей регулятора РФ достигалось бы полное устранение ошиб-
ки Дфоэл = 0. При этом фЛэл = фоэл и в соответствии с (9-9G)
Чг2„ — Ф2иакс, а Чг2а = 0. Таким образом, составляющая
Ф2и непосредственно связана с величиной и знаком ошибки
Дфоэл- С помощью задающего сигнала ДфОэлз устанавли-
вается минимальное значение ошибки, обусловленной выс-
шими гармониками потока.
Полученные на выходе БВФ функции cos фОэл и 8ШфОэл
используются для координатного преобразования токов iia
и i1P, которое осуществляется блоком БКП2. Этот блок не
имеет отличий от блока БКП1 (рис. 9-20); на его выходе
получаются составляющие тока статора ilx и ily, постоянные
по значению (для статического режима). Эти значения,
а также текущие потокосцепления Ч*'2макс и скорости со
поступают в блок регуляторов переменных БРП и исполь-
зуются для регулирования по отклонению от заданных
значений. В рассматриваемом варианте схемы в канал
регулирования потока ^регулятор РП) введен подчиненный
435
контур регулирования намагничивающего тока ilx (регу-
лятор РТ1). В контур регулирования скорости (регулятор
PC) для получения возможности регулирования момента
в режимах ослабления поля введен блок деления БД, опре-
деляющий заданное значение активного тока 11из по задан-
ному значению момента М3 и текущему значению потокосцеп-
ления Чумаке- Кроме того, предусмотрен подчиненный
контур регулирования активного тока (регулятор РТ2).
Все регуляторы блока БРП в [30] приняты интегрально-
пропорциональными для получения астатического регули-
рования каждой переменной.
Потокосцепление статора (2-48) и (2-49) можно выразить
через токи обмоток статора и потокосцепления ротора
с помощью (2-50) и (2-51):
^=^+^(^-1^);
Ь2
(9-97)
Если учесть, что при ориентации по полю Т2Ч = 0,
a ’Fg.v = Чумаке — МгЧ.о то подстановкой (9-97) в первые
два уравнения системы (9-90) можно получить:
- “оЭл LlL27^°- ixy = ulx; |
. | (9-98)
®Оэл^11'1* Н- Rlhy — гг1У‘ )
Решив систему (9-98) относительно токов, можно уста-
новить их связь с составляющими вектора напряжения:
D
“Г «о эл-----------т-------- Uiy
L — %
Н* J I I2
!‘
ь2
. ____ Rluiy— Шоэл^-1И1Л-
h.y ~
ЭЛ И ---------------------Т~
‘-2
(9-99)
(9-100)
^1^2 — L
Полученный результат свидетельствует о том, что полу- -
чающиеся на выходе регуляторов тока РТ1 и РТ2 управляю-
щие воздействия и'1хз и и[у3 оказывают влияние как на свою
регулируемую переменную, так и на регулируемую пере-
менную другого канала. Исключить взаимное влияние
можно путем формирования управляющих воздействий ?
436
и1хз и «1Уз из двух составляющих:
«т = «1.V3 + и"1Хз = и'1хз - Ыоэл(^2 u'lV3-, (9-101)
Wiy3 = Щу3 -|- и1уз = Ujy3 -J n5 Ч1ХЗ- (9-102)
Подставив (9-101) в (9-99) и (9-102) в (9-100),
убедиться, что при и1хз — const изменения и1уз не
Рис. 9-21. Структурная схе-
ма блока развязки БР.
Т(/3
поло-
д. с.
можно
окажут
влияния на намагничивающий ток и наоборот. Для устра-
нения взаимного влияния в схеме предусмотрен блок раз-
вязки БР (рис. 9-21), который вычисляет управляющие воз-
действия по (9-101) и (9-102)
при йОэл « рпа>. Так как в ди-
намических процессах на усло-
вия компенсации оказывает
влияние электромагнитная инер-
ция, в [30] предусмотрено ис-
пользование инерционных уси-
лителей У1 и У2 и сигнал и
дополнен составляющей
жительной связи по э.
®^1макс-
Вычисленные блоком раз-
вязки БР (рис. 9-19) заданные
значения U1X3 и U1!/3, ориентированные по полю, с помощью
формул обратного преобразования (2-41) блоком коорди-
натного преобразования БКПЗ трансформируются в экви-
валентные величины и1аз и U^3, ориентированные отно-
сительно статора. Блок БФПЗ осуществляет двухфазно-
трехфазное преобразование по (2-69) и на его выходе фор-
мируются трехфазные задающие напряжения Ula3, Ulb3
и {/1гз для управления преобразователем частоты, который
в схеме на рис. 9-19 предполагается инвертором с широтно-
импульсным управлением. При использовании преобразо-
вателя частоты со звеном постоянного тока и со свойствами
источника тока ИТТ блок вычисления заданных величин
БВЗВ выдает по каналу регулирования тока задание амп-
литуды переменного тока Д и по каналу регулирования час-
тоты заданное мгновенное значение угла поворота вектора
тока статора Д относительно системы координат статора.
При рассмотрении дайной схемы ставилась цель на кон-
кретном примере показать принципиальные возможности
использования математического аппарата теории обобщен-
437
ной машины, кратко изложенного в гл. 2, для: управления
электроприводами переменного тока. Основные закономер-
ности, заложенные в схему, базируются на рассмотрении
статических режимов работы. Для анализа динамических
свойств этой сложной многосвязной системы необходимо
использовать математическое моделирование на ЭВМ.
Глава десятая
РЕГУЛИРОВАНИЕ СКОРОСТИ АСИНХРОННЫХ
ДВИГАТЕЛЕЙ В КАСКАДНЫХ СХЕМАХ
10-1. ОБЩИЕ ПОЛОЖЕНИЯ
Каскадные схемы включения асинхронных двигателей
позволяют полезно реализовать энергию скольжения при
регулировании скорости, в отличие от ранее рассмотрен-
ных схем, где она рассеивалась в сопротивлениях роторной
цепи.
Рис. 10-1. Схемы электромеханического (а) и электрического (б) кас-
кадов.
По способу реализации энергии скольжения различает
два вида каскадных соединений: электрические и электро-
механические.
В электрических каскадах энергия скольжения, исклю-
чая потери в промежуточных элементах системы, после
соответствующего преобразования возвращается в питаю-
щую сеть; в электромеханических каскадах энергия сколь-
жения возвращается на вал асинхронного двигателя.
На рис. 10-1, а и б представлены схемы электромеханиче-
ского и электрического каскадов с указанием направлений
438
главных потоков энергии и взаимной связи элементов этих
систем. Ток ротора асинхронного двигателя имеет частоту,
пропорциональную скольжению, т. е. изменяющуюся при
изменении угловой скорости двигателя; э. д. с. ротора также
пропорциональна скольжению. Для возвращения энергии
в сеть необходимо, чтобы частота э. д. с. была равна частоте
сети, следовательно, в роторной цепи двигателя требуется
преобразователь частоты, связанный с сетью.
Возвратить энергию скольжения на вал главного дви-
гателя можно только с помощью дополнительного двига-
теля. Если в качестве последнего применяется двигатель
постоянного тока, то энергию переменного тока в цепи ро-
тора необходимо преобразовать в энергию постоянного
тока, которая и будет реализована этим двигателем.
В каскадах с непосредственной реализацией энергии
переменного тока в роторной цепи может быть использован
коллекторный двигатель переменного тока (или коллектор-
ный преобразователь частоты). В таком каскаде энергия
скольжения с помощью двигателя переменного тока сразу
преобразуется в механическую и возвращается на вал глав-
ного двигателя, если имеет место электромеханический кас-
кад или с помощью преобразовательного агрегата, состоя-
щего из коллекторного двигателя и вспомогательной бес-
коллекторной машины, возвращается в питающую сеть.
Преимущество каскадных схем заключается также в том,
что преобразовательное устройство можно выполнить, ис-
ходя из мощности скольжения, в отличие от других систем
регулируемого электропривода (например, системы частот-
ного управления в статорной цепи асинхронного коротко-
замкнутого двигателя), где преобразовательное устройство
рассчитывается из условия пропускания полной первичной
мощности. Это обстоятельство особенно важно для мощных
и сверхмощных приводов [20].
По типу преобразовательного устройства каскадные
схемы делятся на две основные категории: схемы с проме-
жуточным звеном постоянного тока и схемы с непосред-
ственной связью. Преобразовательное устройство может
быть либо электромашинным, либо статическим — на управ-
ляемых или неуправляемых вентилях.
Ниже кратко рассматриваются электромашинные кас-
кады с промежуточным звеном постоянного тока, в которых
преобразовательное устройство выполнено на вращаю-
щихся машинах. На примере схем электромашинных кас-
кадов поясняется принцип регулирования скорости асин-
439
хронных двигателей в каскадах с промежуточным звеном
постоянного тока и ряд общих свойств этих систем. Более
подробно рассматриваются каскадные системы со статиче-
скими преобразователями.
10-2. КАСКАДНЫЕ СИСТЕМЫ С ОДНОЯКОРНЫМ
ПРЕОБРАЗОВАТЕЛЕМ
Классической схемой электромеханического каскада с промежуточ-
ным звеном постоянного тока является схема Кремера. В этой системе
Рис. 10-2. Классическая
схема электромеханиче-
(рис. 10-2) в качестве преобразователь-
ного устройства используется одноякор-
ный преобразователь (ОП). Одноякорный
преобразователь имеет обмотку на якоре,
которая как в обычной машине постоян-
ного тока присоединяется к коллектору,
и, кроме того, соединяется с тремя кон-
тактными кольцами, посредством выводов
точек обмотки, сдвинутых на 120° (в слу-
чае трехфазного преобразователя). Обмот-
ка возбуждения ОП располагается на по-
люсах и выполнена как в обычной маши-
не постоянного тока. К контактным
кольцам подводится переменный ток и
со стороны переменного тока ОП анало-
гичен синхронной машине, а со стороны
ского каскада с проме- коллектора — машине постоянного тока
жуточным звеном посто- (МП).
янного тока. В рассматриваемом каскаде (рис. 10-2)
ротор асинхронного двигателя (АД) сое-
динен с контактными кольцами ОП, а выход последнего включен на
якорь МП. Таким образом, энергия скольжения посредством ОП пе-
редается двигателю постоянного тока и далее на вал АД.
Рассмотрим основные соотношения токов и напряжений в каскаде.
Ток якорной цепи МП
Л = (^о.п EH.U)/R, (10-1)
где £0.п — э. д. с. ОП;
Я —соответственно э. д. с. МП и сопротивление якорной це-
пи ОП—МП.
Между мощностями, потребляемыми ОП и МП, существует сле-
дующая зависимость:
/п(72/2ф cos ф2г] = Д2п/а. (10-2)
При трехфазном исполнении одноякорного преобразователя об-
мотка якоря ОП соединена в треугольник, поэтому линейное напря-
жение равно фазному, а линейный ток, или, что то же, ток ротора АД
I2 = V 3/2ф. Из (10-2) при трехфазном ОП следует, что
Лф=?тг!-п/я-----• (Ю-З)
ф 31/2 cos cp2i] <
Если считать, что U2n/Ui ~ E2/Ef (где Е2 и Ej — соответственно
э. д. с. на щетках коллектора и амплитудное значение напряжения |
440 \
на кольцах) и полагать синусоидальным распределение магнитного
поля, то
^гп/^2 = sin (л/3)//2.
После несложных преобразований
/2 = Л, = у/2—-L-. (10-4)
О Lvo (122 • |
Последнее равенство устанавливает соотношение между дейст-
вующим значением тока ротора и током со стороны коллектора. Из (10-4)
следует, что в трехфазном преобразователе действующее значение пере-
менного тока приблизительно равно постоянному току.
Регулирование скорости АД в рассматриваемой схеме производится
изменением тока возбуждения МП. Например, прн увеличении тока
возбуждения МП э. д. с. машины возрастает, что вызывает уменьшение
согласно (10-1) тока якорной цепи, и, как следствие, снижение в соот-
ветствии с (10-4) тока ротора АД. Это в свою очередь приведет к умень-
шению момента, развиваемого АД. В переходном процессе, например
при быстром увеличении напряжения на зажимах обмотки возбужде-
ния МП, э. д. с. МП окажется больше напряжения на коллекторе ОП,
и тогда ток в якорной цепи ОП—МП изменит свое направление на об-
ратное по отношению к предшествующему установившемуся режиму.
При этом МП становится генератором; энергия потребляется ОП уже
со стороны постоянного тока и возвращается ротору АД, работающего
в генераторном режиме. Происходит торможение привода до скорости,
при которой ток в якорной цепи ОП—МП вновь окажется положитель-
ным и результирующий момент каскада Л4каск = МАд-|- ^мп будет
уравновешиваться моментом нагрузки.
Для увеличения скорости привода необходимо снизить напряжение
на обмотке возбуждения МП,, э. д. с. машины начнет уменьшаться,
ток в якорной цепи машин ОП—МП и ток ротора АД возрастать. Воз-
растание тока ротора приводит к увеличению момента, развиваемого
АД. Увеличение же тока якорной цепи МП при одновременном уменьше-
нии магнитного потока машины не дает заметного изменения момента,
развиваемого МП, поэтому привод ускоряется главным образом за
счет увеличения момента, развиваемого АД. Возрастание скорости
при уменьшении тока возбуждения МП будет происходить до тех пор,
пока момент, развиваемый приводом, не уменьшится до значения,
обусловленного моментом нагрузки.
Наибольшая скорость привода должна была бы отвечать отсут-
ствию тока возбуждения в МП. Однако при этом напряжение на коль-
цах ОП становится небольшим и ОП оказывается подобно синхронному
двигателю склонным к качаниям и выпадению из синхронизма, по-
этому верхний предел скорости привода практически составляет 0,9—
0,92 синхронной скорости АД. Нижний предел составляет примерно
0,50 синхронной скорости. Более глубокое регулирование скорости
АД в данной каскадной системе принципиально возможно, но практи-
чески не оправдано. Действительно, при скольжении s = 0,5 МП реа-
лизует, исключая потери, половину мощности, потребляемой АД.
Прн дальнейшем расширении диапазона регулирования очевидно, что
габаритная мощность МП должна возрастать и можрт достичь габарит-
ной мощности АД. С увеличением диапазона регулирования возрастает
и габаритная мощность ОП, определяемая наибольшим током, прохо-
дящим в роторе АД, и наибольшим напряжением на его кольцах, При-
441
мерные механические характеристики рассматриваемого электромеха-
нического каскада, показанные на рис. 10-3, обладают сравнительно
высокой жесткостью. '
Пуск главного двигателя в каскаде осуществляется с помощью
пускового реостата, после чего при достижении частоты вращения,
близкой к поминальной, производится переключение ротора на одно-
якорный преобразователь.
Примером электрического каскадного соединения с промежуточ-
ным звеном постоянного тока является каскад Шербиуса (рис. 10-4).
В этой схеме, так же как и в рассмотренном выше каскаде, в каче-
стве преобразовательного устройства используется ОП. Однако в этом
каскаде энергия МП передается не
на вал АД, а синхронному генератору
(СГ), который преобразует ее в энер-
гию переменного тока и возвращается
в сеть,
Рис. 10-4. Электрический
каскад с промежуточным
звеном постоянного тока.
Рис. 10-3. Механические характе-
ристики электромеханического ка-
скада.
Как и в предыдущем случае, регулирование угловой скорости АД
производится изменением тока возбуждения МП. С увеличением тока
возбуждения машины скорость АД уменьшается, а при снижении тока
возбуждения МП скорость АД возрастает.
Более тщательный анализ схемы каскадного включения АД пока-
зывает, что при введении с помощью ОП добавочной э. д. с., направ-
ленной встречно с э. д. с. ротора, по мере увеличения тока возбуждения
МП максимальный момент главного двигателя АД уменьшается. По-
высить перегрузочную способность АД можно за счет увеличения тока
Возбуждения ОП. Примерные механические характеристики АД в рас-
сматриваемом каскаде при различных токах возбуждения МП в пред-
положении постоянной перегрузочной способности АД показаны на
рис. 10-5.
Пределы регулирования скорости АД в этом электрическом кас-
каде практически не превышают 2 : 1, так как с ростом диапазона
регулирования, как и в предыдущем случае, увеличиваются габариты
всех вспомогательных машин. Пуск каскада Шербиуса производится
аналогично пуску привода в каскаде Кремера.
Каскады с ОП допускают регулирование скорости только вниз
от синхронной. Они позволяют осуществить плавное регулирование
при сравнительно высоком к. п.д., так как энергия скольжения по-
лезно реализуется на валу или возвращается в сеть. Следует заметить,
что оба каскада позволяют реализовать как двигательный, так и генера-
442
торный режимы АД. Кроме того, эти каскадные установки могут ра-
ботать с высоким коэффициентом мощности, регулирование которого
легко осуществляется изменением тока
возбуждения ОП.
Рассмотренные каскадные схемы с
машинными преобразователями позволи-
ли изложить основные положения, свя-
занные с работой таких систем. Однако
каскадные электроприводы с ОП практи-
ческого распространения не получили.
Преобразователь представляет собой спе-
циальную машину, изготовление ее на
Рис. 10-5. Механические
характеристики АД в
электрическом каскаде.
обусловливает повышенную
большие мощности вызывает затруднения,
особенно когда преобразователь должен
работать при высоком напряжении, что
неблагоприятно отражается на условиях
коммутации. Кроме того, при малых
скольжениях ОП склонен к качаниям и
инерционность электропривода. Наконец, ОП имеет большие габариты
и дороже в сравнении с обычной машинной постоянного тока.
10-3. ВЕНТИЛЬНО-МАШИННЫЕ КАСКАДЫ
К практическому использованию каскадных электропри-
водов обратились в последние годы в связи с развитием
силовой полупроводниковой техники — были созданы так
называемые вентильно-машинные каскады. В этих каскадах
вместо машинного преобразовательного устройства — од-
ноякорного преобразователя или агрегата переменной ско-
рости, состоящего из синхронного двигателя и машины по-
стоянного тока — используется группа неуправляемых
полупроводниковых вентилей.
На рис. 10-6 приведена принципиальная схема электро-
механического вентильно-машинного каскада. Обмотка ста-
тора АД присоединена к сети переменного тока, а роторная
обмотка соединена с выпрямительным мостом В. Энергия
скольжения, преобразуемая выпрямительным мостом, реа-
лизуется МП, установленной на одном валу с АД. Очевидно,
что, как и в случае электромашинкою каскада, при неиз-
менной потребляемой мощности из сети мощность, разви-
ваемая каскадом, исключая потери, остается практически
постоянной независимо от скольжения.
Регулирование угловой скорости привода осуществля-
ется, как и в машинном каскаде, изменением тока возбуж-
дения МП. Если э. д. с. МП равна выпрямленному напря-
жению, выпрямленный ток, как и ток ротора, равны нулю,
следовательно, и момент, развиваемый каскадом, равен
443
нулю, т. е. э. д. с. МП определяет скорость холостого
хода АД.
Из схемы, показанной на рис. 10-6, следует, что в рас-
сматриваемом каскаде не будет наблюдаться электрического
торможения привода, как это имело место в электромашин-
ном каскаде. Последнее объясняется тем, что энергия в цепи
выпрямленного тока при неуправляемом преобразователе не
может изменить своего направления.
Анализировать работу каскадов удобно, если привести
параметры АД и роторного выпрямителя к цепи выпрямлен-
ного напряжения. При этом двигательный режим АД
исследуется на основе работы мостовой схемы в выпрями-
L-ff-A-oFJW
Рис. 10-6. Схема электроме-
ханического вентильно-ма-
шинного каскада.
тельном режиме на противо-
э. д. с. двигателя постоянного
тока или в случае вентильного
каскада на противо-э. д. с. ин-
вертора.
Рис. 10-7. Схема замещения цепи
выпрямленного тока.
----- — с неуправляемым;
— ----с управляемым вы-
прямителем в цепи ротора.
Пользуясь схемой замещения цепи выпрямленного на-
пряжения (рис. 10-7), записываем уравнение электрического
равновесия, учитывая, что при мостовой схеме выпрямителя
и соединении обмоток ротора в звезду ток проходит, исклю-
чая периоды коммутации вентиля, только по двум фазам
ротора:
Edos — Еы. п + ( 2дВ-b 2/?3 /?я. М. п + Rc. дj Id + 2Л«В,
(10-5)
где т — число фаз выпрямителя; для трехфазной мостовой
схемы т = 6;
Rz. д — сопротивление сглаживающего дросселя;
Erf0 — среднее напряжение на выходе выпрямительного
моста при разомкнутой цепи постоянного тока и
444
скольжении s = 1:
(10-6)
7(Z» R„. м. п
м. п
при т = 6; £>0 — 1 >35 £2к;
£2к — линейное напряжение (на разомкнутых коль-
цах) ротора АД при s = 1;
s — скольжение АД;
А«в — падение напряжения в одном вентиле при про-
хождении прямого тока;
— средний выпрямленный ток (ток якоря МП);
сопротивление якоря МП;
Ем. п — э- Д- с- двигателя постоянного тока;
R[ — приведенные к цепи ротора индуктивное и ак-
тивное сопротивления фазы статора АД;
R2 — индуктивное и активное сопротивления фазы
ротора;
хДв — сопротивление рассеяния фазы двигателя,
-'"ДВ = М %2-
(10-5) имеем выражение для выпрямленного тока
г Ем. п 2Див
/а~ Ъ
где Rs — эквивалентное сопротивление:
+ 2/?Js + 2R2 + /?с. д + Дя. м. п.
•^2>
Из
(Ю-7)
Электромагнитный момент, развиваемый электромеха-
ническим каскадом, определяется суммой моментов АД
и МП
<зск = ЛД.д + Мл.п. (Ю-8)
Электромагнитный момент АД можно выразить через
выпрямленное напряжение и ток следующим образом:
f р __ Г \ I
м К3£2к/асо5ф1! _ Г"0 2л ‘а) ‘а
а-Д СОо' С00 ~ Ио • 1 ;
С ростом тока Ц в выпрямителе возрастает угол коммута-
ции у, определяемый выражением
у = arccos (1 — . (10-10)
Угол коммутации определяет два специфических режима
схемы. С увеличением нагрузки угол растет только до
445
у = л/3. Дальнейшее увеличение нагрузки вызывает есте-
ственное запаздывание открывания вентилей на угол ав
и сохранение угла коммутации у = л/3. Значение угла
у = л/3 является граничным между режимами I и II.
Режим I имеет место при у С л/3 и токах, определяемых
неравенством
0
Id < |ЬК— = 0,355 .
212 у-(В хдп
(10-11)
Наличие естественного запаздывания открывания вен-
тилей характеризует режим работы II. Изменение угла
сдвига коммутации характеризуется равенством
sin (ав + л/3) = —-. ЛдчД
(10-12)
Увеличение ав происходит до а3 = л/3. Следовательно,
режим II имеет место при токах
0,355—‘c/rf<~7-£g = 0,613-^-. (10-13)
*дв 2 р 2 хдв Хд„
Последующее увеличение ав и у приводит к нарушению
нормальной работы каскада.
Электромагнитный момент АД для режима работы I
после соответствующих преобразований можно выразить
формулой
<. Д - Мдв), (10-14)
UJq \ Z /
а для режима II
/и а. д = -2-1,357^. (10-15)
Электромагнитный момент МП
А4м.п = /гФм.пД, (Ю-16)
при этом
£ФН. п ^м. п/®м. п>
где сом п = ®0 (1 — s).
Следовательно,
£.м.п = Ж.п®о(1-8) (10-17)
446
с учетом (10-8) момент каскада
Л^='4£йо-^/й + *Фм.п<%1. (10-18)
Если в (10-7) подставить значение Ем п из (10-17) и
пренебречь падением напряжения на вентилях, то
= Edos ^Ф.ч. nmo (1 (10-19)
При Id = 0 из (10-19) найдем скольжение, соответству-
ющее скорости идеального холостого хода каскада:
, &ФМ. пСОр
° -Erfo + ^Фм. пшо
(10-20)
С учетом s0 после преобразования получим:
h =
(^tfo + ^Фм. пСДо) (5 — so)
R,
(10-21)
Подстановка (10-19) в (10-18) после преобразований дает
выражение механической характеристики электромеханиче-
ского вентильно-машинного каскада:
Л4каск = s *> Г/?э - (s -з0)1 (Ю-22)
Шу *'э L j '
или
Мкаск = (^Н^ш^^(з_5о), (10-23)
(Оо Кэ
где
ЯЭ0 = -Й? + 2R^S + 27?2 + R°- «• П + Яс. д.
Критическое скольжение и максимальный момент элек-
тромеханического каскада найдем, приравняв производ-
ную dMKlXKi!ds нулю:
„ __<->„ I 2R'i$ -р27?2-|- м. п 4~^с. д
к-каск тх№/2л
ЛА = (^о4~^Фм. пшо)2
к. каск 2(Во (тХдв/ц)
(10-24)
(10-25)
Из (10-24) и (10-25) следует, что максимальный момент
и критическое скольжение электромеханического каскада
возрастают по мере увеличения магнитного потока МП.
Структурная схема вентильно-машинного электромеха-
нического каскада как объекта регулирования может быть
447
получена исходя из следующей системы уравнений:
Edas ~ Е». п — RJd + L3 ;
Е„. п = Ж. п®>
Л4 я> п — ai(t‘,
Ма.д + Мм.п-Мс = /2^;
«в = /?в/в + *в^.
(10-26)
где ив, 1В — соответственно напряжение на обмотке, воз-
буждения и ток возбуждения;
k, kH — конструктивные коэффициенты машины МП;
Д, R3 — эквивалентные индуктивность и активное со-
противление цепи выпрямленного напряжения.
По сравнению с машинным вентильно-машинный каскад
отличает ряд нелинейностей, основными из которых явля-
ются: параметры R3 и Т3, зависящие от тока нагрузки и
скольжения; нелинейная зависимость э. д. с. и момента
МП от тока возбуждения; наличие выпрямительного звена
с однополярной проводимостью выпрямленного тока.
Нелинейность между моментом АД и выпрямленным то-
ком является слабой и обычно может быть линеаризирована
как Ма.ц^-^-Ia^ h, поэтому вентильно-машинный элек-
тромеханический каскад целесообразно в окрестности выби-
раемой рабочей точки представить как линеаризированную
систему, для которой принято:
ы = со1; id = idx, Ф = Ф1; s = st; = T31 = LjR3l
и момент МП и ее э. д. с. в приращениях
ДЛ4м.п = ^Ф1Д^ + ^(/1ДФ; |
Д£м.п = йФ1Дш + ^1ДФ. J ( °
На линейной части кривой намагничивания
Т3 = L3/R3 = const.
'Структурная схема линеаризованного вентильно-машин-
ного электромеханического каскада приведена на рис. 10-8,
в соответствии с которой передаточная функция по управ-
448
ляющему воздействию
Ц7д“ = = ~ (1+Тв1Лр)(Т^+Т2р + 1). ’ (1 °'28)
где
h ___ Ты КС1 + ^Ф.м. п1) £сД1'~1~^'с?1^э1] .
(с1 + ^Фм. ill) (£rfo/G>o — ^Фм. nl)’
у ___________kiiiiRg±T af_____.
SM (с1'+^Фм. ni) kaii-[-kidiR3i ’
j,2___________RsiJsTsi_____________
1 (с1+^Фм. ni) (£rfo/a>o'—ni)'
______________RaiJs____________
2 (С1 + ^Фм. nl) (£</о/шо — *ФМ. nl)
Передаточная функция вентильно-машинного электро-
механического каскада по возмущающему воздействию
П/'л /„)_ Л“ — 0 +7'э1₽) . /in од\
Ди - ж - - ТГР2+Г2Р+Г ’
здесь
h _________________Rai____________.
(С1 +^Фм. nl) (Edo/^O ^Фм. nl) ’
Т'[ и Т2 те же, что и в 10-28.
Рис. 10-8. Структурная схема вентильно-машинного электромеханиче-
ского каскада при линеаризации.
Знак минус в (10-28) означает, что приращение Дсо
противоположно приращению входного сигнала Аггв, т. е.
увеличение Д«в соответствует уменьшению скорости.
Система устойчива, так как Ed()/ao > £ФИ. п1, что отве-
чает физике процесса, отражающего принцип работы самого
каскада.
15 Чиликин М. Г. и др.
449
Рис. 10-9. Механические
характеристики электро-
механического каскада
при параметрическом уп-
равлении.
Рассмотренная структурная схема в дальнейшем исполь-
зуется в связи с исследованием автоматически регулируемых
каскадных систем с обратными связями.
Из анализа приведенных соотношений для электромеха-
нических характеристик каскада следует, что с ростом маг-
нитного потока МП при допустимом выпрямленном токе
возрастает развиваемый ею момент, а вместе с тем и момент
каскада; при этом одновременно
уменьшается его скорость.
Примерные механические ха-
рактеристики электромеханическо-
го каскада при параметрическом
управлении приведены на рис. 10-9.
При параметрическом регулиро-
вании скорости жесткость механи-
ческих характеристик каскада сни-
жается по мере роста эквивалент-
ного сопротивления роторной цепи,
возрастающего с увеличением
скольжения. Так как точность ре-
гулирования в статическом режи-
ме определяется жесткостью меха-
нической характеристики на рабочем участке ее для
заданного значения параметра регулирования (тока воз-
буждения МП), то с возрастанием его точность снижается.
Однако рассматриваемая система регулирования.при невы-
соких требованиях, предъявляемых к точности, около
0,1—0,15 может быть использована и с параметрическим
управлением. Повышение точности приводит к необходимо-
сти применения автоматического регулирования.
Нижний предел регулирования практически ограничен
габаритами МП. Габаритная мощность МП определяется
ориентировочно'по формуле
Р,.п=Л.д(О-1к
(10-30)
Из (10-30) следует, что при 0 = 2:1 мощность МП
равна мощности д асинхронного двигателя, что практи-
чески и определяет целесообразный диапазон регулирова-
ния. Справедливость (10-30) вытекает из следующих сообра-
жений. Машина постоянного тока потребляет мощность
скольжения, без учета потерь в АД, равную PjS; момент МП
равен:
Мы.п-= As/®0(l ~s).
450
Если D — 2 : 1, то s = 0,5 и Л4М. п — Pi/w0, следова-
тельно, Л4М.П = Ма. д и Рм. п = Ра. д.
В случае расширения диапазона регулирования, напри-
мер до 10 : 1 (s = 0,9), получим:
Мн. п = рг 0>9/0,1ш0 = 9ЛМ, или Рм.п = 9Ра.д.
Плавность регулирования скорости определяется плав-
ностью изменения тока возбуждения, т. е. теоретически
неограничена.
Допустимая нагрузка при регулировании обусловлена
механическими характеристиками каскада и условиями
охлаждения машин каскада.
Приближенно момент каскада можно оценить по формуле
/и1£аск = /иа.д+мм.п^^-ч
Ц>0
Ед. rJ d
<а0 (1 — s) ’
или
лл > EfltJd । EjqS 7 , М„.д
^каск~ Шо Wo(l_s) l-s-
(10-31)
Следовательно, электромеханический каскад допускает
возрастание момента нагрузки на его валу обратно пропор-
ционально скорости. При этом, очевидно, мощность, разви-
ваемая каскадом, остается постоянной, поэтому электро-
механические каскады относятся к каскадам постоянной
мощности. Суммарная установленная мощность электро-
механического каскада определяется как
Р?,К. м = Рц. д + Рм. п “Ь^В. (10-32)
где Р„. д, Р„. п, Рв — соответственно мощность АД, МП и
выпрямителя.
При заданной мощности АД мощности Р„. п и Р„ опреде-
ляются диапазоном регулирования угловой скорости; таким
образом:
рSK. И S Р3. д + ра. д (D - 1) + Erfos/rf. (10-33)
Если учесть, что скольжение может быть выражено со-
отношением s = (О — 1)/О, то установленная мощность
выпрямительного моста
Рв^Ра.д (D - 1)/D (10-34)
и
и Ра. д (О-1/0+1). (10-35)
В связи с тем что в каскаде реализуется энергия сколь-
жения, к. п. д. электропривода сравнительно высок и при
15*
451
номинальной мощности каскада и регулировании скорости
остается примерно на одном уровне, составляя 0,82—0,86,
а коэффициенты мощности АД при номинальном моменте
и номинальной скорости достигают также сравнительно вы-
соких значений, около 0,75—0,85. Так как коэффициент
мощности роторной цепи близок к единице, а искажение,
вносимое выпрямительным мостом, незначительно, с умень-
шением нагрузки к. п. д. и- коэффициент мощности сни-
жаются.
Учитывая, что каналом регулирования является цепь
возбуждения, а момент инерции привода увеличен за счет
установки на одном валу с асинхронным двигателем машины
постоянного тока, то система электропривода не обладает
высоким быстродействием.
При необходимости использования электромеханиче-
ского каскада для механизмов с вентиляторной нагрузкой
й большом диапазоне регулирования (О ж 10 : 1) целесо-
образно для уменьшения установленной мощности МП при-
менить систему регулирования, совмещающую воздействие
на магнитный поток МП и напряжение, подводимое к ее
якорю.
Напряжение можно регулировать либо со стороны ста-
тора АД, либо на выходе ротора.
Дополнительное регулирование угловой скорости кас-
када при вентиляторной нагрузке изменением напряжения
позволяет существенно снизить мощность МП за счет луч-
шего ее использования в зоне низких скоростей. Изменение
напряжения можно осуществить с помощью регулируемого
трансформатора, включаемого в статор АД или в роторную
цепь. Недостатком этих схем регулирования напряжения
являются большие габариты и масса трансформаторов и
дополнительные потери в каскаде.
Более приемлемой схемой регулирования напряжения
следует признать схему, где используется полупроводни-
ковый управляемый выпрямитель, который может быть
включен в стадорной цепи АД или в его роторной цепи. При
этом независимо от того, в какой цепи включен управляемый
выпрямитель, могут быть достигнуты при широком регули-
ровании угловой скорости одни и те же результаты в отно-
шении уменьшения установленной мощности машины МП.
Однако нужно заметить, что управляемый выпрямитель,
включенный в роторной цепи при вентиляторной нагрузке,
будет работать в облегченных условиях по сравнению с его
включением в статоре. Это объясняется тем, что через ротор-
452
ный выпрямитель наибольший ток, соответствующий номи-
нальному току АД, будет протекать при минимальном на-
пряжении, а при наибольшем напряжении на кольцах
ротора ток будет минимальным. Кроме того, наибольшее
напряжение на входе роторного выпрямителя зависит от
диапазона регулирования и будет меньше напряжения ста-
тора. При включении же управляемого выпрямителя в ста-
тор через него протекает полный ток, совпадающий с номи-
нальным напряжением.
Остановимся вкратце на особенностях работы электро-
механического каскада с управляемым выпрямителем (УВ)
в роторной цепи (показан на рис. 10-6 пунктиром). В данном
случае регулирование каскада вниз от наибольшей скорости
производится вначале увеличением до номинального потока
МП при полностью открытых УВ, затем дальнейшее сниже-
ние скорости достигается изменением угла открывания УВ
при номинальном потоке МП.
С учетом изложенного выше электромагнитный момент
каскада с УВ может быть записан так:
А1Каск = ~ (Ed0 cos а /гФм. „ю0 - A x^Id\, (10-36)
WQ \ J L /
где а — угол открывания вентилей УВ;
при Id = 0
g _ /гФн, пго0____________________
tl Дй) cos а + 6ФМ. пш0 ’
(10-37)
(10-38)
С учетом приведенных соотношений момент каскада
_ (Ем cos а + £ФМ. ,,и0)2 /о „ ч Язо
каск ~ ио 1 0> RI ’
(10-39)
Критическое скольжение каскада определяется извест-
ным способом и оказывается равным
С ______ О5 | 2^дв + Rg- м. п
к- шск ~ 0 ЗХд3/л
Критический момент
Л/f _ BrfoCosa + йФн. пш0
К-КаСК 4ш0 (Зл'дв/л)
(10-40)
Выражение (10-40) называют «идеальным», так как при
a — 0 Мк. какс не достигает своего значения, выраженного
453
этой формулой, вследствие влияния на момент коммута-
ционных процессов при значительных токах нагрузки.
Расчетные механические характеристики электромехани-
ческого каскада с управляемым выпрямителем в роторной
Рис. 10-10. Механические характеристики электромеханического каС'
када с управляемым выпрямителем в роторной цепи.
когда критическое скольжение каскада при магнитном
потоке МП, равном нулю, составляет 0,2, а критическое
скольжение для номинального потока МП равно 0,4; при
этом е = ^^2 = 0,108.
Edo
При параметрическом регулировании углом открыва-
ния вентилей резко падает жесткость механических харак-
теристик каскада с УВ в роторе.
Установленная мощность МП определяется ее номиналь-
ным током и э. д. с. Номинальный ток должен соответство-
вать номинальному выпрямленному току. Номинальное
значение э. д. с. может быть найдено следующим образом.
Если в (10-36) подставить Еао cos а -|- /гФм пи0, которое
можно получить из 10-37, то уравнение момента каскада
Мкаск nwo + ^rf (2^г + ^я.м. п)]- (10-41)
ш0э
Учитывая, ЧТО &ФМ> п п. 1У®м. п. н Я.п.Л.п.н.
после несложных преобразований получаем выражение для
электромагнитной мощности МП:
Р — F / —
2 М. П. П ^М. П. Н2 М. П. Н -
= [(MKaCK(Oos)MaKc - Pdu (2R2 + £я. м. п)]. (10-42)
Принимая <йм.п. н — ®0, имеем:
р =Е I =
2 М. П. Н ^М. П. И2 *м. п. н
= (Л4 KacKcOgS)MaKC /5н(27?2 + 7?я.м.п). (10-43)
Зависимости, приведенные на рис. 10-10, указывают
на то, что при Ем.п.н = 0,108 Еаа мощность МП при венти-
ляторной нагрузке Рю. п.п «0,11 Ра.д, если при этом при-
нять допустимым на всем диапазоне регулирования ток
постоянным и равным номинальному (при независимой вен-
тиляции электрических машин каскада), то предельной
характеристикой Л4каск окажется кривая 4 на рис. 10-10, а.
Из сопоставления кривой 4 с идеальной вентиляторной
характеристикой (кривая 3) следует, что при s = 1/3 пре-
дельный момент, развиваемый каскадом, равен требуемому
нагрузочному моменту, т. е. в этом случае МП работает
на пределе без какого-либо запаса. С увеличением е, на-
пример ДО 0,176, МОЩНОСТЬ /’„.„.и » 0,18 Да.д, ПРИ эт°м
граничная характеристика (кривая 4 на рис. 10-10, б)
заметно смещена вправо от идеальной вентиляторной харак-
теристики. В среднем можно принять мощность МП рав-
ной примерно 0,15 д, т. е. соответствующей максималь-
ной мощности скольжения при вентиляторной характе-
ристике.
В связи с тем что жесткость механических характери-
стик каскада резко падает при параметрическом*управлении
с увеличением угла открытия вентилей УВ, точность регу-
лирования небольшая. Диапазон регулирования состав-
ляет для вентиляторной нагрузки (3 ч- 4) : 1 и может быть
расширен лишь введением автоматического регулирова-
ния.
Коэффициент полезного действия каскада с УВ в роторе
определяется по той же методике, как при неуправляемом
выпрямителе и примерно на 7—8% в первом случае ниже,
чем во втором. На рис. 10-11, а дается ориентировочное
сопоставление кривых т] = f (s) для вентиляторной
нагрузки.
Использование УВ в роторной цепи АД приводит к сни-
жению коэффициента мощности каскада. Сдвиг фаз ср2
между первой гармоникой роторного тока и питающим
напряжением определяется выражением
cps<pa = cosa-^-^-. (10-44)
455
При регулировании скорости в зоне больших скоростей
(cos « 1)
<ю-4В)
в другой зоне, когда регулирование производится измене-
нием а,
COS <р2 ~+ 2^ {2R + м п + 2R[s). (10-46)
Из (10-46) следует, что в этой зоне регулирования с уве-
личением скольжения резко снижается коэффициент мощ-
ности АД, что является недостатком этого каскада
Рис. 10-11. Зависимости к. п. д. (а) и коэффициента мощности (б) от
скольжения.
1 — при неуправляемом выпрямителе; 2 — при управляемом выпрямителе.
(рис. 10-11, б). Однако значительное уменьшение момента
на валу каскада со снижением скорости при вентиляторной
нагрузке не приводит к заметному увеличению реактивной
мощности.
Принципиальная схема электрического вентильно-ма-
шинного каскада приведена на рис. 10.-12. Здесь энергия
скольжения, за вычетом потерь, возвращается в питающую
сеть.
Регулирование скорости двигателя АД производится из-
менением тока возбуждения МП. Момент, развиваемый при-
водом, определяется лишь моментом АД, а э. д. с. МП за-
висит только от потока возбуждения, так как МП вращается
с неизменной скоростью. Таким образом, момент электриче-
ского каскада выражается (10-9), а ток Id — (10-7), если
456
принять, что Е„'П = кФн псои п; по аналогии с предыдущим
скольжение АД, соответствующее скорости идеального
холостого хода каскада (при
Д«в = 0),
= (Ю-47)
^du
Из (10-47) следует, что
скорость идеального холос-
того хода пропорциональна
увеличению потока (э- д. с.)
МП.
Рис. 10-12. Принципиальная
схема электрического вентиль-
но-машинного каскада.
Подставляя Id из (10-7)
в (10-9) и учитывая (10-47),
после преобразований полу-
чаем выражение механиче-
ской характеристики электрического вентильно-машинного
каскада:
ЯсасК=^^[Я,-^(5-5о)]. (Ю-48)
или .
MKacK=^--^(s-So). (10-49)
Электромагнитный момент МП
дд _____________ n^dO (s so)
1vim, п де
Потребляемая мощность
^M.n = ~M:-n-£s-(5~-5o) . (Ю-50)
Структурная схема линеаризованного электрического
вентильно-машинного каскада представлена на рис. 10-13.
Рис. 10-13. Линеаризованная структурная схема электрического вен-
тильно-машинного каскада.
В отличие от структурной схемы на рис. 10-8 здесь ин п „ —
номинальная скорость МП, все остальные обозначения те же.
457
По структурной схеме, приведенной на рис. 10-13 для
электрического вентильно-машинного каскада, передаточ-
ную функцию по управляющему воздействию запишем сле-
дующим образом:
где
/, п. цв>0 ,
kr,Edl)
ciEclo
2 ” Cl^rfo
Передаточная функция для электрического вентильно-
машинного каскада по возмущающему воздействию:
Рис. 10-14. Примерные
механические характери-
стики электрического ка-
скада при параметриче-
ском управлении.
где k19 = aoR^/CiEao;
Т\ и Т2 ~• те же, что и в (Ю-51).
Примерные механические характеристики электриче-
ского каскада при параметрическом управлении приведены
на рис. 10-14. Как и в электроме-
ханическом каскаде, здесь с рос-
том скольжения увеличивается эк-
вивалентное сопротивление каска-
да, приведенное к роторной цепи,
поэтому снижается жесткость ме-
ханической характеристики АД.
Если учесть дополнительное влия-
ние тока нагрузки на коммутацион-
ные свойства выпрямительного мо-
ста, то, как указывалось выше, ма-
ксимальный момент АД снижается
по сравнению с тем же моментом в
естественной схеме его включения.
Точность регулирования скорости определяется такими
же показателями, как и в электромеханическом каскаде.
Рассмотрим для данного каскада зависимость габаритной
мощности электрических машин от диапазона регулирова-
ния скорости.
При теоретически неограниченном диапазоне регулиро-
вания выпрямленное напряжение при минимальной скоро-
458
сти близко к приведенному номинальному напряжению
АД. 'Если при этом неизменны условия охлаждения двига-
теля, то во всем диапазоне допускается длительно номи-
нальный ток, и установленная мощность машины постоян-
ного тока должна быть примерно равна мощности АД.
Очевидно, при этом мощность синхронного генератора С'Г
также близка к мощности АД. Если ток АД во всем диапа-
зоне регулирования поддерживать постоянным и равным
номинальному, то при неизменном напряжении питающей
сети электрический каскад будет развивать неизменный
момент, поэтому рассматриваемый электрический каскад
называют каскадом постоянного момента.
При вентиляторной нагрузке на валу электрического
каскада при минимальной скорости выпрямленный ток бу-
дет минимальным, и мощность скольжения также близка
к нулю. Максимальной скорости АД будет отвечать наиболь-
ший выпрямленный ток, соответствующий развиваемому
двигателем моменту, а выпрямленное напряжение оказы-
вается минимальным, определяемым наименьшим рабочим
скольжением, поэтому мощность скольжения изменяется
при регулировании от значения, близкого к нулю, до мини-
мального, максимум мощности скольжения соответствует
s = 1/3 и не превышает 0,2 Ра-Д. Тем не менее установлен-
ная мощность МП должна выбираться по максимальному
выпрямленному напряжению и наибольшему току, т. е.
равной примерно Ра.д.
Установленная мощность синхронного генератора опре-
деляется максимальной мощностью скольжения, т. е. не
превышает 0,2 Р;, д.
Таким образом, суммарная установленная мощность
каскада
Р% каск = Рц, д + Л. + Л,.п + Л,г, (10-53)
или
Р2 каск = ра. Д + 2Да. д (О — l)/D Ps накс, (10-54)
где Ро д, Рв, п, Рс, г — соответственно мощность АД,
выпрямителя, машины постоянного тока и синхронного
генератора;
Psмакс — максимальная мощность скольжения. Напри-
мер, при постоянном моменте нагрузки и диапазоне регу-
лирования 0=2:1 максимальная мощность скольже-
ния Ps иакс « 1/2 Ра.д, тогда
Z3 2 каск 2,5Ра- д.
459
1
Если же ограничиться небольшим пределом регулиро- i
вания скорости от синхронной до 0,7 синхронной, то
Р2 каск 1 ДРа. д>
10-4. АСИНХРОННО-ВЕНТИЛЬНЫЙ КАСКАД
Стремление заменить в рассмотренных выше вентильно-
машинных каскадах вращающиеся электрические машины,
реализующие энергию скольжения, статическим преобразо-
вателем привело к созданию асинхронно-вентильного кас-
када.
Асинхронно-вентильный каскад состоит из асинхронного
двигателя АД, вентильного преобразователя В, инвертора И
и сетевого трансформатора
Тр (рис. 10-15). Эта схема
относится к категории ка-
скадов с промежуточным
звеном постоянного тока и
работает по тому же прин-
ципу, что и электрический
вентильно-мащинный кас-
кад. Вентильный преобра-
зователь В является неуп-
равляемым и предназна-
чен для выпрямления тока
Рис. 10-15. Схема асинхронно-вен- ротора, имеющего частоту
тильного каскада. скольжения. Затем вы-
прямленный ток с помощью
инвертора И преобразуется в переменный ток частотой,
равной частоте сети. Для сглаживания выпрямленного
тока включен дроссель Др.
Принцип действия каскада заключается в следующем.
В цепь выпрямленного тока ротора вводится с помощью
инвертора И регулируемая добавочная э. д. с.
Как и в ранее рассмотренных каскадах, выпрямленный
ток определяется по формуле
j Etios — Еам cos р — 2Див
1а -------------------------------
(10-55)
R3
Если выпрямитель и инвертор включены по трехфазной
мостовой схеме, то: Ed0 — 2,34Е2к ф = 1,35Е2к; EdBfl =
= 2,34£2ф; SAwb — суммарное падение напряжения в вен-
460
тилях роторной и инверторных групп;
Зх-гп
= 4“ + ДГ + » + 27?2 + Re. д + 2RTp, (10-56)
где хтр, Дтр — реактивное и активное сопротивления тран-
сформатора, приведенные к его вторичной обмотке;
р — угол регулирования инвертора.
В двигательном режиме при угловой скорости ниже син-
хронной поток энергии направлен от выпрямителя к инвер-
тору и ток и напряжение выпрямительной цепи имеют оди-
наковое направление.
Момент АД равен:
М = /гФ7р cos <р2, (10-57)
где /р — ток ротора, а так как магнитный поток пропорцио-
нален э. д. с., то
М = kkrE2K, ф/р cos ср2. (10-58)
В (10-58) произведение Е2к.ф/Р cos <р2 представляет собой
активную мощность фазы ротора двигателя, или электро-
магнитную мощность, передаваемую вращающимся магнит-
ным полем в расчете на одну фазу ротора.
Пренебрегая в первом приближении высшими гармони-
ками тока ротора, можно выразить момент АД в вентильном
каскаде (в пределах первого режима работы выпрямителя)
следующим образом:
%+7
M=i4- J <10’59)
flit
где ip (<р9Л) — мгновенное значение фазного тока ротора;
ер (Фэл) — мгновенное значение фазной э. д. с. ротора;
Фел = соо/ — текущее значение электрического угла;
•у — угол коммутации;
<в0 — угловая скорость поля статора;
тг ~ 3 — число фаз ротора.
Определив ток в схеме в предположении, что £яр = <»,
и проинтегрировав (10-59), получим:
£-.(! +cos у). (10'60)
461
Подставив в (10-60) значение cos у, найдем:
или
M = ^(E2K-^Id\ld,
tt>0 \ У 2 ]
(10-6-1)
(10-62)
Выражение для момента АД оказалось таким же, как
при вентильно-машинном каскаде.
Зависимость Id от s для вентильного каскада можно
записать в виде
(10-63)
ПСэ
ИЛИ
= (10-64)
Из (10-55) при Id — 0, пренебрегая Д«в, имеем
_ Ed0„ cos р
где s0 = е cos р + А, — скольжение идеального холостого
хода (при Id = 0), определяемое из режима непрерывных
токов;
е — Е <fQttlEdo',
А = 2 EuB/Ed0.
При подстановке выражения Id из (10-63) в (10-61) окон-
чательно получаем зависимость
М=^а^° (s-s0), (10-65)
где
+ ^ + 2S„+2SIp.
Формула (10-65) дает приближенное аналитическое вы-
ражение для механической характеристики АД в схеме
вентильного каскада, так как не учитывает моментов от
высших гармоник тока и искажения формы механических
характеристик в области прерывистых токов.
462
Скорость холостого хода и соответствующее ей скольже-
ние зависят от угла Р; при |3 = 90° sOmhh = X.
Примерные механические характеристики АД в относи-
тельных единицах в схеме вентильного каскада при раз-
личных углах р приведены на рис. 10-16.
Максимальный момент АД в естественной схеме вклю-
чения
Мк^Р2к/2оЛв. (10-66)
Тогда относительное значение момента
M* = ^ = 3,64^(S-So). (10-67)
'Ki к Кэ
Воспользовавшись выражением момента (10-65), взяв
производную по s и приравняв ее нулю, найдем критическое
скольжение
sk.k = 2s04-p, (10-68)
где
1 Г*то 2л „ 1
Р = 7~ + ~3~^дв + ’
'лцв L r J
Подставив (10-68) в (10-65),
получим выражение критиче-
ского момента
Мк0 = = 0,955 5^- -
ки . 4лсо0хдв 2со0л'дв
Рис. 10-16. Механические ха-
рактеристики асинхронного дви-
гателя в схеме вентильного
каскада.
(10-69)
Момент Л4к0 может быть
назван идеальным максималь-
ным моментом, так как в ре-
альных условиях такого момента двигатель не развивает.
Значение идеального максимального момента, как видно
из сопоставления формул (10-66) и (10-69), меньше макси-
мального момента АД в обычной схеме включения при-
мерно на 4,5% из-за дополнительного падения напряжения
в цепи выпрямленного тока.
Формулы механической характеристики, идеального
максимального момента, так же как и структура формулы
критического скольжения для вентильного каскада, совер-
шенно идентичны формулам для вентильно-машинного кас-
када. Повышенное падение напряжения в цепи выпрямлен-
463
кого тока обусловливает меньшую жесткость его механиче-
ских характеристик.
Так же как и в случае вентильно-машинного каскада,
приблизительно при AfTrp = 0,75 Л4,(0 выпрямитель вен-
тильного каскада переходит в режим работы Л (угол ком-
мутации у — 60°, и появляется угол сдвига коммутации ав).
В режиме II внешняя характеристика выпрямителя оказы-
вается падающей более круто, что приводит к резкому
спаду скорости и уменьшению максимального момента кас-
када, не превышающему 0,826 Л1,(0.
Подставив граничное значение тока Id = У 2Еы/4хяв и
(10-62), после преобразований получим:
М, гр = 0,75 = 0,75Мко. (10-70)
*т. 1Ли0ЛДВ
Следовательно, в пределах первого рабочего режима
момент, развиваемый двигателем, не превышает 0,75 иде-
ального критического момента. Скольжение иа границе
рабочих режимов lull определяется по формуле
si гр — (4s0 + р)/3. (10-71)
Механические характеристики для значений моментов до
0,75 Л41(0 отвечают (10-65). Прн М + 0,75 Л4к0 каскад пере-
ходит в режим работы II.
Проводя те же операции, что и для режима I и учитывая
зависимость угла ав от тока Е/ для второго режима, выражае-
мую равенством
sin (схв + 30°) — |/°2(10-72)
находим:
1<3 l,35E,K/f/
---cos (tx„ + 30°). (10-73)
Выразив cos (ав 4- 30°) через (10-72) и подставив в (10-73),
получим:
441, = _ 2x=BZ3, (10-74)
Z U>o
ИЛИ
(10-75)
Другую запись формулы момента двигателя при работе
в режиме 11 можно получить, подставив 1а из (10-72) в (10-73).
464
Тогда
Л4ц = 1• Sin (2tX° + 60°)- (Ю-76)
осОрЛдв
Из (10-76) следует, что максимальное значение момента
двигателя в режиме работы II имеет место при ав = 15°:
Ж.каски =—7^^-=- 0,826.vf^- = 0,826<. (10-77)
0(00ЛДВ
Следовательно, перегрузочная способность АД в схеме
вентильного каскада снижается в сравнении с его перегру-
зочной способностью в естественной схеме включения при-
мерно на 17%.
В режиме работы II ток Д может быть найден из урав-
нения электрического равновесия
1 1 с 1/^ R т —
2 S Г -krflip — л2*- ‘d —
- ^ои cos Р + ЗД« + 1, (Зг,р/л -|- 2/?дв + 2/?тр). (10-78)
Приравняв производную dM/ds нулю, найдем, что мо-
мент каскада максимален при значении выпрямленного
тока:
Id и = Дгк/2-ГдВ. (10-79)
Подставив (10-79) в (10-74) и (10-78), определим макси-
мальный момент каскада (10-77) и критическое скольжение
Sk. каск11 = (2/2s0-|-p)/K3. (10-80)
Таким образом, и в режиме II формулы для вентильного
каскада идентичны формулам для вентильно-машинного
каскада. Аналогично для вентильно-машинного каскада
значения момента и скольжения, разделяющих режимы ра-
боты II п III выпрямителя, имеют вид:
гр = 0,75Л4кп; (10-81)
sn гр — 2,31 s0-Г р, (10-82)
При большем значении скольжения наступает III, прак-
тически нерабочий, режим выпрямителя.
Регулировочные свойства каскада при уменьшении его
скорости (уменьшении угла |3) ограничены допустимым уг-
лом инвертирования, который должен составлять:
Р^Ти + 6, (10-83)
465
где б — угол восстановления запирающих свойств венти-
лей (примерно 2°);
уи — угол коммутации инвертора.
Следовательно, снизу диапазон регулирования скорости
ограничен как допустимым углом инвертирования, так и
перегрузочной способностью каскада; фактически перегру-
зочная способность вентильного каскада, начиная с неко-
торого значения угла 0, падает по мере снижения скорости.
Рис. 10-17. Структурная схема вентильного каскада при линеаризации.
Сверху диапазон регулирования скорости ограничен
падением напряжения в элементах цепи выпрямления.
Минимальное скольжение холостого хода равно:
sOh„h = S AnE/£rfOp- (10-84)
Линеаризованная структурная схема вентильного кас-
када как объекта регулирования приведена на рис. 10-17,
где Дцу — приращение сигнала на входе усилителя, управ-
ляющего инвертором; Ту — постоянная времени усилителя;
k.n— коэффициент усиления инвертора; Де(/|1—прираще-
ние э. д. с. инвертора; все остальные обозначения такие же
как и на структурной схеме электрического вентильно-
машинного каскада.
Передаточная функция асинхронно-вентильного каскада
по управляющему воздействию согласно структурной схеме
на рис. 10-17 имеет вид:
^д<оа.в(р) (1 + Гур)(74рВ2+Г2р + 1) > (10-о5)
где
^а. в ~
Т\ — J
J
466
Передаточная функция асинхронно-вентильного кас-
када по возмущающему воздействию
(10-86)
где ®о^э1/с^о-
Рассмотрим- основные показатели регулирования угло-
вой скорости, характеризующие работу вентильного кас-
када.
Точность регулирования при параметрическом управле-
нии и минимальной э. д. с. инвертора составляет в среднем
0,08—0,12 при изменении момента от холостого хода до но-
минального значения, понижаясь по мере регулирования
воснтелыюй ошибки от диа-
пазона регулирования.
Рис. 10-19. Механические характе-
ристики вентильного каскада.
вниз от основной скорости, что, как и в вентильно-машин-
ном каскаде, обусловлено возрастанием эквивалентного
сопротивления роторной цепи с увеличением скольжения.
Диапазон регулирования скорости ограничен верхним
пределом скорости, равной при номинальном моменте при-
мерно О,9со0- Минимальная скорость, при которой привод
может нормально работать, определяется той точностью,
которая может быть обеспечена в связи с возможными из-
менениями нагрузки.
Кривая, приведенная на рис. 10-18, дает представление
о точности параметрического регулирования при различ-
ных диапазонах регулирования и изменениях нагрузки от
0,3 до 0,8 номинальной для двигателей до 100 кВт. Напри-
467
мер, если минимальная скорость привода составит 0,6
синхронной, то точность регулирования составит около 0,2.
Вентильные каскады, как и вентильно-машинные кас-
кады, допускают только однозначное регулирование угло-
вой скорости. Плавность регулирования практически не
ограничена.
Вентильный каскад может быть использован для регули-
рования скорости с постоянным моментом нагрузки (при
независимой вентиляции). Однако следует учесть, что
с уменьшением угла инвертирования (ниже 50°) перегру-
зочная способность каскада падает (рис. 10-19). Последнее |
обстоятельство и, как указывалось выше, невысокая точ-
ность ограничивают диапазон регулирования скорости
с постоянным моментом.
Для вентиляторного момента нагрузки диапазон регу-
лирования теоретически не ограничен. Однако при этом
возрастает установленная мощность силовых элементов, ч
включенных в роторную цепь.
Установленная мощность асинхронно-вентильного кас-
када может быть определена по формуле 1
Р^. в = Ра.л + Р* + Р* + Р^ (Ю-87)
где Р3 д, Ре, Рн, Р^р — соответственно мощность АД, выпря-
мителя, инвертора и согласующего трансформатора; или
Рха.в = Р а. д + 275 а.д~75-Ь Р s макс-
и -5
Таким образом, установленная мощность вентильного
каскада оказывается такой же, как и установленная мощ- '
ность электрического вентильно-машинного каскада.
Коэффициент полезного действия вентильного каскада
может быть найден через мощность, развиваемую АД, и
суммарные потери.
Постоянные потери в АД в естественной схеме включения
+ М (Ю-88)
ПН \ ^2 /
В схеме вентильного каскада постоянные потери в АД
увеличиваются за счет наличия высших гармоник в токе
статора и ротора приблизительно на 5% в сравнении
с (10-88).
Постоянные потери в каскаде
^Рс каск ~ 1,05Рс + АРх.х.тр, (10-89) Д
.468
где ЛРх.х.тр — потери холостого хода трансформатора ин-
вертора.
Переменные потери в каскаде
APa = 2/S(/?2 + 7?Tp) + 2At/BZrf, (10-90)
а полные соответственно
АР = ДРскаск + АР.. (10-91)
Коэффициент полезного действия вентильного каскада
^К = Р/(Р + ЬР), (10-92)'
где Р — мощность на валу АД.
В каскадах малой и средней мощности к. п. д. оказы-
вается относительно невысоким и существенно зависит от
скорости и нагрузки. По расчетным данным для привода
мощностью в 55 кВт при регулировании скорости в диапа-
зоне от 0,3 до 0,9 к. п. д. каскада лежит в пределах 0,32—
0,82.
При сравнительно высоком к. п. д. коэффициент мощно-
сти вентильного каскада оказывается невысоким, что объяс-
няется большим суммарным потреблением реактивной мощ-
ности АД и трансформатором инвертора. Коэффициент мощ-
ности АД в каскадной схеме снижается также по сравнению
с обычным включением его в связи с тем, .что коммутация
вентилей вызывает отставание тока ротора от напряжения
на угол у/2, поэтому коэффициент мощности
cos ф = cos фх cos-^-,
где cos фх — коэффициент мощности АД при совпадении
по фазе напряжения и тока ротора.
Кроме того, снижение коэффициента мощности происхо-
дит из-за искажения кривых тока двигателя и трансформа-
тора, обусловленного наличием высших гармоник.
10-5. ЗАМКНУТЫЕ СИСТЕМЫ КАСКАДНЫХ ЭЛЕКТРОПРИВОДОВ
Ранее было показано, что механические характеристики каскад-
ных электроприводов при параметрическом управлении отличаются
невысокой жесткостью, ограничивающей общий диапазон регулирова-
ния скорости.
В большинстве случаев для различных производственных механиз-
мов должны быть обеспечены более высокие требования в отношении
статической и динамической точности, которые достигаются при исполь-
зовании каскадных электроприводов в замкнутых системах автомати-
ческого управления.
469
Дополнив соответствующими обратными связями структурные
схемы разомкнутых каскадов, можно получить замкнутые системы регу-
лирования различных каскадных электроприводов. Для электромеха-
нического вентнльно-машинного каскада с отрицательной обратной
связью по скорости и положительной по току (рис. 10-20) можно записать
следующую систему уравнений:
Wj. — Uy kOt ccoq (1 s)
Wp -- ll-gkyk-f. [I ,
ф = ф (ив) = н2Л' (и2);
n —йФсо = йФш0 (1— s);
(10-93)
С„.„—IdR9,
где k„ — коэффициент усиления суммирующего усилителя,
который стоит на входе преобразователя для пита-
ния обмотки возбуждения МП;
kn = £у£т. п — общий коэффициент усиления преобразователя.
Рис. 10-20. Структурная схема электромеханического вентилыго-машин-
ного каскада с отрицательной обратной связью по скорости и положи-
тельной по току при линеаризации.
Так как максимальной скорости каскада должно соответствовать
напряжение на выходе возбудителя, равное нулю, то результирующий
сигнал на входе суммирующего усилителя также равен нулю. При сни-
жении скорости каскада сигнал обратной связи по скорости уменьша-
ется, что должно привести к уменьшению тока возбуждения МП для
повышения скорости привода, поэтому сигнал обратной связи должен
иметь положительный знак, а входной и обратной связи по току — от-
рицательный;
Из (10-93) можно получить выражение электромеханической ха-
рактеристики в неявном виде:
Edos — &Wo (1— s)fe'n (Us) [l/см — t/y + Ао.сШо (1— s)l
/?B-to0(l-s)*' (^)*о-т (1°’94)
Построение Id = f (s) ведется методом последовательного прибли-
жения,
470
Механические характеристики каскада Л4каск = Ма. д + Л1м. п =
= fx (s) могут быть получены для заданных 1/у и s по значениям
и Фм. п*
Аналогично получаются зависимости Е/ — f (s) и Л4каск = A (s),
если вместо обратной связи по скорости реализуются положительные
обратные связи по току и выпрямленному напряжению ротора.
Рис. 10-21. Структурная схема электрического вентильно-машинного
каскада с положительными обратными связями по напряжению и току
при линеаризации.
Для электрического вентильно-машинного каскада с положитель-
ными обратными связями по напряжению и току (рис. 10-21) справед-
лива следующая система уравнений:
^о. н^гй) &о. тЛ/>
Еи. п = [I. ПФ;
Edas Ем, п — IdEa*
Совместное решение системы (10-95) дает:
Edos k(£>„. п. ak'n (I/v) [t/CM — t/y + ^0.
ЙСОМ. п. akn (Uj.) (Йо. т Йо, ц/?а.д)
(10-95)
(10-96)
При Id — 0 и k'n = const получим скольжение идеального холо-
стого хода:
П. Н^п (^си ^у)
Eda (1 п, п)
(10-97)
Подставляя s0 в (10-96), получаем:
Eda (1 п. н^п^о. и) (s so)
& Еэ п. н^п (^о. т ^о. и^а.д)
(10-98)
Определив по заданным UCM, U„ и s Id = f (s), найдем зависимость
Л1а.д-Л(5).
Наконец, для асинхронно-вентильного каскада с отрицательной
обратной связью по скорости и положительной по току (рис. 10-22)
471
систему уравнений можно представить в виде
//у “Ь*0. С^О (1 S) ^O.l/rfl
^с(и = ^х^и!
E(it)S Е(1ц = f/jRa-
Из (10-99) имеем:
Edo$ [^см ^у + ^о. с<В0 (1 —s)]
Rd Мо. т
При /(7=0
&И (//СМ ’ //у 4“ ^0. с“о)
° Edo~i~kllk0, са>о
Подставив значение s из (10-101) в (10-100), получим:
Л* =
(£</0~Ь^Н^О. смо) (s — So)
Rd ^-i-Ло. т
(10-99)
(10-100)
(10-101)
(10-102)
Методика получения электромеханических и механических характе-
ристик каскада /a — f(s') а М = fi (s) эквивалентного вентилыю-ма-
Рис. 10-22. Структурная схема асинхронно-вентильного каскада с от-
рицательной обратной связью по скорости и положительной по току
при линеаризации.
шинного и вентильного каскадов аналогична той, какая приводилась
для электромеханического каскада,
Глава одиннадцатая
РЕГУЛИРОВАНИЕ ПОЛОЖЕНИЯ
11-1. ТОЧНОЕ ПОЗИЦИОНИРОВАНИЕ
Угловое ,или линейное перемещение — путь, пройден-
ный рабочим органом машины в процессе работы, — всегда
является основной координатой электромеханической си-
стемы, изменение которой во времени по требуемым зако-
472
нам составляет конечную цель управления ее движением.
Однако в большинстве практических случаев необходимо-
сти непосредственного контроля этой координаты при работе
электропривода не возникает, так как точного дозирования
перемещения рабочего органа не требуется. Примерами
подобных электроприводов могут служить электроприводы
эскалатора, бумагоделательной машины, центробежного
насоса и других машин, рабочий процесс которых непреры-
вен, а пуск в работу может быть произведен из любого
исходного положения. Аналогичные условия характерны
и для электроприводов машин с циклическим рабочим
процессом, но среди последних широко распространены и
такие машины, рабочий орган которых для нормального
течения технологического процесса должен либо на отдель-
ных этапах работы, либо в каждый'момент времени занимать
в пространстве строго фиксированные положения. Такие
машины и механизмы называются позиционными-, характер-
ной особенностью их электроприводов является необхо-
димость регулирования положения.
В отличие от других координат регулирование положе-
ния требует обязательного дискретного или непрерывного
контроля фактического значения регулируемой коорди-
наты и чисто параметрическим путем осуществляться не
может. При ручном управлении контроль текущего поло-
жения осуществляется визуально оператором, который,
воздействуя на задание скорости электроприводов машины,
обеспечивает перемещение ее рабочего органа по требуемой
траектории или установку его в фиксированные позиции
в соответствии с технологическим процессом. При этом
к электроприводу требование регулирования положения не
предъявляется, но электропривод должен обеспечивать ре-
гулирование скорости и обладать благоприятными динами-
ческими качествами, облегчающими условия регулирования
положения оператором. Как правило, при этом требуется
автоматическое ограничение координаты в крайних точках
рабочего участка траектории. В простейших случаях оно
осуществляется отключением электропривода и наложением
механического тормоза по сигналу путевого командоаппа-
рата.
Автоматическое регулирование положения в зависимости
от конкретных требований может осуществляться в трех
вариантах: 1) точное позиционирование электропривода
в заданных точках пути по дискретным сигналам путёвых
датчиков; 2) непрерывное автоматическое регулирование
473
положения по отклонению для осуществления дозирован-
ных перемещений или по заданной программе; 3) непрерыв-
ное автоматическое регулирование положения по отклоне-
нию при произвольно изменяющемся сигнале задания
(следящий электропривод).
Рассмотрим задачу точного позиционирования рабочего
органа механизма в заданных точках пути по сигналам путе-
вых датчиков или, как ее называют иначе, задачу автома-
тической точной остановки электропривода. Эта задача
сводится к автоматическому отключению двигателя и нало-
жению механического тормоза в такой точке пути, из кото-
рой электропривод за время торможения, двигаясь по инер-
ции, перемещается в заданную точку пути с требуемой
точностью. Процесс остановки, таким образом, начинается
с поступления в схему управления электроприводом импуль-
са путевого командоаппарата на отключение двигателя и
наложение механического тормоза. Если принять, что отклю-
чение двигателя и наложение механического» тормоза проис-
ходят одновременно и что усилие тормоза возрастает до
установленного значения скачком, то весь процесс точной
остановки можно разделить на два этапа.
Первый этап обусловлен наличием собственного времени
срабатывания аппаратуры ta в схеме управления электро-
приводом. Вследствие возникающего запаздывания в тече-
ние времени ta двигатель не отключается от сети и электро-
привод продолжает движение со скоростью ojliau, с которой
он подошел к датчику точной остановки, и проходит путь
<р = соиач/а.
По истечении времени срабатывания аппаратуры двига-
тель отключается от сети и накладывается механический
тормоз. Наступает второй этап процесса остановки, во время
которого запасенная во всех движущихся массах системы
кинетическая энергия расходуется на совершение работы
по преодолению сил статического сопротивления движению
на проходимом при этом пути <р":
J2<йнач/2 = + MJ ф",
где Л4Т — момент механического тормоза.
Отсюда
J CD^
ф = = (И-D
474
На первом этапе скорость со = сонач = const, на втором
изменяется в зависимости от пути по закону
£0 = ]/сОнач — 2е<р,
где е •= (Мс + MJ/J^ — ускорение электропривода на вто-
ром этапе.
Зависимость со — f (ср) при установке датчика точной
остановки (ДТО) в точке <р = 0 и некоторой начальной ско-
рости сонпч показана на рис. 11-1 (кривая J). ~
параметры, определяющие по
(11-1) путь, проходимый
электроприводом в процессе
точной остановки, при работе
электропривода не остаются
постоянными, абсолютно точ-
ная остановка невозможна.
Так как после срабатывания
ДТО движение системы явля-
ется неуправляемым, наиболь-
шая неточность остановки за-
висит только от пределов из-
менения параметров, входя-
щих в (И-1). Эти пределы можно характеризовать следу-
ющими выражениями, представляющими наибольшие и-
наименьшие значения соответствующих параметров:
Так как все
‘^нач.мш
<У)Ич.мин
Рис. 11-1. Зависимости со =- f (<р)
в процессе точной остановки
электропривода. -
™Лакс
О
®нач = ®ср — Д®макс> 4 = 4р — ^^макс>
—1— А4ма[сс,
~ Мс, ср — АМС, макс, Мг = Мт. Ср zt ДА1Т. макс,
6 = ®ср — Денакс,
(11-2)
где о\р, Zrp, JScp, Мс. ср, Мт.ср и еср— средние значения;
Ди, А/, Д7, ДМС, ДМ,. и Демакс — отклонения от средних
значений.
При этом пределы перемещения можно представить ана-
логично
Ф = фср±Лфмакс> (Н-З)
где фср — средний путь при точной остановке;
Дфмакс — максимальная ошибка позиционирования или
максимальная неточность остановки.
Как показано на рис. 11-1, датчик точной остановки дол-
жен устанавливаться на расстоянии ср3 = <рср, там же кри-
вые 2 и 3 дают представления о зависимостях со = / (<р)
475
при сочетаниях параметров, соответствующих наибольшей
ошибке позиционирования.
С помощью (11-2) можно определить по (11-1) наиболь-
ший путь при точной остановке
Фмакс — (®ср + Д® максЖр+д;макс )+
1 (^Хср4"А/макс) (®ср*Ь^шмакс)2 , дч
2 (Мд. ср- ДЛ4д)наКС
и его наименьшее значение
Фмин ~ (®ср Д®макс) (^ср Д^макс) 4"
I (^Х ср — Аймаке) (мср ~ Аммакс)2 л. д <.
' + 2(Мд.ср+ДЛ4д)иаКС ’
причем в (11-4) и (11-4а) обозначено: Л4д.ср = 7ИС ср + Л4т.ср
и ДЛ4д.макс = ДЛ4с.нач + ДМ-г.макс- Эти выражения позво-
ляют получить среднее значение пути, проходимого электро-
приводом в процессе точной остановки:
гп ___фиакс + фмин _। ... / I 1 I Ай)Макс Ломакс \ ।
Фер--------2 - фсР + фсР - “чАР 1 + ----1^~ ) +
। I 2 Аймаке Аюмякс । (АсОмлКс
Т ^со ®<*п \ СОрл /
| Ъ ср ср ср ср \ ср / /11е
т 9ЛГ ! Л₽ \2 • X1 ‘”1
ср ।_/ ЦЬмакс \
\ еср /
Максимальная неточность остановки
Дфмакс
Анализ (11-6) свидетельствует о том, что максимальная
неточность остановки тем больше, чем больше средний путь
при остановке и чем больше относительные отклонения всех
факторов, от которых он зависит, от соответствующих
средних значений. Так как относительные отклонения
в (11-5) и (11-6) значительно меньше единицы, то можно
пренебречь их произведением и квадратами. При этом (11-6)
можно с некоторым ущербом для точности представить в зна-
476
чительно более удобном для пользования виде:
Дфмакс = Мер +
\ шср *ср /
! ^2сршср (о ^шмакс । макс । макс л
"Г о’дд 'i m "1 М ‘ Л I ‘ I ‘ ‘ /
‘•'“д.ср \ шср /ид.ср a,/Zcp !
Выражение (11-7) наглядно показывает, что наиболее
существенно ошибка позиционирования зависит от средней
начальной скорости и от ее отклонений от среднего значе-
ния. С другой стороны, из (11-7) следует, что основным
фактором, вызывающим неточность остановки, являются
изменения нагрузки электропривода, ибо они непосред-
ственно сказываются на значении динамического момента
АД и при данной жесткости механической характеристики
электропривода определяют основное отклонение началь-
ной скорости от среднего значения, обусловленное изме-
нениями нагрузки Дюмякс = ДМг.мпкс/р. Изменения на-
грузки в большинстве случаев вызывают и изменения сум:
маркого приведенного момента инерции электропривода Js.
В связи с изложенным при данных пределах изменения
статической нагрузки и известных t<p и Д^МШ(С основным
средством уменьшения ошибки позиционирования является
снижение средней скорости электропривода при подходе
к датчику точной остановки и увеличение жесткости меха-
нической характеристики, соответствующей работе двига-
теля с этой пониженной скоростью. Для получения формулы,
связывающей требуемую среднюю пониженную скорость и
жесткость механической характеристики с допустимой не-
точностью остановки примем в (11-7) Дсрмакс — ДсрмаКг. доп»
где Дфмакс.доп—'Допустимая ошибка позиционирования,
определяемая технологическими требованиями к электро-
приводу. При этом получается квадратное уравнение
®ср 4_ 2/Sij8Cp/Cp<j)(.p — S/Cj.jSj-p Дфнакс. доп ~ О,
решение которого дает следующее выражение для допусти-
мой средней остановочной скорости:
®ср 1®ср^ср 4“ 2fej2®cp Дфмакс. доп ^ll^cp^cpi (1 1'8)
где
А®макс/®ср 4“ ^максАср
2Дсомакс/соСр-f- Аммане/ср 4"^^д. максМД. ср
h—__________________£11____________.
Л Д^ыакс/®ср 4-А^чакс/^ср
477
кш3=и;Р3=оо
При заданной допустимой неточности остановки
Дфмакс.доп каждое значение жесткости механической харак-'
теристики и соответствующее этой жесткости значение
А®макс/®ср определяет по (11-8) требуемое значение сред-
ней остановочной скорости <вср. Задаваясь значениями
Дсомакс/соср, можно получить пары значений соср и Дсо/соер =
= АМс.макс/р®ср, которые определяют статические меха-
нические характеристики электропривода, обеспечивающие
заданную точность позицио-
нирования (рис. 11-2).
Таким образом, рассмат-
риваемый способ управления
положением может обеспе-
чить любую требуемую точ-
ность установки рабочего ор-
гана механизма в заданные
позиции при правильном вы-
боре средней остановочной
скорости согр и обеспечении
высокой точности стабилиза-
ции этой скорости. Это озна-
чает, что требование автоматической точной остановки
электропривода определяет необходимый диапазон регули-
рования скорости электропривода D = сосрр/соср при за-
данных пределах измене-
ния нагрузки и других
возмущающих факторов.
Важным достоинством
рассматриваемого способа
является простота реали-
зации, однако при высоких
требованиях к точности и
большом диапазоне регу-
лирования, требуемом для
получения этой точности,
процесс точного позицио-
нирования может при оп-
ределенных условиях не-
допустимо затягиваться и
снижать производительность позиционного механизма.
Указанные условия определяются динамическими свойст-
вами электропривода в процессе замедления электропри-
вода от рабочей скорости ®с.р,п до пониженной остановоч-
ной скорости соср.
|^^с.макс „
I* -»1 т
Мсмин' ^с.ср ^с.макс
Рис,- 11-2. Механические харак-
теристики, обеспечивающие тре-
буемую точность позициониро-
вания.
Рис. 11-3. Зависимости со = f (ср) в
процессе замедления до понижен-
ной скорости и точной остановки
электропривода.
478
На рис. 11-3 показаны зависимости со = f (<р) при двух .
нагрузках электропривода Л4С = Мс..макс и Мс = Л4С.М1111,
охватывающие как процесс точной остановки, так и пред-
шествующий ему процесс замедления. Кривые построены
в предположении, что при любой нагрузке' процессы замед-
ления протекают при неизменном тормозном моменте двига-
теля М = Ммакс = const. Тогда ускорение электропривода
в этом процессе будет зависеть от нагрузки:
е = — (Л4Млкс + Л4С)//2,
причем наименьшей нагрузке на валу Л4С.МИ11 соответствует
и наименьшее по абсолютному значению ускорение. При
ЛД — Мс. иин начальная рабочая скорость при ограниченной
жесткости механических характеристик электропривода
максимальна сор = сор макс, путь, проходимый электропри-
водом за время снижения скорости от сор. макс до сонач мпкс
при минимальном ускорении еИИ1|, также имеет максималь-
ное значение фзам.макс. Датчик импульса замедления (ДИЗ),
дающий команду на замедление, устанавливается от ДТО
на расстоянии 1,1 фзам.маКс, поэтому, как показано иа
рис. 11-3, при М,- = Мс.мип электропривод на пониженной
скорости ®на<1. макс проходит весьма небольшой отрезок пути
и время дотягивания к датчику точной остановки невелико.
При АД = Мс.ма1(с, сор = ®р.МИ1„ в = енакс соответственно
Фзам Фзам.мии Фзам.макс* Дак СЛеДСТВИе, боЛЬШОИ
01 реЗОК ПуТИ Дфзам Дфзам. макс Фзам. мин ЭЛеКТрОПриВОД
проходит на пониженной скорости <онач.мип, время дотяги-
вания при йнач. мин “С ®р. мии оказывается значительным и
соизмеримым с общим временем, требующимся для переме-
щения механизма из исходного рабочего положения в за-
данное.
Рассматривая рис. 11-3, можно заключить, что время до-
тягивания при любых нагрузках может быть сведено к ми-
нимуму, если устранить статическую ошибку регулирова-
ния скорости и сформировать стабильную зависимость
со = f (f) в процессе замедления, инвариантную относитель-
но нагрузки (см. гл. 12), поэтому при большом диапазоне
регулирования скорости, требуемом по условиям точной
остановки, возникает необходимость использования зам-
кнутых систем регулирования скорости в системе УП—Д
с достаточно высокими показателями качества и точности
регулирования как в статических, так и в динамических
режимах.
479
Однако даже при применении этой совершенной системы,
с точки зрения регулирования положения, электропривод
при рассмотренном способе точного позиционирования ведет
себя как разомкнутая система, в которой изменения всех
факторов, влияющих на путь, проходимый при точной оста'
новке, непосредственно сказываются на достигаемой точно'
сти, а небольшая нестабильность кривой изменения скоро'
сти при замедлении может существенно уменьшать быстро-
действие. Поэтому в наиболее сложных случаях электро-
приводы позиционных механизмов по системе УП—Д вклю-
чаются в замкнутую систему автоматического регулирова-
ния положения по отклонению.
11-2. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ПОЛОЖЕНИЯ
(ПУТИ) ЭЛЕКТРОПРИВОДА ПО ОТКЛОНЕНИЮ
Автоматическое регулирование положения требует изме-
рения углового или линейного перемещения рабочего ор-
гана механизма и использования устройств, задающих
эти перемещения.
В простейшем варианте автоматическое регулирование
положения предусматривается лишь на участках движения
в районе заданных рабочих позиций, а на основной части
пути перемещения от позиции к позиции система по выход-
ной координате разомкнута. Этот вариант позволяет исполь-
зовать индуктивные датчики ошибки позиционирования —
датчики, вырабатывающие сигнал, пропорциональный от-
клонению рабочего органа от заданного положения. Дат-
чики подключаются в зоне точной остановки и обеспечивают
автоматическое регулирование положения по отклонению
от заданной точки пути с требуемой точностью. При необ-
ходимости отработки дозированных перемещений, задавае-'
мых на входе системы скачком, или при осуществлении
программного управления перемещением рабочего органа
механизма необходим постоянный контроль текущего поло-
жения, осуществляемый датчиками углового или линейного
перемещения непрерывного или дискретного действия.
В данном разделе ограничимся рассмотрением электро-
приводов постоянного тока, механическая часть которых
с удовлетворительной точностью может быть представлена
жестким механическим звеном, приведенным к валу двига-
теля. Для электроприводов позиционных механизмов кроме
регулирования положения обычно требуется регулирование
скорости и ограничение тока якоря в переходных процессах
480
допустимом значением /я = 7СТОп, поэтому в качестве объекта. -
регулирования положения примем однократноинтегрирую-
щую систему регулирования скорости в системе ТП—Д
с подчинённым контуром регулирования тока (см. рис. 8-16). >
Дополнив ее интегрированием скорости со для получения
перемещения ср, введя обратную связь по положению с коэф-
фициентом усиления &о п и включив на вход регулятор поло-
жения, получим трехконтурную систему регулирования
положения,- структурная схема которой приведена на
рис. 11-4. 1
Рис. 11-4. Структурная схема системы автоматического регулирования
положения.
При рассмотрении схемы на рис. 11-4 полезно иметь
в виду, что для преобразования сигнала ошибки Дер' =
= ерз —ср', измеренного с помощью пары сельсинов или
с помощью дискретных импульсных датчиков заданного и
истинного перемещения, в напряжение управления, кото-
рое пропорционально ошибке, а знак соответствует знаку
ошибки, в схеме предусматриваются дополнительные эле-
менты — фазочувствительные выпрямители, дискретно-ана-
логовые преобразователи или другие устройства. На схеме
рис. 11-4 этот элемент с коэффициентом передачи вклю-
чен в состав регулятора положения. На входе системы можно
задать перемещение либо вала двигателя (&0-п — 1, ерз =
= <Рз), либо угловое перемещение исполнительной оси ме-
ханизма (/го п — 1/i, где i — передаточное число редуктора)/
либо линейное перемещение рабочего органа (ko n — р,
где р — радиус приведения).
Осуществим оптимизацию контура регулирования поло-
жения методом последовательной коррекции, определив
необходимую для этой цели передаточную функцию регу-
лятора положения. В соответствии с рис. 11-4 объект регу-
лирования положения в данном случае имеет следующую’
16 Чиликин М. г._ и др. ' 481
. передаточную функцию:
тт ____ -пл 1 __ У^о. с 1
и'о. р.п — И'зам. с р —а^Т^р+1 Р •
(11-9)
Для получения передаточной функции разомкнутого
контура регулирования положения вида
^Раз-п апасб7тТцр (а^Т^р +1)
регулятор положения должен иметь передаточную функцию
^р.п
...— Ь
^О. пОп^атТ1 Ц П
(11-10)
Передаточная функция замкнутого контура регулиро-
вания положения
W зам.п
____________1 /кр. п____________
апасегт7(1р (aza-ITtlp + 1) + 1 ’
(11-11)
Проведем качественный анализ работы синтезированной
системы регулирования положения при различных усло-
виях. Сначала будем полагать, что система автоматического
Рис. 11-5. Процессы точного
позиционирования в замк-
нутой системе регулирова-
ния положения.
регулирования положения замыкается при подходе к зоне
точной остановки электропривода с целью увеличения точ-
ности позиционирования. В момент замыкания системы
электропривод движется с начальной установившейся ско-
ростью шнач и датчик положения выдает сигнал ошибки
Дфиач, равный расстоянию от начальной точки до заданной
позиции фз. При настройке контура на критическое демпфи-
рование (аП = 4) и отсутствии статической нагрузки (Л4С —
= 0) переходный процесс точного позиционирования будет
иметь характер, показанный на рис. 11-5, а. На этом ри-
сунке приведены примерные зависимости Дер, ш и 1Я = f (t),
соответствующие сформулированным начальным условиям.
482
Для анализа этих зависимостей обратим внимание на то,
что выходное напряжение регулятора положения в данной
схеме представляет собой сигнал задания скорости
^р.пАф'= (/3.с = ^0.сш3. (И-12)
С помощью (Н-12) можно определить задаваемый на
входе контура регулирования скорости темп замедления
в процессе отработки сигнала ошибки А<р:
d<i>3 kp. п d kp. n^o. п .. , . o.
-ЗГ=ЪГ„ «<’’•-ч1’’—<1U3)
Таким образом, задаваемое регулятором положения мак-
симальное ускорение электропривода в процессе замедления
тем больше, чем больше начальная скорость <о„ач. Так как
<онач « <о3.нач, то из (Н-12) следует, что при данном коэф-
фициенте усиления 6р.п, определяемом (11-10), максимальное
ускорение в процессе замедления возрастает с возрастанием
отрабатываемого перемещения Дфнач. Соответственно воз-
растает и максимальный ток якоря /макс, который в соответ-
ствии с уравнением движения равен:
/_.-4[Чй..1..+л4 ' <11Л4>
До тех пор пока задаваемое перемещение при замыкании
системы невелико и /накс< 7стоп> система остается линей-
ной, обеспечивая требуемое качество регулирования. Если
Дфнач и соответственно ш3.иач и со11ач настолько велики, что
Дакс > Лтоп> регулятор скорости переходит на насыщенный
участок своей характеристики, выдавая t/3 т = t/3 T MaKC =
— ^о.тДтоп = const, система регулирования положения раз-
мыкается и идет процесс замедления с ж 7СТ0П = const.
Так как ускорение, соответствующее стопорному моменту,
меньше задаваемого, накапливается дополнительная ошибка
регулирования положения, которая в конце процесса отра-
батывается с перерегулированием.
Из изложенного следует, что оптимизированный контур
регулирования положения требует ограничения отрабаты-
ваемого перемещения и ограничения начальной скорости
в момент замыкания системы допустимыми значениями, при
которых ток якоря в процессе замедления не достигает сто-
порного значения. Определим с помощью (П-13) и (11-14)
допустимое значение скорости электропривода в момент
16* 483
максимума тока якоря 4акс:
„ ^о. с^т. макс ^о. с сЛтоп~г^с
шмакс. доп Ъ Ъ Ъ Ъ R7’
^р.п^о. п ^р. п^о. п Р2 м
(11-15)
С другой стороны, если примем время нарастания тока
до максимума /макс « 2атТц, получим:
®макс. доп ®нач. доп ®т. макЛакс/2-
= ®нач. доп ®т®т. макс^Ц’ (11-16)
Следовательно,
^о. с сЛ.топ + ^с /. ^р. п^о. пат^|л\
®нач. доп= ь ТГ ат \ * Н Е ] —
кр.пко,п Р2 м \ Ло.с /
ала(.а-гТи / 1 \
= -^-^(с/СТ0п + Мс) 1 +—У. (11-17)
Р2 М \ аПаС /
Таким образом, и при использовании для увеличения точ-
ности позиционирования автоматического управления поло-
жением в зоне точной остановки для нормального функцио-
нирования системы необходимо снижать скорость при под-
ходе к этой зоне до значения, определяемого (11-17). Из
(11-17) следует, что тормозной момент нагрузки увеличи-
вает допустимое значение начальной скорости, поэтому,
если нагрузка изменяется в широких пределах, эту скорость
нужно определять по минимальному значению 7ИС.
Аналогичные условия складываются и в тех случаях,
когда система регулирования положения предусматривается
для отработки различных дозированных перемещений, за-
даваемых на входе системы. В этом случае цикл перемеще-
ния начинается при нулевых начальных условиях и, как
показано на рис. 11-5, б, состоит из участка ускорения элек-
тропривода до скорости шмакс и участка замедления его
с остановкой в заданной точке пути. Чем больше заданное
перемещение Д<р3, тем больше максимум тока при пуске, тем
больше максимум скорости шмакс и тем больше максимальный
ток в процессе замедления /иакс. Поэтому и здесь оптималь-
ные динамические свойства системы регулирования положе-
ния сохраняются только в пределах тех задаваемых переме-
щений Аф3, при которых в процессах замедления она оста-
ется линейной (/„акс < Лтоп), при этом шмакс оказывается
значительно меньше номинальной рабочей скорости шр.п,
следовательно, ограничить значение t/3. с значением kOi сшмакс
в данном случае нельзя.
484
(11-19)
Избежать дополнительного перерегулирования при тор-
можении с максимальной рабочей скорости юр макс можно,
' подобрав такой коэффициент усиления регулятора положе-
ния, при котором в момент перехода на торможение в соот-
ветствии с (Н-12) задается номинальная рабочая скорость
электропривода при рассогласовании, равном максималь-
ному пути торможения со скорости шр. н при е = ет-макс '=
= const:
^Фт. макс = ®р. н/2ег макс. (11-18)
Подставив (11-18) в (11-12), разрешим полученное урав-
нение относительно fep.n:
и ___2А0. СВТ. макс
Р‘П ko. пшр. н
Выбор коэффициента усиления регулятора положения по
условию (11-19) позволяет получить удовлетворительное
качество регулирования при задании перемещений, которым
соответствует начальная скорость при торможении, равная
<0р.н. Однако при отработке перемещений, при которых на-
чальная скорость при торможении оказывается меньше
шр.н, процессы торможения сопровождаются дотягиванием,
причем их длительность остается такой же, как при отра-
ботке больших перемещений. В связи с этим в [17] для подоб-
ных электроприводов предлагается использовать регулятор
положения с параболической характеристикой.
Целесообразность такого решения можно обнаружить,
анализируя (11-13). По-видимому, дополнительные ошибки
при ограничении тока не накапливались бы в том случае,
если задаваемый регулятором положения темп торможения
dwjdt был равен максимальному ускорению ет-макс и оста-
вался постоянным на всем участке торможения с /я /стоп.
В соответствии с (11-13) это возможно, если коэффициент уси-
ления регулятора положения kp-n изменялся бы обратно
пропорционально со:
^р. п = ^о. с®т. макс/^о. п®’ 01 "20)
В процессе замедления с постоянным ускорением ет-макс.
скорость ш связана с рассогласованием аналогично (11-18):
- Дф аь ы2/2ет макс. (11-20а)
Определив из (11-20а) ш и подставив это выражение
в (П-20), получим:
& __ fep, с&г. макс__
*о. п 1^28^. макс Дф
.485
Отсюда выходное напряжение регулятора положения
«з.с с входным сигналом рассогласования Дф должно быть
связано соотношением
= (11-21)
Зависимость и3 z = f (Дф), соответствующая (11-21),
представлена на рис. 11-6 кривой 1. При Дф = Дфт.маКс kp.n
имеет значение
X, __*о. сет. макс
кр. п. мни ь „
пшр» и
(11-22)
в 2 раза меньшее, чем при линейном регуляторе с коэффи-
циентом усиления (11-19).
На рис. 11-6 показаны характеристики регулятора, соот-
ветствующие (Н-19)—прямая 2 и (11-22) — прямая 3,
Рис. 11-6. Характеристики
регулятора положения.
причем показано ограничение
заданного значения скорости
из.с.макс = ^о.сИр.н- Уменьшение
Дф в соответствии с (11-21) при-
водит к увеличению коэффици-
ента регулятора вплоть до оп-
тимального значения, определя-
емого (11-10). Это значение име-
ет место при Дф = Дфнач, доп, и
ему соответствует характери-
стика 4 на рис. 11-6. В этом
можно убедиться, подставляя в
(11-20а) значения ш = юяаКс.доп
из (11-15). При дальнейшем уменьшении Дф < Дф,1ач доп
увеличение kp „ по (11-22) привело бы к увеличению коле-
бательности, поэтому нелинейная зависимость t/3 с = / (Дф)
имеет вид жирной кривой, которая при Дф < Дф,1ач.дОп
совпадает с прямой 4, при Дфнач.дОп< Лф < Дфт. макс опре-
деляется (11-21), при Дф > Дфг.макс ограничена значением
^з. с. макс COnst.
Для рассмотренных систем основным требованием, предъ-
являемым к электроприводу в отношении точности регули-
рования, является требование ограничения статической
ошибки позиционирования заданным допустимым значе-
нием. В связи с наличием интегральной составляющей
передаточной функции регулятора тока в установившемся
режиме напряжение на его входе равно нулю:
^р. п^-о. п^р. с ^фс ^0. т/с === 9.
486
, Отсюда определяется статическая ошибка регулирова-
ния — неточность остановки в заданной точке пути:
, М а а*а*Т*
(11-23)
Р* м
Необходимость использования регулятора положения
с нелинейной характеристикой может быть исключена при
любых перемещениях путем задания на входе системы тре-
буемого закона <рэ = f (t), при обработке которого система
остается во всех режимах линейной. Для подобных систем
автоматического программного регулирования положения
характерны более высокие требования к динамической точ-
ности регулирования, аналогично следящему электропри-
воду, особенности которого кратко рассмотрены ниже.
11-3. ОСОБЕННОСТИ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА
Основное отличие следящего электропривода от систем
точного позиционирования состоит в постановке задачи ре-
гулирования: обеспечение следования (слежения) положе-
ния исполнительного органа механизма ср' за изменяющимся
по произвольному закону положением задающего органа фз
с ошибкой, во всех режимах работы не превышающей допу-
стимого значения. Поэтому рассмотренная выше трехкон-
турная система регулирования положения представляет
собой следящий электропривод в тех случаях, когда замыка-
ние электропривода, например по углу поворота исполни-
тельной оси установки, имеет целью воспроизведение про-
извольно меняющегося угла поворота задающей оси, т. е.
слежение исполнительной оси за движением задающей оси,
с заданной точностью. При этом отработка заданного скач-
ком угла поворота, т. е. рассмотренная выше отработка до-
зированных перемещений, является частным режимом ра-
боты следящего электропривода.
Воспроизведение с высокой точностью произвольных
законов движения, задаваемых перемещением задающей
оси фэ (0» является одной из наиболее сложных задач авто-
матизированного электропривода. Произвольность движе-
ния задающей оси определяет исключительное многообразие
условий работы электропривода, при котором проявляется
влияние существенных нелинейностей системы, таких, как
сухое трение при движении с малой знакопеременной ско-
ростью, кинематические зазоры при движении со знако-
переменным моментом двигателя и т. п. Высокие требова-
487
Ния к точности воспроизведения угла поворота задающей
оси требуют особо тщательного синтеза динамических
качеств электромеханической системы, причем их удовлет-
ворение сильно осложняется отмеченным выше влиянием
нелинейностей и наличием в системе упругих механических
связей. -
Ограничимся сначала анализом динамической точности
следящего электропривода с линейными жесткими механи-
ческими связями. Для этого получим изображение ошибки
Рис. 11-7. Преобразованная структурная схема трехконтурной системы
следящего электропривода.
в трехконтурной системе, структурная схема которой пока-
зана на рис. 11-4, с помощью общей формулы ошибки (6-15):
Aq> (р)
,Фз(Р) + ^с(Р)^о.р.п(Р)
1 + W7 раз. П (Р)
(11-24)
где К р.п — передаточная функция объекта регулирования
положения по возмущению Mz (р).
Для определения этой передаточной функции представим
структурную схему рис. 11-4 в виде, показанном на рис. 11-7,
пренебрегая внутренней связью по э. д. с. и принимая
k0_n = 1. На основании этой схемы можно записать:
tw' - ф(р) - ^•т(ат7’иР + 1) ™ 1 _
^0 Р-п-Л4с(р) Ctt7p.c ^зам.с^,
__ ^0. т (^тТ’цР + 1) 1/^0. С 1 ... п-\
_ С^р.с «сатГрР («тТ’цР + 1) +1 р' / ’ ;
Подставляем (11-25) в (11-24), выражая И?р.сс помощью
(8-52) и учитывая, что при &0>п = 1 фз — <р3- В результате
488
преобразований получаем: '
Фз.(Р)апаАТ|Лр[асат7'11р(ат7;цР + 1) + 1]-|-
мст«т(яЛ</’+1)
Л<₽ (Р) " en^T^p [^^(«”7^+1)+1]+1 . • <11 ‘26)
Рассматривая (11-26), можно установить, что статиче-
ская ошибка системы определяется только действием посто-
янной нагрузки 7ИС и не зависит от уровня задающего сиг-
нала. Статическая ошибка определяется формулой (11-23),
которая вытекает.из (11-26) при р = 0 и была выше-полу-
чена из физических соображений. Важной оценкой динами-
ческой точности следящего электропривода является уста-
новившаяся ошибка в режиме отработки линейного нараста-
ния задающего сигнала ф3 (0 = а>31 == <о3/р, которую не-
трудно определить, подставив это изображение задающего
сигнала в (11-26):
Д ф2 макс 1 — (i)3anac.at'^'tx Н-ру—'—~•. (11-27)
Рассматриваемый режим есть режим движения следя--
щего электропривода с постоянной скоростью ш3, задавае-
мой вращением задающей оси. Полученное выражение
(11-27) свидетельствует о том, что в этом режиме ошибка
складывается из двух составляющих. Первая составляющая
называется скоростной ошибкой Дфмакс, которая пропорцио-
нальна скорости и зависит только от уровня некомпенси-
руемой постоянной контура регулирования положения
Тцп = и от соотношения постоянных этого кон-
тура ап:
Дфмакс 1 = (П-28)
Вторая составляющая представляет собой статическую
ошибку Дфс и при данной, нагрузке Л4С = const зависит
от тех же факторов и от модуля статической жесткости
в двухконтурной статической системе регулирования ско-
рости ₽зам (8-57):
Лфс = ¥^Мс. (11-29)
Рзам
Передаточную функцию разомкнутой системы при kon =
= 1 можно представить в виде
k
.489
где fey — 1 lanTw — коэффициент усиления разомкнутого
контура регулирования положения.
Учитывая (11-30), выражение скоростной ошибки (11-28)
можно записать в более общем виде:
ЛфмаКс1-Из/^у = ш/^у (11-31)
Соответственно выражение статической ошибки (11-29)
имеет вид:
A<pc = </fey₽3aM. (11-32)
Следовательно, при данной скорости заводки ш3 умень-
шение скоростной ошибки обеспечивается только увеличе-
нием коэффициента усиления разомкнутой системы fey,
т. е. в данном случае выбором наименьших допустимых по
критерию качества регулирования коэффициентов а„, ас и ат
при данной сумме некомпенсируемых постоянных Тц в кон-
туре регулирования тока. Статическая ошибка зависит как
от коэффициента усиления контура регулирования положе-
ния, так и от жесткости статических механических характе-
ристик системы при разомкнутой связи по положению.
В рассматриваемой системе,. оптимизированной методом
последовательной коррекции, жесткость рзам зависит от
отношения рТм/асйтТц,, поэтому уменьшение ап, ас и ах
снижает статическую ошибку как за счет возрастания коэф-
фициента усиления, так и за счет увеличения жесткости
Рзам. В соответствии с (11-32) статическая ошибка может быть
полностью устранена использованием двукратноинтегри-
рующего контура регулирования скорости при ИП-регу-
ляторе скорости.
Обратим внимание на то, что если момент нагрузки 7ИС
содержит составляющую вязкого трения Рв.тш, то статиче-
ская ошибка в установившемся режиме движения с постоян-
ной скоростью заводки в соответствии с (11-32) будет содер-
жать составляющую, пропорциональную скорости, увели-
чивающую скоростную ошибку на значение, равное:
Дфв. т. макс ~ Рв. т®/^уРзам' (11-33)
Динамические ошибки в неустановившихся режимах
движения могут дополнительно увеличиваться за счет пере-
ходных составляющих. Так как при уменьшении ап, ас и
колебательность системы увеличивается, переходные со-
ставляющие ошибки могут возрастать, в то время как уста-
новившаяся динамическая ошибка (11-27) при этом умень-
шается. Поэтому выбор ап, az и ат, как выше было отмечено,
490
должен обеспечивать минимум полной динамической ошибки
во всех режимах.
Для того чтобы при произвольном входном сигнале иметь
возможность конкретизировать требования к динамической
точности, задают максимальные расчетные значения первой
и второй производных входного сигнала ш,
Для расчетных
с
’макс И ^макс
режимов заводки с постоян-
линейно возрастающей ско-
(dco3/cf/)M3KC.
ной скоростью ш3 = емакс£ и
ростью (03 = 8макс? вводят-
ся понятия добротности по
скорости (см. § 6-3)
— ®мгкс/Дфмакс. доп
(11-34)
и добротности по ускоре-
нию
= ^макс/Афмакс. доп»
(11-35)
Рис. 11-8. Варианты ЛАЧХ следя-
щего электропривода.
где Дфмакс.доп — допусти-
мая ошибка слежения.
Как было показано в § 6-3, эти параметры позволяют
построить граничную ЛАЧХ в области низких частот, ко-
торая обеспечивает в этой области значения динамических
коэффициентов усиления L (Й), достаточных для ограни-
чения ошибки допустимым значением для гармонического
входного сигнала Дер = Д<рмакс sin Й/ при условии со
®макс и е -С емакс. Построение этой ЛАЧХ, как показано
на рис. 11-8, сводится к построению прямой 1 с наклоном
—20 дБ/дек, пересекающей ось абсцисс в точке Й = ka,
и прямой 2, пересекающей ту же ось в точке й = йв = ]/йе.
Для обеспечения требуемой динамической точности сле-
жения ЛАЧХ разомкнутого контура регулирования по-
ложения не должна заходить в область, граница которой
отмечена на рис. 11-8 штриховкой.
Рассмотренная трехконтурная система следящего элект-
ропривода настроена на точную компенсацию постоянных
и ее ЛАЧХ (прямая 3) в низко- и среднечастотной областях
имеет наклон —20 дБ/дек, аналогично прямой /. Очевидно,
эта настройка может обеспечить требуемую точность регу-
лирования, если заданная добротность по скорости ka
меньше частоты среза системы или равна ей:
k < _1_ = .
(11-36)
491
При настройке всех контуров на технический оптимум
ап — az — at = 2 и = 0,01 с заданное значение не
должно превышать 12,5. На практике требуются коэф-
фициенты добротности по скорости на порядок большие,
поэтому рассмотренная система в применении к следящему
электроприводу обладает ограниченными' возможностями.
Вид граничной по условиям точности регулирования
ЛАЧХ (отмеченной на рис. 11-8 штриховкой) свидетель-
ствует о целесообразности использования контура регули-
рования, настроенного на симметричный оптимум. Пусть
при заданной добротности по скорости и ускорению
kE ЛАЧХ трехконтурной системы с пропорциональным
регулятором положения имеет вид, показанный на рис. 11-8
ломаной 3. Заменив П-регулятор положения ИП-регуля-
тором и подобрав параметры по симметричному оптимуму,
получим:
1 + 16Г..П 1
ГРаз-п= 1бГцр 8Гцр(4Тмр+1)- (П’37)
Передаточной функции (11-37) соответствует ЛАЧХ
с частотой среза Qc = 1/8Ли и низкочастотной асимптотой,
имеющей наклон —40 дБ/дек (прямая 4 на рис. 11-8).
Сравнивая прямые 3 и 4, можно убедиться, что использование
симметричного оптимума может обеспечивать выполнение
требований к точности в случаях, когда настройка на
технический оптимум дает недостаточные для этого коэф-
фициенты усиления в области низких частот. Дополни-
тельное увеличение динамической точности регулирования
может быть достигнуто использованием в качестве под-
чиненного контура регулирования астатической однокон-
турной системы регулирования скорости с ИПД-регуля-
тором скорости (см. § 8-4).
Реализация такой системы существенно упрощается
в тех случаях, когда постоянная Тя достаточно мала и мо-
жет быть отнесена к некомпенсируемым постоянным без
значительного увеличения Ttl. В подобных случаях тот
же эффект достигается при более помехоустойчивом ИП-
регуляторе скорости.
В случаях, когда электромагнитная постоянная дви-
гателя пренебрежимо мала, может представить интерес
одноконтурная система регулирования положения с . ИП-
регулятором при небольших Т.л и с ПД-регулятором при
Tw'>\r\fkR с настройкой контура на симметричный
оптимум. В последнем случае следящий электропривод
492
обладает скоростной и статической ошибкой, аналогично
ошибкам в трехконтурной системе, определяемым по (11-31)
и (11-32).
В заключение кратко остановимся на влиянии нели-
нейностей и упругих механических связей. Структурная
схема линейной следящей электромеханической системы
представлена на рис. 11-9. Здесь показано, что в зависи-
мости от требований к точности воспроизведения заданного
перемещения на исполнительной оси механизма система
может быть замкнута либо по .углу поворота срх массы
двигателя (эта связь показана на рис. 11-9 утолщенной
пунктирной линией), либо по углу поворота <р2 массы J2.
на исполнительном валу механизма.
Рис. 11-9. Структурная схема следящей электромеханической системы
с упругой связью.
При невысоких требованиях к точности слежения
может быть использована обратная связь по углу q>j.
При этом условия движения упругой механической си-
стемы будут определяться электромеханической связью
в замкнутой по углу поворота двигателя системе вполне
аналогично рассмотренному' выше для системы, замкнутой
обратной связью по скорости двигателя. В самом деле,
в этом случае, как это наглядно видно на рис. 11-9, обрат-
ная связь по углу поворота двигателя может рассматри-
ваться как интегральная обратная связь по скорости и
электромеханические свойства системы могут характери-
зоваться выражением динамической жесткости механической
характеристики электропривода. Так, для трехконтурной
системы регулирования положения (см. рис. 11-4) при
/г0 п = 1 выражение динамической жесткости после, под-
становки выражений kp_a и kPtC и преобразований может
493
быть представлено в виде
л . , Р7*м (^п^с^т^цР 4" 1)
Рд (р) = ~ »„№ (Wr9+‘)
Рзам (апяса'т7’рР 4" О
СЕпСЕсб?тТцР (^тТ’рР 4“ 1)
(11-38)
-МдБ/дек
£
। *
Рис. 11-10. Асимптотическая
ЛАЧХ динамической жесткости
следящего электропривода,
структурная схема которого
показана на рис. 11-4.
где рзам — модуль статической жесткости в однократно-
интегрирующей системе регулирования скорости.
Асимптотическая ЛАЧХ динамической жесткости (11-38)
при настройке на технический оптимум (ап = ас = ат = 2)
имеет вид, показанный на рис. 11-10. Сравнивая ее с ЛАЧХ,
приведенной на рис. 8-17 и
8-20, можно установить, что
замыкание статической сис-
темы регулирования скорости
по углу поворота двигателя
дает систему с динамической
механической характеристи-
кой астатической системы,
аналогично использованию
двукратноинтегрирующей си-
стемы. Некоторые сведения
об условиях взаимодействия
в таких электромеханических
системах с упругой связью
были изложены в § 8-7; они полностью распространяются
и на рассмотренный вариант следящего электропривода.
Недостатком этого варианта является снижение точности
слежения исполнительного вала за счет упругости механи-
ческих связей и наличия кинематических зазоров, поэтому
в большинстве случаев приходится контролировать непо-
средственно координату исполнительного вала механизма,
замыкая систему по его углу поворота. При этом объектом
регулирования положения является вся электромеханичес-
кая система с упругой связью, разомкнутая, если подчи-
ненные. контуры регулирования не используются, либо
замкнутая по какой-либо переменной двигателя при.на-
личии подчиненных контуров регулирования. При этом,
как выше было неоднократно показано, динамические
свойства объекта регулирования будут существенно зависеть
от сочетания параметров электромеханической системы.
Рациональным выбором параметров разомкнутой системы
или соответствующей настройкой подчиненных контуров
494
регулирования можно добиться минимальной колебатель-
ности объекта регулирования положения, что существенно
упрощает получение благоприятных динамических пока-
зателей следящего электропривода.
В зависимости от сочетаний параметров электромеха-
нической системы возможно три характерных случая:
1) механическая часть имеет низкую частоту свободных
механических колебаний Qla (см. гл. 1), значительно мень-
шую частоту среза разомкнутого контура регулирования
Qla ^ср', 2) частота свободных колебаний Q12 близка
к частоте среза; 3) механическая часть склонна к высоко-
частотным колебаниям П1а ;> Qcp.
Рис. 11-11. Асимптотические ЛАЧХ следящего электропривода, замк-
нутого по координате массы исполнительного механизма.
Для систем, в которых жесткость с1а определяется
жесткостью передач, первый случай чаще всего имеет
место при большом приведенном моменте инерции меха-
низма. При этом влияние индуктивности якорной цепи
на демпфирование механических колебаний разомкнутой
системой электропривода обычно невелико, поэтому соот-
ветствующим выбором модуля жесткости механической ха-
рактеристики можно обеспечить условия, при которых
механическую часть системы можно представить колеба-
тельным звеном со средним и даже высоким коэффициентом
демпфирования. При этом можно соответствующим под-
бором передаточной функции регулятора положения син-
тезировать следящий электропривод, настроенный на сим-
метричный оптимум, с частотными характеристиками ра-
зомкнутой системы, аналогичными показанным на рис.
11-11, а.
Второй случай наиболее сложен для анализа и синтеза сис-
темы, так как получение среднечастотной асимптоты с накло-
ном —20 дБ/дек при слабом демпфировании механических
колебаний затруднительно. В этом случае необходимо демп-
495
фирование разомкнутого контура, близкое к критическому,
при котором объект регулирования распадается на инер-
ционные звенья и задача решается обычным путем.
Третий случай наиболее характерен для следящих
электроприводов механизмов с относительно небольшим
приведенным моментом инерции (рис. 11-11,6, кривая 1).
При небольших у электромеханическая связь ослабляется
(см. гл. 4) и получение высокого демпфирования объекта
регулирования без применения корректирующих связей
по координате исполнительного вала практически невоз-
можно. Однако при этом влияние на динамику замкнутой
системы даже относительно слабо демпфированной механи-
ческой части ослаблено тем в большей степени, чем больше
частота свободных механических колебаний Q12 > QCp'.
В соответствии с рекомендацией, приведенной в [13],
в этом случае для получения заданного показателя коле-
бательности Амакс достаточно, чтобы средне- и высоко-
частотная часть асимптотической ЛАЧХ имела вид, по-
казанный на рис 11-11, б сплошной линией.
При этом необходимо иметь в виду, что присутствие
в контуре регулирования нелинейности, обусловленной
кинематическим зазором, существенно влияет на динами-
ческие качества следящего электропривода. Анализ влияния
зазора на амплитудно-частотные характеристики разомк-
нутой электромеханической системы, выполненный в гл. 4,
свидетельствует о том, что при колебаниях с ростом ампли-
туды коэффициент гармонической линеаризации нелиней-
ности, обусловленной зазором, уменьшается, что равно-
сильно снижению жесткости упругой связи с12. Соответ-
ственно с ростом амплитуд уменьшается частота колебаний
QJ2 и резонансный пик смещается в сторону меньших
частот, как показано на рис. 11-11, б (кривая 2). Насту-
пающее при этом нарушение условий устойчивости может .
приводить к возникновению автоколебаний. Приведенные
на рис. 4-25 амплитудно-частотные характеристики ра-
зомкнутой системы с зазором свидетельствуют о том, что
с ростом демпфирования влияние нелинейности умень-
шается, поэтому необходимо и в этом случае принимать
меры к максимальному демпфированию объекта регулиро-
вания положения.
В заключение отметим, что при движении с малой
скоростью нелинейная зависимость момента сухого трения
от скорости (см. рис; 1-3, б) может также приводить к воз-
никновению автоколебаний, так как в этой области наклон
496
зависимости 7ИС = / (а>) противоположен аналогичной за-
висимости при вязком трении и вызывает эффект усиления
колебаний. Изменения знака скорости приводят к изме-
нению нагрузки электропривода скачком на 2 7ИСО, где
Л4с0 — начальный момент сопротивления при трогании.
Это явление' является причиной нарушения плавности
движения следящего электропривода при низких ско-
ростях.
Глава двенадцатая
ФОРМИРОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ
ПУСКА И ТОРМОЖЕНИЯ
12-1. ПОНЯТИЕ ОБ ОПТИМАЛЬНОМ ХАРАКТЕРЕ
ПЕРЕХОДНЫХ ПРОЦЕССОВ ЭЛЕКТРОПРИВОДА
Осуществление законов движения рабочего органа ме-
ханизма, обеспечивающих выполнение требуемых техноло-
гических операций, является главной задачей автоматизи-
рованного электропривода. Несмотря на исключительное
многообразие производственных механизмов и технологи-
ческих требований к электроприводу, всегда в решении
этой главной задачи важное место занимает выполнение
операций пуска и остановки электропривода, а в регули-
руемых электроприводах перехода от рабочего режима,
требующего одной рабочей скорости, к режиму работы
с другой скоростью, определяемой течением технологи-
ческого процесса.
Как было показано в гл. 5, переходные процессы изме-
нения скорости движения электромеханической системы
при различных сочетаниях ее параметров, определяющих
ее динамические свойства, и различном характере измене-
ния управляющих воздействий протекают по-разному.
Иными словами, переход от одного состояния системы
к другому может совершаться по различным траекториям,
отличающимся длительностью перехода, максимальными
нагрузками электрической и механической части системы,
потерями энергии, выделяющимися в двигателе за время
перехода, потреблением энергии за то же время и другими ’
показателями.
Очевидно, из множества возможных траекторий изме-
нения состояния системы необходимо стремиться выбрать
497
такие, которые обеспечивают максимальное быстродействие,
минимум динамических нагрузок и потерь энергии, макси-
мум полезной работы и оптимальные значения всех других
показателей, характеризующих условия протекания про-
цесса. Характер переходных процессов электропривода,
соответствующий таким траекториям, и является опти-
мальным в самом общем смысле, однако его определение
затрудняется многообразием оптимизируемых показателей,
их различной практической значимостью и противоречи-
востью требований к динамическим свойствам электропри-
вода и законам изменения управляющих воздействий.
Поэтому задача формирования оптимальных переходных
процессов электропривода требует конкретизации критерия
оптимальности. Рассмотрим в качестве примера наиболее
характерные формулировки задачи оптимального управ-
ления переходными процессами электропривода.
В качестве первого примера рассмотрим случай, когда
электропривод должен отрабатывать заданное перемещение
при условии минимума потерь энергии, выделяющихся
в якорной цепи двигателя. Такая постановка задачи пред-
ставляет интерес в случае, когда нагрев двигателя определяет
динамические нагрузки и производительность позицион-
ного механизма ограничивается мощностью установлен-
ного двигателя при отсутствии' других ограничений, на-
ложенных на переменные системы. Нахождение оптималь-
ного закона со, 1Я = f (t) при этих условиях выполнено
в [25] путем использования принципа максимума Л. С. Пон-
трягина. Оптимальные зависимости со, i„, соответствующие
этому решению при А4С = 0, представлены на рис. 12-1, а.
Рассматриваемому критерию соответствует линейный закон
изменения тока и момента двигателя и параболическая
кривая изменения скорости.
В .качестве второго примера рассмотрим задачу осу-
ществления процесса изменения скорости от а>нач до сокон,
оптимального по критерию максимума быстродействия,
т. е. минимума длительности процесса, при наличии огра-
ничения, наложенного на ток двигателя sg /стоп. Анализ
этих условий однозначно приводит к выводу, что оптималь-
ным в этом случае является равномерно ускоренное дви-
жение с максимально допустимым ускорением на всех
участках процесса. Соответствующие зависимости со,
i„ = f (t) показаны на рис. 12-1, б, причем прямая 1 соот-
ветствует активному тормозному моменту А4С = const,
а ломаная 2 — реактивному моменту с тем же абсолютным
498
значением. . Сравнивая переходный процесс пуска на
рис. 12-1, а с оптимальным по быстродействию, легко убе-
диться, что при процессе, оптимальном по критерию потерь
в двигателе, двигатель хуже используется по перегрузочной
способности, чем при. процессе, оптимальном по быстро-
действию, поэтому, если ограничения по нагреву отсут-
ствуют, минимальное время отработки заданного пере-,
мещения при ограничениях, наложенных на ток, 1Я /стоп
и скорость ® о>н обеспечивается при равномерно уско-
ренном протекании всех переходных процессов (рис. 12-2,
сплошные линии).
Рис. 12-1. Примеры оптимальных
зависимостей w, 1Я = f (t).
Рис. 12-2. Оптимальный по
быстродействию процесс пе-
ремещения при наличии ог-
раничения тока („ < /СТоп
и скорости ш sg шн.
Для сравнения двух рассмотренных оптимальных гра-
фиков движения электропривода на рис. 12-2 пунктир-
ными линиями показаны зависимости со, ся (t), оптимальные
по критерию нагрева двигателя, при ®макс ~ а>„ и одина-
ковом перемещении за время /р. Сравнительный анализ,
выполненный в [16, 18], показал, что при параболическом
законе изменения скорости потери в двигателе на 12%
меньше, чем при равномерно ускоренном протекании
переходных процессов. Однако это преимущество может
быть реализовано только в том случае, если /накс /макс. доп-
При наличии ограничения тока 1Я /стоп = /мокс. доп и
скорости со о>н параболический график изменения ско-
рости не имеет преимуществ, но формируется сложнее,
чем зависимость а (/) в виде трапеции, и на практике
используется весьма редко.
Если говорить об условиях реализации оптимального
графика с постоянным ускорением в переходных процессах,
499
т. е. о возможностях формирования прямоугольного графика
тока и момента двигателя (рис. 12-2), то эти возможности
также.ограничены электромагнитной инерцией двигателей,
которая в большинстве случаев исключает изменения тока
и момента двигателя скачком. Исключение представляет
достаточно быстрое нарастание тока и момента при вклю-
чении асинхронных двигателей с фазным ротором или
двигателей постоянного Тока на сеть при большом доба-
вочном сопротивлении в цепи ротора двигателя.
Рассмотрим третий пример формулировки задачи опти-
мального управления переходными процессами электропри-
вода: отработку заданного перемещения за минимальное
время при ограничении тока и скорости, при условии
минимума, динамических нагрузок механической части
электромеханической системы. При отсутствии в механи-
ческой части зазоров и упругих связей ограничение тока
двигателя обеспечивает ограничение его момента, а сле-
довательно, и максимальных нагрузок механического обо-
рудования минимальными значениями, достаточными для
ускорения масс системы и совершения полезной работы.
При, этом минимум времени перемещения обеспечивается
прямоугольной диаграммой тока при пуске и торможении,
рассмотренной выше.
.Однако абсолютно жестких механических связей и пе-
редач без необходимых рабочих зазоров не существует.
Как было показано в гл. 1, приложение момента к упругой
механической системе при слабом демпфировании вызы-
вает в ней слабо затухающие механические колебания,
в значительной степени увеличивающие максимальные
нагрузки передач. Динамический коэффициент (1-91) при
. Л4с2 = 0 достигает значения &д = 2, а при наличии за-
зоров в передачах может достигать и больших значений
(см. § 1-7), поэтому оптимизация электромеханических
систем автоматизированного электропривода по критерию
минимума колебательности (см. § 4-6) и формирование
управляющих воздействий, обеспечивающих снижение ди-
намического коэффициента при переходных процессах,—
эффективный путь решения третьей задачи оптимального
управления движением электроприводов.
Рассмотрим, как повлияет на колебательные динами-
ческие нагрузки повышение плавности нагружения упругой
механической системы за счет ограничения темпа нараста-
ния момента двигателя в начале переходного процесса.
Пусть в системе уравнений (см. 1-41) момент двигателя
500
есть экспоненциальная функция времени (рис. 12-3, а,
кривая /):-
Л4 = Л4Х(1(12-1)
Так как нас интересуют в первую очередь динамические
нагрузки, положим Л4С = 0. Тогда уравнение движения
Рис. 12-3. Ограничение темпа нарастания момента
(а) и соответствующие зависимости w, M12 — f (б (б).
рассматриваемой системы, решенное относительно упругого
момента, имеет вид:
^--^+< = J2eMaKC(l-e-^), (12-2)
где емпкс = М1/(/1 + /г).
Решение (12-2) следует искать в виде
Л412 = cos Q12/-|-D sin Й12Л
После определения коэффициентов и преобразований
получим:
М12 = J2eMaKC (1 - г е~ _|_
(12'3)
где 4> = arctg^.
Сравнивая полученный результат с динамическим про-
цессом при приложении момента М скачком, можно уста-
новить, что в данном случае колебательная составляющая
нагрузки зависит от постоянной времени экспоненты Т,
определяющей темп нарастания момента. Максимум мо-
мента наступает при. П12/ + ф = л/2 4- 2kn, где k =
= 1, 2, 3 ..., когда e~i/T 0 (рис. 12-3, б). Следовательно,
501
динамический коэффициент, соответствующий (12-3), опре-
деляется соотношением
b ___ М12макс _ |__________1____
Д“ Л412ср ~ ’
(12-4)
Полученный результат свидетельствует о том, что по-
вышение плавности нагружения за счет увеличения Т
обеспечивает снижение амплитуды колебательной состав-
ляющей нагрузки и умень-
шение динамического коэффи-
циента. Если время нараста-
ния момента до М = при-
ближенно принять равным
Т\ та 2Т и учесть, что Я12 =
— 2n/T12, можно динамиче-
ский коэффициент выразить
как функцию отношения вре-
мени нарастания момента к
периоду свободных колеба-
ний двухмассовой системы:
(12-5)
01235-5678 ЗаВИСИМОСТЬ Йд =/('Г1/7’12)
Рис. 12-4. Зависимости йд = приведена на рис. 12-4 (кри-
= f (Ti/Tlz). вая /). Рассматривая ее,
можно заключить, что вы-
бором Тг = (0,5 4- 2) Т12 можно снизить амплитуды ко-
лебательных нагрузок в 2—7 раз, ограничив динамический
коэффициент значениями ka = 1,5 4- 1,1.
Таким образом, формирование кривой — (t), обеспе-
чивающей плавное нагружение механической части электро-
привода, в сочетании с максимальным использованием
демпфирующей способности является одним из наиболее
простых путей решения рассматриваемой задачи. Анало-
гичный результат может быть получен при нарастании
момента по линейному закону (рис. 12-3, а, прямая 2).
В этом случае зависимость /гд = f (Тг/ Т12) содержит
периодическую составляющую; огибающая максимумов этой
кривой показана на рис. 12-4 кривой 2. Дополнительное
повышение плавности ^нагружения механической части
системы может быть достигнуто при ограничении второй
производной момента. Этому условию соответствует нара-
502
стание момента по косинусоидальному закону М =
— 0,5Л41 [1—cos (nf/Tj)], показанному кривой 3 на
рис; 12-3, а. Расчетная зависимость &д = /(7\ / Т12), соот-
ветствующая этому закону нарастания момента, приведена
на рис. 12-4 (кривая 3) [22]. Нетрудно видеть, что главным
фактором является ограничение первой производной мо-
мента. Ограничение второй производной при том же общем
времени нарастания момента (косинусоидальное нара-
стание, кривая 3) обеспечивает примерно тот же эффект,
что и ограничение только
первой производной (кри-
вые 1 и 2).
Все изложенное свиде-
тельствует о целесообраз-
ности для минимизации
колебательных механиче-
ских нагрузок ограничи-
вать первую производную
момента dM / dt, или, что
то же, вторую производ-
ную скорости d2<o / dt2
(рывок). Следовательно,
оптимальные зависимости
<о, 1'я = /(0, обеспечиваю-
Рис. 12-5. Оптимальные зависи-
мости со, гя = f (0, обеспечиваю-
щие минимальные динамические
нагрузки системы.
щие минимальные динамические нагрузки электромеха-
нической системы, имеют вид, показанный на рис. 12-5,
а и б. Для механизмов с высокой и средней частотой
свободных колебаний й1а время 7\ обычно много меньше
общего времени переходного процесса и на быстродействии
сказывается незначительно. При весьма низких частотах
колебаний, характерных, например, для раскачивания
грузов, требуется значительное замедление темпа нараста-
ния момента, снижающее средние ускорения и увеличиваю-
щее время цикла отработки перемещения. Для таких
условий особенно важно максимальное демпфирование ме-
ханических колебаний электроприводом (см. гл. 4), умень-
шающее максимальные нагрузки за счет быстрого зату-
хания колебаний.
Рассматривая многообразие требований, предъявляемых
к электроприводу, можно установить, что в подавляющем
большинстве случаев по тем или иным причинам существует
необходимость ограничения ускорений в переходных про-
цессах. В зависимости от характера технологического
процесса и условий работы механизма. все случаи, когда
503
к электроприводу предъявляется требование ограничения
ускорений, можно• разделить на две группы.
В первую группу необходимо включи’гь все случаи,
когда заданное техническими условиями значение расчет-
ного ускорения является предельно допустимым во всех
режимах й при любых реальных значениях нагрузки меха-
низма. Наиболее ясным примером может служить требование
ограничения ускорений, предъявляемое к электроприводу
пассажирских лифтов. Здесь необходимость ограничения
ускорений связана с неблагоприятным воздействием на
организм человека динамических нагрузок, превышающих
некоторый предел, соответствующий так называемому «ком-
фортабельному» ускорению адоп = 1,5 м/с2. Превышать
это значение недопустимо, поэтому при изменениях на-
грузки электропривода ускорения должны изменяться
только в сторону уменьшения (а аС алоп; е бдОП). При этом
минимальное время отработки заданного перемещения при
изменяющейся в широких пределах нагрузке может быть
получено только при условии поддержания постоянства
ускорения е « едоп при любой нагрузке.
Подобное требование уже возникало при рассмотрении
процессов точного позиционирования (см. § 11-1), где
требовалось поддержание постоянства ускорения при раз-
личных нагрузках в процессах замедления от рабочей до
пониженной скорости во избежание недопустимого увели-
чения длительности движения на «ползучей» скорости.
Другими примерами, когда требуется поддерживать’ уско-
рение, постоянным при изменениях нагрузки, могут служить
лебедки с канатоведущими шкивами трения, Механизмы
на рельсовом ходу, рольганги и т. п.
Для всех этих и им подобных механизмов оптимальным
по критерию максимальной, производительности при мини-
муме динамических нагрузок является формирование ста-
бильной тахограммы со — f(t) с ограниченным рывком и
ускорением, инвариантной относительно нагрузки, пока-
занной для процесса пуска кривой 1 на рис. 12-6. При этом
момент двигателя в переходном процессе зависит от стати-
ческой нагрузки .
+ Мс),
поэтому одной и, той же оптимальной тйхограмме со (О
соответствуют различные зависимости М (0 при Mz =
= ^с.макс (кривая 2) и при Мс = Мс.мин (кривая 3).
504
Максимальный момент при Мс = МС;Макс не должен пре-
восходить допустимого по перегрузке момента' двигателя
(^макс ^стоп)"
Ко второй группе необходимо отнести механизмы,
для которых заданное расчетное ускорение едоп ограни-
чивается при максимальной нагрузке только перегрузочной
способностью двигателя. При этом оно не является пре-
дельнодопустимым, напротив, для получения максимальной
производительности необходимо поддерживать момент по-
стоянным при всех нагрузках, используя возможность
Рис. 12-6. Формирование оп-
тимальной зависимости со =
= f (/) при различной на-
грузке.
Рис. 12-7. Формирование оп-
тимальных зависимостей
М = f (/) при различных
нагрузках.
увеличения ускорений при нагрузках, меньших макси-
мальной. В этих случаях ограничения накладываются не
на ускорение, а на момент двигателя, поэтому необходимо
формировать оптимальный закон изменения момента дви-
гателя М. = f (t) с неизменными при различных нагрузках
максимальными значениями и темпом нарастания dM/dt.
При этом переменно максимальное ускорение в оптималь-
ной зависимости <о = f (f)
' емакс =-^-(Л4СТОП-Л4С) = /(Л4С).
При уменьшении статической нагрузки ускорение увели-
чивается и длительность переходного процесса tn сокра-
щается. Изменения емакс при формировании оптимальных
зависимостей ю, i (М) — f (/), показанных на рис. 12-5,
зависят от соотношения между динамическим моментом
Л4д.макс и пределами изменения нагрузки Л4С.МОКС— Л4ск111Н>так
как время нарастания момента 7\ было выше определено
505
для Л1с — 0, т. е. для динамического момента, и должно
быть отнесено к его наибольшему значению (рис. 12-7).
Сопоставляя два рассмотренных случая оптимального
управления переходными процессами электропривода при
изменяющейся нагрузке, можно представить себе и'третий,
достаточно распространенный на практике вариант, при
котором заданное строго регламентированное максимально
допустимое ускорение едоп при больших нагрузках не может
быть реализовано из-за ограниченной перегрузочной спо-
собности двигателя. При этом условия формирования опти-
мальных зависимостей ю, М = f (t) при малых нагрузках
Мс< Л4СфГр определяют необходимость формирования ста-
бильной диаграммы скорости ю (t) аналогично приведённой
на рис. 12-6, а при Mz > Л4с.гр, напротив формирование
оптимальной диаграммы момента М (t) аналогично приве-
денной на рис-. 12-7. Граничное значение нагрузки соответ-
ствует случаю, когда
Л4 = /^вдопЛ4С гр ~ ^стоп»
т. е. имеют место и максимально допустимое значение мо-
мента М = Л4СТ0П и максимально допустимое ускорение
едоп-
При известном требуемом законе изменения механи-
ческих координат М и ю во времени можно ставить задачу
определения соответствующих законов изменения управ-
ляющих воздействий, необходимых для их реализации.
Наибольший интерес представляет рассмотрение этой за-
дачи для систем высокой управляемости, основанных на
регулировании напряжения в цепи якоря для двигателей
постоянного тока или на регулировании частоты для дви-
гателей переменного тока, поэтому в дальнейшем рас-
сматриваются условия формирования оптимальных пере-
ходных процессов в системе УП—Д.
Точное воспроизведение рассмотренных выше оптималь-
ных зависимостей <о, М — f (0 при практическом решении
задач управления движением электропривода в переходных
процессах оказывается нецелесообразным. Эти зависимости
служат эталонами, к которым реальный характер пере-
ходных процессов должен в достаточной степени прибли-
жаться. Как справедливо отмечено в [16], оптимальной
в практическом отношении следует считать ту систему
управления, при помощи которой достигается приближе-
ние к тому или иному оптимальному графику движения
наиболее простыми средствами.
506
12-2. ФОРМИРОВАНИЕ ОПТИМАЛЬНОЙ ДИАГРАММЫ СКОРОСТИ
ю=/(0
Условия формирования переходных процессов в системе
УП—Д существенно зависят от инерционности преобразо-
вателя, поэтому сначала рассмотрим, по какому закону
необходимо изменять напряжение, приложенное к обмотке
возбуждения генератора, для реализации оптимальной за-
висимости <п = f (0 при пуске с максимальным использо-
ванием допустимых значений е «5
=== ®доп И Р макс Р доп (СМ. рИС.
12-5, а). Связь между скоростью
двигателя со и напряжением воз-
буждения генератора ив определя-
ется системой уравнений:
+ | (12-6)
ег = с«)4-7?я2гя. J
В (12-6) индуктивность рассея-
ния якорной цепи принята при-
ближенно равной нулю. Подста-
вив второе уравнение системы (12-6)
в первое, получим:
Рис. 12-8. Оптимальные
зависимости со, гя, ег, ив =
= f (t) в системе Г—Д.
+ ^Я + ^ТГ^. (12-7)
Так как производная тока в оптимальной зависимости
гя (Z) изменяется скачком, ив (0 представляет собой функцию,
имеющую разрывы в точках, где d2 1Я / dt2 = ± со. На рис.
12-8 приведены зависимости едв, ег и ив = f (t), соответ-
ствующие оптимальному закону изменения <о (/) и
показанному там же. Зависимость ив = f (f) (кривая /)
соответствует генератору с большой постоянной времени
Тг, а аналогичная зависимость 2 получена для относительно
небольшой постоянной Тг (кривая 2). В пределе при быстро-
действующем (например, тиристорном) преобразователе
(Тг а; 0) зависимость uB(t) повторяет в другом масштабе за-
висимость er(t).
Таким образом, для формирования оптимального пере-
ходного процесса пуска в системе Г—Д необходимо каким-
либо способом обеспечить соответствующий ему закон
507
изменения управляющего сигнала — напряжения, прило-
женного к обмотке возбуждения генератора. Рассматривая
зависимость приведенную на рис. 12-8, можно убедить-
ся, что точное воспроизведение этой сложной зависимости
в связи с наличием разрывов — скачков напряжения воз-
буждения представляет трудности. Если учесть индуктив-
ность якорной цепи, можно прийти к заключению о не-
возможности точного выполнения линейного закона нараста-
ния тока: при Ья2 0 для получения в начальный момент
dijdt # 0 необходим скачок э. д. с. генератора нае/, =
. — Ья2 dijdt. Очевидно, что при Тг 0 э. д. с. генератора
Рис. 12-9. Формирование линейного нарастания э. д. с.
генератора в системе Г—Д.
скачком при реальных управляющих воздействиях изме-
няться не может. Сказанное подтверждает целесообразность
формирования переходных процессов, близких к оптималь-
ным, но реализующихся более просто.
В связи с этим полезно обратить внимание на то, что
представленная на рис. 12-8 оптимальная зависимость
ег = f на основной части линейна и в целом незначительно,
отличается от прямой <?г — сеД0„Л Формирование линейного
закона нарастания э. д. с. генератора благодаря его большой
постоянной времени осуществляется достаточно просто.
В- частности, генератор с критическим самовозбуждением'
имеет с известными допущениями передаточную функцию-
интегрирующего звена [21]: Wr (р) = \/Т'гр, поэтому для
получения линейного нарастания э. д. с. к его обмотке
возбуждения необходимо приложить напряжение мв =
= — const (ломаная 1 на рис. 12-9, а). Для гене-
ратора с независимым возбуждением эта же зависимость
ev(t) реализуется несколько сложнее (прямая 2 на рис.
12-9, а), но значительно проще, чем оптимальная кривая
508
uB(t) на рис. 12-8. В этом случае для получения линейного
нарастания э. д. с. генератора можно использовать крити-
ческую положительную связь по напряжению генератора
(или по его току возбуждения), воздействующую на вход
тиристорного возбудителя. Как было показано в § 7-3,
при этом генератор совместно с возбудителем приближенно
ведет себя как интегрирующее звено, и при постоянном
задающем сигнале на входе тиристорного возбудителя
напряжение на обмотке возбуждения изменяется по прямой
2 на рис. 12-9, а.
Характер переходных процессов электропривода 'при
линейном нарастании управляющего воздействия <о0 был
проанализирован в § 5-2. Для сравнения полученные там
зависимости ю, iB(t) на рис. 12-9, б сопоставляются с опти-
мальными зависимостями ю, соответствующими при-
веденным на рис. 12-5,а. Из рис. 12-9,6 видно, что линейный
закон изменения э. д. с. преобразователя в системе УП—Д
обеспечивает характер процессов, незначительно отли-
чающийся от представленного на рис. 12-5, а и практи-
чески совпадающий с приведенным на рис. 12-5, б. Для огра-
ничения ускорения допустимым значением едоп достаточно
обеспечить нарастание э. д. с. преобразователя по закону
епр = сеД0ПЛ Однако при этом отсутствует возможность
формировать темп нарастания момента и соответственно
ограничивать рывок допустимым значением рдоп. Как было
показано в § 5-2, при этом максимальный рывок одно-
значно определяется допустимым ускорением
Рмакс = едоп/7\с (12'8)
. Как ясно из изложенного выше, имеется определенная
свобода в выборе допустимого значения рывка, так как
желательное время нарастания момента до максимального
значения лежит в пределах (0,5—2)7\2 и дальнейшее его
увеличение ограничивается только возможным недопусти-
мым уменьшением среднего ускорения. Поэтому во многих
практических случаях предписываемый (12-8) рывок
р максур доп и линейный закон нарастания э. д. с. пре-
образователя или частоты в системе ПЧ—АД обеспечивает
удовлетворительное приближение реального переходного
процесса к оптимальному.
На рис,. 12-9, а приведена зависимость ив — f (/) (пря-
мая 3) для случая малой постоянной времени генератора
Тг. Чем больше постоянная времени Тг при данном тре-
буемом времени возбуждения генератора tB или чем меньше
, 509
время tR при данной постоянной Тг, тем реализация пере-
ходного процесса требует большего напряжения возбудителя
t/B макс-' Возбудитель должен выбираться с запасом по
напряжению, определяемым коэффициентом форсирования
“‘ t/в. макс/^в. в
В разомкнутой системе ТП—Д формирование линей-
ного процесса нарастания э. д. с. преобразователя не
представляет затруднений и обеспечивается включением
на вход преобразователя задатчика интенсивности нара-
стания задающего сигнала и? = f (t). Функциональная
схема такой системы представлена на рис. 12-10. Здесь
пуск электропривода осуществляется включением скачка
Рис. 12-10. Схема с линейным задатчиком интенсивности.
задания и3 = йшОп на вход звена ограничения 30, которое
переходит в состояние глубокого насыщения и выдает на
вход интегратора И постоянный сигнал, обеспечивающий
нарастание uv с темпом, требуемым для получения уско-
рения едоп. По мере возрастания му результирующий
сигнал на входе звена 30 уменьшается и в конце процесса
выводит этот усилитель из зоны ограничения выходного
сигнала на линейную часть его характеристики. Темп на-
растания му быстро уменьшается, и при и3 — 17у.макс —
= &о)он наступает равновесие. При уменьшении скачком
до нуля сигнал отрицательной связи по му обеспечивает
изменение знака сигнала на выходе 30, и происходит
процесс постепенного уменьшения сигнала му с той же
производной, что обусловливает торможение с ускорением
£доп-
Формирование линейного нарастания э. д. с. преобразо-
вателя обеспечивает высокую стабильность максимального
ускорения электропривода емакс — едоп. В системе УП—Д
сю = епр —/?я2гя-1Я2^. (12-9)
510
Продифференцировав (12-9) и разделив на с, получим:
После нарастания тока до максимального значения
dia/dt =d2la/dt2 = 0, поэтому
1 ^пр
емакс = = едоп
й/,гя
Рис. 12-11. Зависимости со, 1Я =
= f (t) при пуске электропривода
по схеме рис. 12-10.
ю, 1’я = /(0 для случая пуска
и не зависит от Л4С. Динамическая составляющая тока
остается постоянной при любых рабочих нагрузках, однако
в 'целом диаграмма скоро-
сти в рассматриваемом
случае формирования пе-
реходных процессов в ра-
зомкнутой системе при из-
менениях нагрузки пре-
терпевает изменения. В
связи с ограниченной же-
сткостью механической ха-
рактеристики при измене-
ниях нагрузки зависимость
to — f(f) смещается по вер-
тикали на значение Дюс,
пропорциональное стати-
ческому моменту Mz. Это
можно видеть из рис. 12-11,
где приведены зависимости
с большим тормозным активным моментом Л4С (кривые
1 и Г) и вхолостую при Mz = 0 (кривые 2 и 2').
Сравнение кривых, приведенных на рис. 12-11, позво-
ляет заключить, что большая статическая ошибка Д<пс,
свойственная разомкнутой системе УП—Д, существенно
нарушает стабильность формируемой диаграммы скорости.
Легко себе представить, что для позиционного механизма
в процессе замедления путь, проходимый электроприводом
при минимальной и максимальной нагрузках, будет раз-
личным, а это приведет, как было показано в § 11-1, к дли-
тельному «дотягиванию» к датчику точной остановки,
которое снижает производительность механизма.
Указанные особенности ограничивают эффективность
формирования переходных процессов в разомкнутой си-
стеме УП—Д. Этот путь представляет интерес для электро-
приводов по системе Г—Д в случаях, когда высоких тре-
511
бований к стабильности зависимости со(/) при различных
нагрузках не предъявляется. При этом использование
большой электромагнитной инерции генератора, как было
отмечено выше, позволяет получить линейную зависимость
ив(0 при скачке управляющего воздействия достаточно
простыми средствами.
Во всех случаях, когда требования к стабильности
диаграммы.скорости являются жесткими и когда желательно
более точное воспроизведение оптимальной зависимости
со (7) в части ограничения рывка, формирование переходных
процессов электропривода должно осуществляться путем
программного управления системами автоматического ре-
гулирования скорости электропривода.
Рис. 12-12. Двухконтурная система регулирования скорости с задатчи-
ком интенсивности.
Простейшим примером программного управления явля-
ется представленная на рис. 12-10схемаТП—Дс задатчиком
интенсивности ЗИ. В отличие от системы Г—Д, где форми-
рование линейной зависимости er(t) обеспечивается исполь-
зованием электромагнитной инерции генератора, здесь
с помощью ЗИ формируется закон изменения управляю-
щего воздействия иу = /го>0 как независимой функции
времени, т. е. задается программа изменения во времени
скорости й0. В разомкнутой системе эта программа отрабаты-
вается со значительной ошибкой; в замкнутой системе
регулирования скорости ошибки могут быть снижены в тре-
буемой степени и обеспечена необходимая стабильность
заданного переходного процесса.
На рис. 12-12 приведена структурная схема двухкон-
турной статической системы регулирования скорости элек-
тропривода с предусмотренным для формирования пере-
ходных процессов пуска и торможения задатчиком интен-
сивности ЗИ первого порядка, т. е. обеспечивающим ли-
512
нейный закон нарастания и3,с = k0_ Ссо3. При настройке на
технический оптимум и линейном нарастании задающего
сигнала, как было показано в гл. 8, суммарная ошибка
равна:
Л . ' 4Тц
макс 1 :=:: ДЮыакс = "о~ ~т~ • (111J
Р 1 м 1 м
При этом общий характер процесса пуска аналогичен
показанному на рис. 12-11, но отличается отсутствием
ошибки по управляющему воздействию (при пренебрежении
внутренней связью по э. д. с.) и при больших Тн умень-
шенной в Тм / 4Гц раз статической ошибкой. При умень-
шении статической ошибки в такой же степени уменьша-
ется время нарастания тока 7\, поэтому условия ограниче-
ния рывка ухудшаются. Если 7\ оказывается значительно
меньше, чем требуемое по условиям ограничения рывка,
зо
И1
иг
Рис. 12-13, Функциональная схема задатчика интенсивно-
сти второго порядка.
необходимо формировать на входе системы требуемый за-
кон движения более точно. Например, оптимальную за-
висимость со3(/), соответствующую рис. 12-5, а, можно до-
статочно точно воспроизвести с помощью задатчика интен-
сивности второго порядка, функциональная схема которого
представлена на рис. 12-13.
В этой схеме звено ограничения 30 в зоне насыщения
своей характеристики задает допустимое значение рывка
Рдоп — / di2, которое интегрируется интегратором И1,
на выходе которого сигнал, пропорциональный е, нарастает
линейно. Интегратор И1 имеет ограничение на уровне
8 == едоп, что обеспечивает переход к линейному участку
нарастания со3. Так как два интегратора, охваченные
обратной связью, являются консервативным колебательным
звеном, для формирования заключительной части кривой
со3(/) и устранения перерегулирования введена отрицатель-
ная обратная связь по s3.
>/817 Чиликин М. Г. и др. 513
Включив такой задатчик вместо линейного задатчика
интенсивности, как показано на рис. 12-12 пунктиром,
можно получить переходный процесс, весьма незначительно
отличающийся от оптимального, с зависимостью от наг-
рузки, определяемой суммарной ошибкой при линейном
нарастании задающего сигнала (12-11). Очевидно, даль-
нейшее увеличение стабильности диаграммы скорости при
различных нагрузках может быть обеспечено применением
систем с меньшей установившейся динамической ошибкой
при линейном нарастании задающего сигнала, поэтому
анализу динамической точности различных систем регули-
рования скорости выше было уделено много внимания
(см. гл. 8). Для уменьшения переходных составляющих
динамической ошибки необходимо обеспечивать высокое
демпфирование переходных процессов в контуре регули-
рования скорости с коэффициентом демпфирования
близким к единице.
В заключение заметим, что для быстроходных позицион-
ных механизмов, требующих точного воспроизведения за-
кона изменения скорости в функции пути, используется
программное управление с заданием сигнала м3. с = k0
в функции пути w3 C = /(ср), а в электроприводах с автома-
тическим регулированием положения по отклонению пре-
дусматривается программное управление перемещением
путем задания зависимости <р3 = f(t) [21].
12-3. ФОРМИРОВАНИЕ ОПТИМАЛЬНОЙ ДИАГРАММЫ МОМЕНТА
м = /(О
Задача формирования оптимальной диаграммы момента
с постоянными при различных нагрузках максимальными
значениями момента и его производной в своей основной
части — поддержания постоянства момента при пуске и
торможении — решается путем формирования статических
характеристик электропривода. Действительно, если от-
влечься от необходимости ограничения производной мо-
мента, т. е. рассматривать случаи, когда желательно
равномерно ускоренное протекание переходных процессов
пуска, реверса и торможения, обеспечить оптимальные
условия протекания переходных процессов можно, сформи-
ровав экскаваторные характеристики, показанные для двух
направлений вращения электропривода на рис. 12-14, из
которого видно, что такие характеристики дают возмож-
ность максимально использовать электропривод по пере-
514
грузочной способности во всех режимах и при отсутствии
других ограничений реализовать максимальное быстродей-
ствие при переходе от одной скорости к другой.
Формирование статических характеристик, в той или
иной мере приближающихся к приведенным на рис. 12-14,
может осуществляться на основе использования рассмот-
ренных выше способов регулирования момента в пределах
поддержания постоянным момента и способов регулирования
скорости на рабочем участке характеристики. Здесь пред-
ставляет интерес коротко рассмотреть особенности форми-
рования статических характери-
стик и ограничения производ-
ной момента в системе УП—Д.
Формирование экскаваторной
статической характеристики в
общем случае требует регулиро-
вания двух координат электро-
привода — скорости (э. д. с. дви-
гателя, напряжения) и тока (мо-
мента) двигателя. Регулирова-
ние каждой из этих переменных
должно осуществляться с тре-
буемыми высокими динамиче-
скими показателями, поэтому
возникает необходимость введе-
ния корректирующих связей или
устройств. При этом возникает
а/д 1
-н> А м
ы i . ^Д-л I.. Цд-т
а » |w 1 ' 1 . |
-----М-----------4
Рис. 12-14. Экскаваторные
механические характеристи-
ки электропривода.
проблема согласования
работы различных обратных связей и устранения их воз-
можного неблагоприятного взаимного влияния, которая
была рассмотрена в § 6-6. Напомним, что в отечественной
практике нашли широкое применение две структуры —
структура с суммирующим усилителем и структура подчи-
ненного регулирования координат.
Наиболее полно выше была рассмотрена структура
подчиненного регулирования координат и показано на
примере двухконтурной статической системы регулирова-
ния скорости, что в этой структуре получение характери-
стик, обеспечивающих равномерно ускоренное протекание
переходных процессов, достигается наиболее простыми
средствами (§ 8-4). Динамические свойства контура регули-
рования тока, оптимизированного методом последователь-
ной коррекции, были проанализированы в § 7-4. Опираясь
на эти данные, можно при ас = аг = 2 представить харак-
тер переходного процесса пуска в такой системе кривыми
!/г17* 515
со, f(0, приведенными на рис. 12-15, а. По этим зави-
симостям на рис. 12-15, б построена динамическая 1 и для
сравнения приведена статическая 2 электромеханические
характеристики электропривода.
Рассматривая рис. 12-15, можно сделать ряд важных вы-
водов. Статическая характеристика определяет общий харак-
тер переходного процесса, однако наличие инерционностей
в системе управления приводит к значительным расхожде-
ниям между статической и динамической характеристиками.
Рис. 12-15. Переходный про-
цесс пуска в двухконтурной
системе регулирования ско-
рости с подчиненным конту-
ром регулирования тока.
Скоростная ошибка регулирования тока при наличии ста-
тической нагрузки определяется формулой
из которой следует, что диаграмма момента зависит от
нагрузки и имеют место отклонения от оптимальных кривых
M(i), показанных на рис. 12-7, в сторону недоиспользо-
вания электропривода по перегрузочной способности, воз-
растающие при уменьшении Мс. Так как ошибка обуслов-
лена влиянием внутренней обратной связи по э. д. с. дви-
гателя, можно уменьшить ее или исключить путем компен-
сации этого влияния в первом приближении с помощью
положительной обратной связи по скорости (э. д. с. и
напряжению).
Время нарастания тока и момента двигателя Т} в данном
случае определяется некомпепсируемон постоянной: 7\ =
— 4,77’jt. Это время при быстродействующем тиристорном
преобразователе мало и во многих случаях окажется не-
достаточным для получения требуемой плавности пуска
упругой механической системы (7\< Tt ло„). При этом для
ограничения производной тока любым требуемым значением
систему регулирования можно дополнить контуром регули-
рования производной тока, как показано на рис. 12-16.
При использовании компенсации внутренней связи по
э. д. с. в такой системе можно получить переходные про-
516
цессы, не имеющие существенных отличий от оптимальных.
Однако необходимо иметь в виду, что введение дополни-
тельного контура регулирования при настройке на техни-
ческий оптимум вдвое уменьшает быстродействие и увели-
чивает ошибки контура регулирования скорости.
Рис. 12-16. Структурная схема системы с ограничением производной
тока.
На практике для формирования экскаваторных характе-
ристик часто используется структура с суммирующим усили-
телем, особенно в системе Г—Д. В § 6-6 было отмечено,
что в этой структуре необходимая избирательность дей-
ствия различных обратных связей обеспечивается введением
нелинейностей в их цепи — так называемых отсечек. На рис.
12-17 представлена схема с суммирующим усилителем
Рис. 12-17. Схема регулиро-
вания скорости с отсечкой
по току.
с непрерывной отрицательной обратной связью по ско-
рости (чаще по э. д. с. двигателя или по напряжению гене-
ратора) и отрицательной обратной связью по току с отсеч-
кой. Если гибкая отрицательная связь по току в этой схеме
отключена, а электромагнитной инерцией усилителя и ин-
дуктивностью якоря можно пренебречь, то максимальный
темп нарастания тока двигателя в такой схеме определя-
ется только запасом по напряжению возбудителя U,, ,,акс
17 Чиликни М. Г. и др.
517
и постоянной времени генератора Тг:
Ш =-^МтС-- (12-13)
\^/макс °я2\^А=0
На рис. 12-18, а приведены зависимости, характеризую-
щие при указанных условиях динамику электропривода,
построенные на основании уравнения баланса напря-
жений на входе тиристорного возбудителя
Uy U3 Uo> с Uo< т U3 kQt сй) т (1Я 1отс)
Из рассмотрения этих зависимостей следует, что в си-
стеме Г—Д с помощью отрицательной обратной связи по
току якоря с отсечкой можно формировать переходный
процесс, близкий к оптимальному, только при 7Х tn.
Начальный темп нарастания тока якоря при этом опреде-
ляется (12-13) и получается значительным, несмотря на
то, что инерционность преобразователя велика, а напря-
жение {/в.макс ограниченно. Как только ток як'оря пре-
высит ток отсечки 70ТС, резко возрастает напряжение и0 т,
уменьшая результирующее напряжение иу и соответственно
напряжение ив до значения, при котором обеспечивается
требуемый темп нарастания э. д. с. генератора. В дальней-
шем ток якоря должен уменьшаться, с тем чтобы обеспе-
чить возрастание напряжения ив в соответствии с законом
ив = показанным на рис. 12-8. Следовательно, уско-
рение привода по мере разгона должно непрерывно умень-
шаться .
При необходимости значительного ограничения dM / dt
и относительно небольшой Тг в рассматриваемой схеме
получить близкий к оптимальному процесс без применения
дополнительных средств невозможно. На рис. 12-18, а
напряжение ив максимально на начальном участке про-
цесса, в то время как по условиям ограничения dM / dt
необходимо вначале иметь уменьшенные значения иа, воз-
растающие по мере разгона до максимума в конце процесса.
Необходимое ограничение темпа нарастания момента дви-
гателя может быть обеспечено введением гибкой отрица-
тельной связи по току якоря, как показано на рис. 12-17
пунктиром.
Статическая электромеханическая характеристика в
схеме с отсечкой по току имеет вид, показанный на рис.
12-18, б (зависимость 1). Ее важным показателем является
коэффициент отсечки k0TC =- /01С / /стоп.
518
Как выше было отмечено, вследствие инерции преобра-
зователя динамическая зависимость со = f(i„) (кривая 2 на
рис. 12-18, б) всегда в той или иной степени отличается
от статической, однако характер ее в широком диапазоне
изменения скорости определяется формой статической меха-
нической характеристики. Сравнивая статическую характе-
ристику с динамической, можно убедиться, что использо-
вание электропривода по допустимому току ухудшается
Рис. 12-18. Переходный процесс пуска (а) и электроме-
ханические характеристики (б) в системе с отсечкой по
току.
вследствие двух причин: уменьшения тока по мере роста
скорости, обусловленного формой статической характери-
стики 1, и расхождения между статической и динами-
ческой характеристикой 2. Эти факторы при заданном
значении 7СТОП увеличивают фактическое время переход-
ного процесса в сравнении с оптимальным законом М = f(t).
Примем, что усилитель и преобразователь обладают ли-
нейными характеристиками и не будем учитывать относи-
тельно небольшого падения напряжения в якорной цепи.
При этом справедливо соотношение
&т. в^г[«з ^о, с® ^о. т Оя Д>тс)]
/ . т d(n\
(12-14)
Полагая механические связи жесткими, можно опреде-
лить производную скорости:
das ___с1я — Мс
dt
(12-15)
17*
519
Подставляя (12-15) в (12-14), после преобразований
получаем:
> 1 ~ ' Rc+вМ0. с) и - сТг
1Я “з^т.в^г | * 2
^СТОП 1 |С2ТГ
J 2 ^т. в^г^о» т
(12-16)
где /?отс = /огс / 7СТ011 — коэффициент отсечки по току.
При Тг = 0 значения тока в переходном процессе опре-
деляются статической характеристикой. Здесь наглядно
видно, что отрицательная связь по скорости уменьшает
заполнение кривой тока в переходном процессе, вызывая
дополнительное уменьшение тока по мере возрастания
.скорости. Этот же вывод справедлив и для отрицательной
связи по напряжению двигателя, так как при принятых
допущениях она эквивалентна отрицательной связи по
скорости.
Расхождения между статической и динамической харак-
теристиками обусловлены электромагнитной инерцией ге-
нератора, которая характеризуется постоянной Тг. Чем
больше Тт, тем при прочих равных условиях меньше ток
якоря при данной скорости. Это влияние проявляется
более сильно у механизмов с относительно малым сум-
марным моментом"инерции. Для электроприводов инерци-
онных механизмов расхождения между статическими и
динамическими характеристиками относительно меньше.
Во всех случаях для уменьшения расхождений между ста-
тической и динамической характеристикой при данном
значении необходимо увеличивать коэффициент обратной
связи по току якоря т. Тормозной момент статического
сопротивления при прочих равных условиях уменьшает
ускорение привода, поэтому с его увеличением расхожде-
ния между статикой и динамикой уменьшаются.
Уравнение (12-16) свидетельствует, что рассмотренная
схема с отсечкой по току не может обеспечить поддержание
постоянства тока в переходных процессах, поэтому ее
использование для формирования оптимальных процессов
неэффективно. Существенное улучшение динамических
свойств этой схемы достигается введением отсецки по
скорости и использованием формирующей положительной
связи по скорости или напряжению. Соответствующая
принципиальная схема показана на рис. 12-19.
Если цепь положительной связи по напряжению ип к
разомкнута, схема отличается от приведенной на рис. 12-17
520 -
только наличием узла отсечки в цепи отрицательной связи
по скорости, поэтому в переходных процессах до тех пор,
пока со < соотс в (12-16) ko c = 0, за счет чего при прочих
равных условиях заполнение кривой = /(/) может быть
заметно повышено. При этом увеличивается заполнение
статической характеристики, которая принимает вид по-
казанной на рис. 12-18, б ломаной 3.
Более значительный эффект повышения заполнения ста-
тической и динамических характеристик может быть
достигнут введением положительной формирующей связи
Рис. 12-19. Схема системы с отсечками по току и скоро-
сти и с формирующей положительной связью по напря-
жению.
по напряжению генератора. Возможность такого введения
обеспечивается наличием отсечки по скорости, за счет
Которой в переходных процессах по скорости система ра-
зомкнута. Положительная связь по напряжению при кри-
тических параметрах полностью устраняет зависимость
тока якоря от скорости (см. гл. 7). При этом условии в пре-
делах 0 < со < соотс статическая характеристика имеет
вертикальный участок 1Я = /стоп. При со > со0тс сильная
отрицательная связь по скорости компенсирует действие
формирующей положительной связи и статическая характе-
ристика приобретает вид кривой 4 на рис. 12-18, б. При
надлежащем естественном ограничении темпа нарастания
тока в соответствии с (12-13) или таком же ограничении
521
с помощью гибкой связи по току якоря схема обеспечивает •
формирование переходных процессов, весьма близких
к оптимальным. Введение отсечки и положительной связи
по напряжению существенно уменьшает и3 и соответственно
начальные форсировки по напряжению управления.
Гибкая отрицательная обратная связь по току необхо-
дима не только из соображений ограничения производной
тока, но обычно используется как корректирующая связь. •
для получения требуемого качества регулирования тока.
По тем же причинам кроме показанных на рис. 12-17 и
12-19 обратных связей обычно предусматривается и гибкая
обратная связь по скорости. В ряде режимов гибкая связь
по скорости ухудшает качество регулирования тока, а
гибкая связь по току ухудшает работу системы регули-
рования скорости. Это неблагоприятное взаимное влияние
обратных связей в структуре с суммирующим усилителем
было отмечено в § 6-6 и является существенным недостат-
ком этой структуры и одной из главных причин, по которым
она постепенно вытесняется структурой подчиненного .или -
независимого регулирования координат электропривода.
12-4. ФОРМИРОВАНИЕ ПРОЦЕССОВ ВЫБОРА ЗАЗОРОВ
В ПЕРЕДАЧАХ
Рис. 12-20. Зависимости сох,
fi = f (t) при выборе зазоров в
передачах.
Анализ динамических нагрузок передач, возникающих при выборе
зазоров, приведенный в гл. 1, свидетельствует о том, что для ограни-
чения динамического коэффициен-
та йд допустимыми значениями при
данном' значении Д<р, необходимо
ограничивать начальную скорость
в момент соударения масс и J2.
Одно и то же значение скорости
оДиач может быть при прочих рав-
ных условиях достигнуто при раз-
личных законах движения в пери-
од выбора зазоров, которые иллю-
стрируются зависимостями, пока-
занными на рис. 12-20.
Кривые 1 и Г соответствуют
случаю, когда ограничивается непо-
средственно скорость вала двигате-
ля путем пубка в соответствии с
предварительной ступенью регули-
рования скорости, обеспечивающей
при разомкнутой кинематической цепи установившуюся скорость двига-
теля сй1уст = со1нач. Аналогичные кривые 2 и 2' соответствуют случаю,-
когда' ограничение начальной скорости обеспечивается ограничением
начального ускорении вала двигателя допустимым значением et =
= еодоп = const, Наконец, кривые 3 и 3' соответствуют случаю, когда
522
при выборе зазоров ограничивается только рывок рдоп = (й2ы1/й?2)доп=
= const. При этом е = рдоп?, что обеспечивается линейным нараста-
нием момента двигателя.
Сравнение этих кривых позволяет сделать вывод, что при прочих
равных условиях ограничение рывка требует наибольшей длительности
процессов выбора зазоров, а ограничение скорости наименьшей. С точки
зрения производительности и управляемости привода третий случай
наиболее неблагоприятен, так как время выбора зазоров не только
увеличивает длительность переходных процессов, но и затрудняет ма-
невры у нули скорости механизма, важные при ручном управлении
механизмами.
Однако в отношении простоты реализации наиболее неблагоприит-
ным являетси первый из рассмотренных способов. Так как нагрузки
на валу двигателя при выборе зазоров близки к нулю, кривые 1 и Г
могут быть реализованы только при достаточно жесткой и стабильной
механической характеристике двигателя. Обычно (сй1нач)Доп состав-
ляет 2—5% установившейся скорости, поэтому способ резко повы-
шает требования к электроприводу в отношении диапазона регулиро-
вания скорости. Вместе с тем уменьшение ускорения в конце процесса
до нуля создает условия для повторного открытия зазора после удара
и может явиться причиной возникновения опасных нагрузок при по-
вторном выборе зазора, если команда на полный пуск поступит до
его окончания.
Первый способ формирования процессов выбора зазоров пред-
ставляет интерес только при выборе весьма больших зазоров (напри-
мер, слабины канатов в подъемных лебедках и т. п.). В остальных
случаях требуемая плавность выбора зазоров обеспечивается введе-
нием ограничения либо рывка, либо ускорения, причем использование
того или иного способа зависит от условий выбора зазоров.
Если зазоры относительно невелики и приведенный момент инерции
не превышает момента инерции двигателя (у 2), специального фор-
мирования плавного выбора зазоров обычно не требуется. При этом
удовлетворительная плавность выбора зазоров обеспечивается форми-
рованием оптимальной зависимости М = f (?) с ограниченной произ-
водной и максимальным значением.
Удары при выборе зазоров возрастают при увеличении момента
инерции механизма; часто электроприводы наиболее инерционных
механизмов имеют и значительные зазоры в передачах, которые при
неблагоприятных динамических свойствах электропривода в эксплуа-
тации быстро возрастают в связи с износом поверхностей зубчатых
зацеплений. Поэтому при у > 2 обычно возникает необходимость огра-
ничения в период выбора зазоров не рывка, а ускорения массы двига-
теля, не связанной с механизмом.
При 2 < у 5 ограничение ускорений в период выбора зазоров
в простейшем асинхронном электроприводе обеспечивается введением
предварительной ступени регулирования момента, на которой пуско-
вой момент выбирается из условия получения допустимого значения
динамического коэффициента kR в процессах выбора зазоров, причем
это значение предварительного пускового момента значительно меньше
допустимого по перегрузочной способности момента Л4СТ0П. При задан-
ном значении kR. доп, е0доп и Л4П. доп можно при известных значениих
Л, ^2> с12. Аф определить с помощью (1-110). Далее можно рассчитать
добавочные сопротивления, которые нужно ввести в фазы статора ко-
роткозамкнутого двигателя либо ротора двигателя с фазным ротором.
Схема управления должна обеспечивать работу электропривода на этой
523
предварительной ступени в течение времени, достаточного для оконча-
ния процесса выбора зазоров.
В электроприводах по системе УП—Д при у > 2 основным сред-
ством обеспечения плавного выбора зазоров является ограничение уско-
рений двигателя значением ей д0[1,при котором динамический коэффициент
не превышает заданного значения. При этом условия формирования про-
цессов плавного выбора зазоров зависят от соотношения между уско-
рением, необходимым для плавного выбора зазоров еПдоп, и ускорением,
допустимым по технологическим требованиям или по перегрузочной
способности двигателя едоп.
Рассмотрим сначала наиболее распространенный случай, когда
бодоп йгГдоп- Если при этом едо|, является предельно допустимым уско-
Рпс. 12-21. Переходные процессы
выбора зазоров в схеме с задатчи-
ком интенсивности.
репном, то формирование опти-
мальной стабильной диаграммы
скорости с в— едоп обеспечива-
ет требуемую плавность выбора
зазоров без каких-либо допол-
нительных мероприятий. Если
едоп соответствует только Л7С. мякс
и ограничивается только пере-
грузочной способностью, то при
формировании оптимальной за-
висимости М (/) при больших
нагрузках необходимо в обла-
сти малых нагрузок ограничи-
вать темп нарастания э. д. с.
преобразователя значением
de../dt— селоп. Нетрудно видеть,
что при этом возникает рассмотренная выше, в § 12-1, ситуация, когда
при больших нагрузках необходимо ограничивать момент, а при ма-
лых — ускорение двигателя.
Наиболее простым и во многих случаях приемлемым решенном
для такого сочетания требований является использование схемы, при-
веденной иа рис. 12-22, при настройке задатчика интенсивности иа
допустимое ускорение Водоп• При выборе зазоров, когда массы механизма
и статическая нагрузка нс связаны с двигателем, задатчик интенсивно-
сти ограничит ускорение массы двигателя значением, требуемым для
ограничения удара при замыкании зазора. В дальнейшем процессе
регулятор скорости насыщается и задает стопорный ток, который п
поддерживается регулятором тока,
Недостатком такой системы является несоответствие, возникаю-
щее при больших нагрузках между значениями скорости, задаваемыми
задатчиком интенсивности, и фактической скоростью электропривода,
обусловленное работой системы токоограиичсния. На рис. 12-21 при-
ведена осциллограмма процесса пуска и реверса электропривода
механизма, обладающего большим моментом инерции (у --- 25). Рас-
сматривая ее, можно убедиться, что задатчик интенсивности, ограничи-
вая темп задающего сигнала и, с (/), обеспечивает благоприятные
условия выбора зазоров. Обращает на себя внимание весьма малое
значение тока двигателя в период выбора зазоров; оно свидетельствует
о том, что при отсутствии ограничения dujdt ускорение двигателя
в период выбора зазоров было бы во много раз больше и динамический
коэффициент /гд достигал бы опасных значений. Однако на этой же ос-
циллограмме можно видеть, как отмеченное выше несоответствие при-
водит при реверсе к потере управляемости. Действительно, после
524
получения команды на замедление скорость двигателя продолжает
увеличиваться до тех пор, пока заданное значение и3. с не станет меньше
сигнала обратной связи по скорости.
Этот недостаток исключает применение схем с задатчиком интен-
сивности для инерционных механизмов и для механизмов, работающих
па упор, для которых возможен режим, когда скорость двигателя не
возрастает из-за большой перегрузки, а задатчик интенсивности задает
выход на полную скорость. При этом после снятия перегрузки электро-
привод ускоряется без ограничения ускорения. Для подобных механиз-
мов задача ограничения максимального тока при больших и максималь-
ного ускорения при малых нагрузках решается применением двух-
коптуриой структуры системы электропривода, приведенной на
рис. 12-22. Здесь преобразователь управляется регулятором тока РТ,
Рис. 12-22. Структурная схема электропривода с ограничением момента
при больших и ограничением ускорения при малых нагрузках.
на вход которого включено звено ограничения 30. При ненасыщенном
звене ограничения контур тока оптимизируется, например, настройкой
па технический оптимум. Если при уменьшении нагрузки темп нара-
стания э. д. с. преобразователя достигнет допустимого значении
= сед011, то звено ограничения ограничит дальнейший рост
\ dt /макс
/ dlLy\
сигнала на входе регулятора тока постоянным значением! I ~
\ dt /.макс
(tip. \
•,11 . Тем самым будет ограничено MaK-
nt /макс.
спмальпое ускорение двигателя и обеспечен плавный выбор зазоров
без возникновения несоответствий, характерных дли схемы с задатчи-
ком интенсивности.
Наиболее сложные условия формирования процессов выбора за-
зоров складываются в тех случаях, когда по расчету и заданию е0лоп
В этом случае необходимо введение в схему управления спе-
циальных узлов выбора зазоров, которые, например в схеме па рис. 12-22,
автоматически изменяют максимальное напряжение звена ограничения,
/dity \
задавая в период выбора зазоров —77- =сеодо|Л>а на осталь-
\ dt /.макс!
„ / dtiy\ , [du,y\
нои части процесса —77- =^ДОп/«п> ' • Переключе-
\ di /мг!КС2 \ dt /макс.1
иия могут осуществляться либо в функции полного тока /я, либо в
функции тока нагрузки /с 121].
525
Глава тринадцатая,
MHO ГОДВИ ГАТЕЛЬН Ы Е ЭЛ ЕКТРОМЕХ АН И Ч ЕСКИ Е
СИСТЕМЫ
13-1. СТАТИКА МНОГОДВИГАТЕЛЬНОГО ЭЛЕКТРОПРИВОДА
Увеличение числа двигателей в электроприводах раз-
личных производственных механизмов, особенно при боль-
шой мощности и при значительной механической инерции,
является одной из характерных тенденций в развитии
современного машиностроения. Преимущества мпогодви-
гательного электропривода инерционных механизмов и
установок большой мощности известны: увеличение числа
валопроводов механизма при заданном допустимом ускоре-
нии и при заданной статической нагрузке позволяет умень-
шить нагрузку каждого валопровода и за счет этого облег-
чить передачи; облегчается задача унификации электропри-
водов различных по мощности установок; уменьшается
суммарный момент инерции роторов двигателей и т. п.
Увеличение числа валопроводов механизма приводит
к разветвлению электромеханических схем, за счет допол-
нительных упругих связей и дробления масс увеличива-
ется число степеней свободы электромеханической системы
и ее динамика усложняется. Одной из важных проблем
для подобных систем является обеспечение равномерного
распределения нагрузок между валопроводами механизма
и двигателя как в статических, так п в динамических ре-
жимах работы. Рассмотрим сначала вопрос о распределении
нагрузок в статике на простейшем примере миогодвига-
тельного электропривода — двухдвигателыюм электропри-
воде (рис. 13-1).
Благодаря наличию механической связи между рото-
рами двигателей в статических режимах работы угловые
скорости двигателей одинаковы при любых различиях
в механических характеристиках, а результирующий мо-
мент электропривода равен сумме моментов двигателей:
М — М J Ц- М-2 Р1 (®01 — ***) (®02 — ®)> (13-1)
где ш01 и |32; со.,2 — модули жесткости и скорости идеаль-
ного холостого хода соответственно двигателей \Д и 2Д.
С помощью (13-1) определяется результирующая механи-
ческая характеристика двухдвигательного электропривода:
₽i+₽2 + ₽r+lV
526
Скорость двухдвигательного электропривода в стати-
ческом режиме работы определяется подстановкой в (13-2)
значения М = Мс. При этом в общем случае моменты
Мг и М2, развиваемые двигателями, не равны:
Mi = Pi (">01 - «) =# м2 = Ра (®о2 - “)•
Очевидным условием равенства статических нагрузок
двигателей в данном случае является идентичность их ме-
ханических характеристик, т. е. Pj — Р2 и шо1 = ш02.
В представленном на рис. 13-1 асинхронном двухдвига-
тельном электроприводе ыо1 <ооа, однако жесткости и
Рис. 13-1. Схема (n) и механические характеристики двухдвлга-
те.чыюго асинхронного электропривода (б).
Р2 различны в связи с практически неизбежным разбросом
сопротивлений роторной обмотки даже у однотипных дви-
гателей. При этом нагрузки распределяются пропорцио-
нально модулям жесткости [3, и Р2, как показано на рис.
13-1, б, где кривая 1 есть зависимость ш = f(M) для дви-
гателя 1Д, кривая 2 — то же для двигателя 2Д, а кривая 3
представляет собой результирующую механическую харак-
теристику эл ектропри вода.
Возникающая неодинаковость загрузки двигателей
весьма неблагоприятна, так как вынуждает завышать
мощность двигателей, поэтому необходимо принимать меры
к увеличению равномерности распределения нагрузок.
В асинхронном электроприводе при двигателях с фаз-
ным ротором можно добиваться равенства жесткостей ме-
ханических характеристик всех двигателей многодвигатель-
ного электропривода, вводя добавочные сопротивления
в роторную цепь двигателей с более жесткими характери-
стиками. Рассматривая рис. 13-1, б, можно заключить,
527
что влияние неодинаковости сопротивлений силовой цепи
двигателей тем выше» чем большую жесткость имеют
характеристики двигателей в среднем, поэтому при двига-
телях с короткозамкнутым ротором для многодвиГаТель-
ного электропривода предпочтительны АД с повышенным
номинальным скольжением.
Для двигателей постоянного тока с независимым воз-
буждением проблема распределения нагрузок в мйогодви-
гательном электроприводе при параллельном их подклю-
чении к источнику питания (рис. 13-2, а) является еще
более острой. Здесь возможны различия не только в жест-
костях, но и в скоростях идеального холостого хода, ко-
торые могут не совпадать как из-за различия сопротивлений!
Рис. 13-2. Схемы включения двухдвигательного электропривода по-
стоянного тока.
обмоток возбуждения, так и из-за различия характеристик
магнитной цепи. Высокую равномерность загрузки дви-
гателей при этом обеспечивает последовательное соединение
якорных обмоток, по схеме, приведенной на рис. 13-2, б.
Токи якорей при этом одинаковы во всех режимах, и
отклонения в развиваемых двигателями моментах опреде-
ляются возможными отклонениями потоков двигателей от
установившегося значения:
= и М2 = /гФ2/я.
Так как возможный разброс значений потока невелик,
схема с последовательным соединением двигателей постоян-
ного тока обеспечивает наиболее благоприятные условия
работы многодвигательнбгб электропривода в отношении
распределения статических нагрузок. Это обстоятельство
и определило ее широкое использование на практике.
528
Зависимость скорости идеального холостого хода и
жесткости' механической характеристики двухдвигатель-
ного электропривода (13-2) определяет возможности полу-
чения специальных характеристик для регулирования ско-
рости. На рис. 13-3, а в качестве примера приведена схема
двухдвйгательного асинхронного электропривода с двига-
телями с фазным ротором, один из которых включен по
схеме динамического торможения с небольшим сопротив-
лением (кривая 1 на рис. 13-3, б), а второй включен в
Рис. 13-3. Схема получения устойчивой пониженной скорости (а) и
механические характеристики (б) в двухдвигательном асинхронном
электроприводе.
сеть с большим добавочным сопротивлением в цепи ротора
(кривая 2 на рис. 13-3, б). Результирующая механическая
характеристика электропривода имеет вид кривой 3 на том
же рисунке. Она обладает низкой скоростью идеального
холостого хода и высокой жесткостью, т. е. позволяет
получить низкую устойчивую скорость при изменяющейся
нагрузке'. Подобные схемы достаточно просты и находят
практическое применение в двухдвигательных электропри-
водах различных механизмов. Их недостаток — значитель-
ные потери энергии при работе на низкой скорости, зна-
чительно превышающие при той же нагрузке потери при
реостатном регулировании.
13-2. ДИНАМИКА МНОГОДВИГАТЕЛЬНОГО ЭЛЕКТРОПРИВОДА
В переходных процессах распределение нагрузок между валопрово-
дами может существенно ухудшаться по той причине, что связь между
двигателями не является абсолютно жесткой. Увеличение числа, упруго
связанных масс и вызываемое этим усложнение структуры электроме-
ханической системы при многодвигательном приводе создают благо-
приятные условия для развития упругих механических колебаний,
529
обусловленных как действием возмущений со стороны электрической
части схемы, так и внутренними и внешними механическими возмуще-
ниями. Колебания упруго связанных масс всегда вызывают дополни-
тельные динамические нагрузки передач, которые при неблагоприятных
условиях могут достигать опасных значений. Поэтому последователь-
ное соединение двигателей обеспечивает примерно одинаковую среднюю
нагрузку каждого валопровода, а мгновенные значения могут разли-
чаться существенно.
Важнейшие особенности динамики многодвигателыюго электро-
привода можно установить на основе рассмотрения простейшей много-
двигательной электромеханической системы —двухдвигателыюго элек-
тропривода, расчетная электромеханическая схема которого представ-
лена на рнс. 13-4. Если пренебречь индуктивностью якорной цепи,
движение такой системы при выбранных зазорах в передачах описыва-
ется следующими дифференциальными уравнениями:
здесь AM, и Д/Ц2 — возмущающие механические воздействия на каж-
дом валопроводе.
С помощью соотношений
—(со' — со.2); d~M'l:,/df2 — с'„ (dw'Jdt — dat^/di);
dM‘Jdt = c''l2 (со" — со2); d-'-My./dfi-^c';., (</„)[']М — с/соа/dl),
переходя при нулевых начальных условиях к операторной форме,
после ряда алгебраических преобразований систему (13-3) представляем
в виде (при с' = с")
(/>= + т +СЫ м;, (р)-
\ ’•'2 i / ”2
Мс-С^ AM, (р);
(р) + ^р- + j М".. (р)—
-С^М(р)=^Мс-С^АМ, (Ру,
J ; 2 «/ 1
(с'“ + -/ ) + (? + г) +
\ с j о v 2 / । о ’’ 2 /
R р
+ -~-рМ (р) = - ег (р) + у- /Ис.
С Lf */ 2
(13-4)
530
Полученная система трех алгебраических уравнений с тремя
неизвестными М\2 (р), Л7/, (р) и М (р) может быть любым известным
способом разрешена относительно каждого из этих трех изображений
функций. В данном случае нас будет интере-
совать момент двигателя Л4 (р) и один из
моментов валопроводов, например (р).
Анализ характеристического уравнения
системы (13-4) с помощью, например, крите-
рия Гурвица свидетельствует о том, что все
его корни при J' у-J'i или с[2 с", имеют
отрицательные действительные части. Следо-
вательно, в этом случае несмотря на то, что
при записи уравнений (13-3) и (13-4) какие-
либо диссипативные силы не учитывались,
возникающие при любых возмущениях пе-
устаповившиеся процессы имеют затухающий
характер благодаря демпфирующему дейст-
вию электропривода.
Иные условия складываются прн иден-
тичности валопроводов, т. е. при J\ - = -
-- и с[^ =-- с"., = с12, которая более харак-
терна для реальных мпогодвигатсльпых при-
водов.
Изображения искомых функций можно
Рис. 13-4. Электроме-
ханическая схема
двухдвнгателыюго
представить в виде
Выражения полиномов Р (р), Ру, (р) и
Q (р) могут быть получены вычислением соот-
ветствующих определителей системы (13-4). Прн
электропривода.
идентичности валопро-
водов эти выражения после преобразований могут быть записаны так:
р =-р) р5+44(ЛМ1+дл4з) pi+
+^4- (р) ₽8+Ь4- (дл11+дМз)1р2+
ZC22^ I ^12 <*^I2 J
+ е'-+ 2 (Мс + ДЯ) + ЛЯа); (13’5)
Рщ (/’) = | Л'ЛН-ЛА (р) | рз +
+ 4^7 -J-г (AMX -ДЛП)] /Р +
R.,v г с/, т
+ I г (АЛ42-|- Л1г) — (Л + J-z) AAfi -|-(p)j р +
-l- g' (Мс-ДЛ41+ЛМо).
ем - -«Эн-#’‘+ гЛ
„,+'W-й + 'й)
+ ~2^~ Р +----------Р+ Ь
(13-6)
12
4с2
(13-7)
531
Анализ корней характеристического уравнения Q (р) = 0 позво-
ляет убедиться, что при одинаковых параметрах валопроводов оно
содержит чисто мнимые корни, свидетельствующие о возможности не-
затухающих колебаний в рассматриваемой электромеханической! системе.
Эти корни удается определить путем разложения характеристического
уравнения на множители. Для этой цели в него необходимо добавить
и вычесть выражение
Л , Wi (2Л+72) з
с12 f 4с-с12 р '
После
вид:
преобразовании характеристическое уравнение принимает
(Р2 + 2о)
4с2Ср,
1 а
2сН
(2Л + 4) Л
с13
4с2с12
=0. (13-8)
Чисто мнимые корни уравнения
Р1л = Jr/Qo,
где Р(| = VcjJJi — частота свободных колебаний каждого валопровода
при неподвижном механизме.
Оригиналы искомых функций могут быть при отсутствии кратных
и нулевых корней определены по формулам
М(/) =
k — n.
Р(0) , у
Q (0) + L
4 = 1
Р (Рк)
PuQ’ (Pi<)
е'
(13-9)
ЛМ)=
Р12 (0) , ' V" Р12 (Pk)
Q (0) Zj PkQ' (Pn)
4=1
ePk(.
(13-10)
Полиномы P (p) и P12 (p) учитывают различные по характеру воз-
действия: управляющее воздействие ег (р) на входе системы, момент
сопротивления на валу механизма Л?с, возмущающие воздействия на
каждом из валопроводов АМг и ЛМ2. Влияние этих факторов на проте-
кание процессов в системе различно и может быть установлено на осно-
вании анализа членов уравнении (13-9) и (13-10), соответствующих
чисто мнимым корням Р] и р2 характеристического уравнения. Осталь-
ные корни уравнения (13-9), как показывает проверка с помощью
критерия Гурвица, при J2 0 имеют отрицательные действительные
части, поэтому соответствующие этим корням члены уравнений (13-9)
и (13-10) с течением времени затухают, в то время как корпи рх и р2
определяют условия возникновения в системе не демпфируемых электро-
приводом колебаний, заслуживающих особого внимания.
Многочлен Р (р) также удается раскладывать на множители, до-
бавляя и вычитая двучлен:
(/Ис + ДМ1 + Д.'И,) р2 + е. (р) рз.
ZC12 4-Ci2C
При этом ои принимает вид:
Р (р) = (р2 + ОД [Ж (Р)рЗ+-^(ЛМ1 + ДЛ12)р= +
+ /Н2Л + ^)Мр)р+ Л (Мс + дМ1 + дЛ)2)1 (13-П)
532
Следовательно, функция М. (t), определяемая по (13-9), незатухаю-
щих составляющих содержать не может, так как при подстановке в много-
член Р (р) чисто мнимых корней рк = pll2 = ±/£}0 он обращается
в нуль. Многочлен Р1г (р) при подстановке в него, например, корня
Pi имеет после преобразований следующий вид:
/Л 1
Р12 (р (4 Ji + Т ~ i Ш1 “ д /Wa) • (13‘12)
Коэффициент электромеханической связи /гэ. г на частоте недемпфи-
рованных свободных колебаний валопроводов при ЬМг
оказывается в соответствии с (13-11) и (13-12) тождественно равным
нулю:
Полученный результат позволяет заключить, что нп управляющее
воздействие, пн возмущение в неразветвлеппой части электромехани-
ческой схемы А4е не могут явиться причиной возникновения незатухаю-
щих колебаний, так как многочлен Р12 (pt), равно как и сопряженный
ему Pv,_ (p-i), от этих факторов не зависит. При возмущениях па каждом
валопроводе AA4j н АЛ42, равных по значению и фазе, коэффициенты
членов разложения, соответствующих чисто мнимым корням, также
обращаются в нуль и незатухающие колебания не могут возникнуть.
Причиной возникновения незатухающих колебаний может явиться
лишь неодинаковость возмущений па каждом валопроводе. Если| ДА/г[ —
— |Д442|, 110 противоположны по знаку, то возникают незатухающие
колебания упругих моментов М\., и Л1"„, которые, однако, не вызывают
аналогичных колебаний тока и момента двигателя, так как Р (pL) —
= Р Ы = 0.
Физически такой характер процессов в рассматриваемой системе
объясняется наличием последовательного соединения двигателей,
вследствие которого при колебаниях скоростей двигателей в противо-
фазе их суммарная противо-э. д. с. остается постоянной. При этом
колебания тока якорной цепи отсутствуют, что п дает зачения /еэ. с = 0.
В общем случае колебания, возникающие при любых возмущениях
в электромеханической системе при условии ее линейности, можно
разложить на противофазную и синфазную составляющие. Если пре-
небречь возможностью повторных зазорообразовапий после процесса
выбора зазоров, рассматриваемую систему при принятых допущениях
можно считать линейной, учитывая лишь ненулевые начальные усло-
вия. В этом случае возможно использовать принцип суперпозиции,
приведя исходную систему уравнении (13-4) к двум независимым диф-
ференциальным уравнениям, одно из которых описывает движение
электромеханической системы при полной идентичности параметров
нагрузок и начальных условий для каждого валопровода, а второе
справедливо лишь для противофазных колебаний, возникающих при
неодинаковости возмущений или начальных условий.
Для получения первого уравнения необходимо принять, что .М'., =
— М"» = ./Mia в любой момент времени, и сложить первые два уравне-
ния системы (13-4). Полученную таким образом систему двух алгебраи-
ческих уравнений с двумя неизвестными разрешим относительно упру-
гого момента /И12. После ряда преобразований и перехода к оригиналам
величин дифференциальное уравнение для этой функции можно запи-
533
сать в следующем виде, удобном для дальнейшего изложения:
уТм d3Mj2 , у ^2М12 । т dMj2 । ц. _
Й?2 dt3 + Й-2 dt2 + ?'м dt ‘М12
= у/2едоп - -J" (V- О т« Tt ^Mi + ^ + у ’ О3’13)
где ________________
й1.2=1/С12 (Л + Л).
Г ^1^2
т ___
м 2с2 ’
__2/1Н- ^2
7 2Л •
Уравнение (13-13) есть уравнение движения эквивалентного одно-
двигательного привода с параметрами С12экв = ^с12; Jj5I(B = 2/^,
сэкв — 2с-
Таким образом, при идентичности параметров и начальных условий
валопроводов двухдвигательный электропривод может быть заменен
эквивалентным однодвигательным приводом для анализа процессов,
возникающих при изменениях управляющих воздействий либо под
действием возмущений в неразветвленной части электромеханической
схемы. В этих условиях последовательное соединение двигателей
обеспечивает высокую равномерность распределения нагрузок между
валопроводами как в переходных, так и в установившихся режимах
работы.
Второе уравнение движения, отражающее возможность колебания
валопроводов механизма в противофазе, может быть получено непосред-
ственно с помощью уравнений системы (13-3). Если из второго уравне-
ния этой системы вычтем третье и в результирующее уравнение подста-
вим выражения моментов М'12 и М'[«, то после преобразований получим:
J1 dt (°5' —051) ~ЬС12 (<Р1 — ф’) — AMi + (13-14)
Противофазная составляющая упругого момента может быть опре-
делена как полуразность мгновенных значений моментов М{2 и М"2:
Mi2 = M'^^ (13-15)
Подставляя (13-15) в (13-14), получаем:
_^^!12. + Л412 = -1(ДМ1-ДМ2). . (13-16)
Это уравнение также подтверждает, что при одинаковых парамет-
рах валопроводов и возмущениях Км.1 = Д/И2 противофазная состав-
ляющая колебаний возникнуть не может и нагрузки между валопрово-
дами распределяются равномерно. Однако в реальных условиях возму-
щения A/Wj и ДЛ42 могут в той или иной степени отличаться. Кроме
того, даже при равенстве полных зазоров в валопроводах механизма
относительное положение валов в пределах полного зазора в начале
каждого переходного процесса является случайным. Различие в на-
534
чальных зазорах приводит в конечном счете к неравенству начальных
значений скоростей со' и со" в конце выбора зазоров и также является
причиной возникновения противофазных колебаний валопроводов в со-
ответствии с (13-16).
Возможность развития противофазных недемпфируемых электро-
приводом колебаний является главной особенностью двухдвигатель-
ного электропривода постоянного тока. Возникновение таких колебаний
нарушает равномерность распределения нагрузок между валопроводами
механизма как в переходных, так и в установившихся режимах и тем
самым во многих случаях лишает после-
довательное соединение двигателей его
главного преимущества, определяющего
целесообразность его применения.
В гл. 1 было показано, что в редук-
торном электроприводе вследствие дефек-
тов зубчатой передачи возникают меха-
нические возмущения, обусловленные не-
равномерностью хода. В многодвигатель-
ном приводе каждый валопровод испыты-
вает возмущения со стороны своего выход-
ного вала. Возмущения на разных вало-
проводах при одинаковой точности изго-
товления шестерен и одинаковом их изно-
се примерно равны, но могут иметь су-
щественно различную фазу ф, которая
определяется относительной фазой зацеп-
ления. В рассматриваемом случае можно
принять, что возмущения Д/Mi и Д/И2
Рис. 13-5. Выбор зазоров
в двухдвигательиом элек-
троприводе с последова-
тельным соединением дви-
гателей.
приближенно отражают действие неравномерности хода зубчатых
передач при данной угловой скорости механизма и их можно пред-
ставить в виде
ATWj = ДМ1макс sin Qi; Д.-И2=Д/И2макс sin (Qi + ф). (13-17)
Анализируя (13-13) и (13-16) с учетом (13-17), можно заключить,
что при изменении ф от 0 до 180° противофазные колебания возрастают,
достигая максимума при ф= 180°, а синфазные возмущения (13-13)
при этом уменьшаются до нуля. Следовательно, наиболее опасные
не демпфируемые электроприводом колебания могут возникать в слу-
чае противофазных возмущений. Здесь последовательное соединение
дает лишь выравнивание средних нагрузок валопроводов, мгновенные
же значения могут существенно различаться как в установившихся,
так и в переходных процессах. При совпадении частоты возмущений
Й с частотой свободных колебаний й0 возникают слабо демпфированные
резонансные колебания валопроводов в противофазе, резко увеличиваю-
щие максимальные нагрузки передач, вызывающие вибрацию и тряску
механизма.
Примем теперь, что механические возмущения на валопроводы
не действуют (A/Wx = Д/И2 = 0), и рассмотрим, какими особенностями
будет обладать процесс выбора зазоров при неодинаковых начальных
зазорах в валопроводах. До тех пор пока не будет выбран меньший
зазор, скорости и ы" нарастают с ускорением з0, которое определяется
темпом нарастания э. д. с. преобразователя (рис. 13-5). В момент окон-
чания выбора зазоров в первом валопроводе происходит удар, в ре-
зультате которого скорость <о( резко уменьшается, а ток якорной цепи
возрастает. Увеличение тока якорной цепи вызывает быстрое возраста-
535
Ние скорости со" и вскоре Оказывается выбранным зазор во втором вало-
проводе. В результате в момент удара во втором валопроводе начальные
условия для каждого валопровода существенно различны, что и явля-
ется причиной слабо затухающих противофазных колебаний.
При известных начальных условиях
/Д"| \ _ С[2 Лсрпач _ ^12пач . /^^12нач \ _^12 (<^i )__ ^12 А^иач
( 12)о“ 2 2 ’ \ dt )0~ 2 ~ 2
противофазная составляющая упругого момента может быть опреде-
лена путем решения дифференциального уравнения (13-16)
Решение его имеет вид:
Л112 = Л cos £>(/ + £ sin Slot-
Определив с помощью известных начальных условий постоянные
А и В, после преобразований получим:
М12 = 4- У’)йннач + йо/1Дй)нач sin (Q,/ + arctg. 7-1'2"!14 . (13-18)
•ь \ ao,ll:i4 /
Полученное уравнение наглядно показывает, что амплитуда проти-
вофазных колебаний при выборе зазоров тем больше, чем больше раз-
ница в начальных условиях каждого валопровода.
Исследования динамики многодвигательных электромеханических
систем [21] показали, что рассмотренные особенности двухдвигатель-
ного электропривода характерны и для большего числа двигателей,
причем с возрастанием числа двигателей динамические процессы услож-
няются и проявление противофазных колебаний становится более ве-
роятным. Поэтому для Многодвигательных электроприводов приходится
отказываться от последовательного соединения двигателей и переходить
к другим схемам соединения силовых цепей, обеспечивающим демпфи-
рование любых возникающих в системе колебаний за счет электромеха-
нической связи.
Число возможных схем соединений двигателей увеличивается при
возрастании числа двигателей многодвигательного электропривода.
Интерес представляет рассмотрение схемы параллельного включения
двигателей и схемы независимого питания каждого двигателя от отдель-
ных управляемых преобразователей.
Обобщенная электромеханическая схема мпогодвигательпого
электропривода с числом двигателей т приведена па рис. 13-6,
причем в качестве возможного варианта показана структура
с суммирующим усилителем У и отсечками по току и напряжению.
Ее исследования показывают, что при параллельном соединении
двигателей любые колебания скоростей двигателей вызывают
соответствующие колебания их токов и моментов, оказывающие
демпфирующее действие. При синфазных возмущениях, обусловленных
неравномерностью хода передач, под действием колебаний э. д. с.
двигателей, совпадающих по фазе, возникают токи, замыкающиеся
через источник питания. В этом случае многодвигательный привод
может быть заменен эквивалентным однодвигательным с параметрами
536
Тя и Ту, определяющими его демпфирующую способность (см. Гл. 4):
T„ = bL±HLLJL. т' Ji^+.mR,,) (13И9)
Rv + mRn’ с*
При симметричных противофазных возмущениях параллельно
включенные цепи двигателей образуют контуры, в которых и замы-
каются переменные составляющие токов, минуя преобразователь.
Демпфирующая способность контуров при этом определяется эквива-
лентными постоянными:
Тя = Тя/Rn', Т м = Д/?я/с2. (13-20)
Недостатками схемы с параллельным соединением являются:
отсутствие возможности оптимизации демпфирующей способности при
противофазных возмущениях за
счет воздействия па преобразо-
ватель, так как она при этом
однозначно определяется (13-20);
необходимость автоматического
регулирования потока двигате-
лей для выравнивания статиче-
ских (средних) токов якоря
двигателей; возможность выбро-
са токов двигателей за стопор-
ное значение при выборе неоди-
наковых зазоров.
Причиной неблагоприятных
условий выбора зазоров при
этом является то обстоятельст-
во, что при параллельном со-
единении имеется возможность
контролировать лишь общий
ток двигателей, т. е. регулиро-
вание момента двигателей обес-
печивается обратной связью по
току преобразователя (рис.
13-6). Если в одном из вало-
проводов зазор выбран, то в
течение выбора зазоров осталь-
ными двигателями всю инер-
ционную и статическую нагрузку
Рис. 13-6. Электромеханическая
схема многодвигательного электро-
привода с параллельным соедине-
нием двигателей.
принимает на себя двигатель этого
валопровода. При этом ток двигателя возрастает, стремясь к максималь-
ному значению:
Аакс ~ 2 ' К Ачех “Р Ав) ео + ЛА]. (13-21)
Если отнести значение тока по (13-21) к стоп ~ Аедоп/С> приняв
Мс « 0, максимум тока можно выразить так:
макс ^Ав- стоп^О»!
ГДе £(>.;. £0/£доп, Ав. стоп Ль стои/^Г*
Нетрудно видеть, что в период выбора зазоров при параллельном
соединении могут иметь место тем более значительные пики тока, чем
больше число двигателей т.
537
Указанных выше недостатков лишена схема индивидуального пи-
тания двигателей многодвигательной системы от отдельных управляе-
мых преобразователей, в которой имеется возможность индивидуаль-
ного управления током каждого двигателя и его скоростью во всех
режимах. Однако, очевидным недостатком этой схемы является уве-
личение габаритов установки вследствие дробления мощности преоб-
разователя. Этот недостаток наиболее остро проявляется в системе
Г—Д, поэтому в многодвигательных электроприводах целесообразно
использовать параллельное включение не более чем двух двигателей,
прибегая при т = 4, 6, 8 и т. д. к индивидуальному питанию пар дви-
гателей от отдельных генераторов. В системе ТП—Д индивидуальное
питание двигателей от отдельных преобразователей в ряде случаев
позволяет избежать параллельного соединения силовых рентилей
в схеме каждого преобразователя. Однако и в системе ТП—Д индиви-
дуальное питание двигателей ухудшает массогабаритные показатели
установки, поэтому во всех случаях, когда влияние зазоров й погреш-
ностей передач на динамические нагрузки электромеханической си-
стемы пренебрежимо мало, рациональным является использование
последовательного соединения двигателей.
13-3. МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД
С ЭЛЕКТРИЧЕСКИМ ВАЛОМ
В ряде случаев между отдельными механизмами одного
и того же агрегата, требующими согласованного движения
и расположенными на значительном расстоянии, трудно
осуществить механическую связь из-за необходимости уве-
личения диаметра и длины соединительных валов, воз-
растания числа опорных подшипников и т. п.
Вместо громоздкой механической передачи может быть
использована электрическая передача для согласованного
вращения отдельных механизмов, которую называют
электрическим валом. Помимо упрощения механизмов
электрический вал обычно дает возможность увеличить
их скорость, так как при этом снимаются ограничения,
обусловленные механическим резонансом, и, кроме того,
упрощается управление механизмами. Электрический вал
находит применение для привода таких механизмов, как
разводные мосты, затворы шлюзов, мостовые краны, круп-
ные токарные станки и т. п.
Система электрического вала наиболее проста, когда
два или несколько синхронных двигателей, предназначен-
ных для привода одного механизма, получают питание от
общей сети переменного тока, при этом они вращаются
с равными или согласованными скоростями, не будучи
механически связанными.
Однако в переходных режимах, в частности при асин-
хронном пуске, возникают существенные рассогласования
538
в скоростях и положении валов отдельных двигателей,
поэтому в системах электрического вала нашли наибольшее
распространение следующие основные схемы с асинхрон-
ными двигателями:
с уравнительными машинами — уравнительный электри-
ческий вал;
с основными рабочими машинами и общим реостатом —
рабочий электрический вал;
с асинхронным преобразователем частоты — дистанци-
онный электрический вал.
Рассмотрим систему электрического вала с уравнитель-
ными асинхронными машинами. Принципиальная схема
такого электрического вала приведена на рис. 13-7. Каждый
элемент привода состоит из основного двигателя 1Д (2Д)
(который может быть ~
любым, в том числе и W
неэлектрическим), меха- ь-__Щ.
нически связанного с 11Г ~Ц1
производственным меха- рм]-[ц~|—(@) (@)-|зд}-^Я
низмом IM (2М), а так- Тр
же с уравнительной доа- '-------1
шиной 1У (2У).
Рис. 13-7. Принципиальная схема
электрического вала с уравнительны-
ми асинхронными машинами.
Уравнительные ма-
шины — это обычные
АД с контактными коль-
цами с одинаковым числом фаз, напряжением и об-
мотками, присоединяемые статорными обмотками парал-
лельно к сети переменного тока, роторные обмотки соеди-
няются между собой встречно.
Принцип действия электрического вала заключается
в следующем. В обеих уравнительных машинах возникают
одинаковые синхронные во времени и пространстве маг-
нитные поля. При одинаковом относительном положении
обмоток статора и ротора в обмотках ротора будут наво-
диться равные по значению э. д. с., совпадающие по фазе
(9 = 0) s = Еък s = £2ks (где £2к — э. д. с. ротора
при неподвижном состоянии; s — скольжение). При встре-
чно-включенных роторных обмотках и при 9=0 ток в них
протекать не будет; каждая из машин потребляет из сети
только ток ’ намагничивания (рис. 13-8, а). Поворот
ротора одной из машин на определенный угол 9 вызовет
под влиянием разности э. д. с. АЕ2 уравнительный ток
Д (13-8, б), который, взаимодействуя с магнитными по-
лями статора одной и другой машин, создает вращающие
539
моменты, стремящиеся повернуть ротор в исходное по-
ложение.
Уравнительный ток, а следовательно, и момент при
данном угле поворота зависят от скорости машин, умень-
Рис. 13-8. Векторные диа-
граммы электрического
вала с уравнительными
асинхронными машинами
при встречном включе-
нии роторных обмоток
(а) и при повороте рото-
ра на угол в (б).
шаясь с ее возрастанием или уменьшением скольжения;
при скольжении s = О, Д£2 = 0 и момент равен нулю.
Для определения уравнительного тока и вращающихся
Рис. 13-9. Схема замещения ро-
торных цепей электрического
вала с уравнительными асин-
хронными машинами.
jxzs Лг J^s
Jr ---0
моментов, развиваемых машинами, воспользуемся схемой
замещения для роторных цепей, приведенной на рис. 13-9.
Согласно схеме замещения
/3 = (13.22) 2z2
ИЛИ / ^2ks (1 cos 0 /' sin 8) /IQ 72 2 (/?2+/x2s) '
Активная составляющая тока /2 равна:
cose R,'sil4 <l3'24)
ИЛИ , , [ 1 — cos 0 sin 0) '2a ~ ' 2а.н.с ' Sk ' > (13-25)
540
где 4a.ii.c —— активная составляющая тока ро-
тора АД в нормальной схеме включения;
sK — R2 /'х2 — критическое скольжение АД при — 0 и
хг = 0.
Так как момент асинхронной машины пропорционален
активной составляющей тока ротора, то момент первой
уравнительной машины равен:
М = fl -cos 9--sin б). (13-26)
\ sk /
Аналогично можно показать, что момент, развиваемый
второй уравнительной машиной,
МУ2 = ^-(1 -cos0 + -sin0), (13-27)
где М = ----момент асинхронной машины в
sK/s+»/sK
нормальной схеме включения.
Уравнения (13-26) и (13-27) показывают, что моменты
уравнительных машин содержат две составляющие: про-
порциональную sin 0 — это синхронизирующий момент
,, I М S . п
мсин(1,2)=± -у —sine,
(13-28)
где знак «—» относится к синхронизирующему моменту
первой машины, «+»— ко второй, и асинхронную со-
ставляющую
МасиН(1,2)=~(1-cose). (13-29)
Синхронизирующий момент поддерживает согласованное
вращение, действуя на обе уравнительные машины оди-
наково, но с противоположными знаками, поэтому разность
этих моментов определяет уравнивающее действие системы.
Таким образом, уравнительный или синхронизирующий
момент системы равен:
Мхснн =Л4 — sin 9 = -7-^к-т- — sin0. (13-30)
sK s/sK + sK/ssK ' >
Наибольшее значение синхронизирующего момента си-
стемы Имеет место при 9 = '90° и равно:
дд _ 2Л4к s ____ 2MKs2 г, л.-.
син. макс -s/Sk + Sk/s^ - (1-^1)
544
Рис. 13-10. Характеристика мо-
ментов электрического вала в
относительных единицах.
Из (13-31) следует, что максимум синхронизирующего
момента зависит от скольжения, уравнительных машин, я
стремясь к предельному значению, равному 2МК. Для уве- j
личения момента уравнительных машин необходимо вра- i
щать эти машины против
направления вращения поля
статора; в этом случае
скольжение будет значитель-
но выше единицы, увеличи-
вается также э. д. с. рото-
ров и соответственно токи и
уравнительные моменты.
Для электрического вала
зависимость М* = MJMK =
= /(9) показана на рис. 13-10; там же показаны составля-
ющие 7ИС[Й1 и ТИасин- Одна из уравнительных машин, как
это видно из (13-27), развивает положительный момент,
т. е. работает в двигательном режиме, тогда как другая
развивает отрицательный момент, работая в генераторном
режиме (13-26). Очевидно, что |ТИу2 | > |7Иу1 |.
Рис. 13-11. Энергетические диаграммы электрического вала при s =
= 0,5 без потерь (а) и с потерями (б).
Синхронизирующий момент поддерживает согласованное
вращение за счет передачи вращающего момента от одной
машины к другой. Для идеальных уравнительных машин,
когда сопротивление роторов равно нулю, развивались
бы только синхронизирующие моменты. Практически же
машины обладают активными сопротивлениями, в ротор-
ной цепи возникают потери и создаются асинхронные
моменты. Рисунки 13-11, а й б иллюстрируют энергети-
ческие диаграммы электрического вала при s ж 0,5 без
потерь и с потерями [9]. На диаграммах через Ри и Р1а
соответственно обозначены мощности, потребляемые ста-
542
Рис. 13-12. Энергетическая диа-
грамма электрического вала при
s > 1.
тором первой и второй машины; Ps— мощность сколь-
жения; 7Иу1) Л4у2 — моменты, развиваемые первой и второй
уравнительными машинами; APU, A?i2 — мощность по-
терь в статоре первой и второй машин и, наконец, Рмех1,
РкеМ — механическая мощность машин. Большая часть
мощности циркулирует в цепи статоров машин. Расхож-
дение в значениях электромагнитных моментов первой и
второй машин (рис. 13-11, а, б) вызвано потерями в роторе.
Чем больше эти потери,
тем больше разность меж-
ду моментами машин.
При вращении роторов
против поля s > 1 подве-
денная с вала к первой
машине мощность Рмех1
складывается с мощностью
со стороны статора и пере-
дается через роторную
цепь другой машине (рис.
13-12). В отличие от слу-
чая вращения роторов
уравнительных машин по полю (s < 1) при s > 1 первая
машина работает в тормозном режиме, потребляя мощ-
ность из сети и с вала; вторая машина частично гене-
рирует энергию в сеть и, кроме того, развивает двига-
тельный момент.
При вращении машин против поля изменяются знаки
электромагнитной мощности и мощности скольжений; урав-
нительный поток мощности в роторной цепи значительно
больше, чем в случае вращения машин по полю, что объяс-
няется большими значениями вторичной э. д. с., пропорци-
ональной скольжению; этим и обусловлено большее зна-
чение уравнительного момента, что является достоинством
этой системы. Направление механической мощности не
изменяется с переходом от s < 1 к s > 1.
Другим достоинством вращения привода против поля
в сравнении с вращением по полю является уменьшение
угла рассогласования валов при одном и том же расхож-
дении в нагрузках отдельных элементов системы.
Недостаток системы вращения машин против поля —
повышенные потери в стали ротора из-за увеличенной
частоты тока ротора.
При нарушении равновесия в электрическом вале
с уравнительными машинами процесс движения может
543
(13-32)
быть записан на основании дифференциальных уравнений, 1
если, ограничиться для упрощения задачи малыми откло-
нениями А0Х и А02 от соответствующих положений равно- >
весия в установившемся режиме 0! и 02, обусловленных
различными моментами, при этом уравнения движения
будут линейными с постоянным коэффициентом, а именно [2]:
J ХА б/ -ф di-jkS-L -ф с!1аА'0г -ф сх (А8Х — А0а) = 0;
J2Д 82 + ^21Д82 + ^22Д82 + С2 (Д8? — Д81) =
где А и J2 — суммарные моменты инерции вращающихся
масс, соответственно приведенных к валу первой и второй
машин;
dn, ^i2> du, d22 — коэффициенты демпфирования; ин-
дексы указывают: первый — демпфирующее действие, ока-
зываемое данной машиной; второй — дополнительное
демпфирование, вызываемое движением другой машины;
и с? — коэффициенты «упругости», определяемые по
крутизне характеристики электромагнитного момента в дан-
ной точке и зависящие^от угла рассогласования:
с = |<Ж/дЭ|. (13-33)
Коэффициенты «упругости» могут быть определены путем
дифференцирования выражений для моментов (13-29).
Если для анализа статической устойчивости не учиты-
вать демпфирование, то система уравнений (13-32) примет
РИД:
М э; + cos 80 — sin 0О) (А0Х - А02) = 0;
М82 + (г- C0S 80 + sin (Д02 - Д81) = °>
где 0О —- отклонение от устойчивого состояния.
Следует учесть, что
8i = 8ю + A6i; 02 = 0до -ф А02;
8 = 8Х 82 = 01о —- 820 -ф Д 8Х — А82 = 80 -ф А81 — А8а.
На основании (13-34) можно получить характеристи-
ческое уравнение:
+ + A) /-cos 0О- (Л - sin 801 = 0. (13-35)
Система устойчива, если выполняется условие
[(J3— Ji)sin80 — (Jx+J?)^-cos 80j<0. (13-36)
(13-34)
544
Отсюда следует, что допустимый угол рассогласования
равен:
6с.макс=агс1ё(^±АА\<90°. (13-37)
\ J 2 J 1 6К /
Для А = А независимо от скорости 5С.М.,1(С = 90°.
Если А > А или JA < J2; 9С.М(.,КС < 90р.
Подставляя максимально допустимый угол рассогласо-
вания из (13-37) в (13-31), получаем необходимый для
передачи уравнительного момента максимальный момент
уравнительных машин электрического вала:
Мк
^2 сип. макс
= (^)2+[(Л - А)/( А+ А)]3- (13-38)
При = J2
мк
сип. макс
. 1 + (*Лк)8
2 (s/sK)?
При А
J2 или J2 ;> Ji
I Мк _ 1+(S/SK)2
I син. макс (s/sk)3
K1 + (s/Sk)3.
(13-39)
(13-40)
Анализ соотношений (13-39) и (13-40) показывает, что
максимальный момент уравнительных машин с ростом
относительного скольжения
снижается и при больших
скольжениях становится ма-
лым (рис. 13-13), что под-
тверждает целесообразность,
с точки зрения статической
устойчивости, работы урав-
нительных машин против на-
правления вращения поля
статора.
По рис. 13-13 можно су-
дить о габаритах уравнитель-
ных машин для обеспечения
требуемого синхронизирую-
щего момента.
При резком изменении
возмущающего воздействия,
Рис. 13-13. Зависимость макси-
мального момента уравнитель-
ных машин электрического ва-
ла от относительного сколь-
жения.
в зависимости от условий
демпфирования, новый установившийся режим наступит в
том случае, если переходный процесс в системе электри-
ческого вала будет протекать апериодически или с зату-
ханием колебаний.
545
В динамическом режиме скорость электрического вала 1
не остается постоянной и изменяется по-разному у каждого л
двигателя. В уравнении токов и моментов необходимо ]
учитывать изменение скорости и углов рассогласования j
каждой машины независимо друг от друга. С этой целью i
можно сначала определить ток первой машины и замкнутой ;
накоротко обмотки второй, а затем его сочетать с током
при' аналогичном включении второй машины. При этом
следует учитывать, что роторы машин электрического вала
Рис. 13-14. Эквивалент-
ная схема одной фазы
трехфазного уравнитель-
ного электрического вала.
вращаются не с постоянной скоростью 0О = ®0(1 —s)>
а с соответствующим отклонением от нее на Asx и As2,
т. е. первая машина имеет скорость
91 = <о0 (1 — s± AsJ, (13-41)
а вторая
92 = <в0 (1 — s ± As2). (13-42)
уравнитель-
рис. 13-14.
При этом частота в цепях роторов отклоняется от ча-
стоты скольжения, а токи, вызванные этими отклонениями,
во взаимодействии с основным магнитным потоком создают
демпфирующие моменты.
Для определения токов в цепях машин можно воспользо-
ваться эквивалентной схемой для одной фазы рассматри-
ваемого трехфазного электрического вала с
ными машинами /У и 2У, приведенной на
Согласно принятым обозначениям
= (Ri + /®(Д1) Л1 + /®oWn;
О = /<о0 (s - Asx) L12/„ 4- 2 [/?2 + /<о0 (s - AsJ L2]
X /и - j(« - Asi) ;
0 = — /<о0 (1 — Asx -|- As2) L12/ii + [Д1 + /©о X
X (1 — Asx -|- As2) Li] 1
(1.3-43)
546
На основании этой системы уравнений могут быть най-
дены значения для токов /Ц) /21 и /12. Аналогично опре-
деляются значения токов 722, /22 и /(2 при питании второй
машины и замыкании статора первой машины.
Электромагнитная мощность (соответственно и момент)
первой машины определяется скалярным произведением со-
пряженного вектора полного тока статора и вектора напря-
жения, наводимого полным током ротора в статоре, а именно:
Р1ВМ = Re [3/®0L12 + 7^е) (/?/ + /^е)], (13-44)
где 9 = 0г — 02-
Путем соответствующих преобразований можно полу-
чить выражения для моментов первой и второй уравнитель-
ных машин и затем проверить систему на устойчивость.
трического вала с основными ра-
бочими машинами и общим рео-
статом.
Рис. 13-16. Упрощенная
схема замещения фазы
роторной цепи рабочего
электрического вала.
В рассмотренной системе электрического вала уравни-
тельные машины могут развивать асинхронный момент
только при 6 Ф 0 и различных нагрузках на валах отдель-
ных элементов системы; основной ее особенностью является
образование синхронизирующего момента, обеспечиваю-
щего согласованное вращение.
Перейдем теперь к рассмотрению схемы с основными
рабочими машинами и общим реостатом (рис. 13-15). В связи
с тем что уравнительные машины развивают асинхронные
моменты, вызывающие, как отмечалось, ускорение или за-
медление привода, и одновременно создают синхронизирую-
щие моменты, возникла идея создания такой системы,
в которой одна и та же машина выполняла бы задачу при-
водного двигателя и синхронизирующего устройства. Такой
является система электрического вала, состоящая из двух
(или нескольких) одинаковых асинхронных машин с кон-
тактными кольцами, статорные цепи которых подключены
547
параллельно к питающей сети, а роторные обмотки соеди-
нены встречно и во все три фазы параллельно этим соеди-
нениям включены регулируемые сопротивления (рис. 13-15).
Иногда эту систему называют рабочим электрическим валом
потому, что в ней одна и та же машина выполняет рабочие и
синхронизирующие функции.
Влияние регулируемого сопротивления весьма сущест-
венно; при /?р = 0 электрический вал превращается в обыч-
ные, независимо работающие асинхронные двигатели с ко-
роткозамкнутым ротором. Если Rp = оо — электрические
машины работают в режиме сельсинной передачи угла.
Рассмотрим свойства этой системы, когда 7?р > 0, восполь-
зовавшись упрощенной схемой замещения, приведенной
на рис. 13-16, на основании которой составляется система
уравнений:
^2KS — (jX2S + ^2 + ^р) Л1 +^?р^22'> | (13 45)
= (№s Н" ^2 + ^р) 22 + ^р/21- /
После несложных преобразований получим уравнения
токов в роторе для первой и второй машин:
г _/?2l!s(l-e>°) F:.2Ks (1 . /идей
21 ~ 2(/x2s + R2) 2 (/x2s-]-R2~)-2Rp) ’
7 = E™s (' +g7'9) _ £2кЗ(1-гуе) /1 о
22 2(jx2s + R,+2Rp) 2(j’x.2s+R2) •
Пользуясь (13-46) и (13-47), можно определить моменты
машин электрического вала, аналогично тому, как это про-
изводилось для системы с уравнительными машинами:
1 — cos 0 [_ 1 +cos о
1 ~ Ls/sk+s.</s + S/5k + Sk/S
4- Л4К sin 6
s/\ 1.
S/Sk + Sk/S I’
(13-48)
1 — COS 0 . 1 + cos O'
s/Sk + S7R + sX + sk/s
+ MKsinO -----------------Д-J, (13-49)
m+v s/sk+sk/sJ
, ^?a + 2Rp
где sK = sK ——.
Из (13-48) и (13-49) следует, что момент, развиваемый
первой и второй машинами, представляется суммой двух
548
составляющих, где первая асинхронная
= + (13-50)
а вторая — синхронизирующая составляющая
(13-51)
По сравнению с уравнительным электрическим валом
здесь прибавляется составляющая асинхронного момента,
равная:
ЛЛ4ас„,1 = /Ик-Ц:1с^-. (13-52)
j с и и К с /е' _ _ с' /с ' '
5/ЬК ‘ 5к/5
Анализ выражений (13-50) и (13-51) показывает, что при
9 == 0 обе машины развивают одинаковые моменты, равные:
(13-53)
т. е. каждый из двигателей работает в асинхронном режиме
с добавочным сопротивлением в роторной цепи, равным 2/?р.
При этом синхронизирующий момент .равен нулю.
Рис. 13-17. Энергетические диаграммы рабочего электрического вала
М1 ~ М2 (а) и Мг =/= М2 (б).
Представляет интерес энергетическая диаграмма рабо-
чего электрического вала (рис. 13-17). При одинаковых
нагрузках на машинах = М2) обмена мощности между
ними не происходит, механические мощности их равны:
Л1ех1 = Л<ех2- Угол согласования 0 между э. д. с. обеих
машин равен нулю, синхронизирующий момент отсутствует,
при одинаковых моментах машины потребляют равные
мощности из сети (рис. 13-17, а).
549
Если нагрузки на валах машин окажутся разными, то
от машины с большей нагрузкой уравнительный момент
направлен в сторону менее нагруженной машины. При этом
нагрузки на обеих машинах окажутся равными, а скорость
одинаковой (рис. 13-17,6).
Статическая устойчивость проверяется по дифференци-
альным уравнениям движения без учета членов, определяю-
щих демпфирование:
/1Дб1-|-с1 (А0Х —А02) = 0; 1 (13 54)
J2 А624-с2(А62-А01) = О. / 1 ’
Коэффициенты «упругости» (\ и с2 определяются диф-
ференцированием уравнений моментов (13-48) и (13-49):
с1 = ^- = [(Я-Я)со50-(Я-Я)81п0]; (13-55)
ся = = [(Я - Я) cos 0 + (Я - Я) sin 0], (13-56)
dug
где
Я=-/-Я;
4К
6К
дд __ 2AfKS/5tt *
1 + (s/Sk)2 *
^k = sk(1 4"27?p/7?2).
С учетом (13-55) и (13-56) в соответствии с дифферен-
циальными уравнениями (13-54) получается характеристи-
ческое уравнение:
-W3+1 [(Я - Я) (А - Л) sin0o —
-(Я-Я)(Л4-Л)СО5 0О]==О. (13-57)
Условие устойчивости требует, чтобы корни этого урав-
нения имели отрицательные вещественные части, т. е.
(Я - Я) (А- A) Sin 0О - (Я - Я) (Л+Л) COS 0О < 0.
(13-58)
550
Максимально допустимый для статически устойчивого
режима работы угол рассогласования составляет:
| 90 макс I = arctg I I. (13-59)
Когда Ji = J2, уравнение (13-59) принимает вид:
I 00 макс I = 90°. (13-60)
Для симметричного, с одинаковым моментом на каждой
машине рабочего вала максимальный угол рассогласования
Рис. 13-18. Моменты рабочего электрического вала при изменении
сопротивления 7?д.
а — зависимость асинхронного приводного момента от скольжения s/sK при
симметричной нагрузке (8 =0); б — максимальный передаваемый уравнитель-
ный момент в зависимости от скольжения; в — необходимая минимальная на-
грузка рабочего электрического вала.
составляет 90°. Это означает, что рабочий электрический вал,
так же как и уравнительный электрический вал, может
нагружаться выше критического момента машины электри-
ческого вала, работающей в генераторном режиме со ста-
тически устойчивой передачей уравнительных моментов.
При этом нагрузочный момент не должен быть ниже опре-
деленного минимального значения.
Возможность использования рабочего электрического
вала видна из рис. 13-18 (масштаб s/sK справедлив для любых
машин, а значения отдельных скольжений верны только
для двигателей мощностью 5 кВт). На рис. 13-18 для ряда
значений и = R2/(R2 + 2^р) показаны кривые зависимости
моментов от скольжения. Все вращающиеся моменты отне-
сены к критическому моменту Л1к машин электрического
вала.
551
Характеристики асинхронных приводных моментов при
симметричной нагрузке изображены на рис. 13-18, а. Урав-
нительный электрический вал в этом случае никакого
приводного момента не развивает (х — 0). При х = 1 ро-
торы непосредственно замкнуты накоротко (7?р = 0) и
машины электрического вала работают как обычные ко-
роткозамкнутые машины с малой нагрузкой. Соответствую-
щим выбором сопротивления можно устанавливать любые
промежуточные значения моментов, причем следует учиты-
вать также и требуемые уравнительные моменты.
Характеристики передаваемых уравнительных моментов
показаны на рис. 13-18, б. Наибольшие уравнительные
моменты имеет уравнительный вал при х — 0, а при х = 1
никакие уравнительные моменты передаваться не могут.
Д/Имакс является разностью нагрузок, передаваемой
при этом режиме работы:
ДМмзкс = |М2-м1;0_юо. (13-61)
В практически важном диапазоне скольжения (of $ = 0,1
приблизительно до s - 0,3) при снижении сопротивления
/?р уравнительный момент сначала ослабляется лишь не-
значительно, хотя уже и создаются значительные привод-
ные моменты. Эта особенность часто весьма благоприятст-
вует обеспечению необходимых моментов на рабочих ме-
ханизмах.
Минимальный нагрузочный момент каждого двигателя
электрического вала приведен на рис. 13-18, а, и для под-
держания статически устойчивой работы его значения не
должны быть ниже указанных.
Когда на обеих группах машин маховые массы равны,
условия работы аналогичны уравнительному электриче-
скому валу, наличие сильно различающихся маховых масс
дает известное сходство с дистанционным электрическим
валом. Статическая устойчивость для уравнительных мо-
ментов определяется здесь исключительно нагрузкой ма-
шин с малой маховой массой. Этот привод может нагру-
жаться максимально вплоть до его критического момента.
За этим пределом статически устойчивая работа невоз-
можна.
В заключение рассмотрим особенности дистанционного
электрического вала.
Для обеспечения согласованной работы маломощного
вспомогательного привода с главным широко применяется
так называемый дистанционный электрический вал. Ыа-
552
пример, для точного нарезания резьбы в токарных стан-
ках часто требуется, чтобы скорость подачи суппорта нахо-
дилась в постоянном соответствии со скоростью главного
привода. Так как мощности привода шпинделя и суппорта
сильно различаются, то индивидуальный приводной двига-
тель для суппорта вообще не предусмотрен и вся необходи-
мая для перемещения суппорта мощность передается через
дистанционный электриче-
ский вал. На рис. 13-19
представлена схема дистан-
ционного электрического
вала. Одна из машин вала
1М — датчик — соединена
с главным приводным дви-
гателем 1, а другая 2М —
приемник — соединена со
вспомогательным механиз-
мом. В дистанционном
Рис. 13-19. Схема дистанцион-
ного электрического вала.
электрическом вале, в от-
личие от уравнительного вала, направление потока энер-
гии неизменно. Датчик получает необходимую мощность
главного привода, приемник как двигатель вращает на-
грузку 2.
Различие между уравнительным и дистанционным элект-
рическими валами заключается в отсутствии приводного
двигателя для одной из групп машин, вследствие чего
изменяются условия нагрузки. Конструкция и схема сое-
динения согласованно работающих машин в обоих случаях
идентичны, поэтому в расчете электрических характери-
стик и электромагнитных моментов никаких различий нет.
Для дистанционного вала работа в направлении против
вращающегося поля является менее благоприятной. Под
нагрузкой скорость приемника падает, вследствие этого
возникает угловой сдвиг в направлении вращения поля,
так как направление вращения вала противоположно
направлению вращения поля. Угол рассогласования при-
емника при этом положительный, а критический момент —
относительно низкий. На рис. 13-20 показаны соотношение
знаков и образование момента приемника из синхронной и
асинхронной составляющих для обоих режимов работы.
Отсюда следует, что работа в направлении вращения вала
является благоприятной (рис. 13-20, а). Для машин боль-
шой мощности, у которых асинхронные вращающие мо-
менты и асимметрия критических моментов вала относи-
18 Чиликин М. Г. и др.
553
тельно малы, может предусматриваться также и работа
в направлении против вращающегося поля (рис. 13-20, б).
Вращающий момент приемника дистанционного элект-
рического вала
Л4пр = • ^1 — cos 0С — sin 0ty, (13-62)
причем угол 0с должен в соответствии с направлением
вращения подставляться либо со знаком «+» для s > 1,
либо со знаком «—» (для 0 <С 1).
Рис. 13-20. Моменты приемника
в зависимости от направления
вращения.
а — работа в направлении враще-
ния поля; б — работа в направле-
нии против вращения поля.
Устойчивая работа дистанционного электрического вала
обеспечивается в диапазоне вплоть до критического момента.’
Максимально допустимый угол рассогласования 0С опре-
деляется из условия
= rsin ос _ ± cos ес1=о (13-63).
ClVQ « SK
и составляет:
0с = arctg | s/sK |. (13-64)
Эта функция показана на рис. 13-21 (кривые 1 и 2
отображают соответственно работу в направлении вращаю-
щегося поля и против).
Приемник не может создать больший вращающий мо-
мент, чем возникающий при 0с- Следовательно, максималь-
ная нагрузка Л4„р мокс на приемнике равна:
Мпр.макс=^ф(1 — cos 0с — i sin Ос). (13-65)
Отсюда можно получить критерий для выбора машин
электрического вала, если в (13-65) вместо ЛЬ ввести Л4К
554
из (13-53) и подставить максимальный угол рассогласова-
ния из (13-64):
—-----------------r-1 + (s//sI)I^r|. (13-66)
М11р.макс | (s/sK)[l Т |/l+(s/sK)=] |
Знак «—» перед корнем справедлив для положительного
угла 0С, т. е- Для работы в направлении против вращения
поля, а знак «+»— при работе машин электрического
вала в направлении вращения поля. Выражение (13-66)
графически представлено на рис. 13-22, кривая 1 соот-
ветствует вращению дистанционного электрического вала
против вращения поля, а кривая 2 — работе вала в на-
правлении вращения поля.
Рис. 13-21. Максимальный угол
рассогласования при статически
устойчивой работе дистанционного
электрического вала.
1 — работа в направлении вращающе-
гося поля; 2 — работа в направлении
против вращающегося поля.
Недостатком рассмотренной системы является рассогла-
сование валов упомянутых приводов по углу и пути, воз-
растающее с увеличением нагрузки. Это рассогласование —
органическое свойство обычной системы электрического
вала, ибо момент, развиваемый приемником, возникает
только в результате рассогласования и пропорционален
синусу угла рассогласования.
Из рис. 13-23 видно, что для характеристики 1 прием-
ника угол рассогласования 0х возникает при статическом
моменте Л4С; если момент нагрузок меняется относительно
заданного значения Л4С, то соответственно изменяется и 01(
определяющий погрешность системы.
Уменьшение погрешности может быть достигнуто за счет
увеличения мощности машин электрического вала. На
рис. 13-23 показана характеристика 2, относящаяся к более
мощной системе; при том же статическом моменте погреш-
ность обусловлена меньшим углом 02-
Установка роторов машин электрических валов в оди-
наковое угловое положение и осуществление предусмотрен-
ных для согласованного вращения соединений между
обмотками машин и сетью производятся с помощью синхро-
низации. Необходимо, чтобы вращающиеся поля соединен-
18* 555
пых между собой машин имели одинаковое направление
вращения.
При нормальной эксплуатации машины электрического
вала не отсоединяются от сети даже в состоянии покоя при-
водных двигателей. Лишь при длительных простоях, исчез-
новении напряжения, перегрузках машин или других на-
рушениях условий эксплуатации машины отсоединяются
от сети и выпадают из синхронизма. При последующем вклю-
чении в работу направление вращения полей сохраняется
прежним, но положения роторов не совпадают между собой.
Рис. 13-22. Необходимый ми-
нимальный критический мо-
мент двигателей с контакт-
ными кольцами для дистан-
ционного электрического
вала.
/ — работа в направлении про-
тив вращения поля; 2 — работа
в направлении вращения поля.
Рис. 13-23. Зависимость
момента дистанционного
электрического вала от
угла рассогласования.
/ — при статическом момен-
те Мс; 2 — то же для бо-
лее мощной системы.
В этом случае при присоединении машин электрического
вала к трехфазной сети переменного тока и малом угле
рассогласования роторов после нескольких колебаний
синхронизирующий момент приведет роторы в одинаковое
угловое положение. При электрическом рассогласовании,
близком к 180°, один из роторов вследствие действующего
асинхронного вращающего момента дополнительно уско-
ряется в направлении вращения поля и может разогнаться
до скорости, превышающей скорость ротора другой ма-
шины. В этом случае машины электрического вала не синх-
ронизируются и разгоняются асинхронно.
На рис. 13-24 дана иллюстрация изменения угла 0 при
синхронизации электрического вала (один ротор затормо-
жен). Без учета моментов трения и других демпфирующих
556
моментов ротор при включении может поворачиваться,
начиная с произвольного угла рассогласования, напри-
мер 0 = —90° (рис. 13-24, а), настолько далеко за синх-
ронное угловое положение, пока кинетическая энергия,
характеризуемая заштрихованным участком Fr под кривой
вращающихся моментов, не будет снова полностью акку-
мулирована в виде потенциальной энергии. При отсутствии
потерь энергии естественно, что = Рг.
Рис. 13-24. Процесс движения при трехфазном подключении электри-
ческого вала к сети трехфазного тока (один ротор заторможен).
а — угол включения таков, что синхронизация возможна; б — асинхронный
разгон при неблагоприятном угле включения.
В случае больших углов включения, близких к 180°,
в трехфазной схеме энергия, накапливаемая в течение пер-
вой полуволны, вследствие несимметрии моментов больше,
чем весь участок под отрицательной полуволной
(рис. 13-24, б). Как только Ft становится больше Ка, ротор
поворачивается за пределы отрицательной полуволны,
в нулевое положение больше не возвращается и разго-
няется асинхронно.
Для предварительной синхронизации машин электриче-
ских валов применяются различные схемы, использующие
однофазное подключение обмоток машин в определенной
последовательности или питание их постоянным током.
Глава четырнадцатая
РАСЧЕТ МОЩНОСТИ ЭЛЕКТРОПРИВОДОВ
14-1. НАГРЕВАНИЕ И ОХЛАЖДЕНИЕ ДВИГАТЕЛЕЙ
Процесс электромеханического преобразования энергии
всегда сопровождается одновременной потерей части энер-
гии в самой машине, которая, преобразуясь в тепловую
энергию, определяет нагрев ее элементов; Введя в рас-
смотрение температуру 0 как одну из переменных преобра-
557
и I
М (1)
Рис. 14-1. Структурная схе-
ма температурного режима
двигателя.
зователя, можно дополнить схему преобразования энергии, ’
приведенную на рис. 2-5, как показано на рис. 14-1. Вход- :
ными переменными, определяющими промежуточную пере-
менную — мощность тепловых потерь АД (как следует из ,
анализа, приведенного в гл. 2), является соотношение
между значениями электрической и механической мощно-
стей, зависящее от конкретного режима преобразования
энергии. Поэтому определение функции АД (0 является
одной из задач при оценке теплового состояния машины
в конкретном режиме; второй ;
задачей является оценка темпе- '
ратуры 0ДВ.
Так как применяемые при .
изготовлении машин материалы
имеют определенную нагрево-
стойкость, то для любых режи-
мов работы электромеханическо-
го преобразователя должно со-
блюдаться условие, состоящее в
том, чтобы температура его час-
тей не превосходила некоторого предельно допустимого
значения. Нагрев электрической машины обычно ли-
митируется допустимой температурой изоляционных ма-
териалов, которая в свою очередь устанавливается исходя
из необходимого срока службы изоляции — примерно
десять лет. В электромашиностроении применяется не-
сколько классов изоляции, каждый из которых имеет оп-
ределенную допустимую температуру нагрева (табл. 14-1).
Небольшое превышение допустимой температуры, вообще
говоря, не означает, что двигатель «сгорит», однако при
этом происходят интенсивное старение изоляции обмоток
и резкое сокращение срока эксплуатации машины из-за
потери диэлектрической прочности изоляции.
Температура изоляции обмоток определяется не только
уровнем внутренних тепловыделений, но и температурой
окружающей среды. Принято указывать уровень допусти-
мых тепловых потерь в электрической машине в расчете
на температуру среды, равную 40° С, поэтому чаще оказы-
вается удобней оперировать превышением температуры т
по отношению к температуре среды.
В тепловом отношении электрическая машина пред-
ставляет собой чрезвычайно сложный объект, имеющий
в различных частях разную теплопроводность, источники
тепловой энергии в котором распределены неравномерно. :
558 j
Соотношение между количеством теплоты, выделяемой в
стали и обмотках, зависит от режима работы машины. При
холостом ходе, например, более нагрета сталь и тепловые
потоки направлены к обмоткам машины, а при нагрузке
направление потоков обратное. Указанные обстоятельства
исключают проведение теплового расчета двигателя с це-
лью определения температуры его частей в том или ином
режиме при его проверке по нагреву и проводятся лишь
в специальных случаях при конструировании машин,
а чаще всего температурный режим надежно оценивается
лишь экспериментальным путем.
Таблица 14-1
Класс изоляции Основные компоненты Допусти- мая тем- пература нагрева, °C
А Хлопчатобумажные ткани, пряжа, бумага, цел- люлоза, шелк 105
В Слюда, асбест, стекловолокно, связующие ор- .ганические 130
F Компоненты те же, что и для класса В, свя- зующие синтетические 155
Н То же; связующие кремнийорганические 180
С Слюда, керамика, кварц; связующие неоргани- ческие 5=180
В задачах электропривода проблемы определения тем-
пературы двигателя 0ДВ (/) не возникает, важно иметь воз-
можность оценки параметров режима работы, при которых
не будет превзойдена допустимая для данного класса изо-
ляции температура, поэтому в теории электропривода на-
гревание и охлаждение двигателей рассматриваются в рам-
ках так называемой одноступенчатой теории нагрева, ко-
торая, как показала практика, позволяет удовлетвори-
тельно решать указанную задачу. Одноступенчатая теория
нагрева базируется на следующих допущениях:
1) двигатель рассматривается как однородное тело, име-
ющее бесконечную теплопроводность;
2) теплоотдача во внешнюю среду пропорциональна
первой степени разности температур двигателя и охлаж-
дающей среды;
559
3) температура охлаждающей среды постоянна.
При указанных допущениях уравнение баланса тепло-
вой энергии в двигателе будет иметь следующий вид:
&Px(t)dt = Axdt + Cdr, (14-1)
где ДАГ (I) — мощность тепловых потерь, Вт;
А — теплоотдача, количество теплоты, выделяе-
мой двигателем в окружающую среду в еди-
ницу времени при превышении температу-
рой двигателя температуры среды на 1°С,
Дж/(°С-с);
С — теплоемкость двигателя, количество теплоты,
необходимое для повышения температуры
двигателя на 1°С, Дж/°С;
т — превышение температурой двигателя темпе-
ратуры среды, т = (0ДВ — 0С) °C.
Дифференциальное уравнение (14-1) предполагает, что
выделившаяся в двигателе теплота ДРТ (i) dt частично
(С dx) пошла на увеличение температуры двигателя и в ко-
личестве Ar dt выделилась в окружающую среду.
Записав (14-1) в операторной форме
АЛ(р) = Дт(р) + Срт(р), (14-2)
нетрудно получить выражение передаточной функции:
в котором kx = МА коэффициент передачи, °С/Вт; Тн =
== С/А — постоянная времени нагрева, с.
Видно, что при принятых условиях динамические про-
цессы изменения температуры двигателя описываются пе-
редаточной функцией апериодического звена с парамет-
рами kx = МА и Ти, имеющего переходную функцию
йт(0 = ^(1-е-'/гн). - (14-4)
Постоянная времени нагрева Ти имеет физическую трак-
товку — она численно равна времени, за которое двигатель
нагрелся бы от т = 0 до установившегося превышения тем-
пературы Ту = ДРт-/гт = &.P.JA при ДРТ = const и отсут-
ствии теплоотдачи. В этом случае темп нарастания темпе-
ратуры был бы равен начальному. Как следует из (14-1),
в начале процесса при т (0) = О
[dx\ АРХ Ту ДРТ С С
\^/нач — с ’ Тн— (dx/dt)na4 ~ А АРТ ~ ~А'
560
.На рис. 14-2, 14-3 представлены кривые изменения пре-
вышения температуры т (/) в соответствии с h-t для различ-
ных значений мощности потерь ДРТ =- const и начальных
температур при нагревании и охлаждении двигателя в рам-
ках принятых допущений.
Практическое отклонение характера изменения темпе-
ратуры отдельных частей машины от приведенных на
рис. 14-2 и 14-3 связано с конечной теплопроводностью и
в связи с этим неодновременностью нагревания различных
частей машины. Так, при нагружении машины скорость
нарастания температуры обмоток сначала определяется не
Рис. 14-2. Кривые нагрева
двигателя.
/ — при ^нэч — ”^о» —
—ДРТ1;2 — при тнач = 0; ДРТ =
=ДРТ1;3— притнач — 0; ДРТ =
= ДРТ2 < ДРТ1.
Рис. 14-3. Кривые охлаж-
дения двигателя.
'-ПРИ *пач= ДРТ1<
< ДРт. пач> 2-"Ри т1.ач =
= т01; ДРт = 0; 3 — при
Гнач = Гог! := 0.
теплоемкостью двигателя в целом, а теплоемкостью меди
См и (</т/<#)пач = ДРТ/СМ > АР^/С, которая значительно
меньше С, поэтому кривая т (/) для обмотки реально отли-
чается от экспоненты, как-показано на рис. 14-2 пунктиром.
Передаточная функция Wx (14-3) справедлива, естест-
венно, лишь при постоянных тепловых параметрах ма-
шины А и С. Однако у двигателей с самовентиляцией тепло-
отдача зависит от скорости ротора и ее изменение принято
характеризовать коэффициентом ухудшения теплоотдачи
= Ail А, где At—'теплоотдача при данной скорости,
а А — при номинальной.
Примерные значения коэффициента р>ю Для неподвижных
машин даны в табл. 14-2.
Абсолютное значение теплоотдачи А пропорционально
поверхности машины, т. е. квадрату линейных размеров,
а теплоемкость пропорциональна кубу линейных разме-
561
ров, поэтому постоянная времени нагрева Тн в рамках ма-
шин одной серии примерно пропорциональна линейным
размерам или номинальной мощности и меняется в диа-
пазоне от 10 мин до 2—3 ч, соответственно для машин ма-
лой и большой мощностей.
Таблица 14-2
Исполнение двигателя Значения ко- эффициента бЛо
Закрытый с независимой вентиляцией Закрытый без принудительного охлаждения Закрытый самовептилируемый Самовентилируемый защищенного исполнения 1 0,95—0,98 0,45— 0,55 0,25-0,35
Из (14-3) следует, что определяющее влияние на нагрев
двигателя оказывают тепловые потери в двигателе, в общем
случае являющиеся функцией времени ЛРТ (f), вид которой
определяется режимом работы электропривода и нагруз-
ками механизма на различных этапах его работы. В связи
с этим возникает необходимость рассмотрения, с одной сто-
роны, номинальных режимов работы двигателей, а с дру-
гой — реальных нагрузочных диаграмм двигателей.
14-2. НОМИНАЛЬНЫЕ РЕЖИМЫ РАБОТЫ ЭЛЕКТРОДВИГАТЕЛЕЙ
Возможные режимы работы электроприводов отличаются
огромным многообразием по характеру и длительности
циклов, значениям нагрузок, условиям охлаждения, соотно-
шениям потерь в период пуска и установившегося движе-
ния и т. д., поэтому изготовление двигателей для каждого
из возможных режимов работы электропривода не имеет
практического смысла. На основании анализа реальных
режимов выделен специальный класс режимов — номи-
нальные режимы, для которых проектируются и изготов-
ляются серийные двигатели.
Данные, содержащиеся в паспорте электрической ма-
шины, относятся к определенному номинальному режиму и
называются номинальными данными двигателя. Заводы-
изготовители гарантируют при работе двигателя в номиналь-
ном режиме при номинальной нагрузке полное использо-
вание его в тепловом отношении.
Действующим ГОСТ предусматриваются восемь номи-
нальных режимов, которые в соответствии с международной
562 ;
классификацией имеют условные обозначения S1—S8.
Ниже приводится краткая характеристика этих номиналь-
ных режимов.
1. Продолжительным номинальным режимом (S1) ра-
боты электрической машины называется режим работы ее
при неизменной нагрузке, продолжающийся до тех пор,
пока превышения температуры всех частей электрической
машины достигнут установившихся значений. Иллюстрация
Рис. 14-4. Зависимости
мощности иа валу двига-
теля, мощности потерь
и температуры от време-
ни (режим S1).
Рис. 14-5. Зависимость
мощности па валу двига-
теля, мощности потерь
и температуры от време-
ни (режим S2).
к этому режиму, где Р, АР.. и 0 — соответственно мощ-
ность на валу двигателя, мощность потерь и температура,
дана на рис. 14-4.
2. Кратковременным номинальным режимом работы (S2)
электрической машины называется режим, при котором
период неизменной номинальной нагрузки чередуется с пе-
риодом отключения машины; при этом периоды нагрузки
не настолько длительны, чтобы превышения температуры
машины могли достигнуть установившихся значений, а пе-
риоды остановки настолько длительны, что все части ее
охлаждаются до температуры окружающей среды (рис. 14-5).-
Для кратковременного режима работы рекомендуются про-
должительности рабочего периода tp: 15, 30, 60, 90 мин.
3. Повторно-кратковременным номинальным режимом
работы (S3) электрической машины называется режим,
при котором кратковременные периоды неизменной номи-
нальной нагрузки (рабочие периоды) чередуются с перио-
563
Рис. 14-6. Зависимости
мощности на валу двига-
теля, мощности потерь
и температуры от време-
ни (режим S3).
дами отключения машины (паузами), причем как рабочие
периоды, так и паузы не настолько длительны, чтобы пре-
вышения температуры частей машины могли достигнуть
установившихся значений.
При повторно-кратковременном режиме работы, без
учета влияния пусковых потерь на температуру машины,
продолжительность цикла не превышает 10 мин. Повторно-
кратковременный режим работы характеризуется относи-
тельной продолжительностью вклю-
чения (рис. 14-6):
пв % = •100 % =?Г •100 % >
*р ТГ0 И Ц
(14-5)
где ip — время работы;
— время паузы;
Тц — время цикла.
Нормируемые значения продол-
жительности включения 15%; 25%;
40%; 60% или е = ip/7\ = 0,15;
0,25; 0,4; 0,6.
Режимы SI, S2, S3 являются в
настоящее время основными, номи-
нальные данные на которые вклю-
чаются в паспорт машины и ката-
логи отечественными электрома-
шиностроительными заводами.
Наличие номинальных режимов S4 — S8 имеет целью
впоследствии упростить задачу эквивалентировапия про-
извольного режима номинальному, расширив номенклатуру
последних. Ограничимся здесь лишь упоминанием этих
режимов.
4. Повторно-кратковременным номинальным режимом
работы с частыми пусками (S4) называется режим, при ко-
тором, в отличие от режима S3, пусковые потери оказывают
существенное влияние на превышение температуры частей
машины.
5. Повторноякратковременным номинальным режимом
работы электрической машины с частыми пусками и элек-
трическим торможением (S5) называется режим, при кото-
ром периоды пуска, кратковременной неизменной нагрузки
и электрического торможения чередуются с периодами от-
ключения машины, причем как рабочие периоды, так и
паузы не настолько длительны, чтобы превышения темпе-
564
ратуры частей машины могли достигнуть установившихся
значений.
В этом режиме пусковые потери и потери при электри-
ческом торможении оказывают существенное влияние на
превышения температуры частей машины.
6. Перемежающийся номинальный режим работы (S6).
Этот режим работы отличается от повторно-кратковремен-
ного номинального режима (S3) тем, что после периода
работы двигатель не отключается, а продолжает работать
вхолостую.
7. Перемежающимся номинальным режимом работы
с частыми реверсами (S7) называется режим, при котором
периоды реверса чередуются с периодами неизменной номи-
нальной нагрузки, причем периоды последней не настолько
длительны, чтобы превышения температуры частей машины
могли достигнуть установившихся значений. В этом ре-
жиме потери при реверсировании оказывают существенное
влияние на превышение температуры частей машины,
которая работает без остановки, находясь постоянно под
напряжением.
8. Перемежающимся номинальным режимом работы
с двумя или более скоростями (S8) называется режим, при
котором периоды с одной нагрузкой на одной скорости
чередуются с периодами работы на другой скорости при
соответствующей этой скорости нагрузке. Периоды на-
грузки на каждой из скоростей не настолько длительны,
чтобы превышения температуры частей машины могли до-
стигнуть установившихся значений.
Искусство выбора электрической машины по мощности
состоит в том, чтобы правильно сопоставить параметры
рабочего режима с номинальным, обеспечив наилучшее
использование выбранного двигателя, т. е. обеспечить теп-
ловой режим, близкий к номинальному.
В § 14-3 рассмотрены особенности нагрузочных диаграмм,
определяемых режимом каждого конкретного механизма.
14-3. НАГРУЗОЧНЫЕ ДИАГРАММЫ ЭЛЕКТРОПРИВОДОВ
В соответствии с уравнением движения для случая,
когда все механические связи в системе можно принять
абсолютно жесткими, момент двигателя на различных эта-
пах работы определяется текущими значениями статиче-
ской и динамической нагрузки электропривода:
= + (14-6)
565
Зависимость момента двигателя от времени М (t) назы-
вается нагрузочной диаграммой двигателя и является глав-
ной характеристикой, используемой при расчетах, связан-
ных с выбором мощности электродвигателя. Основой для
расчета нагрузочных диаграмм, как вытекает из (14-6),
являются информация о статическом моменте на каждом
этапе работы 7ИС (t), которую обычно называют нагрузоч-
ной диаграммой механизма, и сведения о характере движе-
ния электропривода в рабочем процессе, задаваемые,
например, в виде зависимости скорости электропривода от
времени со (t), называемой иногда тахограммой электропри-
вода. Зависимости 7ИС (0 и со (/) при проектировании элект-
ропривода либо являются заданными, либо в техническом
задании на проектирование содержатся данные, достаточ-
ные для их расчета и построения.
Все многообразие производственных механизмов с точки
зрения режимов работы электропривода можно разделить
на две большие группы: механизмы непрерывного и меха-
низмы циклического действия. Для электроприводов меха-
низмов, относящихся к этим группам, характерны вполне
определенные зависимости 7ИС (t), со (t) и, в конечном счете,
определенные типовые нагрузочные диаграммы двигате-
лей 714 (f). Заметим, что на вид зависимостей со (t) принци-
пиальное влияние оказывает требование изменения напра-
вления вращения двигателя, в соответствии с которым
механизмы и соответственно их электроприводы делятся на
нереверсивные и реверсивные. Эта классификация при вы-
боре двигателей по нагреву принципиального значения не
имеет, однако оказывает решающее влияние на проектиро-
вание системы управления электроприводом и поэтому ее
следует иметь в виду.
Особенностью механизмов непрерывного действия яв-
ляется продолжительный режим работы двигателя при не-
изменной заданной средней скорости соср = const. При этом
время пуска и торможения электропривода настолько мало
по сравнению с общим временем работы при каждом вклю-
чении, что на нагрев двигателя влияния не оказывает и
при построении нагрузочных диаграмм может не учиты-
ваться, поэтому тахограмма заданной скорости в подобных
случаях имеет простейший вид прямой 1 (со3 = ис = const),
показанной на рис. 14-7, а, и является характерным при-
знаком рассматриваемой группы электроприводов.
Зависимости 7I4C (t) для механизмов непрерывного дей-
ствия имеют значительное многообразие, которое в свою
566
очередь может быть подразделено на следующие типовые
группы: 1) механизмы с постоянной нагрузкой = const;
2) механизмы с переменной циклической нагрузкой Л4С (f),
регулярно повторяющейся в течение длительного времени;
3) механизмы с переменной циклической нагрузкой, зави-
сящей от пути Мс (ср); 4) механизмы со случайной нагруз-
кой Mz (t). В большинстве случаев в случайной нагрузке
рассматриваемых механизмов удается выделить регуляр-
ную циклическую составляющую. Кроме того, постоянство
заданного значения скорости со3 = соср = const дает доста-
точные основания для приближенной замены зависимости
Рис. 14-7. Нагрузочные диаграммы механизмов непрерывного (а) и
циклического (б) действия.
7ИС (ср) более удобной для расчетов зависимостью 7ИС (/),
что следует из условия соср = const. Для рассматривае-
мой группы механизмов типовая зависимость 7ИС (f) в об-
щем случае имеет вид циклической кривой 2, показанной
на рис. 14-7, а, частным случаем этой зависимости является
работа с постоянной нагрузкой Л4С (4) = 7ИС.ср = const
(прямая 3). Обычно для удобства расчетов реальная зави-
симость Мс (4) может быть с требуемой точностью заменена
ступенчатой зависимостью 7Ие (4), показанной на рис. 14-7, а
ломаной 4.
При работе с переменной нагрузкой Л4С (4) мгновенные
значения скорости электропривода со в той или иной сте-
пени отличаются от заданного среднего значения <ocp
в связи с ограниченной жесткостью механической характе-
ристики рд. Электропривод на изменения нагрузки реаги-
рует изменениями скорости двигателя и для рассматривае-
мого достаточно удаленного от начала работы установив-
шегося цикла тахограмма со (4) имеет вид кривой 5 на
56?
рис. 14-7, а. Изменения скорости со (/) в срответствии с
т dco (t)
(14-6) определяют значение динамического момента Js—
и, как следствие, показанная на рис. 14-7, а (кривая 6)
нагрузочная диаграмма двигателя 714 (0 всегда в той или
иной степени отличается от
Тм на характер нагрузочной
диаграммы.
нагрузочной диаграммы ме-
ханизма 714 с (I) (кривая 2 на
рис. 14-7, я).
Для того чтобы оценить
влияние параметров электро-
привода на степень отклоне-
ния зависимости 714 (t) от диа-
граммы 714с (t), рассмотрим
работу электропривода с ли-
нейной механической харак-
теристикой при Тэ = 0 при
простейшей ступенчатой за-
висимости 714с (0, представ-
ленной на рис. 14-8. Для ус-
тановившегося цикла работы на основе приведенных в
§ 5-1 соотношений можно записать:
Л4нач 2 = 714КОН х = (714нач х - 714с1) е" + 714сХ; (14-7)
Миач х = 714кои 2 = (714„ач 2 - 714с 2) е~ + 714с2. (14-8)
Совместное решение (14-7) и (14-8) дает:
7И11ач1 = Я2 - --1 е (14-9)
1-е м
Л4нач2 = 714сХ - - \!Та _ (И_ ю)
1—е Il/ “
В связи с линейностью механической характеристики
электропривода значениям 714начХ = 714мин и 714пач2 = 714макс
соответствуют значения инач х = <вмакс и инач2 = соиии и
скорость изменяется по аналогичному экспоненциальному
закону с постоянной времени Т„. Соответствующие зави-
симости 714 (f) (кривая 1) и a (t) (кривая 2) для конкрет-
ного значения Тм представлены на рис. 14-8. Из (14-9) и
(14-10) следует, что с возрастанием Д пределы изменения
момента в цикле снижаются и при 77, -> эо электропривод
работал бы со средним моментом 714ср = 714с.ср и со средней
скоростью, соответствующей этому моменту.
558
Зависимости М (f) и a (t), соответствующие увеличен-
ному за счет возрастания момента инерции привода
значению Т'м > Тк, показаны на рис. 14-8 (кривые 3
и 4).
Таким образом, механическая инерция привода в рас-
сматриваемом режиме работы оказывает на нагрузку дви-
гателя сглаживающее действие. Возрастающая скачком
нагрузка частично преодолевается за счет освобождающейся
из-за снижения скорости кинетической энергии, которая
была запасена в период работы с малой нагрузкой, когда
скорость возрастала (рис. 14-8). Так как Т,л = Js/р, сгла-
живание нагрузки при данном возрастает при умень-
шении модуля жесткости механической характеристики |3.
Однако при этом возрастают колебания скорости Дсо и сни-
жается среднее ее значение о>ср.
В группе механизмов непрерывного действия особое
место занимают механизмы, требующие при работе цик-
лического изменения заданной скорости со3 (t). Если
частота циклов изменения скорости достаточно велика,
условия работы электропривода приближаются к усло-
виям работы электроприводов механизмов циклического
действия.
Зависимости <в3 (/) для механизмов циклического дей-
ствия исключительно многообразны, причем общим их
признаком является наличие одного или нескольких вклю-
чений двигателя и соответствующего числа пауз в каждом
цикле, поэтому в качестве типового цикла может быть
принят цикл работы с п включениями и п паузами, с задан-
ным законом изменения скорости со3 (t) на каждом участке
цикла и с возможным изменением направления движения
механизма. Примерная тахограмма механизма циклического
действия представлена на рис. 14-7, б (ломаная /). Там же
показан примерный вид нагрузочной диаграммы 2 меха-
низма 7ИС (/). Нагрузочная диаграмма двигателя М (f)
может быть рассчитана с помощью уравнения движе-
ния (14-6) и имеет вид, показанный на рис. 14-7, б ло-
маной 3.
Рассматривая (14-6) и рис. 14-7, б, можно заключить,
что механическая инерция электропривода циклического
действия является фактором, увеличивающим нагрузки дви-
гателя. Неравномерность нагрузки 714 (/) за счет динамиче-
ских нагрузок существенно увеличивается.
569
14-4. ПОТЕРИ ЭНЕРГИИ В ЭЛЕКТРОПРИВОДАХ J
В § 14-1 было уже отмечено, что для правильной оценки
теплового режима двигателей важнейшим является нахо- j
ждение потерь энергии, обусловливающих нагрев, на раз- <
личных этапах рабочего периода.
. Суммарные потери AZ’ts энергии удобно представлять
двумя составляющими: постоянными потерями \Р1С и пере- • •
менными зависящими от нагрузки. В этом случае
для двигателя постоянного тока
ДРт2 = АРтс + А= АРт. „ + АРт. мех + Д/?, (14-11)
где АРТС = АРТ-СТ + АРг,мех — потери в стали и механиче-
ские;
/яР — потери в силовой (якорной)
цепи двигателя.
Аналогично для асин-
хронного двигателя
АРТ? = АРТ. „ + АРТ. мех + 3 (/]7?г + I?R^. (1442)
Переменные потери также могут быть выражены через
электромагнитный момент и относительную скорость (или
скольжение), а именно:
для двигателей постоянного тока независимого возбу-
ждения
АР„ = Л4(£оо^ю) = Л4®о^ = Р12^) (14-13)
tog too
где Р12 — электромагнитная мощность;
Aw; <о0 — соответственно перепад скорости, обуслов”
ленный моментом, и скорость идеального
холостого хода;
соответственно для АД
APt, = 7I4£oos(1+P1/PO = P13s(1+Pj/P2). (14-14)
Более подробно остановимся на определении потерь и .
расхода энергии в переходных процессах. Здесь целесо-
образно находить не среднее значение потерь мощности,
а расход и потери энергии за время переходного процесса.
Потери энергии в двигателе за время переходного про-
цесса в общем случае равны:
АА„. п = У АРт2 (0 dt = \ "(ДРтС + ДРТ1)) dt,
о 0 . '
570
Так как по сравнению с переменными постоянные по-
тери в переходном процессе, как правило, малы, то в даль-
нейшем они учитываться не будут.
Для двигателя постоянного тока независимого возбу-
ждения потери при пуске
ЛДП = $ М (<в0 — со) dt.
о
Если пуск совершается вхолостую (при Мс = 0), то из
уравнения движения имеем:
тогда
(Оо
ЛЛп0 = j Js (®о — а) da,
о
или
ДДп0 = /2^. (14-15)
Следовательно, потери энергии при пуске двигателя
вхолостую определяются запасом кинетической энергии,
накопленной массами при-
вода к концу разгона.
Полезная работа, про-
изведенная двигателем за
время разгона вхолостую,
также равна запасу кине-
тической энергии, накоп-
ленной массами привода
за этот период:
Рис. 14-9. Идеализированные гра-
фики скорости, развиваемой и по-
требляемой нз сети мощности
двигателя постоянного тока с не-
зависимым возбуждением (а) и за-
висимость со = f (0 (б).
А — I
/1П0 — 2 •
Расход энергии из сети
равен:
^эл =
На рис. 14-9, а приведены идеализированные зависи-
мости скорости и развиваемой (полезной) и потребляемой
из сети мощности от времени для двигателя постоянного тока
с независимым возбуждением.
Суммарная энергия, потребляемая из сети за время пуска
вхолостую, отображается прямоугольником обве; постоян-
571
ные потери соответствуют площади абвг. Мощность на валу .
двигателя растет по прямой ог, принимая максимальное ’
значение к концу разгона, затем падает до нуля, так как ;
Мс — 0; при этом не учитываются постоянные потери, отме-
ченные отрезком ge = вг. Энергия, потребляемая якорной
цепью двигателя, пропорциональна площади оаге, площадь
треугольника оаг— потерям в якорной цепи двигателя,
а оге — полезной работе. Изменение скорости со (t) при по-
стоянном моменте показано отрезком ож.
При пуске двигателя под нагрузкой, в предположении,
что Мс = const, потери энергии
АЛп = J М. (соо — со) dt = (Мс + Мд) (соо — со) dt.
о О
Так как dt — Js,-^-, то после преобразований
<ос *п
АЛП=^ Js (соо —со) dco4-Mc (соо — a) dt,
о о
или
сО(/п — $ со dt
о
Первый член выражения (14-16) представляет собой по-
тери энергии в якорной цепи, обусловленные разгоном инер-
ционных масс привода, а второй — потери, вызванные на-
личием момента нагрузки.
Формулу (14-16) можно записать так:
АЛП = АЛП.Д + АЛП.С. (U-17)
Если сос мало отличается от соо, то
ДЛп.д^/2^,
а
со.о/п — со dt
о
Подсчет Лй,с можно произвести, воспользовавшись за-
висимостью со — f (t), показанной на рис. 14-9, б.
На рис. 14-9, б заштрихованная площадь равна:
соо/п — $ со dt = F„.
о
. (14-16)
АЛп = (соосос — сос72) + Мс
АЛП.С = МС
572
Следовательно,
A4n.c = A4cFn.
Тогда потери в якорной цепи двигателя
ЛДП = Js 1момс — + McFn.
Потери энергии при торможении противовключением
вхолостую определятся по формуле
О йо
АДт_ п0 = Js (— соо — со) da = J /х (соо + w) da,
Ио О
или
АДт.п0 = 3/2^. (
(14-18)
Таким образом, потери при торможении противовключе-
нием вхолостую равны тройному запасу кинетической энер-
гии, т. е. в 3 раза превышают потери
при пуске вхолостую. Графическая
интерпретация изменения механиче-
ской и электрической мощности при
торможении с Мс = 0 показана на
рис. 14-10. Механическая мощность,
поступающая с вала, преобразуется
в электрическую и выделяется в
якорной цепи двигателя, что опре-
деляет одну составляющую потерь,
прямо пропорциональную площади
Рис. 14-10. Графиче-
ская интерпретация
изменения механиче-
ской и электрической
мощности при тормо-
жении с Л4С = 0.
треугольника оаб.
Так как напряжение сети посто-
янно во время торможения, то вторая
составляющая потерь обусловлена
потреблением электрической энергии
из сети и пропорциональна площади,
ограниченной прямоугольником обвг. Как видно, сумма
этих двух составляющих и определяет тройной запас
кинетической энергии.
При торможении противовключением с нагрузкой на
валу двигателя (Л4С — const) потери энергии можно найти
по формуле
АДТ. п = Js (“о“с + Мс/2) — Л4С $ (со„ 4- со) dt,
о
573
АЛ, п = (соосос 4- соа/2) — Л4С
или
4
со0/т + $ ® dt
о
Введем обозначение:
<т
wot.r 4- adt — Ft
о
Тогда окончательно
АЛ, и = Js (%сос + (Ос/2) - MJ\. (14-20)
Из (14-20) следует, что потери энергии при торможении
двигателя под нагрузкой меньше, чем вхолостую.
При динамическом торможении якорь двигателя отклю-
чен от сети и замкнут на сопротивление, поэтому кинетиче-
ская энергия, запасенная в массах электропривода, в про-
цессе торможения превращается в электрическую и выде-
ляется в виде теплоты в якорной цепи. Потери энергии
в якорной цепи двигателя при динамическом торможении
вхолостую
о й0
АЛ, д0 — jj — J^co сйо = jj J^a da,
fflo о
или
АЛ,д0 = «/2. (14-21)
Если динамическое торможение производится под на-
грузкой (Л4С — const), то потери энергии в якорной цепи
4
АЛ,Д = JvW=/2- Л-Ц adt. . (14-22)
о
Второй член (14-22) легко подсчитать, как и ранее,
если известна зависимость а — f (t).
Потери энергии в якорной цепи двигателя’при реверси-
ровании без нагрузки
— «о Йо s
АЛр0 = $ Js (—а0 — а) da = Js (соо4- co) da — 4Js
(Oo — COo
(14-23)
Формула (14-23) подтверждает, что потери энергии» при
реверсировании складываются из суммы потерь энергии при
торможении противовключением и пуске.
574
• (14-19) ?
Для определения потерь энергии при реверсировании
мбжно воспользоваться формулой
А Лр = АЛ п + АЛТ. „•
Следует подчеркнуть, что на потери энергии в переход-
ных режимах при управлении двигателем независимого воз-
буждения от источника с постоянным напряжением и Мс — О
не влияет значение тока в якорной цепи, с которым пу-
скается или тормозится двигатель, а следовательно, и
электромагнитный момент. Эти потери остаются неизмен-
ными при любом числе ступеней пускового или тормозного
сопротивления, так же как и при безреостатном управлении.
Из изложенного следует, что и длительность переходного
процесса не оказывает влияния на потери энергии в пере-
ходных режимах, если Мс = 0.
Иначе решается вопрос об определении потерь энергии
при пуске и торможении двигателя постоянного тока по-
следовательного возбуждения, так как его управление в пе-
реходных режимах обусловлено непостоянством магнитного
потока, зависящего от тока якорной цепи, поэтому потери
в якорной цепи двигателя последовательного возбуждения
при неизменном напряжении питания могут быть меньше,
больше или равны соответствующим потерям в двигателе
независимого возбуждения. Если среднее значение тока
в переходном режиме у двигателя последовательного возбу-
ждения больше номинального, то вследствие увеличенного
магнитного потока момент, развиваемый двигателем, ока-
жется больше, а время переходного процесса будет меньше,
чем у двигателя независимого возбуждения при прочих
равных условиях. Следовательно, расход энергии и потери
станут меньше. По этим же соображениям, если ток в сред-
нем меньше номинального, то и момент двигателя последо-
вательного возбуждения соответственно меньше, чем у дви-
гателя независимого возбуждения, время, расход энергии
и потери будут большими. Только при номинальном токе
время, расход энергии и потери в переходных режимах будут
одинаковыми как для одного, так и другого типа двигателей.
' Если при управлении переходными режимами напря-
жение, подводимое к двигателю, изменяется от меньшего
значения в начале процесса до большего в конце его, то
потери в якорной цепи становятся меньшими, чем при
неизменном напряжении.
Рассмотрим простейший случай пуска двухдвигатель-
ного привода постоянного тока с изменением напряжения
575
в две ступени. Каждый из двигателей рассчитан на номиналь-
ное напряжение. Сначала (рис. 14-11, а) якорные цепи
обоих двигателей включены последовательно и напряжение,
приходящееся на зажимы якоря- каждого из двигателей,
равно половине номинального — оба двигателя разгоняются
Рис. 14-11. Схема двухдвига-
тельного электропривода посто-
янного тока с изменением на-
пряжения при пуске в две сту-
пени.
а — последовательное; б — парал-
лельное соединение двигателей.
до половинной скорости. Очевидно (считая для упрощения
Л1С = 0), потери энергии при пуске до скорости, равной
соо/2, составят:
л ,, М* ,
2 "2 g ।
а при последующем разгоне от скорости со0/2 до соо, осущест-
вляемом переключением с последовательного соединения
Рис. 14-12. Графики разгона двух-
двигательного электропривода в
две ступени.
Рис. 14-13. График зави-
симости со0 (<) и w (f)
при пуске вхолостую.
(рис. 14-11, б), потери
двух двигателей на параллельное
равны:
дл (юо-юо/2)а . ._ т “о
^г*поП — 2 “s 8 ‘
Таким образом, суммарные потери (пуск в две ступени)
ДЛпоЦ п=^з®о/4,
576
т. е. в 2 раза меньше, чём при пуске в одну ступень. Зави-
симости, приведенные на рис. 14-12, а и б, иллюстрируют
в упрощенном виде процесс разгона двухдвигательного при-
вода в две ступени, а площади заштрихованных треуголь-
ников пропорциональны потерям энергии.
В случае линейного изменения напряжения, подводи-
мого к якорю двигателя (линейно изменяется и скорость
идеального холостого хода), зависимости соо (/) и со (t) при
пуске вхолостую представлены на рис. 14-13. Здесь на
первом этапе пуска (t «С /п0)
со(/) = 8о/ — Тме0(1 — e~i/Tw);
на втором (t > tn0)
(О (/) (Оои 4- (ып ®0н) м >
М = Л40е 7'м ,
где е0 — ускорение;
Тк — электромеханическая постоянная привода;
соп — скорость перехода от первого ко второму участку
пуска.
Потери энергии
'п
ДЛПО = 5 Л4 (соо — со) dt.
о
Полагая /п Тм и допуская для упрощения линейную
зависимость для со (/), получаем:
со
Кроме того,
СОо СО = Ти8й; М = J2 — Jх80; 8(/110 = ®0п-
Тогда
5. 0 (14-24)
или окончательно ЛД сп м ^^ПО 9 4 * ^пО (14-25)
577
Из (14-25) следует, что когда Тм tn0, потери энергий'-
при пуске с линейным Изменением напряжения значительно ?
меньше, чем в случае пуска с постоянным напряжением. J
Если управление двигателем производится по системе '
Г—Д путем включения обмотки возбуждения генератора ;
на полное напряжение и э. д. с. генератора изменяется по
экспоненциальному закону, то потери в якорной цепи ,
АЛП = $ i^^.r + Rr.^dt. (14-26)
о
Для пуска вхолостую с учетом, что
= /к. з - е~i/T^) , (14-27)
здесь m = Ts/Ta — отношение постоянной времени об-
мотки возбуждения к электромеханической постоянной при-
вода.
После преобразований (14-26) имеет вид:
ААю(Г-Д) = (14-28)
где АЛп0 = Jscoo/2.
Из (14-28) следует, что чем больше Тв в сравнении с Тк,
тем медленнее нарастает э. д. с. генератора, замедляется
пуск двигателя и уменьшаются потери энергии. Форсирова-
ние возбуждения приводит к возрастанию потерь энергии.
После соответствующих преобразований можно пока-
зать, что при пуске под нагрузкой потери энергии в якор-
ной цепи Г—Д равны [1]:
АЛП (Г- д) = А/4п0(г — д) +PZ (2ТИ + Acocin), (14-29)
где Рс, Аыс — соответственно мощность, потребляемая дви-
гателем, и перепад скорости, обусловленный моментом на-
грузки Мс при установившейся э. д. с. генератора.
В процессе рекуперативного торможения вхолостую по-'
тери в якорной цепи составят:
АЛ то (г-Д) — АЛ 1|0 т_ р •
То же при Мс = const:
АЛт(г-д) — АЛпот_^_ j — Рс (2ТИ4- Асос/Т).
578
v Потери в тормозном режиме под нагрузкой при том же
времени оказываются меньшими, чем вхолостую, из-за
меньшего тока в якоре.
Пусковые потери в АД, если пренебречь постоянной
составляющей потерь АРТС и влиянием тока холостого
хода (т. е. считать Д яь; Гг), можно определить по формуле
О
При Мс = О
dt = — Js^ds.
Далее, заменяя потери мощности в роторной цепи мощ-
ностью скольжения, т. е. ЗД2 (/Д + R^) — M<o0s, в ре-
зультате несложных преобразований получаем:
ААП= J 1+ \ds. (14-30)
с \ 2 2д/
кон
Или, учитывая, что sHa4 = 1 и sK01I = 0,
ДД10= +^Д>-д), (14-31)
где соо — синхронная скорость двигателя;
Ri, R'i, Ria — соответственно сопротивление фазы ста-
тора, приведенное и добавочное сопротивления фазы ротора;
для короткозамкнутых двигателей R'u = 0.
Из (14-31) следует, что потери при пуске состоят из по-
терь:
1) в роторной цепи ААпОг = Jscoi;/2, определяемых запа-
сом кинетической энергии, который приобретает привод
к концу разгона;
2) в статорной цепи ААпМ = 5-,- f 5,-, зависящих
z R-i + 'Дд
от активных сопротивлений статора и роторной цепи;
чем больше сопротивление роторной цепи, тем меньше по-
тери в статоре АД. Уменьшение потерь в статоре с ростом
вторичного сопротивления объясняется уменьшением пу-
скового тока.
Для короткозамкнутого двигателя R'^ = 0 и составляю-
щая потерь в статоре равна:
д д ___ т Rj
579
В короткозамкнутых двигателях общего назначения Д
(единой серии) R'%, т. е. в этом случае составляющая 1
потерь энергии в статоре численно равна запасу кинетиче- 1
ской энергии, т. е. потерям в роторе. |
В двигателе с короткозамкнутым ротором уменьшение i
потерь в статоре может быть достигнуто за счет применения >
специальной конструкции ротора, имеющего повышенное
сопротивление. Сюда можно отнести двигатели с повышен- ..
ным скольжением, со сплошным стальным ротором. Дви- -•
гатели с глубоким пазом или с ротором типа Бушеро также
обладают повышенным сопротивлением ротора, изменяю-
щимся в функции скольжения, что также приводит к умень-
шению переменных потерь в статоре.
Потери в роторной цепи при пуске вхолостую для всех >
типов двигателей определяются запасом кинетической энер-
гии.
Потери энергии при пуске АД под нагрузкой (Л4С =
= const) могут быть найдены по формуле
АД ^ДД Мп’ср ,
где Л4п.ср = Л4|! (% + /гп)/2 — средний пусковой момент АД;
% = МК/МН;
kn = Mn/Mn.
Потери энергии вхолостую в АД в режиме торможения
противовключением могут быть получены из (14-30) при
подстановке в него пределов интегрирования sHa4 = 2 и
Sroh = 1; тогда
AAT.n0 = 3Jsf
Если торможение противовключением производится под
нагрузкой (Л4С = const), то потери
АД - АД Мт'ср
Лт-п-аЛт-п0 Мт.ср+Мс ’
где Л4т.Ср — средний момент, развиваемый АД при тормо-\
жении противовключением.
Потери энергии в роторной цепи двигателя в период
динамического торможения вхолостую определяются запа-
сом кинетической энергии, который приобрел привод к на-
чалу торможения, т. е.
АДТ1 Д02 ~
580
Потери в статоре при динамическом торможении
ДЛт.д1 = ЗЛ8КЖД’ (14-32)
где /1ЭКВ — эквивалентный ток статора;
^т.д — время динамического торможения.
Наконец, если динамическое торможение происходит
под нагрузкой (Мс — const), то потери в роторной цепи
Л Л — АД Мт' д~ср
А м ~ т- дог Мт. д. ср + Мс •
Потери в статоре определяются по (14-32) с учетом того,
что время торможения будет меньше при том же значе-
нии 71экв.
При использовании двух- или многоскоростного двига-
теля прямой пуск его на максимальную скорость нежела-
телен, так как потери энергии окажутся значительно выше,
чем у односкоростного короткозамкнутого двигателя такой
же мощности, имеющего номинальную скорость, равную
максимальной скорости многоскоростного двигателя. Это
объясняется тем, что габариты и момент нагрузки много-
скоростного двигателя, определяемые для низшей ско-
рости, значительно больше, чем у односкоростного дви-
гателя .
С целью уменьшения пусковых потерь энергии следует
использовать ступенчатый пуск. Для двухскоростного.дви-
гателя осуществляется пуск в две ступени. Если для пуска
двигателя на первую ступень обмотка статора включена
так, что его синхронная скорость равна половине верхней
соо/2, то потери энергии при этом составят (при Л4С = 0):
A^noi — 1 •
Пуск на вторую ступень от скорости соо/2 до соо вызовет
потери
Длпо11 = ^§ (1 +§)•
Суммарные пусковые потери
АДп0 = ДДп01 + ДДп011 = 72^(1+^. (14-33)
Следовательно, двухступенчатый пуск уменьшает по-
тери энергии вдвое по сравнению с пуском в одну ступень.
В этом случае предполагалось, что отношение сохра-
581
нялось неизменным с переключением числа полюсов. Сту-j
пенчатый пуск двухскоростного двигателя аналогичен пуску1!
двигателя постоянного тока независимого возбуждения из-
менением подводимого к якорю напряжения в две ступени../
Многоступенчатый пуск трех- или четырехскоростного J
двигателя приводит к снижению потерь энергии еще в боль- *
шей степени. Например, если осуществить ступенчатый '
пуск четырехскоростного двигателя, имеющего синхронные :
скорости 500/1000/1500/3000 об/мин, то потери на первой
ступени (0—500 об/мин) составят 1/36 потерь при пуске
в одну ступень до 3000 об/мин, на второй ступени (500—
1000 об/мин) — 1/36, на третьей (1000—1500 об/мин) —
1/36 и на четвертой (1000—1500 об/мин) — 1/4. Общие
пусковые потери в четыре ступени составят 1/3 полных
потерь при прямом пуске до 3000 об/мин.
Для двигателя со скоростями 500/700/1000/1500 об/мин-
при четырехступенчатом пуске общие потери энергии соста-
вят 5/18 пусковых потерь в одну ступень до 1500 об/мин.
Торможение двух- или многоскоростного двигателя для
снижения потерь энергии аналогично пуску может быть
ступенчатым. Так, если двухскоростной двигатель имеет
две синхронные скорости ®01 и ®02, то торможение от ®оа
до ®01 можно осуществить с рекуперацией энергии в сеть,
а с ®01 до нуля — противовключением.
Потери энергии вхолостую на первой ступени (рекупера-
тивное торможение) можно определить по формуле
I — 1П
ДЛреко=«2;1/<' J sds==j^K'Hlz^+lt
о
где т = ®o2/®oi;
^ = (1+ад).
Потери энергии на второй ступени (торможение противо-
включением)
2
till J i I и
I
Суммарные потери при ступенчатом торможении равны
(в предположении, что К' = К" = К)'.
ДЛтоступ^Со/<от2-^ + 4> (14-34)'
где Со =
582
Если осуществить Торможение противовключением с
максимальной скорости до остановки, тогда
• 2
АЛт по= С0К \lsds = ЗС0/(/2.
i
Отношение потерь
ДЛюступ 2 т2 — 2m-|-4
. ДЛТ. по ~ 3 т2
(14-35)
(14-36)
(14-37)
Например, если осуществляется ступенчатое торможение
двухскоростного двигателя с т = 2, то потери энергии
составят всего 2/3 потерь при торможении противовключе-
нием в одну ступень. С увеличением т уменьшаются потери
энергии в полюсопереключаемом двигателе и ступенчатом
торможении по сравнению с потерями при прямом противо-
включении.
Еще меньшими оказываются потери энергии в частотно-
управляемом асинхронном электроприводе, которые могут
быть определены ориентировочно без учета электромагнит-
ных процессов. Примем, что электромеханический процесс
протекает с абсолютным скольжением, меньшим критиче-
ского, т. е. sa < saK. С указанными ограничениями потери
можно найти из следующей системы уравнений:
Af = ср (sa, f*);
M = MC+J^;
с dt
® (f * Sq)i
Уравнение движения имеет вид:
М = МС + - JS(oni §. (14-38)
Из (14-38) видно, что динамический момент представлен
двумя составляющими:
M/f = Js»lu%- = Jse; (14-39)
MAa==/2<01H-t-- (14’4°)
Момент двигателя при управлении с sa < sK опреде-
ляется линейным уравнением
M = Ksasa. (14-41)
583
Учитывая третье уравнение системы (14-37) и уравне-
ние (14-41), получаем выражение механической характе-
ристики двигателя при частотном управлении:
м(14-42)
Уравнение движения можно представить в виде
^а+^®1н§ = Л4с + /2^,
или
Для линейного изменения частоты во времени е = const.
Параметр абсолютного скольжения можно найти из фор-
мулы .
t'sa.
где Тм = — электромеханическая постоянная
времени;
8а. с —
Потери энергии при пуске
А
ДАП = 7H(olusa (1 + RijR’i) dt.
о
Зная зависимость sa = f (f), можно определить ДАП
при Л4С = 0. Примем для упрощения, что tn ;> Т.л, полу-
чим sa = /хе//Ста, тогда
A4n = W1+^2^. (М-43)
Таким образом, выражение (14-43) аналогично (14-25),
что и следовало ожидать.
Из (14-43) видно, что для Тп <; tn0 потери при частотном
пуске (sa< sK) значительно меньше, чем в случае прямого
включения АД с f* — 1. Аналогично могут быть найдены
потери и при частотном торможении.
Необходимо отметить, что минимальные потери при'
частотном управлении могут быть достигнуты в результате
установления оптимального значения абсолютного сколь-
жения Sa.onT-
584
Выбор sa опт поясним на примере частотно-токового
управления АД, в котором должна быть обеспечена оп-
ределенная связь между током статора и абсолютным
скольжением. Наиболее просто такая связь реализуется,
когда ток статора пропорционален абсолютному сколь-
жению.
Оптимальное значение абсолютного скольжения можно
выбирать исходя из режима минимума тока или режима
минимума потерь. Значение s„.onT в режиме минимума тока
выбирается так, чтобы заданному току статора соответст-
вовал максимум электромагнитного момента, что обеспечи-
вает наибольшее быстродействие, а следовательно, при вы-
бранном токе и минимум электрических потерь.
Пользуясь механической характеристикой М = f (s„),
построенной для фиксированных значений токов статора,
можно установить общую закономерность независимо от
типа и параметров АД, заключающуюся в том, что с ростом
тока статора увеличивается критическое скольжение sn-Kl.
Линия оптимального скольжения проходит через точки
максимумов моментов, каждый из которых отвечает своему
постоянному току статора. Таким образом, сравнительно
просто находится sa.onT.
Определение sa.onT в режиме минимума потерь связано
со значительно более сложными расчетами и практически
не всегда оправдано. Анализ показывает, что потери энер-
гии при частотном пуске и торможении, полученные в ре-
жиме минимума потерь, всего на несколько процентов от-
личаются от потерь, рассчитанных из условий минимума
тока.
Приведенные выше соотношения потерь энергии в пере-
ходных режимах для различных способов управления АД
не учитывают влияния электромагнитных процессов и на-
сыщения магнитной цепи; их влияние можно оценить в ре-
зультате решения системы дифференциальных уравнений
АД с учетом того, что АД питается как непосредственно от
сети, так и от соответствующего преобразователя час-
тоты.
Система дифференциальных уравнений асинхронного
привода, дополненная уравнениями для мощности потерь
и потерь энергии, оказывается сложной и нелинейной и
поэтому аналитически не разрешается. Ее решение возможно
с использованием средств вычислительной техники.
19 Чиликин М. Г. и др.
585
14-5. МЕТОДЫ ЭКВИВАЛЕНТИРОВАНИЯ ПО НАГРЕВУ
ПРОИЗВОЛЬНОГО И НОМИНАЛЬНОГО РЕЖИМОВ РАБОТЫ
На основании изложенного ранее можно заключить, что
наличие ограниченного числа номинальных режимов, на
которые рассчитаны двигатели, и исключительное много-
образие реальных нагрузочных диаграмм электропривода
требует разработки инженерных методов оценки допусти-
мости по нагреву нагрузок двигателей в режимах, отличных
от номинального. Наиболее общим случаем является работа
электропривода в циклическом режиме с переменной в пре-
делах каждого цикла нагрузкой. (Режимы с постоянной на-
грузкой можно рассматривать как частный случай цикли-
ческих режимов, не имеющих переменной составляющей.)
При этом потери в двигателе также являются переменными
в течение цикла работы, и изменения превышения темпе-
ратуры двигателя т (t) определяются, при прочих равных
условиях, зависимостью AP.r (f). Для общего анализа
интерес представляют оценки температурного режима, не
связанные с конкретным видом АР., (t), позволяющие дать
подход к эквивалентированию режимов двигателя в теп-
ловом отношении.
Пусть в общем случае АРТ (/) является функцией вре-
мени, определяющей изменение превышения температуры
двигателя т (/). Пусть также функция АРТ (/), которая
всегда положительна, имеет разложение в ряд Фурье
АРТ (/) = АРТ. ср + У, fl/SinfftV + 'HOL (14-44)
1 = 1
где Qx = 2п/Т^Р ,
Тьр^ — период функции АР, (или время цикла Тц);
а; — коэффициент Фурье;
АРТ ср — ао/2 — среднее по времени значение функции
АРТ (t).
Так как здесь используется линейная модель нагрева,
то на основании принципа суперпозиции т (/) можно пред-
ставить разложением в виде
т (t) = а0Ь0/2 + У aibi sin + ф (j) + <р (t)] =
t = i
= тср + Ат(0, (14-45)
586
здесь bi (гйх) — значения модуля передаточной функции
(14-3);
b0 = \W(jO)\ = ^kx,
ф(1); cp(i)—фазовые сдвиги;
тср — среднее превышение температуры, тср ==
= ДРТ .ср^о = АРтср/Л;
Дт (/) — отклонение превышения температуры от сред-
него значения.
Максимальное' превышение температуры тмлкс = тСр +
+ Дтма1(С. Интерес представляет получение простой оценки
его значения через параметры функции ДР.Г и Оценку
интересующего нас параметра сверху можно дать выраже-
нием
СО
^макс Тср 4“ У। а^Ь^
1
(14-46)
которое в рамках нашей модели обращается в равенство
в случае, если
ДРТ (f) = ДРТ. ср + a sin (й/ -]- ф).
Однако практически использование (14-46) неприемлемо
ввиду необходимости вычисления коэффициентов at и опре-
деления по тепловым параметрам поэтому удобней, не
прибегая к спектральному разложению функции ДР,,
воспользоваться неравенством Буняковского—Коши, из ко-
торого следует, что
со /~ со /со
Sw (14‘47)
i=1 ’ 1=1 ’ Z=1
В свою очередь, сумма квадратов коэффициентов разло-
СО
жения У, я? может быть выражена через среднеквадратиче-
1=1
ское отклонение функции ДРТ на основании равенства
Парсеваля таким образом:
СО
У, al = 2(Дрт,
i = I
(14-48)
19*
587
где
Г Т&Рт
аДРт=]/ С (APH(/)-APT.cp)Mi
’ дл' 'о
— среднеквадратическое отклонение.
С другой стороны, для инерционного звена Wt можно
найти предел суммы:
оо 00 00 / I А2 \
I [/ G^i)] I2 = bi = ( 4л2(Тн/ТДРт)2(2+1 ) <
. VI 1/Л« _ 1/Д2 у 1 _
.Z 4я2 (7н/7ДРт)2 * 4я2 (7и/7ДР1.)2 *
_ 1/Д2 Я2 _ 1/Д2 9
“ 4«2(ЛЛдрт)2 6 24 ГJTдр-г)2’ 1 ;
Используя (14-48) и (14-49), подставляя их в (14-47),
а (14-47) в неравенство (14-46), окончательно получаем:
1 1 ГДРТ
'Смаке < Тер + О ДР т J >
ИЛИ
^АРТ.ер , 1 1 Т’ДРТ
Т”аКС< А +2|/3СТдРгл Тн •
Из последнего соотношения вытекает, что максимально
возможное отклонение превышения температуры от его
среднего значения не превышает
1 1 £дРт
2 J/ 3 СТДР т А 7’н
относительное значение равно:
т ______т
макс ср
ТСр
1 аДРт ГДРт
^2?1дРт.ср Тп
а его
(14-50)
Неравенство (14-50) позволяет обосновать нашедший
широкое применение при выборе двигателей благодаря
своей простоте метод средних потерь.
Действительно, стоит только оценить возможные мак-
симальные отклонения превышения температуры над его
средним значением — видно, что в большинстве случаев
они пренебрежимо малы по сравнению со средним значе-
нием.
588
Для большинства режимов электроприводов механиз-
мов надежно выполняется неравенство Т^/Тп 1 и зна-
чение TbpJTn лежит в пределах 0,2—0,01. В этих усло-
виях, даже при сравнительно большом среднеквадратиче-
ском отклонении стдрт потерь от средних, Дттакс мало.
Например, при ам^/кР.сср = 1:
Дтчакс/тср
макс/ СР ~ 2 |/^3
• 1 (0,2 ч-0,01) № 0,06 ч-0,003.
Причем напомним, что в соответствии с (14-46) дается
оценка Лтна,(с/тср с запасом в сторону увеличения.
При этом можно убедиться в отсутствии недопустимого
превышения температуры, оценив лишь средние потери за
цикл. Основное соотношение метода средних потерь, на
базе которого оказывается возможным эквивалентировать
действительный и номинальный режимы в тепловом отно-
шении, легко получить, записав вначале условие непревы-
шения средней температурой в произвольном режиме сред-
ней температуры в номинальном через т в виде
, Т'ср = ДЛ. ср/^ == Тср и = Д^т. iJД >
откуда следует, что должно выполняться условие
или
кр <. кР
т, ср СЛ1 т. п,
ДДг.ср = ^-т~сДРт.н
(14-51)
Соотношение (14-51) и является основным соотношением
метода средних потерь. Из (14-51) вытекает следующий по-
рядок проверки эквивалентности в тепловом отношении
режима, в котором предполагается работа того или иного
двигателя и номинального режима этого двигателя.
Например, по нагрузочной диаграмме механизма опре-
/ 111 \
деляем среднюю мощность Рср = ИС Pttt\/Ta, rnePi—
\ 1
мощность на валу двигателя на i-м интервале (рис. 14-14).
Затем /\.р умножаем на коэффициент запаса k = 1,1 +- 1,3
и kPtv /’рас, где /’расч — расчетная мощность. На осно-
вании полученной мощности по каталогу предварительно
выбираем соответствующий двигатель. По кривой к. п. д.
двигателя в функции нагрузки находим потери мощности
589
для каждого интервала нагрузочной диаграммы и строим "
зависимость ДРТ = f (t) (рис. 14-14). Затем находим сред-
ние потери за цикл, которые и сопоставляем с номиналь-
ными:
Л/’т. ер Д^т. н == Л1 (1 - 11.Ж.
где — соответственно номинальная мощность и к. п. д.
двигателя.
Если это неравенство выполняется с большим запасом,
то это означает, что выбранный двигатель будет недоисполь-
зован по нагреву и, следовательно, по мощности.
Рис. 14-14. Ступенчатый график Рис. 14-15. Фактическое измене-
при длительной переменной на- ние тока в цикле (-——) и эк-
грузке. "• Бивалентный ток (------).
Если возникают затруднения с определением к. п. д.
двигателя в зависимости от нагрузки, то можно воспользо-
ваться для проверки выбранного двигателя методом экви-
валентного тока, основанным на замене действительного
тока эквивалентным постоянным током, который вызывает
в двигателе те же потери, что и фактически протекающий
ток (рис. 14-15).
Если используется двигатель постоянного тока, то вы-
деляющаяся в нем средняя мощность потерь равна:
ДРт.ср = ДРтс +/5КПРЯ, (14-52)
где ДРТС — мощность постоянных потерь нагрузки;
/экв^я — переменные потери мощности, зависящие от
нагрузки.
Так как средняя мощность потерь за цикл может быть
рассчитана как
Д р APf А + &Р Т2^2 + • • • + АР tntn
т'с₽ 4+^г+^з+.”- + ^1 *
590
то, заменяя потери мощности на каждом участке через соот-
ветствующие постоянную и переменную составляющие, по-
лучаем:
k “Ь ^экв^я
(k + /°7?я) ^ + (* + /°/?я) /2 + + (^ + tn
^ + ^ + ••• + 6?
ИЛИ
п 4^+-+^ , M^i+/&+-+/nQ
/ЭКвЛя tl + t2 + _ + tn + /1 + /2 + ... + ^
Отсюда эквивалентный ток
или в общем случае
(14-53)
(14-54)
Найденный эквивалентный ток сопоставляем с номиналь-
ным током двигателя. Если 1ЭКП — /н, то двигатель отвечает
условиям полного использования его по нагреву.
Следует отметить, что метод эквивалентного тока пред-
полагает независимость потерь в стали и механических
потерь от нагрузки и постоянство сопротивления главной!
цепи двигателя на всех участках графика нагрузки, по-
этому при несоблюдении этих условий применять его
нельзя.
Часто для проверки двигателя по нагреву приходится
пользоваться графиками момента или мощности, развивае-
мой двигателем. При неизменном магнитном потоке, когда
- момент двигателя М = cl, для выбора двигателя можно
воспользоваться методом эквивалентного момента, который
для ступенчатого графика определяется по формуле
=У......-• <14-55)
Эквивалентный момент сопоставляем с номинальным
моментом двигателя. Если Л4ЭКВ = Л4„, двигатель оказы-
вается полностью использованным по нагреву.
j Проверка по нагреву методом эквивалентного момента
j приемлема для двигателей постоянного тока независимого
। возбуждения, а также асинхронных и синхронных двига-
телей, работающих с номинальным магнитным потоком.
591
Если нагрузочная диаграмма электропривода задана
графиком мощности, развиваемой двигателем, то проверка
его по нагреву может быть произведена в том случае, когда
между мощностью и током существует прямая пропорцио-
нальность.
Эквивалентную мощность для ступенчатого графика
определяем по формуле
d _i/rpiiti+p&+---+p^ /м 56)
и сравниваем с номинальной мощностью двигателя; при
этом при Рака = Рк двигатель полностью использован по
нагреву.
Метод эквивалентной мощности может быть использован
для проверки по нагреву асинхронных и синхронных дви-
гателей, а также двигателей постоянного тока независимого
возбуждения, работающих с номинальным потоком и по-
стоянной или мало меняющейся скоростью.
Теперь рассмотрим возможности применения метода
средних потерь при переменной теплоотдаче. Основное
соотношение метода средних потерь (14-51) было получено
для случая постоянной и равной поминальной теплоотдаче
А = const, поэтому в таком виде не может быть применено
с целью эквивалентирования режимов для двигателей с са-
мовентиляцией в условиях снижения их скорости в те-
чение цикла.
Изменения теплоотдачи А возможны лишь в сторону
уменьшения, значит в периоды ухудшения теплоотдачи по-
стоянная Тн увеличивается, что должно способствовать еще
большему снижению колебаний Ат (/), но привести к уста-
новлению среднего значения установившегося превышения
температуры большего того, которое соответствовало бы
номинальному значению т(р > тср.
Пусть теплоотдача на участках цикла t-, равна А/. =
= [ЗдИ, тогда, пренебрегая колебаниями температуры,
уравнение баланса тепловой энергии за цикл можно запи-
сать в виде
Дт'р^=^АРт^, (14-57)
i I
где левая часть — количество теплоты, отданной среде за
цикл, а У ^P-iA — количество теплоты, выделившейся
в машине за это же время.
592
Несколько преобразуем (14-57) и получим выражение
ДЛЯ ТСр.
Д/5тiti ДРт itf.
* i
Сравнивая рассматриваемый режим с номинальным по
нагреву, записываем, необходимое соотношение для пре-
вышения температуры:
откуда следует основное соотношение метода средних потерь
для режимов с переменной теплоотдачей в виде
<14-58)
или, так как У, кР^/Т^ — ДРг.сР, a '^Ait-JT^ = 0лср,
i i
в такой записи:
ДРт.ср/Рлер^ДЛ>. (14-59)
При p^i = const = 1 (14-59) обращается в (14-51).
При применении методов эквивалентных величин в слу-
чаях, когда мощность постоянных потерь иа всех участках
цикла неизменна и выбирается двигатель номинального
режима Slt выражения в знаменателях (14-53), (14-55) и
(14-56) примут вид:
+ • + tn^An = У, At-
1 = 1
14-6. ВЫБОР МОЩНОСТИ ДВИГАТЕЛЯ НОМИНАЛЬНОГО
ПРОДОЛЖИТЕЛЬНОГО РЕЖИМА РАБОТЫ
Операция выбора по каталогу мощности двигателя но-
минального режима состоит в определении расчетных зна-
чений мощности (момента) двигателя, для которого можно
гарантировать, что при работе в предназначаемом ему ре-
жиме температура его изоляции будет близка, ио не пре-
высит допустимую. Наиболее просто такая задача решается
при выборе для работы при непрерывном режиме механизма
двигателя номинального продолжительного режима.
593
Очевидно, должен быть выбран двигатель, мощность
которого больше или близка мощности, полученной по на-
грузочной диаграмме двигателя:
Ра^М& = Ррат. (14-60)
Выполнение (14-60) означает выполнение основного со-
отношения метода средних потерь для эквивалентной мощ-
ности, так как расчетная мощность при постоянстве мощ-
ности в цикле равна эквивалентной.
Следует подчеркнуть, что при выборе двигателя по
условию (14-60) тем не менее нельзя допустить существен-
ного отклонения его номинальной скорости от требуемой
по нагрузочной диаграмме, так как при > сомех будет
выбран двигатель с меньшим номинальным моментом, чем
это необходимо по нагрузочной диаграмме; в другом случае
при сон < сомех будет снижена производительность меха-
низма, а двигатель недоиспользован по нагреву, если не
учитывать изменение теплоотдачи.
Кроме того, после выбора двигателя необходимо про-
извести проверку его пригодности по пусковому моменту,
состоящую в проверке Выполнения неравенства
^4пуск ^14с.макс»
так как для многих механизмов максимальный момент при
трогании может значительно превосходить пусковой.
Нагрузка механизмов непрерывного действия не огра-
ничивается лишь случаем Мс = const. На рис. 14-14 был
показан также весьма характерный случай меняющейся
во времени нагрузки Р (t) и соответствующей мощности
потерь ДРТ (f).
Выбирая для такого режима двигатель номинального
продолжительного режима, следует обеспечить условия,
при которых максимум температуры, зависящей от времени,
не превосходил бы допустимого. В подавляющем боль-
шинстве случаев удается произвести выбор двигателя для
таких режимов, полностью опираясь на метод средних
потерь, проверив лишь наличие условий, гарантирующих
пренебрежимо малые отклонения температуры от среднего
значения (14-50). Иногда достаточно ориентировочно сопо-
ставить одно из отношений Д<тдрт/Д/’т.ср или 7\pJTV:.
Процедура выбора окажется аналогичной случаю неиз-
менной нагрузки, так как превышение температуры будет
практически постоянным и равным среднему тср = ДРт.ср/А,
и двигатель может быть выбран по средним потерям или
594
эквивалентным моменту, мощности или току так, чтобы
Л1Экв=сЛ4н; /ЭКВ=С/Н. (14-61)
В этом случае необходимо ввиду изменения нагрузки
во времени, так как /Ис-макс > Л4ср, проверить кроме пу-
скового момента (если возможен пуск под нагрузкой) пере-
грузочную способность двигателя. Должно выполняться
условие
Д^макс “ ^с.макс
во избежание остановок двигателя при пиках нагрузки.
Расчет мощности двигателей, предназначенных для про-
должительного режима работы, но используемых для по-
вторно-кратковременной нагрузки, производится на осно-
вании следующих соображений.
В период паузы, когда двигатель отключен, в нем потери
отсутствуют, поэтому в рабочий период нагрузка его может
быть увеличена по отношению к номинальной в продолжи-
тельном режиме. Постоянные потери в рабочие периоды не
изменяются, а переменные потери возрастают до значения
АР =ДР II /I )2
ДДХ TV тгП1 ^п.к/2пр/ •
Потери, выделяющиеся в двигателе за цикл, равны:
[ДРТ.С + ДРтта1 (/п.к//пр)2] *₽, (14-62)
где /п.,с, /пр — токи в повторно-кратковременном и про-
должительном режимах.
В установившемся процессе при повтор но-кратковре-
менном режиме, когда превышение температуры достигает
значения ту, количества теплоты, выделяемой в двигателе
и рассеиваемой в окружающую среду, равны; поэтому
справедливо равенство
(ДРТС + ДРт„н) + |Wo) = [Л^тс + (/п.к//пр)2] tp.
После соответствующих преобразований получим:
(ДР 1С + Д^гги) [1 + (1/е — 1)] = АРтс +Д^тин (Jп.к/^пр)2>
откуда
/пр = /п.к У pzqpp (1+а)(1_-р) • (14-63)
Полученный по (14-63) ток для продолжительного ре-
жима сопоставляем с номинальным током выбранного дви-
595
гателя, и если выполняется условие /пр /и, то двигатель
по нагреву выбран правильно.
Если пренебречь постоянными потерями и считать, что
теплоотдача в неподвижном состоянии двигателя такая же,
как и для номинальной скорости фд = 1), то
/„р == Z„.K Уё. (14-64)
Аналогичные формулы для расчета мощности двигателя
оказываются при задании графика нагрузки в виде М =
='f (О или Р = / (t).
Практически возможности использования двигателей
продолжительного режима для работы с циклической на-
грузкой ограничены лишь большими значениями е = tvIT\,
так как перегрузочная способность, которая в этом случае
уменьшается, оказывается недостаточной.
14-7. ВЫБОР МОЩНОСТИ ДВИГАТЕЛЕЙ НОМИНАЛЬНОГО
КРАТКОВРЕМЕННОГО РЕЖИМА РАБОТЫ
Для ряда двигателей номинальные данные ориентиро-
ваны на использование машины при нециклических режи-
мах, когда очередной пуск совершается из исходного тепло-
Рис. 14-16. Простейший
график работы двигателя
в кратковременном ре-
жиме.
вого состояния и время очередно-
го пуска после охлаждения не ли-
митируется.
Простейший график работы
двигателя в кратковременном ре-
жиме приведен на рис. 14-16. Ис-
ходя из ’ определения кратковре-
менного режима работы, возможно
ограничиться рассмотрением лишь
одного периода для установления
превышения температуры, исполь-
зуя переходную функцию (14-4),
по уравнению
т = ту (1 — е-//гн).
Если выбрать двигатель, рассчитанный для продолжи-
тельного режима с мощностью, равной мощности при крат-
ковременном режиме работы Р,(, то превышение темпера-
туры не достигнет установившегося значения ту к концу
рабочего периода tv, как это видно из кривой 1 на рис. 14-16,
поэтому в рассматриваемом случае двигатель недоисполь-
зовался бы по нагреву.
596
В тепловом отношении двигатель при заданных нагрузке
и времени рабочего периода будет полностью использован
по мощности, если к концу рабочего периода tv превышение
температуры его оказалось бы равным тдоп (кривая 2 на
рис. 14-16). В этом случае двигатель по мощности перегру-
жен, а установившаяся температура для неготу > ту > тдоп.
Полное использование двигателя в тепловом отношении
при малых tp может привести к значительной его пере-
грузке.
Связь Ту и ту определяется выражением
ту=Ту(1 — е ''р^и-ср), (14-65)
где Ти.ср = (Ти.нач + ^,.кои)/2 — среднее значение посто-
янной времени нагрева между значениями постоянных вре-
мени в начале и в конце про-
цесса нагрева;
Ту = ДРТ.НМ;
Ту = ДРт.к/Л;
ДРГ,К — потери мощности в
двигателе при кратковременной
нагрузке Рк.
Отношение потерь при крат-
ковременной нагрузке к номи-
нальным называется коэффици-
ентом термической перегрузки а
может быть получено из (14-65):
_ д/5т.к _ 1
Рте₽М дртн 1_е-/р/Т11.ср.
(14-66)
Рис. 14-17. Зависимость до-
пустимого коэффициента тер-
мической и механической пе-
регрузки ртерм, рм от отно-
сительного времени работы
/р/Д.. ср-
Зависимость prepM = f (^р/Д,.сР) приведена на рис. 14-17.
По коэффициенту термической перегрузки можно найти
коэффициент механической перегрузки, равный отношению
мощности Д. к номинальной мощности при продолжитель-
ной нагрузке-Рн, т. е. рм = Рк/Рн.
Действительно,
_ ДРТС + ДРТ„„ (Рк/Рн)2 _ а+Рм
Ртерм- ДРтс + ДРтт)Н я+1 >
(14-67)
или
РМ=К(1+й)Ртерм-«> (14-68)
597
где а = ДРТС/ДРТТ|1 — отношение постоянных потерь к пе-
ременным при номинальной нагрузке.
Подставляя в (14-68) значение р1ерм, из (14-66) полу-
чаем:
п =1 /_____1±^____
Рм |/ l_e-VrH.cp
(14-69)
По (14-69) и заданному коэффициенту а может быть по-
строена зависимость допустимого коэффициента механиче-
ской перегрузки' от относительного времени работы
^р/Л.ср (рис. 14-17).
Пренебрегая постоянными потерями (а = 0), выражение
(14-69) можно записать в виде
Ры V Р герм I/ —1!Т
|/ 1-е V н-ср-
Если нагрузка в рабочий период меняется, то в расчет-
ные формулы вводится вместо Рк эквивалентная мощность»
за время tp.
Выбор мощности двигателей для работы при кратковре-
менной нагрузке номинального продолжительного режима
производится из допустимых нагрева и перегрузки, при
этом номинальные мощности равны:
^и.экв ^к/Ртерм,
Вц.макс ^к/\цв>
где 7Д„ — допустимая перегрузочная способность двигателя,
значения которого указаны в табл. 14-3.
Таблица 14-3
Тип двигателя ^дп
Двигатель постоянного тока 2-2,5
Асинхронный двигатель с короткозамкнутым ротором 1,7—2,2
нормального исполнения
То же с контактными кольцами 2—2.5
Синхронные двигатели 2-2,5
При задании графика нагрузки в виде i — f (t) или
М = <р (/) в расчетные формулы вместо мощности Рк вво-
дится соответствующее значение тока или момента.
598
Из анализа кривых на рис. 14-17 видно, что уже при
^р/Т'ц.ср «£ 0,35 и допустимой перегрузке по нагреву коэф-
фициент механической перегрузки становится равным 2,5,
что для двигателей постоянного тока оказывается предель-
ным. Асинхронные же двигатели допускают еще меньшую
перегрузку, если, кроме того, учесть еще возможное пони-
жение напряжения питающей сети, поэтому двигатели,
предназначенные для продолжительного режима и исполь-
зуемые в кратковременном режиме, редко рассчитываются
по условиям допустимого нагрева и в большинстве случаев
недоиспользуются по нагреву. Для лучшего использования
двигателей по нагреву при небольших значениях tv!TKZp
необходимо применять двигатели специального исполне-
ния, отличающиеся повышенной перегрузочной способно-
стью; асинхронные двигатели с короткозамкнутым ротором
должны также иметь больший пусковой момент.
Двигатели, предназначенные для кратковременного ре-
жима работы, выпускаются заводами с нормированной
длительностью работы 15, 30, 60 и 90 мин, следовательно,
выбранный по каталогу двигатель для кратковременного
режима работы может быть загружен номинальной мощно-
стью в течение указанного времени и будет полностью
использован по нагреву.
Если же время работы такого двигателя отличается
от каталожного, то можно найти нагрузку Рк, при ко-
торой двигатель будет полностью использован по на-
греву.
Превышение температуры двигателя с номинальной на-
грузкой и нормированным временем работы равно:
^o.i = ^0 -е-/Р-^/гн),
где Т„ — постоянная времени нагрева в кратковремен-
ном режиме работы;
tp кат — время работы, определяемое по каталогу.
В течение фактического времени tp с нагрузкой, отлич-
ной от номинальной,
здесь ДДТС — постоянные потери при нагрузке, отличной
от номинальной.
599
По аналогии с предыдущим, коэффициент термической
перегрузки
_ ДРТС _ 1 - е~'р-кат/Гч _ а+ (Рк/Р„)2
Ртер“ ДР-г.и 1+« ’
откуда
Г 1_______е~^р.кат-'^п
Рк = Л, ]/ 1 +а- -Г7т- ~ а
V 1 — е V'и
Если fp > £р.кат> двигатель должен быть также проверен
на допустимую.перегрузку.
14-8. ВЫБОР МОЩНОСТИ ДВИГАТЕЛЕЙ НОМИНАЛЬНОГО
ПОВТОРНО-КРАТКОВРЕМЕННОГО РЕЖИМА РАБОТЫ
Двигатели режима S3, как правило, выбираются в тох
случаях, когда реальный режим работы электропривода
является повторно-кратковременным. Примерный график
такого режима показан на рис. 14-18. Он может отличаться
от номинального графика
работы в режиме S3 чис-
лом включений в цикле,
нагрузкой двигателя на
различных этапах работы
в цикле, а также относи-
тельной продолжительно-
стью включения:
фик нагрузки для повторно-крат-
ковременного режима.
8 = -^-,
2 Ц
tpi — длительность ра-
где
бочих участков цик-та.
Для осуществления проверки двигателя по нагреву
методами эквивалентных величин в подобных случаях воз-
никает необходимость приведения реальной нагрузочной
диаграммы двигателя к эквивалентной по нагреву нагру-
зочной диаграмме номинального режима работы. С этой
целью сначала определяются расчетные значения тока, мо-
мента или мощности, эквивалентные по нагреву реальным
600
нагрузкам за время работы двигателя:
Если реальная продолжительность включения совпа-
дает с одной из номинальных (в -• 0,15; 0,25; 0,4; 0,6), про-
верка двигателя по нагреву производится непосредственно
сопоставлением полученных эквивалентных величин с со-
ответствующими номинальными данными двигателя. Однако
чаще е ви, при этом требуется осуществить приведение
полученных эквивалентных значений /экв8, Л4Э1(В8 или
Т’экве к ближайшей номинальной продолжительности вклю-
чения 8„.
Для отличного от стандартного е двигатель в повторно-
кратковременном режиме имеет допустимую по нагреву
мощность, которая может быть найдена исходя из того, что
потери при искомой мощности и соответствующем в должны
быть равны потерям при мощности Р8„ при в = вн:
(ДРтс + ДРТ.Е„) ТЦ8И = (ДРТС + АРтпе тц8, (14-70)
\ ^еп/
где ДД^еп — переменные потери в двигателе при Реа.
Из (14-70) ______________
7’е = 75611}/’(«Е11+1)^-«ен, (М-71)
ДРТГ , ,
где д8„ = — коэффициент потерь.
тиеп
При 8 > е„ Ре < Р8„; при е < е„ Ре > Р8Н. Пренебре-
гая постоянными потерями, (14-71) упрощаем:
Ре = РеаУ\/г. (14-72)
Из (14-72) можно заключить, что пересчет эквивалент-
ных величин с относительной продолжительности включе-
601
ния s, полученной для произвольного графика нагрузки,
к ближайшей номинальной может быть произведен1 по од-
ному из следующих соотношений:
1 эквен = 1 экве V^8/8!!,
АТэквен = Мэквв К8/8»!
^эквен ^экве V^8/8!!-
(14-73)
Расчеты мощности для повторно-кратковременного ре-
жима с частными пусками и электрическим торможением
(35), когда пусковые и тормозные потери оказывают влия-
ние на нагрев двигателя, можно произвести аналогично
предыдущему, т. е. методом непосредственного учета по-
терь в двигателе.
Если все потери выделяются в самом двигателе, как это
имеет место, например, в АД с короткозамкнутым ротором
при включении его в питающую сеть, то наблюдается интен-
сивное увеличение превышения температуры, лимитирую-
щее число включений. Задача расчета мощности сводится
в этом случае к определению допустимой частоты вклю-
чений.
14-9. ОПРЕДЕЛЕНИЕ ДОПУСТИМОЙ ЧАСТОТЫ ВКЛЮЧЕНИЙ
АСИНХРОННОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ
В приводах значительного числа металлорежущих станков, прес-
сов, вспомогательных механизмов прокатных станов и других механиз-
мов возникает необходимость по условиям технологического процесса
в большой частоте включений двигателя — 600—800 в час и более.
Допустимой частотой включений (допустимое число включений
в час) считают такую-частоту, при которой среднее превышение темпе-
ратуры после большого числа рабочих циклов будет равно допусти-
мой и двигатель будет полностью использованным по нагреву. В этом
случае мощность потерь, выделяемых в окружающую среду, если дви-
гатель работает с номинальной скоростью, равна ДРТ. н, а в период
паузы н. В среднем за время переходных процессов потери равны
(1 + Р (4о)ДРт, п/2. Потери энергии в двигателе за цикл состоят из потерь
энергии за время переходных процессов ДАП + ДАТ и в установившемся
режиме ДРТ7Ц. Потери мощности в установившемся режиме могут
меняться в зависимости от нагрузки.
Когда температура двигателя установилась, потери энергии, выде-
ляемые в двигателе за цикл, равны энергии, рассеиваемой в окружаю-
щую среду, т. е.:
Ц-РЛл
ДАпЧ" Д-4Т=-----------g ДР т. п(п4-ДР т. и£у +
+ 1 + Р/1° ДРт.в*г+₽лодРт.н^, (14-74)
602
где ^n> G'’ — соответственно время пуска, установившегося режима,
торможения и паузы.
Время цикла
т - 3600
h
где h — число включений в час.
Подставляя в (14-74) значения ty и t0 и решая его относительно h,
получаем:
А?т. н т) в +ДРт. нРЛо (1 е)л
. (14-75)
h = 3600
ДАп + ДЛт - (f„ 4-1,) (дрг 4- др.
Для АД с короткозамкнутым ротором третьим членом знаменателя
можно пренебречь в сравнении с суммой ДЛП 4- ДЛТ, так как он не пре-
вышает 2—4% этой суммы, поэтому
. (ДРт.н — ДРт)е4~ ДРт.,1РЛо(1-е)
h 3600 --------------------------5----
АММ------------------• <14'76)
Если в установившемся режиме двигатель работает с номинальной
нагрузкой (ДРТ = ДРТ. н), формулу (14-76) можно упростить и она
примет вид:
ДРт. нрА (1-е)
h «= 3600---А 7 Л° А .
Д Л п 4~ Д Лт
(14-77)
Анализ (14-75) показывает, что число включений в час зависит от
статической нагрузки, определяющей мощность потерь ДРТ, относи-
тельной продолжительности включения в, коэффициента ухудшения
теплоотдачи Рл° и от потерь энергии в переходных режимах.
С уменьшением ДРТ возрастает h, достигая наибольшего значения
при холостом ходе. На значение h существенно влияют потери энергии
в переходных режимах, так как они пропорциональны моменту инерции
привода, поэтому сростом J 2 уменьшается допустимое число включений.
Из (14-75) следует также, что при (ДРТ. н — ДР.Г) = РЛоД^т. ц до-
пустимая частота включений не зависит от в. Когда (ДРТ. н — ДРТ) >
> Рл ДРТ. н, то с ростом в можно допустить большее число включений.
Наконец, если (ДРТ.Н — ДРТ) < РЛоДРт. н> то с ростом в уменьша-
ется h.
На первый взгляд кажется, что с увеличением номинальной мощ-
ности двигателя возрастает й, но с ростом Рп повышается и момент
инерции двигателя, что вызывает увеличение потерь энергии, поэтому,
если момент инерции ротора двигателя составляет небольшую долю
от общего приведенного момента инерции привода, то с ростом Рт. н
значение h увеличивается.
Для номинальной нагрузки в установившемся режиме с ростом в
допустимая частота включений уменьшается.
Увеличение допустимой частоты включений достигается незави-
симой вентиляцией двигателя/ действующей одинаково интенсивно
в течение всего цикла работы электропривода.
Существенного увеличения h можно добиться за счет уменьшения
потерь энергии в переходных процессах. В этом отношении, как ука-
зывалось, частотное управление АД с короткозамкнутым ротором
по сравнению с другими способами управления обеспечивает минималь-
603
ные потери в переходных процессах. Исследования показали, что
практически потери энергии за время переходного процесса достигают
минимума при токах, приблизительно в 1,5—2 раза больших номиналь-
ного, и оптимальном абсолютном скольжении. В большинстве случаев
именно эти значения токов статора и обусловливают максимально
допустимую частоту включений АД с короткозамкнутым ротором прн
частотном управлении.
Для частотно-управляемого асинхронного привода допустимая
частота включений оказывается в несколько раз больше по сравнению
с допустимой частотой включений при прямом пуске двигателя от
сети с неизменной частотой и амплитудой напряжения и торможением
противовключением.
Так как повторно-кратковременный режим с частыми пусками
(S4) характеризуется так же, как и режим с частыми пусками и элект-
рическим торможением (S5), относительной продолжительностью вклю-
чения и числом пусков в час, то режим S4 может рассматриваться как
частный случай режима .85.
По аналогии с режимом S5 для двигателя, работающего в режиме
S4, может быть найдено допустимое число включений в час:
h = ЗСОО (AP'-н-ЛЛ)к + [Зд„ АР,. „(1-е)
А Л „ - /„ (АР,- +-ДР,. „ - Д Р-,. „ }
Когда управление АД производится при прямом включении от
сети, можно для ориентировочной оценки /г не учитывать влияние вто-
рого члена знаменателя по сравнению с первым, тогда
(14.78)
Наконец, если в установившемся режиме двигатель работает с по-
минальной нагрузкой, то
Рд ЛРТ. „(1—е)
/; ~ 3G00 -г-—----1. (14.79)
Л/!,,
Расчет мощности двигателя для перемежающихся режимов работы
(S6, S7 и S8) может быть произведен с учетом изложенных выше ре-
комендаций.
14-10. ОСОБЕННОСТИ ВЫБОРА ДВИГАТЕЛЯ
ДЛЯ МАХОВИКОВОГО ЭЛЕКТРОПРИВОДА
Как уже было сказано в § 14-3, с увеличением Тя выравнивается
диаграмма М (/). Пусть 7’м увеличивается за счет увеличения момента
инерции маховика, прн этом уменьшается значение номинального
момента двигателя, обусловленного допустимой перегрузкой. Одновре-
менно уменьшается и Л4„ по условиям нагрева. Если момент инерции
маховика увеличивать до бесконечности, то номинальный момент дви-
гателя стремится к Л4С|). Если же приведенный момент инерции привода
стремится к. нулю, номинальный момент двигателя достигает наиболь-
шего значения, равного максимальному моменту нагрузки.
Очевидно, номинальный момент двигателя, полностью используе-
мого по допустимой нагрузке и нагреву, должен отличаться от среднего
604
значения момента. Определение поминального момента двигателя и
момента инерции маховика по этим условиям оказывается неоднознач-
ным и представляется неограниченным рядом парных значений иско-
мых тИц и
Решение задачи становится однозначным, если предварительно
задаться поминальным расчетным значением момента двигателя близ-
ким к среднему
^,,= (1,1 -Ь 1,3)Л4ср, (14-80)
где Л4ср для графика нагрузки, показанного на рис. 14-19, равно:
•44сЛ +Л4.<.2/2 + Л4сз^-|-Л4(1 toi
Л4ср =-----------------=------------1---. (14-81)
1 ц
Выбранному номинальному значению момента двигателя, обуслов-
ливающему хорошее использо-
вание двигателя как по нагре-
ву, так п по допустимой пере-
грузке, будет отвечать одно оп-
ределенное .значение момента
инерции маховика.
Воспользуемся простым ме-
тодом ориентировочного расчета
момента пнерцнн маховпка, за-
ключающимся в следующем.
По графику нагрузки (рис.
14-19) выбирается предположи-
тельно наиболее тяжелый учас-
ток работы (Л4с2 == Л1С. м,-;кс)>
при котором момент двигателя
может достигнуть наибольшего зш
шнй момент двигателя будет равен
/елЛ4 и — 7ИС. м.|ле (1
Рнс. М-19. График нагрузки ма-
ховикового привода.
1Ч0ИИЯ. Если считать, что папболь-
/>’дЛ4и, то
(14-82)
Для упрощения полагаем, что начальный момент двигателя равен
моменту холостого хода Л1сП.
Из (14-82)
44с. Макс 44со J vCOoS'n 44с, М.1КС 44со
t.y — 7 м In —-----— —-----------1п ----------— - (14-83)
44с. макс и Л4,| 44,-. макс Лд44ц
где /^—коэффициент перегрузки двигателя;
7V — суммарный приведенный момент инерции привода.
Решая (14-83) относительно Jv, получаем:
72 ' ^^'[(Я-макс-ЛДЛД/И-е. Макс-/гд44и)] ’
Момент инерции маховика
J мах d v u up>
где 7Нр — момент инерции электропривода без учета маховика.
Для проверки прс-дваритслыю выбранного двигателя и рассчитан-
ного .момента инерции маховика следует построить нагрузочную диа-
605
грамму электропривода М = f (f). Примерный вид этой диаграммы
показан на рис. 14-19.
Критерием правильности выбора двигателя и момента инерции
маховика является равенство скоростей и моментов двигателя в начале
и конце цикла, а также равенство площадей, пропорциональных кине-
тической энергии, запасенной в массах привода при холостом ходе,
отмеченной на рис. 14-19 знаком «+» и израсходованной при нагрузке
(отмечена знаком «—»).
Более полное использование маховика достигается при большем
перепаде скоростей электропривода. Если скорость изменяется от
о?! до го2, то энергия инерционных масс привода, отдаваемая на вал
двигателя, составит:
А = J% (<£>?•—го|)/2.
Повышение использования маховика приводит к большему вырав-
ниванию нагрузки, а следовательно, к уменьшению номинального мо-
мента. Возрастание перепада скорости с увеличением нагрузки, дости-
гаемое повышением сопротивления роторной цепи АД с контактными
кольцами или сопротивления якорной цепи двигателя постоянного
тока, , а также применением короткозамкнутого двигателя с повышен-
ным скольжением, приводит к уменьшению момента инерции маховика.
Однако увеличение скольжения ведет к снижению средней скорости
привода за цикл, что влечет за собой снижение производительности
механизма. Сохранение производительности потребует уменьшениям
передаточного отношения от двигателя к рабочему валу механизма,
что в конечном счете приведет к увеличению номинального момента
двигателя.
Применение АД с короткозамкнутым ротором и повышенным сколь-
жением с увеличенным средним моментом нагрузки дополнительно
влечет за собой значительное увеличение габаритов двигателя вслед-
ствие увеличения потерь скольжения,
Включение дополнительного сопротивления в роторную цепь АД
с контактными кольцами для увеличения скольжения вызывает воз-
растание потерь в роторной цепи, однако на габаритах двигателя не
сказывается, так как большая часть потерь, энергии выделяется в до-
полнительном сопротивлении.
Тем не менее использование инерционных масс электропривода
с постоянно включенным сопротивлением в цепи ротора оказывается
неполным, чему отвечает недостаточное выравнивание нагрузки па
двигателе, как это видно, например, на рис. 14-19. Стремление устра-
нить отмеченные недостатки маховичного привода привело к созданию
электроприводов с регуляторами нагрузки. В последних автоматически
изменяется скольжение в зависимости от нагрузки на валу' двигателя,
благодаря чему достигается значительно более полное выравнивание
нагрузки.
Список литературы
1. Головаи А. Т. Основы электропривода. М.—Л.: Госэнерго-
издат, 1959. 344 с.
2. Андреев В. П., Сабииин Ю. А. Основы электропривода.
Л. —М.: Госэнергоиздат, 1963. 722 с.
3. Чиликин М. Г. Общий курс электропривода. М.: Эневгия,
1971. 432 с.
4. Основы автоматизированного электропривода / Чиликин М. Г.,
Соколов М. М., Терехов В. М., Шинянский А. В. М.: Энергия, 1974.
567 с.
5. Сиротин А. А. Автоматическое управление электроприводами.
М.: Энергия, 1969. 560 с.
6. Уайт Д., Вудсон Г. Электромеханическое преобразование
энергии. М. —Л.: Энергия, 1964. 527 с.
7. Петров Г. И. Электрические машины. Ч. I. М. —Л.: Госэнер-
гоиздат, 1956. 224 с. Ч. II. 1963. 416 с. Ч. III. М.: Энергия, 1968. 224 с.
8. Копылов И. П. Электромеханические преобразователи энергии.
М.: Энергия, 1973. 400 с.
9. Унгру Ф., Иордан Г. Системы согласованного вращения асин-
хронных электродвигателей. М.: Энергия, 1971. 198 с.
10. Ботвинник М. М., Щакарян К). Г. Управляемые машины пере-
менного тока. М.: Наука, 1969. 140 с.
11. Теория автоматического управления / Под ред. А. В. Нету-
шила. Ч. I. М.: Высшая школа, 1968. 424 с. Ч. II. 1972. 430 с.
12. Попов Е. П. Динамика систем автоматического регулирова-
ния. М.: Госэнергоиздат, 1954. 798 с.
13. Бесекерский В. А., Попов Е. П. Теория систем автоматиче-
ского регулирования. М.: Наука, 1972. 450 с.
14. Болотин В. В. Динамическая устойчивость упругих систем.
М.: Госэнергоиздат, 1956. 40 с.
15. Ден-Гартог. Механические колебания. М.: Физматгиз, 1963.
720 с.
16. Слежановский О. В. Реверсивный электропривод постоянного
тока. М.: Металлургия, 1967. 423 с.
17. Управление вентильными электроприводами постоянного тока /
Лебедев Е. Д., Неймарк В. Е., Пистрак М. Я., Слежановский О. В.
М.: Энергия, 1970. 197 с.
'18 . Архангельский В. И. Автоматизация реверсивных электро-
приводов. Киев: Техника, 1966. 412 с.
19. Филатов А. С. Электропривод и автоматизация реверсивных
станов холодной прокатки. М.: Металлургия, 1973. 376 с.
20. Сандлер А. С. Регулирование скорости вращения мощных
асинхронных двигателей. М. — Л.: Энергия, 1966. 320 с.
21. Ключёв В. И. Ограничение динамических нагрузок электро-
привода. М.: Энергия, 1971. 320 с.
607
22. Ривии Е. Я. Динамика приводов станков. М.: Машиностроение,
1966. 340 с.
23. Электромагнитные переходные процессы в асинхронном элек-
троприводе / Соколов М. М., Петров Л. П., Масандилов Л. Б., Ла-
дензон В. В. М.: Энергия, 1967. 202 с.
24. Сандлер А. С., Сарбатов Р. С. Автоматическое частотное управ-
ление асинхронными двигателями. М.: Энергия, 1974. 328 с.
25. Чистов В. П., Бондаренко В. Н., Святославский В. А. Опти-
мальное управление электрическими приводами. М.: Энергия, 1968.
232 с.
26. Тарг С. М. Краткий курс теоретической механики. М.: Наука,
1968. 478 с.
27. Buckingham-Olah. Stirnrader mit geraden Zahnen. Berlin, 1932.
360 S.
28. Онищенко Г. Б., Локтева И. Л., Новиков В. И. Методы иссле-
дования электромагнитных переходных процессов асинхронных вен-
тильных каскадов.—Электричество, 1973, №3, с. 46—50.
29. Blaschke F. Das.Prinzip der Feldorientierung, die Qrundlage
fiir die Transvektor-Regelung von Drehfeldmaschinen. —Siemens—Z.,
1971, Bd 45, № 10, S. 151—560.
30. Flotter W., Ripperger H. Die Transvektor-Regelung fiir fel-
dorientierten Betrieb einer Asynchronmaschine. — Siemens—Z., 1971,
Bd 45, № 10, S. 761—764.
31. Вешеневский C.H. Характеристики двигателей в электроприводе.*
М. — Л.: Энергия, 1977. 432 с.
32. Пинчук И. С. Переходные процессы в асинхронных электро-
двигателях при периодической нагрузке. —Электричество, 1957, №'9,
с. 27—31.
33. Wenzke W. Fiir Ableitung der dynamischen Kennlinie des Asyn-
chronmotors im Augenblick auf die Berechnung von Schwingungser-
scheinungen in Antriebsanlagen. —Wiss. Z. Meeh. Hochsch. O. Guericke
Magdeburg, 1970, Bd A 14, № 5—6, S. 517—523.
34. Веников В. А. Переходные электромеханические процессы
в электрических системах. М.: Высшая школа, 1970. 472 с.
35. Загальский Л. Н., Зильберблат Н. Э. Частотный анализ систем
автоматизированного электропривода. М.: Энергия, 1968. 112 с.
36. Решмии Б. И., Ямпольский Б. С. Проектирование и наладка
систем подчиненного регулирования электроприводов. М.: Энергия,
1975. 184 с.
37. Kessler С. Das symmetrische Optimum-Regelungstechnik, 1958,
№ 11, S. 400; № 12, S. 432—436.
38. Eisele H., Vance A. M. Parallel control system regulates motor
torgue.—Westinghouse Engr., 1966, vol 26, №4.
39. Ильинский H. Ф. Элементы теории и применение электропри-
вода со свойствами управляемого «источника момента». — Электро-
техника, 1974, № 10, с. 45—48.
40. Старикова М. В. Автоколебания и скользящий режим в систе-
мах автоматического регулирования. М.: Машгиз, 1962. 194 с.
41. Автоматизированный электропривод в промышленности: Труды
VI Всесоюзной конференции по автоматизированному электроприводу.
М.: Энергия, 1974, с. 46—49.
42. Цехнович Л. И. О динамике электропривода постоянного
тока с упругой связью. — Электричество, 1968, № 6, с. 28—31.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Асимптота частотной характе-
ристики 269
Астатизм 266, 267
Б
Быстродействие электропривода
257
В
Вал электрический 538
Воздействие возмущающее 39,
181
— управляющее 38, 180
Время цикла 564, 586
— регулирования 257
— безразмерное 189
— переходного процесса 51
Д
Декремент логарифмический 48,
193
Демпфирование колебаний 188
Диаграмма нагрузочная двига-
теля 566
----- механизма 566
— скорости электропривода 507
-----:--оптимальная 512
Диапазон регулирования 253
----- момента 295
----- скорости 343
Добротность по скорости 491
-----ускорению 491
Ж
Жесткость механической харак-
теристики динамическая 90,
126, 167, 494
--------оптимальная 195, 203
•-------статическая 88, 120
— упругого элемента 21
-------- эквивалентная 24
3
Зазор кинематический 68
Закон частотного регулирования
420
Задатчик интенсивности 512, 514
Запаздывание постоянное 272
Запас устойчивости 268
---- по амплитуде 269
--------фазе 269
И
Источник напряжения 156, 333
— тока 156, 303
К
Каскад электрический 442
— электромеханический 448
Колебания упругие механиче-
ские 46
— электромеханические 204
Колебательность электромеха-
нической системы 193
Контур регулирования 273
Коррекция последовательности
272
— последовательно-параллель-
ная 285
Коэффициент вязкого трения 47
— демпфирования 366
— динамический 62, 69
— перегрузки механической 598
----термической 597
— полезного действия 34
— усиления 265
— ухудшения теплоотдачи 411
— форсировки 326, 401, 386
— электромеханической связи
200
--------по активной составляю-
щей 202
-------- оптимальный 203
М
Машина электрическая обобщен-
ная 73
Метод гармонической линеари-
зации 204
— графоаналитический 245
— средних потерь 588
— эквивалентного момента 591
----тока 591
609
Метод эквивалентной мощности
592
Механизм непрерывного режима
работы 566
— позиционный 473
— циклического режима работы
566
Модуль динамической жесткости
126
Момент активный 18
— вязкого трения 18
— динамический 58, 218
— допустимый 111, 145
— инерции 32
— короткого замыкация 119
— критический 145
— пусковой 248
— реактивный 18
— стопорный 321
— эквивалентный 601
— электромагнитный 72
Мощность потерь 110
— эквивалентная 601
Н
Нагрузка электропривода дина’
мическая 58
---допустимая 255
---полезная 12, 59
--- статическая 58
Напряжение относительное 420
Неточность остановки 476
О
Объект регулирования 271, 272
Оптимум симметричный 282
— технический 280
Ослабление поля 122
Остановка точная электропри-
вода 474
Ошибка динамическая 367
— регулирования 374
--- скоростная 489
— статическая 266
П
Перегрузочная способность 111
Перерегулирование 257
Плавность регулирования 255
Погрешность кинематическая 64,
204
Постоянная времени возбужде-
ния генератора 261
— ™ нагрева 560
Постоянная в'ремени декомпе-
нсируемая 273
----- эквивалентная 137
-----электромагнитная 117, 153
----- электромеханическая 180,
215
Потери механические 33
— переменные 110
— постоянные ПО
Превышение температуры 560
Преобразование переменных ко-
ординат 94, 107
-------- фазное 434
Продолжительность включения
564
Противовключение 118
Пуск 51, 218
Р
Радиус приведения 21, 485
Реверсирование 53, 230
Регулирование автоматическое *
250
— параметрическое 205, 405
— реостатное 205, 405
— скорости двухзонное 396
----- частотное 417
Регулятор э. д. с. 324
— интегральный 276
— интегрально-пропорциональ-
ный 276
— интегрально-пропорциональ-
но-дифференциальный 276
— положения 482
:----параболический 486
— скорости 364
— тока 317, 323, 325
Режим динамического торможе-
ния 91, 124
.-------кратковременный 563
--------номинальный 561
--------перемежающийся 565
-------- повторно-кратковре-
менный 563
=------------с частыми пус-
ками 564
--------продолжительный 563
— работы электропривода гене-
раторный 91
--------двигательный 44, 91
— рекуперативного торможения
91
— торможения противовключе-
нием 91
610
Резонанс электромеханический
181
Рывок 503
С
Связь механическая жесткая 31
— •— упругая 22
— обратная единичная 265
— — с отсечкой 289
----формирующая 310
— электромеханическая 80
• жесткая 193
---- слабая 193
— — существенная 193
Система упругая двухмассовая
40
------- трехмассовая 38
Скольжение абсолютное 417
— критическое 144
— оптимальное 585
Скорость граничная 303
— синхронная 404
Способ регулирования при по-
стоянном моменте 390
--------постоянной мощности
390
Способность двигателя перегру-
зочная 111, 121
Статизм 266
Структура регулируемого элек-
тропривода 289
Схема механической части элек-
тропривода 10
-----------кинематическая 10
----------- расчетная 20
----------обобщенная 30
— электропривода структурная
176
---- с линейной механической
характеристикой структур-
ная обобщенная 187
— — электромеханическая 170
Т
Теплоемкость двигателя 560
Теплоотдача 560
Ток короткого замыкания 119
— намагничивающий 143
Ток стопорный 516, 317
— эквивалентный 604
Точное позиционирование 472
Точность регулирования 252
У
Уравнения движения электро-
привода 40, 41
— Лагранжа 36-
Ускорение допустимое 504
Устойчивость электропривода
177
Ф
Формула Клосса 144, 153
— Уманского—Линвилля 117
Форсирование переходных про-
цессов 386
Функция передаточная механи-
ческой части электропривода
39
-------------по возмущению
40
— --------------управлению
39
X
Характеристика двигателя есте-
ственная 120, 408
-----искусственная 120
----- механическая 81
-------динамическая 84
----- реостатная 121
------- статическая 84
----- электромеханическая 81
Ч
Частота возмущений 207
— включений допустимая 603
— колебаний свободных 41
Ш
Шунтирование якоря 352'
Э
Экономичность регулирования
257
Электропривод нереверсивный 14
— реверсивный 14
ОГЛАВЛЕНИЕ
Предисловие................................................... 3
Введение................................................... 5
Глава первая. Механика электропривода ..................... . 10
1-1. Кинематические схемы электроприводов ................ 10
1-2. Расчетные схемы механической части электропривода 20
1-3. Уравнения движения и режимы работы электропривода 3’3'
1-4. Установившиеся режимы движения механической части
электропривода . .................................... 44
1-5. Механические переходные процессы электропривода 50
1-6. Динамические нагрузки электропривода............. 57
1-7. Влияние кинематических погрешностей и зазоров в пере- *
дачах электропривода.............................. 64
Глава вторая. Электромеханическое преобразование энер-
гии ..........................................................71
2-1. Обобщенное математическое описание процессов элек-
тромеханического преобразования энергии ............. 71
2-2. Режимы преобразования энергии и их характеристики 79
2-3. Координатные преобразования уравнений динамической
механической характеристики двигателя................ 91
2-4. Ограничения, накладываемые на процессы электроме-
ханического преобразования энергии ................. 110
Глава третья. Электромеханические свойства двигателей 112
3-1. Электромеханические свойства двигателей постоянного
тока с независимым возбуждением..................... 112
3-2. Электромеханические свойства двигателей с последова-
тельным и смешанным возбуждением.................... 127
3-3. Электромеханические свойства асинхронных двигателей 141
3-4. Электромеханические свойства синхронных двигателей 161
Глава четвертая. Динамические свойства электромеха-
нических систем............................................. 169
4-1. Обобщенные электромеханические и структурные схемы
электропривода ..................................... 169
4-2. Статические режимы работы электропривода . . . 176
4-3. Динамические ' режимы электропривода с двигателем
постоянного тока .независимого возбуждения.......... 179
4-4. Понятие о демпфирующей способности электропривода
при упругих электромеханических колебаниях ......... 187
4-5. Влияние параметров электропривода на колебательность
электромеханической системы......................... 182
612
4-6. Косвенные оценки демпфирующей способности электро-
привода при упругих колебаниях.................... 198
4-7. Нелинейные электромеханические колебания в системе
с кинематическим зазором.......................... 204
4-8. Особенности электропривода с синхронным двигателем 210
Главая пятая. Электромеханические переходные процессы 214
5-1. Переходные процессы электропривода с линейной меха-
нической характеристикой при скачке задания............ 214
5-2. Переходные процессы электропривода с линейной меха-
нической характеристикой при линейном нарастании
задания................................................. 225
5-3. Переходный процесс выбора зазора при существенной
электромеханической связи......................... 235
5-4. Переходные процессы электропривода с асинхронным
короткозамкнутым двигателем....................... 238
5-5. Особенности переходных процессов синхронного двига-
теля ............................................. 246
Глава шестая. Регулирование координат электропривода 249
6-1. Способы регулирования координат и их основные пока-
затели ........................................... 249
6-2. Система управляемый преобразователь — двигатель 258
6-3. Частотные оценки точности и качества автоматического
регулирования координат.,................................ 264
6-4. Метод последовательной коррекции с подчиненным
регулированием координат .'..................... 271
6-5. Использование последовательно-параллельной и парал-
лельной коррекции............................... 284
6-6. Типовые структуры электроприводов, требующих регу-
лирования и ограничения нескольких координат. . . . 287
Глава седьмая. Регулирование момента электропривода 294
7-1. Реостатное регулирование момента и тока двигателей 294
7-2. Система источник тока — двигатель................... 302
7-3. Регулирование момента (тока) в системе УП —Д .... 305
7-4. Контур регулирования тока в системе УП — Д, оптими-
зированный методом последовательной коррекции .... 314
7-5. Регулирование тока в системе Г — Д с формирующей по-
ложительной связью по напряжению генератора............ 328
7-6. Регулирование момента асинхронного двигателя изме-
нением напряжения................................. 330
7-7. Регулирование момента асинхронного электропривода
при частотном управлении........................ 333
7-8. Влияние обратной связи по току (моменту) на динамику
упругой электромеханической системы............... 339
Глава восьмая. Регулирование скорости электропривода
постоянного тока...................................... 342
8-1. Реостатное регулирование скорости .................. 342
8-2. Параметрическое регулирование скорости изменением
напряжения на якоре двигателя..................... 345
8-3. Автоматическое регулировапие скорости в системе УП—Д 354
8-4. Последовательная коррекция контура регулирования
скорости в системе ТП—Д........................... 363
613
8-5. Особенности последовательной коррекции контура регу-
лирования скорости в системе Г—Д...................... 384
8-6. .Регулирование скорости изменением потока двигателя 388
8-7. Влияние обратной связи по скорости на динамику элек-
тропривода с упругой механической связью...... 401
Глава девятая. Регулирование скорости асинхронных
электроприводов ......................................... 404
9-1. Общие сведения..................................... 404
9-2. Регулирование скорости асинхронного электропривода
изменением подводимого напряжения................. 405
9-3. Импульсное регулирование скорости асинхронных
электроприводов .................................. 412
9-4. Регулирование скорости электропривода с помощью
электромагнитной муфты скольжения................. 415
9-5. Частотное регулирование скорости асинхронного элек-
тропривода ....................................... 417
9-6. Регулирование скорости асинхронного электропривода
с использованием принципа ориентирования ио полю дви-
гателя ........................................... 431
Глава десятая. Регулирование скорости асинхронных
двигателей в каскадных схемах. .... 438
10-1. Общие положения................................... 43U
10-2. Каскадные системы с одноякорным преобразователем 440
10-3. Вентильно-машинные каскады....................... 443
10-4. Асинхронно-вентильный каскад...................... 460
10-5. Замкнутые системы каскадных электроприводов. . . . 469
Глава одиннадцатая. Регулирование положения .. . 472
11-1. Точнее позиционирование........................... 472
11-2. Автоматическое регулирование положения (пути)
электропривода по отклонению . . . . •........... 480
11-3. Особенности следящего электропривода.............. 487
Глава двенадцатая. Формирование переходных про-
цессов пуска и торможения .... 497
12-1. Понятие об оптимальном характере переходных про-
цессов электропривода............................ 497
12-2. Формирование оптимальной диаграммы скорости со =
= / (t)............................................ 507
12-3. Формирование оптимальной диаграммы момента М =
= f(t) .......................................... 514
12-4. Формирование процессов выбора зазоров в передачах 522
Глава тринадцатая. Многодвигательные электроме-
ханические системы....................................... 526
13-1. Статика многодвигательного электропривода..... 526
13-2. Динамика многодвигательного электропривода.... 529
13-3. Многодвигательный электропривод с электрическим
валом............................................... 538 ,<
Глава четырнадцатая. Расчет мощности электропри-
водов ................................................... 557
14-1. Нагревание и охлаждение двигателей................ 557
14-2. Номинальные режимы работы электродвигателей 562
614
1.4-3. Нагрузочные диаграммы электроприводов.......... 565
14-4. Потери энергии в электроприводах................. 570
14-5. Методы эквивалентирования по нагреву произволь-
ного и номинального режимов работы...................• 586
14-6. Выбор мощности двигателя номинального продолжи-
тельного режима работы........................... 593
14-7. Выбор мощности двигателей номинального кратковре-
менного режима работы........................... 596
14-8. Выбор мощности двигателей номинального повторно-
кратковременного режима работы ................. 600
14-9. Определение допустимой частоты включений асинхрон-
ного двигателя с короткозамкнутым ротором .... 602
14-10. Особенности выбора двигателя для маховикового
электропривода .................................. 604
Список литературы.......................................... 607
Предметный указатель....................................... 609
«
[МИХАИЛ ГРИГОРЬЕВИЧ ЧИЛИКИН\
ВЛАДИМИР ИВАНОВИЧ КЛЮЧЕВ
АБРАМ СОЛОМОНОВИЧ САНДЛЕР
Теория автоматизированного электропривода
Редактор А. О. Горнов
Редактор издательства Л. А. Гетмана
Переплет художника В. Н. Хомякова
Технический редактор О. Д. Кузнецова
Корректор М. Г. Гулина
ИБ № 1182
Сдано в набор 27.04,78 Подписано к печати 18.10.78 Т-19909 Формат
84Х1081/э2 Бумага типографская № 2 Гарн. шрифта литературная Печать
высокая Усл. печ. л. 32,34 Уч.-изд. л. 36,31 Тираж 37 000 экз. Заказ 1931
Цена 1 р. 50 к.
Издательство «Энергия», 113114, Москва, М-114, Шлюзовая наб., 10'
Ордена Октябрьской Революции, ордена Трудового Красного Знамени
Ленинградское производственно-техническое объединение «Печатный
Двор» имени А. М. Горького Союзполиграфпрома при Государственном
комитете Совета Министров СССР по делам издательств, полиграфии
и книжной торговли. 197136, Ленинград, П-136, Гатчинская ул., 26.